/








Author: Литинецкий И.Б.
Tags: биология экология физиология физиология животных бионика биотехника
Year: 1976



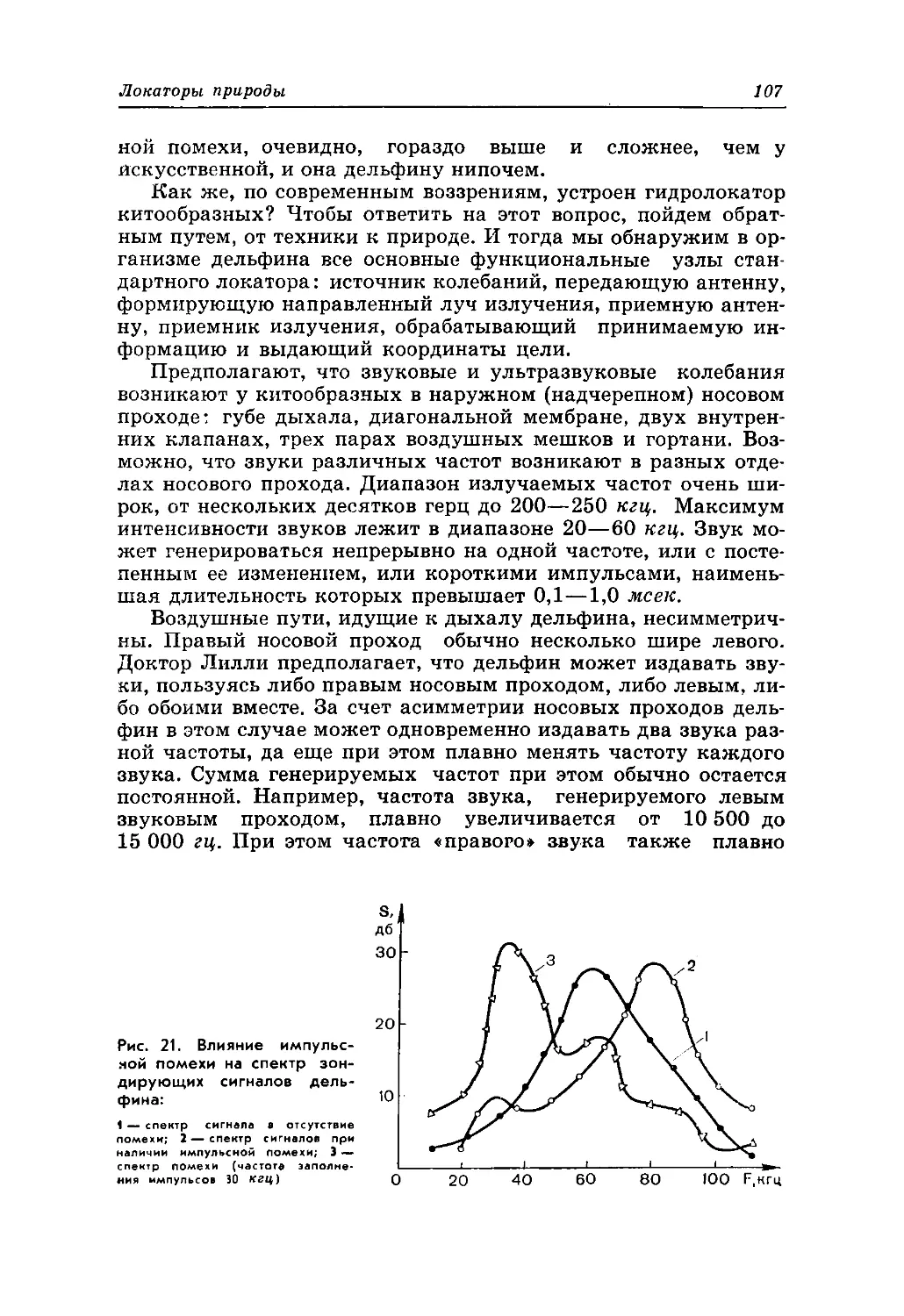
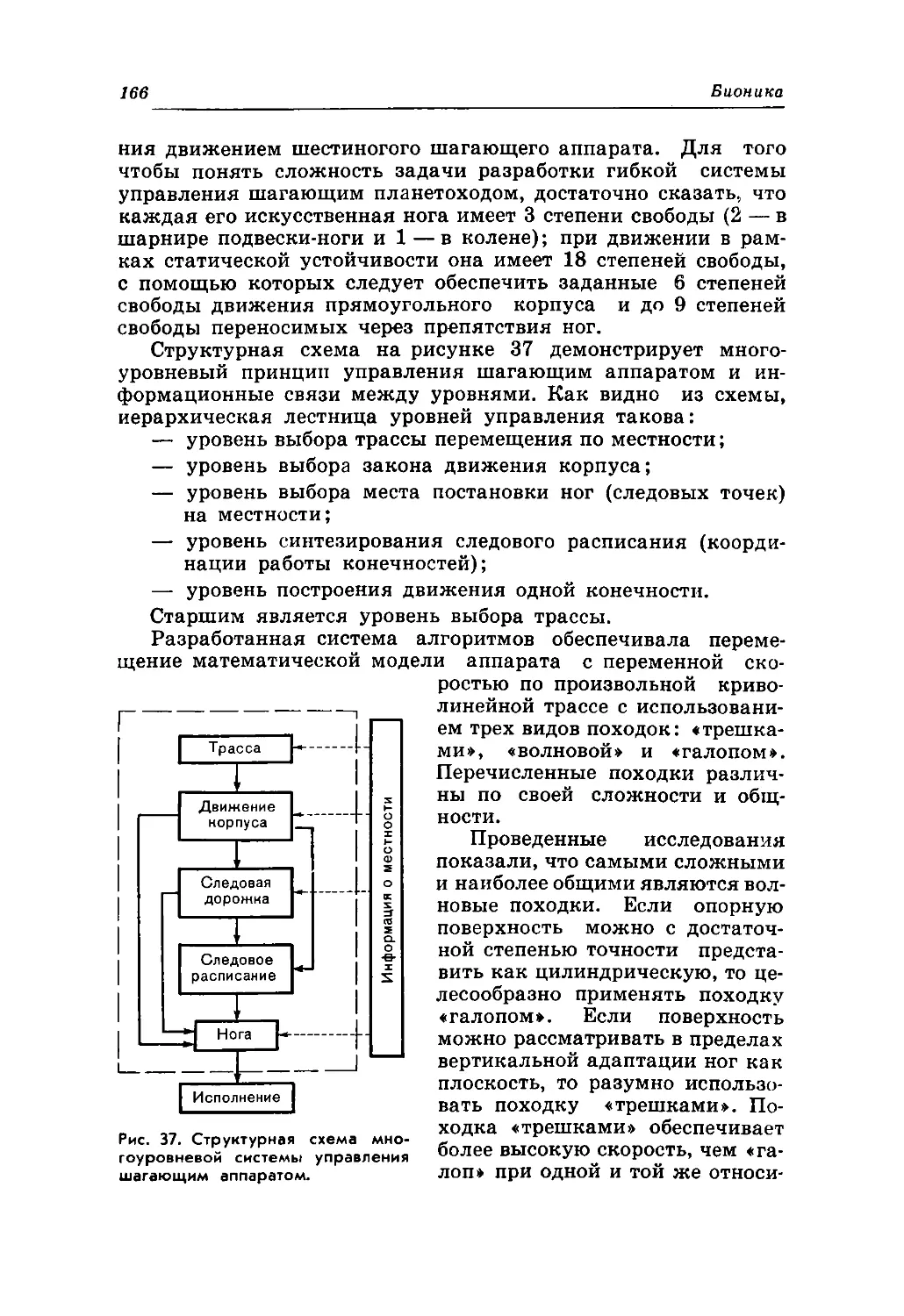
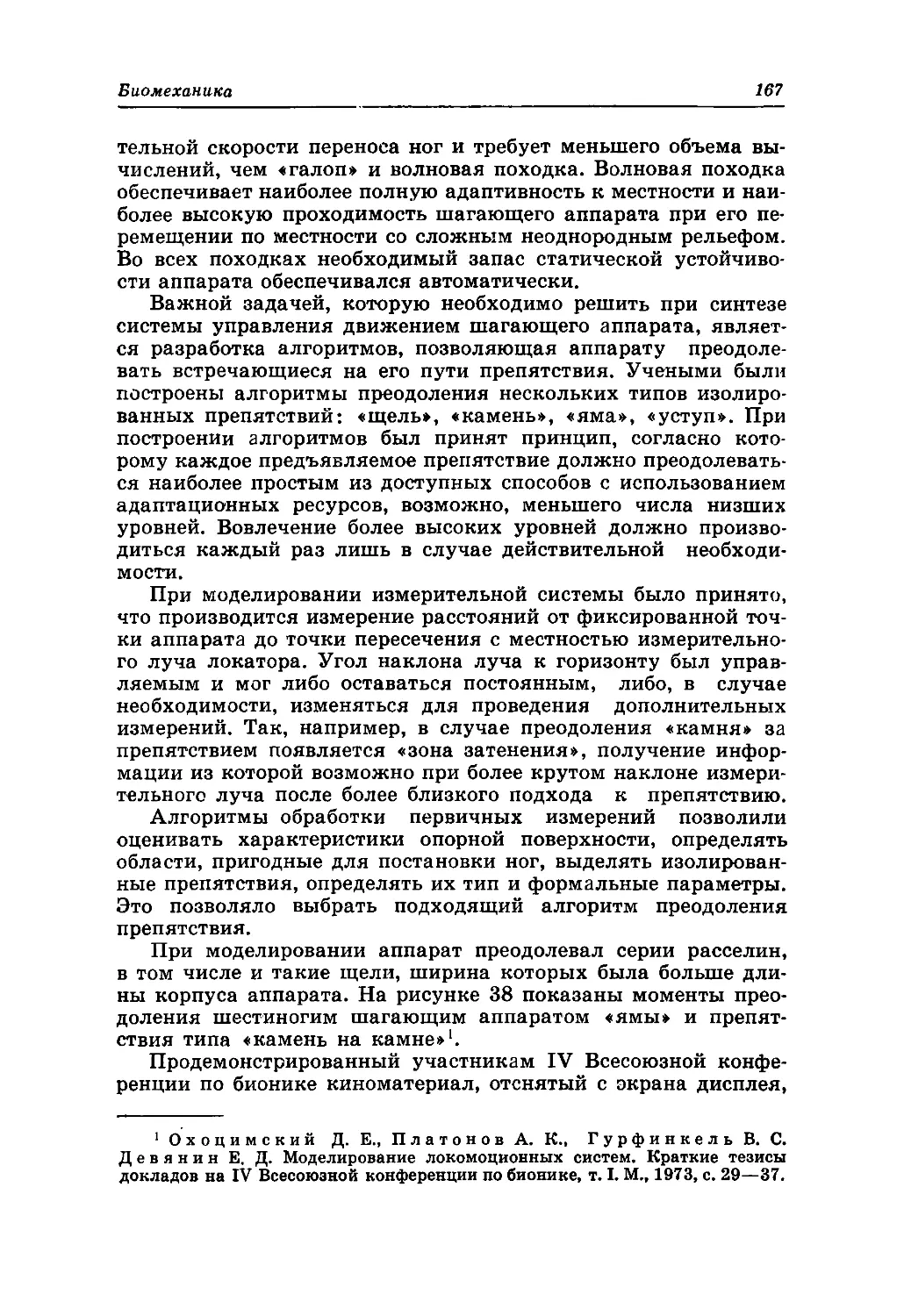
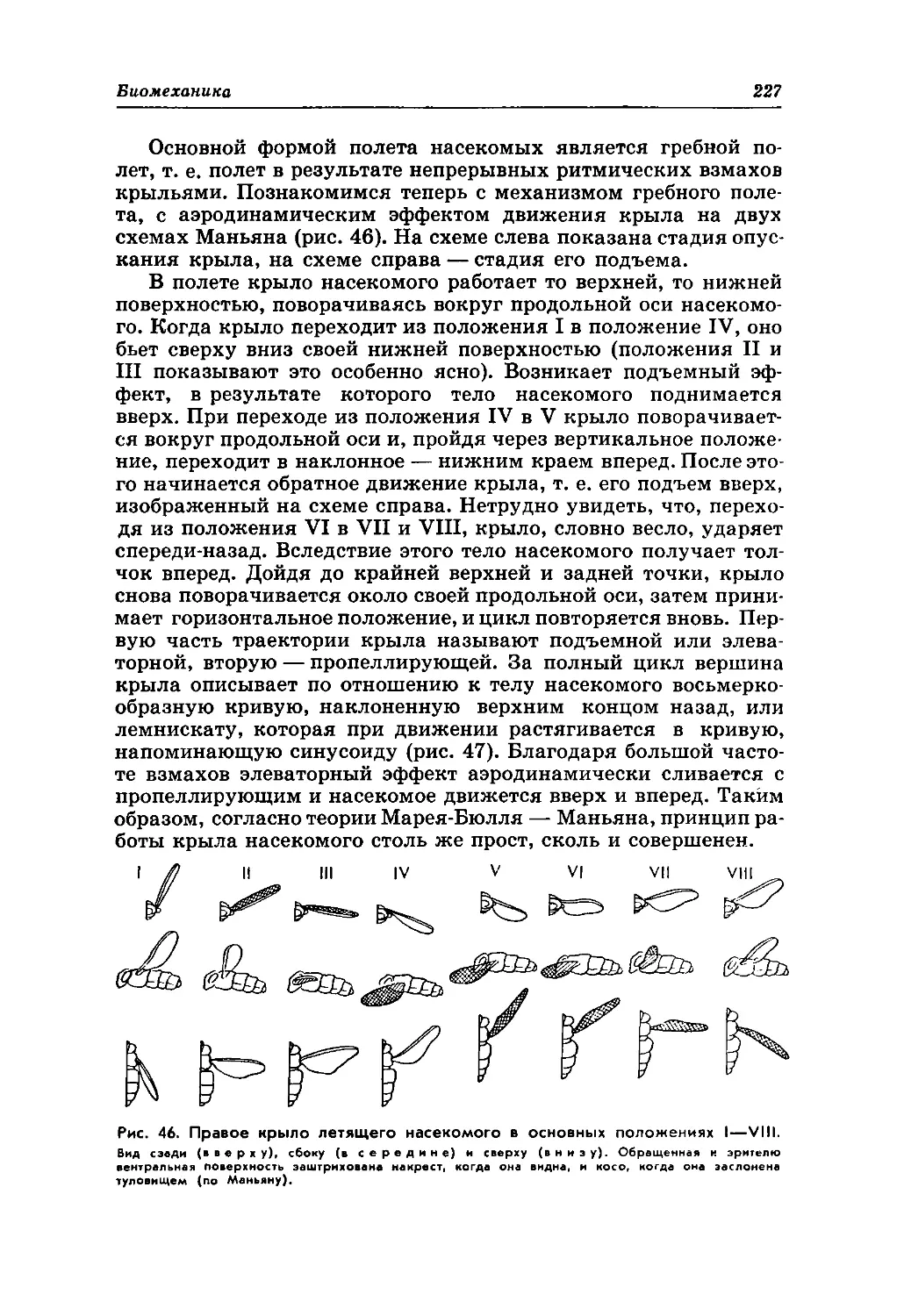
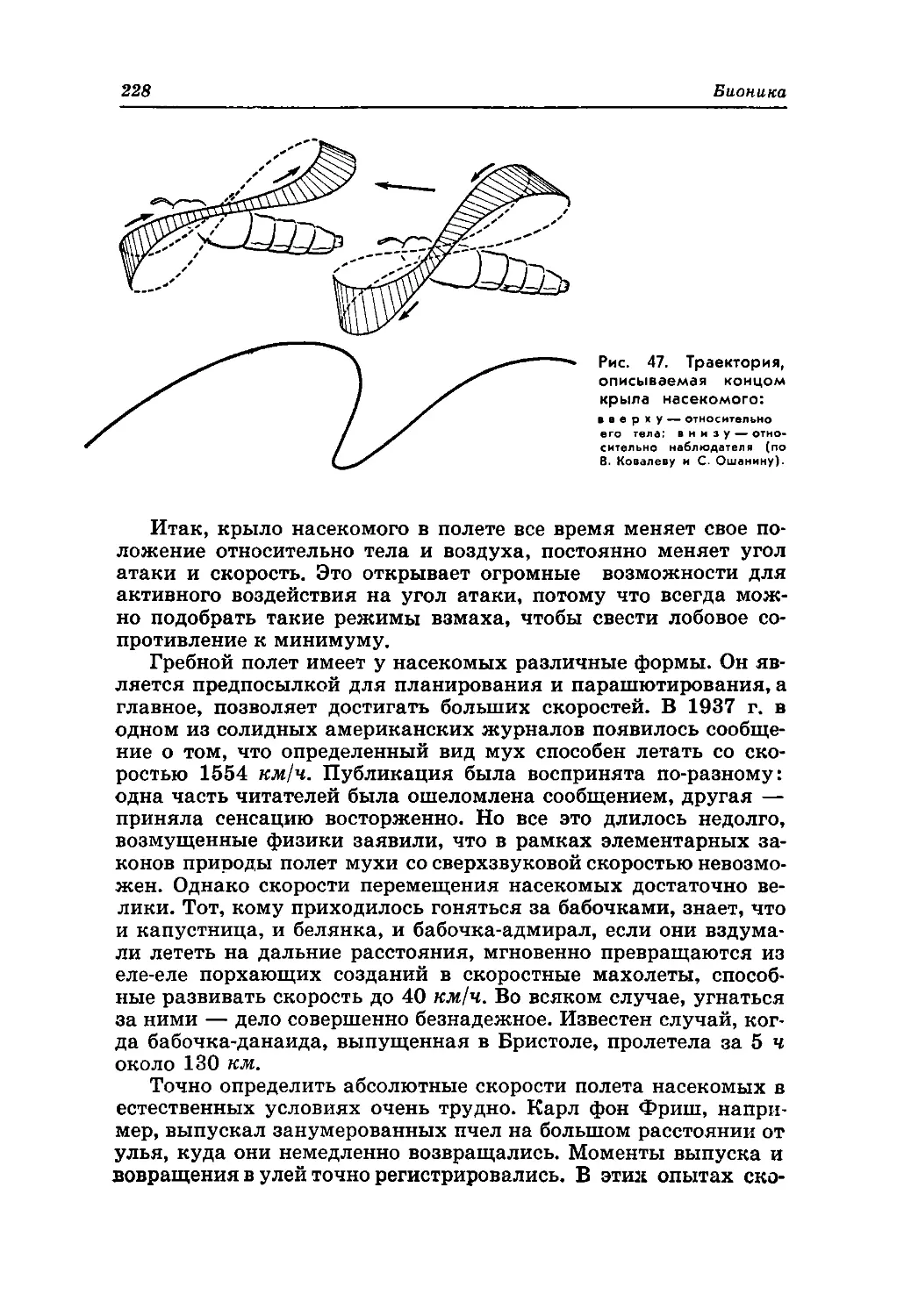
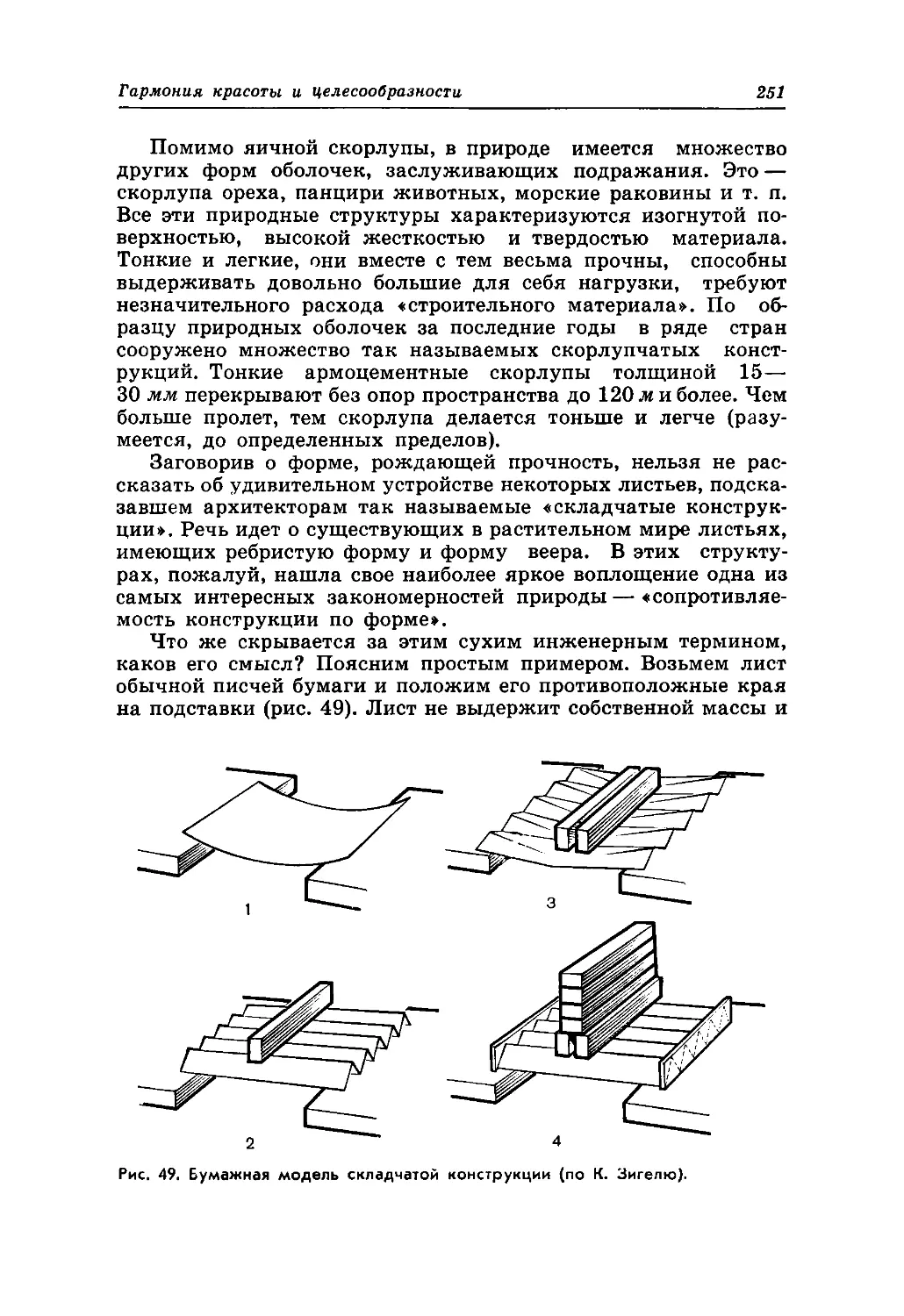
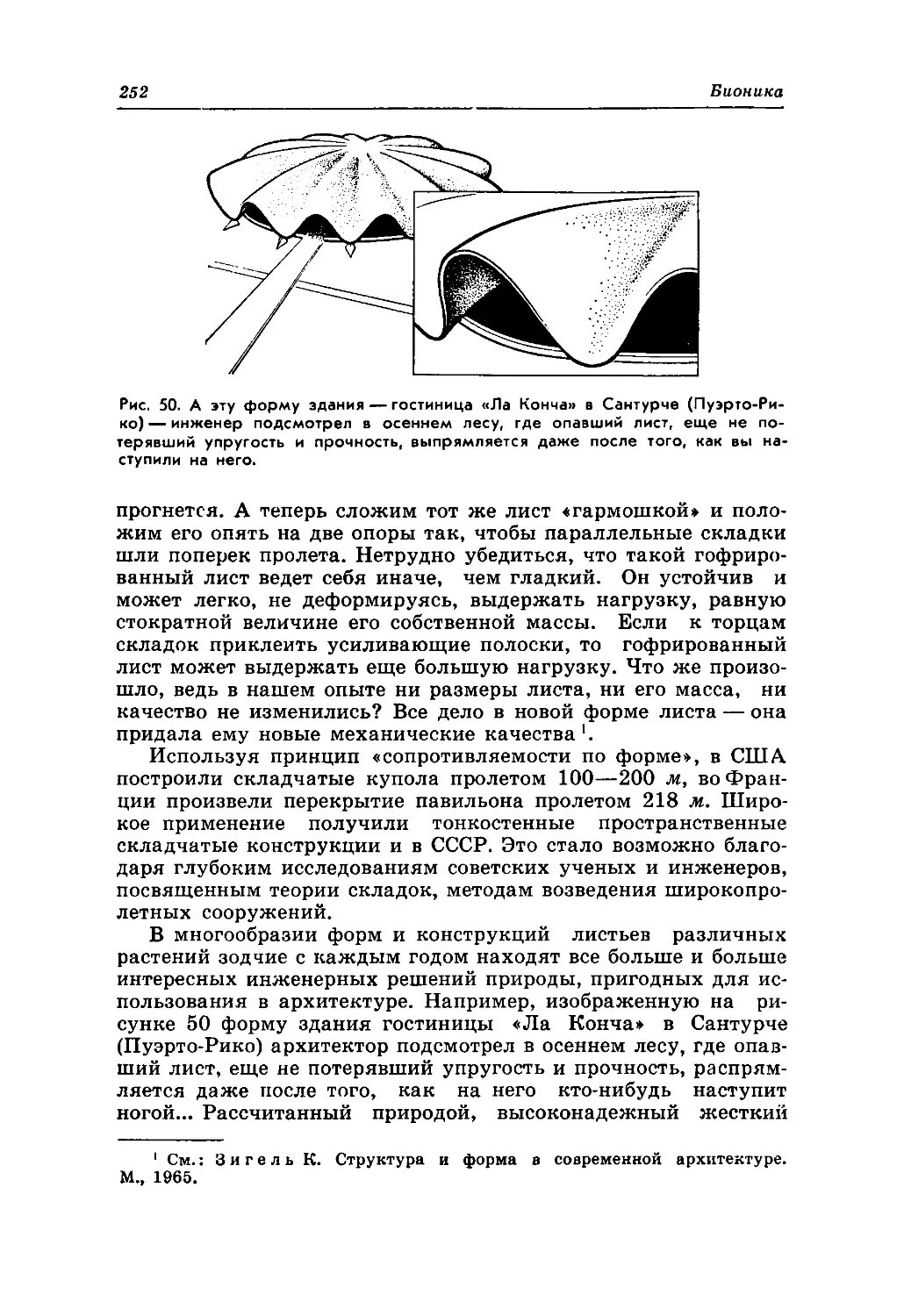
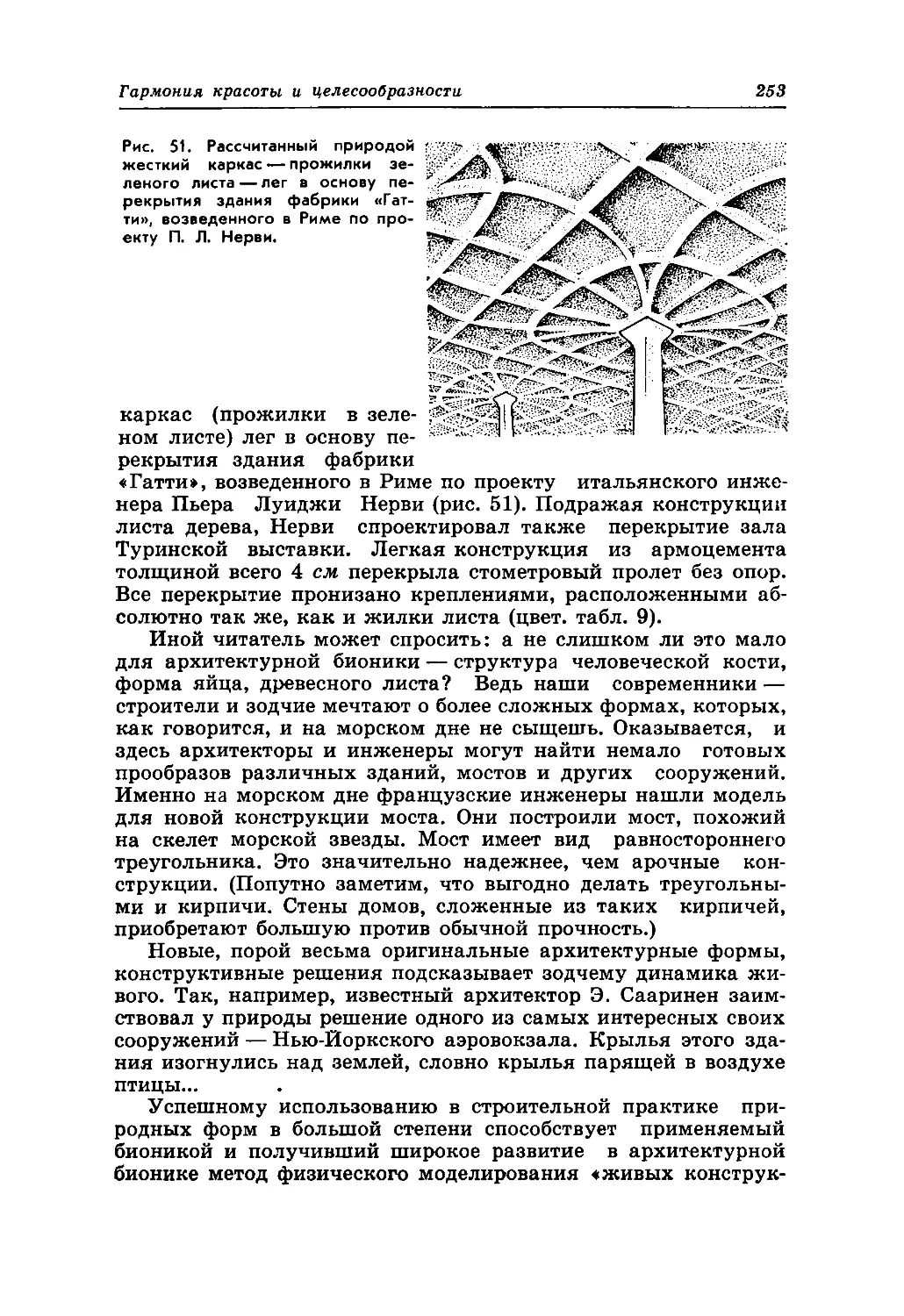
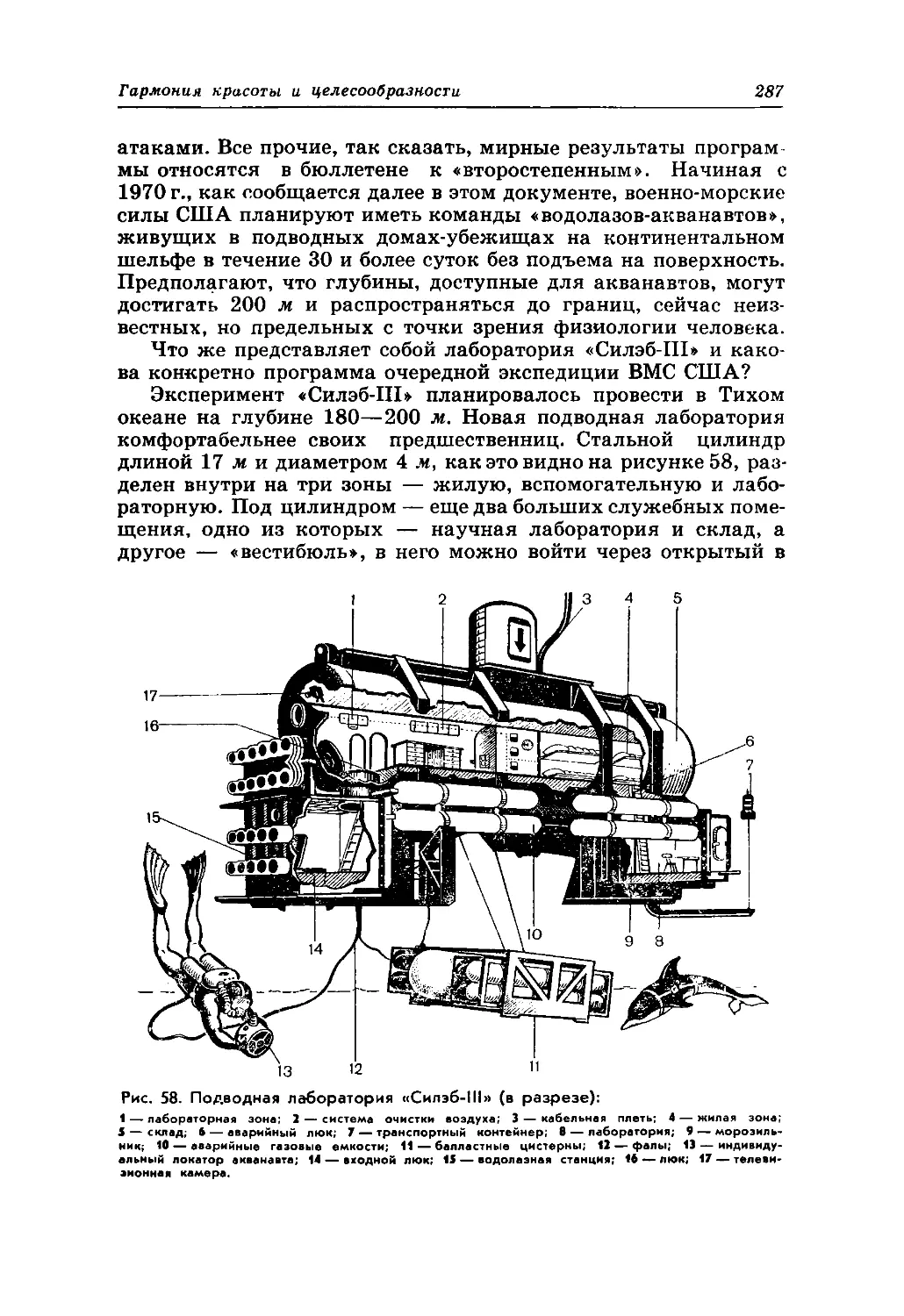
Text
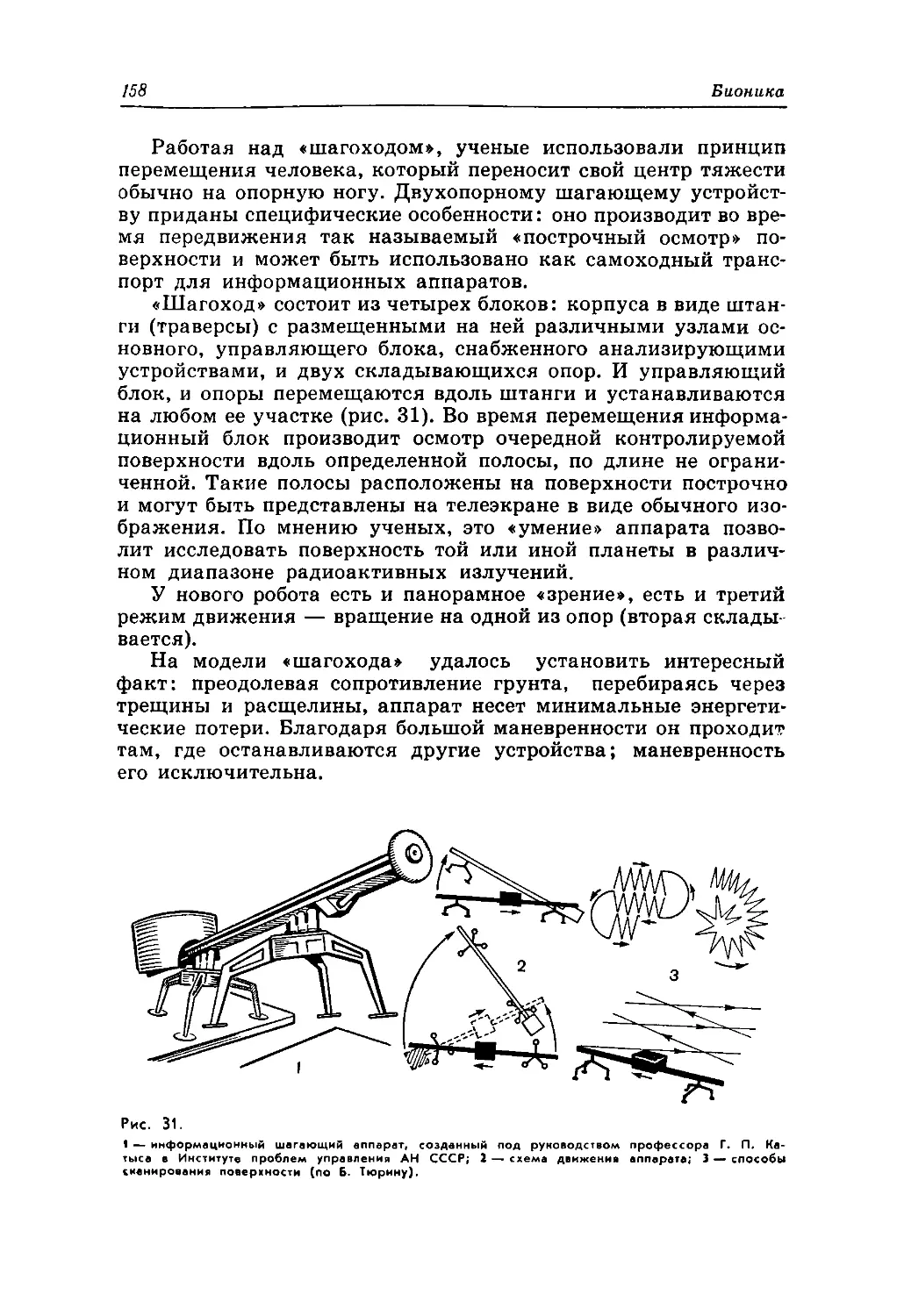
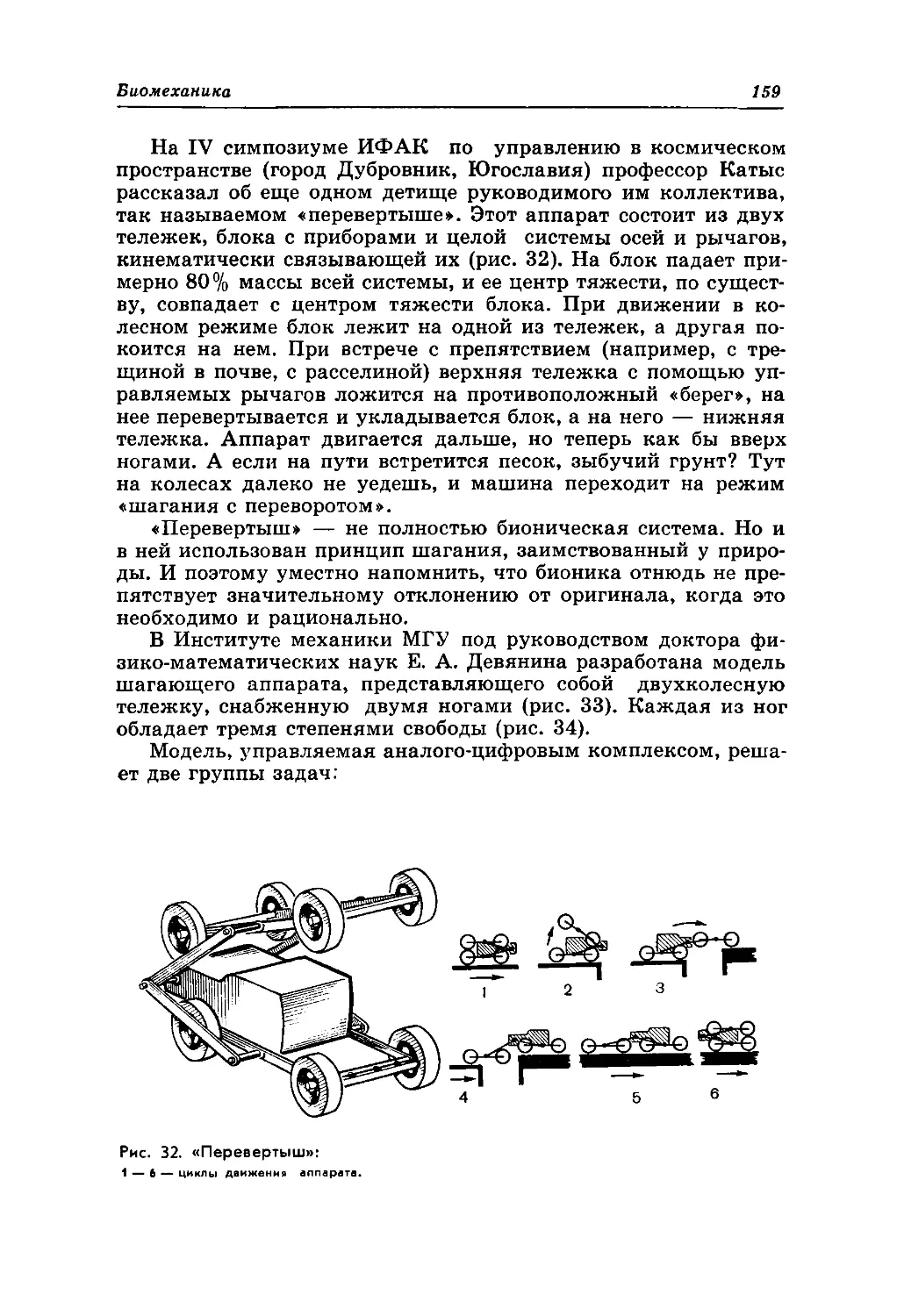
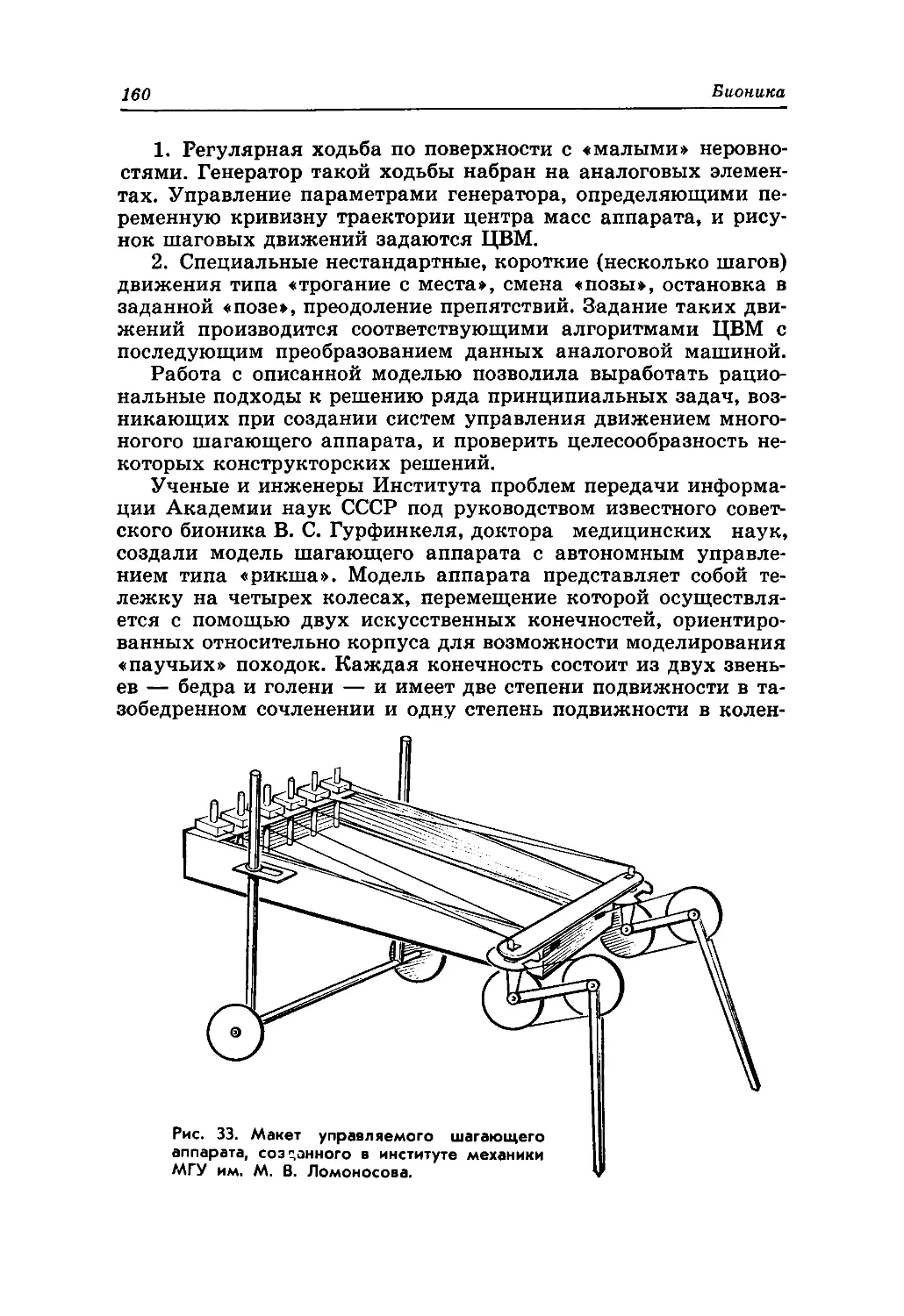
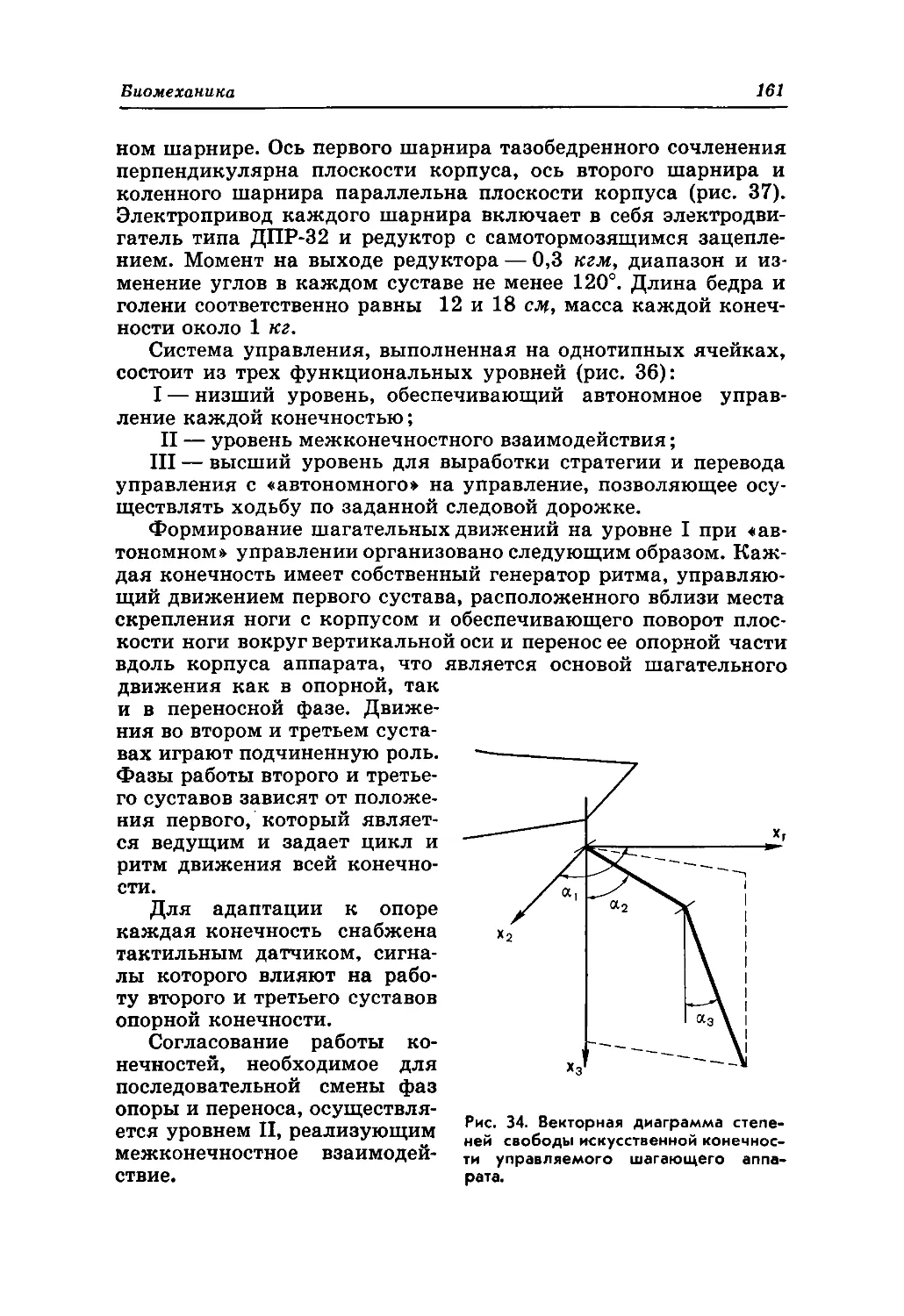
Тр.
14 к.
ИБЛитинецкий
БИОНИКА
Пособие
для учителей
ПРОСВЕЩЕНИЕ
- МОСКВА. 1976
6020.1
JI 64
JI 64
Литинецкий И. Б.
Бионика. Пособие
щение», 1976.
336
для
учителей.
М.,
«Просве-
с. с ил.
Бионика
— молодая наука, недавно сформировавшаяся на базе
биологических и технических знаний.
Автор прослеживает путь, пройденный человеческим познанием
от слепого
копирования
природы
до целенаправленного
поиска
в
мире животных и растений новых идей, новых решений инженерных,
архитектурных, технологических проблем века. Доступно, в увлекательной форме книга знакомит читателя с важнейшими бионическими исследованиями
последних
лет,
достигнутыми
новой
наукой
успехами
во
многих
областях
человеческой
деятельности.
Книга
поможет учителям привить молодежи любовь к природе, к будничному труду биоников, увлечь романтикой бионического творчества.
60501—336
——————
103(03)—76
©
Издательство
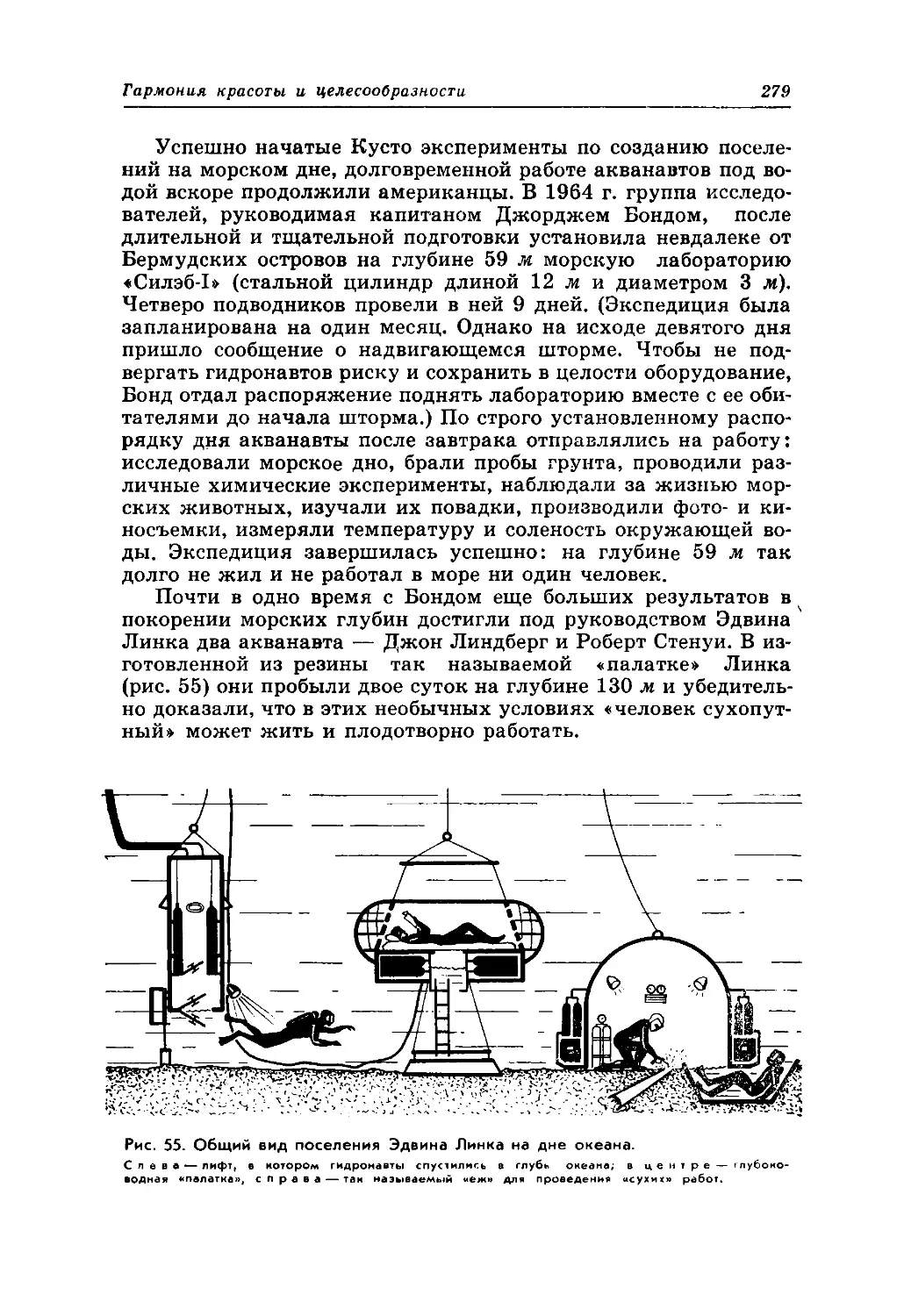
150—776
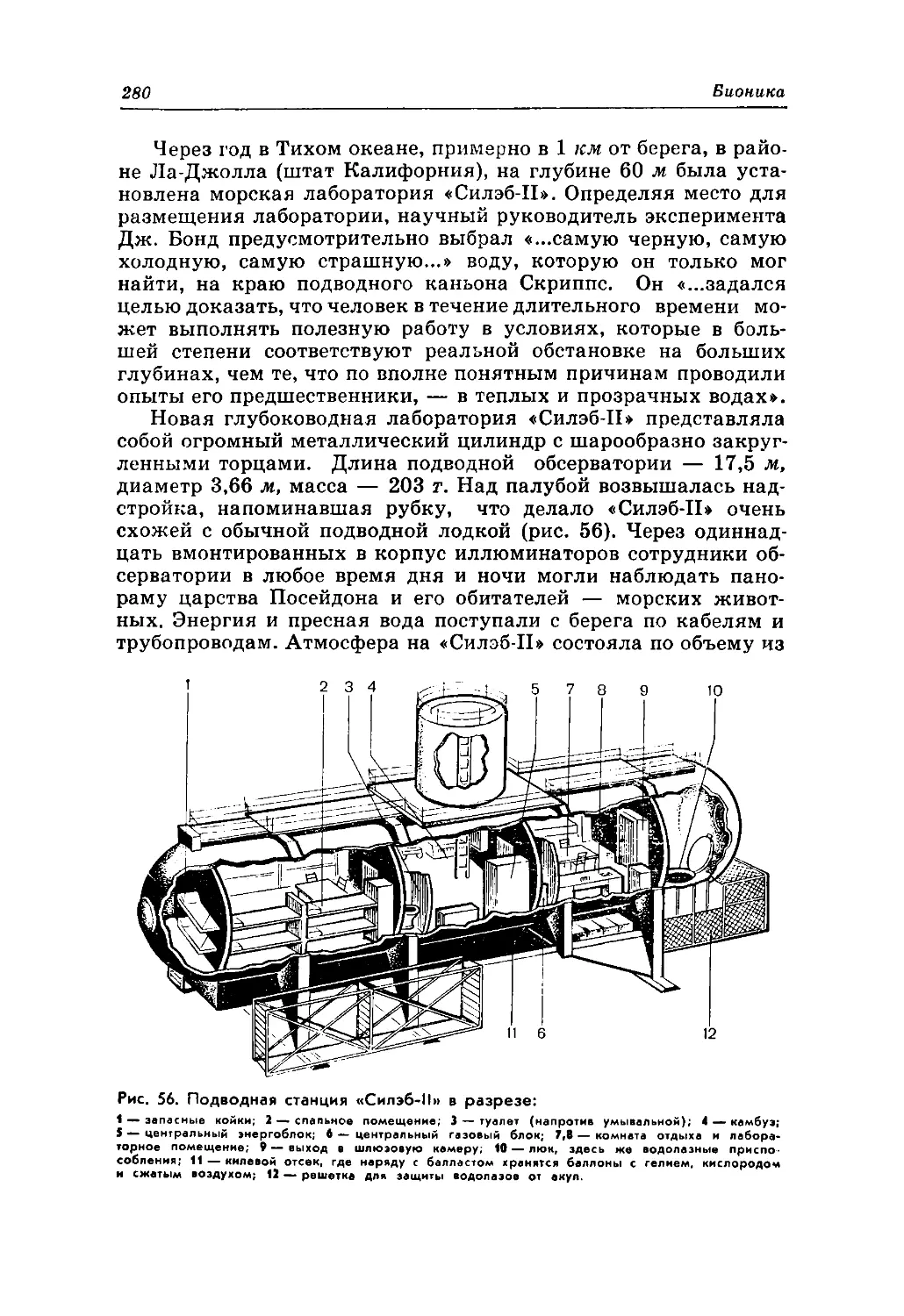
«Просвещение»,
600.1
1976 г.
НЕСКОЛЬКО
МЫСЛЕЙ
О БИОНИКЕ`
(вместо
предисловия)
С незапамятных времен пытливая мысль человека
искала ответ на вопрос: может ли человек достичь того же, чего достигла живая природа? Сможет ли он,
например,
научиться летать по воздуху, как птицы,
или плавать под водой
как рыбы? Сначала человек
мог только мечтать об этом; он создавал сказки о волшебном ковре-самолете или о подводных царствах, где
могут жить люди. Конечно, все это были чудесные вымыслы о нереальном, но страстно желаемом. Однако
здесь не было одно пустое фантазирование: в каждой
такой мечте-фантазии заключалась определенная, целенаправленная идея
— научиться делать то, что сделала уже природа применительно к другим живым существам. Если природа это сделала, значит, в принципе
это возможно и надо только найти ключ к решению
задачи, чтобы научиться делать то, что мы видим в
природе.
Уже ранние изобретатели-самоучки предпринимали попытки овладеть секретами природы, технически
освоить то,
что она
осуществила сама. Неудачи не
обескураживали человека, и он снова и снова возврашался к своей заветной мечте. В эпоху Возрождения,
как только стала возникать подлинная наука, ученые,
и
среди
них
одним
из
первых
Леонардо
да
Винчи,
взялись за ее осуществление. Они надеялись достичь
желаемого решения посредством проведения строгих
математических расчетов и выкладок и создания соответствующих
механических
конструкций. Ведь тогда
механика, опиравшаяся на математику, занимала ведущее место в ряду всех зарождавшихся отраслей механического естествознания; поэтому-то и могло тогда
Несколько
мыслей
о бионике
казаться, что все загадки природы
будут разгаданы
именно с помощью механики и на ее основе.
В соответствии с этим человек стремился к созданию механических моделей, которые могли бы имитировать интересовавшие его предметы и явления природы. Так удалось представить действие костного аппарата высших животных и объяснить его двигательную
способность как функцию системы механических рычагов. Для решения задачи воздухоплавания, казалось
бы, достаточно добиться механической имитации анатомического устройства птичьего крыла.
Однако на поверку задача оказалась неизмеримо
более сложной, нежели это представлялось тогда ученым и изобретателям. На самом деле механика раскрывала лишь одну сторону вещей и явлений природы,
причем далеко не самую главную и существенную, а
скорее всего побочную, второстепенную. И хотя в конце концов с очевидностью обнаружилась ограниченность механического подхода к природе, особенно, конечно, к живой природе, все же с помощью механики
был сделан важный подготовительный шаг к проникновению
в действительную
сущность
вещей
и явлений
природы, к познанию их истинных законов.
Когда прогресс науки привел к открытию фундаментальных законов не только механики, но и физики,
химии, биологии
и других
отраслей
естествознания,
оказалось следующее: опираясь на эти законы, кладя
их в основу соответствующих технических устройств,
можно начать осуществлять одну за другой давнишние
мечты человека. Появились аэростаты, затем самолеты,
были изобретены подводные лодки и осуществлено
множество других замечательных достижений науки и
техники. Человек завоевал подобно птицам воздушный
океан и подобно рыбам морские глубины.
Но какими отличными от живых существ, парящих в небе и плавающих в воде, оказались воздушные
и подводные корабли человека! По сравнению с птицами и рыбами они нередко производили впечатление
чего-то
громоздкого,
тяжеловесного,
неуклюжего,
особенно на первых порах.
И это касается не только кораблей, но и вообще
всяких других конструкций, устройств, инструментов
и приборов. Достаточно сопоставить орган зрения
—
глаз
— любого животного, даже стоящего на сравнительно низкой ступени эволюции, с некоторыми оптическими приборами и инструментами, сконструированными человеком, чтобы убедиться в том, насколько
(вместо
предисловия)
совершеннее естественный орган по сравнению с искусственным устройством, насколько первый оптимальнее (в смысле, скажем, экономии вещества или ком-
пактности) по сравнению со вторым.
В наши дни в условиях научно-технической революции человек вернулся отчасти к своей первоначальной идее
— по возможности полнее и точнее копировать в технике то, что достигнуто в живой природе, воспроизвести это в форме конкретных технических решений (устройств,
установок,
моделей, конструкций,
приборов,
инструментов
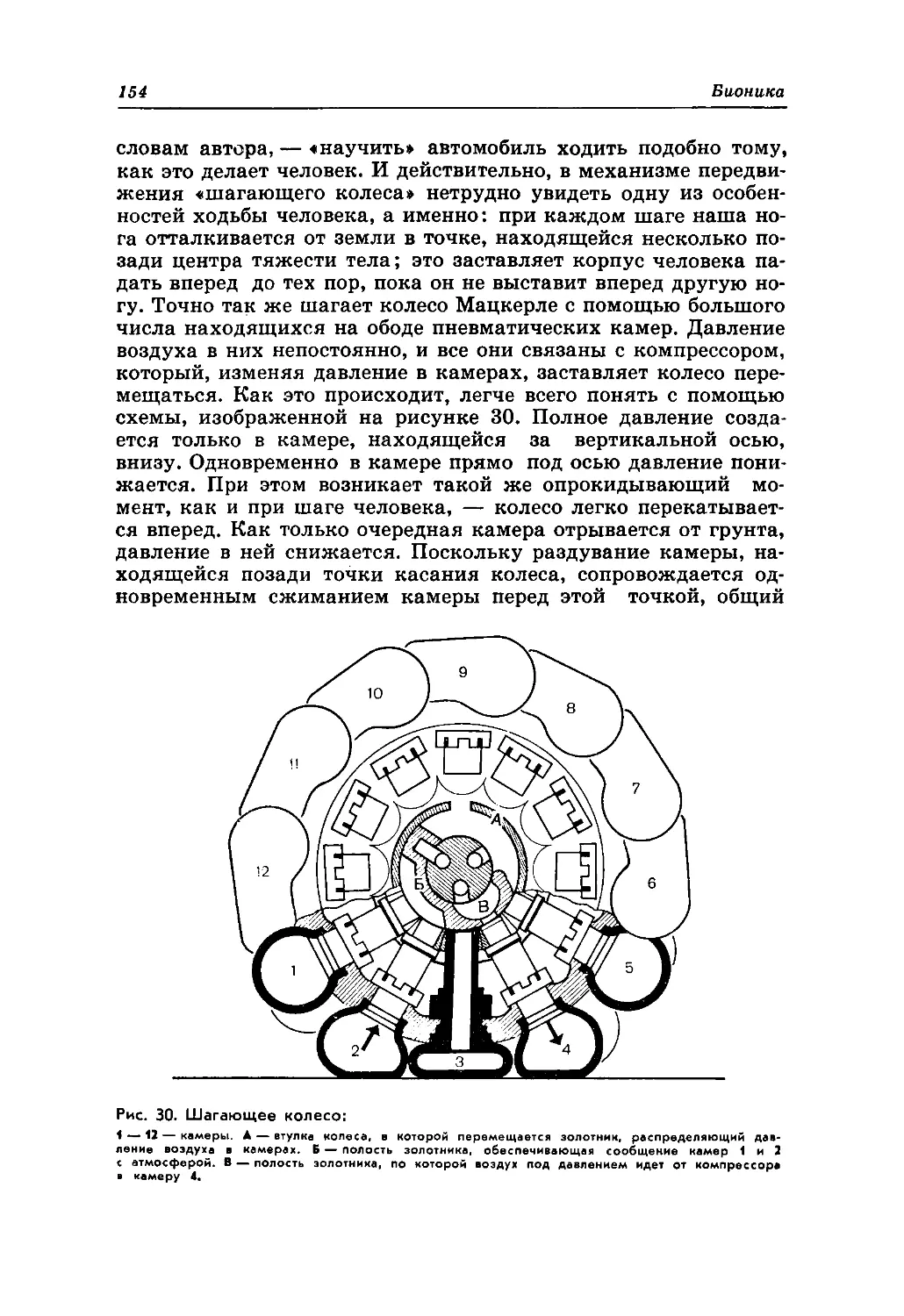
и т. д.). Например,
хорошо
известно, что пчелы строят свои соты в виде правильных шестигранников, словно они знают решения математических задач на максимум и минимум. В ходе длительной
эволюции
природа
стихийно
нашла
такое
ре-
шение и закрепила его в наследственном коде пчелы
в качестве безусловного рефлекса. Это
— случай оптимального решения задачи, возникшей на пути эволю-
ционного процесса. Наиболее приспособленными к
ловиям
жизнедеятельности
оказывались,
в
ус-
частности,
пчелы, у которых обнаруживалась способность тратить
лишь необходимый минимум воска на построение своих сот. Те же, которые не обладали этой способностью,
не выдерживали конкуренции (в борьбе за существование) и гибли, не оставляя после себя потомства.
Ч. Дарвин своей эволюционной теорией, опираясь
на представление о естественном
отборе,
объяснил
сущность и внутренний «механизм» процесса поступательного развития живой природы. Спрашивается: какое отношение к техническим проблемам нашей эпохи
имеет теория Дарвина? Чтобы ответить на этот вопрос,
надо обратиться к бионике, к ее предмету.
Обычно бионику характеризуют по ее практической направленности в качестве особой отрасли современной техники. Ее задачу определяют как стремление
использовать, освоить технически те или иные свойства,
функции,
структуры
и связи,
сложившиеся
в живой
природе на всех уровнях ее организации, начиная с
самого низшего (молекулярного) и кончая высшими
(организменным и выше). Но при таком сугубо практическом подходе к бионике остаются неизбежно в тени
ее теоретические основы, составляющие ее собственный предмет. Каковы же эти ее основы:
Когда бионику
определяют
только как отрасль
новейшей техники, использующей в практических целях
решения, найденные живой природой в результате ее
эволюции, учитывают прежде всего историю возник-
Несколько
мыслей
о бионике
новения бионики, ее генезис. Как и многие другие стратегически важные направления современного научнотехнического прогресса (например, кибернетика), бионика выросла из непосредственных запросов производственной практики. Возникла она на стыке между
биологией и техникой, прежде всего радиоэлектроникой и технической
кибернетикой. Бионика
— прямой
продукт научно-технической революции, одно из самых
типичных
и
ярких
проявлений
и
следствий
этой
революции.
Возникновение подобного рода стыковых наук вообще типично для нашей эпохи, особенно в связи
с
быстрым развертыванием научно-технической революции
в середине
жуточные,
второй
ХХ
научные
половине
в. Впервые
стыковые,
дисциплины
ХХ
стали
в. Как правило,
или
проме-
появляться
сначала
они
во
об-
разовывались в качестве связующих звеньев на стыке
между ранее разобщенными фундаментальными науками.
Таковы
биохимия;
зика,
были
затем
геофизика,
астрофизика,
возникли
биофизика.
физическая
геохимия,
С
химия,
химическая
развитием
фи-
научно-тех-
нической революции возникла кибернетика, связавшая
между собой не только многие отрасли естествознания и математики, но и ряд отраслей техники (радиоэлектронику и др...
Подобно кибернетике, можно сказать, по ее образцу возникла и бионика, которую нередко рассматривают, с одной стороны, как техническое ответвление
биологии, вплоть до молекулярной биологии (по нисходящей линии уровней
биологической
организации
материи) и, с другой, как отрасль собственно киберне-
тики и радиоэлектроники. Здесь стыкуются такие далеко отстоящие друг от друга отрасли человеческого
знания
и практической
деятельнссти,
как
БИОлогия
и
техНИКА.
Параллель между бионикой и кибернетикой может быть проведена и дальше. В отношении будущей
кибернетики сначала казалось, что речь идет о чисто
практических проблемах, связанных с техникой быстроработающих электронно-вычислительных машин, и
лишь много позднее (после работ Н. Винера в особенности) определилась теоретическая область кибернетики как самостоятельной науки. Подобно этому и в
случае бионики сначала казалось, что речь идет здесь
лишь о чисто техническом приложении того, что обнаруживается в живой природе, тогда как теоретическая область бионики оставалась до поры до времени
(вместо
предисловия]
неясной, четко не выявленной. Но такая теоретическая
ее область определится сразу, как только мы познакосмимся ближе с основными методами
бионических
исследовании.
В самом общем
случае для бионики
возможны
два
основных существенно различных способа исследования, способа постановки и решения задач, относящихся к сфере ее компетенции. Один способ кажется наиболее простым, причем вполне естественным, логически оправданным, приводящим к цели кратчайшим
путем. Он состоит в том, чтобы непосредственно моделировать в виде технических устройств и конструкций
ве
ций,
те
схемы
(принципы),
соответствующих
структур,
которые
биологических
связей,
органов,
лежат
в
осно-
явлений,
функ-
например
в
основе
структуры зрительного органа (глаза) данного животного.
Другой способ является несравненно более сложным, и ведет он к цели гораздо более длительным и
отнюдь не прямым путем. Однако он является не менее, а, пожалуй, более естественным и логически оправпанным, нежели предыдущий. Он состоит в том,
чтобы,
опираясь
на
законы
биологической
эволюции,
и прежде всего те, которые были открыты Дарвином,
постараться вкратце повторить средствами современной техники основные этапы развития данного органа,
функции или явления вплоть до их высшей, наиболее
развитой, а потому наиболее совершенной формы, которую мы наблюдаем
сейчас у данного животного.
Другими словами, речь идет о том, чтобы последовательно проследить и технически имитировать процесс
усложнения
интересующей
нас
биологической
функ-
ции, структуры и т. д., с тем чтобы взглянуть на ее нынешнюю стадию у данного животного как исторически
возникшую, прошедшую ряд подготовительных ступеней вплоть до заключительной до котсоой дошел
эволюционный процесс в настоящий момент.
Такой
исторический
подход
должен
подсказать
изобретателю-бионику способ решения технической задачи на современном его уровне: если сама живая природа пришла к найденному ею решению не сразу, а
через ряд псследовательных этапов, то, возможно, и
человек, идя этим же путем, должен искать решение
интересующей его задачи. Это означает, что подражание живой природе,
воспроизведение
ее решений и
достижений
должно
включать
в себя,
на
мой
взгляд,
также и воспроизведение—в общих или основных чер-
Несколько
мыслей
о бионике
тах — пройденного ею эволюционного пути, приведшего в результате к выработке данного органа, данной функции, структуры и т. д.
Именно по этой второй линии
— более длительной,
но зато более надежной и проверенной историей самой природы — следует пытаться, как мне кажется, идти в тех случаях, когда задача не поддается решению
по первому способу, кажущемуся
более простым и
коротким. Здесь как раз и обнаруживается внутренняя
необходимая связь между теоретической частью бионики и дарвиновским эволюционным учением. Таков
ответ на поставленный выше вопрос.
В этой
связи
два
слова
нужно
сказать
и
о
самой
теории Дарвина. Обычно в ней подчеркивается в первую очередь момент действия естественного отбора,
приводящего к тому, что выживают существа, наиболее приспособленные к данным условиям их жизнедеятельности. В случае бионики на передний план выдвигается
сопряженный
с
этим
момент,
гласящий,
что
развитие живых существ и всей живой природы направлено в сторону совершенствования организмов и их
органов от низшей, менее совершенной формы к высшим, все более и более совершенным. Здесь надо назвать замечательные труды
советских дарвинистов
—
А. Н. Северцева и И. И. Шмальгаузена и их школы.
Именно в этом разрезе, на мой взгляд, раскрываются теоретические основы самой бионики, так что бионика выступает как учение о факторах и внутренних
«механизмах» совершенствования живых существ во
всех возможных их аспектах и на всех уровнях биологической организации материи. Сюда относятся «механизмы»
физические,
химические,
кибернетические,
молекулярно-биологические,
не говоря
венно биологических, проявляющихся на
ких уровнях организации живых существ.
Далее,
подобно
любой
другой
уже
о собст-
более
науке,
высо-
имеющей
как свою собственную теоретическую
основу, так и
сферу практических приложений,
бионика
должна
иметь свой технический, прикладной аспект, который
до сих пор выступал настолько
сильно
вперед, что
заслонял ее теоретические основы как науки. Этот технический
аспект
бионики раскрывает
ее целевое,
прикладное значение, сферу практических применений
ее результатов к производственным, промышленным и
прочим нуждам современного человека.
(вместо
предисловия)
Книга И. Б. Литинецкого «Бионика» написана специалистом с большим знанием дела. Книга написана
интересно, хорошим, доходчивым языком, содержит
богатый конкретный
иллюстративный
(фактический)
материал и многие глубокие его обобщения. Поэтому
она вполне может служить умным пособием для учителей и студентов. Хотелось бы обратить внимание на
то, что, чем раньше у будущего деятеля науки и техники в молодом возрасте пробудится интерес к той или
иной области знания или практической деятельности, в
том
числе
и к бионике,
тем
с большим
эффектом
этот
интерес может закрепиться и превратиться в призвание всей жизни, в стремление глубоко овладеть данным предметом.
В отношении бионики создаются дополнительные
трудности, ведь она предполагает соединение в одном
лице
двух
таких далеких между собой
понятий, как био-
логия и техника. Можно сказать, что она предполагает
выработку у одного и того же человека умения взглянуть на живую природу, на живые существа глазами
техника, инженера, изобретателя и одновременно на
саму технику, наее конструкции и модели глазами биолога — исследователя явлений жизни. Между тем, как
правило, современный техник, инженер, конструктор,
изобретатель очень далек от биологии, а современный
биолог не менее далек от техники. Необходимо лик-
видировать
кадров,
подобный
разрыв
в подготовке
и чем скорее, тем лучше.
В этом
будущих
кровно
заин-
тересована бионика.
Книга И. Б. Литинецкого как раз и поможет учителям увлечь учащуюся молодежь новой, исключительно
интересной и перспективной областью знания и деятельности и одновременно даст в руки педагогов средней школы пособие, с помощью которого они могли
бы расширять и углублять школьные курсы по биологии и физике, раскрывая теснейшие связи естествознания с техникой в условиях научно-технической революции. Со своей стороны, я горячо рекомендую эту книгу
читателям.
Академик
Б.
М.
Кедров
Наука
величайших
возможностей
«Законы
внешнего
деятельности
мира,
природы...
суть
основы
целесообразной
человека».
В.
И.
Ленин'.
В науке смена «лидеров» — закономерность. Сначала механика
вырвалась вперед. Более
двухсот
лет,
со
времен
Галилея
(1564—1642) и Ньютона (1643—1727), она занимала
господствующее положение в естествознании и сыграла роль своеобразного трамплина для всех других естественных наук. Напомним: открытые Гарвеем (1578—1657) законы кровообращения
заложили основы научной физиологии. Укажем также на механические концепции в физике и химии, в частности на учение о массе химически реагирующих веществ. Именно эти концепции легли в ХУ
в. в основу открытия закона сохранения
массы вещества (М. В. Ломоносов, А. Л. Лавуазье).
После того как механика к началу ХХ в. выполнила функцию трамплина по отношению к другим отраслям естествознания, изучавшим более сложные, нежели механическая, формы
движения, на ее плечах устремились вперед сразу химия, физика, биология, а также астрономия и геология. Великие естественнонаучные открытия той эпохи свидетельствуют о том, что
уже не одна механика, как это было раньше, а весь комплекс
естественных наук стал фронтально прогрессировать.
В конце ХХ в. оставалась лишь одна область
науки,
не
захваченная общим прогрессивным движением научного
познания,
— область простейших форм бытия и движения, область микрочастиц и ее элементарных
видов, считавшихся
вечными, абсолютно простыми и неделимыми.
' «Философские
тетради».
М.,
1969, с. 169.
12
,
Бионика
Новейшая революция в естествознании началась с проникновения физики в область микромира. Поэтому физика надолго, более чем на полвека, стала лидером развития всего естествознания, выполняя теперь по отношению к остальным его отраслям такую же роль трамплина, какую в течение двухсот
лет перед тем выполняла механика. Физика изучала вновь открытые простейшие (из известных до тех пор) явления природы (микромира) и этим давала возможность химии,
астрономии, геологии, биологии и другим наукам двигаться вперед на
плечах физики.
Новые физические представления дали основу для решения
проблемы химической связи, строения химических соединений,
химической кинетики и катализа; возникла квантовая химия.
Даже сам предмет
химии — химический
элемент — получил
строгое определение только благодаря физике,
равно
как
и
периодический закон Менделеева из химического фактически
превратился в ХХ в. в физический. По существу, физика первой половины ХХ в. всюду выступала
как предпосылка
для
достижений остальных естественных наук и связанного с ними
прогресса техники.
Однако к середине двадцатого столетия положение
вещей
стало меняться. Физика, по словам академика Б. М. Кедрова,
весьма успешно выполнила свою роль лидера естествознания,
дав мощный толчок развитию многих наук '.
Сегодня в качестве нового лидера на передовые рубежи естествознания выходит биология. Наступил ее черед. Мы приближаемся, как справедливо отметили академики А. Н. Белозерский и Г. Франк, все ускоряющимися темпами к постижению материальной сущности
явлений
жизни...
Начинается
подлинный век биологии.
Почетное и заслуженное звание лидера современного естествознания далось «науке о жизни» нелегко. Напомним, что еще
сравнительно недавно биология безапелляционно зачислялась
в разряд описательных наук, которые не могут
дать
точного
знания закономерностей
живой природы.
И действительно,
огромная сложность явлений жизни и слабое в прошлом развитие смежных наук
настолько затрудняли
проникновение
в
сущность
процессов,
что
биологу
приходилось
в
основном ограничиваться добросовестным описанием фактов. Значительно реже удавалось выявить связывающие их закономерности.
Шли годы. Совершенствование техники и методики наблюдения и описания, использование сравнительного метода
по' См.:
пительная
науки. М.,
Кедров Б. М. История науки и принципы исследования. Встуречь на открытии ХШ Международного конгресса
по истории
«Наука», 1971, с. 11—18.
Наука
величайших
возможностей
13
зволили биологической науке прошлого обнаружить ряд важнейших закономерностей
живой
природы,
сформулировать
принципы, многие из которых не потеряли своего значения
и
в наши дни. Это относится, в частности, к научной классификации органических форм, клеточной теории и др. Эпохальным
обобщением
биологии
стало
учение
Ч. Дарвина
(1809—1882)
об эволюции организмов путем отбора. Исторический
метод,
примененный этим ученым, дал возможность представить живые формы в динамике, объяснить сложные механизмы и приспособления к окружающей среде, их относительную целесообразность ит. п.
Значение исторического метода в развитии биологии оказалось поистине революционным, так как с его
помощью
был
преобразован сам фундамент науки,
многие
ее специальные
разделы получили новое направление, а ряд из них был заново
создан в результате утверждения идей эволюционной теории.
Подготовленный всем развитием
естествознания,
дарвинизм
положил начало научной биологии.
Прошло еще несколько десятилетий, и в биологию широким
фронтом властно начали вторгаться методы точных наук. На
вооружение биологии стали поступать не только физические и
химические методы и приборы, но идеи и принципы этих наук.
Пришла на помощь биологии и математика. Все это было вызвано, с одной стороны, дальнейшим развитием самой биологии, с другой стороны, прогрессом смежных с нею наук, которые обрели, наконец, логические и технические методы, позволяющие без грубого насилия проникать в сам ход жизненных
процессов. Такие мощные средства исследования,
как
электронный микроскоп, метод меченых атомов
(радиоактивных
изотопов), позволили перевести биологию с клеточного уровня
на субклеточный и молекулярный. Новые методы и средства
(физико-химический эксперимент,
математический
аппарат,
моделирование живых систем и процессов) не просто дополнили сложившиеся, традиционные способы биологического исследования, а коренным образом преобразовали их, изменили всю
систему методов биологии, характер биологической науки
в
целом. Биология стала наукой точной. Кроме того, важно отметить, что наметилась новая сфера приложения биологического познания — техника. Можно даже точно указать дату —
1 октября 1952 г., когда в нашей стране биологическим исследованиям в прикладных интересах техники
было
положено
плановое начало. Тогда распоряжением президента АН СССР
А. Н. Несмеянова была организована специальная группа ученых для обсуждения мер, призванных расширить биофизические, физиологические и экологические исследования
насекомых, с тем чтобы превратить биологические науки в поставщика также «конструкторских» идей.
14
Бионика
Начало
взаимодействию
биологических
и
технических
дисциплин положила родившаяся в середине нашего века кибернетика — наука, изучающая процессы передачи и преобразования информации в технических устройствах, в живой природе, в обществе, т. е. наука о процессах управления.
Рассматривая живые организмы как сложные
динамические системы, установив принципиальную аналогию в построении и функционировании живых и технических систем, выработав единый подход к изучению
процессов
управления
и
организации
в мире животных и машин, кибернетика первая перебросила мост от биологии к технике. Благодаря такому взаимодействию, когда идеи и методы одних
наук вторгаются
в
область традиционных исследований других, биологические
и
технические дисциплины дали жизнь новому научному направлению, получившему название бионика (от древнегреч. bion —
элемент жизни, ячейка жизни, или, точнее, элемент биологической системы).
В зарубежной и отечественной литературе бионику
часто
называют младшей сестрой кибернетики или новым разделом
ее. В энциклопедии «Автоматизация производства и промышленная электроника», например, можно прочитать следующее:
«Бионика
— это раздел кибернетики, занимающийся
использованием биологических процессови приложением биологических методов для решения инженерных задач». Однако бионика — не техническая дисциплина. Нельзя
сводить
ее задачи
лишь к тривиальному заимствованию накопленных биологией
знаний о живых системах с целью использования этих знаний
для решения тех или иных технических задач.
Бионика
не
просто пользуется готовым материалом, предоставляемым
ей
биологией, а сама также занимается изучением биологических
систем: рассматривая живые организмы как целостные системы определенного
рода, характеризующиеся
особым
типом
энергетической и структурной упорядоченности, она исследует
техническую сторону биологической организации,
процессов,
пытается вскрыть в живой природе особый, технический вид
закономерностей, еще не
использованных,
не
примененных
человеком в его практической деятельности по созданию новой
техники. И хотя у бионики много общего с кибернетикой, нельзя не согласиться с известным американским ученым Уорреном
Мак-Каллоком, высказавшим мнение, что
бионику
«никоим
образом нельзя отождествлять с кибернетикой
или
считать
частью этой науки. В сущности бионика — область гораздо более широкая» '.
'
Мак-Каллок.
Подражание
одних
форм
биомимезис. «Проблемы бионики. Биологические
кие системы». М., «Мир», 1965, с. 551.
жизни
другим
прототипы
формам
—
и синтетичес-
Наука
величайших
возможностей
15
ния
Кибернетика перекрещивается с бионикой, когда она занимается изучением вопросов, непосредственно связанных с процессами управления и связи, т. е. исследует
механизмы
восприятия, переработки и передачи информации в живых организмах. Однако круг интересов самой бионики в живой
природе этим далеко не исчерпывается, он гораздо шире. Бионика
проявляет интерес к самым разнообразным механизмам, устройствам, структурам, процессам жизнедеятельности организмов: изучает способы ориентации животных, их
навигационные способности, исследует
вопросы
микроминиатюризации,
надежности (принципы регенерации, функциональной взаимозаменяемости отдельных органов) в живых системах, архитектонику растений, механику передвижения животных, сложные
быстротекущие химические реакции в живых клетках (например, фотосинтез, синтез белков).
Бионика проявляет живой интерес ко всему,
что
может
быть названо «техникой природы», что может
быть
полезно
человеку
для
создания
новой
искусственной
природы.
Она
свя-
зана теснейшим образом с множеством отраслей техники, прикладных наук: самолетостроением, космонавтикой, судостроением,
радиоэлектроникой,
инструментальной
метеорологией,
машиностроением,
геологией, строительным
делом, сейсмологи-
ей,
медициной,
химических
архитектурой,
технологией
произ-
водств и др.
Объединяя и взаимно обогащая изолированные ранее другот
друга биологические и технические науки, бионика стремится
на основе современных математических, физических и физикохимических методов исследования биологических систем найти в живой природе решения сложных технических проблем.
Бионика — это наука, изучающая принципы организации и
функционирования биологических систем
на
молекулярном,
клеточном, организменном, популяционном, ценозном уровнях,
исследующая процессы преобразования энергии и информации,
переработки веществ в живых организмах, экосистемах с целью
применения полученных знаний для коренного усовершенствования существующих и создания приниипиально новых машин,
приборов, механизмов, строительных конструкций, экономичных источников энергии, технологических
процессов,
эффективных энергетических комплексов и химических производств.
Ее можно также назвать наукой о системах, которые являются
аналогами биологических систем или которым присущи некоторые специфические характеристики живых организмов, или
наукой об оригинальных технических системах и технологических процессах, созданных человеком на основе идей, найденных и заимствованных у природы.
Формально
датой
рождения
бионики
принято
считать
13 сентября 1960 г. — день открытия в Дайтоне (штат Огайо,
16
Бионика
США) первого американского симпозиума на тему «Живые прототипы искусственных систем — ключ к новой технике». Однако эта дата очень условна, ибо некоторые исследования, носившие бионический характер, велись в США и других странах, в
том числе и в СССР, еще задолго до появления термина «бионика». А если строго придерживаться
принципа
историзма, то
можно сказать, что корни бионики
уходят в глубокую древность. Обратимся к фактам.
Во время раскопок Голефельской пещеры в Швабских Альпах были обнаружены топоры первобытного человека. Изучение
этих древних рубящих орудий показало, что первым режущим
элементом в них был острый камень, напоминающий
острый
зуб медведя, т. е. являлся прямым подражанием естественному
образцу. В рабовладельческих государствах, как свидетельствуют археологические данные, были в ходу плуги старокитайской конструкции, которые рыли землю, как свинья или крот,
но не делали борозд
и не переворачивали пласт. Анализ
форм и принципов действия других древнейших орудий труда
также показывает, что по своей
конструкции и выполняемым
функциям они в значительной степени походили на активные
органы животных.
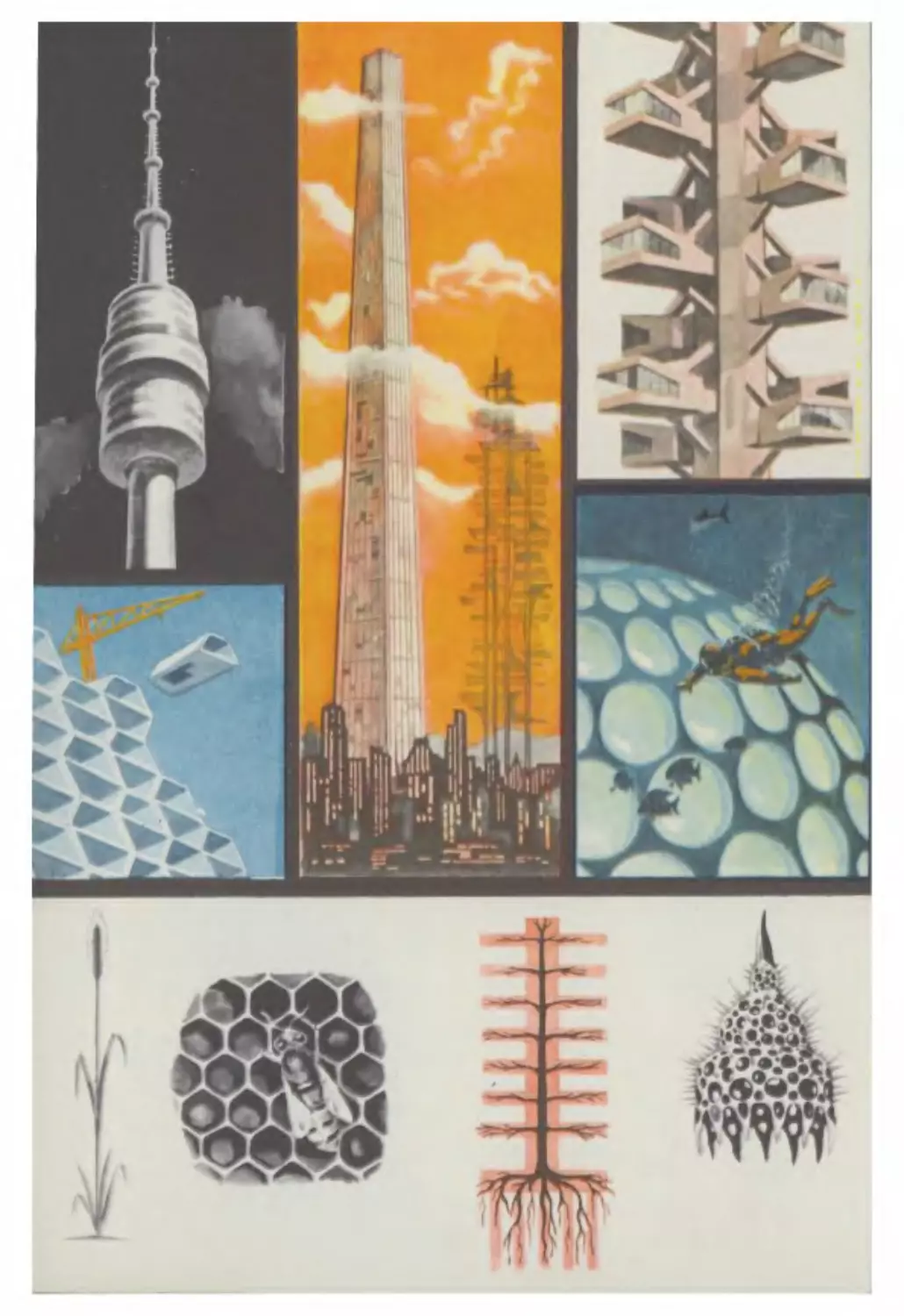
Подражая природе, человек не ограничился только созданием первых орудий труда. Всмотритесь в легкие африканские
постройки — вы увидите в них очертания цветков и деревьев.
Древневосточные пагоды напоминают стройные ели с тяжело
висящими ветками, мраморная колонна Парфенона — олицетворение стройного ствола дерева, колонна
египетского храма
подобна стеблю лотоса, готическая архитектура — воплощение
в бесстрастном камне конструктивной логики, гармонии и целесообразности живого.
Особенно ярко прослеживается прямое подражание биологическим системам при изучении полета птиц и конструировании летательных аппаратов. Например, в дошедших до нас трудах алхимика
Иакова ТУ Шотландского,
Джоана
Домиана
(1500), в тетрадях гениального художника, замечательного инженера, гидравлика и механика Леонардо да Винчи (1452—
1519) содержится множество схем, эскизов и рисунков
летательных аппаратов с машущими крыльями. «Птица, — писал
Леонардо,
— действующий
по математическому
закону
инстру-
мент, сделать который в человеческой власти со всеми его движениями...» Но все попытки построить летательный аппарат на
принципе машущих крыльев птицы тогда неизменно терпели
неудачи. Изобретателям не хватало одной существенной
детали — двигателя, достаточно легкого и мощного, чтобы приводить в движение крылья, в их распоряжении была только
мышечная сила человека, заведомо недостаточная
для этой
цели при существовавших тогда материалах.
Наука
величайших
возможностей
17
——
Таких примеров,
повествующих
о подражательной
деятельности человека живой природе,
о
заимствовании
древними
конструкторами
и изобретателями
у
биологических
систем тех или иных
процессов,
о прямом
копировании
форм и функций различных органов животных при создании
разнообразных технических устройств, можно привести еще
множество.
Все примеры убедительно говорят о том, что живая природа
с незапамятных времен служила человеку источником вдохновения в его стремлении к научному и техническому прогрессу,
что в течение многих тысячелетий человек учился у природы.
копировал ее «изобретения», что техника возникла в виде искусственных орудий труда, функции и конструкции (внешние
формы) которых были тождественны органам живых систем.
Да иначе и быть не могло. Создание искусственных орудий требовало определенных знаний, а эти знания сначала не могли
быть чем-то иным, как только знаниями эмпирическими. Они
не могли выйти за пределы созерцания природы, за пределы опыта, так как были самим опытом или простым
осмысливанием
опыта. В этих первичных знаниях не было ничего, что не наблюдалось бы человеком в природе непосредственно. Поэтому
как функции, так и формы первых искусственных орудий труда были более или менее грубыми копиями органов тела животных и человека. А это значит, что происхождение техники
является бионическим по своей сущности,
что
бионические
принципы всегда были присущи инженерному творчеству.
Познание, как известно, движется от внешнего к внутреннему, от явлений к сущности. Изучая внешнюю,
наблюдаемую
сторону творений природы, копируя то, что доступно непосредственно созерцанию, человек в дальнейшем
стал постепенно
вникать в сущность вещей и процессов окружающего мира. Человек научился вскрывать их глубокие взаимосвязи, познавать
законы природы и, опираясь на добытые знания, перешел к преобразованию познанных вещей и процессов в соответствии с новыми запросами практики.
Одними из первых, кто сделал шаг по пути раскрытия внутренних закономерностей живой системы и их использованию
для создания новых технических устройств, по-видимому, были
арабские врачи. Проводя много сотен лет назад глазные операции, эти хирурги получили представление
о преломлении
световых лучей при переходе из одной прозрачной среды в другую. Изучение хрусталика глаза натолкнуло врачей древности
на мысль об использовании линз, изготовленных из хрусталя
или стекла, для увеличения изображения. Создание линзы является первой попыткой расширить сенсорный аппарат человека... Линза стала прототипом телескопа, микроскопа и других
оптических приборов позднейшего времени. Если бы арабские
18
Бионика
врачи создали только оптику и ничего больше, то и в этом случае они внесли бы важнейший вклад в науку '.
Много лет спустя выдающийся немецкий астроном Иоганн
Кеплер (1571—1630), исследовав архетипы (исходные типы) высокосовершенных природных форм, дал в трактате «О шестиугольном снеге» (1619) ряд рекомендаций по наивыгоднейшему
использованию пространства, экономии
труда и материалов,
достижению наивысшей прочности.
Знаменитые опыты итальянского физиолога, профессора медицины Луиджи Гальвани (1731—1198) с лапкой лягушки позволили открыть так называемое животное электричество и привели в конечном итоге к созданию гальванических элементов —
химических источников электрической энергии.
Французский физиолог и физик, доктор
медицины, член
Медицинской академии Жан Луи Мари Пуазейль (1799—1869)
на основе экспериментальных исследований движения крови в
кровеносных сосудах установил закон для течения жидкостив
тонких трубках, весьма важный для техники. Законом Пуазейля сейчас широко пользуются для определения вязкости в гидравлике, а также скорости течения в капиллярных сосудах.
Глубокие, чрезвычайно интересные идеи, положения, имеющие по своей сути бионический характер, содержатся в трудах
выдающегося русского физика Н. А. Умова (1846—1915).
Уделяя много времени изучению процессов, протекающих в живой
и неживой материи, вопросам эволюции живого, ученый в своих исследованиях не просто изучал некоторые общие принципы
функционирования биологических систем и машин, не просто
указывал на объективную возможность воспроизведения (моделирования) действий животных, а вскрывал физическую основу единства всех организованных систем, анализировал единые закономерности их возникновения,
действия и развития,
формулировал теоретические положения, близкие к тем, которые через несколько десятков лет были положены в основу
кибернетики и приняты на вооружение бионикой. «В целом ряде актов, — указывал Н. А. Умов, — сопровождающихся сознанием и вызываемых внешним миром, живая материя может
быть заменена автоматом».
Большой интерес в бионическом плане представляет творчество великого русского ученого, основоположника гидро- и аэромеханики Н. Е. Жуковского (1847—1921). Выступая
против
тех, кто не видел в исследованиях живых организмов никакой
пользы для технического творчества, ученый указывал, что за
внешним различием животного и машины нужно уметь видеть
одинаковые принципы и общие факторы, лежащие
в основе
'См.:
Бернал
лит., 1956, с. 165.
Дж.
Наука
в истории
общества.
М.,
Изд-во
иностр.
Наука
величайших
возможностей
19
функционирования биологических и технических систем. «Многие исследователи воздухоплавания, — писал Н. Е. Жуковский
в статье «О крылатых пропеллерах», — отвергают крылья как
пропеллер, так сказать арг!ог!, и считают гребной винт единственным рациональным пропеллером. При ‘этом они руководствуются тем, что механическое осуществление движений, замечаемых нами у живых существ, не достигается прямым подражанием природе. Локомотив в своем быстром перемещении не
опирается на землю ногами, подобно бегущему животному, а
пароход приводится в движение не поворотами хвоста, подобно
плывущей рыбе. Но если вникнуть глубже в эти механические
осуществления движений, замечаемых нами в природе, то мы
увидим, что в них в несколько иной форме фигурирует тот же
основной фактор явления, который фигурирует при движении
живых существ. Колесо локомотива так же опирается на трение
пути, как упирается на него нога бегущего животного, а гребной винт парохода дает тягу вперед на основании того же сопротивления жидкости,
развивающегося от образования вихрей, на основании которого движется рыба» '.
Исследуя принципы функционирования живых организмов,
создавая различные теории гидро- и аэромеханики, Н. Е. Жуковский широко пользовался разработанным им, так называемым методом идеализации. Он считал способ идеализирования предметов изучения общим способом научного исследования и объяснял это тем, что мы не можем сразу охватить
все свойства предмета и поэтому сосредоточиваем свое внимание лишь на главнейших из них. Применение этого метода четко прослеживается в разработке вихревой теории гребного винта, теории гидродинамического удара и особенно ярко в работе
«О парении птиц», впервые опубликованной в 1892 г.
Парение птиц исследовалось многими учеными еще до Жуковского. В своих работах они пытались дать математическое
описание конкретно наблюдаемых движений птицы в полете по
прямой, по наклонной, по восходящей, в направлении
ветра,
против ветра, в равномерном ветре, в порывистом ветре и т. д.
Жуковский же при разработке теории динамики полета с самого начала отказался от описания парения птицы в тех или иных
конкретных условиях, так как таким путем, по его глубокому
убеждению, теория в принципе создана быть не может. У него
был другой подход к проблеме. Чтобы выявить, как могут птицы совершать парящие полеты без затраты собственной энергии,
и затем использовать «подсмотренные» у живой природы vexнические закономерности для разработки аэродинамики самолетов, Жуковский применил метод идеализации.
' Жуковский
1937, с. 9.
Н.
Е.
Полное
собрание
сочинений,
т.
УТ.
М.—Л.,
20
Бионика
Поскольку в научном исследовании невозможно охватить в
деталях все свойства изучаемого объекта, ученый сосредоточивал свое внимание на главнейших из них, абстрагируясь от конкретных единичных условий (сила ветра, его направление, размах крыльев птицы, ее масса и т. д.), и представлял процесс парения в чистом, идеализированном виде. Но это был лишь первый этап идеализации. Жуковский производил математический
анализ идеализированного парения, в результате которого возникла теория парения птиц. Изложенная математическим языком, она, по сути, несла в себе биологическое содержание, описывала закономерности поведения организма. Ее ценность заключалась в том, что с ее помощью путем дедукции с соответствующими дополнениями можно было описать любое конкретное поведение парящей птицы в тех или иных условиях. Но
этих знаний было еще недостаточно, чтобы только из них вывести принципы аэродинамики полета технических аппаратов.
И Н.Е. Жуковский перешел на второй этап идеализации:
он применил разработанный им метод математической аналогии и стал рассматривать процесс парения в таком абстрактном виде, что все специфические особенности парения
птицы
как живого организма, как летающей биологической системы
исчезли.
Ученый
«уподоблял
птицу
пластинке»
и рассматривал
ее как предмет более удобный для теоретического и экспериментального исследования. Иными словами, на втором этапе
идеализации Н. Е. Жуковский разработал теорию, которая относилась к парению уже не птицы, а «птицеподобных» предметов. В конечном итоге второй этап идеализации позволил ученому освободиться от биологических особенностей первого этапа и вычленить из биологических закономерностей закономерности технические.
Примененные Н. Е. Жуковским
методы
идеализации и математической аналогии в работе «О парении
птиц» позволили ему не только блестяще решить сложные вопросы парения, но и заложить фундамент теории динамики полета, развитой им в последующих работах.
Опыт развития наук, достигших в настоящее время высокого теоретического уровня, показывает, что формирование теории начинается тогда, когда применяется метод идеализации.
Анализируя,
в свете
сказанного,
методологию
творчества
Н. Е. Жуковского, можно, не боясь
преувеличения,
утверждать, что из всех его предшественников и современников он
внес самый большой вклад в теоретизацию бионики задолго до
того, как эта наука обрела свое современное название. В сущности, своими исследованиями биологических систем Жуковский развивал науку в том плане, в каком ныне развивается бионика. И сегодня работы Жуковского, в которых он анализировал движение живых организмов, являются
классическим
образцом теоретического изучения биологических систем.
27
Наука величайших возможностей
Итак, оглядываясь на историю науки, мы можем сегодня
назвать пионерами бионики
Леонардо да Винчи и Луиджи
Гальвани, Н. А. Умова и Н. Е. Жуковского. Именно они своим
творчеством стали зачинателями нового
подхода к изучению
живой природы
и решению
технических
проблем.
Это утверж-
дение, может быть, покажется кое-кому спорным. Однако в их
методологии творчества, характеризующейся широтой подхода
к исследуемым проблемам, установлением существенных связей между явлениями, различными по своей природе, переносом принципов из одной области в другую, заключается суть
бионики.
Появление бионики как новой области знания было подготовлено всем ходом развития науки и техники к середине ХХ в.
На современном этапе развития науки и техники объективное
единство, сходство биологических и технических систем получили свое отражение в сознании таким образом, что это привело к возникновению бионики как самостоятельной науки. Однако, как это отмечалось выше, оно определенным образом отражалось и в науке прошлого, ибо сегодняшний синтез биологических и технических знаний является результатом развития
наших представлений об объективном сходстве живых и технических систем. Формирование этих представлений завершила
кибернетика. Здесь особенно действенно проявилась ее гносеологическая функция. И, конечно же, бионика не могла бы возникнуть и развиваться как наука, если бы кибернетика:
не способствовала более глубокому пониманию
особенностей, достоинств, преимуществ биологических систем перед техническими;
не стимулировала превращение биологии из качественной в
количественную (точную) науку;
не способствовала созданию новой экспериментальной техники, новых средств исследования живого;
не утвердила свои идеи и методы в биологии, позволяющие
получать новые знания о биологических системах,
открывать
новые свойства и принципы организации и функционирования
живого, эффективно применимые в технике;
не породила сама множество новых сложнейших научных
и инженерных проблем.
Развитие кибернетики привело к бурному развитию автоматики и телемеханики, радиоэлектроники, связи, вычислительной техники. Возникло множество проблем, связанных с накоплением и обработкой большого количества информации, созданием быстродействующих вычислительных машин с болыпим
объемом памяти, построением обучающихся машин, систем для
распознавания зрительных и звуковых образов, созданием ЭВМ,
решающих задачи без предварительного
программирования,
разработкой адаптивных (самоприспосабливающихся) систем,
22
Бионика
созданием иерархических систем автоматического регулирования и управления; появилась проблема «человек
— машина»
(«человек
— автомат»); возникла острая необходимость повышения надежности, уменьшения потребляемой мощности, дальнейшей миниатюризации (сверхмикроминиатюризации) радиоэлектронной аппаратуры и др.
Весь этот обширный круг задач заставил ученых вновь о0братиться к живой природе. Это целенаправленное стремление
ученых и инженеров понять, в чем природа совершеннее, умнее, экономичнее современной техники, попытка найти в ее богатейшей «патентной библиотеке» новые идеи, методы и средства для решения многочисленных инженерных проблем и породили
новое
научное направление,
получившее
название
«бионика».
Бионика — наука междисциплинарная, или,
как принято
сейчас говорить, «наука-перекресток». В ней нашла наиболее
яркое отражение одна из главных особенностей современной
научно-технической революции — интеграция, объединение самых различных и даже противоположных по своим предметам
и методам наук. Она сформировалась на базе естественных и
многочисленных инженерно-технических дисциплин. По существу, она синтезирует накопленные знания в биологии и кибернетике, физике и радиотехнике, химии и теории связи, математике и электронике, ботанике и архитектуре, биохимии и механике, психологии и биофизике, этологии
и
судостроении,
зоопсихологии и геологии, нейрофизиологии и аэронавтике, физиологии и метеорологии, нейрологии и приборостроении и др.
Бионика соединяет разнородные знания
в соответствии с
единством живой природы. Не случайно бионики избрали своей
эмблемой скальпель и паяльник, соединенные знаком интеграла. Скальпель — символ творчества биолога, паяльник — инженера, интеграл — математика. Соединение этих специальностей как нельзя лучше отражает основу, на которой оформилась и развивается бионика.
В бионике наших дней еще не все установилось, не все обозначилось: уточняется предмет, круг задач новой науки, определяются основные ее направления, дальнейшая «стратегия» поисков технических закономерностей в живой природе, вырабатываются новые понятия, устанавливается связь этих понятий,
разрабатывается общая, однозначная для биологов, инженеров,
психологов, врачей, специалистов по кибернетике терминология бионики. Особое внимание уделяется выработке специфических приемов бионических исследований на всех уровнях биологической организации, совершенствованию существующих и
созданию новых средств для изучения интересующих бионику
процессов, явлений и принципов. Идет процесс становления новой
науки.
23
Наука величайших возможностей
Весь исторический процесс человеческого познания показывает, что бурный рост наук начинается на стадии их теоретизации. Теоретизация науки связана с возможностью логически
вывести большинство фактов из некоторого ограниченного множества аксиом. При этом процесс накопления новых фактов
резко ускорится, если создано некоторое исчисление, позволяющее формально, автоматически, подобно тому как это делается,
например, в алгебре, выводить новые
утверждения из ранее
известных. Расширение возможностей получения новых фактов
чисто
логическим,
умозрительным
путем — первые
шаги
теоретизации
любой науки.
Создание исчисления, позволяющего формально
получать
новые
знания,
знаменует
собой
заключительный
шаг
теоретизации
науки — ее математизацию!'. В бионике сейчас широко
используется
математика.
Интенсивно
начавшийся
процесс
математизации
бионики
указывает на достижение этой наукой порога теоретической
зрелости.
Любой биологический объект исследования — это либо совокупность тысяч и миллионов клеток, объединенных в один
организм, либо совокупность большого числа
одноклеточных
организмов. В том и другом случаях основным методом бионических исследований живых организмов, построения бионических систем является моделирование. Оно представляет собой
материальное или мысленное имитирование
реально существующей (естественной, натуральной) системы путем
создания
специальных аналогов (моделей), в которых воспроизводятся
принципы организации и функционирования этой ситемы. Бионическое моделирование является
результатом
развития во
всей современной науке, в частности в бионике, плодотворного
взаимодействия биологии, техники и математики.
Наиболее широко в бионике применяются математическое и
физическое моделирование. Математическое моделирование —
это метод исследования системы с помощью специальных моделей, основанный на идентичности математического описания
процессов в оригинале и модели. «Идентичность» здесь означает одинаковость формы уравнений и наличие однозначных соотношений между переменными в уравнениях оригинала и модели. При этом физическая природа модели и оригинала различна. Известно несколько
разновидностей
математических
моделей.
Физические модели — это действующие электронные, механические, электрические,
гидравлические,
пневматические и
другие устройства, которые копируют реальное поведение изучаемого биологического объекта, воспроизводят его свойства и
' См.
Глушков
В. М. Гносеологические
науки. Киев, «Наукова думка», 1965.
основы
математизации
24
Бионика
функции. Такие модели расширяют возможности физиологического эксперимента, позволяют найти лучший вариант реализации в бионических системах технических
закономерностей
живых организмов.
Нередко в бионике пользуются естественными («живыми»)
моделями. Обычно к ним прибегают при изучении какой-нибудь очень сложной биологической функции организма, например функции нервов человека. Как известно, они состоят из
чрезвычайно тонких волокон, измеряемых
десятитысячными
долями миллиметра. Исследовать сложные
процессы,
протекающие в этих тончайших волокнах, очень трудно. Но можно
воспользоваться нервами кальмара. У этого животного некоторые нервные волокна достигают почти миллиметра в диаметре.
Эти гигантские волокна идут к мышцам, сокращающим сумку,
при помощи которой кальмар движется реактивным способом,
подобно ракете. В такие нервные волокна можно вводить миниатюрные электроды и даже брать пробы содержимого при помощи крошечных пипеток. Вполне естественно предположить,
что нервы человека и кальмара в основном действуют одинаково. Поэтому, используя кальмара как естественную модель, изучая работу его толстых нервных волокон, можно многое выяснить и о принципах действия нервов человека. Разумеется, естественные модели нельзя считать бионическими конструкциями,
так как в них нет ничего от искусственных,
технических устройств. Однако они очень полезны для понимания некоторых
сложных и скрытых биологических механизмов. А понимание
этих механизмов порождает у биоников идеи для создания новых, оригинальных технических систем.
Говоря о применяемых в бионике моделях, нельзя не отметить также предпринимаемые некоторыми учеными попытки
создания моделей, наделенных эмоциями. В этом направлении
делаются только первые шаги. И хотя о роли и значении эмоций в жизнедеятельности организмов нам уже многое известно,
сегодня еще трудно что-либо сказать о целесообразности такого
рода моделирования с точки зрения интересов техники.
В общем логическая схема построения бионических моделей
основана на том, что бионик сначала раскрывает внутреннюю
структуру естественной системы, а затем технически воспроизводит эту структуру — создает искусственное устройство, обладающее искомой функцией (например, чуткостью к приближению шторма, землетрясения и т. п.). Иначе говоря, в бионическом моделировании исследование идет от раскрытия внутренней структуры биологической системы
через ее техническое
воспроизведение к получению искомой функции в искусственном устройстве. Эта операция основывается на том принципе,
что определенная искомая функция
произведена от данной,
уже раскрытой структуры. Это путь от раскрытия структуры к
Наука
величайших
25
возможностей
———
функции'. Идя по этому пути, бионик при конструировании
машины или прибора пользуется характеристиками естественной системы, применяет новые идеи, возникшие во время работы с моделью, или новые знания о функциях живых организмов.
Опыт показывает, что высокая результативность
бионического творчества достигается только тогда, когда глубоко изучен процесс «естественного конструирования» и умело применяются методы, использованные самим процессом
эволюции.
Процесс «естественного конструирования», описанный Ч. Дарвином сто лет назад, включает в себя
четыре
компонента:
во-первых, механизм наследования;
во-вторых,
постоянный
приток изменений, передаваемых по наследству; в-третьих, непрекращающуюся жестокую конкуренцию между живыми организмами — борьбу за существование;
в-четвертых, выживание наиболее приспособленного,
постоянное
отбраковывание
тех «новшеств», которые функционируют плохо.
На первый взгляд «естественное
конструирование»
представляется страшно неэкономным, медленным и неверным по
сравнению с хорошо отработанным процессом инженерного проектирования, привычными для нас этапами создания той или
иной технической системы, но не нужно думать о нем плохо.
Живая природа — гениальный конструктор, инженер, технолог,
великий зодчий и строитель. На каждом этапе, при
каждом
значительном изменении среды природа делала
шаг
вперед,
подвергая пересмотру прежние решения. В ходе эволюционного
развития в живых организмах вырабатывались весьма тонкие
и совершенные механизмы процессов
обмена веществ, преобразования энергии и информации. Эти «биоинженерные системы» природы функционируют очень точно, надежно и экономично, отличаются поразительной целесообразностью и гармоничностью действий, способностью реагировать
на мельчайшие
изменения многочисленных факторов внешней среды, запоминать и учитывать эти изменения, отвечать на них многообразными приспособительными реакциями.
Величайшая ценность биоэволюции — приспособление, постоянная гибкость во взаимодействии
с новыми условиями.
Приспосабливая тот или иной вид к новым условиям обитания,
природа проявила не только поразительную изобретательность,
но и величайшую рачительность. Методом «проб и ошибок» она
сумела придать большинству биологических систем наилучшие
формы, добиться наибольшей мощности
при
минимальной
массе, высокой производительности при минимальном расходе
энергии, высокой прочности и надежности при
минимальных
' См.: Новик
1965, с. 151.
И.
Б.
Моделирование
сложных
систем.
М.,
«Мысль»,
26
.
Бионика
затратах биологического строительного материала. Словом, характеризуя творчество природы, мы можем сказать, что вся ее
конструкторская и технологическая деятельность является образцом оптимизации. Поэтому-то так важно для бионика —
создателя новой техники — глубокое знание путей и методов
природы в достижении максимизации характеристик биологических систем.
Подходя к решению той или иной технической
проблемы,
моделируя ту или иную структуру, функцию живого организма,
бя:
биохимический процесс, бионик всегда должен спросить сеа не окажется ли то, что было на одном из этапов эволюции
благотворно для живых систем, полезным и для аналогичных
искусственных систем? Только при таком подходе творчество
бисника может быть плодотворным и служить техническому
прогрессу.
Тематика ведущихся в настоящее время в Советском Союзе
и за рубежом бионических исследований весьма обширна. Наибольшее внимание уделяется:
изучению органов чувств и других воспринимающих систем живых организмов с целью создания новых датчиков, систем обнаружения и устройств для распознавания образов;
исследованию биологических нейронов, нервных центров и
принципов организации мозга, разработке теории формальных
нейронов и нейронных сетей, физическому моделированию нейронов и нервных центров с целью дальнейшего совершенствования вычислительной техники, разработки новых элементов и
устройств автоматики и телемеханики, микроминиатюризации
и повышению надежности электронных систем;
изучению систем ориентации, навигации и локации у различных представителей животного мира с целью усовершенствования существующей и создания принципиально новой навигационной и локационной техники;
разработке методов и средств, обеспечивающих оптимальное
взаимодействие
человека
с управляемой
им
машиной;
исследованию сложных биологических систем регулирования и управления, методов и механизмов приспособления живых организмов к изменению внешней среды с целью создания
адаптивных
(самоприспосабливающихся)
технических
устройств;
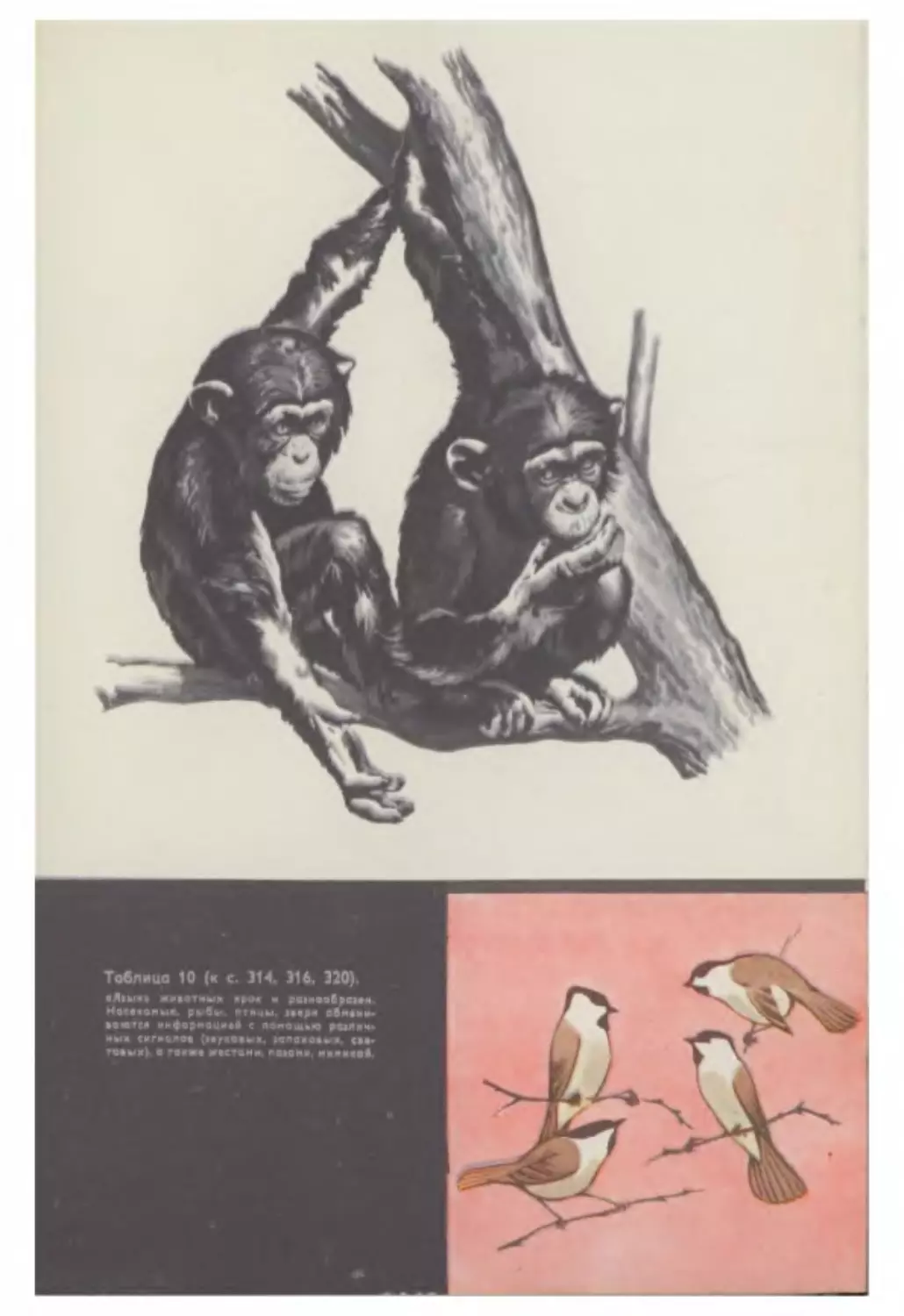
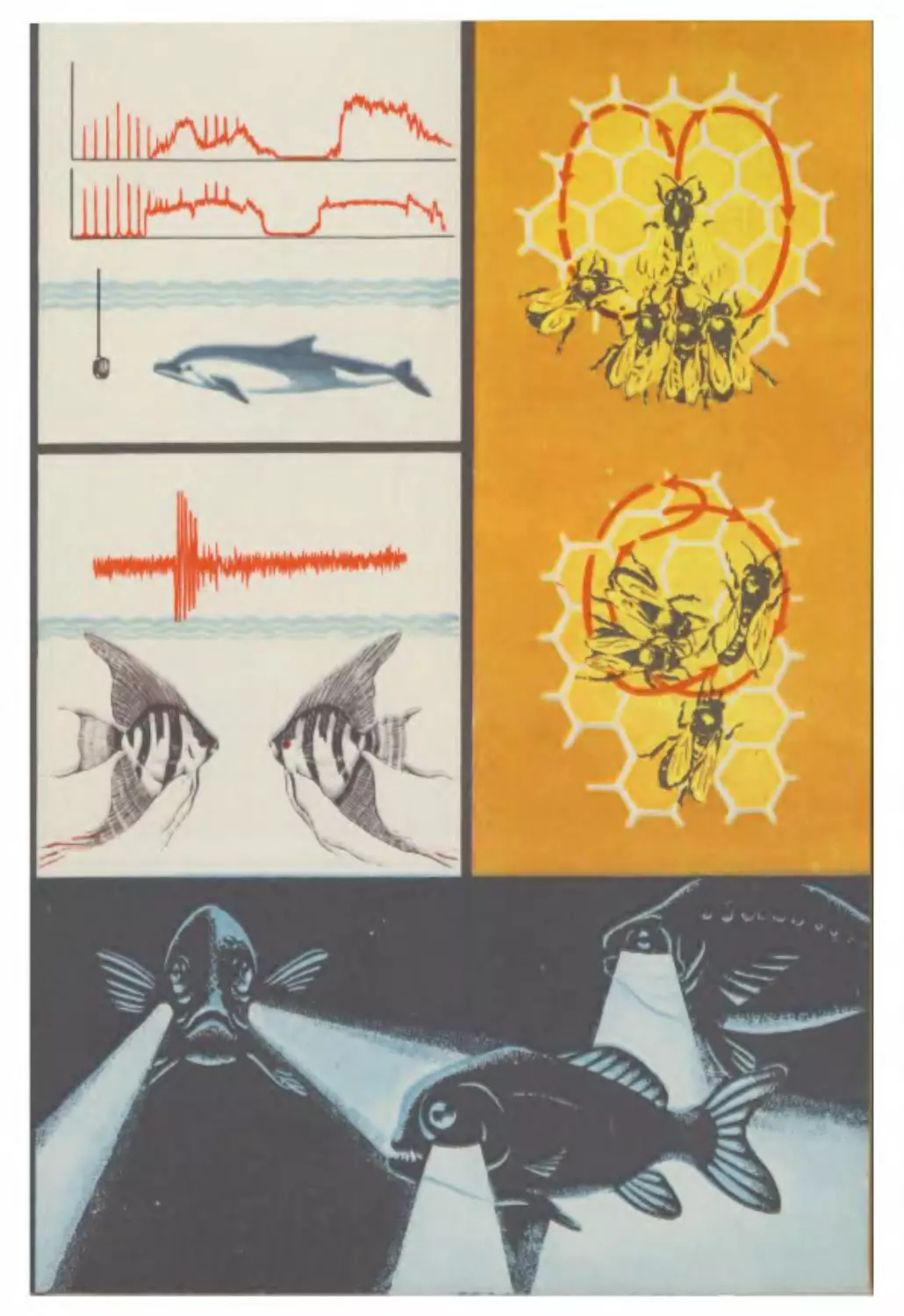
изучению методов обмена информацией между животными
с целью создания новых видов и средств технической связи, оснащения промыслового
рыболовства
биоакустическими приманками, использования «сигналов опасности» птиц, насекомых для борьбы с вредителями сельского хозяйства;
исследованию принципов химического синтеза в живых организмах, способностей некоторых животных
опреснять воду,
селективно накапливать из земли, морской и океанической во-
Наука
величайших
27
возможностей
———
ды отдельные химические элементы с целью
химических производств, высокоэкономичных
установок, освоения биологических
создания новых
опреснительных
способов добычи полезных
ископаемых;
изучению энергетики живых организмов с целью создания
широкой номенклатуры малогабаритных, дешевых источников
питания, мощных, высокоэкономичных
технических
систем
прямого преобразования химической энергии в механическую
и получения энергии в специальных случаях от биологических
систем;
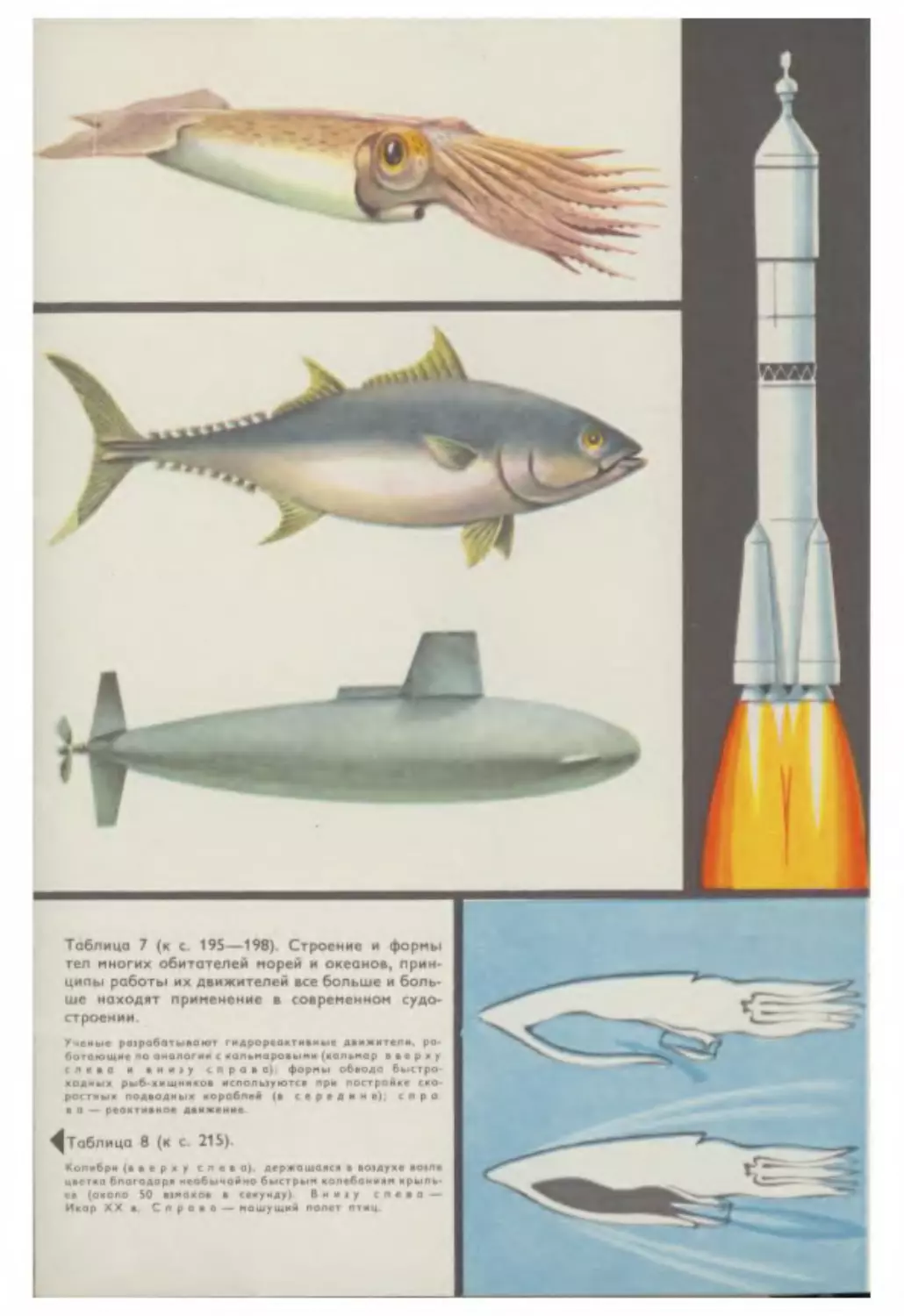
исследованию биомеханики наземной локомоции, биологической аэро- и гидродинамики, а также рыхлящих и землеройных приспособлений некоторых животных с целью использования результатов проводимых исследований при проектировании шагающих аппаратов
с автономным
управлением, в
авиа- и судостроении, при создании землеройных машин;
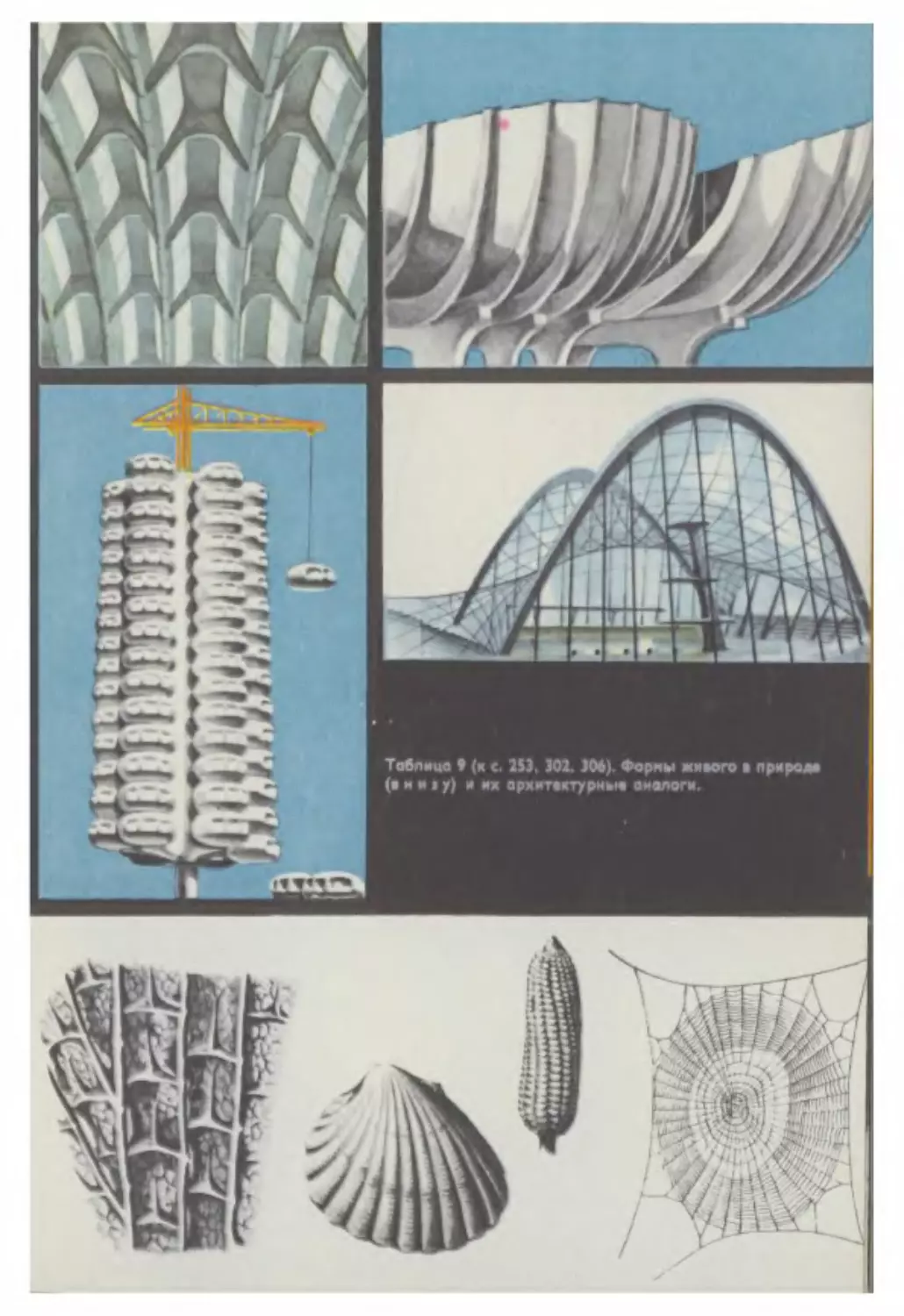
изучению структур, конструкций и форм растений и животных с целью их использования в архитектурно-строительной
практике.
Даже краткий обзор решаемых бионикой проблем показывает, сколь внушителен диапазон ведущихся ныне молодой наукой исследований в интересах прогресса техники. И не только
техники. Методы и подход бионики к исследованию
живого
способствуют также развитию биологии. Разнообразные модели
биологических процессов и поведения живых организмов расширяют возможности биологов проверить традиционные теории
и гипотезы, проследить течение жизненных
процессов, уточнить установившиеся представления о сложном биологическом
мире и о его взаимоотношениях с окружающей средой, объяснить некоторые до сих пор непонятные явления и выявить их
закономерности.
Не менее благотворное влияние оказывает бионика и на развитие медицины. За последние 15—20 лет на основе бионического моделирования биологических систем создан ряд автоматических устройств для медицинских целей. Их можно условно
разделить на три класса: устройства, основанные на использовании информации, отводимой от живого организма (биологическое управление); устройства, предназначенные
для ввода
управляющей информации в живые организмы (биологическая
стимуляция); устройства, заменяющие
отдельные или функциональные системы и имеющие автономную систему управления, изоморфную соответствующей системе в живом организме
(функциональное протезирование).
Примером устройства, управляемого от живого организма,
может служить «искусстеснная рука», созданная советскими
учеными Б. П. Поповым-Ильиным, В. С. Гурфинкелем, А.Е. Кобринским, А, Я. Сысиным, М. Л. Цейтлиным и Я. С. Якобсоном.
28
Бионика
Из устройств, предназначенных для ввода управляющей информации в живые организмы, широкое применение
получил
автономный стимулятор сердечной деятельности. Хирурги вшивают под кожу больного миниатюрные генераторы электрических импульсов, располагая электроды на сердечной мышце, и
электрические разряды заставляют сердце сокращаться в нужном ритме. Американские ученые разработали регулятор биения сердца, батареи которого можно подзаряжать
методом
электромагнитной индукции, не прибегая к помощи хирургов.
Полагают, что такой аппарат сможет работать до 30 лет.
Ведутся также разработки регулятора сердечной деятельности, для питания которого будет использоваться энергия биологических процессов, протекающих внутри организма.
Поистине бионическими системами (хотя разработка их началась, когда еще
не было термина «бионика») являются искусственная почка и аппарат искусственного кровообращения,
повсеместно вошедшие сейчас в хирургическую практику. Многогранному творчеству биоников медики сейчас начинают уделять все больше и больше внимания,
убедившись,
что
его
результаты могут оказать существенное влияние не только на
изучение организма, установление диагноза, но и на методы
лечения.
Сейчас вряд ли можно найти такую область человеческой
деятельности, которая в той или иной степени не была бы связана или не готовилась к сотрудничеству с бионикой. С каждым
годом она захватывает новые рубежи, все больше
и
больше
проникает в различные области производства, в сферу научных исследований, всюду оставляя заметный след своим новаторством, революционными преобразованиями. За сравнительно короткий срок бионика блестяще доказала свою жизнеспособность. По мере того как мы осваиваемся с миром бионических идей, с их эффективным выходом
в практику, мы все
больше убеждаемся в том, что бионика, говоря словами членакорреспондента АН СССР Б. С. Сотскова, становится «мощным
ускорителем научно-технической революции». Она обещает неслыханный расцвет производительных сил человечества, новый
взлет науки и техники.
Уделив столько места истории
возникновения и развития
бионики, ее методологии и проблематике, нельзя не сказать несколько слов о том, как и почему появилась эта книга, какую
задачу пытался решить автор, собирая и обобщая болышой по
объему материал.
Век бионики только начинается. Важнейшим условием ее
дальнейшего развития является широкое вовлечение в сферу
бионических исследований новых, молодых сил. Время не ждет.
Мы не имеем права отставать в этой прогрессивной и перспективной области науки. Нельзя строить подготовку нужных био-
Наука
величайших
возможностей
29
нике специалистов на энтузиазме и самотеке. Здесь нужны организованность и целеустремленность. По нашему
глубокому
убеждению,
подготовку
биоников
необходимо
начинать
со
школьной скамьи, еще в школе учащиеся должны получить
первичные бионические знания. И в этом важном деле первое
место, несомненно, должно принадлежать преподавателям биологии. Большую помощь в вооружении школьников бионическими знаниями, безусловно, могут и должны
оказать также
преподаватели математики, физики, химии и других естественных наук.
Автор не ставит своей задачей осветить в этой книге все области современных бионических
исследований — тогда
она
приобрела бы огромные размеры. Цель книги — помочь читателю овладеть инженерным виденьем
природы, познакомить
его с тем, что является самым главным в бионике, с ее совершенно новым подходом к проблемам жизни и техники, с ее особыми методами и средствами исследования биологических систем. Исходя из этого, автор остановил свой выбор на нескольких, наиболее успешно развивающихся направлениях бионики,
в которых наиболее ярко и зримо проявилась высокая результативность инженерного подхода к изучению техники природы.
Без романтики, без мечты, без творческого
труда
не может развиваться ни одна наука, в том числе и бионика. Здесь
требуются пытливый ум, полет строгой и смелой мысли, употство и творческая фантазия, логика и дерзновенность. Бионике
нужны люди, безгранично любящие
природу,
не
боящиеся
трудностей, способные отдать новой науке
весь пыл и всю
страсть молодости, весь опыт и всю мудрость зрелости. С этой
концепцией автора связава следующая
особенность
книги.
Автор время от времени позволяет себе помечтать вместе с читателем о том, что сегодня может показаться фантастическим
(но не абсурдным!). Более того, в ряде случаев автор пытался
выдать мечту, «головокружительный» проект за реально осуществимый в обозримом будущем замысел. Но все эти приемы, нам
думается, допустимы и оправданы желанием пробудить у читателя живой интерес к бионике, увлечь его романтикой поиска новых идей в живой природе, могущих способствовать прогрессу науки и техники.
Мир ощущений
Мы живем в удивительном мире света и теней, бесчисленного
множества красок и их причудливых оттенков, в мире звуков —
низких и высоких, нежных и грубых, чарующих и оглушающих; нас окружает море запахов, великое обилие вещей — объемных и плоских, ажурных и массивных, привлекательных и
отталкивающих, красивых и посредственных, изящных и аляповатых. Одни нас раздражают, и мы пытаемся от них избавиться. К, другим мы настолько привыкли, что они уже не удивляют нас и мы их даже порой не замечаем. К, третьим привыкнуть невозможно — они всегда волнуют, несут непередаваемую
свежесть ощущений, будят в нашей памяти чудесные воспоминания, делают жизнь человека эмоциональной. И если бы сегодня нашелся какой-нибудь волшебник, который вздумал бы
вдруг лишить нас восприятия всего многообразия мира красок,
звуков, запахов, то жизнь сразу бы поблекла, стала серой и неинтересной, более того — невозможной.
Ощущения составляют главную и неотъемлемую часть человека, любого живого существа. Ни один живой организм нельзя
рассматривать как совершенно автономную биологическую систему, замкнутую в самой себе. Наоборот, каждое живое существо находится в постоянном контакте, активном взаимодействии
со сложившейся в процессе эволюции средой обитания. Оно непрерывно подвергается воздействию
этой
среды,
принимает
ежеминутно сотни внешних раздражений. Внезапное прекращение ощущений
в живом организме, вызываемых потоком световых, звуковых, тепловых и других сигналов, поступающих из
окружающей среды, может привести к пагубным последствиям.
«Новейшие исследования, — как пишет Л. Жерарден в своей книге «Бионика», — показывают, что у человека, полностью
изолированного от внешней среды, появляются признаки психического расстройства: он теряет
представление о времени,
32
Бионика
ему начинает казаться, например, что его голова распухает или
уменышается, а то и вовсе отделяется от тела, затем начинаются галлюцинации. И если эксперимент продолжать, то не исключена вероятность, что он приведет к безумию...» '.
Всей радости восприятия внешнего мира мы обязаны нашим
органам чувств — сенсорным системам, анализаторам.
Классическое представление об органах чувств еще со времен Аристотеля (384—322 гг. до н. э.) различает пять основных
типов чувств: зрение, слух, обоняние, осязание и вкус. Великий
древнегреческий мыслитель определил эти пять чувств и дал
схему, которой следовали более двух тысяч лет.
Современная классификация сенсорных органов более дифференцированная и различает такие ощущения, как чувство боли, тепла, холода, равновесия,
перемещения
в пространстве,
голода, жажды и др.
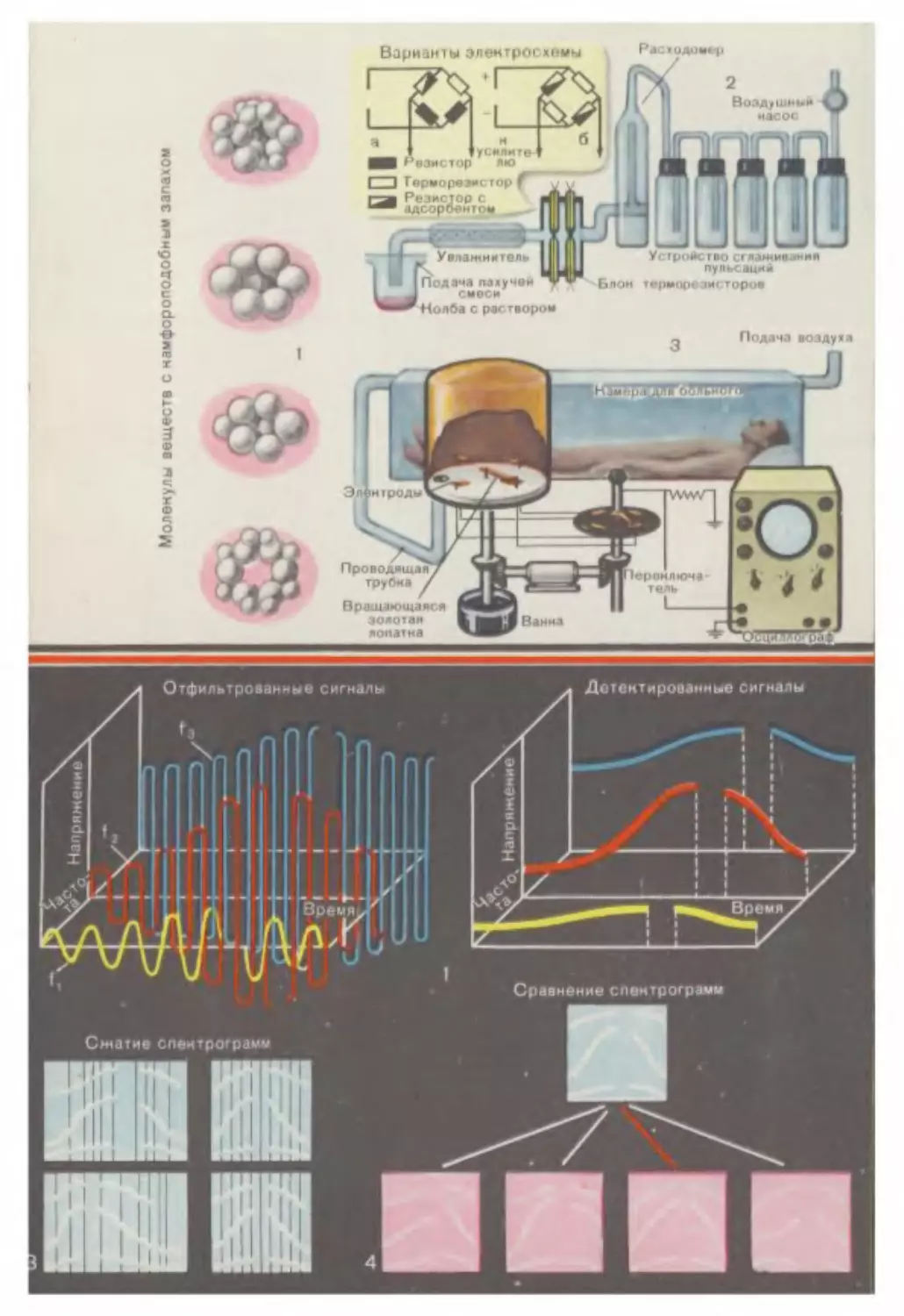
Наши органы чувств способны воспринимать самые ничтожные по силе раздражители, поступающие из окружающей среды. Достаточно сказать, что глаз человека имеет такую чувствительность, которая обеспечивает ему возможность регистрировать попадание на сетчатку нескольких квантов. Чтобы понять, насколько мизерна величина этой энергии и каким чутким
регистратором раздражения является наш зрительный аппарат,
приведем следующий пример. Известно, что энергия поглощается водой и при этом нагревает ее. Например, если 1 см? воды
будет каждую секунду поглощать количество энергии, способное вызвать световое ощущение в человеческом глазе, то для
нагревания этого объема воды на 1°С потребуется время, равное десяткам миллионов лет.
Высокой чувствительностью отличается и наш звуковой анализатор. Журчание ручейка можно услышать на расстоянии
сотен метров, что соответствует энергии звука, равной одной десятимиллиардной
доле
эрга.
Не менее изумительна чувствительность нашего органа обоняния: для возникновения
четкого ощущения
определенного
запаха нам достаточно одновременного
попадания на чувствительную поверхность обонятельных долей всего 300—400 молекул пахучего вещества.
Необыкновенно высока также чувствительность нашего органа осязания — кожи. Иногда мы ощущаем прикосновение не:
видимой паутинки. Если отклонить волосок на тыльной стороне ладони всего на 5° или на кончик волоса длиной около 1 см
оказать давление в 0,03 г, мы ощутим прикоснсвение невидимой паутинки.
Весьма чувствителен и орган вкуса у человека. Дегустаторы,
например, по вкусу и аромату вина безошибочно определяют
' Жерарден Л.
Бионика. М., «Мир», 1971, с. 84.
Мир ошущений
33
не только его марку, но и район и год сбора винограда, из которого было приготовлено вино.
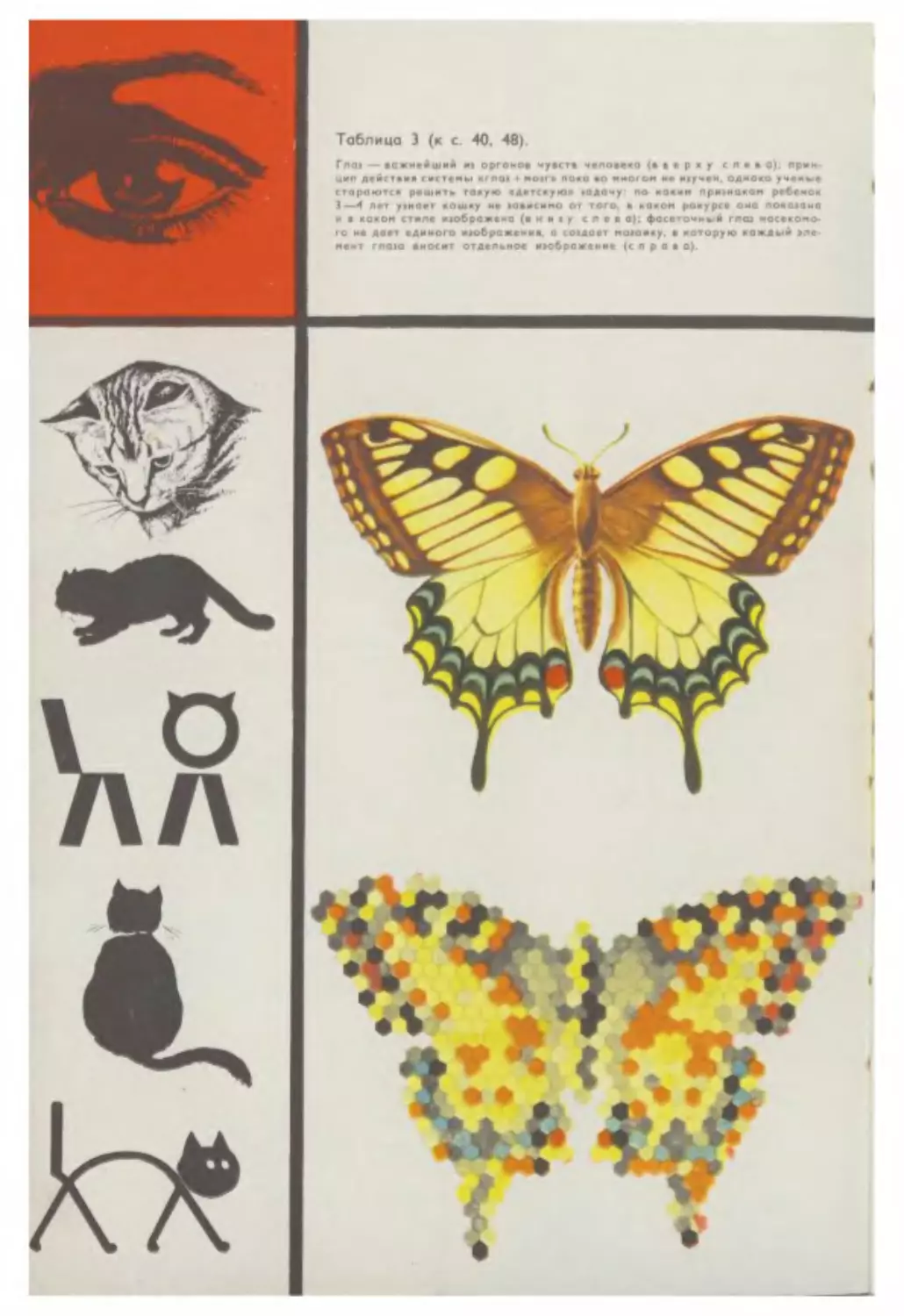
У многих животных органы зрения, слуха, обоняния, вкуса
и осязания более чувствительны, чем у человека. Кошки, например, различают дорогу даже в темноте. Некоторые насекомые имеют тимпанальные органы, расположенные на передних
ножках. Эти органы реагируют, как и наше ухо, на целую гамму частот, но их предел слышимости гораздо выше, чем у нас:
50 тыс. колебаний в секунду, а у некоторых ночных бабочек
даже до 200 тыс. колебаний. Собаки и волки улавливают запахи несравненно более слабые, чем те, которые воспринимает
человек. Высокоразвитым чувством осязания обладает осьминог. Ощупывая предметы щупальцами, он определяет их форму, а по напряжению мыщц судит о массе. Лягушки и жабы не
ощущают сладкого вкуса, но способны воспринимать на вкус
чистую воду. Некоторые мухи различают сладкий вкус в 30 раз
точнее, чем человек.
Биологическими и бионическими исследованиями последних
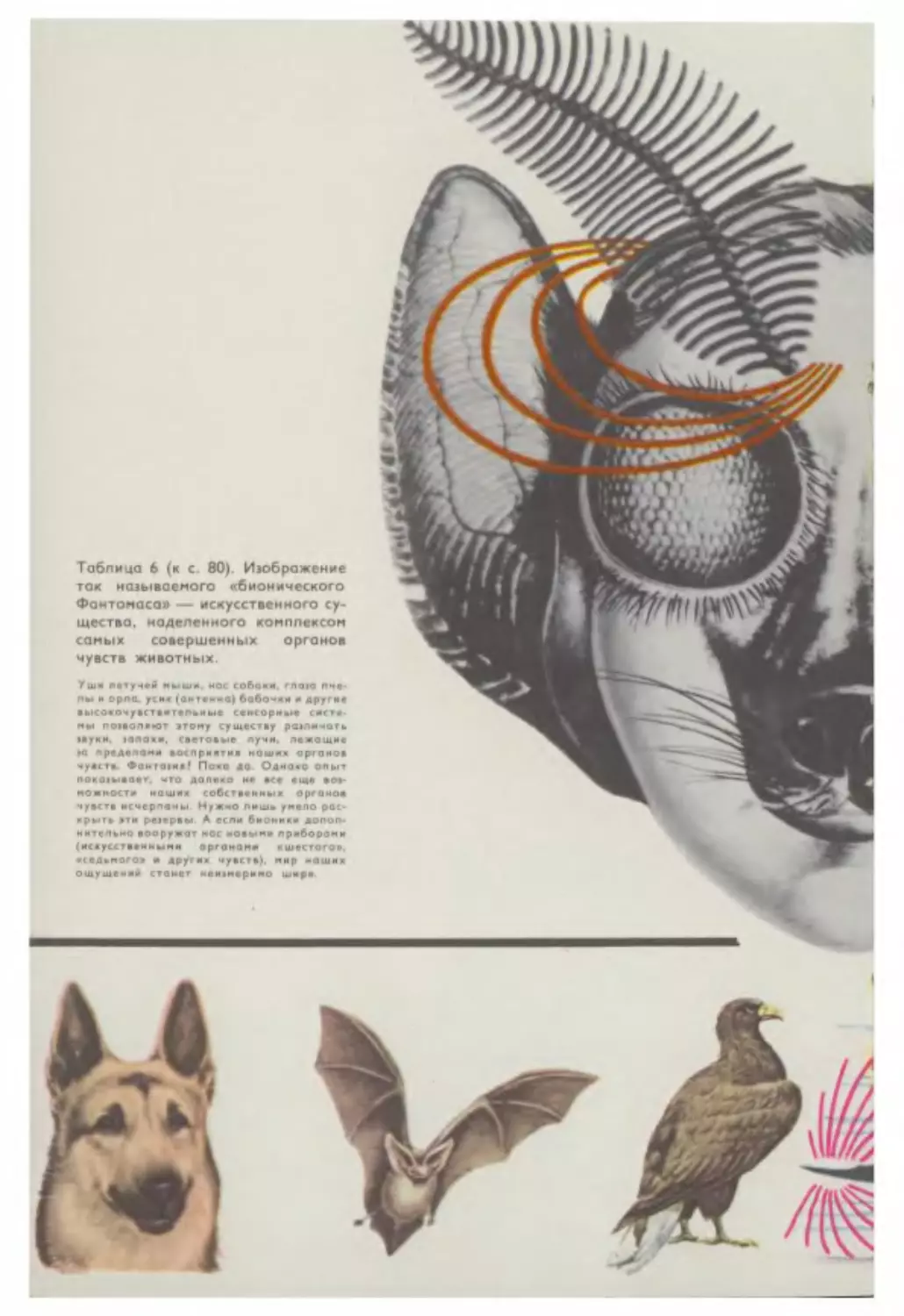
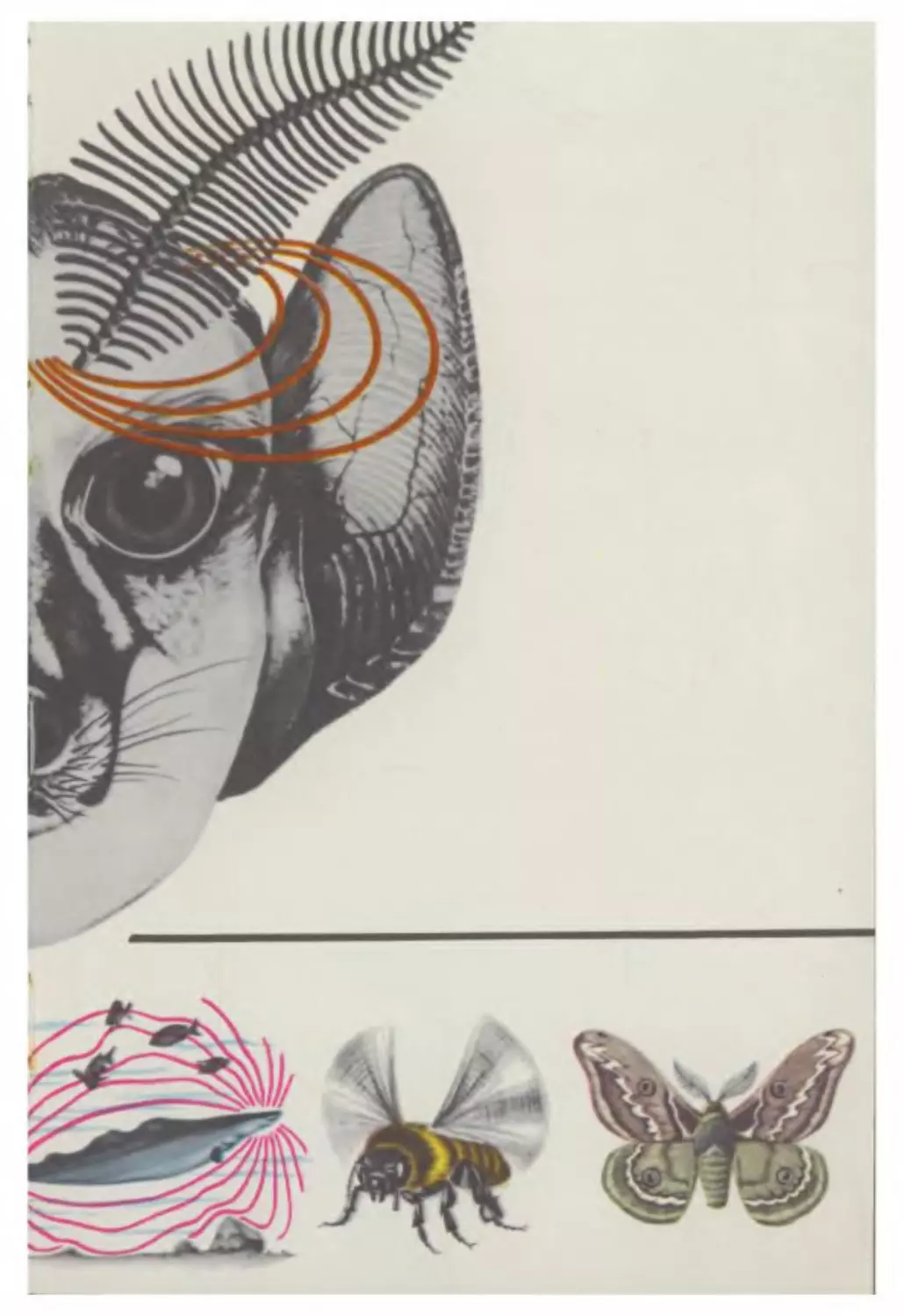
лет установлено, что природа наделила многие виды насекомых и позвоночных сенсорными системами, о которых еще недавно человек не мог и помышлять.
Так, например, во время проведения экспериментов с глазом таракана
исследователи
заметили, что
на
экране осциллографа появлялся сигнал, несмотря
на то что
опыты
проводились в полной темноте. Проверили и — оказалось, что
всплеск возникал как раз в тот момент, когда в глаз насекомого попадало радиоактивное излучение. Многие факты убедительно говорят о том, что не только тараканы, но и некоторые моллюски и мыши тоже реагируют на появление радиации.
Весьма чутко реагируют на радиоактивные излучения лесные
муравьи. Попав в зону даже самой слабой
радиоактивности,
они начинают суетиться, меняют курс и стремятся убежать подальше от опасного места. Вероятно, природа
снабдила этих
маленьких животных
высокочувствительным,
ультраминиатюрным «счетчиком Гейгера». Не менее любопытны особенности зрения пчел. Они видят неведомые нам ультрафиолетовые
оттенки и воспринимают поляризованный свет неба, часто используя его в качестве важного компонента для ориентации в
пространстве. И еще два примера из арсенала созданных живой
природой «специальных механизмов» — анализаторов. У скатов обнаружены так называемые «ампулы Лоренцини». Тщательные эксперименты показали, что эти органы, расположенные в особых ямках, чрезвычайно чувствительны к электрическому току. Опытами установлено, что некоторые животные, в
частности перелетные птицы, некоторые термиты, могут ориентироваться по магнитному полю Земли. Все перечисленные
и
ряд других сенсорных систем «специального назначения», кото2— 327
34
Бионика
рыми так щедро природа одарила различных животных, как
бы добавляются к известным пяти типам ощущений органов
чувств.
Мы не можем поставить себя на место,
скажем, пчелы и
представить себе ее ощущения, когда солнечный свет попадает
в ее глаза. Но если бы нам все же на какое-то
время удалось
поменяться местами с животными и точно узнать, как они воспринимают окружающий их мир, то внутри обитаемой вселенной мы бы увидели великое множество новых, неведомых нам
миров.
Любая высокоразвитая биологическая сенсорная система сегодня представляет огромный интерес для специалистов самых
разных областей науки и техники. Одним из самых актуальных
и перспективных направлений бионических исследований является изучение работы первых ступеней анализаторных систем человека и животных. Конечной целью этих исследований
является создание техническими средствами
разнообразных
датчиков информации. В одном случае датчики, подобные рецепторам, позволят резко сократить размеры воспринимающей
аппаратуры, ведь рецепторы — это
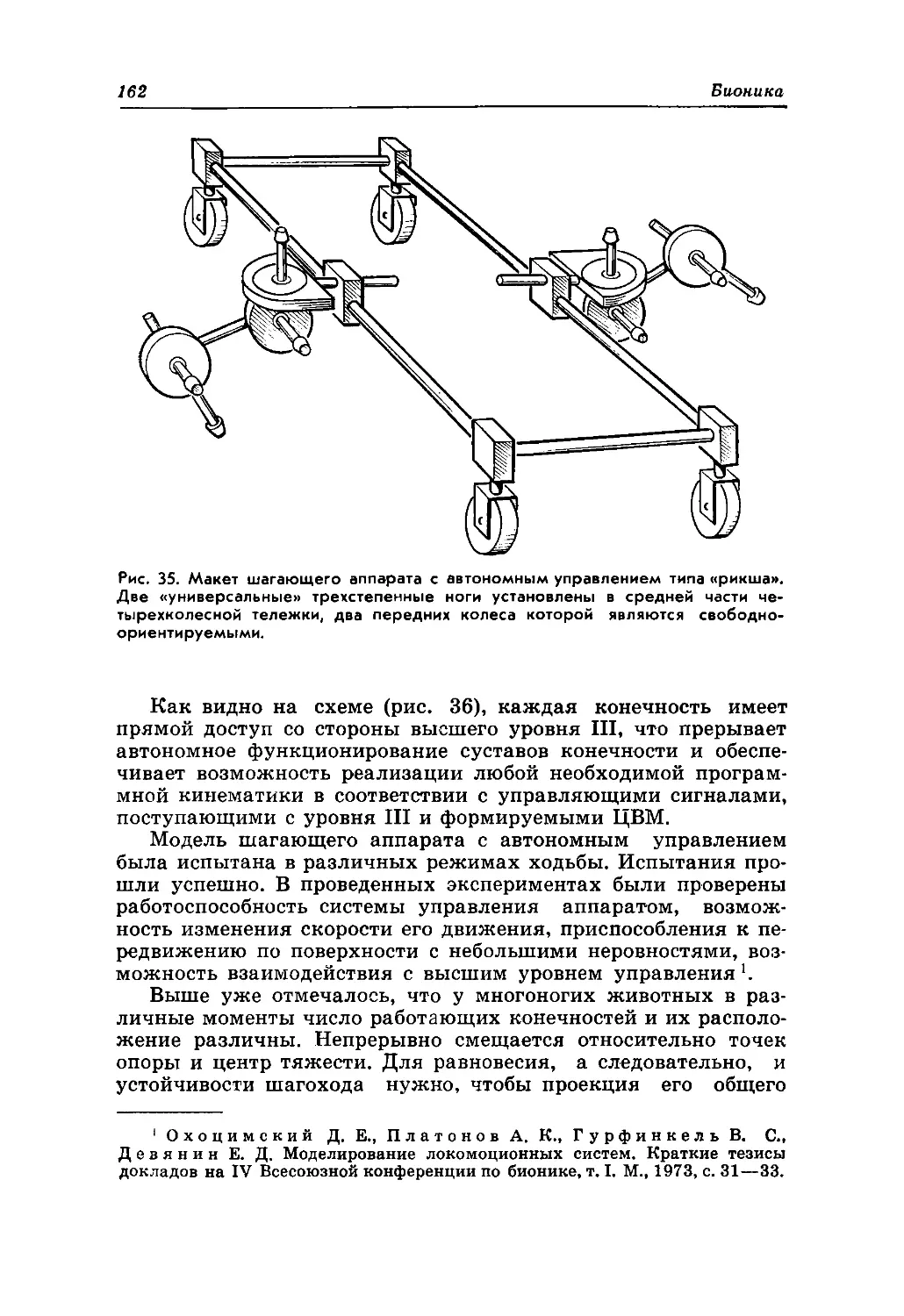
микроскопические
клетки. В другом случае бионический подход к моделированию рецепторов может позволить создать более
чувствительные элементы, чем существующие датчики
систем
автоматического
управления. В третьем случае, как полагают бионики, раскрытие механизмов деятельности рецепторов позволит пополнить
арсенал электроники и автоматики датчиками принципиально
нового типа, например, датчиками вкусовых сигналов.
Немаловажное значение имеет изучение принципов преобразования внешних сигналов в биологических рецепторах для
развития вычислительной и особенно измерительной техники.
Потребность в получении большого количества сведений, характеризующих процессы и объекты исследования, приводит к необходимости перехода от отдельных приборов к определенным
образом организованным системам, предназначенным для автоматического сбора, обработки, хранения и выдачи информации.
Такие системы должны содержать множество чувствительных
элементов и значительное
число
автоматических
устройств,
предназначенных для измерения и обработки
измерительной
информации. Количество этих устройств
может
быть сколь
угодно большим, а алгоритмы, в соответствии с которыми осуществляется их функционирование, могут быть сколь угодно
сложными. Моделируя системы сбора и обработки информации
живых организмов, можно в принципе построить любой измерительно-информационный комплекс.
Наконец, изучение многочисленных анализаторных систем
биологических объектов как с точки зрения их рецепторов, так
и вотношении центральных образований, осуществляющих рас+
Мир
ощущений
35
познавание и синтез разнообразных сигналов, открывает широкие перспективы
для
создания
персептронов — устройств,
предназначенных для автоматического восприятия и опознания зрительных, звуковых и других образов, для конструирования принципиально новых, высокочувствительных систем наведения и распознавания объектов, для разработки
ряда технических устройств, могущих существенно расширить возможности взаимодействия между человеком и машинами.
Из всех известных органов чувств
наибольшее
внимание
бионика уделяла и продолжает уделять изучению и моделированию зрительного анализатора, поскольку в этой области техника испытывает наиболее острую потребность в новых идеях,
в новых методах конструирования, в новых принципах работы
систем. И именно здесь, как ни в одном другом направлении
своей многогранной деятельности, бионикам удалось достигнуть за последние годы наиболее быстрого выхода результатов
научных изысканий в практику, найти ключ к решению ряда
важнейших технических задач. Вот тому первый пример.
Лет 10—12 назад над одним из аэродромов ФРГ столкнулись в воздухе сразу четыре самолета. Когда
оценили вероятность такого события, получилась ничтожно малая величина.
И все-таки катастрофа произошла. Почему?
Воздух над современными большими аэродромами буквально кишит самолетами. С земли этого не видно, а диспетчерская
служба наблюдает на экранах обзорных радиолокаторов за десятком самолетов сразу. Радиолокатор показывает только положение самолета в каждый данный момент, а решить, каким
оно будет через полминуты, — обязанность оператора. Скорости же современных воздушных лайнеров таковы, что, если два
самолета выскочат из облаков навстречу друг другу на расстоянии 1,5 км, они столкнутся прежде, чем летчики успеют чтолибо предпринять. Таким образом, безопасность пассажиров и
экипажей самолетов в зоне аэропорта зависит от того, насколько четко работает его диспетчерская служба.
Расследование причин аварий показало, что часто на экране
радара, который находится в комнате диспетчера
аэродрома,
изображение засоряют помехи от неподвижных предметов, попадающих в луч радара: строений, деревьев, заводских и фабричных труб, мачт линий электропередач. Эти
чпаразитные»
эхо-сигналы маскируют
сигналы,
отраженные от самолетов,
и дезориентируют диспетчеров. В таком случае и может произойти катастрофа, ведь способность
человека выбирать главное в большом потоке информации тоже имеет определенный
предел.
Так возникла в высшей степени важная в практическом отношении задача — создать систему, которая могла бы «видеть»
и «истолковывать» световые метки на экране радиолокатора,
Oe
36
Бионика
которая реагировала бы только на движущиеся объекты. И такое устройство было сконструировано. В его основу был положен принцип работы глаза лягушки!
Жизнь лягушки, обладающей сравнительно слабым слухом,
в основном зависит от работы ее зрительного аппарата. Глаза
помогают ей охотиться, добывать пищу, спасаться от врага.
В отличие от человека лягушка не переводит взгляда с предмета на предмет. Она, по-видимому, не различает неподвижных
предметов и может погибнуть от голода среди изобилия насекомых, если они будут неподвижны. Часто говорят, что лягушка, которая смотрит на скользящего к ней ужа и не двигается с
места, «зачарована» змеей. Все гораздо проще. Лягушка не спасается бегством только потому, что не видит медленно подползающую змею.
Зрительный аппарат посылает в мозг лягушки лишь такие
сигналы, которые для нее жизненно важны. Добычу она выбирает только по размерам, характеру движения и расстоянию до
нее. Пролетает мимо муха на близком расстоянии — лягушка
мгновенно реагирует, а летит муха на
значительном
удалении — животное не видит ее. Если глаза лягушки зарегистрируют резкое движение
тени, лягушка
тут
же
насторожится — уж не хочет ли кто-то ее поймать и съесть? Если же тень
ползет медленно, двигаясь вместе с солнцем, то зрительный аппарат лягушки ей об этом «не сообщает». Словом, глаз лягушки — превосходная биологическая информационная система,
перерабатывающая
всю поступающую
информацию и выбирающая из нее только ту, которая представляет для лягушки
интерес.
Хотя строение глаза лягушки было известно анатомам давно, проведенные
американскими
учеными (Дж. Леттвином,
Х. Матураном, У. Мак-Каллоком и В. Питтсом) исследования
позволили выявить многие ранее неизвестные свойства зрительного анализатора лягушки, роль различных его элементов в
восприятии информации. Оказывается, воспринятое глазом лягушки изображение проходит четыре самостоятельные стадии
обработки. Результаты каждой из них передаются по особой
группе нервных волокон, равномерно распределенных по сетчатке. Стадии эти таковы (цвет. табл. 1):
обнаружение длительно сохраняющего положение контура;
обнаружение кривизны контура; обнаружение
движущегося
контура по изменению его контрастности; обнаружение изменения освещенности.
Работа глаза лягушки почти не зависит от общей освещенности. Поэтому способность лягушки узнавать свою жертву и
моментально обращать на нее внимание не изменяется при изменении внешней обстановки. Так же, как мы можем опознавать образы в очень разнообразных условиях, лягушка способ-
Мир
ощущений
37
на видеть свою жертву и хватать ее при ярком свете и в сумерках, независимо от того, находится она в естественных условиях
или в террариуме.
Изображение на сетчатке глаза передается в мозг лягушки
по зрительному нерву не как единое целое: в мозг поступают
уже кодированные, разделенные по четырем признакам элементы изображения. На рисунке 1 показаны четыре предмета,
находящихся в поле зрения лягушки. Верхние предметы движутся к центру, нижний правый — от центра, нижний левый —
неподвижен. Когда изображение проектируется на сетчатку, то
сначала все контуры выделяются резко (Г), затем неподвижный
предмет становится невидимым (1), а края предметов, обращенные в сторону движения,
обозначаются
четче
и
ярче
(Iu IV).
Таким образом, каждая группа волокон зрительного
нерва
строго специализирована, служит для передачи только одного
вида сообщений в соответствующий слой нервных окончаний
в мозге. В мозге лягушки имеются четыре таких слоя, соответствующих четырем стадиям трансформации изображения. Действия лягушки — результат переработки ее мозгом кодированной информации,
поступающей от зрительного
аппарата.
Глаз лягушки действует в высшей степени избирательно. Это
настоящий локатор насекомых!
Обнаруженные и изученные особенности процесса переработки информации в глазу лягушки позволили бионикам перейти к моделированию этого органа. Ученым удалось
создать
весьма удачную электронную модель сетчатки глаза лягушки,
названную ретинатроном. Правда, устройство получилось намного больше прототипа, созданного природой, но зато функции сетчатки глаза лягушки выполняет довольно точно. При
перемещении объектов в «поле зрения» модели она, как и настоящая сетчатая оболочка глаза лягушки (ретина), отсортировывает контуры объекта, движущиеся выпуклости, изменение
контраста и яркость. Для выполнения всех этих операций в модели имеются соответствующие детекторы.
Искусственный глаз лягушки — ретинатрон — одно из наиболее значительных достижений бионики. «Уставившись»
на
экран аэродромного радиолокатора, он хорошо различает контур изображения с учетом контрастности, отсеивает информацию о неподвижных предметах (ложных отметках), ведет наблюдения только за движущимися объектами и принимает, подобно лягушке, мгновенные решения. В настоящее время уже
известно несколько типов электронных моделей глаза лягушки.
Летчики и диспетчеры считают, что новые системы, действую:
щие в паре с аэродромными радиолокаторами, существенно увеличивают безопасность полетов воздушных
лайнеров в зоне
современных больших, интенсивно работающих аэропортов,
38
Бионика
Электронная модель глаза лягушки, по существу, является
первым крупным шагом к созданию нового класса обзорных и
разведывательных радиолокационных
устройств. По мнению
специалистов, на ее основе в недалеком будущем можно будет
сконструировать систему, которая полностью заменит оператора радиолокационной станции. Такая автоматическая система,
установленная в центре управления воздушным движением, будет давать разрешение на посадку самолетов,
предупреждать
столкновения при взлетах на перегруженных полосах, ее можно использовать при наблюдении за экраном РЛС (радиолокационная система) в большом аэропорту для обнаружения самолета, отклонившегося от своего курса, и для коррекции
курса
подачей команд на автопилот. Можно разработать следящие устройства ретинного типа для мгновенного распознавания летящих ракет, что позволит сэкономить драгоценное время, затрачиваемое сейчас на баллистические
вычисления.
Используя
свойства глаза лягушки, в будущем, по-видимому, удастся создать эффективные средства дешифрирования фотоинформации
(рентгеновские снимки, снимки из космоса ит. п.).
Механизм, близкий к отборочному фильтру лягушки, ученые
открыли и в глазу морского животного — мечехвоста.
Исследованиями, проводившимися в институте Рокфеллера (США),
было установлено, что глаз мечехвоста обладает способностью
усиливать контраст изображения. Выяснилось, что глазные нерИзображение
на сетчатке
вход
Нонтуры
о
T°
Нривизна
контуров
О
(а
Изменение
контраста
(2
||
О
_
о
Яркость
Ш]
о
о
IV
—
.
С
О
=
—>
Som
_
\
Сетчатна
Нервные волонна
глаза — 4-х типов
Центр головного
мозга, формирующий
изобранение
Рис. 1. Схема обработки информации в глазу лягушки. Глаз лягушки выделяет
качественные признаки воспринимаемых им объектов — контуры, их кривизну
ит. п.
В круге (слева) —4 предмета в поле зрения лягушачьего глаза. Верхние
предметы движутся к центру, нижний правый
— от центра, четвертый неподвижен. Когда изображение проецируется на сетчатку, то сначала все контуры выделяются резче (!). Затем неподвижый предмет исчезает (!!), зато
ведущие края движущихся тел обозначаются четче (Ш и IV).
Мир
ощущений
39
вы, воспринимающие относительно яркий свет, стремятся погасить сигналы нервов, воспринимающих относительно слабый
свет. Это позволяет много лучше рассмотреть полезный объект
на фоне мешающих воздействий в том случае, когда края изображения объекта размыты. Инженеры американской фирмы
«Дженерал электрик» создали электронную схему,
работающую по принципу глаза мечехвоста. Они рассчитывают,
что
электронный аналог глаза мечехвоста позволит улучшить работу телевизионных трактов
ряда систем, например
системы
получения и анализа снимков Луны и других планет, системы
получения и анализа аэрофотоснимков земной поверхности со
спутников и др.
Не менее интересны в бионическом плане особенности зрительного аппарата голубя. Голубь может длительное время не
мигая смотреть почти прямо на солнце. Опыты показали, что
сетчатка глаза голубя не страдает от воздействия прямых лучей лазера с энергией до 0,05 дж в импульсе. Кроме этого, зрительный аппарат голубя обладает уникальной
способностью
обнаруживать объекты, движущиеся в одном направлении. Последнее свойство получило название «обнаружение направленного движения». Используя это свойство, можно построить обзорную радиолокационную систему, способную обнаруживать
самолеты, летящие в заданном направлении, например в сторэну авиабазы, и следить за этими самолетами, не реагируя на
другие подвижные объекты, летящие в других направлениях.
По гипотезе профессора Г. Г. Демирчогляна,
виной всему
гребешок, обнаруженный в глазу
голубя, — волнообразный
ажурный лоскут из соединительной ткани и пучков коллагеновых волокон, отходящих от соска зрительного нерва и экранизирующий нижнюю половину сетчатки. Именно он, по-видиMOMY, играет важную роль в обнаружении направленного движения. Изображение движущегося предмета то появляется на
сетчатке, то пропадает, загороженное
зубцом
гребешка,
то
вновь появляется уже на новом участке сетчатки. Таким образом, регистрируя
последовательность
возбуждения
«дежурных» участков сетчатки, голубь может определять направление
(и, очевидно, скорость) движения цели. Гребешок
служит
и
частью астронавигационного аппарата птицы: решетчатая зубчатая тень гребешка падает на участок сетчатки, а каждое положение солнца соответствует определенному выступу; в сочетании с биологическими часами это позволяет голубю определять долготу. Наконец,
расположение
гребешка
в нижней
половине сетчатки облегчает
поглощение самых опасных и
слепящих излучений, поступающих сверху, когда еолнце в зените. В зависимости от кровенаполнения капилляров размеры
гребешка меняются, так что птица может приспосабливаться к
изменению положения солнца на различных широтах.
:
40
Бионика
Рис.
2.
Фасеточный
в разрезе
глаз
(схема).
На основе изучения механизмов глаза голубя разработан
оптический решающий фильтр, предназначенный для классификации и опознавания объемных объектов. Ведутся
работы
по созданию устройства для распознавания штормовых центров и противоослепляющих фильтров для сварщиков.
Значительное место в бионических исследованиях занимают
органы зрения насекомых, особенно летающих. Они имеют так
называемое фасеточное строение
— состоят из многих
тысяч
омматидиев — изолированных друг от друга простых глазков,
каждый из которых воспринимает лучи, идущие только практически параллельно его оси (рис. 2). Лучи же, падающие под
заметным углом к этой оси, поглощаются боковыми стенками.
Такой глаз не дает единого изображения, а создает мозаику, в
которую каждый элемент глаза вносит отдельное изображение
(цвет. табл. 3). Результат можно представить себе как нечто
похожее
на фотографию,
напечатанную
в газете
через
крупный
растр. Таким образом, насекомые распознают не столько детали объектов, сколько их движение. Поскольку любое движение добычи или врага немедленно улавливается одним из элементов глаза, такого рода
орган
удивительно
соответствует
образу жизни членистоногих. Мозаичное зрение облегчает насекомым передвижение по прямой, так как для этого им достаточно сохранять изображение солнца в одном из омматидиев.
Зрительный анализатор насекомых обладает
чрезвычайно
большой чувствительностью к контрастам. Так, глаз насекомого сигнализирует зрительным центрам о таких малых различиях во внешней обстановке, которые вызывают изменение освещенности зрительных клеток на 1% и даже на 0,5%. Фасеточный глаз, особенно у ночных насекомых, способен к очень
сильной адаптации: он изменяет свою чувствительность на 4—
5 порядков и, следовательно, может функционировать в очень
широких пределах освещенности. Фасеточный
глаз реагирует
Мир
ощущений
41
не только на изменение интенсивности света, но и на изменение
его спектрального состава. Очень многие
насекомые
«видят»
ультрафиолетовые
лучи.
В 1948 г. известный мюнхенский профессор Карл фон Фриш
в опытах с пчелами установил, что поляризованный свет позволяет насекомым, не видя солнца (например, из-за
облаков
или специального экрана), определять свой путь. Как же происходит ориентация в таких случаях?
Известно, что солнечный свет представляет
собой электромагнитные колебания во всех плоскостях, перпендикулярных
направлению луча света. Но, рассеиваясь в атмосфере, в особенности в облаках, свет доходит до нас частично поляризованным, т. е. колебания уже
совершаются
преимущественно
в
каком-нибудь одном направлении (в одной плоскости поляризации). Зная плоскость поляризации излучения, можно определить положение его источника даже в том случае, когда он
невидим. Человеческому глазу для этого необходима помощь
специального устройства, называемого анализатором. В сложном глазу пчелы такой анализатор является составной частью
каждого из независимых элементов
— омматидиев, или фасеток. Омматидии
глаза пчелы разделены на восемь частей,
расположенных звездочкой.
Эти своеобразные
поляроидные
фильтры пропускают поляризованный свет
солнца
с разной
интенсивностью в зависимости от направления полета насекомого. Для пчелы небо имеет неодинаковую яркость в каждом
омматидии. Яркость будет различной в зависимости и от наблюдаемого участка неба, и от времени суток. Такое
устройство глаза позволяет пчеле уверенно ориентироваться по солнцу даже тогда, когда оно скрыто плотными облаками.
Из сказанного следуют, по крайней мере, две бионические
идеи: во-первых, возможность изготовления
микроминиатюрных приборов иполяроидов для физического анализа поляризации лучей; во-вторых, принципиальная возможность создания
средств навигации по положению солнца путем анализа поляризованных лучей. Последняя идея уже реализована: создап
так называемый «небесный компас» — прибор для
определе:ния положения солнца по поляризованному свету неба (рис. 3).
Одна из интереснейших особенностей зрительного аппарата
насекомых
— их способность видеть «быстрее»,
чем
многие
другие животные и люди. Там, где человек
видит
какую-то
промелькнувшую тень, та же пчела, например, отчетливо различает размеры и форму предмета. Временная
разрешающая
способность фасеточного глаза выше, чем у глаза человека, что
в известной мере компенсирует ему невысокую угловую разрешающую способность. Частота повторения вспышек, при которой они сливаются и создают у человека впечатление непрерывного света, — 24 раза в секунду — известна
давно
и ис-
42
Бионика
ОРИЕНТАЦИЯ
——
ПО
СОЛНЦУ
Поляризующий
свет
Поляризующий
экран
|
Фотоэлементы
‹о^
зРени,
Система
ориентации
судна
ПА
МИ
Небесный
компас
Пчела
Рис. 3. «Небесный компас»
— прибор
для
определения
положения
солнца по поляризованному свету неба в пасмурную
погоду.
пользуется в кино, телевидении, для измерений, основанных
на стробоскопическом эффекте, и т. д.
Насекомые — мухи, пчелы, осы — не смогли бы смотреть ни
кинофильмы, ни телевизионные передачи.
При изучении
их
зрения оказалозь, что частота повторения световых импульсов,
при которой они сливаются в непрерывный свет, примерно равна 300, т. е. в 10 с лишним раз больше, чем у человека; поэтому насекомые видели бы на экране
совершенно
раздельные
кадры, не сливающиеся в цельное изображение.
Чем замечательно это свойство фасеточного глаза?
Человек различает форму движущегося тела только в том
случае, если изображение задерживается на сетчатке в течение
не менее 0,05 сек. Если время экспозиции
меньше,
то различать контуры отдельного изображения не удается, а одинаковые изображения сливаются в одно. У мухи же или у осы это
время равно 0,01 сек. Измерение центрального угла омматидия
мухи позволяет заключить следующее: если муха
летит
со
скоростью 5 м/сек, то предмет диаметром 1,25 см, находящийся
на расстоянии 1 м, будет восприниматься каждым омматидием
в течение 0,01 сек и, следовательно, будет виден очень отчетлиРо. Человек же увидел бы только промелькнувшую мимо тень.
Для насекомого в единице времени больше мгновений! Процессы, кажущиеся человеку очень быстрыми, для насекомых идут
гораздо медленнее, представляются
расчлененными.
С этим
Мир
ощущений
43
связана и чрезвычайно быстрая, непостижимая для человека
скорость реакции насекомого.
Ничтожная инерционность зрительного восприятия насекомого в сочетании с одной
особенностью
фасеточного
глаза
представляет для бионики особый интерес. Дело в том, что
в
каждом омматидии, как отмечалось
выше,
возникает
одно
изображение предмета, находящегося в поле зрения, а значит,
во всем фасеточном глазе целая серия независимых друг
от
друга изображений. Однако, несмотря на это, мозг насекомого
воспринимает лишь одно изображение
— то, которое возникло
в ближайшем к предмету омматидии. Изображения в остальных омматидиях блокируются (рис. 4). Любой перемещающийся предмет последовательно попадает в поле зрения различных
омматидиев. Таким образом, насекомое может определить скорость движения этого предмета.
Глаз мухи и послужил прототипом для создания прибора,
способного измерять мгновенную
скорость
самолетов,
попздающих в поле его зрения. На рисунке 5 изображена упрощенная схема такого прибора, состоящего
из двух
омматидиев.
Когда самолет движется слева направо, сначала «возбуждается» первый искусственный омматидий. Импульс возбуждения
поступает сразу на оба сумматора: на первый
через
линию
задержки, на второй сразу. Пока импульс проходит линию задержки, изображение самолета попадает на второй омматидий.
Перемещающийся
предмет
Омматидии
\
|
|
|
v4
\
\
-y
|
\st
>
<Я
/
/ и
x
wy! _..
|
|
|
|
ao
Nw
Uso6pamenne
Рис.
4
(слева).
ступает сигнал от
шего омматидия.
Схема
работы
изображения
{
предмета
фасеточного
предмета,
Рис. 5 (справа).
Упрощенная
двух связанных омматидиев:
схема
а — задержка; б — суммирующий
< одинарной амплитудой.
в — импульс
каскад;
глаза.
В
мозг
находящегося
указателя
с двойной
насекомого
напротив
скорости,
амплитудой;
состоящего
г — два
по-
ближайиз
импульса
44
Бионика
Он поступает без задержки в первый сумматор и с задержкой
во второй. Если время прохождения
импульсами
линии
задержки и время перемещения изображения самолета из первого омматидия во второй равны,
то в первом
сумматоре
оба
импульса сложатся, образовав один импульс с двойной амплитудой.
Во
втором
сумматоре
будут
зарегистрированы
два
оди-
ночных импульса с единичной амплитудой. Расстояние между
их передними фронтами будет пропорционально двойному времени пролета самолета между осями полей зрения омматиди-`
ев. Если самолет будет двигаться справа налево, то одиночный,
усиленный импульс образуется во втором сумматоре, а два импульса— в первом. Ценой небольших усложнений можно научить прибор измерять скорости и направления в очень широких пределах.
Изучив работу глаза жука хлорофануса, бионики создали
для авиации индикатор путевой скорости.
Один его
элемент
располагается в передней части самолета, второй
— в хвосте,
и оба обращены к земле. Электронная схема измеряет время,
в течение которого темный или светлый участок поверхности
земли перемещается от одного ограниченного поля зрения до
другого. Эта информация автоматически соотносится с высотой
самолета над местностью, а затем производится индикация вычислительной скорости в километрах за час в переводе на перемещение по карте.
Несколько лет назад одна американская
фирма
создала
фотокамеру «мушиный глаз» для репродукции особо точных
микросхем электронных счетно-решающих машин. Свое название камера получила от объектива, похожего по своей структуре на ячеистую структуру фасеточного глаза мухи. Линза, вернее, 1329 линз, объединенных
в один
плоский
диск,
дают
множество изображений, что обеспечивает разрешающую способность лучшую, чем 4000 линий на 1 см. Главное достоинство
камеры «мушиный глаз» — болышая скорость съемки, что позволяет
получить
за
кратковременную
экспозицию
более
1300 изображений одного объекта.
А теперь посмотрим, что дал и что может дать науке и технике бионический подход к изучению зрительного аппарата человека.
Наш глаз (рис. 6) состоит из роговой оболочки (роговицы),
радужной оболочки, хрусталика, стекловидного тела, белочной
оболочки (склеры), сосудистой оболочки и сетчатой оболочки
(сетчатки). Роговая оболочка — это прозрачное окно, прикрываемое веками, и одновременно передний компонент оптической системы. Радужная
оболочка — структура
(диафрагма),
управляющая количеством поступающего в хрусталик света.
Она имеет отверстие (зрачок), диаметр которого изменяется.
Для изменения размера зрачка служат специальные мышцы.
Мир
ощущений
|
45
Хрусталик — основной оптический
компонент
глаза — представляет собой структуру, которая с помощью определенных
мышц может менять свою форму, оптическую силу, изменяя
фокусное расстояние глаза. Стекловидное тело заполняет полость глаза и является третьим компонентом его
оптической
системы.
Самой важной и сложной частью глаза является сетчатка
(ретина). При толщине всего лишь 0,2 мм она имеет 10 слоев.
Светочувствительный
слой
сетчатки с фоторецепторами —
палочками и колбочками — лежит в самой наружной ее части,
обращенной в сторону сосудистой оболочки. У каждого из нас
около 125 млн. палочек и 6,5 млн. колбочек. Палочки
функционируют при сумеречном зрении, они воспринимают слабый
свет и нечувствительны к цвету. Колбочки воспринимают яркий (дневной) свет и цвета. Между ними существуют взаимно
противоположные отношения. Когда функционируют
колбочки, основная масса палочек заторможена, и наоборот. Фоторецепторы распределены по поверхности сетчатки неравномерно:
в середине преобладают колбочки, а в боковых частях — палочки. В центральной ямке так называемого желтого пятна находятся почти исключительно колбочки, а в самых периферических частях — палочки.
Возникающее в фоторецепторах под действием
света
возбуждение передается по зрительному нерву в мозг. Общее число нервных волокон в зрительном нерве достигает 1 млн., так
что в среднем одно волокно проводит возбуждения от 130 фоторецепторов. При этом в центре желтого пятна одно волокно
fj
1
Lge
12
\
/
13
2
3
4
=>.
И
\
10
14
5
15
6——
в
Ke
2
=
16
‚=
9
Рис. 6. Схема
строения
<
EE
WSS
глаза человека:
4 — ресничная
мышца;
2 — радужная
оболочка;
3 — водянистая
влага;
4,5 — оптическая
ось;
6 — зрачок; 7 — роговица; 8 — связка, поддерживающая
хрусталик; ® — конъюктива;
10 — хрусталик;
44 — стекловидное
тело;
12 — склера;
13 — сосудистая
оболочка;
414 — сетчатка;
15 — центральная ямка; 16 — слепое пятно; 17 — зрительный нерв.
46
Бионика
приходится на 5—1 колбочек, а на
периферии
— на
тысячу
палочек. Вот почему острота зрения максимальна при проекции изображения на центр желтого пятна и убывает к периферии сетчатки. Диапазон чувствительности глаза простирается от энергии, равной 6—8 квантам света, до энергии световых
потоков, поступающих
в глаз от солнца. Если учесть, что минимально возможное количество световой энергии равно одному
кванту, то можно сказать, что чувствительность сетчатки доведена почти до предела.
Помимо высокой чувствительности, наш глаз обладает еще
целым рядом интересных свойств. У нас бинокулярное зрение, благодаря ему мы видим предметы объемно, можем определять расстояния между ними и их отдаленность. В отличие
от фотоэлектронных устройств наши глаза обладают свойствами адаптации — способностью менять свою
чувствительность
в зависимости от величины светового потока. Это обеспечивает
оптимальное зрение при самых различных световых режимах.
Замечено, что глаз человека непроизвольно совершает строго
постоянные быстрые перемещения — скачки, даже если взгляд
фиксирован на каком-либо неподвижном объекте. Частота этих
колебаний находится в пределах от 1 до 150 гц. Такие движения глаза происходят по всем направлениям, и благодаря им
глазом выделяются те участки изображения, которые содержат
основную информацию о рассматриваемом объекте. При рассматривании движущихся объектов
глаза
передвигаются
с
угловой скоростью, равной угловой скорости движения объекта относительно наблюдателя. Наконец, наши глаза способны
различать тончайшие
оттенки
цветов — они
воспринимают
голубизну морской волны и зарево заката, золото осеннего листа и палитру Левитана.
Бионические исследования некоторых свойств и особенностей структурных и функциональных характеристик человеческого глаза позволили создать электронную модель рецептивного поля сетчатки, построить модель центральной части зрительного
анализатора,
разработать
устройство,
аналогичное
механизму управления движениями глазного яблока. Ведутся
работы по созданию систем автоматического управления количеством света, падающим
на фоточувствительные
приборы
(для обеспечивания равномерной чувствительности в широком
диапазоне),
разрабатываются
автоматические
определители
глубины
пространства.
Американской
фирмой
«Дженерал
электрик» построено бионическое устройство «визилог», могущее выполнять некоторые функции человеческого глаза: воспринимать изображения, проводить
измерения
и передавать
информацию. Возможно, такие устройства будут
устанавливаться на непилотируемых космических
кораблях,
посылаемых на Луну, Марс, Венеру.
Мир ощущений
47
По мере роста механизированной обработки
информации
все острее и острее ощущается потребность в машинах, которые
могли бы непосредственно воспринимать зрительную информацию. Практически аспект проблемы
касается
прежде
всего
задачи автоматизации ввода в электронные цифровые машины
буквенной и цифровой информации, чертежей, рисунков, фотографий с помощью так называемых читающих автоматов. Это
программа минимум. А если исходить из потребностей завтрашнего дня, то задача сводится к созданию устройств, которые могли бы распознавать любые образы, вплоть до визуального распознавания производственных и других ситуаций.
Опознавание образа для человека — это выбор из набора образов, сложившихся в течение его жизни. Проделаны эксперименты, однозначно подтверждающие первостепенную роль выбора в процессе опознавания.
Подсчитано,
что
всего
около
1000 простых образов (типа «печь», «стул», «стол» ит. д.) может хранить память взрослого человека.
Достаточно
четкое
изображение любого из этих предметов (образов) будет с большой долей вероятности (или, попросту, почти наверное) опознано человеком. Как нам это удается?
Каждая группа светочувствительных элементов
сетчатки,
иннервируемая одним волокном зрительного нерва, воспринимает проектируемое на нее хрусталиком изображение, образуя
своеобразное мозаичное панно. Каждый элемент мозаики имеет определенный тон — от черного до белого (для простоты мы
не будем учитывать цветное зрение).
Поэтому
формируемое
сетчаткой изображение имеет вид густо расположенных точек,
различающихся по яркости. Расстояние между ними пропорционально диаметрам групп светочувствительных
элементов.
Такое изображение очень похоже
на обыкновенное
газетное
клише. Ясность его отдельных элементов в основном определяется распределением яркости по объекту. Весьма немногочисленные элементы изображения, соответствующие границе между разными по тону его участками, значительно отличаются по
яркости от своих соседей.
Такие элементы образуют контурные линии, и именно с ними связана наибольшая часть информации. В этом легко убедиться, если вспомнить, как легко по шаржу, дающему очень
неполное представление об оригинале, узнать человека.
При опознании сложного образа не требуется его расчленение на все простейшие конфигурации, из которых состоит сам
образ, хотя, если это потребуется, зрительная система может
детально проанализировать изображение, подобно
тому
как
это делается в передающих
телевизионных
трубках.
(Такая
аналогия, разумеется, весьма поверхностна.) Однако такое подробное рассмотрение изображения было бы избыточным. Для
опознания образа необходимо выделить в его изображении лишь
48
Бионика
главное, первостепенное, устранив избыточность, которую создают детали, имеющие малую информационную ценность.
Избыточность может быть устранена
путем
исключения
многократно повторяющихся сигналов от статичной, неменяющейся информации — ведь не видят же лягушки неподвижных
предметов. Кроме того, информация об образе кодируется. Применительно к зрительной системе, как и к любой другой системе обработки информации, кодирование представляет
собой
наиболее экономный способ описания образа.
Таким образом, зрительная система не просто переносит
в
наш мозг информацию о распределении яркости на отдельных
участках сетчатки, а уже с того момента, когда на ней появляется изображение, выделяет его характерные элементы,
признаки, «не обращая внимания» на те его участки, которые не
несут информации об увиденном. Мозг получает эту информацию и удерживает ее — человек запоминает образ.
Дальнейшее как будто несложно. В нашей памяти хранятся
признаки некоторого количества образов, накопленные в процессе обучения, т. е., попросту, за время, прошедшее с тех пор,
когда мы в раннем детстве стали опознавать окружающие нас.
предметы. Мозг, воспринимающий какой-либо образ, сравнивает признаки последнего с соответствующими признаками, хранящимися в памяти, и в случае
обнаружения
их
сходства.
решает, что именно видит человек (цвет. табл. 3).
Для того чтобы облегчить опознавание, мозг еще раз обрабатывает информацию, поступающую от зрительного анализатора. Мозг продолжает работу, начагую органами зрения,
—
он выделяет из всех признаков, о которых в каждом случае сообщает глаз, лишь наиболее существенные, характерные для
данного образа или группы образов. На основании этих сведений человек, видевший, например, овчарку и бульдога, с уверенностью скажет, что такса — тоже собака, несмотря
на
то
что животные этих трех пород отличаются друг от друга. Ребенок, видевший лошадь только лежащей или
стоящей,
легко
опознает ее, если она будет бежать.
Итак, для опознавания любых образов необходимо создать
машину, которая сама составляла бы для себя программу, сама определяла, что существенно для решения данной задачи,
и не реагировала на избыточную для решения данной задачи
информацию. Такая машина должна, подобно человеку,
накапливать в процессе обучения некоторый опыт и в соответствии с ним выбирать линию поведения и сортировать полученную информацию по степени ее важности. Спроектировать
и
изготовить такую машину невероятно трудно
— это
одна
из
сложнейших задач бионики. Дело в том, что люди
сами
не
знают достаточно подробно, — а в этом случае именно подробности определяют успех дела, — как они учатся, как приобре-
Мир
ощущений
49
тают опыт, каким образом и какие именно признаки образов,
хранящиеся в памяти человека, используются в процессе опознавания, как протекает этот процесс и т. д. Мозг функционирует сам по себе, автоматически, его работа проходит мимо нашего сознания, и ее очень
трудно анализировать.
И все
же
даже тех сведений самого общего характера, которыми располагают специалисты сегодня, оказалось достаточно для создания первых, еще не совершенных, но тем не менее
действующих обучающихся машин, которые после курса обучения могут
распознавать
несложные
образы, например геометрические
фигуры.
_
Одна из первых таких машин была разработана в Корнельском университете
группой
американских
ученых
под
руководством Ф. Розенблатта. Машина была названа персептроном (англ. регсерйоп — восприятие), а ее первая модель —
«Марк-1». Очень упрощенная схема модели представлена на
рисунке Т.
Электронно-оптические
преобразователи,
выполняющие
функции светочувствительных клеток глаза, образуют матрицу
из 400 элементов, каждый из которых имеет два выхода. При
освещении электронно-оптического преобразователя на одном
A,
yj!
yt
yl
И
P,
UY
7
\
//
i
Аз
a
i
A7 /
Ay\\
Р
~ >
ьч
K—_\
“i
7™
9
As
YX и
<
LD
`\
—_-»——
<
A,
—
<
`
7
7
/
Р.
Ay
и
ии
L/1 7
a
WYK
/
_
Ag
AY
s
ых
ых
\
\
A
___7_\
`
Рис. 7. Упрощенная
схема
персептрона,
поясняющая
принцип
``
его
Р — рецепторные
Sy
действия:
(чувствительные)
ячейки;
Ав
А — ассоциирующие
ячейки;
Э — эффекторная
ячейка.
50
Бионика
выходе появляется положительный,
на другом — отрицательный электрический сигнал. Каждый выход соединен с несколькими ассоциирующими ячейками (ячейками памяти), которых
в системе 512. Эти соединения совершенно случайны, беспорядочны, поскольку физиологи считают, что связи между ассоциирующими клетками мозга тоже организованы без определенной системы, случайно.
Таким образом, сигнал от одного рецептора, скажем Р»., возбуждает не отдельный ассоциирующий элемент, в котором накапливается определенная информация,
а большинство
элементов памяти. Если алгебраическая сумма сигналов,
поступающих в какую-либо ассоциирующую ячейку от рецепторных,
больше нуля и превышает некоторую пороговую величину, то
такая ассоциирующая ячейка возбуждается и посылает сигнал
в эффекторную (реагирующую) ячейку. Суммарная величина
сигналов, поступающих в эффекторную ячейку, сравнивается
в ней с заранее установленным пороговым значением, и, если
она оказывается больше порога, эффекторная
ячейка
срабатывает.
При этом может произойти ложное срабатывание (учитывая
случайный характер монтажных соединений, оно вполне возможно), т. е. эффекторная
ячейка
может
сработать,
когда
предъявленный персептрону объект не должен
опознаваться.
Тогда оператор, занимающийся «обучением» персептрона, изменяет параметры ассоциирующих ячеек (служащих аналогами нейронов) и добивается от устройства правильной реакции.
Таким же методом вырабатывается правильная реакция
персептрона и в противоположном случае, когда подлежащий опо-
|
Рис. 8. Блок-схема
4 — поле рецепторов;
торные ячейки.
`
2
3
персептрона:
2 — случайные
соединения;
3 — блок
ассоциирующих
ячеек;
4 — эффек-
Мир
ощущений
51
знаванию объект остается неопознанным.
После
некоторого
периода «обучения» персептрон в дальнейшем «самостоятельно» принимает правильные решения (рис. 8).
Сразу же после своего появления персептрон занял одно из
важнейших мест в решении проблемы распознавания зрительных образов. Однако схема трехслойного персептрона, предложенная Розенблаттом, оказалась весьма ограниченной в своих
возможностях, а анонсированные Розенблаттом результаты в
большей части были ошибочными. Было строго доказано, что
первоначальная схема персептрона не обладает нужной способностью к экстраполяции, т. е. к распознаванию объектов,
не
участвовавших в процессе обучения.
В 60-х годах теория и практика персептронов вступили в новую фазу развития. Значительный вклад в создание новых автоматических устройств для опознания
зрительных
образов
внес автор первого персептрона последующими своими трудами, а также советские ученые:
академик
В.
М.
Глушков,
В. М. Ковалевский, В. И. Рыбак, 9. М. Браверман, М. М. Бонгард, Б. Д. Глезер, А. Г. Аркадьев,
М. А.
Айзерман
и
др.
Бионический подход к проблеме, более глубокие
физиологические исследования зрительного анализатора человека позволили значительно расширить опознавательные способности современных персептронов. Они могут, например, быстро опознавать и классифицировать трехмерные объекты, имеющие форму шара, куба, пирамиды и эллипсоида, распознавать изображения различных размеров, имеющих различную ориентацию
и положение в
«поле
зрения»
воспринимающего
элемента
машины.
Если раньше персептроны с трудом
различали
печатные
буквы и цифры, то современные «зрячие»›
машины
читают
слова, написанные любым почерком, лишь бы он был разборчив. Интересен принцип построения, позволивший создать такую машину.
Следящий штифт воспринимающего устройства с помощью
сложной автоматики следует за темной линией,
образующей
букву. Электронное устройство учитывает, анализирует и ненадолго запоминает движение штифта. Далее машина сравнивает длину, высоту и кривизну отдельных
элементов букв,
а
также расстояние между ними и порядок следования с соответствующими элементами, которые она запомнила
в процессе
обучения, и, наконец, опознает буквы, читает их одну за другой. Если написана некая буква, которая лишает слова смысла,
другое устройство, которое следит за порядком в словах,
заставляет штифт вернуться и прочесть ее заново. При
чтении
русского текста это устройство стало бы принимать меры, если
бы ему было сообщено о слове, начинающемся с буквы чь», сочетаниях типа «врж», «счп» ит. д.
52
Бионика
Квазизрительные персептроны представляют собой
новый
класс «интеллигентных» машин. Это определение может
вызвать сомнения, но тем не менее оно отражает существо дела.
Новые машины обучаются. При этом они запоминают, «усваивают» не все подряд, а только то, что необходимо для успеха
дальнейшей «деятельности». Они анализируют, сопоставляют,
обобщают. А это и есть то самое «мышление», которое «выводит всеобщее из отдельных
вещей»,
как
говорил
великий
Авиценна.
Автоматические устройства для распознавания зрительных
образов— одно из самых многообещающих приложений
бионики. В настоящее время во многих странах ведется
большая
теоретическая и экспериментальная работа, направленная на
дальнейшее усовершенствование, расширение сферы практического применения
квазизрительных
персептронов.
Бионики
стремятся наделить их всеми лучшими свойства, максимально
приблизить к структурным и функциональным характеристикам природного прообраза и вместе с тем избавить от недостатков и специфических ограничений, свойственных зрительному
анализатору человека. Улучшается способность машин к распознаванию входной информации, повышаются их быстродействие, пропускная способность, надежность работы, расширяются возможности к распознаванию изображений разных классов. Усовершенствованные
квазизрительные
персептроны —
подлинно бионические системы
— позволят решить
широкий
круг задач современной науки и техники.
Им можно
будет
поручать ввод данных в электронно-вычислительные машины,
астронавигацию, управление беспилотными космическими летательными
аппаратами,
наблюдение
за железнодорожным
и уличным движением.
Не менее увлекательные возможности открываются
перед
ними на заводах. Они смогут выполнять функции операторов
у пультов управления, управлять оборудованием, работающим
в опасных условиях. Вероятно, скоро в цехах появятся кибернетические сборщики. Недавно в лаборатории японской фирмы
«Хитати» создан робот, обладающий искусственным интеллектом. Он способен понимать чертежи и собирать по ним несложные узлы. Робот имеет «глаза», электронный «мозг» и «руки».
«Глаза» — это две телевизионные камеры. Одна из них предназначена
для
наблюдения
и
опознавания
деталей,
подлежа-
щих сборке, вторая — для просмотра рабочих чертежей. В качестве электронного «мозга» используется ЭВМ. «Рука» робота — обычный манипулятор с зажимным устройством, имеющий семь степеней свободы.
Квазизрительные персептроны в сочетании
с быстродействующими ЭВМ, вероятно, смогут заменить
квалифицированных переводчиков. Им можно будет поручить работу наборщи-
Мир
ощущений
53
ков в типографиях — самостоятельно готовить к печати книги,
журналы, газеты. Их можно научить автоматически
опознавать определенный класс сюжетов аэрофотосъемки (уже одно
это позволит сэкономить сотни тысяч человеко-часов работы),
безошибочно диагностировать
болезни
по рентгенограммам,
определять характер «событий», следы которых фотографируют с экранов осциллографов или в пузырьковых камерах. Они
найдут применение в криминалистике и в библиотечном деле.
Со временем системы автоматического опознавания освободят
десятки тысяч людей от многих скучных, однообразных, утомительных операций, чтения банковских чеков, обработки кредитных карточек, проверки кассовых чеков и т. п. В клиниках,
больницах, научно-исследовательских медицинских
учреждениях появятся электронные лаборанты, могущие в любое время
дня и ночи быстро произвести анализ крови, определить качество противомикробного препарата.
А теперь перейдем к бионическим исследованиям
органа
слуха.
По количеству воспринимаемой и перерабатываемой инфопмации орган слуха у человека и многих
высших
животных
стоит на втором месте (глаза доставляют нам около 90%
информации о внешнем мире, слух — 9%). Тем не менее изучение
устройства, моделирование функций нашего звукового анализатора имеют для многих областей науки и техники первостепенное значение. Можно даже сказать, что проблема распознавания звуков речи, разных звуков, сопутствующих самым разнообразным процессам и явлениям в живой и неживой природе, по чрезвычайно большому многообразию приложений
не
уступает квазизрительному опознаванию.
Лингвисты
связывают разрешение голосовой проблемы с машинным переводом;
акустики и связисты изучают ее, чтобы моделировать
речь;
кибернетиков интересует возможность ввода заданий в машины в речевой форме; военные моряки намерены
по отраженным сигналам гидро- и радиолокаторов распознавать вражеские корабли и подводные лодки; криминалисты — опознавать
по голосу преступников.
Говоря кратко, бионический аспект проблемы заключается
в создании квазислуховых систем, которые могли бы воспроизводить некоторые функции нашего органа слуха. Задача эта
чрезвычайно трудная, так как орган слуха человека (мы понимаем под этим термином совокупность уха и соответствующих
отделов мозга) и сегодня, несмотря на огромные успехи акустической техники, успешно выдерживает сравнение с ее наивысшими достижениями. Особенно поражает его исключительно высокая чувствительность. Опытным
путем
установлено,
что минимальная интенсивность звука, которую способно воспринимать человеческое
ухо, равна 10-6 вт/см? при частоте
54
Бионика
1000 гц. Амплитуда
смещения
молекул
воздуха
при этом
не
превышает 8.100 см. Следовательно,
амплитуда
движения
молекул, которая может вызвать ощущение звука, составляет
приблизительно '/5 диаметра молекул воздуха. Примерно такие же колебания испытывают молекулы воздуха
вследствие
так называемого теплового шума. Таким образом, по чувствительности наш орган слуха близок к границе различения теплового движения молекул.
Человек способен слышать звуки исчезающе малой
интенсивности и звуки колоссальной силы:
от комариного
писка
до грома орудийного салюта, от жужжания далеко летящего,
не видимого глазом насекомого до рева рядом
запускаемого
реактивного двигателя, т. е. звуки, отличающиеся по громкости
в триллион раз.
Человек способен отличить звук частотой 1000 гц от звука
частотой 1001 ги! Встречаются люди, особенно часто среди музыкантов, которые обладают так называемым абсолютным слухом и могут определять высоту одного звука даже без сопоставления его с другими звуками с меньшей погрешностью, чем половина элементарного музыкального интервала, — меньше чет-
верти тона (3%
по частоте). Слуховой анализатор человека шу-
тя справляется и с более сложной задачей: он точно определяет число чистых тонов, звучащих одновременно. В органе слуха происходит разложение частот. В определенных случаях —
при восприятии музыки и речи — слух воспринимает
не
отдельные чистые тона, а их определенные комбинации. Например, музыкальная нота — это сумма
многих
чистых
тонов,
дающая ощущение определенной высоты (как и чистый тон),
но, сверх того, еще и ощущение тембра — окраски звука, зависящей от того, какие чистые тона, кроме основного, присутствуют в данной ноте.
Наряду с приведенными выше количественными характеристиками слуха не менее совершенны его качественные характеристики, психоакустические способности. Мы легко распознаем
слова родного языка, произнесенные мужчиной или
женщиной, стариком или ребенком, сопрано или басом, спокойно или
в состоянии сильнейшего эмоционального возбуждения, в полной тишине или на фоне других голосов, звуков, шумов. Через
много лет мы можем узнать однажды слышанный голос, безошибочно выделить из массы звуков голос близкого человека,
как бы он ни был искажен помехами
или эмоциями,
узнать
любимую меледию. Точные опыты показали, что каждый человек с нормальным слухом способен выделить важное для него
сообщение из семи оджовременно (и с равной громкостью) передаваемых. Если в комнате находятся несколько человек, которые разговаривают одновременно, то мы можем
выделить
речь одного из них и слушать только его, не воспринимая ос-
Мир
ощущений
55
тальных. Дирижер симфонического оркестра, насчитывающего
около сотни музыкантов, может (и должен уметь) услышать и
проконтролировать звучание каждого отдельного инструмента,
по своему выбору, заставив «внутри себя» как бы отступить на
второй план звучание всего остального оркестра. Мы
можем
без особых усилий и с очень высокой достоверностью восстановить речевое сообщение, приняв лишь его отдельные обрывки.
Все это пока недоступно самой совершенной электронной технике (по-видимому, потому, что к решению
подобных задач
привлекается весь наш мозг).
Уже из этого далеко не полного перечисления, нам думается, предельно ясно, что разработка искусственных
систем,
которые могли бы выделять и воспринимать из многообразия
звуковых образов на фоне естественных и искусственных помех полезный акустический сигнал, понимать устные инструкции, команды и приказы человека, совершать требуемые действия, является одной из важнейших
и
сложнейших
задач
бионики.
Прежде чем перейти к изложению наметившихся путей
и
первых успехов, достигнутых в решении этой проблемы, познакомимся, хотя бы кратко, с «конструктивными
особенностями», основными структурными элементами, принципами действия нашего
слухового
анализатора — прообраза
будущих
устройств автоматического распознавания различных
3BYKOвых сигналов.
Орган слуха человека состоит из наружного,
среднего
и
внутреннего уха (рис. 9).
Наружное ухо, в свою очередь, состоит из двух
частей —
покрытого кожей хрящевого выроста, или ушной раковины, и
наружного звукового прохода, ведущего от раковины к среднему
уху.
В месте
соединения
слухового
прохода и сред-
Рис. 9. Схема
человека:
1 —
вой
строения
уха
ушная
раковина;
2 — слухопроход;
3 — молоточек;
4 —
наковальня;
5 — полукружные
Kaналы;
6 — слуховой
нерв;
7 —
улитка; 8 — стремечко;
9 — евстахиева труба; 10 — барабанная перепонка.
56
Бионика
него уха
натянута тонкая соединительнотканная мембрана —
барабанная перепонка, вибрирующая
под действием
3BYKOвых волн.
Среднее ухо — это небольшая камера, содержащая три крошечные, последовательно соединенные косточки:
молоточек,
наковальню и стремечко (названные так за свою форму), которые передают звуковые волны через полость среднего уха. Молоточек соприкасается с барабанной перепонкой,
а стремечко — с перепонкой, закрывающей отверстие, ведущее во внутреннее ухо и называемое овальным окном. Среднее ухо соединяется с носоглоткой узкой евстахиевой трубой, служащей для
уравнения давления по обе стороны барабанной перепонки.
Внутреннее ухо состоит из сложной системы сообщающихся между собой каналов и полостей, которую очень удачно называют лабиринтом. Часть лабиринта, имеющая отношение к
слуху !, представляет собой спирально
закрученную
трубку,
образующую два с половиной витка и называемую улиткой за
сходство с раковиной этого животного. Улитка заполнена особой жидкостью и разделена продольной перегородкой на два
канала. Один из них начинается от овального окна, закрытого
основанием стремечка. Часть перегородки,
разделяющей
каналы улитки, образована основной перепонкой, так называемой базилярной мембраной. Вдоль всей перепонки располагается кортиев орган. Важнейшей частью его являются чувствительные клетки
— рецепторы, воспринимающие звуковое раздражение. Под воздействием звуков разных частот возникает
колебание мембраны, достигающее максимума в определенной
точке, причем высокие частоты дают возбуждение вблизи входа в улитку, а низкие проникают к ее дальнему концу. Таким
образом, в улитке осуществляется в какой-то степени тонотопическая проекция,
т. е. соотнесение
определенных
частот
звукового сигнала определенным участкам мембраны 2?.
Попробуем сопоставить органу слуха человека его упрощенную бионическую схему (рис. 10).
Ушная раковина и наружный слуховой проход
— это
направленная широкополосная приемная антенна,
работающая
в диапазоне частот от 16 до 20000 ги, и волновод, направляющий звуковую энергию к преобразователю.
' В лабиринте расположен и орган равновесия; он воспринимает изменения положения головы и тела в пространстве. В сочетании с соответствующими
центрами нервной системы
его
называют
«вестибулярный
аппарат».
2 В последнее время появились
работы, в которых
утверждается, что
улитка не просто производит анализ спектра сигнала, а обрабатывает сигнал более сложным образом. Предполагают, что различные части
улитки
специализированы
для кодирования
различных
характеристик
речевых
сигналов.
Мир
ощущений
57
|
—
|
2
AL_s_}>
Готовая
4
информация
7
Рис.
10. Упрощенная
бионическая
схема
органа
слуха
человека:
4 — приемная антенна; 2 — преобразователь; 3 — компенсатор изменений атмосферного давления; 4 — частотно-амплитудный анализ сигнала, его преобразование в биотоки (кодирование);
5 — устройство определения
направлений
и расстояний;
6 — устройство
опознания
звуковых
образов; 7 — ‹библиотека» слуховых образов.
Барабанная перепонка, слуховые косточки, мембрана овального окошка — преобразователь быстропеременного
звукового
давления (по принципу действия ухо позвоночных
— прибор,
реагирующий именно на изменения звукового давления) в продольные колебания перелимфы и эндолимфы, жидкостей, заполняющих полость внутреннего уха и кортиева органа.
Евстахиева труба
— устройство,
компенсирующее
медленные изменения атмосферного давления.
Наибольшая функциональная нагрузка
в собственно
ухе
падает на улитку
— кортиев орган, в котором
расположены
окончания слухового нерва. Он принимает, регистрирует звуковые колебания, производит частотный анализ звуковых сигналов, необходимый для их дальнейшего разпознавания, амплитудный анализ, результаты
которого
используются
для
определения расстояний до звучащих объектов и для решения
задачи, приближается ли источник звука к наблюдателю, или
удаляется от него. Кроме этого, кортиев орган преобразует всю
получаемую им информацию в биотоки слухового нерва в последовательности нервных импульсов.
Окончательную обработку сигналов, поступающих от обоих
ушей, производит слуховой центр мозга.
Его
работа
очень
сложна и многообразна.
Измеряя разность фаз между одноименными нервными импульсами, поступающими от правого и левого уха (используя
так называемый бинауральный
эффект),
и сопоставляя
изменения этой разности
с направлениями
поворота головы,
он определяет направление на источник звука
с точностью
до 2—3°.
Сравнивая
зафиксированную в данный
момент интенсивность звука какого-нибудь конкретного источника с хранящейся в памяти информацией о наиболее вероятном
абсолютном
уровне интенсивности звука, создаваемого объектами данного
класса (предполагается, что объект, источник звука, опознан и
58
Рис.
Бионика
11. Спектрограммы
человеческого
голоса.
отнесен к определенному классу), он может,
пусть
довольно
грубо, определить расстояние до него.
Наблюдая за тем, как в ходе дальнейшего наблюдения изменяется интенсивность звучания объекта, и сопоставляя эти
изменения с изменениями направлений на объект, мозг может
довольно точно вычислить курс объекта по отношению к наблюдателю.
Вполне возможно, хотя это пока не доказано, что слуховой
центр мог бы, наблюдая за тем, не изменяются ли во времени частоты всех колебаний, на которые разложен
первичный сигнал, т. е. наблюдается или нет эффект Допплера, получать дополнительную информацию о направлении движения
объекта и резких изменениях его скорости.
И наконец, мозг распознает звуковые образы. Именно эта
функция его является основой и в то же
время
ахиллесовой
пятой всех слушающих устройств. Ее было всего труднее понять, объяснить и промоделировать. Дело в том, что после появления первых хороших спектроанализаторов и регистрирующих устройств обнаружилась «крайняя легкомысленность характеров» энергетических спектров звуковых сигналов. Оказа-
Мир
ощущений
59
лось, что даже в случае, когда одно и то же слово произносится
одним и тем же человеком с интервалом в несколько
минут,
спектрограммы довольно сильно отличаются
друг
от
друга
(рис. 11).
Еще больше различия, если слова произносятся различными
людьми. Очень большая разница оказалась между мужскими
и женскими голосами. Эта трудность была
не единственной.
Было неясно, что за звуковые образы хранятся в человеческой
памяти: образы звуков, фонем, или образы слогов, может быть,
образы целых слов и даже выражений. Ведь емкость человеческой памяти настолько велика, что с избытком соответствует
любому из этих предположений.
Постепенно накапливались и систематизировались материалы наблюдений, совершенствовалась исследовательская аппаратура. Стали фиксироваться ускользавшие ранее от экспериментаторов детали спектрограмм. Выяснилось,
что на
фоне
большой изменчивости в звуковых
образах
присутствуют
и
вполне устойчивые, индивидуальные черты.
Они
настолько
устойчивы и индивидуальны, что, оказывается, на Земле нет
двух людей, кроме близнецов,
у которых
могут
полностью
совпадать все особенности спектрограмм их речи. Эти спектрограммы так же индивидуальны, как и отпечатки пальцев, или,
что, пожалуй, не менее точно, как почерк. Подобно тому как
устойчивые элементы почерка сохраняются даже тогда, когда
человек намеренно старается
его исказить,
сохраняются
и
устойчивые черты спектрограмм. Опознавание личности человека путем анализа этих спектрограмм производится настолько
надежно, что, скажем, в США они приравнены к доказательствам при проведении каких-либо расследований. ФБР и полиция США теперь наряду с отпечатками пальцев включают
в
свои досье и спектрограммы речи, благо получать их в обстановке слежки и массового подслушивания телефонных разговоров стало нетрудно.
Однако опознать человека
по спектрограмме
и заставить
машину слушать и понимать человеческую речь совсем не одно
и то же.
Эти задачи во многом противоположны. Интересующее нас
устройство как раз не должно «откликаться» на индивидуальные черты, распознавать их, а искать общие, неизменные для
всех людей признаки тех или иных букв, слогов, слов. Появилось предположение, пожалуй, даже уверенность
в том,
что
именно так, по устойчивым признакам, опознает звуковые образы и мозг.
Остановка была за главным: что выбрать за единицу опознавания? Звуки алфавита отпали почти сразу. Их произношение в реальной речи не совпадает с алфавитным. Более того, в разных словах они произносятся по-разному.
60
Бионика
Нужно было выбирать более крупные «кирпичики». Естественной мыслью было обратиться к слогам, из которых состоят
слова. Но, скажем, в английском языке около 4000 различных
слогов, в русском еще больше.
Внимание исследователей
привлекли
фонемы — основные
звуки реальной устной речи. Их 40—50, т. е. больше, чем букв,
но значительно меньше, чем слогов.
Были построены прообразы машин, различающих отдельные
фонемы. Оказалось, отдельные фонемы, произносимые избранными дикторами, распознавались хорошо, с точностью около
90%. Но со связной речью все получалось значительно хуже.
Стало ясно, что, хотя бы на теперешнем этапе, человек сам
должен приспосабливаться к машине.
Когда
это стало ясно,
пришли первые успехи, причем на пути, который еще недавно
мог показаться парадоксальным. Машину заставили распознавать даже не слоги, а целые слова, а человека (оператора) обязали изучить специальный, очень лаконичный командный язык,
составленный из коротких одно-, двусложных слов.
Рассмотрим в качестве примера одну из таких сравнительно
простых систем, способную анализировать речь и формировать
на основе этого анализа цифровые команды, управляющие работой ЭЦВМ. Оно воспринимает 24 команды, состоящие из одного слова каждая и произносимые человеком, на голос которого система предварительно натренирована.
Устройство, блок-схема которого представлена
на цветной
таблице 3, состоит из микрофона, спектроанализатора, аналогоцифрового преобразователя (описывающего плавно
изменяющийся, аналоговый, сигнал последовательностью
дискретных
значений, подобно тому как график заменяется таблицей значений переменного), цифрового процессора
с фиксированной
программой (специализированного устройства обработки
информации), запоминающего устройства и выходного регистра,
непосредственно связанного с ЭЦВМ. Нетрудно заметить большое структурное сходство этой блок-схемы с бионической схемой человеческого уха.
Как же работает это устройство? (См. цвет. табл. 2.) Спектроанализатор разделяет входной сигнал на 16 полос, лежащих
в пределах от 200 до 5000 ги. Эти полосы и образуют энергетический спектр, служащий для последующей
классификации
речи. Представим себе, что анализируемый в данный момент
звук человеческого голоса
складывается
из
гармонических
(синусоидальных)
колебаний
трех
частот
— Й1, [2, [з (рис. 1
на
цвет. табл. 2). На этом же рисунке тонкими вертикальными линиями обозначены полосы пропускания фильтров анализатора
спектра. В нашем случае наличие колебаний зарегистрируют,
‚скажем, второй, четвертый и седьмой
фильтры.
Амплитуды
этих колебаний
непостоянны.
Они
меняются во
времени,
Мир
ощущений
61
пульсируют. Регистрируя изменения во времени напряжения,
снимаемого с выхода одного из фильтров, мы увидим, что оно
то нарастает, то спадает, то временами пропадает вовсе (падает
до нуля).
Шестьдесят раз в секунду спектроанализатор опрашивается, т. е. последовательно измеряются амплитуды сигналов
в
каждой из 16 полос. Результаты измерений преобразовываются
в цифровую форму (в четырехразрядные двоичные числа). Таким образом система производит амплитудно-частотный
анализ с усреднением по каждой полосе
анализа.
Полученные
числа с использованием обычной техники уплотнения (как в
многоканальной телеграфии), по одному
каналу,
последовзательно подаются в цифровой процессор.
Можно одновременно подать напряжение со всех фильтров
на экран многолучевого осциллографа,
так
чтобы
каждый
фильтр «обслуживал» один из лучей, а изменения напряжения
с выхода каждого из фильтров укладывались в пределы отведенной, теперь уже горизонтальной, полосы экрана. Тогда мы
увидим на экране акустический спектр в координатах напряжение — время (рис. 2 на цвет. табл. 2). Жирные белые линии
на спектрограмме отображают ход трех основных резонансных
кривых (формант) голосовых путей.
Если бы спектрограмма одного и того же слова, произносимого одним и тем же человеком, оставалась всегда постоянной,
можно было бы прямо приступить к опознаванию
команды.
Но, как мы уже знаем и как это показано на рисунке 11, это далеко не так. Меняются общая длительность слова и относительная длина отдельных звуков, меняется и относительная интенсивность их произнесения. Все это осложняет процесс опознавания.
Прежде
чем приступить
к опознаванию,
спектрограммы
нужно привести к единому ритму и одинаковой скорости произношения, по возможности не потеряв при этом содержащуюся в них информацию. Это преобразование осуществляет кодирующее
устройство
сжатия,
являющееся
сердцем
всей
системы.
Оно преобразует каждую команду независимо от того, сколько
звуков она содержит и в каком ритме и за какое время произнесена, в 120-разрядный цифровой образ стандартной длины,
в (/зо сек. Таким образом, для команды длительностью 1 сек
коэффициент сжатия равен 30, для полусекундной команды —
15 ит. д. Секрет устройства состоит в том, что каждая. спектрограмма перед сжатием делится на 10 вертикальных
нолос —
интервалов сжатия, имеющих разную длительность. А после
сжатия все интервалы становятся равными и вся спектрограмма
приобретает
стандартную
длительность.
Как
это происходит?
Детектор
команд
(рис. 12) определяет
их реальную длительность и тем самым задает значение общего коэф-
62
--------------
<>
с
р
Бионика
Рис. 12. Структурная
схема
голосовой
командной
системы:
1 — микрофон;
2 — спектроанализатор;
3 — устройство уплотнения
и аналогоцифровой
преобразователь;
4 — кодирующее
устройство
сжатия;
5 — идентификатор;
6 — выходной
регистр;
7 — детектор команд;
8 — цифровой
процессор;
9 — устройство оценки;
10 — память закодированных акустических образов (запоминающее устройство «ЗУ» на ферритовых сердечниках).
фициента сжатия. Длительность каждого
интервала
сжатия
выбирается
обратно пропорционально
скорости
изменения
плотности энергии в спектре рассматриваемого акустического
образа.
Рисунок 3 на
цвет. табл. 2 иллюстрирует
процесс
сжатия двух спектрограмм испанского слова «Биепо». Масштабы по горизонтали на левых и правых
графиках
различны.
Для удобства они выбраны такими, что общие
длительности
несжатых и сжатых спектрограмм
выглядят
одинаковыми.
Даже при беглом взгляде на спектрограммы видно, что сходство между ними после сжатия гораздо заметнее.
Дальше все сравнительно просто. В памяти устройства хранится по 5 стандартных (сжатых) спектрограмм для
каждой
команды, характеризующих 5 вариантов ее произнесения. Всего, следовательно, 120 спектрограмм. Идентификатор сопоставляет анализируемую спектрограмму со стандартными, эталонными.
При
этом
подсчитывается
число
совпадений
(сравнение,
естественно, производится в цифровой
форме). Эталон,
при
сравнении с которым получено наибольшее число совпадений,
считается соответствующим произнесенной команде. Рисунок4
на цвет. табл. 2 иллюстрирует процесс идентификации. На основании номера этого эталона
выбирается
соответствующая
команда для управления ЭЦВМ, заранее записанная в соответствующих ячейках памяти, и подается в выходной регистр.
Работы по созданию подобных и еще более
совершенных
машин ведутся в разных странах широким фронтом. Основное
Мир
ощущений
63
внимание уделяется разработке устройств, позволяющих человеку непосредственно, голосом, обращаться к ЭВМ. Ведь еще
и сегодня составление программы и перевод ее на понятный
ЭВМ язык перфокарт и перфолент занимает во много раз больше времени, чем само решение. Да и после его получения необходима длительная
расшифровка.
Оперативная
работа
с
электронно-вычислительной машиной при таком способе общения с ней невозможна. Часть проблем решают ЭВМ с клавишными пультами управления. Часть, но не все. Во-первых, это
опять кнопки. Во-вторых, для управления такой машиной на
расстоянии нужна специальная линия связи. А для машины,
обладающей слухом, достаточно телефонной линии.
Такая направленность в разработке слышащих
устройств
вполне понятна. Она отражает быстрорастущую
роль ЭВМ в
современной жизни. Кроме того, трудно даже назвать современное автоматическое устройство, не имеющее хотя бы простейшего, специализированного
вычиелителя,
пусть даже с
жесткой, неизменяемой программой. Поэтому устройство, рассчитанное на работу с ЭВМ, легко трансформировать для выполнения любой другой задачи.
К настоящему времени у нас и за рубежом разработаны
машинные модели восприятия речи, способные решать такие
задачи:
распознавание нескольких десятков изолированных
слов,
произносимых различными дикторами (надежность 93%);
распознавание нескольких сотен изолированных слов, про-
износимых одним диктором (надежность 95%);
распознавание изолированных фонем (надежность 95%);
распознавание фонем в слитной речи (надежность 85%).
Таким образом первые неудачи на пути создания бионических устройств, опознающих отдельные фонемы, не обескуражили ученых и инженеров. Они возвратились к этой идее на
базе более совершенной техники. Создан серьезный задел для
получения в скором времени более существенных результатов.
Имеются, например, данные, что Mupma
«Culler— Harrison»
разрабатывает систему, способную распознавать неограниченный по объему словарь английского языка, на котором говорят
в США. Предполагают, что эта система не будет требовать обучения, чтобы распознавать новые голоса или расширять свой
словарь. В этой системе отдельные фонемы устного сообщения
будут обрабатываться
вычислительной
машиной,
созданной
специально для этой цели.
Если подобную систему соединить с автоматической пишущей машинкой, может получиться автомат-секретарь, от которого не отказался бы ни один писатель. Правда, в него придется вводить специальное устройство, вносящее коррекцию на
разницу между устной и письменной речью. Без него секре-
64
Бионика
тарь-автомат печатал бы «сонце» вместо «солнце», «шол» вмесТО «шел» ит. д.
Сфера применения слышащих автоматов не ограничивается
перечисленными выше функциями.
Она
значительно
шире.
Вот еще несколько примеров.
Химик, исследующий
токсические
вещества,
пользуется
обычно герметичным боксом
со встроенными в него резиновыми перчатками. Чтобы сделать какую-либо запись, приходится либо вынимать каждый раз руки из перчаток, что долго
и неудобно и нарушает ритм работы, либо привлекать второго
оператора. Магнитофон не решает вопроса. Его запись все равно надо
расшифровывать — прослушивать
и
переписывать.
Голосовая система сможет не только записать результаты
с
помощью автоматической пишущей машинки или перфоратора, но и выполнить по команде некоторые простые действия:
включить свет, вентилятор, нагреватель или охладитель. Одна
фирма, применив такое устройство в аналогичной ситуации —
при контроле параметров цветных
телевизионных
трубок, —
вдвое снизила число занятых на этой операции
сотрудников.
Одновременно значительно уменыпилось число ошибок в записях результатов.
Была сделана очень удачная попытка применить слышащее
устройство на крупном, хорошо
механизированном
складе.
Раньше работа была организована так. Несколько
служащих
подвозили грузы к погрузочному устройству конвейера и сообщали место их назначения специальному оператору. Оператор, дождавшись появления очередного
пустого
контейнера,
опускал с помощью полуавтоматического погрузочного устройства в него груз и набирал на пульте код места назначения.
Пустые контейнеры следовали нерегулярно, так
как
склад
большой и имел несколько погрузочных устройств для каждого конвейера. Иногда
грузы
скапливались
у
погрузочных
устройств. Оператору приходилось запоминать несколько мест
назначения. Часто возникали ошибки.
После установки слушающего командного устройства операторы были вообще устранены. Сотрудник ставит груз в приемник накопителя и называет в переносной микрофон место
назначения. Команда опознается, кодируется и вводится в бу:
ферное устройство, способное запомнить в нужной последовательности до шести адресов. Как только появляется свободный
контейнер, очередной груз автоматически помещают
в него
и отправляют по нужному адресу.
Теперь представим себе летчика одноместного сверхзвукового истребителя. Управлением самолетом заняты и руки и ноги. Перед глазами — прицел, экран радиолокатора и несколько
десятков приборов. И в то же время летчику нужно периодически включать и отключать несколько десятков различных сис:
Мир
ощущений
65
тем, обслуживающих самолет в полете. Здесь устройства, выполняющие устные команды летчика, — уже давно насущная
необходимость. И их появление, вероятно, близко. Причем вряд
ли понадобятся устройства более сложные, чем описанная выше система (см. рис. 12). Во-первых, летчики на самолетах меняются нечасто и систему достаточно «натренировать» на дватри голоса. Во-вторых, устройство, распознающее, например,
54 условных слова, способно, используя их сочетания, выполнять 1300 различных команд, что более чем достаточно даже
для такой сложной технической системы, как самолет.
Вот еще один пример, понятный и близкий очень многим.
По шоссе мчится автомобиль. Внезапно
в лобовое
стекло
ударяет сноп грязи из-под колес обогнавшей машины. Водитель потерял ориентировку. Он снимает с руля одну руку, нажимает на насос омывателя стекла, часто непроизвольно, долю
секунды, контролируя это движение и взглядом. И часто это
отвлечение внимания приводит к аварии. Можно, конечно, как
это сделано в «Волге», поручить насос омывателя ноге шофера.
Но ноги в аварийной ситуации нужны для управления тормозом и сцеплением. А вот рот водителя свободен. И произнести
вместо энергичной фразы в адрес обогнавшего водителя короткую команду «стекло» он мог бы, не отвлекая своего внимания
от дороги.
Автоматы можно научить не только слышать и воспринимать звуки нашей речи, но и музыку. Для чего? А хотя бы вот
для чего. Знаете ли вы, как сейчас оценивается качество звучания новых образцов радиоприемников, магнитофонов или музыкальных инструментов? Собирается целый «консилиум» из
видных музыкантов. Находясь в отдельных кабинах, они, не
зная, какой именно инструмент звучит, а зная только его
условный
номер,
выставляют
свои
оценки.
Все
оценки
усредня-
ются, подобно тому как это делается на спортивных соревнованиях, и инструменту (или радиоаппарату) выносится «окончательный приговор». Нельзя сказать, что этот способ не обеспечивает должной точности
и объективности, но он очень громоздок
и дорого обходится. Для оценки качества массовой
продукции
он
вообще
неприменим. Здесь
приходится
полагаться
либо на измерения полосы пропускания,
коэффициента
нелинейных искажений усилителя и параметров громкоговорителя, либо на вкус и мнение приемщика музыкальных инструментов, связанного нормой выработки и устающего
к концу
смены.
Не так давно сотрудники Ленинградского электротехнического института связи им. профессора Бонч-Бруевича создали
систему, получившую название «электронное
ухо»,
— прибор
для определения качества звучания музыкальных инструментов. Уже первый опытный экземпляр «электронного уха» по3— 327
66
Бионика
зволил организовать своеобразный «конкурс ушей». Гитарист
за занавесом по нескольку раз исполнял специально составленную программу. «Электронное ухо» работало параллельно с советом экспертов. Эксперты-музыканты ставили оценки, на основе которых каждому инструменту
был
выведен
средний
балл. Когда их сравнили с оценками прибора (эксперты до этого
ничего не знали
0б
оценках,
поставленных
«электронным
ухом» тому или иному инструменту), получилось полное соответствие. Если раньше компетентному экспертному совету для
оценки звучания выбранной из партии гитары требовалось несколько часов, то автомату на это необходимо меньше минуты.
«Электронное ухо», как опытный педагог-музыкант, выводит
инструменту «отметку» по пятибалльной системе.
Однажды Норберт Винер сказал: «Вполне возможно, чтобы
человек разговаривал с машиной,
машина — с человеком
и
машина — с машиной».
С тех пор прошло около 25 лет. Первая часть предвидения
ученого близится к осуществлению.
А что делается
или что
уже сделано для реализации второй части предсказания отца
кибернетики о возможности разговора между машиной и человеком?
Над решением этой сложнейшей задачи работает болыпая
группа ученых Ленинградаи Новосибирска, научные сотрудники Института проблем управления АН Грузинской ССР, Института
кибернетики
АН
Эстонской
ССР,
многие
специалисты
США,
Японии
и других
стран.
Речь идет
не о создании примитивных систем, вроде всем известных «говорящих
часов», где используются обычные магнитофонные записи, а
о разработке аппаратов искусственной речи, бионических «говорящих машин». Успехи в этой области пока
еще
довольно
скромны (большинство устройств пока еще не вышло из стен
лабораторий), нс многообещающи. Создано несколько опытных
систем, которые по заданным алгоритмам синтезируют человеческую речь. Одну из таких систем в июне 1973 г. демонстрировал доктор технических наук Н. Г. Загоруйко
участникам
проходившей в Москве ТУ Всесоюзной конференции по бионике. Синтезатор речи довольно четко произносил отдельные слова и целые фрезы. Специалисты считают,
что не за
горами
ЭВМ, которые, получив устную
команду
произвести
какиелибо вычисления, также устно, «человеческим голосом», сообщат оператору результаты.
Соединив слушающие и говорящие устройства с ЭВМ, запрограммированной на перевод, скажем, с русского языка на английский (такие программы уже есть), мы получим
aBTOMATпереводчик, как будто сошедший со страниц научной фантастики. А когда системы для анализа, синтеза и перевода речи
достигнут высокой степени совершенства, они станут подлин-
Мир
ощущений
67
ными «полиглотами», с их помощью можно будет вести синхронный перевод на нескольких языках.
На основе аппаратов «искусственной речи» можно построить читающие машины для слепых. В дальнейшем, по-видимому, «говорящие машины» найдут
широкое
применение и
в
связи. Если из речи автоматически выделять на входе характерные признаки фонем и передавать только эти признаки, а
на выходе по ним восстанавливать речь, то ширину канала связи можно сократить минимум на порядок, а то и в несколько
сотен раз. А это значит, что по одной и той же линии сможет
вести переговоры значительно большее число людей.
Большое будущее ожидает слышащие и говорящие системы
и
в медицинской
практике.
Как известно, в ряде первоклассных современных медицинских центрах уже функционируют диагностические электронно-вычислительные машины, хранящие в своей памяти опыт
многих выдающихся врачей и способные ставить точный диагноз в самых запутанных случаях. Но они пока, как и абсолютное большинство ЭВМ, понимают только язык
перфокарт
и
перфолент. И нередки случаи, когда природа отпускает врачу
меньше времени, чем нужно для того, чтобы получить ответ
электронного диагноста. И совсем лишен помощи тот, кто нуждается в ней больше всего, — врач, приехавший по вызову и в
одиночку ведущий борьбу за жизнь больного. Если же диагностические машины обретут слух и голос, связь с ними можно
будет осуществлять
с любого телефона,
прямо
от
постели
больного, и получить спасительный совет буквально через несколько секунд.
Все устройства, о которых
мы
говорили,
работают
или
должны работать по определенным программам. Все, что они
знают, закладывают в них их создатели. Ну, а как же персептроны, самообучающиеся устройства? Возможны ли не только
видящие, но и слышащие персептроны? Безусловно. И они уже
создаются. Первый из них, разработанный уже знакомым нам
Ф. Розенблаттом, назывался «Тобермори». Он имел 45 частотных каналов, 1600 мультивибраторов, 999 ассоциативных суммирующих элементов. Эту обучаемую
опознающую
систему
авторы окрестили «кошкой, которая бродит среди гостей, слушает их разговоры, а затем пересказывает самое интересное
хозяину».
Позднее появилась
целая
группа
такого
рода
систем.
В частности, американская фирма «Райтеон»
построила
по
контракту с министерством обороны США ряд
машин
типа
кибертрон. Системы предназначены для опознавания сигналов,
изменяющихся во времени. Примером таких сигналов являются радиосигналы, сигналы эхолокации и шумопеленгования.
Опыты с первой машиной кибертрон типа К-100 показали, что
3*
68
Бионика
после обучения она быстро и правильно отличает сигналы гидролокатора, отраженные от подводных лодок, от сигналов, отраженных от других обнаруженных
объектов;
вероятность
ошибки не больше, чем у опытных операторов гидролокаторов.
После успешно проведенных испытаний первая модель системы кибертрон К-100 была принята на вооружение ВМФ США.
Разработано несколько вариантов кибертронов для распознавания всех фонем английского языка и воспроизведения речи в печатном виде. Считают, что машины этого типа найдут
широкое применение в различных областях техники. Кибертроны могут с успехом заменить оператора, контролирующего на
слух с помощью стетоскопа работу сложных механизмов. Они
сами определят нарушение нормального режима работы
той
или иной системы и примут необходимые меры.
Итак, положено начало созданию бионических машин автоматического опознавания различных звуковых образов, аппаратов «искусственной речи» и самоорганизующихся систем —
кибертронов. И сегодня нам уже зримо видится, как кибертроны, умеющие нас слушать, понимать
и говорить, будут в не
столь уж далеком завтра
подавать команды автоматическим
станкам, линиям, цехам-автоматам с единого диспетчерского
пункта завода, будут помогать нам на болыпом расстоянии голосом управлять движением поездов и самолетов, подводных
и надводных кораблей, тракторов и комбайнов. И кто
знает,
может быть, однажды, придя домой с работы или вернувшись
из
отпуска,
вам,
как
по
волшебной
силе
заклинания
«Сезам,
откройся!», кибертрон распахнет двери собственной квартиры.
Фантастика? И да, и нет.
Мы привыкли
к обыденности
слов и подчас забываем о величии орудия, которым владеем.
Но, подумав 06 этом, нельзя не восхищаться щедростью
людей, стремящихся передать свои способности, свой интеллект
машинам.
В отличие от широкомасштабных работ, посвященных квазизрительному и квазислуховому опознаванию,
бионика
до
сравнительно недавнего времени непростительно мало уделяла
внимания изучению и моделированию органов обоняния. Вероятно, это объясняется тем, что в жизни людей химические
чувства играют очень незначительную роль, а проводившиеся
ранее биологические исследования запахо-анализаторов животных
не
предусматривали
возможности
использования
их
структурной организации и функций в технических
устройствах. Между тем созданные природой органы хеморецепции —
это не просто датчики запаховых сигналов, а в большинстве
своем уникальные по миниатюрности,
быстродействию,
чувствительности системы, очень хорошо приспособленные
для
приема, передачи
и обработки
поступающей
извне
информации,
Мир
ощущений
69
wv,
Никто сейчас не может точно сказать, когда именно первые
живые организмы на нашей планете начали улавливать молекулы особых химических веществ.
Однако,
читая
великую
Книгу зарождения и развития жизни на Земле, можно предположить, что это произошло задолго до появления первого глаза и первого уха, за много тысячелетий до того
дня,
когда
животные начали выползать на сушу
из своей колыбели
—
Мирового океана. «Чувство обоняния,
— утверждают
известные американские ученые Л. Дж. Милн и М. Милн, — ...предшествовало всем другим чувствам, с помощью которых животное могло на расстоянии ощущать присутствие пищи, особей
противоположного пола или приближение опасности»'!. Аналогичного мнения придерживается один из крупнейших английских
исследователей
проблемы
обоняния
и
запахов —
Р. Х. Райт. В своей книге «Наука о запахах» он пишет: «Если
функция мозга заключается в регуляции
жизнедеятельности
организма на основе полученной информации, то очень похоже, что интеллект зарождался как аппарат для обработки обонятельных сигналов от химических веществ, окружающих наших предков в первобытном океане»?. Если это так, тогда декартово «СобЦо егоо зит» («Я мыслю, следовательно, я сущест-
вую») первоначально должно было
выглядеть
егоо соб{о» («Я чувствую запах, следовательно,
Разумеется,
у современных
людей
обоняние
как
«Olfacio
я мыслю»).
иное,
чем
было
у наших древних предков, ибо нам ведь не нужно ныне выходить на охоту и принюхиваться, где пахнет антилопой, а где
саблезубым тигром. Но все же за миллионы лет эволюции природа сохранила нам весьма тонкое обоняние. Настолько тонкое,
что даже при всех успехах современной науки и техники пока
не удается построить прибор, который по способности улавливать и определять небольшие количества примесей органического вещества
превзошел
бы человеческий нос. Достаточно
сказать, что каждый из нас способен сразу же заметить присутствие в воздухе ионона — синтетического вещества,
обладающего запахом фиалок; мы можем обнаружить даже такую
ничтожную концентрацию этого вещества, которая поначалу
кажется фантастической: на тридцать миллиардов частей воздуха всего одна часть ионона!
В природе существуют сотни тысяч, миллионы запахов 3. Из
них, по литературным данным (хотя и разноречивым), обычный человек без труда различает несколько тысяч, а опытный
'
1966,
?
3
ют
Милн Л. Дж., Милн М. Чувства животных и человека. М., «Мир».
с. 135.
Райт
Р.Х. Наука о запахах. М., «Мир», 1966, с. 122.
Число органических соединений превышает 1 000 000, и все они име-
различные
запахи.
70
Бионика
специалист — десятки тысяч. Для восприятия такого количества запахов, естественно, необходима
большая
избирательная
способность, информационная емкость обонятельной системы.
И природа об этом позаботилась. Наш орган обонян!«л расположен в начальном отделе воздухоносного пути. Носовая полость
разделена перегородкой на правую и левую половину. В каждой из них как бы по три этажа — верхний, средний и нижний
носовые
проходы.
В слизистой
оболочке,
выстилающей
верхний
носовой проход и перегородку носа, имеются три вида клеток:
обонятельные, опорные и базальные. Самые важные из них —
обонятельные. Это рецепторы
запахов,
приборы
первичного
анализа химического раздражителя. Площадь
обонятельного
эпителия
составляет
5 см?.
«Примечательно,
— пишет
Р. Х. Райт, — что эта чувствительная поверхность представляет
собой обнаженное вещество самого нерва. В глазе между нервом и внешней средой есть хрусталик, в ухе — барабанная полость. Когда мы ощущаем запах, мы осуществляем наиболее
непосредственный контакт с окружающим миром» '.
По внешнему виду обонятельные клетки ничем не отличаются от биполярных (двухполюсных) нервных клеток. От одного полюса идет короткий отросток
на периферию, т. е. к поверхности слизистой
оболочки.
Он
заканчивается
немного
выступающим над поверхностью обонятельного эпителия
пузырьком, снабженным 6—8 субмикроскопическими ресничками. От другого полюса тянется по направлению
к головному
мозгу длинный отросток. Группируясь, эти отростки составляют обонятельные нервы. Через отверстия пластинки решетчатой кости они проникают в полость черепа и достигают основания головного мозга. Всего от обонятельных
клеток
к мозгу
идет околс 100 млн. нервных отростков
— аксонов. Для сравнения систем передачи информации в органах чувств человека
напомним, что количество нервных волокон в зрительном нерве 1.105, в слуховом нерве 0,08.105. Эти данные показывают,
какое огромное количество сообщений способен различать обонятельный анализатор. По данным Ю. А. Макаренко, мы воспринимаем свыше 30 млн. запахов.
По мнению
Р. Х. Райта,
число распознаваемых человеком запахов безгранично.
Если человек обладает хорошим обонянием и бережно относится к своему носу, он может научиться различать не только
огромное количество запахов, но даже тончайшие нюансы этих
запахов, ускользающие от нетренированных людей. Примером
могут
служить
парфюмеры.
Но если для современного человека обостренное восприятие
ароматов — это уже своего рода атрибут роскоши, то для многих животных обоняние имеет такое же значение, а иногда
и
' Райт
Р.
Х.
Наука
о запахах.
М.,
«Мир»,
1966,
с.
122.
Мир
ощущений
71
большее, чем зрение и слух. Примером могут служить различные насекомые. У них есть лишь три основных аспекта жизнедеятельности — питание,
спаривание
и откладывание
яиц.
И во всех этих актах они руководствуются запахами, воспринимаемыми органами химического чувства (хеморецепторами),
расположенными на антеннах (усиках) и на лапках (иногда на
пальпах — специальных
выростах
головы).
Используя,
повидимому, широкий
диапазон,
большую
гамму
запаховых
представлений, они обладают великолепной памятью на запахи (запоминают запаховые ориентиры на земле и
в воздухе,
помнят специфические запахи особей
своего
гнезда и т. п.).
Термиты выделяют пахучие вещества, чтобы помочь своим собратьям обнаружить источник пищи. Этот след представляет
собой не просто ряд «вех»: запах следа усиливается, если найден богатый источник пищи, и, наоборот, по мере истощения
его запасов
след постепенно
ослабевает.
Бражник
Macroglossa
${еПа{агит откладывает яйца на подмаренник или на зеленый
субстрат, который смазан соком
этого
растения.
Основную
роль играет здесь, очевидно, запах растения, который не ощутим для человеческого обоняния. Самки наездников, откладывая яйцо внутрь других насекомых с целью обеспечения своего
потомства пищей, одновременно метят поражаемую личинку
отпугивающим запахом, чтобы не использовать ее же для этой
цели повторно: ведь внешне личинка, пораженная наездником,
еще длительное время ничем не отличается от других личинок.
По запаху, воспринимаемому усиками, муравьи, принадлежащие к одному и тому же виду, безошибочно узнают друг друга.
Если чужой муравей
хочет пробраться
в муравейник,
его
узнают и убивают. Достаточно обмакнуть «своего» муравья
в
экстракт из «чужих» муравьев и сотоварищи уничтожат
несчастного. Для многих насекомых запахи служат мощным оружием «женского очарования». Описан случай, когда за одну
ночь одна-единственная бабочка-самка большого ночного павлиньего глаза (Зафигп!а руг!) собрала вокруг себя 125 самцов.
Часть из них, когда окна уже были закрыты, пробралась в комнату... через дымоход старой печки.
«Зовом любви» являются эпагоны — вещества-сигнализаторы, привлекающие особей противоположного пола. У насекомых обнаружена еще одна весьма интересная особенность обоняния. Они могут, даже не прикасаясь к предмету, а лишь поводя усиками у его поверхности, по запаху составить представление о его форме! Эту особенность насекомых ученые называют топохимическим чувством. Человеку же чувство «круглого»
или «квадратного» запаха совершенно недоступно: никто из
нас не может сказать по запаху, какую форму имеет предмет.
В мире запахов живут и верные спутники человека — собаки. Нам трудно вообразить себе мир, состоящий только из за-
72
Бионика
пахов,
потому
жающей
среды
что наш
менее
орган
1%
обоняния
всей
приносит
информации.
нам
Для
из окру-
собаки
же
запахи — главный источник восприятия мира. Мы узнаем своих друзей по чертам лица, а собаки узнают хозяев по комплексу запахов. Причем этот комплекс столь же индивидуален
и
обладает такими же тонкими различиями, как для нас черты
лица. Видимый мир собаки
очень беден и
похож на чернобелый фильм — она не различает цвета. Когда собака идет по
следу, все время принюхиваясь, она видит при этом довольно
плохо, не больше, чем нужно, чтобы разглядеть землю, по которой бежит. Зрение может помочь ей извлечь дополнительные
указания из следов в виде углублений в почве, колеи на дороге, примятой растительности,
но главный
ключ ее поиска —
обоняние (цвет. табл. 4).
Следуя за запахом, собака опознает нечто реальное, физическое присутствие чего-то, что оставляет за собой на земле
или в воздухе животное или человек.
Исключительно велика биологическая роль обоняния в жизнедеятельности
многих
обитателей
рек
и морей.
«Трудно
пред-
ставить, — пишет Филипп Кусто,— как это можно различать
запахи в воде, однако же акула, например,
способна
много
миль идти за запахом в океане и найти его источник.
Ноздри
акулы устроены так, что сенсорные клетки постоянно омываются потоком воды. Для тех акул, которые
подолгу
остаются
неподвижными на дне, достаточно тока
воды,
проходящего
через пасть при дыхании, чтобы вызвать циркуляцию в ноздрях. Обоняние селахий (акул. — И. Л.) работает
по тому
же
принципу, что и наше, только оно во много раз острее. На воздухе запах создается летучими частицами, которые растворяются внутри носа. Это химическое соединение раздражает обонятельные клетки. В подводном царстве
сама вода
служит
растворителем и переносит химические раздражители к клеткам
органа обоняния. Мы провели опыт, проверяя
удивительную
чувствительность акульего
обоняния.
Возле
одного
рифа
в
Красном море погрузили полиэтиленовый
мешочек
с почти
бесцветной
жидкостью,
которую
выжали
из наловленной
рыбы.
Нам не пришлось долго ждать. Две акулы
появились
почти
одновременно, их разделяло не больше
одного-двух
метров.
Они двигались быстро, с явным нетерпением и быстро качали
головами из стороны в сторону. Весь поиск был завершен в восемь минут. Глядя на этих акул, которые вели себя в точности,
как свора охотничьих собак, я невольно вспомнил имя, данное
им греками, — «гончие
морей»'.
Запах служит путеводной
ях» — дальних путешествиях
' «Вокруг
света»,
1972, №
звездой
в подводных
«одиссемногим рыбам-кочевникам. При-
Т, с. 76.
Мир
ощущений
73
мером могут служить лососи. Весной в горных ручьях появляются на свет вылупившиеся из икринок миллиарды мальков.
Спустя некоторое время они отправляются в свои
подводные
маршруты: спускаются по течению, пока не достигнут моря, а
затем начинают кочевать в его глубинах, проплывая тысячи
километров. Через несколько лет (от 2 до Т, в зависимости от
вида) взрослые лососи, пересекая различные огромные массы
воды, с поразительной
точностью
возвращаются
в родные
ручьи, где провели детство, и мечут там икру,
давая
жизнь
новому поколению. Поставленные американским гидробиологом Артуром Хаслером многочисленные опыты показали, что
возвращение лососей в родные реки связано с процессом обоняния. Выяснилось, что лососи и другие рыбы-кочевники обладают замечательной памятью на запахи. Пускаясь в свои дальние странствования, они запоминают, как меняется запах воды, и составляют своего рода запахограмму
маршрута. Возвращаясь же обратно, они постоянно сверяются с ней.
Из насекомых рекорд по дальности запаховой ориентации,
по-видимому, принадлежит дымным жукам.
Несколько
лет
назад в Калифорнии загорелось около 120 тыс. т нефти. На пожар слетелись несметные полчища этих насекомых. Ближайшее место, где росли хвойные деревья и откуда могли прилететь жуки, было расположено
не менее чем в 80 км от места
пожара...
Пока не удалось установить, какие именно вещества дыма
привлекают насекомых. Однако известно, что табачный
дым
тоже привлекает этих жуков, и время от времени
футбольные
болельщики оказываются
жертвами
их
непрошеного
внимания.
Нельзя также не упомянуть о совершенно феноменальных
обонятельных способностях бабочек сатурний. С ними проделали такой опыт. Самцов отделили от самок и спинку каждого
пометили капелькой яркой краски. Потом их рассадили в маленькие клетки, развезли в разные стороны на разные расстояния и выпустили
на волю.
Не прошло и 45 мин, как первый
меченый самец вернулся к клетке с самками сатурний. Он проделал путь в 5 км! Другой самец прилетел
на
«зов любви»,
преодолев расстояние в 11 км. Расчеты показали, что на таком
отдалении от самки в 2—3 дм3 воздуха может находиться всего
одна (!) молекула
вырабатываемого ею
пахучего вещества —
эпагона. Тонкий, еле уловимый запах именно этих единичных
молекул и был тем верным маяком, который вел самца по правильному пути через пески, возвышенности, кустарники, леса
и сады...
Мы так подробно остановились на функциях органов обоняния человека и животных потому, что в этих высокосовершенных устройствах, созданныхи отработанных природой на
74
Бионика
протяжении миллионов лет эволюции, заложены безграничные
возможности для моделирования и построения многих технических систем хеморецепции, в которых давно и остро нуждаются если не все, то абсолютное большинство областей человеческой практики. Разве не похожа, например, проблема сближения автономно управляемых объектов в космосе с тем, как
летят навстречу друг другу самец и самка бабочки
сатурнии,
руководствуясь запахом эпагона. Здесь интересно буквально
все: и система обработки информации, и механизмы управления и самонаведения. Если даже считать, что запах имеет
сигнальное значение только в воздушной или водной среде и
не может использоваться в космосе (хотя пока нет достаточных
оснований отрицать такую возможность), то и для первых двух
сред такие большие расстояния (до 15 км) позволяют назвать
большое число технических
приложений.
Многообещающие
перспективы, например, открываются в создании дистанционной химической сигнализации по образцу и подобию органов
обоняния дымных жуков. Дистантные высокочувствительные
газоанализаторные системы сегодня, как никогда, необходимы
для контроля за состоянием воздушной среды в крупных городах, вокруг больших промышленных комплексов, в аэропортах, на автострадах.
Искусственные органы обоняния могли
бы стать незаменимыми устройствами в различных областях
химической промышленности. Ведь
ассортимент
имеющихся
сейчас электронных датчиков для снятия информации о процессах химизации очень мал, параметры этих датчиков давно
уже не удовлетворяют требованиям
современной
и будущей
химической промышленности. Технический аналог человеческого органа обоняния можно весьма
успешно
применить
в
парфюмерной промышленности,
в частности
в производстве
духов. Здесь «искусственный нос» сможет гораздо лучше работников ОТК следить за точным выполнением процесса производства и качеством выпускаемой продукции. Квазиобонятельные анализаторы могут найти
применение и в пищевой
промышленности в качестве устройств-сигнализаторов начавшейся порчи продуктов, дегустаторов исходного сырья и готовой продукции, в качестве устройств, позволяющих приспособить запах тех или иных продуктов ко вкусам
потребителей.
На предприятиях, в научно-исследовательских институтах,
в
лабораториях, имеющих
дело с токсическими
материалами,
«искусственный нос» позволит вовремя обнаружить чреватую
опасностью утечку ядов и прежде всего тех, которые не улавливаются, не воспринимаются обонянием человека. Наконец,
этот прибор может предупредить о степени загрязнения воздуха в межпланетных
кораблях,
подводных
лодках, самолетах, поднимающихся на большую
высоту,
в операционных,
рудниках, шахтах, на складах, в кузнечно-прессовых, маляр-
Мир
ощущений
,
75
ных, гальванических и других
цехах
промышленных предприятий.
Что же делается и что уже достигнуто в этом направлении?
Из предложенных в последние
годы
квазиобонятельных
опознающих систем в бионическом плане, несомненно, большой интерес представляет аппарат, созданный
профессором
Эндрю Дрэвниксом. Этот американский ученый задался целью
построить «электронный нос» для медицинской
диагностики.
Дело в том, что для некоторых заболеваний характерен особый
запах, связанный, очевидно, с нарушением химического баланса в теле больного. Например, определенный запах часто сопутствует поздним стадиям рака, дифтерии, уремии, диабету,
шизофрении и др. Однако в обычных
условиях
диагностика
болезни по запаху затруднена. Это возможно лишь в том случае, если болезнь значительно прогрессировала, но даже в этом
случае врач должен обладать остро натренированным обонянием и чрезвычайно большим
опытом работы. Иное дело —
«электронный нос». Он должен уметь обнаруживать,
дифференцировать и узнавать специфические
запахи, характерные
для той или иной болезни, абсолютно точно, причем обонятельным способностям такого устройства должны быть чужды утомляемость, адаптация и т. п.
Поскольку носителями запахов являются пары органических веществ, Дрэвникс решил построить модель «искусственного
носа»,
используя
эффект
изменения
контактного
потен-
циала под воздействием пахучих веществ. Несмотря на то что
химико-электрический процесс, лежащий
в основе
действия
созданного аппарата, довольно сложен, его конструкция получилась относительно простой. Представленное на цветной таблице 2 (вверху) сенсорное устройство состоит из четырех неподвижных золотых
электродов
и вращающегося
золотого
гребка-лопатки, помещенных под стеклянный колпак, в который поступает пахучая смесь. Неподвижные пластины покрыты
различными адсорбентами
и подключены
к контактам
переключателя, движок которого вращается синхронно с гребкомлопаткой. В зависимости от изменения контактного потенциала под воздействием пахучих веществ меняется ток через
сосопротивление К и, следовательно, напряжение на нем, подающееся на осциллограф. Когда в сенсорной камере нет запаха,
на экране видна прямая линия.
При появлении
запаха
на
экране возникают типичные волны. По форме волны и величине ее гребней и впадин можно судить о том, какое пахучее вещество и в какой концентрации находится в воздухе.
Пользуясь «электронным носом», Дрэвникс на протяжении
последних лет проводит
большую
научно-исследовательскую
работу в надежде разработать точный метод диагностики различных заболеваний по запаху. Исследуемого пациента поме-
76
Бионика
щают в стеклянный ящик длиной 2 м и шириной 70 см, в который непрерывно вводят очищенный воздух. Затем «загрязненный» воздух — отработанная смесь паров и газов — подвергается анализу, в ходе которого определяют химические вещества, выделенные больным. Пока их обнаружено 24.
Сейчас
профессор Дрэвникс пытается установить, какие из этих веществ свойственны здоровому человеку, какие являются спутниками различных
заболеваний
и
каковы
концентрации.
Ученый надеется, что благодаря созданному им «электронному
носу», который в дальнейшем будет
более
чувствительным,
избирательным и конструктивно более совершенным, медицинская диагностика сможет стать более простым
делом
и, что
особенно важно, врачи будут
выявлять
болезни
в
ранней
стадии.
Оригинальный в бионическом аспекте прибор для распознавания запахов различных веществ и определения
их
KOHцентрации разработал также шотландский
ученый
Р. Монкриф.
Он
использовал
для
его
создания
три
явления:
способность тонких пористых пленок различного состава избирательно поглощать (адсорбировать)
те
или
иные
пахучие
вещества; выделение тепла при адсорбции этими пленками пахучих веществ; свойство полупроводниковых резисторов менять свое сопротивление при изменении температуры.
Основа прибора — несколько одинаковых маленьких камер,
подключенных параллельно к устройству, продувающему через них пахучую смесь, которая предварительно увлажняется,
так же как увлажняется
воздух
в носовой
полости
(цвет.
табл.
2, вверху).
В
каждой
камере
помещены
два
одинаковых
полупроводниковых резистора (терморезистора),
один
из них
покрыт адсорбирующей пленкой (естественно, материалы пленки выбраны различными для
всех
камер).
Терморезисторы
включены в смежные плечи обычного моста Уитстона (табл. 2,
вариант «а» электросхемы). Изменения окружающей температуры действуют одинаково на оба терморезистора, и мост остается сбалансированным. Адсорбция
же
пахучего
вещества
вызывает нагрев (изменение сопротивления) только того резистора, который покрыт адсорбирующей пленкой. Баланс моста
нарушается, и в его диагонали появляется электрический сигнал. Для увеличения чувствительности прибора
можно
поместить в каждую камеру еще два терморезистора: один
покрытый адсорбентом, второй для температурной компенсации
(вариант «б»
электросхемы).
В
диагональ
каждого
моста
включен
усилитель
постоянного
тока
с
коэффициентом
усиле-
ния около
1000. Усиленные сигналы измеряются милли- или
микроамперметром
и одновременно подаются в записывающее
устройство, в качестве которого используется многоканальный
самописец. Зная, к какому химическому
веществу
чувстви-
Мир
ощущений
77
тельна та или иная камера, можно по номеру канала, в котором появился сигнал (номер канала соответствует номеру камеры), определить состав пахучей смеси, а по величине
сигнала — ее концентрацию.
«Электрический нос» Монкрифа, как показали результаты
проведенных с его помощью экспериментов, достаточно чувствителен для восприятия запахов некоторых
цветов
(розы,
бузины и др.). По отношению к ацетону прибор чувствительнее
человеческого носа, но в отношении других пахучих веществ, с
очень низкой
пороговой
концентрацией
(мускус,
ванилин
и др.), прибор имеет слабую чувствительность. У «искусственного носа» Монкрифа имеется ряд сходных черт с обонятельным анализатором человека: он немедленно отвечает на пахучее вещество; ответ сразу же исчезает с удалением запаха; для
работы прибора необходимо движение воздуха над воспринимающей поверхностью; устройство «устает» и должно
отдыхать перед последующими опытами; модель быстрее адаптируется к сильным запахам, чем к слабым; модель показывает
ограничение реакции на сильные запахи,
когда
дальнейшее
увеличение стимула не дает ответа. Небезынтересно, что кривые, полученные с помощью прибора Монкрифа, имеют большое сходство с кривыми электрической активности обонятельного эпителия лягушки (цвет. табл. 2, вверху).
Таким образом, Монкриф созданным им прибором доказал,
что использование адсорбента в непосредственном контакте с
термометрическим устройством любого вида может служить
моделью обонятельного эпителия. Сходство модели с оригиналом еще болыше увеличивается, если используемое термометрическое устройство преобразует тепловые изменения в электрические.
И все же, как ни значительны
первые успехи в создании
бионических систем обоняния, позволяющих объективно оценивать качество и интенсивность запахов, приборы Дрэвникса,
Монкрифа и других биоников пока еще довольно грубые модели хеморецепции живых существ.
Что же мешает бионикам и инженерам создать
автоматические устройства для восприятия и обработки запаховой информации, которые по своему конструктивному совершенству,
структурной организации, свойствам, количественным характеристикам не уступали бы, а то и соперничали с органами обэняния человека и животных? Здесь очень много
трудностей.
Возьмем, к примеру,
обонятельные
рецепторы
насекомых.
Органы химического чувства этих существ, воспринимающие
запахи и вкусовые раздражения — это расположенные
около
рта антенны и щупики, густо усеянные микроскопически малыми волосками, величиной в тысячные или сотые доли миллиметра. У одной только падальной мухи на усиках насчиты-
78
Бионика
храни»
вается
более
3500
хеморецепторов,
рабочей пчелы — около 12 000.
у оводов
— более
Если учесть
размеры
6000,
у
антеннки-
усика, на которой расположены и рецепторные клетки, и нервные сети для проведения и обработки запаховой информации,
то легко представить себе те трудности, которые
испытывает
бионик, пытающийся разобраться в устройстве обонятельного
аппарата насекомых и смоделировать его.
Главная же трудность в моделировании созданных природой органов обоняния заключается в том, что для
ученых до
сих пор остается многое неясно в химии
и физике
запахов.
Никто пока не может объяснить, почему одни вещества обла&дают сильнейшим запахом, а другие не пахнут, почему одни
запахи приятны, а другие отвратительны. Единой точки зрения
на сей счет нет, даже нет меры, которой можно было бы измерять силу запаха так, как мы измеряем силу звука, освещенность или температуру. Не зная, что такое запах, «изучение
физиологических механизмов обоняния, — как пишет Р. Бертон, — можно сравнить с попыткой выяснить, как работает та
или иная часть автомобильного мотора, не зная, для чего она
служит или где ее место»"'.
В разное время было высказано более 30 предположений,
объясняющих механизм обоняния. Все они сводятся в основном
к трем гипотезам. Согласно первой, химической, процесс обоняния связывается с некоторыми химическими процессами, опоеделяемыми структурой пахучих веществ и некоторыми другими их свойствами. Особое значение придается ненасыщенности химических соединений, растворимости в воде и липоидах,
наличию остаточного состава. По второй гипотезе, колебательной, молекулы пахучих веществ излучают электромагнитные
волны
в инфракоасной
части
спектра:
кванты
инфракрасного.
излучения воздействуют на молекулы обонятельного пигмента,
вызывая их перестройку и появление нервного сигнала. Таким
образом, каждое вещество характеризуется особым типом коле-.
баний, и поэтому химические вещества со сходными колебаниями должны иметь очень похожие
запахи.
Согласно третьей:
стереохимической гипотезе, молекулы пахучих веществ взаимодействуют с нервными клетками органов обоняния по принципу «ключа» и «замка» т. е. ощущение запаха вызывается формой и размером молекул, причем сами молекулы входят в соответствующие «лунки» нервных окончаний, как ключ в замок
(цвет. табл. 2). Каждая из этих бегло и упрощенно изложенных
гипотез в той или иной мере экспериментально подтверждается,
в той или иной степени приближает нас к пониманию хеморепепции, но ни одна из них все же не дает исчерпывающих объяснений природы запахов, физиологических механизмов обоняния.
' Бертон Р.
Чувства животных.
М., «Мир»,
1972, с. 138.
Мир
ощущений
79
Проблему запахов академик И. П. Павлов называл «одной
из наиболее сложных в физиологии». И сегодня в ней больше
вопросов, чем ответов. Древнейшее и важнейшее чувство — чувство обоняния — по-прежнему остается полным загадок. И все
же специалисты, работающие в области ольфатроники (науки о
запахах), уверены, что со временем бионики, биологи, физиологи, химики и электронщики не только сумеют общими усилиями воспроизвести в металле, электронных
схемах
созданные
природой высокосовершенные обонятельные анализаторы, но
и превзойдут их по многим параметрам.
Не менее оптимистически настроены в возможностях успешного соревнования с природой и многие ученые, работающие
над созданием квазиосязательных систем, обладающих свойствами человеческой руки. Уже построено несколько
моделей
квазиосязательных персептронов для опознавания формы объекта. Эти персептроны похожи на квазизрительные и отличаются от них лишь рецепторным устройством, которое за счет
механического соприкосновения с распознаваемым предметом
получает необходимую информацию о его форме, объеме. Общеизвестна разработанная в 1958 г. советскими учеными
«биоэлектрическая рука» — протез, управляемый с помощью биотоков мышц. Сегодня — это промышленное изделие. Накопленный специалистами в течение последних пятнадцати лет огромный опыт по усовершенствованию
этой
уникальной системы
позволяет надеяться, что недалеко то время, когда будут созданы квазиосязательные устройства, могущие
не только распознавать форму и объем предмета, но и чувствовать его температуру, твердость, четко различать горячее и холодное, влажное и
сухое, гладкое и шероховатое. Такие квазиосязательные персептроны, снабженные механическими руками — манипуляторами, в комплексе с ЭВМ смогут работать по любой заданной
программе. Они найдут широкое применение во многих отраслях промышленности, на самых различных операциях, начиная с сортировки и штабелирования заготовок различных деталей, упаковки готовых изделий до перезарядки атомных реакторов.
Итак, на наших глазах рождаются машины, которые с оговорками, можно уже назвать
«видящими»,
«слышащими»,
«обоняющими» и «осязающими» в привычном понимании этих
слов. Достигнутые учеными первые успехи в создании различного рода квазиопознавательных систем, естественно, не могли
не привлечь внимания писателей. Их фантазия начала изобретать «человеческие существа», в силу стечения некоторых обстоятельств наделенные особыми органами чувств. Так, например, один итальянский романист описал приключения «человека», глаза которого вместо световых волн
воспринимают
электрические разряды. Его зрительный мир стал совсем иным,
80
Бионика
чем наш. На страницах одного французского журнала появился рассказ, герой которого после сотрясения мозга не может
уже видеть обычный свет, а воспринимает лишь колебания, соответствующие рентгеновским лучам.
Некоторые фантасты идут дальше. Они создают искусственные существа, обладающие целым набором самых высокочувствительных природных сенсорных систем. Один из таких «бионических Фантомасов», появившийся на страницах научно-популярных журналов, изображен
на
цветной
таблице 6. Нос
собаки позволяет Фантомасу распознавать сотни тысяч запахов.
Перистые усики бабочки дают ему возможность обнаруживать
присутствие пахучего вещества даже в том случае, когда его в
воздухе всего лишь несколько молекул.
А если подует ветер? Тогда сверхчувствительное существо
может воспользоваться усиком мотылька. Его антенна воспринимает тепловые лучи инфракрасной части электромагнитного
спектра
— Фантомас может за несколько километров обнаружить появление человека или другого живого существа. Фасеточный глаз пчелы позволяет ему улавливать ультрафиолетовые волны и легко ориентироваться в пространстве в любую
погоду, когда солнце плотно закрыто тучами. Второй глаз Фантомаса орлиный. В его сетчатке три желтых пятна. Он позволяет своему владельцу смотреть сразу в трех направлениях, видеть небольшие предметы на расстоянии нескольких километров. Уши летучей мыши в сочетании с голосовыми
связками,
способными испускать
и обычные, слышимые, и ультразвуки,
помогают Фантомасу ориентироваться в полной темноте, обнаруживать летящих птиц, насекомых и даже рыб, плавающих
вблизи поверхности воды. Благодаря электролокатору мормируса сам Фантомас в воде неуловим, его нельзя застать врасплох.
А как относятся ученые к созданию не фантастических, а
реальных систем, обладающих комплексом тех или иных органов чувств, близких к природным? Да и нужны ли нам такие
сложные бионические системы с несколькими одновременно работающими высокочувствительными анализаторами,
такими,
например, как зрительный, слуховой, обонятельный, осязательный и др.?
Да, такие системы нужны. В ходе современной научно-технической революции задачей первостепенной важности является создание системы машин автоматического действия, могущих облегчить тяжелый физический труд людей, освободить
человека от выполнения однообразных, утомительных, порой
небезопасных для здоровья операций, способных на ходу отремонтировать домну, огнедышащую мартеновскую печь, химический реактор, могущих автономно выполнять сложные функции на самых больших глубинах Мирового океана, в космическом пространстве, на поверхности
планет, находящихся на
Мир
81
ощущений
расстоянии миллионов километров от Земли. Речь идет не просто о замене человека автоматом на самых трудоемких и опасных работах, а о создании технических систем, которые бы во
всех случаях функционировали даже более надежно, чем человек. Разумеется, такие системы не могут быть слепыми и
глухими. Они должны обладать в зависимости от возложенных
задач, вида и условий выполняемой работы, соответствующим
комплексом искусственных органов чувств, устройствами для
оценки ситуаций и принятия самостоятельных решений. Наиболее перспективным направлением решения этой задачи является создание машин, которые называются по-разному: автооператорами, киборгами, промышленными роботами и просто
роботами.
В настоящее время в СССР, США, Норвегии,
Великобритании, Японии, ФРГ, Франции и других странах действуют свыше 3000 машин автоматического действия самых
различных
типов и размеров. Не зная усталости, они работают у конвейеров, собирают автомобили,
окрашивают шасси и т. д. В СССР
создан
опытный
полупромышленный
образец
робота
для
штамповки деталей.
В Ленинградском
технологическом институте холодильной
промышленности сконструирован манипулятор для складов-холодильников.
Однако
все
эти
автономные, до предела специализированные системы, именуемые
первым поколением роботов, довольно примитивны: они способны
лишь
брать
и перемещать
в нужном
направлении
определенные предметы. Лишенные чувств, роботы первого поколения строго подчиняются заложенной в них программе: все
ответы автомата на информацию, поступающую от датчиков,
записаны на пленку мини-кассет. Автомат
не может на йоту
отойти от программы.
Но сейчас уже создаются роботы второго поколения — настоящие механические «рабочие». В японском городе Иокогаме
уже действует робот-пожарный. Это аппарат длиной 1,8 м, массой 600 кг. Он снабжен
телевизионной камерой, устройством
для определения присутствия газа, может самостоятельно перемещаться, снабжен двумя огнетушителями. Автомат поднимает тревогу, когда не видно и даже еще не пахнет дымом, он
первым направляется к очагу пожара, проникает на те участки,
где человеку угрожает гибель.
В Ленинградском институте авиационного приборостроения
под руководством профессора
М. Б. Игнатьева создан
опытный образец робота с клешней-схватом, способного выполнять
функции
термиста.
Система
работает
предельно
четко.
Авто-
мат протягивает клешню-схват в нагревательную печь, нащупывает раскаленную деталь, берет ее точно посередине, осторожно вынимает и, минуя окружащие предметы, опускает в рядом
стоящую ванну с маслом. И так — без устали, без передышки.
4—327
82
Автомат
другой
Бионика
не
смущает,
конфигурации,
если
другой
в печи
массы
он
(для
обнаруживает
обычного,
детали
механиче-
ского автомата это — неразрешимая проблема). Сведения о возможных изменениях условий труда заложены в память робота,
т.е. в ЭВМ, и он гибко меняет свое поведение. Для этого у него
есть все возможности. В его клешне-схвате расположены четыре фотоглаза, с помощью которых робот «видит» деталь и на
расстоянии, и в непосредственной близости. Рабочие поверхности клешни-схвата имеют органы осязания — тактильные датчики. Суставы чувствуют и углы поворота различных элементов «руки» (а всего она имеет восемь степеней свободы), и усилия, которые приходится прилагать гидравлическим мускулам
во время работы. Чтобы было ясно, сколь сложна и чувствительна эта металлическая рука, достаточно сказать, что в ЭВМ
непрерывно поступают
и перерабатываются сигналы восьмидесяти разнообразных датчиков. Но и такого потока информации оказывается мало для робота. Сейчас ученые и конструкторы института хотят одеть металлическую руку особой «кожей»,
которая, как и человеческая, будет информировать о соприкосновении с предметами (это необходимо для безопасности и самого робота, и всего того, что находится вокруг, — оборудования,
конструкций, людей). Такая механическая рука способна овладеть профессиями сварщика, штамповщика, маляра,
пескоструйщика, грузчика; она может сверлить отверстия, навинчивать гайки и т. п.
Отдельные роботы второго поколения уже наделены некоторой самостоятельностью — они могут «импровизировать». Эта
коренная перемена — первая попытка перейти от закрепленного «рефлекса»
к «разуму», точнее, к «симуляции разума».
Один из таких самых умных роботов в мире создан в Школе
искусственного разума в Эдинбурге (Великобритания). Его зовут
Фред. С первого взгляда это какое-то подобие гигантских щипцов, смонтированных на двигателе. У него два глаза — две телевизионные камеры: одна — над двигателем, другая — под
ним. Место работы автомата — площадка 3Ж2 м. На ней в
полнейшем беспорядке разбросаны детали детского конструктора. Задача Фреда — подобрать необходимые детали и собрать
из них игрушечный грузовик. Включив ЭВМ, можно увидеть,
как Фред одну за другой находит детали, складывает их в нужном порядке на участке площадки, затем методично собирает
их и вскоре ставит грузовик на колеса. Фазы монтажа запрограммированы, но в остальном автомат должен «соображать»
сам, т. е. узнавать детали, определять их назначение и т. д.
По
прогнозам
ученых,
к
1980г.
будут
трудиться
до
60000 роботов первого и второго поколений, с двумя или четырьмя руками. К, концу 80-х годов ожидается появление роботов третьего поколения с искусственной мускулатурой и с ру-
Мир ощущений
83
ками, почти такими же подвижными и ловкими, как у человека. Роботы будут снабжены искусственными органами чувств,
чтобы видеть, слышать, обонять, осязать. Роботы научатся не
только узнавать человеческий голос, но и воспроизводить его.
Возможно, их наделят даже рефлексами. Кроме того, у роботов
появятся «чувства», отсутствующие у человека, но свойственные животным. Так, они смогут реагировать на магнитные поля, ультразвуковые колебакия, радиоактивность.
Появятся роботы и для дома. Прообраз такого робота уже
разрабатывают в лаборатории, руководимой английским ученым, профессором М. Трингом. Как будет выглядеть этот идеальный автомат завтрашнего
дня,
что
он
сможет
делать?
Рост — 1 м, сверху — единственная, но складывающаяся рука.
Ее радиус действия по горизонтали до 3 м. Она может перемещать предметы до 40 кг. У робота два «чувства» — зрение и
осязание. Он будет накрывать на стол и убирать с него, загружать посудомойку,
приготавливать
постель,
производить в
квартире уборку — от стирания пыли с фарфоровой вазы до
чистки ванны и раковины; он сможет стирать, сушить и гладить белье, чистить овощи...
Чересчур смелые предположения? Ничуть. Ученые СССР,
США, Японии, Великобритании и других развитых стран накопили значительный
опыт в создании и совершенствовании
роботов различного
назначения.
Прогресс
наблюдается во
всем: в электронике с ее новыми интегральными
схемами (в
тысячи раз миниатюрнее дискретных приборов); в создании и
применении лазеров, чьи удивительные возможности еще только начинают использоваться и которые играют
все большую
роль в запоминающих устройствах ЭВМ и в «зрении» роботов;
наконец, в более углубленном познании строения и функционирования органов чувств и отдельных «деталей» тела человека,
которые пытаются воспроизвести в машинах автоматического
действия. Иными словами, уровень развития науки и техники
сейчас таков, что создание разумных роботов, гибко приспосабливающихся к непрерывно изменяющимся задачам и условиям производства, требованиям нашего быта, уже перестало
быть фантастикой. В ближайшие годы появятся тысячи, десятки тысяч новых, высокосовершенных роботов. Они встанут у
станков, машин, конвейеров,
войдут
в нашу повседневную
жизнь, чтобы сберечь силы человека для более квалифицированной, производительной, творческой работы.
Пока мы еще не в силах создать подлинный синтез, всеобъемлющую имитацию поведения человека. Но
мы
вправе надеяться, что когда-нибудь техника добьется этого, если бионика
и кибернетика смогут описать его поведение во всех тонкостях.
А бионика и кибернетика объединяют самую безумную часть
электроники с самой безумной частью биологии.
4*
Локаторы
природы
К востоку от Перу, в Венесуэле и Гвиане, расположенной на севере Южной Америки, а также на острове Тринидад обитает
множество жиряков, или масляных птиц (З{еа{огп!5). Местные
жители называют их козодоями гвачаро
(гуакаро, гуахаро).
Эти птицы очень похожи на ястребов; размах их крыльев немного менее метра. Они шоколадно-коричневого цвета с множеством крупных белых пятен; у них крепкий, чуть загнутый на
конце клюв и красноватый отблеск в глазах, видный при свете фонаря. С точки зрения человека, козодои гвачаро живут
предельно скучно. Всей роскоши тропической
природы, всему
разнообразию ее ярких красок, свету солнца они предпочитают
сырую тьму пещер. Здесь 5З{еа{югп!$ отлично приспособились к
жизни. Днем они неподвижно сидят парами на почти отвесных
скалах, как бы прилепившись к ним, а ночью в поисках пищи
перелетают с дерева на дерево, заглатывая сливообразные плоды различных видов пальм, в том числе идущие для промышленного изготовления масел. Когда козодои с наступлением сумерек покидают пещеру, чтобы поужинать тропическими плодами, они издают резкие, отрывистые крики
высокого
тона
с частотой около 7000 гц. После
каждого крика
птица улавливает его отражение
от препятствий.
По
направлению, в
котором приходит эхо, птица
узнает о том, где именно
находится
препятствие,
а время,
прошедшее
между
посылкой
сигнала
и возвращением
эха, указывает ей расстояние до препятетвия.
Таким образом, пользуясь эхолокацией, гвачаро прекрасно
ориентируются в кромешной тьме пещер, где они гнездятся.
Аналогичным образом эхолокацией пользуются обитающие
в районе между Южной Индией
и Австралией очень похожие
на ласточек небольшие птички — стрижи саланганы (CallocaПа). Они строят глубоко в пещерах из собственной вязкой слюны
86
Бионика
чашеобразные гнезда, приклеенные к отвесным каменным стенам. Очень часто салаганы живут в пещерах вместе с летучими
мышами. Вероятно, такая форма сосуществования продиктована стремлением стрижей наиболее рационально решить «жилищную проблему». Днем саланганы питаются летающими насскомыми, а ночью спят в тех уединенных местах, где летучие
мыши проводят дневные часы. На рассвете и при заходе солнца
стрижи и летучие мыши меняются местами: одни спят днем,
«отработав
ночную
смену»,
а другие
уступают
им
места
и улетают «на дневную работу». Используя в принципе тот же
механизм локации, что и козодои, саланганы (в отличие от
последних) издают при полете в темноте пещер щебечущие или
чирикающие звуки частотой 5 —10 сигналов в секунду, которые
воспринимаются человеческим ухом. Эти своеобразные эхолокационные сигналы, по утверждению натуралистов и спелеологов, очень похожи на звуки, издаваемые детской трещоткой при
ее быстром вращении.
Эхолокацией пользуются и некоторые певчие птицы, например кулики. Застигнутые в полете туманом или темнотой, они
«‹ощупывают» своим криком землю. Прислушиваясь к эху, пернатые путешественники узнают о высоте полета, о препятствиях
на их пути.
Сриентируются в пространстве с помощью эхолокации также морские свинки, сумчатые летяги, крысы и другие грызуны.
Интересные опыты с землеройками были поставлены американскими
учеными
в штате
Луизиана.
Эти
зверьки
должны
были
в полной темноте перепрыгивать с большой вращающейся платформы на маленькую неподвижную, расположенную несколько
выше первой. Для этого необходимо было определить положение второй платформы (разумеется, были приняты меры, исключающие всякую возможность ориентации по запаху). Экспериментируя, ученые обнаружили, что во время поиска платформы землеройки издавали ультразвуковые импульсы высокой
частоты (несколько десятков тысяч колебаний в секунду) продолжительностью г *1есколько тысячных
долей секунды. Животные почти всегда прекрасно выдерживали экзамен, перепрыгивая на маленькую неподвижную платформу,
чтобы отдохнуть от вращения.
Итак, эхолокация получила очень широкое распространение
в живой природе как для обнаружения различных препятствий, так и для поиска пищи. Давайте же, читатель, вместе пройдемся по лабораториям старейшего в мире «локационного института» природы, заглянем в его «мастерские»,
«патентную
библиотеку», «конструкторские бюро» и выясним, что можно
здесь позаимствовать для дальнейшего развития локационной
техники, созданной за последние 30—35 лет учеными и инже:
нерами разных стран.
Локаторы
природы
87
Длительное время казалась весьма загадочной способность
летучих мышей летать в абсолютной темноте,
их виртуозное
умение ловить на ходу между деревьями, между мелкими ветвями крохотных комаров, бабочек, жуков, поденок и других насекомых, не натыкаясь на встречные препятствия. В 1793 г. выдающийся итальянский ученый натуралист Ладзаро Спалланцани проделал такой опыт: ослепил
небольшого
нетопыря и
выпустил его в темную лабораторию. Результат эксперимента
оказался поразительным: ослепленная летучая мышь летала по
комнате так же свободно, как и зрячая, не задевая ни одного из
хитро расставленных в лаборатории предметов. Через некоторое
время ученый лишил зрения нескольких летучих мышей и выпустил их на волю.
Желая выяснить, сохранили ли они способность продолжать
свою обычную жизнь, Спалланцани на пятый день взобрался
на верхушку колокольни собора в Павии (где ранее жили подопытные животные), поймал четырех ослепленных им нетопырей и произвел вскрытие. При этом было установлено, что слепота ничуть не мешала им на лету настигать добычу — желудки ослепленных летучих мышей были набиты остатками насекомых так же туго, как и у зрячих экземпляров. Значит, шестое чувство помогает нетопырям
хорошо ориентироваться и
маневрировать в темноте, обнаруживать и ловить без промаха
в воздухе насекомых! Опыты Спалланцани повторили в Швейцарии. Однако в этих экспериментах были заткнуты ватой уши
летучих мышей, и животные стали натыкаться на все встречавшиеся при полете преграды.
Узнав об экспериментах швейцарского коллеги (Ш. Жюрина), Ладзаро Спалланцани решил проверить их. Многочисленными опытами, отличавшимися
точностью,
изобретательностью и разнообразием, Спалланцани установил, что нарушение
деятельности таких органов чувств, как зрение, осязание, обоняние и вкус, никакого влияния на полет летучих мышей не
оказывает. Лишь при закрывании рта или ушей они теряют
способность к ориентации. Однако эти важнейшие открытия,
сделанные на рубеже ХУШ и ХХ вв., не были поняты современниками ученого; более того, они были высмеяны, отвергнуты, а затем почти совсем забыты. Досужие критики выдвинули
получившую широкое распространение гипотезу, согласно которой летучие мыши обладают неким тонким чувством осязания, органы которого, вероятно, расположены
в перепонках
крыльев, благодаря чему они и обнаруживают препятствия на
расстоянии и избегают столкновений с ними (цвет. табл. 5).
Полтора века спустя решением так называемой «спалланцаниевой проблемы летучих мышей» занялись три американца —
Г. Пирс, Д. Гриффин и Р. Галамбос. Экспериментируя с летучими мышами, они плотно закупоривали им воском рот или нос.
88
Бионика
И в этом и в другом случае выпущенные
в темноту
комнаты летучие мыши совершенно теряли способность обнаруживать как большие, так и малые
предметы, натыкались
на
стены и на любые другие препятствия, расставленные на пути
их полета.
Теперь главный секрет ориентации летучих мышей можно
считать раскрытым: они обладают поразительными по своему
совершенству органами ультразвуковой локации, заявили ученые. И действительно, точная электронная аппаратура позволила исследователям установить, что летучие мыши испускают
неслышимые для человека
ультразвуки и воспринимают их
эхо, которое в полной темноте предупреждает о препятствиях
или близкой добыче.
Испуская и улавливая
ультразвуковые
волны,
летучая
мышь как бы ощупывает окружающее пространство. Своеобразный локатор помогает ей не только определять направление и
расстояние до предметов, но и различать их между собой.
Изумительное мастерство в использовании ультразвуковых
волн для получения сложных сведений об окружающем пространстве летучие мыши, разумеется, приобрели не сразу. Они обрели его в процессе длительной эволюции и прежде всего потому, что звук является удобным, если не единственным, способом ориентировки в тех условиях, в которых
им приходится
жить и перемещаться.
Каковы же конструкция и режим работы природного локатора летучей мыши? Оказывается, ее гортань устроена наподобие обычного свистка. Через этот «свисток» зверек выдыхает из
легких воздух с такой силой, что он вырывается наружу, словно выброшенный взрывом. Вихрем проносясь
через гортань,
воздух рождает
звук
очень
высокой
частоты — от 50 до
100 кги. Летучая мышь летает с открытым ртом, который служит рупором для испускаемых ею ультразвуковых
сигналов
(а рупор, как известно, заставляет звуковое излучение распространяться преимущественно в одном направлении, в данном
случае — в направлении полета).
Вполне естественно, что для целей локации летучие мыши
используют ультразвук, а не низкочастотные колебания, воспринимаемые человеческим ухом. Дело здесь в том, что размеры предметов, которые еще удается обнаружить
с помощью
эхолокации, зависят от длины звуковой волны. От предмета,
линейные размеры которого значительно больше длины волны,
звук, собранный рупором в пучок, отражается
примерно так
же, как световой луч, падающий на зеркальную поверхность.
В этом случае эхо, улавливаемое ушами летучей мыши, получается сильным: зверек хорошо «слышит» предмет.
Если размеры отражающего объекта равны или меньше длины волны, наблюдаются вторичные, дифрагированные волны,
Локаторы
природы
89
распространяющиеся во всех направлениях от малого объекта.
Энергия отраженной таким образом волны, улавливаемая ушной раковиной летучей мыши, становится значительно меньше
и, следовательно, различить малый предмет оказывается гораздо сложнее.
Аналогичным условиям должен удовлетворять рупор для
собирания излучения в узкий пучок: когда
длина звуковой
волны больше диаметра устья рупора, звук фокусируется очень
слабо или совсем не фокусируется. Локатор летучей мыши, работающий на частоте 100 кгц, излучает ультразвуковые волны
длиной 3,3 мм, которые ей очень легко удается сфокусировать
открытым ртом. Эксперименты Д. Гриффина показывают, что
чувствительность «приемника» локатора летучей мыши — ее
ушей, — настолько высока, что позволяет животному обнаруживать ячейки в металлической
сетке из натянутых
параллельно друг другу проволок диаметром 0,12 мм.
Расстояние
между проволоками в опытах составляло 30 см, т. е. немного
превышало размах крыльев летучей мыши; тем не менее зверьки пролетали сквозь сетку, не задевая ее, до тех пор, пока диаметр проволок не становился меньше 0,12 мм.
В 1946 г. советский ученый Е. Я. Пумпер высказал очень интересное предположение, хорошо объясняющее физиологическую природу эхолокации летучих мышей. По его гипотезе, летучая мышь издает каждый последующий
ультразуковой импульс сразу же после того, как воспринимает эхо предыдущего.
Принятый после отражения сигнал является раздражителем,
вызывающим посылку следующего
зондирующего
импульса.
Таким образом, быстрые изменения обстановки, близость препятствия, необходимость схватить порхающую под носом бабочку вызывают быстрое
нарастание
частоты
следования импульсов.
И действительно, в дальнейшем эксперименты показали, что
летучая мышь перед стартом издает в секунду лишь 5— 10 сигналов. В полете по прямой не слишком близко от непосредственно интересующих его объектов зверек учащает подачу ультразвуковых импульсов до 20—30 в секунду. Однако, как только
он приближается к препятствию, число сигналов резко возрастает. Во время охоты на ночных насекомых летучая мышь, настигая добычу, издает до 250 сигналов в секунду.
Интересно, что чувствительный «приемник» летучей мыши
(ее уши) «выключается» на то время, в течение которого она
«выдыхает» ультразвуковой импульс.
Вероятно,
чуткие уши
животного
могут
повреждаться «ультразвуковым грохотом»,
который производит его передатчик — гортань.
Как
летучие
мыши
ухитряются расслышать сравнительно
негромкое эхо
в том оглушительном ультразвуковом
гаме, который
они сами порождают? Как они не глохнут? Поиском
ответа
на эти
90
Бионика
вопросы
длительное
время занимался
доктор
О. Хенсон —
анатом Иельского университета. Ему удалось доказать правоту
своего предположения, высказаного
лет
двадцать назад.
Оказывается,
у летучих мышей есть мышцы,
закрывающие
уши в момент испускания
разведывательных ультразвуковых
сигналов.
Человек, знакомый с техникой радиолокации, обратит внимание на это обстоятельство, ведь закрывающееся среднее ухо
представляет собой не что иное, как биологический эквивалент
антенного переключателя. Это устройство отключает приемник
радиолокатора на время излучения антенной мощного зондирующего импульса, который может мгновенно вывести приемник из строя. Безопасность ушей у рукокрылых животных гарантируется совершенством избранной
механической
конструкции: при максимальной частоте следования зондирующих
импульсов, равной 250 ги, заслонка в ухе летучей мыши успевает открываться и закрываться 500 раз в секунду. При этом
открывание заслонки должно длиться менее 1 мсек. Менее потому, что, как показали исследования, длительность самих импульсов при такой частоте их повторения составляет около
1 мсек.
Эта характеристика
излучения — длительность
импульсов — определяет точность эхолокации и, стало быть, способность летучей мыши ориентироваться в полете. Чем короче импульсы, тем шире возможности «природного локатора».
В самом деле, для того чтобы при помощи эха можно было
определять расстояние до предмета, интервалы между импульсами должны превышать то время, в течение которого звук может долететь до предмета и вернуться обратно. Если они оказываются короче этого времени, то обнаружение предмета становится весьма затруднительным. Вот пример: за 1 мсек (считая
от начала импульса) звук успевает «пробежать» 33 см. Это значит, что уже через 1 мсек в приемник начнет поступать сигнал,
отразившийся от предмета, который находится на расстоянии
16,5 см от пасти зверька. Если звуковая посылка длится более
1] мсек, то эхо от предметов, расположенных ближе 16 см, будет
заглушаться основным, зондирующим импульсом;
если же
принять во внимание, что на время посылки импульса уши животного «выключаются», то станет ясно, что летучая мышь попросту не сможет «поймать» начало отраженного
импульса.
А ведь промежуток времени между началом посылки импульса
и началом приема отраженного импульса позволяет достоверно определять расстояние до ближайшей «цели». Поэтому для
успешного определения положения близких целей импульсы
должны иметь минимально возможную длительность (1 мсек),
а переключение локатора «на прием» должно осуществляться
за время, меньшее длительности импульса (менее 1 мсек).
Локаторы
природы
91
Следовательно, летучие мыши не могут определять положение насекомых или препятствий,
которые
находятся ближе
16 см, и, стало быть, должны или умереть голодной
смертью,
или разбиться в первом же полете. С ними действительно иногда происходят несчастные случаи, имеющие разные по степени
тяжести последствия. Натуралисты знают, например, что если
у входа в убежище нетопырей положить камень побольше, то
они
будут
регулярно
разбивать об него свои носы. Описаны
также столкновения (со смертельными
исходами)
двух летучих
мышей,
занятых
объяснить.
Всем известно,
ми.
Гоняясь
за
как
своей
охотой.
Эти
летучие
мыши
наблюдения
ускользающей
охотятся
добычей,
было
за
трудно
насекомы-
они
маневри-
руют, проделывая мгновенные повороты и другие акробатические трюки, и в конце концов ловят на лету порхающих в
неправильном полете мелких ночных бабочек, летающих жуков и комаров. Летучие мыши с исправными локаторами всегда
сыты и доживают до глубокой старости. А несчастные случаи?
Бывают. Но только тогда, когда локатор не работает. Недавно
было установлено, что для приземления летучие мыши почти
не пользуются локатором, так как они уверены, что спускаются
в нужное место. Потому они натыкаются при возвращении в
гнездо на камень у входа, которого не было при их вылете. По
той же причине происходят их столкновения в воздухе во время охоты: когда летучая мышь хватает свою жертву, она лишается возможности пользоваться локатором. Если пережевыванием заняты одновременно две летучие мыши, локаторы которых в это время не работают, а скорость полета составляет
4 м/сек, то вполне понятно, что возникает некоторая опасность
столкновения.
Ну, а как обстоит дело с определением положения и преследованием целей, расстояние до которых не превышает 16 см?
Ведь летучая мышь гоняется за насекомым до тех пор, пока ей
не удастся его поймать, причем от момента обнаружения и до
момента «поражения цели» преследование имеет активный характер: в каждый момент времени летучая мышь знает, где
находится жертва, и в соответствии с этим изменяет направление своего полета. Значит, локатор летучей мыши оказывается
эффективным
вплоть
до
того
момента,
когда
она
настигает
и
хватает добычу (цвет. табл. 5).
Работа локатора летучей мыши в режиме
обнаружения и
сопровождения близких целей до сих пор не вполне ясна. Предполагают, что способность летучей мыши «видеть» то, что делается у нее под носом, связана с частотной модуляцией зондирующих импульсов ее локатора. Каждый импульс начинается
с очень высокой частоты, а заканчивается на вдвое меньшей
(падает на целую октаву). Нетопыри, например, начинают им-
92
Бионика
пульс с частоты около 100 кги и заканчивают его на частоте
45 кги. При длительности сигнала в 1 мсек изменение частоты
оказывается очень быстрым. За этот короткий промежуток времени звук пробегает диапазон, вдвое превышающий
область
слышимых человеком частот.
Когда летучая мышь настигает добычу или приближается к
препятствию (цвет. табл. 5, справа), энергия испускаемых ею
зондирующих сигналов уменьшается и при расстояниях, меньших 16 см, вероятно, становится безопасной для приемника.
Если предположить, что после достижения безопасного уровня и вплоть до момента поимки добычи уши летучей мыши перестают «отключаться» на время работы передатчика, то становится понятной эффективность работы локатора на близких
расстояниях. В самом деле, пусть частота испускаемого летучей
мышью крика убывает пропорционально времени (от момента
начала крика). Тогда если за 1 мсек частота линейно падает от
100 до 45 кгц, то скорость ее убывания составляет 55 кгц/мсек.
Отсюда следует, что, например, через 0,1 мсек после начала импульса его частота составляет уже не 100, а 94,5 кагц. К, этому
же времени приемник летучей мыши ловит отразившийся от
цели импульс с начальной частотой 100 кги. Таким образом, в
этот момент на звуковой анализатор животного одновременно
действует сильный сигнал с частотой 94,5 кгц (зондирующий
импульс) и сравнительно слыбый сигнал с частотой 100 кгц
(импульс, отразившийся от цели). По-видимому, летучая мышь
способна выделить из шума, создаваемого работающим передатчиком, слабый полезный сигнал с частотой 100 кги; по задержке сигнала относительно начала зондирующего импульса
и определяется расстояние до «цели». В данном
случае
при
задержке на 0,1 мсек цель, как легко
сообразить,
находится
на расстоянии
1,6 см от уха
животного.
Этот
локатор
успешно справляется не только с помехами от собственного передатчика.
Гоняясь за насекомыми, летучие мыши воспринимают
60лее сложную «смесь» звуков, чем исходный сигнал и одиночное
эхо от данного насекомого. В эту «смесь»
входят эхо
от всех
объектов, расположенных на расстоянии в несколько метров:
от поверхности земли, от стен пещеры, от каждого куста, ветки,
листа, травинки. Многие объекты дают лишь
слабое эхо, но
ведь и эхо от насекомого тоже имеет малую интенсивность.
И если летучая мышь его слышит, то она должна также воспринимать и все остальные эхо. Кроме того, летучие мыши
почти никогда не охотятся в одиночку. Например, в Бракенской
пещере, расположенной на юге СТЛА, обитает свыше 20 000 000
летучих мышей. Каждый вечер это огромное количество рукокрылых покидает свое убежище, чтобы снова вернуться в него
утром.
Локаторы
природы
93
Во
время
охоты
за ночными насекомыми у всех летучих
мышей работают локаторы. При этом зверьки не сталкиваются
и не мешают друг другу. Понятно, что в таких условиях задача
выделения полезного сигнала из ералаша звуков оказывается
чрезвычайно сложной. И тем не менее нетопырям она вполне
по силам.
Способность ушей летучей мыши «отстраиваться» от сигналов, которые не представляют для нее интереса, — свойство величайшей ценности.
Хорошо известно, что выделение полезного сигнала на фоне
естественных и искусственных помех — одна из старейших и
важнейших проблем техники, с которой мы сталкиваемся в
очень многих ее областях. Над решением этой задачи ученые и
инженеры бьются с тех пор, как начало развиваться радиовещание. Были придуманы резонансные контуры с высокой добротностью, узкополосные усилители,
схемы
автоматической
подстройки частоты и фазы, специальные
виды
модуляции,
обеспечивающие защиту
передаваемого
сигнала от помех,
и т. д. Но по мере усложнения задач радиосвязи проблема каждый раз встает с прежней остротой.
Приемник летучей мыши хорошо выделяет из шума звуковые, но не радиосигналы. Расстояния, на которых эффективно работает такой локатор, очень малы. Но, быть может, неизвестный пока принцип, обеспечивающий высочайшую избирательность
приемника
нетопыря,
удастся
использовать
в
устройствах сверхдальней космической связи. И уж наверноеон
сможет оказаться полезным при конструировании защиты от
помех во многих приемных устройствах. Во всяком случае, сейчас, когда в эфире работает огромное количество станций, порой мешающих друг другу, отличные «мышиные» принципы
отбора собственных сигналов привлекают самое
пристальное
внимание биоников, инженеров и физиков.
Предполагают, что летучим мышам удается различать эхо
от нескольких предметов по величине частотного сдвига, возникающего в результате сложения
непрерывно
изменяющейся
частоты зондирующих импульсов и частоты эха (рис. 13). Сложение излучаемых импульсов, промодулированных по частоте,
и отраженных сигналов дает сигналы разностной частоты A f,
которая пропорциональна
расстоянию до объекта.
Длительность сигналов разностной частоты также является функцией
расстояния. Эта гипотеза никак не объясняет удивительную помехозащищенность локатора летучей мыши. А между тем известно, что ее приемник обнаруживает полезный сигнал даже в
том случае, если помехи на 30 децибел (более чем в 30 раз) превышают уровень сигнала!
Поразительными по своему совершенству органами ультразвуковой эхолокации обладают, как установили ученые, тропи-
94
Бионика
ческие летучие мыши-рыболовы (рис. 14). Они летают у самой
поверхности воды и, окуная в нее время от времени острые когти своих лапок, ухитряются ловить мелкую рыбешку. Ловя таким образом рыбу в темные ночи, эти зверьки издают ряд быстро повторяющихся сигналов, которые очень похожи на сигналы
их насекомоядных родичей. Поскольку тело рыбы содержит
больше 90% воды, оно почти не отражает подводные звуки, но
наполненный воздухом плавательный пузырь представляет собой «непрозрачный» для звука экран. Ультразвук, пробив толщу воды, отражается от плавательного пузыря рыбешки, и его
эхо возвращается к рыболову.
Может показаться, что рыбная ловля с помощью звуколокатора нисколько не сложнее или даже проще, чем охота на быстрых, беспорядочно летающих в воздухе насекомых. На самом
деле это не так. Требования к локаторам у летучих мышей-рыболовов и летучих мышей-охотниц несколько отличаются друг
от друга.
Известно, что при падении звука под прямым углом из воз-
духа
на поверхность воды
только 0,12%
его энергии распрост-
раняется в виде звуковых колебаний. Остальная энергия отражается от границы раздела обеих сред. Такая же малая доля
энергии звуковых волн, распространяющихся в воде, проходит
Часть
частотно-
it ae
модульного
импульса
—
НасекомоеА
Рис. 13. Определение летучей
(по П. Т. Асташенкову).
мышью
расстояния
до
объекта
(насекомого)
Локаторы
природы
95
из воды в воздух. Это значит, что от зондирующих импульсов
летучей
мыши
после
падения на поверхность воды из воздуха, распространения в воде,
отражения
от рыбы
и возвращения к приемнику мыши-рыболова остается
доля,
равная
(0,0012)? = 1,44. 10-5, т. е.
эти
импульсы
ослабевают
почти в
миллион раз!
Кроме того, неизбежны и другие потери: лишь малая доля
энергии звука отражается от тела рыбы и очень незначительная ее часть после выхода из воды попадает
в уши летучей
мыши. Интересно отметить, что примерная
оценка затухания
звука при локации насекомого на расстоянии 2 м показывает,
что слуховой аппарат летучих мышей способен воспринимать
эхо столь же слабое, как и эхо при отражении от мелких рыбок, добываемых их собратьями-рыболовами.
Значит, летучая мышь судит об окружающей обстановке по
отраженным сигналам своего локатора, которые иногда возвращаются к ней ослабленными во много миллионов раз. Интересно,
что
существуют
летучие
мыши
(подковоносы),
исполь-
зующие для ориентировки
именно
этот
признак
отраженного
сигнала
(величину
его ослабления),
и по
затуха
нию,
а не по задержке
отраженного импульса
они опреде
ляют расстояния.
Таким
образом,
слуховой
аппарат летучих мышей — это
не просто
анализатор,
обладающий высокой чувствительностью. Органы
их эхолокации
настолько
совершенны,
что
говорить
просто о слухе
здесь не приходится. Мы вправе говорить о качественном отличии слухового аппарата летучих мышей от соответствующих органов чувств других
животных, об ультразвуковом
«видении». Ведь органы
звуколокации
достигают
наибольшего совершенства именно у тех рукокрылых, которые
обладают очень
плохим
зрением, почти слепы, и поэтому
у них совсем иное
соотноше===
ние слуховых
и зрительных
центрсв.
Так,
летучую
мышь
Рис.
должна
ной
a
Тропическая
летучая
неринтезатрудняет
полет в лаби- имшерьболов
определяетлокационмае
из тонких проволочек,
помощью
природной
хотя
при
этом
она
системы.
96
Бионика
иметь представление об их взаимном расположении. По существу, это и есть видение. Приспосабливая рукокрылых к ночному образу жизни, природа так «устроила» этих животных, что
сто раз услышать для них несравненно лучше, чем для нас, например, сто раз увидеть.
Благодаря выполненным за последнее время работам мы можем сегодня уже говорить языком цифр
о ряде важнейших технических показателей локационного аппарата летучих мышей
и сравнивать их с основными параметрами аналогичных систем, созданных человеком. Путем
сопоставления мы можем
также установить, в чем биологическая система
превосходит
технические, какова ее эффективность. Правда, здесь
могут
возникнуть серьезные возражения
против
осмысленности и
правомерности числового сравнения столь разнородных систем
эхолокации, различающихся по мощности (на несколько порядков), по абсолютной дальности действия ит. п.
Однако в общем-то звуколокационный аппарат летучей мыши выполняет те же функции, что и обычные технические радиолокационные устройства. Поэтому в данном случае биологическую систему можно сравнивать с инженерной
почти с
тем же основанием, с каким обычно специалисты сравнивают
между собой технические характеристики двух радиолокаторов. И в этом отношении большой интерес, несомненно, представляет опубликованная в 1963 г. работа Л. Катрона, в которой даются вполне определенные и убедительные количественные характеристики (принятые в радиолокационной технике)
для ультразвукового локационного аппарата
летучей мыши.
Несмотря на многие упрощения, допущенные автором этой работы при расчетах, последние показывают, что по таким важным параметрам локационной системы, как чувствительность
при определении дальности и угловых координат цели, устойчивость к взаимным помехам (т. е. способность не реагировать
на сигналы, испускаемые другими локационными
системами,
работающими в это же самое время поблизости), отношение
сигнала к шуму, локационный аппарат летучей мыши более
чем в 100 раз превосходит самые совершенные современные раРасстояние
до цели
(вм)
3
2,4
1,5
0,6
0,3
Принимаемая
мощность (в вт)
1071
2,5. 10711
1,6. 10-18
6,3. 107-15
10713
Отношение
сигнала к шуму
i
2,5
16
625
104
Погрешность в
определении
расстояния (вм)
Погрешность
в определении
направления (в°)
0,15
0,69
0,038
0,0061
0,0015
3,2
2,2
0,87
0, 14
0,035
|
Локаторы
природы
97
диолокационные системы. Конкретные значения основных параметров эхолокатора летучей мыши, полученные Л. Катроном
расчетным путем, приведены в таблице на стр. 96.
К приведенным показателям остается еще добавить следующее. Звуколокационный аппарат летучей мыши ультраминиатюрен, он весит доли грамма и имеет габариты, равные долям
кубического сантиметра, а энергии расходует так мало, что ни
одна из созданных человеком технических систем не может с
ним сравниться.
Наши же современные радиолокационные устройства весят
десятки, сотни и даже тысячи килограммов, а их объем достигает сотен кубических дециметров. Локационный аппарат летучих мышей — это самовосстанавливающаяся система, которая
всегда находится в рабочем состоянии. Технические же локационные системы должен ремонтировать человек; их эксплуатационная надежность значительно
ниже, чем у эхолокатора
летучей мыши.
Известно, что при расчете и конструировании сложных радиотехнических устройств чрезвычайно важно правильно выбрать характеризующие работу системы показатели качества,
надежности и эффективности. Это требует, разумеется, специальных исследований, и в современной технике с разработкой
таких оптимальных показателей пока дело обстоит,
скажем
прямо, далеко не идеально. Что же касается выбора параметров для правильной оценки эффективности сложных
живых
систем, то нет нужды доказывать, что такая задача еще сложнее, а ведь ее решение весьма важно для успешного моделирования и разработки практического варианта технического устройства.
Простейший анализ современных локационных систем показывает, что летучие мыши обладают локационным устройством в десять — двадцать раз более эффективным. И это справедливо даже в том случае, если не учитывается, что при расчете масса локационной системы летучей мыши была принята
равной 10% ее массы, тогда как масса радиолокатора составляет совершенно ничтожную долю массы самолета, на котором
он установлен. А... если подходить к данному вопросу с самой
общей точки зрения, то превосходство летучих мышей и других
животных становится очевидным, хотя сравнение трудно выразить в количественной форме. В самом деле, летучие мыши
сами поддерживают в рабочем состоянии и ремонтируют свои
живые механизмы, а радиолокаторы и самолеты должен ремонтировать человек. Летучие мыши питают свои механизмы
энергией за счет добычи, которую они сами ловят и переваривают. А от самолетов мы не ждем, чтобы они сами заправлялись
топливом за счет ловли птиц; топливо же, накачиваемое в их
баки, уже не требует никакой предварительной химической пе-
98
Бионика
реработки.
И конечно,
изготовленные
человеком
механизмы
не
размножаются '.
Результаты сравнения биологической и технической локационных систем не могут не вызвать у каждого инженера, работающего в области локационной техники, заслуженного уважения к «живому механизму», который выработался под давлением естественного отбора в процессе эволюции, и горячего
желания воспроизвести его в металле для пользы человечества.
Первый шаг в этом направлении сделал профессор Кентерберийского университета Новой Зеландии Лесли Кэй. Он задался
гуманной целью облегчить участь слепых людей, вырвать их
из плена вечного мрака, открыть невидящим окно в окружающий их мир.
У человека, потерявшего зрение, как известно, всегда сильнее обычного развиваются другие органы чувств. Обостряется,
в частности, слух. Учитывая это, ученый решил создать прибор,
который помогал бы слепому «видеть» окружающую обстановку ушами, пользоваться языком эха. В 1966 г. на основе принципа действия природного радара рукокрылых Кэй сконструировал устройство, названное им «зонаром» (от слова «зондировать»). Экспериментальная модель радара-поводыря
состояла
из двух частей: миниатюрного передатчика
и
электронного
прибора, заключенного в ящик. Слепой должен был держать
передатчик в руках и пользоваться им как карманным электрическим фонарем (цвет. табл. 5). Зонар посылал в окружающую
среду пульсирующие пучки ультразвуковых волн, подобных
тем, что испускает летучая мышь. Возвращающееся эхо накладывалось на исходящие импульсы и создавало «биения» звука,
легко воспринимавшиеся человеком через наушники. Высота
звука указывала на расстояние до предмета.
Испытания первого, опытного образца ультразвукового поводыря Л. Кэя показали, что с его помощью можно обнаружить
столбы, ступеньки, край
тротуара, люки на мостовой и
т. п.
Однако прибор получился довольно
сложным и громоздким,
требующим длительной практики для его эффективного использования.
Двумя годами позже Л. Кэй, используя известный принцип
эхолокации летучих мышей, построил новый, более эффективный и компактный радар для слепых. Этот портативный прибор, похожий на электрический фонарик (рис. 15),
излучает
ультразвуковые колебания, улавливает их отражение и преобразует в звуковой сигнал. Принимая на слух варьирующие по
тону сигналы, человек, лишенный зрения,
может
составить
представление о встречающихся на пути препятствиях, отли'См.:
мат.
лит.
Гриффин
М.,
1961,
Д.
с. 94.
Эхо
в жизни
людей
и животных.
Изд-во
физ.-
Локаторы
природы
99
чать дорожку, посыпанную гравием, от лужайки, покрытой газоном. На расстоянии 3—7 м «фонарик для незрячих» позволяет, например, как показали опыты, определить по звуку принятого сигнала, где находится металлическая дверная ручка, а
значит, и замочная скважина. Первые образцы этого своеобразного радара для слепых,
продемонстрированные на выставке
в Лондоне, привлекли внимание многих лиц и организаций, были приняты на испытание 25 странами.
И все же «фонарик для слепых», надо полагать, не принесет людям, пребывающим в мире вечного мрака, полное удовлетворение. Трудно быстро передвигаться в темной
комнате
при узком свете карманного фонарика. Точно также
трудно
ориентироваться и с ультразвуковым фонарем. (Эхо отражается
от предметов по-разному, в зависимости от их удаления от источника сигнала, материала, из которого они сделаны, и формы
поверхности.) Тот, кому придется пользоваться этим прибором,
должен не только научиться технике передвижения, но и уметь
различать качество эха от различных предметов (от изгороди,
стены ит. п.) и «аккорды», которые могут быть слышны, когда
пучок ультразвуковых волн одновременно отражается от двух
различных предметов. Поэтому большой практический интерес
вызывает следующая ступень развития звукового видения —
ультразвуковые очки, призванные, по замыслу
их создателя
профессора Кэя, заменить узкий пучок звука широким «освещением» окружающих предметов. На предметы, как это показано на рисунке 16, посылается широкий пучок ультразвука
от передатчика, вмонтированного в переднюю часть очков. Микрофоны-приемники, находящиеся по обеим сторонам головы,
улавливают эхо. По разнице степени громкости, высоте звука
и времени сигналов, воспринимаемых каждым ухом, можно усМинкрофон- Наушники
Звуковсй
передатчик
приемник
|
Отраженный
луч
\
Звуковой
\
луч
\\
on
\
ра
м
N
\\
|
i)
—_——
LES
С
Провода н\
усилителю
IN) |
|
и батарейке\\
Рис. 15. Ультразвуковой
фонарь для слепых.
Рис. 16. Принцип
очков-локаторов.
действия
ультразвуковых
А
100
Бионика
тановить местонахождение источника возникаемого эха в пространстве. Создатель ультразвуковых очков утверждает, что с
их помощью у слепого человека разовьется представление об
окружающих его предметах как объектах характерного звучания и он сможет довольно отчетливо «видеть» звуковую картину окружающей обстановки. После соответствующей тренировки слепой человек сможет, принимая на слух варьирующие по
тону сигналы, составить представление не только о встречающихся на его пути препятствиях и предметах, об их конфигурации, но даже и о материале, из которого они изготовлены, отличать гладкие поверхности от шероховатых.
Не менее интересен опыт последних лет в использовании
принципа работы радара рукокрылых применительно к решению ряда чисто производственных задач. Например, при формировании составов на сортировочных горках железнодорожникам всегда большие хлопоты доставляют очень сильные удары вагона о вагон. От таких ударов портятся и грузы, и вагоны.
Чтобы избежать этого, предлагали много способов, специальных механизмов. Но все они на поверку оказывались малоэффективными. И тогда инженеры вспомнили о летучих мышах,
которые своим звуковым локатором безошибочно определяют
расстояние до любого предмета, встречающегося на их пути во
время ночной охоты. Попробовали скопировать живую модель
радара. Изготовленные в металле локаторы оказались
очень
практичными при сортировке железнодорожных составов: прибор, установленный на вагоне, определяет, когда до стоящего
впереди вагона остается 15 м, и включает тормоз. Вагон замедляет ход и мягко подсоединяется к составу...
А вот другой пример, взятый из практики отечественного садоводства (рис. 17). Все мы любим душистые и вкусные яблоки,
искрящийся солнцем виноград, сладкие груши и персики. И не
только мы — этими чудесными плодами не прочь полакомиться разные насекомые. Иногда для защиты садов от вредителей
применяют отравляющие вещества — ядохимикаты. Между рядами фруктовых деревьев движется специальная машина и
опрыскивает раствором их кроны.
Чтобы ядовитый раствор не попадал на землю, не загрязнял
почву и грунтовые воды, сотрудники Всесоюзного института
сельскохозяйственного машиностроения
(ВИСХОМ)
изобрели
интересное устройство. Они вспомнили о радаре летучей мыши
и «научили» серийный опрыскиватель «видеть» кроны деревьев
примерно так же, как их видят рукокрылые. Машину снабдили
ультразвуковым эхолокатором. Раньше
опрыскиватель, двигаясь между рядами деревьев, как слепой, распылял раствор зря.
Теперь же он непрерывно излучает ультразвуковые
сигналы.
Встречаясь с кроной дерева, они отражаются от него и, возвращаясь обратно, улавливаются приемником. Здесь ультразвук
Локаторы
природы
101
преобразуется в электрический сигнал, последний усиливается
и дает команду исполнительному механизму
опрыскивателя.
К, дереву устремляется ядовитый душ (рис. 17). Как только машина минует дерево, душ выключается — эхо исчезло...
Ультразвуковая локация для человека
— дело сравнительно новое. А если говорить об ультразвуковых радарах, созданных живой природой,
то
их
изучением
мы,
в сущности,
по-настоящему, во всеоружии современной науки и экспериментальной техники начали заниматься совсем недавно. Тем не мьнее накопленные биониками за последние годы в этой области
знания, достигнутые ими первые успехи в моделировании радара летучих мышей сегодня открывают
новые,
интересные
перспективы использования таких локаторов в качестве чувствительных элементов различных технических систем во многих
областях производства, в частности в автоматах по сортировке
и отбраковке миниатюрных деталей на конвейере, для регистрации и счета элементсв, особенно в тех случаях, когда работу
требуется производить в абсолютной темноте, и т. п.
Болыпие надежды возлагают и военные специалисты ряда
империалистических стран на ведущиеся ныне в некоторых институтах и лабораториях частных фирм бионические исследования ультразвуковых радаров рукокрылых.
Большим вниманием ученых-биоников и специалистов, занимающихся разработкой локационных систем, ныне окружены не только летучие мыши, но и дельфины.
Все началось с того, что в 1947 г. американский зоолог Артур Мак-Бридж, работавший во флоридском
аквариуме «Меринленд», заметил, что ночью в мутной воде дельфины обходят
сети. Было также обнаружено, что дельфины свободно находят
куски рыбы, помещенные
в водоем, в самые
темные
ночи
бесшумно и на большой скорости обходят установленные в
От насоса
$
5
Рис.
17.
Сотрудники
Все-
союзного института сельскохозяйственного
ма-
шиностроения (ВИСХОМ)
«научили»
серийный
опрыскиватель «видеть»
кроны деревьев.
Усилитель
Генерз:
тор
бас-
102
Бионика
сейне препятствия. В своих заметках, опубликованных посмертно, Мак-Бридж поднял вопрос: не обладают ли дельфины, подобно летучим мышам, эхолокационным аппаратом, помогающим им отличать препятствие, которое надо обойти, от добычи,
которую надо догнать и схватить?
Как показали опыты, подводные преграды не являются для
дельфинов помехой в эхолокации. В бассейне
размером
21Х
Ж11
м,
наполненном
мутной
водой,
в
которой
видимость
не
превышала 50 см, У. Келлог устроил лабиринт из 36 полых металлических стержней, свободно подвешенных с помощью проволок, прикрепленных к тросам. Расстояние между стержнями
составляло 2,5 м. Располагали их либо рядами по 6 штук в
каждом, либо в шахматном порядке. Между ними безостановочно плавали дельфины. При малейшем прикосновении животного к стержню эти легкие металлические препятствия тотчас же издавали звон, как у колокола.
В первом опыте, длившемся 20 мин, когда два дельфина пробирались сквозь преграду из стержней, звон раздался всего
лишь четыре раза. Вероятно, животные задели стержни хвостами в тот момент, когда уже почти завершали поворот при переходе из одного ряда в другой. Во втором эксперименте (в течении 20 мин) дельфины ошибались
трижды,
в последующих
опытах — ни тазу. По-видимому, дельфины свыклись с наличием в бассейне необычных препятствий. Плавая в лабиринте
из стержней, они непрерывно издавали свои звуковые сигналы.
Однако эти сигналы были менее громкими, чем обычно; вероятно, это делалось для того. чтобы уменьшить число возможных
эхо от дальних стержней,
мешавших
дельфинам
ориентироваться. И вот еще что заметили экспериментаторы: в ряде
опытов две афалины, непрерывно лоцируя, плыли сквозь лабиринт погруженных в воду металлических стержней значительно быстрее, чем обычно в свободном бассейне.
Ряд интерееных исследований гидролокационного аппарата
дельфинов провел по заданию ВМФ США профессор зоологии
Кеннет Норрис в Калифорнийском университете в Лос-Анджелесе. Начав с позиций, на которых остановился Келлог, Норрис
научил одну очень послушную афалину, по кличке Кэти, плавать с резиновыми наглазниками
(рис. 18) и принимать пищу
по сигналу. Как только экспериментатор подавал сигнал кормления,
в гидрофон
начинали
поступать
щелкающие
звуки
афа-
лины. По мере приближения животного к рыбе частота щелчков увеличивалась. Но рыбу дельфин схватывал лишь в том
случае, эсли она оказывалась не ниже уровня его верхней челюсти, т. е. попадала в зону локации. В этих экспериментах
Кэти показала, что, плавая с закрытыми глазами, она может
на значительном расстоянии не только обнаружить и поймать
небольшую рыбу, но и очень точно, не коснувшись телом, про-
Локаторы
природы
103
плыть между подвешенными стержнями или расставленными
нырялыциком через 1—2 м друг от друга предметами, по сигналу подплывать к микрофону, нацелившись, выпрыгивать из
воды, чтобы толкнуть рылом колокол и заслужить таким образом награду в виде рыбины.
Таким образом, на основании множества самых разнообразных опытов ученые пришли к общему выводу — эхолокация у
дельфинов является основным способом ориентации в различных жизненных ситуациях: при добывании пищи, преодолении
препятствий, распознавании различных объектов в водной среде. Локатор дельфина работает почти в таком же режиме, что
и локатор летучей мыши. В спокойном состоянии
животное
постоянно испускает звуковые импульсы через каждые 15—
20 сек, которые служат для общей ориентировки. Для определения глубины воды, близости берега и льдов, предотвращения
столкновения с кораблями дельфины обычно используют продолжительные (длительностью 1—5 сек) импульсы с меняющейся частотой (от 7 до 20 кги). Когда
внимание животного
привлекает брошенный в воду предмет, число импульсов резко
возрастает (от 5 до 100 и более в 1 сек) — дельфин
подробно
изучает изменившуюся обстановку с помощью своего звуколокатора.
А как выглядят на фоне природного сонара дельфинов гидролокационные
технические
системы,
созданные
учеными
и инженерами? Подводные эхолокзаторы,
которыми
пользуются сейчас
моряки, не очень совершенны. Гидроакустики обычно жалуются, что очень
трудно разобраться, от чего отразился
звук, ощупывающий толщу морской
воды. На экране гидролокатора ясно
видно ответное эхо, но что его породило: гряда подводных скал или же
густой косяк рыбы?
Обнаружение различных объектов
в толще воды — одна из важнейших
задач современной прикладной физики и бионики. Отставание в этой области стало особенно наглядным после
долгих и безуспешных поисков затонувшей американской подводной лодки «Трешер». Другое дело, если бы у
моряков был бы на вооружении сонар,
Рис. 18. К глазам дельфина
подобный дельфиньему!
Гидролокатор
ма, значительно
сонары,
дельфинов
— систепревосходящая
разработанные
все
человеком.
ПРИкРепляют
наглазники,
способности
плавать
чтобы
вслепую.
резиновые
изучить
ЖИВОТНОГО
104
Бионика
Прежде
всего
поражает
точность
эхолокации
дельфинов.
На расстоянии в десятки метров направление на цель определяется ими с точностью до 0,5°. В экспериментах, проводимых
советскими учеными на Черном море, афалины безошибочно
подплывали к дробинке диаметром 4 мм, брошенной в воду на
расстоянии 20—30 м от животного, предварительно ощупав ее
звуковым пучком.
Изучая работу локационного аппарата дельфина, ученые обнаружили еще одну чрезвычайно важную его особенность: издаваемые животным ультразвуки, отражаясь от окружающих
предметов, позволяют ему на значительном расстоянии точно
определять не только местоположение этих
предметов, но и
форму и размеры их. Так, например, Кеннет Норрис и его коллега Рональд
Тёрнер научили
афалину
по
кличке Алиса
различать, закрыв предварительно ей глаза резиновыми присосками и плотно заткнув нос, размеры бросаемых в воду шариков. Поначалу они обучили Алису различать два стальных шара, маленький диаметром 3,75 см и болыпой диаметром 6,25 см.
Если дельфин выбирал большой шар, он получал в награду рыбу. Затем ученые постепенно стали увеличивать размер маленького шара. С закрытыми глазами, выбирая между шарами
диаметром 5 и 6,25 см, Алиса не ошиблась ни разу на протяжении сотни опытов. Даже когда диаметры шаров составляли
5,62 см и 6,25 см, она в большинстве случаев не ошибалась,
хотя и были случайные ошибки. Разница в 0,6 см так мала,
что ее с трудом может
обнаружить
человек невооруженным
глазом. Дальнейшие эксперименты показали,
что, пользуясь
своей сонарной системой, дельфины способны обнаружить металлическую проволоку диаметром 0,2 мм в 77 случаях из 100.
Не менее поразительна способность эхолокатора дельфина
различать предметы по их структуре !. Так, уже упоминавшаяся выше афалина Кэти, плавая с завязанными глазами, по нескольку раз безошибочно отличала четырехсантиметровую капсулу, наполненную камешками, от куска рыбы точно такого же
размера. По-видимому, дельфиний сонар настроен на вид определенных предметов и, встречая их, сразу узнает старых знакомцев. В экспериментах У. Келлога и его коллег подопытные
дельфины
Альберт и Бесси в кромешной
тьме
безошибочно
отличали форель длиной 15 см от кефали длиной 30 см. Форель нравилась им явно больше! Когда обеих рыб погружали в
воду одновременно, афалины почти всегда устремлялись к любимой рыбе: в первых 16 испытаниях Альберт ошибался только четыре раза, а в последующих 140 — ни разу!
' Оказывается, разрешающач способность дельфиньего сонара по азимуту и дальности также зависит от материала мишени. Для упругих тел (стальные шары) она в 2—3 раза выше, чем для неупругих (свинцовые шары).
Локаторы
природы
105
По одним данным, дельфины могут обнаруживать стаи рыб
и различать их породы на расстоянии 400—500 м, по другим,—
до 3—5 км!. Вероятно, вторая оценка истинных возможностей
биологического эхолокатора несколько завышена, но многочисленные эксперименты в бассейнах разных стран удостоверяют
очень высокие показатели работы локаторов дельфинов в режимах поиска, обнаружения и классификации различных объектов под водой.
Проведенные исследования позволяют утверждать, что гидролокационный аппарат китообразных значительно лучше защищен от воздействия помех, чем самый совершенный современный сонар. Келлог пытался сбивать афалин, ищущих пищу,
записанными ранее на пленку различными, очень
громкими
сигналами. Животные без труда отличали
свои
сигналы от
этих искусственных помех. Оказалось,
гидролокатор дельфинов продолжает эффективно работать в обстановке, когда полезные сигналы в десятки раз слабее мешающего
шума. Для
сравнения заметим, что для сонара отношение сигнала к шуму
должно быть близким к единице,
О том, как именно дельфины «расправляются» с помехами в
работе их сонара, рассказывают полученные в последнее время результаты опытов советских ученых Абрамова, Голубкова,
Королева и Фрадкина.
В экспериментах исследователи в качестве помехи
применяли акустические сигналы трех видов: чистого акустического
тона сигналы-свисты частотой 30 и 80 кгц; шумовые сигналы,
занимающие полосу, примерно от 60 до 100 кгц (зону максимальной чувствительности органов слуха дельфинов); импульсные сигналы с частотой повторения 100 гц (периодом следования 10 мсек), длительностью каждого импульса 200 мсек и частотой заполнения 30 и 80 кгц.
Опыты показали следующее. При появлении помехи дельфины несколько увеличивают уровень излучаемых сигналов,
но не на столько, чтобы скомпенсировать действие помехи, сохранив прежнее отношение сигнала к шуму. Основные механизмы, обеспечивающие высокую помехоустойчивость дельфиньего сонара, действуют по-другому. При помехах (шумовых или в
виде чистого акустического тона) дельфины, как показано на
графиках (рис. 19 и 20), меняют частоту заполнения (а следовательно, и спектр) излучаемого импульсного сигнала, уходя таким образом от помехи вверх или вниз по частотному диапазону. При импульсной помехе животное поступает примерно так
же (рис. 21). Но, кроме этого, оно меняет частоту следования
1 См.:
Асташенков
П. Т. Что такое бионика. Военное изд-во Ми.
нистерства обороны СССР. М., 1963, с. 36. Крайзмер
Л. П.,
Сочивко
В. П. Бионика. М., «Энергия», 1968, с. 85.
106
Бионика
своих лоцирующих импульсов, так чтобы и излучаемые и отраженные импульсы попадали в промежутки между импульсами помехи.
,
Интересно, что, повышая интенсивность
одной из первых
двух помех, удалось помешать дельфину и довести процент его
ошибок до 15. А вот добиться такого же эффекта, манипулируя
ймиульсной помехой, не удалось. По-видимому, это объясняется выработанной природой высочайшей
устойчивостью дельфиньих сонаров к импульсным помехам от сигналов соседейдельфинов. При плавании в стае уровень и структура суммар-
s, |
дб
GOF
SOF
чо
30+
7
ОЕ
2
/
Рис.
19. Влияние
помехи на спектр
1
1
/
\
О
20
\
40
'
60
'
80
ющих
сигналов
1 — спектр
'
помехи;
———
100 Р, кгц
дельфина:
сигнала
2 —
шумовой
зондирув
спектр
отсутствие
сигнала
наличии
шумовой
помехи;
спектр шумовой помехи.
при
3—
5.|
дб
SOF
ОЕ
Рис. 20. Влияние помехи
в
виде акустического сигнала
чистого тона (синусоидального) на спектр зондирую-
10 -
щих
4 —
О
20
40
60
80
100
Е, нгц
сигналов
спектр
помехи;
2 —
наличии
помехи;
мехи.
дельфина:
сигнала
в
спектр
3 —
отсутствие
сигнала
при
спектр
по-
Локаторы
природы
107
ной помехи, очевидно,
гораздо
выше
и
сложнее,
чем у
искусственной, и она дельфину нипочем.
Как же, по современным воззрениям, устроен гидролокатор
китообразных? Чтобы ответить на этот вопрос, пойдем обратным путем, от техники к природе. И тогда мы обнаружим в организме дельфина все основные функциональные
узлы стандартного локатора: источник колебаний, передающую антенну,
формирующую направленный луч излучения, приемную антенну, приемник излучения, обрабатывающий
принимаемую информацию и выдающий координаты цели.
Предполагают, что звуковые и ультразвуковые
колебания
возникают у китообразных в наружном (надчерепном) носовом
проходе: губе дыхала, диагональной мембране, двух внутренних клапанах, трех парах воздушных мешков и гортани. Возможно, что звуки различных частот возникают в разных отделах носового прохода. Диапазон излучаемых частот очень широк, от нескольких десятков герц до 200—250 кгци. Максимум
интенсивности звуков лежит в диапазоне 20—60 кгц. Звук может генерироваться непрерывно на одной частоте, или с посте:
пенным ее изменением, или короткими импульсами, наименьшая длительность которых превышает 0,1—1,0 мсек.
Воздушные пути, идущие к дыхалу дельфина, несимметричны. Правый носовой проход
обычно несколько шире левого.
Доктор Лилли предполагает, что дельфин может издавать звуки, пользуясь либо правым носовым проходом, либо левым, либо обоими вместе. За счет асимметрии носовых проходов дельфин в этом случае может одновременно издавать два звука разной частоты, да еще при этом плавно менять частоту каждого
звука. Сумма генерируемых частот при этом обычно остается
постоянной. Например, частота звука,
генерируемого левым
звуковым
проходом,
плавно
увеличивается
от
10500 до
15 000 гц. При этом частота «правого» звука
также
плавно
$, |
дб
зо|
20-Е
Рис. 21.
Влияние
импульсной помехи на спектр зондирующих
сигналов
дель-
фина:
10|
4 — спектр
помехи;
сигнала
2 —
спектр
в
отсутствие
сигналов
при
наличии
импульсной
помехи;
3 —
спектр
помехи
(частота
заполнения
импульсов
30
кгц)
О
108
Бионика
уменыпается
с 9500
до
5000 гц.
Суммарная
частота —
20000 гц — остается постоянной, а разностная увеличивается
с 1000 до 10000 ги. Способ очень экономный: частота каждого
звука меняется менее чем вдвое, а разностного — в 10 раз. Опыты показали, что дельфин отлично слышит по отдельности «левый звук», «правый звук» и звуки с суммарной и разностной
частотами. Такой «самоконтроль», кроме всего прочего, очевидно, позволяет дельфину добиваться строго линейного закона изменения разностной частоты во времени. А это, как будет видно из дальнейшего, — условие точного определения дистанции
с применением частотной модуляции.
Интересно, что китообразные генерируют звуки за счет циркуляции воздуха в дыхательных путях, не выпуская его через
дыхало наружу.
До сравнительно недавнего времени было неясно, как устроена передающая антенна дельфинов, каким
образом они
ухитряются фокусировать ультразвуки, посылать импульсы в
нужном направлении, что является
непременным
условием
эффективной работы любого локатора. В 1962 г. американские
исследователи Вильям Эванс и Джон Прескотт высказали предположение, что выпуклая жировая подушка, расположенная
на челюстях и межчелюстных костях, и вогнутая передняя поверхность черепа дельфинов действуют как звуковая линза.
Аналогичная гипотеза была выдвинута и советскими учеными В. Бельковичем и А. Яблоковым. Они писали, что на голове
дельфинов и зубатых китов есть лобный выступ из жировой
ткани, предполагая, что эта ткань служит акустической линзой. В пользу этой гипотезы имелись следующие доводы. Показатель преломления жировой ткани, образующей так называемый лобный выступ дельфина, очень близок к показателям преломления веществ, которые используются в технике для изготовления акустических линз. И далее. Вся система жировой подушки снабжена собственной
своеобразной
мускулатурой и
сложной
системой
связок.
Очевидно,
назначение
их
состоит
в
том, чтобы изменять фокусировку линзы. Роль рефлектора генерируемых дельфином ультразуков ученые в своей гипотезе
отвели черепу, исходя из особенностей его конструкции, а также из того, что костные ткани очень плохо проводят ультразвуковые колебания. Таким образом, согласно гипотезе Эванса — Прескотта и Бельковича — Яблокова, «линза» и «рефлектор» — это те органы в природном
гидролокаторе
дельфина,
которые играют роль передающей антенны, концентрируют сигналы, излучаемые воздушными мешками, связанными с носовым каналом, и в виде звукового пучка направляют их на лоцируемый объект. Меняя форму жировой линзы, дельфин может
«ощупывать» пространство впереди себя широким рассеянным
пучком ультразвука и очень тонким. Исследования последних
Локаторы
природы
109
лет внесли некоторые уточнения в эту гипотезу. Во-первых, было установленс, что кости черепа дельфина являются довольно
плохим отражателем звуковых волн. Во-вторых, конструкция
жировой линзы оказалась очень сложной. По мере приближения к ее краям уменьшается количество жировых клеток и растет количество соединительных волокон. Впереди
и сверху линза незаметно переходит в кожу. Такое строение избавляет дельфина от возникновения отражений от границы кожа —
делает его акустическую линзу просветленной.
Ряд исследователей считает, что жировое тело — это
ко часть линзы. Вся (пока еще
в себя не только выступ, но и
звука, в том числе мышцы и
нить почти полное отсутствие
и сзади
тела
толь-
гипотетическая) линза включает
все ткани, окружающие источник
кости. Только этим можно объясзвукового излучения по сторонам
дельфина.
Скорость звука в жире меньше, чем в воде.
родная линза дельфина работает как выпуклая
линза,
вода,
преобразующая
сферический
фронт
Поэтому призамедляющая
звуковой
волны
в
плоский. Плоское звуковое поле — это мечта каждого специалиста, работающего в области акустических (да и радиотехнических) измерений. В нем легче проводить все измерения и
обработку их результатов. В рассматриваемом случае оно позволяет мозгу дельфина наиболее экономно обрабатывать получаемую информацию и не менять способ обработки, когда интересующий дельфина предмет оказывается у самого его носа.
Некоторые исследователи
предполагают,
что, в отличие от
многих локаторов, созданных человеком, передающая антенна
дельфина не переключается на прием отраженных
сигналов.
Дельфины снабжены отдельной приемной антенной. Ею, возможно, является нижняя челюсть животного. Во всяком случае, от нее к каждому внутреннему уху тянется жировой тяж,
который, очевидно, играет роль направленного волновода. В то
же время внутреннее ухо китообразных очень хорошо изолировано и экранировано. Наружный слуховой проход и упомянутый жировой тяж — единственные каналы, по которым звуковой сигнал может проникнуть во внутреннее ухо. Итак, отраженные сигналы принимают
уши
дельфина,
а
обработку
сигналов производит их великолепный мозг.
Некоторые исследователи (например, А. Е. Резников) считают, что дело обстоит значительно сложнее. По их мнению, жировая линза тоже принимает отраженные сигналы и формирует «акустические изображения»
лоцируемых
предметов
на
внутренней поверхности воздушных мешков, которая
играет
роль сетчатки «акустических глаз». Эти акустические изображения воспринимаются дельфином как некие образы «пространственного осязания». Возможно, уши дельфина тоже анализируют эти акустические изображения, но уже как слуховые
110
Бионика
образы. Экспериментальное облучение жировой линзы дельфина ультразвуковыми импульсами показало
наличие ответной
физиологической реакции эпителия воздушных мешков.
Если все обстоит именно так, становятся понятней и интересней
факты
воспроизведения
дельфинами
отраженных
эхо-сиг-
налов при общении друг с другом. Выходит, что они таким образом
делятся друг с другом
разнообразными
картинками
подводного мира. А кое-кто идет дальше, допуская, что в восприятии акустических образов участвуют и глаза дельфинов. Например, чешский ученый Поспешил считает, что колебания давления воды под воздействием ультразвуковых колебаний вызывают в дельфиньих глазах (или в рудиментарном теменном глазу) ощущение света, появление
так
называемых
фосфенов
(вспомните «искры из глаз» от удара). Совокупность фосфенов создает какое-то подобие изображения.
Однако эта роль
глаз, если она такова, не может быть существенной. Ведь дельФфины, как нам известно, отлично ориентируются
и в том
случае, если их глаза закрыты
довольно толстыми мягкими
резиновыми наглазниками.
Как же работает локатор дельфина? Так, как будто дельфин
знает по крайней мере три физических закона: что при постоянных размерах акустической линзы звуковой луч тем шире,
чем ниже частота (тон) звуковых колебаний; что звуковые волны высокого тона сильнее поглощаются морской водой, чем низкие; что чем короче звуковой сигнал, тем выше разрешающая
способность его локатора по дальности. В режиме «дальнего обзора» дельфин излучает редкие импульсы сравнительно низкого тона, слабо затухающие в воде. Ширина звукового луча максимальна, и, покачивая головой (а возможно, «просто» переключая источник звука), дельфин просматривает окружающее
пространство на болыпом расстоянии. Обнаружив добычу и
приближаясь к ней, дельфин повышает частоту тона. Одновременно число импульсов возрастает с 5—10 до 710—100 в 1 сек
и уменынается длительность самих импульсов. Акустический
луч все более и более сужается. Растет разрешающая способность по углу и по дальности. Наконец, добыча почти рядом.
Посылаемые дельфином и отраженные от цели импульсы сливаются, мешая обнаружить добычу. И дельфин включает «частотную модуляцию». Он испускает длинный импульс, продолжительностью 5—10 сек, плавно меняя частоту сигнала, например от 7 до 20 кгиц. Легко понять, что чем дальше добыча,
тем позже вернется отраженный сигнал и тем больше будет разница между частотами излучаемого и принимаемого сигнала.
При определенной разности частот мозг «выдает команду» хватать добычу.
Интересно, что дельфины используют
частотно-модулированное излучение для определения глубины до дна, близости
Локаторы
природы
111
берега и льдов, для предотвращения столкновений
с проплывающими кораблями. Но еще интереснее то, что именно этот
принцип лежит в основе устройства многих сонаров, позволяя
избавиться от «мертвой зоны», улучшить помехозащищенность
и избавиться от помех
собственного
источника
звука. Этот
же
принцип
используется в некоторых радиовысотомерах,
в том числе и в установленных на межпланетных станциях
«Венера».
Из изложенных сведений о принципах устройства и работы
дельфиньего гидролокатора следует, что он не может предупредить животное о нападении сзади или сбоку. Но попробуйте это
сделать. Вас постигнет неудача. В чем же дело? Оказывается,
дельфины используют не только активную локацию, пронизывая окружающее пространство лучом своего сонара, но и пассивную локацию, как и все звери, просто слушая окружающие
шумы и звуки. Для этого ему служат уши,
воспринимающие
звуки через наружные звуковые проходы. Кроме того, полагают, что вся богато иннервированная кожа китообразных принимает разнообразные сигналы, в том числе и акустические.
Гидролокатор дельфинов совершенствовался миллионы лет.
За это время природа «испытала» несчетное количество возможных технических решений и «выбрала» самые лучшие. Однако следует признать, что, несмотря на все усилия ученых, в
устройстве и работе дельфиньего локатора еще далеко не все
ясно. Здесь, в приведенных нами описаниях, опирающихся на
данные многочисленных исследований, возможны неточности
и даже ошибки.
Очень возможно,
что, суммируя
данные
экспериментов
разных ученых, работающих с различными
дельфинами, мы,
незаметно для самих себя, «сконструировали» некоего «синтетического», обладающего суммой способностей, присущих всем
природным видам, дельфинов. Мы наделили свой объект таким
же универсальным локатором. Однако в действительности каждый
вид обладает
лишь
частью
этих способностей, использует лишь
часть
описанных нами
режимов
работы
гидролокатора.
Могут быть и обратные ситуации. Может оказаться, что локатор дельфинов обладает еще многими нераскрытыми возможностями. К примеру, никто из ученых, кажется, еще не работал
с речными гангскими дельфинами — сосунами. Эти животные
полностью лишены зрения. Их рудиментарные глаза не имеют
даже хрусталиков и не связаны с мозгом зрительными нервами. Слизистая оболочка глаз выполняет у них осязательную
функцию. Они постоянно роются в илистых отложениях дна,
добывая рыб, моллюсков и червей. В этих условиях, крайне
неблагоприятных для работы гидролокаторов большинства китообразных, сонары сосунов функционируют бесперебойно. Все
112
Бионика
это со временем, несомненно, прояснится. И тогда творцы локационных систем получат возможность создать новые гидролокаторы, которые по своему совершенству не только сравняются
с дельфиньим феноменом, но и превзойдут его.
Не обидела природа локационными способностями и многих
других обитателей царства Нептуна. Недавно в зоологических
садах Сан-Франциско, Сан-Диего и в Нью-Йоркском аквариуме
были проведены исследования звуков, издаваемых ластоногими. Оказалось, что тюлени способны издавать сигналы с частотой до 30 кги и длительностью 0,3—1,7 мсек. То обстоятельство, что эти звуки, как правило, регистрировались после попадания в бассейн незнакомых предметов, а также во время хватания пищи, дает основания полагать, что ластоногие пользуются активной звуколокацией. Таким образом, к зубатым китообразным и летучим мышам прибавился еще один отряд млекопитающих, способных издавать ультразвуки и применять их
для эхолокации. Однако локация с помощью ультразвука — не
единственное средство обнаружения предметов в арсенале природы. Существуют и другие виды локации.
В Ниле живет рыбка, которую из-за вытянутых в длинный
хобот челюстей называют нильским
длиннорылом
(рис. 22).
Научное название рыбы, данное еще Аристотелем, — мормирус
{Могтугиз). Длиннорыл знаменит тем, что его почти невозможно поймать. Долгое время оставалось непонятным, как же длиннорыл умудряется уходить из сетей. И лишь недавно ученым
удалось установить, что он вовсе не попадает в сети. Он их легко обнаруживает и ускользает.
Как же удается длиннорылу почувствовать сети на расстоянии? Общеизвестно, что сверхвысокочастотные электромагнитные волны очень быстро затухают в воде. Поэтому радиолокация и почти все другие радиослужбы под водой невозможны.
Однако в процессе эволюции у длиннорыла выработался чувствительный орган, позволяющий рыбе обнаруживать
добычу.
Радиус действия этого «природного радара» невелик, всего несколько метров. Но длиннорылу этого вполне достаточно. Он
любит копаться в речном иле. Зарывшись в поисках пищи головой в ил, мормирус, естественно, не имеет возможности следить
за окружающим пространством и может легко попасть в сети
или стать добычей хищников. Вот тут-то ему и помогает его
особого типа радар. Сверху у основания хвоста длиннорыла расположен излучатель электрических сигналов. Он посылает в
окружающее пространство до 100 импульсов в минуту с амплитудой несколько вольт. Возникающее электрическое поле изменяется, как только в нем появляется новый предмет.
Нервные
окончания особого органа, расположенного у основания спинного плавника со стороны головы, улавливают малейшие изменения этого поля в окружающей среде.
Локаторы
природы
113
Попутно следует отметить, что длиннорыл — одно из немногих животных, чувствительных к магнитному полю. Он реагирует на поднесенный к аквариуму постоянный магнит.
Физическая природа локационной системы мормируса еще
не совсем ясна. С одной стороны, установлено, что он посылает
электрические
импульсы
(около 100 импульсов
в минуту).
С другой стороны, он создает в окружающем пространстве электростатическое поле.
Из этого
вытекают две возможности —
улавливание отраженных импульсов и улавливание изменений
конфигурации линий поля. Не исключено, что длиннорыл использует оба способа обнаружения.
В арсенале современной локационной техники пока еще нет
системы поиска и обнаружения, которая работала бы по образцу и подобию радара мормируса. Вероятно, это объясняется
%
3
охой
диэлентрин
SB
4
—)
g
Е
8
®
®
“
e
`.
$
e
i
\
°
%
%
®
®
e
®
*
ъ
*
®
oe
oo”
“0,
Ф
Ф
e
°.
ee
¢
o
Ре
Ф
Рис. 22. Электрическое поле гимнарха.
Силовые линии электрического поля показаны
а:—
нормальное
вызванные
ния,
предметом,
вызванные
5—327
поле
вокруг
который
хорошим
рыбы
(вид
является
проводником.
в
профиль);
плохим
пунктиром:
6 — изменения
проводником
в
электрическом
электрического
тока;
в —
поле,
измене-
114
Бионика
тем, что особенности природного радара длиннорыла еще недостаточно изучены, отсюда трудность и сложность его воспроизведения. Однако можно надеяться, что
искусственный радар,
работающий по принципу генерации электрических разрядов,
все же будет создан. Затраченные на это время и средства, вероятно, полностью оправдают себя.
Отличным электролокатором обладает и родственник длиннорыла — гимнарх, или голохвост (дутпагеиз$). Эта хищная
рыба (длиной до 1,6 м) обитает в африканских реках. У нее
очень маленькие, почти незрячие глаза, однако местонахождение препятствий и добычи она определяет очень точно. В этом
ей помогает ее локатор — орган электрического «зрения». Он
находится у нее в голове и непосредственно связан с мозгом '.
В хвосте рыбы расположен генератор электрических импульсов.
«Выходя» на охоту, гимнарх постоянно испускает ритмичные
импульсы электрических разрядов. Ритм импульсов у него выше, чем у мормируса, — примерно около 300 в секунду. Промежутки между разрядами составляют 2,3 мсек. В момент генерации импульса электрическая нолярность хвоста становится
отрицательной по отношению к голове. В пресной воде создается таким образом электрическое поле, похожее на электрическое поле диполя. Силовые линии его сходятся у головы гимнарха. Любой предмет, попавший в собственное электрическое
поле этой рыбы, изменяет напряженность поля и нарушает картину распределения в нем силовых линий (рис. 22).
Проведенными профессором Кембриджского
университета
Г. Лиссманом опытами было установлено, что гимнарх способен улавливать самые малейшие изменения электрического поля, которые возникают в окружающей его среде. Если снаружи
аквариума вдоль стенок поместить магнит и достаточно быстро
перемещать его на ограниченном участке, рыба
немедленно
очень чутко на это реагирует. А если положить на дно небольшого аквариума четыре медных бруска, образующих прямоугольник, и внутрь его поместить
голохвоста, он становится
узником медного прямоугольника.
Подсчеты показали, что гимнарх
способен
«чувствовать»
очень слабый
источник
напряжения,
создающий
поле до
0,03 мкв/см. Его электрорецепторы «замечают» изменения си-
лы тока порядка 3Х 10-!° ампер!
Локатор гимнарха, как показали эксперименты, настолько
совершенен, что может различать предметы одной формы, но
разной электропроводимости.
ТУ гимнарха, как и у длиннорыла, хорошо развит мозг.
Его
достигает !/5 массы тела, как у млекопитающих и птиц. Основная
мозга приходится на мозжечок, который, по-видимому, выполняет
счетно-решающего устройства локатора гимнарха.
масса
масса
роль
Локаторы
природы
115
Был поставлен такой опыт. В большой аквариум поместили
две трубки из пористого фарфора. Длина каждой трубки была
15 см, наружный диаметр — 5 см, толщина стеыок — 1 см. Сам
но себе фарфор не нарушает электрического поля, однако наполняя одну из трубок дистиллированной водой или парафином — веществами, не проводящими
электричества,
а другую — аквариумной водой или иным раствором такой же проводимости, экспериментаторы создавали различную их проводимость. За каждой трубкой был подвешен кусочек пищи на
проволоке, связанной с регистрирующим устройством (когда
гимнарх хватал пищу, он тянул проволочку, а это вызывало
перемещениесоответствующего записывающего острия). У рыбы
вырабатывали условный рефлекс на определенную трубку: рыбе выдавали пищу, когда она выбирала нужную из трубок и
наказывали (шлепали по морде металлической проволокой), если она приближалась к другой. После ряда экспериментов гимнарх начинал безошибочно выбирать ту трубку, которая давала
ему вознаграждение, — это доказывало, что рыба могла их различать, несмотря на то что по внешнему виду они были совершенно одинаковыми. Чтобы представить себе границы
этих
способностей гимнарха, заметим, что он различал присутствие
спрятанного в трубке стеклянного стерженька диаметром около
1 мм!
Теперь, когда нам известны устройство, принцип действия
и чувствительность электролокатора гимнарха, небезынтересно
рассмотреть, каким путем природа сумела обеспечить постоянство ориентации собственного электрического поля гимнарха.
Задача была не так проста, как может показаться на первый
взгляд. Если бы голохвост загребал, как все рыбы, хвостом или
изгибал бы при плавании тело, то в такт его движения непрерывно перемещались бы силовые линии и электрическое «зрение» было бы невозможным. Однако в процессе эволюции форма тела гимнарха все более и более удлинялась, исчез хвостовой плавник (хвост оканчивается тонким заостряющимся к концу отростком) и очень сильно развился спинной плавник. В отличие от всех других видов рыб хвост гимнарха остается все
время неподвижным. Голохвост плавает при помощи
своего
длинного спинного плавника, очень похожего
на оборку. По
плавнику непрерывно бежит волна, он как бы ввинчивается в
воду, тело же рыбы при движении остается несгибаемым. Даже
на поворотах спина гимнарха остается неизменно прямой. Но
так как поворачивать не сгибаясь трудно, гимнарх приспособился одинаково хорошо плавать и вперед и назад. Наделяя
гимнарха электролокатором, естественный отбор отработал и
связал своеобразную форму тела, способ передвижения рыбы с
ее чувствительностью к изменениям
собственного электрического поля. Именно потому, что хвост гимнарха неподвижен,
5*
116
Бионика
что его тело не изгибается, электрическое поле сохраняет постоянную ориентацию.
Электролокатором гимнарха сейчас интересуются
бионики
многих стран и в первую очередь те, кто работает по заданию
военных ведомств. Повышенный интерес к природному радару
такого рода легко понять. Речь идет о решении одной из первостепенной
важности задач — найти
эффективное
средство
защиты от подводных лодок, создать устройство, которое позволяло бы обнаруживать субмарину по деформациям искусственно созданного электрического поля. Для такой технической системы обнаружения электролокатор
гимнарха — прекраснейшая естественная модель.
До сих пор мы говорили об активной локации, суть которой
состоит в том, что обнаружение «целей» производится за счет
энергии, затрачиваемой передатчиком локатора на «прочесывание» окружающего пространства. С помощью активных локаторов можно обнаружить любой предмет, лишь бы он был достаточно большим и находился близко. Однако большая часть животных ищет добычу, так сказать, пассивными методами: они
либо видят движение своей жертвы, либо ждут, когда она обнаружит себя каким-нибудь звуком или свойственным ей специфическим запахом. Во всех этих случаях восприятие является
пассивным в том смысле, что животное,
воспринимающее то
или иное ощущение, практически не может повлиять на характер физического явления, несущего соответствующую (зрительную, звуковую, обонятельную) информацию. Во власти живого
существа только одно — как можно лучше приспособиться к
окружающей среде, чтобы получить от нее максимум необходимых сведений, оставаясь при этом невидимым и не ощутимым
для поджидаемой жертвы. И здесь природа проявила не меньше изобретательности, чем при создании активных систем локации. За примерами далеко ходить не нужно.
Глаза, как известно, весьма совершенные пассивные локаторы, однако с их помощью человек не может увидеть
темной
ночью объекты, испускающие инфракрасные (тепловые) лучи.
А некоторые животные (в частности, американские гремучие
змеи и азиатские щитомордики) могут.
Голова змеи находится очень близко от земли. Поэтому глазам ее постоянно грозит механическое повреждение.
Однако
природа позаботилась о них — прозрачные и сросшиеся вместе
неподвижные веки защищают глаза от повреждений наподобие
часового стеклышка. Весьма оригинально устроен у змеи и слуховой аппарат. Она глуха в обычном понимании этого слова.
Среднее ухо и барабанная перепонка у нее атрофированы. Но
при тесном соприкосновении с землей змея воспринимает разнообразные колебания, в том числе и звуковые. Земля — источник колебаний, а брюхо змеи — чувствительная мембрана, вос-
Локаторы
природы
117
принимающая эти колебания. Однако этого недостаточно, чтобы обнаружить добычу особенно темной ночью, когда птицы
спят или притаившиеся грызуны ни одним движением не выдают своего присутствия.
Биологи нашли у гремучих змей на голове, между носом
и глазами, два конических углубления. Было установлено, что
каждая из этих ямок покрыта сверху роговой мембраной, толщиной 0,015 мм. Богато иннервированные мембраны не оставляли сомнения в том, что ямки представляют собой какой-то орган чувств. Но какой? На сей счет было высказано множество
предположений. И только в 1931 г. из опубликованного американскими учеными сообщения стало известно, что два конических
углубления
по
обе стороны головы змеи
не что иное,
как «тепловые глаза » животного! Этот своеобразный
термолокатор
способен
улавливать тепловые лучи и определять по
их направлению местонахождение
любого
нагретого
объекта (рис. 23).
Проделали такой эксперимент.
Змею ослепили и лишили
обоняния. Затем к ее голове поднесли невключенную, холодную электрическую лампочку. Змея не обратила на нее никакого внимания. Но когда к голове змеи поднесли горящую лампочку (по соображениям «чистоты» эксперимента
она была
обернута черной бумагой, не пропускавшей свет), змея сделала
молниеносный бросок и укусила теплую «жертву». Лишенная
глаз змея не могла увидеть лампочку, но тем не менее она не
промахнулась. Опыт повторяли много раз, реакция змеи оставалась неизменной. По результатам эксперимента было предложено объяснение устройства и принципа работы термолокаторов: во внутренней камере сохраняется
температура окружающего
воздуха,
а
в наружной
возникают
изменения
температуры, вызванные тепловым излучением «цели». Биопотенциалы, отводимые
от иннервирующих
мембрану нервов,
имеют различную конфигурацию импульсов при воздействии
тепла и холода; нервные волокна улавливают разницу температур и передают ее в мозг — змея узнает, где находятся более
теплые, чем окружающий воздух, объекты.
В поисках добычи змея медленно ползет и обследует землю
и низкие кусты. Используя свои перекрывающиеся конические
поля тепловой чувствительности, змея может определить, когда
Рис. 23.
сколько
цевые
этих
У гремучей змеи позади и нениже ноздрей расположены
лиямки.
ямок
зволяет
Высокая
чувствительность
к инфракрасному
змее
ночью
отыскивать
свету
по-
добычу.
N
kN
SSN
К
me
ON
h
yn
“GOW
<
Rr
АХ
aes REN
Wh
,
ХУ
RMA
YY \\
NA
wr
118
Бионика
именно она приблизится к животному на расстояние, достаточное, чтобы поразить его. Она может также определить позу и
размеры возможной жертвы. Спит, например, в темноте мышь.
На расстоянии 15 см от нее температура воздуха
выше всего
лишь на 0,003°С. Змее вполне достаточно этого ничтожного отклонения температуры. Она настораживается,
бесшумно подкрадывается — и участь жертвы решена. Так охотятся гремучие змеи и на лягушек, охлажденных за счет испарения влаги
с кожи, и на мелких млекопитающих зверьков.
Наши термические детекторы далеко не так хорошо реагируют на холод и тепло, как терморецепторы на голове гремучей
змеи. Человек обладает рецепторами
двоякого
рода. Около
150 000 из них сообщают нам о потере тепла при соприкосновении с холодными предметами и примерно 16 000 — о получении тепла от горячих. Большая часть тепловых рецепторов находится в коже кончиков наших пальцев, носа и на сгибе локтя. Холодовые рецепторы в основном расположены в коже верхней губы, носа, подбородка, груди, лба и пальцев. Единственная
часть тела, не чувствительная ни к теплу, ни к холоду,— эте наши глаза, в них нет ни тепловых, ни
холодовых
рецепторов.
Нервные окончания, чувствительные к потере тепла, находятся
главным образом на глубине 0,5 мм от поверхности кожи; почти две трети их связаны с отверстиями потовых желез. Рецепторы, чувствительные к притоку тепла, расположены глубже,
они в какой-то степени изолированы от внешних колебаний температуры; эти рецепторы реагируют медленнее, чем холодовые.
Человек способен различать только десятые доли градуса изменения температуры.
Чувствительность термолокатора змеи к изменению температуры окружающей среды на два порядка выше термических
детекторов человеческой кожи. Для гремучей змеи не представляет никакого труда обнаружить разность температур в одну
тысячную градуса! Ее «тепловые глаза», как показали исследования, проявляют чувствительность к сигналам мощностью
порядка миллионной доли ватта! Термолокаторы
сибирских
щитомордиков и американских гремучих змей — это самые высокочувствительные температурные рецепторы, которые когдалибо были открыты в животном мире.
Что же могут извлечь бионики для различных целей практики из открытого у змеи термического органа, из добытых знаний о его «конструкции» и работе?
Прежде чем ответить на этот вопрос, познакомимся, хотя бы
бегло, с теми средствами обнаружения и измерения инфракрасного излучения, которыми располагает современная техника.
Задолго до того, как биологи нашли у ямкоголовых змей «тепловые глаза», ученые и инженеры создали довольно широкую
‚гамму устройств, очень чувствительных к излучаемому теплу.
Локаторы
природы
119
Есть снайперские винтовки, инфракрасные прицелы которых
позволяют в полной темноте обнаруживать цель на расстоянии
нескольких сотен метров только благодаря теплу ее тела. Используя замечательную особенность полупроводников, их большую чувствительность к различным внешним воздействиям, и
в первую очередь к тепловым, ученым удалось создать термисторы — термочувствительные сопротивления, способные определять изменения температуры на 0,0005°С. Имеются
микротермосопротивления, представляющие собой шарик диаметром
в несколько микрон. Ими можно, например, измерить температуру листьев растений. Построены высокочувствительные болометры. Эти приборы представляют
собой
тонкую металлическую
или
полупроводниковую
пленку,
изменяющую
свое
электрическое сопротивление под воздействием излучения, падающего на черненую поверхность болометра. Устройство болометра основано на принципе превращения лучистой энергии в
тепловую. Приборы применяются для обнаружения нагретых
объектов, расположенных на очень больших расстояниях. Если
сфокусировать и направить инфракрасные лучи, испуекаемые
нагретыми Телами на болометр, то можно не только обнаружить, например, летящий самолет, мотор которого излучает инфракрасную радиацию, но и определить температуру Луны по
ее излучению. Словом, чувствительность созданных учеными
и инженерами инфракрасных детекторов сегодня в сотни тысяч
раз больше терморецепторов ямкоголовых змей. В этой области
техники человек за несколько десятилетий, несомненно, преуспел значительно больше, чем живая природа за сотни миллионов лет эволюции.
Почему же бионики продолжают
изучать термолокаторы
змей?
Дело в том,
что термичесний
орган, например, гремучей
змеи, несмотря на очень малые размеры, обладает более точной направленностью по сравнению
с имеющимися техническими устройствами. На 1 мм? чувствительного слоя естественного термолокатора приходится, в среднем, 1000 воспринимающих элементов, что в сотни раз больше, чем в самых миниатюрных современных искусственных приборах. И если природный
термолокатор змеи менее чувствителен, чем некоторые инженерные системы аналогичного назначения, то не следует забывать, что в нем нет никаких усилителей между органом и нейронной сетью головного мозга.
Интересно было бы найти принцип трансформации термической энергии в химическую и попытаться спроектировать и
воплотить в металле инфракрасный локатор
типа «змеиный
глаз», связанный с усилителем. Он обладал бы большими преимуществами перед природным термолокатором. Для этого требуется совместная работа биоников, биологов и инженеров.
АА
5
НЕХ
Е
АГА
а
А
—
=
=
Хо
Фивые
барометры,
гигрометры,
сейсмографы
Не так давно после сильнейшей грозы, обрушившейся на Милан (Италия), городское бюро погоды получило письмо следующего содержания:
«Уважаемые синьоры
метеорологи!
Вам,
может быть, будет интересно узнать, что всю прошлую ночь я
занимался тем, что выкачивал из своего подвала вашу «незначительную облачность без осадков». Такие письма в адрес государственных метеорологических служб, синоптических центров в наше время, увы, поступают довольно часто.
Проблема точного прогнозирования погоды
— одна из
самых древних, она так же стара,
как и
само
человечество.
Потребность в какой-то мере предвидеть погоду появилась
У
человека с переходом его к оседлой жизни, к занятию земледелием и скотоводством. Засухи и наводнения, опустошительные бури и морские штормы приносили немалые беды человечеству. Нужно было научиться вовремя узнавать о ненастье
и предвидеть погоду, благоприятствующую работе.
В результате длительных наблюдений люди установили еще
задолго до нашей эры ряд взаимосвязанных процессов между
отдельными атмосферными явлениями. Появилось много примет о погоде, обычно в виде кратких правил, нередко для лучшего запоминания рифмованных. Так, на одной из глиняных
дощечек, дошедших до нас из Вавилонии,
можно
прочесть:
«Когда солнце окружено кругом, то выпадает дождь». У греков
были даже особые календари, высеченные на каменных дощечках, указывающие средний характер погоды для каждого дня
года. Появились они, вероятно, 25 веков
назад
в результате
многолетних наблюдений отдельных ученых. Эти календариотметчики, так называемые парапегмы, прикреплялись к колоннам на рынках, площадях и в других общественных местах
приморских городов. Парапегмы пользовались большим доверием мореплавателей и сельских жителей;
в соответствии
с
122
Бионика
ними люди выходили на рыбную ловлю, на охоту, торговые суда отправлялись в дальнее плавание, производились сельскохозяйственные работы.
Парапегмы давным-давно стали достоянием музеев. Забылись многие накопленные народами в течение веков приметы
погоды, основанные на наблюдениях природы. Прогнозирование погоды ныне ведется на научной основе. О том, что приготовила нам природа на завтра и ближайшие дни, мы обычно
узнаем вечером, сидя у радиоприемника или телевизора, когда
диктор объявляет:
«Передаем сводку погоды...» А утром это
сообщение мы находим в газетах.
Пожалуй, нет человека, которого не интересовало бы состояние погоды. «Потребителями» прогнозов погоды в наше время
являются сотни миллионов людей самых различных профессий и специальностей: полеводы, садоводы, пчеловоды, агрономы, овощеводы, геологи, летчики, космонавты, моряки, лесозаготовители, строители, спортсмены, тысячи и тысячи любителей туризма, охоты и рыбной ловли. Прогнозы погоды прочно вошли в жизнь каждого горожанина,
каждого
сельского
жителя.
Однако бывает и так. Вы собрались в воскресенье отдохнуть на лоне природы. Вечером в субботу
диктор сообщает,
что завтра ожидается теплая погода, правда, с ветром, но без
осадков. А на самом деле прогноз оказывается абсолютно неверным.
Проблема точного прогнозирования погоды очень сложна.
Однако мы не вправе сетовать на природу за то, что она столь
неохотно раскрывает нам свои метеорологические тайны. Удивительно другое
— как человек,
пользуясь
с незапамятных
времен в своей повседневной жизни созданными природой многочисленными живыми барометрами, термометрами, гигрометрами и другими приборами, умеющими чутко реагировать на
все происходящие в атмосфере изменения, до сих пор не сумел
понять их «конструкцию», принцип действия и не перенес весь
этот богатейший арсенал «изобретений» природы в инструментальную метеорологию.
Бионики начинают
изучать
атмосферные
(физические) и
биологические процессы на основе данных о взаимодействии
живых организмов с окружающей средой, чтобы полученные
сведения использовать для повышения точности прогнозирования погоды. И вот первый весьма убедительный по эффективности результат этого нового направления в работе специалистов по бионике.
Многие птицы и другие животные, как это давно заметили
рыбаки и жители побережий, способны заблаговременно «угадывать» приближение шторма. Так, задолго до наступления ненастья, когда барометр стоит еще достаточно
высоко
и нет
Живые
барометры,
гигрометры,
сейсмографы
123
зланинанинииныняяй
никаких внешних признаков, говорящих о скором ухудшении
погоды, дельфины заплывают за скалы, киты уходят далеко
в открытое море, а мелкие
ракообразные
(так
называемые
«морские блохи»), которые в хорошую
погоду
прыгают
по
гальке у самого уреза воды, перед приближением шторма выходят на берег. Ухудшение погоды, приближение шторма чувствуют акулы и чайки. Пингвины ложатся на снег и вытягивают свои клювы в том направлении, откуда
ожидают
бурю
или метель.
Что же это за «шестое чувство»? Какова связь между физическими процессами, происходящими в атмосфере
и втолще
морских глубин, и физиологическим восприятием живых организмов? Ведь человеку, чтобы предсказать изменение погоды,
приближение шторма, надо попучить сведения о метеорологических условиях на обширной территории и по этой информации составить синоптичеекую карту, без анализа которой метеоролог не может предсказать изменение погоды. Что же служит «синоптической картой» для морских птиц, рыб и других
морских животных? Какие «приборы» и «приспособления» заблаговременно и абсолютно точно предупреждают их о приближении шторма или бури? Если бы бионикам удалось. проникнуть в эту тайну, то перед ними открылись
бы
огромные
нерспективы повышения точности
прогнозирования
погоды.
Из многочисленных животных,
обладающих
неизвестными нам «механизмами» для прогнозирования погоды, бионики
в качестве первого подопытного объекта избрали... медузу, которая, по многим наблюдениям, задолго до приближения шторма спешит укрыться в безопасное место литоральной зоны.
Как же медуза узнает о приближении шторма? Оказывается, у нее имеется инфраухо, которое позволяет ей улавливать.
недоступные слуху человека инфразвуковые колебания
(частотой 8—13 ги). Эти колебания хорошо распространяются
в.
воде и появляются на 10—15 ч раньше шторма. Инфраухо медузы
— это стебелек,
оканчивающийся
слуховой
колбой —шаром с жидкостью, в которой плавают камешки, соприкасающиеся с нервными окончаниями. Первой воспринимает инфразвуковые колебания слуховая колба, наполненная жидкостью,
затем эти колебания через камешки
в пузырьке передаются нервам. Используя принцип действия «уха» медузы, сотрудники
кафедры биофизики МГУ им. М. В. Ломоносова создали электронный аппарат — автоматический предсказатель бурь.
Аппарат,
имитирующий
орган
слуха
медузы
(цвет.
табл. 5), состоит из рупора (улавливающего колебания воздуха частотой около 10 ги), резонатора
(пропускающего
именно эти частоты и отсеивающего случайные), пьезодатчика (превращающего пойманные сигналы в импульсы электрического
тока), усилителя и измерительного прибора. Аппарат устанав-
124
Бионика
ливают на палубе корабля. Когда он включен, рупор медленно
вращается, выискивая вокруг штормовые инфразвуки. При обнаружении их рупором особое устройство,
действующее
по
принципу обратной связи, тотчас же останавливает движение
рупора, указывая, откуда надвигается шторм. На капитанском
мостике находятся измерительный прибор и система указателей, оповецающая о наступлении шторма световым или звуковым сигналом.
Испытания показали, что описанный
сигнализатор
бурь
позволяет определять наступление шторма за 15 ч. Более того,
он указывает даже мощность надвигающегося шторма.
Многое сулит инструментальной метеорологии проводимое
биониками изучение барометрических
устройств,
которыми
обладают некоторые рыбы. Например, сом перед грозой и ненастьем обязательно всплывает из глубины, пугая верховодок.
Рыба голец в ясную погоду лежит на дне аквариума без движения, напоминая экспонат зоологического музея. Но вот голец начинает
подавать
признаки
жизни.
Виляя
длинным
телом, он снует вдоль стенок аквариума
— а через некоторое
время небо затягивается облаками. Когда голец мечется
по
аквариуму вверх-вниз и вправо-влево, кажется, что целый клубок темных длинных тел заполнил банку, — это
значит,
что
скоро в окно забарабанят капли дождя. Такими живыми барометрами пользуются крестьяне в некоторых районах
Китая.
Надо сказать, что голец
ошибается
только
в 3—4 случаях
из 100! Большой восприимчивостью к изменениям барометрического давления отличается и вьюн. Перед ненастьем эта рыба выходиг на поверхность воды, она предугадывает изменение
погоды за сутки. Наконец, идеальными барометрами служат
‚красивые мелкие рыбки, обитающие
в глубинах
подводного
царства у берегов Японии. Они заранее
и безошибочно реагируют на малейшие
изменения погоды. За их поведением в
аквариуме пристально следят капитаны
белоснежных
океанских
лайнеров, отправляющихся в дальние рейсы, рыбяаки
и
сельские
жители
прибрежных
районов Страны
восходящего
солнца,
чьи сады и посевы нередко страдают от
штормов.
Чутко реагируют на предстоящие изменения погоды
черви
и медицинские
пиявки. В хорошую погоду медицинские
пиявки спокойны и, как правило, лежат
на дне стеклянной банки или аквариума.
Рис. 24.
Перед дождем пиявки начинают присаЛягушка-барометр.
сываться к стенкам банки и немного вы-
Живые
барометры,
гигрометры,
сейсмографы
125
совываются из воды. А перед грозой и сильным ветром они
ведут себя крайне неспокойно: быстро плавают, извиваются,
пытаются вылезти из воды и присосаться к стенкам сосуда
выше уровня воды. Дождевые
черви выползают на поверхность перед тем, как ясная, сухая погода перейдет в неустойчивую с дождями и грозами.
Блестящий синоптик
— лягушка. При желании, читатель,
и вы можете обзавестись у себя в квартире лягушачьим барометром, как это делалось еще в древней Руси. Устройство его
не хитрое (рис. 24). Сначала нужно сделать маленькую деревянную лесенку и опустить ее в стеклянную банку с водой. Затем поймать лягушку (трявяную, остромордую или
озерную)
и посадить ее в банку. Через некоторое время, когда животное
придет в себя, можно начинать наблюдения.
Если
лягушка
поднимается по лесенке, ждите плохой погоды, спускается —
погода
будет
переменной,
барахтается
на
поверхности
воды —
тепло, солнечно, сухо. Предсказания всегда точны. Дело в том,
что у лягушки кожа очень легко испаряет влагу. В сухой атмосфере кожа быстро обезвоживается, поэтому лягушка перед
сухой погодой сидит в воде. В сырую погоду, когда собирается
дождь, она вылезает на поверхность
— обезвоживание теперь
ей не грозит.
Чудесными синоптиками являются многие птицы. Постоянно находясь в атмосфере, непосредственно
испытывая
на
себе воздействие всех происходящих в воздушном океане изменений, птицы в течение веков приобрели высокую чувствительность к изменению атмосферного давления, к уменьшению освещенности (тонкие, прозрачные облака, ослабляющие солнечный свет, — предвестники ненастья), к скоплению в атмосфере
электричества перед грозой и т. д. И, что особенно важно, птицы реагируют на все метеорологические
изменения
заранее.
Это находит отражение в их пении, криках, поведении и ежегодных сроках прилета.
О приближении дождя заблаговременно сигнализируют человеку муравьи и пчелы. Первые старательно закрывают входы
в муравейник, вторые сидят в ульях и гудят. Мухи и осы перед
ненастьем стремятся залететь в помещение, даже в кабины автомобилей. Хорошо предчувствуют грозу бабочки-крапивницы.
Если в ясчую погоду они ищут укрытия в защищенных от ветра местах, в пучках сухик веток, дуплах деревьев, то это значит, что через несколько часов можно ожидать грозу. Но если
поздно вечером сильно трещат кузнечики, наутро наступит хороший день. Вьющиеся в воздухе столбом
комары
и мошки
обычно тоже предвещают хорошую, ясную погоду. Некоторые
насекомые позволяют нам предугадывать погоду и на более
длительный срок. Чем выше к осени муравьиные кучи, тем
суровее будет зима. На холодную зиму пчелы залепляют леток,
126
Бионика
оставляя в нем еле заметное отверстие,
а к теплой
зиме
он
остается открытым.
К изменениям барометрического давления, инсоляции, температуры воздуха, влажности атмосферы и почвы чувствительны также растения. По поведению целого ряда растений можно
даже построить правильные долговременные прогнозы погоды.
Так, благодаря наблюдательности человека установлено: если
береза раньше ольхи листья выкинет, будет лето ведренное,
а если ольха первая распустится, холод
и дожди
замучают.
Появление среди снега на проталинах, на кручах и склонах, на
железнодорожных насыпях раннего весеннего растения мать-имачеха — верный первоуказатель теплой погоды в конце марта — начале апреля. Если на лугах, на лесных полянах и среди
кустов в первой половине
апреля
распускаются
золотистожелтые цветки первоцветов (примулы), баранчиков, то нужно
ждать первых теплых дней. Белые шапки медоносных цветков
рябины — точный предвестник изменения погоды к надежному
теплу. На установление теплой погоды также указывает весеннее сокодвижение у березы, клена и других деревьев. Появление на поверхности воды в прудах, озерах и реках
широких
зеленых листьев белой кувшинки знаменует конец заморозков. Обильное выделение капель жидкости на широких пластинках листьев конского каштана обычно предвещает наступление длительного дождливого периода.
Таких растений-барометров в природе насчитывается около
400! Добавьте к этому сотни своеобразных растений
— гигрометров, индикаторов температуры, флюгеров, компасов, сотни
чудесных синоптиков — птиц, рыб, насекомых. Мысленно войдите в этот мир живой инструментальной метеорологии, и перед
вами предстанут тысячи оригинальных, мастерски созданных
природой механизмов, чутко реагирующих на различные изменения погоды.
Проникнуть в сокровенные тайны синоптиков живой природы,
смоделировать
наиболее
совершенные,
испытанные
и
проверенные тысячелетиями живые метеорологические «приборы», поставить их на службу прогнозирования погоды — такова одна из важнейших задач бионики.
В недалеком будущем бионики надеются внести свой вклад
также и в прогнозирование землетрясений.
В 1966 г. в американском журнале «Сайенс» была помещена статья Ф. Пресса и В. Брейса, в которой говорилось:
«Несколько лет назад предсказание
землетрясений
было
вопросом, который относился к компетенции астрологов, заблуждающихся любителей, авантюристов, стремящихся получить известность, и членов религиозных сект, проповедующих
«день страшного суда». Неудивительно, что, если какой-нибудь
ученый иногда осмеливался высказать какое-либо мнение по
Живые
барометры,
гигрометры,
сейсмографы
127
данному вопросу, он делал это с трепетом и сдержанностью,
боясь, как бы его коллеги не отмежевались от него».
За последние годы положение резко изменилось. Чтобы показать, почему проблема предсказания землетрясений
стала
пользоваться уважением, почему над ее решением сейчас работают ученые многих стран, надо рассмотреть некоторые сразнительно недавно происшедшие события,
о которых
писала
вся мировая печать как о самых страшных бедствиях.
В 1960 г. человечество постигли два катастрофических землетрясения, унесших тысячи жертв. В феврале был разрушен
город Агадир в Марокко, в котором погибло около 15 000 человек. Едва успели сойти со страниц газет сообщения об Агадире,
как вновь они запестрили заголовками: «Тысячи погибших»,
«Мертвые города и поселки»... 21, 22 и 25 мая в Чили произошло несколько очень сильных и множество слабых землетрясений. Были разрушены крупные города — Вальдивия и ПуэртоМонт, пострадало более половины провинций Чили. Погибло
около 10000 и более 2 000 000 человек осталось без крова. Разрушения охватили побережье протяженностью более 100 км.
Не успело Чили оправиться от одного из крупмейших в мировой истории землетрясения 1960 г., как 28 марта 1965 г. на
него обрушилась новая катастрофа, во время которой пострадало 35 городов. Такого не наблюдалось в последние 100 лет.
Эдгард Каузель, директор Института сейсмологии университета Чили, заявил, что разрушительная сила землетрясения была
равна 30 атомным бомбам, взорванным в Хиросиме. В эпицентре трещины уходили на глубину 30 км. Электронные аппараты
фиксировали толчки каждые
полторы
минуты.
Сила подземных ударов достигала 9 баллов.
Через 13 месяцев, 26 апреля 1966 г., весь мир облетело
сообщение ТАСС: «...в 5 часов 23 минуты по местному времени
в Ташкенте произошло землетрясение силой 7,5 балла...» В этот
день многие семьи ташкентцев остались без крова. Последующие толчки, а их в сентябре уже насчитывалось около 700, привели к новым разрушениям: город потерял более 2000 000 м?
жилья, было разрушено 220 детских учреждений, 181 учебное
заведение,
36
крупных
культурных
учреждений.
В том же году 19 и 21 августа подземные силы повергли в
траур Турцию. В городах восточных провинций Эрзуруме, Муше, Бингеле и других
число погибших
и раненых
достигло
12000. Больше всех пострадал город Варто. Только здесь спасательные отряды турецкой армии извлекли из-под обломков
зданий 2000 убитых и раненых. За два дня в Варто было зарегистрировано около 100 толчков силой до 8 баллов. Землетрясение сравняло город с землей.
28 марта 1969 г. в Турции произошло еще одно землетрясение. На сей раз — в провинции Анатолия (Западная Турция).
128
Бионика
На территории в 3000 км? пострадало 254 населенных пункта.
Землетрясением было полностью разрушено 11 200 и поврежденс 10500 жилых
домов. Погибло 169 человек,
518 получили
тяжелые ранения. Наибольший ущерб землетрясение причинило городу Гедизу. Появились многочисленные оползни, в ряде
мест на поверхности земли возникли складки, вдоль разломов
кое-где образовались горячие источники.
Тяжелым выдался 1969 год и для США. В 22 штатах было
зафиксировано 303 очага достаточно сильных
землетрясений
(всего же сейсмографы зарегистрировали много тысяч подземных толчков). Ущерб, нанесенный наиболее сильным землетрясением этого года в Санта-Розе (Калифорния), экономисты оценили в 6 млн. долларов.
В 1969 г. разрушительные землетрясения произошли в Перу, на острове Сулавеси, в Иране, Эфиопии, Марокко, Португалии, Южной Африке, АРЕ и Албании. Все эти землетрясения
унесли сотни человеческих жизней, лишили
крова
десятки
тысяч людей.
9 февраля 1971 г. страшная
катастрофа
обрушилась
на
южные области калифорнийского побережья США.
Национальный сейсмологический центр в Вашингтоне оценил происшедшее землетрясение в 6,3 и 6,7 балла по
шкале
Рихтера. Это сильнейшее
за последние
40 лет землетрясение в Калифорнии причинило ущерб в сотни миллионов долларов.
Мы рассказали лишь о нескольких сильных и катастрофических землетрясениях, происшедших на нашей планете в основном за последние 12—15 лет. В действительности
же, по
данным международной сети сейсмических станций, на Земле
каждые пять минут происходит одно землетрясение, а за год —
более 100 000. В разных частях земного шара сила землетрясений проявляется неодинаково. Известны большие территории,
на которых их вообще не бывает, и, наоборот, есть такие, где
землетрясения часты и сильны. Наиболее опасны в сейсмическом отношении две области. Первая
— Тихоокеанское кольцо,
которое охватывает побережье Камчатки,
Аляски,
западное
побережье Северной и Южной Америки, далее поворачивается
к Австралии и через Индокитай и побережье Китая, захватывая Японию, заканчивается
на
Камчатке. Вторая область —
Средиземноморско-Азиатская. Она проходит широкой полосой
от Португалии и Испании, через Италию,
Балканский
полуостров, Турцию, Кавказ, страны Юго-Западной
Азии,
через
наши среднеазиатские республики, выходит к Прибайкалью
и далее сливается на побережье
Тихого океана с первой областью.
Из всех перечисленных районов,
входящих
в Тихоокеанский и Средиземноморско-Азиатский активные
сейсмические
Живые
барометры,
гигрометры,
сейсмографы
129
eee
пояса, наиболее частые и сильные землетрясения происходят
в Японии.
По числу и разрушительной силе происходящих землетрясений в один ряд с Японией может быть поставлена и Республика Чили. За 70 лет ХХ в. в Чили произошло около 20 крупных землетрясений
силой от 7,4 до 9 баллов.
Чили,
образно
выражаясь, «пряжка на огненном поясе», охватывающем пространство от Новой Зеландии до Финляндии,
от Японии
до
Алеутских островов и все западное побережье Америки с севера на юг. В этой обширной зоне происходит 40% всех землетрясений планеты, причем самых сильных!
Большинство ученых, изучающих землетрясения, полагают,
что сильное землетрясение (а именно наступление такого землетрясения нужно в первую очередь научиться предсказывать)
подготавливается длительное время
— десятки, сотни, а возможно, и тысячи лет. В течение этого времени идет
процесс
накопления энергии в веществе очага. Этот процесс длится до
тех пор, пока не будет превышен порог прочности вещества.
Когда это случается, вещество, грубо говоря, лопается и в окружающей очаг среде начинают
распространяться
сейсмические волны — происходит землетрясение.
Некоторые специалисты в объяснении причин землетрясений придерживаются так называемой
тектонической
теории
дрейфа континентов. Кратно суть этой теории заключается
в
том, что литосфера (самый
верхний,
твердый
слой
Земли)
состоит из ряда плит (Американская, Евразийская, Африканская, Индийская, Тихоокеанская,
Антарктическая
— 6 крупных и около дюжины более мелких), которые
«плавают»
по
астеносфере (поверхностный слой мантии). Эти
плиты,
двигаясь в различных направлениях, «сталкиваются» друг с другом. Дрейф приводит к возникновению
огромного
давления
по краям плит. Когда давление превышает некоторый предел,
происходит извержение породы вдоль зоны разлома, представляющей собой границу между двумя глыбами.
Над изысканием новых методов и средств прогнозирования
землетрясений энергично работают ученые многих стран, в том
числе советские, японские и американские сейсмологи.
К, решению проблемы прогнозирования землетрясений начинают подключаться и бионики. Так, например, японский профессор Я. Суэхиро считает, что научиться предсказывать землетрясения можно, тщательно изучив поведение ряда обитателей океанских глубин,
прежде
всего
глубоководных
рыб,
которые,
согласно его гипотезе,
заблаговременно
чувствуют
приближение бедствия. Свою гипетезу японский ученый аргументирует большим числом собранных им на протяжении многих лет исторических записей, свидетельств очевидцев, достоверных фактов; 127 из них он изложил в книге «Рыбы и земле-
—
130
Бионика
трясения», и перечень этот продолжает пополняться. Приве.
дем из этой книги несколько особенно любопытных фактов.
По японской мифологии, виновницей землетрясений язляется огромная рыба намадзу, которая якобы
щекочет
своими
усами морское дно. Поэтому изображения такой рыбы издавна
наклеивались на окна как заклятие от подземных
толчков.
Нам неизвестно, знал ли бельгийский ихтиолог-любитель
об
этом древнейшем «способе» японцев защиты от землетрясений,
но летом 1923 г. он был поражен, увидев у самого
пляжа
в
Хаяме, близ японской столицы, раздувшуюся на мелководье
усатую треску, которая, по словам жителей, водится только
на очень болыших глубинах. Через два дня страшное
землетрясение
разрушило
Токио
и погубило
140000
человек.
В 1933 г. один рыбак принес биологу
пойманного
в районе
Одавара угря, какие живут обычно на глубине нескольких
тысяч метров. В тот же день сильный подземный толчок встряхнул Тихоокеанское побережье
Японии,
в результате
чего
погибло около 3000 человек.
Нужно сказать, что, несмотря на обилие собранных фактов
такого рода, профессор Я. Суэхиро еще совсем недавно не был
вполне уверен в правильности выдвинутой им гипотезы о способности рыб «предсказывать»
надвигающуюся
катастрофу.
По собственному признанию, он даже наедине с собой нередко
посмеивался над реальностью
такой
возможности.
Однако
случай, происшедший 11 ноября 1963 г., рассеял все его сомнения на сей счет. В то утро жители острова Ниидзима, расположенного к югу от
Токио,
поймали
«морское
чудовище»
—
неведомую глубоководную
рыбу
длиной 6 м. Руководители
радио- и телецентра предложили профессору отправиться туда
на вертолете, чтобы сделать репортаж о необычайной находке.
Но из-за лекций Ясуо Суэхиро вынужден был отказаться
от
поездки и на прощание шутя сказал, что, судя по всему случившемуся, вскоре надо ждать землетрясения. И оно действительно произошло в районе острова Ниидзима два дня спустя.
Теперь уже японский профессор болыше не шутит на эту
тему. Он пришел к твердому убеждению, что всестороннее изучение поведения глубоководных
рыб накануне
землетрясений
может оказать болыпую помощь ученым в решении проблемы
прогнозирования страшного бедствия. Исходя из этого, Ясуо Суэхиро в 1964 г. обратился через печать к мировой общественности с просьбой сообщать ему о всех наблюдениях над поведением обитателей океанских глубин накануне крупных землетрясений по адресу: Токио, район Бунке, биологический факультет Токийского университета.
Просьба Я. Суэхиро нашла понимание и поддержку ученых
многих стран. В частности, один
из
крупнейших
советских
ихтиологов
— профессор Т. С. Расс, которого попросили про-
Живые
барометры,
гигрометры,
сейсмографы
131
комментировать призыв Суэхиро, заявил следующее: «Гипоте.
за японского ученого заелуживает самого
пристального внимания. По-моему, все ученые с удовольствием поморут профессору Ясуо Суэхиро своими наблюдениями».
«Живыми сейсмологами» могут быть не только глубоководные рыбы. Лет четырнадцать
назад министерство
сельского
хозяйства Японии обратилось к жителям подверженных частым землетрясениям районов
с призывом
разводить
рыбу,
притом не в прудах или реках и не промысловых пород, а всехо
лишь небольшую аквариумную белую рыбку. Было подмечено,
что за несколько часов до землетрясения эта рыбка проявляет
беспокойство, начинает метаться по аквариуму из одной стороны в другую. Видимо, белая рыбка обладает
способностью
воспринимать мельчайшие колебания земной коры. Для жителей Японии, где сейсмографы фиксируют 3—5 землетрясений
в день, такие рыбки-предсказательницы очень кстати. По их
поведению люди узнают о надвигающейся подземной буре.
Имеется у биоников и другой богатейший источник, из которого они могут черпать различные симптомы, связанные
с
приближением землетрясения,
— это мир животных,
обитающих на суше. По наблюдениям людей, переживших землетрясения, приближение катастрофы чувствуют заблаговременно и
показывают это своим тревожным поведением, необычно сильным беспокойством собаки, кошки, гиены, тигры, слоны, львы
и многие другие домашние и дикие звери.
Вот несколько интересных
фактов,
собранных
в разное
время
журналистом
В. Песковым
и опубликованных
им
в
«Комсомольской правде» 15 мая 1966 г.
«Дня за два до ашхабадской катастрофы к ответственному
работнику пришли
старики-туркмены:
«Будет
землетрясение». — «Откуда вы знаете?» — «Змеи и ящерицы
ушли
из
нор...» Через два дня произошло землетрясение.
Вот запись трехлетней давности: «В поезде сосед по купе
достал семейные фотографии. Среди портретов я увидел снимок
овчарки. «Почти как человек дорога
эта
собака...
— сказал
сосед. — Мы с женой работали в Ашхабаде. В ту ночь поздно
вернулись домой. Спать не сразу легли. Я копался в бумагах.
Жена читала. Дочка в коляске спала. Вдруг — чего не бывало ни
разу — собака рванулась с места и, схватив девочку за рубашку,
кинулась в дверь. Сбесилась! Я за ружье. Выскочил с женой.
И тут же сзади все рухнуло. И весь город обрушился на глазах...»
А вот несколько фактов, записанных корреспондентом газеты
«Советская торговля» О. Бычковым: «26-го я проснулся от неприятного чувства: кто-то скребся в постели. Глянул — котята
под одеялом. Кошка понатаскала. Я прогнал кошку, а котят перенес на кухню. Подошел к крану
ополоснуть
руки, и вдруг
меня кинуло так, что ударился головою о стену...»
132
Бионика
А. Забровский рассказывает: «У меня десятка четыре разных пород голубей. За полминуты до первых толчков голуби
вдруг с шумом покинули голубятню и, полетав в темноте, уселись на крышу. Никогда ночью такого не было. Я еще подумал: что это значит? И вдруг началось... И теперь перед каждым толчком стая взлетает...»
Примеров, убедительно свидетельствующих
о том, что
в
окружающем нас мире животных имеется много своеобразныхк,
весьма чутких провозвестников землетрясений, можно
было
бы привести еще уйму. Однако о них люди почему-то больше
всего вспоминают после страшных катастроф, а не перед ними.
И никто из ученых, насколько нам известно, изучением
<¢ycтройства» и «принципа» действия этих разнообразных «живых
сейсмографов» до последнего времени всерьез не занимался.
В чем же секрет сейсмической чувствительности животных?
Какова физика предчувствия землетрясений у живых организмов?
Можно предположить, что предупредительным сигналом о
надвигающемся
бедствии
для
животных
является
«голос
недр» — инфразвук — результат накопления упругой энергии,
доводящей горную породу до разрыва. Правда, у этой гипотезы
есть одно уязвимое место. Ведь ежедневно сейсмические станции регистрируют множество слабых колебаний почвы.
Как
же удается животным отличать эти колебания от тех, которые
предшествуют землетрясению?
Сейсмические колебания, как известно, бывают
разные
—
продольные и поперечные. Продольные передаются в атмосферу и в воду, а поперечные распространяются только
в земле.
Сигнал, предвещающий землетрясение, возможно, состоит из
продольных и поперечных колебаний, смешанных в определенной пропорции, различных по частотному спектру. Некоторые
животные хорошо слышат звуки, слишком низкие по частоте
для человеческого уха. Это удалось установить, применяя метод условных рефлексов. Если во время кормления животного
подавать низкочастотный сигнал, животное постепенно привыкает к совпадению и начинает реагировать на сигнал так же,
как оно реагирует на корм. Для некоторых животных предел
воспринимаемого звука по частоте лежит ниже 16 гц (низкочастотного предела человеческого уха)— они
слышат
звуки
частотой 12 и даже 8 гц. Поэтому медузы накануне
шторма
уходят от берегов, а глубоководные рыбы поднимаются перед
землетрясением вверх. На медуз инфразвук действует сверху,
а на глубоководных — снизу, от дна. Непосредственно ли действуют на животных низкочастотные колебания? Или медуз и
рыб гонит прочь от инстинкта инфразвука наследственная память, сохранившая сведения 0б опасностях, сопровождаемых
инфразвуком? Сейчас трудно сказать. Но одно несомненно:
Живые
барометры,
гигрометры,
сейсмографы
133
обитатели первобытного океана выработали приспособления к
восприятию инфразвука потому, что всякое движение
в воде
рождает колебания именно в этой части спектра.
Итак, если загадка прогнозирования землетрясений некоторыми животными, например глубоководными или белыми аквариумными рыбами, связана с восприятием
инфразвука, то
открывается возможность создания
бионических
приборов,
рассчитанных на улавливание предшествующей
’землетрясению инфразвуковой «увертюры». И тогда, заглядывая в будущее, можно представить себе, что в один из дней жители сейсмоопасных районов в первый раз услышат по радио сигнал
тревоги: «Граждане, выключайте электроэнергию, принимайте противопожарные меры, покидайте жилища!
Инфразвуковая служба извещает: через три часа на территории нашего
района ожидается землетрясение...»
Вероятно, помимо инфразвука, предвестниками землетрясений для многих животных являются и другие сигналы. Надо
надеяться, что, когда бионики разных стран вместе с биологами, инженерами и сейсмологами энергично возьмутся за разгадку тайны биопрогноза, начнут тщательно изучать подмеченные корреляционные связи между поведением живых организмов и приближением землетрясения, они в конце концов установят какую-то однозначную зависимость между инстинктами
животных и изменением их поведения
накануне
стихийного
бедствия, выявят природу основных переносчиков
и каналов
распространения сейсмической информации, а также выяснят
устройство созданных природой
механизмов для восприятия
и расшифровки сейсмоинформации. А это уже могло бы послужить новым этапом, новым началом научного предвидения
землетрясений.
Разумеется, при поисках решения столь сложной проблемы,
как прогнозирование землетрясений, впереди могут встретиться и безусловно встретятся «болотные огни», но на этом же
пути исследователей, несомнеино, ждут и ценнейшие для современной науки и техники находки и открытия. Это можно
проиллюстрировать рядом весьма убедительных примеров.
На подмосковной
биостанции
Института
эволюционной
морфологии
и
экологии
животных
им.
А. М.
Северцова
АН СССР в течение многих лет доктором биологических наук
Н. Н. Дислером ведутся исследования органов чувств акуловых
рыб. В результате этих исследований ученый сумел
найти
и
объяснить взаимозависимость между электромагнитным излучением и поведением «морских собак». Можно предполагать,
что со временем конструкторы приборов сейсморазведки смогут использовать в своих новых разработках добытые советскими ихтиологами данные о боковой линии акуловых рыб,
тонко улавливающей электромагнитные
колебания
и очень
134
Бионика
чувствительной к вибрации окружающей среды. Изучение органа боковой линии, как считают ученые, сулит многое.
Другой пример. Японские ученые Хата и Абе
длительное
время экспериментировали с рыбками сомиками вида РагазПиги$ а$0{15$. Исследователи помещали подопытных сомиков
в
заземленный аквариум и через каждые 6 ч подставку аквариума слегка встряхивали. Обычно рыбы не реагировали на такие
толчки, однако за несколько часов до землетрясения поведение
сомиков резко менялось
— те же легкие толчки вызывали
y
них бурную реакцию. Как же рыбы узнавали
о предстоящем
землетрясении?
«Это объясняется,
— пишет
Л. Жерарден
в
своей книге «Бионика», — отнюдь мые сверхъестественными способностями рыб. Известно, что в земной оболочке
постоянно
циркулируют так называемые теллурические токи и накануне
землетрясений в них наблюдаются возмущения. А эти рыбки,
как и многие другие виды рыб, имеют органы, чувствительные
к очень слабым электрическим колебаниям. Возможно, именно
рыбки сомики помогут найти идею прибора, предсказывающего землетрясения...»!
Не так давно серией опытов удалось установить, что обитатель наших прудов и озер жук-плавунец ощущает своими двумя небольшими отростками, находящимися позади на брюшке,
водяные волны высотой 0,00000004 мм. А маленький кузнечик
из семейства титигония чутко воспринимает
даже самые
незначительные движения почвы, передаваемые растениями, на
которых он сидит. Кузнечик способен, как показали исследования, реагировать на колебания, амплитуда которых равна
половине диаметра атома водорода! Это значит, что если, скажем, произойдет землетрясение где-нибудь на островах Тихого
океана силой 5—6 баллов, то колебания
почвы,
вызванные
этим землетрясением в Москве, будут зафиксированы кузнечиком. К этому необходимо добавить следующее: подобно тому
как лягушка получает лишь «избранную» информацию, так и
кузнечик, вернее, его мозг воспринимает из всего колоссального потока звуков лишь те, которые имеют для него биологическое значение.
Такой избирательной
способности
кузнечика
нельзя не позавидовать.
Разве не заманчиво познать «конструкции» всех этих сверхчувствительных живых «сейсмографов», созданных природой,
воспроизвести их в металле и передать
на
вооружение сейсмологам?
‹...Я
за
то, — говорит
член-корреепондент
AH
CCCP
Е. Ф. баваренский,
— чтобы изучать поведение животных перед подземными толчками. Конечно, такие исследования
не
легко поставить. Очень важно смоделировать те чувствительные
1 Жерарден
Л.
Бионика.
М.,
«Мир»,
1971,
с. 98.
Живые
барометры,
гигрометры,
сейсмографы
135
органы животных, которые воспринимают какие-то сигналы из
недр в связи с происходящими там деформациями и микроземлетрясениями и свидетельствуют о надвигающемся бедствии.
Тогда сейсмологи смогли бы обойтись без услуг самих животных...»
На повестке дня у биоников стоит решение еще одной волнующей человечество земной проблемы. Мы имеем в виду так
называемую проблему «вулканного прогноза».
Известный бельгийский геолог и вулканолог Гарун Тазиев
считает, что вулканическое извержение является «самым фантастическим явлением природы». И с этим нельзя не
согласиться. Трудно представить себе явление более грозное, чем
разгул вулкана. Во время извержения вершину вулкана окутывает клубящееся лиловое облако, похожее на гигантский кочан
капусты... Освещенное отблесками лавы, оно разрастается, заслоняет солнце, засыпает все вокруг горячим
пеплом.
Еще
страшнее картина ночного извержения; с вершины горы к цветущим садам, зеленым равнинам и притихшим селениям движутся огненные потоки лавы, все сжигая на своем пути; обгоняя медлительную лаву, с ревом несутся горячие грязевые потоки, они увлекают с собой вырванные с корнем деревья, огромные каменные глыбы, несут смерть всему живому. Помните картину выдающегося русского художника К. П. Брюллова
«Последний
день
Помпеи»?
В
основе
ее сюжета
лежит
истори-
ческий факт: гибель античных городов Помпеи, Геркуланума
и Стабии при извержении
вулкана
Везувия
в 19 г. до н. э.
Страшные толчки сотрясли окрестности вулкана. Сквозь мрак,
окутавший все вокруг, пробивалось зарево над Везувием. Над
ним плясали осатаневшие молнии. Рушились дома. А потом
град камней и ливни горячего пепла низвергались на город.
Они похоронили на 18 веков три древнейгтих города римлян.
Однако извержение Везувия было далеко не самым грозным
в истории нашей планеты. Сегодня ученые все больше склоняются к мнению, что легендарная Атлантида
существовала в
Эгейском море и погибла примерно 3400 лет назад в результате извержения вулкана Санторин.
Известны в истории Земли и другие примеры страшных по
своей
силе
и последствиям
извержений
вулканов.
Человек издавна стремился проникнуть в тайну вулканизма — грозного и нерегулируемого явления природы.
Между тем имеется немало данных, говорящих о том, что
многие животные обладают способностью предвидеть извержение вулкана. Известен, например, такой достоверный исторический факт. В апреле 1902 г. на острове Мартиника, в Карибском море, вдруг проснулся, спавший до этого пятьдесят лет
вулкан Мон-Пеле. Это событие не особенно взволновало жителей города Сен-Пьер. Первые дни они еще стояли на улице
и
136
Бионика
смотрели, как огромная гора курилась на фоне неба. А потом
и вовсе перестали замечать вулкан.
Но ночью Т мая
город
озарили яркие вспышки. Это было последним предупреждением, и среди 30000 жителей Сен-Пьера нашелся только один
человек, который внял ему. В Т ч утра, взглянув на барометр,
Фердинанд Клерк увидел, что стрелка выбивает мелкую дробь.
Он тут же запряг повозку и вместе с семьей под иронические
возгласы оставшихся покинул город. Когда повозка прошла
часть пути и поднялась на холм, Клерк остановился, чтобы
взглянуть на покинутый город. Было Т ч 50 мин. Все последующее произошло в течение мгновения. Сторона вулкана, обращенная к городу, вдруг распахнулась, как гигантская огненная
дверь. Вырвавшееся из нее черное облако с ревом устремилось
вниз. Понадобилось всего 30 сек, чтобы весь город оказался
накрыт им, как огромным покрывалом.
Все обитатели
СенПьера лишились жизни, не успев ни испугаться, ни даже узнать об опасности. После катастрофы в грудах развалин и
в
дыме пожарищ нашли
погибшими всех
жителей
города и
один-единственный труп кошки.
Куда же девались все домашние животные, принадлежавшие некогда жителям Сен-Пьера, птицы, звери, обитавшие вокруг вулкана?
Оказывается, почти за месяц
до страшного
извержения
вулкана Мон-Пеле, когда видимых признаков будущей катастрофы еще не существовало, животные начали по собственной
инициативе «эвакуироваться» с острова Мартиника. Первыми
двинулись в путь птицы. С незапамятных времен некоторые
перелетные птицы делали привал на озере вблизи города;
на
этот же раз они, не задерживаясь, пролетели мимо и устремились на юг Африки. В середине апреля многие местные пернатые с оглушительным щебетанием тоже покинули город. Заметно оживились в это время
обитатели
густых
зарослей
на
Мон-Пеле
— змеи !, а те, которые находились вблизи кратера
вулкана, по-видимому, решили, что им тоже
пора
покинуть
родные места, и 17 апреля они двинулись в путь-дорогу. По их
«стопам» устремились и пресмыкающиеся.
Несколько дней спустя угроза стала очевидной. Вулкан все
больше и больше мрачнел. И вот 3 мая в 5ч 45 мин преподаватель лицея в Сен-Пьере наскоро делает такую запись: «Собаки
лают. Корова стремительно бежит по дороге, птички беспрестанно перелетают с ветки на ветку, голуби сидят нахохлившись в голубятнях, куры и утки не выходят из клеток».
Небезыинтересен и такой факт. При извержении на Камчатке вулкана Безымянного в марте 1956 г. не было случаев гибе' Змеи обладают отличным сейсмическим «слухом», они воспринимают колебания Земли всем телом. Вероятно, змеи способны тонко реагировать и на изменение электрического поля.
Живые
барометры,
гигрометры,
сейсмографы
137
ли медведей. Все косолапые выбрались из берлог и заблаговременно ушли в безопасные места.
В чем же секрет умения животных предчувствовать извержение вулкана? Что именно пробуждает в животных тревогу
за свою судьбу задолго до катастрофы,
когда
людям вокруг
кажется все спокойным, — шум ли, не слышимый человеческим ухом, неуловимое ли содрогание почвы или не ощутимое
никакими современными приборами инфракрасное излучение,
идущее из глубин вулкана? Ученые пока не могут ответить на
этот вопрос, но факт остается фактом — многие животные обладают замечательной способностью предчувствовать извержение вулкана. Именно это и заставляет специалистов по бионике заняться научным исследованием загадочного феномена.
В свете рассматриваемой нами проблемы не может не привлечь к себе самого пристального внимания ученых и замечательное растение — королевская примула. Она растет на острове Ява и называется там «цветком землетрясения». Королевскую примулу можно найти
лишь на склонах вулкана.
Она
отличается от всех своих сестер-примул тем,
что
расцветает
только накануне извержения вулкана и служит местным жителям своеобразным
сигнализатором
грозящего
им
бедствия.
Завидев расцветшую королевскую примулу, жители деревень,
расположенных у подножия вулкана, всегда покидают свои
дома и устремляются в безопасные места (цвет. табл. 5).
Почему же королевская примула, как правило, расцветает
незадолго до извержения вулкана, а не в другое время? Да потому, что мощным толчкам земной коры всегда предшествуют
слабые колебания самых различных частот, в том числе и ультразвуковых. Они-то,
надо полагать,
и ускоряют
движение
питательных соков по капиллярам растения, ускоряют обмен
веществ — цветок распускается! Аналогичное явление наблюдалось в опытах с элодеей и мимозой,
проводившихся
лет двадцать назад индийскими учеными Сингхом и Панниахом.
Бионика в содружестве с биологией, метеорологией и
смологией продолжает терпеливо исследовать,
казалось
сейбы,
самые незначительные факты и явления, стремится определить закономерности, найти тончайшие нити,
связывающие
происходящие в биосфере процессы с их признаками, которые
обнаруживают и фиксируют живые организмы. Этот целенаправленный поиск обещает и, несомненно, подскажет не одну
замечательную идею для создания принципиально новых инструментальных средств и методов прогнозирования штормов,
ураганов,
цунами,
землетрясений,
извержений
вулканов.
И когда инженеры воплотят эти идеи в электронные системы,
а метеорологи, сейсмологи, геофизики и вулканологи
начнут
ими повседневно пользоваться, слепые силы природы уже
не
будут больше властны над человеком. Человек победит стихию:
5
у
я>
vat
р
4
4
~
s
Y
ri
7
|
Vee Vex
и
И
f
И
ES
WE
WAY
*}
В
4
ки
<
rf ee
f Bioe
a|
Se
$
TAY
МКТ
ish
A
RHA
an
р
«< о
nt 4
$ VA
ИUe
J
SAL
ЗЕ
yt
р
Биомеханика
Природа «не «изобрела» ни колеса, ни гребного винта, ни пропеллера, ни многих других устройств, широко
применяемых
ныне в различных видах транспортных средств. И все же ни
одна отрасль техники так не обязана природе
своим стремительным развитием, количеством заимствованных у нее идей и
методов, средств и видов передвижения, как современный транспорт во всем его многообразии.
У природы человек учился летать, строить планеры
и самолеты; она помогла ему стать крылатым, как птица, и быстрым,
словно мысль. Она же научила его плавать и мастерски сооружать речные, морские и океанские корабли. И очень может
быть, что идею создания колеса, которой мы так гордимся, считаем эталоном оригинальности изобретательской деятельности
человека, независимости его технического творчества от копирования природы, подсказал не кто иной, как сама
природа.
Действительно, присмотритесь повнимательнее, как передвигается человек (рис. 25): опираясь на одну ногу, он отталкивается носком другой ступни от земли и, сохраняя равновесие,
выносит ногу вперед; нога-маятник описывает в воздухе часть
окружности и в конце пути плавно опускается на землю. Шагание, как говорят инженеры, — это «прерывистое качение». Вот
этот-то простой и вместе с тем гениальный принцип движения,
вполне возможно, привел человека к созданию около 6000 лет
назад, а может быть и раньше ', колеса, вырубленного из цельного куска дерева, способного к непрерывному качению. Руши-
' До недавнего времени
родиной
колеса
считали
Средний
Восток.
В 1851 г. один из английских археологов выдвинул предположение о том,
что колесо изобретено в Месопотамии. Однако недавно на территории Болгарии найдено, по-видимому, самое древнее в мире колесо. Анализами ус-
тановлен его возраст — 5850 лет.
140
Бионика
лись царства, сменялись цивилизации, но круглая форма колеса оставалась неизменной.
По сути, живая природа была первым политехническим институтом, в котором человек за многие века своей учебы приобрел «высшее» образование в разных областях транспорта, в
создании различных видов средств передвижения. Но все это
было давно. А сегодня? Можем ли мы, располагая быстроходными автомашинами,
скоростными железнодорожными
экспрессами, комфортабельными дизель-электроходами, летающими со скоростью звука воздушными лайнерами, еще чему-нибудь научиться у природы, позаимствовать изее «инженерной»
сокровищницы новые прогрессивные идеи, методы и средства
для дальнейшего развития техники транспорта? Оказывается,
можем.
Начнем с сухопутного транспорта. Если у специалиста, работающего в этой области, спросить, что сегодня является главным, какая проблема более всего волнует его и его коллег, он не
задумываясь ответит:
«бездорожная» проблема! Нужен добротный, высокосовершенный вездеход!
«А разве «на колесе» нельзя проехать куда угодно?» — может спросить читатель, давно привыюкний к асфальтовым дорогам и бетонным автострадам, железнодорожным магистралям
общей протяженностью миллионы километров.
Так-то оно так, да не совсем. Водитель поезда,
например,
прочно «привязан» к двум металлическим ниткам на шпалах.
Он не имеет возможности не только выбрать себе дорогу по
вкусу, но даже на один сантиметр не может отклониться от пути, предписанного рельсами. Не в лучшем положении находится шофер-профессионал
или автомобилист-любитель.
Достаточно
свернуть
на обочину
и автомобиль
забуксует в
первой мало-мальски глубокой луже, бешено запрыгает на ухабах, не сможет перевалить не такой уж большой камень
или бревно и вовсе
остановится
перед
глубокой траншеей или рвом. Подводит
колесо.
Выдуманное
человеком,
OHO
предназначено для искусственных, дорого обходящихся нам дорог. А их не так
уж много на Земле, как
нам думается.
Взгляните
на
карту,
где
нанесены
черными и красными
линиями
шоссе,
автострады, железные дороги, и вы увидите, что большая часть нашей планеты
недоступна для колесного
транспорта.
Рис. 25. Нога человека
при ходьбе описывает
'едяные, снежные и песчаные пустыни,
часть
окружности.
тундра
и
горы,
леса
и
овраги,
болота
и
Биомеханика
141
илистые берега озер и рек — они занимают более 60% всей суши. Земная поверхность явно мало подходит для передвижения
по ней на колесах.
Но колесный транспорт не так уж безнадежно плох вне искуественных дорог,
ведь человек создал
колесные экипажи,
«несущие дорогу на себе», — гусеничные машины.
И вирямь,
проходимость гусеничной машины гораздо лучше, чем у автомобиля. Но такой вездеход очень зяжел, испытывает несравнимо большее сопротивление движению (а следовательно, больше
расходует энергии). Да и не такой уж он вездеход: преодолевает отнюдь не все препятствия. И еще один чрезвычайно серьезный недостаток гусеничной машины: при движении она уродует покров земли, уничтожает растительность, ломает кустарник
и молодые деревья, она непрерывно роет себе длинные
ямы, стараясь в то же время из них выбраться. Это очень неблагодарный труд.
Итак, нужен хороший вездеход, который с одинаковой легкостью мог бы переносить грузы и пассажиров по снежному покрову и пескам, преодолевал бы поваленные стволы деревьев
и валуны, ледяные торосы и полыньи, болота и топи, канавы и
овраги, ручьи и реки. Наряду с высокой проходимостью он должен быть экономичным, надежным в работе, маневренным и
легко управляемым. Именно в таком вездеходе сегодня испытывают острую нотребность геологи, географы, геодезисты, полярники, прокладчики газо- и нефтепроводов, выеоковольтных
электролиний, строители железных дорог и многие другие специалисты, которым по роду выполняемой работы приходится преодолевать множество самых различных «земных» препятствий.
Поскольку все живое великолепно
обходится без колес и
шоссе, бионики и инженеры, естественно, вынуждены в поисках рационального решения «вездеходной» проблемы обратиться за советом к природе. За миллионы лет эволюции природа
создала много оригинальных биологических типов движения,
приспособила живые существа к различным видам перемещения по земле: ползание, бег, прыжки, ходьба. Бионические исследования конструктивных особенностей
принципов
работы
оригинальных «живых движителей» приводят к мысли, что их
вряд ли можно заменить каким-либо одним, универсальным.
Видимо, наиболынего эффекта можно достигнуть, подбирая в
каждом конкретном случае какой-то оптимальный. И вот тому
пример.
Для многих отраслей народного хозяйства Севера нашей
страны обычные тягачи, тракторы и транспортеры не пригодны — они не могут развивать достаточно большую скорость:
эти машины образуют слишком глубокую колею, часто буксуют и увязают
в мелкозернистом,
несцементированном,
рассыпчатом, как песок, снегу. «Еще в Антарктиде я увидел недо-
142
Бионика
статки многих машин: например, в рыхлом снегу буквально
тонули тягачи», —рассказывает известный советский конструктор антарктических машин, техники для Севера, лауреат Государственной премии, профессор А. Ф. Николаев.
Какими же в таком случае должны быть машины для передвижения по снежной пустыне? Ответ неожиданно подсказали... пингвины. Эти забавные птицы передвигаются весьма своеобразным способом — на животе: отталкиваясь от снега ластами, словно лыжными палками, они развивают
скорость до
25 км/ч. Этот принцип передвижения пингвинов по рыхлому
снегу лег в основу созданного в Горьковском политехническом
институте
им. А. Жданова
под
руководством
профессора
А. Ф. Николаева снегохода с плицевыми движителями. Плицы
выдвигаются на необходимую величину, в зависимости от плотности снежного покрова. Водитель плавно с помощью гидросистемы уменьшает дорожный просвет, и машина, как и пингвин,
скользит на днище корпуса. Днище
покрыто
второпластом,
имеющим
малый
коэффициент
сопротивления
трения
на снегу.
Снегоход «Пингвин» может развивать скорость
по рыхлому
снегу до 50 км/ч.
Несомненный интерес для конструкторов наземных
транспортных средств представляет ползание животных и волочение
туловища по земле. Оба способа движения основаны на использовании следующих друг за другом импульсов — вибраций —
различной продолжительности (частоты) и интенсивности (амплитуды). Под воздействием чередующихся импульсов в грунтах
происходят
так
называемые
вибровязкие
изменения
свойств. Если, получив от вибратора ускорение, кусочек почвы
может сместиться на большее расстояние, чем его размер, грунт
«потечет»; если же нет — уплотнится. Эту истину хорошо усвоила среднеазиатская ящерица круглоголовка. При появлении
малейшей
опасности
тело
ящерипы
начинает
вибрировать,
и
через несколько секунд животное погружается в песок, как
в
воду. Теперь круглоголовку не найти. Исследования показали,
что частота и амплитуда вибраций тела ящерицы точно соответствуют именно данной разновидности песка. А нельзя ли по
принципу «живого вибратора» построить «ползоход»? Были
проведены соответствующие эксперименты, и оказалось: вибромашина не имеет себе равных. При собственной массе свыше
двух тонн и с двигателем всего в 14 л. с. (мощность мотоциклетного мотора) она не только двигалась, но и развивала тягу
в тонну. Такого усилия достаточно, чтобы тащить по целине
груз массой 6—10 7! Этот же вибратор без труда взбирался на
песчаные откосы недоступной человеку крутизны.
Экономичность и высокие тяговые качества вибраторов с
успехом использованы польскими инженерами. Они создали
самоходный малогабаритный аппарат пока мощностью всего
Биомеханика
143
300 вт. Малютка развозит по цехам грузы массой в несколько
центнеров! Правда, скорость передвижения вибратора небольшая, но ее можно повысить соответствующим подбором частоты
и амплитуды колебаний. Простые по конструкции, надежные
в эксплуатации, почти не требующие ухода вибротранспортные
системы можно весьма эффективно использовать в условиях Севера. Здесь новые вездеходы сократят сроки доставки грузов,
повысят надежность и регулярность
транспортных
связей.
И, что важно для Севера, вибратор не только не разрушит мерзлоту (это чревато очень серьезными последствиями), а даже
укрепит ее.
Пресмыкающиеся животные и технические
системы, воспроизводящие их принцип перемещения,
конечно,
не могут
сравниться с энергоскороетными показателями колесного транспорта. Но зато многие бегающие и прыгающие животные по
этим параметрам не уступают колесу, а, самое главное, их высокая проходимость вне конкуренции. Тигр и леопард, например, легко перепрыгивают двухметровые барьеры, а горные козлы — широкие пропасти. Гепард, по свидетельству французского ученого Франсуа Бульера, способен развивать скорость по.
пересеченной местности до 110 км/ч. И как же заманчиво по
образцу этих «живых моделей» создать быстроходные вездеходы! Но построить «бегающую», «галопирующую» или «рысящую» машину пока еще не удалось ни одному инженеру. Однако разработкой машин-«прыгоходов» занимаются изобретатели
и инженеры многих стран. Известно множество предложенных
конструкций вездеходов типа «Кузнечик», «Блоха», «Лягушка» и др.
Не так давно инженер В. Турик разработал проект бесколесного прыгающего автомобиля, идею создания которого ему подсказал ... кенгуру. Да, да! Мы не оговорились, обычный кенгуру, каких немало водится в Австралии. Этих животных природа приспособила к быстрому бегу прыжками на задних конечностях. У крупных кенгуру, массой до 70 кг, медленный, «прогулочный» прыжок покрывает от 1,2 до 1,9 м. Прыжки же во.
время бегства достигают 9 м и более. У серого кенгуру однажды
был зафиксирован прыжок
в 13,5 м! Эти гиганты,
если потребу-
ется, могут и в высоту подпрыгнуть до 3,3 м. Редко какое
бегающее животное может догнать кенгуру, который, передвигаясь мощными прыжками обеих ног, при этом сохраняет очень.
высокую маневренность. Все специфические особенности «прыжкообразного» движения
кенгуру, как
утверждает В. Турик,
нашли свое отражение, точнее, техническое воплощение в разработанной им конструкции автомобиля-прыгуна (рис. 26). Все
бы хорошо, но...
Когда кенгуру, энергично оттолкнувшись от земли
двумя
задними конечностями, совершает прыжок, ему помогает под-
144
Бионика
держивать в полете равновесие и менять направление движения... хвост (длиной до 1 м). Прыгающую машину при скольконибудь большой длине прыжка тоже надо наделить устройствами стабилизации, чтобы она не кувыркалась в полете. Кроме
того, чем выше и дальше прыжок, тем сильнее удар о землю.
Чтобы спасти транспортируемый груз и саму машину от поломок, а экипаж от увечий,
«прыгоход»
потребуется
снабдить
амортизацией,
которая
могла
бы
сравниться
с той,
какую
обес-
печивают задние ноги
кенгуру, блестяще
приспособленные
природой не только для отталкивания, но и для приземления.
Возможно, все это технически и осуществимо, но тогда система автомобиля-прыгуна очень усложнится. А сложная система, как правило, всегда малонадежна. Нет, прыгающая машина
никак не может решить «бездорожной» проблемы. В лучшем
случае, ее удел... трамбовка. Не случайно из года в год поступающие в патентные бюро разных стран заявки на новые конструкции «прыгоходов» остаются на полках этих ведомств нереализованными.
Так,
какой
же
«живой
движитель»
следует
взять
за
обра-
зец, чтобы по его подобию создать принципиально новые транспортные средства, могущие во всех случаях заменить колесо и
гусеницу? И не только на Земле, но и в «иноземном бездорожье», на далеких от нас, малоизученных, во многом таинственных и загадочных планетах солнечной системы, где могут встретиться и горные хребты, и огромные пылевые образования, и каменистые равнины, сплошь изъеденные оспинами кратеров.
Такой движитель беспокойная и вечно
ловека «нашла» давно, еще за 150 лет до
ищущая мысль черождения бионики.
Это — ноги! Однако первая попытка практического использования принципа передвижения искусственными ногами была
D>
LAX OY ODE
Рис. 26. Кенгуру
и схема
перемещения
прыгающего
автомобиля.
BD
Биомеханика
145
направлена не на решение бездорожной
проблемы.
В 1813 г.
англичанин Брантон приделал к паровозу «ноги», и машина
медленно, как пешеход, пошла по дороге, отталкиваясь от нее
двумя железными рычагами — конечностями...
Созданные природой ноги — универсальное средство передвижения. Им не нужно хороших дорог, они не образуют колеи,
позволяют животным и человеку
передвигаться и среди нагромождения скал, и по болотным кочкам, и по пескам пустыни, и по льду, и по снегу. И если раньше паровоз неудачника из
Беттерли историки и техники считали только курьезом, то теперь многие видят в нем предшественника шагающих вездеходов для Земли и космоса, над разработкой которых ныне интенсивно трудятся многие видные ученые, конструкторы, бионики и инженеры ряда стран. Во всяком случае, сам факт использования Брантоном полтора столетия назад ног в качестве
движителя паровоза является еще одним убедительным доказательством, что бионический принцип никогда не был чужд
инженерному творчеству, что происхождение техники бионическое по своей сущности!
Итак, шагающие устройства...
Для создания высокосовершенного
шагающего движителя
природа предлагает бионикам обширный набор шагающих биологических систем, достойных подражания. Здесь можно найти немало интересных для инженера идей, оригинальных в конструктивном отношении решений. И с этой целью бионика исследует структуру органов движения, характер
приложения
мышечных сил, вызывающих движения в суставах, кинематику сочленений, распределение массы тела по его звеньям, закономерности движения этих звеньев и тела в целом, определяет характер, направление и значение действующих сил. На
основе данных структурного, кинематического и динамического
анализов составляется биомеханическая характеристика движений. При структурном анализе определяют количество степеней свободы кинематических цепей тела, их характер. Кинематический анализ дает характеристику движения (траектории, скорости и ускорения); динамический — выявляет картину взаимодействия внутренних и внешних сил. Чаще
всего
задача биомеханического исследования сводится к определению картины действующих сил по кинематическим характеристикам движения. Это позволяет оценить экономичность движения, степень использования как внешних, так и мышечных сил
и судить о механизмах координации и регуляции
движений.
Другая задача биомеханического исследования — изучение отдельных положений тела. При этом определяют значение статичных моментов, положение общего центра тяжести тела по
отношению к опоре, степень устойчивости тела в данном положении (что имеет первостепенное значение при проектировании
6—327
146
Бионика
технических шагающих систем), т. е., по существу, устанавливают характер взаимодействия внутренних и внешних сил.
Во всех перечисленных бионических исследованиях широко
используются разнообразные методы регистрации
перемещений, скоростей, ускорений изучаемых движений. Наиболее употребительны оптические методы: ускоренная киносъемка, циклография, киноциклография и др. С их помощью определяют
пространственные перемещения тела, а также перемещения его
звеньев относительно друг друга,
рассчитывают
линейные и
угловые скорости и ускорения, действующие силы. Используются также методы электрической регистрации механических
величин с помощью механотронов, датчиков угловых перемещений, опорных динамографов.
В свете сказанного болышпой интерес представляет ведущаяся в лаборатории Института зоологии Академии
наук УССР
работа по изучению четвероногой локомоции. Применив электроконтактную подографию,
механографию и электромиографию, В. С. Коток, С. Ф. Манзий и В. Ф. Мороз провели исследование работы конечностей собаки, козы и лошади в статике
и движении, которое позволило дать пространственно-временную и силовую характеристику локомоторных циклов каждой
конечности и выяснить принципы сфазированного действия четырех конечностей.
Проведенные
исследования
позволили ученым
высказать
ряд суждений
о путях
упрощения
технических
шагающих
устройств
за
счет рационального
ограничения
числа
их
функций.
«Известно,— пишут ученые,— что конечности животных в
большей или меньшей степени полифункциональны и что каждая функция реализуется по иной программе. Наиболее отработанными, доведенными до автоматизма, являются программы локомоций. Несравненно сложнее по структуре и труднее
для реализации являются
нелокомоторные
программы (например, вставание, постановка на дыбы, удары конечностями,
разгребание земли, почесывание). Степень сложности конструкции ног
на 70—80% обусловлена
этими
нелокомоторными
функциями, которые вовсе не нужны шагающим устройствам.
При создании шагающих аппаратов достаточно предусмотреть
однопрограммную поступательную локомоцию со сменой скорости циклов и боковые повороты. Это вполне будет осуществимо, если вместо 7 звеньев конечности их будет три, вместо
6 суставов — 2 подвижных узла, вместо 40 мышц — 6—8 движений» |,
' Коток
ческий анализ
В. С., Манзий
С. Ф., Мороз
В. Ф. Электрофизиологичетвероногой локомоции. Краткие тезисы докладов на [У
Всесоюзной конференции по бионике, т. VI. M., 1973, c. 158.
Биомеханика
147
Не так давно внимание ученых привлек обыкновенный паук.
Их заинтересовало, как этот представитель отряда членистоногих ходит и довольно быстро бегает, имея длинные лапки, практически лишенные мышц. Какая же сила движет лапки паука?
Зослоги Кембриджского университета Парри и Браун высказали предположение, что эта движущая сила имеет гидравлическое происхождение и, если это так, движение лапок паука
должно осуществляться посредством своеобразного «гидравлического привода», жидкостью для которого
может
служить
кровь. Произвели киносъемку и с ее помощью установили, что
природа действительно наделила пауков чудесным гидроприводом. Если паук вытягивает лапки, гидропривод повышает в
них давление крови до такой степени, что отвердевают их щетинки, и, наоборот, при сгибании
конечностей
гидропривод
уменьшает в них давление крови.
В состоянии покоя давление крови в организме паука, как
показали произведенные замеры, лишь на 0,05 атм выше давления окружающего воздуха. Но в момент прыжка животного
оно мгновенно повышается на 0,5 атм. «Искусственная гипертония» служит тем самые источником энергии, которая позволяет пауку ставить «мировые рекорды» в прыжках. Так, например, европейские пауки-прыгуны берут высоту, превышающую
в десятки раз (1!) размеры их тела.
Можем ли мы сегодня точно воспроизвести гидросистему
паука? Пока нет, ибо ни биологи, ни инженеры не знают самого
главного: каким образом пауки добиваются мгновенного изменения кровяного давления, как они автоматически регулируют'
его в сосудах? Но когда бионики раскроют этот «секрет», уникальный гидродвижитель паука может послужить образцом для
создания компактного, легко управляемого, неприхотливого в
эксплуатации вездехода повышенной
проходимости и маневренности, скажем, для геологических и географических экспедиций, изыскательных партий. Для этих целей большая скорость шагохода ни к чему,
здесь важно другое — уверенное
прохождение
по
любой
местности.
Длинные
голенастые
ноги
экспедиционного «металлического
паука» нигде не увязнут,
легко одолеют самые крутые подъемы,
образно говоря, они и
болото перейдут по кочкам и речку — по бревнышкам. И еще
одно очень важное качество такой машины — затраты энергии
на преодоление больших расстояний будут невелики.
Природа создала ноги самых разных конструкций. Выбрать
оптимальную для шагохода — одна из важнейших бионических задач. От устройства ног во многом зависит скорость передвижения животных. Медведь и обезьяна передвигаются на
больших плоских ступнях; собаки и кошки бегут на пальцах,
пятка у них всегда поднята над землей; газели, антилопы и лошади — на кончиках копыт. Если бы лучшим спринтерам ми6*
148
Бионика
ра, бегущим стометровку с рекордным
результатом 42 км/ч,
пришлось состязаться с носорогом, они едва ли обогнали его:
прямо со старта этот «живой танк»
развивает
скорость до
40 км/час. Гепард может с места за несколько секунд набрать
скорость 75 км/ч. Такое ускорение не под силу даже гоночному
автомобилю!
Природа не поскупилась и на разнообразие
походок. Лошадь, например, может передвигаться четырьмя
основными
способами (шаг, рысь, иноходь, галоп) и несколькими промежуточными. На малой скорости животное опирается на три и
переносит одну конечность поочередно; с увеличением скорости в опоре остаются две (диагональные), а две другие конечности — в воздухе; при дальнейшем увеличении
скорости в
опоре остается одна конечность, а три — в воздухе; наконец,
появляются моменты, когда все четыре конечности находятся в
воздухе и тело пролетает какое-то расстояние по инерции. При
этом роль силы инерции в локомоции возрастает с ускорением
бега, быстрое движение можно рассматривать как пропульсивные колебания тела в режиме резонанса, сила
мускулатуры
направлена на поддержание установившегося режима.
Особенно большое разнообразие походок наблюдается у различных насекомых. Походка даже одного и того же насекомого
может сильно меняться в зависимости от скорости его движения. Оно может плестись, переставляя поочередно по одной ноге. При большей скорости в воздухе могут одновременно находиться по две ноги, обычно по одной из трех левых и трех правых; таких походок — симметричных и несимметричных —
тоже может быть несколько. Наконец, когда насекомое идет
с большой скоростью, оно переступает одновременно тремя ногами: двумя левыми и одной правой; затем одной левой и двумя правыми. Оно идет так, что всегда опирается на три ноги,
образующие опорный треугольник, внутри которого располагается центр тяжести тела. В частности, наблюдениями установлено: когда тараканы удирают от преследования, они используют наиболее быструю походку «трешками» — одновременно переставляют переднюю и заднюю ноги с одной стороны и
среднюю с другой.
Каждую
такую комбинацию из трех ног
можно сравнить с широкой, устойчивой ступней. Поэтому две
«трешки» действуют почти так же, как две ноги. Иное дело —
неторопливая сороконожка. Чтобы не запутаться в обилии ног,
она предпочитает волновую походку: начиная с задней, по очереди поднимает и опускает все ноги с каждой стороны. Но на
эту процедуру требуется немало времени.
При таком разнообразии устройств, принципов работы движителей шагающих биологических
систем не так-то
просто
выбрать оптимальный вариант конструкции и количество ног,
тип походки для шагохода, к которому предъявляются четыре
Биомеханика
149
основных требования: приспособляемость к переменным условиям рельефа местности, оптимальность траектории опор, устойчивое равновесие системы, обратная связь с дорогой. Нельзя
также забывать о потребляемой машиной мощности, возможном упрощении конструкции, удобстве обслуживания и эксплуатации шагохода.
Какой же живой шагающей системе следует отдать предпочтение, чтобы по ее образцу создать рациональную конструкцию шагохода, успешно решить «бездорожную» проблему?
Мы уже не раз говорили, что бионика, учась у природы, заимствуя из ее великой сокровищницы творений новые для различных областей техники идеи, конструктивные и технологические решения, не идет по пути слепого копирования. В природе
и технике представления о рациональном далеко не всегда совпадают. Возьмем, к примеру, сороконожку. Двадцать пар ног
животного — гарантия того, что на самой неровной местности
по крайней мере три из них обязательно найдут точку опоры.
Но если попробовать воплотить такую конструкцию в металле,
она
окажется
чрезвычайно
громоздкой
и сложной,
да
и управ-
лять четырьмя десятками ног, прямо скажем, нелегко.
С точки зрения простоты конструкции две ноги, казалось
бы, наилучшее решение. Вспомните ходули. Встав на них и переставляя одну ходулю за другой, качаясь из стороны в сторону, можно легко двигаться вперед. Стоять на месте на ходулях несколько сложнее, чем ходить. Поэтому даже опытный
«ходульных дел мастер» — цирковой артист — непрерывно немного перемещается. Впрочем, и ребенок сперва пытается ходить и только потом самостоятельно стоять. На ходулях можно без труда развернуться и места для этого маневра требуется
совсем мало. Конструкцию ходули можно усложнить, снабдив
ее двухзвеньевым механизмом, имитирующим бедро и голень
ноги. Связав две такие ходули общей площадкой, можно построить двуногий стопоходящий механизм. Чтобы привести в
движение такие механические ноги, можно использовать внешние источники мощности, например электро- или гидропривод,
а за человеком оставить функции управления. Но управление
двуногой стопоходящей машиной потребует от водителя всего
его внимания без остатка. Почему?
Дело в том, что шагающий человек руководствуется законами динамической устойчивости. Для
того чтобы
обеспечить
устойчивость двуногой
стопоходящей
машины,
оператор не
сможет ни на одну секунду отвлечься от непрерывного балансирования, независимо от того, будет он двигаться или стоять.
А теперь представьте себе, что вдруг, совершенно неожиданно
выйдет
из
строя
привод
одной
Если это произойдет, когда
катастрофа неизбежна...
из ног
вторая
стопоходящей
нога
находится
машины.
в воздухе,
150
Бионика
Нет, от очень сложной в управлении, неустойчивой, ненадежной в эксплуатации двуногой стопоходящей машины надо
отказаться, заключили ученые. И решили пойти по пути, по которому шла природа, — наделять искусственные
шагоходы
числом ног тем большим, чем ниже
«уровень
организации»
системы. Начали с создания «четырехногих машин».
Основоположником такого рода систем является великий
русский математик П. Л. Чебышев (1821—1894). Он первый, задолго до начавшихся в наше время бионических разработок,
построил модель «переступающего механизма» — «стопоходящей машины», которая демонстрировалась
на Всемирной выставке в Париже в 1878 г. Модель состояла из четырех похожих
на греческую букву лямбда ног. Механические ноги (только они
и показаны на рисунке 27) были соединены так, что их кривошипы образовали обыкновенный параллелограмм, в углах которого
находились шарниры. Стоило рукой переместить корпус стопохода вперед или назад, как машина приходила в движение.
Четыре ноги стопохода перемещались попарно, подобно ногам
животного: вторая с четвертой и первая с третьей. Внешне похожий на плоского кузнечика, стопоход шагал...
Чебышевская
стопоходящая
машина
не
получила
практи-
ческого применения при жизни ее создателя. Лишь 90 лет спустя на испытательном стенде одного из заводов американской
фирмы «Дженерал электрик» появился опытный образец машины «САМ5$» («Кибернетическая антропоморфическая механическая система»), которую чаще всего называют четырехноГОЙ «механической лошадью» или «шагающим
грузовиком».
Этот гигант общей высотой 3,05 м (кузов длиной 3,05 м и шириной 1,21 м) имеет массу около
полутора тонн.
Он снабжен
90-сильным автомобильным мотором, от которого работает гидронасос, питающий гидродвигатели механизмов четырех длинных
(более
двух
метров)
«ног».
Каждая
нога
—
это
трехзвен-
ный рычаг. Движение каждого из сочленений осуществляется
отдельным приводом. А управляет всеми
этими движениями
человек, сидящий в кабине, расположенной в центральной части машины (рис. 28). Руки водителя с помощью
рычагов управляют передними ногами машины, а ноги через
педали —
задними ногами.
Управление «шагающим грузовиком» практически сводится к тому, что оператор «ходит» в кабине. Когда
он делает движения, которые совершает при ходьбе, машина
начинает «шагать», координированно передвигая свои огромные четыре лапы.
Водителю шагохода очень важно, важнее, скажем, чем шоферу на автомобиле, «чувствовать» дорогу, ведь нужно безошибочно решить, куда поставить «ногу», выбрать надежную тропу. Оператор описываемой системы чувствует сопротивление
почвы, когда на нее становится нога машины. Он воспринима-
151
Биомеханика
:
~
>.
Oo
PSS
2
Рис,
27.
«Стопоходящая
машина»
П. Л.
Чебышева.
<
Я
SS
SS)?
Si
ds
Can Y
ТД
Рис, 28. «Шагающий
грузовик»,
„в
й
152
а
Бионика
ет его так, будто почвы непосредственно касается его нога. Оператор как бы сам участвует
в прогулке
«механической лошади».
«Шагающий грузовик» успешно прошел испытания. Они показали, что оператору удается одновременно управлять 12 системами и реагировать на 12 воспринимаемых его руками и ногами усилий. Повинуясь оператору, машина при
испытаниях
шла вперед и назад, поворачиваясь вокруг, балансировала на
двух диагонально расположенных ногах, проходила через узкие проходы, легко перешагивала через встречавшиеся препятствия, «становилась на колени», тащила на себе полутонные
тяжести,
поднимала
одной
передней
ногой
груз
массой
200
кг
и укладывала его на платформу автомобиля.
«Механическая
лошадь» может перейти реку, внести пианино через окно на
второй этаж дома, вытащить небольшой автомобиль из кювета
и многое другое.
И все-таки четырехногий аппарат при всех его достоинствах
не лучшее решение бездорожной проблемы. Во-первых, управление такой системой требует от оператора определенных навыков: чтобы хорошо «ходить машиной», нужна тренировка.
Во-вторых, «механическая лошадь» не имеет электронного мозга и оператор сам должен выбрать для нее оптимальную походку, определить выбор места, куда поставить ступню (башмак),
выбрать траекторию движения опоры и корпуса относительно
земли, решить задачу сохранения равновесия. В-третьих, четырехногий аппарат передвигается очень медленно. В-четвертых,
как показали опыты, езда на «шагающем грузовике» утомительна. На протяжении всего пути человек непрерывно работает руками и ногами. Даже без нагрузки это нелегко.
Идея «шагающего грузовика» получила дальнейшее развитие в ряде созданных «восьминогих систем». Один из первых
образцов такой системы получил название «лунный пешеход».
В отличие от ноги «шагающего грузовика» все восемь ног «пешехода» двигались по наперед заданному закону, который определялся кулачково-рычажным механизмом. Через эти механизмы два двигателя независимо один от другого «вели» четыре левые и четыре правые ноги машины. При движении вперед
или назад оба двигателя вращались в одинаковых направлениях. Для того чтобы машина поворачивала вправо или влево,
достаточно было двигатели включить так, чтобы они вращались в противоположные стороны. «Кулачково-рычажный пешеход» был задуман его создателем как машина обратимого
типа. Это значит, что она могла шагать не только когда вращали вал кулачкового механизма, но даже тогда, когда бы ее
тянули или толкали, как, скажем, товарный вагон. Но, как известно, «кулачково-рычажный пешеход» не был использован
американскими космонавтами в лунных экспедициях. Зато од-
Биомеханика
153
на из модификаций этой машины получила весьма
гуманное
применение на Земле.
На рисунке 29 изображено кресло, похожее на странное насекомое.
Это кресло
— чудесное средство передвижения
для детейкалек с пораженными ногами. При его создании был использован тот же кулачково-рычажный шагающий механизм, что и в
луноходе. Восемь таких механизмов приводят в движение восемь ног кресла. Кресло управляется с помощью одного рычага и способно двигаться вперед и назад как по ровной, так и неровной поверхности, по грязи и песку. Кроме того, на своих
восьми ногах, приводимых в движение батарейным электромотором, кресло передвигается вверх и вниз но лестнице. Кресло
делает больного подвижным даже тогда, когда он не может
шевелить ни руками, ни ногами, — достаточно двигать головой,
нажимая на рычаг управления вперед или назад, направо или
налево. Нужно только рычаг управления вывести на уровень
головы ребенка. Единственный недостаток лунопроходца — это
его малая скорость — 2,5 км/ч.
Поиск рациональной конструкции шагохода
привел ряд
изобретателей, конструкторов к созданию машин, сочетающих
принцип шагания с перекатыванием. Например, чехословацкий инженер Юлиус Мацкерле спроектировал систему, получившую название «шагающее колесо». Идея изобретения, по
>
ОО
Рис.
29. Лунопроходец,
умеющий
шагать.
154
Бионика
словам автора, — «научить» автомобиль ходить подобно тому,
как это делает человек. И действительно, в механизме передвижения «шагающего колеса» нетрудно увидеть одну из особенностей ходьбы человека, а именно: при каждом шаге наша нога отталкивается от земли в точке, находящейся несколько позади центра тяжести тела; это заставляет корпус человека падать вперед до тех пор, пока он не выставит вперед другую ногу. Точно так же шагает колесо Мацкерле с помощью большого
числа находящихся на ободе пневматических камер. Давление
воздуха в них непостоянно, и все они связаны с компрессором,
который, изменяя давление в камерах, заставляет колесо перемещаться. Как это происходит, легче всего понять с помощью
схемы, изображенной на рисунке 30. Полное давление создается только в камере, находящейся
за
вертикальной осью,
внизу. Одновременно в камере прямо под осью давление понижается. При этом возникает такой же опрокидывающий
момент, как и при шаге человека, — колесо легко перекатывается вперед. Как только очередная камера отрывается от грунта,
давление в ней снижается. Поскольку раздувание камеры, находящейся позади точки касания колеса, сопровождается одновременным сжиманием камеры перед этой
точкой, общий
Рис.
30. Шагающее
колесо:
4 — 12 — камеры. А — втулка колеса, в которой перемещается золотник, распределяющий давление воздуха в камерах.
Б — полость золотника, обеспечивающая
сообщение
камер 1 и
‹ атмосферой. В — полость золотника, по которой воздух под давлением идет от компрессора
в камеру 4.
Биомеханика
155
объем воздуха во всех камерах остается практически неизменным. Повысив давление воздуха в системе, нетрудно увеличить
скорость движения колеса, а перенастройкой распределяющих
золотников изменить величину крутящего момента. Эти же золотники позволяют изменить направление
движения
колеса,
тормозить движение разогнанного
экипажа
двигателем. Для
обычного торможения давление во всех камерах делают одинаковым, и тогда, катясь по инерции, колесо попеременно сжимает воздух в камерах, рассеивая кинетическую энергию.
Мацкерле построил действующую модель экипажа с колесами диаметром 450 мм. На каждом ободе — 12 камер. Сжатый воздух подавался в передние колеса по гибким шлангам, в
задние
— по
трубчатой
раме.
Испытания
опытной
модели
но-
вого движителя показали, что принцип, положенный в его основу, практически вполне себя оправдал. При избыточном давлении воздуха в системе (0,3 кг/см?) экипаж с грузом в 10 кг
свободно бегал по полю, легко шагал по глубокому песку и даже преодолевал подъемы в 25°. Для того чтобы экипаж с шагающими колесами мог преодолевать крупные подъемы, диаметр камер должен быть довольно
большим по сравнению с
диаметром колеса. Испытания также показали, что для плавного хода экипажа надо устанавливать возможно больше камер.
По мнению специалистов, шагающее колесо Мацкерле —
незаменимый движитель для вездеходов. Тяга такого движителя мало зависит от сил трения — многокамерные колеса будут
хорошо катиться по мягкому грунту, снегу и льду. Каждое колесо может поворачиваться в любую сторону независимо от
других, ибо нет механической трансмиссии,
ограничивающей
углы поворота. Экипаж может двигаться
перпендикулярно к
продольной оси, разворачиваться вокруг одной точки и т. д.
Чтобы представить себе маневренные
возможности будущего
транспортного устройства, оснащенного шагающими колесами,
достаточно вспомнить краба, легко перемещающегося в любом
направлении на плоскости...
Пока шагоходы делают по земле только первые шаги. Над
их усовершенствованием
предстоит еще немало
поработать.
И все-таки уже не далек тот день, когда по земле зашагают
странные на вид, непривычные для глаза, но чрезвычайно проходимые машины.
Они станут нашими
надежными
помощниками в Антарктиде, в тайге и джунглях, в пустыне и тундре.
Крепко став на «ноги», шагоходы откроют нам путь к «белым пятнам», каких еще немало на Земле, отмерят не одну
сотню километров по еще не освоенным
просторам
родной
планеты.
До сих пор мы вели речь о бионических и близких к ним
разработкам различных конструкций вездеходов, в основном
156
Бионика
для земельного бездорожья. Однако человек приступил к выполнению грандиозной программы покорения космоса. Для исследования далеких планет солнечной системы
тоже нужны
вездеходы, но не такие, как для Земли. На Марс, Венеру, Юпитер, Сатурн, Меркурий, Нептун, Уран, Плутон не пошлешь просто двухногую машину или известный нам «шагающий грузовик», управляемый с Земли посредством телевизора и системы
дистанционного управления.
Если
между
Землей и Луной
«цикл связи» длится 2,6—3 сек — время, необходимое для прохождения сигнала, то для установления связи, скажем, с некоей машиной-автоматом, исследующей Марс, потребуется время, которое необходимо для прохождения
команд только в
один конец, примерно 12 мин. С таким же двенадцатиминутным запаздыванием мы получим на Земле
отчет
о действии
машины на поверхности далекой планеты.
Теперь «представьте себе, — пишет известный специалист в
области электроники А. Коут, — следующую картину. Ученый,
находящийся на Земле, следит за телевизионным экраном. Телекамера установлена на машине, ползущей
по поверхности
Марса. Изображение на экране показывает, что электромеханический робот вот-вот сорвется со скалы. На самом же деле он не
вот-вот рухнет. Он уже рухнул 12 мин назад!» !. Чтобы это не
произошло, нет нужды доказывать, что будущие планетоходы
должны значительно отличаться не только от земных шагоходов, но и от луноходов. Это должны быть полностью
бионические системы в самом прямом и широком понимании этого термина. Они должны точно выполнять на расстоянии миллионов
километров от Земли подаваемые с центра связи и управления
лаконичные приказы типа «пройти 500 м к югу», «выйти к такому-то ориентиру», «взобраться на находящийся справа вулкан», «обследовать вокруг себя местность в радиусе 250 м», «замерить в пункте таком-то скорость воздушных потоков», «взять
пробу почвы» ит. д.
Выполняя те или иные приказы-команды, планетоход должен уметь самостоятельно решать, каким способом ему следует
преодолеть встретившееся на пути препятствие — обойти его
или штурмовать «в лоб», как лучше ему спуститься на дно ме‘теоритного кратера и т. п. Словом, «космические первопроходцы» должны быть достаточно «умны», чтобы не только без всякого риска совершать тысячекилометровые «путешествия» по
самому сложному рельефу изучаемой местности, но и уметь
собрать и передать на Землю информацию об исследуемой планете. Такой подход к созданию дистанционно управляемых передвижных автоматов для изучения далеких небесных тел, где
условия зачастую очень вредны и опасны для человека, нахо'Коут
А.
В поисках
роботов.
М.,
«Мир»,
1970,
с. 13.
Биомеханика
157
дит поддержку у многих ученых. Так, известный американский
физик Эдвард Перселл из Гарвардского университета считает,
что для космических исследований требуются глаза, уши и нос
человека, представленные телевизонными камерами, микрофонами и газоанализаторами... «Пусть человек останется дома,
связанный с чувствительными устройствами с помощью радиоволн, — говорит ученый, — и пусть эти устройства с помощью
радиоволн передают на Землю информацию, с тем чтобы анализировать
полученные
данные
не
спеша,
в
спокойной
обста-
новке» (.
А можно ли построить полностью
бионический
планетоход? Теоретически — да, а практически, если говорить о нынешних технических возможностях, — лишь
в определенном
приближении. Но, как известно из истории техники, сложные
системы никогда не создавались сразу. Всегда шло постепенное наращивание качеств.
Прогресс космической
техники
привел
к возникновению
сложных автоматических систем управления,
использующих
быстродействующие
вычислительные
машины.
Развитие подобных систем, накопленные бионикой знания о локомоции животных, о принципах управления движениями живых организмов позволяют уже сегодня вести работы по созданию необходимых для исследования небесных тел локомоционных
роботов — автоматических шагающих аппаратов, способных воспринимать информацию об окружающей среде и синтезировать
движение, обеспечивающее
целенаправленное
перемещение
системы. И наша цель — познакомить читателя с теми путями,
ло которым идут советские
и зарубежные ученые — бионики
и
механики, кибернетики и биологи, математики и медики к созданию локомоционных роботов,
бионических
планетоходов,
или, как их еще
называют,
«информационные
самоходные
системы».
В СССР разработкой космических вездеходов занимаются
несколько крупных коллективов специалистов. Наше знакомство с работами советских ученых над созданием автоматических разведчиков дальних миров — аппаратов,
передвигающихся с помощью искусственных
конечностей, мы начнем с
рассказа одного из энтузиастов и творцов этой новой отрасли
техники — руководителя лаборатории Института проблем управления Академии наук СССР,
доктора
технических
наук,
профессора Г. ЦП. Катыса.
— Мы увлечены созданием движущихся аппаратов без колес, — говорит Георгий Петрович, — автоматических устройств,
предназначенных для поиска, сбора информации и передачи ее
из труднодоступных для человека пространств.
1 «За рубежом»,
№
24. 1971.
158
Бионика
Работая над «шагоходом», ученые использовали принцип
перемещения человека, который переносит свой центр тяжести
обычно на опорную ногу. Двухопорному шагающему устройству приданы специфические особенности: оно производит во время передвижения так называемый «построчный осмотр» поверхности и может быть использовано как самоходный транспорт для информационных аппаратов.
«Шагоход» состоит из четырех блоков: корпуса в виде штанги (траверсы) с размещенными на ней различными узлами основного, управляющего блока, снабженного анализирующими
устройствами, и двух складывающихся опор. И управляющий
блок, и опоры перемещаются вдоль штанги и устанавливаются
на любом ее участке (рис. 31). Во время перемещения информационный блок производит осмотр очередной контролируемой
поверхности вдоль определенной полосы, по длине не ограниченной. Такие полосы расположены на поверхности построчно
и могут быть представлены на телеэкране в виде обычного изображения. По мнению ученых, это «умение» аппарата позволит исследовать поверхность той или иной планеты в различном диапазоне радиоактивных излучений.
У нового робота есть и панорамное «зрение», есть и третий
режим движения — вращение на одной из опор (вторая складывается).
На модели «шагохода»
удалось
установить интересный
факт: преодолевая сопротивление грунта,
перебираясь через
трещины и расщелины, аппарат несет минимальные энергетические потери. Благодаря большой маневренности он проходит
там, где останавливаются другие устройства; маневренность
его исключительна.
Рис.
31.
+ — информационный шагающий аппарат, созданный под руководством
тыса в Институте проблем управления АН СССР; 2 — схема движения
сканирования поверхности (по Б. Тюрину).
профессора
Г. П. Кааппарата; 3 — способы
Биомеханика
159
На У симпозиуме ИФАК
по
управлению в космическом
пространстве (город Дубровник, Югославия) профессор Катыс
рассказал об еще одном детище руководимого им коллектива,
так называемом «перевертыше». Этот аппарат состоит из двух
тележек, блока с приборами и целой
системы осей и рычагов,
кинематически связывающей их (рис. 32). На блок падает примерно 80% массы всей системы, и ее центр тяжести, по существу, совпадает с центром тяжести блока. При движении в колесном режиме блок лежит на одной из тележек, а другая покоится на нем. При встрече с препятствием (например, с трещиной в почве, с расселиной) верхняя тележка с помощью управляемых рычагов ложится на противоположный «берег», на
нее перевертывается и укладывается блок, а на него — нижняя
тележка. Аппарат двигается дальше, но теперь как бы вверх
ногами. А если на пути встретится песок, зыбучий грунт? Тут
на колесах далеко не уедешь, и машина переходит на режим
«шагания с переворотом».
«Перевертыш» — не полностью бионическая система. Но и
в ней использован принцип шагания, заимствованный у природы. И поэтому уместно напомнить, что бионика отнюдь не препятствует значительному отклонению от оригинала, когда это
необходимо и рационально.
В Институте механики МГУ под руководством доктора физико-математических наук Е. А. Девянина разработана модель
шагающего аппарата, представляющего собой
двухколесную
тележку, снабженную
двумя ногами (рис. 33). Каждая из ног
обладает тремя степенями свободы (рис. 34).
Модель, управляемая аналого-цифровым комплексом, решает две группы задач:
Рис.
4 —
32.
6 —
«Перевертыш»:
циклы
движения
аппарата.
160
Бионика
1. Регулярная ходьба по поверхности с «малыми» неровностями. Генератор такой ходьбы набран на аналоговых элементах. Управление параметрами генератора, определяющими переменную кривизну траектории центра масс аппарата, и рисунок шаговых движений задаются ЦВМ.
2. Специальные нестандартные, короткие (несколько шагов)
движения типа «трогание с места», смена «позы», остановка в
заданной «позе», преодоление препятствий. Задание таких движений производится соответствующими алгоритмами ЦВМ с
последующим преобразованием данных аналоговой машиной.
Работа с описанной моделью позволила выработать рациональные подходы к решению ряда принципиальных задач, возникающих при создании систем управления движением многоHororo шагающего аппарата, и проверить целесообразность Heкоторых конструкторских решений.
Ученые и инженеры Института проблем передачи информации Академии наук СССР под руководством известного советского бионика В. С. Гурфинкеля, доктора
медицинских
наук,
создали модель шагающего аппарата с автономным управлением типа «рикша». Модель аппарата представляет собой тележку на четырех колесах, перемещение которой осуществляется с помощью двух искусственных конечностей, ориентированных относительно корпуса для возможности моделирования
«паучьих» походок. Каждая конечность состоит из двух звеньев — бедра и голени — и имеет две степени подвижности в тазобедренном сочленении и одну степень подвижности в колен-
Рис. 33. Макет
управляемого
шагающего
аппарата, созтанного в институте механики
МГУ им. М. В. Ломоносова.
Биомеханика
161
ном шарнире. Ось первого шарнира тазобедренного сочленения
перпендикулярна плоскости корпуса, ось второго шарнира и
коленного шарнира параллельна плоскости корпуса (рис. 37).
Электропривод каждого шарнира включает в себя электродвигатель типа ДПР-32 и редуктор с самотормозящимся зацеплением. Момент на выходе редуктора — 0,3 кгм, диапазон и изменение углов в каждом суставе не менее 120°. Длина бедра и
голени соответственно равны
12 и 18 см, масса каждой конечности около 1 кг.
Система управления, выполненная на однотипных ячейках,
состоит из трех функциональных уровней (рис. 36):
{— низший уровень, обеспечивающий
автономное
управление каждой конечностью;
П — уровень межконечностного взаимодействия;
Ш — высший уровень для выработки стратегии и перевода
управления с «автономного» на управление, позволяющее осуществлять ходьбу по заданной следовой дорожке.
Формирование шагательных движений на уровне Г при «автономном» управлении организовано следующим образом. Каждая конечность имеет собственный генератор ритма, управляющий движением первого сустава, расположенного вблизи места
скрепления ноги с корпусом и обеспечивающего поворот плоскости ноги вокруг вертикальной оси и перенос ее опорной части
вдоль корпуса аппарата, что является основой шагательного
движения как в опорной, так
и в переносной фазе. Движения во втором и третьем суставах играют подчиненную роль.
Фазы работы второго и третьего суставов зависят от положения первого, который являет_
ся ведущим и задает цикл и
_
_
ритм движения всей конечно
SY | KO ~~~
сти.
a,
Для
адаптации
к
опоре
a2
каждая конечность снабжена
тактильным датчиком, сигналы которого влияют на работу второго и третьего суставов
опорной конечности.
Согласование
работы
нечностей,
необходимое
уровнем
П,
межконечностное
ствие.
из
кодля
последовательной
смены фаз
опоры и переноса, осуществляется
Xo
реализующим
взаимодеи-
Poa
|
x1
Рис.
34. Векторная
ней
свободы
ти
диаграмма
искусственной
управляемого
рата.
=
степе-
конечнос-
шагающего
аппа-
162
Рис.
Бионика
35.
Макет
шагающего
аппарата
с автономным
управлением
Две «универсальные» трехстепенные ноги установлены
тырехколесной тележки, два передних колеса которой
ориентируемыми.
типа «рикша».
в средней части чеявляются свободно-
Как видно на схеме (рис. 36), каждая
конечность
имеет
прямой доступ со стороны высшего уровня Ш, что прерывает
автономное функционирование суставов конечности и обеспечивает возможность реализации любой необходимой программной кинематики в соответствии с управляющими сигналами,
поступающими с уровня Ш и формируемыми ЦВМ.
Модель шагающего аппарата с автономным
управлением
была испытана в различных режимах ходьбы. Испытания прошли успешно. В проведенных экспериментах были проверены
работоспособность системы управления
аппаратом,
возможность изменения скорости его движения, приспособления к передвижению по поверхности с неболыпими неровностями, возможность взаимодействия с высшим уровнем управления '.
Выше уже отмечалось, что у многоногих животных в различные моменты число работающих конечностей и их расположение различны. Непрерывно смещается относительно точек
опоры и центр тяжести. Для равновесия,
а следовательно,
и
устойчивости шагохода
нужно, чтобы проекция
его
общего
' Охоцимский
Д.
Е., Платонов
А.
К.,
Гурфинкель
В.
С.,
Девянин
Е. Д. Моделирование локомоционных систем. Краткие тезисы
докладов на ТУ Всесоюзной конференции по бионике, т. 1. М., 1973, с. 31—33.
Биомеханика
163
центра тяжести на горизонтальную плоскость находилась внутри многоугольника, вершины которого
— опорные башмаки.
А ведь вопросы устойчивости становятся особенно
важными,
когда машина предназначена для автономного передвижения
и не несет оператора, управляющего
ее походкой
и каждое
мгновение готового так или иначе стабилизировать ее положение. Между тем, говоря словами академика И. И. Артоболевского, «для шагоходов условия динамического равновесия вовсе не разработаны». Вот и приходится выбирать такое число
искусственных конечностей и порядок их работы, чтобы в любой моменг шагающий аппарат был статически устойчив.
Ш уровень
Н уровень
|
|
Ноординация
конечностей
1)
Гуровень
д
А
у
|
1
Генератор
ритма
Генератор
ритма
L
| сустав
>
Танктильный
датчик
Рис. 36. Схема
чрикша».
трехуровневой
системы
Тактильныйи
датчик
управления
шагающего
аппарата
типа
164
Бионика
Шесть ног, как
показали
опыты,
— минимальное
число
конечностей, которое дает возможность шагающему аппарату
с автономным управлением идти медленно
или быстро,
не
раскачиваясь из стороны в сторону, как это приходится делать
двуногим и четвероногим. Шестью ногами можно
не
только
варьировать скорость движения планетохода в широком диапазоне, но и применять различные
походки. Так,
например,
можно ходить
«галопом»:
попарно
переставлять
сначала
задние, потом средние и наконец передние искусственные конечности в виде шарнирно-рычажных механизмов. В обыденных ситуациях такая походка не выдерживает
сравнения
с
волновой
походкой
или
походкой
«трешками».
Но
когда
нужно
преодолеть поперечные препятствия типа лежащего
поперек
дороги бревна, глубокой расселины или трещины, без нее просто не обойтись. И еще. Две из шести ног всегда можно превратить в манипуляторы, например, для сбора образцов почвы исследуемой планеты. А остальные четыре позволяют хотя и медленно, но перемещаться с места на
место.
Вот
видите,
как
много дает планетоходу по сравнению с знакомым нам четырехногим «шагающим грузовиком» дополнительная пара конечностей!
Шестью
ногами снабдили свой
«локомоционный
робот»
сотрудники ордена Ленина Института прикладной математики
Академии наук СССР, ведущие под руководством члена-корреспондента АН СССР Д. Е. Охоцимского исследования в 0бласти создания
автоматических
шагающих
аппаратов.
По
внешнему виду, локомоционный робот с высоко поднятой «головой»-локатором похож на кентавра. Это чудо-аппарат! Нам
довелось его видеть в работе на ТУ Всесоюзной
конференции
по бионике, проходившей
в Москве в июне 1973 г. С поразительной легкостью локомоционный робот перешагивал через
крупные камни, широкие
расселины
и трещины,
одолевал
различного рода завалы, влезал
на крутые
горные
уступы,
спускался в глубокие ущелья и выбирался из них. Лишь
однажды на вершине высокого пика, где едва уместились опоры
четырех ног, планетоход на какую-то долю минуты остановился, чтобы «поразмыслить», что делать дальше. Но уже в следующую секунду, обозрев локатором беспорядочное нагромождение валов и хребтов, он снова не торопясь устремился вперед.
И исчез...
Исчез, как призрак. Другого слова не подобрать, ибо участникам конференции по бионике демонстрировался не локомоционный робот в натуре, а его электронный прообраз, точнее
его математическая модель, рожденная в недрах электронной
машины «БЭСМ-6».
Многообразие различных локомоторных задач автоматического шагающего аппарата, имеющего искусственные
конеч-
Биомеханика
165
ности шарнирно-стержневого
типа (обеспечение
целенаправленного движения конечностей, адаптация к разного рода неровностям и препятствиям, выбор типа походки, передвижение
с разными скоростями и др.), требует разработки очень гибкой
системы управления. Главной проблемой здесь является проблема разработки алгоритмов управления. Аппарату,
который
оборудован
измерительной
системой,
дающей
информацию
о
рельефе местности, достаточно сложный алгоритм позволяет
хорошо ориентироваться на местности, уверенно преодолевать
встречающиеся на пути препятствия, гарантирует высокую мобильность, живучесть, экокомный расход энергии.
При разработке систем управления движением шагающего
аппарата целесообразно
применять
методы математического
моделирования. Математическое моделирование на ЦВМ обеспечивает широкие возможности для разработки и отработки
функционирования алгоритмов управления, реализуемых на
бортовой ЦВМ аппарата. Может быть проведено моделирование
самого аппарата как объекта
управления
и моделирование
местности, по которой происходит перемещение, включая препятствия различных типов. Синтезирование на экране специального устройства — дисплея ЦВМ — движущегося
схематического изображения шагающего аппарата в процессе его перемещения позволяет визуализировать процесс, что является
эффективным
средством
для
проверки
правильности
разраба-
тываемых алгоритмов и отыскания путей
их
совершенствования.
Описанный метод был использован в Институте прикладной математики Академии наук СССР при разработке алгоритмов управления шестиногим шагающим аппаратом.
Ученые
построили в ячейках памяти
ЭВМ действующую
модель,
а
описывающую ее информацию вывели на экран дисплея. Для
того чтобы отличить остановки аппарата в процессе движения,
вызванные простым сбоем в расчетах, от тех, когда он сам не
может «придумать» то или иное нужное решение, ученые
наделили
модель
специальным
сигнализатором — «хвостом».
Достаточно аппарату на экране опустить свой «хвост» — иисследователям ясно: в возникшей ситуации «разум» робота бессилен разобраться и принять необходимое решение, надо дальше совершенствовать алгоритм управления. Основное внимание
было уделено разработке и усовершенствованию алгоритмов
в
диапазоне от измерительной информации о местности до синтеза программной кинематики.
Известно, что в физиологии движений биологических систем благодаря работам Н. А. Бернштейна были сформулированы и обоснованы представления
о многоуровневой,
иерархически устроенной системе управления.
Эта концепция
была
принята учеными за основу при разработке системы управле-
166
Бионика
ния движением шестиногого шагающего аппарата.
Для
того
чтобы понять сложность задачи разработки гибкой
системы
управления шагающим планетоходом, достаточно сказать, что
каждая его искусственная нога имеет 3 степени свободы (2 — в
шарнире подвески-ноги и 1 — в колене); при движении в рамках статической устойчивости она имеет 18 степеней свободы,
с помощью которых следует обеспечить заданные
6 степеней
свободы движения прямоугольного
корпуса
и до 9 степеней
свободы переносимых через препятствия ног.
Структурная
схема на рисунке 37 демонстрирует многоуровневый принцип управления шагающим аппаратом и информационные связи между уровнями. Как видно
из схемы,
иерархическая лестница уровней управления такова:
— уровень выбора трассы перемещения по местности;
—
уровень
—
уровень выбора
на местности;
выбора
—
уровень
закона
места
движения
корпуса;
постановки
синтезирования
ног
следового
(следовых
расписания
точек)
(коорди-
нации работы конечностей);
— уровень построения движения одной конечности.
Старшим является уровень выбора трассы.
Разработанная
щение
система
математической
г
``]
|
|
|
|
|
Движение
|
|
|
Следовая
норпуса
|
_]
|
[^^^
дорожна
|
|
Следовое
|
расписание
|
x
18 =
обеспечивала
переме-
аппарата
с переменной
скоростью по произвольной
криволинейной трассе с использованием трех видов походок: чтрешкаМИ»,
«ВОЛНОВОЙ»
И «галопом».
Перечисленные походки различны по своей сложности и общ-
HOCTH.
|.
Е
©
о
Проведенные
исследования
показали, что самыми сложными
и наиболее общими являются вол-
|
=
5
поверхность
ной степенью
|
=
|
aa
алгоритмов
модели
=|
|
новые походки.
вить
как
Если
опорную
можно с достаточточности
предста-
цилиндрическую,
лесообразно
«галопом».
то
це-
применять походку
Если
поверхность
|
можно
L_
вертикальной адаптации ног как
плоскость, то разумно использовать походку
«трешками». Походка «трешками» обеспечивает
Исполнение
Рис. 37. Структурная
схема
многоуровневой
системы управления
шагающим
аппаратом.
рассматривать
в пределах
б
олее высокую скорость, чем «галопП» при однои и тои же относи-
Биомеханика
167
тельной скорости переноса ног и требует меньшего объема вычислений, чем «галоп» и волновая походка. Волновая походка
обеспечивает наиболее полную адаптивность к местности и наиболее высокую проходимость шагающего аппарата при его перемещении по местности со сложным неоднородным рельефом.
Во всех походках необходимый запас статической устойчивости аппарата обеспечивался автоматически.
Важной задачей, которую необходимо решить при синтезе
системы управления движением шагающего аппарата, является разработка алгоритмов, позволяющая аппарату
преодолевать встречающиеся на его пути препятствия. Учеными были
построены алгоритмы преодоления нескольких типов изолированных препятствий: «щель», «камень», «яма», «уступ». При
построении алгоритмов был принят принцип, согласно которому каждое предъявляемое препятствие должно преодолеваться наиболее простым из доступных способов с использованием
адаптационных ресурсов, возможно, меныпего числа низших
уровней. Вовлечение более высоких уровней должно производиться каждый раз лишь в случае действительной
необходимости.
При моделировании измерительной системы было принято,
что производится измерение расстояний от фиксированной точки аппарата до точки пересечения с местностью измерительного луча локатора. Угол наклона луча к горизонту был управляемым и мог либо оставаться постоянным,
либо, в случае
необходимости, изменяться для проведения
дополнительных
измерений. Так, например, в случае преодоления «камня» за
препятствием появляется «зона затенения», получение информации из которой возможно при более крутом наклоне измерительного луча после более близкого подхода
к препятствию.
Алгоритмы обработки
первичных
измерений
позволили
оценивать характеристики опорной поверхности, определять
области, пригодные для постановки ног, выделять изолированные препятствия, определять их тип и формальные параметры.
Это позволяло выбрать
подходящий
алгоритм
преодоления
препятствия.
При моделировании аппарат преодолевал серии расселин,
в том числе и такие щели, ширина которых была больше длины корпуса аппарата. На рисунке 38 показаны моменты преодоления шестиногим шагающим аппаратом «ямы» и препят-
ствия типа
«камень
на камне»'.
Продемонстрированный участникам ТУ Всесоюзной конференции по бионике киноматериал, отснятый с экрана дисплея,
1 Охоцимский
Д. Е., Платонов
А. К.,
Гурфинкель
В. С.
Девянин Е.
Д. Моделирование локомоционных систем. Краткие тезисы
докладов на ПУ Всесоюзной конференции по бионикье, т. 1. М., 1973, с. 29—37.
168
Рис. 38. Моменты преодоления
типа «камень на камне».
Бионика
шагающим
аппаратом
«ямы»
и
препятствия
показал высокую эффективность разработанных учеными Института прикладной математики Академии наук СССР алгоритмов для управления движением шагающего аппарата.
А теперь представьте себе, что математическая модель шестиногого шагающего аппарата обрела «металлическую плоть»
и с помощью ученых превратилась из локомоционного робота в
интегрального робота — механико-электронное устройство, управляемое построенной на базе ЦВМ решающей системой с развитыми подсистемами, принятия решений, а также восприятия
зрительной, слуховой, обонятельной, тактильной и других видов информации о внешней среде. Иными словами, вообразите
себе, что на базе математической модели автоматического шагающего аппарата ученым удалось создать ту самую гипотетическую бионическую систему, с которой мы начали наш рассказ о будущих планетоходах, способных самостоятельно перемещаться в любых условиях, по любому
сложному
рельефу
местности, могущих автономно принимать решения
о своих
действиях и активно их выполнять.
Мысленно представив себе по предложенной схеме облик
будущего шестиногого интегрального робота — шагающей
автоматической лаборатории, мы можем уже сегодня послать ее
на разведку на любую интересующую
нас далекую
планету
и проследить за ее работой с Земли. Поначалу пошлем ее
на
Марс — единственную планету солнечной системы, где ученые
еще продолжают надеяться найти доказательства
существования жизни. Ныне мы хорошо знаем, что на этой планете нет
безбрежных океанов, являющихся в нашем земном мире
колыбелью биологических структур. Однако не исключено,
что
жизнь на Марсе процветала в ранние периоды существования
этой планеты. Находка ископаемых остатков жизни была бы
равносильна открытию самой жизни, ибо также подтвержда-
Биомеханика
169
ла бы возможность существования живых существ на планетах других солнечных (звездных) систем.
Как же интегральный робот
— шагающий автоматический
марсоход
— может найти окаменелость,
тем более
окаменелость чуждой, неземной жизненной формы? Это не так трудно,
как кажется.
Перед отправкой на Марс в электронный мозг нашего воображаемого марсохода ученые заложат информацию относительно ожидаемых свойств марсианской жизни или ее остатков.
Формы
жизни
часто
отличаются от мертвой материи
организованным
характером
своей
структуры.
Известный
пример
— кольца деревьев на Земле. Древнейшие из обнаруженных пока форм земной жизни — окаменелые остатки водорослей — другой яркий пример.
Правда,
иногда
кристаллы
горных пород также можно было бы принять
за проявление
жизни ввиду их правильного строения, но это скорее исключение, чем правило. Сейчас разработано немало программ
для
ЭВМ, задача которых
— поиски закономерностей
даже
там,
где их характер далеко не ясен. Разработка и ввод такой программы в наш космический аппарат не представляют большой
трудности. При обнаружении предмета с правильными геометрическими фигурами он может сделать
вполне
логический
вывод, что данный предмет заслуживает дальнейшего детального изучения. «Узор» необязательно должен быть безупречен
с точки зрения геометрии. Здесь главное, чтобы какие-либо
его характерные черты повторялись с большей регулярностью,
чем можно было бы ожидать, скажем, от беспорядочного нагромождения камней или песчинок.
Автомат можно также научить реагировать на резкие изменения характера и интенсивности света при обзоре поверхности ближайшей скалы с помощью
телевизионного
глаза.
Существуют программы, которые позволяют ЭВМ определять
изменения изучаемых свойств предмета в определенном диапазоне, Подобные программы также легко ввести в память автомата перед отправкой его на Марс.
Итак, унифицированная посадочная ступень мощной ракеты доставила наш шестиногий марсоход на «красную планету». По команде с Земли он покинет космическую станцию
и
сделает несколько первых шагов
по
марсианскому
грунту.
Теперь — за работу.
Вначале марсоход будет выполнять функции наблюдателя.
Его «глаза» — телевизионные камеры — начнут
«обозревать»
окружающий ландшафт, передавая на Землю сотни изображений общим и средним планом. После того как ученые определят наиболее интересные участки планеты, передвижная станция-лаборатория получит команду подойти по очереди к каждому из них и передать на Землю еще несколько сотен крупных
170
Бионика
планов. Затем, когда результаты
этих
наблюдений
с более
близкого расстояния будут проанализированы, станции будет
послана еще одна серия команд, направленных на выделение
небольшой группы объектов на каждом из участков, которые,
по мнению ученых, стоит изучить в деталях. Марсоход подойдет к каждой такой группе с целью
выявления
ископаемых
остатков жизни. Если он обнаружит нечто похожее по отдельным признакам на жизнь, он
начнет
действовать
согласно
программе, заложенной в его запоминающее устройство: при
помощи манипуляторов
или
специального
грунтозаборного
устройства возьмет пробы таинственной марсианской почвы и
тут же на месте проанализирует их на биологическую активность. О результатах исследований на Землю будет послан детальный отчет. Не обнаружив в исследуемом районе
марсианских микробов, планетоход перейдет в другой район и произведет поиск аминокислот — основы всего живого на Земле...
Во время поисков возможных районов скопления остатков
древней марсианской жизни движущаяся автоматическая лаборатория будет передавать на Землю физико-химические данные окружающей среды: состав атмосферы, давление, температуру, скорость воздушных потоков и т. п.
Итак, первые страницы летописи
грядущих
путешествий
вездеходных аппаратов
— автоматических разведчиков
дальних миров уже написаны в ряде лабораторий научно-исследовательских институтов нашей страны и США. Шагающие планетоходы стали делом людей Земли. И, вероятно, через десяток
лет, а может быть, и раньше марсоходы, венероходы, юпитероходы станут для нас такими же привычными, как сегодняшний
луноход.
Вместе с исследователями
далеких
планет
от
биоников
ждут новых идей, новых машин и покорители «космоса № 2».
(Так иногда называют земные недра.)
Общеизвестен миф, согласно которому при дележе вселенной между богами подводное царство досталось Нептуну, подземное
— Плутону. У входа в свои владения сумрачный Плутон поставил громадного трехглавого пса Цербера. Свирепый
страж должен был оберегать от простых смертных тайны обиталища теней. Но не тут-то было. Нашелся смельчак знаменитый силач Геркулес, который победил страшное чудовище
и
вступил в единоборство с Плутоном. В этом античном мифе
отражены наивные представления той эпохи о таинственном
мире, расположенном у нас под ногами, и мечты о его покорении человеком.
Минули тысячелетия. На смену мифам, легендам и сказкам
пришли научные представления геологии и геофизики. В поисках угля и урана, золота и алмазов человек с помощью построенных им машин вдоль и поперек изрыл покров царства Плуто-
Биомеханика
171
на гигантскими коридорами.
Все глубже и глубже ввинчиваются в землю стальные сверла, снабженные алмазными «зубами». Более далекие от поверхности складки земной коры геофизики инспектируют волнами искусственных землетрясений,
отзвуки которых воспринимаются чувствительными приборами — сейсмографами. Изучение выброшенных вулканами
газов, паров и лавы, определение
их состава
и относительного
содержания разных химических элементов дополняет сведения
о строении земных недр. И тем не менее подземный мир до сих
пор окутан покровом таинственности.
Что мы знаем о резиденции Плутона? В сущности, очень
мало. Спустившись на дно глубочайшей шахты мира, вы очутитесь всего в 3,5 км от поверхности земли. Втрое глубже удалось проникнуть бурильщикам нефтяных скважин. Таким образом, в масштабах нашей планеты
досконально
изученный
слой земной коры не превышает по своей толщине слоя краски
на глобусе. А дальше — неизвестность. «Космос № 2» пока еще
белое пятно в науке.
Не потому ли писатели-фантасты так оседлали неисчерпаемую тему покорения «подземного космоса»? Они давно
уже
пробурили Землю насквозь во многих местах с помощью «ракеты-бура» (раскаленной
струи
газа
с температурой
более
3000°С), специальных ампул со взрывчаткой,
подземохода
с
атомным реактором и т. п. Однако в реальной жизни
дело
с
землепроходными (землеройными) машинами
обстоит несравненно хуже, чем на страницах научно-фантастической
литературы.
Подавляющее большинство применяемых
ныне
землепроходных машин не удовлетворяет потребителей своей производительностью, эксплуатационной надежностью и другими параметрами. Можно без преувеличения сказать, что землепроходных машин, достаточно простых, удобных и прочных, к сожалению, пока еще нет. Но в живой природе, если внимательнс присмотреться, можно увидеть не одну «землеройную машину», доведенную в процессе эволюции после многовекового
отбора до самой высокой степени совершенства.
Эти
живые
системы и служат ныне объектом изучения биоников.
Болышпой
интерес
для
творцов
землеройных
машин
пред-
ставляют приспособления, которыми снабжены личинки почвообитающих насекомых для прокладывания ходов в почве. Природа наделила их хорошо развитым аппаратом для рыхления
или раздвигания частиц грунта и специальными приспособлениями
У
для
фикгации
положения
тела.
одних видов рыхлящие органы располагаются на переднем конце тела и работают как клин и отбойный молоток (при
этом отгребание измельченного субстрата осуществляется другими органами); у других
— рыхлящий и отгребающий аппа-
172
Бионика
раты объединены в систему типа сложного скребка, действующего как одно целое, что характерно для личинок, обитающих
в почве или древесине (роль скребка у них играют ротовой аппарат и нижняя поверхность
головы).
Раздвигание
частиц
грунта производится либо гидравлическим способом,
либо с
помощью расширенных, ножницеобразно двигающихся
челюстей; функции опорных приспособлений для фиксации положения тела выполняют либо одно или два острия, расположенных на заднем конце
тела,
в плоскости
приложения
сил
рыхлящего аппарата, либо значительное
число
подушковидных образований, покрытых множеством мелких шипов
(эти
образования тесно прижимаются к стенкам хода, точно повторяя их неровности).
Тщательное изучение приспособлений, которыми
снабжены личинки насекомых для прокладки ходов в почве, и их моделирование может оказать большую помощь
при
создании
новых рыхлящих и движущихся под землей агрегатов (угольные комбайны, приспособления для кротового дренажа и др.).
Чудесной «врубовой машиной» является дождевой червь.
В хорошей почве число червей
бывает около
5 млн. на 1 га.
Сквозь ходы, прорытые ими,
стекает в почву дождевая вода,
без которой нет жизни, проникает воздух, нужный для жизни
почвенных
бактерий и грибов-микроорганизмов, перерабатывающих вещества почвы в природные удобрения для растений.
Ходы червей — настоящая система вентиляции почвы. На 1 м?,
как подсчитали ученые, приходится более полутора тысяч ходов. Они идут вглубь до нескольких метров.
В старину считали, что свои ходы черви прорывают, глотая
землю, въедаясь в нее. Только после долгих наблюдений Дарвин убедился, что это не совсем так. Передний конец тела утоньшается, заостряется, червяк выбрасывает его
вперед,
потом
мышцы расширяют тело, укорачивая его, и червь подтягивается в образовавшуюся ямку, раздвигая кругом землю. Буравя
землю, черви одновременно заглатывают ее, пропускают через
себя, как сквозь мясорубку. Вам, вероятно, доводилось видеть
выбросы, состоящие из гладких склеенных
комочков
земли,
пропущенных через кишечник червяка, — «орехи». Эти выбросы на поверхности земли обычно закрывают вход в норку, их
можно найти и в подземных ходах. Ходы, прорытые червями,
не разрушаются очень долго, потому что их стенки покрыты
слоем слизи, склеивающей накрепко частицы почвы.
Внимание биоников недавно привлекли амфисбены (двуход-
ки) из семейства ящериц. Их более 200 видов. Амфисбены
оби-
тают (преимущественно в тропической Америке и Африке) под
слоем опавшей листвы, в муравейниках и термитниках, в толще
почвы. В связи с роящим образом жизни строение их весьма
своеобразно:
тело
похоже
на
большого
земляного
червя
Биомеханика
173
(рис. 39, 1), хвост очень короткий, многие совершенно безноги.
Узкий подземный ход амфисбена прокладывает себе так: голова ее протискивается вперед, расталкивая частицы земли, затем
«затылком» с силой прижимает частицы
почвы
к
потолку
(рис. 39, 2). Несколько таких быстро следующих друг за другом
движений — и
отрезок
тоннеля
готов.
Для
почвы
различ-
ной плотности требуются
разные
«конструкции» головы. На
рисунке 39, 3 изображены головы амфисбен (вид сбоку и сверху), обитающих
в различных
грунтах:
мягких,
песчаных,
плотных каменистых, плотных
лесных,
слежавшейся лесной
подстилки.
Приведем еще один пример возможного моделирования оригинальной ЖИВОЙ «землеройной машины». Речь идет о воспроизведении весьма совершенного способа передвижения во влажном грунте червей приапулид. Эти крошечные беспозвоночные
животные (длиной 10—15 мм), живущие
неглубоко под морским дном, являются непревзойденными мастерами по прокладке каналов. В своих «туннельных работах» они используют
преимущественно гидравлический способ передвижения. Основным буровым инструментом приапулид
служит короткий и
мощный похожий на усеянный шипами кактус, выбросной хо-
Рис.
39.
1 — амфисбена
— «землеройная машина»;
2 — голова амфисбены
протискивается вперед, растолкивая
частицы
земли,
зотем
«затылком»
с силой
прижимает
частицы
почвы
к потолку.
Несколько таких быстро
следующих
друг за другом движений
— и отрезок
тоннеля
готов;
3 — головы
амфисбен
(вид сбоку м сверху), обитающих
в различных
грунтах; мягких песчаных, плотных каменистых, плотных лесных.
174
Бионика
боток (на нем размещено более 1500 шипиков). Тело червя снабжено небольшим количеством продольных и кольцевых мышц,
а также специальными механизмами, препятствующими обратному движению приапулид в грунте. Технология
прокладки
туннеля такова. Упираясь в грунт, червь при помощи шипов хоботка пробивает во влажной почве ход, поначалу тонкий. Затем
хоботком, раздувающимся поступающей из тела жидкостью,
приапулида расширяет и обжимает ход. Расширив и обжав отверстие, червь подтягивается. В это время хоботок сжимается,
убирается внутрь, и начинается
следующий
цикл
проходки.
При таком передвижении червь обнаруживает большую двигательную силу, в десятки раз
превышающую его собственный
вес. Ученые подсчитали, что червячок массой до 2 г развивает
усилие, в 40 раз (!) превышающее ее собственную массу. И вот
еще что весьма любопытно. Зоологи полагают, что, вонзив силой свой хоботок во влажный морской грунт, червь затем поворачивает хоботок на некоторый угол. Таким образом, хоботок
с насаженными на него многочисленными шипами
работает,
как бур.
Разве недостойна подражанию такая великолепная «гидравлическая машина» для прокладки каналов в грунте? Ведь ее
механизм природа оттачивала веками!
Не останутся, конечно, бионики в стороне и от решения такой увлекательной проблемы, как создание подземной машины
для поисков неразведанных богатств — руд, нефти, алмазов.
Не так давно оригинальную конструкцию «подземохода» разработал советский инженер А. Требелев. При расчете своей машины он всесторонне изучил методы «работы» крота — признанного рекордсмена подземных
проходок. Модель
«железного
крота» успешно прошла испытания.
Много интересных идей, новых технических решений могут позаимствовать у живой природы и инженеры-кораблестроители
— создатели различных плавающих аппаратов.
Около двух тысяч лет назад римский философ Луций Анней
Сенека
писал:
«Корабль
хорошим
именуется,
когда он устойчив
и непоколебим, уступчив ветру и послушен
рулю». В наши
дни, чтобы именоваться хорошим, корабль должен удовлетворять гораздо более многочисленным
требованиям:
иметь высокую скорость, быстро набирать ее, мгновенно останавливаться, разворачиваться на месте, самостоятельно маневрировать
в проливах и портах, не испытывать в самые жестокие штормы
качи. Все эти качества можно выразить одним, но очень емким словом — экономичность. Корабль должен быть рентабельным для грузовых и пассажирских перевозок.
По данным Ллойда, в 1973 г. мировой торговый флот насчитывал 59 606 судов общим водоизмещением 289,3 млн. т. Большинство современных танкеров и сухогрузных судов — это оли-
Биомеханика
175
цетворение последних достижений науки и техники. Однако и
они уже не удовлетворяют требованиям нашего времени. Скорость танкеров, как правило, лежит в пределах 16—18 узлов ',
а сухогрузных судов — 18—22 узлов, что примерно в два-три
раза меньше скорости товарных поездов на электрической тяге
или грузовых автомашин. Не далеко ушли вперед по своим скоростным возможностям и гигантские пассажирские суперэкспрессы. Самый быстрый океанский лайнер, пересекающий Атлантику, не может сравниться в скорости с совоеменным реактивным самолетом, перевозящим
пассажиров
из Лондона в
Нью-Йорк за 6 ч.
В 1973 г. издающийся в ФРГ иллюстрированный еженедельник «Штерн» писал: «Длившаяся около ста лет эра атлантического судоходства, еудя по всему, подходит к концу. Пассажирские лайнеры, курсировавшие между Европой и Новым Светом,
сходят со сцены. Американцы, голландцы и западные немцы,
игравшие раньше ведущую роль в Атлантике, уже капитулировали. Такая же участь ожидает итальянцев. В этом году 12 миллионов пассажиров пересекут
Атлантику
воздухом и всего
25 тысяч — морем».
Повысить скорость морских судов — задача очень трудная.
Это проблема проблем. Дело в том, что с увеличением скорости
морских судов резко повышается гидродинамическое сопротивление воды. С возрастанием скорости корабля оно увеличивается сначала пропорционально ее квадрату, но затем растет быстрее — пропорционально третьей, четвертой и даже пятой степеней скорости. Соответственно требуется
увеличивать мощность силовых установок, что удорожает строительство судов
и повышает расходы на топливо. Это, естественно, приводит к
ухудшению экономических показателей судов при повышении
их скоростей сверх упомянутых пределов. Так, при увеличении
скорости танкера грузоподъемностью 80 000 т с 16 до 19 узлов
мощность его силовой установки увеличивается на 80%, а себестоимость перевозки 1 Т нефти повышается на 12—144. А как
подошла к проблеме снижения гидродинамического сопротивления воды живая природа?
«Конструируя» плавающие биосистемы, природа пошла не
по пути создания болыпших мощностей, а стремилась выработать различного рода устройства, направленные
на наиболее
эффективное преодоление сопротивления среды, в которой происходит движение организмов. За миллионы и сотни миллионов лет эволюции в «природной гидродинамической лаборатории» был опробован и отработан обширный комплекс приспособлений, позволяющих водным животным предельно эконо' Узел —
мера
ле в час, т. е. 1,852
скорости
км/ч.
движения
|
судов.
Он
равен
одной
морской
ми-
176
Бионика
мично расходовать свои энергетические ресурсы при больших
скоростях передвижения, длительных миграциях. Этот богатейший арсенал разнообразных, чрезвычайно эффективных механизмов, представляющих большой теоретический и практический интерес, пока еще остается для нас во многом загадочным,
необъяснимым, является предметом полемики, острых дискуссий ученых. Но постепенно усилиями гидробионики (новой ветви бионики) раскрываются тайны созданных природой меканизмов для уменыпения гидродинамического
сопротивления
воды, моделируются их устройство, принцип действия, намечаются новые принципы конструирования различных плавающих
аппаратов, повышения их скорости и экономичности.
Борьба за повышение скорости судов — это
прежде
всего
борьба с волновым сопротивлением. Волновое сопротивление
является следствием того, что корабли передвигаются на границе раздела двух сред — воды и воздуха. Буруны образуются
впереди любого плывущего судна, будь то крейсер или портовый буксир. И чем быстрее идет корабль, тем более мощный
бурун возникает перед ним. Зрелище разрезаемой форштевнем
волны, безусловно, интересное, величественное: оно дает яркое
представление о той колоссальной силе, которая заключена в
теле корабля. Но для инженера бурун — не повод для восторга,
а враг номер один, препятствующий движению корабля. При
больших скоростях на волнообразование уходит до трети мощности главных двигателей, а то и больше.
Чтобы укротить бурун, инженеры пытаются усовершенствовать формы корпуса водоизмещающих судов. Так, на довоенном французском лайнере «Нормандия»
впервые
появилось
бульбообразное вздутие в нижней
части форштевня (рис. 40).
Результаты не замедлили сказаться. Волны при движении судна были гораздо меньше, чем у близкого ему по размерам и скорости движения английского лайнера «Куин Мери». Постепенно размеры бульбы росли, и у современных судов она иногда
простирается за пределы контура подводного борта и форштевня. Бульбообразный нос при скорости судна 16—25 узлов по-
зволяет повысить последнюю на 5—6%. Еще большего эффекта
удалось достигнуть японскому профессору
Такао Инуи,
подошедшего к решению проблемы волнового сопротивления с
бионических позиций. Создав несколько моделей судов с необычной носовой частью, напоминающей грушеобразную голову кита, он доказал, что такие корабли будут быстрее перемещаться,
чем
те, у которых
форштевень
имеет
ножевидную
фор-
му. И действительно, испытания построенного
по
чертежам
профессора Инуи океанского лайнера «Куренаи Мару» показали, что по сравнению с обычными судами
китообразный
корабль при равной мощности двигателей позволяет
увеличить
скорость на 15%.
Биомеханика
177
Но одно лишь совершенствование формы корпуса водоизмещающих судов не является радикальной мерой предотвращения волнового сопротивления. Оно позволяет повысить скорость корабля в лучшем случае на 8—15%. Чтобы полностью
избавиться от волнового сопротивления, избежать непроизводительного расхода мощности, нужно вырвать судно из плена
воды — «поднять» его на поверхность либо «опустить» под воду. В том и другом случае задачу можно решить бионическим
путем, заимствуя опыт живой природы.
В мире животных над поверхностью воды перемещаются дикие утята. Еще не умеющие летать, они глиссируют над водной
поверхностью с довольно болышой скоростью — 8— 10 км/ч. Некоторые американские утки вообще не умеют летать и передвигаются скользя по воде. Многим птицам (например, куликам,
чайкам, бакланам, гагарам) воздушная подушка помогает осуществлять беспосадочные перелеты над морем. По этому «подсмотренному» у природы принципу передвижения
отдельных
видов биологических систем ученые и конструкторы Советского
Союза, Японии, Англии и других стран создали
суда на подводных крыльях и воздушной подушке. Однако полностью этим
не решгается рассматриваемая проблема.
Для поддержания судна на подводных крыльях над поверхностью воды приходится затрачивать десятки лошадиных сил
на каждую тонну его массы, при этом не наблюдается заметного уменыцения удельной энерговооруженности с увеличением
размеров судов. И хотя таким образом удается достигнуть высокой скорости движения (до 40—50
узлов), совершенно очевидно, что применение судов на подводных крыльях
в будущем, как и сегодня, должно ограничиться перевозкой пассажиров и
мелких партий срочных грузов. Подъем же грузовых судов в несколько тысяч и даже десятков тысяч тонн над
поверхностью воды — идея
утопическая. Дело в том, что масса главных
двигателей
мощностью в несколько
сотен тысяч или даже в миллионы лошадиных сил, требующаяся для них,
и масса необходимых запасов топлива
намного превысит
грузоподъемность
таких судов. К тому
же
необходимо
учитывать ряд трудностей, связанных
с их эксплуатацией в открытом море.
Аналогичное положение., наблюдаРис.
40.
Бульбообразное
ется и у судов на воздушной подушке.
вздутие
Их
—форштевня.
7—327
удельная
энерговооруженность
в
нижней
части
178
Бионика
также равна нескольким десяткам лошадиных сил на одну тонну массы. Однако у них, в отличие от судов на подводных
крыльях, удельная энерговооруженность существенно уменьшается с увеличением размеров судов. Поэтому в отдаленном будущем возможно появление грузовых судов на воздушной подушке больших размеров, но предназначенных для перевозки
сравнительно легких грузов.
Что же касается транспортировки массовых грузов, таких,
как нефть, руда, уголь, зерно, то можно со всей определенностью утверждать, что путь повышения скорости, связанный с
подъемом судов над поверхностью воды © ПОМОЩЬЮ
подводных крыльев или воздушной подушки, для них абсолютно исключен.
Перейдем к рассмотрению второго пути повышения скорости
судов — уход под воду.
Подводный транспорт имеет ряд преимуществ перед
надводным. Во-первых, при достаточном погружении (на глубину
около 100 м) подводное судно не испытывает волнового сопротивления, а это значит, что мощность энергетической установки
на подводном транспорте при прочих равных условиях должна
быть меньше, чем у надводного. Во-вторых, подводным кораблям не страшны ни ветер, ни туман, ни холод, ни шторм, в то
время как надводные суда длиной 130—160 м уже при Т баллах теряют 25—40% скорости. В-третьих, подводные корабли
очень удобны для плавания в северных морях, так как они могут двигаться подо льдом. У подводных судов имеется еще ряд
пропульсивных преимуществ перед надводными.
Пропульсивный, или двигательный, комплекс корабля — это
главный двигатель, гребной винт и корпус. Все элементы пропульсивного комплекса находятся в определенной взаимосвязи
друг с другом. От совершенства каждого из них, а также от их
правильного сочетания зависит одно из важнейших мореходных качеств судна — ходкость, т. е. способность при заданной
мощности главного двигателя развивать
определенную
скорость. Сравните обводы корпуса у крейсера и подводной лодки,
и вы убедитесь, насколько они не похожи. Применение хорошо
обтекаемых обводов позволяет значительно улучшить ходкость
подводных кораблей. Далее. У подводных судов наблюдаются
более благоприятные условия для работы гребных винтов. Пропульсивный коэффициент повышается как за счет улучшения
взаимодействия корпуса и винта
при
оптимальных
обводах
подводных судов, так и вследствие возможности выбора наилучшего с точки зрения к. п. д. дискового отношения гребного
винта.
Все перечисленные преимущества подводных еудов говорят
о том, что единственно реальный путь повышения скорости морских перевозок массовых грузов — это переход на подводное
Биомеханика
179
плавание. Поэтому вполне закономерен резко возросший в последние годы во всем мире интерес к подводному плаванию. По
заданию правительственных органов, а также частных судовладельческих и судостроительных компаний в США, Великобритании, Янонии и некоторых других странах созданы проектно-исследовательские организации, которыми уже выполнено
более 100 разработок гигантских подводных лодок различных
типов. Под воду стараются «опустить» не только грузовые суда
(танкеры, рудовозы), но даже пассажирекие лайнеры. Однако
резко повысить скорость спроектированных
подводных судов
пока не удалось.
В чем же дело? Что мешает достигнуть более высоких рентабельных скоростей у подводных транспортных судов?
Кроме волнового сопротивления, существует еще сопротивление трения. Его действие у подводных судов значительно
больше, чем у надводных. Ведь у последних палуба и надводная часть не смачиваются. У подводных же судов значительно
больше смоченная поверхность: в воду
опускается и палуба.
Кроме того, на подводном транспорте должны быть цистерны
главного балласта для погружения под воду. Подводному кораблю необходимы дополнительное оборудование и вспомогательные механизмы, обеспечивающие погружение,
всплытие,
плавание под водой, живучесть и непотопляемость. Все это существенно увеличивает его водоизмещение но сравнению с надводным судном, а следовательно, и смоченную
поверхность.
К этому следует еще добавить, что преимущество
хорошо
обтекаемых
обводов подводного корабля
сильно снижается
дополнительным
сопротивлением
выступающих
частей (рубок, стабилизаторов,
вертикальных
и
горизонтальных
рулей) — оно достигает 15% от сопротивления
корпуса (воздействие выступающих частей у надводных
судов значительно
меньше).
Теоретические расчеты и опыты на моделях
показывают,
что при высоких скоростях движения сопротивление трения у
надводных кораблей составляет менее половины полного сопротивления, а у подводных, где отсутствует волновое сопротивление, — 80—90
от общего гидродинамического сопротивления. Вот и получается, что у морских судов, как и у самолетов, есть два барьера
скорости
(экономичности):
у надводных — волновой барьер, около 20 узлов; у подводных — барьер
трения, около 30 узлов. Но ведь такие скорости недостаточны.
Как же быть? Выход из тупика подсказывают «скороходы морей» — дельфины.
Дельфины — водные млекопитающие из отряда китообразных. Известно около 70 видов этих животных — гринда, белуха, афалина, морская свинья и другие. Длина тела дельфина достигает 3—4 м, масса — 400—500 кг. Они обитают во всех океа7*
780
Бионика
нах, морях, кроме замкнутых бассейнов, и в некоторых реках
(например, Ганге, Амазонке). Большинство ученых полагает,
что эти животные ведут свое происхождение от наземных млекопитающих.
В процессе эволюции дельфин прошел долгий путь повторного приспособления
к водной
среде.
«Типичные
для
млекопитаю-
щих передние конечности видоизменены у дельфинов в грудные
ллавники. Плавник представляет собой пятипалую конечность,
все элементы которой слиты вединое целое. Он состоит из таких
же отделов, что и рука человека: пальцы, запястье, предплечье
(две кости), плечо. Для всех сочленений такой конечности характерна малая подвижность. И только шаровидный плечевой
сустав характеризуется свободой движений во всех направлениях. Дельфины могут вращать, отводить в сторону и прижимать грудной плавник к телу какединое целое. От задних конечностей и таза остались лишь две небольшие кости, расположенные около половых органов» '. Лопасти хвоста дельфина превратились в движитель. Они расположены горизонтально, а не
вертикально, как у рыбы. Хвостовые лопасти вместе с ластами
и спинным плавником делают дельфина исключительно
подвижным.
«По-видимому,
—
писал
Аристотель,
—
это
самые
быстрые из всех животных, морских и наземных... Их скорость
особенно хорошо проявляется, когда они гонятся за рыбой, которой питаются; при этом рыба пытается ускользнуть. В своем
ненасытном голоде они следуют за ней в глубине воды; нырнув же на
большую
глубину,
они
задерживают
дыхание,
как бы рассчитывая его длительность, а затем изо всех сил
плывут вверх и взлетают,
как
стрела,
стараясь
проделать
длительный подъем на поверхность как можно скорее, чтобы
сделать вдох» 2.
В рассказах моряков еще недавно можно было услышать,
что они собственными глазами видели дельфинов, плывущих
со скоростью около 130 км/ч. Но если заглянуть в специальную
научную и научно-популярную литературу, то там можно встретить самые разноречивые данные на сей счет:
от 12
узлов
(21,6 км/ч) до 40 узлов (74 км/ч). Видимо, абсолютно точных
данных о максимальной скорости движения этих животных в
естественных условиях нет. Возможно, максимальная скорость
дельфинов не превышает 40—50 км/ч3. Эти морские животные плавают достаточно быстро, чтобы, играючи, обгонять
небольшие катера и грузовые суда, состязаться
в скорости
' Лилли
2 Там
же,
Дж.
Человек
и дельфин.
М.,
«Мир»,
1965,
с. 129.
с. 156.
3 По экспериментальным данным Ж. Я. Грушанской и А. И. Короткина,
дельфин афалина, натренированный
совершать
«пробеги»
на дистанции
длиной 100 м, развивал в бассейне максимальную скорость около 11 м/сек.
Биомеханика
181
с большинством океанских лайнеров
и посрамлять
кораблестроителей ХХ в.
Долгое время ученые и инженеры не могли понять,
каким
образом дельфинам удается развивать скорость до 30 узлов и
без видимого усилия сопровождать быстроходные корабли в
течение многих часов и даже дней, не отставая от них. Одни
высказывали предположение, что дельфины обладают инстинктивным «знанием» гидродинамики: при движении вперед у носа судна образуется упругая волна, и дельфины знают, что, если
оказаться на этой волне, можно двигаться почти без всяких дополнительных усилий. Другие занялись расчетами. Они показали, что дельфин не может плыть быстрее 20 км/ч, т. е. его скорость должна быть минимум вдвое, а то и втрое меньше зарегистрированной наблюдателями. Откуда же в таком случае берутся лишние километры?
За разгадку тайны скоростного плавания дельфинов принялся
известный
английский
биолог,
один
из
крупнейших
специа-
листов по движению
животных,
профессор
Джеймс Грей.
В 1936 г. Грей увидел стайку дельфинов, догнавшую и опередившую пароход, на котором он плыл. Ученый был страшно
удивлен такой резвостью животных, ведь судно было одним из
самых быстроходных
в то время — делало 17 узлов в час. Поскольку измерить сопротивление воды, обтекающей плывущего
дельфина, было делом очень сложным, Грей пошел по другому
пути: он буксировал по бассейну жесткую модель, соответствующую по форме и размерам дельфину, и определял сопротивление воды. И тогда исследователь столкнулся с почти необъяснимым фактом: точно воспроизведенная по массе и форме тела
модель дельфина, которой сообщалась тяга, равная развиваемой дельфином, передвигалась по воде гораздо медленнее, чем
живой дельфин.
Дальнейшие расчеты привели к совершенно неожиданным
результатам: гидродинамическое сопротивление движущемуся
дельфину
в 7 раз
меньше,
чем
твердому
телу
такой
же
формы
и размеров. Иными словами, если считать движение дельфина
сравнимым с движением сделанной по его форме, размерам и
массе модели, то мощность мышц дельфина должна быть по
крайней мере в 7 раз выше, чем у любого другого млекопитающего, живущего на суше! Однако подобная мощность мышц ни
с чем не сообразна. Одно только потребление кислорода животным должно быть при этом гораздо выше, чем допускают возможности дыхательной системы дельфина. Тогда, быть может,
имеется принципиальная разница в тканях мышц дельфина и
наземных млекопитающих? Нет, такой разницы выявить не.
удалось. У дельфинов масса мышечной системы примерно та
же, что и у млекопитающих суши. Мускульная сила в пересчете
на килограмм массы мышц у млекопитающих одинакова. Поче-
182
Бионика
му же, вопреки расчетам, морские красавцы плавают с такими
большими скоростями?
Так родилась первая из великих тайн дельфина и греевский
ко:1ментарий к ней: «Природа сконструировала дельфина много созершенней и лучше, чем человек подводную лодку или торпеду». Эта загадка впоследствии получила название «парадокс
Грея». За расшифровку загадки «морских скороходов» принялись многие ученые. Дельфинов взвешивали,
обмеряли, под
микроскопом
рассматривали их ткани,
фотографировали и в
фас, и в профиль. Производились расчеты. И вновь, в который
раз, они показывали, что сопротивление движению дельфина
сведено к такому минимальному значению, которое для нае на
практике пока недостижимо. Оставалось одно: предположить,
что дельфины обладают какими-то приспособлениями, механизмами, которые позволяют им при плавании уменыпать сопротивление воды, сохранять в пограничном слое ламинарнее течение. Но одно дело — предположить, а другое дело — доказать, что дельфины действительно предотвращают возникновение турбулентности ' в обтекающем их потоке, экономят таким
образом свои энергетические ресурсы и тем самым достигают
высокой быстроходности.
И вот в 1960 г. в зарубежной печати появилось следующее
сенсационное сообщение:
‹...Как выяснилось, причина «антитурбулентности» дельфина кроется в специфической особенности
строения его кожи.
Микроскопическое исследование среза кожи показало, что она
состоит из двух слоев:
вычайно эластичного,
внешнего, толщиной около
и внутреннего,
толщиной
1,5 мм, чрезоколо 4 мм,
состоящего из плотных тканей. Внутренняя часть внешнего слоя
пронизана огромным количеством ходов и трубочек, заполненных мягким губчатым веществом. Предполагается, именно благодаря такой структуре весь наружный покров дельфина действует как диафрагма, чувствительная к изменениям внешнего
давления и гасящая возникающие струи путем передачи давления каналам, заполненным амортизирующим веществом.
В США ведутся работы по практическому использованию
этого явления, названного принципом «стабилизации граничной поверхности распределенным гашением»... Работы по антитурбулентным устройствам возглавляет доктор Макс Крамер,
' При движении твердых тел в жидкой или газовой среде образуется
псграничный слой. При обтекаемой форме
тела и не
слишком
быстром
движении
частицы в пограничном
слое движутся
упорядоченно,
параллельными слоями. Такое обтекание называется ламинарным. Сопротивление движению при этом мало. При
увеличении
скорости
пограничный
слой отрывается от тела, в нем возникают вихри и сопротивление
резко
возрастает. Такое обтекание называют турбулентным.
Биомеханика
183
проживающий в США с 1946 г. Прежде он возглавлял Аэродинамический институт в Берлине» ',
Так появилась «кожная теория». Придя к заключению, что
вся
тайна
«антитурбулентности»
дельфинов
заключается в
структуре их кожи, Крамер начал работать над созданием искусственной дельфиньей кожи в надежде одеть в нее подводные
лодки, грузовые и пассажирские корабли. По замыслу Крамера, мягкая резиновая диафрагма, будучи чувствительной к колебаниям давления, должна была воспринимать турбулентные
пульсации в пограничном слое и передавать их вязкой, демпфирующей жидкости, заполняющей промежутки в конструкции покрытия. Таким образом создавались необходимые условия для поглошения энергии турбулентных пульсаций за счет
упругих свойств резины и вязкости жидкости, т. е. ламинаризации пограничного слоя.
Первая экспериментальная мягкая оболочка — искусственная дельфинья кожа, получившая название «ламинфло», была
изготовлена из двух, а затем из трех слоев резины общей толщиной 2,5 мм. Гладкий, наружный
слой (толщиной 0,5 мм)
имитировал эпидермис дельфина; средний, эластичный, с гибкими
стерженьками
и демпфирующей
жидкостью
(толщиной
1,5 мм) был аналогичен дерме с ее коллагеновой и жировой тканями; нижний (0,5 мм) играл роль опорной пластины. Демпфирующая жидкость при давлении сверху могла перемещаться в
пространствах между стерженьками: она играла роль демпфера — гасителя вихрей
в слое воды, ближайшем к корпусу модели (рис. 41 и 42).
Искусственную дельфинью кожу испытывали на моделях,
которые буксировали по заливу вблизи Лос-Анджелеса. Три модели были покрыты разными образцами «ламинфло», несколько различавшимися по структуре.
Для сравнения в качестве
эталона использовали четвертую модель, без покрытия. Модели
буксировал мощный катер, специальные приборы измеряли сопротивление для каждой модели, их показания передавались
по радио на катер. Предположения Крамера подтвердились:
сопротивление воды для всех трех моделей, покрытых искусственной
дельфиньей
кожей,
было
гораздо
меньше,
чем
для
мо-
дели без покрытия, турбулентное течение заменилось ламинарным. У небольшой торпеды, «укутанной» в мягкую резиновую
оболочку, сопротивление трению о воду снизилось почти наполовину. При испытании небольшого катера было обнаружено,
что обшивка «ламинфло» дает наибольший эффект при скорости движения судна около 40—50 км/ч, т. е. близкой к предполагаемой максимальной скорости передвижения дельфина.
1 «Atoms
No. 181.
for
Peace
Digest»,
1960,
v.
5, No. 4;
«New
Scientist»,
1960,
v.
7.
184
Бионика
—===9)
Puc.
—_——
ная
6 —
дермы;
стичных
-2
дельфиньей
2 — дерма;
кожи
3 — жировой
(схема):
пласт;
4 — подкож-
мускулатура;
5 — верхний
роговой
слой
эпидермиса;
ростковый
слой
эпидермиса;
7—ячейки
росткового
слоя;
$ — шиповидные
etme
(5 -—eee
——-—
>
сосочки
дермы;
9 — подсосочковый
10 — пучки
коллагеновых
волокон;
волокон;
12 — жировые
клетки
(по
11 —
А. Г.
слой
пучки
элаТомилину).
<_
X
©
4-5a
Разрез
41.
1 — эпидермис;
Разработки и эксперименты, начатые
Крамером, продолжили ученые
разных
стран. Изменялись соотношения элементов покрытий: толщина слоев, размеры
и расположение стерженьков,
вязкость
промежуточной жидкости ит. д. Результаты многочисленных
испытаний дельфиньей кожи на торпедах, катерах вновь
подтвердили возможность снизить сопротивление воды на 50—60, но для больших судов подобного эффекта достичь не
удалось.
Опять секрет? Многие исследователи,
которым уже не раз мерещились во снеи
наяву быстроходные белые лайнеры, бороздящие безбрежные просторы морей и
океанов, после этой неудачи хотели было прекратить дальнейшие
работы по
усовершенствованию
«дельфиньей
кожи». Но вскоре было сделано новое сенсационное открытие. Киноаппарат аквалангиста запечатлел
кульминационный
момент охоты дельфина. На экране хорошо было видно, как он несется на громадной скорости и вода, кажется, с ревом смыкается за ним. Но вот невидаль:
на теле животного отчетливо проступили
поперечные волнообразные складки!
Первоотрывателем этого явления был
доктор Ф. Эссапьян,
который
еще
в
1955 г. сфотографировал
эти волнообразные складки на теле дельфинов во
+
Рис. 42. Схема
«ламинфло»:
А —
боковой
разрез;
искусственной
Б —
разрез
по
дельфиньей
линии
аб.
1 —
кожи
верхняя
бесшовная
оболочка;
2 — средний
слой
— эластичная
диафрагма с гибкими стерженьками; 3 — нижняя бесшовная оболочка;
4 — корпус
модели;
5 — пространство
между
стерженьками,
заполненное
жидкостью;
6 — гибкие
стерженьки
среднего слоя (по М. Крамеру).
Биомеханика
185
Флоридском океанариуме. Тогда он высказал предположение,
что эти волнообразные складки кожи возникают на теле дельфинов, когда они достигают максимальной скорости передвижения и образующиеся при этом вихревые потоки уже нельзя
погасить антитурбулентными демпферными свойствами кожи.
Именно в этот критический момент начинается волновое движение самого кожного покрова тела животного, которое и гасит
вихри, возникающие при высоких скоростях,
дает дельфину
возможность легко мчаться даже в тесном стаде, где, казалось
бы, вихревые потоки вокруг множества близко плывущих особей должны сделать невозможным стремительное передвижение всего стада. В середине 50-х годов об этой гипотезе ученого
знал лишь неболышной круг специалистов и вскоре о ней забыли
на несколько лет.
«Скоростные складки», как их назвал Эссапьян, выглядели
на идеально гладком теле дельфина так же нелепо, как, скажем, рифленое днище на гоночной лодке или обшивка из илиссированного металла на скоростном автомобиле.
Что, кроме
увеличения сопротивления и, следовательно, потери скорости,
могло это дать? И дельфины вновь, уже в который раз, попали
на «досмотр» к биологам, в лабораторию биоников, начавших
свои исследования очень прозаично — с проверки достоверности уже много лет известного анатомического строения быстроходных обитателей моря. Вот тогда-то и наступило ожидаемое.
Советские исследователи подтвердили гипотезу Эссапьяна:
у дельфинов
имеется
специальный,
так
называемый
двигатель-
ный механизм, который образует на коже «бегущие
волны»
(они бегут по телу к хвосту), гасящие вихри, стабилизирующие
ламинарное обтекание, уменьшающие
трение и тем
самым
обеспечивающие быстрое плавание животных.
Хотя большинство специалистов сходилось во мнении, что
кожные волны помогают дельфинам во время быстрого плавания уменьшать гидродинамическое сопротивление (сбрасывают
возникающие вихри), вопрос о механизме образования «бегущей волны» породил среди ученых разногласия. До сравнительно недавнего времени одни считали, что крупные складки
возникают благодаря действию подкожной или туловищной
мускулатуры дельфина, а мелкие — за счет неравной плотности верхнего слоя кожи — эпидермиса. Другие говорили о сокращении с разной частотой отдельных порций кожной мышцы. Третьи утверждали, что кожные волны — следствие того,
что дельфин меняет упругие свойства кожи. Так или иначе, но
все перечисленные гипотезы сводились к одному: для образования «бегущей волны» необходимо мускульное усиление. Мускулатура, управляющая кожей, должна непрерывно работать,
постоянно находиться в большом напряжении. Но с энергетической точки зрения такой изнурительный труд очень невыго-
186
Бионика
ден для животного. Поэтому некоторые исследователи высказали сомнения в том, что природа могла поступить столь расточительно и создать энергетически неэкономичный механизм.
Для разрешения спорного вопроса в Институте биологии
южных
морей
Академии
наук
УССР
под
руководством
Ю. Г. Алеева были проведены эксперименты, которые доказали,
что мускулатура дельфина не принимает никакого участия в
образовании «бегущей волны».
В результате проведенных исследований было установлено:
поперечные передвигающиеся волнообразные складки на коже
дельфина образуются пассивным путем за счет движения
—
энергетически это самый выгодный способ, ведь животное не
тратит никаких мышечных усилий и в то же время выигрывает
в скорости. Недаром складки образуются и на чешуе многих
рыб'.
Окончательно уверовав, вопреки здравому смыслу, наперекор логике и мнениям кораблестроителей, что «бегущая волна»
и есть тот тайный двигатель, который дает дельфинам возможность при минимальных затратах энергии фантастически быстро плавать, биологи обратились за помощью к математикам и
кибернетикам. Ведь 140 лет инженеры пользовались уравнениями движения вязкой жидкости, и ни разу цифры не противоречили жизни, математика — практике. Только один дельфин,
сам не зная того, не подходил под эти каноны, не желал подчиняться законам гидродинамики.
Теперь
подтвердить правильность гипотезы биологов предстояло математикам. За эту
задачу и взялись советские ученые.
Что же побудило математиков взяться за проверку гипотезы биологов? Прежде всего ее оригинальность, противоречия
обыденному. Через несколько часов работы ЭВМ выдала многометровую бумажную ленту с решением. Ответ оказался столь
же простым, как и само изобретение природы. Любая неровность
на теле скользящего в воде предмета неизбежно замедлит его
движение. Исключение составляет лишь специфическая «бегущая волна» — идеальный случай, наблюдаемый у дельфина,
когда кожа животного как бы настраивается на оптимальный
режим. И складки, по логике вещей сбивающие ход, тогда вызывают совсем противоположный
результат:
«пробегая»
по
телу дельфина в такт с возникшими завихрениями воды, они
не позволяют им перерасти в беспорядочный вихрь, уменышающий скорость плавания.
В ходе многочисленных экспериментов исследователи установили, что, помимо волнообразных кожных складок, дельфин
' См.: Алеев Ю. Г. Морфологические
основы
эффекта
подвижной
шероховатости в кожных покровах нектёров. Краткие тезисы докладов на
ГУ
Всесоюзной
конференции
по
бионике,
т. УТ,
М., 1913,
с. 6—11.
Биомеханика
187
при движении использует еще одну волну, возникающую при
комбинированных ударах корпуса и хвостового плавника. Последний, описывая восьмерку, служит своего рода волновым
пропеллером.
А недавно советским ученым — кандидату технических наук С. В. Першину, кандидату биологических наук А. С. Соколову и доктору биологических наук А. Г. Томилину — удалось
разгадать еще один секрет быстроходности дельфинов, который
зарегистрирован в Государственном реестре СССР Комитетом по
делам изобретений и открытий при Совете Министров СССР.
Сунность этого открытия вкратце такова: при передвижении
животных важную роль играют комплексные кровеносные сосуды, расположенные в плавниках, а также особое строение
тканей, покрывающих плавники (покрытия из сухожильных
тяжей). В зависимости от режима плавания упругость плавников может рефлекторно и почти мгновенно изменяться. Во время быстрого движения в водс или прыжков этих животных
плавники имеют наиболыпую упругость, при отдыхе они расслаблены,
Каким же образом изменяется упругость плавников? Оказывается, она регулируется кровеносными сосудами. В хвостовом
плавнике дельфина имеется
один общий
распределительный
узел кровеносной
системы.
Он-то и регулирует
наполнение
кровью сосудов плавников. Этот механизм «саморегулирования
гидроупругости плавников» в значительной степени способствует той необычайной скорости, с которой дельфины передвигаются в воде.
История этого открытия восходит к началу 50-х годов нашего столетия. Профессор А. Г. Томилин обнаружил в плавниках
дельфинов комплексные артерио-венозные пучки,
связанные
между собой в особую систему. Пятью годами позже они были
обнаружены также у дельфинов и американскими
учеными
Шевиллом и Шолендером. Однако до последнего времени роль
этих сосудов в плавниках оставалась неразгаданной. Понадобилось пятнадцать долгих лет наблюдений с фото- и киноаппаратурой за дельфинами различных видов в движении и покое,
огромное количество опытов, натурных экспериментов, детальное морфологическое исследование плавников, гистологическое
изучение их тканей и рентгенографическое изучение кровеносной системы плавников, тщательное изучение специальной литературы по кровообращению китообразных, чтобы сделать ныне бесспорными выводы о роли «саморегулирования гидроупругости плавников» в быстроходности дельфинов.
Итак, быстроходность дельфинов, помимо идеальной формы
тела, обеспечивается целым комплексом
одновременно действующих систем. Теперь, когда мы в первом приближении знаем
их назначение, устройство и принцип действия, казалось бы,
188
Бионика
можно приступить к их инженерной реализации и тем самым
резко повысить скорость и экономичность
ныне
строящихся
надводных морских и океанских
кораблей
и проектируемых
будущих подводных гигантов. Однако это не так-то просто осуществить.
На этом пути еще очень много трудностей. К примеру, конструкция демпфирующих покрытий Крамера
является лишь
грубым приближением к действительности. Обшивка «ламинфло» пока еще очень далека от того совершенства, которое свойственно естественной коже дельфинов. «Ламинфло» позволяет
достигнуть увеличения скорости только на небольших торпедах
и катерах, но стоит увеличить размеры покрытия, как оно перестает «работать». И это вполне закономерно, ведь кожа дельфина — не пассивный амортизатор, не только мягкая, но и активная оболочка.
Еще Огюст Пикар (1884—1962) в свое время писал, что к
коже дельфина подходит большое число нервов. Соприкасаясь
с водой, соответствующие участки кожи мгновенно посылают
через эти нервы сигналы-импульсы в мозг дельфина, и оттуда
моментально поступает команда определенным мышечным нервам. Их биотоки заставляют мышцы подкожного слоя воздействовать на кожный покров в тех местах, на которые в данный
момент давит сопротивляющаяся вода. Вот в чем, по мнению
Пикара, заключается гидродинамический секрет
дельфина и
почему искусственные покрытия не могут до конца соперничать с естественным «покрытием» животного.
Проведенные позднее советскими учеными Г. Б. Агарковым,
В. В. Бабенко, 3. И. Ференецом исследования иннервации кожи
и кожной мускулатуры дельфина в связи с гипотезой стабилизации течения в пограничном слое показали следующее.
«В коже и кожной мускулатуре (дельфина. — И. Л.) расположены нервные элементы в виде нервных сплетений, нервных
пучков и разнообразных окончаний афферентной и эфферентной природы. В эпидермисе терминальные
нервные
волокна
прослеживаются до верхних слоев. В дерме обнаружены как
свободные, так
и
инкапсулированные
рецепторы-датчики.
У основания дермальных
сосочков на сосудах
обнаружены
сложные
рецепторы — инкапсулированные
клубочковидные
окончания, несвободные усиковидные терминали и др. Характер строения и расположения инкапсулированных
клубочковидных окончаний позволяет предположить, что они воспринимают колебания давления жидкости в пограничном слое. Специфическая иннервация дермальных сосочков, их кровоснабжение, тот факт, что дермальные сосочки расположены под углом
к поверхности эпидермиса, — все это, по нашему мнению, позволяет считать, что двухмерные возмущения
в пограничном
слое
демпфируются в основном
дермальными
сосочками, а
Биомеханика
189
трехмерные — дермальными валиками. Спектр возмущений в
пограничном слое жидкости довольно широк. В связи с этим
кожный покров дельфина должен быть «настроен» на широкий
диапазон возмущений в пограничном слое, и при изменении
скорости движения животного должна меняться и настройка«Перенастройка» может осуществляться следующими путями.
При изменении скорости движения животного изменяется кровоток в его кожном покрове, за счет чего меняется кровенаполнение дермальных сосочков, а так как расположение дермальных сосочков взаимосвязано с расположением дермальных валиков, то автоматически меняется расстояние между последНИМИ...»|
Вследствие специфики строения и иннервации эпидермиса,
дермы кожный покров дельфина, по мнению ученых, может не
только стабилизировать пульсации возмущений в ламинарном
пограничном слое, но и упорядочивать и сглаживать пульсации
давления в турбулентном пограничном слое. Но наделить искусственную дельфинью кожу всеми свойствами ее естественного прототипа нам пока не под силу. Однако продолжающееся
изучение кожного покрова дельфинов и непрерывно расширяющийся арсенал средств и возможностей современной химии и
электроники позволяют надеяться, что со временем удастся создать мягкие синтетические оболочки, по структуре и выполняемым функциям весьма близкие к природному образцу. И тогда
морские и океанские корабли, облицованные
исскусственной
дельфиньей кожей, приобретут невиданную ранее ходкость.
Уже есть проекты покрытия корпусов подводных лодок многокамерными резиновыми оболочками. В камеры этих оболочек
через специальное распределительное устройство будет попеременно нагнетаться и откачиваться
воздух с таким
расчетом,
чтобы создать «бегущую волну». Этот вариант «мягкой» и одновременно «активной» оболочки, как полагают специалисты,
позволит стабилизировать пограничный слой.
По другому проекту предполагается устранить турбулентные завихрения отсосом воды из пограничного слоя. Известный
американский специалист Чарлз Момсен считает, что это даст
возможность увеличить скорость
судна по меньшей
мере в
1,5 раза.
Высказывается мысль, что мягкие синтетические оболочки,
близкие по своим антитурбулентным свойствам к коже дельфинов, в будущем найдут применение и в авиастроении, поскольку и для самолетов существуют проблемы лобового сопротивления, снижающего скорость.
' Агарков
Г. Б., Бабенко
В. В., Ференец
кожи и кожной мускулатуры дельфина в связи
течения в пограничном слое. Проблемы бионики.
З. И. Об иннервации
с гипотезой стабилизации
М., «Наука», 1973, с. 419.
190
Бионика
Можно также полагать, что подобные покрытия будут эффективны не только при движении твердых тел в жидкой или
газообразной
среде (подводные
лодки,
самолеты), но и при
транспортировке жидких, газообразных и даже твердых тел по
трубопроводам. Недавно сотрудник Питсбургского университета (США) Р. Пелт выстлал внутреннюю поверхность трубы материалом, имитирующим дельфинью кожу, и измерил, насколько снизились потери давления при перегонке жидкости по этой
трубе. Оказалось, что они уменыпились на 35%.
Таким образом, если сделать трубу достаточно
длинной,
можно превратить ее в самый экономичный
вид транспорта.
Здесь поток грузов может двигаться непрерывно, днем и ночью,
без простоев, перегрузок, без потерь на «усушку — утруску —
усыпку». По трубопроводам, выстланным «дельфиньей кожей»,
можно будет на сотни и тысячи километров перекачивать воду,
сжиженные газы, спирт, патоку, жидкие удобрения и т. д.
Но вернемся к нашей основной теме — будущим кораблям
голубого континента — и посмотрим, что еще может позаимствовать бионика для их технико-экономического совершенства
в «патентном бюро» обитателей гидросферы Земли.
В открытых просторах Атлантического океана водится необычная рыба, которую по праву можне называть
морским
стайером. Она способна преодолевать расстояние до 9000 км.
По скорости плавания она, за исключением меч-рыбы и парусника, не имеет себе равных. Стремясь догнать
сардину или
кильку — свою основную добычу, — эта рыба развивает скорость до 90 км/ч. Она прыгает и вверх, и в длину так хорошо,
что перепрыгивает океанские корабли или оказывается на их
палубе.
Вы, может быть, уже догадались, что речь идет о тунце —
крупной океанской рыбе, которая обитает и в некоторых
морях — Средиземном, дальневосточных, встречается в Черном
море и иногда заходит в Баренцево море. Это — трехметровый
гигант массой 300—400 кг. Попадаются и более крупные экземпляры. В ихтиологической литературе тунцов разделяют на
две группы. Одна из них (настоящие тунцы) объединяет наиболее крупных представителей (обыкновенный,
большеглазый,
желтоперый и длинноперый), характеризующихся наличием в
кожном покрове скелетных образований — чешуй. Ко второй
группе относят сравнительно мелкие формы тунцов (пятнистый, полосатый, макрелевидный), кожные покровы которых на
большей части тела остаются без чешуи.
Прекрасно приспособленные к быстрому и продолжительному (крейсерскому) плаванию, тунцы обладают
целым рядом
специальных
механизмов
ламинаризации,
представляющих
большой интерес для гидробионики. Так, мелкие тунцы имеют
в высокой степени ламинаризованную форму с отнесенным к
Биомеханика
191
середине длины тела максимальным сечением. Кроме того, поверхность их тела в средней части идеально гладкая, эластичная, лишенная чешуи. Она, как показали исследования, служит
механизмом, повышающим устойчивость ламинарного пограничного слоя путем демпфирования в нем пульсаций. Изучив
ламинаризированную форму тела тунцов, американские инженеры построили подводную лодку «Скипджек». Форма корпуса
подводной лодки в точности такая же, как у тунца. Испытания
показали, что конструкторам удалось добиться хорошей обтекаемости корпуса лодки и значительно повысить ее скорость, а
главное, создать очень поворотливое
судно. (Поворотливостью
называют способность судна к быстрому изменению направления. Это очень важное свойство, ведь болыпому кораблю для
разворота требуется описать
полуокружность с радиусом по
крайней мере 4—5 длин корпуса.)
Исследуя строение кожного покрова желтоперого тунца, ученые установили, что крупные тунцы добиваются снижения сопротивления турбулентного трения при помощи слизистого вещества, выделяющегося из расположенных на поверхности слизистых клеток. Как показывает химический анализ, это слизистое вещество представляет собой высокомолекулярные соединения, воздействующие на структуру
пограничного слоя.
Чем больше скорость движения рыбы, тем интенсивнее выделяются в слизь высокомолекулярные белки и тем
прочнее
они
связаны с поверхностью тела. В принципе слизистое
вещество
быстроходных тунцов не может насытить весь
пограничный
слой, обеспечивая в нем высокую концентрацию полимерного
вещества, так как это сопряжено с болышими
его расходами.
Очевидно, основные
физические
явления,
обусловливающие
снижение сопротивления, происходят на границе тела без массовсго уноса высокомолекулярных веществ. При этом, в соответствии с предположением В. И. Меркулова ', проявляется эффект отрицательной вязкости, а слабый раствор полимера выполняет функцию своеобразной смазки, уменьышающей влияние
шероховатости поверхности тела, от которой существенно зависит как величина сопротивления
трения, так и устойчивость
ламинарного течения.
Многочисленными экспериментами доказано, что добавкой
в пограничный слой даже очень слабых растворов слизи и синтетических полимеров можно уменьшить турбулентное трение
в трубах
на 40—60%.
Такой
же результат специалисты наде-
ются достигнуть, выдавливая
за борт
кораблей синтетическую
слизь тунцов.
будущих
Но для
'См.: Меркулов
В. И., Хотинская
В. А.
ния гидродинамического сопротивления у некоторых
ника». Киев, изд-во АН УССР, 1969, № 3.
подводных
этого надо
Механизм
видов рыб.
уменьшеСб. «Био-
192
Бионика
научиться у тунцов обходиться очень небольшим
количеством слизи.
Одной из актуальных задач гидробионики является
также
раскрытие механизмов адаптации меч-рыбы к быстрому плаванию. В сущности, «парадокс Грея» следовало бы прежде всего
адресовать
к ней, а затем
уже
к дельфинам.
Судите
сами.
Уста-
новлено, что меч-рыба способна длительное время плыть со
скоростью 35—40 м/сек. Для поддержания такой скорости в
воде твердому (жесткому) телу обтекаемой формы длиной 4—
6 м, массой 500—600 кг (таковы размеры и масса крупных меченосов) потребовалась бы мощность около 2000 л. с. Между
тем, по расчетам академика А. Н. Крылова (1863—1945), предельная мощность меч-рыбы 200 л. с. Располагая двухсотсильным движителем, меченосы сегодня, как и миллионы лет назад, легко преодолевают сопротивление воды, могут мчаться с
завидной для кораблестроителей скоростью — до 140 км/ч!
В чем же секрет феноменальных спринтерских способностей
меч-рыбы? Прежде всего обращает на себя внимание форма тела животного. Сжатая с боков, она напоминает профиль крыла
самолета. Такая форма корпуса прекрасно приспособлена для
плавания в воде. Она способствует созданию подъемной силы
при движении животного вперед, в направлении его продольной оси, не требует специальных энергетических затрат на поддержание рыбы во взвешенном состоянии. Существенное значение в скоростном плавании меч-рыбы, вероятно, имеет большой
хвостовой плавник животного, характеризующийся
высоким
коэффициентом относительного удлинения (отношение квадрата ширины плавника к его площади), в процессе эволюции приобретший особую серпообразную
форму.
Все
серпообразные
хвосты обладают хорошими «аэродинамическими профилями»,
а выемчатый и удлиненный плавник меч-рыбы — наилучший
в гидродинамическом отношении. Расчеты показывают, что серпообразный хвост меченоса развивает высокую тягу благодаря
тому, что он генерирует вихревые кольца, несущие очень большой (сравнительно с их энергией) импульс.
Изучение нервной системы меч-рыбы позволяет высказать
предположение, что какую-то роль в снижении сопротивления
воды
играют
спинной
и мелкие
боковые
плавники.
Оказывает-
ся, нервные окончания подходят не только к каждому плавнику, но и к каждому лучу каждого плавника. Такая богатая иннервация, несомненно, позволяет рыбе чутко
реагировать на
малейшие изменения характера обтекания и регулировать его
изменениями положения плавников и их профиля.
' Новейшие данные о применении полимерных примесей, выбрасываемых за борт корабля для снижения сопротивления
воды, приведены
в
сборнике статей «Химия в бою» (М., Воениздат, 1971).
Биомеханика
193
Безусловно, важную роль в движении
меч-рыбы играют
жабры. При быстром плавании рот и жаберные крышки животного открыты. Через жабры течет непрерывный
поток воды.
Скорость струй воды, вытекающих из-под жаберных крышек и
омывающих
больше
трех
четвертей
всей
поверхности
тела,
рав-
на скорости рыбы только при условии, что отверстие рта равно
суммарной площади щелей между жаберными крышками и телом. Если эта площадь больше, вода, прошедшая жабры, движется медленнее воды, обтекающей рыбу; если меныше — TO
быстрее, «смывая» пограничный слой
воды. Таким образом,
меч-рыба простым изменением положения жаберных крышек
может управлятъ пограничным слоем в очень больших пределах. Попутно отметим, что с ростом скорости
автоматически
увеличивается приток воды к жабрам и тем самым активизируется снабжение тканей рыбы кислородом.
Нередко меч-рыба нападает на лодки, корабли, таранит их
своим чрезвычайно прочным, страшным, длинным мечом. Известный натуралист Р. Оуэн рассказывал: «Меч-рыба наносит
Удар, словно пятнадцать молотов, опущенных двумя руками.
Ее скорость равна скорости ружейной пули, а в подобных случаях ее таран опасен, как удар артиллерийского снаряда».
Однако, как полагают сегодня некоторые ученые, необыкновенной прочности костяной меч нужен рыбе не столько для того, чтобы нанизывать на него мелкую рыбу и каракатиц и таранить корабли (парусники и марлины никогда не пользуются
своим мечом как оружием), сколько для искусственного создания кавитации. Того самого «холодного вскипания» воды с образованием массы
пузырьков, наполненных
паровоздушной
смесью, которого, как огня, боятся кораблестроители. Кавитация
снижает
эффективность
работы
винтов,
теряющих
«точку
опоры». При исчезновении, «схлопывании» пузырьков, возникают гидродинамические удары, разъедающие металл их
лопастей. А меч-рыбам кавитация идет на пользу. Возможно,
в
режиме максимальной скорости значительная часть тела рыбы находится
в зоне кавитации, т. е. не в воде,
а в водно-газовой смеси.
Это
должно
сильно
снижать
сопротивление
движению.
У меченоса жесткая, очень упругая кожа. Боковые мускулы
его тела настолько тверды, что их приходится разрубать топором. Можно предположить, что все эти структурные особенности меч-рыбы были «предусмотрены» конструктором-природой,
чтобы противостоять действию кавитации.
По-видимому,
за 400
млн.
лет
жизни
в воде
рыбы
(в частно-
сти, меченосы) накопили значительно больше «секретов» в достижении экономичных высоких скоростей плавания, чем дельфины и другие морские млекопитающие. Надо также полагать,
что меч-рыбы при их рекордных скоростях плавания обладают
194
Бионика
более широким, чем все другие водные животные, комплексом
основных и второстепенных механизмов для улучшения гидродинамического взаимодействия тела с пограничным турбулентным слоем. Но чтобы выявить интересующие
гидробиоников,
инженеров приспособительные механизмы,
познать их функциональное значение, одних морфологических
исследований
животного мало. Проверить ту или иную гипотезу, косвенные
расчеты, которые содержат обычно много условностей, зафиксировать наглядно механизм движения меченоса в воде, установить, какого рода
водяные потоки
образуются
при этом,
можно только постановкой прямых экспериментов. А осущестВИТЬ это не так-то легко.
Меч-рыба — это не добродушный дельфин. Еще две тысячи
лет назад отец географии Страбон писал:
«Меч этой
рыбы
очень длинный, его сила настолько велика, что ее ловля не менее опасна, чем охота на медведя». И в наши дни бывалые моряки, опытные, видавшие виды рыболовы
рассказывают, что
меч-рыба предпочитает лучше выброситься на берег, чем попасть в руки человека. Во всяком случае, еще
несколько лет
назад, насколько нам известно, никому не удалось доставить
хотя бы один экземпляр живого меченоса в аквариумы Европы
и Америки.
Но, рассказывая сегодня с трудностях изучения гидродинамических секретов меченосов, мы не сомневаемся в том, что в
недалеком завтра они все же будут раскрыты гидробионикой и
использованы в кораблестроении. Уж очень заманчиво достигнуть в судостроительной технике конструктивного совершенства и скорости меченосов.
Принципиально новые методы и способы проектирования
подводных кораблей могут подсказать
инженерам и кальмары — представители морских головоногих, именуемых в зоологической литературе цефалоподами.
Первые цефалоподы появились на нашей планете, как считают ученые, 500—600 млн. лет назад, в кембрийский период,
а уже в силурийский они в изобилии размножились и заселили
почти весь Мировой
океан. Ныне
их можно
встретить в водах Арктического бассейна, в жарких
тропиках и льдах
Антарктиды. В любом месте океана, на расстоянии тысяч километров от Земли,
в прибрежных
водах
живут
вездесущие
кальмары.
Кальмары прекрасно приспособлены к жизни в море. Они
принадлежат к числу самых быстрых пловцов наряду
с такими спринтерами моря, как дельфины, тунцы, марлины, парусники и меч-рыбы. Нередко их вполне
заслуженно
называют
«живыми ракетами», «живыми торпедами океана». Они способны стартовать из морских глубин в воздух с такой скоростью, что нередко пролетают над волнами более 50 м. Высота
Биомеханика
полета
195
такой
ков, иногда
живой
ракеты
достигает
7 м. По
над
водой,
по свидетельству
феноменальной
моря-
маневренности
в
воде им нет равных в царстве Нептуна. Они производят чрезвычайно стремительные повороты не только в горизонтальной, но
и в вертикальной плоскости.
Изумительной быстроходности и маневренности кальмаров
в большой степени способствуют чудесные гидродинамические
формы тела животного. Тело у кальмаров мягкое, но упругое,
и оно способно существенно деформироваться. Гладкая в аэродинамическом смысле кожа кальмаров дает минимальное сопротивление трения движущемуся
потоку. Кроме
того, тело
кальмара покрыто тонким слоем прозрачной слизи,
которая
уничтожает шероховатость. Набирая скорость, кальмао зытягивается, и сбоку очертания его тела очень похожи на профиль
самолетного крыла. Его спина становится более выпуклой, чем
была. Продольная ось тела при этом совпадает с направлением
поступательного движения. Иначе говоря, тело — «крыло» все
время сохраняет нулевой угол атаки. Неодинаковые скорости
потоков над и под крылом создают подъемную силу.
Перемещаются кальмары, как и другие головоногие моллюски, хвостом вперед, а голова и десять ног-щупалец с присосками служат как бы кормой. При движении щупальца плотно складываются вместе и вода их хорошо обтекает. Они снабжены продольными килями, которые образуют кормовое оперение корпуса кальмара. Эти необычно длинные (по сравнению с
размерами тела моллюска) кили надежно стабилизируют направление движения кальмара; при их помощи он легко сохраняет и меняет курс. Все эти механизмы, быстроходность, порзазительная маневренность
привлекают
исследователей-гидробиоников, которые считают, что всестороннее, глубокое изучение локомоторного аппарата кальмаров, их гибких и динамичных средств уменьшения гидродинамического
сопротивления
воды и управления пограничным слоем может оказать немалую услугу при решении многих сложных технических задач,
связанных с конструированием и поетройкой скоростных, экономичных подводных судов различного типа.
Наибольший интерес для техников представляет способ реактивного движения кальмаров. В отличие от существующих
технических систем водного транспорта у кальмаров, каки
у
всех подводных обитателей, функции движителя и двигателя
совмещены в одном мышечном механизме, без промежуточных
звеньев, что способствует эффективной отдаче энергии при движении,
повышению
коэффициента
полезного
действия,
гиб-
кости и надежности работы системы. Подавляющее болышинство современных форм головоногих — кальмары, каракатицы
и осьминоги — типичные водометы. Среди их гидрореактивных
движителей
можно
выделить
три
типа:
мантийно-вороночный,
196
Бионика
ручной и вороночный. В конструктивном отношении наиболее
совершенен мантийно-вороночный аппарат кальмара.
Строго говоря, кальмар располагает двумя принципиально
разными движителями (рис. 45, 1). При медленном перемещении он пользуется большим ромбовидным плавником, периодически изгибающимся в виде бегущей волны вдоль корпуса
тела. Для быстрого броска, когда нужно догнать добычу
или
удрать от преследующего врага, животное использует реактивный движитель. Основой
его
является
мантия — мышечная
ткань. Она окружает тело моллюска со всех сторон,
образуя
своеобразный
резервуар
— мантийный
мешок
(мантийную
полость), в который периодически засасывается вода. НПользуясь технической терминологией, можно сказать:
мантийная
полость — это аналог камеры сгорания реактивного двигателя.
В мантийной полости находятся жабры и внутренние органы кальмара (рис. 45, 2). Объем мантийной полости — «камеры
сгорания» — составляет почти половину объема тела моллюска. При реактивном способе плавания
животное
производит
засасывание воды через широко открытую мантийную
щель
внутрь мантийной полости из пограничного
слоя. Мантийная
щель (она плотно «застегивается»
хрящами-замыкателями —
«кнопками»
— после забора воды) расположена вблизи середины тела кальмара, где
оно имеет
наибольшую
толщину.
Сила,
вызывающая
движение
животного, создается за счет
выбрасывания струи
В
| / =
= а р
воды
через
узкое
bs
SSS"
«сопло»
a)
EE
РР,
Мантия
'`Цупальца
Мантийная
(воронку),
которая
расположена на брюшной повэрхности кальмара.
Это
«сопло»
снабжено
специальным
клапаном, и мышцы
могут его поворачивать.
7
полость
/
Вороночный
клапан
Мантийная
стенна
Рис.
43.
Кальмар
реактивный
и
его
движитель:
1 — кальмар — живая ракета;
2 — пульсирующий
реактив-
3
ный
=.
22)
и
движитель
кальмара;
3 —
положение «сопла» и его клапана
при движении
кальмара
назад
(слева)
и
вперед
(справа).
Биомеханика
197
oa
Меняя угол установки воронки (рис. 45, 3), кальмар плывет
одинаково хорошо как вперед, так и назад (если
он
плывет
назад, воронка вытягивается вдоль тела, а клапан
прижат к
ее стенке и не мешает вытекающей
из
мантийной
полости
водяной струе; когда кальмару нужно двигаться вперед, свободный конец воронки несколько удлиняется и изгибается
в
вертикальной плоскости, ее выходное отверстие разворачивается на 180° и клапан занимает изогнутое положение).
На забор воды и ее выталкивание животное затрачивает
доли секунды (время
выбрасывания
одной
порции
воды —
импульс
— регулируется нервно-мышечным комплексом).
Засасывая воду в мантийную полость кормовой части тела в периоды замедленных движений по инерции, кальмар тем самым
осуществляет отсос пограничного слоя, предотвращая
таким
образом срыв потока при нестационарном режиме обтекания.
Увеличивая порции выбрасываемой воды и учащая сокращение мантии, кальмар легко увеличивает скорость
движения.
Отработанный природой на протяжении сотен
миллионов
лет, доведенный ею до самой высокой степени совершенства,
гидрореактивный движитель позволяет кальмару в погоне
за
косяками рыб, служащих для него основной пищей, легко совершать в океане тысячемильные переходы. По имеющимся
в
литературе сведениям, диапазон скорости плавания кальмаров
колеблется от 35 до 65 км/ч. Такое разнообразие данных о скоростных возможностях кальмаров объясняется тем, что до настоящего времени прямых измерений скорости плавания цефалопод произвести не удалось, хотя попыток в этом направлении
предпринималось немало.
Академиком В. В. Шулейкиным
в
свое время была установлена прямо пропорциональная зависимость между длиной животного и доступными для него скоростями движения. Эта закономерность универсальна для всех
обитателей морей и океанов. Она распространяется и на кальмаров. Если моллюск длиной 20 см способен развивать скорость
35—40 км/ч, то его старший по возрасту и более крупный сородич должен плавать гораздо быстрее. Поэтому не исключено, что в океанских просторах кальмары успешно конкурируют не только с такими спринтерами, как тунцы и макрели, но
и с дельфинами. Некоторые исследователи, занимающиеся изучением головоногих моллюсков, учитывая хорошо обтекаемое
веретеновидное тело животного, его умение управлять пограничным слоем, уменьшать гидродинамическое сопротивление
воды, мощный гидрореактивный движитель, считают, что кальмар можег за небольшой отрезок времени развивать скорость
до 120 км/ч! Разумеется, к таким априорным высказываниям
надо относиться очень осторожно. Названная цифра максимально возможной скорости плавания кальмара
явно
завышена.
Но если сравнивать не абсолютные, а относительные скорости
198
Бионика
китообразных, ластоногих и крупных костистых рыб, то пальма первенства — за кальмарами (цвет. табл. 7).
Итак, сама природа нам подсказывает: чтобы будущие подводные корабли были быстроходными и экономичными, необходимо на них ставить гидрореактивные движители по образцу
кальмаровых.
И такие движители инженеры уже создали, даже без «подсказки» кальмаров. Их называют водометами. В передней части днища судна сделано всасывающее отверстие, защищенное
решеткой. Дальше идет широкая труба,
подводящая
внутрь
судна воду к крыльчатке — подобию многолопастного гребного
винта. Крыльчатку вращает судовой двигатель посредством вала, пропущенного через сальник ее кожуха. Захваченная
лопастями, вода с большой скоростью выбрасывается
за корму
через сопла. Возникает реактивная тяга, судно мчится вперед.
Реактивному кораблю не страшны ни мели, ни водоросли,
ни
рыбацкие сети. Но, как это ни странно, широкого распространения этот движитель не нашел. Дальше небольших суденышек,
тракторов-амфибий для лесосплава, разных «малых корабликов», в которых главное — защита винта, водомет не пошел.
А ведь у лидирующего ныне движителя — мощного гребного винта — множество недостатков. Обратите внимание, какой
стремительный вращающийся поток воды отбрасывает за корму винт. Между тем задача движителя только отбрасывать воду, не вращая ее. На ненужное
«закручивание»
гигантского
потока расходуется много энергии. Впрочем, порок не только
в этом. Выгоднее всего, чтобы лопасти винта встречали подтекающие к ним струи с одинаковой
скоростью.
Но участки
лопастей возле ступицы винта движутся слишком медленно,
а концы лопастей
— слишком быстро. И только
на
середине
длины часть лопасти имеет выгодную скорость. Винт ничем не
защищен. На него может намотаться и рыбачья сеть, и канат.
Тогда беда. Еще хуже, если лопасти погнутся или отломаются,
ведь скорость его вращения очень велика — он всегда работает
в очень жестком режиме. Для достижения винтовым судном
той же скорости, что и колесным, число оборотов винта должно быть во много раз больше, чем гребного колеса. И еще один
очень серьезный порок
— винтовой корабль плохо управляем.
Он даже не может без буксира подойти к пристани.
Видимо, не случайно природа, создав десятки тысяч видов
морской фауны, ни один из них не снабдила тривиальным винтом. Будущим
гигантским подводным танкерам, рудовозам,
промысловым,
научно-исследовательским,
спасательным
и
другим судам явно нужен новый движитель, лишенный всех
недостатков гребного винта. Поэтому гидрореактивный движитель кальмаров продолжает привлекать внимание инженеров,
является объектом тщательных исследований биоников.
Биомеханика
199
Поисковые работы специалистов направлены
сегодня
на
создание конструкции гидрореактивного двигателя, подобного
воздушно-реактивному, т. е. такого, где двигатель и движитель
составляют одно целое. Весомый вклад в решение этой проблемы обещают внести химики. Они ведут работу над синтезом
особых веществ, способных гореть в воде, как бензин или керосин в воздухе.
Располагая необходимым горючим, творцы нового «подводного» мотора при разработке
его конструкции,
несомненно,
учтут опыт строителей авиационных реактивных двигателей и
обязательно воспользуются
подсказкой
природы,
создавшей
«живую
ракету»
—
кальмара.
А дальше?
В науке и технике нет последнего слова. Только вот пути,
по которым иногда идет творческая мысль конструктора, бывают довольно странны. Роберт Фултон (1765—1815),
например, и многие инженеры после него изрядно потрудились, чтобы прямолинейное движение поршней паровой машины преобразовать в круговое движение гребных колес,
но не догадались посмотреть за борт корабля на действие рыбьих хвостов.
Привод от паровой машины
к
плавниковому движителю
—
«рыбьему хвосту» — был бы чрезвычайно прост и удобен. Как
бы хорошо работал такой движитель по сравнению с неуклюжим колесом!
Пятьдесят лет спустя, после того как Фултон построил первый в мире колесный пароход, все же нашелся
изобретатель,
который приделал к кораблю извивающийся хвост с приводом
от двигателя. Но идея машущего движителя не получила развития. Трудно было представить себе, что самый лучший механический «рыбий хвост» будет работать так же
эффективно,
как живой хвост тунца, марлина или акулы.
Теперь мы хорошо знаем не только
биомеханику
работы
движителей многих морских животных, их высокий
коэффициент полезного действия, но
можем и воспроизвести лучше,
чем 150 лет назад, работу рыбьего хвоста. Испытания моделей
машущего движителя показали, что в швартовом режиме, т. е.
в закрепленном положении, он создает по сравнению
с обычными в 4 раза больший упор. Поскольку подводным кораблям
особенно важны способы получения высоких скоростей
в течение длительного времени, проблема использования машущего движителя из области общих рассуждений
все больше
и
больше переходит на водную гладь опытных бассейнов. Правда, и у машущего движителя
есть недостаток — нет
заднего
хода. Но конструкторы стараются сделать плавник поворачивающимся вокруг вертикальной оси. Тогда он сможет гнать
воду в любую сторону, и судно будет обходиться
без рулей.
Опыты показали, что выгоднее ставить несколько небольших
200
Бионика
плавниковых движителей в один ряд под кормой почти во всю
ширину судна.
Известны уже проекты подводных
кораблей
с корпусом,
состоящим из отдельных подвижных секций, которые должны
волнообразно изгибаться, как это делают при плавании рыбы,
киты, акулы или морские черви. Ученые подсчитали, что такое
судно не только будет обладать большой скоростью, но и потребует меныцих затрат энергии при своем движении.
Разумеется,
бионику и даже
специалисту-судостроителю
10-х годов нашего столетия трудно представить себе во всех
деталях, какими будут корабли, скажем, через пятьдесят лет.
И все же, читатель, давайте мысленно совершим экскурсию
в морской порт 2026 г. ...У причалов стоят корабли, по форме
очень похожие на китов, дельфинов, акул, тунцов и кальмаров.
Один из них закончил погрузку, отходит от пирса и направляется в открытое море. Несколько минут, величаво покачиваясь
на волнах, плывет, купаясь в лучах заходящего солнца, «белый
КИТ»
и...
исчезает
под
водой.
Пройдет
немного
времени
(путь из Европы в Америку под полярными льдами займет не
более двух суток), и столь же неожиданно
он выплывет
из
глубин океана в другом полушарии...
Теперь посмотрим, что могут позаимствовать бионики, инженеры из «патентов» живой природы для дальнейшего развития воздушного транспорта.
Вероятно, раньше всех на Земле начали летать представители царства растений. Ведь своеобразные
«крылья»
имеют
многие семена деревьев и растений. Так, у семян клена сравнительно большая аэродинамическая поверхность,
имеющая
вид двух симметрично расположенных лопастей, которые, высыхая, несколько закручиваются. Падая
на землю,
семена
быстро
вращаются,
аэродинамические
силы
задерживают
падение семени, благодаря чему ветер может
отнести его на
значительное расстояние. Легкие семена тополя окружены пухом, что дает им возможность в теплые сухие дни высоко подниматься над землей под действием
воздушных
потоков
и
долго парить, далеко улетая от родного «дома». У ели и сосны
семя снабжено
одним
прозрачным
крылышком
— парусом.
В зимнее время ветры заставляют семя,
как
под
парусом,
скользить по насту, и оно перемещается на десятки километров от материнского дерева.
В начале нашего века ученые
заинтересовались
летными
свойствами крупного семени
одного
из тропических
растений
— цанонии из семейства тыквенных. Семена цанонии подолгу парят в воздухе, поднимаясь и опускаясь в его потоках.
По их образцу и были созданы первые
планеры
и самолеты
«летающее крыло». Одно время эти модели были даже очень
популярны...
Биомеханика
201
В царстве животных первыми существами,
завоевавшими
воздушную стихию, по-видимому, были текодонты.
В начале
мезозойской
эры
в обширной
группе
древних
ящеров
текодон-
тов появились небольших размеров рептилии, передвигавшиеся
преимущественно на задних ногах. Некоторые потомки этих
ящеров превратились позже в травоядных или хищных динозавров, в том числе самых крупных из всех известных животных, живших на суше. Другие, пищей которых были насекомые, перешли к обитанию на древесной растительности и дали
начало летающим ящерам
— птерозаврам и птицам. Одна
из
таких рептилий — длинночешуйник
необыкновенный — величиной с мышь была не так давно найдена экспедицией ученых
Палеонтологического института Академии наук СССР в отрогах Туркестанского хребта, в 60 км к юго-востоку от Ленинабада. Судя по отпечаткам на сланце, эта рептилия была покрыта удлиненными чешуйками, перекрывающими
друг
друга.
«Эти чешуйки, — как рассказывает доктор биологических наук
А. ПТаров, — напоминают зачаточные перья:
вдоль
их
оси
проходил срединный стержень, а боковые края были тонкими,
но не расчлененными. Ноеще более необычными
у этого животного были очень длинные чешуи, расположенные вдоль спины.
Самым интересным было то, что на конце эти чешуи расширялись, образуя тонкостенные мешочки. Они, видимо, выполняли
роль парашютиков, замедляя падение животного». Вторая рептилия, найденная экспедицией, — ногокрыл удивительный, тоже небольших размеров. Из сохранившихся отпечатков на сланце четко видны необычайно длинные задние ноги, а между конечностями, туловищем и основанием хвоста — эластичная перепонка. Видимо, она служила для планирования. В отличие от
птерозавров, или летающих ящеров, основной каркас крыльев
у ногокрыла создавался
не передними,
а задними
ногами.
Такого типа летательный аппарат обнаружен у рептилий впервые. Кости конечности у ногокрыла, надо полагать, были полыми (опять аналогия с птицами), поэтому масса животного была
сравнительно небольшая. Можно предположить, что ногокрыл,
как и длинночешуйник необыкновенный, также жил на
деревьях. При передвижении по ветвям перепонка крыльев собиралась в складки, а при прыжках животного с ветки на ветку
или с дерева на дерево растягивалась, как это происходит и у
современного животного — шестикрыла. Ногокрыл не был прямым предшественником птерозавров, как об этом можно судить по особенностям строения задних конечностей и недоразвитым ребрам, но не исключено, что он был в довольно близком родстве с предками летающих ящеров.
По мнению палеонтологов, самым болышим животным, когда-либо летавшим над землей, был ящер птеранодон. Размах
его крыльев достигал 8—9 м. Гигант с коротким, легким
и
202
Бионика
сильным телом был полновластным хозяином воздуха в меловом периоде. Он мастерски летал и парил. Ничтожная скорость
планирования обеспечивала ему и взлет, и посадку. Последнее
особенно важно, так как среди ученых долго шли споры о том,
как птеранодону удавалось садиться
и оставаться
в живых.
Известно, что в процессе эволюции у этого изумительного живого планера сильно облегчилось туловище. Кости стали трубчатыми, да еще такими, что даже у современных
птиц
они
кажутся массивнее и грубее, чем у изящного скелета птеранодона. Достаточно сказать, что стенки у косточек, составляющих
каркас крыла, были не толще
папиросной
бумаги.
Эти пустые внутри цилиндры крепились тонкими перегородками, почти так же, как это делается в современных самолетах. Птеранодон мог полускладывать крылья и снова расправлять их на
лету. По мере надобности с помощью
небольшой
мембраны
впереди ему удавалось менять угол атаки, форму крыла. Эта
особенность заставила группу специалистов заняться изучением летательных качеств птеранодона с помощью компьютера.
Оказалось, ящер знал секреты полета при нескольких различных положениях крыла. Можно предполагать, что птеранодон
послужил «предшественником» современных самолетов с измененной геометрией крыла.
Гигантские ящеры, птерозавры и птицы — три родственные
группы, произзшедшие
от сравнительно
небольших
рептилий — текодонтов. Среди текодонтов возникло, видимо, много
вариантов приспособлений к планированию и полету, из которых только один, характерный для птиц, оказался наиболее
совершенным,
выдержав на протяжении
более чем 150 млн.
лет все перипетии борьбы за существование. Передние
лапы
превратились у птиц в крылья, хвост укоротился
настолько,
что им стало можно пользоваться в полете, как рулем, а мозжечок (отдел мозга, регулирующий
равновесие)
стал
очень
большим.
Особняком в эволюции животного мира
стоят
летающие
рыбы. Палеонтологические находки
этих
животных
очень
скупы и не могут с достаточной полнотой осветить вопрос о времени их возникновения. Можно только
предположить,
что
эволюция летучих рыб началась в верхнем мелу, т. е. около
10 млн. лет назад, и шла, по-видимому, в двух направлениях.
Одно
из них привело
к образованию
двукрылых,
другое
—
четырехкрылых летучих рыб. Первые
используют
в полете
только грудные плавники, которые достигают у них очень боль-
ших
размеров
(до 80%
длины
тела);
вторые
осуществляют
полет с помощью двух пар несущих плоскостей: у них увеличены не только грудные, но и брюшные плавники, причем на
мальковых стадиях развития и те и другие имеют приблизительно одинаковую площадь. Кроме развития «крыльев», при-
Биомеханика
203
способление к полету отразилось у летучих рыб
в строении
хвостового плавника, лучи которого жестко соединены между
собой, а нижняя лопасть очень велика по сравнению с верхней,
в необычном развитии плавательного пузыря, продолжающегося под позвоночником до самого хвоста, и в ряде других особенностей.
Способность к полету выражена у летучих рыб неодинаково. Наибольшей
дальности
и продолжительности
достигает
полет «четырехкрылых»
рыб, конструктивно напоминающих
самолеты ПО-2 и АН-2. Перед вылетом они разгоняются в воде.
Развив скорость
около 30 км/ч, рыба-«биплан»
выскакивает
на поверхность моря и некоторое время, иногда совсем недолго,
скользит по ней
с расправленными
грудными
плавникамикрыльями, энергично ускоряя движение при помощи колебаний погруженной в воду нижней лопасти хвостового плавника
и увеличивая скорость до 65—70 км/ч. Затем рыба отрывается
от воды и, раскрыв брюшные плавники, планирует над ее поверхностьо. В некоторых случаях летучая
рыба при
полете
временами касается воды хвостом и, вибрируя им, получает
при этом дополнительную скорость (до 100 км/ч). Количество
таких касаний может достигать трех-четырех, причем в этом
случае
продолжительность
полета, естественно,
возрастает.
Обычно летучая рыба находится в воздухе не более 10 сек и
пролетает за это время несколько десятков метров, но иногда
длительность полета увеличивается до 30 сек, а дальность его
достигает 200 и даже 400 м. «Двукрылые» рыбы летают хуже.
По форме они напоминают большинство современных самолетов. «Монопланы» поднимаются в воздух без предварительного
скольжения по поверхности воды и пролетают обычно не более 20 м. Продолжительность и дальность полета летучих рыб
зависят от состояния моря и ветра. При неболыпом волнении,
слабом ветре и восходящих токах воздуха продолжительность
и дальность полета увеличиваются.
При отсутствии ветра,
в
штиль, летучие рыбы взлетают с трудом,
причем
продолжительность и дальность полета резко сокращаются.
Многие моряки и путешественники, наблюдавшие летучих
рыб с палубы корабля, утверждают, будто они «ясно видели,
что рыба машет крыльями, точно так же как это делает стрекоза или птица». В действительности «крылья» летучих рыб
сохраняют при полете почти неподвижное состояние и не совершают никаких взмахов. Лишь угол наклона плавников может,
по-видимому, произвольно меняться, и это позволяет рыбе несколько изменить направление полета. Дрожание
плавников,
которое заметно наблюдателю, по всей вероятности,
является
лишь следствием полета, но вовсе не его причиной. Оно объясняется простой вибрацией расправленных «крыльев», особенно
сильной в те мгновения, когда рыба, уже находящаяся в воз-
204
Бионика
духе, еще продолжает работать в воде своим хвостовым плавником. Но в пресных водах Южной Америки обитают мелкие
рыбы из семейства харациновых, совершающие машущий полет. Во время полета эти рыбы, подобно птицам, машут грудными плавниками и с шумом пролетают над поверхностью воды. Размеры рыб не превышают 9—10 см. Грудные плавники
у них увеличены, но относительно меньше, чем у океанических
летучих рыб. Масса мышц, приводящих в движение грудные
плавники, достигает 25% массы тела. Кости плечевого
пояса
развиты значительно сильнее, чем у летучих рыб океана, и напоминают киль на грудине птиц '.
Возникновение машущего полета у рыб в условиях знойного
неподвижного воздуха некоторые ученые объясняют как выработавшееся в процессе эволюции средство для спасения от нападающих хищников. Однако, как считает доктор 5иологических наук В. Д. Лебедев, более правильно предположить, что не
спасение от хищников, а охота за пищей (насекомыми, пролетающими над водой) — источником энергии и основой
вания любого вида — была ведущим экологическим
существофактором
эволюции в выработке планирующего и машущего полета рыб.
Полет птиц также представляет в первую очередь приспособление к освоению кормовой базы, хотя птицы при опасности
прибегают к полету, чтобы спастись от хищников.
Точно так же, надо полагать, и у прожорливых летучих
мышей приспособления для полета развивались главным образом в связи с освоением новых энергетических
ресурсов, т. е.
пищи. Масса проглоченных летучей мышью насекомых часто
достигает одной трети собственной массы.
Чтобы за 15 мин
поймать в воздухе в темноте 175 комаров, надо быть хорошим
летуном. У летучих мышей хорошие аэродинамические формы.
Они летают легко и быстро. В полете летучие мыши
хорошо
маневрируют, а некоторые могут «висеть» в воздухе на одном
месте. Они способны совершать большие перелеты и подниматься на высоту до 200 м.
Природа создала
очень много
оригинальных
летающих
«конструкций». Достаточно сказать, что животные почти трех
четвертей всех известных в настоящее время видов способны
летать. Например, в Австралии можно
встретить
летающих,
или,
как
их
еще
называют,
сахарных,
белок
(Ре{аиги$),
ловко
планирующцих с дерева на дерево, а также карликовых акробатов (АегоБа{ез рустаеи$) размером всего 6—8 см, порхающих,
словно колибри, с ветки на ветку, управляя
при этом
своим
хвостом, по форме напоминающим перо. Нельзя не упомянуть
и гигантских летяг (Зспо1поБа{ез уо|ап$), достигающих метро' См.: Барсуков В.
рода», 1962, № 6, с_ 101.
В. Способны
ли
рыбы
к активному
полету.
«При-
Биомеханика
205
вой и даже полутораметровой длины, способных совершать стометровые полеты. Несмотря на свои внушительные
размеры,
эти животные умеют с легкостью
переносить
свое тело
на
большие расстояния. Такая летяга может в несколько приемов
покрыть расстояние в полкилометра.
Итак, крыло и кожаная перепонка обеспечили возможность
полета чрезвычайно разнообразным и многочисленным представителям мира животных. Но самый совершенный полет —
у птиц. По способу полета их делят на птиц-парителей, малопарящих и птиц-непарителей, летающих
исключительно
за
счет взмахов крыльями. Метка и справедлива народная пословица: «Видна птица по полету». Кулики и утки всегда летят
прямолинейно. Стрижи и ласточки реют, часто меняя направление. Все дневные крупные хищники: орлы, коршуны, ястребы, соколы,
кондоры, грифы — и
болыпая
часть
морских
птиц — прекрасные парители. Птицы-парители, используя восходящие потоки воздуха, залетают на большие высоты. Так,
например, на Кавказе горные орлы-бородачи поднимаются до
5000 м. В Тибете грифы и кондоры
парят на высоте около
1500 м.
Аэродинамические формы птицы хорошо обтекаемы воздухом. Крылья покрыты маховыми и кроющими перьями, образующими легкую и гибкую несущую поверхность. Клюв, голова, шея плавно вытянуты по направлению полета, ноги поджаты и почти не выступают из перьев, напоминая убранное шасси самолета. Взгляните на птиц-парителей, высоко летящих с
распростертыми крыльями. Как много у них общего с современными планерами! Большие удлиненные крылья, обтекаемый корпус, плавный переход крыла в корпус...
Любуясь, порой подолгу, легко парящей
в голубом
небе
птицей, мы в нашем ХХ крылатом веке невольно вспоминаем
легенду
нашей
17
об Икаре.
эры
г. н. э.). И
Полет
воспели
с тех
на крыльях
Аполлодор
пор,
как
мифического
и Овидий
(43
героя
еще
до
г. до н. э. —
принято считать, людьми
овладела
мечта — научиться летать, как птица. Однако имеются основания предполагать, что еще несколько тысячелетий
до нашей
эры в древнем Египте, в отличие от Дедала, изготовляли
не
крылья из перьев, скрепленных воском, а строили... летательные аппараты из дерева. Эту гипотезу недавно высказал Халиль
Мессиа, египетский коллекционер антикварных предметов. Он
является обладателем деревянной модели летящей птицы, напоминающей современный планер. Эта реликвия фараонских
времен была обнаружена в местечке Саккара в 1898 г. Халиль
Мессиа сделал большую копию находки и убедился, что, запущенная в воздух, она свободно планирует. «Птица из Саккары» имеет подчеркнуто аэродинамический профиль. «Египтяне никогда не делали моделей, не имея оригиналов», — сказал
206
Бионика
владелец находки. Все эти соображения заставляют его предполагать, что еще 35 веков назад в стране фараонов люди, возможно, летали на планерах. Это удостоверяют археологи, открывшие недавно на краю Нильской долины
очень
древнее
захоронение времен фараонов Египта. Рядом с мумией лежали
бусы, кувшинчики и загадочный предмет, напоминающий игрушечный планер. Он был привезен в Париж, и там с него сделали точную копию, ибо этот древний планер, которому не менее 4000 лет, был очень хрупким. Серьезным ученым пришлось
«поиграть» с макетом. Он летал и показал неплохие аэродинамические качества.
Приведенные факты, по-видимому, еще не раз будут
подвергнуты тщательной проверке, и им будет дано правильное
историко-научное объяснение.
Однако независимо
от
того,
строили ли древние египтяне четыре тысячелетия назад планеры, летали ли на них, мы вправе утверждать, что в основе современной механики полета лежит планомерное и длительное
изучение полета птиц. Зачинателем этого целенапфавленного
изучения механики птичьего полета с истинно
бионических
позиций, как это уже нами
отмечалось,
был
Леонардо
да
Винчи.
Почему птица держится
в воздухе?
Почему
маленькие
птицы не летают на большую высоту, а большие не любят летать низко? Необходим или нет изгиб на концах крыльев? Почему птица падает по той или иной линии?
Каким
образом
птица взлетает, находясь на ровной земле? Сколько существует
способов, позволяющих птице превращать свое прямолинейное
движение в криволинейное? Почему птица совершает круговое
движение, изгибая свой хвот?
Как балансирует
птица
при
перемене силы и скорости одного и того же ветра? Эти и многие другие вопросы, связанные с полетом птиц, ставил перед
собой неоднократно Леонардо и нытался дать на них правильные ответы.
Найти критерии, которые можно положить потом в основу
полета реального крылатого аппарата тяжелее воздуха, было
заветной целью Леонардо. В небе Флоренции, Милана и Рима
он не уставал наблюдать за полетом ястребов, коршунов, многочисленных представителей богатого мира пернатых. А потом
на страницах его записных книжек птицы многократно повторяли свои полеты. И рядом с ними Леонардо рисовал крылатых людей, летающие кресла. Рассматривая эти рисунки, буквально физически ощущаешь силу мечты Леонардо о полетах
человека.
В поисках рациональной конструкции крыльев
Леонардо
пересмотрел много различных вариантов. Какова наилучшая
форма крыла, из какого материала лучше его сделать? Решение приходит не скоро. Ученый думает над этим повседневно.
Биомеханика
207
Крылья, крылья и крылья... Их можно увидеть буквально на
каждой странице записных книжек Леонардо. Но наконец решение найдено, и он пишет: «Помни, что твоя птица должна
подражать не иному чему, как летучей мыши, на том основании, что ее перепонки образуют арматуру или, вернее, связь
между арматурами, т. е. главными частями крыльев. И если
бы ты подражал крыльям пернатых, то знай, что у них более
мощные кости и сухожилия, поскольку крылья их сквозные,
т. е. перья их друг с другом не соединены и сквозь них проходит воздух. А летучей мыши помогает перепонка, которая соединяет целое и которая не сквозная»'. При взгляде на чертеж
крыла, выполненный Леонардо, конструктор современных самолетов найдет в нем те же силовые элементы, которые присущи конструкции нынешнего крыла. Здесь есть, по сути дела,
лонжероны, нервюры и обшивка. Только вместо дюраля, стали
и титана в конструкции Леонардо предусмотрены материалы
его времени
— сосновые брусья, бумазея
и прокрахмаленная
тафта.
Решив проблему крыла, Леонардо
занялся общей
компоновкой будущего летательного аппарата. Известно, что он разработал конструкцию орнитоптера
— «большой птицы».
Считая, что одной мускульной силы человека будет недостаточно
для полета на орнитоптере, Леонардо предусмотрел установку
на аппарате пружины
— дополнительного
двигателя.
С
помощью специальных блоков можно было осуществить натяжение пружины и аккумулировать механическую энергию,
необходимую летчику. Весьма тщательно были продуманы система управления, расположение человека в летательном
аппарате. Поначалу ученый предполагал разместить его в горизонтальном положении, потом, пересмотрев свое решение, записал: «Я решил, что стоять
на ногах
лучше,
чем
лежать
плашмя, ибо прибор никогда не может перевернуться
вверх
ногами, а вместе с тем этого требует привычка, создавшаяся в
результате длительного упражнения. Подъем и опускание при
движении (крыльев) будут производиться опусканием и подниманием обеих ног, это дает большую силу, а руки остаются
свободными. Если же тебе пришлось бы лежать плашмя,
то
ноги в берцовых суставах сильно уставали бы, держась в таком положении»?.
Леонардо собирался совершить сам первый полет на своей
«большой птице» в окрестностях
Флоренции
с горы
Монте
Чечери
— горы Лебедь. Мысль об этой самой заветной
своей
мечте ученый дважды повторил в «Кодексе
о полете
птиц».
' Стра
жизнь», №
’Там
жева
И. Леонардо
2, 1970, с. 95.
же, с. 96.
да
Винчи
и механика
полета.
«Наука
и
208
Бионика
Осуществить свой замысел ученому не довелось. Но благодарные потомки позаботились о том, чтобы память о дерзновенной
мечте гения никогда не была забыта человечеством. На камне
у подножия горы Монте Чечери высечены слова Леонардо:
«Большая птица начнет первый
полет
со спины
своего
исполинского Лебедя, наполняя вселенную изумлением, наполняя молвой о себе все писания -— вечной славой
гнезду,
где
она родилась».
Увы, судьба научных трудов Леонардо, в том числе его исследований в области механики полета, сложилась
так,
что
они долгое время оставались неизвестными для ученых, инженеров и изобретателей, живших после него. Но древнейшая и
самая дерзновенная мечта
— летать, летать, рассекая грудью
воздух, поднимаясь к облакам, парить в голубом небе, стремительно нырять вниз, к земле, и вновь набирать высоту, всем
телом ощущать волшебную силу полета, чувствовать легкость и
свободу, которую испытывает птица, не переставала волновать,
увлекать человека. Его неугомонная, пытливая мысль настойчиво продолжала работать в поисках путей овладения воздушным пространством. Десятки людей, ученые и умельцы разных
стран мастерили крылья, прицепляли их к рукам,
отважно
бросались с высоты на землю, пытались взлететь, используя
силу своих мускулов. Однако казавшийся предельно простым
полет птиц и летучих мышей так никому воспроизвести и не
удалось.
Шли годы. Разочарованные неудачей, исследователи обращались к другим способам полета, основанным на принципиально иных законах. Так появилась разработанная
великим
русским ученым М.
В. Ломоносовым
оригинальная
модель
«аэродромической машины».
Чертежи этого
замечательного
изобретения Ломоносова до нас не дошли, но, судя по имеющейся в протоколах конференции
императорской
Академии
наук
записи
от 1 июля
1154
г., действующая
модель
ломоносов-
ского летательного аппарата была устроена
следующим
образом.
В специально изготовленном корпусе («коробке») находился двигатель
— пружина, какие обычно бывают в часах. Пружина заводилась ключом и приводила во вращение через систему цилиндрических шестерен два концентрических валика,
на концах которых на некотором эасстоянии друг от друга, на
одной геометрической оси, над верхней плоскостью
корпуса,
были наглухо насажены два воздушных винта, которые вращались «горизонтально в разных
направлениях».
Во время
испытаний модель была подвешена
на веревке,
перекинутой
через два блока, и поддерживалась
в равновесии
гирьками,
привешенными с противоположной стороны. «Когда заводили
пружину, —- повествует протокол, — машина
сразу
поднима-
Биомеханика
209
лась вверх. Таким образом она обещала достижение ожидаемого действия». Однако, несмотря на то что «аэродромическая
машина» и обещала «достижение ожидаемого действия», Ломоносов, по-видимому, все же остался не вполне удовлетворенным
подъемной
силой
своей
модели
и тут
же
по
окончании
испытания «машины»
заявил
присутствующим академикам,
что постарается «еще больше увеличить ее действие»
путем
«увеличения силы пружины и расстояния между каждой парой
крыльев, а коробку, в которой находится пружина, для уменьшения веса сделать деревянной».
О дальнейшей работе Ломоносова над усовершенствованием
его ‹аэродромической машины» никаких сведений не имеется.
По-видимому, другие неотложные дела не позволили ему найти время для того, чтобы довести постройку своего летательного аппарата «до желаемого конца». Но независимо от этого
модель ломоносовской «чаэродромической машины» предопределила принцип полета будущего геликоптера.
По сути, созданную Ломоносовым действующую модель вертолета можно
считать вторым этапом в завоевании
человеком
воздушного
пространства '.
Затем человечество подошло к третьему этапу.
За основу
был взят воздушный змей. Еще тысячелетия назад китайцы
запускали в воздух змеев различной конструкции. Наибольшее
распространение получил коробчатый:
деревянные
планки,
обтянутые материей или бумагой, действительно очень напоминали коробку. Исследовав полеты воздушных змеев, неоднократно поднимаясь на них в воздух, изучив работу воздушных
гребных
винтов,
русский
изобретатель
контр-адмирал
А. Ф. Можайский (1825—1890) твердо стал на путь создания
летательной машины с неподвижным
относительно
корпуса
крылом. Плоскость самолета, словно змей, поставили под углом к горизонту; к плоскости прикрепили мотор, а к мотору —
пропеллер. Лопасти пропеллера загребали воздух.
Давление
воздуха под крылом и разрежение над крылом должны были
держать самолет в воздухе. Дошедшие до нас документы че
называют
даты полета построенного Можайским
«воздухолетательного снаряда» и имени механика, проводившего испытание. В них указывается, что при одном из испытаний самолет оторвался от земли и совершил короткий полет. Это был
первый в мире полет на летательной машине тяжелее воздуха.
Источники, свидетельствующие об этом полете самолета, говорят: самолет под управлением механика взлетел, начал крениться и опустился; при спуске было повреждено крыло ма' Более подробно об «аэродромической машине» см. книгу И. Б. Литинецкого «М. В. Ломоносов и экспериментальная
техника».
Киев,
Изд-во
техн. лит., 1961, с. 139—142.
8—327
210
Бионика
шины, а управлявший
самолетом механик получил увечье".
После поломки самолета Можайский, стремясь улучшить его.
принялся за дополнительное изучение аэродинамики самолета,
работы воздушных винтов.
Он спроектировал
новые,
более
совершенные паровые машины. Постройка на Обуховском заводе этих паровых машин затянулась до 1890 г. Можайский
уже не успел установить их на свой самолет.
Прошло время, и у Можайского появились последователи в
Германии и во Франции. Но почти все полеты на построенных
самолетах заканчивались вначале неудачно. Первые авиаторы
не знали законов аэродинамики, рассчитывать крыло и «центровать» самолет по массе не умели. Моторы были ненадежными,
а ведь именно от них зависела безопасность полета. Останавливался двигатель — и самолет, не умея планировать, камнем падал вниз...
Все это давно позади. Летать человек все же научился. Он
придумал несуществующий в природе
принцип
— двигатель,
воздушный винт и неподвижное крыло. И в этом конструктивном решении проблемы — естественная диалектика человеческой мысли. В противном случае не было бы современной авизции. Не сумев разгадать до конца со времен Леонардо тайны
полета пернатых, не сумев создать законченной теории машущего полета, человеку, чтобы овладеть воздушным пространством, ничего не оставалось
делать, как,
оттолкнувшись
от
«чужого», в конце концов прийти
к совершенному
«своему».
Научившись строить самолеты, человек превзошел
птицу
по скорости полета в 1912 г., по высоте полета — в 1916 г. и
по дальности полета
— в 1924 г. Одновременно со строительством новых самолетов начала быстро расширяться сеть пассажирских воздушных линий. И вдруг...
Перед второй мировой войной по всем странам прокатилась
волна необъяснимых воздушных катастроф. Аварии случались
с самолетами самых разных конструкций и назначения. Полет, казалось, протекал нормально,
и вдруг
машина
словно
взрывалась в воздухе. Спасшиеся на парашютах не могли обстоятельно, конкретно
ничего рассказать
— все
происходило
слишком быстро. Невиданной силы удар, треск, грохот, короткая агония — и от самолета отваливались исковерканные куски металла, падавшие вниз. Только позднее удалось
установить, что взаимодействие крыла с набегающим на него потоком
воздуха может привести к возбуждению
упругих
колебаний
крыла относительно фюзеляжа самолета. Силы давления воз' Проведенные в 1950 г.
проверочные
расчеты
показали,
что
мощности двигателей в 30 Л. с. ик. п. д. винтов всего 0,5 самолет был
собен взлетать с горизонтальной поверхности и летать
со скоростью
11 м/сек (около 40 км/ч).
при
сподо
Биомеханика
211
духа на крыло меняются при колебаниях последнего. В некоторых случаях они
раскачивают
крыло.
Новому
грозному
противнику авиации дали название «флаттер»
(в переводе
с
англ. — «трепетать»). Тотчас же после возникновения флаттера крыло, как правило, ломается и самолет гибнет.
Вот
как
описызает известный всей стране заслуженный летчик-испытатель, Герой Советского Союза М. Л. Галлай
свою
встречу
с
флаттером:
«И вдруг
— будто огромные невидимые кувалды
со страшной силой забарабанили по самолету. Все затряслось
так, что приборы на доске передо мной стали невидимыми, как
спицы вращающегося колеса. Я не мог видеть крыльев, но всем
своим существом чувствовал, что они полошутся, как вымпел
на ветру... Грохот хлопающих листов обшивки, выстрелы лопающихся заклепок, треск силовых
элементов
конструкции
сливались во всепоглощающийся шум. Вот сн, Флаттер!..»
Встреча с флаттером была неожиданностью не только для
пилотов, но и для конструкторов и для ученых. Неизвестно было,
как с ним бороться. Оставалось одно — искать причины, искать
способы борьбы. И они были
найдены. Известный советский
академик М. В. Келдыш выявил все основные факторы, определяющие колебания крыльев, воздействие
на них
воздуха,
и предложил практические
меры
устранения
флаттера:
у
передней кромки на конце каждого
крыла
начали
делать
утяжеление, гасящее вредные колебания. Коварное прегятствие на пути создания машин
для скоростных
полетов
было
устранено.
Позднее биологи обнаружили у разных видов
стрекоз
на
каждом крыле в вершинной его части, у переднего края темное
хитиновое
утолщение — преростигму
(крыловой
глазок). Исследованиями Ю. М. Залесского было установлено, что птеростигма является не чем иным, как противофлаттерным образованием, избавляющим крыло стрекозы от вредных колебаний.
В связи с раскрытием назначения птеростигм на крыльях стрекоз
известный
советский
специалист
по
аэродинамике
М. К. Тихонравов в своей книге «Полет птиц и машины с машущими крыльями» писал: «...природа иногда указывает, как
самые сложные задачи решаются с поразительной простотой».
Действительно, если бы значение птеростигм у стрекоз было
известно раньше, чем
ученые
изобрели
противофлаттерное
устройство у самолетов, то, заимствовав его у насекомых, можно было бы избежать долгих бесплодных поисков и человеческих жертв.
Этот факт, казалось бы, должен
был заставить
авиаконструкторов вернуться к «патентному бюро» природы, к выработанным ею за миллионы лет эволюции различным высокоэффективным приспособлениям к полету птиц, а также к плаванию водных животных, поскольку законы гидродинамики и
8*
212
Вионика
аэродинамики имеют много общего. Но этого
не
случилось.
И за пренебрежительное отношение к природным конструкциям Ттворцам авиационной техники опять пришлось расплачиваться дорогой ценой
— затратой сотен тысяч часов труда на
изобретение того, что было давным-давно изобретено природой.
Например, инженерам удалось
найти
определенный
тип
авиационного
крыла
с болышой
подъемной
силой,
применяемой
для грузоподъемных самолетов. Поперечный
разрез
такого
крыла, или, как говорят, его профиль,
отличается
тем,
что
верхняя часть контура более выпуклая, чем
нижняя.
И вот
оказалось, профиль тела некоторых рыб, в частности некоторых акул и осетровых, почти подобен профилю грузоподъемного авиационного крыла. Сходство это не случайно. Дело в том,
что эти животные, в частности акулы, имеют
большую плотность и в неподвижном состоянии тонут. Однако достаточно
акуле начать двигаться вперед, как благодаря
определенностям формы ее тела создается необходимая
подъемная сила,
которая поддерживает рыбу на плаву. Никаких дополнительных движений, связанных с поддержанием себя во взвешенном
состоянии в толще воды, акула
не производит.
Инженерамавиастроителям при конструировании грузоподъемного самолетного крыла потребовалось много изобретательности, чтобы
придумать нужную конструкцию. А в природе
она уже
существовала очень давно, ее можно было бы просто позаимствовать.
Другой пример. У самолета ТУ-104 на крыльях есть поперечные вертикально стоящие ребра, они расположены
параллельно продольной оси самолета и сделаны из тонкого листового металла. Назначение этих, как их называют,
дефлекторных
пластин
— не допускать
стекания
воздушного
потока
вдоль крыла, потому что это увеличило
бы
сопротивление.
Такие же дефлекторные пластины,
практически
такого
же
вида и совершенно такого же назначения, можно увидеть на
хвостовом плавнике некоторых быстрых
рыб, в частности
у
тунцов и меч-рыбы. Хвостовой плавник — основной движитель
этих рыб
— по форме чрезвычайно близок
к стреловидному
крылу современных реактивных самолетов. И точно так же
как на крыле ТУ-104, на хвостовом плавнике этих рыб расположены дефлекторные пластины. Следовательно, и в этом случае
инженеры-авиастроители изобрели нечто уже существующее в
природе.
Перелистывая страницы истории авиации, таких примеров
можно найти множество. И возможно, что, гордые достигнутыми успехами в развитии моторной авиации, ее творцы
— ученые и инженеры — и дальше бы не обращались за помощью и
советом к биологической аэро- и гидродинамике, продолжали
бы игнорировать тех, кому еще совсем недавно завидовали, у
Биомеханика
213
кого учились летать, если бы не возникла настоятельная необходимость в резком повышении экономичности, маневренности и надежности существующих и будущих пассажирских
и грузовых самолетов. А по всем этим важнейшим показателям
даже самые лучшие воздушные лайнеры, переносящие за несколько часов сотни пассажиров через моря и океаны, все еще
отстают от птиц. Да еще как отстают!
Возьмем, к примеру, наши стремительные ИЛ-18 и ТУ-114
и прикинем, какая масса этих воздушных гигантов приходится, скажем, на одну лошадиную силу их двигателей. Получается, что у самолетов это соотношение составляет 14 кг, у орла
в пересчете на мощность его живого «двигателя»
оно
равно
ТО кг, у обыкновенного аиста — даже 135 кг. Вот и выходит,
что летательный механизм птиц почти в 10 раз экономичнее,
чем у самых совершенных самолетов. Более того, по расчетам
некоторых ученых, машущий полет лучших природных летунов в 20—30 раз экономичнее полета обычных самолетов '.
Экономичность полета пернатых особенно проявляется
во
время их длительных миграций. Чибисы, например, перелетают из Англии в Ньюфаундленд через Атлантический океан, покрывая расстояние в 3500 км без остановки, а бекасы без отдыха пролетают из Японии на зимовку в Восточную Австралию около 5000 км. Почти фантастическим кажется перелет
кроншнепов, гнездящихся на Аляске и зимующих на острове
Таити, на Гавайских
островах.
Весь
путь
протяженностью
9500 км (более 3000 км над морем) они, видимо, пролетают без
остановки. Некоторые
буревестники
гнездятся
на
островах
Тристан-да-Кунья, отстоящих от ближайшей суши на 2400 км,
и при этом проделывают путь в одну сторону
более 10000 км.
Птицы летят без отдыха как над водными пространствами, так
и над пустынями. За время своего «беспосадочного» перелета
они совершают огромную мышечную работу. Так, например,
перелет мелких певчих птиц через
Сахару
длится 30—40 ч.
За это время каждая пернатая путешественница при 4—5 взмахах крыльев в секунду
поднимает
и
опускает
их
около
500 000 раз!
Другое очень важное преимущество
машущего
полета —
его болышая безопасность. Например, дальневосточный
игло' Разноречивость результатов в оценке энергетической эффективности
полета птиц, которая, безусловно, во много раз выше по сравнению с самолетами, объясняется тем, что до недавнего времени ученые не располагали достаточным количеством
надежных, экспериментально
проверенных, исходных данных, не была разработана строгая, математическая методика расчета
мощности
«естественных
летательных
аппаратов». Этот
пробел ныне, в первом приближении, восполнен работами советского ученого
Н.
В.
Кокшайского
423—439).
(см.:
«Проблемы
бионикиь».
М.,
«Наука»,
1973,
с.
214
Бионика
хвостый стриж, летящий со скоростью 170 км/ч, может
вихрем пронестись у самой поверхности
земли, а затем
взмыть
вверх и снова с громадной скоростью
возвратиться
к земле.
Чтобы набрать необходимую подъемную силу, самолету требуется время. Иное дело — птица: орел или глухарь. Птицы с
широким вогнутым крылом могут мгновенно взмывать с места,
без разбега, и даже поднимать дополнительный груз. Это
их
уникальное свойство объясняется образованием
на
нижней
поверхности крыла очень интенсивных вихрей. Располагаясь
компактно, в шахматном порядке, вихри возмущают окружающую среду воздуха и индуцируют скорость, которая направлена в сторону, противоположную движению крыла. Сила резкции, возникающая от этой скорости, есть сила
тяги.
Часто
можно видеть, как некоторые птицы,
летая
высоко
в небе,
вдруг, сложив крылья, камнем падают на свою
жертву
и,
схватив ее. взмывают ввысь, не коснувшись земли. Например,
сокол сапсан в горизонтальном полете развивает скорость около 90 км/ч, но, увидев жертву, немедленно бросается на нее
с высоты и пикирует со скоростью 360 км/ч. Промахнувшись,
он короткой дугой без взмаха крыльями снова поднимается в
небо.
Пройдя строжайший естественный отбор, совершенствуясь
в полете на протяжении многих миллионов лет, птицы далеко
превзошли созданные людьми первоклассные летательные аппараты и в маневренности.
Во всем живом царстве в начале эволюции естественный отбор сохранял в живых надежные, максимально устойчивые
и
плохо управляемые модели. А по мере усложнения мозгового
аппарата (может быть, здесь природа, как и мы, шла по пути
микроминиатюризации и усложнения отдельных функциональных блоков?) на первый
план
выдвигалась
управляемость.
Каждый признак, снижавший устойчивость,
но увеличивавший свободу маневра, сохранялся лишь в том случае, если
соотношение этих характеристик оказывалось наиболее
благоприятным. Теряя часть «естественной» устойчивости (например, за счет изменения формы хвоста или плавников), живое
существо, видимо, компенсировало утрату появлением
нозых
связей в полушариях головного мозга. Далекий предок сегодняшних птиц — археорнис
— имел длинный, из 20 позвонков,
хвост
с мощным
стабилизирующим
оперением.
Маховые
перья на крыльях создавали несущую поверхность сравнительно большой
площади
и с постоянными
характеристиками.
Скорее всего археорнис совершал
небольшие
планирующие
полеты с дерева на дерево и не
был способен
переходить
в
«режим с набором высоты» — для этой цели потребовалось бы
более высокое
аэродинамическое
качество.
Очень
маленькая черепная коробка позволяет сделать вывод, что «управ-
Биомеханика
215
—
ляющая машина» археорниса не способна была решать сложные задачи.
У современных птиц сильно развиты как раз контролирующий полет мозжечок, органы зрения, слуха и равновесия, т. е.
именно те, что нацелены на прием и переработку больших
объемов внешней информации. Птица постоянно
следит
за
состоянием обтекающего
ее пограничного
воздушного
слоя
(то, что мы с громадными затратами делаем в аэродинамических трубах), за всеми его нарушениями в каждой точке и при
необходимости мгновенно меняет режим полета.
Таким образом, долгий путь эволюции позволил птице прекрасно приспособиться к движению, обрести высокую
маневренность в воздушной среде. Известна, например, порода голубей, которые во время полета неоднократно перекувыркиваются, или авторотируют, не теряя при этом равновесия. Виртуозно
летает альбатрос. Он может летать несколькими
способами:
махая крыльями, паря в восходящем потоке воздуха и подпрыгивая на встречных «волнах» (двигаясь с порывами ветра).
Высока маневренность
ласточек.
Летая
со
скоростью
до
120 км/ч, они легко и изящно выполняют в воздухе некоторые
фигуры высшего пилотажа. Мастерски
маневрируют и даже
могут «висеть» в неподвижном воздухе на одном месте жаворонок, зимородок, пустельга.
Пальму первенства
в маневренности,
пожалуй,
следует
отдать самым маленьким представителям пернатого
мира —
колибри. Эти птички-невелички имеют массу от 2 до бг, длину
тела немного больше, чем у шмеля (15—20 мм). В погоне
за
насекомыми колибри развивают на спринтерских дистанциях
скорость до 100 км/ч. Некоторые колибри поднимаются в горы
до
высоты
4000
ми
выше,
где
из
позвоночных
животных
встречаются лишь одни могучие кондоры. Стремительная
в
полете, птичка-невеличка может остановиться в воздухе (цвет.
табл. 8) и, не переставая работать крыльями, подолгу «висеть»
неподвижно в одной точке, словно крохотный вертолет. Когда
эта крошечная птичка «висит» в воздухе,
высасывая
своим
тонким клювом нектар из цветков или склевывая насекомых,
на месте
ее вибрирующих крыльев виден дымчатый бледный
ореол и слышен особый жужжащий звук. Колибри может даже
летать «боком» и «задним ходом». Такая высокая
маневренность полета достигается большой частотой взмахов небольших
по размеру крыльев (около 50 взмахов в секунду) и тем, что
колибри машут крыльями не вертикально, как все птицы, а
горизонтально (это позволяет им, в частности, летать хвостиком вперед!).
Разве не заманчиво авиаконструкторам, располагая примерами столь блестящего творчества природы в области биологической аэродинамики,
довести
экономичность,
маневрен-
216
Бионика
ность и надежность создаваемых воздушных кораблей до уровня, достигнутого птицами? Но прежде чем изложить, как этого можно достичь, необходимо, хотя бы
кратко,
рассмотреть
упрощенную схему полета птицы.
Для простоты представим себе сначала, что птица, работая
крыльями, приобрела уже известную скорость
и теперь
использует ее, продолжая полет на неподвижно распростертых
крыльях. При этом птица испытывает сопротивление движению со стороны воздуха, которое мы изобразим в виде силы К,
называемой силой полного сопротивления воздуха. Ее можно
разложить по известному правилу
параллелограмма
на
две
составляющие: силу Р, направленную по вертикали, и перпендикулярную ей силу ( (рис. 44, Г). Сила Р направлена вверх и
стремится поднять крыло, поэтому ее называют подъемной силой. Если подъемная сила равна массе птицы, то высота полета не изменяется, птица летит горизонтально. Если же сила Р
больше массы птицы, последняя поднимается вверх; если сила
меньше массы, то происходит потеря высоты, птица снижается.
Сила @ тормозит поступательное движение и называется силой
лобового сопротивления.
Если сила лобового сопротивления больше
силы тяги,
то
движение замедляется, в противном
случае
движение ускоряется; наконец, в случае равновесия
сил
тяги
и лобового
сопротивления скорость движения остается постоянной.
Рис.
44.
Разложение
сил,
действующих
на крыло
птицы
во
время
полета.
К — сила полного сопротивления воздуха; Р — подъемная сила; О — сила лобового сопротивления; Q' —cune тяги; С — масса птицы; аб — хорда крыла; а — угол атаки. 1 — птица летит
на неподвижно распростертых «крыльях, используя приобретенную ранее скорость; ИУ — направление
полета
птицы || — птица летит с помощью
езмахов
крыльями;
направление
взмахов
вертикально и совпадает с силой тяжести (или имеет строго противоположное направление);
У! — истинное направление движения крыла, определяемое в результате вертикального движения крыла относительно туловища и горизонтального движения вместе с туловищем.
Биомеханика
217
Откуда же возникает сила тяги? При взмахе крыла вниз
составляющие силы распределяются несколько по-иному, чем
в только что разобранном случае. Сила Р по-прежнему направлена вверх и уравновешивает силу тяжести, а перпендикулярная ей сила ©’ направлена вперед и создает тягу. Разложение
сил при всевозможных положениях крыла
показывает,
что
сила тяги может
возникнуть
и
при
поднимании
крыла
(рис. 44, П). Определяющим моментом в этом случае служит
знак так называемого угла атаки, т. е. угла между хордой крыла и направлением набегающего на него воздушного потока.
Итак, чем больше подъемная сила по сравнению с лобовым
сопротивлением, тем эффективнее полет, тем выше так называемое качество летательного аппарата.
В свете
сказанного
всю историю авиации, в сущности, можно свести
к решению
следующей важнейшей задачи — увеличить подъемную силу и
уменьшить вредное лобовое сопротивление. Главными способами борьбы с лобовым сопротивлением до последнего времени
были «зализывание» форм самолета и уменьшение угла атаки.
Но можно ли уменьшать угол атаки до бесконечности? Нет.
Существует определенный предел, ниже которого
полет самолета становится
невозможным.
Но это в том случае,
когда
крыло неподвижно. А если заставить
его двигаться
подобно
птичьему?
Вероятно, вы не раз наблюдали с земли за полетом птицы.
Обычно кажется, что ее крыло идет после взмаха прямо вниз.
А что происходит на самом деле? Крыло идет вниз и одновременно движется вместе с птицей в направлении ее полета. Таким образом, при взмахе крыло встречает
поток воздуха
не
всей своей нижней поверхностью, как иногда думают,
а под
определенным углом атаки, так же как самолетное. Однако
у
птичьего крыла, кроме угла атаки, появляется при движении
еще и волнообразная траектория полета. Именно поэтому машущий
полет
более
эффективен,
чем
поле
самолета
с непод-
вижными крыльями. Движущееся крыло позволяет
создать
максимум подъемной силы и минимум лобового
сопротивления! Обладая всеми достоинствами крыла птицы, наш обычный
пассажирский самолет, скажем ИЛ-14, смог бы летать с околозвуковой скоростью. И вот
что еще чрезвычайно
важно: машущее крыло хорошо работает на углах атаки,
значительно
превышающих критические углы атаки планирующего крыла,
а как известно, именнс на критическом
угле атаки
самолет
может сорваться в штопор.
Значит, орнитоптер? Да! Машущее крыло аэродинамически
выгодно во всех отношениях. Для повышения экономичности,
маневренности и безопасности самолетов можно использовать
опыт живой природы, строить летательные аппараты с мащущими крыльями. Но осуществить машущий полет, а главное,
218
Бионика
достичь желаемого эффекта — задача далеко не простая даже
в наш ХХ век, казалось бы, век безграничных возможностей
науки и техники.
Лет ссрок назад в зарубежной печати много писали об одном немецком инженере, который изготовил несколько механических птичек. Они были маленькие, но как
настоящие
и
даже летали! Окрыленный успехом,
этот
инженер
задался
целью посгроить орнитоитер. Нашлись последователи и в других странах. Строили махолеты, или, как их еще
называют,
птицелеты, самых различных конструкций.
Один
из таких
махолетов имел массу больше полутонны, площадь его крыльев достигала 30 м?, они делали от 25 до 90 взмахов в минуту.
По расчетам, такой орнитоптер должен был поднять не одного, а несколько пассажиров. Однако взлететь
ему
таки
не
удалось: не хватило
подъемной
силы.
Другие махолеты
с
поршневым бензиновым мотором, едва оторвавшись от земли,
неизменно тотчас же падали...
Почему же зарубежные изобретатели и конструкторы потерпели в своих первых попытках создания махолета
неудачу?
Все дело в том, что они
поверхностно
пытались
копировать
природу, не зная, не понимая истинной физической
картины
образования движущих сил на машущем крыле. Они механически переносили формулы аэродинамики самолета
на орнитоптер. А это неизбежно вело к неудачам. Да иначе и не могло
быть, ибо подъемная сила крыла, жестко закрепленного, и машущего крыла образуется по-разному. Если крыло самолета
плавно обтекается струями воздуха, то при взмахах крыла птицы имеет место так называемое срывное
обтекание.
Однако
почти все изобретатели и конструкторы орнитоптеров до сравнительно недавнего времени не учитывали этой принципиальной разницы.
Раскрыть секреты феноменальной подъемной силы птичьего крыла, постигнуть закономерности полета пернатых, переложить их на инженерный язык, взять у летающих «конструкций»
живой
природы
все
самое
эффективное
в аэродинамичес-
ком отношении, найти новые законы для постройки махолетов
— этим сейчас увлечены бионики многих стран.
Правда,
далеко не все авиаконструкторы разделяют идею
перспективности машущего полета, но
число приверженцев
махолетов
с каждым годом непрерывно растет. Над созданием орнитоптеров
ныне
работают.в
СССР,
Великобритании,
ФРГ,
ГДР,
Япо-
нии, Италии, Франции и других странах очень многие энтузиасты.
В нашей стране после второй мировой войны
был
создан
Комитет машущего полета Федерации
авиационного
спорта
СССР. Летчики, биологи, инженеры, врачи, рабочие, аэродинамики в содружестве с учеными Института морфологии живот-
Биомеханика
219
ных им. А. Н. Северцова Академии
наук
СССР
— доктором
биологических наук Г. С. Шестаковой
и
кандидатами
наук
Т. Л. Бородулиной, В. Э. Якоби, И. В. Кокшайским — занялись
изучением механики полета птиц. За многие годы исследований этим большим коллективом энтузиастов машущего полета опытным путем
были
открыты
многие секреты птичьего
полета, ранее неизвестные
закономерности
феноменальной
подъемной
силы
крыла.
В
частности,
было
установлено
следующее:
1. Перья птичьего крыла эластичны и упруги.
Благодаря
этому крыло имеет переменный профиль.
2. Машущее крыло засасывает воздух. Всасывание разделяется на внешнее (в пазушную область
крыла)
и
внутреннее
(через тоннели).
3. Пограничный слой воздуха вдоль хорды мгигущего крыла автоматически сдувается
— это ведет
к повышению
его
подъемной
силы.
4. Движение крыла довольно сложно, оно
колеблется
не
только в направлении вверх-вниз, но и около трех осей.
5. Второстепенные, главным
образом
большие
маховые,
перья имеют, кроме того, собственные колебания.
6. Концы крыльев
— манус, как говорят
специалисты,
—
обладают
ния
пропеллирующим
действием,
а траектория
их
движе-
приближается к синусоиде.
1. При ударе крыла вниз стержень отдельных перьев
раскручивается, а затем при подъеме крыла перо сильно отбрасывает воздушный поток вниз. Таким образом крыло аккумулирует энергию.
8. Кино- и фотосъемки в гидроканале наглядно показали,
как от крыла в различных положениях во время взмаха и удара
стделяется закручивающийся вихрь, причем одновременно изменяется угол атаки крыла. Эти вихри — срывное обтекание —создают подъемную силу и тягу машущего крыла (сила противодействия — тянущая сила, а отход вихря дает крылу подъемную силу).
9. В отличие от планирующего полета при машущем даже
на закритических углах атаки подъемная сила
продолжает
расти. Это явление объясняется по-разному: эффектами сдува
погранинчого слоя в различных фазах взмаха, проницаемостью
крыла, управлением пограничным слоем, имеющимся на поверхности крыла микрорельефом.
10. На нижней и верхней поверхностях
крыла
интенсивность образующихся вихрей различна. Она зависит как от геометрических характеристик профиля (вогнутости, толщины, угла установки), такиот характера движения (неравномерность
взмахов). Например, профили вогнутые, широкие, такие, каку
орла и глухаря, позволяют образовываться на нижней поверх-
220
Бионика
ности крыла очень интенсивным вихрям. В зависимости от параметров профиля и характера движения вихревая дорожка,
по-видимому, может превращаться в цепочку вихрей.
Сами вихри имеют интересное свойство. Они ведут себя при
встрече друг с другом и с препятствием своеобразно: или обтекают препятствие, или отталкиваются от него, в зависимости
от его размеров. Вихри взаимодействуют между собой, сообщая друг другу или частицам воздуха скорости. Такие скорости
называются
индуцированными.
Этот
эффект
аналогичен
электромагнитному влиянию проводника, по которому
течет
электрический ток.
Опыты с электромашущими моделями, которые
проводились рядом научных учреждений, показали, что
увеличение
подъемной силы машущего крыла возрастает в 5 раз по сравнению с неподвижным. Одновременно было установлено, что
машущее крыло птицы создает значительную тягу
даже при
малых скоростях.
В начале 60-х годов членами Комитета машущего полета
было построено несколько моделей орнитоптеров с бензиновыми
моторчиками
10—15—20 д. с. И в один
из
солнечных
октябрьских дней 1962 г. на одном из подмосковных аэродромов можно было увидеть такую картину...
По бетонной дорожке, плавно взмахивая гибкими крыльями
девятиметрового размаха, мчался необычный летательный аппарат. Сильная
струя
воздуха,
отбрасываемая
машущими
крыльями, заставляла никнуть траву по краям дорожки. Набрав скорость
25—30 км/ч, аппарат
начал
подпрыгивать.
А еще через несколько секунд его колеса повисли в воздухе.
Аппарат летал над аэродромом
недолго, так как
программа
испытаний была рассчитана только лишь на проверку тяги
и
подъемной силы. Однако первый же экспериментальный полет
показал, что даже при
очень
небольшой
скорости
— вдвое
меныпей, чем требуется самолету,
— махолет с маломощным
моторчиком в 18 Л. с. легко отрывается от земли.
Спустя полтора года (19 апреля 1964 г.) на стадионе «Динамо» в Москве были проведены соревнования нескольких моделей аппаратов с машущими крыльями.
Присутствующие
на
соревнованиях воочию убедились, что полет на таких аппаратах абсолютно безопасен, так как махолет может садиться при
нулевой поступательной скорости. А если вдруг в воздухе откажет двигатель? Это не страшно: махолет плавно спланирует
на распластанных крыльях.
Хотя тайна механики полета птиц несколько прояснилась
за последние 20—25 лет (благодаря интенсивным исследованиям советских и зарубежных ученых, многочисленных энтузиастов машущего полета), все же в этом вопросе многое остается
тайной.
Созданные
модели
орнитоптеров
пока
еще
очень
Биомеханика
221
далеки от совершенства биологических прототипов и не могут
конкурировать 2 современными самолетами ни в скорости, ни
в грузоподъемности.
Для эффективного моделирования полета птиц необходима
строгая теория машущего полета, базирующаяся на глубоком
знании организма птицы, ее летных органов, понимания всех
аэродинамических процессов, происходящих при полете птиц.
А такой теории, к сожалению, пока нет. В ее разработке много трудностей. Не говоря уже об очень большой сложности физической схемы исследуемого процесса,
здесь в отличие
от
аэродинамики обычного самолета с неподвижными крыльями,
приходится сталкиваться с массой новых величин и функциональных зависимостей, которые следует соответствующим образом учитывать. Например,
изучая
машущее
крыло,
мы
встречаемся с такими новыми по сравнению со случаем неподвижного крыла показателями, как угловые колебания крыла,
частота их и неравномерность, число взмахов, амплитуда взмаха, ускорение в разных фазах взмаха. Переменными становятся такие бывшие константами в случае неподвижного
крыла
величины, как установочный угол, угол атаки, сами аэродинамические силы в разных фазах взмаха и т. д. Отсюда неизбежно вытекают сложность в осуществлении экспериментальных
исследований и затруднения в теоретическом обобщении их результатов.
Однако в настоящее время имеется немало совершенных технических средств и методов, позволяющих в значительной степени облегчить или даже обойти ряд трудностей, встречающихся при исследовании различных летных показателей птиц. Достаточно упомянуть, например, радары, используемые для определения высоты полета птиц, скоростные кинокамеры, применяемые для определения частот, амплитуд и скоростей взмахов крыльев, телеметрическую аппаратуру, используемую для
измерения физиологических показателей летящей птицы, и др.
Благодаря этой технике надежность и точность
экспериментальных исследований в последнее время значительно повысились.
Очень много дает при изучении закономерностей
полета
птиц применение методов сравнительных исследований (разумеется, в том случае, когда внимание в равной степени обращено на морфологию, физиологию и экологию сравниваемых биологических объектов). Полет птиц многообразен. Это многообразие определяется не только количеством видов птиц, но и тем,
что каждый вид может использовать несколько типов полета.
При сопоставлении птиц разных видов, различающихся
теми
или иными особенностями полета, выявляется взаимосвязь между изменением искомых параметров или конструктивных особенностей летательного аппарата. Тем самым вырисовываются
222
Бионика
некоторые закономерности, доступные искусственному воспроизведению.
В настоящее время учеными изучено более 20 эффектов живого крыла (влияние структуры перьев, уравновешивание крыла в движущемся потоке и др.). Дальнейшие успехи в разрешении множества вопросов, связанных с практическим осуществлением машущего полета, сейчас, очевидно, в значительной
мере будут зависеть от того, насколько бионикам, биологам,
аэродинамикам, математикам, физикам и механикам удастся
до конца познать механику полета птиц, разработать удовлетворительную теорию машущего полета.
Но уже сегодня не подлежит сомнению, что орнитоптер —
не фантастика. Это вполне осуществимый, весьма перспективный летательный аппарат.
Вероятно, формула крыла орнитоптера не будет похожей на
форму крыла птицы. Одни ученые даже утверждают, что будущий махолет тем будет полнее отвечать требованиям человеческой практики, чем меньше он будет представлять собой точную копию птицы. Другие представляют орнитоптер в виде аппарата с несколькими асинхронно работающими парами узких
крыльев, которые, несомненно, обеспечат высокую скорость полета. Третьи видят будущие махолеты покрытыми мягкой синтетической оболочкой, близкой по своим антитурбулентным свойствам к коже дельфинов. Четвертые предполагают, что в будущем на орнитоптеры будут устанавливаться атомные двигатели,
когда их научатся делать достаточно легкими и компактными...
Но
не будем
забегать слишком
далеко вперед, строить прогно-
зы, какими будут орнитоптеры в конце ХХ или начале ХХ в.,
что будет и чего не будет в них от летательного аппарата птиц.
Сегодня, нам думается, важно другое: наметился путь, идя по
которому ученые, несомненно, разгадают тайну полета птиц.
И когда будет создана стройная физическая теория машущего
полета, адекватная высокой сложности явления,
инженеры,
безусловно, построят высокоэкономичные, маневренные, надежные, безопасные махолеты — машины, которые будут на единицу мощности поднимать больше
грузов
и
пассажиров и
стоить значительно меньше, чем нынешние самолеты, как винтовые, так и реактивные.
Помимо изучения полета птиц, у человека имеется еще один
путь решения проблемы машущего полета.
Старинная восточная легенда рассказывает о мудреце, который сделал летательную машину с машущими крыльями, похожую на огромное насекомое. Когда мудрец узнал, что враги
хотят похитить машину, он сжег ее. Так навеки была потеряна
тайна конструкции механической стрекозы. Эта и многие другие легенды повествуют о том, что еще в далекой древности зародилась идея постройки летательного аппарата по принципу
Биомеханика
223
полета насекомого — энтомоптера. Однако до последнего времени интересные особенности полета насекомых сравнительно
мало привлекали внимание инженеров-конструкторов летательных аппаратов. Объяснить это можно лишь одним: полет насекомых — очень сложный процесс. Он таит в себе много загадок,
ответ на которые еще не найден. Так, согласно законам современной
аэродинамики,
майский
жук
летать
не должен.
Однако,
ниспровергая всю нынешнюю теорию полета и сбивая с толку
специалистов по аэродинамике, это насекомое все же летает.
И как! То жук степенно сидит на земле, то вдруг отрывается от
нее, в какое-то мгновение распрямляет крылья и — взмывает
вертикально ввысь. А вот он медленно, лениво кружится над
цветком и внезапно стремительно уносится вдаль...
Какая же сила отрывает жука от земли?
Вибрация? Воздушные потоки? Да, но площадь крыла слишком мала по отношению к массе тела самого насекомого. Для того чтобы
летать, майский жук при средней массе 0,9 г должен иметь коэффициент подъемной силы (относительная величина, пропорциональная подъемной силе) от 2 до 3. Фактически жеу
этого насекомого коэффициент подъемной силы меныше единицы!
Что же это — исключение из правил? А может быть, ошибка в расчетах?
Известно, что коэффициент подъемной силы наиболее совершенных крыльев, созданных самолетостроителями, колеблется
от 1 до 1,5. Следовательно, крыло жука, хотя и кажется несовершенным, обеспечивает сравнительно большую подъемную
силу. Этим обстоятельством
заинтересовались
ученые НьюИЙоркского университета. Для изучения полета майского жука
они сконструировали в натуральную величину искусственное
крыло насекомого (чтобы точно воспроизвести работу крыла,
исследователи долго и внимательно анализировали кинопленку, на которой методом скоростной съемки был заснят полет
жука). Экспериментальная установка позволяла измерить смещение крыла величиной 0,000025 см. Недавно
руководитель
проводимых исследований Леон Беннет заявил: «Если мы сумеем определить аэродинамику полета майского жука, мы или
обнаружим какое-то несовершенство современной теории полета насекомого, или откроем, что
майский
жук обладает каким-то
неизвестным нам способом создания высокой подъемной силы».
Однако оставим в покое майского жука и обратимся к другим летающим насекомым. Далеко не все они хорошо летают.
Едва ли не большинство их составляют посредственно и плохо
летающие особи. Но есть множество и таких, которые летают
превосходно. Полет насекомых в основном определяется двумя
факторами: характером мыщц и строением самого крыла. Так,
у златоглазки мускулатура передних и задних крыльев одинакова по мощности. Обе пары крыльев похожи по форме и вели-
224
Бионика
чине. Летные возможности златоглазки практически ничтожны: судорожные взмахи крыльев позволяют ей достичь в лучшем случае скорости 60 см/сек. Такие же плохие летуны скорпионовы мухи и некоторые дневные бабочки, у которых передняя и задняя пары крыльев почти одинаковы или, во всяком
случае, работают одинаково, да еще не синхронно, а «вразнобой». Исключение составляют лишь стоекозы. Сохранив одинаково развитые пары крыльев, они тем не менее обладают превосходными летными качествами. Но у стрекоз совсем особое
устройство крыловой мускулатуры
— их
«крыловой
мотор»
(крыловая скелетно-мышечная система) высокоспециализирован. Главную роль в полете стрекоз играют мышцы прямого
действия. Кроме того, переднее крыло стрекозы далеко отодвинуто от заднего и они не соприкасаются друг с другом. У всех
остальных насекомых современных видов в процессе эволюции
одна пара крыльев усилилась за счет другой.
Здесь невольно сама собой напрашивается аналогия: подоб:
но тому как творцы самолетов заменили старые, тихоходные
«этажерки» (бипланы и трипланы) монопланами, природа помогла многим четырехкрылым насекомым усовершенствовать
свой
летательный
аппарат,
избавив
или
почти
избавив
его
от
лишней пары крыльев. У двукрылых мух, слепней,
комаров
задние крылья исчезли не бесследно,
а превратились в жужжальца. Каждое жужжальце состоит из вздутого основания,
тонкой ножки и вздутой головки и имеет вид булавы. Эти остатки задних крыльев не играют активной роли
в полете, а
лишь косвенно связаны с ним: они, говоря инженерным языком, выполняют функции стартера. Так как многие двукрылые
взлетают на высоком ритме ударов крыльев, жужжальца способствуют «разгону» крыловых
мышц.
Постепенно
ускоряя
ритм своих движений, жужжальца вызывают соответствующие
ритмические события в тех частях нервной системы насекомого, которые управляют крыловой мускулатурой. Когда достигается нужный ритм, включается
собственный двигательный
аппарат — «мотор крыла» сразу начинает работать полным ходом, что и требуется для взлета.
У перепончатокрылых передние и задние крылья сцеплены
друг с другом, образуя механическое целое без всяких, однако,
сращений. Переднее крыло пчелы, например, имеет на заднем
крае складку — «карман». В него входят загнутые крючки переднего края заднего крыла, и последние оказываются как бы
на буксире у переднего и работают в унисон с ним (рис. 45, 1).
Почти так же устроен сцепочный механизм у тлей (рис. 45, 2,
3, 4), с той лишь разницей, что крючков здесь немного и они
тесно сближены. Бабочки имеют иные сцепочные механизмы —
толстые щетинки на нижней стороне заднего крыла входят в
складку на переднем крыле. У многих высших форм этих при-
Биомеханика
225
Рис. 45. Механизмы
ления
крыльев
у
(1) иу
тлей
сцеппчеп
(2, 3, 4).
способлений нет и крылья связываются посредством широкого
наложения переднего на заднее. Но важен не способ соединения, а результат: у всех перепончатокрылых передние и задние крылья каждой стороны крепко скреплены и работают как
одно целое. Таким образом, выражение
«четырехкрылые» не
следует понимать буквально. Морфологически четырехкрылое
построение является функционально двукрылым.
Рассмотрим теперь устройство крыла насекомого. На первый взгляд твердое, сухое крыло мухи или жука кажется безжизненным образованием. Но в действительности это далеко не
так. В него входят нервы, внутри крыла есть даже (правда, не
У всех насекомых) кровообращение. Крыло насекомого — это
изумительное «инженерное творение» природы, достойное восхищения техников. Оно разделяется на два механически различных компонента — жилки и мембрану. Жилки, будучи построены по типу полых трубок, представляют собой чрезвычайно прочные образования. Но площадь, занимаемая ими в крыле, весьма незначительна, так как они очень тонки. Промежутки между жилками — ячейки — затянуты тонкой прозрачной
мембраной. Последняя занимает ббльшую часть площади крыла и очень гибка. Однако, будучи разделена на ячейки, натянутые на прочный каркас жилок, мембрана приобретает значительную прочность. В общем совокупность жилок и мембраны
напоминает распущенный зонт с материей, натянутой на стальные прутья. Такое строение обеспечивает обширную
гребную
226
Бионика
поверхность крыла при минимальной затрате материала и минимальной массе.
Работа крыла характеризуется частотой взмахов. У насекомых же частота ритмических ударов крыльями очень велика.
Ночные бабочки делают от 35 до 45 взмахов в секунду, стрекоза-коромысло — 80—100,
шмель — 123—233,
обыкновенная
оса — 165—247, комнатная муха — до 300, медоносные
пчелы — 180—330, комары — около 600 взмахов в секунду. Комары-толкунчики, рои которых часто вьются столбом, предвещая
хорошую погоду, делают 800 взмахов в секунду, а комары дергуны и комары мокрецы — даже
до 1000 взмахов в секунду!
Такой высокий ритм работы крыльев (а он присущ большинству хорошо летающих форм) убедительно говорит о колоссальной прочности крыльев.
Крыло насекомого «оснащено» болышим количеством разнообразнейших микроскопических органов
чувств.
Крохотные
колбочки, щетинки, волоски, различаемые
лишь при
многократном увеличении под микроскопом, сложные
устройства,
называемые хордотональными сенсиллами, — вся эта удивительная аппаратура помогает насекомому отлично ориентироваться в пространстве. Одни органы
регистрируют
скорость
встречного потока воздуха, другие выполняют
осязательную
функцию, третьи регистрируют крутящие моменты
в разных
направлениях. Остается только пожелать, чтобы самолеты будущего располагали подобным комплексом столь точных, малогабаритных, но высоконадежных в работе приборов.
Характер полета насекомых чрезвычайно разнообразен. Некоторые виды могут парашютировать. Такой полет наблюдается
в роении поденок; при этом насекомое, взлетев вертикально на
1—2 м вверх и остановив крылья в несколько приподнятом положении, медленно падает вниз. В замедлении спуска, кроме
крыльев, большую роль играют длинные хвостовые нити. Вследствие сопротивления воздуха
они раздвигаются,
загибаются
концами вверх и тянут за собой конец брюшка. Когда насекомое снова начинает работать крыльями, набирая высоту, хвостовые нити сближаются, их концы загибаются вниз и брюшко
опускается. Таким образом, это настоящий парашютный спуск,
но здесь парашютируют не только плоскости
крыльев, но и
хвостовые нити. Крупным формам свойствен планирующий полет: насекомое «выключает мотор» и в течение некоторого времени движется вперед — планирует. Например, крупная бабочка-перламутровка планирует в течение 20 сек со скоростью 1—
3 м/сек, а крупная стрекоза, используя на высоте 3—4 м токи
воздуха, восходящие от нагретой почвы и растительности, может планировать до 4—5 мин. Но поскольку планирующий полет требует болышой абсолютной величины крыла, он не получил большого развития у насекомых.
Биомеханика
227
Основной формой полета насекомых является гребной полет, т. е. полет в результате непрерывных ритмических взмахов
крыльями. Познакомимся теперь с механизмом гребного полета, с аэродинамическим эффектом движения крыла на двух
схемах Маньяна (рис. 46). На схеме слева показана стадия опускания крыла, на схеме справа — стадия его подъема.
В полете крыло насекомого работает то верхней, то нижней
поверхностью, поворачиваясь вокруг продольной оси насекомого. Когда крыло переходит из положения [ в положение ТУ, оно
бъет сверху вниз своей нижней поверхностью (положения Пи
Ш показывают это особенно ясно). Возникает подъемный эффект,
в результате
которого
тело
насекомого
поднимается
вверх. При переходе из положения [У в У крыло поворачивается вокруг продольной оси и, пройдя через вертикальное положение, переходит в наклонное — нижним краем вперед. После этого начинается обратное движение крыла, т. е. его подъем вверх,
изображенный на схеме справа. Нетрудно увидеть, что, переходя из положения УТ в УП и УШЩ крыло, словно весло, ударяет
спереди-назад. Вследствие этого тело насекомого получает толчок вперед. Дойдя до крайней верхней и задней точки, крыло
снова поворачивается около своей продольной оси, затем принимает горизонтальное положение, и цикл повторяется вновь. Первую часть траектории крыла называют подъемной или элеваторной,
вторую
—
пропеллирующей.
За
полный
цикл
вершина
крыла описывает по отношению к телу насекомого восьмеркообразную кривую, наклоненную
верхним
концом назад, или
лемнискату, которая при движении растягивается
в кривую,
напоминающую синусоиду (рис. 47). Благодаря большой частоте
взмахов
элеваторный
эффект
аэродинамически
сливается
с
пропеллирующим и насекомое движется вверх и вперед. Таким
образом, согласно теории Марея-Бюлля — Маньяна, принцип работы крыла насекомого столь же прост, сколь и совершенен.
|f
|
|
IV
м
У
Vil
27
@
Рис.
46.
Правое
крыло
Вид
сзади
(вверху),
вентральная
поверхность
туловищем
(по
летящего
насекомого
сбоку
(в середине)
заштрихована
накрест,
Маньяну).
в основных
положениях
и сверху
(внизу).
Обращенная
когда она видна,
и косо,
когда она
I—VIII.
м
эрителю
заслонена
228
Бионика
Рис. 47. Траектория,
описываемая
концом
крыла насекомого:
вверху — относительно
его тела; внизу — относительно наблюдателя
(по
В. Ковалеву
и
С. Ошанину).
Итак, крыло насекомого в полете все время меняет свое положение относительно тела и воздуха, постоянно меняет угол
атаки и скорость. Это открывает огромные
возможности для
активного воздействия на угол атаки, потому что всегда можно подобрать такие режимы взмаха, чтобы свести лобовое сопротивление к минимуму.
Гребной полет имеет у насекомых различные формы. Он является предпосылкой для планирования и парашютирования, а
главное, позволяет достигать больших скоростей. В 1937 г. в
одном из солидных американских журналов появилось сообщение о том, что определенный вид мух способен летать со скоростью 1554 км/ч. Публикация была воспринята по-разному:
одна часть читателей была ошеломлена сообщением, другая —
приняла сенсацию восторженно. Но все это длилось недолго,
возмущенные физики заявили, что в рамках элементарных законов природы полет мухи со сверхзвуковой скоростью невозможен. Однако скорости перемещения насекомых достаточно велики. Тот, кому приходилось гоняться за бабочками, знает, что
и капустница, и белянка, и бабочка-адмирал, если они вздумали лететь на дальние расстояния, мгновенно превращаются из
еле-еле порхающих созданий в скоростные махолеты, способные развивать скорость до 40 км/ч. Во всяком случае, угнаться
за ними — дело совершенно безнадежное. Известен случай, когда бабочка-данаида, выпущенная в Бристоле, пролетела за 5 ч
около 130 км.
Точно определить абсолютные скорости полета насекомых в
естественных условиях очень трудно. Карл фон Фриш, например, выпускал занумерованных пчел на большом расстоянии от
улья, куда они немедленно возвращались. Моменты выпуска и
зовращения
в улей точно регистрировались. В этих опытах ско-
Биомеханика
229
рость полета равнялась 23,5 км/ч. Другие исследователи установили, что медоносная пчела может летать со скоростью до
50 км/ч. Французский ученый А. Маньян (1934) прикреплял к
телу насекомого тонкую нить, которая
сматывалась с легко
вертящегося барабана, и таким образом определял скорость полета насекомых 30 видов. Однако этот метод далеко не безупречен, поскольку масса нити и трение оси барабана, несомненно,
уменышали скорость полета насекомых. Ныне, используя комплекс новейших методов и средств исследования, ученым все же
удалось получить достаточно достоверные данные о скорости
полета ряда насекомых. Так, майские жуки пролетают в секунду до 3 м, шмели — до 5 м, жуки-навозники — до Т м, стрекозы — до 10 м. Бабочка олеандровый бражник — жительница
средиземноморских тропиков — по неизвестным причинам нередко прилетает к берегам Балтийского
моря.
Расстояние в
1200 км она покрывает менее чем за сутки, т. е. летит со сред-
ней скоростью 15 м/сек, или 54 км/ч!
Из известных нам насекомых наибольшей скоростью горизонтального полета, по-видимому, обладает крупная стрекозадозорщик. Не раз наблюдалось, что она подолгу сопровождала
в полете учебный самолет, летевший со скоростью 144 км/ч и
более, и временами даже обгоняла его! Абсолютные скорости
полета насекомых зависят от длительности полета, температуры воздуха, скорости и направления ветра и ряд других параметров. Но при всех благоприятных условиях абсолютная скорость насекомых, за исключением таких, как бабочки-бражники, стрекоза-дозорщик, все же очень мала, в десятки раз меньше, чем у современных самолетов. Сравним абсолютную скорость самолета со скоростями птиц и насекомых. Если скорость
самолета равна 900 км/ч, то для стрижа
она
равна 100, для
скворца — 70, для вороны — 50 и для шмеля — 18 км/ч.
Однако не может не вызвать самого болыпого
восхищения
относительная скорость полета насекомых. Если сравнить относительные скорости для тех же примеров, т. е. подсчитать,
сколько раз за единицу времени данный летун успевает отложить длину своего тела в полете, то оказывается, что относительная скорость у насекомого намного больше, чем у самолета!
Большинство насекомых (даже хорошо летающих), видимо,
ограничивается неболыпими перелетами. Так, медоносная пчела летает за нектаром на расстояние (в среднем) 1,5—2,25 км.
Но для того чтобы собрать 400 г меда, она должна, по расчетам
пчеловодов, совершить от 40 до 80 тыс. полетов,
т.е. в общей
сложности должна пролететь расстояние, равное двум окружностям Земли! Известно немало случаев «беспосадочного перелета» насекомых из одной местности в другую, находящуюся
на большом расстоянии от первой. В Японии, например, часто
наблюдается перелет стрекоз между островами, удаленными
230
Бионика
друг от друга на 50—60 км. Известны перелеты
лугового мотылька из Кокчетава в Актюбинск и другие пункты на расстояние 400—450 км.
Зарегистрированы случаи
перелетов роев
саранчи через Красное море, где промежуточные посадки исключены. В научной литературе имеются указания на то, что австралийских стрекоз ловили в открытом океане на расстоянии
1540 км от родного материка. Многие бабочки, среди них наши
адмиралы, проделывают путь в Африку, а следующее поколение возвращается обратно в Европу. Одной из рекордсменок по
дальности полетов является американская крупная бабочка-данаис — она перелетает из Мексики в Канаду и Аляску, покрывая расстояние до 4000 км!
Разумеется, при таких перелетах нельзя не учитывать воздушных течений. Но, как бы то ни было, собранные учеными
данные убедительно говорят о том, что маленькие, нежные на
вид существа — насекомые (речь идет о насекомых отдельных
видов) — способны находиться в воздухе в течение многих часов и преодолевать гигантские расстояния. Этим они, безусловно, обязаны совершенству своего летательного аппарата и главным образом высокой экономичности работы своего «мотора».
По экономичности полета многие насекомые превзошли даже
птиц. Так, саранча в полете теряет примерно 0,8% своей массы
за час полета. «Горючим» для ее мышечного двигателя служат
жировые запасы. У тех насекомых, которые расходуют в полете
углеводы, потери массы больше:
например,
плодовая
мушка дрозофила теряет за час полета 7—10% своей массы.
Интересный расчет экономичности полета пчелы произвел
кандидат биологических наук Ю. М. Залесский. Масса пчелы с
грузом нектара и пыльцы равна примерно 0,2 г. Масса мышц,
приводящих в движение крылья, составляет меньше 15% массы насекомого. Если пчела пролетает от места сбора нектара и
пыльцы до улья 3 км, то совершенная ею работа исчисляется в
0,6 кгм. Известно, что 1 кгм работы соответствует 0,0024 ккал
(или 10,048 дж). Следовательно, произведенная пчелой работа
(0,6 кгм) эквивалентна
0,00144 кал (0,006 дж). Сгорая в орга-
низме при совершении работы, 1 г сахара дает 4,1 кал (16,15 дж).
Поэтому пчела, пролетая расстояние в 3 км, расходует только
0,00035 г сахара. В зобе пчелы помещается 0,02 г нектара
с
концентрацией
в нем сахара,
равной
20%;
иными
словами,
в
зобе находится 0,004 г чистого сахара. Следовательно, даже при
расстоянии в 3 км полет пчелы вполне рентабелен, так как расход «горючего» — сахара — не
превосходит 9% полезного
груза!
Теперь сопоставим приведенные данные с соответствующими данными для летательных аппаратов, созданных человеком.
Вертолет расходует за час полета 4—5\
массы (разумеется,
речь идет о топливе), а реактивный самолет — 124%. Как видно,
Биомеханика
231
инженерам стоит поучиться искусству
экономии горючего
в
полете у саранчи, да и у пчелы тоже.
Высокая экономичность полета насекомых в значительной
степени обусловлена режимом работы их крыльев. Так, скорость взмаха, т. е. скорость, с которой движется
конец крыла
по отношению к телу насекомого, довольно велика. По Маньяну, у стрекозы она равна (для заднего крыла) 2,75, у пчелы —
5,5 иу каллифоры — 8,4 м/сек. Теперь остановимся на ритме
Ударов крыла. Полет начинается с редких взмахов, свободно
улавливаемых глазом; затем взмахи крыльев становятся значительно чаще и полет сопровождается гудением и жужжанием.
Несомненно,
частота
последовательных
сокращений
мышц
крыла у насекомых значительно больше, чем у позвоночных.
Для сравнения укажем, что черный гриф, у которого размах
крыльев превышает длину тела почти в 3 раза, делает в течение
секунды всего один взмах; фазаны, куропатки, перепела, рябчики, стремительно перелетающие по прямой, в основном на
короткие расстояния, делаютв секунду до 5 взмахов крыльями.
В отличие от птиц, у хорошо летающих видов насекомыхс
небольшими крыльями частота взмахов очень велика. Оказывается, сила, необходимая для удержания в воздухе разных насекомых одинаковой массы при помощи взмахов крыльями, обратно пропорциональна частоте взмахов. Насекомое, делающее
55 взмахов в секунду, расходует вдвое больше мощности, чем
насекомое той же массы, но делающее 110 взмахов в секунду.
Исследования показали также, при одинаковых условиях масса поднимаемого груза зависит от частоты взмахов крыльями.
В этом отношении весьма показателен полет медовой пчелы.
Установлено, что рабочая пчела, вылетающая из улья за взятком, делает в среднем 180 взмахов крыльями в секунду. Когда
же она возвращается с грузом, число взмахов
возрастает до
280—330. Очевидно, наделяя медоносную пчелу способностью
делать очень частые взмахи крыльями, природа имела в виду
дать ей возможность нести, помимо массы своего тела, добавочный груз — взяток (нектар, пыльца). Расчеты показывают, что
если бы пчела делала не 280—330 взмахов в секунду, а 560—
660, т. е. вдвое больше, то она могла бы переносить по воздуху
груз массой в 16 таких же пчел, как и она сама.
Весьма поучительно проведенное учеными сравнение летных характеристик насекомых и летательных аппаратов, построенных человеком. Оказывается, природа испокон веков великолепно «знала»
формулу,
которую
не
так
давно вывели
математики. Это очень простое соотношение, которое называют
числом Рейнольдса!:
в
числителе — произведение
размаха
' Число
рость
полета,
Рейнольдса
а
У —
Юе
равно
[У/\у,
кинематический
где
{ — размах
коэффициент
крыльев,
вязкости
У — ско-
среды
(если
232
Бионика
крыльев тела на скорость его движения, в знаменателе — кинематический коэффициент вязкости воздуха 9. Так вот, это самое
число Рейнольдса — одна из самых важных летных характеристик. Чем больше число Рейнольдса, тем интенсивнее
бесчисленные воздушные водовороты, завихрения около крыла самолета, и он тормозится. У современных пассажирских лайнеров число Рейнольдса громадно — больше чем 106, тогда как
для саранчи оно составляет около 2000!
Не менее остро, чем проблема повышения экономичности
полета самолетов, ныне стоит вопрос о создании летательных
аппаратов, не требующих длинных взлетно-посадочных полос
и способных садиться и взлетать почти вертикально. Можно назвать несколько причин, выдвинувших эту задачу в число самых актуальных проблем современности. Основная причина —
стремительный рост скорости полета самолетов. За последние
25—30 лет только у пассажирских и транспортных
самолетов
скорость выросла в среднем более чем в два раза и практически
приблизилась к околозвуковым скоростям. Чем выше скорость
самолета, тем больше, как правило, и его пробег при посадке.
Головокружительная скорость при посадке, достигающая 250—
300 км/ч, требует огромных посадочных полос. После
второй
мировой войны их длина увеличилась более чем в 3 раза —
с 700—800 м до 2,5—3 км и больше. Столь большие размеры
взлетно-посадочных полос и чрезмерно высокий уровень шума,
создаваемого мощными двигательными установками, заставляют располагать аэродромы далеко за пределами городов. В результате мы оказались свидетелями своеобразного парадокса:
увеличение скорости полета на маршрутах средней протяженности весьма мало сказывается на сокращении общей продолжительности путешествия. Например, перелет из Лондона в Париж занимает меньше времени, чем поездка из центра города
на аэродром. Вторая причина актуальности проблемы вертикального взлета и посадки связана с появлением тяжелых транспортных летательных аппаратов. Практика показала, что эти
аппараты могут успешно решать такие важные народнохозяйственные задачи, как доставка грузов, машин и оборудования
в труднодоступные, удаленные от основных дорог районы новостроек. Получаемый при этом эффект значительно возрос бы,
если бы транспортные самолеты обладали способностью совершать взлет и посадку на небольшие, специально не подготавливаемые площадки.
скорость при обтекании тела в воздухе значительно меньше скорости звука, то сжимаемостью воздуха можно пренебречь и, следовательно, допустимо рассматривать его как жидкость). Число Рейнольдса — безразмерная
величина. При числе Рейнольдса, меньшем 2200, в цилиндрической трубе
обычно имеет место ламинарное течение, при больших его значениях наступает турбулентное теченце.
Биомеханика
233
Десятки и сотни инженеров разных стран не один год пытаются наиболее эффективным образом решить проблему вертикального взлета и посадки современных больших пассажирских и грузовых самолетов. Однако ни один из предложенных
проектов не дает авиаконструкторам права
утверждать, что
проблема решена. Не говоря уже о многочисленных технических трудностях, препятствующих созданию высокосовершенных вертикально взлетающих самолетов, здесь еще приходится считаться с экономической стороной проблемы, с высокой
стоимостью таких механизмов.
Где же выход? Да опять-таки в применении «изобретенного» природой механизма машущего полета и прежде всего в моделировании довольно широко распространенного среди насекомых «стоячего» полета. Этот полет, при котором организм при
помощи крыльев может держаться в воздухе совершенно неподвижно, является разновидностью гребного полета. Вероятно,
вы видели летом небольших мух, «чвисящих» в воздухе как бы
в одной точке (при этом тело насекомого большей частью занимает горизонтальное положение). Время от времени они внезапно передвигаются на несколько десятков сантиметров и вновь
где-то застывают в воздухе. Передвижение происходит настолько быстро, что уловить его нельзя, можно лишь убедиться, что
муха исчезла с прежнего места и появилась в другом.
Это —
мухи из семейства сирфид (журчалки). Их стоячий полет может длиться часами и, по-видимому, не утомляет насекомое.
Сирфиды могут «выключать» пропеллирующую часть своего
полета, оставляя только подъемную (элеваторную), поэтому они
не подвигаются вперед и «зависают» неподвижно в любой точке
пространства. Траектория перемещения крыла у них изменена
следующим образом. Крыло опускается, не заносясь вперед.
Оно ударяет таким образом вниз всей своей поверхностью и дает элеваторный эффект. Дойдя до предела опускания, крыло поворачивается на 90° вокруг своей продольной оси передним краем вверх, так что плоскость крыла
становится
вертикально.
В таком же положении оно возвращается по прямой вверх, прорезая воздух передним краем, как ножом. При таких условиях
поднятие
крыла
не дает
пропеллирующего
эффекта
и вся
рабо-
та крыла ограничена элеваторными ударами. Достигнув верхнего положения, крыло поворачивается и снова принимает горизонтальное положение. В эту долю секунды муха успевает
«начать падение», завершающееся мягкой вертикальной посадкой, т. е. делает то, на что способен не каждый вертолет.
Приведем еще один пример. Пчела, садясь на цветок, на момент неподвижно повисает в воздухе, затем вытягивает вперед
все шесть лапок и плавно опускается всей тяжестью своего тела
на избранную «посадочную площадку», удерживаясь на ней
лапками с цепкими коготками. Полная безопасность посадки!
234
Бионика
И еще одна деталь. В отличие от вертолета, нуждающегося для
посадки в довольно ровной горизонтальной площадке, пчела и
другие насекомые садятся на неровный и часто совсем не горизонтально расположенный предмет, в приведенном примере на
цветок. Даже в этой небольшой детали посадки есть чему научиться у насекомых.
Болышой интерес для техники представляет высокая маневренность полета насекомых, умение виртуозно управлять им.
Так, бражники развертывают на лету свой длинный хоботок и
вводят его в цветок не присаживаясь. Например, бабочка-языкан питается на льянке, у которой вход в венчик закрыт двумя
губами. Ориентация хоботка должна быть здесь очень точной,
и насекомому в этом помогает работа крыльев. Бражник при
этом покачивается в воздухе около цветка вправо и влево. Одними из самых поворотливых в воздухе насекомых
являются
многие мухи. Так, даже на комнатной мухе, которая не принадлежит к особенно хорошо летающим формам, можно наблюдать, как одна особь гоняется за другой. Муха очень быстро
бросается в воздухе из стороны в сторону, а другая муха следует за первой на коротком расстоянии, в точности повторяя
траекторию ее полета. Относительно стрекоз, перепончатокрылых и бражников известно, что они могут передвигаться в воздухе не только вперед, но и назад. Немало насекомых способно
выполнять в воздухе невероятные «эволюции», вплоть до самых
головокружительных фигур «высшего пилотажа». В частности,
равно- или разнокрылые стрекозы
могут вертикально
подниматься и опускаться, а затем посредством быстрой авторотации
переходить в обычный полет. Одна из сирфид может легко по-
висать в воздухе в полной
неподвижности
спиной
вниз! Дела-
ется это так: сначала муха занимает нормальное положение,
спиной вверх, потом она поворачивается на 90° вокруг продольной оси крыльев головой вверх, затем поворачивается в том же
направлении еще на 90° и принимает положение спиной вниз.
Весь этот каскад фигур насекомому удается выполнить благодаря очень большой быстроте работы рецепторного и летательного аппаратов и их точной координации. Достаточно сказать,
что муха-хризотоксум кувыркается в воздухе с такой скоростью, что каждый ее поворот в вертикальной плоскости занимает всего лишь 0,001 сек!
|
Рассмотренные выше многообразные преимущества летных
характеристик насекомых побудили отдельных ученых, инженеров, изобретателей различных стран заняться
разработкой
энтомоптеров — аппаратов, летающих по тому же принципу,
что и насекомые. За последнее время в ряде стран было создано
несколько моделей энтомоптеров. Некоторые из них даже поднимались в воздух. Однако соперниками самолетов и вертолетов эти экспериментальные аппараты, как известно, пока еще
оиомеханика
235
не стали по той же причине, что и орнитоптеры: все конструкции энтомоптеров были созданы без достаточного понимания
весьма сложной кинематики и аэродинамики крыла насекомого, которое хранит еще десятки нераскрытых секретов.
Но создание энтомоптера — дело абсолютно реальное. Следует лишь иметь в виду, что небольшие оазмеры насекомых, их
малая масса обусловливают совсем другую аэродинамику полета, чем та, которая возможна для
болыших
конструкций.
Здесь нельзя основываться только на законах подобия, так как
с увеличением размеров энтомоптера до размеров самолета значительно меняются все соотношения между прочностью и гибкостью крыла, частотой взмахов и другими показателями. Вероятно, первые «настоящие» энтомоптеры, созданные с учетом
детального знания, всех особенностей механизма полета насекомых, будут летательными аппаратами так называемой «малой
авиации». Управляемые по радио, они будут служить надежным средством связи, для переброски небольших грузов, для
аэрофотосъемки, для подъема аэрологических приборов на высоту и других целей. Далее, энтомоптеры, по-видимому, станут
удобным транспортным средством для широких масс населения. Такой махолет по своим размерам, как нам мыслится, не
будет больше современного легкового автомобиля, он будет гораздо проще по конструкции, легче в управлении, и научиться
летать на нем можно будет за несколько дней. Для полета из
Москвы в Ленинград потребуется израсходовать не более... десятка литров бензина!
Есть еще один вид махолета, над созданием которого работали многие поколения изобретателей, а некоторые упорно продолжают трудиться и сейчас. На свой страх и риск они строят
так называемые мускульные махолеты (или попросту мускулолеты), впрягаются в них и с яростью
раскачивают
рычаги
до полной потери сил в надежде преодолеть земное притяжение.
В ряде стран постройкой мускулолетов занимаются не только
одиночки, но и довольно большие группы энтузиастов.
А какова вероятность такого мускульного полета? Может ли
действительно человек подняться в воздух и летать,
подобно
птице, лишь одной силой своих мускулов? Да и вообще нужен
ли мускулолет в наш космический век?
Мощность, необходимая для обеспечения горизонтального
полета, зависит от так называемой скорости падения в планирующем полете. Эта величина исчисляется потерей высоты в
секунду при свободном падении самолета или планера. При падении совершается работа по преодолению аэродинамического
сопротивления. Такое же количество работы необходимо, чтобы уравновесить падение и вернуть самолету возможность горизонтального полета. Мускулолет по своей конструкции — это
очень
легкий
планер.
Скорость
его
падения
равна 35—
236
Вионика
40 см/сек. Расчеты показывают, что при массе
мускулолета
50 кг и массе летчика 60 кг для уравновешивания падения нужна мощность 0,65 л. с.
Может ли человек справиться с такой нагрузкой?
Великолепный ответ на этот вопрос дают соревнования
велогонщиков. Спортсмены-велогонщики в течение
некоторого
времени способны
ехать со скоростью 60 км/ч, развивая при
этом мощность 0,8 л. с. Еще лучшие результаты достигаются
спортсменами при кратковременной гребле:
в течение
двух
минут развиваемая мощность составляет 1,1 Л. с. и больше.
Несколько сложнее проблема самостоятельного старта мускулолетчика. Мощность во время старта должна быть значительно выше, хотя и потребуется в течение сравнительно короткого времени. Установлено, что человек
способен
развивать
кратковременную мощность в несколько лошадиных сил. Максимальное использование мощности человека наступает, когда
он работает одновременно
мускулами рук и ног так, как это
практикуется в гребле. Такой именно способ
использования
«человеческого
двигателя»
предусматривают
конструкторы
мускулолетов. И летают. И даже начали уже устанавливать рекорды, пока довольно скромные, но убеждающие, что мускулолеты вовсе не утопия, а давняя мечта человека — летать, как
птица, — близка к осуществлению.
Что же представляют собой нынешние мускулолеты? Это не
птицеподобные аппараты. В связи с тем. что аэродинамика машущего полета пока еще недостаточно изучена, что выдержать
определенную закономерность в изменении угла атаки крыла
при мантущем движении трудно, конструкторы мускулолетов
временно отказались от «чисто птичьего» метода
и
начали
строить аппараты с неподвижными крыльями, воздушным винтом и велосипедным приводом. Такая конструкция аппарата
позволила немецкому инженеру Хасслеру незадолго до начала
второй мировой войны пролететь на построенном им мускулолете с одним толкающим винтом 234 м. В конце 50-х годов мускулолет с велосипедным приводом создала группа
советских
спортсменов из бухты Провидения. На этом аппарате северяне
пролетели около 300 м. В 1961 г. студенты Саутгемптонского
университета (Великобритания) построили
мускулолет «Сумпак», представлявший собой довольно легкий планер (60 кг) с
крылом большого удлинения. Основной конструкционный материал — ель и бальза. По оси симметрии мускулолета, над крылом, был установлен пилон с толкающим воздушным винтом,
вращаемым пилотом с помощью велосипедных педалей. После
многих наземных пробежек и прыжков
в ноябре 1961 г. на
«Сумпаке» состоялся первый официально зарегистрированный
полет с помощью мускульной силы человека. Пилотировал аппарат Д. Пиггот, спортсмен-велосипедист. Через шесть месяцев,
Биомеханика
837
в мае
1962 г., на другом,
те —
«Пуффин»,
тоже
весьма
удачной
с толкающим
конструкции,
воздушным
аппара-
винтом,
но
ус-
тановленным за хвостовым оперением, Д. Уимпенни установил
мировой рекорд дальности полета по прямой — 890 м. Хороших результатов сумели добиться и японские
конструкторы
мускулолетов, построив в 1966 г. аппарат «Линнет-П» (размах
крыльев — 22,2 м, масса — 50 кг). Его аэродинамическая компоновка с нижним расположением крыла позволила наиболее
полно использовать эффект «воздушной подушки» при взлете.
В 1972 г. пилот британской военной авиации Джон Поттер соорудил из реек бальзового дерева, обтянутых фольгой, муску
лолет «Юпитер». Воздушный
винт приводился
в движение
обычными велосипедными педалями. На этом аппарате Поттер
без какой-либо посторонней помощи самостоятельно стартовал
на аэродроме в Оксфордшире и добился рекордного результата:
он поднялся в воздух на высоту Т м и пролетел расстояние в
1171 м.
Итак, вопреки всем расчетам ученых, вопреки категорическим утверждениям отдельных биологов, «что попытки создания мускулолета обречены на провал», человек после длительных поисков и экспериментов все же сумел преодолеть поставленный ему природой физиологический барьер к мускульному
полету. Силой своего разума и собственных мышц он сумел наконец оторваться от земли на «искусственных крыльях» в воздух и начал летать! Классическая схема современного самолета — моноплана с жестко закрепленным крылом — сейчас, пока еще не разгадана до конца тайна аэродинамики машущего
полета, наиболее перспективна для развития «мускулолетной
техники».
Избрав своим девизом, как и авиаконструкторы на заре своего
творчества,
знаменитое
изречение
философа
Сенеки:
«Рег-
aspera ad ага» («Сквозь
тернии
к звездам»), — энтузиасты
мускулолетов ныне направляют все свои усилия на снижение
массы, дальнейшее улучшение летных качеств создаваемых аппаратов. Ничего не поделаешь! Мускулолет — это ведь не обычный летательный аппарат, где недостатки аэродинамики, избыток массы можно как-то компенсировать повышением мощности двигателя. Увы, мощность человека-двигателя предопределена природой раз и навсегда. Поэтому остается наиболее эффективно ее использовать. Достигнуть этого можно, заставив
трудиться как можно большую часть мышц одновременно, и
прежде всего улучшением конструкции мускулолетов: снижением потерь энергии в силовой передаче, уменьшением сопротивлений, облегчением каждого элемента системы, усовершенствованием аэродинамики аппаратов. Отсюда — выбор схемы
с крылом очень большого размаха и с очень малой удельной нагрузкой. Воздушный винт выносится за пределы крыла и даже
238
Бионика
за пределы хвостового оперения, что устраняет вредное влияние
закрученной струи на обтекание аппарата. В некоторых мускулолетах применяют компоновку с низким расположением крыла, с тем чтобы максимально использовать эффект «воздушной
подушки», облегчить полет вблизи земли, отрыв и взлет. Некоторые конструкторы, несмотря на малую скорость полета мускулолета (35—40 км/ч), ставят на него обтекатель, закрывающий пилота. Хотя он несколько и утяжеляет аппарат, но, как
показывает опыт, добавка такого конструктивного элемента
вполне себя оправдывает, так как в определенной мере снижает
лобовое сопротивление.
Практика строительства мускулолетов последних лет показывает, что для уменьшения затрачиваемой пилотом энергии
при
полете
уменьшение
массы
аппарата
является
более эффек-
тивным мероприятием, нежели увеличение площади крыла. До
сравнительно недавнего времени при изготовлении мускулолетов широко применяли дерево и бальзу, поскольку они дешевы, хорошо обрабатываются и обеспечивают высокую прочность
аппарата при его малой массе. Однакоу этих материалов имеется весьма существенный недостаток: они очень гигроскопичны
и при сборке впитывают много клея. Поэтому сейчас строители
мускулолетов стремятся большую часть конструктивных элементов изготовить из легких металлических сплавов, стеклоткани, синтетических материалов и бумаги. Средняя масса конструкции современного мускулолета около 50 кг. Применение
новых, легких, высокопрочных материалов и новых принципов
конструирования, компоновки
может позволить, по мнению
специалистов, довести массу аппарата до 40—45 кг.
Величина энергии любого животного зависит от того, какая
доля мышц
его тела участвует в работе. Например, мышечная
система птиц устроена так, что при полете в работу включается
большая часть их мускулатуры. Только большая грудная мышца, связанная с крыльями птиц, составляет
у фазана 16,24
массы его тела. У человека же отсутствует такое узкое целенаправленное распределение мускульной
системы. Кроме того,
как известно, мощность живых существ, в том числе и человека, непостоянна в течение всего времени работы: в первый момент она может быть очень значительной, а при более продолжительной работе уменьшается до !/з от первоначальной величины. Поэтому, чтобы
наиболее
рационально
использовать
мощность
человека-двигателя,
конструкторы
мускулолетов
стремятся максимально повысить эффективность силовой передачи (разумеется, при минимальной ее массе).
Практика показала, что для привода следует использовать
силу ног пилота, передавая мощность на винт с помощью педалей велосипедного типа, приводной цепи и ремней. Естественно,
эффективность передачи во многом зависит и от взаимного рас-
Биомеханика
239
положения пилота и воздушного винта. При наиболее
простой
компоновке — размещении винта на пилоне
над
крылом —
коэффициент полезного действия цепной передачи 0,95. Другие
преимущества — легкость регулировки передаточного отношения и надежность. «Опыт постройки мускулолетов показал также, — пишет инженер-конструктор Ю. Егоров, — что колебания крутящего момента, возникающие при работе ног одного
человека, вызывают неравномерность
вращения
воздушного
винта и потерю мощности порядка 2%. При равномерном вращении потеря составила бы только 0,7%. Видимо, большой диаметр воздушного винта и сосредоточение массы на концах его
лопастей могут значительно поправить дело» '.
Существует повсеместное убеждение, что
конструкторам
мускулолетов следует идти по пути создания не одноместных, а
двухместных аппаратов. В одноместном аппарате пилот использует только силу своих ног, руки его во время полета заняты
управлением. Для полета двухместного аппарата потребуется
двигатель на 30% более мощный, чем у одноместного. Зато действительная мощность «мускульного двигателя» аппарата увеличится больше чем в два раза, так как второй пилот сможет
уже работать руками и ногами одновременно.
Таково вкратце сегодня положение дел у создателей мускулолетной техники. Вероятно, еще будет разработана не одна
промежуточная конструкция мускулолета, прежде чем удастся
построить птицекрылый аппарат с машущими крыльями, обладающий достаточно болышой продолжительностью полета. Но в
том, что такой чистый мускульный махолет будет создан, после
того как бионики и инженеры досконально изучат законы работы крыла птиц и насекомых, а энтузиасты машущего
полета
получат в свое распоряжение новейшие
сверхлегкие, высокопрочные конструкционные материалы и используют все аэродинамические достоинства машущего крыла, сегодня уже не
сомневаются даже самые большие вчерашние пессимисты. Это
будет интересный и очень полезный спортивный аппарат, с помощью которого можно будет выполнять большие
прыжки в
длину и высоту, совершать довольно
длительные
полеты на
«бреющей» траектории и значительной высоте. Крылья станут
частью нас самих, крупицей нашего «я». Человеку, как никогда, станет знакомо невыразимое ощущение легкости и быстроты, счастье подъемов, острое замирание спусков...
Люди, как птицы, станут крылатыми.
Мы глубоко верим,
что именно в наш ракетный век миф об Икаре и Дедале станет
былью. Стремление человека подняться в воздух, летать и парить в нем, опираясь на силу собственных мышц, неукротимо!
' Журн.
«Изобретатель»,
1974,
№
1, с. 38.
Гармония
красоты
И
целесообразности
. >
В мире живстных каждый обслуживает сам себя. Поэтому, естественно, приходится уметь делать многое, и конечно же строить себе жилье. Мышь-малютка, например, аккуратно разрезав
листок на тонкие полоски, необыкновенно
ловко и проворно
плетет кошелек, составляющий основу висячего гнезда. Термиты, из пережеванной и переваренной в утробе миллионов насекомых древесины, возводят на редкость прочные, со сложной
вентиляционной системой, гнезда-глыбы высотой до 5—б6м. Известно много удивительных фактов, связанных со строительной
деятельностью бобров. Даже зоологов иногда поражают размеры
устроенных ими плотин, целесообразность
выбора места для
них, сложность конструкции и разнообразие типов бобровых
жилищ. Приступая к строительным
и
ремонтным
работам,
бобр предварительно осматривает место, «прикидывает», какие
использовать строительные материалы. Если предстоят капитальные работы, он отправляется за толстыми
ветками и обрубками стволов. Для текущего ремонта доставляются тонкие
ветки и палки...
Не менее интересна технология строительства пауком ловчей паутины. Блестящая под каплями росы, ажурная
конструкция кажется скорее произведением искусства, чем смертельной западней. У каждого из видов пауков конструкция паутины собственная. Подобно Пенелопе, пауки-ткачи каждую ночь
разрушают свою работу, а утром по точному графику плетут
паутину вновь. Для производства ткани у пауков есть сложный
аппарат. В конце задней части тела паука находятся шесть
подвижных волосяных утолщений (в виде бородавок). Эти «волосы» на самом деле представляют собой трубки — 600 трубок
на каждой бородавке, соединенной с особой железой. Из трубки выделяется тягучая жидкость, которая моментально застывает на воздухе в виде нити толщиной в тысячную долю мил9— 327
242
Бионика
лиметра (пауки некоторых видов могут ткать также цветные
нити). Сотни таких нитей, сплетаясь, образуют видимую нить
паутины. В зависимости от целей применения
паутины
(для
строительства гнезда, западни, опутывания жертвы, плетения
коконов или перелета) у паука действуют разные железы, подающие различный материал, тем самым влияя на качество паутины. Некоторые нити пауков выдерживают нагрузку около 100 г.
Изумительно архитектурно-строительное
искусство птиц.
Нам думается, если бы люди вдруг решили провести среди животных конкурс на лучшего «строителя» или «архитектора», то
не исключено, что все первые места
достались бы пернатым.
Где они только не сооружают свои жилища? Одни любят дупла,
другие — щели и норы, третьи вьют гнезда в ветвях деревьев и
кустах, в траве, на скалах, под крышами домов и на воде. Иногда птицы, преимущественно певчие, устраивают гнезда на вагонах, пароходах и путешествуют вместе с ними. Встречаются
и оригиналы, такие, как, например, птицы-мухи, которые умудряются свить гнездо и вывести в нем птенцов в самых, казалось
бы, неподходящих и неудобных местах... на шнуре висящей под
потолком электрической лампы либо на подкове, вывешенной
«на счастье» около дома.
Отличительная особенность птичьих гнезд — огромное разнообразие форм и размеров, высокая
конструктивная
прочность, а иногда и довольно
большая
сложность.
Искусным
строителем слывет воробей. Его шарообразное гнездо — сложное сооружение. Воробей мастерски сплетает его из самых разнообразных материалов: лоскутков, ниток,
перьев, кусочков
мочала и бумаги, травинок и соломинок. Внутри гнезда — мелкие перья и мягкий пух. В теплый и по-своему
уютный
дом
ведет небольшое отверстие — леток.
Славятся строительным мастерством и длиннохвостые синицы — маленькие пушистые пепельно-белые птички. Их гнезда,
как и воробьиные, закрыты со всех сторон и несколько вытянуты по вертикали. Синицы плетут их из зеленого мха, скрепленного паутиной и волокнами коконов насекомых. Добавление в
«стройматериалы» лишайников, кусочков коры и пуха делает
дом прочным и улучшает его маскировку.
Ремезы строят висячие жилища из тополиного пуха. По форме и размерам их гнездо похоже на... рукавицу. Вход там, где
у рукавицы «большой палец».
Красавица иволга подвешивает свой дом к веткам высоко,
в кроне дерева. Строит она его обычно из мягкой коры, прошлогодних листьев и стеблей, паутины и пакли. Снаружи гнездо замаскировано мхом, и в листве дерева разглядеть его очень трудно.
Но,
пожалуй,
самая
любопытная
деталь
гнездования
этой
яркой птицы — постепенное изменение наклона гнезда по отношению к стволу. Иволга словно знает, что со временем под
Гармония
красоты
и целесообразности
243
тяжестью гнезда ветви будут гнуться книзу, и начинает строительство на ветках, приподнятых вверх.
В Вест-Индии обитает птица-портниха. Свои гнезда она устраивает на деревьях, пользуясь ниткой и иголкой собственного
«изобретения». Ниткой служит
растительное
волокно, иголкой — клюв, строительным материалом — листья.
Весьма своеобразной технологией пользуются стрижи саланганы при сооружении гнезд. Эти птицы живут на острове Шри
Ланка (Цейлон) и на берегах Бенгальского залива. Свои знаменитые гнезда они строят из густой, быстро застывающей, клейкой слюны. Сначала саланганы на лету прилепляют комочек
слюны к плоской скале, а затем и сами устраиваются на постройке, наращивая стенки гнездышка.
Разумеется, все многогранное строительное мастерство животных не могло не привлечь к себе самого пристального внимания наших далеких предков. Присматриваясь к всевозможным конструкциям нор и гнезд, внимательно изучая веками отработанную, проверенную жизнью технологию их сооружения,
человек многое позаимствовал из сокровищницы строительного
искусства животных. Еще древнегреческий философ Демокрит
(около 460—370 гг. до н. э.), основоположник учения о мимезисе !, отметил, что «от животных мы путем подражания научились важнейшим делам, [а именно, мы — ученики паука] [подражая ему] в ткацком и портняжном ремеслах, мы ученики ласточек — в построении жилищ...» 2. Тремя веками позже известный римский архитектор Витрувий в одном из своих наставлений строителям писал: «‹...ты будешь вести кладку так, чтобы
уже сложенная часть успела окрепнуть. Так делают ласточки,
которые в своих гнездах дают несколько просохнуть первому
слою глины и только потом приносят второй».
Немало замечательных сооружений в далеком прошлом человек создал, копируя архитектурные
формы растительного
мира. Всмотритесь в легкие африканские постройки, и вы увидите в них очертания цветков и деревьев, древневосточные пагоды напоминают стройные ели с тяжело высящими ветками,
мраморная колонна
Парфенона — олицетворение
стройного
ствола дерева, колонна египетского храма подобна стеблю лотоса, готическая
архитектура — воплощение в бесстрастном
камне конструктивной
логики, гармонии и целесообразности
живого. Вспомните знаменитые Кижи. Их купола напоминают
луковицы. Церковь в Филях, как живой организм, уменьшается
с высотой, развивается от центра к периферии. Вся она как бы
'Мимезис — учение, суть которого заключается в том, что оно рассматривает человеческую деятельность, познание и искусство
как подражание
живой
природе.
2 Демокрит
экгиз,
9*
в его фрагментах
1935, с. 139.
и свидетельствах
древности.
М.—Л.,
Соц-
244
Бионика
трепещет, все в ней тонко и гармонично. Храм Василия Блаженного... тот же главный ствол, от которого кверху и в сторону идет разветвление и размельчение форм. Удивительное родство приемов! Словно зодчие договорились
0б общности
CBOих творческих принципов.
Полистав страницы истории строительного дела, можно найти еще множество примеров копирования человеком архитектоники живой природы. Не случайно некоторые
ученые считают, что именно в строительном искусстве ярче, чем в какойлибо другой древнейшей сфере человеческой деятельности, видны первые шаги бионики. И с этим нельзя не согласиться. Однако необходимо еще раз подчеркнуть, что древнее строительное
искусство было подобно организации живой природы лишь по
форме. У природы зодчие учились гармоничности пропорций,
логичному распределению объемов здания, подчинению второстепенного главному, верному сочетанию
размеров
деталей,
конструктивной правде, но они не знали главного — законов
формообразования, секретов самоконструирования живого.
Внутренняя организация живого, конструктивная сторона
листа, стебля злака и ствола дерева стали объектом исследования ученых более поздних времен. В частности, Галилео Галилей в своей работе, написанной в 1638 г., сформулировал одно
из основных положений,
касающихся
конструкции
‘балки:
«Сопротивление двух цилиндров, построенных из равного количества одинакового материала, — из которых один является
полым, а другой сплошным, — находятся между собой в таком
же отношении, как их диаметры». Следовательно, по мнению
Галилея. при работе на изгиб полая конструкция, часто встречающаяся в природе, более рациональна,
более экономична,
нежели применяемая человеком сплошная.
Изучением архитектоники растений занимались такие выдающиеся
ученые,
как Марчелло
Мальпиги
(1628—1694),
Роберт Гук (1635—1703), Неемия Грю (1641—1712),
Герберт
Спенсер (1820—1903), Фриц Мюллер (1821—1897) и др. Известный немецкий ботаник Симон Швенденер (1829—1919) посвятил свои исследования выяснению связи между
анатомическим строением и физиологической функцией органов и тканей
растений. В результате
проведенных
исследований
ученый
установил, в частности, что расположение
опорных тканей в
растениях обеспечивает их наибольшую устойчивость
и соответствует законам механики; он разработал так называемую
механическую теорию листорасположения,
заложил
основы
естественнонаучного изучения
физико-механических
свойств
отдельных частей живых растений. В 1813—1814 гг. Швенденер писал: «Растение строит себя, несомненно, по тем же правилам, по которым инженеры строят здания, но только техника его гораздо тоньше и совершеннее...»
Гармония
красоты
и целесообразности
245
Многое объяснил в архитектонике растений
ныдающийся
русский естествоиспытатель-дарвинист К. А. Тимирязев. В своей знаменитой речи «Факторы органической эволюции» (1890)
ученый сказал: «Роль стебля, как известно, главным образом
архитектурная: это — твердый остов всей постройки, несущий
шатер листьев, и в толще которого,
подобно
водопроводным
трубам, заложены сосуды, проводящие соки... Именно на стеблях узнали мы целый ряд поразительных фактов, доказывающих, что они построены по всем правилам строительного искусства».
Дальнейшими научными исследованиями
физико-механических свойств, конструктивных особенностей растений, раковин и панцирей животных, закономерностей развития, роста,
самоорганизации живых организмов было установлено немало
других поразительных фактов. Выяснилось, например, что конструкция построенной в 1889 г. в Париже всемирно известной
Эйфелевой башни чуть ли не в точности повторяет (совпадают
даже углы несущих поверхностей) строение большой берцовой
кости человека!
Не менее интересный сюрприз преподнес инженерам и пухонос
— растение из семейства осоковых. Когда сравнили поперечные разрезы его стебля и железобетонной высотной фабричной дымовой трубы, рассчитанной по всем правилам современного сопромата, оказалось, что они удивительно похожи:
обе конструкции полые; склеренхимные тяжи стебля пухоноса, так же как и продольная арматура трубы, располагаются
по его периферии. Вдоль стенок обеих конструкций находятся
овальные вертикальные пустоты. Роль спиральной арматуры,
размещенной у внешней стороны
трубы,
в стебле
пухоноса
играет тонкая кожица (рис. 48).
И еще один любопытный факт. Не так давно ученые установили, что арматура современных железобетонных конструкций сходна в принципах строения со скелетом лебедя. Каркас
из неправильных волокон аналога цемента придает прочность
Рис.
48.
Разрез
стебля — пухоноса
(слева)
и фабричной
трубы
(справа).
246
Бионика
eee,
мягкому телу лебедя. Этот каркас состоит главным образом из
спонгина
— белкового вещества, богатого
связанным
йодом.
Стекловидные, заостренные на конце
иглы (так называемые
склеры) выполняют ту же функцию, что и стальная арматура
в бетоне. Скелет лебедя, состоящий как бы из продольных
и
поперечных «балок», тоже может выдерживать значительные
нагрузки.
Познакомившись с изложенными фактами, читатель может
спросить: как же, не зная в прошлом секретов самоконструирования живого, инженеры сумели достигнуть столь поразительного конструктивного сходства ряда технических
и естественных, природных систем.
Что это — случайность?
Нет!
В этом можно легко убедиться, рассмотрев более детально, как
складывались конструктивные особенности, скажем,
фабричной
дымовой
трубы
и
стебля
пухоноса.
Основная функция фабричной трубы, как известно, состоит
в создании тяги, необходимой
для
нормального протекания
процессов горения, и в отведении вредных газов (дыма) в высокие слои атмосферы. Это обусловило значительные вертикальные размеры ствола трубы. Стебель пухоноса играет важную
роль в жизнедеятельности всего организма как проводник питания. Ему нужна живительная энергия солнца, он все время
тянется к теплу и свету и этим определяется его высота. Таким
образом, у фабричной дымовой трубы и стебля осокового растения «жизненные» цели разные. Ноу них есть и нечто общее:
массивная труба и тонкий, стройный стебель находятся
под
воздействием однотипных статических и динамических нагрузок. Они должны
противостоять
собственной
массе,
ветру,
осадкам, буре ит. д. Однотипность внешних механических воздействий и потребносгь в вертикальности обусловили конструктивное сходство живой и технической системы. Решения человека и природы оказались едиными, ибо природа
и техника
строят по одним и тем же законам, соблюдают принцип экономии материала, ищут для создаваемых
систем
оптимальные
конструктивные решения.
Однако, проектируя железобетонную
фабричную дымовую
трубу, инженерам невдомек
было искать
в стебле
пухоноса
прототип разрабатываемой конструкции. Точно так же и Александру Эйфелю (вероятно, не раз видевшему человеческий скелет и не раз слышавшему о прочности его костей) не приходила
на ум мысль искать прообраз своей чудо-башни в берцовой кости человека. Ни Эйфель, ни авторы фабричной дымовой трубы
не копировали природу, а рассчитывали свои сооружения сугубо
математическими методами. Все дело в том, как справедливо
отметил заведующий кафедрой конструкций
жилых
зданий
Московского архитектурного института профессор М. С. Туполев, что до недавнего времени ‹...мало кто задумывался,
что
Гармония
красоты
и
целесообразности
247
природа не только красиво «построена», но едва ли не идеально
«рассчитана», что, создавая любое из своих творений, шлифуя
его столетиями, природа связывала в нем воедино
гармонию
красоты с гармонией целесообразности
— придавала
ему
ту
единственно верную форму, которая идеальна с точки
зрения
инженера»'.
Но были, и о них нельзя не рассказать, в творчестве архитекторов и строителей внезапные «озарения» и узнавания, чаще
всего
подсказанные
тонкой
интуицией,
длительными
наблюдениями, а порой и волей случая, в основном после долгих мучительных поисков, после того как память накопила достаточное для решения задачи
количество
знаний.
Многим
читателям, вероятно, известна
прекрасная легенда
о древнегреческих зодчих, строителях храма Аполлона. Они задумали
соорудить такую колоннаду, чтобы каждая колонна оставалась
стройной, надежно выдерживала свою часть тяжести. Каким
может быть наименьший диаметр колонны, зодчие не знали:
законы прочности были найдены много веков спустя. И тогда
вспомнили о тех стройных и прочных живых колоннах, которые десятилетиями выдерживают тяжесть человеческого тела... Вспомнили о ногах. Строители
измерили след
мужской
ступни в отношении к росту человека. Получилось, что опорное
основание должно составлять одну шестую высоты — это отношение и было положено в основу при изготовлении колонн храма. Красота древнегреческих колоннад восхищает нас и поныне.
А теперь достоверный пример, который любят приводить
строители. Инженер Сэмюэль Броун
работал
над
проектом
моста. Он знал огромное количество разных типов мостов, много их построил сам, но вот профиль и основная
конструкция
нового моста не получались, никак не вырисовывались в его
сознании, несмотря на долгие и мучительные раздумья. Между
тем сроки торопили, нужно было как можно скорее найти общий принцип этой конструкции. Однажды... инженер вышел в
сад. Тысячи тонких нитей паутины поовисали между деревьями, тянулись от ветки к ветке, перебрасывались от куста к ку2ту. Прямо над собой, у дорожки, Броун увидел прообраз искомой им конструкции моста на гибких длинных нитях.
Ветер
раскачивал ее, но подвесные нити не рвались. Оставалось только рассчитать нагрузки и сечения. Так появился прочный и
красивый подвесной мост...
Автор проекта здания театра на Елисейских полях в Париже Огюст Перре услышал в Лурде пение странников под
деревьями. Звучание было прекрасное, хотя люди пели в пространстве, ограниченном землей и покровом из листьев. Перре
решил тогда, что такого рода звучание может быть достигнуто,
! «Вокруг
света»,
1968,
№
6, с. 46.
248
Бионика
если построить зал, «просверленный» в той же пропорции, как
покрытие у листьев. По этому принципу и был построен большой музыкальный зал театра на Елисейских полях. Перре построил сперва закрытый зал, а внутри его — другой зал, «просверленный», как корзина. Эта система оказалась
настолько
удачной, что один из наиболее требовательных руководителей
оркестра говорил об акустике зала, что она является чудом.
Все наши рассуждения об интуитивном и случайном копировании человеком в прошлом архитектурных
форм,
живых
конструкций природы, все приведенные нами примеры из истории строительного искусства лишь необходимая предпосылка для обращения к нашей основной теме настоящей главы —
к новой, недавно родившейся ветви бионики
— архитектурной
бионике.
Архитектурная бионика
— это новая страница в развитии
строительной техники и зодчества, это осознанная, вызванная
требованиями нашего времени необходимость изучить
инженерные решения природы, познать законы, секреты ее строительного мастерства, это целенаправленный поиск оригинальных архитектурных форм, идеально рассчитанных самой природой, это поиск красоты в окружающем нас мире растений
и животных, той самой «гармонии целесообразности», о которой так вдохновенно писал бразильский
поэт
и архитектор
Жоаким Кардозу:
...И в призрачном утреннем свете
Вместо ветвей и цветов
Гармонию целесообразности
Природа рождает для взгляда...
В том, что архитекторы и строители, как чуть раньше радиотехники, электроники, кораблестроители,
авиаконструкторы, машиностроители и специалисты многих других отраслей
техники, обратились к природе, к ее строительному искусству,
нет ничего случайного. Ведь архитектурно-строительная
мастерская природы
без
устали
работает
по
крайней
мере
2100 млн. лет, в то время как у человека строительная практика исчисляется лишь несколькими тысячелетиями существования материальной культуры.
Любой живой организм от одноклеточной радиолярии
до
кита, от стебля злака до корабельной сосны является во всех
отношениях высокосовершенной конструкцией. Вся эта сокровищница творений кудесницы-природы, ее великий тысячевековой опыт тонкого зодчего сейчас, при современных масштабах строительства, не могут не интересовать архитекторов и инженеров.
Природа нелегко раскрывает секреты своего строительного
мастерства. Даже при самом горячем желании порой не так-то
Гармония
красоты
и целесообразности
249
просто разобраться в принципах формообразования биосистем.
Биологические формы зачастую не могут быть ни рассчитаны
современными методами инженерной и математической науки,
ни даже вычерчены из-за своей сложности. Это, разумеется, не
означает, что они незакономерны. Просто мы еще не знаем законов их формирования. Но постепенно рамки неизведанного
сужаются. И зодчие все чаще и чаще обращаются к природе,
ищут и находят в ней готовые прообразы своих зданий, сооружений или их отдельных деталей. Познакомимся же с тем новым, что внесено изучением природных конструкций в строительную технику и архитектуру.
Американский профессор Ле-Риколе
однажды
заинтересовался конструкцией скелета человека. Произведя ряд обследований и обмеров, он установил, что скелет имел массу только
б кг, т. е. в 10 раз меньше, чем средний человек. Исследования
установили, что кость, хотя она и является чрезвычайно хрупким материалом, способна благодаря присущему
ей особому
строению выдерживать болыпие
нагрузки,
порядка
1200—
1700 кг/см?. Отсюда последовал логический вывод — прочность
данного материала зависит от свойства его ткани.
Всестороннее, тщательное изучение человеческого
скелета
показало, что он представляет собой необыкновенно сложный
комплекс пространственных систем. Ле-Риколе пришел к заключению, что следует рассматривать не узлы, а распределение отверстий, ибо порядок повторения этих отверстий можег
дать ключ к истинному смыслу всего построения.
И вот, в творчестве Ле-Риколе
открылась новая
глава —
дырчатые конструкции. Профессор пришел к заключению, что
главное— это соответствующее
расположение
в
материале
пустых пространств. Вопрос заключается
не в расположении
плоскостей, а в обрамлении отверстий, соединяемых
разным
образом. Различные способы соединения
обрамлений
отверстий, по твердому убеждению Ле-Риколе, позволяют
решить
ряд сложных проблем в сопротивлении
материалов.
Ученый
надеется, что разработанные
им
пространственные
системы
найдут в ближайшем будущем широкое применение, в частности, в космонавтических конструкциях, где принимается в расчет не только сопротивление материалов, но прежде всего количество употребляемого материала (снижение массы конструкций). По мнению многих крупных архитекторов, макеты,
выполняемые ныне под руководством Ле-Риколе, могут сегодня казаться утопическими, но, возможно, через несколько лет
они станут основой новых концепций овладения
межпланетным пространством.
Итак,
обычная
кость
человека
предстает
перед
нами
настоящим кладезем технических идей, стоит только всмотреться, взглянуть на нее другими глазами.
250
Бионика
Изучением скелета человека, его костей с целью применения некоторых принципов их построения в строительной технике занимались многие ученые. Проведенными ими исследованиями, например, внутреннего устройства бедренной
кости
была выявлена упорядоченная архитектура перпендикулярных
друг другу пластинок, расположенных строго по законам графостатики. Было установлено, что архитектура кости такова,
что при наименьшей массе кость выдерживает наибольшую нагрузку, что в течение жизни организма нагрузка на кости непрерывно изменяется, при этом изменяется и самоорганизуется архитектура кости. Оказывается, в кости имеются два вида
клеток-строителей. Одни непрерывно разрушают
ту
костную
ткань, которая перестает испытывать нагрузку; другие, наоборот, откладывают костное вещество по линии наибольших напряжений. Поэтому кости так прочны, поэтому скелет человека
так высокосовершенен в своей конструкции, что по сравнению
с ними многие сооружения
строительной
техники
кажутся
безнадежно грубыми и примитивными. Однако
все добытые
учеными за многие годы знания о всех структурных достоинствах кости, которые можно было бы использовать в строительных
конструкциях, не нашли выхода в практику. А вот Ле-Риколе,
занятый поиском новых архитектурных форм, сумел увидеть
в скелете человека, в структуре его костей ту особую
«техническую» специфику природной конструкции, которую можно
воспроизвести в искусственных системах, пользуясь современными материалами, и в его
мастерской
появились
макеты
оригинальных зданий будущего.
Интересное инженерное решение нашли строители в обычном
курином
яйце.
В Дакаре, столице Сенегала, проектировали здание театра,
внутри которого не должно было быть ни одной колонны,
ни
одной даже декоративной опоры, — все здание должно
было
представлять собой огромную, пустую, тонкую,
железобетонную скорлупу, покоящуюся на специальном фундаменте. Когда все расчеты были закончены, оказалось,
что запроектированной конструкции явно не хватает прочности.
Между
тем
естественная яичная скорлупа, напоминавшая по форме будущее здание театра, выдерживала (пропорционально ее размерам) соответствующие нагрузки. В чем же
дело?
Пришлось
обычное куриное яйцо подвергнуть
тщательному
изучению.
Установили, что его прочность объясняется тонкой и эластичной пленкой-мембраной, благодаря которой известковая скорлупа является конструкцией с предварительным напряжением.
Этим открытием строители решили воспользоваться при сооружении театрального
здания,
только мембрана
была,
конечно, изготовлена
не из «куриного» материала,
а из армоцемента.
Гармония
красоты
и целесообразности
251
Помимо яичной скорлупы, в природе
имеется
множество
других форм оболочек, заслуживающих подражания. Это —
скорлупа ореха, панцири животных, морские раковины и т. п.
Все эти природные структуры характеризуются изогнутой поверхностью,
высокой жесткостью
и твердостью
материала.
Тонкие и легкие, они вместе с тем весьма прочны,
способны
выдерживать довольно большие для себя нагрузки,
требуют
незначительного расхода «строительного материала». По
образцу природных оболочек за последние годы
в ряде
стран
сооружено множество так называемых скорлупчатых
KOHCTрукций. Тонкие
армоцементные
скорлупы
толщиной
15—
30 мм перекрывают без опор пространства до 120 м и более. Чем
больше пролет, тем скорлупа делается тоньше и легче (разумеется, до определенных пределов).
Заговорив о форме, рождающей прочность, нельзя не рассказать об удивительном устройстве некоторых листьев, подсказавшем архитекторам так называемые «складчатые конструкции». Речь идет о существующих в растительном мире листьях,
имеющих ребристую форму и форму
веера.
В этих
структурах, пожалуй, нашла свое наиболее яркое воплощение одна из
самых интересных закономерностей природы
— «сопротивляемость конструкции по форме».
Что же скрывается за этим сухим инженерным термином,
каков его смысл? Поясним простым примером. Возьмем лист
обычной писчей бумаги и положим его противоположные края
на подставки (рис. 49). Лист не выдержит собственной массы и
Рис.
49.
Бумажная
модель
складчатой
конструкции
(по
К. Зигелю).
252
Бионика
Рис. 50. А эту форму здания
— гостиница «Ла Конча» в Сантурче (Пуэрто-Рико) — инженер подсмотрел в осеннем лесу, где опавший лист, еще не потерявший упругость и прочность, выпрямляется даже после того, как вы наступили на него.
прогнется. А теперь сложим тот же лист «гармошкой» и положим его опять на две опоры так, чтобы параллельные складки
шли поперек пролета. Нетрудно убедиться, что такой гофрированный лист ведет себя иначе,
чем гладкий.
Он устойчив
и
может легко, не деформируясь, выдержать нагрузку, равную
стократной величине его собственной массы.
Если
к торцам
складок приклеить усиливающие полоски, то
гофрированный
лист может выдержать еще большую нагрузку. Что же произошло, ведь в нашем опыте ни размеры листа, ни его масса,
ни
качество не изменились? Все дело в новой форме листа — она
придала ему новые механические качества '.
Используя принцип «сопротивляемости по форме», в США
построили складчатые купола пролетом 100—200 м, во Франции произвели перекрытие павильона пролетом 218 м. Широкое применение
получили
тонкостенные
пространственные
складчатые конструкции и в СССР. Это стало возможно благодаря глубоким исследованиям советских ученых и инженеров,
посвященным теории складок, методам возведения широкопролетных сооружений.
В многообразии форм и конструкций
листьев
различных
растений зодчие с каждым годом находят все больше и больше
интересных инженерных решений природы, пригодных для использования в архитектуре. Например, изображенную на
рисунке 50 форму здания гостиницы
«Ла Конча»
в Сантурче
(Пуэрто-Рико) архитектор подсмотрел в осеннем лесу, где опавший лист, еще не потерявший упругость и прочность, распрямляется даже после того,
как
на него
кто-нибудь
наступит
ногой... Рассчитанный
природой,
высоконадежный
жесткий
' См.:
М., 1965.
Зигель
К.
Структура
и
форма
в
современной
архитектуре.
Гармония
Рис.
51.
жесткий
красоты
и целесообразности
Рассчитанный
природой
каркас
— прожилки
зе-
253
2
леного листа
— лег в основу перекрытия здания фабрики
«Гат- ‹:
ти», возведенного в Риме по про- :
екту П. Л. Нерви.
каркас
ном
(прожилки
в зеле-
листе) лег в основу
и;
пе- *
рекрытия здания
фабрики
«Гатти», возведенного в Риме по проекту
итальянского инженера Пьера
Луиджи
Нерви (рис. 51). Подражая конструкции
листа дерева, Нерви
спроектировал также
перекрытие зала
Туринской
выставки.
Легкая конструкция
из армоцемента
толщиной всего 4 см перекрыла стометровый пролет без опор.
Все перекрытие пронизано креплениями, расположенными абсолютно так же, как и жилки листа (цвет. табл. 9).
Иной читатель может спросить: а не слишком ли это мало
для архитектурной бионики
— структура человеческой кости,
форма яйца, древесного листа?
Ведь наши
современники —
строители и зодчие мечтают о более сложных формах, которых,
как говорится, и на морском дне не сыщешь. Оказывается,
и
здесь архитекторы и инженеры могут найти немало
готовых
прообразов различных зданий, мостов и других
сооружений.
Именно на морском дне французские инженеры нашли модель
для новой конструкции моста. Они построили мост, похожий
на скелет морской звезды. Мост имеет вид
равностороннего
треугольника. Это значительно надежнее, чем арочные
конструкции. (Попутно заметим, что выгодно делать треугольными и кирпичи. Стены домов, сложенные из таких
кирпичей,
приобретают большую против обычной прочность.)
Новые, порой весьма оригинальные архитектурные формы,
конструктивные решения подсказывает зодчему динамика живого. Так, например, известный архитектор 9. Сааринен заимствовал у природы решение одного из самых интересных своих
сооружений — Нью- ИЙоркского аэровокзала. Крылья этого здания изогнулись над землей, словно крылья парящей в воздухе
ПТИЦЫ...
.
Успешному использованию в строительной практике
природных форм в болышой степени способствует
применяемый
бионикой и получивший широкое развитие
в архитектурной
бионике метод физического моделирования «живых конструк-
254
Бионика
ций». Выше уже отмечалось, что не всегда легко найти причины, породившие ту или иную биоструктуру, так как в изучении процессов структурообразования
организмов
существует
огромное количество «белых
пятен».
Однако
накопленный
бионикой опыт моделирования биологических объектов, обширная номенклатура имеющихся специальных синтетических материалов позволяют сегодня построить в лабораторных
условиях копии многих живых конструкций (от древесного листка
до панциря черепахи), представляющих
интерес для архитектурно-строительной практики. Всесторонние физические испытания таких моделей дают возможность выявить многие важные свойства
природных
систем, позволяющие
им хорошо
«работать по форме» и, не прибегая к сложным, громоздким,
порой практически неосуществимым статическим расчетам, воплотить
конструктивные
особенности
живой
структуры
в
сталь, бетон и стекло, в различного рода
инженерные
сооружения.
Несколько лет назад возвели большой
экран для Берлинского зеленого театра. Его опору построили по такой же схеме,
которая заложена в структуре очень прочной скорлупы диатомовых
водорослей.
Вместо
сложных
расчетов,
обычно
предшест-
вующих созданию новой архитектурной конструкции, строители опоры большого экрана лишь точно воспроизвели в ней пропорции, подсказанные природой, ограничившись только физическими испытаниями модели. И еще пример. Нередко листья
некоторых растений меняют форму: свертываются
в трубку,
образуют причудливые короба, закручиваются
в спираль
—
это обеспечивает их наибольшую прочность, позволяет противостоять
большим
нагрузкам.
Такая
трансформация
формы
подсказала итальянскому архитектору Паоло Солери идею постройки железобетонного автодорожного моста
оригинальной
конструкции. Она имеет форму полусвернутого травяного листа. Легкость моста поразительна, прочность (она обеспечивается загнутыми краями — принцип «сопротивляемости по форме») необычайна. Красотой, экономичностью и долговечностью
этот мост полностью обязан зодчеству природы, ее идеальным
«расчетам», ее гармонии целесообразности!
Подобных примеров достижения высокой
конструктивной
эффективности в архитектурно-строительной практике последних лет посредством физического моделирования
природных
форм можно было бы привести еще много. Однако, обращаясь
к природе, архитектурная бионика не столько стремится к точному копированию природных конструкций, сколько к обобщению природных форм. И это вполне естественно. Архитектурная бионика — это одновременно наука и искусство, это анализ
и синтез. Ей чужды, как и живой природе, каноны. Она внушает зодчему принципы, а не правила. Архитектурная биони-
Гармония
красоты
иц целесообразности
`255
ка — это неустанный
поиск оригинального, полет творческой
мысли за пределы известного, это новый жанр, новый стиль,
коренным образом преобразующие сложившиеся приемы и методы строительства. И сегодня
мы все чаще и чаще
сталкиваемся с обобщениями, синтезом природных форм.
Примером
может
служить
разработанный
архитектором
Беллони проект спортивной арены в Павии со сводом из пересекающихся складок. Выбранная
форма не произвольна -—это модернизированная творческой
фантазией,
инженерным
расчетом природная складчатая конструкция, которая подчиняется законам геометрии и архитектуры.
Складки как бы взаимно проникают одна в другую, образуя
свод, сообщают системе необходимую жесткость, горизонтальный пояс связывает пяты вместе, что препятствует выпрямлению складок. Наружные контрфорсы (местные
усиления
несущей конструкции) воспринимают усилия
сдвига свода. Таким образом, перед нами весьма эффектная конструкция, созданная на основе новых возможностей, предоставляемых в настоящее время использованием природного принципа «сопротивляемости по форме», а также железобетона.
Копируя, обобщая, синтезируя различные природные формы, архитектурная бионика одновременно учится у природы и
пытается перенять ее мудрую, выработанную в процессе эволюции систему стандартизации и унификации элементов живых
конструкций. При
современном
размахе
индустриализации
строительства без изучения и широкого практического использования стандартов природы обойтись невозможно.
Любой живой организм, любая ткань, растительная и животная, как известно, состоят из клеток. В организме человека,
например, около 100 триллионов (101!“) клеток. В выборе строительного материала для создания клетки, этого
стандартного
элемента, «первокирпичика» всего живого, природа проявила
удивительную «изобретательность» и «дальновидность». Располагая тепловатыми водными растворами с клейкими соединениями, со сравнительно скудным набором
элементов, плавающих в архейских морях и океанах, природа, по образному
выражению известного писателя-фантаста Станислава
Лема,
«сумела «выжать» из столь ограниченного исходного материзла буквально все, что было возможно»'!. В итоге была сконструирована клетка по своей принципиальной схеме одинаковая и у вымерших миллиард лет назад трилобитов, и у нынешних ромашки, тюльпана, змеи, крокодила, слона, кита и человека. Универсальность этого материала поразительна.
Каждая клетка, будь то клетка инфузории, мышцы млекопитающего, листа растения, слизистой железы червя, брюшно' Лем
Станислав.
Сумма
технологии.
М.,
«Мир»,
1968,
с. 45—41.
256
Бионика
го узла насекомого и т. п., содержит одни и те же основные
части: ядро с его отшлифованным до предела
молекулярных
возможностей аппаратом наследственной информации, энзиматическую сеть митохондрий, аппарат Гольджи и др. В каждой
из клеток заключена потенциальная возможность динамического
гомеостаза,
специализированной
дифференциации.
Каж-
дая клетка — это своего рода огромный завод
с множеством
цехов, собственной энергобазой, службой
времени
и связи,
конструкторским бюро, транспортными средствами...
Методы стандартизации, унификации
и агрегатирования,
которые «разработала» живая природа, имеют четкую, иерархически согласованную структуру. На элементарном молеку-лярном уровне стандартный набор из 24 аминокислот является
основой длЯ СИнТтеза всех живых материалов. Здесь унификация представлена в наиболее чистом виде.
На более высоких ступенях развития биосистем
внимание
к стандартизации, унификации и агрегатированию не ослабляется, а приобретает более сложный характер. Примером могут
служить нервные системы. По их «конструированию» наиболее
просто и легко можно проследить основные идеи унификации.
которые использует живая природа. Прежде всего бросается
в
глаза организация «модульного» производства. Все разнообразие нервных механизмов строится на базе небольшого
числа
«модулей» — нервных клеток, число типов которых невелико.
Каждая нервная клетка функционально
представляет
собой
элемент широкой информации, который в зависимости от условий
может
выполнять
большое
число
назначений,
в том
чис-
ле таких, которые привычны для специалистов радиоэлектроники; усилителя, интегратора, выпрямителя, делителя частоты, генератора,
фильтра,
порогового
элемента,
сумматора,
реле ит. д.
В процессе эволюции живое создавалось очень
экономно.
Природа
унифицировала лепестки цветков,
чешуйки
рыб,
змей,
шишек, листья злаков, стебли деревьев и многие другие элементы биосистем. В природе также фигурируют
простейшие
формы: треугольник, квадрат, прямоугольник, шестиугольник,
куб, окружность, овал. Но ее
умение
виртуозно варьировать, компоновать из ограниченного числа форм бесконечное
множество сложных, удивительно красивых, легких, прочных,
надежных, долговечных
и экономичных
систем
— укор тем
архитекторам, которые
умудряются
придавать типовым жилым
и общественным
зданиям
предельно
унылую
и однообразную форму.
Плодотворность заимствования опыта природы
в области
стандартизации и унификации можно проиллюстрировать на
примере воспроизведения конструкции пчелиных
сот. Пчелиные и осиные соты — одно из примечательных творений при-
Гармония
красоты
и целесообразности
257
роды. Они представляют собой десятки тысяч шестигранных
призм, расположенных
параллельными
рядами.
Основание
каждой призмы состоит из трех ромбов, образующих
вместе
пирамиду. Здесь четко воплощена идея унификации: главным
и единственным конструктивным элементом всей пчелиной постройки
служит
шестигранная
ячейка,
сделанная
из
воска.
Каждый ряд ячеек пчелы кладут с «перевязкой», как каменщики кирпичную стену.
Но прочность
здесь
(относительно,
конечно) выше, чем у кирпичной стены. Соты изотропны — это
значит, что их прочность одинакова
во всех
направлениях.
Первыми заимствовали опыт пчел авиастроители для создания
сверхзвуковых самолетов и ракет. Лет пятнадцать назад достоинствами пчелиных сооружений
решил воспользоваться
известный польский инженер и архитектор
Адам
Кавровский.
По его инициативе в ПНР начали изготовлять крупные панели
для строительства жилых домов.
Сотовые панели можно делать из самых разных материалов: из обычного железобетона, древесно-волокнистых
плит,
синтетических смол,
шлаковой
ваты,
различных
отходов.
Вместо стали для армирования применяют пластмассы. Конструкция крупной панели, изготовленной по сотовому методу,
показана на рисунке 52. Из панелей шести видов можно собирать дома любой формы и с разным числом этажей.
Соты
— идеальная форма для
монолитной
конструкции:
никто
не мог
бы
предложить
пчелам
что-нибудь
более
удобное.
Однако собирать их из отдельных элементов, например шестигранников, не очень выгодно,
потому
что у каждой
ячейки
тогда окажутся двойные стенки.
И польские
конструкторы
усовершенствовали «идеальные» соты. Они стали собирать их
из одного элемента — треугольника с продленными сторонами.
—
=A “A
1714
Рис. 52. Конструкция
Шесть видов сотовых
мы
и с разным
числом
j
,
крупной панели, изготовленной по сотовому принципу.
панелей, из которых можно собирать дома любой форэта:геяй.
258
Бионика
Внешне рисунок сот усложнился, зато исчезли двойные стенки,
трудоемкость уменьшилась, прочность повысилась. Дома, собранные из панелей Гданьского конструкторского бюро, стали
в 5 раз легче обычных, а затраты
труда
на
их
постройку
уменьшились в 20 раз. Такие дома не требуют глубоких и дорогих
фундаментов.
У пчелиных сот имеется еще одно чрезвычайно важное достоинство, весь секрет которого
заключается
в рационально
выбранной форме, в геометрическом построении восковой ячейки. Этому поистине чудесному пространственному элементу
в
свое время воздали должное французы Маральди
и Реомюр,
швейцарец Гюбер, петербургский академик Рыкачев и многие
другие известные ученые. Видные математики не раз производили самые точные вычисления размеров главного конструктивного элемента пчелиных сот и неизменно приходили к одному и тому же выводу: все острые углы трех ромбов, образующих основание
каждого шестигранника,
равны
70° 32’.
Ученые доказали, что при шестигранной форме именно такая
величина углов обеспечивает наибольшую вместимость сотовой ячейки при минимальных затратах строительного материала на ее сооружение.
Итак, за миллионы лет эволюции у пчел выработалось приспособление (методом «проб и ошибок») — хранить мед в самой
экономичной и емкой форме сосуда.
А нельзя ли нам, людям, воспользоваться опытом мохнатых
тружениц
и тоже хранить в сотах, но только
железобетонных,
разные продукты, например зерно? Безусловно,
можно! Ведь
ежегодно в нашей стране строят десятки элеваторов для хранения зерна. А обычный элеватор — это просто ряд вертикальных
труб — силосов. Толщина стенок круглых монолитных
башен
весьма велика. И не потому, что прочность этого требует,
их
иначе
сделать
невозможно.
В
тонкий
зазор
—
щель
между
кольцами опалубки — бетонную смесь не заложишь и уплотнительный вибратор не вставишь,
волей-неволей
приходится
делать силосы массивными.
Иное дело сотовый элеватор, конструкцию которого разряаботали советские инженеры. Его строить просто и быстро. Уже
в первом, высотой с пятнадцатиэтажный дом, сотовом элеваторе, сооруженном в Купино (под Новосибирском), стенки
силосов, собранные всего лишь из двух типовых железобетонных
элементов, стали намного тоньше, бетона пошло меньше, а надежность конструкции значительно возросла. Следом за
Купинским
поднялся
в Целинограде
еще
более
совершенный
эле-
ватор сотовой конструкции. На него ушло примерно
на 30%
меныпе бетона, чем на его монолитного «предка», а затраты
труда сократились вдвое! Сотовый элеватор стал подлинно типовым.
Гармония
красоты
и
целесообразности
259
Вероятно, в ближайшее
время начнут собирать из стандартных строительных элементов шестигранные общественные
и административные здания, жилые дома, дома-соты, которые
будут отвечать всем современным художественно-эстетическим
и технико-экономическим требованиям. Жилые дома из шестигранных секций уже строят за рубежом.
Комнаты,
подобно
ячейке пчелиных сот, шестистенные, с шестью углами. Необычная пространственная организация позволит по-новому, в различных вариантах, очень удобно разместить мебель в квартирах, улучшить освещение в каждой комнате. Да и архитектура
шестигранных
сотовых
домов,
не говоря уже об их экономичности и прочности, во многом выигрывает, особенно когда широко
используется
богатая
палитра
современных
материалов.
Тысячевековый опыт пчел в сооружении сот ныне весьма
успешно используется также гидротехниками. Гидротехнические соты собираются из однотипных, унифицированных сборных элементов. Огромный рамочный улей выстраивается прямо в реке. Его ячейки квадратные или прямоугольные. Из них
образуется прочный и жесткий во всех направлениях
каркас.
Так вырастают плотины, шлюзы,
подпорные
стенки,
устои,
состоящие
в основном из... пустоты: 90% пустоты
и
лишь
10%
железобетона — рекорд
легкости
и
гидротехнического
изящества. Ячейка-комната объемом в 30 м? имеет массу всего 10 т. Монолитная, она была бы в Т раз тяжелее.
Но гидротехническое сооружение должно иметь не только
большую прочность. Чтобы устоять в воде, нужна масса. С сотами она приобретается дешево. Ведь внутренние пустоты ничего не стоит заполнить песком.
Песчаный
«куличик»
площадью около 10 м? имеет массу
уже более 100 т. Попробуй,
сдвинь!
Сотовому каркасу песчаный кулич дает массу
и устойчивость, железобетону
— возможность работать в полную силу,
а гидротехникам
— новую, совершенную,
экономичную
конструкцию. Песок в таких сотах стал поистине
ценнее
меда.
И вот еще что чрезвычайно важно: сотовые конструкции полносборные. Это значит, что строительная
площадка
превращается в монтажную.
Дома-соты, соты-элеваторы, соты-плотины, соты-шлюзы, соты-устои, соты — подпорные стенки, соты-гостиницы... У сотовых технических конструкций большое будущее.
Рассмотрим теперь живую систему не просто как балку или
пространственную форму, а
как активно
реагирующий
на
внешние и внутренние воздействия организм и попытаемся выяснить, что могут
позаимствовать
архитектурная
бионика,
строительная техника у биосистем, изучив протекающие в них
процессы, устройство и принципы работы различных механиз-
260
Бионика
мов,
обеспечивающих
их
нормальную
жизнедеятельность,
функционирование организма.
Природа учит нас смотреть на здание как на живой организм. Исходя из этого, болышой интерес представляют способы
защиты и изоляции живых организмов
от неблагоприятных
климатических воздействий, приспособления, которые обеспечивают растениям нормальный газовый обмен, регулирование
температуры, влажности и т. п. Так, например, еще в ХХ в.
С. Швенденер обратил внимание на продолговатые, «остроумно
устроенные вентиляционные отверстия» растений, называемые
устьицами. Устьица (их можно увидеть с помощью микроскопа на нижней стороне листа) — это особые природные автоматические устройства (рис. 53), позволяющие осуществлять газои влагообмен, поддерживать необходимый уровень влажности
внутри растения. Механизм работы устьиц таков. При значительном притоке влаги, превышающем потери в листьях, устьица широко открываются и способствуют процессу испарения.
Когда влаги не хватает, клетки устьиц расслабляются и прикрывают вентиляционные отверстия, расход влаги
сокращается.
Количество и расположение устьиц
на листьях
растений
зависят от климатического пояса. Исследования показали, что
во влажных райоглх устьица располагаются на поверхности
листа и их отверстия широко открыты, а в засушливых районах устьица расположены глубоко в мякоти листа и их количество невелико.
Принцип работы устьиц не может не привлечь внимания сантехников.
«Есть
предложение, — пишет
инженер-строитель
а
Рис.
53.
Вентиляционные
устройства
листа
(устьица):
а — поверхность листа язвенника (видны овальные устьица), б — разрез устьица.
4 — эамыкающие
клетки, 2 — дыхательная
полость,
3 — клетки
столбчатого
слоя,
{по В. Н. Семенову).
4 — щель
Гармония
красоты
и
целесообразности
261
В. Н. Семенов, — использовать принцип работы устьиц в строительной технике: заменить форточки и открывающиеся фрамуги жилых, общественных и промышленных зданий «дышащими стенами», со сквозными отверстиями, регулируемыми автоматическими клапанами. Рассчитав заранее действие клапанов,
можно поддерживать в помещении любой температурно-влажностный режим. Технически это вполне выполнимо.
Дело за
конструкторами».
Многие цветки очень точно ведут отсчет времени, чутко реагируют на изменение температуры, влажности,
атмосферного
давления. Так, например, мак открывает свои лепестки в 5 ч,
белая кувшинка — в Т, кислица — в Эч
утра. За несколько часов до наступления дождя плотно складывают свои
лепестки
мальвы, ипомеи; от холода складывают лепестки
мимозы
и
другие цветы. Мы еще не постигли всех секретов удивительно
точной работы природных хронометров, барометров, гигрометров и термометров. Но уже сегодня многие бионики совместно
с архитекторами и инженерами думают и работают над
тем,
чтобы
наделить
аналогичными
механизмами будущие здания,
«оживить» их, заставить, если не полностью,
то
хотя
бы
частично, изменять,
трансформировать
свою
пространственную
форму,
поднимать или опускать,
подобно лепесткам
цветков,
кровлю
здания, автоматически регулировать
микроклимат.
Тщательного изучения заслуживают средства защиты растений и животных от интенсивной солнечной радиации. В решении этой задачи у мудрой природы можно многое позаимствовать.
Так,
например,
природа
добилась
максимальной теплоизоляции ряда
растений соответствующим
подбором
их окраски,
рациональной
формы
и расположением
листьев.
Многое может подсказать природа инженерам в решении
актуальных проблем водоснабжения новых жилых массивов,
промышленных комплексов. Возьмем, к примеру,
обыкновенный зеленый лист. Он снабжен тончайшими полыми трубочками, несущими клеточный сок. Ученые пришли к заключению:
расположение жилок (иннервация) полых трубочек в зеленом
листе — это самая экономичная и надежная
схема
питания,
которую целесообразно использовать при водоснабжении больших территорий.
Итак, мы познакомились с целями, задачами
и методами
исследований архитектурной бионики, достигнутыми
ею
за
последние годы успехами в познании закономерностей развития, роста и структурообразования живых организмов, с рядом
оригинальных сооружений, созданных архитекторами разных
': Семенов В.
В. Природа
учит строить. М., «Знание»,
1966, с. 27—28.
262
Бионика
стран в «соавторстве» с природой. Теперь остается рассказать
о самой важной проблеме, в решении которой архитектурная
бионика стремится внести свой посильный вклад. Эту проблему кратко можно назвать так: «города и люди». Знакомство с
ней нам придется начать с цифр и расчетов, рождающих проблему.
В первый год нашей эры население земного шара составляло 200—275 млн. человек. Для того чтобы численность людей
достигла 1 млрд., потребовалось восемнадцать столетий. Второй миллиард был «взят» за 100 лет — к 1930 г., а на третий
понадобилось всего лишь три десятилетия! Четвертый людской
миллиард был «взят» за еще более короткий промежуток времени — за 15 лет; 29 марта 1976 г. родился четырехмиллиардный человек. Если ничего не изменится,
говорят
демографы,
человечество не позднее, чем в 1989 г. откроет счет шестому
миллиарду землян.
А дальше?
Ученые подсчитали, что человечество движется сейчас навстречу своему будущему с «ускорением» в 145 человек в минуту, или 8700 человек в час. «Скорость» нарастает
за счет
падения смертности в результате повышения уровня цивилизации, улучшения медицинского обслуживания. Растет продолжительность жизни.
Если нынешний темп прироста населения сохранится, можно ожидать, что к 2006 г. на земном
шаре будет проживать
около 7,4 млрд. человек, т. е. почти вдвое больше, чем сейчас.
Еще больше, чем общий
рост численности
человечества,
идет концентрация населения в городах. Однако индустриальное развитие стран сопровождается не только непрерывно увеличивающимся числом городов, их размеров, количеством жителей, но и слиянием отдельных городов в единые гигантские
комплексы — мегалополисы. У них есть и другое, более подходящее название: «города-галактики». Таких «галактик», раскинувшихся на многие сотни квадратных километров, по статистике ООН, сейчас в мире уже около 20. К ним причисляют
Нью-Йорк, Токио, Лондон, Калькутту, Осаку, Рио-де-Жанейро,
Джакарту и др. Токио, после слияния с Иокагамой и близлежащими пригородами занимает ныне 3500 км?.
Подавляющее большинство
современных
западных
индустриальных
городов-гигантов
(мегалополисов) — это
джунгли каменных громад, закованных в бетон и асфальт, в которых уже сейчас нечем дышать. Известный английский писатель-фантаст, популяризатор науки Артур Кларк в своей книге
«Черты будуглего» пишет: «В 70-х годах ряд крупнейших городов Англии задохнется.... Аналогичным образом высказызаются многие ученые относительно будущего
Токио,
Нью-
Гармония
красоты
и целесообразности
263
Иорка и других старых городов-гигантов. И для таких мрачных предсказаний у них есть немало оснований.
Более двух тысяч лет назад великий мыслитель
древности
Аристотель писал, что «город должен быть построен так, чтобы
обеспечить своим жителям
безопасность и счастье».
Однако
подавляющее большинство современных
городов-гигантов
не
выполняют своей исторической миссии: фабричный дым, выхлопные газы автомобилей, отравляющие атмосферу, уничтожающие растительность, порождающие различные виды болезней, чудовищное уличное движение, огромные потери времени
на поездки к месту работы и обратно домой, шум, превышающий пределы допустимого для нервной системы, и т. п. Веками
сложившиеся «форма», структура, индустриальный облик
нынешних больших и сверхбольших городов явно вступили в непримиримое противоречие со всем строем современной жизни,
потребностями человека и общества. Людям
становится
все
труднее и труднее жить в городах-гигантах, а между тем города продолжают непрерывно расти.
Процесс концентрации человечества в городах
неизбежен,
так как индустриальный путь развития — объективная необходимость для всех стран мира. Но, может быть, все или большую
часть противоречий, порождаемых урбанизацией, чрезмерной
концентрацией населения в городах, можно устранить, не меняя привычного городского облика?
— Да, — отвечают многие градостроители
и социологи, —
для этого надо остановить рост больших городов, создавать новые
города с населением 50 000—250 000 жителей.
Допустим,
— возражают им их коллеги,
— такое решение является правильным и мы будем строить во всех странах
мира простирающиеся вширь «пленочные города»
с численностью населения, не выходящей за пределы максимально установленной нормы. Но хватит ли места на Земле для таких
городов? Наверное, нет.
Милая, старая, казалось бы, бесконечная Земля с каждым
годом «становится все меньше и меньше». Бескрайних просторов в прежнем понимании на нашей планете уже нет.
Население Земли быстро растет. По самым приблизительным подсчетам, в ближайшие 125 лет человечество должно будет построить не менее 45 000 новых городов, каждый численностью каждого около 250000 жителей.
При
этом
каждого
горожанина надо будет не только обеспечить физическим пространством, дать кров и поселить, но и накормить. Чтобы удовлетворить потребность увеличивающегося числа землян в продуктах питания, нужно резко повысить
их производство
по
сравнению с достигнутым сегодня уровнем. Как же решить эту
проблему? Необходимо из года в год приумножать раститель—
264
Бионика
ный покров Земли, а не разрушать его строительством многочисленных городов-карликов!
Итак, бесстрастная статистика и несложные расчеты подвели нас к «проблеме будущего города»: во-первых, рационально
расселить миллиарды людей на Земле, чтобы жизнь их была
благоустроенной
но больше
и счастливой;
естественных
насаждения,
каждый
во-вторых,
богатств
гектар
планеты:
плодородной
сохранить
ее леса,
как
мож-
зеленые
земли.
Над решением этой проблемы сейчас работают урбанисты и
инженеры, бионики и архитекторы, социологи
и демографы,
экономисты и футурологи, психологи и медики, биологи и агрономы и еще многие другие специалисты разных стран мира.
Думают, производят расчеты, спорят, прогнозируют и разрабатывают удивительно смелые, порой фантастические
проекты.
Рассмотрим некоторые из них.
Многие архитекторы считают, что города будущего уйдут
под землю. По данным министерства строительства Японии, в
крупных городах страны сегодня уже функционируют 55 подземных торговых центров с общей полезной площадью 36 га.
В Токие
недавно
проложена
под
землей
улица
Новая
Гиндза. Она надежно защищена
как от капризов
погоды
и
выхлопных
газов автомобилей,
так и от опасностей обычной
улицы.
Все больше забираются под землю и парижане, теснимые
уличным движением. Строятся подземные переходы для пешеходов, сооружаются новые линии метро и многоэтажные подземные
гаражи.
Ушел
под
Булонский
лес
целый
участок
ново-
го бульвара. Недавно открылась часть подземного города под
площадью Этуаль.
...Но Новая Гиндза не только защищена от капризов природы, она отграничена и от самой природы.
А кто возьмет
на
себя смелость предположить, что люди откажутся когда-нибудь
от жизни среди природы. Подземные города, видимо, будут и
дальше строиться, но не для того, чтобы
в них
жить,
а для
использования их в качестве «подсоб:ых
помещений».
Tak
считают многие советские и зарубежные специалисты.
Семь тысяч лет назад на одного жителя Земли приходилось
в среднем 15 км? суши. Сегодня эта цифра уменьшилась уже
до 0,04 км?. Поэтому вполне естественно, что внимание архитекторов-градостроителей все больше и болыше обращается
к
морям и океанам,
занимающим 3/. площади
земного
шара.
Многие зодчие даже считают, что ХХТ в. станет веком
морских городов. Люди будут жить в гигантских сооружениях из
бетона, стекла и пластмассы, опирающихся на сваи, забитые
глубоко в морское дно. Такие города, как утверждают инженеры, можно строить практически
в любом
месте
голубого
континента, где позволяют глубина и не слишком высокие при-
Гармония
красоты
и целесообразности
|
265
ливы, — в Северном море, Мексиканском заливе, в Балтийском,
Адриатическом и Черном морях, в Персидском заливе, Восточно-Китайском и Желтом морях, вдоль южноамериканского побережья от Рио-де-Жанейро до Ла-Платы.
Один из первых проектов города на воде разработан в Англии. Министр техники назвал его «пророческим взглядом в будущее». Авторами проекта являются лондонские архитекторы
Джефри Джеликоу, Хел Моггридж, Джон Мартин и Кен Энтони. Город рассчитан на 30 тыс.
жителей,
предполагаемый
район строительства — Северное море, в 15—25 км от
побережья.
Как же будет строиться город среди моря?
Сначала в дно забьют сваи (в этой части моря даже в часы
приливов глубина не превышает 9 м). Затем
на них
уложат
железобетонные плиты, которые
образуют
подковообразную
платформу длиной около 1,5 км и шириной 1 км. На этой платформе возведут из готовых
блоков шестнадцатиэтажный амфитеатр. В верхних восьми этажах расположатся
жилые,
в
нижних
— административные
и промышленные
помещения.
Внутри лагуны
на плавающих
искусственных
островах будут
находиться
магазины, а также
центры
отдыха
и развлечений.
Важнейшим достоинством морского города на сваях является отсутствие загрязненного воздуха и шума. По внутреннему
озеру будут курсировать лишь электрокатера и автомобили на
воздушной подушке. Промышленные отходы
предусмотрено
выбрасывать далеко за пределы города.
Авторы проекта считают, что постройка морского
города
на сваях будет способствовать интенсивному развитию «морских» отраслей промышленности Великобритании. В многочисленных садках с искусственным обогревом можно разводить и
выращивать ценные породы рыбы, креветок, устриц и омаров.
Город среди моря будет экспортировать корма
из водорослей
(с гектара «хлореллового луга» можно получать примерно
в
20 раз больше копма. чем, например, с гектара клеверного поля), морские антибиотики и уникальные лекарства,
морские
удобрения. Кроме всего сказанного, в морском городе на сваях
заложены огромные потенциальные возможности для развития
научно-исследовательской
работы
по
изучению
Мирового
океана.
В отличие от англичан, у японских архитекторов несколько
иной подход к использованию водной поверхности для
строительства городов. Здесь, вероятно, наиболее ярко и остро сказывается специфика условий жизни жителей Страны восходящего солнца. Горожане составляют половину населения сеголняшней Японии, а сами города занимают лишь 1,2% всей территории Японских островов. По официальным данным, Япония
266
Бионика
по плотности населения занимает пятое место в мире. Однако
фактическая плотность ее выше, так как половина территории
этого государства — труднопроходимая, малопригодная к заселению, гористая местность. Проблема перенаселения
в японских городах принимает катастрофические размеры. В особотяжелом положении находится ныне столица Японии — Токио,
город с населением 11,6 млн. человек. По прогнозу статистики,
через 20 лет число его жителей увеличится вдвое. Но где разместить этих будущих горожан? За счет окружающих земель?
Токио расширяться больше не может.
Неудивительно, что взоры японских архитекторов обратились к акватории Токийского залива, что идея сооружения городов на воде приобрела среди японских зодчих наибольшую
популярность. Японцы разработали несколько вариантов так
называемых «плавающих» городов, «городов-рыб». Так, по замыслу одного из крупнейших
современных
архитекторов
—
Кенцо Танге, группа специалистов разработала проект городского массива в Токийском заливе, который должен состоять
из плавающих пирамид высотой более 100 м. По идее авторов,
эти гигантские бетонные поплавки призваны выполнять функцию искусственной земли, на которой можно сооружать индивидуальные жилища.
Ряд
интересных
предложений
выдвинул
другой
японский
архитектор
— Кийонри
Кикутаке.
Его
проект,
именуемый
«Морская цивилизация», также предназначен для расширения
Токио. Кикутаке предполагает построить плавающие острова с
цилиндрическими башнями, на которые нанизаны маленькие
цилиндрики
— жилые ячейки. Жилые башни могут вместить
1250 жителей каждая. Когда ядро башни будет завершено, по
идее автора проекта, главные усилия промышленности будут
направлены на производство взаимозаменяемых жилых ячеек.
Как листья дерева меняются каждый год, так и от поколения
к поколению жилые ячейки будут заменяться и усовершенствоваться. Эта идея получила свое дальнейшее развитие в новом проекте Кикутаке, получившем название «Унабара». Плавающий
город
рассчитан
на
500
тыс.
жителей.
Несколько лет назад группа японских инженеров разработала проект «города на волнах», верхняя
часть
которого —
круглая стальная плита диаметром несколько сотен метров —
окружена высоким барьером. Этот барьер, как предполагают
авторы, сможет задержать самый мощный
штормовой
вал.
В плиту — основание города — встроены стальные
цилиндры,
примерно на 30 м погруженные в море. В этих цилиндрах разместятся квартиры морских горожан. Со всех сторон массивную стальную плиту окружат гигантские понтоны.
Французский архитектор Поль Мэймон предложил построить в Токийском заливе подвесной город на конических сетках
Гармония
красоты
и
целесообразности
267
из стальных канатов, которому не страшны подземные толчки
и внезапные морские приливы. Вот как выглядит этот
город
(пока, разумеется, в проекте). На морском дне,
на
прочном
фундаменте установлена
полая
мачта
диаметром
20 м. От
мачты отходит
«паутина» нержавеющих
стальных канатов,
образующих трехмерную
сетку. В ячейках сетки на расстоянии 30 м друг от друга расположены жилые блоки из пластмассы и стекла. Все вместе образует
гигантский конус — небоскреб высотой 200—300 м. Каждый
такой конус вместит
ot 10 zo 30 тыс. жителей. В подводных кессонах предусмотрено
разместить заводы,
фабрики, отдельные цехи, склады,
автостоянки и т. п.
Идея создания плавающих городов увлекла многих архитекторов США. Поскольку крупные города-миллионеры расположены на берегах океанов и больших
озер,
градостроители
считают, что часть населения из центральных, перенаселенных
районов городов можно поселить в плавающих жилых
комплексах. В одном из проектов плавучего
города приняты
две
планировочные единицы:
мелкие жилые комплексы, рассчитанные на тысячу жителей.
Эти комплексы
предполагается
расположить на пяти-шести прямоугольных платформах, а жилой комплекс
на 6500 жителей
— на болышой
треугольной
платформе.
Оригинальный
проект
возведения
городов
на
водной
поверх-
ности разработал архитектор Рудольф Дернах. Он предлагает
заморозить отдельные участки океана и на поверхности этих
огромных искусственных льдин строить города,
а под
ними
создавать большие рыбоводческие фермы. Дернах считает, что
атомная энергия уже в ближайшем будущем позволит реализовать этот проект.
Но из всех известных сегодня проектов освоения
голубой
целины. пожалуй, самым смелым, самым грандиозным следует признать проект Ионы Фридмана, пытающегося глобально
решить проблему заселения
поверхности
Мирового
океана.
Фридман считает, что будущее принадлежит
городам-мостам.
Главные континенты — Европа, Азия, Африка
и Америка
—
отделены друг от друга узкими проливами,
шириной
от 50
до 150 км, а покрывающие каждый из материков густые сети
железных
и шоссейных
дорог
не
соединены
между
собой
и
не
образуют пока единой системы
в масштабах
всей
планеты.
Фридман предлагает с целью создания общей системы соединить материки восемью мостами общей длиной не более 400 км.
Самый длинный мост (около 150 км) предстоит соорудить над
Беринговым проливом, а два других построить в Японии. Остальные перекроют Ла-Манш, Гибралтар и еще три пролива.
Архитектор считает, что такие мосты можно строить в виде
огромных металлических решеток, покоящихся на понтонах,
268
Бионика
К этим решеткам будут крепиться промышленные, общественные и жилые здания. Общий жилой комплекс, по утверждению
автора проекта, рационально
располагается
в определенном
пространстве и предусматривает возможность его постоянного
изменения в зависимости
от индивидуальных
потребностей.
В обоснование технико-экономической эффективности
своего
проекта Фридман приводит следующие доводы: на сооружение
городов-мостов металла уйдет значительно меньше, нежели его
израсходовано, например, на постройку судов, курсирующих
ныне в пределах одного Атлантического океана; а если произвести расчет, на сколько удешевится перевозка межконтинен‚тальных грузов, то нетрудно. будет убедиться, что затраты на
реализацию столь необычного проекта окупятся с лихвой.
Вероятно, кому-нибудь из читателей проекты будущих городов на голубом континенте покажутся слишком фантастичными. Между тем все описанные проекты городов на сваях,
плавающих островов, городов, подвешенных на тросах, вполне
реальны, даже слишком реальны для такого дела, как заселение Мирового океана. Современная техника позволяет создать
плавучие платформы, способные выдержать массу в сотни тысяч тонн. Существуют достаточно прочные тросы, которые могут выдержать тяжесть городов Поля Мэймона и воздушные
структуры Ионы Фридмана, имеются все основные строительные материалы для осуществления проектов японских
архитекторов «Морская цивилизация», «Унабара» и др.
Итак, современного уровня знаний и технологии вполне достаточно для реализации разработанных проектов плавающих
городов уже сегодня. И первые практические шаги в этом направлении уже делаются. Например, в одном
из ответвлений
Ставангер-фьорда в Норвегии заканчивается строительство гигантского сооружения, названного
«примечательнейшим в истории строительной техники», а именно
— плавучего острованефтехранилища «Экофикс-1». Вскоре он будет отбуксирован
на 300 км от берега в Северное море и там поставлен на якоря.
«Экофикс-1» имеет около 90 м высоты и столько же в диаметре.
Это нефтехранилище вмещает около 150 млн. Л нефти, способно выдержать самые сильные штормы бурного Северного моря.
В ближайшие годы в Японии предполагается
создать
несколько плавающих островов в виде огромных стальных платформ водоизмещением от одного
до
нескольких
миллионов
тонн. На одних островах разместят фабрики и заводы самого
различного профиля, тепловые электростанции,
на других —
гостиницы для туристов, гаражи-стоянки. Проект искусственных островов разработан судостроительными фирмами, имеющими опыт строительства супертанкеров. Сейчас он рассматривается несколькими японскими
министерствами.
Первый
стальной остров намечено построить к 1977
г.
Гармония
красоты
и
целесообразности
269
Сегодня в истории освоения Мирового океана наблюдается
новый этап — начался планомерный штурм гидрокосмоса. Говоря словами широко
известного
французского
океанолога
Жака-Ива Кусто, ученые пытаются приспособить человека
к.
подводной обстановке, приучить его долгое время жить и работать под водой.
Чем же вызывается необходимость «колонизации» глубин
Мирового океана? Угрозой перенаселения суши? Нет! Необходимость изыскания новых дополнительных
внеконтинентальных источников питания, топливных, минеральных и химических ресурсов
— вот что заставляет океанологов, геологов, металлургов, нефтяников, энергетиков, химиков, биологов, физиков и биоников обратиться к темным, холодным,
во
многом
еще загадочным, труднодостижимым глубинам морей и океаНОВ.
Мировой океан по праву можно назвать голубым континентом жизни. В нем обитает более 150 тыс. видов живых организмов —
от
мельчайших,
невидимых
глазу
бактерий
до
гигант-
ских китов. Одних только моллюсков около 60 тыс. видов, ракообразных — 20 тыс., рыб — свыше 16 тыс. По самым скромным подсчетам специалистов,
кормовые
ресурсы
Мирового.
океана в 4 раза больше ресурсов суши и достигают 40 млрд. т
в год. Не менее фантастичны минеральные богатства, заключенные в водах морей и океанов.
Чаша Мирового океана наполнена
1370 000 000 км? воды.
В этом объеме растворено около 50 000 000 млн. т. солей. Если
бы удалось собрать всю массу находящихся в морской
воде
веществ и распределить ее ровным слоем по поверхности суши,
получился бы «бутерброд» толщиной 200 м, в котором присутствовали бы почти все элементы таблицы Менделеева. В каждом литре морской воды содержится 3,34 мг урана. Несмотря
на ничтожность такой концентрации, морские
запасы
этого.
важнейшего для атомной энергетики элемента
очень велики.
В водах
морей
и океанов
рассеяно
от 8 до 10 млн. т золота! Величайшие запасы минералов и химикалиев лежат на дне
Мирового
океана.
В
некоторых
местах
на
глубине
4—
б тыс. м океанское ложе сплошь покрыто округлыми, величиной с картофелину своеобразными желвачками черно-коричневого цвета. Минералоги называют их «рудными почками». Они
содержат до 50% марганца, около 15% железа. В состав «почек» входят также кобальт, никель, медь и другие редкие элементы, многие из которых дороже золота. По самым скромным
расчетам, запасы железомарганцевых
конкреций
только
на
дне Тихого, Индийского и Атлантического океанов составляют
300—350 млрд. т, всего же в донных осадках Мирового океана
хранится, по данным Специальной комиссии Научного комитета Международного совета научных обществ при ООН, около
270
Бионика
1000 млрд. Т «рудных почек». Они могут обеспечить человека
медью на 6 тыс. лет,
алюминием — на 20 тыс.,
кобальтом —
на 200 тыс. лег.
На шельфах обнаружены у берегов Японии
магнетитовые
пески — превосходное сырье для получения железа; в южных
морях
— запасы оловянных руд; у берегов
Флориды,
Шри
Ланка, Индии
— залежи титана; у берегов
Бразилии
и Индии — торий и другие редкоземельные элементы. На береговых
отмелях Южной Африки обнаружены алмазы в такой концентрации, какой нет нигде на суше. Запасы морской нефти в зоне
шельфа, даже при современной совершенно недостаточной их
разведанности оцениваются специалистами до 180 млрд. т, что
в 2,5 раза больше пока разведанных запасов на суше.
Таковы далеко еще не все известные ныне, поистине
сказочные сокровища царства Посейдона. Моря
и океаны
— это
гигантская «естественная фабрика» продуктов питания, «кладовая» несметного количества химического сырья, минералов,
полезных ископаемых. Между тем из этих несметных богатств
голубого континента человечество получает лишь ничтожную
часть — около 8% продуктов питания и еще в менышей степени
покрывает свою потребность в минералах. И вовсе не потому,
что ему хватает добываемых на суше полезных ископаемых и
производимых пищевых продуктов. Причина здесь иная. Для
того чтобы поставить на службу людям огромные минеральные, топливные, химические и биологические ресурсы морей и
океанов, человек должен обжить их глубины, приспособиться
к длительной жизни под водой. Речь идет прежде всего об освоении материковых отмелей, лежащих на глубине
до 300 м,
простирающихся на сотни километров от берега. Именно здесь,
в шельфовой зоне, составляющей около 20% континентального
массива, где людей ждут россыпи сокровищ, сотни научных открытий, человек должен стать ногами на морское дно, должен
получить возможность существовать и работать, перестраивать
подводное царство, создавать морское сельское хозяйство, морские химическую, горную
и
горно-перерабатывающую
промышленность, морскую энергетику.
Эту важнейшую задачу известный советский ученый академик Л. А. Зенкевич сформулировал так: «Человечеству надо
«перестраиваться» на океан
— это неизбежно, и в этом
деле
нельзя проявлять близорукость».
Нужно сказать, что далеко не все ученые едины во мнении,
какими методами следует изучать морские глубины, извлекать
таящиеся в них богатства. Ряд океанологов, например, считает,
что научные исследования голубого континента, разведка и добыча полезных ископаемых морей и океанов, установка и ремонт подводного нефтяного оборудования, прокладка трубопроводов и многие другие работы в глубинах океана должны вы-
Гармония
красоты
и целесообразности
271
полняться лишь с помощью
автоматических
устройств
или
роботов, дистанционно управляемых с поверхности.
Однако большинство специалистов не согласно с этим. Известный американский океанолог Артур О. Флехсиг спорит с
теми, кто выступает против пребывания
человека
в морской
стихии, что будто бы вместо людей можно послать в глубину приборы и машины. Ученый считает, что в тех случаях, когда задачи исследования очень просты, могут справиться и машины.
Но «по поводу изучения сложных явлений это утверждение, на
мой взгляд, представляет собой сущий вздор или более снисходительно
— произвольное мнение»'!. И действительно,
производственный опыт морских нефтяников показывает, что никакая автоматика, никакие манипуляторы глубоководных аппаратов не могут заменить человека в морской пучине. В подавляющем
большинстве
случаев,
особенно
при
выполнении
сложных и ответственных работ, под водой присутствие человека необходимо. Притом человека, способного свободно передвигаться, быстро ориентироваться в окружающей среде. Никакой робот не может сравниться с человеком
по маневренности, гибкости и приспособляемости, а главное, по способности непосредственно увидеть, оценить обстановку
на месте
и
принять единстБенно правильное решение
при сложившихся
обстоятельствах или непрерывно меняющихся условиях. Как
бы ни совершенствовались глубоководная техника,
автоматика, средства телеуправления, никакие инженерные системы не
смогут заменить человека, его разум и руки.
Итак, человек должен покорить голубой континент, обжить
его глубины, заставить Мировой океан служить людям. Таково
веление времени. А каковы
физические
и физиологические
возможности человека для долговременного пребывания
под
водой? На каких глубинах он может жить
и производительно
работать? Что сделано учеными для освоения человеком подводной целины? Каковы планы на будущее?
Покорение голубого континента
очень часто сравнивают
с завоеванием космоса. Однако история проникновения человека в космос и на дно океана сложилась по-разному. В решении
этих двух задач наука и практика пошли диаметрально противоположными путями. В космос первыми отправились автоматические станции, в океан — первым
шагнул
сам
человек.
Сперва опытные и выносливые ныряльцики без всякого снаряжения опускались на глубину более 30 м и оставались там до
3—4 мин. Позднее ныряльщики стали брать с собой кожаный
мешок с воздухом, что позволило им увеличить время пребывания под водой. Далее на смену кожаному маешку пришел во' Флехсиг
А. Значение подводных лабораторий
для науки. В
«Подводная лаборатория» Силэб-П». Л., «Судостроение», 1968, с. 159.
сб.:
272
Бионика
долазный колокол. Затем в первой половине ХХ в. появился
скафандр — прототип современного
вентилируемого
водолазного снаряжения. В нем водолаз мог уже спускаться на глубину до 8Оми недолго выполнять ряд работ на морском грунте.
Однако до 30-х годов нашего века, как отмечает Жак-Ив Кусто,
«водолаз со своими тяжелыми, свинцовыми башмаками оставался жалким и неловким пленником водной стихии, неспособным свободно двигаться, лишенным всякой автономии».
Новую страницу в освоении морских глубин открыл
акваланг
— аппарат с автоматическим
редукционным
клапаном
подачи газовой смеси.
Его
изобрели в 1943 г. французский
морской
офицер,
ныне
всемирно
известный
исследователь
оке&-
нических глубин Жак-Ив Кусто и инженер Эмиль Ганьян. Уже
первые опыты показали, что пловец, вооруженный автоматическим дыхательным аппаратом, может легко и быстро передвигаться под водой, свободно погружаться на глубину
40—
50 м, что аквалангом может практически пользоваться любой
человек со здоровыми ушами и сердцем, для этого не требуются, как раныше,
богатыри
с железным
«водолазным»
здоровьем.
«Водолазный костюм с аквалангом, — как восторженно, но
справедливо писал Кусто, — в корне изменили дело: нет больше сковывающей «привязи» к поверхности, нет нужды в компрессоре, поскольку ныряльщик имеет запас сжатого воздуха
в баллонах и каждая порция воздуха поступает через клапан
в легкие под давлением, уравновешивающим гидростатическое.
Человек получил, наконец, свободу, какую имеют обитатели
моря, — он может двигаться во всех направлениях...» !
Но, открыв человеку «чудеса подводного мира», акваланг
как аппарат, изобретенный для автоматической подачи в легкие ныряльщика обычного воздуха под давлением, по признанию самого Кусто, не позволял «владеть по настоящему подводным миром». «Мы были там, — писал ученый, — случайными прохожими... Наши экскурсии носили лишь кратковременный характер. Препятствиями на нашем пути стали некоторые
физические
законы»?.
Какие же это законы?
Сжатый газ (дыхательные смеси) проникает в организм через легкие, и, в соответствии с законом Дальтона,
растворимость газа в крови и тканях повышается пропорционально увеличению его парциального давления в окружающей среде. Обязательный компонент дыхательной смеси — жизненно необходимый кислород, парциальное давление которого
составляет
214 от общего давления воздуха,— становится токсичным, как
' Кусто
? Там
Ж.
же.
И.
«Вокруг
света»,
№
10, 1963, с. 45.
Гармония
красоты
и целесообразности
273
только его давление достигает 2,2 кг/см?. Поэтому при длительном погружении акванавта на десятки метров сжатый воздух
не годится: избыток кислорода при вдыхании сжатого воздуха
вызывает судороги — кислородную эпилепсию, ведет к кислородной пневмонии, на поверхности легочных альвеол происходит сгорание тканей.
На глубине ниже 50 м при использовании сжатого воздуха
акванавтов, как и водолазов, подстерегает другая опасность —
азотный наркоз. Это явление некоторые нырялыцики начинают
ощущать с 40 м. На глубине 75 м азотный наркоз, или «глубинное опьянение», ощущается всеми. Под действием большого парциального давления азота у акванавта поражается центральная нервная система, теряются самоконтроль и ориентация,
расстраивается координация
движений,
нарушается
логическое мышление, наблюдается растормаживание эмоциональных
реакций, появляются галлюцинации и т. п. — ныряльщик перестает отдавать отчет в своих действиях и может даже потерять сознание.
Но ныряльщцика с автономным
дыхательным
аппаратом
при работе на глубине поджидают не только
перечисленные
опасности. Как известно из физики, количество
газа, растворенного в жидкости, прямо пропорционально давлению, оказываемому газом на жидкость. При нормальном барометрическом
давлении в нашем организме растворено около 1 Л азота. С погружением на глубину свыше 10—12 м количество этого газа
увеличивается в теле аквалангиста. Азот воздуха под сильным
давлением насыщает нервные,
мышечные и жировые
ткани,
растворяется в крови и костном мозге. При быстром всплытии,
т. е. при резком снижении давления, растворенный в организме ныряльщика азот выходит
в виде
газовых
пузырьков,
точ-в-точь как при открывании бутылки шампанского.
Разносясь вместе с кровью по всему телу,
увеличиваясь в объеме
(кровь буквально «кипит»), пузырьки газа вызывают
KeCCOHную |', или декомпрессионную, болезнь. Эта болезнь — давнишний бич водолазов. Она очень мучительна, сопровождается головокружениями, болями в груди, руках и ногах, удушьем; газ
может вызвать травмы мускульной и нервной системы (паралич,
параплезию)
в крайне тяжелой форме, иногда даже со смертельным исходом. Для предотвращения кессонной болезни и всех
связанных с нею явлений всплывать надо медленно, с остановками по расчетным режимам. Чтобы молекулы азота перешли
' Свое название эта болезнь получила от камеры
кессон, предназначенной для производства работ под водой и в водонасыщенном грунте. В камеру нагнетают сжатый воздух, чтобы воспрепятствовать
просачиванию
воды
ших
был
внутрь
кессона.
В
1862
г. такие
камеры
были
применены
на
боль-
глубинах и несколько человек погибло. Механизм кессонной болезни
раскрыт в конце прошлого века французским ученым Полем Бэром.
10—327
274
Бионика
из клеточных элементов во внеклеточные среды, затем в лимфу
и кровь и покинули организм через дыхательные пути, режим
снижения давления (декомпрессии) должен повторять форму
кривой рассыщения организма от избыточно растворенного индифферентного газа, ибо только при таком условии газ будет
выделяться
наружу, не образуя в крови и тканях стойких пузырьков.
Время рассыщения, а следовательно, и сроки
декомпрессии однозначно определяются напряжением растворенного в
тканях индифферентного газа, а напряжение зависит, как отмечалось выше, от глубины спуска и сроков
пребывания под
давлением. Следовательно, чем больше глубина спуска и время
пребывания под водой, тем больше время безопасной декомпрессии. Процесс выведения газа из организма протекает чрезвычайно медленно. Насколько длителен этот процесе, можно
судить по следующим цифрам: после работы на глубине 80 м
в течение 1 ч, на подъем надо потратить около 9 ч. Для глубины 150—200 м сроки декомпрессии настолько превышают «полезное» время пребывания на грунте,
что
водолазный труд
фактически становится непроизводительным: на каждую минуту работы на грунте затрачивается
несколько
часов для
обеспечения безопасности выхода на поверхность.
Таков
перечень
лишь
главных
физических
и
физиологиче-
ских барьеров, которыми океан «оградил» себя от проникновения человека в его глубины.
И все же, как ни сложна и ни трудна проблема покорения
глубин голубого континента, человек не желает расставаться с
этой вековечной мечтой. Наоборот, с каждым годом в это дерзновенное предприятие вовлекается все больше и больше специалистов и научных коллективов разных стран. И то, что еще
10—15 лет назад казалось пределом фантастики, становится
реальностью. Совсем недавно человек «погрузился»
в гидрокамере на глубину, эквивалентную 565 м!
Как же удалось ученым этого достигнуть?
Новую эру в проникновении человека под воду на большие
глубины и на длительное время открыл молодой швейцарский
ученый Ганс Келлер. Начав в 1956 г. заниматься подводным
плаванием, изучая теорию и практику «водолазания», он очень
скоро убедился в том, что в методике погружения
и влиянии
его на физиологию человека много «белых пятен». Первое, что
решил сделать Келлер, проанализировав состояние проблемы
покорения
морских
глубин, — отказаться
от сложившихся
классических методов погружения. При этом он руководствовался следующими
соображениями.
При
увеличивающемся
давлении легкие продолжают снабжаться тем же по объему количеством газовой смеси. Кислорода в сжатом
воздухе посту:
пает тем больше, чем сильнее сжатие, и избыточное его коли-
Гармония
красоты
и
целесообразности
275
чество вызывает кислородное отравление. Чтобы избегнуть гибели, рассуждал Келлер, важно поддерживать в дыхательной
смеси парциальное (долевое) давление кислорода, азота и углекислого газа на том же уровне, что и при нормальном атмосфеоном давлении, независимо от меняющегося давления дополнительно подаваемого инертного газа. В 1959 г. Келлер погрузился на глубину 120 м. Он дышал смесью, где
было только 5%
кислорода и 95% азота, не испытывая
никаких
симптомов
азотного наркоза!
Затем Келлер обратился к проблеме декомпрессии. Будучи
математиком, он с помощью электронно-вычислительной машины получил 9 кг таблиц с различными режимами выхода водолазов на поверхность (только для подъема с глубины 300 м
было зафиксировано 250 000 изменений состава газовой дыхательной смеси). С этим поистине драгоценным грузом
ученый
отправился на озеро Лаго-Маджоре (Швейцария), чтобы
продемонстрировать свою новую методику скоростной декомпрсссии. Погрузившись на глубину 222 м, Келлер появился на поверхности через 53 мин. А при имитации ныряния в барокамере
подводной
научной
исследовательской
группы
в Тулоне
Келлер
после нескольких минут пребывания на глубине 300 м возвратился к нормальному давлению еще быстрее. Время собственно
декомпрессии не превышало 48 мин. Чтобы по достоинству оценить одержанную ученым победу, достаточно привести такой
пример. В 1956 г. лейтенант британского военно-морского флота
Джордж Вуки достиг рекордной глубины погружения — 180 м.
После минутного пребывания на этой глубине его поднимали на
поверхность в течение 12 ч!
На разработанную и успешно опробованную методику необычайно быстрой декомпрессии Келлер получил в Великобритании патент, суть которого состоит в следующем. Известно, что
время декомпрессии зависит от количества растворенного в тканях тела газа и скорости его выделения при снижении давления. Скорость
выделения,
а следовательно,
и растворения
инертного газа в тканях тела зависит от его молекулярной массы. Легкие газы растворяются быстрее, тяжелые — медленнее.
Именно это свойство и использовал в своем методе Келлер. По
его мнению, наибольшее сокращение времени декомпрессии достигается тогда, когда водолаз на каждом последующем этапэ
подъема дышит более тяжелой дыхательной
смесью, чем
ка
предыдущем.
Таких промежуточных смесей может быть много. Все зависит от глубины погружения и времени
работы на дне. Умел ›
пользуясь гелиево-кислородными смесями, как доказал Келле›>,
можно уменьшить время подъема не менее чем в 10 раз ">
сравнению с классическими апробированными таблицами декомпрессии.
10*
276
Бионика
Установленный
ния
в специальной
Келлером
в 1960—1952
барокамере
гг. рекорд
на 400 м был
погруже-
перекрыт
спустя
8 лет под руководством швейцарского профессора-физиолога
Бюльманна, сотрудниками лаборатории физиологии ВМС Великобритании на 57 м. В 19710 г. на экспериментальной базе
ВМС в лабораторной камере они имитировали спуск на глубину 457 м. Однако и этот рекорд просуществовал недолго. В ноябре того же года в Марселе в Научном центре высоких давлений
французской «Компании морской экспертизы» (Комэкс) после
серии опытов под названием «Физалис» (общее физическое состояние) два человека были подвергнуты в специально построенном гидрокомпрессионном комплексе давлению, эквивалентному погружению на глубину 520 м. В 1912 г. Комэкс, щедро питаемая отчислениями от прибылей нефтяников, провела очередной, шестой этап программы Физалис. Два водолаза, Патрис
Шемэн и Робер Горе, в той же камере высокого давления достигли «глубины» погружения 565 м, глубины, просто немыслимой всего три-четыре года назад. В печати («Ме\м Scientists»)
появилось также сообщение об экспериментальном погружении
на 600 м, но никаких подробностей об условиях эксперимента
не было приведено. Известно только, что во всех экспериментах,
проводившихся по программе Физалис, использовался разработанный англичанами метод ступенчатого подъема давления дыхательной гелио-кислородной смеси и что водолазы находились
на рекордных «глубинах» не более 20 мин.
Разумеется, столь кратковременными погружениями нельзя
решить проблемы освоения, «колонизации» морских глубин.
И, вероятно, рекорды, установленные Келлером, англичанами
и французами, не имели бы большой практической значимости,
если
бы
не
были
открыты
способы
долговременной
жизни
и работы человека под водой. Большой вклад в решение этой
задачи внес американский хирург Джордж Бонд. В течение нескольких лет он работал в специальной группе по подводным
исследованиям при управлении ВМС США, где впервые начали
применять гелий для дыхания водолазов, а также другие усовершенствованные методы работы на больших глубинах. При
помощи специальной барокамеры Бонд и его коллеги исследовали дыхание животных, а затем и людей смесями различных
газов.
Было установлено, что примерно в течение суток мышечные
ткани человека можно полностью насытить
смесью гелия и
кислорода. Исследования также показали, что у «насыщенного» таким образом водолаза длительность декомпрессии практически не зависит от срока его пребывания на данной глубине.
Отсюда родилась смелая идея, на первый взгляд казавшаяся
фантастической. Что, если вообще не поднимать человека на
поверхность после каждого эксперимента или работы под водой
Гармония
красоты
и целесообразности
277
на большой глубине, а построить для него на дне убежище, в
котором поддерживались бы такое же давление и состав газовой смеси, как и на глубине погружения. Тогда акванавт сможет снять свое снаряжение, принять горячий пресный душ, поесть, выспаться, обдумать предстоящую работу, взять необходимые для работы инструменты, приборы, и снова выйти в воду,
минуя стадию погружения и всплытия. И декомпрессию акванавту нужно будет пройти только единожды — после окончания подводных работ, например через неделю или месяц. При
этом декомпрессия, сколь бы длительна она ни была, не ограничивает полезное время работы на морском грунте, и режим
труда человека в подводных условиях становится близким к
«наземному».
14 сентября 1962 г. неподалеку от Марселя в Средиземном
море на глубине 10 м Кусто установил. на якорях первый в
мире подводный дом «Преконтинент-[». Длиной 6 м и высотой
2,5 м, он был очень похож на железнодорожную цистерну, снятую с грузовой тележки и опрокинутую люком вниз. Внутри его
обили поглощающей влагу губчатой резиной и установили отопительные батареи. Постоянная температура (22—26°С) в доме
поддерживалась при помощи инфракрасных ламп. Сверху с обслуживающих судов «Калипсо», «Эспадон» и с берега к подводной гостинице были подведены электрокабели, гибкие трубопроводы для подачи холодной и горячей пресной воды, а также свежего воздуха под давлением 2 атм (что соответствовало давлению, испытываемому на данной глубине). Между обитателями
подводного дома и членами экспедиции «Преконтинент-!», находившимися на борту обслуживающих судов, была установлена
прямая телефонная связь. Кроме того, в подводном доме была
установлена телевизионная камера, позволявшая вести с «Калипсо» непрерывное наблюдение за всем, что происходит внутри жилища акванавтов. В первом подводном доме, открывшем
новую эру в покорении глубин голубого континента, два акваHasta прожили 7 суток, точнее, 169 ч. Было доказано, что при
повышенном давлении человек может жить и нормально работать на дне моря.
В 1963 г. Кусто организовал вторую
подводную
экспедицию — «Преконтинент-П». Новое, состоящее из трех металлических домиков поселение, о котором принято говорить как о
целой «подводной деревне», расположилось в районе живописного кораллового рифа Шааб-Руми в Красном море, в 46 км к
северу от Порт-Судана (рис. 54). Главным
сооружением «Преконтинента-П» была «Морская звезда» — комфортабельный пятикомнатный стальной дом (рис. 54). Его установили на глубине 11 м. По сравнению с первой вторая экспедиция была лучше
технически оснащена, в ней участвовало больше людей, программа научных исследований была значительно шире. На сей
278
Рис
Бионика
54.
Дом
1 — спальни,
лаборатория;
«Морская
звезда»:
2 — салон;
3 — кабана
для переодевания;
4 — душ;
#7 — санузел;
8 — фотолаборатория;
® — кухня.
5 —
ограждение
от
акул;
6 —
раз акванавты прожили в «подводной деревне» месяц. Они ежедневно находились в открытом море не по 5, а по Т ч и погружались на большую глубину, до 50 м. За месяц работы участники экспедиции «Преконтинент-ПЦ» провели множество подводных наблюдений, собрали обширнейший,
весьма ценный
научный материал, построили несколько садков для рыб, отловили для лабораторных исследований и для Монакского аквариума ряд интересных живых экземпляров, обитающих в Красном
море, засняли фильм «В мире без солнца» — захватывающий
кинорассказ о подводной эпопее, похожий на фантастику.
Опыты, проведенные
за
время
экспедиции
«Преконтинент-ПЦ», еще раз показали, что человек способен
прекрасно
приспосабливаться к необычным условиям, особенно когда с
ними связано столько неизведанного, красивого, волнующего.
«Преконтинент-!»,
«Преконтинент-П», — писал
Кусто, — убедили нашу группу, что еще при нашей жизни станут обычными
промышленные и научные станции на дне моря. Они найдут
сотни практических применений. Но для нас не это было главной наградой за труд на рифе Шааб-Руми,
а захватывающее
сознание того, что море стало нашим домом».
Гармония
красоты
и целесообразности
279
Успешно начатые Кусто эксперименты по созданию поселений на морском дне, долговременной работе акванавтов под водой вскоре продолжили американцы. В 1964 г. группа исследователей, руководимая капитаном Джорджем Бондом,
после
длительной и тщательной подготовки установила невдалеке от
Бермудских островов на глубине 59 м морскую
лабораторию
«Силэб-!» (стальной цилиндр длиной 12 м и диаметром 3 м).
Четверо подводников провели в ней 9 дней. (Экспедиция была
запланирована на один месяц. Однако на исходе девятого дня
пришло сообщение о надвигающемся шторме. Чтобы не подвергать гидронавтов риску и сохранить в целости оборудование,
Бонд отдал распоряжение поднять лабораторию вместе с ее обитателями до начала шторма.) По строго установленному распорядку дня акванавты после завтрака отправлялись на работу:
исследовали морское дно, брали пробы грунта, проводили различные химические эксперименты, наблюдали за жизнью морских животных, изучали их повадки, производили фото- и киносъемки, измеряли температуру и соленость окружающей воды. Экспедиция завершилась успешно: на глубине 59 м так
долго не жил и не работал в море ни один человек.
Почти в одно время с Бондом еще больших результатов в.
покорении морских глубин достигли под руководством Эдвина
Линка два акванавта — Лжон Линдберг и Роберт Стенуи. В изготовленной из резины
так
называемой
«палатке»
Линка
(рис. 55) они пробыли двое суток на глубине 130 м и убедительно доказали, что в этих необычных условиях «человек сухопутный» может жить и плодотворно работать.
—
a
i
cy
-
——
~—
—
—
—
<P.
oe
wage!
ve
See
Fe
Ge
ee
ь
Rn
Wo‘ ne
be fr
ON
Атео
И
OR
CO Ос"
Bre С
па
roy
hs
ть.
Ма
Ат.
>
с‘:
у .„ м
РС
”“
х
-`
4
д
`
ol
oest
7 и . С оо,
ar,
ef
We
а" Щл"sa
8aN
sot, 3%,
ее
-
Рис.
„``.
-
.
55. Общий
-
*
вид
и
-
y
хх
`
“oo
G
О
т
а
со
A
су.
7,
аа
поселения
Слева — лифт, в котором
водная «палатка», справа
У
Эдвина
`
.
..
^.
11%
TEP,
А
AV
ЩиО
А
Линка
Г
.
!
Sorc
Se
ОР4
324,
им
od
> ` cae
’
WAL
о.
:
.
.
на дне
.’.
a
TQ
<
УСС
сома wy
ль
€
“
>
Дл
=
а
Ро
TET+
лил
“р
.
-“.
=
ayy
КАМИ
.
——
>
ОКАЗАЛ “>
3
РА
океана.
гидронавты
спустились в глубь
океана;
— так называемый «еж» для проведения
>
5
(жа
. ия
37
в центре — глубоко«сухих» работ.
we
ue
280
Бионика
Через год в Тихом океане, примерно в 1 км от берега, в районе Ла-Джолла (штат Калифорния), на глубине 60 м была установлена морская лаборатория «Силэб-П». Определяя место для
размещения лаборатории, научный руководитель эксперимента
Дж. Бонд предусмотрительно выбрал «...самую черную, самую
холодную, самую страшную...» воду, которую он только мог
найти, на краю подводного каньона Скриппс.
Он «...задался
целью доказать, что человек в течение длительного времени может выполнять полезную работу в условиях, которые в большей степени соответствуют реальной обстановке на больших
глубинах, чем те, что по вполне понятным причинам проводили
опыты его предшественники, — в теплых и прозрачных водах».
Новая глубоководная лаборатория «Силэб-П» представляла
собой огромный металлический цилиндр с шарообразно закругленными торцами.
Длина подводной
обсерватории — 17,5 м,
диаметр 3,66 м, масса — 203 т. Над палубой возвышалась надстройка, напоминавшая рубку,
что делало «Силэб-П» очень
схожей с обычной подводной лодкой (рис. 56). Через одиннадцать вмонтированных в корпус иллюминаторов сотрудники обсерватории в любое время дня и ночи могли наблюдать панораму царства Посейдона и его обитателей — морских животных. Энергия и пресная вода поступали с берега по кабелям и
трубопроводам. Атмосфера на «Силэб-П» состояла по объему из
1
234
Но.
5
и
Е
;
_—-E
KN
—f.
r
д.
Рис.
1 —
56.
Подводная
запасные
койки;
2 —
станция
спальное
Ww
\
_
«Силэб-П»
помещение;
8
pt
——
pe]
.
ыы
=
9
10
Бо.
|
~
|
t
7
7
<
Зоне»
OE
ЯР
——-
77
в разрезе:
3 —
туалет
(напротив
умывальной);
4 —
камбуз;
$ — центральный энергоблок; 6 — центральный газовый блок; 7,8 — комната отдыха и лабораторное помещение;
9 — выход в шлюзовую камеру;
10 — люк, здесь же водолазные приспо..
собления; 11 — килевой отсек, где наряду с балластом хранятся баллоны с гелием, кислородом
и сжатым воздухом; 12 — решетка для защиты водолазов от акул.
Гармония
красоты
и целесообразности
281
80% гелия, 15% азота и 5% кислорода, сжатых под давлением
1 кГ/см?. В состав экспедиции входила плавучая база, на которой размещались командный
пункт
и декомпрессионный
комплекс на 10 человек и некоторые вспомогательные средства.
Судно было поставлено над «Силэб-П» на мертвые якоря и соединялось с подводным домом многоканальной
магистралью.
Помимо него, в операции принимало участие еще около двадцати вспомогательных судов надводного обеспечения.
Участники экспедиции составляли
три
группы. Каждая
группа из 10 человек жила и работала на глубине 60 м в течение 15 дней. Первую и вторую группы возглавлял
коммодор
военно-морских сил США, космонавт Малькольм Скотт Карпентер, «потому, что он прошел интенсивную подготовку для действия
во враждебной
космической
среде,
а также
потому,
что
у
него имелся большой
опыт погружения с аквалангом». В общей сложности
он
провел
в глубинах океана 29 дней 10 ч
50 мин. Другой участник экспедиции,
доктор Роберт Сонненберг, входил в состав первой и третьей групп и, таким образом,
тоже провел под водой 30 дней (с 15-дневным перерывом). Всего
в экспедиции «Силэб-П»
принимало
участие 28 акванавтов.
Средний возраст участников эксперимента составил примерно
36 лет.
Эксперимент на «Силэб-П» прошел весьма успешно. Обитаемая научная станция просуществовала на дне океана 45 дней.
В
экспедиции
участвовали
океанографы
различных
профи-
лей — геологи, ихтиологи, метеорологи, техники. Как и во всех
предыдущих экспериментах, акванавты не замкнулись в стенах
подводной станции, а регулярно выходили на выполнение различных работ, заплывая значительно глубже расположения
«Силэб-Ц».
Несмотря на трудности ориентировки в кромешной тьме, на
укусы ядовитых рыб, на низкую температуру воды (10°С) и сырость внутри подводного дома, исследователи проделали, по
словам Бонда, «фантастически огромную работу». Они произвели «перепись» животных, обитающих в районе расположения
станции «Силэб-П», изучили повадки многих рыб, их реакции
на различные сигналы и раздражители, исследовали
явления
биолюминесценции в морской воде, собрали
множество проб
планктона. Геологи изучили рельеф и микрорельеф океанского
дна, провели отбор
проб донных осадков,
топографическую
съемку подводных «окрестностей». Используемый в исследованиях окрашенный песок помог им наблюдать
за
размывом
донных отложений на затвердевших слоях
рудных залежей,
проследить перенос этих отложений.
Кроме
того, были проведены весьма важные и перспективные в промышленном отношении работы, связанные с эксплуатацией подводных рудных и особенно нефтегазовых месторож-
282
Бионика
дений. Интересные научные данные были получены участниками
экспедиции
с
ПОМОЩЬЮ
подводной
станции
погоды,
вошедшей в комплекс оборудования, установленного на борту
«Силэб-П»; они исследовали скорость придонных течений около
станции и на высоте 9 м от поверхности дна, температурный режим на тех же горизонтах, а также колебания давления, вызванные подводными и поверхностными волнами, и т. д. Подводная станция погоды и бентическая лаборатория — особая
подводная телеметрическая станция, установленная в 30m OT
«Силэб-П», — продолжали работать длительное время и по завершении экспедиции, когда
лагерь
покинули
все его оби-
татели '.
Подводная лаборатория «Силэб-И» закончила свою работу
10 октября 1965 г. Последняя группа из 10 акванавтов благополучно поднялась на поверхность океана. Подъем проводился в
специальной кабине и продолжался 9 мин (продолжительность
декомпрессии составляла бы 33 ч). Физиологические исследования и специальные психотехнические тесты показали, что подводные жители не претерпели опасных отклонений от нормы.
Прожив по 15 дней на глубине 60 м при давлении, почти в 7 раз
превышающем
атмосферное, большинство акванавтов
после
подъема на поверхность сообщили,
что, по их мнению, они
смогли
бы
жить
и эффективно
работать
под
водой
на
протяже-
нии неопределенно длительного периода времени. Несмотря на
все тяготы подводного обитания, моральное состояние акванавтов было исключительно высоким.
Любопытная
деталь.
«Магистр
глубин»
Жак-Ив
Кусто
предполагал
провести
очередную
экспедицию
«Преконтинент-ПТ» в «глубоководный космос» осенью 1964 г. Новое подводное поселение намечалось соорудить на глубине 33 м в Средиземном море. Однако, изучив опыт Эдвина Линка и Джорджа
Бонда, Кусто решил основать свою третью по счету «подводную деревню» на глубине 110, а не 33 м.
Для
новой
экспедиции
был
изготовлен
стальной
«подвод-
ный дом» в виде шара диаметром 5,7 м, массой 60 т. Сфера лежала на платформе длиной 14 м. Общая
масса
лаборатории
вместе с платформой равнялась 130 т. Каждый квадратный сантиметр стальной сферы был рассчитан на давление свыше 20 кг,
иными словами, подводный дом мог опускаться на глубину
200 м. Конструкторы разделили шар на два этажа и позаботились не только о том, чтобы океанавты в своем подводном жилище
чувствовали
себя
в полной
безопасности,
но
и
работали
бы и отдыхали в условиях максимального комфорта: к их услугам были хорошо оборудованные жилые комнаты, спальня,
отлично оснащенная многочисленной аппаратурой лаборато' Подводная
лаборатория
«Силэб-Н».
Л.,
«Судостроение»,
1968.
Гармония
красоты
и
целесообразности
283
рия, система искусственного климата и аэрации, кухня, туалег
и душ. Для выхода гидронавтов в открытое море в полу прихожей сделали специальный люк (он должен был распахнуться
тогда, когда по достижении проектной
глубины погружения
внутреннее давление в «подводном доме» сравняется с внешним). Обеспечение станции электроэнергией, телефонной. телевизионной и радиосвязью осуществлялось через кабели извне.
Схема подводного дома «Преконтинент-Ш» показана на рисунке 57.
В «Преконтиненте-Ш», как и в предыдущих подводных лабораториях Кусто, было предусмотрено повышенное давление,
соответствующее глубине погружения станции, — 11 атм. Для
гидронавтов была приготовлена дыхательная
смесь
гелиокс,
хранившаяся в газовых баллонах, установленных
на
борту
подводной лаборатории. Гелиокс состоял из 98% гелия и 2%
кислорода. Действие гелиокса было опробировано сначала на
овцах, а затем сам Кусто и доктор Ш. Аквардо провели 5 дней
в барокамере, наполненной гелиоксом под давлением 13 атм.
Специальная аппаратура обеспечивала в «Преконтиненте-Шь»
__—
7
9
о
—
-—-| O
и
18
Рис.
57.
«Преконтинент-П»:
4 — гостиная;
2 — измерительные
инструменты
и аппаратура
связи;
3 — спальная
комната;
4 — тузлет; 5 — умывальник и душ; 6 — сбрасываемый
балласт; 7 — постоянный балласт; 8 —
баллоны со сжатым воздухом; 9 — телепередатчик;
10 — радиоприемник;
11 — кухня; 12 — звуколокатор;
13 — криогенный
генератор;
14 — лаборатория; 415 — трап;
16 — компрессор им декомпрессор;
терны;
17 —
люк;
18 —
20 — регулируемые
запасные
опоры.
баллоны
с
гелием
и
кислородом;
19 —
бапластные
цис-
284
Бионика
строго дозированную подачу искусственного воздуха, состав которого должен был оставаться постоянным в течение всего времени действия глубоководной лаборатории (требования к составу смеси очень строгие: отклонение концентрации
кислорода
хотя бы на 1%
в ту или иную сторону могло оказаться гибель-
ным для гидронавтов). Для удаления углекислого газа, выдыхаемого обитателями подводного дома,
был сконструирован
криогенератор. Весь воздух станции несколько раз в день прогоняли через этот аппарат. В течение часа криогенератор ох-
лаждал 40 м? воздуха примерно до —
его от конденсирующихся
дом состоянии углекислый
вали в море.
При
большом
давлении
160°С, чтобы освободить
частиц. По мере осаждения в твергаз брикетировали и затем выбрасыв атмосфере,
состоящей
из гелиокса,
человеческий организм теряет тепло в 77 раз быстрее,
чем в
обычных условиях. Кроме того, температура воды на глубине
110 м обычно не превышает 12°С. Поэтому при подготовке экспедиции «Преконтинент-ГШ» особое внимание
было
уделено
теплоизолирующим свойствам подводной одежды акванавтов.
Новый защитный костюм из особого стекловолокна
позволял
гидронавтам ежедневно по 2—3 ч работать в воде при темпеpatype 10—12°C.
Находясь в воде, гидронавты были связаны со своим домом
двумя шлангами: для подачи гелиокса и для откачивания отработанной смеси для последующей регенерации.
На случай
аварии (скажем, отказа компрессора) подводные пловцы носили на спине «запасной парашют» — акваланг — три баллона
с 10-минутным запасом гелиево-кислородной смеси, выдыхаемой в аварийной ситуации непосредственно в воду. Этого запаса должно было хватить на обратный путь в подводный дом.
Экспедиция
«Преконтинент-Ш»
началась
17
сентября
1965 г. Через пять дней стальной дом с шестеркой акванавтов
погрузился в Средиземное море на глубину 110 м, в 350 мот
южной оконечности мыса Ферра (Французская Ривьера). Штабквартирой экспедиции стал маяк на мысе Ферра.
По первоначально разработанной
программе
гидронавты
должны были жить и работать на глубине 110—130 м в течение
15 дней. Однако экспедиция несколько затянулась. Океанавты
пробыли в глубинах Средиземного моря не 15 дней, а три недели. Каждый день был заполнен работой до предела. Обширная
программа научных исследований и физиологических тестов не
оставляла
ни
одной
свободной
минуты.
Для
проверки
состоя-
ния умственной деятельности акванавты решали
математические задачи. Испытывались рефлексы, ориентировка во времени, сообразительность. И вне «дома», когда люди выходили из
своего шара в воду, их ждало много задач:
сбор образцов
грунта, изучение течений, проведение биологических экспе-
Гармония
красоты
и
целесообразности
285
риментов, проверка роста водорослей при искусственном ос:
вещении и т. д.
Так как из 3 млн. франков, потребовавшихся на организацию экспедиции «Преконтинент-Ш», половину внесло французское «Бюро нефтяных изысканий», программой работ были предусмотрены установка подводной нефтяной вышки и монтаж
распределительной колонки на глубине 112 м. Для имитации
нефтяного фонтана применяли ток сжатого воздуха. Задачу по
установке предоставленного нефтяной компанией оборудования — пятитонной конструкции, которая обычно венчает нефтяную скважину и контролирует добычу нефти, — акванавты
успешно выполнили. На высоте оказались гидронавты при выполнении ремонта нефтяного оборудования на болышой глубине. Кран массой 182 кг был установлен за 45 мин, тогда как на
суше такую операцию выполняют обычно не меньше часа.
Наиболее сложная часть задания, которую эксперты-нефтяники, наблюдавшие за акванавтами по телевизору, считали неосуществимой в подводных условиях, заключалась в том, чтобы продеть упругую проволоку через многие ряды затворов.
Но 7 ч кропотливого труда сломили скептицизм «сухопутных»
нефтяников — опытный гидронавт Бонничи одолел затворы!
И так день за днем на дне Средиземного моря шла напряженная работа, приведшая к блистательному окончанию еще одного этапа на пути освоения человеком глубин Мирового океана.
13 октября 1965 г. в 5 ч вечера, освободясь от балласта, сфера всплыла на поверхность. Но шестерка отважных морежителей увидела солнце только через иллюминатор, им еще нельзя
было
выходить
на
«волю».
На
следующий
день
буксир
отвел
подводный дом-шар в Монако. Началась декомпрессия. Пройдя процедуру декомпрессии, гидронавты 17 октября, наконец,
вышли из «заточения» и вновь увидели небо. Они были здоровы. Врачебное обследование подтвердило, что акванавты перенесли почти в течение месяца высокое давление без каких-либо
вредных
последствий.
Было
доказано,
что
длительное
пре-
бывание человека на 100 и 130 м не влечет никаких физиологических и психологических отклонений в организме; более того, человек вполне может выполнять сложные и трудные работы с большей быстротой и точностью, чем на земле.
Экспедиция, бесспорно, доказала, что люди,
живущие на
большой глубине, целиком сохраняют свои способности. Специалисты надводного отряда не обнаружили
в их поведении
ни малейших изменений. Их умственные и физические способности, рассудок, сноровка остались такими же, как и на земле.
Опыт с «Преконтинентом-Ш» подкрепил мнение Кусто и его
коллег о том, что, начиная с определенной глубины, промышленные работы наталкиваются на технические трудности, решить
которые
невозможно
средствами
с поверхности.
Для
286
Бионика
проникновения человека на такие глубины необходимы подводные дома.
21 октября 1965 г. на встрече с журналистами Жак-Ив Кусто поделился своими планами на будущее.
— Наша основная задача — добиться еще меньшей зависимости подводной станции от поверхности. Мы уверены, что через несколько лет нам удастся полностью
избежать связи с
внешним миром, и тогда океанавты обретут подлинную свободу
действия в морских глубинах...
Намечено основать новую станцию «Преконтинент-ТГУ» на
глубине 150—200 м. Внешне она будет такой же, как и предыдущая, но тут уж придется вместо гелиокса использовать для
дыхания
водородно-кислородную
смесь.
«Преконтинент-У»
обоснуется на глубине 300—350 м. В этой подводной «деревне»
предполагается поселить 5 человек сроком на две недели. Пользуясь баллонами со сжатой, специально приготовленной газовой дыхательной смесью, акванавты попытаются взять 425-метровый рубеж. «Преконтинент-У{!ь намечается послать на глубину 500 м. Французскими исследователями уже создано оборудование для тренировки акванавтов, которое позволяет подготовить их к жизни на запланированной и значительно большей глубине...
Новые экспедиции, по глубокому убеждению Кусто, еще в
большей
степени,
чем
все
предыдущие,
должны
доказать,
что
и под водой практическая деятельность человека может быть
вссьма многогранной, что уже сейчас многие области такой
деятельности весьма рентабельны, а другие станут рентабельными завтра и следовательно уже сегодня
необходимо вести
подготовку к рациональному использованию моря и в то же
время принимать действенные меры к его охране.
Но если все, что было сделано Кусто для покорения глубин
Мирового океана в предвидении «близости эры морей», проникнуто идеей гуманизма, если
все
намеченные
эксперименты
французский ученый и его коллеги стремятся осуществить во
имя прогресса человечества, то этого, к сожалению, никак нельзя сказать о запланированной американцами третьей экспедиции «Силэб».
«Силэб-П]Ш» — очередной этап программы ВМС США «Человек в море», которая, в свою очередь,
является
составной
частью более широкой военной программы глубоководных систем. В одном из официальных
бюллетеней
сообщалось, что
главная задача, которую ставят ВМС и министерство обороны
ь программе «Человек в море», — это обеспечение поисковых
спасательных операций, эксплуатация построенных на дне сооружений, использование континентального шельфа как вспомогательного полигона для роенных операций,
связанных с
минной обороной и комбинированными подводно-наземными
Гармония
красоты
и целесообразности
287
атаками. Все прочие, так сказать, мирные результаты программы относятся
в бюллетене
к «второстепенным».
Начиная с
1970 г., как сообщается далее в этом документе, военно-морские
силы США планируют иметь команды «водолазов-акванавтов»,
живущих в подводных домах-убежищах на континентальном
шельфе в течение 30 и более суток без подъема на поверхность.
Предполагают, что глубины, доступные для акванавтов, могут
достигать 200 м и распространяться до границ, сейчас неизвестных, но предельных с точки зрения физиологии человека.
Что же представляет собой лаборатория «Силэб-Ш» и какова конкретно программа очередной экспедиции ВМС США?
Эксперимент «Силэб-П» планировалось провести в Тихом
океане на глубине 180—200 м. Новая подводная лаборатория
комфортабельнее своих
предшественниц. Стальной
цилиндр
длиной 17 ми диаметром 4 м, как это видно на рисунке 58, разделен внутри на три зоны — жилую, вспомогательную и лабораторную. Под цилиндром — еще два больших служебных помещения, одно из которых — научная лаборатория и склад, а
другое — «вестибюль», в него можно войти через открытый в
3
Рис. 58. Подводная
лаборатория
«Силэб-Ш»
4
5
(в разрезе):
1 — лабораторная
зона; 2 — система очистки воздуха;
3 — кабельная плеть; 4 — жилая
зона;
$ — склад; 6 — аварийный люк; 7 — транспортный контейнер; 8 — лаборатория;
9 — морозильник; 10 — аварийные газовые емкости;
11 — балластные цистерны;
12 — фалы;
13 — индивидуальный
змонная
локатор
камера.
акванавта;
14 —
входной
люк;
15$ —
водолазная
станция;
16 —
люк;
17 —
телеви-
288
Бионика
море люк. Здесь хранятся водолазные скафандры и оборудование. Акванавты могут выплывать из своего подводного убежища на работу, не теряя, однако, постоянной
связи с домом:
индивидуальные фалы позволяют им удаляться
от
дома на
200 м или опускаться по склону до глубины 245 м! Такими
возможностями не располагал еще ни один экипаж подводных
станций. Напомним, что акванавты, принимавшие участие в
эксперименте «Преконтинент-Ш», выходили из дома и работали возле него в окружности радиусом не более 60 м.
По
сравнению
с
«Силэб-№
и
«Силэб-П»
экспедиция
«Силэб-Ш» оснащена более совершенным оборудованием и многими новыми, надежными аппаратами и приборами. Так, например, в распоряжении акванавтов имеются три типа гидроскафандров. Первый обогревается электричеством; второй — горячей водой,
циркулирующей
в трубках,
пронизывающих
скафандр (энергия и вода будут подаваться по фалу, соединяющему
акванавта с домом);
третий тип скафандра
снабжен
радио-
изотопным источником тепла, греющим воду, которая циркулирует в трубках неопреновой ткани. Акванавты
экипированы
также
новыми
глубоководными
дыхательными
аппаратами полузакрытого типа
«Марк УШ» и «Марк [Х»›.
В комплекс оборудования эксперимента входит подводный лифт, состоящий из двух транспортных капсул для личного состава.
Эти капсулы поднимаются и опускаются на тросе краном, установленным на борту обеспечивающего
судна «Элк Ривер».
Внутри
каждой
кабины,
вмещающей
четырех
акванавтов,
мож-
но создать нужное давление. Необходимость в подобном лифте
очевидна, ведь судно «парит»
над
лабораторией
на
высоте
10-этажного дома. И еще одна важная
система, входящая в
комплекс, — две декомпрессионные камеры, установленные на
борту «Элк Ривер». Транспортные капсулы герметично стыкуются с этими камерами, после чего люди, поднятые со дна, переходят из капсул в камеры, в которых они после длительного
пребывания на дне должны пройти декомпрессию.
Лаборатория «Силэб-Ш» была опущена в воды Тихого океана в феврале 1969 г. на глубину 183 м. Находившиеся в ней
акванавты заметили утечку газа и вызвали с поверхности аварийный отряд. Совершенно неожиданно для всех участников
экспедиции один из членов экипажа погиб от сердечного приступа в тот момент, когда он устранял неисправности оболочки
лаборатории. Эксперимент пришлось отложить.
За последние десять лет география исследования морских
глубин значительно расширилась. Ученые Кубы в содружестве
с чехословацкими специалистами
обосновали
на дне Карибского моря (неподалеку от Гаваны)
подводную
лабораторию
«Карибе-!». Около десяти подводных поселений создали советские ученые и инженеры на Черноморском побережье Крыма
Гармония
красоты
и
целесообразности
289
и Кавказа. Участники экспедиций собрали
обширнейший материал
в области гидрофизики и гидрооптики, геологии и
биологии
моря. Интересные опыты по строительству подводных
жилищ
проводят
японские
ученые. Программа их исследований рассчитана на 3 года. В соответствии с этим планом совсем недавно на дно залива, расположенного неподалеку от порта Таго, ученые опустили первый
подводный дом
с четырьмя
опытными
акванавтами.
Необычную
экспедицию
на дно Северного
моря
готовят
голландские
ученые.
Цель их эксперимента заключается в том, чтобы лучше изучить возможности чзловека жить под водой
и питаться в основном дарами морских глубин. Члены экспедиции намерены
надолго
поселиться в подводном доме 9-метровой длины. Недавно группа итальянских ученых, инженеров и врачей специальной водолазной школы «Марко Поло» завершила работу над
проектом подводного научного городка.
Ero
предполагается
создать на дне озера Браччано, находящегося в 42 км к северо-западу от Рима. Американская фирма «Дженерал электрик»
проектирует подводный город. Он будет состоять из домов-сфер
диаметром около 4 м. Место для постройки найдено на дне Атлантики, на подводных холмах, где будет легче закрепить эти
дома. Постройку города, предназначенного для океанографических исследований, предполагается осуществить в 1980 г.
Такова краткая летопись завоевания морских глубин, с которой человечество вступает в последнюю четверть ХХ в. Она
еще не дописана до конца. Но уже сегодня становится реальной
перспектива освоения человеком всего континентального шельфа с глубиной до 500 м. В распоряжении
исследователей гидрокосмоса сейчас имеется комплекс технических и медико-биологических средств жизнеобеспечения
в условиях
больших
гидростатических давлений. Он включает ряд систем. Это акваланги с гелиево-кислородной дыхательной смесью замкнутого
и полузамкнутого цикла, с автоматическим поддержанием состава смеси и удалением углекислого газа. Существуют акваланги высокой автономности,
работающие
на
сжиженных
газах. Важной частью комплекса является большая группа высокосовершенных, надежно работающих
автоматических газоанализирующих приборов и датчиков физиологического состояния акванавтов. Наконец, в комплекс входят подводные дома,
глубоководные колокола-кессоны
для подъема
акванавтов в
бортовые декомпрессионные камеры судов и сами бортовые камеры с разветвленными вспомогательными системами. Особенно перспективными в деле освоения морских глубин являются
подвижные подводные дома или «мокрые» подводные лодки,
в которых акванавты могут быть доставлены в необходимое
место океана и осуществлять «бездекомпрессионные» выходы
на грунт для выполнения подводных работ.
290
Рис. 59. Структуры
Бионика
радиолярий
(по Э. Геккелю).
Гармония
красоты
и целесообразности
291
Ныне почти все ученые мира сходятся водном: колонизация
глубин Мирового океана произойдет в ближайшие 15—20 лет.
«Завоевание материковой отмели, — пишет профессор Р. Вессъер, один из крупнейших океанологов Франции, помощник Ку.
сто, — дело ближайшего будущего... Сейчас это уже не научная
фантастика,
проведенные
опыты
служат
тому
доказательством».
Однако человеческий разум никогда не бывает доволен достигнутым. Ученые уже строят планы освоения более глубоких
районов океана. По мнению многих специалистов, в ближайшие
30—40 лет в центре Атлантики под толщей воды люди попытаются построить настоящий город-станцию с улицами, с помещениями для жилья и магазинов,
научно-исследовательских
институтов и промышленных предприятий, больниц, театров и
ресторанов. Но уже на первом этапе осуществления этого грандиозного замысла покорителям шестого континента придется
столкнуться с трудностями, которые не м›ньше тех, что были
связаны с запуском ракеты на Луну.
Прежде веего предстоит решить проблему давления. Давление воды на глубине 3500 м, где должна быть построена станция, огромно. Современные подводные лодки, сделанные из стали, на этой глубине были бы раздавлены, подобно спичечной коробке, попавшей под кузнечный молот.
Несмотря на высокую
степень надежности, стальные
камеры не очень-то пригодны
для сооружения постоянного подводного жилья. Их главный
недостаток в Том, что ‘они подвержены коррозии и соленая вода быстро разъедает сталь. Давление, которому подвергнется
убежище акванавтов
на
глубине 3500 м, — сокрушительное
объятие, способное найти в любом металле даже микроскопическую трещину и раздавить человека в лепешку. Значит, чтобы
жить и работать на тысячеметровой глубинной равнине длительное время, человек должен иметь безопасный кров.
В решении этой задачи покорители больших глубин голубого континента многому могут научиться у исконных обитателей морей и океанов. Кое-что строители подводных домов у них
уже позаимствовали. Например, идею конструкции лаборатории «Преконтинент-П» подсказала морская звезда, а очертания
новой,
самой
крупной
американской
подводной
станции
«Силэб» (рассчитанной на одновременное размещение 40 аква:
навтов на глубине 200 м) напоминают собой распластавшегося
по дну осьминога. Но самый большой урожай открытий новых
форм и конструкции подводных жилищ и других глубоководных сооружений ожидает архитекторов и инженеров
в мире
радиолярий.
К исследованию структур радиолярий (рис. 59) — микроско:
пических простейших животных — призывал инженеров еще
в прошлом веке известный немецкий естествоиспытатель Эрнст
292
Бионика
Геккель (1834—1919), впервые описавший ажурные скелетные
образования лучевиков из кремнезема, сернокислого стронция.
И Е. Монод-Герцен в своем труде «Морфология» писал, что для
инженеров представляет большой интерес изучение этих удивительных шедевров природы, их структуры, позволяющей преодолевать гидростатическое давление, а также наблюдение за
тем, с какой экономией материала природа
сумела защитить
жизнь этих организмов...
Первым внял советам естествоиспытателей
уже известный
нам американский математик-конструктор Ле-Риколе. Исследовав строение некоторых радиолярий, он разработал ряд универсальных конструктивных ячеек, удовлетворяющих требованиям
широкого класса пространственных конструкций — от обычных перекрытий залов до мостов и плотин. Теперь наступил
черед конструкторов глубоководных жилищ — архитекторовбиоников — заняться изучением высокопрочных биомеханических структур радиолярий. Ведь в теплых морях, в тропической
зоне Тихого и Индийского океанов, обитает около 6000 видов
этих маленьких организмов. Они являют собой такое разнообразие форм и конструкций, что их с избытком хватит на создание многих тысяч подлинных шедевров зодчества как в гидрокосмосе,
так
и на
суше.
Не менее пристального внимания строителей глубоководных
сооружений заслуживают диатомеи — одноклеточные водоросли, предки которых в громадном количестве заселяли когда-то
древние водоемы. Диатомеи живут на дне морей и в пресных
зодах, иногда на больших глубинах. Они встречаются на камнях и на различных растениях, а некоторые могут даже передвигаться по дну. Чтобы выжить, выдержать все механические
неззгоды, диатомея одета в панцирь, в котором проводит всю
свою жизнь. Полученные с помощью электронного микроскопа
микрофотографии диатомовых водорослей с увеличением в десятки тысяч раз — это совершенно новый мир форм, границы
которого необозримы. В нем архитектор и гидростроитель могут
увидеть множество достойных подражания замысловатых пространственных решетчатых конструкций, «микроблочные» купола,
фантастически
слозхные
фигуры
и
другие
инженерные
системы, гармонически сочетающие
красоту
и целесообразность, необычную легкость и высокую прочность, надежность и
экономичность.
В чем же секрет прочности и надежности панцирей диатомей? Несомненно, в их конструктивной форме. Форма в природе, как это уже отмечалось выше, служит не только красоте, но
и прочности. Диатомеи имеют вид круглых структур с удлиненными или полигональными поверхностями, образуемых двумя
поеловинами, как бы вставленными одна в другую. Строение их
панциря имеет шишковатую структуру, состоящую из паралле-
Гармония
красоты
и
целесообразности
293
лепипедов или решеток. Встречаются панцири с очень малым
числом отверстий, панцири с болыпим числом отверстий, образующие сетчатые структуры с широкими ребрами, и, наконец,
панцири, в которых предельно тонкие стенки и ребра образуют
пространственные решетчатые системы. Благодаря такому устройству обеспечивается отличное
использование
материала,
панцири диатомей способны выдерживать большие напряжения
при сжатии и изгибах. В хитроумных решетках, замысловатых
формах панцирей диатомей нет ни одного архитектурного излишества, ибо их первейшее основное назначение — прочность!
Разумеется, одним заимствованием, пусть даже самых идеальных с инженерной точки зрения форм и конструкций скелетов, панцирей, оболочек, раковин, позволяющих морским обитателям выдерживать большие нагрузки, конструкторам, строителям, архитекторам-бионикам не решить проблемы создания
надежных подводных жилищ и других сооружений, когда речь
идет о завоевании глубин океана до 3500 м. Для этого нужны
новые, неметаллические, сверхпрочные, некоррозирующиеся в
морской воде материалы. И такие материалы сегодня уже созданы.
Какие же это материалы?
В
свое
время известный.
швейцарский
физик,
создатель
ба-
тискафов Огюст Пиккар (1884—1962) один из первых высказал
идею делать глубоководные лаборатории, корабли из акрилового пластика — искусственного материала, прозрачного как
стекло, и прочного как сталь. Предел прочности на сжатие акрилового пластика некоторых марок достигает 1500 кг на 1 см?
поверхности. В экспериментах иллюминаторы из этого материала выдерживали натиск 11 000-метровой толщи воды! Учитывая это, Пиккар предложил изготовлять корпуса шарообразных
глубоководных аппаратов из 12 одинаковых сферических многоугольников. Акриловый пластик — относительно недорогой
материал.
И
специалисты
надеются,
что
уже
в самые
ближай-
шие годы будет налажено серийное производство подобных обсерваторий разных габаритов и для разных глубин — они появятся в самых отдаленных уголках «мира без солнца». Лаборатория, сквозь стены которой
можно было
бы
видеть
все
происходящее в глубинах, на первых порах хотя бы в пределах
континентального
шельфа,
—
мечта
океанографов
и
многих
других морских специалистов.
Но есть и другой, еще более перспективный
материал —
стекло. Да, да, не удивляйтесь. Стекло, которое считается хрупким материалом, оказывается, как установили ученые, в воде
приобретает изумительные свойства. Если полый
стеклянный
шар опускать в море, то с каждым метром он становится все
прочнее. Специалисты называют это
феноменальное
явление
глубинной закалкой. Первая опытная модель будущего шара-
294
Бионика
жилища была изготовлена из специального
сорта стекла в
1969 г. и успешно прошла испытания на глубине 3500 м. В ряде
опытов каждый квадратный сантиметр шара подвергался давлению более чем 1000 кг. В принципе эти испытания решили одну из важнейших проблем строительства будущих глубоководных поселений.
Но может ли уцелеть на глубине 3500 м человек?
Последние эксперименты показали, что наш организм способен без нарушений переносить давления около 60 атм, т. е.
свыше 60 кг на каждый 1 см? поверхности тела, или
десятки
тонн в пересчете на весь организм. В то же время при местном
действии давление в десятые доли килограмма вызывает баротравму тканей (разрыв барабанных перепонок, легочной ткани
и т. д.). Высокая резистентность оргакизма к действию общей
компрессии связана с его специфическими биомеханическими
свойствами. Эти свойства не позволяют уподобить организм человека ни твердому, ни жидкому телу.
Наш организм — сложная двухфазная система, где твердая
(сохраняющая собственную форму) клеточная часть состоит из
микроэлементов, связанных между собой в конструкцию, и заполнена жидкой средой. В процессе объемной компрессии определяющими становятся свойства практически несжимаемой
жидкой среды с равномерным распределением
напряжений.
Это дает возможность твердым микроэлементам
выдерживать
болыпие давления, так как силы внешнего давления уравновешиваются изнутри. В частности, Ганс Келлер собирается погрузиться с аквалангом в мягком снаряжении на глубину 1000 м.
Атаковать 1000-метровую глубину собирается также Жак-Ив
Кусто. Но в отличие от Ганса Келлера, стремящегося
установить лишь новый рекорд кратковременного погружения, неутомимый Кусто планирует провести со своими коллегами на
километровой глубине долговременную
экспедицию «Преконтинент-УП» с обширной программой научных исследований. По
мнению ряда ученых, глубина в 1000 м — та самая
граница,
ниже которой природа закрыла путь человеку в океан '.
Однако известно, что рыбы выдерживают
очень болышое
давление воды, потому что вдыхают не воздух, а воду. Но если
вдыхание жидкости защищает от гибельного давления, то и ор' Недавно четверо добровольцев из
медицинской
лаборатории
Пенсильванского университета (США)
провели без вредных последствий для
здоровья 4 ч в барокамере, давление в которой соответствовало 1520-метровой глубине! Это в два с половиной раза превышает рекордное погружение французских акванавтов в опыте «Физалис-6». Эксперимент пенсильванцев убедительно показывает, что возможности
человека в завоевании
гидрокосмоса лежат далеко за пределами километровой глубины. При использовании всех физиологических резервов организма граница безопасных
морских погружений человека может быть существенно увеличена.
Гармония
красоты
и целесообразности
295
ганизм человека, погружающегося на большую глубину, должен
перестраиваться. «Пусть он дышит жидкостью» —к такой мысли
пришел
видный
голландский
физиолог,
профессор
Лейден-
ского университета Иоганнес Килстри и начал проводить эксперименты с млекопитающими.
На первый взгляд направленность опытов Килстри одним
читателям может показаться абсурдной, другим — чистейшей
фантастикой. Ведь легкие и жабры различны и по строению, и
по функциям. И все же нас не должно особенно удивлять «водяное» дыхание млекопитающих, ведь жизнь на Земле началась
в воде! Функции дыхательных органов — жабр
и легких —
сходны в одном: кислород
проникает
в кровь
при вдохе, а
углекислый
газ
удаляется
при
выдохе.
Потому
Килстри
и заинтересовался проблемой дыхания под водой с помощью
легких.
Чтобы решить проблему «водного» дыхания человека, надо
было устранить два препятствия. Во-первых, как известно.
в воде
при атмосферном
давлении
растворенного кислорода содержится в 30 раз меньше, чем втом же объеме воздуха.
Следовательно, человек
должен
пропускать
через легкие в
30 раз больше воды, чем воздуха. Чтобы удалить из организма
выделяющийся углекислый газ, надо «выдохнуть» вдвое больше жидкости, чем воздуха. Учитывая, что
вязкость воды в
36 раз больше, чем воздуха, надо затратить на это примерно в
0 раз больше усилий, что может привести к истощению сил.
Во-вторых, морская и пресная вода по химическому составу
сильно отличаются от крови и при вдыхании может повредить
нежные ткани легких, изменить состав жидкостей,
циркулирующих в организме.
Чтобы преодолеть перечисленные препятствия, Килстри приготовил специальный соляной раствор, близкий по своим свойствам к плазме крови. В нем растворили химическое вещество,
вступающее в реакцию с выдыхаемой двуокисью углерода. Затем в раствор был введен под давлением чистый кислород.
Первые опыты были проведены на белых мышах. Подопытных животных помещали в замкнутый резервуар, наполовину
заполненный соляным раствором. Туда же под давлением в
8 атм нагнетали кислород. Почему именно 8 атм? При этом давлении животное обеспечивалось Тем количеством кислорода, которое оно обычно получает из воздуха. После погружения мыши довольно скоро освоились с непривычной обстановкой и как
ни в чем не бывало начали дышать подсоленной водой, обогащенной кислородом. И дышали ею 10—15 ч. А одна мышь-рекордсменка прожила в жидкости 18 ч. Более того, в одном из
экспериментов Килстри
маленькие,
ничем не защищенные
зверьки были подвергнуты давлению 160 атм, что равносильно
спуску под воду на глубину 1600 м!
296
Бионика
Но когда мышей вернули к нормальным условиям дыхания, большинство животных погибло. По мнению экспериментаторов, причина гибели мышей была в том, что у них слишком
миниатюрные органы дыхания, когда зверьки выходят на воздух, остатки воды, не успевая выйти,
застревают
в легких, и
животные умирают от удушья.
Далее Килстри перешел к опытам над собаками. Животное
погружали в установленный на дне барокамеры открытый аквариум, заполненный соляным раствором воды, обогащенным
кислородом. Через определенное количество часов собаку извлекали из аквариума, откачивали из ее легких воду, а затем,
массируя подопытному животному грудную клетку (делать собаке искусственное дыхание сложнее, чем вытащенному из воды человеку), заставляли снова дышать воздухом.
МЛегочное
дыхание у собаки восстанавливалось без каких-либо вредных
последствий. Позднее Килстри и его коллеги
поставили ряд
опытов в камере
с повышенным давлением, где находились и
животные, и экспериментаторы. Собак не погружали в жидкость, их просто заставляли дышать через специальное приспособление соляным раствором с растворенным в нем под давлением кислородом (рис. 60). Семь собак остались живы без
каких-либо осложнений в состоянии здоровья. Одна из них
через 44 дня родила 9 здоровых щенят. В процессе опытов выяснилось,
что
кислород
диффундирует
в жидкости
в 6 тыс.
раз
медленнее, чем в воздухе. Поэтому в каждой легочной альвеоле лишь часть содержащегося в жидкости кислорода достигает
перепонок, через которые он проникает в кровь. Углекислый же
газ скапливается на периферии альвеолы, что затрудняет его
удаление.
|
_.-Вода
Нислород
—— Двери
Номпрессор
“
=
Легние
nal
|
Система дыхательных
(вдоха-выдоха)
Рис. 60. Схема эксперимента подачи
породом, прямо в легкие собаки.
под
нлапанов
давлением
воды,
насыщенной
кис-
Гармония
красоты
и
целесообразности
297
После многочисленных экспериментов на собаках Килстри
решился, наконец, испробовать водяное дыхание на человеке.
Добровольцем
вызвался
американский
водолаз-глубинник
Фрэнсис Фалейчик. Из соображений безопасности испытания
проводились только с одним легким. В дыхательные пути был
введен двойной шланг. Концы его находились в бронхах. Таким
образом каждое легкое могло дышать отдельно. Обычный воздух поступал только в левую половину легких. В правое легкое
водолаз вдыхал через шланг обогащенную кислородом соленую
воду. Никаких осложнений не было. Фрэнсис Фалейчик не испытывал затруднений при дыхании. Цикл был повторен семь
раз... Фалейчик, находившийся в течение всей процедуры в
полном сознании, рассказал, что он не заметил значительной
разницы между легким, дышащим воздухом, и легким, дышащим водой. Он не испытывал также неприятных ощущений при
вдохе и выдохе потока жидкости из легкого...
Может показаться, что опыт, поставленный Килстри, далек
от осуществления идеи полного дыхания человека жидкостью.
И все-таки значение проведенного экспеоимента исключительно велико. Ученому удалось доказать, что заполнение легких
человека специальным раствором не разрушает легочные ткани. Однако, несмотря на успех первого
опыта с Фалейчиком,
Килстри прекрасно понимал, что торжествовать еще рано. Хотя
дыхательная жидкость и хорошо снабжала легкое кислородом,
но при выдохе она в недостаточной степени удаляла двуокись
углерода
—
это было
опасно.
Дыхательной жидкостью может быть не только соленая вода, есть и другие, более подходящие жидкости. Для решающего
опыта, когда человек будет дышать жидкостью обоими легкими, подготавливается специальная синтетическая жидкость —
флюркарбон, способная растворить втрое болыпе углекислого
газа и в 50 раз больше кислорода, чем содержит воздух.
Следующий этап — полное
погружение
человека в жидкость. Еще дальше открывается заманчивая перспектива: опускаться в автономном скафандре с резервуаром со сжатым «дыхательным раствором» на тысячи метров и подниматься оттуда
без прохождения декомпрессии. Кстати, подопытных мышей
переводили от давления 30 атм до 1 атм за 3 сек без
всякого
вреда для них.
Проблема «водного» дыхания в последние
годы
увлекла
многих ученых. Ряд интересных опытов с «подводными собаками» поставил американец 9. Лампьер. Значительных успехов
в экспериментах с мышами достигли советские ученые, сотрудники киевской лаборатории гидробионики В. Козак, М. Иродов,
В. Демченко и др. Интенсивно продолжают работать в этом направлении Килстри и его коллеги. Впереди — множество опытов, десятки нерешенных задач. Но ученые не сомневаются в
298
Бионика
том, что в недалеком будущем снабдят акванавтов, водолазов
гаким дыхательным прибором, в котором роль воздуха будет
выполнять жидкость. Они уверены и в том, что тогда первооткрывателям глубин не будет страшно никакое подводное давление.
А нельзя ли создать искусственные жабры, которые бы позволяли акванавтам жить и плодотворно работать на больших
глубинах длительное время? Как сделать, чтобы люди чувствовали себя в воде не менее уверенно, чем Ихтиандр? Невероятно?
Нет, искусственные жабры сегодня уже не фантастика, не гипотеза, а объект интенсивных разработок. Ученые ряда стран
ныне всерьез работают над созданием
искусственных жабр.
Так, в начале 60-х годов в американской печати было опубликовано сообщение, что одна из фирм США разрабатывает конструкцию миниатюрного аппарата для насыщения крови кислородом. Идея такова. Искусственные жабры
прикрепляются к
поясу ныряльщцика, идущие от них шланги соединяются с аортой. Легкие акванавта заполняются стерильным несжимаемым
пластиком; они как бы выключены, и человек, опустившийся в
морские
глубины,
дышит
через
«жабры»,
точнее,
он
вообще
пе-
растает дышать, кровь насыщается кислородом с помощью искусственных жабр.
Жак-Ив Кусто считает: чтобы человек мог выдержать давление
на
больших
глубинах,
следовало
бы
удалить
у него
лег-
кие, а в его кровесносную систему включить
патрон, который
химически питал бы кислородом его кровь и удалял из нее углекислоту; при этом человек уже не подвергался бы опасности
декомпрессии, он мог бы совершить восхождение на Эверест с
песней на устах; он чувствовал бы себя одинаково хорошо и в
море, и в космосе.
Несколько иначе к решению рассматриваемой проблемы подошел инженер исследовательского центра американской фирмы «Дженерал электрик» Уолтер Робб. На цветной таблице 11
хомяк, сидящий в аквариуме, еще не стал подводным жителем.
Он отделен от воды силиконовой пленкой. И все жеу него и
снующих рядом рыбок есть одно общее: они дышат кислородом, растворенным в воде. Молекулы кислорода легко проникают в подводный домик хомяка через тонкую силиконовую
пленку, созданную Роббом.
Физические свойства силиконовой резины
были известны
давно. Однако лишь Роббу удалось
изготовить из нее пленку
толщиной всего 0,025 мм. Из шести слоев этой пленки
общей
толщиной 0,15 мм был сделан подводный домик хомяка. У силиконовой
пленки
и поэтому
она не пропускает
ма
для
газов.
нет
Правда,
пор
не
(в обычном
для
понимании
воду. Вместе
всех.
лорода и углекислого газа. Молекулы
В
с тем
первую
этого
она
очередь
этих газов могут
слова),
проницаедля
кис-
«протис-
Гармония
красоты
и
целесообразности
299
нуться» между молекулами пленки, переходя из области более
высокого парциального давления в область, где давление этого газа ниже (цвет. табл. 11). Именно совокупность этих ценных
свойств силиконовой пленки
позволила
Роббу
поставить эффектный эксперимент с хомяком, продемонстрировать возможность долговременного пребывания животного в силиконовом
подводном домике. Пленка, отделявшая воду от воздуха при атмосферном давлении, извлекала кислород из воды и вместе с
тем почти не пропускала воду. Этим кислородом и дышал хомяк, а убыль живительного газа в домике непрерывно восполнялась притоком кислорода, растворенного в воде аквариума.
Углекислый
же
газ,
выдыхаемый
хомяком,
проходил
сквозь
пленку в обратном направлении — в воду (ведь в воде парциальное давление этого газа практически равно нулю). Таким образом, в проведенном эксперименте силиконовая
пленка, или
селективная мембрана, выполняла те же функции, что и жабры рыб.
Первую действующую модель искусственных «жабр» создал
американский инженер Вальдемар Эйрес. Над ее созданием
изобретатель работал около десяти лет, независимо от У. Робба.
Тщательно
изучив
механизм
дыхания
млекопитающих,
рыб
и
особенно акул, Эйрес разработал и опробовал множество конструкций искусственных жабр. Основная
трудность, с которой
столкнулся
изобретатель, — выбор подходящего
материала.
Проблему решила селективная мембрана, та самая тонкая силиконовая пленка, из которой был изготовлен подводный домик хомяка. Эйрес рассчитал, что для обеспечения потребности
человека в кислороде под
водой
потребуется
мембрана площадью 6 м?. Ее он прикрепил к нижней стороне четырех длинных лент из пластмассовой пленки, непроницаемой для газов.
Получился своеобразный мешок. Ленты укладывались на воду
так, что единственным источником кислорода, поглощающим
вместе с тем углекислый газ, является вода. Полости, образующиеся между двумя пленками — проницаемой и непроницаемой, — изобретатель соединил шлангами.
Поданную
Эйресом
заявку
на получение
патента
длительное
время игнорировало «Бюро патентов» США: ни::то не хотел верить в возможность создания столь необычного аппарата. Чтобы убедить недоверчивых чиновников патентного бюро в гом,
что искусственные жабры — не миф, Эйресу пришлось на одном из нью-йоркских пляжей с головой залезть в воду. В течение
полутора часов изобретатель дышал, как рыба. Полупроводящие
пленки-мембраны,
соединенные
шлангами
с
обычной
маской
аквалангиста, извлекали растворенный в воде кислород и отдавали в воду углекислый газ. Искусственные «жабры» отлично
выдержали испытание, и в 1966 г. Эйрес наконец получил на
них патент. Одна из последних модификаций «жабр» снабжена
300
Бионика
мембраной, укрепленной на каркасе. Эйрес продолжает работать над усовершенствованием своего изобретения и глубоко
уверен, что созданный им аппарат сделает человека по-настоящему «земноводным» существом.
Однако некоторые специалисты не разделяют
оптимизма
Эйреса относительно возможности
широкого
практического
применения разработанной
им
конструкции искусственных
жабр для покорения морских глубин. Высказывается
мнение,
что лучше
было бы «создать
комбинированные
«легкие —
жабры», и к добытому из воды кислороду в случае чего добавлять то или иное количество газовой смеси или сжатого воздуха из баллонов. А то и вовсе, когда надо, переходить с жаберного дыхания на легочное или наоборот. Особенно при работе
на больших глубинах, где чистый кислород опасен, становится
ядовитым» (.
Много лет созданию «искусственных жабр» отдали японские биологи. По сообщениям печати недавно их труд увенчался успехом. «Жабры» созданы. Это миниатюрная герметически закрытая камера с батарейками из пластинок силикона,
извлекающая из воды кислород и превращающая его в газообразное состояние. Испытатель провел под водой
пять часов,
дыша с помощью искусственных жЖабр. Это устройство установлено в «подводном доме», который
демонстрировался
на
Международной выставке «ЭКСПО-75» (Окинава, Япония), посвященной проблемам океана.
Итак, к решению проблемы амфибизации ученые идут различными путями. И это вполне естественно. Проблема человека-амфибии далеко не так проста. Сегодня никто не может сказать однозначно, согласятся ли
покорители морских глубин
на «затопление» стерильным пластиком легких, функции которых будет выполнять какое-то механическое
устройство, подключенное непосредственно к системе
кровообращения, предпочтут ли предлагаемое Кусто хирургическое вмешательство,
физиологические изменения организма,
перейдут ли на «водное» дыхание, разработанное Килстри, или остановятся на надежно работающих искусственных
жабрах. В практической
реализации всех перечисленных вариантов имеется множество
трудностей. Однако не подлежит сомнению, что ученые в конце
концов найдут средства, которые позволят гидронавтам жить и
плодотворно работать на больших глубинах. Вечный сон царства Нептуна разбудят многочисленные заводы, шахты, рудники
и
обогатительные
фабрики,
нефте-
и
газопромыслы,
химиче-
ские комбинаты, атомные электростанции и подводные порты.
В мире безмолвия появятся морские луга, фактории для разведения рыб, вырастут благоустроенные города и поселки с радио,
' Чернов
А.
Гомо
акватикус.
М.,
«Молодая
гвардия»,
1968,
с. 301.
Гармония
красоты
и
целесообразности
301
телевидением, кино, клубами, театрами, научными центрами
и стадионами. Излюбленным местом отдыха обитателей гидрокосмоса станут экзотические подводные сады и зоопарки, которые по красоте и благоустройству превзойдут самые лучшие
известные земные заповедники. На дне морей появятся академгородки, учебные комбинаты, многоэтажные корпуса научно-исследовательских институтов, лабораторий, геофизических станций. Труды больших научных коллективов позволят открыть
немало вековечных тайн Мирового океана: мы узнаем, как образовались на дне морей и океанов подводные каньоны, напоминающие
затопленные русла рек, и глубоководные
желоба,
похожие на разломы в земной коре, почему появляются и исчезают некоторые виды рыб, чем вызывается смена многолетних периодов обильных и скудных уловов рыбы, как поднялись на
дне океана одинокие горы с плоскими словно срезанными ножом вершинами... И, быть может, в конце концов разрешится
извечный спор философов, историков и археологов: мы узнаем, существовала ли Атлантида.
Заглядывая в будущее, Жак-Ив Кусто заявил
с трибуны
Международного конгресса подводников:
«Рано или поздно человек поселится на дне моря... Я вижу
новую
расу — Ното
аадиаИсиз$ («Гомо
акватикус». — И. Л.),
грядущее поколение, рожденное в подводных деревнях и окончательно приспособившееся к новой окружающей среде...»
Идея создания гомо акватикус (человека подводного) перешла из фантастических романов и повестей на страницы серьезных научных монографий. Мы все больше и больше осознаем,
что человек столь же неразрывно связан в своей жизни с морем,
океаном, как и с землей. «Это неверно, — говорит академик
Л. М. Бреховских, — что человек — существо сухопутное...
Человек должен «обжить» океан, с тем чтобы познать его, заставить служить человечеству».
‘Однако «обжить» океан это не значит, что человек должен
поселиться на его дне навечно. Человеку постоянно нужен свет
солнца. теплота его лучей, запах цветов и шум листвы. И человек
всегда
будет
возвращаться
домой,
на
землю,
к родной
сти-
хии. Иначе он уже не будет человеком.
...Да, человечество, несомненно, будет «прописано» там, где
развивалась его история. И города будущего — в основном города земные.
А как представляют себе архитектуру завтрашнего дня, города будущего бионики?
Город, занимая минимальную территорию, должен не только создавать нормальные условия жизни для всех членов общества, обеспечивать горожанам наряду с высшими благами цивилизации постоянное общение с живой природой. Кроме того, он
должен своим внешним обликом, архитектурным
ансамблем
302
Бионика
повседневно радовать человека, воспитывать в нем чувство прекрасного, духовно обогащать его. Всего этого, по глубокому
убеждению биоников, можно достигнуть, завоевывая воздушное
пространство, учась у великого зодчего — Природы, используя
знания, накапливаемые новой ветвью бионики — архитектурной бионикой. Иными словами, раз уж нам нужен искусственный мир, именуемый городом, он должен не только предоставлять нам возможность постоянного общения с природой, но и
строиться по тем же законам, по каким природа
строит самое
себя (цвет. табл. 9).
Архитектура городов обязана гармонировать с тем, другим,
огромным, многоликим миром, в котором дуют ветры, качаются деревья и поют птицы. Будущее. говорят архитекторы-бионики, принадлежит воздушным структурам — надо строить «голубые города!»
«Голубые города» — это принципиально новые архитектурные ансамбли, развивающиеся по законам естественного роста
организмов: города, которые по своей структуре во многом будут походить на творения природы. В таких городах «дома, —
как предвидит заслуженный
архитектеср
РСФСР П. Бронников, — станут подобными деревьям:
опоры-стволы и кроны
жилых этажей зданий... Появятся протяженные дома-аллеи со
слившимися кронами и многочисленными стволами». Главное
в «голубом городе» — это индивидуальность структурной единицы и одновременно ее массовость. Она придаст городу новое
качество, смягчит геометризм архитектуры. Она индивидуализирует город и придаст ему масштабность. В таком городе не будет однообразных жилых кварталов. Комплексы домев-деревьев,
домов-цветков, по существу своему разные между собой, будут
«вырастать» из земли. Всюду зелень, солнце, прозрачная тень,
отбрасываемая кронами
«воздушных»
строений. Цвет домов
и площадей создаст вместе с великолепной
зеленью, ту среду
обитания.
находясь
в которой
человек
сможет
счастливо
жить и плодотворно работать. И
сегодня уже есть
детально
разработанные проекты таких
тянущихся
ввысь
«голубых
городов».
Что же позаимствовали инженеры и зодчие у природы для
вертикального решения грядущих городов?
Как известно, свободно стоящая колонна становится устойчивой только при защемлении ее у основания: массивная подземная часть обеспечивает устойчивость колонны. Боковые усилия (например, давление ветра) создают напряжения изгиба,
которыеу
основания
достигают
наибольшей
величины.
Самым
простым методом обеспечения устойчивости колонны является
утолщение ее нижнего конца. Но это не выход, ибо такие здания не будут отвечать главному требованию — экономии городских земельных площадей. Между тем мир растений
являет
красоты
и целесообразности
303
собой образец
оптимального
решения
этой задачи. Если отношение высоты к
наибольшему диаметру в наших строительных
конструкциях
до
последнего
времени не превышало 20—30, то природа дает нам примеры конструкций, у
которых оно равно 50—100 (пальмы) и
даже 200—500 (пшеница). Тщательное
изучение этих и других аналогичных
природных высотных конструкций привело инженеров и архитекторов к идее
сооружения
высотных
зданий
нового
типа '.
Немецкий архитектор Доллингер разработал проект высотного жилого дома
по
типу...
елки. Макет этого здания
показан
на рисунке 61.
На железобетонном
трубчатом «стволе», в котором
проложены лифты, кабели, водопроводные и газовые магистрали, укреплены,
словно ветви, квартиры. Каждая
такая
квартира крепится на отдельном кронштейне. Высота дома — 100 м, поверхность же опоры, на которой стоит здание, занимает очень мало места, всего
25 м?! Квартиры-«ветки»
дома-«елки»
спроектированы
из стандартных
деталей,
а это
как
нельзя
лучше
для
Рис.
61.
Макет
дома-«ел-
ки» высотой 100 м (архитектор Доллингер).
=”
Гармония
серий-
ного производства. Применение легких,
прочных и долговечных материалов поздвух
часи легких
объемных блоков-квартир.
Идея подобного разделения жилого
дома на две части поддерживается сейчас многими архитекторами. В разных
странах
начали
появляться
проекты,
развивающие эту идею. Примером может
служить предложенчый английским архитектором Квормби проект
дома-баги' Например, структура соломинки подсказала советским инженерам идею конструкции из
напряженного
железобетона
самой
высокой
в
мире Останкинской башни Московского телевизионного центра. Она стоит словно живой стебель, укрепленный нитями
вертикальных волокон, тело башни прочно и упруго.
чт
||
a
tf “| й
|
i
..
yy”
/
воляет делать жилой дом из
тей — несущей
конструкции
304
Бионика
ни, названный автором
«зерно на початке» (рис. 62). В центральном железобетонном стволе, как и в доме-«елке», размещаются лифтовые шахты. На уровне каждого этажа имеются две
консоли с крюками на конце, к которым подвешиваются легкие, прочные, пластмассовы» жилые ячейки. Консоли располагаются по спирали таким образом, что над и под каждой квартирой остается свободное пространство высотой
в два этажа.
Каждая жилая ячейка имеет узкий отросток, подсоединяющий
ее к заранее предусмотренному отверствию в бетонном стволе
ниже точки подвески. Этот отросток служит входом в ячейку.
Здесь же проходят все сети, которые с помощью гибкого стыка
соединяются с сетями внутри центрального ствола.
Как видно из приведенных описаний, у домов Доллингера
и Квормби,
спроектированных по образу строения растений,
много общего. В обоих проектах
конструктивная
связь между отдельными квартирами отсутствует. В доме-«елке» и в доме
«зерно на початке» жилые ячейки не соприкасаются с соседями, они раздвинуты, пространственно практически совершенно отделены друг от друга. Благодаря этому каждую жилую
ячейку со всех сторон заливает солнечный свет. Каждая жилая ячейка этих домов как бы поднятый высоко в воздух
Рис. 62. Проект
дома-башни
«зерно
на початке»
(архитектор
Квормби).
Гармония
красоты
и целесообразности
305
кусочек земли, на котором установлено жилище, практически
ничем не отличающееся от обычного коттеджа, индивидуального жилого дома. По
существу, в проектах
Доллингера и
Квормби мы наблюдаем
ярко выраженную
трансформацию
многоэтажного дома. Авторы свели всю архитектуру жилища
к индивидуальному дому, сохраняя при этом одно из преимуществ
многоэтажного
строительства — высокую
плотность
населения.
За последние годы в ряде наших
проектных организаций,
НИИ разработано несколько
вариантов
зданий
«стволовой»
архитектуры высотой в несколько сот метров, на которых точно кроны — ответвления, заполненные пористой структурой из
жилых квартир, помещений для работы, питания, лечения, воспитания детей, учебы и развлечений. Особенно больших успехов
в проектировании «домов-деревьев» достиг коллектив архитектурных мастерских
ЦНИИЭП
лечебно-курортных
зданий и
ПНИИЭП
жилищ.
ЦНИЭПовские железобетонные «дома-деревья» будут собираться из правильных кубов и параллелепипедов, из отдельных
объемных блоков. Такая оригинальная конструкция дома при
современном размахе жилищного строительства в нашей стране позволяет достигнуть высокого уровня его индустриализации, сократить сроки и уменьшить стоимость строительных работ. Строить высотные «стволовые» здания из объемных блоков
чрезвычайно удобно. Из стандартных деталей, узлов, блоков,
изготовляемых в заводских условиях, можно создавать великую архитектуру, но при одном
условии:
умело используя
богатейший опыт живой природы, которая, как известно, строя
из совершенно стандартных элементов, производя гигантские
серии, в итоге дает поразительное многообразие форм.
Представьте себе такую картину (ее описал
на страницах
«Литературной газеты» 30 августа 1972 г. П. Бронников в статье «Дома, подобные деревьям»).
«...В самом начале конвейерной цепи
— только
лишь
цемент, песок и мелкий керамзит: из смесительного отделения
их транспортируют в болыпие формовочные машины. Где-то в
середине конвейера, когда уже готовы стены, пол и потолок, в
«полуодетую» комнату монтируются электропроводка, трубы,
сантехнические приборы, двери, наличники.
Ближе к финишу — плинтусами прижимают линолеум
или
ворсолиновый
пол. И вот, наконец, последняя операция: устанавливается панель наружной стены с застекленными окнами и алюминиевым
багетом для занавесей...
Теперь комната полностью готова, ее ставят на платформу
автомобиля для отправки на монтаж. Десять минут на погрузку — и с завода выезжает квартира: все ее помещения заперты на ключ. Если на улице холодно, включены
электроотопи1 —327
306
Бионика
тельные приборы, питающиеся от аккумуляторов,
и каждая
комната укрыта раскладной алюминиевой кровлей. Десять минут
на
разгрузку. Мощный монтажный кран «с колес» принимает блок-комнату, блок-спальню и блок-кухню и ставит все
эти помещения в проектное положение...
..Их конструкция позволяет закреплять квартиры на стволах-опорах в любом месте — хоть на третьем, хоть на тридцатом этаже. Дома станут подобными деревьям... Для архитекторов открывается значительно большая, чем
сейчас,
свобода
композиционных решений...».
В свете сказанного несомненный интерес представляет разработанный английским инженером
Вильямом
Фришменом
оригинальный проект 850-этажного вертикального дома-города
высотой в 3200 м! Автор предлагает выполнить несущий костяк этого грандиозного сооружения в виде древесных стволов
с этажами-«ветвями». Фундамент здания уйдет на 150 м в землю. И принцип этого фундамента «срисован» с корневой системы дерева, хорошо воспринимающей
вертикальные
и значительные горизонтальные нагрузки (цвет. табл. 9). Архитектурный гигант рассчитан на размещение 500 тыс. человек. В доме
предусмотрено кондиционирование воздуха,
в том
числе
в
квартирах на самых верхних этажах, где оно необходимо и для
поддержания нормального давления.
Расчеты показывают, что осуществление проектов, подобных фришменовскому, вполне по плечу человечеству уже
на
нынешней ступени научно-технического прогресса. Ведь уже
сегодня промышленность выпускает
материалы
прочностью
200 кг/мм?. А завтрашний день обещает нам материалы со значительно большей прочностью. Специалисты считают, что на
единицу объема дома-города потребуется материалов
значительно меньше, чем при сооружении современных городов. При
меньшей затрате количества материалов на единицу объема
дома-города, естественно, снизится трудоемкость этой единицы.
Наконец, сооружение больших домов-городов позволит добиться огромной экономии средств
на коммуникациях
и
транспорте.
Но снова все тот же вопрос, о котором шла речь
при
рассмотрении проблемы сверхглубоководных поселений: сможет
ли человек приспособиться к городам, уносящим его жилье на
трехкилометровую высоту? Ведь, по сути
дела,
«сверхвысокая» архитектура тоже отрывает жилище человека от земли.
Однако, в отличие от подземных и подводных городов, сверхвысотные имеюхг реальные и довольно обжитые прототипы
в
наше время. Сто этажей для психики современного горожанина, как говорится, не проблема. И можно надеяться, считают
многие психологи, что 800 этажей явятся скорее количественным, а не качественным психологическим барьером.
Гармония
красоты
и
целесос бразности
307
Итак, будущее за вертикальными
«голубыми
городами»,
городами одновременно и интимными и общественными, краснвыми, как творения природы, прекрасными своей гармонией и
целесообразностью. Возводя «голубые
города»,
мы
можем
успешно решить проблему расселения
десятков
миллиардов
людей, которые завтра будут жить на нашей родной планеть.
У нас есть все возможности сохранить для внуков и правнуков
ныне имеющиеся на Земле леса, луга, плодородные поля, реки
и озера. В нашей власти приготовить грядущим
поколениям
землян в «голубых городах» все блага, какие может дать цивилизация завтрашнего дня.
«Голубые города» — это не туманное будущее. Уже сегодня
можно совершить путешествие в один из таких городов. Давайте вместе с вами, дорогой читатель, его осуществим.
...Прямые и широкие улицы ровной лентой бегут к горизонту среди зеленых аллей, пылающих многоцветием клумб. Вдоль
улиц купаются в ярких солнечных лучах стройные дома «деревья». Отделанные чудесной пластмассой, не подверженной
воздействию жары, холода, влаги, облицованные
керамикой
различчых цветов и оттенков, эти ажурные дома-красавцы поражают какой-то особой, удивительной легкостью, строгостью
и ясностью форм. В городе нет домов случайной ширины, длины и высоты, здесь все подчинено проекту, единой целью которого является создание наилучших условий для жизни людей.
Планирсвка квартир разная, как говорится, на любой
вкус,
любые потребности.
В центре города ни одного автомобиля.
Тут лишь
школы,
высшие учебные заведения, клубы, театры, музеи, магазины,
скверы, спортивные комплексы. Здесь разрешено только пешеходное движение. К услугам горожан движущиеся тротуары,
платформы и другие
бесколесные
системы.
Промышленные
предприятия,
научно-исследовательские
институты,
административные учреждения, вокзалы и аэровокзалы находятся за
чертой города. А далее, вокруг
города, свободная
земля, по
площади большая, чем город, раз в 100, занятая лесами, сельскохозяйственными угодьями, местами отдыха и развлечений.
Под городом
на разных уревнях имеется широко разветвленная транспортная сеть.
Так
выглядит
«голубой
город»,
город-сад,
в
котором
будут
жить наши внуки и правнуки.
Где же находится этот сказочный,
лучезарный
город, построенный по законам природы?
Такого города пока нет. Он существует лишь в воображении
архитекторов, инженеров-строителей, конструкторов, градостроителей-художников и скульпторов, его можно увидеть на чертежах, в рисунках и в макетах. Но, перефразируя В. В. Маяковского, можно сказать: «Мы знаем, город будет!»
11
x с
<
sage
X
xХХХ
x RRR ео
a
yy
+
an
me
eit
er
yi!
ae
tal
\\
)
NS
|
лaаS
КД
=
и
a
и
WARREAYA
a
i
м
~
h
<
Биологическая
связь
В древних легендах знание языка животных рассматривалось
как необходимый атрибут абсолютной мудрости. Общеизвестно
предание, согласно которому библейскому мудрецу Соломону
достаточно было надеть магическое кольцо, чтобы разобраться,
о чем судачат сороки, мурлычет кошка или
переговариваются
вернувшиеся
с пастбищ стада. Притча
утверждает,
что
царь не
только
понимал
животных, но и беседовал с ними
на их языке.
Любую легенду мы обычно воспринимаем как вымысел, выдумку, как нечто невероятное. А вот конкретно к легенде,
о
которой идет речь у Конрада Лоренца, всемирно
известного
австрийского зоолога, посвятившего всю свою жизнь изучению
поведения разнообразных живых существ, совсем иное отношение. «Я склонен принять эту сказку
за
истину,
— пишет
ученый в своей книге «Кольцо царя Соломона». — У меня есть
все
основания
верить,
что
Соломон
действительно
мог
беседо-
вать с животными, и даже без помощи волшебного кольца, 0бладание которым приписывает ему легенда. Я сам могу делать
то
же
самое,
не
прибегая
к
магии,
черной
или
какой-либо
иной... Я нисколько не шучу. В том случае, если «сигнальный
код» общественных видов животных вообще
можно
назвать
языком, тогда человек, изучивший его «словарь», сможет по-
нимать животных...»|.
Известный дрессировщик диких животных,
заслуженный
артист РСФСР Вальтер Запашный рассказывает, что ему часто
задают вопросы: как дрессировщик разговаривает
со своими
«кошками», понимают ли они приказания? «Вероятно, не так
просты эти звери, как мы склонны иногда думать, — полагает
В. Запашный. — Может быть, просто еще не создана та аппара‘' Лоренц
Конрад.
Кольцо
царя Соломона.
М., «Знание»,
1970, с. 5.
310
Бионика
тура, не разработаны те методы, которые могли бы зафиксировать все, что происходит в психике животных...»'.
Несомненно, у многих животных есть свой «язык». Он далеко не то же самое, что речь человека, и, возможно, для его
обозначения более уместен был бы особый термин.
Но
свою
функцию
— функцию
носителя информации, средства
общения — он в конечном счете выполняет: позволяет осуществлять
контакт между отдельными особями, заявить о притязаниях на
определенную территорию, на руководство
группой
или
на
единоличное обладание пищей, координировать действия всего
сообщества при поисках пищи и обороне от врагов, передавать
«традиции», принятые в сообществе от поколения к поколению,
выразить состояние «радости», удовольствия, тревоги, испуга,
страха, нетерпения, гнева, тоски, беспокойства, мук одиночества, голода, оповестить сородичей о приближении врага и т. п.
Язык животных строится не из символов, содержащих информацию,
а из определенных,
специфичных
для
данного
вида
сигналов. Часто мы не можем не только понять, но и уловить
сигналы, посредством которых животные общаются друг с другом: мы воспринимаем лишь их результат. Но если проводить
аналогию с человеческим языком, аналогию весьма условную,
то смысловое значение многих сигналов можно перевести
на
язык людей, и не одним словом или фразой, а иногда даже целой созокупностью фраз. Так, профессор Конрад Лоренц установил, что продолжительное гусиное гоготание или «залп» гогота, состоящий более чем из шести слогов
«га-га-га-га-га-гага», имеет вполне определенный смысл:
«Здесь хорошо. Еды
много. Давайте останемся тут». Если тирада состоит из шести
слогов, это означает: «Травы на лугу мало. Давайте пощиплем
ее и не спеша гронемся дальше». Пять слогов «га-га-га-га-га»
переволятся так: «Надо прибавить
шагу».
Четыре
слога —
«Полный
ход,
вытягивай
шею
вперед».
Три
слога
означают:
«Беги со всех ног. Будь начеку. Наверное, придется взлетать».
Чтобы сообщить, что бежать нужно изо всех сил, но не взлетать,
трехсложное «га-га-га» заменяется на «га-ги-га», произнесенное
с умеренной громкостью на высокой ноте. Сигнал тревоги у
гусей, завидевших, скажем, собаку, звучит как односложный,
не очень громкий носовой возглас «ра». Услышав такой сигнал,
вся стая взлетает, шумно хлопает крыльями.
Отбой
тревоги
подается длительным гоготанием.
На каких же «языках» и «диалектах» изъясняются животные? Каков «лексикон» отдельных видов? Как ученые изучают
язык животных? Что мы знаем о системах биологической связи? Почему в последние 20—25 лет к исследованиям «языка»
‘Запашный
с. 13.
В.
«Литературная
газета»,
№
26,
28
июня
1972
г.,
Биологическая
связь
311
животных начали проявлять столь большой интерес зоопсихологи, этологи, бионики, лингвисты, философы, рыболовы, связисты, животноводы, кибернетики, акустики и даже
военные
моряки? Что практически сулит человеку познание
«языка»
животных?
Многочисленные наблюдения поведения животных показывают: любая общественная группа остается сплоченной только
тогда, когда она имеет внутреннюю связь — язык. «Язык» животных — это зеркало их психических способностей. Чем больше смысловых сигналов в «языке» животных, тем сложнее их
взаимоотношения и совершеннее психика.
Довольно большой «словарный» запас у наиболее развитых
высших обезьян. Язык низших обезьян — гамадрилов — включает
в себя сложную
систему звуков и жестов. В их звуковом
языке около 20 сигналов, каждый из них несет определенную информацию и имеет точный адрес. Вожак,
заметивший
опасность, издает особый возглас. Повторять второй раз не приходится: все стадо сразу же мчится прочь или занимает оборонительную позицию. Обезьяна, отставшая от стада, кричит
подругому. И уже совсем иные звуки сопровождают различные
внутристадные ритуалы, помогающие гамадрилам
выразить
свое отношение к соплеменнику.
Довольно сложным языком обладают летучие мыши. В нем
не менее 22 «слов» («чип», базз», «чёр-чёр» и др.). Все звуки,
которыми мыши обмениваются между собой, отчетливо делятся на четыре группы: первая группа служит для общения матерей с детенышами; вторая связана с «военными
действиями» — битвами между самцами; третья служит для любовных
монологов и дуэтов; четвертая — сигналы тревоги и опасности.
Австралийский зоолог профессор Дж. Нельсон
рассказывает,
что часовой предупреждает «сограждан» криком, похожим на
отрывистый звук кларнета. Воцаряется тишина, и все летучие
мыши начинают пристально смотреть на нарушителя покоя.
Весьма многообразную информацию, как показывают
исследования, несут звуки, издаваемые птицами. Они связаны
со всеми важнейшими формами жизнедеятельности: питанием,
гнездованием, спариванием, выведением птенцов, кочевками,
перелетами и т. п. При помощи одних звуковых сигналов осуществляется связь между партнерами по стае,
при
помощи
других
— между партнерами по гнезду или между родителями и птенцами и т. п. Западногерманский профессор Эрих Боймер на основании шестидесятилетних наблюдений
установил,
что все птицы, принадлежащие к семейству куриных, пользуются одним «языком», состоящим из 30 звуков, несколько различающихся по тону. Эти звуки выражают определенное
настроение или желание, например: «Я хочу
есть»,
«Оставьте
меня в покое» ит. п. Используя микрофон и звукозаписываю-
312
Бионика
щую аппаратуру, Боймер не раз демонстрировал, как куры знакомятся друг с другом, завязывают дружбу, заставляют цыплят клевать зерно и успокаивают их,
если
они
чем-нибудь
взволнованы.
Важную роль в жизни птиц играет песня. Певчие и говорящие птицы очень чувствительны к музыке, они обладают уникальным для животного мира физиологическим и акустическим голосовым аппаратом. Способность к пению у них передается в основном по наследству.
Сколько птиц — столько и разных песен. В репертуаре только одного дрозда около пятидесяти песен! Песня
птиц
— это
своеобразный «разговорный язык», это способ не потеряться в
лесу, сигнал о занятой территории, это средство найти, обнаружить себе подобных, заявить о своей силе, поделиться радостью
любви, это демонстрация способности продолжить жизнь. Несомненно, в песнях птиц содержится еще и другая, неизвестная
пока человеку информация. Установлено, что даже у относительно молчаливых птиц звуковая информация состоит из сотен различных сигналов и что по богатству языка с птицами
могут соперничать только приматы. Один американский ученый подсчитал: для полной характеристики оттенков звуковых сигналов птиц необходимо не менее четырехсот терминов!
Говоря о «языке» птиц, особо следует выделить ворон. Понаблюдайте когда-нибудь за поведением вороньей стаи. Набравшись терпения, вы можете увидеть, как вдруг
одна из
птиц
взлетит и затем сядет на расстоянии нескольких десятков метров от стаи. Остальные не обращают на это никакого внимания.
Через несколько минут покинувшая стаю ворона также неожиданно вновь поднимается в воздух. Но на этот
раз
стая
не
остается безучастной: все птицы почти одновременно взлетают
и перемещаются на несколько сотен метров от прежнего места.
В описанном случае вы не услышите, чтобы отделившаяся
от
стаи ворона кричала «карр» либо подавала другой видимый или
слышимый сигнал. Каким же образом вожак стаи известил своих подопечных, что первый взлет был лишь его «частным делом», а второй
— командой к отлету для всех? Очевидно,
он
подал какой-то особый сигнал, который был принят всеми.
За последние годы ученым удалось выявить около 300 различных возгласов в «языке» ворон. Смысл подавляющего большинства из них пока еще не раскрыт. Но кое-какие
«слова»
уже понятны. Например, беспрерывное карканье особо хриплым голосом означает призыв ко всем членам стаи устроить собрание в поле. Чтобы подслушать, что происходит на вороньей
«ассамблее», профессор Пенсильванского университета (США)
Губерт Фрингс прятал на кукурузном поле микрофоны и динамики. Всякий раз, когда над полем пролетала воронья стая, он
включал магнитофон с записанным на пленку сигналом сбора.
Биологическая
связь
313
После многих неудачных попыток ему повезло: стая обратила
внимание на призыв, доносившийся из динамиков, и приземлилась там, где нужно было ученому.
Профессору Фрингсу принадлежит еще очень любопытное
открытие. Оказывается, у птиц одного
вида «языки»
различаются. Так, сельские вороны не понимают ворон городских,
вороны, обитающие в Америке, не могут «разговаривать» с европейскими. По-видимому, на разных континентах
и в разных
странах складываются разные птичьи диалекты, и тогда «иноземные коллеги», живущие в тысячах километров друг от друга, не в состоянии понять своих соплеменников, не могут между собой общаться, точно так же как, скажем, верхнебаварский
крестьянин, никогда не покидавший родное селение, беспомощен понять язык рыбака с побережья Северного
моря.
Был
проделан такой опыт. На
магнитофонную
пленку
записали
крик ворон, обитающих во Франции. Затем эти записи были
воспроизведены в местах гнездовья ворон в Америке. Выяснилось, что американские вороны не реагируют на крики своих
французских родственниц; они не понимают
даже
сигнала
тревоги, если его прокаркала европейская
ворона.
Заслышав
такой сигнал, они преспокойно продолжают сидеть на месте,
вместо того чтобы спасаться.
Однако есть вороны-бродяги, кочующие из города в сельские местности, из одной страны в другую, которых по праву
можно назвать «полиглотами». Во время своих весенних и осенних перелетов они встречаются
со стаями
других
ворон
и
усваивают их «диалекты». Они овладевают даже в основных
чертах «языками» галок и чаек. Столь выдающиеся лингвистические познания позволяют, например, восточноамериканским
воронам-путешественницам с первого карканья понимать европейских ворон, «диалект» которых им был неизвестен до встречи. И вот что еще интересно. После ряда экспериментов профессор Фрингс установил, что провинциальные вороны не способны к такому «полиглотству», пока они с год не поучатся
в
«международной школе вороньих языков».
Очевидно,
среди
птиц одного вида имеются «высокообразованные» и «менее образованные» особи.
У пернатых существует и какое-то
подобие
межвидового
эсперанто. Они передают звуковую информацию не только непосредственно партнерам, собеседникам, но нередко используют для этого посредников как своей породы, так и «чужих».
Пример, известный, пожалуй, всем: сойки
своими
резкими
криками могут взбудоражить сорок, а сороки разнесут весть
о появлении охотника по всему лесу. Аналогичные
ситуации
довольно широко распространены в мире пернатых.
Многообразны способы
общения
у насекомых.
Природа
здесь достигла максимального творческого эффекта в выборе
314
Бионика
форм, методов и средств общения
для
каждого вида. Так,
например,
многие
насекомые
пользуются
«языком
запахов». У ряда
«общественных»
насекомых
обнаружены
торибоны
— химические вещества,
воспринимаемые
особями того же вида как сигналы тревоги,
бегства или активной обороны. Красногрудые
муравьи-древоточцы
общаются
между собой языком жестов (рис. 63).
«Язык жестов этого вида, — пишет
известный советский энтомолог профессор
II. HW. Мариковский,
— очень
богатый.
Мне удалось подметить более двух десятков сигналов» («Дай поесть!», «Внимание!», «Чужой запах!»,
«Берегись!»,
«На помощь!», «Кто ты?»,
«Тревога!»,
«В бой!» и др.).
У термитов средством передачи информации на расстояние служит своего
рода «телеграф». Пользуясь им, они, в
частности, могут издалека сигнализировать своим братьям о приближении не-
А
рвы рь
Берегись!
приятеля, выстукивая головой
на стенках
туннеля термитника сигналы тревоги.
Пчелы изъясняются
языком танца.
Танцы
пчел,
как
доказал
известный
не-
мецкий натуралист Карл Фриш, — своеобразная служебная пантомима.
С ее
помощью пчелы
передают
друг другу
информацию
С
Очень прошу:
eee
again
тоник»
дай поесть!
Рис. 63.
«Язык»
красногрудых
ев-древоточцев,
жестов
муравь-
о
направлении
полета
к
месту, в котором находится медонос, о
расстоянии до этого места, об изобилии
и виде медоноса, с которого был собран
взяток. Мюнхенский зоолог доктор Геральд Эш
установил, что танец пчел
сопровождается еще и звуками. Эти звуки он записал на магнитную ленту и пришел к выводу,
что продолжительность
«треска» пчелиных крыльев
во время
танца также служит указанием на расстояние от улья до места
взятка. Если,
например, треск, издаваемый крыльями,
продолжается 0,4 сек, то расстояние до
нужного места 200 м. Чем громче «стучат» крылья танцовщицы,
тем
выше
качество нектара (цвет. табл. 10).
Биологическа.з
связь
315
Очень богат стрекочущий язык кузнечиков и сверчков. Доктор Хубер из Тюбинского университета записал на магнитную
ленту около 500 различных типов звуков, издаваемых кузнечиками. По виртуозности язык кузнечиков и сверчков не уступает языку птиц.
Многоязычен и «голубой континент». Многие рыбы, например, обмениваются информацией контактными прикосновениями. Особенно четко тактильная связь развита у видов, обитающих в мутных водах. «У таких рыб, — пишет доктор биологических наук В. Р. Протасов, — имеются
сложно
устроенные
длинные осязательные органы с вкусовыми почками — разнообразные усы и отростки. Очень часто такие рыбы передают
информацию, ощупывая друг друга
усиками
или
взаимно
скрещивая свои усики так же, как это делают своими антеннами муравьи»'. Некоторые рыбы, подобно насекомым, активно
пользуются химической связью, так называемым «языком запахов». Так, гольяны используют химические вещества, выделямые слизистыми клетками кожи, для подачи
сигнала
об
спасности; «Где-то рядом хищник. Он уже схватил
одну из
Hac!» Караси пользуются химическими сигналами в нерестовых играх.
У многих дневных рыб хорошо развита
система
общения
при помощи двигательных реакций и поз. В настоящее время
четко установлено шесть типов
поз, имеющих
определенное
смысловое значение: позы, означающие наличие в данном месте пищи, позы обороны, угрозы и поражения, позы призыва
молоди и позы, связанные с взаимоотношениями самца
и самки. По наблюдениям В. Р. Протасова, «иногда обмен двигательными реакциями и позами представляет собой
своеобразный
сложный
диалог рыб, аналогичный
жестам и мимике
глу-
хонемых» 2.
Болыпое
количество
глубоководных
видов,
обитающих
в условиях низкой освещенности, природа наделила своеобразными «фонарями». Эти сложно устроенные светящиеся органы,
снабженные
линзами,
рефлекторами
и диафрагмами,
часто
напоминают знакомые нам прожекторы. Рыбы,
обладающие
такими органами, пользуются оптической связью; обмен информацией производится при помощи световой азбуки Морзе.
«Переговариваясь» между собой, рыбы могут произвольно менять частотуи длительность световых импульсов. Ряд видов
пользуется «электрической связью», однако эта форма обшения
рыб, как и оптическая
связь, пока еще слабо изучена.
лее широко распространена среди
щих Мировой океан, акустическая
: В. Р. Протассв.
2 Там же, с. 6.
Наибо-
живых существ,
населяюсвязь. Известно более тыся-
Язык рыб. М., «Знание»,
196$, с. 21.
316
Бионика
чи видов рыб, обменивающихся
информацией
при помощи
звуковых сигналов (цвет. табл. 10).
Ярок и разнообразен язык звуков водных млекопитающих.
Наиболее щедро одарила природа китообразных. Их вокальные
возможности поразительны. Диапазон их голоса простирается
от инфра- до ультразвука. Впечатляюще «поет» огромный спермацетовый кит. Он посылает в пространство звуки, равные по
силе тому реву, который слышит человеквбм от реактивного
двигателя, работающего на полную мощность. Исключительную популярность снискала себе своим голосом белуха. Моряки называют ее «морской канарейкой». Это животное из семейства нарваловых, по описаниям натуралистов,
может
глухо
стонать и свистеть, громко хрюкать, издавать звуки,
напоминающие удары колокола, плач ребенка, женский пронзительный
крик,
отдаленный
шум
детской
толпы,
трели
певчих птиц.
«Сравнивали ее голос,
— пишет профессор
А. Г. Томилин,
—
со звуками струнного оркестра во время настройки, услышали
в нем звуки, похожие на свист, визг, тиканье
и клохтанье,
а
также
мяуканье
и щебетанье»'.
Очень мелодично «поют» киты-горбачи. Вокальные способности этих почти вымерших животных были открыты сравнительно недавно молодым американским ученым из Рокфеллеровского института Р. Пайном.
Из всех обитателей Мирового океана самый богатый и самый сложный «язык» у зубатых китов — дельфинов. У них нет
голосовых связок, но тем не менее дельфины издают множество
самых разнообразных акустических сигналов: одни подаются,
как это отмечалось в главе «Локаторы природы» (стр. 107), для
ориентации, навигации, розыска пищи (эхолокационные ультразвуковые сигналы); другие преимущественно
для
обмена
информацией, для связи со своими сородичами
— коммуникационные сигналы.
Болышой
успех
в изучении
акустической
связи дельфинов выпал на долю американского психолога
Дж. Бастиана,
профессора из Калифорнийского университета. Приступая
к
проведению серии экспериментов, ученый исходил из следующей
рабочей
гипотезы:
если
у длиннорылых
дельфинов
(Tursiops) есть сложная акустическая
связь, значит, в определенной ситуации, когда дельфину нужно сделать
какой-то
выбор, он сможет передать информацию о результате своего
выбора другому дельфину. При этом он передаст ее таким образом, что дельфин, получивший сигнал, расшифровав полученную информацию, сможет совершить нужное действие. Иными
словами, речь шла о том, чтобы доказать, что у дельфинов есть
настоящий, свой, дельфиний язык.
' Томилин А.
Г. История
слепого
кашалота. М., «Наука»,
1965, с. 71.
Биологическая
связь
317
Началу
эксперимента
предшествовала
подготовительная
стадия. На этом этапе двух дельфинов — Буза (самца) и Дорис
(самку), которые долго жили в одном бассейне и хорошо знали
друг друга, порознь выучили последовательно совершать ряд
одинаковых
действий.
Затем
бассейн
разделили
сетью
с круп-
ными ячейками на две равные части и подопытные животные
оказались изолированными друг от друга. В каждом отделении бассейна была установлена лампа и две педали на расстоянии метра друг от друга (рис. 64). С помощью лампы Бастиан
подавал дельфинам сигнал: длительное свечение означало приказ «Нажми правый рычаг!». Когда подавался непрерывный
сигнал, животное (для получения награды) должно было нажать
клювом на левую педаль (рис. 65, 1). Таким
образом, задача
первого этапа эксперимента заключалась в том, чтобы заставить дельфинов одинаково реагировать на адекватные возбуднтели. Буз и Дорис быстро усвоили разницу между продолжительным и прерывистым световыми сигналами, между правой
и левой стороной и отлично
справлялись
с порученной
им
«работой».
После того как первое задание было дельфинами усвоено,
начинался второй, более сложный этап эксперимента. Бастиан
прекратил подачу световых сигналов в отделение
самца, и с
этого момента Буз должен был ориентироваться только на тот
Гидрофон
Рис. 64. Схематическое
изображение
опытной
установки
Дж.
люд).
Бастиана
профессора
(по Ж. Ил-
Гидрофон
318
Бионика
сигнал, который получала
Дорис и который был ему виден сквозь сеть. Самка была приучена выполнять свою задачу в течение пяти секунд после сигнала, Бузу же
полагалось подождать, пока Дорис
справится со своей
педалью, и только
потом
уже нажать на ту, которая находилась в
его отделении (рис. 65, 2, 3). Рыба в награду выдавалась самцу и самке лишь после
того, как оба животных точно выполняли
свою задачу. Дельфины успешно справлялись с усложненным заданием: в 97 случаях из 100 после соответствующих сигналов
нажимали нужную педаль.
Далее эксперимент
вступил в решающую стадию. Лампа была замаскирована
таким образом, что по-прежнему подаваемый световой сигнал в отделение самки самец в своей половине бассейна увидеть не
мог.
Тем
не
менее
самец,
не
видя
сигнала,
продолжал правильно выполнять задачу,
почти с таким же успехом,
как и самка.
Из этого следовало: самец получал от самки необходимую информацию. Но какую?
Какого характера? Теоретически она могла
быть либо зрительной, либо акустической.
Для восприятия
зрительной
информации
ничего не требсвалось,
кроме того, чтобы
подопытные животные
могли в процессе
эксперимента видеть друг друга. Такая возможность имелась: самец видел самку через разделявшую их сеть с крупными ячейками. Вместе с тем в ходе опыта дельфины
издавали
многочисленные
акустические
сигналы. Их улавливали гидрофонами, за-
«—
<
Рис.
Ж.
65.
Этапы
эксперимента
Дж.
Бастиана
(по
Иллюд).
1 — сбучение
одновременным
действием
в ответ
на одинаковые
сигналы.
В награду
за правильные
действия
дельфины
получают
рыбу
товой
(изображена на
сигнал получает
схемах
— в карманах
внизу); 2—3
— свеодна самка
(2), самец (3) по условию
опыта выполняет
задание после того, как с ним справится самка;
4 — бассейн
разделен
звукои светонепроницаемой
перегородкой
Действия
самца
правильны
лишь
на 54%;
5 — в перегородке
проделано
отверстие,
позволяющее
животным
общаться
с
помощью
акустических
сигналов.
Самец
дзет
более
80%
правильных
решений,
Биологическая
связь
319
писывали на магнитную ленту и изучали с помощью акустических спектрографов. Было выявлено два типа сигналов: классический свист, который
издают
китообразные, и импульсы,
сходные по своему характеру с эхолокационными сигналами.
Все эти сигналы можно было истолковать по-разному: 1) дельфин получает от своей партнерши настоящую закодированную
и сознательную информацию; 2) самец методом эхолокации определяет положение самки относительно
педали, на которую
она нажимает; 3) дельфин пользуется эхолокационными сигналами, которые издает самка для самой себя, когда выбирает
нужную педаль.
Для того чтобы установить, какая же из всех перечисленных гипотез соответствует действительности, профессор Бастиан провел еще ряд опытов. Он начал с того, что покрыл сеть,
разделявшую животных, непрозрачной пленкой. Таким образом, самец был лишен возможности видеть самку, наблюдать
за ее действиями. Однако в 97 случаях из 100 Буз давал правильные ответы. Этим дельфин показал,
что он He
получает
информацию зрительным путем. Затем экспериментатор
сократил расстояние между двумя педалями до 15 см. При этом
ученый исходил из следующих соображений:
если допустить,
что самец использует эхо сигналов, испускаемых самкой,
то
такое близкое расположение педалей должно помешать самцу
принимать их. Но, несмотря на усложнившиеся условия,
peзультат оставался прежним: 97 правильных ответов из 100!
По полученным в двух последних опытах данным профессор
Бастиан пришел к выводу, что система передачи информации
у дельфинов скорее всего носит акустический характер. Чтобы
проверить это предположение, исследователь наложил поверх
светонепроницаемой пленки, разделявшей
бассейн,
звуконепроницаемые пластинки из неопрена (рис. 65, 4). И сразу
же
эффективность действий Буза резко снизилась: самец дал всего 54 положительных ответа из 100, что статистически примерно равнялось результату, который мог быть получен случайно.
Затем экспериментатор проделал в пластинке из неопрена отверстие (рис. 65, 5), дававшее возможность звуковым волнам
распространяться по всему бассейну. И тогда дельфин принял
86%
правильных
решений!
В результате проведенных экспериментов
Бастиан
добыл
довольно веские доказательства Того, что самец получает
от
самки посредством акустических сигналов информацию, которую он в состоянии был осмыслить
и на основании
которой
может принять правильное решение — нажать правую или левую педаль. Опыты также показали, что самка,
получившая
световую информацию, понимает ее значение (правая или левая педаль) и в зависимости
от светового
сигнала
кодирует
свою информацию.
320
Бионика
В итоге проведенной серии экспериментов Бастиан пришел
к твердому убеждению, что по сообразительности, по развитию
акустических способностей дельфины превосходят всех других
животных, включая приматов. Если до
последнего
времени
считали, что осмысленное преобразование сигналов присуще
лишь человеку, то в опытах Бастиана дельфины доказали, что
они в состоянии воспринимать визуальный сигнал и преобразовывать его в акустический. Выступая в октябре 1966 г. на коллоквиуме, посвященном изучению сонарных систем животных,
профессор Дж. Бастиан в заключение своего доклада заявил:
следует считать доказанным, что дельфины действительно разговаривают друг с другом и что их общение
— гораздо
более
сложный процесс, чем простой обмен сигналами.
Итак, мы теперь знаем, что «язык» животных — это не метафора, а реально существующее многообразное средство
общения «братьев наших меньших». Они изъясняются между собой языком звуков, языком моторики, физиогномики, языком
мимики, используют для обмена информацией оптическую, химическую, тактильную, электрическую и другие виды связи.
Современные знания о методах и средствах обмена информацией между животными различных уровней филогенеза (от насекомых до дельфинов и человекообразных
обезьян)
добыты
кропотливым трудом, многочисленными экспериментами, оригинальными опытами, длительными наблюдениями ученых ряда стран.
Большой вклад в изучение «языка» животных внесли такие
выдающиеся
ученые
современности,
как
Конрад
Лоренц
(Австрия), Н. Тинберген (Голландия), объяснившие ритуальные
движения многих позвоночных, Карл фон Фриш (ФРГ), впервые расшифровавший «язык» пчел, Реми Шовен
(Франция),
вскрывший тайны связи многих насекомых. Многого достигли
в исследовании «языка» рыб Марина
Поланд,
Фиш, Вильям
Таволга (США), Хияма (Япония), Мальтон (Великобритания),
Кнудсен (Норвегия), Ганс
Шнайдер
(ФРГ), Рене
Брюснель
(Франция). Значительный вклад в изучение сигнализации различных
видов
животных
внесли
советские
ученые:
А. Н. Промптов, Н. Н. Лодыгина-Котс, В. Р. Протасов, А. Г. Томилин, П. И. Мариковский, Н. И. Жинкин, А. А. Никольский,
Г. Н. Симкин,
Б. Д. Васильев,
В. Д.
Ильичев,
И.
А.
Тих,
Н. П. Наумов, Е. В. Романенко и другие.
Изучению биологической сигнализации уделяют внимание
многие ученые, и не только биологи.
Для специалистов, занимающихся разработкой
техники
подводной связи, значительный
интерес,
например,
представляет
структура
дальней
свя-
зи рыб, природа
их генерирующих
и приемных
устройств.
Ученые полагают, что, когда досконально будут изучены физические основы сигналов дальней связи рыб, в технике подводной
Биологическая
связь
321
связи произойдет подлинная революция. В знаниях принципов
обмена информацией между живыми организмами нуждаются
также создатели современных
сложных
электронно-вычислительных машин и самоорганизующихся систем, так как система сигнализации
в животном мире имеет очень высокую степень совершенства и сочетается с большой энергетической экономичностью.
Имеется еще немало других интересных и важных прикладных аспектов, привлекающих ученых к познанию тайн биологической связи. К ним мы еще вернемся. А сейчас обратимся
к главной цели ведущихся
исследований
языка
животных.
Речь идет о том, чтобы наладить обмен информацией между
человеком
и
животными,
установить
действенный,
«деловой»
контакт с «братьями нашими меньшими», научиться ими управлять и таким образом использовать с максимальной эффективностью различные способности животного
мира
на благо
человечества.
«Возможно ли это на самом деле?» — может спросить читатель. Вполне! Общеизвестно утверждение кибернетиков, что в
тех случаях, когда между двумя системами можно установить
связь, например, посредством языка, возможен целенаправленный процесс управления. Это положение распространяется
не
только на системы «человек — машина», но и на системы «человек
— животное». Постигнув
язык, мышление
животных,
досконально изучив их поведение, каждый из нас может стать
подобно
Маугли,
героя
хорошо
известного
произведения
Р. Киплинга «Книга джунглей», подлинным повелителем животных.
Все это не так уж фантастично, если учесть, скажем, опыт
профессора К. Лоренца. Научившись подражать крику гусей,
расшифровав значение издаваемых ими звуков, ученый, как
он рассказывает, подружился с гусями и стал полноправным
членом этой стаи. И хотя языковые упражнения давались ему
нелегко, особенно из-за трудно достижимой хриплости произношения и неистового темпа гогота, он все же довольно часто
«беседовал» с гусями, при этом обе стороны хорошо понимали
друг друга. Настолько хорошо, что, когда Конрад Лоренц советовал им ускорить шаг, подольше задержаться на лужайке
или перейти на новое место, гуси следовали этим советам, данным на «чисто гусином языке»,
Речь
— коренное отличие человека от животных. Человек
пользуется членораздельной устной или
письменной
речью,
и она обозначает абстрактные понятия, сформировавшиеся в
процессе социально-исторического развития человечества. Основным условием возникновения человеческой речи были, как
известно, трудовая деятельность наших
далеких
предков
и
сложившиеся при этом общественные отношения.
322
Бионика
Для того чтобы добиться взаимопонимания между человеком и животными, необходимо отрешиться от неверного, ошибочного антропоморфического подхода к решению проблемы.
Мы должны научиться командовать животными на том языке,
которым они общаются и которому
повинуются. Мы
можем
«говорить» им: «Иди сюда!» или «Иди туда!»,
«Делай это!»
или «Не делай этого!», «Откладывай яйца здесь!» или «Не откладывай яйца там!», «Питайся этим!» или «Не ешь того!».
Только в совершенстве овладев языком животных, мобилизуя
их потенциальные психические возможности путем так называемого развивающего
обучения,
человек может достигнуть
больших успехов в использовании многообразных способностей
«братьев своих меныпих», целенаправленно, эффективно управлять ими. И на этом пути многим советским и зарубежным
ученым уже удалось достичь определенных результатов. Обратимся к фактам.
Под Рязанью есть городок Рыбное. Здесь в доме, похожем
на замок, обосновался крупнейший
в мире научно-исследовательский центр пчеловодства. В институте имеется лаборатория, изучающая быт пчел, их повадки,
«язык».
Разумеется,
сотрудникам лаборатории были хорошо известны работы Карла фон Фринта, расшифровавшего замысловатые пчелиные «танцы», указывающие, куда нужно лететь за пыльцой. Им также
были известны предпринимавшиеся многими учеными в течение ряда десятилетий безуспешные
попытки
выработать
у
пчел условные рефлексы на звуковой раздражитель.
Однако
рязанские ученые решили все же выяснить, не пользуются ли
пчелы для обмена информацией (кроме удивительных
«танцев») еще какими-нибудь сигналами. С помощью поставленных
в ульи чувствительных микрофонов и звукозаписывающей аппаратуры биологи провели ряд экспериментов и установили, что
при общении пчелы не только «танцуют», но еще и «поют».
Пение пчел — это звуки, которые они издают
после
того,
как находят лоток с сахарным сиропом, специально приготовленным экспериментаторами
в качестве приманки. Запись пчелиного «пения» несколько раз воспроизводилась вблизи лотка
с сиропом, а рядом устанавливали точно такой же лоток,
но
уже без каких-то привлекающих «мелодий». Оказалось, к лотку, где был установлен магнитофон, собиралось
значительно
больше пчел (примерно в два раза), чем к неозвученному лотку. Затем для контроля меняли лотки местами, но всякий раз
пчелы в основном летели туда, где звучали
записанные
на
пленку пчелиные «голоса». Серия опытов
подтвердила,
что
пчелы воспринимают звуковые сигналы, находясь в воздухе, во
время полета. Так в результате проведенных
экспериментов
выявилась чрезвычайно важная для пчеловодства возможность
выработки у пчел условных рефлексов на звуковой раздражни-
Биологическая
связь
323
тель. Но еще более важно другое. Выявив
у
пчел
звуковой
«язык», расшифровав его смысловое значение, ученые научились по «разговорам» обитателей ульев определять их состояние, распознавать их «настроение». Возник новый, основанный
на «подслушивании разговора» метод диагностики состояния
пчелиных семей, предвосхищения, прогнозирования
ближайших в улье событий.
Знание «языка» пчел позволяет по-новому вести пчеловодство. Любой пасечник знает, что, если вдруг пчелы задумали
роиться, причины тревожные: мало корма, жара, гибель матки. Волнуется семья, вот-вст распадется. Гул в улье в это время
особенно тревожен, требователен. Прослушает пасечник с магнитной ленты голоса пчел и сразу поймет— надо немедленно
помогать семейству! Даже о том, что пчелы воруют мед друг
у друга, пчеловоды научились узнавать по звукам. Акустическим методом диагностики начинают сейчас все больше и больше пользоваться в своей практической деятельности работники
«сладкой индустрии».
«Перевосружается» и промысловое рыболовство. Здесь начали пользоваться специально созданными техническими устройствами для звуковой приманки рыб. Так, на тунцеловных
судах с помощью дождевальной установки имитируют звуки,
производимые выбрасывающимися из воды мелкими рыбками,
а падение
капель— колебания
воды,
создаваемые
движущейся стайкой. Привлеченные этим, тунцы стремительно бросаются к месту падения капель искусственного дождя и попадают на тунцеловные удочки. Аналогичные приемы используют на рыболовных судах и при ловле крупной пеламиды.
А вот последняя биоакустическая новинка. На основании
опытов специалисты пришли
к выводу, что секрет неуловимости сельди заключался в обостренном
восприятии рыбой низкочастотных колебаний, вызываемых вибрацией упругих сетематериалов. Возможно, по этой же причине одна треть улова
сельди, как правило, уходила из кошелькового невода. В разных странах было испробовано немало методов и средств, чтобы резко увеличить добычу сельди, скумбрии, сайры и другой
рыбы. Задачу решили советские ученые. Помогли им в этом...
дельфины!
В момент
нападения
на косяк
рыбы
дельфины
обыч-
но издают интенсивные свистящие, отпугивающие звуки. Этими
«криками» дельфины «загоняют» рыбу и делают
это до тех
пор, пока не сбивают ее в плотную стаю. А потом
со всех
сторон одновременно нападают на косяк. Дельфиньими свистами решили воспользоваться сотрудники Тихоокеанского научно-исследовательского института рыбного хозяйства и океанографии (ТИНРО). Они разработали установку, которая имитирует звуковые сигналы, подаваемые
дельфинами
во
время
охоты.
324
Бионика
Теперь ловлю рыбы кошельковым неводом производят так.
Вначале с судна, где помещена установка, подаются привлекающие рыб звуки. Их рыбы распознают даже на фоне случайных
помех ! — шумов судна. И затем, пока не сомкнулись ворота
кошелькового невода, подаются свистящие звуки, которых рыбы боятся и устремляются прочь от свободного края, откуда
они только что могли выскользнуть. На ВДНХ демонстрируется макет установки, показывающий, как «по-дельфиньи» можно ловить рыбу.
Добытые биоакустикой знания о языке различных рыб используются сейчас также в разработках
новых
приемов
и
средств промысловой разведки «живого серебра».
В Японии
созданы особые радиоакустические буи, которые
устанавливают на пути движения рыб. Улавливая звуки рыб, буи передают по рад::о сообщения судам о движении рыб.
Все это лишь первые шаги в практическом использовании
биоакустики. Океаны и моря исключительно
благоприятные
среды для развития разнообразных живых существ. Здесь
в
изобилии находят себе пищу, живут и размножаются
самые
различные морские организмы, от микроскопических радиолярий до исполинских китов (самых больших животных, которые
когда-либо обитали на нашей планете). Между этими полюсами
существует несметное число видов
животных,
связанное
с
системой взаимопожирания. Каждое животное
одновременно
охотник и жертва, и его жизнь проходит в неумолимом преследовании добычи и отчаянном бегстве от врагов. Если мы действительно хотим сделать своей
житницей
Мировой
океан,
нельзя оставаться пассивными наблюдателями того, что происходит в подводных глубинах. Нам необходимо так организовать вылов, чтобы создать в морях
и океанах
преобладание
наиболее ценных видов над наименее ценными. Мы должны
уметь регулировать численность сорной рыбы, которая конкурирует с ценными видами за пищу, контролировать поведение
крупных морских хищников, управлять
ими. И здесь
снова
нам может оказать неоценимую помощь биоакустика. В этом
легко можно убедиться, познакомившись с работами американского биолога А. Мюрберга.
Его небольшая лаборатория расположена на острове НортБимини (архипелаг Багамских островов).
Здесь
А. Мюрберг
уже несколько лет ведет исследования по управлению крупными морскими хищниками. Нажатием кнопки ученый приводит
в действие подводную телевизионную камеру и генератор звуковой частоты, расположенный на дне океана на глубине 18,5 м.
рым
тона
1 Исследователями установлено, что рыбы обладают чрезвычайно остслухом. Они различают даже четверть тона и выделяют
отдельные
из сложных мелодий.
Биологическая
связь
825
Хищники, находящиеся в пределах слышимости низкочастотного звукового сигнала, воспринимают его как шум, издаваемый рыбой во время кормежки либо при
нападении
врага.
Взволнованные кажущейся близостью добычи, хищники устремляются на сигнал. Не проходит и полминуты с момента подачи сигнала, как оживает экран монитора (телевизора).
На
нем появляются изображения акул, груперов, морских окуней
и других обитателей глубин...
Применяемая А. Мюрбергом техника приманивания
акул
возникла не сразу. В своих исследованиях, которые он начал
проводить с 1965 г., ученый исходил из предположения,
что
рыбы общаются между собой скорее с помощью звуков, чем
посредством световых, запаховых или других сигналов, так как
звук распространяется в воде значительно быстрее и дальше,
чем в воздухе. Для своих первых опытов Мюрберг выбрал небольшую, очень подвижную и способную менять свою окраску
рыбу
хипеипопе
(Нурзурорз
ги !сипаи$),
которая
в изобилии
водится в прозрачных водах у острова Норт-Бимини. Последовательно записывая звуки, издаваемые этой рыбой, и одновременно наблюдая по телевизору за ее поведением, исследователь
изучил «разговорный язык» хипсипопса и, пользуясь им, принялся воздействовать на поведение рыбы. Воспроизводя звукозапись определенных сигналов, в частности особый щебечущий
звук, Мюрберг добился того, что подопытная рыба поворачивалась на 45° и описывала Ц-образную дугу, характерную только
для периода нереста. Другая звукозапись
заставляла
рыбу
менять окраску туловища! Однажды
Мюрберг нажимал
на
кнопку, вызывающую щебечущий
звук, но видимость
была
настолько плохая, что он не мог следить за маленькими рыбками. Ученый попросил оператора попробовать другой набор
сигналов. Как только генератор начал посылать новые сигналы, весь район мгновенно заполнился акулами.
Так, случайный поворот диска настройки дал совершенно неожиданные результаты, приведшие Мюрберга к разработке техники управления поведением крупных морских хищников.
Результаты опытов Мюрберга получили высокую оценку ряда ученых. Они считают, что умение
управлять
поведением
акул может принести большую практическую пользу. Так, например, методом Мюрберга можно будет обезопасить от хищников районы рыболовства и добычи жемчуга. Этим же методом
можно отвлекать акул и опасных рыб из районов морских курортов и мест, где работают аквалангисты. У некоторых военных специалистов возникла даже идея использовать звуковые
команды
в оборонных целях. Они полагают, что, передавая время от времени сигналы на «популярной» у акул частоте, генератор
сможет
вающий
создать
стоящие
«живой
на якоре
суда
барьер»,
эффективно
от водолазов
прикры-
противника.
Но
326
Бионика
сам Мюрберг считает, что его работы должны
прежде
всего
способствовать расширению рыбного промысла,
удовлетворению нужд человечества в продовольствии.
Итак, опыты Мюрберга и других
ученых
позволяют
надеяться, что в недалеком времени человек, используя
знания
«языка» рыб и других водных животных, широкие возможности электронной техники, возьмет на себя управление поведением
обитателей
водного
царства,
по-новому
организует
промыс-
ловое рыболовство. Говоря словами академика Л. М. БреховСКИХ, «‹..нынешним рыбакам
— охотникам за рыбами
— в недалеком будущем придется переквалифицироваться
в пастухов. Они будут как бы играть на дудочках, имитируя
звуки,
издаваемые рыбами при кормлении. Это не метафора. Особые
акустические устройства позволят рыбакам
созывать в свои
сети огромные стада рыб».
Досконально познав «язык» животных (смысловое значение
звуковых, световых и запахосигналов), человек может весьма
эффективно использовать его и против самих животных, для
борьбы с ними, когда это диктуется практическими интересами. Помните легенду о гамельнском крысолове, который, играя
на флейте, выманил огромную стаю крыс и уничтожил их
в
реке? Сегодня эта легенда в связи с успехами, достигнутыми в
изучении «языка» животных, способов их общения, обмена информацией, приобретает новый, реалистический смысл.
Как известно, в мире животных существует много вредителей. С одной стороны, они поддерживают экологическое (биологическое) равновесие в живой природе, с другой
— наносят
огромный ущерб сельскому хозяйству, лесам, промышленности, нашим жилищам, являются разносчиками разных болезней скота и человека. Достаточно сказать, что из 100 тыс. видов насекомых, обитающих в США, 10 тыс. относится к вредителям. Из них 90% вредят
сельскому
хозяйству. В ФРГ,
по
данным официальной статистики, вред, ежегодно
наносимый
стране насекомыми и мышами, оценивается в 400 млн. марок.
Зерновых продуктов, ежегодно уничтожаемых во всем мире
только насекомыми, хватило бы на пропитание 200 млн. человек. В целом же по вине вредителей всех видов около 20% урожая, выращиваемого человеком на полях Земли, никогда не
достигает его стола. Цифра
эта средняя.
В менее
развитых
странах она гораздо выше — от 25 до 30%.
Главная причина, мешающая истреблению
вредителей
и
прежде всего вредных насекомых,
— их Фантастическая плодовитость и быстрая смена потомства. Один долгоносик, выживший в своем поколении, дает десять в следующем. Еще быстрее размножаются домовые мухи — одна пара,
при
условии
беспрепятственного размножения, за лето может расплодиться
до 200 000 000 000 000 000 000 особей!
Биологическая
связь
327
Химический метод борьбы, по самой своей сути, неразборчив: уничтожая врагов, он не щадит и друзей (например, пчел).
Нередко использование химикатов приводит к резкому увеличению численности новых вредителей. Так, в Пенсильвании и
других местах, чтобы избавиться
от яблонной
плодожорки,
фруктовые сады обработали ДДТ. В результате этого мероприятия небывало выросла численность яблонной тли. Она оказалась менее чувствительной к ДДТ, чем паразитирующий
на
ней наездник афелинус, который сдерживал размножение тли.
Подобное явление наблюдалось и в Великобритании на протяжении многих лет. Обработка
почвы
инсектицидами
очень
эффективно уничтожала капустную корневую муху. Но вместе
с этим были уничтожены жужелицы и другие хищники, которые сдерживали размножение мухи. В итоге численность капусткой корневой мухи возросла. Бывает и так, что в силу каких-то незначительных отличий в поведении, в строении или физиологии вредное насекомое избегает смертоносного
действия
ядохимиката, остается жить. Если стличия,
о которых
идет
речь, передаются по наследству, то они быстро распространяются в популяции данного вида. Так возникает линия насекомых, более или менее устойчивых к инсектицидам. Некоторые
из них делаются настолько устойчивыми,
что
ядохимикаты
становятся просто непригодными для борьбы с ними. Это закономерное биологическое явление известно давно. Однако
интенсивность естественного отбора под действием современных
инсектицидов такова, что сопротивляемость насекомых быстро
вырастает до высокого уровня.
Последнее обстоятельство и приведенные примеры показывают, что, вторгаясь в сложные
биологические
связи
мира
насекомых, человек должен очень тщательно в каждом отдельном случае оценивать конкретно сложившуюся ситуацию и в
соответствии с нею вводить в действие те или иные имеющиеся
в его распоряжении средства борьбы с вредителями,
но так,
чтобы отдаленные результаты этих действий не вызывали нарушения равновесия в природе, не противоречили
его
интересам.
Проникнуть в мир насекомых
— задача очень трудная, но
все же осуществимая, и прежде всего путем познания их «языка».
Именно
по
этому
пути
и
пошел
в
поисках
эффективных
методов борьбы с комарами канадский санитарный инспектор
Н. Вайтекер. Заключив пару комаров в камеру, оснащенную
микрофоном, он записал на пленку призыв самца к самке. Эти
записи стали использовать для завлечения комаров в специальный ядовитый туман. Так небольшая ультразвуковая установка освободила большую территорию
от вредных
насекомых.
Грозным вредителем полей являются
саранчовые.
Среди
них различают две группы — кузнечиков и саранчу. Кузнечи-
328
Бионика
ки всегда присутствуют в составе фауны; они кормятся, размножаются и часто наносят урон урожаям. Саранча очень похожа на кузнечиков. Масса одной взрослой самки составляет
всего 2—3 г. Но даже в небольшой по размеру
стае саранчи
этих насекомых так много, что их общая масса, по подсчетам
ученых, составляет более 10 тыс. т. Колоссальные стаи саранчи иногда
простираются
на сотни квадратных километров.
Один натуралист наблюдал стаю пустынной саранчи
схистоцерки, летевшую из Америки через Красное море. Пространство, занятое этой стаей, составляло около 5800 км?. По расчетам,
на такой площади должно было быть около 25 000 биллионов
вредителей! Общая масса этой саранчовой тучи должна была
составлять около 44 млн. т. Даже если расчеты были завышены
на несколько
миллионов тонн, то все равно
цифра
фантастическая. Эти страшные вредители
полей пускаются
в странствие либо «пешком», либо (во взрослом состоянии) на
крыльях. Опустившись на сельскохозяйственные посевы,
саранча
за
несколько часов уничтожает
все начисто,
не оставляя
ни
одного
зеленого стебелька. Сражаться с саранчой
очень
тяжело. В поисках действенных
средств борьбы
с саранчовыми
руководитель лаборатории физиологической акустики
французского
Научно-исследовательского
института
агрономии профессор Р. Бюнель занялся изучением
«языка»
саранчи.
Задача была не из легких. Нужно было найти способы, не
спугнув насекомых, установить как можно ближе к ним очень
чувствительные микрофоны, записать «сольные выступления»
саранчи разных видов, а главное
— разобраться
в смысловом
значении издаваемых насекомыми звуков, установить взаимосвязь между их характером
и действиями.
В конце
концов
длительный, кропотливый труд и терпение исследователя были
вознаграждены. После целой серии хитроумных опытов ученому удалось расшифровать крик самца, желающего
привлечь
самку. И когда этот призывной сигнал был воспроизведен
с
номощью электронной аппаратуры в степи, самки тотчас
же
устремились на свидание. Они взбирались на автомашину, густо облепляли ее и добрались даже до аппаратуры! Начатые так
успешно исследования звуков саранчи продолжаются и сейчас.
В перспективе можно представить себе такую картину: призыв,
который далеко разнесут громкоговорители, соберет тучи саранчи в то место, где все будет подготовлено для ее уничтожения. И наоборот,
транслируя
определенные звуки — сигналы тревоги, опасности, можно будет прогнать
надвигающуюся тучу прожорливых
вредителей,
прежде
чем
они
сядут
на поля.
По мнению ряда ученых, в борьбе с вредителями
можно
также услешно использовать и методы глушения естественных
Биологическая
связь
329
сигналов. Это вызывает, как показали эксперименты, хаос
в
поведении многих насекомых, затрудняет их встречу или делает ее вовсе невозможной.
В поисках эффективных средств борьбы с насекомыми некоторых видов ученые пытаются использовать «язык запахов»,
с помощью которого они обмениваются информацией. В разных странах уже выделили 20 типов
аттрактантов
(веществсигнализаторов) и определили их строение.
Шо
их
образцу
специалисты-химики сейчас создают для отдельных видов насекомых-вредителей соответствующие запахоприманки.
Такой
метод борьбы с вредными насекомыми обещает много преимуществ. Во-первых, запахоприманки не ядовиты,
они
не действуют на другие виды и «опасны» только для тех насекомых,
прстив которых они предназначены. Во-вторых, пользуясь различными «языками запахов», можно избирательно воздействовать на насекомых-вредителей,
не
нарушая
существенно
равновесия, установившегося в природе. Новый метод позволит
просто предотвратить чрезмерное размножение вредителей, не
уничтожая виды целиком.
Много неприятностей доставляют некоторые птицы
жителям крупных населенных пунктов. Практически во всех крупных городах Европы фоновыми видами стали сизые голуби и
домовые воробьи. Эти два вида составляют здесь до 80—90%
всей популяции птиц. Они
приспособились
к напряженному
уличному движению, шуму, яркому ночному освещению и другим своеобразным условиям жизни современных болыших населенных пунктов, нашли тут благоприятную среду для быстрого и массового размножения.
Так, за последнее десятилетие численность сизых голубей в
Гамбурге достигла 20000, в Турине — 60000, в Мюнхене —
100 000, в Вене — 200 000. В местах колониального гнездования и массовых ночевок городские птицы сильно загрязняют
город (карнизы, орнаменты, памятники). Содержащиеся в помете кислоты разъедают каменную кладку и вызывают преждевременное разрушение зданий.
Городские голуби являются переносчиками вирусных заболеваний — орнитозов (пситтакозов). На голубях и воробьях паразитируют клещи, блохи, клопы, некоторые из них могут переходить на человека или на домашних животных и служить переносчиками различных заболеваний.
Явно недружественные
«взаимоотношения»
сложились в
наш век также между птицами и авиацией.
Как же защититься от вредных последствий большого скопления птиц в городах и на аэродромах, от их налетов на поля и
сады, на огороды и виноградники?
Перепробовали множество средств. Вывешивали на шестах в
неестественных позах тушки погибших птиц, выставляли чуче-
330
Бионика
ла крылатых хищников, применяли трещотки, на аэродромах
пытались ставить силуэты охотников с ружьями, при помощи
магнитофонов транслировали прямо на летном
поле
звуки
стрельбы, разбрызгивали нафталин, устраивали внушительные
фейерверки из разноцветных сигнальных
ракет. Выяснилось,
что подавляющее большинство испробованных способов отпугивания пернатых действует только временно. Птицы довольно
быстро перестают реагировать на звуки, издаваемые треп:отками, на выстрелы из ракетниц, свыкаются с силуэтами охотников и чучелами своих собратьев. Использование ядохимикатов
для борьбы с птицами явно недопустимо. Во-первых, при этом
одновременно погибнут и птицы, приносящие огрсмную пользу.
Во-вторых, многие птицы, приносящие вред в одних условиях,
полезны в других. Следовательно, надо изучить «язык» птиц,
выявить среди издаваемых ими звуков сигналы «наибольшей
опасности» и использовать их в качестве репеллента (отпугивающего средства) — к такому единому мнению
после ряда
дискуссий пришли физики-акустики, бионики, зоологи-орнитологи, физиологи, этологи, зоопсихологи и биофизики.
За последние 15 лет ученые разных стран выявили в голосах птиц некоторых видов сигналы опасности и записали их на
магнитную пленку. Воспроизведение этих сигналов сразу принесло желаемый эффект. Например, предостерегающий
крик
скворцов использовали для отпугивания этих птиц от виноградников в Рейнланд-Пфальц (ФРГ). В Африке звуковые репелленты весьма успешно применяют против некоторых видов
ткачиковых птиц, уничтожавших ранее в отдельные годы до
10% урожая. Акустическим методом для отпугивания многотысячных стай зимующих птиц сейчас пользуются в Мюнхене
и многих других городах. Этот метод принят сегодня на вооружение также на многих аэродромах мира: в Лондонском аэропорте перед каждым приземлением и взлетом
самолетов из
мощных репродукторов звучит записанный на пленку магнитофона предостерегающий крик сторожевой чайки, на одном из
наших аэродромов транслируют
крик
сороки, на другом —
крик испуганного грача. Заслышав эти сигналы тревоги, птицы
мгновенно поднимаются с взлетно-посадочных полос и покидают воздушное пространство над аэродромом.
Ученые хорошо изучили также сигналы опасности в вороньих стаях. Среди этих криков удалось выделить
сигнал наиболышей опасности: «Тревога! Улетим
как
можно
скорей!»
Именно этот сигнал ученые записали на автоматически работающий магнитофон. Теперь замаскированные
магнитофоны
устанавливают в излюбленных местах вороньих сборищ. При
приближении стаи магнитофоны автоматически включаются и
на вороньем «языке» кричат об опасности. Стая ворон в панике
улетает.
Биологическая
связь
331
Знания «языка» животных при достигнутых сегодня успехах в этологии и зоопсихологии открывают широкие возможности для формирования у прирученных человеком
животных
новых элементов поведения, облегчающих уход за животными,
способствующих более полному их использованию в хозяйственной работе, обеспечивающих повышение производительности труда
в животноводстве.
Практическое
использование
«языка» животных
возможно в каждом животноводческом хозяйстве.
Располагая необходимой электронной
техникой, магнитной
записью соответствующих звуковых сигналов-команд, можно
управлять поведением скота на пастбище, регулировать время
приема корма, отдыха, направлять движение скота по пастбищу и возвращать его в стойла. Подсчитано, что использование
знаний по этологии позволяет получить от каждого животного
дополнительно до 20% продукции.
Располагая современными знаниями
«языка»
животных,
изучая их мышление, повадки и способности, человек сегодня
может достигнуть больших успехов на поприще одомашнивания диких полезных животных. Так, например, в степях
Херсонской области, в государственном заповеднике Аскания-Нова,
в настоящее время приручают больших африканских антилоп.
У этих животных целебное, очень высокой жирности молоко.
Результаты первых опытов многообещающи:
антилопы уже
подпускают к себе доярок. В малонаселенном таежном районе
Верхней Печоры организована опытная лосеводческая ферма.
Здесь по тщательно разработанной программе ученые ведут работу, конечная цель которой — выведение такого специализированного домашнего скота для тайги, каким является северный олень для
тундры,
як
— для
высокогорья,
верблюд —
для пустыни.
Й еще один чрезвычайно важный в прикладном отношении
аспект проблемы познания «языка», психической деятельности
животных. На Земле обитает около 1 500 000 видов животных.
Среди них человек может, используя добытые бионикой, этологией, зоопсихологией знания, приобрести множество необходимых ему помощников для разных научных исследований, для
сферы производства и быта. Уже известны обезьяны — «космонавты», трактористы, няньки, сборщики кокосовых орехов; гуси, беркуты, змеи — сторожа складов, бахчей, магазинов; голуби — технические
контролеры;
голуби-почтальоны;
ослыгеодезисты; свиньи — сборщики трюфелей; слоны — сцепщи:
ки железнодорожных вагонов; бакланы-рыболовы; собаки —
санитары, пожарники, искатели мин, поводыри слепых людей,
смотрители газовых магистралей, разведчики полезных ископаемых, тренеры спринтеров и др. Но это лишь начало. Впереди
животных ждут еще многие новые, необычные
«профессии».
332
Бионика
А сегодня первым кандидатом на одомашнивание из диких животных ученые называют... дельфина афалину!
Почему же дельфина и именно афалину? Для этого имеется
немало веских, весьма убедительных аргументов. Из них первый и главный — высокое развитие центральной нервной системы дельфинов. Болыпинство ученых считают, что эти животные, и прежде всего афалины, обладают уникальным, высокоорганизованным мозгом. Они способные ученики, легко обучаются. Скорость обучения, быстрота выработки условных рефлексов, стойкое их
сохранение
у дельфинов
поразительны.
Стоит два-три раза показать им упражнение или прием, как они
тут же усваивают его. Другой не менее важный аргумент, на
котором зиждется глубокая уверенность ученых, что приручение афалин возможно, — свойственное им «чувство
дома»,
оседлость — возвращение в определенные районы, а также положительная реакция на зов человека. Афалины очень хорошо
понимают интонацию человеческого голоса, различают свистки, жесты, так что между ними и человеком быстро устанавливается взаимопонимание. Дельфины положительно относятся к
ласке, к поглаживанию и почесыванию тела, что можно использовать при дрессировке для поощрения и закрепления рефлексов. Третий веский довод, несомненно, гарантирующий успех
идеи одомашнивания дельфинов, — их дружелюбие, стремление к сотрудничеству
с человеком.
Еще
великий
Плутарх
(46—126 до н. э.) отмечал, что из всех живых существ дельфину лишь природа даровала то, что ищут лучшие философы, —
способность к бескорыстной дружбе. Хотя ему и ничего не нужно от людей, он их великий друг... И сегодня дельфины верны
своему принципу — «дружба не за вознаграждение», несмотря
на то что человек, гордо шагая по ступеням эволюции, длительное время пренебрегал дельфиньей дружбой, десять столетий
варварски уничтожал этих замечательных морских обитателей.
Опираясь на результаты двадцатилетних исследований
умственных способностей, поведения дельфинов, Д. Ж. Лилли в своей новой
книге
«Мир
дельфина»
пишет:
«Мы
установили,
что,
имея дело с млекопитающими, наделенными таким большим
мозгом, следует все время помнить рабочую гипотезу: они обладают развитым интеллектом и заинтересованы в общении
с
нами не меньше, чем мы в общении с ними» (. И наконец, четвертый,
безусловно,
важнейший
аргумент, говорящийо
практиче-
ской целесообразности одомашнивания дельфинов, — их разносторонние способности.
Дельфины, как известно,
сильные и
ловкие животные, отличные пловцы и ныряльщики,
непревзойденные
загонщики
рыб.
многими изумительными
' Лилли
Дж.
Мир
Природа
щедро
«механизмами»
дельфина.
«Природа»,
наделила
и
1969,
дельфинов
«приборами»,
Ne
5, c. 65.
кото-
Биологическая
связь
333
рые позволяют им легко ориентироваться в сложных условиях
водной среды, обнаруживать на больших расстояниях косяки
рыб, упавшие в море различные предметы, выполнять в океанариумах головокружительные трюки, разыскивать в океане своих раненых собратьев и т. п. Все эти и другие дельфиньи способности при соответствующем обучении, дрессировке человек может весьма эффективно использовать для своих целей.
Учитывая весь комплекс способностей
дельфинов, их необыкновенную
понятливость,
дружелюбие,
стремление к сотрудничеству с человеком, выбор афалины в качестве кандидата
на первоочередное одомашнивание
сделан,
несомненно, правильно. Известный советский ученый-биолог профессор А. Г. Томилин считает, что работу по одомашниванию дельфинов следует проводить при содружестве разных специалистов — этологов, экологов,
физиологов,
зоопсихологов,
дрессировщиков,
зоотехников, акустиков и др. Предполагается, что в Черном море
даже за одно поколение (60—70 лет) советским ученым удастся
создать многочисленную популяцию
домашних
дельфинов
афалин, которые будут пастись близ берегов и по соответствующим сигналам являться к человеку для выполнения различного вида работ и поручений.
Идеей одомашнивания, приручения дельфинов сейчас увлечены ученые многих стран. В Японии, например, где уже давно
занимаются решением проблемы создания подводных пастбищ
в удобных бухтах и заливах для разведения ценных пород морских рыб, группа специалистов работает над проектом использования так называемых бурых дельфинов в качестве наблюдателей за движением косяков рыбы. Профессор Океанографического института Токийского университета Т. Куроки разработал
программу, рассчитанную на 12 лет, в ходе
которой
специально отобранные дельфины должны пройти составленный профессором «курс обучения». Предполагается, что, получив соответствующее
«образование»,
морские
животные
смогут по
команде человека изменять
направление
движения
рыбьих
стай. А в Южной Африке уже начали обучать дельфинов на
отмелях загонять косяки рыб в рыболовные сети. Пока дельфины в Порт-Элизабете проходят соответствующую тренировку, а
в недалеком будущем ученые планируют осуществить эксперименты непосредственно в районе промыслов.
Дельфины могут также стать отличными помощниками человека в розыске и спасании пострадавших во время авиационных катастроф и кораблекрушений. В дельфиньем «языке» есть
один чудодейственный сигнал, который заставляет забывать о
собственной безопасности, бросать все и мчаться с максимальной скоростью к месту, откуда идет призыв. Этот сигнал бедствия — свист. Он состоит из двух частей: сначала высота свиста нарастает, а затем падает. Дельфин подает этот сигнал в тех
334
Бионика
случаях, когда он ранен и не может подняться на поверхность
воды за воздухом. Услышав такой сигнал, находящиеся побли30CTH животные бросаются на помощь. Тот, кто подоспевазт первым, начинает подталкивать раненого к поверхности. Сделав
вдох, пострадавший снова погружается в воду. При этом спаситель и спасаемый переговариваются на языке простых свистов.
Зная о том, как реагируют дельфины на сигнал бедствия, американский ученый Д. Браун, работающий в «Мэриленде», предложил остроумный способ использования «морских скороходов» для помощи летчикам, приводнившимся в море. Он предлагает помещать в летных костюмах летчиков маленькие передатчики с записью дельфиньих криков о помощи. Если, потерпев аварию, летчик упадет в море,
он может
включить
эту
запись. Сигнал бедствия привлечет находящихся
поблизости
дельфинов. Они помогут летчику держаться на поверхности воды до прибытия
спасателей либо сами будут подталкивать
его к ближайшему берегу, как они делают в ряде известных
случаев.
Очевидно, установление контакта с дельфинами
поможет
нам разрешить многие проблемы, связанные с изучением Ми:
рового океана.
Они
помогут, — по
предположению
Джона
Лилли, — получать новую информацию и новые данные в области рыболовства, океанографии, биологии моря, измерять и
картировать поверхностные
течения, температуру,
соленость
ит. д. в безбрежных океанах; собирать нужную информацию п
доставлять ее в наши лаборатории, расположенные на берегу...
Биологам
китообразные
сообщат
о
новых
видах,
которых
мы
не встречали ранышче, и добудут их экземпляры. Они сообщат
о поведении морских организмов, с которыми мы пока незнакомы. Многое мы узнаем
также и о других
китообразных...'!
Некоторые ученые помышляют в недалеком будущем привлечь к изучению Мирового океана ... косаток. Да, да! Мы не оговорились. Оказывается, у этих самых свирепых, грозных морских хищников, ксторых часто называют «китами-убийцами»,
«пиратами морских пастбищ», имеется немало данных, позволяющих строить довольно оптимистические прогнозы на установление непосредственных «производственных» контактов с
человеком. Косаткам свойственны необычайная сообразительность, дружелюбная терпимость по отношению
к
человеку.
Спонг полагает, что у косаток имеется высокоразвитая комму:
никативная система, что они обладают слуховым трехмерным
«зрением»
в отношении
окружающей
обстановки.
Они
способ.
ны нырять на глубину более 300 м и задерживать дыхание на
20 мин. Все это, по глубокому убеждению известного нейрофизиолога и психолога П. Спонга, указывает на необходимость ус' См.
Лалли
Дж.
Человек
и
дельфин.
М.,
«Мир»,
1960,
с. 390.
Биологическая
связь
335
тановления контакта с косатками. Многие подводные работы
они смогли бы выполнить несоизмеримо лучше человека, даже
обладающего самым современным снаряжением. Конечно, для
этого косаток нужно «уговорить». «Я планирую, — говорит
П. Спонг, — поймать стадо косаток и продержать их лето. Затем мы их отпустим, чтобы они могли совершить естественную
миграцию к берегам Мексики, и посмотрим, вернутся ли они
к нам в будущем году. Если вернутся, значит, можно установить с ними какого-то рода взаимоотношения. Первым шагом
здесь, безусловно, будет изучение их «языка».
Изучение «языка» животных и овладение им сегодня является одной из важнейших проблем науки. Решить ее — значит
приобрести в мире животных несметное число новых помощников буквально на все случаи жизни, резко повысить эффектив:
ность животноводства, организовать действенную борьбу с вредителями сельского хозяйства, с животными, опасными для здоровья человека. И еще. Познавая «язык» зверей, мы тем самым,
надо полагать, восстанавливаем связи наших далеких предков
с миром животных, утраченные в ходе эволюции.
Возможно,
это и имел в виду Рабиндранат Тагор, писавший в своих «Жертвенных песнях»: «Я часто думаю, где пролегает скрытая граница
понимания
между
человеком
и
животным...
Через
какой
первоначальный рай, на утре древних дней, пролегала тропинка, по которой их сердца ходили навещать друг друга? Их следы на тропинке еще не стерлись, хотя давно уже забыты родственные связи. Иногда, в какой-то музыке без слов, проснется
темное воспоминание, и животное глядит тогда человеку в лицо
с нежной верой, и человек глядит в глаза животному с растроганной любовью. Как будто сошлись два друга в масках и смутно узнают друг друга под личиной» '.
'! «Природа»,
1968, №
8, с. 15.
ОГЛАВЛЕНИЕ
1
9
3
Нгука
величайших
возможностей
Д
Живые барометры,
гигрометры, сейсмографы
121
5
Биомеханика
139
6
Гармония красоты
и целесообразности
241
Биологическая
309
11
Мир
ощущении
31
Локаторы
природы
85
Изот
]
Борисович
связь
Литинецкий
БИОНИКА
Редактор
Н.
В.
Сдано
к
Королева
Художественный
В. Г. Ежков
редактор
20/111—1975
26/111—1976
г.
г.
Подписано
60X90'/;5.
Трудового
Красного
издательство
+чПросвещение»
венного
комитета
Совета
РСФСР
Цветные таблицы
В. Д. Овчининского
по
делам
Tn-
печ. л.
Тираж
Знамени
ГосударстМинистров
издательств,
полигра-
фии
и книжной
торговли.
Москва,
3-й
проезд Марьиной
рощи, 41. Ярославский
полиграфкомбинат
Союзполиграфпрома
Технический редактор
Е. В. Богданова
Р.
набор
№ 1, янонис. Печ. л. 21+-1
Уч.-изд.
л. 22,33+1,64
вкл.
92 тыс. экз. А05582.
Ордена
Переплет художника
А. Т. Яковлева
Корректоры
Т. А. Кузнецова,
в
печати
погр.
вкл.
Б.
при
Государственном
комитете
Совета
Министров
СССР
по делам
издательств,
полиграфии и книжной торговли. 150014,
Ярославль,
ул. Свободы, 97.
Штутман
Цена
1
руб.
14
коп.
Зак.
321.