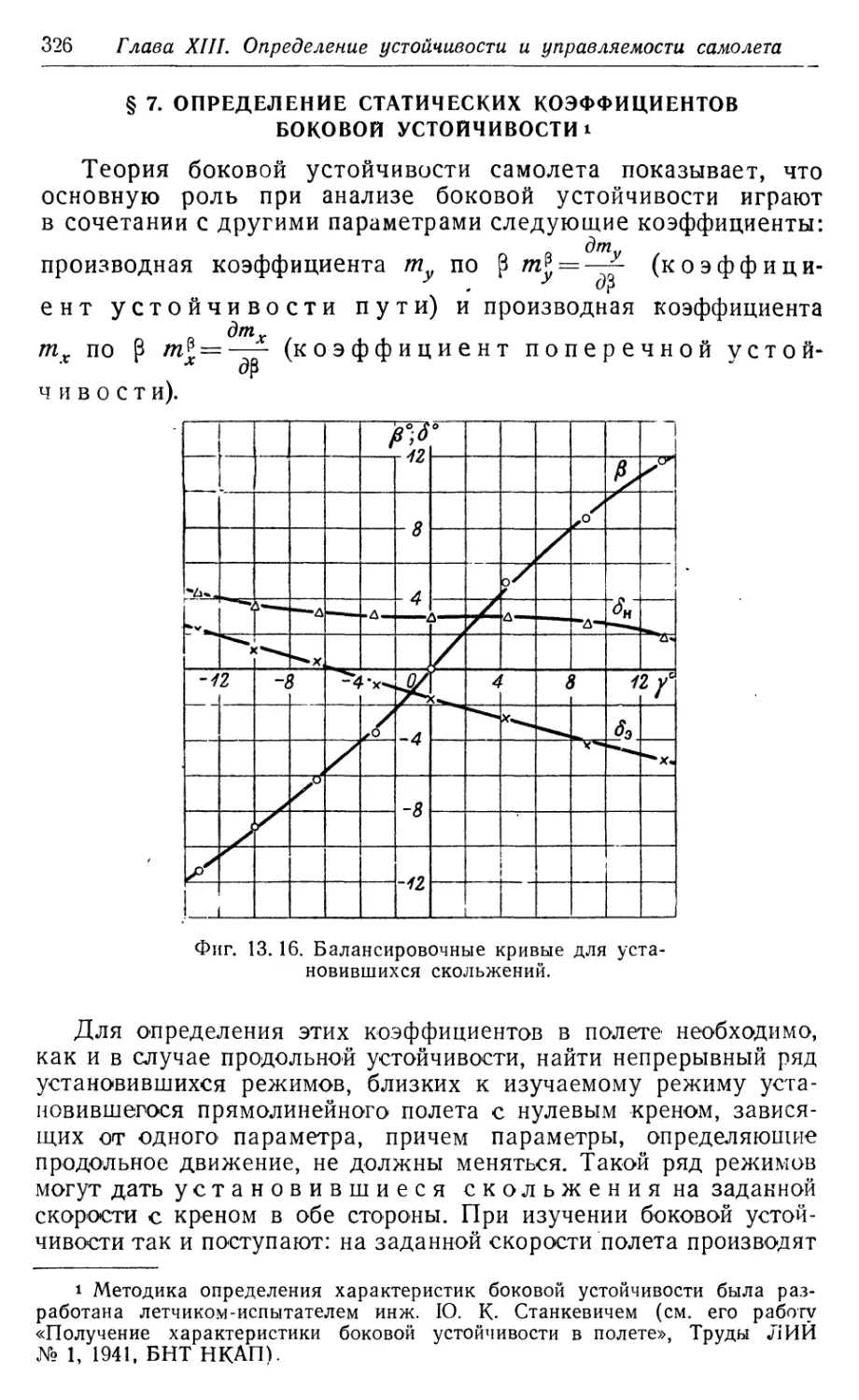
/

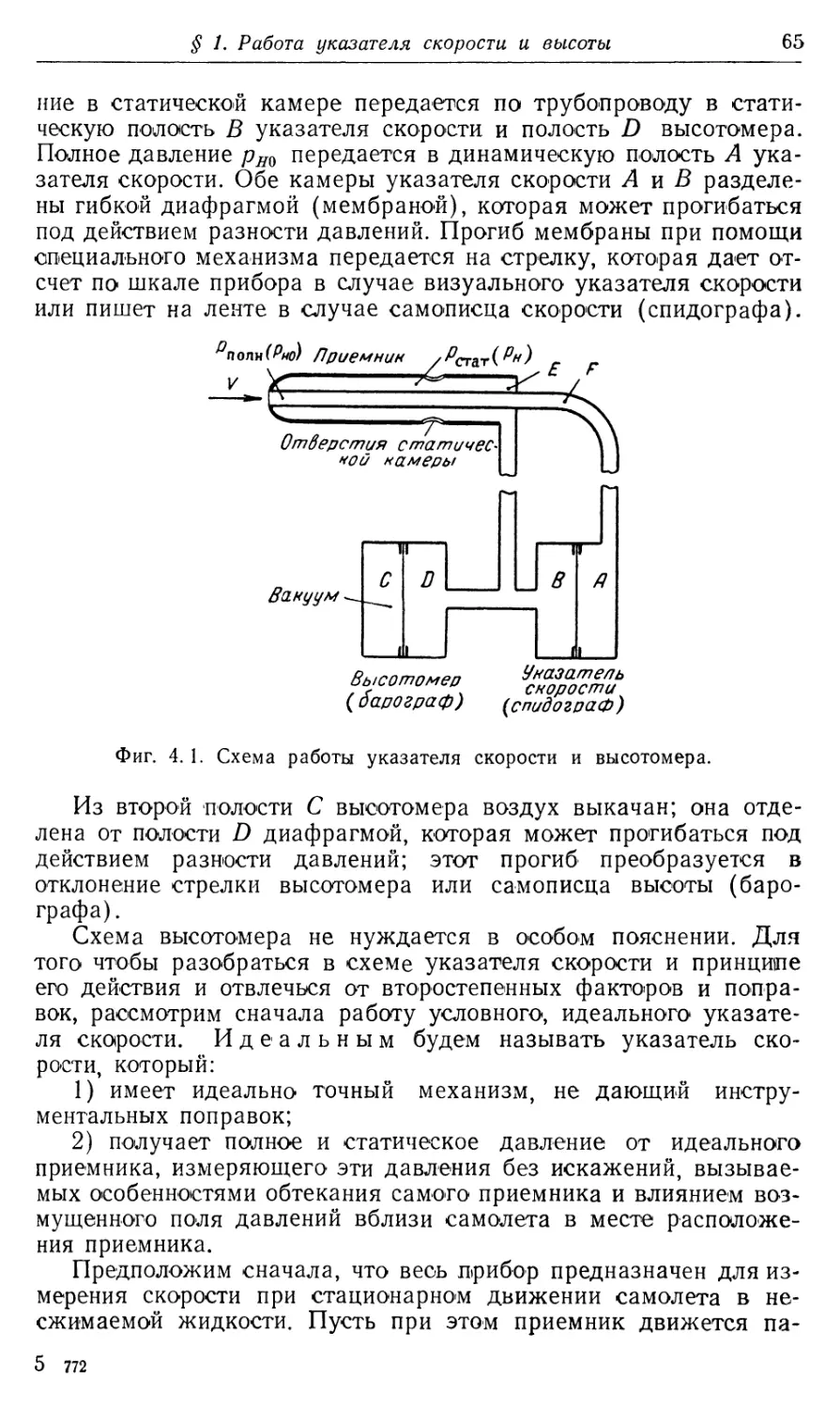
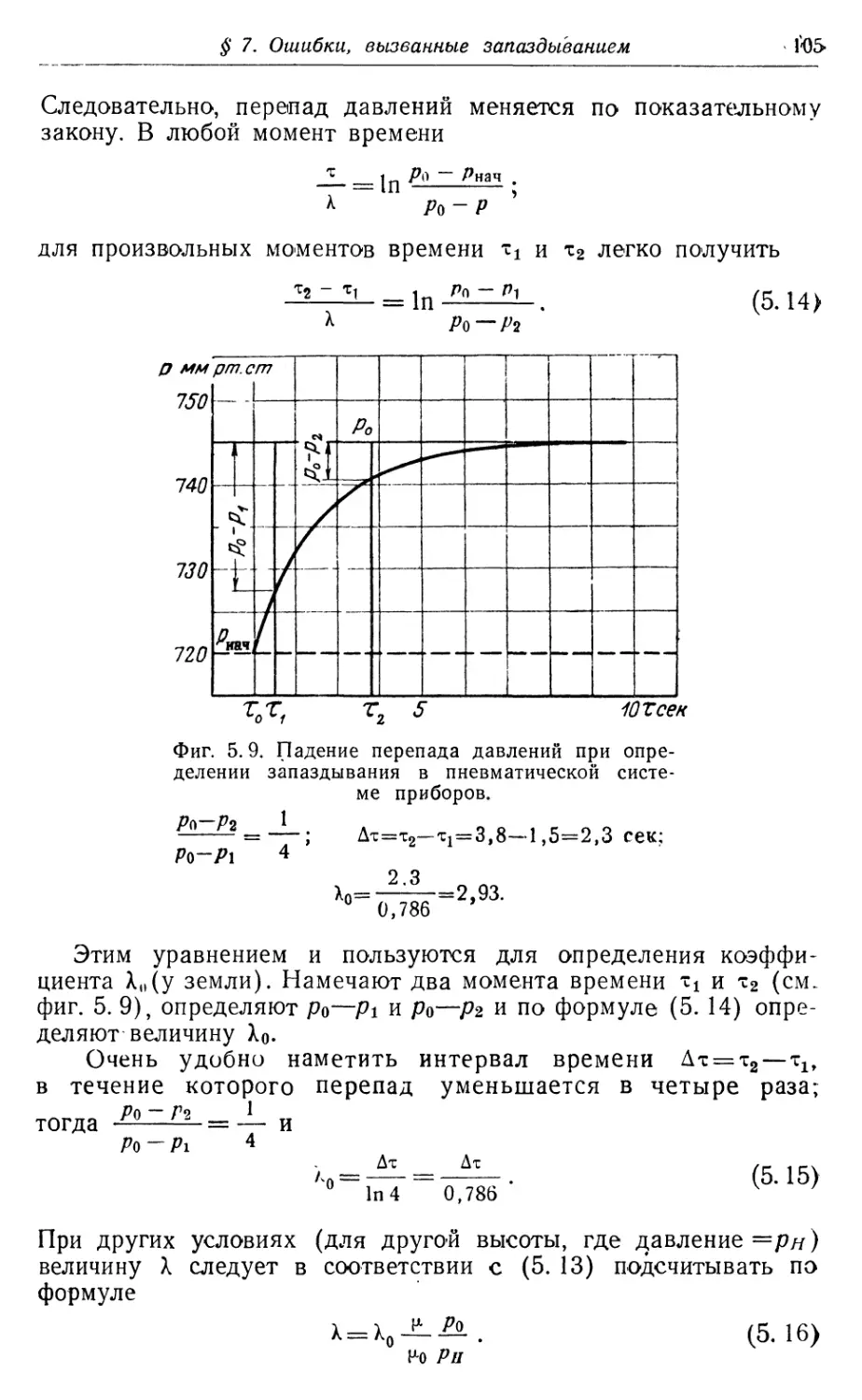
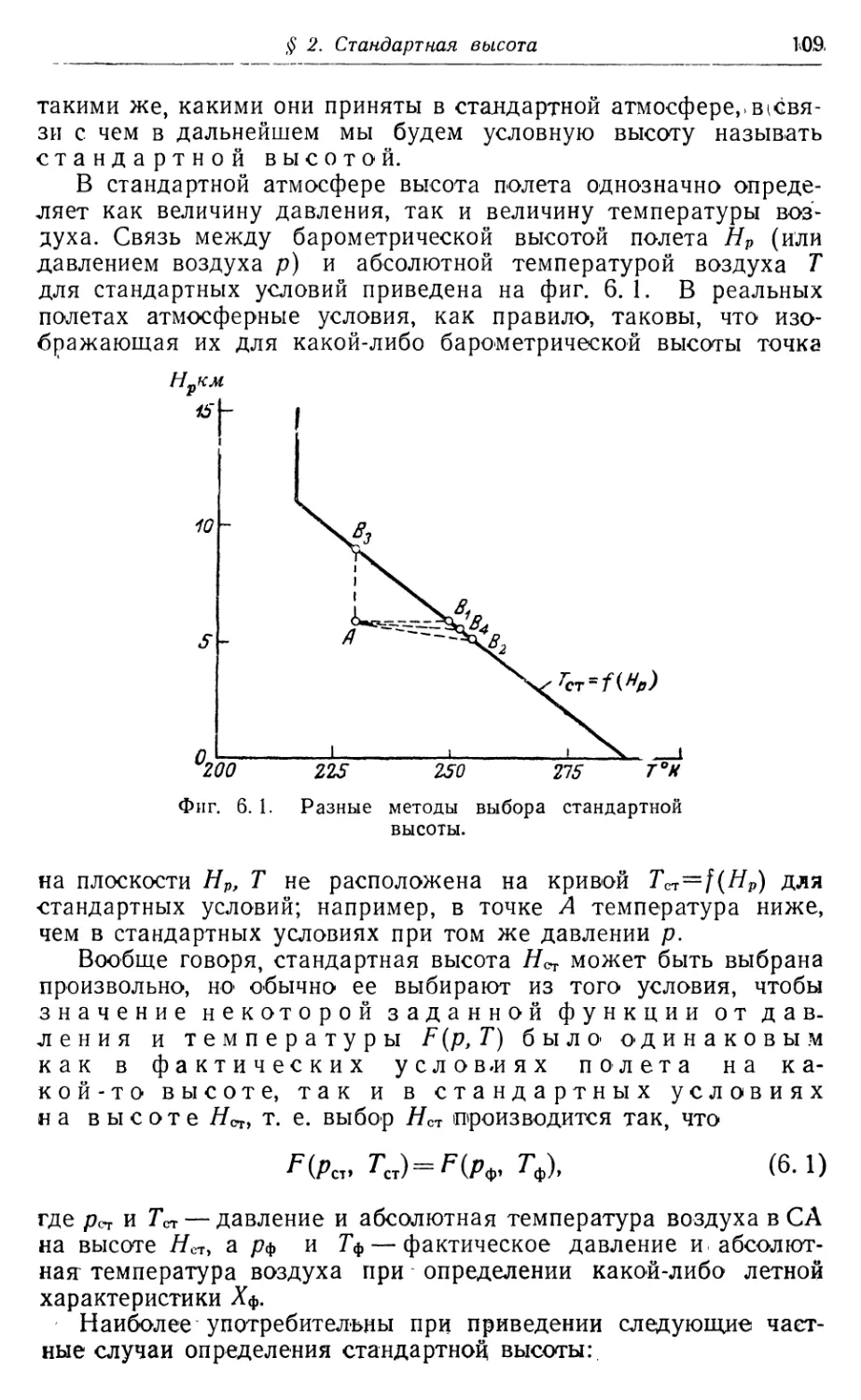

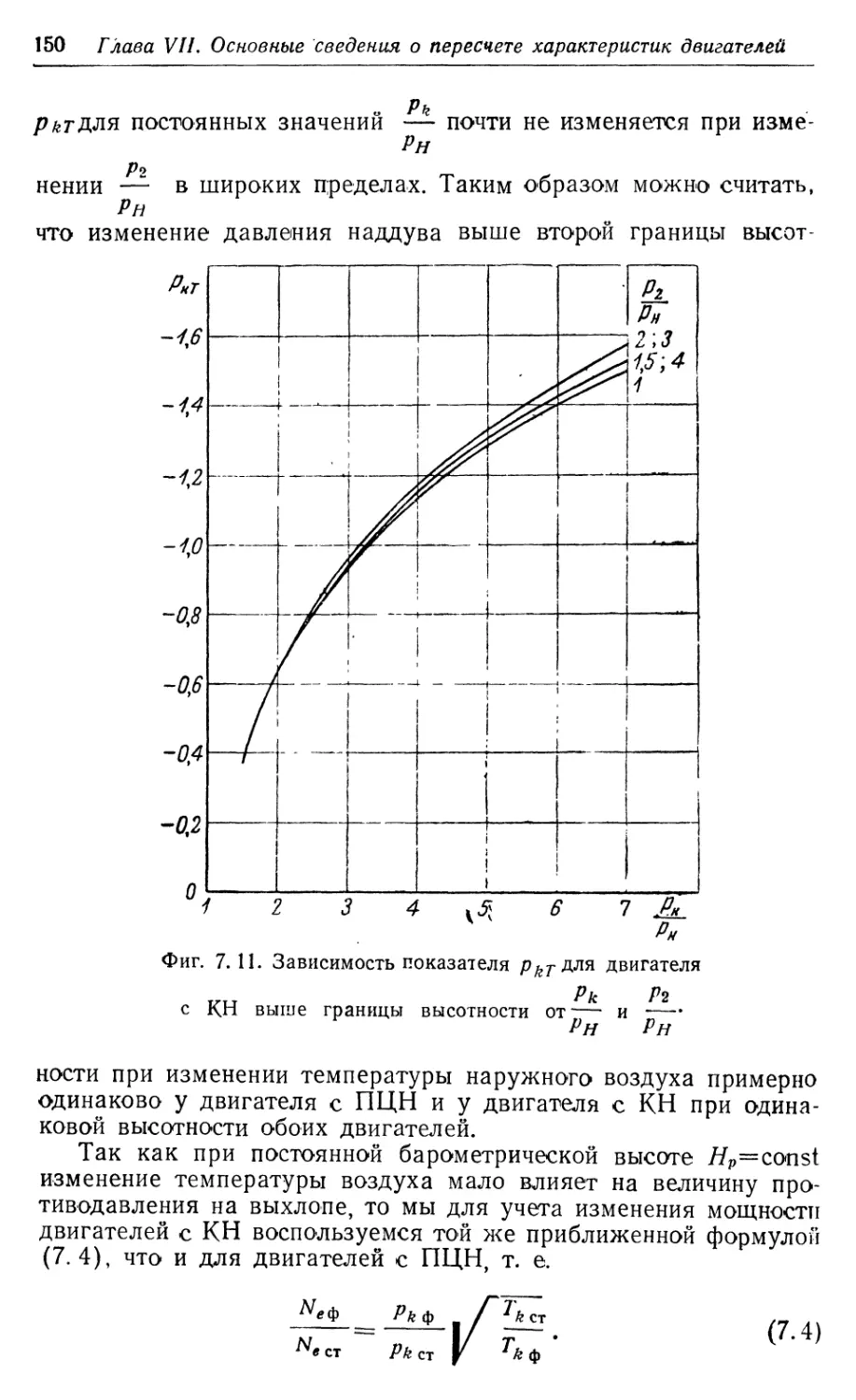
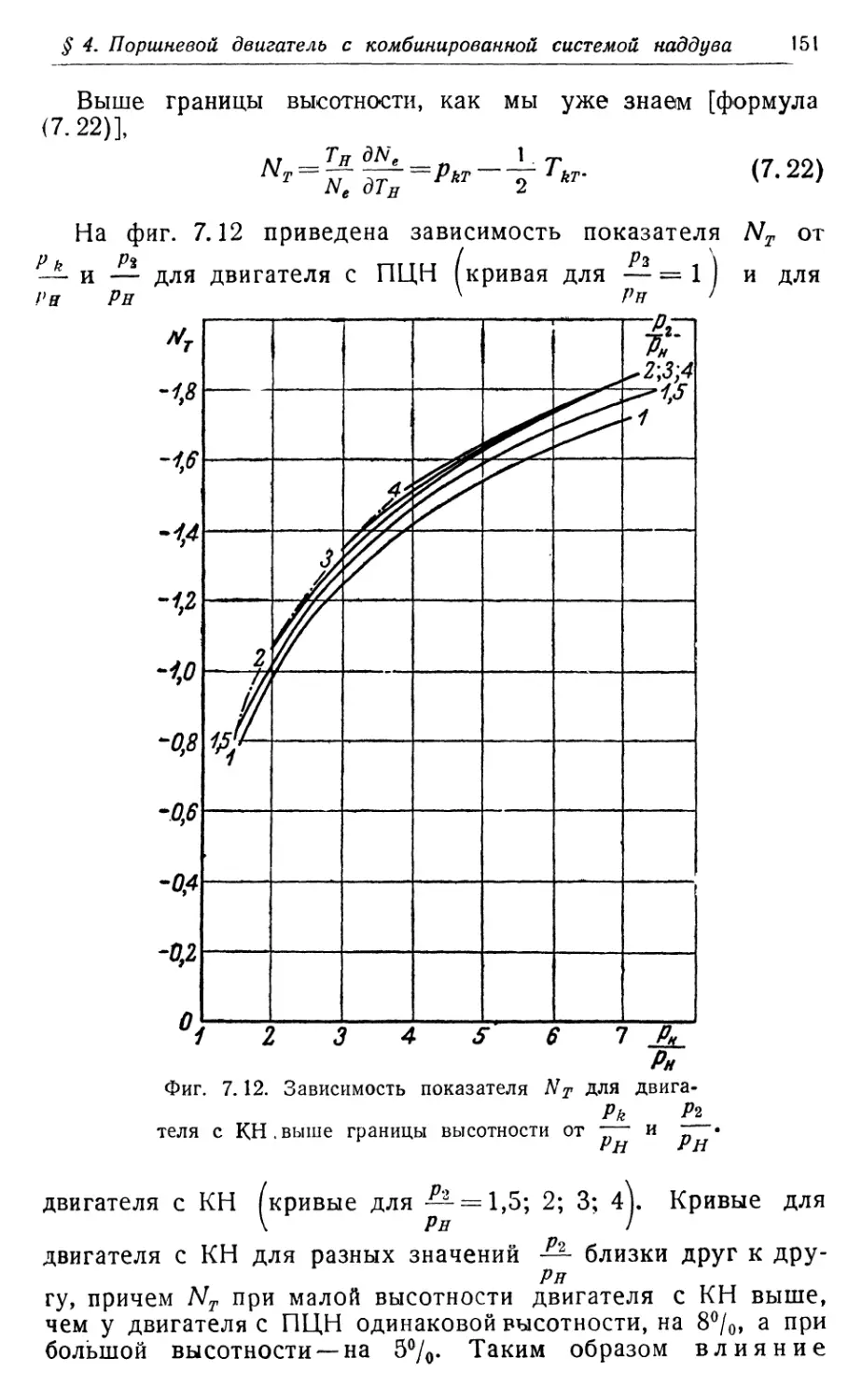
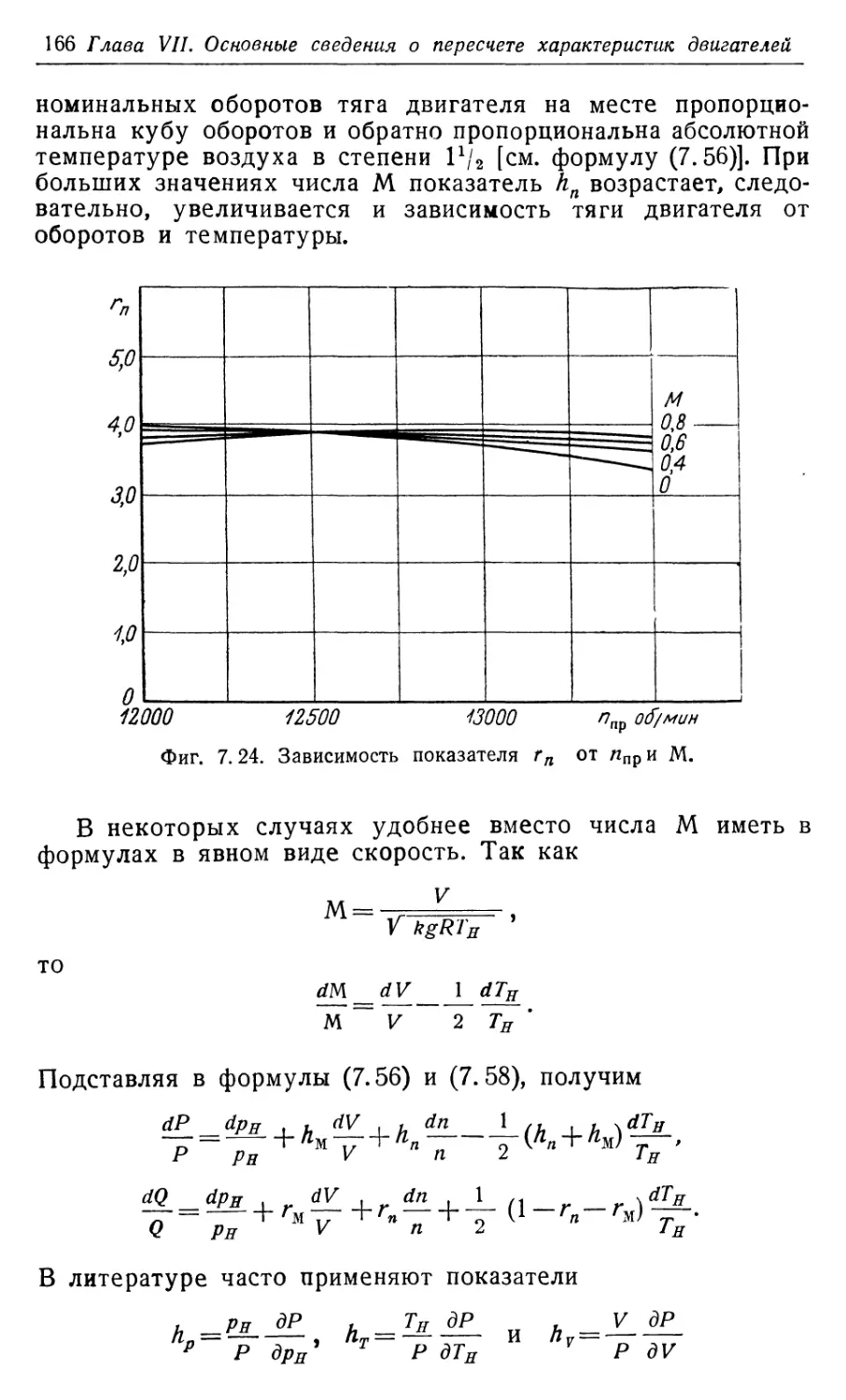

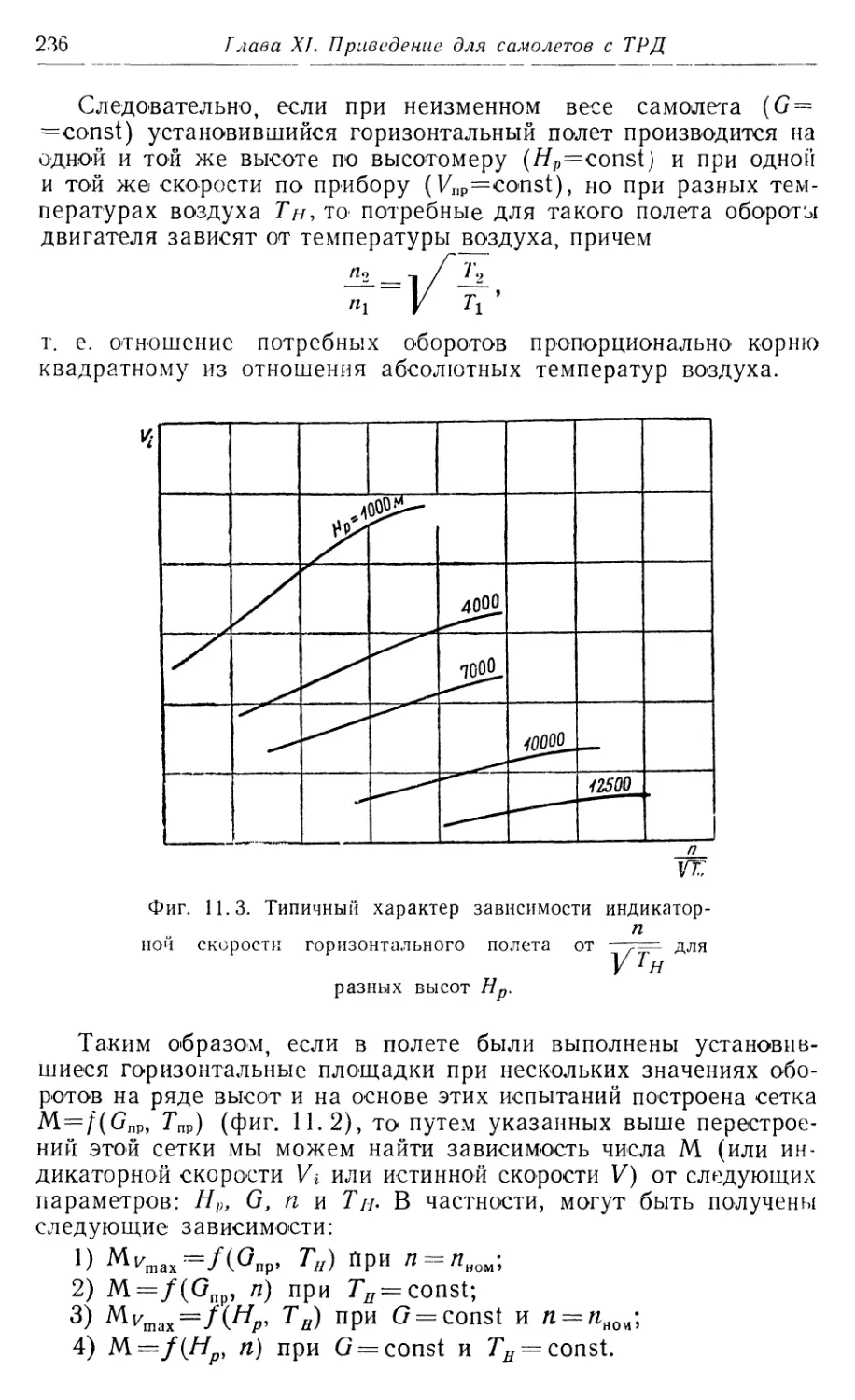
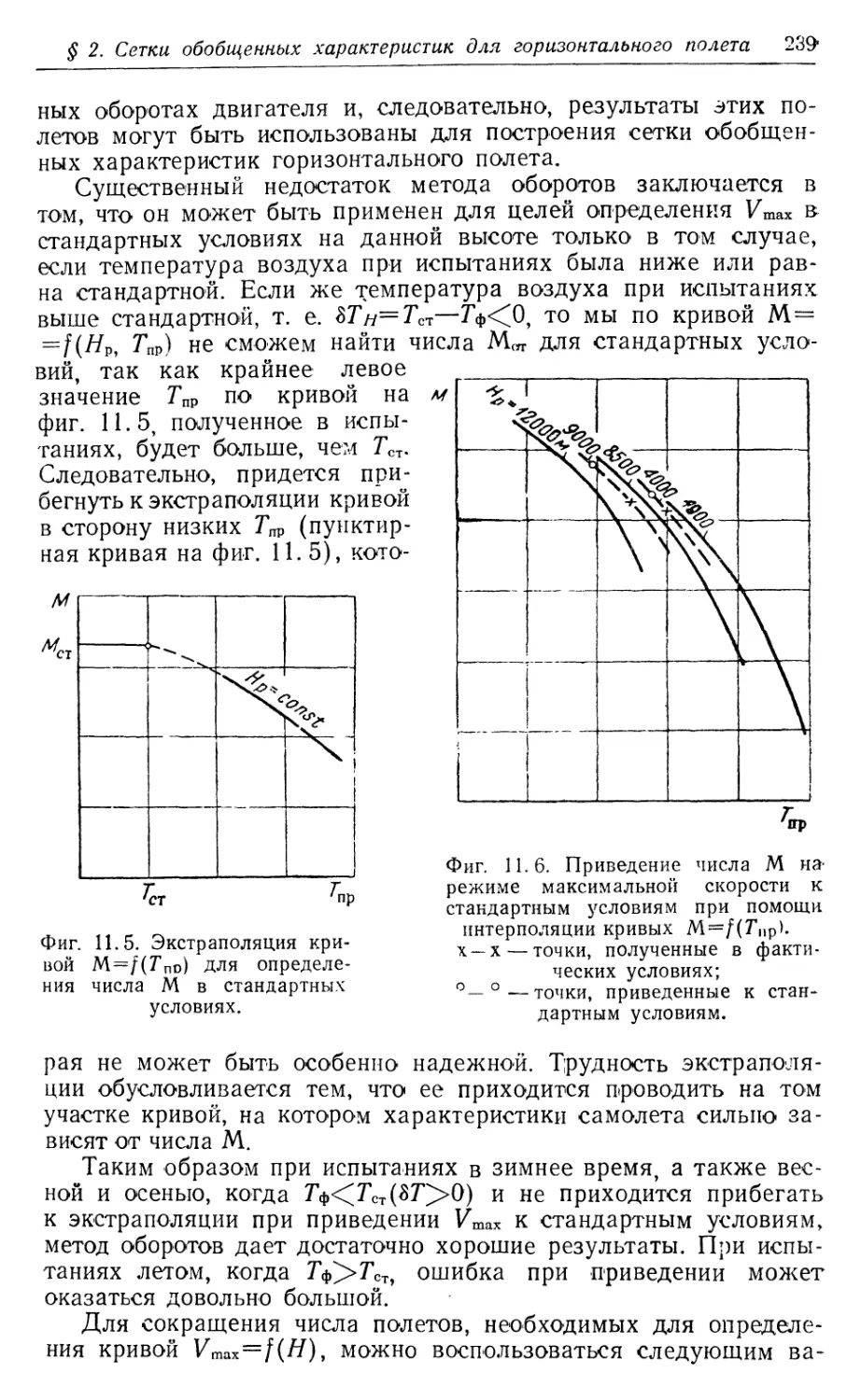
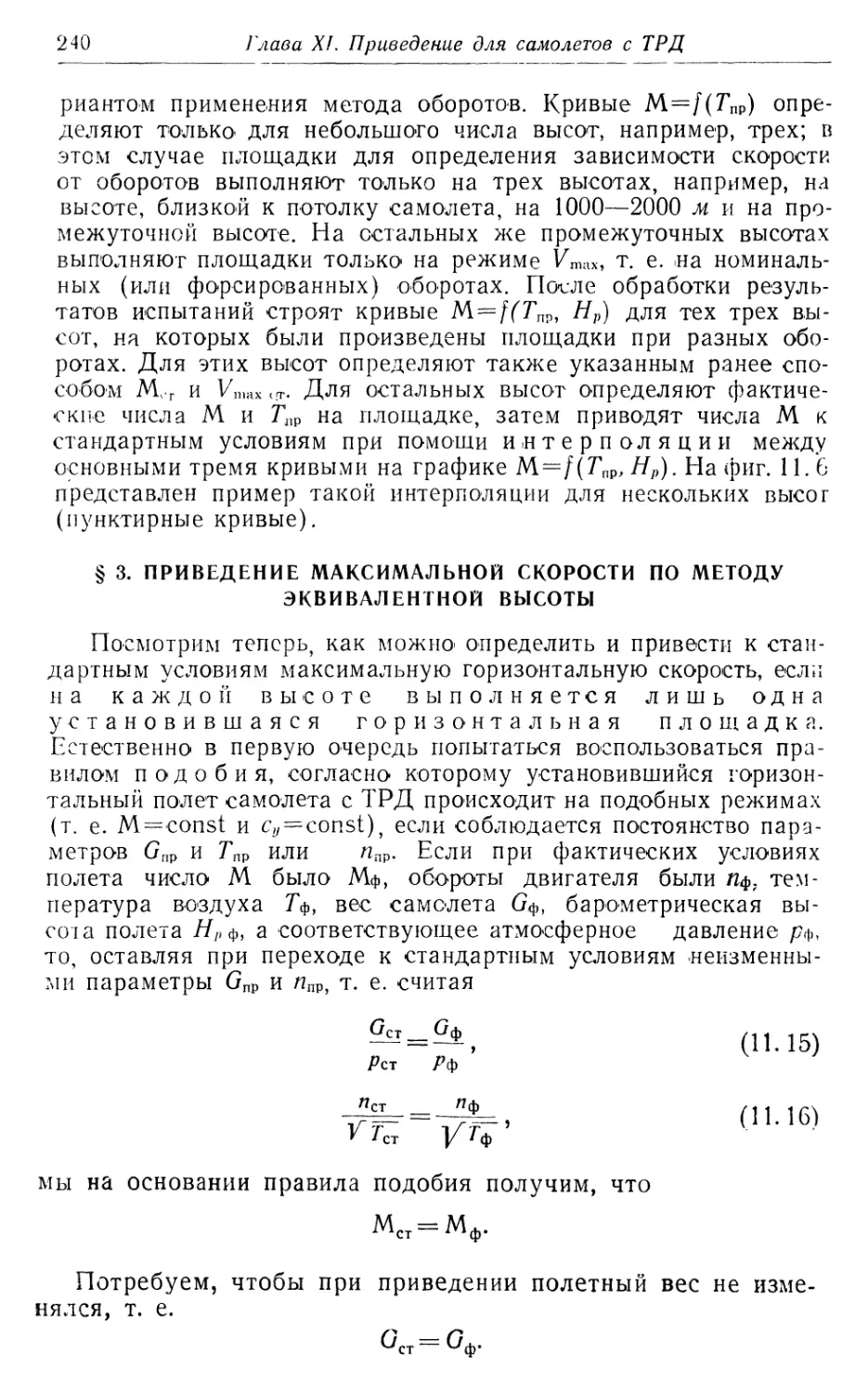


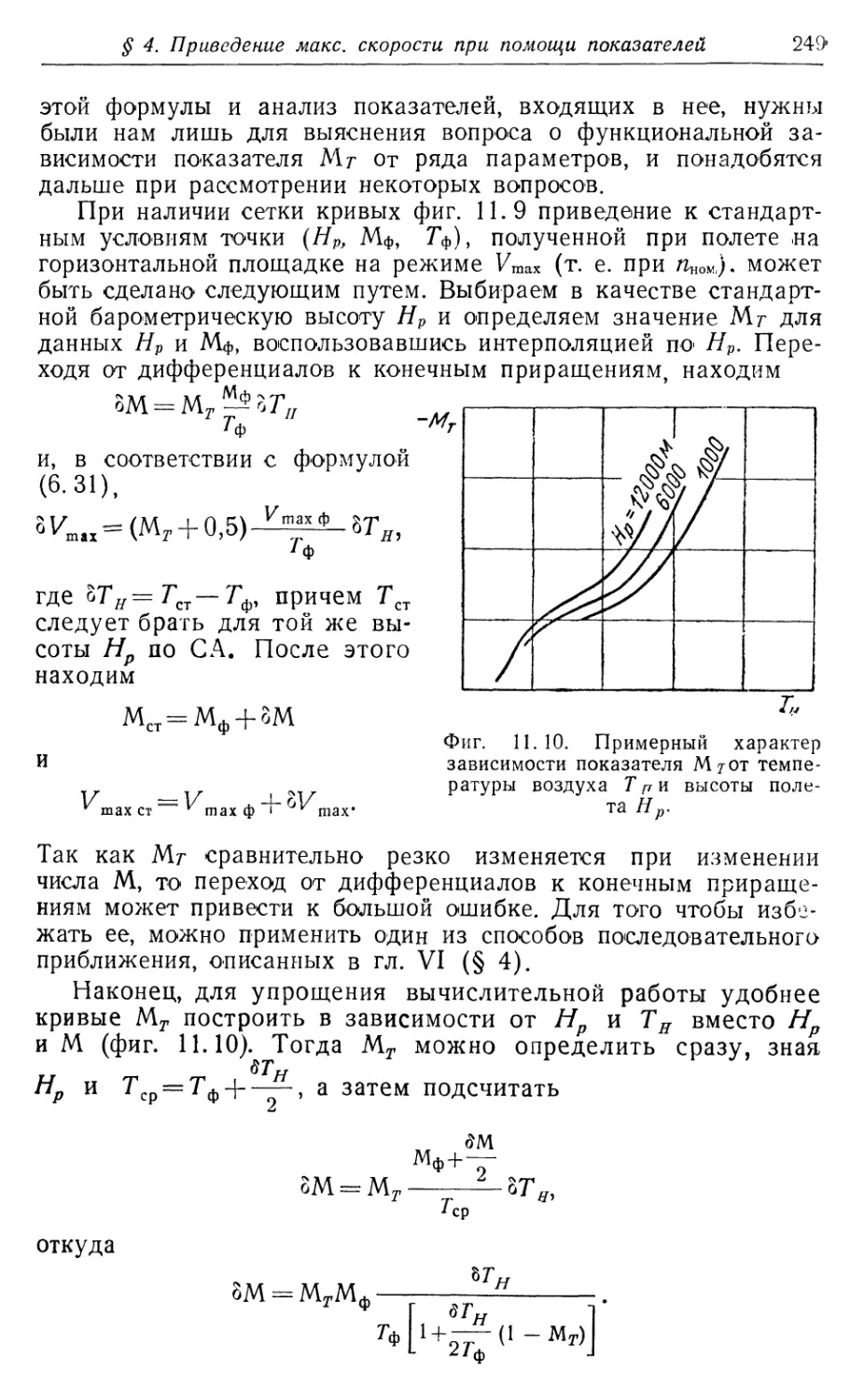
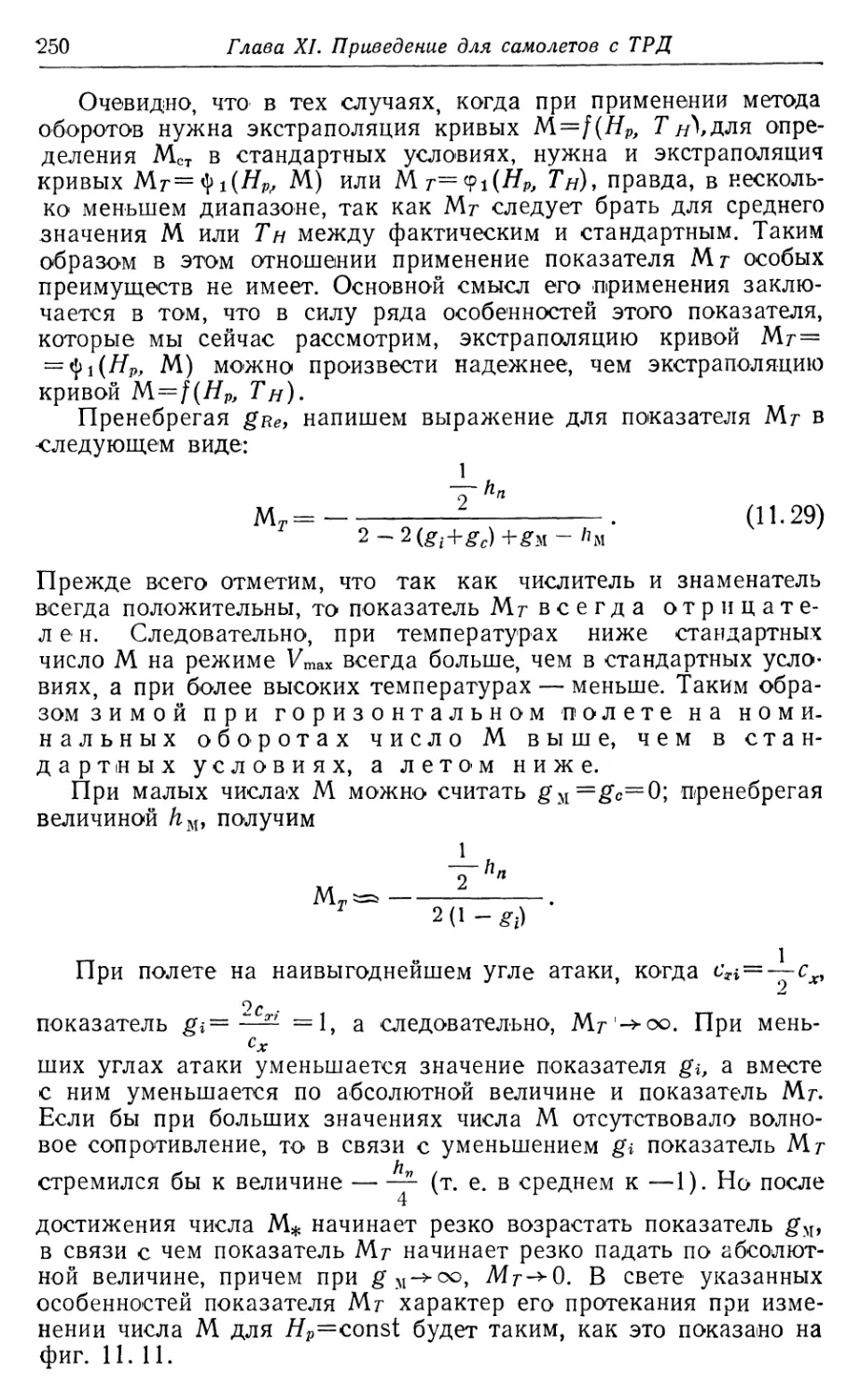
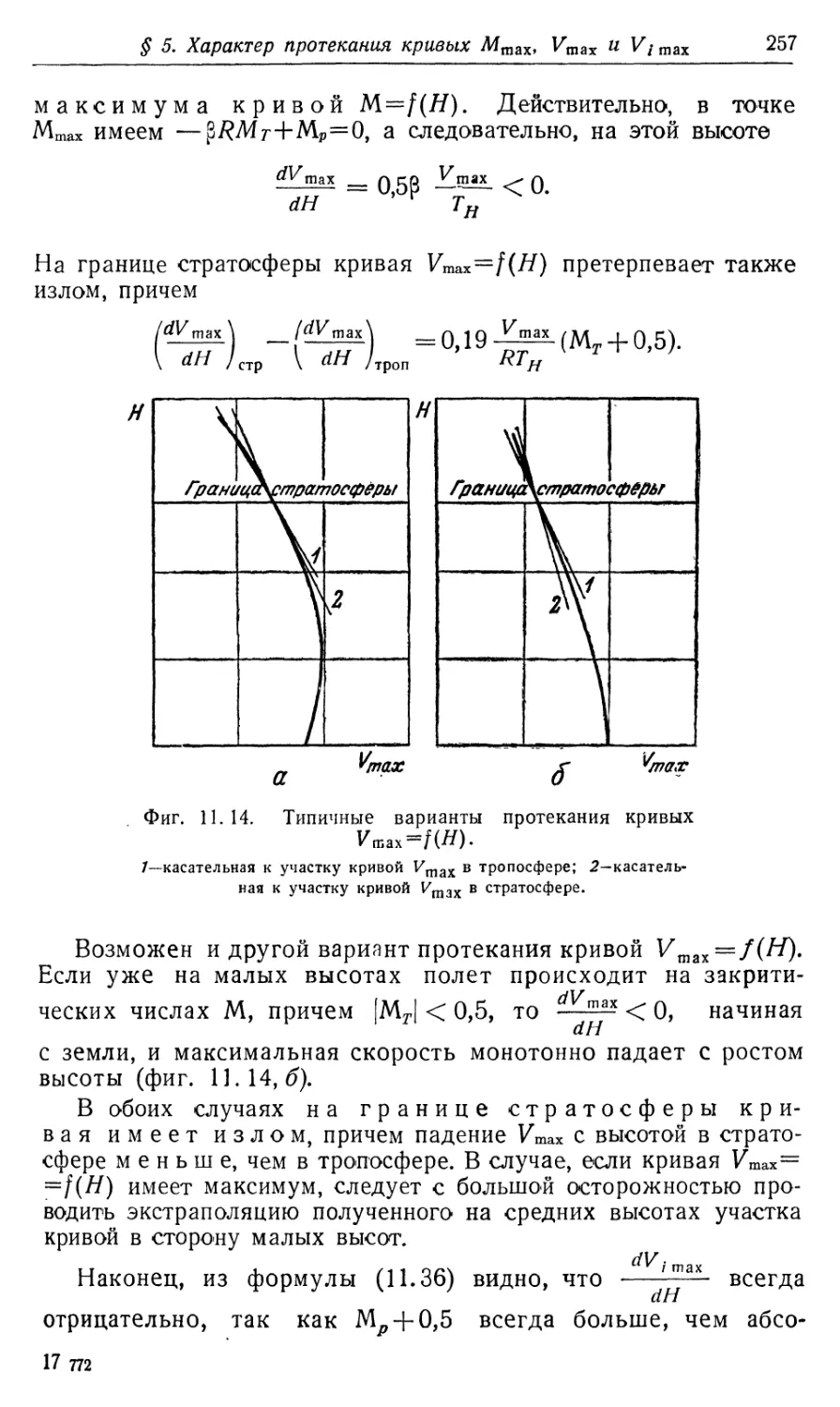
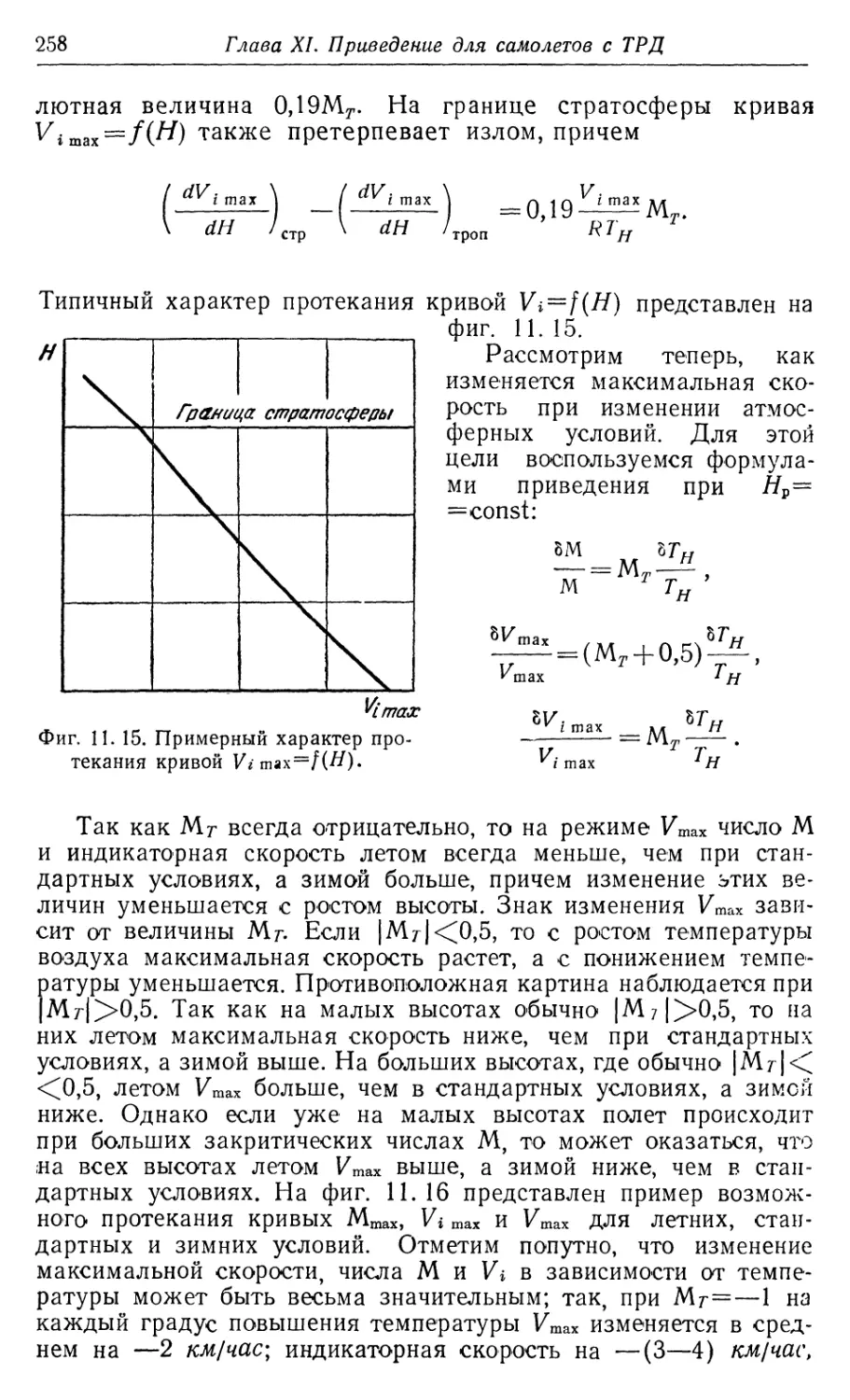
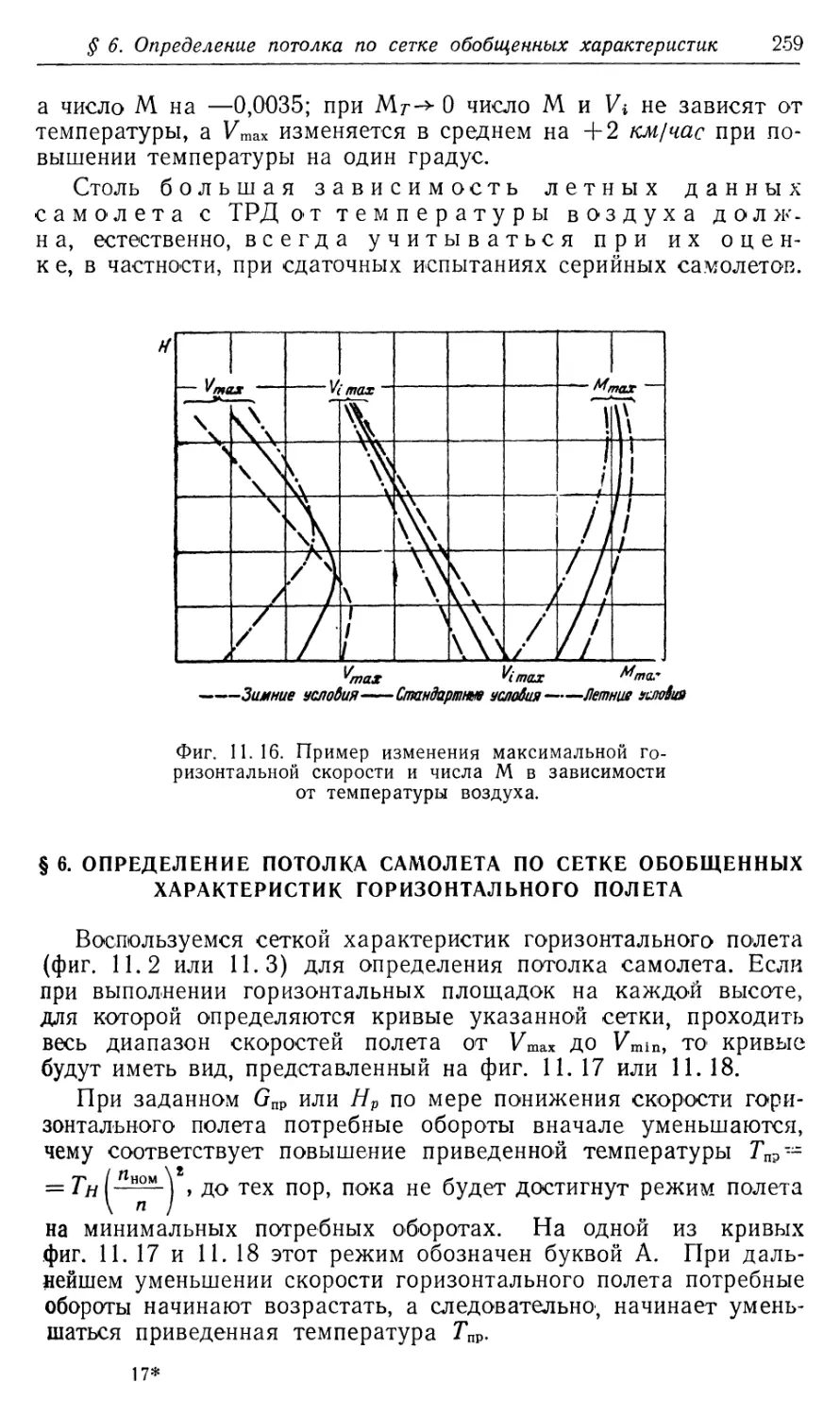
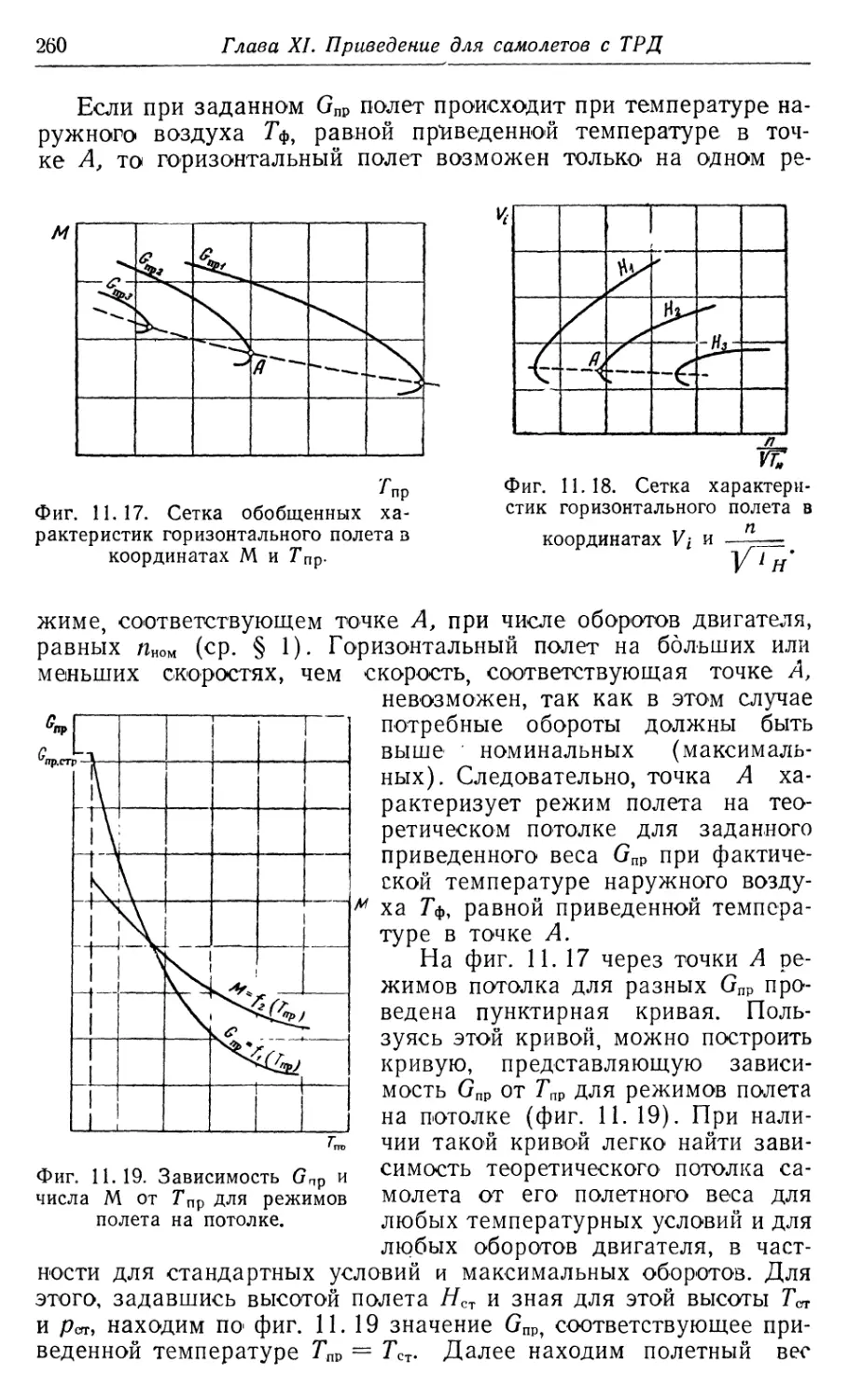
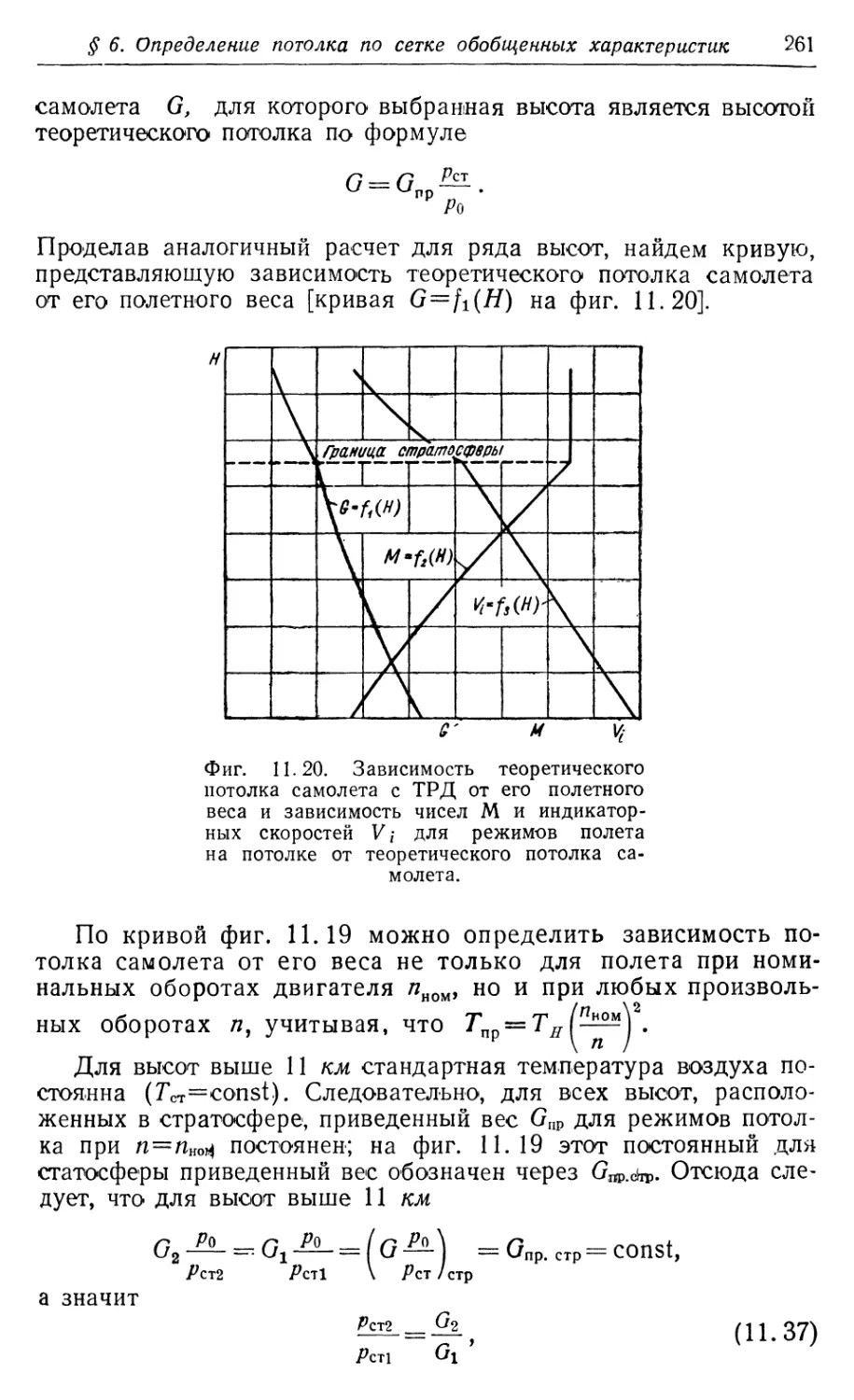
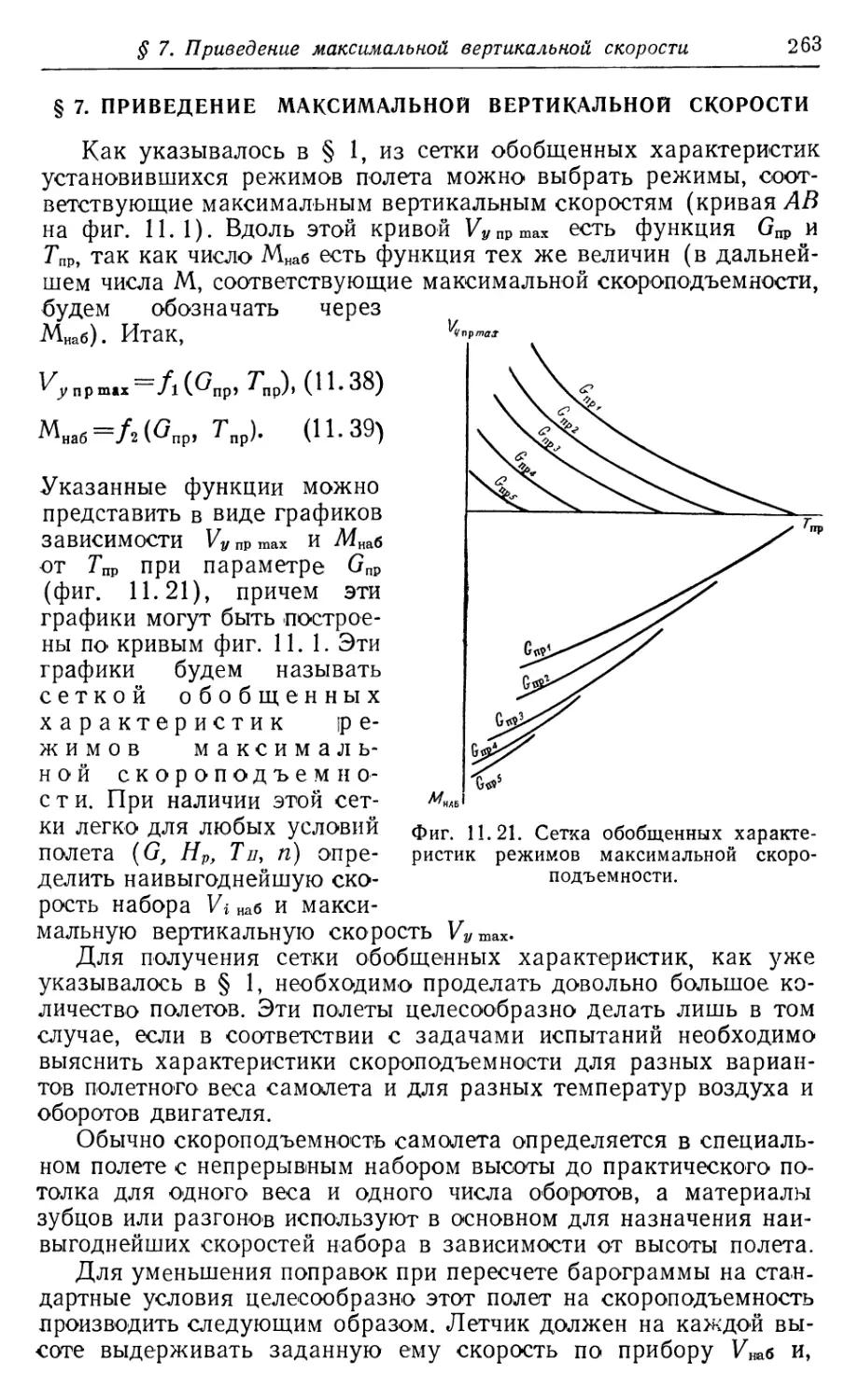


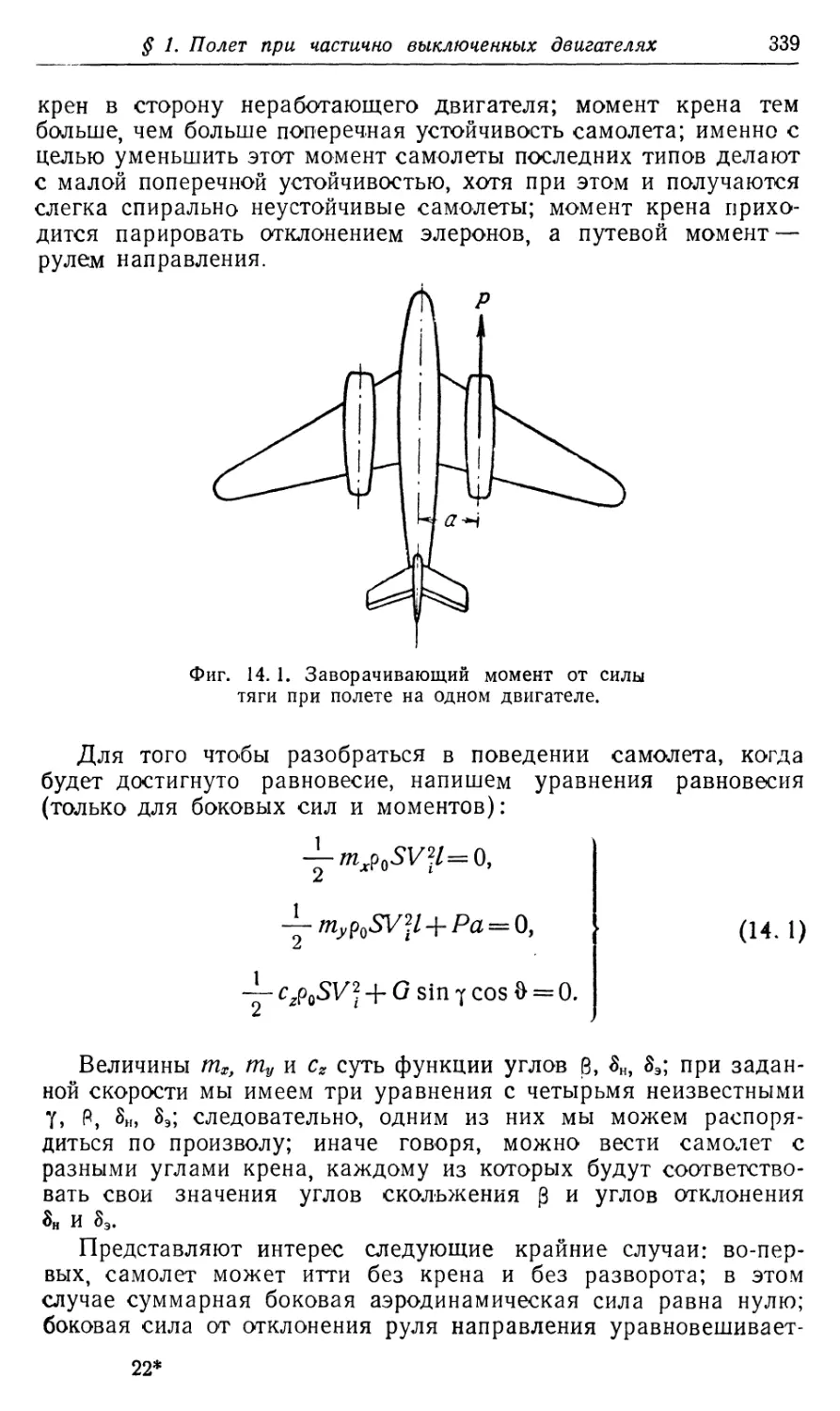
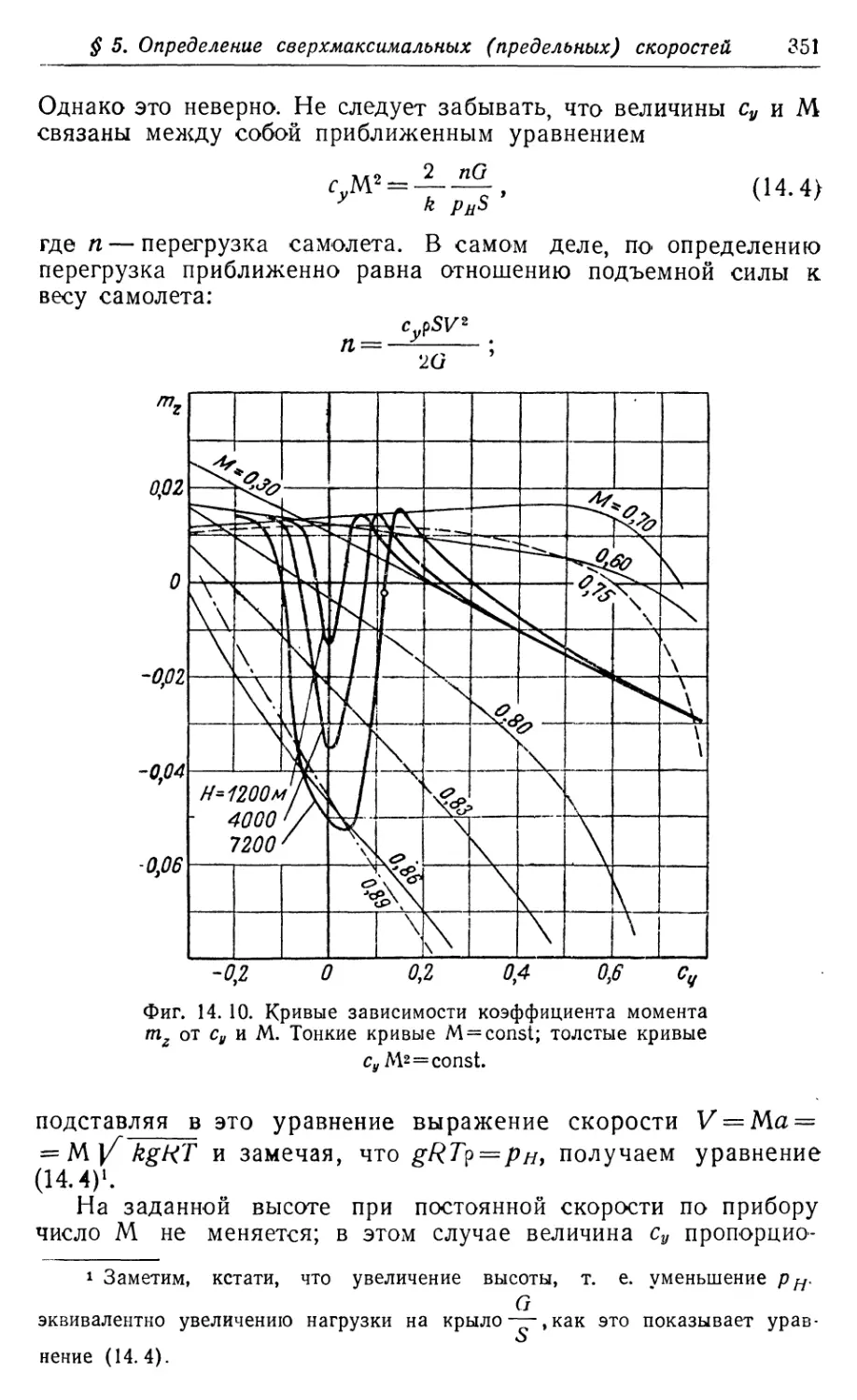
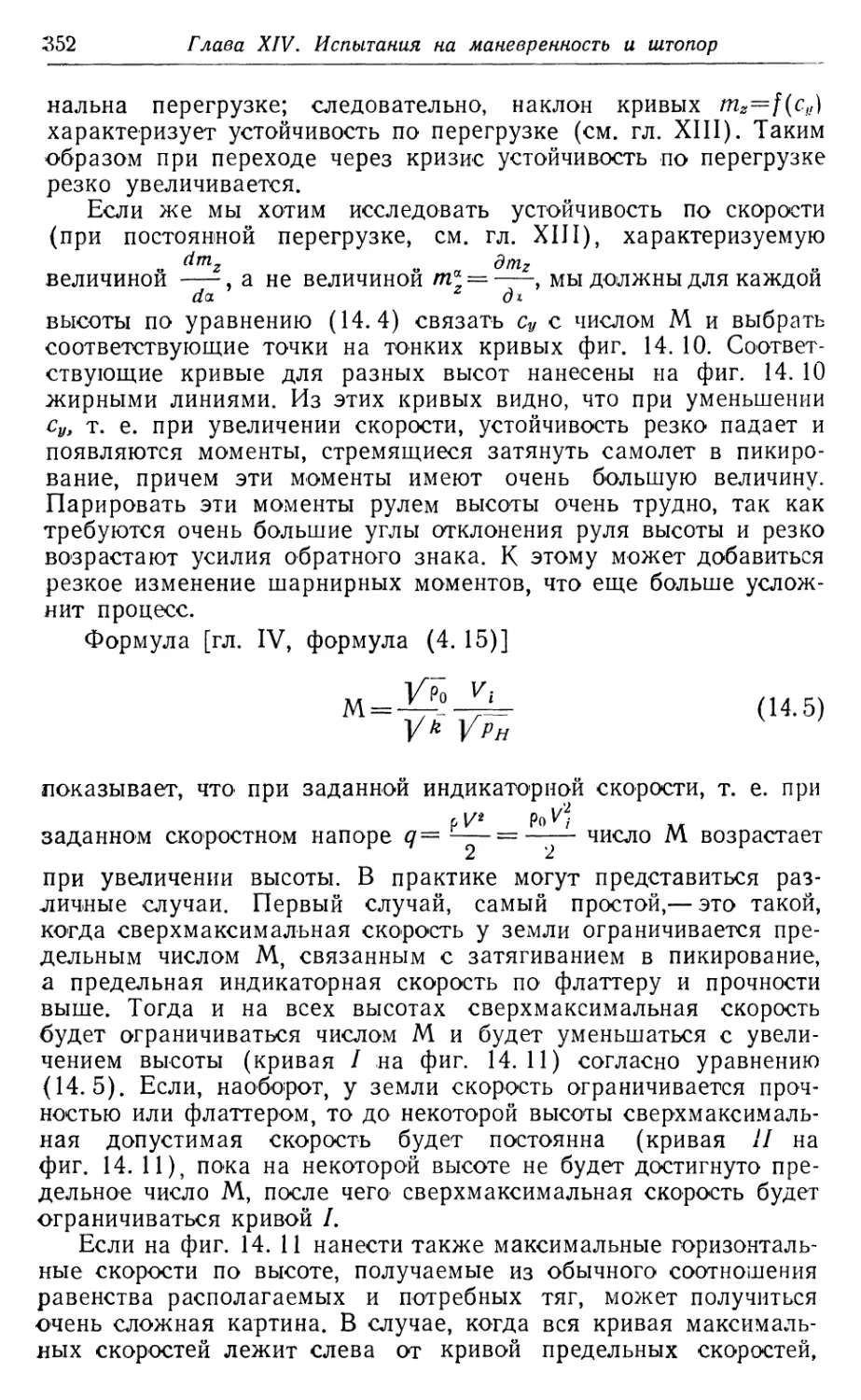
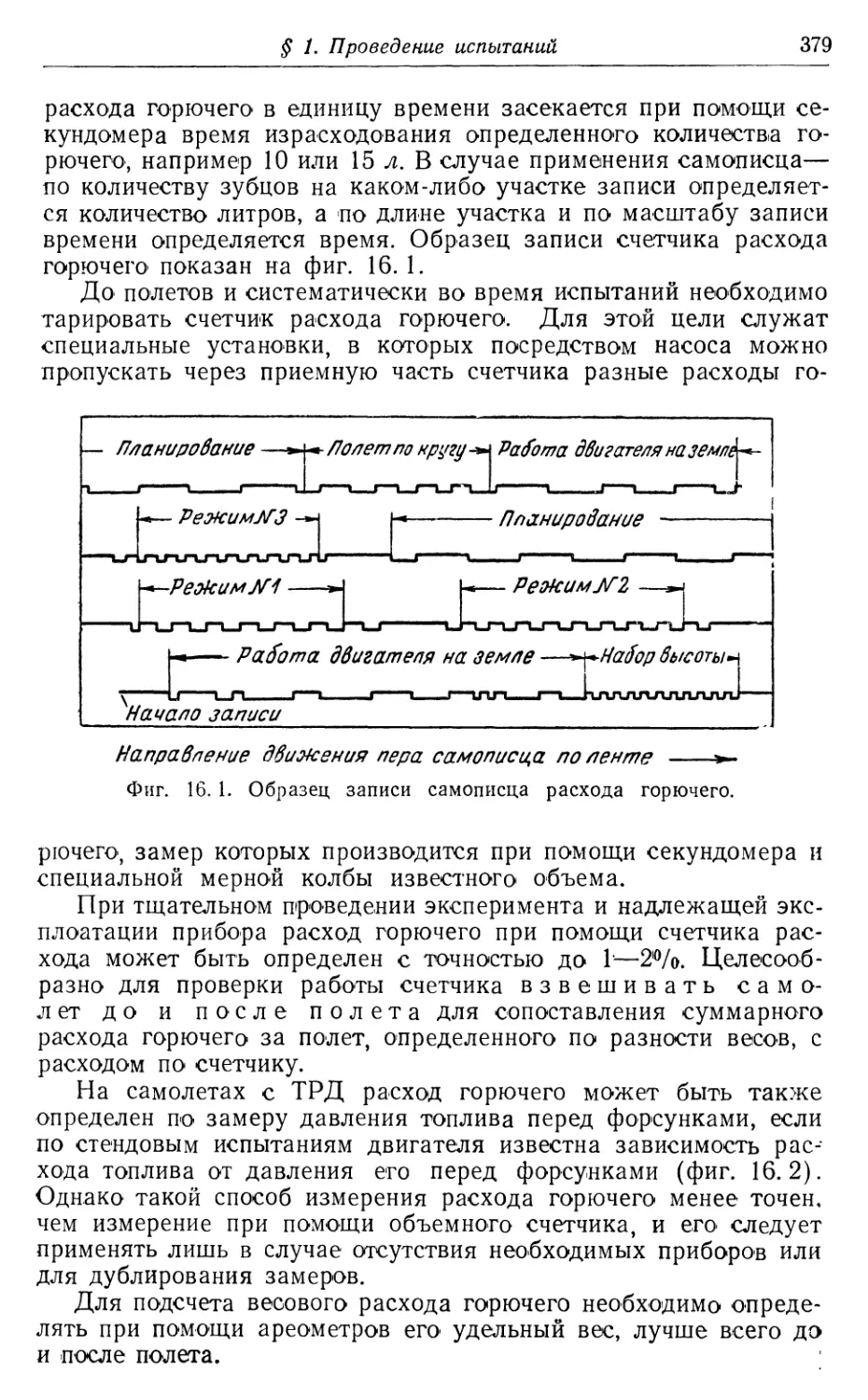
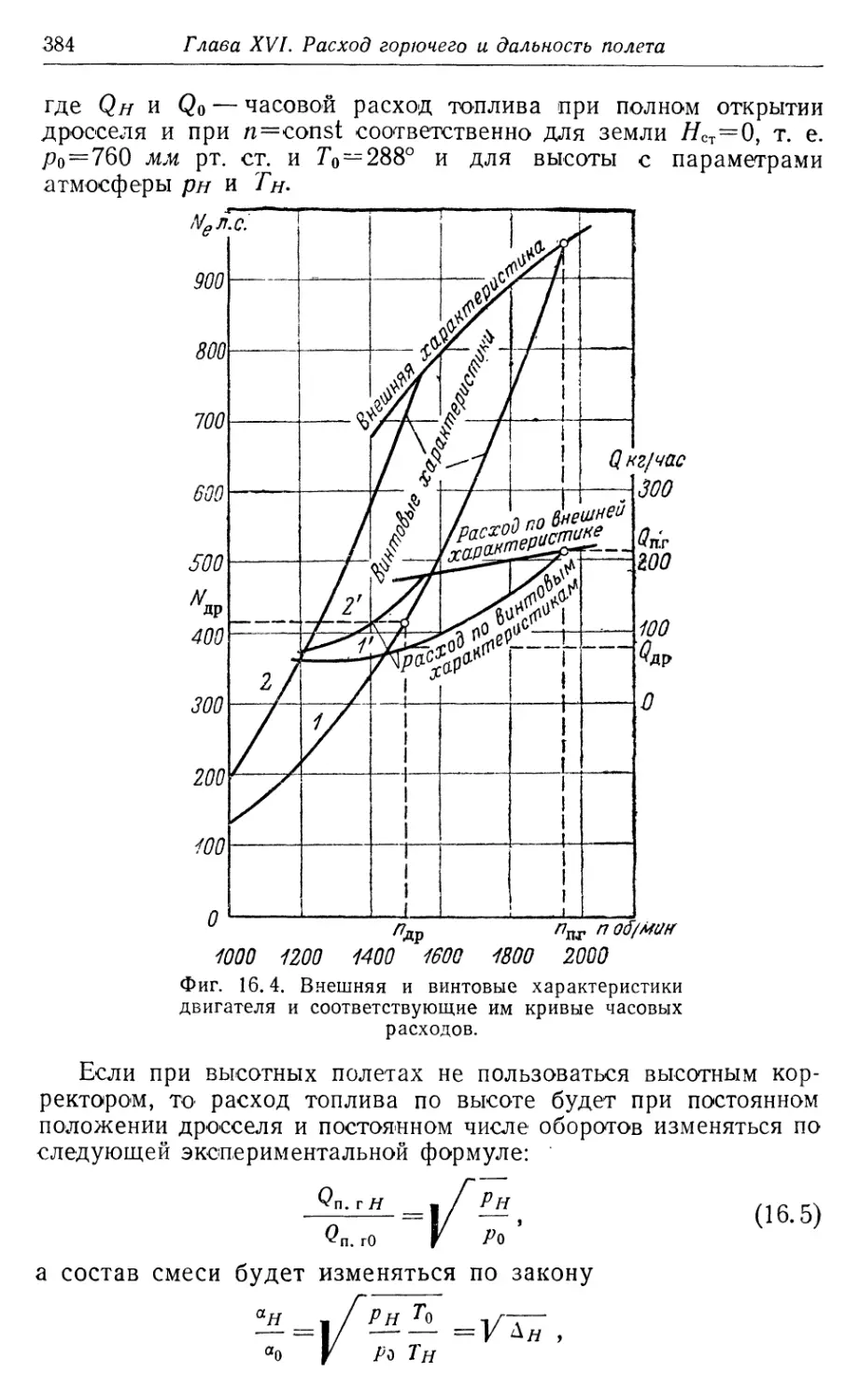
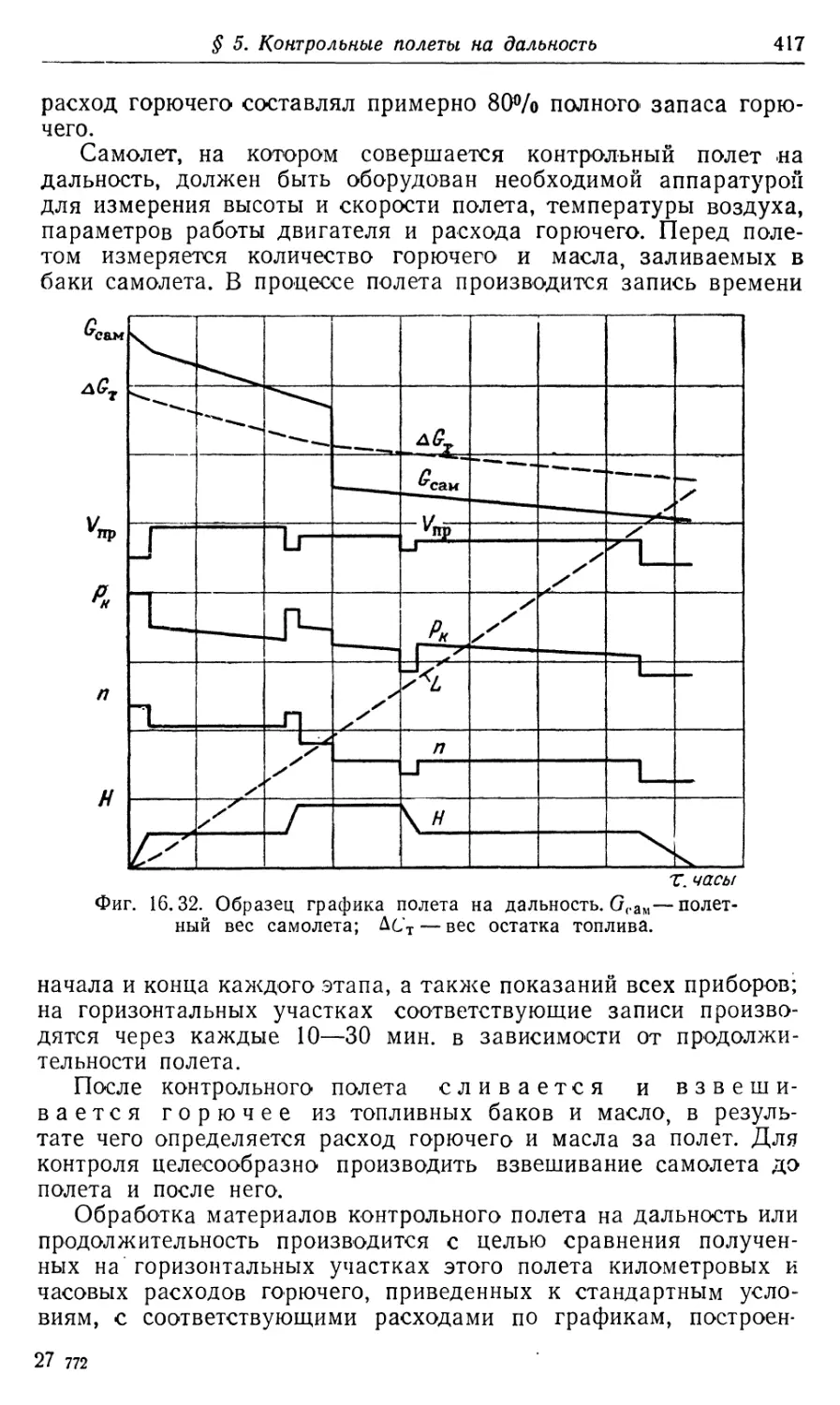








Text
В.С.ВЕДРОВ И М.А.ТАЙЦ
ЛЕТНЫЕ
ИСПЫТАНИЯ
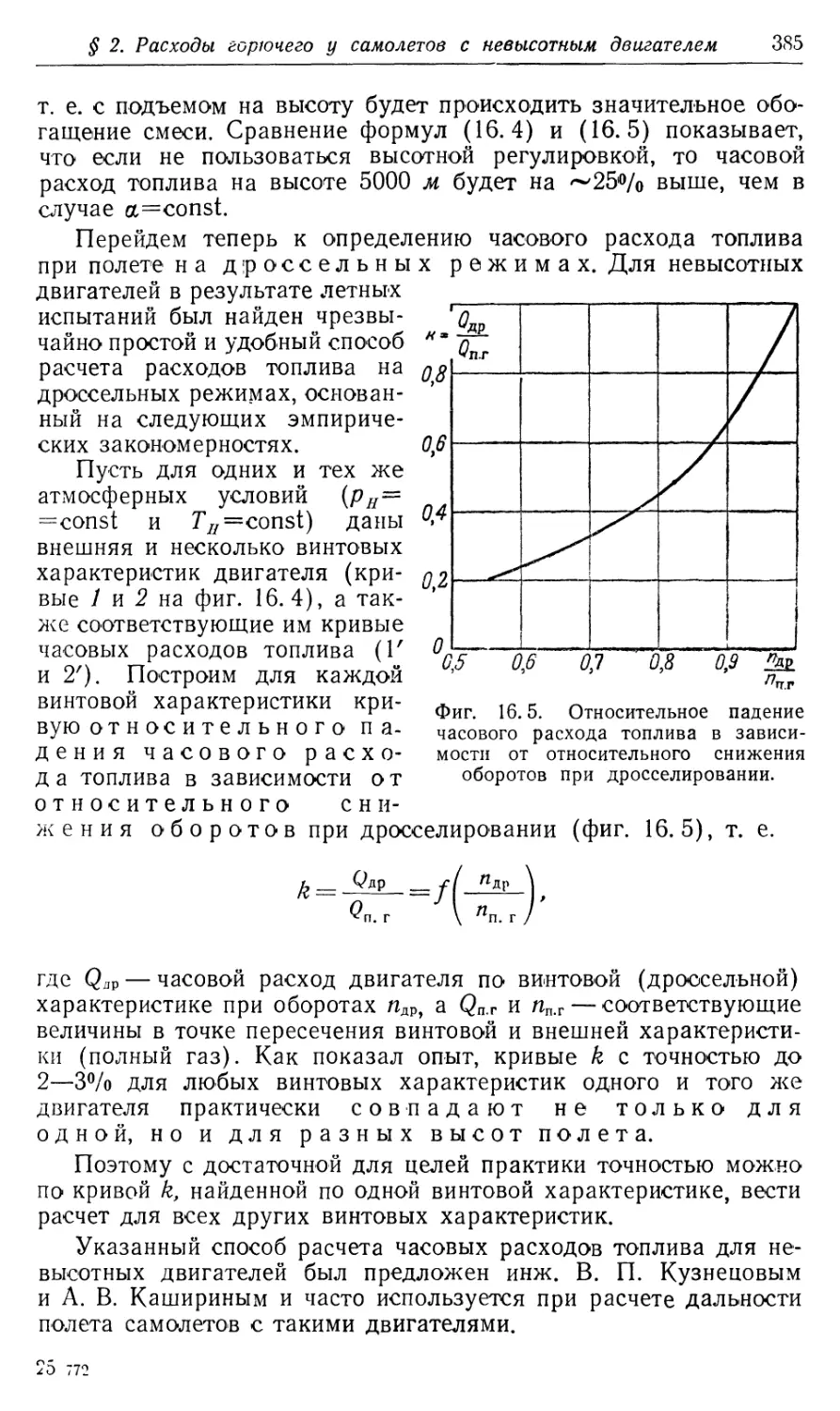
САМОЛЕТОВ
ОБОРОН ГИЗ
1 9 5 4
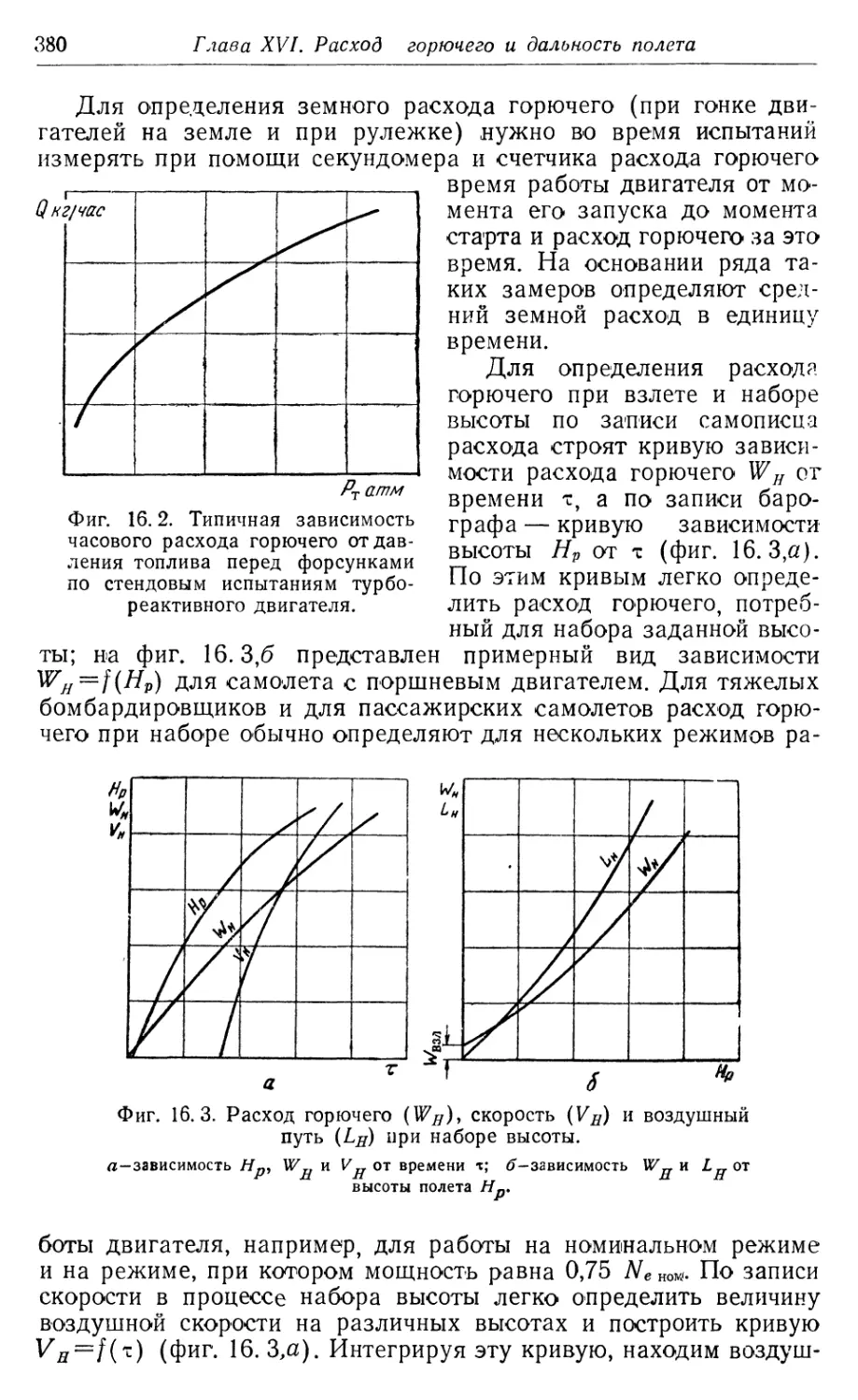
В. С. ВЕДРОВ и М. А. ТАЙЦ
ЛЕТНЫЕ ИСПЫТАНИЯ
САМОЛЕТОВ
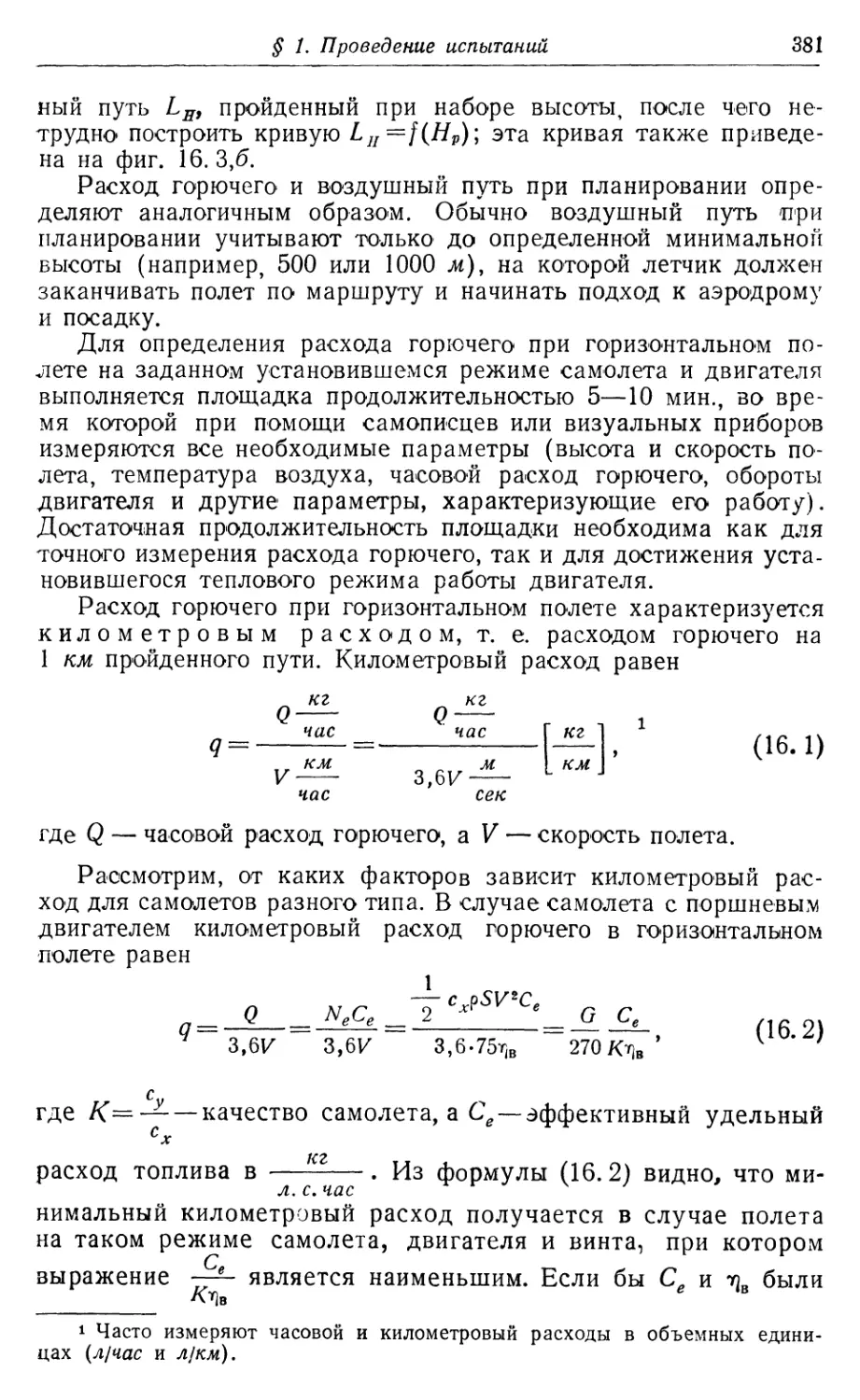
Допущено
Министерством лысшего образования СССР
в качестве учебного пособия
для авиационных вузов
ГОСУДАРСТВЕННОЕ
ИЗДАТЕЛЬСТВО ОБОРОННОЙ ПРОМЫШЛЕННОСТИ
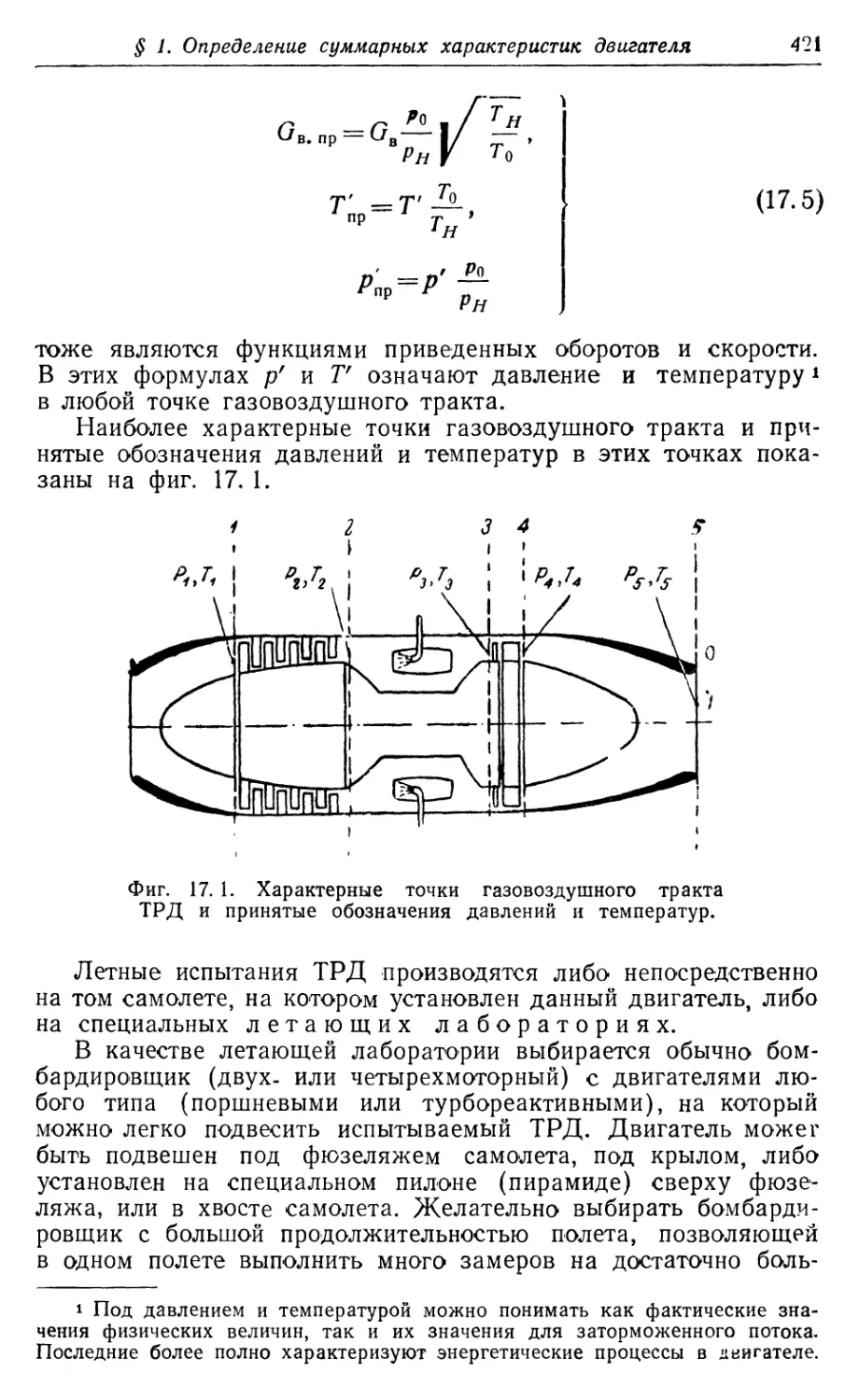
Москва 1951
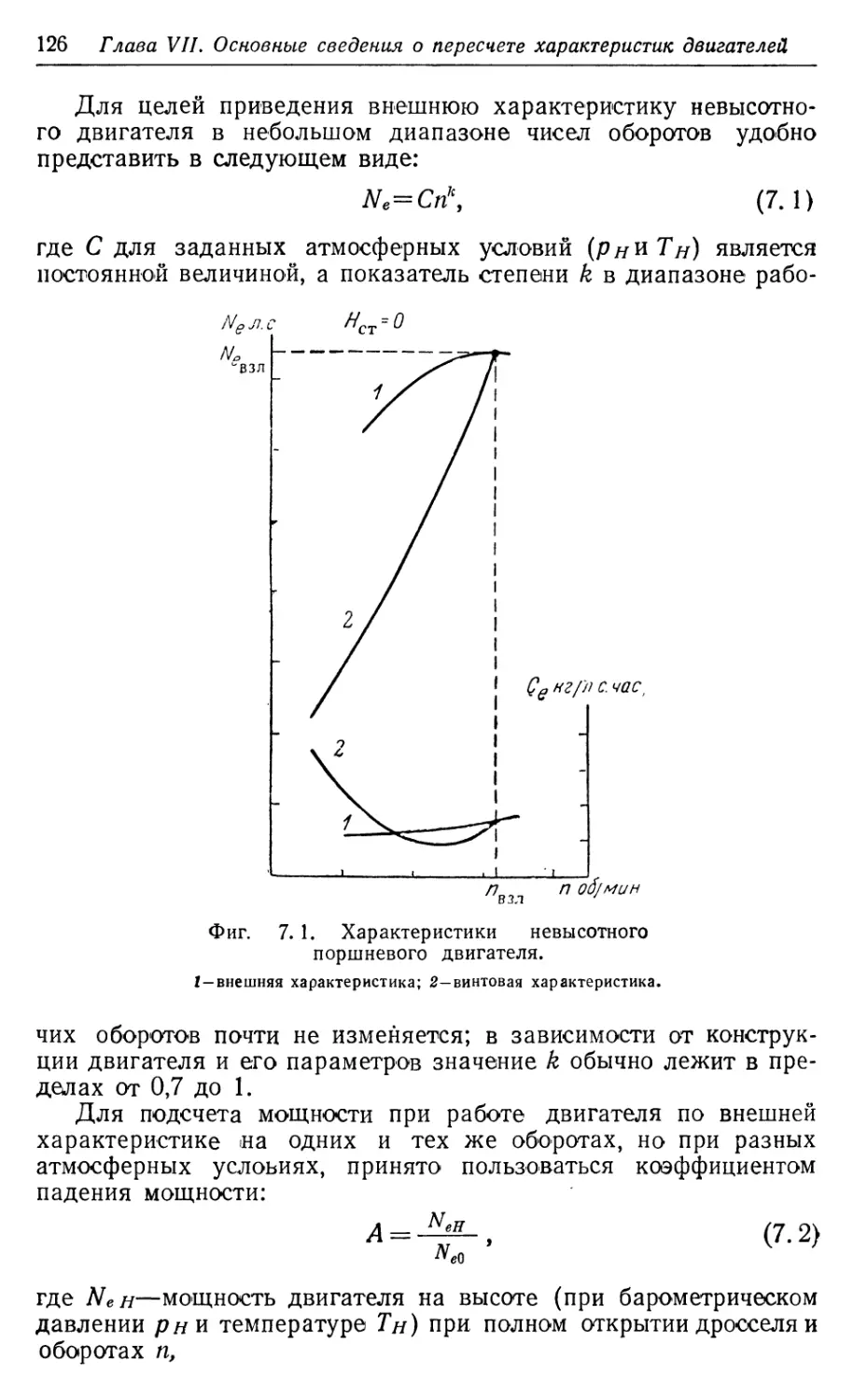
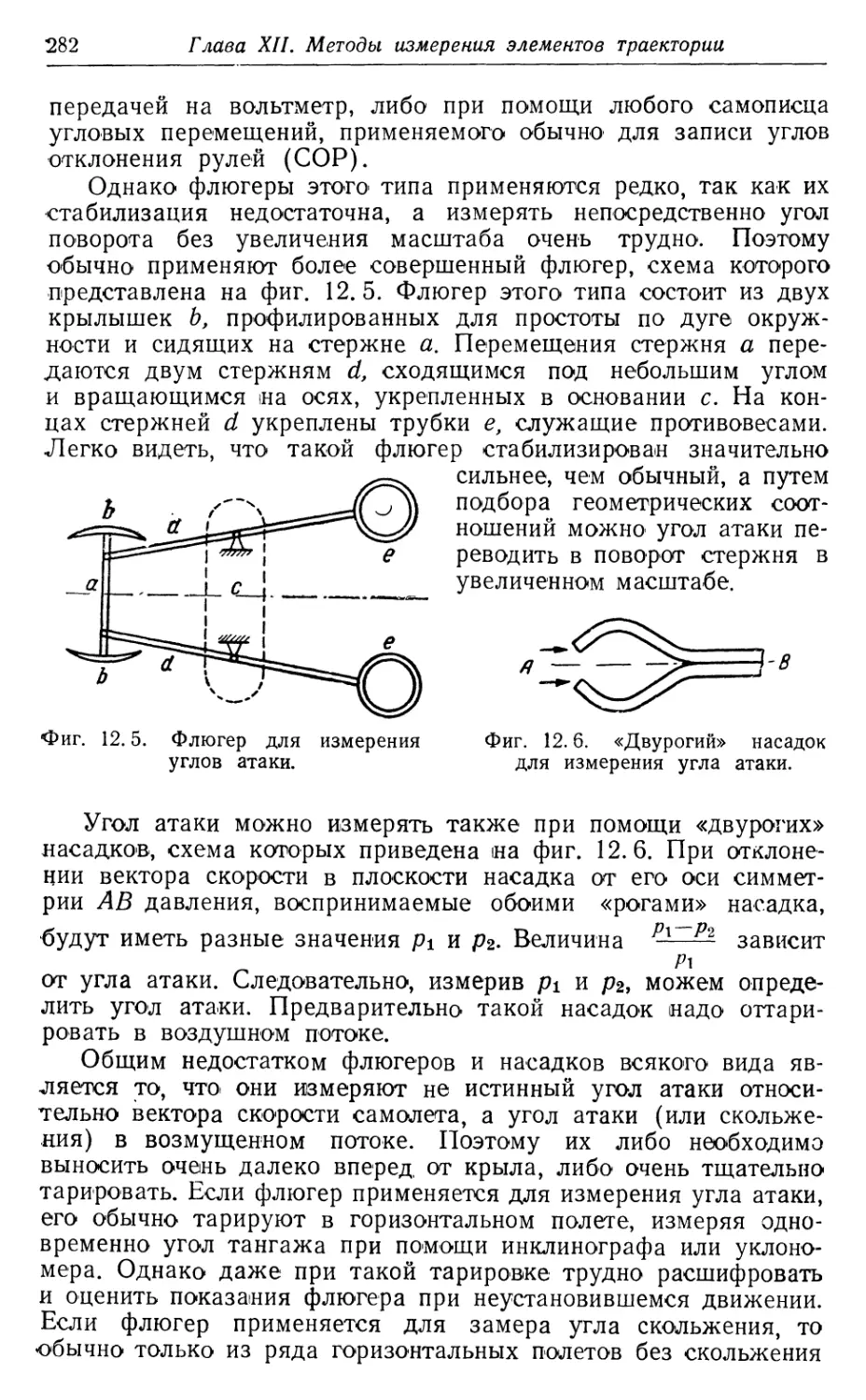
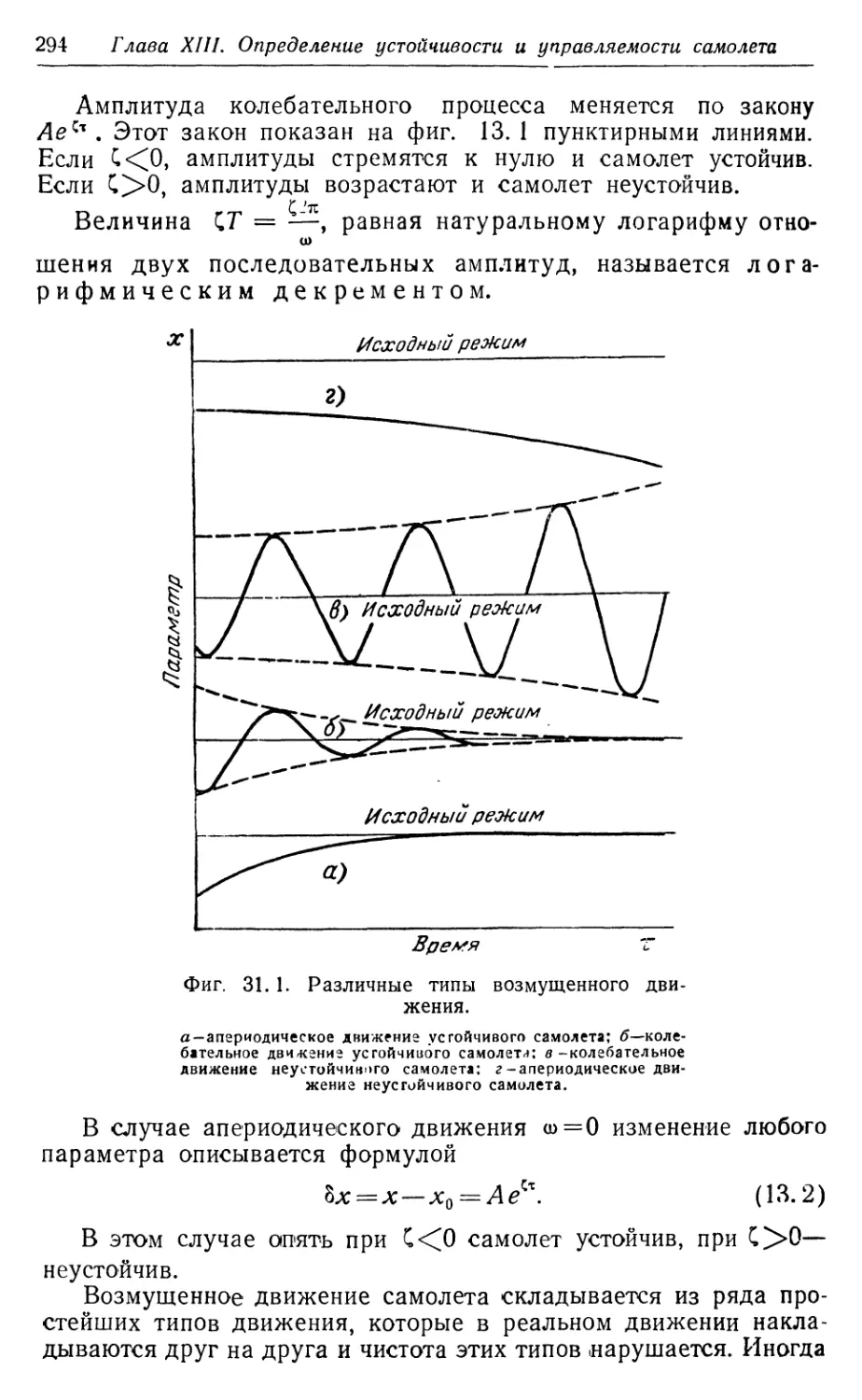
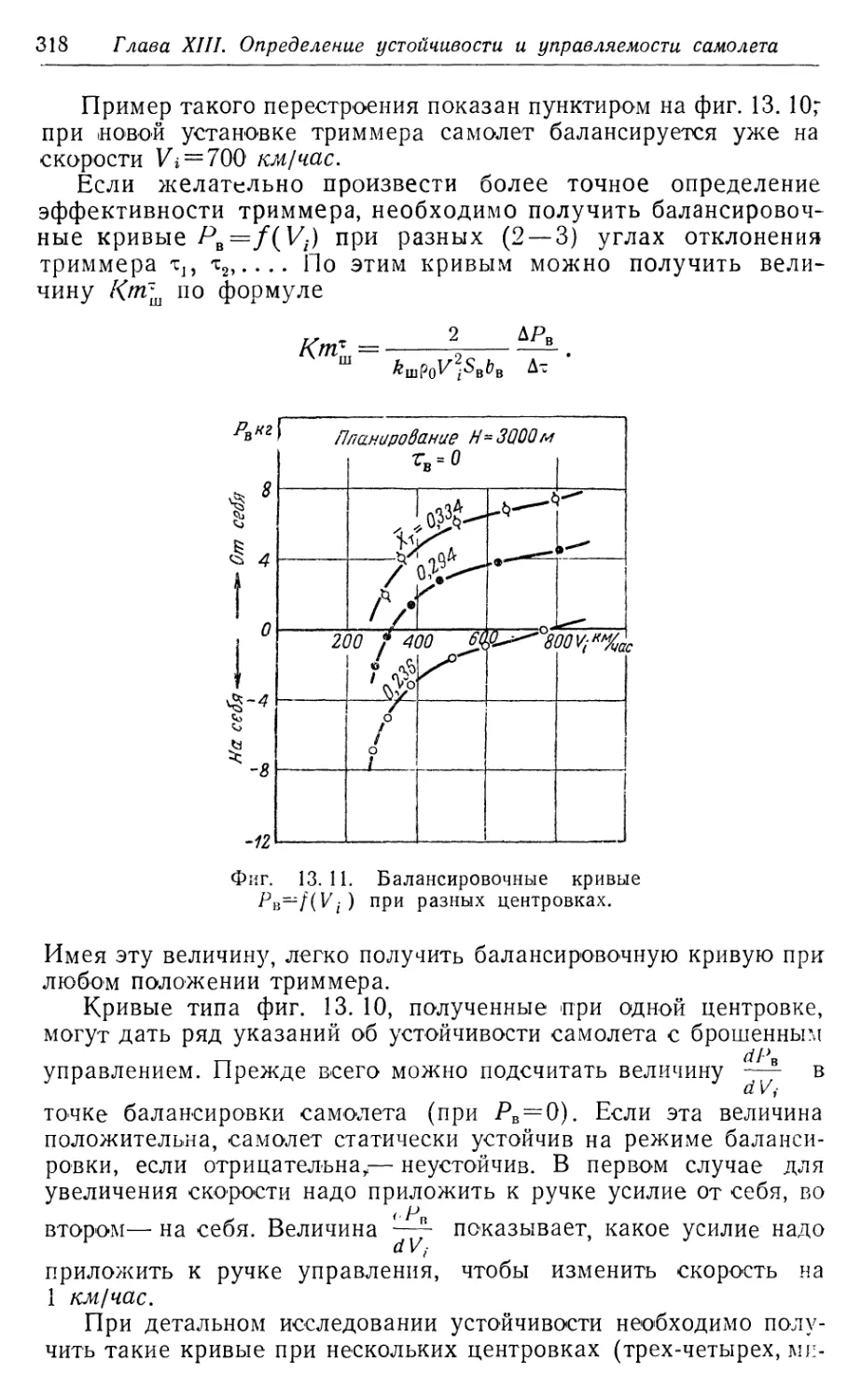
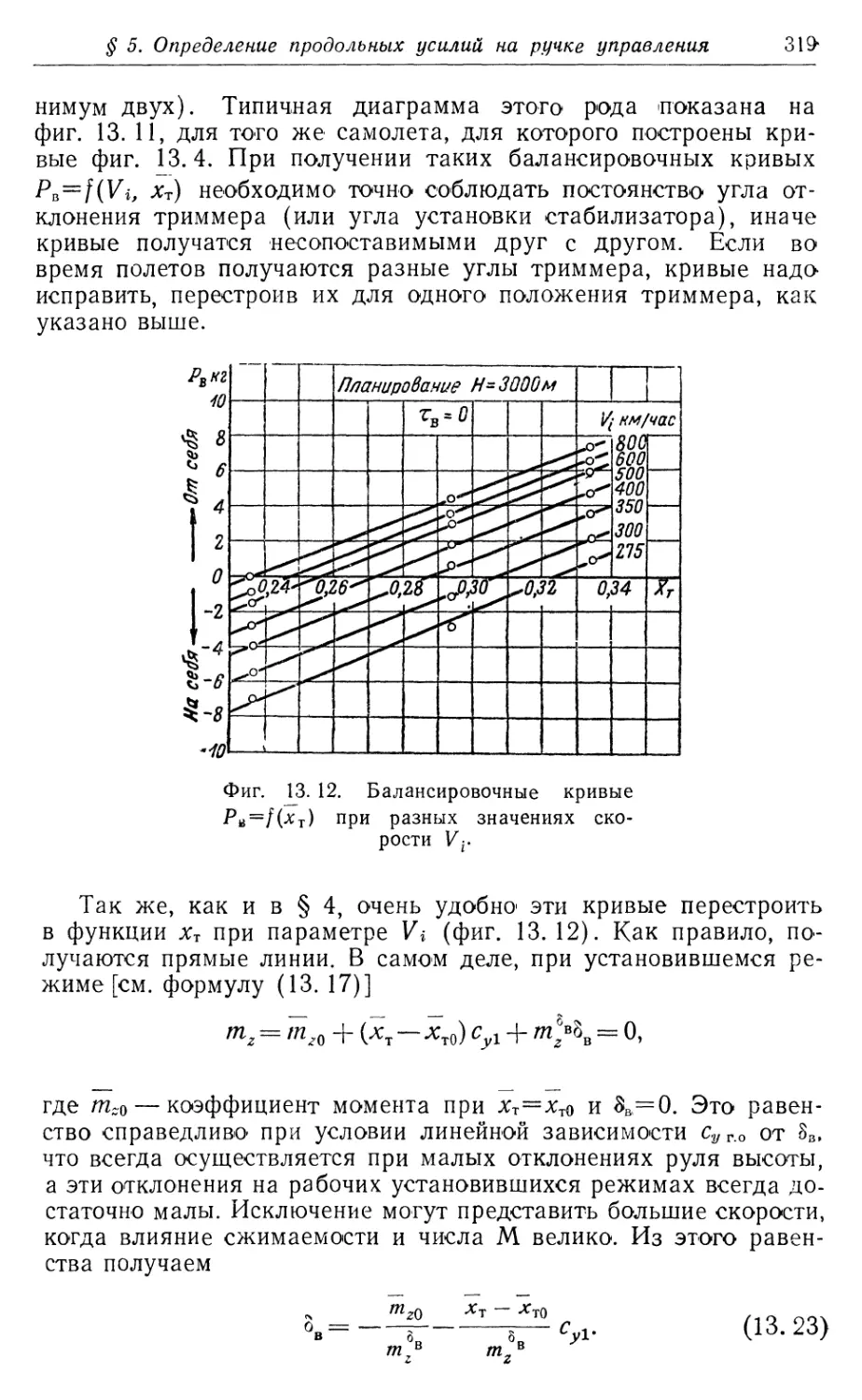
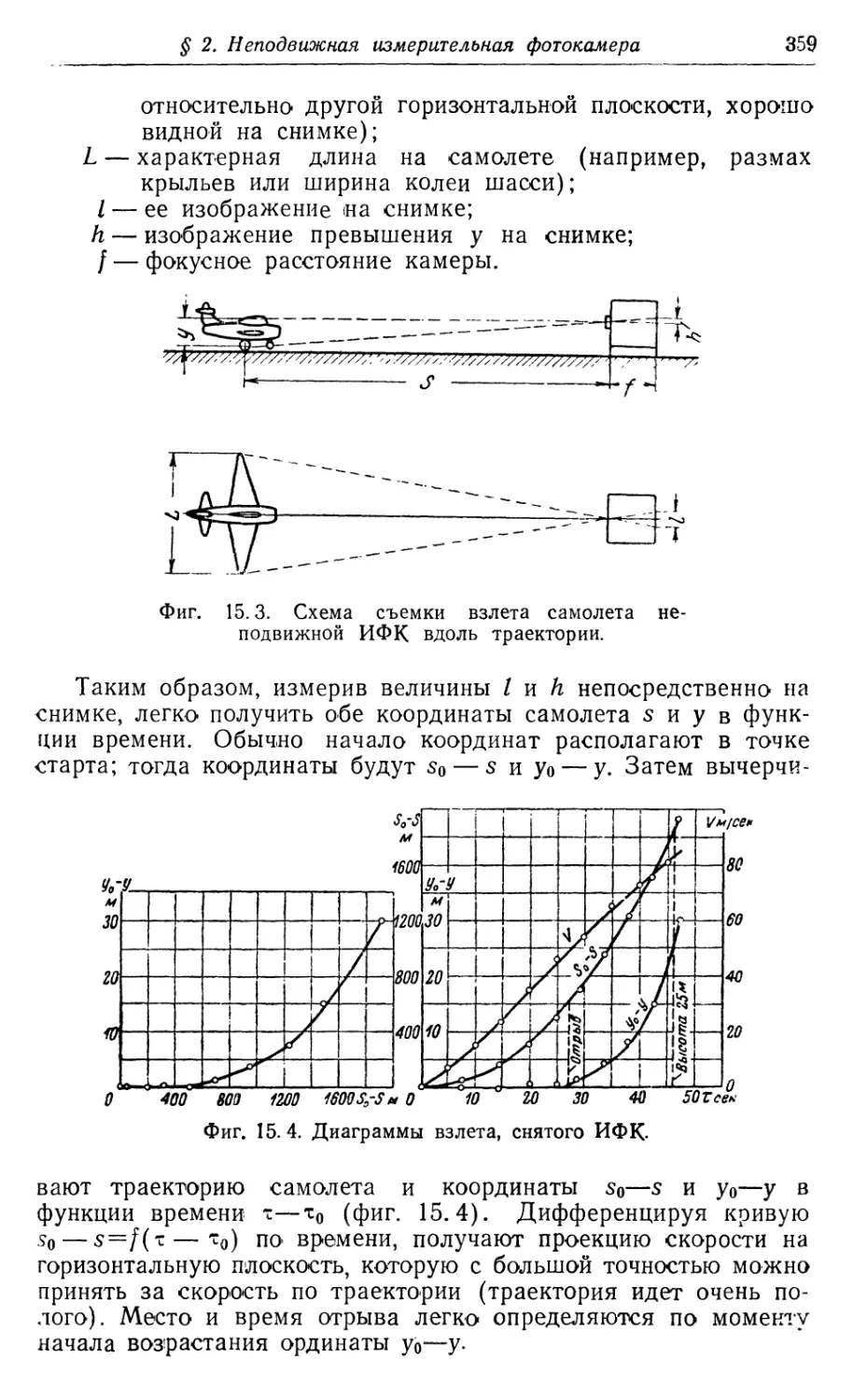
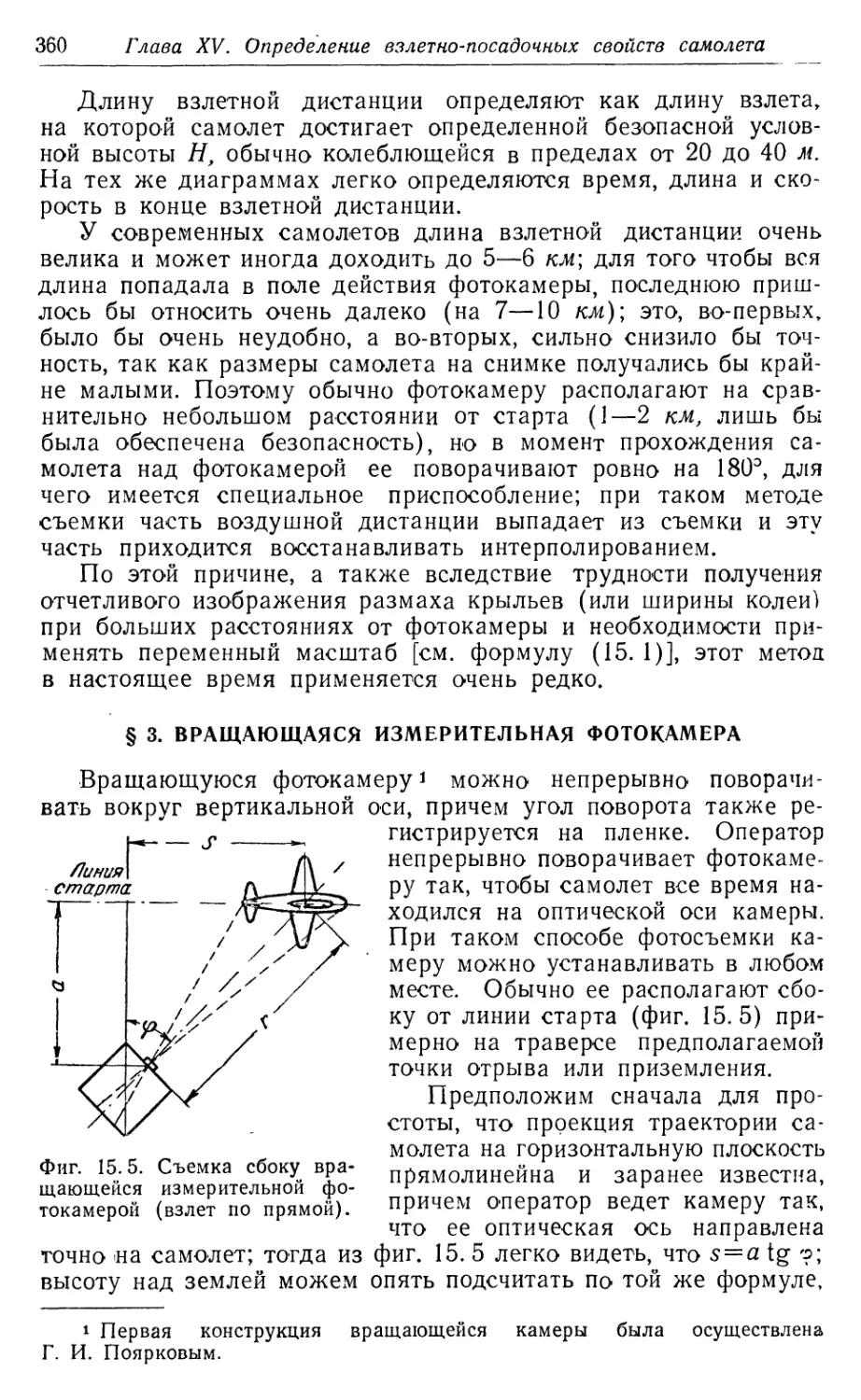
В книге изложены современные методы летных испытаний
самолетов и их силовых установок, причем основное внимание
уделено изложению теоретических основ и описанию методов
испытаний.
Книга является учебным пособием по курсу летных испы-
таний самолетов для авиационных высших учебных заведений.
Одновременно книга может служить в качестве основного мето-
дического пособия для работников исследовательских институтов,
конструкторских бюро и летных станций заводов авиационной
промышленности.
ПРЕДИСЛОВИЕ
Бурный рост авиационной техники за последние годы при-
вел к необходимости основательно пересмотреть методы летных
испытаний самолетов.
Выпущенная в 1941 г. книга Б. Н. Егорова «Летные испы-
тания самолетов» и другие ранее изданные руководства в на-
стоящее время устарели и не могут удовлетворять новым тре-
бованиям. С другой стороны, имеются отдельные монографии и
журнальные статьи, посвященные новым методам испытаний, но
разрозненность такого материала затрудняет систематическое
изучение методики летных испытаний. В то же время роль лет-
ных испытаний при доводке самолетов стала настолько значи-
тельной, что появилась необходимость выпуска соответствую-
щего систематического курса методики испытаний.
Постепенно развиваясь на почве достижений и практических
потребностей авиационной науки и техники в целом, методика
летных испытаний и исследований, созданная в основном тру-
дами советских ученых и инженеров, в настоящее время пред-
ставляет самостоятельную авиационную дисциплину, охваты-
вающую настолько большой круг вопросов, что ее трудно изло-
жить полностью в одной книге относительно малого объема.
Поэтому в настоящей книге излагаются только основы ме-
тодики испытаний, т. е. общая теория методов.
Объем книги также не позволил авторам дать подробное
описание современной аппаратуры для летных испытаний.
В книге приводятся только схемы действия приборов и то только
в тех случаях, когда это необходимо для анализа результатов
показаний прибора и их обработки. Некоторые узко специаль-
ные вопросы (например, испытания шасси, спецоборудования)
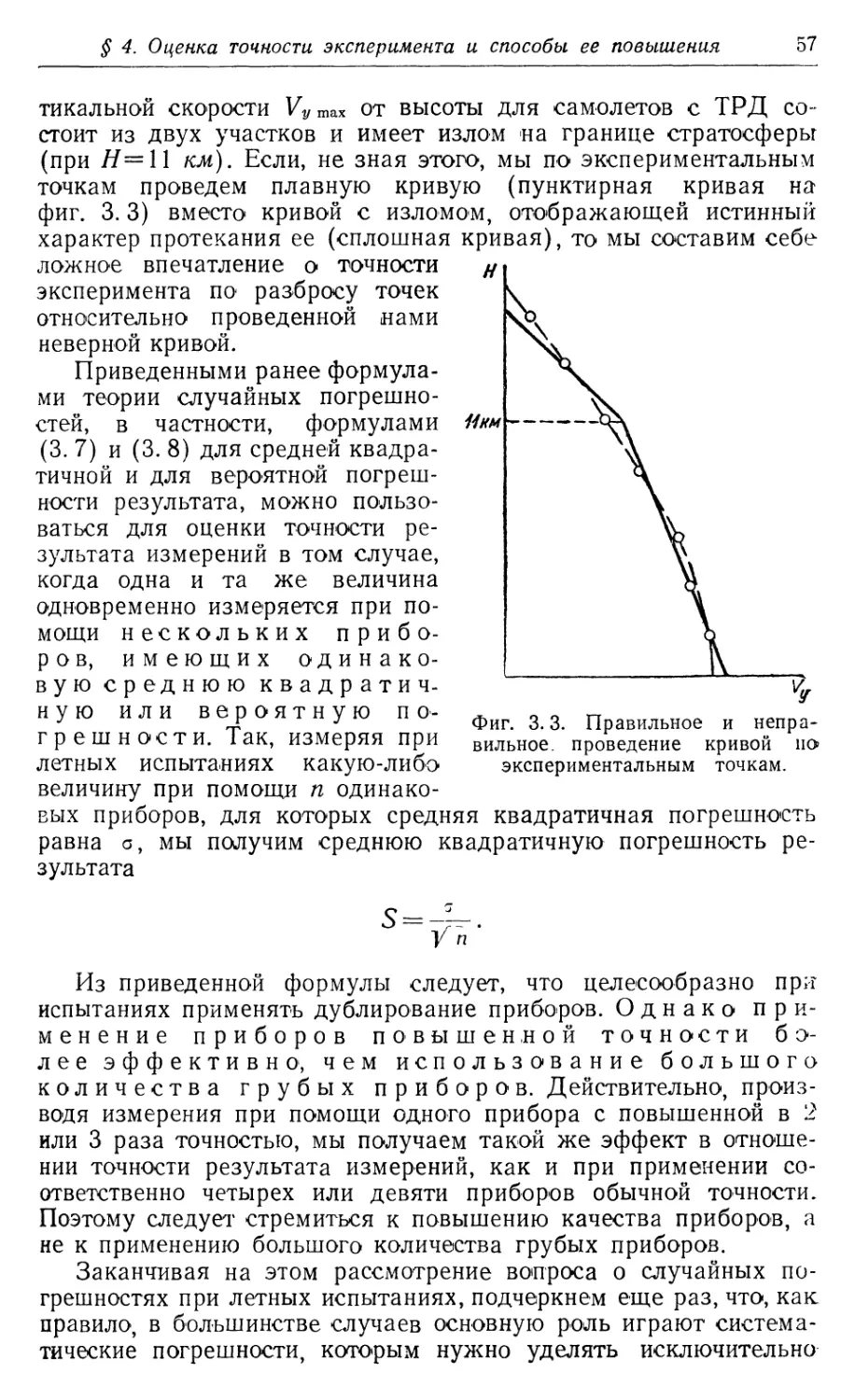
также не вошли в книгу.
Вместе с тем авторы уделили много внимания общему тео-
ретическому обоснованию методики, для того чтобы всякий изу-
чивший эту книгу при появлении новых вопросов по методике
летных испытаний мог в каждом конкретном случае самостоя-
тельно разработать соответствующий частный метод.
Книга написана как учебное пособие для студентов старших
курсов авиационных вузов, но может также оказать существен-
ную помощь инженерно-техническому составу летных станций,
научным работникам и конструкторам самолетов.
4
Предисловие
При использовании книги в качестве учебника в авиацион-
ных вузах, где на прохождение курса летных испытаний отво-
дится ограниченное число лекционных часов, можно ограни-
читься изучением материала, изложенного в следующих разде-
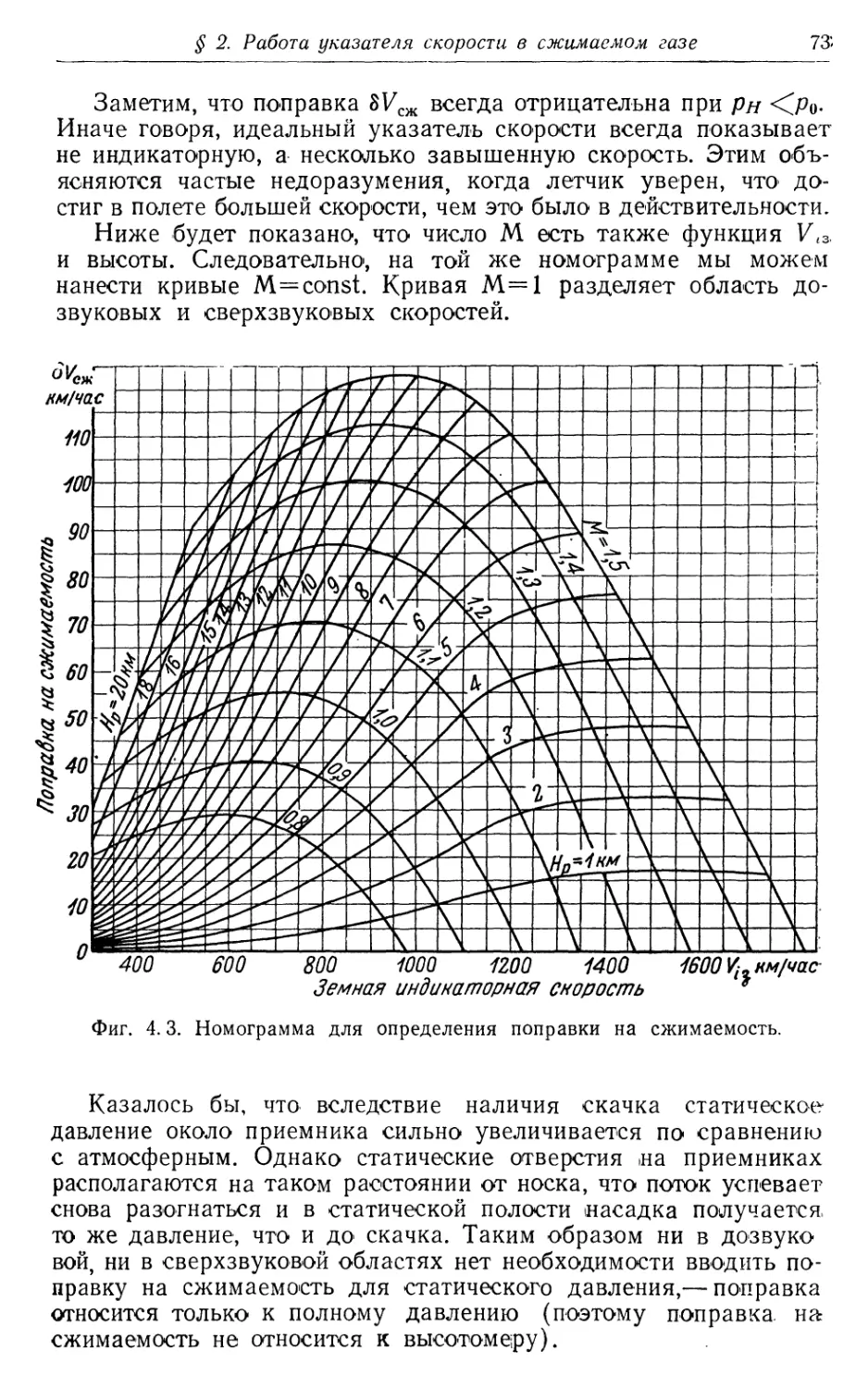
лах книги: главы II, IV, V, VI, глава VII (§ 2, 3 и 5), главы VIII,
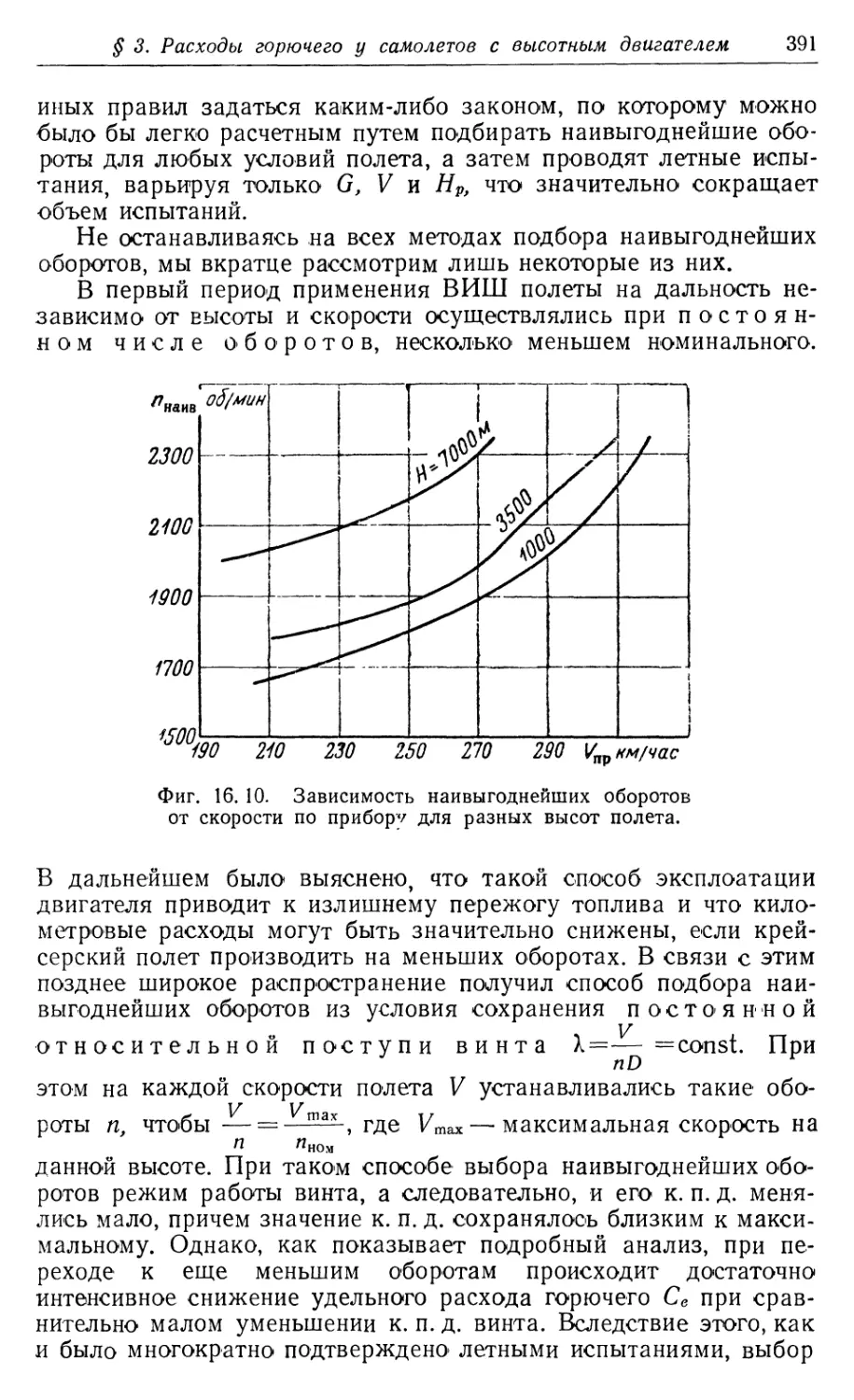
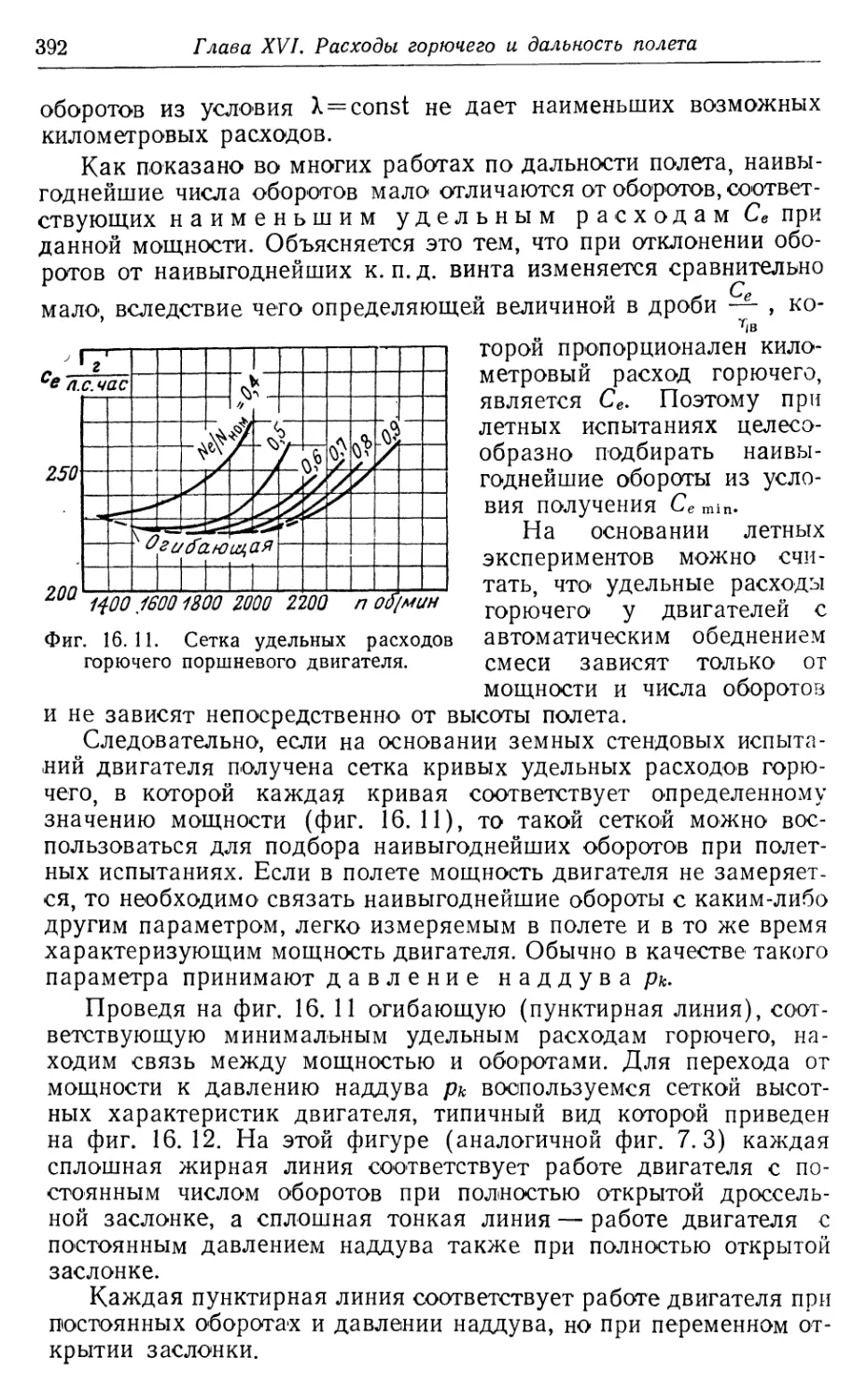
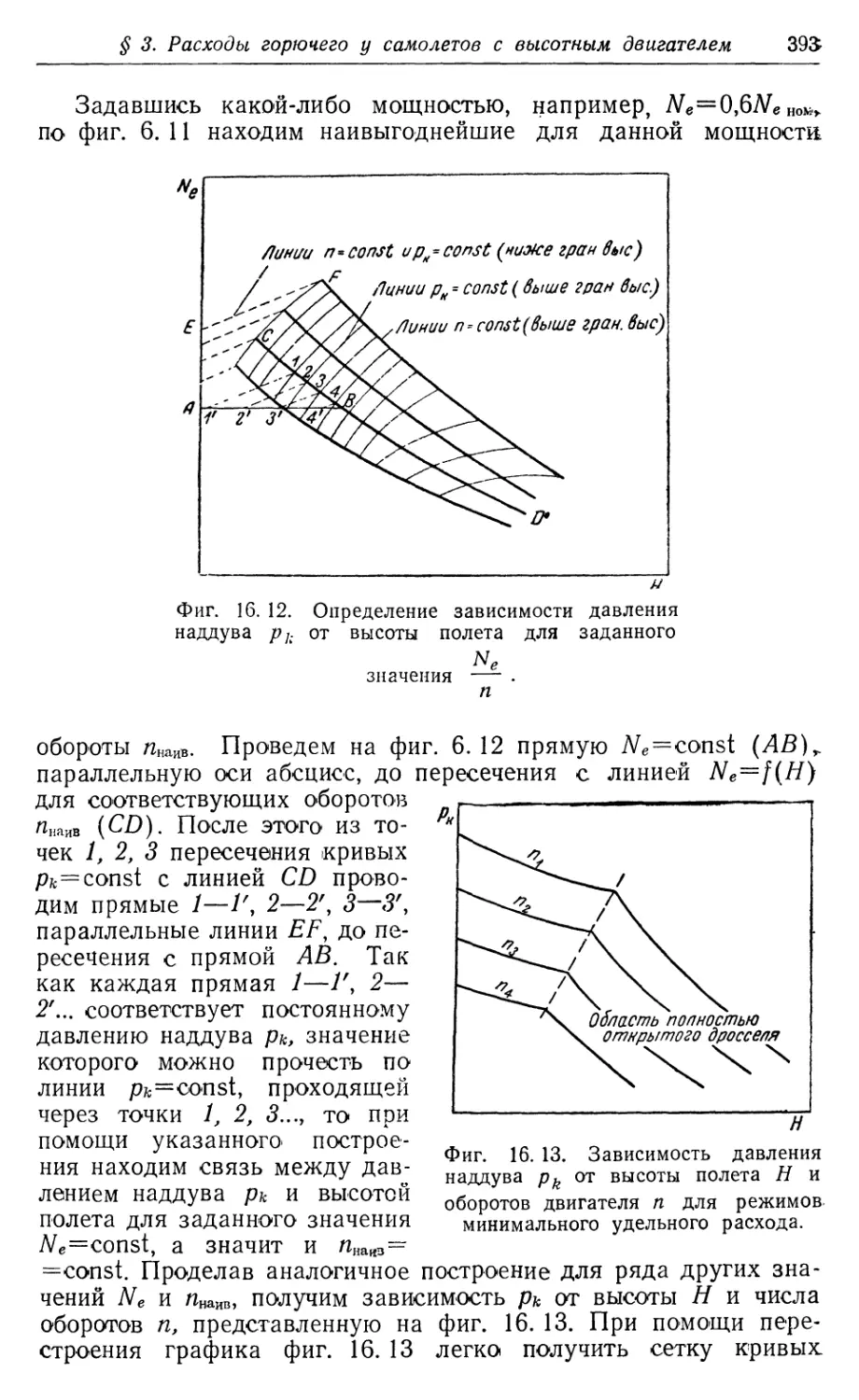
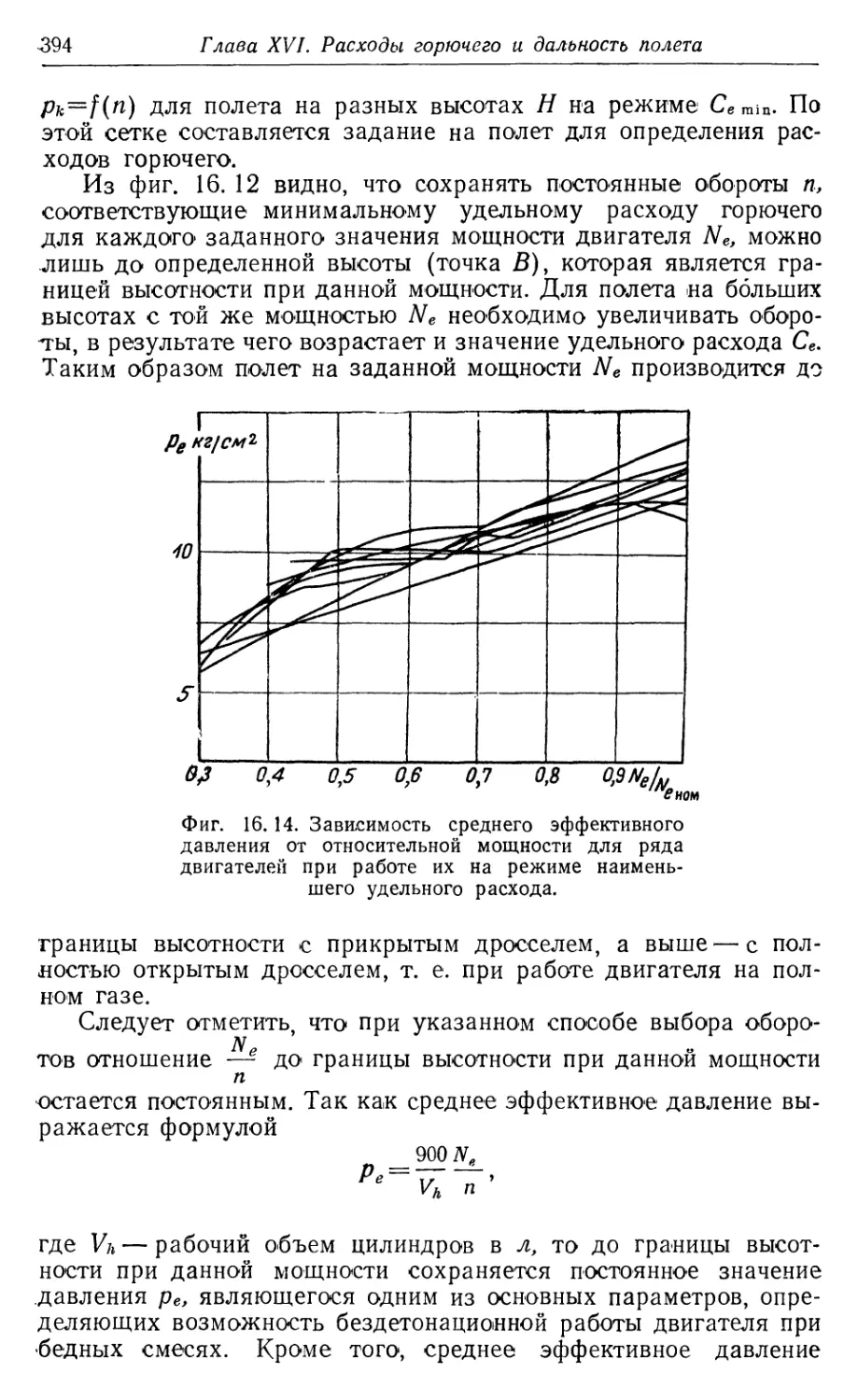
X, XI, XII, глава XIII, глава XIV, глава XV и глава XVI (§1,3,
4, 5).
Главы I, II, III, VI—XI и XVI написаны М. А. Тайцем,
главы IV, V, XII—XV и XVII—XX —В. С. Ведровым.
Авторы приносят благодарность заслуженному деятелю науки
и техники проф. В. С. Пышнову, доктору технических наук про-
фессору Б. Т. Горощенко и кандидатам технических наук
Н. С. Строеву, Г. С. Калачеву и В. В. Косточкину за ряд весьма
ценных указаний при просмотре рукописи этой книги, а также
инженеру М. А. Сидоровой, оказавшей большую помощь при
подготовке книги к изданию.
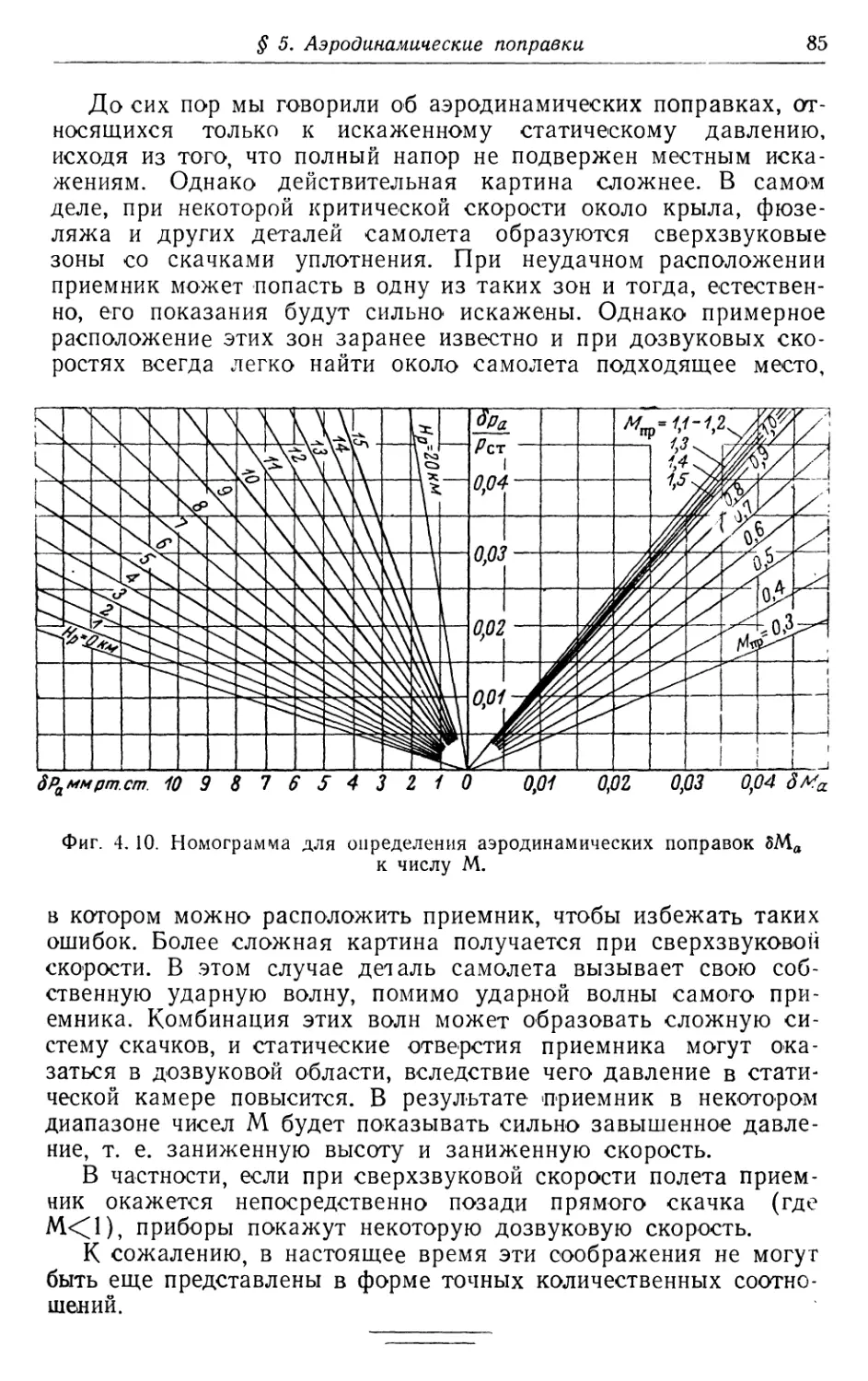
Авторы с признательностью примут все замечания по данной
книге; замечания следует направлять в адрес Оборонгиза,
Москва 51, Петровка 24.
ВВЕДЕНИЕ
Краткий исторический обзор
Развитие методов летных испытаний и исследований нераз-
рывно связано с общим ростом авиационной техники и науки.
Еще при выпуске в воздух первого в мире самолета А. Ф. Мо-
жайского и последующих опытных самолетов русских конструк-
торов (Я. М. Гаккеля, А. А. Пороховщикова и др.) приходилось
весьма тщательно продумывать методику первых испытательных
полетов. Естественно, что в то время на первом плане стояли во-
просы безопасности полета и весьма приближенной качествен-
ной оценки поведения самолета в воздухе. Оценка летно-такти-
ческих качеств не производилась. Отсутствовала контрольно-
измерительная аппаратура. Приборное оборудование сводилось
в основном к самым простым контрольным приборам мотора.
Очень часто отсутствовал даже такой элементарный основной
прибор, как указатель скорости самолета.
Первая мировая война 1914—1917 гг. послужила толчком к
развитию самолетостроения. К 1 ноября 1916 г. в России было
построено около 2000 самолетов Ч Строились в большом количе-
стве знаменитые отечественные самолеты «Илья Муромец» и
гидросамолеты М-5 (конструкции Д. П. Григоровича). Боевое
применение самолетов потребовало при испытании простейшей
оценки летно-тактических качеств самолета. Эти два обстоятель-
ства — расширение выпуска самолетов и необходимость оценки
их качества — привели к разработке методики сдаточ-
ных и с п ы т а н и й. В то время каждый выпускаемый самолет
подвергался испытаниям по следующей простой программе: из-
мерялось время подъема до 100, 200 и 500 ж; производилось пла-
нирование с убранным газом; для оценки маневренности произ-
водились правые и левые развороты; давалась качественная
оценка продольной устойчивости; на некоторых типах самолетов
производились испытания на продолжительность полета. Ника-
кого приведения к единым общим условиям не производилось.
Максимальная скорость не проверялась.
Таким образом в то время еще не существовало научно раз-
работанной методики испытаний, так как сама авиационная
наука была еще очень молода. Несмотря на то, что к этому
времени в России уже существовала школа знаменитых русских
1 Ряд исторических сведений был сообщен авторам инж. А. С. Виш-
невецким.
6
Введение
ученых, основоположников авиационной науки Н. Е. Жуков
ского и С. А. Чаплыгина, и была в основном разработана теория
крыла и винта, все же аэродинамика, в особенности экспери-
ментальная аэродинамика, еще не могла дать прочной базы для
научной разработки методов испытаний самолетов.
Великая Октябрьская Социалистическая революция дала
мощный толчок отечественному самолетостроению и авиацион-
ной науке. Декретом Совета Народных Комиссаров от 28 июня
1918 г. была национализирована авиационная промышленность.
В декабре 1918 г. по постановлению правительства, подписан-
ному В. И. Лениным, был организован Центральный Аэро-Гидро-
динамический институт, в котором были сосредоточены основ-
ные научные силы авиации и который после постройки и обору-
дования целого ряда лабораторий стал мощным научным цен-
тром авиации. Одновременно развивается и конструкторская
мысль. Закладываются первые советские самолеты конструкции
А. Н. Туполева, Д. П. Григоровича, Н. Н. Поликарпова и др.
В это время начинает развертываться первая серьезная летно-
исследовательская работа. В марте 1918 г. была организована
«Летучая л а б о р а т о р и я». Ее научным руководителем яв-
лялся непосредственно' Н. Е. Жуковский, придававший летно-
исследовательской работе очень большое значение. Основные
работы в этой лаборатории проводил известный ученик и сорат-
ник Н. Е. Жуковского — В. П. Ветчинкин. В этой лаборатории
были исследованы вопросы парашютирования и посадки самоле-
тов, основные боевые фигуры (виражи, спирали, перевороты,
пикирование и выход из него, петля Нестерова и др.). Такое под-
робное исследование маневренности самолетов в полете было
произведено впервые. Особенно необходимо отметить широкое
применение простейшего перегрузочного' прибора. Эти исследо-
вания дали обширный материал для расчета самолета на проч-
ность, а впоследствии — для создания первых советских норм
прочности. С тех пор все нормы прочности, как правило, уточ-
няют по материалам, полученным при летных испытаниях.
В 1920 г. был организован Летный отдел Главного Управле-
ния воздушного флота, основными задачами которого были: лет-
ная испытательная и исследовательская работа, метеорологиче-
ские исследования атмосферы, разработка вопросов аэрофото-
съемки, испытания спецоборудования и вооружения, разработка
радиосвязи и аэронавигации.
В эти же годы большая работа по методике летных испы-
таний была развернута в Институте инженеров Красного воз-
душного флота, преобразованном в 1922 г. в Военно-Воздушную
Академию имени Н. Е. Жуковского. В лаборатории летных
испытаний Академии в 1924—1925 гг. была разработана первая
методика летных испытаний самолетов, изложенная в официаль-
ном издании «Практическое руководство' к испы-
танию сухопутных и морских аэропланов». По
Введение
этой методике в 1925—1930 гг. испытывались десятки новых
опытных самолетов.
Большую роль сыграли методы летных испытаний при
подготовке больших перелетов новых советских самолетов
АНТ-3, АНТ-4, АНТ-6, АК-1 и др. в Западную Европу, Азию
и Америку (летчики М. М. Громов, С. А. Шестаков).
После окончания восстановительного периода и в годы раз-
вертывания социалистической индустриализации нашей Родины
большевистская партия и советское правительство уделяли осо-
бое внимание преобразованию нашей страны в мощную авиа-
ционную державу. Решающую роль в этом сыграло личное вни-
мание товарища Сталина, с огромной любовью и заботливостью
растившего нашу авиацию. В годы первых Сталинских пятиле-
ток создается крупнейшая авиационная промышлен-
ность. Советский Военно-Воздушный флот становится мощным
оплотом обороны первого в мире социалистического государства.
Растет Гражданский воздушный флот. Широкое развитие сети
научно-исследовательских институтов и авиа-
ционных учебных заведений поднимает на новую
ступень культуру авиационной науки и техники в нашей стране,
в том числе и методику летных испытаний.
В это время начала усиленно развертываться летно-исследо-
вательская работа. Начинает широко внедряться новая аппа-
ратура; если до этого периода испытания и исследования ба-
зировались в основном на обычной бортовой аппаратуре, то в
начале 30-х годов появляется много типов приборов, специаль-
но предназначенных для исследовательской работы. В первой
половине 30-х годов появляются специальные типы барографов,
спидографов, самописцев отклонения рулей и ряд других прибо-
ров. Уточняются методы тарировки, совершенствуются специаль-
ные установки для проверки и тарировки приборов.
В связи с резко увеличившимся выпуском самолетов потре-
бовалось для сравнительной их оценки приводить их летные
данные к условиям стандартной атмосферы, что
производилось в основном по методу «высоты по плотности». Но
вскоре выяснилось, что этот метод недостаточно точен и необ-
ходимо пересмотреть методику приведения.
Методика испытаний для определения основных летно-такти-
ческих качеств — максимальной скорости, скороподъемности,
дальности, взлетно-посадочных свойств — претерпевает коренные
изменения: уточняются методы километража; методика приве-
дения основных параметров производится уже с учетом специ-
фических законов изменения мощности двигателя при измене-
нии температуры и давления окружающего воздуха; разраба-
тывается новый очень точный, простой и наглядный метод
оборотов, сыгравший большую роль в методике испытаний
самолетов с двигателями без наддува и с винтами фиксирован-
ного шага.
8
Введение
Одновременно происходит перелом в методах и тематике лет-
ной работы. Если раньше летная работа ограничивалась в основ-
ном испытаниями самолетов, то в начале 30-х годов широко раз-
вертываются научно-исследовательские работы.
К этому времени налаживается работа по изучению в полете н е-
установившегося движения, по количественной
оценке устойчивости и управляемости, взлетно-
посадочных свойств, штопора и маневрен-
ности. Тогда же была разработана методика опреде-
ления поляры самолета и характеристик винтов и со-
зданы первые методы определения распределения на-
грузки по частям самолета.
Эти новые методы были созданы школой советских ученых
и инженеров: В. С. Пышновым, Б. Т. Горошенко, А. Н. Журав-
ченко, В. Л. Александровым, А. В. Чесаловым, С. Г. Козловым,
Ю. А. Победоносцевым, Б. Н. Егоровым, Г. С. Калачевым,
Ю. К. Станкевичем, С. И. Афанасьевым, А. А. Кравцовым и др.
Большую роль в развитии новых методов летных испытаний
сыграло тесное содружество научных работников с летчика-
ми-испытателями. Особенно следует отметить творческую
деятельность известных летчиков-испытателей В. П. Чкалова,
М. М. Громова, А. Ф. Анисимова, А. Б. Юмашева, Б. Л. Бух-
гольца, Г. Ф. Байдукова, И. Ф. Петрова, В. С. Степанчонка,
А. И. Никашина и др.
Новая методика испытаний оказала существенную помощь при
подготовке знаменитых перелетов наших летчиков на само-
летах АНТ-6 и АНТ-25 по Сталинскому маршруту (1936 г.), на
Северный полюс (1937 г.) и через полюс в Северную Америку
(1937 г.). Можно утверждать, что доводка самолета АНТ-25, на
котором была произведена большая часть перелетов, значитель-
но затянулась бы, если бы к этому времени не были созданы
новые, совершенные методы испытаний, позволившие сделать
точную оценку самолета, указать его слабые места и произвести
доводку в нужном направлении. С этого момента методика лет-
ных испытаний тесно увязывается с доводкой нового опыт-
ного самолета.
Во второй половине 30-х годов происходит новый качествен-
ный перелом в развитии нашей авиации. Появление двигателей
с наддувом, винтов изменяемого шага с автоматическим регули-
рованием, убирающегося шасси и капотов нового типа, а также
общее улучшение аэродинамики вызвали новое увеличение ско-
рости, скороподъемности и высоты. Этот качественный сдвиг и
появление новой техники повлекли за собой развитие новых ме-
тодов летных испытаний. Разрабатывается новая методика
приведения к стандартным условиям для двигателей с над-
дувом и винтами с изменяемым шагом; вводится поправка
на сжимаемость при измерении скорости; в связи с ростом
потолка разрабатываются методы изучения в полете систем
Введение
9
питания топливом, охлаждения и смазки двигателя и оценки
высотности систем двигательной установки; разрабатываются
методы испытаний всасывающей системы двигателя и оценки его
высотности.
К этому же периоду относится разработка количествен-
ных нормативов устойчивости и управляе-
мости, а также разработка новых методов изучения боковой
устойчивости в полете.
Значительно расширяется круг специалистов по методике
летных испытаний. Кроме указанных ранее лиц, вопросам ме-
тодики летных испытаний посвящают свои работы В. Ф. Болот-
ников, В. Н. Сагинов, Н. С. Строев, А. Е. Донов, В. А. Булин-
ский, В. В. Косточкин, Н. Б. Марьямов, Н. И. Тихонов, М. И. Ге-
расимов, С. П. Щербаков, Г. С. Кириллин и др., а также летчи-
ки-испытатели А. Н. Гринчик, С. П. Супрун и др.
Итоги работ этого периода подытоживаются в книгах
А. В. Чесалова «Испытания опытных самолетов» (Труды ЦАГИГ
1938), «Справочник авиаконструктора» (ЦАГИ, 1937), Б. Н. Его-
ров «Летные испытания самолетов» (Оборонгиз, 1941) и в ряде
руководств и инструкций.
Разработанные за этот период методы летных испытаний сы-
грали очень большую роль во время Великой Отечественной
войны. С одной стороны, эти методы позволили контролировать
и поддерживать на должной высоте качество серийной продук-
ции, а с другой,— выявлять недостатки и возможности улучше-
ния летно-тактических свойств боевых самолетов.
Во время Великой Отечественной войны появилось много
новых образцов самолетов и двигателей прославленных совет-
ских конструкторов С. В. Ильюшина, С. А. Лавочкина, А. И. Ми-
кояна, А. Н. Туполева, А. С. Яковлева, В. Я. Климова, А. А. Ми-
кулина, А. Д. Швецова и др. К концу войны скорости боевых
самолетов достигли цифры порядка 600—700 км/час, сильно воз-
росли дальность и высотность. В связи с этим непрестанно со-
вершенствовалась и методика летных испытаний, главным обра-
зом в направлении уточнения старых методов. За это время были
уточнены методы приведения летных данных с учетом регулиро-
вания систем охлаждения, окончательно разработаны методы
испытаний системы топливопитания, водяной и масляной систем,
уточнены методы определения высотности двигателя и качества
всасывающей системы самолета и двигателя, созданы методы
испытаний пылеулавливающих фильтров, разработаны методы
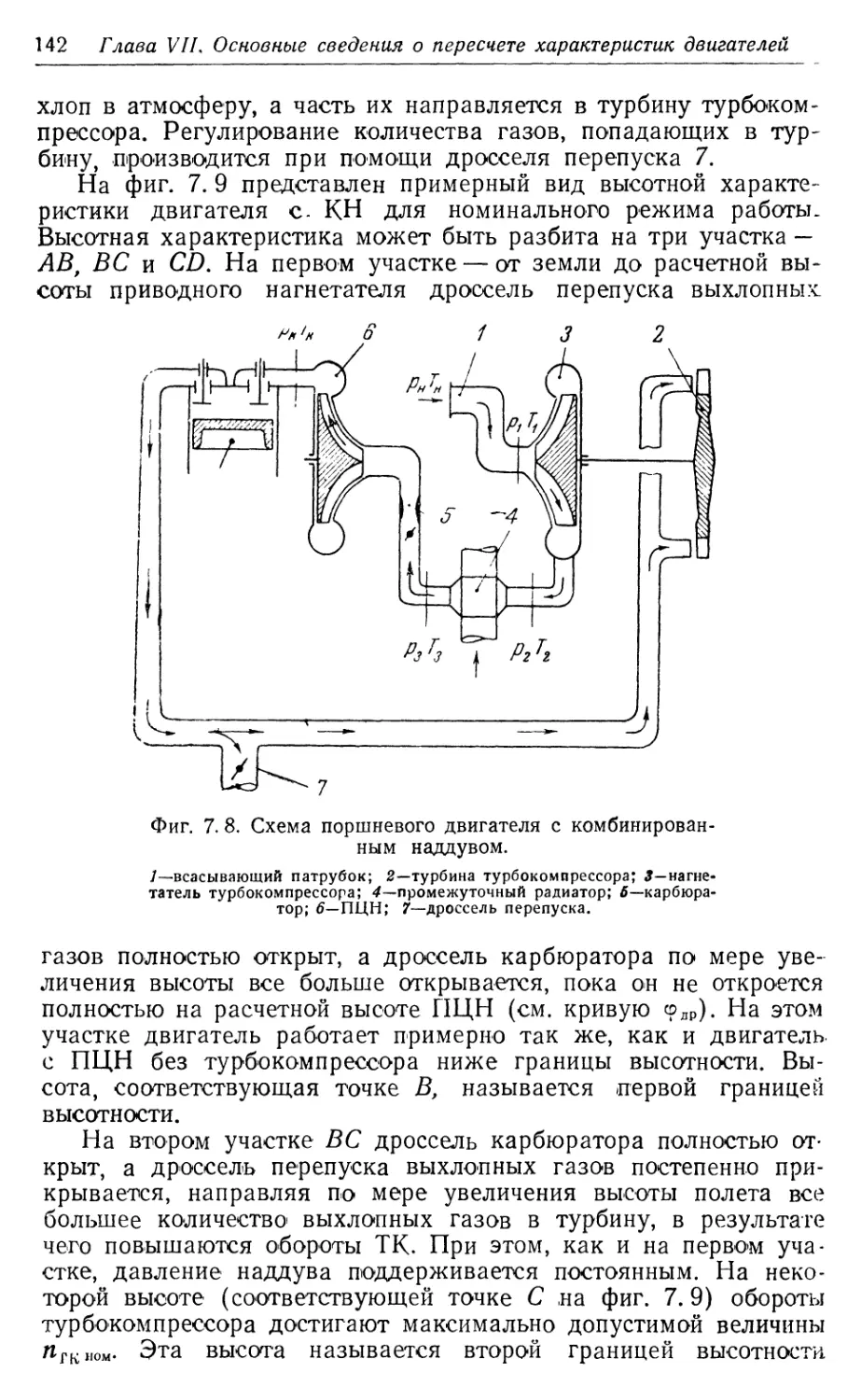
испытаний двигателя с комбинированным наддувом.
Послевоенный период характеризуется бурным развитием
реактивной авиации. В связи с появлением турбореак-
тивных двигателей резко возросли скорости самолетов. Появи-
лось новое аэродинамическое качество — влияние сжимаемости
воздуха и числа М. В связи с этим пришлось пересматривать и
w
Введение
всю методику летных испытаний. Появляются новые методы
тарировки указателя скорости — радиолокационный, фотокино-
теодолитный, барометрический. Разработаны новые типы прием-
ников для определения давления и скорости. Уточнены методы
определения скорости самолета. Развиты новые методы приве-
дения летных данных самолетов с ТРД к стандартным условиям.
Появились методы испытаний двигателей в полете. Разработаны
новые методы испытаний на устойчивость при больших ско-
ростях, в частности, методы определения волнового кризиса и
его влияния на устойчивость.
Из этого краткого исторического очерка видно, что отече-
ственная методика летных испытаний и исследований развива-
лась в тесной связи с общим развитием авиационной отечествен-
ной техники. Это и естественно в нашей стране, где теория не-
разрывно связана с практикой, где наука поставлена на службу
социалистического строительства и укрепления обороноспособ-
ности страны. Наша методика строится таким образом, чтобы
не только установить контроль за выполнением конструкторами
тактико-технических требований, но и помочь конструкторам и
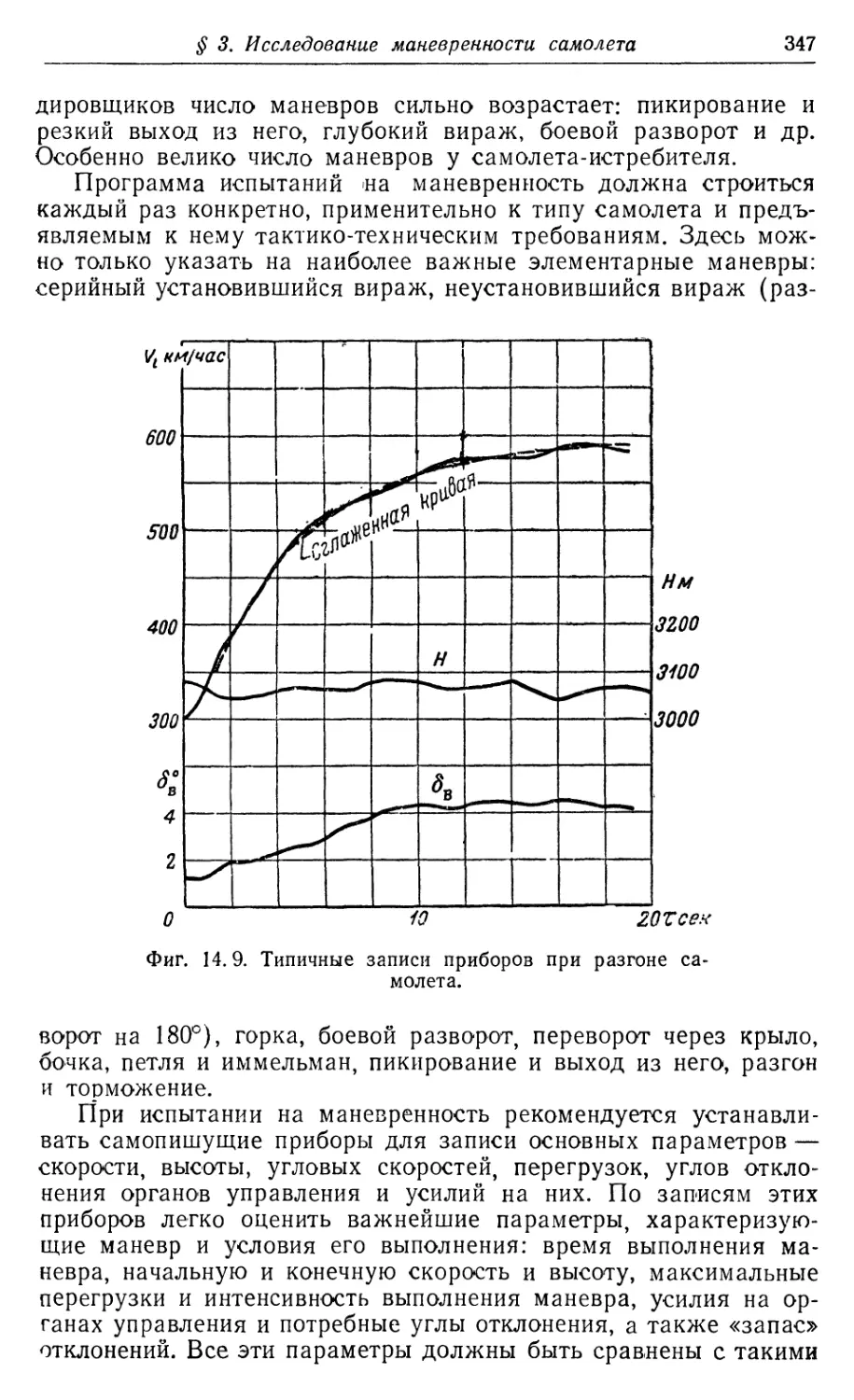
заводам глубоко проанализировать характеристики их объектов
и найти возможности их улучшения. В этом наша методика резко
отличается от методики испытаний в капиталистических стра-
нах, где каждая фирма держит в секрете свои достижения и от-
крытия; естественно, что в зарубежных условиях и не может
широко развернуться методическая научная мысль.
Методика летных испытаний неразрывно связана с вопросами
доводки опытной и серийной продукции, ибо
только на базе серьезного обследования в полете можно улуч-
шить самолет и его оборудование.
В настоящее время методы летных исследований начали
приобретать все большее и большее значение наряду с мето-
дами эксперимента на наземных установках (аэродинамических
трубах, стендах и т. п.). В этих методах заложены большие по-
тенциальные возможности предвидения и изучения техники бу-
дущего. Укажем, например, на возможность изучения аэродина-
мических форм и работы двигателей на больших скоростях поле-
та при помощи летающих моделей. Целый ряд вопросов
может быть наилучшим образом решен при помощи исследований
в полете. Таким образом методика летных испытаний получила
и самодовлеющее научное значение.
Г лав a I
АТМОСФЕРА
§ 1. КРАТКИЕ СВЕДЕНИЯ О СТРОЕНИИ АТМОСФЕРЫ
В настоящее время имеются достаточно полные (с точки
зрения потребностей авиации) и достоверные сведения о струк-
туре и свойствах нижних слоев атмосферы — примерно до вы-
соты 20 км. Резкое увеличение в последние годы высоты полета
самолетов и ракетных аппаратов послужило стимулом к интен-
сивному изучению строения высоких слоев атмосферы.
Методы изучения атмосферы. Систематические
исследования высоких слоев атмосферы производятся в основ-
ном при помощи самописцев и других автоматических приборов,
поднимаемых на высоту на шарах-зондах или других аппаратах.
Идея этого метода была разработана еще М. В. Ломоносовым,
который в 1754 г. построил вертолет («аэродромическую машин-
ку») для подъема метеорологических приборов.
Особенно плодотворным для широкого развития исследований
атмосферы оказалось изобретение советским метеорологом
П. А. Молчановым в 1930 г. радиозонда, поднимающегося до
30—35 км и передающего условными сигналами по радио ре-
гистрируемые на высоте давление, температуру и влажность воз-
духа. Для регистрации местоположения радиозондов применя-
лась радиопеленгация, а впоследствии — радиолокация. В по-
следние годы применяется подъем приборов на ракетах.
В 1934 г. были произведены ценные исследования атмосферы
при рекордных полетах советских стратостатов (до- вы-
соты 22 км).
Для изучения более высоких слоев атмосферы в настоящее
время применяются в основном косвенные методы. Несмотря на
некоторые расхождения между данными, полученными различ-
ными косвенными методами, все эти методы дают сравнительно
согласные результаты, позволяющие сделать основные выводы
о структуре верхних слоев атмосферы.
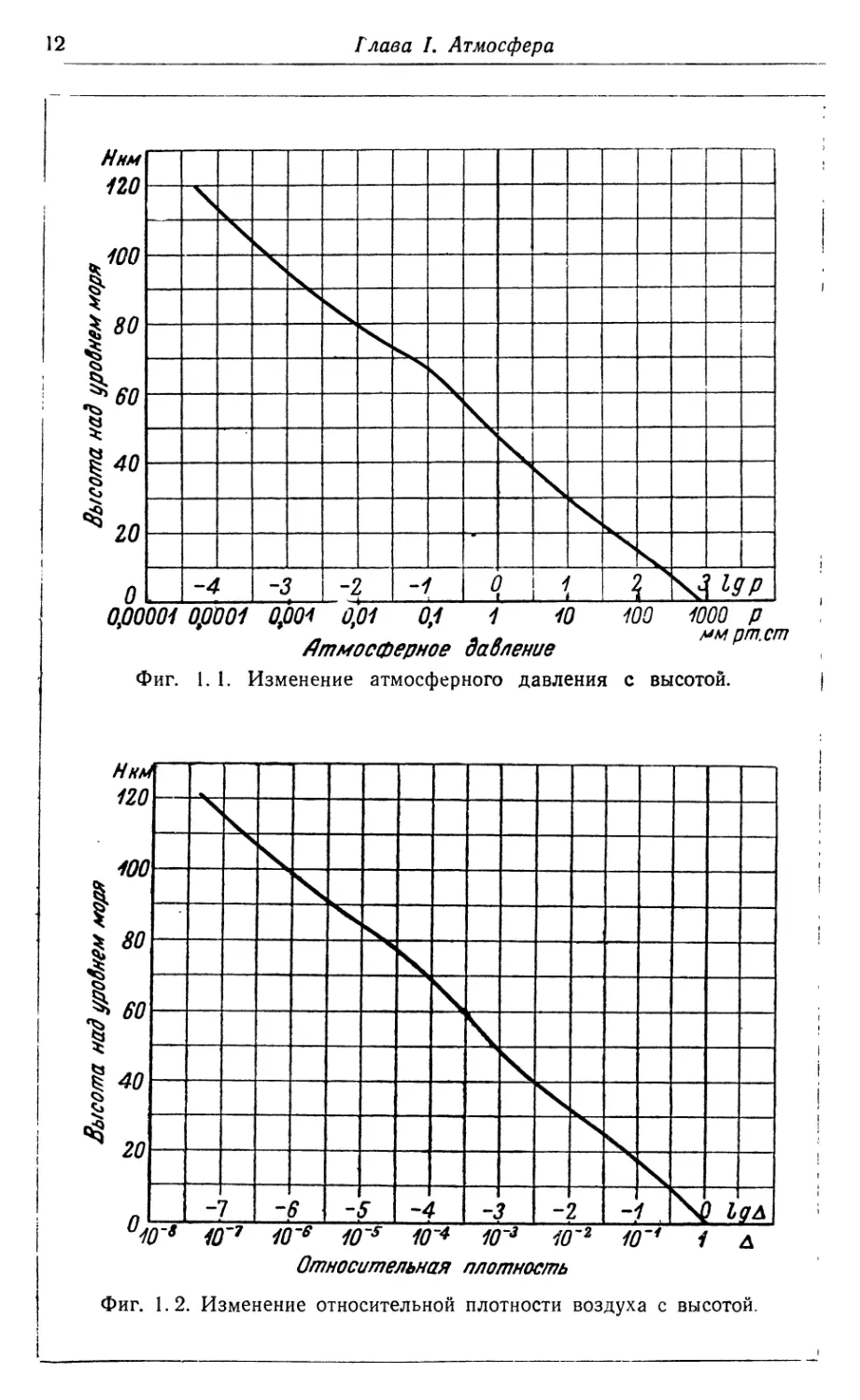
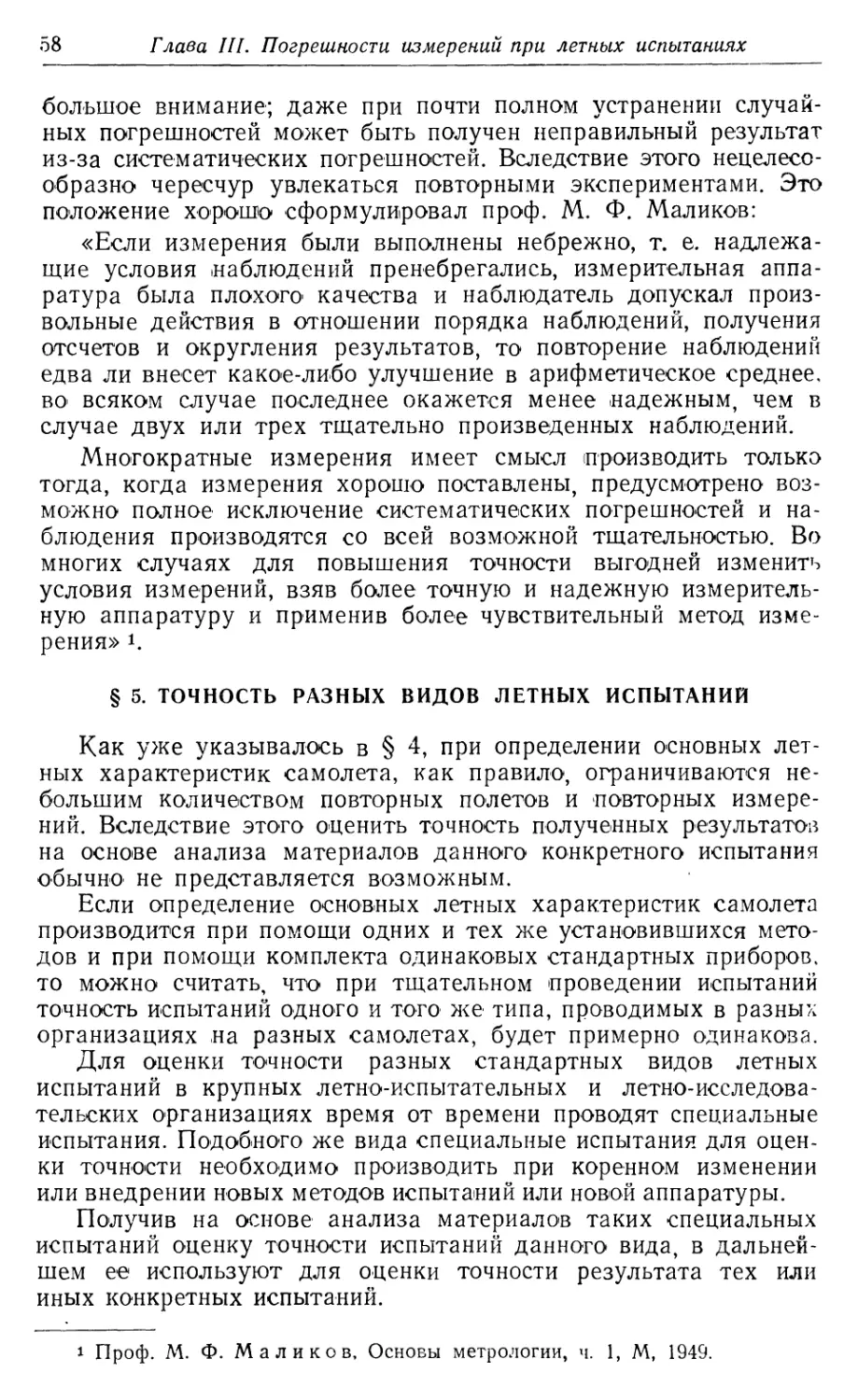
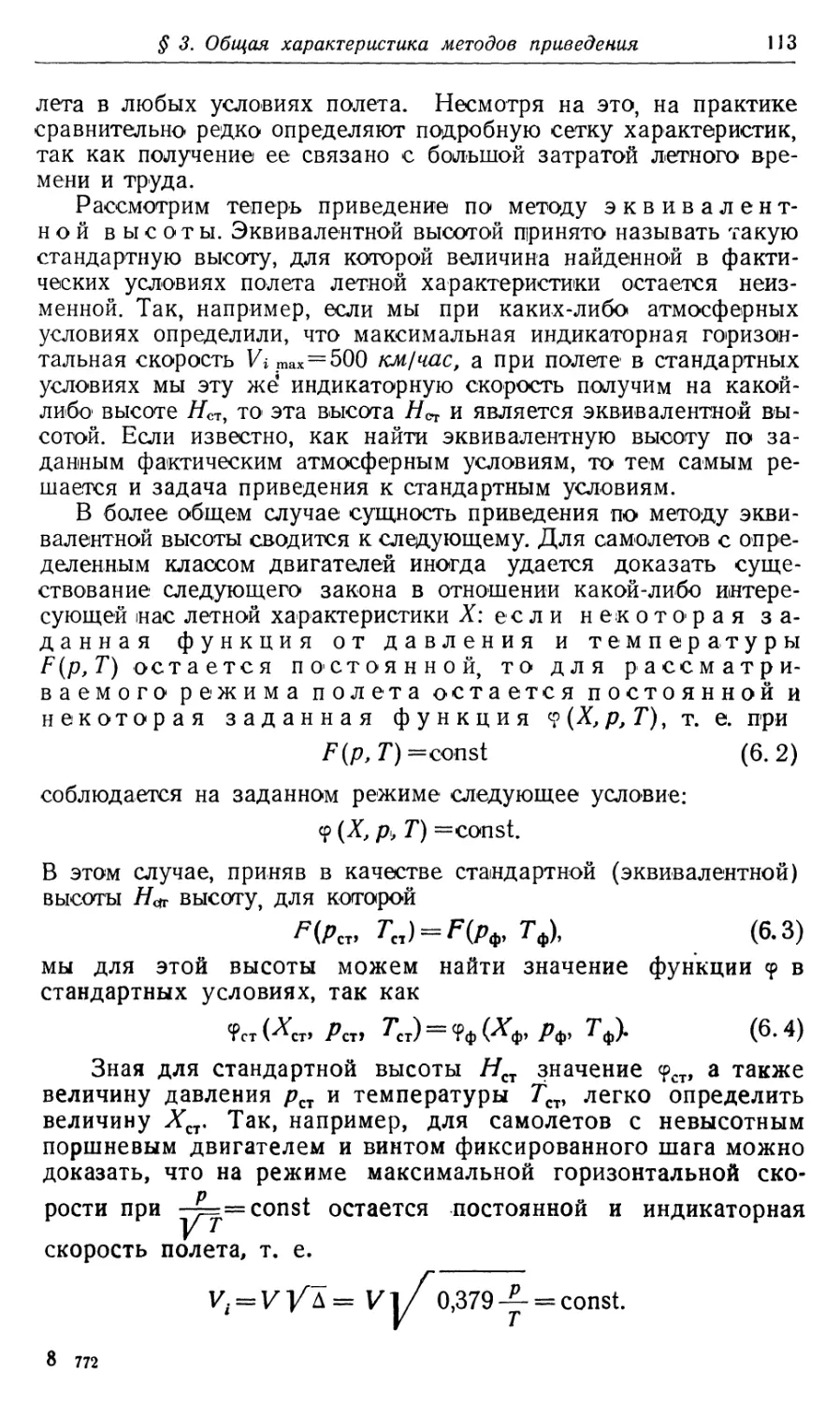
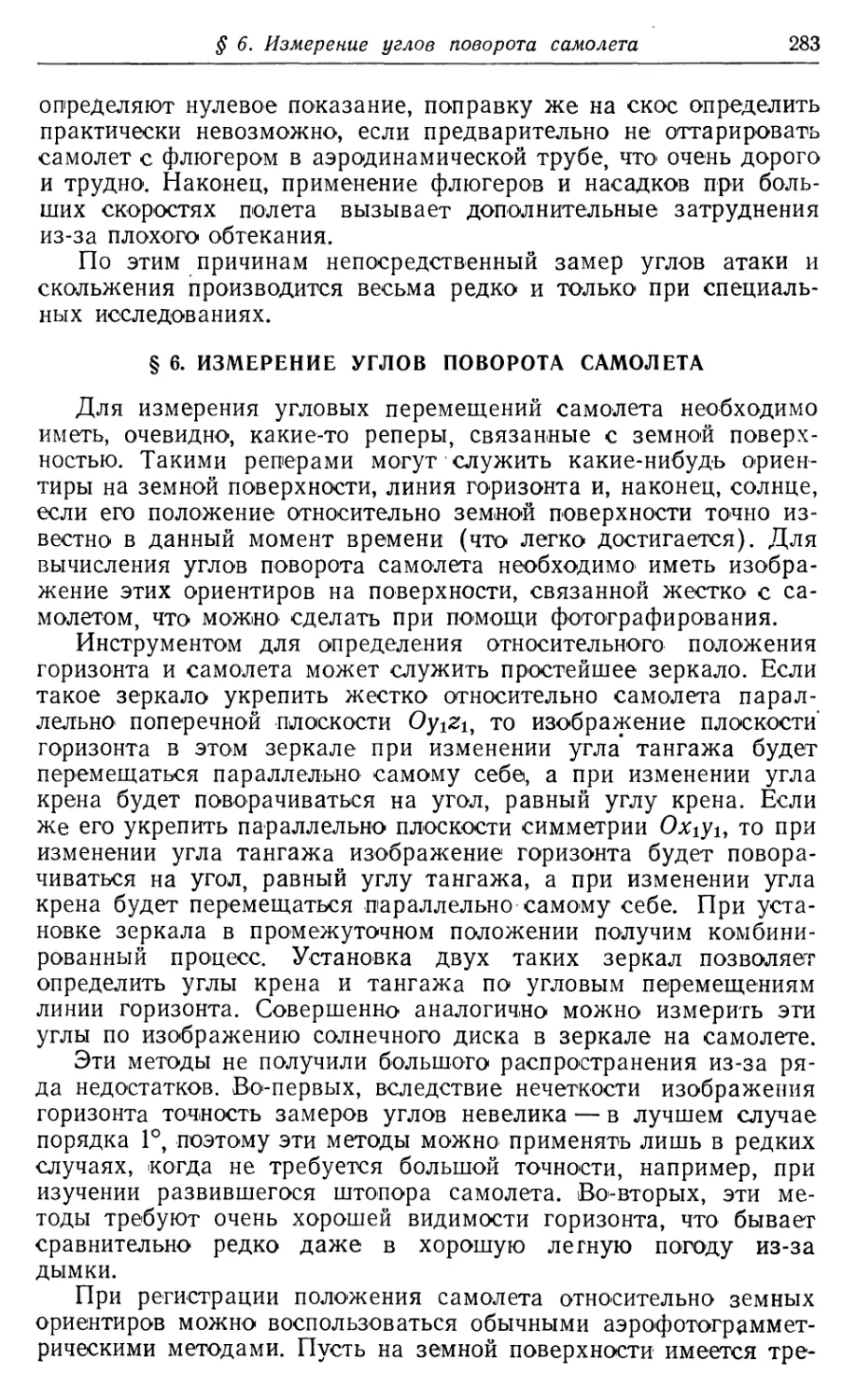
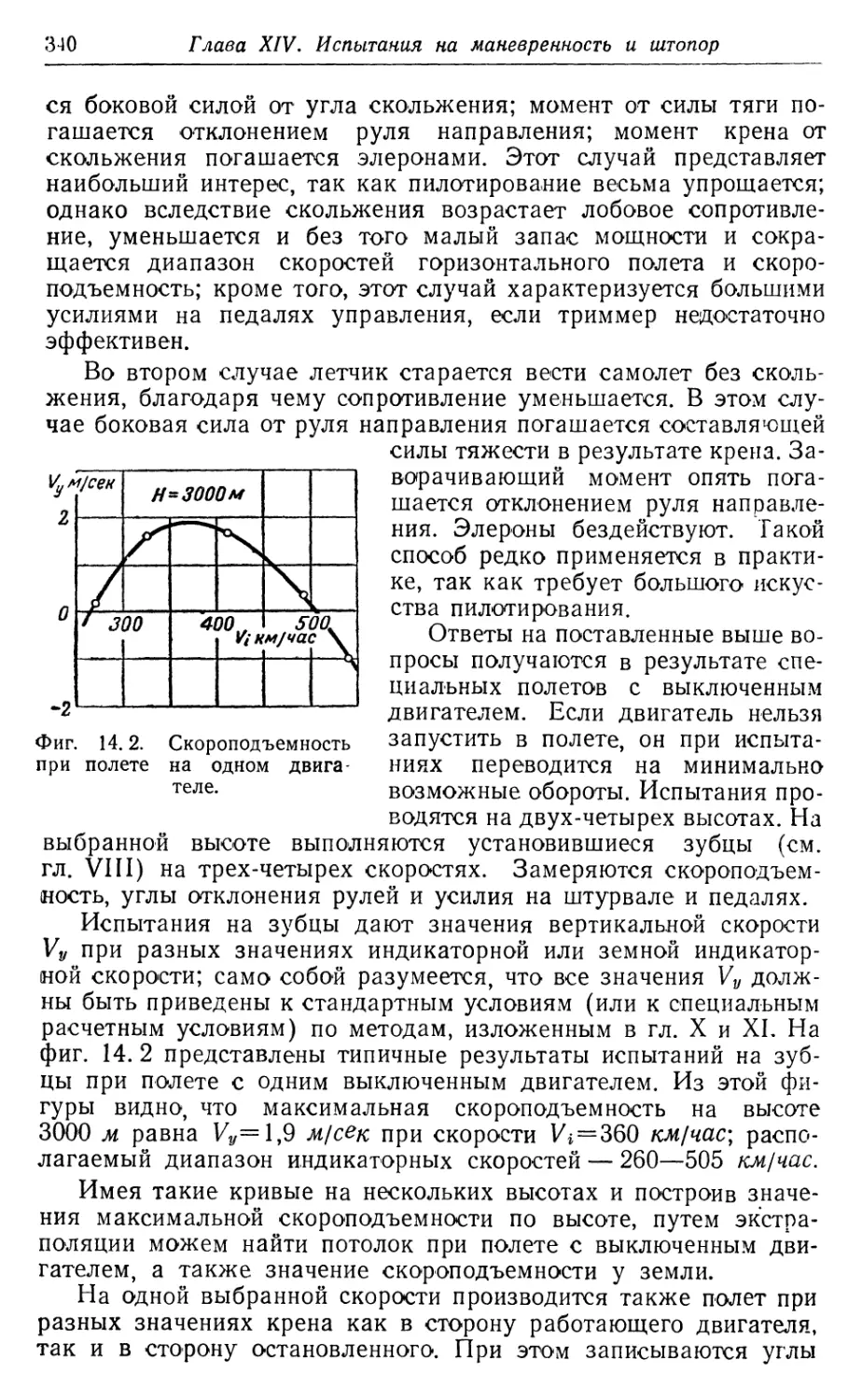
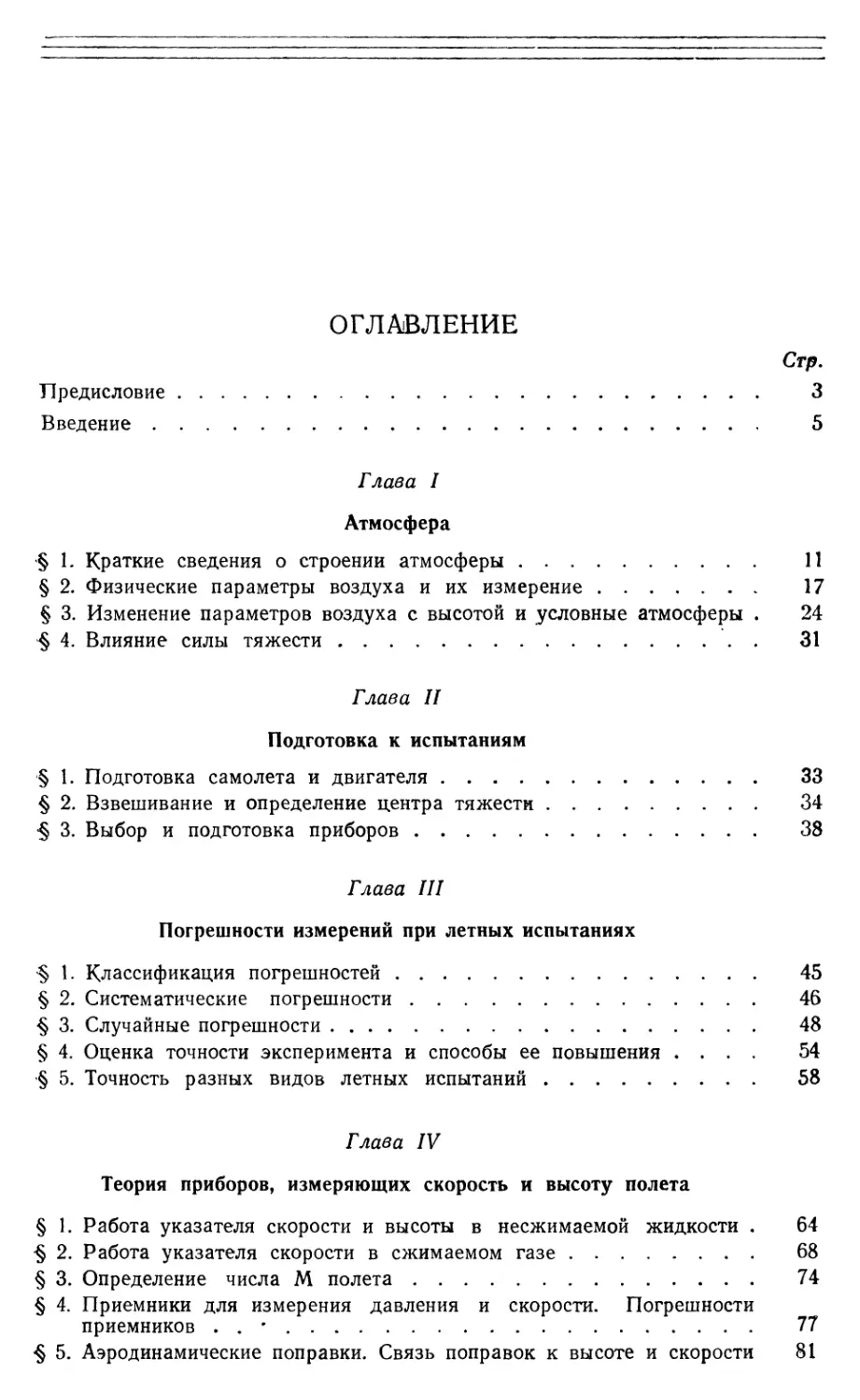
Тропосфера истратосфера. На фиг. 1.1 и 1.2 по-
казан примерный характер изменения давления и относитель-
ной плотности на высотах от 0 до 120 км. До 50% всей массы
атмосферного воздуха находится в прилегающем к земле слое
12
Глава I. Атмосфера
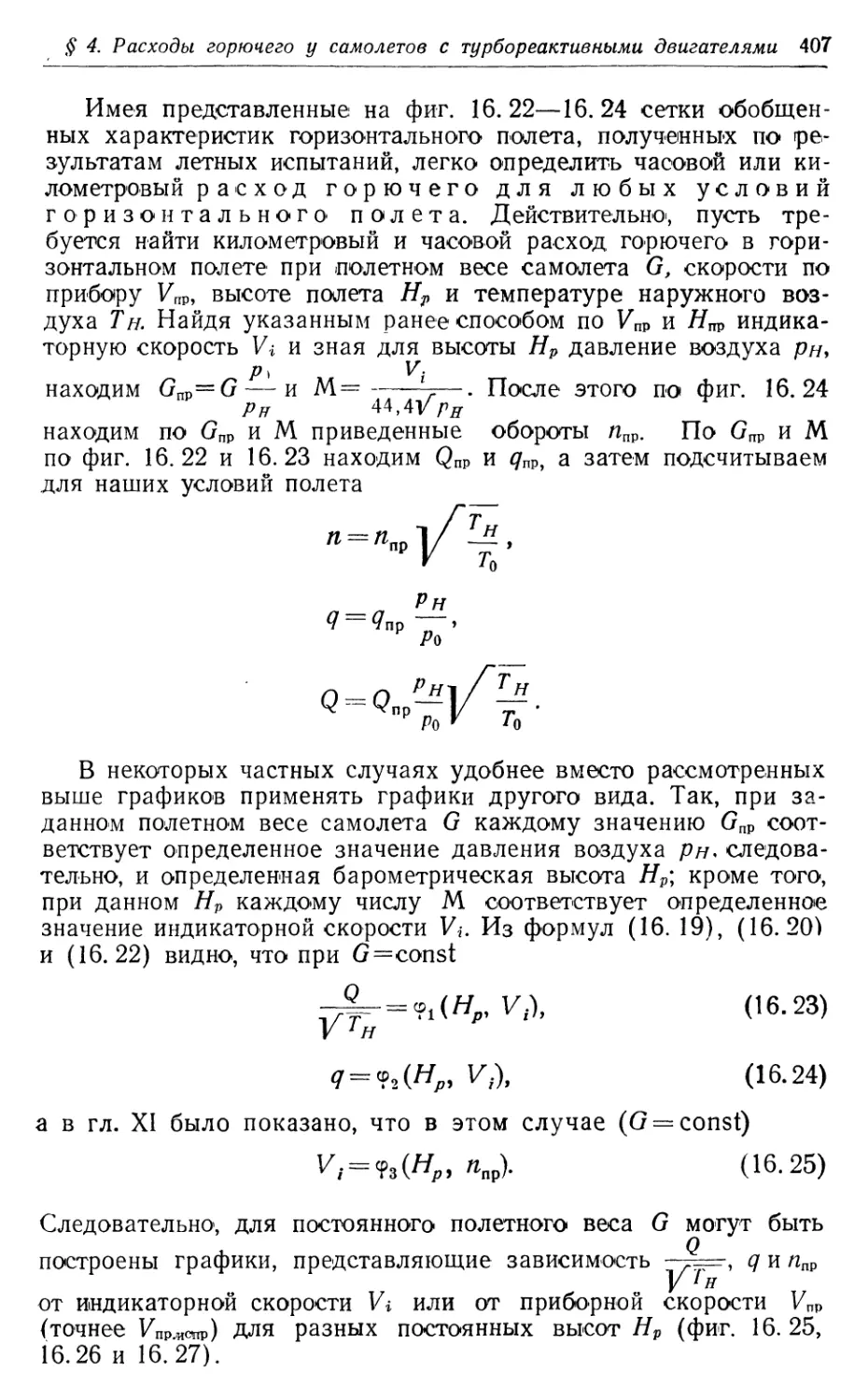
Фиг. 1.2. Изменение относительной плотности воздуха с высотой.
§ 1. Краткие сведения о строении атмосферы
13
высотой 5,5 км. В пределах первых 10 км находится уже около
75%, а первых 30 км — до 99% всей воздушной массы.
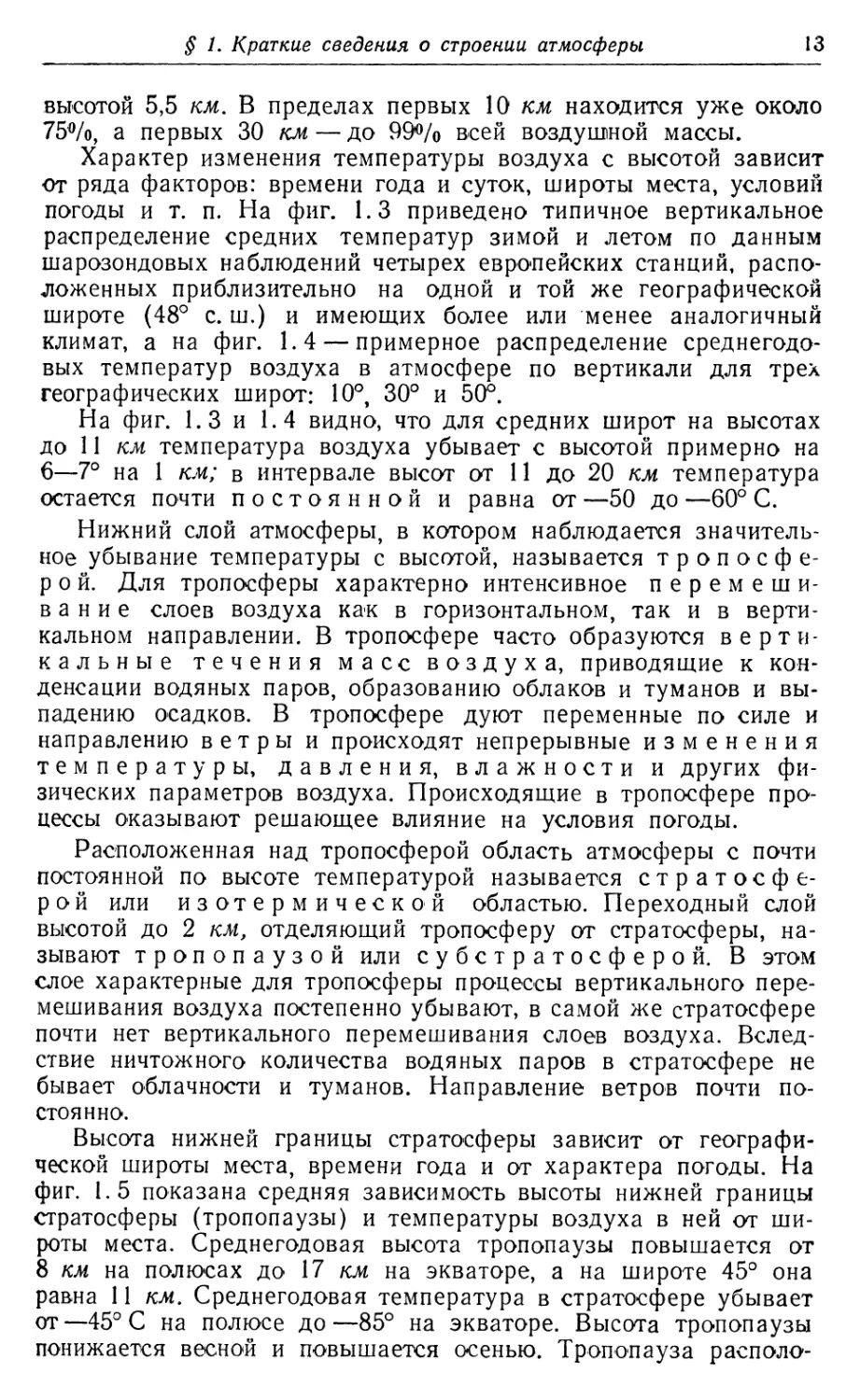
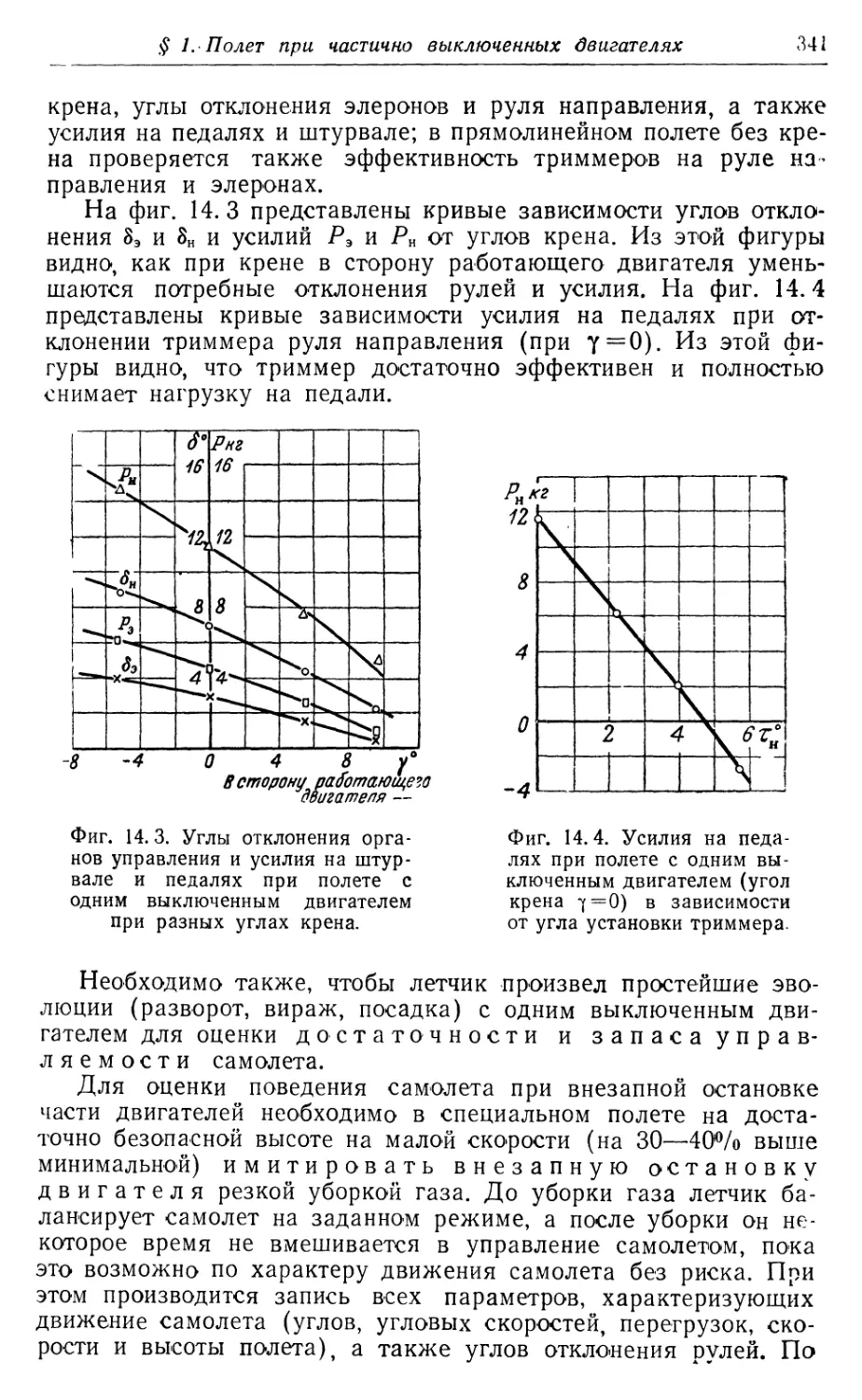
Характер изменения температуры воздуха с высотой зависит
от ряда факторов: времени года и суток, широты места, условий
погоды и т. п. На фиг. 1.3 приведено типичное вертикальное
распределение средних температур зимой и летом по данным
шарозондовых наблюдений четырех европейских станций, распо-
ложенных приблизительно на одной и той же географической
широте (48° с. ш.) и имеющих более или менее аналогичный
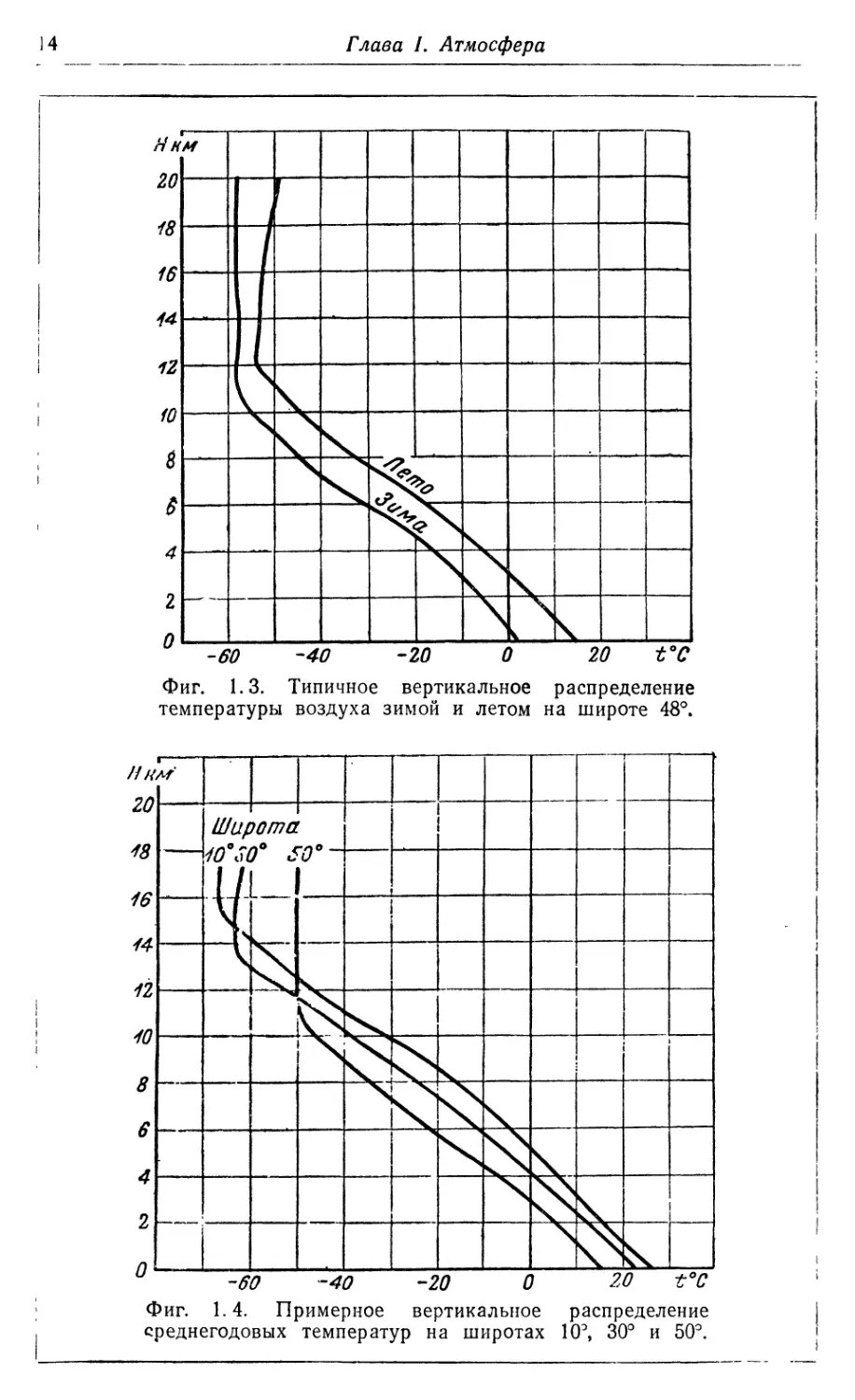
климат, а на фиг. 1.4 — примерное распределение среднегодо-
вых температур воздуха в атмосфере по вертикали для трех
географических широт: 10°, 30° и 5(Л
На фиг. 1.3 и 1.4 видно, что для средних широт на высотах
до 11 км температура воздуха убывает с высотой примерно на
6—7° на 1 км; в интервале высот от 11 до 20 км температура
остается почти постоянной и равна от —50 до —60° С.
Нижний слой атмосферы, в котором наблюдается значитель-
ное убывание температуры с высотой, называется тропосфе-
рой. Для тропосферы характерно интенсивное перемеши-
вание слоев воздуха как в горизонтальном, так и в верти-
кальном направлении. В тропосфере часто образуются верти-
кальные течения масс воздуха, приводящие к кон-
денсации водяных паров, образованию облаков и туманов и вы-
падению осадков. В тропосфере дуют переменные по силе и
направлению ветры и происходят непрерывные изменения
температуры, давления, влажности и других фи-
зических параметров воздуха. Происходящие в тропосфере про-
цессы оказывают решающее влияние на условия погоды.
Расположенная над тропосферой область атмосферы с почти
постоянной по высоте температурой называется стратосфе-
рой или изотермической областью. Переходный слой
высотой до 2 км, отделяющий тропосферу от стратосферы, на-
зывают тропопаузой или субстратосферой. В этом
слое характерные для тропосферы процессы вертикального пере-
мешивания воздуха постепенно убывают, в самой же стратосфере
почти нет вертикального перемешивания слоев воздуха. Вслед-
ствие ничтожного количества водяных паров в стратосфере не
бывает облачности и туманов. Направление ветров почти по-
стоянно.
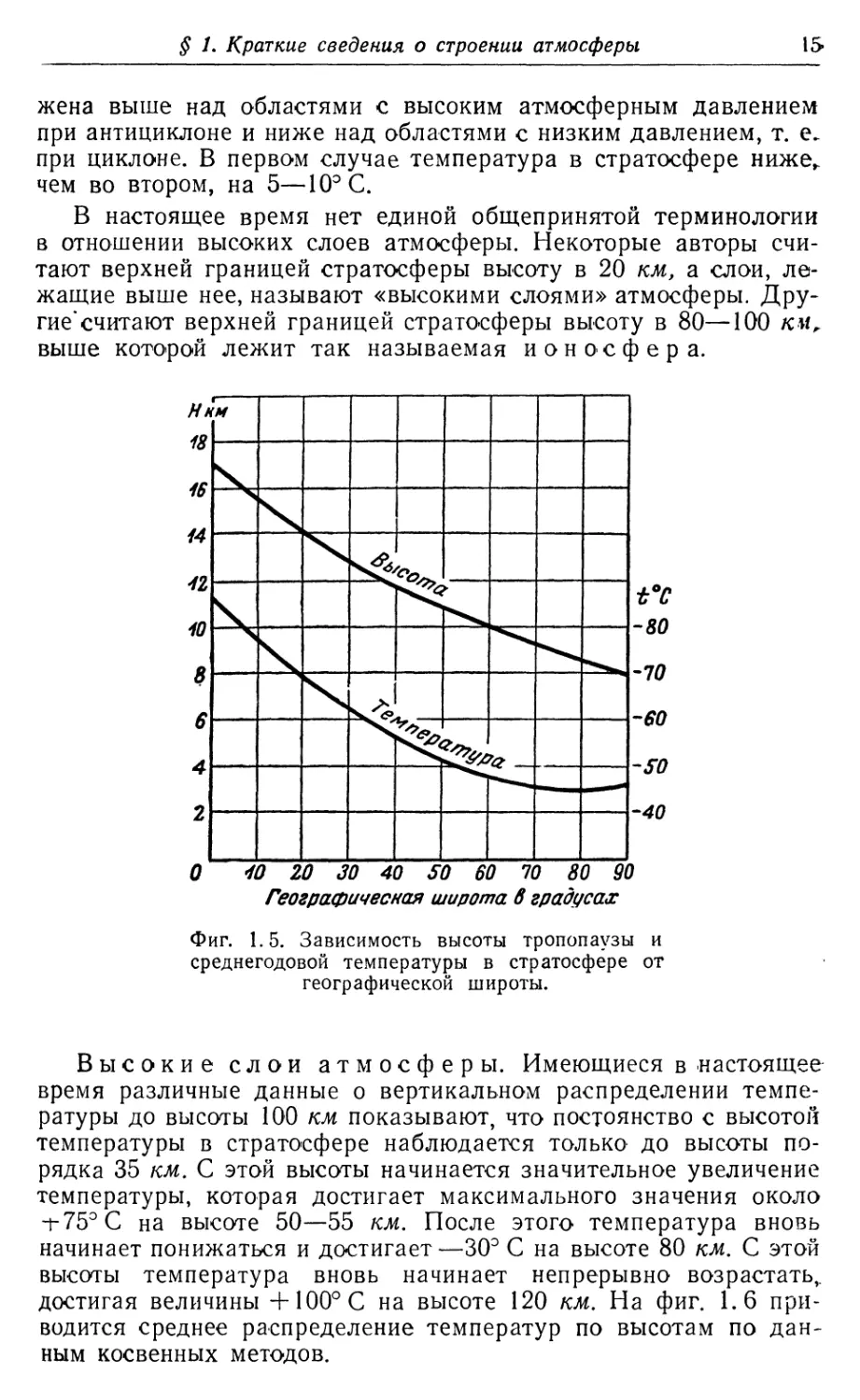
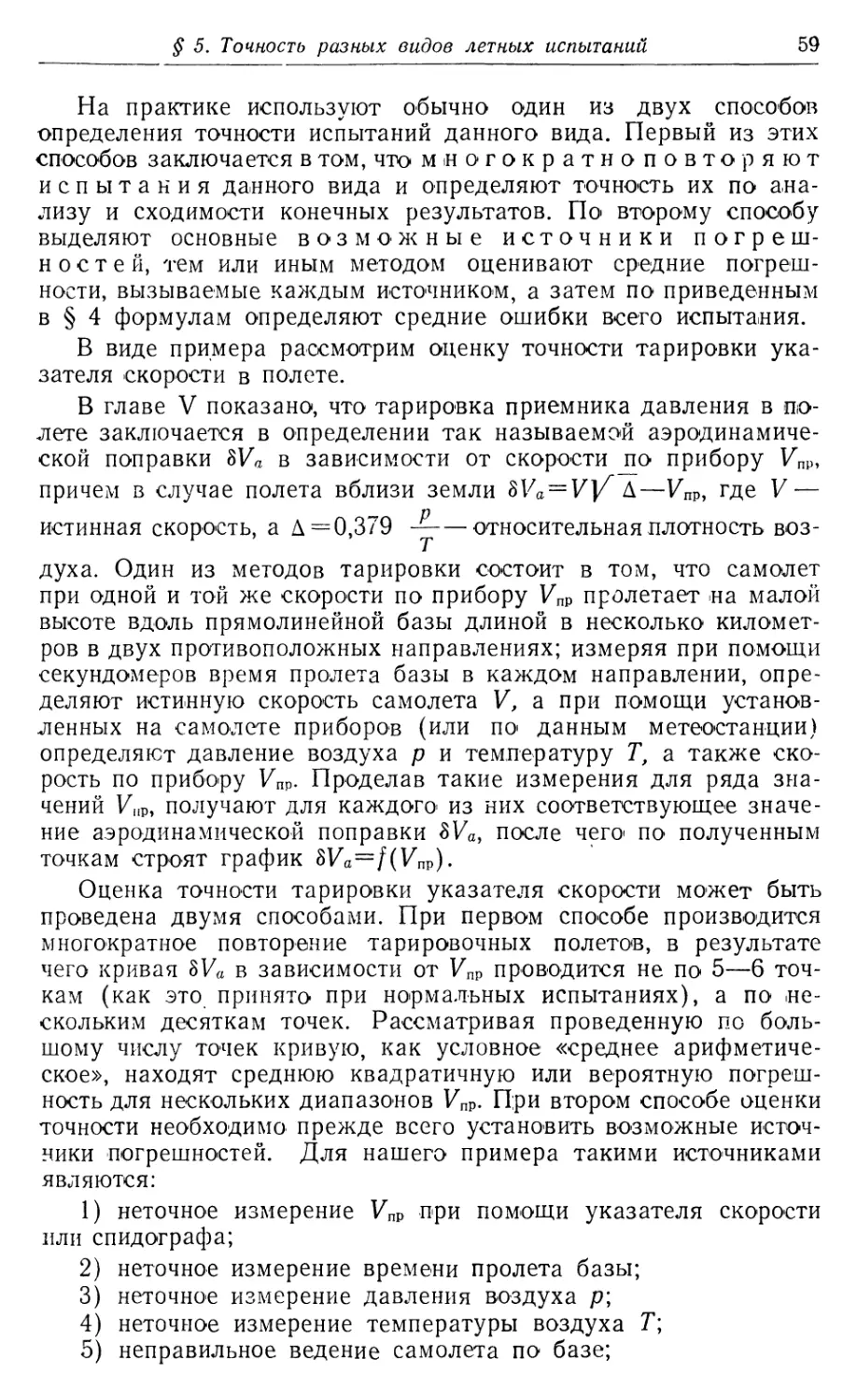
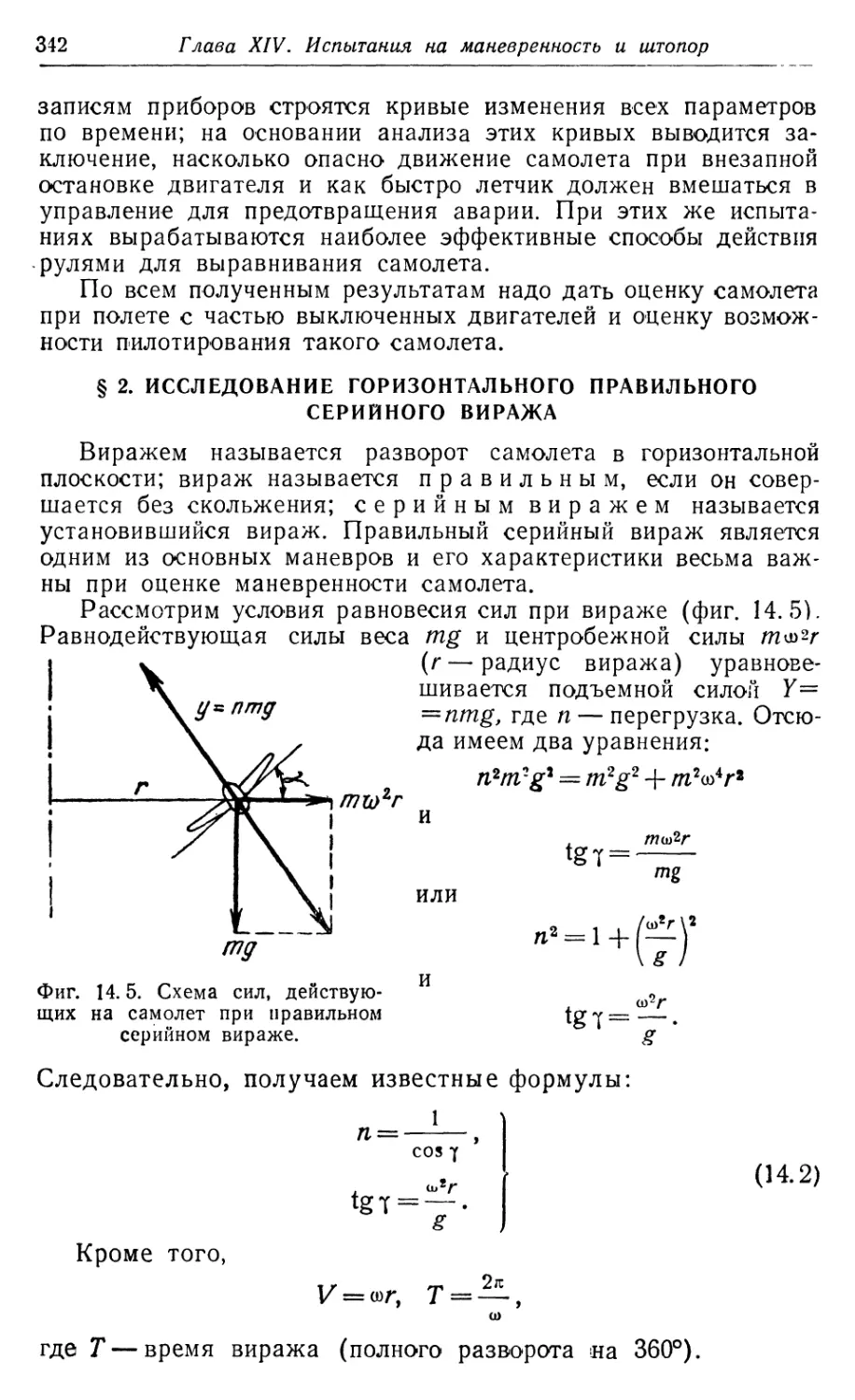
Высота нижней границы стратосферы зависит от географи-
ческой широты места, времени года и от характера погоды. На
фиг. 1.5 показана средняя зависимость высоты нижней границы
стратосферы (тропопаузы) и температуры воздуха в ней от ши-
роты места. Среднегодовая высота тропопаузы повышается от
8 км на полюсах до 17 км на экваторе, а на широте 45° она
равна 11 км. Среднегодовая температура в стратосфере убывает
от—45° С на полюсе до—85° на экваторе. Высота тропопаузы
понижается весной и повышается осенью. Тропопауза располо-
14
Глава 1. Атмосфера
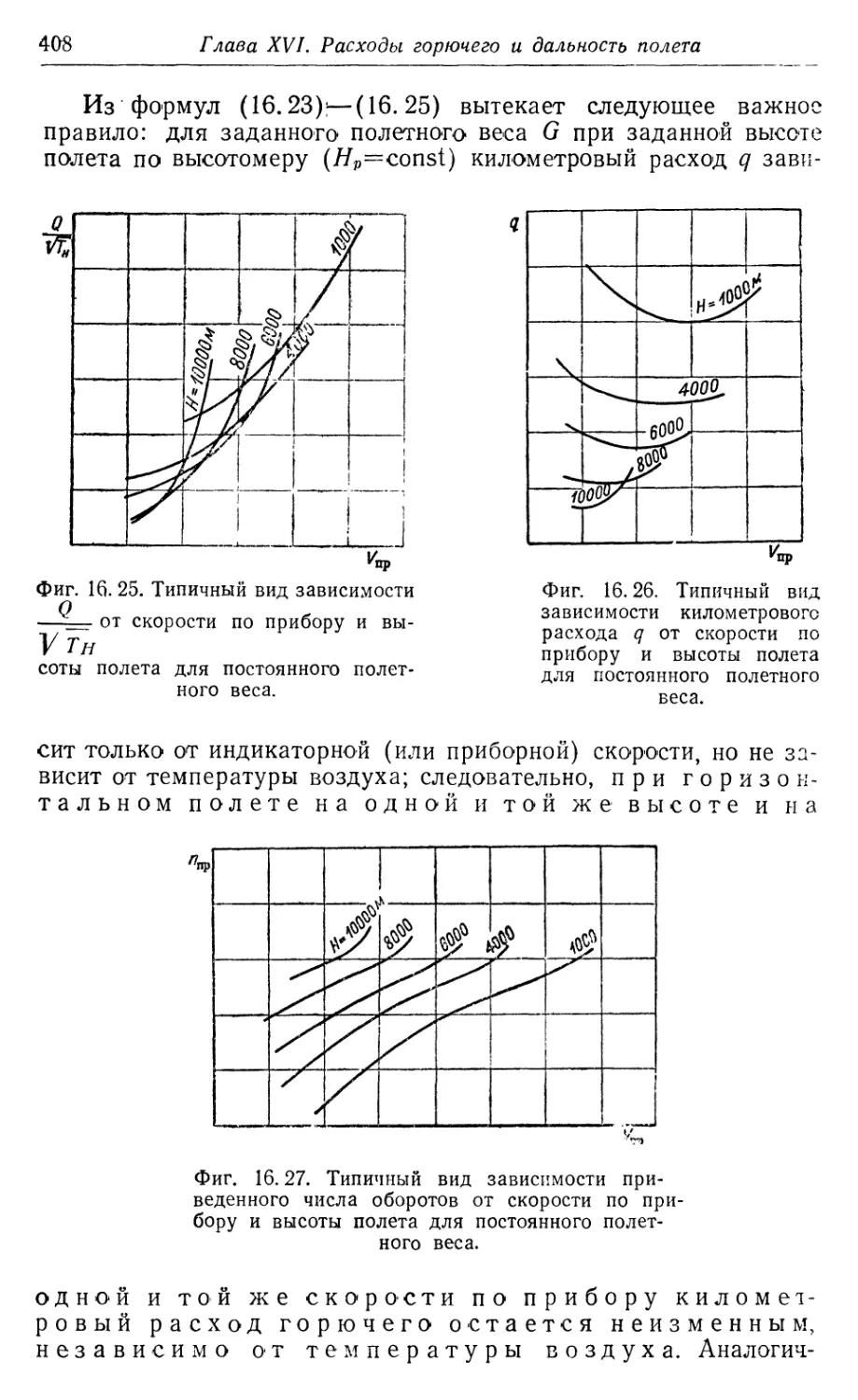
Фиг. 1.3. Типичное вертикальное распределение
температуры воздуха зимой и летом на широте 48°.
§ 1. Краткие сведения о строении атмосферы
15
жена выше над областями с высоким атмосферным давлением
при антициклоне и ниже над областями с низким давлением, т. е.
при циклоне. В первом случае температура в стратосфере ниже,,
чем во втором, на 5—10° С.
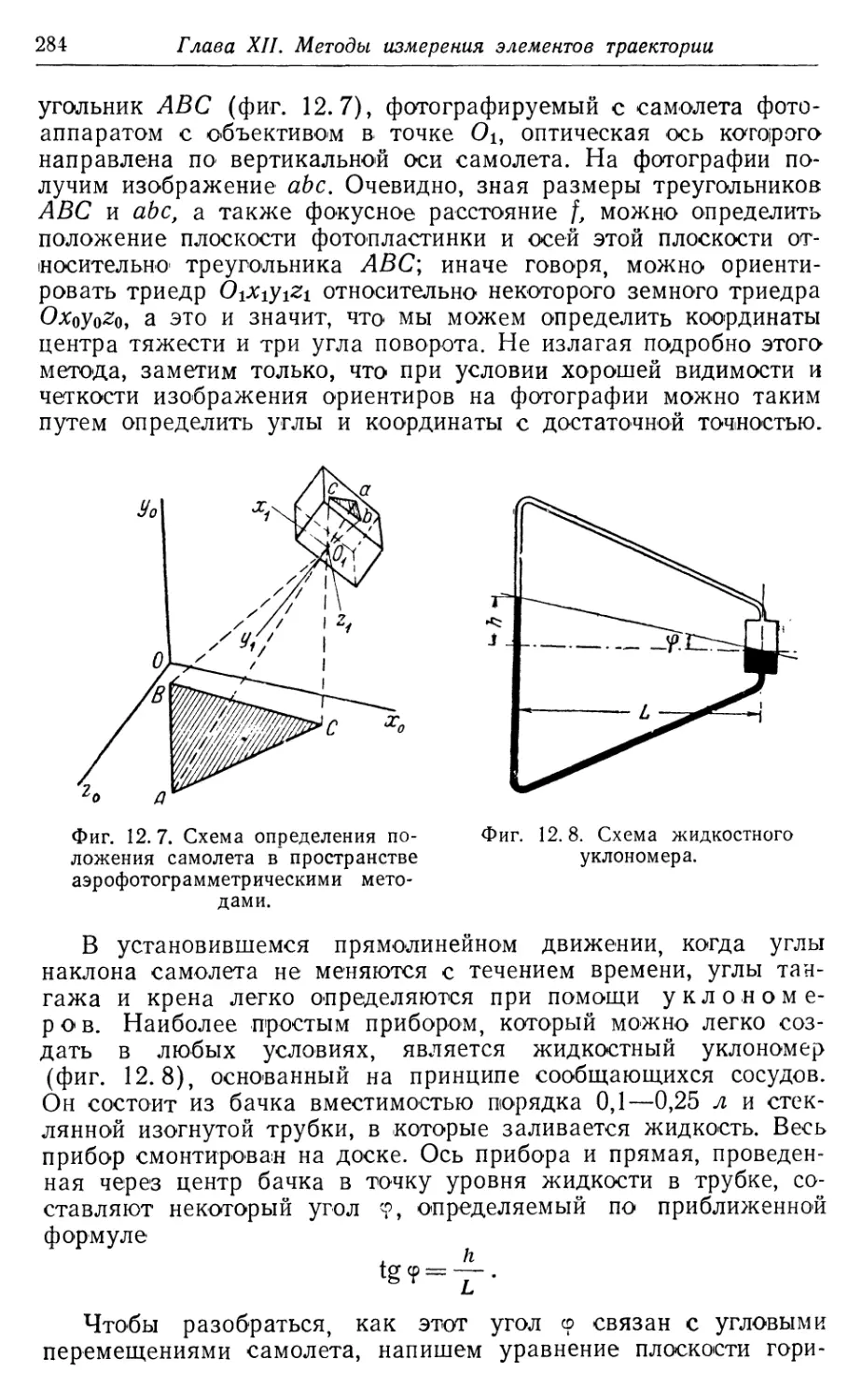
В настоящее время нет единой общепринятой терминологии
в отношении высоких слоев атмосферы. Некоторые авторы счи-
тают верхней границей стратосферы высоту в 20 км, а слои, ле-
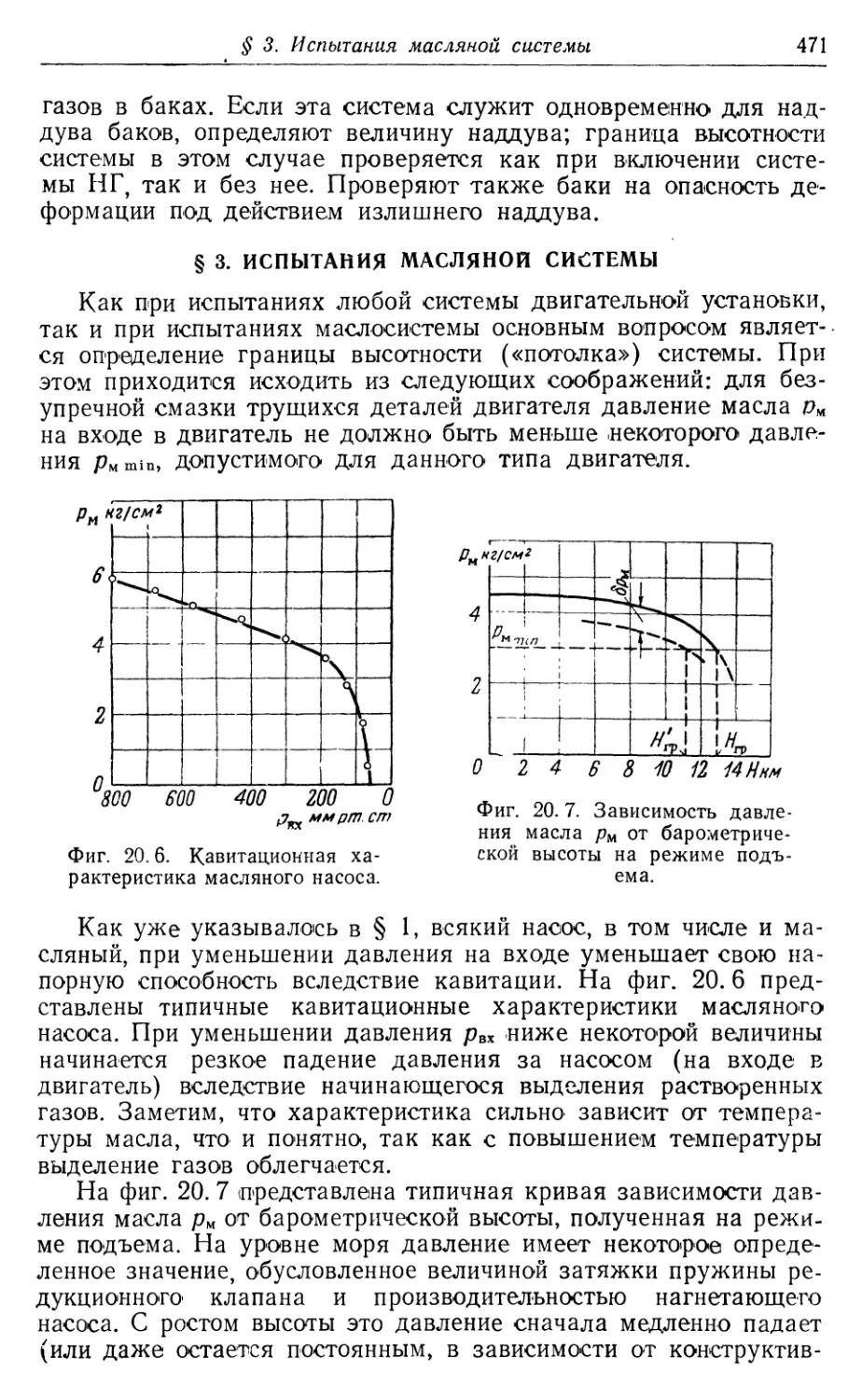
жащие выше нее, называют «высокими слоями» атмосферы. Дру-
гие’считают верхней границей стратосферы высоту в 80—100 км.
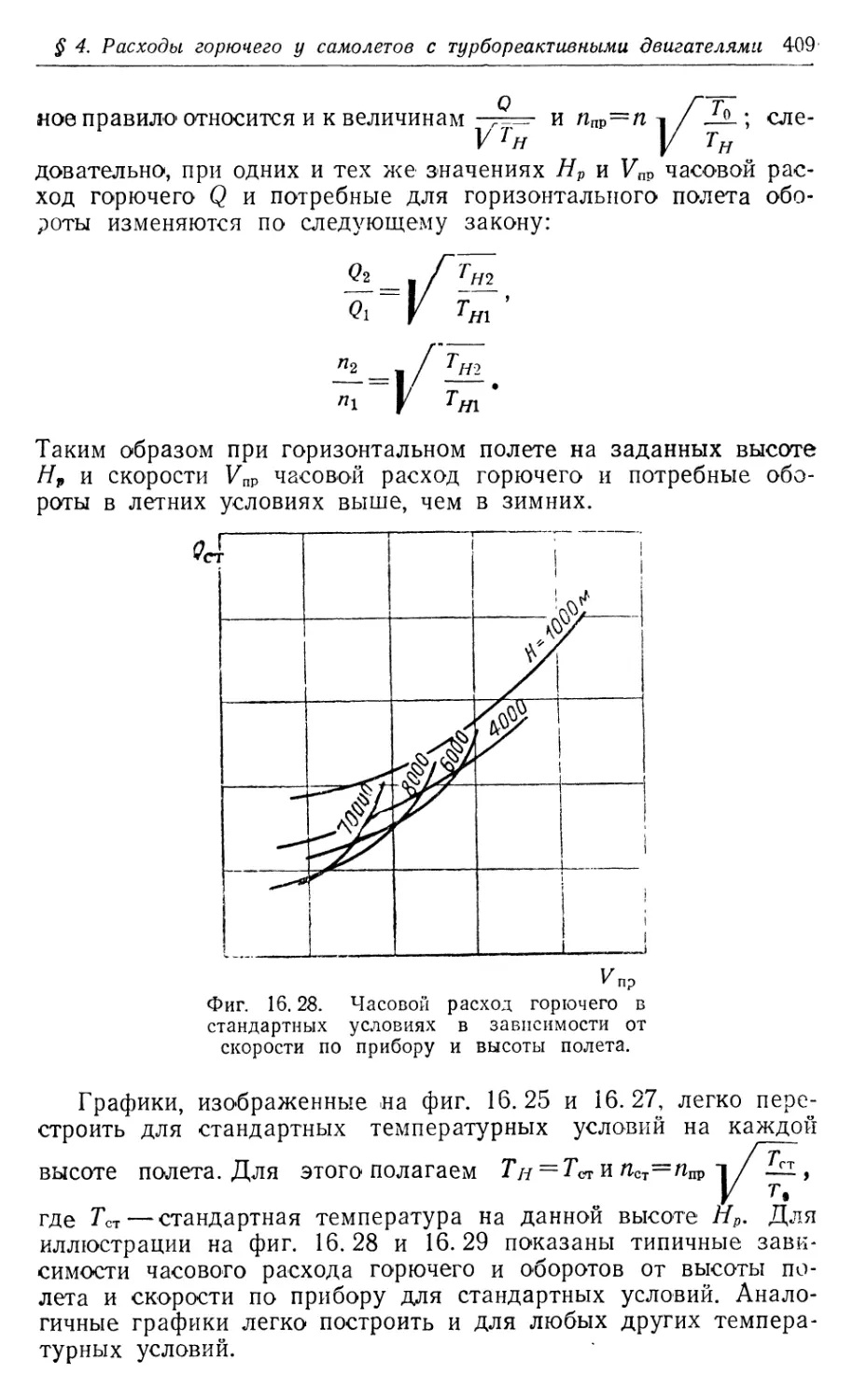
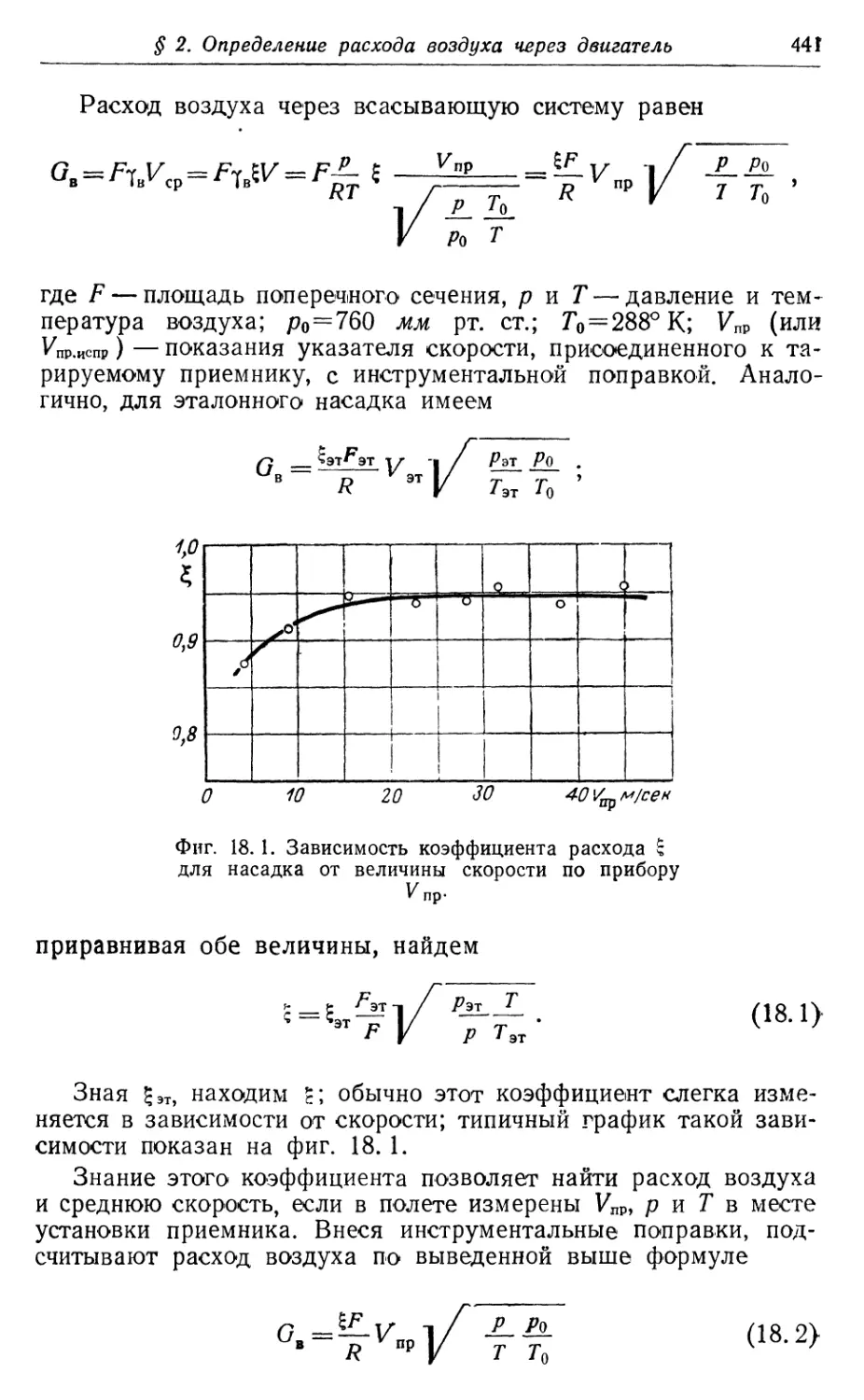
Фиг. 1.5. Зависимость высоты тропопаузы и
среднегодовой температуры в стратосфере от
географической широты.
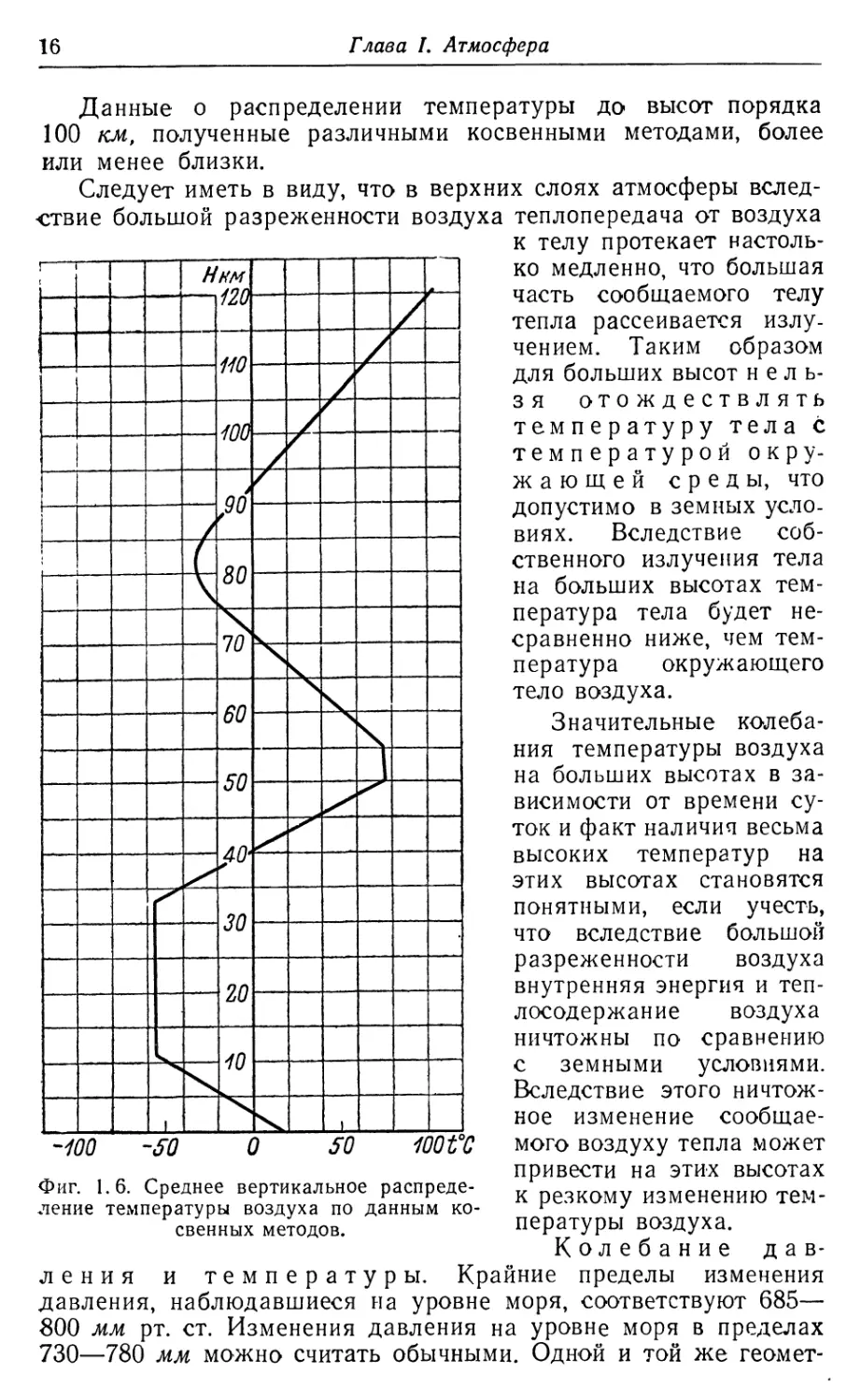
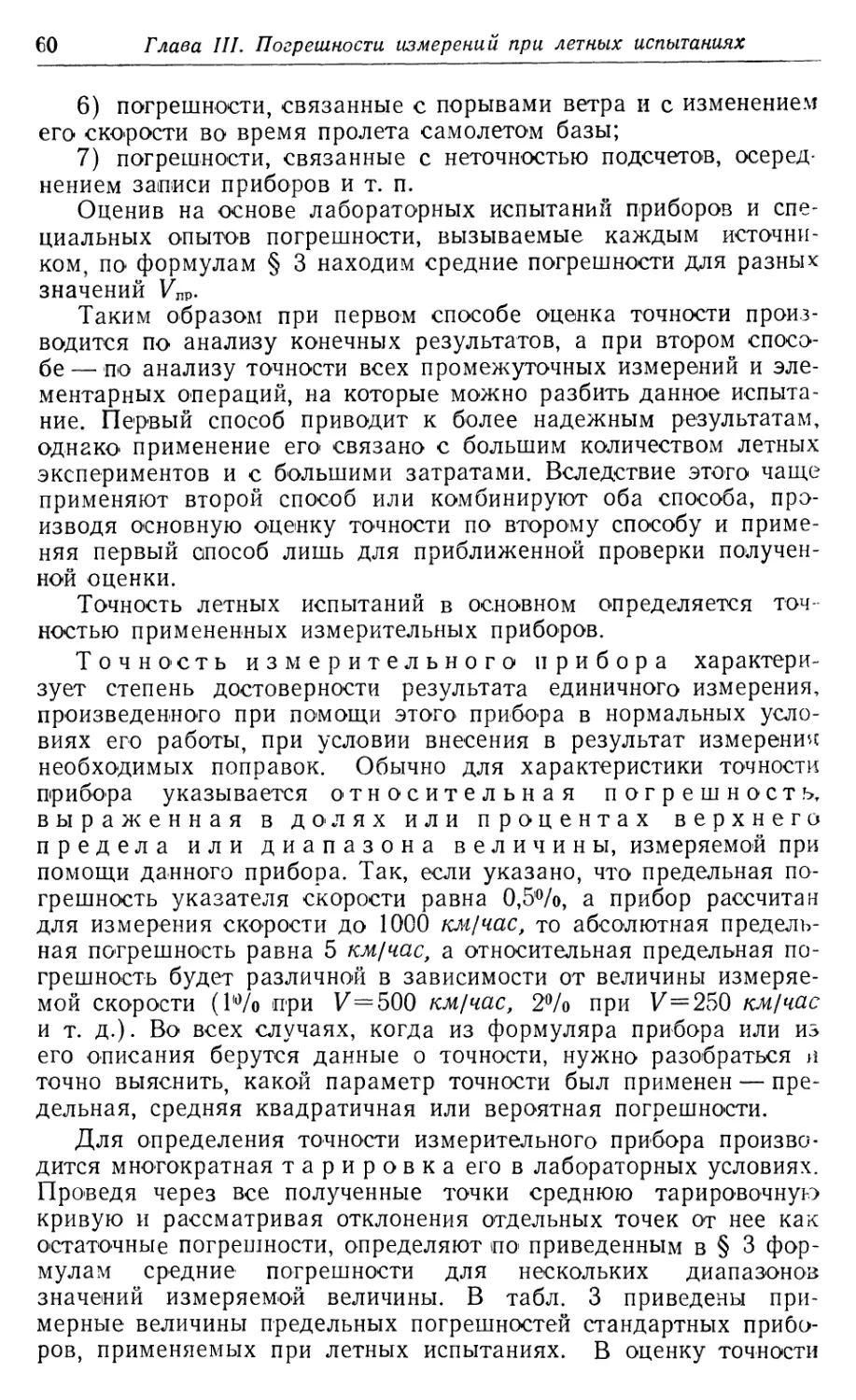
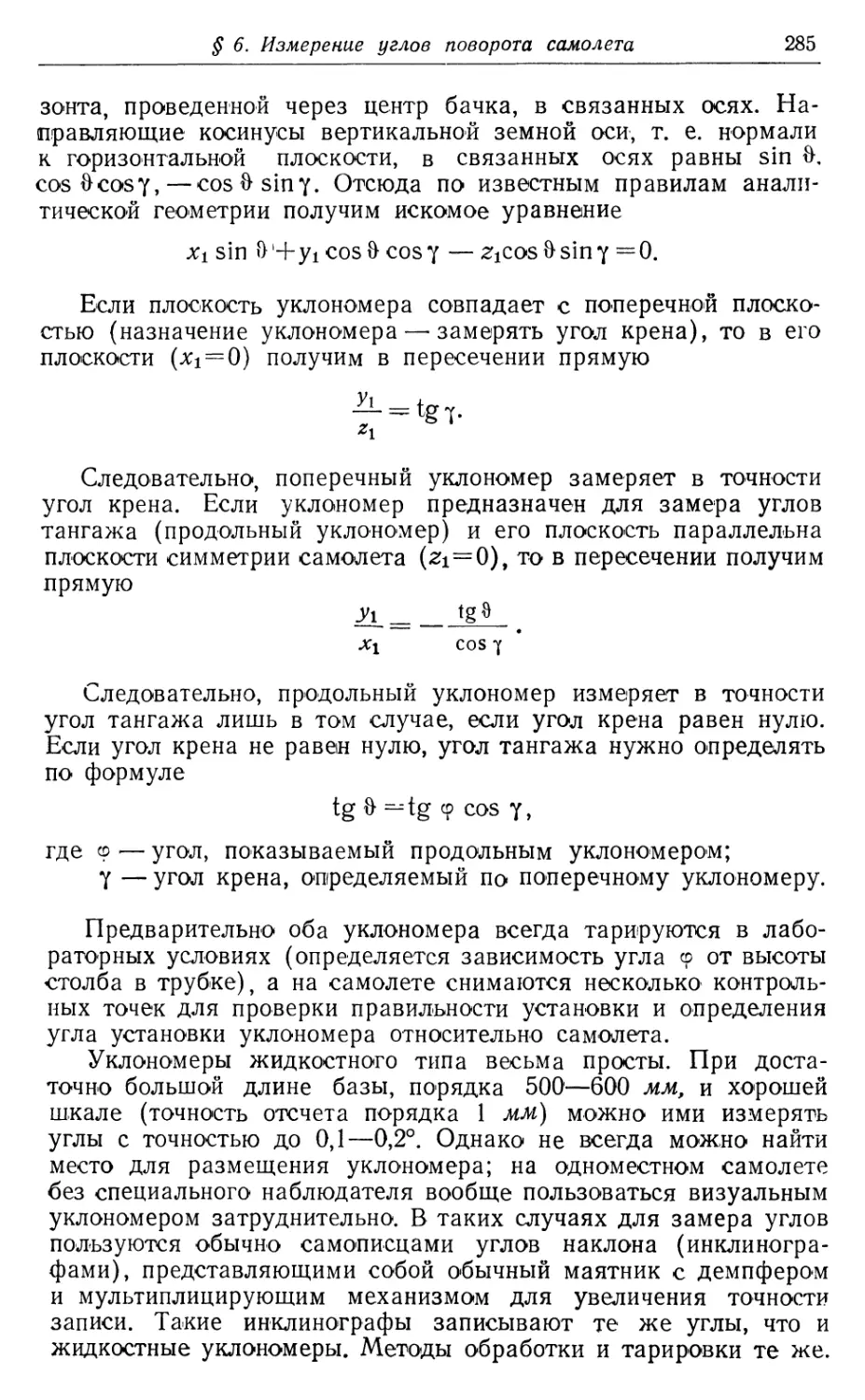
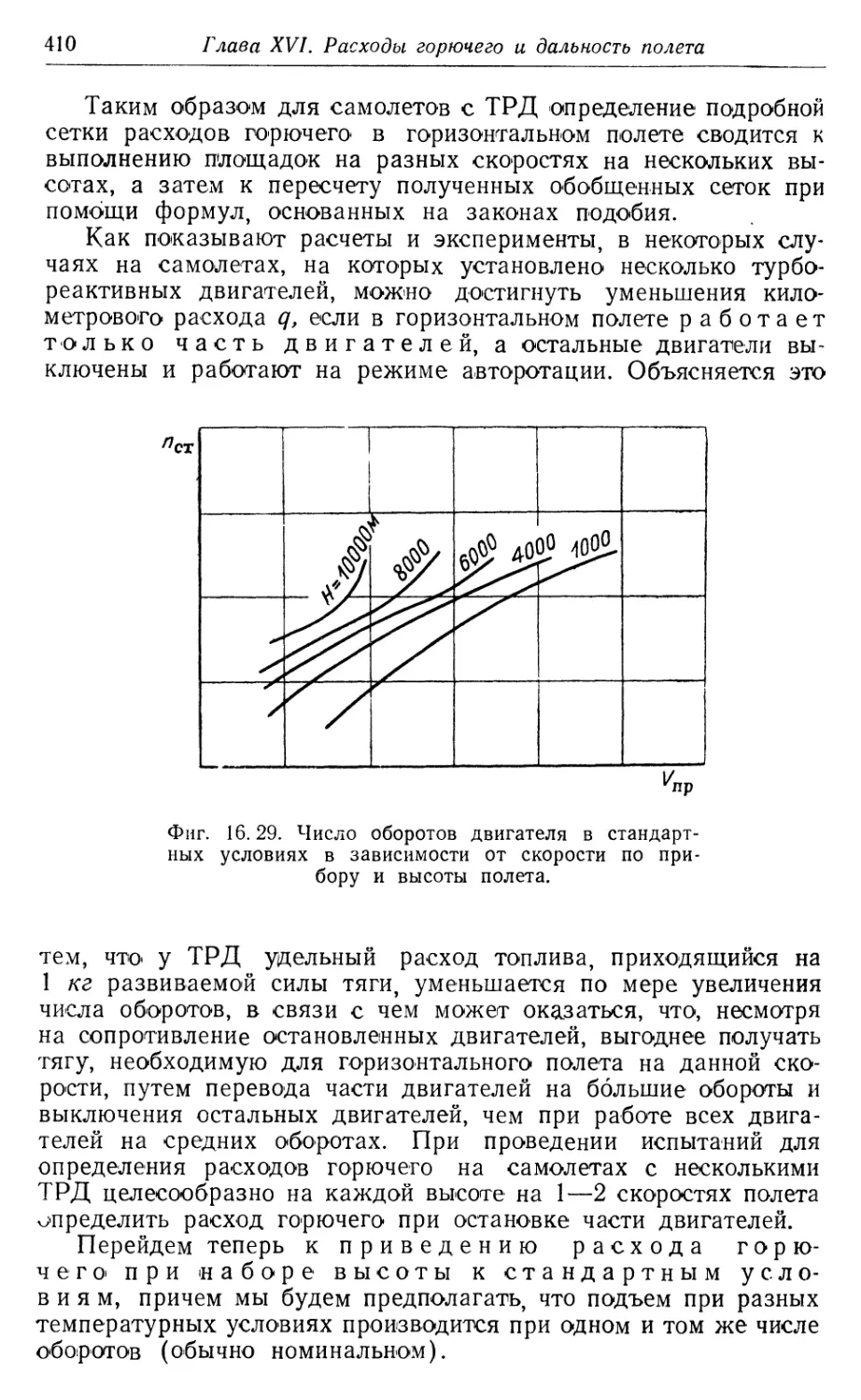
Высокие слои атмосферы. Имеющиеся в настоящее
время различные данные о вертикальном распределении темпе-
ратуры до высоты 100 км показывают, что постоянство с высотой
температуры в стратосфере наблюдается только до высоты по-
рядка 35 км. С этой высоты начинается значительное увеличение
температуры, которая достигает максимального значения около
-г75°С на высоте 50—55 км. После этого температура вновь
начинает понижаться и достигает—30э С на высоте 80 км. С этой
высоты температура вновь начинает непрерывно возрастать,,
достигая величины +100° С на высоте 120 км. На фиг. 1.6 при-
водится среднее распределение температур по высотам по дан-
ным косвенных методов.
16
Глава I. Атмосфера
Данные о распределении температуры до высот порядка
100 км, полученные различными косвенными методами, более
или менее близки.
Следует иметь в виду, что в верхних слоях атмосферы вслед-
ствие большой разреженности воздуха теплопередача от воздуха
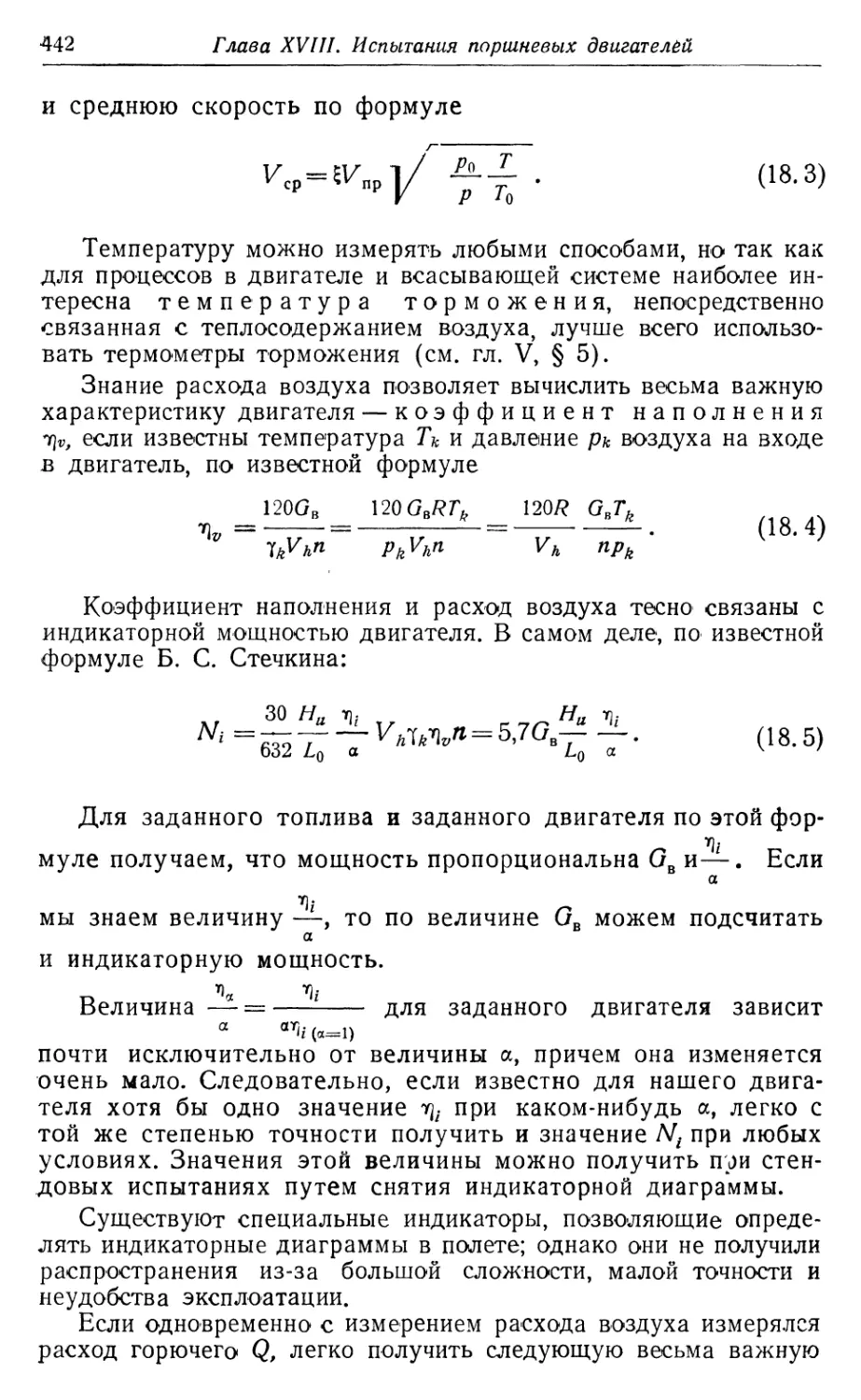
Фиг. 1.6. Среднее вертикальное распреде-
ление температуры воздуха по данным ко-
свенных методов.
к телу протекает настоль-
ко медленно, что большая
часть сообщаемого телу
тепла рассеивается излу-
чением. Таким образом
для больших высот нель-
зя отождествлять
температуру тела с
температурой окру-
жающей среды, что
допустимо в земных усло-
виях. Вследствие соб-
ственного излучения тела
на больших высотах тем-
пература тела будет не-
сравненно ниже, чем тем-
пература окружающего
тело воздуха.
Значительные колеба-
ния температуры воздуха
на больших высотах в за-
висимости от времени су-
ток и факт наличия весьма
высоких температур на
этих высотах становятся
понятными, если учесть,
что вследствие большой
разреженности воздуха
внутренняя энергия и теп-
лосодержание воздуха
ничтожны по сравнению
с земными условиями.
Вследствие этого ничтож-
ное изменение сообщае-
мого воздуху тепла может
привести на этих высотах
к резкому изменению тем-
пературы воздуха.
Колебание дав-
ления и температуры. Крайние пределы изменения
давления, наблюдавшиеся на уровне моря, соответствуют 685—
800 мм рт. ст. Изменения давления на уровне моря в пределах
730—780 мм можно считать обычными. Одной и той же геомет-
£ 2. Физические параметры воздуха и их измерение
17
рической высоте соответствуют меньшие давления и большие
плотности зимой по сравнению с летом. Кроме того, давление
воздуха подвержено суточным периодическим колебаниям, одна-
ко амплитуда этих колебаний невелика.
Годовая амплитуда температу-
ры, т. е. разность между средни-
ми температурами наиболее теп-
лого и наиболее холодного ме-
сяцев, равна в средних широтах
примерно' 30°, а суточная ампли-
туда 4°. В Сибири разность между
наивысшей и наинизшей темпера-
турой, наблюдаемой в течение го-
да, доходит до 90р, соответствую-
щая цифра для средних широт
СССР доходит до1 70° (от —35° до
4-35°). С поднятием на высоту
диапазон изменения температуры
воздуха уменьшается.
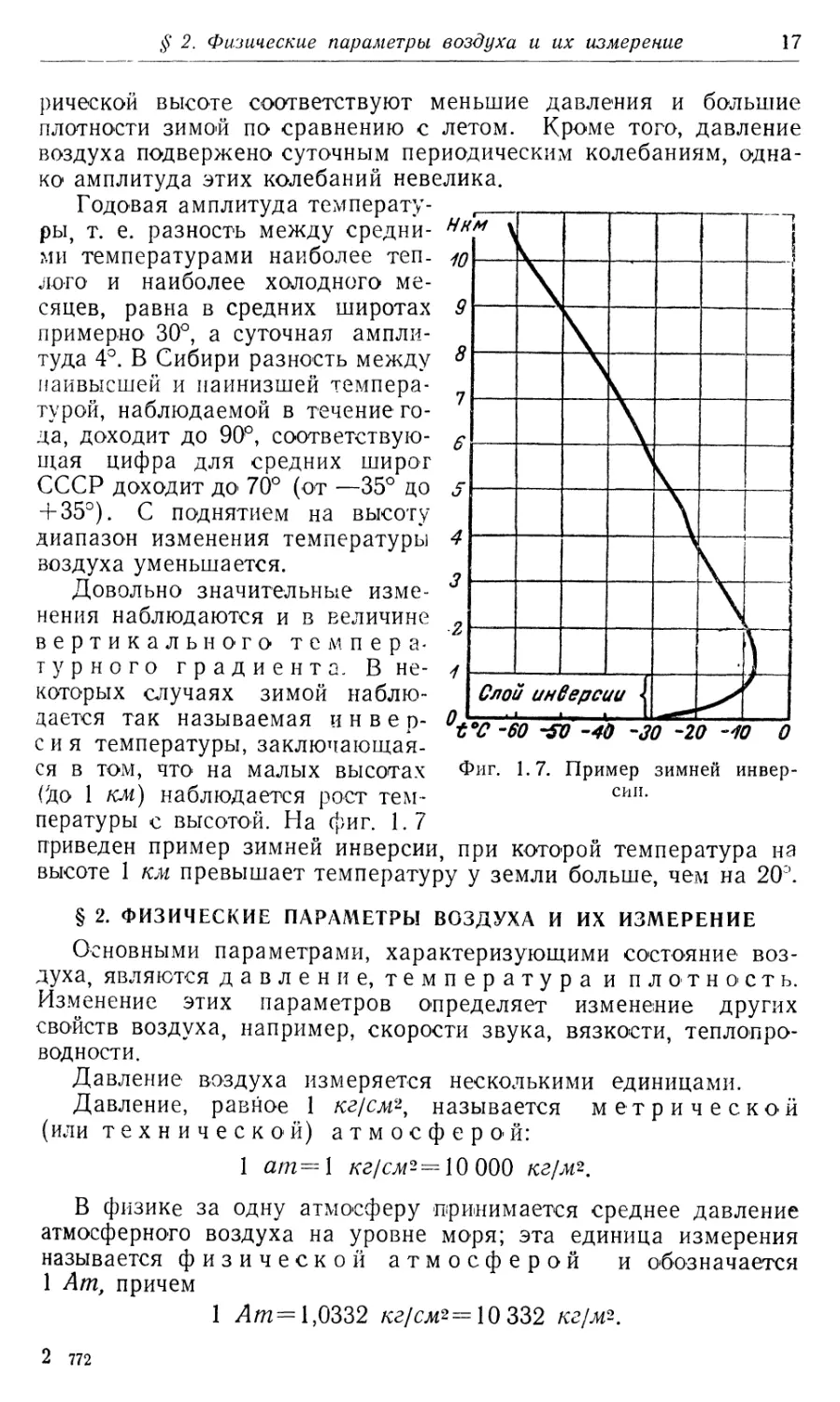
Довольно значительные изме-
нения наблюдаются и в величине
вертикального темпера-
турного градиента. В не-
которых случаях зимой наблю-
дается так называемая и н в е р-
сия температуры, заключающая-
ся в том, что, на малых высотах
(До 1 км) наблюдается рост тем- сии-
пературы с высотой. На фиг. 1.7
приведен пример зимней инверсии, при которой температура на
высоте 1 км превышает температуру у земли больше, чем на 20°.
§ 2. ФИЗИЧЕСКИЕ ПАРАМЕТРЫ ВОЗДУХА И ИХ ИЗМЕРЕНИЕ
Основными параметрами, характеризующими состояние воз-
духа, являются давление, температура и плотность.
Изменение этих параметров определяет изменение других
свойств воздуха, например, скорости звука, вязкости, теплопро-
водности.
Давление воздуха измеряется несколькими единицами.
Давление, равное 1 кг/см\ называется метрической
(или технической) атмосферой:
1 шп=1 /се/сл/2 = 10 000 кг/м%.
В физике за одну атмосферу принимается среднее давление
атмосферного воздуха на уровне моря; эта единица измерения
называется физической атмосферой и обозначается
1 Ат, причем
I Ат= 1,0332 кг/см^^ 10 332 кг/м^.
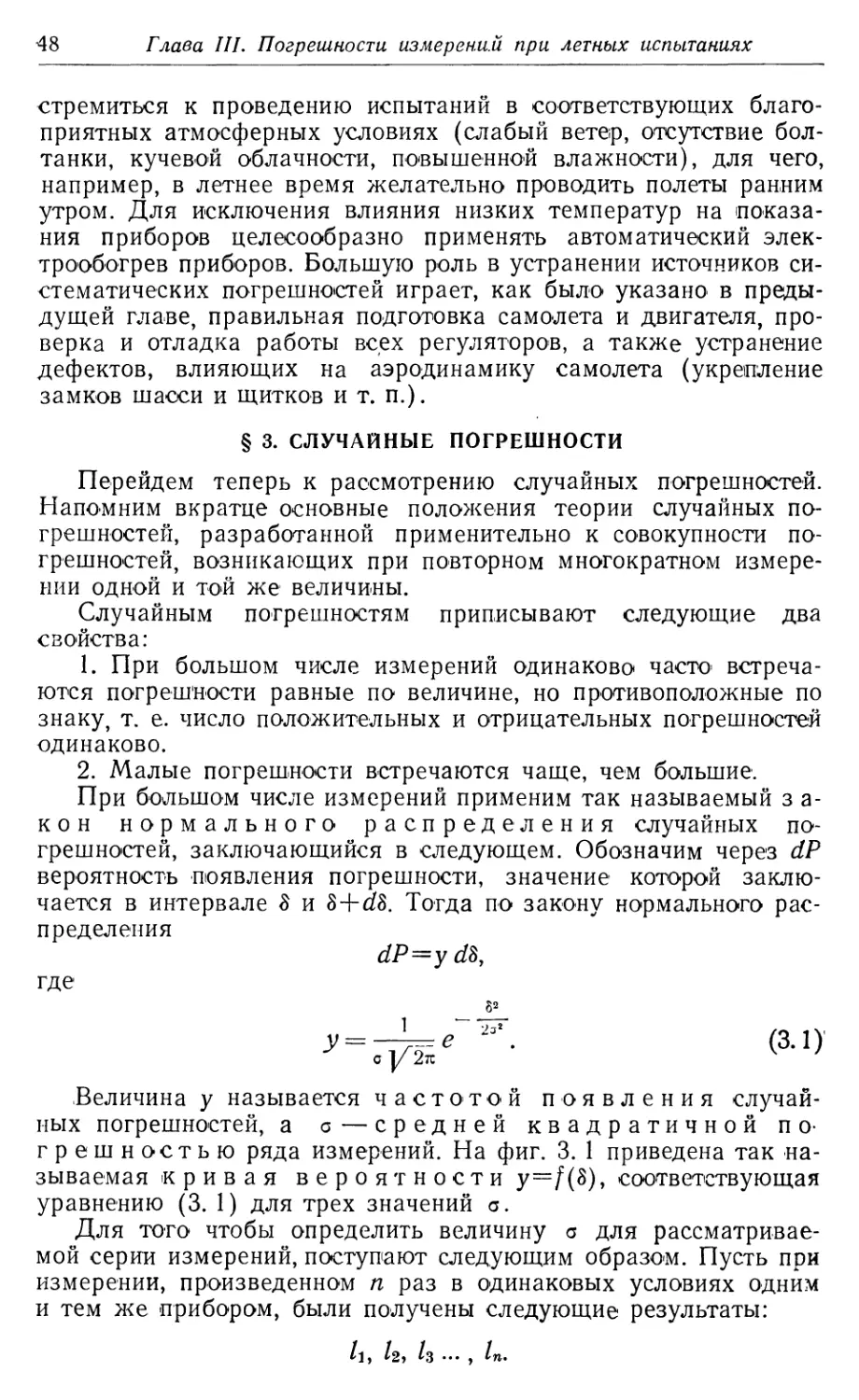
2 772
18
Глава I. Атмосфера
Кроме этого способа измерения давления воздуха как силы,
применяется, как известно, другой способ измерения, при кото-
ром давление определяется высотой уравновешивающего его
столба жидкости •— воды или ртути. Высота столба жидкости h
пропорциональна величине давления и обратно пропорциональна
удельному весу жидкости, т. е. h = . Так как удельный вес
7
ртути при (ГС равен 13 595 кг/м*, а воды — 1000 кг/м*, то
1 ат~\ кг/см2= 10 000 кг/м2~10 м вод. ст. = 735,6 мм рт. ст.,
1 Лт=1,0332 кг/см2^ 10 332 кг/м2^ 10,332 м вод. ст. =
= 760 мм рт. ст.
Таким образом переход от давления, измеренного в мм рт. ст.,
к давлению, измеренному в метрических атмосферах, следует
производить по формуле
. 9 р мм рт. ст.
р кг см2 = —---------.
Г 1 735,6
При измерениях давления часто определяют избыток действи-
тельного давления р над атмосферным давлением рн
Ризб—р — рн.
Давление ри3б называется избыточным или маномет-
рическим давлением, а давление р — абсолютным. Так
как газы не могут работать на растяжение, то абсолютное дав-
ление их не может сделаться отрицательным.
Температура воздуха измеряется либо по стогра-
дусной шкале (°C), либо по так называемой абсолютной шкале
(° К), причем
Т=273 + /,
где Т—абсолютная температура в °К, a t — температура в °C.
Таким образом величина одного градуса одинакова в обеих
шкалах, но нуль абсолютной шкалы на 273° ниже нуля стогра-
дусной шкалы.
Плотность воздуха характеризуется либо> удельным
объемом его v, либо весовой плотностью у, либо массовой плот-
ностью р. Удельным объемом воздуха v называется объем
(в ж3), занимаемый 1 кг воздуха, следовательно, размерность и
будет м^/кг.
Весовой плотностью воздуха называется вес в кг
1 ж3 воздуха:
у = — кг
V
следовательно1, весовая плотность есть величина, обратная удель-
ному объему.
Массовой плотностью воздуха р называется масса
воздуха, находящаяся в 1 ж3 его. Массовая плотность
p — JL кгсек*!**,
g
§ 2. Физические параметры воздуха и их измерение
19
где g — ускорение земного- тяготения, равное для средних широт
9,81 м/сек\
В широком диапазоне изменения температур и давлений
воздуха можно пользоваться так называемым уравнением
состояния газа:
P=1RT, (1.1)
где R — газовая постоянная. Для обычного состава воздуха в
тропосфере /?=29,27 кгм/кг град.
Заменив в уравнении состояния 7 величиной pg, получим
часто применяемую формулу для вычисления массовой плот-
ности о по- давлению р (в кг/м*) и абсолютной температуре Т
воздуха
Введя вместо р в кг/м* его значение в мм рт. ст. и подставив
вместо £ и /? их численные значения, получим следующие фор-
мулы:
7 = 0,4645 у-, (1.2)
о = 0,04737-у-, (1.3)
где р — в мм рт. ст.
При так называемых нормальных условиях *, т. е. при ро=-
=760 мм рт. ст. и /о=15° С, величина массовой плотности р0
равна у8’
Ро = 1/8~ 0,125.
Отношение массовой плотности воздуха в действительных
условиях р к массовой плотности при нормальных условиях р0
называется относительной плотностью воздуха и
обозначается через А:
Д = ^-.
Ро
Подставляя вместо р и р0 их значения, получим часто при-
меняемую при обработке результатов летных испытаний фор-
мулу
i = »JS_‘jL = 0,379-2-,
0,125 Г ’ Т
(1-4)
где р берется в мм рт. ст.
1 См. ниже § 3.
2*
20
Глава Г Атмосфера
Вязкость воздуха. Для характеристики сил внутрен-
него трения в воздухе, иначе называемых силами вязкости, при-
меняется так называемый динамический коэффициент
вязкости р. или кинематический коэффициент
вязкости v, равный отношению динамического коэффициента
вязкости к плотности:
(1.5)
Сила трения dX, действующая на какой-либо элемент площади
dS, равна
dX = v.— dS,
Оу
<ЭУ
где — —градиент скорости воздуха по нормали к поверх-
ности элемента dS. По формуле для dX можно найти размер-
ность коэффициента вязкости <>,
кг •сек
м2
а по формуле (1.5)—размерность кинематического коэффици-
ента вязкости
[кг-секу
__ м2 ] _______'ж2
Г кг•сек2 1 [сек
ж4 I
Как показывает кинетическая теория газов, коэффициент
вязкости п не зависит от давления и плотности газа, а только
от его температуры. При /=0эС коэффициент вязкости для воз-
духа ио=1,712 ♦ 10“б кг сек/м%. Для других температур коэффи-
циент вязкости воздуха может быть определен по- формуле
-^ = УТ 4-0,003665^ •(! +0,000802,
Ро
или по следующим приближенным формулам:
Р' __ I т )0’76
P-о \ С /
— = 1 4~0,00278£,
’О
(1.6)
(1.6Э
(1.6")
дающим хорошие результаты в пределах изменения температур
ст —50° до +50° С. В формуле (1.6') 7’0=273°К.
__________$
2. Физические параметры воздуха и их измерение
Как видно из приведенных формул, с повышением темпера-
туры коэффициент вязкости несколько1 увеличивается.
Кинематический коэффициент вязкости зависит как от тем-
пературы, так и от давления воздуха. При нормальных условиях
(ро = 760 мм рт. ст. и /о= 15° С) кинематический коэффициент
вязкости v =14,41 • 10~6 м?1сек.
Скорость звука. Из акустики известно, что скорость
звука, т. е. скорость распространения в газе малых возмущений,
при адиабатическом процессе распространения звука равна
где £ = —отношение удельных теплоемкостей при постоян-
ен
ком давлении и постоянном объеме. Для воздуха к равно в
среднем 1,4.
ГТ v
Подставляя вместо — его значение по уравнению состояния
р
(1. Г), получим, что скорость звука равна
a = VkgpT, (1.7')
или для воздуха
а = 20,05 р4? м/сек = 72,2[^Т км/час; (1-7")
следовательно, скорость звука пропорциональна
квадратному корню из абсолютной темпера-
туры. При /=15° С скорость звука <7 = 340,2 м/сек.
Влажность воздуха оказывает влияние на его плот-
ность, причем влажный воздух всегда легче сухого при одинако-
вых давлении и температуре. Оценим это влияние количественно.
Абсолютной влажностью уп называется количество водяного
пара в единице объема воздуха; обычно она измеряется в г/мх
Как известно из термодинамики, смеси газов подчиняются закону
парциальных давлений: давление смеси равняется сумме парци-
альных давлений отдельных газов, входящих в смесь. Если обо-
значить парциальное давление (упругость) водяных паров через
рп, а парциальное давление сухого воздуха через то* абсолют-
ное давление влажного воздуха будет равно
р=рв+рп.
Для рассматриваемого диапазона температур для пара мож-
но пользоваться уравнением состояния в том же виде, что и для
газов
- = р-?
‘П ₽ПГ ’
где Rn=^47,1 —газовая постоянная, а уп и рп—-плотность и
давление водяного пара. Таким образом при постоянной темпе-
22
Глава I. Атмосфера
ратуре Т плотность водяного пара уп пропорциональна его
упругости рп.
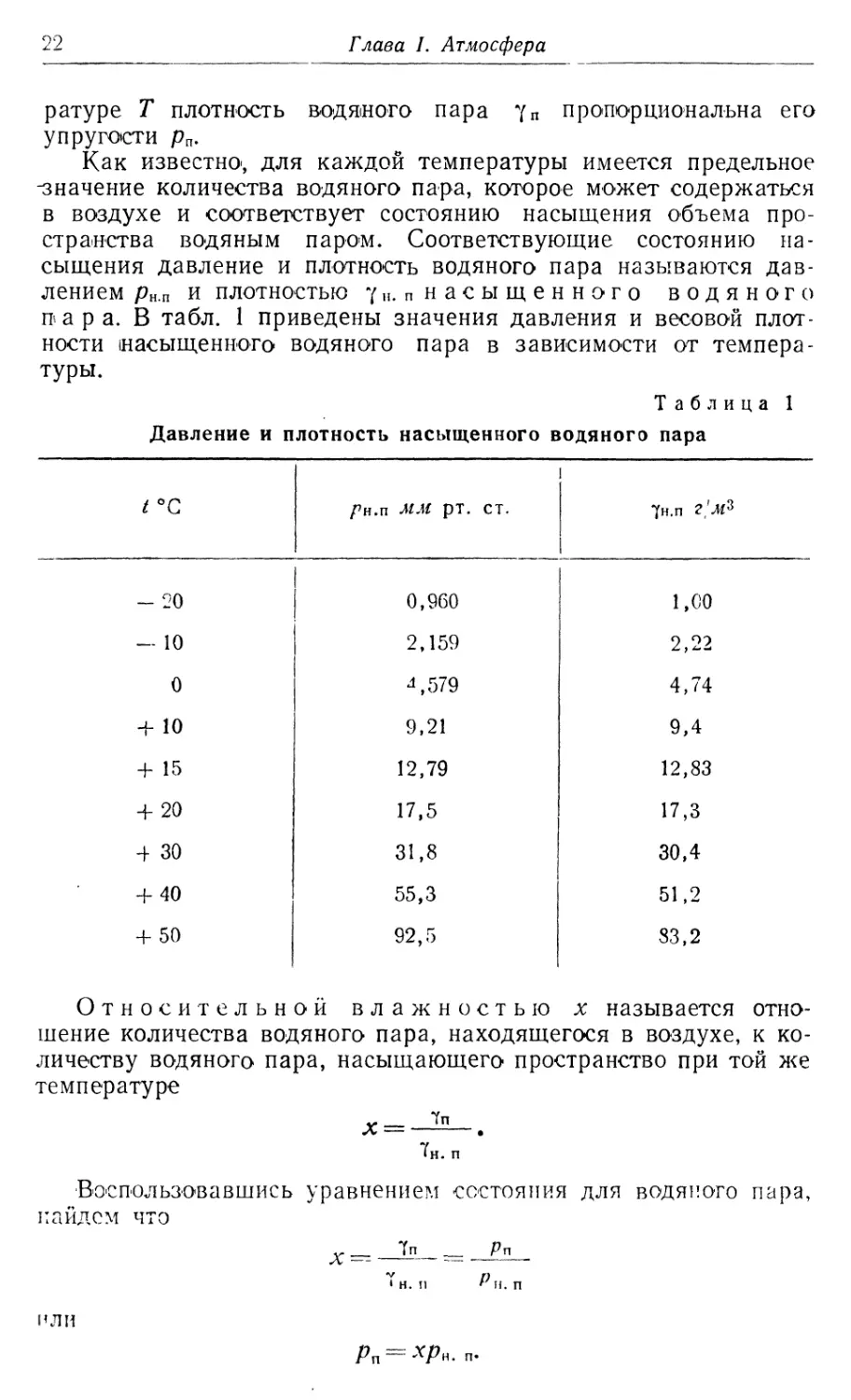
Как известно', для каждой температуры имеется предельное
-значение количества водяного пара, которое может содержаться
в воздухе и соответствует состоянию насыщения объема про-
странства водяным паром. Соответствующие состоянию на-
сыщения давление и плотность водяного пара называются дав-
лением рн.п и плотностью ун. п насыщенного водяного
пара. В табл. 1 приведены значения давления и весовой плот-
ности насыщенного водяного пара в зависимости от темпера-
туры.
Таблица 1
Давление и плотность насыщенного водяного пара
/ °C Дн.п ММ рТ. СТ. 1 7н.п 2>3
- 20 0,960 1,00
- 10 2,159 2,22
0 «4,579 4,74
4- Ю 9,21 9,4
4- 15 12,79 12,83
4- 20 17,5 17,3
4- 30 31,8 30,4
4- 40 55,3 51,2
+ 50 92,5 83,2
Относительной влажностью х называется отно-
шение количества водяного пара, находящегося в воздухе, к ко-
личеству водяного пара, насыщающего пространство при той же
температуре
____7п
Л — •
(н. п
Воспользовавшись уравнением состояния для водяного пара,
найдем что
V __ Тп __ Рп
•Л-- ----------
7 Н. II Г н. п
или
п.
§ 2. Физические параметры воздуха и их измерение
23
Таким образом, зная относительную влажность х и найдя при
помощи табл. 1 рн.п, по температуре воздуха можно определить
парциальное давление водяного пара рп. Относительную влаж-
ность часто указывают в процентах.
Выведем формулу для определения плотности влажного воз-
духа у по заданным относительной влажности х, давлению воз-‘
духа р и температуре Т, Плотность влажного воздуха у равна
сумме плотности сухого воздуха и водяного пара уп:
1 Тв tn*
Воспользовавшись уравнениями состояния для сухого воздуха
и для водяного пара, получим что
V — I Рп
RT RnT'
По закону парциальных давлений
р=р3+рп,
следовательно,
Р»=Р — рп.
Так как рП = хрнп, то
Ж П *Рн.П Р L Л'Рн. п —JLY
f RT + R„T ЯН р V /?„/. ‘
Подставив вместо R и Rn их значения 29, 27 и 47, 1, получим
‘=^(1-0’378—)• (1-8)
RT\ р /
Из формулы (1.8) видно, что плотность влажного воздуха всегда
меньше плотности сухого воздуха при одинаковых давлении и
температуре. Однако даже при относительной влажности х=1
(т. е. 100%) поправка на влажность при определении плотности
невелика. Так, для нормальных условий на уровне моря при
х=1 получим поправку
хри п 1-12,79
0,378 = 0,378------= 0,00635,
р 760
т. е. меньше 0,7%. Для средних условий на высоте Я=5000 м
эта поправка равна 0,00117, т. е. меньше 0,2%. На еще больших
высотах она исчезающе мала.
Поэтому при летных испытаниях обычно не определяют от-
носительной влажности воздуха и подсчитывают плотность по
формулам для сухого воздуха. Однако в случае очень высоких
температур воздуха и большой влажности, встречаемых иногда
24
Глава I. Атмосфера
при испытаниях самолетов в жаркое время года, целесообразно
вводить при подсчете плотности п о п р а в к у н а влажность.
В предельном случае при температуре у земли 40° С и х =
= 100|Э/о получим поправки для плотности соответственно 2,7а/о,
что при подсчете скорости даст поправки 1,35%.
§ 3. ИЗМЕНЕНИЕ ПАРАМЕТРОВ ВОЗДУХА С ВЫСОТОЙ
И УСЛОВНЫЕ АТМОСФЕРЫ
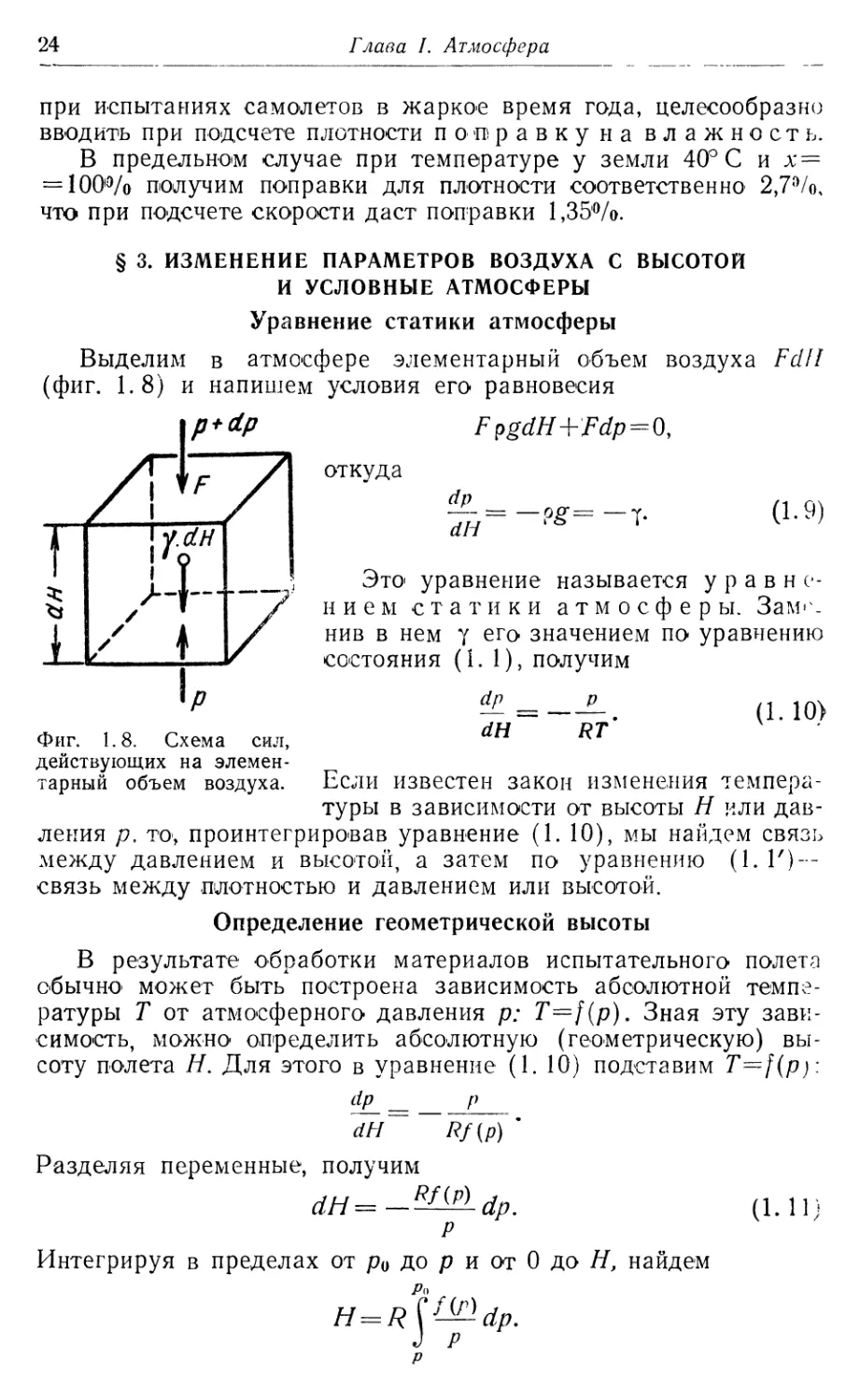
Уравнение статики атмосферы
Выделим в атмосфере элементарный объем воздуха Fdf!
(фиг. 1.8) и напишем условия его равновесия
F?gdH+Fdp=^
откуда
dp
dH
= — ?£= -ъ
(1-9)
Это' уравнение называется уравне-
нием статики атмосферы. Заме-
нив в нем у его значением по уравнению
состояния (1. 1), получим
dp __________£_
dH~~ RT'
(1. 10)
действующих на элемен-
тарный объем воздуха. Если известен закон изменения темпера-
туры в зависимости от высоты Н или дав-
ления р, то, проинтегрировав уравнение (1. 10), мы найдем связь
между давлением и высотой, а затем по уравнению (1. Iх)---
связь между плотностью и давлением или высотой.
Определение геометрической высоты
В результате обработки материалов испытательного полета
обычно' может быть построена зависимость абсолютной темпе-
ратуры Т от атмосферного давления р: T=f(p). Зная эту зави-
симость, можно- определить абсолютную (геометрическую) вы-
соту полета Н. Для этого в уравнение (1. 10) подставим T=f(p):
<ip_ = Р
dH Rf(p)'
Разделяя переменные, получим
dH^—^^-dp. (1.11)
р
Интегрируя в пределах от р0 до р и от 0 до Н, найдем
H = R ^f-ydP-
р
§ 3. Изменение параметров воздуха с высотой 25
гт , ” д. Лр) т
Построив график изменения подинтегральнои функции ----= —
Р Р
в зависимости от р, путем графического интегрирования найдем
величину интеграла, а следовательно, и величину Н для разных
значений р.
Стандартная атмосфера (СА)
Выше были приведены данные, показывающие, в каких зна-
чительных пределах может изменяться температура и плотность
воздуха на одной и той же высоте полета в зависимости от ши-
роты места, времени года и суток, а также от условий погоды.
А так как температура и плотность воздуха оказывают большое
влияние на аэродинамические характеристики самолета и ра-
боту авиационного двигателя, то летные данные одного и того
же самолета различны в зависимости от состояния атмосферы
и изменяются от полета к полету. Для возможности сравнения
между собой различных самолетов, а также результатов летных
испытаний, получаемых для одного и того же самолета в разных
полетах, принято- приводить результаты полетных испытаний к
единообразным условиям.
С этой целью в ряде стран установлена условная так назы-
ваемая стандартная атмосфера, для которой на основе
многолетних наблюдений принят тот или иной закон изменения
физических параметров атмосферы с высотой.
До 1920 г. у нас применяли так называемую условную ат-
мосферу, выработанную для Подмосковного района на основе
обработки наблюдений Кучинского- института за 1905—1914 гг.,
проводившихся до- высоты 18 км при помощи шаров-зондов. По-
нятно, что- вследствие огромной протяженности СССР и боль-
шого разнообразия климатических условий в различных его
пунктах невозможно составить единую стандартную атмосферу,
которая отражала бы с достаточной точностью среднегодовые
изменения параметров атмосферы с высотой для всех пунктов
Союза. В связи с этим принятая в нашей стране в настоящее
время стандартная атмосфера составлена на основании обра-
ботки среднегодовых изменений температуры с высотой для об-
ластей, расположенных на 40—50° северной широты.
Стандартная атмосфера СССР i установлена до высоты
30 км и основана на следующих предположениях:
1. В качестве нулевой высоты в условиях этой атмосферы
принят уровень моря, причем для него приняты следующие на-
чальные данные:
ро = 76О мм рт. ст.; ^0=+15°С; у0= 1,225 кг/м*;
р0 = 0,124966 кг-сек2)м\
1 В дальнейшем всюду сокращенно обозначается буквами СА. См.
ГОСТ 4401—48. Таблица стандартной атмосферы. Издание официальное.
Стандартгиз, 1949.
26
Глава I. Атмосфера
Такие условия состояния воздуха называются нормаль-
ными условиями.
2. До- высоты Н=~-И км принят следующий закон изменения
температур с высотой:
для #<11 000 м = (1.12)
где Н — высота воздушного слоя от уровня моря в м, а Iн — тем-
пература воздуха в этом слое в °C. Таким образом для высот до
11 км принято, что температура воздуха падает на 6,5° Сна
каждые 1000 м, т. е. р=—0,0065 град/м.
Для высот Н выше 11 км принято, что температура воздуха
остается постоянной и равной температуре воздуха на вы-
соте 11 км, а именно — 56,5° С:
^=const= — 56,5° С. (1. 12')
3. Приняты следующие значения параметров, входящих в
формулы для определения давления и плотности:
газовая постоянная R для воздуха: /? = 29,2746 ——----,ускоре-
на. градус
ние силы тяжести g—9,80665 м/сек^.
4. На всех высотах относительная влажность воздуха при-
нята равной нулю.
При указанных выше допущениях формулы для определения
давлений и плотностей в стандартной атмосфере до высоты 11 км
имеют следующий вид:
рн _ / J н \5,2553 _(ТИ \5,2553
Ро ~ \ 44 308 / \ U
д =РЯ==Л________А4’2553
Н р0 44 308 J
а формулы для высот выше 11 км имеют такой вид:
я—и ооо
Рн = ?Н ___ е 6318 в
Al Ри
в этих формулах Н берется в м.
Отрицательные высоты приведены в СА в связи с тем, что
ими приходится пользоваться в некоторых случаях, как это по-
казано ниже, при обработке результатов летных испытаний.
В стандартной атмосфере приведены также численные зна-
чения кинематического коэффициента вязкости v и скорости
звука а, рассчитанные по приведенным в § 2 формулам, причем
значение k принято равным 1,4.
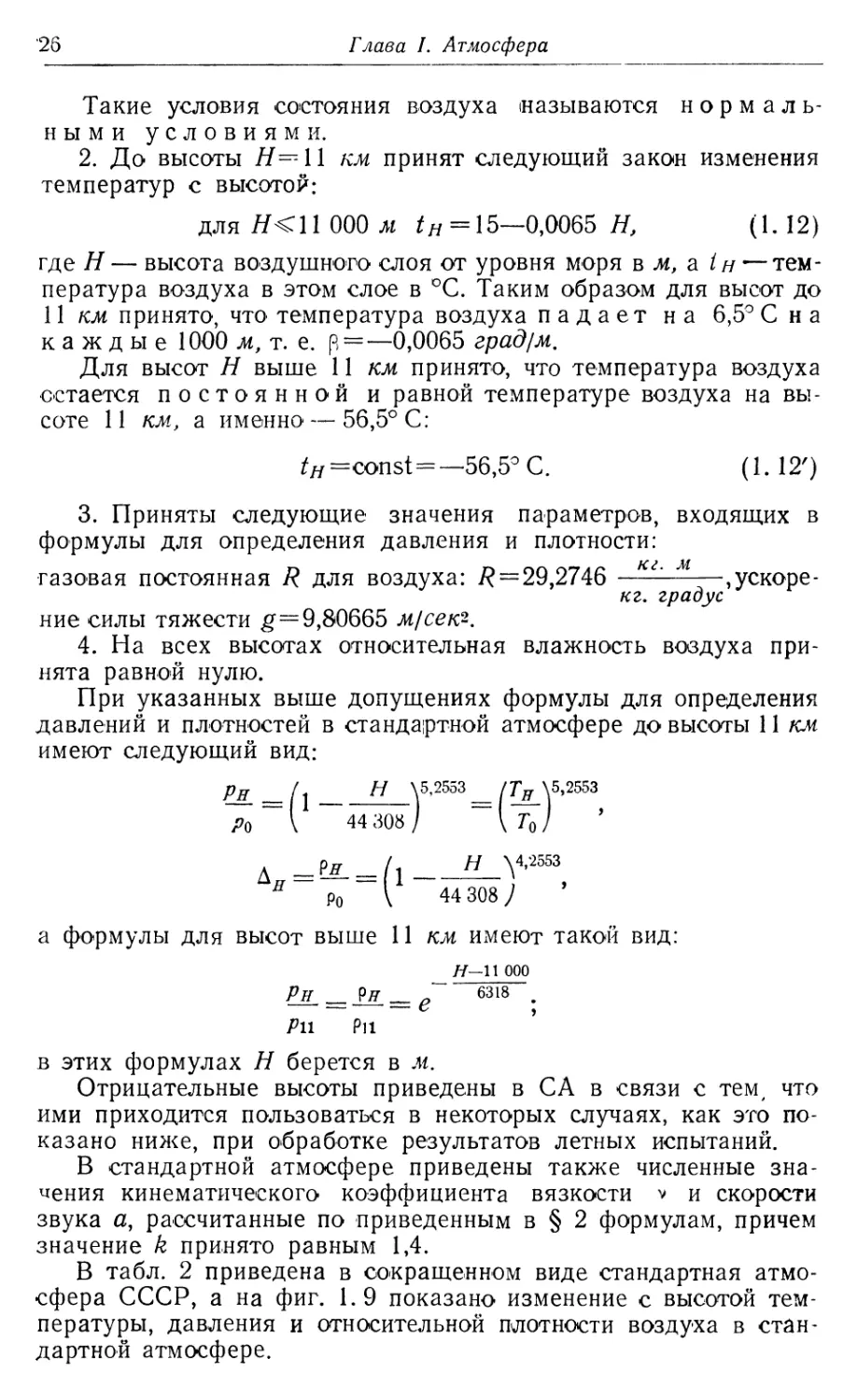
В табл. 2 приведена в сокращенном виде стандартная атмо-
сфера СССР, а на фиг. 1.9 показано изменение с высотой тем-
пературы, давления и относительной плотности воздуха в стан-
дартной атмосфере.
§ 3. Изменение параметров воздуха с высотой
27
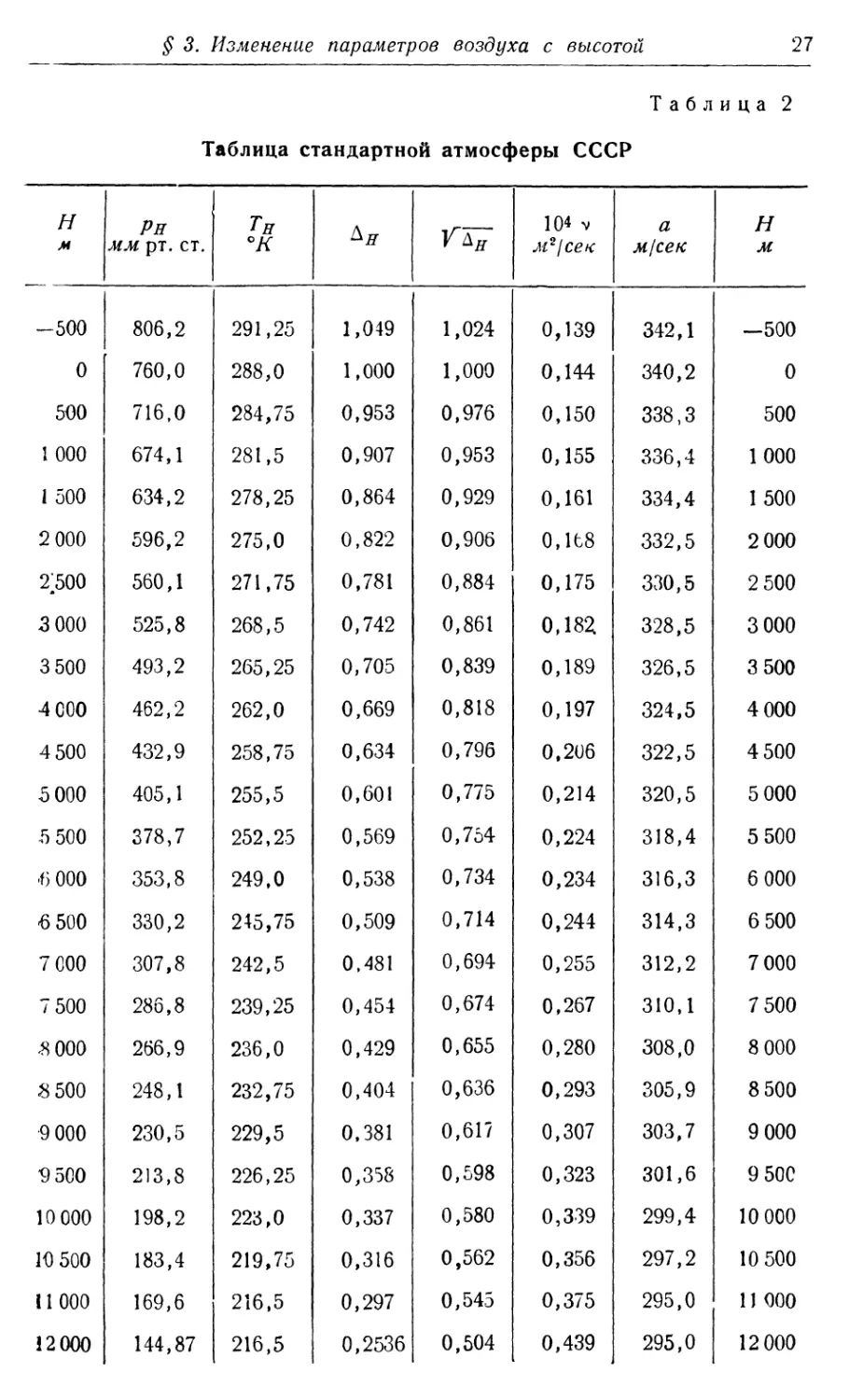
Таблица 2
Таблица стандартной атмосферы СССР
н м Рн мм рт. ст. Тв °К К 104 v м2/сек а м/сек Н м
-500 806,2 291,25 1,049 1,024 0,139 342,1 —500
0 760,0 288,0 1,000 1,000 0,144 340,2 0
500 716,0 284,75 0,953 0,976 0,150 338,3 500
1 000 674,1 281,5 0,907 0,953 0,155 336,4 1000
1 500 634,2 278,25 0,864 0,929 0,161 334,4 1 500
2 000 596,2 275,0 0,822 0,906 0,168 332,5 2 000
2?500 560,1 271,75 0,781 0,884 0,175 330,5 2 500
3 000 525,8 268,5 0,742 0,861 0,1821 328,5 3 000
3 500 493,2 265,25 0,705 0,839 0,189 326,5 3 500
4 000 462,2 262,0 0,669 0,818 0,197 324,5 4 000
4 500 432,9 258,75 0,634 0,796 0,206 322,5 4 500
5 000 405,1 255,5 0,601 0,775 0,214 320,5 5 000
5 500 378,7 252,25 0,569 0,754 0,224 318,4 5 500
5 000 353,8 249,0 0,538 0,734 0,234 316,3 6 000
6 500 330,2 245,75 0,509 0,714 0,244 314,3 6 500
7 000 307,8 242,5 0,481 0,694 0,255 312,2 7 000
7 500 286,8 239,25 0,454 0,674 0,267 310,1 7 500
8 000 266,9 236,0 0,429 0,655 0,280 308,0 8 000
8 500 248,1 232,75 0,404 0,636 0,293 305,9 8 500
9 000 230,5 229,5 0,381 0,617 0,307 303,7 9 000
9 500 213,8 226,25 0,358 0,598 0,323 301,6 9 50С
10 000 198,2 223,0 0,337 0,580 0,339 299,4 10 000
10 500 183,4 219,75 0,316 0,562 0,356 297,2 10 500
11000 169,6 216,5 0,297 0,545 0,375 295,0 11 000
12000 144,87 216,5 0,2536 0,504 0,439 295,0 12 000
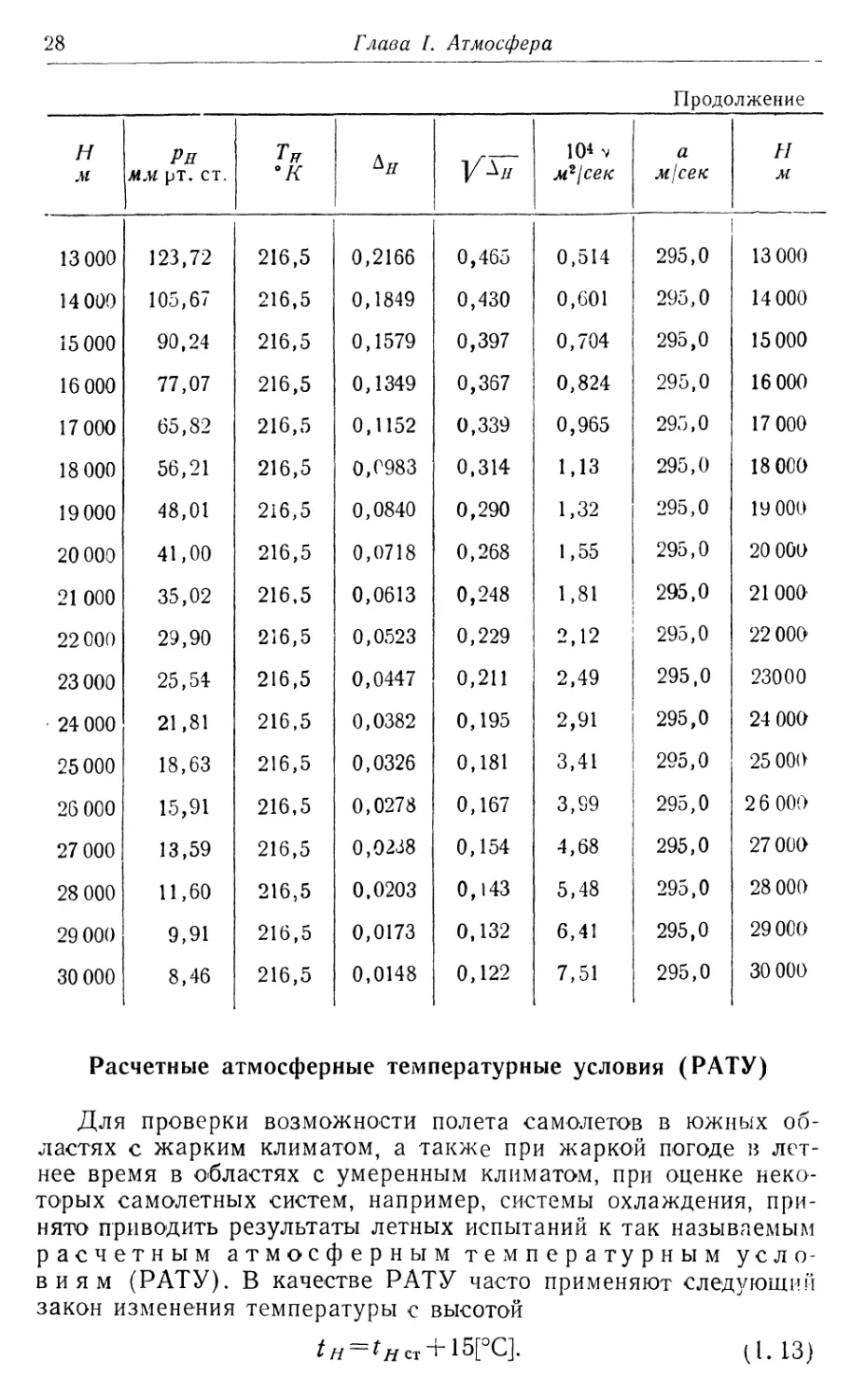
28
Глава I. Атмосфера
Продолжение
н м Рн ММ рт. ст. Т„ °к 10« ч мг1сек а м/сек И м
13 000 123,72 216,5 0,2166 0,465 0,514 295,0 1 13 000
14 000 105,67 216,5 0,1849 0,430 0,601 295,0 14 000
15 000 90,24 216,5 0,1579 0,397 0,704 295,0 15 000
16 000 77,07 216,5 0,1349 0,367 0,824 295,0 16 000
17 000 65,82 216,5 0,1152 0,339 0,965 295,0 17 000
18 000 56,21 216,5 0,0983 0,314 1,13 295,0 18 000
19 000 48,01 216,5 0,0840 0,290 1,32 295,0 19 000
20 000 41,00 216,5 0,0718 0,268 1,55 295,0 20 000
21000 35,02 216,5 0,0613 0,248 1,81 295,0 21 000
22 000 29,90 216,5 0,0523 0,229 2,12 295,0 22 000
23 000 25,54 216,5 0,0447 0,211 2,49 295,0 23000
24 000 21,81 216,5 0,0382 0,195 2,91 295,0 24 000
25 000 18,63 216,5 0,0326 0,181 3,41 295,0 25 000
26 000 15,91 216,5 0,0278 0,167 3,99 295,0 26 000
27 000 13,59 216,5 0,0238 0,154 4,68 295,0 27 000
28 000 11,60 216,5 0.0203 0,143 5,48 295,0 28 000
29 000 9,91 216,5 0,0173 0,132 6,41 295,0 29 000
30 000 8,46 216,5 0,0148 0,122 7,51 295,0 30 000
Расчетные атмосферные температурные условия (РАТУ)
Для проверки возможности полета самолетов в южных об-
ластях с жарким климатом, а также при жаркой погоде в лет-
нее время в областях с умеренным климатом, при оценке неко-
торых самолетных систем, например, системы охлаждения, при-
нято приводить результаты летных испытаний к так называемым
расчетным атмосферным температурным усло-
виям (РАТУ). В качестве РАТУ часто применяют следующий
закон изменения температуры с высотой
+ Ц.13)
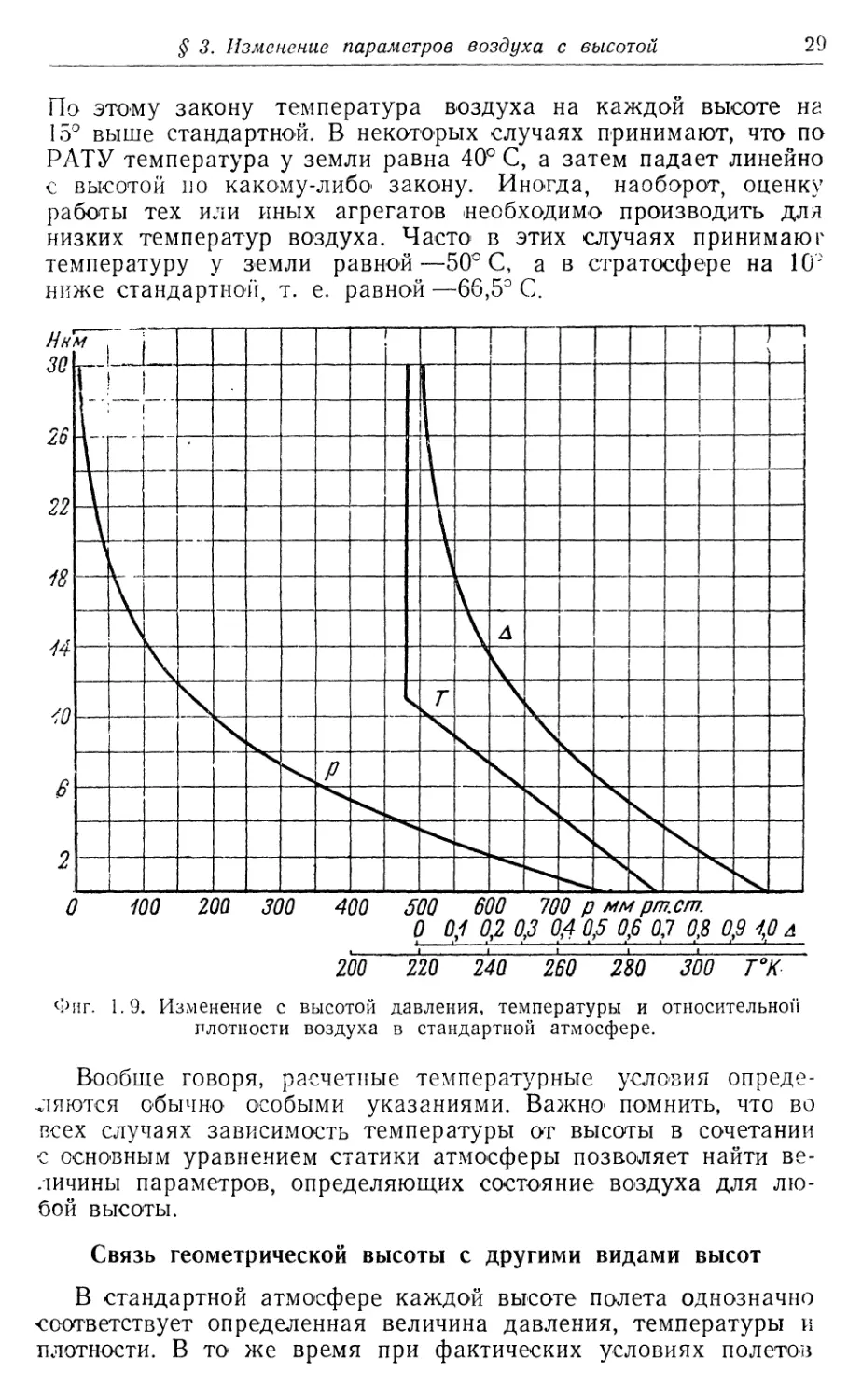
§ 3. Изменение параметров воздуха с высотой
29
По этому закону температура воздуха на каждой высоте на
15° выше стандартной. В некоторых случаях принимают, что по
РАТУ температура у земли равна 40° С, а затем падает линейно
с высотой ио какому-либо- закону. Иногда, наоборот, оценку
работы тех или иных агрегатов необходимо производить для
низких температур воздуха. Часто в этих случаях принимают
температуру у земли равной—50° С, а в стратосфере на 10°
ниже стандартной, т. е. равной —66,5° С.
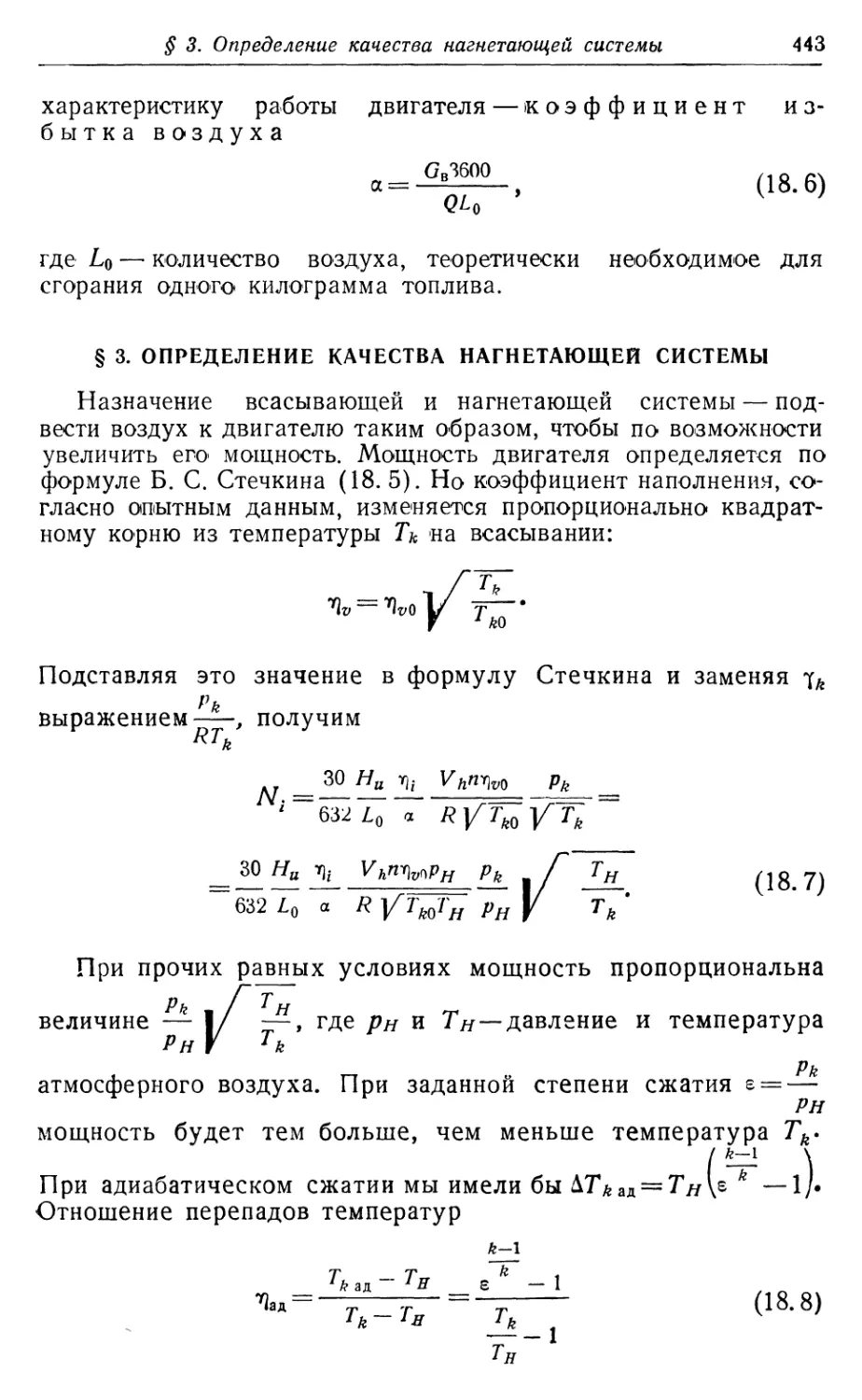
Фиг. 1.9. Изменение с высотой давления, температуры и относительной
плотности воздуха в стандартной атмосфере.
Вообще говоря, расчетные температурные условия опреде-
ляются обычно особыми указаниями. Важно1 помнить, что во
всех случаях зависимость температуры от высоты в сочетании
с основным уравнением статики атмосферы позволяет найти ве-
личины параметров, определяющих состояние воздуха для лю-
бой высоты.
Связь геометрической высоты с другими видами высот
В стандартной атмосфере каждой высоте полета однозначно
соответствует определенная величина давления, температуры и
плотности. В то же время при фактических условиях полетов
30
Глава I. Атмосфера
на одной и той же высоте могут наблюдаться различные вели-
чины давления и температуры, а следовательно, и плотности
воздуха.
В практике летных испытаний установилась следующая тер-
минология высот:
1. Абсолютная или геометрическая высота
Н — истинная высота полета над уровнем аэродрома или над
уровнем моря.
2. Барометрическая высота Нр — высота по стан-
дартной атмосфере, на которой давление воздуха равно факти-
ческому давлению р в условиях полета. Иногда высоту Нр на-
зывают высотой по давлению.
3. Высота по плотности Яд — высота по стандарт-
ной атмосфере, на которой плотность воздуха равна фактиче-
ской плотности в условиях полета.
4. Высота по температуре Нт — высота по стан-
дартной атмосфере, на которой температура воздуха равна
фактической температуре в условиях полета. При температурах
воздуха ниже—56,5° С термин «высота по температуре» теряет
смысл, так как в СА нет высот с более низкими температурами,
чем —56,5° С.
Указанные четыре высоты совпадают между собой только в
том случае, если на всех высотах от земли до рассматриваемого
слоя воздуха господствуют условия, соответствующие СА. Вы-
соты Нр, Н& и Н т могут быть одинаковы и в то же время отли-
чаться от геометрической высоты Н, если только в рассматри-
ваемом слое воздуха атмосферные условия случайно соответ-
ствуют условиям на какой-либо высоте в СА, но в нижележа-
щих слоях это не выполняется.
Выше было показано, каким образом может быть найдена
истинная высота слоя воздуха по заданной зависимости темпе-
ратуры нижележащих слоев воздуха от давления. Определение
истинной высоты полета требует довольно громоздких вычисле-
ний и, как правило, не производится при обработке результатов,
летных испытаний.
При обработке летных испытаний, например, по определению
вертикальной скорости самолета, иногда приходится пользовать-
ся связью между геометрической и барометрической высотами
в дифференциальной форме. Для вывода соответствующей фор-
мулы рассмотрим слой воздуха высотой dH с температурой Т
и давлением р. По уравнению статики атмосферы (1. 10) имеем
dp =—p-dH.
RT
В стандартной атмосфере для слоя воздуха с тем же давлением
---~dHD,
£ 4. Влияние силы тяжести
31
откуда
dH= — dHD.
т Р
1 ст
(1.14)
Полученная формула, связывающая дифференциалы геомет-
рической и барометрической высот, применима только в том
случае, если давления р для обоих случаев одни и те же и только-
фактическая температура Т отличается от стандартной Гег.
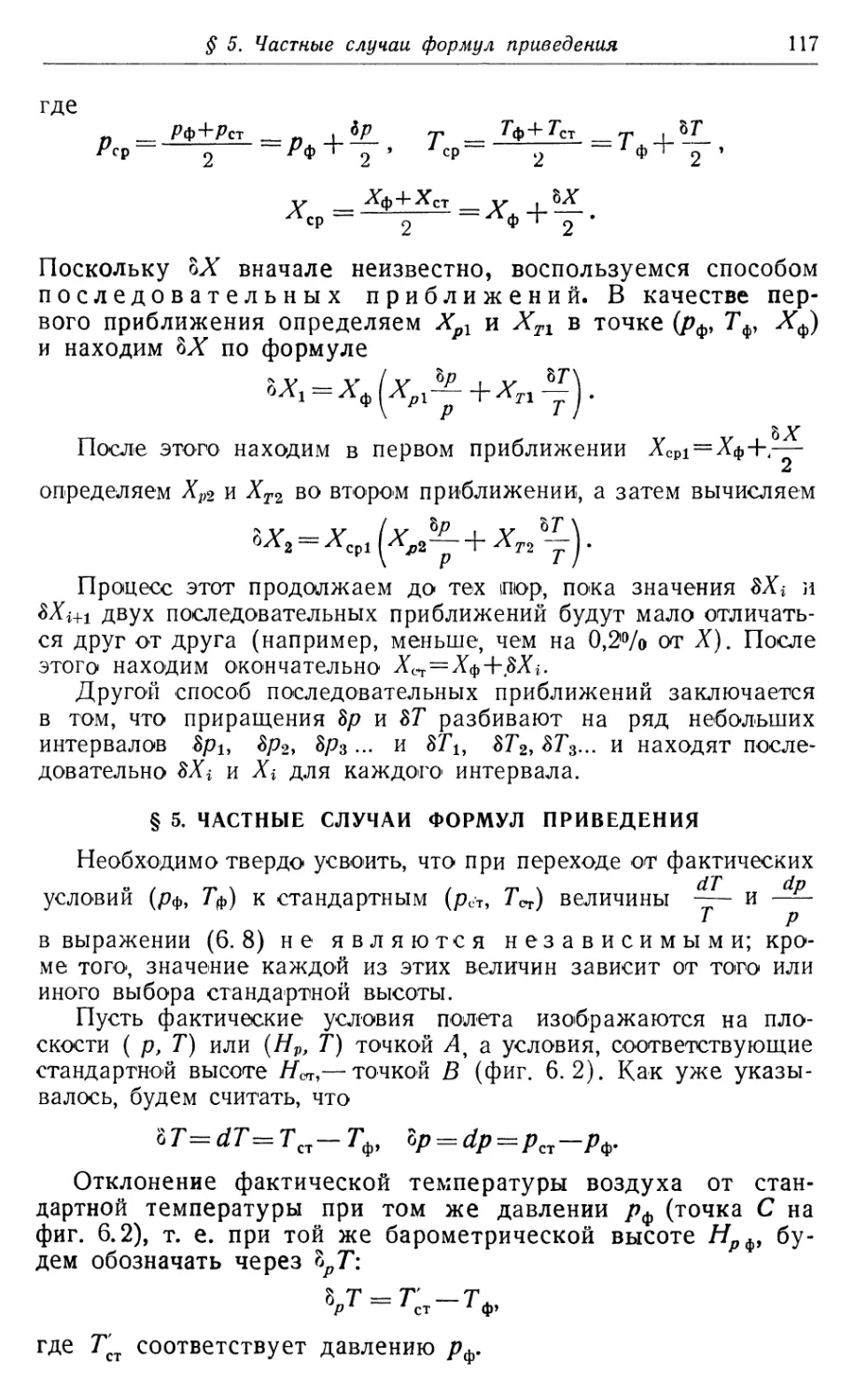
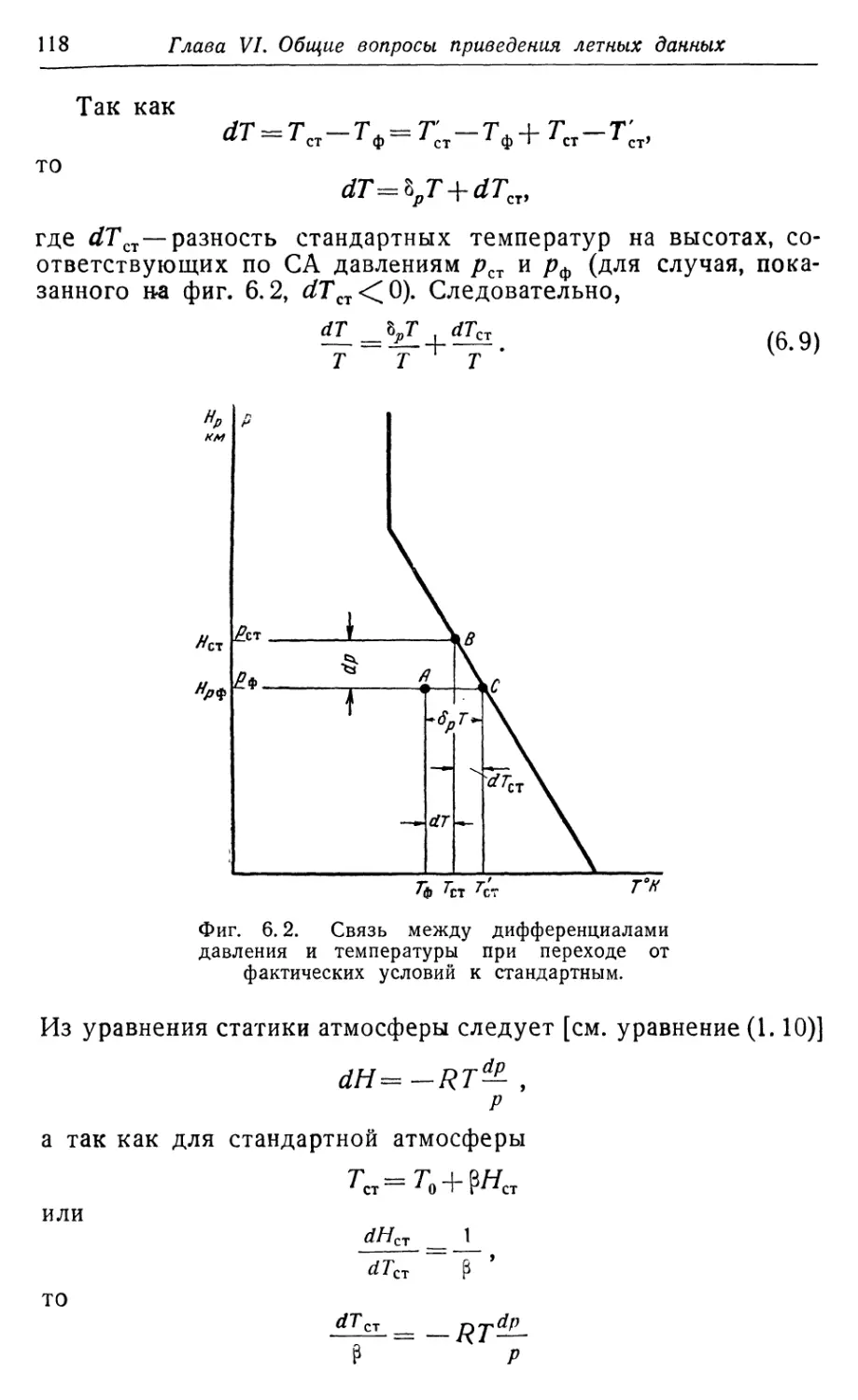
§ 4. ВЛИЯНИЕ СИЛЫ ТЯЖЕСТИ
При выводе в § 3 формул для определения давления и плот-
ности на высоте при заданном законе изменения температуры
мы принимали ускорение силы тяжести g постоянным. В дей-
ствительности же величина g уменьшается с высотой и
на высоте Н
__________________________ г2
S — go ’
где go— ускорение силы тяжести при 7/=0, аг— радиус
Так как Н весьма мало относительно г, то это соотношение мож-
но заменить приближенной формулой
^-=—^-«1-2^-.
go (r + Ну г
равна
(1-15)
земли.
Из кинетической теории газов известно, что газовая постоян-
ная R, отнесенная к массе одной молекулы, неизменна. Так как
в уравнении состояния газовая постоянная R относится
газа, то при изменении g будет меняться и R, причем
R__^ go
g
Возьмем уравнение статики атмосферы (1.10)
dp ==___________________________р
dH~ RT'
Подставив вместо R его- значение из (1. 16), получим
dH RqT gQ RqT (гл-Н)2 RqT \ r )'
Рассмотрим, какую ошибку вносит пренебрежение
нием ускорения силы тяжести g с высотой при интегрировании
уравнения статики атмосферы. Для простоты возьмем частный
случай постоянства температуры T=TQ. Перепишем уравнение
(1. 17) в виде
dp
Р
-L^dH + ^—HdH.
RqTq Г Rolf)
к 1 кг
(1-16)
(1.17)
измене-
32
Глава I. Атмосфера
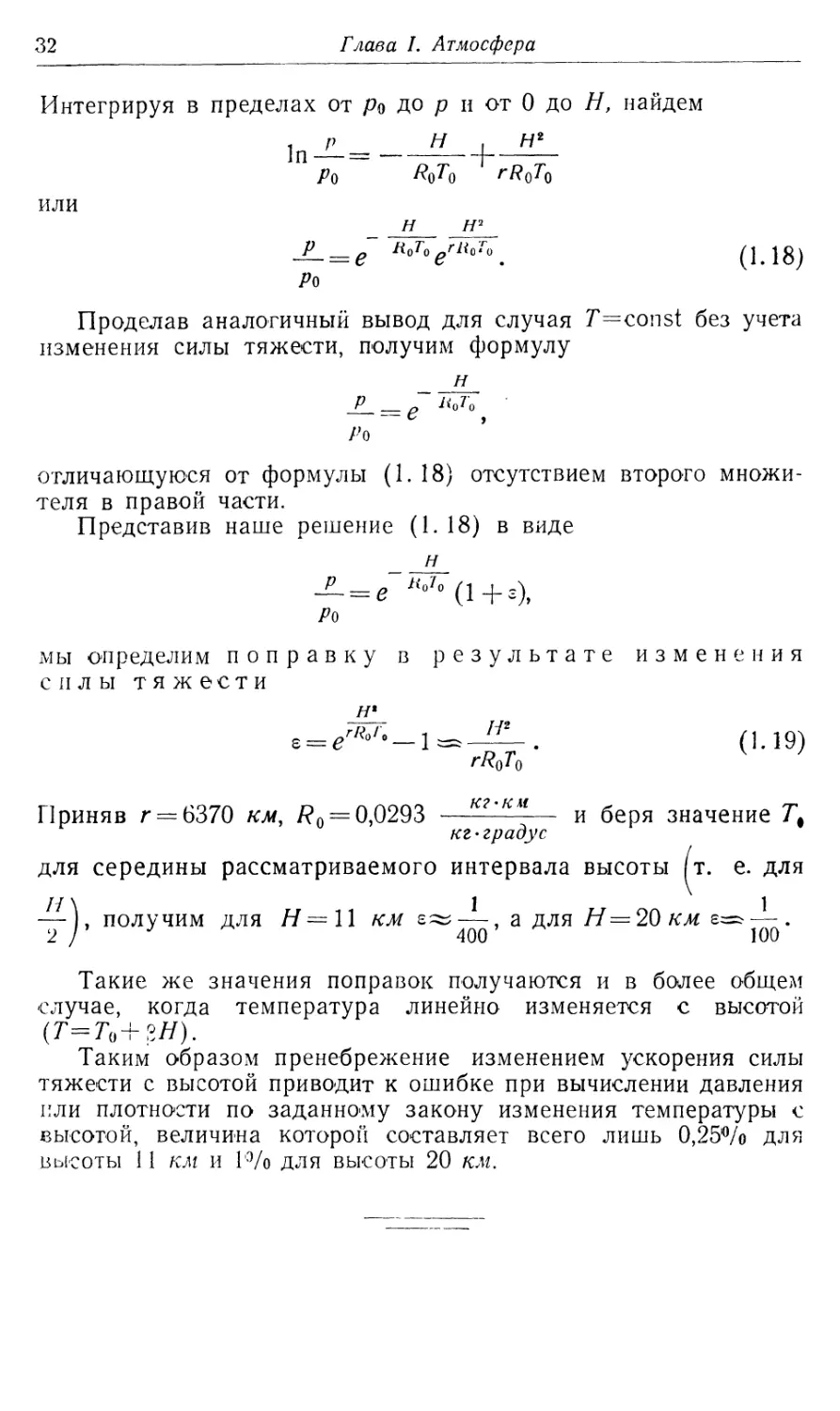
Интегрируя в пределах от Ро до р и от 0 до Н, найдем
1п-£-=-------------------------------—
Ро #оЛ)
или
-Т- = е (1.18)
Ро
Проделав аналогичный вывод для случая T=const без учета
изменения силы тяжести, получим формулу
_ и
Р __ 0
Ро
отличающуюся от формулы (1. 18) отсутствием второго множи-
теля в правой части.
Представив наше решение (1. 18) в виде
___________________________н
— = е
Ро
мы определим поправку в результате изменения
силы тяжести
и*
г = (1.19)
rRoTa
Приняв г = 6370 км, /?0 = 0,0293 —к?'кы— и дерЯ значение у
кг • градус
для середины рассматриваемого интервала высоты (т. е. для
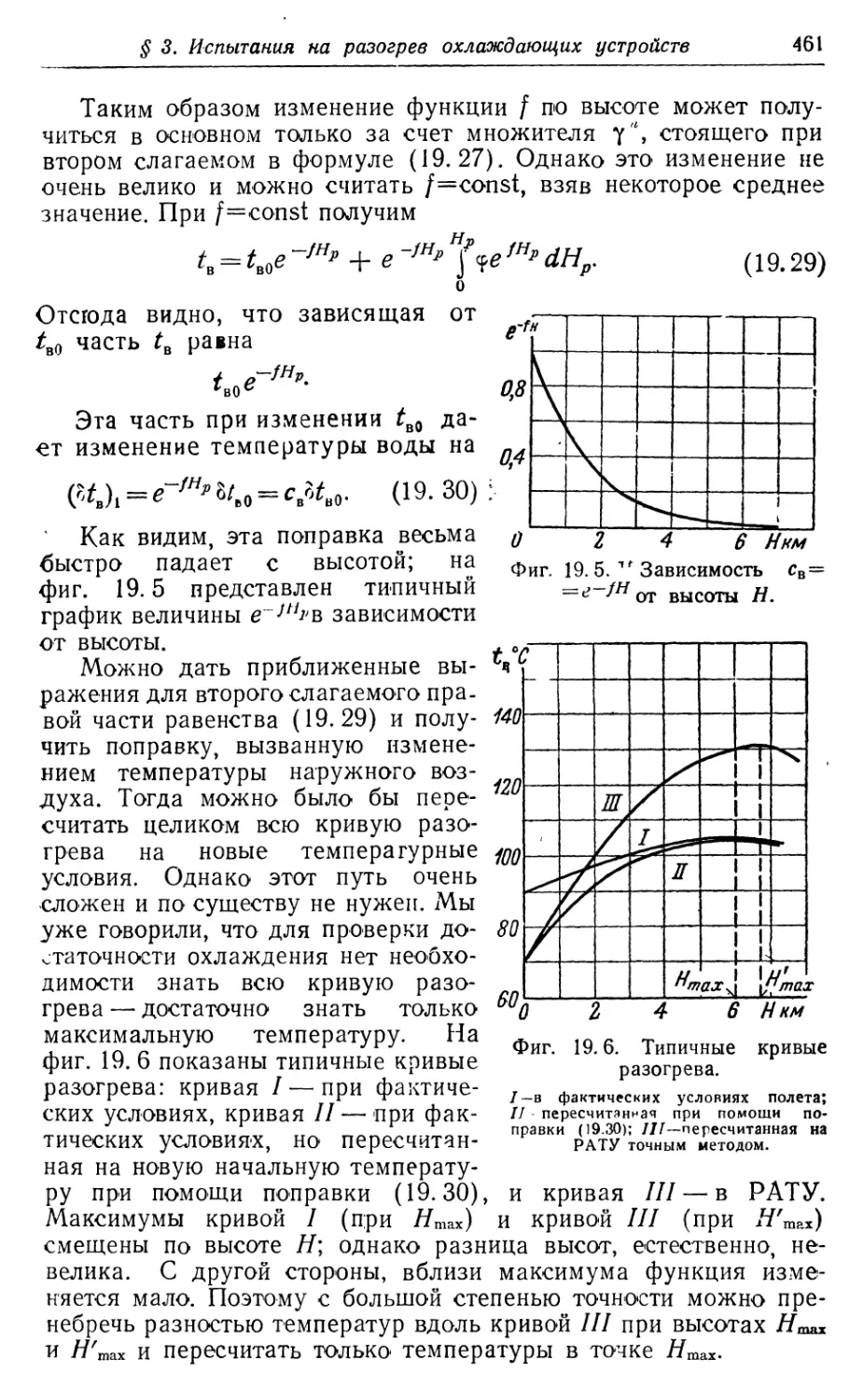
— к получим для Н = 11 км а для 77=20 км .
2 / ’ J 400 100
Такие же значения поправок получаются и в более общем
случае, когда температура линейно изменяется с высотой
(Т=Т«+2Н).
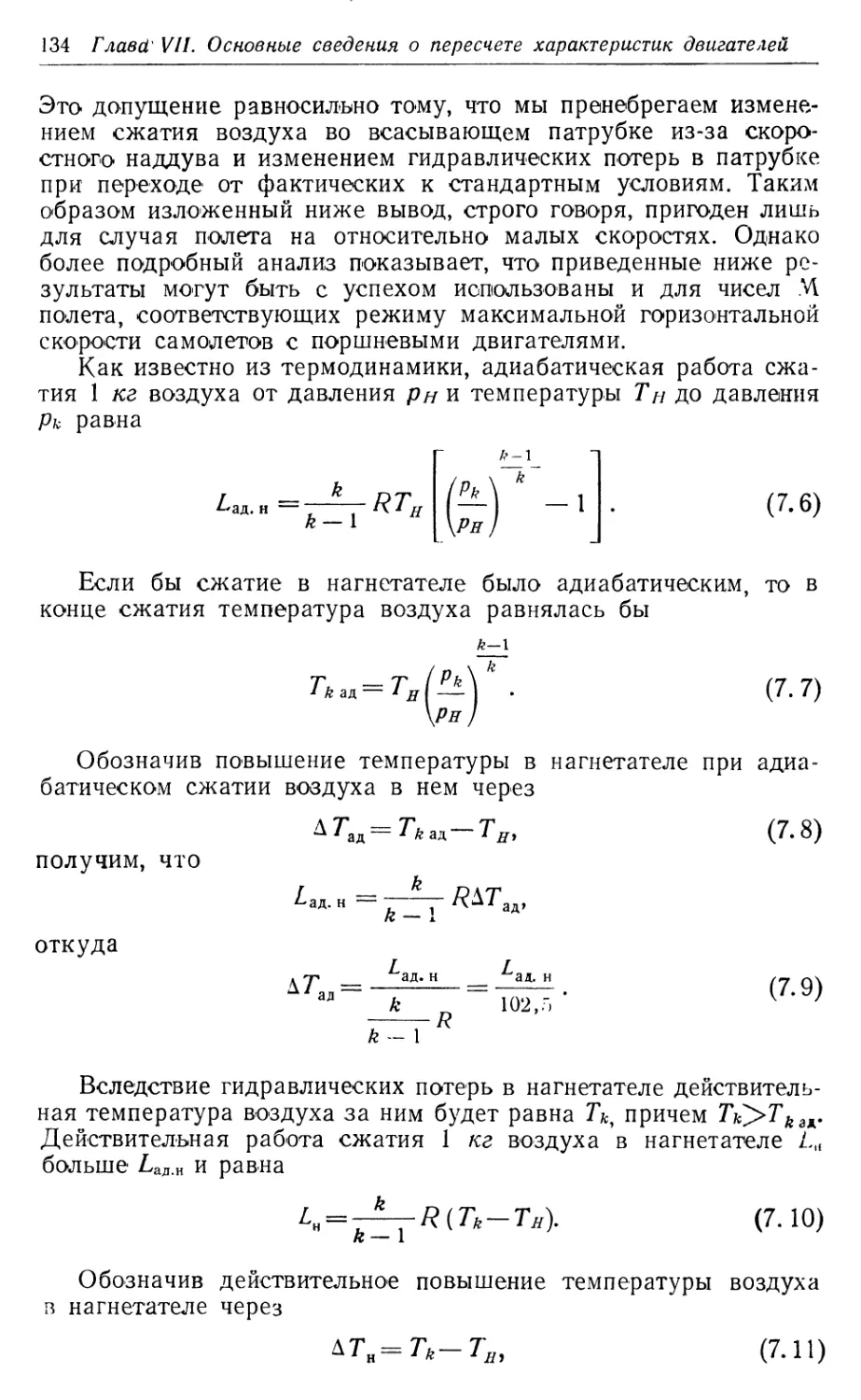
Таким образом пренебрежение изменением ускорения силы
тяжести с высотой приводит к ошибке при вычислении давления
или плотности по заданному закону изменения температуры с
высотой, величина которой составляет всего лишь 0,25% для
высоты 11 км и 1% для высоты 20 км.
Глава II
подготовка к ИСПЫТАНИЯМ
§ 1. ПОДГОТОВКА САМОЛЕТА И ДВИГАТЕЛЯ
Подготовка самолета к испытаниям является весьма важным
этапом в общей программе летных испытаний. От тщательности
подготовки зависит как качество испытаний и точность получае
мых результатов, так и в немалой степени продолжительность
испытаний и количество затраченных на них летных часов.
Обычно в испытательных и исследовательских организациях
по всем видам испытаний имеются специальные инструкции,
предусматривающие последовательность всех операций, связан-
ных с подготовкой самолета к испытаниям, и способы выполне-
ния этих операций. Перед началом испытаний должна быть со-
ставлена их программа. Определяют количество и характер по-
летов, исходя из конкретных условий испытаний. В дальнейшем
в процессе самих испытаний составляется на каждый полет
задание. В задании должны быть четко указаны все режимы,
которые летчик должен выполнить в данном полете, последова-
тельность их выполнения, а также основные данные, относя-
щиеся к условиям испытаний: вес самолета, его центровка,
положение всех регулируемых и подвижных частей самолета
(шасси, щитков, фонаря кабины, заслонок туннелей радиато-
ров и т. п.), а также режимы работы двигателя.
Как показывает практика летных испытаний, во многих слу-
чаях получаются искаженные результаты из-за того, что в полете
происходит отсос створок шасси, щитков, крышек люков
и т. п., вызывающий нарушение внешней аэродинамической
формы самолета. В связи с этим в процессе подготовки самолета
к испытаниям необходимо1 тщательно проверить замки и сто-
поры шасси и щитков, а также надежность крепления таки,к
деталей, как крышки люков, фонарь кабины и др. Должно быть
также проверено состояние отделки наружной поверх-
ности самолета.
Так как все основные характеристики самолета зависят от
качества работы двигателя, то особое внимание нужно уде-
лить обеспечению нормальной работы двигателя и возможности
получения в полете необходимых режимов. На самолете с порш-
невыми двигателями следует проверить, обеспечен ли потребный
3 772
34
Глава П. Подготовка к испытаниям
диапазон углов поворота лопастей винта изменяемого шага;
должна быть проверена регулировка РПД (регулятора постоян-
ства давления наддува); для проверки работы карбюратора и
его настройки следует определить на земле расходы горючего
на нескольких режимах работы двигателя для сопоставления с
задаваемыми моторным заводом техническими условиями. На
турбореактивных двигателях необходимо проверить работу ре-
гулятора оборотов или баростата и убедиться в том, что при
установке сектора газа в положение «полный газ» двигатель раз-
вивает заданные обороты. Таким образом в процессе земной под-
готовки должны быть проверены все параметры и характеристи-
ки двигателя и его агрегатов, от которых зависит величина мощ-
ности или тяги, развиваемой двигателем в полете.
§ 2. ВЗВЕШИВАНИЕ И ОПРЕДЕЛЕНИЕ ЦЕНТРА ТЯЖЕСТИ
Для того чтобы в процессе испытаний знать вес самолета и
положение центра тяжести его в каждом полете, перед началом
испытаний производится взвешивание самолета и определение
его центра тяжести. Взвешивание производится в ангаре с го-
ризонтальным полом при закрытых воротах, для того чтобы не
вносить погрешности в показания весов из-за влияния ветра.
При взвешивании как основные колеса, так и хвостовое или но-
совое колесо устанавливаются на весы. Амортизация шасси
должна быть заклинена, чтобы не происходило смещения фю-
зеляжа и крыльев относительно оси колес.
Самолет обычно взвешивается в двух вариантах: 1) пустой
самолет с несъемным оборудованием и 2) с нормальной полет-
ной нагрузкой. В последнем случае баки самолета должны быть
полностью заправлены, для того чтобы не было переливания
горючего при изменении наклона самолета в процессе взвеши-
вания.
Как известно, центром тяжести твердого тела называется
точка, через которую при любом положении тела проходит рав-
нодействующая сил тяжести. Следовательно, достаточно для не-
скольких положений самолета найти линии действия равнодей-
ствующей сил тяжести; на их пересечении и должен находиться
центр тяжести.
Этот способ определения центра тяжести практически сво-
дится к тому, что самолет взвешивается в каждом варианте в
трех положениях, обычно в следующих:
самолеты с хвостовым колесом:
1) при стояночном угле,
2) в линии полета,
3) с поднятым вверх хвостом, когда нагрузка на хвостовое
колесо близка к нулю;
самолеты с носовым колесом:
1) при полностью опущенном хвосте,
2) в линии полета,
§ 2. Взвешивание и определение центра тяжести
35
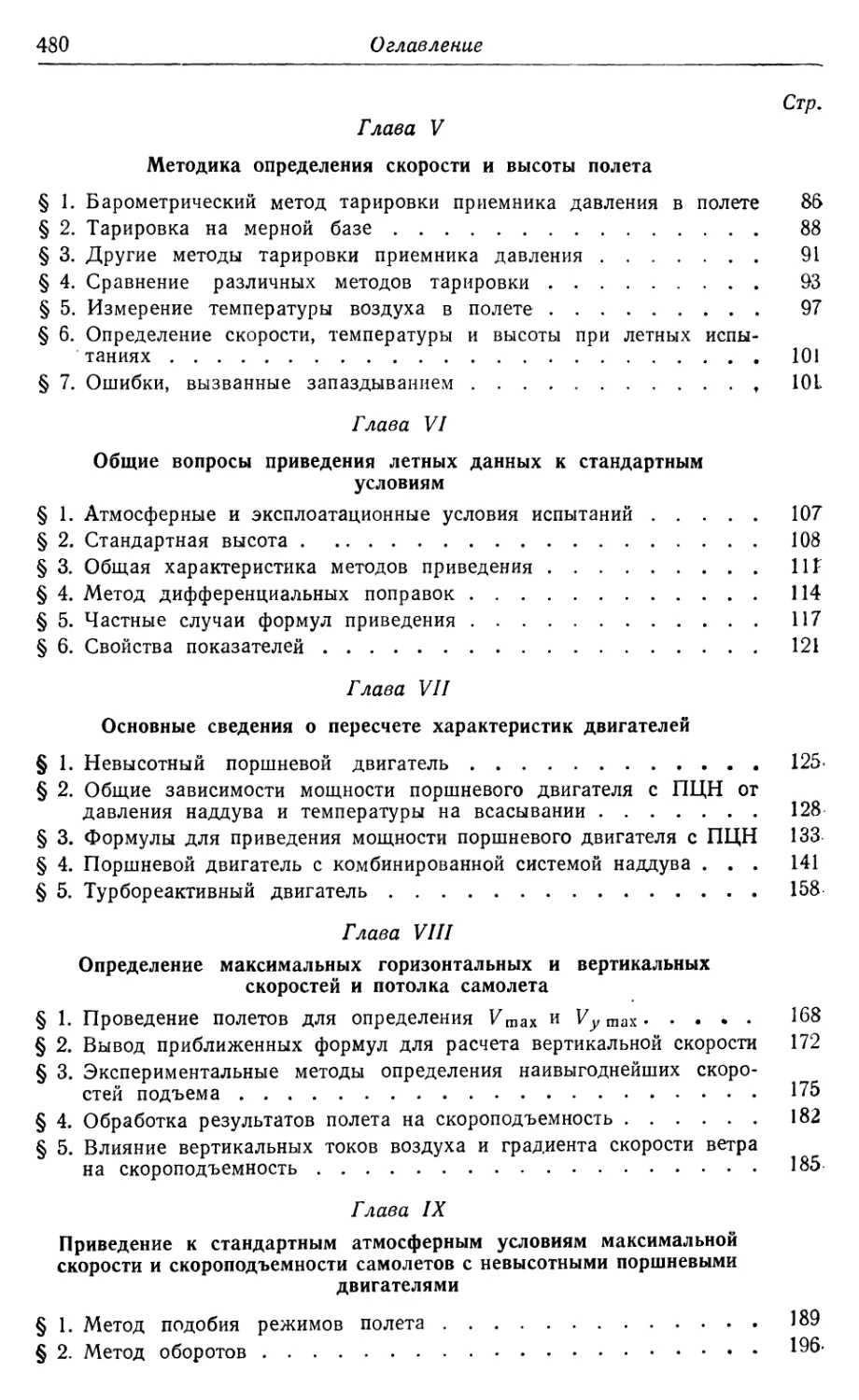
3) при промежуточном положении хвоста.
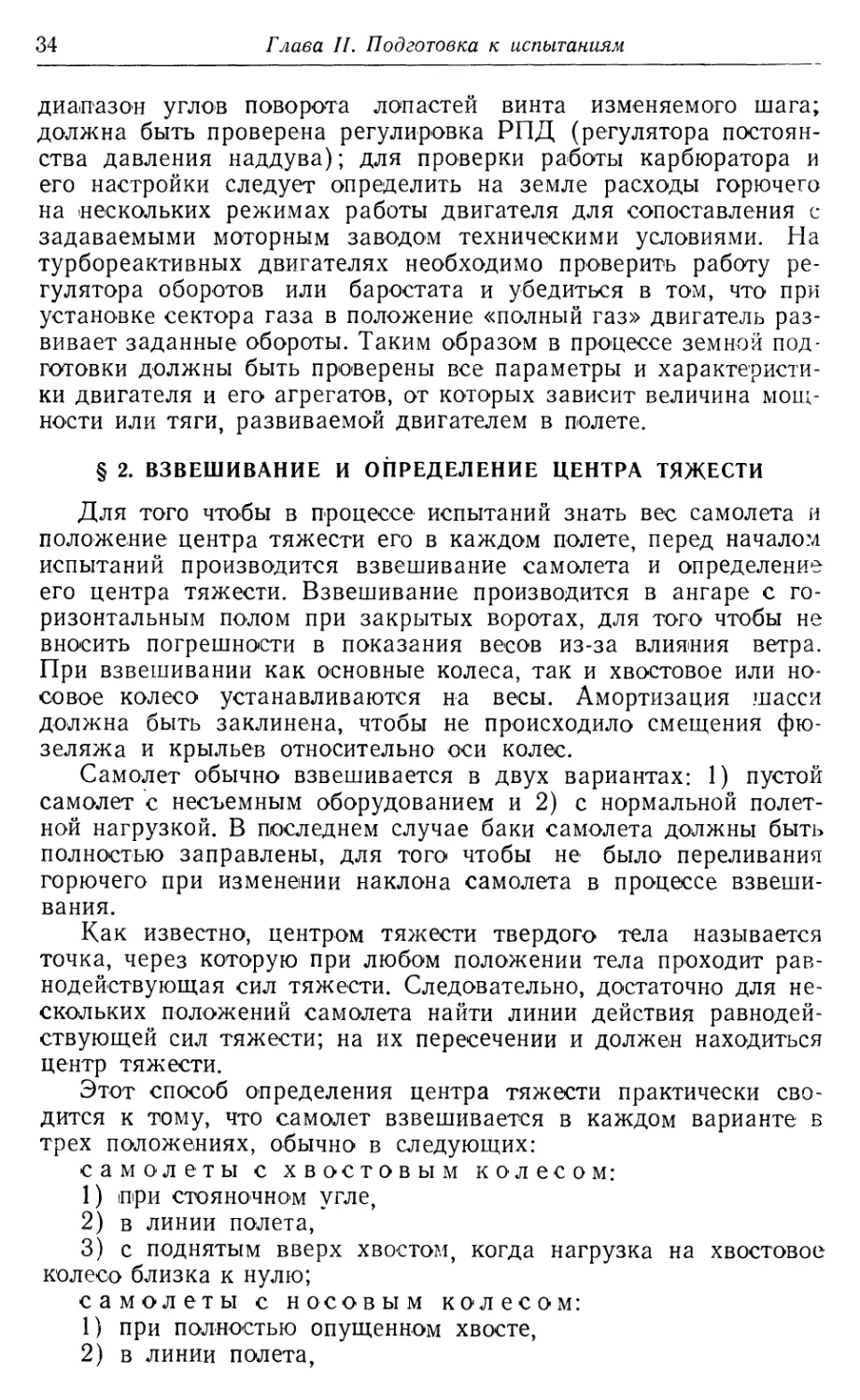
В процессе каждого взвешивания необходимо производить
замеры, указанные на фиг. 2. 1. Линия АВ представляет собой
так называемую хорду обмера, параллельную плоскости
симметрии самолета. В качестве хорды обмера удобнее всего
Фиг. 2. 1. Схема измерений при взвешиваниях для определения центра
тяжести самолета.
взять какое-либо сечение крыла, расположенное внутри колеи
шасси. Для измерений пользуются нивелиром, отвесами и ру-
леткой или стальной линейкой. Из шести замеров, указанных
на фиг. 2. 1, обязательными являются только три, а остальные
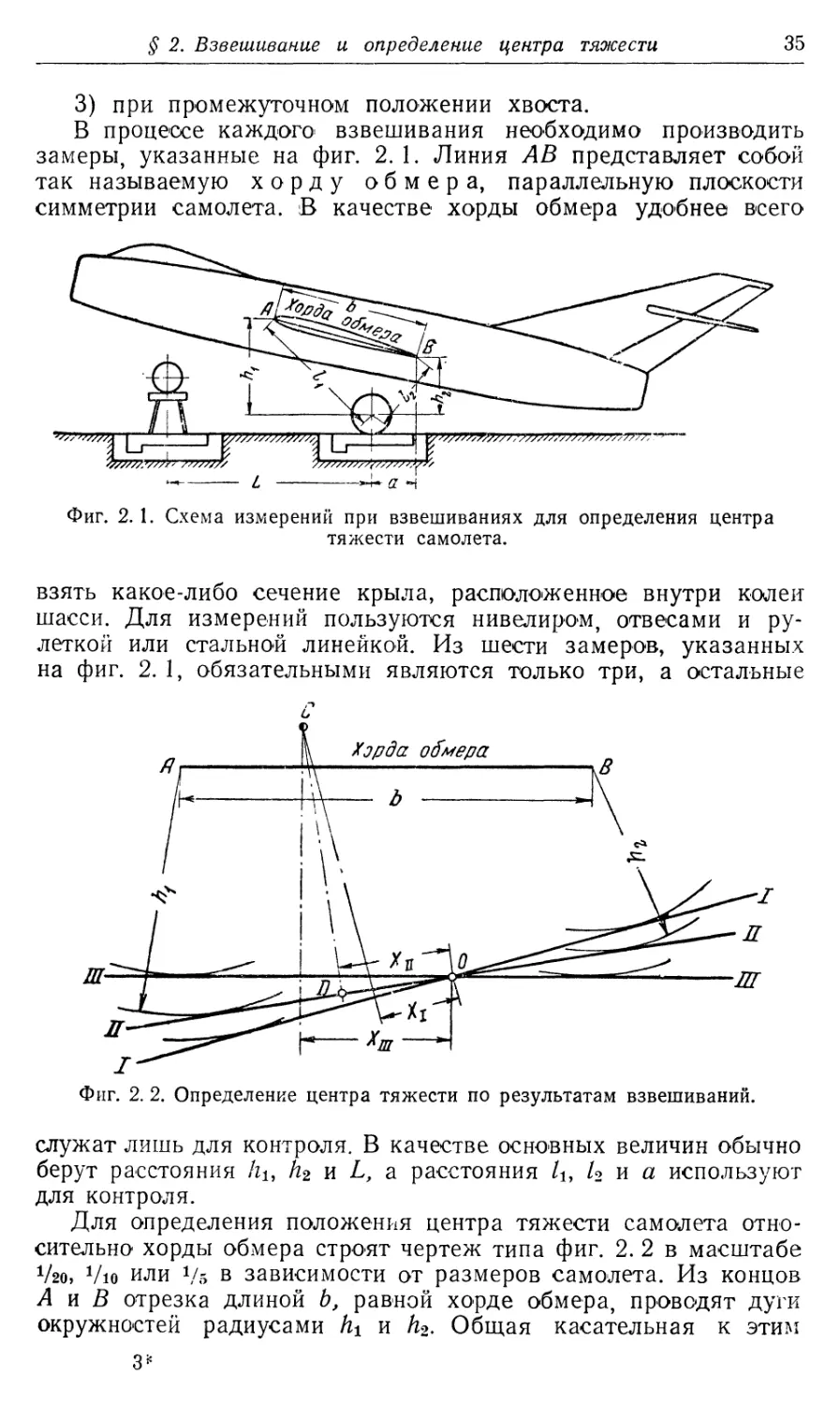
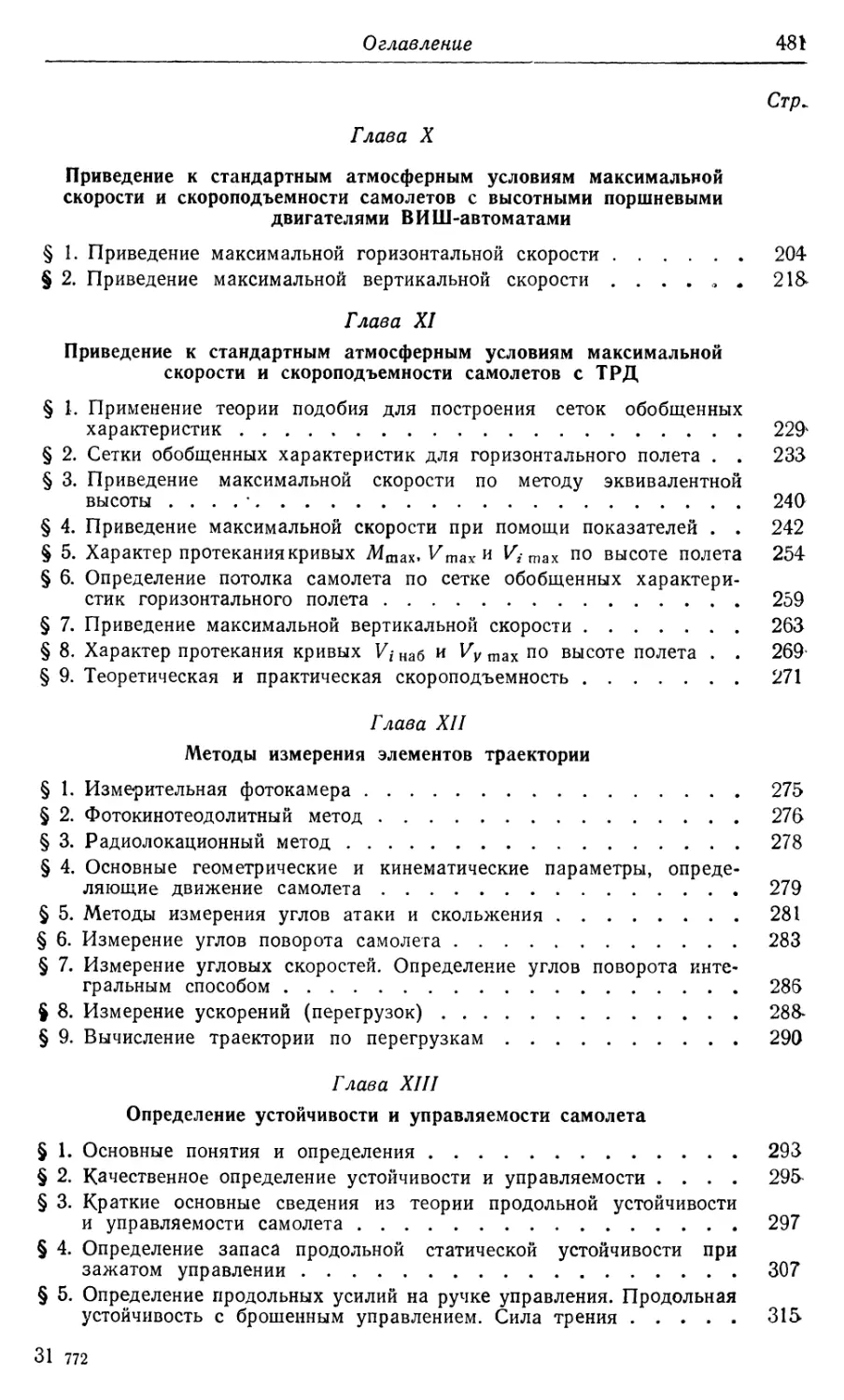
Фиг. 2. 2. Определение центра тяжести по результатам взвешиваний.
служат лишь для контроля. В качестве основных величин обычно
берут расстояния /zi, h2 и L, а расстояния /ъ /2 и а используют
для контроля.
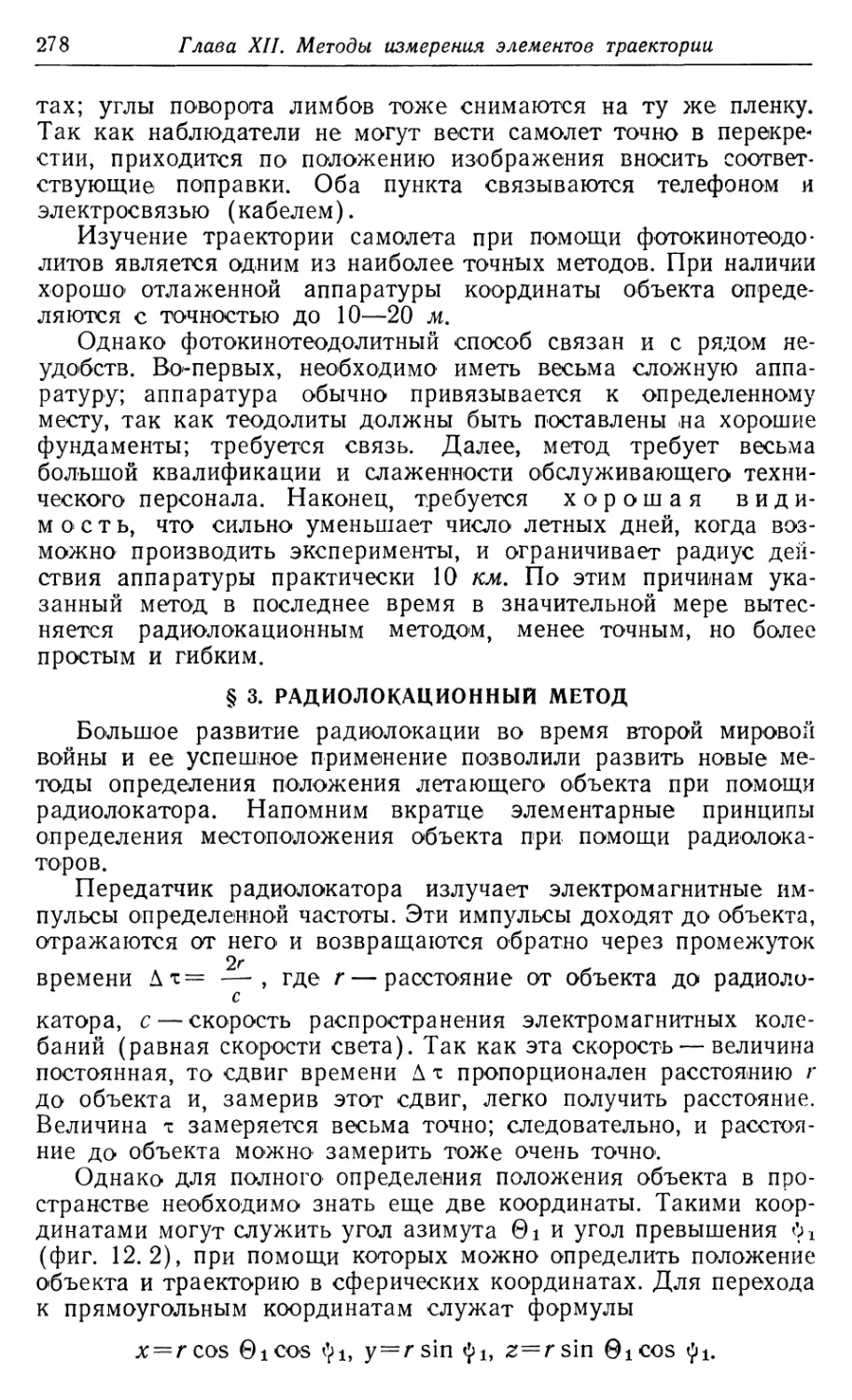
Для определения положешш центра тяжести самолета отно-
сительно хорды обмера строят чертеж типа фиг. 2. 2 в масштабе
1/20, Vio или 1/5 в зависимости от размеров самолета. Из концов
А и В отрезка длиной Ь, равной хорде обмера, проводят дуги
окружностей радиусами и h2. Общая касательная к этим
3*
36
Глава II. Подготовка к испытаниям
окружностям является линией горизонта, проходящей через ось
колеса при положении самолета, соответствующем данному
взвешиванию. Построив линии горизонта I—I, II—II и III—III
для трех взвешиваний, находим точку О пересечения этих ли-
ний, соответствующую центру оси колеса. От точки О по соот-
ветствующей для каждого взвешивания линии откладываем
расстояние OD, равное
Рн
х} = - -- -,
' G
где Рнг — показание весов при данном взвешивании под носо-
вым (или хвостовым) колесом за вычетом тары (козелков), а
G — чистый вес самолета.
Восставив из точки D перпендикуляр к линии горизонта для
соответствующего взвешивания, находим точку С пересечения
трех перпендикуляров, являющуюся проекцией центра тяжести
самолета на плоскость симметрии. Понятно, что при указанном
графическом построении вследствие неточностей обмеров и по-
строения вместо точки пересечения трех перпендикуляров полу-
чают небольшой треугольник, размеры которого тем меньше, чем
точнее произведены обмеры, взвешивание и построение. В ка-
честве проекции центра тяжести самолета обычно принимают
точку, соответствующую центру тяжести указанного треуголь-
ника. В тех случаях, когда треугольник получается слишком
большим, нужно проверить все вычисления и построения, а при
отсутствии в них явных ошибок вновь произвести взвешивание
для повторного определения центра тяжести.
На основе обмеров самолета строят так называемый цен-
тровочный чертеж, на котором хорда обмера и центр
тяжести самолета координируются относительно средней аэро-
динамической хорды.
Положение центра тяжести самолета с убранным шасси, а
также для разной полетной загрузки определяют расчетным
путем, исходя из центровки, найденной при взвешиваниях. Для
этого по весу добавочных грузов и по их координатам опреде-
ляют статические моменты относительно каких-либо принятых
осей, а затем находят новое положение центра тяжести по фор-
мулам
<Л)Хто
^оУто+У^У
где Go — исходный вес самолета, для которого известны коор-
динаты центра тяжести хт0 и ут0 относительно приня-
тых осей;
G — новый полетный вес, для которого определяется цен-
тровка (G=--GQ + ^g);
§ 2. Взвешивание и определение центра тяжести
37
и Jgy — алгебраические суммы статических моментов до-
бавочных грузов относительно принятых осей.
При испытаниях на устойчивость и управляемость указан-
ным способом можно учесть для каждого режима изменение
положения центра тяжести из-за выгорания горючего в полете;
для этого в полете регистрируется при помощи указателя рас-
хода горючего вес выгоревшего горючего и отмечается порядок
его расходования из баков.
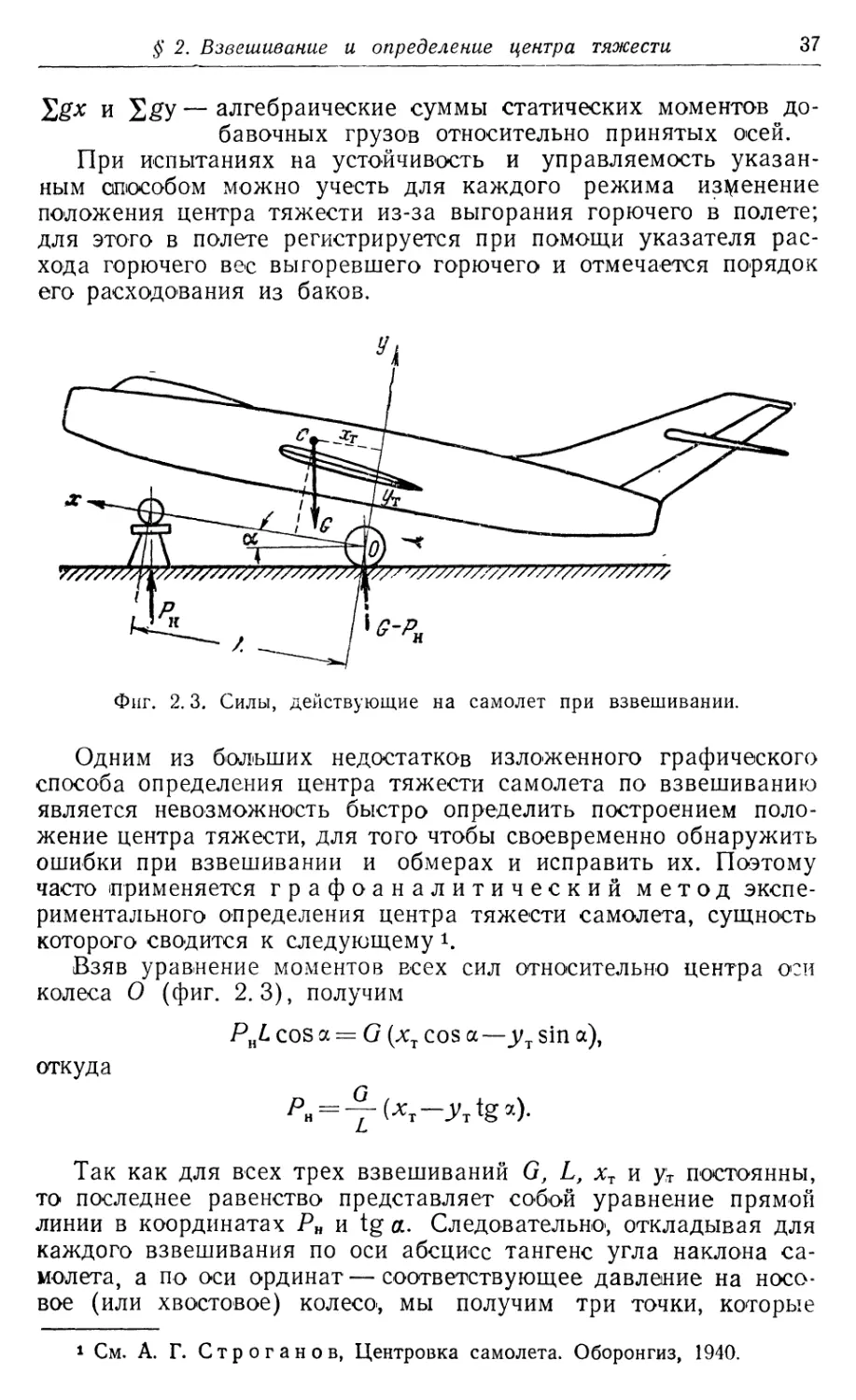
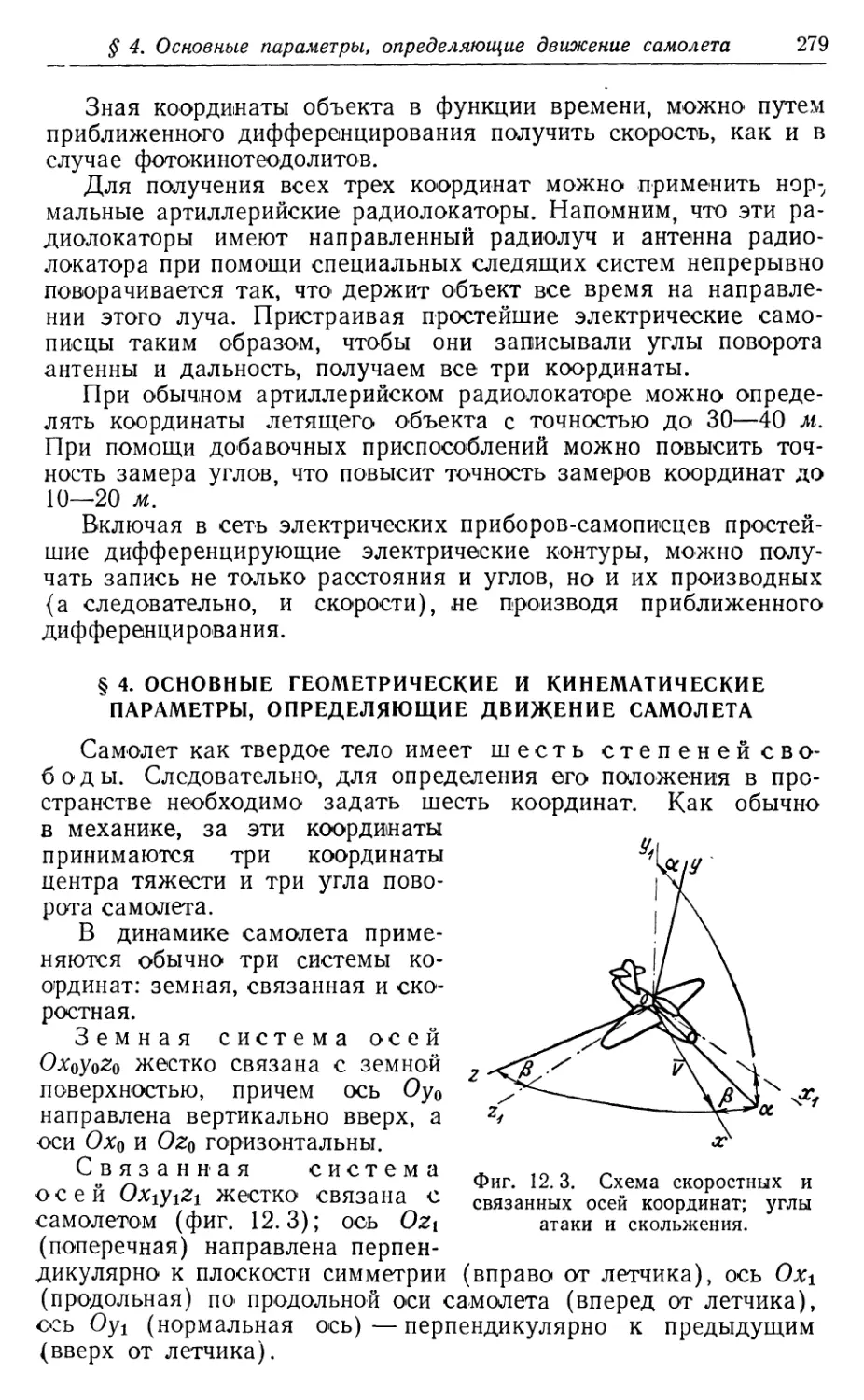
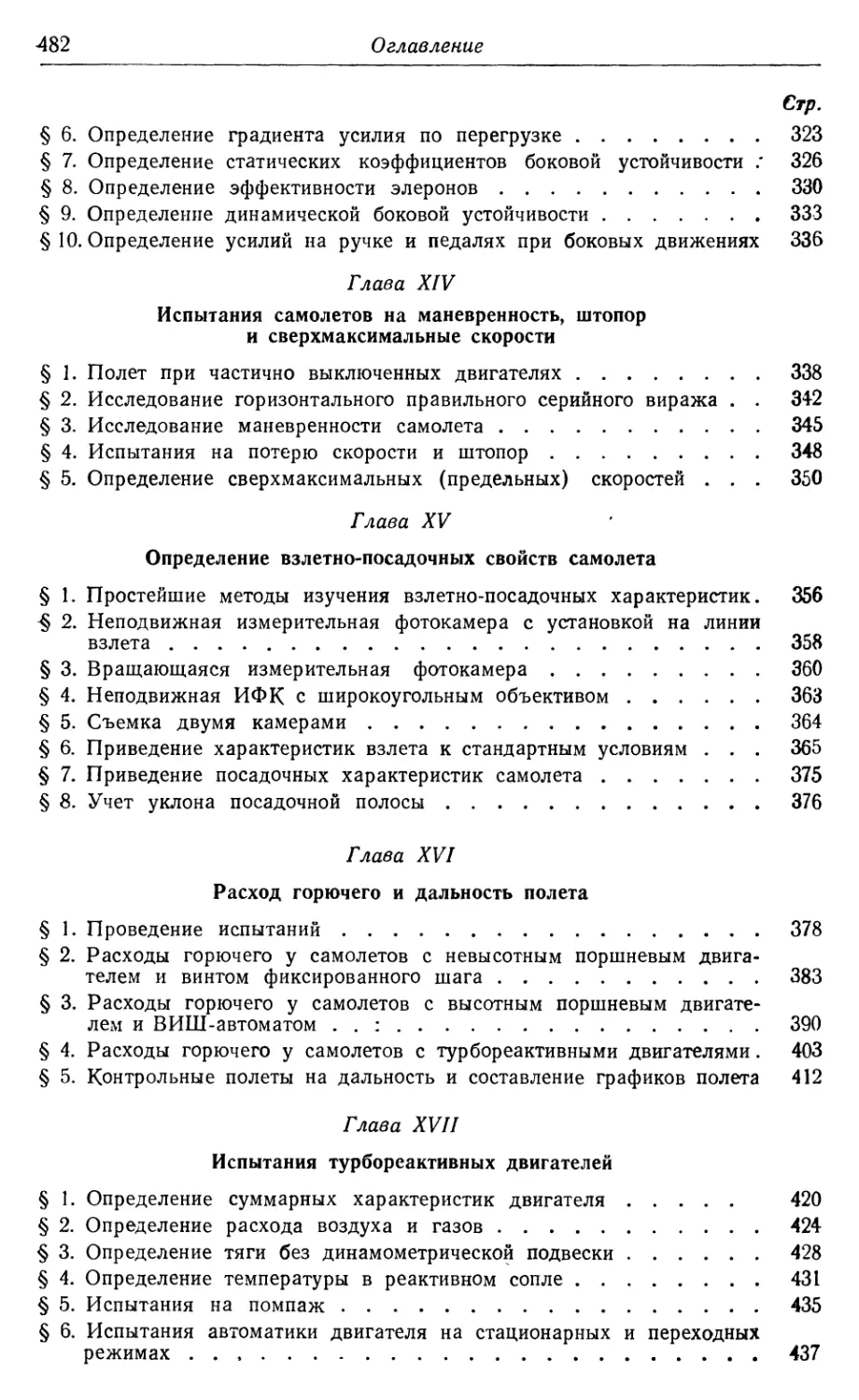
Фиг. 2.3. Силы, действующие на самолет при взвешивании.
Одним из больших недостатков изложенного графического
способа определения центра тяжести самолета по взвешиванию
является невозможность быстро определить построением поло-
жение центра тяжести, для того чтобы своевременно обнаружить
ошибки при взвешивании и обмерах и исправить их. Поэтому
часто применяется графоаналитический метод экспе-
риментального определения центра тяжести самолета, сущность
которого сводится к следующему i.
Взяв уравнение моментов всех сил относительно центра оси
колеса О (фиг. 2.3), получим
PHL cos а = G (хт cos а — j/T sin а),
откуда
Так как для всех трех взвешиваний G, L, хт и ут постоянны,
то последнее равенство представляет собой уравнение прямой
линии в координатах Р» и tg а. Следовательно, откладывая для
каждого взвешивания по оси абсцисс тангенс угла наклона са-
молета, а по оси ординат — соответствующее давление на носо-
вое (или хвостовое) колесо, мы получим три точки, которые
1 См. А. Г. Строганов, Центровка самолета. Оборонгиз, 1940.
38
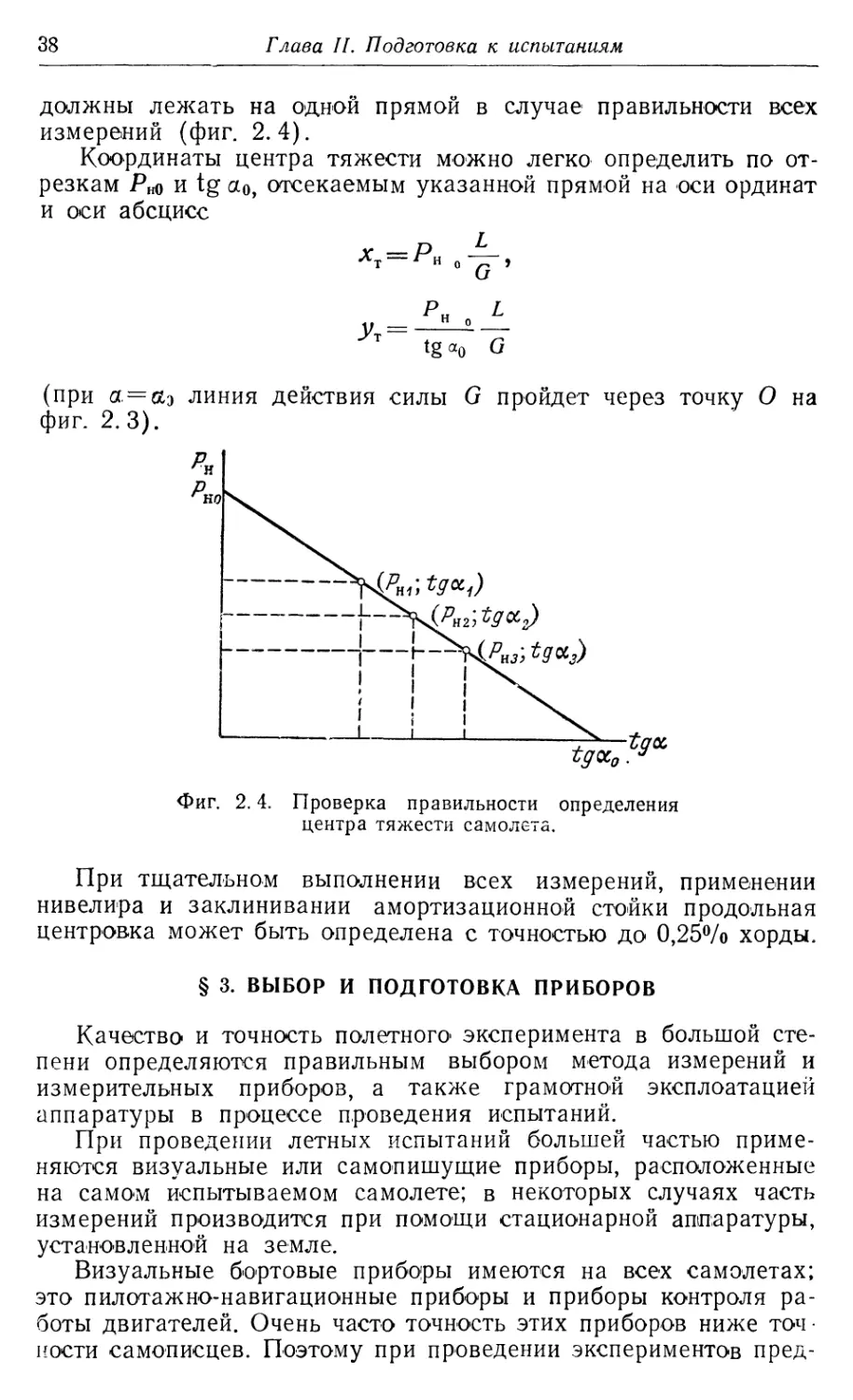
Глава IL Подготовка к испытаниям
должны лежать на одной прямой в случае правильности всех
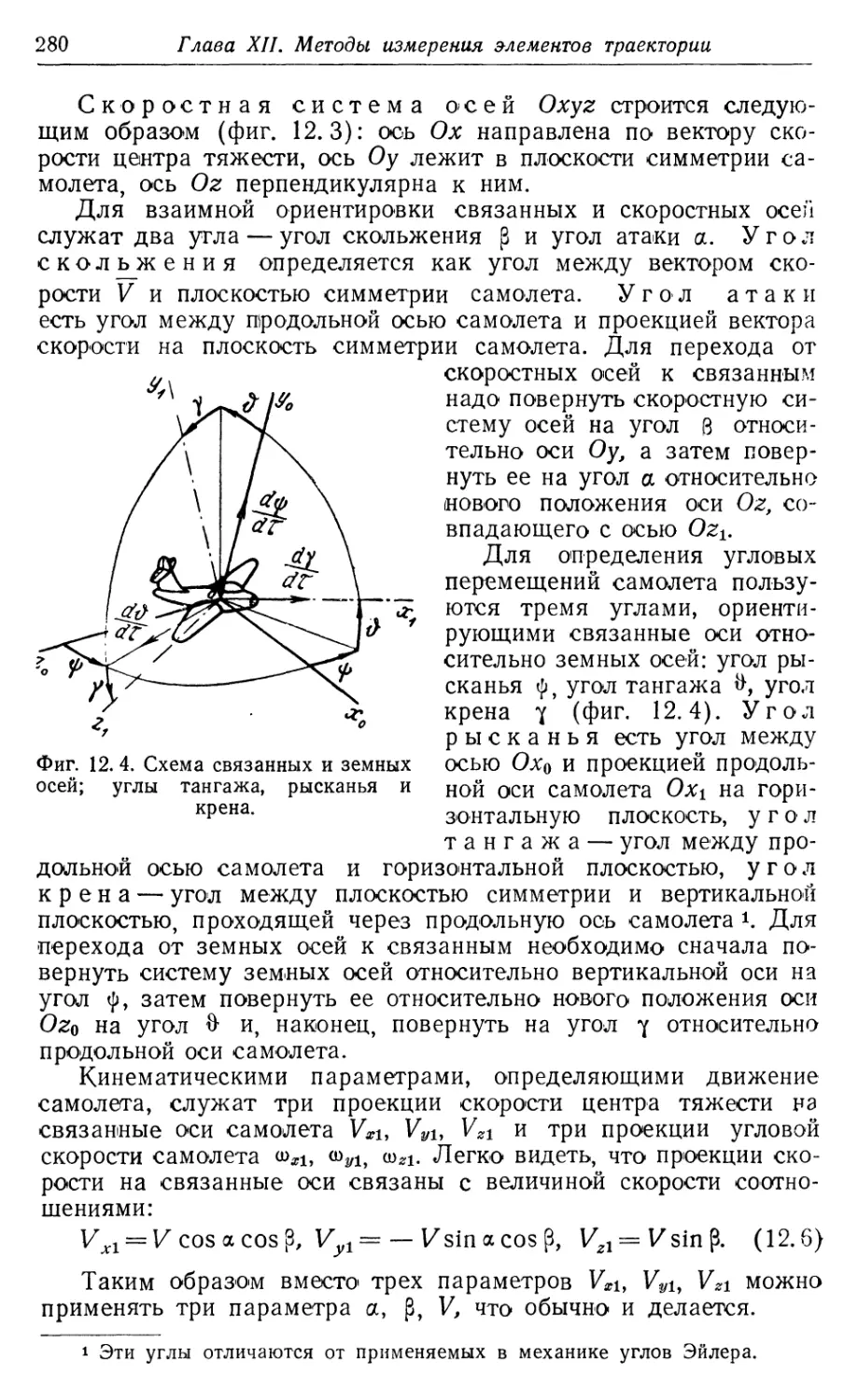
измерений (фиг. 2.4).
Координаты центра тяжести можно легко определить по от-
резкам Рно и tg а0, отсекаемым указанной прямой на оси ординат
и оси абсцисс
х __ р L
лт“^н 0 ,
Рн L
Ут=-----1--
tg «о G
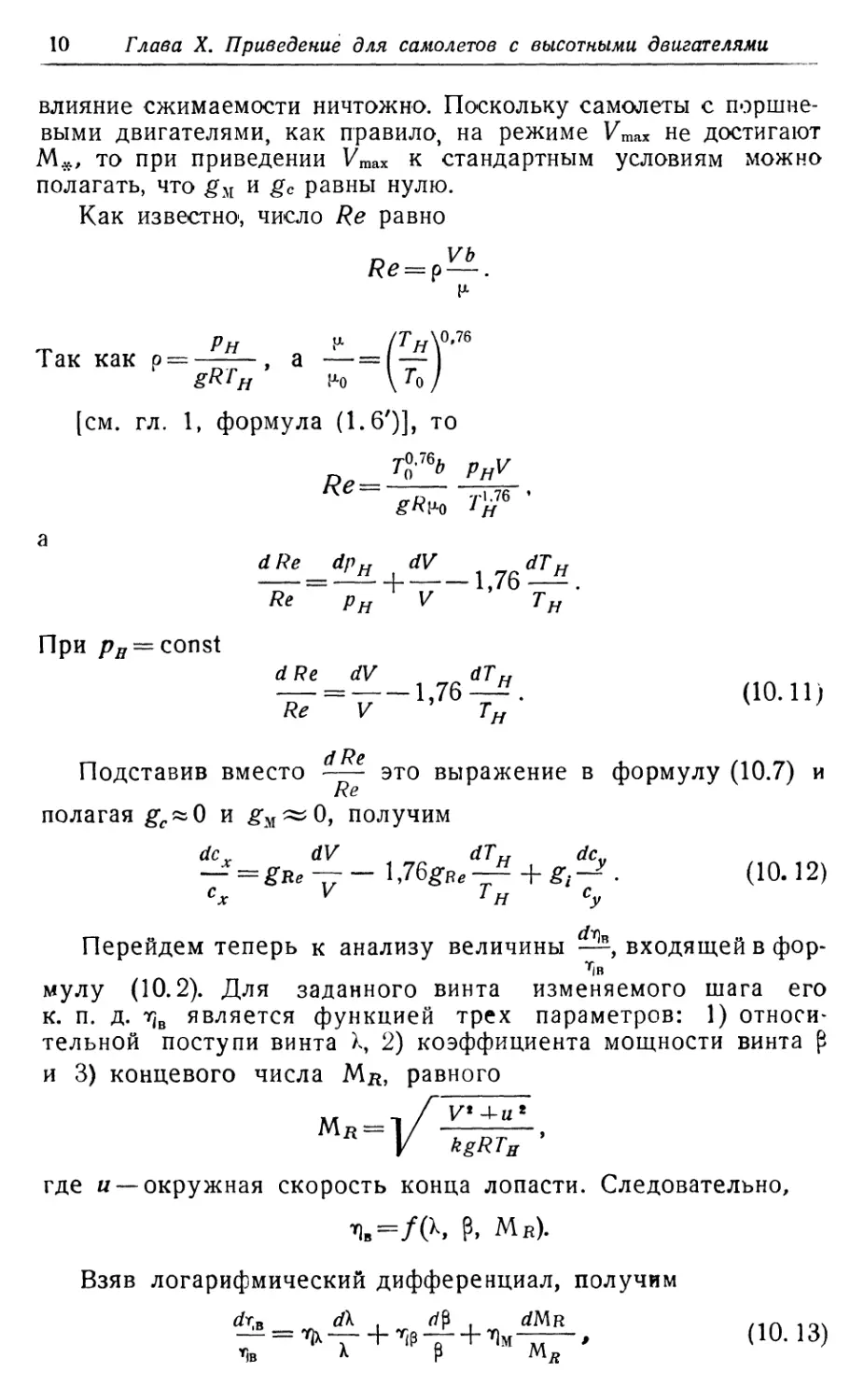
(при & = &) линия действия силы G пройдет через точку О на
фиг. 2.3).
Фиг. 2.4. Проверка правильности определения
центра тяжести самолета.
При тщательном выполнении всех измерений, применении
нивелира и заклинивании амортизационной стойки продольная
центровка может быть определена с точностью до 0,25% хорды.
§ 3. ВЫБОР И ПОДГОТОВКА ПРИБОРОВ
Качество и точность полетного- эксперимента в большой сте-
пени определяются правильным выбором метода измерений и
измерительных приборов, а также грамотной эксплоатацией
аппаратуры в процессе проведения испытаний.
При проведении летных испытаний большей частью приме-
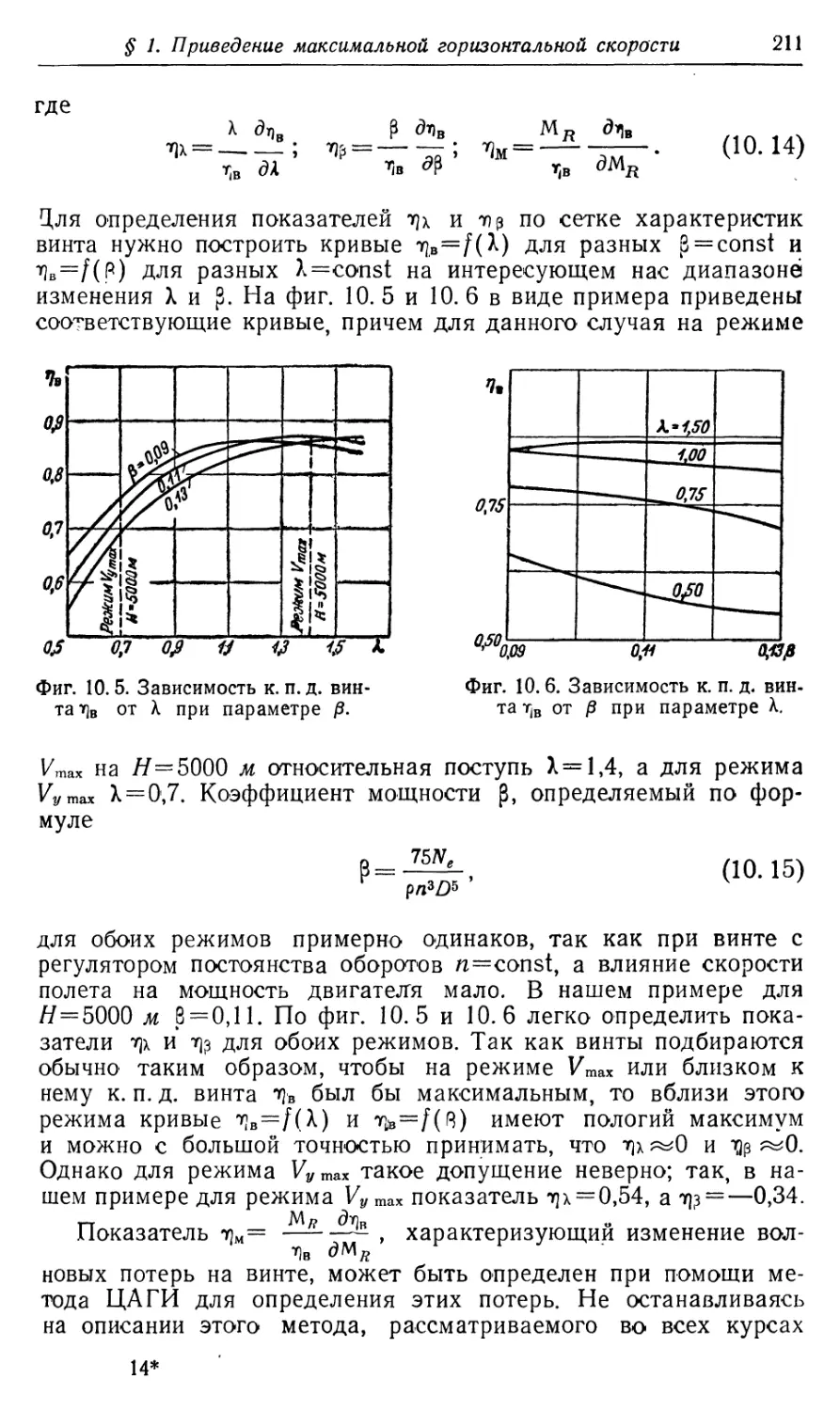
няются визуальные или самопишущие приборы, расположенные
на самом испытываемом самолете; в некоторых случаях часть
измерений производится при помощи стационарной аппаратуры,
установленной на земле.
Визуальные бортовые приборы имеются на всех самолетах;
это пилотажно-навигационные приборы и приборы контроля ра-
боты двигателей. Очень часто точность этих приборов ниже точ-
ности самописцев. Поэтому при проведении экспериментов пред-
§ 3. Выбор и подготовка приборов
39
почитают, как правило, самописцы, применяя визуальные
приборы только в случае необходимости.
Отсчет показаний по> визуальным приборам производится
летчиком или, если это невозможно, наблюдателем. В случае
большого количества измерений или при использовании визуаль-
ных приборов для измерений на неустановившихся режимах
полета целесообразно применять кино- или фотоапппарат и про-
изводить в нужные моменты времени съ е м к у приборной
доски с установленными на ней приборами. В таких случаях
к кино- или фотоаппарату приспосабливается какое-либо меха-
ническое или электрическое устройство, позволяющее летчику
или наблюдателю осуществить дистанционное управле-
н и е. На приборной доске устанавливают часы с секундомером.,
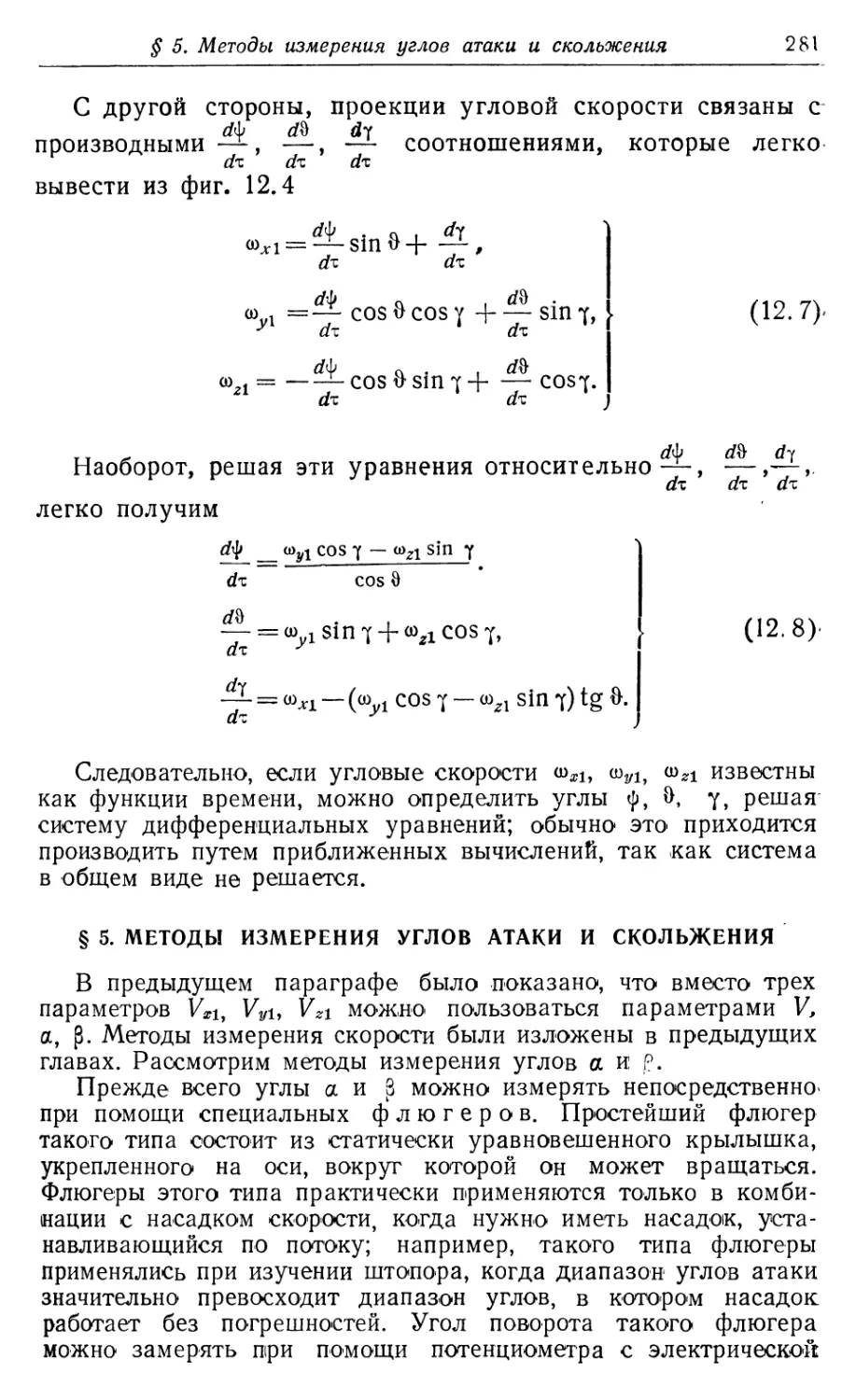
Фиг. 2. 5. Рамка для фото- или киносъемки показаний визуальных
приборов.
расшифровка показаний которых позволяет получить изменение
по времени интересующих нас величин. Иногда производится
съемка не основной, а специальной приборной доски, устанав-
ливаемой в любом удобном месте и обычно искусственно под-
свечиваемой. Обычно специальную приборную доску и фото-
аппарат устанавливают на одной жесткой рамке (фиг. 2.5).
В настоящее время разработаны и широко применяются само-
писцы для регистрации почти всех величин, которые могут пред-
ставлять интерес при летных испытаниях. Существуют само-
писцы скорости (спидографы), высоты или, вернее, атмосферного
давления (барографы), температуры (термографы), давления
масла или горючего (манографы), составляющих перегрузки по
осям самолета (акселерографы), составляющих угловой ско-
рости вращения (жирографы), углов отклонения рулей или ка-
ких-либо рычагов (СОР — самописцы отклонения рулей), углов
тангажа (инклинографы), оборотов двигателя (тахографы)
и т. д.
В этих самописцах применяется самая разнообразная запись
{чернилами по бумаге, накалывающая запись на кальке, фото-
запись на пленке, царапающая запись на бумаге с цветным по-
40
Глава II. Подготовка к испытаниям
крытием, на закончено# бумаге и др.). В зависимости от назна-
чения прибора применяется разная скорость движения ленты —
от 0,1 до 5 мм/сек — для записи показаний на установившихся ре-
жимах и порядка 10—20, а иногда и до 100—200 мм/сек для
записи показаний на неустановившихся режимах. На некоторых
самописцах предусмотрена возможность переключения дви-
жения ленты на несколько скоростей. По принципу действия
конструкции самописцев также весьма разнообразны; в неко-
торых самописцах применяется механическая передача от чув-
ствительного элемента к записывающему рычагу, в других —
электрическая или оптическая. Вращение барабана или бара-
банов, на которых смонтирована лента для записи, осущест-
вляется при помощи электромотора малых габаритов либо ча-
сового механизма. На электросамописцах обычно' предусматри-
вается специальная отметка ленты через определенные про-
межутки времени, позволяющая синхронизировать запи-
си разных самописцев, что особенно существенно при измерениях
на неустановившихся режимах.
Как уже было указано, самописцы обладают обычно повы-
шенной точностью по сравнению с бортовыми визуальными при-
борами. Другим их преимуществом является возможность раз-
мещения их в разных частях самолета. Наконец, при примене-
нии самописцев остается документальная запись, что
часто имеет существенное значение.
Для устранения влияния изменения температуры воздуха в
большинстве самописцев применяется электрообогрев с
автоматической регулировкой температуры внутри кожуха само-
писца.
Для измерения быстро изменяющихся величин, например,
вибраций частей самолета или изменения числа оборотов при
резкой даче сектора газа, часто применяется осциллогра-
фическая аппаратура.
Стационарная аппаратура, к которой относятся радиоло-
каторы, фотокинотеодолитные установки и т. п.,
применяется в основной для измерения элементов разбега и
пробега самолета и его- траектории, а также может быть приме-,
нена для определения траектории полета беспилотных летаю-’
щих моделей. Однако вследствие сравнительной сложности этой
аппаратуры, ограниченной возможности ее применения из-за от-
носительно' малой дальности действия, большого персонала, не-
обходимого для ее эксплоатации, и длительности обработки
материалов, она не нашла особенно широкого применения за
исключением указанных выше видов испытаний. Нужно' доба-
вить, что в большинстве случаев известные трудности представ-
ляет точная синхронизация записей, производимых при помощи
стационарной аппаратуры, с записями самописцев на самолете.
Кроме того, для учета влияния ветра необходимо в процессе из-
мерений производить при помощи шаров-пилотов или радиозон-
§ 3. Выбор и подготовка приборов
41
дов определение скорости и направления ветра по высотам, а
также регистрировать изменения температуры воздуха на вы-
соте.
В последние годы известное распространение получила так
называемая телеметрическая аппаратура, при
помощи которой показания датчиков, расположенных на само-
лете, по радио передаются на землю. Применение этой аппара-
туры, несмотря на известную сложность ее, в ряде случаев яв-
ляется весьма целесообразным. Так, при проведении испытаний
на пикирование, на флаттер, на максимальные перегрузки и при
других видах испытаний, когда возможно разрушение самолета
в- воздухе, а также при первых полетах нового опытного само-
лета, особенно необычной схемы, применение этой аппаратуры
может оказаться исключительно' полезным. Кроме того, наблю-
дая на земле по показаниям приборов весь процесс выполнения
полета, можно на ходу корректировать и исправлять задание.
Для той же цели при некоторых испытаниях целесообразна
передача летчиком п о радио показаний визуальных
приборов и консультация его с земным персоналом в процессе
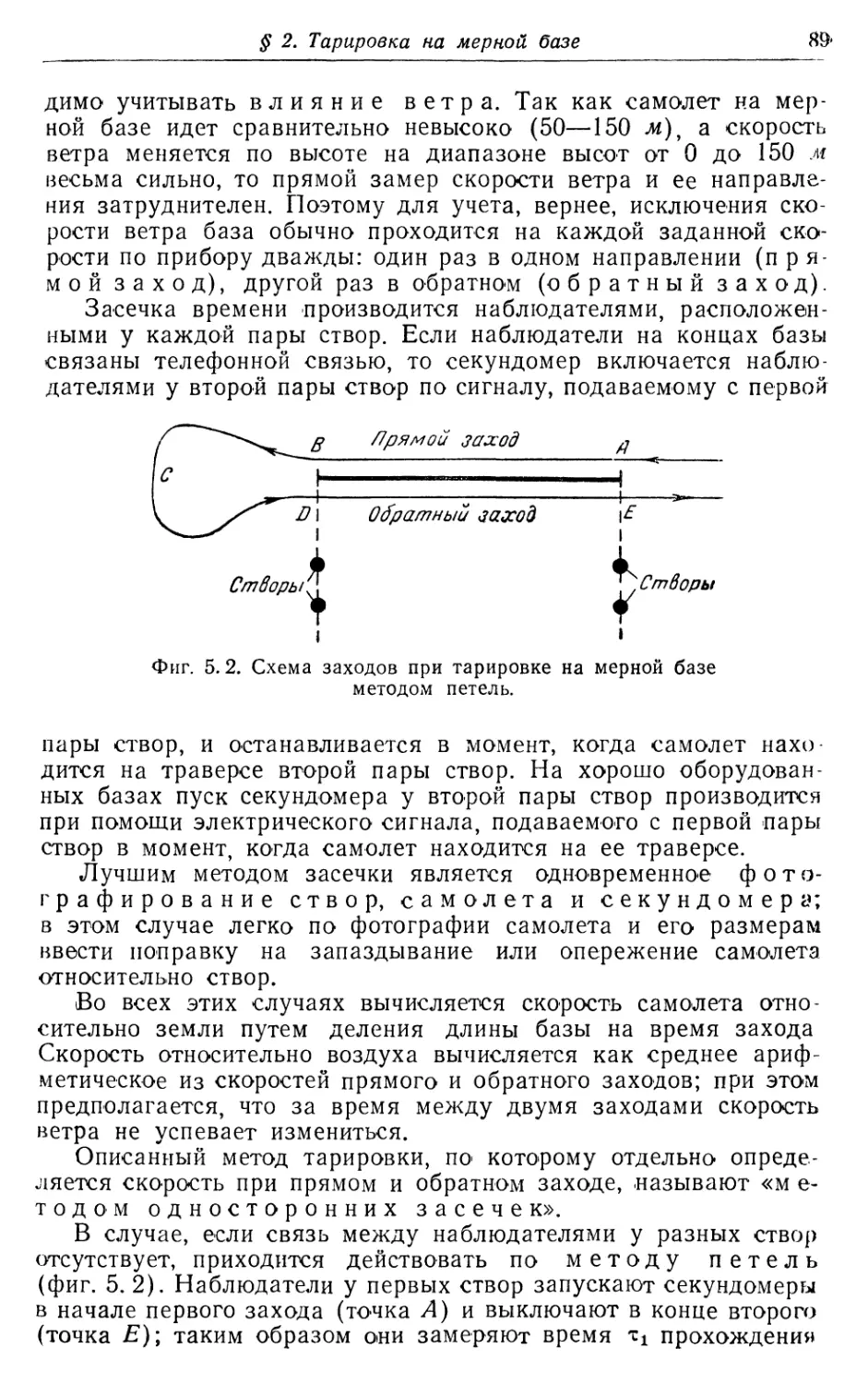
выполнения задания.
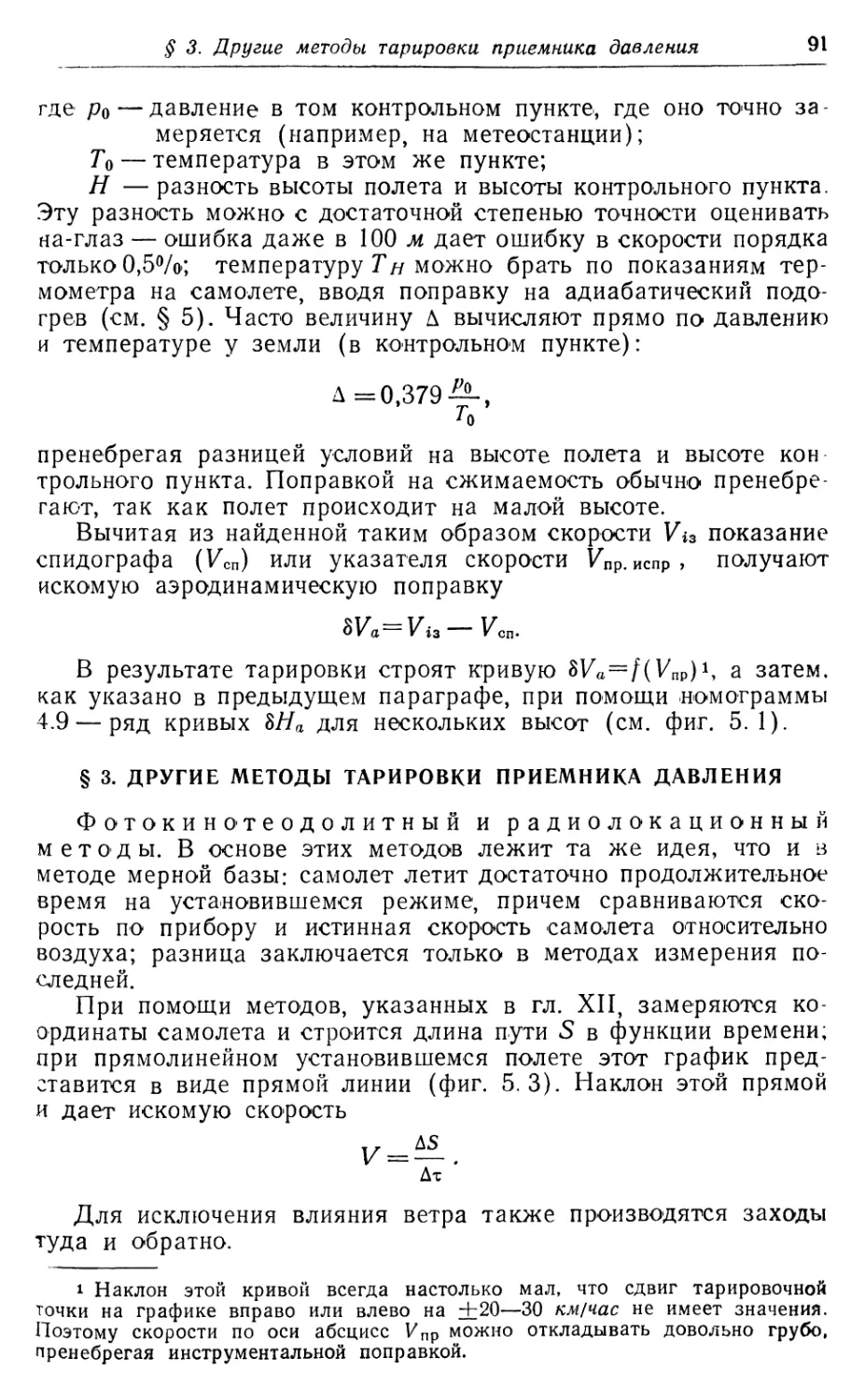
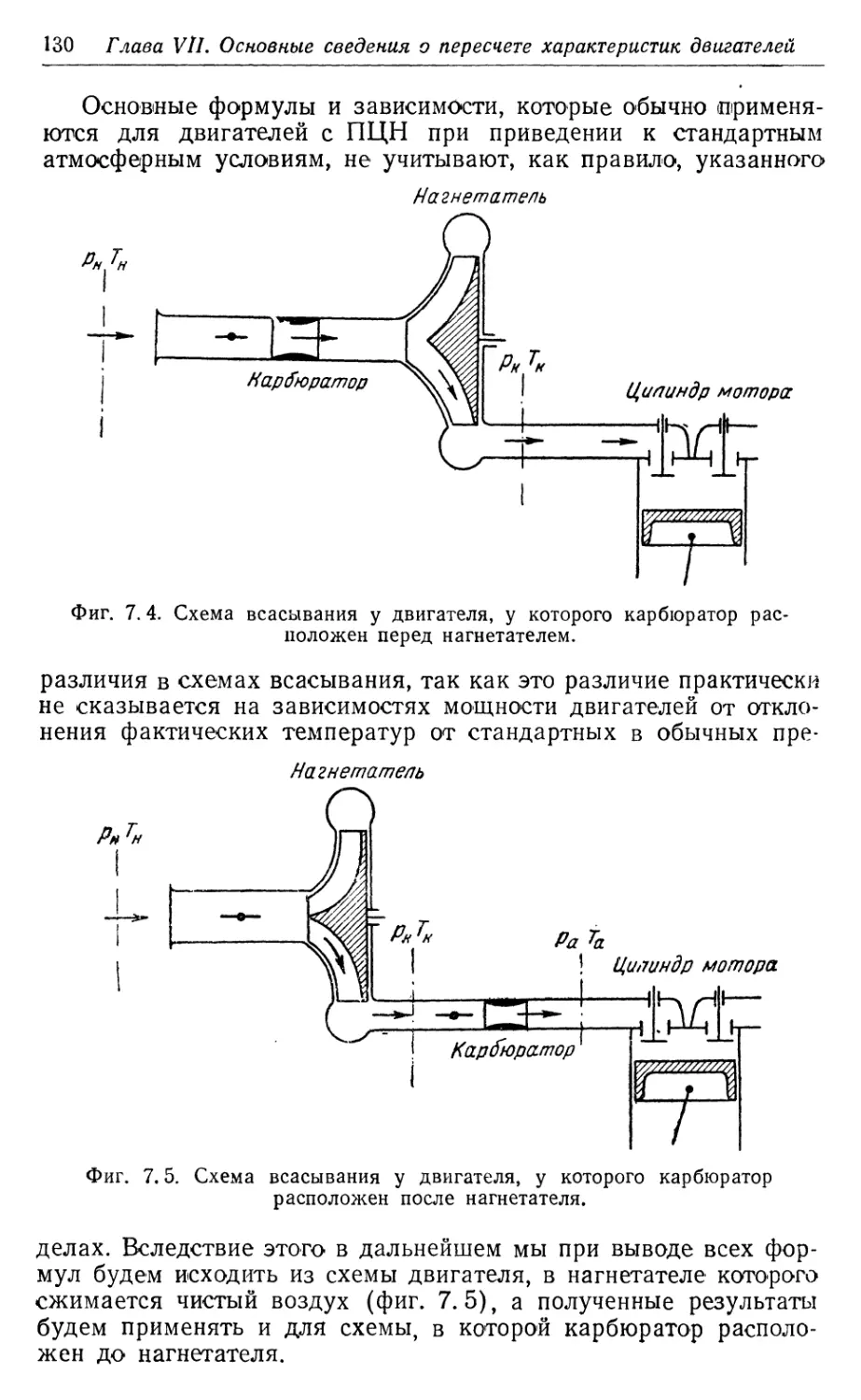
Выбор той или иной аппаратуры и способа измерения для
проведения испытаний зависит от столь большого количества
факторов, что невозможно дать какие-либо общие указания по
этому вопросу. Многое зависит от цели испытаний, потребной
точности, возможности размещения на самолете приборов тех
или иных габаритов, характера заданных режимов (установив-
шиеся или неустановившиеся режимы), количества потребных
измерений, необходимости их синхронизации, срочности прове-
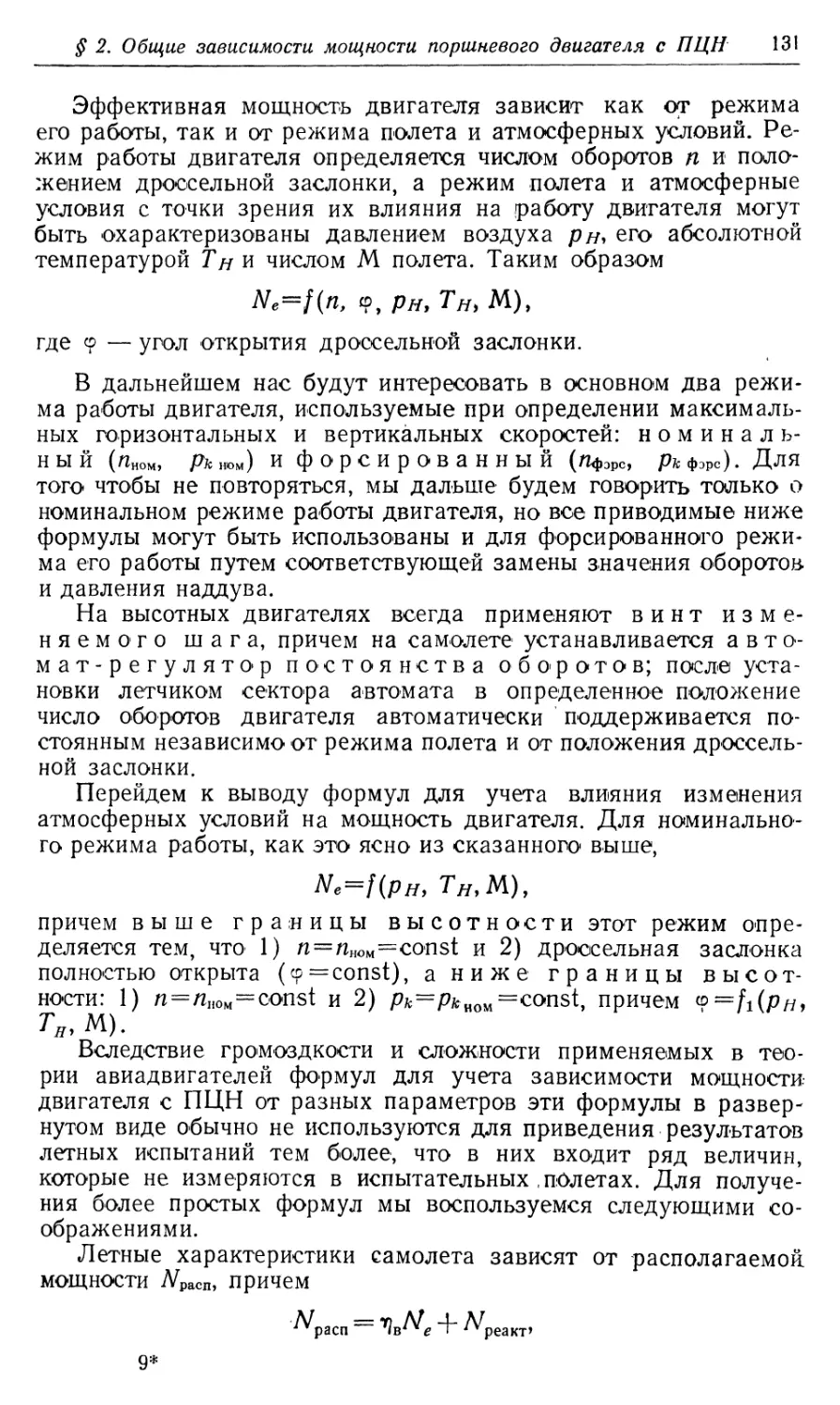
дения испытаний и т. п.
Перед установкой приборов на самолет, а также периоди-
чески в процессе испытаний, если последние проводятся в тече-
ние продолжительного времени, производится лаборатор-
ная поверка и тарировка приборов во всем диапазоне
их работы. В результате этой тарировки определяют инстру-
ментальные (или приборные) поправки при раз-
ных показаниях прибора. Если поправки превышают допустимые
для данного типа прибора величины, то он заменяется другим,
имеющим меньшие поправки. Вследствие наличия в приборах
трения и люфтов инструментальные поправки следует опреде-
лять при прямом и обратном ходе, причем разница
поправок не должна превосходить допустимых для каждого
прибора норм. В результате обработки данных лабораторной та-
рировки строится так называемая тариров очная кри-
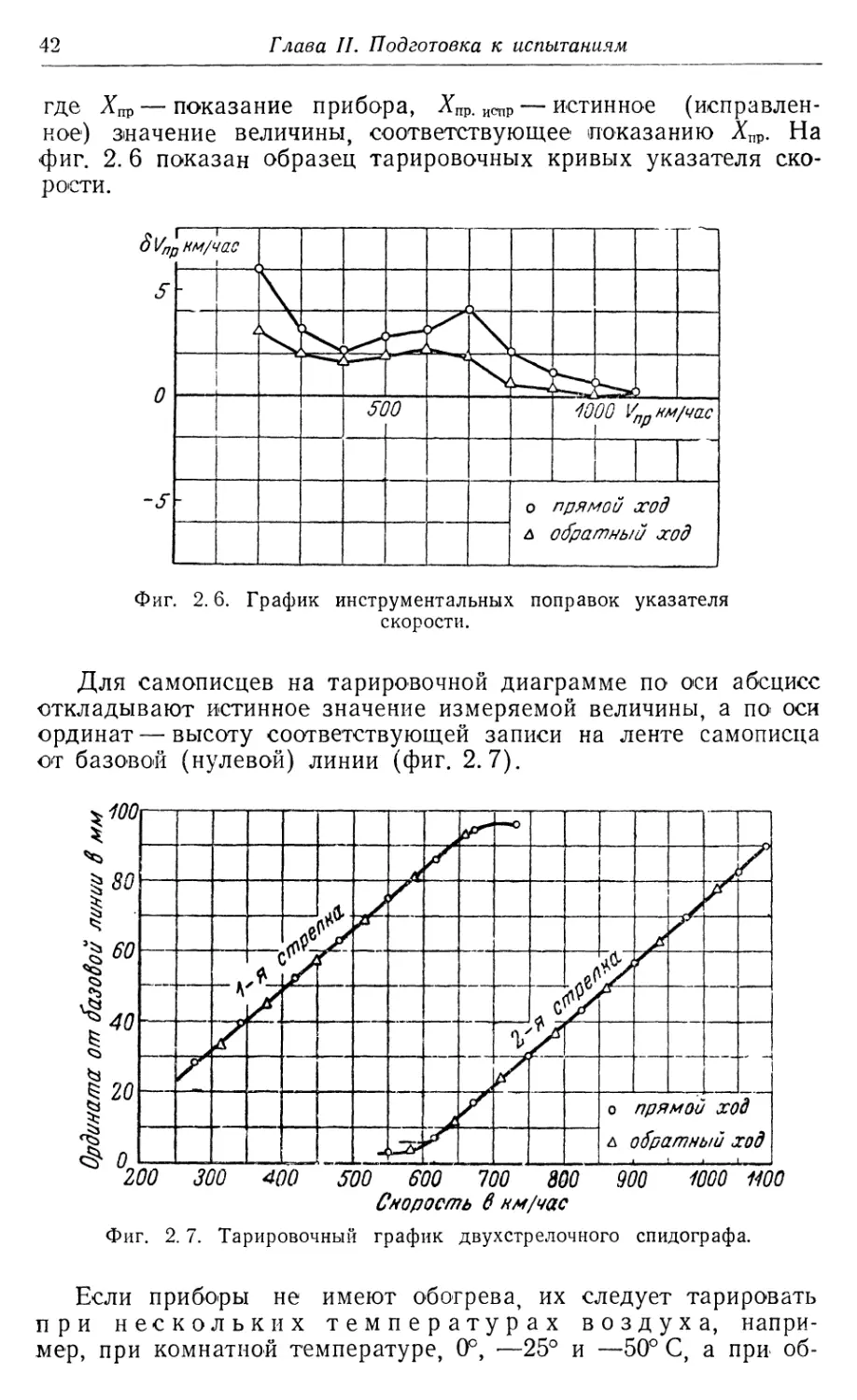
вая, на которой по оси абсцисс откладывается показание визу-
ального1 прибора, а по оси ординат— инструментальная поправка
^пр “ ^пр. испр ^р,
42
Глава II. Подготовка к испытаниям
где Хпр— показание прибора, Хпр. иепр— истинное (исправлен-
Фиг. 2.6. График инструментальных поправок указателя
скорости.
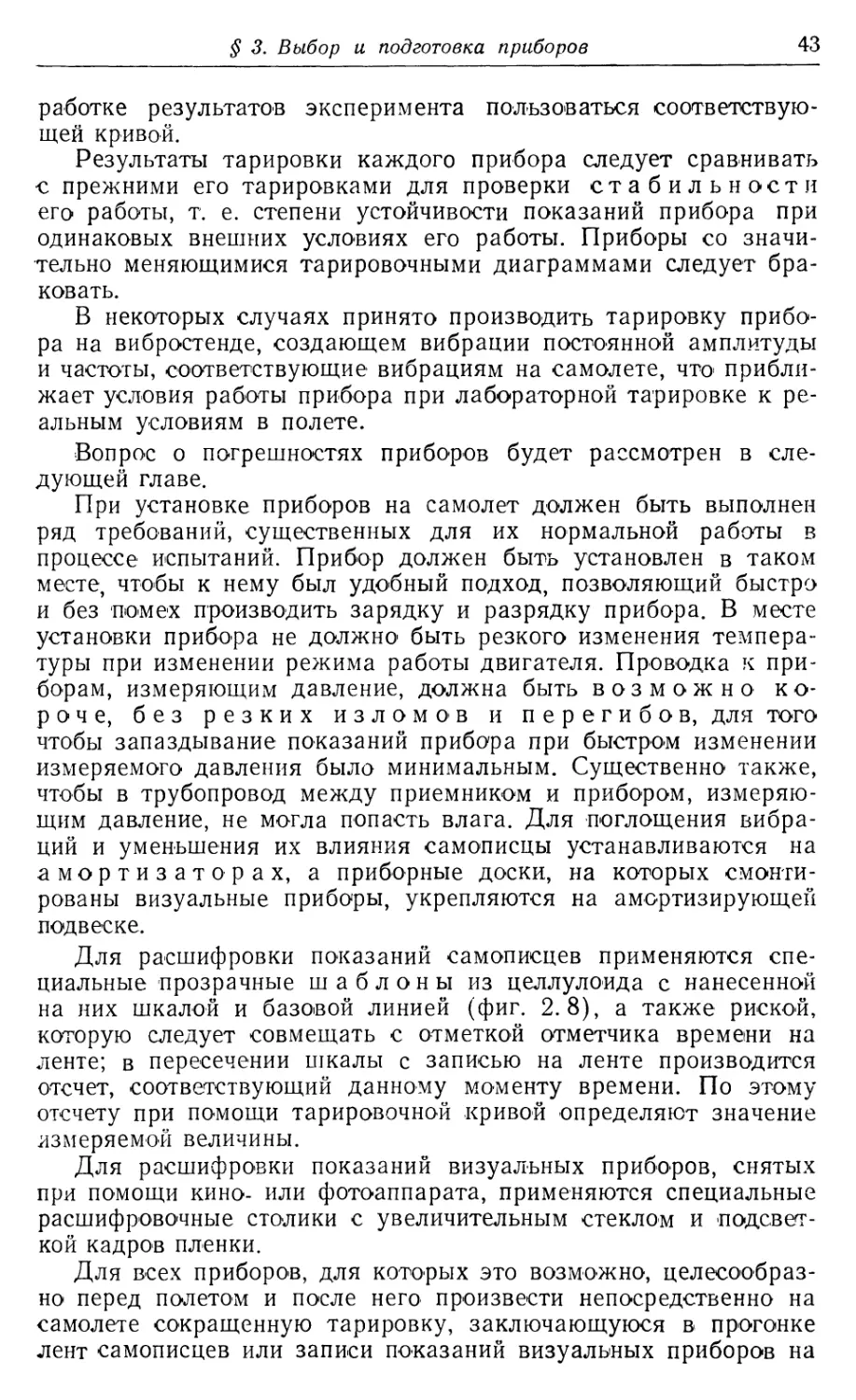
Для самописцев на тарировочной диаграмме по оси абсцисс
откладывают истинное значение измеряемой величины, а по- оси
ординат — высоту соответствующей записи на ленте самописца
Фиг. 2.7. Тарировочный график двухстрелочного спидографа.
Если приборы не имеют обогрева, их следует тарировать
при нескольких температурах воздуха, напри-
мер, при комнатной температуре, 0°, —25° и —50° С, а при об-
§ 3. Выбор и подготовка приборов
43
работке результатов эксперимента пользоваться соответствую-
щей кривой.
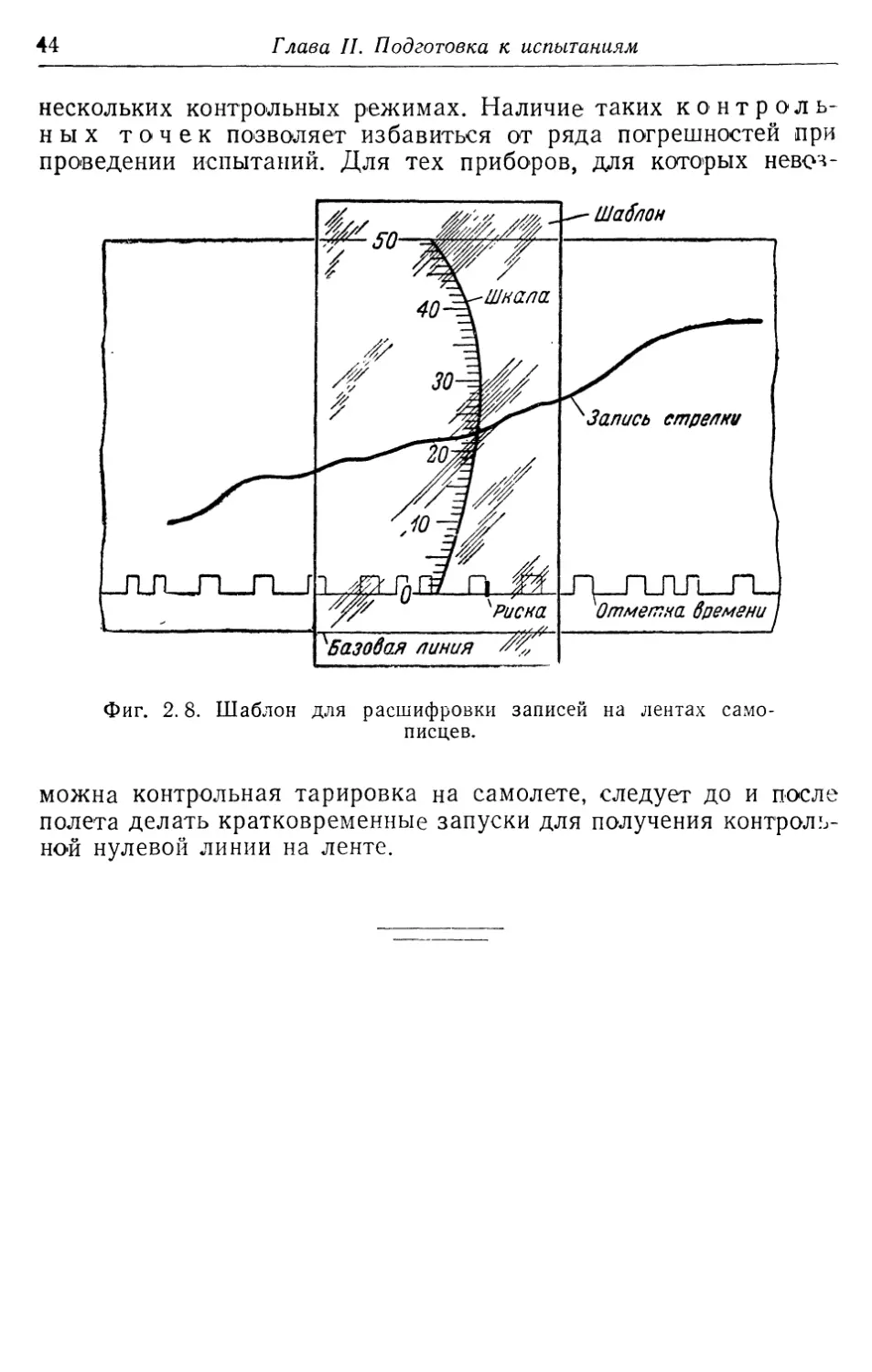
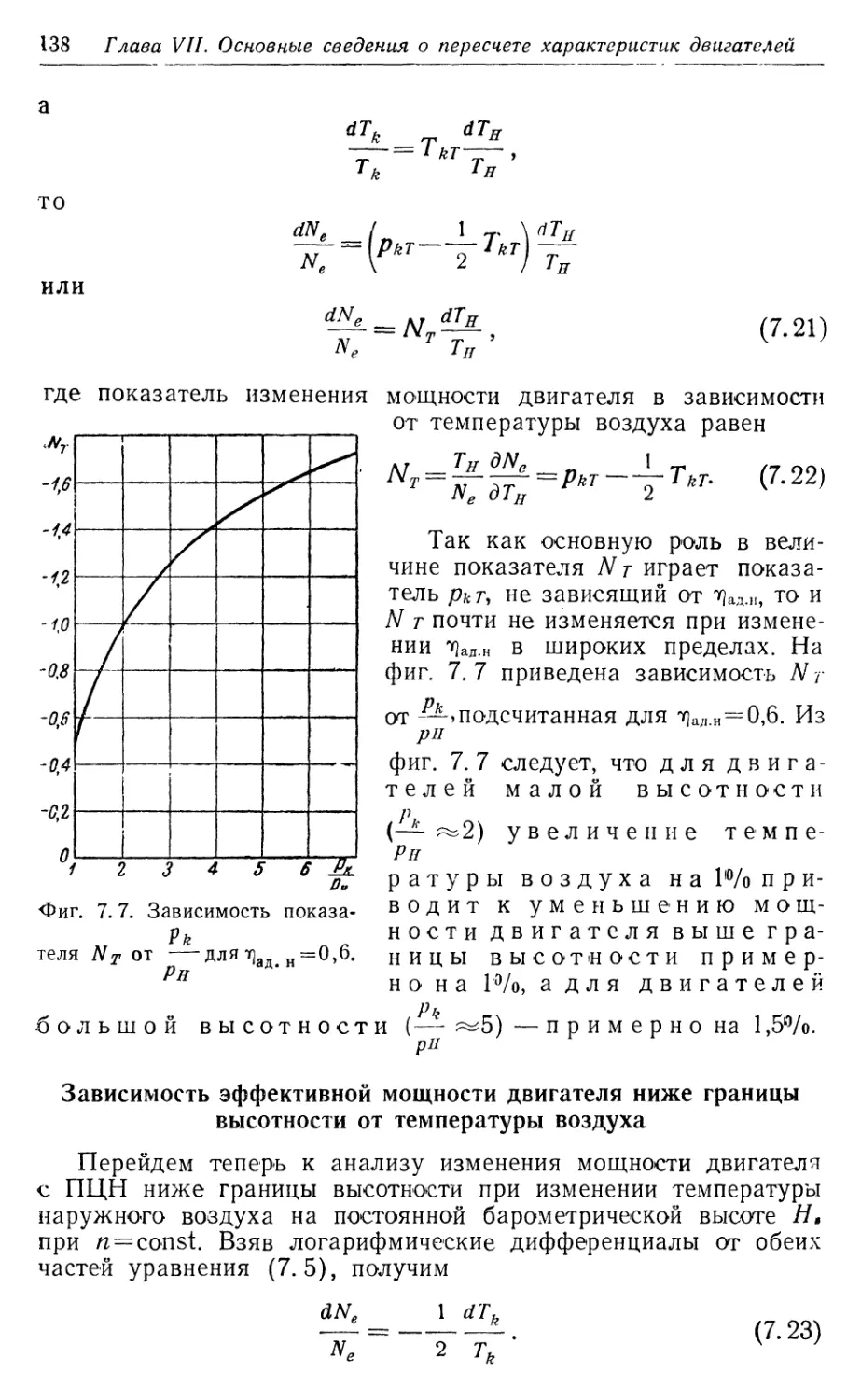
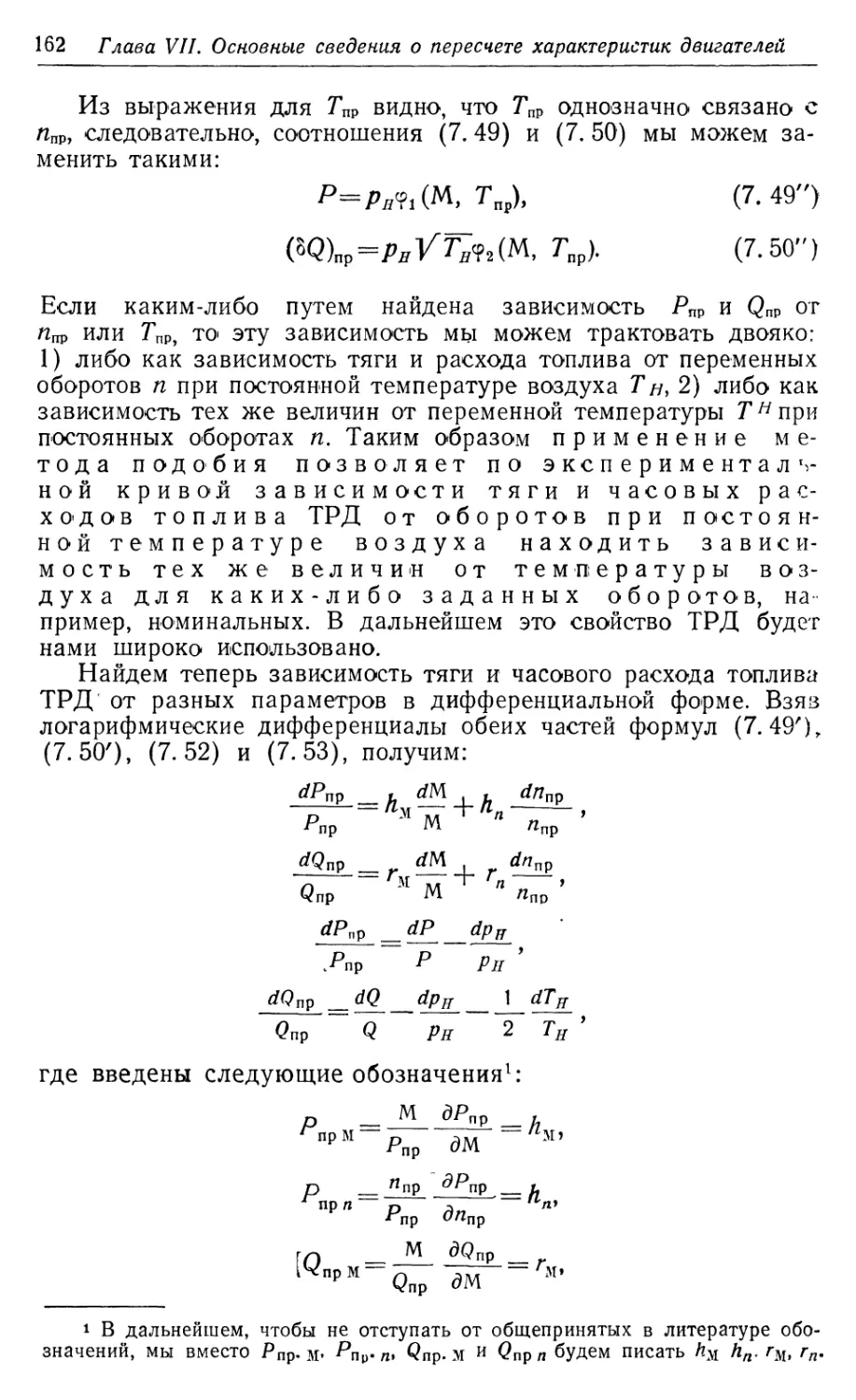
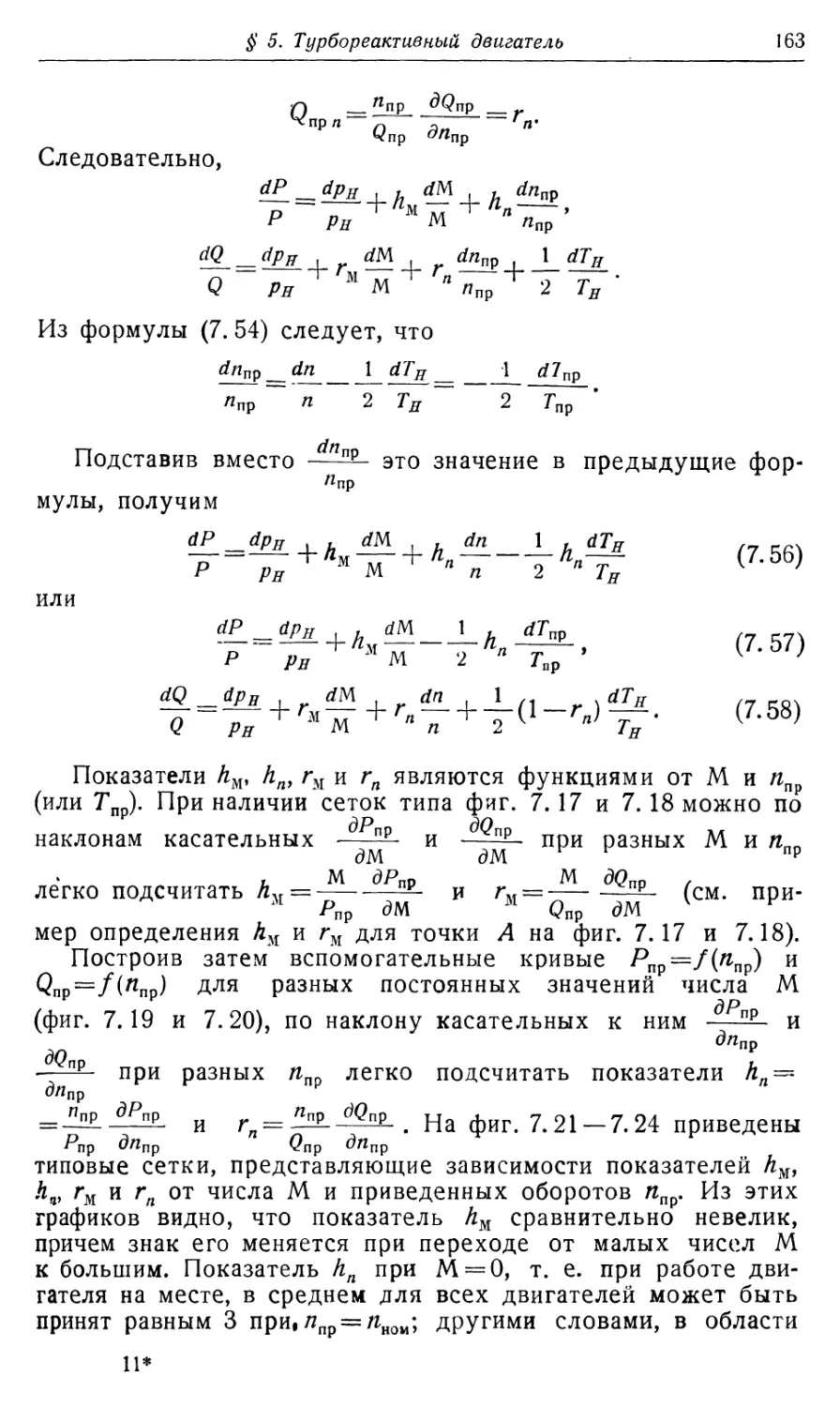
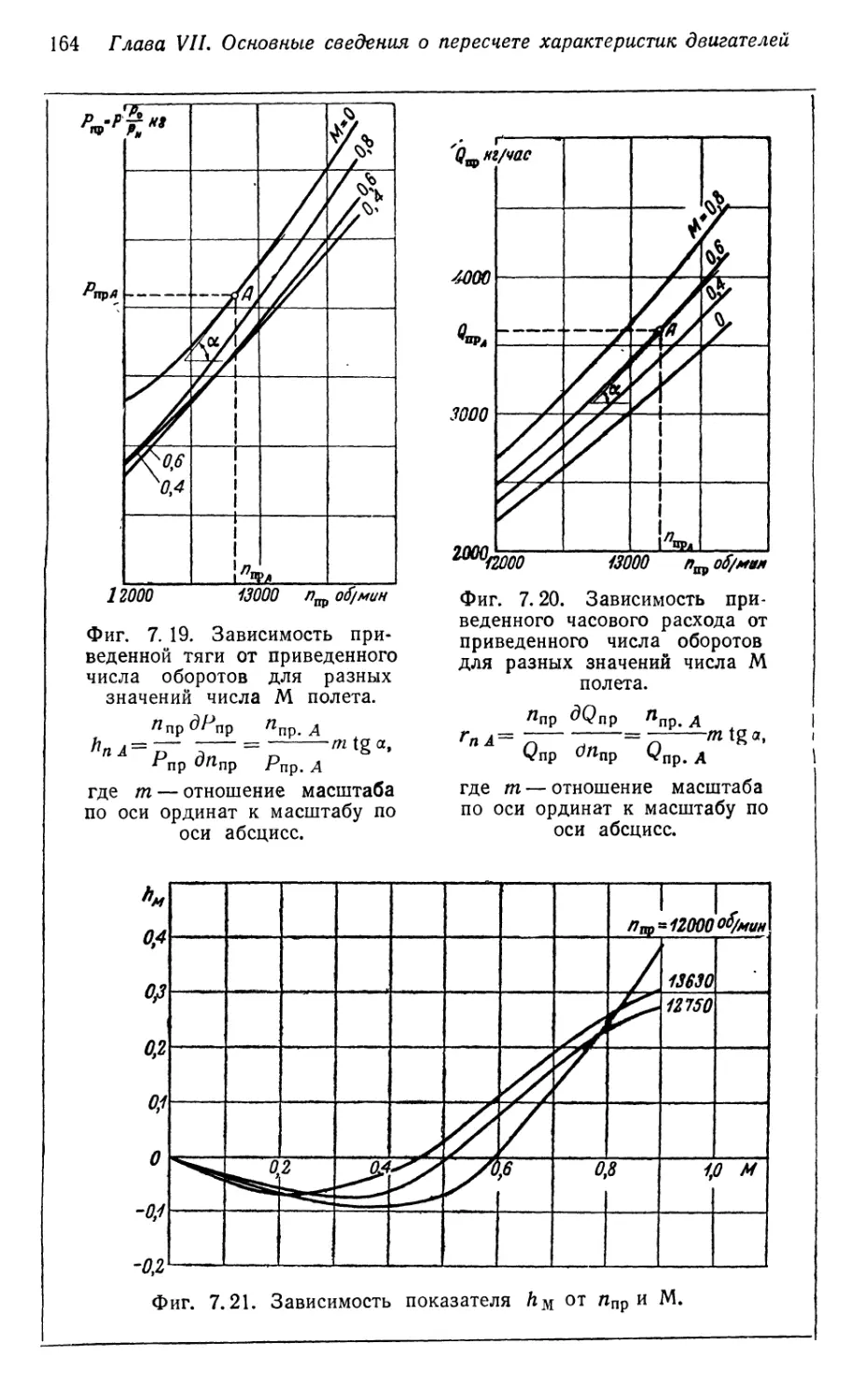
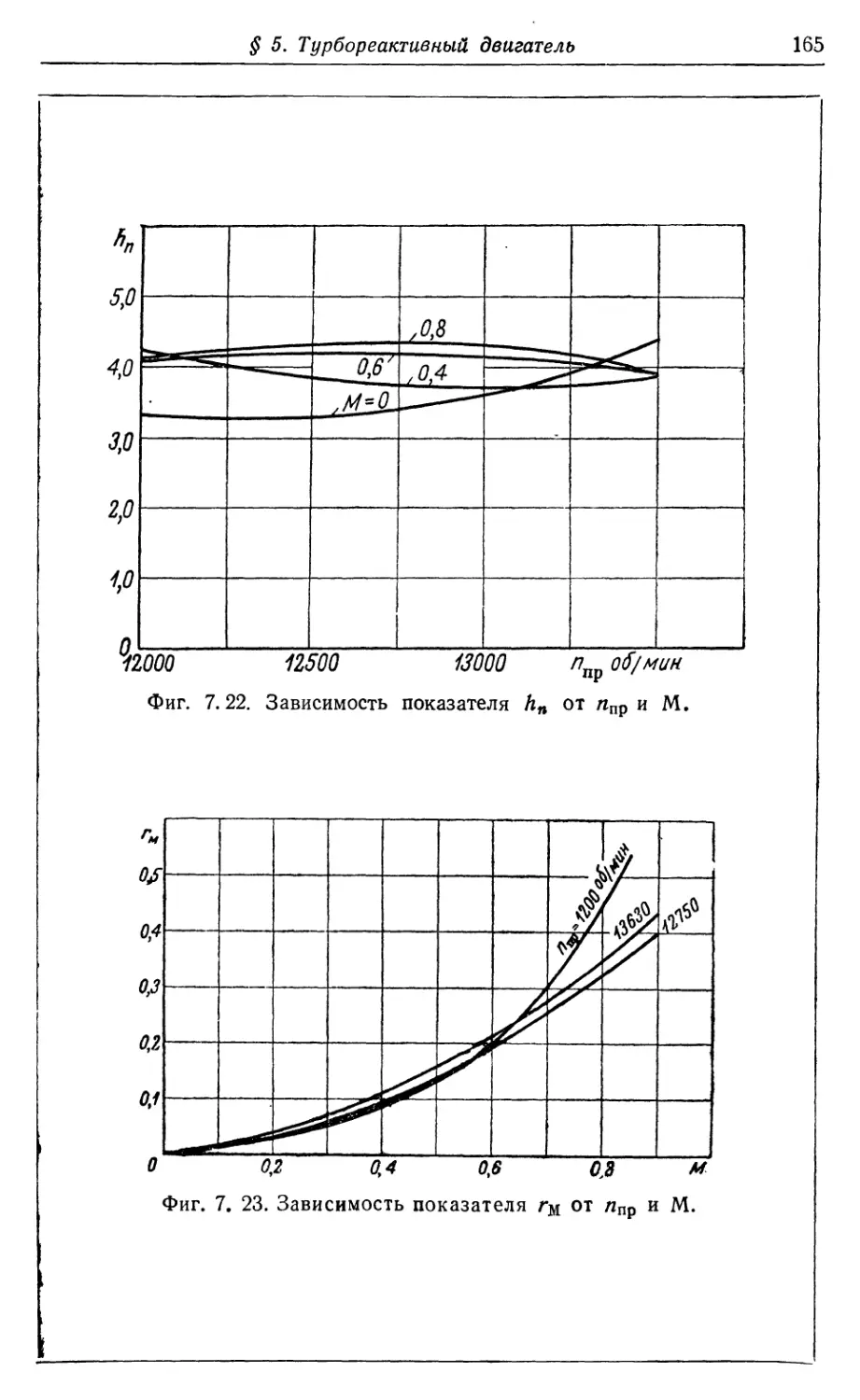
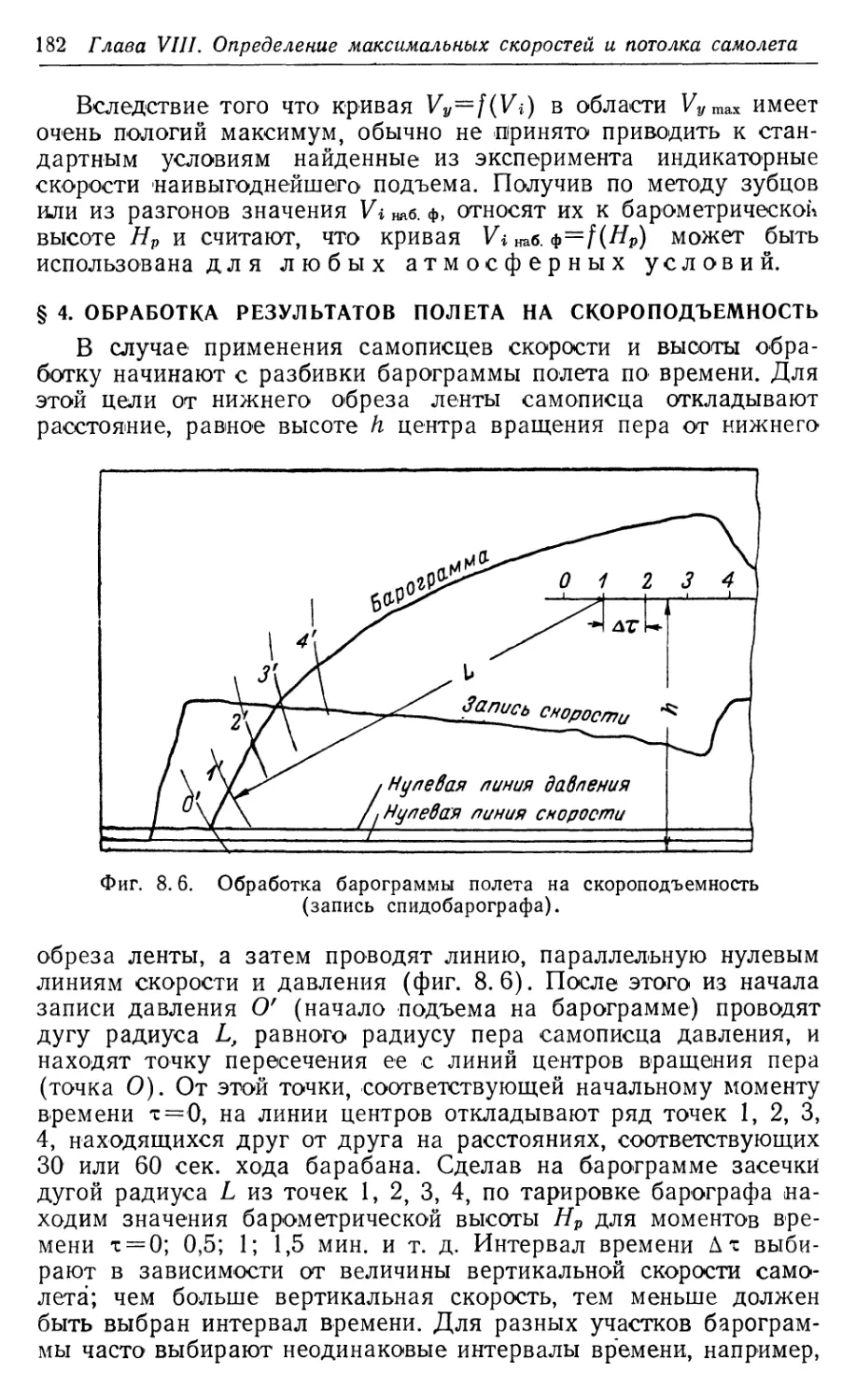
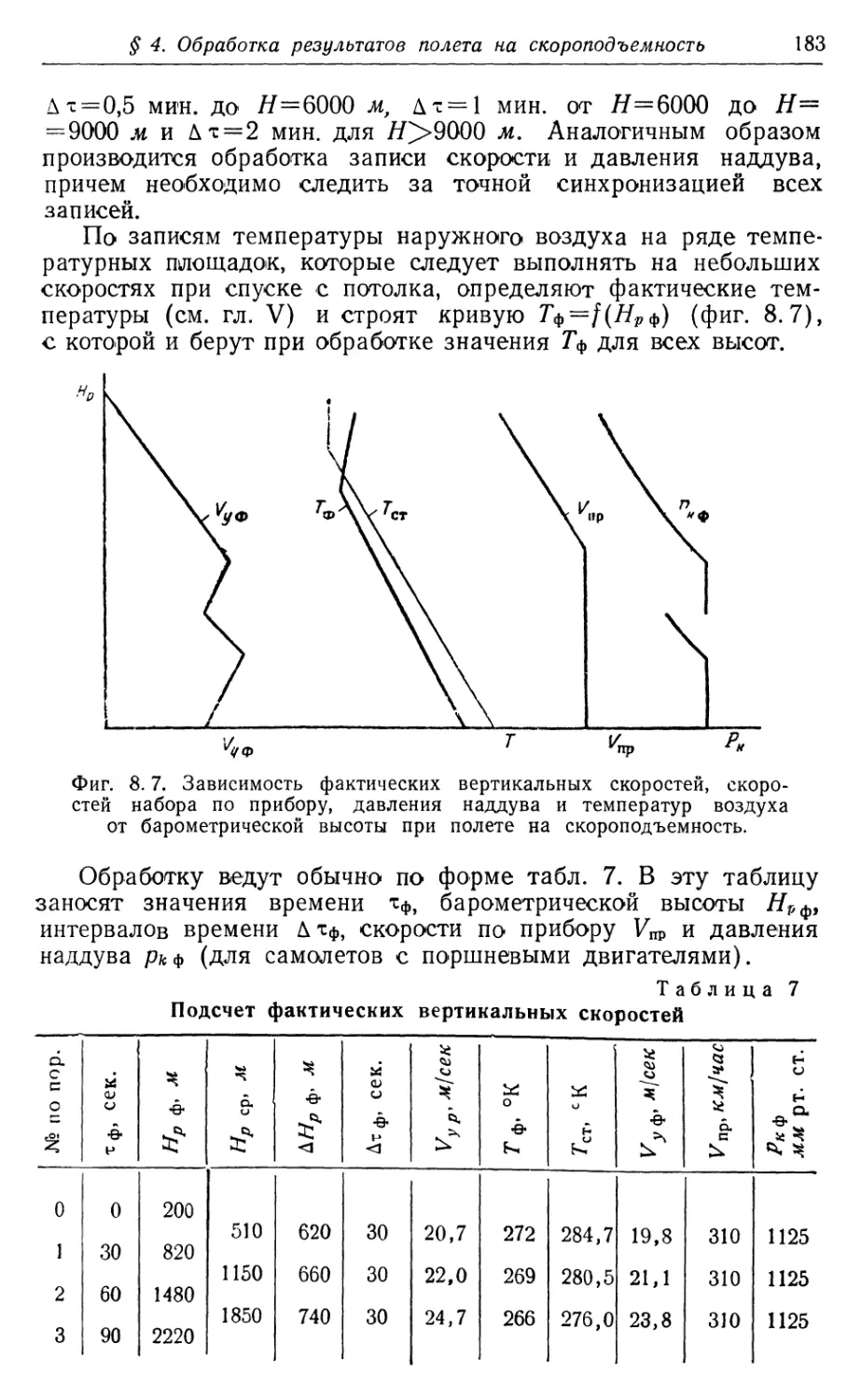
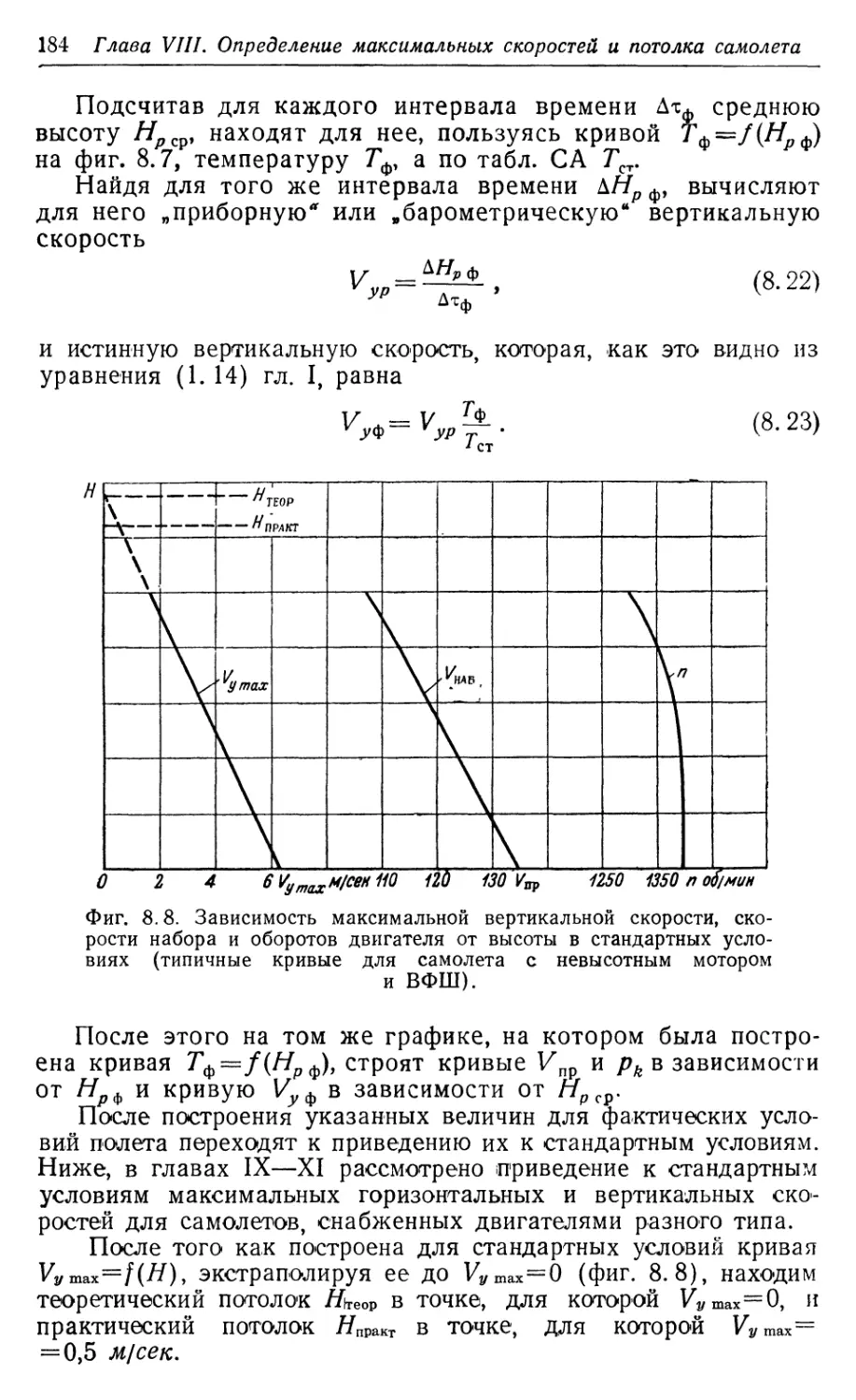
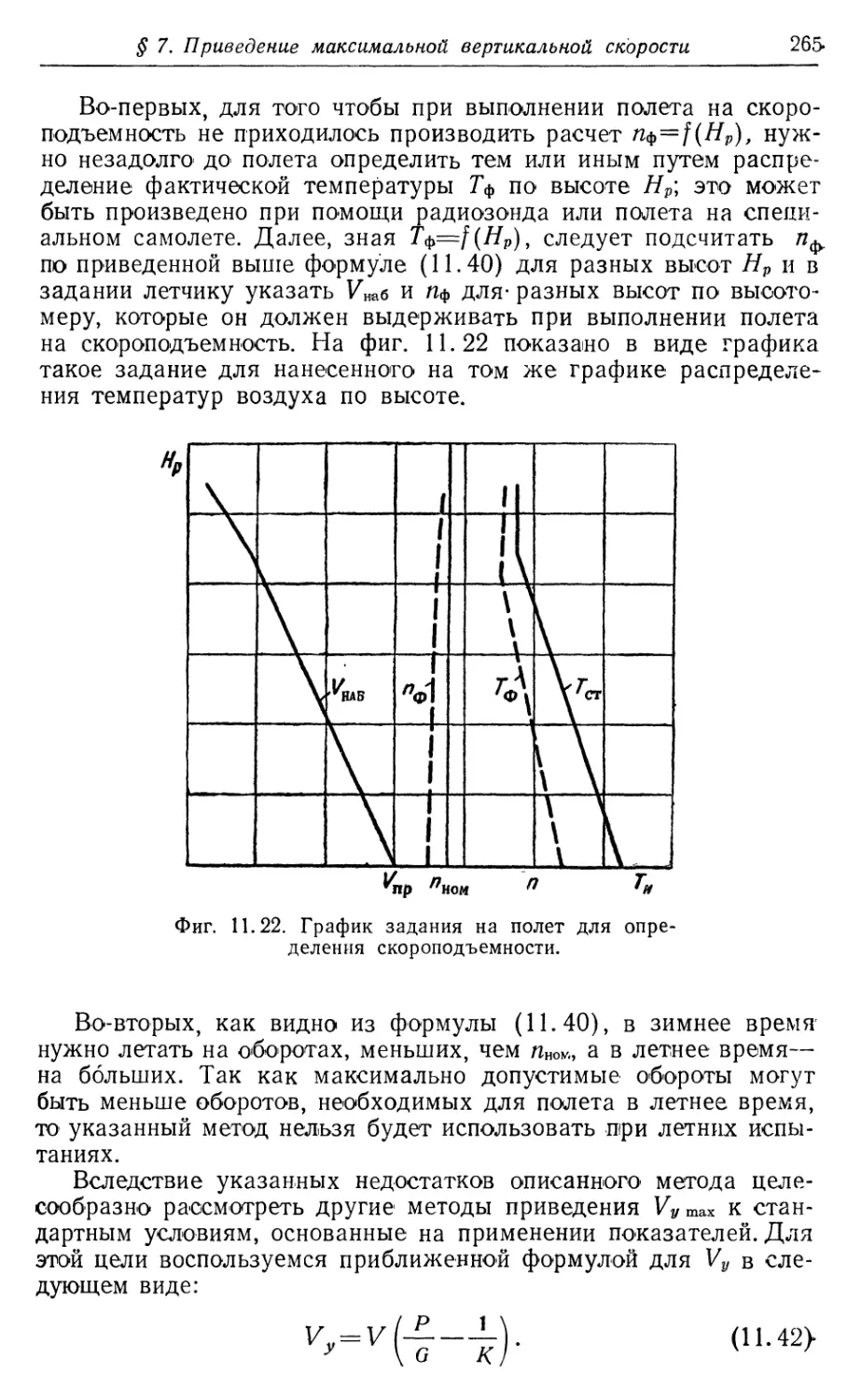
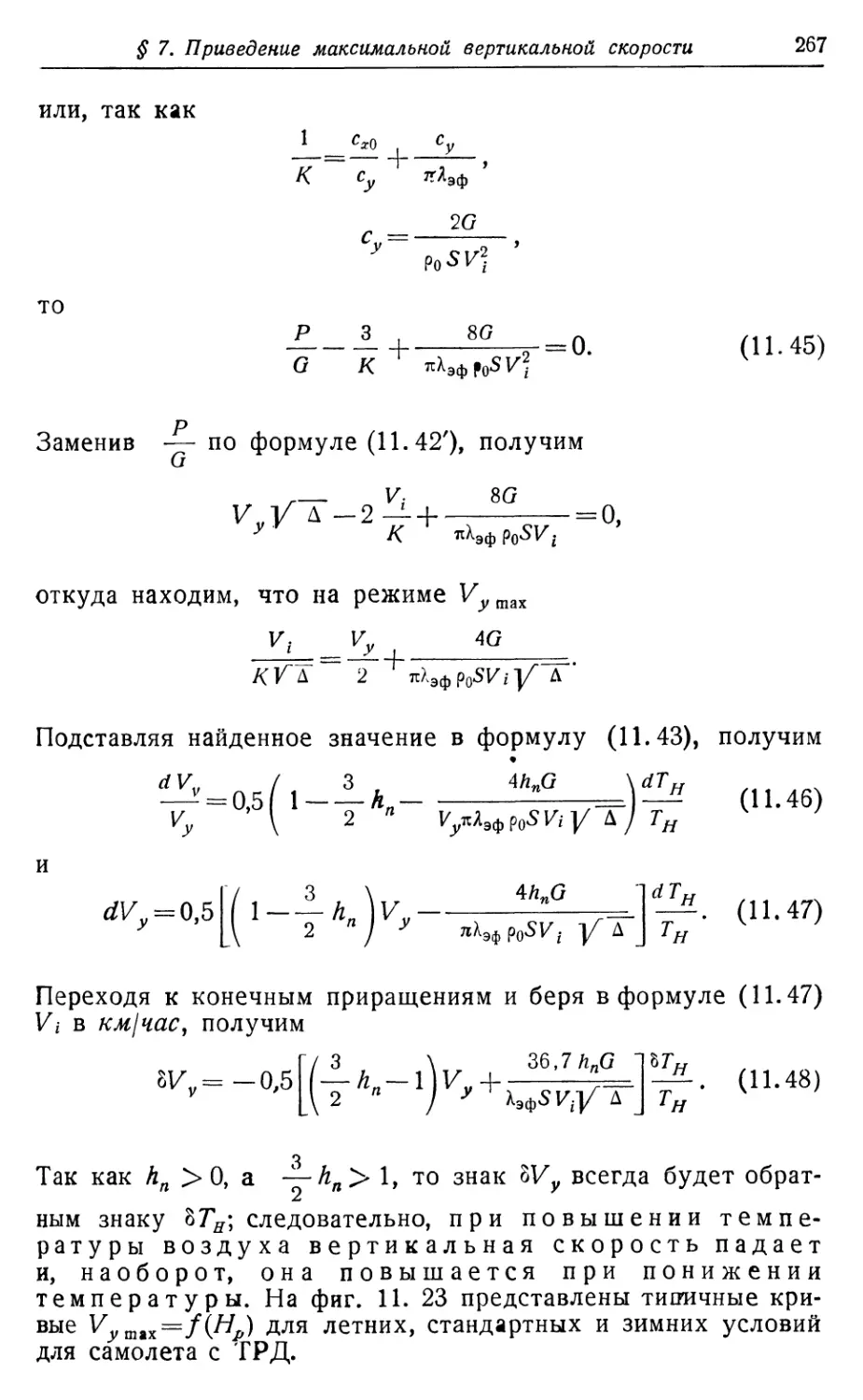
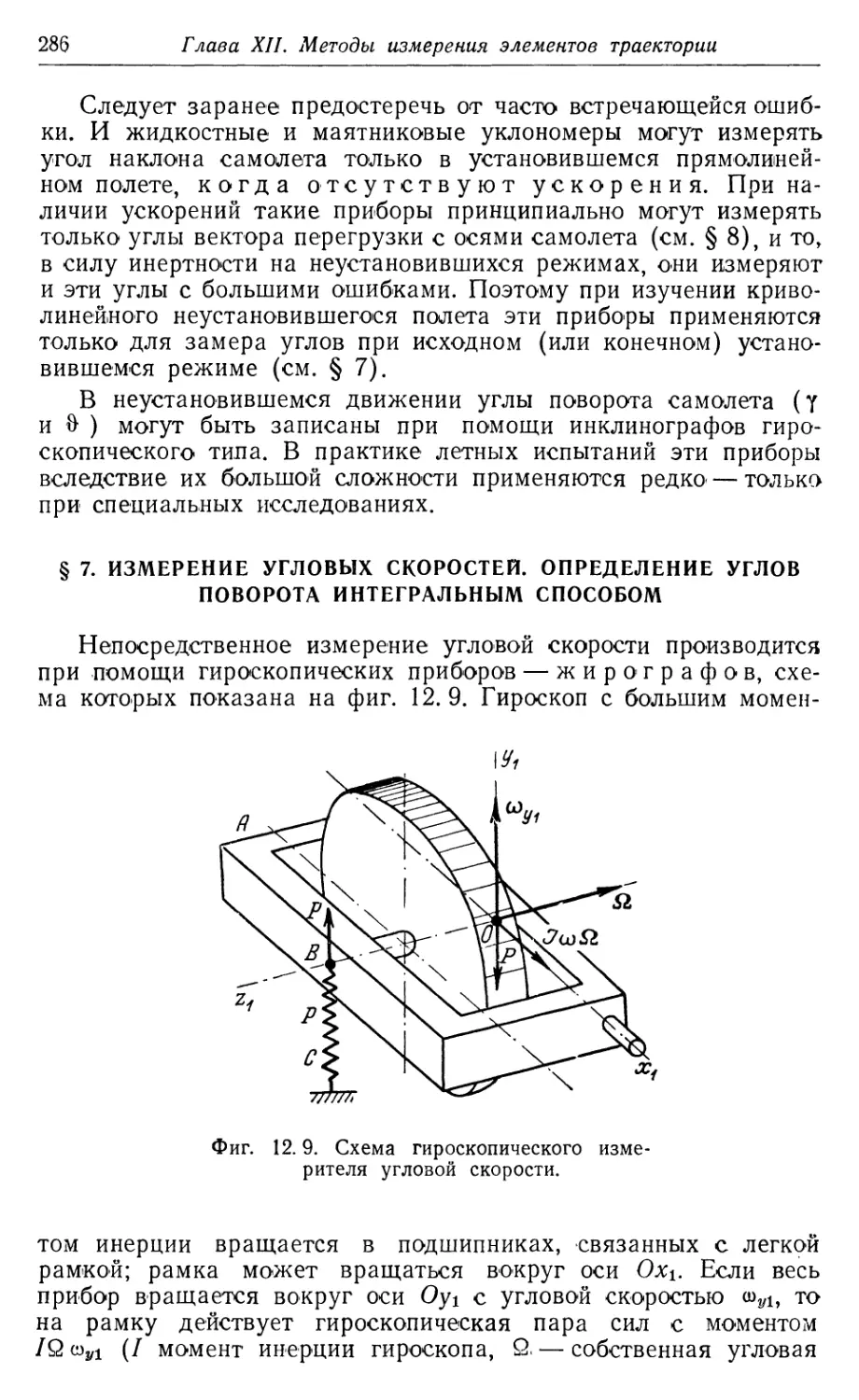
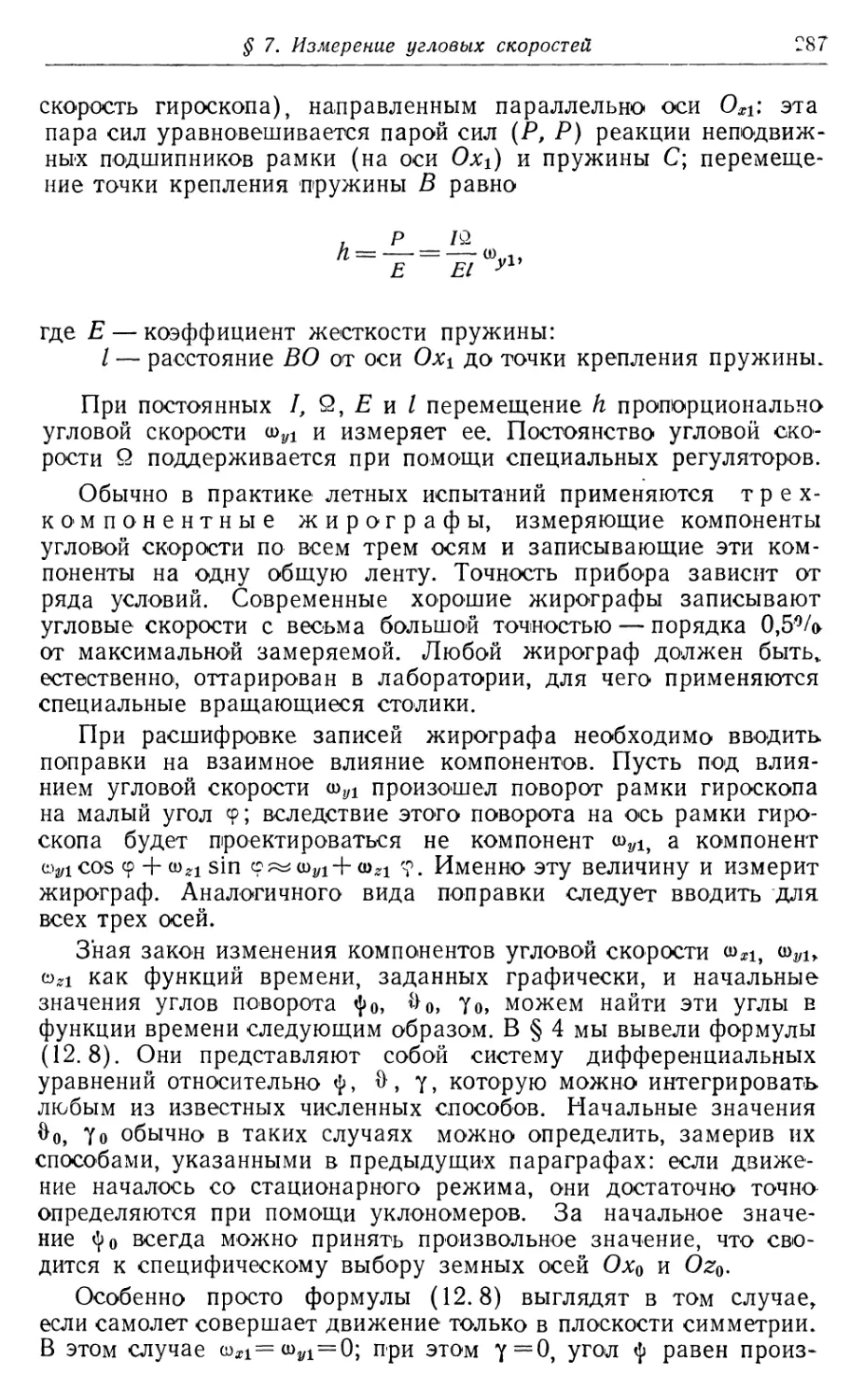
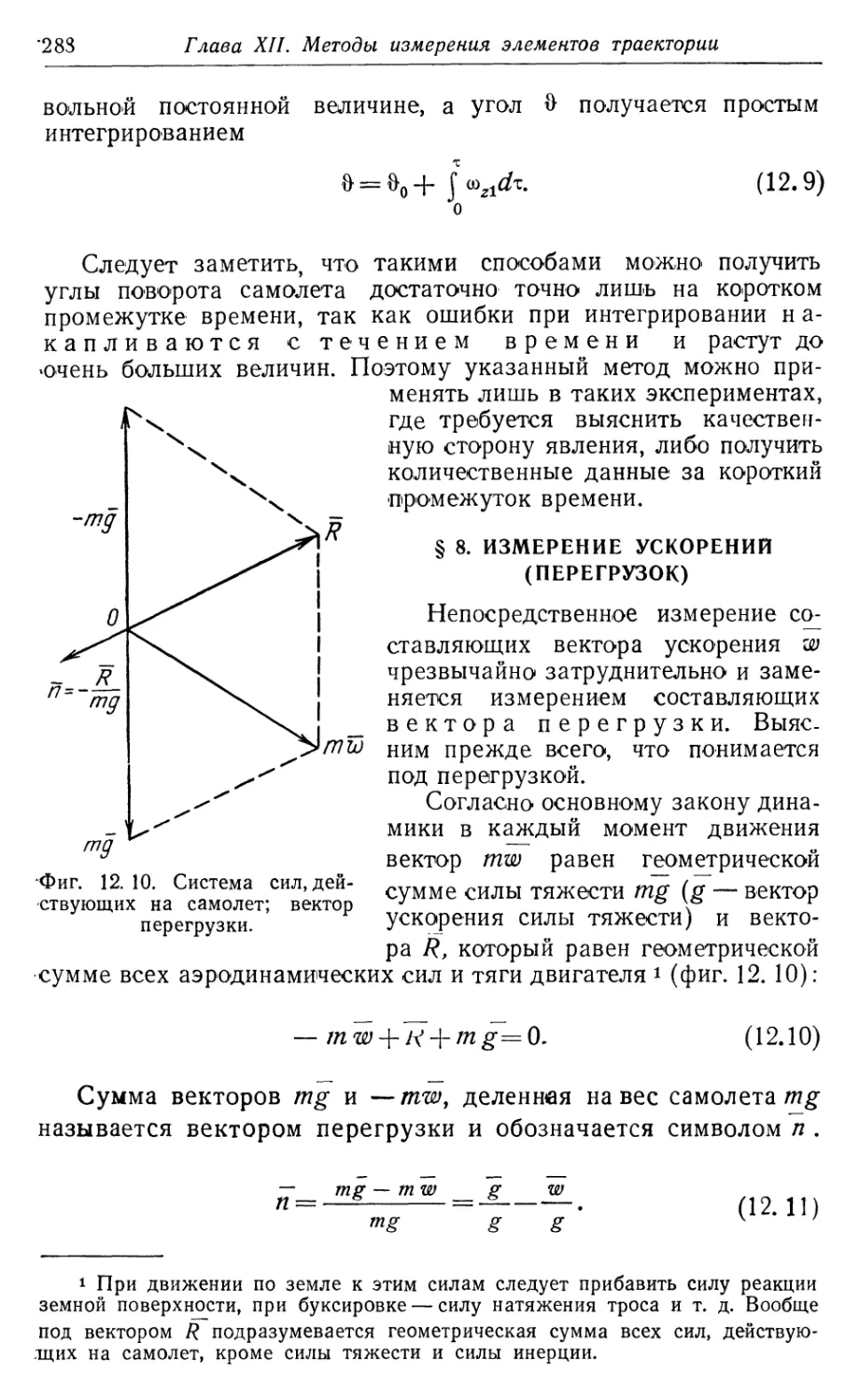
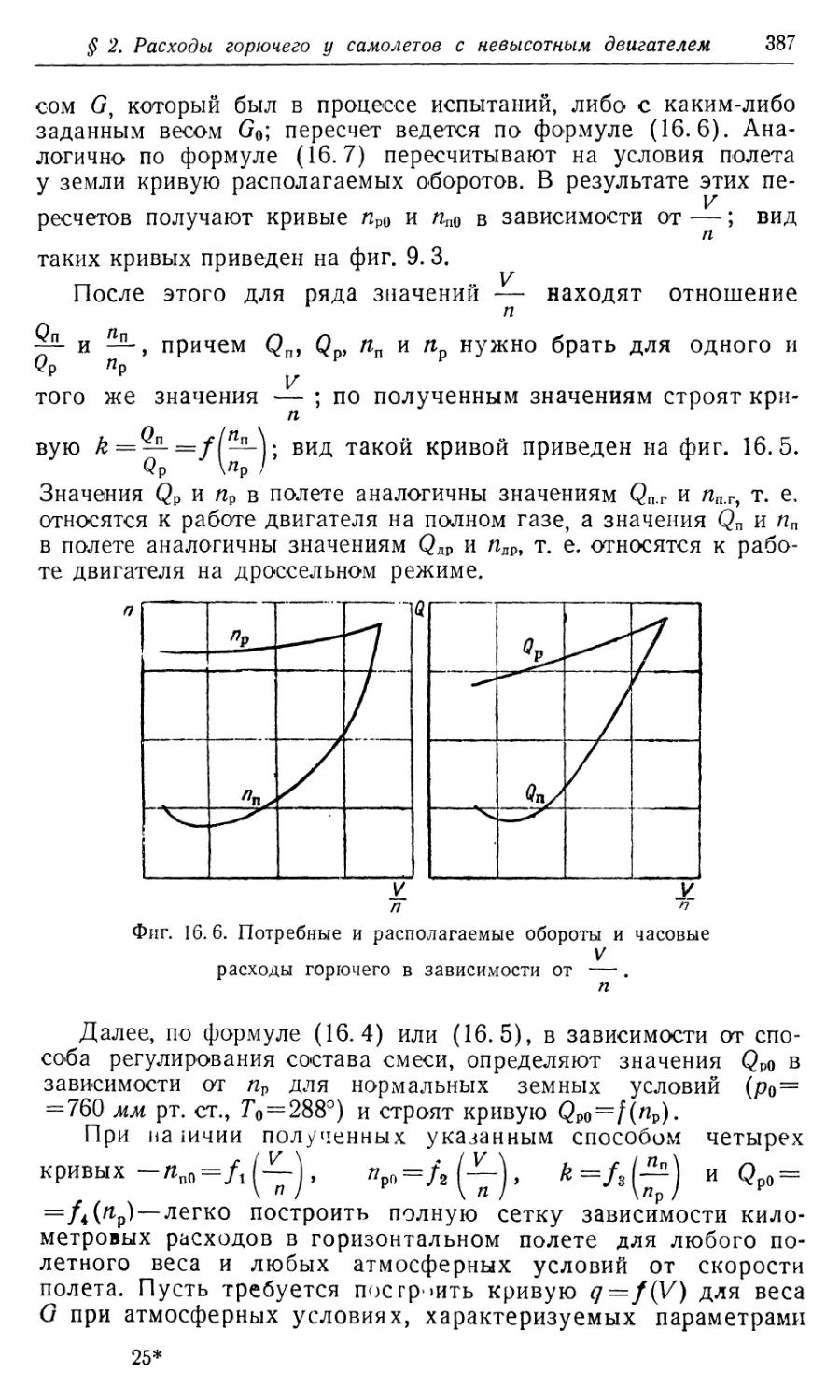
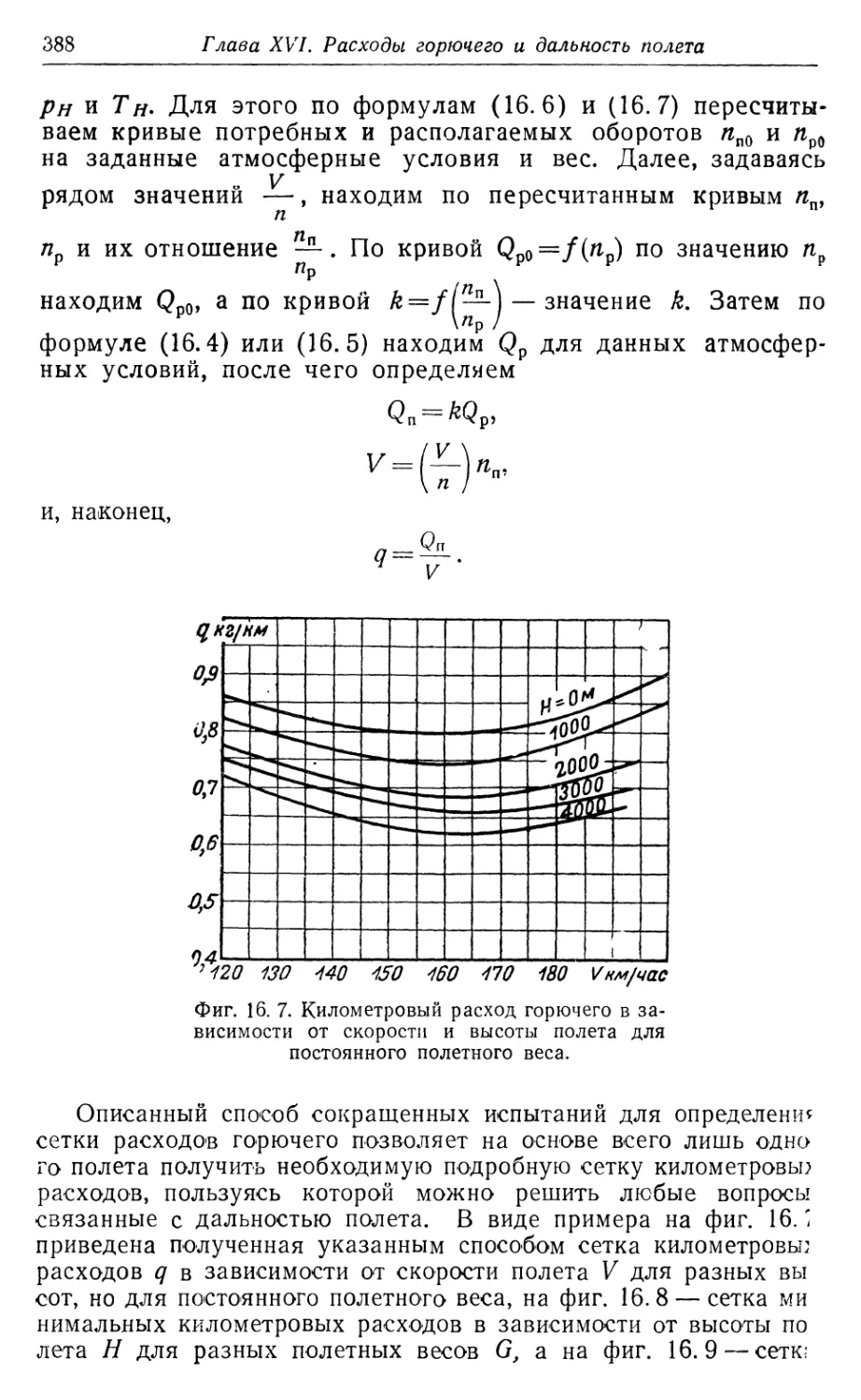
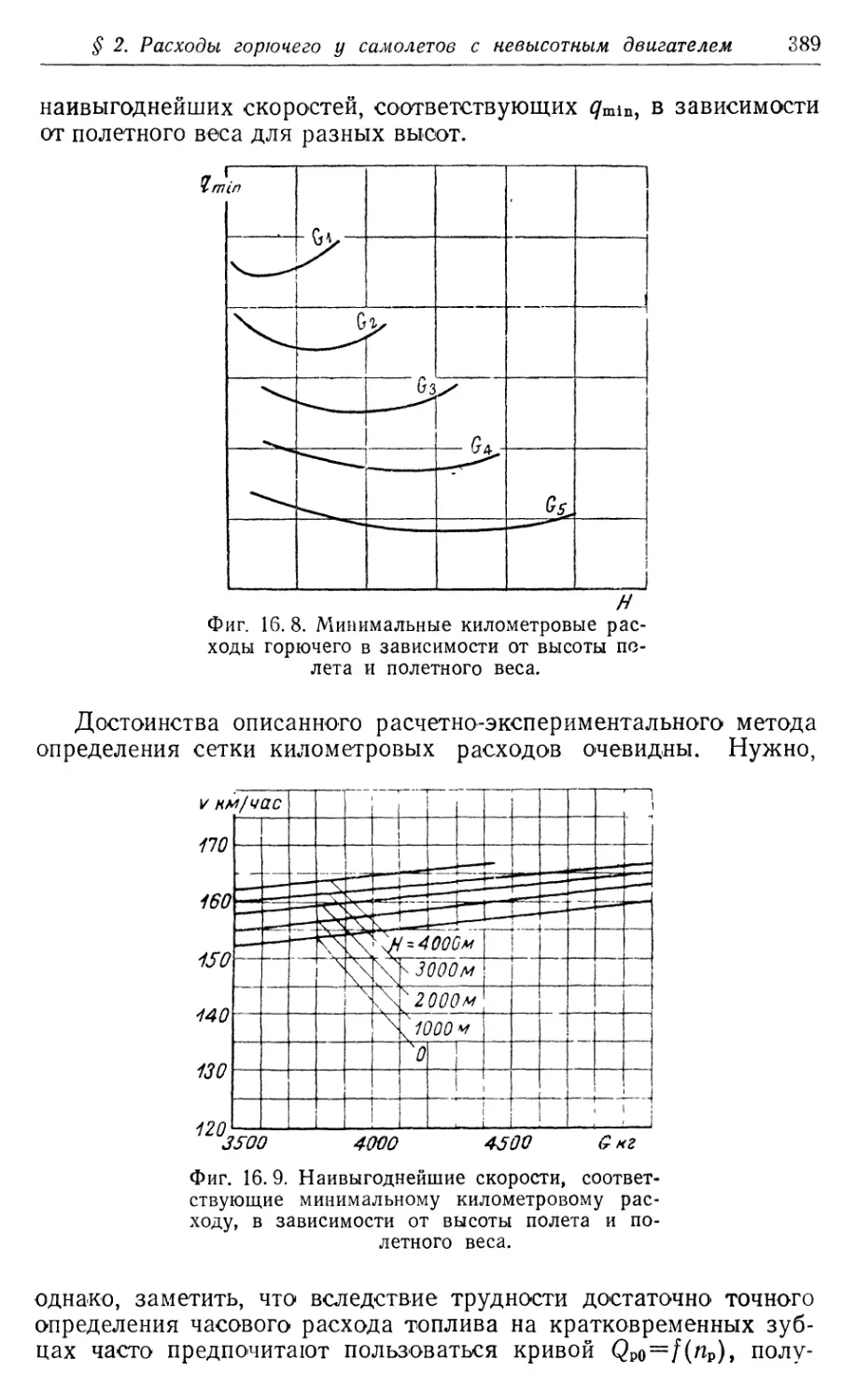
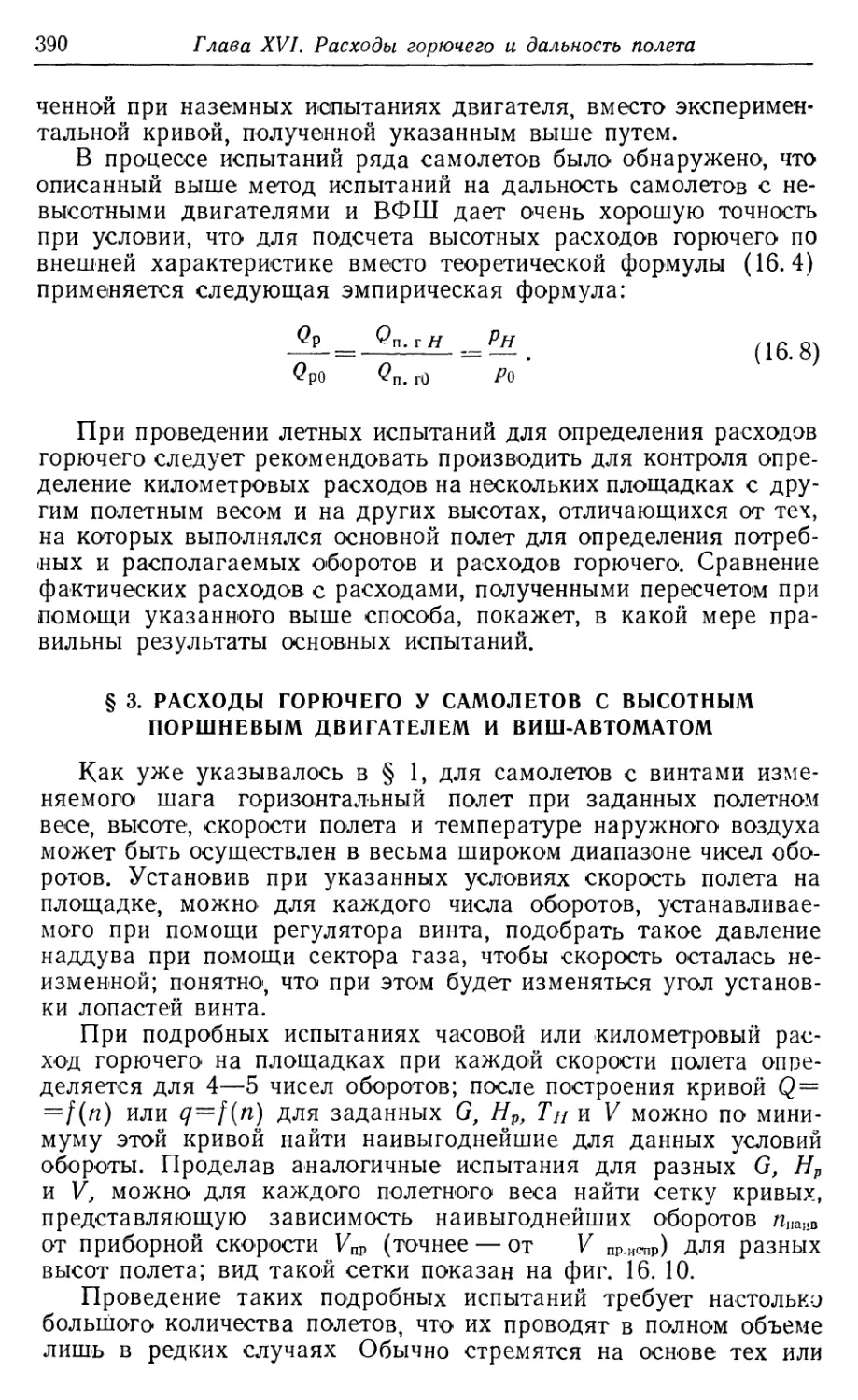
Результаты тарировки каждого прибора следует сравнивать
с прежними его тарировками для проверки стабильности
его работы, т. е. степени устойчивости показаний прибора при
одинаковых внешних условиях его работы. Приборы со значи-
тельно меняющимися тарировочными диаграммами следует бра-
ковать.
В некоторых случаях принято производить тарировку прибо-
ра на вибростенде, создающем вибрации постоянной амплитуды
и частоты, соответствующие вибрациям на самолете, что прибли-
жает условия работы прибора при лабораторной тарировке к ре-
альным условиям в полете.
Вопрос о погрешностях приборов будет рассмотрен в сле-
дующей главе.
При установке приборов на самолет должен быть выполнен
ряд требований, существенных для их нормальной работы в
процессе испытаний. Прибор должен быть установлен в таком
месте, чтобы к нему был удобный подход, позволяющий быстро
и без помех производить зарядку и разрядку прибора. В месте
установки прибора не должно быть резкого изменения темпера-
туры при изменении режима работы двигателя. Проводка к при-
борам, измеряющим давление, должна быть возможно' ко-
роче, без резких изломов и п е р е г и б о в, для того
чтобы запаздывание показаний прибора при быстром изменении
измеряемого давления было минимальным. Существенно также,
чтобы в трубопровод между приемником и прибором, измеряю-
щим давление, не могла попасть влага. Для поглощения вибра-
ций и уменьшения их влияния самописцы устанавливаются на
амортизаторах, а приборные доски, на которых смонти-
рованы визуальные приборы, укрепляются на амортизирующей
подвеске.
Для расшифровки показаний самописцев применяются спе-
циальные прозрачные шаблоны из целлулоида с нанесенной
на них шкалой и базовой линией (фиг. 2.8), а также риской,
которую следует совмещать с отметкой отметчика времени на
ленте; в пересечении шкалы с записью на ленте производится
отсчет, соответствующий данному моменту времени. По этому
отсчету при помощи тарировочной кривой определяют значение
измеряемой величины.
Для расшифровки показаний визуальных приборов, снятых
при помощи кино- или фотоаппарата, применяются специальные
расшифровочные столики с увеличительным стеклом и подсвет-
кой кадров пленки.
Для всех приборов, для которых это возможно, целесообраз-
но перед полетом и после него произвести непосредственно на
самолете сокращенную тарировку, заключающуюся в прогонке
лент самописцев или записи показаний визуальных приборов на
44
Глава II. Подготовка к испытаниям
нескольких контрольных режимах. Наличие таких контроль-
ных точек позволяет избавиться от ряда погрешностей при
проведении испытаний. Для тех приборов, для которых невоз-
Фиг. 2.8. Шаблон для расшифровки записей на лентах само-
писцев.
можна контрольная тарировка на самолете, следует до и после
полета делать кратковременные запуски для получения контроль-
ной нулевой линии на ленте.
Глава Ш
ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ПРИ ЛЕТНЫХ
ИСПЫТАНИЯХ
§ 1. КЛАССИФИКАЦИЯ ПОГРЕШНОСТЕЙ
При летных испытаниях, как и при всяком другом физиче-
ском эксперименте, любое измерение сопровождается погреш-
ностями, полностью избежать которых невозможно.
Различают следующие три класса погрешностей: 1) система-
тические погрешности, 2) случайные погрешности, 3) промахи.
Систематическими называются погрешности, вызы-
ваемые какой-либо постоянно действующей причиной и следую-
щие определенному закону.
Случайными называются погрешности, природа и вели-
чина которых нам неизвестны и появление которых не подчи-
няется какой-либо закономерности.
Промахами называются погрешности, явно искажающие
результат измерения, например, просчет или описка.
Наличие систематических погрешностей
влияет на правильность измерений, случай-
ных погрешностей — на точность, а промахов
на годность измерений. Нужно помнить, что измерения
могут быть произведены очень точно, но из-за наличия систе-
матических погрешностей результат может быть неправильным.
Например, точность определения поляры модели самолета в
аэродинамической трубе может быть очень высокой, что отнюдь
не гарантирует правильности этой поляры для самолета в натуре
вследствие систематической погрешности, связанной с масштаб-
ным эффектом. Наоборот, при летных испытаниях точность экс-
перимента по определению поляры обычно ниже, но- при тща-
тельном проведении замеров получаются правильные результаты.
Необходимо отметить, что деление погрешностей на система-
тические и случайные в значительной мере условно. Погреш-
ности, являющиеся систематическими для данного' эксперимента
или полета, часто- можно считать случайными для серии экспе-
риментов или полетов. Так, влияние восходящих или нисходящих
токов воздуха приводит к погрешностям при летных испытаниях;
эти погрешности мы можем считать случайными для массового
46
Глава III. Погрешности измерений при летных испытаниях
эксперимента, который проводится во1 многих полетах, совер-
шаемых в разное время года, в разное время суток, в различных
местах и при разных условиях погоды. Однако если эксперимент
проводится в течение одного полета, совершаемого в определен-
ном месте при каких-то определенных условиях погоды, то по-
грешность, вызванная наличием вертикальных токов, будет уже
систематической, а не случайной.
§ 2. СИСТЕМАТИЧЕСКИЕ ПОГРЕШНОСТИ
Опыт летных испытаний показывает, что при их проведении
главный источник ошибок — это систематические погрешности.
При этом некоторые систематические погрешности могут приво-
дить к неправильным измерениям, другие же не
влияют на правильность измерений, а влияют лишь на пра-
вильность оценки, сделанной на основе этих измерений.
Так, в случае неудачной установки термометра на крыле са-
молета, при которой летчик или наблюдатель из-за параллакса
производит неправильный отсчет температуры, или в случае не-
правильной тарировки в полете приемника давления результат
каждого измерения в процессе всего эксперимента будет непра-
вильным. К неправильному результату измерений приводит так-
же нагрев термометра солнцем в случае отсутствия надлежащей
защиты шарика термометра или непрерывное падение в полете
напряжения в питании электроприборов из-за неисправности
аккумулятора или же незамеченная ошибка при изготовлении
шаблона, при помощи которого производится обработка записи
на ленте самописца.
В других случаях, несмотря на правильно сделанные измере-
ния, получается неправильная оценка результатов эксперимента.
Например, при наличии вертикальных токов воздуха или при
сильном изменении градиента скорости ветра с высотой мы, пра-
вильно измерив при помощи кинотеодолитов вертикальную ско-
рость самолета относительно земли, неправильно определим ин-
тересующую нас вертикальную скорость самолета относительно
воздуха.
Учет и исключение систематических погрешностей при про-
ведении летных испытаний имеют очень большое значение для
получения правильных и надежных результатов, а также для
правильной оценки летных характеристик самолета. Важнее и
труднее всего — это обнаружить существование систе-
матической погрешности, узнать ее природу и проис-
хождение, причем в каждом отдельном случае необходим ин-
дивидуальный подход, соответствующий характеру эксперимента,
и критический анализ всей совокупности факторов, сопутствую-
щих измерениям.
Хорошие результаты дает обычно сравнение результатов
повторных экспериментов, особенно если в них при-
£ 2. Систематические погрешности
47
менялись разные методы измерения, разные п р и б о-
ры и, если возможно, участвовали разные летчики или
наблюдатели. Так, тарировку приемника давления в полете при-
нято проводить не менее, чем в двух полетах. То же относится и
к определению максимальных горизонтальных скоростей и баро-
граммы полета. При определении взлетно-посадочных характери-
стик принято производить не менее пяти взлетов и посадок, при-
чем желательно проводить не менее двух серий экспериментов
с двумя летчиками для исключения влияния субъективных осо-
бенностей пилотирования.
Вообще всякие ответственные замеры целесообразно дубли-
ровать. Так, при определении максимальной скорости на гори-
зонтальных «площадках» необходимо, чтобы летчик или наблю-
датель, помимо включения самописцев, вел одновременно записи
по визуальным приборам. Сравнение результатов, полученных по
обработке записей самописцев и записей по визуальным прибо-
рам, хотя бы и менее точным, поможет обнаружить системати-
ческие ошибки, особенно если указатель скорости и спидограф
присоединены к разным приемникам давления. Дублирование
измерений является также лучшим средством обнаружения про-
махов.
В случае проведения сравнительных испытаний,
когда основную роль играет не определение абсолютного значе-
ния какой-либо характеристики, а лишь ее относительное
изменение при разных условиях испытаний (например, при
замене одного винта другим), нецелесообразно производить сме-
ну приборов или изменять методику испытаний. В таких случаях
наличие одних и тех же систематических погрешностей не по-
влияет на правильность оценки; наоборот, сохранение не-
изменными всех условий эксперимента будет
способствовать большей точности искомого сравнительного ре-
зультата испытаний.
Для устранения систематических погрешностей применяются
следующие два приема: 1) предварительное изучение зави-
симости погрешности от различных факторов и введение соответ-
ствующих поправок в результаты измерений и 2) исклю-
чение самой причины погрешности. Оба приема нашли широ-
кое распространение в практике летных испытаний.
Для устранения систематических погрешностей, вносимых
приборами, рекомендуется тарировать их повторно при разных
условиях и вносить при обработке соответствующие поправки, в
частности, инструментальную поправку, температурную поправ-
ку, в некоторых случаях поправки на вибрации, на перегрузки,
на запаздывание показаний прибора, на влияние сжимаемости
воздуха и т. д.
Во всех случаях, когда это возможно, следует прибегать к
более радикальному второму приему — исключению самой при-
чины систематической погрешности. С этой целью необходимо
48
Глава III. Погрешности измерений при летных испытаниях
стремиться к проведению испытаний в соответствующих благо-
приятных атмосферных условиях (слабый ветер, отсутствие бол-
танки, кучевой облачности, повышенной влажности), для чего,
например, в летнее время желательно проводить полеты ранним
утром. Для исключения влияния низких температур на показа-
ния приборов целесообразно применять автоматический элек-
трообогрев приборов. Большую роль в устранении источников си-
стематических погрешностей играет, как было указано в преды-
дущей главе, правильная подготовка самолета и двигателя, про-
верка и отладка работы всех регуляторов, а также устранение
дефектов, влияющих на аэродинамику самолета (укрепление
замков шасси и щитков и т. п.).
§ 3. СЛУЧАЙНЫЕ ПОГРЕШНОСТИ
Перейдем теперь к рассмотрению случайных погрешностей.
Напомним вкратце основные положения теории случайных по-
грешностей, разработанной применительно к совокупности по-
грешностей, возникающих при повторном многократном измере-
нии одной и той же величины.
Случайным погрешностям приписывают следующие два
свойства:
1. При большом числе измерений одинаково часто встреча-
ются погрешности равные по величине, но противоположные по
знаку, т. е. число положительных и отрицательных погрешностей
одинаково.
2. Малые погрешности встречаются чаще, чем большие.
При большом числе измерений применим так называемый з а-
кон нормального распределения случайных по-
грешностей, заключающийся в следующем. Обозначим через dP
вероятность появления погрешности, значение которой заклю-
чается в интервале 3 и 8+d3. Тогда по закону нормального рас-
пределения
dP=y d8,
где
__82
у=—^=Г'^. (злу
Величина у называется частотой появления случай-
ных погрешностей, а о—средней квадратичной по-
грешностью ряда измерений. На фиг. 3. 1 приведена так на-
зываемая кривая вероятности у~f(8), соответствующая
уравнению (3. 1) для трех значений а.
Для того чтобы определить величину а для рассматривае-
мой серии измерений, поступают следующим образом. Пусть при
измерении, произведенном п раз в одинаковых условиях одним
и тем же прибором, были получены следующие результаты:
А, ^2, Аз ••• , In.
§ 3. Случайные погрешности
49
Вероятнейшее значение L измеряемой величины равно средне-
му арифметическому из полученных значений, т. е.
L = /,+/2 + <з + ...4./п . „
п
Если истинное значение измеряемой величины равно X, a h —
каждое из п значений, полученных при измерении, то величина
$i=l~X
является случайной погрешностью измерения, а ве-
личина
Vi = li—L
называется остаточной погрешностью.
Средняя квадратичная погрешность п измерений определяет-
ся формулой
о
(3. 3)
В курсах теории вероятности доказывается,
ниченном увеличении числа измерений п величина
ляемая по формуле (3. 3), стре-
мится к значению средней
квадратичной ошибки о, фигу-
рирующей в законе нормаль-
ного распределения [формула
что при неогра-
а, опреде-
(3.1)].
Средняя квадратичная по-
грешность ряда измерений х а-
рактеризует точность
измерений. Из фиг. 3. 1 видно,
что меньшему значению с со-
ответствует преобладание ма-
лых случайных погрешностей
и, следовательно, большая точ-
ность измерения данной вели- Фиг. 3. 1. Нормальные кривые вероят-
чины; наоборот, при большом ности.
значении о большие случай-
ные погрешности встречаются чаще, а значит точность измере-
ния ниже.
Для определения средней квадратичной погрешности а по
формуле (3. 3) нужно знать истинное значение измеряемой ве-
личины X. Так как обычно оно неизвестно, а на основе измерений
определяется среднее арифметическое L и могут быть опреде-
лены только остаточные погрешности каждого измерения Vi, то
для определения о пользуются формулами, в которых подсчет о
ведется через Vi. В случае ограниченного числа измерений
4 772
50
Глава III. Погрешности измерений при летных испытаниях
приближенное значение средней квадратичной погрешности о
может быть найдено по формуле Бесселя через остаточные по-
грешности Vi, значения которых просто определяются по экспе-
риментальным данным измерений
а = + (3.4)
Кроме величины о, точность многократного эксперимен-
та характеризуется так называемой вероятной погреш-
ностью ряда измерений р, имеющей такую величину, что по-
ловина всех случайных погрешностей при повторных измерениях
меньше р, а половина больше.
Из теории вероятностей известно, что вероятная и средняя
квадратичная погрешности связаны простой зависимостью
Р ~ ~~ °- (3.5)
Наконец, точность измерений характеризуют еще предель-
ной погрешностью ряда измерений 3lim, причем
511ш = Зз « 4,5р. (3.6)
Теоретически доказывается, что при 370 повторных измерениях
вероятно, что только одна погрешность по абсолютной величине
больше 3Пт.
Как средняя квадратичная, так и вероятная и предельная по-
грешности могут служить для характеристики точности изме-
рений.
Мы до сих пор рассматривали параметры о, о и 3Пга, ха-
рактеризующие точность процесса измерений. В теории
случайных ошибок показывается, что точность результа-
т а измерений (т. е. арифметического среднего) может быть оце-
нена одним из следующих параметров:
1) средней квадратичной погрешностью ре-
зультата среднего арифметического S, равной
(3.7)
I п
где п — число измерений;
2) вероятной погрешностью результата/?
R = 0,67455 = -°'ет45д = _L_; (3. 8)
У п у п 4 7
3) предельной погрешностью результата^:
Г. •
(3-9)
£ 3. Случайные погрешности
51
Для вычисления погрешностей результата S и R по величине
остаточных погрешностей применяются следующие формулы:
5 = 1/ 'С - , (3.10)
|/ «(»-!)
—1/ . (3.11)
3 У п (п - 1)
Необходимо точно уяснить себе разницу между точностью
процесса измерений и точностью результата измерений.
Точность процесса измерений характеризует степень достовер-
ности результата отдельного (единичного) измерения, в то вре-
мя как точность результата измерений характеризует точность,
с которой определена измеряемая величина, полученная как
среднее арифметическое из нескольких измерений. Предположим,
например, что нам нужно определить максимальную скорость
полета на какой-либо заданной высоте, причем вероятная по-
грешность процесса измерений равна р = 1°/о. Последнее озна-
чает, что если в качестве величины максимальной скорости мы
примем величину, определенную из отдельного (единичного!) экс-
перимента, то равновероятно, что погрешность будет как мень-
ше, так и больше 1%. Если же для определения величины макси-
мальной скорости мы произведем четыре замера и примем в
качестве величины скорости среднее арифметическое из этих че-
тырех замеров, то вероятная погрешность полученного резуль-
тата равна по формуле (3. 8)
Следовательно, в этом случае равновероятно, ‘что погрешность
найденной величины Етах будет как больше, так и меньше 0,9%
(а не Г%, как это мы имели бы для единичного измерения).
Из формул для S и R видно-, что, увеличивая число измере-
ний, мы повышаем точность результата. Однако для существен-
ного повышения точности результата число измерений должно
быть увеличено во много раз. Таким образом повышение точ-
ности результата путем увеличения числа измерений сопряжено*
с большой дополнительной затратой труда и времени.
В технической практике для оценки точности результата из-
мерений, а также процесса измерений обычно применяют пре-
дельную погрешность. Однако в ряде случаев применяются как
средняя квадратичная погрешность (особенно* для оценки точ-
ности процесса измерений), так и вероятная погрешность (осо-
бенно для оценки точности результата измерений). Вследствие
этого во- избежание недоразумений нужно всегда, говоря о точ-
ности эксперимента или прибора, указывать, какой параметр
принят для ее оценки.
4i:
52
Глава III. Погрешности измерений при летных испытаниях
Результат измерения обычно принято представлять в виде
записи следующего вида:
Х — а+Ь,
где а — результат измерения, а b — погрешность результата (ве-
роятная или предельная). Если написано
7=752+9 км/час,
где 9 км/час=\ХХт— предельная погрешность, то эту запись мы
должны понимать так: приняв в качестве значения скорости са-
молета 752 км/час, мы допускаем при этом погрешность, едва ли
превышающую 9 км/час. Если
7=752+2 км/час,
где 2 км/час^Н — вероятная погрешность, то такую запись нуж-
но понимать следующим образом: приняв в качестве значения
скорости самолета 752 км/час, мы допускаем погрешность, кото-
рая в равной степени может быть по абсолютной величине как
больше*, так и меньше 2 км/час, но едва ли превысит Xlim^4,5/? =
= 4,5-2 = 9 км/час в соответствии с формулой (3.9).
При округлении результатов измерений следует руковод-
ствоваться их погрешностями. Обычно округление производится
таким образом, чтобы только последняя значащая цифра была
сомнительна. Так, в приведенном выше примере, получив при
обработке 752,4 км/час, мы округляем до ближайшего целого
числа и пишем 752 км/час. Если принять при определении цент-
ровки самолета предельную погрешность в 0,8% средней аэро-
динамической хорды, то результат центровки имеет смысл запи-
сывать лишь с одним десятичным знаком, например, 23,6% САХ
вместо 23,57% САХ.
Приведенные нами выше формулы относятся к случаю непо-
средственного' (прямого) измерения величины. Рассмотрим те-
перь случай косвенного измерения величин, с которым
обычно приходится иметь дело в практике испытаний. Пусть нам
необходимо определить величину
и = и\х, у, г),
где х, у, z — величины, измеряемые непосредственно. В теории
случайных погрешностей доказывается, что средняя квад-
ратичная погрешность ряда косвенных изме-
рений равна
где ах, ву, вх — соответствующие средние квадратичные погреш-
ности ряда прямых измерений величин х, у и z. Аналогичные
$ 3. Случайные погрешности
53
формулы могут быть написаны и для вероятной или предельной
погрешности ряда косвенных измерений. Эти формулы называют
законом сложения средних погрешностей.
Часто вместо абсолютной погрешности, выраженной в еди-
ницах измеряемой величины, пользуются относительной
погрешностью, выраженной в долях значения измеряемой
величины. Относительные погрешности, являющиеся отвлечен-
ными числами, мы будем обозначать теми же буквами, что и
абсолютные, но с индексом 0 внизу:
°И0=-у ; % = И Т. Д.
Закон сложения средних погрешностей в случае применения
относительных погрешностей можно написать в следующем
виде:
-^ = VuyM+uyv()+u^0, (3.13)
где
х ди v ди z dz
Ur-------, = -----, ----
и дх у и ду ' и ди
(в дальнейшем величины этого вида будем называть показа-
телями). Выражения вида uxgxq называются частными
погрешностями косвенного измерения.
Для часто встречающейся на практике степенной зависи-
мости измеряемой величины от нескольких аргументов вида
u = kxaybzc, (3.14)
получаем
а«о — сМо *
(3. 15)
Применим формулу (3. 15) для определения средней квадра-
тичной погрешности измерения истинной скорости, определяемой
при летных испытаниях по формуле вида (3. 14)
Пусть средние квадратичные относительные погрешности из-
мерений Vi, р и Т равны соответственно 0,5%; 0,1%; 0,3%. По.
формуле (3.15) получим
0,52+-Г-0,1Ч -Г-0,32 «0,524%.
54
Глава III. Погрешности измерений при летных испытаниях
Этот пример показывает, что если одна из частных погрешно-
стей косвенного измерения значительно превышает остальные,
то' результирующая точность близка к этой частной погрешности.
Поэтому для повышения точности особое внимание сле-
дует уделять уменьшению погрешности того
измерения, которое обладает наибольшей ча-
стной погрешностью. Так, в приведенном примере для
повышения точности измерения истинной скорости следует су-
щественно повысить точность измерения индикаторной скорости,
повышение же точности измерения давления или температуры
мало скажется на точности результата.
Если точность определения величины и обусловлена несколь-
кими не зависимыми друг от друга источниками случайных по-
грешностей, причем известны соответствующие этим источникам
средние погрешности о2, о3, то средняя погрешность вели-
чины и определяется по квадратичному закону
Оа=]/^ + 32 + °з + --- (3.16)
Так, например, точность измерения давления воздуха в полете
обусловлена точностью барографа (ai), точностью поправки на
искажение статического давления в месте установки приемника
давления на самолете ( о2), точностью поправки на запаздывание
показаний самописца (<з3) и т. п. Учитывая, что перечисленные
источники погрешностей не зависят друг от друга, точность из-
мерения давления воздуха можно оценить по формуле (3. 16).
§ 4. ОЦЕНКА ТОЧНОСТИ ЭКСПЕРИМЕНТА И СПОСОБЫ ЕЕ
ПОВЫШЕНИЯ
Воспользуемся теперь основными положениями теории слу-
чайных погрешностей для оценки точности эксперимента при лет-
ных испытаниях.
В случае большого количества повторных измерений рекомен-
дуется построить кривую вероятности для данного экс-
перимента следующим образом. Вычисляем среднее арифмети-
ческое по формуле (3. 2):
и находим остаточные погрешности
После этого, выбрав достаточно малый интервал №, разбиваем
все остаточные погрешности Vi на группы погрешностей, величи-
ны которых заключаются последовательно в интервалах: от —’A v
до + Д0, от Ди ДО' ЗДу, от ЗАv ло 5Ду и т. д., от —W до
§ 4. Оценка точности эксперимента и способы ее повышения
55
—ЗДу и т. д., т. е. от (2k—1)Д<7 до (2&+1) Ду, где й = 0,+1,
+2, +3 и т. д. Для каждого из этих интервалов вычисляем от-
носительное число погрешностей Д/г, равное отношению числа
погрешностей Ди, расположенных в данном интервале, к общему
числу измерений п. После этого строим кривую распределения
погрешностей, откладывая по оси абсцисс абсциссы середин ин-
тервалов (2k • Ду), т. е. у = 0, 2Ду, 4Ди, 6Ду, ... —2Ду,—4Ду
и т. д., а по оси ординат — значения относительных чисел
погрешностей для каждого интервала, деленных на 2Ду, т. е
приближенное значение частоты появления погрешности у = —-
(фиг. 3. 2).
Сравнение полученной кривой с нормальными кривыми веро-
ятности (см. фиг. 3.1) может показать, в какой мере до-
пустимо считать ошибки при
данном эксперименте случай-
н ы м и. Если, например, кривая н ес и м-
метрична относительно оси ординат
(как на фиг. 3. 2), то это свидетельствует
о наличии систематических по-
грешностей. Если полученная кривая под-
чиняется закону нормального распределе-
ния, то по формулам (3.4) и (3.7) мож-
но подсчитать средние квадратичные по-
грешности как процесса измерений, так и
результата измерений.
Случайные погрешности при летных
, -
У " 2ду
Фиг. 3. 2. Кривая вероят-
ности, полученная при
фактических измерениях.
испытаниях в основном связаны с точ-
ностью приборов и измерительной аппаратуры, включая
точность их тарировки, а также с точностью отсчета
показаний или расшифровки лент самописцев и другими личными
погрешностями экспериментаторов, выражающимися, например,
в неточном выдерживании заданного режима полета (колебания
скорости или высоты при выполнении горизонтальной площадки,
случайные отклонения от наивыгоднейшей скорости при наборе
высоты и т. п.).
Улучшение точности результата при летных испытаниях мо-
жет быть достигнуто путем многократного повторе-
н и я одного и того же эксперимента. Однако, учитывая затрату
труда, средств и времени, редко идут дальше двух-трехкратного
проведения эксперимента. Это оправдывается также тем обстоя-
тельством, что при летных испытаниях трудно обеспечить посто-
янство условий эксперимента, необходимое для уменьшения
влияния случайных погрешностей на точность результата. Кроме
того, при большом числе повторных экспериментов возможно по-
явление переменных систематических погрешностей, которые не
всегда поддаются учету. При этих условиях многие погрешности,
как уже указывалось, нельзя считать случайными, а приходится
56
Глава III. Погрешности измерений при летных испытаниях
рассматривать их как систематические и вводить соответствую-
щие поправки в результаты измерений. Далее, применять оценку
точности по формулам теории случайных погрешностей можно
лишь в том случае, если исключены систематические погреш-
ности. Если это условие не выполнено, то может быть получена
чересчур оптимистическая оценка точности испытаний.
Поэтому обычным способом исключения влияния случайных
погрешностей на точность результата при летных испытаниях
является определение интересующей нас характеристики п о
кривой, представляющей зависимость этой характеристики от
какого-либо параметра. Например, пусть по заданию необходи-
мо определить максимальную горизонтальную скорость на ка-
кой-либо определенной высоте при работе двигателя на номи-
нальном режиме. Вместо того, чтобы в строгом соответствии с
целью испытаний производить несколько раз измерение скорости
на заданной высоте, поступают следующим образом. Определе-
ние максимальной горизонтальной скорости при работе двига-
теля на номинальном режиме производят на нескольких высотах
выше и ниже заданной высоты. Построив затем по результатам
этого эксперимента кривую VmaX=f(//), находят по ней скорость
для заданной высоты. Вместо высоты можно варьировать другой
параметр, например, обороты, т. е. замерить на одной и той же
высоте скорость при разных числах оборота ниже и (если мож-
но) выше номинальных и получить кривую V=f(n).
Такой метод проведения эксперимента, применяемый для
уменьшения влияния случайных погрешностей на точность ре-
зультата, обладает рядом достоинств по сравнению с простым
повторением эксперимента. В частности, при одинаковом числе
экспериментальных точек получают более полную картину из-
менения интересующей нас характеристики, чем при простом
повторении задания. О точности эксперимента судят по разбро-
су точек относительно проведенной через них плавной кривой.
Строго говоря, к разбросу точек относительно кривой нельзя
применять формулы теории случайных погрешностей, так как в
этом случае понятие среднего арифметического теряет смысл и
производится подмена остаточной погрешности отклонением экс-
периментальной точки от кривой, которую нельзя рассматривать
как среднее арифметическое.
Судить о точности результата по разбросу точек относительно
кривой можно, собственно, только качественно. Однако на прак-
тике все же часто делают в этом случае условные количествен-
ные заключения и оценку точности, пользуясь формулами тео-
рии случайных погрешностей.
Вообще качественная, а тем более количественная оценка
точности по разбросу точек возможна лишь в том случае, когда
нам заранее известен хотя бы ориентировочно харак-
тер протекания кривой. Например, как будет показано
в гл. XI (см. фиг. 11.23), кривая зависимости максимальной вер-
§ 4. Оценка точности эксперимента и способы, ее повышения
57
тикальной скорости 1Л/тах от высоты для самолетов с ТРД со-
стоит из двух участков и имеет излом на границе стратосферы
(при //=11 кж). Если, не зная этого, мы по экспериментальным
точкам проведем плавную кривую (пунктирная кривая на
фиг. 3.3) вместо кривой с изломом, отображающей истинный
характер протекания ее (сплошная кривая), то мы составим себе
ложное впечатление о точности
эксперимента по' разбросу точек
относительно проведенной нами
неверной кривой.
Приведенными ранее формула-
ми теории случайных погрешно-
стей, в частности, формулами
(3. 7) и (3. 8) для средней квадра-
тичной и для вероятной погреш-
ности результата, можно пользо-
ваться для оценки точности ре-
зультата измерений в том случае,
когда одна и та же величина
одновременно измеряется при по-
мощи нескольких прибо-
ров, имеющих одинако-
вую среднюю квадратич-
ную или вероятную по-
грешности. Так, измеряя при
летных испытаниях какую-либо
Фиг. 3.3. Правильное и непра-
вильное. проведение кривой по
экспериментальным точкам.
величину при помощи п одинако-
вых приборов, для которых средняя квадратичная погрешность
равна а, мы получим среднюю квадратичную погрешность ре-
зультата
S
V п *
Из приведенной формулы следует, что целесообразно при
испытаниях применять дублирование приборов. Однако при-
менение приборов повышенной точности бо-
лее эффективно, чем использование большого
количества грубых приборов. Действительно, произ-
водя измерения при помощи одного прибора с повышенной в 2
или 3 раза точностью, мы получаем такой же эффект в отноше-
нии точности результата измерений, как и при применении со-
ответственно четырех или девяти приборов обычной точности.
Поэтому следует стремиться к повышению качества приборов, а
не к применению большого количества грубых приборов.
Заканчивая на этом рассмотрение вопроса о случайных по-
грешностях при летных испытаниях, подчеркнем еще раз, что, как
правило, в большинстве случаев основную роль играют система-
тические погрешности, которым нужно уделять исключительно
58
Глава III. Погрешности измерений при летных испытаниях
большое внимание; даже при почти полном устранении случай-
ных погрешностей может быть получен неправильный результат
из-за систематических погрешностей. Вследствие этого нецелесо-
образно чересчур увлекаться повторными экспериментами. Это
положение хорошо сформулировал проф. М. Ф. Маликов:
«Если измерения были выполнены небрежно, т. е. надлежа-
щие условия наблюдений пренебрегались, измерительная аппа-
ратура была плохого качества и наблюдатель допускал произ-
вольные действия в отношении порядка наблюдений, получения
отсчетов и округления результатов, то повторение наблюдений
едва ли внесет какое-либо улучшение в арифметическое среднее,
во' всяком случае последнее окажется менее надежным, чем в
случае двух или трех тщательно произведенных наблюдений.
Многократные измерения имеет смысл производить только
тогда, когда измерения хорошо поставлены, предусмотрено воз-
можно полное исключение систематических погрешностей и на-
блюдения производятся со всей возможной тщательностью. Во
многих случаях для повышения точности выгодней изменить
условия измерений, взяв более точную и надежную измеритель-
ную аппаратуру и применив более чувствительный метод изме-
рения» 1.
§ 5. ТОЧНОСТЬ РАЗНЫХ ВИДОВ ЛЕТНЫХ ИСПЫТАНИЙ
Как уже указывалось в § 4, при определении основных лет-
ных характеристик самолета, как правило, ограничиваются не-
большим количеством повторных полетов и повторных измере-
ний. Вследствие этого оценить точность полученных результатов
на основе анализа материалов данного конкретного испытания
обычно не представляется возможным.
Если определение основных летных характеристик самолета
производится при помощи одних и тех же установившихся мето-
дов и при помощи комплекта одинаковых стандартных приборов,
то можно считать, что при тщательном проведении испытаний
точность испытаний одного и того же типа, проводимых в разных
организациях на разных самолетах, будет примерно одинакова.
Для оценки точности разных стандартных видов летных
испытаний в крупных летно-испытательных и летно-исследова-
тельских организациях время от времени проводят специальные
испытания. Подобного же вида специальные испытания для оцен-
ки точности необходимо производить при коренном изменении
или внедрении новых методов испытаний или новой аппаратуры.
Получив на основе анализа материалов таких специальных
испытаний оценку точности испытаний данного вида, в дальней-
шем ее используют для оценки точности результата тех или
иных конкретных испытаний.
1 Проф. М. Ф. Маликов, Основы метрологии, ч. 1, М, 1949.
$ 5. Точность разных видов летных испытаний
59
На практике используют обычно один из двух способов
определения точности испытаний данного вида. Первый из этих
способов заключается в том, что многократноповторяют
испытания данного вида и определяют точность их по ана-
лизу и сходимости конечных результатов. По> второму способу
выделяют основные возможные источники погреш-
ностей, тем или иным методом оценивают средние погреш-
ности, вызываемые каждым источником, а затем по приведенным
в § 4 формулам определяют средние ошибки всего испытания.
В виде примера рассмотрим оценку точности тарировки ука-
зателя скорости в полете.
В главе V показано, что тарировка приемника давления в по-
лете заключается в определении так называемой аэродинамиче-
ской поправки в зависимости от скорости по прибору УПР,
причем в случае полета вблизи земли bVa — V]/' А—VnP, где V —
истинная скорость, а А = 0,379 -у—относительная плотность воз-
духа. Один из методов тарировки состоит в том, что самолет
при одной и той же скорости по прибору УПР пролетает на малой
высоте вдоль прямолинейной базы длиной в несколько километ-
ров в двух противоположных направлениях; измеряя при помощи
секундомеров время пролета базы в каждом направлении, опре-
деляют истинную скорость самолета V, а при помощи установ-
ленных на самолете приборов (или по данным метеостанции)
определяют давление воздуха р и температуру Т, а также ско-
рость по прибору УПР. Проделав такие измерения для ряда зна-
чений 7ПР, получают для каждого' из них соответствующее значе-
ние аэродинамической поправки после чею по полученным
точкам строят график Wa=f (УПР).
Оценка точности тарировки указателя скорости может быть
проведена двумя способами. При первом способе производится
многократное повторение тарировочных полетов, в результате
чего кривая 814 в зависимости от 7ПР проводится не по 5—6 точ-
кам (как это принято при нормальных испытаниях), а по не-
скольким десяткам точек. Рассматривая проведенную по боль-
шому числу точек кривую, как условное «среднее арифметиче-
ское», находят среднюю квадратичную или вероятную погреш-
ность для нескольких диапазонов 7ПР. При втором способе оценки
точности необходимо прежде всего установить возможные источ-
ники погрешностей. Для нашего примера такими источниками
являются:
1) неточное измерение VnP при помощи указателя скорости
или спидографа;
2) неточное измерение времени пролета базы;
3) неточное измерение давления воздуха р;
4) неточное измерение температуры воздуха Г;
5) неправильное ведение самолета по базе;
60
Глава III. Погрешности измерений при летных испытаниях
6) погрешности, связанные с порывами ветра и с изменением
его скорости во время пролета самолетом базы;
7) погрешности, связанные с неточностью подсчетов, осеред-
нением записи приборов и т. п.
Оценив на основе лабораторных испытаний приборов и спе-
циальных опытов погрешности, вызываемые каждым источни-
ком, по формулам § 3 находим средние погрешности для разных
значений 7ПР.
Таким образом при первом способе оценка точности произ-
водится по анализу конечных результатов, а при втором спосо-
бе—по анализу точности всех промежуточных измерений и эле-
ментарных операций, на которые можно разбить данное испыта-
ние. Первый способ приводит к более надежным результатам,
однако- применение его- связано с большим количествохм летных
экспериментов и с большими затратами. Вследствие этого чаще
применяют второй способ или комбинируют оба способа, про-
изводя основную оценку точности по второму способу и приме-
няя первый способ лишь для приближенной проверки получен-
ной оценки.
Точность летных испытаний в основном определяется точ-
ностью примененных измерительных приборов.
Точность измерительного прибора характери-
зует степень достоверности результата единичного измерения,
произведенного при помощи этого- прибора в нормальных усло-
виях его работы, при условии внесения в результат измерения
необходимых поправок. Обычно для характеристики точности
прибора указывается относительная погрешность,
выраженная в долях или процентах верхнего
предела или диапазона величины, измеряемой при
помощи данного прибора. Так, если указано, что предельная по-
грешность указателя скорости равна 0,5'%, а прибор рассчитан
для измерения скорости до 1000 км/час, то абсолютная предель-
ная погрешность равна 5 км/час, а относительная предельная по-
грешность будет различной в зависимости от величины измеряе-
мой скорости (Г% при 7=500 км/час, 2% при 7=250 км/час
и т. д.)* Во всех случаях, когда из формуляра прибора или из
его описания берутся данные о точности, нужно разобраться и
точно выяснить, какой параметр точности был применен — пре-
дельная, средняя квадратичная или вероятная погрешности.
Для определения точности измерительного прибора произво-
дится многократная тарировка его в лабораторных условиях.
Проведя через все полученные точки среднюю тарировочную
кривую и рассматривая отклонения отдельных точек от нее как
остаточные погрешности, определяют по- приведенным в § 3 фор-
мулам средние погрешности для нескольких диапазонов
значений измеряемой величины. В табл. 3 приведены при-
мерные величины предельных погрешностей стандартных прибо-
ров, применяемых при летных испытаниях. В оценку точности
§ 5. Точность разных видов летных испытаний
61
каждого прибора включена оценка точности его единичной та-
рировки.
Таблица 3
Точность приборов, обычно применяемых при летных испытаниях
Наименование прибора Диапазон работы Предельная погреш- ность
Барограф До 15 000 м 1.5-2 мм рт. ст.
Спидограф До 1000 км1ч ас 5—10 км/час
Высотомер До 12 000—15 000 м 2 мм рт. ст.
Указатель скорости До Ю00 км!час 5—10 км/час
Жирограф До 0,2 рад/сек. До 3,0 рад/сек. 2—3% от макс, пока- зания То же
Акселерограф От 1g- до —7g 0 до ±lg* (0,06-0,10) g (0,01 '0,02)g-
Тахограф От 500 до 4000 об/мин 1% от макс, показания
Динамометрическая ручка + 10 кг + 20 кг ± 40 кг 1 —1,5% от макс, пока- зания То же
Динамометрическая педаль До 90 кг 1 — 1,5% от макс, пока- зания
Инклинограф ± 25е 20'—30'
Приведенные в табл. 3 предельные погрешности характери-
зуют точность приборов для нормальных условий их работы и при
условии внесения в результат измерения необходимых поправок
(на температуру, влажность воздуха, перегрузку и т. п.). Если
эти поправки не вносятся при обработке результатов испытаний,
то точность приборов, естественно, будет ниже. На практике при
стандартных испытаниях указанные поправки обычно не вносят-
ся, так как в современных приборах предусмотрена температур-
ная компенсация и производится тщательная динамическая ба-
лансировка отдельных элементов прибора. Однако в особо ответ-
ственных испытаниях принято вносить все необходимые поправки.
При оценке точности эксперимента необходимо учитывать
точность обработки, зависящую от точности подсчетов,
точности используемых номограмм или вспомогательных таблиц,
точности осреднения записей приборов, точности графического
дифференцирования и т. п.
В табл. 4 приведены средние данные, весьма ориентировочно
характеризующие точность отдельных видов летных испытаний.
62
Глава III. Погрешности измерений при летных испытаниях
Таблица 4
Примерная точность отдельных видов летных испытаний
(при методически правильном их проведении)
Измеряемая величина Средняя квадратич- ная погреш- ность Примечание
Барометрическая высота 10-15 м Для Н=0
полета 60 — 90 м Для /7=15 000 м
Фактическая скорость по- 0,5% Для ]/Ист=500 км/час, Н~0
лета (истинная) 0,9% Для Иист=500 км/час, 77=10 000 м
0,350/0 Для ИИСт=1000 км/час, /7=0
0,5% Для Уист= 1000 км/час, 10000 м
Температура воздуха г с
Плотность воздуха 0,35% Для Н=0
0,6% Для 77=10 000 м
Число М 0,6% Для М=0,5, /У=0
1°/о Для М=0,5, 77=10000 м
0,4% Для М = 1, /7 = 0
0,60/0 Для М = 1, 77=10 000 м
Максимальная горизон- 1% При определении скорости по
тальная скорость само- кривой Итах=/(Я), проведен-
лета на заданной вы- ной по точкам, полученным из
соте трех полетов
Максимальная вертикаль- 4% При определении вертикальной
ная скорость самолета скорости по кривой Vу тах=
у земли = f(H), проведенной по точ-
Потолок самолета 200 м кам, полученным из двух по- летов То же
Длина разбега (пробега) 3-5% При определении длины разбега
Длина взлетной (посадоч- 3-5% (пробега) как средней из пяти взлетов (посадок)
ной) дистанции Техническая дальность 3-5%
полета
£ 5. Точность разных видов летных испытаний
63
В заключение необходимо отметить, что в технических отче-
тах по летным испытаниям часто для характеристики точности
испытаний на графиках изображают так называемую «дорож-
ку» погрешностей. Пусть, например, целью летных испытаний
является получение зависимости максимальной горизонтальной
скорости самолета от высоты полета. Определив для ряда высот
значения максимальной скорости и нанеся полученные точки на
график, проводим через эти точки кривую VmaX=f(/7) (фиг. 3.4).
Пусть точность определения Vmax на заданной высоте характери-
зуется средней квадратичной погрешностью <sFmax, величина ко-
торой может быть различной для разных высот Н. Тогда, отло-
жив для ряда значений Н величину о Fmax по обе стороны от
кривой Vmax=f (//) и соединив полученные точки кривыми, полу-
чим «дорожку», ширина которой при ординате Н характеризует
точность определения величины УтаХ на заданной высоте Н. Если
от кривой Vmax откладывать предельную погрешность 3lim F max
(а не среднюю квадратичную), то получим «дорожку», относи-
тельно которой с вероятностью, близкой к достоверности, можно
утверждать, что истинная кривая l/maX=f(^) лежит внутри рас-
сматриваемой дорожки.
Глава IV
ТЕОРИЯ ПРИБОРОВ, ИЗМЕРЯЮЩИХ СКОРОСТЬ
И ВЫСОТУ ПОЛЕТА
При современном состоянии измерительной техники методы
определения скорости и высоты полета и параметров состояния
воздуха тесно связаны между собой. В частности, скорость и
давление воздуха воспринимаются одним и тем же измеритель-
ным приемником давления. Из трех основных парамет-
ров воздуха — давления р, плотности р и температуры Т — мож-
но измерить два любых, так как третий параметр можно подсчи-
тать по уравнению состояния (1.1) или (1. 1')
p = RTg?=RT'[.
Измерять непосредственно' плотность воздуха очень затруд-
нительно. Поэтому обычно в полете измеряют давление и темпе-
ратуру. Методика измерения температуры будет изложена
в гл. V.
Шкалы приборов, регистрирующих давление, градуиру-
ются пю высоте, причем каждому значению давления со-
ответствует высота, которая при этом давлении получается в
условиях СА. Поэтому такие приборы называются высото-
мерами. Следует твердо помнить во- избежание путаницы, что
эти приборы в действительности измеряют не высоту, а
давление.
Существуют приборы, измеряющие истинную (геометриче-
скую) высоту самолета над землей и основанные на принципе
отражения акустических или электромагнитных волн от поверх-
ности земли и измерении времени возврата импульсов, переда-
ваемых с самолета. На их описании мы останавливаться не
будем.
§ 1. РАБОТА УКАЗАТЕЛЯ СКОРОСТИ И ВЫСОТЫ
В НЕСЖИМАЕМОЙ ЖИДКОСТИ
На фиг. 4. 1 изображена обычная схема указателя скорости.
Приемник состоит из двух камер: статической камеры Е
и так называемой динамической камеры (точнее — камеры
полного напора или полного давления) F. Давле-
§ 1. Работа указателя скорости и высоты
65
ние в статической камере передается по трубопроводу в стати-
ческую полость В указателя скорости и полость D высотомера.
Полное давление рн$ передается в динамическую полость А ука-
зателя скорости. Обе камеры указателя скорости А и В разделе-
ны гибкой диафрагмой (мембраной), которая может прогибаться
под действием разности давлений. Прогиб мембраны при помощи
специального механизма передается на стрелку, которая дает от-
счет по шкале прибора в случае визуального указателя скорости
или пишет на ленте в случае самописца скорости (спидографа).
^попн(Рио) Приемник у Осты (/к)
У
Отверстия статичесХ
ной намерь/
вакуум
Фиг. 4. 1. Схема работы указателя
скорости и высотомера.
Из второй полости С высотомера воздух выкачан; она отде-
лена от полости D диафрагмой, которая может прогибаться под
действием разности давлений; этот прогиб преобразуется в
отклонение стрелки высотомера или самописца высоты (баро-
графа).
Схема высотомера не нуждается в особом пояснении. Для
того чтобы разобраться в схеме указателя скорости и принципе
его действия и отвлечься от второстепенных факторов и попра-
вок, рассмотрим сначала работу условного, идеального указате-
ля скорости. Идеальным будем называть указатель ско-
рости, который:
1) имеет идеально точный механизм, не дающий инстру-
ментальных поправок;
2) получает полное и статическое давление от идеального
приемника, измеряющего эти давления без искажений, вызывае-
мых особенностями обтекания самого приемника и влиянием воз-
мущенного поля давлений вблизи самолета в месте расположе-
ния приемника.
Предположим сначала, что весь прибор предназначен для из-
мерения скорости при стационарном движении самолета в не-
сжимаемой жидкости. Пусть при этом приемник движется па-
5 772
66
Глава IV. Теория приборов, измеряющих скорость и высоту
раллельно собственной оси и самолет, как было условлено выше,
не оказывает на поток воздуха никакого влияния. Обратим дви-
жение и будем считать, что приемник неподвижен, а воздух обте-
кает его, причем скорость воздуха далеко перед приемником
равна скорости самолета V. Напишем уравнение Бернулли для
несжимаемой жидкости:
У? V2
А + Ру + ? —=/^0 = const, (4.1)
где pi и Vi—давление и скорость в относительном потоке в ка-
кой-нибудь точке вблизи приемника;
рни V—давление и скорость потока далеко, перед само-
летом, т. е. атмосферное (статическое) давление
окружающего воздуха и скорость полета.
При указанных выше предположениях можно считать, что
на боковой поверхности цилиндрического приемника, где распо-
ложены отверстия, ведущие в статическую камеру, скорость по-
тока Vi равна скорости самолета V и, следовательно, р^—рн^
Иначе говоря, давление в статической камере приемника и в
статической полости указателя скорости рст равно атмосферному
давлению рн.
С другой стороны, на входе в динамическую камеру прием-
ника, расположенном спереди, имеем критическую точку (Vi =
= 0) и, следовательно, давление р я0 в этой точке, в динамической
камере приемника и в динамической полости указателя скорости
(полное давление) определяется из уравнения
9нУ2
2
Ряо—Рн
Таким образом на диафрагму указателя скорости действует
перепад давлений, иначе называемый скоростным на-
пором:
Я=Рнь-Рн
(4-2)
Следовательно*, указатель скорости измеряет вообще не от-
носительную скорость самолета V (относительно воздуха), а ско
ростной напор q. Если бы плотность воздуха не изменялась, то
скоростной напор был бы однозначно связан со скоростью и
шкалу указателя можно было бы разметить по величине ско-
рости; фактически это и делается при разбивке шкалы указателя
скорости, причем за плотность ря принимают Ро =
1
8
кг • сек*/м\
т. е. плотность воздуха при нормальных условиях (р0 =
= 760тити рт. ст., Г= 15° С).
$ /. Работа указателя скорости и высоты
67
Таким образом мы приходим к следующему важному выводу:
о гд а
у к а-
с к о-
условиях, к
, идеальный
истинную
воздуха.
при полете в нормальных
плотность воздуха равна р0,
затель скорости показывает
о ость самолета относительно
Что же покажет такой прибор при полете в условиях, отлич-
ных от нормальных (р/у^ро)? Пусть при этих условиях прибор
показывает скорость Vi. Этой скорости согласно разбивке шкалы
РоП2
соответствует скоростной напор --; истинный скоростной на-
Рн^
пор равен —— ; приравнивая обе величины, получим
_ р0Г?
2 2 ’
откуда
У = 1Л1/— = -£т, (4.3)
где согласно формуле (1.4)
А =0,379—.
Г
Следовательно, в этих условиях в показания даже идеального
прибора следует вносить поправку на изменение плотности и
скорость вычислять по- формуле (4.3).
Величину Vi=VYт. е. величину скорости, которую пока-
жет идеальный указатель скорости при полете со скоростью V
при относительной плотности А, называют индикаторной
скоростью. Она играет очень важную роль не только как
величина, определяющая истинную скорость, но еще и потому,
что в горизонтальном установившемся полете самолета она при
заданном весе полностью определяет его коэффициент подъемной
силы. В самом деле, из равенства
G = —cvS?V2,
2 У г
справедливого для горизонтального полета, легко- получить ра-
венство
G = ~cyS?0V2,
из которого видно-, что при заданном весе коэффициент су одно-
значно связан с индикаторной скоростью. Вследствие этого лет-
чик «ощущает» в полете не истинную, а индикаторную скорость,
так как именно она в основном определяет режим полета (только
на большой скорости, когда начинает проявляться влияние сжи-
маемости, близко к кризисным режимам начинает играть роль
второй фактор — число М полета).
5*
68
Глава IV. Теория приборов, измеряющих скорость и высоту
§ 2. РАБОТА УКАЗАТЕЛЯ СКОРОСТИ В СЖИМАЕМОМ ГАЗЕ
Посмотрим теперь, что будет показывать идеальный указа-
тель скорости при движении в сжимаемой жидкости (воздухе).
Выведем прежде всего формулу для давления в критиче-
ской точке (полного давления), которой мы часто будем
пользоваться в дальнейшем. Рассмотрим сначала случай дозву-
ковой скорости (М<1).
Вместо уравнения Бернулли для воздуха возьмем уравнение
теплосодержания
И I/2
+ Л —= const. (4.4)
В критической точке, где Vi = 0, имеем
7'=7’ =7'+_2L
яо йт
С другой стороны, при адиабатическом торможении
k
Рнъ __ /Рно \k 1
Рн \ Ph /
где pHQ—давление в критической точке (полное давление);
отсюда
k
Добавляя известное уравнение термодинамики
АП £ ~ 1
AR — Ср >
к
и учитывая уравнение (1.1), получим
k
г 1 V2 I*"1 Г. , k -1
Рнь—Рп -----------------~~ Р п 14--------
гло гн “г kgRTH J 2
ряУ* Г-1
kps .
(4.5)
Таким образом «а диафрагму указателя скорости действует
перепад давлений (скоростной напор) *
7сж — Рнъ Рн — Рн
1 I*-1
2 kpH /
(4-6)
1 Обычно под скоростным напором понимают величину —» как
и для несжимаемой жидкости. В отличие от этого понятия мы величину
Phq—Vh обозначаем знаком </сж (скоростной напор с учетом сжимаемо-
сти воздуха).
§ 2. Работа указателя скорости в сжимаемом газе
69
для воздуха (&=1,4), следовательно,
<7сж=Ря[(1 +^Г~)3’5-1]- (4-6')
L\ 1Рн / J
При нормальных условиях (ро = 76О мм рт. ст., /0=15°С)
п -пГ/1 РоИ3’5 11 -
?сж ^о[(1'Г7Го) *]-
= 760 [(1 4-0,13334-10-6 У2)3-5 — 1] мм рт. ст., (4.7)
где V — в км/час.
Шкалы указателей скорости для дозвуковых Скоростей
(V< 1224,72 км/час) размечаются именно по формуле (4. 7) —
см. табл. 5.
Таблица 5
Таблица для тарировки указателя скорости и спидографа
ПриМ = -^<1 <7сж = 760 [1 +0,13334- 10“6 И2]3,5 - 1
при М = — > 1
7сж ~~ 760
0,8584 • 10~6 IZ7
(V2 — 214277)2,5
1
а — 340,2 м^сек = 1224,72 км[час;
Pq — 760 мм рт. ст. = 10332,3 мм вод. ст.
V км/час । 1 7сж ММ ВОД. СТ. ( V км!час 7сж ММ вод. ст. 7сж мм рт.ст. V км/час 7сж мм рт. ст.
50 12,1 650 2184 160,7 1250 713,4
100 48,3 700 2561 188,4 1300 787,2
150 108,9 750 2976 218,9 1400 947,2
200 194,1 800 3429 252,2 1500 1125,4
250 304,6 850 3923 288,6 1600 1317,6
300 440,5 900 4461 328,1 1700 1525,5
350 602,5 950 5045 371,1 1800 1748,8
400 792,0 1000 5680 417,8 — —
450 1009,5 1050 — 468,3 — —
500 1256 1100 — 522,8 — —
550 1533 1150 581,5 — —
600 1842 1200 — 645,3 — —
70
Глава IV. Теория приборов, измеряющих скорость и высоту
Поэтому, как и в случае несжимаемой жидкости, при полете
в нормальных условиях идеальный указатель скорости покажет
истинную скорость полета.
Посмотрим теперь, что будет измерять указатель скорости
при полете в условиях, отличных от нормальных, в сжимаемом
воздухе. Обозначим показания идеального прибора символом
Vi3 и будем называть эту величину земной индикаторной
скоростью. Так как тарировка производится по формуле
(4.7), то и перепад давлений будет равен перепаду, вычисляе-
мому по этой формуле. С другой стороны, этот перепад равен
величине, получаемой по формуле (4.6). Приравнивая обе ве-
личины, получим уравнение для определения скорости V:
/г
kpo
(4.8)
Подставляя вместо V величину Vi 1/ — и проводя элемен-
V ?н
тарные преобразования, получим формулу для подсчета инди-
каторной скорости _
V,. = l/ 2kpH- X
V (k - 1) Ро
k
Для несжимаемой жидкости (при /г~>оо и------>1) мы по-
k— 1
лучим из этой формулы предельным переходом Vr=Vi3. С дру-
гой стороны, при рн=^Ро формула (4.9) также дает V^Vi3.
Таким образом при полете на уровне моря по высо-
томеру (т. е. при рн=ро = 7бО мм рт. ст.) идеальный
указатель скорости дает всегда индикатор-
ную скорость независимо' от величины темпе-
ратуры.
При давлении рн Ро индикаторная скорость Vi согласно
формуле (4. 9) отличается от Vi3, причем она зависит от рн, т. е.
от барометрической высоты. Разность
^сж = ^г-^з (4.10)
называется поправкой на сжимаемость.
Заметим, что' традиционный термин «поправка на сжимае-
мость» не совсем точен Фактически наибольшая доля поправки
§ 2. Работа указателя скорости в сжимаемом газе
71
на сжимаемость учитывается уже при калибровке и тарировке
указателей скорости по> формуле (4.7); величина же 31/сж пред-
ставляет не всю поправку на сжимаемость, а только разность
этих поправок при поле
скорости Vi3 на высоте и
До сих пор мы излагали
теорию идеального^ указате-
ля скорости при полете на
дозвуковых скоростях. При
полете на сверхзвуковой ско-
рости резко меняется вся
картина обтекания приемни-
ка давления. В этом случае
перед приемником образует-
ся ударная волна или
скачок уплотнения
(фиг. 4.2). В этой волне
скачком меняются как пол-
ное, так и статическое дав-
те на одной и той же
на уровне моря.
Фиг. 4. 2. Скачок уплотнения перед при-
емником давления при сверхзвуковой
скорости.
ление. После ударной волны
скорость становится дозвуковой, происходит уплотнение воздуха.
Обозначим полное давление за ударной волной, которую бу-
дем считать прямым скачком, через р2о, а статическое давле-
ние •— р2. Учитывая следующее соотношение между числом М
и скоростью [см. формулы (1.7) и (4.3)]
...
М2 = — =----------=--------,
a2 kpff kpff
можем полное давление подсчитать по формуле Релея:
р2 о k 4- Рн 2 _£ + 1 Рои; 2 kpB 1*+^М2 4kw-2(k— i; Г -Ро^ 1 (*+')2'СГ kPH -p—i 1. i fe-i
PoH 4 2(£- 1) Ph j
(4.11)
Следовательно, разность давлений 7СЖ, действующая на мем-
брану идеального указателя скорости^ вычисляется по, формуле
?сж — Рн
fe+l PoV- Г роИ (* + 1)г kpB 1 1 k—i — 1
2 kpH РоИ 4 — 2 (# — 1)
4 Ph j )
(4.12)
72 Глава IV. Теория приборов, измеряющих скорость и высоту
При полете на уровне моря (рл = р0) будем иметь
9сж Ро 1 fe-И Poyl 2 Ьрй 1 Г . РоИ *+1)‘ ь kpp РоИ? 4 -2(k - 1) Ро 1 k-i -1 =
7~ПГ 0,8584-10“61/7 1
= 760 ----------------------- 1 мм рт. ст., (4.13)
(Vs - 214277)2’5
где V — в км/час.
По этой формуле градуируются шкалы указателей скорости
при сверхзвуковой скорости (М^1) и производится их тариров-
ка (табл. 5). Поэтому при рн=Ро — 760 мм рт. ст. идеальный
указатель покажет индикаторную скорость, а при нормальных
условиях, т. е. при р = 760 мм рт. ст., и /= + 15° (Д = 1) —истин-
ную скорость.
Для того чтобы узнать, какова будет скорость при полете на
некоторой высоте (р^Ро), если указатель скорости показывает
величину Угз, мы должны сначала по формуле (4. 13) подсчитать
значение скоростного напора <?сж, а затем решить уравнение
(4. 12) относительно Vi. Иначе говоря, значение Vi следует
определить из уравнения
•' k 4-1 Ро V2
2 крн
ЬРн
РоИ
4-----2(6- 1)
Рн
= Ро
*+1 PoWe
2 kp0
Ро^/3
kpo
4—---- —
Ро
2(А — 1)
(4.14)
+ 1 )2
(*+1)’
И здесь удобнее вычислять сначала не скорость Vi, а по-
правку на сжимаемость 87сж = 1/г— Vi3.
Так как расчеты по формуле (4.9) при М<1 и решение
уравнения (4. 14) при М>1 весьма затруднительны, то обычно
заранее составляются номограммы, при помощи которых непо-
средственно определяется ЗУСЖ по известным величинам Vi3 и
Нр(рн)> Номограмма этого типа приведена на фиг. 4.3. По оси
абсцисс отложена земная индикаторная скорость Vi3, а по оси
ординат — поправки 8УСЖ. Параметром сетки кривых служит
барометрическая высота (по идеальному высотомеру).
£ 2 Работа указателя скорости в сжимаемом газе
73
Заметим, что поправка 8УСЖ всегда отрицательна при рн <СРо-
Иначе говоря, идеальный указатель скорости всегда показывает
не индикаторную, а несколько завышенную скорость. Этим объ-
ясняются частые недоразумения, когда летчик уверен, что' до-
стиг в полете большей скорости, чем это было в действительности.
Ниже будет показано, что число М есть также функция Vl3.
и высоты. Следовательно', на той же номограмме мы можем
нанести кривые M=const. Кривая М=1 разделяет область до-
Фиг. 4.3. Номограмма для определения поправки на сжимаемость.
Казалось бы, что вследствие наличия скачка статическое
давление около приемника сильно увеличивается по сравнению
с атмосферным. Однако статические отверстия на приемниках
располагаются на таком расстоянии от носка, что поток успевает
снова разогнаться и в статической полости насадка получается,
то же давление, что и до скачка. Таким образом ни в дозвуко
вой, ни в сверхзвуковой областях нет необходимости вводить по-
правку на сжимаемость для статического давления,— поправка
относится только к полному давлению (поэтому поправка, на
сжимаемость не относится к высотомеру).
74 Глава IV. Теория приборов, измеряющих скорость и высоту
Резюмируем этот параграф: если даже указатель
скорости и высотомер работают- идеально, то
и в этом случае необходимо, во-первых, вво-
дить поправку на сжимаемость, а затем вы-
числять истинную скорость относительно воз-
духа по формуле (4.3).
Фактически приборы работают не идеально и приходится
вводить еще ряд поправок, о которых будет речь итти ниже.
§ 3. ОПРЕДЕЛЕНИЕ ЧИСЛА М ПОЛЕТА
Число М полета можно определить двумя способами: пере-
счетом через измеренную скорость полета и непосредственно по
указателю числа М. В настоящее время первый способ является
более точным.
Число М выражается весьма просто через индикаторную
скорость. В самом деле, учитывая, как мы это делали выше, фор-
мулу (1.7), можем написать
а У kpH
а подставляя У=УЛ/ — ,—
V Рл
М = 1/ (4.15)
Г k у рн
Если выражено в км [час, а рн в мм рт. ст., то
Если мы Vi выразим через земную индикаторную скорость
Vi3 по формуле (4.9), то из формулы (4.15) получим зависи-
мость числа М от Vi3 и рц\
M=f(Vi3,PH), (4.16)
так как в правой части (4. 9) все остальные величины являются
постоянными.
Мы видим, что на заданной барометрической
высоте (т. е. при заданном давлении рн) число М
зависит только от индикаторной Vi или земной
индикаторной скорости Vi3 .
Это положение весьма полезно и удобно в методическом от-
ношении, так как дает возможность определить число М полета
только по показаниям указателя скорости (спидографа) и вы-
сотомера (барографа), между тем как для определения
истинной скорости нужно еще знать темпера-
туру воздуха.
Так как зависимость (4. 16) имеет сложный вид, то на прак-
тике для определения числа М пользуются номограммой типа,
изображенной на фиг. 4. 4.
§ 3. Определение числа М полета
76
Глава IV. Теория приборов, измеряющих скорость и высоту
В последнее время получили распространение приборы, не-
посредственно показывающие число М.
Число М зависит от отношения полного и статического
давления по уравнениям Бернулли (для дозвуковых скоростей) и
Релея (для сверхзвуковых скоростей):
k
Рно
Рн
М2
k-\
Рнъ
Рн
*+1
2
М2
(Н1)'М2 I*-1
_4ЛМ2-2(й- 1)
при М> 1.
k - 1
2
при М < 1;
Подставляя £=1,4, получим
— = (1+0,2 М2)3-5 приМ<1;
Рн
Рно
Рн
166,92 М?
(7 М2 — 1 )2’5
при М > 1.
(4.17)
Следовательно, связывая перемещение мембраны полного
напора с перемещением мембраны статического давления спе-
циальным делительным механизмом таким образом, чтобы в ре-
зультате получалось их отношение, получаем перемещение, за-
висящее от числа М и, следовательно, измеряющее число М.
Для градуировки или тарировки указателя числа М в лабо-
раторных условиях в динамическую камеру подается давление
или в статическую — разрежение; соответствующее число А1
определяется по формулам (4. 17) или по табл. 6.
Таблица 6
Таблица для тарировки указателя числа М
ПриМ^1 ^=(1 +0,2М2)3'5; при М > 1
м РН(У Рн М Рнь_ Рн М Рнь Р.Н
0 1,0000 0,70 1,3870 1,20 2,4075
0,1 1,0070 0,75 1,4524 1,25 2.5569
0,25 1,0444 0,80 1,5244 1,30 2,7130
0,30 1,0644 0,85 1,6038 1,35 2,8770
0,35 1,0884 0,90 1,6928 1,40 3,0480
0,40 1,1166 0,95 1,7874 1,45 3.2284
0,45 1,1491 1,90 1,8928 1,50 3,4130
0,50 1,1862 1,05 2,0079 — —
0,55 1,2288 1,10 2,1328 — .—
0,60 1,2755 1,15 2,2650 — —
§ 4. Приемники для измерения давления и скорости
77
Нужно отметить, что если при тарировке указателя скорости
нас интересует только перепад давлений в приборе, не завися-
щий от абсолютной величины подаваемого в динамический шту-
цер давления или в статический — разрежения, то при тарировке
указателя числа М для определения отношения давлений прак-
тически необходимо знать абсолютную величину на-
ружного (барометрического) давления, от которого по мано-
метрам отсчитываются давления р о и рн в отдельности.
С другой стороны, так как число М зависит непосредственно
« Рнъ
не от давления Рн, т. е. от высоты, а от отношения давлении— ,
Рн
то ясно, что в показания указателя числа М не нужно вводить
поправки на сжимаемость.
§ 4. ПРИЕМНИКИ ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И СКОРОСТИ.
ПОГРЕШНОСТИ ПРИЕМНИКОВ
Распределение давления по поверхности приемников и, в ча-
стности, около отверстий, воспринимающих полное и статическое
давление, определяется структурой потока, обтекающего прием-
ник; в свою очередь структура потока зависит от геометрических
-факторов (угла атаки приемника и формы и расположения от-
верстий) и от критериев подобия — числа Re и числа М потока.
Кроме того, большие искажения может внести влияние деталей
самолета, возмущающих поток, обтекающий приемник (см. § 5).
Так как числа Re для приемников при современных скоростях
полета достаточно велики, можно считать поток автомодельным
и пренебречь влиянием этого параметра. Зато влияние угла
атаки и числа М весьма значительно и может создать большие
погрешности. С этими погрешностями можно бороться двумя
путями: при помощи учета этих поправок при летных испыта-
ниях и при помощи создания таких приемников, у которых эти
погрешности сведены к минимуму.
Прежде всего выясним, каковы потребные диапазоны углов
атаки и чисел М для современных приемников. Углы атаки кры-
ла самолета в полете на нормальных режимах могут изменяться
в крайних пределах от —5° до 15° к Местный угол атаки у при-
емника, вынесенного впереди крыла вследствие влияния само-
лета на поток, можно грубо считать в 1,5 раза больше угла
атаки крыла (при больших углах атаки). Следовательно, хоро-
ший насадок не должен иметь погрешностей в пределах углов
атаки от—5° доч+20—25°.
Точность измерений зависит от того, насколько точно в дина-
мической и статической камерах приемника устанавливаются
полное давление и статическое атмосферное давление. Обратим-
ся сначала к приемнику полного давления.
1 При полете на очень малых скоростях (например, при сваливании
в штопор) углы атаки могут быть еще больше. Однако рассчитывать прием-
ник на этот случай нерационально.
78
Глава IV. Теория приборов, измеряющих скорость и высоту
0 10 20 30к°
На фиг. 4. 5 показан приемник со сферической головкой, при-
менявшийся обычно раньше на самолетах с умеренными скоро-
стями порядка У<700 км/час. На той же фигуре показаны ре-
зультаты испытаний этого насадка при малой скорости при
разных углах атаки приемника. Как видно, уже при углах атаки
порядка 5° приемник начинает воспринимать уменьшенное пол-
ное давление. Следовательно, полный диапазон углов атаки пра-
вильной работы такого' приемника не превышает 10° (от—5s
до +5Э), что совершенно недоста-
точно (при больших числах М этот
недостаток еще усугубляется).
Объясняется это тем, что при уве-
личении угла атаки критическая
точка потока, обтекающего прием-
ник, смещается по- его поверхности
вниз и попадает на твердую сфери-
ческую стенку, а в области отвер-
стия давление падает. На той же
фигуре показана форма приемни-
ка улучшенной формы с прямым
обрезом и результаты его продув-
ки. У этого приемника падение
полного давления начинается уже
при углах атаки порядка 12—14°.
Таким образом этот приемник
дает почти нужный диапазон
углов атаки. Однако1 этот диапа-
зон можно еще увеличить. При-
емник имеет слишком толстые
стенки, которые, естественно,
должны оказывать примерно' та-
полусферической головки. Экспе-
римент показывает, что действительно при уменьшении толщины
стенок рабочий диапазон углов еще расширяется и такие при-
емники с достаточной для практики точностью обеспечивают пра-
вильную регистрацию полного' давления для всех дозвуковых
скоростей и на всем летном диапазоне углов атаки. Нет особых
причин ожидать каких-нибудь ненормальностей и при сверхзву-
ковой скорости, когда впереди приемника садится скачок уплот-
нения и приемник в передней части работает в дозвуковом пото-
ке, причем величина воспринимаемого полного давления весьма
точно определяется формулой Релея (4. 11).
Обратимся теперь к статической камере. Очевидно, что рас-
положение боковых статических отверстий должно оказывать
большое влияние на точность замера давления. При увеличении
угла атаки на нижней поверхности образуется давление, на верх-
ней — разрежение. На боковых поверхностях также образуется
разрежение. Такой характер обтекания подтверждается экспе-
Фиг. 4.5. Ошибки динамиче-
ской камеры приемников раз-
ных типов в зависимости ст
угла атаки.
А)пр— полное давление, измерен-
ное приемником; р0—истин-
ное полное давление.
кое же влияние, как и стенки
§ 4. Приемники для измерения давления и скорости
79
риментальными данными. На фиг. 4.6 приведены результаты
продувок приемника со сферической головкой, у которого имеет-
ся на боковой поверхности два симметричных отверстия. Про-
дувки сделаны на малой скорости при двух положениях отвер-
стий: в первом случае отверстия расположены сбоку, во втором
сверху и снизу (приемник повернут вокруг своей оси на 90°).
В первом случае (кривая I) относительная погрешность (раз-
ность давления в статической камере рПР и истинного' статиче-
ского давления рст, деленная на скоростной напор) после угла
атаки 5° резко увеличивается по абсолютной величине и при
углах атаки порядка 20° достигает величины —ЗО,о/о из-за боль-
шого разрежения на боковых поверхностях. Наоборот, во втэ-
Фиг. 4. 6. Ошибки статической камеры приемников разных
типов в зависимости от угла атаки.
рпр- статическое давление, измеренное приемником; рСт —
истинное статическое давление.
ром случае (кривая II) при увеличении угла атаки в статической
камере образуется слегка повышенное давление, причем отно-
сительная погрешность при угле атаки 20° имеет величину всего
лишь 2—3%; в этом случае разрежение сверху и давление снизу
как бы компенсируют друг друга. Любопытно, что приемник,
у которого' сделана кольцевая щель по всему периметру, имеет
кривую погрешностей (///), лежащую почти точно посредине
между первыми двумя кривыми. Очевидно', смещая нижние от-
верстия на некоторый угол по меридианальному сечению, а так-
же варьируя число' нижних и верхних отверстий, можно полу-
чить приемник, практически не дающий погрешности -при изме-
нении угла атаки. Именно таким путем и конструируются совре-
менные приемники давления.
Посмотрим, как влияет волновой кризис на статическую часть
приемника. При сферической головке на передней части обра-
зуется зона местных сверхзвуковых скоростей со скачком уплот-
нения (фиг. 4.7). Влияние этого скачка распространяется при-
‘80 Глава IV. Теория приборов, измеряющих скорость и высоту
мерно на четыре-пять калибров трубки; на этом расстоянии и
приходится располагать статические отверстия. Хуже получается
у цилиндрических насадков с прямым обрезом. В этом случае
отверстия необходимо располагать на расстоянии не менее восьми
калибров трубки. Для смягчения кризиса вполне естественно
Фиг. 4.7. Скачки уплотнения на передней
части приемника..
обратиться к заостренным трубкам (фиг. 4.8). У таких
трубок кризис возникает значительно позднее и скачок уплотне-
ния значительно слабее. Таким путем удается получить прием-
ники сравнительно малой длины без заметного искажения ста-
тического давления.
Большую роль играют также форма и тщательность отделки
краев отверстий статической камеры. При неудачной форме или
при плохой отделке краев на них при большой скорости возни-
Фиг. 4.8. Заостренный приемник стати-
ческого давления.
кают местные кризисы, волны и показания сильно искажаются.
Можно думать, что из простых форм отверстий наилучшей яр
ляется круглая форма. Прямоугольные прорези дают значитель-
ное искажение показаний.
Комбинируя оптимальные формы статических и динамических
приемников, приходим к выводу, что наилучшей формой ком-
бинированного приемника является круглая трубка с располо-
жением круглых отверстий для статического давления трубки
сверху и снизу на некоторой дуге окружности. Спереди эта
§ 5. Аэродинамические поправки
81
трубка должна плавно переходить в трубку с меньшим диамет-
ром. Такие приемники будут обеспечивать хорошие показания
на необходимом диапазоне углов атаки и будут мало подвер-
жены волновому кризису при больших скоростях.
§ 5. АЭРОДИНАМИЧЕСКИЕ ПОПРАВКИ. СВЯЗЬ ПОПРАВОК
К ВЫСОТЕ И СКОРОСТИ
До сих пор мы рассматривали изолированный приемник, об-
текание которого зависит только от его формы. В действитель-
ности же любой приемник всегда стоит на летательном аппарате,
отдельные части которого возмущают основной поток, вследствие
чего в показания приемников необходимо вводить дополнитель-
ные поправки на искажение местного давле-
ния. Эти поправки в практике летных испытаний получили наи-
менование аэродинамических. В этом параграфе мы
рассмотрим связь между поправками к давлению и скорости.
В предыдущем параграфе мы видели, что правильно скон-
струированный приемник воспринимает полное давление без
искажений. В возмущенном потоке, каковы бы ни были возму-
щения, вследствие малых сил вязкости можно считать почти
точно, что полное давление остается неизменным, вне тонкого
пограничного слоя. Потеря полного давления может получиться
при М>1 за скачком уплотнения, но эта потеря уже учиты-
вается формулой Релея (4. 11). Следовательно, мы можем счи-
тать, что полное давление воспринимается при-
емником без искажений и ошибки получаются
только вследствие неправильной регистрации
статического давления. Но при этом, естественно,
давление р1Т и индикаторная скорость могут быть измерены не-
верно и в них необходимо внести поправки.
Обозначим эти поправки символами 8ра и 87а:
^в=Цз ^пр. испр, ьра = Рн Рпр. испр,
где V пр. испр и /7пр. испр—скорость и давление, фактически заме-
ренные точными приборами. Следовательно, земную индикатор-
ную скорость и давление надо вычислять по> формулам
Vj 3 — V’пр. испр 4“ д, pff = рпр. испр + ^Р(Г
Чтобы найти связь между поправками Ьра и 314, обратимся
к уравнениям (4.7) и (4.13). Подставляя qc* =pffQ—рн.выра-
зим неизменное полное давление при двух давлениях в стати-
ческой камере: рн и рн — $ра, которым соответствуют скорости
Vi3 и Vi3 —314. Для дозвуковых скоростей по> уравнению (4.7)
получим
Рно=Рн+А [(1 + 0,13334 • 10-6 У(?3)3,5_ 1],
6 772
82 Глава IV, Теория приборов, измеряющих скорость и высоту
Ряо=Ря-^а + Ро{[1+ОЛ3334.10-б(Ц3-8иаЛ3.5-1},
Приравнивая правые части, получим
*Ра = р0 {[1 + 0,13334• IO-6 (1/.з_8уо)2]_
— (1+0,13334 -IO-6 V?3)3’5}. (4.18)
Аналогично из уравнения (4. 13) найдем для сверхзвуковых
скоростей
I (и/3~5Ив)7
?р„ = р0-0,8584- 10- {„Г|з_8,
~ (Г?3-214277)2'5 } (4’ 19^
Из этих равенств видно, что существует функциональная
зависимость
^о=/(К/з,
или
= /( Упр. испр, ^Ра)> (4.20)
так как
V”Пр. испр — V/ 3 а 1 •
На практике связь между поправками выражают в виде но-
мограмм. Типичный образец такой номограммы представлен на
фиг. 4. 9 2. Так как обычно удобнее иметь дело не с давлениями,
а с барометрическими высотами, вместо поправки 8ра вводят
поправку барометрической высоты ЬНа, пользуясь уравнением
статики атмосферы (1.9)
__________ 7 ст
1 В дальнейшем мы будем часто вместо Vnp. испр писать просто Vnp. под-
разумевая, что инструментальная поправка должна быть во всех случаях
внесена в показания прибора.
2 Практически номограмму типа фиг. 4. 9 можно легко построить,
пользуясь таблицей для тарировки указателя скорости (табл. 5). Задаваясь
любым значением Ипр, находим соответствующее ему значение ^сж, к по-
следнему добавляем заданное значение ±ьра и находим по таблице ско-
рость Vnp, соответствующую ^Сж=7сж±^а- Искомое значение ьУа равно
^пр-^пр.
Вследствие нелинейности связи Ъра и SVa значение SVa будет зави-
сеть от знака Ъра. В связи с этим на номограмме фиг. 4.9 для каждого
значения Ипр даны две кривые соответственно для Вра>0 и 6/?а<0. В верх-
ней части номограммы должны быть, строго говоря, также даны по две
линии для каждой высоты, так как в уравнении (1.9) нужно брать сред-
ние для интервала Ъра значения плотности (iCT,cp)> которые будут различ-
ными для разных знаков Ъра. Однако в практическом диапазоне Ъра мож-
но обе кривые дНа для каждой высоты слить в одну, что и сделано на
фиг. 4. 9.
# 5. Аэродинамические поправки
8 1
6*
84
Глава IV. Теория приборов, измеряющих скорость и высоту
Из этого уравнения видно, что при данном значении Ьра вели-
чина поправки к высотомеру в метрах (ЬНа) зависит от плот-
ности в стандартных условиях на данной барометрической вы-
соте (Уст).
Итак аэродинамические поправки к указа-
телю скорости и высотомеру однозначно
связаны между собой, что дает возможность
определять в полете одну из этих поправок,
а другую вычислять.
В соответствии с этим можно наметить два типа тарировок:
при барометрическом методе непосредственно опре-
деляются поправки к высотомеру и вычисляются поправки к
указателю скорости, при методе мерного километра и
других аналогичных ему определяются поправки к указателю
скорости, а поправки к высотомеру вычисляются.
Описание этих методов дано в следующей главе.
Очевидно, что так же, как и указатель скорости или высото-
мер, указатель числа М имеет, кроме инструментальной, также
аэродинамическую поправку 8Ма, соответствующую искажению
местного давления у приемника $ра. Для выяснения величины
поправки возьмем формулу, определяющую число М для дозву-
ковых скоростей
р,/о = Ы1+О,2М2)3-5.
Возьмем логарифмические дифференциалы обеих частей. Заме-
няя дифференциалы конечными поправками, полагая 8рн=8ра
и 8М=8Ма и учитывая, что рнй = const, получим
0 = 1,4№Mg. (4.21)
Рн 1+0.2М2
Мы видим, что
8Ма •=/(—, Мк (4.22)
\Рн 1
Аналогичную зависимость можно получить и для сверхзву-
ковых скоростей.
На фиг. 4. 10 приведена номограмма для определения по-
правок ЗМа. При пользовании ею нужно иметь в виду, что со-
гласно уравнению (4.21) знак ЗЖ противоположен знаку
Для того чтобы аэродинамические поправки были по возмож-
ности невелики, следует приемник располагать в таком месте,
где влияние крыла или фюзеляжа сказывается меньше всего;
с этой целью рекомендуется, например, устанавливать насадок
на продолжении хорды крыла на расстоянии порядка 50%
хорды. Иногда даже отделяют статический насадок от динами-
ческого. Очень хорошо в качестве статического приемника ис-
пользовать отверстие на борту фюзеляжа, подобрав для него
такое место, где его показания не искажаются на летном диа-
пазоне углов атаки.
§ 5. Аэродинамические поправки
85
До сих пор мы говорили об аэродинамических поправках, от-
носящихся только к искаженному статическому давлению,
исходя из того, что полный напор не подвержен местным иска-
жениям. Однако действительная картина сложнее. В самом
деле, при некоторой критической скорости около крыла, фюзе-
ляжа и других деталей самолета образуются сверхзвуковые
зоны со скачками уплотнения. При неудачном расположении
приемник может попасть в одну из таких зон и тогда, естествен-
но, его показания будут сильно искажены. Однако примерное
расположение этих зон заранее известно и при дозвуковых ско-
ростях всегда легко найти около самолета подходящее место,
Фиг. 4. 10. Номограмма для определения аэродинамических поправок ЗМа
к числу М.
в котором можно расположить приемник, чтобы избежать таких
ошибок. Более сложная картина получается при сверхзвуковой
скорости. В этом случае деталь самолета вызывает свою соб-
ственную ударную волну, помимо ударной волны самого при-
емника. Комбинация этих волн может образовать сложную си-
стему скачков, и статические отверстия приемника могут ока-
заться в дозвуковой области, вследствие чего давление в стати-
ческой камере повысится. В результате приемник в некотором
диапазоне чисел М будет показывать сильно завышенное давле-
ние, т. е. заниженную высоту и заниженную скорость.
В частности, если при сверхзвуковой скорости полета прием-
ник окажется непосредственно позади прямого скачка (где
М<4), приборы покажут некоторую дозвуковую скорость.
К сожалению, в настоящее время эти соображения не могут
быть еще представлены в форме точных количественных соотно-
шений.
Глава V
МЕТОДИКА ОПРЕДЕЛЕНИЯ СКОРОСТИ И ВЫСОТЫ
ПОЛЕТА
Рассмотрев в предыдущей главе теоретические вопросы, свя-
занные с измерением скорости и высоты полета, переходим к
изложению практической методики.
В первую очередь остановимся на различных методах тари-
ровки приемника давления для определения аэродинамических
поправок, затем на способах измерения температуры воздуха в
полете и, наконец, рассмотрим законченную методику опреде-
ления истинной скорости и высоты полета.
§ 1. БАРОМЕТРИЧЕСКИЙ МЕТОД ТАРИРОВКИ ПРИЕМНИКА
ДАВЛЕНИЯ В ПОЛЕТЕ
Методы тарировки приемника давления, в основу которых
кладется непосредственное определение аэродинамической по-
правки к высоте с последующим вычислением поправки к ско-
рости, называют барометрическими.
Основная цель любого метода тарировки заключается в по-
лучении зависимости аэродинамических поправок от скорости
по прибору. Следовательно, нужно получить поправки в полете
на нескольких скоростях или, как принято говорить, на несколь-
ких заходах.
При барометрическом методе нужно на каждом заходе знать
показания высотомера на самолете и точное значение истинного
атмосферного давления в определенном месте, в котором нахо-
дится самолет при каком-нибудь заходе.
Замер давления на самолете производится во всех случаях
обычным способом при помощи высотомера или барографа,
тщательно оттарированных в лаборатории. Разные барометри-
ческие методы отличаются только способом замера истинного
атмосферного давления.
Простейшим из барометрических методов является так на-
зываемый «башенный» метод. В этом случае при каждом заходе
самолет пролетает на одной высоте с эталонным высотомером
§ 1. Барометрический метод тарировки приемника давления
87
(барометром), установленным на каком-нибудь здании («баш-
не»), достаточно высоком, чтобы обеспечить самолету необходи-
мую безопасную высоту. При ранних стадиях развития этого
метода обходились даже без здания, а летчик вел самолет брею-
щим полетом на очень малой высоте.
Недостатки башенного метода весьма велики. Как мы уви-
дим ниже, барометрическая тарировка особенно точна при по-
лете на больших скоростях, при которых как раз наиболее
опасны полеты на малой высоте.
Этих недостатков лишен «высотный» барометрический метод
По существу барометрического метода важно только иметь точ-
ное значение атмосферного давления в каком-либо пункте, мимо
которого на той же высоте летит самолет. Это можно сделать
при помощи ранее протарированного вспомогательного самолета.
Такими эталонными самолетами могут вообще слу-
жить самолеты любого типа, но лучше применять относительно
тихоходные самолеты, например, учебные, еще лучше — гели-
коптер.
При любом методе барометрической тарировки во время
производства замеров тарируемый и эталонный высотомеры
должны находиться на одной высоте или разность высот должна
быть настолько' малой, чтобы ее можно было достаточно точно
измерить на-глаз; важно также иметь в момент измерения уста-
новившийся режим показаний высотомеров.
Для каждого захода известны истинная барометрическая
высота (Яр) по показаниям приборов эталонного самолета и по-
казания высотомеров тарируемого самолета (Я) в момент про-
хождения его мимо эталона с некоторой скоростью VnP. Для
этой скорости и определяют аэродинамическую поправку к вы-
сотомеру
8На = Нр—Н.
Эта поправка относится к той барометрической высоте, на кото-
рой производился тарировочный полет.
На верхней части номограммы фиг. 4. 9 берут точку, соответ-
ствующую высоте Нр и найденному значению 8Яа и, переходя
вниз на линию заданной скорости VnP, определяют для нее по-
правку (поправка практически не нужна). В результате
обработки всех заходов получают кривую ^Va=f(Vnp)—одну
для всех высот1 (фиг. 5.1). Получив эту кривую, строят по
верхней части номограммы фиг. 4.9 несколько кривых
$Ha=f(Vnp) для ряда высот (фиг. 5. 1).
1 Строго говоря, поправки Ъра и зависят от высоты из-за влия-
ния числа М, которое изменяется с высотой при ИПр=соп5{, в связи с чем
изменяется и поле давлений вокруг самолета, но на этом вопросе мы здесь
останавливаться не будем.
88
Глава V. Методика определения скорости и высоты полета
§ 2. ТАРИРОВКА НА МЕРНОЙ БАЗЕ
По второй группе методов тарировки приемника давления в
полете определяются непосредственно' аэродинамические по-
правки к скорости, а поправки к высоте вычисляются.
«Классическим» и наиболее часто применяемым еще в на-
стоящее время методом является метод тарировки на мерной
базе, часто именуемый километражом. Для применения
этого метода необходимо иметь мерную базу, которая обычно
располагается на аэродроме или вблизи него. Эта база пред-
ставляет собой достаточно длинный участок земли (для совре-
менных скоростей длиной не менее 5 км) с удобными подходами.
Желательно, чтобы параллельно мерной базе имелись заметные
линейные ориентиры (железная дорога, шоссе и т. п.). В случае
отсутствия ориентиров вдоль базы устанавливаются хорошо за-
метные столбы. На концах этой базы на точно вымеренном рас-
стоянии попарно располагаются створы. Самолет летит вдоль
базы на вполне установившейся заданной скорости и наблюда-
тели засекают время его прохождения между створами. Путем
деления длины базы на время ее прохождения самолетом полу-
чается скорость полета, которая и сопоставляется со скоростью,
записанной по приборам, стоящим на самолете. Такова идея
метода.
В зависимости от типа самолета и оборудования базы воз-
можны различные методы засечки времени и различные способы
заходов на мерную базу.
Заметим прежде всего, что при засечке времени прохожде-
ния определенного расстояния по земным ориентирам мы полу-
чаем скорость самолета относительно земли, а так как для тари-
ровки нужно знать скорость относительно воздуха, то необхо-
§ 2. Тарировка на мерной базе
89-
димо учитывать влияние ветра. Так как самолет на мер-
ной базе идет сравнительно невысоко (50—150 м), а скорость
ветра меняется по высоте на диапазоне высот от 0 до 150 м
весьма сильно, то прямой замер скорости ветра и ее направле-
ния затруднителен. Поэтому для учета, вернее, исключения ско-
рости ветра база обычно проходится на каждой заданной ско-
рости по прибору дважды: один раз в одном направлении (пря-
мой заход), другой раз в обратном (обратный заход).
Засечка времени производится наблюдателями, расположен-
ными у каждой пары створ. Если наблюдатели на концах базы
связаны телефонной связью, то секундомер включается наблю-
дателями у второй пары створ по сигналу, подаваемому с первой
Фиг. 5. 2. Схема заходов при тарировке на мерной базе
методом петель.
пары створ, и останавливается в момент, когда самолет нахо-
дится на траверсе второй пары створ. На хорошо оборудован-
ных базах пуск секундомера у второй пары створ производится
при помощи электрического сигнала, подаваемого с первой пары
створ в момент, когда самолет находится на ее траверсе.
Лучшим методом засечки является одновременное фото-
графирование створ, самолета и секундомера;
в этом случае легко по фотографии самолета и его размерам
ввести поправку на запаздывание или опережение самолета
относительно створ.
Во всех этих случаях вычисляется скорость самолета отно-
сительно земли путем деления длины базы на время захода
Скорость относительно воздуха вычисляется как среднее ариф-
метическое из скоростей прямого и обратного заходов; при этом
предполагается, что за время между двумя заходами скорость
ветра не успевает измениться.
Описанный метод тарировки, ПО' которому отдельно опреде-
ляется скорость при прямом и обратном заходе, называют «м е-
тодом односторонних засечек».
В случае, если связь между наблюдателями у разных створ
отсутствует, приходится действовать по методу петель
(фиг. 5. 2). Наблюдатели у первых створ запускают секундомеры
в начале первого захода (точка А) и выключают в конце второго
(точка £); таким образом они замеряют время прохождения
W Глава V. Методика определения скорости и высоты полета
«большой петли» ABCDE. Наблюдатели у вторых створ вклю-
чают секундомеры в конце первого захода (точка В) и выклю-
чают в начале второго (точка £>), замеряя время т2 «малой
петли» BCD.
Очевидно, при штиле скорость V легко вычисляется по фоо-
муле V=-----, где т=т1—т2— суммарное время прохождения
т
базы туда и обратно.
Влияние ветра на точность километража сказывается
следующим образом. Легко показать, что если скорость ветра
направлена вдоль базы, то при методе односторонних засечек
влияние ветра полностью исключается, а при методе петель от-
носительная погрешность в скорости равна где W— скорость
ветра, V — скорость самолета.
При скорости ветра, направленной перпендикулярно базе,
если летчик летит вдоль базы, выдерживая компасный курс (со
сносом), влияние ветра исключается, так как время полета
между линиями створ на концах базы не зависит от сноса; если
же летчик держит курс параллельно базе (с «упреждением»
против ветра), то относительная ошибка составит — —.
Таким образом при любых направлениях ветра во всех слу-
чаях относительная ошибка не превзойдет —.
У современных самолетов минимальная скорость полета
редко бывает меньше 180 км!час = 50 м/сек; для этой скорости
при большой скорости ветра W=5 м/сек мы получим максималь-
*>5
ную относительную погрешность или 1%. При больших
скоростях полета ошибка получается значительно меньше. При
скорости 900 км/час поправка будет меньше 0,04%. Поэтому
в практике километража обычно пренебрегают поправкой на ве-
тер, но запрещают километраж при сильном ветре, особенно
для самолетов с малой скоростью.
Скорость V, полученная каким бы то ни было методом,
должна быть пересчитана на индикаторную скорость (или рав-
ную ей у земли земную индикаторную скорость) по формуле
^ = У.3=1//Д>
где Д — относительная плотность в фактических условиях по-
лета
Д = 0,379^-;
ТИ
давление рн на высоте полета можно подсчитать по формуле
Ря=Ро--Г<Д=А-^г# =Ро(1
К/о \ А/о/
§ 3. Другие методы тарировки приемника давления
91
где ро — давление в том контрольном пункте, где оно точно за-
меряется (например, на метеостанции);
TQ — температура в этом же пункте;
Н — разность высоты полета и высоты контрольного пункта.
Эту разность можно с достаточной степенью точности оценивать
на-глаз — ошибка даже в 100 м дает ошибку в скорости порядка
только 0,5%; температуру Тн можно брать по показаниям тер-
мометра на самолете, вводя поправку на адиабатический подо-
грев (см. § 5). Часто величину А вычисляют прямо по давлению
и температуре у земли (в контрольном пункте):
Д = 0,379-+
Т'о
пренебрегая разницей условий на высоте полета и высоте кон
трольного пункта. Поправкой на сжимаемость обычно пренебре-
гают, так как полет происходит на малой высоте.
Вычитая из найденной таким образом скорости Vi3 показание
спидографа (Усп) или указателя скорости Vnp.испр, получают
искомую аэродинамическую поправку
Wa=Vi3-Vcn.
В результате тарировки строят кривую $Va=f(Vnp)1, а затем,
как указано в предыдущем параграфе, при помощи номограммы
4.9 — ряд кривых ЬНа для нескольких высот (см. фиг. 5. 1).
§ 3. ДРУГИЕ МЕТОДЫ ТАРИРОВКИ ПРИЕМНИКА ДАВЛЕНИЯ
Фотокино'теодолитный и радиолокационный
методы. В основе этих методов лежит та же идея, что и в
методе мерной базы: самолет летит достаточно продолжительное
время на установившемся режиме, причем сравниваются ско-
рость по прибору и истинная скорость самолета относительно
воздуха; разница заключается только в методах измерения по-
следней.
При помощи методов, указанных в гл. XII, замеряются ко-
ординаты самолета и строится длина пути S в функции времени;
при прямолинейном установившемся полете этот график пред-
ставится в виде прямой линии (фиг. 5.3). Наклон этой прямой
и дает искомую скорость
Дт
Для исключения влияния ветра также производятся заходы
туда и обратно.
1 Наклон этой кривой всегда настолько мал, что сдвиг тарировочной
точки на графике вправо или влево на +20—30 км/час не имеет значения.
Поэтому скорости по оси абсцисс Vnp можно откладывать довольно грубо,
пренебрегая инструментальной поправкой.
92
Г лава V. Методика определения скорости и высоты полета
Дальнейшая обработка почти не отличается от обработки
при методе мерной базы. Вычисляется индикаторная скорость
Vi=V\/ Д. Замер давления и температуры производится либо
на самом тарируемом самолете, либо на специальном самолете
с эталонными приборами. Если полет производится на большой
высоте, из величины Vi необходимо вычесть поправку на сжи-
маемость 81/сж, чтобы получить земную индикаторную скорость,
которую и сравнивают с показаниями приборов. Только этим и
отличается обработка.
Фиг. 5.3. Диаграмма зависимости пути
от времени на установившемся режиме,
полученная при тарировке указателя
скорости при помощи радиолокатора
или фотокинотеодолитов.
Тарировка в полете строем. Для применения
этого метода необходимо иметь эталонный самолет с таким же
примерно диапазоном скоростей, как и у испытываемого само-
лета. Аэродинамические поправки для эталонного самолета
должны быть точно определены путем тщательной и неодно-
кратной тарировки любым другим методом. При тарировке
строем оба самолета летят рядом на возможно более близком
расстоянии, последовательно на нескольких скоростях. При этом
записываются и сравниваются показания приборов (спидографов
и барографов) обоих самолетов. Этет метод весьма удобен, но
относительно менее точен, требует хорошей слаженности работы
экипажей и наличия самолета-эталона. При обработке для боль-
шей точности лучше при малых скоростях определять 37а (срав-
нением показаний спидографов), а при больших скоростях
определять 8ра или %На (сравнением показаний барографов).
§ 4. Сравнение различных методов тарировки
93
Можно указать еще на один метод, который иногда упо-
требляется при проведении исследовательских работ, связанных
с точным измерением малых скоростей — метод аэ р о л а г а 1
Аэролаг представляет собой хорошо обтекаемое тело вращения
с мощными стабилизирующими поверхностями (фиг. 5.4). Он
выпускается в полете под самолет при помощи троса и спе-
циальной лебедки на достаточно большое расстояние, на котором
можно пренебречь влиянием самолета на поток. Аэролаг кре-
пится к тросу на такой подвеске, что он может свободно вра-
щаться вокруг поперечной оси, проходящей через его центр
тяжести, поэтому в полете под действием стабилизаторов он
всегда устанавливается так, что его продольная ось направлена
параллельно- скорости самолета относительно воздуха. Замеряя
скорость аэролага (при помощи приемника давления или вер-
тушки), получают истинную скорость, а сравнивая ее с показа-
ниями прибора на самолете, определяют аэродинамическую по-
правку.
§ 4. СРАВНЕНИЕ РАЗЛИЧНЫХ МЕТОДОВ ТАРИРОВКИ
К методам тарировки предъявляются следующие требования:
1. Метод должен обладать большой точностью в том диапа-
зоне скоростей, который требуется для проведения данного испы-
тания или исследования.
2. Тарировочный полет должен быть безопасным.
3. Тарировка не должна требовать высокой квалификации
летного и обслуживающего технического персонала.
4. Метод должен быть применим при любых метеорологиче-
ских условиях.
В настоящее время практически нельзя указать метода та-
рировки, который превосходил бы остальные по выполнимости
1 Первая конструкция аэролага была осуществлена Б. В. Смирновым.
94
Глава V. Методика определения скорости и высоты полета
всех требований; поэтому в зависимости от местных условий
тарировки, местных возможностей и специфики испытаний при-
ходится выбирать один из описанных методов.
Начнем с оценки точности тарировки при методе мерно-
го километрас ручной засечкой времени. Пусть длина базы
равна 3 км, а скорость самолета — 600 км/час^ 167 м/сек\ тогда
время пребывания самолета на базе будет т = 2^ =18 сек. Мож-
167
но на основании имеющихся экспериментальных данных считать,
что предельная погрешность засечки времени одним наблюда-
телем равна примерно 0,25 сек; при засечке времени двумя на-
блюдателями она равна—сек., следовательно, относи-
У2
тельная предельная погрешность определения времени равна
0 18 1
--— — 1,0'°/о, а абсолютная — 6 км/час. Погрешность вследствие
18
неправильности ведения самолета по< базе, порывов ветра, его
изменения и пр. можно оценить величиной порядка О,2°/о или
1,2 км/час. Следовательно, предельная погрешность определения
истинной скорости V равна 0^ = ]/б2 + 1,2-’= 6,11 км/час, а отно-
сительная 1,02'%. Земная индикаторная скорость Vi3 определяет-
ся по формуле Vi3=V]/ S = 0,379 ~ . Относительная по-
грешность будет [см. гл. III, формула (3. 15)]:
=1/§2 I t J_§
И‘3О у 4 Ро 1 4
Предельная ошибка измерения давления на метеостанции
может быть оценена величиной 3Р=0,3 мм рт. ст. а относитель
оз
ная 8р0= =0,04'%; считая предельную погрешность опреде-
760
0 5
ления температуры в тех же условиях 8Г =0,5° и
-«0,17®/о, получим
оИ/3 =1/ W+—0,04« + —0,172= 1,023.
1 3° у 4 4
Мы видим, что почти вся погрешность может быть отнесена к по-
грешности измерения времени; абсолютная погрешность равна
1,023 - 600=6,14 км/час.
Предельная погрешность прибора равна примерно 6 км/час.
Тогда абсолютная предельная погрешность определения аэроди-
намической поправки будет равна
S(31Q = + (б Ипр)2 =Гб,142 + 6г =8,65 км/час.
Обычно при тарировке на мерной базе берут не меньше пяти
режимов. При проведении кривой по этим точкам точность уве-
$ 4. Сравнение различных методов тарировки 95
личивается; хотя законы теории случайных погрешностей в этом
случае можно применять лишь с большой натяжкой, все же
грубо можно считать, что предельная погрешность при пользо-
вании километражной кривой равна
— = км/час ж км/час.
4
Средняя квадратичная ошибка будет — =1,33 км/час, ве-
3
роятная----= 0,89 км/час [см. формулу (3.6)].
4,5
Специальные сравнительные испытания подтверждают поря-
док этих величин.
При увеличении скорости до 1200 км/час на той же базе
ошибка в отсчете времени увеличится в два раза и общая по-
грешность единичного замера SVa будет уже 27 км/час, а погреш-
ность километражной кривой ~Г°/о от скорости. Для уменьше-
ния погрешности до прежней величины необходимо увели-
чить длину базы вдвое, что затруднительно. Таким
образом при увеличении скорости погрешность тарировки на
мерной базе сильно увеличивается. При необходимости пользо-
ваться мерной базой на больших скоростях нужно для устране-
ния главной погрешности отказаться от ручной засечки времени
и перейти на фотографирование самолета при прохождении
створ.
Другим существенным недостатком метода мерной базы яв-
ляется необходимость полета на базе на относительно малой
высоте (100—150 ж), что при большой скорости полета пред-
ставляет значительную опасность.
Указанные соображения заставляют для скоростных само-
летов отказаться от метода мерной базы. Однако этот метод
остается основным методом тарировки приемников давления
самолетов со скоростями порядка до 600 км/час.
Обратимся теперь к барометрическому методу та-
рировки. Предельную погрешность хорошего высотомера мож-
но считать равной приблизительно 2 мм рт. ст., а суммар-
ную погрешность при сравнении показаний двух высотомеров:
|/ 22 +22^2,8 мм рт. ст. Этой погрешности ^=2,8 мм рт. ст. по
фиг. 4. 9 будут соответствовать следующие предельные погреш-
ности скорости при тарировке по барометрическому методу:
Упр» км/час 300 400 600 900 1200
&(&Ув), км)час 12,5 9,5 5,5 3,2 2,0
Ипр 4,16 2,38 0,92 0,35 0,165
96
Глава V. Методика определения скорости и высоты полета
Таким образом можно утверждать, что, начиная со ско-
ростей порядка 400 км/час, точность тарировки по
барометрическому методу выше, чем по методу
мерной базы, а при очень больших скоростях погрешности
весьма малы.
Следующая таблица показывает, какое значение должна
иметь погрешность высотомера, чтобы погрешность аэродинами-
ческой поправки скорости была равна 1°/о скорости:
Упр (км!час) 200 400 600 800 1000
Ърн (мм рт. ст ) 0,3 1,25 3,0 5,75 10,0
ЬН (м, у земли) 4 14 33 64 111
Из этой таблицы видно, что при очень больших скоростях вы-
соту можно определять очень грубо. На скорости порядка
1000 км/час достаточно определить высоту с погрешностью 100 м,
чтобы получить аэродинамическую поправку скорости с точно-
стью до Г°/о скорости.
Зато при малых скоростях точность барометрического
метода сильно падает. Для увеличения ее приходится замерять
высоту по нескольким высотомерам. Например, при скорости
400 км/час и ниже необходимо применять уже четыре высото-
мера, чтобы получить точность порядка Г°/о.
Учитывая возрастание точности при увеличении скорости,
нужно при составлении задания на тарировочный полет разбить
весь диапазон скоростей так, чтобы в области меньших скоро-
стей число заходов было больше (точки лежали гуще), а в об-
ласти больших скоростей меньше.
К недостаткам барометрического метода следует отнести
необходимость высокой квалификации летчика. При каждом за-
ходе летчик должен прежде всего найти эталонный самолет (при
современных скоростях его очень легко потерять), а затем так
рассчитать весь заход, чтобы пройти точно около эталона на
установившемся режиме горизонтального полета. Резкие откло-
нения от горизонтальности полета для выравнивания высот не-
допустимы. Необходима слаженность работы экипажей обоих
самолетов.
Радиолокационный и фотокинотеодолитный. методы требуют
большого наземного оборудования. Метод аэролага также тре-
бует специального оборудования (аэролага и лебедки) на само-
лете, а потому применяется редко (главным образом для изме-
рения на малых скоростях полета при исследовательских рабо-
тах). Меньше всего оборудования требует барометрический
метод.
С точки зрения безопасности примерно одинаково приемлемы
все указанные методы, кроме метода мерной базы.
§ 5. Измерение температуры воздуха в полете
97'
Наконец, оценим различные методы с точки зрения их тре-
бований к метеорологическим условиям. Метод мерной базы,
требует наличия достаточной видимости, высоты порядка 500 м
и отсутствия сильного, в особенности порывистого ветра. Баро-
метрический и фотокинотеодолитный метод также требуют хо-
рошей видимости. Значительно менее требователен к метеоусло-
виям радиолокационный метод, требующий только возможности
произвести нормальный полет и посадку.
Приведенный краткий анализ условий применимости различ-
ных методов показывает, что невозможно указать для всех слу-
чаев наилучший метод; выбор метода зависит от местных усло-
вий, оснащенности летной станции, квалификации летного и тех-
нического персонала и ряда других условий.
§ 5. ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ ВОЗДУХА В ПОЛЕТЕ
Каков бы ни был прибор, измеряющий температуру воздуха
(термометр с шариком, термопара), в нем имеется некоторое
тело, обтекаемое потоком воздуха и предназначенное для вос-
приятия его температуры. В сжимаемом газе’ вследствие адиа-
батического разогрева его, а также трения, температура на по-
верхности тела в каждой точке вообще различна и изменяется
в зависимости от скорости по уравнению теплосодержания
(4.4):
А И?
ср ?g
А V2
ср ‘1g
В частности, в критической точке тела, где скорость равна нулю,
имеем температуру воздуха (температуру торможе-
ния):
д I/2
T^TH = TB+^V— = T,
Ср ^g
21)00*
(5-1)
Здесь Тн—фактическая температура воздуха; V — истинная
скорость самолета в м/сек. Таким образом в критической точке
температура повышается на величину адиабатического подо-
грева
оТ = — •
° ад“20и0’
(5.2)
если скорость выражена в км/час, то адиабатический подогрев
равен
^ад = —
ад 26 ъОО
(5-2-)
Численные значения ЪТЛЛ приведены в следующей таблице:
7 772
98 Глава V. Методика определения скорости и высоты полета
V (к mJ час) 0 300 6С0 900 1200 1500 1800 2100 2400
ЯГад (град.) 0 3,5 ! 13,8 31,1 55,4 86,5 125 169 221
2 ~ 57ад (град.) о 0 2,3 9,2 20,7 37,0 57,7 83,2 123 147
Из этой таблицы видно, что температура воздуха в критиче-
ской точке при современных скоростях полета значительно от-
личается от истинной температуры воздуха; следовательно, и
термометры показывают завышенную темпе-
ратуру.
Если бы температура газа на поверхности шарика термо-
метра была всюду равна температуре в критической точке, тер-
мометр показал бы температуру торможения. Однако в тепло-
вом пограничном слое шарика термометра происходят сложные
процессы теплопередачи, в результате чего различные конструк-
ции термометров дают различные величины поправок на подо-
грев; обычно' эта поправка колеблется в пределах от 50% до
85% от адиабатического подогрева. Средние величины поправки
— £Тад приведены выше в третьей строке таблицы.
Таким образом формула (5. 1) должна быть переписана в
следующем виде:
V2 I/?
T..r - Г„+₽ — = т, + ? м = Т„ - >.Т. (5. 3)
Практика летных испытаний показывает, что величина по-
правочного коэффициента В для данной конструкции термометр^
мало зависит от величины скорости и условий полета. Поэтому
величину поправки
ЗТ=-8-П (5.4)
г 2000 v
можно получить при тарировке приемника давления на одной
и той же высоте, замеряя на заходах температуру, показанную
термометром. Нанося полученные значения /ПР. испр на диаграмму
в зависимости от величины V2 (фиг. 5. 5) и проводя прямую че
рез полученные точки, легко получаехМ значение В по формуле
□ 2000#Г
Р— V2
если V берется в м/сек или
0 26 0005 Т
(5. 5)
(5. 5')
5. Измерение температуры воздуха в полете
99
если V выражено в км/час (ЗГ — фактическое завышение тем-
пературы, показанное термометром).
Так как для определения истинных скоростей V нужно зара-
нее знать истинную температуру Т то последняя должна быть
получена отдельно по данным метеостанции (при тарировке на
малой высоте), либо' по измерениям температуры на специаль-
Фиг. 5.5. Диаграмма для определения коэффициента
торможения термометра.
ном самолете с малой скоростью (например, учебном), сделан-
ным на той же высоте. При барометрическом методе такие изме-
рения можно сделать на эталонном самолете. Зная истинную тем-
пературу ThUh), мы наносим ее для скорости V=0 (крестик на
фиг. 5.5), что дает возможность уверенно провести эксперимен-
Фиг. 5. 6. Схема термометра торможения.
Можно избежать такой тарировки термометра, если приме-
нять термометры специальной конструкции, приспособленной
для замера температуры торможения. Шарик (пли
термопара) такого термометра заключается в специальный об-
текатель (фиг. 5.6); в критической точке этого обтекателя, рас-
положенной спереди, устанавливается температура торможения
которая и воспринимается шариком. Для продува внутренности
полости обтекателя с малой скоростью (практически не влияю-
щей на температуру торможения) в задней стенке обтекателя
100 Глава V. Методика определения скорости и высоты полета
делаются отверстия малого калибра. Для таких термометров ко-
эффициент 3 близок к единице — порядка 0,95.
При определении фактической температуры воздуха Гф(Тн)
по измерениям в полете неудобно пользоваться формулой (5.4),
так как туда входит величина V, для вычисления которой нужно
знать 7ф, так что для определения поправки 8Т приходится при-
бегать к последовательным приближениям. Здесь удобнее вос-
пользоваться известным соотношением, связывающим темпера-
туру полного торможения, фактическую температуру и число М:
+^-1-М2) = 7'ф(1 + 0,2М2). (5.6)
Фиг. 5.7. Номограмма для определения факти-
ческой температуры по показаниям термометра.
Если коэффициент торможения рне равен единице, мы по-
лучим связь между показанием термометра (Тпр.испр) и Гф:
ГПр. испр = Тф(1 +0,2рМ2) (5.7)
или
т
'р — пр-испр /5 7'\
ф (1 + 0,2£М2) ’ V’ 7
Так как для определения числа М не нужно знать температуру
воздуха (см., например, фиг. 4.4), то формула (5.7') практи-
чески вполне удобна. Обычно по этой формуле строят рабочую
номограмму для данного типа термометра (т. е. заданного, зна-
чения 3). На фиг. 5.7 приведена номограмма для {5 = 0,95.
$ 6. Определение скорости, температуры и высоты
101
§ 6. ОПРЕДЕЛЕНИЕ СКОРОСТИ, ТЕМПЕРАТУРЫ И ВЫСОТЫ
ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ
В предыдущих параграфах мы выяснили, какие поправки
нужно вносить в показания приборов, измеряющих скорость, вы-
соту и температуру, и разобрали методы определения этих попра-
вок. Покажем теперь, как пользоваться на практике этими по-
правками и определять скорость, барометрическую высоту и тем-
пературу по показаниям приборов, записанным в полете.
В случае визуальных приборов мы имеем показания прибо-
ров Vnp (указатель скорости), Нпр (высотомер) и Тпр (термо-
метр). Прежде всего по лабораторным тарировочным кривым
определяем инструментальные поправки и находим исправлен-
ные показания приборов: 17пр испр» 7/пр. испр, 7пР. испр*
При применении приборов-самописцев снимаются ординаты
кривой записи и по лабораторным тарировочным кривым непо-
средственно' определяются те же величины: Ven, Нб.
Затем вносим аэродинамические поправки IVа и оНа по
тарировочному графику типа фиг. 5.1 и получаем земную
индикаторную скорость V,3 = Упр. испр + 5Va (или Vcn-f-8Vzo) и
барометрическую высоту Нр = Япр. испр + *На (или Яб + 8Яа).
Зная Vi3 и Нр, определяем по номограмме фиг. 4.4 число М
и затем по формуле (5.7') или по номограмме типа фиг. 5.7 —
истинную температуру Гф. Далее можно вычислить истин-
ную скорость двумя способами:
1. Так как V = Ma, а скорость звука а равна по форму-
ле (1.7") 72,2 Икм чае, то истинную скорость можно сразу
определить по формуле
У=72,2М Vl\. (5.8)
2. По номограмме фиг. 4. 3 находим поправку на сжимаемость
&УСЖ, определяем индикаторную скорость Vi = Vi 3l+SV гж. Затем
по таблице СА находим соответствующее высоте Нр давление р
в мм рт. ст., вычисляем
Д = 0,379 —
т
и, наконец,
§ 7. ОШИБКИ, ВЫЗВАННЫЕ ЗАПАЗДЫВАНИЕМ i
До сих пор мы рассматривали измерение основных парамет-
ров при установившемся движении, когда они не изменяются с
течением времени. Посмотрим, какие показания будут давать
1 Излагаемые ниже методы учета запаздывания были разработаны
О. Н. Хариной и Б. В. Смирновым.
102 Глава V. Методика определения скорости и высоты полета
приборы, измеряющие скорость и высоту при неустановив-
шемся движении, когда эти параметры изменяются с не-
которой скоростью.
Расчеты и эксперименты показывают, что приемник не вно-
сит заметных погрешностей и давления в обеих полостях уста-
навливаются практически без запаздывания. Однако при пере-
даче этих давлений в полости регистрирующих частей приборов
происходит существенное запаздывание.
Решим такую задачу: пусть мы имеем некоторый сосуд объе-
мом W (фиг. 5.8), соединенный с внешней средой при помощи
длинной трубки длиной I и диаметром d. Пусть состояние воз-
духа во внешнем пространстве характеризуется давлением рн и
температурой Тн, зависящими от времени. Требуется найти дав-
ление р и температуру Т в сосуде также в функции времени.
Рн> Тн
Объем й/
4* А Г
Фиг. 5.8. Схема перетекания воздуха в ка-
меру прибора.
Так как разность температур Т и Тн невелика и поверхности
относительно малы, будем пренебрегать теплопередачей. Будем
также пренебрегать кинетической энергией перетекающего воз-
духа, так как скорость его очень мала. За время di в сосуд по-
ступает элементарный объем воздуха весом udi, где и—
скорость воздуха в конце трубки, у — плотность. Напишем урав-
нение баланса теплосодержания. Вначале вес воздуха в сосуде
был G=yW, а теплосодержание TcpG = cpyWT. Вновь посту-
пающая масса воздуха приносит дополнительное теплосодержа-
ние 1 нч— ucpdz, вследствие чего температура в сосуде подни-
4
мется и новое теплосодержание всей массы воздуха будет
ср (Т+dT) (у + d у) W, следовательно,
cp(T + dT)b + dT) W= cpTiW+ T„^ucp&.
Раскрывая скобки и пренебрегая бесконечно малыми второго
порядка, получим
7 Т Т 4И?
§ 7. Ошибки, вызванные запаздыванием
103
гл «пг» и\ I Ui иР
так как p = *\RT, то-------------------------------------------1---------= — и
7 Т Р
Р
Тн itd2
~T~4W
adz.
(5.9)
Далее, по закону сохранения массы
(7+ </() Г = ^W+v^-udz
4
ИЛИ
d^ _ nd2 ___dp dT
V ~4W ~ p T '
Комбинируя с уравнением (5.9), получим
dT dp Гц -T
T ~ P TH
(5.10)
Так как разность Тн—Т значительно меньше температу-
~ „ 1 dT
ры /я, то и относительная величина производной -------- зна-
Т d'z
1 dp .
чительно меньше величины----------— \ практически можно
р dz
считать, что температура при перетекании воздуха не изме-
няется, т. е. Т = ТН.
Так как обычно в трубке скорости очень малы и число
Re~^~ мало, можно применить закон Пуазейля и написать
iA
где р —коэффициент динамической вязкости.
Определяя из этого уравнения а, подставляя в уравне-
ние (5.9) и полагая Т — Тн, получим
Рн = Р + '^, (5.12)
at
где
= (5.13)
nd4p
Мы видим, что коэффициент X для данной системы зависит
от давления, т. е. барометрической высоты, и от температуры
воздуха (через, коэффициент у,). Следовательно, если известно
1 Строго говоря, давление р нельзя вводить в коэффициент X, так как
оно является в данном процессе величиной переменной. Однако перепад рИ—р
обычно очень мал и вместо р можно в формуле (5. 13) брать рИ.
; Ш4 Г лава V. Методика определения скорости и высоты полета
значение этого коэффициента при одних условиях, можно его
пересчитать на другие.
Уравнение (5. 12) показывает, что давление р в сосуде отли-
вается от давления наружной среды, причем разница тем боль-
ше, чем быстрее изменяется давление и чем больше коэффи-
циент 1. Последний в свою очередь тем больше, чем больше
объем сосуда и длина трубки и чем меньше диаметр трубки
Особенно сильно влияет диаметр.
Применим теперь этот вывод к приборам, измеряющим ско-
рость и давление (высоту). У каждого такого прибора имеется
полость, соответствующая сосуду в нашей схеме, и трубопро-
вод, соединяющий эту полость с камерами приемника. Именно
давление в полости и замеряет прибор. Следовательно, при пе-
ременных давлении или, скорости необходимо, в показания
прибора вносить поправку по формуле (5. 12). Особенно ве-
лики эти поправки у приборов-самописцев, имеющих боль-
шие объемы статических камер. У визуальных при-
боров объемы камер значительно меньше и поправками обычно
йожно пренебречь.
Для внесения поправки необходимо знать величину X. Ее
можно вычислить по формуле (5.13); однако эта формула не
очень точна по ряду причин. Во-первых, закон Пуазейля, как по-
казывают эксперименты, не совсем точен в применении к дан-
ным процессам; во-вторых, не учитывается дополнительное со-
противление проводки (тройники, переходники), потери на удар
и т. д. Поэтому в практике летных испытаний предпочитают по-
стоянную X определять экспериментальным путем.
Для этого на стоянке самолета закрывают заборные отвер-
стия приемника и создают в статической системе небольшой ва-
куум. Запускают самописцы и в некоторый момент времени т = 0
открывают отверстия приемника, открывая воздуху доступ в си-
стему. Прибор запишет давление по времени в виде некоторой
кривой (фиг. 5. 9). Из уравнения (5. 12) легко найти форму этой
кривой. В нашем случае рн есть величина постоянная, равная
внешнему давлению р0. Следовательно, это уравнение напишет-
ся так:
> dp , .
л — + р =р0 = const.
dz
Это линейное уравнение с постоянными коэффициентами имеет
общее решение
Р=рй+Се х.
В момент времени т = 0 имеем р-=рнач и значение С=рнач—Ро;
итак, окончательно получаем решение
А— Р = (Р<~pttm)e х.
§ 7. Ошибки, вызванные запаздыванием
1'05
Следовательно, перепад давлений меняется по показательному
закону. В любой момент времени
т __Ро ~ Рнач ,
* Ра - Р
для произвольных моментов времени ч и т2 легко получить
= In -п-—' . (5.14>
* Ро— Рг
Фиг. 5.9. Падение перепада давлений при опре-
делении запаздывания в пневматической систе-
ме приборов.
Ол — ро 1
; Дт=т2-т1=3,8-1 ,5=2,3 сек;
Ро-Р1 4
Этим уравнением и пользуются для определения коэффи-
циента Х0(у земли). Намечают два момента времени ч и т2 (см.
фиг. 5. 9), определяют ро—pi и ро—Р2 и по формуле (5. 14) опре-
деляют величину Хо.
Очень удобно наметить интервал времени Дт = т2 —
в течение которого перепад уменьшается в четыре раза;
РО — 1
тогда ——— = — и
Ро - Р1 4
При других условиях (для другой высоты, где давление =рн)
величину X следует в соответствии с (5. 13) подсчитывать по
формуле
k = k0-^-^., (5.16)
Р-о Рн
106 Глава V. Методика определения скорости и высоты полета
Внесение поправок по формуле (5. 12) —весьма кропотливая
операция и естественно стремление свести эти поправки к весьма
малой величине так, чтобы ими можно было1 пренебречь. Как
показывает формула (5. 13), для этого необходимо уменьшать
длину трубопроводов I и присоединенные объемы приборов W и
увеличивать диаметр трубопроводов d. Приборы последних вы-
пусков имеют обычно малый присоединенный объем и поправкой
часто можно пренебрегать.
Насколько может быть иногда велика поправка, видно из
того факта, что тарировочные кривые, полученные на режимах
подъема, горизонтального полета и планирования (например, при
помощи аэролага), иногда очень сильно отличаются между со-
бой— разность поправок к указателю скорости доходит до 15—
20 км/час. Особенно большая поправка получается при очень
резком изменении высоты (вертикальный маневр, пикирование).
Глава VI
ОБЩИЕ ВОПРОСЫ ПРИВЕДЕНИЯ ЛЕТНЫХ ДАННЫХ
К СТАНДАРТНЫМ УСЛОВИЯМ
§ 1, АТМОСФЕРНЫЕ И ЭКСПЛОАТАЦИОННЫЕ УСЛОВИЯ ИСПЫТАНИЙ
Значения летных характеристик самолета, измеряемых в по-
лете,— максимальной горизонтальной и вертикальной скорости,
расхода топлива и других — зависят от фактических, вообще го-
воря, случайных условий, в которых производится испытатель-
ный полет.
В первую очередь условия испытания характеризуются:
1) атмосферными условиями;
2) весом самолета G;
3) режимом работы двигателя, который, в свою очередь, ха-
рактеризуется положением регулирующих рычагов: для поршне-
вых двигателей — сектора газа, сектора регулятора оборотов вин-
та, сектора дросселей перепуска в случае комбинированного над-
дува, сектора перестановки скоростей нагнетателя и т. п., а для
ТРД^—сектора газа и рычага управления изменением выходной
площади реактивного сопла;
4) внешней аэродинамической формой самолета, которая для
данного конкретного самолета может быть охарактеризована
положением регулируемых или подвижных органов (например,
заслонок туннелей радиаторов, юбок капотов, шасси самолета),
а также наличием или отсутствием внешней подвески ряда агрега-
тов (подвесных баков, бомб, антенны и т. п.).
При обработке результатов летных испытаний всегда возни-
каем следующая задача: зная из испытаний значение какой-либо
летной характеристики самолета Х$ (например, максимальной
скорости) при данных фактических условиях испытаний, найти
путем пересчета величину этой характеристики для условий стан-
дартной атмосферы и для заданных стандартных эксплоатацион-
ных условий испытаний (например, для заданного нормального
веса, заданного положения заслонок туннелей радиаторов ит.п.).
Этот пересчет производится обычно в два этапа. В первом
этапе, оставляя неизменными все условия испытаний за исклю-
чением атмосферных, находят величину характеристики Хст для
какой-либо стандартной высоты //ст (т* е. для какой-либо сово-
108
Глава VI. Общие вопросы приведения летных данных
купности атмосферных условий и Гст). Этот этап пересчета
летных характеристик, измеренных в испытательном полете, на-
зывают приведением к стандартным атмосфер-
ным условиям.
Во втором этапе пересчета, который мы назовем приведе-
нием к заданным эксплоатационнымусловиям
испытаний, находят поправку к уже приведенной ранее к
стандартным атмосферным условиям величине характеристики
вследствие изменения полетного веса, положения регулируемых
заслонок туннелей радиаторов и т. п. Необходимость в таком при-
ведении к заданным эксплоатационным условиям возникает лишь
в некоторых случаях. Так, пересчет на другой полетный вес про-
изводится лишь тогда, когда по каким-либо причинам (напри-
мер, из-за выгорания горючего) полетный вес самолета при
испытаниях довольно значительно отличается от нормального
веса самолета. Для самолетов с поршневыми двигателями часто
принято производить пересчет максимальной скорости на дру-
гое положение заслонок охлаждающих устройств, исходя из
требования соблюдения заданного температурного режима ра-
боты двигателей при полете в стандартных условиях. В ряде слу-
чаев при испытаниях вследствие тех или иных случайных причин
могут наблюдаться небольшие отклонения в режиме работы дви-
гателя от заданных условий, что также приводит к необходимости
пересчета летных данных.
При тщательной подготовке и проведении испытаний во мно-
гих случаях удается обеспечить в полете заданные стандартные
эксплоатационные условия, так что необходимость в соответ-
ствующем приведении отпадает. Зато приведение к стандартным
атмосферным условиям неизбежно при любых испытаниях, вслед-
ствие того, что испытания практически всегда проводятся при
атмосферных условиях, отличных от стандартных.
§ 2. СТАНДАРТНАЯ ВЫСОТА
Как уже указывалось в гл. 1, основными параметрами, ха-
рактеризующими атмосферные условия,, являются баромет-
рическое давление и температура воздуха.
Значение этих параметров меняется в довольно широких преде-
лах на постоянной абсолютной (геометрической) высоте полета,
в связи с чем и летные характеристики самолета будут различ-
ными для заданной геометрической высоты в зависимости от
атмосферных условий на этой высоте.
При конкретном использовании самолета по его назначению
геометрическая высота полета часто имеет большое значение.
Однако, так как летные данные самолета не зависят непосред-
ственно от расстояния его по вертикали от земли, а определя-
ются атмосферными условиями, то принято получаемые из
’испытаний летные данные относить к некоторой условной высоте.
Для- этой условной высоты атмосферные условия принимаются
§ 2. Стандартная высота
109.
такими же, какими они приняты в стандартной атмосфере,-в^свя-
зи с чем в дальнейшем мы будем условную высоту называть
стандартной высотой.
В стандартной атмосфере высота полета однозначно опреде-
ляет как величину давления, так и величину температуры воз-
духа. Связь между барометрической высотой полета Нр (или
давлением воздуха р) и абсолютной температурой воздуха Т
для стандартных условий приведена на фиг. 6. 1. В реальных
полетах атмосферные условия, как правило, таковы, что изо-
бражающая их для какой-либо барометрической высоты точка
на плоскости Нр, Т не расположена на кривой Tcr=f(Hp) для
стандартных условий; например, в точке А температура ниже,
чем в стандартных условиях при том же давлении р.
Вообще говоря, стандартная высота может быть выбрана
произвольно, но- обычно ее выбирают из того условия, чтобы
значение некоторой заданной функции от дав-
ления и температуры F(p,T) было- одинаковым
как в фактических условиях полета на ка-
кой-то высоте, так и в стандартных условиях
на высоте //ст, т. е. выбор //ст производится так, что
^(Рст. 7'ст)=^(Рф. Т'ф).
(6.1)
где рст и Тст — давление и абсолютная температура воздуха в СА
на высоте //ст, а рф и Тф— фактическое давление и абсолют-
ная температура воздуха при определении какой-либо летной
характеристики Хф.
Наиболее употребительны при приведении следующие част-
ные случаи определения стандартной высоты:
110
Глава VI. Общие вопросы приведения летных данных
1) F(p,T)=p> следовательно,
/?СТ рф,
т. е. в качестве стандартной высоты при приведении принимается
барометрическая высота
Ясг=//рф.
Этот случай называют приведением при постоянной
барометрической высоте.
Если фактические атмосферные условия на фиг. 6. 1 изобра-
зить точкой А, то стандартным условиям в этом случае будет
соответствовать точка Bt.
2) /7(p,T) = f.
В этом случае
А ст Аф,
в качестве стандартной высоты при приведении принимается вы-
сота по плотности Н д
//ст В Д ф.
Это случай приведения при постоянной плот-
ности.
На фиг. 6. 1 стандартные условия изобразятся точкой В*.
3) F(p,T)=T
ИЛИ Гет=7ф.
Приведение в этом случае называют приведением при
постоянной температуре. Стандартная высота равна
высоте по температуре И т (точка В3 на фиг. 6. 1)
// ст И Т ф.
4) Р(р, Т) = ^=, т. ё. стандартная высота (точка
на фиг. 6.1) выбирается по условию
Рет __ Рф
Выбор той или иной стандартной высоты при приведении за-
висит от ряда соображений, на которых мы остановимся в даль-
нейшем подробнее. Здесь ограничимся замечанием о том, что в
некоторых случаях приведение может оказаться невозможным
вследствие того что высота /М может оказаться за пределами
£ 3. Общая характеристика методов приведения 11Г
стандартной атмосферы, т. е. будет фиктивной. Практически это
бывает в случаях приведения при постоянной плотности и посто-
янной температуре. Например, на малой высоте при повышенном
баро-метрическом давлении и низкой температуре часто бывает,
что Лф>1, а так как в стандартной атмосфере максимальное
значение & равно 1 (при Я=0), то за высоту НС^Н±
Должна быть принята некоторая фиктивная высота ниже уровня
моря. Для случая приведения при постоянной температуре мы
также получаем отрицательную высоту, если фактическая тем-
пература выше +15° С; при Тф=216,5° К получаем неопределен-
ную высоту Нс-г от 11 км и выше, а при Тф<216,5° — несуществую-
щую высоту, так как 216,5° является самой низкой температурой
в стандартной атмосфере.
Следовательно, для стратосферы понятие высоты по темпера-
туре вообще лишено- смысла, и поэтому для условий полета в
стратосфере нельзя применять такой выбор стандартной высоты.
Вследствие указанных соображений удобнее всего, каза-
лось бы, в качестве стандартной принимать барометрическую вы-
соту; однако-, как это будет показано в следующих главах, во
многих случаях выгодно пользоваться и высотой по плотности и
даже по температуре, несмотря на указанные выше ограничения
§ 3. ОБЩАЯ ХАРАКТЕРИСТИКА МЕТОДОВ ПРИВЕДЕНИЯ
Вследствие большого разнообразия типов самолетов и двига-
телей на практике применяют самые различные методы приведе-
ния летных характеристик к стандартным атмосферным усло-
виям. В этой главе мы рассмотрим лишь некоторые общие чер-
ты, присущие всем методам приведения. В следующих главах
будут подробно- изложены наиболее употребительные методы
приведения для самолетов различных типов.
При разработке методов приведения к стандартным атмосфер-
ным условиям необходимо соблюдать некоторые общие требова-
ния, основные из которых сводятся к следующему.
Прежде всего при разработке метода необходимо предусмат-
ривать возможно- более простой способ прове-
дения испытаний и возможно меньшее число полетов и
потребного для эксперимента летно-го времени.
Формулы для приведения к стандартным условиям замерен-
ных в полете летных характеристик должны быть достаточно
простыми и удобными для пользования и должны вы-
водиться при минимальном количестве допущений. В основе их
должны лежать только достаточно хорошо подтвержденные прак-
тикой общие теоретические и эксперименталь-
ные зависимости и законы, использование же ре-
зультатов стендовых испытаний или испытаний в аэродинамиче-
ских трубах нежелательно.
Кроме то-го, для достаточной надежности формул приведения
желательно брать не средние значения численных коэффициентов
412
Г лава VI. Общие вопросы приведения летных данных
для данного класса самолета или двигателя, а определять эти
коэффициенты экспериментально по результатам
летных испытаний того самолета, для которого делается
приведение.
Наконец, весьма существенно, чтобы выбор стандартной вы-
соты и сам метод приведения требовал введения возможно
меньшей численной поправки при переходе от зна-
чения замеренной в фактических условиях полета характеристи-
ки к ее значению при стандартных атмосферных условиях.
Только при соблюдении указанных выше требований опреде-
ление летных характеристик самолета в стандартных условиях
будет производиться с точностью, мало отличающейся от точ-
ности измерения данной характеристики в полете. В противном
случае дополнительная ошибка от приведения может стать не-
допустимо большой при значительных отклонениях фактических
атмосферных условий от стандартных.
Применяемые в настоящее время методы приведения к стан-
дартным условиям в зависимости от их характера можно условно
разделить на следующие три группы: 1) приведение по
сетке характеристик, 2) приведение по мето-
ду эквивалентной высоты и 3) приведение по
методу дифференциальных поправок.
Методы приведения, относящиеся кпервой группе, осно-
ваны на том, что в процессе летных испытаний определяется под-
робная сетка изменения интересующей нас характеристики са-
молета в зависимости от изменения разных параметров. При
этом для нескольких высот полета, а иногда и для нескольких
весов самолета, определяют кривые, аналогичные применяемым
в аэродинамическом расчете кривым потребных и располагаемых
мощностей или тяг. Но в отличие от аэродинамического расчета
вместо потребных и располагаемых мощностей или тяг, непосред.
ственное измерение которых в полете связано с большими труд-
ностями и обычно не производится, определяются величины, ко-
торые легко измерить в полете и которые в то же время доста-
точно полно характеризуют мощность или тягу двигателя (обо-
роты, давление наддува и т. п.). Получив из полетных испытаний
подробную сетку потребных и располагаемых оборотов или дав-
лений наддува для разных условий полета, в дальнейшем эту
сетку используют как для приведения к стандартным атмосфер-
ным условиям, так и для приведения к заданному полетному
весу или оборотам. Формулы и методы, применяемые при пере-
счете подобных сеток на другие условия полета, обычно совпа-
дают с формулами и методами, применяемыми при аэродинами-
ческом расчете самолетов.
Методы приведения, основанные на использовании подроб-
ной сетки характеристик, как правило, хорошо обоснованы и дают
наиболее точные результаты. Кроме того, наличие такой сетки
позволяет получать подробные данные о характеристиках само-
§ 3. Общая характеристика методов приведения 113
лета в любых условиях полета. Несмотря на это, на практике
сравнительно редко определяют подробную сетку характеристик,
так как получение ее связано с большой затратой летного вре-
мени и труда.
Рассмотрим теперь приведение по методу эквивалент-
ной высоты. Эквивалентной высотой принято называть такую
стандартную высоту, для которой величина найденной в факти-
ческих условиях полета летной характеристики остается неиз-
менной. Так, например, если мы при каких-либо атмосферных
условиях определили, что максимальная индикаторная горизон-
тальная скорость 1Л таХ=500 км/час, а при полете в стандартных
условиях мы эту же индикаторную скорость получим на какой-
либо- высоте Яст, то- эта высота и является эквивалентной вы-
сотой. Если известно, как найти эквивалентную высоту по за-
данным фактическим атмосферным условиям, то тем самым ре-
шается и задача приведения к стандартным условиям.
В более общем случае сущность приведения по методу экви-
валентной высоты сводится к следующему. Для самолетов с опре-
деленным классом двигателей иногда удается доказать суще-
ствование следующего закона в отношении какой-либо интере-
сующей нас летной характеристики X: ес л и некоторая за-
данная функция от давления и температуры
F(p,T) остается постоянной, то для рассматри-
ваемого режима полета остается постоянной и
некоторая заданная функция <?(Х,р,Т), т. е. при
F(p, Т) =const (6. 2)
соблюдается на заданном режиме следующее условие:
ср (X, р, Т) =const.
В этом случае, приняв в качестве стандартной (эквивалентной)
высоты Ясгг высоту, для которой
F{p„, Т„) = Р(рф, Тф), (6.3)
мы для этой высоты можем найти значение функции ср в
стандартных условиях, так как
<Рст(^ст. Рст, Лт) = ?ф(^ф> Рф, Тф). (6.4)
Зная для стандартной высоты Н„ значение <рст, а также
величину давления р„ и температуры Т„, легко определить
величину Х„. Так, например, для самолетов с невысотным
поршневым двигателем и винтом фиксированного шага можно
доказать, что на режиме максимальной горизонтальной ско-
рости при ^=== const остается постоянной и индикаторная
скорость полета, т. е.
V. = V /д = V1/ 0,379 = const.
8 772
114
Глава VI. Общие вопросы приведения летных данных
Поэтому, выбрав эквивалентную высоту //ст из условия
легко найти для этой высоты максимальную
скорость из соотношения
^ст/дст=уф/дф
или
В тех случаях, когда можно доказать существование указан-
ных соотношений (6.3) и (6.4), приведение целесообразно про-
изводить по методу эквивалентной высоты.
Применение этого метода обладает тем огромным преимуще-
ством, что он позволяет производить приведение к стандартнььм
условиям изолированной точки, т. е. характеристики,
полученной на одной высоте полета при каких-то определенных
атмосферных условиях, и нет необходимости определять в по-
лете кривую, а тем более сетку кривых, характеризующих изме-
нение интересующей нас величины X в зависимости от изменения
разных параметров.
Известной разновидностью этой же группы методов приве-
дения являются такие методы, при которых используется нали-
чие подобных режимов полета или таких режимов,
при которых остается неизменным ряд безразмерных характе-
ристик.
Указанные выше методы приведения удается использовать не
во всех случаях. Поэтому на практике часто применяют методы
приведения, относящиеся к третьей группе, к рассмотрению ко-
торой мы и переходим.
§ 4. МЕТОД ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК
Пусть подлежащая приведению летная характеристика X за-
висит от давления воздуха р и температуры его Т:
Х=/(р, Т). (6.5)
Продифференцируем обе части равенства (6. 5):
dX=^dp + ~dT, (6.6)
разделив на X, после преобразований получим
dX р дХ dp , Т дХ dT .с „,х
X X др р X dl Т 4
где — так называемый логарифмический диффе-
ренциал.
§ 4. Метод дифференциальных поправок
115
т? Р дХ Т дХ
Безразмерные коэффициенты вида и будем
называть показателями; введем для них следующие
обозначения:
Л ___р_дх.. у —l_d2L
ip~ X др ' т~ X дГ *
(6.7)
Тогда уравнение (6.6') перепишется так:
г
Т т
(6.8)
Показатели Хр и Хт зависят от конструктивных и аэродина-
мических характеристик самолета, а также от характеристик
двигателя и являются, вообще говоря, функциями давления воз-
духа р и его температуры Г. Из уравнения (6. 8) видно, что ве-
личина каждого из рассматриваемых показателей, например, ХР,
показывает, на сколько процентов изменяется летная характе-
ристика X при изменении соответствующего параметра (р) на
1%. Например, если Лр=2, то при изменении давления на Г%
характеристика X изменяется на 2'%. В очень малом диапазоне
изменения какого-либо параметра, например давления воздуха р,
можно обычно представить изменение величины X в виде сте-
'VI X I Р \Хр „
пенной формулы — = — ; в этом случае соответствующий по-
Хо \ Ро /
казатель равен показателю степени в формуле указанного вида.
Применение в формулах приведения показателей Хр и Хт
дХ дХ
вместо частных производных — и — удобнее потому, что,
во-первых, показатели эти безразмерны, а во-вторых, во многих
случаях применяемые показатели в довольно большом диапа-
зоне изменения параметров, от которых они зависят, могут быть
приняты постоянными. В частности, если зависимость характери-
стики X от р и Т выражается степенной формулой, то показатели
равны соответствующим показателям степени.
В большинстве случаев показатели, применяемые в форму-
лах приведения, зависят от сравнительно небольшого числа пара-
метров и благодаря этому для определения показателей могут
быть использованы несложные графики.
Существенно также отметить, что при пользовании показа-
телями достаточно знать только закон изменения характеристи-
ки X, но нет необходимости знать все постоянные коэффициенты
в зависимостях типа (6.5). При пользовании же частными про-
изводными необходимо знать все эти коэффициенты, для того
чтобы по уравнению типа (6. 6) найти дифференциал X.
Обычно отклонения температуры и других величин от стан-
дартных сравнительно невелики. Относительная величина от-
клонения температуры от стандартной для одной и той же баро-
8*
116
Глава VI. Общие вопросы приведения летных данных
метрической высоты в редких случаях превышает 7%. Величина
отклонения давления воздуха в фактических условиях рф от дав-
ления на стандартной высоте рст зависит от того, какая высота
принята в методе приведения в качестве стандартной. Обычно
эту высоту выбирают так, чтобы отношение — было доста-
точно малым и не превышало в крайних случаях 10—20%. В свя-
зи с этим при приведении принято рассматривать конечные при-
ращения величин при переходе от фактических условий к стан-
дартным как дифференциалы, т. е. считать
8Х=ХСТ-Хф==</Х, = = ВГ=Тст--Тф==</Т
И т. д.
На основании этого при выводе формул приведения обычно
применяется следующий метод вывода поправок для перехода
к стандартным условиям. Составляют основное уравнение ти-
па (6.5), определяющее интересующую нас величину. Затем
это уравнение дифференцируют и получают уравнения ти-
па (6.6) или (6.8), из которых определяют дифференциал иско-
мой величины, рассматриваемый как поправка при пересчете
данной величины к стандартным условиям, т. е.
XCT — Хф + 8Х = Хф + dX.
В некоторых случаях ошибка, связанная с тем, что мы конеч-
ные приращения величин приравниваем их дифференциалам,
может быть слишком велика; обычно' это бывает в тех случаях,
когда показатели Хр или Хт резко> изменяются, в зависимости от
величины тех или иных параметров. В таких случаях для уточ-
нения величины поправки §Х при переходе от фактических к
стандартным условиям можно использовать один из следующих
способов.
Пусть Хр и Хт являются функциями от р, Т и X:
Хр=Хр(р,Т,Х\
Хт=Хт(р, Т,Х).
По уравнению (6. 8)
ъх=х(хр^+хт6-^.
При приведении мы переходим от рф к р„, от Тф к Т„ и от
Хф к Х„. Если бы Ър и 8Г были бесконечно малыми первого
порядка, то с точностью до бесконечно малых второго порядка
мы могли бы вычислять Хр и Хт в точке (рф, Тф, Х$) или
в точке (рст, Тст, Хп). Однако, так как 8р, 8Т и 8АГ конечные
величины, то точнее определять Хр и Хт для точки
(Рср> ^Ср> ^₽).
$ 5. Частные случаи формул приведения
117
где
«___Рф+Рст ._ n I Ър гр Тф+Рст _ 'Т’ I
Гер— " “ Гф“Г 2 > 7 ср— “2Ф"1" 2 ’
TZ Лф4-ХСТ _ У t
лср — £ “ АФ + у •
Поскольку оХ вначале неизвестно, воспользуемся способом
последовательных приближений. В качестве пер-
вого приближения определяем Хр1 и ХТ1 в точке (рф, Тф, Хф)
и находим ЬХ по формуле
После этого находим в первом приближении XCPi=Xt>+r^-
определяем Хр2 и ХТ2 во втором приближении, а затем вычисляем
Процесс этот продолжаем до тех пор, пока значения 8Xi и
двух последовательных приближений будут мало отличать-
ся друг от друга (например, меньше, чем на 0,2% от X). После
этого находим окончательно +
Другой способ последовательных приближений заключается
в том, что приращения 8р и ST разбивают на ряд небольших
интервалов 8рь 8р2, Зрз... и 87\, 8Г2, 8Г3... и находят после-
довательно 8Xi и Хг для каждого' интервала.
§ 5. ЧАСТНЫЕ СЛУЧАИ ФОРМУЛ ПРИВЕДЕНИЯ
Необходимо твердо усвоить, что при переходе от фактических
условий (рф, 7ф) к стандартным (рСт, Л?г) величины и
Т Р
в выражении (6. 8) не являются независимыми; кро-
ме того, значение каждой из этих величин зависит от того или
иного выбора стандартной высоты.
Пусть фактические условия полета изображаются на пло-
скости ( р, Т) или (Нр, Т) точкой Л, а условия, соответствующие
стандартной высоте //от,— точкой В (фиг. 6.2). Как уже указы-
валось, будем считать, что
6Т=(1Т=Т„—Тф, Zp = dp=p„— рф.
Отклонение фактической температуры воздуха от стан-
дартной температуры при том же давлении рф (точка С на
фиг. 6.2), т. е. при той же барометрической высоте Нрф, бу-
дем обозначать через ЪрТ-.
\Т-Т„-Тф,
где Гст соответствует давлению рф.
118
Глава VI. Общие вопросы приведения летных данных
Так как
^т=тст-тф=т;т-тф+гС1-т;т,
ТО
dT=tpT + dT„,
где dTCJ—разность стандартных температур на высотах, СО'
ответствующих по СА давлениям р„ и рф (для случая, пока'
занного на фиг. 6.2, dT„<^0). Следовательно,
I лт„ /<- q
р р I ' р * ' *
Фиг. 6.2. Связь между дифференциалами
давления и температуры при переходе от
фактических условий к стандартным.
Из уравнения статики атмосферы следует [см. уравнение (1.10)]
dH= —RT— ,
Р
а так как для стандартной атмосферы
гст= го+ряст
или
dHzy __________________________ 1
dTzr р ’
ТО
§ 5. Частные случаи формул приведения
119
ИЛИ
ст __рdp
Т Р
(6.10)
Подставляя это выражение в формулу (6.9), получим
— = (6.11)
т т г р '
Формула (6.11) связывает отклонение температуры dT с
отклонением давления dp при переходе от фактических к стан-
дартным условиям при заданном отклонении 8РТ в фактических
условиях полета. Так как в тропосфере (•£=—0,19, то
— = ^+0,19^-. (6.12)
Т Т р к
В стратосфере Р = 0, а следовательно,
= (6.12')
Подставив в уравнение (6.8) вместо его выражение по
формуле (6.11), получим для тропосферы
^=(Хр- + (6.13)
л pi
для стратосферы
аЛ = Хр^- + Хт^. (6.13')
Уравнения (6. 13) и (6. 13') удобны тем, что при любой про-
извольно выбранной величине dp мы сразу переходим к стан-
дартным условиям при заданной величине Рассмотрим не-
сколько частных случаев применения этого уравнения.
Если в качестве стандартной принять высоту
Н„=нр,
т. е. делать приведение при рф=рст=const, то — = 0, а
В случае приведения при Т — const, т. е. при Н„ = НТ
— = 0.
т
120
Глава VI. Общие вопросы приведения летных данных
(6. 15)
Из формулы (6. И) следует, что
rfp = _1_
р Т ’
а
— = Х5,26Х.
X р р р/? Т р Т
Для стратосферы выбор высоты по температуре в качестве
стандартной невозможен.
При разработке метода приведения к стандартным условиям
выбор стандартной высоты производится таким образом, чтобы
формулы вида (6. 13), (6. 14) и (6. 15) для данного конкретного
типа самолета и двигателя имели наиболее простой вид и чтобы
входящие в них показатели Хр или X т могли быть легко и с до-
статочной точностью найдены либо по данным летных испыта-
ний, либо из теоретических зависимостей.
В тех случаях, когда лишь один из показателей Хр или Хт мо
жег быть определен с большой точностью, целесообразно выби-
рать стандартную высоту таким образом, чтобы в формулы при-
ведения входил только этот показатель. Так, если величина по-
казателя X т мала или может быть точно определена, приведение,
как это видно из формулы (6. 14), целесообразно производить при
постоянной барометрической высоте. Если точнее может быть
определен показатель Хр, то при приведении к стандартным усло-
виям целесообразно/, как это видно из формулы (6. 15), выбирать
высоту по температуре в качестве стандартной. В следующих
главах на конкретных примерах будет показано применение рас-
смотренных выше методов приведения к стандартным атмосфер-
ным условиям.
Приведение к заданным эксплоатационным условиям, как
уже говорилось выше, сводится обычно' к введению поправок на
изменение веса или оборотов. Все ранее сказанное в отношении
методов приведения к стандартным атмосферным условиям почти
полностью относится и к методам приведения к заданным экс-
плоатационным условиям. И в этом случае поправки вводятся
либо по подробной сетке характеристик, либо путем перехода к
другой эквивалентной высоте, для которой некоторые данные
функции вида ©ДХ, G,p, Г) или ®2(Х,п,р,Т) сохраняют свое
значение при переходе от одного веса или оборотов к другим, ли-
бо, наконец, путем получения поправок §Х, рассматриваемых как
дифференциалы, зависящие от дифференциалов dG или dn и по-
„ v G дХ Y п дХ
казателеи вида ХГг =— —~ , лп=~~-и т. п.
X dG X дп
Для.учета изменения внешней аэродинамической формы са-
молета обычно приходится проводить соответствующие полетные
испытания при различных вариантах аэродинамической формы
самолета (с подвесными баками и без них, полеты при различном
положении заслонок туннелей радиаторов и т. п».). На основе по-
§ 6. Свойства показателей
121
лученных из таких полетов результатов выводятся те или иные-
формулы для учета влияния изменения аэродинамической формы
самолета на его летные характеристики.
§ 6. СВОЙСТВА ПОКАЗАТЕЛЕЙ
В дальнейших главах нам часто придется находить дифферен-
циалы функций вида
X=f(p, Т, п, G).
Для сокращения выводов обычно проще находить так назы-
ваемый логарифмический дифференциал. Остано-
вимся несколько подробнее на его свойствах.
Пусть некоторая величина X есть функция двух перемен-
ных у и z
X—f(y, z). (6. 16)
Прологарифмировав обе части равенства (6. 16): lnX=lnf(y, z), (6.17)
продифференцируем ренциал X: или Так как (6. 17) и найдем логарифмический диффе- tZ(ln X) =d[ln f(y, z)] — = -^. (6.18) X f(y, z) X df= — dy + — dz, (6.19) dy dz
то уравнение (6.18) можно написать в следующем виде:
г, v V дХ v z дХ
Введя обозначения Ху = -^~— и Хг = > получим
^L = Xv^- + X2— . (6.21)
X у у z
В частности, если
X=ymzm, (6.22)
то
In Х= m 1 n_y + п In z,
а
— = . (6.23)
X у z
122
Глава VI. Общие вопросы приведения летных данных
Из сопоставления (6.21) и (6.23) найдем, что если
X—ymz\
то
Xy = m\ Xz = n. (6.24)
о „ i дХ
Выше мы условились называть выражения вида Х. =--------
показателями. Из соотношений (6.24) следует, что если X
является степенной функцией от у и z, то показатели Ху и
Xz равны показателям степени при соответствующих пере-
менных.
Рассмотрим случай сложной функции. Если
г), (6.16)
>' = ?(“' Я (6.25)
г=Ф(«, »),/
то на основании правил дифференцирования функции от функ-
ции можем написать:
dX dy . dz У~у z~7* (6.21)
dy du , dv \ — =ya — +У„ —, у и V dz du , dv — = za \-zv—. z и V (6.26)
Подставляя в (6.21) вместо — и — их значения по фор-
У z
мулам (6.26), получим
™(6-27)
Так как, с другой стороны, рассматривая X как функцию от
и и v, мы можем написать, что
= + (6.28)
то, сопоставляя формулы (6.27) и (6.28), получим
Xv=Xyyv+.XzZv. (6.29)
Пользование формулами (6.21) и (6.29) особенно удобно в
тех случаях, когда все функции f, ср и ф являются степенными,
§ 6. Свойства показателей
123
так как при помощи соотношений (6. 24) можно, не производя
непосредственного дифференцирования, сразу написать необхо-
димые формулы для логарифмических дифференциалов.
Следует помнить, что в общем случае показатели Ху и Xz
являются сами функциями от у и г.
В виде примера разберем задачу, с которой в дальнейшем
придется встретиться. Для определенного режима полета, напри-
мер, для режима горизонтального полета с двигателем, работаю-
щим при постоянных оборотах, число М полета зависит от атмо-
сферных условий, т. е.
М=/(ря, Тя),
где рн и Тн — независимые переменные. Пусть в результате экс-
перимента были найдены показатели Мр и Мг. Требуется найти
для того же режима полета показатели Ут и УР, а также Vi г
и У,?.
Для подсчета показателей Ур и Ут воспользуемся формулой
V=M.a = M.V kgRTH, (6.30)
причем по условию
М=/(р«, Тя).
Сопоставляя приведенные зависимости с формулами (6. 16),
(6.25) и (6.29), получим
УР=У^ЛР+УтТр- Vt=V^t+VtTt.
Из формулы (6. 30) следует, что
7М=1; Уг=0,5.
Так как Тн и рн мы считаем независимыми переменными, то
Т Рн_дТ^ а т 7k^=i.
Р ТИ дРн ТИ дтн
Следовательно,
^=М„
у = Mujr -J- 0,5.
(6.31)
Таким же образом, воспользовавшись для Vi формулой (4. 15)
у =М1/
V Ро
и считая
М=/(ря, ТИ),
124 Глава VI. Общие вопросы приведения летных данных
найдем Vip = V t мМр + V }ррр, ViT = И; ММГ + VjppT.
Так как И/м=1; V/p = 0,5; Л>=1; рт=^
то VZp = Мр + 0,5, | (б 32)
Глава VII
ОСНОВНЫЕ СВЕДЕНИЯ О ПЕРЕСЧЕТЕ ХАРАКТЕРИСТИК
ДВИГАТЕЛЕЙ
При обосновании методов и формул приведения летных дан-
ных самолетов к стандартным атмосферным условиям существен-
ную роль будут играть зависимости характеристик поршневого
или турбореактивного двигателя от атмосферных условий.
Рассмотрим основные положения, формулы и принятые в
большинстве методов' приведения допущения, касающиеся ха-
рактеристик двигателей.
Вследствие большого разнообразия типов применяемых на
самолетах двигателей мы в дальнейшем остановимся только на
следующих основных типах: 1) невысотный поршневой двига-
тель, 2) высотный поршневой двигатель с приводным центробеж-
ным нагнетателем, 3) поршневой двигатель с комбинированной
системой наддува и 4) турбокомпрессорный воздушно'-реактивный
двигатель (ТКВРД), обычно сокращенно называемый турбо-
реактивным двигателем (ТРД).
§ 1. НЕВЫСОТНЫЙ ПОРШНЕВОЙ ДВИГАТЕЛЬ
Основными характеристиками невысотного поршневого дви-
гателя являются, как известно: 1) внешняя характеристика на
земле и на высоте и 2) винтовая характеристика на земле и на
высоте.
Внешней характеристикой называется кривая из-
менения эффективной мощности двигателя Ne по числу оборотов п
при полном открытии дросселя карбюратора. Винтовой ха-
рактеристикой называется кривая изменения эффективной
мощности Ne по числу оборотов п при одном и том же винте, но
при различном открытии дросселя. На фиг. 7. 1 показан для
обычный вид внешней и винтовой характеристик двига-
теля, а также кривой изменения эффективного удельного расхода
топлива Се по оборотам, причем Се равно расходу топлива на
эффективный сило-час, т. е.
С __ Q кг
е Ne л.с.час
где Q — часовой расход топлива в кг/час, а
Ne — эффективная мощность в л. с.
126 Глава VII. Основные сведения о пересчете характеристик, двигателей
Для целей приведения внешнюю характеристику невысотно-
го двигателя в небольшом диапазоне чисел оборотов удобно
представить в следующем виде:
Ne=Cn\ (7.1)
где С для заданных атмосферных условий (ряиТя) является
постоянной величиной, а показатель степени k в диапазоне рабо-
Фиг. 7. 1. Характеристики невысотного
поршневого двигателя.
I — внешняя характеристика; 2—винтовая характеристика.
чих оборотов почти не изменяется; в зависимости от конструк-
ции двигателя и его параметров значение k обычно лежит в пре-
делах от 0,7 до 1.
Для подсчета мощности при работе двигателя по внешней
характеристике на одних и тех же оборотах, но при разных
атмосферных условиях, принято пользоваться коэффициентом
падения мощности:
где NeH—мощность двигателя на высоте (при барометрическом
давлении ряи температуре Тя) при полном открытии дросселя и
оборотах п,
§ 1, Невысотный поршневой двигатель
127
Neo — мощность двигателя при полном открытии дросселя и
при тех же оборотах п, но на высоте Яст=0, т. е. при ро —
= 760 мм рт. ст. и То —288° К.
У нас в СССР принята следующая формула для подсчета ко-
эффициента падения мощности невысотного двигателя с высотой
при n,=const:
Л = 1,11^1/ ——0,11 =0,0248-7=—0,11, (7.3)
Ро V ТД у Тв
где рннужно брать в мм рт. ст.
Зависимость коэффициента А от высоты для стандартных
условий приведена на фиг. 7. 2.
Фиг. 7.2. Зависимость коэффициента падения
мощности невысотного двигателя от высоты
(для стандартных условий).
Перейдем к винтовой характеристике двигателя. Из теории
винтов известно, что потребная для вращения винта мощность
выражается формулой
757V = р рп3о05,
где р — плотность воздуха;
пс — секундное число оборотов винта (по= где и — число
60
оборотов двигателя в минуту, а I — степень редукции);
D—диаметр винта;
128 Глава VII. Основные сведения о пересчете характеристик двигателей
’Р — коэффициент мощности винта. Для винтов фиксиро-
ванного шага (ВФШ) коэффициент мощности g зави-
сит только^ от относительной поступи винта
77CZ) ’
где V — скорость полета. Для винта изменяемого шага коэффи-
циент мощности зависит как от X, так и от угла установки ло-
пасти 9 на среднем радиусе лопасти. Так как на невысотных
двигателях обычно устанавливаются винты фиксированного ша-
га, то мы будем считать, что Р=/(Х), и называть винтовой харак-
теристикой кривую изменения мощности двигателя при X=const
(при работе двигателя на земле 7=0, а следовательно, и Х=0).
Поэтому для одного и того же винта при работе двигателя по
винтовой характеристике на земле
Р = go—const,
а эффективная мощность двигателя, равная мощности, погреб-
ной для вращения винта, при Н^=0 пропорциональна кубу обо-
ротов
^0 винт = Btl\
еде
&___ ррврР5/3
~ 75-603
Таким образом винтовая характеристика для Hcr=Q представ-
ляет собой кубическую параболу. Пересечение этой ку-
бической параболы с внешней характеристикой мотора для
определяет так называемое взлетное число оборотов ивзл, а раз-
виваемая при этом мощность называется взлетной мощностью
Nе рзут (см. фиг. 7. 1).
§ 2. ОБЩИЕ ЗАВИСИМОСТИ МОЩНОСТИ ПОРШНЕВОГО ДВИГАТЕЛЯ
С ПЦН ОТ ДАВЛЕНИЯ НАДДУВА И ТЕМПЕРАТУРЫ НА ВСАСЫВАНИИ
На фиг. 7. 3 приведена типичная сетка характеристик двига-
теля с приводным центробежным нагнетателем (ПЦН) для стан-
дартных условий. В левой части этого графика приведена зави-
симость эффективной мощности двигателя Ne от давления надду-
ва рк и числа оборотов п для 77с^=О|, в правой части — зависи-
мость Ne от высоты полета для разных оборотов п. На этом
же графике приведены линии постоянного значения давления
наддува p/c=const для случая работы двигателя с полностью от-
крытой дроссельной заслонкой.
Как известно', границей высотности двигателя назы-
вают ту высоту, выше которой невозможно сохранение заданно-
го давления наддува рк при работе двигателя на полном газе.
§ 2. Общие зависимости мощности поршневого двигателя с ПЦН 129
Граница высотности зависит от числа оборотов двигателя и ра-
стет с увеличением этого числа. При полете на высотах ниже
границы высотности (для данных оборотов) давление надду-
ва рк поддерживается постоянным и равным номинальному дав-
лению наддува; в случае приводного центробежного нагнетателя
это достигается соответствующим дросселированием воздуха на
входе в нагнетатель. Таким образом высотная характеристика
двигателя для n=const состоит из двух ветвей: ветви, соответ-
ствующей высотам ниже границы высотности (кривая АВ на
фиг. 7.3), для которой p&=const, и ветви ВС, соответствующей
участку выше границы высотности и полному открытию дрос-
сельной заслонки.
[ рм = 965 мм pm. cm.
—j—-----1------1------1_________L .. » _______।______। ।______,
1QQ 800 900 1000p^MMpT.cr.O 1000 2000 3000 4000 5000 бОООНм
Фиг. 7.3. Типичная сетка характеристик двигателя с приводным
центробежным нагнетателем.
Как известно, на современных поршневых двигателях с ПЦН
применяются два типа системы всасывания. Как правило, на
двигателях воздушного охлаждения карбюратор расположен пе-
ред нагнетателем непосредственно после всасывающего патрубка
(фиг. 7.4). В этом случае в нагнетателе сжимается смесь воз-
духа с бензином, поступающим из карбюратора. У двигателей
жидкостного охлаждения обычно карбюратор с дроссельной за-
слонкой, управляемой сектором газа, расположен между нагне-
тателем и цилиндрами двигателя (фиг. 7.5). На входе в нагне-
татель имеется вторая дроссельная заслонка или дроссельное
устройство в виде поворотных лопаток, управляемых регуля-
тором постоянства давления наддува (РПД).
При полете ниже границы высотности и при полном открытии
дроссельной заслонки карбюратора РПД устанавливает дрос-
сельную заслонку перед нагнетателем в такое положение, чтобы
сохранялось постоянное давление наддува. При этой системе вса-
сывания в нагнетателе сжимается чистый воздух.
9 772
130 Глава VII. Основные сведения о пересчете характеристик двигателей
Основные формулы и зависимости, которые обычно применя-
ются для двигателей с ПЦН при приведении к стандартным
атмосферным условиям, не учитывают, как правило, указанного
Фиг. 7. 4. Схема всасывания у двигателя, у которого карбюратор рас-
положен перед нагнетателем.
различия в схемах всасывания, так как это различие практически
не сказывается на зависимостях мощности двигателей от откло-
нения фактических температур от стандартных в обычных пре-
Фиг. 7.5. Схема всасывания у двигателя, у которого карбюратор
расположен после нагнетателя.
делах. Вследствие этого в дальнейшем мы при выводе всех фор-
мул будем исходить из схемы двигателя, в нагнетателе которого
сжимается чистый воздух (фиг. 7.5), а полученные результаты
будем применять и для схемы, в которой карбюратор располо-
жен до нагнетателя.
§ 2. Общие зависимости мощности поршневого двигателя с ПЦН 131
Эффективная мощность двигателя зависит как от режима
его работы, так и от режима полета и атмосферных условий. Ре-
жим работы двигателя определяется числом оборотов п и поло-
жением дроссельной заслонки, а режим полета и атмосферные
условия с точки зрения их влияния на работу двигателя могут
быть охарактеризованы давлением воздуха рн, его абсолютной
температурой Т/уи числом М полета. Таким образом
Ne=pn, ср, pH, Тн, М),
где с? — угол открытия дроссельной заслонки.
В дальнейшем нас будут интересовать в основном два режи-
ма работы двигателя, используемые при определении максималь-
ных горизонтальных и вертикальных скоростей: номиналь-
ный (пНом, рк ном) и форсированный (Пфэрс, рк фэре). Для
того чтобы не повторяться, мы дальше будем говорить только о
номинальном режиме работы двигателя, но все приводимые ниже
формулы могут быть использованы и для форсированного режи-
ма его работы путем соответствующей замены значения оборотов
и давления наддува.
На высотных двигателях всегда применяют винт изме-
няемого шага, причем на самолете устанавливается авто-
мат-регулятор постоянства оборотов; после уста-
новки летчиком сектора автомата в определенное положение
число оборотов двигателя автоматически поддерживается по-
стоянным независимо от режима полета и от положения дроссель-
ной заслонки.
Перейдем к выводу формул для учета влияния изменения
атмосферных условий на мощность двигателя. Для номинально-
го режима работы, как это ясно из сказанного выше,
Ne=f(PH, Тн,М),
причем выше границы высотности этот режим опре-
деляется тем, что 1) n = nHoM=const и 2) дроссельная заслонка
полностью открыта (<? = const), а ниже границы высот-
ности: 1) п=пиОм=const и 2) Pfc=£fcHOM=const, причем
М).
Вследствие громоздкости и сложности применяемых в тео-
рии авиадвигателей формул для учета зависимости мощности,
двигателя с ПЦН от разных параметров эти формулы в развер-
нутом виде обычно не используются для приведения результатов
летных испытаний тем более, что в них входит ряд величин,
которые не измеряются в испытательных .полетах. Для получе-
ния более простых формул мы воспользуемся следующими со-
ображениями.
Летные характеристики самолета зависят от располагаемой
мощности А^расп, причем
^расп е “Ь ^реакт»
9*
132 Глава VII. Основные сведения о пересчете характеристик двигателей
где ч)в — к. п. д. винта, а ЛГреакт—реактивная мощность, созда-
ваемая реакцией струи выхлопных газов. Введем понятие
результирующей эффективной мощности двигателя
щ ^реакт А^расп
е " -Цв Чв '
Так как
где Nr—мощность трения, a —индикаторная мощность, то
ЛГ'=М_дг
В дальнейшем для характеристики мощности двигателя в по-
лете мы всегда будем пользоваться результирующей эффектив-
ной мощностью N'e, причем для упрощения будем называть ее
просто эффективной мощностью и обозначать через Ne. Написав
выражения для этой мощности для фактических и стандартных
условий полета, получим
| Nr ф -Мреакт
Ne ф № ф М ф '’Qb. ф^» Ф Nj ф
Neer М'ст J Nr ст ^реакт М ст
NiCT ^В. сг^ст
Мощность трения составляет примерно 10% от Ni9 а -Ур?а-^-
в зависимости от режима полета и от типа реактивных вы-
хлопных патрубков составляет 5 —15% от ^..Следовательно,
с достаточной точностью можно считать, что В^1, а
Ne ф Nj ф
Nе ст Ni ст
Таким образо-м при приведении летных данных изменение ре-
зультирующей эффективной мощности можно учитывать по фор-
муле, применяемой в теории авиадвигателей для индикаторной
мощности, т. е. считать, что при п=const
Ng ф
М? ст
Ркф
Pk ст
(7.4)
где Л^ф, Ркф и Ткф — эффективная мощность, давление наддува
и температура воздуха или смеси за нагнетателем при атмосфер-
ных условиях, характеризуемых атмосферным давлением и
£ 3. Формулы для приведения мощности поршневого двигателя1 с ПЦН 133
абсолютной температурой воздуха 7ф, a Neer, Рк^ и 7\-ег— те же
величины при Рст^Рф+^Р и Гст=Гф + 8ГС
Так как ниже границы высотности давление наддува под-
держивается постоянным, то для этого участка формула (7. 4^
принимает следующий вид:
Как известно, мощность поршневого двигателя сравнительно
мало зависит от скорости полета. Как показывает подробный
анализ, влияние изменения скорости полета на эффективную
мощность поршневого двигателя при переходе от фактических
к стандартным условиям полета настолько незначительно, что
им свободно' можно пренебречь без особого ущерба для точ-
ности. Вследствие этого в дальнейшем мы будем считать, что
эффективная мощность двигателя зависит лишь от давления
воздуха и его температуры и не зависит от скорости полета,
а следовательно, и от числа М полета.
§ 3. ФОРМУЛЫ для ПРИВЕДЕНИЯ мощности
ПОРШНЕВОГО ДВИГАТЕЛЯ С ПЦН
Зависимость эффективной мощности двигателя выше границы
высотности от температуры воздуха
Так как для самолетов с поршневыми двигателями приве-
дение к стандартным условиям чаще всего производится при
постоянной барометрической высоте, то ниже мы рассмотрим
зависимость эффективной мощности двигателя Ne лишь от тем-
пературы воздуха при рн=const. Для изучения этой зависимости
необходимо', как это видно из формул (7.4) и (7.5), определить
зависимость давления наддува рк и температуры на всасывании
Тк от температуры воздуха Т//.
Вывод будем проводить для схемы двигателя, представлен-
ной на фиг. 7. 5, причем вначале рассмотрим работу двигателя
при полете выше границы высотности, т. е. при полностью от-
крытой дроссельной заслонке. При выводе принимаем ряд до-
пущений.
Первое наше допущение заключается в том, что мы будем
считать давление и температуру воздуха на входе в нагнетатель
двигателя равными давлению и температуре наружного воздуха.
1 Строго говоря, в формуле (7.4) для схемы всасывания, представлен-
ной на фиг. 7.5, следовало бы вместо pk брать р а. т. е. давление смеси
перед цилиндром. Однако в дальнейшем мы используем эту формулу только
для случая, когда дроссельная заслонка карбюратора полностью открыта;
в этом случае разность между pkupa настолько мала, что ею можно вполне
пренебречь.
134 Главен VII. Основные сведения о пересчете характеристик двигателей
Это допущение равносильно тому, что мы пренебрегаем измене-
нием сжатия воздуха во всасывающем патрубке из-за скоро-
стного наддува и изменением гидравлических потерь в патрубке
при переходе от фактических к стандартным условиям. Таким
образом изложенный ниже вывод, строго говоря, пригоден лишь
для случая полета на относительно малых скоростях. Однако
более подробный анализ показывает, что приведенные ниже ре-
зультаты могут быть с успехом использованы и для чисел М
полета, соответствующих режиму максимальной горизонтальной
скорости самолетов с поршневыми двигателями.
Как известно из термодинамики, адиабатическая работа сжа-
тия 1 кг воздуха от давления рн и температуры Тн до давления
Рк равна
7*ад.н —~ — RTH
к — 1
(7.6)
Если бы сжатие в нагнетателе было адиабатическим, то в
конце сжатия температура воздуха равнялась бы
fe-i
। . (7.7)
\Рн /
Обозначив повышение температуры в нагнетателе при адиа-
батическом сжатии воздуха в нем через
АГад=Лад-Тя, (7.8)
получим, что
7<ад. и — k __ 1 R&Tад,
откуда
Вследствие гидравлических потерь в нагнетателе действитель-
ная температура воздуха за ним будет равна 7\, причем Tk^>TkaJk,
Действительная работа сжатия 1 кг воздуха в нагнетателе
больше Лад.н и равна
Ln = -^—-R[Tk-TH\ (7.10)
k — 1
Обозначив действительное повышение температуры воздуха
в нагнетателе через
&Тк=Тк—ТИ, (7.11)
§ 3. Формулы для приведения мощности поршневого двигателя с ПЦН 135
получим
А= /?АТН= 1О2,5ДТН,
н k- 1 н "
откуда
дТн = -^-
н 102,5
(7.12)
Введем понятие адиабатического к. п. д. нагнетателя, равного
отношению адиабатической работы сжатия 1 кг воздуха к дей-
ствительной работе сжатия:
^ад. н
^ад. н — - •
Ln
В соответствии с формулами (7. 9) и (7.12)
•Чад. „ = • (7.13)
Адиабатический к. п.д. нагнетателя зависит, вообще говоря,
от режима его работы; однако в рабочем диапазоне работы на-
гнетателя т]ад.н меняется мало и может быть принят постоянным.
Таково второе допущение, принятое нами.
Из формул (7.6), (7.9) и (7.13) следует, что повышение
температуры воздуха в нагнетателе будет
k-\
д 'р _ н
Н” ^Чд.н
J___Т
1 н
%д. н
(7.14)
Из теории центробежных нагнетателей известно, что в рабо-
чем диапазоне работы двигателя адиабатическую работу сжа-
тия можно принять пропорциональной квадрату оборотов.
^ад. н! _ п\
•^ад.н2 п2
Следовательно, при постоянном числе оборотов (п=const) не
изменяется и величина адиабатической работы сжатия воздуха
в нагнетателе, т. е. Z^.H=const. Но в этом случае, считая и
Tjaj.H=const, из формулы (7. 13) получим, что и &rH=--const.
Таким образом при сделанных выше допущениях повышение
температуры воздуха в нагнетателе ДГН в случае n=const
остается постоянным и, как следует из формул (7. 11) и (7. 14),
4 7; = T*-7\ = const, (7.15)
л-i
т/ад. н А Т'н — Ти
= const.
(7.16)
136 Глава VII. Основные сведения о пересчете характеристик двигателей
Формулы (7. 15) и (7. 16) являются основными формулами,
по которым можно определить изменение давления наддува р*
и температуры выше границы высотности в зависимости от
изменения температуры наружного воздуха Тн при постоянных
оборотах двигателя п=const и при постоянном барометрическом
давлении рн^const. Продифференцируем обе части формул
(7.15) и (7. 16). Учитывая, что в нашем случае pn=const, по-
лучим
dT k — dT н — 0, 1
-1- I
k - 1 pk * !
dTH-\---- TB k_i~ dpk — 0.1
Ph
(7.17)
Для характеристики зависимости температуры за нагнетате-
лем Tic и давления наддува рк от температуры наружного воз-
духа Тн при p//=const введем показатели
г тн dTk
1кГ=т~^т~
Tk дТа
тн dpk
PkT = —• —-
Pk дГн
Из формул (7.17) следует, что
дть .
— =1,
дТв
dPk
дТв
k - 1
откуда
_ 1
ТнРк k
(7.18)
(7.19)
Так как Тк=Т в + \ТК, а ДГН может быть определено по
формуле (7. 14), то после соответствующих подстановок фор-
мулу (7. 18) можно написать в таком виде:
Ьг=----------1 ,_1 • (7.20)
^ад. н \Рн /
§ 3. Формулы для приведения мощности поршневого двигателя с ПЦН 137'
Как видно, из формулы (7. 19), показатель рьт, характери-
зующий относительное изменение давления наддува ръ в зави-
симости от относительного изменения температуры воздуха Тц
на данной барометрической высоте, зависит только от —
Рн
(фиг. 7.6). Для двигателей малой высотности (—<С2) пока-
Рн
затель ркт равен в среднем—0,5-4----0,6, а для двигателей
Pk
большой высотности (—>5) — 1,3ч-----1,4. Следовательно, при
Рн
увеличении температуры воздуха на 1% давление наддува
уменьшается у первых двигателей г _
на 0,5—0,6%, а у вторых — на ; j| .
1,3—1,4%. . ,4--j------i---
Из формулы (7.20) видно, что i j /
показатель Ткт, характеризующий
относительное изменение температу- _____
ры воздуха после нагнетателя в за-
висимости от относительного измене- _08____________________
ния температуры воздуха на данной ’ \/
барометрической высоте, зависит от —у---------------------
Pk и '
т]ад.н и —.Легко показать что изме- ____/1__х------L-------
Рн ' 1 Г
нение значения ^ад.н в пределах 1 I______________
0,5—0,7 мало влияет на величину ’ |
показателя Тьт, а основное влияние 1---------------1—-
на величину этого показателя оказы- 1 2 3 4
вает параметр — . Поэтому для Фиг- 7-Зависимость показа^
Рн Pk
практических целей приведения мож- теля р kT от —.
но считать, что показатель 7\т за- Рн
висит только от —, а подсчет его производить для среднего
Рн
значения ^ад.н=0,6. Зависимость показателя Т*т приведена на
фиг. 7. 13 (пунктирная кривая).
Рассмотрим теперь, как изменяется на одной и той же баро-
метрической высоте эффективная мощность двигателя с ПЦН
выше границы высотности при изменении температуры воздуха.
Для этого возьмем логарифмические дифференциалы от правой:
и левой частей формулы (7. 4)
dNe dpk 1 dTk
Так как
Ne Pk 2 ?k
dpk dTH
— =PkT — >
Pk TH
138 Глава VII. Основные сведения о пересчете характеристик двигателей
а
*Тк т ЧТн = * kT » Tk тП
то dN. / 1 _ \ <iTa
или ^ = /7^, (7.21) Ne ТИ
мощности двигателя в зависимости
от температуры воздуха равен
Так как основную роль в вели-
чине показателя Nt играет показа-
тель ркт, не зависящий от ^ад.н, то и
N т почти не изменяется при измене-
нии 7]ал.н в широких пределах. На
фиг. 7.7 приведена зависимость Nt
от подсчитанная для ^алн^0,6. Из
рн
фиг. 7. 7 следует, что для двига-
телей малой высотности
Р
(— ^2) увеличение темпе-
Рн
ратуры воздуха на 1'% при-
водит к уменьшению мощ-
ности двигателя выше гра-
ницы высотности пример-
но н а Г°/о, а для двигателей
Pk
большой высотности (— ^5) — примерно на 1,5%.
Зависимость эффективной мощности двигателя ниже границы
высотности от температуры воздуха
Перейдем теперь к анализу изменения мощности двигателя
с ПЦН ниже границы высотности при изменении температуры
наружного воздуха на постоянной барометрической высоте Н»
при n = const. Взяв логарифмические дифференциалы от обеих
частей уравнения (7.5), получим
dNe
1 dTk
2 Tk
(7.23)
§ -3. Формулы для приведения мощности поршневого двигателя с ПЦН 139
Ниже границы высотности сохранение постоянного давления
наддува рк=рк ном достигается дросселированием двигателя, т. е.
прикрытием дроссельной заслонки, расположенной перед нагне-
тателем (см. фиг. 7.5). Как известно, можно считать, что при
прохождении воздуха через дроссель температура воздуха
остается постоянной, а происходит лишь уменьшение его- давле-
ния. Будем считать, что во всасывающий патрубок двигателя
поступает воздух с давлением
Ph~z^Ph’>
где гдр
=-----степень понижения давления в дросселе.
Рн
При сделанных нами ранее допущениях о работе нагнета-
теля и для рассматриваемого случая остаются в силе уравнения
(7. 15) и (7. 16), но в последнем уравнении рн надо заменить
произведением едр рн, т. е.
ДТН = Tk — Тн = const,
—-1 = const.
(7.24)
Воспользовавшись прежними обозначениями, мы можем пе-
реписать уравнение (7.23) по типу (7.21):
dTn
Ne Т Тн’
где для работы двигателя ниже границы высотности
NT=-±-TkT, (7.25)
а Ткт — определяется по той же формуле (7.20), что и для
высот выше границы высотности, но с заменой рн величиной
«др Рн* Для исключения едр из формулы (7.20) для Ткт вос-
пользуемся уравнением (7.24) и перепишем его в следующем
виде:
1
/ \ k
-1
хРН /гр. в
где Кр.в и — —соответственно температура наружного
\Р Н /гр.в
воздуха и отношение давления наддува к атмосферному давле-
нию на высоте, соответствующей границе высотности для за-
140 Г лава VII. Основные сведения о пересчете характеристик двигателей
данных оборотов п=const; понятно, что на границе высотности
вследствие полного открытия дросселя 8ДР=1.
Из последнего уравнения найдем, что
Подставляя найденное значение в формулу (7.20), получим,
что для высот ниже границы высотности
TkT—------------
1
1 +
т
'ад. н
1
?гр. в
Тн
Так как
^гр.в_1 0,0065Ш
Тн Тн *
где ДН—разность между границей высотности и рассматри-
Гг
ваемой высотой, то величина —г-р‘в- лежит в пределах 0,9 —1,0.
Тн
Pk
Для небольших — порядка 2, где в среднем 7\тгр. в = 0,8,
Рн
получим
Г.г-(1,о-1,02) Т.ггр.в,
Pk
а для больших — порядка 5 (7\ггр. в^0,55)
Рн
Т*гМ1,0-1,04)7^гр.в.
В общем
TkT~ Т^Ггр.в.
Таким образом с достаточной точностью можно принять, что
показатели Т*т для всех высот ниже границы высотности равны
значениям этих показателей для границы высотности, т. е. их
можно определять по пунктирной кривой фиг. 7. 13 или по фор-
муле (7. 20) для значения —, соответствующего границе высот-
Рн
ности. Зная 7\г, легко по формуле (7.25) определить значение
показателя NT для высот ниже границы высотности.
Если на двигателе имеется двухскоростной нагнетатель, то
Pk . '
значения — нужно брать для границы высотности при работе
двигателя на соответствующей скорости нагнетателя.
Ранее мы указывали, что выше границы высотности для дви-
§ 4. Поршневой двигатель с комбинированной системой наддува
141
(р \
— »2 увеличение температуры
Рн /
воздуха на 1% приводит в среднем к уменьшению мощности на
(Pk \
—~5 I— на
Рн )
1,5%. Из формулы (7.25) следует, что соответствующие
цифры для высот ниже границы высотности
будут 0,35% и 0,25%.
Следовательно', ниже границы высотности изменение темпе-
ратуры воздуха оказывает значительно меньшее влияние на
мощность двигателя, чем выше границы высотности. Из пред-
шествующего анализа ясно, что причиной такого различия яв-
ляется дополнительное изменение мощности двигателя выше
границы высотности из-за изменения давления наддува при
переменной температуре воздуха.
Заканчивая на этом анализ зависимости мощности двигателя
с ПЦН от атмосферных условий, заметим, что при выводе фор-
мул мы пользовались приближенной зависимостью мощности
двигателя от разных параметров. Однако, как показывают бо-
лее точные расчеты, принятые нами допущения в известной сте-
пени компенсируют друг друга, в результате чего приведенные
в предыдущих параграфах формулы достаточно' хорошо под-
тверждаются практикой приведения результатов летных испы-
таний.
Следует, кроме того, подчеркнуть, что все выведенные выше
формулы можно применять только для целей приве-
дения к стандартным условиям, т. е. только для небольшого
диапазона относительного изменения температуры воздуха или
числа М. Пользоваться этими формулами для случаев весьма
значительного изменения температуры или числа М недопустимо
вследствие грубости сделанных нами исходных допущений.
§ 4. ПОРШНЕВОЙ ДВИГАТЕЛЬ С КОМБИНИРОВАННОЙ СИСТЕМОЙ
НАДДУВА
На фиг. 7. 8 представлена часто применяемая схема поршне-
вого двигателя с комбинированным наддувом (КН). Основными
элементами этой схемы являются: всасывающий патрубок 1:
турбокомпрессор, состоящий из турбины 2, приводимой во вра-
щение выхлопными газами, и нагнетателя турбокомпрессора
(НТК), 3, сидящего на одном валу с турбиной; промежуточный
радиатор 4, служащий для охлаждения воздуха; карбюратор 5
и односкоростной приводной центробежный нагнетатель 6
(ПЦН). Воздух через всасывающий патрубок поступает в НТК,
являющийся первой ступенью сжатия. Из НТК воздух поступает
в промежуточный радиатор, а затем, пройдя через карбюратор,
сжимается в ПЦН, являющемся второй ступенью сжатия. Вы-
хлопные газы после выхода из двигателя частично идут на вы-
142 Глава VIT Основные сведения о пересчете характеристик двигателей
хлоп в атмосферу, а часть их направляется в турбину турбоком-
прессора. Регулирование количества газов, попадающих в тур-
бину, производится при помощи дросселя перепуска 7.
На фиг. 7. 9 представлен примерный вид высотной характе-
ристики двигателя с. КН для номинального режима работы-
Высотная характеристика может быть разбита на три участка —
АВ, ВС и CD. На первом участке — от земли до расчетной вы-
соты приводного нагнетателя дроссель перепуска выхлопных
Фиг. 7. 8. Схема поршневого двигателя с комбинирован-
ным наддувом.
1—всасывающий патрубок; 2—турбина турбокомпрессора; 3—нагне-
татель турбокомпрессора; 4—промежуточный радиатор; 6—карбюра-
тор; 6— ПЦН; 7—дроссель перепуска.
газов полностью открыт, а дроссель карбюратора по мере уве-
личения высоты все больше открывается, пока он не откроется
полностью на расчетной высоте ПЦН (см. кривую флр). На этом
участке двигатель работает примерно так же, как и двигатель
с ПЦН без турбокомпрессора ниже границы высотности. Вы-
сота, соответствующая точке В, называется первой границей
высотности.
На втором участке ВС дроссель карбюратора полностью от-
крыт, а дроссель перепуска выхлопных газов постепенно при-
крывается, направляя по мере увеличения высоты полета все
большее количество выхлопных газов в турбину, в результате
чего повышаются обороты ТК. При этом, как и на первом уча-
стке, давление наддува поддерживается постоянным. На неко-
торой высоте (соответствующей точке С на фиг. 7.9) обороты
турбокомпрессора достигают максимально допустимой величины
ягк«ом. Эта высота называется второй границей высотности
$ 4. Поршневой двигатель с комбинированной системой наддува
143*.
(часто ее называют просто границей высотности). На третьем
участке, т. е. на высотах, больших второй границы, ТК вра-
щается с постоянным числом оборотов, в связи с чем по мере'
увеличения высоты падает давление наддува pk.
Фиг. 7. 9. Примерный вид высотной характеристики двигателя
с КН при номинальном режиме работы.
Ър—Угол открытия дросселя карбюратора;
?пер — угол открытия дросселя перепуска.
Рассмотрим, как изменяется мощность двигателя с КН it
зависимости от изменения атмосферных условий на втором и на
третьем участках i. Мы выведем формулы для изменения мощ-
ности двигателя с КН только- в зависимости от изменения тем-
пературы воздуха Тн при неизменной барометрической высоте
Нр (т. е. при p/7=const) и при постоянных оборотах (n=consth
1 Приводимые ниже результаты близко совпадают с результатами, по-
лученными И. И. Шунейко.
144 Глава VII. Основные сведения о пересчете характеристик двигателей
Для упрощения выкладок мы будем считать, что всасываю-
щий патрубок и нагнетатель турбокомпрессора можно рассмат-
ривать как единый агрегат, в котором при постоянных оборотах
.Птк =const повышение температуры при сжатии воздуха АЛ
остается постоянным независимо от температуры наружного
воздуха 7н- Кроме того, адиабатический к. п. д. всасывающей
системы и НТК 'Падх, а также адиабатический коэффициент ПЦН
ч]ад2 мы будем считать постоянными.
Рассмотрим изменение по тракту температуры и давления
воздуха, поступающего в двигатель. При сделанных нами допу-
щениях для всасывающего патрубка и НТК мы можем написать
ЬТ^Ъ-Т^-^-
^ад!
(7.26)
где Т2 и Р2 — температура и давление воздуха за НТК (см.
фиг. 7.8).
Всл едств и е гидр а в л и ч еского соп ротивления п ром ежу точно! о
радиатора
рз=р2—Арр, (7.27)
где р3 — давление воздуха за радиатором,
АрР— потеря полного напора при прохождении воздуха че-
рез радиатор. В хорошо выполненных радиаторах АрР очень
мало и не превышает 15—20 мм рт. ст. Для оценки степени
охлаждения воздуха в промежуточном радиаторе вводится так
называемый коэффициент качества tqp, равный
Л-Л
Т2 - Тн 9
(7.28)
и представляющий отношение фактического перепада темпера-
тур воздуха в радиаторе к максимально возможному перепаду.
Значение коэффициента т]р зависит как от качества и конструк-
ции радиатора, так и от степени открытия регулируемых засло-
нок туннеля промежуточного радиатора. Обычно величина ?)₽
ле!жит в диапазоне от 0,50 до 0,70. В среднем можно считать
7]р=0,60 как для стандартных, так и для фактических условий
полета. Из формул (7.26) и (7.28) следует, что
Тз = Т2-7)р(Т2-Тя) = Тн + (1 -7^р) А(7.29)
Повышение температуры воздуха в ПЦН равно
АТ2 — Tk Т% —
k-1
Т'з / /^4? \ £
*7ад2 Ц р3 /
(7.30)
§ 4, Поршневой двигатель с комбинированной системой"Наддува 145
По изложенным ранее соображениям [см. формулу (7. 15)]
можно считать, что при n=const
const.
Из формул (7. 29) и (7. 30) найдем, что
^ = Тя + (1-7]р)ДТ1 + ДГ2,
а из формулы (7.30)
k
pk==lX+2^H\^ Рз-
\ У3 /
(7.31)
Выразив р3 из (7.27) и (7.26), а Т3 из (7.30) и (7.31) и под-
ставив в последнее равенство, получим
Pk= 14
_____Тад2 А ^2 _
7я+(1 — Y)p) AFj
k
k—1
k
(7.32)
Iff J J
Формулы (7.31) и (7.32) могут быть использованы для
высот как выше, так и ниже второй границы высотности. Однако
в первом случае, птк=const, а следовательно, и Д7\—const,
а ниже границы высотности /г const, следовательно, и
const. Значения д7\ и пткмогут быть найдены из условия,
что ниже границы высотности pfc=const.
Для упрощения дальнейших выкладок введем следующие
обозначения:
k—i
( Рг \ k __।
^Рн)
k-Л
k -1.
\ Рз/
Кроме того, так как
р8=р2—Дрр=р2 ( 1 —
а очень мало и меняется в сравнительно узких пределах,
Рз
то с достаточной для наших целей точностью можно считать,
что
Рз-Рг-
При указанных выше обозначениях, полагая —^-<^0, по-
Р2
лучим следующие формулы для двигателя с комбинирован-
ным наддувом:
ДГ1 = -^-Г1, (7.26')
т]ад1
10 772
146 Глава VII. Основные сведения о пересчете характеристик двигателей
^3 = ^(1+-^-К1к
\ ^ад1 /
дт2=2ку2>
^адЗ
»—i
'*
Гн )
(7.29')
(7.30')
(7.31')
= (l + K1)(l + r2).
(7.32')
Рассмотрим вначале изменение давления наддува pk и тем-
пературы смеси Тк выше второй границы высотности в зависи-
мости от изменения температуры воздуха Тн- При сделанных
нами допущениях в этом случае Д Theorist и ДГ2 = const. Диф-
ференцируя правую и левую части формулы (7.31), получим
dTk = dTB
или
^=Тяс(7>=т rfTff
Тк Тк Тн kT Тн
где
(7.33)
т
Подставляя значение — по формуле (7.3Г), найдем, что
7я
или
1+—
т|адз _
(7.34)
Как показывают расчеты,
практике значений т)р, т]ад1
в диапазоне встречаемых на
и ^адг величина показателя
§ 4. Поршневой двигатель с комбинированной системой наддува
147
сравнительно мало зависит от их значений, а главным образом
зависит от — и — да —. Так как
Рн Рз Р2
Pk
Pk Рн
Р2 Р2
Фиг. 7.10. Зависимость показателя Т^для двигателя
Pk Рз
с КН выше границы высотности от — и — •
Рн Рн
то, следовательно, показатель TkT является функцией от —
Рн
и —. На фиг. 7.10 представлена зависимость показателя
Рн
Tkr для двигателя с КН выше границы высотности от —
Рн
и —. При подсчете было принято, что
Рн
71р = 71ад1 = 71ад2 = 0>6.
В случае отсутствия турбокомпрессора и промежуточного
радиатора рз—р2—рн и Т^—Т^—Тн. Легко, видеть, что при этих
условиях формула (7.34) для Тит совпадает с формулой (7.20)
для двигателя с ПЦН. Таким образом представленную на
фиг. 7. 10 кривую для — =1 можно рассматривать, как кривую
Рн
10*
148 Глава VII. Основные сведения о пересчете характеристик двигателей
изменения показателя Т для двигателя с ПЦН. Как видно из
фиг. 7.10, изменение Тк у двигателя с комбини-
рованным наддувом выше границы высот-
ности при изменении температуры наруж-
ного воздуха несколько больше, чем у двига-
теля с ПЦН при одинаковой высотности обоих двигателей
(т. е. при одинаковых — ].
Рн]
В случае отсутствия в нагнетающей системе двигателя при-
водного- центробежного нагнетателя (ПЦН), но при наличии
радиатора, рк=р^Р2, и Тк=Т%. Следовательно, представленную
р &
на фиг. 7. 10 кривую Тит для — = 1 (верхняя штрихпунктирная
Ръ
кривая) можно рассматривать как кривую изменения показа-
теля Т kT для двигателя с турбокомпрессором и радиатором,
охлаждающим воздух, но- без ПЦН. У такого двигателя влия-
ние температуры наружного воздуха на величину Тк выше, чем
у двигателя с КН или с ПЦН (при одинаковой высотности срав-
ниваемых двигателей).
В случае отсутствия в нагнетающей системе двигателя и
ПЦН и радиатора, положив в формуле (7.34) %)Р=0, рк=рз==:р2.
получим
Это выражение полностью совпадает с формулой (7. 20) для
двигателя с ПЦН. Следовательно, кривой для — = 1 (фиг. 7. 10)
Рн
можно пользоваться также для двигателя, у которого наддув
создается только нагнетателем турбокомпрессора.
~ тн dPk
Определим теперь показатель pkT —— ~— для высот выше
Pk дтн .
второй границы высотности. Взяв логарифмический дифферен-
циал от обеих частей уравнения (7.32'), получим
k^\dPk dYx dK2
------------------------. (ЛОО)
k pk 1 + Fj l + r2
Взяв логарифмические дифференциалы от обеих частей уравне-
ния (7.26'), найдем
(7.36)
71 Тн
или
^71 УI dTff /j
14-Ух 1 + 71 Тн ’
$ 4. Поршневой двигатель с комбинированной системой наддува
149
Аналогично логарифмические дифференциалы от обеих частей
уравнений (7.29') и (7.30') будут
1 - dY
ЛТ3_дТя . т|аЛ] 1
Ъ 1/-^,’
т1ад1
dY2 _dTs
Y2 Тй
или, воспользовавшись уравнением (7.36),
dY, _ У2 dT2 = Y,__________________1 dT„
1 + У2 1 + У2 Г3 1 + Уз.,1-т.р„ Тп' (7.38)
1 “Г /1 7
*)ад1
Подставив уравнения (7. 38)
после преобразований получим
и (7.36) в уравнение (7.35),
rfp* dTH
— PkT r >
Pk rB
(7.39)
На фиг. 7.11 приведена зависимость показателя р,ьт от —
Рн
и — для 7)р='г]аД1=7)ад2=0,6. Легко видеть, что при pn=pi=PH
рн
и Гз=Т2==7’н формула (7.40) переходит в формулу (7.19) для
двигателя с ПЦН. Следовательно, изображенная на фиг. 7.11
кривая для — =1 совпадает с аналогичной кривой для двига-
Рн
теля с ПЦН. Из формулы (7. 40) следует, что этой же кривой
можно воспользоваться для двигателя, у которого наддув со-
здается только нагнетателем турбокомпрессора (для такого дви-
гателя т]р=0, а ръ=рь=Р2). Как видно из фиг. 7. 11, показатель
150 Глава VII. Основные сведения о пересчете характеристик двигателей
Pk
PkTlX^ постоянных значений — почти не изменяется при изме-
ни
ро
нении — в широких пределах. Таким образом можно считать,
Рн
что изменение давления наддува выше второй границы высот-
Фиг. 7.11. Зависимость показателя р^для двигателя
тли Рк
с КН выше границы высотности от— и •—•
Рн Рн
ности при изменении температуры наружного воздуха примерно
одинаково у двигателя с ПЦН и у двигателя с КН при одина-
ковой высотности обоих двигателей.
Так как при постоянной барометрической высоте 7/p=const
изменение температуры воздуха мало влияет на величину про-
тиводавления на выхлопе, то мы для учета изменения мощности
двигателей с КН воспользуемся той же приближенной формулой
(7. 4), что и для двигателей с ПЦН, т. е.
Pk ф
ст Pk ст
(7.4)
£ 4. Поршневой двигатель с комбинированной системой наддува
151
Выше границы высотности, как мы уже знаем [формула
(7. 22)],
---!_/• (7.22)
т Ne дТн 2 кт ' '
На фиг. 7.12 приведена зависимость показателя NT от
Pk Рг
теля с КН . выше границы высотности от ~ и
двигателя с КН (кривые для — = 1,5; 2; 3; 4). Кривые для
\ Рн 1
двигателя с КН для разных значений — близки друг к дру-
Рн
гу, причем NT при малой высотности двигателя с КН выше,
чем у двигателя с ПЦН одинаковой высотности, на 8°/0» а при
большой высотности —на 5%. Таким образом влияние
152 Глава VII; Основные сведения о пересчете характеристик двигателей.
изменения температуры воздуха на мощность
двигателя выше границы высотности несколько
больше для двигателей с КН, чем для двигате-
лей с ПЦН.
Из приведенных ранее соображений следует, что штрих-
Pk
пунктирная кривая на фиг. 7.12, для которой —=1, пред-
Р2
ставляет изменение показателя 7Vr для двигателя с турбо-
компрессором и радиатором, но без ПЦН; кривой же для
— =1 можно воспользоваться для двигателя с турбокомпрес-
Рн
сором, но без ПЦН и радиатора.
Перейдем теперь к анализу изменения мощности двигателя
с КН ниже второй границы высотности. Мы рассмотрим только
ту область режимов работы двигателя, в которой сохранение
постоянного давления наддува рк достигается изменением числа
оборотов турбокомпрессора путем соответствующего открытия
дросселя перепуска газов при заслонке карбюратора полностью
открытой (область II на фиг. 7.9). При большой высотности
приводного центробежного нагнетателя у некоторых двигателей
при полете на малых высотах может оказаться, что даже при
полном выключении ТК давление наддува окажется выше но-
минального его значения, если не прикрывать дроссельную за-
слонку карбюратора. Так как на этом участке работы двига-
теля можно воспользоваться выведенными ранее соотношениями
для двигателя с ПЦН ниже границы высотности, то мы в даль-
нейшем будем считать, что дроссельная заслонка карбюратора
открыта полностью, а ТК вращается с таким числом
оборотов итк, которое необходимо для сохранения рк=РкнОМ=^
=const. При этом, как и раньше, мы будем выводить формулы
для учета влияния температуры при п=const и 7/P=const.
Продифференцировав при указанных условиях формулу
(7.31) для Тк, получим
dTk=dTB+(\—nJd^TJ
или
d7\_ Тн г d(ДЛИdTH dTH
zp <р 1 TV Ур) ,Г ~ * kT т >
Tk Tk L drH J Th Th
где
T Г1 -L Л 'n d (\T\\
TkT=-jr ! + (!— V—— •
1 k н
Для определения величины —-—— обратимся
dTH
нию (7.26'). Из него следует, что
_Y.^TH dY{ .
dTn тшд1 ’’Оад! dTн
(7.41)
к уравне-
(7-42)
§ 4, Поршневой двигатель с комбинированной системой наддува 153
Так как при Н„ — const ниже границы высотности и — = const,.
Ри
то, взяв логарифмический дифференциал от обеих частей ура-
внения (7.32'), получим
dy-i । . о
1 + Г1 1 + г2
или
dY, _ 1+ К, dY2
dTu 1 + У2 dTs'
Взяв (как мы уже это делали выше) логарифмические
дифференциалы от обеих частей уравнения (7.30'), найдем
ЛУ2 _ _dT$
г2 т3
или
dY2 _ Y2 dT3
dTs ~ t:3 drB
Продифференцировав уравнение (7.29), получим
^=1+(1_.)^.
dTs Р dTB
Подставив в уравнение (7.42) вместо —- его значение по
dTH
полученным выше выражениям, найдем
d(M\) { Tff 1 + Г1 У2 [
dTн Г13Д1 ^ад1 1 + Уз Т3 L
d(^Ty)
dTH
3
т
или, заменив — его значением по уравнению (7.29')
Тя
d(M\) = к,1 14 У,
dl'x ’lail 'lanl 1 + Т2
т1ад1
d(A7,) '
dlH .
Умножив обе части последнего уравнения на
бавив после этого по единице, получим
= + —Р~-
dTs ^ад1 ^ад! 1 + ^2
(1 — ’Ip) и при-
12
1+-^
*Чад1
d^T,)
dTH
154 Глава VII. Основные сведения о пересчете характеристик двигателей
откуда
! ! 1 — ТР
1 + (1 — '’Ip) ~d {*Т'} = ------------—-----------------(7.43)
dTz , 1-T.pl-t-K, Y2
’laal 1 + ^2 j ~ ''ip у
"Лад!
Подставив в формулу (7.41) для показателя Т^тниже границы
высотности вместо — его значение по уравнению (7. ЗГ) и
воспользовавшись уравнением (7. 43), окончательно получим
I
п + y2
^ад1 1 + Y2 1 ~ т,р
> + Л
*1ад1
или
?kT —
На фиг. 7.13 показана зависимость показателя Tkr от •—
Рн
и для 71 =^ - = 7] 2 = ОД вычисленного по формуле (7.44).
Рн
Pk
Там же нанесена сетка кривых — = const. Пунктирная ли-
Ръ
ния дает зависимость показателя TkT от — для двигателя
Рн
с ПЦН ниже границы высотности.
Для 7/p=const и n=const изменение мощности двигателя
ниже границы высотности может быть подсчитано по прибли-
женной формуле
Ng ф -J / k ст
Nе ст у Tk ф
откуда
§ 4. Поршневой двигатель с комбинированной системой наддува 155
Из фиг. 7. 13 видно, что ниже границы высотности мощность
двигателя с КН изменяется сильнее при изменении температуры
воздуха, чем у двигателя с ПЦН. Так как —- для заданного
Р2
двигателя изменяется ниже границы высотности в очень малой
степени, то, как это следует из фиг. 7. 13, показатель Nt для
всех высот ниже границы высотности сохраняет для данного
двигателя почти постоянное значение. Для двигателей с КН, у
Фиг. 7.13. Зависимость показателей Nt и Т^для дви-
гателя с КН ниже второй границы высотности
Pk
от
Рн
Р*
Рн
Pk
которых — находится в диапазоне 1,5—2,0, можно принять,
что в среднем ниже границы высотности ЛУ=--------—0,44.
Если бы в двигателе не было ПЦН и наддув создавался бы
I Pk \
только нагнетателем турбокомпрессора I— = 11, то Nt равня-
' Р2 '
лось бы — 0,50.
Заметим, что формулу (7. 44) можно применять только при
условии, что — >1. Если бы отношение — равнялось 1, то для
Рн Рн
сохранения постоянства давления наддува необходимо было бы
при изменении температуры воздуха изменять положение дрос-
сельной заслонки в карбюраторе. Между тем при выводе фор-
мулы (7. 44) мы считали, что дроссельная заслонка карбюратора
находится неизменно в положении полного открытия.
156 Глава VII. Основные сведения о пересчете характеристик двигйтелей
На малых высотах, когда в турбокомпрессоре не произво-
дится сжатия воздуха, двигатель с КН работает примерно так
же, как и двигатель с ПЦН. Вследствие этого для таких высот
показатели Т\т и Nт можно определить по пунктирной кривой
Pk
фиг. 7. 13 для значения —> соответствующего той высоте, нача-
дя
ная с которой дроссельная заслонка карбюратора при n=const
/’о
остается в положении полного открытия, а • — начинает увели-
Рн
чиваться.
Рассмотрим теперь приведение к стандартным условиям
оборотов турбокомпрессора ятк ниже второй границы высот-
ности. Приведение будем делать при //p=const и п = const. Как
известно из теории нагнетателей, адиабатическая работа сжатия
равна
L - п - ( nDnTK Y (7 45\
60 /’ (7‘4Ь)
где и и D — окружная скорость и диаметр крыльчатки нагне-
тателя;
— гидравлический коэффициент полезного действия на-
гнетателя.
Для центробежных нагнетателей в широком диапазоне ре-
жимов работы можно считать 7^=const. Так как адиабатиче-
ская работа нагнетателя ТК пропорциональна Д7\ (в силу ра-
венства £ад= то из формулы (7.45) следует, что
птк = ЛКД7'1, (7.46)
где
Д = —1Л —— Rg''-^-.
V k - 1 тй
Для данного двигателя А можно считать постоянной вели-
чиной. Из формулы (7. 46) получим
бГитк 1 d (А
птк 2 Д
Подставляя вместо и Д7\ их выражения из формул
(7.43) и (7.26'}, получим
^ТК. _ 1 ~Лад1 1 ___________Д1_______________। Тн
лтк 2 1 — Tjp Y\ * 1 - Тф I + Ki У2 Тд
^ад1 1 + К2 1 ~ Тр
L 1+-^ГГ1 J
§ 4, Поршневой двигатель с комбинированной системой наддува 157
ИЛИ
(7.47)
где
„ йГн
— лТК Т
ЛТК 1 н
1
Фиг. 7. 14.Зависимость показателя пТкГдля
двигателя с КН ниже второй границы вы-
Ръ Р2
сотности ОТ -— И -— .
Рн Рв
(7.48)
На фиг. 7.14 представлена зависимость показателя
Рь Р%
от— и — при т] = тг)ад1 — 7]ад2 = 0,6. Так как пткг>0, то
Рн Рн
с рэстом температуры наружного воздуха возрастают и обо-
роты турбокомпрессора, причем чем больше доля ТК
158 Глава VII. Основные сведения о пересчете характеристик, двигателей
в сжатии воздуха (т. е. чем больше —тем мены
\ Рн /
ше влияние температуры на изменение оборо-
тов ТК при полете ниже второй границы высот-
ности. Для системы наддува, состоящей только из нагне-
тателя ТК, показатель лтк т достигает минимального значения,
равного 0,5.
§ 5. ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ
Основные характеристики заданного турбореактивного двига-
теля — тяга и часовой или удельный расход топлива — зависят
от следующих четырех параметров: 1) оборотов двигателя п ,
2) барометрического давления рн* 3) абсолютной температуры
воздуха Тн и 4) скорости полета V (или числа М). Задание пере-
численных четырех параметров, совокупность которых обуслов-
ливает определенный режим работы двигателя, однозначно
определяет величину тяги Р и часового расхода топлива Q.
В настоящее время наиболее широкое распространение полу-
чили ТРД с нерегулируемым соплом, т. е. двигатели
с постоянным проходным сечением реактивного сопла. Известно,
что для таких двигателей применим закон подобия, кото
рый может быть сформулирован следующим образом:
для данного двигателя при
л , V
-7=- = const И const
VTH утв
остаются постоянными: отношения как полных, так и
статических давлений в произвольных сечениях двигателя к ба-
рометрическому давлению рн]
отношение как температур торможения, так и истинных тем-
ператур в произвольных сечениях двигателя к температуре на
ружного воздуха Т н\
отношения скоростей в произвольных сечениях двигателя к
скорости полета;
Р
пропорциональная тяге величина — ;
Рн
Ы}
пропорциональная расходу топлива величина ----—=• ;
РнУ[н
GR V Тгт
пропорциональная расходу воздуха величина ------— .
Рн
Здесь буквой 8 обозначен коэффициент полноты
сгорания, т. е. отношение действительно полученной теплоты
при сгорании данного количества топлива к максимальному ко-
личеству теплоты, которое можно получить от того же количе-
ства топлива. Легко' видеть, что параметр --,2— пропорционален
V 7 н
окружному числу МОКр крыльчатки компрессора двигателя, а па-
£ 5. Турбореактивный двигатель
159
раметр ~__- — числу М полета. Учитывая это, мы можем, вос-
V 1 н
пользовавшись законом подобия, написать, что
Р=РнЛ(м, -М, (7.49>
\ Утн)
8Р=Ря/77/2(м, -ДД (7.50)
где и /2 —заданные, обычно графически, функции.
г» п
Вместо величины - - — можно применять пропорциональ-
у t н
ную ей величину
Р Q
а вместо величин — и -------= — пропорциональные им
Рн Рн у ?н
величины
Рпр = Р^-> (7.52)
Рн
№P = SQ^1/ (7.53}
Рн У Тн
где ро и То — давление и абсолютная температура в нормаль-
ных условиях (Ро=76О мм рт. ст., Т0=288° К). Величины ппр,
и (8Q)np называются приведенными оборотами, при-
веденной тягой и приведенным часовым рас-
ходом горючего. Применяя эти понятия, мы можем
переписать зависимости (7. 49) и (7. 50) в следующем виде:
ппр), (7.49')
(8Q)BP=A(M, ппр). (7.50')
В дальнейшем, считан 8 » const, мы соотношение (7.50') за-
меним следующим:
<?пР=Л(М, гапр).
При наличии сетки высотных характеристик двига-
теля для п = const (например, для пнои = const) легко
найти функции и /2. Для этой цели необходи-
мо перестроить обычные сетки высотных характери-
стик Р=/(У) и <2=/(У)при f/ = const и п = лном = const
160 Глава VII. Основные сведения о пересчете характеристик двигателей
и для
ветственно QnV — Q —
Рн
Рнг
О 500 4000Vm/wc
Фиг. 7. 15. Сетка высотных харак-
теристик P=f(V) для номиналь-
ных оборотов.
{фиг.7,15 и 7.16) в сетку Pnp=/i(M> и QnP=/2(M< япр).
Перестроение производится следующим образом. Каждой
высоте Н соответствует по СА определенное давление рн
и температура Тв. Взяв кривую, соответствующую какой-либо
высоте Н, находим для нее пар = пЛ/ 7^=ян0>,1/ :
г Гн V
каждой точки этой кривой подсчитываем Р =Р^~ (соот-
Рн \
\ V
и М = —т=. После этого
I VkgRrH
полученной таким путем кри-
вой Рпр=/(М) или Qnp=/(M)
приписываем параметр пПР. Про-
делав аналогичную операцию для
остальных высот, получим сетки
кривых (фиг. 7. 17 и 7. 18), пред-
ставляющих в графическом виде
искомые функции /1 и
При наличии сеток кривых,
аналогичных приведенным на
фиг. 7. 17 и 7. 18, легко найти тя-
гу и часовой расход топлива для
любого режима работы двигате-
ля, т. е. для заданного давле-
ния рн, абсолютной температуры
Т н, оборотов п и скорости поле-
та V. Для этого, подсчитав
/288 ,,
V км!час
Т1,'1УтИ
нужно по фиг. 7. 17 и 7. 18 определить РПР и Qnp, а затем найти
тягу и часовой расход по формулам
р Рн ,
пр п ’
Ро
Для дальнейших наших целей удобно ввести еще одно по-
нятие, а именно приведенную температуру Тпр, опре-
деляемую из следующего соотношения:
или
(7.54)
(7.55)
где Пвом — номинальное число оборотов двигателя.
'0 SOO 1OOOV**/<MC
Фиг. 7.16. Сетка высотных харак-
теристик Q=f(Vj для номиналь-
ных оборотов.
Фиг. 7. 17. Зависимость приведен-
ной тяги от числа М полета для
Фиг. 7. 18. Зависимость приведен-
ного часового расхода топлива от
числа М полета для разных зна-
чений приведенного числа обо-
§ 5. Турбореактивный двигатель
разных значений приведенного
числа оборотов.
М дРпр Мл
= “-----=------------т Iff <*»
1 РПр дМ Лф. А
/гм
где т — отношение масштаба по
оси ординат к масштабу по оси
абсцисс.
ротов.
_ М dQnp _ M,t
Гм4 (?пр <ЭМ ^СПр.А
т tg а,
где т — отношение масштаба по
оси ординат к масштабу по оси
абсцисс.
162 Глава VII. Основные сведения о пересчете характеристик двигателей
Из выражения для ТПР видно, что Тпт) однозначно связано с
ппр, следовательно, соотношения (7.49) и (7. 50) мы можем за-
менить такими:
ТП{), (7.49")
№р=Ря/^?2(М, Тпр). (7.50")
Если каким-либо путем найдена зависимость РПР и QnP от
Пир или ТПР, то эту зависимость мы можем трактовать двояко:
1) либо как зависимость тяги и расхода топлива от переменных
оборотов п при постоянной температуре воздуха Тн, 2) либо как
зависимость тех же величин от переменной температуры Тн при
постоянных оборотах п. Таким образом применение ме-
тода подобия позволяет по эксперименталь-
ной кривой зависимости тяги и часовых рас-
ходов топлива ТРД от оборотов при постоян-
ной температуре воздуха находить зависи-
мость тех же величин от температуры воз-
духа для каких-либо заданных оборотов, на
пример, номинальных. В дальнейшем это свойство ТРД будет
нами широко использовано.
Найдем теперь зависимость тяги и часового расхода топлива
ТРД от разных параметров в дифференциальной форме. Взяз
логарифмические дифференциалы обеих частей формул (7. 49')>
(7.50'), (7.52) и (7.53), получим:
рпр 4 м " «пр
^Qnp _r dM. । r dnup
Qnp “ м М п пп, ’
rfPnp = dP dpff
.Р пр Р рн
dQn$ dQ dpH 1 dTjj
Qnp Q Ph 2 TH
где введены следующие обозначения1:
Р = м _ д
прМ Рпр дм м’
р Ппр дРпр Л
пр п Р дп п'
* пр ('"пр
_____ М dQnp __г
npM~QnP дм “ м’
1 В дальнейшем, чтобы не отступать от общепринятых в литературе обо-
значений, мы вместо Рпр- м« Рпр-д. Qnp. м и Qnp л будем писать /hi hn. r^t rn.
£ 5. Турбореактивный двигатель
163
_____ппр dQnp ____г
ПР Л п ~~ГП'
Чпр ^пр
Следовательно,
__ , dM h dnnp
D — „ т "м “ т Лл--------->
' Pff M /znp
dQ _ dpff , dM dnnp 1 dTff
n ~ n ~г Л м м "Г rn -------г "77 "77“ •
Q рл M лПр 2 TH
Из формулы (7.54) следует, что
dn„p _ dn____1 dTH_______1 rf7np
«пр ~ П 2 TH~ 2 rnp ’
Подставив вместо —”пр это значение в предыдущие фор-
^пр
мулы, получим
dP dpH . , dM
dn
Vhn^-—-hn^S.
п п 2 п Тп
п
(7.56)
ИЛИ
dP dpH . . dM 1 ,
— = + hy,----— hn
P рИ m M 2 n
dQ _dpв , „ dM dn
"V
dTup
Лф
— (1-г„)^
2\ П' т
1 и
(7.57)
(7.58)
Показатели Ам, hn, гм и гп являются функциями от
Показатели Ам, гм и гп являются функциями от М и лпр
(или Тп ). При наличии сеток типа фиг. 7. 17 и 7. 18 можно по
дРПР
наклонам касательных —и
дм
‘ , М дРпР
легко подсчитать =---------
11 Рпр дм
мер определения Ам и гм для точки А на фиг. 7.17 и
Построив затем вспомогательные кривые 7эпр=/(ппр)
Qnp=/(nnp) для разных постоянных значений числа
^Рпр
по наклону касательных к ним ——
длПр
дпр легко подсчитать показатели hn —
п _ ^др. . На фиг. 7.21 — 7.24 приведены
..г ..г Опр ^ЯПр
типовые сетки, представляющие зависимости показателей Ам,
гм и гп от числа М и приведенных оборотов ппр. Из этих
графиков видно, что показатель Ам сравнительно невелик,
причем знак его меняется при переходе от малых чисел М
к большим. Показатель Ztn при М = 0, т. е. при работе дви-
гателя на месте, в среднем для всех двигателей может быть
принят равным 3 при, лпр = пном; другими словами, в области
д(?пр
дМ
И Гг
при разных М
. М <^пр
м“о
Чпр
(см.
дМ
и лпр
Qnp f(”np)
(фиг. 7.19 и 7.20),
2?SP- при
dnnp
__ япр дР^
Рпр длпр
разных
и
при-
7.18).
и
М
и
И*
164 Глава VIГ Основные сведения о пересчете характеристик двигателей
Фиг. 7.20. Зависимость при-
веденного часового расхода от
приведенного числа оборотов
для разных значений числа М
полета.
Лпр dQnp лпр. а х I
Qnp ^пр Qnp. А I
где пг — отношение масштаба
по оси ординат к масштабу по
оси абсцисс.
Фиг. 7. 19. Зависимость при-
веденной тяги от приведенного
числа оборотов для разных
значений числа М полета.
Лпрд^пр ^Пр. А
а = — -----=-------m tg а,
Лтр д^пр Рпр. А
где пг — отношение масштаба
по оси ординат к масштабу по
оси абсцисс.
Л пр 1 1, -12000 оо/мин
13630
12150
^0, 2 0J 0, 8 1, 0 м
Фиг. 7.21. Зависимость показателя от лпр и М.
§ 5. Турбореактивный двигатель
165
5ft
3,0
2,0---------------------------------------------------------
1,0---------------------------------------------------------
$12000 12500 13000 ппр об/мин
Фиг. 7.22. Зависимость показателя hn от лпр и М.
166 Глава VII. Основные сведения о пересчете характеристик двигателей
номинальных оборотов тяга двигателя на месте пропорцио-
нальна кубу оборотов и обратно пропорциональна абсолютной
температуре воздуха в степени Р/2 [см. формулу (7.56)]. При
больших значениях числа М показатель hn возрастает, следо-
вательно, увеличивается и зависимость тяги двигателя от
оборотов и температуры.
м 0,8 0,6 0,4 0
12000 12500 13000 япр otf/мин
Фиг. 7.24. Зависимость показателя гп от лпр и М.
В некоторых случаях удобнее вместо числа М иметь в
формулах в явном виде скорость. Так как
М=
то
___1 dTH
М — V 2 ТП '
и (7.58), получим
П 2 1 н
п i J Н
Подставляя в формулы (7.56)
d L = dPH + h dV_ h
Р Рн V
dQ dpB . dV
— •* iz
Q Рн V
В литературе часто применяют показатели
р Р дрп* т Р дТн v Р дУ
§ 5. Турбореактивный двигатель
167
и пишут формулу для — в следующем виде:
Р Р Рн
V п Тн
Из сравнения приведенных выше соотношений видно, что для
двигателей с нерегулируемым соплом
Л„=1
а
Лг = —^-(Л + Лм).
Заканчивая этот раздел, сделаем следующее замечание. Вы-
ше уже указывалось, что при применении закона подобия нужно
во всех формулах вместо величины расхода топлива Q брать
величину так называемого условного расхода топлива Qz= 8Q,
где 81—коэффициент полноты сгорания. На основании ряда
экспериментов известно', что коэффициент полноты сгорания 8
зависит от коэффициента избытка воздуха а, теплонапряжен-
ности камеры сгорания, абсолютного давления в ней и распыла
топлива. В результате воздействия указанных факторов коэф-
фициент полноты сгорания у ТРД ухудшается с подъемом на
высоту и при переходе от номинального к крейсерским режимам
работы. Вследствие этого приведенные в настоящем разделе
формулы для Q дают достаточно точные результаты при не
слишком большом изменении входящих в них величин, особенно
величины давления р н в формуле (7. 50). В частности, для того
небольшого диапазона изменения величин, с которым прихо-
дится иметь дело при приведении результатов летных испытаний
к стандартным условиям, точность приведенных формул совер-
шенно достаточна.
Глава VIII
ОПРЕДЕЛЕНИЕ МАКСИМАЛЬНЫХ ГОРИЗОНТАЛЬНЫХ
И ВЕРТИКАЛЬНЫХ СКОРОСТЕЙ И ПОТОЛКА САМОЛЕТА
§ 1. ПРОВЕДЕНИЕ ПОЛЕТОВ ДЛЯ ОПРЕДЕЛЕНИЯ Vmax И Vy max
Максимальной горизонтальной скоростью самолета Vmax на
данной высоте Н называется скорость установившегося прямо-
линейного горизонтального полета при установившемся режиме
работы двигателя с наибольшей допустимой мощностью или тя-
гой. В дальнейшем эту скорость мы сокращенно будем называть
максимальной скоростью. При полете на максимальной скорости
располагаемая мощность или тяга двигателя равна мощности
или тяге, потребной для горизонтального полета.
Вертикальной скоростью самолета Vy называется проекция
скорости V самолета по траектории на вертикаль. Если угол ка-
сательной к траектории с горизонтом обозначить через то,
как это видно из скоростного треугольника, изображенного на
фиг. 8. 1,
Vv = V sin в = —. (8.1)
у dz V 7
Как известно из курсов аэродинамического расчета самоле-
тов, если пренебречь силами инерции, действующими на самолет
при наборе высоты, то максимальная вертикальная скорость
К, тах на данной высоте Н получается при установившемся ре-
жиме работы двигателя с наибольшей допустимой тягой или
мощностью в случае полета на таком угле атаки, при котором
избыток мощности на данной высоте является наибольшим. Из
формулы (8.1) следует, что
= (8.2)
V У
Интегрируя в пределах от 77=0 до Н, получим, что время набо-
ра высоты Н равно
С dH
J Vy
о у
§ 1. Проведение полетов для определения Утах и Ку max 169»
Очевидно, что время набора высоты т будет наименьшим, если
в процессе непрерывного набора изменять скорость полета та-
ким образом, чтобы на каждой высоте Н вертикальная скорость
была бы наибольшей и равнялась Vy maxj следовательно,
н
с ан
Snin— | у
% ryrnax
(8.3}
Теоретическим потолком самолета Ятеор называет-
ся та предельная высота, на которой еще возможен горизон-
тальный полет самолета при работе двигателя на полном газе.
Фиг. 8. 1. Скоростной треугольник при на-
боре высоты.
При полете на теоретическом потолке Vy max О, время набора
высоты, соответствующей теоретическому потолку, равно беско-
нечности. В связи с этим вводится понятие практическо-
го потолка //практ, соответствующего высоте, на которой
максимальная вертикальная скорость равна 0,5 м/сек.
Максимальная горизонтальная и вертикальная скорости на
разных высотах, а также потолок принадлежат к наиболее важ-
ным летным характеристикам самолета, играющим большую
роль в оценке его тактических свойств при сравнении с другими
однотипными машинами. Вследствие этого принято при летных
испытаниях нового опытного самолета, а также при контрольных
испытаниях серийных самолетов определять Vmax и Vj/max на
ряде высот.
При проведении испытательных полетов для определения
максимальных горизонтальных и вертикальных скоростей на раз-
ных высотах необходимо обращать особое внимание на тща-
тельную подготовку самолета и соблюдение требуемых условий
испытаний в отношении номинальных (или форсированных) ре-
жимов работы двигателей, веса самолета, состояния его аэро-
динамической формы и т. д. (см. гл. II).
170 Глава VIII. Определение максимальных скоростей и потолка самолета
Все визуальные и самопишущие приборы должны быть пред-
варительно протарированы в приборной лаборатории. Высото-
мер на земле регулируется при помощи кремальеры таким обра-
зом, чтобы в окошке против риски было число» 760. Последнее
необходимо для того, чтобы по показанию высотомера и по его
лабораторной тарировке, которая производится при положении
риски на отметке 760, можно было определить барометрическую
высоту полета.
Для измерения максимальной скорости летчик на нескольких
заданных высотах выполняет горизонтальные «п л о щ а д к и», на
которых после разгона самолета и достижения установившейся
скорости производится горизонтальный полет на режиме работы
двигателя на полном газе.
Для получения нужной точности при определении максималь-
ной скорости необходимо придерживаться следующих правил.
Полет на площадке должен быть строго горизонталь-
н ы м, причем горизонтальность его летчик контролирует по
двухстрелочному высотомеру или статоскопу. Наличие незначи-
тельного снижения или подъема приводит к довольно существен-
ной погрешности, как в этом легко убедиться из следующих со-
ображений. Пусть на площадке вместо горизонтального полета
самолет идет с подъемом или снижением, при которых угол тра-
ектории полета с горизонтом равен 0. В этом случае лобовое со-
противление будет уравновешиваться тягой двигателя, уменьшен-
ной или увеличенной на величину проекции веса на направление
траектории полета, т. е. на Gsin0, или, приближенно, на G&,
где 0 берется в радианах. В горизонтальном полете скорость в
первом приближении можно считать пропорциональной корню
квадратному из тяги; следовательно, ошибка в тяге на 2,0/о при-
ведет к ошибке в скорости примерно на Г°/о.
Найдем, при какой величине угла 0 скорость при одинако-
вом режиме работы двигателя изменится на Г%; очевидно, что
в этом случае
G©=0,02P
или
0 = О,О2-Р-,
G
где Р — тяга двигателя. Приняв, например, для современных
самолетов с ТРД для средних высот полета — =0,4, получим,
G
что ошибка в скорости в Гй/о< возникает при угле 0=0,02*0,4=
= 0,008 радианов ^0,5°. При полете самолета со скоростью
720 км/час, т. е. 200 м/сек, набор или потеря высоты при таком
угле 0 составит за минуту 96 м. Таким образом строгое соблю-
дение горизонтальности полета является необходимым условием
для точного определения максимальной скорости-
§ 1. Проведение полетов для определения Ушах 11 Ку max 171
Для получения достаточно- точных результатов при опреде-
лении максимальной скорости летчик при разгоне самолета на
площадке после дачи полного газа должен вести самолет по
горизонтали в течение достаточно длительного времени с тем,
чтобы замер максимальной скорости производился на установив-
шемся режиме полета. Принято считать, что после дачи полного
газа продолжительность полета по горизонтали должна быть не
менее 5 мин., причем н е менее 2 мин. должно, прихо-
диться на установившийся режим.
В некоторых случаях, с целью сокращения времени на раз-
гон по горизонтали, выход на скоростную площадку совершает-
ся сразг о на на полном газе при снижении. При
этом выход на заданную высоту производится на скорости, близ-
кой к ожидаемой максимальной скорости. Однако и в этом слу-
чае продолжительность площадки должна быть достаточной для
достижения установившегося режима полета и установившегося
теплового режима работы двигателя.
Записи показаний приборов, а также температуры наруж-
ного воздуха летчик производит в конце площадки. Вследствие
большой инертности термометров нельзя произво-
дить измерение температуры при снижении или подъеме. Запись
температуры воздуха на площадке следует производить не
ранее, чем после 3 мин. установившегося режима полета. При
большом количестве одновременно испытываемых самолетов, а
также в случае испытаний нового самолета с малой продолжи-
тельностью полета целесообразно для замера температур по вы-
сотам использовать специальный вспомогательный са-
молет.
При обработке результатов испытаний для каждой скорост-
ной площадки определяются по тарировочным кривым показа-
ния самописцев: высота по барографу Нб (Япр), скорость по сти-
лографу Vcn(Vnp) и температура воздуха ^пр по термографу или
по записи летчика. После этого определяют по методам, изло-
женным в гл. V, следующие величины для данной скоростной
площадки:
Нрф или рф — истинную барометрическую высоту или
истинное давление на площадке:
Vi3. ф — земную индикаторную скорость;
Мф —фактическое число М полета;
Тф —фактическую температуру воздуха;
Уф — фактическую воздушную скорость.
После определения указанных величин для каждой скорост-
ной площадки приводят полученные фактические максимальные
скорости к стандартным атмосферным условиям. Так как спосо-
бы приведения различны для самолетов с разного типа двигате-
лями, то мы в дальнейшем рассмотрим приведение к стандарт-
172 Глава VIII. Определение максимальных скоростей и потолка самолета
ным условиям отдельно для самолетов с каждым типом двига-
теля (см. главы IX, X и XI).
Для определения максимальных вертикальных скоростей по
высотам, времени набора высоты и потолка самолета произво-
дятся специальные полеты, которые обычно называют полета-
ми на скороподъемность. В этих полетах после взлета
летчик на малой высоте разгоняет самолет до достиже-
ния заданной скорости по прибору, после чего производится н е-
прерывный набор высоты до практического
потолка при работе двигателя на полном газе. Набор высоты
производится на заданных для каждой высоты наивыгоднейших
приборных скоростях, причем изменение скорости набора про-
изводится обычно ступеньками через каждые 500 или 1000 м.
На самолетах с малым запасом топлива определение скоро-
подъемности и определение максимальных горизонтальных ско-
ростей производится в разных полетах. На самолетах с доста-
точным запасом топлива оба задания объединяются: после до-
стижения практического потолка летчик в том же полете при
снижении выполняет на ряде высот горизонтальные площадки
для определения максимальных горизонтальных скоростей.
Если в процессе эксплоатации самолета возможно значитель-
ное изменение его взлетного веса, то полеты на скороподъем-
ность следует провести при двух взлетных весах, со-
ответствующих основному и перегрузочному варианту.
Перед полетом на скороподъемность необходимо провести
специальный полет для экспериментального
определения н а и в ы г о д н е й ш и х скоростей на-
бора высоты. Прежде чем переходить к описанию этого по-
лета выведем формулы для расчета вертикальной скорости и
наивыгоднейших скоростей набора.
§ 2. ВЫВОД ПРИБЛИЖЕННЫХ ФОРМУЛ ДЛЯ РАСЧЕТА
вертикальной скорости
Вследствие изменения скорости по траектории и угла подъе-
ма 0 с высотой набор высоты происходит по криволинейной тра-
ектории с переменной скоростью. На фиг. 8. 2 представлена схе-
ма сил, действующих на самолет в общем случае криволинейного
движения в плоскости симметрии самолета. В дальнейшем мы не
будем рассматривать сил, действующих на горизонтальное опе-
рение, вследствие их малости, а также не будем писать уравне
ния моментов всех сил относительно центра тяжести самолета,
считая, что летчик при помощи отклонения руля высоты создаем
необходимый момент. Уравнения движения для рассматривае-
мого случая имеют следующий вид:
7n^- = Pcos(a— ср) —Q —О sin 0,
mV — — Г—Geos Q + P sin (a — ср).
§ 2. Вывод приближенных формул для расчета вертикальной скорости 173
Так как при наборе высоты угол а—<р мал, то мы примем
cos(a—<p)=l,asin(a—<р) = 0. Тогда уравнения движения пере-
пишутся так:
m —= P-Q-Gsin0,
dz ’
<8’4)
mV—=Y~G cos 0.
dT
Гэризонт
Фиг. 8.2. Силы, действующие на самолет при неустановившемся
движении.
Произведем следующие преобразования:
dV 'G dV dH G dV
nt—- =--------=-------У «,
di g dH dz g dH v
mV
H = .<Lv — —=—VV
dz g dH dt g y dH g dH
Используя эти формулы, перепишем уравнения (8.4) в сле-
дующем виде:
vv Г
P-Q — G-y 1
V
1 dW1)
V2i~dH~
Y— Geos©/ 1 4- —tg0 —\ = 0.
\ g 6 dH)
(8.5)
174 Глава VIII. Определение максимальных скоростей и потолка самолета
В случае установившегося прямолинейного набора высоты
под углом 0 к горизонту с постоянной скоростью V -
dH
d® /О Г\
и — равны нулю; в этом случае уравнения (8.5) примут
dH
следующий вид:
Р— Q-G^ = 0, (8.6)
У—Geos 0 = 0. (8.7)
Легко видеть, что в уравнении (8. 6) мы пренебрегаем
касательной силой инерции, а в уравнении (8.7)
центробежной силой инерции.
Обычно при анализе результатов летных испытаний пользу-
ются приближенными уравнениями (8.6) и (8.7) вместо более
точных уравнений (8.5), учитывающих инерционные силы. Кро-
ме того, часто принимают cos 0 = 1, т. е. считают подъемную силу
равной весу самолета
У=6. (8.7')
В курсах аэродинамического расчета показывается i, что пре-
небрежение центробежной силой инерции при расчете верти-
кальной скорости Vy в худших случаях приводит к занижению V!f
всего лишь на величину порядка 0,2% у земли и Г% на высотах
более 10 000 м. Там же показывается, что допущение cos 0 = 1
приводит к занижению Vy даже при очень больших углах 0
(порядка 25—30°) всего лишь на 2%. Объясняется это тем, что,
полагая cos 0 = 1, мы несколько завышаем величину подъем-
ной силы, что, в свою очередь, приводит к завышению лишь ин-
дуктивного сопротивления, составляющего только' часть полного
сопротивления; при больших углах подъема тяга значительно
больше лобового сопротивления, вследствие чего ошибка в опре-
делении величины последнего не оказывает существенного влия-
ния на расчетную величину вертикальной скорости Vy.
Пренебрежение касательной силой инерции приводит к не-
сколько бдльшим ошибкам при расчете вертикальной скорости:
к завышению ее примерно на 3—4% при 77=0 и на 6—8% на
высотах порядка 10 000 м (для самолетов как с поршневыми
двигателями, так и с ТРД).
Так как указанные ошибки частично компенсируют друг дру-
га, то суммарная ошибка будет сравнительно невелика. Вслед-
ствие этого вполне допустимо для целей приведения пользо-
ваться для самолетов с поршневыми двигателями и с ТРД при-
1 См., например, Б. Т. Г о р о щ е н к о, Аэродинамика скоростного само-
лета, Оборонгиз, 1948, стр. 279—280 и 307—310.
§ 3. Методы определения наивыгоднейших скоростей
175
ближенными формулами (8.6) и (8.7') вместо более точных
формул (8. 5). Но* для самолетов с ЖРД, для которых отношение
тяги к весу весьма велико и может быть больше единицы, ошиб-
ка в случае пользования приближенными формулами может до-
стигнуть большей величины.
§ 3. ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ
НАИВЫГОДНЕЙШИХ СКОРОСТЕЙ ПОДЪЕМА
Перейдем теперь к описанию экспериментальных методов
определения наивыгоднейших скоростей подъема. Для этой цели
производится так называемый полет «на з у б ц ы», заключаю-
щийся в следующем.
Фиг. 8.3. Примерное распределе-
ние скоростей при выполнении зуб-
цов.
Фиг. 8. 4. Примерная запись
на ленте барографа при
выполнении зубцов на
одной высоте.
Для определения скорости наивыгоднейшего подъема на ка-
кой-либо высоте полета производится серия установившихся
подъемов на разных скоростях по прибору при работе двигателя
на полном газе. Каждый подъем, называемый «зубцом», выпол-
няется около одной и той же средней высоты. Высота зубца вы-
бирается достаточно большой с тем, чтобы время выполнения
его составляло не менее 30—40 сек. Зубцы следует производить
не менее, чем на шести скоростях: на ожидаемой наивыгодней-
шей, на двух меньших скоростях (примерно на 20 и 40 км/час)
и на трех больших скоростях (на 20, 50 и 100 км/час). Кроме, то-
го, желательно определить максимальную горизонтальную ско-
рость на средней высоте зубца. На фиг. 8. 3 схематически пока-
зано примерное распределение скоростей при выполнении зубцов
на одной высоте.
Обычно рекомендуется следующая техника выполнения зуб-
цов. В горизонтальном полете ниже средней высоты зубцов при-
мерно на полную высоту зубца устанавливается заданная ско-
рость. После этого дается полный газ и самолет переводится на
режим набора высоты с указанной скоростью. К моменту начала
зачетного участка зубца следует иметь полностью установив-
176 Глава VIII. Определение максимальных скоростей и потолка самолета
V
Ур 6т
шийся режим полета и работы двигателя. После прохождения
конца зачетного участка зубца летчик убирает газ и плани-
рует до соответствующей высоты для выполнения очередного
зубца на следующей скорости. На фиг. 8.4 показана запись
барографа при выполнении зубцов на одной высоте (запись имеет
вид зубцов).
При выполнении зубца производятся следующие записи: вы-
сота начала и конца зубца, скорость по прибору, время выпол-
нения зубца по секундомеру. Эти же показания записываются
при помощи спидобарографов. На средней высоте зубца опре-
деляется температура наружного воздуха.
Обработка результатов полета производится следующим об-
разом. Для каждой скорости подъема определяется так назы-
ваемая «приборная» (или «барометрическая»)
вертикальная скорость Vyp, равная
(8.8)
где ЬНр — разность барометрических высот конца и начала за-
четного участка зубца;
5т — время его выполнения в секундах.
После этого строится кривая зависимости Vyp от скорости по
прибору VnP; по максимуму этой кривой определяется скорость
по прибору на данной высоте для наивыгоднейшего подъема.
Эту скорость обозначают УНаб, опуская индекс «пр». Инструмен-
тальной поправкой пренебрегают, так как само значение Унаб
определяют обычно довольно грубо (с погрешностью порядка
+ 10 км/час) вследствие пологого максимума кривых типа
фиг. 8. 3.
Определив по серии зубцов для других высот наивыгодней-
щие скорости для этих высот, строят кривую зависимости Унаб
от барометрической высоты полета (фиг. 8.5). В зависимости
от типа установленного на самолете двигателя эта кривая имеет
различный вид. Для самолетов с поршневыми двигателями ниже
границы высотности для каждой ступени нагнетателя скорость
по прибору для наивыгоднейшего подъема почти не изменяется
с высотой, а выше границы высотности она падает с высотой
примерно по линейному закону (фиг. 8. 5,а). Для самолетов с
ТРД Унаб падает с высотой также примерно по линейному закону
(фиг. 8.5,6), причем кривая имеет излом на высоте 77= 11 000 м.
Для самолетов с поршневыми двигателями зубцы выполняют
обычно на трех высотах; одна из высот берется ниже второй гра-
ницы высотности и полученная для нее приборная скорость наи-
выгоднейшего подъема принимается постоянной для всех высот
до второй границы высотности двигателя. Выше второй границы
высотности зубцы выполняются на двух высотах, причем послед-
няя высота должна быть ниже потолка не больше, чем на 2000 м.
§ 3. Методы определения наивыгоднейших скоростей
177
Для самолетов с ТРД зубцы следует выполнять на трех-четы-
рех высотах, через равные интервалы в диапазоне от земли до
потолка. Так, если потолок самолета равен 12 000 м, то зубцы
следует выполнить на высотах 3000, 6000 и 9000 м.
После первого полета на скороподъемность кривая Унаб=/(Я)
должна быть исправлена для высот, близких к потолку, на осно-
вании замечаний летчика. На этих высотах летчик, пользуясь
вариометром, может достаточно- хорошо определить в процессе
полета на скороподъемность 7наб, так как даже незначительное
отклонение от этой скорости приводит к резкому снижению вер-
тикальной скорости.
Фиг. 8.5. Примерный вид зависимости наи-
выгоднейшей скорости набора по прибору
от высоты полета.
а—для самолета с поршневым двигателем;
б — для самолета с ТРД.
При большом избытке мощности скорость наивыгоднейшего
подъема на данной высоте может быть с большой точностью
определена значительно проще, чем при помощи зубцов, путем
разгона самолета по горизонтали при работе
двигателя на полном газе.
Уравнения разгона по горизонтали имеют следующий вид:
A^K = p_Q> (8.9)
g dx
Y=G. (8.10)
Сравнивая эти уравнения с приближенными уравнениями
для режима набора высоты (8.6) и (8.7') и учитывая, что при
одинаковых атмосферных условиях и одной и той же скорости
полета в обоих случаях равны тяги Р и лобовые сопротивления
Q, получим
V g dx
12 772
178 Глава VIII, Определение максимальных скоростей и потолка самолета
или
V : 1
У 2g dz ’
iz?
Так как V2 =—, то
д
V =^^L^2-v1d^
у 2gb. dz gb 1 dz
(8.Н)
Построив кривую У.=/(т) для разгона, находим для ряда
точек ее V, и , а затем по формуле (8.11) подсчиты-
dz
ваем У\,= —После этого строим кривую Vv=f^Vt)
у gk dz у
и по точке максимума находим У/наб, а затем после соответ-
ствующего пересчета скорость Vnp. наб (которую мы услови-
лись обозначать просто Унаб).
Находя индикаторную скорость, соответствующую максиму-
му правой части уравнения (8. 11), мы находим точку, для ко-
торой избыток мощности является наибольшим. Однако при
подъеме избыток мощности затрачивается как на подъем веса
самолета, так и на преодоление касательной силы инерции (уве-
личение кинетической энергии), причем доля избытка мощности,
затрачиваемого на последнее, возрастает с увеличением скорости.
Вследствие этого, уменьшив несколько скорость по сравнению
с точкой максимума избытка мощности, мы можем получить
большую вертикальную скорость, так как падение избытка мощ-
ности может оказаться меньшим, чем падение мощности, затра-
чиваемой на преодоление касательной силы инерции. Однако
более подробный анализ показывает, что разница в индикатор-
ных скоростях, -полученных обоими способами, не превышает
2—3%, что не оказывает почти никакого влияния на величину
вертикальной скорости. Поэтому при обработке результатов раз-
гона по горизонтали с целью определения индикаторной скорости
наивыгоднейшего подъема нецелесообразно вносить уточнения,
связанные с затратой мощности на преодоление касательной
силы инерции при подъеме.
Если результаты разгона используются не только для опре-
деления наивыгоднейшей скорости набора, но и для определения
значения максимальной вертикальной скорости на данной высо-
те, то для определения правильного значения вертикальной ско-
рости при непрерывном наборе высоты следует внести поправку
по формуле [см. формулы (8.5) и (8.6)]:
I/ ____'* У разг max /о i
ymK 1 d(^)’ 1 }
+ 2g <Ш
$ 3. Методы определения наивыгоднейших скоростей 179
где Vymax—исправленное значение максимальной вертикальной
скорости при непрерывном наборе высоты, а Vу разг тах—макси-
мальное значение вертикальной скорости по кривой Vyt подсчи-
d —
тайной по формуле (8. II). Величина - — может
быть найдена при помощи кривой У2наб=/ (Я), построенной
по результатам разгонов или зубцов на разных высотах.
Использование разгона для определения скорости наивыгод-
нейшего набора целесообразно применять для самолетов с ТРД
на высотах, на которых они обладают достаточно большим из-
бытком мощности. На больших высотах, где избыток мощности
мал, можно точнее определять Унаб при помощи метода зубцов.
Рассмотрим теперь вопрос о приведении скоростей наивыгод-
нейшего подъема, определенных экспериментальным путем, к
стандартным условиям.
Анализ, проводимый в курсах аэродинамического расчета для
самолетов с поршневыми двигателями, показывает, что ниже
границы высотности двигателя индикаторная скорость наивы-
годнейшего' набора примерно постоянна и соответствует полету
на наивыгоднейшем угле атаки, для которого
Су ^^эф^лО>
сх~
а
Ро^ л^эфсл0
Выше границы высотности двигателя скорость наивыгоднейшего
набора постепенно падает с высотой и на потолке приближается
к скорости, соответствующей полету на угле атаки, близком к
экономическому. В среднем принято считать, что выше гра-
ницы высотности индикаторная скорость наи-
выгоднейшего набора падает на 5—10 км/час на
каждую тысячу метров высоты.
Из формулы (8. 13) для самолетов с поршневыми двигате-
лями видно, что Vi наб н е зависит от атмосферных
условий, вследствие чего можно считать, что
Vнаб. ст
— V) наб. ф«
(8.14)
Перейдем теперь к самолетам с ТРД. Выведем сначала при-
ближенную формулу для скорости наивыгоднейшего подъема.
Воспользуемся для этого приближенным уравнением набора вы-
соты (8. 6) в следующем виде:
Vy~(P-QY,
' Ст
12*
180 Глава VIII. Определение максимальных скоростей и потолка самолета
Q Q 1 ,, rz, ,z
учитывая, что — = ~=—, гДе л —качество самолета |u= Y
по уравнению (8.7')], получим
Так как
. 1 2
^~Go+ лхэф СУ'
_ _ СхО ! 1 г
"I . Су>
Су ^Эф
2G
Ро5И?’
1
К с.
с,
Vi
70
г =^(-Р
у У ДАС
ИЛИ
V Vi (р c^sy2i
у /Д\С 2G
Vi
2G
(8.15)
а
V
V д ’
1
К
у У д \ G
Взяв производную Vy по Vit приравняв ее нулю для режима
наивыгоднейшего подъема и считая, что в первом приближении
тяга Р не зависит от скорости, получим
dVy_ 1 (Р 3c-roPoS^
dVt ~ V Д\ G 2G
2G \
----------- 1 = 0.
яАЭфро£|/ /
(8.15')
Решая это1 биквадратное уравнение, найдем, что индикаторная
скорость наивыгоднейшего' набора для самолета с ТРД равна
V/Ha6 = rl/
где
(8.17)
Принимая £*0=0,02, Хэф=5 и — = 0,5 у земли и 0,25 для высоты
G
10 000 м, получим, что у земли с= 1,01, а на высоте Я=10 000 м.
§ 3. Методы определения наивыгоднейших скоростей
181
с=1,03. Таким образом с достаточной точностью1 2 * * * можно счи-
тать, что для самолетов с ТРД индикаторная скорость наивыгод-
нейшего- подъема
^•наб=1/-VTV- (8-18>
Так как тяга ТРД падает с высотой, то и наивыгоднейшая ин-
дикаторная скорость при подъеме, пропорциональная корню
квадратному из тяги, также падает с высотой.
Взяв логарифмический дифференциал от правой и левой
части приближенной формулы (8. 18) для скорости наивыгоп-
нейшего подъема, найдем
-^- = ——. (8.19)
ViK36 2 Р
Если делать приведение при Нр=const, то, пренебрегая измене-
нием тяги из-за изменения числа М, вследствие того что- на чи-
слах М, соответствующих подъему, зависимость от числа М нич-
тожно мала, получим
^==An^p=An^__LAnZZk) Р п Ппр " п 2 п ТИ’
И, следовательно, = п — (8.20) V/наб 2 п п 4 п Тв
Полагая i наб. ст Еi наб. ф, /2ст ^ф, /у Тст Тф,
можно по формуле (8.20) делать приведение к стандартным
условиям экспериментально найденной величины Vi наб. ф для са-
молета с ТРД в случае отличия фактической температуры от
стандартной на той же высоте НР и в случае отличия фактиче-
ских оборотов от номинальных. Так как на режиме подъема в
среднем то приближенно можно считать, что
—. (8.21)
Vi наб П Тн
Таким образом зимой набор высоты следует производить на
большей скорости, чем летом, причем при превышении темпера-
туры по сравнению со стандартной на ll0/o Vi наб падает также
на Г%.
1 Строго говоря,— только для высот, не слишком близких к потолку. Лег-
/3
— — 1,22. Кроме того,
2
при выводе формулы не учитывалось влияние числа М на лобовое сопро-
тивление самолета, а вблизи потолка это влияние может быть заметным
даже для режима набора высоты.
182 Глава VIII. Определение максимальных скоростей и потолка самолета
Вследствие того что кривая Vy=f(Vi) в области V^max имеет
очень пологий максимум, обычно не принято приводить к стан-
дартным условиям найденные из эксперимента индикаторные
скорости наивыгоднейшего подъема. Получив по методу зубцов
или из разгонов значения Угнав, ф, относят их к барометрической
высоте Нр и считают, что кривая Vi $=f(Hp) может быть
использована для любых атмосферных условий.
§ 4. ОБРАБОТКА РЕЗУЛЬТАТОВ ПОЛЕТА НА СКОРОПОДЪЕМНОСТЬ
В случае применения самописцев скорости и высоты обра-
ботку начинают с разбивки барограммы полета по времени. Для
этой цели от нижнего обреза ленты самописца откладывают
расстояние, равное высоте h центра вращения пера от нижнего
Фиг. 8.6. Обработка барограммы полета на скороподъемность
(запись спидобарографа).
обреза ленты, а затем проводят линию, параллельную нулевым
линиям скорости и давления (фиг. 8.6). После этого из начала
записи давления О' (начало подъема на барограмме) проводят
дугу радиуса L, равного радиусу пера самописца давления, и
находят точку пересечения ее с линий центров вращения пера
(точка О). От этой точки, соответствующей начальному моменту
времени т=0, на линии центров откладывают ряд точек 1, 2, 3,
4, находящихся друг от друга на расстояниях, соответствующих
30 или 60 сек. хода барабана. Сделав на барограмме засечки
дугой радиуса L из точек 1, 2, 3, 4, по тарировке барографа на-
ходим значения барометрической высоты Нр для моментов вре-
мени т = 0; 0,5; 1; 1,5 мин. и т. д. Интервал времени Ат выби-
рают в зависимости от величины вертикальной скорости само-
лета; чем больше вертикальная скорость, тем меньше должен
быть выбран интервал времени. Для разных участков барограм-
мы часто выбирают неодинаковые интервалы времени, например,
§ 4. Обработка результатов полета на скороподъемность
183
Лт = 0,5 мин. до //=6000 м, = 1 мин. от //=6000 до 77=
= 9000 м и Дт = 2 мин. для //>9000 м. Аналогичным образом
производится обработка записи скорости и давления наддува,
причем необходимо следить за точной синхронизацией всех
записей.
По записям температуры наружного воздуха на ряде темпе-
ратурных площадок, которые следует выполнять на небольших
скоростях при спуске с потолка, определяют фактические тем-
пературы (см. гл. V) и строят кривую Тф=}(НРф) (фиг. 8.7),
с которой и берут при обработке значения Тф для всех высот.
Фиг. 8.7. Зависимость фактических вертикальных скоростей, скоро-
стей набора по прибору, давления наддува и температур воздуха
от барометрической высоты при полете на скороподъемность.
Обработку ведут обычно по форме табл. 7. В эту таблицу
заносят значения времени тф, барометрической высоты //рф,
интервалов времени Дтф, скорости по прибору и давления
наддува ркф (для самолетов с поршневыми двигателями).
Таблица 7
Подсчет фактических вертикальных скоростей
Q. с * о а* о
С О о CU е о о о о V км!
2 •е р 3? а? 3? <1 •& <1 ч 4 S-1 е с* 1 WK
0 0 200
510 620 30 20,7 272 284,7 19,8 310 1125
1 30 820
1150 660 30 22,0 269 280,5 21,1 310 1125
2 60 1480
1850 740 30 24,7 266 276,0 23,8 310 1125
3 90 2220
184 Глава VIII. Определение максимальных скоростей и потолка самолета
Подсчитав для каждого интервала времени ДТф среднюю
высоту HpQy находят для нее, пользуясь кривой гф=/(#рф)
на фиг. 8.7, температуру Гф, а по табл. СА Гст.
Найдя для того же интервала времени ьНр ф, вычисляют
для него „приборную" или „барометрическую" вертикальную
скорость
Г (8.22)
и истинную вертикальную скорость, которая, как это видно из
уравнения (1. 14) гл. I, равна
Фиг. 8.8. Зависимость максимальной вертикальной скорости, ско-
рости набора и оборотов двигателя от высоты в стандартных усло-
виях (типичные кривые для самолета с невысотным мотором
и ВФШ).
После этого на том же графике, на котором была постро-
ена кривая Гф=/(/7р ф), строят кривые Упр и pk в зависимости
от /Урф и кривую 1/уф в зависимости от HPQp.
После построения указанных величин для фактических усло-
вий полета переходят к приведению их к стандартным условиям.
Ниже, в главах IX—XI рассмотрено приведение к стандартным
условиям максимальных горизонтальных и вертикальных ско-
ростей для самолетов, снабженных двигателями разного типа.
После того как построена для стандартных условий кривая
Уг/таХ=/(Я), экстраполируя ее до Vymax=0 (фиг. 8.8), находим
теоретический потолок Дгеор в точке, для которой 14тах=0, и
практический потолок ЯПРакт в точке, для которой 1Л/тах=
= 0,5 м/сек.
§ 5. Влияние вертикальных токов воздуха и градиента скорости ветра 185*
Пользуясь этой же кривой, можно построить баро-
грамму подъема в стандартных условиях, т. е.
кривую где т — время, которое обычно берется в ми-
нутах. Удобнее всего расчет барограммы подъема производить
следующим образом. Задаемся интервалом высоты Д//, напри-
мер, Д//=1000 м. Разбив всю высоту Н на ряд участков &Н, по
средней высоте каждого интервала &Н, т. е. для //=500, 1500,
2500 м и т. д., находим среднюю для данного интервала верти-
кальную скорость Vy шах ср и время Ат, затрачиваемое на набор
высоты Д// и равное
Дт = -------- мин.
60 Vу max ср
Просуммировав время для всех интервалов Д// от 27=0 до дан-
ной высоты Н, находим время т набора высоты Н. Если кривую'
У2/тах=/:(//) можно заменить прямой, то барограмму подъема
легко подсчитать аналитически. В этом случае
1^у max ^/геор Н ।Н
^.угпахО //теор ^Леор
где I/vmax0 —максимальная вертикальная скорость у земли;
/Утеор — теоретический потолок.
Время подъема на высоту Н равно
н н
С dH С dH
I У ] Vу тахо И г, I
L/' t/ \ ''теор /
0 0
= 0,0383 -//теор 1g------!---мин. (8.24>
V у тахО ।
^теор
§ 5. ВЛИЯНИЕ ВЕРТИКАЛЬНЫХ ТОКОВ ВОЗДУХА И ГРАДИЕНТА
СКОРОСТИ ВЕТРА НА СКОРОПОДЪЕМНОСТЬ
В заключение этой главы остановимся на двух вопросах, свя-
занных с точностью определения вертикальной скорости самоле-
та при летных испытаниях.
Пользуясь формулами (8.22) и (8.23), мы находим верти-
кальную скорость относительно земли, причем она совпадает с
вертикальной скоростью относительно воздуха только в случае
отсутствия вертикальных токов воздуха.
При наличии вертикальных токов
Vу воЗд Vy зем
где Vy воад и Vy зем — вертикальная скорость самолета соответ-
ственно относительно' воздуха и земли, a v — вертикальная ско-
186 Глава VIII. Определение максимальных скоростей и потолка самолета
рость воздушного потока, положительная при восходящем потоке
и отрицательная при нисходящем.
Наличие вертикальных токов приводит к искажению резуль-
татов испытаний. Хотя при обычных условиях испытаний ско-
рость восходящих токов сравнительно невелика (до 1 м/сек),
все же наличие таких токов приводит к разбросу точек кривой
Vy=f(H); этот разброс, естественно, относительно меньше для
самолетов с большой скороподъемностью, но может оказаться
весьма заметным у самолетов с малой скороподъемностью.
Вследствие этого правильный выбор погоды при испытаниях на
скороподъемность имеет большее значение для самолетов с ма-
лым избытком мощности по сравнению с самолетами, имеющими
большой избыток мощности.
Другим источником неправильной оценки вертикальной ско-
рости является наличие градиента горизонтальной
скорости ветра по высоте. Если горизонтальная ско-
рость ветра изменяется с высотой, то' это приводит к изменению
вертикальной скорости самолета при наборе высоты, причем, как
мы это сейчас докажем, при увеличении скорости встречного вет-
ра с высотой возрастает скороподъемность самолета.
Пусть вектор скорости ветра образует угол у с плоскостью
полета, с которой совпадает плоскость симметрии самолета, при-
чем при встречном ветре 7=0, а при попутном 7 = 180°. Слагаю-
щая скорости ветра в плоскости полета равна
w = U^cos 7,
где W — горизонтальная скорость ветра.
Пусть самолет производит установившийся набор высоты по
прямолинейной относительно воздуха траектории с воздушной
скоростью V, составляющей угол 0 с горизонтом. В случае воз-
растания скорости ветра с высотой самолет будет двигаться от-
носительно земли с горизонтальным ускорением
dw dw dH
— =-------------— — —v„,
dz dH dz dH y
(8.25)
где------градиент скорости ветра с высотой. Спроектируем
dH
силы, действующие на самолет, включая силу инерции—
на направление вектора воздушной скорости (фиг. 8.9)
Р— Q — G sin 0 ф-т — Vv cos 0 = 0,
dH у
или
Р —Q = Gsin0—— — К,cos 0;
g dH у '
§ 5. Влияние вертикальных токов воздуха и градиента скорости ветра 187
Умножив на V и помня, что V sin©= Vy, получим
(p_Q)V = GVy -— — V^VcosB. (8.26)
J g ап
В случае отсутствия градиента ветра с высотой и подъема
самолета с той же скоростью V по траектории
(P-Q)V=GV,0, (8.27)
Фиг. 8. 9. Схема сил, действующих на самолет при установившемся
подъеме при наличии градиента ветра.
где Vy о — вертикальная скорость самолета в спокойном или дви-
жущемся на всех высотах с одинаковой скоростью воздухе. Из
формул (8. 26) и (8. 27) следует, что
(8.28)
у у \ g dH j
Полагая, что --^0,1, получим следующую приближенную фор-
мулу для определения значения вертикальной скорости самолета
в случае отсутствия градиента ветра по замеренному значению
вертикальной скорости при наличии этого градиента:
где V — скорость по траектории в м}сек,
м/сек
ветра в —----, или
м
Vy. = Vy(l- 0,000028 V^\,
л \ dH /
где V—в км)ч.ас, а-----------в
м/сек
1000 л'
dw
dH
(8.29)
градиент
(8.30)
188 Глава VIII. Определение максимальных скоростей и потолка самолета
Возьмем следующий пример: скорость по траектории V=
1 ел / « dw п п. м/сек
150 м/сек; встречный ветер с градиентом — = 0,01—--------, т. е.
10 м/сек на 1000 м высоты. В этом случае
2^ = 1 - о,1 • 150-0,01 = 0,85.
Следовательно1, полученная при летных испыта-
ниях при наличии указанного градиента
встречного ветра вертикальная скорость са-
молета окажется на 15°/о выше вертикальной
скорости того же самолета при отсутствии
градиента ветра. Приведенный пример показывает, что
при наличии большого градиента ветра с высотой целесообразно
вводить поправку по формуле (8.29) или (8.30), особенно для
скоростных самолетов.
Глава IX
ПРИВЕДЕНИЕ К СТАНДАРТНЫМ АТМОСФЕРНЫМ
УСЛОВИЯМ МАКСИМАЛЬНОЙ СКОРОСТИ
И СКОРОПОДЪЕМНОСТИ САМОЛЕТОВ С НЕВЫСОТНЫМИ
ПОРШНЕВЫМИ ДВИГАТЕЛЯМИ i
§ 1. МЕТОД ПОДОБИЯ РЕЖИМОВ ПОЛЕТА
Выведем сначала общие соотношения для самолета с невысот-
ным поршневым двигателем и винтом фиксированного шага для
установившихся прямолинейных режимов полета. В случае
установившегося подъема с углом ©
Так как
то
G cos 0 = — с nSI/2,
2 у'
G sin 0 — Р—— cxoSVs.
2 х
COS 0 =
(9-1)
(9.2)
(9-3)
(9-4)
(9. 5)
а
Из теории подобия винтов известно, что создаваемая винтом тя-
га Р равна
Р = аРпЧР,
(9-6)
где а —коэффициент тяги, зависящий для винта фиксирован-
ного шага (ВФШ) только от относительной поступи винта
1 В настоящей главе изложены в переработанном и обобщенном виде
методы, описанные в работах В. С. Пышнова, М. А. Тайца и др.
190
Глава IX. Приведение для самолета с невысотными двигателями
Х = —, При заданном диаметре винта D относительная по-
nD
ступь X пропорциональна
По уравнению (9.1)
V
п
имеем
у2 2G cos 0
С„Р5
или, воспользовавшись
формулами (9.3) и (9.5),—
(9.7)
Преобразуем уравнение (9. 2), воспользовавшись соотноше-
ниями (9.3), (9.4) и (9.6):
vyV^
VG
Vi
/G
1
apnW4_-_fxpo5lz2
Так как
ариа£Н = ар V*— Di = арп V? —
‘ Г 1/2 Ги 1 ]/2
то
— = ap(. —— —- D*-----------£,pn.S •
]/G \J/G/ И2 2 \)/G/
(9-8)
Из уравнения (9. 7) следует, что при установившемся
ме с углом 0 для данного самолета
подъе-
Vi
VG
(9-9)
2
G
. о V
а является функцией —, а с*—
Так как коэффициент тяги винта
функцией су, то из уравнений (9. 8) и (9. 9) следует, что
_ /J2 И
KG 2 \1/с» ’ П /
или
Vi
V
п
(9.10)
§ 1. Метод подобия режимов полета
191
Уравнение (9.10) связывает три величины: —
У ж
и —, причем функциональная связь между ними зависит
п
только от вида поляры самолета, т, е. кривой cx=f(c^, и
v
чений параметра — =const.
п
характеристики винта, т. е. кривой
а=/(Х)=/ ( Х-V Вслед-
ствие этого, по аналогии с аэродинамическим расчетом, кри-
вые, построенные по уравнению (9. 10), будем называть кри-
выми потребных скоростей. На фиг. 9.1 приведена ти-
пичная сетка потребных скоростей
V
метре —.
п
при пара-
192
Глава IX. Приведение для самолета с невысотными двигателями
Как известно из теории подобия винтов, мощность двигателя,
потребная для вращения винта, выражается соотношением
75^ = Н3£>6,
где В — коэффициент мощности, зависящий для заданного ВФШ
И
только от относительной поступи винта Х= —.
Интересующие нас в этой главе режимы полета — режим
максимальной горизонтальной скорости и режим максимальной
вертикальной скорости — получаются при работе двигателя на
полном газе, т. е. при работе его по внешней характеристике.
Как указывалось в гл. VII, внешняя характеристика невысотного
двигателя может быть представлена в следующем виде [форму-
лы (7.1) и (7.2)]:
Ne=ACn\
где А — коэффициент падения мощности с высотой — может
быть вычислен по формуле (7. 3) гл. VII.
Так как при установившемся режиме работы двигателя мощ-
ность, потребная для вращения винта, равна мощности двигателя,
то
АСл6 =—$рп3О6. (9.11)
С достаточной для целей приведения точностью можно поло-
жить k=l. Тогда, умножая и деля на рэ, получим
л = Ро£-5Вдгаг PoD°T2A =
75С Г 2
75С —
п?
PoD5 V, 7 v\
75С / И V \ ' п)
\ п /
так как В зависит от —.
п
Разделив обе части на О, получим
о
V \ V,
— или
п / V
(9.12)
(9.13)
V
п
В общем случае при k ф 1 это уравнение примет вид
1—fe
А/АЛ 2 Г
]/G J G \ G / ’ п
(9.13')
§ 1. Метод пособия режимов полета
193
Уравнение (9.13') связывает три величины
ними
Связь между
ристики двигателя
p=/(kw(^)- Продол
зависит только от вида внешней характе-
(т. е. Ne = Cnk) и характеристики винта
жая аналогию с аэродинамическим рас-
четом, будем называть кривые, получаемые по уравнению
(9.13'), кривыми располагаемых скоростей. На
13 772
194
Глава IX. Приведение для самолета с невысотными двигателями
фиг. 9. 2 показана типичная сетка кривых располагаемых ско-
ростеи -, i-fe JV\ А (2 у—) при параметре •
Исключая из уравнений (9.10) и (9. 13) параметр —, по- п
лучим У« У* У V, А \ —y~~=f М- — . (9.14) Vg \ И G) '
В частности, на режиме Ушах (Vy = 0)
max__f f 'l
ya ~j\g/
(9.15)
Из уравнений (9.13) и (9.15) получим, что для режима 1/ш
V А
величина — зависит также только от —:
n G
(9.16)
Аналогичными рассуждениями получим, что на режиме
наивыгоднеишего подъема, т. е. при
иметь место зависимости
шах, будут
Vy max ук J А
YG G
Vi / А \
УО~Д G )’
(9.17)
Из уравнений (9. 15) и
ются постоянными:
для режима 17тах:
(9.17) следует,
А
что при — = const оста-
V-
v I max .
----з~ = const,
V
— = const,
§ 1. Метод подобия режимов полета
195
для режима
]/G
= const,
к
к г наб
Уа
const,
— = const.
п
Режимы полета, характеризуемые одними и теми же зна-
чениями cv и сх (т. е. а= const), будем называть подоб-
ными режимами.
Из полученных выше результатов следует, что для са-
молета с невысотным двигателем и ВФШ при
установившемся прямолинейном полете и рабо-
те двигателя на полном газе условием подобия
режимов является постоянство параметров — и
G
—. При этом остаются также постоянными п а-
п
v-t vy Кд п VI
раметры
п П
Постоянство следует из условия
V v. VG
— = —= const (9.18)
п п/Д Д v 7
/8
Соблюдение постоянства любых двух из перечисленных пяти
параметров влечет за собой постоянство и остальных трех пара-
метров.
Из полученных соотношений следует простой способ приведе-
ния Vmax и 14 max к стандартным условиям и пересчета их на
другой вес по методу эквивалентной высоты.
Прежде всего нужно построить кривую для стан-
дартных условий (см. фиг. 7.2), затем самый пересчет следует
производить в таком порядке. Зная давление рф и температу-
ру Тф в фактических условиях, вычисляем
0,0248^ _о н (7 3)
ф угф V 7
и находим по кривой фиг. 7.2 эквивалентную высоту, на
которой
Лст=Лф^т. (9.19)
13;
196
Глава IX. Приведение для самолета с невысотными двигателями
Это будет высота /Уст, для которой определяем максимальные
скорости
V,-maxcT=V/max(J)l/ (9.20)
(э.21)
максимальную вертикальную скорость, равную
V = V * 1 / — . (9.22)
v у max ст *у ш„ ф у , V /
индикаторную скорость наивыгоднейшего подъема, равную
V/Ha6.CT= ^наб.ф]/^ (9.23)
V Сф
и обороты в стандартных условиях для режима Vmax или
v шах•
Лтахст = «тахф j/" (9-24)
Если, как это обычно принято при приведении к стандартным
условиям, можно считать полетный вес самолета неизменным, то
в формулах (9.20) — (9.24) следует положить 6Ст=6ф.
Формулами (9.19) — (9.24) можно воспользоваться также
для пересчета летных данных в стандартных условиях при пере-
ходе от исходного веса Gt к новому весу G2; для этого во всех
этих формулах следует заменить индекс «ф» индексом «1», а
индекс «ст» индексом «2».
§ 2. МЕТОД ОБОРОТОВ
Для самолетов с невысотным мотором и ВФШ большое рас-
пространение получил так называемый метод оборотов,
разработанный В. С. Пышновым и С. Г. Козловым в 1931 г.
Сущность этого метода заключается в следующем. Проделав ряд
горизонтальных площадок на разных скоростях на какой-либо
высоте полета при разной степени дросселирования двигателя,
легко после обработки получить кривую потребных оборотов п
И ~
в зависимости от величины — . Эту кривую, называемую кривой
потребных оборотов, как будет показано ниже, легко
пересчитать на другой полетный вес и другие атмосферные усло-
вия. Проделав на какой-либо высоте ряд зубцов на разных ско-
ростях при работе двигателя на полном газе, легко построить
$ 2. Метод оборотов
197
с / И\
кривую n—fl—, которая называется кривой рас пол а гае
мых оборотов и также может быть пересчитана на другие
атмосферные условия. По кривым потребных и располагаемых
оборотов можно найти максимальные горизонтальные скорости
для любого веса и любой высоты полета и теоретический потолок
для любого веса самолета.
Необходимые для пересчета кривых располагаемых и потреб-
ных оборотов формулы могут быть получены из выведенных в
§ 1 формул для подобных режимов.
Согласно формулам (9. 10) и (9. 18) для горизонтального по-
лета, т. е. при У?/=0,
и К А , V
= const при — = const.
VG * п
Следовательно,
(925>
Уравнение (9. 25) связывает потребные для горизонтального
полета обороты пп с величиной —. Если у нас имеется кривая
п
потребных оборотов о в зависимости от — для полетного ве-
п
са Go и для нормальных условий у земли, т. е. для До=1, то
для определения потребных оборотов 1% при одном и том же
значении — =const, но для веса G и относительной плотности д,
п
мы можем, в силу уравнения (9. 25), воспользоваться следующей
формулой:
Таким образом, определив экспериментально из ряда гори-
зонтальных площадок кривую nn=f{~~^для веса G при относи-
тельной плотности А, мы можем по уравнению (9. 26) найти кри-
вую па о для Н = 0 и для Go, а затем по той же формуле построить
кривые потребных оборотов для любых условий, т. е. лю-
бых А и G.
Воспользуемся для полета при полном газе формулой (9. 12):
Л = ^йД/г
75С Г
2
ИЛИ
198
Глава IX. Приведение для самолета с невысотными двигателями
Для заданного двигателя и винта, как это следует из полу-
ченной формулы, располагаемые обороты п зависят только
от — и ]/ — , т. е.
п Ид
Если у нас имеется кривая располагаемых оборотов пр0 в зави-
И
симости от —для земли, т. е. при Ао=1 и Ло= 1, то для других
п
высот полета располагаемые обороты при — = с on st будут
п
Фиг. 9.3. Типичные кривые потребных и распо-
лагаемых оборотов для Н—0.
(9. 27)
Аналогично тому, как это было сделано для кривой потреб-
ных оборотов, получив кривую располагаемых оборотов по зуб-
цам, выполненным на какой-либо высоте Н (точнее — при
атмосферных условиях, характеризуемых давлением рн и абсо-
лютной температурой Тн, по которым может быть определено
отношение —), легко по формуле (9. 27) определить кривую рас-
полагаемых оборотов для нормальных условий, у земли, т. е.
§ 2. Метод оборотов
199
пр0=/ (—\ а затем, пользуясь этой кривой и формулой (9.27),
\ п I
построить кривую располагаемых оборотов для любых условий
полета. На фиг. 9. 3 приведен типичный вид кривых погребных
и располагаемых оборотов для Н=0.
Так как на режиме максимальной горизонтальной скорости
располагаемые и потребные обороты равны друг другу, то в
точке пересечения этих кривых для соответствующей высоты и
веса мы найдем значения nmax и — для режима Утах, откуда
\ П /max
^max ( ’ I ^max*
\ n / max
Фиг. 9.4. Зависимость отношения потребных и
V
располагаемых оборотов от — .
п
Вместо того чтобы перестраивать кривую потребных обо-
ротов для разных весов и высот, а кривую располагаемых
оборотов для разных высот, проще воспользоваться следую-
щим способом определения Ушах по этим кривым. По кривым
„ V
п 0 и ип0 для земли и для веса (_/0 найдем для разных —
' п
отношение потребных оборотов к располагаемым, т. е. ,
лр0
л У
и построим кривую зависимости — от — (фиг. 9.4). Восполь-
Про п
зовавшись формулами (9.26) и (9.27), легко найти отношение
V
п„ к пп для одного и того же значения —, но для другой
и п
высоты и другого веса G:
Пп =^пП -|/
Пр «ро V О0а ’
200 Глава IX. Приведение для самолета с невысотными двигателями
Так как на режиме Утах потребные обороты равны распо-
лагаемым, т. е. — = 1, то для этого режима
"р
(9.28)
Найдя по этой формуле для заданных высоты Н и веса G
отношение —, по фиг. 9.4 находим соответствующую этому
Пр0 у v
отношению величину —, а по фиг. 9.3 для этого — опре-
п п
деляем лр0 или пп0, после чего подсчитываем Vmax и /гтах для
высоты Ни веса О по следующим формулам:
вых потребных и располагае-
мых оборотов на высоте, со-
ответствующей теоретическому
потолку самолета.
Таким образом, пользуясь описанным способом, можно опре-
делить Vmax и Птах Для любых весов и высот по кривым потреб-
ных и располагаемых оборотов для земли.
Как известно, на теоретическом потолке самолета возможен
горизонтальный полет только на одном режиме, т. е. на этой
высоте кривые располагаемых и потребных оборотов касают-
ся друг друга в одной точке (фиг. 9.5). Из уравнения (9.28)
следует, что коэффициент падения мощности с высотой для ре-
жима Umax выражается соотношением
Д=—(9.29)
Go \«ро/
Так как на потолке самолета А принимает минимальное значе-
ние, то из формулы (9. 29) следует, что полету на потолке соот-
ветствует такое значение — , для которого отношение — бу-
п пр:,
дет минимальным (см. фиг. 9.4); следовательно,
Лпот = 7-М2 • (9.30)
^0 WpO/min
§ 2. Метод оборотов
201
По формуле (9. 30) можно определить значения А для теоре-
тического потолка для любого веса G, а по значению А и
таблице СА — соответствующие высоты ЯтеоР. На фиг. 9.6 пред-
ставлена зависимость Vmax, Лтах И|-)max ОТ ВЫСОТЫ Я ДЛЯ ИСХОД-
\ п /
Фиг. 9.6. Зависимости максимальных горизон-
тальных скоростей и соответствующих им оборо-
V
тов и — от высоты, подсчитанные по методу обо-
п
ротов.
кого полетного веса, а на фиг. 9. 7 зависимость теоретического
потолка от веса самолета; эти кривые подсчитаны указанным
выше способом по кривым фиг. 9. 3.
Фиг. 9. 7. Зависимость теоретического потолка
от веса самолета.
Рассмотрим теперь вкратце основные допущения, которые
были приняты при выводе формул для самолета с невысогным
двигателем и ВФШ. Эти допущения следующие:
1. Пренебрежение влиянием чисел М и Re на изменение ко-
эффициента лобового сопротивления сх, т. е. предположение,
202 Глава IX. Приведение для самолета с невысотными двигателями
что Сх зависит только от коэффициента подъемной силы само-
лета Су.
2. Пренебрежение круткой лопастей винта под влиянием
аэродинамических и инерционных сил и допущение, что к винту
полностью приложимы законы подобия.
3. Допущение, что изменение мощности двигателя с высо-
той следует принятому закону.
Следует отметить, что так как все указанные допущения
используются нами лишь д л я перехода от одного ре-
жима полета к другому, сравнительно близ-
кому, то они не приводят к сколько-нибудь ощутимым погреш-
ностям, что и доказано практикой летных испытаний самолетов
< невысотными двигателями и ВФШ.
•Фиг. 9.8. Зависимость Vmax- Vi max* Лтах и max от барометрической вы-
соты полета для летних, стандартных и зимних условий.
Лишь при применении винтов с тонкими металлическими ло-
пастями крутка их может оказаться довольно большой и зна-
чительная погрешность может возникнуть в случае применения
метода оборотов, при котором кривые, экспериментально полу-
ченные для одной высоты полета, пересчитываются на другие,
значительно отличающиеся высоты. Поэтому в случае большой
крутки лопастей винтов не рекомендуется пользоваться методом
оборотов в изложенном выше виде, а определять эксперимен-
тально' эти кривые для разных высот полета.
В заключение рассмотрим, как изменяются летные характе-
ристики самолета с невысотным двигателем и ВФШ в зависи-
мости от температуры наружного воздуха. На фиг. 9. 8 пред-
ставлена зависимость максимальной горизонтальной скорости
Кпах, соответствующих ей Vi max и nmax, а также V^max от ба-
рометрической высоты полета Нр для летних, стандартных и зим-
них условий. Кривые для летних и зимних условий были получе-
ны из кривых для стандартных условий путем пересчета по
§ 2. Метод оборотов
203
формулам (9. 19) — (9. 24), причем принималось, что отклонение
фактической температуры от стандартной равно +15° С для
всех высот.
Как видно из фиг. 9. 8, максимальная индикатор-
ная скорость Vi maX, так же как и максимальная вер-
тикальная скорость Vу max, на заданной барометрической
высоте Нр увеличивается при понижении темпе-
ратуры. Истинная же максимальная скорость
Кпах на заданной высоте Нр уменьшается при пониже-
нии температуры воздуха на малых высотах
и увеличивается на больших высотах, близких к
потолку. П о т о л о к уменьшается по мере повыше-
ния температуры. Влияние изменения температуры на
заданной высоте Нр на летные данные сравнительно невелико на
малых и средних высотах и становится значительным лишь на
высотах, близких к потолку.
На некоторых самолетах с невысотными двигателями приме-
няются винты с двумя положениями лопастей. Очевидно, что
все выводы этой главы распространяются и на этот случай,
если рассматривать самолет с каждым положением лопастей как
отдельный самолет с винтом фиксированного шага.
Глава X
ПРИВЕДЕНИЕ К СТАНДАРТНЫМ АТМОСФЕРНЫМ
УСЛОВИЯМ МАКСИМАЛЬНОЙ СКОРОСТИ
И СКОРОПОДЪЕМНОСТИ САМОЛЕТОВ С ВЫСОТНЫМИ
ПОРШНЕВЫМИ ДВИГАТЕЛЯМИ И ВИШ-АВТОМАТАМИ
§ I. ПРИВЕДЕНИЕ МАКСИМАЛЬНОЙ ГОРИЗОНТАЛЬНОЙ СКОРОСТИ
На самолетах с высотными поршневыми двигателями уста-
навливаются винты изменяемого шага с регулятором постоянства
оборотов. На режимах максимальных горизонтальных и верти-
кальных скоростей двигатель работает при постоянных
оборотах, равных номинальным или форсированнььм оборо-
там. Поэтому при приведении Vmax и V^max к стандартным усло-
виям мы всегда будем считать, что обороты в стандартных усло-
виях должны равняться оборотам в фактических условиях, т. е.
при приведении будем полагать п=const.
Для самолетов с высотными поршневыми двигателями и вин-
тами изменяемого шага не получили распространения методы
приведения летных данных при помощи сеток характеристик или
путем перехода на эквивалентную высоту, аналогичные описан-
ным в главе IX методам для самолетов с невысотными двигате-
лями. Объясняется это более сложными зависимостями пара-
метров для самолетов с высотными двигателями, а главное тем,
что такие решающие параметры, как угол установки лопасти вин-
та, трудно измерить в полете.
Приведение летных данных будехМ делать при постоян-
ной барометрической высоте, т. е. в качестве
стандартной высоты примем барометриче-
скую: Нст=Нрф. Применим при этом метод дифферен-
циальных поправок.
Так как в этом случае при приведении не меняется атмосфер-
ное давление воздуха (рСт=Рф=const), то при выводе формул
этого параграфа мы будем считать, что дифференциал dp = Q.
Рассмотрим вначале вопрос о приведении к стандартным
условиям максимальной горизонтальной скорости. Для режима
полета на Vmax мы имеем следующие уравнения:
1. Приведение максимальной горизонтальной скорости
205
1™e^ = ±cjSV*,
G^~cy?SV\
(Ю. 1)
Взяв логарифмические дифференциалы, получим
dNe drtB de do dV
~+ — = —+— +Э—,
Ne Ъв cx ? V
dG
G
(10.2)
(10.3)
Так как p= - H ,
а приведение мы делаем при рн = const,
то в нашем случае
dp _ dTH
Р Тн
(Ю.4)
При дифференцировании мы считаем полетный вес самолета
переменным, для того чтобы наряду с выводом формулы для
приведения Vmax к стандартным условиям при изменении темпе-
ратуры воздуха Тн получить одновременно формулу для приве-
дения Vmax к заданному полетному весу G. Как уже указывалось
ранее, обычно полетные испытания производят с нормальным
полетным весом; в этом случае, считая, что при стандартных
и фактических условиях полетный вес один и тот же, мы долж-
ны будем в окончательной формуле приведения положить
dG=Q.
В гл. VII была выведена формула (7.21) для изменения
мощности высотных поршневых двигателей двух типов (с при-
водным центробежным нагнетателем и с системой комбиниро-
ванного наддува) при рн= const:
dNe dTH
— = NT
тн
(10.5)
где Nt — показатель, величина которого различна при полете
выше и ниже границы высотности двигателя и зависит, в основ-
Pk
ном, от отношения—характеризующего высотность двигателя.
Рн
Формулы и графики, необходимые для подсчета показателя Nt
были приведены в гл. VII.
205
Глава X. Приведение для самолетов с высотными двигателями
Рассмотрим теперь, чему равна величина —входящая в
сх
уравнение (10.2). Коэффициент лобового сопротивления можно
представить в следующем виде:
Сх ~ СХ$ 4" Сх1 4“ Сх в»
где —коэффициент вредного и профильного сопротивления,
cxi— коэффициент индуктивного, а
^„ — коэффициент волнового сопротивления. Обычно при-
нято считать, что для данного самолета гл0 зависит
от числа Re, cxi = —±—rJ,acXB зависит как от ко-
эффициента подъемной силы су, так и от числа М, т. е.
^х= cx0(R^ + cxt(cy) + схв(су, М).
Продифференцировав обе части этого уравнения, получим
. дс гП дс г1 , дс г „ дс „ _
dcx=—-dRe + — dcv + ~^~dcv + —*-^dM
x dRe dc„ y de y dM.
или после несложных преобразований
rfc_ Re дсгП dRe с„ дс r! dc„ с,, дсга de,, М дс „ „ dM
JC Л V । у XI у । у X В у । X В
сх сх dRe Re сх дсу су сх дс
м
с -
Введем следующие обозначения:
Re дс xQ с дсх1 с дсхв
• а. — • рт — —£-
с dRe 1 с dcv 1 с сх dcv
л-------------------------------------л у-л у
М дсх в
~ ~х ам ’
Тогда
dcx d Re dcv de dM.
~~^Re~d^ + £i~~ + Sc----H v •
CX cy cy
(10.6)
(10. 7)
Сделаем приближенную оценку числовых значений пока-
зателей, входящих в правую часть формулы (10.7)
Для оценки величины показателя gne можно воспользовать-
ся обычно применяемыми в аэродинамическом расчете графика-
ми зависимости коэффициента трения плоской пластинки от
числа Re и от положения точки перехода ламинарного погра-
ничного слоя в турбулентный. Считая, что в среднем сопротивле-
ние трения составляет 50—60% от общего сопротивления, по-
§ 1. Приведение максимальной горизонтальной скорости
207
лучим, что gne примерно равен — 0,07, т. е. увеличение числа
Re на Г°/о приводит в среднем к снижению сх на О,О7ю/о.
Показатель gi можно определить следующим образом:
Сх!~ Лс2у’
— Су d°xi__су с ________2Cjri
Сх дСУ С X У ^х
(10.8>
(10.9}
или, пренебрегая волновым сопротивлением,—
cx0+cxi \+ —
(10.10)
Зная примерное значение сл0, равное в среднем 0,018 — 0,022,
и определив с из уравнения (10.1), после подсчета cxi —
I у
=------с2 можно найти g- по формуле (10.10).
гЛЭф у
Из приведенных формул видно, что gi возрастает с высотой
полета и с увеличением удельной нагрузки на 1 крыла. Для
истребителей gi^0,075 у земли и £1^0,30 для высоты
= 10 000 м. Так как у бомбардировщиков - больше, чем у
истребителей, то величина показателя gi для них выше. В сред-
нем для этого класса машин gi равно 0,2 у земли и 0,6 на вы-
соте 10 000 м.
Перейдем теперь к показателям gyl и gc. На фиг. 10.1
представлена для иллюстрации зависимость коэффициента ло-
бового сопротивления самолета сх о г числа М и су. По этой
су дсг в
зависимости можно подсчитать показатели ge = ——:— и
сх дсу
М дсхв
£м=~-----. Для подсчета gM в разных точках кривой сЛ =
для с = const проводятся касательные (см. фиг. 10.1)
и по тангенсу их угла наклона определяется величина =
= #ztga, где т — отношение масштабов по оси ординат и по
м
оси абсцисс, а затем =— mtga для данного М и rv. Для
с У
сх
подсчета gc нужно по фиг. 10. 1 построить вспомогательный
график (фиг. 10.2), на котором приведены кривые cXQ=f(cy)
при М = const, причем сх* — сх—схй — сх!.
208
Глава X. Приведение для самолетов с высотными двигателями
Фиг. 10. 1. Зависимость коэффициента лобового сопротив-
ления самолета от числа М и су.
$ 1. Приведение максимальной горизонтальной скорости
209
Проводя касательные к кривым фиг. 10.2 и определив
Фиг. 10.3. Зависимость показателя gyt от
числа М и су.
= —miga. для данного cv и М. Проделав аналогичные one-
Сх У
рации для всего диапазона су и М, получаем приведенные на
фиг. 10.3 и 10.4 зависимости показателей gy[ и gc от числа
Фиг. 10.4. Зависимость показателя gc от числа М и ct.
В случае, если полет на режиме Vmax происходит при числе М,
меньшем критического числа М.й (М.х.— число М, начиная с ко-
торого происходит заметное увеличение сх всего самолета), пока-
затели g& и gc практически равны нулю, так как в этом случае
14 772
10 Глава X. Приведение для самолетов с высотными двигателями
влияние сжимаемости ничтожно. Поскольку самолеты с поршне-
выми двигателями, как правило, на режиме Утах не достигают
М#, то при приведении Утах к стандартным условиям можно
полагать, что и gc равны нулю.
Как известно1, число Re равно
/?е = р —.
Р н
Так как о —----, а
и /Тн\0-7в
Ро V о /
[см. гл. 1, формула (1.6')], то
а
Re
_7О0'76» РнУ
d Re dp н dV
dT И
1,76 — .
Th
При pB = const
dRe dV
~Re~~V
(IT,,
1,76 —.
Th
(10.11)
Подставив вместо -- это выражение в формулу (10.7) и
Re
полагая gc~0 и gM~0, получим
de dV dTH dcv
— =gne--\ ,76gRe —• (10. 12)
cx V TH cy
Перейдем теперь к анализу величины —, входящей в фор-
ь
мулу (10.2). Для заданного винта изменяемого шага его
к. п. д. 7)в является функцией трех параметров: 1) относи-
тельной поступи винта X, 2) коэффициента мощности винта £
и 3) концевого числа Mr, равного
Мд =
У*+иг
kgRTH
где « — окружная скорость конца лопасти. Следовательно,
Ъ=Ж MR).
Взяв логарифмический дифференциал, получим
rfr.B
d\ . dfi , dMR
=^т+чт+,м—
(10.13)
§ 1. Приведение максимальной горизонтальной скорости
211
где
X дц3 Р дт)в
т=--------; —-тт;
Ъ д1 Ъ W
__мл дЛв
d^R
(10. 14)
Цля определения показателей tqx и т? по сетке характеристик
винта нужно построить кривые tqb=/(X) для разных k8 = const и
Для разных X=const на интересующем нас диапазоне
изменения Хи {3. На фиг. 10. 5 и 10. 6 в виде примера приведены
соответствующие кривые, причем для данного случая на режиме
Фиг. 10.5. Зависимость к. п. д. вин-
та от X при параметре р.
та Т|В от р при параметре X.
Ктах на Я=5000 м относительная поступь Х = 1,4, а для режима
V^max Х=0,7. Коэффициент мощности 0, определяемый по фор-
муле
75Ne
pn3D5
(10.15)
для обоих режимов примерно одинаков, так как при винте с
регулятором постоянства оборотов n=const, а влияние скорости
полета на мощность двигателя мало. В нашем примере для
/7=5000 м 8 = 0,11. По фиг. 10.5 и 10.6 легко определить пока-
затели ?)х и 7)3 для обоих режимов. Так как винты подбираются
обычно таким образом, чтобы на режиме Vmax или близком к
нему к. п. д. винта т?в был бы максимальным, то вблизи этого
режима кривые ^В=/(Х) и т^==/(^) имеют пологий максимум
и можно с большой точностью принимать, что т)х^0 и ^0.
Однако для режима Vymax такое допущение неверно; так, в на-
шем примере для режима Vymax показатель т)х = 0,54, а тр = —0,34.
Показатель тм= —, характеризующий изменение вол-
7)в dMR
новых потерь на винте, может быть определен при помощи ме-
тода ЦАГИ для определения этих потерь. Не останавливаясь
на описании этого метода, рассматриваемого во всех курсах
14*
212
Глава X. Приведение для самолетов с высотными двигателями
аэродинамического расчета, приведем для иллюстрации возмож-
ного диапазона значений ?]м зависимость этого показателя от
концевого числа Мр на режиме Vmax для одного из винтов
(фиг. 10.7). Как видно из фиг. 10.7, изменяется от нуля при
небольших Mr до—1,4 при больших Mr.
На режиме наивыгоднейшей скороподъемности Мт? значитель-
но меньше, чем на режиме Vmax; вследствие этого можно счи-
Vymax показатель равен нулю.
Так как
тать, что для режима
~ nD'
то при п — const
d\__dV_
\ ~ V '
Взяв логарифмический диффе-
ренциал от обеих частей формулы
(10. 15), найдем, что при п=const и
рИ =const [см. формулы (10.4) и
(Ю.5)]
Фиг. 10.7. Зависимость показате- дф dNe dp dTн
ля тм от концевого числа Мд. ~ = ----------------= ,
Р N, Р К Т ’
Так как окружная скорость и при n=const остается постоян-
ной, то из формулы для М r следует, что
dMR У* dV 1 (1TH dV 1 dTH
-----=-----------------------= a--------------- ,
Мд Г24-и2 У 2 Тн У 2^ Гн
где а =
у*
Уг + и*
. На режиме Ушах
в среднем а = 0,2 —
— 0,25, а для режима а = 0,03—9,1.
d\ d$ dM. п
Подставляя в формулу (10.13) вместо —, — и —- их
X Р Мд
выражения из предыдущих формул, получим
driB dV dT tj
==(71>- + a%)~ + [(Wy + l)vj? — 0,5%]——. (10.16)
4a v ‘ ц
Как уже указывалось, для режима Vmax можно принимать,
что % = 0 и >;)? = 0; при этих условиях
dV dT ij
— = а71м —— °>5% — (10.16)
Чв v * н
§ 1, Приведение максимальной горизонтальной скорости
213
Вернемся теперь к исходным уравнениям (10.2) и (10.3)
и определим поправку к скорости на отклонение температуры
воздуха от стандартной при рн= const. Для этого из уравнения
de dp
(10.3) определим —, заменив— по формуле (10.4):
dcy^dG dTH
су~ G+ Тн
dV
2 —
V
Далее, подставим в уравнение (10.2) вместо —- , — > —
Г13 Р
de
и — их выражения по уравнениям (10.5), (10. 16'), (10.4) и
сх
dcv
(10.12), причем в последнем заменим — его выражением по
су
последнему уравнению. После несложных алгебраических
преобразований получим
dT н dG
.v (NT+l - 0,5^м+1,76gs. - gi) -------g- —
dv J H (j
V 3
(10.17)
Приравняв дифференциалы конечным приращениям и по-
ложив о1/ = Уст — Кф, 8Г=Тст—Гф, 8G = GCT — Оф, можно,
найдя по формуле (10.17) величину 8У, определить максималь-
ную скорость в стандартных условиях при заданном весе GCT
на основе замера Vmax в фактических условиях при полетном
весе Оф:
^СТ=УФ + 81А
Использование формулы (10. 17) для целей приведения Vmax
к стандартным условиям представляет известные затруднения,
так как в нее входит большое количество показателей, точное
значение которых обычно неизвестно.
Поэтому поступим следующим образом. На основе анализа
формулы (10. 17) можно показать, что пренебрежение некото-
рыми показателями при приведении не приводит к недопустимо
грубым ошибкам.
Влияние числа Re на сх самолета и влияние концевого числа
Мк на к. п. д. винта, как это видно из формулы (10. 17), в какой-
то мере взаимно компенсируют друг друга, вследствие чего по-
ложим в числителе—0,5 т]м + 1„76 gRe^O, а в знаменателе
214
Глава X. Приведение для самолетов с высотными двигателями
g&—Тогда формула (10.17) примет следующий про-
стой вид: 8И __ Л^-М -gi ЪТН gi 8G
V 3-2g; Тн d-2gi G
или SIZ ЪТ„ 8G V TH e G (10. 18)
где NT+\-gi \r m - • (10.19)
3 - 2g,•
а V — Si (10. 20)
G з - 2g i •
На фиг. 10.8 представлена зависимость показателя VT от —
Рп
и gi для высот выше и ниже границы высотности для двух типов
поршневых двигателей: 1) с приводным центробежным нагне-
/ pk \
тателем и 2) с системой комбинированного наддува для —=2 1
\ Р2 /
Выше границы высотности величина VT почти во всем диапазоне
Рч
значений — и gi (за исключением небольших значений этих ве-
Рн
личин) отрицательна, а ниже границы высотности — положи-
тельна.
Следовательно, выше границы высотности по-
вышение температуры наружного' воздуха
приводит к уменьшению максимальной ско-
рости (за исключением самолетов с двигателями малой вы-
сотности), а ниже границы высотности — к увели-
чению. Примерный характер зависимости максимальной го-
ризонтальной скорости от барометрической высоты для само-
лета с поршневым дви/ателем для зимы, стандартных условий
и л?та показан на фш. 10.9.
Как видно из фиг. 10.8, выше границы высотности коэффи-
циент Vt по абсолютной величине больше для двигателя с КН,
чем для двигателя с ПЦН; он возрастает с увеличением высот-
ности двигателя, т. е. с ростом —, а также с увеличением gi-
Рн
Таким образом, чем больше высотность двигателя
и чем больше высота полета, тем сильнее ска-
зывается влияние атмосферных условий на
величину максимальной скорости самолета с
высотным поршневым двигателем.
§ 1. Приведение максимальной горизонтальной скорости
215
Фиг. 10.9. Типичный ход кривых V/ max. V'max и pk в стандартных, летних
и зимних условиях.
216
Глава X. Приведение для самолетов с высотными двигателями
Ниже границы высотности величина показателя V? меньше
для двигателя с КН по сравнению с двигателем с ПЦН; коэффи-
циент V т для обоих типов двигателей падает по мере увеличе-
ния gi.
На фиг. 10. 10 приведена зависимость показателя Vg от gr
на малых высотах (gi мало) максимальная скорость почти не
меняется при изменении веса и лишь при больших высотах
(больших gi) влияние веса на скорость из-за возрастания роли
индуктивного сопротивления становится более ощутимым. При
Фиг. 10. 10. Зависимость показате
ля Vст от показателя gi-
gi = 0,2 увеличение веса на 1%
приводит к снижению скорости
всего лишь на 0,075%, а при g‘»=
= 0,6 —на 0,33%.
Для оценки влияния отклоне-
ния температуры воздуха от стан-
дартной на величину максималь-
ной скорости приведем следующие
средние цифры. При малой вы-
Pk <-о
сотности двигателя, считая —<2,
Рн
получим, что ниже границы вы-
сотности увеличение температуры
воздуха на 1% приводит в сред-
нем к увеличению Vmax на 0,15%,
а выше границы высотности — к
уменьшению 7тах на 0,1%. При большой высотности двигателя
(Р k Г- \ ,
— ^5 1 такое же изменение температуры на 1% приведет к
Рн /
увеличению Vmax ниже границы высотности в среднем на 0,2%,
а выше границы высотности — к уменьшению в среднем на 0,4%.
Так как отклонение температуры от стандартной не превы-
шает 6—7%, то поправка при приведении максимальной ско-
рости к стандартным условиям лишь в редких случаях
достигает 2—3% Vmax, обычно же она значительно ниже.
Малая величина этой поправки оправдывает грубость сделан-
ных нами допущений при выводе формул приведения.
Одновременно с приведением к стандартным условиям макси-
мальной скорости горизонтального полета по формуле (10. 18)
может быть найдена соответствующая индикаторная скорость
в стандартных условиях. Так как
то
ЪТИ об
(yT-0,5)-^ + Va-,
Тн G
vi
§ 1. Приведение максимальной горизонтальной скорости
217
где Vt и VQ—показатели, по которым делается приведение
максимальной скорости; индикаторная скорость в стандартных
условиях равна
Vi ст— Vi ф + ^Vi.
Наконец, рассмотрим приведение к стандартным
условиям давления наддува pk на режиме Umax вы-
ше границы высотности (ниже границы высотности p^const).
Основная зависимость имеет вид (см. гл. VII):
Pk ТН
Г;
Фиг. 10.11. Фиктивные точки,
получаемые при приведении
результатов летних испытаний
вблизи границы высотности.
Фиг. 10. 12. Фиктивные точки,
получаемые при приведении
результатов зимних испытаний
вблизи границы высотности.
(10.21>
Формулы для вычисления показателя ркТ для двигателей
с ПЦН и КН были приведены в гл. VII, см. формулы (7. 19) и
(7.40). Определив из уравнения (10.21) делают приведение
по формуле
Р^ст = р/гф
После обработки данных по всем скоростным площадкам
строят кривые Vmax cr = f (#сТ), pk сТ = /(#ет ) И VimaxCT f (Н ст )
(фиг. 10.9). По кривой pk ст^ЦЯст) производится определение
границы высотности в стандартных условиях для каждой ско-
рости нагнетателя, причем граница высотности определяется по
пересечению участка кривой pk cr=f(HCT) выше границы высот-
ности с участком pk=const ниже границы высотности.
При полетах летом, когда барометрическая высота, соответ-
ствующая фактической границе высотности, ниже, чем в стан-
дартных условиях, значение рк Ст=Ркф+$рк для некоторых пло-
щадок выше границы высотности в фактических условиях мо-
жет оказаться больше номинального рк (см. точки А и В на
фиг. 10.11). Эти фиктивные значения и соответствующие
218
Глава X. Приведение для самолетов с высотными двигателями
им максимальные скорости могут быть использованы лишь для
уточнения характера протекания кривых pfccT и VmaXCT выше гра-
ницы высотности, а при проведении кривых ниже границы вы-
сотности ориентироваться на эти точки не следует.
При полетах зимой аналогичная картина наблюдается для
некоторых площадок, расположенных между границами высот-
ности в фактических и стандартных условиях (фиг. 10. 12).
В этом случае точки Л' и В' для этих площадок, приведенные к
стандартным условиям по формулам для высот ниже границы
высотности, могут быть использованы лишь для уточнения ха-
рактера кривой Umax ст=/(//ст) ниже границы высотности, а при
проведении кривых выше границы высотности их следует исклю-
чить из рассмотрения как фиктивные.
§ 2. ПРИВЕДЕНИЕ МАКСИМАЛЬНОЙ ВЕРТИКАЛЬНОЙ СКОРОСТИ
Перейдем теперь к вопросу о приведении к стандартным ат-
мосферным условиям максимальных вертикальных скоростей
самолетов с высотными поршневыми двигателями.
Как было указано в гл. VIII, с достаточной точностью для
целей приведения можно пользоваться следующим уравнением
для определения вертикальной скорости:
откуда
или
Р—Q —G —=0,
v
V = ™-___У-
у G _б
Q
„ 75^в V
у G К ‘
(8.6)
где К — качество самолета. Наконец, заменяя истинную ско-
рость индикаторной, получим
_75Л^В V,
у~ Q
(10. 22)
Так же как и при приведении Vmax, будем считать
=const, т. е. в качестве стандартной будем при-
нимать барометрическую высоту Нр. Из прибли-
женной формулы (8. 13) для наивыгоднейшей индикаторной
скорости набора следует, что эта скорость не зависит от атмо-
сферных условий. Следовательно, при переходе от фактических
условий полета к стандартным мы должны считать, что Vi —
= const ИЛИ Vnp = const.
§ 2. Приведение максимальной вертикальной скорости
219
Считая полетный вес самолета одинаковым для стандартных
и фактических условий и воспользовавшись формулой
мы найдем, что при указанных условиях су = const, а следова-
тельно, и cXt являющейся функцией от су, также остается по-
стоянным. Таким образом, производя приведение V//max при
p//=const и G=const, мы должны считать, что V\=const,
Ct/=const, G=const я /С= —=const.
Сх
Перепишем уравнение (10.22) в следующем виде:
С^1/д + ^-) = 75Ли,/Д
и возьмем логарифмические дифференциалы от обеих частей
этого уравнения
dNe drlH 1 dA
—Ч=т+7+тт (10-23)
Так как
Ро Тн
то при рв= const
<fA dTH
Г- Г- 1 d\ r- , 1 r—dTH
d(vyV^^ у —-vyV^
z 1 н
г- / 1 dTH\
= Vb\dVv------Vv— j.
y 2 y Tff
Как и в предыдущем параграфе,
dKe dTH
—=NT—,
Ne тн
dv^ dk d$ dMR
— =1QX—4-Ti?—+7JM——.
Т]в Л ₽ Mr
(10. 5)
(10. 13)
Найдем теперь, чему равны ~ ,
</₽ dMR
Г и “м?'
220
Глава X. Приведение для самолетов с высотными двигателями
Так как
V Vi
nD
ТО
dK 1 dk 1 dTH
X ~ 2 А ~~ 2 Тн ’
Из равенства
lbNe = pp/z3Z)5 = рр0 A n3Z)5
найдем, что
d$ dNe dA r dTH
— = —--------------------------=(N r + l)—.
p Ne A г i TH
Наконец, так как
то
dMp 2 Д 1 dTH 1 dTH
---*- =--------------"=------(1-д)-",
MR и2 + И2 2 TH 2 V ’ TH
где попрежнему
ift+V* '
на режиме набора высоты а в среднем равно 0,1, а следова
тельно,
dTH
—-0,45 —
MR Т Н
Подставив в уравнение (10.23) найденные выше выраже
ния различных членов этого уравнения, после несложных пре
образований получим
dVy
1 dTH
— v —
у тн
^v +
Vi
/<Кд
= ^ + 0,5^+(ЛГг+1)7)3-4-( 1 ~ «Ьм-0,51^
2 Т и
Тн
§ 2. Приведение максимальной вертикальной скорости
221
или
У
V к/д)[Л^ + °’5^ +
4- (Nr + 1) т)э — 0,5 (1 — а) т]м—0,5] + 0,5
а7н
Тн'
(10.24)
Введем следующее обозначение:
/ V- \
X [ЛГг + 0,5m + (Л^г + 1) m -0,5 (1 - а) -Пи — 0,5] + 0,5Уг (10.25)
Перейдя от дифференциалов к конечным приращениям, по-
лучим следующие формулы для приведения максимальной вер-
тикальной скорости к стандартным условиям:
Ыу = А
Vy„=Vy* + Wy,
(10.26)
причем
сТц—Тст—Тф.
Рассмотрим, как определять значения величин, входящих в
выражение (10.25), для коэффициента Л^-Как уже указыва-
лось выше, наивыгоднейший набор высоты производится на
высотах, далеких от потолка, на углах атаки, близких к наивы-
годнейшему, а вблизи потолка — на угле атаки, близком к эко-
номическому. В первом случае
во втором случае
4сл0
222
Глава X. Приведение для самолетов с высотными двигателями
Приняв для истребителей — = 200 кг/м*, Хэф = 5 и Схо = О,О2,
S
получим
-^ = 4,7-5,35;
К
Q
для бомбардировщиков при — = 300 кг[м2, 1=8 и cxq = 0,02.
-±^=4 07—4,65.
К
Pk
Показатель Nt зависит от отношения — и может быть
Рн
определен по графикам гл. VII. Показатели и nqp на режиме
скороподъемности достигают довольно значительной величины и
пренебрегать ими, как мы это делали для режима Утах, нельзя.
Величина этих показателей с достаточной для целей приведения
точностью может быть определена по сетке характеристик винта.
Так как на режиме набора высоты вследствие малой скорости
полета концевое число Мд лопасти сравнительно невелико, мож-
но при подсчете коэффициента приведения вертикальной скорости
Avy считать т)м=0.
Если при выводе формул для приведения вертикальной
скорости к стандартным условиям полагать к. п. д. винта по-
стоянным, т. е. т]в = const, то формула для подсчета коэффи-
циента Ауу значительно упростится. Ее легко получить, поло-
жив в формуле (10.25) 7]Х = т)? = тдм = 0:
Ayy = NTVy + ^(NT-0,5). (10.27)
Учитывая сравнительно малую точность определения вер-
тикальных скоростей, можно еще больше упростить формулу
для коэффициента приведения Ауу, приняв средние значения
z—
для —У д и Ти. Так, для двигателей с ПЦН, считая для
§ 2. Приведение максимальной вертикальной скорости
223-
высот ниже границы высотности NT равным в среднем — 0,35»
(см. фиг. 7.13), —=4,7, /д = 0,9 и 7^ = 275° (для /7=2000 м),
К
получим следующие формулы приведения:
л У, = -(0,3517,+ 4,45),
Фиг. 10. 13. График для определения коэффициентов
приведения Vy maxсамолетов с поршневыми двигате-
лями с ПЦН.
для участка выше границы высотности, считая, что NT —
/Рь\ V; г-
=f(—I, —=4,7, ]/д = 0,7, а Тн = 242,5, получим
\Рн) К
Луу = Л/г^ + 6,7(^-0,5),
= V, + 0,0276(^-0,5)15^. (10.29)
На фиг. 10.13 приведены кривые —- в зависимости от
ътн
Pk lz
— и Vy для высот ниже и выше границы высотности, по-
Рн
строенные по приведенным упрощенным формулам (10.28)
224 Глава X. Приведение для самолетов с высотными двигателями
и (10.29). Как видно из фиг. 10.13, поправка к вертикальной
скорости растет с ростом высотности двигателя с ростом ве-
личины У„. При Vv = 20 м/сек и — = 5 — 0,20, т. е. на
у у Рн *тн
каждый градус увеличения или уменьшения температуры
воздуха вертикальная скорость уменьшается или увеличи-
вается на 0,2 м/сек (на 1%).
Фиг. 10. 14. Типичный вид кривых V у р}
для летних, стандартных и зимних условий.
Так как коэффициент приведения А всегда отрицателен,
то на той же барометрической высоте Нр вер-
тикальная скорость летом всегда меньше,
чем зимой. Типичный вид кривых Vy=f(Hp) для летних,
стандартных и зимних условий для самолетов с поршневыми
двигателями представлен на фиг. 10. 14.
Рассмотрим теперь, насколько велика ошибка при приве-
дении по упрощенной формуле (10.27) вместо приведения по
более точной формуле (10.25). В табл. 8 приведены значения
коэффициентов приведения Av , подсчитанных по обеим фор-
мулам, для следующих условий: — = 4,7; т]\ = 0,5; — 0,3;
К __
тдм=— 0,2; 1^=10 м/сек и для трех значений NT и ]/д;
1) —0,35; ]/~Д = 0,9; 2)ЛГг=-0,85 и /Д=0,8 и
3) NT=—1,43 и /Д =0,7.
r\V 2. Прш;еденас максимальной вертикальной скорости
225
Таблица 8
Значения коэффициентов приведения вертикальной скорости Av
По формуле (10 25) По приближен- ной формуле (10.27) Расхождение в %
1 ЛГ7.= -0,3.-> Кд = 0,9 — 5,75 - 7,95 38
2 Nr = — 0,85 /Д = 0,8 - И,4 - 16,45 44
3 Л'у = — 1,43 /А =0,7 - 19,4 - 27,2 40
Как видно из табл. 8, пренебрегая изменением к. п.д. винта
при переходе от фактических к стандартным условиям, мы мо-
жем переоценить величину поправки вертикальной скорости до
40% (в нашем примере). В связи с этим следует рекомендовать
пользоваться для целей приведения Гутах более точной форму-
лой (10.25), учитывающей изменение к. п.д. винта из-за изме-
нения X и г\
Как указывалось в гл. VIII, при обработке результатов по-
лета на скороподъемность обычно определяют так называемую
«приборную» (барометрическую) вертикальную скорость, свя-
занную с фактической вертикальной скоростью следующим соот-
ношением:
у = V ж —
УР УФт ’
J ф
При приведении к стандартным условиям мы определяли
поправку
оУ =V — V
У У СТ уф
Часто вместо поправки oVy определяют поправку
оУ =V —V
УР У ст ур ’
причем при обработке результатов полета не вычисляют факти-
ческой вертикальной скорости.
Найдем связь между поправками ЗГу и Wyp. Очевидно', что
а
Уу ф ~~ ур _Тф ~ ^ст _ _^Тн
Vyp ” ?ст Гст ’
15 772
226 Глава X. Приведение для самолетов с высотными двигателями
Следовательно,
ът н
WyP = Wy-VyP^-
Как видно из формулы (10.24), поправку 8Vv можно пред-
ставить в таком виде:
Ыу = (аУуф + Ь)^”,
1 н
а значит
Ъ1 тт ЪТ„
^УР=(^Уф + ^-УУР-~
7 н 7ст
или, с точностью до малых второго порядка,
57 „
8V^ = [(a-1) Vyp + b]-”-. (10.30)
1 н
Пользуясь этим выражением, легко написать формулу для
поправки §Vyp, если дана формула для поправки SVy.
Перейдем теперь к приведению давления над-
дува рк. Так как приведение 14 шах производится при /7//=const,
то приведение к стандартным условиям давления наддува рк на
режиме набора высоты выше границы высотности следует про-
изводить по формулам
pk ст —pk ф 4“
Определение границ высотности в стандартных условиях про-
изводится тем же способом, что и на режиме Vmax (см. § 1).
До сих пор при выводе формул приведения 14 max мы считали,
что G = const. Однако в некоторых случаях полеты на скоро-
подъемность могут производиться при весе, несколько отличаю-
щемся от нормального, в связи с чем полезно вывести формулы,
по которым можно определить изменение максималь-
ной вертикальной скорости max при измене-
нии веса самолета G.
На практике обычно производят набор высоты с разными
полетными весами, незначительно отличающимися друг от друга,
на одной и той же индикаторной скорости, поскольку кривая
14=/(14) имеет очень пологий максимум. В этом случае при
пересчете вертикальной скорости на другой вес следует считать
I4=const, р я —const, Th = const, ?4=-~const и const, a G, cv
и Д' следует считать переменными.
§ 2. Приведение максимальной вертикальной скорости
227
Так как
1 сг
С х СгО Cxi Схо Н ~
яЛэф •
то
1 _СгОРо$И 2G
/< 2G nK^^SV]
и [см. формулу (10.22)]
с roPoS V3i 2G-
Дифференцируя, получим
GdVy + VydG==
4G
кЛэфРо/Д5^; ’
откуда после перехода к конечным приращениям
/л/ , 4G \8G
01/ = — I у -]--------------—
у \ у ^Лэфр0/Д5Иг/ G
V. кмjчас
или, заменив V, мсек величиной —1------------
3,6
ZV = — \ V н-------— — <
(10.31)
В заключение необходимо отметить, что приведенный выше?
анализ точности поправок к максимальной вертикальной ско-
рости при приведении ее к стандартным условиям показывает,
что в неблагоприятных случаях приближенные формулы для
этих поправок приводят к погрешности, доходящей до 30—40°/о
от значения поправки. Сами же поправки сравнительно неве-
лики и поэтому даже грубая погрешность при их определении
не приводит к значительной погрешности в окончательном
результате. Это верно только для рассмотренного' в этой
главе способа приведения при постоянной барометрической вы-
соте (P// = COnst).
15*
228 Глава X. Приведение для самолетов с высотными двигателями
Можно показать, что при другом выборе стандартной вы-
соты, например, при выборе высоты по плотности или по темпе-
ратуре в качестве стандартной, поправки могут стать достаточно
большими, причем в этом случае относительная погрешность
может быть меньше, но' абсолютная погрешность может достичь
недопустимой величины.
Этот вывод относится только к самолетам с высотными порш-
невыми двигателями и ВИШ-автоматами. В следующей главе
будет показано, что для самолетов с турбореактивными двига-
телями поправки к скорости при приведении к стандартным
условиям при р//= const могут достигать, в отличие от самолетов
с поршневыми двигателями, весьма значительной величины.
Глава XI
ПРИВЕДЕНИЕ К СТАНДАРТНЫМ АТМОСФЕРНЫМ
УСЛОВИЯМ МАКСИМАЛЬНОЙ СКОРОСТИ
И СКОРОПОДЪЕМНОСТИ САМОЛЕТОВ С ТРД
§ 1. ПРИМЕНЕНИЕ ТЕОРИИ ПОДОБИЯ ДЛЯ ПОСТРОЕНИЯ СЕТОК
ОБОБЩЕННЫХ ХАРАКТЕРИСТИК
Рассмотрим установившиеся режимы прямолинейного полета
самолета в плоскости симметрии. Для такого режима уравнения
движения имеют следующий вид:
Р = cjSV2 + G sin А,
G cos 0 = — cv oSV2.
2 y
Так как для самолетов с турбореактивными двигателями
аэродинамические характеристики сильно зависят от числа М,
целесообразно преобразовать написанные выше уравнения, введя
в них в явном виде М. Для этого выполним следующее преобра-
зование:
— оУ2 = — kp][ —= — kpH -- = -1 kp/fM2,
2 2 kpn 2 ГН а2 2 1
где ^- — скорость звука [см. формулу (1.7)].
Следовательно,
Р = -^p/ASM2 + Gsin0,
G cos 0 = -~рпсу5(Л2.
(11-1)
(H.2)
Так как
sin 0 ~
V V
у = у
V MykgRTlf'
230
Глава XI. Приведение для самолетов с ТРД
то
V I/ —
= ± р с sm2 + G У '____,
Рн 2 х рп М/kgRT«
И
(11-3)
G А
Рн
9 ^0
1Л2 —
утв
№kgR7a
— рйсу3^.
(П-4)
В гл. VJI было введено понятие приведенной тяги двига-
теля [формула (7.52)]:
р — р
пр 2
Рп
(И.5)
Там же было показано, что для турбореактивного двигателя с
заданной площадью выходного сечения реактивного сопла
^пр=Л(м, «пр)=А(м, тпр), (п.6)
/Т In \2
у1 и Гпр = Тн —так называемые при-
веденные обороты и приведенная температура. Тяга двигателя
при оборотах /г^1 и температуре воздуха Гпр равна тяге при
оборотах п и температуре Тп, так как в обоих случаях равны
приведенные обороты:
По аналогии с понятием приведенной тяги введем понятие
приведенного веса самолета
Gnp=C —. (11.7)
Рп
а по аналогии с понятием приведенных оборотов — понятие
приведенной вертикальной скорости
V = V л/' —.
vynp ^|/ Тя-
(И.8)
1 Понятие поминального режима работы двигателя в данной главе
является условным. Под номинальными оборотами в этой главе следует по-
нимать просто некоторые зафиксированные обороты (например, максималь-
ные обороты, номинальные и т. д. в зависимости от исследуемого режима).
Если, например, максимальная горизонтальная или вертикальная скорости
определяются при форсированном режиме, то под Ином следует понимать
обороты, соответствующие форсированному режиму.
§ 1. Теория подобия к построению сеток обобщенных характеристик 231
Теперь основные формулы (11.3) и (11.4) можно написать
в следующем виде:
k
/Эпр = уРо^Мг+0Пр
V
.у пр
V2
у пр
М2^/?7’о
p0cvSM2.
(П-9)
(11.10)
Пренебрегая влиянием числа Re на коэффициент лобового
сопротивления сх, мы будем считать, что он зависит от коэффи-
циента подъемной силы су и от числа М:
М). (11. 11)
Четыре уравнения (11.6), (11.9), (11.10) и (11.11) связывают
семь величин — cXf cv, М, Gnp, ГПР, Рпп и Vy пр; следовательно,
четыре величины сх, су, Рпр и 14 пр являются функциями трех
остальных Gnp, и М:
^Пр = ?(СПр. Тпр, М),
(11.12)
СХ = Ъ (Gnp, Тпр, М), ^=?2(Gnp. тпр> М), (11.13)
Рпр = (Gnp, Тпр, М)=/2(Тпр, М). ,
Режимы полета самолета с ТРД при c?/=const и М—const
будем называть подобными режимами.
Из соотношений (11.13) вытекает следующее правило:
установившийся прямолинейный полет само-
лета происходит на подобных режимах при
соблюдении постоянства GnP, Тлр и М
Если известны поляра самолета для различных чисел М, т. е.
задано в виде сетки кривых уравнение (II. 11), и задана зави-
симость Лр от М и ТПР [т. е. задано в виде сетки кривых уравне-
ние (11.6)], то по приведенным формулам нетрудно получить
графики, представляющие зависимость сх, су и К, пр при устано-
вившихся прямолинейных полетах от GnP, Тщ> и М или, что одно
и то же, от GnP, лПР и М.
При определении основных летных характеристик самолета
нас, естественно, не интересуют величины су и сх и доста*
точно ограничиться построением сетки кривых (11.12).
Покажем, каким путем эта сетка может быть построена по
результатам летных испытаний. Для этого на нескольких
высотах следует произвести серии „зубцов" (т. е. установив-
шихся подъемов) на ряде скоростей, причем на каждой ско-
1 Это условие является достаточным, но не необходимым.
232
Глава XI. Приведение для самолетов с ТРД
рости зубцы нужно проделать при нескольких числах оборотов
двигателя. Зная среднюю барометрическую высоту зубца Нр,
температуру воздуха на этой высоте Тн, вес самолета би число
оборотов двигателя на зубце п, находим давление воздуха
рн, а затем приведенный вес самолета О =G-^=G-—
Рн Рн
и приведенную температуру T„p—Ts^^ для каждого
зубца. По записи спидографа после обработки находим ско-
рость полета 1Л и число М, а по записи барографа определяем
приведенную вертикальную скорость Vy пр = Vy -^- =
,, УГЛУ
= Vyp—;-----, где Гст —стандартная температура на высоте
Л:т
Нр. В результате обработки серии зубцов для одной средней
высоты получаем график зависимости V\np0T М для несколь-
ких значений Тпр при Gnp = const. Вид 'этого графика пред-
ставлен на фиг. 11.1. Аналогичные графики для других зна-
чений Gnp могут быть получены из зубцов на других высотах
(или при других весах, если возможно значительное измене-
ние веса самолета).
На практике получение указанной сетки по методу зубцов
чрезвычайно затруднительно вследствие необходимости выпол-
нения огромного количества зубцов (порядка 80—100 и даже
более). Ту же сетку можно получить гораздо быстрее, восполь-
зовавшись описанным в гл. VIII (§ 3) способом определения
Vv=f(Vi) из горизонтальных разгонов на разных высотах при
разных числах оборотов. Потребное время при использовании
разгонов взамен зубцов сокращается примерно в 10 раз.
Полученную сетку V2ZnP= ? (GnP, Тпр, М) мы будем называть
сеткой обобщенных характеристик для уста-
новившихся прямолинейных режимов полета.
§ 2. Сетки обобщенных характеристик для горизонтального полета 233
При наличии такой сетки можно решать все задачи, связанные
с указанными режимами полета. Ряд таких частных задач будет
рассмотрен в следующих параграфах.
На каждой сетке обобщенных характеристик (фиг. 11.1)
для Gnp=const особый интерес представляют две кривые: 1) ось
абсцисс, для которой Пр = 0; точки, лежащие на этой оси, со-
ответствуют режимам установившегося горизонтального полета,
в частности, режиму полета на 2) линия АВ, соединяющая
максимумы кривых Тпр=const; эта линия соответствует ре-
жимам максимальной скороподъемности lzFnpmax для разных
условий полета (G, рн, п, Тн). Эти режимы будут подробно
разобраны в следующих параграфах.
Точка А пересечения указанных линий соответствует усло-
виям полета, при которых установившийся полет возможен
только на одном режиме; эту точку мы будем называть р е ж и-
м о м потолка для приведенного веса Gnp.
§ 2. СЕТКИ ОБОБЩЕННЫХ ХАРАКТЕРИСТИК
ДЛЯ ГОРИЗОНТАЛЬНОГО ПОЛЕТА
Как указывалось в § 1, точки, лежащие на фиг. 11. 1 на оси
абсцисс, соответствуют режимам установившегося горизонталь-
ного полета. Отсюда ясно, что заданным значениям Gnp и Г!1Р.
соответствует для этих режимов определенное значение числа М,
а следовательно, и определенное значение с* и су. Таким обра-
зом для режимов установившегося горизонтального полета
М = ?(Опр, тпр),
^=C?l(Gnp. ^пр),
^=?2(0Пр- Tip)-
(11-14)
Ll
Ти
или G„p и /гпр =п
Из соотношений (11.14) вытекает следующее правило: го-
ризонтальный полет самолета с турбореак-
тивным двигателем происходит на подобных
режимах при соблюдении постоянства пара-
метров Gnp и ТцР
Если известны обобщенные сетки для установившихся прямо-
линейных режимов полета, то по ним, выбирая точки, лежащие
на оси абсцисс, легко построить сетку обобщенных характери-
стик горизонтального полета, т. е. зависимость M=<p(Gnp, Гпр)
(фиг. 11.2).
Легко показать, что такая сетка для установившегося гори-
зонтального полета может быть построена также в результате
летных испытаний на горизонтальных режимах (без зубцов или
разгонов). Для этого на нескольких высотах следует выполнить
установившиеся горизонтальные площадки на нескольких ско-
234
Глава XI. Приведение для самолетов с ТРД
ростях (в диапазоне от минимальной до максимальной скорости),
причем на максимальной скорости двигатель будет работать на
номинальных оборотах, а на меньших скоростях — на оборотах
меньше номинальных. Зная барометрическую высоту полета Нр
и средний вес самолета G на данной площадке, находим давле-
ние воздуха рн , а затем приведенный вес самолета Gnp=G —
Рн
для данной высоты. По записи спидографа на каждой площадке
и по температуре воздуха на ней находим число М, а по записи
//2 \ 2
оборотов п — приведенную температуру воздуха Тпр—Тн\-^\
Фиг. 11.2. Сетка обобщенных характеристик
горизонтального полета.
для каждой площадки. На фиг. 11.2 приведена типичная сетка
кривых М=/(ТПР) для разных значений Gnp, которую можно
получить в результате выполнения нескольких площадок на
разных скоростях на каждой высоте.
При заданном весе самолета G каждому значению пара-
метра Gnp соответствует определенное значение давления воз-
духа рн, а значит и определенная барометрическая высота//р.
Следовательно, если G=const, то для горизонтального полета
М=с?(ЯРл Тпр).
Приписав каждой кривой М=/(ТПР) фиг. 11.2 соответствую-
щее значение Нр, мы и получим сетку кривых, представляющих
зависимость числа М в установившемся горизонтальном полете
от приведенной температуры Гпр для разных барометрических
высот Нр при заданном весе G=const.
§ 2. Сетки обобщенных характеристик для горизонтального полета 235
Если нас интересует горизонтальный полет на каких-либо
заданных оборотах п при заданном весе G, то кривые фиг. 11.2
можно рассматривать, как кривые, представляющие зависимость
числа М для указанных условий от температуры воздуха Тн =
= Тпр|-^-| для разных барометрических высот. Если, в част-
ности, нас интересует горизонтальный полет только на номи-
нальных оборотах (режим Ута*), то в этом случае Тя=ГПр, а сле-
довательно, кривые фиг. 11.2 представляют изменение числа М
в горизонтальном полете в зависимости от температуры воздуха
для режима Vmmx (т- е. при
М-Утах ^(Gnp, ТН)
ИЛИ
Мип„ = ^Нр, Та).
График, представленный на фиг. 11.2 и дающий зависимость
числа М в установившемся горизонтальном полете при G = const
от приведенной температуры ГПР для разных барометрических
высот Нр, можно перестроить в график, дающий зависимость
индикаторной скорости Vi от -у=-для разных Нр при G=const.
V Тн
Согласно формуле (4. 15')
VZ = 44,4M/^.
Взяв на фиг. 11.2 кривую для какой-либо высоты Нр и
подсчитав для разных точек этой кривой величину V-, найдем
зависимость V. от Т или от ”— = для данной вы-
ути ут
пр
соты. Проделав аналогичное перестроение для всех высот,
получим сетку кривых
для G=const. Сетка подобного вида показана на фиг. 11.3 и
будет нами в дальнейшем использована при анализе вопроса о
дальности полета.
Отметим, что для каждой барометрической высоты Нр инди-
каторная скорость однозначно связана со скоростью по прибору.
Воспользовавшись этим, можно перестроить график фиг. 11.3
п
в сетку ГпР=/ |
при параметре G=consti.
1 Символ Гпр обозначает попрежнему приборную скорость (точнее
Vnp. испр Во всех остальных случаях в настоящей главе индексом «пр»
обозначаются приведенные величины.
236 Глава XI. Приведение для самолетов с ТРД
Следовательно, если при неизменном весе самолета (G =
=const) установившийся горизонтальный полет производится на
одной и той же высоте по высотомеру (//p=const) и при одной
и той же скорости по прибору (Vnp=const), но при разных тем-
пературах воздуха Тн, то' потребные для такого полета обороты
двигателя зависят от температуры воздуха, причем
"i “ V Л ’
т. е. отношение потребных оборотов пропорционально' корню
квадратному из отношения абсолютных температур воздуха.
Фиг. 11.3. Типичный характер зависимости индикатор-
п
ной скорости горизонтального полета от • для
У 1Н
разных высот Нр.
Таким образом, если в полете были выполнены установив-
шиеся горизонтальные площадки при нескольких значениях обо-
ротов на ряде высот и на основе этих испытаний построена сетка
M=/(Gnp, ТПр) (фиг. 11.2), то путем указанных выше перестрое-
ний этой сетки мы можем найти зависимость числа М (или ин-
дикаторной скорости Vi или истинной скорости У) от следующих
параметров: Hl)f G, п и Тн> В частности, могут быть получены
следующие зависимости:
1) -^Итах УХ^пр» ^я) ЙрИ П ^ном,
2) М=/(Опр, п) при Ти = const;
3) мИпах=/(Ч>’ Тд ПРИ О = const и п = «нои;
4) М— f(Hp, п) при G = const и Тн = const.
$ 2. Сетки обобщенных характеристик для горизонтального полета 237
Рассматриваемый нами способ определения характеристик
установившегося горизонтального полета самолета с турбореак-
тивным двигателем получил название метода оборотов
(по аналогии с методом оборотов для самолетов с невысотными
поршневыми двигателями).
Воспользуемся теперь особенностями метода оборотов для
приведения максимальной скорости к стандартным условиям, а
также для пересчета ее на другой вес или обороты.
Для определения максимальной горизонтальной скорости в
стандартных условиях необходимо на нескольких высотах вы-
полнить установившиеся горизонтальные площадки при разных
оборотах двигателя (так называемый полет на скорости
по оборотам).
Обработав результаты этого полета указанным ранее спосо-
бом, получаем сетку типа фиг. 11.2, т. е. сетку обобщенных
характеристик горизонтального полета.
Для определения максимальной горизонтальной скорости в
стандартных условиях при нормальном весе самолета GH и но-
минальных оборотах яНом, поступаем следующим образом. Для
каждого значения параметра Gnp находим соответствующую ему
барометрическую высоту Нр по давлению рн, равному
и эту высоту Нр приписываем соответствующей кривой. Для
определения на стандартной высоте Н^=НР находим зна-
чение числа Мет при температуре Д1Р=ДГ, так как для номи-
(п \
= Тн, а затем подсчитываем
п /
VfflaxCT=72,2MCT/77T.
Найдя таким путем Ушах ст и соответствующие этому режиму
для нескольких высот, строим кривую их зависимости от высоты
полета (фиг. 11.4).
Аналогичным путем могут быть при помощи сетки обобщен-
ных характеристик определены скорости полета и соответствую-
щие им числа М для другого веса G=const, других оборотов
n=const и другого закона изменения температуры воздуха в
зависимости от барометрической высоты полета.
Метод оборотов для самолетов с ТРД, как видно из изложен-
ного, хорошо1 обоснован. Основные допущения, принятые нами
при выводах, сводятся к следующим: 1) применимость закона
подобия для турбореактивных двигателей; 2) предположение,
что сх является функцией только1 от су и М и не зависит от числа
Re 1.
1 Учет влияния числа Re рассмотрен ниже.
238
Глава XI. Приведение для самолетов с ТРД
Практика летных испытаний подтверждает достаточно высо-
кую точность результатов, получаемых при использовании ме-
тода оборотов. Другим достоинством этого метода является воз-
можность широкого использования результатов, полученных при
фактических условиях полета, для определения характеристик
самолета при измененных условиях. Пользуясь сеткой обобщен-
ных характеристик, легко определить изменение скорости полета
при изменении веса, высоты полета, температуры воздуха, обо-
ротов двигателя.
Однако метод оборотов обладает рядом существенных не-
достатков, на которых мы вкратце остановимся. Прежде всего
следует указать, что для построения сетки обобщенных харак-
теристик нужно проделать не меньше 25—30 установившихся
горизонтальных площадок, для выполненйя которых необходимо
произвести несколько полетов. Если целью испытаний является
только определение максимальных горизонтальных скоростей по
высотам, то, понятно, предпочтительнее воспользоваться другими
методами, при которых максимальная скорость на разных высо-
тах может быть определена при значительно меньшей затрате
летных часов при помощи выполнения площадок только на но-
минальных (или форсированных) оборотах. В тех же случаях,
когда испытания для определения максимальных горизонталь-
ных скоростей и испытания для определения километровых рас-
ходов горючего совмещаются и проводятся одновременно, при-
менение метода оборотов весьма целесообразно, так как кило-
метровые расходы принято определять на площадках при раз-
§ 2. Сетки обобщенных характеристик для горизонтального полета 239*
ных оборотах двигателя и, следовательно, результаты этих по-
летов могут быть использованы для построения сетки обобщен-
ных характеристик горизонтального полета.
Существенный недостаток метода оборотов заключается в
том, что он может быть применен для целей определения Утах &
стандартных условиях на данной высоте только в том случае,
если температура воздуха при испытаниях была ниже или рав-
на стандартной. Если же температура воздуха при испытаниях
выше стандартной, т. е. ^Тн—Т^—7ф<Д, то мы по кривой М=
Гпр) не сможем найти числа Мот для стандартных усло-
вии, так как крайнее левое
значение ТПР по кривой на
фиг. 11.5, полученное в испы-
таниях, будет больше, чем Гст.
Следовательно, придется при-
бегнуть к экстраполяции кривой
в сторону низких Тпр (пунктир-
ная кривая на фиг. 11.5), кото-
Фиг. 11.6. Приведение числа М на-
режиме максимальной скорости к
стандартным условиям при помощи
интерполяции кривых М=/(7’Пр).
х —х — точки, полученные в факти-
ческих условиях;
°—°—точки, приведенные к стан-
дартным условиям.
Фиг. 11.5. Экстраполяция кри-
вой М=7(Тпо) для определе-
ния числа М в стандартных
условиях.
рая не может быть особенно надежной. Трудность экстраполя-
ции обусловливается тем, что ее приходится проводить на том
участке кривой, на котором характеристики самолета сильно за-
висят от числа М.
Таким образом при испытаниях в зимнее время, а также вес-
ной и осенью, когда Гф<ТСт(377>0) и не приходится прибегать
к экстраполяции при приведении Vmax к стандартным условиям,
метод оборотов дает достаточно хорошие результаты. При испы-
таниях летом, когда Тф>ТСт, ошибка при приведении может
оказаться довольно большой.
Для сокращения числа полетов, необходимых для определе-
ния кривой Vmax=f(//), можно воспользоваться следующим ва-
240
Глава XL Приведение для самолетов с ТРД
риантом применения метода оборотов. Кривые М=/(ТПР) опре-
деляют только- для небольшого числа высот, например, трех; в
этом случае площадки для определения зависимости скорости
от оборотов выполняют только на трех высотах, например, на
высоте, близкой к потолку самолета, на 1000—2000 м и на про-
межуточной высоте. На остальных же промежуточных высотах
выполняют площадки только на режиме Vmax, т. е. на номиналь-
ных (или форсированных) оборотах. После обработки резуль-
татов испытаний строят кривые M = f(TnP, Нр) для тех трех вы-
сот, на которых были произведены площадки при разных обо-
ротах. Для этих высот определяют также указанным ранее спо-
собом Мсг и Umax ст. Для остальных высот определяют фактиче-
ские числа М и Тпр на площадке, затем приводят числа М к
стандартным условиям при помощи интерполяции между
основными тремя кривыми на графике М=/(ГПР, Нр). На фиг. 11.6
представлен пример такой интерполяции для нескольких высот
(пунктирные кривые).
§ 3. ПРИВЕДЕНИЕ МАКСИМАЛЬНОЙ СКОРОСТИ ПО МЕТОДУ
ЭКВИВАЛЕНТНОЙ ВЫСОТЫ
Посмотрим теперь, как можно' определить и привести к стан-
дартным условиям максимальную горизонтальную скорость, если
на каждой высоте выполняется лишь одна
установившаяся горизонтальная площадка.
Естественно в первую очередь попытаться воспользоваться пра-
вилом подобия, согласно которому установившийся горизон-
тальный полет самолета с ТРД происходит на подобных режимах
(т. е. M=const и су=const), если соблюдается постоянство пара-
метров Gnp и Тпр или дпр. Если при фактических условиях
полета число М было Мф, обороты двигателя были Лф. тем-
пература воздуха Тф, вес самолета бф, барометрическая вы-
сота полета /Дф, а соответствующее атмосферное давление /?ф,
то, оставляя при переходе к стандартным условиям неизменны-
ми параметры GnP и лПР, т. е. считая
= (11.15)
Рст Гф
мы на основании правила подобия получим, что
Мст = Мф.
Потребуем, чтобы при приведении полетный вес не изме-
нялся, т. е.
Ост = Оф.
§ 3. Приведение макс, скорости по методу эквивалентной высоты
241
Из условия (11.15) получим, что
следовательно*, в этом случае эквивалентной является
барометрическая высота. Из условия (11.16) най-
дем, что
«ст = «ф]/' ~-
Если«ф = пном, то после приведения мы найдем число М в стан-
дартных условиях (Мст = Мф), но для полета при оборотах,
отличающихся от номинальных (зимой получится пст > пном,
а летом пст < лном). Для того чтобы после приведения было
выполнено условие яст = яном, нужно горизонтальную площадку
выполнять при работе двигателя на измененных оборотах пф,
подбираемых из условия
П<Ь —Ииом 1/ ~ •
ф НОМ /
г 7 ст
Следовательно, в зимних условиях нужно летать при оборотах
Яф</гНом, а в летних — при Иф>пном. Таким образом предла-
гаемый метод испытаний является вполне приемлемым во* всех
случаях, когда на данной барометрической высоте Тф<Гст.
Итак, на основе правила подобия может быть применен сле-
дующий способ определения максимальной скорости самолета
с ТРД: на каждой высоте установившуюся горизонтальную пло-
. / Тф
щадку следует выполнять при оборотах Иф = /гНо^ I/ т^-;вы-
V ^ст
брав в качестве стандартной барометрическую высоту, мы най-
дем, что при полете в стандартных условиях на режиме Vmax с
тем же весом, что и в фактических условиях, число МСт=Мф.
следовательно,
а
V = / —
к шах ст Ф I/ 'г *
V 7ф
Недостатком этого* способа является невозможность его
применения приЗТя<0.
В тех случаях, когда в полете выдерживались обороты
Пф, отклоняющиеся от получаемых по формуле =
= лном1/ необходимо в величину скорости I/max ст ввести
F * СТ
небольшую дополнительную поправку, использовав один из
способов, указанных в § 4.
16 772
242
Глава XL Приведение для самолетов с ТРД
§ 4. ПРИВЕДЕНИЕ МАКСИМАЛЬНОЙ СКОРОСТИ ПРИ ПОМОЩИ
показателей
Из изложенного выше видно, что ни метод оборотов, ни ме-
тод эквивалентной высоты не дают возможности выполнить
приведение максимальной горизонтальной скорости к стандарт-
ным атмосферным условиям, если при испытаниях 8Г//<0,т. е.ж
когда фактическая температура воздуха вы-
ше стандартной на данной барометрической высоте. По-
скольку это обычно имеет место почти на всех высотах в летнее
время, когда чаще всего проводятся испытания, необходимо раз-
работать и другие способы приведения Vmax к стандартным усло-
виям. В связи с этим рассмотрим методы приведения макси-
мальной скорости самолетов с ТРД, основанные на примене-
нии показателей. При выводе соответствующих формул мы
будем для большей общности учитывать влияние числа Re на
сх самолета, которым мы пренебрегали при рассмотрении пре-
дыдущих методов.
Написав уравнения установившегося горизонтального полета:
Pno=p^-=^ScxM2,
пр Ря 2 х ’
G =O — = ~Sc М2
Рн 2
и взяв логарифмические дифференциалы правых и левых частей
этих уравнений, получим
I Р \
d—
dPnp _ \Рн/ _dcx 2(И 17)
Рпр "" Р ~ сх + М 9
Рн
Л! 18)
Gnp О рн су М * 1 '
В гл. VII было показано, что при Pnfl—f(M, Тпр)
-^2£- = Л м——(11.17')
Рпр м М 2 п Тпр ’
[это следует из формулы (7.57) и предыдущих].
Так как на режиме 1/шах полет производится при номиналь-
ных оборотах пном, то
Тпр=гя(^)‘=тя,
а значит
^Т'пр dTH
^пр Тн
$ 4. Приведение макс, скорости при помощи показателей
243
и, следовательно,
dPnp tZM 1 dT1
-----= ------------К —
Pnp м м 2 n Th
(11.19)
В гл. X § 1 при выводе формул приведения для самолетов
с поршневыми двигателями, считая
сх = сх0 (Re) + сxi (су) + сх в (су, М),
т. е., разбивая лобовое сопротивление на три части: вредное
и профильное, индуктивное и волновое, мы получили [фор-
мула (10. 7)]:
de de dM. dRe
— + +gM—,
x У
где, как уже указывалось ранее,
= . СУ дсхв . ..т М дсХй
сг де.. с’ с с dcv ’ м с дМ. 9
д у д д у д
/?е дсх()
сх dRe'
Так как
Re = ^ = ±-^}
ц [J-0 ц.
.“0
или, заменяя р через
р!/=рМ
= М / kpBp
Рн
sRTH'
а
то
_ _L 1 f k Мрн
~ но V gRT0 / м1-26
\г0/
16*
244
Глава XI. Приведение для самолетов с ТРД
Взяв логарифмический дифференциал, получим
dRe dM dpH dTH
---= _ + _™-l 2б_".
Re M Рн Тн
Подставляя найденное значение — в выражение для
Re
dcx
---, найдем, что
С.
dcr f ч de v
---= (Si + Sc)~ + (gRe + +
cx cy M
dp tj
+ gRe----- — 1,26g/?e
Ph
dTH
TH
Из формулы (11.18) следует, что
dcy
су
dG dpH
dM
Рн
(11.20)
(11.21)
2 — .
M
Подставив в формулу (11.20) значение — по формуле (11.21),
су
dcx
а затем подставив найденное для — выражение в формулу
С X
(11.17) и воспользовавшись соотношением (11.19), после про-
стых преобразований получим
[2—2 (g; + + gpe — Лч] — +
+ [gRe - (& + gf)J---+ (gi + gj ~ +
Ph g
1 \ атн
hn-\^gRe]-^0.
2 / 1 н
в
(11.22)
Полученное уравнение мы можем представить
виде:
следующем
где
Тн dM
т М дТИ
Р н
------
Р М дрн
dTH
1Н
dpH dG
Рн °
у hn -1,26^
2-2 (gi + gc> + g*+gRe~ hyi
2-2 (gtч g'J + g'M+g’fle — hyt
(11.23)
(11.24)
— = M
M
(11.25)
£ 4. Приведение макс, скорости при помощи показателей
245
G дМ
(11.26)
-----
G М dG
2 — 2 + +
При выводе уравнения (11.23) мы считали, что п = пнощ сле-
довательно, это уравнение дает зависимость относи-
тельного изменения числа М на режиме Vmax
от относительных изменений температуры
воздуха, его давления и полетного веса само-
лета.
Перейдем теперь к анализу показателей уравнения (11.23),
причем вначале разберем показатель Мг.
Как уже указывалось ранее, показатели hn и характе-
ризующие относительное изменение тяги в зависимости от отно-
сительных изменений приведенных оборотов (или приведенной
температуры) и числа М, зависят от ТПР и М. Для интересующего
нас режима Vmax приведенная температура равна температуре
воздуха, а значит h м и hn зависят от числа М и температуры
воздуха Тн- Типичные зависимости /гми hn от М и пПР представле-
ны на фиг. 7.21 и 7.22. Обратим внимание на то, что показа-
тель входящий в знаменатель выражений для Мг, Мр и М^,
по абсолютной величине значительно меньше 2 и величина
его не оказывает заметного влияния на значение этих показате-
лей. Показатель hn растет с ростом числа М. Для прикидочных
расчетов можно принимать, что на режиме Vmax этот показатель
равен в среднем 4.
Показатель gR6 характеризует относительное изменение сх
самолета в зависимости от относительного изменения числа Re.
Для грубых прикидок можно считать, что на режиме Vmax у со-
временных самолетов gRe=—0,05; 0,1. Этот показатель ока-
зывает заметное влияние лишь на Мр, в выражении для которого
он стоит в числителе и где его величина соизмерима с величиной
других показателей.
Показатель gi, оценивающий относительное изменение ин-
дуктивного сопротивления в зависимости от относительного изме-
нения су, для самолетов с ТРД удобно представить в таком виде:
/ 20 \2
2 2 \ kpHSW> /
(11.27)
kpHSW
или
Ро
4
^гс^-эфА)
Si
G О Ро 1
5 Ро Р /рЛ*
— М2I — I2
Рн \Ро/
(11.28)
246
Глава XI. Приведение для самолетов с ТРД
где Ро — тяга двигателя у земли при V=0, n = nWM и при нор-
А)
мальных условиях (ро = 76О мм рт. ст., Г0==288оК). Отношение
Рн
является функцией от Тн и М (для номинальных оборотов),
причем оно зависит в основном от температуры воздуха Тн и в
меньшей степени от числа М. Это отношение может быть легко
воздуха и числа М.
определено при наличии сетки высотных характеристик двига-
теля. В качестве примера на фиг., 11.7 представлено это отно-
шение для одного из современных турбореактивных двигателей.
Таким образом для данного самолета показатель gi зависит
от числа М, барометрической высоты полета Нр и температуры
воздуха Тн- 1
У скоростных истребителей вблизи земли gi равно в среднем
0,03—0,05, а на высоте 11 000 м 0,2—0,3; соответствующие значе-
ния для скоростных бомбардировщиков 0,05—0,1 и 0,3—0,4. Этот
показатель на режиме Vmax оказывает заметное влияние на М?
и и сравнительно малое на Мл
Напомним, что показатели gy[ и gc характеризуют относитель-
ное изменение сх самолета вследствие изменения волнового со-
противления в зависимости соответственно от относительного из-
менения числа М (при ^=const) и от относительного измене-
§ 4. Приведение макс, скорости при помощи показателей
247
НИЯ Су (при M=const). Для грубых прикидок можно принять,
что = 0,05—0,1.
При М<М.Х. показатель g^ равен нулю, а при дальнейшем
увеличении числа М он начинает резко возрастать, достигая зна-
чений порядка 10—15. Очевидно, что величина этого показателя
оказывает огромное влияние на величину показателей Мг, Мр
и М^. Показатели g^ и gc являются функциями от М и су (см.
фиг. 10.3 и 10.4). Так как при установившемся горизонтальном
2G
kpHSМ2 ’
полете су=
то для данно! о самолета показатели gM и
go
зависят от числа М и барометрической высоты Нр.
Таким образом показатели, относящиеся к двигателю, а имен-
но — hn и /гм, зависят от М и Т н. показатели £ми gc, связанные с
волновым сопротивлением, зависят от М и Нр, а показатели gRe
и gi — от М, Нр и Тн. Следовательно, каждый из показателей Мг,
Мр и MG зависит от трех параметров — числа М, барометриче-
ской высоты полета Нр и абсолютной температуры воздуха Тн:
М^срДМ, Нр, Тн).
Мр=с?2(М, Нр, Тн).
М6? = сРз(М, Нр, Тн).
При постоянном весе самолета G на режиме Vmax как было
ранее доказано,
М=/(ЯЛ Тн).
В итоге, выражая по последнему соотношению один из пара-
метров через два других, мы можем считать, что Мг, Мр и MG
являются функциями любых двух из трех
параметров М, Нр и Тн. например,
Мг-с?1(^ Тн) = Ь(Ъ, M) = Z1(M, Тн).
МР=ъ(НР, Тн) = <Ь(Нр, М)=Х2(М, Tn).
MG =^(НР, Тн) = ЫНР, M)=Z3(M, Тн).
Выбор той или другой функциональной зависимости, вообще го-
воря, произволен и определяется рядом соображений, связан-
ных с конкретным использованием данной зависимости для целей
приведения к стандартным условиям.
Определить расчетным путем показатель Мг не представ-
ляется возможным, в основном из-за отсутствия достаточно на-
дежных способов расчета влияния числа М на аэродинамические
характеристики самолета. Воспользоваться для определения по-
казателей gy[ и gc продувками модели самолета в скоростной
аэродинамической трубе также нежелательно из-за погрешно-
248
Глава XI. Приведение для самолетов с ТРД
стей, связанных с переходом к натуре. Поэтому лучше применять
экспериментальные методы определения показателя М т на осно-
ве результатов летных испытаний.
Для этой цели можно воспользоваться описанным нами ра-
нее сокращенным вариантом применения метода оборотов, при
котором для небольшого числа высот находятся кривые М--
= }(Тщ) путем выполнения ряда площадок на нескольких ско-
ростях для определения зави-
симости скорости от оборотов.
Построив кривые М=/(7\)
для каждой из высот, опре-
деляем затем в ряде точек
каждой из кривых графиче-
ским путехМ производную
Фиг. 11.9. Примерный харак-
тер зависимости показателя М7-
от числа М и высоты полета Нр.
d м
, равную танген’су угла наклона касательной к кривой
dTH
(фиг. 11.8). После этого подсчитываем для каждой точки
Тн дм Тн
Мг =-------= — m tg а,
1 М дтн М s
где m — отношение масштабов по оси ординат и по оси абсцисс,
а затем строим кривые
Мг=/(М)
для каждой из высот Нр (фиг. 11.9). Для других высот кривые
Mr=f(M) получаются интерполированием.
Отметим, что при описанном способе экспериментального
определения показателя Mr нет необходимости знать значения
всех показателей, входящих в формулу (11.24) для Mr. Вывод
§ 4. Приведение макс, скорости при помощи показателей
240
этой формулы и анализ показателей, входящих в нее, нужны
были нам лишь для выяснения вопроса о функциональной за-
висимости показателя Мг от ряда параметров, и понадобятся
дальше при рассмотрении некоторых вопросов.
При наличии сетки кривых фиг. 11.9 приведение к стандарт-
ным условиям точки {Нр, Мф, Тф), полученной при полете на
горизонтальной площадке на режиме Vmax (т. е. при /w). может
быть сделано следующим путем. Выбираем в качестве стандарт-
ной барометрическую высоту Нр и определяем значение Мг для
данных Нр и Мф, воспользовавшись интерполяцией по Нр. Пере-
ходя от дифференциалов к конечным приращениям, находим
ГФ
и, в соответствии с формулой
(6.31),
5^.х = (Мг + 0,5)^*-8Тя,
/ф
где ьТн=Тст— 7ф, причем Тст
следует брать для той же вы-
соты Нр по СА. После этого
находим
Мст=Мф + 8М
и
V = V Л Ч- 5У
v max ст v max ф * v max*
зависимости показателя М^от темпе-
ратуры воздуха Т р и высоты поле-
та Нр.
Так как Мт сравнительно резко изменяется при изменении
числа М, то переход от дифференциалов к конечным прираще-
ниям может привести к большой ошибке. Для того чтобы избе-
жать ее, можно применить один из способов последовательного
приближения, описанных в гл. VI (§ 4).
Наконец, для упрощения вычислительной работы удобнее
кривые Мг построить в зависимости от Нр и Тв вместо Нр
и М (фиг. 11.10). Тогда Мг можно определить сразу, зная
8ТН
пр и Тср = ТфН-----, а затем подсчитать
оМ = Му
..
Мф+ 2
ср
откуда
§М = МуМф
Г 8Тн
Тф (! — Мт)
*- ^/ф
250
Глава XI. Приведение для самолетов с ТРД
Очевидно, что в тех случаях, когда при применении метода
оборотов нужна экстраполяция кривых М=/(//Рл Т /Л для опре-
деления Мст в стандартных условиях, нужна и экстраполяция
кривых Мг= ф 1(НРг М) или Мг=91(Я^ Тн), правда, в несколь-
ко меньшем диапазоне, так как Mr следует брать для среднего
значения М или Тн между фактическим и стандартным. Таким
образом в этом отношении применение показателя Mr особых
преимуществ не имеет. Основной смысл его применения заклю-
чается в том, что в силу ряда особенностей этого показателя,
которые мы сейчас рассмотрим, экстраполяцию кривой Мг =
= М) можно произвести надежнее, чем экстраполяцию
кривой N[=f(Hp, Тн).
Пренебрегая gne, напишем выражение для показателя Mr в
следующем виде:
Мг =
т‘-
Лм’
(11.29)
Прежде всего отметим, что так как числитель и знаменатель
всегда положительны, то показатель Mr всегда отрицате-
л е н. Следовательно, при температурах ниже стандартных
число М на режиме Vmax всегда больше, чем в стандартных усло-
виях, а при более высоких температурах — меньше. Таким обра-
зом зимой при горизонтальном полете на номи-
нальных оборотах число М выше, чем в стан-
дартных условиях, а летом ниже.
При малых числах М можно считать gy[==gc==:0; пренебрегая
величиной Лм, получим
При полете на наивыгоднейшем угле атаки, когда с’н= —сх,
ос .
показатель gi =—- =1, а следовательно, Мг'->оо. При мень-
сх
ших углах атаки уменьшается значение показателя gi, а вместе
с ним уменьшается по абсолютной величине и показатель Mr.
Если бы при больших значениях числа М отсутствовало волно-
вое сопротивление, то в связи с уменьшением gi показатель Mr
стремился бы к величине----(т. е. в среднем к —1). Но после
достижения числа М* начинает резко возрастать показатель gyi,
в связи с чем показатель Mr начинает резко падать по абсолют-
ной величине, причем при Л4г->0. В свете указанных
особенностей показателя Mr характер его протекания при изме-
нении числа М для //p=const будет таким, как это показано на
фиг. 11. 11.
§ 4. Приведение макс, скорости при помощи показателей
251
При увеличении барометрической высоты полета одному и
тому же числу М соответствует меньшая индикаторная скорость,
а значит большее значение су, а одной и той же индикаторной
скорости (или Су) соответствует большее значение числа М. Так
как при G — const полет на наивыгоднейшем угле атаки, когда
gi=l, происходит при Vi~const, то при большей высоте Нр вер-
тикальная ассимптота кривой Мг будет проходить правее — при
большем числе М. Точка же А, соответствующая М*, передви-
нется влево из-за увеличения cv. Таким образом кривые Мг для
двух высот НР1 и Нр2 расположатся так, как это показано на
ФИГ. 11.11 (Нр2>НР1).
Фиг. 11.11. Характер изменения показате-
ля Му в зависимости от М и Н.
Указанные особенности показателя Мг облегчают экстрапо-
ляцию кривых в сторону больших чисел М; именно в этом за-
ключается основное преимущество1 применения этого показателя
для целей приведения Утах к стандартным атмосферным усло-
виям при /fp=const.
Рассмотрим теперь, в какой степени может быть использован
показатель Мр для целей приведения. Прежде всего укажем, что
из выражений (11.24) и (11.25) для Мг и Мр легко найти их
отношение
т 1
у Л„-1,26^
Числитель этого выражения, как правило положителен; знаме-
натель всегда положителен. Следовательно, показатель Мр про-
тивоположен по знаку показателю М г и, как правило, положи-
телен. Далее, по абсолютной величине числитель значительно
252
Глава XI. Приведение для самолетов с ТРД
меньше знаменателя, следовательно, Мр по абсолютной величи-
не значительно меньше М т (во много раз на малых высотах и
примерно в 5 раз на высоте, где число М достигает максимума).
На малых высотах можно грубо считать, что gi—giie^Q и gc^O
(вследствие малости М и , а следовательно, М^О.
Если воспользоваться показателем Мр для приведения Утах к
стандартным атмосферным условиям, то для того, чтобы в фор-
мулы пересчета не входил показатель Мг, приведение придется
делать при Г//= const, т. е. вкачестве стандартной при-
нимать высоту по' температуре. Таким образом при
использовании показателя Мр приведение к стандартным усло-
виям точки (Нр, Мф, 7ф), полученной на площадке на ре-
жиме Утах, может быть сделано следующим образом. По таб-
лицам СА находим стандартную высоту Нст по температуре Т$
и соответствующее этой высоте давление рСт. После этого, найдя
тем или иным способом Мр, определяем
гм = мр-ф^я>
РФ
^ах = м,-^Ь8Ря,
РФ
где 8ря = Рст—Рф> а затем
Мст = Мф + SM
и
V = V
к max ст v max ф
max’
причем Утах ст и Мст относятся уже к высоте Яст, а не Нр.
Приведение при T//=const можно делать и несколько иным
путем. Как было показано в гл. VI, в случае приведения при
7//=const
Ърн I н
-----= -5,26 — ,
Рн ?н Тн
где %ТН = Т'„— Тф, а Т'„—стандартная температура на исход-
ной барометрической высоте Нр. По уравнению статики ат-
мосферы • Z' v * Ърн ън Рн RT н
откуда ... ЪТн -=154 37+, 0 я,
а Нст = /^ + 8/7 = ^+ 1548 Т„.
§ 4. Приведение макс, скорости при помощи показателей
253
Формулы для 8М и 8Vmax примут вид:
ам=—5,26МОМЛ —,
р ф Гф
8V = - 5,26M„Vmax * —.
НШЛ ' £J Шал Ip гр
7 ф
(11.31)
Пользоваться показателем Мр и приведением при Т//=const
целесообразно' только тогда, когда этот показатель может быть
получен расчетным путем. В этом случае отпадает необходимость
в получении кривых Тн), что приводит к значительному
сокращению летного эксперимента.
Фиг. И. 12. Приближенная зависимость по-
казателей Мр и Mg от
На малых высотах показатель Мр очень мал и поэтому даже
весьма грубое приближенное определение его не может привести
к большим ошибкам при приведении. Так как на этих высотах
влияние числа М обычно невелико, можно Мр подсчитывать по
следующей приближенной формуле:
g- +0,05
Мр =------------,
р 2(1-^)-0,15
(11.32)
полученной из формулы (11.25) при g'c—gRe =—0,05 и
Лм=0,1. На фиг. 11. 12 представлена зависимость Мр от gi, вычи-
сленная по формуле (11.32).
На больших высотах нельзя считать gc и gM равными нулю;
однако, так как рост этих величин происходит одновременно и
при этом увеличивается и числитель и знаменатель выражения
для Мр [см. формулу (11.25)], то в первом грубом приближе-
нии можно воспользоваться формулой (11.32) и для больших
254
Глава XI. Приведение для самолетов с ТРД
высот. Следует однако иметь в виду, что приведение при Тн=
const вообще возможно' только для высот до 11 000 м. Учиты-
вая же сделанные нами грубые допущения при расчете Мр,
вряд ли можно рекомендовать указанный способ приведения
для высот больше 7000—8000 м.
Подсчет при приведении по указанному методу следует
производить по формуле (11.28), причем рн нужно брать для
средней высоты Нср = Нр + ^\т. е. рср = а число М
можно брать фактическое, не прибегая к последовательным
приближениям, поскольку 8М сравнительно мало.
Так как Мр, как правило, больше нуля, то при переходе
к стандартной высоте число Мст будет больше Мф при
обработке испытаний, проведенных летом
(В Тп < 0, ВМ >0), и наоборот, Мст < Мф при зимних
испытаниях (В Тн > 0, ВМ < 0).
Перейдем теперь к вопросу о пересчете Vmax при измене-
нии веса самолета. Из формулы (11.23) следует, что при изме-
нении веса
t/M _ dV _ ЛЛ dG
МИ G G
Из равенств (11.25) и (11.26) для Мр и видно, что если
пренебречь влиянием числа Re, т. е. принять gi{e = 0, то
MG=—Мр;
следовательно, все сказанное выше относительно показателя Мр
справедливо и для показателя Ме, который приближенно может
быть определен по формуле
или по фиг. 11. 12.
§ 5. ХАРАКТЕР ПРОТЕКАНИЯ КРИВЫХ Mmax, Т'так И У/тах
ПО ВЫСОТЕ ПОЛЕТА
Воспользуемся теперь формулами (11.23) — (11.26) для ана-
лиза вопроса о характере протекания кривых Ушал=/(Н), 1Лтах=
=f(H) и Мтах=ДЯ) в стандартных условиях.
В стандартных условиях
dH
Рн
RTH
dTH=$dH.
$ 5. Характер протекания кривых Л4тах» Vmax и Vj max
255
dpH
Заменив в формуле (11.23) ----- и dTn, по этим равенствам
Рн
получим
^Мщах
•Мтах
ТН Р *ТН
или
^Мщах
dH
^(-^МГ+МД
к/ н
(11.34)
Аналогично получим, воспользовавшись связью между Мг>
VT, ViT, Мр, Vp и Vip [см. гл. VI, формулы (6.31) и (6.32)]:
^ = - [ - № (Мг + 0,5) + Мр] (11.35)
dri КI н
И
dV V •
—^- = -^(-^МУ + Мр + 0,5), (11.36)
причем —;-7? = 0,19 в тропосфере и ^=0 в стратосфере.
Рассмотрим сначала изменение числа Mmax с высотой на
реЖИМе Ртах.
На малых высотах 0,19Мг + М^<0, а следовательно,
о, т. е. число М растет с увеличением высоты полета.
По мере увеличения высоты полета растет g-L и gc (из-за
роста числа М), в связи с чем, как это видно из формулы
(11.25), возрастает Мр. На некоторой высоте 0,19Мг4-Мр,
а следовательно, и — “лх становятся равными нулю; тогда
число М достигает максимума, (фиг. И. 13,а). На еще
больших высотах—Мтах • отрицательно, и число М.тах падает.
dH
В некоторых случаях кривая Mmax =f(H) монотонно возра-
стает до высоты 11000 м (фиг. 11.13,6). На высоте 11000 м
кривая Мшах=/(/7) имеет излом, так как на этой высоте
ветвь кривой, расположенной в тропосфере, имеет наклон
^Мтах\
. dH )
троп
^(0,19Mr + Mp),
а ветвь кривой, расположенной в стратосфере,
^мтах\
, dH J стр
Мта* м
яг„ р'
"256
Глава XI. Приведение для самолетов с ТРД
Так как Мр всегда больше нуля, то в стратосфере Мшах
(rfMmax /л \
—<01. Раз-
ность наклонов обеих ветвей кривой на границе стратосферы
равна
1ТООП = 0,19-^МГ;
|ТР°П RT
стр
так как Мг всегда меньше нуля, то число Мтах в стратосфере па-
дает сильнее при увеличении высоты, чем в тропосфере. На
фиг. 11.13 приведены типичные варианты характера кривых
Мтах-/(Я).
Фиг. И. 13. Типичные варианты протекания кривых Мтах
=Ж).
1 -касательная к участку кривой Мтах в тропосфере;
2 — касательная к участку кривой Мтах в стратосфере.
На малых высотах характер протекания кривой Vmax—/(//)
может быть различньим в зависимости от величины Мг. Если на
этих высотах полет происходит на числах М, близких к М*, когда
влияние волнового сопротивления невелико, а Мг по абсолют-
ной величине велико, то Mr + 0,5<0, a dVrn— ^>0, т. е. макси-
dH
мальная скорость вначале растет с увеличением высоты полета.
Но по мере увеличения высоты полета увеличивается число М,
растет влияние волнового сопротивления и М/
по абсолютной величине падает, в результате чего умень-
шается, на какой-то высоте становится равным нулю, а затем
становится отрицательным. В результате кривая Vm&x=f(H) имеет
вид, представленный на фиг. 11. 14,а. Легко видеть, что макси-
мум кривой расположен всегда ниже
§ 5, Характер протекания кривых Л4тах, Утах и У/max 257
максимума кривой Действительно, в точке
Мтах имеем —g/?W+Mp=0, а следовательно, на этой высоте
dVmax q со maX <Z О
dH ’ Р тн
На границе стратосферы кривая Vmax=f(H) претерпевает также
излом, причем
Фиг. 11.14. Типичные варианты протекания кривых
Утах =/(//).
7—касательная к участку кривой Итах в тропосфере; 2—касатель-
ная к участку кривой Итах в стратосфере.
Возможен и другой вариант протекания кривой Vmax=/(H).
Если уже на малых высотах полет происходит на закрити-
ческих числах М, причем [Мг| < 0,5, то —т-~ < 0, начиная
с земли, и максимальная скорость монотонно падает с ростом
высоты (фиг. 11.14,5).
В обоих случаях на границе стратосферы кри-
вая имеет излом, причем падение Vmax с высотой в страто-
сфере меньше, чем в тропосфере. В случае, если кривая Vmax=
=/(//) имеет максимум, следует с большой осторожностью про-
водить экстраполяцию полученного на средних высотах участка
кривой в сторону малых высот.
^У/ max
Наконец, из формулы (11.36) видно, что --------- всегда
dH
отрицательно, так как Мр + 0,5 всегда больше, чем абсо-
17 772
258
Глава XL Приведение для самолетов с ТРД
лютная величина 0,19Мг. На границе стратосферы кривая
Vimax=/(#) также претерпевает излом, причем
Типичный характер протекания кривой Vi=f(H) представлен на
фиг. 11.15.
Рассмотрим теперь, как
изменяется максимальная ско-
рость при изменении атмос-
ферных условий. Для этой
цели воспользуемся формула-
ми приведения при Нр=
=const:
SM ътИ
—=му-А
м т т„
8Ута_ ЪТ н
*т~—= (Мг + 0,5)—
Г max 1 н
бу. ЪТы
^max 7Н
Так как Mr всегда отрицательно, то на режиме Утах число М
и индикаторная скорость летом всегда меньше, чем при стан-
дартных условиях, а зимой больше, причем изменение этих ве-
личин уменьшается с ростом высоты. Знак изменения Утах зави-
сит от величины Мл Если |Мг|<0,5, то с ростом температуры
воздуха максимальная скорость растет, а с понижением темпе-
ратуры уменьшается. Противоположная картина наблюдается при
|Мг|>0,5. Так как на малых высотах обычно |М7|>0,5, то на
них летом максимальная скорость ниже, чем при стандартных
условиях, а зимой выше. На больших высотах, где обычно |Мг|<
<0,5, летом Утах больше, чем в стандартных условиях, а зимой
ниже. Однако если уже на малых высотах полет происходит
при больших закритических числах М, то может оказаться, что
на всех высотах летом Утах выше, а зимой ниже, чем в стан-
дартных условиях. На фиг. 11. 16 представлен пример возмож-
ного протекания кривых Mmax, Vi max и Утах для летних, стан-
дартных и зимних условий. Отметим попутно, что изменение
максимальной скорости, числа М и Vi в зависимости от темпе-
ратуры может быть весьма значительным; так, при Мг=—1 на
каждый градус повышения температуры Утах изменяется в сред-
нем на —2 км/час\ индикаторная скорость на —(3—4) км/час,
§ 6. Определение потолка по сетке обобщенных характеристик
259
а число М на —0,0035; при 0 число М и Vi не зависят от
температуры, a Vmax изменяется в среднем на +2 км/час при по-
вышении температуры на один градус.
Столь большая зависимость летных данных
самолета с ТРД от температуры воздуха д о л ж-
н а, естественно, всегда учитываться при их оцен-
ке, в частности, при сдаточных испытаниях серийных самолетов.
-----Зимние услобия-----Стандартные услобия-----Летние еслобия
Фиг. 11.16. Пример изменения максимальной го-
ризонтальной скорости и числа М в зависимости
от температуры воздуха.
§ 6. ОПРЕДЕЛЕНИЕ ПОТОЛКА САМОЛЕТА ПО СЕТКЕ ОБОБЩЕННЫХ
ХАРАКТЕРИСТИК ГОРИЗОНТАЛЬНОГО ПОЛЕТА
Воспользуемся сеткой характеристик горизонтального полета
(фиг. 11.2 или 11.3) для определения потолка самолета. Если
при выполнении горизонтальных площадок на каждой высоте,
для которой определяются кривые указанной сетки, проходить
весь диапазон скоростей полета от Ушах до Vmin, то кривые
будут иметь вид, представленный на фиг. 11. 17 или 11. 18.
При заданном GnP или по мере понижения скорости гори-
зонтального полета потребные обороты вначале уменьшаются,
чему соответствует повышение приведенной температуры ТПр“
= , до тех пор, пока не будет достигнут режим полета
\ п )
на минимальных потребных оборотах. На одной из кривых
фиг. 11. 17 и II. 18 этот режим обозначен буквой А. При даль-
нейшем уменьшении скорости горизонтального полета потребные
обороты начинают возрастать, а следовательно, начинает умень-
шаться приведенная температура ГПР.
17*
260
Глава XL Приведение для самолетов с ТРД
Если при заданном GnP полет происходит при температуре на-
ружного воздуха 7ф, равной приведенной температуре в точ-
ке А, то горизонтальный полет возможен только на одном ре-
Фиг. 11.17. Сетка обобщенных ха-
рактеристик горизонтального полета в
координатах М и ТПр-
Фиг. 11.18. Сетка характери-
стик горизонтального полета в
Т7 я
координатах Vi и —;
жиме, соответствующем точке А, при числе оборотов двигателя,
равных пНом (ср. § 1). Горизонтальный полет на больших или
меньших скоростях, чем скорость, соответствующая точке А,
Фиг. 11.19. Зависимость 6пр и
числа М от Тпр Для режимов
полета на потолке.
невозможен, так как в этом случае
потребные обороты должны быть
выше номинальных (максималь-
ных). Следовательно, точка А ха-
рактеризует режим полета на тео-
ретическом потолке для заданного
приведенного веса Gnp при фактиче-
ской температуре наружного возду-
ха Т$, равной приведенной темпера-
туре в точке А.
На фиг. 11. 17 через точки А ре-
жимов потолка для разных Gnp про-
ведена пунктирная кривая. Поль-
зуясь этой кривой, можно построить
кривую, представляющую зависи-
мость Gnp от ГПР для режимов полета
на потолке (фиг. II. 19). При нали-
чии такой кривой легко найти зави-
симость теоретического потолка са-
молета от его полетного веса для
любых температурных условий и для
любых оборотов двигателя, в част-
ности для стандартных условий и максимальных оборотов. Для
этого, задавшись высотой полета Яст и зная для этой высоты Тот
и рст, находим по1 фиг. 11. 19 значение GnP, соответствующее при-
веденной температуре Гпр = Тст. Далее находим полетный вес
§ 6. Определение потолка по сетке обобщенных характеристик
261
самолета G, для которого выбранная высота является высотой
теоретического потолка по формуле
О = Опр^.
Ро
Проделав аналогичный расчет для ряда высот, найдем кривую,
представляющую зависимость теоретического потолка самолета
от его полетного веса [кривая G=fi(H) на фиг. 11.20].
потолка самолета с ТРД от его полетного
веса и зависимость чисел М и индикатор-
ных скоростей Vi для режимов полета
на потолке от теоретического потолка са-
молета.
По кривой фиг. 11.19 можно определить зависимость по-
толка самолета от его веса не только для полета при номи-
нальных оборотах двигателя лном, но и при любых произволь-
ных оборотах п, учитывая, что Т =ТН[^^\ .
Для высот выше 11 км стандартная температура воздуха по-
стоянна (rCT=const). Следовательно, для всех высот, располо-
женных в стратосфере, приведенный вес GIIP для режимов потол-
ка при п=Пном постоянен; на фиг. 11.19 этот постоянный для
статосферы приведенный вес обозначен через G^,^. Отсюда сле-
дует, что для высот выше 11 км
а значит
Рст2 Рст1
G —| = Опр. стр = const,
Рет / стр
Рст2 G2
Рст1 Gl
(11.37)
262
Глава XL Приведение для самолетов с ТРД
т. е. атмосферное давление, соответствующее
высоте потолка, пропорционально полетному
весу самолета. Следовательно, если из испытаний известен
теоретический потолок для какого-нибудь веса самолета, то по
приведенной формуле легко определить потолок для другого по-
летного веса.
Рассмотрим теперь, насколько изменяется потолок самолета
с ТРД при изменении полетного веса. Воспользовавшись форму-
лой (11.37) и уравнениями стандартной атмосферы для страто-
сферы (см. гл. I, § 3), получим
Я2—11000
<7 п о 6318
__Р2ст _ #
7Г~Й “ 77, —11000 *
Взяв логарифмические дифференциалы, получим
dG _ / Н - 11 000 \ _ dH
G “ \ 6318 / 6318
или, перейдя к конечным приращениям
1Н= — 6318 — ;
G
следовательно, увеличение полетного веса само-
лета с ТРД на Г% приводит к уменьшению тео-
ретического' потолка на ~63 м.
Пользуясь пунктирной кривой фиг. 11.17, можно одновре-
менно с кривой, представляющей зависимость Gnp от Тпр для ре-
жимов полета на потолке, построить кривую, дающую зависи-
мость числа М от Тпр для тех же режимов. Вид этой кривой по-
казан на фиг. 11. 19. Одновременно с определением зависимости
теоретического потолка самолета от его полетного веса для но-
минальных оборотов двигателя при стандартных условиях целе-
сообразно, пользуясь кривой М=/(ГПр) Для режимов полета на
потолке, найти соответствующие числа М, по которым легко опре-
делить и индикаторные_скорости для режимов полета на потолке
по формуле Vi = 44,4|/ рстМ; соответствующие кривые, представ-
ляющие зависимость числа М и индикаторной скорости Vi для
режимов полета на потолке от теоретического потолка самолета,
приведены на фиг. 11.20. Отметим попутно, что при стандартной
температуре в стратосфере M=const.
Режимы полета на потолке соответствуют полету на
наивыгоднейшем угле атаки. Этому углу атаки соответствует
значение су = У ^ок^эф в случае отсутствия волнового сопро-
тивления (см. гл. VIII) и несколько большее значение су при
наличии волнового сопротивления.
§ 7. Приведение максимальной вертикальной скорости
263
§ 7. ПРИВЕДЕНИЕ МАКСИМАЛЬНОЙ ВЕРТИКАЛЬНОЙ СКОРОСТИ
Как указывалось в § 1, из сетки обобщенных характеристик
установившихся режимов полета можно выбрать режимы, соот-
ветствующие максимальным вертикальным скоростям (кривая АВ
на фиг. 11.1). Вдоль ЭТОЙ кривой Vynpmax есть функция Gnp и
Тпр, так как число Мнаб есть функция тех же величин (в дальней-
шем числа М, соответствующие максимальной скороподъемности,
будем обозначать через
Мнаб). Итак,
Vyn9w=fAGnp,T^, (11-38)
Мна6=/2«7пр, Тпр). (11.39)
Указанные функции можно
представить в виде графиков
зависимости Vv пр max И наб
от Тпр при параметре GnP
(фиг. 11.21), причем эти
графики могут быть построе-
ны по кривым фиг. 11. 1. Эти
графики будем называть
сеткой обобщенных
характеристик [ре-
жимов максималь-
ной скороподъемно-
сти. При наличии этой сет-
ки легко для любых условий
полета (G, Нр, Ти, п) опре-
делить наивыгоднейшую ско-
Фиг. 11.21. Сетка обобщенных характе-
ристик режимов максимальной скоро-
подъемности.
рость набора Vi наб и макси-
мальную вертикальную скорость V^max.
Для получения сетки обобщенных характеристик, как уже
указывалось в § 1, необходимо проделать довольно большое ко-
личество полетов. Эти полеты целесообразно делать лишь в том
случае, если в соответствии с задачами испытаний необходимо
выяснить характеристики скороподъемности для разных вариан-
тов полетного веса самолета и для разных температур воздуха и
оборотов двигателя.
Обычно скороподъемность самолета определяется в специаль-
ном полете с непрерывным набором высоты до практического по-
толка для одного веса и одного числа оборотов, а материалы
зубцов или разгонов используют в основном для назначения наи-
выгоднейших скоростей набора в зависимости от высоты полета.
Для уменьшения поправок при пересчете барограммы на стан-
дартные условия целесообразно этот полет на скороподъемность
производить следующим образом. Летчик должен на каждой вы-
соте выдерживать заданную ему скорость по прибору Утаб и,
264
Глава XL Приведение для самолетов с ТРД
кроме того, такие обороты Иф, чтобы в этом полете на каждой
высоте
Лтр — 7ф
т. е.
Г Ль /1 вт\Д
«<Ь = Пном]/ — ~«но„ И-— — > (11.40)
ф НОм |/ 'р п ОМ \ О 7* / * '
г 1 ст \ 'ст/
где ЪТН = Т„ — Тф.
Если выполнить эти условия, то на каждой высоте Нр по
высотомеру О„р. ф = Опр. ст, Гпр. ф- Т^Пр. СТ И Мф = Мст, следова-
тельно, как это видно из соотношения (11.38), Vj,npmax = const,
или
V л, v
v у max ф v у max ст
/7ф ~ Ут^ ’
а
V
у max ст
у max ф
ИЛИ
V у max ст Vу max ф ?Н
Vу max ф у max ф
Указанный метод определения максимальной вертикальной
скорости и приведения ее к стандартным условиям, основанный
на формулах подобия, является весьма точным. Сущность его
сводится к тому, что мы в полете на каждой высоте Нр подбираем
такие обороты в зависимости от фактической температуры воз-
духа, чтобы тяга двигателя равнялась тяге при номинальных
оборотах и стандартной температуре на той же высоте. В ре-
зультате мы .проводим фактический полет при тех же су, сх, М
и G на каждой высоте Нр, на которых мы бы проводили полег
на скороподъемность в стандартных условиях; отметим, что при
этом соблюдается равенство углов наклона траекторий
@ф.
Таким образом, пользуясь «эквивалентностью» оборотов и
температуры воздуха в отношении характеристик ТРД, мы пу-
тем подбора оборотов совершаем в фактических
условиях полет на тех же режимах, что и в
стандартных условиях.
Однако указанный метод обладает следующими двумя суще-
ственными недостатками.
§ 7. Приведение максимальной вертикальной скорости
265
Во-первых, для того чтобы при выполнении полета на скоро-
подъемность не приходилось производить расчет n$=f(Hp), нуж-
но незадолго до полета определить тем или иным путем распре-
деление фактической температуры Тф по высоте Нр; это может
быть произведено при помощи радиозонда или полета на специ-
альном самолете. Далее, зная Тф=}(Нр), следует подсчитать
по приведенной выше формуле (11.40) для разных высот Нр и в
задании летчику указать 7наб и Пф для- разных высот по высото-
меру, которые он должен выдерживать при выполнении полета
на скороподъемность. На фиг. 11.22 показано в виде графика
такое задание для нанесенного на том же графике распределе-
ния температур воздуха по высоте.
Во-вторых, как видно из формулы (11.40), в зимнее время
нужно летать на оборотах, меньших, чем nHov., а в летнее время—
на больших. Так как максимально допустимые обороты могут
быть меньше оборотов, необходимых для полета в летнее время,
то указанный метод нельзя будет использовать при летних испы-
таниях.
Вследствие указанных недостатков описанного' метода целе-
сообразно рассмотреть другие методы приведения VymaX к стан-
дартным условиям, основанные на применении показателей. Для
этой цели воспользуемся приближенной формулой для Vy в сле-
дующем виде:
(11.42}
266
Глава XI. Приведение для самолетов с ТРД
Заменяя V через
лучим
Vi
и преобразовывая эту формулу, по-
G(vXA+v)=^-
\ Л. !
(11.42')
Приведение будем делать при G=const и P/i=const, т. е. в
качестве стандартной примем барометриче-
скую высоту Нр. Так как на практике принято полеты на
скороподъемность производить, сохраняя неизменной зависимость
приборной или, практически, индикаторной скорости по высоте:
Vi Наб=/(//р), то при приведении мы будем считать, что при рн=
= const не меняется и Vi, но в этом случае и M=const, const,
А=const и ^=const. Напомним, что, сохраняя один и тот же
закон ViHa6=/(//p) в стандартных и фактических условиях, мы
несколько уходим от режима наивыгоднейшего набора, но вслед-
ствие пологого характера максимума кривой Vy=f(Vi) вносимая
этим ошибка незначительна.
Взяв логарифмические дифференциалы обеих частей уравне-
ния (11.42'), получим
сЦУуУТ) ^dP __h dnw Х hdTH
V /-+" р "2 ’т«'
’' к
Так как при рв = const
. г— 1 г—dT rr
d{VyV A ) = / A dvy-—vyV A
2 1H
то после небольших преобразований, получим
£5' = 0)5|<1-Л„---
v у \ WyV у тн
a
Г hnV; IdT,
dVy = 0,5 (1—An)Vy—-—^=.
(11.43)
(11.44)
__н
TH
Формулы (11.43) и (11.44) могут быть использованы для при-
ведения Vy на любом режиме, а не только на режиме Vy^x.
Воспользуемся особенностями режима? Vy^x для того, чтобы
исключить /С из формулы (11.44) и получить формулу для при-
ведения V^max. Ранее было показано [см. гл. VIII, формула
(8. 15')], что для режима 1Л/тах действительно следующее соот-
ношение:
G 2G А»фРо5И
§ 7. Приведение максимальной вертикальной скорости
267
или, так как 1 схЪ | СУ Я^эф
то р СУ~ — —4 PoSr? ^-5- = 0. (11.45)
G К
р
Заменив — по формуле (11.42'), получим
G
А —2 —Ч-------
к
откуда находим, что на режиме Vymax
7, 4G
---— = — -I------------=.
Я Г Д 2 кХЭф ро5гг У Д
Подставляя найденное значение в формулу (11.43), получим
dVu / 3 4hnG \dTff
— = 0,5 1-------h------------------7=|— (11.46)
Vy \ 2 n ^Лэфро5И/у Д/ TH
и
7 3 \ 4AMG ](ITH
dV = 0,5 | 1-------hn\Vv-----------------=. —. (11.47)
y \ 2 n y тйэф po-sr,. у д I TH
Переходя к конечным приращениям и беря в формуле (11.47)
Vi в км/час, получим
з
Так как hn >0, а — Лп> 1, то знак Wy всегда будет обрат-
ным знаку 8Тн\ следовательно, при повышении темпе-
ратуры воздуха вертикальная скорость падает
и, наоборот, она повышается при понижении
температуры. На фиг. 11. 23 представлены типичные кри-
вые ^т1Х=/(//р) для летних, стандартных и зимних условий
для самолета с ТРД.
268
Глава XI. Приведение для самолетов с ТРД,
Для оценки порядка поправок Wy примем
Л«=4;
= 250 кг/м2-,
2эф = 5. При этих условиях
G
5
1 / 7340
-d2’5l/'+w
Приняв для высот, близких к потолку, Vl У Д = 180 км/час,
ТЯ = 216,5°К, получим
Фиг. 11.23. Типичные кривые скороподъемности для летних,
стандартных и зимних условий.
у земли, приняв Тн = 288°К и V А =600 км/час, получим
ЪУ
= -(0,00871^ + 0,0425).
о'Гя
Следовательно1, при Ту=40 м/сек, у земли поправка $Vv равна
примерно 0,4 м/сек на каждый градус превышения температуры
над стандартной, т. е. достигает большой величины. На потолке
эта поправка при К/=0 для нашего примера равна —0,19 .
'Выведем теперь формулу для поправки к вертикальной ско-
рости при изменении веса самолета. Пересчет на другой вес
обычно производят после приведения летных данных к стандарт-
ным условиям, считая при этом p//=const, 7\=const и A=const.
Так как целью этого пересчета является исправление результа-
тов полета в тех случаях, когда полетный вес несколько отли-
§ 8. Характер протекания кривых Наб и У у max по высоте полета 269
чался от нормального, будем считать, что с измененным весом
набор высоты производится при тех же значениях Vi, что и с
первоначальным весом, т. е. при выводе формул мы будем пола-
гать Vi=const.
Заменив в формуле (11.42) — следующим выражением:
К
получим
1 __ £го_ । су
К Су 7гХэф
^oPoSH / 2G
2G лХэфРо^У-
20 \
20 'яХэфРо^!/ /
(11.49)
Продифференцировав, получим
Р б/О CxtfbSV} dG 20 dG\
G О 20 О ялЭфр05 V2 G /
откуда, учитывая выражение (11.49) для Vу и переходя к ко-
нечным приращениям, получаем
•8V7= -(Vy +------40
причем Vi надо брать в м/сек, или
Зб,7-у \0
ХэфИу’Г/'о
(11.50)
где V,- берется в км/час.
§ 8. ХАРАКТЕР ПРОТЕКАНИЯ КРИВЫХ V1 наб И Vy max ПО ВЫСОТЕ
ПОЛЕТА
Анализ характера изменения максимальной вертикальной ско-
рости Vv max и соответствующей ей наивыгоднейшей индикатор-
ной скорости набора Vi наб в зависимости от высоты полета при-
водит к следующим результатам.
Кривая Vi состоит обычно из двух почти прямо-
линейных отрезков, причем отношение тангенсов углов, образуе-
мых касательными к участкам кривой на границе стратосферы с
осью Н, равно примерно 1,6.
В стандартных условиях градиент падения Кушах с высотой
может быть определен по следующим приближенным формулам
(в которых Vi берется в м/сек)-.
для тропосферы
Y 0,0342/ V. Р\ z
- = -V- 0,405 Vy шах -0,62 ; (11.51)
dH 1н \ у A G )
270
Глава XI. Приведение для самолетов с ТРД
для стратосферы
у max
dH
0,0342
210,5
0,5Vу щах
(11.52)
Фиг. 11.24. Типичный характер протекания зависимостей V/Наб
И Vy max от высоты для самолета с ТРД. АА и А'А' — касательные
в точке границы стратосферы к участкам кривых в тропосфере;
ВВ и В'В' — касательные к участкам кривых в стратосфере.
По формулам (11.51) и (11.52) найдем изменение наклона
кривой Vymax = f(H) на границе стратосферы:
/ dVу ша>
\ dH
I =0,00016 (0,095ц, max-
тр \
-0,38
К; Р \
ГТ’од
(П.53>
$ 9. Теоретическая и практическая скороподъемность
271
В этих формулах не учтены зависимости сх самолет^ от
числа М полета. Так как вблизи потолка это влияние становится
ощутимым у самолетов с ТРД даже на режиме подъема, то
пользование приведенными формулами на высотах, близких к по-
толку, может привести к заметным ошибкам.
Пользуясь формулами этого параграфа, можно уточнить про-
текание кривой I4maX=f(//) в случае значительного разброса,
экспериментальных точек. В виде примера на фиг. 11.24 приве-
дена типичная кривая Vy max=f (Н) для всего диапазона высот—
от земли до потолка.
§ 9. ТЕОРЕТИЧЕСКАЯ И ПРАКТИЧЕСКАЯ СКОРОПОДЪЕМНОСТЬ
Обычно полет на скороподъемность выполняется следующим
образом. После разбега и отрыва летчик разгоняет само-
лет, набирая одновременно высоту, до достижения скорости.
наивыгоднейшего набора на некоторой небольшой высоте; после*
этого выполняется набор высоты на наивыгоднейших скоростях
подъема. В результате барограмма подъема имеет вид, показан-
ный сплошной кривой на фиг. 11.25, на которой НП и тп обо-
значают высоту и время от старта до перехода на режим наи-
выгоднейшего подъема.
Для самолетов с поршневыми двигателями время тп сравни-
тельно мало и обычно при обработке экстраполируют барограм-
му до земли, не интересуясь переходным участком ее от старта
до точки А. Для самолетов с турбореактивными двигателями,
у которых скорость наивыгоднейшего набора значительно выше„
172
Глава XI. Приведение для самолетов с ТРД
время тп относительно велико и может составлять значитель-
ный процент от времени набора высоты 5000 или
Р
10 000 м. Так, при — = 0,5 и —0,017 время набора высоты
G
5000 м равно примерно 100 сек., а высоты 10 000 м— 240 сек.
При этих данных скорость наивыгоднейшего набора у земли
равна примерно 720 км/час, т. е. 200 м/сек. Для оценки време-
ни тп воспользуемся теоремой импульсов, причем будем прене-
брегать всеми сопротивлениями и считать, что тяга двигателя за-
трачивается лишь на разгон самолета по горизонтали. В нашем
примере
-И,аб = Ргп,
g
откуда
с^наб 200
тп = ——? =------------= 40,7 сек.
п Pg 0,5-9,81
Фактически тп будет больше, но даже при наших допущениях
это время составляет около 40% от т5000 и около 16,5% от
т10 ООО-
Вследствие этого для самолетов с ТРД принято различать
теоретическую и практическую скороподъем-
ность. В первом случае считается, что самолет сразу от уровня
земли начинает набор на наивыгоднейшем режиме, причем не
учитывается время разгона. Во втором случае принимается, что
время набора какой-либо высоты Н равно
dH
V
v у max
На фиг. 11.25 изображены соответствующие барограммы для
рассматриваемых двух случаев.
При обработке фактической барограммы полета вначале не
рассматривается ее участок ОА. После определения фактических
(или приборных) вертикальных скоростей для всех высот выше
Нп и приведения их к стандартным условиям строят кривую
тахсгг=/(7/ст) и экстраполируют ее до- 77=0. Затем указанным
ранее (в гл. VIII) способом строят теоретическую барограмму
тст=/(ЯСт).
Для определения практической скороподъемности в стан-
дартных условиях нужно привести к этим условиям время
перехода на наивыгоднейшую скорость подъема. После этого
следует сдвинуть параллельно оси т теоретическую барограмму
таким образом, чтобы она прошла через точку А (тп,Ст„ Нп)>
Так как время перехода тп само является, по существу, поправ-
кой и при переходе к стандартным условиям мы ищем поправку
$ 9. Теоретическая и практическая скороподъемность
273
к поправке, то вывод формулы приведения тп можно сделать
при очень грубых упрощающих предположениях. Примем, что
в процессе старта самолета и разгона его в воздухе до скорости
Vi наб тяга самолета расходуется только на разгон его. В этом
случае
~ G У,-наб
gp у~ь'
Написав выражения для тп в фактических и стандартных усло-
виях и разделив их друг на друга, получим, считая Vina6. ст=
Vi наб ф*
тп. ст -| /~ Дф
тп. ф ^ст г Дет
Так как разгон производится вблизи земли, а в стандартных
условиях Дст=1, то
тп. ст = Тп. ф]^ Дф .
< ст
Представим отношение тяг при фактических и стандартных
условиях в следующем виде:
Рф Рст ~ ^Р
ст
ст
Рст \ Т р р0
где ВГг = Т0 — Тф = 288 — Тф, 8ря=р0—рф = 760—^ф, а/гти hp —
показатели изменения тяги в зависимости от температуры воз-
духа и его давления. Для ТРД с нерегулируемым соплом
hT=------- hn, hp—\. В этом случае формула для определения
тп в стандартных условиях примет следующий вид:
тп. ст = тп. ф/Дф 1 { — hn-^~ + (11.54)
L \ 2 7о Ро /J
или при hn = 3
тп. ст =ТП. ф/Дф( 1 + 1,5—---—V
\ Л) Pq )
Пусть £ф=—15° С (Гф = 258°К), а рф = 780 мм рт. ст.
В этом случае
тп ст = 1,07 тп. ф ( 1 +1,5 = 1,07 • 1,183 тп. ф = 1,27 т„. ф,
\ 288 7о0/
т. е. поправка равна 27,о/о от тп,ф.
18 772
274
Глава XL Приведение для самолетов с ТРД
В заключение этого параграфа остановимся на следующем
вопросе.
Выше в этом параграфе и в гл. VIII указывалось, что для
подсчета барограммы в стандартных условиях используют кри-
вую Vy тах=/(//ст). Однако такой способ подсчета обладает ря-
дом недостатков. Вначале приходится дифференцировать полу-
ченную в полете кривую Нр ф=/(тф) для определения Кушахф
на ряде высот; затем эти Ку тахф приводятся к стандартным усло-
виям. В результате графического дифференцирования получается
большой разброс точек, затрудняющий проведение кривой
1Лутахст=:/(^ст). После проведения этой кривой производится
интегрирование для получения барограммы полета. Естественно,
что процесс дифференцирования, а затем обратный процесс ин-
тегрирования связаны с внесением дополнительных погрешно-
стей. Кроме того, при таком способе обработки при определении
времени набора в стандартных условиях исключается неизбеж-
ное в полетах дополнительное время, связанное со снижением
Кушах при переключении скоростей нагнетателя у самолетов с
поршневыми двигателями или при разворотах самолета в про-
цессе набора высоты. Таким образом при описанном способе
обработки для стандартных условий получается приукрашенная
барограмма.
В некоторых случаях обработку ведут несколько по-иному.
Барограмму для стандартных условий определяют не по кривой
Ку ст=f (Яст), а непосредственно приводят к стандарт-
ным условиям фактические интервалы вре-
мени Зтф по формуле
где УУф и Ку ст — средние значения вертикальной скорости
для одного и того же интервала высоты о//, который прохо-
дится самолетом в фактических условиях в течение времени
Втф, а в стандартных—отст. Суммированием интервалов време-
ни SrCT нахоцят время набора высоты в стандартных условиях.
Из сказанного ясно, что при втором способе обработки опре-
деление вертикальных скоростей используется лишь для опре-
деления поправки времени при переходе к стандартным уело
виям, в связи с чем отпадают погрешности первого способа
обработки. Однако это достоинство второго способа обработки
является одновременно' и его недостатком, так как в оконча-
тельный результат входят все, даже случайные, отклонения ог
режима Кушах, которые имели место в полете по> каким-либо
причинам. Выбор того или иного способа обработки зависит
от задач и целей проводимых испытаний.
Глава XII
МЕТОДЫ ИЗМЕРЕНИЯ ЭЛЕМЕНТОВ ТРАЕКТОРИИ
§ 1. ИЗМЕРИТЕЛЬНАЯ ФОТОКАМЕРА
Принципиально простейшим прибором для регистрации
траектории самолета является теневая камера (камера-
обскура). Она представляет собой темную камеру с отверстием
в одной из стенок и координатной сеткой на противоположной
стенке, на которой проектируется изображение летящего само-
лета. Отмечая тем или иным способом в каждый момент вре-
мени положение изображения, можно получить проекцию траек-
тории на стенку.
Фиг. 12. 1. Вычисление расстояния от объекта
до ИФК.
На этом принципе устроена измерительная фото-
камера (ИФК), в которой изображение самолета фикси-
руется через короткие промежутки времени на фотопленку.
Одновременно с изображением самолета снимается секундомер,
что позволяет знать время в каждой точке траектории i.
Если движение самолета относительно камеры совершается
таким образом, что некоторая характерная длина на самолете
(размах крыльев, длина фюзеляжа, расстояние между коле-
сами и т. д.) параллельна плоскости пленки, то из подобия
треугольников (фиг. 12. 1) легко получим г= ,
где г—расстояние от самолета до объектива;
f — фокусное расстояние камеры;
1 Конструкция первой в СССР ИФК была осуществлена Д. С. Зосимом
и А. П. Павленко.
18*
276
Глава XII. Методы измерения элементов траектории
L — характеристическая длина самолета;
/ — длина изображения.
Величины L и / известны заранее. Измерив на пленке длину I,
определяют расстояние г.
Если взятый отрезок длиной L не остается параллельным
плоскости фотопленки, расчет осложняется. Вообще говоря,
можно1 измерить три взаимно-перпендикулярные характерные
длины на самолете и получить по фотоснимкам расчетом угло-
вые перемещения самолета, а затем и расстояния г. Таким об-
разом в принципе возможно путем фотографирования получить
не только траекторию, но и угловые перемещения самолета;
однако практически это> невозможно: либо нельзя точно опреде-
лить на фотографии все три длины, либо расчеты получаются
очень неточными. По этой причине метод измерительной фото-
камеры получил очень ограниченное применение— почти исклю-
чительно для изучения взлета и посадки. Подробности
применения ИФК для этой цели будут изложены в гл. XV.
§ 2. ФОТОКИНОТЕОДОЛИТНЫЙ МЕТОД
Этот метод по существу давно известен в практике геодези-
ческих изысканий. В практике отечественной авиации теодолит-
ный метод был применен Рыниным в 1910 г.
Фиг. 12.2. Схема определения координат
объекта при помощи фотокинотеодолитов
и радиолокаторов.
Самолет, находящийся в точке S (фиг. 12.2), засекается при
помощи двух теодолитов, установленных в двух точках О и Л
на расстоянии L друг от друга. При этом определяются два
угла азимута 01 и 02 и два угла превышения tyi и
Сущность метода такова. Зная углы и длину базы L, можно
найти координаты самолета. Выберем начало' координат в точ-
§ 2. Фотокинотеодолитный метод
277
ке О, ось х направим вдоль базы, ось у вертикально вверх, ось
z перпендикулярно к ним. Обозначим искомые координаты са-
молета буквами х, у, z.
Из треугольников OCD и ACD имеем
z = xtg ©! = (£ — x)tg©2,
откуда x^-L tgP>2 z — L tgej+tge/ ~ tg«i+tg©3 ' (12.1)
Далее, из треугольников OCS и ACS имеем
И у = ОС tg ф, = —-— tg ф, = L — —tg sin cos 0, (tg ©j + tg 02) (12.2)
и у = A C tg ф2 — — tg ф2 = L —tg tg . Sin 02 COS ©2 (tg ©1 + tg ©2) (12. 3)
Таким образом апликату у можно вычислить двояко, что
служит хорошей проверкой правильности замеров.
Можно также описать траекторию самолета при помощи трех
полярных координат: углов ф1, ©i и радиуса вектора г, который
легко вычисляется по формуле
=-----£----= /.-------1^1---------. (12.4)
cos 4ч cos sin 02 cos 4ч cos ®2 (tg®i+tg 02)
Зная координаты х, у, z в функции времени т, легко под-
считать скорость самолета по формуле
v==1 Д
dz У \dz ) \dz) \dz/
Так как засечки обычно делаются через короткие проме-
жутки времени, то на интервале времени — тп скорость
вычисляют по приближенной формуле
V (12. О)
тл “ тл-1
Следует заметить, что таким путем получается путевая ско-
рость, т. е. скорость относительно земли, а не скорость отно-
сительно- воздуха.
Таким образом идея метода очень проста и могла бы быть
реализована при помощи всего двух теодолитов. Однако прак-
тически невозможно вести самолет точно в перекрестии окуляра
теодолита и производить отсчеты по лимбам. Поэтому теодолиты
обычного типа заменяются фотокинотеодолитами, в которых
самолет снимается на кинопленку одновременно- в обоих пунк-
278
Глава XII. Методы измерения элементов траектории
тах; углы поворота лимбов тоже снимаются на ту же пленку.
Так как наблюдатели не могут вести самолет точно в перекре-
стии, приходится по положению изображения вносить соответ-
ствующие поправки. Оба пункта связываются телефоном и
электросвязью (кабелем).
Изучение траектории самолета при помощи фотокинотеодо-
литов является одним из наиболее точных методов. При наличии
хорошо отлаженной аппаратуры координаты объекта опреде-
ляются с точностью до 10—20 м.
Однако фотокинотеодолитный способ связан и с рядом не-
удобств. Во-первых, необходимо иметь весьма сложную аппа-
ратуру; аппаратура обычно привязывается к определенному
месту, так как теодолиты должны быть поставлены на хорошие
фундаменты; требуется связь. Далее, метод требует весьма
большой квалификации и слаженности обслуживающего техни-
ческого персонала. Наконец, требуется хорошая види-
мость, что сильно уменьшает число летных дней, когда воз-
можно' производить эксперименты, и ограничивает радиус дей-
ствия аппаратуры практически 10 км. По этим причинам ука-
занный метод в последнее время в значительной мере вытес-
няется радиолокационным методом, менее точным, но более
простым и гибким.
§ 3. РАДИОЛОКАЦИОННЫЙ МЕТОД
Большое развитие радиолокации во время второй мировой
войны и ее успешное применение позволили развить новые ме-
тоды определения положения летающего объекта при помощи
радиолокатора. Напомним вкратце элементарные принципы
определения местоположения объекта при помощи радиолока-
торов.
Передатчик радиолокатора излучает электромагнитные им-
пульсы определенной частоты. Эти импульсы доходят до объекта,
отражаются от него> и возвращаются обратно через промежуток
* 2г .
времени Ат = —где г — расстояние от объекта до радиоло-
с
катора, с — скорость распространения электромагнитных коле-
баний (равная скорости света). Так как эта скорость — величина
постоянная, то сдвиг времени А т пропорционален расстоянию г
до объекта и, замерив этот сдвиг, легко получить расстояние.
Величина т замеряется весьма точно; следовательно, и расстоя-
ние до объекта можно замерить тоже очень точно;
Однако для полного определения положения объекта в про-
странстве необходимо знать еще две координаты. Такими коор-
динатами могут служить угол азимута 01 и угол превышения
(фиг. 12.2), при помощи которых можно определить положение
объекта и траекторию в сферических координатах. Для перехода
к прямоугольным координатам служат формулы
x = rcos 0i cos tyi, y=r sin z=r sin 0icos $i.
£ 4. Основные параметры, определяющие движение самолета
279
Зная координаты объекта в функции времени, можно путем
приближенного дифференцирования получить скорость, как и в
случае фогокинотеодолитов.
Для получения всех трех координат можно применить нор-,
мальные артиллерийские радиолокаторы. Напомним, что эти ра-
диолокаторы имеют направленный радиолуч и антенна радио-
локатора при помощи специальных следящих систем непрерывно
поворачивается так, что держит объект все время на направле-
нии этого луча. Пристраивая простейшие электрические само-
писцы таким образом, чтобы они записывали углы поворота
антенны и дальность, получаем все три координаты.
При обычном артиллерийском радиолокаторе можно опреде-
лять координаты летящего объекта с точностью до 30—40 м.
При помощи добавочных приспособлений можно повысить точ-
ность замера углов, что повысит точность замеров координат до
10—20 м.
Включая в сеть электрических приборов-самописцев простей-
шие дифференцирующие электрические контуры, можно полу-
чать запись не только расстояния и углов, но и их производных
{а следовательно, и скорости), не производя приближенного
дифференцирования.
§ 4. ОСНОВНЫЕ ГЕОМЕТРИЧЕСКИЕ И КИНЕМАТИЧЕСКИЕ
ПАРАМЕТРЫ, ОПРЕДЕЛЯЮЩИЕ ДВИЖЕНИЕ САМОЛЕТА
Фиг. 12.3. Схема скоростных и
связанных осей координат; углы
атаки и скольжения.
(вправо от летчика), ось Ох±
Самолет как твердое тело имеет шесть степеней сво-
боды. Следовательно, для определения его положения в про-
странстве необходимо задать шесть координат. Как обычно
в механике, за эти координаты
принимаются три координаты
центра тяжести и три угла пово-
рота самолета.
В динамике самолета приме-
няются обычно три системы ко-
ординат: земная, связанная и ско-
ростная.
Земная система осей
OxQyoZQ жестко связана с земной
поверхностью, причем ось Оу0
направлена вертикально вверх, а
оси Охо и Ozq горизонтальны.
Связанная система
осей OxiyiZi жестко связана с
самолетом (фиг. 12.3); ось Ozi
(поперечная) направлена перпен-
дикулярно к плоскости симметрии
(продольная) ПО' продольной оси самолета (вперед от летчика),
ось Oyt (нормальная ось)—перпендикулярно к предыдущим
(вверх от летчика).
280 Глава XII. Методы измерения элементов траектории
Фиг. 12. 4. Схема связанных и земных
осей; углы тангажа, рысканья и
крена.
Скоростная система осей Oxyz строится следую-
щим образом (фиг. 12.3): ось Ох направлена по вектору ско-
рости центра тяжести, ось Оу лежит в плоскости симметрии са-
молета, ось Oz перпендикулярна к ним.
Для взаимной ориентировки связанных и скоростных осей
служат два угла — угол скольжения (3 и угол атаки а. Угол
скольжения определяется как угол между вектором ско-
рости V и плоскостью симметрии самолета. Угол атаки
есть угол между продольной осью самолета и проекцией вектора
скорости на плоскость симметрии самолета. Для перехода от
скоростных осей к связанным
надо повернуть скоростную си-
стему осей на угол В относи-
тельно оси Оу, а затем повер-
нуть ее на угол а относительно
нового положения оси Oz, со-
впадающего с осью Oz±.
Для определения угловых
перемещений самолета пользу-
ются тремя углами, ориенти-
рующими связанные оси отно-
сительно земных осей: угол ры-
сканья ф, угол тангажа угол
крена у (фиг. 12.4). Угол
рысканья есть угол между
осью Oxq и проекцией продоль-
ной оси самолета Ох^ на гори-
зонтальную плоскость, угол
тангажа — угол между про-
дольной осью самолета и горизонтальной плоскостью, угол
крена — угол между плоскостью симметрии и вертикальной
плоскостью, проходящей через продольную ось самолета i. Для
перехода от земных осей к связанным необходимо сначала по-
вернуть систему земных осей относительно вертикальной оси на
угол ф, затем повернуть ее относительно нового положения оси
Oz0 на угол & и, наконец, повернуть на угол у относительно
продольной оси самолета.
Кинематическими параметрами, определяющими движение
самолета, служат три проекции скорости центра тяжести на
связанные оси самолета Vyl, Vzi и три проекции угловой
скорости самолета u^i, Легко видеть, что проекции ско-
рости на связанные оси связаны с величиной скорости соотно-
шениями:
УХ1 = у cos a cos р, Vyl = — V" sin а cos р, У21 = V sin р. (12.6)
Таким образом вместо трех параметров Ул, У^, Vzi можно
применять три параметра а, р, V, что обычно и делается.
1 Эти углы отличаются от применяемых в механике углов Эйлера.
§ 5. Методы измерения углов атаки и скольжения
281
С другой стороны, проекции угловой скорости связаны с
cty d$ dy
производными—, —, — соотношениями, которые легко
dz dz dz
вывести из фиг. 12.4
“н = — Sin & + ,
dr dz
<о , =— COS о COS Y Н--------SHI ?,
y dz dz
d<p a . , d&
o\, =-------— COS & Sin Y H-----COST.
21 dz * dz ‘
(12.7).
Наоборот, решая эти уравнения относительно—, —
dz dz dz
легко получим
dty cQyi cos 7 — cozi sin у
dz cos 0
db
— = <0.810 1 +Шд COSY,
dz
—(%,! COS Y — <0д sin y) tg &.
dz '
(12.8).
Следовательно, если угловые скорости «ы, <x>zi известны
как функции времени, можно определить углы ф, у, решая
систему дифференциальных уравнений; обычно это приходится
производить путем приближенных вычислений, так как система
в общем виде не решается.
§ 5. МЕТОДЫ ИЗМЕРЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ
В предыдущем параграфе было показано, что вместо трех
параметров Vxl, Vyi, V?i можно пользоваться параметрами V,
а, [}. Методы измерения скорости были изложены в предыдущих
главах. Рассмотрим методы измерения углов аир.
Прежде всего углы аир можно измерять непосредственно'
при помощи специальных флюгеров. Простейший флюгер
такого типа состоит из статически уравновешенного крылышка,
укрепленного на оси, вокруг которой он может вращаться.
Флюгеры этого типа практически применяются только в комби-
нации с насадком скорости, когда нужно иметь насадок, уста-
навливающийся по потоку; например, такого типа флюгеры
применялись при изучении штопора, когда диапазон углов атаки
значительно превосходит диапазон углов, в котором насадок
работает без погрешностей. Угол поворота такого флюгера
можно замерять при помощи потенциометра с электрической
282
Глава XII. Методы измерения элементов траектории
передачей на вольтметр, либо при помощи любого самописца
угловых перемещений, применяемого обычно для записи углов
отклонения рулей (СОР).
Однако флюгеры этого типа применяются редко, так как их
стабилизация недостаточна, а измерять непосредственно угол
поворота без увеличения масштаба очень трудно. Поэтому
обычно применяют более совершенный флюгер, схема которого
представлена на фиг. 12.5. Флюгер этого типа состоит из двух
крылышек Ь, профилированных для простоты по дуге окруж-
ности и сидящих на стержне а. Перемещения стержня а пере-
даются двум стержням d, сходящимся под небольшим углом
и вращающимся на осях, укрепленных в основании с. На кон-
цах стержней d укреплены трубки е, служащие противовесами.
Легко видеть, что такой флюгер стабилизирован значительно
“Фиг. 12.5. Флюгер для измерения
углов атаки.
сильнее, чем обычный, а путем
подбора геометрических соот-
ношений можно' угол атаки пе-
реводить в поворот стержня в
увеличенном масштабе.
Фиг. 12.6. «Двурогий» насадок
для измерения угла атаки.
Угол атаки можно измерять также при помощи «двурогих»
насадков, схема которых приведена на фиг. 12.6. При отклоне-
нии вектора скорости в плоскости насадка от его оси симмет-
рии АВ давления, воспринимаемые обоими «рогами» насадка,
будут иметь разные значения pi и р2. Величина р-—— зависит
Р\
от угла атаки. Следовательно, измерив pi и р2, можем опреде-
лить угол атаки. Предварительно такой насадок надо оттари-
ровать в воздушном потоке.
Общим недостатком флюгеров и насадков всякого вида яв-
ляется то, что они измеряют не истинный угол атаки относи-
тельно вектора скорости самолета, а угол атаки (или скольже-
ния) в возмущенном потоке. Поэтому их либо необходимо
выносить очень далеко вперед от крыла, либо очень тщательно
тарировать. Если флюгер применяется для измерения угла атаки,
его обычно тарируют в горизонтальном полете, измеряя одно-
временно угол тангажа при помощи инклинографа или уклоно-
мера. Однако даже при такой тарировке трудно расшифровать
и оценить показания флюгера при неустановившемся движении.
Если флюгер применяется для замера угла скольжения, то
обычно только из ряда горизонтальных полетов без скольжения
§ 6. Измерение углов поворота самолета
283
определяют нулевое показание, поправку же на скос определить
практически невозможно, если предварительно не оттарировать
самолет с флюгером в аэродинамической трубе, что очень дорого
и трудно; Наконец, применение флюгеров и насадков при боль-
ших скоростях полета вызывает дополнительные затруднения
из-за плохого обтекания.
По этим причинам непосредственный замер углов атаки и
скольжения производится весьма редко и только при специаль-
ных исследованиях.
§ 6. ИЗМЕРЕНИЕ УГЛОВ ПОВОРОТА САМОЛЕТА
Для измерения угловых перемещений самолета необходимо
иметь, очевидно, какие-то реперы, связанные с земной поверх-
ностью. Такими реперами могут служить какие-нибудь ориен-
тиры на земной поверхности, линия горизонта и, наконец, солнце,
если его положение относительно земной поверхности точно из-
вестно в данный момент времени (что легко достигается). Для
вычисления углов поворота самолета необходимо- иметь изобра-
жение этих ориентиров на поверхности, связанной жестко с са-
молетом, что можно сделать при помощи фотографирования.
Инструментом для определения относительного положения
горизонта и самолета может служить простейшее зеркало. Если
такое зеркало укрепить жестко относительно самолета парал-
лельно- поперечной плоскости OyiZi, то изображение плоскости'
горизонта в этом зеркале при изменении угла тангажа будет
перемещаться параллельно самому себе, а при изменении угла
крена будет поворачиваться на угол, равный углу крена. Если
же его укрепить параллельно плоскости симметрии Oxiyi, то при
изменении угла тангажа изображение горизонта будет повора-
чиваться на угол, равный углу тангажа, а при изменении угла
крена будет перемещаться параллельно самому себе. При уста-
новке зеркала в промежуточном положении получим комбини-
рованный процесс. Установка двух таких зеркал позволяет
определить углы крена и тангажа по угловым перемещениям
линии горизонта. Совершенно аналогично можно измерить эти
углы по изображению солнечного диска в зеркале на самолете.
Эти методы не получили большого распространения из-за ря-
да недостатков. Во'-первых, вследствие нечеткости изображения
горизонта точность замеров углов невелика — в лучшем случае
порядка 1°, поэтому эти методы можно применять лишь в редких
случаях, когда не требуется большой точности, например, при
изучении развившегося штопора самолета. Во-вторых, эти ме-
тоды требуют очень хорошей видимости горизонта, что бывает
сравнительно редко даже в хорошую легную погоду из-за
дымки.
При регистрации положения самолета относительно земных
ориентиров можно воспользоваться обычными аэрофотограммет-
рическими методами. Пусть на земной поверхности имеется тре-
284
Глава XII. Методы измерения элементов траектории
угольник АВС (фиг. 12.7), фотографируемый с самолета фото-
аппаратом с объективом в точке Oi, оптическая ось которого
направлена ПО' вертикальной оси самолета. На фотографии по-
лучим изображение abc. Очевидно, зная размеры треугольников
АВС и abc, а также фокусное расстояние f, можно определить
положение плоскости фотопластинки и осей этой плоскости от-
носительно треугольника АВС; иначе говоря, можно ориенти-
ровать триедр OiXiyiZi относительно некоторого земного триедра
OxoyQZo, а это и значит, что мы можем определить координаты
центра тяжести и три угла поворота. Не излагая подробно этого
метода, заметим только, что при условии хорошей видимости и
четкости изображения ориентиров на фотографии можно таким
путем определить углы и координаты с достаточной точностью.
Фиг. 12.7. Схема определения по-
ложения самолета в пространстве
аэрофотограмметрическими мето-
дами.
Фиг. 12.8. Схема жидкостного
уклономера.
В установившемся прямолинейном движении, когда углы
наклона самолета не меняются с течением времени, углы тан-
гажа и крена легко определяются при помощи уклономе-
ров. Наиболее простым прибором, который можно легко соз-
дать в любых условиях, является жидкостный уклономер
(фиг. 12.8), основанный на принципе сообщающихся сосудов.
Он состоит из бачка вместимостью порядка 0,1—0,25 л и стек-
лянной изогнутой трубки, в которые заливается жидкость. Весь
прибор смонтирован на доске. Ось прибора и прямая, проведен-
ная через центр бачка в точку уровня жидкости в трубке, со-
ставляют некоторый угол ф, определяемый по приближенной
формуле
h
/Г *
Чтобы разобраться, как этот угол ф связан с угловыми
перемещениями самолета, напишем уравнение плоскости гори-
§ 6. Измерение углов поворота самолета
285
зонта, проведенной через центр бачка, в связанных осях. На-
правляющие косинусы вертикальной земной оси, т. е. нормали
к горизонтальной плоскости, в связанных осях равны sin ft.
cos & cosy,—cos & sin у. Отсюда по известным правилам анали-
тической геометрии получим искомое уравнение
Xi sin ft '+yi cos ft cos y — ZiCos&sinY =0.
Если плоскость уклономера совпадает с поперечной плоско-
стью (назначение уклономера — замерять угол крена), то в его
плоскости (Xi = 0) получим в пересечении прямую
Следовательно, поперечный уклономер замеряет в точности
угол крена. Если уклономер предназначен для замера углов
тангажа (продольный уклономер) и его плоскость параллельна
плоскости симметрии самолета (zi=0), то в пересечении получим
прямую
У1 = tg 0
Xi cos 7
Следовательно, продольный уклономер измеряет в точности
угол тангажа лишь в том случае, если угол крена равен нулю.
Если угол крена не равен нулю, угол тангажа нужно определять
по формуле
tg ft =4g о cos y,
где ср-—угол, показываемый продольным уклономером;
Y — угол крена, определяемый по поперечному уклономеру.
Предварительно оба уклономера всегда тарируются в лабо-
раторных условиях (определяется зависимость угла ср от высоты
столба в трубке), а на самолете снимаются несколько' контроль-
ных точек для проверки правильности установки и определения
угла установки уклономера относительно самолета.
Уклономеры жидкостного типа весьма просты. При доста-
точно большой длине базы, порядка 500—600 мм, и хорошей
шкале (точность отсчета порядка 1 мм) можно ими измерять
углы с точностью до 0,1—0,2°. Однако не всегда можно найти
место для размещения уклономера; на одноместном самолете
без специального наблюдателя вообще пользоваться визуальным
уклономером затруднительно. В таких случаях для замера углов
пользуются обычно самописцами углов наклона (инклиногра-
фами), представляющими собой обычный маятник с демпфером
и мультиплицирующим механизмом для увеличения точности
записи. Такие инклинографы записывают те же углы, что и
жидкостные уклономеры. Методы обработки и тарировки те же.
286
Глава XII. Методы, измерения элементов траектории
Следует заранее предостеречь от часто встречающейся ошиб-
ки. И жидкостные и маятниковые уклономеры могут измерять
угол наклона самолета только в установившемся прямолиней-
ном полете, когда отсутствуют ускорения. При на-
личии ускорений такие приборы принципиально могут измерять
только углы вектора перегрузки с осями самолета (см. § 8), и то,
в силу инертности на неустановившихся режимах, они измеряют
и эти углы с большими ошибками. Поэтому при изучении криво-
линейного неустановившегося полета эти приборы применяются
только для замера углов при исходном (или конечном) устано-
вившемся режиме (см. § 7).
В неустановившемся движении углы поворота самолета (у
и & ) могут быть записаны при помощи инклинографов гиро-
скопического типа. В практике летных испытаний эти приборы
вследствие их большой сложности применяются редко< — только
при специальных исследованиях.
§ 7. ИЗМЕРЕНИЕ УГЛОВЫХ СКОРОСТЕЙ. ОПРЕДЕЛЕНИЕ УГЛОВ
ПОВОРОТА ИНТЕГРАЛЬНЫМ СПОСОБОМ
Непосредственное измерение угловой скорости производится
при помощи гироскопических приборов — жир о графов, схе-
ма которых показана на фиг. 12.9. Гироскоп с большим момен-
Фиг. 12.9. Схема гироскопического изме
рителя угловой скорости.
том инерции вращается в подшипниках, связанных с легкой
рамкой; рамка может вращаться вокруг оси Ох^. Если весь
прибор вращается вокруг оси Oyi с угловой скоростью то
на рамку действует гироскопическая пара сил с моментом
/Qcjj/i (/ момент инерции гироскопа, Q. — собственная угловая
§ 7. Измерение угловых скоростей
287
скорость гироскопа), направленным параллельно оси 0х1\ эта
пара сил уравновешивается парой сил (Р, Р) реакции неподвиж-
ных подшипников рамки (на оси 0х±) и пружины С; перемеще-
ние точки крепления пружины В равно
где Е — коэффициент жесткости пружины:
I — расстояние ВО от оси Ох^ до точки крепления пружины.
При постоянных I, Q, Е и I перемещение h пропорционально
угловой скорости и измеряет ее. Постоянство угловой ско-
рости Q поддерживается при помощи специальных регуляторов.
Обычно в практике летных испытаний применяются трех-
компонентные жирографы, измеряющие компоненты
угловой скорости по всем трем осям и записывающие эти ком-
поненты на одну общую ленту. Точность прибора зависит от
ряда условий. Современные хорошие жирографы записывают
угловые скорости с весьма большой точностью — порядка 0,5°/о
от максимальной замеряемой. Любой жирограф должен быть,
естественно', оттарирован в лаборатории, для чего применяются
специальные вращающиеся столики.
При расшифровке записей жирографа необходимо вводить
поправки на взаимное влияние компонентов. Пусть под влия-
нием угловой скорости произошел поворот рамки гироскопа
на малый угол ф; вследствие этого поворота на ось рамки гиро-
скопа будет проектироваться не компонент (o^i, а компонент
с.^1 cos с? + «)zi sin e^a>2/i+ «ы ?. Именно эту величину и измерит
жирограф. Аналогичного вида поправки следует вводить для
всех трех осей.
Зная закон изменения компонентов угловой скорости «м,
см как функций времени, заданных графически, и начальные
значения углов поворота фо, &о, То, можем найти эти углы в
функции времени следующим образом. В § 4 мы вывели формулы
(12.8). Они представляют собой систему дифференциальных
уравнений относительно ф, Т, которую можно интегрировать
любым из известных численных способов. Начальные значения
»о, То обычно в таких случаях можно определить, замерив их
способами, указанными в предыдущих параграфах: если движе-
ние началось со стационарного режима, они достаточно точно
определяются при помощи уклономеров. За начальное значе-
ние фо всегда можно принять произвольное значение, что сво-
дится к специфическому выбору земных осей OxQ и Ог0.
Особенно просто формулы (12.8) выглядят в том случае,
если самолет совершает движение только в плоскости симметрии.
В этом случае 0^=0; при этом Т =0, угол ф равен произ-
•283
Глава XII. Методы измерения элементов траектории
ВОЛЬНОЙ постоянной
величине, а угол 0- получается простым
интегрированием
&==&о+ J
О
(12.9)
Следует заметить, что такими способами можно получить
углы поворота самолета достаточно точно лишь на коротком
промежутке времени, так как ошибки при интегрировании н а-
капливаются с течением времени и растут до
ючень больших величин. Поэтому указанный метод можно при-
Фиг. 12. 10. Система сил, дей-
ствующих на самолет; вектор
перегрузки.
менять лишь в таких экспериментах,
где требуется выяснить качествен-
ную сторону явления, либо получить
количественные данные за короткий
промежуток времени.
§ 8. ИЗМЕРЕНИЕ УСКОРЕНИЙ
(ПЕРЕГРУЗОК)
Непосредственное измерение со-
ставляющих вектора ускорения w
чрезвычайно затруднительно и заме-
няется измерением составляющих
вектора перегрузки. Выяс-
ним прежде всего, что понимается
под перегрузкой.
Согласно основному закону дина-
мики в каждый момент движения
вектор mw равен геометрической
сумме силы тяжести mg (g — вектор
ускорения силы тяжести) и векто-
ра R, который равен геометрической
сумме всех аэродинамических сил и тяги двигателя 1 (фиг. 12. 10):
— m w + К + m g= 0.
(12.10)
Сумма векторов mg и —zzzw, деленная навес самолета wg
называется вектором перегрузки и обозначается символом п .
mg — mw g w
mg
(12.11)
1 При движении по земле к этим силам следует прибавить силу реакции
земной поверхности, при буксировке — силу натяжения троса и т. д. Вообще
под вектором подразумевается геометрическая сумма всех сил, действую-
щих на самолет, кроме силы тяжести и силы инерции.
§ 8. Измерение ускорений (перегрузок)
289
Из уравнения (12.10) и фиг. 12.10 видно, что
(12.12)
Таким образом вектор п направлен в -сторону, противопо-
ложную главному вектору аэродинамических сил и тяги двига-
теля, а его численное значение показывает, во сколько раз этот
главный вектор больше веса самолета.
Как и всякий вектор, вектор перегрузки имеет
составляющую (проекцию) по любому направле-
нию s
(12.13)
где —проекция вектора ускорения силы тя-
жести на направление s;
проекция вектора ускорения на это же
направление.
Именно эти проекции вектора перегрузки и из-
меряются при помощи специальных приборов —
акселерометров и акселерографов.
Схема простейшего акселерометра показана на
фиг. 12. 11 1. Некоторый груз массы т может пе-
Фиг. 12. 11. Схе-
ма акселеро-
метра.
ремещаться вдоль направляющих, параллельных
направлению s. Перемещение этого груза стес-
няется пружиной. На груз вдоль направления дей-
ствуют следующие_силы: вес mgs, сила упругости пружины N и
сила инерции — mws. По принципу Даламбера
откуда
— = —= п
mg g g
Таким образом сила N измеряет величину перегрузки по
заданному направлению s. А так как она однозначно связана
с перемещением груза, то перемещение груза однозначно изме-
ряет перегрузку по заданному направлению. Обычно с каждым
акселерометром связывается шкала, дающая непосредственно
величину перегрузки.
1 Простейший прибор такого типа в виде пружинного безмена с грузом
применялся еще В. П. Ветчинкиным на «летучей лаборатории» в 1918 г.
С тех пор конструкции акселерометров и акселерографов значительно услож-
нились и в настоящее время они представляют собой весьма совершенные
приборы очень высокой точности.
mg ’
g g
19 772
290 Глава XII, Методы измерения элементов траектории
Показанная на фиг. 12.11 простейшая схема в настоящее
время почти не применяется, так как имеет ряд недостатков;
в частности, боковые направляющие создают трение, значительно
уменьшающее точность измерений. Поэтому в настоящее время
употребляются более сложные схемы приборов, но принцип
остается тот же: перемещение груза на упругой подвеске.
Каждый акселерометр или акселерограф обязательно под-
вергается лабораторной тарировке. Для перегрузок меньше 1
(по абсолютной величине) тарировка производится на поворот-
ных столиках, на которых перегрузка создается путем наклона,
столика (меняется составляющая gs). Перегрузки больше 1 соз-
даются либо путем подвешивания тарированных грузов, либо
под действием центробежной силы на ротативных машинах.
В зависимости от цели эксперимента употребляются одно-
компонентные, двухкомпонентные и трехкомпонентные акселеро-
графы, дающие перегрузки по одной, двум и трем осям.
Так как перегрузка непосредственно определяет силы, дей-
ствующие на самолет, то акселерометр является совершенно
обязательным и основным прибором при всех испытаниях, свя-
занных с вопросами прочности самолета.
Необходимо иметь в виду, что в отличие от приборов, изме-
ряющих угловую скорость, перегрузочный прибор показывает
перегрузку в том месте, где он поставлен. Поэтому
в тех случаях, когда поле ускорений неравномерно, а необходимо
получить перегрузку, скажем, в центре тяжести, прибор следует
располагать возможно ближе к центру тяжести.
§ 9. ВЫЧИСЛЕНИЕ ТРАЕКТОРИИ ПО ПЕРЕГРУЗКАМ
Покажем теперь, как можно получить основные кинемати-
ческие параметры — линейные скорости центра тяжести само-
лета и его координаты,— если известны угловые скорости (или
углы) и перегрузки в функции времени *. В § 6 и 7 мы уже
видели, как можно получить углы ф, О, у. Поэтому будем
считать, что эти углы и угловые скорости известны.
Как известно из курсов_ теоретической механики, проекции
ускорения центра тяжести w (или вообще любой точки твердого
тела, принятого за начало связанных координат) на оси, связан-
ные с твердым телом, выражаются формулами
™ .= -1_ш .у , , у (
\ я 21 V у1>
— —~~~ + (12.14)
V I — <0 i Кн-
d т л л
1 Указанный метод был развит в работе В. С. Ведрова, Ю. К- Станке-
вича и С. А. Коровицкого «Исследование штопора самолета Р-5 в полете>,
Труды ЦАГИ, 1935, № 238.
§ 9. Вычисление траектории по перегрузкам
291
С другой стороны, проекции вектора ускорения силы тя-
жести на связанные оси равны
— gsinft,
gyi = — g cos & cos у,
g2i = g cos & sin y.
(12.15)
Након_ец, проекции векторов ускорения центра тяжести са-
молета w, ускорения силы тяжести g и перегрузки п связаны
между собой в соответствии с равенством (12. И) уравнениями
Wxl = gxl — gnx\,
^yl=gyl-g^yU
Wzl = gzv~gn21.
(12.16)
Комбинируя уравнения (12.14), (12.15) и (12.16), легко
получаем
= “,1^1—°>ylV2l—g sin &—gnxU
dz = 1 vzl — <DX1VX! — g cos 8 COS t—gnyl, (12.17)
dz = 0>ylV x 1 — WriV^ + g-cos&sin-f—gnA.
Эта система дифференциальных уравнений относительно Ki,
Vyi, Vzi может быть проинтегрирована любым численным спосо-
бом, если известны значения см, Y, nv\, nzX в
функции времени и известны начальные значения величин
Последние известны, например, если движение началось
с некоторого установившегося режима; при этом Vx^ Vvu V~i
легко вычислить, зная V, а, 0.
Следует указать, что такой метод определения составляющих
скорости можно применять только для сравнительно коротких
промежутков времени, так как ошибки, накапливаясь при инте-
грировании, могут существенно исказить результат. Поэтому
при длительных промежутках времени можно этим методом
пользоваться только в том случае, если желательно получить
лишь качественную картину. Например, таким путем в свое
время пользовались при изучении качественной картины вы-
хода из штопора.
Метод очень упрощается (и уточняется) в отдельных частных
случаях. Разберем, например, случай продольного движения в
плоскости симметрии1. В этом случае = == у =0
1 См. работу В. С. Ведрова и Г. С. Калачева «Исследование вы-
ходов из планирования самолета Р-5», Труды ЦАГИ, 1935, № 244.
19’
292
Глава XII. Методы измерения элементов траектории
и система дифференциальных уравнений приводится к весьма
простому виду
7- = <Bzi>
«т
d-V xl
dx
dVyy
dx
gsin& — gnxl.
—<bzyx—g cos &—gnyl.
(12.18)
Первое уравнение сводится к квадратуре
&==&о+
‘о
(12.19)
Введем проекции вектора скорости V на земные оси Vxo,
связанные с проекциями Vxi и Vyl соотношениями
Vxo = Vxicosft—Vylsin &, VrJ() = Vxisin&4-VJ,1cos&.
Подставляя в уравнения (12.18), получим весьма простые
соотношения
— g(«xlCOS& — Пу1 sin&),
at л
= — g—g(/i,i sin Я + яу cos&),
at
(12. 20)
из которых V*o и VyQ могут быть получены тоже простыми квад-
ратурами. Зная Vzo и Vyo, можно подсчитать величины V^i и Ги.
а затем скорость V и угол атаки.
Комбинируя изложенные методы с методами, при которых
скорость, высота или какие-нибудь другие параметры замеряются
непосредственно, можно получить большое разнообразие мето-
дов. Некоторые из них получили практическое применение.
Глава XIII
ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ
САМОЛЕТА
§ 1. ОСНОВНЫЕ ПОНЯТИЯ и ОПРЕДЕЛЕНИЯ
Пусть самолет сбалансирован на определенном установив-
шемся режиме полета. Под устойчивостью самолета пони-
мается его способность самостоятельно, без вме-
шательства летчика возвращаться к этому
исходному режиму после случайного' возму-
щения.
Движение самолета после случайного возмущения может
иметь, как известно', различный характер. На фиг. 13. 1 показаны
различные типы возмущенного движения. По оси абсцисс от-
ложено время, по оси ординат какой-нибудь параметр х, харак-
теризующий режим: угол атаки или скольжения, скорость, угол
тангажа, крена, рысканья и т. д. Самолет может возвращаться
к исходному режиму без колебаний (кривая а). В этом случае
говорят об апериодическом движении устойчивого
самолета. Он может возвращаться к исходному режиму путеАм
колебательного движения (кривая б). Самолет в этом
случае также устойчив. Неустойчивый самолет может ухо-
дить от исходного режима путем колебаний (кривая в) или без
колебаний (кривая г). В этих случаях говорят о колеба-
тельной и об апериодической неустойчивости.
На границе между устойчивыми и неустойчивыми находятся
нейтральные самолеты.
Из теории колебательного движения известно, что в случае
колебательного процесса при малых возмущениях отклонение
любого параметра х, определяющего режим полета, от началь-
ного значения х0, определяется формулой
= х0 = cos(«)T + a) = cos -у-4-, (13. 1)
где С—декремент затухания;
Т — период колебания;
со—круговая частота колебаний;
А,а—постоянные величины.
294 Глава XIII. Определение устойчивости и управляемости самолета
Амплитуда колебательного процесса меняется по закону
AeZ1 . Этот закон показан на фиг. 13. 1 пунктирными линиями.
Если амплитуды стремятся к нулю и самолет устойчив.
Если £>0, амплитуды возрастают и самолет неустойчив.
Величина СТ = —, равная натуральному логарифму ОТНО-
со
шения двух последовательных амплитуд, называется лога-
рифмическим декрементом.
Фиг. 31. 1. Различные типы возмущенного дви-
жения.
а—апериодическое движение устойчивого самолета; коле-
бательное движение устойчивого самолета: в -колебательное
движение неустойчивого самолета: г-апериодическое дви-
жение неустойчивого самолета.
В случае апериодического движения о>=0 изменение любого
параметра описывается формулой
8х = х-л0 = ЛеСх. (13.2)
В этом случае опять при С<0 самолет устойчив, при С>0—
неустойчив.
Возмущенное движение самолета складывается из ряда про-
стейших типов движения, которые в реальном движении накла-
дываются друг на друга и чистота этих типов нарушается. Иногда
§ 2. Качественное определение устойчивости и управляемости.
295
по первым этапам движения легко спутать его слагающие типы.
Например, если складываются быстро затухающее колебатель-
ное движение с медленно затухающим апериодическим, вначале
может получиться движение с одним-двумя колебаниями, пока
колебательное движение не затухнет настолько, что останется
одно апериодическое.
Теоретический анализ показывает, что при малых возмуще-
ниях боковое движение самолета, характеризуемое параметрами
3 (угол скольжения), у (угол крена), (угол рысканья),
(угловая скорость рысканья) и о* (угловая скорость крена)
отделяется от продольного движения, характеризуемого парамет-
рами V (скорость самолета), а (угол атаки), $ (угол тангажа)
и (угловая скорость тенгажа). Поэтому можно говорить от-
дельно о продольном движении (продольная устойчи-
вость и управляемость) ио боковом движении (бо-
ковая устойчивость и управляемость).
Следует различать устойчивость при зажатом
управлении, когда летчик держит органы управления
(рули и элероны) неподвижно, и устойчивость при бро-
шенном управлении, когда летчик не препятствует дви-
жению органов управления.
Под управляемостью понимается способность
самолета переходить на дру г ой реж им полета
при активном действии летчика. Эта способность
характеризуется, во-первых, величиной усилия, которое
необходимо приложить к органам управления (ручке, штурвалу,
педалям), и, во-вторых, быстротой перехода от одного
режима к другому.
§ 2. КАЧЕСТВЕННОЕ ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ
Как бы ни была развита наука об устойчивости и управляе-
мости самолетов и как бы ни хорошо была разработана система
критериев и нормативов для количественной оценки этих ка-
честв, все же первую и основную роль при оценке устойчивости
и управляемости играет всегда летчик. Кроме того, норма-
тивы изменяются, естественно, в связи с изменением материаль-
ной части. И именно на основе суждения летчиков приходится
изменять эти нормативы.
Если спросить летчика, что значит «хорошо управляемый
самолет»,— он даст ответ, на первый взгляд тривиальный: «это
самолет, которым легко управлять». При подробной
расшифровке этого ответа можно вывести заключение, что хо-
рошо управляемый самолет — это такой самолет, который не
отвлекает сил, внимания и не требует нервного напряжения лет-
чика при выполнении оперативного задания, которое и является
щелью каждого полета. Во время выполнения задания летчик не
296 Глава XIII. Определение устойчивости и управляемости самолета
должен отвлекаться от этого выполнения никакими другими
задачами, в том числе и задачей управления самолетом, которое
должно выполняться почти автоматически.
Поэтому полная оценка управляемости и устойчивости может
быть дана только после большого количества полетов, произво-
димых для выполнения заданий, свойственных само-
лету данного типа. Например, для истребителя такими
заданиями являются воздушный бой с другим самолетом, атака,
уход от противника; для бомбардировщика и штурмовика —
бомбежка и обстрел определенных земных объектов, оборона
от чужого истребителя, противозенитный маневр и т. д. При
всех этих операциях самолет должен быть настолько устойчив
и управляем, чтобы возможно меньше отвлекать внимание и
силы летчика, освобождая их для непосредственного выполне-
ния задания.
Следует оговориться, что индивидуально взятый летчик мо-
жет ошибаться в оценке управляемости и устойчивости само-
лета. Говоря об основной роли летчика в такой оценке, мы
имеем в виду «коллективного летчика», иначе говоря, подразу-
мевается, что только на основе опыта облета самолета многими
летчиками при самых разнообразных условиях и заданиях можно
дать четкую оценку устойчивости и управляемости.
Первоначальная качественная оценка управляемости и устой-
чивости обычно дается в одном из первых полетов опытного
самолета. В этом случае летчик на некоторой высоте устанавли-
вает определенный режим полета, а затем дает самолету возму-
щающий импульс, обычно при помощи рулей и элеронов. Если
нас интересует устойчивость с зажатым управлением, то после
отклонения рули устанавливаются в исходное положение. Если
оценивается устойчивость с брошенным управлением, самолет
первоначально полностью балансируется на заданном режиме
при брошенном управлении, затем рули слегка отклоняются и
летчик снова бросает управление. Наблюдая за поведением
самолета после возмущения, летчик оценивает характер движе-
ния (колебательный или апериодический), устойчивость, степень
затухания и период колебаний. Подобная оценка производится
для ряда характерных режимов.
Точно так же производится оценка управляемости; быстро
перекладывая рули, летчик оценивает характер перехода на
другой режим, запаздывание, приемистость, величину усилий,
необходимых для перевода самолета в новый режим. Слишком
малые усилия неприятны, так как не дают возможности «чувство-
вать» управление самолетом, слишком большие усилия отвлекают
силы и внимание летчика. Существует определенный диа-
пазон усилий для хорошо управляемого само-
лета.
Кроме того, оценка устойчивости и управляемости должна
быть дана при выполнении маневров, свойственных данному
£ <3. Сведения из теории продольной устойчивости и управляемости 297
типу самолетов. Во время маневров летчик должен оценить
быстроту перехода с режима на режим, величину усилий, «гар-
монию управления», т. е. согласованность действия рулей и эле-
ронов и усилий на ручке. Для современных самолетов особенно
важно найти предельную скорость пикирования,
при которой не получается затягивания в пикирование или дру-
гих нарушений пилотирования из-за волнового кризиса.
При полете на малой скорости летчик должен прежде всего
оценить «э в о л ю т и в н у ю скорость», т. е. минимальную
скорость полета, при которой самолет еще достаточно хорошо
слушается рулей, не теряет устойчивости, не сваливается на
крыло. Необходимо выяснить, предупреждает ли самолет лет-
чика о потере скорости, т. е. имеются ли какие-нибуць
явления (вздрагивания самолета или органов управления, тряска
и т. д.), которые указывают на приближение потери скорости.
Необходимо оценить величину усилий на ручке управления при
подходе к потере скорости и оценить, как легко рядовой летчик
может непроизвольно потерять скорость. Перед потерей скорости
величины продольных усилий должны быть достаточно велики,,
чтобы не допустить летчика легко потерять скорость.
При сваливании на крыло необходимо проверить,
как быстро самолет может быть выведен в нормальный полет и
каковы должны быть методы управления для быстрейшего вы-
вода.
Если самолет имеет несколько двигателей, необходимо про-
верить, может ли самолет итти по горизонтали или набирать
высоту при остановке части двигателей, можно
ли при этом сбалансировать самолет (достаточна ли эффектив-
ность триммеров) и можно ли достаточно уверенно управлять
самолетом (существует ли запас рулей для управления), а также
выявить характер движения самолета после внезапной
остановки двигателей.
Наконец, для оценки устойчивости при длительных рейсах
весьма важно проверить поведение самолета при полете в не-
спокойной атмосфере (в «болтанку»), насколько долго он может
итти на заданном режиме и курсе без вмешательства летчика,
какие усилия и какую быстроту реакции требует самолет для
парирования возмущений.
§ 3. КРАТКИЕ ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ПРОДОЛЬНОЙ
УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ САМОЛЕТА!
Возмущенное движение самолета описывается системой диф-
ференциальных уравнений четвертого порядка. Начиная с не-
которой очень небольшой степени статической устойчивости
1 См. И. В. Остославский и Г. С. Калачев, Продольная устой-
чивость и управляемость самолета, Оборонгиз, 1951.
В. С. Ведро в, Динамическая устойчивость^ самолета, Оборонгиз, 1938
"298 Глава XIII. Определение устойчивости и управляемости самолета
самолета, возмущенное движение его разделяется на два типа
движения — короткопериодическое и длиннопе-
риодическое (фугоидное) движение, накладывающиеся
друг на друга.
Самолет может быть либо апериодически неустойчивым, либо
колебательно неустойчивым. Первый случай может получиться
только у статически неустойчивого самолета I—->0). В этом
\ dcy /
случае один из малых корней характеристического уравнения,
соответствующий длиннопериодическому движению, при умень-
шении статической устойчивости обращается сначала в нуль,
а затем становится положительным. При любом возмущении
самолет апериодически уходит от заданного установившегося
режима. Этот случай летчики расценивают, как очень нежела-
тельный, и его нельзя допускать при эксплоатации самолета.
Другой случай неустойчивости — колебательное движение—
может получиться и у статически устойчивого самолета. В этом
случае вещественная часть корня характеристического уравне-
ния, соответствующего длиннопериодическому движению, стано-
вится положительной. Как показывают многочисленные летные
эксперименты и опыт эксплоатации, этот случай неустойчивости
не представляет никакой опасности, так как период колебаний
настолько велик (больше 20—30 сек.), а амплитуды колебаний
увеличиваются настолько медленно, что летчик легко парирует
все возмущения.
Длиннопериодическое движение соответствует паре малых
корней характеристического уравнения, имеет очень большие
периоды колебаний и малую степень уменьшения или увеличе-
ния амплитуды колебаний с течением времени. Только такое дви-
жение и может потерять устойчивость. При этом движении угол
атаки остается практически постоянным.
Короткопериодическое движение соответствует паре больших
корней характеристического уравнения. Оно всегда затухает
очень быстро и никогда не теряет устойчивости. Если оно коле-
бательное, то период колебании мал. Иногда (при малой степени
статической устойчивости) оно распадается на два апериодиче-
ских движения. При короткопериодическом движении, наблю-
дающемся только в первые моменты времени после возмуще-
ния, можно считать, что скорость полета неизменна (вслецствие
-большой продольной инерции самолета и малого демпфирования
колебаний скорости).
Из сказанного ясно, что с точки зрения устойчивости доста-
точно обеспечить некоторый определенный запас статической
о dm?
устойчивости; иначе говоря, величина--- должна быть боль-
dcy
ше некоторой определенной положительной величины.
При выполнении этого условия характеристики длинноперио-
дических движений не играют практической роли при оценке
§ 3. Сведения из теории продольной устойчивости и управляемости 299
пилотажных качеств самолета. Наоборот, характеристики ко-
роткопериодических движений играют очень большую роль, так
как от них зависит управляемость самолета. В самом деле, при
быстрых маневрах, связанных с быстрым изменением режима
самолета, скорость не успевает в первые моменты времени за-
метно измениться. Следовательно, при быстром движении рулем
высоты самолет будет в первые моменты времени двигаться по
законам короткопериодического движения.
При изучении неустановившегося движения самолета за па-
раметры, определяющие режим полета, удобно взять скорость
V и перегрузку nvU так как именно эти величины непосредственно
наблюдаются и ощущаются летчиком. Теория неустановившихся
движений самолета показывает, что при малых отклонениях
руля высоты имеем следующие приближенные выражения для
изменения угла отклонения руля высоты Д8в, изменения пере-
мещения ручки (штурвала) Дх,в и изменения величины усилия
на ручке (штурвале) ДРВ:
ДРВ = + Р2Х d-^'L + Р" д п +Р^,
d~J dz V
Дхв = х"2 + х" Д п. х + хви ,
dz2 dz Л V
ДЗВ = ов2 —~ + 8В1 —- - + % ДпУ1 + 8В — ,
dz2 dz V
(13.3)
где
г
рпп__ рх г
*ц2 — * в »
РХ
Рп — —— I г2 —
“В1 -------I • Z -
И \
m 2 св + mz св
а
(13.4)
dm^ dxn
— = V —.
dcyy dV
I
300 Глава XIII. Определение устойчивости и управляемости самолета
дР
Здесь Рх = ---так называемый к оэ ф ф и ц и е н т рас-
В дхт
хода усилия —величина добавочного усилия, которое нуж-
но приложить к ручке управления, чтобы сбалансировать само
лет на той же скорости при изменении центровки хт на единицу
(т. е. на 100% средней аэродинамической хорды). Аналогичное
значение имеют символы Xх и называемые соответственно
коэффициентом расхода ручки и коэффициен-
том расхода руля.
dPR dxB
Производные и берутся вдоль линейной серии
v dp*
равновесия (см. ниже). Соответствующие величины Рв =V —
dV
и хв =V — называются коэффициентом расходауси-
dV
лия по скорости и коэффициентом расхода руч-
ки по скорости.
Для угла отклонения руля высоты будем иметь формулы,
совершенно аналогичные формулам (13.4) для х*, но с соответ-
ствующей заменой х3 величинами Зс. Если бы система проводки
от руля высоты к ручке была абсолютно жесткой, можно было
бы все формулы получить простой заменой Дхв величиной
Л * dxB dxB
Дов —-, где —— передаточное число от ручки к рулю высоты.
dbB
Тогда и все коэффициенты получились бы простым умножением
на передаточное число. При упругой проводке эта пропорцио-
нальность нарушается. Во всяком случае следует иметь в виду,
что при всех дальнейших рассуждениях в этой главе можно
заменять угол отклонения руля высоты перемещением ручки
хв. Все рассуждения останутся неизменными. Поэтому мы в
дальнейшем не будем нигде применять понятия перемещения
ручки хР, имея в виду, что всюду можно вместо Зв подставить хв.
Объясним значение других символов, входящих в уравнения
(13.4):
гг — ——относительный радиус инерции самолета относи-
ла
тельно поперечной оси (Ьа — характерный линей-
ный размер);
dcv
а — —-—частная производная коэффициента подъемной
да
силы по углу атаки;
2m
u =-----относительная плотность самолета;
pSba
•» dm*
m—коэффициент демпфирующего момента;
ды~
§ 3. Сведения из теории продольной устойчивости и управляемости 301
m* = —---производная коэффициента момента по скорости
да
изменения угла атаки а;
=------коэффициент статической устойчивости.
2 дсУ,
Индекс «св» означает, что соответствующая величина вы-
числяется при условии, что управление брошено (свободно) и
летчик не препятствует движению руля высоты.
dm7 /dm \
Величины —21 и ---- требуют особого объяснения.
dcy\ \dcy\ /св
Пусть в установившемся полете при угле атаки а получился
случайный прирост угла атаки на малую величину За. Момент
в установившемся движении равен нулю. Следовательно, момент
при увеличении угла атаки на За будет равен
дМ, 1
_^8а = —(13.5)
где —величина момента относительно центра тяжести;
^ — коэффициент момента;
Ьа — характерная длина, к которой отнесен момент
(обычно за Ьа принимают длину средней аэродина-
мической хорды);
dm
ma =-----коэффициент статической устойчивости.
z да
Из уравнения (13.5) видно, что если т*>0, возникает
момент на кабрирование, стремящийся еще больше увеличить
угол атаки, а если возникает момент на пикирование,
стремящийся уменьшить угол атаки, т. е. вернуть самолет
к исходному углу атаки. Поэтому величину т* называют
коэффициентом статической устойчивости и
говорят, что самолет статически устойчив, если т* < 0, и ста-
тически неустойчив, если Если = говорят, что
самолет статически нейтрален.
Такое положение возможно только при продувке самолета
или его модели в аэродинамической трубе, когда самолет вра-
щается вокруг неподвижной оси, а скорость постоянна. При
действительном движении самолета в полете он может также
двигаться вдоль продольной и вертикальной оси; кроме того,
скорость тоже может изменяться. Следовательно, величина т\
уже не может характеризовать устойчивость самолета. Необхо-
димо принять во внимание уравнения движения по вертикальной
и продольной осям.
302 Г лава XI И. Определение устойчивости и управляемости самолета
Однако и в случае полета можно показать, что с известной
точки зрения понятие продольной статической устойчивости про-
должает играть роль. Представим себе, что мы очень медленно
изменяем установившийся режим самолета (скорость, угол
атаки), прикладывая какой-то добавочный момент к самолету.
Природу этого момента мы выясним позже, а пока будем искать
необходимую величину этого добавочного момента. Пусть само-
лет сбалансирован на каком-то режиме. Прикладывая добавоч-
ные моменты разной величины Ат, мы получим непрерывный
ряд смежных установившихся режимов или, как говорят в общей
теории устойчивости, линейную серию установив-
шихся режимов. Будем следить за самолетом вдоль такой
серии установившихся режимов.
В общем случае коэффициент момента при установившемся
прямолинейном движении при 5B=const является функцией угла
атаки и скорости:
m.=/(a, V). (13.6}
Дифференцируя это уравнение, получаем
dm^^d^^ dV = mad^ + m^dV. (13. 7)
г да dV z z Г
(13.8)
С другой стороны, уравнения равновесия по касательной к
траектории и по нормали к ней имеют вид:
у 5,pSy2 = /ngcos0,
у c^SV^ — P—mgsinO,
где Р — сила тяги, зависящая от скорости;
0 — угол наклона траектории к горизонту;
mg — вес самолета.
Из этих уравнений можно определить V и 0 как функции
угла атаки а. Следовательно, вдоль линейной серии равновесия
все параметры являются функциями только одного угла атаки
(поэтому серия и называется линейной). Итак, есть функция
только а и мы можем взять полную производную по углу атаки:
dm
— = т* + п1*—.
da da
Эта полная производная показывает, какую величину момен
та надо приложить к самолету, чтобы перевести его на сосед-
ний установившийся режим с углом атаки, увеличенным на 1°.
Конкретно в полете такую линейную серию можно получить,
изменяя последовательно положение руля высоты. Тогда в каж-
§ 3. Сведения из теории продольной устойчивости и управляемости 303
дом положении равновесия добавочный момент dmz будет со-
здаваться моментом от руля высоты. Введем обозначение
= , где SB — угол отклонения руля высоты. Тогда добавочный
дбв
уравновешивающий момент будет
8 —
и dm2 da (13.9) da
Следовательно, dbB __ da 1 dm? —-~r- (13.10) m в da z
Эта величина 'показывает, «на сколько надо изменить угол от-
клонения руля высоты, чтобы изменить угол атаки на 1°.
Вместо независимого параметра а лучше взять другой пара-
метр, характеризующий режим полета. Если взять за параметр
величину скорости V, получим
dbB 1 dmz
dV /л5в dV
(13. U>
Эта величина показывает, на сколько надо отклонить руль
высоты, чтобы изменить скорость на единицу (1 м/сек или
1 км/час).
Чаще всего за независимый параметр принимают коэффи-
циент нормальной силы су±. Тогда
1 dmz
dcyi т*в dcyX ‘
(13.12)
Из этих формул и формул (13.4) видно, что все поведение
самолета при медленном изменении режима известно, если
известны две величины: коэффициент эффективности руля
5 dm2 dtn2 dm2
т* и одна из величин----, ---- или —.
2 dz dV dcyX
f и dm 2
Величину т2уХ =------обычно называют „к о эф фи ци-
dcy\
ентом статической устойчивости по скорости".
[dm\ с
Величина —i = zn/1 играет совершенно аналогичную роль
\ S^/cB СВ
304 Глава XIII. Определение устойчивости и управляемости самолета
при свободном управлении. Эти величины и фигурируют
в уравнениях (13.4) и, как видно из уравнений (13.3), от их
знаков зависят знаки потребного отклонения руля высоты и
потребного усилия на ручке управления при очень медленном
изменении режима, когда можно пренебречь величиной пе-
регрузки и принимать в расчет только изменение скорости V;
«отсюда и название этих коэффициентов.
Наоборот, при быстром маневре, когда можно пренебречь
приращением скорости и считаться только с величиной пере-
грузки Ьпу1, основную роль будут играть, как показывают
dm2
формулы (13.3) и (13.4), не полные производные —, а част-
dCyi
М
I
Фиг. 13.2. Схема вычисления моментов при
изменении центровки.
ные производные пгсгУх =—- и ni2^ = (—-) , учитывающие
дСу1 J \^1/св
изменение только коэффициента су1, и не учитывающие
изменения скорости. Поэтому эти величины называют ста-
тическими коэффициентами устойчивости по
перегрузке.
Коэффициент можно представить в более простом ви-
dcyx
де. На фиг. 13.2 представлена схема сил, действующих на само-
лет, в связанных осях Oxiyi. При приведении плоской системы сил
к центру Ло с координатами %ю, ую получим главный вектор сил
о составляющими У1 и главный момент MzQ. Если взять за
центр приведения точку А с координатами Xi, ую, то главный
вектор сил не изменится, а новый момент будет
— Яо (xi хю)-
(13.13)
§ 3. Сведения из теории продольной устойчивости и управляемости 305
Переходя к безразмерному коэффициенту момента, полу-
чим путем деления на -^-pSbaV2
тг = тг0 + (хт—х1й)су1, (13.14)
— Xi — Х1П
где хт= — —, хт0 =----— — относительные координаты
Ьа Ьа
центров (в практике они часто сокращенно именуются „цент-
ровками*4, если центр приведения является центром тяжести).
Дифференцируя обе части уравнения по cvi (безразлично, бе-
рем ли полную производную или частную), получим (цри 8В=
=const)
dmz (dmy \ — —
“-----ITT’) ==’Гт~Л:тО-
dcyl \dcy\/о
Отсюда видно, что разности коэффициентов стати-
ческой устойчивости равны разностям соот-
ветствующих центровок. Поэтому обычно выражают
коэффициент статической устойчивости в частях средней аэро-
динамической хорды.
— dm2
Центровку хт.н, при которой получается ----= 0, называ-
dcy\
ют нейтральной центровкой. Из предыдущей фор-
мулы видно, что в этом случае
(dm Л — —
- = Хт0 Хт. н.
dCy\/Q
Иначе говоря, коэффициент статической устойчи-
вости равен разности между фактической
центровкой и нейтральной центровкой. Поэтому
часто устойчивость определяют «запасом центровки»
ДХТ = ХТ.Н— ХтО.
Из формул (13.3) видно, что управляемость самолета может
быть характеризована коэффициентами Р”2, . Р", ,
3вр Sb’ 3вИ- Величины Р%2, Р"р 8”2, S" играют отно-
сительно малую роль. Наиболее важную роль играет вели-
чина Р”, показывающая, какое дополнительное усилие необ-
ходимо приложить к ручке (штурвалу), чтобы изменить
перегрузку на единицу. Величина Р” называется градиен-
том усилия по перегрузке.
Самолеты, у которых градиент усилия по перегрузке очень
мал, летчики называют «строгими», так как пилотирование
таких самолетов требует очень большого внимания. Небольшое
непроизвольное изменение усилия на ручке у таких самолетов
20 772
305 Глава XIII. Определение устойчивости и управляемости самолета
приводит к возникновению больших перегрузок, а следовательно,
и резких эволюций самолета. При малых скоростях легко может
произойти непреднамеренный выход на критический угол
атаки. Самолеты, у которых градиент усилия по перегрузке
слишком велик, тяжелы и неприятны при пилотировании, так
как требуется приложение больших усилий при маневре. Отсюда
ясно, что величина градиента усилия по перегрузке Р“ должна
быть всегда положительной и лежать в определенных пределах
в зависимости от типа и назначения самолета.
Величина 3" практически не имеет значения, так как летчик
не замечает, на сколько нужно отклонить руль высоты (ручку
управления), чтобы получить заданную перегрузку.
Известную роль играет коэффициент PBV, показывающий,
какое усилие надо приложить к ручке при постоянной перегруз-
ке, в частности, при установившемся движении, чтобы изменить
скорость на единицу. Эта величина называется градиентом
усилия по скорости. Она тесно связана с запасом ста-
тическои устойчивости при брошенном управлении —- , как
/св
показывают формулы (13. 4). Абсолютное значение величины Р^
не столь существенно; необходимо только, чтобы она была п о-
ложит ель на (для увеличения скорости необходимо давить
на ручку) и чтобы максимальные усилия Рв тах и PBmin при макси-
мальной и минимальной скорости лежали в определенных пре-
делах. Кроме того, желательно, чтобы при подходе к минималь-
ным скоростям усилия в направлении на себя начинали резко
возрастать для предотвращения непроизвольного выхода на
большие углы атаки.
Величина 8^ играет роль только как величина, непосредствен-
но связанная с запасом статической устойчивости.
В итоге можно сказать, что первой и непосредственной за-
дачей летных испытаний на устойчивость и управляемость
является определение градиента усилия по пе-
регрузке^ во всем диапазоне скоростей и эксплоатацион-
ных центровок самолета.
Для полной оценки продольной устойчивости и управля-
емости самолета необходимо также определить запасы устой-
dmz !dmz \
чивости ----, --- и усилия на ручке Ръ в зависимости
dCyl \acyj СЗ
от скорости полета и центровки.
Так как характеристики длиннопериодических колебаний не
играют практической роли, то мы не приводим методов их опре-
деления в полете. Впрочем, эти методы практически не отлича-
ются от методов определения характеристик колебательного бо-
кового движения (§ 9), и можно при необходимости воспользо-
ваться методами, изложенными в § 9.
§ 4. Запас продольной устойчивости при зажатом, управлении
307
§ 4. ОПРЕДЕЛЕНИЕ ЗАПАСА ПРОДОЛЬНОЙ СТАТИЧЕСКОЙ
УСТОЙЧИВОСТИ ПРИ ЗАЖАТОМ УПРАВЛЕНИИ!
Из формулы (13.12) видно, чго коэффициент статической
устойчивости будет известен, если известны и inzB или
dcyl
и 3£. Как определить т/‘в, мы увидим дальше. Для опре-
деления величины —- необходимо иметь зависимость угла
dcyl
отклонения руля высоты Зв от коэффициента су1 или от V,
т. е. так называемую балансировочную кривую.
Так как в зависимости от режима работы двигателя изменя-
ются характеристики устойчивости самолета, балансировочные
кривые необходимо- получать при неизменном режиме работы
двигателя. Обычно берут два крайних случая: 1) работа двига-
теля на полно<м газе и 2) работа двигателя на малом газе.
Для получения балансировочной кривой необходимо в поле-
те изменять режим полета только при помощи отклонения руля
высоты. Задав несколько величин скорости в пределах летного
диапазона скоростей, на ряде установившихся режимов измеряют
угол отклонения руля высоты (при помощи самописца отклоне-
ния рулей СОР), скорость и угол тангажа (при помощи уклоно-
мера или инклинографа). При этом необходимо тщательно сле-
дить, чтобы центровка самолета изменялась в полете возможно
меньше.
Перед полетом необходимо тщательно взвесить самолет и
найти его центровку способами, указанными в гл. II.
При определении этим методом балансировочных кривых на
полном газе необходимо выполнить ряд зубцов на разных
скоростях около заданной средней высоты. Наоборот, при ра-
боте двигателя на малом газе необходимо вместо зубцов произ-
вести ряд планирований. Обычно оба ряда экспериментов
совмещают в одном полете, выполняя последовательно подъемы
(зубцы) и планирования около одной заданной средней высоты.
Указанный метод получения исходных балансировочных кри-
вых требует большого количества полетов и много- времени. Кро-
ме того, у современных самолетов очень трудно выдержать
в одном полете постоянную центровку. В связи с этим может
быть применен другой метод, при котором исходная балансиро-
вочная кривая определяется по результатам записи указанных
выше параметров при непрерывном горизонтальном
разгоне самолета от минимальной до максимальной ско-
рости с двигателем, работающим на полном газе, и, наоборот,
при горизонтальном торможении самолета с
двигателем, работающим на малом газе. При этом допустимы
1 Методика испытаний на продольную устойчивость была заложена в
работах В. С. Ведрова, Г. С. Калачева и С. И. Афанасьева.
20*
308 Глава XIII. Определение устойчивости и управляемости самолета
лишь небольшие отклонения от горизонтальности, чтобы состав-
ляющая перегрузки по нормальной оси самолета мало отлича-
лась от пУ1 = — 1. Само' собой разумеется, что при определении
балансировочных кривых из разгонов или торможений необхо-
димо вносить в показания приборов поправки, связанные с на-
личием составляющей перегрузки по продольной оси (пх1).
На фиг. 13.3 приведена для иллюстрации балансировочная
кривая (а), полученная в полете при центровке хт=0,294. По оси
Фиг. 13.3. Типичная балансировочная кривая
Зв=/(1//) для самолета.
«—устойчивый самолет; б—самолет с областью неустойч -вости.
абсцисс отложена индикаторная скорость, по оси ординат — угол
отклонения руля высоты. Уже такая балансировочная кривая
позволяет получить очень много данных. Из уравнения (13.11)
видно, что для устойчивости
dV
должно иметь знак плюс) не-
обходимо, чтобы у^->0 (нужно помнить, что всегда /77% <Д).
Для данного самолета это условие соблюдается на всем диапа-
зоне скоростей.
На той же фигуре пунктиром (кривая б) приведена баланси-
ровочная кривая того же самолета, но при центровке хт=0,334,
имеющего область неустойчивости в диапазоне скоростей от 280
до 360 км/час. На этой диаграмме видна так называемая
«ложка».
§ 4. Запас продольной устойчивости при зажатом управлении
309
Ту же диаграмму ов=/(1А) легко перестроить в диаграмму
ов=/(су1), для чего надо подсчитать значения су1 по формуле
______________________2G cos 0 166 cos 0
Cyl V] ~ ~S '
Пересчитанные таким образом кривые фиг. 13. 3 представ-
лены нафиг. 13.4. Если известна величина то по любой
Фиг. 13.4. Балансировочные кривые Зв=/(^1) для разных
центровок хт.
dm
из этих кривых можно в каждой точке подсчитать -- и •—
по формуле (13. 12).
Обычно величина эффективности руля высоты т^в неизвест-
на. Поэтому эксперимент повторяется при трех-четырех (мини-
мум при двух) разных центровках. На фиг. 13.4 приведены для
примера балансировочные кривые Зв=/(си) при трех разных
центровках. На фиг. 13. 5 те же кривые перестроены так, что
аргументом служит центровка, а параметром су1. Если бы эффек-
тивность руля высоты не зависела от величины су1, то можно
показать, что эти линии должны были бы быть прямыми. Это
требование почти осуществляется при малых значениях За
(до 10°), когда практически получаются прямые линии. Точка
пересечения двух бесконечно близких прямых при су1 и cyl + dcyl
дает нейтральную центровку, так как при этой центровке изме-
нение су1 на величину dcyl не приводит к изменению Зв (т. е.
310 Глава XIII. Определение устойчивости и управляемости самолета
Фиг. 13.5. Балансировочные кривые Зв =f(хт) для
разных значений су1.
Фиг. 13.6. Диаграмма зависимости m2o=f(cyit ае).
§ 4. Запас продольной устойчивости при зажатом управлении
311
— =0) и, следовательно, =0, как это видно из форму-
//Cyi dCy^
лы (13. 12).
Теперь легко построить и величины mzQ при любом значении
центровки хт0. Для этого заметим, что по уравнению (13. 14) при
^=const
тг9=— Cyl (хт — хт0),
так как на установившемся режиме mz=0. Следовательно, до-
статочно при заданной величине Зв взять разные центровки и вы-
числить величины mz0 по приведенной формуле. Для каждого
фиксированного значения &в берем по фиг. 13. 5 значения су1 для
каждого хт и вычисляем величину mzQi которую и строим в за-
висимости от су1. Результаты для балансировочных кривых, при-
веденных на фиг. 13.5, представлены на фиг. 13.6 (приня-
то Хг0 = 0,3).
Всю эту операцию вычисления mzQ можно проделать и непо-
средственно по диаграмме фиг. 13.4, задаваясь определенными
значениями SB и снимая с этой диаграммы соответствующие зна-
чения су1. Однако при этом будет получаться мало- точек. Именно
с целью получения большего числа точек рекомендуется по-
строить диаграмму фиг. 13.5, на которой легко производить
интерполяцию благодаря линейности функций. Кроме того, в
случае неустойчивого самолета фиг. 13.4 не даст возможности
получать разные значения су1 при заданном Эв, так как кривые
пойдут расходящимся пучком.
Имея семейство кривых mz$—f(cy^ ов), легко путем диф-
ференцирования кривых в точках, где они пересекают ось
. _ к С 1V dmZ
абсцисс (mzQ = 0— режимы равновесия), найти т у1 =------- и
dcyi
in*. Для примера на фиг. 13.7 показаны эти величины, под-
считанные по данным фиг. 13.6.
Если величина т\в не зависит от су1, т. е. если кривые
фиг. 13.6 идут эквидистантно, то можно найти значение коэф-
фициента статической устойчивости по скорости при другой
центровке по формуле
= хт0. (13.15)
В самом деле, для любой центровки имеем
тг=тгь + (Хт-Х^)Су1,
дифференцируя, получим предыдущую формулу; следует заме-
тить, что при заданном значении су1 самолет сбалансируется на
другом значении Зв, но это не имеет значения, если тЧ =const
и кривые эквидистантны.
312 Глава XIII. Определение устойчивости и управляемости самолета
нейтральной центровки хт н и эффективности
руля высоты т°в.
Фиг. 13.8. Схема перестроения сетки
кривых тг0=/(с1/1, Зв) на новую цент-
ровку хт.
§ 4. Запас продольной устойчивости при зажатом управлении
313>
В этом случае легко также найти нейтральную цент-
ровку, т. е. такую центровку, при которой коэффициент
статической устойчивости при заданном cyi равеннулю. По
предыдущей формуле для тсУх\ полагая н и
= получим
Хт.н=-ГтО~'<Ь1/-
(13.16)
Если условие = const не соблюдается, то для другой
центровки xT^xTf) необходимо произвести перестроение кри-
вых tnz=f(cy^ при заданных_8в, _что выполняется либо по
той же формуле mz = w^Q + (xT—хт0) суУ, либо при помощи
графического приема, показанного на фиг. 13.8. Из начала
координат __ проводится прямая ОА по уравнению т2 =
= — (хт — хто)су}; новые значения пгх при центровке хт отсчи-
тываются от этой прямой, т. е. новые значения mz будут
равны BD вместо CD.
Если величина хт н — хт не велика или значение zn°B
мало меняется при изменении су1, то можно значение
при другой центровке и значения хт. н найти по приближен-
ным формулам
тгУ1 V = т2Х V + От - -*то)
Cyl dmB
т‘ в de,.,
z У1
(13.15'}
су1 dm°B
mzB dcyl
(13.16'}
В самом деле, обозначим значение тг при центровке хт0.
и 8в = 0 символом /пг0; тогда приближенно
т2 = mzo + От — *то) <yi + (13.17)
Дифференцируя по cyi и учитывая, что 8В есть функция от-
су1, получим
z. и — — — * dm^
= (Хт_Ао) + от> + 8в_^_.
314 Глава XIII. Определение устойчивости и управляемости самолета
Так как в точке балансировки /пг = 0, то из формулы (13.17)
имеем
подставляя в предыдущее равенство, получим
mCzyX V = V + (хт - хто) +
dcyl
тМ dm2B
т'У dcyi
Хт Л”тО
mz
У d<yl
При хт=хт0 имеем из этой формулы:
с„, v —C„,V . 8 тг0
тгУ = тХ +т^7с-------------%
асуг тгв
dmz"
dCyl
следовательно, вычитая одно уравнение из другого, получаем
1
СУ1 йт*
т?в dcyl
Таким образом мы доказали формулу (13.15'). Формулу
(13.16') легко вывести, полагая ?nczylV=0.
Результаты подсчетов хт.н также представлены на фи-
гуре 13.7. Так как в этом случае почти постоянно, то
JcT. н можно подсчитать по формуле (13.16).
Величина хт. н является очень наглядной характеристикой
устойчивости. Часто запас устойчивости выражают величиной
хт. н—хт, т. е. запасом центровки.
Весь описанный метод построения, весьма громоздкий,
следует воспроизводить только в том случае, если необхо-
димо получить всю сетку зависимости т2 от су1 и 8В. Если
необходимо только найти запас устойчивости, достаточно
построить только фиг. 13.5. Больше того, в этом случае
можно построить диаграмму зависимости Вв от хт при пара-
метре V (гу1 однозначно связано с V). По такой диаграмме
легко определяются значения о* для разных значений Ц. (или
сух). С другой стороны, непосредственно из балансировочных
кривых легко получить величину 8BF= ; согласно пос-
§ 5. Определение продольных усилий на ручке управления
315
леднему равенству (13. 4), в котором х заменим 8, величина
У dm
т у1 =— определяется по формуле
dcyl
mc^v =
21.
28ВХ ’
(напомним еще раз, что все рассуждения можно провести для
величины перемещения ручки хв вместо угла отклонения руля
высоты Яв).
Если необходимо^ найти влияние числа М на устойчивость, на-
до весь эксперимент провести на разных высотах с тем, чтобы
получить разные значения числа М при одной и той же ско-
рости Vi.
§ 5. ОПРЕДЕЛЕНИЕ ПРОДОЛЬНЫХ УСИЛИЙ НА РУЧКЕ
УПРАВЛЕНИЯ. ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ С БРОШЕННЫМ
УПРАВЛЕНИЕМ. СИЛА ТРЕНИЯ
Как уже было указано, при оценке пилотажных качеств са-
молета особо большую роль играет величина усилий на штур-
вале или ручке управления. Именно это усилие и позволяет лет-
чику «чувствовать» самолет при управлении.
Для измерения усилий на руч-
ке управления применяются ди-
намометрические р у ч-
к и (ДР), устанавливаемые вместо
нормальной ручки управления.
Схема такой ручки (ДР-4) пока-
зана на фиг. 13. 9. Усилие при-
кладываемое летчиком к ручке,
воспринимается упругой рамой
ABCD, деформация кото-рой зави- . ской ручки ДР-4.
сит от величины усилия.
Основное требование, предъявляемое к такой ручке, заклю-
чается в том, что измеряемая величина усилия не долж-
на зависеть от места приложения силы. В схеме
ручки ДР-4 это требование осуществляется тем, что записывает-
ся перемещение f конца Е стержня EF, жестко соединенного с
траверсой CD. Величина перемещения этого конца зависит от
длины стержня Z. Как показывают теоретические расчеты при
Z—-—1, это перемещение зависит только от упругих констант
и величины силы Р3, и не зависит от Zo, т. е. от места приложе-
ния силы.
При обработке записей динамометрической ручки необходи-
мо вводить поправки на вес самого прибора с учетом перегрузки.
316 Глава XIII. Определение устойчивости и управляемости самолета
Эти поправки вследствие большого веса прибора могут достигать
заметной величины.
Измерение усилий на ручке осуществляется в тех же поле-
тах, что и при испытании на продольную статическую устойчи-
вость с зажатым управлением. На фиг. 13. 10 представлена диа-
грамма продольных усилий для того же самолета, к которому от-
носятся и фиг. 13. 3—13. 7.
------- при балансировке на скорости 510 KMt4ac\
------- пересчитано на балансировку при скорости 700 км1час.
Усилие на ручке весьма сильно^ зависит от угла установки
триммера; поэтому при испытаниях этого рода важно точно вы-
держивать угол установки триммера. Если эффективность трим-
мера постоянна, легко пересчитать полученную кривую на дру-
гой угол установки триммера, при котором самолет балансируется
не в точке Л, а в точке В, при другой скорости Vi л. Для этого
необходимо из усилия при любой скорости вычесть величину
ViB тгвв
(13. 18)
В самом деле, усилие на ручке от аэродинамических сил мож-
но написать в следующем виде:
Рв = ~ кштшР()У^вЬвК, (13.19)
где тш — коэффициент шарнирного момента;
8В, Ьв — площадь руля и его хорда, к которым отнесен
момент;
§ 5. Определение продольных усилий на ручке управления
317
небольшой
(13.20)
от с..,, что
, ^8
яш =—- — передаточное число от руля к ручке;
(1Хц
о
К — ———коэффициент торможения скорости;
Vr. о — средняя скорость потока у горизонтального опе-
рения.
Следовательно, при отклонении триммера на
угол Дт имеем
в 2 in* I в в 7
в точке В
ДРВ В = Я В = У2$ЛКвм
И
ДРВ v* к
рГв=уГвК~в'
При этом предполагается, что /п^ не зависит
оправдывается достаточно точно.
С другой стороны, коэффициент момента т2 можно пред-
ставить в виде суммы
т2 = tn2Kp + AKcyr.0i (13.21)
где /п2кр —коэффициент момента самолета без хвостового
оперения, не зависящий от ов;
А = г'0—относительный статический момент площади
Sba
горизонтального хвостового оперения;
5Г. о—площадь горизонтального оперения;
Аг. о —плечо горизонтального оперения относительно
центра тяжести;
ГуГ.о—коэффициент подъемной силы оперения.
Отсюда
/п>=ЛК#0. (13.22)
Следовательно,
^zB Кв fyr.oB Кв
так как величина с** 0 не зависит от су1. Подставляя значе-
ние ~~ в формулу (13.20), получаем формулу (13.18).
К в
318 Глава XIII. Определение устойчивости и управляемости самолета
Пример такого перестроения показан пунктиром на фиг. 13. 10;
при новой установке триммера самолет балансируется уже на
скорости Vi = 700 км/час.
Если желательно произвести более точное определение
эффективности триммера, необходимо получить балансировоч-
ные кривые ^=/(1/;) при разных (2 — 3) углах отклонения
триммера тп т2,.... По этим кривым можно получить вели-
чину по формуле
Имея эту величину, легко получить балансировочную кривую при
любом положении триммера.
Кривые типа фиг. 13. 10, полученные при одной центровке,
могут дать ряд указаний об устойчивости самолета с брошенным
управлением. Прежде всего можно подсчитать величину в
точке балансировки самолета (при Рв = 0). Если эта величина
положительна, самолет статически устойчив на режиме баланси-
ровки, если отрицательна,— неустойчив. В первом случае для
увеличения скорости надо приложить к ручке усилие от себя, во
< Р
втором— на себя. Величина —- показывает, какое усилие надо
d l/z
приложить к ручке управления, чтобы изменить скорость на
1 км/час.
При детальном исследовании устойчивости необходимо полу-
чить такие кривые при нескольких центровках (трех-четырех, ми-
§ 5. Определение продольных усилий на ручке управления
319-
нимум двух). Типичная диаграмма этого рода показана на
фиг. 13. 11, для того же самолета, для которого построены кри-
вые фиг. 13.4. При получении таких балансировочных кривых
Pn=f(Vi, Хт) необходимо' точно соблюдать постоянство угла от-
клонения триммера (или угла установки стабилизатора), иначе
кривые получатся несопоставимыми друг с другом. Если во
время полетов получаются разные углы триммера, кривые надо
исправить, перестроив их для одного положения триммера, как
указано выше.
Фиг. 13. 12. Балансировочные кривые
при разных значениях ско-
рости V г
Так же, как и в § 4, очень удобно1 эти кривые перестроить
в функции х-т при параметре Vi (фиг. 13. 12). Как правило, по-
лучаются прямые линии. В самом деле, при установившемся ре-
жиме [см. формулу (13. 17)]
mz = /«го + (*т — хто) Су1 + т3в = О,
где mzQ — коэффициент момента при хт=хто и Зв=0. Это равен-
ство справедливо' при условии линейной зависимости суг,0 от SB,
что всегда осуществляется при малых отклонениях руля высоты,
а эти отклонения на рабочих установившихся режимах всегда до-
статочно малы. Исключение могут представить большие скорости,
когда влияние сжимаемости и числа М велико. Из этого равен-
ства получаем
mz0
mJ
Хт Хто
\ СУ1'
mz
(13. 23)
•320 Глава XIII. Определение устойчивости и управляемости самолета
С другой стороны, можем написать
тш = шт0 + тЧв,
где тш0 —значение тш при % = 0, т^ = ^.
Следовательно,
5в %
тш тш ч
тш = — т2й —-------г (хт — хт0) су1.
т2в т2в
(13. 24)
Подставляя в формулу (13.19)
172 2G
p0V1=------, получим
и полагая приближенно
G 8ЪЬВ
ХК тш0 — т.
S
„Л
пЛ
'20 5
/72/ т2*
Дифференцируя по хт, получим
Ux ъ *^в^в ту ШщВ
в дхт
тп в
= - кша~к'~=кша— f
S тьв S Ас в
2 у Г
(13. 25)
(13.26)
>1
Эта величина не зависит от хт, а только от су1; иначе го-
воря, мы доказали, что при условии линейной зшисимосги
ш2 и /пш от 8В, величина Рв всегда линейно зависит от хт.
Это же равенство (13.26) показывает, что величина Р*
практически не зависит от су1 (или I/Д если тЛ и г/г о не
зависят от этих параметров, чго осуществляется достаточно
точно за исключением области очень больших скоростей,
где сказывается влияние числа М. Иначе говоря, все кривые
'Л=ж.) или ^?В = (И/) при разных центровках должны итти
почти эквидистантно. Это дает нам в руки метод контроля,
позволяющий исправить кривые, если при полетах по какой-
нибудь причине сбился угол установки триммера.
Имея величину Р* и получив дифференцированием баланси-
f/P dP
ровочных кривых величины и Р^=, легко полу-
чаем величину коэффициента статической устойчивости с
брошенной ручкой по 4-й формуле (13.4) при Рв = 0 (в точке
балансировки):
"г?117
(13.27)
§ 5. Определение продольных усилий на ручке управления
321
Для определения нейтральной центровки и запаса цент-
ровки можно воспользоваться приближенной формулой
Pv — 2FP
хт.н-хт =------2-----в—, (13.28)
‘>ЕРХ — у. —-
в ‘ dVt
где
г, Vi dPl
Е = — — .
'*pl dVi
В самом деле, при переходе от заданной центровки хт
к другой центровке хт. н (при заданной скорости V,)и от угла
триммера к углу триммера %, приближенно имеем (если
разности хт. н—хт и -с—тн невелики):
Рв. н = Рв + Pt (%т. н — хт) 4- Pl (ти — т),
где
Pl = ^~ при V = const.
в dt '
Дифференцируя это равенство по Vif получим
дрв „ 1
dV; ~ V7
dPt
ди;
ДА
ди,-
Если при заданной скорости V. самолет при помощи трим-
мера сбалансирован так, что усилие равно нулю, а центровка
Хт. и подобрана так, что самолет нейтрален, то обе величины
г. И
Рв. н и —— равны нулю
dV i
Рв + Pt (хт. н — Хт) + Р1 (тн — т) = О,
1 tiPx riPx
---Pq +------ (%т. н — %т) Н--- (тн““т) = 0-
I/. dVt т/ dVi 4 н 7
Решая эти уравнения относительно лт. н— хт и исклю-
чая тн — т, получим формулу (13.28).
Величина легко определяется, если сделаны специальные
полеты для определения эффективности триммера и получены
балансировочные кривые при одной центровке и разных фикси-
рованных положениях триммера. Если таких кривых не имеется,
можно коэффициент Е подсчитать по приближенной формуле
vi df<
£=1+ — —
2/< dV-t
г
Vi dm/
2т/ dV, e
(13.29)
21 772
322 Глава ХШ. Определение устойчивости и управляемости самолета
В самом деле, мы уже видели, что величина
d-^ = P'k J_pS A
fa в КШ. 2 Г в в 111
отсюда
In р- = In *"'р5в&я + 2 In v+ In к+ In nTL,
предполагая, что пгш не зависит от скорости, получим диф-
ференцированием :
V аР1 V dK
—- —= 1 Н-------•.
2Р’ dV 2К dV
Так как по доказанному выше коэффициент торможения
К пропорционален т*в, легко получаем формулу (13.29).
Обычно коэффициент торможения К мало зависит от ско-
рости V, поэтому коэффициент Е мало отличается от еди-
ницы. Если величины Р% и К неизвестны, то часто принимают
Е—1 и вычисляют хт. н—хт по приближенной формуле
— — — 2Р
хт.н-хт=----(13.30)
Кроме того, как показано выше, величина Р* также очень
мало зависит от У; поэтому формула (13. 30) получает весьма
простой приближенный вид
_ _ pv____2Р
хт.н-хт = -в2^ в-. (13.31)
Если балансировочная кривая определена только при одной
центровке, можно провести все расчеты, определяя из экспе-
римента только величины Рв и ри а рх определять расче-
том; однако следует помнить, что в этом случае величина
Лт.и—хт определяется весьма приближенно.
В заключение покажем, как определяется передаточное
число £ш, сила трения и весовой момент руля высоты. На стоянке
самолета при работающем или лучше остановленном двигателе
(чтобы исключить влияние вибраций) медленно' ведут ручку не-
сколько раз туда и обратно. При этом записывают углы откло-
нения руля высоты и ручки ар и усилия на ручке. После рас-
шифровки получаются диаграммы типа фиг. 13. 13. Наклон кри-
вой ар=/(^) дает непосредственно передаточное число
§ 6. Определение градиента усилия по перегрузке
323
t, 1 d р *
яю=--------, где /р — длина ручки управления от шарнира до точки
Zp dap
приложения усилий. Силы на ручке имеют разное значение при
ходе туда и обратно; разность этих сил показана заштрихован-
ной полосой. Средняя линия (пунктир) дает усилие, вызываемое
весом руля высоты; зная эту величину и передаточное число,
Фиг. 13. 13. Определение передаточного числа
продольного управления и силы трения в
управлении.
легко подсчитать момент от сил веса руля относительно оси
шарниров и степень весовой балансировки руля. Разность сил
(заштрихованная полоса) дает удвоенное значение усилия на
ручке от сил трения Ртр.
§ 6. ОПРЕДЕЛЕНИЕ ГРАДИЕНТА УСИЛИЯ ПО ПЕРЕГРУЗКЕ
Летчик ощущает управление самолетом непосредственно че-
рез величину усилия на ручке. Поэтому важнейшим критерием
управляемости, как уже указывалось, является величина Р" =-
дР3 *
= —которая дает величину усилия, необходимого' для измё-
дп
нения перегрузки на единицу. Эта величина также показывает,
как легко летчик может создать перегрузку, опасную для са-
молета.
Определение этой величины можно производить на уста-
новившихся спиралях на заданной скорости полета и заданном
режиме двигателя с разными кренами. Сделав ряд таких спи-
21*
324 Г лава XIII. Определение устойчивости и управляемости самолета
ралей (включая и прямолинейный установившийся полет) и
замерив при этом величину перегрузки пу1, углы отклонения
руля 8В и усилия на ручке Рв, можем построить функциональ-
ные зависимости Pn=f(ny^ и (фиг. 13.14). По на-
клону этих кривых при пуХ =—1 непосредственно получаем
Р* и 8". В нашем случае Р" = 3,9 и 8" = 3,0 (углы в гра-
дусах).
Другой метод определения градиента усилий Р", чаще при-
меняемый в настоящее время, непосредственно связан с прямым
физическим смыслом величины Р“. Кроме того, он позволяет
получать значительно большие величины перегрузки п, чем при
первом методе. Установив определенный режим полета, летчик
Фиг. 13. 14. Зависимость угла отклонения руля вы-
соты и усилия на ручке Рв от перегрузки п,Л
на спиралях с заданной скоростью.
быстрым движением ручки управления на себя создает некото-
рую заданную перегрузку, которую затем старается выдержать
некоторый промежуток времени, для чего на приборную доску
ставится визуальный измеритель перегрузки. Приборы-самопис-
цы в это' время записывают скорость V, высоту Н, перегрузки
и Пд.1, усилие Рв и угол отклонения руля высоты 8|в. Типичная диа-
грамма такого маневра, полученная в полете, показана на
фиг. 13. 15.
Обработка диаграммы производится весьма просто; выби-
рают интервал времени, на котором можно считать, что пу1 —
= const. По величинам пх1 и пу1 вычисляют угол наклона &
вектора перегрузки по отношению к самолетным осям ^tg& =
= -^-j и величину перегрузки п = ]/~пу1 + nxV по этим вели-
nyi /
чинам вносят поправки в величину усилия Рв на вес динамо-
£ 6. Определение градиента усилия по перегрузке
325
метрической ручки; определяют приращение усилия ДРВ и
приращение перегрузки Д/г по отношению к установившемуся
режиму и, наконец, величину градиента
Фиг. 13. 15. Запись маневра при отклонении
руля высоты для определения градиента усилий
по перегрузке.
Отметим, что самолеты, мало устойчивые по скорости, т. е.
имеющие слишком малый запас устойчивости по скорости mc^v
и pv или даже слегка неустойчивые, не являются особенно не-
приятными при пилотировании, хотя на них невозможен продол-
жительный полет без вмешательства пилота. Напротив, на са-
молетах с малым запасом устойчивости по перегрузке и тем бо-
лее на неустойчивых полет практически невозможен. Самолеты
с малым запасом устойчивости по перегрузке, как уже указыва-
лось, летчики называют «строгими». На таких самолетах не обес-
печена безопасность полета вследствие опасности при малейшем
отвлечении от управления создать большую перегрузку или не-
произвольно потерять скорость; при маневре летчик перестает
«чувствовать» управление и с трудом производит заданный ма-
невр.
326 Глава XIII. Определение устойчивости и управляемости самолета
§ 7. ОПРЕДЕЛЕНИЕ СТАТИЧЕСКИХ КОЭФФИЦИЕНТОВ
БОКОВОЙ УСТОЙЧИВОСТИ!
Теория боковой устойчивости самолета показывает, что
основную роль при анализе боковой устойчивости играют
в сочетании с другими параметрами следующие коэффициенты:
dm
производная коэффициента ту по = (коэффици-
ент устойчивости пути) и производная коэффициента
дтх
т.. по В ш =--- (к о э d) cb и п и е н т попеоечной устой-
Фиг. 13.16. Балансировочные кривые для уста-
новившихся скольжений.
Для определения этих коэффициентов в полете необходимо,
как и в случае продольной устойчивости, найти непрерывный ряд
установившихся режимов, близких к изучаемому режиму уста-
новившегося прямолинейного полета с нулевым креном, завися-
щих от одною параметра, причем параметры, определяющие
продольное движение, не должны меняться. Такой ряд режимов
могут дать установившиеся скольжения на заданной
скорости с креном в обе стороны. При изучении боковой устой-
чивости так и поступают: на заданной скорости полета производят
1 Методика определения характеристик боковой устойчивости была раз-
работана летчиком-испытателем инж. 10. К- Станкевичем (см. его работу
«Получение характеристики боковой устойчивости в полете», Труды «ЛИЙ
№ 1, 1941, БИТ НКАП).
§ 7. Определение статических коэффициентов боковой устойчивости 327
по два-три скольжения в обе стороны. При этом измеряются углы
отклонения элеронов 8Э и руля направления 8Н, угол скольжения В
и угол крена у. По данным испытаний строятся величины 8Н, 8Э и 3
по углу крена у. Типичный график этого рода приведен на
фиг. 13. 16. За угол отклонения элеронов принят угол отклонения
правого' элерона.
Напишем уравнения равновесия на установившемся режиме:
п
77^ = 0,
mx = Q> (13.32)
-у- V? = — G cos & sin 7 = — -у cvl tg ^SV].
Коэффициенты my, mx и cz являются функциями углов p,
и 8Э. Практически можно считать, что тпх не зависит от
SH, a с2 не зависит от 8Э. Дифференцируя уравнения (13.32)
в точке р = 0, получим
m*yd$ + my«d\ + mfd^ = 0,
trfixd$ + т x9do3 = 0,
-cyXd^.
(13.33)
Из эксперимента нам известны только величины ,
—, —. Следовательно, если мы хотим определить все семь
d$ dfi
величин /и|, туэ, ту»9 тпх3, с?, с*», нам нехватает урав-
нений. Как видоизменить эксперимент, чтобы получить все
нужные величины, мы увидим дальше,
а пока заметим, что
d$H d§3
величины ~ и представляют самостоятельный интерес
в качестве пилотажных характеристик, так как они показы-
вают, на какой угол нужно отклонить руль на-
правления и элероны, чтобы изменить угол
скольжения на 1°.
Так же как и в случае продольного движения, часто вместо
углов отклонения Зн и Зэ рассматривают линейные переме-
щен и я хн и хэ; все рассуждения остаются теми же.
Как указывалось в гл. XII, измерение угла скольжения В пред-
ставляет некоторые затруднения. Поэтому в большинстве случаев
при обычных испытаниях его не измеряют, а ограничиваются из-
мерением угла крена у при помощи жидкостного уклономера или
инклинографа и в качестве пилотажных характеристик прини-
мают величины и — , показывающие, н а с к о л ь к о ну ж-
328 Глава XIII. Определение устойчивости и управляемости самолета
но отклонить органы управления, чтобы изме-
нить угол крена на 1°.
Если необходимо получить все характеристики устойчивости,
нужно приложить известные заранее моменты
относительно соответствующих осей. Именно таким образом мы
действовали при изучении продольной устойчивости, изменяя
продольную центровку при помощи грузов, создающих извест-
ные заранее моменты относительно поперечной оси. В случае
моментов относительно продольной оси создать такие моменты
очень легко; достаточно в крыло самолета заложить груз, создаю-
щий относительно продольной оси момент Мд при таком положе-
нии самолета, когда продольная ось горизонтальна. В этом случае
уравнения равновесия в установившемся скольжении будут иметь
вид
“ ^aPoSV'?/ + cos & cos y = 0,
-у + Mg sin 7 = 0,
-T- cao0SV? + G cos & sin 7 = 0,
где Z—размах крыльев самолета.
Отсюда легко получить
m „ =-------V- cos 0 cos 7 = — cos v cos 7,
x e
2M„
-------*— sin 7 = — mo sin y,
2G cos 17 . ,
cz =-----—y-sin7=-c1tg7,
PO-SZ;
где mg
™g
P^V^Z
(13.34)
(13.35)
Зная величины Mg, S, p0 и l, легко по этим формулам
подсчитать значения mx, tnv и cx, измерив 7 и V\.
На фиг. 13. 17 представлены балансировочные кривые
оэ=/(Р, полученные на установившихся скольжениях при
заданной скорости. Задавшись разными значениями 8Э, полу-
чив из этой фигуры соответствующие значения р при разных
mg и подсчитав значения шх по первой формуле (13. 35), полу-
чим значения коэффициента пгх в зависимости от р и 8Э. По-
лученные таким образом значения тх представлены на фи-
гуре 13. 18.
J 7. Определение статических коэффициентов боковой устойчивости 329
Имея такие зависимости, легко получить статический
дтх Г1
коэффициент поперечной устойчивости и коэффици-
6 дтх
ент эффективности элеронов т э = —— . В нашем случае при
^ = 0 имеем т?х = —0,001, /п*э = —0,0028 (углы взяты в граду-
сах).
Фиг. 13. 17. Балансировочные кривые пг^}
для установившихся скольжений с разными попе-
речными центровками.
Моменты относительно продольной оси получаются, таким об-
разом, прикладыванием к самолету заранее известного момен-
та Мд. Для получения моментов ту относительно нормальной оси
тоже нужно создать заранее известный момент относительно этой
оси. Простейшим методом создания такого момента может слу-
жить изменение продольной центровки при помощи каких-нибудь
грузов. В самом деле, пусть мы изменим продольную центровку
330 Глава XIII. Определение устойчивости и управляемости самолета
со значения хт0 на значение хт. Только при крене у мы получим
дополнительный момент относительно старого центра тяжести
(хт0), равный baG cos & sin у (хт—хт0).
Метода обработки результатов полета мы здесь не приводим.
Он изложен в упомянутой выше работе Ю. К. Станкевича.
Такой метод определения производных момента пути при по-
мощи продольного смешения центра тяжести неудобен и нето-
чен. При 8 = 0, т. е. в самой интересной точке, он не позволяет
определить ни сами моменты, ни их производные; это и понятно,
так как дополнительный момент Шу получается в результате сме-
щения центра тяжести только при причем момент тем
больше, чем больше В.
Чтобы получить добавочный момент ту, не равный нулю при
8 = 0, как это получалось для момента тх при смещении попе-
речной центровки, ничего нельзя сделать при помощи грузов (мо-
ментов от сил веса); но такой момент можно создать при помощи
аэродинамических сил; иначе говоря, необходимо создать асим-
метрию формы; при этом добавочный момент должен быть строго
известен.
Простейшим приспособлением для создания такого момента
служат небольшие парашюты, укрепленные на конце крыла
самолета; сила, действующая на парашют, измеряется специ-
альным динамографом, а углы направления этой силы относи-
тельно самолетных осей измеряются при помощи простейших
угломеров, проще всего СОР’ов.
Изложенные методы определения статических коэффици-
ентов боковой устойчивости и управляемости требуют боль-
шого числа полетов и сложного оборудования. Поэтому обычно
в практике летных испытаний ограничиваются простейшими
испытаниями без измерения моментов и без замера угла сколь-
жения, а измеряют только он, Вэ и у и вычисляют величины
, по которым судят о боковой устойчивости.
Особо важную роль играет величина > характеризующая
„гармонию" руля направления и элеронов.
В упомянутой работе Ю. К. Станкевича показано, что, про-
изводя ряд установившихся спиралей, можно получить также
вращательные производные, которые вместе с статиче-
скими производными и моментами инерции определяют боковую
устойчивость самолета.
§ 8. ОПРЕДЕЛЕНИЕ ЭФФЕКТИВНОСТИ ЭЛЕРОНОВ
Для определения эффективности элеронов в установившемся
полете энергично отклоняют элероны на угол Д8Э и фиксируют их
в новом положении. Уравнение моментов относительно продоль-
ной оси можно написать в следующем виде:
dx3 j б?оэ\ dxtt [dbH
dy \ dx ) 9 dx \dx
§ 8. Определение эффективности элеронов
331
А
дМх
дМ
ди>
дМг дМх *
—хш _|---
d«v у± дЬ3 9'
где А — момент инерции самолета относительно продоль-
ной оси.
Переходя к безразмерным коэффициентам, получим
4А (/(а*
pSH=Z dt
s — <D J. — (1) , I
m\'3 + /п ^ЭД8Э + m"/ ——|- tn-Z—,
дгГ I x Si x 21Z x 2V
где nCx—коэффициент демпфирования крена производная
коэффициента mx по =
— — (DVZ
nty—производная коэффициента mx по -
Как показывают теоретические расчеты и эксперимент, в
О) z
первые моменты движения величины р и малы и ими
можно пренебречь. Приближенное уравнение движения крена
будет иметь вид
4А ?SV4 rfu) v dt 8 a a । ш (13.36)
ИЛИ 4А pSUZ2 dm x dt = znj’AB9 + ni°xxu>x. (13.37)
На фиг. 13. 19 представлены типичные кривые изменения па-
раметров °, и>х и («у по времени, полученные в полете при энер-
гичном отклонении элеронов последовательно в обе стороны i.
В некоторый момент времени (точки А, В) угловая скорость
крена <т>х достигает максимального значения.
В качестве меры эффективности выбирают величину
dm ^мх ld^x\
-^-1--- в точке А или ------ --- . Заметим, что величина
- ^xl
^X = ~2V имеет весьма простое и наглядное кинематическое
значение —это величина изменения угла атаки на конце крыла
вследствие вращения относительно продольной оси с угловой
1 Вид полученной кривой ц\г=/(т) отличается от кривой, получаемой при
точном решении уравнения (13.37), вследствие наличия добавочных членов,
отброшенных в этом приближенном уравнении, и вследствие неточного вы-
держивания углов отклонения элеронов и руля направления.
332 Г лава XIII. Определение устойчивости и управляемости самолета
скоростью крена. Следовательно, — есть отношение этого
добавочного угла атаки к углу отклонения элеронов. Иногда
за меру эффективности принимают значение при опреде-
ленном значении 8э(хэ) или Рэ.
Фиг. 13. 19. Кривые изменения параметров Рэ,
ц)у и дэ при энергичнохм отклонении эле-
ронов.
Эксперимент при определении эффективности элеронов про-
изводят обычно на всем диапазоне скоростей на двух-трех вы-
сотах для оценки влияния числа М и скоростного напора (от
него зависят деформации крыльев йри отклонении элеронов).
J—г V-
Ио результатам эксперимента строят кривые зависимости —~
от индикаторной скорости или числа М для разных высот полета.
§ 9. Определение динамической боковой устойчивости
333
По этим кривым проверяется достаточность эффективности эле-
ронов на всех режимах полета и возможность потери управляе-
мости на больших скоростях.
§ 9. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКОЙ БОКОВОЙ УСТОЙЧИВОСТИ
Теория боковой динамической устойчивости самолета показы-
вает, что возмущенное боковое движение складывается из трех
типов возмущенного движения.
Первый тип связан с движением крена. В этом случае дви-
жение является апериодическим и затухает очень быстро по за-
кону , где Xi имеет очень большое отрицательное значение.
Второй тип возмущенного движения также является аперио-
дическим, но, в отличие от первого, движение затухает очень сла-
бо или, наоборот, медленно нарастает; этот тип движения назы-
вается «спиральным движением». Убывание (или на-
растание) происходит по закону , где коэффициент затуха-
ния Х2 имеет малую величину. Непосредственное определение
величины Х2 в полете не удается, так как этот тип движения
всегда перекрывается третьим типом движения, представляю-
щим собой колебательное движение, совершающееся
во закону
х = х0 4- Ае-f sin (2п -y-j ,
где T — период колебаний;
С — коэффициент затухания;
xq — значение параметра при исходном установившемся дви-
жении.
Для определения двух величин С и Т создают возмущенное
движение самолета при помощи элеронов или руля направления,
после чего их возвращают в прежнее положение (если опреде-
ляется устойчивость с зажатым управлением) или бросают (если
определяется устойчивость с брошенным управлением); при этом
записывают изменение параметров возмущенного движения на
ленту самописцев. В качестве параметра удобно взять любой из
параметров <^i, «ы (записываются жирографом) или боковую
перегрузку nzl (записывается акселерографом). Полученную
запись колебательного движения обрабатывают следующим об-
разом.
При умеренной степени затухания (а только такие виды
движения и удается записать) можно считать, что максималь-
ные и минимальные значения получаются в моменты времени
т зт г
т = 0, — , Т, — и т. д. Иначе говоря, можно считать, что
пики кривой даются уравнением (п—любое целое число)
СлГ
хп = хй + Ае2 (-1)”. (13.38)
334 Глава XIII. Определение устойчивости и управляемости самолета
Период определяется непосредственно по диаграмме как раз-
ность времени между двумя последовательными максимумами
или минимумами. Остается определить величину С; из уравне-
ния (13.38) и аналогичного уравнения
r.mT
хт=х.й + Ае 2 ( — 1)т
получаем путем вычитания
СпТ С тТ
хп-хт = А\е 2 (~1)п-е 2 (- 1Г..
Взяв два других значения лЦ-А и где k какое-нибудь
целое число, получим
Г г"пТ :тТ ] сkT
xn+k -xm^k = A[e 2 2 (- 1Г]е 2 (-1)*.
Путем деления получим
С kT
х n-\-k Xfn-\-k _(_ \ С 2
хп хт
Следовательно, если при заданном k построить величины
(Хп+к—хт^к) в зависимости от (хп—хт) для разных значений т
и п мы получим прямую линию. Угловой коэффициент этой пря-
мой даст величину е 2 . Дальше путем логарифмирования легко
получить ZkT и С Г.
На фиг. 13.21 в качестве примера представлен такой график
для случая записи колебательного движения, приведенного на
фиг. 13. 20. Заметим, что нет нужды производить расшифровку
записи; достаточно с графика фиг. 13. 20 прямо взять значения
ординат от базовой линии. По графику фиг. 13.21 составляем
таблицу.
k 2 4 6 8 10 12
kT 'lk ~е 0,76 0,594 0,476 0,350 0,282 0,211
'g'fc -0,120 — 0,224 — 0,322 — 0,456 - 0,549 - 0,675
4,61 lgz\ ST = — — 0,276 - 0,258 - 0,248 - 0,263 - 0,253 — 0,259
k
§ 9. Определение динамической боковой устойчивости
335
Средняя величина QT равна—0,26. Зная период Т= 1,65 сек.,
получаем —0,158. Заметим, что величина дает значение
так называемого логарифмического декремента,
Фиг. 13.20. Запись колебаний при возмущенном
движении самолета.
т. е. натурального логарифма отношения двух последовательных
2
амплитуд. Затухание за период равно = в нашем случае
оно равно' в среднем 0,769.
Фиг. 13.21. Вспомогательный график для определения ко-
эффициента затухания.
Часто определяют также время т2, в течение которого ам-
плитуда колебаний уменьшается в два раза. Очевидно, что
In 2 0,693
В нашем случае
'2
0,693
0,158
4,4 сек.
336 Глава XIII. Определение устойчивости и управляемости самолета
Характерной величиной является также отношение времени
затухания наполовину т2 к периоду Т:
т2 0,693
Это отношение, как видим, обратно пропорционально логариф-
мическому декременту затухания. В нашем примере =2,66.
Описанный нами метод обработки вообще может служить
для определения характеристик колебательного движения лю-
бого типа.
При оценке боковой устойчивости очень важно также опре-
делить отношение амплитуд угловых скоростей и
§ 10. ОПРЕДЕЛЕНИЕ УСИЛИЙ НА РУЧКЕ И ПЕДАЛЯХ
ПРИ БОКОВЫХ ДВИЖЕНИЯХ
Если одновременно с испытаниями на боковую устойчи-
вость (§ 7 — 9) измерить усилия от элеронов на ручке и уси-
лия на педалях, можно получить основные характеристики
Фиг. 13. 22. Кривые усилий от элеронов и руля
направления в зависимости от угла крена при
установившихся скольжениях.
боковой управляемости. На фиг. 13.22 представлены
кривые зависимости P9=f(^) и Рн=/(у), полученные на уста-
dP
повившихся скольжениях. Наклоны этих кривых =—- и
§ 10, Определение усилий при боковых движениях
337
dP
Pi =—“ показывают, какие усилия на ручке и педалях надо
н df
приложить, чтобы создать крен 1°. В нашем случае Pi =
= 0,51 кг)град, Рч = 0,0125 кг/град.
Если провести все испытания при разных поперечных и
продольных центровках, легко отделить влияние р, Зн и Зэ
и получить величины Рн°н, Р^, Р*э, Р?, т. е. все величины,
характеризующие боковое управление. Легко далее получить
и величины шарнирных моментов в зависимости от
угла скольжения и от углов отклонения элеронов и руля
направления. При этом метод обработки ничем не отличается
от методов, изложенных в предыдущих параграфах.
Аналогично, если при оценке эффективности элеронов путем
их отклонения (§ 8) мы запишем усилия от элеронов Рэ
(фиг. 13. 19) и подсчитаем величину ДРЭ, т. е. усилие, которое
нужно приложить к ручке, чтобы получить угловую скорость
в точке А, легко найдем критерий
dP3___&РЭ
da>x ’
показывающий, какое усилие необходимо прило-
жить к ручке (или штурвалу), чтобы получить
угловую скорость крена о>х=1 рад/сек. В нашем
примере эта величина равна ^-^ = 17,3 кг, сек.
Как и в случае изучения продольных движений на земле,
необходимо таким же методом определить величину трения
в проводке управления, а также передаточные
числа и кривую дифференциальности элеронов,
т. е. кривую зависимости угла отклонения левого элерона от угла
отклонения правого.
22 772
Глава XIV
ИСПЫТАНИЯ САМОЛЕТОВ НА МАНЕВРЕННОСТЬ,
ШТОПОР И СВЕРХМАКСИМАЛЬНЫЕ СКОРОСТИ
§ 1. ПОЛЕТ ПРИ ЧАСТИЧНО ВЫКЛЮЧЕННЫХ ДВИГАТЕЛЯХ
Характеристики самолета при частично выключенных (оста-
новленных) двигателях имеют очень большое, часто решаюгцее
значение при оценке самолета. Во-первых, при аварии одного из
двигателей весьма важно, чтобы самолет мог продолжать полет
на остальных двигателях и долететь до места посадки, имея в
то же время достаточный запас управляемости и маневренности.
Во-вторых, в ряде случаев, особенно для самолетов с турборе-
активными двигателями, при дальних или продолжительных
полетах выгодно выключать часть двигателей, переведя осталь-
ные на повышенные, более экономичные режимы.
Три основных вопроса необходимо выяснить при таких испы-
таниях с частично выключенными двигателями:
1. Может ли самолет лететь по горизонтали, каков диапазон
скоростей, на которых возможен горизонтальный полет, и обла-
дает ли самолет достаточным запасом скороподъемности, чтобы
совершать простейшие маневры — развороты и виражи без глу-
боких кренов; каков потолок самолета при частично выключен-
ных двигателях.
2. Имеет ли самолет достаточный запас управляемости при
горизонтальном полете и подъеме и при выполнении элементар-
ных маневров.
3. Каково поведение самолета при внезапной остановке дви-
гателя и как нужно действовать рулями для выравнивания са-
молета.
Остановка двигателя отражается на поведении самолета
двояко: во-первых, уменьшается располагаемая
тяга; во-вторых, возникает асимметричный завора-
чивающий момент (фиг. 14.1):
&Му=Ра.
Этот дополнительный момент вызовет разворот самолета
влево (см. фиг. 14. I); получающееся при этом скольжение вы-
зовет, в свою очередь, момент относительно продольной оси и
§ 1. Полет при частично выключенных двигателях
339
крен в сторону неработающего двигателя; момент крена тем
больше, чем больше поперечная устойчивость самолета; именно с
целью уменьшить этот момент самолеты последних типов делают
с малой поперечной устойчивостью, хотя при этом и получаются
слегка спирально неустойчивые самолеты; момент крена прихо-
дится парировать отклонением элеронов, а путевой момент —
рулем направления.
Фиг. 14. 1. Заворачивающий момент от силы
тяги при полете на одном двигателе.
Для того чтобы разобраться в поведении самолета, когда
будет достигнуто равновесие, напишем уравнения равновесия
(только для боковых сил и моментов):
-^-тхр05У2/=О,
my^SV4 -\-Ра=^
(14.1)
~ c2Pq^2 + G sin у cos ft = 0.
Величины mx, my и cz суть функции углов В, £н, 8Э; при задан-
ной скорости мы имеем три уравнения с четырьмя неизвестными
Y, А, 8И, 8Э; следовательно, одним из них мы можем распоря-
диться по произволу; иначе говоря, можно вести самолет с
разными углами крена, каждому из которых будут соответство-
вать свои значения углов скольжения g и углов отклонения
8Н и 8Э.
Представляют интерес следующие крайние случаи: во-пер-
вых, самолет может итти без крена и без разворота; в этом
случае суммарная боковая аэродинамическая сила равна нулю;
боковая сила от отклонения руля направления уравновешивает-
22*
340
Глава XIV. Испытания на маневренность и штопор
ся боковой силой от угла скольжения; момент от силы тяги по-
гашается отклонением руля направления; момент крена от
скольжения погашается элеронами. Этот случай представляет
наибольший интерес, так как пилотирование весьма упрощается;
однако вследствие скольжения возрастает лобовое сопротивле-
ние, уменьшается и без того малый запас мощности и сокра-
щается диапазон скоростей горизонтального полета и скоро-
подъемность; кроме того, этот случай характеризуется большими
усилиями на педалях управления, если триммер недостаточно
эффективен.
Во втором случае летчик старается вести самолет без сколь-
жения, благодаря чему сопротивление уменьшается. В этом слу-
чае боковая сила от руля направления погашается составляющей
силы тяжести в результате крена. За-
теле.
ворачивающий момент опять пога-
шается отклонением руля направле-
ния. Элероны бездействуют. Такой
способ редко применяется в практи-
ке, так как требует большого искус-
ства пилотирования.
Ответы на поставленные выше во-
просы получаются в результате спе-
циальных полетов с выключенным
двигателем. Если двигатель нельзя
запустить в полете, он при испыта-
ниях переводится на минимально
возможные обороты. Испытания про-
водятся на двух-четырех высотах. На
выбранной высоте выполняются установившиеся зубцы (см.
гл. VIII) на трех-четырех скоростях. Замеряются скороподъем-
ность, углы отклонения рулей и усилия на штурвале и педалях.
Испытания на зубцы дают значения вертикальной скорости
Vy при разных значениях индикаторной или земной индикатор-
ной скорости; само собой разумеется, что все значения Vy долж-
ны быть приведены к стандартным условиям (или к специальным
расчетным условиям) по методам, изложенным в гл. X и XI. На
фиг. 14. 2 представлены типичные результаты испытаний на зуб-
цы при полете с одним выключенным двигателем. Из этой фи-
гуры видно, что максимальная скороподъемность на высоте
3000 м равна 14=1,9 м/сек при скорости 14 = 360 км/час\ распо-
лагаемый диапазон индикаторных скоростей — 260—505 км/час.
Имея такие кривые на нескольких высотах и построив значе-
ния максимальной скороподъемности по высоте, путем экстра-
поляции можем найти потолок при полете с выключенным дви-
гателем, а также значение скороподъемности у земли.
На одной выбранной скорости производится также полет при
разных значениях крена как в сторону работающего двигателя,
так и в сторону остановленного. При этом записываются углы
$ 1. Полет при частично выключенных двигателях
341
крена, углы отклонения элеронов и руля направления, а также
усилия на педалях и штурвале; в прямолинейном полете без кре-
на проверяется также эффективность триммеров на руле на-
правления и элеронах.
На фиг. 14.3 представлены кривые зависимости углов откло-
нения 8Э и 8Н и усилий Рэ и Рн от углов крена. Из этой фигуры
видно, как при крене в сторону работающего двигателя умень-
шаются потребные отклонения рулей и усилия. На фиг. 14.4
представлены кривые зависимости усилия на педалях при от-
клонении триммера руля направления (при Y=0). Из этой фи-
гуры видно, что триммер достаточно эффективен и полностью
Фиг. 14.3. Углы отклонения орга-
нов управления и усилия на штур-
вале и педалях при полете с
одним выключенным двигателем
при разных углах крена.
Фиг. 14.4. Усилия на педа-
лях при полете с одним вы-
ключенным двигателем (угол
крена 7=0) в зависимости
от угла установки триммера.
Необходимо также, чтобы летчик произвел простейшие эво-
люции (разворот, вираж, посадка) с одним выключенным дви-
гателем для оценки достаточности и запаса управ-
ляемости самолета.
Для оценки поведения самолета при внезапной остановке
части двигателей необходимо в специальном полете на доста-
точно безопасной высоте на малой скорости (на 30—40% выше
минимальной) имитировать внезапную остановку
двигателя резкой уборкой газа. До уборки газа летчик ба-
лансирует самолет на заданном режиме, а после уборки он не-
которое время не вмешивается в управление самолетом, пока
это возможно по характеру движения самолета без риска. При
этом производится запись всех параметров, характеризующих
движение самолета (углов, угловых скоростей, перегрузок, ско-
рости и высоты полета), а также углов отклонения рулей. По
342
Глава XIV. Испытания на маневренность и штопор
записям приборов строятся кривые изменения всех параметров
по времени; на основании анализа этих кривых выводится за-
ключение, насколько опасно движение самолета при внезапной
остановке двигателя и как быстро летчик должен вмешаться в
управление для предотвращения аварии. При этих же испыта-
ниях вырабатываются наиболее эффективные способы действия
рулями для выравнивания самолета.
По всем полученным результатам надо дать оценку самолета
при полете с частью выключенных двигателей и оценку возмож-
ности пилотирования такого самолета.
§ 2. ИССЛЕДОВАНИЕ ГОРИЗОНТАЛЬНОГО ПРАВИЛЬНОГО
СЕРИЙНОГО ВИРАЖА
Виражем называется разворот самолета в горизонтальной
плоскости; вираж называется правильным, если он совер-
шается без скольжения; серийным виражем называется
установившийся вираж. Правильный серийный вираж является
одним из основных маневров и его характеристики весьма важ-
ны при оценке маневренности самолета.
Рассмотрим условия равновесия сил при вираже (фиг. 14.5).
Равнодействующая силы веса mg и центробежной силы m^r
(г—радиус виража) уравнове-
шивается подъемной силой У=
= nmg, где п — перегрузка. Отсю-
да имеем два уравнения:
ntni'g1 = m2g2 + /zfo/r2
Фиг.
щих
14.5. Схема сил, действую-
на самолет при правильном
серийном вираже.
и
или
п2
, тиЯг
tg? =------
mg
и
tgf= —
g
Следовательно, получаем известные формулы:
1
п =----
cos 7
tgl"T
(14.2)
Кроме того,
V=.r, Т = —,
О)
где Т — время виража (полного разворота иа 360°).
§ 2. Исследование горизонтального правильного серийного виража 343
Следовательно, если мы при вираже измерим перегрузку,
скорость и угловую скорость, то можем легко подсчитать угол
крена, радиус и время виража по формулам
cosy =—, г = —, Т = —. (14.3)
П о) <о
Именно таким путем и поступают при исследовании виража
в полете. На самолет устанавливаются самописцы угловых ско-
ростей, перегрузок и скорости. Выполняется ряд виражей с раз-
ными углами крена и, следовательно, с разными скоростями. На
каждом вираже получают величины «м, Ли» У-
Имея эти величины, можно, во-первых, проконтролировать пра-
вильность виража: перегрузка ^должна быть равна
нулю; затем подсчитывается величина угловой скорости
Ф = 1/ СО2 -I- (JD2 +
и перегрузки _____________
Далее вычисляется угол крена у по формуле cosy =—,
п
а также по формуле fgy =—; оба значения должны совпасть;
подсчитывается поправка к указателю скорости ДУ = фл cos у =
= —, где а — расстояние от плоскости симметрии до при-
емника; поправка берется со знаком „ + если крен совершен
в сторону приемника давления, так как в этом случае ско-
рость приемника меньше скорости центра тяжести самолета.
Подсчитывается истинная скорость V центра тяжести отно-
сительно воздуха, время виража Т =— и радиус виража г
О)
, У
по формуле г=— .
О)
На фиг. 14. 6 представлены примерные характеристики пра-
вильного виража, полученные в полете; из этой фигуры видно,
что минимальный радиус виража получается при V = 220 км/час
и равен 220 м; минимальное время получается при У=245 км/час
и равно Т=22 сек.; максимальный угол крена у =60,5°; макси-
мальная перегрузка --------=2,03.
cosy
Заметим, что нет необходимости применять самописцы угло-
вой скорости и перегрузки. Как показывают формулы (14.3),
достаточно каким-нибудь образом измерить п или у, а также
два параметра из четырех — г, V, ф, Т\ остальные вычисляются
по простым формулам. Если, например, отсутствуют самописцы
угловых скоростей, можно измерить непосредственно время ви-
344
Глава XIV. Испытания на маневренность и штопор
ража Т. Для этого выбирается какой-нибудь хороший видный
Фиг. 14.6. Время полного виража Т, радиус
виража г, угол крена 7 и углы отклонения
органов управления при правильном серийном
вираже в зависимости от скорости.
требует только применения секундомеров, но он недостаточно
точен и особенно неудобен на одноместном самолете.
Можно также вместо применения самописцев перегрузки
ограничиться записью показаний визуального перегрузочного
прибора или записать угол крена при помощи оптических кре-
номеров или гироскопических указателей горизонта, имеющихся
на каждом самолете; но эти способы обладают теми же недо-
§ 3. Исследование маневренности самолета
345
статками. Поэтому желательно по возможности применять усо-
вершенствованные самописцы угловых скоростей и перегрузок.
Одновременно с параметрами, определяющими общие харак-
теристики серийного виража, необходимо измерить углы откло-
нения органов управления и усилия на рычагах управления
(ручке, штурвале и педалях). На той же фиг. 14.6 представлены
для примера кривые углов отклонения органов управления.
Обращает на себя внимание значительная разница между
углами отклонения на правом и левом вираже. Она объясняется.
во-первых, влиянием гироскопического момента
винта, имеющего противопо-
ложные знаки на правом и ле-
вом вираже и, во-вторых, раз-
личием в знаках угловых ско-
ростей вращения. Предположим
сначала, что гироскопический
момент отсутствует. Тогда руль
высоты должен преодолеть
демпфирующий момент танга-
жа (фиг. 14. 7) от угловой ско-
рости для чего необходимо
отклонить руль высоты вверх
(знак «—»), как это показы-
вает пунктирная линия на
фиг. 14. 6, дающая среднее зна-
чение 3ВСР. Так как гироскопи-
ческие моменты на правом и
Правый вираж
Левый вираж
Фиг. 14.7. Схема угловых скоростей
и гироскопических моментов на ви-
раже; направление вращения винта—
правое. Направление полета от пло-
скости чертежа к читателю.
левом виражах имеют разные
знаки (фиг. 14.7), для их преодоления необходимо отклонять
руль высоты по разному (фиг. 14.6).
Для руля направления, наоборот, отклонение, необходимое
для преодоления гироскопического момента, одинаково на пра-
вом и левом вираже (фиг. 14.6, 8Н. ср), а вследствие разных зна-
ков (фиг. 14.7) необходимо отклонять руль в разные стороны
для преодоления демпфирующего момента рысканья. Аналогич-
ную картину в отношении преодоления демпфирующих момен-
тов крена имеем и для элеронов. Кроме того, для всех трех ор-
ганов управления и в прямолинейном полете приходится по-раз-
ному отклонять рули на разных скоростях. В результате картина
отклонений получается весьма сложной. То же самое можно
сказать и об усилиях на органах управления.
Для реактивных самолетов с ТРД роль винта в создании
гироскопического момента играет ротор двигателя.
§ 3. ИССЛЕДОВАНИЕ МАНЕВРЕННОСТИ САМОЛЕТА
Под маневренностью самолета обычно понимают способ-
ность его быстро изменять элементы траек-
тории, т. е. величину скорости и направление движения. Та-
346
Глава XIV, Испытания на маневренность и штопор
кое изменение можно производить как одновременно, так и раз-
дельно. Например, при установившемся вираже изменяется
только направление движения, а скорость не изменяется. На-
оборот, при разгоне и торможении изменяется величина ско-
Фиг. 14.8. Типичные записи приборов при
иммельмане.
Каждый тип самолета, в зависимости от его назначения,
должен быть в состоянии производить определенные маневры.
Так например, маневры тяжелых бомбардировщиков сводятся
по существу к неглубоким виражам. Для пикирующих бомбар-
§ 3. Исследование маневренности самолета
347
дировщиков число маневров сильно возрастает: пикирование и
резкий выход из него, глубокий вираж, боевой разворот и др.
Особенно велико число маневров у самолета-истребителя.
Программа испытаний на маневренность должна строиться
каждый раз конкретно, применительно к типу самолета и предъ-
являемым к нему тактико-техническим требованиям. Здесь мож-
но только указать на наиболее важные элементарные маневры:
Фиг. 14.9. Типичные записи приборов при разгоне са-
молета.
ворот на 180°), горка, боевой разворот, переворот через крыло,
бочка, петля и иммельман, пикирование и выход из него, разгон
и торможение.
При испытании на маневренность рекомендуется устанавли-
вать самопишущие приборы для записи основных параметров —
скорости, высоты, угловых скоростей, перегрузок, углов откло-
нения органов управления и усилий на них. По записям этих
приборов легко оценить важнейшие параметры, характеризую-
щие маневр и условия его выполнения: время выполнения ма-
невра, начальную и конечную скорость и высоту, максимальные
перегрузки и интенсивность выполнения маневра, усилия на ор-
ганах управления и потребные углы отклонения, а также «запас»
отклонений. Все эти параметры должны быть сравнены с такими
348
Глава XIV. Испытания на маневренность и штопор
же параметрами для других типов самолетов аналогичного на-
значения и с тактико-техническими требованиями к данному
типу самолетов.
Для иллюстрации на фиг. 14.8 представлены типичные
записи приборов при выполнении иммельмана. Из этой
фигуры видно, что время иммельмана равно ^19 сек., макси-
мальная перегрузка равна 4,2, выигрыш высоты равен 330 м.
На фиг. 14.9 такие же кривые приведены для случая разгона
самолета. Время разгона со скорости 340 км/час до 590 км/час
V-t
равно 18,5 сек. Обычно строят величину -----и отыскивают вре-
max
Vi
мя разгона от начального значения --------, обусловленного ин-
V i max
струкциями, до некоторого условного значения--------, близкого к
V i max
единице.
Нельзя указать параметры, характеризующие маневренность
вообще. Для каждого маневра выбираются определенные пара-
метры и величина их сравнивается с рекомендациями и с так-
тико-техническими требованиями.
§ 4. ИСПЫТАНИЯ НА ПОТЕРЮ СКОРОСТИ И ШТОПОР
Испытания этого типа имеют целью проверить, насколько
легко самолет теряет скорость и сваливается на крыло, а также
изучить эффективные методы вывода самолета из штопора, если
он начался.
Так как при таких испытаниях нет уверенности, что самолет
легко выйдет из штопора, необходимо предусмотреть специаль-
ные устройства, обеспечивающие выход из што-
пора, если органов управления нехватает для вывода. Такими
устройствами могут служить, например, специальные антишто-
порные хвостовые парашюты, раскрываемые после неудачных
попыток обычного вывода из штопора, или другие приспособле-
ния этого типа. Испытания должны производиться в определен-
ной последовательности, шаг за шагом, чтобы исключить воз-
можность аварии.
Испытания надо начать с постепенного медленного уменьше-
ния скорости самолета с целью проверки, при какой скорости
самолет начинает валиться на крыло. При этом необходимо
отметить все характерные явления, предшествующие свалива-
нию; в частности, весьма важно отметить величину усилий, не-
обходимых для перевода на режим сваливания; желательно,
чтобы эти усилия прогрессивно нарастали по мере уменьшения
скорости и тем самым предупреждали летчика о возможной по-
тере скорости. Некоторые типы самолетов перед потерей ско-
рости начинают вздрагивать, что предупреждает летчика о под-
§ 4. Испытания на потерю скорости и штопор
349
ходе к потере скорости. Такие испытания необходимо произвести
на планировании и на разных режимах работы двигателя.
ЗатехМ необходимо проверить эффективность органов управ-
ления при уменьшении скорости, особенно эффективность
элеронов, и найти так называемую «эволютивную» скорость, т. е.
ту минимальную скорость, при которой самолет еще достаточно
управляем.
Испытания этого типа необходимо проводить при нормальной
центровке самолета и проверить результаты при крайних цен-
тровках. При испытаниях желательно оборудовать самолет
самописцами скорости и углов отклонения органов управления
(СОРами).
После этого можно переходить к испытаниям на штопор.
Самолет доводится до потери скорости; если он самопроизвольно
срывается в штопор, надо' после срыва выводить его ногой, по-
следовательно увеличивая число витков после срыва (от 0,5 до
2—3 витков, а иногда и до 6 витков, в зависимости от типа са-
молета). При первых испытаниях элероны должны быть ней-
тральны; вывод производится рулем направления. После отра-
ботки срывов производятся принудительные вводы в штопор
рулем направления, сначала на половину хода педали, затем
на полный ход педали. Число витков после каждого ввода посте-
пенно увеличивается. Начинать надо с вводов в штопор по на-
правлению вращения винта или ротора, так как дополнительный
гироскопический момент в этом случае помогает выводу.
После этого производятся вводы в штопор при дальнейшем
выбирании ручки на себя тоже с постепенным увеличением хода
педалей и числа витков после ввода.
После этих испытаний производятся испытания на ввод и
вывод с различным положением элеронов: сначала «по што-
пору», затем «против штопора» («в перекрест»).
При испытаниях необходимо тщательно следить, как само-
лет выходит из штопора, как растет запаздывание при выводе
и отработать метод вывода из штопора, начав с нормального
метода вывода: энергичное отклонение руля направления про-
тив штопора с последующим (через 0,5—1,0 виток) отклонением
ручки вперед.
После этих испытаний производятся испытания на срыв в
штопор с фигур, в частности, с крутого виража, для чего пред-
намеренно имитируется ошибка пилотирования — ручка выби-
рается на себя больше, чем это нужно.
На основании проведенных испытаний дается оценка поведе-
ния самолета при потере скорости и составляется инструкция о
выводе самолета из непроизвольного штопора.
Если это необходимо, в дальнейших испытаниях число витков
штопора увеличивается вплоть до получения установившегося
режима штопора.
350
Глава XIV. Испытания на маневренность и штопор
При детальном изучении штопора необходимо на самолет
установить самописцы угловых скоростей и перегрузок; перегру-
зочный прибор следует устанавливать возможно ближе к центру
тяжести, так как при интенсивном вращении на штопоре возни-
кающее неравномерное поле сил инерции может значительно
исказить показания прибора.
При наличии этих приборов, а также барографа, можно
получить полную кинематическую картину как установившегося
штопора, так и вывода из него1.
§ 5. ОПРЕДЕЛЕНИЕ СВЕРХМАКСИМАЛЬНЫХ (ПРЕДЕЛЬНЫХ)
СКОРОСТЕЙ
Скорость любого самолета ограничивается некоторым верх-
ним пределом. Для самолетов старого типа, для которых влия-
ние сжимаемости было несущественно, величина предельной
скорости ограничивалась прочностью или возможностью наступ-
ления флаттера. Поэтому эти самолеты перед определением
максимальной скорости обязательно испытывались на пикиро-
вание до величины индикаторной скорости, превышающей на
15% максимальную индикаторную скорость горизонтального
полета у земли. В конце испытаний опытного самолета он обя-
зательно испытывался на пикирование с доведением скорости
до величины, безопасной по условиям прочности и флаттера, но
предписанной для самолетов данного типа. При этом проверя-
лась легкость управления, отсутствие затягивания в пикирова-
ние и других ненормальностей в поведении самолета.
Появление турбореактивных двигателей и связанный с ним
резкий скачок скоростей самолетов значительно усложнили во-
прос о сверхмаксимальной скорости. Увеличение скоростного
напора повлекло за собой увеличение деформаций частей само-
лета, что, в свою очередь, привело к уменьшению управляемости
вплоть до опасности реверса. С другой стороны, и это са-
мое важное, увеличение скоростей вплоть до близких к скорости
звука привело к тому, что на режиме сверхмаксимальных ско-
ростей (а иногда и максимальных скоростей горизонтального
полета) происходит кризис обтекания, вызывающий рез-
кие изменения устойчивости и управляемости.
На фиг. 14. 10 тонкими линиями представлены результаты
продувки модели самолета на продольную устойчивость при
определенном угле отклонения руля высоты при различных зна-
dmz
чениях числа М. Сначала величина ----- с увеличением числа М
doc
увеличивается, а начиная с значения М=0,75, начинает резко
уменьшаться. На первый взгляд может показаться, что стати-
ческая устойчивость таким образом резко увеличивается.
1 См. В. С. Ведро в, Ю. К. Станкевич и С. А. Коровицкий
«Исследование штопора самолета Р-5 в полете», Труды ЦАРИ, 1935, № 238
§ 5. Определение сверхмаксимальных (предельных) скоростей
351
Однако это неверно. Не следует забывать, что величины су и М
связаны между собой приближенным уравнением
^М2
_ 2 М/
£ Рн$ ’
(14.4)
где п — перегрузка самолета. В самом деле, по определению
перегрузка приближенно равна отношению подъемной силы к
весу самолета:
Фиг. 14. 10. Кривые зависимости коэффициента момента
mz от су и М. Тонкие кривые М = const; толстые кривые
су №=const.
подставляя в это уравнение выражение скорости У = Ма =
= tA\/'~kgpT и замечая, что gRT?=рн, получаем уравнение
(14.4)4
На заданной высоте при постоянной скорости по прибору
число М не меняется; в этом случае величина су пропорцио-
1 Заметим, кстати, что увеличение высоты, т. е. уменьшение р
Q
эквивалентно увеличению нагрузки на крыло—-, как это показывает урав-
о
нение (14.4).
352
Глава XIV. Испытания на маневренность и штопор
нальна перегрузке; следовательно, наклон кривых mz=f(ctf}
характеризует устойчивость по перегрузке (см. гл. XIII). Таким
образом при переходе через кризис устойчивость по перегрузке
резко увеличивается.
Если же мы хотим исследовать устойчивость по скорости
(при постоянной перегрузке, см. гл. XIII), характеризуемую
„ dmz ,, а dmz
величиной ---, а не величиной =------, мы должны для каждой
da z дх
высоты по уравнению (14.4) связать су с числом М и выбрать
соответствующие точки на тонких кривых фиг. 14. 10. Соответ-
ствующие кривые для разных высот нанесены на фиг. 14. 10
жирными линиями. Из этих кривых видно, что при уменьшении
сУг т. е. при увеличении скорости, устойчивость резко падает и
появляются моменты, стремящиеся затянуть самолет в пикиро-
вание, причем эти моменты имеют очень большую величину.
Парировать эти моменты рулем высоты очень трудно, так как
требуются очень большие углы отклонения руля высоты и резко
возрастают усилия обратного знака. К этому может добавиться
резкое изменение шарнирных моментов, что еще больше услож-
нит процесс.
Формула [гл. IV, формула (4. 15)]
(14.5)
показывает, что при заданной индикаторной скорости, т. е. при
заданном скоростном напоре q= — число М возрастает
при увеличении высоты. В практике могут представиться раз-
личные случаи. Первый случай, самый простой,— это такой,
когда сверхмаксимальная скорость у земли ограничивается пре-
дельным числом М, связанным с затягиванием в пикирование,
а предельная индикаторная скорость по флаттеру и прочности
выше. Тогда и на всех высотах сверхмаксимальная скорость
будет ограничиваться числом М и будет уменьшаться с увели-
чением высоты (кривая / на фиг. 14.11) согласно уравнению
(14.5). Если, наоборот, у земли скорость ограничивается проч-
ностью или флаттером, то до некоторой высоты сверхмаксималь-
ная допустимая скорость будет постоянна (кривая II на
фиг. 14. 11), пока на некоторой высоте не будет достигнуто пре-
дельное число М, после чего сверхмаксимальная скорость будет
ограничиваться кривой /.
Если на фиг. 14. II нанести также максимальные горизонталь-
ные скорости по высоте, получаемые из обычного соотношения
равенства располагаемых и потребных тяг, может получиться
очень сложная картина. В случае, когда вся кривая максималь-
ных скоростей лежит слева от кривой предельных скоростей,
§ 5. Определение сверхмаксимальных (предельных) скоростей 353
Фиг. 14.11. Изменение сверхмакси-
мальных предельных скоростей по вы-
соте. Кривая I — ограничение по
числу М; кривая II— ограничение по
скоростному напору (индикаторной
скорости); пунктирная
максимальные скорости
тального полета.
все просто. Тогда в горизонтальном полете не могут быть
достигнуты предельные скорости. Но если имеется частич-
ное перекрытие, то картина значительно осложняется. Для при-
мера на фиг. 14.11 пунктиром показана кривая максимальных
горизонтальных скоростей в одном из очень сложных случаев.
От земли до точки В максимальная скорость ограничивается
скоростным напором, от точки С до точки D числом М, и только
на интервале высот от В до С
и на высотах выше точки D—
величиной тяги двигателя.
К этому надо добавить,
что ограничение по числу М
может обусловливаться не
только затягиванием в пики-
рование. В отдельных слу-
чаях при достижении кризи-
са могут появляться неприят-
ные явления другой приро-
ды. Например, из-за неболь-
шой асимметрии крыльев
скачки уплотнения
на них возникают не
одновременно', вслед-
ствие чего при достижении
некоторой скорости самолет
резко бросает с крыла на
крыло; в других случаях при
неудачной компоновке крыла
теряется эффектив-
ность элеронов. Разу-
меется, трудно предвидеть
все возможные случаи.
Из изложенного видно,
насколько важно еще до сис
ление максимальной скорости по высоте найти предельные ско-
рости.
Предел индикаторной скорости по флаттеру и прочности
обычно задается по расчету, по испытаниям специальных моде-
лей в трубах и статическим испытаниям на прочность. Поэтому
прежде всего необходимо определить предельное число' М.
Испытания этого типа необходимо вести на такой высоте, где
заранее можно ожидать, что предельная скорость по числу М
будет не больше предельной скорости по условиям прочности
и флаттера. Так как критическое число М примерно известно
заранее, такую высоту легко найти.
При испытаниях постепенно увеличивают скорость полета,
причем после достижения определенной заданной конечной ско-
рости самолет переводится на меньшую скорость вытягиванием
кривая —
горизон
испытании
на
23 772
354
Глава XIV. Испытания на маневренность и штопор
ручки на себя. Эта конечная скорость разгона постепенно уве-
личивается. При появлении каких-либо особенностей поведения
самолета необходимо полет прекратить впредь до выяснения
характера этих особенностей и выполнения соответствующих
доводок, если это необходимо.
При испытаниях необходимо тщательно' следить за положе-
нием всех триммеров. Желательно записывать их углы откло-
нения. Могут встретиться случаи, когда деформации или непра-
вильная установка триммера вызовут такой же кажущийся
эффект, как и аэродинамический кризис.
Самолет должен быть оборудован самописцами высоты,
скорости, усилий на ручке (штурвале) и педалях, отклонений
органов управления. Все приборы должны быть по- возможности
безинертными; должно быть тщательно учтено запаздывание в
пневматической проводке к самописцам (см. гл. V), так как
даже малейшая ошибка, вызванная запаздыванием, может при-
вести к ошибке в числе М порядка 1—2%, что в области крити-
ческих чисел М является большой ошибкой. У летчика должны
быть установлены тщательно проверенные визуальные приборы,
особенно указатель числа М. Желательно установить самописцы
угловых скоростей и перегрузок.
На фиг. 14. 12 для примера приведены кривые, полученные
при разгоне самолета. Из этих кривых видно, что при дощи-
жении скорости Vi = 865 км/час кривые Зв и Рв начинают заги-
баться вниз, при скорости 875 км/час усилие обращается в нуль,
а затем становится отрицательным, причем оно достигает весьма
большой величины — 20 кг. По критическим значениям скорости
можно по формуле (14.5) найти М, зная высоту.
На фиг. 14. 13 приведен другой интересный случай. При уве-
личении скорости ни отклонение руля высоты, ни продольное
усилие на ручке не претерпевали резких изменений, но при до-
стижении скорости Vi = 790 км/час самолет резко' бросило на
правое крыло; что ясно видно по записи продольной угловой
скорости еы.
Все такие записи должны быть тщательно проанализированы
и выяснены полная картина и причины ненормального поведе-
ния самолета. После того как установлено предельное число М.
необходимо построить кривую предельных индикаторных ско-
ростей Vi по формуле (14.5) и приборных скоростей (с учетом
поправки на сжимаемость, аэродинамической и инструменталь-
ной поправки — см. гл. V) для всех высот. Только' после этого
можно спокойно приступить к определению максимальных ско-
ростей горизонтального полета, причем летчику необходимо за-
дать предельные числа М и предельные скорости по прибору.
В отдельных случаях бывает трудно отличить, получилась ли
потеря управляемости вследствие влияния сжимаемости или
вследствие больших деформаций или же реверса управления
В этих случаях необходимо такой же эксперимент провести на
§ 5. Определение сверхмаксимальных (предельных) скоростей
355
другой высоте, выбранной с таким расчетом, чтобы при одном
и том же числе М индикаторные скорости заметно отличались.
Фиг. 14. 12. Типичные кривые
изменения индикаторной ско-
рости, угла отклонения руля
высоты и продольного усилия
на ручке при разгоне самолета
до сверхмаксимальной ско-
рости.
Фиг. 14.13. Типичные кривые
изменения индикаторной ско-
рости и продольной угловой
скорости самолет резко
сваливается на крыло.
совпадут предельные индикаторные скорости, то причина лежит
в деформациях или реверсе. Иногда может наблюдаться одно-
временное действие обеих причин.
Глава XV
ОПРЕДЕЛЕНИЕ ВЗЛЕТНО-ПОСАДОЧНЫХ СВОЙСТВ
САМОЛЕТА
§1. ПРОСТЕЙШИЕ МЕТОДЫ ИЗУЧЕНИЯ ВЗЛЕТНО-ПОСАДОЧНЫХ
ХАРАКТЕРИСТИК
Основными взлетно-посадочными характеристиками явля-
ются: длина разбега, пробега, взлетной и поса-
дочной дистанции, скорость отрыва и посадоч-
ная скорость. Эти параметры определяют потребные разме-
ры аэродрома и взлетно-посадочных полос, а также размеры под-
ходов к аэродрому.
Фиг. 15. 1. Схема определения длины разбега при
помощи наблюдателей.
Как мы увидим далее, все эти параметры весьма сильно
изменяются в зависимости от условий испытания, особенно от
веса самолета, поэтому весьма важно уметь пересчитывать их
с одних условий на другие. В отдельных случаях требуется ука-
зать, каким образом можно улучшить взлетно-посадочные ха-
рактеристики; для этого нужно провести специальные испыта-
ния для изучения факторов, определяющих эти характеристики.
Наиболее простым методом замера длины разбега и пробега,
доступным для любой летной станции и требующим только
рулетки и секундомеров, является визуальный метод.
Вдоль взлетно-посадочной полосы вблизи предполагаемой точки
отрыва (касания) самолета (фиг. 15. 1) расстанавливают на
расстоянии 30—70 м друг от друга наблюдателей, которые на-
$ 1. Простейшие методы изучения взлетно-посадочных характеристик 357
глаз отмечают место отрыва (касания) самолета, после чего
длина L разбега (от старта) или пробега (до места остановки
самолета) промеряется рулеткой. Для ускорения промеров са-
молет стартует со строго определенного места, а старт разби-
вается заранее на отрезки длиной 50—100 лг, обычно разбивка
производится при помощи ярких флажков перемежающихся
цветов, которые служат также ориентирами для летчика; при
такой системе нужно только измерить расстояние от точки от-
рыва (касания) до* ближайшего флажка.
Для замера времени разбега наблюдатель у старта подает
условный сигнал в момент трогания самолета с места; по этому
сигналу наблюдатели включают свои секундомеры и выклю-
чают их в момент отрыва самолета. Эти же наблюдатели при
каждом взлете отмечают особенности данного взлета или по-
садки (с «подрывом», с «козлом» и т. д.).
Скорость при отрыве отмечается наблюдателем или летчиком
на самолете. Если на самолете стоят приборы-самописцы, м'о-
мент отрыва легко установить по записи приборов: в этот мо-
мент прекращается разброс записи из-за вибраций и толчков
при разбеге по земле. При каждом взлете обязательно записы-
вается скорость ветра по анемометру.
При посадке самолета все операции производятся в обратном
порядке.
Этот простейший метод доступен в любых условиях, но об-
ладает рядом недостатков. Во-первых, таким путем можно из-
мерить только земную часть (пробег, разбег) без воздушной
части. Во-вторых, очень трудно на-глаз точно заметить место
отрыва и параметры измеряются недостаточно точно. Недоста-
точно точно измеряются также скорости отрыва и посадки.
Определение истинной величины этих скоростей осложняется
тем обстоятельством, что невозможно определить аэродинами-
ческие поправки указателя скорости или спидографа (гл. IV)
для таких малых скоростей, на которых нельзя производить
установившийся полет для тарировки на мерной базе, и прихо-
дится делать крайне ненадежную экстраполяцию километраж-
ных тарировочных кривых в сторону малых скоростей.
Для уточнения измерений было предложено много методов
и специальных приборов. Простейшим приспособлением можно
считать применение счетчика оборотов колеса само-
лета. Обозначим число оборотов колеса буквой и, радиус его
г, длину пройденного пути $; тогда 5 = 2тггп. Зная по счетчику
оборотов число п, а следовательно, и путь s в функции времени,
путем дифференцирования получаем скорость относительно зем-
ли в функции времени. Момент отрыва легко обнаруживается по
угловой точке на кривой /г=/(т), так как в этот момент колесо
начинает замедлять вращение; при посадке, момент касания от-
мечается начинающейся раскруткой колеса. Радиус колеса, во-
обще говоря, меняется по мере изменения нагрузки на колеса;
358
Глава XV. Определение взлетно-посадочных свойств самолета
Фиг. 15.2. Раскраска ко-
леса для подсчета его
оборотов фотометодом
при определении длины
разбега.
поэтому обычно измеряют радиус колеса на стоянке и радиус
колеса без нагрузки; за расчетный радиус берут среднюю из этих
величин.
При другом методе, не требующем применения специального
счетчика оборотов колеса, на одно из колес наносится несим-
метричный рисунок, удобный для отсчета оборотов, как показано
на фиг. 15.2; границей рисунка обычно служит кардиоида (серд-
цеобразная кривая). На стойке другого колеса укрепляется
киноаппарат, снимающий одновременно первое колесо и секун-
домер; при обработке фильма в этом случае можно построить
ту же кривую
Оба метода требуют применения до-
вольно- сложной аппаратуры и в то же
время не дают достаточной точности, так
как совершенно не учитывают скольжения
колеса; кроме того, они не позволяют из-
мерить воздушную часть взлетной или по-
садочной дистанции. Поэтому эти методы
не получили большого распространения и
в практике летных испытаний пользуют-
ся либо простейшим визуальным методом,
либо применяют методы, позволяющие
построить траекторию самолета при взле-
те или посадке и описанные в гл. XII.
Радиолокационные методы при изуче-
нии посадки тоже пока не получили рас-
пространения из-за недостаточной точно-
сти, с одной стороны, и сложности, с другой. Фото-кинотеодолит-
ный метод более точен, но требует очень сложной аппаратуры.
В итоге из точных методов, позволяющих найти всю траекто-
рию целиком, в настоящее время почти всюду применяется ме-
тод измерительной фотокамеры.
§ 2. НЕПОДВИЖНАЯ ИЗМЕРИТЕЛЬНАЯ ФОТОКАМЕРА
С УСТАНОВКОЙ НА ЛИНИИ ВЗЛЕТА
В настоящее время применяются два типа измерительной
фотокамеры.- неподвижная фотокамера и вращающаяся. Непо-
движная фотокамера устанавливается на продолжении линии
старта (фиг. 15.3) сзади или спереди самолета на достаточно
безопасном удалении. Из подобия треугольников легко получаем,
что
fL sh Lh
l У f I
(15.1)
где s — расстояние от самолета до фотокамеры;
у — превышение самолета относительно горизонтальной
плоскости, проходящей через объектив камеры (или
§ 2. Неподвижная измерительная фотокамера
359
относительно другой горизонтальной плоскости, хорошо
видной на снимке);
L — характерная длина на самолете (например, размах
крыльев или ширина колеи шасси);
I — ее изображение на снимке;
h — изображение превышения у на снимке;
f — фокусное расстояние камеры.
Фиг. 15.3. Схема съемки взлета самолета не-
подвижной ИФК вдоль траектории.
Таким образом, измерив величины I и h непосредственно на
снимке, легко получить обе координаты самолета s и у в функ-
ции времени. Обычно начало координат располагают в точке
старта; тогда координаты будут s0 — 5 и уо — у. Затем вычерчи-
вают траекторию самолета и координаты s0—5 и у0—у в
функции времени т—т0 (фиг. 15.4). Дифференцируя кривую
s0 — — т0) по, времени, получают проекцию скорости на
горизонтальную плоскость, которую с большой точностью можно
принять за скорость по траектории (траектория идет очень по-
лого). Место и время отрыва легко определяются по моменту
начала возрастания ординаты у0—у.
360
Глава XV. Определение взлетно-посадочных свойств самолета
Длину взлетной дистанции определяют как длину взлета,
на которой самолет достигает определенной безопасной услов-
ной высоты Н, обычно колеблющейся в пределах от 20 до 40 м.
На тех же диаграммах легко определяются время, длина и ско-
рость в конце взлетной дистанции.
У современных самолетов длина взлетной дистанции очень
велика и может иногда доходить до 5—6 км; для того чтобы вся
длина попадала в поле действия фотокамеры, последнюю приш-
лось бы относить очень далеко (на 7—10 км); это, во-первых,
было бы очень неудобно, а во-вторых, сильно снизило бы точ-
ность, так как размеры самолета на снимке получались бы край-
не малыми. Поэтому обычно фотокамеру располагают на срав-
нительно небольшом расстоянии от старта (1—2 км, лишь бы
была обеспечена безопасность), но в момент прохождения са-
молета над фотокамерой ее поворачивают ровно на 180°, для
чего имеется специальное приспособление; при таком методе
съемки часть воздушной дистанции выпадает из съемки и эту
часть приходится восстанавливать интерполированием.
По этой причине, а также вследствие трудности получения
отчетливого изображения размаха крыльев (или ширины колеи)
при больших расстояниях от фотокамеры и необходимости при-
менять переменный масштаб [см. формулу (15. 1)], этот метод
в настоящее время применяется очень редко.
§ 3. ВРАЩАЮЩАЯСЯ ИЗМЕРИТЕЛЬНАЯ ФОТОКАМЕРА
Вращающуюся фотокамеру! можно непрерывно поворачи-
вать вокруг вертикальной
Фиг. 15.5. Съемка сбоку вра-
щающейся измерительной фо-
токамерой (взлет по прямой).
точно на самолет; тогда из
оси, причем угол поворота также ре-
гистрируется на пленке. Оператор
непрерывно поворачивает фотокаме-
ру так, чтобы самолет все время на-
ходился на оптической оси камеры.
При таком способе фотосъемки ка-
меру можно устанавливать в любом
месте. Обычно ее располагают сбо-
ку от линии старта (фиг. 15.5) при-
мерно на траверсе предполагаемой
точки отрыва или приземления.
Предположим сначала для про-
стоты, что проекция траектории са-
молета на горизонтальную плоскость
прямолинейна и заранее известна,
причем оператор ведет камеру так,
что ее оптическая ось направлена
фиг. 15. 5 легко видеть, что s = a tg о;
высоту над землей може^м опять подсчитать по той же формуле,
1 Первая конструкция вращающейся камеры была осуществлена
Г. И. Поярковым.
§ 3. Вращающаяся измерительная фотокамера
361
что и раньше, зная расстояние г———. Следовательно, опять
cos 7
получим те же данные, что и при неподвижной фотокамере.
Дальнейший метод обработки тот же, что и в § 2.
Практически, горизонтальная проекция траектории самолета
никогда не бывает известна заранее, а также не бывает прямо-
линейна; кроме того, не удается направлять оптическую ось
строго на самолет; поэтому приходится применять другой
Фиг. 15.6. Съемка сбоку вращающейся
измерительной фотокамерой (криволиней-
ный взлет).
метод обработки (фиг. 15.6). Во-первых, приходится в угол по-
ворота фотокамеры ©вводить поправку Д ? =агс tg — ,где z—
смещение изображения самолета относительно вертикальной ли-
нии, проходящей через центр кадра. Далее, обозначим неизве-
стный угол поворота плоскости симметрии самолета относительно
плоскости камеры буквой 0, а характерный продольный размер
самолета (например, его длину) буквой L. Из подобия треуголь-
ников следует, что
г cos Д?
/
L cos 8
I
На том же снимке можно обычно измерить другой характер-
ный размер самолета D (например, размах крыльев, ширину
колеи и т. п.), перпендикулярный к первому; пусть длина его
изображения на снимке будет rf. Тогда из такого же подобия
можно написать
г cos Дер _ D sin (")
d '
62
Глава XV. Определение взлетно-посадочных свойств самолета
Фиг. 15. 7. Образец кадра, снятого камерой ИФК.
§ 4. Неподвижная МФК с широкоугольным, объективом
363
Из обоих уравнений легко определить неизвестный угол
tg© = ^- (15.2)
Зная угол 0, теперь легко определить расстояние г по любой из
двух формул (поправка А 9 очень мала и можно считать
cos А 9 = 1):
___ /Lcos0 fD sin 0 /-.г qx
Г~ I ~ d V • /
Зная радиус-вектор г и угол поворота 9 (с поправкой Ат),
легко построить на чертеже горизонтальную проекцию траекто-
рии с отметкой времени. Измеряя дугу по чертежу, легко дальше
произвести всю обработку, как и ранее. Ордината у определяет-
ся прежним способом, так как известно удаление самолета г от
фотокамеры.
На фиг. 15.7 показан образец кадра, полученного при по-
мощи измерительной фотокамеры такого типа. Внизу на кадре
видны секундомер и отсчет угла поворота камеры.
Некоторое видоизменение камер этого типа представляет
английская камера с неподвижной фотопленкой, у которой вра-
щается только объектив. При этом неподвижная фотопленка
располагается по- цилиндрической поверхности, ось которой про-
ходит через центр вращения объектива.
Метод вращающейся камеры со съемкой сбоку применяется
и в настоящее время. Однако он имеет ряд неудобств: необходи-
мость вести камеру и ловить самолет на оптическую ось требует
высокой квалификации оператора; масштаб для ординаты у
опять получается переменным. Поэтому в настоящее время при-
меняются преимущественно неподвижные фотокамеры со съем-
кой сбоку.
§ 4. НЕПОДВИЖНАЯ ИФК С ШИРОКОУГОЛЬНЫМ
ОБЪЕКТИВОМ
Камеры этого типа устанавливаются также сбоку взлетной
траектории, но имеют широкоугольный объектив с таким углом
охвата, что на пленку проектируется вся взлетная дистанция.
Образцом такой камеры может служить камера конструкции
Долинского. В ней размеры кадра ограничены экранирующим
колпаком, который вращается вокруг вертикальной оси, прохо-
дящей через центр объектива. При съемке оператор ориентирует
ось колпака по самолету при помощи визира. Затвор работает
автоматически через определенный интервал времени. На не-
подвижной фотопленке получается серия кадров, фиксирующих
положение самолета.
364 Глава XV. Определение взлетно-посадочных свойств самолета
Если самолет взлетает строго по прямой, а ось камеры уста-
новлена перпендикулярно к
Фиг. 15.8. Съемка сбоку фотока-
мерой с широкоугольным объек-
тивом.
ходимо ввести поправки по
линии взлета (фиг. 15.8), то из
подобия треугольников легко
найти
s=x—, у =
f f
В этом случае, как видно из
формул, масштаб съемки не ме-
няется, что упрощает обработку
и увеличивает точность.
Если самолет при взлете от-
клоняется от предполагаемой пря-
мой (а это всегда можно прове-
рить, так как должно соблюдать^
Ln L
ся соотношение —- = —
f I
L — характерная длина самолета,
/ — длина ее изображения), необ-
методу, аналогичному методу § 3.
Заметим также, что в этом случае можно измерить изобра-
жение величины всего пробега Si непосредственно на пленке;
умножив ее величину на масштаб ~, найдем сразу длину раз-
бега.
§ 5. СЪЕМКА ДВУМЯ КАМЕРАМИ
Преимущества съемки траектории взлета при помощи фото-
кинотеодолитного способа, особенно его точность, настолько ве-
лики, что наводят на мысль применить этот способ без слож-
ной установки (см. гл. XII, § 2). Заменяя теодолиты двумя ка-
мерами ИФК, можно получить весьма большую точность. Обяза-
тельное условие—-.одновременность срабатывания затворов или
синхронизацию двух камер — легко осуществить при помощи
питания затворов или отметчиков времени от одного общего
источника.
Можно также отказаться от точной синхронизации, если одну
из камер установить по линии взлета. Так как составляющая ско-
рости по нормали к предполагаемой линии взлета мала, ошибка
порядка 0,5—1 сек. в синхронизации не может иметь существен-
ного значения. В этом случае секундомеры обеих камер включа-
ются по сигналу флажком.
Обработка производится по* тем же формулам, что и в случае
фотокинотеодолитного метода.
§ 6. Приведение характеристик взлета к стандартным условиям
365
§ 6. ПРИВЕДЕНИЕ ХАРАКТЕРИСТИК ВЗЛЕТА
К СТАНДАРТНЫМ УСЛОВИЯМ
В предыдущих параграфах мы описали методы, при помощи
которых можно получить основные элементы траектории взлета
или посадки. Эти элементы весьма сильно зависят от условий
испытания и поэтому их всегда приводят к стандартным условиям
для возможности сравнения или пересчета на другие условия
применения. За такие стандартные условия в случае взлета и
посадки принимаются: нормальные атмосферные
условия на уровне моря (£0 = 760 мм рт. ст., Т0 = 288оК), от-
сутствие ветра (штиль) и г о р и з о н т а л ь н о ст ь пло-
щадки. Кроме того, так как характеристики взлета и посадки
зависят от веса самолета, их всегда приводят к определен-
ному (для данного типа) весу самолета. Наконец, как
мы увидим далее, они очень сильно зависят от конечной ско-
рости в случае разбега и начальной скорости в случае посадки;
поэтому их приводят к определенной скорости.
Напишем уравнение движения самолета при разбеге по
земле:
= Р-/о[1+2|К1^-^]=р_иа,
где Р —сила тяги;
/—коэффициент трения о землю;
Подставим
(15.4)
и разделим обе части уравнения на G. Тогда
IZ; dV-t р
g\ ds G
2G \ f y,
откуда длина разбега
За верхний предел интеграла нужно принять индикаторную
скорость отрыва.
366
Глава XV. Определение взлетно-посадочных свойств самолета
р
Величина------р, равная ускорению, деленному на g, мало
G
изменяется в процессе разбега; в самом деле, сила тяги Р
зависит от скорости, но так как величина скорости отрыва
невелика, то и Р меняется незначительно; коэффициент и
X XZ
может меняться только от изменения добавочного члена —— X
2G
I с \
X , который в начале движения равен нулю, а затем
возрастает пропорционально квадрату скорости, но даже
в момент отрыва мал по сравнению с единицей, так как лет-
чик инстинктивно ведет самолет под таким углом атаки, что
с
величина -----су близка к нулю. Заменяя в интеграле знаме-
р
нагель его средней величиной-------и вынося его из-под
G
знака интеграла, легко получим
1 И?
L =---------—
2^Д JP_
G
(15.5)
При выводе формул приведения к нормальным условиям мы
будем предполагать, что при изменении атмосферных условий
(р и Т) индикаторная скорость отрыва не меняется, так как имен-
но индикаторная скорость определяет угол атаки при отрыве и
воспринимается летчиком непосредственно. Кроме того, мы будем
считать, что при изменении веса угол атаки при отрыве и, сле-
довательно; су не меняется, так как величина угла атаки перед
отрывом определяется условиями безопасности и управляемости,
а влиянием чисел М и Re в этом узком диапазоне скоростей
можно пренебречь.
Начнем с приведения к нормальным атмосферным условиям.
При фактических давлении и температуре длина разбега опреде-
ляется уравнением (15.5), при стандартных условиях (когда
А = 1) получим
(15-6>
— —и
G k
Разделив уравнения (15.6) и (15.5) друг на друга, получим
Р
1ст_д
Z. Рсу
G ~ А
J 6. Приведение характеристик, взлета к стандартным условиям Z6T
Многочисленные расчеты и эксперименты показывают, что
р
для поршневых двигателей с винтами величина----------почти
G
пропорциональна А. Следовательно, для поршневых двигате-
лей получим
аст=л2а.
(15. 7)
р
Для турбореактивных двигателей величина —согласно
z Рн
законам подобия (гл. VII) есть функция только и
Пренебрегая влиянием скорости, можем считать
Для оборотов, близких к взлетным, можно приближенно
считать
где Л„ и С—некоторые постоянные (А„—показатель измене-
ния силы тяги при изменении оборотов, см. гл. VII). Следо-
вательно,
Н— СрИ
\Vth)
(15.8>
Для стандартных
ротах
условий при тех же фактических обо-
и, следовательно,
•368
Глава XV. Определение взлетно-посадочных свойств самолета
Отсюда
Р ст Рн / ^0 \ 2
. ____г Рн /?0 \ Т„)
ЬСт L т
Рь 1И
ст
о
Ря / То V _ P-G
__дРН То Po\Tff/ р*ст
Ро Тн 1
Рст
(15.9)
Зная энерговооруженность — данного самолета и вели-
G
чину (л (она колеблется от 0,04 до 0,07), можно по формуле
(15.9) привести значение разбега к стандартным метеоусло-
ВИЯМ.
На фиг. 15.9 представ-
лены значения величины
— в функции от для
/. Рст
двух крайних, редко встре-
чающихся случаев: кривая
?
0,4
Фиг. 15.9. Значения для двух
крайних случаев; кривая I — Рн —
— 770 мм рт. ст.; 7,#=248°К; кривая//—
рн =720 мм рт. ст.; 7'7/=303°К.
0,3 I—pH = 77Q мм рт. ст., Тн =
=248° К (—25°С) и кривая
’ П—рн = Т%} мм рт. ст.,
д/ Тя = 303° К ( + ЗЭ°С). При
расчете принято й„ = 3.
Из этой фигуры видно,
что влияние величины !—
Рст
не очень велико; ошибка
даже в 1,5 раза от — =
\ Рет
= 0,3 до' ° = 0
Рст
к ошибке в величине
всего лишь на 3 — 4%. При
умеренных отклонениях рн
и Тн ог стандартных значе-
,2)приводит
р
ний ошибки получаются еще меньше. Величина — обычно
G
известна очень точно; поэтому ошибка в величине у- не очень
сильно сказывается на результате пересчета.
Формулу (15.9) можно приближенно представить в другом
виде. При небольших отклонениях рн и Тн от р0 и То вели-
£ 6. Приведение характеристик взлета к стандартным условиям
369
Рн / ^0 \ 2 о
чина — — мало отличается от единицы. Представим ее
Ро ун/
в виде 1+8, где 8 мало по сравнению с единицей, и попы-
таемся отношение
Рн [ 7о\ 2
— — ~ 1-И-—•
Ро У Н/ Рст Дт
представить в виде 1 +(1+^)8, где —некоторый коэффици-
ент (показатель); приравнивая обе части, получим
------£-.= 1+(1+<7)8,
и. Ст
Р ст
откуда
9 = (15.10)
1 _
РсТ
Полагая затем приближенно (при малом о)
1-Н
получим
1+(1+?)8«(1 + 8)ьн =
hn
Рн
Ро
^ст P/f Pq
Р Ро Рн
Рн
Ро
Qhn
2
1+^-
Pff'^+q / ?0 \
„ Ро / V н)
(15.11)
Для оценки точности этой формулы вычислим значение
для случая рн^РЮ мм рт. ст., 7^ = 248° К, Ап = 3, — =0,3.
Р ст
По формуле (15.9) получим = 1,642, по формуле (15.11)
24 772
370
Глава XV. Определение взлетно-посадочных свойств самолета
—1,600; следовательно, в этом крайнем случае получим
ошибку всего лишь 2,5%, если будем пользоваться форму-
лой (15.11) вместо формулы (15.9).
Формула (15.11) проще и нагляднее формулы (15.9) по
структуре, НО' сложнее по технике вычисления вследствие нали-
чия сложных показателей степени. Величины показателей при-
ведены в следующей таблице:
jiG Рст 0 0,1 0,2 0,3
ч 0 0,111 0,25 0,429
2 4- q 2 2,111 2,25 2,429
« . . Ч^п 2 2 2,5 2,667 2,875 3,144
(при hn = 3)
Значения показателя q приведены на фиг. 15.9.
Перейдем теперь к пересчету времени разбега. Для
дифференциала времени имеем
mdV m dV i
d'z —-------= -----------.
P — У Л P — p.G
Интегрируя и осредняя величину Р—у.0, получим для вре-
мени разбега формулу
где —индикаторная скорость отрыва.
Для стандартных условий
V,
= пг--------.
ст Р - {xG
Отсюда
Р _(iG
тст __ тЛ д _ 1/"^ ^ст ^ст
t Рст - (iG j _
Р ст
Для самолетов с поршневыми двигателями получим
з
тст = хД2. (15.13)
§ 6. Приведение характеристик взлета к стандартным условиям
371
Для самолетов с турбореактивными двигателями
hn
____________________________рн(21\2
Р° \Тн) рст
Ро Ро_______________________|лб
Рст
(15.14)
Можно последнюю формулу переписать также в виде степен-
ной формулы, аналогично (15.11):
hn+^vhnq
[РнХ^/ТоХ 2 2
ст In) I т )
\Ро / V н)
(15.15)
Легко видеть, что при малых отклонениях величин рн
и Тн от р0 и То показатели степени в формулах (15.11) и
(15.15) являются не чем иным, как „показателями" того же
типа, что и введенные в гл. VI. Покажем это, например, для
формулы (15.11). Если PH—pQ-\-dpHf TH=TQ + dTн, где dpH
и dTн~бесконечно малые величины, то А = LCT + dL9 где dL —
бесконечно малое приращение дистанции L. Тогда, пренебре-
гая в формуле (15.11) бесконечно малыми величинами порядка
выше первого, получим
dL , dp И / h„ qhn\dTrr
= _(2+^)-"+ l+v + т
2>ст Ро \ / * О
откуда
(2 + ^)=—^ —
v L„dpH
^7”
Л,
То dL _L
LCt dTн
Последние формулы и доказывают наше утверждение.
Формулы (15.9) — (15. 15) дают возможность привести длину
и время разбега к нормальным атмосферным условиям. Посмот-
рим теперь, как привести длину и время воздушной
части пути. Дифференциальное уравнение разгона в этомслу-
чае будет
Vi dVi Р
------=------и
gL as G
где
, dy
U, = —i---------•
•2G ds
так как на режиме разгона приближенно можно считать, что
±C^SV\ = G, то
24*
372
Глава XV, Определение взлетно-посадочных свойств самолета
Таким образом структура формул для воздушной части взлет-
ной дистанции имеет тот же вид, что и для разбега, если принять
среднее значение р.; часто считают, что и числовые значения ко-
эффициентов р остаются теми же, что и при разбеге.
Перейдем теперь к пересчету длины и времени на другой
вес; мы уже указывали, что при этом следует считать, что углы
атаки не меняются, а индикаторные скорости при замене G ве-
личиной Go изменяются по формуле
Следовательно, при изменении веса мы получим
(15.6) и (15.12) при неизменных (стандартных)
условиях:
по формулам
атмосферных
_^0 P CT -G-11 _ = /4 j P CT
L PCT \ G / , P-Gp
Ц* Go ' Pct
1 /<V 3_ , \2
vi PCT \ G > 1 1
g9 1-Pct
(15.16)
Так же как и в случае приведения к нормальным атмосферным
условиям, можем и эти формулы представить в виде степенных
формул следующим образом. Положим G = G0+3G, где 8G
значительно меньше Go; тогда
'-г
___7 СТ _ |
р ст
P-Gp
Р ст
Р ст
BG -
— = 1—а—-
Go Go
Следовательно, приближенно можно считать
Go \2+
IG(]
"° ~ (~G /
(15.17)
где показатель q имеет то же значение, что и в формуле (15. 10).
Для оценки точности приближенных формул возьмем опять
крайний случай
^ = 0,3; <7 = 0,429; — = 1,20;
Рст ’Go
$ 6. Приведение характеристик, взлета к стандартным условиям
373
тогда по формуле (15.16) имеем -- = -2—о 0’635; по
формуле (15.17) j = 0,643; ошибка даже в этом
крайнем случае равна 1,26%.
Перейдем к выводу поправки на влияние ветра.
Без существенно большой ошибки можно считать, что движение
является равномерно-ускоренным. При наличии встречного ветра
со скоростью W конечная скорость самолета относительно земли
при конечной скорости относительно воздуха V будет V—W.
Тогда длина пути и время определяются формулами
т {V - U7)£ V - W
ь =------------ т —----------------
2/ ’ j
где j — ускорение движения. Это ускорение, очевидно!, опреде-
ляется только массой самолета и движущими силами, которые
не зависят от того, имеется ли ветер или нет. Поэтому при штиле
будем иметь
L =
0 2/
У ,
разделив первые и вторые равенства друг на друга, получим
L __(У — _ / __ J/у т _ V - ГГ _1 __ U7
Ц V2 \ V j 9 т0 ~ V ~ V ‘
Соединяя полученные результаты,
формулы приведения:
получим окончательные
для самолетов с турбореактивными двигателями
hn
Рн / \ 2 _
. _ . Рнто Уя/ Рст /21V 1
ст~ ТьТн \<Ч /i_!Ly
Рст \ V)
(15. 19)
Рн / \ 2 3
у ГРн Ро\Тн) ^СТ /<?0 \2
г Р° ТН 1 _ \G /
Р ст
W ’
V
374
Глава XV. Определение взлетно-посадочных свойств самолета
для самолетов с поршневыми двигателями
Рст 1
Рст \ V)
з ( |xG
~Рст 1
:iZA) №_
Рст V
(15.20)
л2 /°о V
: =тД -М —
При пользовании формулами (15. 19) и (15. 20) следует иметь
в виду, что скорость ветра вблизи земли изменяется с высотой.
Если скорость ветра замерена на высоте 1,5=—2 м от уровня зем-
ли, следует ввести поправку на градиент ветра. Обычно прини-
мают, что скорость ветра W, которую надо ввести в формулы
пересчета воздушной дистанции, на 20% больше скорости ветра
у земли (точнее — проекции скорости ветра на направление
взлета).
Если использовать приближенные степенные формулы, мож-
но написать:
для самолетов с турбореактивными двигателями
1 ।
/ря\2+?/ТИ '2 2 /О0\2+? 1
\ v J
fen+1 ; hnq
(pH\',s+q ( To\ 2 2 y<G0y.5+? 1
TcT=TW w (it) j_ IV
V
(15.21)
и для самолетов с поршневыми двигателями
з
.2 /% М.5 + <7 1
тгт = тД — -------
ст \G]
~ V
(15.22)
В отдельных случаях бывает необходимо привести характери-
стики кодной и той же скорости. Тогда, как видно из
приведенных формул, можно считать, что длина изменяется про-
§ 7. Приведение посадочных характеристик самолета
375
порционально квадрату скорости, а время — прямо пропорцио-
нально скорости.
Все формулы, выведенные в этом параграфе, являются при-
ближенными, и поэтому в зависимости от ряда факторов — из-
менения конструктивных параметров, усовершенствования аэро-
динамической формы, улучшения шасси и т. д.»— в них время от
времени вводятся поправки, получаемые эмпирическим или рас-
четным путем.
§ 7. ПРИВЕДЕНИЕ ПОСАДОЧНЫХ ХАРАКТЕРИСТИК САМОЛЕТА
Дифференциальное уравнение движения при пробеге имеет
вид
mV — =------------crc
ds 2 Vi
G- ~cy?SV^.
Вводя
делив
вместо скорости V индикаторную скорость V; и рав-
на G, получаем
1 dV; cp^SV2,
— V,— х ' '
g-Д ds
20
20
откуда
ds =
V,dV,-
_ cy?nSV2i
2G +/\ 2G
(15.23)
1
Для стандартных атмосферных условий получим то же уравне-
ние, но при д = 1. Следовательно, ds Ст=Ь ds; для всей длины про-
бега получим такое же соотношение. Далее, имеем
dz = — = Vl — = д-^т. =
V V-t Д Vt ]/ д
Такое же соотношение останется и для суммарного времени.
Таким образом получаем окончательные формулы приведения
длины и времени пробега к стандартным метеоусловиям:
АСТ=Д£, тст = /дт. (15.24)
При изменении веса квадрат скорости V2 изменяется пропор-
ционально весу. Следовательно, в формуле (15.23) числитель
изменяется пропорционально G, а знаменатель не изменяется.
Таким образом полная длина изменяется пропорционально ве-
су G, а время — пропорционально У. G:
..-tl/f. (15'25)
G у G
376
Глава XV. Определение взлетно-посадочных свойств самолета
Для поправки на встречный ветер мы, очевидно, получим те
же формулы, что и в предыдущем параграфе, так как все рас-
суждения останутся без изменения.
Таким образом получим окончательные формулы
Z,T=L—--------------, тст = Ч/ . (15.26)
ст G I W\* ст I/ G W v 7
1 - — r 1 - —
\ V V
Для воздушной части посадочной дистанции дифференциаль-
ное уравнение будет иметь вид
/ray^==__L^siz2 + a-^.
ds 2 х ds
играет ма-
деле, на этом
cxpSVz
2G
— , а отно-
С
су
с
В этом случае предыдущие рассуждения уже неприме-
нимы. Однако легко показать, что член G —
ds
лую роль по сравнению с cxoSV2. В самом
участке можно приближенно написать
шение двух членов будет равно
G —
ds dy
1 ds
-^cx?sv-
Среднюю величину —, т. e. средний уклон траектории, мож-
ds
„ 25
но оценить величиной а качество самолета при посадке
с
——величиной порядка 7. Следовательно, отношение двух
сх
членов меньше 0,14. Поэтому можем пренебречь членом
О—, а тогда все предыдущие рассуждения остаются в силе.
ds
Итак, формулами (15.26) можно пользоваться не только для
пробега, но и для всей посадочной дистанции.
§ 8. УЧЕТ УКЛОНА ПОСАДОЧНОЙ ПОЛОСЫ
Пусть самолет разбегается по горизонтальной площадке; для
среднего' ускорения j будем иметь по известной формуле меха-
ники
V2
2L. ’
§ 8. Учет уклона посадочной полосы
377
где V — скорость при отрыве;
Lo—длина разбега по горизонтальной площадке.
Если аэродром имеет встречный подъем с уклоном I, то
среднее ускорение уменьшится под действием составляющей
силы веса на величину i — = tg, и новая длина разбега будет
m
L = уг = уг = L°
\2^о / V1
Возьмем такой пример: V = 50 м/сек; Z,o = 5OO м;
г = 0,01. Тогда = 2-°’-°l'-9i-8.1.'-5?0 = о,0393 « 4 %.
V2 2500
Таким образом даже в этом очень неблагоприятном расчетном
случае длина разбега изменяется всего лишь на 41О/о. Поэтому
обычно пренебрегают поправкой на уклон.
Глава XVI
РАСХОД ГОРЮЧЕГО И ДАЛЬНОСТЬ ПОЛЕТА
§ 1. ПРОВЕДЕНИЕ ИСПЫТАНИЙ
Дальность полета является чрезвычайно важной характери-
стикой самолета, определяющей в значительной степени его так-
тическое применение. Величина ее зависит от многих факторов.
Для заданного конкретного самолета она зависит от полетного
веса, запаса горючего, режима полета и режима работы двига-
теля, регулировки двигателя (работа двигателя на бедной или
богатой смеси) и от ряда других факторов, в частности, от на-
личия или отсутствия внешней подвески баков, бомб и т. п.,
влияющих на аэродинамические свойства самолета. Большую
роль в вопросах дальности играют эксплоатационные факторы,
в первую очередь правильная регулировка топливных агрегатов
двигателя (карбюратора, насосов непосредственного впрыс-
ка и т. п.).
В полете на дальность горючее расходуется как при работе
двигателя на горизонтальных участках маршрута, так и при
работе его во время гонки на земле, рулежки к старту и после
посадки, при наборе высоты, планировании и полете по кругу
перед посадкой. Основную роль для всех типов самолетов, осо-
бенно для бомбардировщиков и пассажирских самолетов, играют
расходы горючего в горизонтальном полете.
Задача летных испытаний заключается в подборе наи-
выгоднейших режимов самолета и двигателя при поле-
тах на дальность и в определении сетки расходов
горючего при разных режимах полета. Для измерения расхода
обычно' применяются объемные счетчики расхода горючего. При-
емная часть такого счетчика включается в топливную магистраль
двигателя и через нее проходит все горючее, поступающее в
двигатель. Внутри приемной части вращается вертушка, число
поворотов которой пропорционально объему проходящего топ-
лива. Прохождение определенного объема горючего через при-
емную часть регистрируется либо визуальным счетчиком, либо
дистанционно расположенным самописцем с электромагнитной
передачей, на ленте которого запись получается в виде зубцов.
В случае применения визуального счетчика для определения
§ 1. Проведение испытаний
379
расхода горючего в единицу времени засекается при помощи се-
кундомера время израсходования определенного количества го-
рючего, например 10 или 15 л. В случае применения самописца—
по количеству зубцов на каком-либо участке записи определяет-
ся количество литров, а по длине участка и по масштабу записи
времени определяется время. Образец записи счетчика расхода
горючего' показан на фиг. 16. 1.
До полетов и систематически во время испытаний необходимо
тарировать счетчик расхода горючего. Для этой цели служат
специальные установки, в которых посредством насоса можно
пропускать через приемную часть счетчика разные расходы го-
Направпение движения пера самописца по ленте ------
Фиг. 16. 1. Образец записи самописца расхода горючего.
рючего, замер которых производится при помощи секундомера и
специальной мерной колбы известного объема.
При тщательном проведении эксперимента и надлежащей экс-
плоатации прибора расход горючего при помощи счетчика рас-
хода может быть определен с точностью до 1’—210/о. Целесооб-
разно для проверки работы счетчика взвешивать с а м о-
лет до и после полета для сопоставления суммарного
расхода горючего за полет, определенного по разности весов, с
расходом по счетчику.
На самолетах с ТРД расход горючего может быть также
определен по замеру давления топлива перед форсунками, если
по стендовым испытаниям двигателя известна зависимость рас--
хода топлива от давления его перед форсунками (фиг. 16.2).
Однако такой способ измерения расхода горючего менее точен,
чем измерение при помощи объемного счетчика, и его, следует
применять лишь в случае отсутствия необходимых приборов или
для дублирования замеров.
Для подсчета весового расхода горючего необходимо опреде-
лять при помощи ареометров его удельный вес, лучше всего до
и после полета.
380
Глава XVI. Расход горючего и дальность полета
часового расхода горючего оглав-
ления топлива перед форсунками
по стендовым испытаниям турбо-
реактивного двигателя.
Для определения земного расхода горючего (при гонке дви-
гателей на земле и при рулежке) нужно во время испытаний
измерять при помощи секундомера и счетчика расхода горючего
время работы двигателя от мо-
мента его запуска до момента
старта и расход горючего за это
время. На основании ряда та-
ких замеров определяют сред-
ний земной расход в единицу
времени.
Для определения расхода
горючего при взлете и наборе
высоты по записи самописца
расхода строят кривую зависи-
мости расхода горючего WH от
времени т, а по записи баро-
графа — кривую зависимости
высоты Нр от т (фиг. 16. 3,а).
По этим кривым легко опреде-
лить расход горючего, потреб-
ный для набора заданной высо-
ты; на фиг. 16.3,6 представлен примерный вид зависимости
для самолета с поршневым двигателем. Для тяжелых
бомбардировщиков и для пассажирских самолетов расход горю-
Фиг. 16.3. Расход горючего (Wn), скорость (Vн) и воздушный
путь (Lh) при наборе высоты.
а—зависимость Нп, Wт. и V „ от времени т; ^-зависимость Z„ot
Р Л Л ЛИ
высоты полета Нр.
боты двигателя, например, для работы на номинальном режиме
и на режиме, при котором мощность равна 0,75 NeWM. По записи
скорости в процессе набора высоты легко определить величину
воздушной скорости на различных высотах и построить кривую
Уя=/(т) (фиг. 16. 3,а). Интегрируя эту кривую, находим воздуш-
§ 1. Проведение испытаний
381
ный путь LH, пройденный при наборе высоты, после чего не-
трудно построить кривую эта кривая также приведе-
на на фиг. 16. 3,6.
Расход горючего- и воздушный путь при планировании опре-
деляют аналогичным образом. Обычно воздушный путь при
планировании учитывают только до определенной минимальной
высоты (например, 500 или 1000 ж), на которой летчик должен
заканчивать полет по маршруту и начинать подход к аэродрому
и посадку.
Для определения расхода горючего при горизонтальном по-
лете на заданном установившемся режиме самолета и двигателя
выполняется площадка продолжительностью 5—10 мин., во вре-
мя которой при помощи самописцев или визуальных приборов
измеряются все необходимые параметры (высота и скорость по-
лета, температура воздуха, часовой расход горючего, обороты
двигателя и другие параметры, характеризующие его работу).
Достаточная продолжительность площадки необходима как для
точного измерения расхода горючего, так и для достижения уста-
новившегося теплового режима работы двигателя.
Расход горючего при горизонтальном полете характеризуется
километровым расходом, т. е. расходом горючего на
1 км пройденного пути. Километровый расход равен
кг кг
(2-- ------------ Г 1 1
час час Г кг |
9=---------=--------------—, (16.1)
т г км п м I км I
И---- 3,61/-- L J
час сек
где Q — часовой расход горючего, а V — скорость полета.
Рассмотрим, от каких факторов зависит километровый рас-
ход для самолетов разного типа. В случае самолета с поршневым
двигателем километровый расход горючего в горизонтальном
полете равен
п Л7 с 4 Сх^Се
q = = —---------= _2_S_ (16.2)
3,6И 3,6У 3,6-75т;в 270 Кг,в ’ 4 ’
С
где К= — — качество самолета, а Се —эффективный удельный
сх
расход топлива в ---------. Из формулы (16.2) видно, что ми-
л. с. час
нимальный километровый расход получается в случае полета
на таком режиме самолета, двигателя и винта, при которохм
выражение —е— является наименьшим. Если бы Се и т]в были
1 Часто измеряют часовой и километровый расходы в объемных едини-
цах (л]час и л]км).
382
Глава XVI. Расход горючего и дальность полета
постоянны, то максимальная дальность получалась бы при
полете на наивыгоднейшем угле атаки, для которого качество
является максимальным, так как в этом случае километровый
расход был бы минимальным.
В случае самолета с турбореактивным двигателем километ-
ровый расход горючего равен
~ с г pSl/Суд
О _РСУД_ 2 уд
4 3.6И 3,6И 3,6
= (16.3)
сх
где Суд — удельный расход топлива, т. е. часовой расход топлива,
приходящийся на один килограмм развиваемой двигателем силы
тяги
кг/час
кг тяги
. Минимальному километровому расходу соответ-
ствует полет на режиме, для которого —=min. Если бы удель-
ный расход топлива был постоянным, то максимальная дальность
получалась бы при полете на угле атаки, для которого —- =шах;
сх
этот угол атаки меньше наивыгоднейшего угла, следовательно,
у самолета с ТРД минимальный километровый расход дости-
гается при полете на большей скорости, чем у самолета с порш-
невым двигателем, при одинаковой высоте полета и одинаковой
удельной нагрузке на крыло.
Анализ формулы (16.2) показывает, что для самолетов с
поршневыми двигателями и винтом изменяемого шага километ-
ровый расход в горизонтальном полете является функцией по-
летного веса G, высоты полета Нр, температуры воздуха Тн,
скорости полета V и числа оборотов двигателя п\
q—f(G, Нр, Тн, К п).
Для самолетов с поршневыми двигателями и винтом фикси-
рованного шага, а также для самолетов с ТРД при заданных G,
Нр и Тн скорость горизонтального полета V однозначно связана
с числом оборотов двигателя п, вследствие чего для этих само-
летов
q=f(G, Нр, Th,V).
Вследствие указанных соотношений во втором случае для
определения полной сетки километровых расходов в горизон-
тальном полете необходимо при летных испытаниях выполнить
§ 2. Расходы, горючего у самолетов с невысотным двигателем
383
площадки на нескольких высотах при нескольких значениях ско-
рости на каждой высоте и при разных полетных весах, а затем
при помощи тех или иных формул пересчитать полученные зна-
чения q для заданных температур воздуха. В первом же случае,
т. е. при наличии винта изменяемого шага, необходимо, кроме
того, либо определить наивыгоднейшие обороты для каждой ско-
рости полета 7, соответствующие наименьшему километровому
расходу при заданных G, Нр и Тн, либо при летных испытаниях
произвести дополнительно варьирование оборотов.
Если считать, что для определения полной сетки километро-
вых расходов нужно произвести полеты с тремя полетными ве-
сами на пяти высотах и на каждой высоте получить значения q
для пяти скоростей, то во втором случае общее число площадок
при летных испытаниях будет равно 3 • 5 • 5 = 75. В первом случае,
считая, что на'каждой скорости необходимо провести испытания
при четырех значениях числа оборотов, получим, что потребное
число площадок равно 4*75 = 300. Такие испытания являются
весьма громоздкой и трудоемкой операцией. Для сокращения
числа полетов до минимума чрезвычайно важно разработать до-
статочно надежные методы определения километровых расходов
на основании результатов сокращенных летных испытаний. Обыч-
но на практике при составлении сетки расходов применяют ком-
бинированные расчетно-экспериментальные методы, к изложе-
нию которых мы и перейдем.
§ 2. РАСХОДЫ ГОРЮЧЕГО У САМОЛЕТОВ С НЕВЫСОТНЫМ
ПОРШНЕВЫМ ДВИГАТЕЛЕМ И ВИНТОМ ФИКСИРОВАННОГО ШАГА
Рассмотрим вначале изменение по оборотам и по высоте ча-
сового расхода топлива по внешней характеристике
двигателя Qn.r — на режимах полного газа. Зависимость часового
расхода (?пг от числа оборотов при полном открытии дросселя
для Яст=0 определяется обычно экспериментально при стендо-
вых испытаниях двигателя.
Изменение Qn.r при постоянных оборотах п в зависимости от
высоты полета, т. е. от рн и Т н, в значительной степени зависит
от устройства карбюратора. В связи с тем, что на карбюраторах
невысотных двигателей по мере уменьшения плотности воздуха
с поднятием на высоту смесь сильно обогащается, в их конструк-
ции предусмотрено устройство, называемое высотным кор-
ректором и позволяющее летчику или механику регулиро-
вать состав смеси при полете на высоте.
Если высотная регулировка производится летчиком таким об-
разом, чтобы при n=const состав смеси, характеризуемый коэф-
фициентом избытка воздуха, остается постоянным, то
Qn.r я _Рн
Qn. гО Рй
Т,
(16.4)
384
Глава XVI. Расход горючего и дальность полета
где Qh и Qo — часовой расход топлива при полном открытии
дросселя и при n=const соответственно для земли 77Ст=0, т. е.
Ро=76О мм рт. ст. и То—288° и для высоты с параметрами
атмосферы рн и Тн.
Фиг. 16.4. Внешняя и винтовые характеристики
двигателя и соответствующие им кривые часовых
расходов.
Если при высотных полетах не пользоваться высотным кор-
ректором, то расход топлива по высоте будет при постоянном
положении дросселя и постоянном числе оборотов изменяться по
следующей экспериментальной формуле:
Фп. г Н
@п. гО
(16.5)
а состав смеси будет изменяться по закону
“о
Рз Тн
§ 2. Расходы горючего у самолетов с невысотным двигателем 385
Фиг. 16.5. Относительное падение
часового расхода топлива в зависи-
мости от относительного снижения
оборотов при дросселировании.
т. е. с подъемом на высоту будет происходить значительное обо-
гащение смеси. Сравнение формул (16.4) и (16.5) показывает,
что если не пользоваться высотной регулировкой, то часовой
расход топлива на высоте 5000 м будет на ^25% выше, чем в
случае a=const.
Перейдем теперь к определению часового расхода топлива
при полете на дроссельных режимах. Для невысотных
двигателей в результате летных
испытаний был найден чрезвы-
чайно простой и удобный способ
расчета расходов топлива на
дроссельных режимах, основан-
ный на следующих эмпириче-
ских закономерностях.
Пусть для одних и тех же
атмосферных условий {Рц—
=const и r7/=const) даны
внешняя и несколько винтовых
характеристик двигателя (кри-
вые 1 и 2 на фиг. 16. 4), а так-
же соответствующие им кривые
часовых расходов топлива (Г
и 2'). Построим для каждой
винтовой характеристики кри-
вую от н ос и т е л ь н о г о па-
дения часового расхо-
да топлива в зависимости от
относительного сни-
жения оборотов при дросселировании (фиг. 16.5), т. е.
__ Фдр
<2п.г
где QJP — часовой расход двигателя по винтовой (дроссельной)
характеристике при оборотах пдр, a Qnr и пп.г — соответствующие
величины в точке пересечения винтовой и внешней характеристи-
ки (полный газ). Как показал опыт, кривые k с точностью до
2—3% для любых винтовых характеристик одного и того же
двигателя практически совпадают не только для
одной, но и для разных высот полета.
Поэтому с достаточной для целей практики точностью можно
по кривой k, найденной по одной винтовой характеристике, вести
расчет для всех других винтовых характеристик.
Указанный способ расчета часовых расходов топлива для не-
высотных двигателей был предложен инж. В. П. Кузнецовым
и А. В. Кашириным и часто используется при расчете дальности
полета самолетов с такими двигателями.
25 772
386
Глава XVI. Расходы горючего и дальность полета
В главе IX был рассмотрен метод оборотов и было показано,
что при наличии кривых потребных и располагаемых оборотов
в зависимости от X или —для нормальных условий (при Нсг=0}
и какого-либо веса Go легко определить эти кривые для любых
других условий, пользуясь следующими формулами пересчета
при const (9.26) и (9.27):
п
для потребных оборотов
причем рн берется в мм рт. ст.
(16.6)
(16.7)
Пользуясь указанными соотношениями, можно применить
следующий метод определения полной сетки километровых рас-
ходов горючего в горизонтальном полете для разных весов и
разных атмосферных условий на основе сокращенных летных
испытаний.
На какой-либо одной высоте полета Нр выполняется ряд го-
ризонтальных площадок при каком-либо полетном весе G в диа-
пазоне скоростей от минимальной до максимальной; при этом
производится измерение давления воздуха р ч, температуры воз-
духа Тн, оборотов двигателя п, скорости полета V и часового
расхода горючего Q. Далее, в том же полете выполняется ряд
зубцов при работе двигателя на полном газе в диапазоне ско-
ростей от Vmin до Vmax, причем средняя высота каждого зубца
должна соответствовать той же высоте Нр, на которой выполня-
лись горизонтальные площадки. На каждом зубце измеряются
те же параметры, что и на площадках.
Обработка результатов полета производится следующим об-
разом. По данным, полученным на площадках, строят кривую
потребных оборотов пП и кривую соответствующих часовых рас-
ходов топлива Qn в зависимости от — (фиг. 16.6). По данным,
п
полученным на зубцах, строят кривую располагаемых оборотов пр
и соответствующих часовых расходов Qp также в зависимости
от — (фиг. 16.6). После этого кривую потребных оборотов
пересчитывают на условия полета у земли либо с тем же ве-
§ 2. Расходы горючего у самолетов с невысотным двигателем
387
сом G, который был в процессе испытаний, либо- с каким-либо
заданным весом Go; пересчет ведется по формуле (16.6). Ана-
логично по формуле (16.7) пересчитывают на условия полета
у земли кривую располагаемых оборотов. В результате этих пе-
ресчетов получают кривые ир0 и пп0 в зависимости от —; вид
таких кривых приведен на фиг. 9. 3.
После этого для ряда значений — находят отношение
п
— и —, причем Qn, Qp, пп и пр нужно брать для одного и
Qp яр
Г
того же значения — ; по полученным значениям строят кри-
п
вую k = — вид такой кривой приведен на фиг. 16.5.
QP \пр !
Значения Qp и пР в полете аналогичны значениям Qn.r и ип.г, т. е.
относятся к работе двигателя на полном газе, а значения Qn и пп
в полете аналогичны значениям <2ДР и пдр, т. е. относятся к рабо-
те двигателя на дроссельном режиме.
Фиг. 16.6. Потребные и располагаемые обороты и часовые
V
расходы горючего в зависимости от — .
п
Далее, по формуле (16.4) или (16.5), в зависимости от спо-
соба регулирования состава смеси, определяют значения Qp0 в
зависимости от ир для нормальных земных условий (ро =
= 760 мм рт. ст., Го^288°) и строят кривую QPo=/(^P).
При на 1ичии полученных указанным способом четырех
кривых k=f3[^ и Qpo =
=/4 — дегко построить полную сетку зависимости кило-
метровых расходов в горизонтальном полете для любого по-
летного веса и любых атмосферных условий от скорости
полета. Пусть требуется построить кривую q=f(y) для веса
G при атмосферных условиях, характеризуемых параметрами
25*
388
Глава XVI, Расходы горючего и дальность полета
рн и Тн. Для этого по формулам (16.6) и (16.7) пересчиты-
ваем кривые потребных и располагаемых оборотов «п0 и пр0
на заданные атмосферные условия и вес. Далее, задаваясь
„ V
рядом значении —, находим по пересчитанным кривым п„,
п
пр и их отношение —. По кривой Qpo=/(ttp) по значению пр
пр
находим Qp0, а по кривой — значение k. Затем по
формуле (16.4) или (16.5) находим Qp для данных атмосфер-
ных условий, после чего определяем
Qn = *Q₽
и, наконец,
Фиг. 16. 7. Километровый расход горючего в за-
висимости от скорости и высоты полета для
постоянного полетного веса.
Описанный способ сокращенных испытаний для определение
сетки расходов горючего позволяет на основе всего лишь одно
го полета получить необходимую подробную сетку километровые
расходов, пользуясь которой можно решить любые вопросы
связанные с дальностью полета. В виде примера на фиг. 16/
приведена полученная указанным способом сетка километровые
расходов q в зависимости от скорости полета V для разных вы
сот, но для постоянного полетного веса, на фиг. 16.8 — сетка ми
нимальных километровых расходов в зависимости от высоты по
лета Н для разных полетных весов G, а на фиг. 16.9 — сетю
§ 2. Расходы горючего у самолетов с невысотным двигателем
389
наивыгоднейших скоростей, соответствующих ^min, в зависимости
от полетного веса для разных высот.
ходы горючего в зависимости от высоты по-
лета и полетного веса.
Достоинства описанного расчетно-экспериментального метода
определения сетки километровых расходов очевидны. Нужно,
Фиг. 16.9. Наивыгоднейшие скорости, соответ-
ствующие минимальному километровому рас-
ходу, в зависимости от высоты полета и по-
летного веса.
однако, заметить, что вследствие трудности достаточно' точного
определения часового расхода топлива на кратковременных зуб-
цах часто предпочитают пользоваться кривой Qpo=/(nP), полу-
390
Глава XVI. Расходы горючего и дальность полета
ченной при наземных испытаниях двигателя, вместо эксперимен-
тальной кривой, полученной указанным выше путем.
В процессе испытаний ряда самолетов было обнаружено, что
описанный выше метод испытаний на дальность самолетов с не-
высотными двигателями и ВФШ дает очень хорошую точность
при условии, что для подсчета высотных расходов горючего по
внешней характеристике вместо теоретической формулы (16.4)
применяется следующая эмпирическая формула:
= (16.8)
^р0 Сп. гО Ро
При проведении летных испытаний для определения расходов
горючего следует рекомендовать производить для контроля опре-
деление километровых расходов на нескольких площадках с дру-
гим полетным весом и на других высотах, отличающихся от тех,
на которых выполнялся основной полет для определения потреб-
ных и располагаемых оборотов и расходов горючего. Сравнение
фактических расходов с расходами, полученными пересчетом при
помощи указанного выше способа, покажет, в какой мере пра-
вильны результаты основных испытаний.
§ 3. РАСХОДЫ ГОРЮЧЕГО У САМОЛЕТОВ С ВЫСОТНЫМ
ПОРШНЕВЫМ ДВИГАТЕЛЕМ И ВИШ-АВТОМАТОМ
Как уже указывалось в § 1, для самолетов с винтами изме-
няемого шага горизонтальный полет при заданных полетном
весе, высоте, скорости полета и температуре наружного воздуха
может быть осуществлен в весьма широком диапазоне чисел обо-
ротов. Установив при указанных условиях скорость полета на
площадке, можно для каждого числа оборотов, устанавливае-
мого при помощи регулятора винта, подобрать такое давление
наддува при помощи сектора газа, чтобы скорость осталась не-
изменной; понятно1, что при этом будет изменяться угол установ-
ки лопастей винта.
При подробных испытаниях часовой или километровый рас-
ход горючего на площадках при каждой скорости полета опре-
деляется для 4—5 чисел оборотов; после построения кривой Q =
=f(n) или q=f(n) для заданных G, Нр, Тц и V можно по мини-
муму этой кривой найти наивыгоднейшие для данных условий
обороты. Проделав аналогичные испытания для разных G, Нр
и V, можно для каждого полетного веса найти сетку кривых,
представляющую зависимость наивыгоднейших оборотов пНанв
от приборной скорости Упр (точнее — от V пр.и^р) для разных
высот полета; вид такой сетки показан на фиг. 16. 10.
Проведение таких подробных испытаний требует настолько
большого количества полетов, что их проводят в полном объеме
лишь в редких случаях Обычно стремятся на основе тех или
§ 3. Расходы, горючего у самолетов с высотным двигателем
391
иных правил задаться каким-либо законом, по которому можно
было бы легко расчетным путем подбирать наивыгоднейшие обо-
роты для любых условий полета, а затем проводят летные испы-
тания, варьируя только G, V и Нр, что значительно сокращает
объем испытаний.
Не останавливаясь на всех методах подбора наивыгоднейших
оборотов, мы вкратце рассмотрим лишь некоторые из них.
В первый период применения ВИШ полеты на дальность не-
зависимо от высоты и скорости осуществлялись при постоян-
ном числе оборотов, несколько1 меньшем номинального.
Фиг. 16. 10. Зависимость наивыгоднейших оборотов
от скорости по прибору для разных высот полета.
В дальнейшем было выяснено, что такой способ эксплоатации
двигателя приводит к излишнему пережогу топлива и что кило-
метровые расходы могут быть значительно снижены, если крей-
серский полет производить на меньших оборотах. В связи с этим
позднее широкое распространение получил способ подбора наи-
выгоднейших оборотов из условия сохранения постоянной
относительной поступи винта = const. При
этом на каждой скорости полета V устанавливались такие обо-
роты п, чтобы — = где Vmax — максимальная скорость на
П «ном
данной высоте. При таком способе выбора наивыгоднейших обо-
ротов режим работы винта, а следовательно, и его к. п. д. меня-
лись мало, причем значение к. п. д. сохранялось близким к макси-
мальному. Однако, как показывает подробный анализ, при пе-
реходе к еще меньшим оборотам происходит достаточно
интенсивное снижение удельного расхода горючего Се при срав-
нительно малом уменьшении к. п. д. винта. Вследствие этого, как
и было многократно подтверждено^ летными испытаниями, выбор
392
Глава XVI. Расходы горючего и дальность полета
оборотов из условия X —const не дает наименьших возможных
километровых расходов.
Как показано во многих работах по дальности полета, наивы-
годнейшие числа оборотов мало отличаются от оборотов, соответ-
ствующих наименьшим удельным расходам Се при
данной мощности. Объясняется это тем, что при отклонении обо-
ротов от наивыгоднейших к. п.д. винта изменяется сравнительно
мало, вследствие чего определяющей величиной в дроби — , ко-
т;в
горой пропорционален кило-
метровый расход горючего,
является Се. Поэтому при
летных испытаниях целесо-
образно подбирать наивы-
годнейшие обороты из усло-
вия получения Се min.
На основании летных
экспериментов можно счи-
тать, что удельные расходы
горючего у двигателей с
автоматическим обеднением
смеси зависят только от
мощности и числа оборотов
Фиг. 16.11. Сетка удельных расходов
горючего поршневого двигателя.
и не зависят непосредственно- от высоты полета.
Следовательно, если на основании земных стендовых испыта-
ний двигателя получена сетка кривых удельных расходов горю-
чего, в которой каждая кривая соответствует определенному
значению мощности (фиг. 16.11), то такой сеткой можно вос-
пользоваться для подбора наивыгоднейших оборотов при полет-
ных испытаниях. Если в полете мощность двигателя не замеряет-
ся, то необходимо1 связать наивыгоднейшие обороты с каким-либо
другим параметром, легко измеряемым в полете и в то же время
характеризующим мощность двигателя. Обычно в качестве такого
параметра принимают давление наддува рк.
Проведя на фиг. 16. 11 огибающую (пунктирная линия), соот-
ветствующую минимальным удельным расходам горючего, на-
ходим связь между мощностью и оборотами. Для перехода от
мощности к давлению наддува рк воспользуемся сеткой высот-
ных характеристик двигателя, типичный вид которой приведен
на фиг. 16. 12. На этой фигуре (аналогичной фиг. 7.3) каждая
сплошная жирная линия соответствует работе двигателя с по-
стоянным числом оборотов при полностью открытой дроссель-
ной заслонке, а сплошная тонкая линия — работе двигателя с
постоянным давлением наддува также при полностью открытой
заслонке.
Каждая пунктирная линия соответствует работе двигателя при
постоянных оборотах и давлении наддува, но при переменном от-
крытии заслонки.
§ 3. Расходы, горючего у самолетов с высотным двигателем
39$
Задавшись какой-либо мощностью, например, Ne=0fiNenoti.
по фиг. 6. 11 находим наивыгоднейшие для данной мощности.
Фиг. 16. 12. Определение зависимости давления
наддува рк от высоты полета для заданного
Ne
значения — .
п
обороты /гнаив. Проведем на фиг. 6. 12 прямую Ne=const (AB)r
параллельную оси абсцисс, до пересечения с линией Ne=f(H)
для соответствующих оборотов
пнаив (CD). После этого из то-
чек 1, 2, 3 пересечения кривых
рк=const с линией CD прово-
дим прямые 1—2—2', 3—3'.
параллельные линии EF, до пе-
ресечения с прямой АВ. Так
как каждая прямая 1—Г, 2—
2'... соответствует постоянному
давлению наддува рк, значение
которого можно прочесть по
линии pfc=const, проходящей
через точки 1, 2, 3..., то при
помощи указанного^ построе-
ния находим связь между дав-
лением наддува рк и высотой
полета для заданного значения
Are=const, а значит и пнаиз^
Фиг. 16. 13. Зависимость давления
наддува pk от высоты полета Н и
оборотов двигателя п для режимов,
минимального удельного расхода.
=const. Проделав аналогичное построение для ряда других зна-
чений Ne И Пнаив, получим ЗаВИСИМОСТЬ р]с от высоты Н и числа
оборотов п, представленную на фиг. 16. 13. При помощи пере-
строения графика фиг. 16. 13 легко получить сетку кривых
394
Глава XVI. Расходы горючего а дальность полета
pk=f(n) для полета на разных высотах Н на режиме Cemin. По
этой сетке составляется задание на полет для определения рас-
ходов горючего.
Из фиг. 16. 12 видно, что сохранять постоянные обороты п,
соответствующие минимальному удельному расходу горючего
для каждого- заданного значения мощности двигателя Ne, можно
лишь до определенной высоты (точка В), которая является гра-
ницей высотности при данной мощности. Для полета на больших
высотах с той же мощностью Ne необходимо увеличивать оборо-
ты, в результате чего возрастает и значение удельного расхода Се.
Таким образом полет на заданной мощности Ne производится до
Фиг. 16. 14. Зависимость среднего эффективного
давления от относительной мощности для ряда
двигателей при работе их на режиме наимень-
шего удельного расхода.
границы высотности с прикрытым дросселем, а выше—с пол-
ностью открытым дросселем, т. е. при работе двигателя на пол-
ном газе.
Следует отметить, что при указанном способе выбора оборо-
TV^
тов отношение — до границы высотности при данной мощности
остается постоянным. Так как среднее эффективное давление вы-
ражается формулой
__ 900 N,
где Vh — рабочий объем цилиндров в л, то до границы высот-
ности при данной мощности сохраняется постоянное значение
давления ре, являющегося одним из основных параметров, опре-
деляющих возможность бездетонационной работы двигателя при
бедных смесях. Кроме того, среднее эффективное давление
§ 3. Расходы горючего у самолетов с высотным двигателем
395
является параметром, определяющим износ двигателя и срок его
службы.
На фиг. 16. 14 приведена зависимость среднего эффективного
давления от относительной мощности для ряда двигателей при
работе на режиме наименьшего удельного расхода горючего.
Графиками такого типа можно пользо-
ваться для приближенного подбора наи-
выгоднейших оборотов в случае отсут-
ствия достаточных материалов по удель-
ным расходам двигателя. Для той же це-
ли можно воспользоваться графиком
„ Ne п
осредненнои зависимости —— от ---------
N & ном Яцом
(фиг. 16. 15).
При проведении летных испытаний
уточняют расчетные кривые pk=f(n) для
горизонтального полета на разных высо-
тах следующим образом. Для двух значе-
ний рк или при двух скоростях полета
определяют километровые расходы при
числах оборотов, полученных пофиг. 16.13,
а также при числах оборотов больше и
меньше на 100—150 об/мин. По полученным для указанных
двух значений рк наивыгоднейшим оборотам исправляют расчет-
ную кривую. Обычно наивыгоднейшие обороты, соответствующие
Фиг. 16. 15. Осредненная
зависимость относитель-
ной мощности от относи-
тельных оборотов для
работы двигателя на ре-
жиме С^пнп.
Фиг. 16. 16. Зависимость оборотов от мощ-
ности для высоты Н—3000 м при трех
способах подбора оборотов: X = const,
Гс=СеГП1п И Q — #min-
минимальному километровому расходу q, получаются несколько
выше, чем обороты, соответствующие минимальному удельному
расходу горючего Се, причем эта разница возрастает с пониже-
нием мощности двигателя и с увеличением высоты. В виде при-
мера на фиг. 16. 16 приведена для одного самолета зависимость
396
Глава XVI. Расходы горючего и дальность полета
оборотов от мощности для высоты //=3000 м при Х=const, при
Се min и при минимальных километровых расходах.
На некоторых двигателях существует ограничение минималь-
ного числа оборотов из условия надежной работы всех агрегатов
двигателя или винта; в таких случаях на режимах, для которых
наивыгоднейшие обороты меньше минимально допустимых, по-
лет следует, разумеется, производить на минимально допустимых
оборотах.
На двигателях скомбинированной системой над-
дува на малых высотах одно и то же заданное давление над-
дува может быть получено по-разному — прикрытием дросселя
карбюратора или уменьшением числа оборотов турбокомпрессо-
ра. Как показывают теоретические расчеты и эксперимент, рас-
ходы горючего меньше в том случае, когда дроссель кар-
бюратора полностью открыт, а ТК работает на
меньших оборотах. В связи с этим все полеты на даль-
ность на самолетах, на которых установлены двигатели с КН,
следует производить с полностью открытым дроссе-
лем карбюратора и регулировать давление наддува при
помощи дросселя перепуска выхлопных газов.
Необходимо отметить, что если известны кривые наивыгод-
нейших оборотов в зависимости от давления наддува рк для ка-
кого-либо самолета, то ими можно пользоваться и для други?:
типов самолетов с тем же двигателем. В таких случаях удобнее
построить для исходного самолета кривые —— =//—и по
V max \^ном '
ним задавать обороты для разных скоростей полета испытывае-
мого самолета с тем же двигателем.
Перед проведением испытаний для определения расходов го-
рючего необходимо проверить регулировку карбюратора или на-
сосов непосредственного впрыска. Как правило, для каждого
двигателя заводом-изготовителем задаются нормы расходов го-
рючего у земли для номинального режима и нескольких крейсер-
ских режимов (например, 0,75; 0,6; 0,5; 0,4; 0,ЗМеном(), причем
каждому крейсерскому режиму соответствует определенное зна-
чение числа оборотов п и давления наддува рк. Если возможна
по условиям охлаждения двигателя достаточно продолжитель-
ная работа его на заданных режимах на земле, то проверку ре-
гулировки топливных агрегатов производят при гонке двигателя
на земле. Если же это- невозможно, то необходимо провести по-
лет на малой высоте (200—300 м) и, определив часовые расходы
горючего на заданных режимах, т. е. при определенных комби-
нациях значений п и рк, сравнить полученные результаты с за-
водскими нормами. В случае отклонения от норм, превышающего
заданные допуски (обычно порядка +3—4%), необходимо про-
вести перерегулировку карбюратора.
Полученные в полете или при гонке на земле часовые расходы
при определенном значении п и рк следует привести к стан-
§ 3. Расходы горючего у самолетов с высотным двигателем
397
дартным условиям или к тем условиям, для которых за-
даны заводские нормы.
Так как часовой расход
то
горючего
Q-ceNe,
IN. 5
При выводе формулы (16.9) мы принимаем, что при заданном
п и рк удельный расход Се не изменяется при изменении темпе-
ратуры воздуха. Так как проверка регулировки карбюратора
производится на малой высоте, т. е. ниже границы высотности,
то Л'/следует определять по правилам, указанным в гл. VII, для
высот ниже границы высотности. При испытаниях самолетов, па
которых установлены двигатели с КН, лучше в процессе испы-
таний регулировать температуру воздуха перед карбюратором
при помощи заслонок промежуточного радиатора таким образом,
чтобы она равнялась температуре, для которой составлены нор-
мы расходов. В этом случае отпадает необходимость в приведении
полученных расходов горючего к стандартным условиям.
После окончательной регулировки карбюратора выполняют
горизонтальные площадки на ряде высот и определяют часовые
и километровые расходы горючего для какого-либо полетного ве-
са G для разных значений скорости по прибору 7ПР; при этом
подбор наивыгоднейших оборотов производят при помощи одно-
го из способов, рассмотренных в начале этого параграфа. Приве-
дение к стандартным условиям часовых расходов Q и километ-
ровых расходов q производится при //P=const, G=const и
Vnp=const.
По формуле (16.9) имеем
Q ~~ Ne ’
В горизонтальном полете
~ с^51/3 4-схРо|/Го5^
/V = --------=-- .
е 75TjB 75т]в1/'р
так как при наших условиях приведения рн~ const, = const
и М= const, то = const и = const.
Считая и т]в — const, получим
1 1 ът н
Ne 2 р 2 Тн ’
398
Глава XVI. Расходы горючего и дальность полета
откуда SQ 1 ЪТИ — = (16.10) Q 2 тн
Так как Q 4 V vt ’
то 8? =8£_ 1 Sr"_.Q q Q 2 тн
а следовательно, q = const. (16. 11)
Таким образом приведение к стандартным условиям при
1/пр = const сводится только к пересчету часовых расходов
горючего по формуле
$ст = <?ф + ^ = 3ф И
(16/12)
2 W
где Тст—Гф, а километровые расходы горю-
чего не изменяются.
Рассмотрим теперь, как производится пересчет кривых часо-
вых и километровых расходов горючего на другой полетный вес.
Способ такого пересчета, предложенный проф. В. С. Пышновым,
основан на предположении, что при одинаковом составе смеси
на данной высоте полета одной и той же мощности двигателя со-
ответствует одинаковый часовой расход горючего. Пусть в ре-
зультате летных испытаний была получена для какой-либо высо-
ты Н и полетного веса G зависимость часового расхода горюче-
го Q от скорости полета V (фиг. 16. 17, кривая 1). Для пересчета
этой кривой на измененный полетный вес необходимо определить
зависимость мощности двигателя от скорости полета для исход-
ного и нового веса.
Считая
после преобразования двух уравнений горизонтального полета:
G — -^-cy?SV2
75Ч^в = -1
§ 3. Расходы горючего у самолетов с высотным двигателем
399>
найдем
p0ASr n 4G2
N = 22—±1 у з +-----------------.
е 150т]в 150т|ВгсЛэфроДЗУ
(16. 13)
Подставив вместо V в м/сек
ние (16. 13) к такому виду:
V в км/час, приведем
_и\3
юо/
уравне-
(16.14)
2450
где Кг = 18 — , а К2 = —, пр
Т|В ^В^эф
размах самолета; так как
= (0,9 ч-0л95)/, а 71в в среднем
равно 0,75 — 0,8, то можно при-
нять ^в/э2ф = 0,65/2, где /—размах
самолета; после подстановки по-
„ 3770 п
лучим, ЧТО Л2 =-----• Для опРе"
/2
деления величины восполь-
зуемся данными для режима по-
лета на I/max на этой же высоте
/У; по формуле (16.14) найдем,
что
Фиг. 16. 17. Пересчет кривой ча-
сового расхода горючего на дру-
гой полетный вес.
Определив значения 7G и Ki, подсчитываем по формуле (16. 14)
значения Ne в зависимости от скорости для исходного и нового
полетного веса (кривые 2 и 3 на фиг. 16. 17).
После этого, исходя из основного предположения, что равным
мощностям двигателя соответствуют одинаковые часовые расхо-
ды горючего, перестраиваем кривую 1 часовых расходов; пример
такого перестроения для одной точки показан на фиг. 16. 17,
причем точки А и А' относятся к исходному весу, а В и В' — к но-
вому. После определения кривой часовых расходов можно найти
Q
зависимость километровых расходов q— — от скорости для но-
вого веса.
Основной недостаток описанного способа пересчета расходов
на другой вес (или на другие температурные условия) заклю-
чается в том, что значение Къ пропорциональное —, опреде-
400
Глава XVI. Расходы горючего и дальность полета
ляется для режима Vmax, а затем принимается постоянным для
всех других скоростей полета. Однако связанная с этим ошибка
практически невелика, так как на окончательный результат
влияет не ошибка в абсолютной величине —, а только ошибка
из-за разницы значений ~ для исходного и нового веса в пе-
а $
Фиг. 16. 18. Зависимость мощности (а) и давления наддува
Pk (б) от числа оборотов п и высоты полета Н при наименьших
удельных расходах горючего.
Фиг. 16. 19. Зависимость часового
расхода горючего Q от высоты
полета Н для разных постоянных
чисел оборотов п.
В некоторых случаях, особенно для тяжелых самолетов с
большим запасом горючего, целесообразно пользоваться сле-
дующим расчетно-экспериментальным способом определения рас-
ходов горючего, основанным на
применении так называемой
«условной поляр ы».
При помощи графиков, пред-
ставленных на фиг. 16. 12 и
16. 13, легко построить график
(фиг. 16. 18), на котором дана
зависимость мощности Ne и дав-
ление наддува рк от числа оборо-
тов и высоты полета при наи-
меньших удельных расходах го-
рючего. Выбрав какую-либо вы-
соту полета, выполняют на ней
5—6 площадок при комбинациях
п и рк, соответствующих кривым
фиг. 16. 18. На этих площадках определяют скорость полета и
часовой расход горючего для каждой пары значений п и р^ Про-
делав аналогичные испытания на 4—5 высотах, по результатам
этих испытаний строят график зависимости часового расхода го-
рючего Q от высоты полета для разных постоянных оборотов п
(фиг. 16. 19).
§ 3. Расходы, горючего у самолетов с высотным двигателем
401
Далее, по результатам тех же испытаний строят „услов-
ен
ную поляру", представляющую зависимость — от с - для под-
Ъ У
счета этих величин пользуются следующими формулами:
_ 207,4 G
СУ~ S И? ’
сх
~в= si4 ’
J
(16.15)
где Vi нужно брать в км/час. Значения Ne следует определять по
фиг. 16. 18 и вводить в них указанным ранее способом поправку
на отклонение температуры от стандартной. Если через получен-
ные экспериментальные точки трудно провести общую условную
поляру для всех высот, то про-
водят отдельные поляры для
каждой из высот (фиг. 16.20).
При помощи полученных по-
ляр и по экспериментальным
значениям рк следует произ-
вести корректировку кривых
расчетных мощностей и давле-
ний наддува рк, изображенных
на фиг. 16. 18.
После окончательной увяз-
ки всех материалов получают
графики, вид которых показан
на фиг. 16.18—16.20. Поль-
зуясь этими графиками, при
помощи обычных методов аэро-
динамического расчета можно
определить часовые и километ-
Фиг. 16.20. «Условные поляры» для
нескольких высот полета.
ровые расходы горючего для
любого веса, высоты полета и
температурных условий, а так-
же определить соответствующий режим работы двигателя и его
потребную мощность. Необходимо отметить, что при этих рас-
четах, в отличие от.обычного аэродинамического расчета, по
формулам (16. 15) определяется не потребная для горизонталь-
ного полета тяговая мощность, а потребная мощность двига-
теля Ne.
Применение «условной поляры» особенно удобно в тех слу^
чаях, когда по результатам испытаний необходимо составить так
называемые крейсерские графики для определения рас-
хода горючего, скорости, оборотов и давления наддува в гори-
зонтальном полете для разных полетных весов в широком диа-
пазоне скоростей и высот полета.
!б 772
402
Глава XVI. Расходы, горючего и дальность полета
«Условную поляру» можно применить также для пересчета
характеристик набора высоты на разных режимах работы дви-
гателя. Не останавливаясь на подробностях такого пересчета,
поскольку при этом используются обычные методы аэродинами-
ческого расчета, укажем лишь, что — для режима набора вы-
соты следует подсчитывать по очевидной формуле
/ Gvy\
56 • 103 [Ne-—2 / Д
\ 75тш /
(16. 16)
где Vi — в км/час, a Vy — в м/сек. После того как по результатам
летных испытаний получена «условная поляра» для режима на-
бора высоты, пользуясь ею и графиками, представленными на
фиг. 16. 18 и 16. 19, можно рас-
рючего при наборе высоты в стан-
считать режим подъема для
любого полетного веса и за-
данного режима работы дви-
гателя. В случае значительного
изменения веса самолета при
наборе высоты из-за расхода
горючего, расчет приходится
производить методом последо-
вательных приближений.
В заключение этого пара-
графа рассмотрим вопрос о
приведении расходов
горючего при наборе
высоты к стандартным
условиям. Пусть при по-
лете в фактических условиях
дартных условиях. на каком-либо определенном
режиме работы двигателя, на-
пример, номинальном, была получена зависимость расхода го-
рючего при подъеме 1Гн.ф от высоты полета Нр (фиг. 16.21). При
полете в фактических условиях в интервале высот ^Н=Нр2—Нц
расход горючего равнялся ДИ^н.ф (фиг. 16.21). Найдем расход
горючего в стандартных условиях в том же интервале Д//.
Так как
т,
где Q — часовой расход горючего*, а Ат — время прохождения
интервала ДЯ, то
А ^н. ст ^СТ Атст
£ 4. Расходы горючего у самолетов с турбореактивными двигателями 403
Учитывая, что
Q = CeNe
и считая = const, получим
ътн
Тн’
Сет
Оф
5(2 5ЛГе
-|-----== 1 ---------= 1 4~ Nt
Q Ne
где Nt может быть найдено по графикам гл. VII, а оТн-~
= Тст —Тф. Следовательно,
ДИ'н.ф \ 7'я/^Ф
Отношение следует определять по фактической барограмме
Дтф
полета и по барограмме для стандартных условий, подсчитанной
одним из способов, указанных в гл. X. Суммируя расходы горю-
чего ДИ^н.сгг от высоты Н=0 до- произвольной высоты Я, получим
кривую №н.от=/(Я) для стандартных условий (фиг. 16.21). Сле-
дует указать, что приведение расходов на режиме набора высоты
целесообразно производить лишь для тяжелых самолетов, а для
истребителей можно без особого ущерба для точности отказаться
от него.
Расходы горючего при наборе высоты для измененного по-
летного веса определяются либо одним из указанных выше рас-
четных способов, либо по формуле
Д1Гн2 _Дт2
ДП7Н1 Дт/
где индекс «2» относится к новому весу, а индекс «1» — к исход-
ному; время Дт2 набора интервала высоты \Н для самолета с
измененным полетным весом определяется одним из способов,
рассмотренных в гл. X.
§ 4. РАСХОДЫ ГОРЮЧЕГО У САМОЛЕТОВ С ТУРБОРЕАКТИВНЫМИ
ДВИГАТЕЛЯМИ
Рассмотрим вначале вопросы, связанные с определениехм рас-
ходов горючего в горизонтальном полете. Для
самолетов с ТРД определение сетки километровых и часовых рас-
ходов горючего при горизонтальном полете значительно проще,
чем для самолетов с поршневыми двигателями и винтом изменяе-
мого шага, так как при заданных полетном весе, высоте полета
и температуре воздуха скорость реактивного самолета однознач-
но связана с оборотами двигателя. Применение закона подобия,
*26
401
' ' Глава XVI. Расходы горючего и дальность полета
в частности, метода оборотов, еще более упрощает задачу, так
как позволяет, как мы это сейчас покажем, по результатам испы-
таний с одним полетным весом определять расходы горючего для
других весов.
В гл. XI было доказано, что при соблюдении постоянства
параметров Gnp=G — и лпр = л1/ — горизонтальный полет
Рн V тн
самолета с ТРД происходит на подобных режимах, т. е. при
М = const и- Гу = const. Следовательно, в горизонтальном по-
лете
М=А(Опр, ппр). (16.17)
Для турбореактивных двигателей с нерегулируемым соплом
применим закон подобия, в соответствии с которым [см. гл. VII,
§ 5, формулу (7.53)]
(SQ)np=SQ -]/^=Л(М, лпр). (16.18)
Рн У 1 н
В небольшом диапазоне изменения параметров допустимо счи-
тать коэффициент полноты сгорания 8 постоянным. Тогда
Q„P = Q— |/^=/з(М,«п„). (16.19)
Рн У н
Из сопоставления формул (16.17) и (16.19) следует, что при-
веденный расход горючего при горизонтальном полете зависит от
Gnp и М, т. е.
Qnp fi(Gnp, М).
(16. 20)
На фиг. 16.22 показан примерный вид сетки приведенных
расходов горючего QnP в зависимости от Gnp и числа М для само-
лета с ТРД.
Километровый расход горючего в горизонтальном полете
равен
или, заменяя Q его значением по формуле (16.19), а ско-
рость V выражением Ма= М )/ kgl<Tu , получим
л = q _ Qnp
Р Рн л0М’
(16.21)
где ай — скорость звука в нормальных условиях (а}—340,2 м/сек).
Сопоставляя формулу (16.21) с формулами (16.17) и (16.20).
§ 4. Расходы горючего у самолетов с турбореактивными двигателями 405
мы видим, что в горизонтальном полете приведенный километро-
вый расход #пр зависит от GnP и М:
^ = 7^=75 (Gnp. М). (16.22)
Рн
Типичная сетка приведенного километрового расхода в зависи-
мости от GnP и М представлена на фиг. 16.23.
ных часовых расходов горючего в зависим
мости от приведенного веса и числа М.
В гл. XI было указано, что для определения из полетных
испытаний сетки кривых M=/(Gnp, Гпр) или M=/(Gnp, япр)
(фиг. 16.24) необходимо выполнить на ряде высот установив-
шиеся горизонтальные площадки во всем диапазоне скоростей
полета. Если на этих площадках производить одновременно
с замерами скорости и числа оборотов замеры часового рас-
хода горючее© Q, то, кроме сетки М=/(Опр, ипр), могут быть
построены сетки Qnp=/(Gnp, М) и ^np=/(Gnp, М). Так как
каждой высоте полета при летных испытаниях соответствует
определенное значение Gnp, то, подсчитав для каждой пло-
щадки на этой высоте число М, приведенный расход горю-
чего Qnp=Q—]/'и 9 =£пр а также «пр = п1/^по-
Рц V Tff «о™ г ‘ я
лучим по испытаниям на данной высоте одну из кривых фи-
гур 16.22 и 16. 23; проделав аналогичную обработку для
остальных высот, получим и остальные кривые.
406
Глава XVI. Расходы горючего и дальность полета
- ^7 V
- ,5
1
М
Фиг. 16.23. Типичный вид сетки приведен-
ных километровых расходов горючего в
зависимости от приведенного веса и
числа М.
Фиг. 16.24. Зависимость числа М в горизонтальном полете от
приведенного веса и приведенного числа
оборотов двигателя.
§ 4. Расходы горючего у самолетов с турбореактивными двигателями 407
Имея представленные на фиг. 16.22—16.24 сетки обобщен-
ных характеристик горизонтального полета, полученных по ре-
зультатам летных испытаний, легко определить часовой или ки-
лометровый расход горючего для любых условий
горизонтального полета. Действительно, пусть тре-
буется найти километровый и часовой расход горючего в гори-
зонтальном полете при полетном весе самолета G, скорости по
прибору 7ПР, высоте полета Нр и температуре наружного воз-
духа Тн. Найдя указанным ранее способом по Vnp и ТЛр индика-
торную скорость V-i и зная для высоты Нр давление воздуха рн,
р} И.
находим Gnp=G— и М=——. После этого по фиг. 16.24
Рн 44,41/ рп
находим по GnP и М приведенные обороты ппр. По GnP и М
по фиг. 16.22 и 16.23 находим QnP и #ПР, а затем подсчитываем
для наших условий полета
Ро ' То
В некоторых частных случаях удобнее вместо рассмотренных
выше графиков применять графики другого вида. Так, при за-
данном полетном весе самолета G каждому значению Gnp соот-
ветствует определенное значение давления воздуха рн. следова-
тельно, и определенная барометрическая высота Нр\ кроме того,
при данном Нр каждому числу М соответствует определенное
значение индикаторной скорости Vi. Из формул (16. 19), (16.20)
и (16.22) видно, что при G== const
-^- = ?1(Яр, V;), (16.23)
V 1 н
q = V,.). (16.24)
а в гл. XI было показано, что в этом случае (G = const)
У, = ъ(Нр, М (16.25)
Следовательно', для постоянного полетного веса G могут быть
построены графики, представляющие зависимость —/=, q и пПР
у
от индикаторной скорости Vi или от приборной скорости Г,„,
(точнее Крииф) для разных постоянных высот Нр (фиг. 16. 25,
16.26 и 16.27).
408
Глава XVI. Расходы горючего и дальность полета
Из формул (16.23)’—(16.25) вытекает следующее важное
правило: для заданного полетного- веса G при заданной высоте
полета по высотомеру (/7p=const) километровый расход q зави-
Фиг. 16. 25. Типичный вид зависимости
Q
—— от скорости по прибору и вы-
V Тн
соты полета для постоянного полет-
ного веса.
Фиг. 16.26. Типичный вид
зависимости километрового
расхода q от скорости по
прибору и высоты полета
для постоянного полетного
веса.
сит только от индикаторной (или приборной) скорости, но не за-
висит от температуры воздуха; следовательно, при горизон-
тальном полете на одной и той же высоте и на
Фиг. 16.27. Типичный вид зависимости при-
веденного числа оборотов от скорости по при-
бору и высоты полета для постоянного полет-
ного веса.
одной и той же скорости по прибору километ-
ровый расход горючего остается неизменным,
независимо от температуры воздуха. Аналогии-
§ 4. Расходы, горючего у самолетов с турбореактивными двигателями 409
ное правило относится и к величинам рту— и пПР==/г р/сле-
довательно, при одних и тех же значениях Нр и Vnp часовой рас-
ход горючего Q и потребные для горизонтального полета обо-
роты изменяются по следующему закону:
Q2
Qi
Таким образом при горизонтальном полете на заданных высоте
Нр и скорости Упр часовой расход горючего и потребные обо-
роты в летних условиях выше, чем в зимних.
Фиг. 16.28. Часовой расход горючего в
стандартных условиях в зависимости от
скорости по прибору и высоты полета.
Графики, изображенные на фиг. 16.25 и 16.27, легко пере-
строить для стандартных температурных условий на каждой
высоте полета. Для этого полагаем Тя = и пСт=лПР 1 / — ,
V т9
где Гст — стандартная температура на данной высоте Нр. Для
иллюстрации на фиг. 16.28 и 16.29 показаны типичные зави-
симости часового расхода горючего и оборотов от высоты по-
лета и скорости по прибору для стандартных условий. Анало-
гичные графики легко построить и для любых других темпера-
турных условий.
410
Глава XVI. Расходы горючего и дальность полета
Таким образом для самолетов с ТРД определение подробной
сетки расходов горючего в горизонтальном полете сводится к
выполнению площадок на разных скоростях на нескольких вы-
сотах, а затем к пересчету полученных обобщенных сеток при
помощи формул, основанных на законах подобия.
Как показывают расчеты и эксперименты, в некоторых слу-
чаях на самолетах, на которых установлено несколько турбо-
реактивных двигателей, можно достигнуть уменьшения кило-
метрового расхода q, если в горизонтальном полете работает
только часть двигателей, а остальные двигатели вы-
Фиг. 16.29. Число оборотов двигателя в стандарт-
ных условиях в зависимости от скорости по при-
бору и высоты полета.
тем, что- у ТРД удельный расход топлива, приходящийся на
1 кг развиваемой силы тяги, уменьшается по мере увеличения
числа оборотов, в связи с чем может оказаться, что, несмотря
на сопротивление остановленных двигателей, выгоднее получать
тягу, необходимую для горизонтального полета на данной ско-
рости, путем перевода части двигателей на большие обороты и
выключения остальных двигателей, чем при работе всех двига-
телей на средних оборотах. При проведении испытаний для
определения расходов горючего на самолетах с несколькими
ТРД целесообразно на каждой высоте на 1—2 скоростях полета
определить расход горючего при остановке части двигателей.
Перейдем теперь к приведению расхода горю-
чего' при наборе высоты к стандартным усло-
виям, причем мы будем предполагать, что подъем при разных
температурных условиях производится при одном и том же числе
оборотов (обычно номинальном).
$ 4. Расходы горючего у самолетов с турбореактивными двигателями 411
Проделав вывод, аналогичный приведенному для самолетов
с поршневыми двигателями (§ 3), получим, что отно-шение рас-
ходов горючего в стандартных и фактических условиях в одном
и том же интервале высот ДЯ=Яр2 — НР1 (см. фиг. 16. 21) равно
Д^н.ст _QctAtct
Д1ГН ф ”"рф ’
(13. 26)
где А Тс,, и Дтф—время набора высоты ДЯ соответственно' в
стандартных и фактических условиях, определяемое по соответ-
ствующим барограммам полета.
Как было показано в гл. VII Гем. формулу (7.58)], при по-
стоянном числе оборотов п
Qct
Q$
oQ 1
l+-T = l+-r(l-'.l
4.
TH M
nnp dQ M dQ
где г =-ПЕ —- и rM =-------—показатели изменения часового
" Q дппр м Q <)М
расхода горючего в зависимости от изменения приведенного числа
оборотов и числа М. Типичный вид графиков показателей гп и
приведен на фиг. 7. 23 и 7. 24. Так как показатель гм при числах
ЛА, соответствующих режиму набора высоты, очень мал (см.
фиг. 7.23), то с достаточным приближением можно считать, что
Qct 1 И
~ = 1 + — (1 —гп), (16.27)
L * н
где 8Т// = Тст-' Тф. Как видно из фиг. 7.24, показатель гп мо-
жет быть принят постоянным. Если в качестве среднего
значения этого показателя принять гл = 4, то
Qct 3 н
Рф 2 Тн
Следовательно,
А^н.ст
Д^н.ф
3 \ Дтст
2 Zjj у Дтф
(16.28)
(16.29)
Определив расходы горючего при наборе высоты в стан-
дартных условиях для ряда интервалов высот ДЯЛ суммирова-
нием находим зависимость этого расхода от высоты полета, т. е.
Wn.CT=f(Hr).
412
Глава XVI. Расходы, горючего и дальность полета
§ 5. КОНТРОЛЬНЫЕ ПОЛЕТЫ НА ДАЛЬНОСТЬ И СОСТАВЛЕНИЕ
ГРАФИКОВ ПОЛЕТА
В предыдущих параграфах было показано, каким образом
определяются по результатам летных испытаний расходы горю-
чего при разных режимах полета для различных полетных ве-
сов и температур воздуха. На основании этих материалов со-
ставляются инструкции по выполнению полетов на дальность и
так называемые крейсерские графики для определе-
ния расхода горючего, скорости и оборотов, а также давления
наддува (для самолетов с поршневыми двигателями) в горизон-
тальном полете с разными полетными весами. Инструкции
должны содержать весь необходимый материал для расчета
дальности и продолжительности полета самолета на любом ре-
жиме. Крейсерские графики применяются самого различного
вида в зависимости от назначения и типа самолета, использо-
вания их на борту самолета или при предварительных расчетах,
необходимой точности и т. п. В одних случаях строят отдельные
крейсерские графики для каждой высоты полета, но для пере-
менных полетных весов, в других случаях график строят для
определенного полетного веса, но для разных высот полета.
Для иллюстрации на фиг. 16.30 и 16.31 приведены два ва-
рианта крейсерских графиков. На фиг. 16.30 представлен обра-
зец крейсерского графика для определенной высоты полета, но
для разных полетных весов. На этом графике дана зависимость
литровой дальности, т. е. дальности на 1 л израсходо-
ванного горючего1, от скорости по прибору и полетного веса.
На этом же графике показаны наивыгоднейшие обороты двига-
теля и давления наддува, а также мощности двигателя, необ-
ходимые для горизонтального полета на заданном режиме.
Графики такого вида удобны для самолетов, у которых вес из-
меняется в широких пределах, например, для тяжелых бомбар-
дировщиков.
Представленный на фиг. 16.31 крейсерский график построен
для заданного' среднего полетного веса. На нем дана зависи-
мость часового расхода горючего, наивыгоднейших оборотов и
давления наддува от высоты полета по высотомеру, скорости
по прибору и температуры воздуха. Одновременно на том же
графике приведена номограмма, позволяющая определять
истинную скорость полета по скорости по прибору, высоте и тем-
пературе воздуха. Графики подобного вида удобны для самоле-
тов с относительно небольшим изменением полетного- веса.
Для самолетов, полетный вес которых изменяется в широких
пределах, кроме крейсерских графиков для горизонтального по-
лета, строят также графики для набора высоты на разных
режимах работы двигателя (Авеном.; 0,75 А/еном и т. п.).
1 Очевидно, что литровая дальность является величиной, обратной кило-
метровому расходу горючего.
§ 5. Контрольные полеты на дальность
413
Полученные в процессе летных испытаний расходы горючего
принято проверять в длительном полете на определенных зара-
нее выбранных режимах; такие полеты обычно называют кон-
трольными полетами на дальность или продол-
жительность. Эти полеты проводят по какому-либо мар-
шруту или, в случае трудности организации полета по мар-
Фиг. 16. 30. Образец крейсерского графика для постоян-
ной высоты полета.
труту, в зоне аэродрома. Одновременно с проверкой расходов
горючего в этих полетах проверяется работа и надежность всей
материальной части в нормальных эксплоатационных условиях.
Прежде чем перейти к описанию контрольных полетов, вкрат-
це остановимся на принятой терминологии в вопросах даль-
ности и на расчете графика перелета.
Технической дальностью полета называют путь,
пройденный самолетом до полного выгорания горючего при от-
сутствии ветра. Обычно в техническую дальность включается
путь, пройденный только при наборе высоты и в горизонтальном
полете, однако в некоторых случаях включается и путь при пла-
нировании. Аналогично, технической продолжитель-
Решение
1 2
3 -» 4
Ответ
Точка 4
Фиг. 16.31. Образец крейсер
ского графика для постоянно
го полетного веса. Пример ре-
шения. Дано: //=4500 ля;
—40° С; 1/пр =230 км/час.
В точке 4 читаем: УИСт~
=290 км/час; Q = 336 л/час\
/г =1835 об/мин; p*=570 мм
рт. ст.; первая скорость нагне-
тателя.
Глава XVI. Расходы горючего и дальность полета
§ 5. Контрольные полеты на дальность
415
ностью полета называется время полета до полного израсхо-
дования горючего; как правило, в техническую продолжитель-
ность включают только время, затрачиваемое на набор высоты
и на горизонтальный полет.
Технические дальность и продолжительность полета практи-
чески не могут быть реализованы по ряду причин. При полете
самолетов строем, как показывает опыт, расходы выше, чем при
полете одиночных самолетов. Сбор соединения после взлета
также приводит к уменьшению дальности полета. Неточное вы-
держивание заданного маршрута, необходимость изменения его
из-за особенностей данной метеорологической обстановки, откло-
нения от заданных режимов полета по скорости, высоте и по
режиму работы двигателя, влияние ветра и тому подобные об-
стоятельства приводят к тому, что практическая дальность и
продолжительность полета меньше, чем техническая. В связи с
этим наряду с технической дальностью и продолжительностью
полета применяют понятие тактической дальности и
тактической продолжительности полета, где
учтены регламентированные поправки на уменьшение дальности
и продолжительности полета по указанным выше причинам.
Как было указано ранее, дальность и продолжительность по-
лета зависят от режимов полета самолета. Обычно- различают
следующие режимы: 1) дальность и продолжительность полета
на режиме максимальной горизонтальной ско-
рости; 2) скоростная дальность и продолжи-
тельность, обычно на режиме 0,9 Утах для истребителей и
0,8 Утах для бомбардировщиков и транспортных самолетов;
3) максимальная дальность на режиме, при котором
километровый расход является минимальным, и, наконец,
4) максимальная продолжительность на режиме,
когда часовой расход горючего является минимальным. Во всех
случаях, когда говорится о характеристиках дальности и про-
должительности полета, следует точно оговаривать, рассматри-
вается ли техническая или тактическая дальность и для какого
именно режима полета; отсутствие таких указаний может при-
вести к недоразумениям и ошибочным толкованиям.
Расчет графика перелета подробно рассматривается
в курсах аэродинамического расчета, поэтому мы лишь бегло
коснемся этого вопроса. Прежде всего должен быть определен
профиль полета, т. е. зависимость высоты полета от
пройденного расстояния. Далее должна быть выбрана ско-
рость для каждого горизонтального участка полета. Если
полет производится на режиме скоростной дальности, то- в за-
висимости от веса самолета определяется максимальная ско-
рость и задается скорость полета, составляющая определенный
процент от максимальной; для режима максимальной дальности
на каждом горизонтальном участке скорость подбирается в за-
висимости от веса самолета таким образом, чтобы километровый
415
Глава XVI. Расходы, горючего и дальность полета
расход горючего был минимальным, а для режима максималь-
ной продолжительности минимальным должен быть часовой рас-
ход. В зависимости от емкости топливных баков или от варианта
загрузки самолета определяется полный запас горюче-
г о, т. е. общее количество горючего, заливаемое в баки. После
этого по результатам летных испытаний определяется расход
горючего на работу двигателя на земле, на набор заданной вы-
соты, на планирование, на круг над аэродромом перед заходом
на посадку, а также н е в ы р а б а т ы в а е м ы й остаток
горючего (он определяется специальными испытаниями на
земле). Разность между полным запасом горючего и расходом
горючего на указанные этапы полета или работы на земле дает
располагаемый запас горючего для горизонтальных
участков полета.
Если полетный вес изменяется в процессе полета незначи-
тельно, то весь расчет проводят для среднего полетного веса,
равного
G = G — ,
^ср нач 2 ’
где GIia4— взлетный вес, a Grop— полный запас горючего.
В случае значительного изменения полетного веса маршрут
разбивают на несколько участков и определяют средний полет-
ный вес для каждого участка. При расчете расходы горючего,
время и путь определяют отдельно для каждого этапа полета,
причем границей этапа является либо изменение режима полета
(переход от набора высоты к горизонтальному полету, измене-
ние высоты, скорости или режима работы двигателя), либо рез-
кое изменение полетного веса самолета (сброс грузов или бомб).
При подсчете веса самолета на каждом этапе принимается, что
расход масла составляет определенный процент от рас-
хода горючего.
Определив километровые и часовые расходы горючего для
каждого горизонтального участка и зная располагаемый запас
горючего для этих участков, находят дальность и продолжитель-
ность полета на горизонтальных участках. Просуммировав пути,
проходимые при наборе высоты и на горизонтальных участках
полета, находят техническую дальность полета, а просуммиро-
вав время полета на этих же этапах, находят техническую про-
должительность полета.
В результате расчета составляется график полета, на кото-
ром строится по времени высота полета и скорость по прибору,
пройденный путь при штиле, обороты двигателя, давление над-
дува, полетный вес самолета и остаток горючего в баках
(фиг. 16.32); этим графиком руководствуется экипаж само-
лета, совершающего контрольный полет на дальность. Длина
маршрута или время контрольного полета намечаются так, чтобы
§ 5. Контрольные полеты на дальность
417
расход горючего составлял примерно 80% полною запаса горю-
чего.
Самолет, на котором совершается контрольный полет на
дальность, должен быть оборудован необходимой аппаратурой
для измерения высоты и скорости полета, температуры воздуха,
параметров работы двигателя и расхода горючего. Перед поле-
том измеряется количество горючего и масла, заливаемых в
баки самолета. В процессе полета производится запись времени
Фиг. 16.32. Образец графика полета на дальность. 6(.ам—полет-
ный вес самолета; ДСТ — вес остатка топлива.
начала и конца каждого этапа, а также показаний всех приборов;
на горизонтальных участках соответствующие записи произво-
дятся через каждые 10—30 мин. в зависимости от продолжи-
тельности полета.
После контрольного полета сливается и взвеши-
вается горючее из топливных баков и масло, в резуль-
тате чего определяется расход горючего и масла за полет. Для
контроля целесообразно производить взвешивание самолета до
полета и после него.
Обработка материалов контрольного полета на дальность или
продолжительность производится с целью сравнения получен-
ных на горизонтальных участках этого полета километровых и
часовых расходов горючего, приведенных к стандартным усло-
виям, с соответствующими расходами по графикам, построен-
27 772
418
Г лава XVI. Расходы горючего и дальность полета
ным на основе предшествовавших летных испытаний. Расход
горючего на горизонтальных участках определяется по записям
показаний счетчиков расхода горючего, а пройденный путь опре-
деляется по записям скорости по прибору, температуры воздуха
и высоты полета. Приведение к стандартным условиям часового
и километрового расхода горючего следует производить по со-
ответствующим формулам, приведенным в предыдущих парагра-
фах этой главы. Фактический расход горючего за весь полет, по-
лученный по взвешиваниям, целесообразно сравнить с расходом,
определенным по показаниям счетчика расхода горючего, для
того чтобы убедиться в правильности его показаний; при хорошо
налаженном эксперименте разница не превышает 2—3°/о.
Во всех случаях, когда это возможно, необходимо по записям
экипажа и по лентам самописцев построить фактический
график перелета, аналогичный представленному на
фиг. 16.32, а затем по крейсерским графикам и по другим ма-
териалам испытаний рассчитать расходы горючего для факти-
ческих режимов перелета. Сравнение полученных расчетных
расходов с фактическими позволит оценить точность графиков
расходов горючего не только для горизонтального участка, но и
на всех других этапах полета.
Фактический воздушный путь при контрольном полете может
быть определен при помощи планиметрирования площади, огра-
ниченной кривой У=/(т) и осью абсцисс. Обычно вместо плани-
метрирования суммируют элементарные пути Дт, где
VCp — средняя истинная скорость в интервале времени к т.
Если на основании результатов контрольного полета должна
быть определена техническая дальность или продолжительность
полета, то расчет производится тем же способом, что и указан-
ный ранее предварительный расчет, но значения километровых
расходов на горизонтальных участках берутся фактические, а не
по графикам.
В заключение этой главы необходимо указать, что расходы
горючего для ряда экземпляров самолетов одного и того же типа
могут несколько отличаться друг от друга вследствие производ-
ственных отклонений при изготовлении планера и двигателя, а
главное из-за отклонений в регулировке топливных агрегатов.
Так как отклонения от средних цифр могут достигать довольно
больших значений (до+Ю°/о, а иногда и выше), необходимо
в процессе испытаний систематически проверять правильность
регулировки топливных агрегатов. Кроме того, большое внима-
ние следует уделять проверке устойчивости и стабильности ра-
боты карбюраторов и насосов непосредственного впрыска. Вслед-
ствие большого влияния состава смеси на расходы горючего сле-
дует, при всех испытаниях, а также при контрольных полетах
строго следить за соблюдением эксплоатационных правил по
использованию высотного корректора или других способов
обеднения смеси. Для получения более надежных сред-
§ 5. Контрольные полеты на дальность
419
них значений расходов горючего для самолетов, строящихся
большими сериями, принято крейсерские графики для них строить
на основе обработки результатов испытаний нескольких само-
летов.
Вопросы, связанные с влиянием ветра на даль-
ность полета, подробно разбираются во всех курсах аэроди-
намического расчета, поэтому мы их здесь опускаем.
Глава XVII
ИСПЫТАНИЯ ТУРБОРЕАКТИВНЫХ ДВИГАТЕЛЕЙ
§ 1. ОПРЕДЕЛЕНИЕ СУММАРНЫХ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ
Из закона подобия (см. гл. VII) известно, что для данного
конкретного двигателя приведенные тяга и расход топлива
Рпр = Р^-, (8Q)np = SQ-^l/^ (17.1)
Рн Рн V 1 н
являются функциями только приведенных скорости и оборо-
тов:
v-=vV(17-2)
т. е.
Р„₽= Л («пр. Vnp), (8Q)„p=А (»пр) vnp). (17.3)
Зная эти функции, мы можем подсчитать тягу Р и расход 8Q
для любых значений ря, V, п, Тн- Для этого сначала подсчиты-
ваем приведенные обороты и скорость, находим РПР и (8Q)nP
(8 — коэффициент полноты сгорания), а затем подсчитываем
фактические тягу и расход:
Р=Рпр-, SQ=(8Q)np —1./^-
Ро Ро * Го
(17.4)
Таким образом основная задача летных испытаний заклю-
чается в построении сетки зависимостей (17.3).
Для более детального анализа работы двигателя необходимо
оценить работу его отдельных агрегатов и получить их харак-
теристики. Для этого, в свою очередь, необходимо знать рас-
ход воздуха через двигатель ираспределение
температур и давлений по г азов оздушно м у
тракту. Та же теория подобия показывает, что приведенные
значения расхода воздуха, давлений и температур
£ /. Определение суммарных характеристик, двигателя
421
(17.5)
тоже являются функциями приведенных оборотов и скорости.
В этих формулах р' и Т' означают давление и температуру 1
в любой точке газовоздушного тракта.
Наиболее характерные точки газовоздушного тракта и при-
нятые обозначения давлений и температур в этих точках пока-
заны на фиг. 17. 1.
Фиг. 17. 1. Характерные точки газовоздушного тракта
ТРД и принятые обозначения давлений и температур.
Летные испытания ТРД производятся либо непосредственно
на том самолете, на котором установлен данный двигатель, либо
на специальных летающих лабораториях.
В качестве летающей лаборатории выбирается обычно бом-
бардировщик (двух- или четырехмоторный) с двигателями лю-
бого типа (поршневыми или турбореактивными), на который
можно легко подвесить испытываемый ТРД. Двигатель может
быть подвешен под фюзеляжем самолета, под крылом, либо
установлен на специальном пилоне (пирамиде) сверху фюзе-
ляжа, или в хвосте самолета. Желательно выбирать бомбарди-
ровщик с большой продолжительностью полета, позволяющей
в одном полете выполнить много замеров на достаточно боль-
1 Под давлением и температурой можно понимать как фактические зна-
чения физических величин, так и их значения для заторможенного потока.
Последние более полно характеризуют энергетические процессы в двигателе.
422 - Г лава XV П. Испытания турбореактивных двигателей
шом диапазоне выест и скоростей. Питание испытываемого дви-
гателя производится либо из основных баков самолета, либо из
специально установленных баков. Управление двигателем про-
изводится дистанционно из кабины летчика или наблюдателя.
Как выше было указано, суммарные характеристики двига-
теля представляются в виде кривых зависимости тяги и расхода
от оборотов ротора и скорости самолета. Поэтому при всех испы-
таниях необходимо измерять тягу, расход горючего, обороты
и скорость.
Сила тяги при установке на летающей лаборатории изме-
ряется следующим образом. Двигатель подвешивается на по-
движной раме1 (обычно на шарнирном параллелограме) таким
образом, что он может слегка .перемещаться в продольном на-
правлении под действием силы тяги. Эти перемещения ограни-
чиваются пружиной. В качестве пружины можно применять
обычный пружинный динамометр, показания которого непосред-
ственно дают тягу; можно также изменение длины пружины
измерять либо при помощи механических указателей перемеще-
ния (типа СОР), либо при помощи электрических датчиков (на-
пример, индукционного типа). Само собой разумеется, динамо-
метр должен быть тщательно оттарирован.
Так как в полете двигатель стоит под некоторым углом к
горизонту, то на динамометр будет действовать составляющая
силы веса самого двигателя. Поэтому из показаний динамометра
следует вычесть величину Gsin^, где G — вес двигателя,
& — угол наклона оси двигателя относительно плоскости гори-
зонта, который измеряется при помощи уклономера или инкли-
нографа (см. гл. XII).
Следует отличать внешнюю и внутреннюю тягу двигателя.
Под внешней тягой понимается суммарная тяга всего
двигателя, включая сопротивление обтекателя. Под внутрен-
ней тягой понимается внешняя тяга без сопротивления об-
текания, т. е. та часть тяги, которая обусловлена внутренними
процессами в двигателе и равна внешней тяге плюс внешнее со-
противление. Так как при испытании двигателя нас прежде
всего интересует именно внутренняя тяга, а динамометр замеряет
внешнюю тягу, то необходимо ввести поправку на внешнее со-
противление. Вообще, внешнее сопротивление неотделимо от
внутренней тяги и при изменении режима двигателя внешнее
сопротивление изменяется. Обычно условно считают, что внеш-
нее сопротивление двигателя при его работе имеет такую же
величину, как и в случае неработающего двигателя с закрытым
протоком. Исходя из этих соображений, внешнее сопротивление
обтекания находят следующим образом. Входное отверстие об-
текателя закрывают специальной крышкой так, чтобы получить
плавные передние обводы. Выходное отверстие тоже закрывают
крышкой, сведенной на конус. В специальном полете определяют
сопротивление полученного тела и его коэффициент сх. При
§ 1. Определение суммарных характеристик двигателя
423
испытаниях с работающим двигателем к показаниям динамо-
метра прибавляют величину сопротивления — capjSV? и полу-
чают условную внутреннюю тягу двигателя Р по формуле
P = P5aa+y^o5H-0sina>
где РзаМ — замеренная тяга по показаниям динамометра.
Обороты п, скорость V и сила тяги Р приводятся по форму-
лам (17. 2) и первой формуле.(17. 4). Расход топлива Q может
быть приведен по второй формуле (17.4), если известен коэффи-
циент полноты сгорания 3 для фактических условий и для усло-
вий приведения.
Очень часто делают приведение не к земным условиям, а к
высотным для каждой высоты отдельно. В этом случае под /?о
и То подразумевают стандартные значения этих величин на дан-
ной высоте per и Тет. Так как обычно на заданной барометриче-
ской высоте проводится серия испытаний, то считают рСт=рн и
делают приведение только по температуре. Если средние высоты
при проведении эксперимента мало отличаются друг от друга,
то вводят поправку и на давление. В этом случае расход топлива
тоже приводится по формуле
Qnp=Q-Tl/K (17.6)
Рн V тн
так как при введении малых поправок можно считать 3=const.
Типичный график этого типа приведен в виде примера на
фиг. 17.2.
Часто вычисляется удельный импульс
или удельный расход топлива.
= A = WO
У* р р v 7
При всех испытаниях в полете скорость, естественно, не мо-
жет быть меньше эволютивной скорости самолета. Поэтому
основным недостатком летных испытаний является отсутствие
характеристик при малых скоростях полета *. Этот пробел может
быть частично восполнен, если имеются характеристики двига-
теля, определенные на стенде. В самом деле, в этом случае из
стендовых испытаний имеем кривую /\P=/(nnp) при V=0. Для
1 Заметим, что для конструктора самолета знать такие характеристики
не нужно, так что этот недостаток существенен только при изучении пол-
ных характеристик самого двигателя.
424
Глава XVII. Испытания турбореактивных двигателей
заданных оборотов п на высоте Н вычисляем приведенные обо*
роты иПр=п ] / —,далее определяем РПР и Р=Рпр_.Таким об-
V тн р)
разом для любой высоты можем подсчитать величину тяги Р
при V=0. Для расхода горючего таким путем можно пересчи-
Фиг. 17.2. Характеристики двигателя, получен-
ные в полете.
Р JT / 'J'
тать только величину (8Q)/y = (8Q) пр — 1/ —. Если известен
Ро у г0
коэффициент 8 для данного режима двигателя, то можно под-
считать и расход топлива, но, к сожалению, он обычно неизве-
стен. Именно коэффициент 8 может очень сильно изменяться по
высоте.
§ 2. ОПРЕДЕЛЕНИЕ РАСХОДА ВОЗДУХА И ГАЗОВ
В тех случаях, когда двигатель работает не совсем нормально
и расчетные характеристики не сходятся с фактическими, необ-
ходимо выяснить причины расхождения. Иногда при испытании
опытных самолетов расчетные значения летных характеристик
расходятся с полученными фактически. В этом случае также
надо проверить работу двигателя.
Расход воздуха и расход газов являются наиболее важными
характеристиками, определяющими вместе с числом оборотов
§ 2. Определение расхода воздуха и газов
425*
режим работы всех агрегатов двигателя. Поэтому эти величины
необходимо определять наиболее точно. Если известен расход
топлива, то достаточно определить только одну из этих величин,,
так как они связаны соотношением
Gr— GJ+Qc,
где Qc — расход топлива за 1 сек.
Расход воздуха можно определять разными способами. Во-
первых, можно в канале установить «гребенку» с некоторым
числом (6—12) приемников скорости, расположенных по диа-
метру, и определять поле скоростей в канале, после чего рас-
ход получать интегрированием. Недостатком этого способа яв-
ляется громоздкость аппаратуры и неточность, связанная с до-
пущением неизменности профиля скоростей по всем диаметрам;
частично последний недостаток можно устранить, устанавливая
вторую гребенку по другому диаметру.
Более простой способ заключается в установке одного прием-
ника скорости в середине канала или в измерении перепада
давлений между статическим давлением на стенке канала и ста-
тическим давлением атмосферного воздуха. В обоих случаях
необходимо вводить поправочные коэффициенты на неравномер-
ность поля или потери, для чего при предварительных стендо-
вых испытаниях производится измерение расхода как этими
способами, так и при помощи специального насадка с заранее
известным коэффициентом расхода, устанавливаемого перед
каналом.
Все эти методы недостаточно точны. Поэтому в настоящее
время предпочитают измерять расход газов Gr по показаниям
насадков полной температуры и полного давления, установлен-
ных в реактивном сопле или удлинительной трубе.
Напишем известные уравнения расхода газов через реактив-
ное сопло:
для докритического режима истечения из сопла
для закритического режима
Здесь р40 и 740—-давление и плотность адиабатически за-
торможенного потока в реактивном сопле;
kr—коэффициент адиабаты для газов;
F— площадь сопла на срезе;
р. —коэффициент расхода.
426
Глава XVII. Испытания турбореактивных двигателей
Воспользовавшись соотношением pw = Rrl\Q у40, можем обе
формулы переписать в виде одной формулы
где
(17.9)
для докритического истечения и Х=1 для закритического
истечения, Зависимость X от — представлена на фиг. 17 3.
Фиг. 17.3. Величина X для подсчета расхода
газов Gv
Постоянный коэффициент
зависит от состава газов в реактивном сопле. Обычно считают
Лг= 1,32, /?г=29,5 м/град. Тогда е = 2,101 и формула (17.9) пере-
писывается так:
Gr=2,101PF-/^k.
v
(17.10)
§ 2. Определение расхода воздуха и газов
427
При этих численных значениях критический перепад
= 0,542;
—) =1,8446.
J? HJ кр
Если процесс истечения из сопла происходит по закону, близ-
кому к адиабатическому, потери малы и поля температур и дав-
лений равномерны, то коэффициент расхода р, мало отличается
у разных достаточно правильно сконструированных сопел и ко-
леблется в пределах 0,97—0,99. Фактический процесс может
Фиг. 17.4. Коэффициент расхода и для реактив
ного сопла.
очень сильно отличаться от такого идеализированного процесса
и коэффициент расхода для данного двигателя необходимо опре-
делять опытным путем. Такое определение производится при
предварительных стендовых испытаниях. В этом случае изме-
ряют расход воздуха и топлива, как указывалось выше, и вы-
числяют расход газов по формуле Gr=GB + Qc, после чего по
формуле (17. 10) определяют р.. Определенный таким образом
коэффициент не является, строго говоря, истинным коэффициен-
том расхода, но содержит как поправки на отклонение идеали-
зированного процесса от фактического, так и поправки на не-
правильность измерения полного давления р4о и температуры
торможения Т4о из-за неравномерности полей.
Обычно считается, что коэффициент расхода р также
является функцией отношения —. Типичный пример такой
Рн
зависимости, полученной из эксперимента, приведен на фигу-
ре 17.4. Для удобства расчетов обычно строят непосредствен-
но кривую р/7=/7э=/(—| или, еще лучше, кривую pFX =
\рн)
\Рн)
428
Глава XVII. Испытания турбореактивных двигателей
Зная при полетных испытаниях величины рн, р4о и Т4о, непо-
средственно из этой кривой получают величину а затем по
формуле (17. 10) величину Gr.
§ 3. ОПРЕДЕЛЕНИЕ ТЯГИ БЕЗ ДИНАМОМЕТРИЧЕСКОЙ
ПОДВЕСКИ
Динамометрирование подвески двигателя представляет труд-
ную задачу и может осуществляться лишь при специальных
испытаниях. При обычных испытаниях опытных и серийных само-
летов определение силы тяги проводится другими методами.
Напишем известную формулу для расчета силы тяги:
P = — c.-^-V + F(Pi-pH),
s g
(17.11)
где Gr, Ов — расход газов и воздуха через двигатель;
с-а — скорость газов на срезе реактивного сопла;
V — скорость самолета;
F—площадь реактивного сопла;
pi—давление газов на срезе реактивного сопла;
рн—давление наружного воздуха.
В случае докритического истечения р&=рн и
(17.12)
где <р — коэффициент скорости при истечении.
При сверхкритическом истечении
<ч = <Р1/ 2^-^-/?гГ40 (17.13)
Г *г+1
И
Рь > Рн-
Таким образом при докритическом истечении силу тяги мож-
но подсчитывать по простой формуле
P = —c5— — V, (17.14)
g g
где с5 подсчитывается по формуле (17. 12).
§ 3. Определение тяги без динамометрической подвески
429
Ряд подсчетов показывает, что и в случае сверхкритического
истечения можно при подсчете тяги применять те же формулы
(17. 14) и (17. 12) *, что видно из следующей таблицы:
PwlP/1 I 1,85 2,0 2,5 3,0 3,5 4,0
Ошибка в тяге в % при подсчете ее по формулам (17.14) и (17.12) 0 0,1 0,3 0,8 1,4 2,0
Итак, во всех случаях можно подсчитывать силу тяги по
простым формулам (17.14) и (17.12). Как подсчитывать GB и
Gr, мы видели в предыдущем параграфе. Для подсчета скорости
с5 необходимо знать коэффициент скорости <?, который опреде-
ляется при предварительных стендовых испытаниях.
Из формулы
Р=^-
g
^5>
справедливой при работе двигателя на стенде, определяют с5,
затем по формуле (17. 12) определяют <?.
Обычно ? также считают функцией —. Типичный экспери-
Рн
ментальный график этой функции представлен на фиг. 17.5.
Обычно, как уже указывалось, принимают &г=1,32, /?г=
= 29,5 м/град и формулу (17. 12) пишут в более простом виде
(17.15)
* Значения величин Gn и Gr при этом надо брать по формуле (17.9),
иначе могут получиться большие ошибки. Получаемые при этом значения с6
по формуле (17.12) отнюдь не являются истинными значениями скорости
истечения из сопла.
430
Глава XVJI. Испытания турбореактивных двигателей
где
(17.16)
График функции ф представлен на фиг. 17.6.
Как указывалось выше, для подсчета тяги по формуле
(17. 14) в случае сверхкритического истечения нужно скорость
с5 определять по формуле (17. 12) и, следовательно, функцию ф
по формуле (17. 16). Истинная величина скорости с5 должна
быть подсчитана в случае сверхкритического истечения по
формуле (17.13) или по формуле (17.15), в которой нужно
положить ф = 1.
Заметим, что при вычислении Gr по формуле (17.9) величина
КГ40 входит в знаменатель, а при вычислении с$ по формуле
(17. 15) — в числитель. При вычислении силы тяги эта величина
сокращается; таким образом для вычисления Grc5 нет, строго
говоря, надобности определять Г40. Это весьма важно, так как
температура Г40 определяется недостаточно точно вследствие
большой неравномерности температурного поля.
Вообще, если вычислить величину
§ 4. Определение температуры в реактивном сопле
431
дающую количество движения газов на выходе, подставив,
вместо Gt и их значения по формулам (17. 13) и (17.9), легко
получить
2£г
л*г 1
/ \kv
'Рн\ _рЛ
Т>40 / Р<0
(17. 17)
Эта формула ясно показывает, что для подсчета этой части
величины тяги достаточно знать величины р40 и рн, так как
коэффициенты р, и ? зависят от отношения —.
Рн
§ 4. ОПРЕДЕЛЕНИЕ ТЕМПЕРАТУРЫ В РЕАКТИВНОМ СОПЛЕ
Во избежание пережога двигателя температура газов перед
турбиной не должна превышать определенной величины. Ввиду
трудности измерения температуры перед турбиной измеряют
температуру газов в реактивном сопле Т4 и ограничивают ее ве-
личину определенной максимально допустимой величиной 74дОП-
Температура газов в сопле Г4 зависит от режима работы
двигателя.
Теория подобия показывает, что отношение температуры Т4
к температуре на входе Л есть функция только двух величин:
приведенных оборотов ипр и приведенного расхода воздуха GB,nP:
~ — О в, Пр )•
Л
на сверхкритическом режиме,
тоже является функцией приведенных
Л
— есть
Л
Опасность пережога может возникнуть только при больших
температурах, т. е. на режимах, близких к режиму максимально
допустимых оборотов Птах. Но на этих режимах у всех совре-
менных двигателей с большой степенью сжатия истечение из
реактивного сопла происходит
Вследствие этого GB. пр
оборотов. Следовательно, на этих режимах отношение
функция только приведенных оборотов.
В дальнейшем мы заменим истинную температуру на входе
Л температурой торможения и будем ее вычислять по формуле
(5-2'):
И*
Ло Т" + 26 000 ’
где V — в км/час*, такая замена вполне законна, ибо отношение
— согласно теории подобия тоже является функцией только
Ло
432
Глава XVIИспытания турбореактивных двигателей
приведенного числа оборотов. В соответствии с этим и приве-
денное число оборотов будем вычислять по формуле (17. 2)
Таким образом мы можем утверждать, что величина — за
Гю
висит только1 от иПР. Мы можем построить эту зависимость, если
в полете запишем температуру наружного воздуха Т н, скорость
V, обороты п и температуру в сопле Г4, что можно сделать по-
путно в любом испытательном полете.
Вместо — удобнее вычислять величину
71о
Т4=т7-^у, (17.18)
в вместо ппр величину
^пр
Лтах
П
nmax
В соответствии с законом подобия
Следовательно, величина тоже является функцией толь-
ко относительных приведенных оборотов —пр-. В то же вре-
Ищах
мя пользование этой величиной позволяет избежать построе-
ния предельных значений -74-д-°-р- для данного двигателя. Кро-
Ло ___________________________________
ме того, отношение ——р- = —-—1/ — является для задан-
^тах ^тах г 7\q
кого значения относительных оборотов ------ функцией толь-
Ятах
ко Т1й, одинаковой для всех двигателей.
§ 4. Определение температуры в реактивном сопле
433
На фиг. 17.7 приведен образец полученной при эксперимен-
те кривой зависимости от Ппр-. Экстраполируя эту кривую
^гпах
до значения 7\=7\ьОЩ получим предельное значение относитель-
ных приведенных оборотов, при которых имеет место -предельное
значение температуры, если фактические обороты равны nmax.
При другом значении фактических оборотов п необходимо кри-
вую экстраполировать до значения
Фиг. 17.7. Приведенная температура в сопле
в зависимости от приведенных оборотов;
у* _ у | Пта* ] . ^пр п 1 7
\ п / лтах #тах У Тщ
Имея предельную величину =—— 1/ — , легко
Лтах Лтах г Ло
подсчитать значение Т10, при котором получится предельное
значение температуры. Это значение необходимо сравнить
с температурой, обусловливаемой по расчетным атмосферным
температурным условиям (РАТУ).
В свою очередь РАТУ должны быть подсчитаны по уравнению
V2 V2f
Ло — Тн+ 2б 000 — Тн + д26000
= ГЯ +-------------= Тя(1 + У2‘
Pffl, 379-26 000 \ 9850р н
где Vi выражено в км/час, Рн—в мм рт. ст.
28 772
434
Глава XVII. Испытания турбореактивных двигателей
Очевидно, наихудшие условия при заданной скорости Vi по-
лучатся на границе стратосферы, где Тн имеет наименьшее зна-
чение. При дальнейшем повышении высоты Тн остается неизмен-
ным, а член в скобках увеличивается. Для высоты //=11 000 л.
получим (рн = 169,4 мм рт. ст.):
и \
1 670 000 / ’
Ло — Т н Н
Если взять, например, Vi = 350 км/час, Тн=2№$?К (на 10°
меньше стандартной температуры), получим расчетное значение
температуры на входе
Фиг. 17.8. Приведенная температура в сопле в
функции температуры воздуха на входе;
~ т* /птах \2
J10=/10 ( ~ I .
При этой температуре на входе температура в сопле не
должна превышать Лдоп. Этой температуре соответствуют отно-
сительные приведенные обороты
”пр
п
1,139.
Можно диаграмму jfrnr. 17.7 перестроить непосредственно
по температуре Ло( W (фиг. 17.8), если подсчитать для каж-
§ 5. Испытания на помпаж
435
дого значения —-— приведенное значение температуры па
^тах
входе
(„ \ 2
"max ।
П~' / *
С такой диаграммой можно производить те же операции, с той
разницей, что для предельного значения Л=ЛдоП получается
непосредственно температура на входе, при которой Г4=7\Доп-
Так, из фиг. 17.8 видно, что для испытанного* двигателя при
п = пт&х предельная температура торможения на входе бу-
дет —44°.
§ 5. ИСПЫТАНИЯ НА ПОМПАЖ
Помпаж у турбореактивных двигателей выражается в виде
резких колебаний давления по газовоздушному тракту. На
Фиг. 17.9. Граница устойчивости работы дви-
гателя и эксплоатационная кривая.
фиг. 17.9 представлена типичная кривая степени сжатия в ком-
прессоре в зависимости от приведенного расхода воздуха и при-
веденных оборотов (или, что то же,— осевого и окружного чи-
сел М). Для каждого двигателя существует определенная гра-
ница устойчивости, при переходе за которую начинается пом-
паж. На стационарных режимах зависимость е от GB.np идет по
«эксплоатационной» кривой BD, находящейся на некотором рас-
28*
436
Глава XVII. Испытания турбореактивных двигателей
стоянии от границы устойчивости. Помпаж может получиться в
двух случаях: при резком движении дросселя или на больших
оборотах при стационарном режиме и низкой температуре на
входе.
При даче газа двигатель переходит на новый стационарный
режим не по эксплоатационной кривой, а по некоторой кривой,
более близкой к границе устойчивости. При умеренном темпе
перемещения сектора газа (кривая BCD) помпаж не будет иметь
места. При резкой даче газа (кривая BED) двигатель попадает
в неустойчивую область и появятся вибрации. Испытания двига-
теля на переходных режимах будут рассмотрены в следующем
параграфе, а сейчас рассмотрим помпаж на стационарном ре-
жиме.
Как указывалось в предыдущем параграфе, при оборотах
близких к максимальным, согласно теории подобия, режим дви-
гателя определяется только« приведенными оборотами. При
понижении температуры на входе приведенные обороты растут,
как это показано пунктирным продолжением DA эксплоатацион-
ной кривой (см. фиг. 17.9). При достаточно низкой температуре
на входе, когда продолжение эксплоатационной кривой пересе-
чется с границей устойчивости, произойдет помпаж. Этот режим
можно определить приведенными критическими оборотами nnp.KP
или, еще лучше,— числом относительных оборотов ---к-, лока-
утах
зывающим, каков запас оборотов по помпажу в процентах от
максимальных оборотов.
Поэтому испытания на помпаж ведутся таким образом, чтобы
определить величину /гпр,кр. Для этого летчик производит подъем
на малой скорости на оборотах /?тах, пока на некоторой высоте
температура на входе не понизится настолько, что появятся пер-
вые признаки помпажа. Летчик обнаруживает это явление в виде
отдельных срывов давления, проявляющихся внешне в виде до-
вольно резких хлопков. Для точной регистрации характера яв-
ления необходимо в этот момент записать колебания давления
за компрессором при помощи манографа. После этого летчик
сбавляет обороты на 50—100—150 об/мин и продолжает подъем,
пока снова не обнаружит хлопки. Таким путем будет получено
несколько экспериментальных точек начала помпажа.
Обработка ведется следующим образом. На каждом режиме
подсчитываются скорость Vi и температура на входе
/ у2- \
Т.^Тн 1 +-------[.
10 \ 9850р„ /
Затем подсчитываются относительные приведенные обороты по
формуле
лпр. кр *1 288
Утах Утах г ^10
§ 6, Испытания автоматики двигателя
437
Можно также характеризировать режим помпажа непосред-
ственно температурой на входе, при которой наступает помпаж
при максимальных оборотах.
Зная эти величины, можно проверить, удовлетворяет ли дви-
гатель требованиям надежной работы в РАТУ, которые уста-
навливаются так же, как и РАТУ для проверки опасности пере-
грева двигателя (см. § 4).
§ 6. ИСПЫТАНИЯ АВТОМАТИКИ ДВИГАТЕЛЯ НА СТАЦИОНАРНЫХ
И ПЕРЕХОДНЫХ РЕЖИМАХ
Задача автоматических регуляторов ТРД заключается в пра-
вильной подаче топлива таким образом, чтобы двигатель дер-
жал заданные обороты на установившемся режиме и плавно
переходил с одного режима на другой.
Фиг. 17.10. Кривые оборотов на режиме пол-
ного газа и холостого хода в зависимости от
высоты.
Поэтому прежде всего необходимо оценить, насколько устой-
чиво двигатель поддерживает заданные обороты, для чего до-
статочно простого наблюдения за стрелкой тахометра при за-
данном положении дросселя на установившемся горизонтальном
режиме полета.
Далее, необходимо проверить, устойчиво ли держит двига-
тель заданные обороты по высоте на максимально-м режиме и
на режиме холостого хода. На фиг. 17. 10 представлены типич-
ные кривые изменения оборотов на режиме полного газа и ми-
нимальных устойчивых оборотов холостого хода.
Особенно важно оценить работу автоматических регуляторов
на переходных режимах — при уборке и даче газа. Для этого
438
Глава XVIL Испытания турбореактивных двигателей
необходимо оборудовать двигатель самопишущей аппаратурой
с малой инертностью. Необходимо
измерять ход рычага дросселя,
число оборотов, давление пе-
ред топливной форсункой, дав-
ление за компрессором и в ре-
активном сопле, температуру пе-
ред турбиной и в реактивном соп-
ле. Желательно также записать
ход отдельных элементов регули-
рующей системы и изменение от-
дельных параметров (например,
давлений) в этой системе.
На фиг. 17.11 показаны ти-
пичные диаграммы, получаемые
при испытании двигателя на прие-
мистость (при даче газа). При
анализе диаграмм подобного рода
необходимо оценить, во-первых,
время приемистости, а во-вто-
рых,— плавность изменения от-
дельных параметров. При очень
быстром темпе передвижения сек-
тора может получиться помпаж
двигателя, что будет ясно отме-
чено вибрациями давления за
компрессором. Иногда при слиш-
ком быстром темпе дачи газа дви-
гатель может заглохнуть из-за пе-
Фиг. 17.11. Изменение основных реобогащения, что будет видно по
параметров на переходном ре- падению оборотов и слишком
жиме. большому давлению топлива пе-
ред форсунками. Необходимо
также проверить, не получаются ли слишком большие темпера-
туры газов, опасные из-за возможности пережога двигателя.
Глава XVIII
ИСПЫТАНИЯ ПОРШНЕВЫХ ДВИГАТЕЛЕЙ
§ 1. ОПРЕДЕЛЕНИЕ ЭФФЕКТИВНОЙ МОЩНОСТИ И КРУТЯЩЕГО
МОМЕНТА
Способы определения крутящего момента двигателя в по-
лете весьма разнообразны. Попытки создать универсальные
динамометрические втулки, пригодные для установ-
ки на любой двигатель или на определенный класс двигателей,
не удались вследствие громоздкости конструкции таких втулок.
Поэтому в настоящее время обычно делают специальные при-
способления для каждого типа двигателя.
Наибольшим распространением пользуется метод определе-
ния крутящего момента, основанный на измерении угла за-
кручивания вала либо при помощи непосредственного
измерения этого угла с механической мультипликацией, либо
при помощи специальных электрических тензодатчиков, наклеи-
ваемых на вал, с последующим усилением тока, проходящего
через датчик. Тарировка производится непосредственно на са-
молете при помощи грузов, подвешиваемых на концах лопастей
винта или на рычаг, присоединенный к носку вала.
Существуют также конструкции втулок, основанные на непо-
средственном измерении момента. В этом случае часто редуктор
устраивается таким образом, что он может свободно провора-
чиваться вокруг своей оси; крутящий момент воспринимается
либо жидкостными месдозами (момент измеряется величиной
давления в месдо-зах), либо пружинами (момент измеряется де-
формацией пружин).
Зная крутящий момент М (в кгм) и обороты вала п (в
об/мин), легко подсчитать эффективную мощность >на носке вала
по известной формуле:
е 716,2
а также среднее эффективное давление
__ Af
Ре 795 Vh ’
где Уъ— суммарный рабочий объем цилиндров в л.
440
Глава XVIII. Испытания поршневых двигателей
Если при измерениях момента параллельно измерялся часо-
вой расход горючего Q, легко подсчитать удельный расход го-
рючего
Полученные величины необходимо привести к условиям
стандартной атмосферы по> методам, изложенным в гл. VII
и XVI.
§ 2. ОПРЕДЕЛЕНИЕ РАСХОДА ВОЗДУХА ЧЕРЕЗ ДВИГАТЕЛЬ.
КОЭФФИЦИЕНТ НАПОЛНЕНИЯ И ИНДИКАТОРНАЯ МОЩНОСТЬ.
КОЭФФИЦИЕНТ ИЗБЫТКА ВОЗДУХА
Для поршневого двигателя, как и для турбореактивного,
расход воздуха является одним из основных параметров,
характеризующих внутренние процессы в двигателе, так как от
него в основном зависят индикаторная мощность, индикаторное
давление и коэффициент наполнения. Поэтому при глубоких
исследованиях работы двигателя необходимо этот параметр
определять особо тщательно.
Существует много способов измерения расхода воздуха.
Наиболее простой из них заключается в том, что в некоторой
части всасывающей линии устанавливается приемник для замера
скорости, присоединенный к какому-нибудь манометрическому
прибору, например, к указателю скорости. Около этого же места
измеряется температура воздуха при помощи специальной тер-
мопары. Зная величину индикаторной скорости, давление и тем-
пературу, можно найти значение истинной скорости, а зная дав-
ление и температуру, можно найти и значение плотности воз-
духа. Перемножая эти величины, находим весовой расход воз-
духа.
Так как поле скоростей в трубопроводе неравномерно, а
приемник имеет свои поправки, его предварительно тарируют
в земных условиях. С этой целью к входу во всасывающую си-
стему двигателя при помощи специально сделанных переходни-
ков присоединяют специальный эталонный насадок, который
время от времени проверяют на воздуходувной установке. За-
пускают двигатель и постепенно увеличивают обороты. Записы-
вают одновременно показания тарируемого приемника и эталон-
ного насадка, температуры и давления в соответствующих ме-
стах. Затем для каждого режима вычисляют поправочный коэф-
фициент для тарируемого приемника, исходя из следую-
щих соображений.
§ 2. Определение расхода воздуха через двигатель
44 Г
Расход воздуха через всасывающую систему равен
О. = Лв^Р = Лв^ = /7^- £
о • в tp I ь DT*
Упр _ т/
--------р У пр
р_ Л) к
Ро Т
\f Р Ро
V 1 тй '
где F — площадь поперечного сечения, р и Т — давление и тем-
пература воздуха; ро=76О мм рт. ст.; 7'0=288оК; VnP (или
Кр.испр ) — показания указателя скорости, присоединенного к та-
рируемому приемнику, с инструментальной поправкой. Анало-
гично, для эталонного насадка имеем
GB
эт
R
Рэт Ро ,
Тэт То
Фиг. 18. 1. Зависимость коэффициента расхода %
для насадка от величины скорости по прибору
У пр-
приравнивая обе величины, найдем
(18.1)
Зная £эт, находим обычно этот коэффициент слегка изме-
няется в зависимости от скорости; типичный график такой зави-
симости показан на фиг. 18. 1.
Знание этого коэффициента позволяет найти расход воздуха
и среднюю скорость, если в полете измерены Vnp, р и Т в месте
установки приемника. Внеся инструментальные поправки, под-
считывают расход воздуха по выведенной выше формуле
G = — V
1В ПР
т Го
(18. 2>
442
Глава XVIII. Испытания поршневых двигателей
и среднюю скорость по формуле
V = W
v ср пр
1/--
V р То
(18.3)
Температуру можно измерять любыми способами, но так как
для процессов в двигателе и всасывающей системе наиболее ин-
тересна температура торможения, непосредственно
связанная с теплосодержанием воздуха, лучше всего использо-
вать термометры торможения (см. гл. V, § 5).
Знание расхода воздуха позволяет вычислить весьма важную
характеристику двигателя — коэффициент наполнения
если известны температура и давление рк воздуха на входе
в двигатель, по известной формуле
120GB 120 GBRTk 120/? GKTk /1о
-л —------=-----------=------------. (18, 4)
V lkVhn pkVhn Vh npk 7
Коэффициент наполнения и расход воздуха тесно связаны с
индикаторной мощностью двигателя. В самом деле, по известной
формуле Б. С. Стечкина:
30 На
632 Ао а
^лТ^« = 5,7Ов--------.
Lo «
(18.5)
Для заданного топлива и заданного двигателя по этой фор-
муле получаем, что мощность пропорциональна GB и—. Если
а
мы знаем величину —, то по величине GB можем подсчитать
а
и индикаторную мощность.
г» га
Величина — =--------- для заданного двигателя зависит
а аГП (а=1)
почти исключительно от величины а, причем она изменяется
очень мало. Следовательно, если известно для нашего двига-
теля хотя бы одно значение при каком-нибудь а, легко с
той же степенью точности получить и значение при любых
условиях. Значения этой величины можно получить при стен-
довых испытаниях путем снятия индикаторной диаграммы.
Существуют специальные индикаторы, позволяющие опреде-
лять индикаторные диаграммы в полете; однако они не получили
распространения из-за большой сложности, малой точности и
неудобства эксплоатации.
Если одновременно с измерением расхода воздуха измерялся
расход горючего Q, легко получить следующую весьма важную
§ 3. Определение качества нагнетающей системы
443
характеристику работы двигателя — коэффициент из-
бытка воздуха
GB3600
QLq ’
(18.6)
где Lo — количество воздуха, теоретически необходимое для
сгорания одного килограмма топлива.
§ 3. ОПРЕДЕЛЕНИЕ КАЧЕСТВА НАГНЕТАЮЩЕЙ СИСТЕМЫ
Назначение всасывающей и нагнетающей системы — под-
вести воздух к двигателю таким образом, чтобы по возможности
увеличить его мощность. Мощность двигателя определяется по
формуле Б. С. Стечкина (18. 5). Но коэффициент наполнения, со-
гласно опытным данным, изменяется пропорционально квадрат-
ному корню из температуры на всасывании:
Подставляя это значение в формулу Стечкина и заменяя Тл
pk
выражением-----, получим
RTk
N _ 30 ни rli Vhn^ Pk __
г~ 632 £0 а 7? УтУУТ>.~
__ 30 Ни т)(- VhnrlvnPff Pk ^/~ Tff (18 yj
632 Z.o a R Ph j P k
При прочих равных условиях мощность пропорциональна
Pk Г Т н
величине — I/ —, где рн и Тн—давление и температура
Рн У Tk
Pk
атмосферного воздуха. При заданной степени сжатия е = —
Рн
мощность будет тем больше, чем меньше температура Tk-
/k~l \
При адиабатическом сжатии мы имели бы Л7\ад==Гя v5 * — 1/•
Отношение перепадов температур
k-i
. Tk^-Тн -1
Tk-rs ъ
Тн
(18.8)
444 Глава XVIII. Испытания поршневых двигателей
называют термодинамическим коэффициентом1,
качества нагнетающей системы. Чем больше этот'
коэффициент, тем большую мощность может развить двигатель!
при заданной степени сжатия. Заметим во избежание недоразу-!
мений, что этот коэффициент не обязательно меньше единицы;!
у современных установок с комбинированным наддувом оц
нередко больше единицы благодаря охлаждению воздуха в про*
цессе сжатия в промежуточном воздухо-воздушном радиаторе^
а также впрыску воды и испарению бензина. У хороших уста-
новок коэффициент т]ад достигает значения 1,5 и даже выше.
Для оценки термодинамического коэффициента необходимо
знать только величины Тк, Тн, рк и рн\ все эти величины легко
измеряются и вычисление т]ад не представляет затруднений.
§ 4. ОПРЕДЕЛЕНИЕ ГРАНИЦЫ ВЫСОТНОСТИ ДВИГАТЕЛЯ
Как определяется граница высотности двигателя, установлен-
ного на самолете, было указано в гл. X. В случае, если граница
высотности оказывается ниже расчетной, возникает вопрос: где
скрыта причина этого — в двигателе и его нагнетающей системе
или во всасывающем канале самолета. Иначе говоря, нацо ре-
шить вопрос: является ли истинная граница высотности двига-
теля (без всасывающего канала) ниже расчетной, соответствую-
щей техническим условиям, или всасывающий канал имеет слиш-
ком большие гидравлические сопротивления и скоростной напор
используется плохо.
Этот вопрос решается при помощи той же аппаратуры, кото-
рая была указана в предыдущем параграфе. На горизонтальных
площадках на разных высотах * выше границы высотности изме-
ряются: скорость полета V, давление атмосферного воздуха рн,
полное давление рю в конце канала, на входе в нагнетатель, и
давление рк на входе в двигатель.
По этим данным вычисляют адиабатический перепад темпе-
ратур в нагнетателе:
- \рм/
(18. 9)
При этом температура торможения на входе в нагнетатель
вычисляется по обычной формуле
Т1О = ТН+
Н 26 000
где V — в км/час.
1 Полеты совмещаются с полетами для определения максимальной ско-
рости
§ 4. Определение границы высотности двигателя
445
Величина А Тад изменяется весьма мало, так как режим на-
гнетателя изменяется мало. Зная эту величину, легко подсчи-
тать для ряда высот значения р^ст в условиях стандартной
атмосферы, которые получились бы при выключении регулятора
постоянства давления
k
pk ст —Рн 1 +
'ст .
(18.10)
Построив значения рлст в зависимости от высоты (фиг. 18.2)
и отметив на этой кривой точку с заданным значением рк рег, по-
лучим границу высотности в стандартных условиях для двига-
теля без скоростного наддува.
Если передавать давление рю
прямо на высотомер или баро-
граф, можно значительно упро-
стить все вычисления. На фиг. 18. 3
приведена номограмма, позво-
ляющая найти дГад в стандартных
условиях по заданным Нр и рк. Но -
мограмма построена по уравне-
нию (18. 10). Пользоваться номо-
граммой нужно следующим обра-
зом. Зная показание Нр высотоме-
ра (с инструментальной поправ-
кой), соответствующее давлению
Фиг. 18.2. Зависимость давления
перед нагнетателем, и давление рк, наддува^ от высоты и опреде-
полученные в полете, находим по ление границы высотности,
номограмме АТад.ф, т. е. то фиктив-
ное значение этой величины, которое получилось бы, если бы
температура перед нагнетателем равнялась Стандартной темпе-
ратуре, соответствующей высоте Нр, Полученное значение исправ-
ляем по формуле
дтад=дтад.ф^.
' ст
Кривая на номограмме, соответствующая этому значению
А Гад, и дает зависимость р&ст от Нр в условиях стандартной
атмосферы для двигателя без всасывающего канала и скорост-
ного наддува. Достаточно' дальше на этой кривой найти точку,
соответствующую регулировочному значению рлРег, чтобы полу-
чить границу высотности двигателя.
Легко определить границу высотности двигателя по той же
методике и при наземных испытаниях. Для этого достаточно при-
соединить на входе во всасывающую систему специальный дрос-
сель, позволяющий постепенно понижать давление перед на-
гнетателем. Дроссель такого типа легко сделать на любом за-
446
Глава XVIII. Испытания поршневых двигателей
воде. Установив заданные обороты двигателя (для этого иногда
приходится облегчать винт), дросселем постепенно понижают
давление на входе в нагнетатель. Замеряются те же величины,
что и в полете. Замеры нужно делать только при таком дроссе-
Фиг. 18.4. Типичные кривые
Pk ст —КН)-
лировании, когда давление за на-
гнетателем станет ниже регулиро-
вочного (заслонка нагнетателя бу-
дет полностью открыта). Метод
обработки тот же, что и в случае
испытаний в полете. Роль темпе-
ратуры перед нагнетателем играет
температура наружного воздуха.
При испытании необходимо тща-
тельно следить, чтобы вследствие
разрежения не произошло дефор-
мации канала.
Если на двигателе имеется
фильтр-пылеочиститель, очень
удобно воспользоваться этим
агрегатом как дросселем; для
этого сетка фильтра оклеивается
полосками перкаля. Постепенно отдирая эти полоски, можно
получать различные разрежения перед нагнетателем.
На фиг. 18.4 представлена кривая полученная ука-
занным выше путем на одном самолете.
Фиг. 18.5. Типичная виброграмма-
при помпаже»
§ 5. ИСПЫТАНИЯ НА ПОМПАЖ
У поршневых двигателей помпаж проявляется в виде интен-
сивных вибраций воздуха в нагнетающей системе двигателя. Раз-
вившийся помпаж приводит к
полному расстройству работы дви-
гателя и к интенсивным вибра-
циям всего самолета.
Отличительным свойством пом-
пажа от других типов вибраций
является то, что он наиболее рез-
ко проявляется позади на-
гнетателя. Поэтому при испы-
таниях на помпаж необходимо из-
мерять статическое давление за
нагнетателем при помощи чувст-
вительного самописца давлений с
большой скоростью движения
ленты. На фиг. 18.5 показана ти-
пичная виброграмма, полученная
при испытаниях на помпаж. На-
чался помпаж в точке А. Частота
с теоретической частотой органной трубы с одним открытым и
вибраций хорошо совпадает
§ 5. Испытания на помпаж
447
одним закрытым концом, имеющей ту же длину, что и воздухо-
провод, начиная от входа во всасывающий патрубок и кончая
входом в двигатель
где а = У kgRTff —скорость звука;
L — длина трубопровода (воздуш-
ного тракта).
Помпаж в полете проявляется
обычно на дроссельных режимах.
Поэтому прежде всего необходимо
найти границы помпажа. Для этого
на какой-нибудь высоте двигатель
постепенно дросселируют, пока не
появятся признаки помпажа. При
этом записывают давление на входе
в двигатель ра, обороты, высоту, тем-
пературу. Эта операция повторяется
на нескольких высотах. По получен-
Ра
Фиг. 18.6. Границы помпажа.,
ным данным строят границу пом-
пажа, откладывая по оси абсцисс давление ра, по оси ординат —
высоту (фиг. 18.6).
Глава XIX
ИСПЫТАНИЯ СИСТЕМ ОХЛАЖДЕНИЯ ДВИГАТЕЛЯ
§ 1. ОБЩИЕ ЗАВИСИМОСТИ
Для нормальной работы поршневого двигателя необходимо во
избежание перегрева отводить от него некоторое количество теп-
ла либо непосредственно в окружающий воздух, (у двигателей
воздушного охлаждения), либо в охлаждающую жидкость, обыч-
но в воду (у двигателей жидкостного охлаждения), от которой
в свою очередь тепло передается в воздух при помощи радиато-
ров. Температура жидкости (у двигателей водяного охлаждения )
или головок цилиндров (у двигателей воздушного охлаждения)
не должна превышать определенной величины. Для регулирова-
ния температуры применяются заслонки, оперируя которыми
можно пропускать большее или меньшее количество воздуха
сквозь юбку капота или туннель радиатора. Одной из первых за-
дач испытаний винтомоторной группы является проверка до-
статочности охлаждающих устройств.
Так как двигатель должен нормально работать в любых усло-
виях, а наиболее тяжелые условия охлаждения получаются, есте-
ственно-, при высоких температурах наружного воздуха, то
охлаждение рассчитывается и проверяется обычно не в условиях
стандартной атмосферы (СА), а в так называемых «расчетных
атмосферных температурных условиях» (РАТУ, см. гл. I).
Эффективность охлаждения определяется балансом тепло-
отдачи двигателя и теплоотдачи охлаждающих устройств. Тепло-
отдача двигателя зависит от очень большого числа факторов,
главными из которых являются мощность и температура охлаж-
дающей среды. Для двигателей водяного охлажде-
ния обычно принимают, что теплоотдача двигателя
равна
QB = CBN?(AB-tB), (19.1)
где QB—теплоотдача двигателя в воду;
Ne— эффективная мощность двигателя;
4 — температура воды, выходящей из рубашек двигателя;
т — показатель;
Св и А „—некоторые постоянные.
§ 1. Общие зависимости
449
Физическое значение постоянной Ав легко объяснить. Тепло-
отдача в воду пропорциональна разности между температурой
стенок и температурой воды; таким образом постоянная Ав есть
некоторая средняя эффективная температура стенок. Показа-
тель ш колеблется в пределах от 0,5 до 0,65, постоянная Аь — в
пределах от 280° до 500° С, а постоянная Св зависит от типа дви-
гателя. Аналогичная формула принимается и для двигателей
воздушного охлаждения, только вместо /в надо подставить тем-
пературу головок цилиндров /г, а вместо Ав — величину АР, кото-
рая колеблется в пределах от 600° до 800° С.
Кроме теплоотдачи в воздух и в воду, трущиеся детали дви-
гателя отдают тепло в масло. Это тепло тоже необходимо отвести.
Теплоотдача в масло зависит от ряда факторов, в том числе от
температуры охлаждающей воды. Обычно принимают для тепло-
отдачи такую зависимость:
Q, = C^U + 4A4). (19.2)
где /м — температура масла, выходящего из двигателя. Показа-
тель m имеет среднее значение порядка 0,25, коэффициент Ам—
порядка 200°, коэффициент Вм — порядка 1.
Тепло, полученное водой или маслом, рассеивается в Окру-
жающий воздух при помощи радиатора, который в настоящее
время, как правило, ставится в туннеле с регулируемыми заслон-
ками; для водяных радиаторов теплоотдача пропорциональна
площади охлаждения Sp и перепаду температур
Qp=^p(^B-^), (19.3)
где tH—температура наружного воздуха.
Теория подобия тепловых процессов утверждает, что кри-
терий Для теплоотдачи от стенок к воздуху есть
. п ЗбООг^И^ п 3fi00cpg-X
функция двух критериев Ре =-----------и Рг =----:
X р.
^=/(Ре,Рг), (19.4)
Л
где —-коэффициент теплоотдачи от стенок трубок к воздуху;
d —диаметр трубок радиатора;
X — коэффициент теплопроводности для воздуха;
Vj —скорость в трубках радиатора;
у —плотность воздуха;
ср — теплоемкость^ при постоянном давлении;
р. —коэффициент вязкости воздуха.
29 772
450
Глава XIX. Испытания систем охлаждения двигателя
Критерий Рг для воздуха есть почти постоянная величина и
ее влиянием можно пренебречь. Таким образом можно считать,
что
, \ г / \
1 ~ ~d * ( Л / ‘
Многочисленные эксперименты показывают, что с достаточ-
ной степенью точности можно считать
= С2 — ( 36С0сяК1£у = сх (f Vj)” = CxVn (19.5)
где п—показатель степени;
V — скорость самолета;
Vi , ,
а = —коэффициент расхода; *
Са и Ci —некоторые постоянные.
Коэффициент р
формы радиатора и туннеля, т. е.
Фиг. 19. 1. Зависимость коэффициента
расхода туннеля радиатора от от-
крытия заслонки.
а с ход а есть функция геометрической
для данного туннеля — функция
угла открытия заслонки. Обыч-
но в качестве параметра, ха-
рактеризующего степень откры-
тия заслонок, принимают от-
носительную площадь
выходного отверстия
р
fa= , где Гв'ых — площадь
Г
выходного отверстия; У7—фрон-
товая площадь радиатора. За-
висимость коэффициента рас-
хода от степени открытия за-
слонок обычно имеет вид кри-
вой, показанной на фиг. 19. 1.
Строго говоря, закон подо-
справедливы только для
лопередачи k — именно
бия (19.4) и формула (19.5)
одной части общего коэффициента теп-
для коэффициента k± теплоотдачи от
стенки к воздуху. Значение k надо получать из формулы
_L = _L+JL + ±,
k ki k2
где В — толщина стенок трубок;
— коэффициент теплопроводности металла стенок;
^—коэффициент теплоотдачи от воды к стенкам.
Но k2 и — значительно больше kp поэтому с достаточной
степенью точности можно формулу (19.5) применять к полному
коэффициенту теплопередачи k.
$ 2. Изменение температуры воды, масла и головок цилиндров 451
Далее, под /в, строго говоря, надо понимать полусумму тем-
ператур воды на входе и выходе из радиатора. Однако обычно
за /в принимают температуру на входе, что сводится к некоторому
изменению значения коэффициента k. Показатель п имеет сред-
нее значение порядка 0,3.
Для масляных радиаторов мы должны иметь ана-
логичную формулу, так как она основана на теории подобия.
Однако в случае масляных радиаторов появляется совершенно
новое явление, связанное с загустеванием масла в от-
дельных пазухах и застойных углах, получающихся в месте сты-
ков перегородок с обечайками и стенками. Вследствие этого
коэффициент теплопередачи для масляных радиаторов зависит
от температуры наружного воздуха и формулу (19. 3) приходится
писать так:
Q. = kS^t^tH^D + tH\ (19.6)
где k попрежнему определяется формулой (19. 5). Коэффициент/)
имеет значение порядка 150.
Наконец, в случае двигателя воздушного охлаж-
дения мы имеем для теплоотдачи в воздух аналогичную фор-
мулу
Q = kS(t — (19.7)
где коэффициент k подчиняется тем же зависимостям, что и в
формуле (19.5). Роль заслонок туннеля радиатора здесь играют
заслонки юбки капота.
Теперь мы имеем все зависимости, позволяющие проанализи-
ровать вопрос об изменении температуры головок цилиндров,
масла и воды при изменении температуры наружного воздуха.
Обычно расчетным случаем для оценки охлаждающих
устройств считают полет на максимально допустимой мощности
двигателя; при этом различают два случая: установивший-
ся горизонтальный полет на режиме макси-
мальной скорости и набор высоты.
§ 2. ИЗМЕНЕНИЕ ТЕМПЕРАТУРЫ ВОДЫ, МАСЛА И ГОЛОВОК
ЦИЛИНДРОВ НА РЕЖИМЕ МАКСИМАЛЬНОЙ СКОРОСТИ
На самолетах с поршневыми двигателями регулирование тем-
пературы масла, воды или головок цилиндров производится пу-
тем изменения выходного сечения туннелей радиаторов или юбок
капота при помощи открытия заслонок. Открытие этих заслонок
создает добавочное лобовое сопротивление.
Так как на режиме максимальной горизонтальной скорости
общее сопротивление относительно мало, то при открытии за-
слонок максимальная скорость изменяется весь-
ма сильно: при полном открытии заслонок можно потерять до
8—10% скорости. Поэтому при испытании самолета на эффек-
тивность охлаждения весьма важно оценить не только изменение
температуры, но и изменение скорости.
29*
452
Глава XIX. Испытания систем охлаждения двигателя
На установившемся режиме полета, пренебрегая потерями
тепла в соединительных трубопроводах, мы можем считать, что
тепло, отдаваемое двигателем, целиком рассеивается радиато-
ром. Так как все дальнейшие рассуждения совершенно одинако-
вы для температуры воды, головок цилиндра и масла, мы для
определенности будем говорить о температуре воды и соответ-
ственно о заслонках водорадиаторов, имея в виду, что результа-
ты рассуждений целиком переносятся и на температуры масла
и головок цилиндров.
Напишем уравнение баланса теплоотдач:
Ж (Л - fB) = С. (a^V)n(tB - tH\ (19. 8)
Пусть мы имеем полет при других атмосферных условиях и
при другом положении заслонки туннеля. Обозначив индек-
сом «1» все параметры в этих новых условиях, можно написать
такое же уравнение баланса
Ж (Л - *в1) = с. (а1Ъ V^tBi - (19.9)
Разделив одно уравнение на другое, получим
И ~ z»i) /В1 —
\ / 'в — tB
(19.10)
При помощи этого уравнения можно решать все задачи пере-
счета на другие условия полета.
При одинаковых атмосферных условиях мощность двигателя
остается неизменной к Поэтому уравнение (19.10) можно пере-
писать следующим образом:
aV у
ао^о/
___ ^во А
А — ^во
(19.11)
где индексом «0» обозначены параметры при каком-то опреде-
ленном положении заслонок. Это уравнение очевидно определяет
зависимость температуры воды от степени открытия заслонки.
Зависимость скорости от положения заслонки определяется
двумя уравнениями горизонтального полета:
±cyPSV* = O', ±cjSV* = 75Ne^. (19.12)
i Строго говоря, при изменении скорости изменяется и мощность двига-
теля вследствие изменения скоростного наддува. Однако это изменение неве-
лико и им можно пренебречь (см. гл. VII).
§ 2. Изменение температуры воды, масла и головок цилиндров 453
Для самолетов с поршневыми двигателями коэффициент сх
можно считать функцией от су, но, кроме того, он зависит от
степени открытия заслонки.
У современных высотных двигателей мощность сравнительно
мало изменяется с высотой, если исключить участок высот око-
ло потолка, не являющийся расчетным для охлаждения. Поэто-
му при одном и том же положении заслонки коэффициент cg на
режиме максимальной скорости почти не изменяется с высотой.
В самом деле, из уравнений (19. 12) легко получить
сх
3
150 PS
3
(19.13)
(2G)2
Это уравнение показывает,
что при изменении высоты (и
вообще атмосферных условий
полета) коэффициент --х из-
меняется практически пропор-
ционально |/ А. Даже на вы-
соте 10000 м имеем V А =
= 0,58; следовательно, коэф-
фициент может умень-
V
Фиг. 19.2. Зависимость у= от
высоты полета.
шиться не больше, чем в два раза. Но на режимах максималь-
ной скорости (при £> = 0,07 — 0,20) значение сх почти не зави-
сит от су и от —=|-. Следовательно, можно считать, что сх на
режиме максимальной скорости изменяется мало при заданном
открытии заслонки. А тогда и отношение
(19.14)
(где индекс 0 относится к начальному положению заслонки), за-
висящее от угла открытия заслонки и атмосферных условий, то-
же мало зависит от атмосферных условий. Иначе говоря, можно
считать, что величина у практически зависит только от отклоне-
ния заслонки.
Этот вывод подтверждается многочисленными расчетами, а
также специальными летными испытаниями. В виде примера
приводим на фиг. 19.2 результаты летного эксперимента для
двухмоторного бомбардировщика.
454 Глава XIX. Испытания систем охлаждения двигателя
Так как величина у =— есть функция только Д, то и ве-
^0
личина
/ аУ \”
\ /
(19.15)
есть функция только Д. В самом деле, как уже было указано,
величина а есть функция только fa, если отвлечься от влияния
чисел Re и М; последнее почти не играет роли для самолетов
с поршневыми двигателями,
далеких от волнового кризи-
са, а число Re практически
не играет роли на режимах
максимальной скорости, так
как поток на этих скоростях
является практически авто-
модельным.
Теперь мы можем пере-
писать наше соотношение
(19.11) следующим обра-
зом:
2 — , ^0 — \
До
функцию z, а также функ-
Фиг. 19.3. Зависимость скорости от
степени открытия заслонки fa.
(19.16)
Из этого уравнения видно, что
цию у, легко найти, если известны величины Д и V в функции Д
на какой-нибудь высоте при одной и той же величине /я. Обычно
для получения этих зависимостей производят полет на опреде-
ленной высоте, желательно вблизи границы высотности двигате-
ля (так как там температурная напряженность двигателя наи-
большая) при нескольких (4—5) открытиях заслонки радиатора
и записывают fa, V, t3 и tH- Затем строят V (или Vi) в функции Д
(фиг. 19.3), выбирают определенное положение заслонки До
У Vi
(обычно положение «по потоку») и строят величины у= — =------
Vo Vi0
и г по формуле (19. 16) в функции Д. На фиг. 19.4 приведены в
виде примера эти функции для того же самолета, к которому
относится и фиг. 19.2.
При помощи двух функций у и z мы можем теперь решать
все задачи, относящиеся к пересчету полученных при испытании
параметров на любые условия полета. Тремя важнейшими зада-
чами являются следующие:
1. На некоторой высоте при температуре атмосферного' воз-
духа tH получены скорость V и температура Д. Найти, какие ве-
личины получатся при том же открытии заслонки на той же
высоте, но при другом значении t'H (в частности, при стандарт-
ных условиях или в РАТУ).
£ 2. Изменение температуры воды, масла а головок цилиндров
455
2. При некоторых условиях полета и некотором открытии за-
слонки fa получены значения V и tB. Найти значения этих вели-
чин при тех же условиях полета, но при другом значении fa-
3. При некоторых условиях полета и некотором открытии
заслонки получены значения V и tB. Каковы будут значения Vr
и f'a при другом заданном значении tB?
Если мы умеем решать эти три основные задачи, то, комби-
нируя их, мы можем решить любую задачу пересчета. Обратим-
ся сначала ко второй задаче.
Пусть при значении fa получена
=у/0; но при значении открытия
V'=y' Vo; отсюда
скорость V; имеем V =
заслонки fa
мы
имеем
V'
V.
(19.17)
Далее, из формулы (19.16) легко
получить
___ 2 (А — /вр) + — tg) А
2 (А — /в0) + /ед — tg
(19.18)
I — 2 Л + (Д — 4) g
во 2(/в-/я) + (Д-/в)
(19.19)
Перепишем уравнение (19. 18), подставив вместо z и tB их
значения z' и tB при другом открытии заслонки fa, и подста-
456
. Глава XIX. Испытания систем охлаждения двигателя
вим в полученное выражение значение £в0 из уравнения (19.19);
получим
^В М — + — ?в)
------------------(19.20)
21 (Д-/в)+/в-/я
Это уравнение можно было бы написать и сразу, исходя
из следующих соображений: выбор значения /а0 условен и мы
вправе взять за величину /а0 именно fa, но тогда надо вели-
чину z' заменить относительной величиной следователь-
но, достаточно в формуле (19.18) заменить £в0, tB и z, соот-
ветственно, величинами: tKt 4 и —, чтобы получить форму-
Z
лу (19.20).
Теперь мы можем окончательно решить вторую задачу; до-
статочно подсчитать /'в по формуле (19.20) и V' по форму-
ле (19. 17).
Перейдем к третьей задаче. Зная А, можем полу-
чить /в0 по формуле (19. 19). Зная /в0, /ни А по формуле (19. 16),
получаем г. Если произвести эти подстановки, получим
Z — z
А — t3 Ir —
А — tQ — tn
(19.21)
И эту формулу можно получить непосредственно из фор-
мулы (19.16), если заменить z, tB и соответственно величи-
нами—, t' и tR.
z в в
Зная z’, легко определяем fa и у', откуда по формуле
(19.17) получаем V', на чем и заканчиваем решение третьей
задачи.
Первая задача представляет, по существу, задачу о приведе-
нии значения скорости и температуры к стандартным условиям.
Как делается приведение скорости, было показано в гл. X. Если
приведение производится не к стандартным условиям, а к дру-
гим, произвольно заданным (например, к РАТУ),— все сводится
только к изменению значения КГц.
Возьмем логарифмический дифференциал равенства баланса
теплоотдач (19.8):
dNe dfB dv . dV . dtB dtH
m —- ---— = n —L + n--------------------£— ,
Ne A — tB 7 V tB —
§ 2. Изменение температуры воды, масла и головок, цилиндров
457
< di
Заменив дифференциалы поправками и учитывая, что -у- =
dT и dt и v <\j
------ =-----найдем
A
/в — trr / Т/7 dNе
—-----— п 4- m —-----------
Тн \ Ne аТн
V dTg
„ . 7H dN. Tg dV
Заменив значения показателей ——- и — —- их ooq-
Ne dTg V dTg
значениями из гл. X, получим
Ц = ^-в f 1 + <B~/g- (п + mNT - пУг)18T«=
4 — (я L hi
= аа',Тн. (19.22}
Второй член в квадратных скобках сравнительно мал. В са-
мом деле, возьмем крайний случай:
t — tn= 100+56= 156° С; ГЯ=216,5°К; n=0,8; т=0,6;
Nr=—1,2; Vr=—0,4.
Для второго члена получим значение
(0,8 - 0,6 • 1,2 + 0,8 • 0,4) = 0,288.
Следовательно, ошибки во втором члене, вызванные ошибками
при определении величин п, m, Vт и N т, незначительно отражают-
ся на окончательном результате и эти величины можно осредниты
Обычно для коэффициента ав составляются специальные гра-
фики, на которых а'а дается в функции /в и ///.Для быстрых при-
кидок можно принимать среднее значение ав = 0,7—0,8.
Аналогично получаются формулы для пересчета температуры
толовок цилиндров:
S/r—аГЪТ н
и для температуры масла:
(19. 23 Ь
(19. 24>
Таким образом мы можем решить все три основные задачи
Как уже указывалось, зная решение этих задач, можно решать
все остальные задачи. Например, решим следующую весьма
важную задачу: пусть при испытании самолета мы получили не-
которую максимальную скорость 1/тах ф при фактическом откры-
тии заслонки fa и температуре воды /Е; надо найти максимальную
скорость Утах в РАТУ при максимально допустимой температуре
воды /Вшах. Для этого сначала решаем первую задачу и находим
458
Глава XIX. Испытания систем охлаждения двигателя
максимальную скорость Vmax РАТУ и температуру воды £вРАТУ
при расчетной температуре воздуха и том же открытии заслон-
ки fa ф. Затем решаем третью задачу и находим искомые вели-
чины fa РАТУ и Утах при температуре воды t3 max.
Приведем пример. Пусть мы имеем характеристики заслонок
водорадиатора, приведенные на фиг. 19.4, и пусть при испыта-
нии самолета на максимальную скорость была получена скорость
1Л = 500 км/час на высоте //=4000 м при температуре воздуха
— —35° С = 238° К, температуре воды /в= 100° С и открытии
заслонок fa ф=0,5. Надо найти максимальную скорость и необ-
ходимое открытие заслонки /аРАТу в РАТУ (t 7/рату=4°С) при
максимально допустимой температуре воды /втах=110°С.
Сначала приводим температуру воды к РАТУ при fa=const =
= 0,5. Имеем
§ Тн = tH р ату - tH = 4° - (- 35°) = 39°С; ав = 0,71;
М = 0,71 • 39 = 27,7°С; /в РАТУ = 100 + 27,7 = 127,7°С.
Из этого результата видно, что в РАТУ при fa=0,5 летать
нельзя (tr рату>^в max) и надо открывать заслонку. Далее, если
—0,7, то
У/рдту = 500 (1 -0,7^ = 442 км/час.
Теперь решаем третью задачу. Имеем (при А=400°) по форму-
ле (19.21):
2=1,04; г--1,04 w - 1г7А-4_ 1,29.
400 —127,7 110-4
По фиг. 19.4 находим:/а рату =0,83; У = 0,967; у=1,ООЭ
(для /аф = 0,5);
V\рату = Vt РАТУ = 442 • = 427 км/час.
Если охлаждающие устройства снабжены регуляторами, авто-
матически поддерживающими заданную температуру при помо-
щи воздействия на заслонки, то для получения кривых зависи-
мости у и z от fa необходимо автоматы выключить (только на со
ответствующий экспериментальный полет); во всем остальном
методика остается неизменной. При этом скорость надо приво-
дить к той температуре воды (головок цилиндров, масла), кото
рая задана регулятору.
Очень часто, особенно при испытании серийных самолетов,
ограничиваются только проверкой достаточности охлаждения, а
пересчет максимальной скорости на максимальную температуру
воды, головок или масла не производится.
§ 3. Испытания на разогрев охлаждающих устройств
459
§ 3. ИСПЫТАНИЯ НА РАЗОГРЕВ ОХЛАЖДАЮЩИХ УСТРОЙСТВ1
В отличие от предыдущего случая, при подъеме самолета мы
уже не имеем права считать теплоотдачу двигателя равной теп-
лоотдаче радиатора по двум причинам: во-первых, режим двига-
теля и условия внешней среды не являются постоянными и,
следовательно, баланс теплоотдачи все время нарушается;
во-вторых, подъем, как правило, начинается при» температурах,
отличающихся от температур при стационарном режиме, что так-
же создает дисбаланс теплоотдач.
Этот дисбаланс идет на повышение температур двигателя и
охлаждающих устройств. Поэтому процесс уже нельзя рассмат-
ривать как стационарный и температуры будут с течением вре-
мени (по мере набора высоты) изменяться; этот процесс назы-
вают процессом разогрева, так как обычно температуры по-
вышаются.
Так как все рассуждения будут совершенно одинаковыми для
воды, масла и головок цилиндров, будем для определенности го-
ворить о системе водяного охлаждения; для других систем
охлаждения выводы будут аналогичны.
Разница между теплоотдачей двигателя и теплоотдачей в воз-
дух (дисбаланс теплоотдач) идет на увеличение температуры
воды, радиатора и деталей двигателя. Обозначим суммарную теп-
лоемкость этих агрегатов буквой с. Тогда при повышении тем-
пературы воды на dtB за время dz количество теплоты, идущее
на разогрев, будет равно cdt3. Оно должно равняться дисбалан-
су теплоотдач, умноженному на dx. Отсюда
^1Lb = qb_q (19.25)
dT н
Время dx связано с изменением барометрической высоты
tz dHp
зависимостью Vyp~ — я. • отсюда
dz •
cyyp-^- — Q—Q
yPdHp в р
Подставляя выражения для QB и Qp из формул (19. 1) и
(19.3) и учитывая формулу (19.5), получим
>=-V- N” и» - 4) - •$₽ уп - м
cVyp cVyp
или
^-+/(ЯР)/В = ?(ЯД (19.26)
1 При написании настоящего параграфа использован ряд работ
Н. Б. Марьямова.
460
Глава XIX. Испытания систем охлаждения двигателя
где
C*N* t 2£1( )„
eV v
v yp
= eV
cv ур
CaN^
bV ур
(19.27)
tn-
cVyp
А
При заданных атмосферных условиях (т. е. при заданной за-
висимости температуры наружного воздуха от барометрической
высоты) и заданных режимах полета и работы двигателя вели-
чины f(Hp) и (Нр), очевидно, зависят только от высоты Нр. Сле-
довательно, дифференциальное уравнение (19.26) определяет
температуру воды как функцию высоты Нр, т. е. определяет кри-
вую разогрева. Это линейное дифференциальное уравнение пер-
вого порядка имеет, как известно, общее решение
-y/d/fp
t„ = e °
a+ J
0
0 dH,
Произвольная постоянная a определяется из начальных усло-
вий: при Нр=0 должно быть /в = /10, где /во — начальная темпе-
ратура воды. Отсюда a = /Lo и окончательно получаем:
tB = e 0
я,
А»0 + j W dHp
О
(19.28)
Функции f и 9 имеют очень сложный вид, задать их в ана-
литическом виде невозможно и значения интегралов в форму-
ле (19.28) приходится вычислять приближенными численными
методами. Обычно вводят упрощающие предположения. Для
нашей цели — пересчета с одних условий испытания на другие—
с достаточной точностью можно считать, что функция f(Hp) есть
величина постоянная. В самом деле, при испытаниях необходимо
оценить достаточность охлаждения, т. е. определить значение
максимальной температуры разогрева. Как показывают и рас-
четы и эксперимент, максимальное значение получается всегда
несколько (на ~1000 м) выше границы высотности двигателя,
что и понятно: выше границы высотности теплоотдача двигателя
начинает резко падать. Только в стратосфере падение теплоотда-
чи радиатора вследствие изотермичности стратосферы падает
сильнее теплоотдачи двигателя и там может получиться новый
подъем температуры. Однако такой случай встречается редко.
С другой стороны, в диапазоне высот от нуля до границы высот-
ности Ne и Vvp можно считать почти постоянными, вернее, слегка
колеблющимися около некоторого среднего значения.
§ 3. Испытания на разогрев охлаждающих устройств
461
Таким образом изменение функции f по высоте может полу-
читься в основном только за счет множителя стоящего при
втором слагаемом в формуле (19.27). Однако это- изменение не
очень велико и можно считать /=const, взяв некоторое среднее
значение. При f=const получим
tB = tBOe ~/Нр + е ~}н» Hf ye ffi? dHp. (19.29)
Отсюда видно, что зависящая от
/в0 часть tB равна
f
1вОе
Эта часть при изменении £в0 да-
ет изменение температуры воды на
С4)1=^Чо=^Чо- (19.30)
Как видим, эта поправка весьма
быстро падает с высотой; на
фиг. 19.5 представлен типичный
график величины е~у/^в зависимости
от высоты.
Можно дать приближенные вы-
ражения для второго слагаемого пра-
вой части равенства (19.29) и полу-
чить поправку, вызванную измене-
нием температуры наружного воз-
духа. Тогда можно было бы пере-
считать целиком всю кривую разо-
грева на новые температурные
условия. Однако этот путь очень
сложен и по существу не нужен. Мы
уже говорили, что для проверки до-
статочности охлаждения нет необхо-
димости знать всю кривую разо-
грева — достаточно знать только
максимальную температуру. Па
фиг. 19. 6 показаны типичные кривые
разогрева: кривая I — при фактиче-
ских условиях, кривая II — при фак-
тических условиях, но пересчитан-
Фиг. 19.6. Типичные кривые
разогрева.
7—в фактических условиях полета;
II пересчитанная при помощи по-
правки (19.30); III—пересчитанная на
РАТУ точным методом.
ная на новую начальную температу-
ру при помощи поправки (19.30), и кривая III — в РАТУ.
Максимумы кривой I (при /7тах) и кривой III (при //'та1)
смещены по высоте Н; однако разница высот, естественно, не-
велика. С другой стороны, вблизи максимума функция изме-
няется мало. Поэтому с большой степенью точности можно пре-
небречь разностью температур вдоль кривой III при высотах
и Н'тях и пересчитать только температуры в точке //тах.
462
Глава XIX. Испытания систем охлаждения двигателя
Но в момент времени, когда температура достигает макси-
мальной величины, — = 0 и мы снова приходим к тому же ба-
dt
лансу теплоотдач, что и в предыдущем параграфе, следователь-
но, и поправка сводится к той же поправке Присоеди-
няя сюда поправку на начальную температуру, получим оконча-
тельно
Ч = + (19.31)
Аналогично будем иметь для температуры масла и головок
цилиндров:
= + (19.32)
КГ = аГЪТн+сГМг0. (19.33)
При приведении для каждого типа двигателя уславливаются
брать определенные начальные значения tBQ, /го, /мо- Итак, поправ-
ка на режиме подъема такая же, как и на режиме максималь-
ной скорости, но прибавляется поправка на отклонение на-
чальной температуры. У двигателей с большой высотностью эта
поправка несущественна.
Приведем пример. Пусть при подъеме с начальной темпе-
ратурой воды £в0 = 9СР максимальная температура воды полу-
чалась tB = 105" на высоте 6J00 м при температуре воздуха
tn =—35°; стандартная начальная температура пусть равна
^в.ст = 70°С. Имеем (при приведении к РАТУ):
lTH = tH рату - tH = 4 - (- 35) = 39°; а в = 0,678;
. сй = 0,03; о£в0 = 70-90 = -20°;
отсюда
Тн + св«в0 = 0,678 • 39 + 0,03 ( — 20) = 26,5 -0,6 = 25,9°.
Следовательно, в РАТУ
tB= 105 + 25,9=130,9°С.
Такая температура недопустима и, следовательно, охлаждение
явно не обеспечивается; величина второго члена поправки 0,6°
показывает, что никаким выбором начальной температуры нель-
зя поправить дело.
В отличие от режима максимальной скорости пересчет на
другое положение заслонки при подъеме не производится по
следующей причине: испытания на скороподъемность, как пра-
вило, производятся при полном открытии заслонок, так как на
режиме скороподъемности (при относительно больших значе-
ниях су и сх) дополнительное сопротивление почти не влияет на
скороподъемность самолета.
Глава XX
ИСПЫТАНИЯ ТОПЛИВНОЙ, ВОДЯНОЙ И МАСЛЯНОЙ
СИСТЕМ1
§ 1. ОБЩИЕ ПОЛОЖЕНИЯ
Системы двигательной установки играют очень большую роль
при эксплоатации самолета, так как именно они обеспечивают
нормальную работу двигателя и только при условии хорошей
работы этих систем можно выжать из двигателя все, что он мо-
жет дать. Опыт эксплоатации показывает, что очень часто
вследствие дефектов систем двигательной установки, вскрываю-
щихся при массовой эксплоатации, приходится значительно из-
менять конструкцию самолета, что всегда сопряжено с ломкой
серийного производства и чего можно было бы избежать при
условии внимательного изучения двигательной установки еще в
процессе испытаний опытного самолета. Иногда приходится из-за
дефектов систем накладывать ограничения при летной эксплоа-
тации самолета, понижающие его боевые и эксплоатационные
качества.
Появление в эксплоатации турбореактивных двигателей в.
значительной мере устранило трудности, связанные с конструи-
рованием и эксплоатацией двигательной установки. Для совре-
менных ТРД проблема охлаждения и смазки вообще не суще-
ствует, а если необходимость в них и появится с увеличением
мощности, то едва ли решение этих вопросов может создать су-
щественные затруднения. Проблема топливопитания в основном
решена до высот порядка 16 000—18 000 м\ для больших высот
придется делать закрытые системы, что также не представит
больших затруднений. Таким образом конструирование двига-
тельной установки в настоящее время представляет проблему
только для поршневых двигателей.
Требования к системам двигательной установки весьма раз-
нообразны; каждая система имеет свои специфические особен-
ности. Однако некоторые общие черты имеются у всех систем.
Прежде всего, в каждой из этих систем рабочим телом являет-
ся жидкость, причем нельзя допустить, чтобы жидкость превра-
1 При составлении настоящей главы использованы результаты ряда ра-
бот М. И. Герасимова, В. В. Косточкина и Н. И. Тихонова.
464
Глава XX. Испытания топливной, водяной и масляной систем
щалась в пар i или нарушалась ее сплошность. Как известно, во
всякой системе, в которой рабочим телом является жидкость,
наиболее опасным врагом является кавитация: при пониженных
давлениях происходит выделение растворенных газов или паров
жидкости; это явление часто наблюдается в полостях рабочих
насосов (центробежных, шестеренчатых, коловратных и т. д.),
где по самому существу рабочего процесса неизбежно существен-
ное понижение давления. Для каждого насоса имеется опреде-
кавитационная
насоса.
•Фиг. 20. 1. Типичная
характеристика
ка В) начинается
ленное предельное давление на входе, начиная с которого по-
является кавитация; вследствие этого необходимо на входе иметь
некоторый запас в отношении кавитации.
На фиг. 20. 1 представлена типичная кавитационная характе-
ристика насоса; по оси абсцисс отложено давление на входе в на-
сос рвх, по оси ординат — дав-
ление на выходе рвых (или на-
пор Рнас = рЕХ—Рвых при W =
=const или же объемный рас-
ход W при рНас=-const). Харак-
теристика получается обычно
экспериментально при постоян-
ных оборотах. При больших
напорах на входе (точка Л)
насос работает нормально. По
мере уменьшения давления на
входе напор либо слегка па-
дает, либо остается постоян-
ным; начиная с некоторого кри-
тического значения p^i (точ-
е напора, пока при некотором
давлении pLX2 насос не потеряет полностью свою работоспособ-
ность. Вид кривой АВС очень сильно зависит от типа насоса и
от свойств жидкости. В ряде случаев давления pBXi и ptX2 близ-
ки друг к другу и кавитационная характеристика в точке В
имеет перелом почти под прямым углом (пунктирная кри-
вая на фиг. 20. 1); в других случаях начало кавитации (точка В)
лежит дальше от точки С полной потери работоспособности на-
коса и кривая после точки В не имеет излома, а опускается вниз
более или менее круто.
Очевидно, начало кавитации связано с давлением pt насы-
щенного пара жидкости, которое зависит для данной жидкости
от ее температуры. Для нормальной работы насоса необходимо
иметь некоторый запас давления на входе рвх по сравнению с
давлением пара pt. Разность ^p^p^-pt называется кавита-
ционным запасом и должна быть обусловлена для каж-
1 Для водяной системы с выпариванием это требование нарушает-
ся: на форсированных режимах или в условиях стратосферы мощности
охлаждающего радиатора нехватает, часть воды отводится в атмосферу в ви-
де пара, обеспечивая очень большой теплосъем вследствие большой скрытой
теплоты парообразования.
§ 1. Общие положения
'465
дого типа насоса в зависимости от свойств жидкости и режима
работы насоса.
При кавитации или частичном испарении жидкости в ней
появляются паровоздушные включения, резко сни-
жающие работоспособность системы; иногда эти включения об-
разуют такие пробки, что- работа системы полностью нарушается.
Для обеспечения нормальной работы двигателя необходимо
иметь определенное давление на входе в двигатель. Для обеспе-
чения смазки давление масла на входе в двигатель должно быть
не меньше определенной величины pM.min; для обеспечения пита-
ния топливом давление последнего на входе в двигатель тоже
не должно быть меньше некоторого минимума; наконец, давле-
ние воды должно- быть таким, чтобы в рубашках не могло- про-
исходить кипение. |
В открытых системах, сообщающихся с наружной атмосфе-
рой при помощи дренажных трубок, давления в отдельных ргоч-
ках системы понижаются и в конце концов на некоторой выроте
давление становится недопустимо низким как в отно-щении воз-
можности кавитации или кипения, так и в отношении требо-
ваний со стороны двигателя. Эту высоту называют «п от о л к О м»
или «границей высотности» системы. Естественно,
что для современных самолетов с очень большим летным потол-
ком необходимо- обеспечить и соответствующую высотность си-
стем, что представляет очень трудную задачу. Для каждой си-
стемы существует такая высота, выше которой неизбежно при-
менение закрытых систем с наддувом. Для топливных систем та-
кой высотой сейчас можно считать: для керосина 18—20 км, для
бензина 8—10 км, для масла — порядка 20—24 км (на этой вы-
соте начинается кипение масла); для воды эта высота значи-
тельно ниже и уже давно приходится применять системы закры-
того типа с дренажными клапанами.
Следует оговориться, что приведенные выше цифры характе-
ризуют топливные системы только с точки зрения высотности.
Если учесть потери горючего в результате испарения при боль-
ших разрежениях в топливных баках, наддув необходимо при-
менять на значительно меньших высотах.
Так или иначе, непременным и обязательным условием пра-
вильной работы системы является определенный минимум давле-
ния. Поэтому основным прибором при испытаниях являются мано-
метры самых разнообразных типов; обычно употребляются ме-
таллические манометры с трубкой Бурдона. ^Желательно приме-
нение самописцев, особенно на одноместных самолетах. Необхо-
димым прибором является также термометр, так как температу-
ра для масла и воды определяет их свойства как охлаждающей
среды, а кавитационные свойства топлива очень сильно- зависят
от температуры.
Помимо определения высотности необходимо- провести целый
ряд испытаний систем для проверки надежности их работы. Так
30 772
466
Глава XX. Испытания топливной, водяной и масляной систем
как эти испытания не представляют каких-либо особенностей с
методической точки зрения, мы о них далее лишь упомянем, от-
сылая за подробностями к специальным инструкциям и руковод-
ствам.
§ 2. ИСПЫТАНИЯ ТОПЛИВНОЙ СИСТЕМЫ
Основная задача топливной системы заключается в правиль-
ном питании двигателя топливом, что может быть обеспечено на-
сосами двигателя лишь при условии, что на входе в насосы дав-
ление выше определенного минимально необходимого давления
Фиг. 20. 2. Зависимость давле- Фиг. 20. 3. Зависимость давления
ния топлива от барометриче- топлива от высоты при наличии
ской высоты. насоса подкачки.
приспособлений, поддерживающих давление в баке, то при уве-
личении высоты давление во всех точках системы падает, пока
давление на входе в двигатель рД не станет ниже минимально
допустимого /?д min. На фиг. 20. 2 изображена типичная кривая
зависимости рД от барометрической высоты Нр для системы без
насосов подкачки. В точке В при высоте Нгр давление рд сравни-
вается с минимально допустимым и выше этой высоты — грани-
цы высотности (потолка) топливной системы — нормальная ра-
бота двигателя невозможна. Обычно это проявляется сначала
в колебаниях давления, а затем питание двигателя прекращается
и двигатель «обрезает» — его работа прекращается.
Для увеличения давления на входе в двигатель в последнее
время почти на всех типах высотных самолетов применяются
специальные насосы подкачки, работающие независимо
□т двигателя и повышающие давление перед двигателем. Такого
типа насосы обычно вмонтированы непосредственно в топливный
бак. На фиг. 20. 3 изображена типичная зависимость рд от Нр при
наличии насоса подкачки. В точке В включается насос подкачки,
вследствие чего давление рл резко возрастает (до точки С) и
граница высотности увеличивается до значения Падение
§ 2. Испытания топливной системы
467
давления в этой точке обусловливается уже отказом самого насо-
са подкачки из-за понижения давления на входе в него. Для
дальнейшего увеличения высоты необходимо делать специаль-
ный наддув в баках топливной системы.
Основная методическая задача при определении гра-
ницы высотности топливной системы заключается в сле-
дующем. Пусть в полете получена кривая давления рд и грани-
ца высотности Н^р при каких-то фактических атмосферных усло-
виях; найти границу высотности при определенных расчетных
условиях.
Напишем выражение для р^:
Рвх. pH Ргидр Н" Н" Арнадд* (20.1)
Это уравнение означает, что потери давления на пути от ба-
ка до входа в двигатель составляются из гидравлических потерь,
но добавляется гидростатическое давление Лу; давление в баке
равно атмосферному рн. увеличенному на давление наддува
ДРнадд. Отсюда запас на кавитацию
Ьрк~Рвк Pt pH Ргидр Н" Н“ АРнадд Pt' (20. 2)
При других условиях, обозначая величины теми же буква-
ми со штрихом вверху, получим
ДА = Рн -Рпкр + + ДРнадд -Р 'г
Отсюда легко получить уравнение:
Ря=/’я+(ЛИдр-Л„др)- (А,-А)7-(ЛАнаад-Арнадд ) +
+ (А—Pt) + <Ж — Дрк). (20.3)
показывающее, какое значение должно иметь новое атмосфер-
ное давление при новом значении величин. Зная давление рв
(известна барометрическая высота Н^) на границе высотности
системы, можем найти значение рн в новых расчетных условиях
по формуле (20.3), а по табл. СА — значение границы высот-
ности Нр в расчетных условиях.
Посмотрим, как подсчитать остальные члены, входящие в
уравнение (20.3). Гидростатическое давление Л у изменяется
крайне мало, так как положение самолета в пространстве почти
не изменяется и величина h может измениться в основном вслед-
ствие изменения уровня горючего в баке (на другой высоте
будет израсходовано меньше или больше топлива), но это- изме-
нение очень мало и обычно полагают 1г'—Л=0. Значительно боль-
ше может быть изменение гидравлических потерь р'^ю—Рпю,
так как при изменении высоты изменяется расход топлива в
двигателе. Однако, как показывает практика расчетов, влияние
этого члена мало и им обычно пренебрегают.
30*
468
Глава XX. Испытания топливной, водяной и масляной систем
Большое изменение границы высотности может дать член
Лр'надд—Дрнадд, так как давление наддува может сильно ме-
няться по высоте. Если наддув баков получается под действием
скоростного наддува через дренаж или путем вывода дренажа
в место с повышенным давлением, то он может сильно изме-
няться в результате уменьшения скорости, плотности и давле-
ния. Если наддув производится действием выхлопных газов дви-
гателя, он изменяется вслед-
Фиг. 20. 4. Зависимость давления на-
сыщающих паров бензина Б-78 от
температуры и отношения объема
паровой фазы b к объему жидкой
фазы а.
ствие изменения противодав-
ления в выхлопных патрубках.
Только в том случае, если в
системе имеется клапан, авто-
матически поддерживающий
Арнадд^ const, можно1 прене-
бречь этим членом. Поэтому
при испытаниях рекомендуется
замерять изменение Дрйадд по
высоте.
Наибольшее значение имеет
член p't—pt. Авиационное топ-
ливо является многокомпонент-
ной жидкостью. Поэтому нель-
зя говорить о каком-то опреде-
ленном давлении насыщающих
паров; это давление зависит не
только от температуры, но и от
соотношения объемов жидкой и
паровой фазы. На фиг. 20.4
для примера приведен гра-
фик, показывающий зависи-
мость давления насыщающих
паров авиационного бензина
Б-78 от температуры бензина t
и от отношения объема паро-
вой фазы b к объему жидкой
фазы а. Поэтому вместо про-
стого обозначения pt принято
ПИСаТЬ pt, ba .
Кроме того, нельзя считать, что явление кавитации обуслов-
ливается только величиной pt,bia, так как при движении жидко-
сти испарение происходит по законам, отличным от законов испа-
рения покоящейся жидкости. По существу говоря, законы кави-
тации многокомпонентных жидкостей в настоящее время изуче-
ны крайне мало. Поэтому обычно на основании данных ряда
экспериментов за величину pt, определяющую кавитацию, прини-
мают значение pt,*i „ т. е. значение давления насыщенного пара
при температуре топлива i и отношении паровой фазы к
„ Ь 4
жидкой — = —.
§ 2. Испытания топливной системы
469
Из фиг. 20.4 видно, что значение pt,^ очень сильно зависит
от температуры. Поэтому при испытаниях необходимо тщатель-
но измерять температуру бензина в линии всасывания основного
насоса при помощи специального термометра. За расчетную тем-
пературу обычно принимают /=40° С. На первый взгляд, может
показаться странным, что в условиях больших высот темпера-
тура бензина берется столь высокой. Однако опыт летных испы-
таний показывает, что температура топлива при подъеме на вы-
соту мало изменяется из-за малой поверхности теплоотдачи.
А нагрев топлива при долгой стоянке на земле при прямом дей-
ствии солнечных лучей в летнее время легко может довести его
температуру до 40°, а в отдельных случаях даже выше.
Перед полетом и после полета из бака отбираются специ-
альные пробы топлива для измерения температуры и определе-
ния упругости его паров.
Для определения расчетного давления обычно применяются
формулы, позволяющие для данного сорта топлива найти давле-
ние насыщающих паров pt в зависимости от температуры t. Так
например, для бензинов применяют формулу
4,069-
pw=p'-10 273+z, (20.4)
где р' — упругость паров топлива при /=37,8°. Зная упругость
паров при фактической температуре pt,^ и при расчетной p't,^,
легко найти разность p't,*^ —pt, • Так как пользование эмпи-
рическими формулами типа
(20.4) всегда вызывает не-
уверенность, следует при
испытаниях в условиях, силь-
но отличающихся от расчет-
ных, перед испытаниями по-
догревать топливо в баках
до температуры, близкой к
расчетной.
Разберем последний член
в формуле (20.3). Запас на
кавитацию Дрк зависит от
условий работы насоса, т. е.
от его оборотов, расхода топ-
лива и напора, создаваемого
насосом. На фиг. 20.5 при- Фиг. 20.5. Типичные кавитационные ха-
ведены типичные кавитаци-
онные характеристики топ-
рактеристики топливного насоса при;
разных расходах.
ливного насоса при разных
расходах. По оси абсцисс отложено1 давление на входе рзх (или
рзх—Pt,*!,), по оси ординат — давления за насосом Мини-
мально допустимому давлению на выходе ра min соответствует
определенное значение pBXi. Разность Дрк=Рвх1—Р*,*/» дает ка-
470
Глава XX. Испытания топливной, водяной и масляной систем
витационный запас. Имея такие характеристики для ряда рас-
ходов W, можем найти как функцию расходов, а зная рас-
ходы двигателя (по измерениям или по высотным характери-
стикам), можем найти Др'к—\рк.
Основную роль в уравнении (20. 3) играет член p't—pt. Для
иллюстрации влияния этого члена приведем такой пример. Пусть
при испытаниях граница высотности на бензине Б-78 ори темпе-
ратуре 10° С получилась равной 9000 м (рн=230 мм рт. ст.).
Определим границу высотности при температуре бензина 40°. По
фиг. 20.4 имеем pt,^ = 130 мм рт.ст., /?+</, =360 мм рт. ст. От-
сюда, пренебрегая всеми членами, кроме р\—pt, получим
рн=рн +p't,<il—Pt,'i, = 230+360—130=460 мм рт. ст., что соот-
ветствует высоте 4000 м\ таким образом только подогревом топ-
лива на 30° мы снижаем границу высотности системы с 9000 м
до 4000 м, т. е. на 5000 м.
Очень часто пересчет по уравнению (20. 3) проводят, прене-
брегая всеми членами, кроме p't—pt. При желании уточнить ре-
зультат можно, получив таким образом первое приближение для
новой границы высотности, подсчитать расходы топлива по ха-
рактеристике двигателя, подсчитать члены Др'надд — ДрНадЛ и
Др'к—Дрк и получить новое значение р'я, по, которому найти вто-
рое приближение границы высотности. Этот процесс приближения
можно повторить, iHo обычно даже второе приближение мало
отличается от первого.
Кроме проверки высотности топливной системы, обычно при
летных испытаниях производится проверка надежности по
дачи горючего к двигателю при всех возможных режимах
работы двигателя (стационарных и переходных) и всех возмож-
ных режимах полета, включая резкие маневры. Особенно следует
обратить внимание на такие режимы полета, когда возможно
оголение штуцеров бака и временное прекращение подачи топ-
лива в двигатель, например, полет на спине или полет с отрица-
тельной перегрузкой (при заходе в пикирование). При таких ре-
жимах вследствие инерционных нагрузок возможно также умень-
шение давления на всасывании и переход насоса на кавитацион-
ный режим.k
Все испытания на надежность работы системы следует про-
изводить, естественно^, при наименее выгодной последователь-
ности включения баков.
Одновременно со всеми этими испытаниями проводится опре-
деление равномерности выработки топлива из крыльевых баков.
На земле определяется минимальный запас горючего, при ко-
тором возможна бесперебойная работа двигателя, проверяется
аварийный слив, емкость баков и время заправки горючего.
Наконец, весьма важным элементом испытаний является про-
верка системы нейтральных газов. Для определения пожарной
безопасности определяют состав и концентрацию нейтральных
§ 3. Испытания масляной системы
471
газов в баках. Если эта система служит одновременно для над-
дува баков, определяют величину наддува; граница высотности
системы в этом случае проверяется как при включении систе-
мы НГ, так и без нее. Проверяют также баки на опасность де-
формации под действием излишнего наддува.
§ 3. ИСПЫТАНИЯ МАСЛЯНОЙ СИСТЕМЫ
Как при испытаниях любой системы двигательной установки,
так и при испытаниях маслосистемы основным вопросом являет-
ся определение границы высотности («потолка») системы. При
этом приходится исходить из следующих соображений: для без-
упречной смазки трущихся деталей двигателя давление масла рм
на входе в двигатель не должно быть меньше некоторого давле-
ния рм min, допустимого для данного типа двигателя.
Фиг. 20.6. Кавитационная ха-
рактеристика масляного насоса.
Фиг. 20.7. Зависимость давле-
ния масла рм от барометриче-
ской высоты на режиме подъ-
ема.
Как уже указывалось в § 1, всякий насос, в том числе и ма-
сляный, при уменьшении давления на входе уменьшает свою на-
порную способность вследствие кавитации. На фиг. 20.6 пред-
ставлены типичные кавитационные характеристики масляного*
насоса. При уменьшении давления рвх ниже некоторой величины
начинается резкое падение давления за насосом (на входе в
двигатель) вследствие начинающегося выделения растворенных
газов. Заметим, что характеристика сильно зависит от темпера-
туры масла, что и понятно, так как с повышением температуры
выделение газов облегчается.
На фиг. 20. 7 представлена типичная кривая зависимости дав-
ления масла рм от барометрической высоты, полученная на режи-
ме подъема. На уровне моря давление имеет некоторое опреде-
ленное значение, обусловленное величиной затяжки пружины ре-
дукционного' клапана и производительностью нагнетающего
насоса. С ростом высоты это давление сначала медленно падает
(или даже остается постоянным, в зависимости от конструктив-
472
Глава XX. Испытания топливной, водяной и масляной систем
ных особенностей), а затем падает все быстрее и быстрее, что
обусловливается, как мы видели, падением давления в масло-
баке с высотой. На некоторой высоте НГР давление становится
равным минимально допустимому давлению рм min. Эта высота и
является границей высотности (потолком) . маслосистемы.
Давление на выходе из насоса при одном и том же давле-
нии на входе зависит от температуры масла по двум причинам:
вследствие изменения количества выделяемых газов и измене-
ния вязкости при изменении температуры масла. Поэтому кри-
вую фиг. 20. 7, полученную в полете при некоторой случайной
температуре масла на входе, следует пересчитать на другую,
наиболее неблагоприятную температуру масла. Для этого на
высоте несколько меньшей
полученной границы высот-
ности производят горизон-
тальный полет на том же
режиме двигателя, но при
разных открытиях заслонки
радиатора, в результате че-
го получают зависимость
давления масла на входе в
двигатель от температуры
масла на входе в насос
(фиг. 20.8). Взяв на этой
Фиг. 20.8. Зависимость давления масла кривой точку А, соответ-
от температуры на входе. ствующую фактической тем-
пературе масла при подъе-
ме, получают поправку 8рм, на эту поправку снижают рм (на
фиг. 20. 7 пунктирная кривая); пересечение новой кривой с го-
ризонтальной прямой pxrmin дает границу высотности маслосисте-
мы Н'^ при наихудших температурных условиях.
Одной из наиболее частых болезней маслосистем на совре-
менных самолетах является выброс масла. Это явление
обследуется путем постепенного увеличения количества масла,
заливаемого в бак. При эксплоатации количество масла в баке
не должно превосходить того количества, при котором на всех
режимах двигателя не происходит выброса. Если это количество
слишком мало, необходимо переделать колодец и пеногаситель.
И высотность и выброс тесно связаны с количеством
воздуха, которое содержится в масле, находя-
щемся в баке. При особо ответственных испытаниях необходимо
при помощи специальных приспособлений отбирать пробы масла
и определять количество воздуха, содержащегося в нем. При
слишком большом содержании воздуха необходимо переделать
систему.
Кроме указанных испытаний, обычно проверяется надеж-
ность работы маслосистемы при резких маневрах и особенно
на таких режимах полета, когда возможно временное прекраще-
§ 4. Испытания водяной системы
473
ние подачи масла в двигатель и его агрегаты (полет на спине,
маневр с обратной перегрузкой).
Особое место занимает испытание системы разжижения
масла бензином. Здесь необходимо определять следующие
основные характеристики: обороты, при которых следует произ-
водить разжижение, расход бензина, время выпаривания.
Наконец, при предварительных наземных испытаниях необхо-
димо определить такие эксплоатационные характеристики, как
емкость системы, полноту слива, время слива и заправки.
§ 4. ИСПЫТАНИЯ ВОДЯНОЙ СИСТЕМЫ
Напомним прежде всего простейшую схему водяной системы
охлаждения поршневого двигателя (фиг. 20. 9).,В каждой такой
системе имеется основной циркуляционный кон-
тур. Вода из насоса поступает в рубашки цилиндров, отнимает
у них тепло и после нагрева по трубопроводу поступает в ра-
диатор, откуда после охлаждения снова поступает в насос.
1—блоки двигателя; 2—радиатор; 3—водяной насос; 4—расши-
рительный бачок; 5—дренажный клапан.
Кроме основного контура, существует компенсацион-
ный контур. Часть воды из блоков поступает в компенсаци-
онный бачок, а затем в насос. В компенсационном бачке уста-
навливается дренажный клапан, который открывает выход из
бачка в атмосферу либо в том случае, если давление воздуха и
паров воды в верхней части бачка превышает атмосферное
давление на определенную величину (клапан с постоянным пе-
репадом давления), либо в том случае, если это давление до-
стигает определенной величины (анероидный клапан постоян-
ного давления открытия). Заметим, что давление в верхней
части бачка равно сумме парциального давления воздуха и пар-
циального давления паров воды, равного давлению насыщаю-
щих паров при температуре воды в бачке.
474
Глава XX. Испытания топливной, водяной и масляной систем
Фиг. 20. 10. Кавитационная характери-
стика водяного насоса.
Надежность работы водосистемы зависит прежде всего от
того, наступит или не наступит при каких-нибудь режимах си-
стемы кавитация (кипение). Поэтому главной задачей испыта-
ний является проверка запаса на кавитацию.
На фиг. 20. 10 приведена типичная кавитационная характе-
ристика водяного насоса. По оси абсцисс отложена разность
Др=р|ВХ—Pt, где рвх— давление на входе в насос, pt—яавле-
температуре воды t. По оси
ординат отложены объемный
расход W или напор pnacf=
=рвых—р?х. При больших
значениях Др насос работает
нормально и поддерживает
нужные расход и напор. При
уменьшении Др, начиная с
некоторого значения, обе ве-
личины начинают падать
сначала медленно, а затем
все быстрее.
Обычно считается, что
авиационный водяной насос
работает удовлетворительно,
если прокачка уменьшается
не больше, чем на 5—10°/о
от первоначальной величины.
Поэтому разность Др не должна быть меньше определенной ве-
личины Дрк, которая и называется запасом на кавитацию. Отно-
шение запаса на кавитацию к напору насоса о = —- назы-
Т’нас
вается коэффициентом кавитации. Для центробеж-
ных водяных насосов коэффициент кавитации в основном зави-
сит от коэффициента быстроходности
где W— прокачка в л!сек\
п — число оборотов насоса в об/мин;
Лас — напор насоса в м вод. ст.
Экспериментально для водяных насосов была найдена зави-
симость о от ns, приведенная в следующей таблице.
90 100 125 150 175 200 225 250
а 0,06 0,075 0,100 0,125 0,152 0,184 0,214 0,250
§ 4. Испытания водяной системы
475
Фиг. 20. 11. Зависимость полного на-
пора от температуры воды на входе.
У авиационных водяных насосов ns колеблется обычно в пре-
делах от 125 до 160; поэтому для них иногда принимают
О =0,10—0,13.
Основной задачей испытания. водосистемы является, во-пер-
вых, определение коэффициента кавитации насоса и, во-вторых,’
проверка, является ли его величина достаточной для надежной
работы системы при всех возможных условиях.
Для решения первой задачи на земле снимают дренажный
клапан. Установив нужные числа оборотов двигателя (обычно
номинальные и приблизитель-
но на 400—500 об/мин меньше
номинальных), постепенно уве-
личивают температуру воды,
пока не начнется выброс воды
из расширительного бачка.
При этом измеряют давление
перед насосом и за ним и тем-
пературу воды на входе и вы-
ходе из двигателя. Затем
строят зависимость полного на-
пора насоса /7нас Рвых р»х в
зависимости от температуры
воды на входе в двигатель
(фиг. 20.11). За начало кави-
тации принимают такой режим,
когда полный напор насоса равен 0,95 напора, при котором за-
ведомо нет кавитации, т. е. напора при минимальной температу-
ре воды при испытаниях (фиг. 20. 11). Затем для этой точки под-
считывается фактический коэффициент кавитации
а Pt
Рнас
где pt — давление насыщенных паров в точке начала кавитации.
Этот коэффициент должен быть не больше коэффициента а,
указанного в приведенной выше таблице. Только в этом случае
насос может считаться кондиционным.
Для решения второй задачи дренажный клапан ставится на
место и производится испытание закрытой системы на земле.
Производится гонка двигателя на установившемся режиме в диа-
пазоне оборотов от номинала до 0,5—0,6 от номинальных обо-
ротов. При этом регистрируются число оборотов, температура
воды на входе в двигатель и выходе из него и в расширительном
бачке, давление перед насосом, за насосом и в расширительном
бачке.
Аналогичные испытания закрытой системы производятся в
полете на высоте в пределах 2000—6000 м при нескольких обо-
ротах двигателя (обычно: номинал, на 300 об/мин и на 600 об/мин
меньше номинала) при температуре, рекомендованной по усло-
виям эксплоатации. Замеряются те же величины.
476
Глава XX. Испытания топливной, водяной и масляной систем
По полученным данным подсчитывается разность давлений
р,вх — pt. Чтобы найти кавитационный запас при наиболее тяже-
лых условиях, когда давление в расширительном бачке равно
давлению насыщенных паров и отсутствует парциальное давле-
ние воздуха, из полученной разности вычитается разность
Рь — P6t, гДе Рб — давление в бачке во время испытаний;
pet— давление насыщенных паров при температуре t в бачке,
т. е. парциальное давление воздуха в бачке. По полученным
значениям подсчитывается коэффициент кавитации
&__Рвх Pt^~ Рб t Рб
Риас.
Этот коэффициент должен быть больше расчетного коэффи-
циента, приведенного в таблице. Таким путем определяется на-
дежность запаса на кавитацию.
Определение надежности циркуляции производится следую-
щим образом. В полете на высоте 4000—5000 м при номиналь-
ных оборотах устанавливают температуру воды на 15—20° ниже
максимально допустимой. Затем заслонки прикрывают, темпе-
ратура доводится до максимально допустимой и выдерживается
в течение 4—5 мин. После этого заслонки открывают и темпера-
тура доводится до прежней величины.
Обработка замеренных величин производится следующим об-
разом. Подсчитывается абсолютное давление в бачке (если из-
меряется избыточное давление) рб и разность Рь~Рб*- Эта раз-
ность на исходном режиме должна быть больше нуля, а на вто-
ром и третьем режимах равна нулю, так как воздух удален че-
рез открывшийся клапан. При всех режимах напор насоса дол-
жен оставаться неизменным i.
Высотность водосистемы определяется регулировкой дренаж-
ного клапана. Клапан должен быть закрыт на всех высотах до
потолка при всех допустимых температурах воды в расширитель-
ном бачке. В соответствии с этим для пружинного клапана с по-
стоянным перепадом давления должно выполняться условие
P™>Pt-PH,
где рКЛ — затяжка пружины (избыточное давление, при кото-
ром открывается клапан);
pt—упругость паров воды при максимально допустимой
температуре;
рн—атмосферное давление на расчетной высоте (потолке
самолета).
Обычно разность р^— (pt — Рн) берут порядка 0,1—0,2 ат.
1 Для самолетов с большой высотностью этот эксперимент может не
получиться, так как через клапан уйдет мало воздуха. В этом случае рекомен-
дуется затяжку клапана уменьшить, сделав ее примерно на пол-атмосферы
больше упругости насыщающих паров при максимальной температуре воды.
§ 4. Испытания водяной системы 477
Для анероидного клапана постоянного давления давление
открытия должно' быть не меньше упругости паров воды при
максимальной температуре; обычно для создания запаса берут
не максимально допустимую температуру, а несколько более
высокую (на несколько градусов).
Регулировка клапана проверяется или производится обычно
в лабораторных условиях. В случае нехватки высотности следует
проверить и изменить регулировку клапана.
Кроме указанных испытаний, обычно определяют ряд пара-
метров системы: полноту заливки и слива, емкость системы,
время заливки и слива.
ЛИТЕРАТУРА
1 Юрьев Б. Н., Экспериментальная аэродинамика, часть 1, Оборон-
гиз, 1939.
2. Христианович С. А., Гальперин В. Г., Миллионщи-
ков М. Д., Симонов Л. А., Прикладная газовая динамика, 1948.
3. К о ч и н Н. Е., К и б е л ь И. А. и Розе Н. В., Теоретическая гидро-
механика, части 1 и 2, Гостехиздат, 1948.
4. Левинсон Я- И., Аэродинамика больших скоростей, Оборонгиз, 1950.
5. Остославский И. В. и Титов В. М., Аэродинамический расчет
самолета, Оборонгиз, 1947.
6. Горощенко Б. Т., Аэродинамика скоростного самолета, Оборон-
гиз, 1948.
7. Пышно в В. С., Аэродинамика самолета, Оборонгиз, 1943.
8. В ед ров В. С., Динамическая устойчивость самолета, Оборонгиз, 1938.
9. Остославский И. В. и Калачев Г. С., Продольная устойчи-
вость и управляемость самолета, Оборонгиз, 1951.
10. Ветчин кин В. П., Динамика самолета, Госмашметиздат, 1933.
11. Тай ц М. А. и Чеса лов А. В., Испытания самолетов в полете,.
Справочник авиаконструктора, том 1, ЦАГИ, 1937.
12. Егоров Б. Н., Летные испытания самолетов, БИТ, 1941.
13. Приборы и аппаратура для летных испытаний, ЦАГИ, 1940.
14. Таблица стандартной атмосферы. Стандартгиз, 1949.
15. М а с л е н н и к о в М. М. и Pan и порт М. С., Авиационные двига-
тели легкого топлива, книга 1, Оборонгиз, 1946.
16. И но з е м ц е в Н. В. и Зуев В. С., Авиационные газотурбинные
двигатели, Оборонгиз, 1949.
17. Маликов М. Ф., Основы метрологии, Коммерприбор, часть 1,1949.
18. Хвостиков И. А., Строение и состав стратосферы и ионосферы,
Вестник Академии Наук СССР, № 1, 1948.
19. Бенуа К- М., Метеорология, Госвоенмориздат, 1941.
20. X р о м о в С. П., Основы синоптической метеорологии, Гимиз, 1948.
ОГЛАВЛЕНИЕ
Стр.
Предисловие........................................................ 3
Введение........................................................... 5
Глава I
Атмосфера
§ 1. Краткие сведения о строении атмосферы........................ 11
§ 2. Физические параметры воздуха и их измерение.................. 17
§ 3. Изменение параметров воздуха с высотой и условные атмосферы . 24
§ 4. Влияние силы тяжести......................................... 31
Глава II
Подготовка к испытаниям
§ 1. Подготовка самолета и двигателя.............................. 33
§ 2. Взвешивание и определение центра тяжести..................... 34
•§ 3. Выбор и подготовка приборов................................. 38
Глава III
Погрешности измерений при летных испытаниях
§ 1. Классификация погрешностей................................... 45
§ 2. Систематические погрешности.................................. 46
§ 3. Случайные погрешности........................................ 48
§ 4. Оценка точности эксперимента и способы ее повышения .... 54
§ 5. Точность разных видов летных испытаний...................... 58
Глава IV
Теория приборов, измеряющих скорость и высоту полета
§ 1. Работа указателя скорости и высоты в несжимаемой жидкости . 64
§ 2. Работа указателя скорости в сжимаемом газе.................. 68
§ 3. Определение числа М полета................................... 74
§ 4. Приемники для измерения давления и скорости. Погрешности
приемников . . ’.................................................. 77
§ 5. Аэродинамические поправки. Связь поправок к высоте и скорости 81
480
Оглавление
Стр,
Глава V
Методика определения скорости и высоты полета
§ 1. Барометрический метод тарировки приемника давления в полете 85
§ 2. Тарировка на мерной базе..................................... 88
§ 3. Другие методы тарировки приемника давления................... 91
§ 4. Сравнение различных методов тарировки........................ 93
§ 5. Измерение температуры воздуха в полете....................... 97
§ 6. Определение скорости, температуры и высоты при летных испы-
таниях .......................................................... 101
§ 7. Ошибки, вызванные запаздыванием..........................., 10L
Глава VI
Общие вопросы приведения летных данных к стандартным
условиям
§ 1. Атмосферные и эксплоатационные условия испытаний............ 107
§ 2. Стандартная высота.......................................... 108
§ 3. Общая характеристика методов приведения..................... Ilf
§ 4. Метод дифференциальных поправок............................. 114
§ 5. Частные случаи формул приведения............................ 117
§ 6. Свойства показателей........................................ 121
Глава VII
Основные сведения о пересчете характеристик двигателей
§ 1. Невысотный поршневой двигатель..............................125-
§ 2. Общие зависимости мощности поршневого двигателя с ПЦН от
давления наддува и температуры на всасывании..................... 128
§ 3. Формулы для приведения мощности поршневого двигателя с ПЦН 133
§ 4. Поршневой двигатель с комбинированной системой наддува ... 141
§ 5. Турбореактивный двигатель....................................158
Глава VIII
Определение максимальных горизонтальных и вертикальных
скоростей и потолка самолета
§ 1. Проведение полетов для определения Итах и ^j/max............ 168
§ 2. Вывод приближенных формул для расчета вертикальной скорости 172
§ 3. Экспериментальные методы определения наивыгоднейших скоро-
стей подъема..................................................... 175
§ 4. Обработка результатов полета на скороподъемность............ 182
§ 5. Влияние вертикальных токов воздуха и градиента скорости ветра
на скороподъемность............................................. 185-
Глава IX
Приведение к стандартным атмосферным условиям максимальной
скорости и скороподъемности самолетов с невысотными поршневыми
двигателями
§ 1. Метод подобия режимов полета.................................189
§ 2. Метод оборотов..............................................196-
Оглавление
481
Стр-
Глава X
Приведение к стандартным атмосферным условиям максимальной
скорости и скороподъемности самолетов с высотными поршневыми
двигателями ВИШ-автоматами
§ 1. Приведение максимальной горизонтальной скорости................204
§ 2. Приведение максимальной вертикальной скорости 218-
Глава XI
Приведение к стандартным атмосферным условиям максимальной
скорости и скороподъемности самолетов с ТРД
§ 1. Применение теории подобия для построения сеток обобщенных
характеристик..................................................... 2294
§ 2. Сетки обобщенных характеристик для горизонтального полета . . 233
§ 3. Приведение максимальной скорости по методу эквивалентной
высоты . '...............................................240
§ 4. Приведение максимальной скорости при помощи показателей . . 242
§ 5. Характер протекания кривых Mmax, V'max и И2Гпах по высоте полета 254
§ 6. Определение потолка самолета по сетке обобщенных характери-
стик горизонтального полета ....................................... 259
§ 7. Приведение максимальной вертикальной скорости..................263
§ 8. Характер протекания кривых Vi наб и Vy max по высоте полета . . 269'
§ 9. Теоретическая и практическая скороподъемность..................271
Глава XII
Методы измерения элементов траектории
§ 1. Измерительная фотокамера.......................................275
§ 2. Фотокинотеодолитный метод......................................276
§ 3. Радиолокационный метод........................................ 278
§ 4. Основные геометрические и кинематические параметры, опреде-
ляющие движение самолета............................................279
§ 5. Методы измерения углов атаки и скольжения......................281
§ 6. Измерение углов поворота самолета..............................283
§ 7. Измерение угловых скоростей. Определение углов поворота инте-
гральным способом...................................................286
§ 8. Измерение ускорений (перегрузок)............................. 288-
§ 9. Вычисление траектории по перегрузкам...........................290
Глава XIII
Определение устойчивости и управляемости самолета
§ 1. Основные понятия и определения.................................293
§ 2. Качественное определение устойчивости и управляемости .... 296
§ 3. Краткие основные сведения из теории продольной устойчивости
и управляемости самолета .......................................... 297
§ 4. Определение запаса продольной статической устойчивости при
зажатом управлении..................................................307
§ 5. Определение продольных усилий на ручке управления. Продольная
устойчивость с брошенным управлением. Сила трения...................315
31 772
482
Оглавление
Стр.
§ 6. Определение градиента усилия по перегрузке..............323
§ 7. Определение статических коэффициентов боковой устойчивости : 326
§ 8. Определение эффективности элеронов......................330
§ 9. Определение динамической боковой устойчивости...........333
§ 10. Определение усилий на ручке и педалях при боковых движениях 336
Глава XIV
Испытания самолетов на маневренность, штопор
и сверхмаксимальные скорости
§ 1. Полет при частично выключенных двигателях.....................338
§ 2. Исследование горизонтального правильного серийного виража . . 342
§ 3. Исследование маневренности самолета...........................345
§ 4. Испытания на потерю скорости и штопор.........................348
§ 5. Определение сверхмаксимальных (предельных) скоростей . . . 350
Глава XV
Определение взлетно-посадочных свойств самолета
§ 1. Простейшие методы изучения взлетно-посадочных характеристик. 356
§ 2. Неподвижная измерительная фотокамера с установкой на линии
взлета............................................................358
§ 3. Вращающаяся измерительная фотокамера..........................360
§ 4. Неподвижная ИФК с широкоугольным объективом...................363
§ 5. Съемка двумя камерами.........................................364
§ 6. Приведение характеристик взлета к стандартным условиям . . . 365
§ 7. Приведение посадочных характеристик самолета..................375
§ 8. Учет уклона посадочной полосы.................................376
Глава XVI
Расход горючего и дальность полета
§ 1. Проведение испытаний..........................................378
§ 2. Расходы горючего у самолетов с невысотным поршневым двига-
телем и винтом фиксированного шага................................383
§ 3. Расходы горючего у самолетов с высотным поршневым двигате-
лем и ВИШ-автоматом . . :.........................................390
§ 4. Расходы горючего у самолетов с турбореактивными двигателями. 403
§ 5. Контрольные полеты на дальность и составление графиков полета 412
Глава XVII
Испытания турбореактивных двигателей
§ 1. Определение суммарных характеристик двигателя.............. 420
§ 2. Определение расхода воздуха и газов..........................424
§ 3. Определение тяги без динамометрической подвески..............428
§ 4. Определение температуры в реактивном сопле...................431
§ 5. Испытания на помпаж...........................................435
§ 6. Испытания автоматики двигателя на стационарных и переходных
режимах...........................................................437
Оглавление
483
Стр
Глава XVIII
Испытания поршневых двигателей
§ 1. Определение эффективной мощности и крутящего момента . 439
§ 2. Определение расхода воздуха через двигатель. Коэффициент на-
полнения и индикаторная мощность. Коэффициент избытка воздуха 440
§ 3. Определение качества нагнетающей системы.....................443
§ 4. Определение границы высотности двигателя.....................444
§ 5. Испытания на помпаж..........................................446
Глава XIX
Испытания систем охлаждения двигателя
§ 1. Общие зависимости.......................................... 448
§ 2. Изменение температуры воды, масла и головок цилиндров на ре-
жиме максимальной скорости....................................... 451
§ 3. Испытания на разогрев охлаждающих устройств ... ... 459
Г лава XX
Испытания топливной, водяной и масляной систем
§ 1. Общие положения........................................ ... 463
§ 2. Испытания топливной системы................................. 466
§ 3. Испытания масляной системы.................................. 471
§ 4. Испытания водяной системы . .... 473
Литература ....................... . . ... 478
Редактор Е. В. Латынин
Трхн. редактор Н. Н Пискарева
Г70976. Подп. в печ. 12/Х 1951 г
Учетно-изд. л. 28.23 Формат бу-
маги 60х921/]б= 151/4 б. л.-3()1/2п. л
Цена в пер. 15 руб. Зак. 772/1220.
Типография Оборонгиза
Список опечаток
Стр. Строка Напечатано
76 12 снизу *5-(1 + Рн
Рно 166,92 М7 Рн (7М2 — I)2,5
155 4 сверху Pk
Г2
281 3-я формула (12,8) 4-шл sin у
303 формула (13.11) Vd
331 формула (13.37) V2l
451 10 сверху паузах
В. С. Ведров и М. А. Тайц. Летные испытания самолетов
Должно быть
Phq
Ph
=(1 +
Рно _ 166,92 М?
рн ~(7М*-1)2 * *’5
Pk
Р2
— <1>21 sin 7
dV
VP
пазухах
Зак. 772