/





















































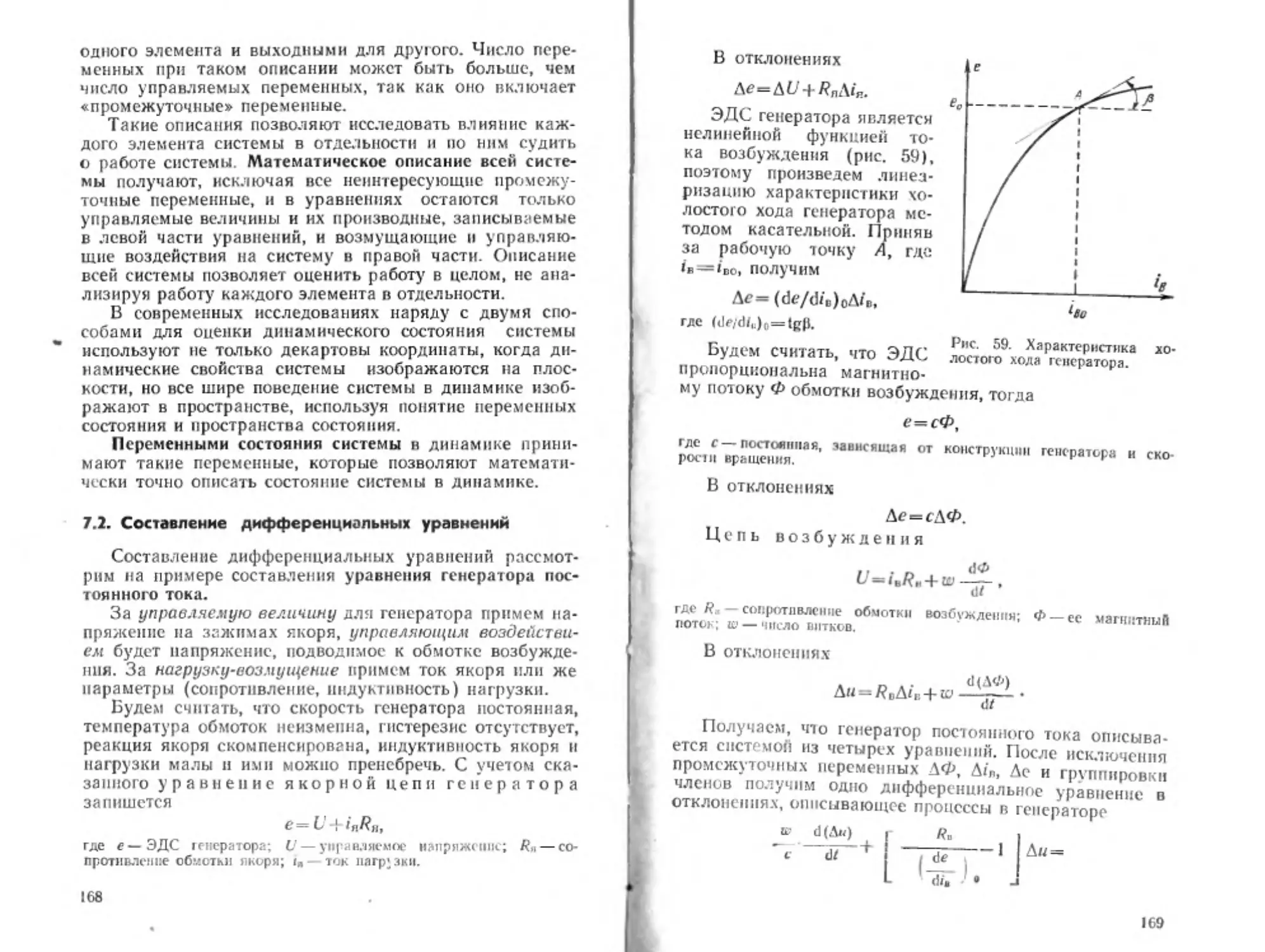
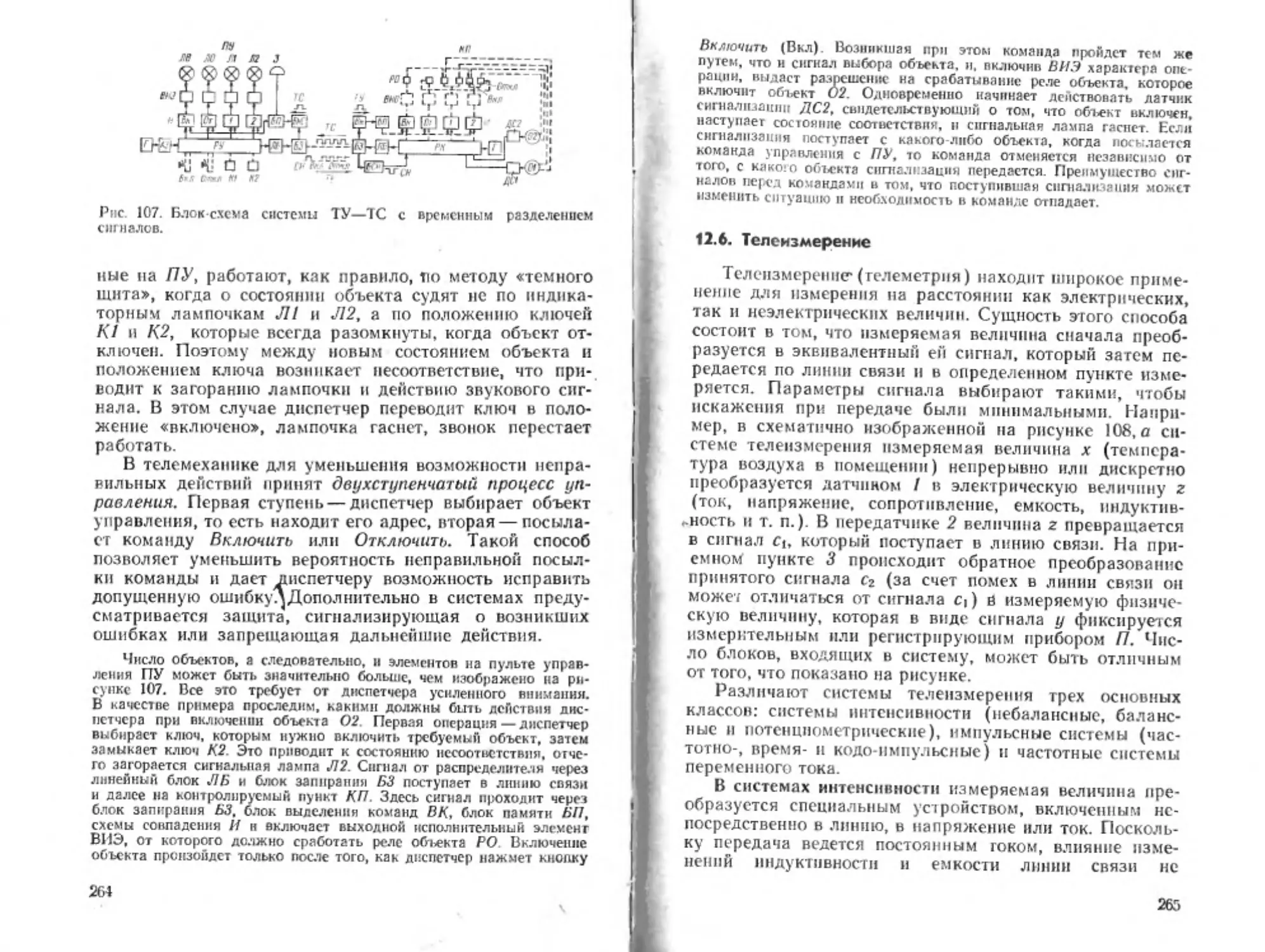
![A[SxøOd/] =](https://djvu.online/jpg1/J/z/2/Jz212inNmdVT1/088.webp)







































Text
Г9ШЯ
ИЯ
л.в.НОЛЕСОВ
ОСНОВЫ
А В Т О М А ТИ К И
tC ^ J O
УЧЕБНИКИ И УЧЕБНЫЕ ПОСОБИЯ
ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ТЕХНИКУМОВ
'
Л. В КО Л ЕСО В
основы
АВТОМАТИКИ
ИЗДАНИЕ ВТОРОЕ, ДОПОЛНЕННОЕ И ПЕРЕРАБОТАННОЕ
PfinywfiHo Главным управлением высшего и среднего
сельскохозяйственного образования Министерства сель
ского хозяйства СССР в качестве учебника для сред
них сельскохозяйственных учебных заведений для спе
циальностей 1509 «Электрификация сельского хозяйст.ва» и 1518 «Механизация и электрификация животно
водства»
19В4
@
ВВЕДЕНИЕ
ББК 40.7
К60
УДК 631.3—52(075.3)
Р е ц е н з е н т ; док тор технических
наук, проф ессор
И. Ф. Бородин (М И ИСП)
К 60
Колесов Л. В.
Основы автоматики.—2-е изд., доп. и перерао.
М.: Колос, 1984. — 288 с., ил.
Учебник написан в соответствии с программой одноименной дис*^"освещаются элементы систем автоматики, измерительные у с т р ^ ства. усилители, их назначение и рассматриваю тся основы теории, п о
сравнению с первым изданием (вышло в 1978 г.) м атериал обновлен
и дополнен с учетом современных достижений в науке и технике, а
такж е требований новых ГОСТов.
Для учащихся по специальностям 1509 «Электрификация сельского
хозяйства» и 1518 «М еханизация и электрификация ж ивотноводства».
3802040100—196
035(01 ) - 8 4
Б Б К 40.7
631.3
102—84
Лев Васильевич Колесов
ОСНОВЫ ABTOMAfMKM
Заведующая редакцией А. И. Г е р а с ь к и н а
Редактор И. А. К у з и н а
Художественный редактор А. И. Б е р ш а ч е в с к а я
Технический редактор В. И. С м и р н о в а
Корректор М. И. Б ы н е ё в
ИБ № 3454
Сдано в набор 11.08.83. Подписано к печати 06.06.84. Т-10559.
Формат 84Х1087 з2. Бумага тип. № 2. Гарнитура литературная.
Печать высокая. Уел. печ. л. 15,12. Уел. кр.-отт. 15,44, Уч,-изд, л. 15,44.
Изд. № 039. Тираж 30 ООО экз. Заказ № 5067. Цена 65 коп.
Ордена Трудового Красного Знам ени издательство «Колос»,
107807, ГС:П, Москва. Б-53. ул. С адовая-Спасская, 18.
О бластная типография управления издательств, полиграфии и книжной тор
говли К-.>ановского облисполкома, 153628, г. Иваново, ул. Т ипограф ская, 6.
©
@
Издательство «Колос», 1978
Издательство «Колос», 1984, с. изменениямк
Основным направлением
развития современного
сельскохозяйственного производства является комплекс
ная механизация, электрификация и автоматизация тех
нологических процессов. Это направление нашло свое
отражение в решениях XXVI съезда КПСС, Продоволь
ственной программе СС СР, одобренной майским (1982 г.)
Пленумом Ц К КПСС и в последующих постановлениях,
принятых Центральным Комитетом КПСС и Советом
Министров СССР по дальнейшему развитию комплекс
ной механизации, электрификации и автоматизации от
раслей сельского хозяйства.
Так, в постановлении Ц К КПСС и Совета Министров
С С С Р «О мерах по дальнейшему развитию электрифика
ции сельского хозяйства» записано: «Осуществлять по
степенный переход от автоматизации отдельных произ
водственных процессов и операций к полной автомати
зации цехов и сельскохозяйственных предприятий».
Автоматизация сельскохозяйственного производства
повышает производительность и улучшает условия тру
да, устраняет различие между физическим и умственным
трудом, увеличивает выпуск продукции, снижает ее се
бестоимость, позволяет полнее удовлетворять потребно
сти человека.
Началом развития автоматики как науки считают
1765 г., когда талантливый русский механик И. И. П ол
зунов создал первую в мире замкнутую aBTOMaitnqecKyra
систему для регулирования уровня воды в паровом кот
ле. Применение автоматов в промышленности сыграло
важную роль в развитии техники. Этот период можно
назвать периодом формирования принципов автоматики:
принцип регулирования по отклонению (Ползунова —
У атта), принцип регулирования по нагрузке (Понселе),
метод регулирования по производной (братьев Симен
сов). Именно в это время появляются первые теорети
ческие исследования, посвященные изучению процессов
регулирования машин. В 1868 г. была опубликована
работа М аксвелла «О регулЖ )рах», а в 1876 г.—работа
И. А. Вышнеградского «О регуляторах прямого дейст
вия». Дальнейшее развитие автоматики шло как по пути
создания автоматических устройств во всех отраслях
техники, так и теоретических разработок основ авто
матики. Большой вклад в развитие основ автоматики
внесли русские и советские ученые: И. А, Вышнеград
ский, И. Н. Вознесенский, А. И. Ляпунов, Н. Е. Ж уков
ский. А. В. Михайлов, В. В. Солодовников, Я- 3. Цыпкин и многие другие.
Говоря об автоматизации вообще, нельзя не остано
виться на автоматизации сельскохозяйственного произ
водства — одной из важнейших отраслей народного хо
зяйства. Богатый практический и теоретический опыт,
накопленный при автоматизации промышленности, по
зволяет использовать его при автоматизации процессов
в сельском хозяйстве. При этом необходимо помнить,
что сельскохозяйственному производству присущи и
свои специфические особенности, которые следует учи
тывать при автоматизации. К ним относятся: большое
число помещений с агрессивными средами, с повышен
ной запыленностью, с широкими пределами изменения
влажности и температуры; связь сельскохозяйственных
машин и другой техники с биологическими объектами
(животными и растениями), которые оказываю т опре
деленное влияние на работу установок, большое число
мобильных машин как в растениеводстве, так и в ж и
вотноводстве, подверженных сильной вибрации; рассре
доточенность сельскохозяйственных машин и установок
по площадям значительных размеров, а такж е удален
ность от ремонтной базы.
Современный этап развития автоматизации характе
ризуется широким внедрением принципиально новых
средств автоматики, выполненных на интегральных мик
росхемах, внедрением микропроцессоров и микро-ЭВМ.
Достижения электроники, электротехники и механики
воплощаются в роботах, создание и использование ко
торых является одним из магистральных направлений
технического прогресса.
Без автоматизации производственных процессов не
мыслимо дальнейшее развитие сельскохозяйственного
производства.
ГЛАВА
I
ОБЩИЕ СВЕДЕНИЯ ОБ ЭЛЕМЕНТАХ
И СИСТЕМАХ АВТОМАТИКИ
1.1. Основные понятия и определения
А в т о м а т и к а , как и любая техническая наука,
имеет свои понятия и определения, свою терминологию.
Рассмотрим существующие основные понятия и опреде
ления в автоматике.
Любой технологический процесс характеризуется фи
зическими величинами, называемыми показателями про
цесса. Д л я одних процессов показатели могут быть по
стоянными, для других допускается их изменение в за
данных пределах по определенному закону.
Совокупность предписаний, ведущих к правильному
выполнению технологического процесса в каком-либо
устройстве, ряде устройств (системе), выполняющих
один и тот же технологический процесс, называется
а л г о р и т м о м (законом) ф у н к ц и о н и р о в а н и я
у с т р о й с т в а (системы).
Устройство или совокупность устройств, осущест
вляющих тот или иной технологический процесс и нуж
дающихся в специально организованных командах извне
для выполнения алгоритма функционирования, называ
ют у п р а в л я е м ы м о б ъ е к т о м . Каждый управляе
мый объект должен иметь устройство, называемое у пр а в л я ю щ и м о р г а н о м , при изменении положения
или состояния которого показ1атели процесса будут из
меняться 'Ь заданных пределах или в заданном направ
лении. Так, управляющим органом в электрическом ге
нераторе может служить обмотка возбуждения, в водо
напорной башне — вентиль, управляющий подачей воды,
в вентилируемом помещении — задвижка в вентиляцион
ной трубе, в автомобиле — руль и т. д. Через управляю
щий орган в объект поступают воздействия, которое по
зволяю т осуществлять заданный алгоритм функциони
рования.
Совокупность предписаний, определяющая характер
воздействий извне на управляемый объект с целью вы
полнения им заданного алгоритма функционирования,
называется а л г о р и т м о м
управления.
Физические показатели объекта, которые преднаме
ренно изменяются или сохраняются неизменными в про
цессе управления, называю тся у п р а в л я е м ы м и ( р е
гулируемыми)
величинами
(координата
ми ) . Обычно управляемые величины в управляемом
объекте характеризуют качественньГе показатели процес
са. Поэтому управлять объектом — это значит созда
вать условия, при которых качественные п оказатели —■
управляемые величины — изменялись бы по требуе
мому закону с определенной точностью независимо от
действия на объект внешних условий.
Управлением называется преднамеренное воздейст
вие на управляемый объект, обеспечивающее достиже
ние определенных самим технологическим процессом
целей. Управление, осуществляемое без непосредствен
ного участия человека, называется автоматическим.
Если управление осуществляется с участием человека,
то оно называется ручным.
Автоматическим
управляющим
уст
р о й с т в о м называют техническое устройство, осуще
ствляющее воздействие на управляемый объект в соот
ветствии с заложенным в нем алгоритмом управления.
Управляющее устройство воздействует на управляемый
объект через орган управления.
Совокупность управляемого объекта и автоматиче
ского управляющего устройства, взаимодействующих
между собой в соответствии с алгоритмом управления,
называют а в т о м а т и ч е с к о й с и с т е м о й у п р а в
л е н и я ( АСУ) .
И з всех операций управления технологическим про
цессом, объединенных определением автоматической си
стемы управления, наибольший интерес для практиче
ских целей представляют операции по поддержанию или
изменению показателей процесса. Эти операции получи
ли название регулирование. Техническое устройство,
предназначенное для автоматического поддержания по
стоянного значения показателей процесса регулирования
или изменения этих показателей по какому-либо тре
буемому закону, называют автоматическим регулятором.
Сочетание объекта регулирования с автоматическим ре
6
гулятором принято называть автоматической системой
регулирования.
В процессе работы автоматическая система в целом
или ее отдельные части испытывают на себе воздейст
вие различных факторов. Воздействием в автоматике
называю т взаимодействие между автоматической систе
мой и внешней средой или одной ее части на другую,
при котором в ней происходят изменения. Различаю т
внутренние и внешние воздействия.
Внутренними воздействиями называют такие, кото
рые передаются ат-^рдной части автоматической систе
мы на другую, образуя последовательную цепь воздей
ствий, обеспечивающих протекание технологического
процесса с заданными показателями. Такие воздействия
называю т управляюи{ими и обозначают, рассматривая
их во времени как z{t ) .
В н е ш н и е в о з д е й с т в и я , в свою очередь, мож
но разделить на два вида. К первому относят такие,
которые необходимы для нормального протекания тех
нологического процесса. Их подают на вход системы
намеренно в соответствии с алгоритмом функциониро
вания, обозначают через x{t ) и называют задающими.
Ко второму виду относятся те, которые поступают не
посредственно на систему (объект) из внешней среды
(под внешней средой понимается все то, что не входит
в рассматриваемую автоматическую систему). Они но
сят незапланированный, зачастую случайный характер,
обозначаются через F{t ) и называются возмущ ающ и
ми воздействиями.
Под влиянием x( t ) в автоматической системе проис
ходят различные количественные и качественные изме
нения, в результате чего управляемы е (регулируем ы е)
величины, обозначаемые как y{t ), приобретают зад ан
ные значения или получают требуемый характер изме
нения.
Значение управляемой величины, предусмотренное
алгоритмом функционирования, называется п р е д п и
с а н н ы м , а измеренное (фактическое) — д е й с т в и
тельным.
Кроме того, в соответствии с принятой терминологи
ей задаю щ ие воздействия x{t ) называют входными, а
управляемые величины y ( t ) — выходными (д ля системы
в целом или отдельного элемента).
1
'
Возмущающие воздействия F{t ) подразделяют на
основные и второстепенные. К основным относят такие,
которые оказывают наибольшее влияние на управляе
мые (регулируемые) величины y( t ) . Если влияние воз
мущающих воздействий на управляемые величины y( t )
незначительно, то их считают второстепенными.
Автоматическая система обычно испытывает влияние
и основных, и второстепенных возмущающих воздей
ствий.
Таким образом, на основании рассмотренных поня
тий и принятых обозначений можно сделать вывод, что
управлять объектом — это значит вы рабатывать управ
ляющее воздействие z{t ) с таким расчетом, чтобы управ
ляем ая (регулируемая) величина y{t) изменялась по
заданному закону и с требуемой точностью независимо
от влияния на объект возмущающего воздействия F( t ) .
Д л я двигателя постоянного тока при неизменном
номинальном токе возбуждения управляемой величиной
будет угловая скорость, управляющим воздействием —
напряжение на якоре, основным возмущающим воздейст
ви ем — нагрузка на валу, а второстепенными — те воз
мущающие воздействия, которые приводят к незначи
тельным отклонениям угловой скорости (в частности,
изменения температуры окружающей среды, напряж е
ния питания обмотки возбуждения, сопротивления ще
точных контактов и т. п.).
Если в системе только одна управляемая величина,
то систему называют о д н о к о н т у р н о й ; если ж е
управляемых величин, характеризующих технологиче
ский процесс, несколько, причем изменение одной влия
ет на другие, то систему считают м н о г о к о н т у р н о й .
В дальнейшем будут рассмотрены только однокон
турные автоматические системы управления (регули
рования).
1.2. Управление по разомкнутому
и замкнутому циклам
Поддержание управляемой величины в определенных
пределах или изменение ее по заданному закону в про
цессе работы системы может быть выполнено как по
разомкнутому, так и по замкнутому циклам управления.
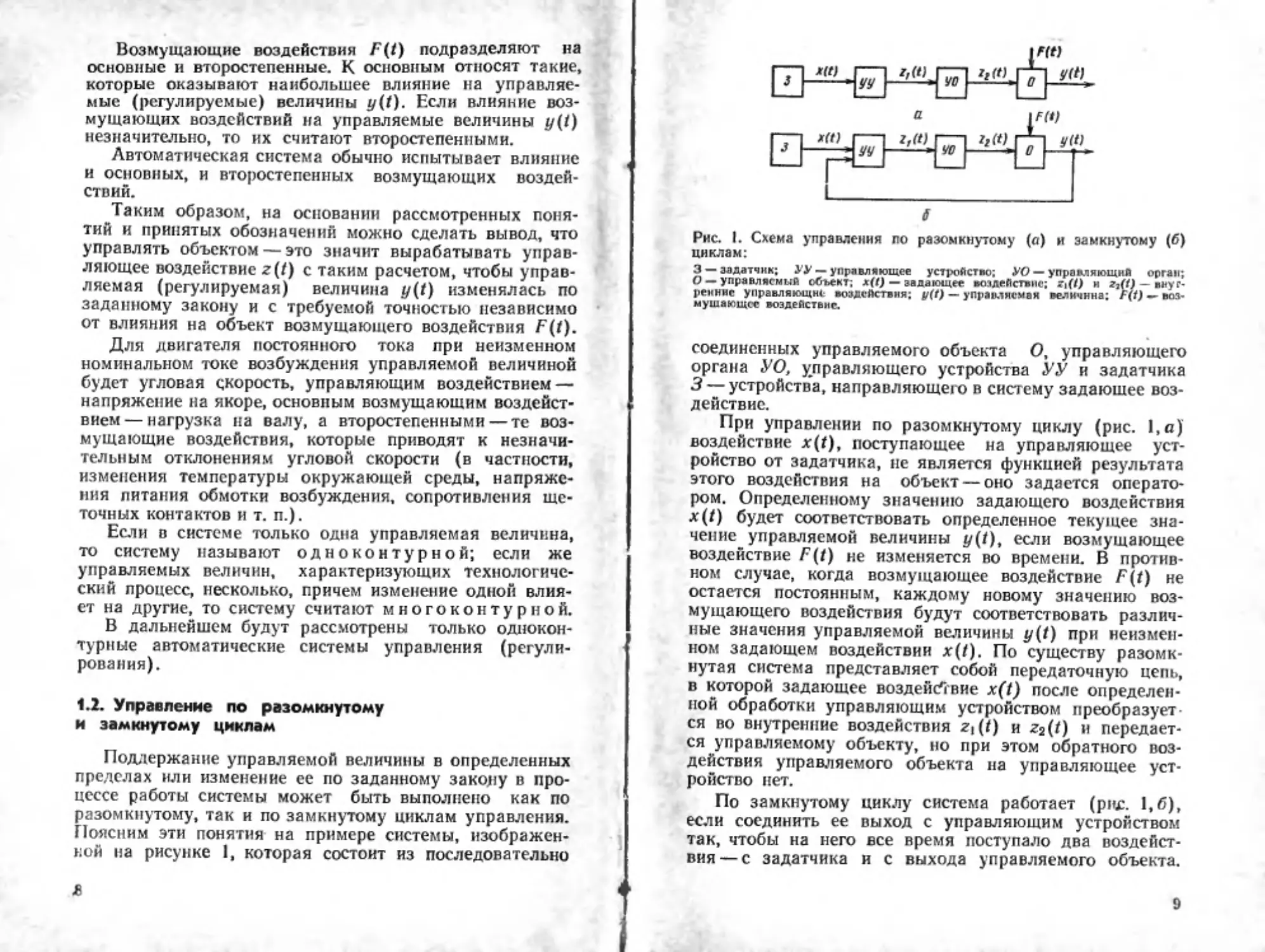
Поясним эти понятия- на примере системы, изображен
ной на рисунке 1, которая состоит из последовательно
Рис. 1. Схема управления по разомкнутому («) и замкнутому (б)
циклам:
3 — задатчик; У У — управляющ ее устройство; УО — управляю щ ий орган;
О у п р а в л я е м ы й объект; x ( t) — задаю щ ее воздействие; Z i(t) и Z2(i) — внут
ренние управляющие воздействия; y ( t) — управляемая величина; F (i) ^ воз
мущающее воздействие.
соединенных управляемого объекта О, управляющего
органа У О, управляющего устройства У У и задатчика
3 — устройства, направляющего в систему задаю щ ее воз
действие.
При управлении по разомкнутому циклу (рис. 1, а )
воздействие x{t ) , поступающее на управляющее уст
ройство от задатчика, не является функцией результата
этого воздействия на объект — оно задается операто
ром. Определенному значению задающего воздействия
x ( t ) будет соответствовать определенное текущее зна
чение управляемой величины y{t ), если возмущающее
воздействие F(t ) не изменяется во времени. В против
ном случае, когда возмущающее воздействие F{t) не
остается постоянным, каждому новому значению воз
мущающего воздействия будут соответствовать различ
ные значения управляемой величины y{t ) при неизмен
ном задающем воздействии x{t ) . По существу разомк
нутая система представляет собой передаточную цепь,
в которой задающее воздейЛ вие x ( t ) после определен
ной обработки управляющим устройством преобразует
ся во внутренние воздействия Zi{t) и гг(/) и передает
ся управляемому объекту, но при этом обратного воз
действия управляемого объекта на управляющее уст
ройство нет.
По замкнутому циклу система работает (ри£. 1, 6 ),
если соединить ее выход с управляющим устройством
так, чтобы на него все время поступало два воздейст
в и я — с задатчика и с выхода управляемого объекта.
Таким образом, в данной системе существует воздей
ствие не только управляющего устройства на объект,
но и объекта на управляющее устройство.
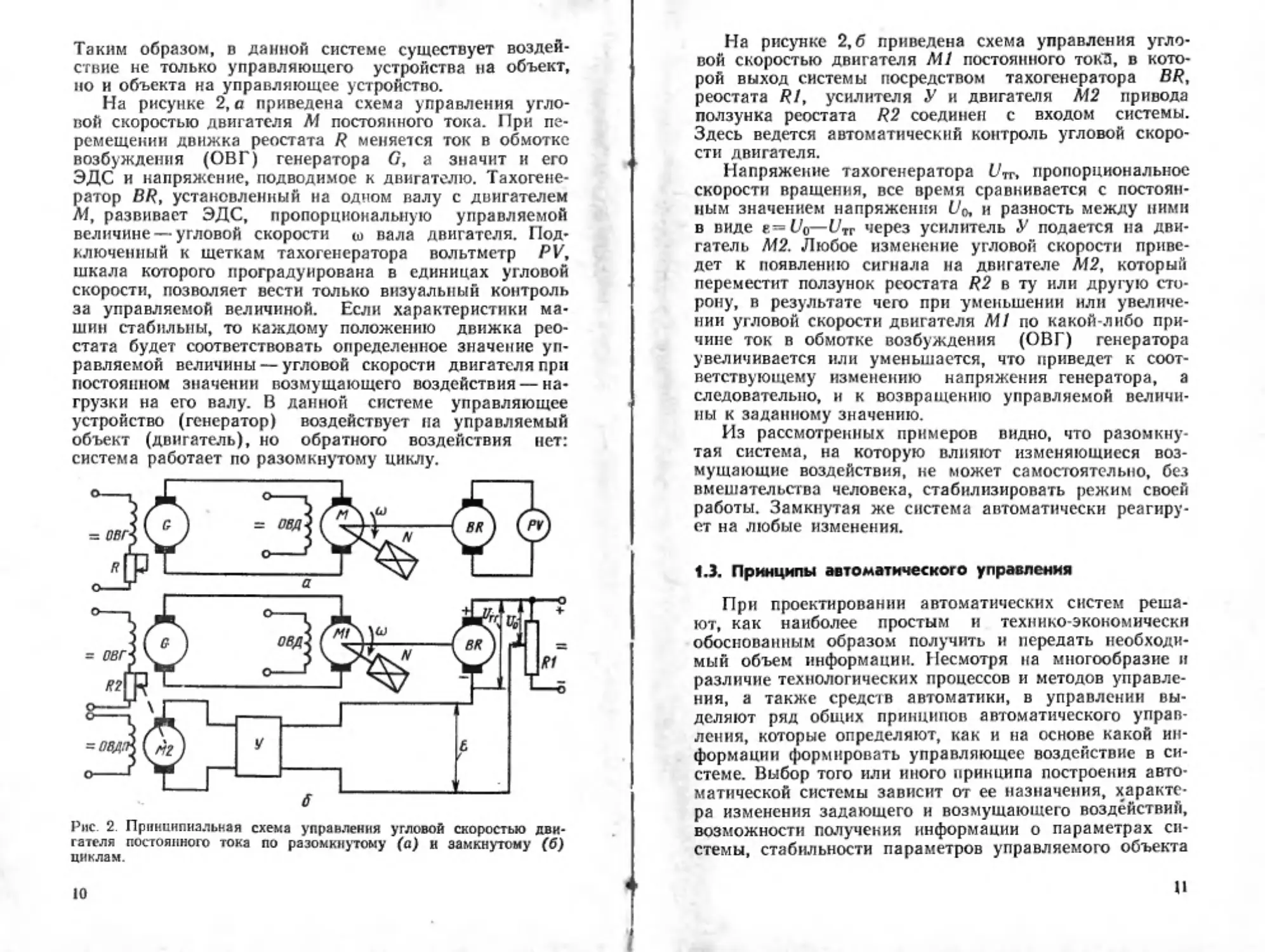
Н а рисунке 2, а приведена схема управления угло
вой скоростью двигателя М постоянного тока. При пе
ремещении движка реостата R меняется ток в обмотке
возбуждения (О ВГ) генератора G, а значит и его
ЭДС и напряжение, подводимое к двигателю. Тахогенератор BR, установленный на одном валу с двигателем
М, развивает ЭДС, пропорциональную управляемой
величине — угловой скорости со вала двигателя. П од
ключенный к щеткам тахогенератора вольтметр PV,
ш кала которого проградуирована в единицах угловой
скорости, позволяет вести только визуальный контроль
за управляемой величиной. Если характеристики м а
шин стабильны, то каждому положению движ ка рео
стата будет соответствовать определенное значение уп
равляемой величины — угловой скорости двигателя при
постоянном значении возмущающего воздействия — на
грузки на его валу. В данной системе управляющее
устройство (генератор) воздействует на управляемый
объект (двигатель), но обратного воздействия нет:
система работает по разомкнутому циклу.
Н а рисунке 2, 6 приведена схема управления угло
вой скоростью двигателя M I постоянного токИ, в кото
рой выход системы посредством тахогенератора BR,
реостата R / , усилителя У и двигателя М2 привода
ползунка реостата R 2 соединен с входом системы.
Здесь ведется автоматический контроль угловой скоро
сти двигателя.
Напряжение тахогенератора i/тг, пропорциональное
скорости вращения, все время сравнивается с постоян
ным значением напряжения U q, и разность между ними
в виде e ^ U q — f/тг через усилитель У подается на дви
гатель М2. Любое изменение угловой скорости приве
дет к появлению сигнала на двигателе М2, который
переместит ползунок реостата R 2 в ту или другую сто
рону, в результате чего при уменьшении или увеличе
нии угловой скорости двигателя M l по какой-либо при
чине ток в обмотке возбуждения (ОВГ) генератора
увеличивается или уменьшается, что приведет к соот
ветствующему изменению напряжения генератора, а
следовательно, и к возвращению управляемой величи
ны к заданному значению.
И з рассмотренных примеров видно, что разомкну
тая система, на которую влияют изменяющиеся воз
мущающие воздействия, не может самостоятельно, без
вмешательства человека, стабилизировать режим своей
работы. Замкнутая ж е система автоматически реагиру
ет на любые изменения.
1.3. Принципы автоматического управления
Рис. 2. Принципиальная схема управления угловой скоростью дви
гателя постоянного тока по разомкнутому (а) и замкнутому (б)
циклам.
10
При проектировании автоматических систем реша
ют, как наиболее простым и технико-экономически
обоснованным образом получить и передать необходи
мый объем информации. Несмотря на многообразие и
различие технологических процессов и методов управле
ния, а такж е средств автоматики, в управлении вы
деляю т ряд общих принципов автоматического управ
ления, которые определяют, как и на основе какой ин
формации формировать управляющее воздействие в си
стеме. Выбор того или иного принципа построения авто
матической системы зависит от ее назначения, характе
ра изменения задающего и возмущающего воздействий,
возможности получения информации о параметрах си
стемы, стабильности параметров управляемого объекта
U
Рис. 3. Схемы управления;
а — ПО отклонению; б — по возмущению; в — комбинированная; г ~ само*
приспосабливающаяся; Р — регулятор; УО — управляющий орган; О — управ
ляемый объект; Л У У —• автоматическое управляющее устройство; УЛО —
устройство анализа состояния объекта;
— автоматическое вычислитель
ное устройство; УЛВ — устройство анализа задающ его воздействия; И У ^
исполнительное устройство.
и элементов управляющего устройства и т. п. Рассмотрим
основные принципы автоматического управления.
Принцип
управления
по
отклонению
основан на том, что управляющее воздействие в авто
матической системе вырабатывается с учетом информа
ции об отклонении управляемой величины от заданного
значения. Чтобы реализовать этот принцип, в управ.ляющем устройстве должно происходить сравнение
действительного значения управляемой величины с
заданным (предписанным), и в зависимости от резуль
татов полученного сравнения формируется управляю
щее воздействие.
Принцип управления по отклонению иллюстрирует
система управления угловой скоростью двигателя по
стоянного тока (рис. 2, б). Д вигатель MI, как управляе
мый объект, испытывает на себе влияние различных
возмущающих воздействий (изА^енения нагрузки на ва
лу, напряжения питающей сети, угловой скорости дви
гателя, приводящего во вращение якорь генератора G,
температуры окружающей среды и др.). Возмущающие
воздействия вызовут отклонение управляемой величи
н ы — угловой скорости двигателя Ml , но, как описано
ранее, отклонение будет сведено к нулю или к зад ан
ным пределам. Это произойдет потоА^у, что управляю
щее воздействие по его значению и знаку формируется
с учетом не только задаю щ его воздействия, но и уп
равляемой величины, то есть система работает на осно
ве принципа управления по отклонению.
В общем случае система, реализующая принцип уп
равления по отклонению, может быть представлена
схемой, изображенной на рисунке 3, а. Здесь отклоне
ние управляемой величины от заданного значения вы
зывает изменение управляющего воздействия гг(0 .
стремящегося всегда уменьшить появившееся откло
нение. Д л я получения разности
—y ( t ) в си
стему вводится элемент сравнения ЭС. Управляющий
орган действует независимо от того, по какой причине
произошло изменение управляемой величины. Поэтому
такие системы нашли широкое применение.
Принцип у п р а в л е н и я
по
возмущению
(принцип
коА^пенсации
возмущения)
ос
нован на том, что управляющее воздействие в системе
управления вырабатывается в зависимости от резуль
татов измерения возмущающего воздействия, оказы
13
вающего влияние на объ
ект. В общем виде схема
системы,
реализующей
этот принцип, показана на
рисунке 3,6.
В качестве примера
рассмотрим работу гене
ратора постоянного тока
(рис. 4), обмотка возбуж
дения O B I которого сое
Рис. 4. Схема управления напря
динена с независимым ис
жением генератора постоянного
точником постоянного то
тока.
ка, а 0 В 2 включена на
сопротивление Яш, по
следовательно введенное в якорную цепь. Обмотки воз
буждения соединены так, что их м. д. с. F, и F j скла
дываются, то есть напряжение на клеммах генератора
Uj. зависит от суммарной м. д. с. F = F i-\-F 2. При увели
чении или уменьшении тока / (изменяется сопротивле
ние нагрузки Ru), напряжение Ur остается на заданном
уровне, поскольку м. д. с. Рг, пропорциональная току
нагрузки /, создаваемая обмоткой возбуждения 0 В 2 ,
действует таким образом, что она компенсирует изме
нение м. д. с. Fi обмотки 0 В 1 и поддерживает суммар
ную м. д. с. F, а следовательно, и напряжение Ur в за
данных пределах. Так происходит компенсация паде
ния напряжения при изменении тока нагрузки — основ
ного возмущающего воздействия на генератор. В дан
ном случае сопротивление Яш выполняет роль устрой
ства, измеряющего возмущающее воздействие— на
грузку, поэтому рассматриваемый принцип иногда на
зывают п р и н ц и п о м
управления
по
на
грузке.
Сопоставляя схемы на рисунках 3. а и б, легко уяс
нить, что системы, использующие принцип отклонения,
работают по замкнутому циклу управления, а исполь
зующие принцип возмущения — по разомкнутому.
Возмущающие воздействия вызываются разными
причинами, и их может быть не одно, а несколько.
Обычно во внимание принимают основное возмущающее
воздействие, которое оказывает наибольшее влияние на
работу системы. Компенсация всех возмущающих воз
действий затруднительна, неосновными возмущающими
воздействиями, как правило, пренебрегают. Это являет
14
ся существенным недостатком принципа управления по
возмущению; суммарное влияние второстепенных воз
мущающих воздействий на управляемую величину мо
ж ет оказаться значительным.
Принцип
комбинированного
управле
н и я , сочетающий в себе достоинства принципов уп
равления по отклонению и по в о з м у щ е н и ю , используется
при построении систем высокой точности. Н а рисунке
3, в показана схема системы комбинированного управ
ления. Действие неучтенных возмущений в комбиниро
ванных системах компенсируется или ослабляется уп
равлением по отклонению.
^Принцип
адаптации
(приспособле
н и я ) находит применение в кибернетических системах
управления. Чтобы понять отличительные особенности
этого принципа, рассмотрим (самоприспосабливающуюся
автоматическую систему управления (рис. 3,г), в кото
рую, кроме основной части, построенной согласно прин
ципу управления по отклонению и содержащей управ
ляемый объект О и автоматическое управляющее устJ ройство АУУ. введен ряд дополнительных устройств,
/ настраивающих систему на наивыгоднейший режим раI боты.i Необходимость использования дополнительных
" ' устройств вызвана тем, что характеристики управляе
мого объекта изменяются в процессе работы в широких
пределах, и поэтому без автоматической настройки не
возможно достигнуть '^ебуем ы х показателей качества
процесса управления, ^дополни тельны м устройствам в
рассматриваемой систёйе относятся следующие: уст
ройство анализа состояния объекта УАО , позволяющее
оценить характеристики управляемого объекта по из
меряемым в процессе работы значениям управляемой
величины y ( t ) и управляющего воздействия z ( t ) \ устрой
ство анализа задаю щего воздействия УАЗ, оценивающее
значение и характер изменения задающего воздействия
в процессе работы системы; автоматическое вычисли
тельное устройство АВУ , которое на основании получае
мой Информации огустройств УАО и УАВ вырабатывает
воздействие для изменения характеристики АУУ\ испол
нительное устройство ИУ, настраивающее по сигналу
А В У автоматическое управляющее устройство основного
контура на режим работы, соответствующий изменив'ш им ся условиям.
15
. Автоматическая система, основанная на любом из
рассмотренных принципов управления, состоит из двух
основных частей: у п р а в л я е м о ^ ) (ун^авляемый объект)
и управляющей J(автоматическое управляющее устрой
ство). Д ля измерения управляемой величины управ
ляющее устройство должно иметь измерительный эле
мент, а управляемый объект — содержать управляю
щий орган, возвращающий управляемую величину пос
ле ее отклонения к заданному значению. Если в систе
ме управляющий орган получает воздействие непосред
ственно от измерительного элемента и приводится им в
действие, то говорят о системе прямого управления
(регулирования), а управляющее устройство называю т
регулятором прямого действия. Эти регуляторы приме
няют, когда сигнал измерительного элемента обладает
достаточной мощностью д л я непосредственного управ
ления управляющим органом. Однако такие случаи
сравнительно редки, поскольку измерительный элемент
стремятся сделать малогабаритным и малоинерциоиным, а это обычно препятствует получению достаточных
выходных мощностей. В большинстве случаев д л я уп
равления управляющим органом сигнал измерительно
го элемента нуждается в усилении. Тогда говорят о
регуляторе непрямого действия, а систему, в которой
применен регулятор, работающий с усилителем, назы
вают системой непрямого управления (регулирования).
В подобных системах для перемещения управляющего
органа используют вспомогательные механизмы, дейст
вующие от постороннего источника энергии или За счет
энергии управляемого объекта.
<Э
1.4. Обратные связи
Характерной чертой автоматических систем, ис
пользующих принцип управления по отклонению, явля
ется наличие обратной связи. Обратные связи подраз
деляю т на жесткие и гибкие, отрицательные и положи
тельные, главные и местные.
Поясним само понятие и принцип действия обратной
связи на примере системы управления угловой скоро
стью двигателя постоянного тока (рис. 2 ,6 ) . Чтобы
поддержать управляемую величину в заданных преде
лах, поступающее на объект управляющее воздействие
(в нашем случае напряжение, подводимое к якорной
I
цепи двигателя) формируется с учетом значения угло
вой скорости вращения. При помощи тахогенератора
B R выход системы соединяется с ее входом. Такое сое
динение и называется обратной связью, то есть направ
ление действия ее противоположно ходу управляющего
воздействия, которое передается через элементы систе
мы к управляемому объекту (в прямом направлении).
Такпм образом, о б р а т н а я
с в я з ь — это связь,
по которой информация о состоянии управляемого объ
екта (контролирующее воздействие, соответствующее
действительному значению управляемой величины) пе
редается с выхода системы на ее вход.
Если воздействие обратной связи, поступающее на
вход системы, по знаку совпадает со знаком задаю щего
воздействия, то ее называю т положительной. В против
ном случае говорят об отрицательной обратной связи.
Когда передаваемое воздействие зависит только от
выходной величины и не зависит от времени, связь
считают жесткой. Практически жесткие обратные связи
действуют как в установившемся, так и в переходном
режиме. Обратная связь, оказываю щ ая влияние на р а
боту системы только в переходном режиме, называется
гибкой. Такие связи реагируют на приращения воздей
ствий, поступающих на их вход. Те из них, что реаги
руют на производные от воздействий, называют диф
ференцирующими, а на интегралы от воздействий — интегрирующими, гибкими обратными связями.
Если обратная связь соединяет выход системы с ее
входом, то ее называют главной. Остальные обратные
связи считают местными. Они служат для улучшения
регулировочных свойств отдельных элементов или их
группы, соединяя выход элементов или группы элемен
тов с соответствующим входом. Их еще называют корректирующими. Местные связи, как и главная, могут
быть гибкими или жесткими.
Следует отметить, что размыкание главной обратной
связи превращает систему замкнутого цикла в разомк
нутую, при размыкании ■ ж е местной обратной связи
зам кнутая система будет продолжать работать по з а
мкнутому циклу.
Рассмотренные обратные связи находят широкое
применение в автоматических системах управления.
I
2 Заказ 5067
,■17
1.5. Элементы автоматических систем
Л ю бая автоматическая система состоит из отдель
ных, связанных между собой элементов. Э л е м е н т о м
автоматики
называют часть системы, в которой
происходят качественные или количественные преобра
зования физической величины, а такж е передача преоб
разованного воздействия от предыдущего элемента к
последующему. Элементы, применяемые в системах
автоматики, весьма разнообразны. В качестве основных
используют датчики, элементы сравнения, усилители,
исполнительные механизмы, корректирующие элементы
и элементы настройки, а кроме того, командоаппараты,
аппараты защиты, измерительные приборы.
Д а т ч и к и измеряют управляемые (регулируемые)
величины объектов управления и преобразовывают из
меренные величины одной физической природы в дру
гую (например, разность температур — в ЭДС, усилие —
в электрическое сопротивление и т. п.). Различные типы
датчиков будут подробно рассмотрены в главе II.
Элементы
сравнения
сопоставляют задаю
щее воздействие x{t) и управляемую величину y{t ) .
Получаемая на выходе разность B{ t ) = x { t ) —y{t ) пере
дается по цепи воздействия либо непосредственно, либо
через усилитель на исполнительный механизм. Элемен
ты сравнения как самостоятельная часть системы не
применяются, а являются составной частью других уст
ройств.
У с и л и т е л и в системах автоматики (магнитные,
электронные, полупроводниковые и др.) обычно ис
пользуются для усиления задающего воздействия x{t)
или разности е ( 0 , когда мощность этих сигналов недо
статочна для нормальной работы регулятора.
Исполнительные
механизмы
предназна
чены для изменения управляемых величин или поддер
ж ания их в заданных пределах. Исполнительным меха
низмом может быть электрический двигатель, нагрева
тельное устройство и др.
Элементы
настройки
(задающие
эле
м е н т ы ) представляют собой устройства, при помощи
которых в систему автоматики подаются задаю щ ие
воздействия x{t). В качестве этих элементов применя
ются потенциометры, сельсины, вращающие трансфор
маторы и т. д.
18
Л
t
Г
Корректирующие
элементы
предназна
чаю тся для улучшения регулировочных свойств систе
мы в целом или отдельных ее частей.
К о м а н д о а п п а р а т ы (кнопки, переключатели,
конечные выключатели и т. п.) предназначены для по
дачи в систему различных воздействий и команд.
Элементы защиты
(тепловые и токовые ре
ле, плавкие предохранители, автоматы и д р . ) — для
выполнения защитных функций при недопустимых ре
ж им ах работы, а к о н т р о л ь н о-и з м е р и т е л ь н ы е
приборы
(амперметры,
вольтметры,
тахометры
и т. д .) — для контроля и измерения различных вели
чин.
Всем элементам автоматики независимо от их назна
чения присущи общие параметры: статическая и дина
мическая характеристики, передаточный коэффициент,
погрешность, порог чувствительности.
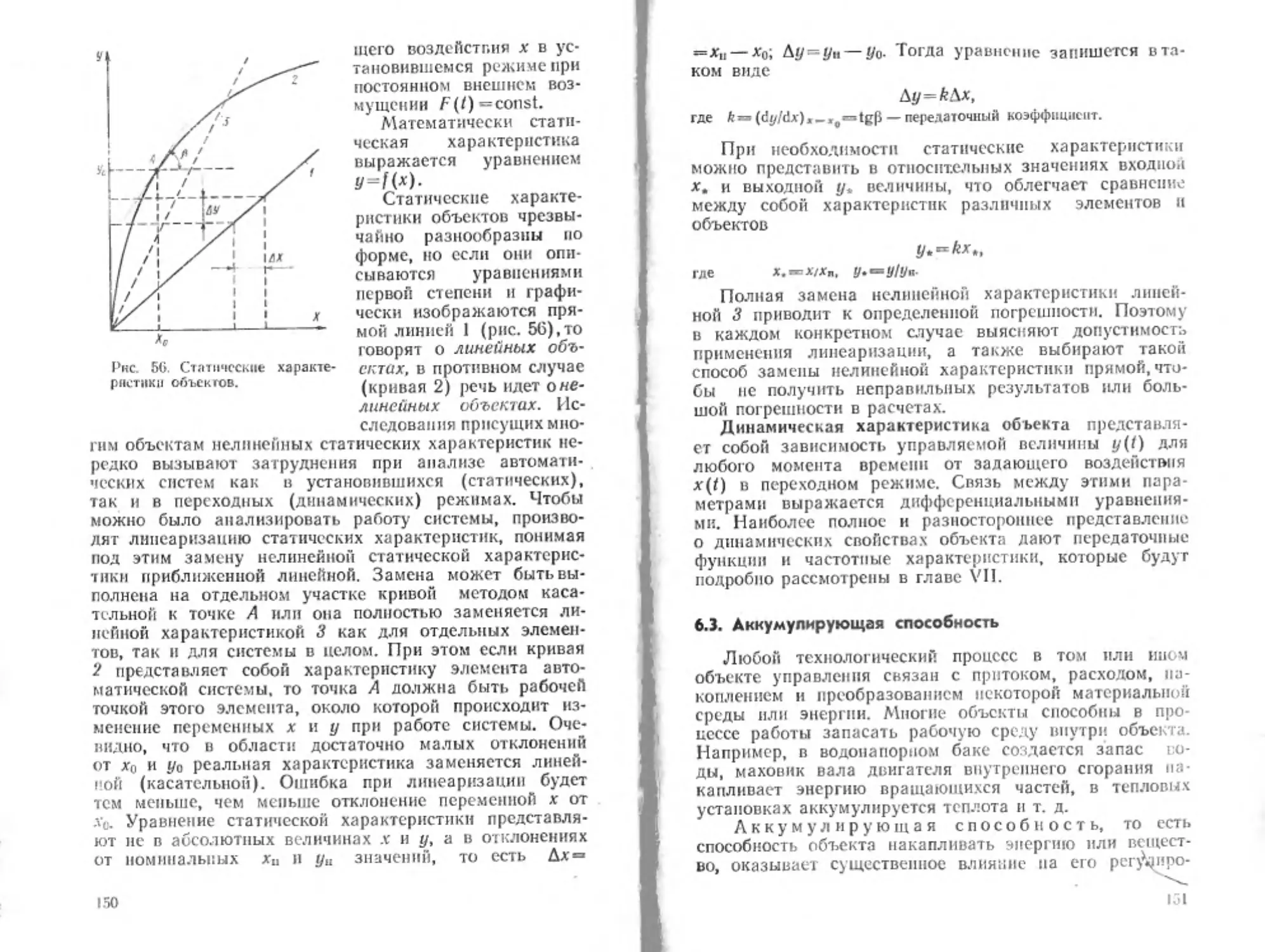
Л од статической характеристикой элемента понима
ют зависимость y = f { x ) , то есть зависимость между
выходной у и входной X величинами в установившемся
режиме, когда х и у неизменны во времени. По виду
статической характеристики различают элементы с ли
нейной и нелинейной характеристиками.
Под динамической характеристикой элемента пони
мают зависимость выходной величины у от входной ве
личины X
в переходном — динамическом — режиме,
когда X \{ у меняются во времени.
Н а характер изменения динамической характеристи
ки оказывает влияние инерционность элемента, из-за
которой выходная величина изменяется в динамическом
режиме с некоторым запаздыванием по отношению к
изменению входной величины.
Передаточный коэффициент элемента представляет
собой отношение выходной величины у к входной х —
статический передаточный коэффициент
k c = y lx ,
или отношение приращения Ау к приращению
динамический передаточный коэффициент
Дх —
kn=dyldx!=bAylAx,
где А у = у 2 —уи A x = X 2 —X i .
Д л я линейной статической характеристики кс — кд
при всех значениях х и у. Единица измерения переда
2*
19
точного коэффициента равна отношению единиц изме
рения выходной и входной величин.
В практике пользуются относительным передаточ
ным коэффициентом
S = (Ау1Уи)1Ах1хи) = AyXulAxya ^
где Хи и i/в — номинальные значения входной и выходной величин.
Д л я датчиков передаточный коэффициент назы ва
ют коэффициентом чувствительности, а для усилите
лей — коэффициентом усиления.
Погрешностью
называется
разность между
текущим и номинальным заданным значениями выходной
величины. Используют абсолютную и относительную
погрешности, которые возникают из-за изменения внут
ренних свойств элемента (износ, старение) и внешних
условий (изменение температуры и влажности окру
жающей среды, изменение питающего напряжения
и т. п.).
П о р о г ч у в с т в и т е л ь н о с т и — наименьшее из
менение входной величины, способное вызвать появле
ние изменения выходной величины. Вызывается он н а
личием в конструкциях элементов люфтов, трения, ги
стерезиса и т. п. Если Х\ и JC2 — значения порога чувст
вительности, то А х= |д;11 -f-1JC2I — зона нечувствитель
ности.
Необходимо отметить, что в отдельных элементах
автоматики при постоянстве входной величины возни
кают самопроизвольные изменения выходной, которые
в зависимости от назначения элемента называю т поразному: помехи, шумы, дрейф нуля, плавание коэффи
циента усиления и т. п.
работы всей установки, при наладке, при управлении,
контроле и ремонте систем автоматики.
Н а принципиальной схеме все элементы, входящие
в системы, и связи между ними изображаются в виде
условных графических обозначений в соответствии с
действующими ГОСТами.
Различаю т совмещенные и разнесенные принципи
альные схемы. На совмещенных схемах все элементы
изображ аю т в непосредственной близости друг от друга
и соединяют их связями в виде линий, идущих от одно
го элемента к другому. Эти схемы при небольшом коли
честве элементов и связей наглядны и удобны для чте
ния. Когда ж е элементов много, обращаются к разне
сенным схемам, на которых все элементы, входящие в
одну цепь, располагаются последовательно, друг за
другом, а отдельные цепи — параллельно в виде гори
зонтальных или вертикальных строк. Д л я удобства чте
ния принципиальных схем каж дому элементу дают бук
венное и цифровое обозначение. Буквенное обозначе
ние представляет собой сокращенное название элемен
тов, а цифровое показывает нумерацию элементов слева
направо или сверху вниз.
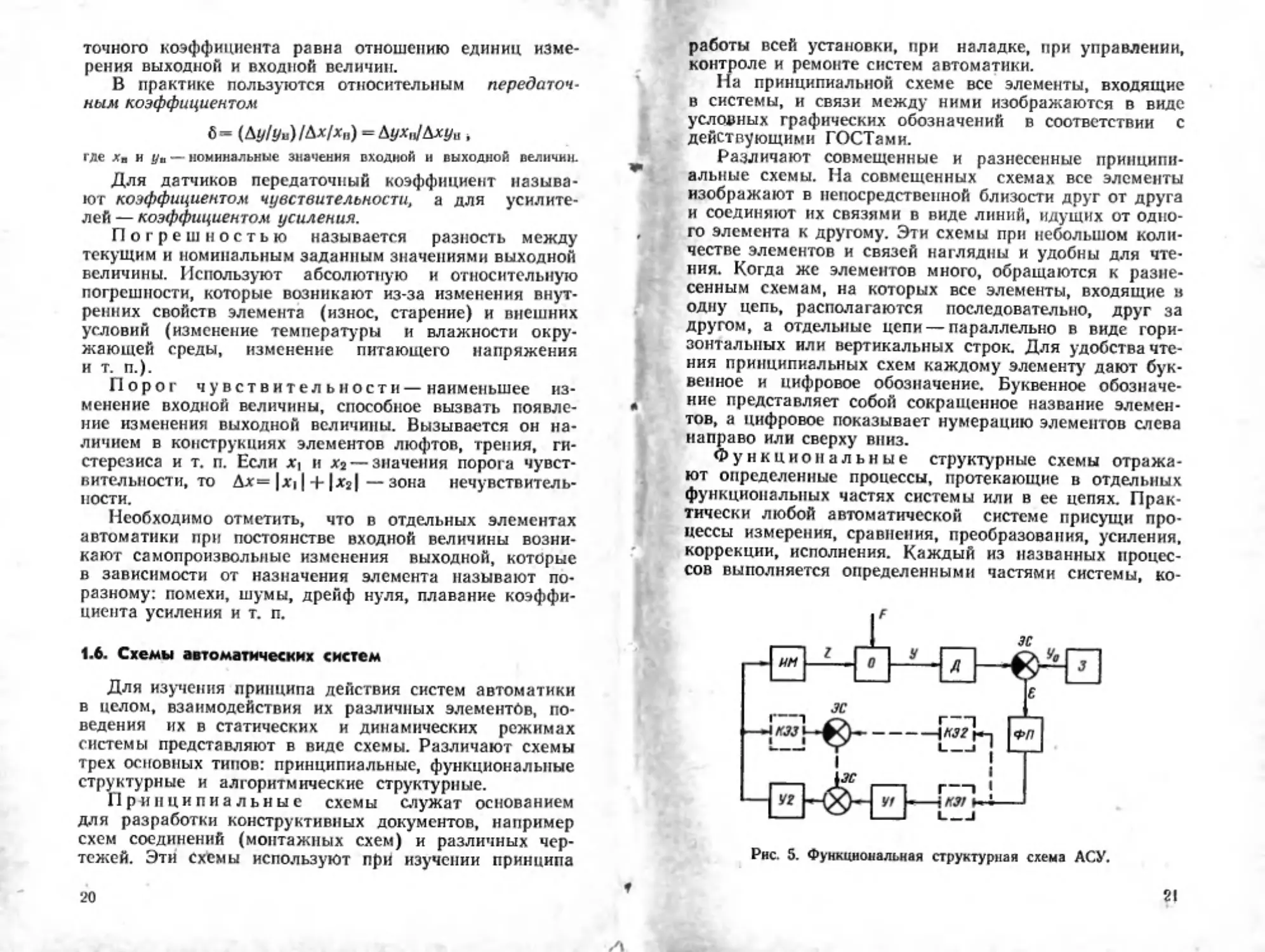
Функциональные
структурные схемы отраж а
ют определенные процессы, протекающие в отдельных
функциональных частях системы или в ее цепях. П рак
тически любой автоматической системе присущи про
цессы измерения, сравнения, преобразования, усиления,
коррекции, исполнения. Каж ды й из названных процес
сов выполняется определенными частями системы, ко-
эс
1.6. Схемы автоматических систем
Д л я изучения принципа действия систем автоматики
в целом, взаимодействия их различных элементбв, по
ведения их в статических и динамических режимах
системы представляют в виде схемы. Различаю т схемы
трех основных типов: принципиальные, функциональные
структурные и алгоритмические структурные.
Принципиальные
схемы служат основанием
для разработки конструктивных документов, например
схем соединений (монтажных схем) и различных чер
тежей. Эти Схемы используют при изучении принципа
20
им
Д
е
•
1
зс
I-----1
<РП
--------- L T T n
I
J 3C
!
г ---1 I
I___ I
Рис. 5. Функциональная структурная схема АСУ.
?!
торые обозначаются прямоугольниками, с указанием
наименования элемента, в соответствии с выполняемы
ми функциями. Связи между функциональными элемен
тами обозначаются линиями со стрелками, показываю
щими направление внутренних воздействий. На рисун
ке 5 приведена функциональная структурная схема
АС У с наиболее типичными для многих схем элемен
тами.
В данной схеме датчик Д измеряет управляемую
величину у объекта О. Задатчик 3 вырабатывает в со
поставимом масштабе аналогичную физическую вели
чину уо, пропорциональную мгновенным значениям уп
равляемой величины, которую требуется поддерживать
в соответствии с алгоритмом функционирования. Эле
мент сравнения ЭС, сравнив у и у^, вырабатывает раз
ность Е = у о ~ у , которая поступает в функциональный
преобразователь ФП. Чтобы получить мощность, доста
точную для приведения в действие управляющий орган,
сигнал в усилителях У1 и У2 усиливается и поступает
на исполнительный механизм, вырабатывающий управ
ляющее воздействие z на объект. Если выходной вели
чиной исполнительного механизма является механиче
ское перемещение, его обычно называют сервомотором.
Корректирующие элементы КЭ1, КЭ2. КЭЗ сл у ж атд ля
улучшения динамических свойств процесса управления.
Способы включения их разнообразны.
Алгоритмические
структурные
схемы
показывают взаимосвязь отдельных частей системы и
характеризуют их динамические свойства. Н а алгорит
мической структурной схеме вся система автоматики,
как и на функциональной, изображается в виде прямо
угольников, каждый из которых представляет собой ди
намическое звено направленного действия. Поэтому ал
горитмическая структурная схема отображает м атем а
тическую модель процесса управления. Внутри звена
(прямоугольника) указы вается математическая зависи
мость между выходной и входной величинами данного
звена, а связи между звеньями обозначают стрелками,
указывающими направление и точки приложения воз
действий. При этом какое-либо устройство реальной
системы может быть представлено несколькими эле
ментарными звеньями направленного действия и, на
оборот, несколько устройств могут быть изображены
как одно звено. Эти схемы будут рассмотрены ниже.
1.7. Классификация автоматических систем
Автоматические системы управления можно класси
фицировать по различным признакам; по назначению
(системы управления станками, сушильными установ
ками, установками микроклимата и т. п.); по характе
ру управляемых величин (системы управления напря
жением, частотой, скоростью, температурой, освещени
ем и д р .): по виду используемой для управления энер
гии (электрические, гидравлические, электронные, пнев
матические и др.) и т. д.
Н иж е приведена классификация АС У по наиболее
характерным определяющим признакам. По характеру
изменения управляемой величины (по характеру алго
ритма функционирования) различаю т системы стабили
зации, программные и следящие системы.
Системы
с т а б и л и з а ц и и поддерживают тре
буемое значение управляемой величины с заданной
точностью. Поскольку требуемое значение управляемой
величины в системе стабилизации постоянно, то рас
хождение между ним и текущим значением в устано
вившемся режиме (ошибка управления) не должно пре
вышать допустимого значения. Если заданное значение
управляемой величины ^/о(0 = const, текущее значение
y ( t ) , расхождение между ними в установившемся ре
жиме Д^/, допустимое значение этого расхождения
Аудоп, то с учетом того, что в системах стабилизации
задаю щ ее воздействие х( ( ) постоянно, можно записать
x(^)==const, A y= !/o(t) - y ( t ) ^А удоп.
Л ю бая система управления характеризуется зависи
мостью между управляемой величиной и внешним воз
действием (нагрузкой) на объект управления. По виду
таких зависимостей, называемых регулировочными х а
рактеристиками, различают системы стабилизации ста
тического и астатического регулирования.
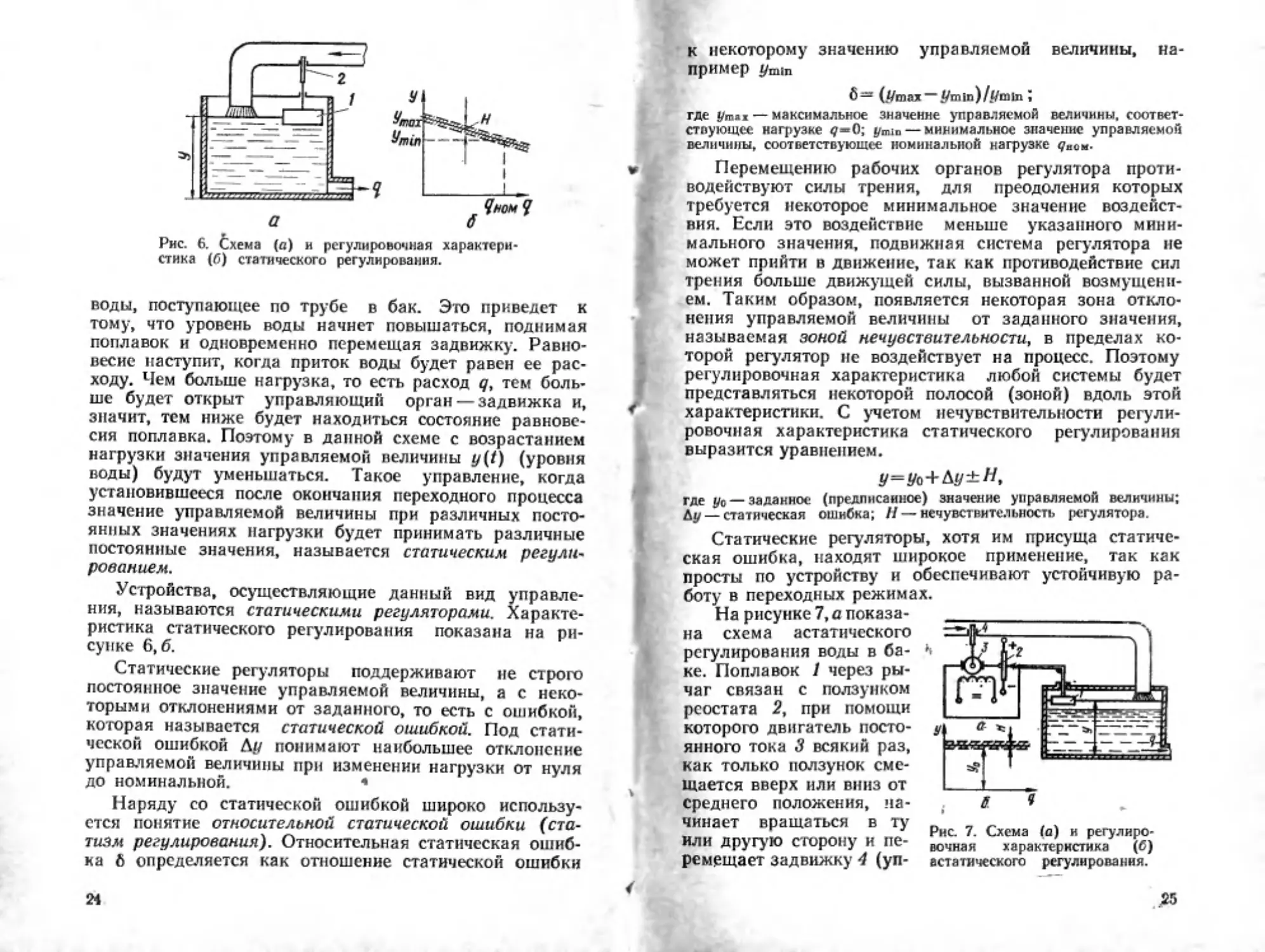
Н а рисунке 6, а показана система статического ре
гулирования уровня воды в напорном баке. Поплавок 1
соединен непосредственно с управляющим органом —
задвиж кой 2. Поэтому любые изменения уровня воды
в баке передаются через поплавок на задвижку. Если
увеличивается расход q воды, то ее уровень в баКе по
низится, поплавок опустится и изменит положение за
движки таким образом, что увеличится пропускное се
чение питающей трубы, а следовательно, и количество
22
23
К некотором у значению
пример f/min
управляем ой
величины,
н а
S = (i/max — </min)/t/inin J
где j/max — максимальное значение управляемой величины, соответ
ствующее нагрузке <7= 0 ; j/min — минимальное значение управляемой
величины, соответствующее номинальной нагрузке ^яом.
Рис. 6. Схема (а) и регулировочная характери
стика (б) статического регулирования.
ВОДЫ, поступающее по трубе в бак. Это приведет к
тому, что уровень воды начнет повышаться, поднимая
поплавок и одновременно перемещая задвижку. Равно
весие наступит, когда приток воды будет равен ее рас
ходу. Чем больше нагрузка, то есть расход д, тем боль
ше будет открыт управляющий орган — задвиж ка и,
значит, тем ниже будет находиться состояние равнове
сия поплавка. Поэтому в данной схеме с возрастанием
нагрузки значения управляемой величины t/(t) (уровня
воды) будут уменьшаться. Такое управление, когда
установившееся после окончания переходного процесса
значение управляемой величины при различных посто
янных значениях нагрузки будет принимать различные
постоянные значения, называется статическим регулы^
рованием.
Устройства, осуществляющие данный вид управле
ния, называются статическими регуляторами. Х аракте
ристика статического регулирования показана на ри
сунке 6, 6.
Статические регуляторы поддерживают не строго
постоянное значение управляемой величины, а с неко
торыми отклонениями от заданного, то есть с ошибкой,
которая называется статической ошибкой. Под стати
ческой ошибкой Д«/ понимают наибольшее отклонение
управляемой величины при изменении нагрузки от нуля
до номинальной.
«
Н аряду со статической ошибкой широко использу
ется понятие относительной статической ош ибки (статизм регулирования). Относительная статическая ошиб
ка б определяется как отношение статической ошибки
24
Перемещению рабочих органов регулятора проти
водействуют силы трения, для преодоления которых
требуется некоторое минимальное значение воздейст
вия. Если это воздействие меньше указанного мини
мального значения, подвижная система регулятора не
может прийти в движение, так как противодействие сил
трения больше движущей силы, вызванной возмущени
ем. Таким образом, появляется некоторая зона откло
нения управляемой величины от заданного значения,
назы ваем ая зоной нечувствительности, в пределах ко
торой регулятор не воздействует на процесс. Поэтому
регулировочная характеристика любой системы будет
представляться некоторой полосой (зоной) вдоль этой
характеристики. С учетом нечувствительности регули
ровочная характеристика статического регулирования
вы разится уравнением.
У=Уо + ^ У ± Н ,
где J/0 — заданное (предписаиное) значение управляемой величины;
— статическая ошибка; Н — нечувствительность регулятора.
Статические регуляторы, хотя им присуща статиче
ская ошибка, находят широкое применение, так как
просты по устройству и обеспечивают устойчивую ра
боту в переходных режимах.
Н а рисунке 7, а показа
на схема астатического
регулирования воды в б а
ке. П оплавок 1 через ры
чаг связан с ползунком
реостата 2 , при помощи
которого двигатель посто
янного тока 3 всякий раз,
как только ползунок сме
щ ается вверх или вниз от
среднего положения, н а
чинает вращ аться в ту „
,
_
__^
Или др угую сторону и перем рщ ает задв и ж к у 4 (уп-
Рис. 7. Схема (а) и регулировечная
характеристика
(б)
астатического регулирования.
,.25
п р е д п и с а н и ю — программе, которая
составляется за р а
нее на основании требований технологического процес
са. Эти требования выражаю тся изменениями з а д а ю щ е
г о ' воздействия по определенному закону в виде заранее
известной функции времени. С учетом ранее принятых
обозначений для программной системы
x{t)=Nn{t), A y { t ) = y o { t ) - y i t X y n o u { t ) ,
равляющий орган) до тех пор, пока не восстановится
заданный уровень воды в баке, то есть пока напряжение,
подведенное к якорной цепи двигателя, не станет равным
нулю и не наступит установившийся режим (равновесное
состояние). Этому режиму соответствует определенный
заданный уровень уо воды в баке, который для всех р ав
новесных состояний остается строго постоянной величи
ной с точностью до нечувствительности регулятора.
Графическое изображение регулировочной характе
ристики в функции расхода q воды будет соответство
вать зависимости, показанной на рисунке 7,6. Следо
вательно, под астатическим регулированием понимают
такое, когда в установившемся режиме при различных
значениях постоянной нагрузки поддерживается посто
янное значение управляемой величины, равное зад ан
ному.
Регулировочная характеристика для астатического
регулирования без учета нечувствительности регулято
ра вы раж ается уравнением
{/=«/0= const.
где Nn( t ) — заранее известная функция времени — программа, по
которой должна изменяться управляемая величина.
Д л я получения определенной программы в таких
системах предусмотрено специальное устройство — за
датчик, изменяющий управляющее воздействие x {t ) в
заданном направлении. В качестве примера таких си
стем можно назвать системы программного управления
работой металлорежущих станков, системы программ
ного управления освещенностью в различных произ
водственных сельскохозяйственных помещениях и т. п.
Следящие
автоматические
системы
предназачаю тся для изменения управляемой величины
по закону заранее неизвестной функции времени, опре
деляемой задающим воздействием
( 1)
x{t ) = iV (0 , Ay it) = f/o( 0 - y { t ) <Аг/доп(0 .
При наличии нечувствительности, а она практиче
ски существует во всех регуляторах, уравнение ( 1)
примет вид
где N{t) — заранее неизвестная функция времени.
В таких системах применяется следующая термино
логия: вместо управление говорят слежение, окончание
процесса — отработка, входная величина — ведущ ая ве
личина, выходная величина — ведомая величина.
Н а рисунке 8 , а показана схема следящей системы.
Основным ее элементом является датчик рассогласова
ния Д, который определяет расхождение (ошибку)
между ведомой и ведущей величинами. Ведомая вели
чина y {t ) измеряется измерительно-преобразовательным
элементом И П и приводится к уровню ведущей величи-
у= уо±Н .
Устройства, осуществляющие данный вид регулиро
вания, называются астатическими регуляторами. Такие
регуляторы более точно поддерживают заданное значе
ние управляемой величины, но, как правило, сложнее
но устройству, чем статические, склонны к колебаниям
в переходных режимах и в большинстве случаев не
обладаю т требуемой устойчивостью брз вспомогатель
ных устройств. Если сравнить системы статического и
астатического регулирования, то нетрудно заметить, что
в первом случае поплавок действует непосредствеьгао
на управляющий орган — задвиж ку, а во втором случае
через промежуточный элемент — электродвигатель, ко- «
торый в значительной мере усиливает сигнал, снимае
мый с поплавка. Поэтому первая система будет прямо
го, а вторая — непрямого управления.
П р о г р а м м н ы е с и с т е м ы предназначаются для
изменения управляемой величины по определенному
lF(t)
yi(t)
ИП
y(t)
Рис. 8. Схема (а) и диаграмма (б) изменения углового переме
щения на входе и выходе следящей системы.
а-
27
26
ны л:(/). Установив значения рассогласования меж ду
ведущей величиной x{t ) , поступающей от ведущего эле
мента 3, и ведомой величиной y{t ) , датчик Д выдает
сигнал регулятору Р, который вырабатывает управляю
щее воздействие z {t ) , направленное на ликвидацию
рассогласования. На рисунке 8 ,6 приведена диаграм
ма изменения ведущей x{t ) и ведомой y ( t ) величин
следящей системы.
Примером следящей системы может служить систе
ма автоматического управления движением трактора
при работе с почвообрабатывающим агрегатом в зависи
мости от изменения направления ранее проложенной
борозды, за которой следит копир.
/ По способу передачи и преобразования управляюще-
Рис. 9. Диаграмма ос
новных видов управля
ющих воздействий:
а — непрерывное; б я в —
прерывистое; г н д — ре
лейное.
28
ГО воздействия, обеспечивающего нормальное протека
ние технологического процесса, автоматические системы
управления делят на непрерывные и дискретные. Это
связано с тем, что управляющее воздействие исполни
тельного механизма в зависимости от устройства регу
лятора может иметь непрерывный или прерывистый
характер.
Н а рисунке^ 9, а представлена кривая отклонения
управляемой величины y ( t ) во времени от заданного
значения
В нижней части рисунка показано, как
i
должно
меняться
управляющее воздействие z ( f ) \ оно
Л
находится в линейной зависимости от сигнала управ
I
ления и совпадает с ним по фазе. Регуляторы, вы раба
fii.f
тывающие такое воздействие, называю тся регуляторами
непрерывного действия, а само управление — непре
рывным. Эти регуляторы работаю т только тогда, когда
существует управляющее воздействие, то есть пока
имеется различие между действительным и предписан
ным значениями управляемой величины.
Если в процессе работы автоматической сис^гемы
управляющее воздействие при непрерывном сигнале
управления прерывается в некоторые промежутки вре
мени или подается в форме отдельных импульсов, то
такое управление называю т п р е р ы в и с т ы м ( д и с
кретным).
Рассмотрим два способа формирования прерыви
стого управляющего воздействия. На рисунке 9 , 6 и в
:
показаны графики прерывистого управляющего воздей
ствия при непрерывном отклонении Ау управляемой
величины. В случае (б) управляющее воздействие пред
ставлено отдельными импульсами одинаковой длитель
II ности At, следующими через равные промежутки вре
' %• мени ti = t 2 =t , то есть формируется сигнал управления,
SfK квантованный по времени. При этом амплитуда им
пульсов z = f { t ) пропорциональна значению сигнала уп
Х<‘- равления в момент формирования управляющего воз
действия. В случае (в) все импульсы имеют одинаковую
амплитуду z = f { t ) и следуют через равные интервалы
времени*/] = ^2= Л но имеют различную длительность At,
то есть образуется сигнал управления квантованный по
уровню (амплитуде). При этом длительность импуль
сов зависит от значения сигнала управления в момент
формирования управляющего воздействия. Возможно
совместное квантование сигнала по времени и по уров29
ню. Управляющее воздействие от регулятора передает
ся управляющему органу с соответствующими переры
вами, поэтому управляющий орган меняет свое положе
ние такж е с перерывами.
В практике широкое применение находят системы
автоматического управления релейного типа с двухпо
зиционными и трехпозиционными регуляторами. Д в у х
позиционный
р е г у л я т о р (рис. 9, г) имеет два
устойчивых состояния: одно — когда отклонение уп
равляемой величины перейдет установленный положи
тельный предел + h y , а другое — когда отклонение из
менит знак и достигнет отрицательного предела —
Управляющее воздействие в обеих позициях одинаково
по абсолютной величине, но различно по знаку, причем
это воздействие посредством регулятора заставляет уп
равляющий орган перемещаться скачкообразно таким
образом, чтобы абсолютная величина отклонения все
гда уменьшалась. Если отклонение
достигнет допу
стимого положительного значения +!^у (точка t ) , то
сработает реле и на объект через регулятор и управ
ляющий орган будет оказываться управляющее воз
действие
z {t ) , которое равно и противоположно по
знаку положительному значению управляющего воздей
ствия + z { t ) . Отклонение управляемой величины по
истечении некоторого времени будет уменьшаться. Д о
стигнув точки 2, отклонение lS,y станет равным допусти
мому отрицательному значению — h y, реле сработает
и управляющее воздействие z { t ) изменит свой знак на
противоположный и т. д.
Трехпозиционный
регулятор
занимает
одно из трех устойчивых положений (рис. 9 ,d ). В диа
пазоне отклонения управляемой величины от + h y до
—Д«/ регулятор находится в так называемом нейтраль
ном положении.
^
Релейные регуляторы просты по устройству, срав
нительно недороги и находят широкое применение в тех
объектах, где не требуется большая чувствительность
к внешним воздействиям. По математическому описа
нию, то есть по виду дифференциальных уравнений,
отражаю щ их поведение системы в динамике, все авто
матические системы делят на линейные и нелинейные.
К линеины м автоматическим системам относят те, по
ведение которых в динамике достаточно точно описыва
ется линейными дифференциальными уравнениями. В
30
нелинейны х системах переходный процесс описываец:я
нелинейными дифференциальными уравнениями.
. Кроме рассмотренных, определенное, хотя и довольно пока
ограниченное применение находят самоприспосабливающиеся (само, настраивающиеся автоматические системы).
,
Ко всем производственным установкам предъявляются требо, вания работы в оптимальном режиме с точки зрения расхода энер■ГИИ, производительности и качества выполнения производственной
операции. Чтобы в полной мере выполнить эти требования, необхо'димы специальные устройства, которые обеспечивали бы автома‘.тическую настройку производственной установки на работу в опти
мальном режиме. Их и называют самоприспосабливающимися или
самонастраивающимися автоматическими системами управления.
■Такие системы автоматически настраивают производственную уста
новку применительно к меняющимся условиям работы, то есть к
изменяющимся характеристикам управляемого объекта в оптималь
ном режиме. Поэтому данные системы часто называют системами
оптимального или экстремального управления. Использование э ти х .
систем позволяет увеличить производительность установки, улуч
шить качество выпускаемой продукции, уменьшить затраты труда,
повысить культуру производства и т. д. Хотя такие системы значн■_г тельно сложнее и дороже других, часто требуют коренной рекон
струкции производства, тем не менее в будущем следует ожидать
их все более широкого применения в автоматизированных установ
ках сельскохозяйственного назначения.
Приведенная классификация дает общее представ
ление об автоматических системах. Из всего их много
образия в практике наибольшее распространение полу
чили автоматические системы управления с отрица
тельной обратной связью, работающие по замкнутому
ц и кл у ., Поэтому в дальнейшем материал будет изла
гаться применительно к этим системам.
1.8. Основные законы управления
П од законом управления в автоматике понимают
^ математическую зависимость, по которой управляю щ ее
устройство (регулятор) воздействует на объект управ
ления.
Существует много законов управления, которые используйтся в технике. Рассмотрим простейшие из них,
в которых управляющее воздействие линейно зависит
от отклонения, его интеграла и первой производной пО'
времени.
•*
Д л я математического описания законов управления
используем безразмерные относительные величины от
клонений управляемой величины
Ф=Д*/Аб
.31
I
й управляющего воздействия
Х =Д2:/гб,
где Иб и 2б — базовые значения (за базовое значение принимают
любое известное значение, например номинальное).
П ропорциональны й
за к о н
(Я )
Х=йрф.
Регулятор, реализующий этот закон, называется
пропорциональным, а управление, осуществляемое им,
будет статическим (рис. 6). Коэффициент Кр передадаточный коэффициент регулятора.
И н т е г р а л ь н ы й з а к о н ( Я)
или
'h
I
dX
IV
dt
5
Контрольные вопросы и задания. 1. Что такое алгоритм функ
ционирования и алгоритм управления? 2. Поясните термин «управ
ляемый объект». 3. Что понимают под внешним управляющим и
задающим воздействиями? 4. Чем отличается автоматическая си
стема управления от автоматической системы регулирования?
5. Каковы преимущества автоматической системы управления с
замкнутым циклом воздействий в сравнении с автоматической си
стемой управления с разомкнутым циклом воздействий? 6. Что
такое обратная связь и какие виды обратных связей вы знаете?
7. Перечислите и охарактеризуйте основные элементы автоматиче
ских систем управления. 8. Расскажите о классификации автомати
ческих систем управления. 9. Какими характерными признаками
отличается статическое регулирование от астатического? 10. Что та
кое статическая ощибка? 11. Изложите принципы составления прин
ципиальных и функциональных структурных схем автоматических
систем управления. 12. Каковы основные функции, выполняемые •
элементами автоматических систем? 13. Что такое закон управле
ния? 14. Назовите основные законы управления.
здесь Г — постоянная времени интегрирования, имеющая размер
ность времени. Регулятор, реализующий этот закон, называется
интегральным или астатическим, с его помощью осуществляется
астатическое регулирование (рис. 7).
П р о п о р ц и о н а л ь н о-и н т е г р а л ь н ы й
закон
(ПИ)
(2)
И з уравнения (2) видно, что этот закон объединяет
в себе пропорциональное регулирование с интегральной
коррекцией, то есть регулятор П И осуществляет астати
ческое регулирование.
Пропорционально-интегрально-диффе
р е н ц и а л ь н ы й з а к о н {ПИД)
■#
(
t
+ Т д -^
где Т , н Г„ — постоянные времени интегрирования и дифференцирования.
Регулятор, реализующ1<й этот закон, такж е обеспе
чивает
астатическое
регулирование. Производная
d<^/dt вводится в закон управления для улучшения к а
чества процесса управления.
' 32
Э Заказ 5067
ГЛАВА II
ДАТЧИКИ СИСТЕМ АВТОМАТИКИ
2.1. Общие сведения
Д л я непрерывного контроля за режимом работы
различных машин и агрегатов, протеканием техноло
гических процессов необходимо иметь устройства, изме
ряющие значения величин, характеризующих эти про
цессы. В автоматике эти устройства называют датчи
ками.
Следует отметить, что термин «датчик» не имеет
четкого толкования. В одних случаях за датчик прини
мают элемент, который выполняет функции измерения
управляемых величин, в других — измерительный эле
мент и дополнительный преобразователь, включаемый
с целью преобразования сигнала измерительного эле
мента в сигнал другой величины.
В дальнейшем под датчиком будем понимать уст
ройство, измеряющее параметры процесса, режима ра
боты машин и агрегатов и преобразующее измеренные
физические величины в сигнал, удобный для дальней
шей обработки и передачи на расстояние или в цепь
управляющего устройства.
В большинстве случаев на выходе датчика будет
либо механическая величина (перемещение, сила), либо
электрическая величина (напряжение, ток, электриче
ское сопротивление, емкость, индуктивность, сдвиг фаз
и др.).
Наиболее легко измерению поддаются электрические
величины, поэтому во многих случаях при измерении
неэлектрических величин совместно с измерительным
органом предусматривается специальное устройство —
преобразователь, в котором неэлектрическая величина
на его входе преобразуется в электрическую величину
на его выходе. Любая величина независимо от ее физи
34
ческой природы может быть преобразована в электри
ческое напряжение или ток, поэтому при автоматизации
производственных процессов' наиболее широкое распро
странение получили электрические датчики — измери
тельные устройства с преобразованием неэлектрической
величины в электрическую.
Необходимо отметить, что одна из самых трудных и
ответственных проблем при автоматизации любого про
изводства и особенно сельскохозяйственного — это раз
работка соответствующих датчиков, способных отобра
ж ать и контролировать автоматизируемые процессы.
Очень часто требуется в одно и то же время измерять
несколько управляемых величин (например, в животно
водческих помещениях — влажность, температуру и га
зовый состав среды), поэтому нужны различные д а т
чики.
Свойства, которыми должен обладать каждый д ат
чик, чтобы соответствовать своему назначению в авто
матической системе, разнообразны, поэтому можно вы
делить основные требования, предъявляемые к ним:
однозначность зависимости между входной и выходной
величинами, когда конкретному значению входной ве
личины соответствует строго определенное значение
выходной; линейная (там, где это возможно) — самая
простая и наглядная зависимость между выходной и
входной величинами; высокая чувствительность к изм е
ряемой величине; достаточная мощность выходного сиг
нала, обеспечивающая по возможности дальнейшее уп
равление элементами системы без усилителей; стабиль
ность характеристик во времени, то есть в течение
определенного периода эксплуатации; отсутствие влия
ния нагрузки выходной цепи на измеряемую электриче
скую величину и на технологический процесс в целом;
м алая инерционность, то есть минимальная задерж ка в
передаче сигнала через датчик; наименьшее влияние
посторонних факторов на характеристики датчика
устойчивость к воздействиям окружающей среды; на
деж ная и долговечная работа; невысокая стоимость
технологичность изготовления; удобство эксплуатации
достаточная степень унификации отдельных частей
Датчики, используемые в современных системах автома
тики, классифицируют по различным признакам; физи
ческой природе входных и выходных величин, принципу
действия и конструктивному исполнению.
3*
35
в зависимости от физической природы входной ве
личины датчики делятся на датчики электрических ве
личин (тока, напряжения, мощности, частоты) и датчи
ки неэлектрических величин (температуры, давления,
скорости, уровня и т. п.). По виду энергии выходной
величины датчики делятся на электрические и неэлек
трические. Электрические датчики по принципу дейст
вия делятся на п а р а м е т р и ч е с к и е , в которых
входные величины (обычно неэлектрические) преооразуются в выходные параметры электрических цепей
(R — сопротивления, L — индуктивные, С — емкостные
и М — трансформаторные) и г е н е р а т о р н ы е , в кото
рых энергия входной величины преобразуется в энергию
электрического выходного сигнала — ЭДС.
Неэлектрические датчики подразделяются на м е х а
нические,
п н е в м а т и ч е с к и е и др.
По характеру изменения выходного сигнала во вре
мени различают датчики непрерывного действия, кото
рые выдают сигнал непрерывно, и дискретного дейст
вия, у которых значение выходного сигнала в опреде
ленные промежутки времени равно нулю.
Основными параметрами, характеризующими дат
чик, являю тся чувствительность и инерционность.
Чувствительность S датчика представляет собой от
ношение изменения Ду его выходной величины к изме
нению Дх входной
S = AylAx или S = dy/dx.
(3)
Таким образом, чувствительность является первой
производной функции, выражающей зависимость выход
ной величины от входной. В дальнейшем при изучении
динамики автоматических систем управления отноше
ние (3) для установившегося режима будем называть
коэффициентом
усиления
датчика.
Инерционность датчика отраж ает некоторое зап аз
дывание в измерении значения управляемой величины,
которое может быть обусловлено массой деталей, тепло
выми свойствами, индуктивностью, емкостью и другими
параметрами самого датчика.
2.2. Датчики сопротивления
В системах автоматики для измерения усилий, мо
ментов сил, линейных и угловых перемещений и иных
величин широкое применение находят датчики электри
33
'L J '
1
V
/Я
Рис. 10. Контактные датчики:
а — одностороннего
предельный.
действия;
б — двухстороннего
действия;
в — много
ческого (активного) сопротивления (контактные, рео
статные, тензометрические и д р.).
В контактных датчиках в результате различных воз
действий происходит замыкание и размыкание контак
тов, включенных в какую-либо электрическую цепь.
Контактные датчики бывают одностороннего действия
(рис. 10, 0 ) с одним неподвижным и одним подвижным
контактами и двухстороннего (рис. 10, 6 ) с одним под
вижным и двумя неподвижными контактами, а такж е
многопредельными, то есть с несколькими последова
тельно замыкающимися друг за другом контактами
(рис. 10, в).
Несмотря на простоту, контактные датчики могут
контролировать линейные размеры с высокой точно
стью. Все дело в самих контактах и в том, в какую цепь
они включены. Чем меньше ток цепи, в которую введен
контактный датчик, тем выше его точность. Весьма
точные результаты можно получить, включая датчик
в сеточную цепь электронной лампы, поскольку эта цепь
потребляет очень небольшой ток.
Нечувствительность контактных датчиков определя
ется начальным зазором б о между контактами. Выход
ная величина датчика будет равна нулю до тех пор,
пока подвижная часть контактов под действием изме
ряемой величины Р не преодолеет зазор б о .
Основной недостаток рассматриваемых датчиков —
ограниченный срок службы контактов, которые подвер
гаются действию электрической дуги, обгорают, изме
няют свои свойства и размеры.
Потенциометрические датчики за счет изменения
своего электрического сопротивления преобразуют уг
ловое или линейное перемещение измерительного орга37
1 02
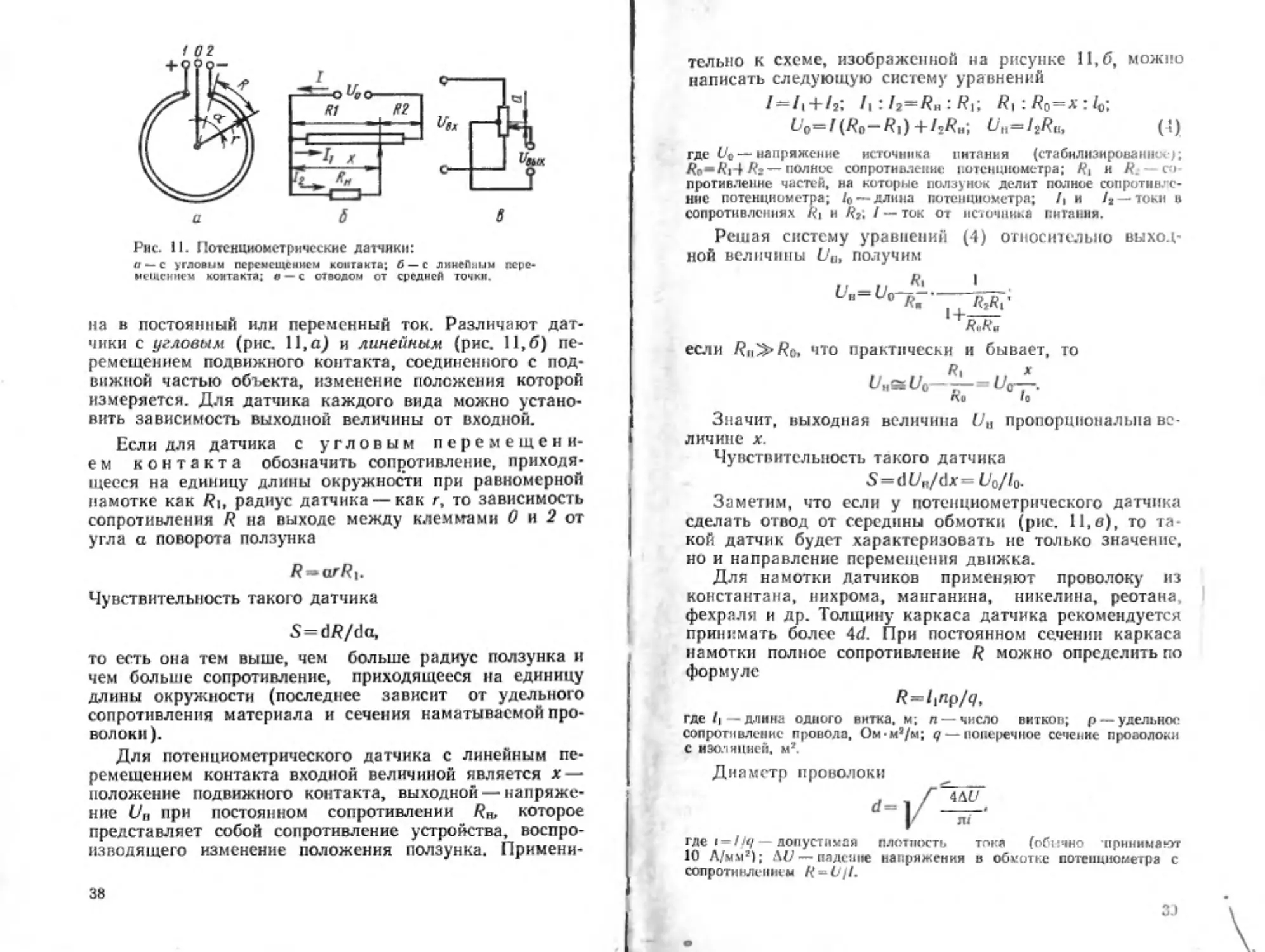
тельно к схеме, изображенной на рисунке 11, 6, можно
написать следующую систему уравнений
—о ^оОF2
R1
ir.'ex
I = I l + / 2 ', I i ' I 2=^Rb '-Ri ', R \ - R o= ^ ' ^ o\
Uo —I { R o ~ R l ) + h R H , Ua—I^Rii,
rO
Vnm
в
Рис. и. Потенциометрические датчики:
й — с угловым перемещением контакта; б — с линейным пере
мещением контакта; в — с отводом от средней точки.
где t/fl — напряжение
источника
питания
(стабилизированное;;
— полное сопротивление потенциометра;
и
— со
противление частей, на которые ползунок делит полное сопротивле
ние потенциометра; 1а — длина потенциометра; /j и /2 — токи в
сопротивлениях Ri и кг', I — ток от источника питания.
Реш ая систему уравнений (4) относительно выход
ной величины Uu, получим
V,= U o ~ - -
на в постоянный или переменный ток. Различаю т д ат
чики с угловы м (рис. \ \ , а ) и линейным (рис. 11, 6 ) пе
ремещением подвижного контакта, соединенного с под
вижной частью объекта, изменение положения которой
измеряется. Д л я датчика каждого вида можно устано
вить зависимость выходной величины от входной.
Если для датчика с у г л о в ы м п е р е м е щ е н и
е м к о н т а к т а обозначить сопротивление, приходя
щееся на единицу длины окружности при равномерной
намотке как R\, радиус датчика — как г, то зависимость
сопротивления R на выходе между клеммами О к 2 от
угла а поворота ползунка
Чувствительность такого датчика
S = d/?/da,
то есть она тем выше, чем больше радиус ползунка и
чем больше сопротивление, приходящееся на единицу
длины окружности (последнее зависит от удельного
сопротивления материала и сечения наматываемой про
волоки).
Д л я потенциометрического датчика с линейным пе
ремещением контакта входной величиной является х —
положение подвижного контакта, выходной — напряж е
ние Ub при постоянном сопротивлении Ra, которое
представляет собой сопротивление устройства, воспро
изводящего изменение положения ползунка. Примени38
(4)
1-Ь
‘ 2RI'
R
RoR»
если Rii'>Ro, что практически и бывает, то
АО
/о
Значит, выходная величина Ua пропорциональна ве
личине X.
Чувствительность такого датчика
S = dU ,,/dx= U o/lo.
Заметим, что если у потенциометрического датчика
сделать отвод от середины обмотки (рис. 11, в), то т а
кой датчик будет характеризовать не только значение,
но и направление перемещения движка.
Д ля намотки датчиков применяют проволоку из
константана, нихрома, манганина, никелина, реотана,
фехраля и др. Толщину каркаса датчика рекомендуется
принимать более 4d. При постоянном сечении каркаса
намотки полное сопротивление R можно определить по
формуле
/? = /,n p /9 ,
где / | — длина одного витка, м; п — число витков; р — удельное
сопротивление провода, Ом-м^/м; q — поперечное сечение проволоки
с изоляцией, м^.
Д иаметр проволоки
АШ
где ( = //9 — допустимая плотность
тока
(обычно ‘принимают
10 А/мм^); ДО — падение напряжения в обмотке потенциометра с
сопротивлением R ^ V j l .
Сопротивление датчика с некоторым приближением
вы раж ается зависимостью
/? = /? о + ( а /Р ) ,
(S)
где Ло — постоянная величина, соответствующая сопротивлению при
Р -> о о , О м ; Р — усиление, приложенное к датчику, Н ; а — постоян
ный коэффициент, О м -Н .
Чувствительность датчика
5=
&R
йР
= ^ 1Р \
.( 6)
Силу тока можно определить как
Рнс. 12. Угольные датчики:
а — простой;
6 — характеристики
и
угольного датчика; е — диффе-
ревцнальпый.
/= -
Л о - Ь ( а /Р )
К недостаткам потенциометрических датчиков мож
но отнести наличие скользящего контакта и то, что х а
рактеристика «выход» от «входа» не всегда получается
линейной. Однако простота конструкции и возможность
обойтись без усилителей зачастую компенсируют отме
ченные недостатки.
'Угольные датчики преобразуют действующее на них
усилие в электрическое сопротивление или силу тока^;
Входной величиной здесь будет измеряемое усилие, а
выхощ ой — сопротивление датчика или силы тока в
нем. ^ з л и ч а ю т датчики этого типа в виде столбиков л
- так называемые тензолиты, состоящие из порошка угля,
графита или сажи, смешанного с бакелитовым или дру
гим изолирующим лаком. Простейший датчик в виде
с т о л б и к а , набранного из 10. . . 15 угольных ш а й б /
диаметром 5 . . . 10 мм и толщиной 1 . . . 2 мм, показан
на рисунке 12, а. На концах столбика монтируются
контактные диски 2 и упорные конструкции 3, через
которые передается усилие Р на диски. Электрическое
сопротивление такого столбика складывается из пере
ходных контактных сопротивлений между угольными
дисками и собственных сопротивлений дисков. При сж а
тии сопротивление столбика уменьшается. На рисунке
12,6 приведены кривые изменения сопротивления R и
силы тока I датчика в зависимости от усилия Р сж а
тия. Чтобы сопротивление столбика не изменялось от
случайных встряхиваний и ударов, на него дают небольшое начальное давление,
По показаниям прибора, включенного в цепь датчика,
судят об усилии, приложенном к датчику.
Т е н з о л и т ы , изготовляемые в виде стерженька
диаметром около 1 мм с медными выводами, применяют
для измерения различных упругих деформаций, кото
рые возникают в рабочих деталях под действием внеш
них нагрузок и исчезают после их снятия. Наклеенный
на полоску бумаги в том месте детали, где необходимо
измерить деформацию, стерженек, растягиваясь или
сжимаясь, воспринимает эту деформацию. При этом
изменяется плотность контакта между частицами угля
в бакелитовом лаке и общее сопротивление датчика.
Чувствительность такого датчика определяется по фор
муле (6) и сравнительно невелика.
Д ля повышения чувствительности датчика применя
ют дифференциальное включение столбиков (рис. 12, е).
На предварительно сжатые давлением P q столбики
(рабочая точка должна находиться на линейной части
характеристики) действует входная величина — давле
ние Р — таким образом, что сжатие одного столбика
увеличивается, а другого — уменьшается. Столбики дат
чика совместно с сопротивлениями /?з и
включают
по схеме измерительного неуравновешенного моста; вы
ходной .величиной (диагональ моста) является напря
жение f/н. Приняв R z= R i, напряжение на выходе моста
можно определить по следующей формуле.
40
. 41
Если сопротивление Ri и R 2 посредством формулы
(5) выразить через усилия Ро и Р, приложенные к д а т
чику, то получим
2аР
R 2~ ^ 1-
(7)
2а Ро
(8)
Рв-Р^
Подставив выражения (7) и (8) в (6), найдем, что
Uu=Uo{PI2Po).
Чувствительность дифференциального датчика
S = d ty jd P = t/o /2 P o .
Основными недостатками угольных датчиков явл я
ются нелинейность характеристики R = f ( P ) , нестабиль
ность сопротивления, зависимость сопротивления от
температуры, наличие явления, аналогичного гистерези
су. При дифференциальном включении датчиков нели
нейность в значительной степени устраняется.
Пензометрические датчики, или так называемые тензссопротивления, предназначаются главным образом для
измерения дёформаций и механических напряжений,
обусловленных этими деформациями. Они представля
ют собой тонкую (диаметром 0 ,0 2 ... 0,04 мм) зигзаго^образно уложенную и обклеенную с двух сторон тонкой
папиросной бумагой I (рис. 13, а) проволоку 2, изго
товленную из материала высокого удельного сопротив
ления. Тензосопротивление приклеивают прочным кле
ем к поверхности испытуемой детали так, чтобы на^правление ожидаемой деформации совпадало с длинной
стороной петель проволоки^^ Разм еры тензодатчиков
невелики: длина 2 ,5 ... 150 мм, ширина 3 ...6 0 мм. Со
противление тензодатчиков
обычно 1 0 0 ... 200 Ом.
МДеформации детали пе
редаются на проволоку, в ре
зультате чего изменяются ее
длина, диаметр и как след- |
L
Оствие электрическое сопро
тивление R. Установлено,что
относительное изменение со^
Рис. 13. Тензометрическии дат
противления можно опреде
чик (а) и его характеристи
лить по формуле
ка (б).
где AI/I — относительная деформация; S t — чувствительность тензодатчика (так, для константсна S t = 1 ,9 ... 2,1, для нихрома S t= 2 ) .
Зная зависимость / ? = / ( Р ) , которая представляет
собой тарировочную кривую, устанавливаемую опыт
ным путем, определяют по ней усилие Р. Характеристи
ка тензодатчиков (рис. 13,6) линейна, поэтому их чув
ствительность практически постоянна. Стабильность
характеристики — важное преимущество тензометров по
сравнению с угольными датчиками.
К недостаткам тензометрических датчиков можно
отнести влияние температуры на сопротивление и срав
нительно низкую чувствительность (намного меньшую,
чем у угольных датчиков). Несмотря на это, тензомет
ры находят широкое применение.
2.3. Индуктивные датчики
ГПринцип действия датчиков основан на изменении г
индуктивного сопротивления катушки при перемещении ^
в ней ферромагнитного сердечника или при изменений-,.
зазора в сердечнике с помещенной на нем катуш кой/'
Вследствие простоты и надежности конструкции, боль
шой мощности на выходе и отсутствия подвижных кон
тактов находят широкое применение при измерении
давления, расхода различных жидкостей и газов, ли
нейных и угловых перемещений)! Эти датчики работают
от сети переменного тока на частотах от 50 Гц до не
скольких килогерц. / ,
Индуктивные датчики с подвижным якорем (с изме
няющимся зазором) используют для измерения и конт
роля очень малых (до 2 мм) перемещений.’ Когда под
вижный якорь I (рис. 14, а) под действием механиче
ского усилия Р меняет положение по отношению к не
подвижному магнитопроводу 2 , изменяется воздушный
зазор 6, который является входной величиной датчика,
что вызывает изменение индуктивного сопротивления
катушки, а следовательно, и выходной величины — тока
I (при заданном напряжении U) 4 поскольку
l= V ! z ,
где
• полное сопротивление катушки датчика.
Ом.
43
42
i
Рис. 14. Индуктивные датчики и их характеристики:
а —с подвижным якорем; б — с перемещающимся сердечником; в — с изме
няющейся площадью зазора; г — дифференциальный; д — характеристика
датчиков (а, 6, е); е — характеристика дифференциального датчика.
■ Индуктивность катушки (Гн) можно определить по
приближенной формуле
L = w ^F iil 6 ,
где ш — число витков катушки; F — сечение
ц — магнитная проницаемость, Гн/м.
магнитопровода, м^;
Так как активное сопротивление R катушки незна
чительно по сравнению с индуктивным ( и /- » /? ) , то им
допустимо пренебречь и считать, что
z=(£)L = w^F(j)ixl6 .
Тогда сила тока в катушке
I^UIz.
Чувствительность
(А/м) датчика определяется как
S = dl / d 6 =U/w^Fom.
Индуктивные датчики с перемещающимся сердеч
ником (рис. 14,6) способны измерять большие (до
50 мм) перемещения, а датчики с изменяющейся пло
щадью зазора (рис. 14, е) — до 8 мм.
Характеристика
/= Д б )
индуктивного
д а/'.и к а
(рис. 14,(9) линейна только на определенном участке;
Линейность нарушается, когда активное сопротивление
становится сравнимым с индуктивным. Индуктивные
датчики выбирают так, чтобы в пределах зоны управг
ления характеристика была линейна.
|
Наибольшее распространение получили дифферент
циальные индуктивные датчики (рис. 14,г), у которьь^.
входной величиной является смещение якоря относи
тельно среднего положения, а выходной — напряжение
U h. Д л я среднего положения якоря, когда входная ве-\
личина равна нулю, 61 = 62 и L'h=0. При отклонении!
якоря от среднего положения происходит изменением
индуктивного сопротивления обеих катушек. НапримерУ|
если якорь переместится вправо, то зазор 62 уменьшит*
ся, а зазор 61 увеличится. Поэтому индуктивное сопро/,
тивление правой катушки станет больше, а левой - i
меньше. На выходе датчика появится напряжение U ,j
которое будет возрастать по мере увеличения отклонеV
ния.^Характеристика (рис. 14, е) такого датчика покац \ зывает, что для двух одинаковых по величине, но раз, ^ ' личных по знаку отклонений значения Uh отличаются
только противоположными фазами.
У дифференциальных датчиков по сравнению с про- '
стыми выше чувствительность и значительно меньше
погрешность от колебания напряжения питания.
К недостаткам всех индуктивных датчиков следуете
отнести сильную зависимость их работы от частоты на-'
пряжения питания катушки и невозможность примене-i
ния на высоких частотах, поскольку при этом резко
увеличиваются потери на перемагничивание и индук
тивное сопротивление обмотки.
2.4. Трансформаторные датчики
Принцип действия датчиков основан на изменении
взаимной индуктивности между двумя системами обмо
ток.
Взаимная индуктивность М может изменяться как
от изменения полного магнитного сопротйвления Zm
цепи, так и от взаимного перемещения обмоток.
Трансформаторные датчики, прдменяемые для изме\ i рения угловых перемещений, имеют вторичную обмотку,
.i, N. выполненную в виде рамки, которая поворачивается в
кольцевом якоре (рис. 15,а ), и ее ЭДС может меняться
V
в зависимости от угла ф, £ г = Д ф ).
Ш ироко применяются трансформаторные датчики,
выполненные в виде электрических машин, конструктив-
44
>4.
45
ния Wb статора в сеть и замыкании квадратурной об
мотки Шкв на сопротивление /?i (режим СКВТ) в обмот
ках ротора наведется ЭДС, величина которой при от
счете угла поворота ф от нейтрального положения про
тив часовой стрелки пропорциональна синусу этого
угла в обмотке гг^сии, поэтому эту обмотку называют
синусной, а в косинусной обмотке йУ„ос ЭДС пропорцио
нальна косинусу угла ф.
но похожие на синхронные машины с первичной обмот
кой, расположенной на статоре, а вторичной — на роI торе. Они подразделяются на вращающиеся трансформаторы (ВТ) и сельсины.
У ВТ на статоре и роторе, как правило, расположе
но по две взаимно перпендикулярные обмотки. Р аб о
тают ВТ либо в режиме синусно-косинусного вращ аю
щегося трансформатора (СКВТ)
(рис. 15,6), либо в
режиме линейного
вращ аю 1цегося трансформатора
(ЛВТ) (рис. 15, в). При включении обмотки возбужде-
6^3= А{/,С05ф,
где А=ьг/ 1н/и)в=!Икос/к>в — максимальный
мации В1
коэффициент
трансфор
Сопротивление /?], R 2 и
подбирают так, чтобы
ток в обмотке Wb был неизменным для любого ф.
В режиме Л ВТ выходное напряжение U2 преобразо
вателя равно
U2^ k U r
Характеристики являются линейными в пределах изме
нения угла ф = ± 6 0 ° .
Погрещность возникает из-за неправильного подбо( ра сопротивлений в схеме, отклонения • напряжения пи^ тания и частоты, изменения температуры датчика.
Сельсины обычно имеют однофазную первичную и
‘ трехфазную вторичную обмотки. Трехфазные обмотки
расположены в пространстве под углом 120° одна отно^ сительно другой. Сельсины могут работать в дистанци. онном и трансформаторном режимах. В первом случае
на передающей стороне устанавливается сельсин-дат
ч ик-В С , на приемной стороне — сельсин-приемник BE
, (рис. 15, г'^. Первичные обмотки ОВ сельсинов питают' ся от одной и той ж е сети переменного тока, а трех
фазные соединены между собой.
При согласованном положении обоих сельсинов
фд=фп их роторы будут неподвижны, так как в одина
ковых ф азах ВС и BE будут индуктироваться равные,
по величине ЭДС. Они уравновесят друг друга, так как
обмотки синхронизации включены встречно.
При повороте ротора ВС на угол ф2>фп в обмотках
синхронизации возникнут токи, обусловленные углом
рассогласования 0 = ф2—фп. Взаимодействуя с магнит
ным полем ОВ, эти токи создадут вращающий синхро-
г
Мс
-т о
в
\
-3 0
^
^
0
*9 0 * 1 8 0
+ в
и еы х
-т
-9 0
г \
* 9 0 *180 + в
г
Рис. 15. Трансформаторные датчики:
а — угловых
перемещений; б — вращающийся трансформатор в снмуспо-косинусном режиме: в — вращающийся трансформатор в линейном режиме;
г — схема включения сельсинов в режиме дистанциопной передачи угла;
5 — схема включения сельсинов в трансформаюрногм режиме; е — стат.’^чрские
характеристики.
Л ’
46
sincp
l-fteos<p
1
47
низирующий момент Мс, который повернет ротор BE
на угол фп.
Точность дистанционной передачи зависит от момен
та трения и нагрузки на валу. Выпускают сельсины с
погрешностью Аф равной: ±0,75°; ± 1,5°; ±2,5°.
i
Во втором случае к сети переменного тока подклю
чается первичная обмотка сельсина-датчика ВС (рис.
15,5), а с однофазной обмотки сельсина-приемника BE,
называемого
сельсином-трансформатором, снимается
сигнал в виде переменного напряжения
^ci^mSin0 ,
где kc — коэффициент, учитывающий конструктивные и электриче
ские параметры сельсина; t/m — амплитуда напряжения питания;
0 — угол рассогласования; в = ф д —фп.
Зависимости синхронизирующего момента Мс и на
пряжения f/вых от угла рассогласования 0 изображены
на рисунке 15, е.
I
Трансформаторным датчикам присущи недостатки
г и достоинства индуктивных датчиков, кроме того, у
них отсутствует гальваническая связь между цепями
( входа и выхода.
2.5. Емкостные датчики
Емкостный датчик представляет собой конденсатор,
емкость которого зависит от площади пластин, рас
стояния между ними и диэлектрической проницаемости
среды между обкладками. Различаю т три типа емкост
ных датчиков: с изменяемой пл'ощадью пластин, с из
меняемым расстоянием между пластинами и с изменяе
мой, диэлектрической проницаемостью между пластина
ми. Все названные параметры емкостных датчиков яв
ляются входной величиной, а выходной величиной бу
дет емкость. Наибольшее распространение получили
датчики, выполненные в виде плоского или цилиндри
ческого конденсатора. Различные примеры емкостных
датчиков схематично изображены на рисунке 16.
Как известно, емкость (Ф) плоского
датчика
(рис. 16, а)
eoef
4
7.
it
*
’ I
Рис. 16. Емкостные датчики:
а — плоский; б — с угловым перемещением; в — цилиндри
ческий.
(электродами) конденсатора; F — площадь электродов конденсато
ра, м^; X — расстояние межу пластинами конденсатора, м.
В таком датчике входной величиной может быть е,
F или X , а выходной величиной будет емкость. Если за
входную величину принять х — расстояние между пла
стинами, то чувствительность (Ф /м) датчика
dx
Емкость (Ф) датчика с угловым перемещением элек
тродов (рис. 16,6)
где rf — расстояние между пластинами; F — полная площадь пла
стин (при а = 0 ) ; а —угол поворота подвижных пластин.
Чувствительност1? (Ф /град) такого датчика
5=
dC
BoeF
da
nd
Емкость (Ф) цилиндрического датчика (рис. 16, е)
(e-\)x+ h
С = 2 пго~
1п
di
Чувствительность
(Ф/м)
цилиндрического датчика
dC
С=—
dx
где ео — диэлектрическая проницаемость вакуума, Ф/м; е — диэлек
трическая проницаемость среды, заключенной между пластинами
48
eoeF
dC
5=
4 Заказ 5067
= 2 лео-
1п
da
49
Датчики, работа которых основана на емкостном
принципе, применяют для измерения различных пара
метров: влажности (почвы, зерна и д р.), численного
состава, расхода, давлений, толщины различных м ате
риалов и т. я. Все более широкое распространение по
лучают емкостные датчики для измерения уровней р аз
личных веществ с цифровым отсчетом результатов, ко
торые можно передавать на большие расстояния.
,
Емкостным датчикам присущ ряд недостатков:
!1) мощность выходного сигнала невелика, поэтому не
обходимо применять усилители; 2) при промышленной
частоте не удается получить значительную мощность
датчиков, в связи с этим обычно они получают питание
от источников повышенной частоты (10 кГц и более);
3) сильное влияние оказывают паразитные емкости
(особенно емкости соединительных проводов относи
тельно зем ли), что вынуждает использовать экрани
рующие элементы для проводов и датчика.
2.6. Фотоэлектрические датчики
Эти датчики получили широкое распространение в
автоматических системах контроля и управления раз
личными технологическими процессами. Принцип дей
ствия их основан на использовании фотоэлектрического
эффекта. Датчики представляют собой фотоэлементы,
реагирующие на изменение светового потока. Известно,
что световая энергия, действуя на некоторые материа
лы, сообщает их электронам дополнительную энергию,
достаточную для того, чтобы часть электронов о каза
лась свободной.
В зависимости от поведения высвобождающихся под
действием светового потока электронов различают три
типа фотоэлементов: с внешним фотоэффектом (ваку
умные или газонаполненные), с запирающим слоем
(вентильные) и с внутренним фотоэффектом (фотосо
противления).
Фотоэлементы с внешним фотоэффектом (рис. 17, а)
представляют собой вакуумную или газонаполненную
лампу, анод 1 которой выполнен в виде кольца или
пластинки, а катод 2 образован светочувствительным
слоем (цезий или сплав сурьмы с цезием), нанесенным
на внутреннюю поверхность колбы.
Электрический ток возникает как поток электронов,
50
вьГбитых под действием световой энергии с поверхности
вещества (внешний фотоэффект).
К промышленным относятся фотоэлементы типа
ЦГ — цезиевый, газонаполненный (аргон), СЦВ — сурь
мяно-цезиевый, вакуумный и ЦВ — цезиевый, вакуум
ный. Вольт-амперные характеристики таких фотоэле
ментов приведены на рисунке 17,6. По ним можно за
ключить, что фотоэлементы ЦВ и СЦВ имеют предел
насыщения, когда при некоторой освещенности количе
ство выбиваемых свободных электронов не увеличива
ется. У фотоэлементов типа ЦГ при возрастании напря
жения фотопоток резко усиливается за счет ионизации
газа, которым наполнена колба.
У фотоэлементов с внутренним фотоэффектом сво
бодные электроны, изменяя под действием светово
го потока свое энергетическое состояние, остаются в ве
ществе. Наиболее распространены селеновые и меднозакисные фотоэлементы.
На рисунке 17, в показаны устройство и схема вклю
чения селенового фотоэлемента. Элемент состоит из
тонкой пленки золота /, запирающего слоя 2 , селено^вого слоя 3 и стальной подкладки 4. Запирающий слой
на границе селена с золотом, обладая детекторными
свойствами, не позволяет электронам, выбитым свето
вым потоком, возвращаться обратно. Световой поток
проходит через пленку золота и создает вентильный
фотоэффект, при котором электроны из освещенного
слоя переходят в неосвещенный, отделенный изоляци
онным запирающим слоем. Вследствие этого возникает
разность потенциалов £ф и протекает ток /ф в нагру
зочном сопротивлении /?н- Чем больше /?н, тем менее
линейна световая характеристика (рис. 17,г).
У фотосопротивлений (рис. 17, д) на стеклянную
пластинку / нанесен тонкий слой селена или сернистых
соединений металлов (таллия, висмута, кадмия, свин
ца). К пластинке прикрепляют электроды 2, контакти
рующие с полупроводниковым слоем. Размеры свето
чувствительной поверхности очень невелики и для вы
пускаемых отечественной промышленностью фотосопро
тивлений типа ФС-А1, ФС-А4, ФС-К1 и ФС-К2 состав
ляют 4 X 7 мм. Выводные концы рассчитаны на вклю
чение в нормальную радиоламповую панель.
При подаче к электродам напряжения через полу
проводник потечет ток, сила которого зависит от осве
Г'
f
(
к
щенности светочувствительной поверхности фотосопро
тивления. Чем больше световой поток Ф, падающий на
поверхность фотосопротивления при постоянном напря
жении питания t/ф, тем больше сила тока /ф . НелинейкЬсть характеристики (рис. 17, е) объясняется тем,что
начиная с определенного предела число свободных
электронов с ростом освещенности не увеличивается.
Чувствительность фотосопротивлеиий в сотни раз пре
вышает чувствительность вакуумных фотоэлементов, что
обеспечивает непосредственную работу на электромаг
нитное реле без усилителя. Кроме того, фотосопротив
ления не реагируют на полярность включения и могут
работать в цепи переменного тока. Они обладаю т боль
шой инерционностью и не способны следовать за быст
рым изменением интенсивности светового потока.
Фотоэлементы и фотосопротивления просты по уст
ройству, невелики по габаритам, высокочувствительны
и достаточно надежны в работе. Н аходят широкое при
менение в системах автоматики сельскохозяйственного
производства; для автоматического управления улич
ным освещением, как датчики освещенности в тепли
цах, для измерения температуры нагретых тел (фото
электрический пирометр), определения прозрачности
жидкости или газов, подсчета изделий, проходящих по
конвейеру, для оценки состояния поверхности объекта,
для контроля пламени в топках и т. д.
Фотодатчики с электрическим током на выходе ча
сто используются в составе фотоэлектрических реле,
для чего их соединяют с контактными или бесконтакт
ными электрическими реле. Особенно подходят для
этой цели тиратроны, выполняющие функции одновре
менно и усилителя и реле. Фотоэлектрические реле
очень удобны, а в ряде случаев и незаменимы как ап
параты для автоматической сигнализации, браковки,
сортировки, счета, защиты, управления и т. д. В целом
ж е возможности фотоэлектрических реле в автоматике
чрезвычайно велики.
Широкое применение в автоматике находят фото
диоды, фототриоды и фотоумножители. Принцип дейст
вия полупроводниковых фотодиодов и фототриодов ос
нован на использовании свойств р — п — перехода в
германиевом или кремниевом слое. Ф о т о д и о д ы мо
гут работать как с внешним источником питания (фото
диодный реж им ), так и без него (вентильный режим).
53
52
М н о г о к а с к а д н ы й ф о т о у м н о ж и т е л ь , пред
назначенный для усиления тока, использует явление
вторичной эмиссии. В стеклянной колбе, кроме катода
К и анода А , расположены эмиттеры Э \ .. .Э^, к которым
прикладывают напряжения U i . . . U5, возрастающие по
мере приближения эмиттеров к аноду. Световой поток,
падающий на катод К, выбивает из него электроны,
которые под действием разности потенциалов между
катодом и первым эмиттером 5 i и всеми парами сосед
них эмиттеров движутся со все возрастающими скорос
тями от эмиттера к эмиттеру и выбивают все большее
количество вторичных электронов. Достигнув анода А,
эти электроны поступают во внешнюю цепь в виде тока,
’превышающего ток катода в 10^... 10® раз. Промышлен
ность выпускает фотоумножители типа ФЭУ с числом
каскадов усиления до 15 и наибольшим током на вы
ходе до 0,2 мА (для фотоумножителей с жалюзийной си
стемой ток достигает 25 мА).
1
i
n
4
i
fI — «
«в
2.7. Датчики температуры
. Датчики для измерения температуры различных тел
или сред используют в своей работе разнообразные
свойства веществ или материалов, изменяющиеся в за
висимости от температуры. Это может быть изменение
линейных размеров или объема, коэффициента темпе
ратурного сопротивления, термоэлектродвижущей силы,
электропроводности и т. п.
Широкое применение в системах автоматики находят
контактные термометры, биметаллические датчики, тер
мометры сопротивления, полупроводниковые термосо
противления, термопары, позисторы.
Контактные термометры относятся к датчикам, ос' нованным на принципе теплового расширения жидкосI тей и газов.
I
Ж и д к о с т н ы й ( р т у т н ы й ) д а т ч и к представ
ляет собой стеклянную трубку, внутри которой разме. щена стеклянная ампула с капилляром, где находится
ртуть. В ампулу (рис. 18, й) введены два контакта; один
впаян снизу и соединен со столбиком ртути, а второй
1 (подвижный) расположен сверху и может перемещать
ся в капилляре при помощи магнитной головки (на ри
сунке не показана). Поскольку высота столба ртути
зависит от температуры измеряемой среды, то каждому
Рис. 18. Датчики температуры:
а, б, в, г а д — жидкостные;
е, ж и з — манометрические.
положению подвижного контакта будет соответствовать
определенное значение температуры срабатывания дат
чика. Таким образом, контактный термометр — датчик
двухпозиционного действия, входной величиной которо
го является температура, а выходной — высота столба
жидкости в капилляре.|П ределы регулирования темпера
туры от —30 до -J-100°C (и выше). В схемах автома
тики такие термометры применяются с промежуточным
реле, потому что разрывная мощность контактов не пре
вышает 2 Вт при токе 0,2 Ai
Помимо рассмотренной конструкции, применяют тер- t
мометры, где вариации столба жидкости используют для *
изменения сопротивления резистора, впаянного в к а
пилляр (рис. 18,6), индуктивности катушки (рис. 18,в),
емкости (рис. 18, г), интенсивности светового потока
(рис. 18, d).
М а н о м е т р и ч е с к и е д а т ч и к и используют за
висимость давления, находящегося в замкнутой системе
газа или насыщенного пара низкокипящей жидкости, от
54
55
температуры. Зам кнутая система (рис. 18, е, ж, з) со
стоит из баллона 1, погружаемого в измеряемую сре
ду, соединительного капилляра 2 и манометра 3, связан
ного через систему рычагов со стрелкой 4 измеритель
ной шкалы 5. Изменение температуры в этих датчиках
■происходит за счет перемещения манометрических пру• жин (е), мембран (ж), сильфонов (з). При достижения
' предельных значений температуры стрелка вызывает
I срабатывание контактной системы 6 j в результате чего
' возникает управляющий сигнал. \ Датчики манометри
ческого типа позволяют вести визуальный контроль
температуры, причем шкала датчика может быть уда
лена на значительное расстояние от контролируемого
объекта (длина капилляра до 40 м).^Ж идкостные мано
метрические датчики заполняются ртутью, ацетоном,
эфиром, спиртом и их соединениями, а газовые — азотом
и инертными газами.
Погрешность измерения манометрических датчиков
составляет 1. . . 2,5 %, а пределы измерения ограничи
ваются температурами качественного изменения физи
ческих свойств рабочего тела (например, температуры
• замерзания и кипения рабочей жидкости ).\ Недостатки
. таких датчиков в том, что значительная инерционность
и повышенная чувствительность к вибрации и толчкам
могут вызвать срабатывание контактов. В схемах ав(томатики манометрические датчики применяют без
промежуточных реле, поскольку мощность их контактов
доступна для управления магнитными пускателями ис
полнительных механизмов.
В биметаллических датчиках измерительным органом
служит спай двух полосок металлов с различными тем
пературными коэффициентами расширения. При изме
нении температуры измерительный эффект деформи
руется (изгибается), причем степень деформации про
порциональна температуре. Спаянные пластинки изги
баются в сторону металла с меньшим температурным
коэффициентом расш ирения.-Н а рисунке 19, а показан
датчик, у которого деформация биметаллической плас
тинки 1 используется для освобождения пружины 2 .
которая обеспечивает резкое и четкое срабатывание кон
тактов 3.
Д ля резкого срабатывания контактов в датчиках
температуры типа ДТКМ (с пределами регулирования
56
:
ж
и7777777777777
V'
Y
Pijc. 19. Датчики температуры:
о i - биметаллический;
б — термометр
сопротивления;
в — характеристика
термистора: г — схема включения термистора: б — вольт-амперные .характе
ристики термистора; е — схема включения термопары; ж — температурные
х ар^терн сти ки позисторов при одном напряжении: 1 — позистора СТ6-1А;
^■*~СТ6-1Б; 3 — СТб-ЗБ.
от —30 до -f50°C и разрывной мощностью контактов
50 Вт) применяют постоянные магниты, которые притя
гивают пластинку сразу после того, как при определен
ной температуре она достигнет заданной степени де
формации.
Диапазон рабочих температур биметаллических д ат
чиков весьма велик: от —60 до + 350°С . Чувствитель
ность нх обычно составляет ± 1 ° С , но может быть и
выше.
В термометрах сопротивления используют свойство ^
металлических проводников изменять свое электриче
ское сопротивление при изменении температуры.
В практике используют платиновые термометры со
противления типа ТСП с номинальным сопротивлением
10, 46 и 100 Ом для измерения температур от —200 до
+ 650°С и медные типа ТСМ на номинальное сопротив
ление 53 и 100 Ом для измерения температур от —50
до -М 80°С .'В этих термометрах на рисунке 19,6 прово- \
57
лока 1, изготовленная из меди или платины, намотана
/на изоляционный каркас 2 и закрыта кожухом 3. Вы/воды 5 закреплены в изоляционной колодке 4.
Зависимость сопротивления проволоки термометра
от температуры окружающей среды описывается выра
жением
^?0 = ^?о[1 + а ( 0 — 0 о ) ] .
где /?(, — сопротивление, соответствующее начальной температуре
0о; R& ~ сопротивление проволоки, соответствующее измеряемой
температуре 0 ; а — температурный коэффициент сопротивления
(для меди 0= 6,00433, для платины а = 0 ,0 0 3 9 4 ... 0,0056 Ом/град).
Чувствительность (Ом/град) термометра сопротивле
ния
S = d R e ld e = Rea.
Токовые нагрузки термометров сопротивления очень
малы, с тем чтобы тепло, выделяемое током в проволоке
термометра, было возможно меньшим по сравнению с
получаемым. от среды, где измеряется температура.
Поскольку интенсивность расхода тепла зависит от мно
гих факторов (геометрических размеров и формы про
водника и арматуры, к которой крепится проводник, сос
тава, плотности, теплопроводности окружающей среды,
скорости перемещения и т. п.), термометры сопротивле
ния могут применяться и для измерения других вели
чин— скорости, плотности и состава газовой или ж ид
кой среды.
/п т о ч
Полупроводниковые термосопротивления (П Т Р) или
термисторы, температурный коэффициент которых в
8 . . . 10 раз больше, чем у металлов, получили широкое
распространение в автоматических системах управления
температурой. В зависимости от материала термисторы
делятся на медномарганцевые (ММТ) и кобальто-марганцевые (КМ Т). Диапазон измеряемых и контроли
руемых ими температур составляет от —70 до -f 1оО
Конструктивно они представляют собой шарик, трубку
или диск из этих полупроводниковых материалов с ме
таллическими выводами.
Зависимость сопротивления термистора от темпера
туры (рис. 19, в ) описывается уравнением
Re = Rooe г .
где R q — сопротивление при измеряемой температуре, Ом; / — тем
пература. “К; /?оо II В — постоянные для данного термистора коэф
фициенты; е — основание натурального логарифма.
58
Значения коэффициентов Reo и В можно определить
по следующим формулам
T Jz ,
R z'
в
/?оо=/?,е S’ •
В качестве /?, обычно берется сопротивление тер
мистора при температуре 7’i = 293°K, которое называют
н о м и н а л ь н ы м . Сопротивление /?2 удобно измерять
при температуре 7’2= 373°К.
В этом случае формула для В приводится к виду
В = 1 3 6 5 1 п -^ *
Чувствительность (Ом/град) полупроводникового тер
мистора
S = d /? e /d 0 = a/?e-
Величину а называю т температурным коэффициен
том термистора
В
а = -------- •
Тг
Значения сопротивления термистора и его коэффици
ента а весьма велики, что обеспечивает высокую точ
ность измерения небольших отклонений температуры.
Характерной особенностью термисторов является воз
можность получения релейного эффекта
в цепи
(рис. 19,г), куда они включены. Если через термисторы
пропускать ток, то по мере его увеличения напряжение
Ue на термисторе /?i растет сначала пропорционально
току, а затем начинает падать из-за уменьшения сопро
тивления, вызванного нагревом термистора током. Д а л ь
нейшее повышение напряжения в цепи термистора, не
ограниченной другим проводниковым сопротивлением,
до значения Dm сопровождается скачкообразным неогра
ниченным увеличением тока и вызывает разрушение
термистора (рис. 19, d ). Чтобы ограничить ток, в цепь
термистора включают сопротивление R с прямолиней
ной вольтамперной характеристикой. Общ ая вольтамперная характеристика определяется как сумма харак
теристик
и t/, и в цепи возникает р е л е й н ы й э ф
ф е к т ; при напряжении f/cp (напряжение срабаты ва
59
ния) ток скачкообразно возрастает до значения /ср, при
снижении напряжения до
(напряжение возврата)
ток скачкообразно уменьшается до значения /в.
К недостаткам термисторов относится сравнительно
низкая стабильность параметров. Выпускаемые про
мышленностью термисторы имеют разброс по сопротивле
нию до ± 2 0 % от номинала, что затрудняет их взаимо
заменяемость.
Позисторы обладаю т большим положительным тем
пературным коэффициентом сопротивления, достигаю
щим 80 % на I °С в узком диапазоне температур. Их
изготавливают из титаната бария со специально подоб
ранными примесями, придающими им свойства полу
проводника, у которого сопротивление сильно зависит
от температуры. Температурный коэффициент позисторов в 3 .. .4 раза больше, чем у термистора. В темпера
турных характеристиках позисторов (рис. 19, ж ) наблю
дается значительный в а р и с т о р н ы й э ф ф е к т , за
ключающийся в уменьшении их сопротивления Rn с рос
том приложенного напряжения. Выпускают позисторы
следующих марок; СТ-5, СТ-6, СТ-7 до СТ-15 различ
ных модификаций. Позисторы встраиваются в обмотки
двигателей для измерения их температуры.
В термоэлектрических датчиках (термопары ) исполь
зуют термоэлектрический эффект. Если спаять два р а з
ных специально подобранных проводника и спаянный
конец 1 (рис. 19, е) нагреть, то на свободных (холодных)
концах проводников появится термо-ЭДС. Это происхо
дит потому, что энергия свободных электронов в раз
личных металлах увеличивается с ростом температуры
неодинаково. Наличие перепада температур вдоль про
водника приводит к тому, что энергии и скорости элект
ронов на конце проводника с более высокой температу
рой будут больше и электроны начнут двигаться от го
рячего конца к холодному. Значение термо-ЭДС Е
пропорционально разности температур нагретого 0 г и
свободных концов ©X и зависит от м еталла проволок
£ = а (© г —©х). При измерении температуры свободным
концам обеспечивают постоянную температуру, для чего
их достаточно удаляю т от спая или удлиняют путем
подбора проводов 2 , обладающих темн ж е термо-ЭДС и
названных
поэтому
термоидентичными
или
к о м п е н с а ц и о н н ы м и . Н а практике применяются
термопары; хромель-копелевые (ХК) с пределами изме
рения температуры до 600 °С, хромель-алюмелевые (ХА)
до 900 °С, медь-константановые (М) до 350 fC, железоконстантановые (Ж ) до 600 °С и др.
2.8. Датчики уровня
Датчики уровня — это устройства для измерения
уровней веществ относительно какой-либо отметки, при
нятой за начало отсчета. В автоматических системах уп
равления находят применение мембранные, электрод
ные, поплавковые и другие датчики уровня.
На рисунке 20, а показаны мембранные датчики,
используемые как указатели предельного (верхнего и
нижнего) уровня сыпучих тел в емкостях. В таких дат
чиках применяют микропереключатели, которые сраба
тывают при заданном усилии, соответствующем опре
деленному уровню сыпучего материала над датчиком.
Н а рисунке 20 ,6 изображен мембранный уровнемер, '
в котором на основе измерения давления, передаваемого
Рис. 20. Датчики уровня:
О И б — м ем б р ан н ы е; е — элект
родный;
г — поплавковый.
60
61
2.9. Датчики угловой скорости
на мембрайу весом столба жидкости, контролируется
ее уровень. Вес жидкости, пропорциональный ее уровню
Н, вызывает определенный изгиб мембраны 1 , механиче
ски связанный с угольным датчиком 2. Давление, соот
ветствующее уровню материала, передается к угольно
му датчику, на выходе которого возникает электриче^ский сигнал, измеряемый прибором П или используемый
для управления.
Ш кала прибора проградуирована в единицах уровня.
Заметим, что измерение давления столба жидкости про
исходит в сосуде, сообщающемся с тем резервуаром,
где контролируется уровень.
Электродные датчики позволяют измерять уровни
жидкостей и некоторых сыпучих тел по соответствую
щему изменению активной или емкостной проводимости
межэлектродного пространства датчика (рис. 20, е).
Электродные датчики просты, точны, недороги и де\ лают возможным дистанционное измерение уровней в
• различных емкостях.
В поплавковых датчиках изменения уровня жидкос
ти, воспринимаемые поплавком 1 (рис. 20, г), переда
ются механической связью (трос 2. блоки 4, противо
вес 5 ) элементу, который обычно преобразует эти изме
нения в электрический сигнал при помощи потенцио
метрического 3 или индуктивного преобразователя. К вы
ходу датчика подключен измерительный прибор Я , ре
гистрирующий отклонения уровня. ^Сигнал с выхода мо
ж ет быть подан в автоматическую систему управления.
Такие датчики позволяют контролировать уровень в
широких пределах.] Их основным недостатком является
наличие подвижных частей.1
Кроме рассмотренных датчиков, для измерения уров
ней жидкостей применяют различные уровнемеры
дифманометры, реагирующие на перепад давлений, соз
данных жидкостью в напорном бачке на постоянной
высоте, и жидкостью, уровень которой измеряется.
Среди датчиков для измерения уровней сыпучих м а
териалов можно назвать, например, крыльчатки, кото
рые свободно вращаются в воздухе и останавливаются,
замы кая свои контакты при соприкосновении с сыпучим
материалом.
Д ля измерения угловых скоростей широкое примене
ние находят центробежные тахометры и тахометриче-jj
ские преобразователи (тахогенераторы).
Схема простейшего центробежного тахометрического
датчика показана на рисунке 21, о. Ось 3, на которой
при помощи шарниров и четырех рычагов 2 закреплены
два груза 1, воспринимает вращательное движение от
объекта, чья угловая скорость со измеряется. Пружина 4
надета на ось 3 в слегка сжатом состоянии, поэтому
ползунки (нижний подвижный, верхний неподвижный),
когда ось не вращ ается, удалены друг от друга на мак
симально возможное расстояние. При вращении оси с
некоторой угловой скоростью и грузы 1 под действием
центробежной силы симметрично расходятся, пружина
сжимается и нижний ползунок поднимается до тех пор,
пока сила пружины не уравновесит инерционные силы
двух масс.
Центробежная сила Рц пропорциональна квадрату
угловой скорости
где кт— постоянный коэффициент, зависящий от конструкции та
хометра и массы грузов; г — расстояние от оси вращения до цент
ра грузов.
Вращение оси через зубчатое колесо передается на
счетный механизм 5. который регистрирует угловую
скорость на шкале, проградуированной в единицах уг
ловой скорости, или на специальное устройство 6 , фик-
Рис. 21. Датчики скорости;
а — тахометрический центробежный; 6 — тахогенератор постоянного тока:
в — тахогенератор переменного тока.
63
62
сирующее перемещение нижнего ползунка. Таким уст
ройством может быть якорь индуктивного датчика, под
вижный электрод емкостного датчика, подвижный пол
зунок потенциометрического датчика и т. п.
Чувствительность (Н -рад /с) датчика ^
S = d f J d ( o = 2feTCor.
Тахогенераторы могут быть постоянного тока^ (рис.
21, 6 ) с постоянными магнитами или с обмоткой воз
буждения переменного тока (рис. 21, в).
У тахогенера тора постоянного тока с
постоянными
магнитами
якорь 1 вращ ает
ся в магнитном поле постоянного магнита 2. Выходная
величина — напряжение U, снимаемое с коллектора ма
шины, пропорционально (коэффициент т ) входной ве
личине — угловой скорости (О
U — mti).
.Чувствительность (В -с/рад) датчика
S = (iU /d (a = tn .
В тахогенераторах постоянного тока обмотка воз
буждения получает питание от независимого источника,
поэтому магнитный поток остается неизменным, а вы
ходное напряжение прямо пропорционально угловой
скорости вала (при этом переходными процессами в
якоре пренебрегают).
Такие тахогенераторы имеют следующие недостатки:
наличие щеток в коллекторе приводит к снижению на
дежности работы, температура влияет на сопротивление
обмоток, а следовательно, на выходную величину и др.
Асинхронные
тахогенераторы
пере
м е н н о г о т о к а не имеют подвижных контактов. На
статоре размещено две обмотки (рис. 21, в), располо
женные под углом 90°. Обмотка возбуждения 1 получа
ет питание Ui от источника переменного тока, с обмот
ки 2 снимается выходное напряжение U2. Ротор 3 пред
ставляет собой алюминиевый стакан, вращающийся
между статором и неподвижным цилиндрическим сер
дечником. Когда ротор не вращается, выходное напря
жение С/г равно нулю, так как оси обмоток взаимно
перпендикулярны. В роторе, вращающемся в магнит
ном поле обмотки возбуждения, индуктируется ток, ко
торый создает магнитный поток, пересекающий в и т м
выходной обмотки 2. и наводит в ней переменную ЭДС,
пропорциональную (коэффициент т , ) угловой скорости
ротора
U2 = tTli<x)Ui.
Таким образом, при постоянном значении напряж е
ния, подводимого к обмотке возбуждения, выходное
напряжение будет пропорционально угловой скорости
тахогенератора.
Существуют и некоторые другие датчики измерения
угловой скорости. Так, находят применение центробеж
ные (гидравлические или пневматические) импеллеры.
Д л я измерения частоты вращения используют цифровые
автоматические тахометры с индикацией результата
измерений на световом табло в десятичной системе^ Та
кие тахометры (например, цифровой автоматический та
хометр ЦАТ-ЗМ) включают в себя датчик частоты вра
щения и частотомер.
2.10. Датчики давления
И з всего разнообразия датчиков давления, отлича
ющихся принципом действия и устройством, будут рас
смотрены лишь некоторые, получившие наиболее ши
рокое распространение в практике сельскохозяйствен
ного производства.
В датчике с манометрической тонкостенной упругой
трубкой 1 (рис. 22, а), изогнутой по дуге и имеющей
овальное сечение, при изменении давления контроли
руемой среды меняется давление внутри трубки. Сво
бодный конец трубки перемещается и через систему
рычагов 2 приводит в движение указательную стрелку 3
относительно измерительной шкалы 4. Стрелка связана
с контактной системой, включенной в электрическую '
цепь управления. Движение свободного конца трубки
можно преобразовать в перемещение контакта потен
циометрического датчика и т. п.
У
сильфонных датчиков давления газов (рис. 22,6)
и жидкостей (рис. 22, в) гофрированная трубка 1 сое
динена через рейку 2 с зубчатым колесом 3, которое
связано с подвижной частью устройства, преобразую
щего перемещение рейки 2 под действием изменяющего
давления Р в электрический сигнал. Н апряжение С/вык
на выходе потенциометрического преобразователя про
порционально (коэффициент k) измеряемому давлению
иъ ъ л—kP .
5 З ак аз 5067
64
65
Рис. 22. Датчики давления;
с — с маномегрической трубкой; б и в — сильфонные.
Под действием давления Р сильфон растягивается или
сжимается и перемещает рейку, а вместе с ней, как
показано на рисунке, и ползунок потенциометра 4.
Пьезоэлектрические датчики применяются для и31мерения давлений и особенно там, где процесс изменения
давлений происходит быстро, например изменение д ав
ления газов в двигателях внутреннего сгорания, давле
ния звуковых колебаний и т. п. Ш ироко прим еняется
пьезоэлектрические адапторы (звукосниматели граммо
фонных пластинок), манометры, вибраторы (для изме
рения вибрации маш ин), акселерометры (измерители
ускорений) и многие другие приборы. Принцип дейст
вия их основан на использовании прямого пьезоэлектри
ческого эффекта, то есть появления электрических за
рядов на гранях некоторых диэлектриков при их де
формации. Наибольшее применение из материалов, об
ладающих пьезоэлектрическим эффектом, получили
кварц, сегнетова соль, титанат бария и др.
М алые габариты, простота устройства, широкий ча
стотный диапазон измеряемых величин — достоинства
пьезоэлектрических датчиков; невысокая чувствитель
ность и непригодность к измерению статических вели
чин — недостатки.
ления в дроссельных устройствах, которыми могут слу
ж ить диафрагмы, сопла, различные трубки.
В датчике с дросселем-диафрагмой 2 (рис. 2 3 ,а ),
помещенной в трубопровод 1, за счет того, что сечение
отверстия диафрагмы намного меньше сечения трубо
провода, создается перепад давлений. Этот перепад
улавливается при помощи отводных трубок 3, в одну
из которых вставлено омическое сопротивление R, ко
торое с измерительным прибором П подключено к
источнику тока и в процессе работы шунтируется жид
костью. Сила тока /п прибора пропорциональна (коэф
фициент а ) перепаду давлений в трубопроводе
/ „ = а ( Р , - Р 2) = а Д Р .
Расход Q (м®/с) связан с перепадом давлений АР
следующим соотношением
Q
АР,
где So — сечение отверстия диафрагмы, м^; у — плотность жидко
сти, кг/м®; Ь — коэффициент расхода (приводится в справочниках);
g — ускорение свободного падения, м/с*.
Таким образом, по показанию прибора, ш кала ко
торого проградуирована в единицах измерения расхо
д а, судят о количестве жидкости, проходящей по трубо
проводу в единицу времени.
Датчики с вертикальной и спиральной вертушками
находят широкое применение для измерения расхода
воды, жидкого топлива, газа и других веществ.
В датчике
с
вертикальной
вертуш
к о й 1 (рис. 2 3 ,6 ), помещенной в корпус 2, жидкость,
протекая через датчик, приводит во вращение вертуш
2.11. Датчики расхода
Д ля измерения расхода жидкостей и газов приме
няются различные датчики. Наибольшее распростране
ние получил метод измерения расхода по перепаду д ав
66
Рис. 23. Датчики расхода:
о — с дросселем-диафрагмой; б — с вертикальной вертушкой; в >
ральиий вертушкой.
67
ку, угловая скорость и (рад/с) которой
нальна (коэффициент с) скорости потока
пропорцио
(o = c(Q /5«),
где Q — расход жидкости, м^/с; 5д — рабочее сечение датчика, м*.
Вертушка соединена со счетным механизмом прибо
ра 3, измеряющего расход.
У д а т ч и к а со
спиральной вертуш кой
2 (рис. 23, е ), размещенной в трубопроводе 1, вращ е
ние вертушки передается на измерительный прибор 3.
ш кала которого проградуирована в единицах расхода.
Угловая скорость и (рад/с)
вертикальной вертушки
пропорциональна расходу Q и обратно пропорциональ
на шагу лопасти А 1
и
=
с ( ( 3/ 5 д Д /) '.
Кроме рассмотренных датчиков расхода, находят
применение
объемные
счетчики,
работающие
по принципу измерения числа отмеренных объемов
жидкости, протекающей по трубопроводу: расходомеры
постоянного перепада давлений, в которых перепады
гидродинамических давлений восходящего потока урав^
новешиваются весом поршня или поплавка; расходоме
ры обтекания, у которых рабочий элемент (крыло, диск,'
шарик и т. п.) воспринимает динамическое давление
обтекающего его потока и перемещается в зависимости
от значения расхода; расходомеры щелевого типа, теп
ловые, чашечные анемометры и многие другие.
2.12. Датчики влажности
Существующие методы измерения влйжности твер
дых и сыпучих тел, газов и других сред разделяю т на
прямые и косвенные. П р и п р я м ы х м е т о д а х и з
мерения влажности
измеряемое вещество раз
деляю т на сухое вещество и влагу, определяют их мас
сы и находят влажность по формуле
М о+ М
где М — масса влаги вещества. Л1о — масса сухого вещества.
В практике метод высушивания используют как эта
лонный, но реализовать его для измерения влажности
в виде датчика автоматики практически сложно. По
68
этому используют к о с в е н н ы е
методы
изме
р е н и я , здесь о влажности материала судят по какойлибо физической величине, связанной с его влажностью.
Широкое распространение
получили э л е к т р и ч е
с к и е м е т о д ы , которые менее точны, чем прямые, но
они наиболее просто и быстро позволяют осуществить
измерение влажности и полученный сигнал использо
вать для целей контроля и управления.
К электрическим методам относят кондуктометрический, при котором о величине влажности судят по ре
зультатам измерения электрической проводимости из
меряемого м атериала; диэлькометрический — здесь о
влажности судят по значению диэлектрической прони
цаемости или тангенса угла диэлектрических потерь и
гигрометрический, при котором о влажности среды су
дят по изменениям электрических или механических ха
рактеристик гигроскопического вещества, помещаемого
в измеряемую среду.
По конструкции к о н д у к т о м е т р и ч е с к и е
и
диэлькометрические
датчики состоят из ци
линдрического или плоского конденсатора, между элек
тродами которого размещ аю т материал, влажность ко
торого подлежит измерению. Наибольшее распростра
нение получили датчики с диэлькометрическим методом
и31мерения влажности.
Гигрометрические
датчики
применяются
для измерения влажности воздуха и газов. Восприни
мающим элементом служит человеческий обезжирен
ный волос или пленка толщиной 5 . . . 30 мк, изготовлен
ная из оболочки кишок крупного рогатого скота. Волос
удлиняется на 2 ...2 ,5 %, а животная пленка — на
4 . . . 5 % при изменении относительной влажности воз
духа от О до 100 %. Удлинение передается через ры
чажной механизм на стрелку прибора, которая откло
няется пропорционально влажности. Д л я измерения
влажности газов и воздуха нашли применение п о л у
проводниковые
гигристоры.
Они представ
ляют собой тонкую пленку из полупроводникового ма
териала, сопротивление которого резко падает при уве
личении влажности. Больш ая инерционность, наличие
гистерезиса и влияние температуры окружающей среды
на точность измерения не позволяют гигристорам найти
широкое применение.
69
Конструкция датчиков влажности, в основе которых
лежит один из названных выше методов, очень разнооб
разна. Подробные сведения о конструкции датчиков,
влажности и их характеристиках приводятся в специаль
ной литературе.
2.13. Электронные и ионизационные датчики
Электронные датчики представляют собой электрон
ные и ионные лампы, у которых можно менять взаимное
расположение электродов: анода, катода и сетки. П ере
мещение одного из электродов приведет к изменению
вольт-амперной характеристики лампы. Д ля практиче
ских целей применяют сдвоенные диоды с мостовой из
мерительной схемой (рис. 24). Подлежащее измерению
перемещение осуществляют поворотным измерительным
стержнем /, закрепленным в мембране 2 , который сме
щает сдвоенные аноды 3 относительно неподвижного
катода 4. Такие датчики имеют высокую чувствитель
ность по току. Значение анодного тока определяют по
формуле
где ft — постоянный коэффициент, й=2,34-10-®; s — активная по
верхность катода, см^; t / a — анодное напряжение, В ; / — расстоя
ние между электродами, см.
Чувствительность датчика по току будет равна
препаратами, для измерения числа и местонахождения
специально «меченых» атомов, а также для измерения
неэлектрических величин, функционально связанных
с радиоактивным излучением, попадающим в при
емник.
Обязательные элементы любого датчика ионизирую
щего излучения — и с т о ч н и к и п р и е м н и к и з л у
ч е н и я . Источниками излучений служат естественные
и искусственные радиоактивные изотопы и рентгенов
ские ^ у б к и . Используки-ся различные виды ионизирую‘ щих излучений (а-, р- или Y-излучение, нейтронное и
рентгеновское излучение). Основные величины, харак
теризующие
ионизирующие
излучения,
активность
источника, интенсивность и доза излучения, а- и р-излучения представляют собой потоки радиоактивных
частиц, ^'Излучение и рентгеновское — коротковолновое
электромагнитное излучение, рассматриваемое часто по
аналогии с а- и р-частицами как поток уквантов.
Принцип действия приемников излучения, преобра
зующих энергию ионизирующего излучения в электри
ческую 'Знергию основан на я в л е н и и и о н и з а ц и и
г а з о в при прохождении через них излучения или на
л ю м и н е с ц е н ц и й некоторых веществ под действием
излучения. В качестве пр\^*ри ков используют: иониза
ционные камеры, пропорциок^^^ьные счетчики, газораз
рядные счетчики (явление ионизслии) и сцинтилляционные счетчики (явление люминесценции).
S = d I J A l = — 2 ksUe.‘4 l^
2.14. Электрические задающие устройства
или с учетом тока /а
S = 2IJI:
Электронные датчики, или, как их называют, меха
нотроны, характеризуются малым внутренним сопротив
лением и значительным
током
при
невысоком
анодном напряжении и
чувствительности по току
до 100 мА/мм.
Рис. 24. С-хе.ча электронного дат
чика со сдвоенным диодом.
70
Датчики . ионизирую
щего излучения применя
ются для измерения мощ
ности радиоактивного из
лучения, загрязненности
веществ радиоактивными
Задаю щ ие устройства по характеру выдаваемого
сигнала можно разделить на два основных класса;
аналоговые и цифровые. Аналоговые, в свою очередь,
делятся на н е п р е р ы в н ы е и д и с к р е т н ы е . Д ис
кретность может быть как по времени, так и по значе
нию вырабатываемого сигнала. Цифровые задаю щие
устройства формируют сигналы дискретных уровней.
Кроме того, задаю щ ие устройства различают по виду
энергии вырабатываемых сигналов, которые могут быть
алектрическими,
пневматичеакими. гидравлическими,
механическими (в виде перемещений или усилий).
Программу или заданную функциональную зависи
мость, которую должен реализовать регулятор, можно
получить при помощи различных методов и средств.
71
в задающих устройствах непрерывного действия чаще
используются кулачковые механизмы (жесткие и регу
лируемые), функциональные потенциометры, бумаж ная
диаграмма, рычажные механизмы. В качестве носителя
программы в задаю щих устройствах дискретного дейст
вия находят применение многоценные переключатели,
перфокарты, магнитные ленты, кинопленки и т. п. В ка
честве примеров рассмотрим ряд электрических носите
лей программ и функциональных зависимостей.
Н а рисунке 25, а . . . е показаны различные виды
функциональных преобразователей, выполненные на по
тенциометрах. Ступенчатые потенциометры с плоскими
каркасами (рис. 2 5 ,6 ) и посекционно шунтируемые по
тенциометры с отводами от намотки (рис. 25, е) при за
данной высоте каркаса в первом случае и величине
шунтирующего сопротивления во втором позволяют по
лучить необходимую зависимость R{x) .
На рисунке 25, б показана функциональная зависи
мость между сопротивлением R и положением х пол
зунка ступенчатого потенциометра. Д л я получения
функциональной зависимости, отличной от приведенной,
необходимо изменять каркас, что является недостатком
таких потенциометров.
В практике для реализации различных сложных
функций, в том числе тригонометрических, широко при
меняют потенциометры с профильными каркасами. На
рисунке 26,0 изображены профильный потенциометр с
поступательным перемещением подвижного контакта,
воспроизводимая им функция y = f ( x ) при перемещении
ползунка в заданном интервале точек О. . . 6 и схема сое
динения отдельных участков потенциометра, позволяю
щ ая получить заданную функцию.
При изготовлении таких потенциометров весь потен
циометр делят на несколько частей и соединяют их так,
чтобы точки нулевых значений функции соединялись
между собой в одну общую нулевую точку; точки, со
ответствующие максимальному или минимальному зн а
чению функций, присоединяют к плюсу или минусу ис
точника в зависимости от знака функции. Начальную и
конечную точки потенциометра, если в них функция не
равна нулю, присоединяют к полюсам источника пита
ния через добавочные сопротивления, обеспечивающие
ненулевые начальное и конечное значения. Если значе
ния максимума и минимума неодинаковы, то для полу72
Рис. 25. Функциональные преобразователи:
''
а — профильный потенциометр с круглым каркасом; б — ступенчатый потен
циометр; в — потенциометр с некруглым каркасом; г — потенциометр с пере
менным шагом намотки; д — секционный потенциометр; е — потенциометр с
дополнительными резисторами.
ко
о
f
СПЗ-»— с
R4 It 3
■h
и
RB
+
%
Г
—
R2
Rt
-о
R„
Ид о -
Ж.
СЯ ОС=Э с=) )
ООО
п
е
Рис. 26. Воспроизведение функциональных зависимостей:
а — схема профильного потенциометра; б — схема соединения отдельных
участков потенциометра; в — схема диодной линейки; г — вид нелинейной
фувкцнн; в н е — перфорированные ленты.
чения меньшего значения присоединения выполняют
через добавочное сопротивление. В соответствии с из
ложенными правилами и построена схема присоедине
ния точек потенциометра к источнику тока (рис. 2 6,6).
Заданный интервал 0 . . . 6 разделен на участки точками
J, 2 . . . 6 . Точки 1, 3, 5 сведены в одну общую нулевую
точку. Сопротивление Ro обеспечивает значение функ
ции в точке О, а сопротивление
— значение функции
в точке 6 . Сопротивление Ri уменьшает значение ушт
по отношению к значению утах за счет падения напря
жения на нем.
Кроме различных потенциометров для воспроизведе
ния сложных функций применяют диодные линейки.
Принципиальная схема такой линейки показана на ри
сунке 26, в.
Когда значения напряжения входа (7вх малы, все
диоды будут закрыты и напряжение на выходе
и^ЫХ — t^BX.
Как только анодное напряжение Vs. станет равным
нулю, откроется диод VI и через сопротивление R\ и
R пройдет ток
г/вх- t / o ,
Теперь напряжение на выходе
Такое состояние в схеме будет продолжаться до тех
пор, пока не откроется диод V2, то есть пока анодное
напряжение С/о2 диода V2 не станет
1Уог= ^вы х—
+
При этом напряжение выхода будет равно выходному
напряжению на втором участке диодной линейки
^^ВЫХ=^ВЫХ2
Процесс открытия диодов с увеличением входного
напряжения U bx будет продолжаться, и в результате на
выходе диодной линейки появится напряжение, которое
изменяется по закону, графически изображенному на
рисунке 26, г. Включая диодные линейки соответствую
щим образом, можно получить воспроизведение различ
ных функций. Подробно этот вопрос освещен в специ
альной литературе.
74
Погрешность воспроизведения сложных функций для
рассмотренных потенциометров со ступенчатыми карка
сами и линейных потенциометров с шунтирующими ре
зисторами достигает ± 2 %, для диодных линеек ± 1 %.
Более точное воспроизведение дают функциональные
преобразователи, выполненные на цифровых вычисли
тельных устройствах. Поэтому применение рассмотрен
ных преобразующих устройств возможно там, где не
требуется высокая точность работы автоматических си
стем регулирования. Находят применеиие и пневматиче
ские функциональные преобразователи, особенно в тех
системах управления, которые работают в активных
средах.
Носителем программы, как уже отмечалось, может
быть перфорированная лента (рис. 26, д. е). В первом
случае (рис. 26, d) длина отверстия основной перфора
ции отвечает длительности рабочего периода, опреде
ляемого временем освещения фотоэлемента, а расстоя
ние между смежными отверстиями в продольном ря
д у — длительности нерабочей паузы. Во втором случае
(рис. 26, е) все отверстия ленты основной перфорации
имеют одинаковые размеры, а команды включения и
выключения определяются расстоянием между отвер
стиями и надлежащ ей их группировкой. Н а ленте мож
но записать (зашифровать) любые команды, а следова
тельно, и получить управляющие сигналы, которые пе
редаются затем в систему автоматического управления.
Наряду с перфорированными используются ленты с
участками различной электропроводности, прозрачно
сти или отражательной способности и др.
Контрольные вопросы и задания. 1. Какими основными пара
метрами характеризуются датчики автоматических систем? 2. В чем
достоинства и недостатки контактных датчиков? 3. Какие датчики
называют потенциометрически.чи? 4. Расскажите об устройстве и
работе тензометрических датчиков. 5. Почему у индуктивного дат
чика характеристика «вход — выход» нелинейная? 6. Объясните
принцип действия и назначения емкостных датчиков. 7. Каковы от
личия термометров сопротивления от полупроводниковых термисто
ров? 8. Изложите принцип действия термопар и укажите область
их применения. 9. Перечислите типы датчиков уровня. 10. Назовите
тнпы тахогенераторов и укажите их достоинства и недостатки.
11. Расскажите об утройстве и работе фотоэлементов различных
типов. 12. Объясните принцип действия пьезоэлектрических датчи
ков. 13. Назовите
разновидности
трансформаторных
датчиков.
14. Каково назначение электрических задающих устройств?
75
Лабораторная работа № 1
Испытание индуктивных датчиков и тензоеопротивпений
Содержание работы. Изучить устройство, принцип действия и
основные характеристики индуктивных датчиков и тензосопротиялений. Получить основные характеристики испытуемых датчиков.
Описание лабораторной установки. Лабораторная установка
должна содержать стенд, на котором закреплены индуктивные дат
чики устройство для испытания тензосопротивлений и электриче
ские’ схемы для получения основных характеристик индуктивных
датчиков и тензосопротивлений. С целью получения зависимостей
выходных величин датчиков от приложенных усилий в схемы необ
ходимо ввести приборы для измерения токов датчиков. Целесооб
разно, чтобы установка предусматривала возможность включения
индуктивных датчиков по дифференциальной схеме (рис. 14, г).
Порядок выполнения работы. 1. Ознакомиться с датчиками,
установленными на стенде, изучить электрическую схему соедине
ний датчиков и измерительных приборов по руководству к лабо
раторной работе. 2. Собрать электрические схемы испытании (для
индуктивных датчиков можно рекомендовать схемы на рисунке 14,
для тензодатчиков — схе.чу на рисунке 27, а. 3. Изменяя положение
подвижной части индуктивных датчиков, снимают зависимости
/=/^(6). 4. Изменяя вес груза Р от нуля до максимального и от
максимального до нуля (рис. 27,6), снимают зависимости для тен
зосопротивлений h=-f{P). Д ля повышения чувствительности тензо
сопротивлений два тензодатчика R1 и R2 включают в измеритель
ный мост, как показано на рисунке 27. а, и наклеивают на стальную
пластину сверху и снизу (это увеличивает чувствительность в 2
раза, способствует температурной компенсации и исключает влия
ние измеряемых деформаций (например, поперечных). Результаты
измерений вносят в протокол испытаний и по ним строят зависи
мости: для индуктивных датчиков / = / ( б ) , а для тензодатчиков
/= Д ст), причем (т — напряжение изгиба, определяемое как отноше
ние момента изгиба М к моменту сопротивления пластины N в ме
сте наклейки датчиков { c = M / N ) \ M=PL , N= bh^ j 6, где 6 и ft —
ширина и высота пластины, L — расстояние от места приложения
груза Р до центра тензодатчика.
Содержание отчета. Отчет должен содержать краткое описа
ние принципа действия и назначения исследуе.мых датчиков, табли
цы результатов проведенных опытов, расчетные формулы и расче
ты, графики зависимостей выходных величин от входных, электри
ческие схемы исследований, анализ полученных результатов, выво
ды по работе, таблицу с техническими данными измерительных
приборов, заключение по работе.
Лабораторная
работа
№ 2
Испытание фотодатчиков.
Фотореле в схемах автоматического управления
Содержание работы. Изучить принцип действия и устройство
фотоэлементов и фотосопротивлений. Снять вольт-амперные харак
теристики фотоэлементов с внешним (вакуумных и газонаполнен
ных) и внутренним фотоэффектом и фотосопротивлений при раз
личных значениях освещенности, пользуясь схемой, представленной
ка рисунке 28, а. Собрать схе.му фотореле (рис. 28, б) и испытать
ее в работе (управление асинхронным двигателем). Значение катод
ного сопротивления R в цепи фотоэлемента задается преподава
телем.
Описание лабораторной установки. Установка для снятия
вольт-амперных характеристик должна содержать осветитель и
фотоэлемент. Целесообразно, чтобы осветитель был выполнен в виде
трубы I с в.чонтированным в нее патроном 2 для лампы накали
вания 3 и объективом 4, собирающим световой поток в параллель
ный пучок (рис. 28, в). Фотоэлемент необходимо поместить в све
тонепроницаемую камеру 6 и внутри нее укрепить панель 8 для
фотоэлемента и фотосопротивления. На передней стенке камеры
расположить окно 5 с диафрагмой 9. Чтобы уменьшить влияние
постороннего света на фотокатод, диафрагму располагают в на
садке, зачерненной изнутри. Схема для снятия вольт-амперных
характеристик изображена на рисунке 28, а. Защитное сопротивле
ние R принимают равным 1 . . . 2 Мом. Отверстие диафраммы дела
ют таким, чтобы освещался весь фотокатод. Измерения следует
выполнять после того, как установлено определенное расстояние
между осветителем и камерой, соответствующее максимальному
фототоку при номинальном напряжении на лампе. Д ля удобства
сборки схемы фотореле с электронным усилителем вводы всех эле
ментов, в том числе и электронной лампы, снабжаются зажимами
и монтируются на панели.
Порядок выполнения работы. 1. Снять вольт-амперные харак
теристики выбранных фотоэлементов и фотосопротивлений при раз
личных освещенностях, устанавливаемых изменением
отверстия
диафрагмы. 2. Собрать схему управления асинхронным двигателем
Ф
Ф
Я1
Тензадатчт
Рис. 28. Схемы исследования фотореле:
Рис. 27. Схемы испытаний тензосопротивления.
76
а — снятия вольт-амперной характеристики фотоэлемента; б — управления
асинхронным двигателем; в — определения чувствительности фотоэлемента.
. 77
от фотореле. Схема должна работать по принципу светового барье
ра, то есть при попадании света на фотоэлемент реле К получает
питание (электронная лампа открыта), а при отсутствии света реле
К теряет питание (лампа закрыта). 3. Установить определенное
значение светового потока и испытать действие всей установки.
И зм мить силу токов срабатывания и отпускания реле К.
Содержание отчета применительно к исследуемым элементам по
основным пунктам аналогично лабораторной работе № 1.
Лабораторная
работа
№
ГЛАВА
III
УСИЛИТЕЛЬНЫЕ И СТАБИЛИЗИРУЮЩИЕ
ЭЛЕМЕНТЫ
3
Испытание датчиков температуры
Содержание работы. Изучить устройство, принцип действия и
основные характеристики датчиков температуры. Получить основ
ные характеристики.
Описание лабораторной установки. Установка должна содер
жать стенд с набором датчиков те.чпературы (полупроводниковые
терморезисторы — ПТР,
термо.четры сопротивления,
термопары
и т. д.), электрические приборы для получения основных характе
ристик и электрические схемы испытания датчиков.
Порядок выполнения работы. 1. Ознакомиться с устройством
датчиков, установленных на стенде. Изучить электрические схемы
включения датчиков и измерительных приборов по руководству к
лабораторной работе. 2. Собрать электрические схемы. 3. Снять
вольт-амперные характеристики датчиков, установленных на стенде.
4. Снять температурные характеристики, то есть зависи.чость со
противления от температуры нагрева
для чего датчик по
мещают в термостат, температура в котором из.меряется ртутным
термометром. 5. Составить и собрать схему термореле (рис. 19, г)
и определить его параметры; температуру срабатывания и воз
врата
Содержание отчета аналогично лабораторной работе № I.
3.1. Общие сведения
Г
Выходные сигналы датчиков и других элементов, как
правило, очень слабые и не могут использоваться непо
средственно для приведения в действие элементов си
стем автоматики. Выходная мощность датчиков в боль
шинстве случаев составляет сотые, тысячные доли ват
та, тогда как мощность, необходимая для управляю
щего органа, может достигать десятков и даж е сотен
киловатт. Поэтому в современных автоматических си
стемах управления широко применяют усилительные
элементы (усилители), которые нередко наряду с основ
ным назначением усиливать мощность сигнала выпол
няют и функцию его преобразования в вид, более удоб
ный для работы системы.
Усилителем называется устройство, предназначенное
для увеличения мощности сигнала за счет энергии до
полнительного источника питания, при этол^ выходная'
(усиленная) величина является функцией входного
сигнала и имеет одинаковую с ним физическую при
роду.
Усилители различаю т по выходной мощности, виду
подводимой вспомогательной -^энергии, коэффициенту
усиления, принципу действия, по форме характеристи
ки, выражающей зависимость между выходной и вход
ной величинами, и по ряду иных признаков.
Выходная
мощность
современных усилите
лей, используемых в системах автоматики, колеблется
от долей ватта до десятков и более киловатт.
По
виду
вспомогательной
энергии,
подводимой к усилителям, их разделяю т на электриче
ские, электромеханические, магнитные, электронные,
гидравлические, пневматические, комбинированные.
79
Коэффициент
усиления
усилителей дости
гает тысяч, сотен тысяч и д а ж е более раз. В электри че
ских усилителях разл и чаю т усиление по мощ ности, н а
пряж ению и току. Т ак, коэффициент усиления по мощ
ности для установивш егося реж им а определяю т по ф ор
муле
kp = Д Р вых/ДР вх,
I
V
0
"^1
к
ВХ^
е
где АРвых, АРвх — изменения мощности выходного и входного сиг
налов.
Д л я усилителей н апряж ения и тока соответственно
разли чаю т коэф ф ициенты усиления по напряж ению и
току, которые в установивш ем ся реж им е определяю тся
соотношениями
= Д^/вых/Д^вх ;
fe/= Д/вых/Д^вх ,
где Д{Увых. ^Uвx. Мвых, А/вх — изменения напряжений и токов вы
ходного и входного сигналов.
Усилители р аб отаю т в определенном реж им е, кото
рый определяю т соотнош ениями его входного R bx и вы
ходного Н в ы х сопротивлений и сопротивлений источни
ков сигнала R r и н агрузки /?н- Усилитель мощности ра
ботает в реж им е согласованной нагрузки, при котором
R bx ^ R t, Р н » Р в ы х выходной величиной явл яется мощ
ность (м акси м ал ьн ая в условиях согл асован и я).
Усилитель напряжения работает в реж им е, п ракти
чески близком к холостому ходу на выходе, при кото
ром R t ^ R bx, /?н>/?вы х входная и вы ходная величи
ны — напряж ение.
Усилитель тока р аб отает в реж им е, практически
близком к коротком у зам ы канию на выходе, при кото
ром Р г > Р в х , Р н « Р в ы х входная и вы ходная величи
ны — ток.
Коэффициент
усиления
по
мощности
в зависимости от принципа действия и конструкции
усилителя м ож ет составлять от 1 до 10^.
Усилению могут подвергаться не только электри че
ские парам етры , но и другие входные величины (пере
мещение, скорость, усиление, давление и т. п .).
У силительный элем ен т совместно с резисторам и,
конденсаторами и другим и элем ентам и схемы н азы ва
ют усилительным каскадом. Если усиления сигнала
одним каскадом недостаточно, прим еняю т соединение
нескольких каскадов, выполняю щ их роль предваритель80
Рис. 29. Статические характеристики усилителей:
с — линейного; б, в, г, д ч е — нелинейнык.
него усиления и обеспечиваю щ их работу мощ ного вы
ходного каскада. П оэтом у разли чаю т однокаскадны е и
м ногокаскадны е усилители, при этом в м ногокаскадном
усилителе первый к а ск а д от входа н азы вается вход
ным, а последний — выходным.
По форме
характеристики,
отраж аю щ ей
зависим ость м еж ду выходной и входной величинами,
усилители разд ел яю т на две больш ие группы: с линей
ными и нелинейными характеристикам и. Обычно пред
почтительнее, к ак наиболее простая, линейная х а р а к
теристика.
К усилителям , применяемым в автом атических си
стем ах, предъявляю т требован ия по ограничению зоны
нечувствительности, зап азд ы ваю щ его действия усили
тел я и др.
Х арактеристики, вы раж аю щ ие
зависим ость меж ду
; выходной у и входной X величинами усилителя в у ста
новивш емся реж им е, могут быть различны (рис. 29).
^Д ля характеристики (а ) л и н е й н о г о
усилителя
п оказательно, что на всем и нтервале управлен ия между
величинами у к х сущ ествует прямо пропорциональная
■зависимость. Х арактеристики
нелинейных
уси'лителей
изображ ены на рисунке 29, б . . . е . Харак•теристика (б) нелинейного усилителя с зоной нечувстгвительности от — Дх до Ч-Дх; х ар актер и сти ка (в) неI линейного усилителя релейного типа: у него выходной
’ о Заказ 5067
81
сигнал у равен нулю до тех пор. пока л ;< А х При
х > Д х выходной сигнал релейного усилителя мгновен
но достигает значения уо, которое не изменяется, как
бы не увеличивался сигнал х. Характеристика (г) не
линейного усилителя релейного типа с различными зна
чениями токов срабатывания и возврата, реле (она
близка по форме к петле гистерезиса Длг1< Д х 2). Х а
рактеристика (d) нелинейного усилителя с зоной не
чувствительности и насыщением (подобную характери
стику имеет, например, сервомотор с золотником, ход
которого больше величины открытия окон, из-за чего
золотник перекрывает их). Характеристика (е) нели
нейного усилителя с зоной нечувствительности, насы
щением и петлей гистерезиса (такова характеристика
усилителей с зазорами в механизмах). В дальнейшем
изложении будут рассмотрены усилители, которые по
лучили наибольшее применение в автоматических си
стемах управления технологическими процессами сель
скохозяйственного производства.
3.2. Электронные усилители
Рис. 30. Схемы усилителей:
электровакуумных постоянного тока (а)-, переменного (б) и полупровод
никовых с общей базой (в); с общим коллектором (г)-, с общим эмит
тером
Электронные усилители (ЭУ) широко применяются
в системах автоматики для предварительного усиления
сигналов, получаемых от датчиков. П редельная выход
ная мощность усилителей не превышает 100 Вт. В ав
томатических системах используют электронные усили
тели на лампах и полупроводниках, постоянного и пе
ременного тока, однокаскадные и многокаскадные.
Схема простейшего однокаскадного электровакуум
ного усилителя постоянного тока показана на рисунке
30, а. Входной сигнал (напряжение J7bx) подается на
сетку электронной лампы, в анодную цепь которой
включено сопротивление (нагрузка) /?а=/?н- Неболь
шие изменения входного напряжения вызывают значи
тельные изменения анодного тока /а, а следовательно,
выходного напряжения [Увых, равного падению напря
жения на нагрузочном сопротивлении R^. В этом и за
ключается у с и л и т е л ь н ы й
эффект
рассматри
ваемой схемы. Резистор R2 служит для ограничения
сеточных токов. Резистор R 1 введен как стабилизирую
щий по отношению к сопротивлению между сеткой и
катодом лампы. Значит, входная мощность будет опре-
82
деляться сопротивлением резистора R1. Д анная схема
является нереверсивной.
В низкочастотном однокаскадном электровакуумном
усилителе переменного тока с трансформаторным выхо
дом (рис. 30,6) нагрузочное сопротивление Ra вклю
чено в анодную цепь через трансформатор, поэтому на
пряжение выхода содержит только переменную состав
ляющую (дрейф нуля здесь не проявляется). Эта схема
является реверсивной, то есть изменение фазы входно
го напряжения на 180° приводит к изменению фазы
выходного напряжения. Такие усилители широко при
меняются в системах автоматического управления в
отличие от высокочастотных, которые используют в
радиотехнических
приемно-передающих
устройствах
телемеханических систем.
Полупроводниковые усилители характеризуются не
значительной мощностью потребления, достаточной на
дежностью, высоким быстродействием, сравнительно
6*
■\
83
большим коэффициентом усиления, малыми размерами
и поэтому вытесняют ламповые усилители из многих
сфер применения. Они могут работать на постоянном
и переменном токе. По способу включения полупровод
никовых триодов эти усилители делятся на три основ
ных вида: с общей базой, с общим коллектором и с
общим эмиттером.
В у с и л и т е л я х с о б щ е й б а з о й (р и с.3 0 ,в)
электрод базы — общий для входной и выходной це
пей. Усилители, построенные по такому принципу, ис
пользуются в качестве входного каскада по отнощению
к датчику с низким входным сопротивлением. Выходное
напряжение находится в фазе с входным. Коэффициент
усиления по току меньще единицы, а по напряжению
много больше единицы.
Усилители
с
общим
коллектором
(рис. 30,г), где общим служит выход коллектора, при
меняют в качестве первого каскада усиления для согла
сованного включения с датчиками, имеющими высоко
омный выход, а такж е в качестве выходного каскада
при работе с низкоомной нагрузкой. Коэффициент их
усиления по току 10^ а по напряжению — меньше еди
ницы.
Усилители
с общим
эмиттером
(рис.
30, й ), у которых общим для входной и выходной цепей
является выход эмиттера, получили наибольшее прак
тическое распространение, потому что они обеспечивают
высокий коэффициент усиления по мощности и току
(порядка 10®) и обладаю т сравнительно большим вход
ным сопротивлением. Выходное напряжение находится
в противофазе относительно входного.
В практике применяют в основном м н о г о к а с к а д
ные
усилители
с емкостной или индуктивной
трансформаторной связью.
3.3. Магнитные усилители
Схема простейшего однотактного магнитного усили
теля (МУ) показана на рисунке 31, а. Магнитопровод
усилителя выполнен из двух отдельных сердечников.
Н а них накладываются рабочая обмотка с числом вит
ков wj 2 на каждом сердечнике и обмотка управления
(подмагничивания) с числом витков Wy, охватываю
щ ая оба сердечника. Входной величиной МУ является
84
oirro о _ г
W
г
Wr
'CM
Рис. 31. Схемы и характери
стики магнитного усилителя:
— П р о стей ш и й магнитный усили
тель; б — характеристика управ
ления; в — магнитный усилитель с
обмоткой смещения; г — характе
ристика управления; д — услов юе
обозначение.
Q
W„
постоянный ток / у обмотки управления, а выходной —
переменный ток / в,рабочей обмотке и нагрузочном ре
зисторе Rn.
Ток в рабочей обмотке
/=
(o )L )2 ,
где и — напряжение переменного тока; R — активное сопротизле
ние нагрузки и рабочих обмоток: to L = o )(L i+ /, 2) — реактивное со
противление рабочих обмоток.
Индуктивность (Гн) рабочих обмоток
"85
где w — число витков рабочей обмотки олиой или второй полови
ны; / — длина средней линии сердечника, м; F — площадь сечения
сердечника, м^; ц — магнитная проницаемость сердечника, Гн/м.
Половины рабочей обмотки расположены на сердеч
никах так, что магнитные потоки, вызванные протека
нием по ним переменного тока, будут в средних сердеч
никах направлены встречно и взаимно компенсировать
друг друга, поэтому эти потоки никакого влияния на
обмотку управления не оказывают.
Чем больше постоянный ток в обмотке управления,
тем сильнее магнитный поток, создаваемый обмоткой
управления, а следовательно, тем выше насыщение
сердечника. При этом магнитная проницаемость сер
дечника уменьшается, что приводит к снижению индук
тивности рабочих обмоток, падению их реактивного
сопротивления и увеличению тока / нагрузки. Таким
образом, незначительные изменения постоянного тока
управления в подмагничивающей обмотке вызывают
весьма существенные изменения переменного тока в
рабочей обмотке. В этом и заключается эффект усиле
ния МУ. Характеристика МУ — зависимость тока на
грузки I от подмагничивающего постоянного тока / у
показана на рисунке 31,6. При отсутствии тока управ
ления на выходе магнитного усилителя будет небольшой
ток нагрузки. С усилением тока управления увеличи
вается ток нагрузки. Характеристика / = / ( / у ) в целом
нелинейна; рабочей ж е ее частью является линейный
участок M l . . . М 2.
Д ля увеличения коэффициентов усиления и получе
ния характеристики усилителя с рабочей точкой М,
соответствующей нулевому току управления, в МУ
вводится дополнительная обмотка — обмотка смещения
I0CM, которая подключается к постороннему источнику
постоянного тока (рис. 31, в). Ток смещения обеспечи
вает дополнительное подмагничивание. В обмотке уп
равления в этом случае ток изменяется только в пре
делах —Д /у < /у < ;-Ь Д /у при работе усилителя на рабо
чем участке характеристики М 1 . . . М 2 (рис. 3 1 ,г):
Магнитные усилители характеризуются к о э ф ф и
циентами усиления
по току, напряжению и
мощности
ki = A U M j А:р=ДРн/АРу.
где Д/н,
и АРн — приращения тока, напряжения и мощности
в рабочей обмотке магнитного усилителя при соответствующем из
86
менении тока Л/у, напряжения Л£/у и мощности ДРу в цепи обмотки управления.
Коэффициент усиления зависит от конструктивных
; параметров магнитного усилителя, в частности, от
объема меди обмотки управления, от материала сер|’дечника магнитопровода (сталь, пермаллой). Д ля маг
нитных усилителей со стальным сердечником он в не
сколько раз меньше, чем для пермаллоевых. Н а коэф'фициент усиления влияет и частота тока нагрузки. По
скольку с увеличением частоты коэффициент усиления
возрастает, М У широко применяют в системах с повы
шенной частотой. Так, при частоте 50 Гц коэффицие'.п
усиления по мощности усилителя с сердечником из
трансформаторной стали составляет 50..-.200, из пер
м ал л о я — 1 0 0 ... 1000, а при частоте 500 Гц соответст
венно 1 0 0 ... 800 и 2 0 0 ... 2000. Широко применяют маг
нитные усилители, которые работают в диапазоне ча
стот 4 0 0 ...3 0 0 0 Гц.
Н а рисунке 31, д показано условное изображение
магнитного усилителя.
Магнитные усилители с обратной связью (особенно
с положительной) получили наибольшее практическое
применение. Такие М У могут быть как с внешней
(рис. 3 2 ,а ), так и с внутренней (рис. 32,6) обратной
связью (поле, создаваемое ею, совпадает по направле
нию с полем управляющего сигнала), которая увеличи
вает общий коэффициент усиления, а отрицательная
(ее действие обратно положительной)-—уменьшает,
характеристика усилителя (рис. 32, в) становится не
симметричной; участок аЬ соответствует положительной
обратной связи, а ас — отрицательной. При внешней
обратной связи поле создается дополнительной обмот
кой Wo.c, а при внутренней — обмоткой переменного
тока (в цепь обмоток включают диоды V I п V 2 , вслед
ствие чего в обмотке переменного тока протекает пуль
сирующий ток, постоянная составляющая которого и
создает поле обратной связи).
Коэффициент усиления по мощности М У с обратной
связью, сердечник которых выполнен из трансформатор
ной стали или из пермаллоя, при частоте 50 Гц дости
гает соответственно 1000 и 3 0 0 0 ... 10 ООО, а на повы
шенных частотах намного больше.
Важным показателем, характеризующим интенсив87
Рис. 32. Схемы и характеристики магнитных
ратными связями:
усилителей с об
а — с внешней; б — с внутренней; е — характеристика управления* г и б —
в релейном режиме.
ность обратной связи, является коэффициент обратной
связи
ko.C = lo.c^o .clf^’
В схеме с внешней обратной связью можно обеспе
чить любое значение fto.c, так как можно задать Wo.c и
менять /о.с, изменяя сопротивление
В схемах с внут
ренней обратной связью
При &о.с>1 МУ обладает релейными свойствами и
его можно использовать в качестве бесконтактного реле
(рис. 32,г). Характеристика управления М У I = f ( I y )
и характеристика его обратной связи — прям ая ОА
пересекаются на рисунке 32, г в точках 1 ,2 и 3 при токе
управления /у = 0 . Увеличение тока управления равно
88
сильно перемещению прямой ОА на графике параллель
но самой себе вправо, соответственно уменьшение этого
тока — перемещению влево. С ростом тока управления
точка 1 (рис. 32, д) перемешается в точку 4, а даль
нейшее усиление /у приведет к тому, что рабочая точка
скачком перейдет в точку 5 и ток в рабочей обмотке
резко возрастет от / = / 4 до / = / 5. Такой режим рабо
ты МУ аналогичен режиму срабатывания электромаг
нитного контактного реле. Ток управления, соответст
вующий точке 4, называется т о к о м с р а б а т ы в а н и я .
При снижении /у тока в рабочей обмотке будет умень
шаться и усилитель из точки 5 перейдет в точку 6 . Д а л ь
нейшее ослабление /у приведет к тому, что ток усили
теля скачком упадет от 1=1е до / = / 7. Этот режим уси
лителя можно сравнить с режимом отпускания элект
ромагнитного контактного реле. Поэтому ток управле
ния, соответствующий точке 7, называют т о к о м о т
п у с к а н и я . Таким образом, МУ в данном случае ра
ботает как поляризованное реле. Д л я получения харак
теристики магнитного усилителя, аналогичной характе
ристике нейтрального электромагнитного реле, необхо
димо включить обмотку смещения и пропустить по ней
ток такой величины, чтобы характеристика обратной
связи (прямая ОА) передвинулась влево и пересекла
характеристику I = f ( I y ) только в одной точке.
Двухтактные магнитные усилители обеспечивают
большую крутизну характеристики / = f ( / y ) , отсутствие
тока в нагрузке при /у = 0 и изменение фазы выходного
напряжения на 180° при изменении полярности тока / у .
Такие усилители представляют собой два соединенных
определенным образом однотактных усилителя. Р азл и
чают дифференциальную, мостовую и трансформатор
ную схемы включения двух однотактных магнитных уси
лителей.
В дифференциальной схеме (рис. 33, а ) обмотки уп
равления и смещения включены последовательно, а р а
бочие— параллельно. В обмотку смещения подается по
стоянный ток от стабилизированного источника питания.
Обмотки управления создают постоянное магнитное по
ле. Поле одной из них совпадает по направлению с полем
обмотки смещения, а поле другой направлено ему
встречно. Когда ток управления равен нулю ток на вы
ходе магнитного усилителя (сопротивление г,,) отсут
ствует, потому что токи в рабочих обмотках равны и
еэ
сдвинуты по ф азе на 180°. С появлением тока управления
возникает магнитное поле, которое в одном сердечнике
складывается с полем обмотки смещения, а в другом
вычитается из него, поэтому ток на выходе первого уси
лителя больше, чем второго. Ток в нагрузочном сопро
тивлении равен геометрической сумме токов обоих уси
лителей
hi = l \ + l 2 ■
Это отражено и на характеристике усилителя
(рис. 33,6). При изменении полярности тока управления
фаза тока нагрузки изменяется на 180°. Недостаток
дифференциальной схемы заключается в необходимости
применения силового трансформатора Тр.
В мостовой схеме (рис. 33, в) четыре части рабочей
обмотки составляют плечи моста, в одну диагональ ко
торого включено сопротивление нагрузки, а во вто
р у ю — источник питания переменного напряжения. При
ц и
Рис. 33. Двухтактный магнитный усилитель:
а — дифференциальная схема; б — характеристики управления; е — мостовая
схема; г — трансформаторная схе.ма.
90
1
/у = 0 ток в нагрузке (сопротивление 2н) отсутствует.
Появление тока управления сопровождается возникно
вением магнитного поля, которое совпадает по знаку с
полем смещения в одном сердечнике и направлено
встречно во втором. Так как рабочие обмотки однотактного усилителя составляют противоположные плечи мос
та, то его равновесие нарушается и в нагрузке появля
ется ток. Перемена полярности тока управления вызы
вает изменение тока нагрузки на 180°. Н апряжение на
нагрузке составляет 0,5 . . . 0,6 напряжения источника
питания.
Трансформаторная схема (рис. 33, г) объединяет
два трансформатора насыщения, четыре секции первич
ных обмоток которых включены последовательно и
присоединены к источнику переменного напряжения, а
нагрузка подключена к соединенным встречно вторич
ным обмоткам. При /у = 0 напряжение на нагрузке от
сутствует. Появление тока управления изменяет взаим
ную индуктивность первичных и вторичных обмоток
трансформаторов, и на нагрузке появляется напряж е
ние, значение которого зависит от силы, а ф аза — от по
лярности тока управления.
Существенным недостатком МУ является их инер
ционность в передаче сигнала от входа к выходу, ха
рактеризуемая постоянной времени усилителя T=kp/ f ,
которая прямо пропорциональна его коэффициенту уси
ления &р и обратно пропорциональна частоте / источни
ка питания.
Магнитные усилители нашли широкое применение в
автоматических системах управления, просты по устрой
ству (нет вращающихся частей), надежны, долговечны,
имеют высокий коэффициент усиления. Промышлен
ность выпускает широкий ассортимент МУ, из которых
наибольшее применение находят усилители серий ТУМ
и УМП.
Магнитные усилители серии Т УМ имеют продольный
магнитопровод из холоднокатаной ленточной трансфор
маторной стали толщиной 0,35 мм. Выполнены на вы
ходную мощность 2 ,5 ... 50 Вт и рассчитаны для работы
в схемах с внутренней обратной связью, с питанием от
сети 50 и 60 Гц. Основной является схема с выходом па
постоянном токе. Усилители имеют пару идентичных об
моток на переменном токе и несколько обмоток управ
ления, которые можно использовать для суммирования
91
и сравнения сигналов, введения внешней обратной свя
зи, осуществления смещения и т. д. Обмотки управле
ния с наибольшим числом выходов имеют коэффициент
усиления по мощности й р = 7 4 0 . . . 2420 и постоянную
времени 7’= 0 ,2 2 . . . 0,41 с. Общий коэффициент усиления
по мощности всех Обмоток управления равен 3 3 0 0 ...
10 000, а суммарная постоянная времени 7 = 1 с.
Л^агнитные усилители серии У М П имеют П-образный
магнитопровод из трансформаторной стали толщиной
0,5 мм и выполняются на мощность 0 ,0 7 ... 25 кВт. Вы
пускаются одно- и трехфазные для работы от сети с
частотой 50 Гц и линейным напряжением для трехф аз
ных 220, 380, 254 и 440 В, для однофазных 220 и 380 В.
Они предназначены для работы в схемах с внутренней
обратной связью с выходом на переменном и постоян
ном токе. Коэффициент усиления по мощности на пере
менном токе
4 8 0 ... 15200, на постоянном — 40. . .
12 650, постоянные времени от 0,08 до 0,38 с.
3.4. Гидравлические и пневматические усилители
Гидравлические и пневматические усилители при
меняют в автоматических системах для усиления сиг
налов по мощности. Принципиальные схемы таких уси
лителей практически не отличаются одна от другой.
Если в гидравлических усилителях перемещение испол
нительного органа происходит под действием жидкости,
поступающей от специального насоса, то в пневматиче
ских рабочей средой является воздух, нагнетаемый
специальным компрессором. В сельском хозяйстве гид
равлические усилители используют чаще, чем пневмати
ческие (например, в гидравлическом оборудовании ав
томобилей, тракторов, комбайнов, при управлении на
весными машинами и д р.). Различаю т два класса гид
равлических усилителей: дроссельные и струйные.
В дроссельных усилителях (рис. 3 4 ,а, б ) давление
?2 рабочей жидкости изменяется в зависимости от пе
ремещения дросселя Д или заслонки 3. Количество р а
бочей жидкости, проходящей через дроссель или сопло,
дросселируемое управляемой заслонкой
Q = a F \ / i i - ( P 3- P 3),
»
i
i
где а-к о э ф ф и ц и е н т расхода; f - проходное
сопла м=; /- у с к о р е н и е свободного падения, м/с=; Y — плотность
жидкости. кг/м=; Д - д а в л е н и е впо.посги между дросселями.
кг/м •с*; Рз — давление за дросселем или соплом, к г/м -с .
■ Таким образом, чем больше сечение F, тем больше
О сечение ж е зависит от перемещения х регулирующе
го органа дросселя или заслонки. Коэффициент Усиле
ния дроссельного усиления по мощности
Конструктивно дроссельные усилители могут
выполнены в виде задвиж ек или заслонок,
слонками, дроссельных игл и т. п. Широкое
находят гидравлические усилители с золотниковыми
устройствам^ (рис. 34, в ), у которых в зависимости от
Ьоложения ;с золотника давление Ра, а следовательно, и
расход Q жидкости будут разными.
ПОВ струйных усилителях, схема одного из
казана на рисунке 34, г, основным
является
струйная трубка, состоящая из поворотной трубки .
приемника 4 с двумя соплами, части 2 , которая воспри
нимает действие измерительного элемента. Д л я компе
сации влияния веса трубки на ее о т к л о н е н и е под Дей
ствием чувствительного элемента на струйной трубке у
э л е м
rff'
/
ч
е н т о м
^ г /777//7"
\д
1
'
“ IU
гИС
1
jf
—I--
а - с дросселем; б - с соплом-заслонкой;
ником; г — со струйной трубкой.
в -с
цилиндрическим золот
,93
92
тановлен противовес 1. Ж идкость под давлением Р поструйную трубку с Г
падать я в
в левом канале сопла будет
жилкпртЛп п
" наоборот. Рабочей
специальные жидкоэффициентом вязкости,
подаваемые насосом под давлением. Отклонение конпа
струйной трубки не превышает 1 . . . 2 мм КоэлГш ш
ент усиления по мощности таких усилителей со £ ^ в л я-
Г
т
!^В
.V2
Г
Цр
Ro
щ
-
+
Ry
и
V
И ?А
■t
!^С
В
/?z
'DC
3.5. Функциональные элементы
шг
т е л ? м Г ш 1 " п 1 ^ " п ^ " полупроводниковыми усилиэлементыДРУгие бесконтактные
и Г Г р а с ? м о т З ’„ я Т ’’™ "^^Р"™ Р“ ’ нуль-индикаторы
эл^енто?
^
назначение и принцип действия этих
Триггер представляет собой электронную
S r ii
cxeM v
г
i
Рис. 35. Триггеры:
а — симметричный с автоматическим смещением; б — транзисторное реле с
параллельной обратной связью по напряжению нагрузки; е - - транзисторное
реле с последовательной обратной связью по току нагрузки; г — мульти-
НОЙ
связи В
положительной обрат-
мш има*льныГ^Р^'^“ “ “
=
=
Г
е
“Г
“" у „ :=
"
•
состочни™'^Х<т^иР^*^*^'^°’
^
с =
(например, V2) —
Г
г г =
Г
о « Г ,е . 1 о = Г
, г
изменения б™ового “
Z находятся в активном
по«ощ„ у и р а Г л ,Х г о Т “ р Г с т в 7 Т
Т Г ™
™ 'т З з в д о Г ' ’'" ” ™ "' ™ чульсы то к а'н а в в д З Р
запуск,. К
94
а ^ Г р г з Г т ;1 Т « ? = г ^ ^ -
коллектором одного и базой другого. Они обеспечивают
протекание базовых токов, когда транзисторы открыты.
Через резисторы R ^ m и /?см' подается напряжение сме
щения на базы транзисторов.
Рассмотренный симметричный триггер используют
для низкочастотной коммутации тока в двух индуктив
но не связанных обмотках электромагнитных механиз
мов. Д л я этого вместо резисторов /?„ и
включают
обмотки и шунтируют диодами V3 и V4 для устранения
перенапряжений на транзисторах.
Однако практические схемы транзисторных реле в
отличие от симметричного триггера выполняют так, что
бы всякий раз управляющее напряжение или ток, про
ходя некоторые фиксированные уровни — пороги сра
батывания и отпускания, имели один и тот ж е знак.
В этом случае транзисторные реле занимаю т вполне
определенные исходные состояния при отсутствии управ
ляющего воздействия.
95
Наибольшее распространение в силу простоты схем
ных решений получили два варианта реле: с парал
лельной обратной связью по выходному напряжению
(рис. 35,6) и с последовательной обратной связью по
выходному току (рис. 3 5 ,в). В исходном состоянии схе
мы (б) транзистор VI насыщен от источника питания
через резистор Ro.c обратной связи и нагрузочный ре
зистор R h- Транзистор V2 заперт падением напряжения
на диоде V3, входящем в состав делителя V3 — R2, через
резистор R h ток практически не проходит. Схема (в)
имеет противоположное исходное состояние. Транзистор
VI заперт напряжением обратной связи, а транзистор
V2 насыщен от источника питания через резистор R1.
Нагрузочный резистор R h соединен с источником пита
ния.
При U y> U cp состояние каждой схемы скачкообразно
изменяется на обратное. Так, в схеме (б) транзистор
VI запирается источником напряжения управления.
Транзистор V2 насыщается, и нагрузочный резистор Ra
соединяется с источником питания. В схеме (в) тран
зистор VI открывается напряжением источника управления, а транзистор V2 закрывается, и ток в нагрузке
R h прекращается. В новом устойчивом положении схемы
удерживаются до тех пор, пока t / y ^ t /отп, после чего
скачкообразно возвращаю тся в исходное состояние.
Рассмотренные реле подобны по своим свойствам
электромагнитным с соответственно размыкающим и за
мыкающим контактами. Транзисторные реле обладают
значительным усилением по мощности, поэтому могут
быть использованы для управления работой импульсных
регуляторов. Кроме того, такое реле может служить
как преобразователь непрерывного изменяющегося на
пряжения в импульсное.
Мультивибраторы представляют собой транзистор
ные устройства, формирующие управляющие сигналы
определенной формы и длительности. Их применяют в
автоматических системах и особенно в электрических
вычислительных устройствах дискретного типа.
Одна из схем мультивибратора показана на рисунке
35, г. Транзисторы VI и V2 выполняют роль собранных
по схеме с общим эмиттером ключей, которые поочеред
но замыкаются и размыкаются. Коллекторно-базовая
часть каскадов осуществляется конденсаторами CI и
С2, а резисторы Rsi и R 52 обеспечивают требуемый ток
96
Щ
базы открытого транзистора и создают цепь перезаряда
соответствующего конденсатора связи.
Допустим, транзистор VI закрыт, а V2 открыт. Кон
денсатор С2, левой обкладкой подключенный к коллек
тору закрытого транзистора, а правой через участок
база — эмиттер открытого транзистора — к земле, за р я
ж ается до напряжения, близкого к напряжению
коллектора. Напряжение на разряжаю щ емся конденса
торе CI, приложенное к базе запертого транзистора,
достигает значения, при котором транзистор откры ва
ется. Это приводит к появлению коллекторного тока
транзистора VI и возникновению положительного скач
ка напряжения на коллекторе, который через конденса
тор С2 поступает на базу открытого транзистора V2.
Ток его базы и коллектора уменьшается и вызывает
отрицательный скачок напряжения на коллекторе, кото
ры й через конденсатор С1 подается на базу транзистора
VI. Транзистор V2 закрывается.
В результате под действием положительной обрат
ной связи возникает лавинообразное опрокидывание
мультивибратора в новое временно устойчивое положеHHie. Процесс кратковремен, и можно считать, что за
Ьремя опрокидывания напряжение на конденсаторах не
изменяется. Через открытый транзистор VI заряженный
конденсатор С2 оказывается педключенным к участку
эмиттер — база транзистора V2. Поэтому в первый мо
мент к базе приложено напряжение Uc2 =U u. поддержи
вающее запертое состояние транзистора. Конденсатор
С2 разряж ается через открытый транзистор VI. источ
ник питания Ек и резистор /?б2 с постоянной времени
разряда Tp2 ^ C 2 R 62 , стремясь перезарядиться от напря5кения J7c~— Uk до напряжения +U k. Одновременно
конденсатор CI заряж ается от источника Uk через учас
ток эмиттер — база открытого транзистора VI, резистор
Rb3 - Постоянная времени цепи заряда Tai^CIR^s выби
рается такой, чтобы конденсатор С1 зарядился раньше,
чем напряжение на одновременно разряжаю щ емся к о н -,
денсаторе С2 достигнет нуля, тогда транзистор отпира
ется. Открытое состояние транзистора VI после оконча
ния заряда конденсатора CI обеспечивается протекани
ем тока базы через резистор /?6iКогда напряжение на разряжаю щ емся конденсатвре
С2 становится равным нулю, транзистор V2 открыпает^
"ся, что вызывает уменьшение коллекторного тока тран
7 Заказ 5067
97
hbix
In
icp
Рис. 36. Схема нуль-индикатора с двумя
ниями (а) и его характеристика (б ).
устойчивыми состоя
зистора VI. Появляется положительная обратная связь,
приводящая к лавинообраз'ному опрокидыванию муль
тивибратора в положение, при котором VI закрыт, а V2
открыт. Временно устойчивое состояние поддерживается
разрядом конденсатора С1 через открытый транзистор
V2, источник питания, резистор R k\. В то ж е время кон
денсатор С2 заряж ается от источника Ик через участок
эмиттер — база открытого транзистора V2 и резистор
R ku подготавливая схему к поддержанию очередного
временно устойчивого положения: VI открыт, V2 за
крыт. Это произойдет при перезарядке конденсатора С1,
когда напряжение U o i^ U c i станет равным нулю. Д а л ь
ше процессы повторяются.
Нуль-индикатор представляет собой полупроводни
ковый усилитель с положительной обратной связью, ра
ботающий в режиме переключения и реагирующий на
величину и знак разности двух сравниваемых электри
ческих величин (токов или напряжений). Схемы полу
проводниковых нуль-индикаторов могут быть разные,
но принцип действия их одинаков. Выходная величина
нуль-индикатора при его срабатывании или возврате,
как и реле, изменяется скачкообразно. На рисунке 36, а
изображена схема двухкаскадного нуль-индикатора с
токовым выходом и двумя устойчивыми состояниями.
Она включает два усилительных каскада, выполненных
на транзисторах VI и V2 и охваченных положительной
обратной связью Ro.c что обеспечивает работу транзис
торов в ключевом режиме. Электромеханическое реле
98
f
i
;
ДС, включенное на выходе, соответствует варианту с кон
тактным выходом, при бесконтактном выходе вклю ча
ется резистор. Н а вход схемы подают сигнал рассогла
сования сравниваемых величин в виде малого тока или
напряжения. Если входной сигнал /вх= 0, транзистор
VI открыт, а транзистор V2 закрыт — первое устойчи
вое состояние, ток реле равен /о (рис. 36,6). При 1вхФ0
имеющееся положительное направление (указано стрел
кой) и по значению равное току срабатывания /ср при
водит к закрытию триода VI, открытию триода V2 и
срабатыванию реле К. Если входной ток уменьшится до
величины тока возврата /в, работа схемы происходит в
обратном порядке, то есть схема скачкообразно перехо
дит в первоначальное состояние.
Чтобы устранить пробой коллекторного перехода
триода V2, при его закрытии включается цепочка V2 —
R4. Диод V4 открывается только в момент закрытия
V2 и пропускает ток самоиндукции обмотки реле.
Цепь VI — R3 служит для компенсации изменения
чувствительности схемы с изменением температуры. С
ростом температуры падение напряжения на переходе
эмиттер — база триода VI уменьшается, поэтому потен
циал точки 1 возрастает. Наличие V8 увеличивает по
тенциал точки 2 с увеличением температуры за счет
уменьшения падения напряжения на диоде VS.
Нуль-индикатор с тремя устойчивыми состояниями
представляет собой соединение двух нуль-индикаторов,
изображенных на рисунке 36, а.
1
3.6. Стабилизаторы
I
L
Г
‘
Стабилизатор — это элемент, который автоматически
поддерживает постоянным какой-либо параметр. Напрнмер, в электрических цепях обычно возникает необходи
мость стабилизировать напряжение, ток, частоту. В сис
темах автоматики чаще всего стабилизируют напряж е
ние. Если изменения напряжения влияют на изменения
параметров элементов автоматики, то напряжение ста
билизируют с точностью 1 . . . 5 % . Если заданное значение параметра, управляемого системой, устанавлива
ется в виде некоторого напряжения, поступающего от
задаю щего элемента, то напряжение стабилизируют с
точностью 0 , 1 . . . 0,001 % и выше, так как любое изме7*
нение задающего напряжения скажется на точности р а
боты автоматической системы.
Точность работы
стабилизатора
характеризуется
коэффициентом стабилизации, показывающим, во сколь
ко раз относительное изменение воздействующего ф ак
тора больше относительного изменения стабилизирован
ного фактора. Так, для стабилизатора напряжения воз
действующим фактором будет входное напряжение, а
стабилизированным фактором — выходное напряжение.
Тогда коэффициент стабилизации
Д{/вх I AUshix
t /вх /
h
I
]
/
/
R„
I
— i—
t /вых
Стабилизаторы по принципу действия делят на пара
метрические и компенсационные.
Параметрические стабилизаторы ^используют в своей
работе элементы с нелинейными статическими харак
теристиками. Эти стабилизаторы могут действовать в
цепях постоянного, и переменного тока. К элементам с
нелинейными характеристиками относятся а к т и в н ы е
н е л и н е й н ы е с р н р о т и р у 1 е н и я : бареттёры, тер
мисторы, стабиловольты, полупроводниковые диоды-ста
билизаторы, полупроводниковые термосетфотивления,
обладающие отрицательным температурным коэффици
ентом, и р е а к т и в н ы е н е л и н е й н ь ^ е с о п р о т и в
л е н и я ; дроссели с насыщенными ф’ёрромагнитными
сердечниками и конденсаторы с нелинейными диэлект
риками (варнконды). В практике чаще других приме
няют дроссели в комбинации с линейными конденсато
рами — ф е р р о р е 3 о н а н с н ы е с т а б и л и з а т о р ы .
Стабилизаторы, выполненные на реактивных линейных
элементах, пригодны для стабилизации только перемен
ного напряжения или тока. Как правило, у них выше
К П Д, но их работа зависит от частоты и, кроме того,
они увеличивают реактивные токи.
По характеру вольт-амперных характеристик актив
ные нелинейные сопротивления делятся на два типа:
сопротивления, у которых вольт-амперная характеристи
ка имеет участок, где ток I более или менее постоянен
для определенных пределов изменения подводимого на
пряжения (рис. 3 7 ,й), и сопротивления, вольт-амперная
характеристика которых имеет участок, где падение
напряжения V можно считать постоянным для опреде
ленных пределов изменения тока (рис. 37,6).
100
« 1 -С Э -г
%
Рис. 37. Вольт-амперные
характеристики
нелинейных
резисторов:
о — с нелинейностью типа R у-, б — с нелинейностью типа Я.
®
а-ф е р р о р е зо н а н с н о г о ;
и схемы стае-к о м п ен -
■'I К сопротивлениям первого типа относятся лампы на
каливания и бареттеры. С увеличением подводимого к
лампам накаливания напряжения возрастает температу
ра металлической нити и ток усиливается не пропорцио
нально подаваемому напряжению, а значительно мед
леннее. ( Б а р е т т е р ы представляют собой стеклянный
баллон, заполненный водородом, в котором располож е
на проволока из чистого ж елеза. При включении такого
сопротивления последовательно с сопротивлением на
грузки /?н (рис. 37, в) с изменением входного напряж е
ния в определенных пределах ток в цепи, а следователь
но, и выходное напряжение 6^вых=/н/?н будут изменять
ся незначительно. ИПоскольку нелинейное сопротивление
стибилизирует то< а не напряжение, то при изменении
сопротивления нагрузки выходное напряжение будет
меняться. Если такие изменения нежелательны, то со
противление нагрузки шунтируют постоянным сопротив
лением /?ш (показано На схеме пунктиром). При этом,
однако, необходимо применение более мош,ного нели
нейного сопротивления.
нелинейным сопротивлениям второго типа относят
_,полупроводниковые терморезисторы и наиболее часто
101
применяемые стабнловольты и полупроводниковые дио
ды-стабилизаторы.
С т а б и л о в о л ь т ы являются лампами тлеющего
разряда с холодными электродами больших размеров.
(До определенного значения тока характер Р^зряда ста%нловольта, а следовательно, и падение напряжения на
нем сохраняются, изменяется лишь участвующая в раз
ряде площадь электродов. В этом и заключается стаби
лизирующее действие
рассматриваемого
эл ем ен т^
Дальнейшее увеличение тока приводит к образованию
дугового разряда и выходу стабилизатора
рактерно, что зажигание стабиловольта
тлеющего разряда) происходит при напряжении больmeiM, чем необходимо для горения.
Сдолупроводниковые
диоды-ста били‘
ч а Т о с ы — это германиевые или кремниевые диоды, к
X p L приложено обратное напряжение, н е с ^
превышающее напряжение пробоя, которое в^ нависи
мости от конструкции различно (от сотых долей ЯР Л
ниц вольт, в то время как нижний предел для стабиловольтов порядка десятка вольт^у
Схема включения стабиловольтов и диодов-стац^лизаторов показана на рисунке 37, г. Стабилизация №
ходного напряжения обеспечивается и при изменении
входного напряжения С/вх и при изменении с о ^ о т и в
ния нагрузки
Увеличение выходного
любой причине приводит к росту тока / с , а излишек
выходного напряжения поглощается
тивлением /?„, то есть
Уровень стабилиза
ции не превышает 0,1 %.
В
ф е р р о р е з он а и с н о м
стабилизаторе
(рис. 3 7 , д) поддержание неизменного выходного напря
жения осуществляется за счет того, что дроссель L] ра
ботает в ненасыщенном режиме при постоянной и н д у к
т и в н о с т и , а дроссель Lz — в насыщенном
режиме. П о
этому повышение напряжения на дросселе L 2 приводит
к резкому усилению тока и как следствие
к увеличе
нию падения напряжения на дросселе Lj. Чтобы полу
чить насыщение дросселя L 2 при малых токах, потреб
ляемых от сети, параллельно ему включается конденса
тор С.
Компенсационные стабилизаторы могут быть выпол
нены на лампах и полупроводниках. Н а рисунке 37, е
изображ ена схема транзисторного стабилизатора. Она
включает усилительный орган — триод VI и измеритель
ный орган — диод V2. Резистор выполняет роль отри
цательной обратной связи. При изменении входного на
пряжения Ubx триод VI препятствует отклонению вы
ходного напряжения L/вых. Если Ubx увеличится, то
возрастет ток через диод V2 , а это приведет к увеличе
нию напряжения на резисторе /?б и как следствие — к
частичному закрытию триода VI и увеличению падения
напряжения на нем. Это препятствует увеличению вы
ходного напряжения стабилизатора. Значение выходного
напряжения практически равно обратному напряжению
на стабилизаторе V2.
Контрольные вопросы и задания. 1. Что называется усилитель
ным элементом и каково его назначение? 2 . Перечислите основные
требования, предъявляемые к усилителям автоматических систем.
3. Усилители каких типов вы знаете? 4. Н азовите достоинства и
недостаткн электронных усилителей. 5. Объясните принцип действия
магнитного усилителя. 6 . Каково влияние частоты переменного тока
на работу магнитного усилителя? 7. В чем заключается действие
обратны х связей магнитных усилителей? 8 . Расскаж ите о релейном
реж им е магнитного усилителя. 9. Расскаж ите о работе гидравли
ческих и пневматических усилителей. 10. Каково назначение стаби
лизаторов? 1 1. Перечислите основные типы стабилизаторов. 12. Как и » нелинейные элементы применяют в стабилизаторах? 13. Чем
определяется точность стабилизации
стабилизатора?
14.
В чем
основные отличия параметрических стабилизаторов
от компенса
ционных?
ч
Лабораторная
работа
№ 4
Исследование магнитного усилителя
С одерж ание работы. Изучить устройство, принцип действия п
свойства магнитного усилителя. Снять характеристики однотактного магнитного усилителя / = / ( / у ) б ез обмотки и с обмоткой смещения, ^ 3 обмоток и с обмотками внутренней и внешней обратных
связей. Перевести магнитный усилитель в релейный режим и снять
его характеристику. Построить кривые и определить коэффициент
усиления по току.
Описание -лабораторной установки. Схема лабораторной уста
новки для снятия характеристик аналогична приведенным на ри
сунке 32. Дополнительно в цепь к аж дой обмотки включают изм е
рительные приборы.
П орядок вынолиеиия работы. 1. Собрать схем у лабораторной
установки (рис. 31, е ), и, не включая обмотку смещения,
сн^чъ
зависимость I = f( ly ) при изменении тока управления /у. 2. Вклю
чить обмотку смещения и, задаваясь различными значениями тока
смещ ения, снять ряд характеристик /=/С/у), увеличивая ток уп
равления /у от О д о / = /ун. 3. Включить внешнюю обратную связь
103
102
г»
при отключенной обмотке смещения (см. рис. 32, а ) и снять х а
рактеристику I - f ( I y ) . 4. Включить внутреннюю связь (рис. 32,6)'
и снять ту ж е характеристику. 5. Выбрав число витков обмотки
обратной связи магнитного усилителя таким, чтобы / o .c t f o .c S
^ ( w \ - \ - W 2 ) ! , перевести его в релейный режим и снять релейную
характеристику. 6. Д л я каж дой характеристики получить коэф ф и
циент усиления по току и сравнить их значение.
С одерж ание отчета. Отчет дол ж ен содерж ать схемы испытаний,
краткое описание принципа действия и устройства магнитного уси
лителя, таблицы с результатами опытов, построенные по ним х а
рактеристики, технические данные измерительных приборов и о б о
рудования, заключение по работе.
ГЛАВА
IV
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
4.1. Общие сведения
Исполнительными механизмами автоматических сис
тем называю т устройства, воздействующие непосредст
венно или через управляющий орган на объект управ
ления. В исполнительный механизм входит двигатель
и передаточное устройство. В зависимости от вида дви
гателя различают исполнительные механизмы: э л е к
трические, механические, гидравлические и пневматиче
ские. Наибольшее распространение в системах автома
тики получили злектрические и гидравлические испол
нительные механизмы. Электрические исполнительные
механизмы в зависимости от типа исполнительного дви
гателя делятся на злектромагнитные и злектродвигательные. К исполнительным элементам такж е относят
злектрические реле и шаговые искатели. Часто усили
тельные и исполнительные механизмы представляют
собой единое устройство. Основными показателями, х а
рактеризующими регулировочные свойства исполнитель
ных механизмов, является коэффициент усиления по
мощности, усиление на вы ходе механизма,
линейное
или угл овое перемещение, частота вращения и т. п.
Так как исполнительные механизмы изменяют положе
ние управляющего органа в соответствии с поступаю
щими "сигналами от датчика, измеряющего значения уп
равляемой величины, поэтому к ним предъявляют оп
ределенные требования: мощность на выходе испол
нительного механизма долж на быть достаточной для
перемещения управляющего органа с заданной ско
ростью при всех режимах; перемещение исполнитель
ного механизма на выходе должно быть согласовано
с соответствующим перемещением управляющего орга
на; выходная величина
исполнительного механизма
долж на быть (по возможности)
пропорциональной
входному сигналу.
105
4.2. Электромагнитные механизмы
Ш ирокое применение в системах автоматики нахо
дят
электромагнитные
исполнительные
м е х а н и з м ы д и с к р е т н о г о д е й с т в и я . Их ис
пользуют для управления различного рода регулирую
щими и запорными клапанами, вентилями, золотника
ми и т. п. По виду движения исполнительного органа
(шток, выходной вал) злементы подразделяют на пря
моходовые электромагниты с прямолинейным движе
нием и электромагнитные муфты с ераи^ательным д в и
жением. В зависимости от типа, конструктивного ис
полнения и условий применения выходной величииои
этих механизмов может быть: для элементов с прямо
линейным движением рабочего органа — п е р е м е щ е
н и е , с к о р о с т ь , у с и л и е ; для элементов с вращ а
тельным движением рабочего органа — у г о л
пово
рота, ч астота в р а щ е н и я или р а з в и в а е м ы й
и м в р а щ а ю щ и й момент.
Входной величиной (управляющим воздействием)
электромагнитных исполнительных механизмов явл я
ется электрический ток в намагничивающей обмотке,
создающий магнитное поле и действующий через него
на рабочий орган.
Прямоходовые электромагнитные механизмы, назы
ваемые с о л . е н о и д н ы м и, используют в системах
автоматики позиционного управления, так как уп
равляющий орган (вентиль, клапан) может находиться
только в двух конечных положениях, соответствующих
двум положениям сердечника электромагнита; включен
или выключен.
В настоящее время наибольшее распространение по
лучили электромагнитные приводы серии Э-В, которые
по принципу действия делятся на две группы: приводы
ЭВ-1 и ЭВ-2 рассчитаны на длительный режим рабо
ты от сети постоянного тока напряжением ПО и 220 В
или переменного тока напряжением 220 и 380 В, име
ют ход штока 6 и 18 мм при тяговом усилии около
4 И; привод ЭВ-3 рассчитан на кратковременный ре
жим работы в 1 мин при усилии 100 Н. Он имеет два
электромагнита; один тяговый, который служит для от
крывания рабочего органа, а другой, являясь приводом
механической защелки, удерживает рабочий орган в
открытом положении и обеспечивает его закрывание.
Рис. 38. Схемы конструкций электромагнитных муфт;
а — сухого трения; б '— вязкого трения; в — индукционная.
Обе катушки находятся под током только в момент
переключения рабочего органа. При подаче питания на
катушку главного электромагнита его якорь втягива
ется, рабочий орган открывается и удерживается в от
крытом положении защелкой, цепь катушки главного
электромагнита разрывается с помощью конечного вы
ключателя. Подачей напряжения на катушку электро
магнита защелки рабочий орган освобождается и под
действием собственного веса или возвратной пружины
закроется, а конечный выключатель отключит электро
магнит защелки. Недостаток электромагнитных кл ап а
нов и вентилей — возможность возникновения гидрав
лических ударов в трубопроводах с жидкостями при
практически мгновенных переключениях.
Э л е к т р о м а г н и т н ы е м у ф т ы служат связую
щим звеном между приводом и рабочим механизмом.
В зависимости от вида связи их разделяю т на фрик
ционные муфты сухого трения, муфты вязкого трения
и различные индукционные муфты.
На рисунке 38 изображены конструктивные схемы
электромагнитных муфт сухого (а ), вязкого ( б ) трения
и индукционная (в).
Муфта сухого трения состоит из двух полумуфт: ве
дущей 5 и ведомой 6 , насаженных на валы 3 я 9. О б
мотка 1 запитывается током через кольца 2 и щетки 4.
Полумуфта 6 перемещается по шлицам 8 вдоль вала 9,
который связан с валом рабочего механизма и отж и
мается от полумуфты 5 пружиной 7. Магнитное поле,
преодолевая усилие пружины, притягивает ведомую полумуфту к ведущей. Силы трения между полумуфтами
позволяют передать крутящий момент с ведущего вала
на ведомый. Д ля увеличения передаваемого крутящего
107
106
V?
момента муфты изготавливают многодисковыми. Выпу'^скают муфты сухого трения типа ЭМ с номинальным
моментом от 10 (ЭМ -12, 12 А) до 1000 Н -м (ЭМ-62,
62А) с наибольшей частотой вращения соответственно
3000 и 1500 об/мин и мощностью катушки возбужде
ния 1 1 ,5 ... 50 Вт.
Муфты вязкого трения — ферропорошковые или маг
нитоэмульсионные работают по принципу намагничи
вания магнитного порошка /, образуя сцепляющий
слой между ведомым 2 и ведущим 4 элементами муф
ты. С увеличением магнитного потока обмотки нам аг
ничивания 3 возрастает величина передаваемого кру
тящего момента. Эти муфты различают по конструк
тивному исполнению, расположению катушек (унипо
лярные, многополюсные), их числу (однокатушечные,
многокатушечные); по форме рабочей поверхности (ди
сковые, цилиндрические, барабанные, конусные); по
числу рабочих зазоров (одно- и многозазорные); по ви
ду токопроводов (с контактными кольцами и бескон
тактны е); по скорости срабатывания (малоинерцион
ные и инерционные). Эти муфты не боятся перегрузок,
как исполнительные элементы — быстродействующие с
постоянной времени 0 ,0 0 5 ... 0,008 с и коэффициентом
передачи, достигающим 3500.
Индукционная муфта скольжения состоит из двух
основных частей: ведущего массивного якоря 3, жестко
связанного с валом 2 приводного двигателя 1 , и ведо
мого индуктора 5, жестко соединенного с выходным
валом 6 рабочего механизма 9. Обмотка возбуж де
ния 4, расположенная между зубчатыми частями индук
тора 3, питается током возбуждения через кольца 7
и щетки 8 .
При работе ток, протекающий в индукторе, создает
магнитный поток, который в связи с наличием в индук
торе полюсов (зубцов и пазов) наводит в якоре ЭДС.
ЭДС вызывает появление вихревых токов в якоре, ко
торые, взаимодействуя с магнитным потоком полюсов,
создают электромагнитный момент, увлекающий ведо
мую часть муфты в ту ж е сторону, что и ведущая. Ч ас
тота вращения ведомого вала зависит от тока возбуж
дения и момента сопротивления на ведомом валу.
Принцип работы такой муфты аналогичен работе
асинхронного электродвигателя, каждому току возбуж
дения соответствует своя механическая характеристика.
108
Д л я рабочих механизмов малой мощности выпус
кают муфты типа ПМС с номинальными моментами
1,7 — 30 Н -м , для бесступенчатого регулирования ско
рости в диапазоне 1 :8. Муфты серии ИМС с номи
нальными моментами 7 0 ... 1600 Н -м применяют для
рабочих механизмов большой мощности.
4.3. Электродвигательные механизмы
i
Электродвнгательные исполнительные механизмы
состоят из двигателя, редуктора и тормоза. Сигнал уп
равления одновременно подается на двигатель и тор
моз, при этом двигатель растормаживается и приводит
в движение рабочий орган. При снятии сигнала двига
тель выключается, а тормоз останавливает движение
рабочего органа.
Простота схем, малое число элементов, участвую
щих в формировании управляющего воздействия, и вы
сокие эксплуатационные свойства обеспечили широкое
применение этих исполнительных элементов при созда
нии систем автоматики.
Существует большое число электродвигательных ис
полнительных механизмов, которые классифицируют
по различным признакам.
По виду движения исполнительного органа разли
чают однооборотные — МЭО, многооборотные — МЭМ
й прямоходные — МЭП. Исполнительные элементы МЭО
применяют для рабочих органов с вращательным и по
ступательным движением; МЭМ применяют для трубо
проводной арматуры с управляющими органами, имею
щими большие площади проходного сечения; МЭП
применяют для арматуры, где управляющие органы
имеют малую и среднюю площадь проходного сечения
затвора.
По скорости движения электродвигательные испол
нительные механизмы делят на элементы с постоянной
■ii' переменной скоростями передвижения рабочего ор
гана.
Исполнительные элементы с постоян
ной с корос тью д в и ж е н и я р а б о че г о орган а делятся на позиционные типа Д Р и пропорцио
нальные с резисторными или индукционными устройст
вами обратной связи типа МЭО, МЭМ, МЭП, М ЭК,
КДУ, ИМ и др. Их используют в сочетании с двухпо109
Г'р 4 L '.
Рис. 39. Схемы управления электродвигательными исполнительны
ми механизмами;
а — постоянной сксросгн перемещения рабочего органа; б — переменной
скорости.
ОПЦИОННЫМИ И трехпозиционнымн регуляторами, а такж е с пропорциональными (П) и пропорционально-ин
тегральными (П И ) регуляторами.
Исполнительные элементы с перемен
ной с к о р о с т ь ю движения уп равляющ его
о р г а н а используют в основном с интегральными (И ),
' ( П ) , (П И ) и пропорционально-интегрально-дифференциальными (П И Д ) регуляторами.
П о способу управления и с п о л н и т е л ь н ы е м е
х а н и з м ы делятся на контактные с релейно-контак
торными блоками управления и бесконтактные с уп
равляющими устройствами непрерывного действия на
основе магнитных усилителей.
В качестве исполнительных двигателей используют
однофазные, двухфазные и трехфазные короткозамк
нутые асинхронные двигатели.
Из всего многообразия электродвигательных испол
нительных механизмов в качестве примера рассмотрим
исполнительный механизм постоянной скорости пере'м ещ ения рабочего органа типа КДУ (рис. 39,а) и пе
ременной скорости перемещения рабочего органа типа
БИ М (рис. 39,6).
Исполнительный механизм типа
КДУ
включает
трехфазный асинхронный короткозамкнутый двигатель
М с редуктором, реверсивный магнитный
пускатель
с ключом управления QS, дистанционный указатель
положения (ДУП) и резисторный или индуктивный
НО
указатель положения. Ключ управления обеспечивает
требуемое направление вращения: КП — В перед К З —
Назад. Резистор Я (ДУ П) с резистором R^c образуют
мостовую измерительную схему, в диагональ которой
включен миллиамперметр Р А , проградуированный в
процентах от максимального угла поворота рабочего
вала. Угол поворота ограничивается концевыми выклю
чателями К В 2 и КВ4. Выключатели КВ1 и КВЗ служат
для предупреждающей сигнализации. При приближе
нии к крайнему положению размыкается КВ1, вклю
чается сигнальная лампа Л1. Дальнейшее движение
исполнительного механизма приводит к размыканию
КВ2, катуш ка К П обесточивается, и двигатель М от
ключается. Д ля противоположного движения
ключ
Q 5 необходимо перевести в противоположное положе
ние с использованием в цепи управления выключате
лей К В З и КВ4.
Мощность двигателя 2 5 0 ...4 0 0 Вт, частота вращ е
ния 1500 об/мин, передаточное число редуктора 2000
перестановочный момент 2 5 0 ...1 0 0 0 Н -м , время одного
оборота 120 с, угол поворота 4 5 ...2 4 0 ° , сопротивление
резисторного датчика обратной связи 34 Ом. Схема ис
полнительного элемента переменной скорости с бескон
тактным управлением типа БИ М включает фазочувст
вительный усилитель ФЧУ, магнитные усилители МУ1,
МУ2 и обратную связь Ro.c по частоте вращения испол
нительного двухфазного асинхронного двигателя, ис
пользующую косвенный метод измерения частоты вра
щения двигателя с помощью положительной обратной
связи по току от трансформатора тока ТА и отрица
тельной обратной связи по напряжению от трансф орма
тора напряжения TV. Обмотки двигателя включены по
следовательно с рабочими обмотками усилителей Л1У/
и М У2. При t/Bx=0 токи в обмотках управления МУ
равны нулю, сопротивление рабочих обмоток М У оди
наковы и значительно превосходят по величине сопро
тивление обмоток двигателя. Напряжение на конден
саторе С равно нулю, поэтому двигатель неподвижен
и на рабочий орган через редуктор не передается дви
жение. Если f/gjjijito, то в зависимости от его величины
н фазы изменяются токи в выходных цепях ФЧУ и в
обмотках управления МУ, а следовательно, и сопротив
ление рабочих обмоток МУ^ При одной фазе работает
усилитель МУ1, при изменении фазы
на 180° запи111
рается МУ1 и открывается МУ2. Частота вращения
двигателя зависит от величины управляющего сигнала.
Диапазон пропорциональной зависимости между час
тотой вращения двигателя и величиной управляющего
сигнала {Увх определяется величиной обратной связи,
то есть положением движ ка Ro.c- Конечные выключа
тели КВ1 и КВ2 останавливаю т двигатель при подходе
управляющего органа УО в крайнее положение, разры
вая цепь обмоток управления МУ. Мощность двухф аз
ного двигателя исполнительного элемента 60 Вт, час
тота вращения 1500 об/мин, передаточное число редук
тора 5400, номинальный перестановочный момент
25 Н -м , пусковой момент 80 Н -м ; время одного оборо
та 120 с.
та преобразованный сигнал, сравнивает его с зад ан
ным и в случае отклонения от него формирует коман
ду на срабатывание реле, то есть передает воздействие
исполнительному элементу.
И с п о л н и т е л ь н ы й э л е м е н т (у контактных ре
л е — контактная система), приняв команду от проме
жуточного, воздействует на управляемую цепь, изменяя
ее параметры. При этом различаю т реле прямого дей
ствия, когда исполнительный элемент оказывает непо
средственное влияние на контролируемую цепь, и реле
косвенного действия, когда исполнительный
элемент
воздействует на контролируемую цепь через другие ап
параты.
Основной характеристикой реле является статичес
4.4. Реле
то есть зависимость выходной величины у от входной
X. Эта характеристика для большинства реле имеет
гистерезисную петлю.
кая
Релейные исполнительные элементы (реле) щироко
применяются в автоматических системах. Классифици
руют реле по следующим признакам: параметру, от
которого они приходят в действие, — токовые, напряж е
ния, мощности, времени и др.; виду физических вели
чин, на которые реле реагирует — электрические, ме
ханические, магнитные, тепловые,' химические, акусти
ческие и т. д.; назначению — реле защиты, управления,
автоматики, связи и т. п. В данном разделе будут рас
смотрены только получившие наибольшее распростра
нение контактные электрические реле, реагирующие на
различные электрические параметры. В устройстве та
ких реле можно выделить три основных функциональ
ных элемента; воспринимающий, промежуточный и ис
полнительный.
В о с п р и н и м а ю щ и й э л е м е н т непосредствен
но реагирует на внешний контролируемый параметр и
преобразует его в физическую величину, необходимую
для дальнейшей работы реле (в контактных реле, как
правило, в механическую силу). Следовательно, воспри
нимающий элемент является двигательным органом,
который у электрических реле может быть выполнен
на электромагнитном, индукционном, электродинами
ческом, магнитоэлектрическом, резонансном и других
принципах.
П р о м е ж у т о ч н ы й э л е м е н т (у контактных ре
л е — пружина), получив от воспринимающего элемен
112
характеристика
(характеристика
управления),
Рис. 40. Виды статических характеристик релейных элементов:
доукпозициоиного нейтрального реле; в — двукпозициопного поле
^ ^ ^
С д в у м я устойчи вы ми состо яния ми ; г и д — трех по зи цио нно го реле.
8 З а к а з 5067
1'ГЗ
Виды статических характеристик реле приведены на
рисунке 40. Характеристики
(рис. 40,а,б) присущи
двухпозиционным нейтральным
р е л е , не
реагирующим на знак входного сигнала. При измене
нии входного сигнала от О до Х2 (рис. 40,о) реле не
изменяет своего состояния. Выходной сигнал у скачко
образно изменяется от г/min ДО Ут&х по достижении вход
ным сигналом значения лгг и остается неизменным,
то есть i/=«/max = const при дальнейшем увеличении Х2.
При уменьшении лгг от значения Х > Х 2 до x = x i у не из
меняется, то есть г/ = г/тах и по достижении входным
сигналом значения Х\ выходная величина скачкообраз
но изменится от г/тах до f/min.
Устройства с характеристикой (рис. 40,6) отлича
ются от устройств с рассмотренной на рисунке 40,а ин
вертированием сигнала. Если входной сигнал л:=0, то
выходной сигнал у=утах, если Х =Х 2 , то у = 0 или име
ет минимальное значение у = у т 1п. На рисунке 40,в
приведена характеристика двухпозиционных релейных
устройств с двумя устойчивыми состояниями. При сня
тии входного сигнала х = 0 реле останется в состоянии,
находящемся до этого. Изменение знака входного сиг
нала меняет знак выходного сигнала.
Характеристики
трехпозиционных
релей
н ы х э л е м е н т о в изображены на рисунке 40,г ,^
Н а рисунке 45,г с зоной нечувствительности и с неод
нозначной зависимостью сигнала на выходе от входно
го, а на рисунке 40,d с зоной нечувствительности.
К основным параметрам, характеризующим работу
реле, такж е относятся следующие.
Параметр срабаты вания — минимальное
значение
входного сигнала, при котором реле действует (сраба
ты вает). Этот параметр характеризует чувствительность
реле. Например, у токовых реле параметр срабаты ва
ния составляет от десятков микроампер до десятков
ампер.
П араметр
отпускания — максимальное
значение
входного сигнала, при котором реле возвращ ается в ис
ходное положение.
Коэффициент возврата представляет собой отноше
ние параметров отпускания и срабатывания.
У электрических реле он всегда меньше единицы
(от 0,4 у электромагнитных до 0,99 у электронных)
114
Хоти
-< 1 .
Хер
Рабочий параметр — наибольшее значение входной
величины, при котором реле длительно находится во
включенном состоянии и работает нормально (воспри
нимающий элемент не перегревается).
Коэффициент запаса при срабатывании (он всегда
больше единицы )— это отношение рабочего параметра
к параметру срабатывания
^з.ср — Л^ср ■>1
Коэффициент запаса при отпускании (возврате) (он
всегда меньше единицы )— это отношение параметра
отпускания к рабочему параметру
Хота
< 1.
Время срабатывания tcp — период от момента по
ступления сигнала на воспринимающий элемент до мо
мента появления сигнала в управляемой цепи. В зави
симости от значения этого параметра различают реле;
безынерционные
(^ср<0,001 с),
быстродействующие
(^ср<0,05 с ), нормальные (^ср = 0 ,0 5 .. .0,25 с), зам ед
ленного действия (^ср=0 ,2 5 ... 1,0 с), выдержки време
ни (^ср> 1,0 с).
Время отпускания ^отп — период момента снятия
сигнала, действующего на воспринимающий элемент до
момента прекращения воздействия исполнительного
элемента на управляющую цепь.
Срок службы — допустимое число срабатываний ре
ле (для различных реле число срабатываний может со
ставлять ог нескольких тысяч до нескольких десятков
миллионов).
Электромагнитное
р е л е — типичный и наи
более распространенный вид электрических реле. На
рисунке 41,а в качестве примера показано устройст' во — реле клапанного типа. В электромагнитную си
стему реле входят скоба / , сердечник 2, полюсный на
конечник 5, якорь 4 и втягиваю щ ая катушка 5. Якорь
и сердечник изготовлены из магнитомягкого м атериа
ла. Когда по обмотке реле протекает ток, якорь при
тягивается к сердечнику, поворачивается относительно
призмы 6 п действует на замыкание контактов 7. При
8»
11Г>
исчезновении тока якорь и контакты возвращаю тся в
исходное положение усилием пружины 8. Наконечник 3
сделан из немагнитного материала (латунь или медь),
чтобы под влиянием остаточного магнитного потока
якорь после отключения тока не оставался притяну
тым к сердечнику.
Электромагнитные реле могут быть постоянного и
переменного тока промышленной и высокой частоты.
Реле постоянного тока
делятся на ней
тральные и поляризованные. У нейтральных реле вое-
...i-ft!. .
\ I
h
ф,
/5^
г
Рис. 41. Схемы конструкций реле:
а — илапаниого типа; б — поляризованного реле; в — перемен
ного тока; г — диаграмм а магнитных потоков.
116
принимающий орган одинаково реагирует на постоян
ный ток независимо от его полярности, а у поляризо
ванных полярность сигнала
влияет на направление
действующего на якорь усилия. Принцип действия по
ляризованных реле иллюстрируется рисунком 41,6. Ес
ли тока в рабочей обмотке w нет, то якорь 1 находит
ся в нейтральном положении, потому что магнитные
потоки 0 1 и 0 2 , создаваемые постоянными магнитами,
равны и противоположны. Контактная группа 3 будет
находиться в разомкнутом состоянии. При подаче в ра
бочую обмотку тока той или иной полярности возни
кает поток 0 3 , который наклады вается на потоки 0 [
и 0 2 (с одним суммируется, а из другого вычитается).
Равновесие нарушается, якорь 1 притягивается к маг
ниту 4 или 5 и, поворачиваясь на оси 2, замы кает ле
вую ил 1ь- 1ф авую пару контактов 3. Д ля создания по
токов 0 1 и 0 2 могут быть использованы электромаг
ниты.
У электромагнитных
реле
переменно
г о т о к а сердечник набирается из листовой трансфор
маторной стали с целью уменьшения потерь на вихре
вые токи. Д ля устранения вибрации контактов, вызы
ваемой периодическим изменением значения и направ
ления синусоидального тока, а следовательно, и уси
лия, создаваемого его магнитным полем, на торец
электромагнита насаж ивается медный короткозамкну
тый виток (рис. 41,в). М агнитный поток 0 делится на
два составляющих потока 0 i и 02- Поток 0 i (рис. 41,г)
наводит в короткозамкнутом витке ток, магнитный по
ток 0 к которого суммируется с потоком 0 , и вычита
ется из потока 02 (геометрически). В результате полу
чаются потоки 0 1 и 0 2 , сдвинутые один относительно
другого на угол ф. Каждый из потоков создает тяговое
усилие, а их результирующее усилие будет иметь тем
меньше пульсаций, чем больше угол ф.
Реле с магнитоуправляемыми контак
т а м и , называемые такж е герконами (герметизиро
ванные контакты), представляют собой стеклянную ам
пулу 1 (рис. 42), из которой выкачан воздух — в а к у
умные герконы, или заполненную инертным газом (азо
том, аргоном ) — газонаполненные герконы. В ампулу
впаяны тонкие упругие ферромагнитные пластинки
(электроды 2 ), выполняющие одновременно роль кон
тактов, упругих элементов и части магнитопровода. Н а
«17
пластины
герконов
наносят покрытия из
хорошо проводящих
материалов
(сереб
ра, золота, родия).
Ток, протекающий по
катушке 3, при пода
че сигнала на вход
реле, создает маг
нитный поток, зам ы
кающийся
внутри
катушки по плас
тинкам, которые на
магничиваются
и
Рис. 42. Р ел е с магнитоуправляемыми
контактами.
приобретают проти
воположную поляр
ность. М ежду пластинками возникают силы притяжения,
которые замыкаются, и на выходе появляется сигнал.
При снятии входного сигнала пластины возвращаются
в исходное положение. Промышленность выпускает
ряд типов герконов (КЭМ-1, КЭМ-2, КЭМ-3, МК4,
МКВ, МКП, МУК, МУП, М КО и др.) с размерами ам
пулы: длиной 2 0 ... 50 мм и диаметром несколько мил
лиметров. Намагничивающая сила колеблется от 25 А
(для М КО) до 250 А (для М К П ), время срабатывания
5 0 ...2 5 0 0 МКС, коммутируемый ток до 1,0 А и более
при напряжении до 5 0 ...6 0 В, число срабатываний
10®... 10®, сопротивление контактного перехода 0 ,0 5 ...
0,2 Ом.
Выпускаются
различные типы реле с герконами:
РЭС42 — с одним контактом КЭМ-2; РЭС43 — с двумя
контактами КЭМ-2;
РЭС44 — с тремя
контактами
КЭМ-2 и др.
Реле времени представляют собой устройства, кон
струкция которых содержит специальный узел, обеспе
чивающий задерж ку появления (исчезновения) выход
ного сигнала после подачи (снятия) входного.
Выдержки времени до 5 с можно получать посред
ством несложных схемных решений, которые позво
ляют замедлить нарастание или спадание токов в об
мотках электромагнитных реле постоянного тока! Д ля
этого, как показано на рисунке 43, параллельно'обмотке реле можно включить резистор (а ), полупроводни
ковый диод (б ), конденсатор ( в ) или использовать ко
V
118
роткозамкнутый виток. Ш унтирование обмотки реле ре
зистором или диодом (рис. А3,а,б) позволяет после
отключения ключа 5 поддерживать протекание тока по
обмотке в прежнем направлении за счет ЭДС само
индукции, возникающей в обмотке. Подбором емкости
конденсатора С и сопротивления R можно в широких
пределах менять продолжительность времени зад ерж
ки срабатывания реле (рис. 43,в).
Д л я создания выдержки времени больших размеров
широко применяют электромагнитные реле времени
с электромагнитным, пневматическим
и различными
механическими замедлениями с помощью устройств,
пристраиваемых к реле, электронные (полупроводни
ковые), моторные и д р./
В реле времени постоянного тока с электромагнит
ной задержкой задерж ка в срабатывании или ртпускании создается электромагнитным демпфированием, осу
ществляемым специальной
короткозамкнутой обмот
кой или гильзой из меди, латуни или алюминия, р аз
мещенной на магнитопроводе реле. Эти реле просты
и надежны, выдержка времени составляет 0 ,1 5 ... 10 с
и зависит от толщины немагнитной прокладки между
якорем и сердечником и натяжения пружины. Н едо
статки реле — большие габариты и небольшой диапа
зон выдержек времени.
В электромагнитном реле времени с пневматичес
кой задержкой задерж ка создается
пневматическим
механизмом, пристроенным к приводному механизму
электромагнитного типа. Реле типа РВП-72 имеет вы
держ ку времени 0 ,2 ... 180 с. Оно рассчитано на пере
менное напряжение 127, 220 В и имеет разные наборы
контактов: замыкающие, размыкающие с выдержкой
’
п
к
Рис. 43. Схемы увеличения вы держ ек времени и исследования
реле.
1(Г
времени при замыкании или размыкании, а такж е
мгновенно срабатывающие контакты.
Д л я получения различных по величине регулируе
мых выдержек времени по нескольким выходным це
пям, что позволяет применять их при программном уп
равлении, широкое применение находят моторные ре
ле времени. Привод в этих реле выполняется от синх
ронного электродвигателя, вращение от которого через
редуктор и муфту сцепления с электромагнитным при
водом передается на кулачковый валик, кулачки кото
рого переключают выходные контакты через опреде
ленные заранее установленные промежутки времени.
Величина выдержки времени регулируется изменением
передаточного числа редуктора и положением кулач
ков. Выпускают различные типы моторных реле; так,
для реле серии ВС -10 с синхронным двигателем преде
лы выдержек времени составляют 2 . . . 6 0 с для
ВС-10-31; 15 с . . . 9 мин для ВС-1-34 и 1 . . . 2 4 ч для
В С -10-38. Число выходных цепей равно трем или
шести.
Д л я программного управления периодическими тех
нологическими процессами широкое применение нахо
дят командные электропневматические приборы (К Э П ).
Так, КЭП-12У может управлять 12 электрическими
или пневматическими цепями. Реле выбирают в соот
ветствии с техническими данными, электрическими ре
жимами работы и условиями их эксплуатации. Тип ре
ле зависи,т от рода тока, напряжения питания, величи
ны коммутируемых токов и выходного напряжения,
времени срабатывания и отпускания, числа контактов,
габаритов и массы.
Особое внимание необходимо обращ ать на соответ
ствие номинальных данных обмоток реле и контактов
режимам их работы в различных системах автоматики.
Рабочие напряжения и токи в катушках реле долж
ны соответствовать паспортным данным выбранного
реле. Отклонение напряжения обмоток реле неж ела
тельно. При выборе учитывают не только величину, но
и род коммутируемого тока, характер нагрузки, со
противления контактов, количество и частоту переклю
чений. Коммутация активных и активно-индуктивных
нагрузок вызывает возникновение искрового разряда
при размыкании цепи, при необходимости применяют
искрогасительные контуры.
120.
4.5. Шаговые искатели
Г
Ш аговые искатели являю тся электромагнитными
импульсными переключателями, передвигающими кон
тактные щетки при каждом импульсе с одного непод
вижного контакта (ламели) на другой. Переключение
может происходить в начале импульса — искатели пря
мого действия и после окончания импульса — искатели
обратного действия.
В шаговом искателе прямого действия (рис. 44, с)
ламели 1 располагают по дуге. Они занимают */з или
•/г окружности, и поэтому каж д ая щетка 2 состоит из
трех или двух лучей, сдвинутых на 120 или 180° отно
сительно одна другой (в данном случае — из двух).
Когда один луч щетки выходит из контактного ряда,
другой входит в него, делая коммутацию непрерывной.
Располагаясь по дуге окружности в несколько кон
тактных рядов, ламели образую т
контактное поле.
Каждый контактный ряд имеет свою щетку, соединен
ную через скользящий контакт с выводом 7. Помимо
рабочих ламелей, на каждый ряд предусмотрена одна
нулевая ламель О, соответствующая нулевому (исход
ному) положению щетки. В рассматриваемом искателе
контактное поле из четырех рядов и четырех щеток а.
а б Вг
Рис. 44. Шаговый искатель прямого
действия с ;;ву,хлучевыми
щетками:
а— конструкция искателя; б — схема соединения лакелей.
121
б, в, г (рис. 44,6), которые состоят из двух параллель
ных пружин и охватывают ламели с двух сторон. При
подаче импульса якорь 4 (рис. 44,а) притягивается
к сердечнику электромагнита 5 и собачка 5 толкает
зуб храпового колеса 6, жестко соединенного с ротором
и со щетками. Ротор поворачивается и переводит щ ет
ки по ламелям в следующее контактное положение.
После исчезновения импульса пружина 8 возвращ ает
якорь в исходное положение.
В искателях обратного действия зубья храпового
колеса направлены по-другому, а собачка ориентиро
вана соответствующим образом. При подаче импульса
якорь притягивается и собачка занимает исходное по
ложение, а по его окончании собачка под действием
пружины возвращ ается в исходное положение, пово
рачивая ротор со щетками.
Применяемые в практических
схемах
искатели
Ш И-11,
ШИ-17 (прямого
действия)
и ШИ-25,
Ш И-50 (обратного действия) имеют в каждом контакт
ном ряду соответственно по 11, 17, 25 и 50 рабочих л а
мелей. Допустимое значение тока, разрываемого кон
тактами, составляет 0,2 А, потребляемая электром аг
нитная мощность 5 0 ... 70 Вт, время срабатывания
0,0 0 7 ...0 ,0 1 с, а отпускания — 0,0 4 . . . 0,007 с.
I
\
4.6. Электрические и гидравлические /двигатели
Электрические двигатели распространены в автома
тических системах, поскольку обеспечивают широкий
диапазон регулирования, обладаю т значительным бы
стродействием, просты в обслуживании и т. п. Их мощ
ность может составлять десятые доли ватта (как, иа- '■
пример, в электронных регулирующих приборах типа
ЭПП, КСП) и достигать сотен киловатт. Чащ е всего
применяют электродвигатели постоянного тока с неза
висимым возбуждением, представляющие наибольшие
возможности для регулирования частоты вращения и
электродвигатели переменного тока (обычно это двух
фазные асинхронные с короткозамкнутым или тонко
стенным полым ротором).
Свойства электродвигателей, их устройство и схе
мы включения изучаются в курсе электрических машин
)
и поэтому здесь не рассматриваются.
122
И з гидравлических серводвигателей наибольшее при
менение в автоматических системах получили двига
тели поршневого типа с золотниковым управлением.
Их используют при автоматизации мобильных машин
для управления навесными агрегатами и в системах
автоматического вождения тракторов
и комбайнов.
Принципиальная схема такого двигателя показана на
рисунке 45,0.
Д авление рабочей жидкости создается и поддержи
вается насосом I, а ограничивается перепускным кла
паном 2.
При нейтральном положении золотника 3
каналы, соединяющие его с силовым цилиндром 4,
полностью перекрыты, а поршень 5 неподвижен. В ре
зультате входного воздействия х золотник 3 переме
щается вверх или вниз и открывает отверстия. При
этом одна полость силового цилиндра оказывается со
общенной с находящимся под давлением маслом, г
другая — со сливным трубопроводом. Давление в пер
вой полости возрастает, так как насос 1 работает, на
гнетая масло из бака 6 в силовой цилиндр, и пор
шень 5 перемещается вверх или вниз в зависимости от
направления входного воздействия х.
Скорость движения поршня dy/d< зависит от коли
чества масла, поступающего и вытекающего из цилинд
ра, что, в свою очередь, связано со степенью открытия
отверстий. При постоянной нагрузке на шток поршня
скорость движения выходного штока будет определять
ся величиной перемещения входного штока.
На статической характеристике
гидравлического
серводвигателя (рис. 45,6) можно выделить зону нек
Рис. 45, Схема гидравлического серводвигателя с золот
никовым управлением (а ) и его статическая характерис
тика (б ).
123
чувствительности 2 а , обусловленную тем, что ширина
пояска золотника больше диаметра отверстия, и зону
насыщения, которая соответствует полному открытию
золотниковых отверстий, когда
скорость движения
поршня уже не может возрастать. Если перемеш,ения
золотника при работе не достигают значений полного
открытия Хтах И ЗОНОЙ нечувствительности можно пре
небречь, то статическую характеристику можно счи
тать приблизительно линейной (пунктирная прям ая).
Д л я получения больших выходных мощностей ис
пользуют каскадное соединение серводвигателей, при
котором поршень каждого предыдущего гидроцилиндра
воздействует на золотник последующего. Таким обра
зом, выходная мощность этих двигателей может состав
лять единицы, десятки, сотни киловатт и более. Гид
равлические серводвигатели обладаю т значительным
коэффициентом усиления (3-10® ... 3-10^) и достаточно
высоким быстродействием.
нее значение параметров. 4. Измерить при помощи мегомметра,
действуя по инструкции, прилагаемой к нему, сопротивление изоля
ции обмотки реле. 5. Измерить выдержки времени посредством
электросекундомера, включенного в схему совместно с реле так,
чтобы выполнялось условие одновременного пуска секундомера
после замыкания или размыкания контактов реле.
Содержание отчета. Отчет должен содержать схему испытаний
реле, краткое описание лабораторной установки и принципа дейст
вия устройства реле и способов регулирования выдержек времени,
результатов испытаний, значения вычисленных параметров, необхо
димые формулы, выводы по работе и технические характеристики
реле и приборов.
Контрольные вопросы и задания. 1. Что такое исполнительный
элемент? 2. Какие электромагнитные исполнительные элементы при
меняют в системах автоматики? 3. Какие электромагнитные муфты
применяют в системах автоматики? 4. Назовите электродвигательные исполнительные элементы. 5. Что такое реле? 6. Охарактери
зуйте типы и определяющие параметры реле. 7. Назовите основные
элементы реле. 8. Как можно изменить выдержку времени реле?
9. Каковы назначение и принцип действия шагового искателя?
10. Как работает гидравлический серводвигатель поршневого типа?
Лабораторная работа
№ 5
Исследование электромагнитных реле
Содержание работы. Изучить устройство, принцип действия и
технические характеристики электромагнитных реле. Ознакомиться
со способами изменения выдержки времени различных реле. Изме
рить токи срабатывания и отпускания. Определить коэффициенты
возврата и запаса при срабатывании и отпускании реле. Измерить
сопротивления изоляции обмоток реле. Установить минимально и
максимально возможные выдержки реле времени.
Описание лабораторной установки. Лабораторная установка
должна иметь стенд с закрепленным на нем набором различных
электромагнитных реле, электросекундомером, мегомметром, мил
лиамперметром, вольтметром.
Порядок выполнения работы. 1. Собрать схему, изображенную
на рисунке 43. 2. Изменяя потенциометром П напряжение на об
мотке реле, определить ток и напряжение его срабатывания в мо
мент загорания лампы Л. 3. Уменьшая потенциометром Я напря
жение на реле, определить значения тока и напряжения его отпу
скания в момент погасания лампы Л . Измерения повторять не ме
нее трех раз для каждого реле и по результатам вычислить сред124
Иь
К».
ГЛАВА
V
ЭЛЕМЕНТЫ ТЕОРИИ РЕЛЕЙНЫХ
СИСТЕМ АВТОМАТИКИ
/г/
£
Y
к
_
X
нг
\н з
кг
К1
К
5.1. Основные понятия и определения
Среди многочисленных устройств автоматического
управления релейные системы занимают видное место.
Характерной их особенностью является скачкообраз
ное изменение регулируемой (выходной) величины при
изменении входной. Другими словами, любой элемент
релейной системы может принимать только два состоя
ния: «включен» или «выключен». Наиболее типичны и
распространены релейные схемы, состоящие из кон
тактных электромагнитных ‘элементов (реле).
По характеру работы релейные системы разделяю т
на однотактные и многотактные.
В однотактных системах состояние исполнительных
элементов однозначно определяется состоянием при
емных элементов в любой момент времени. Какая-либо
четкая последовательность в их действиях не предус
м атривается, и поэтому отпадает надобность в проме
жуточных элементах. Иначе говоря, в однотактной си
стеме определенной комбинации
входных сигналов
(аргументов) соответствует определенное значение вы
ходной величины (функции). При описании схем таких
систем не могут использоваться понятия «до», «после»,
«пока» и т. п., характеризующие последовательность
ввода аргументов. Например, в однотактной схеме,
изображенной на рисунке 46,а, действие исполнитель
ного элемента X однозначно зависит от действия при
емного элемента — замыкающего контакта а; проме
жуточных элементов здесь нет.
У многотактных систем в работе приемных и испол
нительных элементов предусматривается определенна^я
последовательность, для осуществления которой необ
ходимо наличие промежуточных элементов. С ледова
тельно, аргументам одной и той же комбинации, но по126
Рис. 46. Разновидности релейных схем:
а — однотактная; б — многотактная; в — типа П; г — типа Н.
данным В различные моменты времени, могут соответ
ствовать несколько функций. Так, в схеме на рисунке
46,6 действие исполнительного элемента X определя
ется не только действием приемного элемента — зам ы
кающего контакта а, но и промежуточного элемента S.
И зображение схемы релейной системы, показываюш,ее количество и состав структурных элементов, а так
же конфигурацию соединений между элементами, на
зывают с т р у к т у р о й р е л е й н о й с х е м ы . Часть
релейной схемы, содержащую только контакты, назы
вают к о н т а к т н о й с х е м о й .
Чащ е всего структуру релейных схем изображают
графически в виде символов элементов и их соедине
ний. К аж дому графически
выполненному элементу
схемы
дается
буквенное обозначение.
Согласно
I ОСТ 2.710—81, катушки контактов, магнитных пус
кателей, реле обозначаются буквой К. Если в схеме не
сколько элементов, то к буквенному обозначению при
бавляется цифра, соответствующая порядковому номе
ру элемента на схеме. Можно применять двухбуквен
ное обозначение: так, катушки контактора, магнитного
пускателя обозначаются КМ, реле времени КТ; реле
напряжения KV, реле токовое КА и т. д. Контактам
элементов даются те же обозначения, что и катушкам.
Например, К4 — четвертое реле и все контакты этого
реле будут иметь такое же обозначение.
По виду соединений различают схемы п а р а л л е л ь
н о - п о с л е д о в а т е л ь н ы е (типа П ) и с м о с т о в ы
м и с о е д и н е н и я м и (типа Н ). В схемах типа П
(рис. 4б,е) контакты и катушки различных элементов
127
соединяют между собой последовательно, а отдельные
цепи параллельно. В схемах типа Н (рис. 46,г) нали
чие мостовых элементов (элемент КЗ) приводит к од
новременным последовательным и параллельным сое
динениям в различных цепях. У мостовых схем по
сравнению со схемами типа П значительно меньше
контактов. Кроме названных, применяют схемы с вен
тильными элементами и взаимно исключающими кон
тактами и инверсные схемы, которые описаны в специ
альной литературе.
При изучении релейных систем автоматики решают
в основном две задачи; первая сводится к анализу р е
лейных схем, то есть к определению условий работы
каждого реле и последовательности их действия, а
вторая — к синтезу схем. то есть к нахождению струк
туры схемы по заданным условиям ее работы. Анализ
(I синтез позволяют получить электрическую схему си
стемы с минимально возможным числом реле и кон
тактов.
При изучении установившихся состояний отдельных
элементов релейных систем автоматики без учета их
поведения во времени широко пользуются специаль
ным математическим аппаратом — так называемой а л
геброй логики.
нение между контактами знаком умножения (точка),
а параллельное — знаком сложения (плю с), структуру
релейных схем записывают в виде аналитических вы
ражений, которые называются структурными формула
ми схем. Например, графически изображенная на ри
сунке 47,а релейная схема переведена на рисунке 47.6
в соответствии с принятыми правилами на буквенные
символы.
Структурная формула для этой схемы будет выгля
деть так
5.2. Аналитическая запись структуры
и условий работы
Релейную схему можно представить не только посредство{|? графических символов. Если, как это д ела
ется на практике, обозначить катушки элементов боль
шими буквами латинского алфавита, замыкающие кон
такты — малыми буква1— Г
■л— ^ ми и размыкающие кон
а
с
й та к т ы — малыми буква
т
I
JL
'1.
е ми с черточкой над ни
j_
I
■
т ми (знак отрицания),
то можно отказаться от
Ч X
графических символов
— -iи составлять схемы, ис
а
пользуя
только буквен
Рис. 47. Способы изображ ения релей
ные обозначения. К ро
ных схем;
ме того, обозначив по
о — с использованием графических симво
лов; б и в — с использованием буквенных
следовательное соедисимволов.
Т
128
V
F x = a ^ + c d e + m.
(9 )
В правой части выражения (9) аналитически пред
ставлена контактная схема, а в левой части индекс X
при функции F указывает, что контактная схема воз
действует на катушку одного элемента X. Структурная
формула, таким образом, отраж ает не только струк'•'УРУ самой контактной схемы, но и определяет услоВИ5Г работы элемента, в цепь которого она включена.
Эти условия для элемента А" в формуле (9) можно за
писать словами: элемент X сработает, если сработает
элемент А и не сработает элемент В, или сработает
элемент С и не сработает элемент Д и сработает эле
мент Е, или сработает элемент М.
В свою очередь, если условия работы какого-либо
элемента У выражены словами, то по ним можно со
ставить соответствующие структурную формулу и схе
му. Например, пусть какой-либо элемент У ' должен
сработать: ]) при срабатывании элементов Л и В и
несрабатывании элемента С или 2) при срабатывании
элементов Д и Е и несрабатывании элемента М. Струк
турная формула, отвечающая данным условиям, при
мет вид
FY=abc+dem ,
и соответствующая схема будет выглядеть, как пока
зано на рисунке 47, в.
5.3. Логические функции
Алгебра логики изучает различные логические з а
висимости между высказываниями и оперирует только
двумя понятиями и значениями; истинно — «1», лож
но — «О».
9 З а к а з 5067
129
в алгебре логики выделяют три основные логичес
кие функции: 1) логическое умножение или конъюнк
ция (И ); 2) логическое сложение, или дизъюнкция
(ИЛИ); 3) логическое отрицание (НЕ). Рассмотрим
сущность этих логических функций.
Логическое умножение — И. Эту операцию можно
выполнять над двумя и более высказываниями. Струк
турная формула F = a b . Функция принимает значение!
тогда и только тогда, когда аргумент а и аргумент Ь
равны 1, то есть оба значения истинны. При любой
другой комбинации значений а п Ь получим 0. Д ейст
вительно, если <2 = 0 , Ь—1, то /'= 0 - 1 = 0; если а = 1 ,
Ь = 0, то такж е
1-0 = 0 . В электрической схеме эле
мент, реализующий логическую операцию И, по свое
му действию аналогичен цепи, состоящей из последо
вательно включенных контактов реле. Цепь тока обра
зуется тогда, когда замкнуты все контакты.
Логическое сложение— ИЛИ.
Д анная операция
представляет собой сложное высказывание, которое
истинно при истинности хотя бы одного из составляю
щих его высказываний, и ложно, если все высказыва
ния ложны. Составляющих высказываний может быть
два и более. Структурная формула F = a + b. Функция
принимает значение О тогда и только тогда, когда оба
аргумента равны О, а значение 1, когда или вход а,
или вход Ь, или оба вместе имеют значение 1. В элек
трической схеме функции ИЛИ соответствует парал
лельное включение контактов.
Логическое отрицание — НЕ. Эта операция преобра
зует истинное высказывание в ложное и ложное в ис
тинное. Структурная формула F = a. Выход всегда про
тивоположен входу. В электрической цепи функцию
логического отрицания может выполнять реле с размы
кающими контактами (при подаче напряжения кон
такты реле размыкаю тся).
Кроме трех основных логических функций, приме
няются производные от них с более сложной логичес
кой связью. К ним относятся следующие функции:.
ИЛИ — НЕ (стрелка П ирса), И — НЕ (щтрих Ш еффе
ра), РАВНОЗНАЧНОСТЬ (эквивалентность), НЕРАВ
НОЗНАЧНОСТЬ
(неэквивалентность), ИМПЛИКА
ЦИЯ, ЗАПРЕТ, ПАМЯТЬ, ЗАДЕРЖ КА, ПОВТОРЕ
НИЕ и др.
130
функция ИЛИ — НЕ (инверсия суммы) в структур
ном виде для двух аргументов записывается как F =
= а + Ь. Она принимает значение 1 тогда н только тог
да, когда оба аргумента равны О, то есть функция
истинна, лищь когда ложны оба входящие в нее выска
зывания. Стрелке Пирса аналогично в электрическое
цепи последовательное включение двух или более раз
мыкающих контактов. Цепь будет замкнута, если ни
на одно реле не подан сигнал.
Функция И — НЕ (инверсия произведения) в струк
турном виде записывается как F = ab. Функция прини
мает значение О тогда и только тогда, когда оба аргу
мента имеют значение 1, то есть функция ложна, лишь
когда истинны оба входящие в нее высказывания. Элек
трический эквивалент штриха Ш еффера — параллель
ное включение двух или более размыкающих контак
тов. Цепь будет разомкнута, если на оба реле подан
сигнал.
Функция РАВНОЗНАЧНОСТЬ в структурном виде
записывается как F = ^ + ab. Функция принимает зна
чение 1 тогда и только тогда, когда оба аргумента од
новременно имеют одинаковые значения, и принимает
значение О, когда аргументы имеют разные значения,
то есть сложное высказывание истинно, лишь когда оба
высказывания истинны или ложны одновременно.
Функция НЕРАВНОЗНАЧНОСТЬ в структурном ви
де записывается как F = a b + ab. Функция принимает
значение 1 тогда и только тогда, когда либо аргумент
а, либо аргумент Ь равен 1, но не оба вместе, то есть
сложное высказывание истинно, лишь когда одно из
высказываний истинно, а другое ложно. Электричес
кий аналог данной функции — схема, в которой на вы
ходе появляется сигнал, если сигнал подан только на
один из входов; при одновременном поступлении на
входы двух сигналов на выходе схемы сигнала не бу
дет.
Функция ИМПЛ11КАЦИЯ в структурном виде з а
писывается как F = a + b. Функция принимает значение
О тогда и только тогда, когда аргумент а имеет значе
ние 1, а аргумент Ь — значение О, то есть сложное вы
сказывание ложно, лишь когда первое высказывание
истинно, а второе — ложно.
9*
131
функция ЗАПРЕТ в структурном виде записывает
ся как F = a b . Функция принимает значение О, если на
вход Ь подан сигнал I, каким бы при этом ни был сиг
нал на входе а.
Функция ПОВТОРЕНИЕ в »зтруктурном виде запи
сывается как F ^ k a и означает, что функция прини
мает значение в k раз отличное от значения входного
сигнала, совпадая с ним по знаку.
Функция ЗАДЕРЖ КА в структурном виде записы
вается как F = a(t~ —т) и означает, что функция прини
мает значение, совпадающее или отличное по знаку
от входного сигнала а, через время т после его подачи.
L
В таблице 1 даны условные обозначения всех рас
смотренных логических функций и приведены их ре
лейные и полупроводниковые эквиваленты. Д ля авто
матизации различных производственных процессов про
мышленность выпускает полупроводниковые элементы
типа «Логика И», магнитные логические элементы
ЭЛМ, элементы типа УСЭППА (универсальная систе
ма элементо! промышленной пневмоавтоматики).
5.4. Основные законы алгебры логики
и их следствия
При создании релейных автоматических систем ана
литическая запись структуры и условий работы схемы
позволяет найти ее оптимальный вариант. С этой целью
делают аналитические равносильные преобразования и
находят схемы, аналогичные по своему действию, но
разные по структуре. В основе этих преобразований
леж ат методы
преобразования, базирующиеся на м а
тематическом аппарате алгебры логики (ее еще на
зывают булевой алгеброй — по фамилии английского
математика прошлого века Буля).
В обычной математике оперируют числами или сим
волами, которым могут быть приданы определенные
численные значения и физический смысл. Однако те
или иные события и явленйя можно оценивать путем
логического их толкования, то есть перейти к «исчис
лению высказываний» — математической логике.
Часть математической логики, где оперируют двумя
высказываниями — «истинно» или «ложно», «да» или
«кет», «1» или «О», получила название алгебры логики
(или двоичной булевой алгебры ). По существу исчис132
ление высказываний представляет собой алгебру двух
чисел, где любой аргумент и любая функцня могут
иметь одно нз двух этих понятий или значений.
Поскольку в контактных релейных системах авто
матики любой контакт схемы может принимать только
два положения
(в структурной формуле только два
значения) — замкнутое или разомкнутое, то точно так
же вся структурная формула может вы раж ать или за
мкнутую, или разомкнутую цепь. При этом разомкнуто
му состоянию контактов соответствует значение ноль
(0), а замкнутому — единица (1).
В булевой алгебре выделяют четыре пары законов,
которые позволяют установить равносильность различ
ных выражений, что дает возможность заменить одно
выражение другим. А та1ч как каждому выражению со
ответствует своя определенная схема, то это означает
и замену одной схемы другой. В качестве символа рав
носильности используется символ равенства из обыч
ной алгебры. ( = ).
Рассмотрим основные законы и вытекающие из них
следствия, устанавливая их справедливость путем ана
лиза схем, соответствующих правым и левым частям
равносильных выражений.
1. Переместительные (коммутативные) законы:
4. Законы инверсии:
относительно сложения
а + Ь = аЬ,
относительно умножения
а Ь - а + Ь.
(11)
1ерта над левыми частями равенств (10) и (И )
берется отрицание от данного выражения
кптппктр*'''
^
правой части получаются выражения,
которые имеют обратное значение по отношению к исходному.
Схемы, иллюстрирующие законы теории релейных
схем, приведены на рисунке 48. Равносильность прсдставлепных схем не вызывает сомнений. В этом можно
уоедиться, рассмотрев различные комбинации сраба
тывания контактов; больше того, нетрудно видеть, что
переместительные, сочетательные законы и распреде
лительный закон умножения относительно сложения
соответствуют аналогичным законам обычной алгебры.
7 Г Г
относительно сложения
Т Г Г
r i
г
а + Ь-\-с=Ъ + с + а,
относительно умножения
X
относительно сложения
{ a J r b ) + c = a + ( b + c),
’ Г!
т
г
а
П=
относительно умножения
с
L-»—'■
Г-*—I
S с
U
{аЬ)с —а{Ьс).
3. Распределительные (дистрибутивные) законы:
®
в противопо-
лпжт
аЬ-\-с= (а + с) (Ь + с),
умножение относительно сложения
{ а -\-Ь )с = а с + Ь с .
г
в
t
О
сложение относительно умножения
•Ip
а
t
а
—
аЬс=сЬа.
2. Сочетательные (ассоциативные) законы:
(1 0 )
! //
в
Vс “ сl сI
л?
J-
В
^
т
о
.
протиВопо- а
В ложна
I
I
J-
В
Л ------- L -
Рис. 48. Схемы, иллюстрирующие законы теории
релейных схем:
с — переместительный; б — сочегательныЬ; в — расппеделнгельнын; е — инверсный.
134
1.Г)
Исключение составля
ют законы инверсии и
распределительный з а
кон сложения относи
тельно умножения, ко
торые
встречаются
только в булевой ал
гебре.
Нанрпмер, на рисун
ке 49,(2 приведена с х е
ма
с последова
Рис. 49. Прямая (а ) и инверсная
тельным соедине
(б) схемы включения.
нием к о ит а к т о в и
обмотки контактора. Структурная формула для этой
схемы
F=abcX .
(12)
Д ля получения и н в е р с н о й (то есть обратной по
действию) с х е м ы нужно взять инверсию от вы раж е
ния (12)
f 1= / = йЬсХ —о , Ь с X,
Над символом обмотки реле знак инверсии не ста
вится, так как он не имеет смысла.
Структурная схема, соответствующая выражению
(12), показана на рисунке 49,6. Сопоставляя, легко убе
диться, что элемент А' сработает в обеих схемах, если
сработают элементы А, В, С; при этом контакты а, Ь.
с в первой схеме замкнутся, а во второй — разомкнутся.
Следовательно, по своему действию схемы равносиль
ны, но их схемное решение различное. По аналогии
для любой релейной схемы можно найти равносильную
по действию схему, в которой все последовательно
включенные контакты и обмотки контакторов (реле)
будут заменены на параллельно включенные, а все па
раллельные цепи — на последовательные; все замы каю
щие контакты — на размыкающие, а размыкаюндие —
на замыкающие.
Рассмотренные законы алгебры логики имеют ряд
следствий, которые широко используются для преоб
разования структурных формул:
1) а -ь О = о ;
2) а-Ы = 1; 3) а + а = а; 4) а + а==\-,
5) а - 0 = 0 ;
6) а - 1 = а ;
136
7) аа = а\
8) аа = 0-,
9) a + ab = a ( l + b ) = a ;
10) a { a + b ) = a -
11 ) a + a b = a + b\
12) a + ab = a + b.
( 13 )
В справедливости этих равносильностей можно убе
диться, начертив схемы, соответствующие левой и правон частям выражений, и сравнив их работу.
5.5. Минимизация релейных схем
Сущность минимизации состоит в том чтобы ис
пользуя алгебру логики, найти для релейной системы
автоматики оптимальный ее вариант с минимальным
числом используемых элементов, наиболее просгой и
надежный в работе.
Среди различных способов минимизации схем наи
более распространенными для однотактных схем явля
ются аналитический, графоаналитический, табличный
(матричный) и другие способы.
При аиалитическО)й^ способе для имеющейся релей
ной системы записывают логическую функцию и при
меняя приведенные выше законы алгебры логики них
следстепя, находят ^минимальную форму записи функ
ции. На основе этой минимальной функции выполняют
реализацию схемы.
релейной схемы этим способом можно пояснить
^Р'^буется минимизировать контактСледуя методике мини
мизации, запишем логическую функцию для данной схемы:
ную ^хГ“
F = m [ ( c + b ) m - \ - c (d + m c ) ] + r n [ { c + e ) m + (а+ am) с ] .
алгебры логики
минимальную ф орм у записи.
и равносильности, найдем
Р®“ “ °'"Р""' вьфаж ение с ( d + m c )
щ ен м
с целью его упро-
c {d + m c )= c {d + m \)= c {d + m ).
w
■s—
Tm
/77
T
' i
I
1 4Ш dЛ m. Мm
Л
- L li a L
Рис. 50.
К пояснению
t.
интуитивного способа
минимизации:
в — исходная схема; б — преобразованная схема.
137
ответствуюших исходной формуле, такова. Сначала в минимизируюшеи карте вычерчивают все строки, конституенты которых не входят
в исходную ф ормулу (нулевая, вторая, пятая). Потом в каж дом
столбце вычеркивают все комбинации, которые встречаются в вы
черкнутых строках. Зате.м находят те строки, где есть по одной
невычеркнутой комбинации с минимальным число.м символов (пер
вая и четвертая). В п е р в о й к о м б и н а ц и я ас. а в четвертой ”сс.
И х называют «существенными», и они обязательно входят в ре
зультирующее выражение. И з таблицы видно, что комбинацию
ас получаю'^ при сложении конституента аЬс первой строки с конституентом обе третьей строки, а комбинация ас — при сложении
конституеита аЬс четвертой строки с конституентом аЬс шестой
строки. dTH комбинации обведены прямоугольными рамками. В за
ключение находят строки, в которых нет комбинаций ас и ас но
есть н еск о ^ к о незачеркнутых комбинаций с минимальным числом
символов. Это седьмая строка с комбинациями аЬ и Ьс. Их назы
вают «свободными». В результирующ ее выражение входит одна
из них: либо аЬ. либо Ьс. Комбинацию аЬ м ож но получить при
сложении jioHCTHTyeHTa аЬс седьмой строки таблицы с консти
туентой аЬс третьей строки, а комбинацию Ьс в результате сл ож е
ния конституента аЬс с конституентом ~аЬс шестой строки. К омби
нации аЬ и Ьс обведены кружками.
Следовательно, из минимизирующей карты видно, что исход
ную структурную ф ормулу (15) м ож но представить двумя различны.ми минимальными формулами с одинаковым числом структур
ных элементов
Справедливость полученной записи подтверж дается схемами,
соответствующими левой и правой частям выражения. Тогда
f= n i^ (^ + b ^ c (rf+ m )]
+ т [ { с + е ) т + ( а + а т )с ].
Раскроем квадратные скобки с учетом
из формулы (1 3 );
следствий
(7)
и
(8 )
F = m (c + b ) + m c ( d + m ) + n i c ( a + a m ) = m c + i n b - \ + m c d + т с а + т с а ^ т с ( l + d ) + m b + inca+ m ca =
= tnc-\-mb + m t a + m c a = n i ( c + b ) + n i c ( a + a )
=
= rnc+rnb+ m c = с (m + m ) + m b = c+inb.
Формула
счеча из
5 0 ,6 .
(14)
трех
показывает, что
элементов Ь. с.
исходной равносильна
представленная на
т,
(1 4 )
простая
рисунке
При графоаналитическом способе для минимизации
функции применяют так называемые минимизирующие
карты — таблицы, содержащие комбинации состояний
ее элементов.
Н апример, для схемы с тремя приемными элементами А ^ С
м ож но написать 2 ^ = 8 различных произведений; аЬс, аЬс, аЬс,
аЬс, аЬс. аЬс. аЬс, аЬс. К аж дое такое произведение в исходной
структурной формуле выражает отдельную параллельную цепь,
называемую конституентой разлож ения единицы, потому что сум
ма всех 2 " произведений выражает постоянно замкнутую цепь.
В чем м ож но убедиться, вычертив соответствующ ую схему со все
ми комбинациями состояний ее элементов.
На рисунке 51 представле
на минимизирующая карта для
с аВ QC. Bc aSc
a
в
схемы с тремя приемными эле
о
^ 0 — —РГ—- a v t
ментами Л, В, С. Число строк
с —ut
0
— 0-таблицы равно числу конституентов. В крайнем правом столб
t У
i r aic
г
це таблицы записрлвают все
е
1
T-R
-iiiz
конституенты, а в остальных
столбцах — все
комбинации
J
aBc
ж ж @ ЕЕ
состояний элементов по одн о
му, по два, по три и т. д., если
JiT обе
i
-Г Ж
i
число элементов более трех.
Д опустим ая
исходная
7 ■ 'C Gfl QC W
5
аесструктурная
формула
имеет
такой вид
ж ir
В ж Л
ale
F^^a~c+a-c+ab.
F x = a c + a c - i- b c .
j
Эти структурные формулы
данной.
^
М инимизация с помощью минимизирующих карт на
глядна, но с увеличением числа приемных элементов
схемы карта получается очень громоздкой. При числе
приемных элементов более трех- применяют способ ми
нимизации «координатных таблиц». С ним можно озна
комиться в специальной литературе.
В многотактных схемах условия срабатывания от
дельных элементов составить невозможно, так как в
работе приемных и исполнительных элементов предус
матривается определенная последовательность дейст
вий во времени.
При анализе и синтезе многотактных схем пользу
ются таблицами включений и временными диаграммами взаимодействия. Таблица включений представляет
Таблицу, в которой последовательно записываются из
®
I
ж
Рис.
51.
карта.
138
ж
@
aSc
М ини\иинрую щ ая
= a b c + a b c + a b c + a b c -\-a b c 1 5 j
М етодика нахож дения б о
лее коротких произьедений, со-
выражают
схемы,
равносильные
за-
139
менения состояний всех
элементов схемы. Вклю
ченное состояние элемен
та обозначают ( + ), от
клю ченное— минус ( —).
Изменение состояний эле
ментов называют т а кт о м р а б о т ы схемы .Н е
прерывный ряд тактов, в
течение которого элемент
схемы находится во вклю
ченном состоянии, назы
вают п е р и о д о м в к л ю
ч е н и я этого элемента, в
отключенном состоянии —
периодом
о т к л ю ч ен и я.
lC
S
F x 2 = x \ - x 4 + x 2 ( x l - x 2 + x i- x 5 ) ;
F i 3 = x \- x 2 ;
F x i - x l - x 2 - i - x b - x \ + x l- x 4 - x 2 - ,
F xi= {xl-x2 + x5 ){x3 + l4 ).
-
-
о
-
-
-
о
о
о
-
о
о
-
о
-
-
о
-
-
-
о
-
-
-
о
-
о
t—*
+
1
1
1
1
1
+
со
о
о
+
о
-
+
-1-
1
о
о
о
-
о
-
о
о
-
с
со
-
о
о
-
о
с»
I—•
о
о
-
о
-
-
о
о
о
о
+
о
о
о
о
о
о
1
ю
1
+
-h
1
i
1
1
1
(IG)
,1П
1
TJ*
“Ь
сч
f^2= l-0-f0(0-l-h0-l)= 0;
+
СО
\п
54
+
(N
54
fi4 = 0 -l-l-b 0 + l-0 -0 = 0 ;
(0-0+0) (0-H)=0.
Допустим, в первом такте при замкнутом тумблере S включается
приемный элемент а, тогда Г д т —1- Э то приведет во втором такте
к включению исполнительного элемента X I. Дальнейш ее изменение
значений структурных формул (16) воздействую щ их контактных
цепей представлено в таблице 2. Там ж е указаны изменения с о
стояний элементов схемы. Например, структурная формула для
1 x2 принимает значение 1 в шестом тлкте, поэтому элемент Х2
долж ен включиться в седьмом такте и т. д,
140
+
+
о
П олож ение исполнительных элем ш тов схемы определяется с о
стоянием приемных элементов а, Ь. с. d и положением тум бле
ра S.
Запиш ем начальные состояния элементов схемы, когда с = 0 ;
fjt3 = = 0 -0 = 0 ;
о
C-J
о
П остроенпе таблицы вклю
чений рассмотрпм на примере
(рис. 52). Допустим, требуется
определить условия, при кото
Рис. 52. Схема для построения
рых срабатывают элементы Х2,
таблицы включений.
ХЗ, Х4, Х5 и последователь
ность действия элементов,
Запиш ем структурные формулы для всех исполнительных элементов схемы (S — промежуточный элемент, тумблер)
F xi= a b cd \
-
-
см
IЛ
.
I
I
ТО
И
а
а
11^
И
И
54
II
то
н
t=i
x i4 H d A i^ A d i3
+
'3
54
11^
И
со
X
2,
IизI
и
tu.
irAv\do0
9tiH9bB»«e
а01НЭИЭГ€
1ЧИЭХЭ
9ИНВ01Э0Э
141
KZ
K1
HZ
и
б
Рис. 53. П остроение временпой диаграммы взаимодействия.
Временные диаграммы взаимодействия можно по
лучить как экспериментально, так и расчетным путем
по данным временных параметров (срабатывания и воз
врата) отдельных элементов из каталогов.
На рисунке 53 показаны релейная схема и времен
ная диаграм ма взаимодействия элементов. Число строк
на диаграмме равно числу аппаратов, взаимодействие
которых рассматривается. Д ля каждого элемента по
казывается своя
ось
времени,
параллельная оси
абсцисс. Отключенному состоянию элемента соответ
ствует прямая линия на оси времени, включенному —
прямая горизонтальная линия на некотором
произ
вольном расстоянии выше оси времени. Срабатывание
и отпускание элемента изображаются
прямыми на
клонными линиями, соответственно повышающей и по
нижающей. Время нахождения элемента под напря
жением заштриховывается.
По диаграмме можно определить, что происходит
в любой момент времени, для чего проводят перпенди
куляр к оси времени и смотрят, с чем он пересекается.
Можно определить, сколько времени необходимо для
достижения определенного состояния электросхемы и
какова последовательность взаимодействия элементов.
5.6. Логические устройства
на интегральных микросхемах
Устройства микроэлектроники, состоящие из диодов,
транзисторов, резисторов, конденсаторов, нзготовлен-
ных в едином технологическом процессе, электрически
соединенных между собой
по определенной
схеме,
смонтированных в общем пластмассовом или металли
ческом корпусе, составляющие единую, нераздельную
конструкцию, называются интегральными микросхема
ми (И С ). Одна интегральная микросхема эквивалентна
электронной схеме, содержащей большое число (десягки, сотни и более) дискретных элементов (диодов,
транзисторов и т. п.).
Достоинствами ИС являются высокая надежность
и быстродействие, малые габариты и масса, неболь
шая потребляемая мощность, усложнение реализуемых
функций, большая нагрузочная способность. Выпуска
ют полупроводниковые, пленочные и гибридные интег
ральные схемы.
Большое распространение получили серии микросхем транзис
торно-транзисторной логики (ТТЛ ) (К 133, К 155, К511 и д р .), ко
торые находят широкое применение при разработке дискретных
систем автоматики. С е р и я м и к р о с х е м К 155 включает 14 ти
пов схем ТТЛ. В микросхемы этой серии входят элементы, реа
лизующие логические функции И — НЕ, И — И Л И — НЕ, тригге
ры, расширители входов. Основной элемент И — НЕ включает многоэмиттсрный транзистор (имеет несколько эмиттеров и одну о б
щую б а зу ), реализующ ий логическую функцию И , и сложный
инвертор, реализующ ий логическую функцию Н Е. Число эмитте
ров в транзисторе, а поэтому и число входов в элементе И — НЕ
составляет 2 . . . 8 . Н а рисунке 54.а изображ ена схем а логического
элемента ТТЛ с многоэмиттерным транзистором на входе и с
простым инвертором на выходе, а на рисунке 54,6 со сложным
инвертором, состоящ им из двухкаскадного усилителя М‘2, V3
и эмитгерного повторителя V4, что повышает нагрузочную спо
собность и быстродействие схемы. При наличии на входах а,Ь,с, . . . п
транзистора V I положительных сигналов, что соответствует л о
гическому сигналу 1, через коллекторный и эмиттерный перехо
ды транзисторов VI и V2 протекает значительный ток, обеспечи
вающий открытие V2 и появление на его вы ходе сигнала 0. Если
один из входных сигналов равен О, то под действием смещения со
ответствующего (эмиттер — б а за ) перехода в прямом направлении
транзистор V2 запирается и на выходе буд ет си 1нал 1. Работа
схемы (рис. 54.6) аналогична рассмотренной, при запирании тран
зистора V2 и соответственно V3 откроется V4 высоким потенциа
лом, появившимся на коллекторе V2, и на вы ходе схемы появит
ся сигнал 1.
Основные электрические параметры элементов серии К155: на
пряжение питания + 5 В , напряжение выходного си 1нала 1 — не
менее 2,4 В, а О — не более 0,4 В, потребляемая мощность 1 0 . . .
157 мВт, в зависимости от типа микросхемы.
Серия
в ы с о к о п о м е Xо у с т о й ч и в ы X л о г и ч е с к и х
интегральных микросхем
К511, представляет собой си
стему элементов ТТЛ и диодов Зенера. Основным логическим эле-ментом является элемент И — НЕ (рис. 5 4 .е). В ход элемента I,
143
142
5.7. Построение релейных схем
на бесконтактных элементах
Psic. 54. Схемы логических элементов на
схемах.
интегралыгых микро
выполненный на транзисторах V I . . . V4 р — п — р типа реализует
логическую функцию И с одновременным усилением входных сиг
налов.
Часть микросхемы II представляет собой буферный усили
тель на транзисторе V5, а часть микросхемы I I I — ди од V9 (диод
Зенера) с порогом напряжения 6 В обеспечивает статическую по
мехоустойчивость. Д и о д V8 обеспечивает динамическую устойчи
вость за счет ускорения рассасывания неосновных носителей йз
области базы транзистора V5.
Вы ход микросхемы IV, включающий транзисторы V6. V7 и
диод V10, обр азуя активную выходную цепь, представляет вы
ходной инвертор. П ри единичном входном сигнале (о-1, Ь-1, с-1,
d-1) V7 Открыт, выходной сигнал равен 0. Если на один из входов
подать О, то V7 закроется и на вы.ходе б у д ег 1. Серия К511 име
ет параметры; напряж ение питания -Ь15В, напряж ение выходного
сигнала О — не более 1,5В, а 1 — не менее 13,5 В. Она включает
И типов микросхем различного
назначения: микросхемы, содер
ж ащ ие несколько элементов с различным числом входов — два,
три, четыре; логическую схему для работы на сильнодействую
щую нагрузку (д о 100 м А ), микросхемы для преобразования вы
соких уровней напряжений в более низкие уровни; микросхемы для
обратных преобразовании, триггеры, счетчики и т. п.
144
Построение систем автоматизации с применением
бесконтактных логических элементов можно вести пу
тем перевода релейных схем на бесконтактные и путем
непосредственной разработки
бесконтактных схем на
основании заданных условий
технологического про
цесса.
Первый путь предполагает наличие
релейно-кон
тактного варианта схемы, проверенного и пригодного
для практической работы. Если такого варианта нет,
то вначале составляют релейно-контактную схему, а
затем переводят ее на бесконтактные элементы. Этот
путь целесообразен при построении несложных схем,
особенно когда уже есть навыки создания таких схем.
По имеющейся релейно-контактной схеме состав
ляют структурные формулы, причем в этой работе мож
но выделить два этапа.
Н а п е р в о м э т а п е выявляют входные элементы
с контактами а, Ь, с, d , . . . , исполнительные и промежу
точные элементы Z, У, Х , . . . , Р с контактами z, у, х,
. . . , р. Через входные элементы в функциональную
часть схемы управления подают входные сигналы. Вы
ходные сигналы поступают в исполнительные элементы
непосредственно от выходных элементов или через про
межуточные. Входные, промежуточные и выходные сиг
налы обозначают так же, как и контакты соответст
вующих элементов.
К входным относят сигналы о состоянии концевых
и промежуточных выключателей, кнопок управления,
датчиков, контролирующих процесс, и т. п. Если есть
возможность, число входных сигналов сокращают, объ
единяя ряд простых сигналов в один эквивалентный
или сложный сигнал. Так, при последовательном сое
динении нескольких контактов в блокировочной цепи
их сигналы можно заменить одним, значение которого
равно конъюнкции элементарных сигналов. К выход
ным причисляют сигналы, управляющие работой испол
нительных элементов
контакторов, электромагнитов
и т. п. При возможности выполняют группировку вы
ходных и промежуточных сигналов.
На в т о р о м э т а п е ведут запись алгебраических
выражений, соответствующих цепям выходных и про
10 З а к а з &367
143
межуточных переменных релейно-контактной
схемы.
Порядок составления алгебраических выражений з а
ключается в следующем. Составляют структурные фор
мулы для выходных сигналов и отдельно для проме
жуточных сигналов без обратных связей и с обратными
связями. Выражаю т в структурных формулах выход
ных и промежуточных сигналов с обратными связями
встречающиеся промежуточные сигналы без обратных
связей через входные. Полученные уравнения, если это
возможно, преобразуют, используя алгебраические рав
носильности. Группируют преобразованные структур
ные формулы по функциональным узлам. Составляют
бесконтактную схему с учетом особенностей выбранно
го типа логических элементов.
Второй путь, который предусматривает составление
структурной формулы на основе заданных условий тех
нологического процесса, в принципе более правилен,
так как позволяет находить самые целесообразные
схемные решения с простейшими узлами и с наимень
шим числом аппаратуры. Следует отметить, что логи
ческий элемент не является эквивалентом реле. У реле
один вход (обмотка) и может быть несколько несвя
занных выходов — цепей, замыкаемых контактами, в то
время как у логического элемента зачастую несколько
входов и несколько выходов. При изображении бескон
тактных схем в отличие от контактных показывают
только логические связи между отдельными элемента
ми и опускают цепи их питания и другие соединения,
не имеющие принципиального значения.
Применение указанных способов для построения
бесконтактных схем рассмотрим на конкретных при
мерах.
Пример 1. Требуется преобразовать релейную контактную схеч у (рис. 55,а ) в бесконтактную.
В соответствии с приведенной методикой выделим сигналы:
входные — а, Ь, с, d; выходные — z; промежуточные — их нет.
Составим структурную формулу для контактов цепи включе
ния исполнительного элемента
Г
Рис. 55. Схемы к примеру 1 и 2;
а и в — контактные; б и г — бесконтактные.
Пример 2. Требуется составить схсм.у на логических элемен
тах, эквивалентную по ^воему действ 1п6 контактному
вариант/
(рис. 55,е ) .
_
Выделим сигналы: входные — а, Ь, с, d, е; выходные — Z, А.
У, N, М, Р; промежуточные — Р.
Составим структурные формулы для контактов цепей вклю
чения исполнительных элементов Z, X, У, N. М, Р
Fг ~ [{o+d)b-^z^c.
Этой структурной формуле соответствует бесконтактная схе
ма (рис. 55,6) из пяти логических элементов: д вух элементов И Л И ,
соответствующ их сложению , j e y x элементов И, соответствующ их
умножению, и одного элемента НЕ,
соответствующ его черточке
нгд элементом с.
146
F z = a { b - { - z ) c У;
Р ц= х\
F x = ap<:;
Р м — г+у\
Р у = ар^ г'-,
Рр — Ь(е+ р).
П о этим уравнениям составим структурную логическую схему
(рис. 55,г) на элементах И, И Л И , НЕ, Д ля реализации первого
уравнения необходим элемент И1, на вход K o T o p o io
поступает
10*
147
4 входных сигнала; а — непосредственно, Ь + г — через элемент
ИЛИ1; с — через элемент НЕ1; у — через элемент НЕ2. Выходной
сигнал с элемента И1 через усилитель УУ подается на исполни
тельный элемент Z. П одобным образом реализованы и остальные
Г Л А В А VI
ОБЪЕКТЫ УПРАВЛЕНИЯ
И РЕГУЛЯТОРЫ
уравнения.
Контрольные вопросы и задания. 1. О бъясните понятие рав
носильного преобразования схем. 2. Ч то такое структура релей
ной схемы? 3. В чем отличие однотактных схем от многотактных?
4. Расскаж ите о мостовых релейных схем ах и излож ите их осо
бенности. 5. Н азовите отличительные признаки инверсных схем.
6 . Какие применяются способы перевода релейно-контактных схем
в бесконтактные? 7. Назовите основные
логические
операции.
8 . Каковы достоинства интегральных микросхем?
6.1. Общие сведения
Любое производство, в том числе и сельскохозяйст
венное, характеризуется чрезвычайным многообразием
объектов управления.
В качестве таких объектов могут рассматриваться
как отдельные машины и установки, так и целые ком
плексы машин, различных устройств, оборудования
и т. д.
К наиболее распространенным объектам сельскохо
зяйственного производства относятся тепловые устрой
ства (теплогенераторы, водоподогревателн, калорифе
ры, электропечи, котельные установки, обогреватели
и т. п.), в которых обычно требуется управлять тем
пературой, подачей воздуха, топлива или энергии; комп
лексы по производству, переработке и храпению про
дукции (животноводческие помещения,
овощехрани
лища, теплицы и парники, зерносушильные пункты
и т. д .), где необходимо управлять одновременно тем
пературой, влажностью, газосодержанием; мобильные
сельскохозяйственные агрегаты и машины (тракторы,
комбайны, сеялки, плуги и др.), у которых необходимо
управлять скоростью, траекторией движения, произво
дительностью и иными показателями работы.
Свойства объектов оказывают существенное влия
ние на весь процесс управления и, поэтому при анали
зе работы автоматической системы их необходимо учи
тывать. К основным свойствам объектов управления
относят статическую и динамическую характеристики,
аккумулирующую способность, самовыравниванис, за
паздывание процесса в объекте, время разгона объекта.
6.2. Статическая и динамическая характеристики
Статическая характеристика объекта представляет
собой зависимость управляемой величины у от задаю149
щего воздейстг.ия х в ус
тановившемся режиме при
постоянном внешнем воз
мущении f ( / ) = c o n s t .
Математически стати
ческая
характеристика
выражается
уравнением
y= f{x).
Статические характе
ристики объектов чрезвы
чайно разнообразны ио
форме, но если они опи
сываются
уравнениями
первой степени и графи
чески изображаются пря
мой линией 1 (рис. 5 6 ),то
говорят о линейны х о б ъ
Рис. 56. Статичсскпе характе
ектах, в противном случае
ристики объектов.
(кривая 2) речь идет о н е
линейны х объектах. Ис
следования присущих мно
гим объектам нелинейных статических характеристик не
редко вызывают затруднения при анализе автомати- ,
ческих систем как
в установившихся (статических),
так и в переходных (динамических) режимах. Чтобы
можно было анализировать работу системы, произво
дят линеаризацию статических характеристик, понимая
под этим замену нелинейной статической характерис
тики приближенной линейной. Замена может быть вы
полнена на отдельном участке кривой методом каса
тельной к точке А или она полностью заменяется ли
нейной характеристикой 3 как для отдельных элемен
тов, так и для системы в целом. При этом если кривая
2 представляет собой характеристику элемента авто
матической системы, то точка А должна быть рабочей
точкой этого элемента, около которой происходит из
менение переменных х н у при работе системы. Оче
видно, что в области достаточно малых отклонений
от хо и уо реальная характеристика заменяется линей
ной (касательной). Ошибка при линеаризации будет
тем меньше, чем меньше отклонение переменной х от
л'о. Уравнение статической характеристики представля
ют не в абсолютных величинах х и у , а в отклонениях
от номинальных Хи и уп значений, то есть Ах =
1.50
= Хи — Хо; Ау = ун — Уо- Тогда уравнение запишется в та
ком виде
A y = kAx,
где
k = ( , dyl dx)
^
= tg|3 — передаточный коэффициент.
При необходимости
статические
характеристики
можно представить в относительных значениях входной
X, и выходной у* величины, что облегчает сравнение
между собой характеристик различных элементов и
объектов
y* = kx^,
где
х ,= х /х я ,
У<,=у 1Ув-
Полная замена нелинейной характеристики линей
ной 3 приводит к определенной погрешности. Поэтому
в каждом конкретном случае выясняют допустимость
применения линеаризации, а такж е выбирают такой
способ замены нелинейной характеристики прямой,что
бы не получить неправильных результатов или боль
шой погрешности в расчетах.
Динамическая характеристика объекта представля
ет собой зависимость управляемой величины y ( t ) для
любого момента времени от задающего воздействия
x { t ) в переходном режиме. Связь между этими пара
метрами вы раж ается дифференциальными уравнения
ми. Наиболее полное и разностороннее представление
о динамических свойствах объекта дают передаточные
функции и частотные характеристики, которые будут
подробно рассмотрены в главе VII.
6.3. Аккумулирующая способность
Любой технологический процесс в том или ином
объекте управления связан с притоком, расходом, на
коплением и преобразованием некоторой материальной
среды или энергии. Многие объекты способны в про
цессе работы запасать рабочую среду внутри объекта.
Например, в водонапорном баке создается запас во
ды, маховик вала двигателя внутреннего сгорания на
капливает энергию вращающихся частей, в тепловых
установках аккумулируется теплота и т. д.
Аккумулирующая способность,
то есть
способность объекта накапливать энергию или вещест
во, оказывает существенное влияние на его рег>\^н^151
Еочные свойства. Аккумулирующую способность оцени
вают по емкости объекта, под которой понимают запас
накопленной объектом энергии или вещества. Чем боль
ше емкость объекта управления, тем медленнее при
прочих равных условиях будет изменяться управляе
мая величина при возмущающих воздействиях, и, нао
борот, чем меньше емкость объекта управления, тем
он чувствительнее к возмущающим воздействиям.
Д ля оценки влияния емкости на изменение управ
ляемой величины служит коэффициент емкости. Под
коэффициентом емкости понимают то количество энер
гии или вещества, которое необходимо подвести к
объекту или отвести от него, чтобы изменить управляе
мую величину на единицу измерения. В общем виде
коэффициент емкости с представляет собой отношение
емкости С к соответствующему значению управляемой
величины у
с=С1у.
Так, при регулировании уровня воды в баке коэф
фициент емкости представляет собой то количество
жидкости (м^), которое необходимо добавить или изъять,
чтобы уровень изменился на 1 м; при регулировании
температуры коэффициент емкости — это
количество
тепла (кД ж ), которое необходимо подать или отвести,
чтобы температура изменилась на один градус.
Чем больше коэффициент емкости с, тем больше
емкость объекта, тем медленнее изменяется управляемая
величина и тем меньше чувствительность
объекта к
внешним воздействиям.
Чувствительность объекта к возмуще
н и я м представляет собой отношение скорости измене
ния управляемой величины d y ld t к изменению
воз
мущающего воздействия
ставляет количество теплоты, которое содержится в
теплоносителе, находящемся в подогревателе и в его
сосуде, а вместимость со стороны потребления — коли
чество теплоты в теплоносителе до точки замера управ
ляемой величины после подогревателя и во всех метал
лических трубопроводах и других частях. Если отноше
ние емкостей со стороны подачи и потребления незна
чительно, то управление процесса протекает легче, чем
в случае, когда объекты имеют большую вместимость
подачи и малую со стороны потребления.
Объекты управления, как показано на рисунке 57,
могут быть безъемкостными (а ), одноемкостными (б ) и
многоемкостными (в ). Объекты с очень малой вмести
мостью, например небольшие трубопроводы, относят к
безъемкостным. Одноемкостными считают такие, у ко
торых нарушение равновесия между подачей и потреб
лением вызывает одновременное и одинаковое изменение
величины во всех ее точках. У двухъемкостных объектов
процесс управления в значительной мере зависит от со
отношения между емкостями на стороне потребления и
подачи. Управление многоемкостными объектами за
трудняется тем, что им присуще переходное запазды ва
ние.
6у/й1
AF
Д ля каждого объекта различают емкости со сторо
ны потребления, которая зависит от характеристик уп
равляемой среды, и емкость СО стороны подачи, ко
торая определяется характеристиками вещества или
энергии, влияющими на управляемую величину и под
вергающимися изменению управляющим органом. Так,
для подогревателя емкость со стороны подачи пред
152
Рис. 57. Объекты с различными аккумулирующими свойствами:
С — безъемкостный ( Я » Д ) ; б — одыоемкостный {И соизмеримо с Д):
е — двухъемкостный (Яд соизмеримо с Д 1 ; И^ — с Д :); г — кривые за
паздывания.
153
6.4. Самовыравнивание
В процессе работы в объекте возникает несоответст
вие между притоком и расходом рабочей среды (энер
гии), которое может быть ликвидировано двумя спосо
бами; без участия или под действием регулятора.
Если такое несоответствие стремится к нулю, а уп
равляемая величина — к новому установившемуся зна
чению без участия регулятора, то, значит, объект обла
дает самовыравниванием. Например, явление самовыравнивания наблюдается в теплицах, когда температура
воздуха внутри теплицы снижается из-за увеличения
тепловых потерь через стены и крышу, но вместе с тем
возрастает отдача тепла от почвы, обладающ ей боль
шой аккумулирующей способностью. Наступает новое
тепловое равновесие при понижепной температуре, и
если она не выходит из заданных пределов, то действия
регулятора не требуется.
Объекты б ез самовыравнивания
характеризуются
тем, что нарушенное в результате действия возмущения
равновесие не
восстанавливается.
Такие
объекты
очень трудно поддаются управлению.
Самовырави 1шание может быть п о л о ж и т е л ь н ы м
или о т р и ц а т е л ь н ы м . В первом случае равновесие
восстанавливается без участия регулятора, во втором
возникшее нарушение стремится к нарастанию.
У разных объектов способность самовыравнивания
различна, то сеть при одних и тех ж е внешних воздей
ствиях изменения управляемой величины могут оказать
ся неодинаковыми.
Количественно самовыравнивание объекта оценива
ется коэффициентом самовыравнивания, который равен
отношению производной от приращения внешнего воз
действия к производной от управляемой величины; та
ким образом
p = dAF/da>
где A f = ( f 1 — f 2) /f'li — приращение внешнего визд^Гпвил в от
носительных единицах; a = !//(/n — управляемая величина в отно
сительных единицах; Fa и {/„ — номинальные значения внешнего
воздействия и управляемой величины.
Чем больше коэффициент р, тем легче осуществить
процесс автоматического управления. Поскольку коэф
фициент самовыравнивания определяется как отношение
внешнего воздействия к отклонению управляемой вели
154
чины, вызванному этим воздействием, это значит, чем
больше коэффициент самовыравнивания, тем меньше от
клонение управляемой величины при одинаковых внеш
них воздействиях и тем быстрее протекает процесс уп
равления, а следовательно, тем он качественнее.
6.5. Запаздывание процесса
Большинству объектов в той или иной степени при
суща инерционность, которая вызывает запаздывание
во времени между изменениями управляющего воздей
ствия, поступающего на объект, и соответствующими из
менениями управляемой величины. Запаздывание свой
ственно не только объекту, но и другим элементам
автоматических систём, в том числе и регулятору, и за
висит от инерционности входящих в систему элементов.
В зависимости от причин, обусловливающих запазды ва
ние, различают переходное Тц и транспортное (переда
точное) То запаздывание.
Переходное запазды вание появляется из-за сопротив
ления переходу вещества из одной емкости в другую
или энергии из одного состояния в другое и всегда на
блюдается в тех объектах, где имеются емкости, индук
тивности, вращающиеся массы и т. и. Определяется оно
как промежуток времени от момента возмущения до
начала изменения управляемой величины в результате
преодоления названных сопротивлений. Так, для подо
гревателя пере.ходным запаздыванием будет время от
момента изменения подачи теплоносителя до момента
изменения температуры стенок подогревателя. Естест
венно, что переходное запаздывание отрицательно влия
ет на процесс управления.
Транспортное запаздывание присуще тем объектам,
у которых между управляющим органом и выходом объ
екта имеются передаточные каналы (транспортеры, тру
бопроводы, теплопроводы и т. п.). Д ля прохождения
такого канала требуется время, равное отношению дли
ны канала к скорости движения вещества (энергии).
Процесс автоматического управления протекает более
благоприятно при меньшем времени транспортного за
паздывания. Заметим, что разным видам объектов при
сущи различные запаздывания.
Так, одноемкостные объекты обладают только пере
даточным запаздыванием, двухъемкостные и многоемко155
и !
„
Рис. 58. Кривые разгона объектов:
а — графическое определение постоянной времени н времени регулирова
ния;
б — определение
постоянных
времени
в — определение динамических свойств объекта.
многоемкостных
объектов-
стные — транспортным и переходным запаздыванием, а
у безъемкостных запазды вания нет.
На рисунке 57, г графически изображено изменение
управляемой величины у в объектах только с переход
ным (кривая / ) и переходным и транспортным (кривая
2) запаздываниями при изменении внешнего воздейст
вия (нагрузки) на объект. Из приведенных кривых вид
но, что транспортное запаздывание оказы вает сущест
венное влияние на характер переходного процесса.
Запаздывание регулятора относится к переходному
виду. Оно представляет собой время, необходимое для
преодоления влияния зазоров, сил трения, индуктивнос
тей, емкостей, задерж ек срабатывания реле, исполни
тельного механизма и т. п. Отрицательное действие за
паздывания заклю чается в том, что перемещение
управляющего органа не совпадает по времени с теми
командными сигналами, которые формирует регулятор
в процессе изменения управляемой величины. Особенно
опасно влияние запазды вания, если объект не обладает
свойствами самовыравнивания.
6.6. Время разгона и постоянная
времени
Д ля сравнивания отдельных объектов по их свойст
вам в переходном режиме или, другими словами, для
оценки динамических свойств объектов введено понятие
полного времени разгона
Чтобы объяснить это поня
тие, проще всего рассмотреть кривую разгона, которая
156
иллюстрирует изменение управляемой величины объек
та во времени. Такую кривую можно получить, если на
вход объекта скачкообразно подать входную величину
и записать изменения управляемой величины для раз
личных моментов времени.
Н а рисунке 58, а изображена кривая разгона объек
та, обладающего самовыравниванием. Здесь кривая у =
— f ( t ) показывает изменение значения управляемой ве
личины в процессе самовыравнивания при мгновенном
изменении внешнего воздействия F {t). Время разгона /р
определяет продолжительность переходного процесса
от момента подачи внешнего воздействия до момен
та, при котором управляемая величина будет отличать
ся от установившегося значения не более чем на 1 7о
( ! / к = 1 % ) , то есть составлять 99 % своего номиналь
ного значения. Д ля каждого объекта время разгона
имеет свой физический смысл. Так, временем разгона
объекта будет, например, время от подачи напряжения
до достижения электродвигателем номинальной скорос
ти вращения и равновесного состояния после его пус
ка или, скажем, время, необходимое, чтобы в нагрева
тельном элементе установилась заданная температура
после его подключения к сети и т. д.
Постоянная времени объекта — это время его разгона
при отсутствии самовыравнивания. Значение постоянной
времени Т объекта можно определить, если провести
касательную к начальной точке кривой разгона. Отре
зок, отсекаемый этой касательной на прямой, параллель
ной оси абсцисс, представляет постоянную времени Т.
М ежду временем
разгона, постоянной времени Т,
чувствительностью v и коэффициентом самовыравнива
ния р объекта существуют следующие зависимости
r= l/v p
и ^р=4,6Г.
Чем больше постоянная времени Т, тем хуже объект
поддается регулированию. На рисунке 58, б приведены
кривые разгона объектов с различным числом емкостей.
Значения постоянных времени различных объектов не
одинаковы: для безъемкостного Г = 0 , для одноемкост
ного Т = Т \ , двухъемкостного T = T z , трехъемкостного
T— Tz и т. д. (причем {Т \< с Т 2 < Т г ) . Следовательно, чем
больше емкость объекта, тем больше постоянная вре
мени.
157
6.7. Определение основных свойств
Кривая разгона, характеризующая динамические
свойства объекта, после соответствующей обработки и
анализа позволяет определить (рис. 58) время запазды
вания, коэффициент самовыравнивания, изменение уп
равляемой величины, скорость этого изменения, посто
янную времени объекта и время регулирования.
Время передаточного запаздывания то на кривой
разгона представляется отрезком kl между моментами
начала изменения внешнего воздействия F и начала
изменения управляемой величины.
Время переходного запаздывания Тп находят так:
проводят линию а6, находят на кривой разгона точку
О максимальной скорости изменения и проводят к ней
касательную до пересечения с линией аб; отрезок 12 и
характеризует переходное запаздывание.
Время полного запазды вания: т= то+Т пЗначение коэффициента самовыравнивания опреде
ляют как отношение воздействия F к вызванному им
максимальному отклонению «/max управляемой величины:
р = Р 1Утах-
Зная значение коэффициента р самовыравнивания,
находят коэффициент усиления объекта ко, который по
казывает, насколько изменится управляемая величина
от изменения положения управляющего органа: feo=l/pЧем больше коэффициент самовыравнивания, тем
относительно меньше воздействие управляющего органа
на скорость и значение изменения величины, то есть
тем менее чувствителен объект к управляющим воздей
ствиям и тем ниже коэффициент усиления.
Чтобы определить постоянную времени То объекта,
проводят горизонтальную uq через новое установившееся
значение управляемой величины, затем касательную
до пересечения ее с линией uq в точке ж, потом через
точку г вертикаль до точки м\ отрезок мж в масштабе
и соответствует постоянной времени объекта Го, кото
рая позволяет судить об общей продолжительности про
цесса самовыравнивания и характере изменения управ
ляемой величины во времени. Так, для одноемкостного
объекта по истечении времени с момента, когда закан
чивается переходное запаздывание (объекты с запазды
ванием), или с момента возникновения возмущения
(объекты без запазды вания) управляемая величина дос
158
тигнет точки О и будет составлять 0,632 установившего
ся значения //max- Через время 2То //=0,865 //max, через
ЗТо //=0,956 У т а х , через 4То //=0,99 //m ax, то есть прак
тически через 4,6 То процесс самовыравнивания закон
чится.
Скорость разгона е, или максимальную скорость из
менения управляемой величины в процессе самовырав
нивания определяют для одноемкостного объекта, про
водя через точку I вертикаль до пересечения с каса
тельной в точке л и линию, параллельную аб, через
точку л; отрезок в и дает в масштабе скорость разгона.
Полученные данные, то есть значения т, р. То и е,
позволяют судить о динамических свойствах объекта, на
основании которых выбирают регулятор и определяют
параметры настроечных элементов, обеспечивающих ус
тойчивость и необходимые качественные показатели
процесса управления. Параметры е и т чаще используют
для оценки динамических свойств объекта без самовы
равнивания; параметры ко. То и т — для объекта с самовыравниванием. В общем ж е случае параметры ко. То
и т пригодны для оценки объектов без самовыравнивання, и, наоборот, параметры е и т могут характеризовать
объекты с самовыравниванием. У объектов без само
выравнивания коэффициент усиления й о = 1 , а время
разгона tp— To. Д ля выбора настроечных параметров
регулятора большую роль играет отношение т/Го или
произведение ерт (т /Г = е р т ).
Д 1шамические свойства объекта очень часто опреде
ляют по частотно-фазовым или амплитудно-фазовым
характеристикам, которые будут рассмотрены далее.
6.8. Автоматические регуляторы
Автоматическая система управления обеспечит з а
данный алгоритм функционирования, если регулятор
выбран правильно и его параметры настроены на тре
буемый режим работы. Основная функция регулятора
состоит в том, чтобы выявить отклонение управляемой
величины от заданного значения, усилить это отклоне
ние и преобразовать в перемещение исполнительного
механизма млн в управляющий сигнал управляющего
органа объекта управления.
159
Промышленность выпускает регуляторы, которые
можно классифицировать по следующим видам: управ
ляемой величины, используемой энергии, конструктив
ному исполнению, принципу управления, алгоритму уп
равления, управляющему воздействию на объект и зако
ну управления. П о в и д у у п р а в л я е м о й величины
различают регуляторы скорости, температуры, напря
жения, освещенности, мощности, давления, уровня
и др.
По виду
используемой энергии
разли
чают регуляторы прямого (рис. 6, а)
и непрямого
,(рис. 7, а) действия.
По к о н с т р у к т ив но м у и с п о л н ен и ю
раз
личают регуляторы приборные, аппаратные и агрегат
ные. Приборные регуляторы содержат измерительное
устройство, которое одновременно выдает сигнал на
измерительный прибор, регистрирующий значение конт
ролируемой величины и сигнал управления. К ним
относятся электронные потенциометры или автомати
ческие мосты, измерительные логометры и т. п. В ре
гуляторах аппаратного типа вырабатывается только
управляющий сигнал. Основные узлы регуляторов —
измерительный блок и электронное устройство, форми
рующее законы управления. Измерительный блок вос
принимает сигналы от первичных приборов и задатчи
ка, усиливает их и формирует унифицированный сиг
нал, подаваемый на вход электронного управляющего
устройства. Электронное устройство включает электрон
ный усилитель и устройство с релейным или аналого
вым выходом при использовании отрицательных обрат
ных связей.
Базовой конструкцией современных электронных
устройств является регулирующий прибор Р-111, кото
рый используется в высокоточных регуляторах ВРТ и
входит в состав электрической унифицированной сис
темы приборов автоматического управления «Каскад»
с некоторой модификацией под индексом Р-12. Д ля вы
сокоточного управления тепловых процессов серийно
выпускается регулятор ВРТ-2 с диапазоном управления
температур 0 . . . 1600°С и точностью управления ± 0 ,5 °С;
в качестве измерительных и задающих элементов ис
пользуют термопары П Р или ПП. Он состоит из измери
тельного блока (И Б ) типа И-101 (102) и регулирующе
го прибора (Р П ) типа Р-111, выпускаемого в трех
160
модификациях. Аналоговый регулирующий прибор Р-111
вклю чает модуль высокоомного усилителя, модуль ис
точника питания, модуль станции управления, цепи
функциональной обратной связи, входные и выходные
цепи. В И Б компенсируется ЭДС термопары и усилива
ется сигнал разбаланса термопары и задатчика. Сигнал
с выхода И Б поступает на вход РП , который преобра
зует выходной сигнал в унифицированный сигнал пос
тоянного тока О. . . 5 т А и формирует закон управления
(П, ПИ, ПД, П И Д ). Сигнал с выхода РП воздействует
на исполнительное устройство управления нагревом
(тиристорные, магнитные и д р.).
В регуляторах агрегатного типа преобразовательно
усилительный блок сравнивает сигнал датчика и зад ат
чика, формирует выходной сигнал. Сигналы этого блока
унифицированы как на входе, так и на выходе. По та
кому принципу выполняют пневматические регуляторы.
По принципу управления регуляторы классифициру
ют в соответствии с принципами автоматического уп
равления (1.3).
По алгоритму управления регуляторы классифици
руют, так же как и автоматические системы (1.7), на
статические, астатические, программные и следящие.
По управляющему воздействию на объект в соответ
ствии с классификацией управляющих воздействий
(рис. 13) различают регуляторы непрерывного, релей
ного и импульсного действия. По закону управления
непрерывные
регуляторы
разделяю т в соот
ветствии с законами управления (1.8).
Интегральный регулятор реализует интегральный
закон управления и характеризуется тем, что лю
бому положению управляющего органа, то есть любой
нагрузке, соответствует заданное значение управляемой
величины. Если в автоматической системе с таким регу
лятором произойдет отклонение управляемой величины
от заданного значения, управляющий орган будет пе
ремещаться до тех пор, пока она не вернется к зад ан
ному значению. Подобные регуляторы могут быть с
постоянной и переменной скоростью перемещения уп
равляющего органа. Положительной особенностью явл я
ется то, что управляющий орган может занимать любое
положение в пределах своего хода при поддержании уп
равляемой величины на заданном уровне. Основной не
достаток эгих регуляторов— замедленное действие. Реli
Закг1з 50п7
1G1
гулнроБОчная характеристика автоматических систем о
И-регулятором аналогична показанной на рисунке 7 ,6 ,
поэтому такие регуляторы называют еще астатическими.
В пропорциональном регуляторе реализуется про
порциональный закон регулирования, в нем отклонение
управляемой величины от заданного значения вызывает
пропорциональное по значению и скорости перемещение
управляющего органа. Эти регуляторы, называемые
статическими, в своем действии они все время стремятся
«догнать» отклонившуюся от заданного значения уп
равляемую величину и остановить ее, то есть прекра
тить ее дальнейшее отклонение. Д ля такого регулятора
диапазон управляемой величины, в пределах которого
происходит перемещение управляющего органа из одно
го крайнего положения в другое, является п р е д е л о м
п р о п о р ц и о н а л ь н о с т и . Этот предел представляет
собой величину, обратную чувствительности регулятора.
Д ля получения заданного предела пропорциональности
в П-регуляторах обязательно наличие жесткой обратной
связи. Автоматические системы с П-регуляторами име
ют статическую характеристику, изображенную на ри
сунке 6, б. В их работе проявляется статическая ошиб
ка регулирования.
Пропорционально-интегральный регулятор реализу
ет закон управления ПИ и, как следует из его назва
ния, совмещает в себе свойства интегрального и пропор
ционального регуляторов и поэтому действует без ста
тической ошибки. Если в автоматической системе с ПИрегулятором произойдет нарушение равновесия, то в ра
боту вступят его статическая и астатическая составляю
щие. При этом статическая часть будет стремиться как
бы догнать и остановить изменение управляемой вели
чины при одновременно действующей астатической сос
тавляющей. По достижении управляемой величиной
первоначального значения, пропорциональная состав
ляю щ ая прекратит свое влияние на управляющий ор
ган, который займет положение, отличающееся от задан
ного на статическую ошибку. Действие астатической
составляющей на управляющий орган будет продол
жаться, и поэтому он займет такое полол<ение, при
котором статическая ошибка будет ликвидирована (рав
на нулю). В ПИ-регуляторах пропорциональную функ
цию выполняет ж есткая обратная связь, а астатичес
к у ю — гибкая обратная (изодромная) связь, которая
проявляется только в переходном рсл<име, а по его
окончании исчезает.
У пропорционально-дифференциального и пропорци
онально-интегрально-дифференциального
регуляторов,
соответственно реализующих закон управления П Д н
П И Д на перемещение управляющего органа дополни
тельно к пропорциональному или пропорционально-ин
тегральному действию, оказывает влияние скорость
изменения управляемой величины, которая представля
ет собой первую ее производную по времени. Поэтому
такие регуляторы в своем названии имеют приставку
«дифференциальный» (их иногда называют еще регу
ляторами по первой производной). Введение первой
производной в закон управления вынуждает управляю
щий орган перемещаться с некоторым временным опе
режением, возрастающим по мере увеличения скорости
изменения управляемой величины.
С уменьшением скорости изменения управляемой
величины уменьшается и опережающее действие, а пол
ностью оно прекращ ается, когда управляемая величина
перестает изменяться.
Создание эффективно действующей автоматической
системы управления требует выбора соответствующего
регулятора и тщательной его настройки. Регулятор
выбирают после того, как составлены требования к про
цессу управления, изучен объект и действующие на него
внешние воздействия. В каждом конкретном случае
стремятся выбрать самый простой по закону управления,
наиболее дешевый и удобный в эксплуатации регуля
тор, который способен с учетом динамических свойств
данного объекта обеспечить требуемое качество управ
ления. Вместе с тем можно дать следующие, сугубо об
щие рекомендации по применению рассмотренных регу
ляторов.
Импульсные регуляторы подходят для объектов без
большого запазды вания, обладающих средней емкостью
при постоянной или мало и плавно меняющейся нагруз
ке, когда выполняется условие —^Т’о> 0 , >5 •. . .• 1,0.
> •
Двухпозиционные регуляторы можно рекомендовать
для объектов без значительного запаздывания, имеющих
большую емкость, при постоянной или мало меняющей
ся нагрузке, с учетом следующего условия; о < —^ < 0 2
То
11»
162
'
1СЗ
Управление двух- и многоемкостными объектами мо
жет вестись двухпозиционными регуляторами только
тогда, когда не требуется высокая точность поддерл<ания управляемой величины.
П-регуляторы рекомендуют для объектов с неболь
шим запаздыванием и незначительными изменениями
нагрузки. Обычно их применяют на одноемкостных, ре
ж е — на двухъемкостных объектах и надежно обеспечи
вают управление объектом с самовыравниванием, если
—
I^
и объекта без самовыравнивания, когда
1
1,57 > kp
6'
где ко — коэффициент усиления объекта; kf, — коэффициент уси
ления регулятора; б — относительная статическая ошибка управ
ления; То — постоянная времени объекта.
И-регуляторы применимы в тех случаях, когда до
пускается большое время регулирования. Их нельзя ис
пользовать на объектах без самовыравнивания и с за
паздыванием, так как процесс управления может быть
неустойчивым. Если И-регулятор должен обеспечивать
работу объекта при непрерывно изменяющемся внеш
нем воздействии, то для устойчивого действия такой сис
темы необходимо, чтобы максимальная скорость управ
ляющего воздействия была больше скорости изменения
внешнего воздействия.
ПИ-регуляторы применяются практически при любых
требованиях к значению ошибки и при сколь угодно
широком диапазоне изменения внешнего воздействия,
если допустимое время регулирования превышает 6т, то
есть ^р> 6т. Эти регуляторы получили наибольшее рас
пространение.
ПД-регуляторы можно рекомендовать для объектов
с большим временем запаздывания, незначительными
изменениями воздействий и со средней емкостью.
ПИД-регуляторы пригодны для объектов с больши
ми запаздываниями, значительными и резкими измене
ниями внешних воздействий и с любой емкостью, когда
выполняется условие
При использовании И-, ПИ- и ПИ Д-регуляторов в
условиях неустановившихся внешних воздействий, кото
164
рые изменяются с постоянной скоростью, необходимо,
чтобы максимальная скорость исполнительного меха
низма регулятора была больше скорости изменения
внешнего воздействия, иначе отклонение управляемой
величины будет^накапливаться (поскольку компенсация
внешнего воздействия происходит медленнее, чем его
изменение) и может стать недопустимо большим.
вояросы « задания. 1. Что такое объект управния Ч
основных свойствах объектов управле
ния. J Как м ож но определить основные свойства объектов уппавления? 4. Какие вы зн аете регуляторы? 5 . И злож ите общ те ре
комендации по выбору регуляторов различных типов.
ГЛАВА
VII
ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКИХ
СИСТЕМ УПРАВЛЕНИЯ
7.1. Общие понятия о работе
автоматических систем
Процесс автоматического управления характеризу
ется изменением управляемой величины у во времени,
то есть функцией y { t ) .
Допустим, автоматический регулятор работает па
поддержание постоянного значения управляемой вели
чины Уй. При отсутствии в н е ш н и х в о з д е й с т в и й ,
или в так называемом идеальном случае, функция
y { t ) = y o - В действительности же в систему все время
поступают внешние воздействия, которые приводят к
тому, что график процесса управления y { t ) отличается
от идеального. На регулятор возлагается задача удер
живать управляемую величину y { i ) вблизи установлен
ного значения уо.
Технологическим процессом определяются пределы,
за которые не долл<ны выходить некоторые отклонения
фактического значения управляемой величикы. Кривая
процесса управления наглядно отражает, насколько хо
рошо данная автоматическая система справляется со
своей задачей. Регулятор выбирают так, чтобы он удов
летворял технологическим требованиям данного объек
та. От соотношения между параметрами регулятора и
параметрами объекта в основном зависит близость кри
вой процесса управления y ( t ) к заданной уо.
Однако правильного выбора схемы регулятора в соот
ветствии с общими принципами управления недостаточ
но. В системе могут быть не только потребители энер
гии, но и ее источники. Без учета этого может получить
ся, что регулятор не будет стабилизировать (успокаи
вать) систему, а, наоборот, раскачивать ее за счет
внешних воздействий. Кривая такого процесса начнет
удаляться от заданного значения. Поэтому правильность
выбора регулятора обычно подтверждают расчетными,
166
а если необходи.мо, экспериментальными данными с
целью выяснения наилучших его параметров. Причем
эти данные получают не только для статических (уста
новившихся) режимов работы системы, но и для дина
мических (переходных) процессов.
При изучении динамических свойств системы все
входящие в нее элементы рассматривают с точки зре
ния их динамических качеств. Такое представление эле
ментов приводит к понятию д и н а м и ч е с к о г о з в е н а
(или просто звена), к которому относят часть системы,
описываемую тем или иным уравнением. Переходные
процессы автоматических систем в целом или в отдель
ных ее звеньях описывают линейными или нелинейны
ми дифференциальными уравнениями, причем общее
уравнение системы составляют из уравнений отдельных
звеньев.
Работу системы можно описать словесно— пояснить
принцип действия конкретной системы и отдельных эле
ментов, что необходимо при ее анализе и синтезе.
Однако количественной оценки качества работы сис
темы словесное описание не дает. Поэтому для полу
чения возможности оценивать и сравнивать различные
по назначению и принципам действия системы применя
ют математическое описание как отдельных элементов,
так и системы в целом, которое называют математичес
кой моделью. Заметим, что модели отраж аю т наиболее
существенные свойства оригинала. Малосущественные
факторы, оказывающие незначительное влияние на ка
кое-либо конкретное исследование, как правило, во вни
мание не принимают. Поэтому один и тот ж е объект в
разных исследованиях можно представлять разными
моделями.
В теории автоматического управления применяют три
основных способа описания: поэлементный, а для систе
мы в целом в управляемых переменных и в переменных
состояния. При поэлементном описании на основании
изучения физических свойств сигнала получают уравне
ния для отдельных входящих в систему конструктивных
или функциональных элементов и для связей, объеди
няющих эти элементы в систему. В левые части уравне
ний включают физические выходные переменные эле
ментов или их производные по времени, в правые час
ти — физические входные переменные — воздействия на
элементы. Отдельные переменные будут входными для
167
одного элемента и выходными для другого. Число пере
менных при таком описании может быть больше, чем
число управляемых переменных, так как оно включает
«промежуточные» переменные.
Такие описания позволяют исследовать влияние к аж
дого элемента системы в отдельности и по ним судить
о работе системы. Математическое описание всей систе
мы получают, исключая все неинтересующне промежу
точные переменные, и в уравнениях остаются только
управляемые величины и их производные, записываемые
в левой части уравнений, и возмущающие и управляю
щие воздействия на систему в правой части. Описание
всей системы позволяет оценить работу в целом, не ана
лизируя работу каладого элемента в отдельности.
В современных исследованиях наряду с двумя спо
собами для оценки динамического состояния системы
используют не только декартовы координаты, когда ди
намические свойства системы изображаются на плос
кости, но все шире поведение системы в динамике изоб
раж аю т в пространстве, используя понятие переменных
состояния и пространства состояния.
Переменными состояния системы в динамике прини
мают такие переменные, которые позволяют м атемати
чески точно описать состояние системы в динамике.
Ae = AU + R„M„.
ЭДС генератора является
нелинейной
функцией то
ка возбуждения (рис. 59),
поэтому произведем линеа
ризацию характеристики хо
лостого хода генератора ме
тодом касательной. Приняв
за рабочую точку А, где
»в= 1во, получим
{6е/6{в)оА1в,
где (de/di„)o = tgP.
Рис. 59. Характеристика
Будем считать, что ЭДС лостого
хода генератора.
пропорциональна магиитному потоку Ф обмотки возбуждения, тогда
хо
е=сФ ,
р ^ сги 7 р а д е н и Г ‘"”’
конструкции генератора и ско-
В отклонениях
Ае = сАФ.
7.2. Составление дифференциальных уравнений
Цепь
Составление дифференциальных уравнений рассмот
рим на примере составления уравнения генератора пос
тоянного тока.
З а управляемую величину для генератора примем на
пряжение на заж им ах якоря, управляющим воздействи
ем будет напряжение, подводимое к обмотке возбужде
ния. За нагрузку-возмущ ение примем ток якоря или же
параметры (сопротивление, индуктивность) нагрузки.
Будем считать, что скорость генератора постоянная,
температура обмоток неизменна, гистерезис отсутствует,
реакция якоря скомпенсирована, индуктивность якоря и
нагрузки малы и ими можно пренебречь. С учетом ска
занного у р а в н е н и е я к о р н о й ц е п и г е н е р а т о р а
запишется
e = l ' + inRn,
где е — Э ДС генератора; U — управляемое напряжение;
противление обмотки якоря; 1я — ток нагрузки.
В отклонениях
R„ — со
возбул<дения
ГАС R-,
сопротивление обмотки
поток; ш — число витков.
возбуж дения;
'
Ф — ее
магчртнпн
Mdrai.THbiH
В отклонениях
Аи —R eAi в + ^
(1(АФ)
d?
Получаем, что генератор постоянного тока описыва
ется системой из четырех уравнений. После исключения
промежуточных переменных АФ, Ain, Де и группировки
членов получим одно дифференциальное уравненче в
отклоне{П1ях, описывающее процессы в генераторе
ш
d(Atj)
Rb
с
~dT
de
~ 1
Au =
d/в
168
169
НяЯв
iJ L
*
wRa
-Alp
d (Ain)
dt
)
Н аряду со стандартной формой записи применяют
операторную. Она ннчем не отличается от обычной, но
более компактная.
Если обозначить физические величины, входящие в
стандартное уравнение типа (19), то есть ы*, i„, и т. п.
через X i , Х 2 , хз. . . и ввести символы операторов диффе
ренцирования
(17)
d l 'a
Уравнение (17) очень громоздко, переменные в нем име
ют размерности напрял<ення, тока. Пользоваться таким
уравнением неудобно, поэтому применяют безразмерную
форму записи, в которой все переменные величины,
входящие в уравнение, кроме времени, безразмерные.
Д л я перехода к такой форме нужно разделить и ум
ножить каждое слагаемое уравнения на постоянную
величину, имеющую размерность той переменной, кото
рая входит в это слагаемое. Такой величиной обычно
считают номинальное установившееся значение перемен
ной. В безразмерной форме уравнение (17) запишется
■I
dt +
wRuIb
RnRnfн
T^ id(,n
d^x
йх
системы
d /
+
UliUs, :
d l„a
~df
ffco/.
(20)
iaip^+02p^+aip + ao)x{t) = (bip + bo)f{i).
(2 1 )
Операторное уравнение (21) является дифференциаль
ным уравнением, в нем буква р обозначает оператор
дифференцирования, а переменные x{ t ) и l ( i ) являются
(18)
'
-
u , = UlUn, ( я . = 1я //н — безразмерны е величины.
при низшей производной
( ii, )
- ' dL /
'JU
7 - , = -
‘
реальными функциями времени.
7.3 Преобразование Лапласа
i l l
Г
d/„
,
При исследовании и расчетах автоматических систем
часто обращаются к математическому методу, который
получил название преобразование Л апласа. Этот метод
позволяет функцию x { t ) одного переменного (обычно
времени t) преобразовать в функцию х ( р) другого пе
ременного (как правило, р) посредством соотношения
(19)
•^(Р)= S
I
Rb
-1
(—
)
\ dt^ /«
S.
~ ir
\ di» / *
Уравнение (19) позволяет определить характер про
цессов в генераторе и установить влияние всех парамет
ров на его напряжение.
170
d^
то дифференциальное уравнение элемента или
вида
Уравнение (18) приводят к стандартной форме запи
си, когда коэффициент при низшей производной равен
единице. Д л я получения стандартной формы разделим
левую и правую части уравнения (18) на коэффициент
где
d2
в операторной форме запишется
wUn
где
d
где p = a + / f c — произвольная
щественные переменные.
x {t)e -P 4 t,
комплексная
величина;
а и Ь — ве
Функция x ( t ) называется о р и г и н а л о м , а х ( р ) —
и 3 о б р а е н и е м. Сокращенно преобразование Л а п л а
са записывается так
J f ( p ) = A [ jr ( 0 ] .
Преобразование Л апласа дает возможность выпол
нить алгебраизацию дифференциальных уравнений, то
есть операции дифференцирования и интегрирования за171
мснить алгебраическими операциями умножения и деле
ния. При этом первая производная от х будет иметь
изображение р х (р ), вторая — р^х(р), третья — р Н ( р ) ,
производную п-го порядка выражают как произведение
оператора р в п-ной степени на изображение х ( р )
Н аряду с преобразованием Л апласа широко приме
няют преобразование Карсона — Л апласа
00
х { р ) ^ р S jc (/)e -P W .
О
f d"jc(0
~dF
=р-х{р).
Интеграл от х заменяю т дробью, в числителе кото
рой изображение х ( р ) , а в знаменателе р
A[ Sx ( Od / ] =
Ф)
Если применить преобразование Л апласа к диффе
ренциальному уравнению (20), то при нулевых началь
ных условиях оно запишется так .
{a3p^+a2p^+aip+0(,)x{p) = {bip + bo)f{p)_.
(22)
Т акая форма записи дифференциального уравнения на
зывается операционной. Под нулевыми начальными ус
ловиями понимают такие, когда выходные величины
звеньев, из которых состоит система управления, в на
чальный момент имеют нулевые значения, если они опи
сываются уравнениями первого порядка, дополнительно
имеют нулевые значения первых производных, если они
описываются уравнениями второго порядка, и т. д.
Уравнения одного и того ж е элемента или системы, за
писанные в операторной (21) и операционной (22) фор
ме внешне одинаковы, но они принципиально отлича
ются одно от другого. Уравнение (21) — дифференциаль
ное, в нем р — оператор дифференцирования, а x ( t ) и,
f ( t ) — реальные функции времени. Уравнение (22) ал
гебраическое, в нем р — независимая комплексная пе
ременная, а х ( р ) и f ( p ) — изображения физических ве
личин x ( t ) и f (t).
Операционную форму записи уравнений применяют в
теории автоматического управления, так как она проста
и удобна. При нулевых начальных условиях ф ормаль
ный переход от операторной к операционной форме осу
ществляется заменой переменных как функций времени
t обозначениями этих переменных как функций комплек
сной переменной р .
172
Д л я перехода от изображения переменной по Л ап
ласу к ее изобрал<ению по Карсону — Л апласу необхо
димо умножить его на р. Оригинал по изображению
находят с помощью таблиц оригиналов и их изображе
ний или применяя обратное преобразование Л апласа.
Д л я функций, часто встречающихся в задачах управле
ния, таблицы дают в справочниках. В качестве приме
ра приведем некоторые оригиналы и их изображения:
sinco/ =
pH o) ’
-at.
COSdlt--
p+ a
Уравнение генератора в операционной форме после обо
значения напряжения и» и тока нагрузки Гя» соответст
венно через X и f и применения преобразования Карсо
н а — Л апласа запишется
iT^p + l ) x { p ) = - { T 2 p + k i ) f { p ) .
Дифференциальные уравнения автоматических систем
составляются на основании уравнений отдельных звень
ев (элементов) по отношению к управляемой величине
путем последовательного исключения всех промежуточ
ных переменных. В общем виде такое уравнение может
быть записано следующим образом:
d"t
Go—
- - f Йг
d /n - l
^ 0 — TTZ— ^"^1—
йУ
(It
-Ь . . . -f C n - l ---- -—г +
d/™-*
. . -Ь b,n-v
+С1пУ —
dx
dt
■+b,nx,
(23)
где Go, Oi, 02, . . . , и bo, bi, Ъг, . . — постоянные коэффициенты, в
которые входят постоянные времени, передаточные коэффицненты
и другие неизменные величины, стоящ ие при членах производных
левой и правой частей дифференциального уравнения.
Операционное уравнение системы в
учетом уравнения (23) будет иметь вид
=
общем виде с
(floP" + G iP "-4- . . . + а п - Ф + а п ) У { р ) ==
^
+ . . . -Ь bm-ip -Ь Ь,п) -V{р ).
(24)
173
7.4. Статические свойства
где kp — передаточный коэффициент
коэффициент местной обратпой связи.
Статические свойства систем оценивают по статичес
кой
характеристике.
Статической
характеристикой
(рис. 56) системы или звена называют зависимость уп
равляемой величины у от входной величины х. Если эта
зависимость вы раж ается линейной функцией (прямая
i ) , то система будет линейной и y = k x .
При нелинейной зависимости (кривая 2) систему
считают нелинейной.
Передаточный коэффициент {к) является основным
параметром, характеризующим работу системы или зве
на в установившемся режиме. Значение передаточного
коэффициента определяется из статической характерис
тики 1 как отношение приращений Дг/ и Дх выходной и
входной величин: k = A y / A x .
Звенья, входящие в систему, могут быть соединены
последовательно или параллельно.
При последовательном соединении общий передаточ
ный коэффициент k системы равен произведению пере
даточных коэффициентов k i , k 2 , . . . , k n ее отдельных
звеньев:
• • •,
При параллельном соединении звеньев общий пере
даточный коэффициент равен сумме передаточных коэф
фициентов отдельных звеньев: f e = ^ i+ f e 2 + ^ 3 + •. • + ^ п .
Д л я нелинейной системы передаточный коэффициент
определяют так же, как и передаточный коэффициент
нелинейного объекта (рис. 56).
Важным качественным показателем работы системы
в статическом режиме является статическая ошибка.
Различаю т статическую ошибку для разомкнутой и
замкнутой автоматических систем. Если в разомкнутой
системе относительная статическая ошибка равна б,
то в соответствующей замкнутой статической системе с
передаточным коэффициентом
при том ж е внешнем
воздействии статическая ошибка у уменьшится в l + f e
раз, то есть
В формуле знак плюс ( + ) относится к отрицатель
ной обратпой связи, а знак минус (— ) к Jг^oлoжитeльной. Формула показывает, что при охвате звена отрица
тельной обратной связью передаточный коэффициент
уменьшается (А з<*р), а при положительной — увеличи
вается ( к з > к р ) . Эффективность автоматической систе
мы в установившемся режиме оценивается степенью
точности — отношением статической ошибки ДдГц неав
томатизированного объекта управления (без регулято
ра) к статической ошибке Дл: автоматической системы
Когда в систему входит звено, охваченное местной
обратной связью, значение передаточного коэффициента
ka этого звена рассчитывают по уравнению
Йр
ka =
174
l+ ftp A o .c
у=— ^
Д -V:
звена;
й о .с — передаточный
(рис. 60). Чем выше степень точности, тем
'
эффективнее работает система.
Д л я астатической системы значение
статической
ошибки и коэффициент статизма равны нулю, а степень
точности — бесконечности.
Статические характеристики отдельных звеньев и
системы в целом мол<но снять экспериментально или
рассчитать.
При экспериментальном определении статической
характеристики входной величине звена или си
стемы ^ придают поочередно различные значения и
каждый раз по истечении времени, необходимого
для затухания переходного процесса, фиксируют зн а
чение выходной величины. Соединив полученный ряд
точек плавной линией, строят с т а т и ч е с к у ю х а
р а к т е р и с т и к у з в е н а или системы (рис. 61, а ).
Если выходная величина у зависит не только от вход-
Рис. 60. К определению степе
ни точности статической систе
мы в установившемся режиме:
I и 2 “ статические характеристики
неавтоматизированного объекта уп
равления и автоматической систе
мы.
Рис. 61. П остроение опыт
ных статических
характе
ристик:
а — статическая характеристи
ка звена; б — семейство
тических характеристик.
ста
175
ной X, но и от некоторой величины 1г, то получают с е
мейство
статических
характеристик
(рис. 6 1 ,6 ). По статическим характеристикам для кан<дого значения входной величины х можно найти соот
ветствующее значение выходной величины у.
При аналитическом определении статической харак
теристики системы составляют уравнения, описываю
щие работу каладого элемента в установивщемся ре
жиме. Затем путем последовательных преобразований
приходят к вырал<ению, которое отраж ает зависи
мость регулируемой величины у от задающего воздей
ствия X, то есть находят математическое вырал<ение
статической характеристики системы. Аналитический
метод расчета позволяет получить зависимость любого
параметра системы в виде аналитической
функции
других параметров; определить вырал<ения статичес
ких характеристик, которые наглядно показывают
влияние на процесс любого параметра системы; выя
вить общие закономерности данного процесса управ
ления, не прибегая к подстановке в полученные урав
нения конкретных значений параметров и исходных
данных. Аналитический способ расчета
статических
характеристик применим только для линейных и лине
аризованных систем.
При графоаналитическом способе, пригодном для
анализа линейных и нелинейных систем, статические
характеристики отдельных элементов представляют в
виде графиков, которые строят на основании аналити
ческих выражений, записанных для отдельных элемен
тов. Затем в основном графически исключают проме
жуточные зависимые переменные. Характеристики эле
ментов, охваченных обратными связями, такж е находят
графическим построением.
системы на входное воздействие
(возмущение). Так как входные
воздействия по своему характеру
и величине могут быть разными,
то и решение одного и того же
уравнения будет различным. Что
,
t
бы можно было однозначно оце
нивать поведение системы в пере
а
ходном режиме, входное воздей
ствие должно быть простым, не
затрудняющим решение уравне
КЩ
/
ния и соответствовать самому тя
___ / £
желому режиму работы системы
из числа встречающихся при ее
эксплуатации.
Таким входным воздействием
является единичная ступенчатая Рис. 62. Типовые внеш
функция (рис. 62, а ). Единичная ние воздействия;
а — ступенчатое; б — гармо
ступенчатая функция или типовое
ническое.
воздействие представляет собой
мгновенное (скачкообразное) включение или отключение
входного сигнала. Она обозначается символом 1 (t) и
записывается
при включении
\
,
t
t
е’
1 //Ч 333, / О при К О
I 1 при
при отключении
1(0 =
1 при ^ < 0
Оценку динамических свойств автоматических сис
тем, то есть поведения их в переходных рел<имах, вы
полняют различными методами. Д ля этой цели приме
няют дифференциальные уравнения,
передаточные
функции, временные и частотные характеристики.
Решение дифференциального уравнения.
которым
описывается система, представляет собой
реакцию
О при
Н аряду с единичной ступенчатой функцией приме
няют единичную импульсную функцию, когда входной
сигнал подается в виде импульса, подробнее с ней
можно ознакомиться в специальной литературе.
Уравнение переходного процесса, то есть реакцию
системы на типовое единичное воздействие. изобрал<енное в графической форме, называют временной или раз
гонной характеристикой. Она представляет собой реше
ние дифференциального уравнения движения системы
или элемента для единичного входного воздействия
при нулевых начальных условиях.
Динамические свойства систем можно такж е оце
нивать по передаточным функциям, которые получают
176
12 З а к а з 5067
7.5. Динамические свойства
177
>l2(0)i)
нз операционных уравнений.
Передаточная функция
элемента или системы представляет отношение Л апласова изображения соответствующей выходной величи
ны к Л апласову изображению входной величины при
нулевых начальных условиях, то есть при условии, что
элемент или система находились в состоянии покоя при
^<;0. в соответствии с определением передаточная
функция записывается
В общем виде передаточная функция системы с опе
рационным уравнением (24) равна
у(р)
f c o p ™ + b i p ’" - * + ■ . ■ + Ь щ - ' Р + Ь " »
_
^ 26)
aop"+aiP’‘“ ‘+ • • •
Заметим, что знаменатель выражения (26) является
левой частью характеристического уравнения системы,
причем по условию физической осуществимости ^;истемы всегда должно выполняться соотношение т < / г .
Н аряду с передаточными функциями динамику систем
оценивают по частотным характеристикам, которые от
раж аю т зависимость амплитуды и фазы от частоты
синусоидальных колебаний при прохождении их через
звено или систему. Д л я получения частотных характе
ристик на вход системы или звено подают типовое
воздействие в виде периодически изменяющегося вход
ного сигнала (рис. 62, б ). На выходе появится сигнал
той же частоты, но с другой амплитудой и фазой, ко
торые зависят от частоты входного сигнала. П одавая
на' вход системы или звена гармонические воздействия
х = Л , 51п(0< постоянной амплитуды и разной частоты, на
выходе установятся синусоидальные колебания с дру
гой амплитудой и сдвинутые по фазе на угол ф,
1/ = Л 25ш(со^ — ф). По полученным
значениям х н у
для различных частот со получают частотные ху»актеристики: амплитудную, фазовую и амплитудно-фазо-
Фазовая частотная характеристика (ФЧХ) отраж а
ет зависимость разности фаз между входными и выход
ными колебаниями от частоты колебаний
ф ( с О г ) = ф в х ( с О г ) — <P B b ix ( tt > i) .
I
З а д ав а я различные частоты входному гармоничес
кому воздействию, получают в результате серию точек,
по которым строят частотные характеристики Д(со) —
= Д м ) и (р(со)=/(со).
Амплитудно-фазовую
частотную
характеристику
(АФЧХ) строят по амплитудной и фазовой характе
ристикам. С этой целью на графике ФЧХ для опреде
ленной частоты со находят значение фазы ср(со), отклады ваю т его в виде угла от горизонталыюй оси (по
часовой стрелке, если угол отрицательный, и против
часовой стрелки, если угол положительный). На пря
мой, проведенной под этим углом, откладываю т значе
ния амплитуды К(со), взятые с графика АЧХ при
той ж е частоте, и получают точку характеристики для
частоты со. Затем аналогичным образом находят точки
для других частот, соединив которые получают кри
вую АФЧХ. Таков путь экспериментального определе
ния частотных характеристик.
Если в выражение передаточной функции звена или
разомкнутой системы подставить
то получим
выражение АФЧХ или частотной функции, представлен
ное на комплексной плоскости как геометрическая
сумма вещественной Р(со) и мнимой /Q(co )частей
W (/co)=P(co)-b/Q (co).
Амплитудная частотная характеристика
как
К (с о )= у я Ч ы )+ О Ч « ),
(27)
определяется
(2Ь)
а ф азовая
ср(со) = arctg
Q(to)
(29)
PM
^ Амплитудная частотная характеристика
(АЧХ)
есть зависимость отношения амплитуды
коле
баний гармонического воздействия на выходе к ампли
туде i4 i(( 0t) колебаний на его входе от частоты коле
баний (Oi
П одставляя в формулы (27) . . . (29) значения со от
О до оо, строят амплитудную, фазовую и амплитуд
но-фазовую
частотные характеристики
отдельных
звеньев и системы в целом.
178
12*
1Г9
7.6. Типовые динамические звенья
т)
При изучении
автоматических систем наряду с
классификацией элементов по функциональным приз
накам широко применяют классификацию элементов
по их динамическим свойствам. Это позволяет все
многообразие физических устройств, из которых состо
ят автоматические системы, представить сравнительно
небольшим числом типовых динамических звеньев, по
нимая под динамическим звеном, или просто звеном,
часть автоматической системы, которая имеет опреде
ленные динамические свойства. При этом необязатель
но, чтобы каждый элемент системы соответствовал
только одному звену. Одному элементу с высоким по
рядком уравнения динамики может соответствовать не
сколько звеньев или, наоборот, одно звено — несколь
ким элементам с низким порядком уравнения дина
мики.
Типовые звенья подразделяют на усилительные,
безынерционные, апериодические, дифференцируюш.ие,
'интегрируюш.ие,
колебательные
и запаздываюш.ие.
В основу такой классификации
положена
реакция
звеньев — изменение выходной величины на строго з а
данное значение входной {типовое воздействие).
В усилительном безынерционном (пропорциональ
ном) звене (рис. 63) выходная величина у в любой
момент времени прямо пропорциональна входной вели
чине X. Уравнение такого звена
y=kx,
(30)
где k — передаточный коэффициент звена.
Уравнение динамики этого звена совпадает с его
статическим уравнением. Временная
характеристика
звена, получаемая подачей па его вход едииичного
воздействия х — 1 (0 (рис. 63, б), показана на рисунке
63, е.
Передаточная функция звена (рис. 63, й)
(31)
Частотная функция или АФЧХ безынерционного звена
W { j u ) ) = k (рис. 63, е) представляет собой точку, рас
положенную от начала координат па расстоянии k по
вещественной оси Р (ш ). Из уравнения (30) видно, что
у(р)
Мр)
Рис. 63. Безынерционное
звено;
G — условное
изображение;
б — входное
воздействие;
в — временная
характерис
тика; г — амп*1 итудная ха
рактеристика;
д — фазовая
характеристика: е — ампли
туд но-фазо-частотная
ха
рактеристика.
6
О
г
О!
О
I
о
т
d
W iju )
^
^ ^
при входном сигнале д:=Лвх31по)/ выходной сигнал ра
вен
i/=^BbixSinco<.
Следовательно, в безынерционном звене выходной и
входной сигналы находятся в ф азе (рис. 63, г)
(р(о))=0,
(32)
а амплитуда выходного сигнала (рис. 63, д ) в k раз от
личается от амплитуды входного
Л'(о))=А:.
(33)
И з (32) и (33) видно, что частотные характеристи
ки безынерционного звена не зависят от частоты. При
мерами безынерционного звена могут служить элект
ронные усилители постоянного тока, редукторы, раз
личного рода рычаги без трения и зазоров, потенцио
метрические датчики и т. п.
Апериодическое звено может быть первого и вто
рого порядка, причем в последнем случае его мож 1!-э
представить как последовательное соединение двух
апериодических звеньев первого порядка. В апериодически.к звеньях первого порядка выходная величина
при подаче на вход сигнала в виде единичной функции
изменяется по экспоненциальному закону (апериоди
чески), достигая нового установившегося значения.
Часто такое звено называю т инерционным, одноемко
стным или статическим.
Апериодическое звено первого порядка описывается
дифференциал ьным уравнением
йи
T— ^ + y = kx,
(34)
где k — коэффициент передачи; Т — постоянная времени.
160
181'
Передаточная функция
W{p)
(ЗГ.)
Тр+\
1’
Х{р)
н
у{р)
Тр*1
АФЧХ апериодического звена
УМ ,
Амплитудную н фазовую характеристики можно по
лучить, решив уравнение (34). Однако их легче найти,
не решая уравнения, а используя АФЧХ.
В выражении (36) выделим действительную и мни>
мую части, для чего знаменатель уравнения умножим
на сопряженное число и после преобразований найдем
и
‘^и=т
вещественную
(37)
и мнимую
kwT
Q(co) = -
(38)
частотные характеристики.
Используя (37) н (38), определим амплитудную
/^ (C 0 )= y p 2 („ )+ Q 2 ^ „ )= .
(39)
yi+Pco^
и фазовую
Q((o)
Ф(со) ==a r c t g = - arctgw r.
(40)
Из анализа уравнения (39) следует, что апериоди
ческое звено обладает свойствами фильтра, то есть
хорошо пропускает сигналы малой частоты и плохо —
большой, поэтому /((со) с ростом частоты убывает
(рис. 64, в), убывает и амплитуда выходного сигнала.
Ф азовая частотная характеристика (40) показывает,
что выходные сигналы отстают по фазе от входных.
Величина отставания находится в пределах 0 ° . . . —90°.
Частота сои= 1/7’= —45° называется ч а с т о т о й и з
л о м а . Постоянная времени Т характеризует меру
инерционности звена. Переходный процесс заканчива
ется практически за время t = { 4 . . . 5 ) T . Чем меньше
Т, тем ближе апериодическое звено по своим динами
ческим свойствам к безынерционному.
182
Рис. 64. Апериодическое звено первого порядка:
с — условное обозначение; б — временная характеристика; в — аыилитудчая
характеристика; г — ф азовая характеристика; д — амплитудно-фазовая х а
рактеристика; с — пример звена.
На рисунке 64 показаны условное обозначение и
характеристики апериодического звена 1-го порядка.
К такому звену можно отнести обмотки возбуждения
электрических машин, обмотки управления магнитных
усилителей и ряд других устройств.
Апериодическое звено второго порядка описывает
ся дифференциальным уравнением
^ T i-~ j7 -+ y = k x .
(41)
При 7' i ^ 27'2 потери энергии в звене очень велики и
колебания в нем не возникают. Такое звено может
быть представлено как два последовательно включен
ных апериодических звена первого порядка, описыва
емых уравнением (34).
Передаточная функция звена
^
"
('^2)
183
П ередат очная ф ункция
(47)
W(p)=kp.
Частотные характеристики:
плит удная и ф азовая
им плит удно-ф азовая,
/((oj)=A;{o;
У равн ен и е
р еа л ь н о го
зв ен а
йх
-у=кТ
W[ p ) =
(« )
Частотные характеристики:
плит удная и ф азовая :
А м плит удная характеристика
(49)
kip
(50)
7> + i
ам плит удно-ф азовая
’
ач"
k T /(О
W{ j a) =
^
(48)
П ередат очная ф ункция
А м плит удно-ф азовая частотная характеристика
■
д и ф ф ерен ц и рую щ его
At
Рис. 65. Апериодическое звено второго порядка:
и — условное обозначение; б — временная характеристи
ка; е — амплитудно-фазовая .характеристика.
ф (и)= — -
ам-
^ ---------- ■
(44);
Г/(0 -f 1
;/((со) =
yi-fz-s
: (r(co) = arclg7'&).
(51)
y(l-t0^rj2)2 + to27’i2
Ф а зо в а я характеристика
, .
.
o>Ti
<p(o)) = - a r c t g - y - ^ -
(45)
Условное обозначение, временная и амплитудно-фазо
вая, частотная характеристики показаны на рисунке 65.
К апериодическому звену второго порядка относят
ся нагревательные установки, теплицы, сушильные аг
регаты, животноводческие помещения и т. п.
У дифференцирующего звена выходная величина,
пропорциональная производной по времени от входной
величины, другими словами, выходная величина про
порциональна скорости изменения входной. Различают
идеальное
и реальное
дифференцирующие
звенья.
•
i'р а вн е н и е и деа л ьн о го ди ф ф ер ен ц и р ую щ его зв е н а
y=
184
. dx
di
(46)
Условное обозначение, временная и частотные хаоактеристики и д е а л ь н о г о з в е н а показаны на рисунке ЬЬ. Такое звено можно представить в виде схемы
(рис. bb, е) с выходным сопротивлением, равным ну
лю. При скачкообразном изменении входной величи
ны на выходе звена образуется мгновенный выходной
импульс, теоретически имеющий бесконечно большую
амплитз^ду.
Временная и АФЧХ р е а л ь н о г о з в е н а показа
ны на рисунке 66, ж, з . Такое звено можно прсдстави.гь
в виде четырехпадюспика, содерж ащ его элементы R и
с (рис. ЬЬ, и) . Практически создать идеальное звено
удовлетворяющее уравнению
(4 6 ), невозможно Из
уравнения (49) видно, что чем меньше Т и больше/С
тем ближ е реальное дифференцирующее звено к ил--альному. Чем больше Т, тем ближ е реальное дифф е
ренцирующее звено к усилительному, а при 7’= о о о н о
превращается
в усилительное. Значение постоянной
времени Т^можно определить методом касательной и л и ’
как 1
185
в интегрирующем звене выходная величина про
порциональна интегралу по времени от величины, по
даваемой на вход. Оно описывается уравнением
Если продифференцировать левую и правую части вы
ражения (52), то
—^ = * ^ (0 -
(52)
у
U i'
х(р)
Нр
У(Р)
0
V(u)
90'
(53)
Из уравнения (53) видно, что скорость изменения
выходной величины интегрирующего звена пропорцио
нальна входной величине. Передаточный коэффициент
k численно равен скорости изменения выходной вели
чины при единичном значении входной величины. Если
входная и выходная величины измеряются в одинако
вых единицах, то единица измерения передаточного
коэффициента с~*. В таких случаях применяют не пе
редаточный коэффициент, а постоянную времени интег
рирующего звена T = l / k . Тогда уравнение (53) примет
вид
dy
dt
-x{t).
(54)
Передаточная функция
^1-
'Qiio)
а- ^
'oj-0
X
P{LJ)
W { p ) = -------’
Тр
Частотные
характеристики:
амплитудно-фазовая,
ние идеального звена;
б — временная характе
ристика идеального зве
на;
в — амплитудная
характеристика; г — ф а
и
зовая
характернстика;
д — амплнтудно-фазозая
характеристика; е — пример идеального звена; ж — вре*иенная характеристика реального звена; з — амплитудно-фазовая характеристика; и — пример реального зве»!а.
ам
плитудная и фазовая
Й ^ ( У « ) = - ^ ; / < ( ш ) = - ^ ; ^(co) = - i ^ -
Рис. 66. Д иф ф еренци
рующ ее звено:
а — условное обозначе
(55)
(56)
Условное обозначение, временная и частотные харак
теристики интегрирующего звена показаны на рисун
ке 67. К ак видно из рисунка 67 ,6 и уравнения (53),
при подаче иа вход звена постоянного воздействия на
его выходе получается величина, возрастаю щ ая линей
но с течением времени. Характерным свойством этого
звена является то, что оно способно «запоминать», то
есть удерживать то значение выходной величины, ко
торое оно имело в момент исчезновения входного воз
действия. Примером такого звена может служить, если
пренебречь электромагнитной и электромеханической
постоянными времени, электродвигатель постоянного
тока, идеализированный интегрирующий контур с ем
костью (рис. 67, е). Амплитудная характеристика звена
с ростом частоты и убывает, поэтому убывает и ампли
туда выходной величины. Звено вносит отрицательный
сдвиг фаз, равный 90°, не зависящий от частоты.
186
187
f
кую. При обмене энергиями, в канале, по которому
происходит взаимный обмен, происходят безвозврат
ные потери (для электрической цепи в сопротивлении
R). Мерой этих потерь является коэффициент затуха
ния g, чем больше | , тем больше потери энергии. Если
1 > | > 0 , то переходный процесс будет колебательным
затухающим, и чем больше
тем быстрее затухнут
колебания. Такое звено называют устойчивым. Посто
янная времени колебательного звена определяется че
рез его резонансную частоту ио,
и она в 2л
раз
меньше
периода
резонансных
колебаний
7’о = 2 л /и о = 2 я 7 ’.
Передаточная функция звена
у(р)
Jp
Пи)
CJ
в
-30°
VF(p)=О
(J =<^
Р(ш)
T'^p^+2Tlp+\
(58)
Частотная характеристика
Со
W (/ш) =
'ex
С
-JQM
7'2(/(о)Н2Ш < о+1
(59)
^
д
Рис. 67. Интегрирующее звено:
а — условное обозначение; б — временная характерисгика;
характеристика: г — ф азовая характеристика;
рактеристика; е — пример звена.
в — амплитудная
d — ам нлитудно-фазовая ха
Колебательным звеном считают такое, у которого
при подаче единичного воздействия на вход выход
ная величина достигает
установившегося
значения,
совершая гармонические колебания.
Дифференциальное уравнение такого звена
d</
d^2 ■
‘ =
At
y=kx,
(57)
где I — коэффициент затухания; Т — постоянная времени.
Примером колебательного звена служит электри
ческая цепь (рис. 68, е). При наличии на входе на
пряжения <7вх емкость С накапливает энергию электри
ческого поля (потенциальная энергия), а индуктив
ность L — энергию электромагнитного поля (кинети
ческая энергия). Поэтому колебательное звено мож
но рассматривать как два последовательно соединен
ных элемента способных накапливать различные виды
энерг.ии, в одном потенциальную, в другом кинетнчес188
Рис. 68 . Колебательное звено:
а — условное обозначение; б — временная характеристика; е — ампли7уд-|ая
характеристика; г — фазовая характеристика; д — амплитудно фазовая х ар ак
теристика; е — пример звена.
189
I
колебательны м (консервативным). Уравнение динамики
такого звена
A4j
T^~+y=kx.
(63)
Передаточная функция, частотная, амплитудная н фа
зовая характеристики консервативного звена имеют вид
W (p ).
Ti^p^+l ’
W (/со) =
К (0 ))= -
ТгЦ1ыУ+1
ф(сй) = 0 .
Рис. 69. Неустойчивое колебательное звено:
а—
у с л о в 1ю е о бо зн а ч ен и е; б ~ вр ем ен н а я х ар ак тер и сти
ка; в — а м п лн т у д н о -ф а зо в а я х ар ак тери сти ка .
Амплитудная характеристика
(60)
У (1 - со2Р)2+4 ы27'2|
Фазовая характеристика
,
2|«Г
(p(o)) = - a r c t g - j 3 : ^ , -
(61)
Условное обозначение и частотные характеристики зве
на при единичном воздействии д := 1 (< ) показаны на
рисунке 76.
Частотные
характеристики
колебательного звена
зависят от коэффициента g. Е сли при колебаниях запас
энергии в звене не уменьшается, а увеличивается, то
амплитуда колебаний будет возрастать, такое звено
называется неустойчивым.
Уравнение динамики неустойчивого колебательного
звена
йу
Т — ~ 2 П —^+у=кх.
с1/
y {t) = { t - T ) x .
(64)
(62)
На рисунке 69 изображены условное обозначение, вре
менная и амплитудно-фазовая частотная характеристи
ки неустойчивого звена.
Е сли с = 0, то такое звено называется гармоническим
19Q
Графическое изображение этих характеристик пред
ставлено на рисунке 70. Характеристика W {}и>) при
изменении со от О до оо начинается на положительной
вещественной оси на расстоянии k от начала коорди
нат и уходит в бесконечность, а возвращается от — оо
по оси отрицательных вещественных чисел.
Запаздывающее звено передает входное воздейст
вие без искажений, но при этом задерживает его на
некоторую постоянную величину, то есть выходная ве
личина по отнощению к входной запаздывает на по
стоянную величину т. У ж е отмечалось,
что
такими
свойствами обладаю т трубопроводы, длинные электри
ческие линии без потерь, транспортеры и т. п. Запаз
дывающее звено описывается уравнением
Рис. 70. Консервативное звено;
а — у с л о в н о е о бо зн а ч ен и е; 6 — време:^ная хар ак тер и сти
к а ; в — а м п ли т уд н о -ф а зо в а я х ар ак тер и сти к а .
191
Я поэтому
нием
У
К (р)
-от
не ^
этот
режим
описывается
L
У(Р)
Г
<-----^
t
[цНа.
d /в
Vа= I eRe-h
"
it
to
Разделив левую и правую части дифференциального уравнения
на R b, получим
О
t^lu)
!
ураяне-
Таким образом,
а
о
дифференциальным
'flu )
d/a
Rb
CJ
dt
Rd
Если обозначить \ I R a = k , L bI R b = T
цепи возбуж дения), то
кив=1в-\-Тв —
Рис. 71.
звено:
( J b — постоянная времени
b
•
at
В оспользуемся преобразованием Л ап ласа и получим
торное уравнение при нулевых начальных условиях
Запаздывающее
Ш в (Р ) = 1 в {Р )+ Т в р 1 в {р ) =
a — у с ло в н о е
о б о зн а ч ен и е;
б — а м п ли т у д н а я
характе
р и с т и к а ; г — ф азо в а я харак^
т ер и сти к а ;
д — ам п литудн о
ф азо в а я хар ак тери сти ка.
Передаточная
жению (26)
функция
обмотки
опера
(1 + Т в Р ) 1 в ( Р ) .
возбуждения,
согласно
выра
W{p)===------- = ------------*,
U
Передаточная функция, частотная, амплитудная
зовая характеристики звена записываются так
W (p )= k e -P \
W ( j a ) = k e - i ‘^ ^ ;
и фа
/ ((с о ) = / г ; cp(co) = - с о т -
Графическое изображение названных
характеристик
показано на рисунке 71.
А Ф Ч Х представляет собой окружность единичного
радиуса с центром в начале координат.
Амплитудны е характеристики этих звеньев одинако
вы, а фазовые различны. Это звено создает отрица
тельный сдвиг фаз, который линейно зависит от час
тоты вынужденных колебаний.
Пример 3. Составить операторное уравнение и найти переда
точную функцию обмотки возбуждения машнны постоянного тока,
если входной величиной является напряжение t/в, приложенное к
этой обмотке, а выходной — ток возбуждения /в.
В статическом
режиме
уравнение
обмотки
возбуждения
Uc==Rp.fB, а в динамическом в цепи появляется Э Д С са?.юиндукции
b {p
)
1 + Т вР
Пример 4. Составить операторн ое ур авн ен ие и найти передаточ
ную функцию д л я электрической схемы, изображен[Ю Й на рисун
ке 66, U.
Запишем дифференциальные уравнения д ля отдельных участ
ков цепи.
Напряжение, приложенное к схеме
и.
Выходное напряжение
ивых=т.
Разделим оба уравнения на R
1
1
R
RC
г
--- U b^ = I + -----
1
\/d^—
UBb,z =
r.
R
1
Обозначив
R C = T , получим
k U B x= I-{--
kUKhS\= I .
Перейдем в ураг.ис1Н1ях от пспемонной t к переменной р
ei, = —i-ii-
192
Ah
(Р). =
it
/ {PJ - f — ’ •
T
13 З а к а з o 'W
.
kUBb, ^ [ P ) ^ I i » ) .
P
193
Решив совместно оба
уравпепня, найдем
операторное уравне-
1
Ре.эультаты пычислоний представлены ни;кс. а по ним на ри
сунке 72 ностроены характеристики К ( м ) н rp(w) и амплитутчофазовая I V (/lo).
‘
kVвх (р) ==^^^ВЫХ(р) -|-- - kU
Тр
или
1+ -
ш
i)
Рш )
0.W)
К (о ,)
ф {ю )
Передаточная функция схемы
Тр
W(P)^
1+ Тр
С/'ех(р )
Пример 5. Построить амплитудную, фазовую и амплитудно
фазовую характеристики апериодического звена первого порядка.
Примем иередаточцый коэффициент /е= 1, а постоянную
времени
7 '= 0 ,5 с. Заменяя р на ;Чо. в выражении (35) передаточной функ
ции апериодического звена, найдем вещественную и мнимую части
передаточной функции
rO (o) =
k
k (l-T i^ )
(1 + 7 '/ и )(1 -Г / ш )
l+ T jb )
k
kTio
1+1027-2
Я (со) =
-
1
’
-
1-
1+Ш=Р
Q (fo )= -
/гГ,„
l + w^T-z
ПодстапиЕ зиачошя P (w ) и Q ((o ) в выражения (28) и (2 0 ),
получим формулы для расчета искомых характернетик рассматри
ваемого звена
k
/ ( ( ( , ) ) = ------------------ ,
ср((0) =
— a rc tg w r.
1/Г2и2+1
<‘.5
0,9-1
— 0,23
0.S8
— 11
1,0
0,8
0.4
0.89
-2 7
1.5
0,61
-0 ,4 8
0,8
— 37
2,0
0,.-)
— 0,5
0 ,7
4.')°
J.0
5.0
0,31
— 0,46
0,Г)6
—5d'
0,14
-0 ,3 4
0,37
-G 8 ^
10,0
0,04
— 0,19
0,21
-7 9 ’
Подобным образом можно рассчитать и построить
частотные характеристики для лю бого типового звена.
7.7. Логарифмические частотные характеристики
М етод логарифмических частотных характеристик
представляет собой один из основных методов анализа
и синтеза автоматических систем. Он применим к сло ж
ным системам и позволяет оценивать
динамические
свойства замкнутых систем по их частотным характе
ристикам в разомкнутом состоянии.
Различаю т амплитудную и фазовую логарифмичес
кие частотные характеристики.
Логарифмической
амплитудной
характеристикой
L ( a ) называется зависимость от частоты модуля час
тотной характеристики, изображенной в логарифмичес
ком масштабе. Эту характеристику строят, переходя
^^’ "•"итудно-фазовой
характеристики
И/ (/(о) к выражению
WOJ
^ ( “ )= 2 0 1 g | H 7 (/ w )| = 2 0 Ig A '(w ) .
(65)
При построении
логарифмических
характеристик,
пользуются а к у с т и ч е с к и м и е д и н и ц а м и . Ч асто
ты по оси абсцисс откладывают в логарифмическом
масштабе в о к т а в а х и д е к а д а х . Считают, что часТОТЫ ©2 И Ю] о т л и ч а ю т с я н а о к т а в у , е с л и
C
l>
—
2
каду, е с л и - ^ = 1 0 .
Рис. 72. Частотная характеристика апериодического
звена первого порядка:
а
— ам:1лит1'Диая;
б — фазовая;
е — амплитудно-фазовая.
Величина L (o j)
0)9
— = 2 , н на де-
Wl
измеряется в д е ц и -
оелах (1 децибел равен 0,1 б е л а ). Бел — логарифмиче
ская единица, соответствующая десятикратному уве
личению мощности (1 Б равен увеличению мощно
13*
т
19^
сти в 10 раз, 2 Б — в 100 раз, 3 Б — 1000 раз и т. д.)'Так
как
характеристики
/ ((ш )
являются
отнош е
нием не мощностей, а выходной и входной коорди
нат, то увеличение этого отношения в 10 раз соот
ветствует увеличению отношения мощностей в 100 раз,
то есть 25 или 20 дБ. П оэтом у в выражении
(65) в
правую часть введен множитель 20. Один децибел о з
начает изменение амплитуды колебаний в У 10 раз, его
считают сравнительно небольшой величиной.
Логарифмическую
амплитудную
характеристику
1 { ы ) = 2 0 \ ц К { ы ) строят в прямоугольной системе ко
ординат (рис. 73, а ). П о оси абсцисс откладывают у г
ловую частоту в логарифмическом масштабе Igco, а по
оси ординат — равномерно децибелы. Ось абсцисс про
ходит через нуль оси ординат, что
соответствует
Л’ ( и ) = 1, так как l g l = 0 . П оскольку значение ш= 0
находится на
оси абсцисс
слева
в бесконечности
( ] g O = — оо ), ось ординат проводят так, чтобы она пе-
ресекала ось абсцисс в точке, справа от которой д о л ж
на леж ать исследуемая часть логарифмической амп
литудной характеристики.
Логарифмической фазовой
характеристикой ф(со)
называется зависимость аргумента частотной характе
ристики от логарифма частоты. Э ту характеристспсу
<р(со) такж е строят в прямоугольной системе коорди
нат, откладывая на оси абсцисс частоту в логарифми
ческом масштабе, а на оси ординат — фазу в гра
дусах (рис. 73, б ) .
Рассмотрим логарифмические характеристики ти
повых звеньев, напомнив прежде некоторые соотно
шения; l g l= = 0 и соответственно 2 0 1 g l= 0 , 1сг10=1 и
201gI0 = 20 дБ; lg 2 = 0 ,3 и 201g2 = 6 дБ.
Логарифмические характеристики безынерционного
звена получаю т на основе выражения (31) передаточ
ной функции. П оскольку м одуль частотной характе
ристики K { o ) ) = k , то
L(co)=201g/((co)=201gy^.
С ледовательно, логарифмическая амплитудная ха
рактеристика безынерционного звена представляет пря
мую линию, параллельную оси частот и у д а ле 1шую
от нее на 201g&, дБ (рис. 73, в ). Логарифмическая фа
зовая
характеристика
совпадает
с осью частот
(рис. 73, г ) , так как безынерционное звено не создает
фазового сдвига.
Логарифмические характеристики апериодического
звена первого порядка. Амплитудную характеристику
получают, логарифмируя выражение (39)
L (o ))= 2 0 Ig ft -2 0 1 g y 7 W T }
а фазовая
женисм
характеристика
будет
описываться
9 (M ) = - a r c t g o jr .
Рис. 73. Логарифмическая координатная
ские характеристики;
система и логарифмиче
а _ амплитудных характеристик; б — фазовых характеристик; е — ам члигудная характеристика безы керцистю го звена; г — фазовая характеристика
безынерцнонного звена; д — амплитудная и фазовая характеристики апе
риодического звена.
(И )
вырп*
(67)
Выражение (66) состоит из двух частей. Первая яв
ляется постоянной, не зависящей от частоты величиной
и представляет собой характеристику безынерционного
звена. Вторая зависит от частоты, и поэтому ее значе
ния нужно вычислить в функции частоты. Обычно же,
чтобы избеж ать вычислений, пользуются
асимптоти
ческими логарифмическими характеристиками. С этой
целью весь диапазон разделяю т на два участка.
196
197
Н а участке
с интервалом
частот
0 ^ и ^ 1 / 7 '=
=озсп (сосп = l/ r — сопряженная частота, при которой
пересекаются асимптотические логарифмические ха
рактеристики) второе слагаем ое в подкоренном выра
жении всегда больш е первого
слагаемого
или при
Wcn==l/7’ равно ему. П оэтом у слагаемым
можно
пренебречь, значит
- 201 g V Р и 2
201 g-y 1 = 0.
Ошибка при таком допуш,еиии будет максимальной
на сопряженной частоте и составит
- 2 0 1 g y P ( o V + l = - 2 0 1 g y 2 ^ - 3 дБ.
Д л я участка с интервалом
частот
1/7’ ^ и ^ о о
можно пренебречь единицей в подкоренном выраже
нии, и тогда
- 2 0 1 g y © 2 7 ’2 + l ^ - 2 0 1 g c o r .
Увеличив частоту в два раза — на октаву, будем иметь
L { a ) = — 201g2M 7'=— (201go)7’-|-201g2).
Получается,
что второе слагаемое логарифмической характеристики
увеличилось на 201 g2, то есть примерно на — 6. С л е
довательно, наклон характеристики на этом участке со
ставит — 6 дБ/окт. Повышение частоты в 10 раз — на
декаду увеличит второе слагаем ое на 201gl0, так как
L (c o ) = — 201gl0o)7’ a-“(201gMr— 201gl0), то наклон характе
ристик будет 20дБ/дек. Оба значения — 6 и — 20дБ/дек
дают один и тот же наклон.
Проведенный анализ показывает, что для построе
ния асимптотической амплитудно-частотной
характе
ристики необходимо определить значение сопряженной
частоты исп и отлож ить его на оси частот. Д л я пер
вого участка провести прямую 1 (рис. 73, <5), парал
лельн ую оси частот и отстояш.ую от нее на 201 g /г до
сопряженной частоты. Д л я второго участка из точки С
с координатами сосп=1/7' и L (c o ) = 20lg/j вычертить
прямую 3 с наклоном — 20дБ/дек. Чтобы построить
точную характеристику 2, необходимо учесть ошибку,
вызванную сделанными допущениями. На сопряженной
частоте о)сп=1/Т нужно
ввести
поправку,
равную
— З д Б , а на частотах, отличающихся от сопряженной
на 1 октаву, то есть 0,5 сосп и 20 Юсп, поправка соста
вит — 201 g-y 1 ,2 5 ^ — 1 дБ.
198
Д л я построения точной логарифмической амплитуд
ной характеристики нримсняют споциалыиле, npnisoдимые в справочной литературе шаблоны, которые сов
мещают с асимптотическими-характеристиками и про
водят но ним точную характеристику.
Логарифмическую
фазовую
характеристику
(рис. 73,d ) строят, используя уравнение (6 7 ), по не
скольким характерным точкам. Так, для сопряженной
частоты
Ч (шси) = -a rc tg o c n ? ' = - a r c t g l = -4 5 ° .
Если частота приближается к нулю, то фазовая ха
рактеристика будет стремиться к прямой cp(w) = G“
если к бесконечности, то к прямой ф (о ))= я / 2 . При бо
лее точном построении фазовой характеристики необ
ходимо помнить, что она симметрична относительно со
пряженной частоты. Поэтому, задаваясь двумя значе
ниями фазового сдвига, можно получить четыре точки
кривой. Так, фазовый
сдвиг
на частотах, отличаю
щихся на 1 октаву от сопряженной, то есть 0,5шсн
и 2юсп, отклоняется от фазового сдвига сопряженной
частоты на 18,4°, а на частотах, отличающихся на
1 декаду от сопряженной, в диапазоне от 0° и — л/2—на 5,7°. Д л я построения логарифмических фазовых х а
рактеристик также используют специальные шаблоны.
Логарифмические характеристики дифференцирую
щего звена. Д л я идеального дифференцирующего звена
с частотной функцией
(/ш ) - = 7-/10 логарифмическая
амплитудная характеристика выражается так
L (ш) = 201gA'(ш) = 201gr-f-201 geo
и представляет собой прямую линию 1 (рис. 74, й ),
проходящую через точку, соответствующую на оси час
тот И сп =1/Т и
имеющую наклон
-[-20 дБ/дек. или
- f 6 дБ/окт. Логарифмическая фазовая характеристика
ф(со) выражается прямой 3 (рис. 7 4 ,6 ), параллельной
оси частот и отстоящей от нее на +я/2 .
Д л я р е а л ь н о г о д и ф ф е р е н ц и р у ю щ е г о з в ен а с частотной функцией
W{jio)=-
1 + Т ]ы
логарнфми !сскую амплитудную и фазовую характерис
тики можно наити, если слож ить соответствующие ха199
‘^спгт
Рис. 74. Логарифмические характеристики дифференцирующего звена:
О — амш’хнтудпые;
о — фазовые.
рактеристики
идеального
дифференцирующего и апе
риодического звена первого
порядка, так как из уравнения видно, что реальное
дифференцирующее
звено
представляет собой последовательное ИХ соединение. Выражение ДЛЯ
амплигудной
характеристики
запишется
.
кзк
Логарифмическая фазовая характеристика интегри
рующего звена не зависит от частоты и представляет
собой прямую линию, проходящую от оси абсцисс на
расстоянии — л /2.
Логарифмическую амплитудную характеристику ко
лебательн ого звена строят, основываясь на уравнении
(60 ).
Если прологарифмировать уравнение (6 0 ), то полу
чим выражение для построения логарифмической ам
плитудной характеристики
L { ( i ) ) = 2 0 \ g k - 201 g l'7 1 - to^P) 2+
L (ю ) = 201 g r +201 geo - 201 g y 1+ co^P.
П о этой формуле на рисунке 76, б построены логариф
мические амплитудные характеристики д ля различных
значений g. В интервале 0 , 3 < К 1 , 0 пользуются уп
рощенной логарифмической амплитудной характерис
тикой, которая получается следующим образом:
Д о сопряженной частоты сосп=1/7’ характеристика
идет вверх с началом + 2 0 или 6 дБ/окт. Так как пере
даточный коэффициент звена равен Т, то на сопряжен
ной частоте асимптотическая амплитудная характерис
тика проходит через нуль. Второй участок (рис. 74, а )
характеристики 2 совпадает с осью
частот, так как
сумма слагаемы х в правой части
уравнения
равна
нулю.
Логарифмическая
фазовая
характеристика
4
(рис. 74, б ) по форме
совпадает
с характеристикой
инерционного звена, смещенного вверх на л/2.
Логарифмические характеристики интегрирующего
звена (рис. 75), частотная функция которого
(/ «)= .
при а Т < ^ \ L (w )= 2 0 lg k -,
Ш,
ВБ
О
----К=1
\ m s i i '}ек
Igu)
-5
-15
1
10
А
/
S ^ ^ 0 ,2 5
Ш
0.5
IffU
-5
а
L (to ) =201g^ — 201gco и ф (и ) = — л/2.
Логарифмическая амплитудная характеристика со
стоит из двух частей. Первая является постоянной, не
зависящей от частоты величи
ной, вторая же, будучи пере
Ш)
менной, имеет постоянный на
клон к оси частот — 20 или
— 6 дБ/окт. Чтобы построить
характеристики интегрирующе
го звена, принимают в качестве
опорной частоту oj = l, при которой вторая часть уравнения
характеристики равна
нулю:
Рис. 75.
Логарифмиче
— 201go)= — 2 0 1 g l= 0 . Тогда
ские характеристики ин
L ( b ) ) = 20\gk.
тегрирующего звена.
S
^0.15
о
\
0.1
\
10
\Ш )
-W
описываются выражениями
200
Ш),
SE
S
/со
если ^ = 1 , то L ( t o ) = 0 ;
-W
-15
О,!
I
Пш)
6
10
1ды
0
J --O J
^ ^ 0 .2 5
В
п
-9 0 - п
Рис. 76.
Логарифмиче
ские характеристики ко
лебательного звена:
а — приС.чнжепиые;
реа.чьны^.
к
б,
в—
^
\
7
;
А --------------------
0.1
W
201
при (о7’> 1 1 { ы ) = 201gfe — 401g7w; если /г - 1, то
L (to ) = -4 0 1 g7 'o.
Подставим в полученное выражение
(o = 1 0 o ji, тогда
L (lO o )i) = —-401gl0 - 401g7’(Oi. Если ю = ыь то L ( w i ) = = —401g7’o)i.
Взяв разность этих выражений, получим
Z . (I O c o i)- i (o)i) = - 4 0 дБ/дек.
П олучаем , что логарифмическую амплитудную харак
теристику можно представить двумя асимптотами: с
наклоном О дБ/дек до значения to= 1 и далее с накло
ном — 40 дБ/дек. На рисунке 76, а построены такие
характеристики для двух значений К. Логарифмичес
кие фазовые частотные характеристики строят по урав
нению (6 1 ). Д л я различных значений & эти характе
ристики построены на рисунке 76, в.
Логарифмические характеристики широко использу
ют при оценке регулировочных свойств систем.
Все воздействия на алгоритмической
стрза(т\фной
схеме изображены по Л ап ла су. Д л я определения пере
даточной функции разомкнутой или замкнутой системы
используют правила эквивалентного преобразоваипя.
П од эквивалентным подразумевается такое преобразо
вание, при котором одна схема заменяется другой с со
хранением динамических характеристик системы. Основ
ные правила эквивалентного преобразования алгоритми
ческих структурных схем приведены ниже.
1. Передаточная функция
последовательно
вклю
ченных звеньев или разомкнутой системы (рис 77 а )
равна произведению передаточных функций отдельных
звеньев
^ ^ (p )= ^ V 7 ^ ip )W 2 ip )W ,{p ).
т
щр)
т
т
Щ (Р )
7.8. Алгоритмические структурные схемы
и их эквивалентное преобразование
Л ю бу ю автоматическую систему можно представить
в виде динамических звеньев направленного действия,
определенным образом взаимодействующих между со
бой. Графическое изображение, показывающее, из ка
ких динамических звеньев состоит система и как они
соединены меж ду собой, называется алгоритмической
структурной схемой системы.
Наличие такой схемы позволяет изучить динамику
системы, так как она отображ ает ее динамические свой
ства и фактически есть графическое условное изобра
жение дифференциального уравнения системы, записан
ного в операторной форме по Л а п ла су при нулевых
начальных условиях. Основными элементами схемы яв
ляю тся; динамические звенья направленного действия
с указанием
их передаточных
функций;
соединения
( с в я з и ) звеньев — линии со стрелками, указывающие
направление передачи воздействий; элементы сравне
ния, в которых суммируются или вычитаются воздейст
вия (при суммировании воздействии сектор
внутри
кружка не затемнен); точки разветвления, в которых
воздействие разветвляется в разных иаправлениях.
Нр)
6
Х(р)
Щ(р)
т
М Р)
У(Р)
Xip)
У(Р)
iV3(p)
Wip)
V(P)
iV i(p M w ^ (p )\ - J\ W3(p}\
Ц%.о(Р)
С Wz{p)\^Wo,c(p)\^
Рис. 77. Эквивалентное преобразование структурных схем:
о — последоьательно включенных звеш ев;
б — п а п а м е 1 ьно
вклю чеиниг
звеньев: в - . в е н а , охваченного обратной с в я з ^ ;
о — перенос точки суммирования.
г i
перенос точ?й c S a
utpcnui, ючки съем а.
£02
203
Передаточную функцию ошибки, устанавливающую
связь меж ду возмущением F ( р ) (рис. 78) и вызванной
им ошибкой А у г { р ) , определяют по уравнению
2. Передаточная функция п араллельно включенных
звеньев (рис. 77, б ) равна сумме передаточных функ
ций отдельных звеньев
W (р ) =
{/;) + U"2 i p ) +
3( Р ) .
(69):
р{р )
3. Передаточная функция замкнутой системы с от
рицательной обратной связью (рис. 77, в ) определяет
ся по ф ормуле
^ з ( р ) = - ______ --------------- •
l + Wo(/^)H7o.c(P)
Контрольные вопросы и задания. 1. Что такое статическая ха
рактеристика автоматической системы управления? 2. Назовите
виды статических характеристик. 3. Объясните, что такое переда
точная функция. 4. Чем отличается операторное уравнение от опе
рационного? 5. Перечислите типовые звенья и дайте их характе
ристику. 6. Ч то понимают под амплитудной и фазовой частотными
характеристиками? 7. Назовите логарифмические частотные харак
теристики и укажите их достоинства и ) 1едостатки.
8. Каковы
основные правила эквивалентного преобразования алгоритмических
структурных схем?
х(р )
1
£04
(7^)
Если F { p ) приложить к другой точке системы, то
под W'l (р ) понимают часть системы меж ду точкой при
лож ения возмущения и выходом системы.
Знаменатель передаточной
(Jjj/hkhhh W p {p ) такой
же, как и знаменатель других передаточных функций
замкнутой системы. Изменение точки приложения воз
мущения приводит к изменению передаточной функции
числителя, который всегда представляет передаточную
функцию соединения
звеньев,
заключенных
между
точкой приложения возмущения и выходом системы.
(70)
сравнивая передаточные функции
W,.{p) и
\Х\,(р), можно заметить, что между ними существуют
определоииые соотношения. Зная U^p(p), мон^ио опре
делить две другие функции.
Если за входную величину автоматической системы
принять возмущающее воздействие с точкой прилон^ения иа входе объекта и счиFp .
тать, что другие воздействия
отсутствуют, то реакция на
. е,;о)
W,(pl
Wiip)
выходе системы в этом с л у
чае является отклонением
управляемой
велнч!И1Ы от
требуемого зиачепня и иаРис. 78, Сгрхктурная
схсглп
зываегся ошибкой
влияния
рзтоматичсс: :>ii
системы при
возмущения.
действий возмущения.
’’
где W\(p), 11^2 (р ) — передаточные функции соответственно объекта
и регу.пятора при условнп, что возмущение
приложено к входу
объекта.
При положительной обратной
связи в выражении
р О ) в знаменателе будет знак минус ( — ).
4. При переносе точки съема
или
суммирования
сигнала на больш ее число звеньев
в цепь обратной
связи необходимо добавить звено с передаточной функ
цией 1/11^3(Р ) (рнс. 77,г ).
5. При переносе точки съема (суммирования) на
меньшее число звеньев в цепи обратной связи необ
ходимо последовательно включить звено с исключаемой
передаточной функцией (рис. 77, д ) .
Д л я оценки точности автоматической системы в ус
тановившемся режиме определяют передаточную функ
цию ошибки, устанавливающ ую связь между ошибкой
и задающим воздействием (рис. 77, в).
х (р )
\+ W , ( p ) \ V , ( p )
<«»
ГЛАВА
VIII
УСТОЙЧИВОСТЬ АВТОМАТИЧЕСКИХ
СИСТЕМ УПРАВЛЕНИЯ
8.1. Понятие об устойчивости
В лю бой автоматической системе управления под
влиянием возмущающих воздействий возникает пере
ходный процесс 1/(0, который зависит как от свойств
самой системы, так и от вида воздействия. Поведение
системы в переходном процессе моною представить
двумя составляющими. Первая — свободное
двюкение
системы y c { t ) , то есть движение системы, выведенной
из состояния равновесия и предоставленной самой себе,
вторая — вынужденное движение системы у в { ( ), обус
ловленное внешним воздействием и свойствами сисТ6МЫ
y {t)= y c {t)+ y B {t).
(Щ
Устойчивость си стем ы — одна из самых важных ха
рактеристик. отражающих поведение автоматической
системы в переходном процессе.
П од устойчивостью
понимается свойство системы возвращаться к состоя
нию установившегося равновесия после устранения
нарушившей его причины.
Неустойчивая система не возвращается в равновес
ное состояние, из которого она по той или иной причи
не вышла, а непрерывно удаляется от пего или совер
шает около него некоторые колебания.
Простейшей иллюстрацией понятия устойчивости может с л у
жить изображенная па рг.суике 79 система шар — поверхность в
различных
сочетаниях.
Система
(а ) — наглядный пример неустой
чивости:
достаточно
малейшего
отклонения от начального п о л о
жения шара, как он начнет двиt
в
О
гаться вниз по поверхности и, уже
НС возвратится в исходное полоРис. 79. К определенкю устойженне. Систему (б ) можно отнести
чивых состомний систекы шар—
к устойчивой, поскольку шар, наповерхиость.
ходящийся во впадине, при л ю
206
бом отк.тонении обязательно вернется в нервоиачалыюе состояние.
В рассмотренных примерах устойчивость и неустойчивость не з а
висит от начальных отклоне 1н1й шара. Н о есть и такие системы,
которые устойчивы в «м а ло м » и неустойчивы «в больш ом », по
скольку их устойчивость связана со значением начального откло
нения. Действительно,
систему (в ) можно
считать устойчивой,
только когда шар при начальном отклонении не выходит за край
внадины: стоит ему миновать край внадины, как он уже не смо
ж ет вернуться в исходное положение и система будет неустойчи
вой.
Применительно к уравнению (73) суждение об ус
тойчивости можно сформулировать так, что для ус
тойчивости системы необходимо, чтобы свободная со
ставляющ ая с ростом времени от начала переходного
процесса стремилась к нулю: lim y c (0 ~ ^ 0 при t-^-oo.
С ледовательно, характер свободного движения систе
мы определяет степень ее устойчивости.
При аналитическом
исследовании
динамических
свойств системы управления необходимо в качестве
математического описания составить дифференциаль
ное уравнение и решить его. Однако решение диффе
ренциальных уравнений даже для линейных систем со
пряжено со значительными трудностями. Поэтому об
устойчивости таких систем судят по определенным
признакам, обходясь без непосредственного
решения
дифференциальных уравнений. Эти признаки, получив
шие название критериев устойчивости, позволяют, не
прибегая к региению дифференциального
уравнения
системы, установить, устойчива ли она, а кроме того,
выяснить характер влияния того или иного параметра
и структуры системы на ее устойчивость.
8.2. Критерии устойчивости
Алгебраические критерии. К ним относится крите
рий Вышнеградского, который применим
для систем
третьего порядка, критерий Рауса и Гурвйна.
В соответствии с к р и т е р и е м В ы ш н е г р а д с к о г о для устойчивости линейной системы с характеристи
ческим уравнением
аоР^+Й1р^Ч-й2Р + ^*з=0
(74)
необходимо выполнение двух условий:
1)
все коэффициенты характеристического уравне
ния должны
быть
положительными — О о > 0 ,
a i> 0 ,
«2 > 0 , О з>0;
207
В общем случае, если система имеет характеристи
ческое уравнение п-й степени
й о р " Ч - й , р " - ‘ - Ь . . . - Ь й „ _ , р - Ь й „ = 0,
(79)
2)
произведение средних
коэффициентов долж но
быть больш е пронзведення крайних — Gia2 > « o 03 .
В
коэффициенты
характеристического уравнения
входят лиш ь значения параметров системы, поэтому
устойчивость системы определяют только по парамет
рам, не рассматривая состояния системы.
К р и т е р и й Г у р в и ц а формирует условия устой
чивости автоматических систем управления в виде оп
ределителей.
Д л я устойчивости
системы
с характеристическим
уравнением первого порядка
(XqP-\-CIi = 0
то условия устойчивости по критерию Гурвица можно
сформулировать следующим образом ; система устойчи
ва, если й о > 0 и все диагональные определители таб
лицы коэффициентов положительны
необходимо и достаточно, чтобы коэффициенты харак
теристического уравнения были положительными, то
есть О о > 0 , a i > 0 .
Д л я устойчивости системы
с характеристическим
уравнением второго порядка
(7G)
необходимо и достаточно, чтобы все коэффициенты
характеристического уравнения бы ли положительны, го
есть G o> 0 , a i > 0 , О2 > 0 .
Д л я устойчивости
системы
третьего
порядка
с
уравнением
ОоР'* + «1Р^+о2р + йз = 0
I Оз
0.J 0 2
Д л я устойчивости
уравнением
четвертого порядка с
ОоР^+а|/Я+йо/?2 + азр + о,1=0
(7 8 )
необходимо и достаточно чтобы были положггтельными
все коэффициенты Я п > 0 , й 1> 0, й 2> 0 , о . ^ О , й 4> 0, и
определители Л 2 > 0 и
й| й з
Аз =
о
Go Й2 «4
О а, йз
Е08
=
йз
(Й ,Й
2—
fljGj) — й ,\ 7 4 > 0 .
I': ■
%
= Й,Й2- ЙоОз>0.
системы
V
(77)
необходимо и достаточно, чтобы были положительными
все коэффициенты О о>0 , Й1> 0 , О2 > 0 , О з > 0 , и опреде
литель второго порядка
о з
05
02
04
О
О
О
0
0
Oi
03
0
•
•
й ,г _ з
0
•
■
С1п— 4
*
•
0
Ап =
(^ 5)
ЙОР^ + Й1,0 + 02 = 0
Oi
Go
«,,_ 1
0
2
(80)
Определитель Гурвица (80) составляют из коэф
фициентов характеристического уравнения следующим
образом. П о главной диагонали последовательно выпи
сывают коэффициенты характеристичес[сого уравнения,
начиная с й]. Столбцы таблицы, начиная с главной
диагонали, заполняют вверх по возрастающим индек
сам, вниз — по убывающим. Все коэффициенты с ин
дексами ниже нуля и выще степени уравнения п зам е
няют нулями.
Заметим, что если конечный определитель прирав
нять нулю при условии положительности всех преды
дущих определителей, то полученное уравнение будет
соответствовать границе устойчивости. Например, для
системы третьего порядка (п = 3) граница устойчи
вости определится уравнением Д 2 = й 1й 2 — йойз = 0. И з
полученного уравнения определяют допустимые преде
лы изменения параметров
(йо, . . . , йз),
при которых
система устойчива.
К р и т е р и й Р а у с а применяется реже, чем крите
рий Гурвица, так как он сложнее.
С увеличением порядка характеристического урав
нения увеличивается число выполняемых расчетов, по
этому их применяют для уравнений не выше пятого
порядка.
Частотные критерии. Они относятся к графоанали
тическим критериям определения устойчивости системы.
К ним о т н о с я т критерий М ихайлова и Найквиста.
К р и т е р и й М и X а й л о в а осг'ован- на использова
нии характеристического уравнения системы. Д л я этого
14 З а и л л
209
Рис. 80. Годографы Михайлова
(fi) и неустойчивой (б ) систем.
для
и, поскольку Go,. . . , flj, и
— постоянные коэф
фициенты, то, придавая to значения от О до со и вычис
ляя каждый раз 11^г(/ш,), строят годограф вектора
W ( j(o ) — амплитудно-фазовую характеристику системы.
П о ней и судят об устойчивости системы. Критерий
Найквиста формулируется гак: замкнутая система ус
тойчива, если амплитудно-фазовая характеристика ус
тойчивой разомкнутой системы не охватывает точку с
координатими ( — 1; j 0 ) при изменении ю от О до оо. На
рисунке 81, G приведены амплитудно-фазовые характе
ристики 1 и 2 устойчивой и неустойчивой автоматичес
ких систем управлений.
устойчивой
В характеристическое уравнение системы подставляют
р — /ш и получают выражение годографа Михайлова
Z) (/ш )=Оо ( / « ) ” + о. Д/со) «-*-1-...
(81);
Изменяя значение о от О до оо, вычисляют значение
вектора /?(/ш) и строят его годограф
в комплексной
плоскости (заметим, что при со= 0 D ( 0 ) = a „ > 0 ) . П о
лученный годограф позволяет судить об устойчивости
системы. С огласно критерию М ихайлова, для устой
чивости системы п-го порядка годограф вектора харак
теристического уравнения D ( j a ) при повороте против
часовой стрелки должен
последовательно
пройти п
квадрантов, начиная из точки, лежащей на положи
тельной полуоси, и нигде не обратиться в нуль. При не
соблюдении одного нз названных условий система не
устойчива. На рисунке 80, а и б представлены годо
графы Михарглова для устойчивой и неустойчивой сис
тем. При п ~ 0 годограф превраидается "в точку на по
лож ительной части вещественной оси. Чтобы с помо
щью критерия Михайлова оценить влияние изменения
параметров элементов системы на ее устойчивость, не
обходимо построить годограф М ихайлова при данном
значении параметра.
К р и т е р и й Н а й к в и с т а позволяет судить об ус
тойчивости замкнутой автоматической системы по ам
плитудно-фазовой характеристике разомкнутой систе
мы. Д л я этого в уравнение передаточной функции
разомкнутой системы подставляют р = / и и получают вы
ражение
ш) _
”
210
Критерий Найквиста нашел широкое применение по
следующим причинам: оценка устойчивости дается по
передаточной функции разомкнутой системы, которая
состоит нз ряда сравнительно простых сомножителей,
содержащих в качестве коэффициентов ее параметры,
что дает возможность для слож ных систем выбирать па
раметры устройств такими, чтобы системы были устой
чивыми; критерий позволяет использовать эксперимен
тальны е частотные характеристики вместо дифференци
альных уравнений слон^ных систем, когда составление
этих уравнений весьма затруднительно; критерий свя
зывает исследования устойчивости с последующим ана
лизом качества автоматической системы управления.
Рассмотрим ряд примеров, поясняющих определение
устойчивости на основании рассмотренных критериев.
Пример 6. Определить по критерию Гурвнца устойчивость ав
томатической системы управления, характеристическое уравнение
которой р’ -)-1,5р2-{-4,5р-)-4==0.
Решение. В соответствии с условием устойчивости для систем
третьего порядка (74) все коэффициенты уравнения (а о = 1 ; a^ —
JG(u)
U r 5,55
-JQ(u)
)p=ES5
Р(и)
^o~-0 -’Ж
W P(w)
\
Р(ш)
Ч
6о(/со)™ +
6,0о))“ ~
. .■ +fe,„_,/co
+ 6m
OoUW)'‘
+PlUCd)"‘
~ ‘' ++ .- ■
-bOm-i/(0 +
Рис.
во(/ю)«+С1(/ю)"-1+.. .+о„_,/(о+о^
14*
81. Амплитудно-фазовые
характеристики.
211
= 1,6; 02 = 4.5; оз = 4) и определитель второго порядка Д 2 = 1 .5 Х
Х 4 ,5 — 1-4 = 2.75 положительны. Следовательно, система устойчива.
Пример 7. Построить годограф М ихайлова и определить ус
тойчивость автоматической системы по характеристическому урав
нению 0 ,0 5 р з+ 0 ,8 р 2 + 2 р -Ы 0 = 0 .
Задаваясь значениями to от О до оо, вычисляют К { ы ) и ф(о>).
Результаты расчетов представляют в табличной форме
0
0,1
1
5
10
20
СО
Решение. В соответствии с выражением (81) подставляют в
уравнение р = у ы н разделяют на вещественную и мнимую части
Р(ш) = 0 з —Ci(ji2= 10—О.8оз^
р (ы )
Q ( m ) — azLo— a.jLO^ = 2 < о — 0,05со^.
Приравняв вещественную
котором характеристика
10— 0,8 И 1^= 0;
часть к нулю, находят значение (oj,
пересекает мнимую ось; Р (и | )= = 0 ;
Пример 8. Определить по критерию Найквиста, устойчива ли
замкнутая автоматическая система, если ее передаточная функщ!.ч
в разомкнутом состоянии
W ( p ) = ---------------------------- и значения
P (^ lP + i)(^ 2 P + l)
параметров * = 1 0 0 , 7 'i = 0 , l с, 7’2 = 0 ,2 с.
Решение. Подставив р = / ш в уравнение передаточной функции,
получают выражение для частотной характеристики передаточной
=
передаточной
выражениям
2 ,3
-1 6 Г
0 ,3
— 198
0,0045
-2 2 8 ’
0
— 270*
= 12,5; coi = 3,55. Значение мнимой части при
Следовательно, результирующий угол поворота годографа при
изменении ы от О д о оо равен 3 я/2 — система устойчива, так как
годограф начал движение от точки па положительной вещественной
полуоси и прошел три квадранта (уравнение третьей степени),
н нигде не обращаясь в нуль.
мента
99
-1 0 7 -
8.3. Исследование влияния параметров
систем управления на их устойчивость
(1)1 = 3,55: Q ( w i ) = a 2coi — aotoi*=2 -3,5 5 — 0,05-3,55^=6,5. Годограф
пересекает вещественную ось между вторым и третьим квадрантами
при С02, определяемой из
уравнения
(^ (и г) = 2(02 — 0 ,05 о)2^= 0;
( 02^= 40. Значение вещественной части при О)2^^= 40; Р ( и 2) = Ю—
- 0 , 8 - 4 0 = — 22. При ш = оо Q ( ( o „ ) = — оо; Р ( ( в „ ) = — оо.
функции
10 000
— 92'
и по пей строят амплитудно-фазовую характеристику (рис. 81, в ).
Нетрудно убедиться, что характеристика разомкнутой системы не
охватывает точку с координатами ( — 1; / 0 ), следовательно, замк
нутая система будет устойчивой.
Задаваясь значением и от О до оо, получают значение Р(и>)
и Q (w ) и по ним строят годограф. Так, для ио==0, Р (ы ) = 10 и
Q ( o j ) = 0 находят первую точку (рис. 8 1 ,6 ).
при
ос
— 90
. Значение модуля и аргу
функции
А ( и ) = ___________
определяют
соответственно
k
-
и
по
(р(ш) = — (fi/ 2 +
<u=V(7’, W + l ) (7-2^032+1)
-barctg T iO + a r c lg Ггсо). Подставив значения параметров в выраже
ние м одуля аргумента, находят, что
/С(ы) = ----------
100
co^V(l-1-0.010)2} (1-Ю,04ш")
и ф ( с о ) = — (90°4-arctg O .lui-farctg 0,2ш).
I
1
Рассмотренные критерии устойчивости
дают
воз
можность при конкретных заданных параметрах систе
мы делать заключение об ее устойчивости. Чтобы ис
следовать влияние различных
значении
параметров
системы на ее устойчивость, проводят синтез системы,
исходя из условий устойчивости. Понимая под этим на
хождение таких областей параметров (или коэффици
ентов), в которых при любом значении исследуемого па
раметра система будет устойчивой. Значение области ус
тойчивости в пространстве параметров системы
(осо
бенно если эти параметры относятся к числу настраивае
мых) имеет больш ое практическое значение, позволяя
в процессе проектирования или наладки правильно выб
рать параметры системы.
Н аибольш ее применение на практике получил метод
Д-разбиения. При построении границы Д-разбиения, те
есть границы областей устойчивости вначале выявля
ют, по каким параметрам необходимо построить Д -р а з
биение, то есть устанавливают факторы, которые способ
ствуют неустойчивости системы.
Одним из важных факторов является увеличение коэффии^иента усиления системы с целью повышения точ
ности управления. Увеличение коэффициента усиления
снстгмы увеличивает м одуль А Ф Ч Х , поэтому точка пересечония А Ф Ч Х с вещественной осью перемещается
влево и система из устойчивой может превратиться в
неустойчивую (рис. 81, й ).
Ь'амегив параметры, по которым намечается Д-разбиенне, ваписывают? характеристическое уравнение или передаточную фуик-
212
213
цпю с этими параметрами в об
щем виде. Затем па ооювании
выбранного критерия записыва
ют условия нахождения систе
мы на границе устойчивости.
Д л я этого неравенства записы
вают в внде равенств. На осно
вании равенств строят кривые
или прямые в плоскости намеченны.х параметров. П олучен
ные кривые штрихуют так, что
бы штриховка была направлена
в ту сторону полуплоскости,
точки которой удовлетворяют
данному условию устойчивости.
Н а рисунке 82 построены
обласпг устойчивости в плос
кости параметров Т и /< для
системы с характеристическим
уравнеш 1ем
0,0005/;=- f (0.57'-f 0,00i) р^-+
Рис. 82. К определению
области устойчивости.
границ
(0 ,5 -f T j p - f = 0 .
„
В соответствии с критерием
Вышнеградского и вышеизло
женной методикой запишем равенства;
0.57’-|-0.001=0; 0 ,5 -Ь 7 '= 0 ; / < + 1 = 0 ;
^ S r + O .O O l) (0 ,5 + Г ) = 0 ,0 0 0 5 (/ С -Ы ).
Гранпчпым кривым исходя из записанных равенств соответствуют
кривые на рисунке 82 соответственно 2, 1, 4 и 3, а условия ус
тойчивости соответственно Г > — 0,002; 7 ' > — 0,5;
(0 5 -t-7 )V
Областью устойчивости, как следует из
(рис. 90), будет часть плоскости с координатными осями К, Т,
расположенная в первом квадрате между граничной прямой 4 и
кривой 3.
8.4. Згпас
I
устойчивости
При математическом описании движения автомати
ческой системы вводятся различные допущения с целью
линеаризации статических характеристик и улучшения
возможности анализа. П оэтому теоретически устойчивая
система может из-за неточностей, допущенных при сос
тавлении уравнений, оказаться практически неустойчи
вой или во время ее работы возникнут непредвиденные
и недопустимые отклонения параметров от расчетных.
С ледовательно, параметры системы долж ны быть та
кими, чтобы она бы ла устойчивой не только при приня
тых дифференциальных уравнениях н характеристиках
элементов, но и при реальных зависимостях выходных
величин от входных, то есть действительные значения
параметров системы должны отличаться от предельных
и обеспечивать некоторый
запас
устойчивости.
Предельными называются значения параметров системы,
при которых она находится па г р а н и ц е
устойчи
в о с т и . Например, если годограф М ихайлова проходит
через начало координат или амплитудно-фазовая ха
рактеристика разомкнутой системы управления через
точку с координатами ( — 1; / 0 ), то считают, что систе
ма находится на границе устойчивости.
Запас устойчивости — это количественная оценка то
го, насколько значения параметров системы или ее ха
рактеристики отстоят от границы, опасной с точки зре
ния устойчивости. Различаю т запас
устойчивости по
амплитуде и фазе.
Запас устойчивости по а.мплитуде I показывает, на
сколько необходимо изменить м одуль Л"(оз) амплитудно
фазовой характеристики разомкнутой системы при час
тоте среза «ср, чтобы замкнутая система оказалась на
границе устойчивости. За частоту среза разомкнутой
системы принимают такую, при которой
выполняется
равенство
л ^ ( « ) = |1|70и,1 = 1.
Отсюда следует, что при частоте среза характеристика
W{j(i3) пересекает окружность единичного
радиуса с
центром в начале координат (рис. 8 3 ). Если здесь час
тоту, соответствующую
пересечению характеристики
W {jw ) с вещественной отрицательной полуосью, когда
выполняется
равенство
ф ( о ) ) = arctg
( / ш ) = — 180”,
обозначить через coj, то запас устойчивости по амплиту
де / = [1 + И ^(/и)] будет опре
деляться расстоянием от точки
этого пересечения до точки с
координатами ( — 1; / 0 ).
Запас устойчивости по фа
зе ij' показывает, насколько
необходимо
увеличить
фазу
в разомкнутой системе при
частоте
среза, чтобы
соот
ветствующая
ей
замкнутая
система
оказалась
на Vpa- р,,^ gg ^ опреде.-.ешш занице устойчивости. Запас успаса устойчивости.
#
214
2 i5
тойчивости по фазе определяется углом я]; между векто
ром
и отрицательной вещественной полуосью '
■ ^ = [1 8 0 — ф (ш ср)]. Обычно при определении необходи
мого запаса устойчивости вокруг опасной точки вычер
чивается определенная область, куда не долж на захо
дить амплитудно-фазовая характеристика. Такие запрет
ные области показаны на рисунке 84. В случае (а ) система_^ регулирования будет иметь необходимый запас
устойчивости, если она при м одуле характеристики
К { а ) , отличающемся от единицы не менее чем иа за
данную величину
имеет фазу, отличающуюся от
— 180° не менее чем на угол Нгф. В случае ( б ) система б у
дет обладать необходимым запасом устойчивости, если
ее амплитудно-фазовая характеристика не заходит в
окружность, проведенную
радиусом I из точки
( — 1;
j 0).
Применительно к алгебраическим критериям запас
устойчивости системы будет выражаться тем условием,
чтобы равенства (75) . . . ( 7 9 ) были достаточно далеки
от их нарушения. Применительно к годографу М ихай
лова D { jb i) запас устойчивости обеспечивается, когда
кривая D(/o)) не заходит в круг заданного радиуса с
центром в начале координат (е ).
8.5. Определенке устокчквости по логаркфмкческим
частотным хграктеркстккам
Устойчивость автоматических систем управления и
запас устойчивости по модулю и фазе можно опреде
лить и оценить не только посредством
рассмотренных
критериев, но и на основе графиков амплитудной и фа
зовой логарифмических частотных характеристик ра
зомкнутой системы для соответствующей ей замкнутой
Рис. 84. Графическое изображение
устойчивости.
216
различных
видов запасов
системы. Если за частоту среза
L (и), dff
соср принять такую, при которой
график логарифмический ампли
I
тудной характеристики пересека
ет ось частот, то есть L (co ) =
= 201gA’ (M ) = 0, то можно запи
1
сать следую щ ие правила опреде
\
ления устойчивости.
1
1. Замкнутая система устой
I
D __ _
1
чива, когда у го л на фазовой ха
ig u
рактеристике разомкнутой систе
мы при ш= Юср по абсолютной ве -1SD
личине меньше 180° (рис. 85). З а
пас устойчивости по фазе ф =
= 180° — фср. Регулирование счи Рис. 85. К определению
запаса устойчивости по
тается хорошим, если ф ^ ( 3 0 . . .
фазе
и амплитуде
по
45°).
логарифмическим частот
2. Замкнутая система устойчи ным характеристикам.
ва, если значение ординаты Ly
логарифмической амплитудной характеристики имеет
отрицательное значение, то есть Z .y(co „)< 0 , когда
ф((Оу) = — 180°. Запас устойчивости по амплитуде для
замкнутой системы определяют по графику логарифми
ческой амплитудной характеристики при ф(соу) = —
Д л я этой цели измеряют ординату Z.(coy) = L i, которая
и характеризует данный запас устойчивости. Управление
считаеся хорошим, если L i ^ l O дБ.
N
i
Контрольные вопросы и задания. 1. Объясните понятие «устой
чивость автоматической системы управления». 2. Что такое крите
рий устойчивости? 3. Какие критерии используют для оценки ус
тойчивости систем? 4. Чем отличаются алгебраические критерии ус
тойчивости от частотных? 5. Сформулируйте критерии устойчивост!
Гурвица, Михайлова, Найквиста. 6. Как определяется запас устой
чивости по модулю и фазе?
^ЛА В А
IX
КАЧЕСТВО ПЕРЕХОДНЫХ ПРОЦЕССОВ
УПРАВЛЕНИЯ В АВТОМАТИЧЕСКИХ
СИСТЕМАХ
Перерегулированием а называется максимальное от
клонение утах управляемой величины от заданного зна
чения уо и выраженной в процентах
а=-
9.f. Показателк качества
Автоматические системы управления долж ны быть
не только устойчивыми, но и обеспечивать качество про
цесса управления. Основные наиболее существенные тре
бования к качеству управления, которые позволяют
оценить работу почти всех систем управления, называ
ют
показателями
процесса
управления.
Они характеризуют поведение системы в переходном
процессе. На рисунке 86, с показана кривая переходного
процесса системы при единичном возмущении, поданном
на вход.
П оказателям и качества здесь будут время регулиро
вания, перерегулирование, колебательность процесса, ус
тановившаяся ошибка, характер затухания переходного
процесса, запас устойчивости. Рассмотрим каждый по
казатель в отдельности.
Время регулирования /р характеризует быстродейст
вие системы и соответствует периоду, по истечении ко
торого управляемая величина входит в зону нечувстви
тельности регулятора.
Рис. 86. Основные виды характеристик переходных про
цессов автоматических систем регулирования при ти
повом единичном воздействии.
i/inax— Уо
7о
ш о% .
Перерегулирование появляется потому, что система
к новому установившемуся состоянию подходит с опре
деленной скоростью, определяемой тангенсом угла нак
лона касательной в точке А. Чем больш е скорость, тем
больш е будет перерегулирование, и для его уменьшения
необходимо снижать скорость нарастания управляемой
величины. Н о снижение скорости приведет к увеличению
времени регулирования, что неж елательно. П оэтому пе
ререгулирование считают оптимальным, если оно нахо
дится в пределах 20 . . . 30 %.
Колебательность процесса характеризуется числом
колебаний управляемой величины за время регулирова
ния.
Количественно колебательность оценивается по л о
гарифмическому
декременту
затухания,
который представляет собой натуральный логарифм отношенпя двух последующих амплитуд отклопений уп
равляемой величины одного направления
d = I n —- — •
Д(/2
Чем больш е логарифмический декремент затухания,
тем быстрее происходит затухание переходного про
цесса.
Установившаяся ошибка показывает точность управ
ление в установившемся режиме. Она, как бы ло отме
чено ранее, равняется разности между заданным значениег5 управляемой величины и ее установившимся зна
чением при номинальной нагрузке.
Характер затухания переходного процесса позволяет
классифицировать переходные процессы в системах уп
равления и выделить среди их многообразия четыре ос
новных вида (рис. 8 6 ,6 ): колебательный процесс (кри
вая 1 ) — ему присуще несколько значений перерегули
рования; малоколебательный процесс ( 2 ) —-процесс с
одним перерегулированием; монотонный процесс ( 4 ) , при
котором скорость изменения управляемой
величины
218
219
й///(1^ не изменяет знака в течение всего времени регули
рования; апериодический процесс (5 ) — процесс, когда
управляемая величина меньше ее установившегося зна
чения с точностью до зоны нсчувствнтельности регуля
тора при всех значениях t.
Запас устойчивости — физическая суш,пость и мето
ды определения этого показателя качества управления
рассмотрены в 8.5 предыдуш,ей главы.
ференциального уравнения операционным методом сво
дится к отысканию оригинала функции по известному
ее изображению, то есть путем обратного преобразова
ния Л ап ласа. Переходную функцию y { t ) по ее изобра
жению F ( p ) находят из уравнения
f/ (0 = A - > [f(p )].
Изображ ение F { p ) можно найти из уравнения переда
точной функции ^ з ( р ) замкнутой системы
У ( Р ) = ^ 4 р ) х (р ).
9.2. Методы построения
График временной или переходной функции, по кото
рой определяют числовые значения показателей пере
ходного процесса, можно получить экспериментально,
при ПОМОШ.И моделирования и расчетным путем.
При экспериментальном методе определения кривой
переходного процесса необходимо иметь автоматическую
систему, то есть объект управления и регулятор. Р еги
стрируя изменение управляемой величины y { t ) во вре
мени при единичном воздействии 1(/) на входе, получа
ют кривую переходного процесса. Такой метод не всег
да можно реализовать практически из-за отсутствия той
или другой части системы или невозможности постанов
ки эксперимента.
М етод моделирования применим при наличии диффе
ренциальных уравнений, описывающих процесс управ
ления, и аналоговы х. (А В М ) или цифровых (Ц В М )
вычислительных машин.
А В М удобны в применении и позволяют быстро и
просто получить наглядное решение, проанализировать
влияние параметров системы
на качество
процессов.
Ц В М наиболее целесообразно применять при исследо
вании системы с большими запаздываниями, сложными
нелинейностями, сложными входными сигналами и при
©тмскании наилучших (оптимальны х) параметров сис
темы.
Подробнее вопросы моделирования можно изучить в
специальной литературе.
К расчетным методам относят методы, основанные
на р е ш е н и и д и ф ф е р е н ц и а л ь н ы х у р а в н е н и й ,
и ч а с т о т н ы й м е т о д . Решение дифференциальных
уравнений может быть выполнено классическим мето
дом, что представляет значитеяьные трудности и приме
няется редко, и операционным методом. Решение диф
22>3
Если принять x { t ) = l ( t ) , то на выходе получим y { t ) .
Так как изображение единичной ступенчатой функции
равно — , то
\Vsip)
fip ) =
Тогда
1/(0 = Л -1
W4P)
И спользуя таблицы
изображении, находят значение
оригинала.
Частотный метод, основанный иа свойствах ампли
тудно-фазовых и вещественных частотных характерис
тик, разработанный В. В. Солодовниковым, применяют
при построении кривых переходного процесса чаще дру
гих. Главное его достоинство в том, что, пользуясь ве
щественной характеристикой, можно сравнительно прос
тым способом построить приближенную кривую пере
ходного процесса управления и по ней определить пока
затели процесса.
Процесс построения кривой переходного процесса по
вещественной частотной характеристике может быть све
ден к нескольким основным операциям, последователь
ность которых изложена ниже.
1.
Рассчитывают и строят вещественную частотную
характеристику Р (с о ), для чего в выражение передаточ
ной функции замкнутой системы подставляют значения
р = ;с о , выделяют вещественную и мнимую части
lF (/ c o )= P (c o )+ iQ (c o ),
и, задаваясь значением со от О до оо, находят д ля раз
личных частот значения Р { ы ) , по которым и строят ве
щественную частотную характеристику.
221
2. Вещественную частотную характеристику заменя
ют линейно-кусочной таким образом, чтобы ломаная
прямая достаточно хорошо воспроизводила кривую. Бо
лее точную разбивку делаю т на начальной части харак
теристики Р (с о ), которая соответствует основному уча
стку кривой переходного процесса. .Аппроксимировать
кривую необходимо только в зоне рабочих частот.
3. Полученную
линейно-кусочную
характеристику
раскладывают на трапеции, одна сторона которых д о лж
на всегда располагаться на оси ординат. Чем больш е
число трапеций, тем, очевидно, полнее ломаная линия
воспроизводит кривую Р { ы ) , тем точнее построение кри
вой переходного процесса, ио и тем слож нее расчет.
Если трапеции соответствуют площади, охватываемой
кривой Р ( и ) выше оси абсцисс, то их считают полож и
тельными, и, напротив, если они соответствуют площади,
охватываемой кривой Р { ы ) ниже оси абсцисс, или п ло
щадям, дополненным к положительным трапециям при
разбивке, их считают отрицательными.
4. П ользуясь
таблицами
интегральных
функций
h {to ), для каждой трапеции строят кривые переходных
процессов и по ним находят результирующ ую кривую
переходного процесса автоматической системы регули
рования как алгебраическую сумму ординат y i { t ) для
частот сог всех трапеций.
Так, характеристика Р { ы ) па рисунке 87, а заменена четырь
мя трапециями (рис. 8 7 ,6 ); трапеция 1 является положительной,
а остальные — отрицательные, прнчем верхнее основанпе трапецнп
2 равно нулю. К аж дая из этих трапеций характеризуется следую
щими основными параметрами (рпс. 87, е ), по которым находят
значение интегральных функций: Р — высота, tocp — частота среза,
tod — интервал равномерного пропускания
частот,
?.=(.,j^/iocp —
коэффициент наклона.
Функция /i(fo) представляет собой кривую переходного процес
са системы, вещественная частотная характеристика которой есть
единичная трапеция с Р о = 1 и (Вср = 1 с -*. Значения интегральных
функций даются в справочных таблицах в зависимости от раз
личных коэффициентов наклона (0 : ^ Я : ^ 1 ). Д л я каж дого К (для
каждой трапеции) при различных значениях времени to в таблице
находят значение h ( t o ) . Чтобы получить кривую у { ( ) переход
ного процесса, соответствующего неединпчной трапеции, каждое
значение функции li(to ) умножают на P i , а время to делят на
частоту среза Шсрь то есть
y i{t)= P ih
to
Ординаты полученных кривых складывают с учетом их знаков
И находят кривую y { t ) переходного процесса (рис. 8 7 ,г ). П ользуясь
РМ
Рис. 87. Построение кривой переходного процес
са по вещественной частотной характеристике.
полученной кривой переходного процесса, определяют качественные
показатели. Если они не отвечают заданным требованиям, прини
мают меры по их улучшению.
9.3. Коевен(!ые оценки качества
Переходной процесс характеризуется рядом
пара
метров, определение которых представляет собой слож
ную и громоздкую задачу. При решении практических
задач не всегда требуется значение всех показателей
качества. Поэтому, чтобы не строить кривую переходно
го процесса для исследования качества управления, при
меняют косвенные методы оценки переходного процесса.
Косвенными оценками называют величины, характери
зующие отдельные свойства переходного процесса, ко
торые находят без его построения. Существует несколько
косвенных оценок качества переходного процесса: оцен
ка по частотным характеристикам, интегральные оценки,
322
223
корневые методы и т. д. Н аибольш ее распространение
получила о ц е н к а п о ч а с т о т н ы м х а р а к т е р и с
т и к а м . Н а рисунке 88 изображены примерные ампли
тудная К { а ) и фазовая ф(со) частотные характеристики
замкнутой автоматической системы. В амплитудной ха
рактеристике можно выделить ряд характерных участ
ков: на участке аЪ амплитуда выходного сигнала равна
амплитуде входного, то есть /((со) = 1; на участке Ьс в
точке для резонансной частоты амплитуда
имеет мак
симальное значение Лтах, при дальнейшем увеличении
частоты система вследствие своей инерционности не ус
певает реагировать на колебания
больш их
частот и
Л (о )) резко падает — участок de. Выходной сигнал от
стает по фазе от входного, поэтому фазовая характерис
тика отрицательна.
О т н о ш е н и е " 2 3 “ вают коэффициентом коА([))
лебательности. Чем больш е М, тем более колебатель
ным является
переходный
процесс.
Обычно М = :
= 1 ,2 ... 1,5. М алы м М соответствует больш ое время ре
гулирования, система вяло реагирует на возмущения.
При больш их М увеличивается
перерегулирование и
система приближается к границе устойчивости.
Характерными частотами наряду с частотой сотак
для А Ч Х являются Юсз и соц. Ч астоту
сосз называют
частотой среза замкнутой системы, и ее значение опре
деляю т на уровне /((со) = 1, когда амплитуды входного
Ш
1.0
0,8 \
0,747
Dfi
(Jfi
ОЛ
а
4£f
!
1
1
1
К Ы
I
1
1
1
I
1
1
1
а
системы и определяется как
—;|г-=0.707. Она влияет на
точность н быстродействие системы, с ее увеличением
быстродействие системы увеличивается. Чем больш е Юп,
тем больший спектр входного сигнала передается систе
мой без искажений и тем вьине точность работы систе
мы.
Колебательность М и полоса пропускания ыи замк
нутой системы являются косвенными показателями ка
чества переходного процесса, и по ним можно судить о
работе системы.
Оценку качества управления можно выполнить и по
логарифмическим частотным
характеристикам. Д л я
этого введены типовые Л Л Ч Х разомкнутых систем, ко
торые отличаются друг от друга наклонами отдельных
участков. Количественная связь меж ду показателями
процесса управления и параметрами типовых Л А Ч Х за
ранее определена и имеется в виде номограмм. По ним
определяют как косвенные, так и прямые показатели.
С интегральными оценками
и корневы
м и м е т о д а м и можно ознакомиться в специальной л и
тературе.
9.4. Определение установившихся ошибок
Автоматическая система управления в процессе ра
боты долж на передавать и воспроизводить сигналы, по
ступающие на ее вход. Точность воспроизведения этих
сигналов оценивается ошибками системы. Различаю т
ошибки; п о з а д а ю щ е м у в о з д е й с т в и ю
С
Vlui'l
и выходного колебаний равны
между собой. Частота
соп называется полосой пропускания частот замкнутой
iS
l- V
1 l\
1 1\
1
I
1 \
1
е(/
)= х (0 - «/ (0 .
представляющую разность между входным воздействи
ем x ( f ) и управляемой величиной г/(О. и п о в о з м у
щающему воздействию
\^n
CJ
т
е ( 0 = - '/ ( 0 .
Вис. 88. Частотные характеристики автоматической
амплитудная и фазовся; б — логарифмические.
системы;
а—
равную изменению управляемой величины под влияни
ем этого возмущения (задаю щ ее воздействие отсутст
вует).
З ак аз 5007
224
225
Величина установившейся ®u:ih6kh вычисляется для
зпачсиия времени t — oo, то есть
где Wp f p ) — передаточная функция по возмущению
6 (Оуст —lilTlE (О •
1+ Г ( р )
i-*-oo
Существуют различные способы определения значе
ния установившейся ошибки, наиболее просто она опре
деляется при помощи передаточной функции ошибки
(71 ), откуда
e (p ) = W o (p )x (p ).
Д л я нахождения ошибки как функции времени д ела
ют обратные преобразования Л а п ла са и при t-^oo
Е ( О = Л - > [ е (/ ? )].
Тогда установившаяся ошибка от вос«мущення будет рав
на
р^О
Д л я статического объекта и статического регулятора
соответственно имеем
W i ( 0 ) — йо и W {0 )= k o k ,). При
Ро
(р ) = — ~
и установившаяся ошибка
е(/ )уст---- ’
е(/ ) уст = limp Vl^’o(p )^ v(p ),
в основе которого леж ит теорема отрицательного ис
числения о конечном значении функции. Т ак как пере
даточная функция ошибки (71) равна
l+Wp(p)
будем иметь
х(Р)
р -*0
Д л я статической системы VF(0) = fe, а изображение по
Л а п ла су единичного типового воздействия л :(0 = л :о р а в
-V.1
, поэтому установившаяся ошибка статино х ( р ) ■
(8 4 )
где k =kok'p — коэффициент передачи разомкнутой системы.
И з уравнения (84 ) следует, что различным значе
ниям Fo соответствуют различные значения установив
шейся ошибки.
Контрольные вопросы и задания. 1. Назовите основные пока
затели качества переходных процессов и дайте их характеристику.
2. Какие методы построения переходных процессов применяются
на практике? 3. Назовите косвенные оценки качества переходных
процессов. 4. Ч то такое установившаяся ошибка? 5. Какими ус
тановившимися ошибками характеризуется система? 6. Методы
определения установившихся ошибок.
ческой системы будет
(82)
где /г — коэффициент передачи разомкнутой системы.
И з уравнения (82) следует, что статическая ошибка
пропорциональна
величине задающ его воздействия и
уменьшается с увеличением коэффициента передачи k
разомкнутой системы.
Установившуюся ошибку от возмущ аю щ его воздей
ствия определяют по уравнению
е ( О уст= lim p W f ( p ) F ( p ) ,
226
(83)
е (/ )у с т = l i m p - | - ^ f ( p ) .
скачкообразном возмущении F { t ) — Fo, тогда
Значение установившейся ошибки от задающ его воз
действия можно определить и не применяя обратного
преобразования Л а п ла са по уравнению
Vl^’o ( p ) = -
(7 2 ), рапная
15*
ГЛАВА
X
КОРРЕКЦИЯ АВТОМАТИЧЕСКИХ
СИСТЕМ
10.1. Понятие о коррекции
Показатели качества процесса регулирования д олж
ны удовлетворять предъявляемым к системе требова
ниям, то есть система долж на быть устойчивой и иметь
заданную точность. Д л я уменьшения ошибки в устано
вившемся режиме, как уж е отмечалось, необходимо уве
личивать коэффициент усиления регулятора. Однако она
все равно остается, так как увеличение коэффициента
усиления всегда ограничено либо уменьшением запаса
устойчивости и ухудшением переходного процесса, либо
из-за физической неосуществимости больш ого коэффи
циента усиления в данной конструкции регулятора.
Увеличение коэффициента усиления может привести
к тому, что система станет неустойчивой раньше, чем
удастся получить требуемый коэффициент усиления.
На рисунке 8 8 изображены Л А Ч Х и Л Ф Ч Х системы
с различными коэффициентами усиления k\ и ко. Если
при малом значении
система имеет достаточный запас
устойчивости по фазе ф1 и амплитуде Lj при ошибке,
превышающей допустимое значение, то с увеличением
коэффициента усиления до ^2 с целью
уменьшения
ошибки до требуемого значения система, как видно из
рисунка, становится неустойчивой. Увеличение коэффи
циента усиления привело к увеличению частоты среза
сос2> Ш с ь к уменьшению запаса устойчивости по фазе
до отрицательного значения ф9 из-за
инерционности
звеньев системы, создающей запаздывание в передаче
колебаний по фазе.
Чтобы с увеличением коэффициента усиления сохра
нить устойчивость, то есть стабилизировать систему и
обеспечить получение заданных показателей
качества
переходного процесса, необходимо осуществить коррек
цию системы.
228
Одним
из
способов
коррекции является вве
дение в закон управления
производной от сигнала
ошибки.
В системе (рис. 89, а ),
состоящей из объекта уп
равления О У, д атчш о Д ,
усилителя У и исполни
тельного механизма И М ,
включено дифференциру
ющее устройство Д У с
воздействием на выходе
dz
На выходе датчика
нал равен
U
т
ОУ
ду
сиг
Рис. 89. Введение производной в
закон регулирования.
z=ky.
(8 6 )
В усилитель поступает воздействие
йу
Z
+
Zi
= k {y +
k ])
и
(8 ^
П о сле усилителя имеем
z2 = k2{z + z i ) .
(88)
Исполнительный элемент
вырабатывает управляющее
воздействие на объект
Zz^hZi
(89)
или после подстановки значения 29 из ( 8 8 ) и его со
ставляющих из (85) и ( 8 6 ) получим
(90)
Включение дифференцирующего устройства в сис
тему привело к тому, что управляющее воздействие на
объект оказалось пропорциональным не только откло
нению управляемой величины у, но и производной
от этого отклонения.
Н а рисунке 89, б изображено изменение отклонения
управляемой величины у во времени (кривая /), а на
рисунке 89, в — изменение производной — j с течением
df
229
времени (ее величина представляет собой тангенс угла
наклона касательной в соответствующей точке кривой
у )При работе регулятора по закону Z:i=k^i-y все вре
мя, пока у > 0 , то есть на участке О А В , регулятор вы
рабатывает полож ительное управляющее воздействие Z3,
действующее на уменьшение полож ительного отклоне
ния у. Е точке В изменяется знак отклонения, и регуля
тор должен изменить свое действие в обратную сторо
ну. Но из-за инерционности регулятора он будет про
долж ать работать на уменьшение управляемой величи
ны и начнет действовать в обратную
сторону позже,
когда накопится определенное отрицательное отклоне
ние у — внутри участка ВС. Это способствует раска
чиванию системы и тем сильнее, чем больш е коэффи
циент усиления регулятора.
При работе регулятора по закону (90 ) с увеличе
нием отклонения у (участок О А ) производная AyjAt и
отклонение имеют одни знак, поэтому их слож ение уве
личивает управляю щ ее воздействие регулятора 23 на
объект, направленное на уменьшение отклонения у. С л е
довательно, наличие производной в законе управления
формирует действие регулятора на участке возрастания
отклонения управляемой величины. П оэтом у максималь
ное отклонение в точке А будет меньше, чем для регу
лятора без производной.
При уменьшении отклонения у (участок А В ) произ
водная имеет отрицательное значение, и в выражении
(90) ее значение будет вычитаться из у, что приводит
к уменьшению 23 в сравнении с воздействием без про
изводной. П оэтом у наличие производной в законе регу
лирования тормозит действие регулятора
на участке
уменьшения отклонения управляемой величины. Это пре
дотвращает переход отклонения к отрицательному зна
чению и в итоге к подавлению колебаний в системе и
созданию переходного процесса, кривая 2 (рис. 89, б ) .
Управляющ ее воздействие Z3 станет отрицательным
не в точке В, а раньше, еще при полож ительном у. Вве
дение производной компенсирует инерционное запазды
вание в изменении действия регулятора в обратную сто
рону.
Итак, если в закон управления введена производная,
то регулятор реагирует не только на значение управля
230
емой величины в данный момент времени, но и на ха
рактер изменения отклонения в последующие моменты
времени, то есть работает как бы с опережением, у луч
шая качество процесса управления за счет тенденции
последующ его развития процесса- П оказатели качества
системы можно улучш ить путем изменения закона уп
равления и с помощью других корректирующих уст
ройств, выходной сигнал которых может быть некото
рой функцией от входного сигнала; интегралу во вре
мени, сумме производной и интеграла и т. д. Эти кор
ректирующие устройства включаются либо параллельно,
либо последовательно с элементами системы (рис. 5 ).
П оэтому корректирующие устройства называют п о с л е
д о в а т е л ь н ы м и или п а р а л л е л ь н ы м и . Н а прак
тике применяют и те и другие. При выборе схемы под
ключения корректирующих устройств нужно иметь в ви
ду следующее.
Последовательное включение, аналогичное введению
производных в основную цепь управления, увеличивает
скорость воздействия на систему, но одновременно со
провождается усилением влияния высокочастотных внеш
них воздействий (при этом ускорение воздействия тре
бует повышения мощности системы
и ее прочности).
Введение же интегралов в закон управления
делает
систему астатической и, следовательно, устраняет стати
ческую ошибку, но в данном случае д ля стабилизации
приходится услож нять схему системы.
П араллельное включение корректирующих устройств
основным звеньям, то есть включение их в обратные
связи, даст преимущества по сравнению с последова
тельным, так как д елает систему менее чувствительной
к внешним воздействиям и изменениям параметров ос
новной цепи управления и не усиливает помех. У л у ч
шение переходного процесса происходит потому, что при
охвате можно изменить как коэффициент усиления зве
на, так и его постоянную времени и получить звено с
нужными параметрами.
10.2. Коррекция с помощью последовательных
корректирующих устройств
Коррекцию А С У можно осуществить с помощью по
следовательных интегрирующих и дифференцирующих
устройств, включаемых в цепь управления системы. Кор231
рекция системы с помощью последовательных диффе
ренцирующих фазоопережающих устройств наряду с
увеличением коэффициента усиления системы позволяет
увеличить частоту среза системы, то есть наряду с умень
шением ошибки системы в установившемся режиме име
ется возможность уменьшить и время переходного про
цесса.
Так, п о с л е д о в а т е л ь н о е
в к л ю ч е н и е диф
ф е р е н ц и р у ю щ е г о з в е н а , которое на выходе да
ет производную от входной величины,
может умень
шить влияние какой-либо постоянной времени. Напри
мер, если передаточная функция системы
Ц 7 , (р ) = --------------- -----------:
’
(\ + Т ,р )(\ + Т .р )
(9 1 )
^
^
и требуется уменьшить влияние постоянной времени Т\,
то последовательное введение в цепь управления диф
ференцирующего звена с передаточной функцией
a
Щр)=^
d
Щр) =
К*тр
CJ=0
в
^г(р)
^j(p)
jm )
и=0
т р )= -
t*Tp
>^з(р)
Х* (Р )
тр
Рис, 90. Схемы включения апериодических звеньев и их влияние
на вид амплитудно-фазовой характеристики системы.
^2{Р)
приведет к тому, что выражение (91) на основании фор
м улы (68) при Т ц = Т х будет иметь вид
W ( p ) ^ W i { p ) W 2 { p ) = -------- — ---------’
(\ + П р )(\ + Т ,р )
Из полученного уравнения видно, что включение диф
ференцирующего звена привело к полной компенсации
неж елательной постоянной времени Г] и, следователь
но, к улучшению динамических свойств автоматической
системы. П оследовательное включение дифференцирую
щих фазоопережающих устройств приводит к о с ла б
лению сигнала в области низких частот, оно тем интен
сивнее, чем больш ее опережение долж но обеспечить уст
ройство. Компенсацию этого
ослабления
выполняют
увеличением коэффициента усиления за счет других ее
элементов. Высокие частоты пропускаются этим устрой
ством без ослабления, если на дифференцируемый по
лезный сигнал накладываются высокочастотные помехи,
то они будут полностью пропускаться. П оэтом у с помо
щью дифференцирующих фазоопережающих устройств
осущ ествляют коррекцию только в том случае, если на
вход системы поступает управляющ ее воздействие без
помех.
232
JQ(tj)
Д (и )
■Ijo co-t/o (jj^o . -i.jo
Последовательное включение типовых
з в е н ь е в также изменяет характеристики отдельных
звеньев и системы в целом. Амплитудно-фазовая час
тотная характеристика апериодического звена показана
на рисунке 90, а. Если к нему последовательно подклю
чить такое ж е апериодическое звено
(рис. 90, б ) , то
амплитудно-фазовая характеристка будет выглядеть, как
на рисунке 90, в. П о с л е д о в а т е л ь н о е в к л ю ч е н и е
т р е т ь е г о з в е н а (рис. 90, г ) приводит к тому, что
амплитудно-фазовая характеристика принимает вид, по
казанный на рисунке 90, д. И з рассмотренных приме
ров следует, что последовательное включение
в цепь
управления апериодического звена с передаточной функ
цией W { p ) = k / ( l - \ - T p )
соответствует повороту вектора
А Ф Х по часовой стрелке или отставанию по фазе на
у го л a r c tg (— соТ'). Д ругим и словами, значение фазового
угла амплитудно-фазовой характеристики растет с уве
личением в системе числа апериодических звеньев, вклюненных последовательно.
Если в систему, характеристика 1 которой показана
на рисунке 91, последовательно включить интегрирую
щ ее звено с характеристикой 2, то получим амплитудно
фазовую характеристику 3.
233
Таким образом, включение
привело к повороту всех век
торов характеристики на угол
/0)-^^ и=0
Р(Ы)[
__90° по часовой стрелке с одновременныл! увеличением их
1
/Р(и)
на модуль интегрирующего зве
на k j ^ f . Введение интегрирую
i'2
щего звена позволяет значи
\д
тельно повысить коэффициент
усиления системы, не увеличи
Рис. 91. Влияние инте
вая ее частоты среза. Это поз
грирующего
звена
па
А Ф Х системы.
воляет уменьшить динамичес
кую ошибку системы li снизить
уровень влияния помех, поступающих на вход системы
вместе с задающим воздействием. Недостатком такой
коррекции является то, что переходный процесс ухуд
шается.
И з приведенных примеров следует, »то включением
различных звеньев в цепь управления системы можно
повернуть А Ф Х на комплексной плоскости так, что она
займет требуемое положение.
В заключение отметим, что включение в цепь управ
ления корректирующих звеньев (дифференцирующих и
интегрирующих), которые вносят в закон управления
составляющие, пропорциональные производным и ин
тегралам выходной величины, позволяет значительно
повысить устойчивость и быстродействие системы.
Одиако нельзя полностью скомпенсировать влияние
всех постоянных времени в системе и сделать ее безы
нерционной. Если это сделать, то передаточная функция
системы станет равной постоянному числу и система
окажется мгновенно действующей.
В результате потребуется регулятор теоретически
неограниченной мощности, а это выполнить невозмож
но. При переходных процессах в деталях системы будут
возникать больш ие перенапряжения, что приведет к вы
ходу их из строя.
Рассмотрим влияние
обратных связей на параметры
основного звена.
Н а рисунке 92, а изображено апериодическое звено,
охваченное жесткой обратной связью.
Эквивалентная
передаточная функция этого звена в соответствии с пра
вилами преобразования структурных схем (70)
и,
11?(р )
_____ _______ ?------ -х{р)
с (р )
l+Tp+kko.o
Перейдем от передаточной функции к дифференци
альном у уравнению. В начале запишем операторное урав
нение
У { р ) + Т р у { р ) +kko.^ij ( р ) ,= k x { p ) ,
из которого, перейдя от изображения F ( p ) к оригиналу
f ( t ) , получим дифференциальное уравнение апериоди
ческого звена, охваченного жесткой обратной связью
T - ^ + y + kko-cy==kx.
П осле преобразования этого уравнения получим
\-\-kko.c
It
d/
+ г/=-
-X.
1+^^О .С
И з полученного уравнения видно, что структура зве
на не изменилась, а постоянная времени звена и коэф
фициент усиления уменьшились в (l-i-fe^o.c) раз.
Д л я апериодического
звена,
охваченного
гибкой
обратной связью (рис. 92, б ), запишем, опуская про-
10.3. Коррекция с помощью обратных связей
В практике наряду с последовательной коррекцией
систем управления широко применяют корректирующие
устройства, включаемые в местные обратные
связи.
234
S
Рис. 92. Схемы охвата
г
типовых
звеньев обратными
связями:
а а б — апериодического; в и г — интегрирующего.
235
межуточные
уравнение
преобразования,
его
дифференциальное
Т—ГГ“ + kko.cTo.c— At
At
в [VOHC4HOM виде
Ay
{ Т + kky^cTo.c)
+ ij = k x ,
то есть характер звена сохраняется, а постоянная вре
мени увеличивается на kk„.cTo.cУравнение интегрирующего звена, охваченного жест
кой обратной связью (рис. 92, в ),
At
kko.cy = kx
Рис. 93. Схема
разгона:
Ay
или
kko,
С
- У = Т« о~. с^ -
Следовательно, звено становится эквивалентным апе
риодическому, что существенно изменяет динамику сис
темы.
Коэффициент
усиления
и
постоянная времени
уменьшаются в kko.c раз.
Уравнение интегрирующего звена, охваченного ги б
кой обратной связью (рис. 92. г ).
Ay
Ay
At
или
At
( T + k k o c T o .c )----- = kx
At
Значит, полученное звено остается интегрирующим,
но его постоянная времени увеличивается на kkn.cTo.cПодобным образом можно проанализировать охват
обратными связями и других звеньев.
лабораторных
а — электрического
элемента.
двигателя;
установок
б - - гидроцилиндра;
Лабораторная
работа
б
Определение постоянных времени различных элементов
автоматических систем
Содержание работы. О владеть методами и навыками определе
ния постоянных времени различных элементов систем.
Описание лабораторной установки. Схемы лабораторных уста
новок для снятия кривых разгона y ( t ) различных элементов при-
236
снятия
кривых
в — нагревательного
ведены на рисунке 93. Д л я снятия кривой разгона электродвига
теля Л/ в схеме используют тахогенератор B R и регистрирующий
вольтметр P V (рис. 93, а ). Напряжение подают, замыкая рубиль
ник Р. Д л я исследоиания гидроцилиндра необходимо иметь потен*
циометрический П или индуктивный датчик, преобразующий пере
мещение поршня в напряжение (рис. 93, б ) . При снятии кривой
разгона сначала включают двигатель масляного насоса, а затем
полностью
открывают
золотник.
Нагревательный
элемент
(рис. 93, в) исследуют при помощи термопары, выводы которой
подключают к вольтметру P V с больш[им внутренним сопротиплением. Время нагрева отсчитывают по секундомеру, начиная с мо
мента замыкання рубильника Р.
Порядок выполнения работы.
1. Снимают
кривые
разгона
объектов. 2. П о кривым разгона методом касательной определяют
постоянные времени. 3. Рассчитывают зависимости y = f { t ) по фор
муле
t
Контрольные вопросы и задания. 1. Д ля чего необходима кор
рекция? 2, Назовите способы улучшения качественных показате
лей процесса управления. 3. Как влияет последовательное включе
ние корректирующих устройств на показатели системы? 4. Как влия
ет охват звеньев обратными связями иа их параметры? 5. Каковы
недостатки включения корректирующих устройств?
для
Т
y — yycr(i—в ^ ) -t-f/начб ^ J
где г/уст и у„ач — соответственно установившееся н начальное зна
чения управляемой величины.
Содержание отчета. Отчет долж ен содержать принципиальные
схемы и описание установок, таблицы с данными расчетов зави
симости y = f { t ) , опытные и расчетные кривые y = f ( t ) , построенные
для каж дого элемента на одном графике, паспортные данные ос
новного оборудова 1т я и приборов, выводы по работе.
ГЛАВА
XI
НЕЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ
СИСТЕМЫ УПРАВЛЕНИЯ
11.1. Общие сведения
Автоматическую систему управления, в состав кото
рой входит хотя бы один элемент с нелинейной стати
ческой характеристикой, называют нелинейной. У ж е от
мечалось, что системы, описываемые линейными диф
ференциальными уравнениями, на практике встречают
ся довольно редко. Нелинейности статических характе
ристик отдельных элементов могут обусловливаться раз
личными причинами.
При исследовании рассматриваемых систем стремят
ся провести линеаризацию статических характеристик
как отдельных элементов, так и систем в целом. Однако
встречаются и такие системы, движение которых опи
сать линейным или
линеаризованными
уравнениями
не представляется возможным из-за наличия в них э л е
ментов со значительными нелинейностями. П оэтом у при
менить изложенные ранее методы к анализу нелинейных
систем, у которых динамические характеристики описы
ваются нелинейными дифференциальными уравнениями,
не удается, так как нет методов решения этих уравне
ний.
Виды статических характеристик некоторых распро
страненных в практике нелинейных элементов изобра
жены на рисунках 29, 40. Нелинейные А С У в зависи
мости от начальных условий м о г у т быть устойчивыми, со
вершать незатухающие колебания или находиться в не
котором критическом автоколебательном режиме. ^Не
линейная автоматическая система может быть устойчи
вой при малых отклонениях параметра управления и
оказаться неустойчивой при больших отклонениях и в
целом быть неустойчивой.
Математическую модель нелинейных систем состав
ляю т так же, как и д ля линейных. С оставляю т принци238
V
ниальную, функциональную и алгоритмическую струк
турные схемы А С У . Д л я каждого элемента находят ста
тические и динамические характеристики с последующей
их линеаризацией и выявлением возможного диапазо
на изменения управляемых параметров. Если нелиней
ность м ало влияет на характер переходного процесса, ее
линеаризуют, явно выраженные нелинейностн сохраня
ют. Таким образом, получают алгоритмическую струк
турную схему с некоторой
нелинейной
передаточной
функцией и иелинейными характеристиками звеньев.
Д л я анализа отдельных свойств автоматических не
линейных систем предложен ряд приближенных методов,
из которых наибольшее распространение получили мето
ды фазовой плоскости, припасовывания, гармонического
баланса и математического моделирования. Самая важ
ная задача при исследовании нелинейных систем — вы. явление условий, при которых создается режим автоко
лебаний, и оценка их параметров. Автоколебания в не
линейных системах возникают не как р езультат внеш
них воздействий, а как проявление их особы х динами
ческих свойств. Рассмотрим отдельные методы анализа
нелинейных систем.
а . 2.
1
ч
i
I
J
1
Метод фазовой плоскости
Состояние автоматической системы может быть оха
рактеризовано числами, которые допустимо рассматри
вать как координаты некоторой точки в пространстве:
нри этом любой точке этого пространства будет соответ
ствовать одно определенное состояние системы. С тече
нием времени параметры изменяются, точно так же из
меняются координаты точки в пространстве. Таким об
разом, по движению точки можно судить о поведении
автоматической системы управления. Точку, описыва
ющую поведение системы, принято называть изображ а
ющей точкой, ее траекторию — фазовой траекторией, а
пространство — фазовым пространством. Д л я исследо
вания нелинейных автоматических систем второго по
рядка фазовое пространство сводится к фазовой плос
кости.
Следовательно, фазовые траектории и фазовое про
странство дают геометрическое представление о дина
мике процессов, происходящих в системе. Вместе с тем
метод фазовой плоскости не позволяет судить о протека239
ПИИ переходного процесса во времени и служ ит лиш ь его
качественной характеристикой.
Н а фазовой плоскости по оси абсцисс откладывают,
как правило, отклонение управляемой величины у от
заданного значения, а на оси ординат — скорость ее из
менения Ayldt = y'. П оэтом у состояние системы, описы
ваемой уравнением второго порядка, будет в лю бой мо
мент времени определяться значениями у и у ' — поло
жением изображающей точки. В переходном
режиме
значения у а у' меняются и изображающая точка за
нимает различные положения на фазовой плоскости, по-
этому по ее траектории можно судить о характере ис
следуем ого переходного процесса.
Допустим, что отклонение управляемой величины от
заданного значения представляет собой незатухающие
синусоидальные гармонические колебания (рис. 9 4 ,а ).
Изобразим их на фазовой плоскости в координатах у и
у . Будем считать, что в момент времени t = 0 синусои
дальные колебания г/= /4„,51п(соГ) имеют значение уо
и характеризуются точкой А. На участке переходного
процесса А В отклонение параметра у увеличивается, а
его скорость у уменьшается. Н а фазовой
плоскости
(рис. 94, б ) это соответствует участку
фазовой
траектории. В точке М в у = А т \ г/' = 0. На участке В С
отклонение у уменьшается, а его скорость у ' возрастае'1, но имеет отрицательное значение. Н а фазовой
плоскости это изображено фазовой траекторией М в М с .
Подобным образом д ля точек D, Е, F переходного про
цесса на фазовой плоскости получены изображающие
точки М с , M e , Мр. П о истечении периода переходный
процесс автоматической системы в точке F будет иметь
те же значения у и у', что и в точке А, поэтому фазо
вые траектории в изображающих точках М р и М д на
фазовой плоскости будут совпадать. С ледовательно, фа
зовая траектория представляет собой замкнутую кри
вую.
Уравнение для фазовой траектории при незатухаю
щих гармонических синусоидальных колебаниях можно
получить, если найти скорость изменения отклонения
управляемой величины
d{/
d
у = - d/
^ =
^ -^Л,„51ПС0/=С0ЛтСО5С0Л
At
—
(92)
Исключив из выражения (92) переменную t
у ' = о)Ат COS a r c s in - ^ = Л „,cocos arccos
I—
найдем искомое уравнение
if
( уУ
= 1.
А,
Рис. 94. Колебательные переходные процессы и их изображение
на фазовой плоскости:
а и б — незатухающий; в и г — затухающий; д и е — расходящийся.-
.240
■ Нетрудно убедиться, что это уравнение эллипса с
полуосями А„, и соЛ,„. При разных значениях Л,„ на фа
зовой. плоскости получим семейство эллипсов, которые
16 Заказ 5067
2Я
Рис. 95. Переходные апериодические процессы и
их изображения на фазовой плоскости:
« — затухающий; 6 — расходящийся.
ие пересекаются и имеют общ ую точку, называемую
центром (рис. 94, б ).
Фазовая траектория затухающего гармонического колебательного процесса (рис. 94, в ) представляет собой
спиралевидную кривую (рис. 94, г ), постепенно прибли
ж ающ уюся к началу координат фазовой плоскости, так
как амплитуда отклонения регулируемой величины и
скорость его изменения постепенно уменьшаются. Точка
равновесия в начале координат называется у с т о й ч и
в ы м ф о к у с о м . Д л я гармонического колебательного
расходящегося (неустойчивого) процесса
(рис. 94, д )
фазовая траектория изобразится в виде спиралевидной
кривой (рис. 94, е ), удаляю щ ейся от начала координат,
так как амплитуда отклонения управляемой величины и
скорость его изменения постепенно увеличиваются. В
этом случае точка равновесия — центр координат назы
вается н е у с т о й ч и в ы м ф о к у с о м . У апериодического
затухающего переходного процесса, изображенного на
242
рисунке 95, о (система устойчива), фазовые траектории
стремятся к началу координат. Точка равновесия в этом
случае называется у с т о й ч и в ы м у з л о м . Д л я апе
риодического расходящегося процесса (рис. 95, б ) фа
зовые траектории удаляю тся от начала координат фазо
вой плоскости. Точка равновесия теперь будет н е у с тойчивымузлом.
Приведенные примеры подтверладают, что перемеще
ние изображающей точки на фазовой плоскости по той
или иной фазовой траектории дает возможность судить
о характере исследуемого переходного процесса. При по
строении фазовых траекторий на фазовой плоскости у
и у ' можно пользоваться следующими, общими для всех
переходных процессов, правилами; 1) фазовые траек
тории не пересекаются меж ду собой (исключение со
ставляю т только особые точ к и ); 2) если значение г/'по
лож ительно, то фазовая траектория находится в верх
ней половине фазовой плоскости и изображающая точка
всегда движется слева направо, при отрицательном же
значении у ' фазовая траектория располагается в ниж
ней половине фазовой плоскости и изображающая точка
движется налево; 3) фазовые траектории при скорости
изменения t/'=0 пересекают ось всегда под прямым у г
лом.
11.3 Метод припасовывания
Сущ ность м е т о д а п р и п а с о в ы в а н и я
(метода
точечного преобразования) состоит в том, что нелиней
ную характеристику заменяют рядом линейных участ
ков, д ля которых составляют линейные дифференциаль
ные уравнения, приближенно описывающие поведение
системы. Затем на основании условия непрерывности ре
шения полученные результаты для каждого участка при
пасовывают в точках соединения. Существуют различ
ные варианты этого метода, в том числе и метод точеч
ного преобразования, предложенный А. А. Андроновым.
Переходный процесс разбивают на участки или эта
пы, в пределах которых процесс описывают линейными
дифференциальными уравнениями. Поэтому всю фазо
вую плоскость разделяю т на области со своими фазо
выми траекториями, отвечающими уравнениям соответ
ствующих этапов.
Рассмотрим фазовую плоскость, разделенную на че
16*
243
Рис. 96. Картина фазовых траек
торий к методу п ри п а со Б Ы в ан и я
(точечного преобразования).
тыре области (рис. 9 6 ).
Каждая из этих областей
очерчена границами: м еж
ду областями IV и I гра
ницей служ ит
полож и
тельная полуось у, меж
ду областями I и I I —
кривая А\В\, меж ду о б л а
стями II и I I I — полуось
оуи между областями I I I
и IV — кривая Л 3В 3. Б у
дем считать, что началь
ные координаты изобра
жающей точки определя
ются положением точки
Мо, что соответствует на
чальным условиям у ( 0 ) = ОМ о=уо- Изображ аю щ ая точ
ка на первом этапе переходного процесса перемещается
по некоторой фазовой траектории области 1 и по
падает в точку М\ на границу А\В\. Д л я области I I при
нимается такая фазовая траектория, которая проходит
через точку М й тогда изображающая точка, двигаясь по
этой траектории, на втором этапе переходного процесса
приходит в точку М 2 на границе оу\. С ледуя по соответ
ствующим фазовым траекториям на этапах I I I и IV , из
ображ аю щ ая точка Мо снова достигает полуоси оу в не
которой точке Мо* с координатой г/о*^
Возможны три случая: уо* <Уо\ Уо’^^Уо и уо > У о В первом случае переходный процесс будет затухающим,
во втором имеет место предельный цикл, в третьем пе
реходный процесс будет расходящимся. Д л я тех или
иных значений г/о значения г/о* будут различными, сле
довательно,
существует
определенная
зависимость
yo* = f{yo)- Такая зависимость позволяет судить о том,
каким будет переходный процесс.
Зависимость уо* = !{уо) строят следующим образом.
Задаются на фазовой плоскости рядом точек Мо началь
ного отклонения и, пользуясь семейством фазовых тра
екторий в каждой области, находят соответствующие им
точки М о*. Приняв положение точек М о и М о * за коор
динаты некоторой преобразующей точки, строят в дан
ной системе координат искомую кривую, различные ва
рианты которой показаны на рисунке 97. Так, отрезок
0/Vo (ci) представляет собой наименьшее начальное
Рис. 97. Характеристики Уо* = 1(Уо) к методу т о
чечного преобразования.
отклонение, когда систему можно вывести из равнове
сия. Если через начало координат провести прямую
=
то получим биссектрису координатного угла.
Возмож но несколько случаев расположения крнвои
yo* = f ( y o ) по отношению к биссектрисе.
1.
Кривая y o * = f { y o ) не пересекает биссектрису
располагается справа от нее (рис. 97, а ). Переходный
процесс будет затухающ им, в чем можно убедиться, за
менив преобразование точки г/о в г/о* на фазовой плос
кости системы движением преобразующей точки Мопо
отрезкам, как показано стрелками. Где бы ни взята на
чальная точка Мо, мы, двигаясь подобным
образом,
всегда придем к отрезку 0/Vq- Если кривая f (г/о) распо
лож ена слева от биссектрисы (рис. 97, б ), то процесс
будет расходящимся.
245
244
и
2. Кривая г / о * ( г / о ) псресс'кает биссектрису в од
ной точке (рис. 97, в, г ) . В случае (е ) система будет
иметь устойчивый предельный цикл, автоколебания бу
дут устойчивыми, так как при любом начальном от
клонении г/о<Со или г/о>Со преобразующая точка Мо
движется к точке /< с координатами уо* = Цо=Со. В с л у
чае (г ) также предельный иикл, но при уо<сСо процесс
устойчивый, так как изображающая точка движется к
зоне равновесия, а при у о > С о — неустойчивый, посколь
ку изображающая точка удаляется в бесконечность.
3. Кривая y o * = f { y o ) пересекает биссектрису в двух
точках (рис. 97, д ) . Когда у о < С , переходный процесс
протекает устойчиво и система возвращается к полож е
нию равновесия. Когда же у о > С и изображающая точка
движется к точке Kz с координатами у о *= У о = --С 2 и в
системе возникают устойчивые автоколебания.
4. Кривая yo* = f {yo) касается биссектрисы в неко
торой точке К (рис. 97, е). При г/о<Со изображаю щ ая
точка движется к зоне равновесия, при у о > С о — к точ
ке К с координатами уо*— уо=Си.
Таким образом, пользуясь методом припасовывания,
можно провести анализ переходного процесса нелиней
ной автоматической системы.
11.4. Метод гармонического баланса
М етод гармонического баланса (частотно-амплитуд
ный метод) исследования нелинейных систем лю бого
порядка является приближенным, так как ие учитыва
ет влияние высших гармоник. Основан он на сравнении
входного гармонического колебания и первой гармоники
иа выходе нелинейного элемента.
Автоматическую систему с одним нелинейным элементом
представляют в
виде нелинейного элем ен
та Н Э и линейной части
' нз [—» л?
Л Э , куда объединяют все
линейные элементы систе
мы (рис. 9 8 ,а ). П редпо
Х=АГП51ЛиТ
НЗ
лагают, что в такой нели
нейной замкнутой систе
Рис. 98. Структурное представле
ме, находящейся под воз
ние
нелинейной системы (а )
и
действием гармонического
воздействие
гармоническим
сиг
возмущения, входная ве
налом на нелинейный элемент ( б ) .
личина X нелинейного элемента будет изменяться гар
монически, то есть Jc=i4mSinto^. Такое предположение
справедливо, если линейная часть системы не пропус
кает (отф ильтровывает) все высшие (кроме первой),
гармонические составляющие входного сигнала х. Это
допущение позволяет определить условия устойчивости
нелинейных систем и ввести понятие о передаточной
функции нелинейного элемента, которая при гармони
ческом входном воздействии является функцией входной
и выходной амплитуд и частот.
Н аи более распространен метод, когда передаточная
функция считается зависящей только
от
амплитуды
входных колебаний, то есть передаточной функцией не
линейного элемента Н Э называется отношение ампли
туды первой гармоники его выходного сигнала к амп
литуде входного гармонического сигнала НЭ. Если и а
вход нелинейного элемента в разомкнутой
автомати
ческой системе (рис. 98, б ) подать гармоническое воз
действие л:=Л„,51по)^, то на выходе Н Э установятся пе
риодические колебания с той ж е частотой ш
2
0
г/=Ло + 2 ] ( Л isirm(o^-f^ cos«co -
(93)
П = 1
Расклады вая выражение (9 3 ) в ряд Ф урье и исклю
чая высшие (кроме первой) гармоники, получим
i/=/4o-f/4|Sinco/-f Лгсозо)^.
(94)
Коэффициенты A i и Аг разлож ения в ряд Ф урье опреде
ляю тся выражениями
2л
I
^ 1= —
г
J f {AmS\n(i)t) sinat dat,
(95)
2л
(9Г,)
П олож ив в уравнении С94’1 / о = 0 и т / = ф и подста
вив в него^выражепия (95) и (9 6 ), найдем
2.Ч
У =[—
5 /(Л ,„5!П ф )3 1П ф (1 ф ]5 !П ф +
2л
Г J Г
+ ! “
1
J f (Л т 5 1 П ф )С 0 5 ф (З ф J С 0 5 ф .
(97)
247
24G
JQ(u)
П оэтом у передаточная функция нелинейного элемента,
согласно определению, представляет
в общ ем
виде
комплексную величину вида
W n A j A . n ) = - ^ + j - ^ = b { A . n ) + jc{A rn )
^т
^ VI
(98).
и может быть обозначена как W'n.a (^m ).
Выражение (98) показывает, что передаточная функ
ция нелинейного элемента является функцией амплиту
ды Ат входного сигнала. Коэффициенты Ь (Л „ ,) и с (Ат)
определяются как коэффициенты разложения Ф урье
2л
fc (^ r« )= - ^ ^
S /(Л ,„5 Ш ф )5 Ш (р(З ф :
о
с { А т ) - = ----л Л ,„
I
JQ<u)
2я
/(Л,п51Пф)с05ф(1ф.
о
М о д уль передаточной функции (его еще называют
комплексным коэффициентом усиления или амплитуд
ной характеристикой нелинейного элемента)
Рис. 99 . Амплитудно-фазовые
.характеристики л и
нейной части и обратные
амплитудно-фазовые ха
рактеристики нелинейной части системы.
эти характеристики не пересекаются ( а ) , то автоколе
бания в системе не возникают. Когда характеристики
касаются одна другой ( б ) , система находится на гра
нице устойчивости (изменяя параметры нелинейного э л е
мента, можно устранить касание характеристик). При
пересечении характеристик в одной или нескольких точ
ках (в ) в системе возможны автоколебания. В каждой
точке пересечения характеристик можно определить зна
чение частоты (О и амплитуды Ат автоколебаний. Ч а с
тоту находят по характеристике— \^л.э(/со), а ампли
туду — по харс^^^теристике
• Чтобы
выяснить,
К п .э{А т )= ^ Ь Ц А т )+ сЦ А т ),
устойчивы или неустойчивы автоколебания в системе,
пользую тся следующим правилом: если точка годогра-
а аргумент
с{А,„)
9 = a r c t g — л ----Условия возникновения автоколебаний
ческой системе с нелинейным элементом
^ л .э (/ о ))1 ^ 'н .э (Л т )+ 1 = 0 .
Обычно уравнение
ставляя его в виде
(99 )
Ф<^
в автомати
(9 9 )
литуды Ага входной синусоиды. Первую кривую строят
как амплитудно-фазовую характеристику с учетом зна
ка, а вторую — по точкам. Н а рисунке 99 изображены
три случая взаимного расположения характеристик. Если
,
увеличенной
амплитуде (п о сравнению с амплитудой в точке пересе
чения годограф ов),
не
охватывается
годографом
1^^л:э(усо), то автоколебания устойчивы (и наоборот).
решают графически, пред
Затем строят кривые — \^л .э(/<й ) при разных значе1
ниях частоты со и -----;------ при разных значениях амп(,Лт)
248
’ ^(^ответствующая несколько
11.5. Метод математического моделирования
М етод моделирования, который может быть физи
ческим и математическим, универсален и прост и по
этому широко применяется^ д ля исследования систем
автоматического управления.
Физическое моделирование предполагает, что про
цессы, происходящие в натуральном объекте, воспроиз
водятся в модели, имеющей меньшие размеры, но оди
наковой по физической природе с оригиналом.
Л^атематическое моделирование основано на анало,249
уравнений, которыми
описываются
натуральный
объект и модель как в статике, так и в динамике. Такое
моделирование реализую т на аналоговых нли цифровых
машины
вычислительных машинах. А н а л о г о в ы е
проще в управлении, деш евле и в сочетании с осц и лло
графом дают возможность воспроизводить и наблю дать
на экране исследуемый процесс в виде кривых. Н едоста
ток аналоговых машин — сравнительно больш ая погреш
ность ( ± 5 % при исследоваипи линейных и ± 2 0 % при
исследовании нелинейных систем). Однако во многих
практических случаях
такая
погрешность
считается
вполне допустимой. Ц и ф р о в ы е в ы ч и с л и т е л ь н ы е
м а ш и н ы обеспечивают более высокую точность, но
слож нее и дороже.
Аналоговы е машины состоят из отдельных типовых
блоков, каждый из которых выполняет определенные
математические или логические операции; суммирование,
умножение, деление, дифференцирование, интегрирова
ние, воспроизведение различных нелинейностей, измене
ние знака и т. и. Блоки машины соединяют определенным
образом в зависимости от степени и вида уравнения. На
вход подают напряжение, пропорциональное возмущ е
нию, а с выхода снимают напряжение, в определенном
масштабе соответствующее управляемому параметру
системы. Промышленность выпускает целый ряд ан ало
говых вычислительных машин: МН-7, М Н -7М , М Н -10М ,
М Н -17М , МН-18, ЭМ У-10 и др. Основной элемент лю бой
машины — реш аю щ ий бл ок , в котором решается постав
ленная задача. Данные д ля решения вводятся в соот
ветствии со структурной схемой системы с помощью
ком м ут ационного пол я решающего блока. На поле вы
ведены гнезда всех решающих элементов, выполняющих
соответствующие математические
операции, и гнезда
проводников, соединяющих с этими элементами решаю
щий блок. Структурная схема модели, соответствующая
структурной схеме реальной А С У , набирается па комму
тационном поле. Решения в виде кривых переходного
процесса наблюдают на экране осциллографа.
ГИИ
Д л я исследования А С У
в решающем блоке Э В М
имеются элементы, выполняющие три основные матема
тические операции; м а с ш т а б н о е п р е о б р а з о в а
н и е , с у м м и р о в а н и е и и н т е г р и р о в а н и е . Вы
полнение этих операций осуществляется
при помощи
250
р е ш а ю щ его о п ер а ц и он н ого усилителя пост оянного тока
с отрицательной обратной с вя зь ю .
Существуют различные способы набора моделей ав
томатических систем, но в практике наиболее распрост
ранен с п о с о б н а б о р а п о о т д е л ь н ы м з в е н ь я м ,
соответствующим определенным звеньям
структурной
схемы исследуемой систсдмы. Значение переменных ве
личин Xi при этом определяется через машинную пере
менную А', и соответствующий масштабный коэффициент
nii
Xi = niiXi.
(100)
Так как p = dld t, то в машинных единицах p — tntP.
Составим схему набора апериодического звена на модели, пе
редаточная функция которой имеет вид
W’ (p )= 1+ Тр
Задаемся масштабом времени т и вводим
менные, тогда с учетом формулы (100) получим
p^nitP;
riiiT p Y + Y = k X
пере
У
X
Отсюда
машинные
I+ Tftp
vY--
-Y.
tiitT
nitT
Величина У в модели будет представлять папряжепие, поэтому
взяв от нее посредством делителя часть, пропорциональную коэф-
k
фициенту
и просуммировав с иапряженнем
--------- X, получим
ftifT
напряжение, пропорциональное рУ. П одав это напряжение на вход
усилителя, на выходе его получим величину У. Соединив выход
усилителя с входной клеммой, принятой за величину У, воспроиз
ведем искомую схему модели (рис. 100,а ). Подобным образом
могут быть получены схемы набора д ля других типовых звеньев.
Моделирование нелинейных А С У выполняют на ма
шинах, в которых, кроме операционных усилителей, име
ются у н и в е р с а л ь н ы е или с п е ц и а л и з и р о в а н
н ы е б л о к и н е л и н е й н о с т е й , представляющие со
бой набор диодно-резисторных ограничителен. В основе
моделирования лежит замена заданной
нелинейной
функции отрезками прямых. Кром е них, имеются блоки
перемиолчени.я.
251
ГЛАВА
H F -1
*'
г
Kz
иf X
Рис. 100. Схемы
ния на Э ВМ :
у
XII
СИСТЕМЫ ТЕЛЕМЕХАНИКИ
моделирова
а — зоны нечувствительчости; б —
релейной характернсти 1си с зоной
нечувствительности.
Л
а
' '4D0S
Л
К!
О+г
V!
RD
R,
12.1. Основные сведения
^
1^1
— 1> м = 1
, -w oв
ч>
Л хо-\
I
и,вых
1
V?
Rl
В
Так, для нелинейности типа «зона нечувствительнос
ти » схема моделирования изображена на рисунке 100, б.
Диоды V I н V2 закрыты напряжениями, снимаемыми
с потенциометров, до тех пор пока входная величина
t/fix меньше некоторого значения Uo. Когда сигнал t/вх
превысит заданное значение, один из диодов в зависи
мости от знака сигнала откроется и на выходе схемы
появится напряжение, пропорциональное входному.
Схема моделирования релейной характеристики с
зоной нечувствительности (рнс. 4 0 ,5 ) показана на ри
сунке 100, в. Если напряжение па входе меньше напря
жения отпирания диодов V I и V2, входное сопротивле
ние стремится к бесконечности и коэффициент усиления
равен нулю. При возрастании входного сигнала откро
ется один из диодов, входное сопротивление становится
значительно меньше сопротивления обратной связи. Н а
пряжение иа выходе резко возрастает и ограничивается
диодами обратной связи V3 и V4.
Контрольные вопросы и задания. 1. Когда систему считают
нелинейной? 2. Назовите основные методы исследования не.аинейных
систем. 3. Расскажите о б основных свойствах фазовых траекторий.
4. При каких условиях переходный процесс нелинейной системы
будет устойчивым? 5. В чем заключается сущность метода гармо
нического баланса? 6. Назовите условия возникновения устойчивых
автоколебаний в нелинейной системе.
Телемеханика — это область науки и техники, зани
мающаяся изучением и построением устройств, получа
ющих информацию об объекте, преобразующих ее в сиг
налы и передающих их в соответствующие команды
управления на расстояние по линиям связи для измере
ния, сигнализации и управления. С лово «телем еха н и к а »
состоит из двух греческих слов: «т е л е » — далеко и «м е
х а н и к а »— мастерство или наука о машинах.
Выполнение этих функций возлагается на специаль
ные телемеханические устройства и системы. Т е лем еха
нические устройства применяют для управления сосредоточенны.ми и рассредоточенными, стационарными и
мобильными объектами и процессами. Телемеханизация
имеет особое значение в условиях сельскохозяйственного
производства, которое характеризуется рассредоточен
ностью объектов. В телемеханике различают системы
телеизмерения (Т И ), системы телесигнализации (Т С ),
системы телеуправления ( Т У ) и системы телерегули ро
вания ( Т Р ) . Эти системы могут функционировать как
раздельно, так и совместно; системы телеуправления и
телесигнализации (Т У — Т С ), системы телеуправления,
телесигнализации и телеизмерения (Т У — Т С — Т И ).
Системы телеизмерения (Т И ) предназначены для
передачи данных о непрерывно измеряемых величинах
какого-либо техгюлогического процесса. Например, тре
буется передать данные об уровне некоторой жидкости.
Датчики уровня долж ны непрерывно следить за каждым
отклонением уровня от заданного значения, а система
телеизмерения передавать соответствующую информа
цию. Примерная блок-схема системы Т И изображена на
рисунке 10 1 , 0 . Информация но линии свйзи с контроли
руемого пункта К П передается на пункт управления П У
252
2.ад
40
Дп
Ml
Z
Т
ГИ
кп
Линия сдязи
объекты
лс
О!
OiJB
ГУ
ПУ
тс
Линия связи
02
03
ш ш ш
нп
Рис. 101. Блок-схемы:
а — телеизмерения; б — телеуправления и телеснгиалнзации;
ЦО — цифровой отсчет; Р П — регистрирую.щи^Ч
прибор; СП — самопишущий прибор; Д, . . .Д
датчи»
ки; Л С — лампы сигнальные; Зв — звоиок.
(диспетчерский пункт). Если переданные величины ад
ресуются диспетчеру, то на П У они поступают на стре
лочные приборы или светящееся табло, по которым ве
дется контроль за процессом. Кроме этого, полученная
информация может направляться на регистрирующие
приборы, где фиксируется в виде документов — пленок,
бумажных лент и т. п. При необходимости информация
может поступать в управляю щ ую вычислительную ма
шину (У В М ), которая обрабатывает ее и выдает необ
ходимые команды д ля улучшения режимов технологиче
ского процесса.
f Системы телесигнализации (Т С ) передают различ
ные данные о ходе технологического процесса и разного
рода дискретных величинах, которые также вводятся в
вычислительную машину (иногда непосредственно в ав
томатический регулятор) или сигнализируют диспетчеру
о состоянии технологических процессов. При необходи
мости используют световую или звуковую сигнализацию,
которая обращ ает внимание диспетчера на изменения в
состоянии объекта или на аварийную ситуацию.
yf Системы телеуправления (Т У ) передают информа
цию в виде команд, которые посылает диспетчер с П У
или У В М , на изменение режимов работы регуляторов,
на отключение или включение исполнительных механиз
254
мов и т. п. Объекты управления 01, 02, 03 находятся вне
поля зрения диспетчера, поэтому требуется специальная
сигнализация, извещающая об исполнении поданных
команд.
Системы телеуправления и телесигнализации (Т У —
Т С ) относятся к комбинированным, в которых команды
на управление объектом ( Т У ) подаются с диспетчерско
го пункта П У , а с контролируемого пункта К П поступа
ет сигнализация (Т С ) об исполнении команд, действую
щих на включение или отключение механизмов и уст
ройств, изменение режима работы объекта и т. п. Блоксхема такой системы изображена на рисунке 101,6.
Системы телеуправления, телесигнализации и теле
измерения (Т У — ТС — Т И ) предназначены д ля управ
ления отдельными агрегатами или целым комплексом
машин. Обычно в таких системах диспетчер дает коман
ды на выполнение различных операций, а по данным
Т У и Т С проверяет их исполнение.
Телемеханическую информацию передают по различ
ным линиям связи: проводным, электропередачи, радио,
а такж е по высокочастотным. В зависимости от функций,
выполняемых телемеханической системой, информация
идет ли бо с П У на К О — система Т У , ли бо с К П на
П У — система Т И и ТС, либо с К П на П У и с П У на
К П — система Т У — ТС. П оэтому каждый из этих пунк
тов может быть источником или приемником сообщения.
Ч тобы эффективно эксплуатировать линию связи, сооб
щения передают от одного диспетчера к многим прием
никам — система Т У или от многих источников к одному
приемнику — система ТС, то есть используют линию свя
зи многократно посредством каналов связи. Канал свя
зи — это совокупность технических средств, обеспечиваю
щих передачу сообщений по линии связи от источника
к приемнику. Ч исло каналов связи на линии может
бы т ь ^)азличным._
12.2. Сообщение и информация
Управление производственным процессом осущ еств
ляется на основании тех сообщений, которые возникают
в ходе процесса и передаются от одного звена автомати
ческой системы к другому. П од сообщением понимают
все то, что передается о ходе производственного процес
са, а под информацией только ту часть сообщения, кото255
Переносчин
f\ (\
Сигнип
Сигнал
Л
Линия
Л
-АЛЩ/ 1/
т
И * ПИ
ГК 1
свиза
а
1И
Переносчин
Ин!рормпция
□
Помехи
Сигнал
Линия связи
Сигнал с
помехами
„ .
Сооищение
^л/Viг
-Сообщение
Яаф
пи
Сообщение с
паггечат
Рис. 102. Схема телемеханической информации;
а — без помех; б — с помехами.
рая представляет новизну и о которой раньше не сооб
щ алось. Например, оператор периодически получает о
производственном процессе все сведения; наименование,
номер процесса, данные о его качественных показателях
и т. п. И .5 всех этих сведений информацией будут только
те, которые относятся к изменению качественных пока
зателей, что крайне необходимо для управления процес
сом, а все остальные, периодически повторяющиеся дан
ные относятся к сообшенивэ.
Сообщения передаются посредством сигналов. В ка
честве переносчиков информации в телемеханике ис
пользуются
электромагнитные колебания.
Если
на
переносчик воздействовать, то есть нанести на него сооб
щение или информацию, то получим сигнал. С ледова
тельно, сигнал — это переносчик с нанесенным на нем
сообщением или информацией. Так как сообщений о про
изводственных процессах поступает много, то и сигналов
долж но быть много, но, поскольку переносчик один,
сигналы должны отличаться один от другого и соответ
ствовать передаваемым сообщениям. Передаваемые со
общения о различных показателях производственного
процесса по своему характеру делятся на непрерывные
и дискретные. В первом случае сигналы, передающие
сведения о непрерывном процессе, являются непрерыв
ными. Во втором случае, когда необходимо передать
только определенное конкретное значение показателей
процесса (например, минимальное и максимальное зна
чения параметров), сообщения будут дискретными,
256
^ учетом изложенного д ля получения диспетчером или
машиной новых сведений долж на быть организована
следую щ ая информационная цепь: происходит событие,
сообщение с информацией превращается в сигнал, сиг
нал накладывается на переносчик,' поступает в линию
связи и передается к получателю ; здесь сигнал снова
преобразуется в сообщение и информацию.
Схематично информационная цепь показана на ри
сунке 102. Информация 1И (рис. 102, й ), поступающая
от датчиков, воздействует на переносчик, создаваемый
генератором колебаний Г К , и образует сигнал, который
передается по линии связи. На приемной стороне избав
ляю тся от переносч-ика, и информация в чистом виде по
ступает к получателю информации П И . Н а рисун
ке 102, б изображена схема телемеханической информа
ции с помехами, которые частично или полностью
искажают передаваемые сообщения. Эти искажения от
фильтровываются, и к получателю П И поступает инфор
мация без помех.
Д л я того чтобы передать информащи^-с возможно
меньшей ошибкой по каналу связи, в котором действуют
помехи, применяют соот
ветствующие методы ко
дирования. В качестве пе
реносчиков информации в
телемеханике используют
электромагнитные
коле
бания в виде колебаний
переменного тока или им
пульсов. Переменный ток
характеризуется амплиту
дой, частотой и фазой И з
менения этих параметров
при наложении информа
ции осуществляются ме
тодом модуляции. М оду
ляция — это
изменение
параметров
переносчика
под воздействием сообщ е
ния. При непрерывной мо
дуляции
переносчиком Рис. 103. Непрерывные м оду
служ ат высокочастотные лированные колебания:
а — передаваемый сигнал {ч!ояуликолебания.
Существуют рую ш ии); б — колебания переносчи
б — амплитудная модуляция;
три основных типа непре- гка;
— частотная модуляция.
17 ЗаЕ(аз 5067
257
рывных модуляций: а м п л и т у д н а я ( A M ) , ч а с т о т
н а я ( Ч М ) , получившие наибольш ее применение, ф а з о
вая (ФЛ1) и их комбинации.
На рисунке 103 представлены непрерывные м одуля
ции: передаваемое сообщение ( а ) и высокочастотный
переносчик ( б ) . При воздействии сообщения на перенос
чик образуется новое колебание, в котором изменяется
амплитуда { A M ) , а частота остается стабильной ( в ) или
амплитуда остается постоянной ( г ) , а изменяется часто
та ( Ч М ) . Сравнивая A M и ЧМ, можно отметить, что А М
требует значительно меньшей полосы частот и техни
чески проще реализуется; вместе с тем помехоустойчи
вость Ч М значительно выше, поэтому А М находит огра
ниченное применение. В телемеханике используется
главным образом Ч М или двойная модуляция А М — ЧМ.
сохраняют своп индивидуальные свойства и не искажя
=
258
г
г
- ”
~
следоватеГнТ
нации этих с п о с о б ^ .
-
о д н о в р е м е н н о -л и б о поПрименяют и комби-
вре^1ниК ^способа^п^л?п°^^^^^
простейшая
схема
на шаговых M e ^ ^ ^ ^ ^ H ^ r r c v ^ e ^
=Т к1 ч = ~
одинаковые лам ели на /7V п К П
низм вращ ен ияТа d h c v h k p
но замыкают лам ели
12.3. Передача и прием сигналов
Передача сигналов не представляет особых трудно
стей, если сигнал следует по одной линии связи, то есть
если для передачи сигнала одному приемнику выделя-;
ется пара проводов, а для передачи N сигналов N при
емникам предусматривается N пар проводов. Все значи
тельно усложняется, если передавать N сигналов по
одной паре проводов, так как сигналы, следую щ ие по
одной липни связи, не долж ны терять своих отличитель
ных особенностей, чтобы их можно бы ло отделить на
приемной стороне от других сигналов и направить по
своему адресу. Реш ить эту задачу простым кодировани
ем сигналов, присваивая каж дому сообщению определен
ную кодовую комбинацию, невозможно, поскольку в си
стемах телемеханики информация передается как от
одного источника информации ко многим приемникам
(команды ТУ, направляемые на К П ) , так и от многих
источников к одному приемнику (сигналы телеизмере
ния, отправляемые на П У с К П ) . П одобная информация
может поступать на К П одновременно с разных мест,
поэтому коды долж ны быть такими, чтобы сигналы не
смешивались при приеме. Реш ается данная система спе
циальным кодированием, которое включает в себя э л е
менты разделения сигналов.
Р а з д е л е н и е с и г н а л о в — это обеспечение пере
дачи и приема многих сигналов, следую щ их по одной
линии связи или в одной полосе частот, когда сигналы
р
гг Р^'^’ ^нно замыкая
При вращении (меха-
/,2,5,'.
" Т п с к ^ 'I
, - ■ . , 1 1 искателя, к которым
кг
t
J1
Н!
Щ
Линия
связи
i
—
SL
—
HS
—
Постоянный
и
паЗаВаемый Влинию сВязи
Синкронизирупщий иппульс
р азд елен и я сигналов:
искателем;
рую щ 1!|"1 н.чпульс.
шаговых
диаграммы; в — сипхронизи-
25Э
на П У через ключи
подсоединена одна к лем
ма батареи Б. Другая клемма батареи присоедашена на
К П через линию связи к обмоткам реле
. . . , Ап- »^то
рым пГовоДОМ линии соединяются тетки. В момент за£ьи<анГ.я цепи, когда щетки находятся под л а м е .я м и и
кпючи S1
,S n включены, цепи реле
зам
кнуты а когда щетки располагаются между лам елям и,
эти цепи разомкнуты. Получающ иеся
янного тока показаны на рисунке 104,6. В Д^чиом слу
чае распределитель является одновременно и
ром импульсов. П олн ом у обороту щеток
один цикл, за время которого передаются
Если щетки продолжают вращаться, тЬ за первым цик
лом c S e T второй, третий и т. д. Каждый импульс не
сет то или иное сообщение, так как распределитель поотередно подключает линию связи к источникам инфорQ
Такие
устройства называют
машш ключом С 1
Аакие ycipuni,!
Пчрпрпцнклическими пли непрерывно
ность передачи сигналов м ож ет'бы ть разной, так, в пер
в ш Г ц и к л е
передается, например, сигнал 2, во в тор ом ^ г н а л Г и т п Рассмотренная передача действует на
дежней, если распределители работают синхронно и с
‘^^''обы чно для синхронизации
ляется один специальный сигнал, так называемый син
Т р о ш з :р \ ю щ и и импульс, обеспечивающий
работу ведущего распределителя на П У
К П Этот импульс имеет отличительныи признак (у им
пульса на рисунке 104,6 отрицательная полярн ость),
п о т о м у число передаваемых сигналов за один цикл
уменьшается на один.
поп
При
частотном
способе
разделения
сигналов
(рис 105) на передающей стороне П У располож ены ге
нераторы П , Г2, Г З , . . . , Гп, которьте формируют син^^
соидальные колебания частотой П -Ь.
» с л ^
использования одночастотного кода
/V, N 9 N 4 . . . , N n соответствует определенная часгота
fi h h
’ fn Чтобы сообщение поступило к определен
ному объекту, на приемной стороне У^^^анавливают час
тотные избиратели, которые выбирают необходимый
сигнал. В состав частотных избирателен входят фильтры
Ф и специальные выходные исполнительные элементы
( В И Э ) , работающие в релейном режиме, то есть они
срабатывают после того, как сигнал достигнет некото-
i
‘
Рис. 105. Схема частотного способа разделения сигналов.
рого заданного значения. П оэтом у частотные избиратели
называют ч а с т о т н ы м
р е л е . Таким образом, на
приемной стороне каждый поступивший сигнал вы деля
ется вначале фильтром, построенным на данную частоту,
затем выпрямляется диодами V I , Vn, и уж е постоян
ный ток воздействует на реле К 1 , . ■■, Кп, которые вво
дятся в цепь ключами S 1 , . . . , S „ . Порядок следования
сигналов может быть любы м. Так, одновременное зам ы
кание всех ключей, когда все реле сразу получают сиг
налы, дает параллельную посылку сигналов. Если ж е
в посылке предусмотрена определенная очередность, то
есть реле К \ , . . . , К п включаются один за другим, то го
ворят о последовательной передаче сигналов.
12.4. Способы кодирования
Кодом называют структуру, составленную ьз ком
бинации дискретных посылок, однозначно соответствую
щих набору сообщений. К аж дую такую комбинацию з а
писывают в виде последовательности условных сигналов,
обозначающ их два или несколько состоянии дискретно
го сигнала. Процесс формирования по определенному
закону сигналов, каждый из которых соответствует оп
ределенному сообщению, называется к о д и р о в а н и е м .
Л ю бо й код содержит определенный набор символов,
который называют б у к в а м и
алфавита.
М есто
261
260
комбинаций одинакова, то такие коды называют комплектными (р ав
номерными) и наоборот. В телемеханике обычно используют только
комплектные коды. Если информация передается по каналу связи, то
каждой цифре или букве соответствует элементарный сигнал (и м
пульс), наделенный определенными признаками: наличие или отсутст
вие импульса, его амплитуда, продолжительность, полярность, часто
та заполнения п ее фаза.
H
' t,
rAvVbrAy'V^^/rA/i
ts
Рис. 106. Передача кодовых комбинаций:
а — буквами; б — частотами.
f
расположения каждой буквы называют э л е м е н т о м
к о м б и н и р о в а н и я , а сами буквы — п р и з н а к а м и
э л е м е н т о в . Весь набор букв образует алфавит кода,
называемый о с н о в а н и е м к о д а . Кодовая комбина
ция, составленная из определенного числа п букв, на
зывается с л о в о м , имеющим длину п.
Если число признаков (букв алфавита) К = 2 , то та
кие коды называют двоичными (бинарны м и), при
^ 3 — небинарными (троичными, четвертичными и т. п .).
Элементы кода мож 1ю передавать последовательно во
времени (коды с временным разделением си гн алов ) или
одновременно. Одновременную передачу выполняют по
нескольким проводам или применяют частотные призна
ки д ля разделения элементарных сигналов.
I
В телемеханике для различных целей используются
различные коды, в основе которых леж ат соответствую
щие системы счисления: десятичная, пятеричная, дво
ичная и т. п. Ш ирокое распространение получили д в о
ичные коды, в основе которых леж ит двоичная система
счисления. Каждый элемент комбинирования двоичного
кода обладает двумя признаками.
Обычно один признак записывается в виде единицы,
а другой — в виде нуля, а их передача осущ ествляется
при помощи самых разнообразных импульсных призна
ков. В телемеханике и..в вычислительной технике двоич
ный код широко применяют потому, что большинство
элементов и устройств обладает релейными характери
стиками и может принимать одно из двух устойчивых
состояний. Б олее подробно с кодами можно ознакомить
ся в специальной литературе.
12.5. Телеуправление и телесигнализация
Отличительная особенность систем телеуправления —
это использование одной линии связи для передачи со
общений от одного источника (диспетчера) ко многим
приемникам, а систем телесигнализации — от многих ис
точников к одному (д и сп етч еру).
На рисунке 107 изображена блок-схема системы
Т У — ТС . Распределители на П У и К П переключаются
от импульсных генераторов н работают синхронно и
синфазно, что обеспечивается посылкой синхронизирую
щего импульса с одного из распределителей (обычно ве
д ущ его). ^Ведущий распределитель вводится в действие
при помощи автозапуска А З в начале работы системы.
Состояние объектов 01 и 02 контролируется датчиками
сигнализации Д С . Согласование распределителей вы
полняется блоком синхронизирующего импульса Б С И ,
импульс которого поступает па распределитель К П , син
хронизируя работу распределителей. Блок памяти Б П
обеспечивает в схеме И точное совпадемте имяульсок
распределителей на К П и П У . Индикаторы, установлен-
Рассмотрим последовательную передачу кодов. Допустим, есть
пять элементов комбинирования; Д Б, В, Г п Д (/ i = 5 ) , каждый
из них обладает признаками а и б ( К — 2 ), то есть сущ ествует пяти
элементный двоичный код. Число возможных комбинаций Л 1 =2 ==3 2 .
На рисунке 106, о показана последовательная передача комбинации
буквами с некоторыми интервалами между ними для отличия одной
комбинации от другой. Вместо букв можно передавать импульсы с
различными признаками, например частотными, то есть букве а будет
соответствовать частота /i и букве 6 — fz- Тогда те же комбинации
примут вид, представленный (частотами) и изображенный на рисун
ке 106,6.
При параллельной передаче кодов во времени каж дому элементу
комбинирования присваивается своя частота: А —
Б — /"г; В — /з;
Г — h\ Д — fb- Отличительными признаками будут не частоты, а, на
пример, амплитуды или длительность импульса. Д л я амплитудных
признаков их число будет два: « д а » — есть импульс, «н е т » — нет
н.мпульса.
Ч исло кодовых комбинаций, которые могут быть образованы, за
висит от числа букв алфавита, длины кодовой комбинации и ограпичеиий, накладываемых при построении кода. Если длина всех кодовых
262
2G3
(
Включить (В к л ). Возникшая при этом команда пройдет тем же
путем, что и сигнал выбора объекта, и. включив В И Э характера ozieрации. выдаст разрешение на срабатывание реле объекта которое
включит объект 02. Одновременно начинает действовать датчик
сигнализашш ДС2, свидетельствующий о том, что объект вклюоен
наступает состояние соответствия, и сигнальная лампа гаснет. Если
сигнализация поступает с какого-либо объекта, когда посылается
команда управления с П У , то команда отменяется независимо от
того, с какого объекта сигнализация передается. Преимущество сиг
налов перед командами в том, что поступившая сигнализация может
изменить ситуацию и необходимость в команде отпадает.
Рис. 107. Блок-схема
сигналов.
системы
Т У — ТС
с
временным
разделением
ные на П У , работают, как правило, Tie методу «тем н ого
щ ита», когда о состоянии объекта судят не по индика
торным лампочкам Л 1 и Л 2 , а по положению ключей
K I и К2, которые всегда разомкнуты, когда объект от
ключен. П оэтом у между новым состоянием объекта и
положением ключа возникает несоответствие, что при-,
водит к загоранию лампочки и действию звукового сиг
нала. В этом случае диспетчер переводит ключ в п оло
жение «вк лю чен о», лампочка гаснет, звонок перестает
работать.
В телемеханике д ля уменьшения возможности непра
вильных действий принят двухступенчатый процесс уп
равления. Первая ступень — диспетчер выбирает объект
управления, то есть находит его адрес, вторая — посы ла
ет команду Включить или Отключить. Такой способ
позволяет уменьшить вероятность неправильной посы л
ки команды и дает диспетчеру возможность исправить
допуш,енную ош ибку^Д оп олни тельн о в системах преду
сматривается защита, сигнализирующая о возникших
ош ибках или запрещающая дальнейшие действия.
Число объектов, а следовательно, и элементов на пульте управ
ления П У может быть значительно больше, чем изображено на ри
сунке 107. Все это требует от диспетчера усиленного внимания.
В качестве примера проследим, какими должны быть действия дис
петчера при включении объекта 02. Первая операция — диспетчер
выбирает ключ, которым нужно включить требуемый объект, затем
замыкает ключ К2. Это приводит к состоянию несоответствия, отче
го загорается сигнальная лампа Л 2 . Сигнал от распределителя через
линейный блок Л Б и блок запирания БЗ поступает в линию связи
и далее на контролируемый пункт К П . Здесь сигнал проходит через
блок запирания БЗ, блок выделения команд В К , блок памяти Б П,
схемы совпадения И и включает выходной исполнительный элемент
В И Э , от которого долж но сработать реле объекта Р О . Включение
объекта произойдет только после того, как диспетчер нажмет кнопку
12.6. Телеизмерение
Телеизм ерение (телем етр и я ) находит широкое приме
нение д ля измерения на расстоянии как электрических,
так и неэлектрических величин. Сущность этого способа
состоит в том, что измеряемая величина сначала преоб
разуется в эквивалентный ей сигнал, который затем пе
редается по линии связи и в определенном пункте изме
ряется. Параметры сигнала выбирают такими, чтобы
искажения при передаче были минимальными. Напри
мер, в схематично изображенной на рисунке 108, о си
стеме телеизмерения измеряемая величина х (тем пера
тура воздуха в помещении) непрерывно или дискретно
преобразуется датчиком / в электрическую величину z
(ток, напряжение, сопротивление, емкость, индуктив,.ность и т. п.). В передатчике 2 величина z превращается
в сигнал Си который поступает в линию связи. Н а при
емном пункте 3 происходит обратное преобразование
принятого сигнала Сг (за счет помех в линии связи он
может отличаться от сигнала С)) б измеряемую физиче
скую величину, которая в виде сигнала у фиксируется
измерительным или регистрирующим прибором П. Чис
л о блоков, входящих в систему, может быть отличным
от того, что показано на рисунке.
Разли чаю т системы телеизмерения трех основных
классов; системы интенсивности (небалансные, балан с
ные и потенциометрические), импульсные системы (ч а с
тотно-, время- и кодо-импульсны е) и частотные системы
переменного тока.
В системах интенсивности измеряемая величина пре
образуется специальным устройством, включенным не
посредственно в линию, в напряжение или ток. П о ск о ль
ку передача ведется постоянным током, влияние изме
нений индуктивности
и емкости линии связи
не
264
265
X
1
L
п
С
f/ Лимин
---- Ь-|
О
- 0
сВязи
лмия
р
It
— FT
_ЛШ1М_____ ["
— й/7/7
сВяги
пз
Липия
ПР
сВязи
L4-
г
Липия
X
^
с^язи
I]-©
Рис. 108. Схемы систем телеизмерения:
II — токовой пебалаисиои;
б — псбалапсноп с потепино*
метрпческим преобразователем; в — t o k o b o i i балансной;
г — потеицпометрической системы напряжения; и
час
тот ilO' и м пул ьсной.
сказывается на показаниях приемного прибора, подклю
ченного к линии. Погреш ность телеизмерения из-за из
менения параметров линии связи составляет 1 . . . 2 ,оД альность передачи для воздушных линий связи не пре
вышает 10 км, д ля кабельны х достигает 25 км.
Т о к о в а я н е б а л а н с н а я с и с т е м а по своему
схемному решению и принципу действия соответствует
изображенной на рисунке 108, а.
Небалансная система с потенциометри
ч е с к и м п р е о б р а з о в а т е л е м изображена на ри
сунке 108,6. Д л я уменьшения влияния изменения сопро
тивления линии связи на погрешность в начале линии
включено больш ое балластн ое сопротивление /?б- У п рав
ляем ая величина измеряется датчиком (на схеме не по
казан ), и сигнал передается на ползунок преобразова
теля, напряжение с которого передается по линии связи
на выходной прибор П.
266
Напряжение U источника долж но быть стабилизиро
вано, поскольку ему пропорционален ток в линии связи.
Токовая балансная
с и с т е м а представлена
на рисунке 108,6. В основу действия таких систем п оло
жен принцип компеисации погрешностей, обуслов лен
ных внешними воздействиями, при помощи воздействий
обратного знака. П оэтому ток в линии не зависит от из
менении ее сопротивления и напряжения источников
питания. В системе^ непрерывно сравниваются два пара
метра: создаваемый током в линии связи и создаваемый
измеряемой величиной. Д л я этой цели используют пре
образователь с отрицательной обратной связью по току
выхода. Если нзм^^ряемая величина х увеличится по какой-либо причине, то первичный преобра.зователь П П
^ н л и т воздействие на противодействующий элемент
l i d и одновременно включит регулятор тока Р Т , что
приведет к росту тока в линии, а тот, в свою очередь,
увеличит влияние противодействующего элемента П Э
в противоположную сторону, стремясь тем самым урав
новесить влияние П П . Когда эти воздействия сравняют
ся, ток в линии будет соответствовать новому значению
измеряемой величины х. Если возрастет сопротивление
^ш и и связи, то ток в линии станет меньше, воздействие
П с) также уменьшится и первичный преобразователь д о
полнительно повлияет на регулятор тока Р Т , который
увеличит ток в линии до исходного значения (прибор П
будет показывать прежнее значение измеряемой вели
чины).
В
потенциометрической
системе
(рис.
108, г ) подаваемое в линию связи напряжение Vx, в ко
торое преобразована измеряемая величина преобразо
вателем П Р , компенсируется напряжением, снимаемым
с автоматического потенциометра АП. Компенсация
происходит на приемной стороне, поэтому ток в линии
связи становится равным нулю, о чем можно судить по
прибору П. При изменении измеряемой величины дви
жок А П передвигается, пока не исчезнет ток в цепи
прибора.
В импульсных системах значение измеряемой вели
чины передается посредством импульсных сигналов, в
которых изменения амплитуд, происходящие из-за коле
бании параметров линий связи, не влияют на результаты
телеизмерения. В силу того, что переносчиком сигнала
является серия импульсов с нанесенной на них инфор
267
мацией об измеряемой величине, измерения можно пере
давать на значительные расстояния, поэтому им пульс
ные системы иногда называют системами дальнего дей
ствия. Д альность передачи зависит от уровня сигнала
и чувствительности приемника.
В частотно -импульсных системах
изме
ряемая величина пропорциональна частоте импульсов.
Существуют различные способы превращения измеря
емой величины в частоту импульсов. Например, измеря- ■
емая величина сначала преобразуется в скорость вращ е
ния диска и уж е скорость — в частоту (такими преобра
зователями
являются
всевозможиьге
электрические
счетчики) или сначала в постоянный ток (напряж ение),
а потом посредством различных генераторов или м у л ь
тивибраторов-— в частоту импульсов. В показанной на
рисунке 108,d схеме измеряемая величина с датчика
постоянного тока / подается на преобразователь 2 пос
тоянного тока в переменный, который усиливается уси
лителем 3, а затем снова превращается выпрямителем 4
в постоянный. Полученный ток, пройдя преобразователь
5 , поступает в виде импульсов по линии связи к прием
нику 7, где осущ ествляется обратное преобразование им
пульсов в постоянный ток, средняя составляющая ко
торого меняется в зависимости от числа импульсов, про
ходящих за определенный интервал времени, прибором
8. Д л я увеличения точности преобразования вводится
отрицательная обратная связь 6.
У в р е м я - и м п у л ь с н ы х с и с т е м в зависимо
сти от значений измеряемой величины передаваемые им
пульсы изменяют либо свою длительность, либо свое
местоположение. В первом случае системы называют
широтными, а во втором— фазо-импульсными.
Кодо-импульсные
системы
разбивают из
меряемую величину на ряд уровней и каждый передают
своими импульсами, определенная комбинация которых
образует код.
В частотных системах переменного тока измеряемая
величина изменяет (м о д ели р ует) частоту переменного
тока, передаваемого по линии связи. Такие системы спо
собны действовать на больш ие расстояния, так как частотно-модулированные колебания обладаю т высокой
помехоустойчивостью и изменение параметров линии
связи почти не создает погрешностей.
268
12.7. Преобразователи и приемники
измеряемых величин
Преобразователи — важный элемент систем телеиз
мерения. И з разнообразных по устройству и принципам
действия преобразователей рассмотрим только некото
рые.
Бесконтактный фотоэлектрический пре
о б р а з о в а т е л ь (рис. 109, о ) превращает измеряемую
величину в частоту импульсов. Зубцы диска Д , который
вращается с частотой, пропорциональной измеряемой ве
личине, прерывак)т луч света, падающий на фотоэлемент
Ф Э от осветительвой лампы О Л . Посредством формиро
вателя длительности импульсов Ф Д И получают импуль
сы одинаковой длительности и передают их в линию
связи. Если число зубцов диска ш, а угловая скорость
вращения ш, то частота следования импульсов /=Ш (о.
Бесконтактный преобразователь напря
ж е н и я в ч а с т о т у и м п у л ь с о в (рис. 109,6) пред
ставляет собой схему магнитополупроводникового уп
равляем ого генератора с магнитной положительной о б
ратной связью (генератор Р о э р а ). Если на вход пода
ется постоянное напряжение Овх, которое снимается с
датчика измеряемой величины, то всЛ|едствие неидентичности параметров транзисторов ток коллектора у одного
из них, например V I, будет больш е, чем у другого. Это
приведет к тому, что напряжение, индуктируемое в о б
мотках Wi и W 2 трансформатора, будет направлено так,
что на базу транзистора V I подается минус, а на базу
плюс подводимого напряжения. В результате про
изойдет дальнейш ее открытие транзистора V I и увели
чение тока, протекающего по обмотке W^. Одновременно
полож ительное напряжение, наводимое в обмотке W 4,
полностью закроет транзистор V2. Сердечник трансфор
матора, выполненный из материала с прямоугольной
петлей гистерезиса, быстрее перемагничивается из-за
увеличения тока через обмотку W 2, и транзистор V I п о л
ностью открывается. При помощи такой положительной
обратной связи сердечник полностью перемагнитится, и
при выходе в область насыщения на горизонтальной
(верхн ей) ветви петли гистерезиса, где изменение ин
дукции равно нулю, транзистор V I начнет закрываться,
так как на Wi отрицательная Э Д С будет равна нулю, а
V2 — открываться за счет наведенного отрицательного
269
jr m jT .
ал
Bxod
I %/л
I^
ЛЛП.
ГЧ
IT
жен, так как он прикреплен к стрелке прибора, а кон
такт 2 — неподвижен и располож ен в начале шкалы.
Д ви гатель Д с постоянной частотой вращает щеточный
контакт 3. При замыкании щеткой контакта 2 в линию
посылается первый импульс, при замыкании контакта
/
второй, отстоящий от первого в зависимости от по
лож ения стрелки, то есть от значения измеряемой вели
чины. Расстояние между импульсами превращается в
модулированные по длительности импульсы.
В электрическом преобразователе (рис. 109,г ) д ля
получения импульсов различной длительности исполь
зуется время заряда конденсатора С, которое зависит
от значения измеряемой величины, фиксируемой рео
статным датчиком R 2 . Напряжение питания на схему
подается в виде определенных ипульсов путем периоди
ческого замыкания и размыкания ключа К. При зам ы
кании ключа К поступает импульс напряжения д ли тель
ностью Т и конденсатор С начинает заряжаться. Через
диод V ток не идет, так как U a > U o . Напряжение на кон
денсаторе С достигнуть изменения Э Д С Е не сможет,
потому что после наступления равенства Ua = Uc через
резистор R1, диод V и резистор R2 пойдет ток. При раз
мыкании ключа К ток по истечении определенного вре
мени через конденсатор прекратится. С резистора Ru
снимается импульс напряжения длительностью
Рис. 109. Схемы преобразователей измеряемых величин:
G — бесконтакию го фотоэлектрического; б — генератора Роэра; в — м еха
нического; г — бесконтактного; д — емкостного; е — индуктивного.
напряжения на обмотке IF 4. В результате по обмотке
Ws пойдет ток и сердечник станет перемагиичиваться
в другую сторону через обмотки W 3 и W^. П о достижении
нижней горизонтальной ветви кривой намагничивания
сердечник начнет перемагиичиваться в обратном направ
лении, и процесс будет повторяться. На выходе м ульти
вибратора получаются прямоугольные импульсы, часто
та которых зависит от подводимого к схеме напряжения.
Преобразователи измеряемых величин
в д л и т е л ь н о с т ь и м п у л ь с а могут быть механи
ческими, у которых преобразуется угол поворота первич
ных измерительных приборов, и электрическими.
У механического преобразователя (рис. 109, е ) к вы
водам контактов первичного измерительного прибора
П П подводится напряжение питания. Контакт 1 подви270
r = R C In
П оскольку сопротивление R2 меняется в зависимости
от изменения измеряемой величины, то неодинаково и
время заряда конденсатора, а на выходе схемы получа
ются разные но длительности импульсы.
В преобразователях измеряемой величины в частоту
переменного тока (рис. 109, й и е ) измерение передава
емой величины может осущ ествляться емкостным ( 5 )
или индуктивным ( е ) датчиком. В первом случае при
изменении’ измеряемой величины поворачивается ротор
конденсатора С переменной емкости, включенного в схе
му генератора, что вызывает изменение частоты генера
тора Г Ч переменного тока (частотная м одуляция). Во
втором случае изменение частоты генератора Г Ч проис
ходит за счет изменения индуктивности L, которая за
висит от изменения передаваемой величины.
271
i р
^»
устройства частотных систем переменного тока вы пол
няются ли бо в виде конденсаторных частотомеров, по
добных изображенному на рисунке ПО, либо в виде
частотных детекторов, в которых изменение частоты сиг
нала преобразуется в соответствующее изменение его
амплитуды.
12.8. Линии связи
Приемные устройства систем* телемеханики весьма
разнообразны. Ниже рассмотрены некоторые приемные
устройства описанных ранее систем телеизмерения.
Т р а н з и с т о р и о-к о н д е н с а т о р н ы й ч а с т о т о
м е р частотно-импульсных систем, в основу которого п о
лож ена схема триггера, изображен на рисунке 110. П р и
ходящ ие по линии связи импульсы воздействуют на б а з у
триода V2 триггера и открывают е го , что вызывает з а
крытие триода V3. Конденсатор С заряжается через
конденсатор Спр, диод V5 и резистор R 3 до тех пор, пока
не будет пробит стабилитрон СТ. Это повлечет за собой
включение триода V I и вы ключение триода V2. П р и
этом триод V3 откроется и конденсатор С начнет через
него и диод V6 разряжаться. Приход очередного и м п у л ь
са вызовет повторение описанного процесса. Прибор П
фиксирует постоянную составляю щ ую импульсов, к о т о
рая создается выпрямителем из диодов V4 и V5 и пропорщ юнальна частоте следования входны х им пульсов.
Приемные
устройства
время-импульсн ы х с и с т е м делятся на электроме-ханические и э л е к
трические. В первых, представляю щ их собой разли чного
рода механические устройства, осущ ествляется и зм ер е
ние длительности импульса, во вторы х происходит п р е
образование длительности импульса в средний ток и ли
измерение отношения длительности им пульса к периоду.
Д ли тельн ость импульса преобразуется в средний т о к
устройствами, аналогичными тем, ч то применяются в
частотно-импульсных системах (рис. 108,5). П рием ны е
272
i
Линия связи соединяет передающую и приемную
части телемеханической системы. Д л я передачи сигна
лов используют проводные линии связи (воздушные и
кабельны е) и ли^ии электропередач (низковольтные
и высоковольтные).
Кроме^ проводиых линий связи прямого назначения,
д ля целей телемеханики используют телефонные линии.
Н а рисунке 111, о изображена такая линия с использо
ванием ее для двухсторонней телесвязи между пунктами
П1 и П2. Например, чтобы передать команду из /7/ в П2,
замыкают ключ S I . И м п ульс тока от батареи Б через
обмотки реле 2 К и разделяющ ие трансформаторы Тр1
и Тр2 поступает на реле 1К и включает его. Суммарный
поток дифференциального реле 2К равен нулю, так как
в его обмотках токи равны и направлены встречно, и по
этому оно не включается. Р е л е J K срабатывает, посколь
ку токи в нем протекают согласно, и подает команду на
объект. Помех в телефонных аппаратах не возникает, так
Линия
гпг
«VJ
R
Рис. 111. Схемы телемеханических каналов:
й
по .^ипии телефонной связи; б — по высоковольтной линии.
18 З ак аз 5067
273
как токи в дифференциальных обмотках трансформато
ров напрсвлены в разные стороны. Подобным образом
передают команды и пз пункта П2 в П1. Частота т ел е
команд в таких линиях связи 2400 ...85 00 Гц, а телеф он
ные разговоры передают на частотах от 300 до 2400 и
свыше 8500 Гц.
В энергосистемах для передачи телемеханических
сигналов используют линии электроснабжения. П ереда
ча сигналов ведется на частотах в диапазоне от 30 до
500 кГц. На рисунке И 1,6 изображена схема телем еха
нического канала, образованного на высоковольтной
линии. Посты телемеханики 1П Т и 2Т1Т отделены от
высоковольтной линии. Посты телемеханики 1П Т и 2П1
отде«1 ены от высоковольтной линии конденсаторами связи
КС, которые создают больш ое сопротивление для переда
ваемого по линии переменного тока промышленной час
тоты и м алое сопротивление для высокочастотных сигна
лов телемеханики. Чтобы канал бы л настроен на пере
дающ ую частоту, в схему включен фильтр присоедине
ния Ф П , который вместе с конденсаторами К С образует
полосовой фильтр, пропускающий сигнал определенной
частоты. Растеканию токов высокой частоты в сторону
от телемеханического канала препятствуют высокочас
тотные заградители В Ч З , задерживающие телемехани
ческие сигналы и пропускающие промышленный ток.
Рассматриваемый телемеханический канал выполнен по
схеме фаза — земля; возможно образование канала по
схеме фаза — фаза, но при этом число аппаратуры удваи
вается.
Все больш ее значение в условиях сельскохозяйствен
ного производства приобретает радиосвязь на волнах
от 3 см до 10 м (3 0 ... 10000 м Г ц ), обеспечивающая пе
редачу сигналов на расстояния до 5 0 ... 70 км.
I
ГЛАВА
Х1П
НАДЕЖНОСТЬ ЭЛЕМЕНТОВ
И АВТОМАТИЧЕСКИХ СИСТЕМ
УПРАВЛЕНИЯ
13.1. Общие сведения
С ростом автоматизации производственных процес
сов средства автоматики и телемеханики делаются все
более сложными. Услонш ение систем и средств автома
тики приводит к тому, что они становятся менее надеж
ными. Отклонение параметров элементов от номиналь
ных и допустимых и особенно неисправность хотя бы
одного элемента не только нарушают нормальную ра
боту системы, но и нередко приводят к выводу ее из
строя. Причины, вызывающие разброс параметров, под
разделяю т на технологические и эксплуатационные.
,К технологическим причинам относятся различного
рода допуски: на свойства материала, из которого изго
товляется элемент; на размеры деталей элементов; на
сборку элементов их деталей и т. п. Чтобы уменьшить
влияние указанных причин, в конструкциях элементов
может быть предусмотрено регулировочное приспособ
ление (переменное сопротивление, емкость и т. п.), кото
рое позволяет изменять параметры и компенсировать
отклонения. Отметим, что такая регулировка может
обеспечить сокращение допусков на параметры только
при определенных внешних условиях.
К причинам эксплуатационного характера причисля
ют влияние окружающей среды, состояние энергоисточ
ника, качество обслуживания, старение, износ.
Известно, что в сельскохозяйственном производстве
различные- установки нередко работают на открытом
воздухе и в условиях, когда меняются основные показа
тели окружающей среды (температура, плотность воз
духа, влаж ность и т. п.). Все это приводит прежде всего
к изменению параметров отдельных деталей (например,
удельного сопротивления проводников, вязкости рабочей
жидкости и т. д .), а также элемента в целом.
18*
275
Существенное влияние на параметры элемента ока-i
зывает и состояние энергоистбчннка. Так, увеличение
напряжения в системе приводит к уменьшению времени
срабатывания реле или магнитного пускателя, а повы
шение давления жидкости вызовет ускорение перемеще
ния поршня гидроусилителя.
Старение и износ деталей — естественные явления,
развитие которых происходит сравнительно медленно и
сопровождается отклонениями параметров элементов.
Установлено, что наиболее интенсивны эти процессы в
начальный период эксплуатации, поэтому ответственные
детали (например, электронные лампы') подвергают до
выпуска с завода предварительному искусственному
старению. На каждый элемент устанавливается гаран
тийный срок служ бы, по истечении, которого интенсив
ность старения возрастает и он подлежит замене вне за
висимости от его фактического состояния.
13.2. Основные понятия и определения
Надежность технических устройств, в том числе и ав
томатических систем, связана по крайней мере с двумя
сторонами процесса их эксплуатации: с безотказностью
в работе в течение определенного промежутка времени
и способностью к восстановлению — ремонтопригодно
стью при полном или частичном выходе из строя. Р а с
смотрим основные понятия и определения надежности.
П од
надежностью
системы,
изделия или
элемента понимают свойство, обусловленное безотказ
ностью, долговечностью и ремонтопригодностью и обес
печивающее нормальное выполнение всех заданных
функций при сохранении своих эксплуатационных пока
зателей в требуемых пределах в течение заданного про
межутка времени.
Б е з о т к а з н о с т ь — свойство
системы
(изделия,
элем ен та) непрерывно сохранять свою работоспособ
ность в определенных режимах и условиях эксплуатации
Б течение некоторого интервала времени.
Д о л г о в е ч н о с т ь — свойство
системы
(изделия,
элем ен та) длительно, с возможными перерывами на ре
монт, сохранять работоспособность в определенных ре
жимах и условиях эксплуатации до разрушения или д р у
гого предельного состояния.
Р е м о н т о п р и г о д н о с т ь — свойство системы (и з
276
делия, элем ен та ), показывающее, насколько данный
объект приспособлен к восстановлению исправности и к
поддержанию технического состояния путем предупреж
дения, обнаружения и устранения отказов.
И с п р а в н о с т ь — состояние системы (изделия, э л е
м ента), при котором в данный момент времени со блю
дается соответствие всем требованиям, установленным
как в отношении основных параметров, характеризую
щих нормальное выполнение заданных функций, так и в
отношении второстепенных параметров (например, у д о б
ство эксплуатации, внешний вид и т. д .).
О т к а з — это'собы тие, заклю чающ ееся в полной или
частичной утрате системой (изделием , элем ен том ) рабо
тоспособности, то есть в утрате состояния соответствия
всем требованиям, установленным в отношении основ
ных параметров. Различаю т внезапные отказы, возни
кающие в результате скачкообразного изменения одного
или нескольких основных параметров, и постепенные от
казы, причиной которых является постепенное измене
ние значений одного или нескольких параметров систе
мы (изделия, элем ен та) вследствие износа, старения и
т. п.
П о степени разрушения параметров системы р азли
чают отказы полные, до устранения которых система или
элемент не могут использоваться по их прямому назна
чению, и частичные, до устранения которых остается
возможность хотя бы частичного использования системы.
Основные численные показатели, характеризующие
надежность, безотказность, долговечность и эффектив
ность,— вероятность безотказной работы, интенсивность
отказов, наработка на отказ (среднее время безотказ
ной р аботы ), срок служ бы, технический ресурс, среднее
время восстановления.
Вероятность безотказной работы — вероятность того,
что при определенных режимах и условиях в пределах
установленной (заданной) продолж ительности работы
системы отказ не возникает.
Интенсивность отказов — это вероятность отказа невосстанавливаемой системы в единицу времени после
данного момента времени при условии, что до этого м о
мента отказ не возникал.
Н аработка как величина принята д ля измерения про
долж ительности или объема работы системы в определен
ных условиях.
Ш
Наработка на отказ — это наработка восстанавлива
емой системы между двумя последовательно возникши
ми отказами.
Срок служ бы — календарная продолж ительность экс
плуатации системы до разрушения или другого предель
ного состояния.
Технический ресурс — сумма интервалов времени
безотказной работы системы за период эксплуатации до
разрушения или другого предельного состояния.
Среднее время восстановления — время вынужденисго нерегламентироваииого простоя.
Рассмотренные основные понятия надежности опре
деляю т, исходя из теории вероятностей, математической
статистики и т. п. Д л я практических целей наиболее
важными параметрами надежности, являются; наработ
ка на отказ Тср, интенсивность K{ t ) или частота v (/ )
отказов, вероятность безотказной- работы P { t ) в течение
заданного времени.
Н аработку на отказ использую т д ля сравнительной
оценки надежности отдельных установок, систем, изде
лий и определяют на основании статистических данных
как
N
Тср —
где ti — время безотказной работы м еж ду f -мн выходами из строя;
N — число выходов из строя.
Интенсивность отказов — это отношение числа отка
завших изделий n { t ) в единицу времени к среднему чис
л у N { t ) исправно работающих изделий в данный отре
зок времени At
n (t)
N i-1 + N i
гяе N ( t ) = ------- ------- , .Vi_i
и N i — число
исправио
работающи.^!
изделий соответственно в начале и в конце интервала времени At.
Графически интенсивность отказов элементов во
времени выражается графиком, представленным на ри
сунке 112. Здесь можно выделить три периода: п е р
в ы й — /i характеризуется повышенной опасностью от
казов и дает возможность выявить производственные
дефекты и ошибки; в т о р о й — h отличается сравии278
тельно малым, практически по
стоянным
н
соответствующим
нормальной работе числом отка
зов; т р е т и й — ^3 характеризует
ся увеличением опасности отка
зов, обусловленны х закономер
ным износом и старением элем ен
тов.
Частота отказов определяется
по формуле
Рис. 112. Кривая
ности отказов.
опас
n(t)
где Ne — число однотипйах изделий, находящихся под наблюдением.
Вероятность безотказной работы характеризуется от
ношением числа исправно работаю щ их деталей к общ е
му числу деталей No, ^^находящихся под наблюдением
2 Пг
1= 1
' Тс
где Ili- ■число деталей, вышедших из строя, в интервале времени
Ati.
Среднее время восстановления равно
1 т
7'в = — ^ tui,
i= l
где
— время восстановления i-ro изделия, включающее время
поиска отказа, демонтажа, ремонта, монтажа и проверки; т — число
отказов каж дого i-ro изделия до требуемой наработки.
С течением времени опасность отказов возрастает и
вероятность исправной работы падает. Если считать, что
7^(0==const, то уменьшение надежности происходит по
экспоненциальному закону
P { t ) = е ’^’ср
где Тср — среднее время исправной работы системы или элемента,
или средняя наработка на отказ.
Расчет надежности системы в целом выполняют по
уравнению
где РсСО — вероятность безотказной работы системы; Р\(1), P o ( t ) ,
P n ( t ) — вероятность безотказной работы отдельных элементов.
279
ГЛАВА
Т а к как
Р , (/ )= е - ^ ''; P a (0
Следовательно,
, Р „ (/ )= е - ^ п ^
= е-(> “+>‘^+ • ■• K)t = e - K t ,
XIV
ТЕХНИКО-ЭКОНОМИЧЕСКАЯ
ЭФФЕКТИВНОСТЬ АВТОМАТИЗАЦИИ
СЕЛЬСКОХОЗЯЙСТВЕННОГО
ПРОИЗВОДСТВА
13.3. Пути повышения надежности элементов
и систем автоматики
Повышение надежности — важная народнохозяйст
венная задача.
При проектированпп элементов и систем повышение
их надежности достигается схемными и конструктивны
ми способами. Схемные способы основаны на совершен
ствовании и упрощении схем, на создании схем с огра-.
ииченными последствиями и схем с резервированием.
Упрощение
с х е м — caMJ^ifl
распространенный
метод увеличения надежности с одновременным умень
шением габаритов и массы проектируемого устройства.
Схемы проектируют так, чтобы замена лю бого элемента
однотипным не отраж алась на ее работе. Схемы с огра
ниченными последствиями отказов применяют в ответ
ственных устройствах автоматики. Выход из строя л ю б о
го элемента не приводит к аварии.
Р е з е р в и р о в а н и е предполагает замену выходя
щего из строя элемента резервным. Резервные элементы
подключаются постоянно или вводятся автоматически
после выхода из строя основных.
Различаю т общее, автономное, раздельное и внутриэлементное резервирование. При общем резервируется
вся схема, за исключением входных и выходных уст
ройств. При автономном имеется несколько независимых
систем автоматики, выполняющих одну и ту же задачу.
При раздельном резервируются отдельные узлы ав
томатики. Внутриэлементное резервирование предпола
гает резервирование внутренних связей элемента.
Конструированием также можно повысить надеж
ность систем и элементов автоматики, для чего приме
няют детали с большим запасом по электрическим и ме
ханическим параметрам.
Контрольные вопросы.
1. Что понимают под надежностью
средств автоматизации? 2. Какие причины приводят к изменению
параметров элементов? 3. И злож ите основные понятия, определенил
и качественные показатели надежное™ ? 4. Назовите способы повы
шения надежности.
280
14.1. Общие сведения
А втом атизации— одно из магистральных направле
нии технического прогресса в сельскохозяйственном
производстве. Внедрение средств автоматизащш спо
собствует; повышению производительности машин, агре
гатов, поточных линий и увеличению числа часов их ис
пользования; повышению производительности труда и
значительному облегчению труда; удешевлению Лродукции и улучш ению ее качества; сокращению расхода топ
лива и энергии, повышению надежности работы энерге
тического оборудования. При автоматизации производст
венных процессов возникают различные варианты ее
практической реализации. И з всех возможных выбирают
наиболее эффективный, простой, надежный и обеспечи
вающий более высокий рост производительности труда.
За базовый вариант сравнения принимают тот, в ко
тором применена самая совершенная механизация про
изводства.
Автоматизацию, если говорить вообще, можно счи
тать эффективной, когда с ее внедрением повышается
производительность всего производства, сокращаются
прямые и капитальные затраты, удеш евляется продук
ция и улучш ается ее качество, облегчается труд ч ело
века, повышается культура труда.
14.2. Основные показатели эффективности
автоматизации
Д л я оценки экономической эффективности иримеияются различные показатели, наиболее важные из кото
рых: производительность труда, годовые эксплуатаци
онные издержки, срок окупаемости капитальных затрат,
281
нормативный коэффициент экономической эффективно
сти
Повышение производительности труда является од
ним из основных показателей экономической эффектив
ности, который определяется либо количеством произ
веденной в единицу времени продукции, либо количест
вом времени, затраченного на единицу продукции. П о
вышение производительности труда за счет средств
автоматизации оценивают по уменьшению затрат труда
где / — вид системы, потребляющей электроэнергию; Д о з — число ча
сов работы системы в году;
— коэффициент использования усгановленной мощности системы; Pyj — установленная мощность си
стемы. кВт; Z/aj — стоимость 1 (кВт-ч)/"руб.
Затраты на горюче-смазочные материалы определя
ют как произведение количества израсходованных мате
риалов на их прейскурантную стоимость с учетом тран
спортных расходов.
Срок окупаемости капитальных затрат на автомати
зацию определяется как
К .-К и
А Р =
Рв
И ПО ГОДОВОЙ
5 „-5 а ’
экономии т р у д а
Э ^={Рц
где Ка и Ки — капитальные затраты иа автоматизированное и не
автоматизированное производство ( К п С К а ) ' , 5а И Э а — Эксплуата
ционные расходы автоматизированного и неавтоматизированного
PajQ a,
где Рн — затраты труда па единицу продукции или впд работы при
неавтоматизированном способе производства; Рв, — то же, при авто
матизированном способе производства; t3 a — производство продук
ции за год при автоматизированном способе производства.
Годовые эксплуатационные издержки производства
определяются как сумма амортизационных отчислений
На, отчислений на текущий ремонт Ят, годовых затрат
на зар плату обслуж иваю щ ему персоналу Яо, на электро
энергию Яэ и горюче-смазочные материалы Яг
Я = И а+ Ят -Ь и о -Ь Яэ
Яр.
Амортизационные отчисления и отчисления на текущий
ремонт определяются по следующим выражениям:
Яа=таК ;
И^ = т-сК,
где /?1а — коэффициент амортизационных отчислений; Шт — коэффи
циент отчислений на текущий ремонт; К — первоначальные капи
тальные затраты.
Затраты
на зарплату
обслуж иваю щ ем у
персоналу
п р ои зв од ств а
(5 н > 5 а ).
Чем меньше срок -окупаемости, тем эффективнее ав
томатизация. Расчетный срок окупаемости сравнивают
с нормативным сроком окупаемости, который для сель
скохозяйственной техники принят равным пяти годам.
Нормативный коэффициент экономической эффектив
ности дополнительных капитальных вложений представ
ляет собой обратную нормативному сроку окупаемости
величину. Д л я сельского хозяйства он установлен рав
ным 0,2.
Применение средств автоматизации повышает техно
логичность производства за счет сокращения числа н
времени простоев, применения более прогрессивных спо
собов производства, типизации и унификации технологи
ческих операций.
Эффективность автоматизации можно определить по
так называемым приведенным, или расчетным, затратам,
которые находят по следую щ ему уравнению:
З^ЕК+И,
Я о =
2
ДогЦог-
г=1
где 1— 1 , . . . , п — число обслуживающего персонала; Doi — число ча
сов работы 1-го обслуживающего персонала в году; M d — опла га
S3 час г-го обслуживающего персонала с учетом отчислений в соц
страх и надбавок к зарплате.
Затраты на электроэнергию
т
М ,=
ш
2
г=1
г д е £ = 1 / 7 ’он — нормативный
тивности.
коэффициент
экономической
эффек
Если при выборе варианта автоматизации может ока
заться, что" капитальные вложения Кг и годовые эксплуа
тационные издержки производства Яд выше, чем для
предшествующего варианта, то есть К 2 > К \ и Я 2> / ^ ь
то эффективность нового варианта следует определять
исходя из следую щ его неравенства:
ЕК, + И 1 > Е К 2 + М . , - Д ,
283
'T
УКАЗАТЕЛЬ
где Д — дополнительный доход за счет -увеличения производитель
ности, улучшения качества продукции, уменьшения затрат за счет
различных потерь и т. п.
Определим в качестве примера экономическую эффективность
автоматизации водокачки с суточным расходом воды 200 м^. П ри
менение средств автоматизации увеличило капитальные затраты с
590 до 700 руб., при этом годовые эксплуатационные расходы умень
шились с 2850 до 1800 руб., а затраты соответственно с 1200 до
150 ч.
В соответствии с принятыми обозначениями имеем
/(„ = 590 руб.,
5 и = 2 8 5 0 руб..
Р „= 1 2 0 0 ч;
/(а= 7 0 0 руб..
5а = 1800 руб.,
Ра=150ч.
Вычислим срок окупаемости дополнительных капитальных вло*
жений на автоматизацию
/ (а -К н
Го=-
5 я — Эа
7 0 0 -5 9 0
=0,1047 года.
2850-1800
Нормативный срок окупаемости оборудования составляет 5 лет, по
этом у автоматизация оказывается весьма эффективной.
Снижение затрат труда
Дополнительно определим себестоимость 1
томатизированной
Си —
5„
2850-100
365
365-200
воды для неав
^ 4 коп/м-’
и для автоматизированной водокачки
С ,= -
5а
1800-100
365
365-200
■s2 коп/м^.
Таким образом, по всем показателям автоматизация водокачки
имеет высокую эффективность.
Контрольные вопросы и задания. 1. Какие цели преследует ав
томатизация производственных процессов? 2. Каковы основные пока
затели оценки техиико-экономической эффективности автоматизации?
I
I
ЛИТЕРАТУРЫ
1. М атериалы X X V ? съезда К П С С .— М .; Политиздат, 1981.
2. Продовольственная программа С С С Р на период до 1990 го д а .—
М .: Политиздат. 1982.
3. Материалы июньского (1983 г.) П ленума Ц К К П С С . — Н.: П о
литиздат, 1983.
4. Беседы по автоматике. П од редакцией П. И. Чииаева. — Киев;
Техника, 1973.
5. М. А Б а б и к о в , А. В. Н о с и и с к и й. Элементы и устройства
автоматики. — М.: Высшая, школа, 1975.
6. И. Ф . Б о р о д и и, Н. И. К и р и л и и. Основы
автоматики и
автоматизации производственных процессов. — М.: Колос, 1977.
7. И. Ф. Б о р о д и н .
Технические
средства
автоматики — М.:
Колос. 1982.
8. Л . И. К о н о в а л о в , Д. П. П е т е л и н . Элементы и системы
электроавтоматики. — М.: Высшая школа, 1980.
9. Техническая кибернетика. Устройства и элементы систем авто
матического регулирования и управления, книга I. Измеритель
ные устройства, преобразующие элементы
и устройства. Под
редакцией В. В. Солодовникова. — М.; Машиностроение. 1973.
10. Электрические измерения неэлектрических величин. П од редак
цией П. В. Новицкого. — Л .: Энергия, 1975.
ОГЛАВЛЕНИЕ
Г Л А В А IV . Исполнительные м е х а н и з м ы .............................
4.1. Общие с в е д е н и я .......................................................
4.2. Электромагнитные м еха н и зм ы ..................................
4.3. Электродвигательиые м е х а н и з м ы ........................
4.4. Р е л е .............................................................................
4.5. Ш аговые и с к а т е л и .....................................................
4.6. Электрические и гидравлические двигатели . . .
Лабораторная работа 5. Исследование э.пектромагнитны
реле
...........................................................................................
ВВЕДЕНИ Е
Г Л А В А V. Элементы теории релейных систем автоматики
Г Л А В А 1. Общие сведения об элементах и системах автома
тики
.................................................................................
5.1.
5.2.
5.3.
5.4.
5.5.
5.6.
5.7.
Основные понятия п о п р е д е л е н и я ...................
Управление по разомкнутому и замкнутому циклам
Принципы автоматического управления .
Обратные с в я з и .........................................................
Элементы автоматических систем
. . . . .
1.6. Схемы автоматических с и с т е м .............................
1.7. Классификация автоматических систем .
.
1.8. Основные законы у п р а в л е н и я .................................
1.1.
1.2.
1.3.
1.4.
1.5.
/
,
Г Л А В А V I. Объекты управления и регуляторы .
6.1.
6.2.
6.3.
6.4.
6.5.
6.6.
6.7.
6.8.
Общие с в е д е н и я ...........................................
Статическая и динамическая характеристики .
Аккумулирующая способность
. . . .
С ам овы ра вн и ван и е......................................
Запаз.чываиие п р о ц е с с а .............................
Время разгона и постоянная времени .
Определение основных свойств . . . .
Автоматические р е г у л я т о р ы ...................
Г Л А В А V II. Основы теории автоматических систем управле
н и я ........................................................................
76
Г Л А В А I II . Усилительные и стабилизирующие элементы
3.1. Общие с в е д е н и я ................................................
3.2. Электронные у с и .ч и т е л п .................................
3.3. Магнитные у с и л и т е л и ......................................
3.4. Гидравлические п пневматические усилители
3.5. Функциональные элементы
. . .
3.6. С т а б и л и з а т о р ы ................................................
Лабораторная работа 4. Исследова! 1нс магиит:!ого
теля
. .................................................................................
106
1С9
112
121
122
126
126
128
1S9
132
137
142
145
Г Л А В А II. Датчики систем автоматики . . . .
2.1. Обшие с в е д е н и я ...........................................
2.2. Датчики сопротивления . . . . . . .
2.3. Индуктивные датчики
2/1 Трансформаторные д а т ч и к и ........................
2.5. Емкостные д а т ч и к и .................................
2.6. Фотоэлектри«еские д а т ч и к и ...................
2.7. Датчики те м п е р а ту р ы ...................
. .
2.8. Датчики уровня
......................................
2.9. Датчики угловой с к о р о с т и ........................
2.10. Датчики д а в л е н и я ......................................
2.11. Датчики р а с х о д а ......................................
2.12. Датчики в л а ж н о с т и .................................
2.13. Электронные и ионизационные датчики
2.14. Электрические задающие устройства
Лабораторная работа I. Испытание индуктивных датчиков
и тензосопротивлений ............................................
. . .
Лабораторная работа 2. Испытание фотодатчшчоь. Ф о т о
реле в схемах автоматического управления
Лабораторная работа 3. Испытание датчиков температуры
Основные понятия и о п р е д е л е н и я .............................
Аналитическая запись структуры и условий
работь
Логические функции ................................................
Основные законы алгебры логики и их следствия .
Минимизация релейных с х е м ......................................
Логические устройства на интегральных микросхема
Построение релейных схем на бесконтактных элемен
105
ЮГ)
103
,
\
7.1.
7.2.
7.3.
7.4.
7.5.
7.6.
7.7.
7.8.
Обшие понятия о работе автоматических систем
Составление дифференциальных уравнений . .
Преобразование Л а п л а с а ......................................
Статические с в о й с т в а ................................................
Динамические с в о й с т в а ...........................................
Типовые динамические з в е н ь я .................................
Логарифмические частотные характеристики . . .
Алгоритмические структурные схемы и их эквивалент
ное преобразование
..................................
149
149
149
151
154
l.-iS
156
158
159
166
166
Й$8
171
174
176
180
195
202
Г Л А В А V I II . Устойчивость автоматических систем управления
206
8.1. Понятие об у с т о й ч и в о с т и ......................................
8.2. Критерии у с т о й ч и в о с т и ................................................
8.3. Исследование влияния параметров систем управления
на их устойчивость ......................................................
8.4. Запас устойчивости..........................................................
8.5. Определение устойчивости по логарифмическим час
тотиым х а р а к т е р и с т и к а м ................................. . .
206
207
Г Л А В А IX . Качество переходных процессов управления в ав
тематических с и с т е м а х ............................. ....
213
214
2fe
218
S815
287
9.1.
9.2.
9.3.
9.4.
218
22Э
Показатели качества . .........................
Методы п о с т р о е н и я .............................
Косвенные оценки качества . . . .
Определение установившихся ошибок
223
22.5
. ■ ...................
228
10.1. Понятие о к о р р е к ц и и .....................................................
10.2. Коррекция с номошью последовательных корректи
рующих у с т р о й с т в ................................. ............................
10 3. Коррекция с помощью обратных с в я з е й ...................
Лабораторная работа 6. Определение постоянных времени
различных элементов автоматических с и с т е м ........................
224
Г Л А В А X. Коррекция автоматических систем .
Г Л А В А X I. Нелинейные автоматические системы
11.1.
11.2.
11.3.
11.4.
11.5.
Общие
М етод
М етод
М етод
М етод
управления
с в е д е н и я .........................................................
фазовой п ло с к о с ти ...........................................
припасовьш ания................................................
гармонического баланса
.
...................
математического моделирования
. . . .
Основные с в е д е н и я .....................................................
Сообщение и и н ф о р м а ц и я .......................................
Передача и прием с и г н а л о в ......................................
Способы к о д и р о в а н и я ................................................
Телеуправление и т е л е с и г н а л и з а ц и я ....................
Т е л е и з м е р е н и е ..............................................................
Преобразователи и приемники измеряемых величин
Линии связи . .
................................................
Г Л А В А X III. Надежность элементов и автоматических систем
управления
......................................................
13.1. Общ ие с в е д е н и я ......................................................
13.2. Основные понятия и о п р е д е л е н и я ...................
13.3. П ути повышения надежности элементов и систем
а в т о м а т и к и ...............................
241
25 >
2 38
..i-l
2V)
2S ■
2i6
2i i
Г Л А В А X II. Системы телемеханики
12.1.
12.2.
12.3.
12.4.
12.5.
12.6.
12.7.
12.8.
2-51
. . . .
2 'i
2.35
2r,S
2lU
261
26Г)
2oJ
2П
27.'.
275
276
2«0
ГЛ А В .\. X IV . Технико-экономическая эффективность автома
тизации сельскохозяйственного производства
2i\
14.1. Общие с в е д е н и я ..........................................................
14.2. Основные показатели эффективности автоматизаии
28»
281
Указатель литературы ..................................................... ....
•
28