








































































































Author: Лукомский Ю.А. Чугунов В.С.
Tags: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика водный транспорт военно-морское дело морской флот издательство судостроение морской транспорт
ISBN: 5-7355-0036-8
Year: 1988



ЮЛЛсУК?у^
шшшш
//МОРСКИМИ
подвижными
ОБЪЕКТАМИ
// Ленинград
/ Издательство
„Судос троение "
1988
ББК 39.47
Л84
УДК 681.51(075.8)
Авторы: Ю. А, Лукомский, В. С. Чугунов
Рецензенты: кафедра конструирования и управления качеством
РА ЛИ АП (д-р техн, наук А. Г. Варжапетян) , д-р техн, наук
Л. Ф. Суевалов
Лукомский Ю. А., Чугунов В. С.
Л84 Системы управления морскими подвижными объектами:
Учебник — Л.: Судостроение, 1988.— 272 с., ил.
ISBN 5-7355-0036-8
Рассмотрены принципы построения, основы теории, моделирова-
ние и синтез широкого класса систем управления (СУ) движением
различных типов морских подвижных объектов (МПО). Книга пред-
ставляет собой обобщение работ по оптимизации управления надвод-
ными судами и подводными аппаратами, судами с динамическими
принципами поддержания, движение которых происходит в условиях
воздействия ветро-волновых возмущений, носящих случайный ха-
рактер.
Предназначена для студентов высших учебных заведений, обу-
чающихся по специальности „Электрооборудование и автоматика
судов”. Может быть использована аспирантами, инженерно-техни-
ческими и научными работниками, специализирующимися в области
судовой автоматики, а также специалистами по управлению различ-
ными техническими системами.
36050 30000- 053
Л --------------32-88 ББК 39.47
048 (01)-88
Учебник
Лукомский Юрий Александрович
Чугунов Виталий Семенович
СИСТЕМЫ УПРАВЛЕНИЯ
МОРСКИМИ ПОДВИЖНЫМИ ОБЪЕКТАМИ
Заведующий редакцией П. К. Зубарев. Редактор Э. В. Зубкова. Технический
редактор И. Ю. Подольская. Корректор С. Н. Маковская. Художественный
редактор Э. А. Бубович. Оформление художника Ю. Б. Осенчакова.
ИБ№1360
Подписано в печать 24.06.88. М-26389. Формат 60 х 90 1/16. Бумага офсет-
ная № 1. Печать офсетная. Усл. печ. л. 17,0. Усл. кр.-отт. 17,0. Уч.-изд. л. 17,5.
Тираж2200 экз. Изд. № 4266—87. Заказ № 5"/О . Цена 90 коп.
Набрано в издательстве „Судостроение” на набор но-печатающих автоматах
операторами И. В. Дроздовой и В. А. Шевелевой.
Издательство „Судостроение”, 191065, Ленинград, ул. Гоголя, 8.
Тульская типография Союзполиграфпрома при Государственном комитете
СССР по делам издательств, полиграфии и книжной торговли, г. Тула,
пр. Ленина, 109.
ISBN 5-7355-0036-8 ©Издательство ,,Судостроение”, 1988.
ПРЕДИСЛОВИЕ
Современный этап развития судостроения характери-
зуется появлением новых типов морских подвижных объектов (МПО).
Наряду с обычными водоизмещающими судами и подводными аппа-
ратами созданы суда с динамическими принципами поддержания, глу-
боководные стабилизируемые аппараты. Некоторые традиционные
МПО используют в необычных режимах. Примерами этого являются
буровые суда, комплексы для проведения научно-исследовательских,
геол ого-геофизических, поисково-разведочных работ и добычи полезных
ископаемых на шельфе и в океане.
Для новых типов МПО автоматическое управление движением
приобретает особое значение и оказывается необходимым для обеспе-
чения высокой эффективности их функционирования и безопасности.
В общем объеме технических средств МПО доля систем управления
движением все время возрастает.
Проектирование автоматических систем управления движением
(АСУД) представляет собой сложную научно-техническую проблему
в силу технического многообразия, сложности кинематических и дина-
мических связей в объектах, особых условий движения МПО в среде,
возмущение которой носит интенсивный случайный характер, в связи
с особыми требованиями по надежности и безотказности функциони-
рования. При создании новых МПО проектирование АСУД требует
значительного времени. Резервом роста эффективности проектирования
АСУД и повышения качества является переход к автоматизированному
проектированию с использованием современных ЭВМ.
За последние годы опубликован ряд работ, посвященных различным
аспектам расчета и проектирования систем управления морскими под-
вижными объектами [1, 4, 11—18]. В них рассмотрены вопросы дина-
мики движения различных типов МПО, построения конкретных АСУД,
взаимодействия МПО с окружающей средой.
Настоящая книга предназначена в качестве учебника по дисциплине
„Системы управления морскими подвижными объектами”. В ней во-
просы гидродинамики и аэродинамики изложены с позиций проекти-
ровщика систем управления движением. Основное внимание уделено
тем процессам, которые определяют характер движения объектов,
3
подробно обсуждены допущения, приводящие к существенным упроще-
ниям математических моделей. Применение матричного описания дина-
мических систем в форме переменных состояния, специфика используе-
мых методов анализа и синтеза, детальное обсуждение вычислительных
процедур непосредственно подводят читателя к использованию ЭВМ
для решения задач исследовательского проектирования СУ МПО. В конце
книги даны основы автоматизации проектных работ при создании этих
систем.
Авторы приносят благодарность канд. техн, наук Кудряшову В. Е.,
который совместно с Ю. А. Лукомским написал гл. 7.
При работе над книгой авторы использовали полезные советы
д-ров техн, наук профессоров Е. А. Архангельского, М. Н. Катханова,
О. С. Попова, И. Р. Фрейдзона.
Большую помощь при подготовке рукописи оказали канд. техн, наук
доценты Ю. О. Демченко и В. Б. Щукин, а также И. М. Ануфриева,
Г. Д. Me дни с и Т. В. Михайлова.
Авторы будут весьма признательны читателям за предложения
и критические замечания, которые следует направлять по адресу:
191065, Ленинград, ул. Гоголя, 8, издательство „Судостроение”.
ВВЕДЕНИЕ
Предмет дисциплины „Системы управления морскими
подвижными объектами” составляют системотехнические принципы по-
строения этих систем и общие подходы к их проектированию на основе
теории оптимальных процессов с использованием вычислительных
машин.
ГОСТ 19176—85 „Системы управления техническими средствами
корабля. Термины и определения” определяют систему управления
техническими средствами корабля как „функционально и конструк-
тивно законченное изделие, обеспечивающее управление техническими
средствами корабля” (п. 1). Основываясь на этом понятии, можно
определить систему управления морским подвижным объектом по
особенности управляемого объекта. СУ МПО — это система управления
теми техническими средствами, которые обеспечивают постоянство
или изменение по определяемому закону кинематических параметров
движения, характеризующих положение объекта в заданной коорди-
натной системе, его скорость движения, угловую ориентацию и скорость
ее изменения.
Понятие „морской подвижный объект” является более общим,
чем „корабль” или „судно”. Оно включает в себя как одиночные суда,
так и совокупности судов и аппаратов.
Одиночными МПО могут быть надводные водоизмещающие корабли,
подводные корабли и аппараты, суда с динамическими принципами
поддержания (на подводных крыльях, воздушной подушке, экрано-
планы). К МПО относятся и много объектные комплексы для проведе-
ния геолого-геофизических и поисково-разведочных работ на шельфе
и в океане, а также комплексы для добычи полезных ископаемых. Их
особенность состоит в том, что помимо основного водоизмещающего
судна комплексы включают в себя аппараты — носители технологи-
ческих инструментов и приборов, которые, как правило, соединены
с судном гибкой связью. Это может быть буксирный кабель-трос,
трубопровод эрлифтной установки и т. п. Таким образом, комплекс
формируется из двух (или более) объектов с сосредоточенными па-
раметрами, связанных между собой элементом с распределенными
параметрами.
5
Разные типы морских подвижных объектов имеют различные систе-
мы управления движением. Наибольшее распространение получили
авторулевые, которые обеспечивают автоматическую ориентацию ко-
рабля в заданном направлении движения. Практически все МПО распо-
лагают такой системой. Появление научно-исследовательских судов
дало толчок к развитию систем стабилизации судна на заданной линии
профиля, а создание буровых судов и судов для добычи твердых полез-
ных ископаемых в океане потребовало разработки систем динамического
позиционирования и стабилизации. Суда с глубоко погруженными
управляемыми крыльями не могут нормально двигаться без системы
стабилизации продольной и вертикальной качки. В некоторых специаль-
ных случаях требуется автоматическая стабилизация бортовой качки.
Несмотря на разнообразие систем управления движением и под-
вижных объектов, СУ МПО имеют структурную общность, обуслов-
ленную тем, что во всех случаях управляемым объектом является
твердое тело, движущееся в воде, воздухе или на границе раздела вод-
ной и воздушной среды. Это приводит к единым системотехническим
принципам построения, общим методам анализа и синтеза различных
классов СУ МПО.
В общем случае системы управления МПО, как и многие другие,
включают в себя управляемый объект, исполнительные органы, дат-
чики состояния кинематических параметров и вычислительные устройст-
ва, обеспечивающие формирование сигналов управления. Синтез алго-
ритмов этого вычислительного устройства составляет фундаментальную
задачу проектирования СУ МПО, для решения которой приходится
привлекать современные методы теории оптимальных процессов, мате-
матическое моделирование, электронно-вычислительные машины. В зна-
чительной мере успех решения этой задачи зависит от знания условий
функционирования управляемого объекта. Поэтому изучение начинается
с математических моделей движения МПО и ветро-волновых возмуще-
ний с тем, чтобы затем на их основе рассматривать вопросы функциональ-
ной организации, синтеза и анализа СУ МПО, машинного проектиро-
вания и т. п.
Глава 1
УРАВНЕНИЯ ДИНАМИКИ МОРСКИХ ПОДВИЖНЫХ
ОБЪЕКТОВ
1.1. Предварительные замечания
Практика кораблевождения связана с двумя задачами
управления движением морских подвижных объектов. Одну из них
решает штурман, другую — рулевой. Первый прокладывает курс и
определяет местоположение корабля в океане, второй — осуществляет
оперативное управление, обеспечивающее движение корабля по заданно-
му маршруту с определенными показателями.
Навигационная задача прокладки курса связана с анализом движе-
ния МПО в больших временных и пространственных интервалах. Пере-
мещение корабля из одной точки океана в другую при современных
скоростях движения происходит в течение часов или дней. В этих усло-
виях собственные геометрические размеры объекта, а также его мгно-
венное состояние, характеризующееся качкой или рысканием, теряют
свое значение, движение корабля можно рассматривать на основе кине-
матики материальной точки, совпадающей с центром масс МПО. При
решении этой задачи интерес представляют интегральные показатели
движения, усредненные по времени, которые рассчитываются с помощью
кинематических моделей движения МПО.
Оперативное управление движением корабля требует непрерывной
оценки его состояния с последующей корректировкой. Весь процесс
управления движением протекает в малых временных и пространствен-
ных интервалах. При этом корабль уже нельзя рассматривать как ма-
териальную точку, а следует изучать с позиций движения твердого тела
в пространстве, мгновенное состояние которого оценивается векторами
скорости поступательного движения центра масс ’
V = iVx +Jvy + kVz (1.1)
и вращательного движения относительно центра масс
П = +/+ kcoz , (1.2)
—* —► —
где i, j, к — единичные векторы (орты) осей принятой координатной
системы; Vx, Vy, VZf сох, соу> coz — проекции скоростей на соответ-
ствующие оси координат, а также мгновенным положением центра масс
в принятой системе координат x(t), (г) и угловой ориентацией
7
объекта в пространстве, характеризующейся мгновенными значениями
трех углов 0 (?), 9? (?), ф (?).
Таким образом, двенадцать переменных характеризуют состояние
МПО в любой момент времени. Они получили название кинематических
параметров движения. Изменение во времени этих параметров происхо-
дат в результате внешних возмущающих воздействий окружающей
среды и управляющих усилий исполнительных механизмов технических
средств управления движением. Связь между кинематическими пара-
метрами, управляющими воздействиями и возмущениями устанавли-
вается дифференциальными уравнениями динамики, составляющими
математическую модель движения морских подвижных объектов.
Система уравнений движения МПО содержит:
— динамические уравнения, описывающие движение центра масс
(характерной точки или полюса) и полученные на основе закона сохра-
нения количества движения;
— динамические уравнения, описывающие движение объекта отно-
сительно полюса и полученные на основе закона сохранения количества
и момента количества движения;
— кинематические уравнения связи угловых и линейных скоростей
с угловыми и пространственными координатами, полученные на основе
уравнений связи (кинематических соотношений) между различными
координатными системами.
Формирование математической модели движения всегда связано
с проблемой допущений. Всякая математическая модель имеет опреде-
ленное назначение, и степень сложности уравнений может быть различ-
ной в зависимости от цели исследования и характера решаемых задач.
Модели, предназначенные для изучения тонких аэрогидро динамических
процессов на корпусе МПО, должны быть наиболее полными. Однако
всякое усложнение исходной математической модели делает ее мало-
эффективной для анализа и синтеза систем управления МПО, тем более,
что вид модели прямо или косвенно сказывается на сложности алго-
ритмов управления и возможности их технической реализации. Поэтому
любое целенаправленное упрощение математического описания объекта
и процесса управления весьма полезно. В то же время эти упрощения
не должны приводить к искажению определяющих физических явлений.
Так, совершенно необходимо выполнение условия устойчивости или
неустойчивости по Ляпунову и для полной и для упрощенной системы
дифференциальных уравнений.
1.2. Системы координат, используемые в задачах
управления МПО
При решении задач навигации, ориентации и управления
морскими подвижными объектами используют разные системы коор-
динат. Это объясняется различием задач, а также тем, что структура
и форма уравнений движения МПО существенно зависят от выбора
координатной системы [ 16].
8
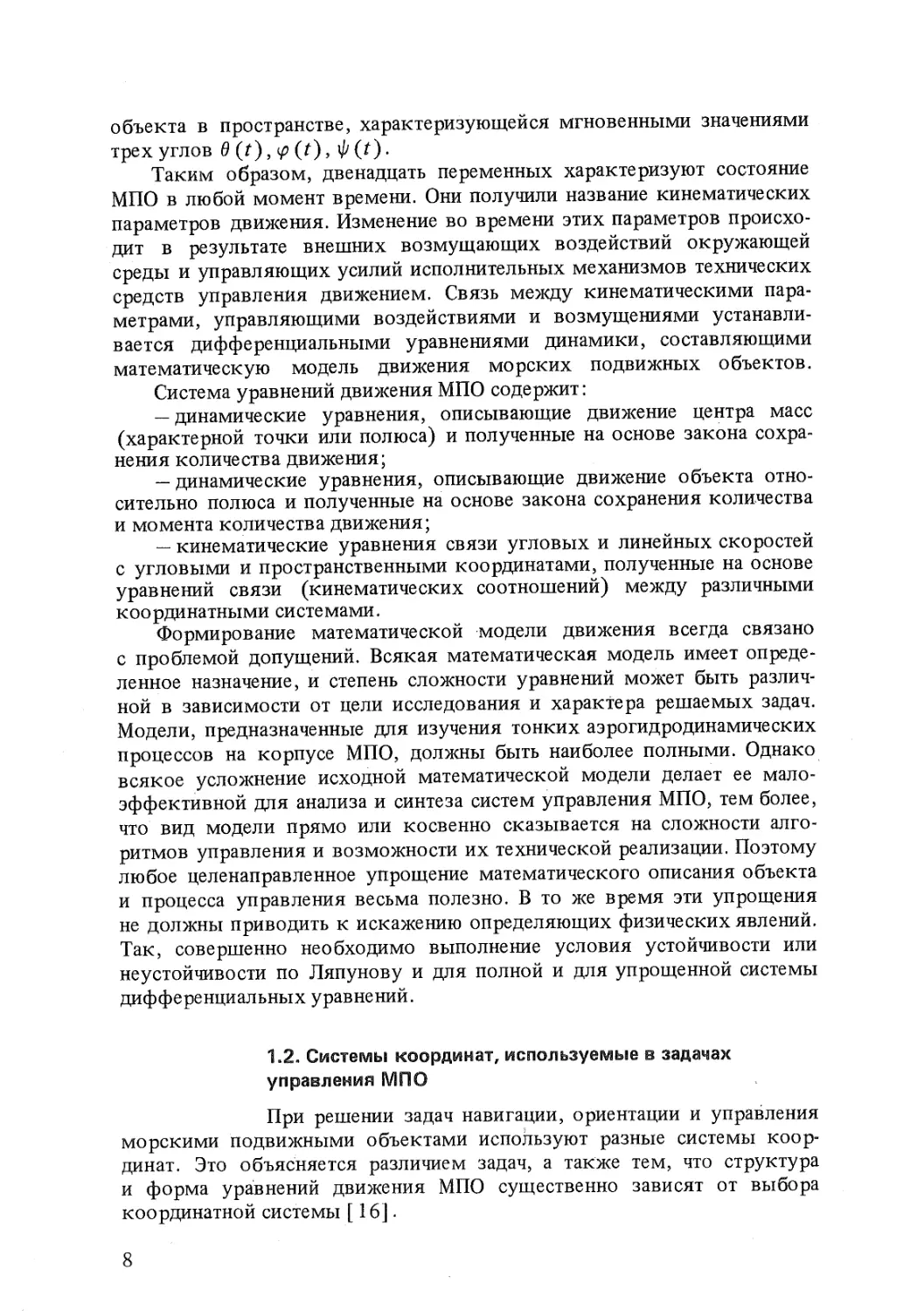
В задачах навигации используется так называемая геоцентрическая
система координат О1з £, т?, f, показанная на рис. 1.1. Начало координат
этой системы Ог совпадает с центром Земли, ось О1} f направлена
по оси суточного вращения Земли в точку северного географического
полюса; ось О}, % расположена в плоскости земного экватора и направ-
лена от центра Земли в точку пересечения экватора и нулевого мери-
диана; ось т? составляет с первыми двумя осями правую систему
координат. Геоцентрическая система координат вращается в пространст-
ве вокруг оси Olf £ с угловой скоростью суточного вращения Земли
w =7,29.10-5 с"1.
Положение любой точки М, лежащей на поверхности Земли, одно-
значно определяется в геоцентрической системе координат тремя линей-
ными координатами т)М и Однако при решении задач навига-
ции — перемещения по поверхности Земли — удобнее определять поло-
жение точки М ее географическими координатами, считая неизменным
радиус поверхности Земли. Тогда положение точки М характеризуется
географической широтой — углом между радиусом-вектором R,
проведенным из центра Земли в точку М, и плоскостью экватора, а также
географической долготой — двугранным углом между плоскостью
нулевого меридиана и плоскостью меридиана, проходящего через точку
М, Длина радиуса-вектора R считается известной.
В навигационных задачах Землю представляют либо в виде сферы
радиусом 6371110 м, либо в виде эллипса вращения, малая полуось
которого длиной 6356863 м совпадает с осью суточного вращения,
а большая полуось лежит в плоскости экватора и равна 6378245 м.
Оперативное управление движением МПО осуществляется в огра-
ниченных временных и пространственных интервалах в окрестности
произвольной точки криволинейной траектории маршрута. Поэтому
при анализе и синтезе систем управления движением можно рассматри-
вать перемещение объекта относительно „плоской и неподвижной”
Земли и использовать прямоугольные координатные системы. Первая
Рис. 1.1. Геоцентрическая система Рнс- Г2, Земная базовая система
координат координат
9
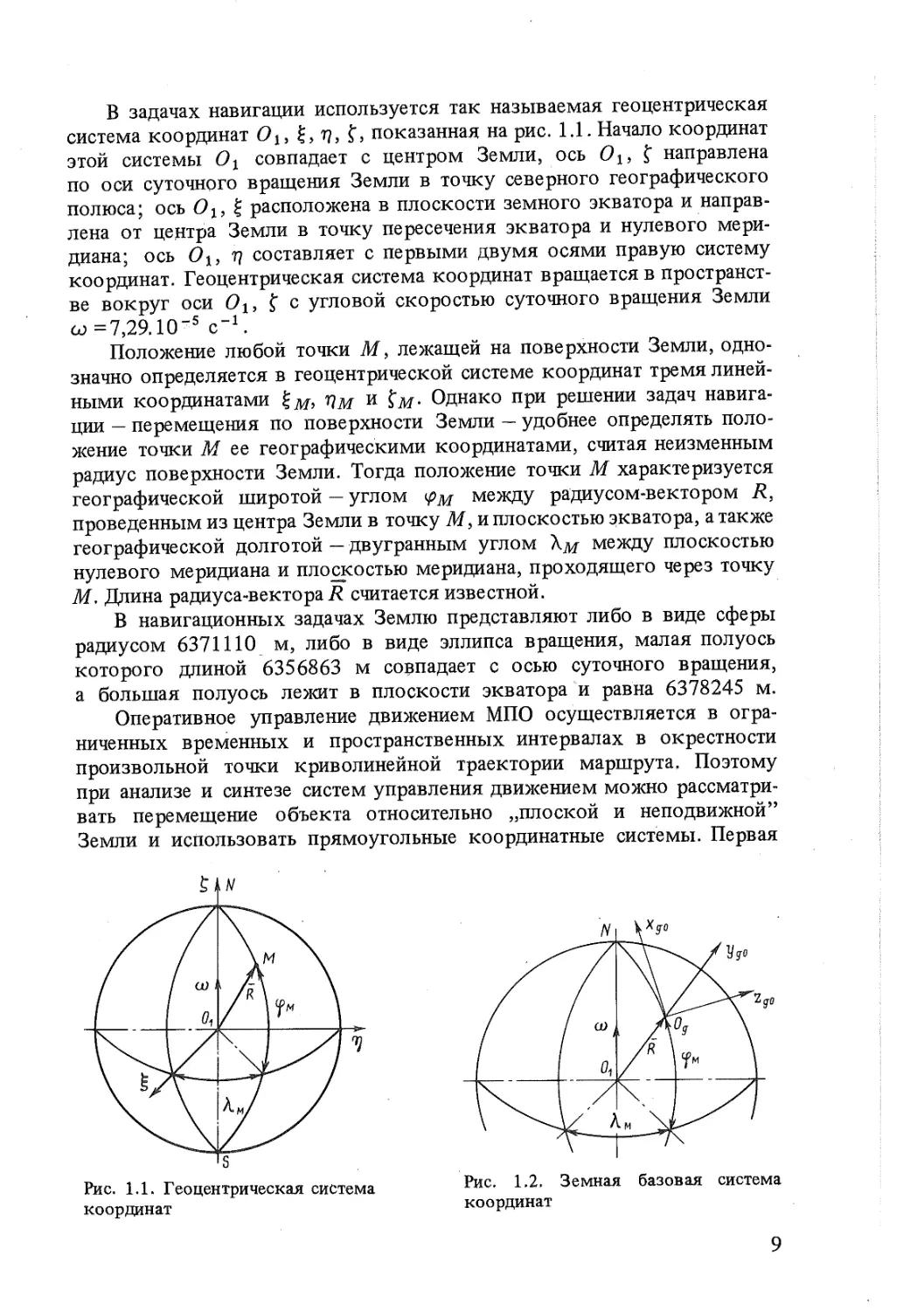
Рис. 1.3. Полусвязанная
система координат
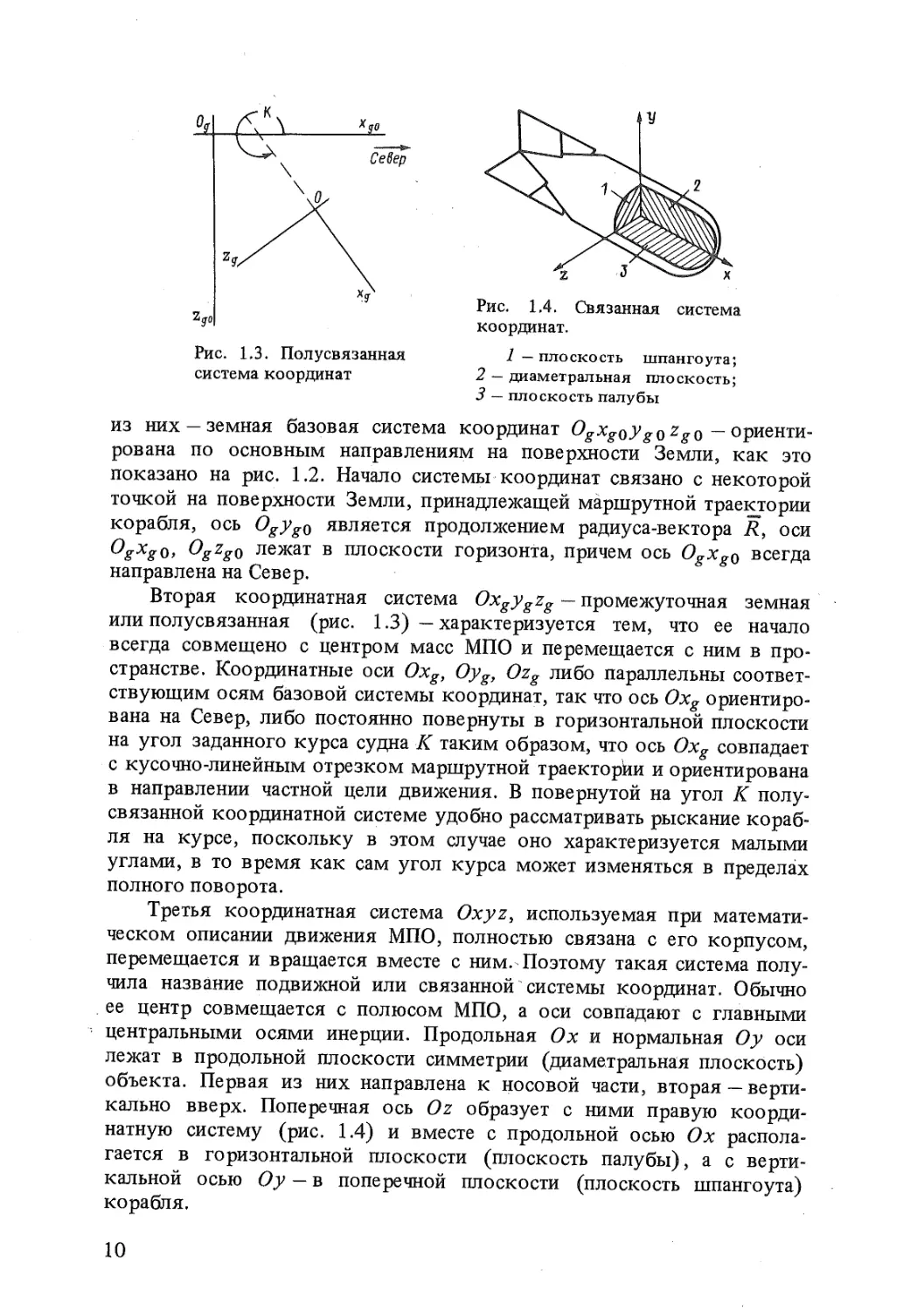
Рис. 1,4. Связанная система
координат.
1 — плоскость шпангоута;
2 — диаметральная плоскость;
3 — плоскость палубы
из них —земная базовая система координат ~ ориенти-
рована по основным направлениям на поверхности Земли, как это
показано на рис. 1.2. Начало системы координат связано с некоторой
точкой на поверхности Земли, принадлежащей маршрутной траектории
корабля, ось OgygQ является продолжением радиуса-вектора R, оси
OgxgQ, OgZgQ лежат в плоскости горизонта, причем ось OgXg() всегда
направлена на Север.
Вторая координатная система OxgygZg — промежуточная земная
или полусвязанная (рис. 1.3) — характеризуется тем, что ее начало
всегда совмещено с центром масс МПО и перемещается с ним в про-
странстве. Координатные оси Oxg, Oyg, Ozg либо параллельны соответ-
ствующим осям базовой системы координат, так что ось Oxg ориентиро-
вана на Север, либо постоянно повернуты в горизонтальной плоскости
на угол заданного курса судна К таким образом, что ось Oxg совпадает
с кусочно-линейным отрезком маршрутной траектории и ориентирована
в направлении частной цели движения. В повернутой на угол К полу-
связанной координатной системе удобно рассматривать рыскание кораб-
ля на курсе, поскольку в этом случае оно характеризуется малыми
углами, в то время как сам угол курса может изменяться в пределах
полного поворота.
Третья координатная система Oxyz, используемая при математи-
ческом описании движения МПО, полностью связана с его корпусом,
перемещается и вращается вместе с ним. Поэтому такая система полу-
чила название подвижной или связанной системы координат. Обычно
ее центр совмещается с полюсом МПО, а оси совпадают с главными
центральными осями инерции. Продольная Ох и нормальная Оу оси
лежат в продольной плоскости симметрии (диаметральная плоскость)
объекта. Первая из них направлена к носовой части, вторая — верти-
кально вверх. Поперечная ось Oz образует с ними правую коорди-
натную систему (рис. 1.4) и вместе с продольной осью Ох распола-
гается в горизонтальной плоскости (плоскость палубы), а с верти-
кальной осью Оу— в поперечной плоскости (плоскость шпангоута)
корабля.
10
Уравнения динамики МПО, получаемые на основе закона сохранения
движения, обычно записывают в подвижной координатной системе.
Поэтому в качестве кинематических параметров движения выступают
проекции линейной (Кх, Vy, Vz) и угловой скоростей
на связанные оси. Сами же векторы линейной V и угловой 12 скоростей
можно выразить через проекции либо в векторной форме (1.1), (1.2),
либо в виде матриц-столбцов:
F =
Ух ’
Vy
Vz
= [VxVyVz ]т
(1-3)
“>х
£2 =
со ?
со2
(1.4)
так как в информативном отношении векторные и матричные соотно-
шения эквивалентны.
Использование связанной координатной системы для записи урав-
нений динамики МПО обусловлено следующими обстоятельствами.
Во-первых, подвижные оси с началом в центре масс являются глав-
ными осями инерции объекта и моменты инерции относительно них
не зависят от изменения кинематических параметров движения.
Во-вторых, основные внешние силы, действующие на МПО, ориенти-
рованы по отношению к корпусу (сила тяги движителей, гидроаэроди-
намические силы и моменты, ветро-волновые возмущения) и наиболее
просто выражаются в осях, жестко с ним связанных.
Благодаря этим обстоятельствам форма уравнений динамики МПО,
записанных в подвижной координатной системе, оказывается наиболее
простой и удобной для последующего решения при достаточно полном
отражении процессов взаимодействия движущегося тела и окружающей
среды.
Следует иметь в виду, что измерительная аппаратура и датчики
параметров движения в основном находятся на борту корабля. Поэтому
информация об особенностях движения объекта, используемая в системе
управления МПО, также представляется в связанной координатной
системе.
1.3. Кинематические параметры и уравнения связи
вращательного движения
Ориентация МПО в пространстве в любой момент опре-
деляется взаимным расположением полусвязанной и подвижной коор-
динатных систем, которое характеризуется тремя угловыми координа-
тами. Для этого используются углы Эйлера [16]:
11
— угол рыскания <р — угол между проекцией связанной оси Ох
на горизонтальную плоскость и осью Oxg ;
— угол дифферента (тангажа) ф — угол между связанной осью Ох
и горизонтальной плоскостью;
— угол крена 6 — угол между продольной плоскостью симметрии
МПО (диаметральной плоскостью) и вертикальной плоскостью, со-
держащей связанную ось Ох.
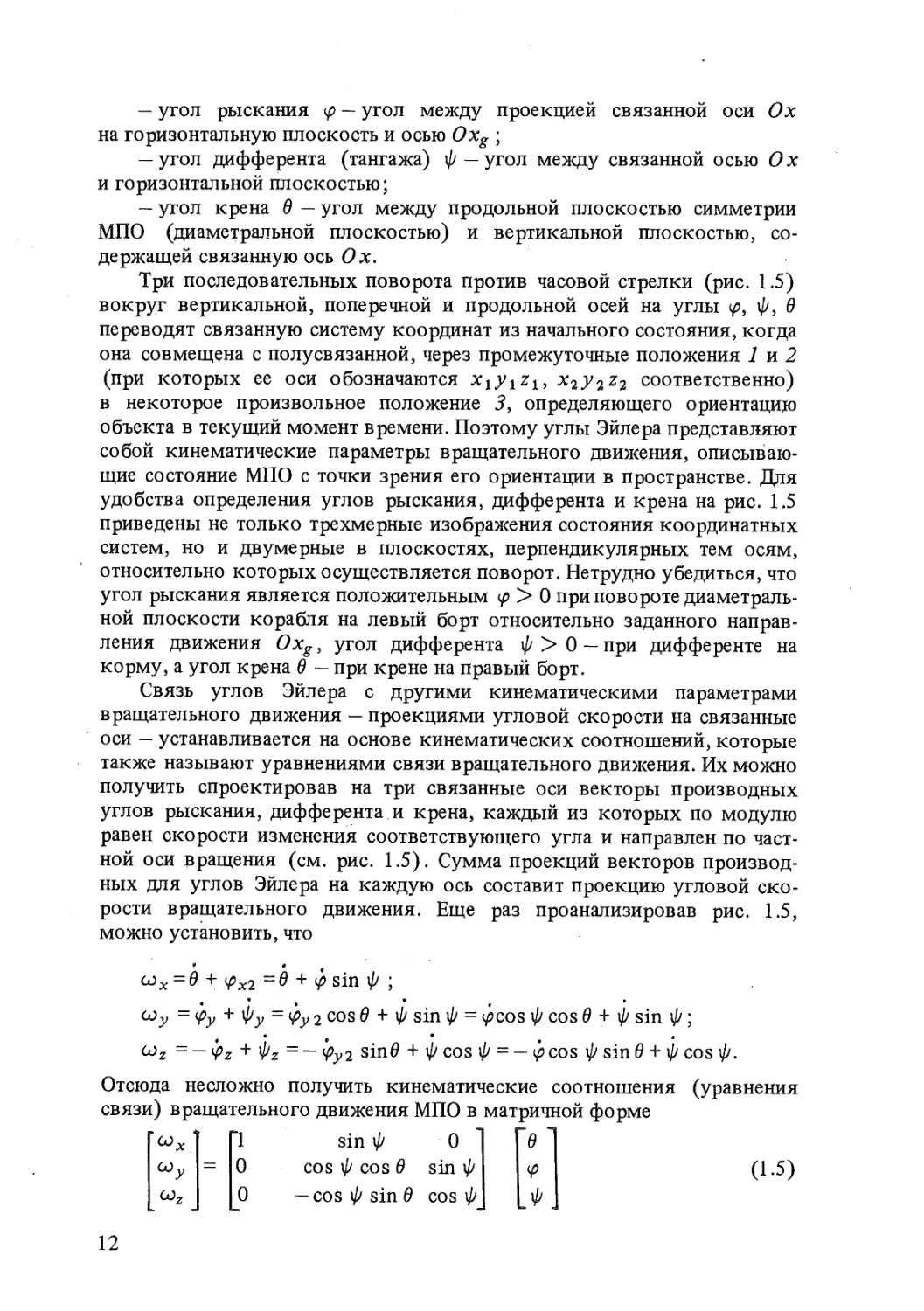
Три последовательных поворота против часовой стрелки (рис. 1.5)
вокруг вертикальной, поперечной и продольной осей на углы ф, О
переводят связанную систему координат из начального состояния, когда
она совмещена с полусвязанной, через промежуточные положения 7 и 2
(при которых ее оси обозначаются x2y2z2 соответственно)
в некоторое произвольное положение 5, определяющего ориентацию
объекта в текущий момент времени. Поэтому углы Эйлера представляют
собой кинематические параметры вращательного движения, описываю-
щие состояние МПО с точки зрения его ориентации в пространстве. Для
удобства определения углов рыскания, дифферента и крена на рис. 1.5
приведены не только трехмерные изображения состояния координатных
систем, но и двумерные в плоскостях, перпендикулярных тем осям,
относительно которых осуществляется поворот. Нетрудно убедиться, что
угол рыскания является положительным </> > О при повороте диаметраль-
ной плоскости корабля на левый борт относительно заданного направ-
ления движения Oxg, угол дифферента ф>0 — при дифференте на
корму, а угол крена 0 — при крене на правый борт.
Связь углов Эйлера с другими кинематическими параметрами
вращательного движения — проекциями угловой скорости на связанные
оси — устанавливается на основе кинематических соотношений, которые
также называют уравнениями связи вращательного движения. Их можно
получить спроектировав на три связанные оси векторы производных
углов рыскания, дифферента и крена, каждый из которых по модулю
равен скорости изменения соответствующего угла и направлен по част-
ной оси вращения (см. рис. 1.5). Сумма проекций векторов цроизвод-
ных для углов Эйлера на каждую ось составит проекцию угловой ско-
рости вращательного движения. Еще раз проанализировав рис. 1.5,
можно установить, что
= 0 + фх2 =в + ф sin ф ;
со-у = фу + фу = фу 2 cos 0 + ф sin ф - фсоз ф cos 0 + ф sin ф;
<x)z “ — Фг + Фг = ~Фу2 Sin0 + ф COS ф = — ф COS ф Sin 0 + ф COS ф.
Отсюда несложно получить кинематические соотношения (уравнения
связи) вращательного движения МПО в матричной форме
“1
О
О
sin ф О
cos ф cos 0 sin ф
— cos ф sin 0 cos ф
Ф
(1-5)
12
ио
Рис. 1.5. Углы Эйлера
*2
*1
2
x2
или, обозначив кинематическую матрицу вращательного движения
В а матрицу-столбец производных углов Эйлера = [ Офф], полу-
чим общий вид матричного уравнения связи
£i=B^£ig' 0-6)
Относительно углов рыскания, дифферента и крена уравнение (1.6)
представляет собой систему дифференциальных уравнений
которую можно использовать для расчета угловой ориентации корабля.
Прямая и обратная кинематические матрицы В и В существенно
упрощаются при малых углах рыскания, крена и дифферента. Известно,
что при | <30° sin а ~ а (с погрешностью не выше 5 %), a cos а 1
(с погрешностью менее 14%, так как cos 30° =0,867). С учетом этого
соотношения (1.5) приобретают вид
Х 3 + ф ф ;
<Оу ъф + ф ф ; I
COZ ~ Ф - фо.
(1-8)
При малых углах Эйлера и одинаковом уровне их производных в выра-
жениях (1.8) определяющими оказываются только первые слагаемые.
Поэтому приблизительно можно считать, что проекции на связанные
оси угловой скорости вращения МПО совпадают с соответствующими
производными эйлеровых углов
сох = 0 ; (оу = ф ; (oz = ф, (1.9)
а кинематические матрицы становятся единичными матрицами: Ва) =
= =1.
1.4. Кинематические параметры и уравнения связи
поступательного движения
Кинематическими параметрами поступательного движения
МПО являются проекции на связанные оси мгновенного значения векто-
ра скорости перемещения центра масс, а также его координаты в базо-
вой координатной системе в любой момент времени.
По отношению к подвижной системе координат Oxyz вектор ско-
рости K(f) в каждый момент времени занимает произвольное положе-
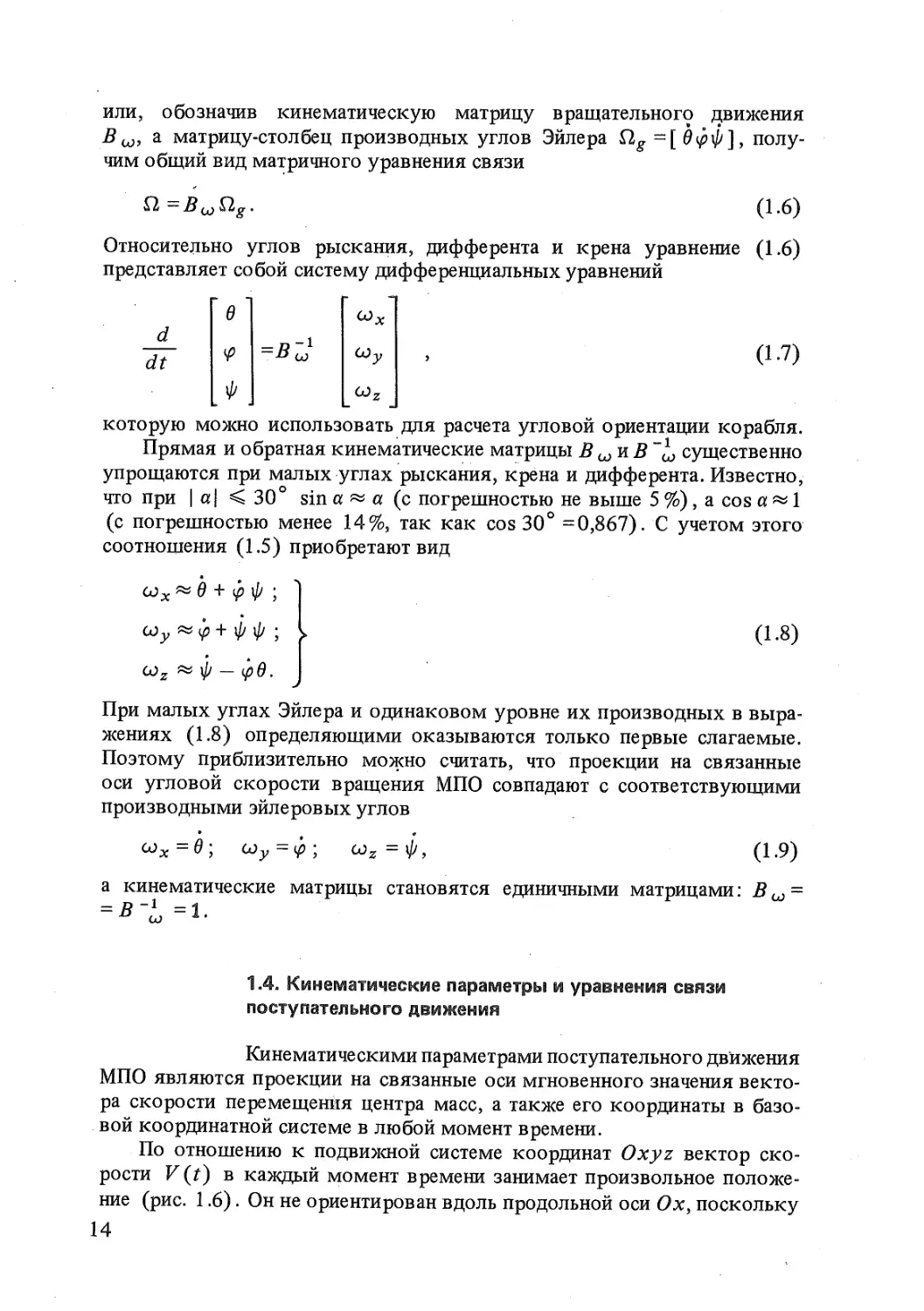
ние (рис. 1.6). Он не ориентирован вдоль продольной оси Ох, поскольку
14
корабли редко движутся так, что площадь у
палубы остается параллельной плоскости
горизонта, но обычно имеют дифферент на
корму. Наблюдается также снос корабля у __х
под влиянием поперечных возмущений, 11Q11 ГТ-
в результате чего появляется боковая /
составляющая вектора скорости. На рис. 1X) / Vxy
показано разложение вектора скорости V у
на составляющие путем последовательного
проектирования сначала на плоскость Оху Рис. 1.6. Вектор линейной ско-
. рости в подвижной коорди-
V — Vz + натной системе
а затем по осям ли у, т. е. Vxy = Vx + Vy,
Анализируя положение вектора линейной скорости (см. рис. 1.6),
можно отметить, что его ориентация в связанной координатной системе
определяется двумя углами:
— углом дрейфа р — между вектором скорости и продольной пло-
скостью МПО;
— углом атаки а — между проекцией вектора скорости на продоль-
ную плоскость и связанной осью Ох.
В отличие от углов рыскания, крена и дифферента, положительные
значения которых отсчитываются против часовой стрелки, углы атаки
и дрейфа положительны при повороте вектора скорости относительно
подвижных координатных осей по часовой стрелке. При этом положи-
тельному углу дрейфа (Р > 0) соответствует положительная проекция
Vz вектора скорости на ось Оz (снос корабля на правый борт), а поло-
жительному углу атаки (а > 0) — движение корабля с дифферентом
на корму и отрицательная проекция Vy вектора скорости на ось Оу.
Поэтому (см. рис. 1.6)
= Vxy cos а = Vcos Р cos a ;
Vy = - Vxy sin a = - Feos p sin a; r (1.10)
Vz=Vsinp.
При малых углах атаки и дрейфа выражения (1.10) имеют вид
Vy^-Va; Vz^Vp.
(Ill)
Соотношения (1.10) и (1.11) показывают, что в качестве скорост-
ных кинематических параметров поступательного движения могут
выступать как проекции вектора линейной скорости МПО на связанные
оси Vx, Vy, Vz, так и модуль вектора (величина, значение) V вместе
с углами атаки а и дрейфа р. При постоянной скорости движения корабля
V = const угол атаки выступает аналогом скорости вертикальных пере-
мещений, а угол дрейфа — аналогом скорости бокового сноса
p^Vz/V. ' (1.12)
15
Кинематическими параметрами текущего положения центра масс
служат его координаты xg(t), yg(t)> zg(t) в базовой координатной
системе. Ею может служить прямоугольная система с фиксированным
полюсом О g, положение которого связано с какой-либо точкой маршру-
та движения корабля, что можно рассматривать как начало частного
этапа движения. Оси базовой системы Ogxg; Ogygf Ogzg удобно направить
параллельно осям полусвязанной системы таким образом, чтобы про-
дольная ось Ogxg была направлена по желаемому маршруту в сторону
частной цели движения.
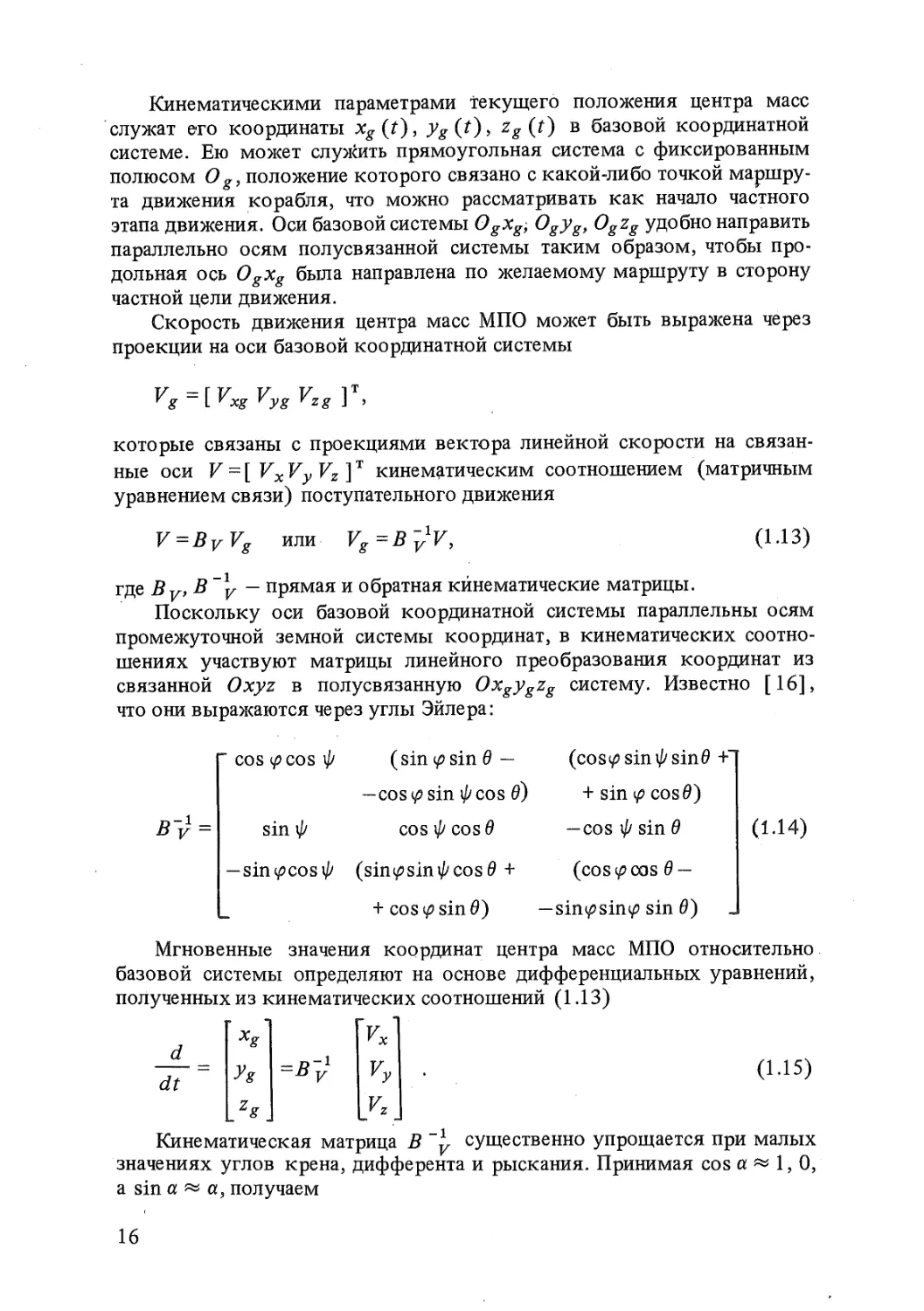
Скорость движения центра масс МПО может быть выражена через
проекции на оси базовой координатной системы
которые связаны с проекциями вектора линейной скорости на связан-
ные оси И = [ VxVy Vz ]т кинематическим соотношением (матричным
уравнением связи) поступательного движения
V=BvVg или Vg=ByV, (1.13)
где By, В ~у — прямая и обратная кинематические матрицы.
Поскольку оси базовой координатной системы параллельны осям
промежуточной земной системы координат, в кинематических соотно-
шениях участвуют матрицы линейного преобразования координат из
связанной Oxyz в полусвязанную Oxgygzg систему. Известно [16],
что они выражаются через углы Эйлера:
В~у = ~ cos <pcos ф sin ф (sin ip sin в — —cos <р sin i//cos 0) cos ф cos 6 (cosy? sin i//sin 0 +’ + sin <p cos0) —cos ф sin 0 (1-14)
—sin cos ф (sine/?sin ф cos в + (cos cos 0 —
+ cos sin 0) —sin^sin^ sin 0)
Мгновенные значения координат центра масс МПО относительно
базовой системы определяют на основе дифференциальных уравнений,
полученных из кинематических соотношений (1.13)
(1-15)
Кинематическая матрица В ~у существенно упрощается при малых
значениях углов крена, дифферента и рыскания. Принимая cos а & 1, О,
a sin а « а, получаем
16
Тогда уравнения связи (1.13) приобретают вид
vxg = Vx - Ууф + Vz <р ;
vyg = vx^ + vy-vze-, >
vzg=-vxy> + vye + vz.
(1.16)
Проекции вектора скорости движения центра масс МПО в непод-
вижной координатной системе могут быть выражены через другие
кинематические параметры: величину (модуль) скорости поступатель-
ного движения МПО, углы атаки и дрейфа. Подставляя (1.11) в (1.16),
получаем в случае малых углов атаки и дрейфа следующие приближен-
ные уравнения связи
Vxg=V(l-аф + 0^);
^g=F[(^-a) -0^]; >
(1.17)
rzg = K[(|3-^) +«q.
В (1.17) присутствуют произведения углов аф, рб, (fy, а0, которы-
ми можно пренебречь ввиду их малости по сравнению с другими слагае-
мыми. С учетом этого получаем окончательный вид упрощенных выра-
жений, определяющих движение центра масс МПО в неподвижной систе-
ме координат
= К;
zg=Vzg=^V(^~p)=~VGi
(1-18)
где а = ~ /3 ~ приращение путевого угла.
Ёис. 1.7. Кине-
матические со-
отношения по-
ступательного
движения МПО.
2—510
17
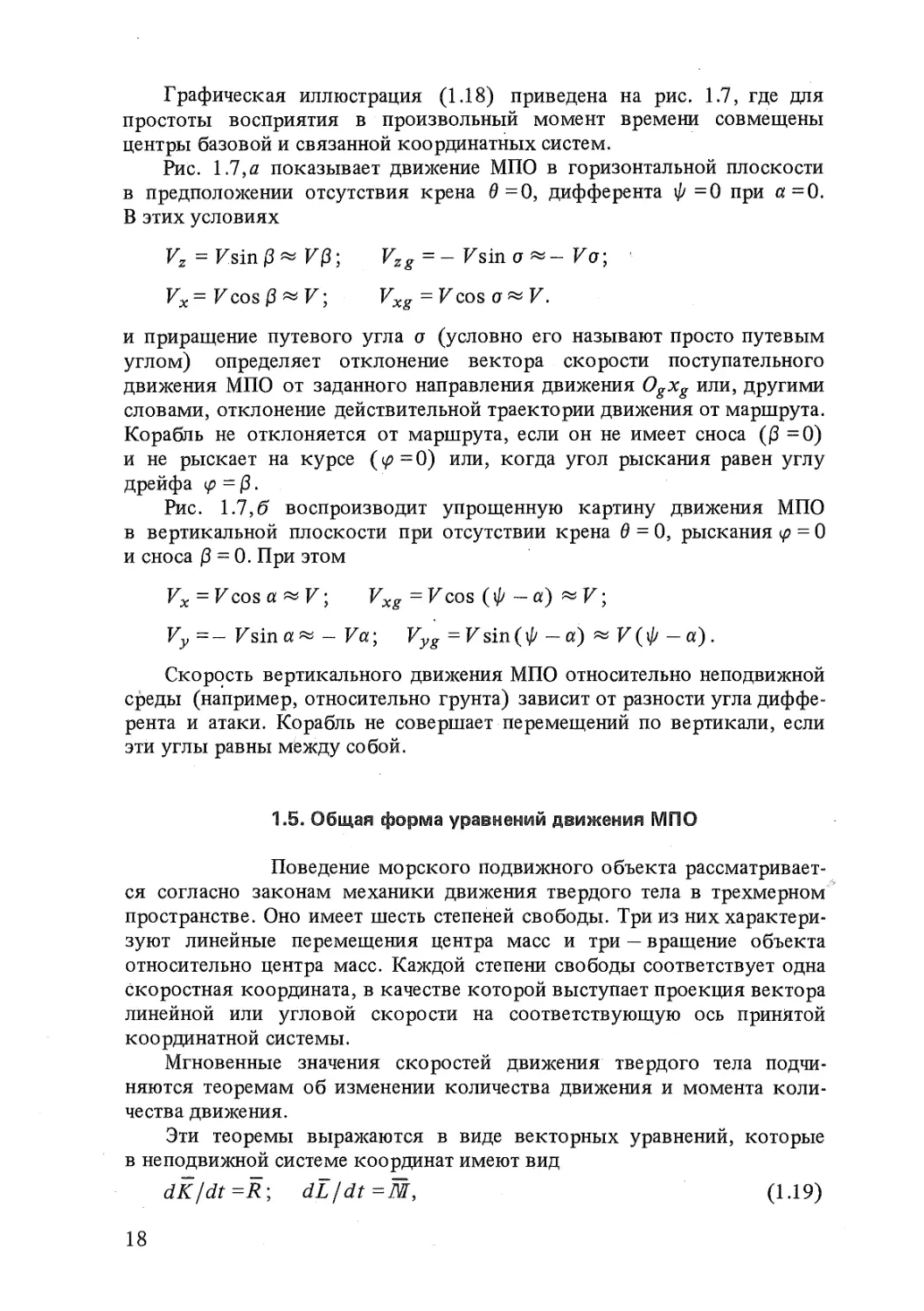
Графическая иллюстрация (1.18) приведена на рис. 1.7, где для
простоты восприятия в произвольный момент времени совмещены
центры базовой и связанной координатных систем.
Рис. 1.7, а показывает движение МПО в горизонтальной плоскости
в предположении отсутствия крена в =0, дифферента ф =0 при а=0.
В этих условиях
Vz = Fsin0~F(3; Vzg=-Fsina-- Va;
Vx = Feos (3 V; Vxg = Feos о * F.
и приращение путевого угла о (условно его называют просто путевым
углом) определяет отклонение вектора скорости поступательного
движения МПО от заданного направления движения Ogxg или, другими
словами, отклонение действительной траектории движения от маршрута.
Корабль не отклоняется от маршрута, если он не имеет сноса (Р =0)
и не рыскает на курсе (</?=0) или, когда угол рыскания равен углу
дрейфа = Р.
Рис. 1.7,5 воспроизводит упрощенную картину движения МПО
в вертикальной плоскости при отсутствии крена в = 0, рыскания = 0
и сноса р = 0. При этом
Fx = Fcosa~F; Vxg = Feos (ф
Fp=- Fsina- - Fa; Vyg = Fsin(i// - a) ~ Р(ф-а).
Скорость вертикального движения МПО относительно неподвижной
среды (например, относительно грунта) зависит от разности угла диффе-
рента и атаки. Корабль не совершает перемещений по вертикали, если
эти углы равны мёжду собой.
1.5. Общая форма уравнений движения МПО
Поведение морского подвижного объекта рассматривает-
ся согласно законам механики движения твердого тела в трехмерном
пространстве. Оно имеет шесть степеней свободы. Три из них характери-
зуют линейные перемещения центра масс и три — вращение объекта
относительно центра масс. Каждой степени свободы соответствует одна
скоростная координата, в качестве которой выступает проекция вектора
линейной или угловой скорости на соответствующую ось принятой
координатной системы.
Мгновенные значения скоростей движения твердого тела подчи-
няются теоремам об изменении количества движения и момента коли-
чества движения.
Эти теоремы выражаются в виде векторных уравнений, которые
в неподвижной системе координат имеют вид
dK/dt=R\ dL/dt=№, (1.19)
18
где К — главный вектор количества движения МПО; L — главный вектор
момента количества движения относительно начала координатной систе-
мы, Л—главный вектор внешних сил, действующих на МПО; М ~
главный момент внешних сил относительно начала координат.
Однако уравнения движения МПО записывают обычно в системе
координат, жестко связанной с корпусом. Это объясняется тем, что
силы и моменты взаимодействия корпуса МПО с окружающей средой,
а также силы и моменты внешних воздействий наиболее просто выра-
жаются в связанной системе координат. Так как точка О— начало
связанной системы координат Oxyz движется с некоторой линейной
скоростью F, и МПО поворачивается вокруг начала координат с угло-
вой скоростью £2, в уравнениях об изменении количества движения
и момента количества движения, записанных в подвижной координатной
системе, появляются в виде дополнительных слагаемых векторные
произведения:
~~ + sTxZ=A;
dt
+ П хГ+ VxK=M
dt
Два векторных уравнения (1.20) соответствуют шести скалярным
дифференциальным уравнениям, записанным относительно проекций
на связанные оси. Так как
К=7кх + kKz ;
— *. -► -*
L iL х 4" j L у 4" kL 2 ;
R - iRx 4- jRy 4- kRz ;
M = iMx 4- jMy 4- kMz ,
а векторные произведения выражаются через определители с последую-
щим их разложением по элементам первой строки
(1.20)
i / к
х/< = сх>х СО-у ^z i(coyKz coz Ky) — / (yoxKz —
кх Ку Kz ~(X)zKx)^k{<X)xKy ~coyKx);
i / к
П х£ = СО-у <^>z — i(coyLz — coz L y) —j(coxLz co z L x) 4- к (coxL у co у L x) ;
Lx Ly L z
19
i j к
VxK= Vx Vy Vz ^(VyKz^V^Ky)~7(VxKz~-
~VZKX) ^{VxKy-VyKx^
Kx Ky Kz
TO
dKx
"Ь co у Кz co 2 R у R x 5
dt
dKy
4“ CO £ К x co x К 2 R у )
dt
dKz
d t + ^X^y Rx “ RZ j
d L x
~V + ^y L z Ly 4“ Vy К z Vz Ky M x j
(1.21)
dLy
~~j~t x~-.(i)xLz + ~ RXRz ~ M.у
dLz
d + у CO у L x Vx Ry VyKx Z ‘
Согласно законам механики существует связь между кинетической
энергией движущегося тела Т, проекциями скоростей и векторов К и М:
дТ „ дТ дТ
“ TV ’ Ку ” ~diV ’ Kz ~ dVz ’ I
дТ дТ дТ
R у 5 R Z
да>х dco-p dcoz
(1.22)
Выражения (1.22) позволяют получить в явной форме зависимости
проекций векторов количества и момента количества движения от
составляющих угловой и линейной скоростей, так как именно ими
определяется величина кинетической энергии МПО.
Морские подвижные объекты отличаются тем, что в процесс собст-
венного движения они вовлекают прилегающие к ним слои окружающей
среды (жидкость, воздух). Частицы воды, находящиеся вблизи корпуса
движущегося корабля, из-за вязкости жидкости начинают перемещаться,
приобретая определенную кинетическую энергию за счет работы главной
энергетической установки судна. МПО и окружающая его среда образуют
взаимосвязанную целостную в энергетическом отношении систему.
Поэтому для расчета параметров движения объекта следует исходить
из анализа суммарной кинетической энергии, включающей в себя, наряду
с энергией самого твердого тела, присоединенную кинетическую энергию
20
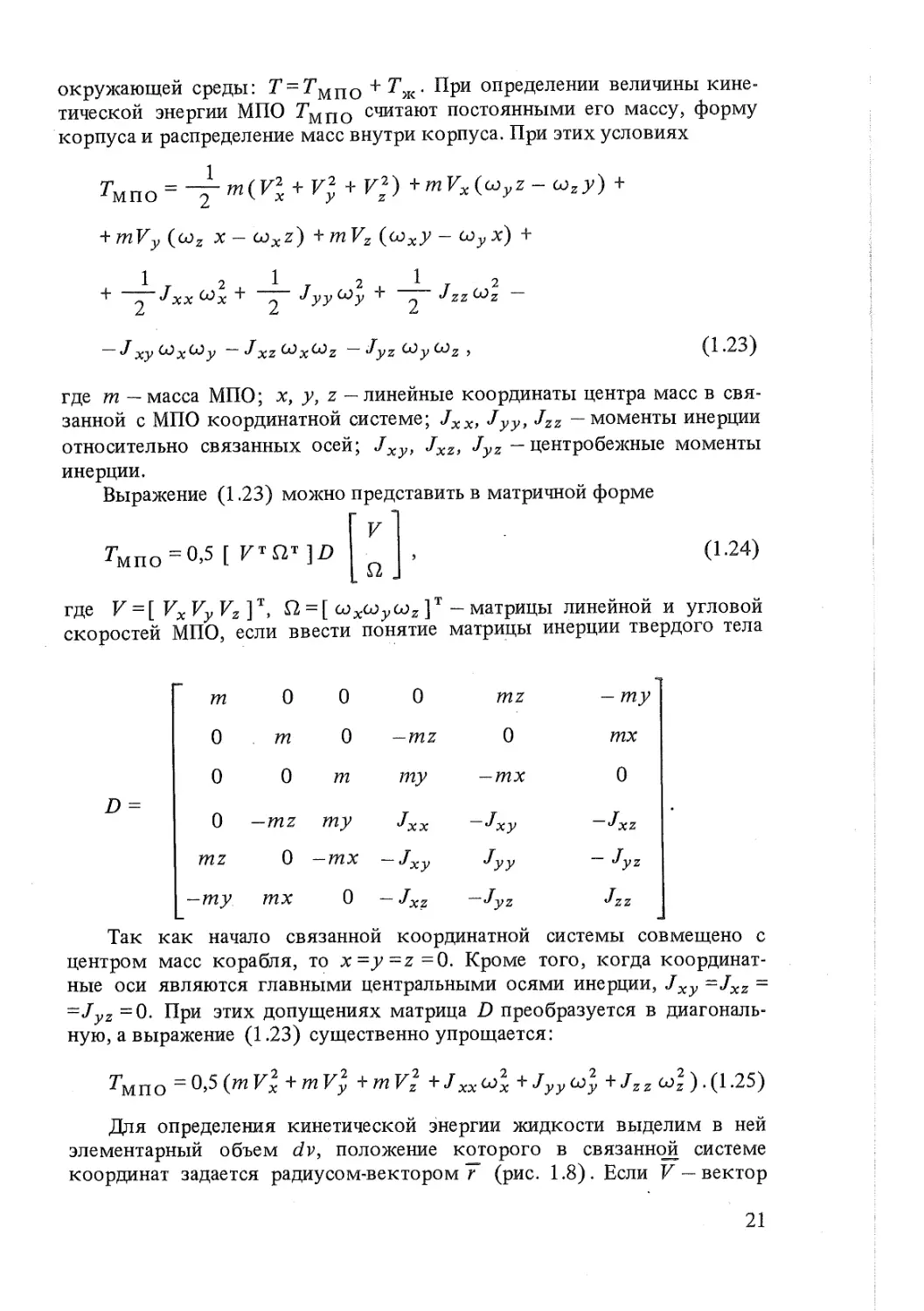
окружающей среды: Г = ТМПО + Тж. При определении величины кине-
тической энергии МПО Тмпо считают постоянными его массу, форму
корпуса и распределение масс внутри корпуса. При этих условиях
TMno = ^m(Vx + Vy + mVx^yz-cozy) +
+ mVy (coz x - cdxz) + mVz (ыхУ - ^y x) +
2 xx 2 2 ^zz ^z ~~
Jxy у Jxz x^z Jyz у ^z > -23)
где m — масса МПО; x, у, z — линейные координаты центра масс в свя-
занной с МПО координатной системе; Jxx, Jyy, Jzz — моменты инерции
относительно связанных осей; Jxy, Jxz, Jyz — центробежные моменты
инерции.
Выражение (1.23) можно представить в матричной форме
ГМПо=0>5 [
V
12 . ’
(1-24)
где V = [ Vx Vy Vz ]т, П = [ со xcoycoz]T—матрицы линейной и угловой
скоростей МПО, если ввести понятие матрицы инерции твердого тела
m 0 0 0 mz - my
0 . m 0 — mz 0 mx
D = 0 0 m my — mx 0
0 —mz my Jxx ~~Jxy — Jxz
mz 0 -mx ~ ^xy Jyy ~ Jyz
-my mx 0 ~ Jxz ~Jyz Jzz
Так как начало связанной координатной системы совмещено с
центром масс корабля, то х=у =z Кроме того, когда координат-
ные оси являются главными центральными осями инерции, Jxy =JXZ =
~Jyz =0. При этих допущениях матрица D преобразуется в диагональ-
ную, а выражение (1.23) существенно упрощается:
Гмпо = 0,5(wK? +mVy + mVz + Jxxa>x + Jyya)y + JZZ wf).(1.25)
Для определения кинетической энергии жидкости выделим в ней
элементарный объем dv, положение которого в связанной системе
координат задается радиусом-вектором Т (рис. 1.8). Если К —вектор
21
линейной скорости данного элементарного объема,
то его кинетическая энергия
dT-K = 0,5 pF2 dv ,
где р — массовая плотность жидкости постоянная
во всем объеме.
Рис. 1.8. К опреде-
лению кинетической
энергии среды
Полная кинетическая энергия жидкости
Тж = 0,5pfV2dv. (1.26)
Объем идеальной жидкости V ограничен поверхностью корпуса
МПО и сферой бесконечно большого радиуса, на границе которой сохра-
няется невозмущенное состояние жидкости.
В литературе, например, [12, 16], показано, что интеграл (1.26)
раскрывается в виде, подобном (1.24) :
Тж =0,5 [ FTUT] Л
(1-27)
где Л — матрица присоединенных масс и моментов инерции МПО.
Элементы Х^ квадратной матрицы Л размером 6x6 характери-
зуют количество движения и момент количества движения жидкости
при перемещении в ней корпуса МПО и позволяют выразить проекции
векторов количества движения и момента количества движения жид-
кости через составляющие скорости поступательного и вращательного
движений МПО. Значения Х/& зависят от линейных размеров, формы
корпуса МПО и выбора системы координат. Величины \ik с разными
индексами могут иметь различные размерности в зависимости от того,
какой частный вид движения МПО сообщает жидкости кинетическую
энергию. Если это достигается только за счет составляющих линейной
скорости, то кинетическая энергия жидкости характеризуется при-
соединенными массами. Энергия, обусловленная вращательным движе-
нием МПО, определяется присоединенными моментами инерции.
В случае сочетания поступательного и вращательного движений
МПО для вычисления кинетической энергии жидкости необходимо
дополнительно ввести понятие присоединенных статических моментов.
Оказывается, что при i = 1, 2, 3, к -1, 2, 3 Xz^ называются присоединен-
ными массами с размерностью массы, при i =4, 5, 6, k-^t 5, 6 \ik яв-
ляются присоединенными моментами инерции с размерностью момента
инерции, при i =1, 2, 3, &=4, 5, 6, и i =4, 5, 6, к = 1, 2, 3 Xik имеют раз-
мерность статического момента и определяются как статические момен-
ты. Матрица Л обладает свойством симметрии [ 12]: Х/& = \ki.
В связи с тем, что сам корпус МПО обладает определенной симмет-
рией, ряд элементов матрицы Л обращается в ноль. Так симметрия
корпуса относительно диаметральной плоскости хОу делает малозначи-
мыми Х13, Х14, Х15, Х23, Х24, Х25, Х36, Х46, Х56. Если плоскостью
симметрии является плоскость палубы xOz, нулевые значения при-
22
НИМЯЮТ X J 2 > ^14з 1.6 j ^2 3j Х34, ^36j.^52> Х54, ^56* При СИММСТрИИ
МПО относительно продольной оси Ох значимыми остаются лишь диаго-
нальные элементы Xi t Х22 ^зз ^44^5 5 ^бб> а также два внедиагональ-
ных элемента Х35 и Х26. И, наконец, когда МПО рассматривают как
эллипсоид вращения, матрицу Л считают диагональной.
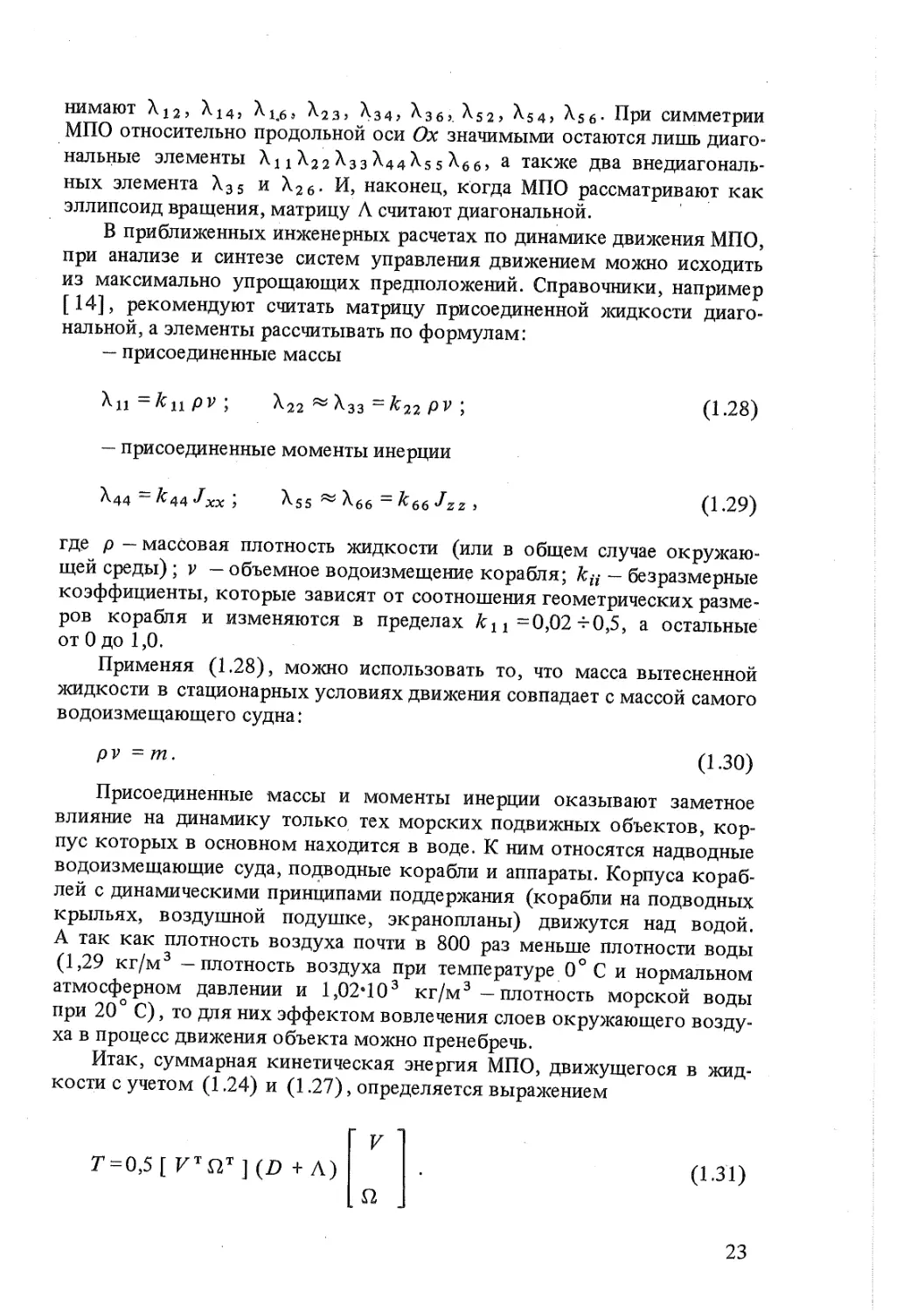
В приближенных инженерных расчетах по динамике движения МПО,
при анализе и синтезе систем управления движением можно исходить
из максимально упрощающих предположений. Справочники, например
[14], рекомендуют считать матрицу присоединенной жидкости диаго-
нальной, а элементы рассчитывать по формулам:
— присоединенные массы
Хц = 11 Р^ j Х22 ^33 = к 22 > (1 -28)
— присоединенные моменты инерции
Х44 ~ ^44 Jхх ? ^-55 ^^66 ~^6бЛг ) (1 «29)
где р — массовая плотность жидкости (или в общем случае окружаю-
щей среды) ; v — объемное водоизмещение корабля; к„ — безразмерные
коэффициенты, которые зависят от соотношения геометрических разме-
ров корабля и изменяются в пределах кх i =0,02 -т0,5, а остальные
от 0 до 1,0.
Применяя (1.28), можно использовать то, что масса вытесненной
жидкости в стационарных условиях движения совпадает с массой самого
водоизмещающего судна:
pv = т. (1.30)
Присоединенные массы и моменты инерции оказывают заметное
влияние на динамику только тех морских подвижных объектов, кор-
пус которых в основном находится в воде. К ним относятся надводные
водоизмещающие суда, подводные корабли и аппараты. Корпуса кораб-
лей с динамическими принципами поддержания (корабли на подводных
крыльях, воздушной подушке, экранопланы) движутся над водой.
А так как плотность воздуха почти в 800 раз меньше плотности воды
(1,29 кг/м3 — плотность воздуха при температуре 0° С и нормальном
атмосферном давлении и 1,02е! О3 кг/м3 — плотность морской воды
при 20° С), то для них эффектом вовлечения слоев окружающего возду-
ха в процесс движения объекта можно пренебречь.
Итак, суммарная кинетическая энергия МПО, движущегося в жид-
кости с учетом (1.24) и (1.27), определяется выражением
Т = 0,5 [ Ит Пт ] (Z) + Л)
F
П
(1.31)
23
При всех оговоренных допущениях, а именно :
— линейная и угловая скорости движения определяются в связанной
координатной системе, начало которой совмещено с полюсом объекта;
— корпус корабля принимается подобным эллипсоиду вращения,
суммарная матрица инерции D 4- Л является диагональной, а ее элемен-
ты с учетом (1.28) — (1.30) имеют вид
4-&п)т;
J X ~ 0 + ^44) XX ?
тпу - mz = (1 4-^22)^-;
JУ JZ бб') ^уу
(1.32)
кинетическая энергия
Т= 0,5(mxKx2 +myVy + mzVz +Jx^x + Jy^>y + Jz“>}). (133)
С помощью выражения (1.33) определяют проекции векторов
количества движения и момента количества движения в соответствии
с формулами (1.22)
Кх X Vx 5 Ку у Vy > Kz Z Vz 5
L х JХ^ X) У Jу ^у \ L z J z z •
(1.34)
С учетом (1.34) уравнения динамики движения МПО (1.21) могут
быть записаны только через составляющие линейной и угловой скоростей
вращения. Так как согласно (1.32)
ту
O)yLz~cozLy=0 и VyKz-VzKy=0i
то общая форма уравнений динамики МПО приобретает вид
dVx ч
4" TYl z <^у Vz И? у COZ Vy R х ?
dVy
< ttixcoz Vx — 777z ^XVZ — R-y \
dVz
4-tiiy<x)xVy — mxa)yVx— Rz ;
at I
da>x (
dt x
dcoy
j ^x^z (Zx ~ Jz ) + Vx Vz (ttix — THz) —My ;
at
da)z
(^y ~~ VxVy (,my ~ mx) ~M2 .
mz
(1.35)
у
Z
Выражения (1.35) требуют дальнейшей конкретизации — раскрытия
зависимостей внешних сил и моментов в правых частях уравнений
24
от параметров движения, состояния средств управления и ветро-волно-
вых возмущений применительно к определенным типам МПО.
Все внешние силы и моменты могут быть разбиты на пять основных
категорий:
1) аэродинамические силы и моменты на корпусе;
2) гидродинамические силы и моменты на корпусе;
3) силы веса и водоизмещения;
4) управляющие силы и моменты, создаваемые движителями и дру-
гими средствами управления корабля;
5) силы и моменты, обусловленные ветро-волновыми возмущения-
ми, которые появляются в результате воздействия течений, морского
волнения и ветра.
1.6. Гидродинамические и аэродинамические силы
и моменты
Силовое взаимодействие корпуса МПО с окружающей
средой обусловлено не только инерционностью, но и вязкостью воды
и воздуха. Инерционность среды уже нашла свое отражение в присоеди-
ненных массах и моментах инерции, которые вошли как коэффициенты
в уравнения динамики (1.35). Вязкие свойства жидкости и воздуха
приводят к появлению гидродинамических и аэродинамических сил и мо-
ментов. Физические процессы движения тела в водной и воздушной сре-
дах качественно подобны, а различаются только количественными пока-
зателями (массовой плотностью, коэффициентом вязкости, скоростью
потока и т. п.). Поэтому математические выражения гидродинамических
и аэродинамических сил и моментов имеют одинаковую форму.
Если бы жидкость была идеальной, т. е. лишенной вязкости, то при
обтекании потоком такой жидкости гладкой поверхности тела скорость
потока во всех его точках была бы одинаковой и частицы жидкости
скользили вдоль поверхности, не испытывая торможения. В реальной
жидкости, обладающей вязкостью, частицы жидкости, прилегающие
к поверхности тела, сцепляются с ним и приобретают скорость движу-
щегося тела. Частицы жидкости, отстоящие от поверхности тела, имеют
меньшую скорость.
Весь объем потока при обтекании тел вязкой жидкостью можно
условно разделить на три зоны (рис. 1.9) :
1) пограничный слой, представляю-
щий область потока вдоль поверхности
тела, где возникают значительные силы
вязкости;
2) поток вне пограничного слоя с
незначительными силами вязкости;
3) область гидродинамического сле-
да за телом, в которой на структуре
Рис. 1.9. Образование гидродина-
мических сил
25
потока существенно сказываются характер течения жидкости
и явления, происходящие в пограничном слое.
Поперечные размеры пограничного слоя малы по сравнению с ли-
нейными размерами тела. В нем происходит интенсивное изменение
скорости потока относительно движущегося тела от нулевого значения
на поверхности тела до скорости движения тела на внешней границе
пограничного слоя.
На изменение характера потока жидкости в зонах 1 и 3 расходуется
определенная энергия, затрачиваемая на преодоление сил вязкого трения,
составляющих силы гидродинамического сопротивления.
Влияние вязкости жидкости на скорость потока в носовой части
тела, где толщина пограничного слоя невелика, мало изменяется. При
приближении к хвостовой оконечности тела разность скоростей идеаль-
ной и вязкой жидкостей становится значительной. Это приводит к воз-
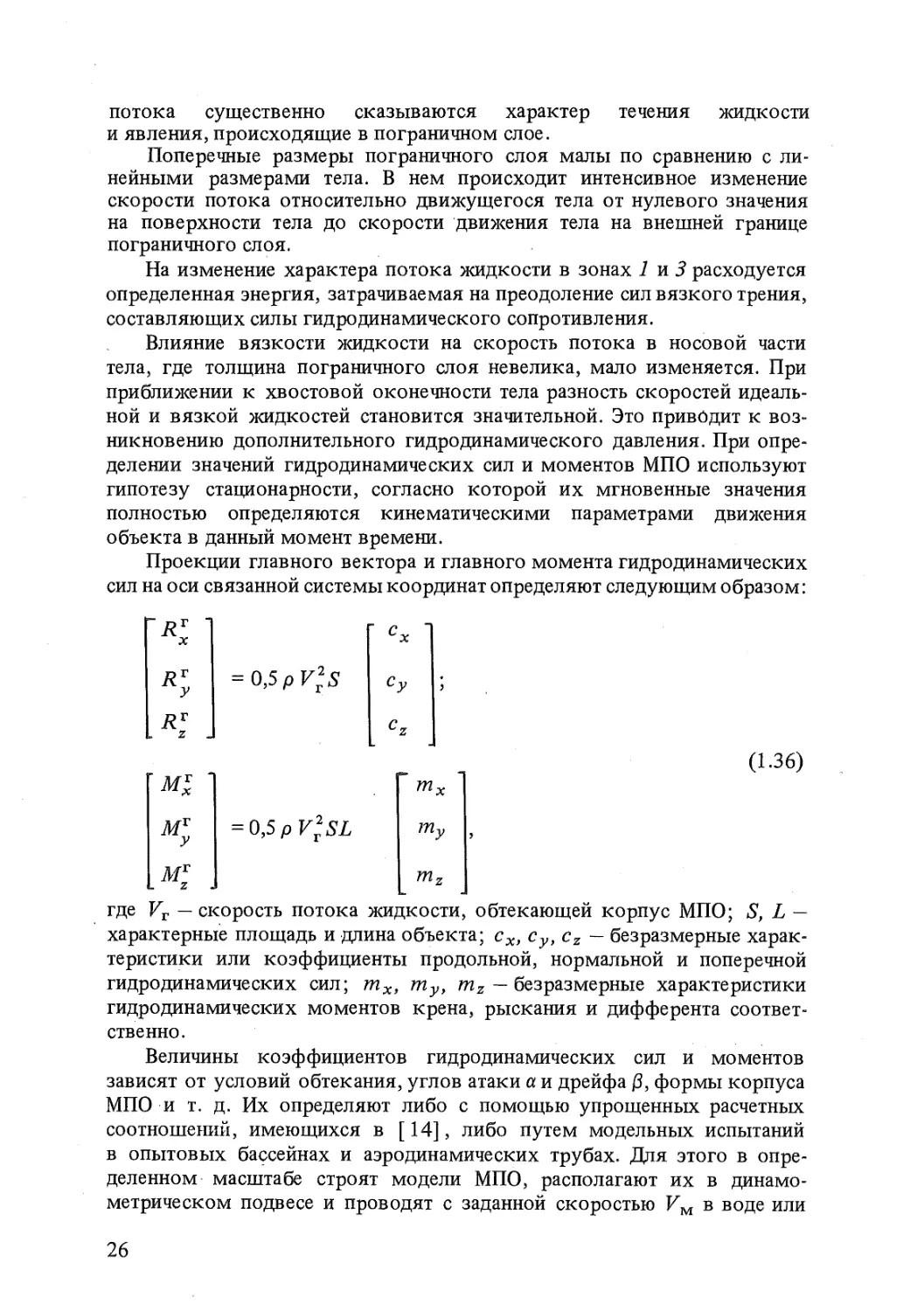
никновению дополнительного гидродинамического давления. При опре-
делении значений гидродинамических сил и моментов МПО используют
гипотезу стационарности, согласно которой их мгновенные значения
полностью определяются кинематическими параметрами движения
объекта в данный момент времени.
Проекции главного вектора и главного момента гидродинамических
сил на оси связанной системы координат определяют следующим образом:
су
cz
М*
(1.36)
Мту
= 0,5 pV^SL
ЛГ
™х
ту
mz
где Кг — скорость потока жидкости, обтекающей корпус МПО; S, L —
характерные площадь и длина объекта; сХ) су, cz — безразмерные харак-
теристики или коэффициенты продольной, нормальной и поперечной
гидродинамических сил; тх, ту, mz — безразмерные характеристики
гидродинамических моментов крена, рыскания и дифферента соответ-
ственно.
Величины коэффициентов гидродинамических сил и моментов
зависят от условий обтекания, углов атаки а и дрейфа 0, формы корпуса
МПО и т. д. Их определяют либо с помощью упрощенных расчетных
соотношений, имеющихся в [ 14], либо путем модельных испытаний
в опытовых бассейнах и аэродинамических трубах. Для этого в опре-
деленном масштабе строят модели МПО, располагают их в динамо-
метрическом подвесе и проводят с заданной скоростью Им в воде или
26
обдувают воздухом в аэродинамических трубах. При этом фиксируют
силы и моменты z, у zi действующие на модель МПО, а за-
тем рассчитывают характеристики гидродинамических сил и моментов
по формулам
л л V Т
где qM =0,5 р — скоростной напор в бассейне или трубе; 5М, ZM —
характерные площадь и длина модели.
Необходимыми условиями переноса на реальный МПО экспери-
ментальных данных, полученных на модели, являются условия геометри-
ческого и динамического подобия. Считается, что условие динамического
подобия выполняется при равенстве чисел Рейнольдса для модели и
натурного образца, которое определяется формулой Re = F£/p, где
v — кинематическая вязкость жидкости (или воздуха).
Для подобия необходимо, чтобы
VL/V=VMLM/vM.
Следовательно, отношение скоростей потока воды или воздуха
при модельных испытаниях и в натуре определяется соответствующими
отношениями вязкости сред и длин модели и объекта:
Vm/V=LVm/Lmv.
Отметим, что если модельные испытания для определения гидроди-
намических характеристик проводятся в аэродинамической трубе при
масштабе модели 1:10, то скорость воздушного потока в ней должна
быть примерно в 150 раз выше номинальной скорости движения МПО,
так как кинематическая вязкость воздуха превосходит соответствую-
щий показатель для воды в 14,54 раза [7]. Поэтому, чтобы избежать
больших энергетических затрат при испытаниях, стремятся проводить
их в однородных средах, когда рм/р=1. Гидродинамические харак-
теристики обычно определяют по результатам моделирования в бассей-
нах, а аэродинамические — в трубах.
Для МПО, одна часть корпуса которого находится в воде, а другая
в воздухе, силы и моменты взаимодействия с окружающей средой
представляются в виде суммы аэродинамической и гидродинамической
составляющих. Проекции главного вектора и главного момента аэро-
динамических сил на оси, связанной с МПО системы координат могут
быть определены по аналогии с (1.36), но вместо гидродинамических
характеристик должны быть использованы коэффициенты аэродинами-
ческих сил и моментов, а также скоростной напор воздушного потока,
определяемый плотностью и скоростью воздуха.
Коэффициенты гидроаэродинамических сил сх, су, cz и моментов
mx, my> mz зависят от ориентации корпуса МПО, условий обтекания,
27
формы корпуса и угловой скорости изменения его положения относи-
тельно потока. Изменение формы корпуса реальных МПО происходит
в результате поворотов гидро аэродинамических рулей. Поэтому соот-
ветствующие коэффициенты МПО записывают в виде нелинейных за-
висимостей
Х,У ,Z т X, у, z (я, Р 5 > ^>z > , 5В ) >
где 5Г и 5В — углы поворотов горизонтальных и вертикальных рулей
соответственно.
Степень зависимости гидродинамических коэффициентов от ориен-
тации корпуса МПО в потоке, характера обтекания, параметров дви-
жения и отклонения рулей различна. Многочисленными эксперимен-
тальными исследованиями установлено, что значимыми являются сле-
дующие функциональные соотношения:
сх “ сх («> 8Г> 6В); Л
Су Су ( й, Sp, СОz ) ,
cz ~ cz (3 > ^у ) >
I (137)
тх=тх(р)8в, сох, соу),
ту =ту(Р,5в> сох,со^),
mz = mz (й, 5Г> coz) .
Зависимости (1.37), как правило, нелинейны и задаются графически
или в виде таблиц.
1.7. Вес и водоизмещение МПО
МПО любого класса испытывают на себе действие силы
веса, которая ориентирована по вертикальной оси полусвязанной коор-
динатной системы. Будучи приложенной к центру масс корабля, она
не создает кренящий или дифферентующий моменты, но при произ-
вольной пространственной ориентации МПО раскладывается на про-
дольную, поперечную и вертикальную составляющие в подвижной
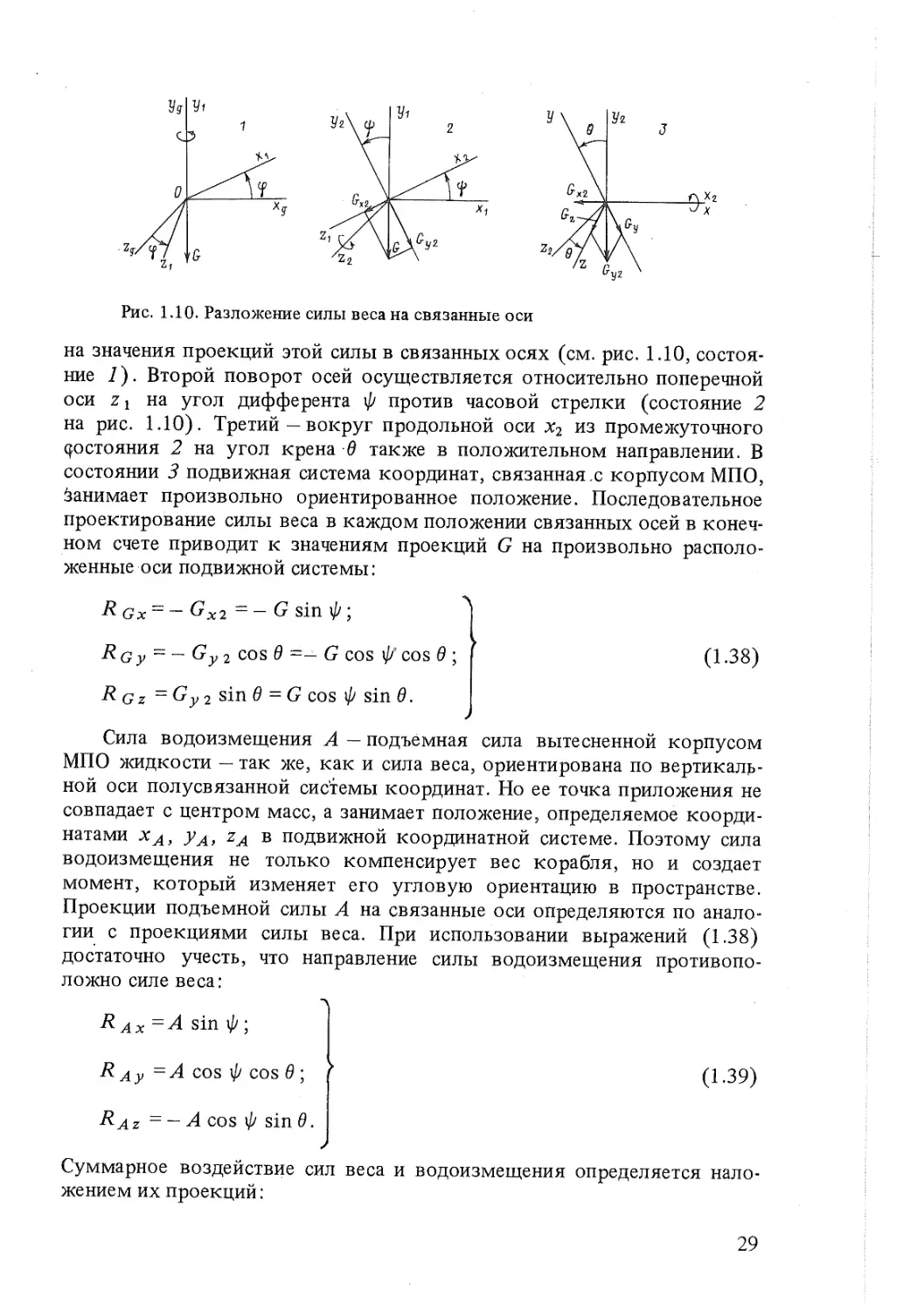
координатной системе. Это разложение иллюстрирует рис. 1.10. Оно
осуществляется тремя последовательными поворотами связанной коор-
динатной системы Oxyz из начального положения, совмещенного с полу-
связанными осями Oxgygzg, как это делается при определении углов
Эйлера. Первый поворот на угол рыскания у? совершается вокруг верти-
кальной неподвижной оси yg в плоскости xgOzg перпендикулярной
направлению силы веса G. Поэтому рыскание корабля не сказывается
28
Рис. 1.10. Разложение силы веса на связанные оси
на значения проекций этой силы в связанных осях (см. рис. 1.10, состоя-
ние 1). Второй поворот осей осуществляется относительно поперечной
оси zx на угол дифферента ф против часовой стрелки (состояние 2
на рис. 1.10). Третий — вокруг продольной оси х2 из промежуточного
достояния 2 на угол крена в также в положительном направлении. В
состоянии 3 подвижная система координат, связанная,с корпусом МПО,
Занимает произвольно ориентированное положение. Последовательное
проектирование силы веса в каждом положении связанных осей в конеч-
ном счете приводит к значениям проекций G на произвольно располо-
женные оси подвижной системы:
Rgx = ~ Gx2 = - G sin ф ;
R G у ~ " &у 2 cos 6 =~ G cos ф" cos в ;
A Qz = Gy 2 sin 0 = G cos ф sin 0.
(1.38)
Сила водоизмещения А — подъемная сила вытесненной корпусом
МПО жидкости — так же, как и сила веса, ориентирована по вертикаль-
ной оси полусвязанной системы координат. Но ее точка приложения не
совпадает с центром масс, а занимает положение, определяемое коорди-
натами хА, yAf zA в подвижной координатной системе. Поэтому сила
водоизмещения не только компенсирует вес корабля, но и создает
момент, который изменяет его угловую ориентацию в пространстве.
Проекции подъемной силы А на связанные оси определяются по анало-
гии с проекциями силы веса. При использовании выражений (1.38)
достаточно учесть, что направление силы водоизмещения противопо-
ложно силе веса:
X
Я Ах = Л sin ф ;
А Ау =А cos ф cos 3 ; г
(1-39)
R А z = - A cos ф sin 0.
У
Суммарное воздействие сил веса и водоизмещения определяется нало
жением их проекций:
29
Ragx = О* - G) sin ф;
^AGy = (Я - G)cos ф cos 0 ;
Ragz = —(A - G) cos ф sin в,
где разность A — G представляет собой плавучесть корабля.
Сила веса так же, как и масса МПО на ограниченных временных
интервалах, остается постоянной, в то время как сила водоизмещения
может изменяться, например, в результате морского волнения. Если
в стационарных невозмущенных условиях движения вес корабля и его
водоизмещение взаимно компенсируются, то при плавании на волнении
их суммарное силовое воздействие проявляется существенно. Ненуле-
вая плавучесть характерна также для режимов всплытия и погружения
по дв одных аппаратов.
Проекции момента силы водоизмещения на связанные оси имеют вид
МАх R-АгУА ~"^Ау^А\
^Ау ~~ Rax^A ~~ Raz^A >
М-Az ~ RAy^A ~~ RAxyA ?
(1.40)
Их можно преобразовать, подставив (1.39) в (1.40). Тогда кренящий
момент силы водоизмещения
МАх =-Azacos ф cos в - АуА cos ф sin 9,
дифферентующий момент
MAz = Аха cos ф cos 9 - Аул sin ф
и момент рыскания
МАу = Аха cos ф sin 9 + Aza sin ф.
Моменты МАх, МАу, MAz существуют даже при нулевой плаву-
чести. В связи с тем, что они зависят от углов крена и дифферента, при
постоянной силе водоизмещения А - const, можно найти условия равно-
весия, т. е. такое угловое положение МПО, при котором моменты сил
водоизмещения обращаются в ноль:
?а
tg0o = - — ;
Уа
ХА %А '
tg ф0 =--- cos 90 = — - sin 9 о.
Уа Уа
30
Балансировка корабля на тихой воде достигается правильным
расположением груза. При этом стремятся получить нулевой крен и
небольшой (1—2°) дифферент на корму. Бортовая и килевая качка
при волнении моря происходит в окрестностях балансировочных зна-
чений углов крена и дифферента.
1.8, Силы и моменты средств управления МПО
Средства управления обеспечивают поступательное дви-
жение МПО в заданном направлении при поддержании в определенных
пределах его кинематических параметров. К ним прежде всего относят
главные движители, которые сообщают МПО линейную скорость пере-
мещения центра масс. Управление направлением движения достигается
с помощью гидродинамических, а на экранопланах и судах на воздушной
подушке аэродинамических вертикальных рулей, подруливающих
устройств или движительно-рулевых колонок. На подводных аппаратах
для стабилизации крена и дифферента используют горизонтальные
гидродинамические рули, элероны, закрылки.
При работе средств управления возможны и некоторые побочные
явления. Так, движитель помимо силы тяги создает дифференту ющий
момент. Гидродинамические рули образуют поворачивающий момент
на корпусе относительно вертикальной оси и одновременно дополни-
тельное сопротивление в продольном направлении, а также боковую
силу, создающую неконтролируемый снос корабля. При анализе сил
и моментов средств управления рассматривают главные управ-
ляющие силовые воздействия и сопутствующие им возмущающие
факторы.
Наиболее распространенным типом движителя МПО является гребной
винт, упор или сила тяги которого создается за счет реакции воды,
отбрасываемой при его вращении лопастями. Форма лопастей образо-
вана винтовыми поверхностями. МПО, которые не имеют непосредст-
венного контакта с водой — суда на воздушной подушке, снабжают
воздушными винтами, а экранопланы — турбореактивными двигате-
лями. На некоторых судах устанавливают винты регулируемого шага
(ВР1П), у которых изменяется положение лопастей и таким образом
обеспечивается регулирование силы тяги. Для быстроходных подводных
аппаратов используют соосные гребные винты противоположного вра-
щения, благодаря чему достигается взаимная компенсация кренящих
моментов, сопутствующих работе винтов.
Помимо винтов на судах встречаются крыльчатые движители, греб-
ные колеса, водометные движители. Однако широкого распространения
эти устройства не получили.
Высокая эффективность, простота конструкции и передачи мощности
от двигателя, низкая стоимость изготовления, надежность эксплуатации
делают гребной винт одним из самых экономичных судовых движителей.
31
Сила тяги гребного винта вдоль оси вала опеделяется формулой [ 14]
Тд = Сд (5Ш.В, 0д)ри2<Л (1.41)
где п, d — частота вращения и диаметр винта; сд — коэффициент упора,
который определяется конструктивными особенностями и шагом винта
а также углом направления потока жидкости относительно оси
винта Рд.
Гребные винты позволяют изменять скорость МПО в широких
пределах, обеспечивают простоту управления при высоком коэффи-
циенте полезного действия. Как следует из (1.41), изменение силы
тяги винта, а значит и скорости МПО, возможно за счет вариации частоты
вращения винта п или коэффициента упора сд. В первом случае управле-
ние скоростью хода МПО достигается изменением частоты вращения
вала главного двигателя, а во втором — поворотом лопастей гребного
винта, т. е. установкой разного шага винта 5Ш>В при неизменной ско-
рости вращения главного двигателя.
При проектировании МПО, строительстве корпуса, монтаже движи-
телей и механизмов главной энергетической установки достигается
параллельность силы тяги продольной оси МПО. Поэтому проекция
упора движителей на продольную ось связанной координатной системы
совпадает с величиной тяги при одновальной движительной установке
или образуется суммой тяг каждого винта многовальной установки
д х Гд или R д х 2} Гд j,
но при этом проекции силы тяги на вертикальную и поперечную оси
равны нулю: Rny =R^Z =0.
В подавляющем большинстве случаев движущая сила винта не про-
ходит через начало связанной системы координат и поэтому на корпусе
судна появляются дополнительные моменты.
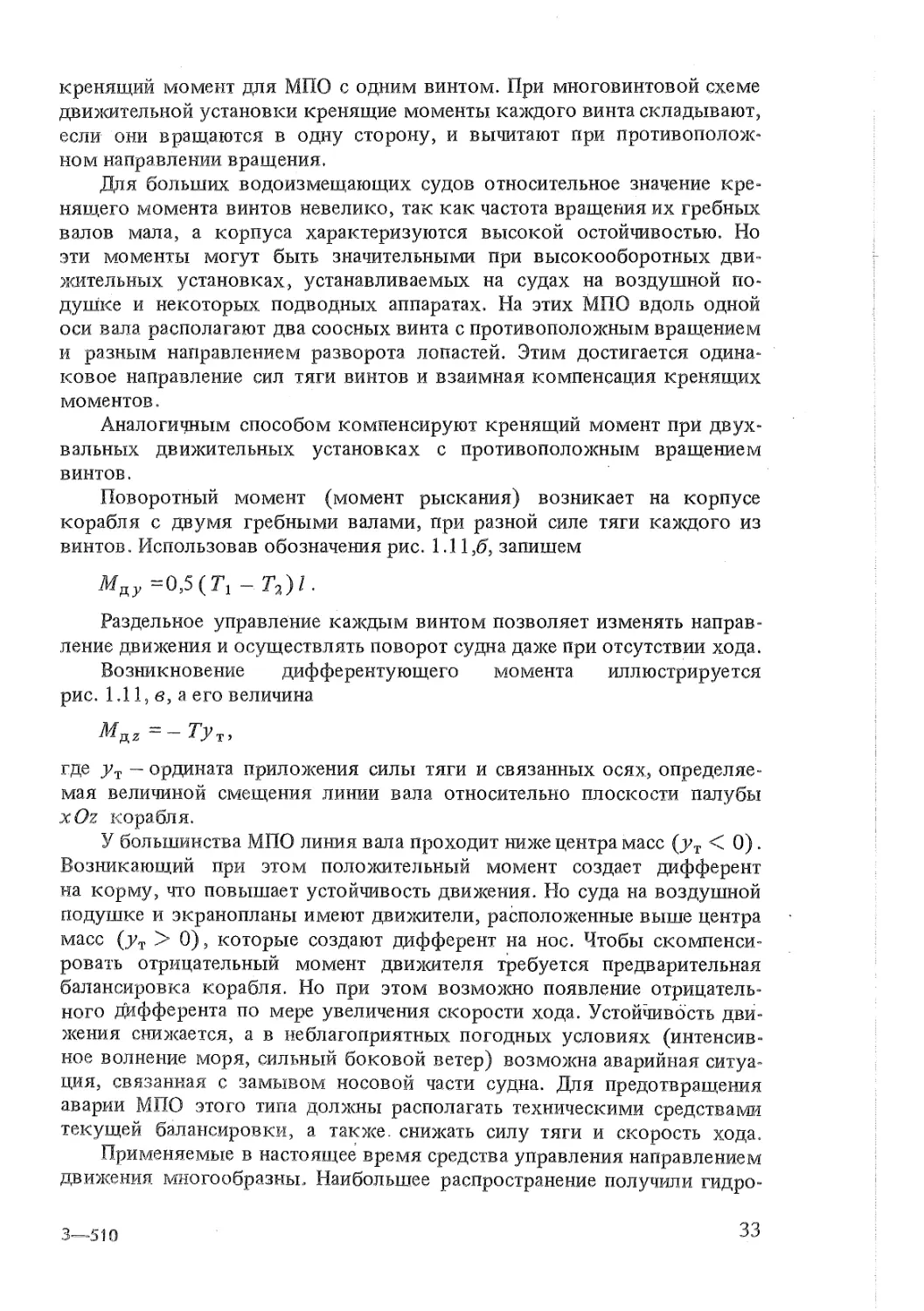
Кренящий момент Мдх возникает из-за сопротивления жидкости
вращению винта (рис. 1.11,я). Величину момента определяют [14]
выражением Мдх = тд (5Ш.В, Рд) р п2 d5, которое характеризует
Рис. 1.11. Кренящий (я), поворотный (5) и дифферентующий (в) моменты
при работе движителей
32
кренящий момент для МПО с одним винтом. При многовинтовой схеме
движителы-юй установки кренящие моменты каждого винта складывают,
если они вращаются в одну сторону, и вычитают при противополож-
ном направлении вращения.
Для больших водоизмещающих судов относительное значение кре-
нящего момента винтов невелико, так как частота вращения их гребных
валов мала, а корпуса характеризуются высокой остойчивостью. Но
эти моменты могут быть значительными при высокооборотных дви-
жительных установках, устанавливаемых на судах на воздушной по-
душке и некоторых подводных аппаратах. На этих МПО вдоль одной
оси вала располагают два соосных винта с противоположным вращением
и разным направлением разворота лопастей. Этим достигается одина-
ковое направление сил тяги винтов и взаимная компенсация кренящих
моментов.
Аналогичным способом компенсируют кренящий момент при двух-
вальных движительных установках с противоположным вращением
винтов.
Поворотный момент (момент рыскания) возникает на корпусе
корабля с двумя гребными валами, при разной силе тяги каждого из
винтов. Использовав обозначения рис. 1.11Д запишем
М^у =0,5 -Т2}1.
Раздельное управление каждым винтом позволяет изменять направ-
ление движения и осуществлять поворот судна даже при отсутствии хода.
Возникновение дифферентующего момента иллюстрируется
рис. 1.11, в, а его величина
z ~ ~~ Ту т ?
где ут — ордината приложения силы тяги и связанных осях, определяе-
мая величиной смещения линии вала относительно плоскости палубы
xOz корабля.
У большинства МПО линия вала проходит ниже центра масс (ут < 0).
Возникающий при этом положительный момент создает дифферент
на корму, что повышает устойчивость движения. Но суда на воздушной
подушке и экранопланы имеют движители, расположенные выше центра
масс (ут > 0), которые создают дифферент на нос. Чтобы скомпенси-
ровать отрицательный момент движителя требуется предварительная
балансировка корабля. Но при этом возможно появление отрицатель-
ного дифферента по мере увеличения скорости хода. Устойчивость дви-
жения снижается, а в неблагоприятных погодных условиях (интенсив-
ное волнение моря, сильный боковой ветер) возможна аварийная ситуа-
ция, связанная с замывом носовой части судна. Для предотвращения
аварии МПО этого типа должны располагать техническими средствами
текущей балансировки, а также, снижать силу тяги и скорость хода.
Применяемые в настоящее время средства управления направлением
движения многообразны. Наибольшее распространение получили гидро-
3—<510
33
динамические рули, поворотные кольцевые насадки на гребные винты,
подруливающие устройства и поворотные винтовые движительно-руле-
вые колонки. Гидродинамические рули и поворотные кольцевые насад-
ки на гребных винтах эффективны лишь при интенсивной работе главных
движителей, их применяют на МПО, обладающих значительными ско-
ростями перемещения. МПО, которые в рабочем режиме имеют предель-
но малые скорости, снабжают поворотными винтовыми колонками.
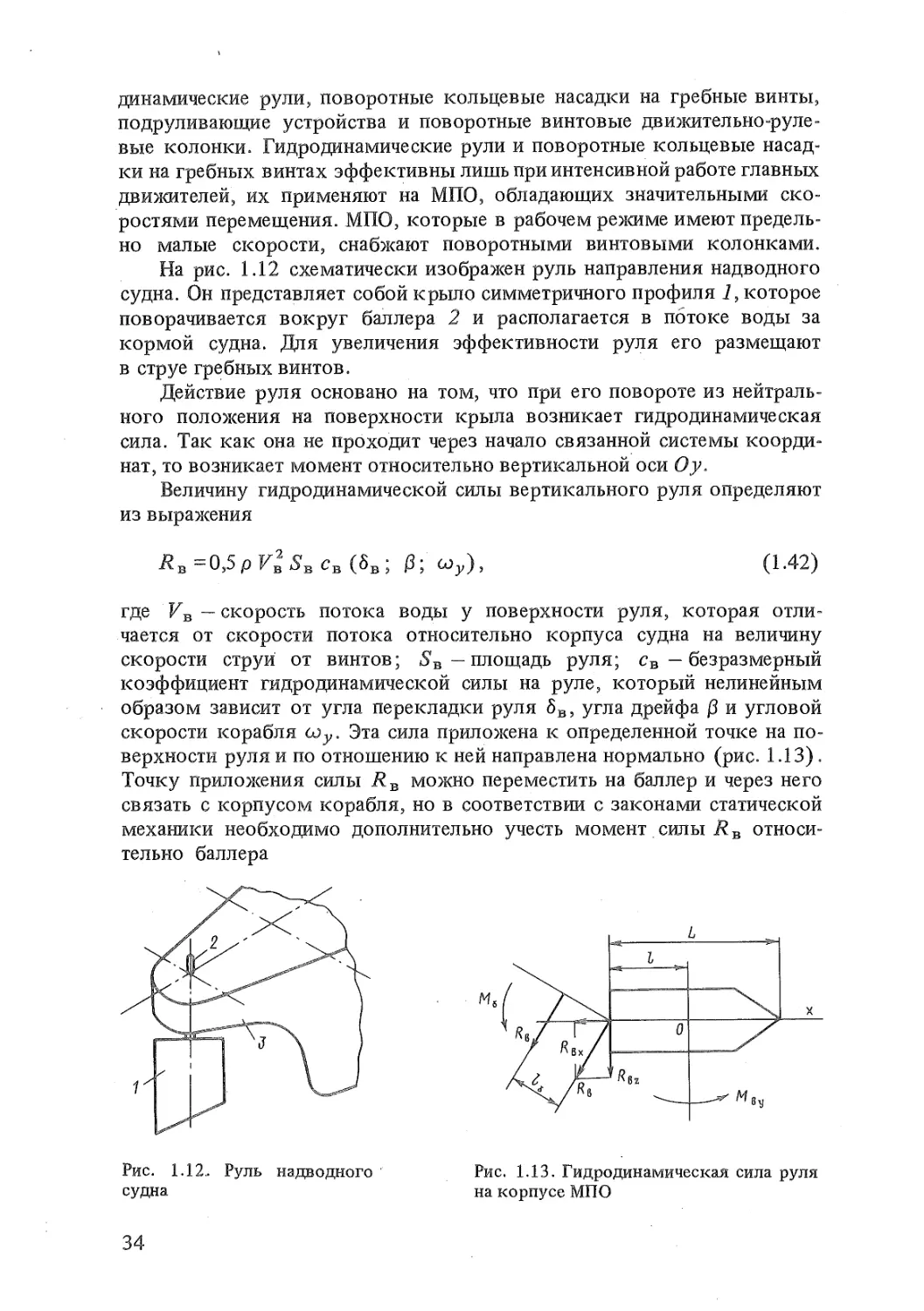
На рис. 1.12 схематически изображен руль направления надводного
судна. Он представляет собой крыло симметричного профиля 7, которое
поворачивается вокруг баллера 2 и располагается в потоке воды за
кормой судна. Для увеличения эффективности руля его размещают
в струе гребных винтов.
Действие руля основано на том, что при его повороте из нейтраль-
ного положения на поверхности крыла возникает гидродинамическая
сила. Так как она не проходит через начало связанной системы коорди-
нат, то возникает момент относительно вертикальной оси Оу.
Величину гидродинамической силы вертикального руля определяют
из выражения
7?B=0,5pFB2SBcB(5B; /3; со?), (1.42)
где Кв — скорость потока воды у поверхности руля, которая отли-
чается от скорости потока относительно корпуса судна на величину
скорости струи от винтов; 5В — площадь руля; <?в — безразмерный
коэффициент гидродинамической силы на руле, который нелинейным
образом зависит от угла перекладки руля 5В, угла дрейфа /3 и угловой
скорости корабля Эта сила приложена к определенной точке на по-
верхности руля и по отношению к ней направлена нормально (рис. 1.13).
Точку приложения силы 7?в можно переместить на баллер и через него
связать с корпусом корабля, но в соответствии с законами статической
механики необходимо дополнительно учесть момент силы К в относи-
тельно баллера
Рис. 1.12- Руль надводного
судна
Рис. 1.13. Гидродинамическая сила руля
на корпусе МПО
34
Мв,б б >
который образует сопротивление для привода рулевого устройства.
Гидродинамическая сила руля, приведенная к корпусу МПО, обра-
зует на связанных осях проекции
^ВХ <7 В *^В X (^В » 3 э *
? (1.43)
bz “ в cos Зв — (/в iSBCBZ(6B,3> <^у) >
где qB =0,5 pVB — скоростной напор на руле, свх, cBZ — коэффициенты
продольной и поперечной составляющих гидродинамической силы на
руле. Первая из них /?вд; располагается вдоль продольной оси Охи соз-
дает дополнительное сопротивление движению. Поэтому интенсивная
работа руля приводит к дополнительному расходу топлива в главной
энергетической установке корабля и снижает среднюю скорость хода.
Поперечная составляющая гидродинамической силы на руле RBZ
смещена по отношению к центру масс на расстояние I и поэтому обра-
зует момент относительно вертикальной оси
М В у R*Z I фв •S'b (^В > 3> ’ (1 .44)
где L — длина корпуса МПО; т.ву — коэффициент гидродинамического
момента руля.
Нетрудно убедиться, что величина момента Мвн обращается в ноль,
когда руль располагается в диаметральной плоскости корабля (6В =0)
или нормально к ней (6в=90°). Максимум момента в зависимости
от конструктивных особенностей руля лежит при углах перекладки
30—40°. Поэтому угол поворота пера ограничивают величиной 30°
на каждый борт для гидродинамических и 35—40° — для аэродина-
мических рулей.
Составляющие силы на руле RBX и RBZ смещены по отношению
к центру масс по вертикали на величину ув. У МПО, не имеющих кон-
такта с водой, рули располагают выше плоскости палубы (ув > 0).
Рули водоизмещающих судов располагаются ниже центра масс (ув < 0).
Поэтому гидроаэродинамические силы на рулях создают моменты
относительно осей х и у связанной системы координат. Продольная
составляющая RBX образует дополнительный дифферентующий момент
a RBZ —кренящий момент Мвх. Первый момент мал и не оказьп
вает заметного влияния на килевую качку МПО. Но влияние работы
вертикального руля на бортовую качку оказывается существенным,
особенно у малых судов.
Именно наличие момента Мву на корпусе обеспечивает управ-
ляемый поворот, изменение курса корабля и стабилизацию угла
рыскания. Однако сама боковая сила RBZ, создавая полезный управляю-
щий момент, в то же время вызывает дополнительный отрицательный
эффект: появляется поперечная скорость поступательного движения
35
центра масс и неконтролируемый боковой снос корабля, увеличивается
угол дрейфа. Это удлиняет действительный путь корабля, снижает сред-
нюю скорость движения, приводит к перерасходу топлива.
Кроме гидродинамических рулей для управления движением судов
используют средства активного управления: подруливающие устройства
(ПУ) и поворотные вспомогательные движительно-рулевые колонки
(ВДРК). Их работа не требует включения главных двигателей, поскольку
они оборудуются собственными электроприводами. Средства активного
управления предназначены для управления МПО на предельно малых
ходах и без хода, когда крайне мала или вообще отсутствует гидроди-
намическая сила обычного пассивного вертикального руля. Подрули-
вающие устройства создают поперечную движущую силу, ориентация
которой относительно корпуса МПО неизменна, а изменяется лишь ее
величина и знак. Ориентация силы тяги поворотных движительно-руле-
вых колонок, величина и знак упора винтов могут изменяться в широ-
ких пределах, чем достигается большая гибкость управления.
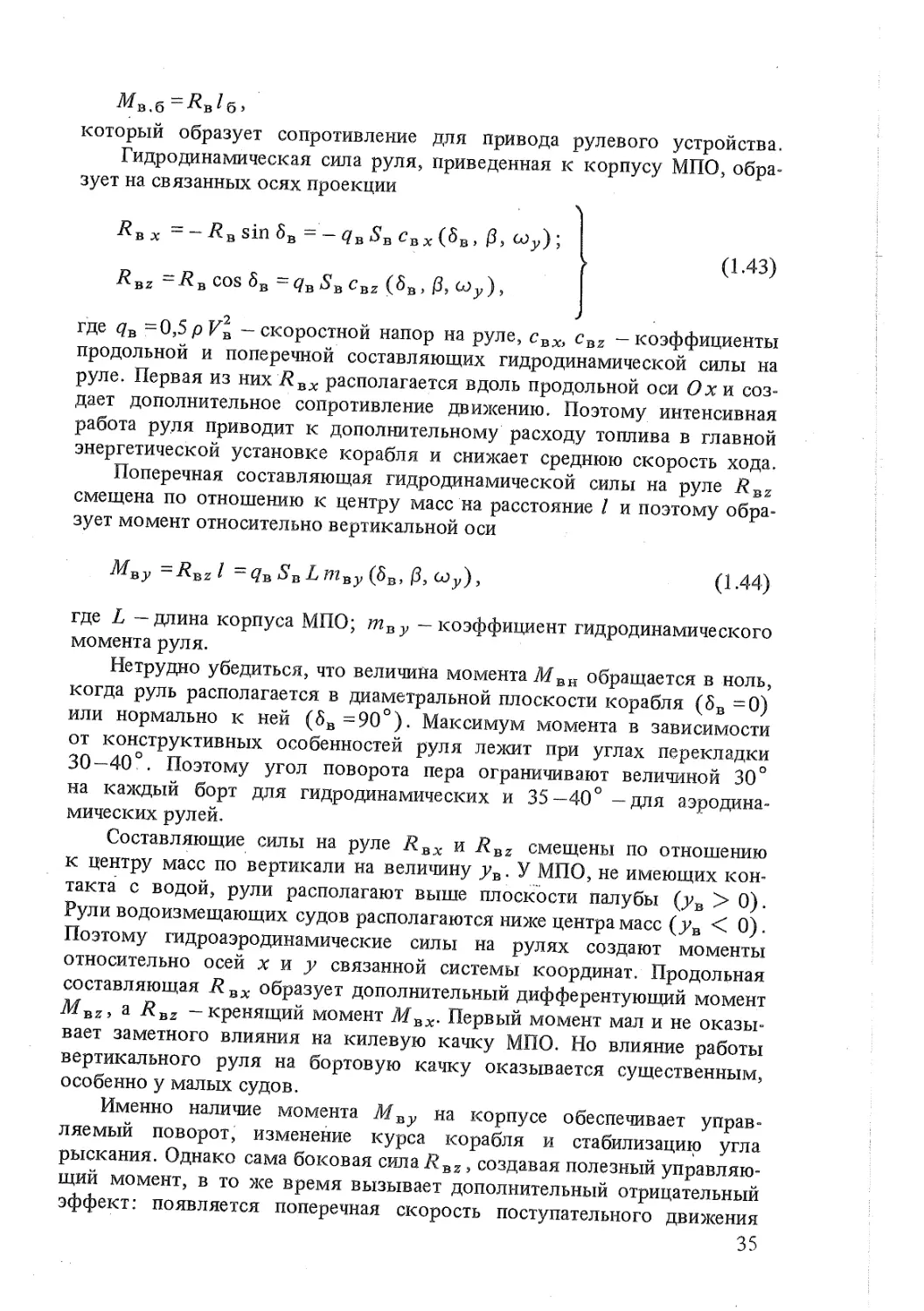
Подруливающее устройство представляет собой движитель, разме-
щенный в поперечном канале подводной части корпуса судна (рис. 1.14)
в носовой и (или) кормовой частях. При наличии носового и кормового
подруливающих устройств результирующая боковая сила на корпусе
и поворотный момент относительно вертикальной оси образуются поло-
жением каждого из них
^n.yz ~ ? ^пуу ~ ТН1 н ” TKZK .
Сила тяги подруливающих устройств определяется выражением
(1.41) для упора винта. Управление тягой осуществляется изменением
частоты вращения вала или шага винта, причем соответствующим пово-
ротом лопастей можно изменять направление тяги елевого борта (поло-
жительное направление) на правый (отрицательная тяга). Управление
подруливающими устройствами раздельное. Это позволяет создавать
самые различные сочетания боковой силы и поворотного момента,
изменять характер бокового перемещения и разворота судна. Наиболее
интересны случаи создания чистой боковой силы, когда моменты ПУ
взаимно компенсируются Тп1 н = ТК1 к, а также образование чистого
момента в результате равенства и противонаправленное™: тяг каждого
из ПУ Тн=—Тк. В первом случае реализауется боковое смещение
Рис. 1.14. Схема подрули-
вающих устройств
Рис. 1.15. Выносная
движительно-руле-
вая колонка
36
Рис. 1.17. Силы на гори-
зонтальном крыле,
боковых сил внешних воз-
Рис. 1.16. Силы и момент системы ВДРК
корабля (без разворота) или париро
мущений; во-втором — поворот судна без сноса. Такое управление
выгодно отличается от использования обычного вертикального руля,
потому что не приводит к побочным отрицательным факторам. Таким
образом реализуется принцип наиболее благоприятного развязанного
управления движением, при котором раздельная работа каждого из
средств управления оказывает влияние на кинематические параметры,
принадлежащие только одной из степеней свободы твердого тела. К
сожалению, реализация этого принципа наталкивается на сложности
технического исполнения. Сами подруливающие устройства достаточно
сложны в изготовлении, не технологичны, дорого стоят и занимают
полезное пространство внутри корпуса корабля. Поэтому их используют
главным образом на судах, специально предназначенных для выполнения
исследований на шельфе и в Океане, на буровых судах и судах для
добычи полезных ископаемых, работа которых требует динамического
позиционирования или динамической стабилизации в определенной зоне
акватории. Сравнительно небольшое число транспортных судов имеют
подруливающие устройства для повышения управляемости и маневрен-
ности, причем, как правило, на них устанавливают одно кормовое ПУ.
На судах, которые по условиям эксплуатации должны длительное
время находиться в определенной точке открытого моря, наряду с
подруливающими устройствами, широко применяют поворотные дви-
жительно-рулевые колонки. ВДРК (рис. 1.15) предсталяют собой винты,
помещенные в кольцевую насадку и вынесенные за пределы корпуса
на консоли. Вращение винтов поворотных рулевых колонок обеспечи-
вается электродвигателями. В отличие от подруливающих устройств,
они могут создавать продольную и боковую движущие силы Аркх=
и вращающий момент Л/р.к^ (рис. 1.16). Регулирование частоты
вращения винта, изменение шага и направления силы тяги в сочетании
с произвольным числом поворачивающихся колонок позволяют исполь-
зовать ВДРК в самых разнообразных режимах управления судном.
Современные поворотные винтовые колонки (трастеры) изготовляют
мощностью от 500 до 4500 кВт, их можно использовать не только как
средства управления, но и в качестве главных движителей.
Подруливающие устройства и поворотные рулевые колонки обла-
дают общим свойством — создавать движущую силу при отсутствии
37
Рис. 1.18. Горизонтальный руль (7) с закрылком (2)
3 — ось закрылка; 4 — рулевая тяга; 5 — стойка
хода судна. Поэтому их объединяют термином — средства активного
управления. Эффективность этих средств управления зависит от соот-
ношения сил тяги и гидродинамических сил на корпусе. Их управляю-
щие усилия Снижаются по мере увеличения скорости хода судна отно-
сительно воды [14]. Это свойство ограничивает использование средств
активного управления режимом позиционирования судна в заданной
точке и движением с предельно малой скоростью хода.
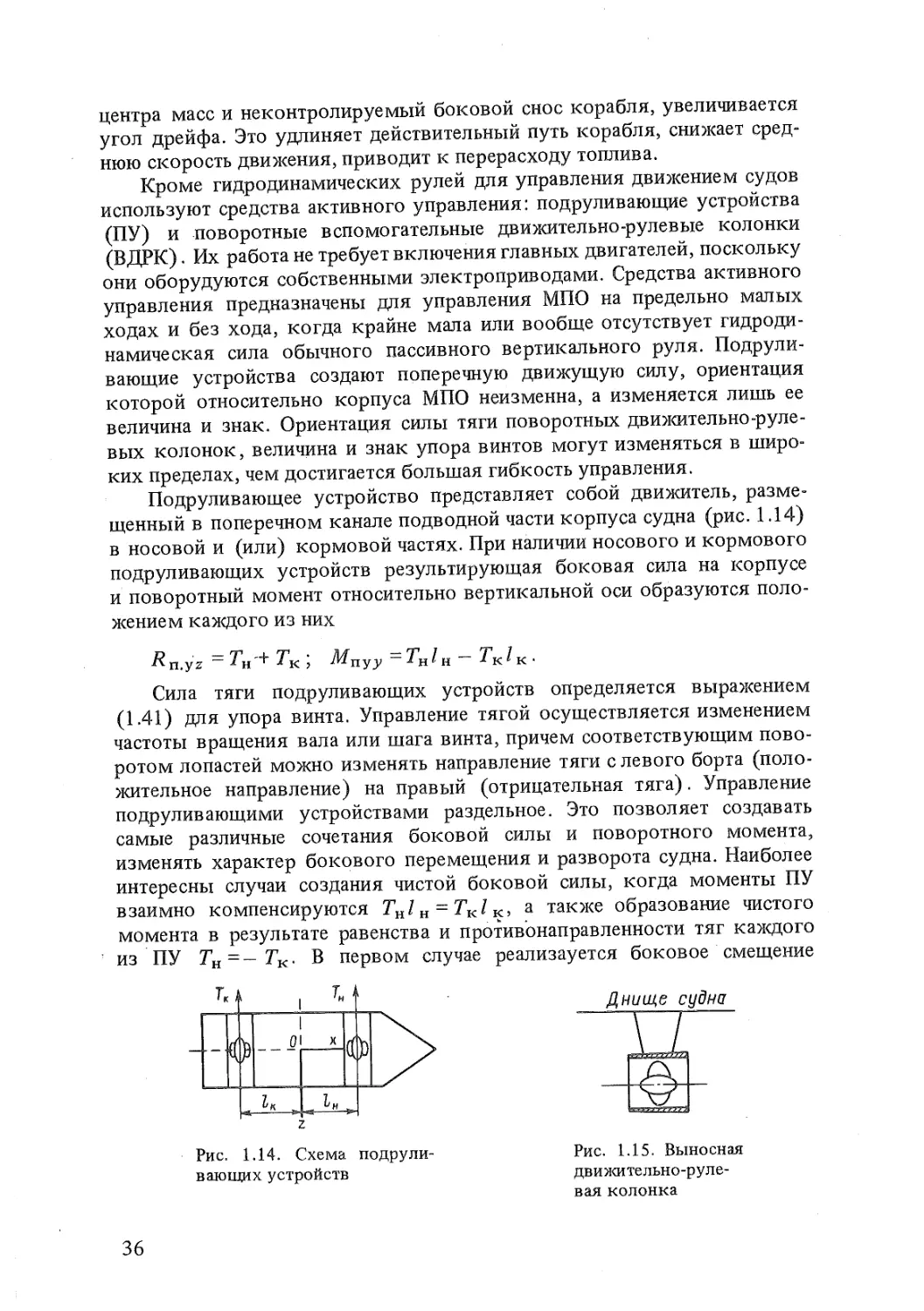
На некоторых типах МПО используют гидродинамические и аэро-
динамические рули, расположенные в горизонтальной плоскости. Си-
ловые и моментные характеристики горизонтальных и вертикальных
рулей подобны, но ориентация сил и моментов у них разная. Горизон-
тальный руль (крыло) в кормовой части корабля создает (рис. 1.17)
продольную силу сопротивления движению, вертикальную силу и диффе-
рентующий момент, которые рассчитывают по формулам, аналогичным
(1.43), (1.44):
Дгд. — — дг сгх (<5Г, <х, coz ) *
7? ру Qg S р Cp-j; ( 5p, (X , GJ £ ) J
MTZ (5r, a, coz ),
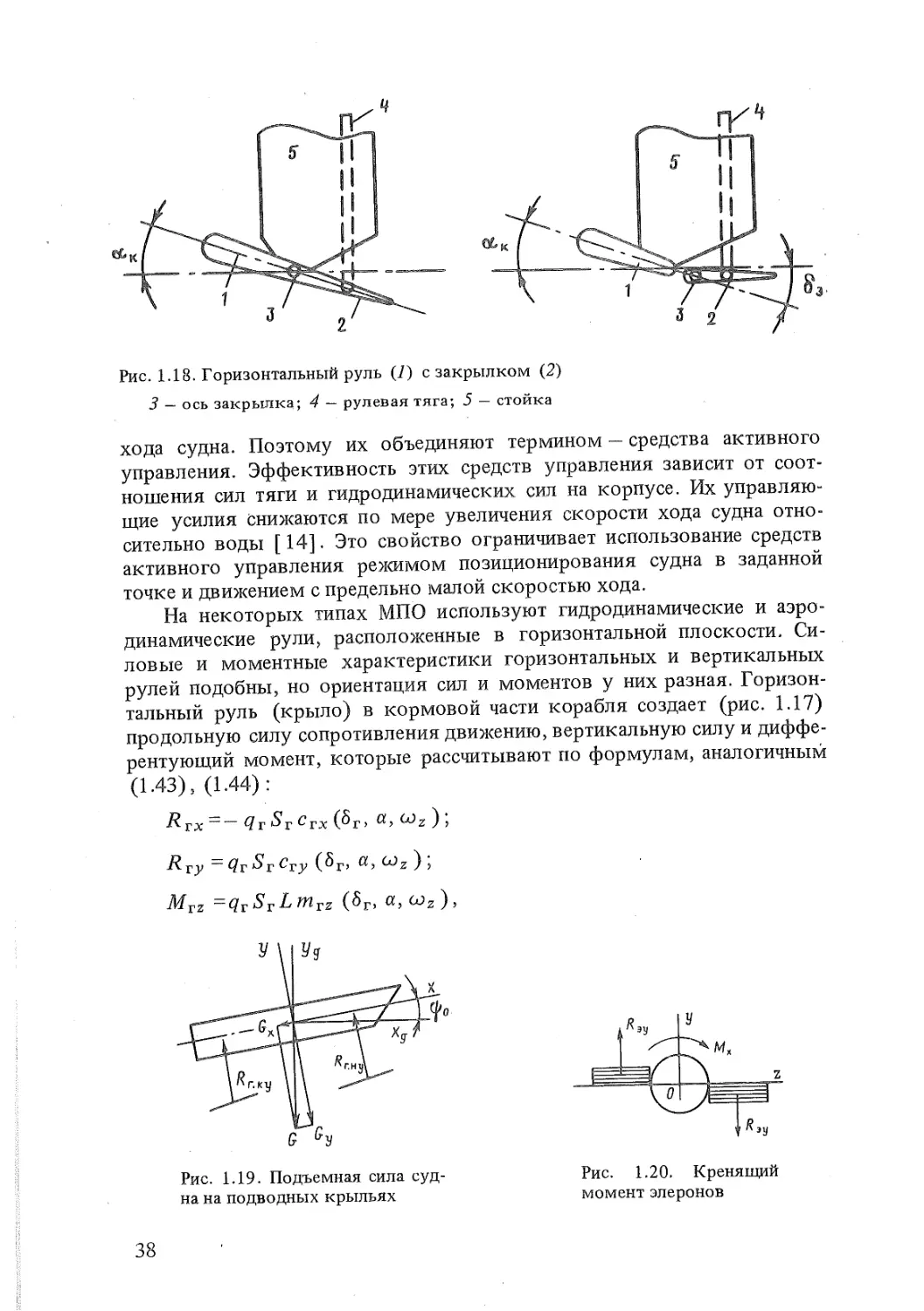
Рис. 1.19. Подъемная сила суд-
на на подводных крыльях
Рис. 1.20. Кренящий
момент элеронов
38
где =0,5 р KJ — скоростной напор потока среды на горизонтальном
руле; сгх, сту, mTZ — соответствующие коэффициенты гидроаэродина-
мических сил и момента на крыле, которые зависят от его ориентации
в потоке, определяемой углами наклона крыла 5Г и углом атаки а,
а также от угловой скорости coz .
Горизонтальные рули используют для создания управляемого диф-
ферента. Этой цели может служить неподвижное кормовое крыло.
Так как с увеличением скорости хода MTZ растет и повышается диффе-
рент на корму, то увеличивается устойчивость движения. Эффект управ-
ления дифферентом усиливается, если используется поворотное гори-
зонтальное крыло. В некоторых схемах оперения МПО передняя часть
горизонтального крыла неподвижна, а задняя (закрылок) поворачи-
вается (рис. 1.18).
В судах на подводных крыльях используют горизонтальные рули
в носовой и кормовой частях корпуса для создания подъемной силы,
компенсирующей вес корабля (рис. 1.19).
С помощью разрезных горизонтальных рулей (элеронов) можно
управлять креном МПО. Несвязанные части крыла левого и правого
бортов поворачивают в разные стороны (рис. 1.20). Возникающие
при этом разнонаправленные вертикальные силы создают кренящий
момент Мх относительно продольной оси. Элероны используют на неко-
торых типах подводных аппаратов для стабилизации крена.
1я9. Характеристика нелинейной модели
пространственного движения МПО
Уравнения (135), вытекающие из теоремы об изменении
количества движения и момента количества движения, совместно с
уравнениями связи поступательного движения центра масс МПО (1.15)
и вращательного движения относительно центра масс (1.5) с учетом
проекций внешних сил и моментов на связанные оси, специфических
для конкретных типов МПО (см. параграф 1.8), образуют единую систе-
му обыкновенных нелинейных дифференциальных уравнений, описываю-
щих пространственное движение МПО. Систему составляют дифферен-
циальные уравнения первого порядка, каждое из которых содержит
только одну производную какого-либо одного кинематического пара-
метра. Так, уравнения равновесия сил относительно связанных осей
координатной системы содержит производные составляющих линейной
скорости объекта VX} Vy> Vz. В уравнениях равновесия моментов отно-
сительно осей х, у, z содержатся производные проекций угловой ско-
рости МПО сЬд., соу, coz. Дифференциальные уравнения связи записаны
относительно производных линейных координат центра масс МПО
)>g> zg и углов Эйлера 0, <^, ф.
Выделив производные в левую часть уравнений, можно представить
математическую модель динамики движения МПО в форме Коши и
39
записать ее в виде одного нелинейного матричного дифференциального
уравнения общего вида
х = <р(х, Г), (1.45)
где х} S, f— матрицы-столбцы (векторы) переменных состояния объекта?
управляющих и возмущающих воздействий? состоящие из произвольно-
го числа элементов; ~~ нелинейная векторная функция? представляю-
щая собой матрицу-столбец скалярных нелинейных функций? общее
Поведение МПО характеризуется кинематическими параметрами.
Поэтому переменными состояния модели движения выступают проекции
угловой и линейной скоростей? углы рыскания? крена и дифферента?
а также линейные координаты центра масс. Вектор состояния? харак-
теризующий полное пространственное движение объекта? содержит
12 составляющих
x=[xgygZg VxVyVz dtp ф cox(VyUz ]т.
Управления 6 составляют переменные величины? характеризующие
эффективность соответствующих технических средств корабля. Ими
могут быть проекции сил и моментов? развиваемые исполнительными
органами систем управления МПО или углы перекладки гидродинами-
ческих рулей 6В, Зг? поворота лопастей винтов и винтовых колонок
6р,к? частота вращения винтов движителей и т. п. Общее число компо-
нент вектора управления произвольно и зависит от состава технических
средств конкретного корабля.
Внешние ветро-волновые возмущения? действующие на МПО? опре-
деляют содержание вектора /. Его составляют проекции сил и моментов
течения? ветра и волнения моря. Он может также формироваться не-
посредственно скоростями ветра и течения? волновой ординатой? углом
волнового склона и т. п.
Нелинейный характер дифференциальных уравнений (1.45) вызван
присутствием в них нелинейных зависимостей типа тригонометрических
функций от углов Эйлера? которые образуют кинематические матрицы
В ~у и В уравнениях связи. Другой вид нелинейных соотношений —
произведения угловых и линейных скоростей (произведение переменных
состояния) появляется в уравнениях динамики (135) в связи с тем?
что они записываются в подвижных координатных осях. Наконец? в
40
уравнении (1.45) присутствуют нелинейные функциональные зависи-
мости , определяющие изменение гидроаэродинамических сил и момен-
тов при переменных кинематических параметрах движения (1.37).
Полная математическая модель пространственного движения МПО,
содержащая двенадцать нелинейных дифференциальных уравнений,
мало пригодна для исследования систем управления МПО. Ее анализ
настолько сложен, что даже использование современных цифровых
вычислительных машин дает численное решение для ограниченного
числа случаев, которые не позволяют восстановить общую картину
процессов управления движением. Еще большие трудности возникают
при синтезе систем управления, который требует многократного реше-
ния уравнений (1.45). И дело даже не в затратах машинного времени.
Структура и алгоритмы систем управления непосредственно зависят
от структуры исходных математических моделей. Синтез по упрощен-
ным моделям приводит к более простым структурным решениям,
доступным для технической реализации, и технологичным в изготовле-
нии и настройке. Причем упрощения систем заметных потерь с точки
зрения качества управления не вызывают. В связи с этим вопросы
упрощения математического описания движения МПО весьма важны.
Решение достигнуто путем перехода к линейным моделям и разделением
движений.
Теория линейных систем управления, базирующаяся на линеари-
зованных дифференциальных уравнениях, разработана в настоящее
время достаточно глубоко. С ее помощью решают многие задачи, воз-
никающие при проектировании и исследовании систем управления
МПО. Линеаризованные модели позволяют исследовать режимы стаби-
лизации, для которых характерны небольшие отклонения кинемати-
ческих параметров возмущенного движения от стационарного невозму-
щенного состояния. Более сложные режимы маневрирования МПО
могут быть исследованы с помощью совокупности (континуума) ли-
нейных моделей.
Следующий этап упрощения модели движения МПО заключается
в раздельном анализе элементарных движений.
Практическими инженерными расчетами, опытом и эксперимен-
тальными исследованиями, установлено, что диапазон изменения кине-
матических параметров для большинства объектов и многих режимов
движения ограничен значениями, при которых взаимное влияние пере-
менных, характеризующих различные степени свободы твердого тела,
не имеют определяющего значения. Это позволило выделить для само-
стоятельного исследования из общего пространственного движения
бортовую, килевую и вертикальную качки, поступательное продольное
движение, рыскание корабля и боковой снос. Каждое из этих элемен-
тарных движений описывается дифференциальными уравнениями 2-го
порядка, решение которых досконально изучено.
Именно упрощенные модели открывают путь к успешному решению
задач исследования и проектирования систем управления движением МПО.
41
Контрольные вопросы
1. Какие положения механики используются при формировании математи-
ческих моделей движения морских подвижных объектов?
2. Дайте характеристику координатных систем, в которых определяются
параметры движения МПО.
3. Какие кинематические параметры характеризуют вращательное движение
МПО?
4. Как связаны углы крена, рыскания и дифферента с проекциями угловой
скорости вращательного движения на связанные оси координат?
5. Для чего используются кинематические матрицы вращательного движения?
Какой они имеют вид в общем случае и при малых значениях углов Эйлера?
6. Перечислите кинематические параметры поступательного движения МПО.
7. Являются ли кинематическими параметрами углы атаки и дрейфа? Какое
движение МПО - поступательное или вращательное они характеризуют?
8. Для чего необходимы кинематические матрицы поступательного движения?
. 9. Используя выражение для обратной кинематической матрицы поступатель-
ного движения (1.14) , покажите, что при малых углах килевой и бортовой качки
перемещение центра масс МПО в горизонтальной плоскости происходит согласно
выражениям VXg~ Kxcos</? + Vz sin<^; Vzg = - Vx sin<p + Vz cos^. Дайте геометри-
ческую иллюстрацию этих выражений.
10. Как определить боковой снос корабля при малых углах крена и диффе-
рента?
11. Как определить вертикальное перемещение корабля при малых углах
крена?
12. Запишите векторные уравнения изменения движения в неподвижной
и связанной системах координат. Как эти уравнения представляют в скалярной
форме?
13. Что такое присоединенные массы и моменты инерции? В математических
моделях каких МПО их нужно учитывать, и когда ими можно пренебречь? Почему?
14. Какой физический процесс связан с понятием присоединенных масс и
моментов инерции?
15. При каких условиях матрица инерции объекта, а также матрица присое-
диненных масс и моментов инерции оказываются диагональными?
16. Перечислите основные внешнйе силы и моменты на корпусе МПО.
17. Чем определяются гидродинамические силы и моменты на корпусе МПО?
Что общего у них с аэродинамическими силами и моментами, и в чем они разли-
чаются?
18. Что такое гидродинамические характеристики сил и моментов МПО?
От каких факторов зависят их значения?
19. При каких условиях происходит взаимная компенсация сил веса и водо-
измещения судна?
20. Какие силы и моменты возникают на корпусе судна при работе винтовых
движителей? Как можно изменять их силу тяги?
21. Дайте анализ сил и моментов, возникающих при перекладке вертикальных
рулей.
22. При каких условиях работа вертикальных рулей не эффективна? Какие
другие средства управления направлением движения применяются на судах?
23. Каково назначение горизонтальных рулей, устанавливаемых на некоторых
типах МПО?
24. Что такое элероны, и для какой цели они применяются?
25. Приведите общую форму нелинейной математической модели МПО. Какие
физические величины образуют вектор переменных состояния МПО? Перечислите
основные типы нелинейных зависимостей, которые входят в дифференциальные
уравнения движения МПО.
42
Г лава 2
ЛИНЕЙНЫЕ МОДЕЛИ МОРСКИХ ПОДВИЖНЫХ
ОБЪЕКТОВ
2.1. Балансировочные режимы и режимы движения МПО
Формирование линейных моделей МПО путем линеари-
зации уравнений динамики движения базируется на предположении
существования некоторого стационарного режима равновесия, в окрест-
ностях которого происходят малые изменения кинематических пара-
метров объекта. Если дифференциальное уравнение движения в матрич-
ной форме имеет вид
х = <р(х, 8,f, t), (2.1)
то стационарный режим равновесия, характеризующийся постоянст-
вом переменных состояния, управляющих воздействий и внешних
возмущений х(?) =х0-const, 3 (?)-30 = const, f(t) =fo = const,
удовлетворяет системе уравнений, которые можно представить в виде
одного матричного нелинейного функционального уравнения
С*о, , /о) ~ (2.2)
Такой режим получил название балансировочного. В определенной
степени он является математической абстракцией, так как реальное
движение морских подвижных объектов всегда происходит в условиях
переменных ветро-волновых возмущений, которые для своей компен-
сации требуют также переменных управляющих воздействий. Под их
влиянием переменные состояния также изменяются во времени, а не
остаются постоянными. Однако с точки зрения удобства для математи-
ческого анализа объектов и систем полезно выделение балансировочно-
го режима из общего движения при решении уравнения (2.1) .
Ближайшим физическим аналогом балансировочного режима яв-
ляется движение МПО в однородной окружающей среде при постоянст-
ве течения и ветра и полном отсутствии волнения моря с постоянной
скоростью поступательного движения и неизменной ориентацией в
пространстве (Ко = const, = const, = const, = const). При этих
условиях другие переменные состояния — кинематические параметры
движения — имеют значения, вытекающие из кинематических соотно-
шений поступательного и вращательного движений.
43
Центр масс корабля в балансировочном режиме перемещается
в продольном направлении неподвижной координатной системы с по»
стоянной скоростью
= или xg0 (f) = Vot + Xg (0). (2.3)
To, что xg0 (t) — в балансировочном режиме не остается постоянным,
противоречит условию (2.2). Чтобы снять несоответствие между мате-
матическими ограничениями и реальной физической картиной установив-
шегося движения МПО, которое заключается в перемещении в прост-
ранстве, следует исключить xgQ из числа переменных, характеризующих
балансировочный режим по условию (2.2). Это не нарушает совмест-
ности оставшихся уравнений в виду того, что (2.3) полностью обособле-
но от остальных уравнений. В нем отсутствуют другие переменные*
состояния, a xg0 не входит в состав прочих уравнений системы (2.2).
Достаточной характеристикой поступательного продольного движения
в балансировочном режиме служит проекция вектора скорости на ось
Ох связанной координатной системы Vx ~ Ко.
Кинематические параметры вертикального движения МПО в баланси-
ровочном режиме характеризуются постоянной во времени проекцией
вектора скорости перемещения центра масс на ось Оу подвижной систе-
мы координат Vy0 =- Vo aQ =const или неизменным углом атаки
ц0 = const, а также положением центра масс относительно неподвижной
системы координат, которое определяется условием
J ’g о = о ° о )
При равенстве в балансировочном режиме углов атаки и дифферента
ф о = ао ордината центра масс корабля не меняется yg 0 = const.
При установившемся режиме поступательного движения в попереч-
ном направлении угол дрейфа и боковая составляющая линейной
скорости Kz0 постоянны. Боковое отклонение центра масс корабля
описывается уравнением
zgo = Vo (Ро — ^о)
и сохраняется постоянным zg0 - const, когда совпадают установившие-
ся значения углов дрейфа и рыскания ~Ро- В частном случае при
отсутствии боковых возмущающих сил, они могут быть равны нулю.
Можно допустить существование балансировочного режима при =0
и /30 0, но при этом имеет место постоянный боковой снос
Zgo=Pol3o и zg0(r) =zg(0) + Vo0ot,
рассмотрение которого из анализа условий равновесия (2.2) целесооб-
разно исключить по аналогии с переменным продольным перемещением
центра масс (t).
44
Постоянство углов Эйлера в устано-
вившемся режиме движения (иногда до-
пускают отсутствие крена 0$ =0) пред-
полагает нулевые значения угловых ско-
ростей относительно всех трех связанных
координатных осей ох0 = сор0 = = Cl-
Таким образом, можно представить
вектор состояния МПО в балансировоч-
ном режиме в виде
х0 “ [ У$о Zgo Vxo Vyo Vzq ^oOOO]
(2-4)
Рис. 2.1. К определению ба-
лансировочных режимов
ИЛИ
=[ygo^go Vq йо/3()0^о V^qCIOO]1.
Изменение условий равновесия приводит к новому балансировоч-
ному режиму, характеризующемуся своим вектором состояния. Су-
щественной особенностью морских подвижных объектов является
многорежимный характер движения и наличие нескольких балансиро-
вочных режимов. Причина этого заключена в возможном изменении
уровня постоянных возмущений /0 в связи с изменением скорости
ветра или течения, различных величинах управляющих воздействий,
которые изменяют скорость и ориентацию корабля в пространстве.
Нелинейный характер уравнения (2.2), допускающий множественность
решения, также является возможным источником нескольких режи-
мов равновесия даже при постоянстве управления и возмущения. Для
иллюстрации рассмотрим уравнение равновесия сил относительно про-
дольной оси, характеризующее поступательное движение судна на воз-
душной подушке (СВП),
mV=T-X, (2.5)
где Г —сила тяги винтов, которая при постоянной частоте вращения
зависят от скорости хода V и управляющих воздействий (угла поворота
лопастей) : Х~ сила гидродинамического сопротивления, изменяющаяся
в функции скоростей СВП и ветра.
На рис. 2.1 показаны зависимости Т и X для трех значений (7\,
~Т2> Т3 ) угла разворота лопастей винтов и двух скоростей ветра (Хь Х2 ) •
Условие балансировочного режима Т( Vo) = Х(У0) * удовлетворяется
при 13-ти значениях скорости хода. Одному уровню управления и возму-
щения может соответствовать до трех балансировочных режимов в силу
TV-образной формы зависимости силы гидроаэродинамического сопро-
тивления от скорости хода (например, точки 8, 10, 11 при силе тяги Т\
и сопротивлении Л)). Установившееся движение может происходить
с большой (точка 8) и малой (точка 11) скоростями, хотя возмущение
и управление в обоих случаях остается одинаковым.
45
Не все балансировочные режимы соответствуют устойчивому уста-
новившемуся режиму движения. К ним относятся только точки, лежа-
щие на восходящих ветвях X(F). Режимы 4, 5, 10 соответствуют
неустойчивому равновесию, а 9 — нейтральному. Это подчерки-
вает различие понятий балансировочного режима и физически сущест-
вующего режима установившегося движения МПО. Первый может быть
как устойчивым, так и неустойчивым, второй соответствует только
устойчивым балансировочным режимам.
Движение морского подвижного объекта происходит при пере-
менных внешних возмущениях, связанных с ветро-волновым процессом,
и непрерывном изменении управляющих воздействий, которые обеспе-
чивают стабилизацию и маневрирование корабля.
В соответствии с уравнением (2.1) кинематические параметры
МПО в этих условиях также определяются переменным во времени
вектором состояния. Все три переменных вектора можно записать
путем наложения постоянных составляющих, определяющих опорный
балансировочный режим, и переменных отклонений
х(^) = х0 + Дх(Г),
6 (Г) = 30 +
/(О=/о + А/(О-
Для удобства анализа и синтеза, моделирования и исследования
систем управления МПО удобно свести все многообразие поведения
кораблей к трем основным режимам движения, определяемым преде-
лами изменения переменных составляющих векторов со стояния, управ-
ления и возмущения. Первый из них — режим стабилизации — характе-
ризуется малыми отклонениями Дх(г), ДЗ (t), Af(t) от постоянных
значений х0> 30,/0 устойчивого балансировочного режима, при котором
нелинейность характеристик объекта не оказывает существенного влия-
ния. Это режим стационарного движения объекта в нормальных эксплуа-
тационных условиях.
Второй режим — режим малого маневрирования — связан с пере-
ходом объекта из исходного балансировочного режима с состоянием
х01, управлением 301 и возмущением /о i в новый балансировочный
режим, характеризующийся х02> 3О2, /02- Это происходит в результате
изменения уровня управления или возмущения. Поскольку и то, и дру-
гое изменяется непрерывно, то, стого говоря, переход из одного баланси-
ровочного режима в другой связан с бесконечно малым изменением
состояния. При практических расчетах ближайшим может считаться
балансировочный режим, переход к которому не сопровождается про-
хождением перегибов нелинейных характеристик. Другими словами,
малое маневрирование представляет собой такое конечное изменение
состояние объекта, которое происходит в пределах гладкой части нели-
нейных зависимостей.
46
Взаимные переходы в пределах состояний 1, 2, 5, 8, 9, а также 6, 7,
И, 12 (см. рис. 2.1) могут считаться малым маневрированием. Физи-
ческим аналогом малого маневрирования является изменение стацио-
нарного режима движения.
Совокупность режимов малого маневрирования образует режим
глубокого маневрирования. Он связан с переходом состояния МПО
из одного балансировочного режима в другой, в ходе которого харак-
теристики объекта проявляют свои существенно нелинейные свойства,
связанные, в частности, с их перегибами. Если в процессе малого ма-
неврирования состояние объекта проходит промежуточные точки устой-
чивого равновесия, то при глубоком маневрировании объект после-
довательно минует несколько балансировочных режимов, среди которых
имеются неустойчивые точки. К глубокому маневрированию могут
быть отнесены переходы из состояния 6, 7 к 1, 2, 3 или из И, 12, 13
к 8 (см. рис. 2.1). В реальных условиях движения МПО глубокое ма-
неврирование ассоциируется с аварийным управлением и экстремаль-
ными внешними возмущениями, разгоном и торможением корабля.
Математическая модель движения МПО в форме (1.1) адекватно
описывает все три режима. Но для каждого из них может быть найдено
свое описание процесса. Режим стабилизации достаточно точно характе-
ризуется системой линейных дифференциальных уравнений: малое
маневрирование — двумя кусочно-линейными моделями, а глубокое —
набором линейных моделей, объединяемых условием непрерывности
переменных состояния.
2.2. Линеаризация уравнений движения
Линеаризация дифференциальных уравнений базируется
на разложении в ряд Тэйлора нелинейных функций одного или несколь-
ких аргументов с последующим выделением членов ряда с первыми
степенями аргументов.
Нелинейная скалярная функция одного аргумента (jq) в окрест-
ности опорной точки ^10 (х10) изменяется на величину Д iq в результате
приращения аргумента Дхр Эта функция может быть представлена
в виде бесконечной суммы — ряда Тэйлора
<Pi (Xi +' Дх,) = </510 (Хю) + (Д *1) =
d<p! 1 d2 ipi
Х1
Д х2 + ...
Х1 =Х1Р
Ряд определяется первыми двумя членами
(xt + Дхх) = <р10 (х10) +Д1/’1(Дх1) У’юОюИ ------
dxt
Дхь
47
если отклонение аргумента от опорного значения мало Дхх ~>0, либо
высшие производные функции в опорной точке d2^1/dx1 I Л =х ,
d3$1/dx\
__ и т. д. имеют значения, близкие к нулю. Последнее
Х1 "Х19
означает слабое проявление нелинейных свойств и линейное приращение
функции соответствует широкому диапазону изменения аргумента
ахх
Если функция зависит от нескольких аргументов (хь . . . , хл),
т. е. имеет векторный аргумент х =[ хь . .., хп ]т, то (2.6) приобретает
вид
¥>i (х + Дх) = (х0) + -----
О Х{
Axt + . . . + —- Дхл =
дх" х=х0
= <^10 +
дх!
Последнее выражение можно распространить на случай векторной
функции нескольких векторных аргументов $(х, 8, /) -[ . . . с^]т:
<р(х + Д х, З + Дб'У + Д/’) =. ^(х0 59/о) +
(2.7)
Использовав (2.7), можно представить матричное уравнение дви-
жения МПО (2.1) в линеаризованном виде для некоторого баланси-
ровочного режима, определяемого условием (2.2) ,
d (х0 + Дх)
= ^(х0, 6о./о) + -
dt------------------------------- дхт
Д х +
О
Д 6 4-
0
ддт
dfT
О
Так как х0 =const и (х0<50/0) =0, получаем линейную модель
движения МПО в приращениях относительно балансировочного режима
х0, 5о, /о> которые в дальнейшем будем обозначать без символа прира-
щения Дх -х, Д 5 = 5, Д/ = f
x(t) =Ях(0 в 6(0 + с/(0,
(2-8)
48
где
д<р
d'Pi д$Г
dtp
F7
д^п д<Рп
— матрицы коэффициентов, постоянных для одного балансировочного
режима. При переходе состояния МПО из одного балансировочного
режима ^(Хо1> /oi)=0 в другой </?(х02, 5О2, /02) ~0 элементы
матриц Д, В, С изменяются.
Линейное матричное дифференциальное уравнение (2.8) при фикси-
рованных значениях А, В, С является достоверной моделью режима ста-
билизации МПО. Режим малого маневрирования требует для своего
анализа две модели вида (2.8), различающиеся между собой значениями
матриц A, В, С, которые определяются по начальному и конечному
балансировочным режимам. Для глубокого маневрирования необходим
набор линейных моделей (2.8), определенных по характерным опорным
точкам промежуточных состояний объекта, сопровождающих его пере-
ход из одного стационарного режима в другой.
Переход от нелинейной модели (2.1) к линеаризованным описаниям
вида (2.8) существенно упрощает анализ движения МПО, обобщает
получаемые решения даже в тех случаях, когда нельзя ограничиться
одной линейной моделью, а приходится использовать набор дифферен-
циальных уравнений.
Согласно первому методу Ляпунова линеаризованное уравнение
в большинстве случаев позволяет оценить устойчивость нелинейного
объекта в опорных точках равновесия. Для этого достаточно найти
4—510
49
собственные числа матрицы А путем расчета корней характеристическо-
го полинома (pi,..., Рп)> в который раскладывается характеристи-
ческий определитель системы линейных дифференциальных уравнений
det \ р 1 —А \ = рп + an-i aiP + aQ =
= (p-Pi) • • (Р-Рп), (2-9)
где 1 — единичная матрица размером п х п.
Наличие хотя бы одного корня рк с положительной вещественной
частью говорит о неустойчивом балансировочном режиме. Только появ-
ление нулевого корня не позволяет определить устойчивость системы.
Для иллюстрации проанализируем устойчивость балансировочных режи-
мов, указанных на рис. 2.1, использовав линеаризованное уравнение
т V =
dT
dV
dx
dV
V,
v=vQk
получецное из (2.5) для приращения скорости хода СВП. Корень харак-
теристического уравнения рг=\1т (dT/dV - dX/dV) имеет отрица-
тельные значения при dT/dV < dX/dV, что соответствует точкам 1-3,
6, 7, 8, 11 — 13. В точке 9 dT/dV - dX/dV и рх =0, а в остальных точках
Pi > 0, что говорит о неустойчивости этих балансировочных режимов.
Скалярные нелинейные функции <рк (х, 5, /), составляющие правую
часть уравнения (2.1), образуются наложением более простых нелиней-
ных зависимостей. Практическое формирование линейных моделей
движения МПО начинается с линеаризации этих элементарных нелиней-
ных функций, которые объединяются в три основные группы: тригоно-
метрические функции, образующие кинематические матрицы уравнений
связи, произведения проекций угловой и линейной скоростей, функцио-
нальные зависимости нескольких аргументов, отражающие связь сил
и моментов с кинематическими параметрами движения. Для каждой
группы существуют свои эффективные приемы линеаризации.
При малых углах крена, рыскания и дифферента уравнения связи
теряют свою нелинейность и превращаются в линейные. В таком виде
их используют для формирования общей системы линеаризованных
дифференциальных уравнений МПО.
Основное правило линеаризации (2.6), примененное к произведению
двух переменных (хь х2 ) =Xi х2, дает следующее выражение:
X1 Х2 Х1оХ2о+Х2ОАх1+Х1ОДх2.
Первое слагаемое соответствует значению функции в опорном
режиме “^10^20“ Приращение функции, связанное с вариацией
аргументов в окрестности опорного режима, выражается двумя другими
слагаемыми =х20 Ахх + х10Дх2. Именно они участвуют в обра-
50
зовании линейной модели движения МПО вида (2.8). Приращения
произведений проекций угловой и линейной скоростей, которые входят
в уравнения динамики МПО с учетом их значений в балансировочных
режимах (2.4), имеют вид
Д ( X Vy ) ^ХО Vy Vy О Д ^Х VqOIqACOx'^'O,
Д (сод. ) — coxq A Vz Vz 0 Асох = Vq PqAcOx^O',
(^у Vx) — C0yQ A Vx 4- Vxq Д со у — Vq А сОу j
Д (щр Vz ) со у о Д Vz + Vz q А со у Vq /3 о А со у ~ 0 j
Д (gjz Vx) — со2 0 Д Vx + Vxq Acoz — Vq Acoz ‘
Д (^z Vy) ~ cozo Vy H" Vy о A co z Vq a q Aco z ~ 0 j
Д(<х>хо>2) + O)zo Д^>х=0;
A (coxcoy) =coxq Ago у + GOyQ$G0x =0;
&(VxVz)=VxQAVz+VzqAVx =
= Ко2Д0 + Ко0оДКх~Ко2Д0;
A(VxVy) = Vx0&Vy + Vy0AVx =
=- Ко Да- Fo«o ДКХ«- К2 Да. J
(2.10)
Выражения (2.10) упрощаются благодаря нулевым установив-
шимся значениям угловых скоростей сох0 = ojy0 = ^z о =0 и исключе-
нию членов второго порядка малости, образованных произведениями
малых приращений скоростей, углов атаки а0 и дрейфа
Гидроаэродинамические силы и моменты на корпусе МПО и рулях
выражаются нелинейными функциональными зависимостями
R-x, у, z qScx,y, z (V, а, р, со х, C0y? coz 6В, 6Г);
х, y,z ~ QSLtnXf yfZ(Vfix,P,coXf coyf coz, 6B, 6Г),
линеаризация которых осуществляется в предположении постоянства
скоростного напора, определяемого по скорости потока в балансиро-
вочном режиме, и сводится к разложению в ряд Тэйлора с последую-
щим выделением линейных слагаемых скалярных функций нескольких
аргументов
сх, yt z Cxyz + с %yz А V + c^yz а + . . . ,
mx,y,z =mxyz +mVyzAV + mxyza + .. .,
(2.И)
51
где , mxyz — значения коэффициентов гидроаэро динамических сил
и моментов в балансировочном режиме; c%yz = dcxyz /dV I 0; m^.yz =
= dmxyz / dV \ о и т. д. — частные производные коэффициентов по соот-
ветствующим кинематическим параметрам движения в опорной точке
режима.
При расчете частных производных гидро аэродинамических характе-
ристик МПО встречаются определенные трудности, так как характе-
ристики редко задаются аналитическими выражениями. Обычно по
результатам модельных экспериментов их представляют в виде таблиц
или графиков, которые всегда содержат ошибки опытов. При такой
форме задания исходных данных коэффициенты линеаризации удобнее
определять не по производным, а по отношению приращений скалярной
функции и аргумента в окрестностях опорной точки характеристики
<р2
dx _ . x2 — X j
X XQ
Для лучшего осреднения экспериментальных ошибок, когда на интер-
вале изменения аргумента Дх известно несколько значений нелинейной
скалярной функции (xj), ср2 (х2) ... Ч>п(Хп)> следует использовать
метод наименьших квадратов, суть которого применительно к рассмат-
риваемой задаче состоит в следующем.
Если требуется аппроксимировать функцию линейной зависимостью
ф(х) то это означает, что нужно выбрать коэффициент наклона
а таким образом, чтобы среднеквадратичная ошибка между исходными
данными и результатами аппроксимации была минимальной
п
е2 - S {axi — ср/)2 min.
i = 1
Для этого необходимо, чтобы
de2 п
—— = 2 S (йх/ — <р/) х/ == О,
da
откуда
п < п
а = 2 tpiXil S х]. (2.12)
Пример 2.1. Зависимость коэффициента боковой гидродинамической силы
на корпусе от угла дрейфа корабля задана табл, 2.1. Определить коэффициент
наклона аппроксимирующей прямой на заданном интервале изменения угла дрейфа.
В соответствии с (2.12)
„ 0,08 • 0,175 + 0,21 • 0,35 + 0,35 0,525 + 0,5 • 0,7
с% = —------------------!----!----------------- = 0,676.
0,1752 + 0,352 + 0,5252 + ,0,72
52
В табл. 2.1 приведены также значения гидродинамического коэффициента, вы-
численные по линейной зависимости с@(3, величины ошибок аппроксимации е =
= (р) - с/(3, а также коэффициенты наклона аппроксимирующих прямых
bf = czilвычисленные по приращению функции на интервале изменения аргу-
мента /3 от нуля до /3/, значения характеристики гидродинамической силы при
таком способе определения коэффициента наклона cz = и возникающие при
этом ошибки. Такой анализ подтверждает эффект усреднения ошибок при исполь-
зовании метода наименьших квадратов.
Таблица 2.1.
/3, град 10 20 30 40
/3,рад 0,175 0,35 0,525 0,7
i 1 2 3 4
czi 0,08 0,21 0,35 0,5
0,119 0,238 0,357 0,473
bi 0,46 0,6 0,667 0,71
0,08 0,16 0,24 0,32
Ьг^ 0,10 0,21 0,32 0,42
b3Pi 0,117 0,233 0,35 0,467
b^i 0,124 0,25 0,37 0,5
£ i -0,039 -0,028 -0,007 0,027
£ li 0 0,05 0,11 0,18
$ 2i —0,02 0 0,03 0,08
% 3/ -0,037 0,023 0 0,033
£ 4Z -0,044 -0,04 -0,02 0
Переход к линейным моделям упрощает форму математического
описания пространственного движения МПО. Но порядок дифферен-
циальных уравнений при этом остается неизменным. По-прежнему 12
уравнений 1-го порядка образуют систему (2.8) так же, как и (2.1).
Дальнейшее преобразование математической модели движения МПО
с целью рационального упрощения анализа и синтеза систем управления
достигается путем перехода от одной системы дифференциальных урав-
нений 12-го порядка к нескольким несвязанным между собой системам
пониженного порядка. Это оказывается возможным в результате разде-
ления движений, при котором полное пространственное перемещение
МПО образуется наложением элементарных движений.
2.3. Разделение движений
Пространственное движение МПО имеет шесть степеней
Свободы. Оно состоит из шести элементарных движений, причем каждое
удовлетворяет уравнению равновесия сил или моментов относительно
одной оси подвижной системы координат. Такими элементарными
53
движениями, являются поступательное продольное и вертикальное
движения, боковой снос и рыскание корабля, бортовая и килевая качка.
Поступательное продольное движение характе-
ризуется проекцией вектора линейной скорости на связанную ось Ох
и координатой положения центра масс на продольной неподвижной
оси OgXg. Вектор состояния этого элементарного движения хп.п =
= [ Vxxg ]т определяется уравнением равновесия сил относительно
оси Ох
Vx л? х (^ х т z yV z “Ь т у со z Vy) (2 .13)
и соответствующим уравнением связи кинематических параметров
поступательного движения, которое при малых углах крена и диффе-
рента, но произвольных углах рыскания имеет вид
“ Fxcos + Vz sin (р = Feos (0 — <р). (2.14)
Вектор состояния вертикального движения (в частном
случае вертикальной качки) образуется проекцией линейной скорости
на связанную вертикальную ось и ординатой центра масс в неподвижных
осях хв.д = [?gVy ]т. Вместо Vy характеристикой вертикального дви-
жения может служить угол атаки, и тогда хвд =[yg п]т. Это движение
происходит в соответствии с уравнением равновесия сил относительно
оси Оу
Vy - т у (Rу тх U7Z Vx + mz coxVz) (2.15)
и кинематическим уравнением
= Vx sin ф + Vy cos ф = Fsin (ф — a) . (2.16)
Уравнение равновесия сил относительно поперечной оси
Vz 171 z (Rz 171 у O7xVy + 171 х СО у Fx) (2.17)
и уравнение связи
zg = Fxsin + Vz cos = Fsin (0 - (/?) (2.18)
определяют боковой снос корабля. Вектор состояния этого эле-
ментарного движения x6c=[z^Fz]T может быть представлен также
через угол дрейфа хб.с " [ 3]т-
Бортовая качка представляет собой элементарное враща-
тельное движение МПО относительно продольной оси. Оно характери-
зуется углом крена и соответствующей проекцией угловой скорости
хб.к =[ 0сох]т, которые удовлетворяют уравнению равновесия момен-
тов относительно оси Охи упрощенному кинематическому уравнению
54
<^X=J-X1MX- в=ых (2.19)
Рыскание корабля является вторым элементарным вращатель-
ным движением, которое совершается относительно вертикальной оси.
Для него вектор состояния формируется углом рыскания и проекцией
угловой скорости на ось Оу хр = [</?соу]т. Движение описывают соот-
ветствующие уравнения равновесия моментов и связи
со у — <7 у [ М у (j.,)xcoz («7^. Л ) ) ] ?
(2.20)
~~ у
Килевая качка корабля характеризуется углом дифферента
и поперечной составляющей угловой скорости хкж = [ Ф (vz ]т- Она
подчиняется уравнению равновесия моментов относительно оси Oz
~~ Jz [ М z — ( Jу — <7Х ) —- VxVy (тп у — J (2.21)
и условию ф = оо7 .
Элементарные движения взаимосвязаны и оказывают влияние
друг на друга. В этом нетрудно убедиться, анализируя уравнения
(2.15) — (2.21). Но степень их взаимной обусловленности различна:
одни имеют существенные перекрестные связи; в других эти связи
ослаблены и проявляются только в исключительных случаях экстре-
мальных режимов движения МПО. Опыт исследований утверждает, что
существуют две группы элементарных движений, внутри которых взаим-
ное влияние кинематических параметров проявляется у многих типов
МПО и обнаруживается в большинстве нормальных эксплуатационных
режимов. Первая группа получила название бокового движения МПО
и включает боковой снос, рыскание и бортовую качку. Вторая группа
определяет продольное движение МПО и состоит из килевой качки,
вертикального и продольного поступательных движений. Соответствен-
но вектор состояния МПО х формируют векторы состояния бокового
х Б и продольного хп движений:
х=К<]т,
которые имеют вид:
хБ = [zg^GjyVz в(х>х ]т
или
хБ =[zg(pcoypOcox ]т
и
Ф^гУ^ VyVxXg ]
ИЛИ
хп = [ фы^ aVxxg ]т.
55
представим линеаризованное
уравнение пространственного движе-
ния МПО (2.8) при отсутствии внешних
возмущений в виде
хБ
^4бб ^б/
^пБ ^4пп
Хб]
(2.22)
Структурная схема, отражающая
характер связей кинематических па-
раметров движения в соответствии с
(2.22), изображена на рис. 2.2. Струк-
тура пространственного движения
МПО характеризуется собственными
матрицами параметров бокового А Б Б
Рис. 2.2. Структура линейной мо-
дели пространственного движения
МПО
и продольного Лпп движений и матрицами перекрестных связей ЛБп
и ЛпБ.
Собственная матрица бокового движения ЛББ содержит пара-
метры, которые соответствуют зависимости поперечных сил Rz поворот-
ного Му и кренящего Мх моментов на корпусе МПО от кинематических
параметров бокового движения: углов дрейфа и крена, угловых скоро-
стей (лх и GOy. Проведенный в гл. 1 анализ сил и моментов выявил
наличие таких связей. Поэтому матрица ЛББ содержит существенно
значимые элементы.
Отличны от нуля и элементы собственной матрицы Лпп продоль-
ного движения. Они отражают реальную зависимость продольных Rx
и вертикальных Ry сил, а также дифферентующего момента Mz от
углов атаки и дифферента, угловой со2 и линейной Vx скоростей.
Иначе обстоит дело с матрицами перекрестных связей. В силу сим-
метрии корпуса относительно диаметральной плоскости перемещение
центра масс корабля и изменение ориентации в продольной вертикаль-
ной плоскости, определяемые скоростями Vx, Vy и coz, углами as и ф,
ординатой yg, не изменяют симметрии потока воды и воздуха и не
оказывают заметного влияния на моменты крена Мх, рыскания Му
и боковую силу R z.
Этим устанавливается отсутствие существенного влияния пара-
метров продольного движения на характер бокового. Собственная
матрица перекрестных связей для большинства типов МПО в основных
режимах движения обращается в ноль А Бп = 0.
Вертикальная симметрия корпуса корабля приводит к четной зави-
симости продольных сил и моментов от параметров бокового движения
[например, Rx(fi) =RX(~I3) ]. Производные таких функций в баланси-
ровочных режимах с малыми углами рыскания, крена и дифферента
параметры, получаемые в результате линеаризации этих зависимостей,
также близки к нулю ЛпБ ~0.
56
Возможность раздельного анализа бокового и продольного движе-
ния существенно облегчает исследование систем управления МПО.
Однако будучи развязанными по переменным состояния, эти движения
могут иметь взаимные связи в результате работы средств управления.
Возможность появления таких связей — следствие того, что некоторые
устройства создают одновременно разные силы и моменты. Поворот
рулевой колонки, например, приводит к боковой и продольной силам.
Проявление взаимной связи бокового и продольного движений
начинается при значительных углах крена и дифферента в режимах
глубокого маневрирования. Конкретные пределы допустимого раз-
дельного анализа определяются типом МПО и характером процесса.
Такой предварительный анализ всегда необходим для достоверности
прикладных результатов упрощенного исследования.
В некоторых частных случаях можно осуществить более глубокое
разделение движений. Для этого требуется оценить матрицы перекрест-
ных связей между самими элементарными движениями в пределах
их групп.
Представим автономные линеаризованные уравнения изолирован-
ных бокового и продольного движений, полученные на основании (2.22),
•^Б Б Б *^Б j ^пп^п>
Внедиагональные матрицы характеризуют перекрестные связи
между кинематическими параметрами элементарных движений. Их
слабая заполненность и относительно малые значения элементов могут
явиться основанием для раздельного анализа.
Опыт экспериментальных исследований и моделирование устанав-
ливают допустимый уровень разделимости моделей движения примени-
тельно к каждому типу МПО в том или ином режиме движения. Известно,
например, что режимы стабилизации кинематических параметров МПО
и малого маневрирования допускают раздельный анализ бортовой,
килевой и вертикальной качки, продольного поступательного движения
надводных водоизмещающих кораблей и судов на воздушной подушке.
57
Но их рыскание тесно взаимосвязано со скоростью бокового сноса.
Стабилизация экранопланов, подводных аппаратов и судов на подводных
крыльях рассматривается в рамках моделей бокового и продольного
движения. С увеличением скорости хода растет взаимное влияние раз-
личных видов движения.
2.4. Линейная модель рыскания надводного
водой змещающего судна
Частная линейная модель движения рыскания надводного
водоизмещающего корабля при отсутствии ветро-волновых возмущений
(их влияние подробно рассматривается в гл. 3) образуется дифферен-
циальным уравнением равновесия моментов (рис. 2.3) относительно
вертикальной оси и уравнением связи (2.20), а также уравнением равно-
весия сил относительно поперечной оси (2.17) в виду существенной
зависимости внешних моментов на корпусе и руле. от направления
обтекающего потока воды, определяемого углом дрейфа. Упрощение
уравнений базируется на следующих допущениях:
— движение рыскания происходит в условиях балансировочного
режима, характеризующегося постоянной скоростью хода Ко, малой
величиной угла установившегося дрейфа |30 и нулевым значением уста-
новившегося угла рыскания =0;
— определяющими являются гидродинамические силы на корпусе
и вертикальном руле, которые появляются в результате движения
судна в невозмущенной среде;
— в любой момент времени сила тяги компенсирует продольное
гидродинамическое сопротивление;
— возможные отклонения угла дрейфа /3, рыскания у? и угловой
скорости соу ограничиваются кусочно линейной зоной гидродинами-
ческих характеристик, допускающих анализ на основе их линеаризации;
— техническим средством управления является вертикальный руль,
угол перекладки которого <5В не достигает предельно допустимых
значений.
При этих допущениях для анализа режима рыскания могут исполь-
зоваться в линеаризованной форме исходные нелинейные уравнения
= соу;
со у — J у [ Му ох coz (/ х — VxVz (jnx ~ ►
Vz =m~1 [Л2 - mycoxVy+mxa>yVx] ,
выражения для внешних сил и моментов на корпусе
^ZK "S'К Cz к СР. ^^) >
~ L >ПуК (р, Wy)
(2.23)
58
и руле
^2р ~~ Q 1 $р CZ Р (Р> > ^в) >
^ур ~ $р %р ^ур (Р> ^у> ^в) •
Согласно правилам линеаризации
(2.10), (2.11) определяются прираще-
ния функций в правых частях уравне-
ний (2.23). С учетом присоединенных
масс и моментов инерции тх~т +
+ Хп, ту = т + Х22, mz = m4-X33,
Jz~Jzz + ^66> а также соотношения
Рис. 2.3. Силы и моменты при
рыскании судна
^Х ~^ХХ + ^44f Jy ~~ Jyy + ^55,
z “ Vo P переходим к линеаризо-
ванным уравнениям движения рыскания водоизмещающего надводного
корабля для приращений кинематических параметров относительно их
значений в балансировочном режиме
Д = Д О) у ;
Д<Ьу = (Jyy +Х55)~1[<18к1(т?к&Р +т“кЛыу) +
+ <715рхр(т£рДр + т“Д^ + т£рД8в) -
-^оОи-Х33)Д|3]; Г
дД=г;1(т +х33)-1[^к(с^кд/з + с“ Д^) +
+ <7i5d(c^ ДР +с€0Дбо1? +cs Д5В +
+ (т +Хи) Г0До>у ].
Опустив символ приращения, можно привести (2.24)
(2.8) линеаризованной модели МПО
(2.24)
к форме
0 1 0 0
у 0 #23 ^у + ъ21 6. (2.25)
р. 0 ^32 #33 р ^31
Элементы матриц А и В легко определяются при сопоставлении
(2.24) и (2.25).
Модель (2.25) позволяет найти изменение бокового сноса корабля
на основании (2.18). При малых значениях углов крена и рыскания
дополнительное дифференциальное уравнение имеет вид
Zg =Ко(Р-^>).
59
Структура взаимосвязей между переменными состояния линейной
модели движения рыскания иллюстрируется рис. 2.4.
Другой формой линейной модели МПО являются передаточные
функции, которые связывают операторными соотношениями изобра-
жения переменных состояния x(s) с управляющими 6($) и возму-
щающими /(s) воздействиями, преобразованными по Лапласу.
Если исходная форма линейных дифференциальных уравений
х(0 =Лх(г) + яб(О + с/(О>
то после преобразования по Лапласу при нулевых начальных условиях
х(0) =0 они превращаются в алгебраическое матричное уравнение
sx(s) =Xx(s) +£6(s) + С/(5), (2.26)
где 5 — комплексная переменная.
Соотношение (2.26) можно записать в такой форме
(И-Д)х(О =£6(s) + Cf(s)
или
х(з) =(Я-Л)-1 [B5(s) +C/(s)]
и выразить через матрицы передаточных функций
по управлению
Hs (s') = (si - А)'1 В (2.27)
и возмущению
Рис. 2.4. Структурная схема линейной модели рыскания судна
60
Число строк матрицы передаточной функции равно количеству
переменных состояния п> а столбцов — по размеру векторов управле-
ния г или возмущения т, Таким образом, общее число передаточных
функций по управлению п х г , а по возмущению п х т .
В соответствии с правилом обращения матриц
(sl-4r'= dethl -Л1 (2»)
где det | si — А | — характеристический определитель линейной системы,
который преобразуется в полином, являющийся общим знаменателем
всех передаточных функций: Adj | si -А\ — матрица-адъюнкта, раз-
мером п х п> образованная алгебраическими дополнениями для соот-
ветствующих элементов характеристического определителя с их после-
дующим транспонированием.
Применив формулы (2.27), (2.29) к линейной системе (2.25),
получим передаточные функции корабля, которые связывают изобра-
жения углов рыскания, и дрейфа, а также угловой скорости с изобра-
жением угла перекладки руля
<Р(«)
^(s)
/Щ)
Яп (s)
Я21 (s)
Я31 (s)
5(s).
(2.30)
Харак теристический
МПО
D (s) = det | si — A I
полином-знаменатель передаточных функций
о
- #23
s — #зз
s — 1
0 s~a23
0 — #32
— s[s2 — (#22 +#3з)5 (#22#33 ” #23 # З2) ]
имеет один нулевой полюс s0 =0, а два другие
(2-31)
5 1, 2 “0^ (#22 + # зз) - у/ 0,25 (#22 “ #3з) 2 + #23# 32
могут быть вещественными или комплексно-сопряженными и распо-
лагаться в комплексной плоскости слева или справа от мнимой оси.
Последний случай соответствует неустойчивому движению судна на
заданном курсе.
Полиномы числителей получают с помощью алгебраических допол-
нений характеристического определителя
5-#22
An(s)=(~l)1+1
“#23
S “#33
“ S2—(#22 + # Зз) 5 + (#22 # 33 “
“-#2 3 #32)
“ #32
61
0 “ #23
Д120)=(-1)1+2 0 5 — #33 = 0;
A13W=(-1)1 + 3 0 $ — Й22 = 0;
0 ~ #32
Aai(s) =(-1)2+1 -1 0 = s — #33;
— #32 $ — #33
$ 0
Д22 (s) =(-1)2+2 0 5 — #33 = s(s — а33)
S -1
Д23(О = (-1)2+3 0 — #32 = # 32 S \
-1 0
A31(s) =(—1)3+1 S —#22 “#23 = #23 j
Дз2 «=(-1)3+2 $ 0 ~ # 235;
0 “#23
5 - 1
Дзз(О=(-1)3+3 0 — #22 = s(s-a22)
путем перемножения матрицы-адъюнкты и матрицы параметров управ-
ления В
дп Д 12 д 13 т 0
Д21 Д22 Д23 ^>21
Д31 А 32 Д зз &31
^21 “ #3з) + ^>31#23
£>21 S (<$ ~ #33) + £>31 $#23
Z>21 $#32 + £>31 $ ($ ~~ ^22)
После несложных преобразований приходим к общему виду пере-
даточных функций, характеризующих движение рыскания надводного
водоизмещающего корабля,
ЯиМ =
$($2 4-2#$ 4- о>о)
Я12 - sHn (s);
Я1з($) =
&2 (^2 $ 1)
s2 + 2as + со о
62
где
~ ^31 ^23 ~ ^21 33 ? к2 — ^21 ^32 — ^31 #22 5
т т ____!______________________________.
11 — , 12 — ,
#23 ^31/^2 1 ~#33 #32 ^21/^31 ~ а22
а — 0,5 (^22^^33)5 6J о = а 22 а 33 ~ #2 3 ® 32 •
Подробнее модели движения надводного водоизмещающего ко-
рабля рассмотрены в [ 14].
2.5. Линейные уравнения бокового движения судна
на воздушной подушке
Суда на воздушной подушке (СВП) поднимаются над
водной поверхностью благодаря аэростатическому давлению между
корпусом судна и поверхностью воды. Подъемная сила, компенсирую-
щая вес судна, создается вентиляторами 7, нагнетающими воздух в зону
повышенного давления 2 (воздушная подушка), которая замкнута
гибким капроновым ограждением 5, конструктивно объединенным
с корпусом 4 (рис. 2.5). Ходовые и мореходные качества СВП в значи-
тельной степени зависят от конструкции гибкого ограждения. Благо-
даря ему жесткий корпус поднят над водой на достаточную высоту,
при которой исключается их непосредственный контакт даже при раз-
витом волнении моря. Тем самым обеспечиваются амфибийные свойст-
ва МПО, его способность двигаться не только над водой, но и над твер-
дой поверхностью, выходить на лед, берег и т. п.
Устойчивое движение СВП поддерживается стабильностью воздуш-
ной подушки. Подлом гибкого ограждения нарушает балланс между
подъемной силой и весом корабля и почти всегда приводит к возникно-
вению аварийной ситуации. Через гибкое ограждение осуществляется
взаимодействие корабля с опорной поверхностью, хотя между ними
нет постоянного непосредственного контакта.
СВП обладают собственной продольной и боковой остойчивостью
[11]. При возникновении крена или дифферента изменяются расстояния
между водной поверхностью и краем гибкого ограждения (см. рис. 2.5) ,
и)
Рис. 2.5. Образование избыточного давления под днищем СВП
63
В результате перераспределяется давление внутри воздушной подушки.
Там, где расстояние между водной поверхностью и краем гибкого
ограждения больше, давление в подушке уменьшается и судно занимает
положение, параллельное опорной поверхности. Иногда для увеличения
продольной и боковой остойчивости воздушная подушка делится допол-
нительными гибкими элементами на секции.
Поскольку СВП не имеют контакта с водной поверхностью, их
движители располагают на палубе. Они представляют собой воздушные
винты самолетного типа с изменяемым шагом.
Для изменения направления движения корабля устанавливают
разный шаг винтов правого и левого бортов. Тем самым создается
поворотный момент, пропорциональный разности сил тяги движителей.
Управление движением осуществляется также с помощью вертикальных
аэродинамических рулей, располагающихся непосредственно за винтами
в потоке их воздушных струй.
Кроме СВП амфибийного типа, имеющих гибкие ограждения воз-
душной подушки, существуют СВП скегового типа. У них бортовые
ограждения представляют собой жесткие погруженные в воду пласти-
ны — скеги, конструктивно представляющие одно целое с жестким
корпусом, а в носовой и кормовой частях ставят гибкое ограждение.
В отличие от амфибийного типа скеговые СВП имеют постоянный кон-
такт жесткого корпуса с опорной поверхностью и не могут выходить
на берег или двигаться над льдом.
Подробнее элементы устройства и конструкции СВП изложены
в [11, 14]. Там же даются фундаментальные основы теории движения
этого типа МПО. Они использованы при формировании частной линейной
математической модели бокового движения СВП в невозмущенной
среде при отсутствии ветро-волнового воздействия, которое будет
рассмотрено в гл. 3. При этом делаются следующие основные допущения.
Рассматривается поведение СВП в режиме стабилизации кинемати-
ческих параметров в балансировочном режиме движения СВП с постоян-
ной скоростью Ко, когда сила тяги винтов полностью компенсирует
продольное сопротивление при малой величине установившихся углов
дрейфа Ро, атаки и дифферента без крена 0о=О и установив-
шегося значения угла рыскания =0.
В этих условиях определяющий характер имеют аэродинамические
силы и моменты на корпусе и ограждении подушки, обусловленные
набегающим потоком воздуха. В меньшей степени сказывается реакция
струи воздуха, вытекающего из под гибкого ограждения, а силы и мо-
менты, обусловленные протеканием внутри корпуса больших масс
воздуха, который нагнетают вентиляторы, существенного влияния
не оказывают.
Избыточное давление воздушной подушки полностью компенси-
рует вес корабля. Поэтому отсутствуют проекции их суммарного сило-
вого воздействия на оси подвижной координатной системы. Но аэроди-
намический момент воздушной подушки обеспечивает остойчивость
64
СВП и имеет позиционную и демпфи- Г~\ г ч
рующую составляющие. Так как корабль г* ------s'?
движется в воздухе, плотность которого г j 1 i 111..i.i.I.i ГГ "(Л
в 800 раз меньше плотности воды, при- ----—-Hi ----
соединенные массы и моменты инерции
себя не проявляют. Но СИЛЫ и моменты Рис. 2.6. Особенность движения
гидродинамической природы существу- СВП над водной поверхностью
ют в результате взаимодействия между
корпусом корабля, воздушной подушкой и поверхностью воды. При
малых скоростях хода под днищем корабля образуется углубление в
водной поверхности (рис. 2.6). Это приводит к эффектам, подобным
тем, которые сопровождают движение твердого тела в воде. ___
Образование углубления определяется числом Фруда Fr = K0/ y/gbl
которое характеризует отношение инерционных сил и сил тяжести,
действующих в потоке жидкости. При скоростях движения СВП, соот-
ветствующих Fr > 2,5, углубление водной поверхности в области воз-
душной подушки не образуется и уровень гидродинамических сил
и моментов заметно снижается. Характер этой зависимости показан
на рис. 2.1.
При формировании уравнений бокового движения СВП будем
учитывать два технических средства управления: вертикальный аэроди-
намический руль, характеризующийся углом перекладки 6В, который
создает как поперечную силу RZp, так и поворотный момент Мур на
корпусе, и движители, которые при разной тяге винтов левого и правого
бортов создают поворотный момент, пропорциональный разности шага
винтов
Муд (2.32)
Математическая модель бокового движения СВП базируется на
уравнениях равновесия поперечных сил (2.17) и моментов относитель-
но продольной и вертикальной осей подвижной координатной системы
(2.19), (2.20), а также использует соответствующие кинематические
соотношения:
= ыу;
СОд, — J у у [ Му — Сл)х COZ (Jxx ~ Jzz ) ]
Vz ~~ Rz (^x Vy у Vx) j
~ ^X 5
(2.33)
В правые части уравнений (2.33), кроме поворотного момента
(2.32) входят следующие:
5—510
65
— аэродинамические силы и моменты воздушного потока на корпусе
= сгка
М хка ~~ L WI хк.а (^)^э')?
М уКа ~Я^^^у'ка (&>^у)
и руле (хр> ур . — координаты приложения силы в связанных осях)
&zpa = Ql^pczpa (PjCJ>y,6B)j
МХра ~ 0л8р.Уртхра (0>^у?^в)>
Мура — QiSpXpTH ура (/3, СОу, 6В) >
— восстанавливающий (позиционный) и демпфирующий моменты
воздушной подушки судна шириной В
Mxn=gniBmxn(Ofb)x)')
— боковая сила струи воздуха, истекающего между гибким огражде-
нием и поверхностью воды
Rzn ~ S^^zn (0) >
— гидродинамические силы и моменты для расчетного объема
судна v
Rzr=qrv2/3 czr(Fr,0,0);
MXT=qrvmXT(Fr,P,6);
Myi=qTvmyr (Fr, ft, 0, a>y).
При линеаризации исходных уравнений (2.33) предполагаем по-
стоянство числа Фруда Fr, Скоростных напоров воздушного потока
на руле Qi, корпусе q, и потока жидкости qT, определяемых скоростью
балансировочного режима Ко. Кроме того, считаем, что изменения
кинематических параметров происходят в кусочно-линейной части
нелинейных функциональных зависимостей, и поэтому приращения
функций, составляющих правые части (2.33), пропорциональны прира-
щениям аргументов. Эти предположения допустимы при анализе режи-
мов стабилизации движения СВП.
Линеаризованные уравнения бокового движения СВП для прираще-
ний кинематических параметров СВП имеют вид
Д {р - Д <Лу ;
^bjy=Jy1y[qSL(m^K_aSP + myK^Sa>y) + :
66
+ QiS x (m$ Д(3-ЦиДсо +
P Pv yp.a yp.a у
+ m6 Д6 + qv(rrfi Д^ + т^Дсо +
yp.a в nr v yr r yr у
+ тв Д0)] + /c6 ДЗ ;
yr 7J уд Ш.в’
Д/3 = тгГ 1 [#5(с^ Д]3 + си До) ) +
к v z к ,а н z к ,а у 7
+ qtS' (с? Д/3+с“ До ,+ с® ДЗ ) +
pv zp.a zp.a у zp.a в7
+ qrv2/3 (с^&Р +с°гАд] +gk°nM + FoW^;
дё = дсох; >
(2.34)
ДД= Jx~x teSL(mxK аД0 +WXK аДй%) +
Л ЛЛ AAed ArJX*.a J7
+ qiS у (т$ Д0 + тш До; +
z 1 р7 р v хр л хр .а у
+ m8v Д5 ) + q v(m@ Д0 + т0Д0) +
хр,а в7 v усг хг 7
+ gmB (т°п Д 9 + Д ш*),
а в матричной форме (без применения символа приращения)
'о 1 0 0 0 ’ "о 0
йу 0 а22 #23 #24 0 Wl> ^21 ^22 Rs 1 в
= 0 а32 азз #34 0 (3 + ^31 0 - (2.35)
в 0 0 0 0 1 е 0 0 .6 Ш.В
0 а52 #5 3 #54 #5 5 ^51 0
или х = Ах+В8,
Элементы матриц А и В определяют непосредственно по (2,34).
Структура линейной модели бокового движения СВП (рис. 2.7)
характеризуется наличием двух блоков, один из которых соответст-
вует движению рыскания и дрейфа, другой — бортовой качке. Если пред-
ставить полный вектор состояния х в виде двух составных частей для
рыскания хрх= [^a^j3]T и крена = [0O)JT, а вектор управле-
ния 6 ~ [Зв5шл]т, т° уравнение (2.35) можно представить в виде
р.с
5 ,
(2.36)
67
где
л
"О 1
О' ^22
.0 а 32
О ’
^23
^33 .
а 54
1
а 55
О
&21
&31
О
^22
О
Лее ~
В
о
— собственные матрицы, характеризующие изолированные движения
рыскания и бортовую качку, а
— матрицы перекрестных связей.
Анализ модели в форме (2.36) показывает, что структура связей
между кинематическими параметрами изолированного движения рыска-
ния полностью совпадает для СВП и водоизмещающего надводного
корабля. Это же можно утверждать в отношении бортовой качки [ 14],
но работа руля приводит к дополнительному крену.
Рис. 2.7. Структура линейной модели бокового движения СВП
68
Особенностью СВП является существенное влияние параметров
рыскания (угловой скорости и угла дрейфа) на бортовую качку, нашед-
шее свое отражение в матрице А^. Оно вызвано эффектом косого
обтекания корпуса СВП воздушным потоком и зависимостью гидро-
динамических сил и моментов от поперечной составляющей скорости.
Обратное влияние бортовой качки на рыскание корабля, определяемое
матрицей , связано в основном с неравномерным истечением возду-
ха из подушки через промежутки между гибким ограждением и опорной
поверхностью по правому и левому бортам, которое возникает при
накренении корабля. Коэффициент боковой силы kezn =0,2 -г 0,4 изме-
няется в зависимости от расхода воздуха и конфигурации гибкого
ограждения. При малых углах крена относительное влияние бортовой
качки на рыскание СВП невелико, и можно принять A =0.
Когда отсутствует система управления движением, поведение СВП
при управлении рулем полностью определяется собственными частотами
объекта, которое являются собственными числами матрицы Л, т. е.
корнями характеристического определителя det I pl - А | . При А^о =0
их определяют наложением характеристических чисел изолированных
движений рыскания и крена, так как
det | р 1 - А I = det
pl~A^ 0
— Aq^ pi—Aee
= det | pl -A^ | det | pl ~Авв I -D(p).
После преобразования определителей получаем характеристический
полином бокового движения СВП в виде произведения соответствую-
щих полиномов для элементарных движений:
D(p) =Р[Р2 - («22 + «Зз)Р + («22 «33 -«23«32>] (Р* -«55? + «54)
(2.37)
Силовые и моментные характеристики реальных СВП таковы, что поми-
мо нулевого полюса р0 =0, характеристический полином (2.37) содер-
жит две пары комплексно-сопряженных корней [11], принадлежащих
движению рыскания р1}2 и бортовой качке р^ц, которые имеют отри-
цательные вещественные части
Р1, 2 =-«1 ±7^1 ; Рз,4=-“2 ±7^2-
Собственные частоты бортовой качки выше, чем движения рыскания
(cq < а2} < со2). Бортовая качка затухает быстрее, чем коле-
бания судна на курсе, и имеет меньший период колебаний Т2 =
= 2тт/со2 < = 2тт/со!. В [11] для СВП типа SKMR-1 (США) даны
следующие численные значения:р^ 2 =~ 0,0208 ±/ 0,1772; p3i 4 =
= — 0,45 ±/ 1,681. Для этого СВП время затухания переходного процесса,
69
равное 3/а, составляет 144 и 6Л64 с, а периоды колебаний 35 и 3,74 с
соответственно.
Вид собственных чисел матрицы А линейной модели движения
СВП определяет колебательный характер изменения угловой скорости
рыскания, углов дрейфа и крена при мгновенной перекладке руля на
угол 60, которая сопровождается поворотом корабля с установивши-
мися значениями угловой скорости сс-уо, углами крена 0Q и дрейфа р0.
При независимом движении рыскания (А 0 = 0)
соу (f) = соуО + £lym е cos (CC11 + k^) ;
P(t) =00 + Bme~ cos (б?1Г + Kp).
Установившиеся значения и Ро определяются при решении
алгебраический системы уравнений, полученной из (2.36) по условию
равновесия для нового установившегося движения
#22 СС-уо + #23 Ро = ^21 ^0?
#32 + #33 Зо =~ ^31 § 0 )
а амплитуды и начальные фазы переменных составляющих кинемати-
ческих параметров (постоянные интегрирования) — на основании на-
чальных условий, которые приводят к двум системам линейных
уравнений:
(Р) — ^ут COS Kqj '
со у (0) со 1 £2 yjfi sin ® 1 ут cos
и
Р(0) “ Ро +Вт cos ;
Р(0) =— согВт sin Kq — ахВт cos .
Начальные значения переменных состояния нулевые соу (0) = /3 (0) =
= 0, так как при конечной величине угла перекладки руля в начальный
момент времени они не могут измениться мгновенно. До начала поворо-
та судно двигалось в установившемся режиме, и отклонения кинемати-
ческих параметров от значений исходного балансировочного режима
отсутствовали.
Для определения начальных значений производных переменных
состояния со у (0) и Р (0) нужно рассмотреть (2.35) в начальный момент
времени. При А^в =О,ссу(О) =0,Р(0) =O,cb?(O) = Z>213o,P(O) =Z>3150.
Изменение угла рыскания в процессе поворота судна мож-
но получить интегрированием угловой скорости соу (t). В общей
форме
70
ip(t) = ojyot -I- Фш e (lyt cos (Wj t + кф) .
Характер качки при перекладке руля на борт определяется собст-
венным движением крена, а также воздействием угловой скорости
рыскания и угла дрейфа в соответствии с матрицей перекрестных свя-
зей A Q . Изменение угла крена в переходном процессе определяется
тремя составляющими: установившимся постоянным значением 0О
и двумя переменными с собственными частотами рыскания и качки
0(/-) =0О + ® izn е cos (сох г + Ki) + 02щ е “a2*cos(aV + к2).
Величина 0О определяется алгебраическим уравнением для уста-
новившегося движения, полученным из (2.35),
0о ““#54(^52 + а S3 Ро +^51^о)-
Составляющая крена, вызываемого угловой скоростью рыскания
и дрефом, рассчитывается методом комплексных амплитуд [ 8], широко
используемым в теории электрических цепей для анализа периодических
режимов. Согласно этому методу переменные составляющие одной
комплексной частоты
е “ait cos (со^ г кш);
Вт е ~ait cos (a^r + к^);
®i w е cos (сс^ + кх)
имеют комплексные амплитуды
Ъут=Пут е’к“ Вт=Вте,к^, ®1т = <Э1те'к>,
связанные между собой уравнением линейной модели (2.35) в комплекс-
ной форме:
Р1®1т ~#52 ^ут + ^5зВт + #54 01 т d 55 Pl ® 1т э
отсюда можно получить комплексную амплитуду
Д Л?52 Qym + а5зВт
® 1 т = ! >
Pl (1 ~#55) ~~ # 54
которая содержит всю необходимую информацию об искомой состав-
ляющей бортовой качки.
71
Амплитуду и начальную фазу второй переменной составляющей
угла крена к2 определяют на основании начальных условий
в (0) = 0О + 01W COS Ki + &2m cos J
0(0) =- coi ®lw sin Ki -«t ®1жсо8К! — co2®awisin k2 -
— a2 cos k2 ,
По принципу непрерывности переменных состояния системы линей-
ных дифференциальных уравнений можно обосновать нулевые значения
начального отклонения угла крена и его производной так же, как это
делалось применительно к начальным значениям приращений угла дрей-
фа и угловой скорости рыскания.
2.6. Уравнения продольного движения судна
на подводных крыльях
Отличительная особенность судов на подводных крыльях
(СПК) состоит в том, что у них подъемная сила образуется с помощью
горизонтальных гидродинамических крыльев. Обычно таких крыльев
два. Одно устанавливается в носовой, другое —в кормовой частях
судна. Сила водоизмещения компенсирует вес корабля только в непод-
вижном состоянии, когда его корпус погружен в воду. После начала
движения на горизонтальных погруженных в воду крыльях возникает
вертикальная гидродинамическая сила, величина которой
ЯуГ=0,5р И25кс^г(ак, h, /3)
зависит от скорости И, смоченной поверхности крыльев 5К, их заглубле-
ния h , углов атаки пк и дрейфа судна /3.
По мере разгона корабля подъемная сила начинает превосходить
вес, но корпус поднимается из воды, сила водоизмещения исчезает
и гидродинамическая сила на крыльях полностью компенсирует вес.
Это сопровождается резким снижением продольного сопротивления,
и при той же мощности главной энергетической установки можно достичь
более высокой скорости хода.
Устойчивое движение СПК при постоянной высоте корпуса над
поверхностью воды достигается путем полной взаимной компенсации
веса и подъемной силы, когда в любой момент времени соблюдается
равенство проекций этих сил на вертикальную ось связанной системы
координат
gm cos ф cos 0 =0,5 р К25к сут (ак, h, (3). (2.38)
Левая часть равенства (2.38) в процессе движения СПК изменяется,
Имеет место бортовая и килевая качки, меняется масса, например,
72
в связи с расходом топлива. Соответствующего изменения подъемной
силы можно достичь переменным заглублением крыла или управлением
углом атаки, который определяет ориентацию потока жидкости отно-
сительно крыла. В практике кораблестроения реализуются две крылье-
вые конструкции, основанные на этих способах регулирования подъем-
ной силы.
СПК первого типа имеют крылья, форма которых в процессе дви-
жения не меняется. Изменение подъемной силы осуществляется благо-
даря тому, что в ходовом режиме эти крылья находятся вблизи поверх-
ности воды. Положительным качеством такой конструкции является
то, что с ее помощью без принудительного регулирования естественным
путем поддерживается устойчивая компенсация силы веса. Действи-
тельно, если по каким-либо причинам уменьшилась масса судна, то из-
быток подъемной силы приведет к тому, что корпус поднимется выше
над поверхностью воды. Одновременно часть крыла, жестко связанного
с корпусом, выйдет из воды, уменьшится смоченная поверхность крыль-
ев, и, следовательно, снизится подъемная сила до уровня, соответствую-
щего уменьшенному весу корабля. Конструкция крыльев делается
такой, что изменение веса не сопровождается значительным перемещени-
ем корабля вверх и вниз.
. Аналогичным образом обеспечивается устойчивость СПК по крену
и дифференту за счет увеличения подъемной силы при большем погру-
жении какой-то части крыльевого устройства. На рис. 2.8 показано
возникновение восстанавливающего момента по дифференту, а на
рис. 2.9 — по крену.
Отрицательное свойство такой конструкции крыльев проявляется
при волнении моря, когда степень погруженности крыла непрерывно
меняется, и на корпусе СПК появляется переменная несбалансированная
подъемная сила, которая приводит к качке корабля. При этом элементы
конструкции и механизмы СПК испытывают значительные перегрузки,
снижается комфортность обитания для пассажиров и команды.
В другом типе СПК используют глубоко погруженные крылья. При
допустимых условиях плавания, ограниченных определенной высотой
^Н.Х4^К.К) к.к ум.к
Mz<0
Рис. 2.8. Продольная остойчивость СПК
73
Рис. 2.9. Поперечная остойчивость СПК
волньс эти крылья не должны пересекать поверхности воды. Напри-
мер, если мореходность судна ограничена 4 баллами при высоте волны
3 %-ной обеспеченности равной 2 м, то требуется заглубить крылья
больше чем на 2 м. Если крылья не выходят из воды, то переменное
морское волнение не сказывается на величине подъемной силы. Этим
достигаются благоприятные условия работы конструкций и ме-
ханизмов/ комфорт для пассажиров и удобство функционирования
экипажа.
Баланс между подъемной силой и весом СПК с глубоко погружен-
ными крыльями обеспечивается путем регулирования углов атаки
носового и кормового крыльев aKtH, ак к определяющихся углами
дифферента и атаки корпуса, и зависят от углов ориентации самих
крыльев, которые изменяются с помощью специальной автоматической
системы. В некоторых случаях положение крыльев остается неизменным,
а регулирование обеспечивается с помощью закрылков.
Крыльевые схемы с управляемым крылом достаточно сложны по
конструкции и в изготовлении, имеют пониженную надежность. Поэто-
му в чистом виде их применяют редко. Наиболее эффективными ока-
зываются СПК с комбинированной крыльевой схемой, у которых основ-
ная компенсация веса обеспечивается подъемной силой крыльев с по-
стоянной ориентацией, а стабилизация на волнении достигается благодаря
глубоко погруженным управляемым крыльям.
При формировании линейной модели продольного движения СПК
используют уравнения равновесия сил по продольной (2.13) и верти-
кальной (2.15) связанным осям, уравнение моментов относительно
поперечной оси (2.21) и соответствующие кинематические уравнения.
Присоединенными массами и моментами инерции пренебрегаем, так
как корпус в нормальных ходовых режимах движется в воздушной
среде. Тогда исходная система нелинейных уравнений имеет вид
74
Ф=Ы2‘
U>Z~JzzMz &>Х^У (1 Jxx/Jzz^\
yg = Vx sin ф + Vy cos ф; ?
Vy =m MiRy -a>z Vx + a>xVz ;
Vx—/?i Rx (^yVz +<ajzVy.
(2.39)
Продольная сила Rx образуется тягой винтов Т, гидроаэродинами-
ческим сопротивлением X от потоков воздуха на корпусе и жидкости
на крыльях, нескомпенсированной продольной составляющей веса Gx.
На СПК применяют гребные винты как постоянного, так и изме-
няемого шага. Сила тяги таких винтов зависит от угла поворота лопастей
6ш.в> частоты вращения гребного вала и, а также скорости ходя судна
V и угла дрейфа /3, т. е. T = T(V, Р, 5Ш.В, п).
Гидроаэродинамическое сопротивление определяется углами атаки
а, дифферента ф и дрейфа Р, а также скоростью хода V. Кроме того,
оно зависит от зуглубления крыльев, которое можно выразить через
ординату центра масс yg. Поворот крыльев на углы 6К>Н, 5К>К создает
некоторое дополнительное сопротивление. Принимая во внимание,
что проекция силы веса на продольную ось
Gx -gm sin ф9
сформируем суммарную силу по продольной оси в виде функции кине-
математических параметров и управляющих воздействий
&х T(V, Р, 5ш.в> я) Х(К, а, Р, ф, yg, 5к.н» ^к.к) ~~ &х(.&) ~
Ф , yg,n> .в > ^к.н > .к) •
(2.40)
Вертикальная составляющая Ry состоит из проекции силы веса
на связанную координатную ось Оу и подъемной силы крыльев:
Ry = 0,5pK2SKcyr (ак, 7г, Р) - gm cos \tcos 0. (2.41)
Согласно (2.38) в установившемся режиме они взаимно компенси-
руются. Но мгновенные значения этих сил в переходных режимах между
собой различаются, благодаря чему происходит подъем корабля на
крылья и обратный переход в водоизмещающий режим. Дисбаланс
подъемной силы и силы веса приводит также к вертикальной качке.
Подъемная сила на носовом и кормовом крыльях зависит от углов
атаки крыльев акн, ак к их заглубления 7zH, hKn угла дрейфа корабля
0. Углы атаки крыльев выражаются через угол атаки корабля а, его
дифферент ф и угловую скорость килевой качки a>z [ 14], а также
изменяются при повороте крыла (или закрылков) на углы 5К.Н, 5КЛС.
75
Величина заглубления каждого из крыльев hHt hK при отсутствии
волнения моря определяется ординатой центра масс корабля yg и углом
дифферента ф. С учетом (2.41) сумма проекций внешних сил на верти-
кальную ось представляет собой функцию нескольких аргументов,
среди которых есть переменные состояния СПК (а, /3 s Ф=Уё> со2) и
управляющие воздействия (3К.Н,6К<К)
А-у — Ry (И, а, р, ф, ygt cvz , 6к.н, $к.к) (2.42)
Соотношение вертикальных сил на носовом и кормовом крыльях
определяют дифферентующий момент на корпусе (см. рис. 2.8), кото-
рый зависит от тех же переменных, что и вертикальная сила
=MZ (К, й, р, ф,yg, coz , 5К н> §к.к) * (2.43)
Линеаризация уравнений (2.39) с учетом (2.40), (2.42), (2.43)
выполняется по обычным правилам при следующих допущениях.
Исходным балансировочным режимом считается установившееся
движение СПК с постоянной скоростью хода VQ, при которой гидро-
динамическая сила на крыльях обеспечивает полную компенсацию
веса корабля, и его корпус целиком выходит из воды. В этих условиях
корабль обладает большой кинематической энергией, и благодаря его
инерции колебания продольной скорости оказываются незначитель-
ными. Гидроаэродинамические силы и тяга винтов определяются практи-
чески постоянным скоростным напором. Поэтому при формировании
линейной модели продольного движения СПК, которая описывает при-
ращения кинематических параметров относительно их значений в ба-
лансировочном режиме, можно исключить зависимость сил и момен-
тов от приращения скорости поступательного движения и не рассматри-
вать уравнение равновесия сил по продольной оси.
В балансировочном режиме СПК имеет постоянные и равные между
собой углы атаки и дифферента а0 = Фо > благодаря чему ордината центра
масс = const. Кроме того, управляемые крылья находятся в своем,
исходном состоянии Зкн0=6к,кО=0,и дрейф судна отсутствует (30 = 0.
Благодаря симметрии корпуса и крыльев относительно* диаметральной
плоскости СПК, малые отклонения угла дрейфа Д0 не изменяют про-
дольные и вертикальные силы и дифферентующий момент. При этих
допущениях приращения кинематических параметров рассчитывают
на уравнения (2.39) , в которых правые части формируются приращения-
ми функций, определяемыми по формулам (2.7), (2.10), (2.11). Одно-
временно осуществляем замену переменной Vy =~ a VQ ив дальнейшем
скорость вертикального перемещения СПК будем оценивать углом
атаки. Тогда
Д ф = Д ; л
Д = J +M?byg + !
76
+ M^3&COZ A SK H +AfZK A6K(K) j
Ayg = VQ (А ф - Aa);
Ai—W1 (R^a+R'^+R? A^g +
+ £“Acaz +Я*Н A6KJI +Я$к A6K.K + Ry&<^,
(2.44)
где ; M—частные производные соответствующих функ-
ций по каждому из аргументов.
Опуская знак приращения переменных, представим (2.44) в матрич-
ной форме
(2.45)
матриц А и В (2,45) определяют с помощью
методик, которые приводятся в [14]. Форма этих матриц показывает,
что килевая и вертикальные качки связаны между собой в рамках
продольного движения СПК.
2.7. Уравнения пространственного движения
автономного подводного аппарата
В последние годы подводные аппараты находят широкое
применение при проведении научно-исследовательских, аварийно-спаса-
тельных, промысловых и других работ на континентальном шельфе и в
океане. Аппараты отличаются многообразием форм и габаритных разме-
ров, имеют различные принципы движения, стабилизации и управления.
При этом их объединяет способность свободно перемещаться в воде
в том или ином удалении от поверхности.
Подводные аппараты классифицируют по способу создания движу-
щей силы: гравитационно-гидростатические, автономные и буксируемые.
В пределах каждого класса они могут быть обитаемыми или необитае-
мыми.
Гравитационно-гидростатические аппараты движутся за счет потен-
циальной энергии балласта — нескомпенсированного веса. Их всплытие
и погружение, а также продольное перемещение, обеспечивается управ-
лением плавучести и ориентацией в пространстве. Этим аппаратом свой-
ственны невысокие скорости и неудобообтекаемые формы, а зона ра-
боты может располагаться на значительной глубине, но ограничена по
расстоянию.
77
У Автономные аппараты имеют специаль-
ный двигательно-движительный комплекс.
/X Они МОГУТ развивать средние и высокие
Xх скорости движения. При ограниченных
энергетических ресурсах расширение райо-
на Работ достигается благодаря удобообте-
каемой форме корпуса. Изменение глубины
z погружения, как правило, осуществляется
V \ чХ путем управления дифферентом. Однако
Vх некоторые автономные аппараты, кроме
Рис. 2.10. Автономный под- ВЙНта с горизонтальной линией вала, ко-
водный аппарат торый создает тягу по продольной оси,
имеют вертикальные винты. Последние
позволяют всплывать и погружаться не изменяя ориентацию аппарата.
Возможность такого маневра, в частности, бывает необходима по усло-
виям использования технологического инструмента для автономных
подводных роботов, выполняющих аварийно-спасательные работы.
Буксируемые подводные аппараты не имеют собственной двигатель-
но-движительной установки. Сила тяги такого аппарата создается натяже-
нием кабель-троса. Поэтому его скорость, глубина погружения, район
плавания, особенности движения при выполнении технологических опе-
раций во многом определяются особенностями судна-буксира.
При всем многообразии подводных аппаратов в характере их движе-
ния есть много общего. Поэтому математическое описание процессов
управления движением одного класса аппаратов с незначительными из-
менениями может использоваться при анализе поведения аппаратов
других классов. В качестве базовой математической модели используют
уравнения автономного подводного аппарата (АПА), который может
свободно перемещаться в горизонтальной и вертикальной плоскостях.
Для анализа этих перемещений требуется полная модель пространствен-
ного движения твердого тела в жидкой среде. Упрощения допускаются
только для частных стационарных режимов, к которым относятся дви-
жение и стабилизация аппарата на заданной глубине, всплытие и заглуб-
ление по наклонной траектории или вертикально.
При составлении уравнений динамики АПА следует иметь в виду,
что его форма не соответствует эллипсоиду вращения. Для повышения
остойчивости аппараты имеют развитое кормовое оперение в виде ста-
билизаторов, вертикальных рулей и элеронов (рис. 2.10). Поэтому
в матрице присоединенных масс и моментов инерции необходимо учиты-
вать внедиагональные элементы. При симметрии аппарата относительно
продольной оси кроме диагональных элементов Хп 4-Х66 значимую ве-
личину имеют Х2б ~Х62 и Х35 =Х53 [12]. Поэтому суммарная кинети-
ческая энергия АПА, движущегося в водной среде, не соответствует
(1.33), а согласно (1.31) равна
78
” tn+ Хц 0 0 0 0 0 VX
0 0 0 0 xa§ Ky
0 0 m+ 0 ^8S 0 Vz
Т— ( ] 0 0 0 ^XX + ^4 4 ° 0 Чк
2 0 0 x58 0 ^yy+Xss 0 Cdy
0 ^6 2 0 0 0 Jzz +
После перемножения матриц с учетом (1.32) получаем
Т = 0,5 (шх Vx + ту Vy + ™Z Vz + Jx^x + dy СОу + Jz COZ ) +
X 3 g Vy ^z X 3 5 ^2 у •
Располагая формулой кинетической энергии, на основании (1.22) опре-
деляем проекции векторов количества движения и момента количества
движения
Кх ™Х ^Х ) Ку у ^*26^2 J Kz ™Z ^35 j
> (2.46)
d^x dx^x'i djy Jy co у + X 35 Vz j Lz — Jzcoz + X26 Vy
Уравнения динамики пространственного движения АПА в общей
форме получаются подстановкой (2.46) в (1.21)
<7ГХ 2 2^
mz со у Vz — ту coz Vy + Х35 со у Х26 coz — Rx *f
mx
т
dVy dcoz
^26 x^z Fx ~ ^2 ^X^2 ~ ^35 ^X^y =d^y j
mz
dVz d со у
^3S & + my ^xVy — mxcoyVx + Ki§GJx(oz—Rz \
doo
x
^—+(X26 +^35) (<^yVy - (OZVZ) =MX;
(2.47)
dVz
у
^wv
~dt ^35 dt (Zx ~~ /2) + ^x ^2 (^x “ mZ )
~ ^26 wx Vy — X35 co у Vx-My ;
dcoz dVy
dt + ^26 dt ^^y^Jy-Jx^^xV^my-mx)^
^Хз5СОхК2 +^26^2 Vx ~MZ
79
Правые части уравнений (2.47) образуются гидродинамическими сила-
ми и моментами, определяемыми выражениями (1.36), (1.37), силами
веса G> водоизмещения А и тяги винта Т3 выраженными соотношениями
(1.38) —(1.41). Специфические особенности формы АПА отражаются
в зависимости гидродинамических характеристик от кинематических
параметров движения. Многие аппараты имеют разрезные горизонталь-
ные рули (элероны). При разном повороте левой и правой лопастей
на углы 6Л и 5П дифферентующий момент управления определяется
их средним значением 6Г =0,5 (6Л + 6П) /а кренящий — разностью А 5Г =
= 5Л — 5П- Другая конструктивная особенность АПА заключается в том,
что при одновальной двигательной установке ось вала движителя совме-
щается с продольной осью аппарата, а сам движитель образуется двумя
винтами с противоположным вращением. Благодаря этому сила тяги
ориентируется по оси Ох и исключаются сопутствующие дифферен-
тующий и кренящий моменты, которые могли бы играть роль дополни-
тельных возмущений.
С учетом сказанного можно представить внешние силы и моменты
уравнений (2.47) в следующем виде:
RX = T-- qv2^ сх(а,$3Ьт, 5В) + (А - G) sin ф ;
Ry = qv 2у/3 Су («, coz, 6Г) + (А - (7)cos ф cos 3;
Rz = qv 2^3 cz (Р, Ыу, 5В) - (А - G) cos ф sin 3; ч
Мх =qvmx (/3, сох, Д8Г) —Aza cos ф cos 3 ~Аул cos ф sin 3;
(2.48)
Му -qvmy (3, Щ?,5В) + Ахл cos ф sin 3 +Aza sin ф,
Mz = qvmz (a, coz , 5Г) ~ АУа sin Ф + Axa cos ф cos 3.
Чтобы получить полную модель пространственного движения АПА,
уравнения равновесия сил и моментов (2.47) с учетом (2.48) должны
быть дополнены уравнениями связи общего вида (1.7) и (1.13). Эта
модель используется для анализа глубокого маневрирования аппарата,
крена и дифферента. Режимы малого маневрирования и стабилизации
можно исследовать по упрощенным линеаризованным уравнениям.
Рассмотрим движение АПА на заданной глубине (yg0 = const)
с постоянной скоростью (VQ = const). Кинематические параметры в ис-
ходном балансировочном режиме постоянны и имеют следующие зна-
чения: Кх0 = Ко; Kyo=-Koao; =0, = <*>z о =0; Фо=ао',
“ 3Q =0. В процессе движения происходят малые колебания пере-
менных состояния (углов атаки и дрейфа, рыскания, крена и диффе-
рента) и управляющих воздействий (углов перекладки вертикального
и горизонтального рулей).
80
Линеаризация модели пространственного движения АПА приводит
к следующим уравнениям равновесия сил и моментов:
- myVQa + \26coz + mxV0coz =qv2,3(:cya + с “wz +
+ c«Sr) + (Л-G);
mz V0fi + X3Scoy -mxV0coy = qv2/3 (c^fi + c^coy +
+ csz 8B) + (A-G)d;
Jxcox = qv (т%Р + т“шх + т*Ь8г) -AzA -AyA6;
J У co у + X35 Ko /3 + Ko /3 («1 x — mz ) — X35 Vo co у —
=qv (m0y/3 +m^coy +msy8B) + Axa6 + Axa ф-,
Jz ^Z ^26 ^0 ~ Cl (jTly Шу) "h ^26 K0 ^z ~~
=qv (mz a + m^coz +msz 8Г) -АуАф+АхА , (2.49)
а предположение о малых значениях углов Эйлера позволяет исполь-
зовать упрощенные уравнения связи вида (1.9), (1.18) .
При хорошей исходной балансировке аппарата, когда достигается
совпадение точки приложения силы водоизмещения с центром масс
(хл =Уа = za =0), уравнения бокового и продольного движения АПА
оказываются независимыми. После приведения к форме Коши уравне-
ния бокового движения имеют вид
(2.50)
а продольного
Структура линейной модели АПА показана на рис. 2.11.
(2.51)
6—510
81
Sr
Рис. 2.11. Структура линейной модели автономного подводного аппарата
82
Сопоставление (2.50), (2.51) с уравнениями бокового движения
СВП (2.35) и продольного движения СПК (2.45) подтверждает струк-
турное подобие линейных моделей различных типов морских подвиж-
ных объектов. Специфика подводных аппаратов проявляется в отсут-
ствии позиционных моментов в уравнениях бортовой и килевой качки
(я65 ~0, бг87 =0), а также позиционных сил в уравнении вертикальных
перемещений (#09 =0). Это означает, что аппарат не обладает остойчи-
востью и его устойчивое движение возможно при автоматической стаби-
лизации с помощью вертикальных и горизонтальных рулей.
У АПА слабо проявляется взаимное влияние движений рыскания
и крена, что находит отражение в относительно малых величинах коэф-
фициентов #35, я45, #64 • Поэтому возможен раздельный анализ трех ви-
дов движений при плавании АПА на заданной глубине. Бортовая качка,
перемещение аппарата в горизонтальной (рыскание и боковой снос)
и продольно-вертикальной плоскостях исследуются без учета взаимного
влияния.
Другой характерный режим движения АПА — это всплытие или по-
гружение по наклонной траектории с большими углами дифферента,
но малыми углами атаки, дрейфа, крена и рыскания при постоянной
скорости хода. Переход на наклонную траекторию осуществляется с по-
мощью горизонтальных рулей, так же как и возвращение в режим пла-
вания по заданной глубине.
При этих условиях движение аппарата в продольно-вертикальной
плоскости описывают первое и последнее линеаризованное уравнения
равновесия сил по вертикальной оси и моментов относительно попе-
речной оси, преобразованные к форме Коши в предположении хл =
=УА ~ZA =0:
= Д gg Сйг + а 80 Я + ^83 8 г + Z>84 (-^ — G) J
а =д08 wz + «00 я + &03Sr + 8о4 (А - G),
а также уравнение связи, которые для этого режима движения являются
нелинейными:
ф = (1/cos ф) coz ;
= VQ (cos ф + a sin ф) ;
= Ко (sin ф — acos ф) .
Нетрудно заметить, что позиционные переменные состояния (^>х^,
yg) не влияют на угол атаки а и угловую скорость , которые мож-
но определять путем решения линейных уравнений динамики. Рассчитан-
ные a(t) и ccz (t) можно затем использовать, чтобы найти ф (t), xg (О
и Xg (О • Математическая модель движения АПА в рассматриваемом ре-
жиме распадается на линейный и нелинейный блоки с односторонней
связью между ними.
Особенности математических моделей подводных аппаратов в дру-
гих режимах движения рассмотрены в [ 1,12].
83
Контрольные вопросы
1, Что такое балансировочный режим МПО? Дайте физическое и математи-
ческое определение.
2. Каковы значения кинематических параметров движения МПО в баланси-
ровочном режиме?
3. В чем причина многорежимного характера движения МПО?
4, Почему при постоянном уровне управляющих и возмущающих воздействий
возможны несколько балансировочных режимов?
5. Какие основные режимы движения МПО Вы знаете? Дайте их определение
и физические аналогии.
6. Как осуществляется линеаризация скалярной и векторной функции ска-
лярного и векторного аргументов?
7. Покажите, как линеаризуется обыкновенное нелинейное матричное диффе-
ренциальное уравнение в форме Коши.
8, Какая из матриц постоянных коэффициентов линейного уравнения пере-
менных состояния МПО позволяет оценить устойчивость нелинейного объекта
в балансировочных режимах?
9. Запишите характеристический полином линейной модели МПО.
10. Можно ли по корням характеристического полинома судить о динамических
свойствах линейного объекта?
11. Как протекает переходный процесс в линейной системе, если корни харак-
теристического полинома вещественные, мнимые или комплексные? Рассмотрите
случаи, когда они расположены в комплексной плоскости слева и справа от мни-
мой оси.
12. Какие численные показатели переходного процесса можно определить
по значениям корней характеристического полинома?
13. Как линеаризуются основные нелинейные зависимости уравнения движе-
ния МПО?
14. Какие методы используются для определения коэффициентов линеари-
зации гидроаэродинамических характеристик МПО? Как при этом используется
метод наименьших квадратов?
15. Какие кинематические параметры определяют каждое из элементарных
движений МПО?
17. Какие уравнения равновесия сил и моментов, какие уравнения связи
характеризуют поступательное продольное движение, боковой снос, рыскание,
бортовую, килевую и вертикальную качки МПО?
18. Какие элементарные движения образуют боковое и продольное движения
МПО?
19, Приведите структурную схему линейной математической модели про-
странственного движения МПО. Что определяют матрицы перекрестных связей?
20, Приведите структурные схемы линейных моделей бокового и продольного
движения МПО. Что определяют собственные матрицы элементарных движений?
21. В каких режимах допускается разделение движений при анализе различных
типов МПО?
22, На основе каких уравнений формируется линейная модель рыскания
надводного водоизмещающего судна? Какие при этом делаются допущения?
23. Дайте характеристику внешних сил и моментов, которые учитываются
в уравнениях рыскания водоизмещающего судна.
24, Запишите линейную модель рыскания надводного корабля в виде урав-
нений переменных состояния и передаточных функций.
25. Как по линейной матричной модели оценить устойчивость движения судна
на курсе?
26. Кратко охарактеризуйте особенности движения судна на воздушной по-
душке. Почему СВП обладает собственной продольной и боковой остойчивостью?
27. На основе каких уравнений, при каких допущениях формируется линей-
ная модель бокового движения СВП?
84
28. Дайте характеристику основных внешних сил и моментов, действующих
на СВП. В чем заключается особенность гидродинамических сил и моментов?
29. Охарактеризуйте взаимное влияние рыскания и бортовой качки СВП.
30. Существует ли подобие рыскания надводного водоизмещающего судна
и СВП?
31. Какой характер носят свободные динамические процессы при рыскании
и бортовой качке СВП?
32. Покажите, какой вид имеют основные амплитудно-частотные характе-
ристики, определяющие боковое движение СВП.
33. Дайте краткую характеристику особенности движения СПК. Чем дости-
гается его устойчивость?
34. На основе каких уравнений,при каких допущениях формируется линейная
модель продольного движения СПК? Какие при этом учитываются внешние силы
и моменты?
35. Приведите линейную модель продольного движения СПК в форме уравне-
ний переменных состояния, структурной схемы, передаточных функций.
37. Какие классы подводных аппаратов Вам известны? Дайте краткую ха-
рактеристику каждого из них.
38, Какие особенности автономного подводного аппарата необходимо учиты-
вать при формировании его математической модели?
39. Что общего и какие различия у линейной модели движения АПА на задан-
ной глубине с линейными моделями других типов МПО?
40. Приведите известные Вам формы линейных моделей АПА.
41. Расскажите об особенностях моделирования процесса всплытия или погру-
жения АПА по наклонной траектории.
Глава 3.
ВЕТРО-ВОЛНОВЫЕ ВОЗМУЩЕНИЯ
ЗЛ. Общая характеристика
□етро волновых возмущений
Движение морских подвижных объектов происходит
в условиях постоянного воздействия ветра, течений, морского волнения.
Взаимодействие перемещающихся частиц воды и воздуха с корпусом
движущегося объекта приводит к возникновению гидроаэродинамиче-
ских сил и моментов, которые образуют ветро-волновые возмущения.
В результате этих внешних воздействий появляется качка (бортовая,
килевая, вертикальная), рыскание и боковой снос (дрейф), снижается
скорость поступательного движения МПО. Существенная часть мощности
исполнительных органов управления (рулей, подруливающих устройств,
движителей и т. п.) расходуется на компенсацию возмущающего воздей-
ствия среды. При интенсивном ретро-волновом процессе уровень управ-
ляющих воздействий может быть существенно ниже возмущений. Это
отрицательно сказывается на характере движения и качестве управления.
Ухудшаются условия функционирования МПО. Системы управления
перестают обеспечивать требуемые параметры движения. В экстремаль-
ных условиях преобладание ветро-волновых возмущений приводит к
развитию аварийных ситуаций. Сопоставление возможностей управления
и уровня ветро-волновых воздействий осуществляется в процессе соз-
дания МПО.
Разнообразные движения водной и воздушной среды представляют
собой единый физический процесс. Волны и течения в океане образуются
за счет энергии воздушного потока. Йх интенсивность зависит от средней
скорости ветра над морем. В свою очередь, энергия морского волнения
сказывается на характере движения воздуха в приводном слое атмосфе-
ры. Физически сложный ветро-волновой процесс удобно разложить на
несколько элементарных. Это упрощает изучение физического явления,
делает более наглядным математическое описание отдельных составляю-
щих и процесса в целом при сохранении адекватности моделей. Расчет
возмущающих гидроаэродинамических сил и моментов при раздельном
анализе ветра, течения и волнения в большей мере согласуется с сущест-
вующей теорией и методами гидроаэродинамики. Раздельный анализ воз-
можен из-за различного характера движения частиц среды и их физиче-
ских отличий.
86
Рис. 3.1. Распределение поверхностного (я) и глубинного (6)
течений
Ветро-волновой процесс образуется движением водной и воздушной
среды. Движение воды состоит из течения и волнения. Воздушный поток
включает в себя постоянный ветер,, турбулентную и волновую составляю-
щие, а также шквалы.
Характерный признак течения заключается в том, что оно образуется
однонаправленным поступательным горизонтальным движением частиц
жидкости. Это самая простая составляющая ветро-волнового процесса.
Различают поверхностное (рис. 3.1, а) и глубинное (рис. 3.1, б) течения.
Интенсивность течения и его направления характеризуются вектором
скорости и>т. При исследовании систем управления движением МПО этот
вектор можно считать постоянным, так как анализ выполняется на огра-
ниченных временных и пространственных интервалах, а геометрические
размеры морских объектов существенно меньше протяженности слоев
воды с одинаковой скоростью поступательного движения. Вертикальные
перемещения частиц воды из одного слоя течения в другой не имеют оп-
ределяющего значения. В основном наблюда-
ется плоскопараллельное движение жидкости
с постоянной групповой скоростью частиц на
заданной глубине (см. рис. 3.1). Это дает
основания считать, что вектор скорости
течения на поверхности моря или определен-
ной глубине расположен в горизонтальной
плоскости неподвижной координатной сис-
темы, состоит из продольной и поперечной
составляющих и не имеет вертикальной
составляющей. Взаимодействие течения с
кораблем определяется не только скоростью
z
Рис, 3,2, Вектор скорости
течения в связанной коор-
динатной системе
87
водного потока, но и углом набегания £, который отсчитывается относи-
тельно диаметральной плоскости против часовой стрелки (рис. 3.2).
Течение при 0<| £| <90° — с носа при 90° < | < 180° — с кормы.
При малых углах крена и дифферента корабля, когда горизонтальные
плоскости неподвижной и связанной координатных систем практически
совпадают, проекции вектора скорости течения на связанные координат-
ные оси имеют вид
w тХ = — wT cos J; wTZ=wTsin£.
Скорость океанических поверхностных течений редко превышает
1—2 уз (0,5—1 м/с), хотя скорость Гольфстрима на поверхности может
достигать 5 уз (2,5 м/с). Течения ослабевают по мере погружения. Су-
ществуют также глубинные течения.
Морское волнение связано с вертикальным перемещением частиц
жидкости. Это движение носит колебательный характер, причем после-
довательные волны случайным образом различаются по амплитуде,
периоду и форме. В океане встречаются самые разнообразные волны:
приливные с периодом 12—24 ч, долго периодические — 5 мин — 12 ч,
вызванные циклонами и землетрясениями. Наиболее характерны ветро-
вые гравитационные волны с периодом 1—30 с, которые возникают в
результате воздействия на частицы жидкости ветра и гравитационных сил
Земли. Они практически всегда присутствуют на поверхности моря и
содержат основную энергию морского волнения.
Воздушный поток над поверхностью моря представляет собой одно-
направленное горизонтальное движение частиц воздуха, характеризую-
щееся некоторой групповой скоростью. В определенной мере можно про-
вести аналогию между ветром и течением. Но из-за того, что плотность
воздуха в 800 раз меньше плотности воды, в воздушном потоке ярче
проявляются вертикальные составляющие, обусловленные, в частности,
волнением на поверхности моря, а также турбулентные завихрения. На-
рушение плоскопараллельного движения воздушного потока в привод-
ном слое атмосферы проявляется в переменном характере скорости
ветра, Особый вид ветрового процесса представляют собой шквалы, ког-
да скорость ветра в течение короткого времени изменяется в широких
пределах.
3.2. Регулярное волнение
Гравитационные волны, вызванные ветром, преобладают
в открытых акваториях Для корабля они являются основным постоян-
но действующим возмущением. Поэтому математическое описание мор-
ского волнения наиболее разработано применительно к этому типу волн.
На рис. 3.3 представлен график распределения волны. Там же пока-
заны ее основные элементы — вершина, или гребень Г и подошва П.
88
гущей волны
Длина волны X, м представляет собой расстояние между вершина-
ми или подошвами волн. Высота волны Л,м — это вертикальное
расстояние от подошвы до вершины. Волновая ордината г (х,
t), м определяет отклонение от средней линии кромки водной поверхно-
сти в заданной точке х в момент времени t. Максимальное значение вол-
новой ординаты называют амплитудой волны Rm. Очевидно, что
высота волны равна удвоенной амплитуде h = 2Rm. Угол наклона каса-
тельной в любой точке х для момента t называют углом волново-
го склона у (х, t), рад.
Периодическое вертикальное движение частиц жидкости создает эф-
фект бегущей волны,, гребень которой перемещается в определенном на-
правлении (рис. 3.4) с фазовой скоростью с. Скорость распространения
глубоководных гравитационных ветровых волн определяется их перио-
дом 71, с или угловой частотой а = 2я/ Г, рад/с:
с~ g/ g ~ gT/lir = 1,55 Т, м/с,
где g =9,81 м/с2 — ускорение силы тяжести.
Длина волны с учетом (3.1)
Х= сТ = 2-ngl g2
(3.1)
(3.2)
Фазовая скорость мелководных волн зависит не от периода волне-
ния, а определяется глубиной акватории Н3 м
с~ (gH)Q>5 = 3,1 у/7Г
Разница между глубоководными и мелководными волнами опреде-
ляется отношением длины волны к глубине. При глубине акватории
больше четверти длины волны (Н > Х/4), волна считается глубоковод-
ной; при глубине менее двадцатой части длины волны Н < Х/20 — мел-
ководной.
89
Пример 3.1. Рассмотрим гравитационную волну с угловой частотой а=1,1 с"1
и периодом Т = 5,7 с. Скорость ее распространения в глубоком бассейне равна
8,92 м/с, а длина, рассчитанная по формуле —50,9 м. Следовательно, глу-
бина бассейна, при которой волна может считаться глубоководной, должна быть
больше 12,7 м. Если же глубина бассейна меньше 2,5 м, то волна такой частоты
оказывается мелководной. Скорость ее распространения уже не зависит от частоты
и изменяется по мере уменьшения глубины. При Н =2,5 м она составляет с =
= 4,9 м/с, при Н = 1 м - с = 3,1 м/с, а длина волны А равна соответственно 27,9 и
17,7 м (рис. 3.5).
При синусоидальной форме бегущей волны волновая ордината в за-
висимости от времени t и координаты х определяется гармонической
функцией:
2ттх \
— - о/ . (3.3)
Л /
В произвольной точке акватории (при фиксированном х=х0) волно-
вая ордината является функцией только времени
с периодом Т=2тг/о.
Подставляя (3.2) в (3.3), получаем выражение волновой ординаты
бегущей глубоководной волны в виде
/ 0"^ \
г (х, t) = Rm cos I x — at I
Угол волнового склона связан с волновой ординатой условием
(3-4)
Рис. 3.5. Зависимость скорости
волны от глубины бассейна
tgy(x, Г) =
dr (х, t)
dx
откуда для малых углов
' а2 .( а2
, г) Rm-------sm ----х~ at
g V
что устанавливает приблизительное со-
отношение между амплитудой волны и
максимальным значением угла волно-
вого Склона
Гт ~ Rm & , рад,
(3.5)
погрешность которого не превосходит
10 % при Гт <0,5774 (30°).
90
В фиксированной точке акватории (х=х0) угол волнового склона
представляет собой гармоническую функцию времени
(2тгх0 \
at ~ —X-----] ’
которая по фазе отстает на четверть периода от гармонической функции
волновой ординаты в той Же точке акватории.
Морское волнение с синусоидальной формой волны называют регу-
лярным. Предположение, что вся энергия волнения связана с одной гар-
монической составляющей фиксированной частоты, является достаточно
грубым допущением. Следующие одна за другой волны различаются
между собой по амплитуде, периоду и форме. Суммарная энергия волн
распределяется в некотором частотном диапазоне. Однако модель регу-
лярного волнения, благодаря своей простоте и наглядности, весьма
удобна для изучения взаимодействия волнового процесса с корпусом
движущегося судна, а спектральные методы позволяют использовать ре-
зультаты гармонического анализа при изучении более сложных форм
волнового воздействия.
3.3. Кажущаяся частота и редукционные коэффициенты
Волновое возмущение, воспринимаемое МПО, по частоте
и интенсивности отличается от волнения на поверхности моря. Это про-
исходит вследствие взаимного перемещения корабля и волн и соизмери-
мости их геометрических размеров. Движение корабля на волне изменя-
ет частоту волнового возмущения. Если размеры волны близки к разме-
рениями (длина, ширина, осадка) корабля, то он не может при своем
движении повторить ее профиль. В результате уровень возмущающего
воздействия волнения изменяется.
На движущемся МПО регулярное волнение воспринимается не со
своей истинной частотой а, а с новой преобразованной частотой со, кото-
рая получила названия кажущейся. Соотношение между о и со
получается на основании уравнения регулярной глубоководной вол-
ны (3.4).
Будем считать объект материальной точкой, которая движется рав-
номерно со скоростью V под углом £ к направлению движения волн, как
это показано на рис. 3.6. Тогда координата точки встречи корабля с вол-
ной изменяется
х = — Vt cos £.
(3.6)
Подставив (3.6) в (3.4), получим закон изменения волновой ординаты
в точке встречи корабля с волной:
91
r (/•) -Rm cos
где
Vo \
—~ cos £ + 1 \ ot
g /
~Rm COS GJt
co =
2 V
o + о -----cos g
g
1 +ao
Vo
1 +-----cos £
g
(3-7)
o =
о
представляет собой кажущуюся угловую частоту регулярного волнения,
действующего на движущийся корабль; a = Vcos£/g — фактор относи-
тельного движения корабля на волне.
Анализ соотношения (3.7), представленного в виде графика на
рис. 3.7, показывает, что при движении корабля лагом к волне | % I =90° ,
а = 0, истинная и кажущаяся частоты совпадают. Если объект движется
навстречу волне, 0<| £| < 90°, а > 0, и кажущаяся частота волнения
оказывается больше истинной. Более сложная зависимость оказывается
при движении корабля по волне 90° < | £ | <180°, а < 0.
Прежде всего отметим, что возможны такие условия движения, при
которых попутное волнение с частотой а0 = 1/1 а I имеет нулевую кажу-
щуюся частоту со0 =0. Это происходит при совпадении скорости волны
и корабля V I cos £ I =с, когда сохраняется без изменения их взаимное
расположение. При других скоростях движения корабль может отставать
от волны V I cos | < с или обгонять ее V\ cos £ | > с. В первом случае
частота волнения лежит в диапазоне 0 < о < 1 /1 а I, и кажущаяся частота
оказывается меньше истинной. Во втором случае частота волнения лежит
в области а> 1/1 а I, и кажущаяся частота может превосходить истин-
ную.. Сказанное иллюстрируется рис. 3.8, где показаны кажущиеся часто-
ты волнения при одном фиксированном значении истинной частоты пи
для корабля с разной скоростью хода. С увеличением скорости хода кри-
вая со (а) смещается в область низких частот, так как а0=1/1д I =
=g/ V I cos £ I. Одновременно уменьшаются экстремальные значения ка-
жущейся частоты и соответствующие им значения истинной частоты. Вы-
вод, следующий из приведенного анализа, заключается в том, что волне-
ние, которое для тихоходных судов создавало низкочастотное возмуще-
ние, для быстроходных судов может оказаться возмущением высокоча-
стотным. Определим, при какой скорости хода корабля кажущаяся
Рис. 3.6. Взаимное движение
корабля и волн
Рис. 3.7. Истинная и кажу-
щаяся частота регулярного вол-
нения
92
Рис. 3.8. Влияние скорости хода на
кажущуюся частоту волнения
Рис. 3.9. Продольная и поперечная
составляющие угла волнового склона
частота окажется выше истинной для попутного волнения, воспользовав-
шись условием, вытекающим из (3.7): | 1 +яп| >1. Имея в виду, что
а < 0, получим I а | >2/а, откуда при £ = 180° (волнение в корму)
V > 2g/ о или V > 2 с, т. е. скорость корабля должна вдвое превосходить
скорость распространения волны/
При характеристиках гравитационной глубоководной волны, рас-
смотренной в примере 3.1 (а = 1,1 с“"1=Т = 5,7 с, с = 8,92 м/с, Х = 50,9 м),
корабль должен двигаться со скоростью свыше 17,84 м/с (около 36 уз-
лов), чтобы кажущаяся частота волнения превосходила истинную. По-
добные скорости характерны, в частности, для судов с динамическими
принципами поддержания.
Рассмотрим теперь, как сказываются на интенсивности волнового
воздействия соотношения геометрических размеров корабля и длины
волны.
При движении корабля перпендикулярно волне (встречно или по-
путно) изменение дифферента ^(f) совпадает с углом волнового склона
у(?), если длина корабля существенно меньше половины длины волны
(2£4- X) . По мере роста отношения L/ X амплитуда дифферента корабля
уменьшается при неизменной амплитуде угла волнового склона. Ана-
логичный эффект уменьшения амплитуды угла крена в зависимости от
отношения ширины корабля к длине волны В/ X имеет место при попе-
речном волнении. На ослабление качки влияет также осадка корабля Г.
Иные геометрические соотношения существуют при движении ко-
рабля под некоторым углом % к направлению бега волн.
Во-первых, амплитуда угла дифферента корабля определяется в
этом случае не амплитудой угла волнового склона Гш, а только его про-
дольной составляющей Гф = Гт I cos § | . В свою очередь, амплитуда угла
крена зависит от поперечной составляющей угла волнового склона =
= Гт I sin § I (рис. 3.9). Поэтому гармонику угла волнового склона
93
xe
. 813^11
Рис, 3.10. Общая форма
редукционных коэффи-
циентов
у (Г) =Гт cos at удобно представить в виде
продольной 7^(7) =rwl cos £ I cos Gt и попе-
речной 7е (f) =Гт I sin g I cos Gt, составляю-
щих, ориентированных по отношению к свя-
занным осям х, z. Первая вызывает ки-
левую качку (дифферент) , вторая — бортовую
(крен).
2 Во-вторых, соотношение геометрических
размеров следует определять с учетом ориен-
о2 тации корабля относительно направления бега
волн, которая характеризуется углом £
(см. рис. 3.9). Амплитуда угла дифферента
при этом зависит от соотношения
L I cos £ I /X, а угла крена— от В I sin £ I /X.
Степень умерения качки оценивается
тремя редукционными коэффициентами: (£ I cos £ I/X) — для киле-
вой качки; (В I sin £ I /X) — для бортовой качки; кт (Т/ X) — для
учета влияния осадки.
Эти коэффициенты позволяют определить амплитуды бокового и
продольного воздействий, которые будем называть приведенными про-
дольным и поперечным углами волнового склона. Для регулярной волны
фу (f) = К ф Кт I COS £ I Гт COS Gt;
>
Оу (t) = к о к т I sin £ I Гт cos Gt.
(3-8)
Редукционные коэффициенты зависят от длины волны, и, следова-
тельно, от частоты волнения. Они имеют вид амплитудно-частотных ха-
рактеристик линейных низкочастотных фильтров (рис. 3.10). Конкрет-
ные значения этих коэффициентов определяются конструктивными осо-
бенностями корпуса корабля.
3.4. Нерегулярное волнение
Синусоидальная форма волновой ординаты и понятие ре-
гулярного волнения представляют собой математическую абстракцию.
В действительности на поверхности океана профиль волны существенно
отличается от синусоидального. Причина этого заключена в пространст-
венной неоднородности и непостоянстве ветрового потока над обшир-
ной акваторией, в сложности процессов волнообразования, распростра-
нения, отражения и наложения волн. В результате последовательные вол-
ны отличаются по амплитуде, периоду и форме. Суммарная энергия волн
распределяется в некотором частотном диапазоне. Это означает, что вол-
новая ордината формируется совокупностью элементарных гармониче-
ских волн, различающихся по амплитуде, частоте, длине и т. п.
94
f 2пх \
г (х, 0=S Rm к cos I —--- (ДД ) .
к у /
Нерегулярность и хаотичность взволнованной поверхности дают ос-
нования рассматривать волнение как случайный вероятностный процесс,
при котором амплитуды и частоты элементарных гармоник изменяются
случайным образом. Такое волнение получило название нерегуляр-
ного.
В общем случае этот процесс носит нестационарный характер. Одна-
ко для сравнительно небольших отрезков времени (20—40 мин) при
благоприятных условиях волнообразования волнение можно рассматри-
вать как квазистационарный эргодический процесс. При этом волновая
ордината в фиксированной точке г (х0, t) представляет собой слу-
чайную стационарную функцию времени, удовле-
творяющую условию эргодичности. По определению волновой
ординаты эта функция является центрированной, т. е. ее математическое
ожидание тг =0. Мерой интенсивности для нее служит дисперсия Dr ,
м2. Кроме того, вероятностные свойства волновой ординаты определя-
ются корреляционной функцией Кг (т), м2, спектральной характеристи-
кой Sr (о), м2 с и плотностью распределения высоты волны f(h).
В отечественной практике для оценки интенсивности нерегулярно-
го волнения наряду с дисперсией волновой ординаты Dr используют
понятие высоты волны 3 %-ной обеспеченности. Под этим понимают
такую высоту волны, вероятность превышения которой составляет 3 %,
т. е. Р (h >/г з%) =0,03. Между дисперсией волновой ординаты и вы-
сотой волны 3 %-ной обеспеченности существует пропорциональная за-
висимость. Она определяется плотностью распределения высот волн,
которая, как установлено многочисленными и достоверными экспери-
ментальными данными, подчиняется закону Релея:
h
exp (-Й2/8Dr), 0<h<°°.
Функция распределения F (h ), устанавливающая вероятность того,
что случайная величина высоты волны принимает значения меньшие чем
h, имеет вид
h
F(h) = f f (h) dh = 1 - exp ( — h2 /8Dr ),
о
тогда
P(h >h3%) = 1 -F(h3%) = exp (-h23%/8Df) =0,03,
откуда после логарифмирования можно получить
h3%= 5,29 ; Z>r = 0,0358Л(3.9)
95
Значения высоты волны 3 %-ной обеспеченности в соответствии с
принятой в СССР 9-балльной шкалой оценки интенсивности волнения
приводятся в табл. 3.1.
Таблица 3.1
Волнение, баллы h 3%, м Волнение, баллы h 3%, м Волнение, баллы h 3%, м
1 0-0,25 4 1,25-2,0 7 6,0-8,5
2 0,25-0,75 5 2,0-3,5 8 8,5-11
3 0,75-1,25 6 3,5-6,0 9 Более 11
Корреляционные функции и энергетические спектры нерегулярного
волнения формируются на основе экспериментальных океанографиче-
ских исследований. С помощью волнографов в течение длительного про-
межутка времени записывается высота волны в произвольной точке оке-
ана и путем осреднения выделяется волновая ордината г (t), Используя
гипотезу об эргодичности случайной функции г (?), с помощью специаль-
ных вычислительных приборов — корреляторов можно рассчитать по
экспериментальным данным оценки корреляционной функции волновой
ординаты
Кг(т)=-^~ f r(t)r (t + r)dt.
1 о
С ростом интервала наблюдения Т увеличивается степень приближения
оценки к самой корреляционной функции
1 т
Кг (т) = lim — / r.(t) г (t + т) dt.
* о
Преобразование Фурье, примененное к корреляционным функциям, по-
зволяет получить спектральные характеристики морского волнения
Sr (а) = & [Кг (т) ] = /” Кг (т) е °Tdr.
--------------------------------- со
Вид этих характеристик при различной интенсивности волнения приве-
ден на рис. 3.11.
Спектр по своему физическому смыслу является энергетической
характеристикой случайного волнения. Для иллюстрации этого восполь-
зуемся правилом определения корреляционной функции на основе об-
ратного преобразования Фурье:
кг (т) = Sr (а) е’ OTdo.
96
Рис. 3.11, Спектральные
характеристики морского
волнения
Рис. 3.12. Частоты макси-
мума спектра морского вол-
нения разной интенсивности
Величина дисперсии совпадает с начальным значением корреляционной
функции:
Dr = Кг (0) =
/ Sr (a) do.
Из этого следует, что площадь, ограниченная спектральной характеристи-
кой, пропорциональна дисперсии волновой ординаты и энергии волново-
го процесса на ограниченном временном интервале (удельной энергии
или мощности волнения).
Спектры показывают также распределение удельной энергии волне-
ния между элементарными гармоническими составляющими различной
частоты. Непрерывность спектра означает, что случайная волновая орди-
ната формируется бесконечным множеством гармоник, которые разли-
чаются между собой по частоте на бесконечно малую величину. Каждая
из них имеет бесконечно малую амплитуду, так как волнение характери-
зуется конечной мощностью процесса. Сложность явления усугубляется
тем, что амлитуды и частоты элементарных гармоник изменяются слу-
чайным образом. Закономерность же проявляется в том, что в среднем
относительный уровень мощностей, связанных с гармониками различ-
ной частоты, соответствует виду спектральных характеристик волнения,
которые называют также энергетическими спектрами. По отношению
к амплитудным спектрам сигналов они являются квадратичными.
Графики, представленные на рис. 3.11, показывают, что энергия
волнения сосредоточена в сравнительно узком частотном диапазоне, при-
чем точка максимума спектра от смещается в область низких частот при
увеличении интенсивности волнения, характеризуемого высотой волны
3 %-ной обеспеченности (рис..3.12).
7—510
97
3.5. Расчетные спектры морского волнения
При математической аппроксимации спектральных харак-
теристик волнения исходят из двух моделей волнового процесса.
Первая, упрощенная модель получается в предположении двумерно-
го волнения, при котором гребни волн имеют бесконечную длину и пе-
ремещаются в одном направлении, сохраняя параллельность. Более точ-
ной является модель трехмерного волнения, которое образуется супер-
позицией большого числа двумерных волн с разным направлением рас-
пространения. Спектр двумерного волнения представляет собой функ-
цию только одного аргумента — частоты Sr (о). Спектр трехмерного вол-
нения зависит как от частоты, так и от угла д между главным направле-
нием распространения волн и направлением, в котором определяется
спектральная плотность. Между этими спектрами существует связь:
2
5 (п, д) = S (и) соз2д
при соблюдении условия сохранения энергии
7 5(a) da =f f S (а,ц) dp.da,
0 0 —7Г
позволяющая свести расчеты систем управления движением МПО на
трехмерном волнении к расчетам на двумерном волнении с использова-
нием частотного энергетического спектра.
В настоящее время для математического описания спектра волнения
предложено большое количество формул, в той или иной степени согла-
сующихся с результатами натурных исследований. Они образуют группы
экспоненциальных и дробно-рациональных спектров.
Общая форма экспоненциальных спектров
Sr (о) = A (f~ k exp (—В сГп) ,
где Л, В, к, п — параметры, из которых А, В определяются интенсив-
ностью волнения, а к, п — особенностями волнообразования.
12-я Международная конференция опытовых бассейнов (МКОБ)
в 1969 г. рекомендовала пользоваться типовыми спектрами волнения,
полученными для конкретных мест и условий. При отсутствии инфор-
мации о типовом спектре района было предложено пользоваться стан-
дартным спектром, у которого к = 5, п = 4.
В [4] приведена следующая интерпретация стандартного спектра
МКОБ:
5
— ехр
о /
\4
I \
- 1,25 ---------
\ о J
(3.10)
98
где а = 2 rf/ Т — средняя частота
волнения, с"1; 7~3,1 \/h ^% ~
средний период волнения, с;
=0,71 о — частота максиму-
ма спектра, с“1.
В зарубежной практике в
качестве расчетного спектра
получил распространение также
спектр Неймана:
1,2
(о) - ' х
/4,575 \
х 2тг ехр -НголКЗ.И)
V7 "зМ
Рис. 3.13. Корреляционные функции нере-
гулярного морского волнения
Группу дробно-рациональных спектров и соответствующих им кор-
реляционных функций образуют следующие выражения [ 16]:
2Dr а (а2 + Р2 + о2)
о4 4- 2 (си2 - р2) о2 + (а2 + Р2)2
Рис. 3.14. Расчетные спектры волнения
99
Кг (т) = Dr e alrl cos 0т;
(3.12)
4Dr a (a2 4- 02)
Sr (<7) = a4 +2(a2 -02) a2 + (a2 +|32)2
Kr (t) = Dr л/l + (a/£D2e a|T| cos (01 r| - arctga/(3); (3.13)
4Dr a a2
Sr (a) = a4 +2(a2-0?) a2 + (a2 + 02)2 ’
Kr (o) = Dr \/Г+ (a/0)2e a| r| cos (0| t| + arctg a/0). (3.14)
Вид дробно-рациональных спектров помимо дисперсии волновой
ординаты Dr определяется двумя параметрами: коэффициентом зату-
хания а и угловой частотой 0 корреляционных функций. Для развитого
морского волнения соблюдается соотношение а = 0,21 0. Поэтому корре-
ляционные функции, определяемые выражениями (3.12)-(3.14) , мало
различаются (рис. 3.13) между собой (arctg а/Р « 12°; V1 + (а/0р
^1,02).
Частоты максимумов всех спектров ат практически совпадают
с 0, так как от = у/а2 +Р2 = 0 л/1 + (я/0)2 = 1,020.
Практические расчеты показывают, что дробно-рациональные спект-
ры смещены по отношению к экспоненциальным в область более низких
частот. На рис. 3.14 приведены графики спектральных характеристик,
рассчитанные на основании (3.10) —(3.14) для волнения в 4 балла при
исходных данных: h = 2 м, Dr =0,143 м2, от = 0 = 1,1 с-1. Частотные
свойства морских подвижных объектов таковы, что полоса пропускания
располагается именно в низкочастотной области. Поэтому применение
расчетных спектров морского волнения в дробно-рациональной форме,
являющихся в области низких частот менее точными, при анализе движе-
ния МПО приводит к завышенному уровню возмущающих воздействий.
Однако дробно-рациональные спектры имеют определенные преиму-
щества, так как их моделирование осуществляется более простыми ап-
Белый шум H(s)
s(0)=1 э
паратными или программными средствами.
В теории случайных процессов функции времени с переменными в
зависимости от частоты спектральными характеристиками, к которым
относятся расчетные спектры морского волнения, называют цветными
шумами в отличие от случайной функции типа белый шум со спектраль-
ной характеристикой равномер-
но распределенной во всдм диа-
пазоне частот: (a) =G2 =
= const , где G — интенсивность
белого шума. При G = 1 случай-
ный сигнал называют единичным
r(t)
sr(o)-\n(j о)\2
Рис. 3.15. Понятие формирующего фильтра
100
белым шумом. Его корреляционная функция равна импульсной функ-
ции/?о(т) =5(т).
При моделировании цветных шумов считают, что они являются ре-
зультатом преобразования белого шума формирующим фильтром
(рис. 3.15).
Передаточная функция Н (5) , или амплитудно-фазовая характеристи-
ка H(jo) =Н (5) |5 -уа формирующего фильтра определяют спектр узко-
полосного случайного сигнала, Правила преобразования сигналов в ли-
нейных системах устанавливают эту связь в виде
Я(/а)Я(-/а) - 1Я(/а)|2 =5(п). (3.15)
Из (3.15) следует, что если спектральная характеристика случайной
функции времени имеет дробно-рациональную форму, то передаточная
функция формирующего фильтра также является дробно-рациональной,
а сам формирующий фильтр представляет собой линейную систему с по-
стоянными сосредоточенными параметрами. Так, чтобы промоделиро-
вать процесс со спектром (3,14), достаточно пропустить единичный бе-
лый шум через фильтр с передаточной функцией
2\/aDr
Я(я) = (3.16)
s2 + 2as + (а2 + 02)
Спектральная характеристика сигнала на выходе этого фильтра совпада-
ет с квадратом его амплитудно-частотной характеристики *5 (п) =
= IЯ ( j а) | 2. Нетрудно убедиться, что она совпадает с (3.14).
Использование экспоненциальных спектров приводит к нелинейным
моделям ,волнения и усложнению задач анализа и синтеза автоматиче-
ских систем управления МПО.
Приведенные соотношения позволяют по заданной балльности вол-
нения однозначно определить его математическую модель, выраженную
энергетическим спектром или передаточной функцией формирующего
фильтра, со следующими основными параметрами:
— дисперсией волновой ординаты Dr , определяемой (3.9) по высоте
волны 3 %-ной обеспеченности, взятой из табл. 2.1;
— частотой максимума спектра ат. ^(3, определяемой по графику
приведенному на рис. 3.12.
Пример 3.2. Определить спектр волновой ординаты в форме (3.14) при состоя-
нии моря 4 балла,
По табл. 3.1 находим высоту волны 3 %-ной обеспеченности h з%=2 м, по
формуле (3.9) - дисперсию волновой ординаты Dr =0,143 м2. Согласно рис. 3.12
/3=1,1 с“\ а а = 0,21 /3=0,231 с"1. При этих исходных данных спектр волновой
ординаты
0,132 а2
Sr (а) = ---------------- .
а4 — 2,32 а2 + 1,58
101
В практических расчетах используют не только характеристику вол-
новой ординаты (а), но и спектр угла волнового склона (а).
Связь между ними можно установить на основе соотношения (3.5)
между амплитудами элементарных гармоник, совокупность которых об-
разует нерегулярное волнение. Учитывая, что энергетический спектр яв-
ляется квадратичным амплитудным спектром, получаем
а4
Sy(a)=-p- Sr(o). (3.17)
3.6. Кажущиеся спектры морского волнения
Кажущимися спектрами волнения назы-
вают спектральные характеристики волнового возмущения, определен-
ные с учетом взаимного движения объекта и волн, а также соотношения
их геометрических размеров, Кажущиеся или приведенные спектры
определяют характер изменения волновой ординаты и угла волнового
склона, приведенных непосредственно к кораблю и оцениваемых с
позиции находящегося на нем наблюдателя.
Рис. 3.16. Частотное преобразование спектра волнения
102
Изменение спектра волнового возмущения по отношению к нату-
ральному спектру волнения объясняется тем, что при движении корабля
каждая элементарная гармоническая волна воспринимается не со своей
истинной частотой а, а с кажущейся а>, связь между которыми определя-
ется (3.7) . По этой причине происходит частотное преобразование спект-
ра. Наблюдается амплитудное преобразование спектра, так как возмуще-
нием для корабля являются не истинные, а приведенные углы волнового
склона (3.8) , рассчитываемые по редукционным коэффициентам, кото-
рые зависят от соотношения геометрических размеров корабля и волны.
На рис. 3.16 показан порядок преобразования спектральных харак-
теристик волнения, связанного с переходом от реальной частоты к кажу-
щейся. При.этом преобразовании смещается частота максимума кажуще-
гося спектра согласно (3.7)
+ (3.18)
Изменяется также величина максимума, так как энергия, определяемая
по истинному и преобразованному спектрам одна и та же, должны со-
храняться значения дисперсии, найденные по каждому из них:
7 S(a)do= S(a>)da>, (3.19)
о о
При встречной волне (см. рис. ЗЛб^а) спектр воздействия5 (со) распо-
лагается в области более высоких частот и становится шире спектра
волнения. Чтобы при этом сохранялось условие (3.19), его максимум
должен быть меньше (при построении вспомогательной кривой В это
не учитывалось).
При попутной волне изменение вида спектра более сложное и раз-
лично в зависимости от фактора относительного движения корабля на
волне a =Kcos^/g. Однозначные кажущиеся спектральные характери-
стики получаются только в том случае, если истинный спектр волнения
расположен в области частот 0 < о < 1/21 а | или а > 1/1 а
В первом случае (рис. 3.16, б) спектр воздействия сужается и сме-
щается в область низких частот, его максимум увеличивается. Энергия
передается на частотах, близких к частоте максимума. Характер возму-
щения приближается к регулярному. Во втором случае возможно расши-
рение спектра и смещение его в область высоких частот подобно тому,
как это происходит при встречном волнении.
Расширение спектра и уменьшение величины его максимума свиде-
тельствуют об усилении нерегулярности возмущения, энергия которого
передается гармониками различных частот.
Наиболее сложный неоднозначный вид спектра воздействия оказы-
вается, когда максимум морского волнения расположен в области ча-
стот вблизи п= 1/2 I а I . В этом случае S (со) может иметь разрывы пер-
вого и второго рода. Экспериментальные исследования подтверждают
появление резких выбросов в кажущихся спектрах воздействия.
103
Сложный вид кажущихся спектральных характеристик возмущения,
обусловленных нерегулярным морским волнением, требует их аппрок-
симации в математической форме, простой и удобной для расчетов сис-
тем управления движением МПО. Универсальные методы аппроксимации
У (со) отсутствуют. Можно указать на некоторые подходы, которые до-
статочно хорошо зарекомендовали себя в практических инженерных рас-
четах. Они базируются на следующем: во-первых, преобразование спект-
ра не связано с изменением дисперсии волнения, во-вторых, вид кажу-
щегося спектра подобен исходному и частота максимума смещается со-
гласно (3.18). При этих допущениях осуществляется линейное преобра-
зование частоты спектра ы = ка, когда коэффициент /c = pK/j3=l+aP
выбирают по частоте максимума. Тогда дробно-рациональные спектры
волнения (3.12) —(3.14) преобразуются в кажущиеся заменой в аналити-
ческих выражениях коэффициентов а и /3 на их кажущиеся значения /3К
и пк =0,21рк.
Пример 3.3. Предположим, что корабль движется со скоростью 20 м/с на-
встречу (£ =0) волне при состоянии моря 4 балла. Требуется рассчитать кажу-
щийся спектр волновой ординаты в форме (3.14).
Использовав результаты расчета волновой ординаты при 4 баллах из приме-
ра 3.2, определив « ~2 с и подставив в (3.14) вместо /3 = 1,1 с"1 (3К ={? + а р2 =
= 3,52 с"1 и вместо а —0,231 с'1 ак=0,74 с”1, получим для кажущегося спектра
4 Df co
Sг (со) = 1 ~
w4 + 2 (а^ - 0^) со2 + (а2К + /32к)
0,423 со2
со4 - 23,7 со2 +169
Амплитудное преобразование спектра волнения, обусловленное со-
измеримыми геометрическими размерами волны и корабля, можно осу-
ществить с помощью редукционных коэффициентов по аналогии с тем,
как рассчитывались при регулярном волнении амплитуды приведенных
углов волнового склона. Каждый редукционный коэффициент зависит
от длины волны и, следовательно, от частоты. Поэтому его можно рас-
сматривать как амплитудно-частотную характеристику некоторой ли-
нейной системы. Как правило, в соответствии с видом редукционных
коэффициентов (см. рис. 3.10) эта линейная система представляет со-
бой низкочастотный фильтр.
В соответствии с правилами преобразования спектра случайного
стационарного сигнала в линейной системе можно по аналогии с (3.8)
получить спектральные характеристики приведенных к объекту про-
дольной и поперечной составляющих угла волнового склона:
5ф7 (а) = к.^ (а) к?т (а) cos2£S7 (а) ;
7(а) =к| (а) к2г(о) sin2|57(a).
(3.20)
Выражения (3.20) определяют энергетические свойства случайных стаци-
онарных функций изменения приведенных составляющих угла волнового
104
склона, которые можно, исполь-
зовать в качестве внешнего
волнового воздействия при рас-
четах возмущенного движения
МПО на нерегулярном вол-
нении.
На практике удобно, поль-
зуясь (3.20), рассчитывать чис-
ленные спектры приведенных
воздействий, которые обычно
имеют колоколообразную фор-
му. Часто такие спектры могут
быть аппроксимированы дроб-
но-рациональной функцией
вида: 2
с/ \ Да7а
(3.21)
Рис. 3.17. Пример аппроксимации спект-
: ра волнения
где Sm = S (ит), от ~ значение
и частота максимума спектра;
Да = (Ji — а2 — ширина спектра, определенная по уровню половинной
мощности: 5 (с^) =S (п2) =
Легко убедиться,что сигнал со спектром (3,21) получается в резуль-
тате преобразования единичного белого шума линейным фильтром с пе-
редаточной функцией (3.16). Сопоставление (3.16) и (3.21) позволяет
аналитически определить некоторые характеристики приведенного вол-
нового воздействия, в частности, его дисперсию D, Для этого использу-
ются соотношения
Дст = 2а; а2 + /З2 = 2 \/aD = Дст
(3.22)
Представив спектр (3.21) через параметры а, (3, D по правилам пере-
хода к кажущейся частоте, можно получить окончательную форму кажу-
щегося спектра приведенного волнового воздействия.
На рис. 3,17 приводится пример аппроксимации (кривая 2) спектра
5ф7(п) (кривая 2) выражением
5ф7(п) —
0,042 у о
1,56 — а2 + 0,5 / а
2
Используя (3.22), находим
а = 0,5 Да = 0,25 с-1, (3 = \/а2т-а2 = 71,56-0,06 = 1,22 с"1;
а/(3= 0,205; TD~= Да ^5^ /2 у/<Г= 0,042’рад = 2,4°.
105
При условиях движения МПО, взятых из примера 3.3, переведем
спектр в кажущиеся частоты. Для этого определим
0К = 0| 1 + а0| =1,221 1 + 2- 1,221 =4,2 с"1;
ак = аГ1 + a/3l = 0,25'11 + 2- 1,221 =0,86 с"11.
В соответствии с (3.14) получаем окончательный вид кажущегося
спектра
2Раксо2 0,006 со2
) се4 + 2(ак - 0к) w2 + + /3^)2 а? - 34 а? + 336
Соответственно передаточная функция формирующего фильтра приве-
денного волнового воздействия согласно (3.16)
Н z ч = 2\/a^D s
s2 + 2aKs + (пк2 + /З2.)
0,078 s
s2 + 1,72s + 18,33 ’
Формирующий фильтр может быть определен не только передаточ
ной функцией Я($), но и дифференциальными уравнениями. Существу-
ют различные способы преобразования передаточных функций вида
Я(х) =
s + ats + aQ
к уравнениям в переменных состояния.
Нормальная форма уравнений получается, если в качестве
переменных состояния принять выходной сигнал фильтра х2 и его ин-
теграл Xi = f х2 dt. Обозначая входной сигнал фильтра (единичный белый
шум) через и, после элементарных преобразований приходим к вы-
ражению
(3.23)
где Ь = 2 y/a^D; а1 = 2ак; aQ = а£ + 0^.
3.7. Характеристика воздушного потока
в приводном слое атмосферы
Особенности ветровых возмущений, действующих на
МПО, определяются тем, что воздушные процессы протекают в непо-
средственной близости от водной поверхности, которая представляет со-
бой особый вид подстилающей поверхности. Между воздушным потоком
106
и взволнованной поверхностью моря возникает непрерывный взаимосвя-
занный и взаимообусловленный процесс обмена энергией. Скорость вет-
ра определяет высоту волны, а с другой стороны, в воздушном потоке
появляются дополнительные флюктуации от волнения,
В основной стадии развития волнения передача энергии от ветра к
волнам осуществляется главным образом за счет энергии средней скоро-
сти движения воздушного потока, а не турбулентных флюктуаций.
Поэтому интенсивность развитого волнения зависит только от средней
скорости ветра над морем. Интенсивность движения нижнего слоя
воздушного потока определяется не только средней скоростью, но и
турбулентными движениями, а также добавочными случайными колеба-
ниями, связанными с обратным влиянием морского волнения на воз-
душный поток. Это подтверждается наличием в спектре пульсаций
скорости ветра максимумов, соответствующих максимумам спектра
волнения.
Исследования скорости ветра вблизи морской поверхности показа-
ли, что определяющее движение воздушного потока происходит в гори-
зонтальной плоскости, и существенных вертикальных колебаний направ-
ления средней скорости ветра в нижних 20—30 м не наблюдается. Поэто-
му можно рассматривать воздушный поток как двумерный, хотя турбу-
лентные движения, перпендикулярные плоскости потока, имеют место.
Мгновенное значение скорости ветра над морем в общем случае
представляет собой случайную функцию времени, которую можно
Таблица 3.2.
Сила ветра по шкале Бофорта Баллы волнения Переменная скорость ветра
Баллы Название ветра Средняя скорость м/с
wt6’ м/с м/с
1 2 3 4 5 6
0 1 Штиль Тихий 0,5-1,5 0
2 Легкий 2-3 1 — —
3 Слабый 3,5-5 2 —
4 Умеренный 5,5-8 3 0,46 —
5 Свежий 8,5-10,5 4 0,85 —
6 Сильный 11-13,5 5 1Д 0,19
7 Крепкий 14-16,5 6 1,42 0,4
8 Очень крепкий 17-20 7 1,55 0,63
9 Шторм 20,5-23,5 8 2,0 0,92
10 Сильный шторм 24-27,5 9 2,3 1,42
11 12 Жесткий шторм Ураган 28-31,5 32-35,5
107
считать стационарной для развитого ветрового процесса. Она образуется
суммой средней величины w и переменной составляющей, которая., в
свою очередь, состоит из турбулентной wтб и волновой wB.
Среднюю скорость ветра можно считать постоянной при заданной
балльности моря, как математическое ожидание стационарного случайно-
го процесса. Ее значения приведены в табл. 3.2.
Средняя скорость ветра изменяется также в зависимости от высоты
у точки наблюдения по закону [ 16]:
У У»
w = wa In --- I In —---- , (3.24)
a >>o Уо
где wa — средняя скорость ветра на заданной высотеуа; у0 ~0,65 • 10“5 •
м — аэродинамическая шероховатость подстилающей поверхности. Со-
гласно (3.24) чем выше точка наблюдения, тем больше скорость ветра.
Так, если на высоте уа = 10 м средняя скорость ветра составляет w10 =
= 13 м/с, то на высоте у -4 м она будет w = 11,7 м/с.
Волновая составляющая скорости ветра определяется морским вол-
нением. Ее корреляционная функция и спектральная плотность совпада-
ют с аналогичными характеристиками для функции волновой ординаты,
отличаясь от них только величиной дисперсии, приближенное значение
которой может быть вычислено по формуле [16]
DWB « 1,5 ^Dr exp (-2// X), (3.25)
где Х = (10 4-15) h з % — расчетная длина морской волны.
Среднеквадратичные значения волновой составляющей скорости
ветра, рассчитанные по (3.25), приведены в табл. 3.2. Там же даны
среднеквадратичные значения турбулентной составляющей, которые оп-
ределяют по эмпирической формуле [ 14]:
у-™ у
\/Dw « w / In ~
Л0
Рис. 3.18. Изменение скорости ветра при
шквале
108
Сопоставление уровня переменных составляющих и средней скоро-
сти воздушного потока позволяет сделать вывод о том, что вблизи вод-
ной поверхности определяющее влияние имеет постоянная скорость вет-
ра, которую и следует учитывать при анализе корабельных систем управ-
ления.
Особым видом ветрового возмущения, который также необходимо
учитывать при исследовании процессов управления движением МПО, яв-
ляются шквалы. Считают [ 14], что при шквале скорость ветра изменяет-
ся от среднего значения до максимального по линейному закону
(рис, 3.18, а) причем время нарастания т зависит от максимальной ско-
рости шквалистого ветра (рис. 3.18, б), которая может примерно вдвое
превышать среднюю.
3.8. Силы! и моменты ветро-волновых воздействий
Движение окружающей воздушной и водной среды вы-
зывает на корпусе корабля дополнительные усилия гидродинамического
и аэродинамического характера, Совокупность составляющих сил и мо-
ментов относительно связанных координатных осей х, у, z, которые
появляются в результате ветра, течения и волнения, образуют ветро-
волновые возмущения МПО:
^в,в ~~ [^в.вХ^в.ву ^B.BZ ] ? ^в.в “[^b.bAJ^b.b.X^b.bZ ] *
Возмущения от течения и ветра описывают в подобной математи-
ческой форме, несмотря на то, что первые имеют гидродинамическую
природу, а вторые аэродинамическую, Причина подобия математическо-
го описания заключается в том,что в обоих случаях наблюдается гори-
зонтальное перемещение частиц среды с постоянной средней скоростью
потока. Возмущения, обусловленные морским волнением, математиче-
ски отличаются от них, так как движение частиц среды при волнении
носит переменный характер и происходит в вертикальной плоскости.
Поэтому расчет возмущений для течения и ветра одинаков, а для волне-
ния существует своя методика.
Определение возмущающих воздействий течения и ветра сводится
к вычислению дополнительных гидродинамических и аэродинамических
сил и моментов, возникающих в связи с усилением потока окружающей
среды, который обтекает корпус корабля.
Гидродинамические силы и моменты корабля определяются ско-
ростью потока жидкости Fr и углом встречи с набегающим потоком
0Г. Аэродинамические силы и моменты зависят от аналогичных показа-
телей воздушного потока Fa; ра:
z = 0,5 рг Fp SCx^ayf z. (^г(а) ) > ]
> (3.26)
Мх, z = рг (а) К? (а) ((Зг (а) )>
109
При движении корабля в неподвижной среде скорость потока (воды или
воздуха) определяется только вектором скорости его движения относи-
тельно земли Кг (а) =— V. а угол набегающего потока совпадает с углом
дрейфа (5г(а) Если же объект движется в среде, перемещающейся
с вектором скорости wr (а) относительно земли (течение, ветер), то
вектор скорости потока относительно его корпуса будет
Гг(а)= *г(а)-й. (3.27)
Условие (3.27) позволяет определить величину скорости потока
Уг(а) и угол набегания рг (а) для использования в (3,26), Рассмотрим,
как это делается для плоской задачи, когда горизонтальные плоскости
связанной и неподвижной координатных систем совпадают (случай дви-
жения МПО с малыми углами крена и дифферента).
Запишем (3,27) в проекциях на связанные оси, предполагая, что
МПО движется со скоростью V и углом дрейфа р в поле течения или вет-
ра со скоростью w и встречает их под углом £ (рис, 3,19) :
Kcos Р + WCOS £ = Vr COS Рг (а) ;
Esin р - wsin £ = Кг (a) Sin рг (а) 3
откуда
И2 (а) = К2 [ 1 + w2 + 2WCOS ($ +0)]; 1
„ I <3'28>
sin Р — w sin £
tg Рг (а) =“ ’ л V* »
COS Р + W COS £
где w = w/V — относительная скорость течения или ветра.
ПО
В частном случае при боковом течении или ветре =90° и малых уг-
лах дрейф а.выражения (3.28) можно упростить
Pr(a)«0-w; К2(а) ~ K2(l+ W2)-
При попутном 180° или встречном £~0 движении среды они имеют
вид
0г (а) ^0/(1 + W ); ^г(а) *»К2(1 + w),
Приведенные формулы показывают, что возмущающее воздействие
движения среды сказывается сильнее при малых скоростях объекта,
так как при этом возрастает относительное влияние течения или ветра.
Взаимодействие корпуса корабля с волнением представляет собой
более сложный физический процесс. Изучение его составляет в настоя-
щее время предмет фундаментальных теоретических и эксперименталь-
ных исследований. Одним из аспектов этих работ является установле-
ние математических соотношений между параметрами волны и силовы-
ми и моментными характеристиками на корпусе, т. е. получение зависи-
мостей Rx* у9_ z (у, г ) , Мх* у* z (у, г ), Полученные результаты, базиру-
ющиеся на линейной теории качки и принципе суперпозиции движений
корабля, позволяют выполнить в первом приближении анализ возмущен-
ного движения систем управления МПО. Ниже приводятся некоторые из
этих соотношений, заимствованные из [ 4, 14, 17].
Несмотря на то, что морское волнение рассматривается как процесс
центрированный, гидродинамические силы и моменты, возникающие на
корпусе судна при действии морских волн, содержат как переменные,
так и постоянные (точнее, медленно меняющиеся) составляющие. По-
следние оказывают заметное влияние на характер движения судна в го-
ризонтальной плоскости при малых скоростях движения, характерных,
в частности, для режимов позиционирования. Их величины оцениваются
выражениями [ 14]
^вох= O95gpLhj% свох5
02 ~ gpLh % св02 з
М^оу = gpL^hl%n^Qy\
где свОХ, св02, mnQy — безразмерные коэффициенты, которые зависят
от размерений судна, длины волны X и угла встречи с волной
Переменные составляющие волновых возмущений — боковая сила
и момент рыскания — при регулярном волнении рассчитывают по
формулам
(0 = g Pv fmsin £ cos at\
111
2тг
MBy(f) =-gjy —— кт rmsing sin at.
Принимая во внимание, что pv = m— масса объекта, а Гт sin^ =
= 0ym — амплитуда приведенной поперечной составляющей угла волно-
вого склона, получаем
Rz(t)=gm0y(t). (3.29)
\ Если допустить, что значения редукционных коэффициентов и кт
близки между собой в области существенных частот волнения и 2я/Х =
= можно представить возмущающий момент рыскания в виде
d0y(t)
My(t}=Jya (3.30)
Выражения (3.29) и (3.30) могут быть использованы и при модели-
ровании возмущений на нерегулярном волнении, когда 0y(t} — случай-
ная функция времени, определяемая кажущимся спектром угла волно-
вого склона. При этом (3.30) можно упростить, положив а = 13 = const.
При определении кренящего и дифферентующего моментов в [ 17]
предлагается считать их пропорциональными соответственно попереч-
ной и продольной составляющих приведенного угла волнового склона:
=а 0у (f); Мъ2 = Ьфу(/), а коэффициенты пропорциональности
а, b принимать равными коэффициентам при углах крена и дифферента,
входящих в уравнения бортовой и килевой качки. Это означает, что для
введения волнового возмущения в математической модели МПО доста-
точно заменить угол крена 0 на разность 0 — 0уз а угол дифферента ф на
ф — фу, Фактический смысл такой замены заключается в том, что на ти-
хой воде свободные колебания качки сходятся к нулевым углам крена
и дифферента, а при волнении — к соответствующим составляющим угла
волнового склона.
Сказанное иллюстрируется уравнением бортовой качки при регуляр-
ном волнении [17]
d20 d0
*i ~dtr + а2 ~dT" " ° = Зут C°S
которое можно записать в таком виде
d20 d0
~dt^ + a2 ~dT + 6 =
и использовать при расчетах качки на нерегулярном волнении, положив,
что приведенная поперечная составляющая угла волнового склона 0у (г)
представляет собой случайную стационарную функцию времени с изве-
стными стохастическими характеристиками.
112
Контрольные вопросы
1. Какие движения воздушной и водной сред образуют ветро-волновые возму-
щения, действующие на МПО?
2. Приведите формулу, которая описывает регулярную волну, а также ее
график. Дайте определение основных элементов волны.
3. Каким образом возникает эффект бегущей волны?
4. С какой скоростью распространяется морская волна?
5. Как связаны между собой волновая ордината и угол волнового склона?
6. С какой частотой воспринимает волновое возмущение движущегося судно?
7. При каких условиях движения кажущаяся частота больше (меньше) нату-
ральной частоты регулярного волнения?
8. Как сказывается на интенсивности морского волнения соотношение гео-
метрических размеров корабля и длины волны?
9. От чего зависят значения редукционных коэффициентов?
10. Почему реальное морское волнение является нерегулярным?
11. Какие характеристики определяют нерегулярное морское волнение в за-
данной точке акватории?
12. Дайте определение высоты волны 3 %-ной обеспеченности. Как она связана
с дисперсией волновой ординаты?
13. Какой физический смысл заключен в понятии спектральной характеристи-
ки морского волнения?
14. Какой вид имеют энергетические спектры морского волнения?
15. Как рассчитываются спектры морского волнения по эксперименталь-
ным данным?
16. Какими математическими выражениями аппроксимируются спектры
морского волнения?
17. Дайте сравнительный анализ расчетных спектров морского волнения
в дробно-рациональной и экспоненциальной формах.
18. Дайте определение понятий белого и цветного шумов.
19. Для чего используются формирующие фильтры?
20. Какая связь между спектральными характеристиками волновой орди-
наты и угла волнового склона?
21. Дайте определение кажущегося спектра волнения. Как происходит преобра-
зование натурального спектра в кажущийся?
22. Как аппроксимируются кажущиеся спектры морского волнения?
23. Какие особенности характерны для воздушного потока в приводном слое
атмосферы?
24. Какие силы и моменты создают на корпусе корабля течение, ветер и вол-
нение?
25. Как можно объяснить появление постоянных сил и моментов в резуль-
тате воздействия на судно морского волнения?
26. Как связаны спектральные характеристики сил и моментов на корпусе
судна со спектрами морского волнения?
27. Как рассчитать спектральные характеристики, корреляционные функции
и дисперсии кинематических параметров судна, движущегося при воздействии
волнения?
8-510
Глава 4
ФУНКЦИОНАЛЬНЫЕ СТРУКТУРЫ СИСТЕМ
УПРАВЛЕНИЯ МПО
4Х Общая функциональная структура СУ МПО
Системы управления движением (СУД) занимают особое
положение среди судовых автоматических систем. Для них управляемым
объектом оказывается корабль в целом. Функция управления этих сис-
тем заключается в автоматической стабилизации, т. е. поддержании на за-
данном уровне кинематических параметров движения МПО, которые оп-
ределяют в любой момент времени положение, скорость перемещения
и ориентацию корабля в пространстве . Некоторые СУ МПО обеспечивают
автоматическое или автоматизированное маневрирование, которое пред-
полагает изменение по определенному закону значений кинематических
параметров.
Автоматические системы управления движением (АСУД) морских
подвижных объектов разнообразны. Наиболее распространены системы
управления курсом (авторулевые), которыми оборудованы практиче-
ски все современные типы МПО. Дальнейшим развитием авторулевых
можно назвать системы стабилизации путевого угла, используемые на
судах на воздушной подушке, а также системы стабилизации боковых
отклонений, необходимые при движении судна по заданной траектории
(заданной линии профиля) во время выполнения геолого-геофизических
исследований и поисково-разведочных работ на шельфе и в океане. Появ-
ление буровых судов потребовало создания систем динамического пози-
ционирования, обеспечивающих удержание судна в заданной точке над
устьем скважины, а перспектива добычи твердых полезных ископаемых
в океане ™ разработки систем динамической стабилизации судна отно-
сительно движущихся глубоководных агрегатов.
Для судов с динамическими принципами поддержания (СДПП)
в большинстве своем необходим повышенный уровень автоматизации
движения. Неотъемлемой составной частью СПК с глубоко погруженны-
ми управляемыми крыльями является автоматическая система стабили-
зации ординаты центра масс, принципиально неотделимая от системы
стабилизации килевой качки. Без такой системы невозможен нормаль-
ный ходовой режим корабля. Корабли-экранопланы требуют стабилиза-
ции вертикальной, бортовой и килевой качки. Предназначенные для это-
го автоматические системы совместно с системой управления курсом
обеспечивают нормальное пространственное движение корабля. Подобную
114
систему имеют автономные подводные
аппараты, для которых дополнительно
предусматривается возможность авто-
матического выхода на заданную глуби-
ну погружения.
Автоматическое управление движе-
нием существенно повышает качество
функционирования МПО и позволяет
сокращать численность экипажа. В на-
стоящее время именно сокращение
личного состава судна рассматривается
как основное направление повышения
экономичности морских перевозок.
Однако определяющими факторами
Рис. 4.1. Структура системы уп-
равления МПО.
являются возможность успешного выполнения целевого назначения
МПО, обеспечение безопасности плавания и повышение мореходности.
При всем многообразии СУ МПО, различающихся между собой по
назначению, виду объекта, составу технических средств, элементной ба-
зе, системотехнические принципы их формирования остаются общими,
а функциональные структуры подобными. Они строятся по принципу z
систем с обратными связями по состоянию в соответствии с типовой
структурой, представленной на рис. 4,1.
Любую систему управления движением с обратной связью по на-
блюдаемым переменным образуют: управляемый объект (УО), датчики
(Д) кинематических параметров движения и управляющих воздействий,
исполнительные органы (ИО), вычислительное устройство (ВУ) и сред-
ства отображения информации (СОИ).
Вычислительное устройство, система отображения информации и
устройство введения данных от оператора выделены в единую кон-
струкцию, получившую название „пульт управления движением”
(ПУД).
Состояние управляемого объекта оценивается мгновенным значе-
нием вектора x(Z'), который изменяется под влиянием внешних ветро-
волновых возмущений (вектор f (г)), и управляющих воздействий ис-
полнительных органов (вектор 3 (/)). Управляемым объектом является
сам МПО. Его математическая модель представляет собой в общем слу-
чае уравнение пространственного движения, при котором состояние
определяется 12-ю кинематическими параметрами. Но при автоматизации
элементарных движений МПО, когда система управления предназначена
для стабилизации и изменения одного-двух кинематических параметров,
для математического описания управляемого объекта используют част-
ные модели (например, линейные уравнения движения рыскания или
качки и т. п.). Вектор состояния jv(f) включает в себя только кинемати-
ческие параметры, входящие в частную модель МПО. Конкретизацию мо-
дели управляемого объекта производят в зависимости от типа МПО
и назначения системы управления.
115
Исполнительные органы СУД включают в себя механизмы и приводы
технических средств, обеспечивающих создание управляющих сил и мо-
ментов на корпусе корабля. Ими могут быть движители с механизмами
изменения шага винтов, вертикальные рули с электрогидроприводами
рулевого устройства, винтовые движительно-рулевые колонки, подру-
ливающие устройства ит.п. Изменение состояния исполнительных орга-
нов осуществляется с помощью сигналов управления, образующих век-
тор и (г).
Датчики кинематических параметров движения и состояния испол-
нительных органов представляют собой информационное обеспечение
системы. Вектор измеряемых переменных состояния у (Г) обычно отли-
чается от векторов х(7) и 6(f) в связи с тем, что не все кинематические
параметры движения поддаются измерению. Наиболее трудно измерять
углы атаки и дрейфа, абсолютную скорость корабля относительно дна.
Главная часть СУ МПО — это вычислительное устройство ВУ, в ко-
тором формируются сигналы управления на основании измерения со-
стояния УО и ИО. ВУ представляет собой счетно-решающую схему с не-
прерывной обработкой сигналов или цифровую управляющую вычисли-
тельную машину с дискретным преобразованием информации. Большин-
ство существующих СУ МПО выполнено как системы непрерывного дей-
ствия аналогового типа, однако развитие микропроцессорной техники
предопределяет появление и широкое распространение цифровых систем
управления движением.
Управление в СУ МПО может осуществляться также по командам
оператора (О), принимающего решения на основе данных, поступающих
к нему от средств отображения информации СОИ. Состав исполнитель-
ных органов и информационное обеспечение индивидуальны для кон-
кретного типа АСУД и зависят от ее назначения и вида МПО. Для каждой
системы требуется и свое вычислительное устройство аналового или циф-
рового типа, реализующее закон управления, присущий конкретному
виду СУ МПО.
4.2. Система стабилизации курса
Система стабилизации курса (ССК) судна предназначена
для автоматической ориентации его продольной оси в заданном направ-
лении движения.
Если заданный курс судна на частном галсе KQ} а его истинный курс
в любой момент времени А?(/), то разница между ними образует угол
рыскания:
Функция управления автоматической системы стабилизации курса
заключается в том, чтобы поддержать значения угла рыскания близкими
к нулю: $ -> 0.
116
На рис. 4.2 показано произвольное положение
судна в горизонтальной плоскости, определяемое
взаимным расположением полусвязанной коорди-
натной системы Xg Ozg, продольная ось которой Oxg
ориентирована в направлении частной цели движе-
ния на заданном галсе, и подвижной системы коор-
динат xOz, жестко связанной с корпусом судна. В
совмещении этих координатных систем заключается
основная функция управления для этого вида сис-
темы управления движения МПО.
Вспомогательная функция ССК состоит в ав-
томатическом изменении курса на величину ^о>
Рис. 4,2. Ориентация
судна в горизонталь-
ной плоскости.
которая представляет собой разницу между двумя значениями заданного
курса:
“ /^oi,
ее называют градусной поправкой. Допустимая величина градусной по-
правки не йревосходит 10°, что позволяет отнести автоматическое изме-
нение курса судна к режимам малого маневрирования МПО в отличие
от циркуляции, являющейся примером глубокого маневрирования.
Добиться нулевого значения угла рыскания в любой момент времени
практически невозможно. Под влиянием ветро-волновых возмущений,
вследствие несимметрии корпуса, неравномерности работы главных ме-
ханизмов и т. п. корабль постоянно уходит с заданного курса. Система
стремится компенсировать эти отклонения, вернуть его на заданный курс
с помощью имеющихся на борту технических средств управления направ-
лением движения. В большинстве случаев для этой цели используют вер-
тикальный руль, если скорость судна достаточно высока, чтобы обеспе-
чить необходимую величину скоростного напора и, следовательно, требуе-
мый уровень гидродинамической (или аэродинамической) силы на руле.
Мгновенное значение угла рыскания зависит от интенсивности ветро-
волновьтх возмущений, которая определяется скоростями течения wT и
ветра vvB, отнесенными к скорости хода корабля, а также поперечной
составляющей приведенного угла волнового склона 07(^). Расчет ip(t)
при действии возмущений и управляющего воздействия вертикального
руля, определяемого углом перекладки 6, выполняется с помощью ча-
стной линейной модели возмущенного движения рыскания, которая
для широкого класса МПО имеет вид
117
Элементы cq матрицы параметров С и вектор внешних возмущений
[ wT wB 07 07] формируются в соответствии с выражениями для сил и
моментов, приведенными в гл. 3. Сравнительно простая форма ветро-
волновых возмущений в (4.1) , когда С = const получается в предположе-
нии постоянства скоростного напора. При течении и ветре в борт судна
(угол встречи £ =90° ) это соответствует максимальным значениям боко-
вой силы и поворотного момента, и расчет на основании (4.1) приводит
к наибольшим значениям угла рыскания.
Модель управляемого объекта (4.1) должна быть дополнена урав-
нием динамики исполнительного органа. Вертикальный руль является
позиционным средством управления, и его перекладка осуществляется
согласно выражению
6(0 =и (г). (4.2)
Если пренебречь инерционностью привода рулевого устройства, ко-
торая существенно меньше инерционности МПО, то при отсутствии об-
ратной связи по углу перекладки руля выражение (4.2) может служить
моделью исполнительного органа, а сигнал управления w(Z") приобретет
смысл скорости перекладки руля.
Волновое возмущение МПО случайно. Случайный характер носят
также изменения всех координат состояния, в том числе и угла рыскания.
При больших временных интервалах процесса управления судном </>(?)
так же, как Щу (/), р (t), 8 (t), и (f), могут считаться случайными стаци-
онарными функциями времени, удовлетворяющими условию эргодич-
ности. Интегральными характеристиками угла рыскания как случайной
стационарной функции являются математическое ожидание (среднее
значение по времени)
1 т
= f ip(t)dt
т^°° 1 о
и дисперсия
^ = Ит * [ [<р(г) -аи]2о7,
7 00 1 J
0
которые не зависят от времени.
Чтобы избежать необходимости анализа процесса управления на бес-
конечном временном интервале, можно воспользоваться оценками ма-
тематического ожидания и дисперсии
Л 1 Т
mv = — J P^df,
о
Л 1 Т
Df = ~f J МО -m^Vdt.
о
При этом интервал доверительности Т выбирается таким образом, что-
бы интегральные характеристики случайной функции ^(f) и их оцен-
ки мало различались между собой
118
Л л
D^D^.
Математическое ожидание угла рыскания определяет статическую
ошибку системы управления, дисперсия (или среднеквадратичное от-
клонение — переменную составляющую мгновенного значе-
ния отклонения судна от заданного курса. С учетом случайного характе-
ра рыскания функция управления системы стабилизации курса, заклю-
чающаяся в минимизации угла может быть выражена через допу-
стимое значение статической ошибки Ф при минимуме дисперсии
<Ф; -*min.
(4.3)
Реализация функции управления (4.3) — не единственное требование
к системе. Важно, чтобы оно было достигнуто при минимуме затрат. Так
как интенсивная работа руля сопровождается ростом сопротивления
движению и повышенным боковым сносом, необходимо, чтобы цель уп-
равления была достигнута при ограниченном значении среднего угла
перекладки руля и минимуме его дисперсии
т5 < Д; ->min.
(4.4)
Аналогичные ограничения накладываются и на скорость перекладки
руля с целью облегчить условия работы и уменьшить износ механизмов
управления судном. В силу (4.2) тм=0,и требование к характеру сиг-
нала управления заключается в минимизации его дисперсии
Du -> шш.
(4-5)
Требования (4.3) — (4.5) противоречивы. Действительно, повысить
точность стабилизации выходной переменной управляемого объекта
можно только за счет интенсификации управления. Нельзя одновременно
выполнить условия (4.3) и (4.4). Оптимизация процесса управления
достигается на основе компромисса между ними путем минимизации
критерия вида
J + X6Z)5 + XUDU
при обеспечении заданной статической точности согласно (4.3).
В состав критерия оптимальности отдельные слагаемые входят со
своими весовыми коэффициентами X, которые определяют соотношение
между требованием точности работы системы и ограничением на затраты
управления. Они дают возможность разработчику системы варьировать
удельный вес этих факторов, добиваясь разумного компромисса между
характером рыскания судна и режимом работы рулевого устройства. Ве-
совые множители определяются путем экспертных оценок, предвари-
тельных расчетов или пробных решений .
119
Иногда критерий качества работы системы стабилизации курса до-
полняется слагаемым, пропорциональным дисперсии угловой скорости
рыскания Поэтому общая форма средневзвешенного дисперсион-
ного критерия оценки качества работы ССК имеет вид
J = + + (4.6)
Достижение поставленной цели осуществляется путем формирова-
ния сигнала управления по закону
и = g^ + g^^y + + &4 (4.7)
и организацией соответствующих отрицательных обратных связей по со-
стоянию управляемого объекта и исполнительного органа. Первое слагае-
мое в (4.7) соответствует обратной связи по основной управляемой пе-
ременной. Кроме нее в системе предусмотрена демпфирующая обрат-
ная связь g2coy, обеспечивающая устойчивость и требуемые динами-
ческие свойства системы, и интегрирующая связь g4 f <pdt, благодаря ко-
торой достигается структурный астатизм системы и появляется возмож-
ность исключить статическую ошибку стабилизируемой величины. Внут-
ренняя отрицательная обратная связь по углу перекладки руля повышает
качество функционирования привода рулевого устройства и обеспечи-
вает следящий режим его работы.
Совместное рассмотрение (4.2) и (4.7) с учетом того, что все обрат-
ные связи в системе отрицательны (g/ <0), приводит к следующему
выражению для угла перекладки руля:
(р + lg3 l)5= — (|gi I + lg2 lp+ lg4 I (4.8)
где р — символ дифференцирования. Оно показывает, что в системе ста-
билизации курса реализуется пропорционально-интегрально-дифференци-
альное регулирование по выходной переменной (ПИД-регулятор). Ос-
новная постоянная времени ти>0 и коэффициент передачи kntO исполни-
тельного органа определяются коэффициентом внутренней отрицатель-
ной обратной связи
. О 1/1^3 i — и. о
Значения коэффициентов обратных связей в (4.7) находят из реше-
ния оптимизационной задачи минимизации критерия (4.6).
Реализация закона управления (4.6) предполагает, что формирую-
щие его переменные величины поддаются измерению. На корабле уста-
навливается гирокомпас (или гирокурсоуказатель), представляющий
собой гироскопический прибор, на выходе которого напряжение посто-
янного или переменного тока пропорционально углу рыскания.
120
Угловая скорость рыскания может измеряться с помощью датчика
угловых скоростей (ДУС). Он также является гироскопическим прибо-
ром, но его выходной электрический сигнал пропорционален производ-
ной угла рыскания. В некоторых вариантах системы вместо ДУС исполь-
зуют дифференцирующие электромеханические или электронные устрой-
ста, работающие непосредственно по сигналам гирокомпаса. Такого же
типа интегрирующие устройства применяют для обратной связи вида
giftpdt. В создании обратной связи по углу перекладки руля участвует
линейный вращающийся трансформатор (ЛВТ). Его ось механически
связана с баллером руля, и напряжение выходной обмотки изменяется
в соответствии с углом перекладки.
Перечисленные приборы составляют информационное обеспечение
систем стабилизации курса.
Для выполнения градусной поправки в системе предусматривается
возможность введения в устройство формирования сигнала u(f) непо-
средственно от штурвала управления судном напряжения пропор-
ционального требуемому изменению курса.
Система стабилизации курса, известная под названием, „авторуле-
вой” (в зарубежной литературе — автопилот), получила самое широкое
распространение и находит применение практически на всех типах мор-
ских подвижных объектов. В большинстве вариантов реализация закона
управления (4.7) осуществляется с помощью аналогового вычислитель-
ного устройства электромеханического или электронного типа. В послед-
нее время начали появляться авторулевые в цифровом исполнении, в ко-
торых управление (4.7) реализуется программными средствами.
На рис. 4.3 приведена развернутая функциональная схема автома-
тической системы управления курсом судна типа „Аист” с гидропри-
водом ГТТруля, выпускаемой отечественной промышленностью.
В системе „Аист” используется сельсиноизмерительное звено курса,
которое состоит из сельсина-датчика СДК, связанного с гирокомпасом
ГК, и сельсина-приемника курса СПК. Механическая передача МП осуще-
ствляет алгебраическое суммирование углов поворота СПК и штурвала
Рис. 4.3. Развернутая функциональная схема авторулевого.
121
Ш, которым устанавливается заданный курс. Угловое перемещение на
выходе МП пропорционально углу отклонения судна от заданного кур-
са, т. е. углу рыскания <р. Сельсин-датчик управляющего сигнала СДу пре-
образует угол рыскания в переменное напряжение управляющего
сигнала. Блок коррекции БК, который состоит из дифференцирующего
ДУ и интегрирующего ИУ устройств, вырабатывает сигналы, пропорци-
ональные первой производной ^диф и интегралу С7ИНТ от Угла рыскания.
Электродвигатель исполнительного механизма ИМ через редуктор Р
и рычажную передачу управляет гидроприводом ГП (рулевой гидравли-
ческой машиной). Сельсин СДр, работающий в трансформаторном ре-
жиме, вырабатывает сигнал обратной связи по положению руля а
Рис. 4.4. Принципиальная схема авторулевого „Аист”
122
сельсин СДим служит для получения сигнала обратной связи Uq по
положению штока золотника гидроусилителя. На входе усилителя У
суммируются управляющий и корректирующие £7диф’ ^инт сигналы,
а также сигналы обратных связей , СТ#.
На принципиальной схеме соединения приборов (рис. 4.4) показано,
что суммирование сигналов происходит на переменном токе (частота
50 Гц). Для этого обмотки сельсинов СДу, СДр, СДим, а также выход-
ные трансформаторы дифференцирующего и интегрирующего устройств
соединены последовательно и подключены на вход полупроводникового
усилителя, который усиливает сигнал и подает его на управляющую об-
мотку двигателя исполнительного механизма.
Конструктивно система оформлена в виде пульта управления и гид-
равлического привода. В пульте управления ПУ расположены сельсины
СПК, СДу) блок БК (включающий в себя фазочувствительный выпрями-
тель ФЧВ, дифференцирующее и интегрирующее вычислительные устрой-
ства на базе усилителя постоянного тока УПТ и преобразователя 77~), а
также полупроводниковый усилитель У. На пульте управления установ-
лен штурвал, который служит для управления курсом в автоматическом
и следящем режимах. Штурвал связан с механическим дифференциалом
МД и муфтой проскальзывания МПр, установленной для того, чтобы не
сломать штурвалом механический ограничитель сельсина СДу, так как
штурвал имеет неограниченный угол поворота.
На лицевой панели пульта управления расположены шкалы грубого
и точного отсчета курса и шкала указателя руля, подвижный индекс,
стрелки заданного и истинного положений руля, переключатель режимов
управления на три положения, рукоятки устройств настройки, регули-
рующих коэффициенты дифференцирующего звена и обратной связи
по рулю.
В качестве исполнительного механизма для управления насосом ре-
гулируемой подачи НРП используется прибор ИМ (см. рис. 4.4). В при-
боре ИМ расположен двигатель исполнительного механизма Ди м с ре-
дуктором Р, сельсин СДим, пружинный нульустановитель и рукоятка
управления. Исполнительный механизм размещается непосредственно
на насосе.
На судах устанавливают две независимые, резервирующие Друг дру-
га системы управления, что обеспечивает высокую надежность процесса
управления курсом судна.
При нажатии на пульте управления кнопки „Автомат” СУ переходит
в режим автоматического удержания, и судно идет прямым курсом, со-
вершая около него небольшие колебания (рыскание). При отклонении
от заданного курса под влиянием возмущающих воздействий гироком-
пас отмечает величину этого отклонения с помощью СДК (см. рис. 4.4).
Сельсин СПК, связанный с СДК синхронной передачей, повернется на
тот же угол и соответственно развернет СДу. В результате на выходе СДу
появится напряжение U^, пропорциональное углу рыскания. Так как
напряжение с сельсина СДу поступает на блок коррекции БК? то в нем
123
вырабатывается напряжение £/ДИф, пропорциональное первой производ-
ной от ф. Сигналы , (7ДИф суммируются на входе усилителя У. Усилен-
ный сигнал поступает на Дим, который через редуктор Р повора-
чивает СДим и одновременно через рычажную передачу РП пере-
мещает шток системы золотник-поршень гидроусилителя ГУ. Послед-
ний приводит в действие насос регулируемой подачи НРП, осущест-
вляющий перекладку пера руля с помощью гидравлического приво-
да к баллеру ГП.
Сигналы обратной связи, снимаемые с сельсинов СДим и СДр, вычи-
таются из основных сигналов, и, когда эта разность равна нулю, вра-
щение ДПлМ прекратится, а руль будет переложен на определенный угол.
Под действием момента, создаваемого рулем, судно начнет возвращаться
на заданный курс. При этом СДК вращается в обратную сторону и СПК
возвращает сельсин СДу в нулевое положение.
Если рыскание судна несимметрично, то начинает работать интегри-
рующее устройство, сигнал которого /7ИНТ автоматически смещает руль
на определенный угол так, чтобы компенсировать момент внешних сил,
вызывающих несимметричное рыскание. Гирокомпас отметит величину
и направление сноса с помощью сельсина СДК. Принимающий сельсин
курса СПК повернется на этот же угол и через механическую цепь повер-
нет ротор сельсина-датчика СДу. Сигнал с СДу поступит на вход усилите-
ля и одновременно на вход блока БК. С выхода БК напряжение (/инт по-
ступит на вход усилителя У и про суммируется с основным сигналом
рассогласования по курсу. Руль переложится на угол, соответствующий
входному суммарному сигналу. В результате судно начнет возвращаться
на заданный курс, а руль займет положение, отличное от нулевого и обус-
ловленное величиной (7ИНТ. При этом сигнал, снимаемый с СДу равен ну-
лю, а напряжение £/инт скомпенсировано напряжением обратной связи,
снимаемым с сельсина СДр. Угол руля автоматически будет выбран та-
ким, чтобы гидродинамический момент, создаваемый рулем, равнялся
моменту, создаваемому возмущающим воздействием. В этом случае
судно идет заданным курсом.
Рассмотрим работу системы при вводе градусных поправок. Пред-
положим, что требуется изменить курс судна на 5° вправо. Поворотом
штурвала вправо перемещают ротор сельсина-датчика СДу на угол,
соответствующий изменению курса на 5°. Напряжение сигнала, пропор-
циональное углу поворота штурвала Uy> поступит на вход с усилителя
и далее на электродвигатель. Перекладка руля вправо приведет к тому,
что судно тоже начнет поворачиваться направо. Когда угол поворота суд-
на достигнет 5°, сельсин гирокомпаса СДК через синхронную связь
с сельсином СПК возвратит СДу в нулевое положение, и руль вернется
в исходное состояние.
Возможна работа системы в следящем режиме управления рулем.
При этом отключается сельсин-приемник курса СПК (главная обратная
связь) и блок БК. В основном схема работает так же, как и в режиме из-
менения заданного курса путем введения градусных поправок. Угловое
124
положение руля при этом соответствует угловому положению штурвала
пульта управления.
Конструкция системы позволяет варьировать коэффициенты закона
управления (4.7) путем изменения усиления в канале обратной связи по
рулю и в дифференцирующем устройстве. Этим создается практическая
возможность оптимизации работы авторулевого согласно критерию
(4.6) при изменении условий плавания (скорости и направления хода,
интенсивности волнения, ветра, течений, загрузки судна и т. п.).
4.3. Система стабилизации путевого угла
Предположим, что система стабилизации курса идеально
реализует свою функцию управления и угол рыскания судна в любой мо-
мент времени равен нулю. Продольная ось корабля направлена по задан-
ному курсу (рис. 4.5). Однако этого оказывается недостаточно, чтобы
достигнуть заданной конечной точки прямолинейного галса. Вектор ско-
рости корабля отклоняется от продольной оси на угол дрейфа (3 под
влиянием боковых сил внешнего воздействия. В результате появляется
боковой снос, скорость которого определяется выражением
Vzg = zg = KsinP~H3o/57,3.
Для большинства морских подвижных объектов, двигающихся со
значительными скоростями, в нормальных ходовых режимах величина
угла дрейфа невелика и скорость бокового сноса существенно меньше
скорости продольного перемещения. Но в некоторых случаях боковой
снос оказывается существенным. Это прежде всего относится к судам
на воздушной подушке, которые, не имея непосредственного контакта
с водой, могут двигаться с углами дрейфа 0° =5 — 10°. Соответствую-
щий боковой снос составляет при этом 10—20 % от прямолинейного пу-
ти. На каждых 10 милях уклонение от маршрута составит 1—2 мили. Это
отрицательно сказывается на всем процессе плавания судна и выполне-
нии им своего функционального назначения.
Рис. 4.5. Неконтролируе-
мый боковой снос судна.
Рис. 4.6. Ориентация век-
тора Скорости судна в го-
ризонтальной плоскости.
125
Значительные углы дрейфа имеют и некоторые водоизмещающие су-
да, которые по своему назначению вынуждены двигаться с малыми ско-
ростями хода, соизмеримыми со скоростями течений в океане. К ним
относятся научно-исследовательские суда, выполняющие геолого-
геофизические исследования или поисково-разведочные работы. По
условиям работы технологического оборудования эти суда имеют
скорости хода в диапазоне 2—5 уз. При этом боковое течение со
скоростью 0,5—1 уз может привести к существенному неконтроли-
руемому сносу.
Избежать некотролируемого бокового сноса позволяет система ста-
билизации путевого угла (СПУ), которая осуществляет автоматическую
ориентацию вектора скорости судна в заданном направлении движения.
Функция управления такой системы заключается в минимизации откло-
нения путевого угла от заданного курса о = — /3 0 (рис. 4.6)
Цель управления может быть достигнута путем компенсации или па-
рированием дрейфа. В первом случае технические средства управления
должны создавать боковую силу, способную компенсировать влияние
возмущающих факторов. Такими возможностями - располагают подру-
ливающие устройства и винтовые движительно-рулевые колонки. Если
на судне они имеются, то управление движением может быть организова-
но таким образом, чтобы угол дрейфа был равен нулю. Тогда система
стабилизации курса одновременно обеспечивает и стабилизацию путевого
угла (4.7).
Парирование дрейфа (рис. 4.8) достигается поворотом судна в на-
правлении действия боковых возмущающих сил на угол рыскания, рав-
ный углу дрейфа (^ ->|3, б ->0). Достоинство такого способа управления
движением является возможность обходиться без специальных техниче-
ских средств, создающих управляющую боковую силу. Обычный верти-
кальный руль может обеспечить требуемый разворот корабля в ходовом
режиме. Кроме того, парирование дрейфа сопровождается меньшими энер-
гетическими затратами, так как движение с косым обтеканием корпуса
потоком жидкости или воздуха при ненулевых углах дрейфа происходит
Рис. 4.7. Компенсация дрейфа
судна.
126
Рис. 4.8. Парирование дрейфа
судна.
с меньшим сопротивлением, чем преодоление бокового потока при
компенсации дрейфа.
Система стабилизации путевого угла (ССПУ), построенная по прин-
ципу парирования дрейфа, представляет собой модификацию системы
стабилизации курса. Она должна содержать дополнительную обратную
связь по углу дрейфа. Поэтому в закон управления добавляется одно
слагаемое
«(О = g^ + gi^y +g35 +g4 f (<p-0) dt+g5fi. (4.9)
Кроме того, поскольку основной стабилизируемой переменной
является отклонение путевого угла, для обеспечения структурного аста-
тизма системы то = 0, интегрирующая обратная связь организуется по
разности углов рыскания и дрейфа. По этой же причине оценку качества
работы ССПУ следует вести по средневзвешенному дисперсионному кри-
терию, который содержит слагаемое, пропорциональное дисперсии путе-
вого угла вместо дисперсии угла рыскания
J = Л6 D6 J-
Для реализации закона управления (4.9) необходимо, чтобы инфор-
мационное обеспечение системы измеряло полный вектор состояния уп-
равляемого объекта и исполнительного органа. В дополнение к приборам
измерения состояния, которыми располагает система стабилизации кур-
са, на борту МПО нужен измеритель угла дрейфа. В существующих при-
борах дрейф определяется путем замера боковой и продольной скоростей
поступательного движения центра масс относительно неподвижной базы
J3 = arctg Vz/Vx.
Такими приборами являются двухкоординатные абсолютные лаги —
измерители скорости, построенные на принципе Доплера.
Доплеровские измерители скорости (ДИС) существуют в двух ис-
полнениях, различающихся по несущей частоте излучения.
Суда на воздушной подушке имеют высокую скорость хода, непод-
вижной базой для них может считаться поверхность воды. Относительно
воды определяются скорости перемещения СВП, Для этого используют
ДИС с радиоизлучением, которое распространяется в воздухе и отражает-
ся от воды. Радиоизлучению свойственна высокая несущая частота, это
определяет сравнительно небольшие массу и габариты прибора.
Для водоизмещающих судов неподвижной базой может считаться
только поверхность дна. Поэтому на них используют гидроакустиче-
ские ДИС. Сравнительно низкая несущая частота гидроакустического
излучения приводит к значительным массогабаритным характеристикам
приборов.
127
Двухкоординатные абсолютные лаги в настоящее время представля-
ют собой достаточно сложные и дорогие устройства. Это ограничивает
область применения систем стабилизации путевого угла.
4.4. Стабилизация боковых отклонений судна
Задача удержания судна на прямолинейном участке задан-
ной траектории требует минимизации боковых отклонений центра масс.
На рис. 4.9 показано, что боковое отклонение zg удобно определять в ба-
зовой координатной системе xg Og zg, начало которой лежит в произволь-
ной точке заданного прямолинейного галса судна, принимаемого за ось
OgZg, Базовая координатная система ориентирована так же, как и полу-
связанная система координат. Это позволяет при определении мгновен-
ной величины бокового отклонения от заданной траектории использо-
вать кинематическое соотношение поступательного движения, приведен-
ное в гл. 1, которое при постоянной скорости хода Ко и малых углах
крена, дифферента, атаки и дрейфа имеет вид
(4.Ю)
откуда
t
zg(t) =zg(Q) -Fo / o(t)dt.
Выражение (4.10) вместе с линейной моделью движения рыскания
(4.1) позволяет решать задачи, связанные с исследованием систем ста-
билизации боковых отклонений МПО. Целевая функция систем этого
типа заключается в минимизации величины zg С учетом реальных
условий эксплуатации МПО при действии случайных ветро-волновых
возмущений она сводится к минимизации дисперсии этой величины и ог-
раничению математического ожидания
Dz
Рис. 4.9. Боковое отклонение
судна.
(4.U)
Если по каким-либо причинам центр
масс судна отклонится от заданной прямо-
линейной траектории, то вернуться на нее
можно, соответствующим образом скор-
ректировав курс судна (см. рис. 4.9). Это
означает, что для стабилизации боковых
отклонений, в систему стабилизации курса
следует вводить градусные поправки,
значения которых определяются величиной
бокового отклонения ^o(zg)- При этом
закон управления вертикальным рулем
имеет вид
128
5=u=g1[1p-lp0(z^)] +
+ giMy +£з5 +^4 S pdt
или
u=gip + g^y +£з§ +
+ g4J^+^6Zg. (4.12)
Выражение (4.12) показывает, „
r v 7 Рис. 4.10. Изменение курса судна при
что система стабилизации боко- компенсации бокового отклонения,
вых отклонений судна (ССБО)
создается на основе авторулевого, к которому добавляется еще одна
обратная связь по величине бокового отклонения. Основную сложность
при создании ССБО составляет определение Zg на борту судна. Это
возможно лишь в том случае, если МПО располагает совершенной радио-
навигационной системой или системой инерциальной навигации. Харак-
терной особенностью таких систем является дискретность выходной
информации. Она поступает в систему управления со значительными
временными интервалами, которые для различных типов навигационных
систем составляют несколько секунд или часов.
Поэтому в большинстве случаев ССБО представляет собой комбини-
рованную систему, в которой сочетается аналоговое исполнение автору-
левого с цифровым каналом организации обратной связи по величине бо-
кового отклонения. Процесс последовательного введения градусных
поправок в такой системе иллюстрируется рис. 4.10. Значение градусной
поправки (Ро/ корректируется в каждый момент времени когда по-
ступает информация о величине бокового отклонения Zgi. По мере того,
как центр масс судна Oj приближается к заданной прямолинейной тра-
ектории, величины градусных поправок уменьшаются.
В некоторых вариантах исполнения ССБО используется модифици-
рованный закон управления, в основе которого лежит способ управле-
ния (4.9), примененный в системе стабилизации путевого угла:
u(t) =gve + g2b>y +?з§ +g4 f (р-0) dt +gs0+g6zg.
Для обеспечения структурного астатизма по величине бокового
отклонения иногда соответствующим образом организуют интегри-
рующую обратную связь
«(О = gip+g2^y +?з8 +g4' f Zgdt +g6Zg.
При расчете коэффициентов законов управления решается оптими-
зационная задача, связанная с минимизацией средневзвешенного диспер-
сионного критерия, который непременно должен содержать слагаемое,
9—510
129
пропорциональное дисперсии бокового отклонения. Результаты решения
оптимизационной задачи оцениваются по величине статической ошибки
регулируемой переменной согласно требованию (4.11).
Необходимость стабилизации судна на заданной кусочно-линейной
траектории движения существует во многих случаях. Она связана, в част-
ности, с выполнением геолого-геофизических и поисково-разведочных
работ, когда требуется обеспечить точное следование заданной линии
профиля. Только в этом случае истинный маршрут судна можно доста-
точно точно связать с географической картой района, что определяет эф-
фективность исследовательских работ на шельфе и в океане.
4.5. Динамическое позиционирование
Система динамического позиционирования предназначена
для автоматического удержания судна в заданной точке океана без поста-
новки на якорь.
Проблема динамического позиционирования приобрела особую ак-
туальность в связи с работами по освоению природных богатств океана,
и, в частности, при создании буровых судов, осуществляющих поиск
нефтегазовых месторождений на значительной глубине.
При бурении судно должно находиться над устьем скважины (У),
а точка позиционирования Og — располагаться с ним на одной вертикали
(рис. 4.11, а). В результате внешних возмущений судно смещается отно-
сительно Og и вместе с ним отклоняется точка крепления бурового ин-
струмента О на величину, оцениваемую мгновенным значением радиуса-
вектора R (0. Максимально возможная величина смещения судна опре-
деляется допустимым углом отклонения бурового инструмента от вер-
тикального положения 17, при котором сохраняется его работоспособ-
ность. По условиям прочности этот угол не превосходит 3—5 °. Следова-
тельно,
^max^^tgT? ~ 0,05 4-0,10#,
т. е. точка крепления инструмента на судне (условно можно считать,
что она совпадает с центром масс) в любой момент времени должна
Рис. 4.11. Динамическое позиционирование.
130
находиться в круге с центром в точке позиционирования и радиусом
5—10 % от глубины бурения Н. При Н = 250 м его значение Ятах-
= 12,5 4-25 м близко к ширине судна и меньше его длины.
Необходимость в динамическом позиционировании судна возникает
не только при бурении скважин, но и при проведении поисковых работ
с помощью буксируемых подводных аппаратов. Хотя в последнем слу-
чае требования к точности позиционирования существенно мягче, тем не
менее трудно обеспечить безопасность аппарата, если судно находится
в неуправляемом дрейфе, особенно при неблагоприятной погоде.
В связи с проблемой добычи твердых полезных ископаемых со дна
океана появилась новая задача обеспечения согласованного движения
донного агрегата сбора сырья и надводного судна, соединенных между
собой трубопроводом эрлифтной установки. В такой системе задача уп-
равления движением надводного судна представляет собой разновид-
ность динамического позиционирования. Отличие заключается в том,
что позиционирование осуществляется относительно подвижной точки
Og, характер перемещения которой определяется маршрутом донного
агрегата сбора полезных ископаемых. Эта задача получила название ди-
намической стабилизации.
Динамические позиционирование и стабилизация представляют со-
бой задачи, существенно отличающиеся от традиционных задач управле-
ния движением МПО. Прежде всего движение судна совершается относи-
тельно неподвижного балансировочного режима с малыми значениями
линейной скорости. Поэтому гидродинамические силы на корпусе,
вызванные собственным движением судна, незначительны и не оказы-
вают заметного влияния на динамику процессов управления. Определя-
ющими являются силы и моменты ветро-волновых возмущений, средств
управления и реакция технологического инструмента.
Гидродинамическая сила и момент на руле значительно выше, чем
на корпусе судна благодаря потоку воды от винтов. Однако они недоста-
точны для эффективного управления процессом позиционирования в ус-
ловиях интенсивных внешних возмущений. Поэтому на таких судах ис-
пользуют активные средства управления: подруливающие устройства
и винтовые движительно-рулевые колонки.
Особые сложности связаны с созданием информационного обеспече-
ния системы, которое должно с высокой точностью устанавливать истин-
ное положение центра масс судна и измерять малые значения проекций
скорости поступательного движения относительно неподвижной базовой
поверхности (дна). Добиться этого можно только на основе комплекси-
рования различных систем радионавигации, гидроакустических систем
и систем автономной навигации. Необходимость сложной обработки сиг-
налов первичной информации предопределяет использование цифровых
вычислительных машин для реализации информационных и управляю-
щих алгоритмов системы. Важным требованием является высокая на-
дежность системы, которая приводит к многократному резервированию
и дублированию информационных и управляющих каналов.
131
Чтобы сформулировать функцию управления при динамическом пози-
ционировании (ДП), будем рассматривать плоское движение центра масс
судна (точка О на рис. 4.11, б) в базовой неподвижной координатной
системе, начало которой Og совмещено с точкой позиционирования, а
оси горизонтальной плоскости 0gxgi Ogzg ориентированы аналогично
соответствующим осям полу связанной системы координат. Тогда ориен-
тация корабля однозначно определяется углом у между осями базовой и
связанной с корпусом координатных систем, который имеет смысл угла
рыскания.
Цель динамического позиционирования состоит в минимизации рас-
стояния между точкой позиционирования и центром масс судна
R = + Zg min,
которая может быть выражена через координаты О в базовой системе
xg zg min,
что означает минимизацию боковых и продольных отклонений судна.
Динамическое позиционирование связано с компенсацией внешних
ветро-волновых возмущений. Этот процесс требует значительных энерге-
тических затрат, которые можно уменьшить, если ориентировать судно
таким образом, чтобы силы ветра, течения и морского волнения, а также
моменты этих сил на корпусе судна были минимальными. Отсюда появ-
ляется дополнительная функция управления — выбор угла курса <р0 (он
определит ориентацию осей базовой системы) в зависимости от направ-
ления и силы ветра, скорости течения, а также высоты и направления
волн, и стабилизация судна на этом курсе ->min.
При случайном характере возмущений и стационарном процессе в
системе ДП цель управления можно выразить через дисперсии соответст-
вующих переменных
Z>x-*min; Dz min, min.
Условие безопасности использования технологического оборудова-
ния ограничивает максимальное расстояние OOg;
к <ЯДОП =#tg7?.
Изменения кинематических параметров движения судна в режиме
позиционирования в результате ветро-волновых возмущений и управля-
ющих воздействий происходит в соответствии с уравнениями связи
xg = Vx cos v? + Vz sin v?;
zg ~ sin + Vz cos </?;
= coy,
132
уравнениями равновесия сил относительно продольной и поперечной
осей, в которых согласно [3] определяющими являются слагаемые,
содержащие проекции сил возмущения, управления и реакции инстру-
мента
(ш + Хц) ^-^ХВВ.В + ^Хупр + ^Хинс>
(ш + Х33) Vz ”^Zbb,b + ^гупр + ^ZHHC5
и уравнением равновесия моментов относительно вертикальной оси
уу ^55 ) ^у = ^(увв.в + Диупр'
Согласно приведенным уравнениям вектор состояния управляемо-
го объекта в системе ДП включает в себя шесть переменных:
х = [*g Vxzs Vz
Они участвуют в формировании управляющих сил и момента
&Х упр = $>XlXg + S Х2 Vx + Рхзв.В)
&Z упр ~~ g z \ % g + Sz 2 Vz ^ZBB.B>
My ynp “ ^y 1 (^0 — *" &y2 + Fy BB ,B >
(4.13)
которые зависят также от характера ветро-волновых возмущений, выра-
женных в слагаемых ^zbb.b> ^увв.в и задаваемой ориентации
судна <Ро- Учитывать возмущения необходимо для достижения требуемой
динамической точности позиционирования.
Особенность управляющей части системы заключается в том, что в
ней отдельно формируются управления в виде желаемых сил и момента
согласно (4.13), а затем для их реализации задаются режимы работы ло-
кальных регуляторов, обеспечивающих 'последовательное включение
имеющихся на судне подруливающих устройств, винтовых колонок
и других технических средств.
Наиболее сложной частью системы динамического позиционирова-
ния является ее информационное обеспечение, которое непрерывно вы-
рабатывает информацию об относительном положении судна, скорости
движения центра масс, ориентации и скорости вращательного движения,
ветро-волновых возмущениях.
Расчет отклонения судна от точки позиционирования выполняется
по данным(радионавигационных систем ближнего и дальнего действия,
системы спутниковой навигации, гидроакустической системы с маяками-
ответчиками, устанавливаемыми в зоне выполнения работ. Кроме того,
на борту судна осуществляется систематическое счисление координат
133
по скорости, измеряемой с помощью двухкоординатного абсолютного
лага, и ориентации судна, которая определяется по гирокомпасу. В
процессе обработки первичной информации осуществляется оценка ее
достоверности (защита от сбоев), комплексирование (определение сред-
невзвешенного значения измерений разных систем) и фильтрация помех.
На борту судна удается измерить скорость и направление ветра, а не-
достающая информация о течении и волнении обычно восстанавливается
с помощью наблюдателей возмущения на основе математического опи-
сания волнового процесса.
Вспомогательный информационный канал организуется с помощью
инклинометров — приборов, которые измеряют угол наклона технологи-
ческого инструмента. Их показания позволяют рассчитать отклонение
судна от точки позиционирования или непосредственно по углу 17 оце-
нить опасность этого смещения.
4,6. Стабилизация продольного движения судна
на подводных крыльях
СПК со стационарными крыльями малого заглубления при
движении на волнении испытывают значительные возмущающие воздей-
ствия, Возникающая при этом переменная подъемная сила и вертикаль-
ные ускорения ухудшают условия обитаемости, создают дополнитель-
ную нагрузку на элементы конструкции и механизмы. Вертикальная
качка СПК сопровождается килевой качкой, так как переднее и заднее
крылья располагаются в разных точках волны, что приводит к появле-
нию возмущающего дифферентующего момента.
В связи с тем, что вертикальные перемещения элементарных частиц
жидкости при волнении носят орбитальный характер, волновое возму-
щение на крыльях оказывается различным при движении СПК на встреч-
ных и попутных курсовых углах к волнению.
Вертикальные составляющие скоростей движения частиц воды на-
кладываются на скорость потока жидкости относительно крыла вследст-
вие поступательного продольного движения СПК. В результате изменя-
ется угол атаки на крыле при движении СПК на встречных курсовых уг-
лах к волне. Такое положение потоков жидкости приводит к увеличению
подъемной силы во время прохождения переднего склона волны и к ее
уменьшению, когда крыло проходит задний склон. Поэтому при встреч-
ном волнении судно стремится следовать за профилем волны, сохраняя
продольную устойчивость. Вертикальные перегрузки при этом имеют от-
носительно высокие амплитуды и частоту. При попутном волнении кар-
тина оказывается обратной: подъемная сила на крыле снижается во
время прохождения переднего склона и растет, когда крыло находится
на заднем склоне волны. В результате нарушается продольная устойчи-
вость движения СПК, и судно может испытывать удары волны о корпус
даже в том случае, когда высота волны меньше клиренса. (Клиренс —
134
это расстояние между нижней точкой корпуса и водной поверхностью
при движении СПК в крыльевом режиме на тихой воде).
Подверженность волновым возмущениям отрицательно сказывается
на мореходность СПК со стационарными крыльями. Чтобы использовать
эти судна при интенсивном волнении, необходимы средства компенса-
ции возмущающих воздействий. Для этого в конструкцию крыльев вво-
дят подвижные элементы — закрылки, положением которых управляют
автоматически, изменяя тем самым угол атаки крыла и, следовательно,
величину подъемной силы.
СПК с глубоко погруженными крыльями также требуют автомати-
ческого управления подъемной силой. Это связано с тем, что при такой
крыльевой схеме подъемная сила на крыле практически не зависит от за-
глубления. Глубина погружения крыла начинает сказываться только при
движении на волнении, когда крыло оказывается в поверхностном слое
воды. В нормальном ходовом режиме СПК такого типа собственной про-
дольной устойчивостью не обладают. Для создания ее необходимо авто-
матическое управление положением крыльев или закрылков.
Снижение вертикальных перегрузок СПК, обеспечение продольной
устойчивости судна достигаются с помощью автоматической системы ста-
билизации продольного движения, которая предназначена для поддержа-
ния на заданном уровне ординаты центра масс и угла дифферента. Функ-
ция управления этой системы заключается в минимизации текущих от-
клонений кинематических параметров от заданных значений
Ф = Фз - Фт(О ^rnin; yg = yg3 - yg т (О min.
При случайном характере внешних возмущений функция управле-
ния определяется минимумом дисперсий управляемых переменных
Dv ->min; -> min.
По условиям движения СПК на волнении стабилизация ординаты
центра масс и угла дифферента возможна при высоте волн меньшей, чем
клиренс. Если же высота волн больше клиренса система переходит в ре-
жим слежения за профилем волны.
Расчет законов управления системы можно вести на основе линей-
ной модели (2.45). В соответствии с вектором состояния продольного
движения СПК сигналы управления носовым и кормовым крыльями
формируются в виде
SK.H = «1 =ёп Ф +gi2“>z +gi3yg + £i4« + £iS8K,H;
> (4.14)
8к.к=м2 =£21’/' +£22WZ +£23^g +£24« + £2s8k.k.
Оба крыла, носовое и кормовое, используют для управления положени-
ем ординаты центра масс и углом дифферента.
135
При создании подъемной силы они разворачиваются в одном направ-
лении, а для образования нужного дифферентующего момента — в раз-
ных направлениях. Поэтому знаки коэффициентов закона управления
gi3, gi4, g23, g24 одинаковы (все отрицательны), agu,gi2 имеют знаки
противоположные знакам g21, g22 (£n, g12 ~ отрицательны, g21, g22 —
положительны). Согласно (4.14) каждый канал управления формирует-
ся из основных обратных связей по управляемым переменным (позици-
онные связи по углу дифферента ф и ординате центра Maccyg) и коррек-
тирующих связей (демпфирующие связи по угловой скорости и углу
атаки а). Внутренние обратные связи по углам перекладки носового и
кормового крыльев улучшают характеристики гидроусилителей испол-
нительных органов системы и обеспечивают следящий режим их работы.
Измерение угла дифферента осуществляется с помощью гировертикали,
сигнал которой подается через масштабные преобразователи на сумми-
рующие устройства, где формируются законы управления крыльями.
Этот же сигнал используется при образовании демпфирующей обратной
связи по угловой скорости килевой качки. Для этого его пропускают че-
рез дифференцирующий фильтр с передаточной функцией H(s) =
= ks/Ts + 1.
Более сложную задачу представляет собой измерение ординаты
центра масс. Иногда для этой цели используют акселерометры (датчики
линейных ускорений), выходные сигналы которых подвергаются двой-
ному интегрированию. Если акселерометр жестко связан с корпусом
судна, то с его помощью определяются линейные перемещения в связан-
ной системе координат, которые на основе обратной кинематической
матрицы преобразуют в неподвижную координатную систему. Для
образования демпфирующей обратной связи по углу атаки можно ис-
пользовать сигнал, получаемый в результате однократного интегриро-
вания выходного сигнала акселерометра, так как он пропорционален
скорости вертикального перемещения центра масс в связанной системе
координат и, следовательно, углу атаки.
В других системах вместо акселерометров используют гидростатиче-
ские датчики давления, устанавливаемые в крыльях. С их помощью
измеряется глубина погружения крыла. Система, в которой использу-
ются такие датчики, стремится поддерживать постоянное заглубление
крыльев, отслеживая профиль волны.
Контрольные вопросы
1. Приведите общую функциональную схему системы управления МПО. Дайте
характеристику управляемого объекта, исполнительных органов, информационно-
го обеспечения системы.
2. Какие функции выполняет вычислительное устройство системы, и как оно
реализуется?
3. Дайте характеристику векторов состояния управляемого объекта и испол-
нительных органов, возмущающих воздействий и сигналов управления СУ МПО,
а также вектора измеряемых переменных состояния.
136
4. Для чего предназначена система стабилизации курса судна, и в чем заключа-
ется функция управления этой системы?
5. Приведите математическую модель, на основе которой можно исследовать
процессы управления в системе стабилизации курса судна.
6. Как формируется критерий качества работы системы стабилизации курса
при случайных ветро-волновых возмущениях?
7. Приведите закон управления в системе стабилизации курса и объясните зна-
чение всех его составляющих.
8. Почему в системе стабилизации курса реализуется ПИД-регулятор?
9. Расскажите об информационном обеспечении системы стабилизации курса.
10. Какая разница существует между функциональной и структурной схемами
системы?
11. Приведите функциональную и структурную схемы системы стабилизации
судна на курсе.
12. В чем заключается назначение и функция управления системы стабилиза-
ции путевого угла?
13. Как осуществляется компенсация и парирование дрейфа?
14. Чем различаются законы управления и критерии качества систем стабили-
зации курса и путевого угла?
15. Как измеряется угол дрейфа на борту судна? Какие другие датчики ис-
пользуются в системе стабилизации путевого угла?
16. Определите назначение и функцию управления системы стабилизации боко-
вых отклонений судна.
17. Какие дополнительные элементы вводятся в систему стабилизации курса,
чтобы получить возможность стабилизировать судно на заданной траектории?
18. Изобразите структурную схему системы стабилизации боковых отклоне-
ний. Какие переменные в системе являются непрерывными и какие дискретными?
19. Для чего предназначена система динамического позиционирования, какая
функция управления в ней реализуется?
20. Чем различаются системы динамического позиционированияистабилизации?
21. В чем заключается специфика математической модели, описывающей про-
цессы управления в системе динамического позиционирования?
22. Напишите законы управления для системы динамического позициониро-
вания. Какими исполнительными органами они реализуются?
23. Дайте характеристику алгоритмического и информационного обеспечения
системы динамического позиционирования.
24. В чем заключается особенность движения судна на подводных крыльях
при волнении моря? Что ограничивает мореходность СПК?
25. Охарактеризуйте назначение и функцию управления системы стабилизации
продольного движения СПК
26. Изобразите структурную схему системы стабилизации продольного движе-
ния СПК.
27. Каким образом одними и теми же исполнительными органами осуществ-
ляется стабилизация вертикальной и килевой качки СПК?
28. Расскажите об информационном обеспечении системы стабилизации про-
дольного движения СПК
29. Некоторые СПК с крыльями малого заглубления имеют управляемые за-
крылки только на кормовом крыле. Какую систему стабилизации Вы можете реа-
лизовать с помощью такого исполнительного органа?
30. Приведите выражения для закона управления в системе стабилизации
продольного движения СПК Какой критерий используется при выборе коэффи-
циентов закона управления? Надо ли изменять значения коэффициентов при изме-
нении условий плавания?
137
Глава 5
СИНТЕЗ АВТОМАТИЧЕСКИХ СИСТЕМ
УПРАВЛЕНИЯ ДВИЖЕНИЕМ
5.1. Математическая формулировка задачи
Задача синтеза автоматических систем вообще и систем уп-
равления движением морских подвижных объектов (МПО), в частности,
заключается в определении структуры и параметров системы, при кото-
рых обеспечивается поставленная цель управления.
В общем случае система управления движением (СУД) включает уп-
равляемый объект, исполнительные органы, датчики кинематических па-
раметров движения и состояния исполнительных органов, которые сов-
местно со средствами фильтрации, защиты от помех и сбоев образуют
информационное обеспечение системы. Характеристики управляемого
объекта и исполнительных органов определяются конструкцией корпуса
МПО, составом и показателями технических средств. При синтезе СУД
проектировщик должен располагать этими характеристиками, выражен-
ными в форме математических моделей динамики так же, как и описани-
ем свойств информационного обеспечения системы. Эти элементы обра-
зуют неизменяемую часть системы. На этапе синтеза они составляют
естественные ограничения. Предмет синтеза заключается в определении
структуры и параметров вычислительного устройства, его алгоритмиче-
ского и программного обеспечения в соответствии с поставленной целью
управления и принятыми критериями качества.
Математическую формулировку задачи синтеза начинают с уравне-
ний неизменяемой части системы.
Поведение управляемого объекта определяется изменением во вре-
мени вектора состояния яу>о (г) морского подвижного объекта. В пре-
дельном случае он включает 12 кинематических параметров движения
твердого тела, которые определяют: положение центра масс МПО в не-
подвижной системе координат (xg ,ygi zg) ; его ориентацию в простран-
стве, выраженную в углах рыскания крена и дифферента (ср, 0, ф),
скорость поступательного (Vx, Vy, Vz) и вращательного (шх, а)у, a>z)
движений в связанной координатной системе.
Вектор состояния МПО максимальной размерности ху<о (V) =
~[xgygzg Vx Vy У26<рфыхЫуЫ2 ]Т используют только при решении задач
анализа и синтеза систем управления пространственным движением,
которые встречаются в практике достаточно редко. В большинстве
случаев задача сводится к рассмотрению элементарных движений МПО,
138
определяемых усеченными векторами состояния. Например, движение
рыскания характеризуется трехкомпонентным вектором состояния
*у.о (0 = [ ^у0]т, бортовая качка — двухкомпонентным ху>о (С) =
= [0 6ОХ]Т ит. д.
Изменение состояния МПО происходит под влиянием внешних вет-
ро-волновых возмущений и управляющих воздействий исполнительных
органов, характеризующихся векторами произвольной размерности:
/ (t) = [ Л > •••> fm\ \ $ (7) =[ , ..., ]т. Характер движения определя-
ют системой дифференциальных уравнений. В общем случае эти урав-
нения нелинейны
*у.О ~ <Ру.О (Лу.О> ^, /") , (5 • 1)
однако во многих практических задачах можно использовать линейные
модели вида
Ху ,о “ Ду .О^у .0 .О Су X) f (5,2)
В (5.2) предполагается, что ху>о — это вектор отклонений кинемати-
ческих параметров от некоторых постоянных значений, характеризую-
щих балансировочный режим стационарного движения, а Лу<о, Вуо,
Су<0 — матрицы постоянных коэффициентов, определяемые характери-
стиками объекта в окрестностях балансировочного режима.
Линейные модели используют при решении задач стабилизации МПО
на заданном режиме движения, когда они позволяют получить практиче-
ски достоверные результаты. Во всех других случаях возможность ис-
пользования вместо нелинейной модели одной или нескольких линей-
ных должна быть дополнительно исследована.
Исполнительные органы (ИО) включают в себя механизмы управле-
ния МПО (руль, главный движитель, подруливающее устройство, пово-
ротные движительно-рулевые колонки и т, п.) и их приводы. Уровень
управляющих воздействий ИО выражается углами перекладки рулей или
поворота лопастей винтов, частотой вращения гребного вала и т. п. Эти
величины формируют вектор 6(f), который изменяется под влиянием
сигналов управления и (t"), причем будем считать, что оба вектора имеют
одинаковую размерность. Так как исполнительные устройства являются
инерционными элементами СУД, в которых происходит усиление мощно-
сти сигналов управления, то их математические модели имеют форму
дифференциальных уравнений
5 = Л.о (5, u,t)
ИЛИ а
5 = Ди.о6 + В ио и.
Одинаковая математическая форма моделей движения управляемо-
го объекта и исполнительных органов позволяет описать их общей мат-
ричной моделью вида
139
х= у (х, и, ?.)
(5-3)
ИЛИ
х- Ах + Ви + Сf
(5-4)
путем объединения их векторов состояния ху<о и 5 в один вектор состоя-
ния СУД x(t) =[хуто 6Т]Т. Размерность и состав этого вектора изменя-
ются в зависимости от принятой модели объекта и набора исполнитель-
ных органов, поэтому для общности последующих решений будем при-
нимать его произвольным
=[ *1 • • .*и]Т.
На конкретном объекте не все кинематические параметры движения
поддаются измерению. Число измеряемых компонент состояния I <и.
Наибольшие трудности обычно вызывают определение параметров
поступательного движения МПО. Поэтому измерение состояния системы
может быть неполным. Датчики вносят свою систематическую или
случайную ошибку и, если они соизмеримы с уровнем полезного сигна-
ла, то измерение состояния определяется как неточное.
При неполной и неточной информации измеряемый вектор состоя-
ния у (f) = [у1 ...yi ]т отличается отх(г).
В линейных безынерционных измерительных системах эта связь вы-
ражается соотношением
у =Dx + w,
(5-5)
где D — матрица постоянных коэффициентов размером I х п, характери-
зующая состав измерительной аппаратуры на объекте; w—погрешность
(или шумы) измерений.
Исходная форма алгоритмов управления представляет собой зависи-
мости сигналов управления от времени u(t) или измеряемых перемен-
ных состояния и (у). В первом случае реализуется программное управле-
ние движением, во втором — систему строят по принципу обратной свя-
зи. Вид функции и (у), которую называют также законом управления,
определяет структуру обратных связей в СУД, а ее численные коэффи-
циенты — параметры системы. В общем случае задача синтеза заключает-
ся в определении как структуры, так и параметров системы. Однако ча-
сто вид функции и (у) назначают, а в процессе синтеза рассчитывают
только параметры обратных связей. В этом случае мы имеем дело с пара-
метрическим синтезом.
Законы управления формируются в соответствии с поставленной
целью (функцией) управления,. Она соответствует требованиям техниче-
ского задания, предъявляемым к характеру изменения кинематических
параметров объекта, управляющих воздействий или сигналов управле-
ния в стационарных и динамических режимах движения. Функции управ-
ления существенно различаются в зависимости от назначения системы
140
и режимов движения. Наиболее полно систематизированы целевые
функции и критерий качества для систем автоматической стабилизации
движения МПО в связи с тем, что стабилизация объекта является основ-
ным стационарным режимом работы СУД, в той или иной степени свой-
ственным большинству МПО.
Цель управления для системы стабилизации заключается в поддер-
жании неизменными одного или нескольких кинематических парамет-
ров движения, т. е. в обеспечении минимальных отклонений ошибок
от их значений в балансировочных режимах: X/ (О где i = 1,2 ...
соответствует количеству стабилизируемых параметров движения. Дви-
жение МПО происходит в условиях нерегулярных ветро-волновых воз-
мущений. Поэтому в установившемся режиме Xj (t) представляет собой
случайную стационарную функцию времени, удовлетворяющую услови-
ям эргодичности с постоянными математическими ожиданием mXj
и дисперсией DXj. Техническое задание на СУД обычно ограничивает ве-
личину статической ошибки mXj и предполагает минимизацию
переменной составляющей отклонений DX[ min.
Помимо основной цели управления при проектировании СУД необ-
ходимо учитывать другие факторы, в частности, требование минимиза-
ции энергетических затрат на управление объектом <Д/ ->min,
/ =1, 2, ..., г, а также ограничение переменных составляющих сигналов
управления D^uj ~>min, / =1, ..., г, определяющих износ механизмов.
Обеспечить минимум дисперсий нескольких переменных одновременно
в общем случае невозможно. Компромисс достигается путем минимиза-
ции единого средневзвешенного дисперсионного критерия
п о г
J = Y/^\XjDXj + S DUj = trXxDx + trXUDU, (5.6)
где Xx, \u — диагональные матрицы весовых множителей; Dx, Du — диа-
гональные матрицы, образованные дисперсиями переменных состояния
системы и сигналов управления.
Общие правила определения весовых множителей до настоящего
времени не разработаны. Для сравнительно простых частных случаев
удается найти их путем предварительного^анализа математической моде-
ли объекта или минимизируемого критерия. Однако в общем случае ве-
совые коэффициенты приходится искать путем последовательных при-
ближений по циклу: один набор весовых множителей — синтез — оценка
результатов — коррекция весовых множителей. Если на первом шаге это-
го итерационного процесса воспользоваться принципом равного вклада,
то очень часто можно сразу получить достаточно хорошие результаты.
Принцип заключается в том, что максимально допустимые значения дис-
персий различных переменных состояния и сигналов управления должны
вносить равный вклад в величину критерия
\пДптах ••• \ciDxi max ~ • • ^uj max “ •• • ~ ^-ur^ur max
141
Приняв один весовой множитель равным единице (например, Хиг =
= 1), можно определить относительные значения всех остальных. Макси-
мальные значения дисперсии либо задают техническими требованиями
на систему, либо устанавливают на основе экспертных оценок. Если же
техническое задание определяет не дисперсию, а максимально допусти-
мые мгновенные значения фазовых координат (xz- шах, Uj max), то пер-
вые значения весовых множителей можно находить из условия
Кы' = (иг max/^fmax)2 ? (^rmax luj max ) 2 •
Таким образом, задача синтеза системы управления движением МПО
сводится к определению закона управлениям (у) динамическим объектом
х = (х, и, Л); у = Dx + w,
при котором достигается поставленная цель управления, В частном слу-
чае, при синтезе систем стабилизации движения решается задача выбора
управления стационарным линейным объектом
х = Ах + Ви + Cf\ у = Dx + w
при случайных внешних возмущениях/^), которое обеспечивает мини-
мум дисперсионного критерия (5.6).
Помимо дисперсионного или среднеквадратичного критерия качест-
во работы системы стабилизации определяется уровнем математических
ожиданий ошибок. Поэтому после определения структуры и параметров
СУД путем решения оптимизационной задачи должен быть выполнен
проверочный расчет установившихся ошибок mXj в системе при задан-
ном уровне постоянных возмущений. Если они сказываются меньше
или равными заданным тх GX, то синтез считается законченным. При
неудовлетворительных результатах проверки следует повторить оптими-
зационную задачу при других значениях весовых множителей в критерии
качества.
Кроме дисперсионного критерия с ограничением математических
ожиданий, при синтезе СУД используют и другие критерии качества. К
ним, в частности, относится критерий максимального быстродействия.
Он требует такого управления, при котором минимизируется время пе-
рехода управляемого объекта из начального состояниях^) в конечное
х(?2):
Т = t2 — ti min.
При управлении в аварийных ситуациях критерием служит достиже-
ние вектором состояния области устойчивости движения, при решении
задач управления эволюциями МПО минимизируют радиус или время
циркуляции и т. п.
142
Сказанное позволяет утверждать, что СУД МПО является многоре-
жимной системой. В зависимости от целей управления, принятых крите-
риев качества, режимов движения МПО изменяются законы и алгорит-
мы управления. Такая возможность должна быть предусмотрена в вы-
числительном устройстве системы.
Полученная при синтезе форма закона управления непосредственно
используется для конструирования вычислительного устройства непре-
рывного действия. Проектирование цифровых систем на основе синте-
зированного закона управления требует алгоритма цифровой обработки
сигналов и реализующей его программы, которая вместе с сервисными
программами образует математическое обеспечение СУ МПО.
Закон управления цифровой системы существенно зависит от перио-
да дискретности. Это требует математического описания системы в виде
уравнений в конечных разностях [5, 6, 15], Когда интервал дискретно-
сти соизмерим с длительностью процессов в системе, от его значения за-
висит устойчивость СУ МПО. Опыт разработки существенно дискретных
систем показал, что проблему их устойчивости осложняет десинхрониза-
ция опроса датчиков. Неопределенность момента получения информации
о различных переменных состояния может привести к потере устойчиво-
сти даже в теоретически устойчивых системах. Поэтому в практике со-
здания цифровых СУ МПО стремятся к уменьшению интервала дискрет-
ности. Когда его значения оказываются существенно меньше длительно-
сти процессов в системе, она переходит в класс квазианалоговых систем,
которые, в основном, сохраняют свойства систем непрерывного действия.
5.2. Эквивалентная детерминированная задача
и ее решение
Задача синтеза СУД МПО, сформулированная в (5.1),
является стохастической, так как при случайных внешних возмущениях
f (О переменные состояниях^) и управления и (Г) представляют собой
также случайные функции времени, а оценка качества работы системы
проводится по дисперсионному критерию. Однако при стационарном
случайном процессе в системе, линейной модели ее неизменяемой части
и линейном операторе обратных связей и(х) может быть сформулирова-
на эквивалентная детерминированная задача. Смысл ее заключается в
том, что оптимизация линейной системы, подверженной детерминиро-
ванным возмущениям, при среднеквадратичном критерии качества при-
водит к тем же результатам, что и решение стохастической задачи.
Необходимо только согласовать вид детерминированного возмущения
со случайным и обеспечить равенство матриц весовых множителей
дисперсионного и среднеквадратичного критериев.
При объяснении эквивалентной детерминированной задачи исходим
из известного положения (3.5), что скалярный сигнал, описываемый слу-
чайной стационарной эргодической центрированной функцией
143
Рис. 5.1. К эквивалентной детерминированной задаче.
можно рассматривать как результат преобразования сигнала вида еди-
ничный белый шум линейным фильтром, амплитудно-фазовая харак-
теристика (АФХ) которого (j со) определяется по спектральной плот-
ности из условия (со) = I (/ со) | 2 . Дальнейшее преобразование
этого сигнала определяется математической моделью системы. Если АФХ
системы для фазовой координаты X/ по воздействию Д (0 (рис. 5.1)
обозначить Я Л (/со), то АФХ всего пути от источника белого шума до
координатыX/г ftywnHxi (/ со) (/ со) • Н?* (/ со). Поэтому при ста-
ционарном процессе в системе спектральная плотность фазовой коорди-
наты Xf имеет вид (со) = 1ЯХ/(/со) | 2, а автокорреляционную
функцию определяют соотношением [8]:
Кц(т)= 1 hxi(t)hxi (5.7)
о
где hXi (t) — импульсная характеристика пути белый шум — координа-
тах/ , связанная с (/ со) обратным преобразованием Фурье.
Дисперсия фазовой координаты равняется начальному значению ав-
токорреляционной функции
Dxi = Кц (0) = / hx2i(t)dt. (5.8)
о
Используя аналогичные выражения для дисперсий сигналов управле-
ния, получаем возможность представить дисперсионный критерий в виде
/ = S Xxi DXi + S Duj = f [ X \Xi h2Xi (t) +
i =1 / =1 0 i =1
+ s \uj h2Uj (t)]dt. (5.9)
7=1
144
Из (5.9) следует совпадение результатов расчета критерия качества
по дисперсиям переменных состояния и сигналов управления, когда в
линейной системе имеет место случайный стационарный эргодический
центрированный процесс, и по их квадратичным отклонениям, проинте-
грированным на бесконечном временном интервале при детерминирован-
ном процессе в той же системе. Эта эквивалентность стохастической и де-
терминированной задач для одной и той же линейной системы наблюда-
ется, если случайный процесс возбуждается единичным белым шумом на
входе формирующего фильтра, а соответствующий ему детерминирован-
ный процесс — единичной импульсной функцией Дирака. Сама же линей-
ная система в первом случае подвергается случайному воздействию со
спектральной плотностью, определяемой амплитудно-фазовой характери-
стикой фильтра. Во втором случае на линейную систему действует детер-
минированное воздействие, которое определяется импульсной характе-
ристикой фильтра, рассчитываемое по той же амплитудно-фазовой
характеристике с помощью обратного преобразования Фурье:
Г (5.10)
Z7T J
Изложенное можно сформулировать в виде такого утверждения.
Результаты оптимизации линейной системы, подверженной случайному
стационарному эргодическому воздействию и оцениваемой по дисперси-
онному критерию, совпадают с результатами оптимизации той же систе-
мы при детерминированном воздействии и среднеквадратичном крите-
рии качества, если случайное и детерминированное воздействия соглас-
ны по виду передаточной функции формирующего фильтра, а также если
в критериях равны между собой весовые матрицы.
Это утверждение на основе принципа наложения можно распростра-
нить на случай векторного воздействия f (t) = [/i (0 ... fm (r)]T, если
его составляющие некоррелированы между собой.
Итак, чтобы синтезировать линейную систему, т. е. определить опе-
ратор и (х) в классе линейных функций, нет необходимости минимизиро-
вать дисперсионный критерий
J = tr Хх + Xw
который оценивает движение линейного объекта
х = Ах + Ви + Cf(t)
при случайных возмущениях f (t). Достаточно решить эквивалентную
детерминированную задачу, которая заключается в минимизации сред-
неквадратичного критерия
J= f ( s \xi*i + S \Uj u?)dt = 7 (xTXxx + wT\Uu)dt (5.11)
о i =1 j=i о
145
10—510
при движении системы
х= Ах + Ви + CF(O (5.12)
под влиянием эквивалентного детерминированного возмущения F(t),
определенного на основании (5.10).
Пример 5Л. На МПО действует возмущение, определяемое поперечной состав-
ляющей приведенного угла волнового склона которая является случайной
п z ч I 0,042/со I
в/ (и>) - | 1,56 +0,5/w — w1 I ’
Соответствующее эквивалентное детерминированное возмущение Fey(t) =
= 0,043 е “°^5/cos(l,25f + 11°).
При формулировке эквивалентной детерминированной задачи осо-
бое значение имеет аппроксимация спектральных характеристик случай-
ных внешних возмущений. Удобно выделить два случая.
В первом случае принимаем, что спектр возмущений значительно
шире полосы пропускания объекта. Тогда можно предположить, что это
воздействие имеет характеристики единичного белого шума 5 (со) =1,
а эквивалентное детерминированное возмущение равно импульсной
функции Дирака F(f) =6 (0. Поведение объекта при этом определяется
решением уравнения (5.12) при-/7 (/) = 0 и ненулевых начальных услови-
ях х(0) =£ 0.
Во втором случае рассматриваем возмущение со спектрами, которые
целиком расположены в полосе пропускания МПО и могут быть аппрок-
симированы дробно-рациональными функциями. Соответствующие пе-
редаточные функции формирующих фильтров являются положительны-
ми вещественными функциями вида
Hi(s)=Al (s),
а эквивалентное детерминированное возмущение согласно обратному
преобразованию Лапласа
т < skt
Fr(t)= S Ai (s)B^(s)(s~sk) e (5.13)
- к = 1 s =
где — однократные полюса, которые либо вещественны, либо попарно
сопряжены. Оптимизация системы в этом случае определяется полным
решением неоднородных уравнений (5,12) при возмущениях (5.13)
и нулевых начальных условиях.
Эквивалентную детерминированную задачу решают методами теории
оптимальных процессов. Для этой цели удобно использовать принцип
максимума Л. С. Понтрягина, отличающийся общностью и математиче-
ской простотой.
146
Принцип максимума позволяет решать задачи оптимизации движе-
ния динамического объекта с математической моделью
Х = <р{х, ц Г)
при перемещении его из состояния x(/i) в x(t2) путем выбора управле-
ния принадлежащего ограниченной области u&U, которое обеспе-
чивает минимизацию функционала
G
J = f L (х, и, Г)dt, (5.14)
Ч
где х, и — векторы состояния и управления размерности пи г соответст-
венно, (£ = [<£! ... <Ри]т — нелинейная векторная функция; L — произволь-
ная скалярная функция.
Суть принципа максимума заключается в следующем:
1. Управление u(f) оказывается оптимальным, если оно обеспечи-
вает максимальное значение скалярного произведения двух векторов,
первый из которых формируется скоростями изменения состояния объ-
екта и минимизируемого функционала, а второй представляет собой
вспомогательный или сопряженный вектор ф (Г) =[ ф1 ... i//w] т. Это ска-
лярное произведение
п
• S * ф^ щ + ф0Ь. (5.15)
называют функцией Гамильтона.
Обратим внимание на то обстоятельство, что приближение к макси-
муму функции Гамильтона соответствует сближению векторов х = <р и
ф, так как их скалярное произведение [ ip • ф] =1^1 Iф\ cos (фф) ->тах
при cos (ф Ф) 1, т. е. когда угол между этими векторами стремится к
нулю. Это дает основание трактовать вспомогательный (сопряженный)
вектор ф (f) как вектор скорости оптимального движения системы, учи-
тывая, что вектор <р(г) является вектором скорости ее реального дни-
жения.
2. Вспомогательный вектор ф (t) определяется сопряженной систе-
мой дифференциальных уравнений, формируемой по условию
ф{ --дН/dXj, / =0,1..., п
или в векторной форме
^(Г)=-ЭЯ/Эх. (5.16)
Кроме компонент вектора ф (t) в (5.15) и (5.16) присутствует пе-
ременная ф0, которая является сопряженной по отношению к критерию
качества. Если (5.14) представить в дифференциальной форме
147
J = L (x, u, t),
то критерий можно рассматривать как дополнительную компоненту век-
тора состояния х0 • В связи с тем, что Н в явной форме не содержит
х0,из условия (5.16) следует ф0 =0 или ф0 = const. В частности, можно
принять ф0 — — 1. При этом функция Гамильтона
п
Н= S ipj - L = - L = фтф - L.
i - 1
Необходимое условие экстремума оптимального управления соглас-
но принципу максимума
дН/дЫ] =0, / = 1,...г или дЯ/дг/ = О.
Чтобы экстремум Н был максимумом по отношению к и, матрица
д2Н!дидит размером г Хг должна быть отрицательно определенной,
5.3. Оптимальная линейная система.
Регулятор состояния
Определим оптимальное управление линейным объек-
том, при котором обеспечивается минимум дисперсионного критерия
качества, учитывающего затраты на управление в условиях широкопо-
лосного возмущения, характеристики которого имеют вид белого шума.
Используем принцип максимума для решения эквивалентной детермини-
рованной задачи, учитывая, что модель неизменяемой части системы
в этом случае не содержит возмущения
х = Ах + Ви (5.17)
и минимизируется среднеквадратичный функционал
J = 0,5 Г (хтХхх + ur\uu) dt (5.18)
о
Начальное состояние системы х(0) — произвольное, конечное х(00 ) =
= 0 выражает требование устойчивости оптимальной системы и сходи-
мость функционала (5,18).
При этих исходных данных функция Гамильтона имеет вид
Н= фтАх + фтВи — 0,5хтХхх - 0,5uTXw н.
Необходимое условие оптимального управления
дН/ди=В1:ф ~\ыи = 0,
148
откуда
u(t)=
(5-19)
Так как д2Н/дйди?=—Хш то достаточным условием оптимально-
сти управления (5.19) является положительная определенность весовой
матрицы Xw.
Для определения сигналов управления и (г) необходимо знать вспо-
могательный вектор ф (/). Его можно найти путем совместного решения
основной системы уравнений (5,17) с учетом управления (5.19) и сопря-
женной, получаемой по условию (5 .10). Образуемая при этом автоном-
ная система дифференциальных уравнений порядка 2п имеет вид
х= Ах + ВХ^^Ф',
У (5.20)
ф= Ххх - Атф.
Ее решение формируется на основе фундаментальной матрицы (матрич-
ной экспоненты)
x(t) х(0)
= епг
Ф (П Ф (0)
(5.21)
где
матрица параметров основной и сопря-
женной систем уравнений (5.20).
Выражение (5.21) показывает, что при оптимальном управлении
основной x(t) и вспомогательный ф (t) векторы состояния системы из-
меняются подобным образом. Можно доказать существование единст-
венной квадратной матрицы подобия К размером п х и, которая уста-
навливает связь этих векторов:
1//(0=-Ах(0.
(5.22)
Чтобы показать справедливость (5 .22), используем общее решение
однородной системы дифференциальных* уравнений (5.20) в разверну-
той форме
2П ° t 2П п .
Xj(t)= S XikePkt- S *ikePkt i = 1,.... n,
к = 1 к = 1
(5.23)
где Xi (t), ф} (t) — компоненты векторов x (t), ф (t); Xj k^ik “ постоян-
ные интегрирования; pjc — собственные числа матрицы П, являющиеся
корнями характеристического полинома
149
det I П I =det
= аь + а2р2 + а4р4 + ... + р2П
-ВХи'В'1
(5.24)
Рис. 5.2. Полюса оп-
тимальной линейной
системы.
Полином (5.24) — летный согласно виду диа-
гональных членов определителя. Его корни в
комплексной плоскости располагаются симмет-
рично относительно мнимой оси (рис. 5.2). По-
этому в общем решении (5.23) можно выделить
затухающие составляющие, соответствующие кор-
ням левой полуплоскости pj^ и незатухающие с корнями правой полупло-
скости pfc. При отсутствии кратных корней их можно записать в виде
п Pkt п — Pkt
xi(t) = S Xike + S Xike kt •
к = 1 к - 1
__ +
n pkt n p kt
(0 = S Vik e + S 4ik e
к = i к = i
Запишем в развернутой форме также (5.22)
(5.25)
п
(О ~ — kimxm(f)
т = 1
и после подстановки (5 .25) в (5.26) получим
(5.26)
п п Pkt п — pkt
= ~ Е kim ( Z Xik е + Е Xike ).
т = 1 к = 1 к = 1
(5.27)
Условие (5.27) следует выполнять для любого момента времени. По-
этому коэффициенты при экспонентах с одинаковыми показателями
степени в левой и правой частях (5.27) должны быть равны
150
к ~ ~ т Xik>
т = 1
\^ik= — S kjm Xiki к — 19 23
(5.28)
Выражение. (5.28) представляет собой систему 2пнеоднородных ли-
нейных' алгебраических уравнений, в которой п — число неизвестных эле-
ментов i -строки матрицы подобия. Но в связи с симметрией корней
Re^ = Rep/7; Imp/* = Imp/7 попарно ^симметричными оказываются и по-
стоянные интегрирования (Ф/ и Ф/^; X/ и JQ&). Поэтому среди 2п
уравнений (5.28) только п независимых, которые образуют совмест-
ную систему. При ненулевом определителе, что при разных корнях ха-
рактеристического полинома обеспечивается всегда, эта система урав-
нений является невырожденной и имеет единственное решение.
Путем вариации номера строки i = 1, п можно получить п сис-
тем уравнений вида (5.28). Следовательно, с учетом требования отсутст-
вия кратных характеристических чисел однозначно определяются все
элементы матрицы К. Тем самым объясняется факт существования,
единственности и размерности матрицы подобия. Существует более стро-
гое доказательство этого положения, которое снимает ограничение на
вид характеристических чисел оптимальной линейной системы и допус-
кает существование кратных корней, определяя безусловное существо-
вание, единственность и форму аддитивной связи между вектором со-
стояния и сопряженным ему вектором.
Использовав (5.22) и подставив его в (5.19), получим выражение
“(0= - V BTKx(t) = Gx(t), (5.29)
которое определяет структуру оптимальной линейной системы управле-
ния (рис. 5.3, а) с постоянными коэффициентами обратных связей, со-
ответствующими элементам матрицы G размером г х п:
••• Sin
Sr i Srn
(5.30)
Особенность структуры обратных связей (рис. 5;3, б) заключается
в том, что каждый из сигналов управления формируется всеми компо-
нентами вектора состояния
= £/i*i + ... + Sjnxn> 7 = г.
Регуляторы этого типа называют регуляторами полной структуры, или
регуляторами состояния. Для их реализации требуется полное и точное
измерение вектора состояния системы.
Линейная система управления оказывается оптимальной только при
соблюдении двух условий: линейной неизменяемой части системы вида
151
Рис. 5.3, Структура оптимальной линейной системы.
(5.17) и среднеквадратичном критерии качества (5.18), который вклю-
чает все сигналы управления. Исключение из функционала хотя бы од-
ного сигнала управления делает оптимальную систему управления ли-
нейным объектом нелинейной.
Пример 5.2. Определим структуру оптимальной системы автоматической стаби-
лизации путевого угла а(Т) морского подвижного объекта, линейная модель неиз-
меняемой части которого представлена уравнениями движения рыскания МПО
и перекладки вертикального руля 6 :
В критерии качества
J=0,5 / (X а 62 + X + Х662 + u2)dt,
0
первый член под интегралом соответствует дисперсии стабилизируемой перемен-
ной, второй обеспечивает требуемое демпфирование в системе, третий и четвер-
тый - минимизацию затрат на управление. Так как путевой угол ст не является пе-
ременной состояния, для определения весовой матрицы из критерия его следует
исключить, использовав соотношение ст=^ /3. Тогда J =0,5 / (Ха<р2 + Х^2 -
-- 2\oif>/3+ coy + Х§ 5 2 + u2>)dt. °
Выделив из подынтегральной функции квадратичную форму, связанную с век-
тором состояния
Ф(х) = 0,5хт Ххх = 0,5 (X а«р2 + Ха/32 ~ 2Ха<р/3 + Xwgj2 + Xg 52),
и продифференцировав ее по правилу
д Ф д Ф О Ф д Ф
д у др д 6
152
можно получить, допустив симметрию весовой матрицы >
^сг (<Р ~ 0) XqT 0 ^сг 0
0 со 0 0 у
= — 0 0 р
0 0 0 6
Весовая матрица в данном случае не является диагональной, однако остается
симметричной.
При заданной модели и принятом критерии оптимальное управление обеспечи-
вает регулятор состояния
и=ёц'Р + % 12 + gl3 0 + ^14 8
параметры которого
^11^12^13^14
^21 ^22^23^24
[^1^12^13^14 1 = [0 0 0 !]
к 31 3 2 ^33
[ к42 к43 к44 ]
^41 ^42^43^
Во многих задачах проектирования автоматических систем стабили-
зации МПО выдвигается требование структурного астатизма, т. е. равен-
ства нулю математического ожидания одного или нескольких кинемати-
ческих параметров движения при любых значениях математического
ожидания внешнего возмущения. Использование регулятора состоя-
ния не гарантирует астатизма оптимальной линейной системы. В этом
можно убедиться, анализируя, в частности, результаты, полученные
в примере 5.2.
Для того, чтобы регулятор состояния обеспечивал астатизм системы
по произвольной переменной X/ в модели неизменяемой части системы
должно присутствовать уравнение вида
Хк=Х1. (5.31)
Тогда в стационарном режиме при любых параметрах регулятора будет
обеспечиваться нулевое значение математического ожидания перемен-
ной xi : mxi = 0. При необходимости уравнение вида (5.31) может быть
искусственно введено в исходную модель путем расширения вектора со-
стояния хп+ i =xi. Тем самым в структуру регулятора вводится интегри-
рующая обратная связь. Одновременно под интеграл критерия качества
должно быть введено дополнительное слагаемое +1 > х^+ \ > В против-
ном случае характеристическое уравнение оптимальной системы окажет-
ся с нулевым корнем, и стационарный режим в ней достигаться не будет.
153
В примере 5.2 для обеспечения астатизма по путевому углу необхо-
димо расширить модель уравнением хп+х — Тогда регулятор со-
стояния будет иметь дополнительное слагаемое
«= £11 + gllty + £i30 + § + £15 f Odt,
О
которое соответствует наличию интегрирующей обратной связи по путе-
вому углу.
Чтобы окончательно определить оптимальную линейную систему,
нужно осуществить аналитическое конструирование регулятора- Под
аналитическим конструированием (АНКОР) понимают определение па-
раметров регулятора состояния, т. е. коэффициентов обратных связей G
оптимальной линейной системы. Это параметрический этап синтеза сис-
темы управления частной структуры. Понятие АНКОР более узкое, чем
синтез.
Наиболее употребительны два метода аналитического конструиро-
вания. ^Тервый заключается в том, что путем решения основных и сопря-
женных уравнений вида (5.20)определяют оптимальные изменения век-
торов состояния х(?) и управления и(?), которые образуют семейство
устойчивых экстремалей. Располагая семейством устойчивых экстре-
малей, можно с помощью (5.29) определить матрицу коэффициентов
обратных связей оптимальной линейной системы.
Второй метод базируется на решении матричного уравнения Рикка-
ти, в результате которого определяется матрица подобия К, а затем со-
гласно (5.30) — матрица обратных связей G. Оба метода приводят к рас-
четным процедурам, требующим использования вычислительных машин.
Каждый метод характеризуется определенными достоинствами и недо-
статками, поэтому трудно отдать предпочтение одному из них.
5.4. Аналитическое конструирование на основе
расчета устойчивых экстремалей
Метод аналитического конструирования, при котором
используют уравнения оптимального движения системы, заключается
в том, что с помощью основных и сопряженных уравнений линейной
оптимальной системы (5.20) при произвольных начальных х (0) и нуле-
вых конечных х(°°) = 0 условиях определяют вектор состояния x(t)
и сопряженный вектор ф (t). Последний позволяет найти оптимальное
управление u(t) по формуле (5.19). Цель этого этапа расчета—получе-
ние экстремалей — уравнений движения оптимальной системы, которые
в соответствии с конечным условием х(°°) =0 обеспечивают устойчи-
вость синтезируемой системы.
На следующем этапе аналитического конструирования определя-
ют параметры регулятора состояния на основе соотношения и (?) =
154
= Gx(t). После исключения времени t оно позволяет рассчитать элементы
матрицы G.
Рассмотрим подробнее порядок расчета семейства устойчивых экс-
тремалей. Было показано, что система однородных дифференциальных
уравнений (5.20)
х= Ах + ВХц1 Вт ф;
ф = Ххх - Ат ф
имеет четный характеристический полином (5 24)
р2п + «2 (и- 1) р2(”~ + ••• + а*р4 + а2р2 + а0,
корни которого располагают в левой и правой частях комплексной пло-
скости симметрично относительно мнимой оси. Поэтому общее решение
исходных дифференциальных уравнений порядка 2п содержит затухаю-
щие составляющие, соответствующие корням левой полуплоскости рк,
и незатухающие — с корнями из правой полуплоскости рк. Если все
эти корни разные, то выражения, описывающие оптимальное движение
линейной системы без учета граничных условий, имеют вид (5.25)
п Pkt п — Pkt
Xf (t) = S Xike + E Xik e * ;
к = 1 к = 1
n Pkt n ~ Pkt
(t)= S 4ike + S Vike .
к = 1 к = 1
Условие устойчивости синтезируемой системы и конечное нулевое
значение векторов состояния х(°°) =0 и управления и(°°) =0 достига-
ется только в том случае, если постоянные интегрирования составляю-
щих с правыми корнями равны нулю: Xj• к =0, Ф/ к =0. Зависимые по-
стоянные интегрирования составляющих с левыми корнями Xjki ^ik)
общее число которых п2, можно выразить через независимые постоян-
ные интегрирования Ск с числом и, совпадающем с количеством произ-
вольных начальных условий вектора состояния х(0). Эти соотношения
для случая разных корней согласно теории дифференциальных уравне-
ний имеют вид
%i к = Qc (рк) > = Ск Д / («+/) (Pfc)>
где Д/z (Рк) — алгебраическое дополнение произвольной /-строки
и i -столбца характеристического определителя
, ( pl—А — В\^ВТ
det I р 1 - ПI = det
155
вычисленные при значении корня р-рк> Следовательно, устойчивое оп-
тимальное изменение компонент вектора состояния и сопряженного век-
тора находят по выражениям
п Рк*
Xi(t)= S Ск^ц(рк)е
к = 1
(5.32)
п — Pkt
Ск A i (n+i) (Рк ) е
к - 1
которые образуют семейство устойчивых экстремалей, определенное
с точностью до постоянных интегрирования, В дальнейшем будем рас-
сматривать только устойчивые оптимальные системы, поэтому при обо-
значении корней знак ” будем опускать, принимая р^ =Рк-
Теперь обратимся к расчету коэффициентов обратных связей. Исход-
ное соотношение для определения элементов матрицы G образуется на
основе связи вектора управления и (?) с вектором состояния х(?) (5.29)
и сопряженным вектором ф (?) (5.19) :
«(?) =Gx(f) =Хй1О(?);
откуда:
XwGx(?) -Втф(?).
(5.33)
Представим (5.33) в развернутом виде
После перемножения матриц имеем
п
Х^ 1 S g 1 у Xj
i =1
п
\лг 2} gr i Xi
i =1
i = 1 .
n
S bjr Ф1
i = 1
(5.34)
Выражение (5.34) позволяет получить г независимых соотношений
вида
п п
Xw/ S S Ьцф^Г), /=1,..., г. (5.35)
i =1 i =1
Подставляя (5.32) в (5.35), получаем для одного произвольного /-
канала управления
156
n n pkt п П pkt
\uj S gji Z C^A//(p^)e = Ё bij _ Z Cfc ^Z(n + z) (P&) e
i =1 k- 1 i =1 к = i
.36)
Условие (5.36) следует выполнять для любого момента времени, по-
этому коэффициенты при экспонентах с одинаковыми показателями сте-
пени в левой и правой частях (5.36) должны быть равны. После сокраще-
ния независимых постоянных интегрирования Ск получаем
п п
\ij 8ji^li(Pk)~ Ьц (Л+1) (р&), & = 1,..., п. (5.37)
7=1 7=1
Выражение (5.37) представляет собой систему п линейных алгебраи-
ческих уравнений, в которой неизвестны п коэффициентов обратных
связей произвольного /-канала управления gj х ...gjn. Если корни Рк раз-
ные, то система уравнений (5.37) имеет ненулевой определитель' являет-
ся невырожденной, совместной, с единственным решением. В (5.37) не
входят постоянные интегрирования, поэтому коэффициенты обратных
связей не зависят от начальных условий х(0).
Варьируя в (5.37) / =1,2, ..., г получаем полный набор независимых
между собой систем алгебраических уравнений для нахождения элемен-
тов всех строк матрицы G. Их решение определяет коэффициенты обрат-
ных связей^всех каналов управления автоматической системы.
Пример, 5.3. Предположим, что неизменяемая часть синтезируемой системы
имеет один канал управления и описывается дифференциальными уравнениями
а минимизируемый функционал
J = 0,5 f (х2 + х2 + xj + u2) dt.
0
Соответственно матрицы исходных параметров
А = 0 1 0 0 0 1 ООО ; В = 0 0 1 1 0 0 0 1 0 0 0 1 ; х^-1.
157
Искомая матрица обратных связей G = [gn, gi2, g13 ]
Хар det актеристический определите; р -1 о о а о 0 р -1 0 0 0 0 0 р 0 0 -1 -10 0 р 0 0 0 -1 0 1 р 0 0 0 -1 0 1 р 1Ь
преобразуется в четный полином р6 ~ р* + р2 ~ 1 с корнями:
Р1,4=Т1; ?2,5= * (l/s/2) (1 +/), Рз,6 =’ (l/VT) (1 -/).
Требуемые для расчета алгебраические дополнения в полиноминальной форме
д1, (р) =Р5 -р3 +р; Дц (р) =1; Д„ (р) =р; Д36 (р) =р2
и при подстановке следующих корней:
д„ (Р»)=-1; ДП(Р2) = (1/V2)(-1+/); Ди(р3) = (1/72) (—1—/).
Д1э(Р,)=-1; Д13(Р2) = (1/>Д)(-1-/); Д13(Р3) = (1/ч/2)(-1+7);
Д1«<Р1)=1; д16(рг) =/; Д16(Р3)=-/-
После несложных преобразований, связанных с использованием выражения
(5.37) при комплексных коэффициентах, получаем систему алгебраических урав-
нений:
& 11 ~ & 12 + <^13 ~
(1/ч/2)?11 - g„ + (1/T2)g13 =0;
(1/ 72) „ - (1/72)*., = 1,
решение которой= -1; g12 =g13 =-2,41.
На рис. 5.4 приведена структурная схема системы с рассчитанными обратны-
ми связями.
Расчет коэффициентов обратных связей не вызывает существенных
затруднений при ручном счете, если порядок исходных уравнений неиз-
меняемой части системы не выше третьего. Для объектов более высоко-
го порядка потребуется использовать ЦВМ, на которой последовательно
реализуется следующая вычислительная процедура:
1 ) массив исходных данных, состоящий из матриц Л, В, Хх, Хы, вво-
дится в машину;
2 ) формируется характеристический определитель (5,24);
158
3 ) характеристический оп-
ределитель преобразуется в по-
липом;
4 ) рассчитываются корни
характеристического полинома,
и выделяются те из них, кото-
рые имеют отрицательную ве-
щественную часть;
5 ) формируются алгебраи-
ческие дополнения Д/г- (р) и
определяются их значения при
Рис. 5,4, Структурная схема к примеру 5.3,
рассчитанных корнях характеристиче-
ского полинома;
6 ) формируются системы алгебраических уравнений вида (5.37);
7 ) рассчитываются коэффициенты обратных связей (элементы мат-
рицы (7) путем решения систем уравнений (5.37). ''
Достоинство этой вычислительной процедуры заключается в том, что
в ней используют стандартные программы расчета корней полинома, ре-
шения систем линейных алгебраических уравнений, входящие в матема-
тическое обеспечение практически любой универсальной ЦВМ. Кроме то-
го, в процессе решения определяют не только конечные результаты в ви-
де матрицы коэффициентов обратных связей, но и целый ряд дополни-
тельных полезных сведений о динамических свойствах синтезированной
системы: характеристический полином, собственные частоты, экстрема-
ли устойчивого движения.
Однако этот метод аналитического конструирования имеет и недо-
статки. Определение корней характеристического полинома — задача не-
простая даже для ЦВМ, С повышением порядка резко возрастает расход
машинного времени и снижается точность расчета корней. С большим
расходом машинного времени связано также определение алгебраиче-
ских дополнений. При близких характеристических числах появляются
плохо обусловленные матрицы систем алгебраических уравнений, что
приводит к большим ошибкам определения коэффициентов обратных
связей. Для организации замкнутого цикла решения на ЦВМ требуется
достаточно сложная сервисная программа формирования различных ма-
тематических соотношений, определяющая последовательность операций,
ввод исходных данных, вывод проверочных и конечных результатов.
Разновидностью аналитического конструирования на основе устой-
чивых экстремалей является расчет коэффициентов регулятора состоя-
ния по заданным собственным частотам (корням характеристического
уравнения) замкнутой системы управления, которые однозначно опреде-
ляют вид и коэффициенты характеристического полинома. Собственные
частоты могут быть вычислены как собственные числа матрицы П соглас-
но (5.24), и в этом случае они соответствуют корням характеристическо-
го уравнения оптимальной в смысле минимума дисперсионного крите-
рия линейной системы. Но они могут быть директивно назначены проек-
тировщиком, который таким образом заменяет задачу синтеза системы,
159
минимизирующей дисперсионный критерий качества, на задачу обеспе-
чения заданных динамических свойств системы.
При математической модели неизменяемой части системы и регуля-
тора состояния
х = Ах 4- Ви; и = Gx
уравнение замкнутой автономной системы х= (Л + BG)x, а характери-
стический определитель
det I pl - (Л -f- £G)I
раскладывается в полином, порядок которого совпадает с порядком
исходных уравнений, и коэффициенты зависят от неизвестных элементов
матрицы G:
£>(p) = p"+/n-i(G)p"~1 + ... + Л(О)р + /0(С). (5.38)
При заданных собственных частотах замкнутой системы р%, (fc = 1,2,
п) коэффициенты этого полинома определяют однозначно:
D(p) = (р-Pi)(p-Р2)-(р~ Рп) =рп + an-ipn~l + ... + а1р + а0. (5.39)
Сопоставление (5.38) и (5.39) позволяет получить п условий для оп-
ределения неизвестных параметров обратных связей:
fi (G) =а19 fQ(G)=a0. (5.40)
Если G представляет собой матрицу — строку [ ... gin], что имеет
место при одном канале управления в системе, соотношение (5.40) пре-
образуется в линейные алгебраические уравнения, число которых совпа-
дает с числом неизвестных параметров обратных связей. Эта система,
как правило, является невырожденной даже при кратных характеристи-
ческих числах, совместной, и имеет единственное решение, однозначно оп-
ределяющее параметры обратных связей линейной системы.
Пример 5.4. Пользуясь исходными данными примера 5.3, определяем коэф-
фициенты обратных связей ], не вычисляя алгебраических дополнений.
Так как собственные частоты устойчивой оптимальной системы рх - 1, Р2,зХ
Х0,707 (-1 ±/ ), то характеристический полином имеет вид
D(p) =(p-pj (р-р2) (Р~Р3) =Р3 + 2,41р2 + 2,41р + 1.
Так как
Р -1
det | pl - (А + ВG) I = det 0 р
^11 & 12
TOgn = —1; g12 =g13 = -2,41.
160
Таким образом, при скалярном управлении (г =1) процедура опре-
деления матрицы обратных связей может быть упрощена за счет исклю-
чения из расчета алгебраических дополнений. Необходимые условия по-
лучаются, если выразить характеристический полином замкнутой систе-
мы D(p) сначала через известные собственные частоты, а затем через
коэффициенты обратных связей.
5,5. Аналитическое конструирование на основе
уравнения Риккати
Выражение (5.30) G = — \^ВТК показывает, что матри-
цу обратных связей можно рассчитать, если известна матрица подобия,
устанавливающая связь вектора состояния и сопряженного вектора
ф (t) ~-Kx(t). Условие для расчета матрицы К получают исключением
из основных и сопряженных уравнений (5 20) оптимальной линейной
системы вспомогательного вектора ф (Г) :
x(t) = Ax(t) -BX^B^Kx^t),
(5.41)
-Kx(f) = * (О +Лт^лг(Г),
После несложных преобразований (5,41) приходим к уравнению
Риккати для стационарных систем, к частному случаю, справедливому
для линейных систем с постоянными коэффициентами:
. КА 4- АТК 4- - КВХ^В^К = 0. (5.42)
Оно является нелинейным матричным уравнением квадратичной формы
и симметричным относительно неизвестной матрицы К, Эти особенности
уравнения (5.42) определяют ее основные свойства.
Во-первых, матрица Риккати — квадратная и симметричная по от-
ношению к главной диагонали К ~КТ (кц= fy, Чтобы это показать
воспользуемся основными правилами транспонирования матриц:
— транспонирование не нарушает равенства матриц, если А =В, то
АТ=ВТ,
— транспонированная сумма матриц равна сумме транспонирован-
ных слагаемых (А 4- В )т =ЛТ + Вт,
— при транспонировании произведения справедливо (АВ ) т =^ТЛТ.
Представим (5.42) в виде
КА 4-ЛтК- КВХ^ВтК = -Хх (5.43)
и осуществим его транспонирование
(£А)Т+ (АТКУ - (КВХ^В^У = -\тх. (5.44)
161
1 1—510
Последовательно используя правило транспонирования произведения
матриц и имея в виду симметрию матрицы весовых множителей Хх -Х^,
преобразуем (5.44) к виду
Лт/Г + К*А - КтВХи1В^ = ~Хх. (5.45)
Уравнение (5.45) повторяет (5.43), но имеет в качестве неизвестно-
го транспонированную матрицу Риккати. Так как решения одинаковых
уравнений (5.43) и (5.45) совпадает, то К? = К.
Симметрия матрицы подобия приводит к тому, что количество не-
известных в уравнении Риккати (5.42) меньше, чем полное число ее
элементов п2. Внедиагональные элементы связаны условием =
= кц (/ ¥= i, /, i = 1, ..., ri). Поэтому число неизвестных элементов матрицы
Риккати равно 0,5 п (и+1) и совпадает с количеством независимых
скалярных уравнений, заключенных в матричном уравнении (5,42).
Второе свойство матрицы Риккати заключается в ее положительной
определенности. Хотя существуют два решения уравнения в виде поло-
жительно и отрицательно определенных матриц, для расчета матрицы
обратных связей пригодна только одна из них — положительно опреде-
ленная, так как именно она обеспечивает отрицательные обратные связи
и устойчивость замкнутой системы управления, .
Подтвердим это положение анализом связей в линейной системе с ре-
гулятором состояний, уравнение которой имеет вид
х~ Ах + BGx
или с учетом (5.30)
х= Ах - ВХ^В'Кх. (5.46)
Из (5.46) следует, что регулятор состояния u = Gx обеспечивает ус-
тойчивость линейной системы путем организации отрицательных обрат-
ных связей в том случае, если ВХй1 ВТК — положительно определенная
матрица. В этом произведении Хй1 — положительно определенная и диа-
гональная матрица по исходному условию оптимальности, Поэтому по-
ложительно определенной является и квадратичная форма В Ху1 Вт, Сле-
довательно, К также должна быть положительно определенной.
Аналитическое конструирование на основе уравнения Риккати об-
ладает рядом преимуществ по сравнению с методом устойчивых экстре-
малей. Во-первых, исчезает необходимость получения характеристиче-
ского полинома и определения его корней. Во-вторых, все вычисления
проходят только с вещественными числами. Оба обстоятельства могут
привести к повышению точности результата и сокращению машинного
времени.
Однако метод имеет и свои недостатки. Решение нелинейного матрич-
ного уравнения связано с существенными вычислительными трудностями,
162
резко возрастающими с увеличением размерности решаемой задачи.
Кроме того, при таком подходе исчезает промежуточная информация
о динамических свойствах синтезируемой системы. Поэтому выбор ме-
тода аналитического конструирования в значительной мере зависит от
характера решаемой задачи, личных склонностей проектировщика
и того математического обеспечения, которым он располагает.
Пример 5.5. По исходным данным примера (5.3) выполним аналитическое
конструирование методом уравнения Риккати. Так как исходные уравнения имеют
третий порядок, то размер искомой матрицы Риккати [3x3]:
^11 ^12^13
/l — ^21^'22^'23 9
^31 ^32^33
При ЭТОМ к^2 “^21 > ^31 ~^13 > 23 32'
Следовательно в К имеется 6 неизвестных элементов. Запишем в развернутой
форме слагаемые уравнения
^33^31 ^33^32 ^зз
Из девяти скалярных уравнений, получаемых на основании уравнения Риккати,
выделим шесть независимых:
13 ^13^33 “^12» ^23^33 “^13 + ^22,
LX3 ^23 ~ 1 + Н3 = 1 + 2к^.
1 □ j&9 2 1 7 ЛЭ кА ? 99 а9
Из первого соотношения fc13 =± 1, но для решения нужно принять положительное
значение, чтобы получить положительно определенную матрицу К, Путем последо-
вательного исключения переменных получаем уравнение к*23 - 2Л^3 = 8Аг23 + 3. Ре-
шение его численным методом дает к23 =2,41. Последовательно вычислив все эле-
менты матрицы Риккати, получим
" 2,41
2,41
2,41 1
4,82 2,41
1 2,41 2,41
После этого определяем матрицу обратных связей
G = -\„‘BTK = -[1 2,41 2,41].
163
Уравнение Риккати (5.42) относится к классу нелинейных функцио-
нальных матричных уравнений вида F(х) =0. Аналитическое решение
этих уравнений в замкнутой форме получить практически не удается.
Поэтому используют численные методы, среди которых наиболее эффек-
тивным считается алгоритм Ньютона—Рафсона,
Суть численного решения функционального уравнения заключается
в том, что оно достигается путем последовательного изменения аргу-
мента (х1? х2, Xk+\9...)- Алгоритм решения определяет такой по-
рядок перехода от одного значения аргумента х^ к другому х^ + i, кото-
рый обеспечивает уменьшение F (х) на каждом шаге: F^ > F^+ t,
Эффективность алгоритма тем выше, чем меньше шагов требуется
для решения. Максимальная эффективность получается, когда при F^ =
= F(xjc)^0 уже на следующем шаге достигается' решение F^+1 =
=F(xfc + i) =0, Однако в общем случае сложный вид функции F(x) не
позволяет найти щаг h к =х^ + j , который сразу приводит к решению.
Можно найти только его приближенное значение путем аппроксимации
F(x) , например, рядом Тейлора:
Fk+l-Fk+Fkhk + ^TFkh^ + ...
Если ограничиться первыми двумя членами ряда, то величина шага, обес-
печивающая Fk+ t =0, будет равна
hk = - Fk/Fk >
а алгоритмическая формула решения (алгоритм Ньютона—Рафсона)
xk+l=xk- (Ffo-'Fk. (5.47)
164
Так как принятая линейная аппроксимация F(x) груба, получить
точное решение уже на первом шаге не удается. Для этого требуется
несколько шагов. К сожалению, алгоритм сходится только в том слу-
чае, если на интервале: начальное приближение аргумента — решение
x0” F(x) — гладкая функция без перегибов (рис, 5.5). Будучи весьма
эффективным, алгоритм Ньютона-Рафсона очень чувствителен к выбору
начального значения аргумента.
Алгоритмическая формула (5,47) справедлива как в скалярной, так
и в векторной форме,когдаF=[F1F2 .., ]т,[xxx2 ... ]т. В этом случае
dFx dFt
dxj dx2
F'k = dF2 dF2 npnx^xifc; x2=x2k
dxx dx2
При численном решении уравнения Риккати аргумент х образуется
независимыми элементами матрицы K:x = [xi -• *0,5 п (п + 1) ]т =
"[^11^12 ••• ]т- Количество используемых функциональных зависимо-
стей совпадает с размерностью аргумента
F=[Fx...F^n(n+l)]\
Другая группа численных методов расчета матрицы Риккати ис-
пользует то обстоятельство, что решение уравнения (5,42) является
асимптотическим решением при t 00 дифференциального уравнения
dK
КА 4- АтК•+ - КВХ^В'К. (5,48)
Для получения этого решения используют численные алгоритмы
интегрирования обыкновенных дифференциальных уравнений вида
x = F(x, Г),
которые подробно описаны в литературе (см,, например, [ 19]), а здесь
мы только перечислим наиболее употребительные из них:
— простой алгоритм Эйлера или метод Рунге—Кутта I порядка с ал-
горитмической формулой
= *k + hF(xk, tk)-
— модифицированный алгоритм Эйлера (метод Рунге—Кутта II по-
рядка)
хк + 1 = хк +hF [х£ + 0,5hF (хк, tk), tk + O,Sh ];
165
— исправленный алгоритм Эйлера
* к+1 = xk + 0,5h {А(хъ tk) +F[xk+hF(xk, tk), tk + й ] ] ;
— алгоритм Рунге—Кутта IV порядка
Хк + ! = хк + h (Л + 2/2 + 2/з + Д);
f\~ F (хк, tk),
f2 = F(xk + 0,5h fu .tk+0,5h)-,
f3 =F(xk + 0,5h f2, tk+0,5h);
f* = F(xk+hf3, tk+h).
В приведенных формулах вектор * = [£ц£12 — ]т образуется неза-
висимыми элементами матрицы Риккати: х^9 Xfc + j — рассчитываемые
значения этого вектора при и + i J h =tfc+t ~tfc — шаг интегрирова-
ния; F = [Fx ... FQ£n («+ 1) ]T — векторная функциональная зависимость,
определяемая уравнением Риккати,
Однако асимптотическое решение при t 00 численными методами
можно получить только в том случае, если нелинейное дифференциальное
уравнение (5.48) является устойчивым, В конкретных задачах аналити-
ческого конструирования автоматических систем управления движением
часто приходится сталкиваться с неустойчивой дифференциальной фор-
мой уравнения Риккати. В этом случае вместо (5,48) можно использо-
вать уравнение
М — = КА 4- А* К + Хх - КВК^В'К, (5,49)
где М — квадратная корректирующая матрица размером [ п х п],
С точки зрения асимптотического решения, оба уравнения (5.48)
и (5,49) идентичны, но матрицу М можно подобрать таким образом,
чтобы (5.49) было устойчивым при неустойчивом уравнении (5.48).
Часто это достигается при М = — 1,
Существенным достоинством численного интегрирования при реше-
нии уравнения Риккати является возможность использования стандарт-
ных программ ЦВМ,
166
5,6. Оптимизация линейной системы,
подверженной узкополосному возмущению
Регулятор состояния оптимизирует движение линейной
системы, которая находится под воздействием широкополосного возму-
щения, аппроксимируемого белым шумом, Математическая форма эк-
вивалентной детерминированной задачи, вид семейства устойчивых экс-
тремалей, результаты аналитического конструирования наглядно пока-
зывают, что при этих исходных данных оптимизируются динамические
свойства линейной системы, но не учитываются какие-либо индивидуаль-
ные свойства внешнего возмущения. Происходит это потому, что белый
шум не имеет определенных отличительных признаков и представляет
собой возмущение „вообще95. Следствием неопределенности внешнего
воздействия явилось отсутствие в регуляторе состояния связей, исполь-
зующих или формирующих информацию о возмущениях.
Иной результат получается, если оптимизировать движение линейной
системы, подверженной узкополосному случайному возмущению. Точ-
ная настройка системы на форму спектральных характеристик возму-
щения потребует включения в регулятор состояния дополнительных
связей, с помощью которых вводится информация о внешних воздейст-
виях .
Задача синтеза оптимальной автоматической системы, подверженной
действию случайного стационарного возмущения с ограниченным по ча-
стоте энергетическим спектром, эквивалентна детерминированной задаче
оптимизации полной реакции системы на эквивалентное детерминиро-
ванное воздействие F (Г) при нулевых начальных условиях х(0) =0,
В соответствии с этим математическая модель неизменяемой части
системы, используемая при решении оптимизационной задачи, определя-
ется матричным уравнением
Ах -ь Ви + CF(r), (5.50)
а минимизируемым критерием по-прежнему остается среднеквадратич-
ный функционал (5.18).
Особенность функции Гамильтона заключается в том, что она содер-
жит дополнительное слагаемое, являющееся функцией времени:
Н = фтАх + $тВи + фгСР (г) - 0,5хт X* х - 0,5 нтХии,
По-прежнему, согласно принципу максимума, оптимальное движе-
ние системы обеспечивается управлением u(t), которое в любой момент
времени максимизирует величину Я. Но в данном случае это движение
происходит не только в.результате управляющих воздействий, но и под
влиянием эквивалентных детерминированных возмущений F(t), Поэто-
му, хотя и остается справедливым условие оптимального управления
(5-19)
167
u(t) = Втф (t),
но семейство экстремалей определяется решением неоднородной систе-
мы основных и,сопряженных уравнений
х = Ах + ВУи1^ + №(0;
> (5.51)
ф=Ххх~Атф. J
Система (5.51) содержит 2п скалярных уравнений I порядка и для
ее решения требуется знать 2п начальных или граничных условий. Нуле-
вые начальные условиях (0 ) = 0,вытекающие из эквивалентной детерми-
нированной задачи, определяют п из них. Кроме того, требование устой-
чивости синтезируемой системы в сочетании с затухающим характером
эквивалентных детерминированных возмущений, свойственных соглас-
но (5.13) узкополосным случайным воздействиям, определяет нулевые
конечные условия для переменных состояния системы х(°°) =0, число
которых тоже равно п. Для каждой компоненты вектора состояния
X/ (Z) и сопряженного вектора i/// (f) решение (5.51) состоит из общего
решения системы однородных дифференциальных уравнений и частного
решения системы неоднородных уравнений. Первое определяет свобод-
ное движение системы хг- св (f), св (^), второе— вынужденное X/ в (Г),
ф/ в не-
свободные составляющие семейства устойчивых экстремалей имеют
вид (5.32) с точностью до независимых постоянных интегрирования.
Вид вынужденных составляющих экстремалей определяется законом из-
менения компонент матрицы возмущения F(r). При дробно-рациональ-
ной форме спектральных плотностей случайных возмущений эквивалент-
ные детерминированные воздействия имеют вид затухающих экспонен-
циальных функций времени с комплексными коэффициентами (5.13).
Использовав принцип наложения и метод комплексных амплитуд, хо-
рошо известный в теории электрических цепей [8], можно найти вынуж-
денные составляющие в форме
т . sк t ™ ° skt
*fB(O = Xike ; 1///в(0 = S *ike , (5.52)
к = 1 к = 1
где sk — комплексные частоты эквивалентного детерминированного
возмущения, соответствующие полюсам формирующего фильтра; Xjki
Ф/ к — комплексные амплитуды частных решений системы уравнений
(5.51).
Следует иметь в виду, что комплексные частоты и комплексные
амплитуды либо вещественны, либо попарно сопряжены, так что вынуж-
денные составляющие экстремалей всегда вещественны.
168
Общий вид семейства устойчивых экстремалей
(5.53)
т » skt п pkt
(0 = S ^ik е + ' S Q Д Z(n+I) (Pfc) е
к = 1 к = 1
Можно показать, что регулятор состояния вида u = Gx не может обес-
печить изменение переменных согласно экстремалям (5.53). Действи-
тельно, при оптимизации свободного движения, когда вынужденные со-
ставляющие в экстремалях отсутствуют, общее число обратных свя-
зей автоматической системы по каждому каналу управления равно п —
порядку исходных уравнений неизменяемой части системы (5 .50). Сис-
темы алгебраических уравнений (5 37) для определения коэффициентов
обратных связей оказывались совместными и имели единственное реше-
ние благодаря тому, что число неизвестных коэффициентов обратных
связей было равно количеству экспоненциальных функций времени в
составе экстремалей (5.32).
При наличии в исходной модели (5,50) эквивалентного детермини-
рованного возмущения количество экспоненциальных функций в соста-
ве экстремалей (5.53) превосходит на т число координат состояния сис-
темы. Поэтому, чтобы системы уравнений для определения коэффици-
ентов в линейных законах управления и (х) были совместными и имели
единственное решение, необходимо расширить регулятор состояния вве-
дением дополнительных слагаемых. С их помощью в регуляторе систе-
мы формируется информация о внешнем возмущении, его специфиче-
ских свойствах и особенностях, осуществляется оптимизация системы
применительно к конкретному типу воздействия, характеризуемого оп-
ределенным видом спектральной характеристики. Поэтому к дополни-
тельным членам закона управления предъявляется необходимое условие
содержать информацию о внешнем возмущении. Для этой цели исполь-
зуют идентификаторы внешних воздействий либо дифференцирующие
обратные связи по переменным состояния. Регуляторы состояния с диф-
ференцирующими связями рассмотрим подробнее, причем для простоты
рассуждений будем считать возмущение скалярным Fi(t). Общее число
дифференцирующих связей, дополняющих регулятор состояния должно
равняться числу экспоненциальных функций т, образующих вынужден-
ные составляющие семейства устойчивых экстремалей (5,53). Чтобы
эти связи содержали необходимую информацию о внешнем воздействии,
они должны удовлетворять ряду условий.
Во-первых, дополнительная дифференцирующая обратная связь
выбирается по той переменной состояния Xj, уравнение которой в исход-
ной модели содержит эквивалентное детерминированное возмущение
в явной форме Fi (t). Предположим, что в закон управления для/ -го ка-
нала
169
п
Uj = S gji Xj
i = 1
вводится дополнительная составляющая gjXXj, причем в составе систе-
мы уравнений (5.50) имеется такое
, п
Xi = S aikxk + (5.54)
к = i
Введение дополнительной дифференцирующей связи обеспечивает
информацию о компоненте возмущения Fj (t). Это видно, если записать
закон управления с учетом (5.54) таким образом
п - - п А ~А
ujSji' + gj' г g^i ^gpF^t). (5.55)
_ Если ввести еще одну дифференцирующую связь I порядка
Sj 2xi + i, то функциональная структура алгоритма (5.55) не изменится,
так как в составе исходной системы (5 .50) могут присутствовать урав-
нения только с возмущением Fj (t)
п
Xj + J = Е а (/ + J) к Xfc + С(j + j) Fj (Г) ,
к = i
поэтому
Uj = S gji Xi +gjjXj + gj2xi + 1 = S gji Xi + gjiFi (t).
i =1 i
Связи gj iXj и gj 2Xi + i оказываются взаимозависимыми в силу ма-
тематической модели неизменяемой части системы.
Если же в регулятор состояния дополнительно ввести сигнал gj 2Xj ,
то в закон управления вводится дополнительно информация о скорости
изменения возмущения
_ . _ .. в «в -в •
Uj = S gji Xi +gjtXi +gj2Xi = S gji Xi + gjlFt(t') +gj2Fi (t).
1 г (5.56)
Следовательно, при общем числе необходимых дополнительных свя-
зей, равном т, закон управления оптимальной системы должен форми-
роваться на основе регулятора состояния и m-кратного дифференциро-
вания одной из переменных состояния
. п
Uj = Z gji Xi + S (5.57)
i =1 v = 1
Он обеспечивает введение информации о возмущении F/ (t) и его произ-
водных до т — 1-го порядка включительно.
170
Второе требование к дополнительным дифференцирующим обратным
связям сводится к тому, что допустимая кратность дифференцирования
фазовой координаты хг- ограничена структурой исходной математиче-
ской модели (5.50). Если после исключения из закона управления диф-
ференцирующих составляющих в силу (5.50) в правой части закона по-
являются сигналы управления и их производные, то такой алгоритм уп-
равления либо не может быть сформирован, либо может привести к нару-
шению устойчивости в замкнутой системе.
Возможность появления сигналов управления и их производных
в правых частях закона управления легко показать, если, например,
в системе (5.50) есть уравнение
t п г
Xf = Е aifcXfc+ S bijUj +qFi(t),
к = 1 j - 1
а управление формируется в виде
Uj = s g/iXj i-g^x, +gj2Xj.
i
В зависимости от кратности дифференцирования в законе управле-
ния могут появляться члены
AxUj ; A2Uj .
Это приводит к тому, что порядок дифференциальных уравнений (5.50)
совместно с (5.57), определяющих процессы в замкнутой автоматиче-
ской системе, окажется выше, чем число экспонент в свободных состав-
ляющих экстремалей (5.53). Следовательно, алгоритм (5.57) в этих ус-
ловиях не может быть сформирован. При появлении члена Апорядок
уравнений замкнутой системы совпадает с порядком составляющих
экстремалей. Но при этом в системе в неявном виде появляется замкну-
тый безынерционный контур, охватывающий элемент, который форми-
рует сигнал управления. Если Ао >0, то наличие этого контура в силу
положительной обратной связи может быть причиной неустойчивости
замкнутой системы.
Существует третье условие, которое ограничивает кратность диф-
ференцирования фазовой координаты, но уже не по форме математиче-
ской модели объекта, а по виду возмущения,. Отмечалось, что при струк-
туре обратных связей (5.57) в алгоритм управления неявно входят
возмущение и его производные. При форме эквивалентных детермини-
рованных возмущений (5.13) не исключена возможность появления раз-
рывов 1-го рода для одного из этих сигналов в начальный момент време-
ни. Последующее дифференцирование разрывного сигнала (возмущение
или его производные) при введении в закон управления приведет к по-
явлению бесконечных управляющих сигналов, которые не соответствуют
экстремалям (5.53). Физически это означает, что многократное диффе-
ренцирование случайного возмущения при формировании управляющего
171
сигнала приводит к такому росту высокочастотных составляющих спек-
тра, что сигнал управления приобретает черты белого шума, его диспер-
сия оказывается бесконечно большой и дисперсионный критерий обра-
щается в бесконечность.
В соответствии со сказанным третье условие, которому должны
удовлетворять дифференцирующие обратные связи, можно сформули-
ровать следующим образом: m-кратное дифференцирование фазовой ко-
ординаты допустимо только в том случае, если эквивалентные детерми-
нированные возмущения и их производные порядка т — 2 непрерывны
во всем диапазоне изменения аргумента 0 < t < 00.
Сформулированные выше три условия регламентируют возможные
структуры дифференцирующих обратных связей и являются условиями
физической реализуемости дифференцирующих операторов.
Выбрав вид дифференцирующего оператора и убедившись, что он
удовлетворяет условиям физической реализуемости, можно рассчитать
коэффициенты обратных связей. Покажем, как это выполняется при
операторе (5.57). Для этого представим его с учетом условия оптималь-
ного управления и (t) = Хц1 ВТ ф (t) в виде
п п л?
S.Mz (0 = Xi//( S g/ixi(t) + S g/vx^). (5.58)
i = 1 i - 1 v = 1
Подставим (5.53) в (5.58) и получим г условий (варьируя/ = 1,...,г):
п т . Skt п Pkt
bij ( ке ' + Ск А I (п+ 1) (Рк) е ) “
Z = 1 к = 1 к = 1
п т . skt п pkt
= Хи/ [ S g//( S Xike + S Ск Д// (Рк)? )+ (5.59)
Z = 1 к = 1 к = 1
т - т » ' skt п Pkt
+ S g/Л s skXike + S PkCk^li (.Pk) e )].
v = 1 к = \ к =~1
Учитывая, что (5.59) должно выполняться в любой момент времени,
можно составить систему из т + п алгебраических уравнений с таким же
числом неизвестных коэффициентов обратных связей, приравняв ампли-
туды экспонент с одинаковыми показателями степени в левой и правой
частях (5.59) . Первые п уравнений имеют вид
п т _
Х^у [ S gji Д/7- (рк) + S gjvPk (аО] “
Z =1 “ v = 1
п
= S b[j (n + i) (Рк) > k =
/ = 1
а остальные т уравнений можно выбрать из условий
л т __ л -
Re Xuy [ S gji Х{к + Z gjv s k%ik\ “Re S Z?/y ^ik\
i = 1 v ~ 1 i - 1
172
п . т . п
Im ^uj [ 2} gji Xjk + S gjv SfcXifc] — Im E Ь^к,
i = 1 p = 1 i = 1
к = 1,2, ..., m,
которых хотя и 2m, но независимых только m, так как комплексные
частоты sk и комплексные амплитуды Xjk, либо вещественны, ли-
бо попарно сопряжены, Re, Im — символы вещественной и мнимой час-
тей функции.
Итак, при оптимизации движения системы стабилизации, подвержен-
ной внешним возмущениям с ограниченным энергетическим спектром,
набор обратных связей в каждом канале управления включает в себя
как основные обратные связи по всем координатам состояния, так и до-
полнительные дифференцирующие связи,.
Вычислительная процедура определения коэффициентов основных
и дополнительных обратных связей в значительной степени повторяет
процедуру аналитического конструирования на основе расчета устойчи-
вых экстремалей. Дополнительно возникает необходимость вычисления
комплексных амплитуд вынужденных составляющих экстремалей и вы-
бора структуры дифференцирующих связей, удовлетворяющих услови-
ям физической реализуемости.
Исследования оптимальных автоматических систем стабилизации
движения, настроенных на определенный вид возмущения, показывают,
что они характеризуются меньшими значениями дисперсий ошибок
фазовых координат морских подвижных объектов. По сравнению с
системами, имеющими регуляторы состояния только с основными
обратными связями, системы этого типа позволяют повысить точность
стабилизации при сохранении неизменными частот свободных колебаний.
Поэтому такие системы могут удовлетворительно работать как при
компенсации постоянно действующих возмущений (ветер, волна), так и
при одиночных импульсных воздействиях.
Но точность стабилизации повышается только при строгом матема-
тическом соответствии статистических характеристик реальных внешних
возмущений с расчетными, чего практически добиться очень трудно.
Кроме того, точность стабилизации растет за счет резкой интенсификации
работы исполнительных органов (увеличение числа и амплитуды кла-
док), причем повышенный износ механизмов рулей сохраняется и в том
случае, когда из-за несовпадения расчетного возмущения с реальным вы-
игрыш в точности стабилизации невелик.
Другой недостаток операторов с дифференцирующими обратными
связями заключается в том, что далеко не всегда можно выбрать допол-
нительные связи, удовлетворяющие трем условиям физической реализуе-
мости. Кроме того, возникают и чисто технические трудности многократ-
ного дифференцирования сигнала. В связи с этим ряд авторов при опти-
мизации линейных систем, настраиваемых на определенный вид узкопо-
лосного случайного возмущения, обосновывают предпочтительное ис-
пользование идентификаторов внешнего воздействия, построенных по
173
принципу редуцированных наблюдателей или наблюдателей полного по-
рядка.
5.7. Идентификация кинематических параметров
движения МПО
Линейные оптимальные системы с регуляторами состоя-
ния обладают рядом положительных свойств. Их использование для уп-
равления движением морских подвижных объектов позволяет получить
высокую точность стабилизации, хорошие динамические характеристики
при маневрировании, обеспечивает благоприятные условия работы меха-
низмов исполнительных органов. Эти регуляторы являются весьма гру-
быми, т. е . в основном сохраняют свои свойства при разбросе парамет-
ров управляемого объекта. Однако это достигается благодаря полному
и точному измерению вектора состояния. К сожалению, существующее
информационное обеспечение МПО не позволяет точно измерить все ки-
нематические параметры движения. Наибольшие трудности связаны с оп-
ределением параметров поступательного движения: координат центра
масс, проекций скорости движения, углов атаки и дрейфа. Поэтому из-
мерение вектора состояния МПО является неполным. Оно также и не-
точное, так как измерение координат движения осуществляется с ошибка-
ми в условиях помех, которые, как правило, носят случайный характер.
Для реализации регуляторов состояния при неполных и неточных
измерениях в состав системы управления движением включают специ-
альные динамические устройства — идентификаторы состоя-
ния (или н аблюдатели), которые на основе математической мо-
дели неизменяемой части системы и измеряемого вектора состояния,
во-первых, восстанавливают неизмеряемые переменные состояния и,
во-вторых, фильтруют помехи измерения.
Существуют идентификаторы полного порядка и редуцирован-
ные. Первые восстанавливают все переменные состояния, вторые —
только неизмеряемые.
На выходе идентификатора получаются оценки х(г), отличающие-
ся от переменных состояния на величину ошибки восстановления:
е (г) =x(t) -£(f).
Восстановление вектора состояния принципиально возможно,, если
линейная математическая модель объекта, используемая при построении
идентификатора
i = Ах + Ви + С/, у = Dx + w, (5.60)
где w—вектор помех измерения; у — измеряемый вектор состоя-
ния, содержащий I элементов (/ < п) ; D — матрица размером I х п,
174
характеризующая информационное обеспечение
системы, удовлетворяет условию наблюдаемо-
сти, которое отражает наличие взаимосвязи
между измеряемыми и неизмеряемыми перемен-
ными.
Пусть, при полном измерении всех пере-
менных состояния D= 1. Если измерение частич-
ное, то полный вектор состояния распадается на
две части: измеряемую у и неизмеряемую z
Рис. 5.6. Структура на-
блюдателя полного по-
рядка.
откуда у -Dx и z =Dx, причем нетрудно убедиться, что матрицы D и D
образуются разбиением единичной матрицы
10.... 0
01.... 0
‘ 0 ° I строк
п — I строк ,
0 0.... 1
и поэтому каждая из них содержит одинаковое число столбцов/?, но, в
общем случае, разное количество строк: D имеет I строк, D — п — I
строк.
Рассмотрим структуру наблюдателя полного порядка. С помощью
математической модели объекта
х = Лх + Ви,
располагая сигналами управления «(f), можно определить оценку все-
го вектора состояния x(f). Для повышения точности восстановления
в наблюдателе организуется обратная связь по рассогласованию измерен-
ного вектора / и восстановленного у =Dx. Структура наблюдателя пред-
ставлена на рис. 5.6, а его уравнение имеет вид
х- Ах + Ви + F(у - Dx), (5.61)
Размерность уравнения (5.61) равна п: порядок наблюдателя совпадает
с порядком объекта. Прямоугольная матрица F размером пх I опреде-
ляет коэффициенты обратных связей. При известных параметрах ис-
ходной модели А, В, D синтез наблюдателя сводится к определению эле-
ментов матрицы F.
175
Пример 5.6. Определим структуру наблюдателя полного порядка для восста-
новления угла дрейфа (3 МПО, линейная модель которого
и измеряются углы рыскания $ и перекладки руля 6В, а также угловая скорость
соу. Тогда.
“=sB ; у = I v Г;
приводит к структурной схеме, изображенной на рис. 5.7.
Наблюдатель полного порядка восстанавливает переменные состоя-
ния системы с определенными ошибками. Уравнение ошибок восстанов-
ления можно получить из основного соотношения
e(z) =х(г) -x(t)
путем дифференцирования
ё(г) =x(t) -х(г)
с последующей подстановкой уравнений (5 .60) и (5.61).
После несложных преобразований:
ё(О - (A-FD) e(t)=Cf(t) - Fw(f).
(5.62)
Решение этого матричного линейного неоднородного дифференци-
ального уравнения порядка п с постоянными коэффициентами состоит
из свободной есв (f) и вынужденной ев (f) составляющих:
е (О ^св (О ев (О •
Первая составляющая характеризует динамическую погрешность на-
блюдателя. Она определяется с точностью до постоянных интегрирования
на основании решения однородного дифференциального уравнения
176
Рис. 5.7. Наблюдатель полного порядка для восстановления угла дрейфа МПО.
«св (О - (А — FD) есв (г)=0
в виде
есв (Г) =ехр [ (А - FD) t] е (0).
Время существования динамических ошибок, их форма, частота,
и скорость затухания зависят от расположения в комплексной плоскости
корней характеристического полинома
det| pi - (А - FD) I = Pi) ... (р- рп),
которые являются собственными частотами идентификатора состояния.
Если исходная модель объекта (5.60), характеризуемая матрицами А и
Z), полностью наблюдаема, то изменением коэффициентов обратных
связей наблюдателя (матрица F) можно добиться любых корней харак-
теристического полинома. Смещая их влево от мнимой оси путем увели-
чения коэффициентов усиления F, добиваются быстрого затухания
переходных процессов в наблюдателе, повышая тем самым динамиче-
скую точность восстановления кинематических параметров движения в
системе управления МПО.
Помимо динамической погрешности существует стационарная ошиб-
ка наблюдателя, которая определяется вынужденной составляющей
ев (г) и зависит от вида функций / (г) и vv (f), формирующих правую
часть уравнения (5.62). В общем случае как возмущения, действующие
на объект f (Г), так и шумы измерения w (t), носят случайный характер.
Поэтому для расчета ев (г) требуется аппарат случайных функций. Сде-
лав предположение о стационарном характере f (t) и w (f), можно
177
12—510
в явном виде установить связь математических ожиданий погрешности
восстановления те, внешнего возмущения ту и шумов mw ;
те = - (Л- FD)"1 (Cmf - Fmw). (5.63)
Анализ соотношения (5.63) показывает, что при больших коэффициен-
тах обратных связей идентификатора F доля внешних возмущений в по-
стоянной стационарной ошибке уменьшается, но растет относительное
влияние ошибок измерения. При этому улучшается свойство наблюдате-
ля восстанавливать неизмеряемые переменные состояния, но одновре-
менно снижается его способность фильтровать шумы датчиков кинемати-
ческих параметров движения МПО.
Включение в состав оптимальной линейной системы идентификатора
состояния полного порядка можно осуществить двумя способами. В пер-
вом варианте на все входы регулятора с выхода наблюдателя подаются
оценки вектора состояния (рис. 5.8, а). Можно также от наблюдателя
на регулятор подавать оценки только неизмеряемых переменных, а из-
меряемые непосредственно получать от датчиков кинематических пара-
метров движения (рис. 5.8, б).
В состав функциональной схемы на рис. 5Я входят: неизменяемая
часть системы НЧС с математической моделью (5.60), идентификатор
состояния ИС, описываемый уравнением (5.61), и регулятор состояния
Р, реализующий закон управления (вариант „а”)
и (f) = G'x(f)
или (вариант ,,б”)
м(0
A z ч >
Z (г)
где zj7) ~Dx(t) — вектор оценок неизмеряемых переменных состоя-
ния, D— матрица, выделяющая из вектора состояния x = [xt ... х/?]т
неизмеряемые переменные z = [z х ... zn _ /]т.
Рассматриваемая структура системы управления характеризуется
следующими особенностями.
Рис. .5.8. Оптимальная линейная система с наблюдателем полного
порядка.
178
Во-первых, порядок дифференциальных уравнений, описывающих
свободные процессы в замкнутой системе складываются из порядка не-
изменяемой части системы п и порядка идентификатора. При использо-
вании наблюдателя полного порядка происходит удвоение размерности
математической модели замкнутой системы. Поэтому восстановление
кинематических параметров связано с ухудшением динамических
свойств системы управления движением МПО.
Во-вторых, собственные частоты системы с идентификатором обра-
зуются характеристическими числами оптимальной линейной системы
и отдельно рассматриваемого наблюдателя. Это свойство известно как
теорема разделения. Докажем ее для системы, структура ко-
торой изображена на рис. 5 В ,а.
Свободные процессы в замкнутой системе описываются однородны-
ми матричными уравнениями, получаемыми на основании математиче-
ских моделей НЧС, ИС и Р:
+ BGx,
4 л л л <5'64)
х=Ах + BGx + FD (х- х).
После тождественных преобразований, связанных с заменой переменных
х=х - е, можно получить систему уравнений, эквивалентную исходной
(5.64):
х=(Л+ BG) х- BGe ,
е = (А - FD) е,
характеристический определитель которой
pl - (А + BG)
- BG
D(p) = det
pl - (A- FD)
образуется произведением
D(p) =Di (p)D2 (p) = det | pl - (A + BG)\ det| p 1 - (A - FD)\
Первый сомножитель
Di (p) = det|pl - (A- BG)\
является характеристическим определителем оптимальной линейной
системы, и его корни рц ... р1п являются ее собственными частотами.
Второй
D2(p) =det|pl - (А - F£)|
179
с корнями р21 Pin характеризует собственные динамические свой-
ства идентификатора состояния. Следовательно,
D(p) = (р- Рн) (Р- Pin) (Р~ Р21) (Р- Ргп)>
что подтверждает достоверность теоремы разделения. Аналогично мо-
жет быть доказана ее справедливость при структуре системы, изображен-
ной на рис. 5.8, б, а также при использовании редуцированного наблюда-
теля. Теорема разделения является весьма полезной при синтезе систем
с идентификаторами состояния, так как показывает возможность раз-
дельного расчета параметров оптимальной линейной системы и наблюда-
теля. Если регулятор состояния и наблюдатель устойчивы, т. е. собствен-
ные частоты ... pifl> Р21 ... Ргп располагаются в комплексной плоско-
сти слева от мнимой оси, то замкнутая система с идентификатором так-
же будет устойчивой.
Однако наложение собственных частот происходит только в том слу-
чае, если характристики НЧС в точности соответствуют элементам мат-
риц А, В, D} которые определяют параметры наблюдателя. На практике
всегда существует расхождение между характеристиками морского под-
вижного объекта и параметрами его линейной математической модели.
Степень влияния этого несовпадения должна быть дополнительно иссле-
дована. Опыт проектирования систем с наблюдателями показывает, что
они весьма чувствительны к достоверности исходной математической
модели вплоть до потери устойчивости. Грубость системы снижается по
мере роста числа восстанавливаемых переменных. Лучшие результаты
достигаются, когда измеряемые координаты непосредственно подаются
на регулятор (вариант „б”) , хотя при этом не удается фильтровать поме-
хи измерений. Существенное же улучшение свойств систем при восста-
новлении переменных состояния можно получить с помощью адаптив-
ных наблюдателей.
Стремление улучшить динамические свойства и повысить грубость
замкнутой системы за счет снижения порядка идентификатора привело
к разработке редуцированных наблюдателей, восстанавливающих только
неизмеряемые координаты.
Полный вектор состояния системы включает в себя I измеряемых
переменных, образующих вектор yyyDx и п— I неизмеряемых, которые
составляют вектор z =Dx, где Он D матрицы размером / х п и (д — I ) х
х п соответственно. Эти соотношения можно также записать в виде:
Структура наблюдателя для восстановления неизмеряемой части
вектора состояния формируется на основе линейной математической
модели неизменяемой части системы:
z - Dx = DA х -г DBu = DA Ly + DA Lz + DBu.
(5.65)
180
Уравнение (5.65) превра-
щается в модель наблюдателя
только в том случае, если оно
будет дополнено членом, учи-
тывающим рассогласование из-
меряемых переменных и их
оценок, как это имело место в
наблюдателе полного порядка.
Однако организовать обратную
связь вида F (у - у) в редуци-
рованном наблюдателе невоз-
можно, так как в нем не фор- 5-9- Редуцированный наблюдатель для
восстановления угла дрейфа МПО.
мируется, оценка измеряемых л
переменных. Условие минимизации рассогласования (у — >>) приходится
вводить в (5.65) косвенным путем на основе соотношений:
у^Рх’или у — Dx = 0.
И далее
у — DA х - DBu =у - DALy — DALz — DBu - 0.
(5.66)
Достижение в уравнении наблюдателя условия (5.66) реализуется
через дополнительное слагаемое с матрицей усиления F:
z = DALy + DALz + DBu + F(y - DALy -DALz - DBu). (5.67)
Однако практическая реализация наблюдателя на основе (5.67)
затруднена необходимостью дифференцирования подаваемых на его
вход измеряемых переменных. Исключить эту операцию можно с по-
мощью новой векторной переменной
л
q=z - By.
После тождественных преобразований математическая модель ре-
дуцированного наблюдателя приобретает вид:
q (DAL - FDAL ) q = (DAL + DALF - FDAL - FDALF) у +
+ (DB - FDB) u,
A ri
z =q + Ly.
(5.68)
Уравнения (5.68) показывают, что восстановление происходит по из-
меряемым переменным и сигналам управления и (t) в динамическом
устройстве, порядок которого (и - I ) равен количеству неизмеряемых
переменных состояния.
181
Пример 5.7. На основании исходных данных примера 5.6 определим структу-
ру редуцированного наблюдателя-для восстановления угла дрейфа МПО. Дополни-
тельные исходные данные для расчета редуцированного наблюдателя:
D=[Q 0 1] ; L
; =
[/и Аз 1 •
Промежуточные результаты:
DAL = а33', FDAL -f\2a23;
DB = b3i; FDB=f\2b2y-
DALF~[a33fn a 33fl2]\ DAL = [0 #32];
FDAL=[Q + f\2a22];FDALF=[a23fnfi2a23fl2 1
Уравнение наблюдателя:
^/1 (А 33 /12 fl 23 ) *7 1 “ A 1 (fl ЭЗ " "A 2 fl 23 ) f f'12 (A 33 ~~ A 22 ~~ /12 A 23 )
+ (#32 — All 1 + (Ь 31 ~ Al2^21)^B
0 = + Al + Al wy-
Структурная схема редуцированного наблюдателя дрейфа приведена рис. 5.9.
На ней обозначено:
о.С — А 33 А1 А 23 ’ ~ Al (а 33 “ А 2 #23 А
— /1 2 (° 33 ~ А 22 А1 #23 ) + С7 32 ~ А1 ) 5
6 — 31 " Аг 21 1
5.8. Оптимальные релейные системы
Оптимизация движения линейного объекта обеспечивает-
ся регулятором состояния в том случае, если критерий качества заключа-
ется в минимизации дисперсионного (среднеквадратичного) функциона-
ла, учитывающего затраты на управление. При другой форме критерия
строгое решение оптимизационной задачи даже при линейной модели
неизменяемой части системы приводит к нелинейным регуляторам.
В некоторых задачах управления .МПО качество работы системы оце-
нивается по времени перехода из одного состояния х (t 1) в другое х(Г2).
Система максимального быстродействия характеризуется минимальным
значением
Т -t2 — 11.
182
Для удобства применения принципа максимума этот критерий мо-
жет быть представлен в интегральной форме:
2
Т= f dt. (5.69)
При линейной модели неизменяемой части системы
х=Ах Ви
и критерии (5.69) функция Гамильтона
Н= фтАх + ф^Ви- 1 (5.70)
линейно зависит от управления и и при отсутствии ограничения на его ве-
личину не имеет конечного значения максимума. Смысл этого очевиден:
чем больше величина управления, тем меньше времени требуется на пере-
ход системы из одного состояния в другое, и минимальное время дости-
гается при бесконечно большом управлении. Задача оптимального уп-
равления может иметь смысл только в том случае, если управление огра-
ничено по модулю: uEUs например, — (/) < Щ— Ur <
(Г) < Ur . При этом максимум функции Гамильтона, т. е. оптималь-
ное управление, достигается, когда все сигналы управления имеют
предельные значения
I И/ (О I = Uj, / = 1> г>
а их знаки таковы, что
фтВи(ф) ->шах
или
~ S bi 1 ф{ + ... -1- ur X bir ф; шах.
i ~ 1 / = 1
Тогда условие оптимального управления:
при S bj j ф1 (Г) > 0,
при S ф/ (Г) < 0,
при 2^> ф/(Г) > 0,
при S bir ф1 (t) < 0,
183
Рис. 5.10. Сигналы управления в релей-
ной системе.
Рис. 5.11. Структура системы максималь-
ного быстродействия^
или в матричной форме:
м(7) = £/sign^Ti//(r). (5.71)
Выражение (5.71) показывает, что система управления линейным
объектом, обеспечивающая максимальное быстродействие, содержит
релейный регулятор. Управление обеспечивается изменением состояния
релейных элементов (рис. 5.10) в моменты переключения Г1п, /2п
и т. д., которые зависят от вида вспомогательного вектора ф (t), опреде-
ляемого сопряженной системой уравнений. На основании правила фор-
мирования (5.16) при (5.71) она имеет вид:
ф = -Ат ф,
и для ее решения необходимо знать начальные значения ф (0). Систе-
ма может быть реализована в варианте программного управления
(рис. 5.11, а) или с обратными связями (рис. 5.11, б), если найти нели-
нейную функциональную связь ф =F (х) между x(t) и ф (t) при опти-
мальном управлении. Чтобы найти эту связь надо решить нелинейное
дифференциальное уравнение:
х~ Ах + В (7sign Втф.
(5.72)
Расчет обеих структур связан с большими вычислительными трудно-
стями, быстро возрастающими по мере увеличения порядка объекта.
Источники этих трудностей заключаются в необходимости расчета на-
чальных значений сопряженного вектора по известным конечным зна-
чениям вектора состояниях^), решения уравнения (5.72), а также в
чрезвычайно сложной процедуре формирования функциональной связи
между векторами состояния и управления. Практически удается полу-
чить решение только при математической модели неизменяемой части
системы, выраженной дифференциальными уравнениями П-го порядка.
184
К релейной системе управления приводит решение оптимизационной
задачи и в том случае, когда среднеквадратичный критерий качества не
учитывает затраты на управление
J = 0,5 f xTXxxdt. (5.73)
о
При линейной неизменяемой части системы с учетом (5.73) гамиль-
тониан имеет вид:
Н ~ фтАх + фхВи ~ 0,5хтХхх (5.74)
Так же, как и (5.70), функция Гамильтона (5.74) линейно зависит
от управления. Поэтому по аналогии с системой максимального быстро-
действия при наличии ограничений на сигналы управления система опти-
мальная по критерию (5.73) должна быть релейного типа с алгоритмом
(5.71) и структурой, изображенной на рис. 5.11. Но в отличие от систе-
мы максимального быстродействия эта система рассчитывается на осно-
ве связанных между собой основных и сопряженных уравнений:
х= Ах + Вsign Втф,
ф - Ххх - Атф.
Это существенно усложняет и без того трудоемкий процесс расчета
программного управления или нелинейных обратных связей.
5.9. Параметрическая оптимизация регуляторов
В составе систем управления движением МПО широкое
распространение получили регуляторы, построенные по принципу
„вход-выход”, в которых сигнал управления и (Г) формируется на ос-
новании информации об одном выходном кинематическом параметре
движения. К таким регуляторам относятся пропорциональный (П) и
пропорционально-дифференциальный (ПД) регуляторы, используемые
в системах стабилизации качки
Hi =gn6 или щ =gnO + g120,
пропорционально-интегрально-дифференциальный (ПИД) регулятор,
на основе которого строятся авторулевые
t
U1 = Sn4> + gi2 <Р + £1з f ‘pdt,
о
а также релейные регуляторы с линейными обратными связями, в ко-
торых реализуется скользящий режим
и- Usign Gx,
185
работающие с электрогидравлическими приводами механизмов испол-
нительных органов. Уступая в определенной степени регуляторам состоя-
ния по статическим и динамическим показателям качества регулирова-
ния и грубости замкнутой системы, эти регуляторы требуют для своей
реализации минимальное информационное обеспечение и, в основном,
позволяют достигнуть поставленных целей управления путем оптимиза-
ции их параметров при заданной структуре системы, которая директивно
назначается проектировщиком на основании эвристических соображений
и может существенно отличаться от структуры, определяемой строгим
решением оптимизационной задачи. Таким образом, мы сталкиваемся
с типичной задачей параметрической оптимизации системы.
Аналитические методы параметрической оптимизации регуляторов
малоэффективны применительно к большинству задач синтеза систем
управления движением МПО в связи с высокой размерностью математи-
ческих моделей. Предпочтительнее использовать для этих целей поиско-
вые алгоритмы численной оптимизации динамических систем. Основные
их достоинства заключаются в универсальности и возможности практиче-
ского решения задачи вне зависимости от вида математического описания
системы и принятого критерия качества. В равной степени поисковые
алгоритмы могут использоваться при линейных и нелинейных моделях
неизменяемой части системы, при линейных или релейных регуляторах
произвольной структуры, критериях качества любой формы. Это могут
быть обычные дисперсионные или среднеквадратичные функционалы, а
также время перехода системы из одного состояния в другое. Но поис-
ковые алгоритмы численной оптимизации позволяют получить решение,
когда используются математически более сложные критерии, например,
средний по модулю
п г
J = f ( S ^хк I хк I 1^/1) dt
п к = 1 j = 1
или минимаксный
J = min max xz- (/ )
и многие другие, отражающие те или иные специфические требования,
предъявляемые к системам управления движением морских подвижных
объектов.
Критерии качества обычно выражаются в виде функционалов, зави-
сящих от переменных состояния x(t) и сигналов управления и(Г). Но
поскольку эти функции времени изменяются в зависимости от парамет-
ров регуляторов заданной структуры, в конечном счете, критерии каче-
ства зависят от варьируемых параметров матрицы G. В большинстве
своем эти зависимости J (G) представляют собой непрерывные гладкие
функции. В точках экстремума выполняется условие?
186
dJ dJ
---- = . . . =—- = 0.
dgti d£rn
В области параметров G критерий качества может иметь один (уни-
модальная функция) или несколько минимумов и максимумов.
Наибольший из максимумов и наименьший из минимумов называют
абсолютным или глобальным, все остальные - локальными или относи-
тельными. Наличие локальных минимумов в значительной степени
затрудняет решение задачи оптимизации, так как определив параметры G
в точке экстремума, нельзя быть уверенным, что найден абсолютный
минимум.
Численная оптимизация динамических систем заключается в после-
довательном моделировании процесса в системе при различных парамет-
рах регулятора, на основании которого выбирается наилучший вариант
в смысле принятого критерия качества. Реализуется она в следующей вы-
числительной процедуре:
1. Осуществляется решение дифференциальных уравнений, описы-
вающих поведение системы управления МПО с неизменяемой частью про-
извольной математической формы
х = ф (х, и, f, t ), у = Dx
и регулятором произвольной структуры и (у) при фиксированных зна-
чениях параметров G^\ моделируемый процесс может возбуждаться де-
терминированным или случайным внешним возмущением/^), но во
всех экспериментах должен иметь одинаковую математическую модель
воздействия, неизменные начальные условия х(0) и длительность расче-
та , соответствующую интервалу доверительности Т.
2. В ходе моделирования эталонного процесса рассчитывается приня-
тый критерий качества, значения которого изменяются от
опыта к опыту в зависимости от параметров регулятора.
3. На основе сопоставления величины критерия в двух последова-
тельных экспериментах Jfc _ j и Jfc принимается решение о том, каковы
должны быть значения параметров в последующем эксперименте + г
4. Эксперименты повторяются до тех пор, пока не обнаружится ми-
нимальное значение критерия.
Процесс поисковой оптимизации может быть полностью или частич-
но автоматизирован на основе использования вычислительных машин.
Алгоритмы поиска различаются между собой стратегией изменения
параметров, причем, наиболее эффективными являются те из них, кото-
рые достигают результата при меньших затратах машинного времени.
Дадим краткую характеристику наиболее употребительных методов
поиска экстремальных решений в области нескольких параметров
gr п (методы многомерного поиска).
187
Рис. 5.12. Поиск оптимальных
параметров путем перебора
Поиск путем перебора. Это наиболее
простой метод, который заключается в том,
что последовательно определяются значения
критерия J во всех узлах сетки, дискрети-
зирующей пространство параметров gu, g12,
..., grn. Интерполяция значений варьируе-
мых параметров между узлами сетки
делается в предположении, что функция
J (G) — непрерывная и гладкая. Получив
информацию о виде критерия во всем
диапазоне изменения параметров, можно
выбрать экстремальную точку.
Практически поступают следующим об-
разом (см. рис. 5.12 для случая двух варьи-
руемых параметров). Рассчитывают и стро-
ят кривые зависимости критерия от одного
из параметров при различных фиксиро-
ванных значениях остальных, а затем в
плоскости двух параметров получают линии
равных значений критерия и определяют
положение экстремальной точки.
Кроме простоты, этот метод обладает
тем достоинством, что позволяет получить
полную информацию о возможностях ре-
гулятора принятой структуры во всем
диапазоне изменения параметров. Однако недостатки его значительны:
необходимость большого числа пробных решений, большой расход
машинного времени и малая наглядность, когда число варьируемых
параметров больше двух. Поэтому, применительно к исследованию
систем управления МПО поиск путем перебора следует применять, в
частности, при анализе влияния условий плавания с постоянными ско-
ростями, когда варьируются два показателя: балльность и угол встречи
корабля с волной.
Метод наискорейшего спуска. Этот метод представляет собой один
из вариантов градиентных методов. Он основан на том, что экстремум
критерия может быть быстрее всего достигнут, если двигаться по траек-
тории, направление которой совпадает или противоположно градиенту
функции/(G). Так как
dJ dJ
grad J = kn ------- + ... + krn —--------
dgril
где кiit .... к,- „ — единичные векторы осей, по которым откладываются
варьируемые параметры, то при таком поиске изменение параметров
должно быть пропорционально соответствующим частным производным:
188
dJ
........
, , dJ
где к - положительный коэффициент
произвольной величины. Число ша-
гов, необходимое для достижения
экстремума непосредственно зависит
от к, и поэтому его следует выбирать
возможно большим. Однако при
слишком большом его значении
решение на машине может стать неус-
тойчивым, причем траектория будет
Рис. 5.13. Поиск оптимальных пара-
метров градиентным (1), релаксаци-
онным (5) методами и методом на-
искорейшего спуска (2).
совершать колебания вокруг точки экстремума, не достигая ее. Поэтому
целесообразно уменьшить к при приближении к точке экстремума.
Предположим, что в начале поиска параметры системы равны g°n,...,
gr°,„ а Д значение критерия. Для определения направления движения
делаются небольшие пробные шаги по каждому параметру: изменяют
параметр g-j на величину и определяют при этом изменение кри-
терия AJ о7. В результате в пространстве параметров gn ,... gr п определя-
ют направление уменьшения (увеличения) критерия/0. Далее предпола-
гается, что
dJ Ц
dgij
и поэтому первый рабочий шаг делается в точку с параметрами
S i
причем i = 1, г ; j = 1,и. Принятое направление изменения парамет-
ров сохраняется неизменным илри последующих шагах т. е.
„ , Д/'о Д/о
g?. -g!. - к --------- g?. = g2 — к ----------
" " д^- ’ !> li ^g°if
и т. д.,
если очередной шаг сопровождается уменьшением (увеличением) крите-
рия. Изменение направления поиска происходит только тогда, когда до-
стигнуто минимально (максимально) возможное на предыдущем на-
правлении значение критерия. Выбор нового направления поиска осуще-
ствляется аналогично предыдущему с помощью пробных шагов.
При наискорейшем спуске выигрыш во времени поиска оптималь-
ных параметров достигается за счет увеличения рабочего шага и исклю-
чения пробных шагов для определения частных производных в каждой
189
точке траектории, хотя траектория спуска может оказаться длинее, чем
при непрерывном спуске по градиенту.
Для иллюстрации метода на рис. 5.13 в плоскости двух параметров
изображены линии равного критерия и траектории непрерывного гради-
ента (1) и наискорейшего спуска (2).
Релаксационный метод. Метод заключается в поочередном измене-
нии параметров. Сначала варьируется один параметр при фиксирован-
ных остальных и отыскивается частный экстремум по этому параметру,
когда dJ/dg n ”0. Затем фиксируют параметр gn> и варьируют g12 для
отыскания другого частного экстремума dJ/dg^ =0 и т. д. После цикла
поиска по всем параметрам вновь начинается вариация первого парамет-
ра и цикл повторяется. Поиск осуществляется до тех пор, пока все
частные производные dJ /dgy не окажутся близкими к нулю (меньше
заранее принятой величины), после чего считается, что параметры оказа-
лись в области экстремальных значений. На рис. 5.13 изображена траек-
тория (3) поиска оптимальных значений двух параметров, построенная
на основе релаксационного метода.
Релаксационный метод уступает по времени поиска методу наиско-
рейшего спуска, однако реализация поиска оказывается более простой.
Метод случайного поиска. Поиск начинается с некоторого случайно-
го сочетания параметров Со, для которых вычисляется критерий/0 . За-
тем величина каждого параметра изменяется произвольно вокруг исход-
ного значения. Всякий раз, когда величина критерия / j становится мень-
ше (больше) предшествующей величины / 0 происходит переход от ис-
ходных значений параметров к тем их значениям, которые соответству-
ют J!. После этого параметры варьируются случайным образом вокруг
новых величин.
При оптимизации динамических систем с малым числом варьируе-
мых параметров метод случайного поиска уступает методу наискорей-
шего спуска и релаксационному методу, так как в последних измене-
ние параметров подчинено определен-
ной логической последовательности, а
метод случайного поиска основан на
простом угадывании значений парамет-
ров. На каждый однократный процесс
решения на ЭВМ, приводящий к умень-
шению функции J , может приходиться,
по нескольку бесполезных шагов. Одна-
ко эффективность метода может быть
высокой, если варьируется большое
число параметров, и поиск осуществля-
ется в диалоговом режиме, когда опыт
и интуиция оператора позволяют све-
сти к минимуму напрасный расход
машинного времени.
Таблица 5.1
Но- мер шага 8 2/ Хз/
1 9,75 0,35 1,0 303
2 9,50 0,70 2,0 86
3 9,25 1,05 3,0 42
4 9,00 1,40 4,0 26
. 5 8,75 1,75 5,0 20
6 8,50 2,10 6,0 17
7 8,25 2,45 7,0 15
8 8,00 2,80 8,0 14
9 7,75 3,15 9,0 13
10 7,50 3,50 10,0 12
11 7,25 3,85 11,0 13
190
Пример 5.8. Неизменяемая часть системы управления МПО описывается ли-
нейными однородными дифференциальными уравнениями:
а закон управления
-«= St*, + g2x„ + g3X3.
Начальные значения переменных: (0) =1,0; х2 (0) ~х3 (0) =0.
Методом дискретного наискорейшего спуска определим значения коэффици-
ентов g g 3, при которых переходный процесс в системе протекает таким обра-
зом, что обеспечивается минимум функционала
=(1/Г)7 [10(|х, Г+ lx2 I + lx3 I) + |и|]А,
о
где Т - некоторое фиксированное время (интервал доверительности), которое для
рассматриваемого примера принято равным 6 с. Для произвольно выбранных ко-
эффициентов g10 =10, g2Q =g30 = 0 определяем на ЭВМ значение функционала
Jo =380. Пробные вариации коэффициентов приводят к следующим значениям
функционала: gi = 9,g2 =g3 =0, /01 =318; gx =10, g2 = 1,Г3 =0, J02 =292; gt =
= 10, g2 =0, g3 =1, J 03 =130. Приближенные значения частных производных соот-
ветственно равны
Д/„ 318 - 380 ДЦ 292^380^ оо. ДЦ__
“°““— = — ------ — о2* — — — оо, —- - Z3U.
Ag, 9-10 ’ 1-0 Ag3
Приняв к = 0,004, определяем приращения коэффициентов на первом участке
траектории спуска: Agn ^-0,25; Ag21 -0,35; Ag31 =1,0. После этого моделиру-
ется переходный процесс в системе и одновременно определяются значения функ-
ционала, которые приводятся в табл. 5.1.
Вернувшись к параметрам десятого шага, следует определить новые прираще-
ния коэффициентов AgI2, Ag22, Ag32 т- е- изменить направление спуска. Однако
пробные шаги в окрестностях точки gi =7,5; g2 =3,5; g3 =10 не выявили сколь-
нибудь значительного изменения критерия, и поэтому эти параметры можно счи-
тать практически оптимальными.
5.10. Растет математических ожиданий и дисперсий
переменных состояний систем управлений движением
Необходимым этапом расчетных исследований, связан-
ных с проектированием автоматических систем управления МПО явля-
ется анализ синтезированных регуляторов. Цель его заключается в опре-
делении основных характеристик замкнутой системы в переходных и ус-
тановившихся режимах движения МПО. Полученные результаты сопо-
ставляются с требованиями технического задания, на основании чего де-
лается вывод о применимости системы рассчитанной структуры.
191
Потребность в поверочных расчетах связана с тем, что синтез опти-
мальных регуляторов осуществляется по косвенному показателю —
средневзвешенному дисперсионному критерию, который не учитывает
все разнородные требования, предъявляемые к проектируемой системе,
а выделяет в обобщенной форме только основные, определяющие фак-
торы. Кроме того, критерий сам содержит элемент неопределенности
в виде весовых матриц, выбор которых в определенной степени носит
субъективный характер. Расчет переменных состояния системы, управ-
ляющих воздействий и сигналов управления во всем многообразии ста-
тических и динамических режимов предназначен для объективной оцен-
ки результатов синтеза. При неблагоприятных результатах анализа не-
обходимо изменить критерий качества и повторить цикл синтез—анализ.
Такой итерационный процесс может продолжаться до тех пор, пока не
будут получены результаты, удовлетворяющие требованиям техниче-
ского задания.
Для анализа АСУД МПО используется все многообразие методов тео-
рии управления, подробно описанных в литературе (например, [5,6, 15,
16]). Динамические свойства системы во временной области определя-
ются переходными или импульсными характеристиками, а в частотной —
передаточными функциями и амплитудно-фазовыми характеристиками.
При расчете динамических характеристик АСУД наряду с аналитиче-
скими методами широко используется моделирование на вычислитель-
ных машинах, применение которых наиболее эффективно при исследо-
вании нелинейных явлений в системе, связанных с ограничением величи-
ны управляющих воздействий, конечной мощностью приводов испол-
нительных механизмов, наличием люфтов в передачах, изменением
параметров управляемого объекта и т. п.
Анализ стационарных режимов работы АСУД МПО требует вычисле-
ния статистических характеристик. Установившееся движение МПО в за-
данном балансировочном режиме сопровождается случайными отклоне-
ниями кинематических параметров под влиянием внешних ветро-волно-
вых возмущений. Система управления обеспечивает стабилизацию объек-
та и ограничение отклонений переменных состояния.
Для режима стабилизации процессы в АСУД описываются линейной
моделью, которая включает в себя уравнения неизменяемой части системы
х = Ах + Ви + С/;
(5.75)
у - Dx
и регулятора
и-Gy, (5.76)
а в некоторых случаях дополняется уравнением идентификатора со-
стояния.
192
Переменные состояния x(t), управления и (?) и возмущения/ (?)
в (5.75 и (5.76) представляют собой векторы, компоненты которых
в установившемся режиме движения МПО являются случайными
стационарными функциями времени. Возмущающие силы и моменты
содержат постоянные составляющие, которые появляются в результате
течения, ветра и волнения, а также переменные, связанные с волновым
процессом. Поэтому вектор возмущения можно представить в виде нало-
жения двух составляющих:
f (Г) =mf + f (t)s
первая из которых является вектором математических ожиданий, а вто-
рая — вектором центрированных переменных случайных функций. Ана-
логичный вид имеет и вектор переменных состояния
•*(0 = тх + X (/)
Вектор математических ожиданий переменных состояния
тх = [тх1 ... тх„]Т
определяет постоянные ошибки стабилизации МПО в заданном баланси-
ровочном режиме. Средние значения переменных ошибок оцениваются
дисперсиями центрированных функций вектора состояния или их сред-
неквадратичными значениями. Расчет дисперсий требует знания элемен-
тов матрицы корреляционных функций Кх(т) или матрицы спектраль-
ных пло тно стей (со ),
Матрица корреляционных функций л-мерного вектора представляет
собой квадратную матрицу вида
Кп (О ... К,„(т)
(и) ... Кпп (т)
Ее диагональные элементы Кц (т) называются автокорреляционными
функциями. Их начальные значения совпадают с величинами дисперсий
соответствующих переменных Dj =Кц (0). Внедиагональные элементы
являются взаимными корреляционными функциями и удовлетворяют
условиюKik (г) ~Kkj (-г).
Элементы матрицы спектральных плотностей
5ц (со) ... Sin (со)
5(со) =
(°-5) $ИП (^)
193
13—510
связаны с соответствующими корреляционными функциями преобра-
зованием Фурье. Дисперсия z-й переменной определяется интегрировани-
ем в бесконечных пределах соответствующего диагонального элемента
собственной спектральной плотности.
Di = f Su(u>)du.
Ли J
(5-77)
Расчет математических ожиданий и дисперсий переменных состояния
АСУД МПО выполняется в соответствии с правилами преобразования
случайного стационарного сигнала в линейной системе с постоянными
сосредоточенными параметрами [2,5].
При этом используется математическое описание линейной системы
в виде (5.75) и (5.76) или преобразованное к одному матричному урав-
нению
x = (A+BGD) x+Cf.
(5.78)
Входным сигналом для линейной системы служит вектор возмуще-
ния f (f), а выходным — вектор состояния х(г). Их изображения, полу-
ченные путем преобразования Лапласа, связаны между собой матрицей
передаточных функций
X(S)= Я(5)Р(5),
(5-79)
которая определяется непосредственно из (5.78) по правилам опера-
ционного исчисления
Н0) =[И - (4 4-BGZ))]
(5.80)
Принцип наложения, применимый для линейных систем позволяет
разделить вычисление математических ожиданий и дисперсий.
Так как в установившемся режиме m,f = const и тпх = const, то из
(5.78) следует
mx=— (А + BGD)~YCmf,
что можно представить также в виде
тх = Н (0) mf.
При расчете дисперсий используют различные подходы. Первый
из них основан на формуле (5.77) и требует определения собственных
спектральных плотностей выходных сигналов системы. При скалярном
входном сигнале f (f) =/i (t) co спектральной плотностью 5(co) они
определяются выражением
194
Sxii^ = Hit (/ co) Hit (-/ w) Sfi (w) = I Hir (j a>)| *Sfi (a>),
(5.81)
где Hj! (/co) — соответствующая амплитудно-фазовая характеристика
системы.
Если спектральная плотность входного сигнала S (со) представля-
ет собой дробно-рациональную функцию частоты, то спектральная плот-
ность выходного сигнала образуется отношением четных полиномов,
а (5.77) представляет собой стандартный интеграл вида
1 Г Bn(j со)
t/co, (5.82)
2я Ап{] со) Ап{~] со) 7
где
^«(/со) = Ьх (j С0)2(/7~ ° 4- Ь2 (/ Со)2(П~ 2) 4- ... 4- ьп>
Ап{] со) = я0 (/со)" + at (/со) !) 4- ,., + ап>
причем, все корни полинома A^(s) после замены $ = / со должны распо-
лагаться в левой полуплоскости комплексной частоты.
Значение стандартного интеграла (5.82) вычисляется по формуле
(см., например Д 2])
(- 1)л+ 1 Nn
Df = -------------
2# о
(5.83)
где Мп -- определитель Гурвица для полинома Ап (s). Например, при п- 6
он равен
7И6 =
(71 0 0 0 0
6Z3 ^2 (Z1 ^0 0 0
#5 #3 ^2 ах aQ
0 Яб ^5 а* «3 ^2
0 0 0 Й5
0 0 0 0 0 а6
195
Определитель Nn в (5 «83) образуется из определителя Мп заменой
первого столбца коэффициентами Вп (s). При п = 6 имеем
N6 = bi а0 0 0 0 0 Ь2 аг flj д0 0 0 Ь3 а3 а2 ад Ьа 0-6 а5 а4 а2 Ь5 0 0 а6 as д4 b(, 0 Q 0 0 До
Пример 5,9» Случайный стационарный центрированный сигнал f (f) со спект-
ральной плотностью Sf(co) = 2XZy/(co2 + X2) поступает на вход линейного устой-
чивого звена первого порядка с передаточной функцией Н (у) =k/(s + а). Опреде-
лить дисперсию Dx выходного сигнала дс(Z) в установившемся режиме.
Спектральная плотность сигнала на выходе системы согласно , (5.81) имеет
дробно-рациональную форму
2KDfk2
( со2 + X2 ) (а + j со) (а - j со)
поэтому его дисперсию можно представить в виде стандартного интеграла (5.82),
полиномы которого
В (jeo) =2XDfk2 =b2>
А (/ со) = (а + /'со) (X + j со) = — со2 Т/ со (а + X) 4- аX = а0 (/со) 2 4- аг /со.-!- а2.
Определители 2-го порядка формуле (2.83)
М2 -
= ага2 = аХ ( а + X);
= ~aQb2 = - .
Согласно (2.83) дисперсия выходного сигнала
(-1)3 (~2\Dfk2)
2аХ (а 4- X)
1 + \/а
196
Другой способ расчета дисперсий предполагает определение началь-
ной корреляционной матрицы переменных состояния A^(0), которую
называют также матрицей дисперсий. Известно (см., например [2]), что
если линейная система, определенная матричным уравнением
х = Ах + С со (г), (5.84)
возбуждается вектором единичного белого шума oj(f), то матрица
А^(0) является решением алгебраического уравнения Ляпунова
Хх(0)Лт+ ЛХх(О) 4- ССТ = 0. (5.85)
Чтобы использовать (5-85) при возмущении тиНа цветной шум, не-
обходимо расширить модель реальной линейной системы за счет диффе-
ренциального уравнения формирующего фильтра с матрицами парамет-
ров Лф, Сф. Тогда вектор х в (5.84) должен включать в себя перемен-
ные состояния не только АСУД но и фильтра, а матрицы параметров
в (5.85) определяются выражениями:
Первые п диагональных элементов Хх(0) в решении уравнения
(5.85) определят искомые дисперсии переменных состояния АСУД МПО.
Пример 5.10. По исходным данным примера 5.9 расчцтаем дисперсию выход-
ного сигнала с помощью уравнения Ляпунова.
Для этого по известной передаточной функции запишем дифференциальное
уравнение звена первого порядка
х = — ах -г kf,
а по спектральной плотности входного сигнала — уравнение формирующего фильтра
f = - Kf + sj7.KDf w, (f).
Следовательно, для данного примера уравнение (5.84) имеет вид
где W, (Г) — скалярный единичный белый шум, а
уравнение (5.85) после подста-
новки соответствующих матриц
Кхх (0) &xf (0) — a
Kfx (0) Kff (0)_ к
’Kxf _Kff (0)" (0) ’o \/
*хД0)
KfxW
197
и их перемножения
~Kxx(ff)a + Kxf (0)7с
~Kfx(di}a+Kff(G)k
-KxxWa+Kfx(O)k
-Kfx(0)X
' о о
О 2XDf
-Kxf (О) X
-K/z(O)x]
-Kxf (0) a + Kff(0) к
~Kff(0) X
позволяют сформировать систему скалярных алгебраических уравнений
[ Kxf (0) + Kfx (0) ] к - IK** (0) X = 0;
-Kxf(0) (а + Х) + Kff(0)k = 0;
—Kfx(0) (а + Х) + Куу(О) к =0;
2Л’//(0)Х= 2KDf,
решение которой
Dtk
= Df, Kxf(0) = Kfx(0) = —
повторяет результат, полученный в примере 5.9.
Расчет дисперсии через матрицу начальных значений корреляцион-
ных функций является более общим. Он позволяет выполнять вычисле-
ния при векторном внешнем воздействии легко использовать вычисли-
тельные машины при анализе сложных систем,
сложных систем.
Контрольные вопросы
1. В чем заключается задача синтеза автоматических систем?
2. Что включает в себя неизменяемая часть системы? Напишите общую форму
математической модели неизменяемой части линейной системы.
3. Из чего состоит проектируемая часть системы? Что такое закон управления?
4. Напишите выражения для средневзвешенного дисперсионного критерия.
Как формируются матрицы весовых множителей?
5. Почему СУ МПО является многорежимной системой?
6. В чем заключается смысл эквивалентной детерминированной задачи? Запи-
шите общую форму интегрального квадратичного критерия.
7. В чем заключается специфика эквивалентной детерминированной задачи при
широкополосном и узкополосном внешних возмущениях?
198
8. Какое внешнее возмущение МПО можно считать широкополосным и какое
узкополосным? Как это связано с движением МПО под разными курсовыми
углами к волнению?
9. Сформулируйте основные положения принципа максимума,
10. При каких исходных данных оптимальная система оказывается линейной?
11. Напишите основное и сопряженное дифференциальные уравнения в матрич-
ной форме, которые описывают оптимальную линейную систему.
12. Какой закон управления имеет оптимальная линейная система?
13. Докажите подобие основного и сопряженного векторов оптимальной ли-
нейной системы. Напишите матрицу подобия и расскажите о ее свойствах.
14. По известной матрице П запишите матрицы А и
а) "о 1 0 0
П = 0 2 0 0,125
10 0 0 0
.0 20 -1 — 2
б) п= "о 2 2 _ 0
1 0 0
3 0 1
0 0-2
0 -1 —3_
15. По известным матрицам А, В, Хх, составьте матрицу П:
16. По собственным числам матрицы П оцените переходные процессы в опти-
мальной линейной системе:
a) = 0,1; рг = 0,3; р3 = 0,4;
б) р, =-0,15; = - 0,2 + / 0,3; р3 = 0,4 - / 0,5.
17, По заданным собственным числам матрицы Л определите корни характери-
стического уравнения оптимальной линейной системы с регулятором состояния:
a) pt =- 1; р2 =- 2 + / 3;
б) р, =- 3 + /4; рг = 2 - j 3.
18. Дайте определение и нарисуйте структуру регулятора состояния.
19. Как достигается астатизм оптимальной линейной системы? Какими свой-
ствами обладает такая система?
20. Чем отличается аналитическое конструирование регуляторов от синтеза
системы? Как выполняется аналитическое конструирование?
21, Приведите выражения для семейства устойчивых экстремалей оптимальной
линейной системы.
22. Сделайте выводы уравнений для определения коэффициентов обратных
связей многоканальной оптимальной линейной системы, используя выражения для
устойчивых экстремалей,
23. Дайте характеристику вычислительной процедуры аналитического кон-
струирования по методу устойчивых экстремалей.
199
и заданным корням характеристического уравнения замкнутой системы.
а) р, =~1, р,=-2; б) ₽! =-2, р2=-3;
в) Pi = -3, р2 = —4; г) Р; = —5, р2 =-6
рассчитайте регулятор состояния.
25. Являются статическими или астатическими системы, у которых следую-
щие передаточные функции по возмущению:
а) (2 5 + 1)5 /(54 + 4'53 + 352 + 2s + 1),
б) (2s2 + s + j)/(s4 + 4s3 + 3s2 + 2s + 1).
26. Напишите уравнение Риккати для линейных стационарных и нестационар-
ных систем. Сколько неизвестных оно содержит?
27. Как с помощью уравнения Риккати выполняется аналитическое конструи-
рование?
28. Дайте характеристику методов решения уравнения Риккати.
29. В чем заключаются особенности структуры оптимальной линейной системы,
подверженной узкополосному возмущению?
30. Как используется метод устойчивых экстремалей при аналитическом кон-
струировании оптимальных линейных систем, подверженных узкополосному воз-
мущению?
31. Какие требования предъявляются к дополнительным дифференцирующим
обратным связям оптимальных линейных систем?
32. Дайте сравнительную характеристику оптимальных линейных систем с ре-
гулятором состояния и дополнительными обратными связями.
33. Для чего можно использовать идентификаторы состояния в системах
управления МПО?
34. Дайте определение вектора оценки состояния системы и ошибки восста-
новления,
35. По известной матрице D и вектору состояния х = [ со у, 0, 6 ]т запишите
вектора измеряемых^ и неизмеряемых z переменных состояния системы:
а) 0 1 0 0 б) 1 0 0 0
D = 0 0 0 1 ; D = 0 0 0 1
в) ~1 0 0 о' г) 1 0 0 0
0 1 0 0 0 1 0 0
D = 0 0 1 0 0 0 0 1
0 0 0 1
200
36. Нарисуйте структурную схему и напишите общее уравнение идентификатора
полного порядка. В чем заключается синтез идентификатора?
37. Какова структура наблюдателя для восстановления дрейфа судна?
38. Напишите передаточную функцию наблюдателя полного порядка для вос-
становления дрейфа судна и по ней рассчитайте его частотные характеристики.
Какими свойствами обладает это устройство? Является ли оно дифференцирую-
щим или интегрирующим элементом?
39. Разработайте структурную схему наблюдателя полного порядка для восста-
новления угла атаки СПК. Проведите для него все расчеты, перечисленные в п. 38.
40. Расскажите об ошибках восстановления переменных состояния системы в
идентификаторе полного порядка. Как на них влияют его параметры?
41. Каким образом включаются идентификаторы состояния в оптимальную
линейную систему?
42, Какие свойства приобретает линейная система с регулятором состояния
и идентификатором? Сохраняются ли они, когда параметры математической моде-
ли не совпадают с характеристиками неизменяемой части системы?
43. В чем заключаются особенности структуры редуцированных наблюдателей?
44. Какие свойства имеет оптимальная линейная система с редуцированным на-
блюдателем?
45. Рассмотрите редуцированные наблюдатели для восстановления дрейфа
судна и угла атаки СПК.
46. Докажите, что система максимального быстродействия должна иметь ре-
лейное управление даже при линейной неизменяемой части.
47, Какие условия используются для определения моментов переключения оп-
тимальной релейной системы максимального быстродействия?
48. В каких случаях возникает необходимость в параметрической оптимизации
регуляторов? Можно ли считать аналитическое конструирование параметрической
оптимизацией?
49. Расскажите о критериях и методах поисковой параметрической оптими-
зации.
50. Какие подходы используются для расчета математических ожиданий и дис-
персий СУ МПО?
Г лава 6
ЭЛЕМЕНТЫ АВТОМАТИЗАЦИИ
ПРОЕКТИРОВАНИЯ СУ МПО
6.1. Общие сведения о проектировании СУ МПО
Проект—это описание системы, прибора или аппарата,
которые предстоит создать. Он зарождается в виде технического зада-
ния — самого общего исходного первичного описания предмета проекти-
рования. Результатом, как правило, служит полный комплекс докумен-
тации, содержащий достаточные сведения для изготовления объекта в за-
данных условиях. Эта документация представляет собой окончательное
описание объекта. Преобразование исходного описания в окончательное
порождает промежуточные описания, которые рассматриваются при оп-
ределении направления развития положительных свойств проектируемой
системы. Такие описания образуют проектные решения.
Проектирование — важнейшая и наиболее сложная часть разработки
новой системы. Чтобы получить качественную новизну функциональных
свойств и характеристик требуется выполнить большой объем исследова-
тельских, расчетных и конструкторских работ. Только на этой основе
можно преобразовать исходные описания в рабочую документацию.
Проектирование всегда ограничено жесткими временными рамками.
Затягивание этого процесса приводит к моральному старению системы
еще на стадии разработки, до ее появления в виде законченного изделия.
Но ускорение не может быть достигнуто в ущерб глубине и детализации,
потому что это отрицательно скажется при изготовлении системы, а за-
тем и при ее эксплуатации.
В настоящее время единственная возможность выполнить необхо-
димый комплекс научно-исследовательских, опытно-конструкторских
работ и экспериментальных исследований заключается в автоматизации
проектирования на основе использования ЭВМ, которое имеет свои осо-
бенности.
.Этапы проектирования определяют содержание и последовательность
вопросов в процессе проработки описания системы.
Первый этап — формирование технического задания, которое опреде-
ляет назначение системы, технические требования (функция управления,
точность, быстродействие), условия эксплуатации и требования по на-
дежности и сроку службы, технико-экономические показатели (стои-
мость, масса, габариты).
202
Следующим этапом является исследовательское проектирование,
на котором определяют функциональные особенности и структуру сис-
темы управления. Путем моделирования системы выбирают состав и оце-
нивают эффективность технических средств управления, определяют
необходимое информационное обеспечение, формируют и исследуют
законы управления. На этом этапе осуществляют инженерный анализ и
оптимизацию, выбирают элементную базу системы. По результатам
исследовательского проектирования дают предварительную оценку
реализуемости требований технического задания в сопоставлении с
характеристиками управляемого объекта и составом технических
средств управления МПО.
На основе результатов, полученных в ходе исследовательского про-
ектирования, начинают этап конструирования. Он заключается в разра-
ботке технической документации на изготовление системы, определении
контрагентских поставок и комплектующих изделий, согласовании их
характеристик с требованиями проектируемой системы.
Далее следует этап технологического проектирования, в ходе кото-
рого устанавливают технологические особенности изготовления, контро-
ля и испытаний системы, разрабатывают технологическую документа-
цию, определяют требования к номенклатуре используемых материа-
лов. Результаты этого этапа отражаются в технологических картах.
Степень готовности проекта определяют стадии проектирования.
В ходе стадии предпроектных решений выполняют комплекс работ
по формированию технического задания и предложений по структуре
системы. Эту стадию определяют как научно-исследовательскую работу
(НИР). Ее содержание соответствует этапам разработки технического
задания и исследовательского проектирования.
На стадии эскизного проекта (опытно-конструкторская работа —
ОКР) проверяют корректность и реализуемость основных принципов
и положений, определяющих функционирование будущей системы. Со-
держание этой стадии соответствует этапу исследовательского проекти-
рования с элементами конструирования.
На стадии технического проекта выполняют всестороннюю прора-
ботку всех частей проекта, конкретизируют и детализируют технические
решения. В основе этой стадии лежит конструкторское проектирование,
дополняемое элементами исследований и технологическими вопросами.
На стадии рабочего проекта формируют необходимую документацию
(конструкторскую и технологическую) для изготовления изделия. Да-
лее создают и испытывают опытный образец или пробную партию систе-
мы. По результатам испытаний вносят необходимые коррективы в про-
ектную документацию, после чего осуществляют внедрение в производ-
ство на выбранном предприятии.
На практике проектирование систем редко носит однонаправленный
характер. Как правило, оно развивается итерационным путем, когда
на какой-либо стадии проекта приходится обращаться к предыдущим
стадиям для уточнения предварительных решений. В наибольшей степени
203
этот процесс характерен для начальных стадий проектирования при
выполнении преднроектных исследований и эскизного проекта., Стре-
мятся, чтобы при техническом и рабочем проектировании все вопросы
общего характера функционирования системы были проработаны. Одна-
ко окончательные коррективы в проект вносят даже после испытания
опытного образца или по результатам опытной эксплуатации системы.
Каждый этап и каждая стадия проектирования имеют свой состав
проектных процедур, которые определяют характер использования ЭВМ
и других технических средств проектирования.
Исследовательское проектирование выполняют в тот период, когда
проектировщик располагает минимумом информации. На этой стадии
проектных работ на первый план выступают математические методы ис-
следования системы. В число проектных процедур исследовательского
проектирования входят: формирование математических моделей эле-
ментов и системы в целом, анализ и синтез. При выполнении этих проце-
дур вычислительные машины используют по своему прямому назначе-
нию как средство ускорения инженерных расчетов и оптимизации. Так
как проектируемая новая система редко не имеет прототипа, то весьма
полезно наличие банка данных о существующих системах подобного типа»
На последующих стадиях проекта объем расчетно-исследова-
тельских работ сокращается, но увеличивается число рабочих докумен-
тов (схем, чертежей, спецификаций), которые требуют специальных
программных и технических средств автоматизированного проектиро-
вания.
Степень автоматизации проектирования может быть различной. В на-
стоящее время при проектировании СУ МПО не достигается полная авто-
матизация этапов или стадий, но ряд проектных процедур и их элементов
могут быть выполнены с помощью технических средств и программного
обеспечения существующих ЭВМ.
В процессе создания современных СУ МПО проектирование имеет
две стороны. Во-первых, оно направлено на создание комплекса техни-
ческой аппаратуры; во-вторых,— на разработку программного обеспече-
ния создаваемой системы. Проектирование аппаратуры протекает, как
правило, традиционно. Создание программного обеспечения является
более сложным и трудоемким процессом.
Обычно программное обеспечение СУ МПО содержит три группы
программ. Первую из них образуют программы обработки первичной ин-
формации о состоянии управляемого объекта, исполнительных органов,
об уровне и характере внешних возмущений. Вторую группу составляют
основные программы, реализующие управляющие алгоритмы системы.
В третью группу входят сервисные программы, необходимые оператору
для получения информации о характере процессов в системе, а также те,
которые позволяют ему реализовать свою роль в управлении системой.
Все три группы программ объединяют в систему реального времени,ко-
торая функционирует согласно установленным приоритетам.
204
В ходе проектирования программное обеспечение проходит несколь-
ко уровней проработки. На стадии эскизного проекта характер обработ-
ки первичной информации, управления и отображения ситуаций опреде-
ляют формульными описаниями законов управления. При техническом
проектировании их детализируют до уровня алгоритмов обработки циф-
ровой информации. Наибольший объем работы по программному обеспе-
чению приходится на рабочий проект, в котором оно должно быть пред-
ставлено в виде программ, объединенных в систему, и записанных на при-
нятых носителях информации (магнитных дисках, перфоленте, и т. п.).
6.2. Основные понятия о системах
автоматизированного проектирования
Система автоматизированного проектирования (САПР)
[ 10] — это организационно-техническая система, состоящая из комплек-
са средств автоматизации проектирования, взаимодействующего с под-
разделениями проектной организации, и выполняющая автоматизи-
рованное проектирование.
Средства автоматизации проектирования можно сгруппировать по
видам обеспечения этого процесса.
Техническое обеспечение САПР представляет собой совокупность
взаимосвязанных и взаимодействующих технических средств, предназ-
наченных для выполнения автоматизированного проектирования. Тех-
ническое обеспечение делят на группы средств программной обработки
данных, подготовки и ввода данных, отображения и документирования,
архива проектных решений, передачи данных.
Средства программной обработки данных представлены процессора-
ми и запоминающими устройствам^, т. е. устройствами ЭВМ, в которых
реализуются преобразования данных и программное управление вычи-
слениями. Средства подготовки, йвода, отображения и документирова-
ния данных служат для общения человека с ЭВМ. Средства архива про-
ектных решений представлены внешними запоминающими устройства-
ми; средства передачи данных используют для организации связей меж-
ду территориально разнесенными ЭВМ и терминалами (оконечными
пунктами).
Математическое обеспечение САПР Объединяет в себя математиче-
ские модели проектируемых объектов, методы и алгоритмы выполнения
проектных процедур, используемые при автоматизированном проектиро-
вании. Элементы математического обеспечения в САПР чрезвычайно
разнообразны. Среди них имеются инвариантные элементы, широко
применяемые в различных САПР. К ним относятся принципы построения
функциональных моделей, методы численного решения алгебраических и
дифференциальных уравнений, постановки экстремальных задач, поиска
экстремума. Специфика предметных областей проявляется прежде всего
в моделях проектируемых объектов, она заметна также в способах
205
решения задач структурного синтеза. Формы представления математиче-
ского обеспечения также довольно разнообразны, но его практическое ис-
пользование происходит после реализации в программном обеспечении.
Программное обеспечение САПР объединяет собственно программы
для систем обработки данных на машинных носителях и программную
документацию, необходимую для эксплуатации программы. Програм-
мное обеспечение (ПО) делят на общесистемное, базовое и прикладное
(специальное). Общесистемное ПО предназначено для организации
функционирования технических средств, т. е. для планирования вычисли-
тельного процесса и управления им, распределения имеющихся ресурсов,
и представлено операционными системами ЭВМ. Общесистемное ПО
обычно создается для многих приложений и специфику САПР не отражает.
Базовое и прикладное ПО создают для нужд САПР. В базовое ПО входят
программы, обеспечивающие правильное функционирование прикладных
программ. В прикладном ПО реализуется математическое обеспечение
для непосредственного выполнения проектных процедур. Прикладное
ПО обычно имеет форму пакетов прикладных программ (ППП), каждый
из которых обслуживает определенный этап процесса проектирования
или группу однотипных задач внутри различных этапов.
Информационное обеспечение САПР объединяют всевозможные дан-
ные, необходимые для выполнения автоматизированного проектирова-
ния. Эти данные могут быть представлены в виде тех или иных докумен-
тов на различных носителях, содержащих сведения справочного характе-
ра о материалах, комплектующих изделиях, типовых проектных решени-
ях, параметрах элементов, сведения о состоянии текущих разработок
в виде промежуточных и окончательных проектных решений, структур
и параметров проектируемых объектов и т. п. Основная составная часть
информационного обеспечения САПР—банк данных, представляющий
собой совокупность средств для централизованного накопления и коллек-
тивного использования данных в САПР. Банк данных (БНД) состоит из
базы данных и системы управления базой данных.
База данных (БД) — сами данные, находящиеся в запоминающих
устройствах ЭВМ и структурированнные в соответствии с принятыми
в конкретном БДН правилами. Система управления базой данных
(СУБД) - совокупность программных средств, обеспечивающих функ-
ционирование БНД. С помощью СУБД производят запись данных в БНД,
их выборки по запросам пользователей и прикладных программ, обеспе-
чивают защиту данных от искажений и несанкционированного доступа
и т. IL
Лингвистическое обеспечение САПР представлено совокупностью
языков, применяемых для описания процедур автоматизированного
проектирования и проектных решений. Основная часть лингвистического
обеспечения — языки общения человека с ЭВМ.
Методическое обеспечение САПР составляют документы, характери-
зующие состав, правила отбора и эксплуатации средств автоматизирован-
ного проектирования. Допускается более широкое толкование понятия
206
методического обеспечения, подразумевающего совокупность мате-
магического, лингвистического обеспечения и названных документов,
реализующих правила использования средств проектирования.
Организационное обеспечение САПР включает положения, инструк-
ции, приказы, штатные расписания, квалификационные требования
и другие документы, регламентирующие организационную структуру
подразделений проектной организации и взаимодействие подразделений
с комплексом средств автоматизированного проектирования.
6.3. Содержание пакета прикладных программ
для исследовательского проектирования СУ МПО
При разработке систем управления движением МПО по-
вышение предварительной обоснованности проектных решений на на-
чальных стадиях проектирования имеет особое значение. Эти системы,
как правило, бывают малосерийными или уникальными. Их проектиро-
вание даже при наличии прототипа требует значительных исследований,
связанных с особенностями управляемого объекта и составом техниче-
ских средств управления движением (СУД). В прямой зависимости от
качества функционирования СУД находится мореходность некоторых ти-
пов МПО, а надежность СУД в ряде случаев непосредственно сказывается
на живучести корабля в условиях экстремальных воздействий.
, Процессы, протекающие в СУ МПО, отличаются значительной слож-
ностью. Это объясняется видом функциональных связей между парамет-
рами движения, многоканальным управлением и характером движения
вблизи границы раздела воздушной и водной среды. Оценить качество
управления в таких системах без всесторонних исследований во многих
случаях затруднительно.
Особое значение исследовательского проектирования определяется
еще и тем, что в процессе моделирования, анализа и синтеза формирует-
ся, углубляется и детализируется научно-техническое знание о системе,
составляющее интеллектуальный фонд разработчика.
Опыт создания СУ МПО показывает, что углубленная проработка на-
чальных этапов проектирования значительно облегчает последующий
процесс проектирования, изготовления и сдачи системы, Пренебрежение
исследовательским проектированием неизменно приводит к трудно раз-
решимым ситуациям на стадиях технического и рабочего проектов при
испытании опытного образца.
Наличие ЭВМ и автоматизация проектирования открывают широкие
возможности для использования современных достижений теории управ-
ления и вычислительной математики при анализе и синтезе СУ МПО. Для
эффективного их использования требуется определенная организация
пакета прикладных программ, содержание которого связано с этапами
исследовательского проектирования.
207
Рис. 6.1. Этапы исследовательского проектирования.
На рис. 6.1 показано содержание этапов исследовательского проекти-
рования и их взаимосвязь применительно к исследовательскому проек-
тированию динамических систем, подверженных случайным внешним
возмущениям.
Исходными предпосылками к исследовательскому проектированию
служат характеристики управляемого объекта и технические требования
к системе. Первая группа исходных данных является базой для построе-
ния полной нелинейной математической модели, вторая служит для фор-
мулировки общих критериев оценки работы системы. Объем исследова-
ний, связанных с формированием нелинейной математической модели
в форме переменных состояния
х = (х, и, /, t),
направлен на поиск наиболее простой адекватной модели, а также оцен-
ку управляемости объекта по условию обеспечения стационарных рабо-
чих режимов и его устойчивости в пространстве состояний.
Дальнейшее развитие модели объекта связано с ее линеаризацией
при условии, что для объекта характерны стационарные режимы малых
отклонений относительно балансировочных режимов — опорных точек
пространства состояний. Линеаризация включает в себя расчет опорных
точек решением нелинейных уравнений
<р(х0, «о, fo)= 0
и может осуществляться путем разложения в ряде Тейлора, методом
наименьших квадратов или идентификацией по данным натурных
208
(модельных) испытаний. Конечным результатом линеаризации служит
совокупность матричных уравнений вида
х-= Ах + Ви + Cf> (6,1)
y=Dx} (6.2)
которые должны быть дополнены уравнениями формирующих фильтров
для случайных стационарных внешних возмущений
/ = Лф/ + Сф^(Г). (6.3)
В уравнениях (6.1) — (6.3) А, Лф, Bs С, D — матрицы посто-
янных коэффициентов; х9 у, и, f —векторы состояния объекта, вы-
ходных координат, управлений и возмущений управляемого объекта;
w (t) — вектор белого шума.
Частным критерием оценки качества функционирования линеаризо-
ванной системы, подверженной случайным внешним возмущениям, мо-
жет служить дисперсионный критерий с ограничениями на величину мате-
матического ожидания выходных координат объекта
J = 7И[^тХ;;х + и*\ци] = tr [ XyDy + XUDU]; (6.4)
M[y]EY. (6.5)
Минимизация критерия (6.4) при модели объекта (6.1) — (6.3)
составляет известную задачу теории линейных оптимальных систем [6].
Практический интерес с точки зрения исследовательского проектирова-
ния представляют следующие частные случаи:
а) минимизация J при полном и точном измерении пространства
состояния (D=t) для объекта, находящегося под воздействием белого
шума. Эта задача эквивалентна оптимизации свободного движения
системы
х = Ах + Ви
при среднеквадратичном критерии. Результатом синтеза является опти-
мальный регулятор состояния
и = Gxy
параметры которого могут быть рассчитаны по методу устойчивых экст-
ремалей либо решением уравнения Риккати в алгебраической или диф-
ференциальной форме;
б) минимизация J при неполном и неточном измерении пространст-
ва состояния управляемого объекта. Задача синтеза оптимального ре-
гулятора дополняется синтезом оптимального наблюдателя;
209
14—510
в) расчет оптимальных параметров регулятора и-Gy произвольной
заданной структуры (случай возможный при проектрировании систем
управления по известным прототипам), который осуществляется различ-
ными методами поисковой оптимизации, в частности, различными моди-
фикациями метода наискорейшего спуска.
Предварительный анализ синтезированной системы имеет целью со-
поставить математические ожидания и дисперсии компонент вектора
состояния с уровнем, определяемым техническим заданием. По резуль-
татам этого сопоставления может быть организован первый инерцион-
ный цикл синтез—анализ—синтез с вариацией параметров линейной мо-
дели и весовых множителей частного критерия. Математические ожида-
ния рассчитывают по постоянным внешним возмущениям с использова-
нием модели объекта и уравнений регулятора для установившегося ре-
жима, а дисперсии — путем анализа расширенной модели системы, воз-
буждаемой единичным белым шумом, который сводится к решению
матричного уравнения Ляпунова
ADx + ПХЛТ + ССТ = 0, (6.6)
где г
А + BGD
А =
О
О
— расширенные матрицы параметров объекта, формирующего фильтра
и регулятора; Dx - матрица дисперсий.
Заключительным этапом исследовательского проектирования явля-
ется полный анализ системы на основе нелинейной модели. Сопоставле-
ние результатов этого анализа с общими критериями оценки системы
может привести к необходимости изменения характеристик управляе-
мого объекта или внести коррективы в технические требования к систе-
ме. По своей математической постановке это наиболее сложный этап,
методология которого базируется на подходах имитационного модели-
рования. В круг исследования этого этапа входит анализ нормальных
эксплуатационных и аварийных режимов, в частности, анализ областей
устойчивости.
Разработка пакета прикладных программ включает в себя три уров-
ня решения:
1. Теоретический уровень, связанный математической формулиров-
кой прикладных задач анализа и синтеза судовых автоматических систем
и обоснованием методов их решения.
2. Алгоритмический уровень, характеризующий поиск эффективных
вычислительных процедур.
3. Уровень программного обеспечения, включающий в себя выбор
стайдартных подпрограмм базовых вычислительных алгоритмов и раз-
работку сервисных программ.
210
6.4. Базовые алгоритмы исследовательского
проектирования СУ МПО
В соответствии с содержанием пакета прикладных про-
грамм к числу базовых алгоритмов исследовательского проектирования
систем управления движением относят алгоритмы формирования линей-
ной модели движения МПО и ее предварительного анализа, алгоритмы
синтеза линейных регуляторов и анализа синтезированных структур. За
пределами этого набора алгоритмов оказывается только исследование
нелинейных задач управления движением МПО, каждая из которых (на-
пример, определение областей устойчивости при проектировании автома-
тических систем предотвращения аварий) достаточно специфична и тре-
бует своего состава алгоритмов решения.
Традиционные алгоритмы формирования линейных моделей бази-
руются на расчете совокупности балансировочных режимов с последую-
щим разложением в ряд Тейлора. При этом переход от нелинейной моде-
ли движения
X=(f(x, и, /, t)
к набору линейных
= Лх(г) + Bu(f) + Cf(t)
требует расчета балансировочных режимов по условию
4>(хо, w0, /о) = О
и вычисления якобианов
дФ дФ дФ
Ja — А — ~~ ; Jjy = В = ..‘ ; Jc = С = —— .
дх ди df
в этих точках. В вычислительном отношении обе задачи достаточно слож-
ные, с большими затратами машинного времени и требуют значительного
объема оперативной памяти. Первая требует решения нелинейного функ-
ционального уравнения, вторая ~ определения большого числа частных
производных.
Алгоритмы синтеза линейных регуляторов могут базироваться на од-
ном из двух методов: решении уравнений Риккати или аналитическом
конструировании по методу устойчивых экстремалей. Расчетная схема
аналитического конструирования применительно к задачам управления
движением подробно изложена в гл . 5. Существенный недостаток второго
подхода — необходимость вычисления собственных векторов матриц
удвоенной размерности 2п х 2ги
211
Нелинейное уравнение Риккати в вычислительном отношении также
достаточно сложное, так как содержит 0,5 и(и + 1) неизвестных. Однако
его решение может быть получено проще, благодаря хорошей сходимо-
сти расчетных алгоритмов,
Для решения нелинейного матричного алгебраического уравнения
Риккати
КА + X* + А*К - КВХй1 ВТК = О
при синтезе линейных регуляторов стационарных систем размерности
до 10—15 можно применять алгоритм Ньютона—Рафсона, который ос-
нован на многократном итерационном решении линейного матричного
уравнения типа Ляпунова, Однако в ряде случаев серьезную задачу мо=
жет представить выбор начального приближения KQ, при котором ите-
рационный процесс сходится к искомой матрице К. Кроме того, при
увеличении п возможны численные сложности с решением уравнения
Ляпунова и требуется бльшой объем оперативной памяти, так как не-
обходимо решать систему линейных уравнений размерности п2*
В значительной степени указанные недостатки могут быть устране-
ны при применении алгоритма, основанного на том, что решение урав-
нения Риккати для стационарных систем является асимптотическим
решением дифференциального уравнения
К = КА 4- Хх 4- АГК - КВ К1ВТК.
Это позволяет получить результат с помощью любых стандартных
алгоритмов численного интегрирования, не накладывая никаких ограни-
чений на локальные ошибки усечения. Сходимость алгоритма обеспечи-
вается выбором алгебраической величины шага интегрирования, В ре-
зультате с увеличением количества итераций Kj ->К, уменьшается общая
ошибка, связанная с выбором начального приближения KQi дискретиза-
цией и округлением, возникающими при численном решении;
Этот же алгоритм позволяет получить решение для матричного ли-
нейного уравнения Ляпунова (6,6), используемого при расчете диспер-
сий, которое является частным случаем уравнения Риккати с вырожден-
ным квадратичным слагаемым.
На базе этих вычислительных процедур строят алгоритмы синтеза ли-
нейных регуляторов и наблюдателей полного порядка, анализа синтези-
рованных систем стабилизации движения МПО с расчетом математиче-
ских ожиданий кинематических параметров движения и управляющих
воздействий, а также их дисперсий.
Общая структурная схема базовых алгоритмов автоматизирован-
ного исследовательского проектирования СУД приведена на рис. 6.2,
212
213
6.5. Автоматизированная система исследовательского
проектирования линейных систем управления МПО
Для иллюстрации принципов автоматизации проектирова-
ния СУ МПО приводим описание автоматизированной системы исследо-
вательского проектирования (АСИП) для анализа и синтеза линейных
регуляторов состояния (см, этапы 1.3, 2.3,3.1, 3.2 — на рис. 6.1.).
Функциональная структура АСИП. Автоматизированная система
обеспечивает выполнение на ЦВМ следующих функций в любом необхо-
димом проектировщику порядке:
— подготовку рабочей библиотеки проектировщика, предназначен-
ной для хранения исходных данных и промежуточных результатов на
весь период проектирования (режим IN) ;
- - ввод данных в рабочую библиотеку, их коррекцию, а также вывод
содержимого последней на устройство печати (режим PD) ;
— расчет коэффициентов обратных связей регулятора состояния
(режим OS);
— расчет математических ожиданий компонент векторов состояния
и управления при воздействии на объект, охваченный обратными связя-
ми, постоянных возмущений (режим МО );
~ расчет дисперсий компонент векторов состояния и управления при
воздействии на объект, охваченный обратными связями, случайных
центрированных возмущений (режим DR);
— расчет характеристических чисел объекта без регулятора и объек-
та, охваченного обратными связями регулятора состояния (режим HN) ;
— оценку качества системы управления по дисперсиям и математи-
ческим ожиданиям, заключающуюся в формировании итоговых таблиц
по данным, находящимся в рабочей библиотеке проектировщика (ре-
жим CS );
— расчет коэффициентов наблюдателя полного порядка для вос-
становления кинематических параметров движения (режим АС) ;
— расчет дисперсий восстановливаемых переменных на выходе на-
блюдателя (режим/)/);
— оценку качества системы управления по дисперсиям и математи-
ческим ожиданиям (режим CS).
Программное обеспечение системы разработано на языке PL/Iв опе-
рационной системе ОС ЕС ЭВМ, его используют в виде общего програм-
много модуля, с помощью которого выполняют задания проектировщи-
ков, введенные в ЦВМ.
Организация работы и задачи проектировщика. Задание проектиров-
щика для ЦВМ при работе с АСИП состоит из набора перфокарт, в ко-
торый входят два последовательных раздела. Первый раздел содержит
управляющие карты, предназначенные для обеспечения доступа к про-
граммному модулю и рабочей библиотеке проектировщика, а также для
осуществления необходимых стандартных действий по управлению
операционной системой ЦВМ. Перфокарты этого раздела выдают
214
проектировщикам одновременно с заданиями по расчету. Задача проек-
тировщика заключается в подготовке к перфорации второго раздела
задания, составляющего пакет исходных данных. Перфорацию подготов-
ленных проектировщиками пакетов исходных данных и ввод заданий в
ЦВМ осуществляют сотрудники вычислительного центра. На основа-
нии анализа полученных результатов проектировщик принимает ре-
шение о дальнейших действиях, направленных на выполнение зада-
ния по расчету.
Структура пакета исходных данных. Основу пакета исходных дан-
ных составляют перфокарты режимов работы АСИП, определяющие
функции, которые должны быть выполнены при вводе задания в ЦВМ.
Каждую перфокарту режима работы заполняют следующим образом:
RGM = ' ...' ,
где f ... * — строка символов из восьми элементов. После каждой перфо-
карты режима работы должны следовать перфокарты внутреннего под-
пакета данных, обеспечивающих конкретный режим исходными и управ-
ляющими данными. Информация, составляющая пакет исходных дан-
ных, может размещаться в любом месте перфокарт с 1 колонки по 80.
Элементы внутреннего подпакета данных отделяют друг от друга либо
запятой, либо одним или несколькими пробелами, либо запятой
и одним или несколькими пробелами. Порядок следования элементов —
произвольный. Каждую строку символов перфокарты режима работы,
а также окончание внутренних подпакетов данных обязательно следует
завершать символом н ; ” .
Основные правила заполнения строки символов перфокарт режима
работы. Позиции 1 и 2 заполняют именами выполняемых функций. По-
зиция 3 при выполнении курсового расчета всегда содержит ”1”. Пози-
ции 4 и 7 являются разделяющими, заполняют символом ” _ ” („под-
черкивание”) . Позиция 5 определяет необходимость подготовительных
расчетов коэффициентов при расчетах уравнений типа Риккати и Ляпу-
нова, заполняют символами: ”1” — да, ”0” — нет. Позиция 6 определя-
ет потребность в начальном приближении решения уравнений типа Рик-
кати и Ляпунова, ее при выполнении курсового расчета заполняют сим-
волами: ”1” — начальное приближение необходимо и берется нулевым,
”0” — начальное приближение не нужно.
Позиция 8 определяет этап выполнения функции и осуществляет ре-
гулирование объема вывода на печатающее устройство. При выполнении
курсового 'расчета позицию заполняют символами: ”7?” — при ограничен-
ном выводе информации на печатающее устройство и при получении
очередных приближений решения уравнений типа Риккати и Ляпунова,
— при завершающем этапе выполнения функции, когда надо обес-
печить запись полученных результатов в рабочую библиотеку проекти-
ровщика, или при необходимости обеспечить полный объем вывода на
печатающее устройство.
215
Правила построения подпакетов данных для различных режимов ра-
боты АСИП. Режим подготовки рабочей библиотеки проектировщика
(IN) предназначен' для полной очистки библиотеки и записи в рабочую
библиотеку информации о проектировщике, проводимой работе, размер-
ностях вектора состояния ’7Х¥” и вектора управления " DU" управляе-
мого объекта. Соответствующие перфокарты режима и внутреннего па-
кета данных заполняют следующим образом:
RGM = 'IN 1 -00 - F' ;
DX= .... DU =
FP =
INFORM-
где FP — строка символов длиной не более 22 элементов, определяющая
фамилию проектировщика, INFORM — строка символов длиной не более
58 элементов, определяющая существо выполняемой работы.
Режим ввода и коррекции данных в рабочей библиотеке проектиров-
щика и вывода содержимого последней на устройство печати (PD) пред-
назначен при выполнении задач расчета для передачи в рабочую библио-
теку информации:
— о матрицах, определяющих объект A (DX, DX), B(DX, DU)\
— о векторе постоянных возмущающих воздействий PP0(DX);
— о матрице интенсивности белого шума, воздействующего на объ-
ект VX(DX, DX)-
— о матрицах, определяющих интегральный квадратичный критерий
качества(DX, DX), RU(DU, DU), D (DX, DX).
Внутренний подпакет данных содержит только ненулевые элементы
исходных данных; Соответствующие перфокарты режима и внутреннего
подпакета при вводе или корректировке исходных данных заполняют
следующим образом:
RGM = 'PD1—M __ R' ;
А(2,3)=..., В(1,2) =-, £>(1, 1) = 1,...,
КГ(1,4)=-,
При необходимости распечатать полностью содержимое рабочей
библиотеки проектировщика соответствующие перфокарты режима
и подпакета имеют вид
RGM= 'Р£>1 _ 0 0 _ F' ;
216
При этом помимо исходной информации на устройство печати выводят:
— матрицу AOPTfJDX, DX) объекта, охваченного обратными свя-
зями регулятора полной структуры;
— матрицу F0 (DX, DX), определяющую обратные связи;
— вектор МОХ (DX) математических ожиданий компонент вектора
состояния объекта, охваченного обратными связями;
— вектор МОТ/ (DIE) математических ожиданий компонент вектора
управления объекта, охваченного обратными связями;
— матрицу Q22 (JDX, DX) дисперсий компонент вектора состояния
объекта, охваченного обратными связями.
Режим расчета коэффициентов обратных связей регулятора состоя-
ния (C*S) предназначен для расчета матрицы F ty(DX, DX)5 определяю-
щей обратные связи, и матрицы АОРТ (DX, DX) объекта, охваченного
обратными связями, и записи последних в рабочую библиотеку. Обрат-
ные связи определяют с помощью решения алгебраического матрич-
ного уравнения Риккати методом Эйлера I-го порядка. Решение уравне-
ния Риккати можно считать полученным, если все элементы искомой
матрицы 4—5 порядков больше соответствующих элементов матрицы не-
вязки алгебраического уравнения Риккати. Сходимость алгоритма обес-
печивается выбором величины шага интегрирования.
В случае первоначального запуска решения перфокарта режима
имеет вид
RGM= ' <951_ R' ;
На этапах получения очередных приближений решения перфокарту ре-
жима заполняют следующим образом:
RGM= 'OS 0 0 R' ;
На этапе завершения расчета обратных связей перфокарта режима имеет
вид
RGM= ' OS \ _ 00 _ F' .
При выполнении расчетов внутренний подпакет всегда содержит сле-
дующие параметры:
— Н — шаг интегрирования (отрицательная величина при расчете
обратных связей);
— MOD — модификатор решения задачи, Представляющий собой
строку бит длиной единица (при расчетах рекомендуется MOD -
= f В — для решения DX(DX- 1)/2 уравнений с учетом свойств
симметрии решения матричных уравнений Риккати и Ляпунова, в слу-
чае MOD = ' i ' В обеспечивается расчет всех DX • DX уравнений) ; !
— MAXCYCLE задаваемое количество шагов решения;
217
— PREC — точность применяемой при расчетах арифметики, пред-
ставляющая собой строку символов длиной единица (PREC = f Sf —
обычная точность; PREC = 1 D1 — удвоенная точность).
Пример внутреннего подпакета при расчете обратных связей:
Н= — 0. 1,
MOD = ’(/)' В,
MAXCYCLE = 2 00,
PREC = 'S ’.
Режим расчета дисперсий компонент векторов состояния и управле-
ния (DR) предназначен для расчета матрицы дисперсий Q 22 и записи
последней в рабочую библиотеку. Матрицу дисперсий определяют с по-
мощью решения алгебраического матричного уравнения Ляпунова мето-
дом Эйлера I-го порядка. Все рекомендации по составлению карты
режима аналогичны режиму определения обратных связей при условии
замены имени выполняемой функции на DR, Внутренний подпакет
содержит те же параметры, что при расчете обратных связей, однако шаг
интегрирования должен быть положительной величиной.
Режим расчета математических ожиданий (МО) предназначен для
расчета векторов МОХ и записи последних в рабочую библиотеку.
Перфокарта режима работы имеет вид
RGM= 'МО 1_ 00 _ F' ;
Внутренний подпакет для этого режима не нужен.
Режим расчета характеристических чисел (HIF) выполняет расчет и
вывод на устройство печати характеристических чисел различных матриц.
Для расчетов необходимы два варианта перфокарт режимов работы. Ес-
ли в шестой позиции перфокарты режима находится символ:
— О — производят расчет характеристических чисел объекта без ре-
гулятора;
— В — выполняют расчет характеристических чисел объекта, охвачен-
ного обратными связями регулятора состояния.
Внутренний подпакет данных для этого режима при проведении рас-
четов не нужен. Перфокарты режима заполняют следующим образом:
RGM = W1_0 О —F';
RGM= *HN 1— 0 В — F*.
Режим оценки качества системы управления (GS1) обеспечивает
формирование итоговых таблиц по данным, находящимся в рабочей
218
библиотеке, и вывод их на устройство печати. Внутренний подпакет дан-
ных для этого режима не нужен» Перфокарта режима работы имеет вид
RGM= ’CS1_00 _ F' .
Краткая характеристика операционной системы. АСИП рассчитана
на эксплуатацию в среде ОС ЕС ЭВМ. Она включает в себя библиотеку
программ (БП), логически распадающуюся на две части. Первая содер-
жит программы обслуживания, доступные только лицам, ответственным
за эксплуатацию и сопровождение системы. Вторая образуется рабочими
программами, доступными пользователям системы, которые обеспечи-
вают все ее функциональные возможности. Кроме того, система содержит
совокупность рабочих библиотек проектировщиков (библиотек дан-
ных — БД), предназначенных для хранения данных, необходимых в про-
цессе проектирования.
Библиотека программ является разделяемой, т. е. допускает одно-
временное использование несколькими заданиями, запущенными на вы-
полнение в ОС ЕС. Библиотеки данных - индивидуальные. Каждому
пользователю системы выделяют свою библиотеку, доступную только
ему.
Под библиотеки на внешних носителях требуются следующие объ-
емы памяти. Для БП на дисках типа 5050 (объемом 7,25 Мбайта) необ-
ходимо примерно 10 цилиндров, а на дисках типа 5061 (объем
29 Мбайт) — 3 цилиндра.
Каждой БД при максимальном порядке исследуемой системы уп-
равления п =10 на дисках типа 5050 требуется 1 цилиндр, а на дисках
типа 5061 — 0,25 цилиндра.
Для эффективной эксплуатации системы необходимо включение
в библиотеку каталогизированных процедур ОС ЕС (SYSL PROCLIB)
пяти процедур суммарным объемом до 100 карт.
В процессе расчетов система требует не более 128 Кбайт (обычно
до 100 Кбайт) оперативной памяти. Время работы исполнения одного
задания зависит от набора режимов системы и исходных данных. ОнЬ
лежит в пределах 1—15 мин для процессора ЕС-1033.
Контрольные вопросы
1. В чем заключается проектирование системы управления МПО?
2. Какие этапы проходит проектирование СУ МПО? Дайте краткую характери-
стику каждого из них.
3. Перечислите стадии проектирования СУ МПО. Как они связаны с этапами
проектирования? Какие задачи решаются на каждой стадии?
4. Какое значение имеет исследовательское проектирование при создании
СУ МПО?
5. Какие проектные процедуры входят в исследовательское проектирование
СУ МПО?
6. Дайте определение системы автоматизированного проектирования?
219
7. Что ' включает в себя математическое и программное обеспечение САПР
СУ МПО?
8, Каковы информационное, методическое и организационное обеспечение
САПР СУ МПО?
9. Какие этапы включает в себя исследовательское проектирование СУ МПО?
10. Какое математическое и программное обеспечение используется на каж-
дом этапе исследовательского проектирования СУ МПО?
11. Какие стандартные вычислительные алгоритмы используются при решении
задач синтеза СУ МПО?
12. Дайте характеристику функциональной структуры автоматизированной
системы исследовательского проектирования СУ МПО, предназначенной для анали-
за и синтеза линейных регуляторов состояния.
Глава 7.
УПРАВЛЕНИЕ МНОГООБЪЕКТНЫМИ КОМПЛЕКСАМИ
ИССЛЕДОВАНИЯ И ОСВОЕНИЯ ОКЕАНА
7.1. Особенности процессов управления судами,
осуществляющими исследование и освоение
минерально-сырьевых ресурсов океана
Во всем многообразии современных морских геолого-
геофизических, поисково-разведочных и добычных работ можно выде-
лить три основные группы, различающиеся по виду сырьевых ресурсов:
1. Геолого-геофизические исследования, направленные на обнаруже-
ние горючих полезных ископаемых (нефть, газ, уголь и т. д.) на шельфе
и континентальном склоне.
2. Поиск и разведка негорючих полезных ископаемых (железо-мар-
ганцевые конкреции, сульфидные руды и т. д.) в Мировом океане.
3. Добычные работы, связанные со сбором и подъемом твердых по-
лезных ископаемых со дна Мирового океана.
Технические средства для выполнения этих работ представляют со-
бой сложные комплексы, образованные судами, аппаратами и другими
носителями технологических инструментов. Управление движением
этих комплексов требует решения новых задач, отличных от задач уп-
равления одиночными МПО.
Рассмотрим три типа комплексов, основной отличительной особен-
ностью которых является наличие, кроме судна-носителя, различных
по конструкции и назначению буксируемых систем с соответствующими
техническими средствами исследования, поиска и добычи минеральных
ресурсов океана.
1. Сейсморазведочный комплекс. Сейсмические и
сейсмоакустические методы являются одним из важнейших видов гео-
физической разведки. Их применение связано с изучением искусственно
возбуждаемых упругих колебаний. Морская сейсморазведка по методу
отраженных волн получила наибольшее распространение благодаря своей
Рис. 7.1. Сейсморазведочный комплекс.
221
высокой производительности» С ее помощью определяется структура
разрезов земной коры и тем самым сведения о глубине залегания и фор-
мах различных геологических образований, прогнозируются физические
свойства многих видов минерального сырья.
Морской сейсморазведочный комплекс (рис. 7.1) включает в себя
судно с излучателем акустических сигналов и буксируемый на глубине
10—20 м сейсмографный кабель, протяженностью до 4000 м с установ-
ленными в нем приемниками отраженных сейсмических сигналов. При
сейсморазведке производится зондирование вертикальных разрезов-
профилей. Пересечения таких вертикальных плоскостей с поверхностью
океана образуют заданные линии профиля. С движущегося судна 1 с по-
мощью излучателя 2 производят периодические посылки акустических
сигналов. Отраженные от различных слоев земной коры сейсмические
волны принимаются пьезоприемниками 5, расположенными в прибор-
ных секциях буксируемого сейсмограф кого кабеля 4. Скорость дви-
жения комплекса меняется в. пределах 2—4 м/с.
Кабель, буксируемый в верхнем слое воды, подвергается воздей-
ствию поверхностных течений, в результате чего отклоняется от задан-
ной линии профиля.
В процессе управления комплексом на основе оценки пространствен-
ного расположения (конфигурации) сейсмографного кабеля и местопо-
ложения судна минимизируются отклонения приборных секций кабеля
от линии профиля.
Управление осуществляется с помощью судна-буксира. При этом не-
обходимо уменьшать уровень акустических помех, которые возникают
в результате работы винтов и других судовых технических средств, а
также собственных шумов движущегося кабеля.
2. Поисково - разведочный комплекс с букси-
руемым глубоководным аппаратом. Поисково-разве-
дочные работы в глубоководных районах океана при изучении рудных
полей твердых полезных ископаемых на глубинах до 6000 м выполня-
ются с помощью подводных аппаратов (ПА). На них устанавливается
фототелевизионная аппаратура, локаторы бокового обзора, зонды гам-
маспектроскопического анализа и проч.
Поисково-разведочный комплекс (рис. 7.2) состоит из судна 7, ка-
бель-троса 2, связанного с судном посредством буксирной лебедки 3
и буксируемого подводного аппарата 4.
Программа движения комплекса зависит от характера работ и спе-
цифики функционирования аппаратуры. Исследование заданного района
выполняется путем покрытия его сетью опорных (генеральных) траек-
торий, отстоящих одна от другой на величину, зависящую от ширины
захвата поисковой аппаратуры, ее разрешающей способности, точности
навигационного обеспечения и комплекса требований к детальности
съемки. Сеть траекторий, которые являются линиями профиля, определя-
ет программу движения ПА. Важнейшее требование к качеству проведе-
ния работ — движение ПА на заданном расстоянии от дна (обычно от 5
до 20 м) с заданной скоростью, которая не превышает 1—1,5 м/с.
222
223
Рис. 7.2. Поисково-разведочный комплекс с буксируемым
глубоководным аппаратом.
Рис. 7.3. Добычный комплекс.
Большинство ПА не имеют активных средств управления, поэтому
управление движением комплекса по заданной программе осуществля-
ется посредством судна-буксира и буксирной лебедкой. При этом необ-
ходимо обеспечивать минимизацию отклонений подводного аппарата
от заданной линии профиля, стабилизацию скорости аппарата и его от-
стояния от дна на основе оценки пространственных конфигураций кабель-
троса, а также взаимного расположения судна и ПА. Во время перехода
комплекса с одной линии профиля на другую требуется координирован-
ное управление всеми элементами комплекса, при котором достигается
его безопасность и целостность.
3. Комплекс добычи твердых полезных иско-
паемых. Наиболее ценными твердыми полезными ископаемыми в
океане являются железомарганцевые конкреции (ЖМК) и сульфидные
полиметаллические отложения руды, распространенные в глубоковод-
ных районах Мирового океана.'Добыча твердых полезных ископаемых
требует специальных технических средств, разработка которых в настоя-
щее время ведется во многих странах.
Океанский добычный комплекс для сбора ЖМК и подъема их на по-
верхность эрлифтным способом (рис. 7.3) состоит из судна 7, колонны
труб 2, оканчивающейся буферной платформой 5, и донного самоходно-
го агрегата сбора 4, связанного с буферной платформой гибким шлан-
гом 5.
Предполагается, что впереди агрегата сбора движется телеуправляе-
мый подводный аппарат 6 для изучения донной обстановки на пути дви-
жения комплекса. Аппарат соединен с буферной платформой кабель-
тросом.
Донный агрегат осуществляет сбор, загрузку, предварительную про-
мывку и дробление породы, которая в виде пульпы (смесь породы, во-
ды и воздуха) через гибкий шланг и колонну труб откачивается на борт
добычного судна. Гибкий шланг обеспечивает относительную свободу
перемещений агрегата сбора, необходимую для обхода препятствий
и технологических маневров.
Добычный комплекс движется со скоростью 0,25-1,0 м/с. Основная
цель управления при этом заключается в том, чтобы обеспечивать коор-
динированное перемещение всех элементов комплекса в соответствии
с программой движения агрегата сбора, которая определяется технологи-
ей обработки месторождения и необходимостью обходить препятствия.
Другими словами, в процессе управления должно выполняться условие
безопасности, заключающееся в том, чтобы расстояния между отдельны-
ми элементами комплекса (судно—буферная платформа, буферная
платформа — агрегат сбора) не превосходили допустимые значения. Для
этого система управления добычного комплекса должна выполнять сле-
дующие функции:
— определять оптимальный курс добычного судна с целью мини-
мизации энергетических затрат в условиях ветро-волновых возму-
щений;
224
— стабилизировать судно на оптимальном курсе во всех режимах ра-
боты при спуске и подъеме колонны труб, при позиционировании в точ-
ке, при движении по заданной траектории и т. п.;
— обеспечить динамическую стабилизацию судна и буферной плат-
формы на основе оценки взаимного расположения движущихся
объектов;
— формировать координированные программные траектории движе-
ния и определять желаемые изменения кинематических параметров
элементов комплекса по условиям технологии сбора, наличия препятст-
вий, динамических свойств объектов ит.п.;
— обеспечивать координированное движение комплекса в соответст-
вии с программными траекториями его элементов;
— предотвращать аварийные ситуации, связанные с внезапной оста-
новкой агрегата сбора, уходом судна с программной траектории и т. п.
Рассмотренные специфические конструктивные и динамические
свойства многообъектных комплексов исследования и освоения океа-
на, несмотря на существенные различия объектов и выполняемых ими
задач, имеют ряд общих признаков и условий функционирования. Во
всех комплексах присутствуют элементы с распределенными парамет-
рами (сейсмографный кабель, кабель-трос, колонна труб), математиче-
ское описание которых основано на дифференциальных уравнениях
в частных производных. Это дает возможность сформировать некоторые
общие подходы к разработке математических моделей, анализу и синте-
зу управления движением этих комплексов.
7,2. Общая форма уравнений динамики и статических
пространственных конфигураций гибких
протяженных буксируемых объектов
Режимы движения протяженных буксируемых объектов
в водной среде, включающие переходные процессы и статические про-
странственные конфигурации, могут быть исследованы на основе извест-
ных методов решения задач динамики и статики гибких нитей в потоке
жидкости.
Большая длина гибких буксируемых объектов, значительно превы-
шающая диаметр, позволяет рассматривать их в виде нитей и с учетом
реальных значений жесткости на изгиб делает допустимым анализ движе-
ния по траекториям без учета изгибной жесткости.
Предъявляемые требования к плавности процессов управления дви-
жением буксируемых объектов для исключения механических повреж-
дений и обрывов дают основание предполагать малые колебания натяже-
ний и считать протяженные гибкие объекты нерастяжимыми.
Силы, обусловленные срывом вихрей, вызывают колебания нити. Но
они практически не оказывают влияния на траекторное движение бук-
сируемого объекта. Это позволяет учитывать их опосредованно, через
коэффициенты гидродинамического сопротивления.
225
15—-510
Рис. 7.4. Системы координат и кинема-
тические параметры движения много-
объектного комплекса.
При решении задач управле-
ния движением буксируемых объ-
ектов используются несколько
прямоугольных координат систем
(рис.7 4): земная неподвижная
система OgXg0ygoZg() с ортами
Tx, еу, полусвязанная систе-
ма OXgygZg, начало которой сов-
мещено с центром масс надводно-
го судна, и пблу связанная система
sxyZ) начало которой находится в
произвольной точке нити, отстоя-
щей от места крепления к судну
на расстояние s (0 <$<£), где
L — длина нити).
Состояние элементов нити в
любой момент времени t опреде-
ляется вектором скорости посту-
пательного движения текущей точ-
ки нити в неподвижной системе
координат
V (t, s)= Vx(t, s)ex + Vy(t, s)e‘y+Vz(t, s)Tz, (7.1)
радиусом-вектором текущей точки
7(t, s) = Xg (r, + s) (7.2)
и ортом касательной к нити в точке s
m(r, s) = mx(r, s)Tx + my(tf s)e*y + mz(t, s)~eZi (7.3)
который образует меридианальный угол в (t, s) с вертикальной осью
sy и азимутальный угол <p(t, s) между проекцией орта на горизон-
тальную плоскость sxz и осью sx в системе координат sxyz. Проекции
орта т (С s) выражаются тригонометрическими функциями этих углов:
тх (Z, s) = — sin# (г, s)cos^(r, s);
ту (t, s) — — cos 0 (t, s );
mz (t, s) =sin 0 (t, s) sin ^(C s) .
(7.4)
Условие нерастяжимости | m (t, s) | 2 = 1 устанавливает взаимосвязь
между углами
mx(t, 5) + Шу (C s.) + т 2 (г, s) = 1.
(7.5)
226
Радиус-вектор связан с векторами скорости и касательной для про-
извольной точки нити соотношениями
[ d7(t, 5)] /dt = F(f,s), (7.6)
[ d7(t, s)] /ds = m (t,s). (7.7)
Из (7.6) с учетом (7.1) и (7.2) следует
Vx(t, s) = dx(t, s)/dt; Vy (t, s) = dy(t, s)/dt;
Vz (t, s) = dz (t, s)/dt,
а из (7.7) с учетом (7.2) и (7.3) вытекает
mx (t, s)-dx(tf s)!ds\ my(t,s) = dy(t, s)/ds;
mz (t, s) = dz (G s)/ds.
В результате дифференцирования уравнения (7.6) по аргументу
s, а (7.7) по t, получаем основное уравнение связи в векторной форме
d27(t, s) dm(t,s) d V(t, s)
dtds dt ds
что в проекциях на оси неподвижной системы координат имеет вид
dmx(t, s)ldt = dVx(tf s)lds; dmy (t, s)/dt = dVy (t, s) /ds\
d mz (t, s)/dt = dVz (t> s)/ds. (7.8)
Исходное уравнение динамики гибкой нерастяжимой нити пред-
ставляет собой условие баланса сил движущегося в жидкости элемен-
та нити бесконечно малой длины ds
dV(t,s) - _
m(s) ds —---------- fn (tf s)ds = R (t, s)ds + dT(t, s),
которое можно представить в виде дифференциального уравнения
в частных производных
dK(t, s) _ _ dT(t,s)
m(s)~t---------- - =R(t,s) +----L , (7.9)
где m(s) — масса; /n(t? s) &R(t, s.) — векторы сил инерции присоеди-
ненных масс воды и внешних сил/рассчитанные на единицу длины нити.
227
Вектор натяжения нити направлен по касательной в каждой точке
нити
T(t, s) = T(t, s) m (t, s).
(7.Ю)
После дифференцирования соотношения (7.10) по пространствен-
ному аргументу получаем
dT(t,s)
ds
dT(t,s)
-......- у) + T(r, s)
dm(t, s)
ds
(7.И)
или в развернутом виде
[dT(t, з) z x (t, s)~| ->
+ |_ m z (/, s) + T(t, s) --ez .
Внешние силы,, действующие на нить в потоке жидкости, опре-
деляются суммой распределенной гидродинамической силы /г (f, з)
и распределенных сил водоизмещения и веса, разность которых образует
вектор плавучести со (з) = —со (s)?); нити
R 5) =7Г(Л з) +со (з). (7.13)
Для определения сил /п (t, з.) и /г (Г, з) необходимо рассматривать
движение нити относительно воды. Вектор скорости произвольной точки
нити относительно воды (гидродинамическая скорость) определяется
разностью векторов поступательного движения точки и течения:
Кг(г, з.) = Г(г,з) - W(t, з).
Он раскладывается на нормальную и касательную составляющие
W, s)= rr„(f,s) +
(7.14)
(7.15)
таким образом, что все эти три вектора лежат в о дной^ плоскости, век-
тор Vrm совпадает по направлению с ортом т (t, з), а Иг н - расположен
нормально по отношению к нему.
Вектор распределенной гидродинамической силы, рассчитанный на
единицу длины однородной нити,определяется по формуле
/г(г, s) = 0,5р Dcn[ (1 - g)| иг,;(т, s)| Kr„(f, s) +
+ д| ИГ(Г,5)| ИГ(М)]>
(7-16)
228
где р — плотность жидкости; D диаметр нити; д — коэффициент тре-
ния; сп — коэффициент.нормального гидродинамического сопротивления.
Иногда его представляют как сумму гидродинамических распреде-
ленных сил формы и трения:
/г(^ 5.) = /ф(Г, s) + /Т(Г, S),
где _ _ __ _
/ф (t, s) = - Иг„(Г, s); /т (Г, s) = - &т И,. (t, s);
кф = kd (1 - - д) | Kr„| ; fcT = kdp\ Иг| ; kd =0,5 pDc„
или в виде
fr (t> s) (7гф "I" /ст) Иг (t, 5) +/Сф Vym (Z, s).
(7.17)
(7.18)
Сила инерции присоединенных к нити масс воды выражается двой-
ным векторным произведением
/п(С 5) = ~ Мт (С 5) х
Г/ д
I ~ К т
L \ dt
д
ds
2
г (с S)
х т (с s)L
(7.19)
где М -0,25 pwD2 — присоединенные массы воды, приведенные к едини-
це длины нити.
В (7.19) входит оператор [d/d Г- Vvm (t, s)d/ds], который отра-
жает специфическое влияние кривизны движущейся нити на силы инер-
ции присоединенных масс воды. Первое применение его к вектору
г (t, s) дает
dr (t, s') . dr (t} s) —
“37^“ (t,s)-^-^ = V(tfs)-VTm(tfs)m(tfs)) (7.20)
а повторное приводит к выражению
d d "I —
~ Vvm(t,s) [K(f, s) - Krm (f, s) m (t, s)] =
dV(t, s) dVrm(t, s) -w
= _ ------- m(t, s) - 2Угт —-------------- +
o dm(t, s)
+ Km (C *)-----------~m(tf s) +Cr2w (с <) \ (7.21)
После вычисления двойного векторного произведения согласно (7.19)
с учетом (7.21) получается выражение для силы инерции присоединен-
ных масс, записанное в проекциях на неподвижные координатные оси:
229
Г dVx(t, s')
fn(t, $)=Mex |_——----- - mx(t, s)G(t, s) -
2 V^m (ft s)
dmx(t, s') dmx(l,s)
~ dVy(t, s)
dt
„ dmv(t, s)’
_
dm? (t, s)
- 2 Vrm (t, s) ......- + Kr2m (t,s) ds
где обозначено скалярное произведение
-Me
dmy (t, s)
- my (t, s)G(t, s) - 2KrOT(r, s) ——----------+
' d Vz (t, s)
---------- - mz (t, s) G (t, s) -
dmz (t, sf
- Me z
(7.22)
<ж(м) s)
G(t, =----dt--= ~dt--------- mx^’ S) +
dVy(t,s) dVz(t,s)
+ ------------my (t,s) + —t------- mz (t,s).
Подставив выражения (7.12), (7.13), (7.18), (7.22) в векторное уравне-
ние (7.9), можно написать скалярные уравнения динамики нити, сфор-
мировав их из проекций векторов на неподвижные оси координат. По-
сле тождественных преобразований эти дифференциальные уравнения
в частных производных приобретают вид
дК* dVx дтх дТ ?
— = v,m — . (т - м ~ + «а 7Г -
^2 (^ф ^т) VrX Л4 (/Сф + кт) Vrmmx + Vrf^f7ix +
+ 4Z4CO Шу тх\
dVy dVy дгпу дТ
~dT -а^^Г+ ^a3—m
(7.23)
- «2 + кг) Ггу - а4 (кф + kT) Vrmmy + а 3 кф VTtnmy +
+ о4 <х> my mv + az w ;
dVz _ .. dVz , .,rz2 ч dmz , dT
dt a'Vrm ds +a^T~MVrm) ds +«з ds mz-
(.кф + /<т) ИГ2 (?4 (кф + кт) Кр/77кф +
+ а4 со ту mz,
230
где ах = 2М/ [т (s) + М]; а2 =
= 1/[т (s) + 7И]; а3 - 1/т (s); сц =
=М/[т (s)[m (s)+ Л/]} , а все пере-
менные величины являются функци-
ями пространственного и временного
аргументов: ^>y^(tfs), тХгУ,2(Г,з)
и т. д.
Уравнения динамики (7.23) сов-
местно с уравнениями связи (7.8)
при ограничении (7.5) образуют
математическую модель пространст-
Рис. 7.5. Разложение гидродинами-
ческой скорости в горизонтальной
плоскости.
венного движения гибкой нити в
потоке жидкости. Эта система урав-
нений имеет единственное решение
при определенных начальных тх (О,
5); т у (0, 5); т2 (0, s); Их(0, s); Ир (0, s); Vz (О, s);T(0, s) и гранич-
ных условиях тх (г, £); ту (t, Z); mz (г, £); Vx(t, 0); Vy (t, 0);
Vz (t, 0); T(t, L)= T(t, .0), которые определяются, в частности,
скоростью движения судна—буксира V(г, 0) = 7С (t).
Уравнения пространственного движения гибкой нити в потоке жид-
кости позволяют рассчитывать ее статические пространственные конфи-
гурации в стационарном режиме движения с постоянной скоростью при
неизменной скорости течения. При этих условиях все частные производ-
ные переменных величин по временному аргументу t обращаются в нуль,
а граничные условия принимаются постоянными величинами. В резуль-
тате этих упрощений пространственные статические конфигурации нити
определяются системой обыкновенных нелинейных дифференциальных
уравнений, независимой переменной которых является пространствен-
ный аргумент:
dT/ds = krVrm - go ту; \
dmz /ds = { (Лф + кТ) [ Иг2 - Vrmmz ] +
+ штут2 | /(Т-MV//m ); >
dmy /ds = { (/сф + fcT)[ Vry - Vrmmy] +
+ Gomy myGo L I (T - MVr2m ).
J >
(7-24)
Дальнейшего упрощения математической модели при расчете про-
странственных конфигураций можно достичь, если допустить, что вектор
гидродинамической скорости (t, s') любой точки нити располагается
в горизонтальной плоскости (рис. 7.5). При этом Vrx(t, s) =
= Иг (t, . s)cos к; s)=0; Kr2 (t, s)~ Vr(t} s)sinK,. (к —угол
между направлением оси sx и вектором Иг (t, s) в полусвязанной
системе координат sxyz), а уравнения приобретают вид
231
dT/ds = cocos0 - И* Msin0cos (к + <p);
d$/ ds = | Ир[ (1 - д) cos0 4- g] [sinк 4-
4- cos (к 4- ip) sin (/?]/[ sin 6 cos (p(T - MV?m ) ];
dti I ds = | kdVr [ (1 “ P-) c°s0 + M] cos(k 4- cos0 -
-wsin0 )l[T-MV2m].
Их решение ограничено условиями
(Г-MV?m ) > 0; 0 > 0; Ы я/2.
(7.25)
Нелинейный характер уравнений практически всегда требует ис-
пользования ЭВМ при расчете статических пространственных конфигура-
ций гибких протяженных буксируемых объектов.
7.3. Статические и динамические модели
буксируемых сейсмографных кабелей
Положение сейсмографного кабеля относительно судна
и заданного профиля в основном зависит от скорости буксировки, рас-
пределения течений вдоль кабеля и параметров конструкции (диаметр
и длина, плавучесть и вес грузовых секций и межсекционных соедине-
ний). При эксплуатации необходимо буксировать его в горизонтальной
плоскости на заданной глубине. В этих условиях углы встречи рабочих
секций кабеля с потоком жидкости как в вертикальной, так и в горизон-
тальной плоскостях, малы, а меридианальные углы 0 (t, s) близки к 90°.
Чтобы применить правила приближенного вычисления тригонометриче-
ских функций при малых углах в расчетах удобно использовать углы, до-
полнительные к меридианальным 0 (^ s) = я/2 - 0 (f, s). Тогда из (7.4)
следует такая форма уравнений связи
dx(t, s) *
тх (t, s) = —= “Cos0 (Г, s) cos<p(r, 5) ~~ 1;
<4 V ( 1 ' ? i & *
ту (t, s) -------7^--------= - sin 0 (t, s) 0 (Г, s); ►
dz (t, s) *
mz (t, s) =——— = cos 0 (/, s) sin^(/L, s) s'),
(7.26)
а дифференциальные уравнения для расчета пространственных конфигу-
раций сейсмографных кабелей приобретают вид
232
дТ * \
=<х>0- kdttV}-,
д<р 1
ds Т-MV~^ Х
х (к+ </?);
*
до -1
ds ~ T-MV2m Х
х # + со );
* (7-27)
где обозначено т]= (1 - д)0 + д.
Решение уравнений (7.27)
совместно с (7.26) позволяет
рассчитать значения координат
всех точек кабеля x(s), j(s),
z(s), натяжение T(s) и углы
<р($) и 0(s) по его длине.
Некоторые результаты та-
ких расчетов приведены на
рис. 7.6—7.8.
Рис. 7.6. Статические конфигурации сей см о-
графного кабеля в горизонтальной плоско-
сти при линейно изменяющемся боковом
течении.
На рис. 7.6,5 доказано положение кабеля в горизонтальной плоско-
сти при поперечном к заданному профилю течении Wz, характер которо-
го указан на рис. 7.6; а. Рис. 7.7 показывает конфигурацию начального
(вблизи точки крепления к судну) участка кабеля в вертикальной пло-
скости, а рис. 7.8 — конфигурации кабеля в горизонтальной плоскости
Рис. 7-7. Статическая конфи-
гурация начального участка
сейсмографного кабеля в вер-
тикальной плоскости.
Рис. 7.8. Статические конфигурации сейсмографного кабеля в горизонталь-
ной плоскости при скачкообразном изменении течения.
233
при скачкообразном изменении бокового течения Wz от 0 до 0,375 м/с
на расстояниях 500 м (кривая 7) и 2000 м (кривая 2) от точки его
крепления к судну. Приведенные результаты показывают, что движение
сейсмографных кабелей при буксировке судном происходит практичес-
ки только в горизонтальной плоскости. Это позволяет при анализе дина-
мики таких объектов перейти от математической модели пространствен-
ного движения к исследованию уравнений движения в боковой пло-
скости.
Из (7.26) вытекают дифференциальные уравнения связи, а уравне-
ния динамики получаются из условия равновесия сил по поперечной оси
элемента кабеля
dVz{t,s) d^>(t,s~) \ d<p(t, s)
----- K"<f) + -
- (О XI иг2 (s, Г) t v„(!)<?(", >)]; <7,28)'
MM) dz(t,s) dz(t,s)
-----— = “S----------; “--------= v<’-s); = v’ J
При этом учитывалось, что касательная составляющая гидродинамической'
скорости точки кабеля Vrm (7, s.) при буксировке его в горизонтальной
плоскости определяется гидродинамической скоростью судна Fcr(r).
Начальные условия к системе (7.28) получаются из исходной про-
странственной конфигурации кабеля </?(0, s); Vz (0, s); z(0, 5), а гра-
ничные задаются кинематическими параметрами судна-буксира
VrZ (t, L )
Vz (t, 0) = rcz (0; z (t, 0) =zc (f); ^(r, L) = ~y~~y ;
^0)=^мИс2г(г)(£-5)-Г(£).
-Управляющим воздействием, прикладываемым к сейсмографному
кабелю при стабилизации его на заданном профиле, является боковая
скорость судна VcZ (f). Чтобы перевести управляющее воздействие из
граничных условий в уравнение, введем новые кинематические пара-
метры KKZ (7, s.) и zK (t, s') — скорость и координату бокового переме-
щения произвольной точки кабеля относительно судна, что позволяет
представить скорость и координату бокового перемещения элементов
кабеля в неподвижной системе координат в виде двух слагаемых:
vz(t, s.)=Vcz(O + VKZ(t,s)-
z(t, s) = zc(t) + zK(r, s).
234
Это позволяет представить уравнения дина-
мики сей смотр афно го кабеля
р азо м:
dVKZ(trs). dVKZ(t,s) _
dt ds
T(s) d<p(t, 5) kdt]
2m ds 2m
Рис. 7.9. Представление сейсмограф-
ий го кабеля конечным числом эле-
ментов.
х[Исг(ОИкг (r,5) + Kc?(O^(r, S) +(
+ КсЖг (О-Гсг(г)И/г(О] =0;
d$(t, s') ~ dVKZ (t, s)
dt ds ’
(7.29)
где Vrz(t, s) , zK(t, s) — компоненты вектора состояния кабе-
ля; Vcz (?), Wz (?) — управляющее и возмущающее воздействия, а на-
чальные и граничные условия задаются в виде <^(0,s); VKZ (0,s); zK (О,
О; £); о)=о; zK(r,o)=o.
Решение уравнений (7.29) может быть выполнено, в частности, ме-
тодом конечных элементов, который основан на дискретизации про-
странственного аргумента. При этом сейсмографный кабель представля-
ется в виде к у сочно-линейных элементов, а его состояние определяется
в общих точках этих элементов ,„,sn (рис. 7.9). Такой подход позво-
ляет перейти от дифференциальных уравнений в частных производных
с тремя переменными состояния к обыкновенным дифференциальным
уравнениям, вектор состояния которых содержит Зп переменных. Таки-
ми переменными являются азимутальные углы элементов (?), боко-
вая скорость (г) и боковое перемещение zK/ (?) каждого узла
(/ =1 ... /?). Все силы, действующие на z-м элементе кабеля, считаются
приложенными в его начальном узле. Под их воздействием происходит
перемещение конечного узла. При этом граничные условия автоматиче-
ски включаются в дифференциальные уравнения начального и конечного
узлов кабеля.
7.4. Статические пространственные конфигурации
и динамическая модель кабель-троса
при буксировке глубоководных аппаратов
Форма пространственной конфигурации кабель-троса при
буксировке подводного аппарата зависит от режима движения (скорости
относительно воды, распределения течений по глубине), особенностей
235
аппарата и характеристик кабель-троса (диаметр, длина, плавучесть
и т. п.). Особенность формы кабель-троса при движении комплекса
вдоль заданной линии профиля заключается в том, что по его длине ме-
ридианальные углы 0 изменяются в широких пределах (так же, как и до-
полнительные меридианальные углы 0), но азимутальные углы р и углы
гидродинамической скорости к в любой точке троса имеют малые зна-
чения. Это допущение позволяет представить уравнения связи гибкой
нити для данного случая, выраженные в проекциях орта касательной
на неподвижные оси, следующим образом:
dx(t, s) * '
mx(t, s) = —-------------- = - cos 6 ;
dy (t, s) *
(^ s) = ..... —:-----= — sin 0 ;
y v ds
dz (f, s) *
mz (t, 5) “ ------7------- ~ COS 0 ,
(7.30)
а уравнения, полученные из условия равновесия сил на элементарном от-
резке гибкой нити в стационарном режиме, записать в виде
(1Т * - *
... = со sin 0— М cos 0 ;
dp 1 *
~йг= [(1"M)sin0+M1[ “+; (7,31)
*
de
ds
— 1 Г * *
7—77772-----\kd K<? [ (1 - M) sin0 + M] sine + wcos0
1 — 1V1 V Krm I
Нелинейные обыкновенные дифференциальные уравнения (7.30)
и (7.31) представляют собой математическое описание статической
пространственной конфигурации кабель-троса. Ниже приводятся неко-
торые результаты исследований, выполненных путем решения уравнений
(7.30) и (7.31) на ЦВМ.
На рис. 7.10 приведены кривые зависимости натяжения Т, глубины
Ду и расстояния Дх между ПА и судном от скорости буксировки при
фиксированной длине кабель-троса 6000 м. Натяжение Т в точке крепле-
ния к судну (у буксирной лебедки) уменьшается с увеличением скоро-
сти до 4 м/с и нарастает при дальнейшем увеличении скорости буксиров-
ки. При этом ПА всплывает с глубины 6000 до 1000 м,но расстояние
между аппаратом и судном увеличивается.
Рис. 7.11 показывает, как изменяются натяжение Т в точке крепле-
ния к судну, длина L кабель-троса и расстояние Дх между ПА и судном
с увеличением скорости буксировки при поддержании постоянной
236
Рис. 7.11. Статические параметры дви-
жения кабель-троса при постоянной
глубине погружения ПА.
Рис. 7.10. Статические параметры дви-
жения кабель-троса в зависимости от
скорости буксировки.
глубины погружения ПА на 6000 м. С ростом скорости буксировки до
2 м/с необходимо увеличить длину кабель-троса до 13000 м. Вид стати-
ческих конфигураций кабель-троса длиной 6000 м в вертикальной
плоскости при скоростях буксировки 0,25; 0,5; 1,0 м/с (кривые 1, 2, 3
соответственно) иллюстрирует рис. 7.12.
Особенность движения кабель-троса при буксировке ПА заключается
в том, что оно происходит с малыми боковыми и вертикальными скоро-
стями по сравнению со скоростью продольного перемещения кабеля.
Для любой его точки соблюдаются условия Vz(tf s) s)>
Vy(t, 5) <Vx(t, s); mz(t, s)^mx(t, 5); my(t, s) s), Ho
и скорость поступательного продольного движения практически никогда
не превосходит 2 м/с. Кроме того, стремятся, чтобы буксировка проте-
кала плавно, без резких усилий в кабеле. При этих условиях допускается
раздельный анализ динамики движения кабель-троса в вертикальной
(продольное движение) и горизонтальной (боковое движение) плоско-
стях. Уравнения продольного движения записываются в виде
dVx(t,s) dVx(t,s) dmx(t, s') )
—— =<н ю -77— + ю — +
+ <7з (s)mx(t, s) + q4 (s)VTX(t, s);
дУУ s) / ч z 4 dmy(t, s)
------ = <7j (s) -;---- + a 2 (s) —г-------
dt--------------------------------------------------' v 7 ds 42 ' 7 ds
> (7 32)
+ q3(s)my(t, s) -q4(s)Kry(t, s) -qs(s);
dmx(t,s) dVx(t, s) dmy(t,s) dVy(t,s)
dt ds ’ dt ds
237
а бокового -л
dVz (t, s) dVz (t, «) z 4 dmy (t, s)
• ~t----------= Ts----+<?2(X)------ds----+
>
+ q3 (s)mz (r, 5) - q4 (5) VYZ (f, <?);
dm2 (t, s) = dV2(t, s)
dt ds 3
где
2M 1
41 (s) ” m + K’mo; ^2(5) - m (To -AfK2rmo);
1 / dTQ \ M
m у ds + ^cbo^rm)J m(mA M) f ^Ф° +
+ kT о ) Vrm о + co my о ];
= - k^’ «‘M = ~m~+M Ш'
Все коэффициенты qj (s) рассчитываются при постоянных значениях
гидродинамической скорости Кг0 и ее касательной составляющей ИгШ0
и неизменном во времени натяжении кабель-троса, определяемого выра-
жением
Рис. 7.12. Статические конфи-
гурации кабель-троса в верти-
кальной плоскости при разных
скоростях буксировки ПА.
s
То (s) = f (туоы + kj0Vrmo)ds.
О
Дифференциальные уравнения в ча-
стных производных (7.32) и (7.33)
решаются при начальных тх (0, s );
ту (0, s); т2 (0, s); Vx (0, s); Иу (0, s);
Vz (0, 5)> а также граничных условиях
на нижнем тх (t, ту (Г, £); mz (г,
Л) и верхнем концах кабель-троса,
причем последние играют роль управ-
ляющих воздействий и складываются
из соответствующих проекций скорости
движения судна-буксира и изменения
длины кабеля L в результате работы
буксирной лебедки:
Vx {t, 0) = Vcx(t) - dL/dt sin0 (A, 0);
Vy (t, 0) =- dL/dt cos 9 {t, 0);
238
Рис. 7.13. Изменение кинематических параметров движения ПА в вер-
тикальной плоскости.
Рис. 7.14. Изменение кинематических параметров движения ПА.
М^0)= Ис2 (Г) - — sin <р(Г,О)
Численное решение уравнений динамики кабель-троса может быть
получено методом конечных элементов, который позволяет путем ди-
скретизации пространственного аргумента перейти от краевой задачи
в частных производных к задаче Коши и системе обыкновенных диффе-
ренциальных уравнений. Ниже приводятся некоторые результаты иссле-
дований.
На рис. 7.13 приведены кривые изменения продольной и вертикаль-
ной скоростей движения ПА относительно их начальных установившихся
значений, а также приращения координат Дх; Ду центра масс аппарата
в результате изменения длины кабель-троса на величину ДА. Аналогич-
ные кривые изменения кинематических параметров ПА изображены на
рис. 7.14.
7.5. Статические конфигурации и динамические
характеристики буксируемой колонны труб
При установившемся движении добычного комплекса со
скоростями, соответствующими нормальному эксплуатационному ре-
жиму работы, статические пространственные конфигурации колонны
239
Рис. 7.15. Конфигурации колонны
труб.
Рис. 7.16. Изменение конфи-
гурации при разгрузке ниж-
него конца трубопровода.
труб определяются путем решения обыкновенных дифференциальных
уравнений (7.24) или (7.25). Конфигурация зависит, главным об-
разом, от скорости движения комплекса и течений (их распределением
по глубине), конструктивных особенностей (диаметр, длина, количест-
во, вес секций соединительных муфт, насосных станций) трубопровода
и буферной платформы. Ниже приводятся некоторые результаты иссле-
дования статических характеристик колонны труб, выполненные путем
решения на ЦВМ уравнений (7.25).
На рис. 7.15, а приведены статические конфигурации колонны труб
длиной 6000 м при скорости движения комплекса 0,25 м/с (кривые 1, 2)
и 0,5 м/с (кривые 3, 4) при отсутствии течения (кривые 1, 5), и когда
Рис. 7.17. Влияние скорости
хода на буксировочное со-
противление и меридианаль-
ный угол в верхней точке
колонны труб.
Рис. 7.18. Зоны возможных
положений буферной плат-
формы относительно непо-
движного судна (?) или
движущегося со скоростью
0,25 м/с (2), 0,5 м/с (5).
240
течение распределено по глубине в соответствии с графиком на
рис. 7.15, б.
Рис, 7.16 иллюстрирует изменение статической конфигурации при
движении комплекса со скоростью 0,5 м/с в зависимости от массы, со-
средоточенной на нижнем конце трубопровода. Кривая 2 рассчитана в
предположении, что масса буферной платформы составляет 100 т.,
а кривая 3 соответствует конфигурации колонны труб с ненагруженным
нижним концом. На этом рисунке показано, что при нагруженном ниж-
нем конце учет изгибной жесткости практически не уточняет форму
статической конфигурации ( кривая 1 определена без учета упругости
колонны труб).
На рис. 7.17 приведены кривые буксировочного сопротивления и уг-
лов отклонения колонны труб от вертикали в точке крепления к судну
при различных скоростях судна, когда течение отсутствует (кривая 7)
или оно распределено по глубине в соответствии с рис. 7.15,6 (кривая2).
На рис. 7.18 показаны зоны возможных положений буферной плат-
формы относительно центра масс добычного судна (ДС) в горизонталь-
ной плоскости при распределении скоростей течений, показанных на
рис. 7.15, б и различных скоростях движения судна. Для расчета дина-
мических характеристик колонны труб с протекающей по ней пульпой
необходимо преобразовать уравнения динамики гибкой нити (7.23)
к виду:
6ИХ „ дтх ( дТ
(mr+M)-—= (ТТ-М^т) —— +
С/4 С/Л \ С/Л
+ j (^ф ^т) К-Х>
dVy дту ( дТ
(mr + М~) —= (Тт - М rr2w ) —z + —- +
(J L U Л \ С/Л
+ Кт\ ту ” (кф + *т) ^гу + <^т;
dVz „ dmz / дТ
+ ~ (^ф + ^т) >
(7.33 а)
где погонная масса труб и натяжение определяются с учетом массы
пульпы (тт-т^тп) и силы, возникающей при ее движении со ско-
ростью Кп (Тт = Г- mnV^).
Решение системы нелинейных дифференциальных уравнений, образо-
ванной (7.33), уравнениями связи (7.8) при соблюдении условия не-
растяжимости (7.5), начальных и граничных условий составляет нели-
нейную краевую задачу. Линеаризацию этой модели - можно произвести
для изучения динамики движения колонны труб в окрестностях
241
16—510
балансировочного режима, который соответствует заданной скорости
буксировки Ко и характеризуется определенной статической конфигу-
рацией. При скоростях движения до 0,5 м/с колонну труб, нагруженную
буферной платформой, можно считать абсолютно гибкой нитью, мериди-
анальные углы которой не превосходят 8—10 граду сов, а натяжение опреде-,
ляется плавучестью единицы длины колонны, которую условно считают
постоянной, и поэтому T(s) = со (Z - s). Когда нет резких вертикальных
рывков, колонна труб движется, сохраняя практически вертикальное
положение, и ее точки перемещаются плоско-параллельно» Это означает,
что д Vy (f, s)/dt ~0; y(t, s.) Vrm ~0.
Изучение статических конфигураций трубопровода показывает так-
же, что определяющее влияние на его поведение оказывает скорость бук-
сировки, а поверхностное течение (распределение на рис. 7.15,6) сказы-
вается значительно слабее, и поэтому можно проводить упрощенный ана-
лиз динамики гибкой нити вневозмущенной среде, принимая для балан-
сировочного режима Кг0=Йсг0. При этих ограничениях оказывается,
что радиус-вектор произвольной точки гибкой нити
Т (Г, s) = x(t, + 5?^ + z (t, s)~ez ,
а вектор скорости
— dF(t,s) . _
И(f, s) = ---—— = Vx(t, s)ex + Vz (t, s)ez
можно выразить через его значение в балансировочном режиме и прира-
щение V (t, s):
К s) = Ро = const.
Кроме того, существенно упрощается исходное векторное уравнение ба-
ланса сил на элементе нити, которое теперь записывается в виде:
(тт + М)
д2г (t, s) d2r (Г, 5)
dr (t, s)
dt
dr (r, 5)
dt
а выраженное через проекции на неподвижные оси координат, оно рас-
падается на два несвязанных между собой скалярных уравнения, кото-
рые совместно с соответствующими уравнениями связи образуют моде-
ли продольного и бокового движения. После их линеаризации получаем
для продольного движения
242
. ... dVx(t, s) dmx(t, s) (m^M) - dt- - T(s) -d- + dT(s) + d~ mx(t,s) -kxVx(t,s); dVx(t,s) dmx(t,s) ds dt ’ ) > (7.34)
где kx - p 1 Vo I Dcn , а для бокового
^Vz (t, s) dmz (t} s) (тт + М) d\ = T(s) + dT(s) + * -ds - mz(t,s)-kz Vz (t,s); (^ s) __ dmz (t, s) > (7.35)
ds dt ’
где kz =0,5 p 1 Vo 1 Dcn. J
Имея в виду,, что T(s) = со (£ - s), путем тождественных преобразо-
ваний (7.34) и (7.35) приходим к линейным дифференциальным уравне-
ниям в частных производных второго порядка для каждого вида движе-
ния
СО
, . ... d2Vx(t,s) , dVx(t,s)
(^т+М) - -+ кх~-------- ;
Г d27z(t,s) d?z(t,s) ’
(L - s) 1------- +------- --
ds2 ds
dr dt
(7.36)
с начальными и граничными условиями Jx(O, s) = VZ (0, s) =0; Vx(t, 0) =
= Vz (t, 0) = b! (t)/ (61 (t) — единичная ступенчатая функция) .
После замены пространственного аргумента Hasi =L — s и примене-
ния преобразования Лапласа каждое из уравнений (7.36) приобретает
вид, на основании которого можно вычислить передаточную функцию
по скорости (продольной или поперечной) от верхнего Sj =L конца
к любой точке колонны труб:
Я(51?
ч Vx, z (si,p)
р) =—i-----------
VX,z(L,P)
lojly/st/g у/р(р + к)]
10[2^ГЦ y£F+fc)]
(7.37)
243
Рис. 7.19. Переходные характери-
стики трубопровода при различ-
ных скоростях буксировки (7 -
0,1 м/с, 2-0,15 м/с, 3 - 0,2 м/с,
4 - 0,25 м/с).
Рис. 7.20. Время распростране-
ния фронта волны по длине ко-
лонны труб.
где /0 — функция Бесселя нулевого порядка; g = со/(т,т + М); к-
= кх z I (т т + 7И) ; р — комплексная переменная Лапласа.
Переходная характеристика колонны труб, представленная в об-
ласти комплексного аргумента, определяет изменение скорости движе-
ния точек при единичном скачке скорости буксируемого конца. Так как
при этом Vx Р) “ 1/р, то согласно (737) эта характеристика име-
ет вид
р) = я (s1:p)lp
/Л (51,
/0[2Vsi/g~ y/ptp+k')]
/0[2 V77F Vp(p+*)]
Она является мероморфной функцией и допускает разложение по полю-
сам, которые помимо нулевого значения (pQ -0) образуются корнями
функции Бесселя /0 [ 2 VL / g \/р(р + к)~]. Эта функция имеет бесконеч-
ное число корней Pi, р2, ..., и поэтому переходная характеристика
раскладывается в бесконечный ряд простых дробей:
, \ 0 1 ’ 0)
V0,m/c
Рис. 7.21. Постоянная
времени колонны труб
длиной 6000 м.
Р
Рк) ’
А-=т р_рк
а ее оригинал во временной области образу-
ется бесконечной суммой экспоненциальных
функций
/?1 (sb г) = Ао (s!, 0) +
°° р/Л
+ S A/C(sl,p/C)e
к = 1
244
Практические расчеты переходных характеристик, выполненные для
колонны труб, показывают, что они имеют сравнительно простой вид.
На рис. 7.19 приведены графики этих функций для нижнего конца трубо-
провода ($! —0) при различных установившихся скоростях буксировки.
Нетрудно убедиться, что они хорошо аппроксимируются зависимостями
вида:
hAt)™ (1- е~'/т)51Р _ to), . (7.38)
где т— постоянная времени, (Г - t0) — единичная ступенчатая функ-
ция с запаздыванием на время f0, которое определяется фазовой ско-
ростью распространения в нем волны:
s __
dt0/ds= 1/Гф($); Го = / [ 1/Иф (s)]<7s; где Рф(х) =>/Лх)/(тт+7И)
о
Z, м
Рис. 7.22. Траектории движения колонны труб при скоро-
сти буксировки 0,3 м/с (я) и 0,5 м/с (б) :
_——-..... верхнего конца, определяемая судном;
—----х------ нижнего конца, рассчитанная с использованием
упрощенной передаточной функции (7.39) ;
—__о. нижнего конца., рассчитанная методом конеч-
ных элементов.
На траекториях одними цифрами указано положение край-
них точек колонны в одинаковые моменты времени.
245
На рис. 7.20 приведен график времени распространения фронта вол-
ны по длине колонны труб, а на рис. 7.21 — значения постоянной времени
т при различных скоростях движения добычного комплекса. Расчеты
выполнялись при следующих параметрах трубопровода: L =6000 м, со =
= 2,9 кН/м, сп = 0,8, тт =300 кг/м,М = 142 кг/м,Л= 1 м.
Аппроксимация переходной характеристики вида (7.38) обеспечива-
ет достаточно высокую точность при расчете переходных режимов движе-
ния добычного комплекса. Это, в частности, подтверждает рис. 7.19, где
кривая 5 вычислена по формуле (7.38) для скорости движения комп-
лекса 0,25 м/с. Это подтверждают также графики рис. 7.22, где приведе-
ны траектории движения верхнего и нижнего конца колонны труб, при-
чем траектории нижнего конца рассчитывались методом конечных эле-
ментов и с использованием упрощенной передаточной функции, которая
при переходной характеристике (7.38) имеет вид:
- Pt о
Н(р)=е /(1+тр). (7.39)
Использование упрощенной модели колонны труб существенно облегча-
ет анализ процессов управления движением всего добычного комплекса.
7.6. Управление движением сейсморазведочного
комплекса
Управление движением сейсморазведочного комплекса
требует решения ряда взаимосвязанных задач.
Во-первых, требуется определять положение сейсмографного кабеля
относительно заданного профиля и рассчитывать средние значения от-
клонений точек фактически изучаемого разреза (т. е. точек дна, от ко-
торых отражаются сигналы, принимаемые пьезоприемниками сейсмо-
графного кабеля) от заданного профиля. Если эти отклонения превыша-
ют допустимые значения, необходимо вычислять требуемую коррекцию
в виде бокового отклонения судна и кабеля, которое позволяет мини-
мизировать ошибки. Далее требуется формировать траектории дви-
жения приборных секций кабеля и судна при коррекции их
движения таким образом, чтобы обеспечивать допустимый уровень гид-
родинамических шумов буксировки. Наконец, осуществляется стабили-
зация судна на заданной оптимальной траектории движения.
Управление движением кабеля при маневрировании судна—буксира
приводит к появлению боковой составляющей скорости приборных сек-
ций. Уровень пульсации давления и вибрации, а следовательно, и уровень
шумов пьезоприемников пропорционален квадрату этой составляющей
скорости. Для ограничения шумов, связанных с маневрированием судна,
необходимо ограничивать величину боковой скорости судна.
Для оценки качества управления сейсморазведочным комплексом
используют интегральный квадратичный критерий
246
OO Sic
J= f [X / z2(t,s)ds + vj(t)]dt, (7.40)
X) *0
где X- весовой множитель; s0 точки начала и конца приборных
секций кабеля. На траектории движения комплекса, которая соответ-
ствует минимуму функционала (7.40), обеспечивается наименьшее сред-
неквадратичное отклонение приборных секций кабеля от требуемого по-
ложения при ограничении величины управляющего воздействия, роль ко-
торого в данном случае играет боковая составляющая скорости судна
в полусвязанной системе координат. Боковое отклонение любой точки
кабеля s от заданного профиля при условии, что кусочно-линейный от-
резок заданной линии профиля совпадает с осью Oxgi рассчитывается
по формуле
z (г, s.) = zc(f) + f sin s) -V’n] ds,
0
(7.41)
а ее положение вдоль линии профиля определяется выражением
x(t, s) = xc(f) + f cos [ф(г, s)-фп] ds, (7.42)
0
где zc(t) -отклонение судна от заданного профиля; s) — азиму-
тальные углы в произвольных точках сейсмографного кабеля, — кур-
совой угол профиля.
В результате поверхностных течений в океане сейсмографный кабель
отклоняется от диаметральной плоскости судна-буксира. Поэтому для
оптимизации боковых отклонений приборных секций кабеля, на кото-
рых установлены пьезоприемники, судно должно двигаться с некоторым
боковым смещением относительно заданного профиля (рис. 7.23). Тре-
буемая величина бокового смещения судна zCT(r) рассчитывается по
Рис. 7.23. Отклонение приборных секций сейсмографного
кабеля и исследуемых точек дна от заданного профиля.
247
условию минимизации среднеквадратичных отклонений точек фактиче-
ски изучаемого разреза от заданной линии профиля. При этом будем
предполагать, что отражение сигнала от дна происходит в точках $/,
лежащих посередине между судном, где находится излучатель, и точкой
кабеля s, в которой располагается приемник. Тогда боковое отклонение
одной точки фактически изучаемогр разреза от заданного профиля равно
*
~ zct ” 0,5 2/.
Для минимизации среднеквадратичного значения всей совокупности изу-
чаемых точек (при числе приемников равном п) требуется, чтобы в каж-
дый момент времени выполнялось условие:
п
Б (zCT- 0,5 z/)2 min ,
f =i
или
zCT(r)= S Zj (t, (1-43)
i = 1
Смещение z-й точки кабеля относительно судна определяется его
конфигурацией, т. е. характером изменения азимутальных углов
si
Zi(t, sf)= f sin [<p(s)-ф„] Л. (7.44)
О
Функцию ip(s) при оперативном управлении определяют по измерению
датчиков азимутальных углов, установленных в нескольких местах
сейсмографного кабеля, с помощью интерполяционного полинома
т
E(s - S1) . . . (s -- Sw)
(7'45)
где т — количество установленных датчиков, Sj — место установки
и — показание каждого из них.
При расчетах ^(s) находят путем анализа статических конфигураций
кабеля.
Соотношения (7.41) — (7.44) позволяют рассчитать требуемую кор-
рекцию движения судна и сейсмографного кабеля. При формировании
оптимальных траекторий движения приборных секций кабеля и судна
можно использовать методы теории оптимального управления и, в част-
ности, аналитическое конструирование регуляторов. Но для этого- необ-
ходимо, чтобы математическая модель движения комплекса имела
вид обыкновенных линейных дифференциальных уравнений. Такая
модель получается в результате линеаризации уравнений (7.29) с после-
дующим применением метода конечных элементов на основе дискрети-
зации пространственного аргумента.
248
Для этого весь кабель разбивается на п отрезков длиной As =L/n
каждый. Приращение скоростй на каждом отрезке A Vfczj = Vfcz + q —
— Vfczi определяется разностью скоростей в узлах дискретизации (общие
точки, а также начало и конец кабеля), число которых равно п + 1. Со-
стояние кабеля определяют значения скорости в и узле, так как скорость
буксируемого узла совпадает со скоростью движения судна, которая
играет роль управляющего воздействия. Переменными состояния бу-
дут также п азимутальных узлов и п боковых отклонений точек кабеля,
а также отклонение судна (или, что то же самое — буксируемого конца
кабеля) от требуемого положения. Таким образом вектор состояния
дискретизированной модели сейсмографного кабеля имеет размерность
(3 п + 1) и записывается в виде
х(г) = [ V^z 1 Vfczn> zq> 21 j -• zn\т,
а управляющее и возмущающее воздействия являются скалярными.
Первое совпадает со скоростью движения судна w(f) = KcZ (f), второе —
со скоростью бокового течения f (t ) = Wz (f).
Общая форма линейной дискретной модели сейсмографного кабеля
имеет вид матричного дифференциального уравнения
х~ Ах 4- Ви + Cf
и в сочетании с минимизируемым функционалом (7.40), который пре-
образуется к виду
Рис. 7.24. Функциональная схема управления движением сейсморазведочным комп-
лексом,
249
J = 0,5 / (xTX^x + t/2) dt,
0
составляют известную задачу оптимального управления. Решение этой
задачи определяет оптимальную траекторию перехода судна из исходного
положения zc0 в требуемое zCT. Эти расчеты могут быть выполнены не-
посредственно на бортовой ЦВМ, используемой при управлении движе-
нием сейсморазведочного комплекса. Общая функциональная схема сис-
темы управления приводится на рис. 7.24.
Параметры движения судна (координаты, скорость, курс) и курсо-
вой угол заданного профиля формируются в навигационной ЦВМ. В нее
поступает информация от гирокомпаса (ГК), доплеровского лага, радио-
навигационной системы (РНС), в том числе спутниковых РНС.
Различают два принципа построения навигационно-управляющих
систем: централизованный и децентрализованный. В первом случае ис-
пользуют одну ЦВМ для всех задач навигационного обеспечения и управ-
ления. Во-втором случае используется распределенная вычислительная
система, благодаря чему появляется возможность автономного исполь-
зования отдельных модулей и более простых микропроцессорных
средств, упрощается разработка программного обеспечения.
Оба варианта построения навигационных и управляющих систем ис-
пользуют одни и те же алгоритмы обработки информации и управления,
которые рассматриваются ниже.
Информация от датчиков азимутальных углов ? <Рп сейсмо-
графного кабеля поступает в управляющую ЦВМ, где с помощью алго-
ритма А1 осуществляется их интерполяция по длине кабеля в соответст-
вии с (7.45). Алгоритм А2 на основе начальных условий (НУ), задавае-
мых алгоритмом А5, позволяет рассчитать конфигурацию кабеля в соот-
ветствии с (7.41) и (7.42), а алгоритм АЗ определяет требуемое положе-
ние судна относительно заданного профиля согласно (7.43) . При помощи
алгоритма А4 вычисляется требуемая коррекция траектории судна на
основе текущей информации о его боковом отклонении. Корректирую-
щая поправка вводится при отклонении судна от требуемого на величи-
ну больше граничного значения zrp. После этого на основе алгоритма А6
формируется оптимальная программная траектория движения элементов
сейсмографного кабеля. Алгоритм А7 реализует оптимальную програм-
мную траекторию движения судна. Алгоритм А8 обеспечивает фильтра-
цию и сглаживание управляемой координаты — бокового отклонения
судна 2С. Алгоритм А9 реализует регулятор стабилизации судна на за-
данной траектории по рассогласованию наблюдаемого zc отклонения
судна от программного и Выходом А9 является оптимальное желаемое
изменение курса судна для движения по заданной траектории. Алгорит-
мы А10 и АН реализуют соответственно регуляторы курса и следящей
системы управления рулем.
250
7.7. Управление движением поисково-разведочного
комплекса
Управление движением поисково-разведочного комплек-
са при буксировке подводного аппарата по заданной программе требует
решения трех основных задач: необходимо обеспечивать стабилизацию
ПА на заданном расстоянии от дна с помощью буксирной лебедки, фор-
мировать оптимальные траектории движения судна для минимизации бо-.
ковых отклонений ПА от заданного профиля и поддерживать заданную
скорость буксировки вдоль линии профиля.
Разделение движений судна-буксира, кабель-троса и аппарата на бо-
ковое и продольное поступательное движение, позволяет синтезировать
независимые алгоритмы управления, которые формируют сигналы уп-
равления, соответствующие требуемому курсу судна ус, желаемым ско-
ростям продольных VcX и боковых VcZ перемещений и необходимой
длины кабель-троса £ (рис. 7.25). Курс судна выбирается таким,
чтобы угол схода кабеля с барабана лебедки не превышал допустимого
значения во избежание аварийной ситуации.
Независимое управление курсом, боковым, вертикальным и про-
дольно-поступательным движениями достигается благодаря согласова-
нию алгоритмов, при котором вертикальные перемещения аппарата
Рис. 7.25. Структура управляющих алгоритмов поисково-разве-
дочного комплекса.
251
зависят, в основном, от длины кабель-троса, а изменение продольной
скорости рассматривается как возмущение в контуре вертикального
движения. Возможность такого разделения обусловлена тем, что про-
цессы регулирования вертикального движения за счет длины кабель»
троса протекают значительно быстрее, чем изменения поступательной и
боковой скоростей движения комплекса,
В процессе стабилизации вертикального движения ПА формируется
сигнал управления, соответствующий изменению длины кабель-троса Д£
в зависимости от расстояния между аппаратом и дном /?а, дистанции
между судном и аппаратом ха, вертикальной Ка^ и продольной КаХ
скоростей ПА. Все эти переменные соответствуют параметрам движения
нижней точки кабель-троса, зависят от времени и длины троса. Отклоне-
ния этих величин от заданных значений образуют закон управления
Д£(Д/га, Дха> ДИаХ, ЛУау)
и критерий качества
J= Г (Xt ДГа2(г,£.)+Х2ДИа2(£ L) +Х34(г,£) +
^0
+ X4hl(t, L) + Д£2)^.
Для расчета закона управления можно воспользоваться методом конеч-
ных элементов и провести дискретизацию по пространственному аргу-
менту математической модели кабель-троса, после этого его вертикаль-
ное движение можно представить матричным уравнением
хв = -^вхв + Вв Д7>,
где хв — вектор состояния множества узлов кабель-троса; Лв, - мат-
рицы параметров дискретизированной модели.
При такой постановке задача сводится к определению закона управ-
ления в форме регулятора состояния.
Задачей управления движением поисково-разведочного комплекса
является формирование оптимального управления Vcz с целью мини-
мизации бокового отклонения za подводного аппарата от линии профиля
с учетом ограничения по требованию плавности буксировки. Для этого
необходимо минимизировать функционал
J = j“[Xza2(f,£) +
^0
Формирование оптимальных траекторий бокового движения судна
и ПА осуществляется по аналогии с описанным в параграфе 7.6 алгорит-
мом бокового движения сейсморазведочного комплекса. На рис. 7.26
252
представлена функциональная схема системы управления поисково-
разведочного комплекса с навигационной и управляющей ЦВМ. Пред-
варительные оценки вектора фазовых координат судна zc,
ИсХ? Vcz>$c] и подводного аппарата ха =[ха, za, $а? KaZ? Рау,
л z
/? а] формируются в навигационной ЦВМ по информации навигационного
обеспечения судна, которое включает гирокомпас (ГК), доплеровский
лаг, радионавигационные системы (РНС), в том числе спутниковыеРНС,
гидроакустическую станцию (ГС), эхолот (Э), а также по информации
Управляющая ЦВМ
253
навигационного обеспечения ПА, включающего доплеровский лаг, гид-
роакустическую станцию (ГС), гидролокаторы (ГЛ). Последние изме-
ряют расстояния до дна (ha, ) под различными углами к линии
горизонта, что позволяет прогнозировать изменение рельефа дна.
Навигационная ЦВМ осуществляет предварительную обработку ин-
формации и фильтрацию измеряемых координат, а при необходимости
восстанавливает неизмеряемые кинематические параметры, переменные
состояния комплекса через интерфейсный модуль вводятся в управляю-
щую ЦВМ. В нее также поступает информация о измеряемых внешних
возмущениях, управляющих воздействиях судна цс =[6Н, 5К, ^г.д>
длине кабель-троса и его угле схода а(8н, 5К, 6г.д и Sp — углы разво-
рота носовой й кормовой ВДРК, ВРИ1 главного движителя и руля).
Алгоритмы управляющей ЦВМ формируются по иерархическому
принципу с тремя основными уровнями.
1. Алгоритмы А13-А17 локальных систем управления приводами ис-
полнительных механизмов ВДРК, механизма изменения шага ВРП1
главного движителя и рулевой машины (РМ).
2. Алгоритмы А8-А12 управления судном,обеспечивающие достиже-
ние формируемых значений скоростей Zcz , координат хс, zc и курса
судна. * * $
3. Алгоритмы А1-А7 формирования требуемых значений VcX, VcZ,xc,
* * *
zc’ ^с, ДГ для обеспечения заданных параметров движения подводного
аппарата za3, Ка^3,/га3.
7 В. Управление движением добычного
комплекса
Основной задачей управления движением комплекса до-
бычи при эрлифтном способе подъема твердых полезных ископаемых яв-
ляется формирование координированных траекторий движения судна,
буферной платформы и агрегата сбора для обеспечения согласованного
движения объектов в соответствии с технологией сбора и подъема, а
также выполнение условия безопасности, под которым понимается со-
хранение целостности комплекса в процессе движения.
На рис. 7.27 представлены объекты комплекса добычи и основные
кинематические параметры их движения в проекциях на горизонтальную
плоскость неподвижной системы координат.
Условия безопасности записываются в следующем виде: /)СмБ *^с.б •
5б.а <£>б.а <^б.а; Ы <^б.а; Д1 <2А.Б, где £>С.Б - расстояние
между добычным судном (ДС) и буферной платформой (БП) в проекции
на горизонтальную плоскость; Яс Б — предельно допустимое расстояние
между ДС и БП; 7>БА ” дистанция между БП и агрегатом сбора; ЯБА
и ^б.а соответственно максимальное и минимальное допустимые рас-
стояния между БП и AC; q и § — курсовые углы БП относительно АС
и АС относительно БП соответственно; <7Б>А и ZАБ - предельно
254
допустимые значения углов q и £,
определяемые конструктивными
особенностями гибкого шланга
(ГШ), соединяющего АС с БП
и стратегией их взаимного дви-
жения.
Расстояние АБ А выбирается
в соответствии с длиной ГШ, а
минимально допустимое расстоя-
ние ^б.а обусловлено тем, что на
БП установлены гидроакустиче-
ские приборы, излучающие и при-
нимающие отраженные сигналы от
дна. Необходимо исключать воз-
можность попадания АС в зону 5
под БП.
Основными ограничениями на
кинематические параметры АС
являются возможные препятствия
G на его пути и зоны предыдущего
сбора твердых полезных ископае-
мых (ТПИ). Для получения тре-
буемой чистоты сбора ТПИ, без
Рис. 7.27. Кинематические парамет-
ры движения комплекса добычи
твердых полезных ископаемых.
пропусков и необработанных участков^ АС должен двигаться вблизи
полосы предыдущего сбора.
Таким образом, функция системы управления комплекса добычи
ТПИ заключается в достижении координированного движения объектов
(ДС, БП и АС) в соответствии с полосой предыдущего сбора и техноло-
гией работ при обеспечении обхода препятствий на пути АС и выполне-
нии условий безопасности.
Текущее состояние комплекса характеризуется вектором X(t) =
= [Ха(7), Xc(f), ХБ(г)], образованным из векторов Аа=[ха> z а,
Az ] , Л = [хс > 2 с > ^сх> Vcz j ^с] ’ ^Б = [ХБ > 2 Б > VБх> ИБ2 ] И Фа"
зовых координат АС, ДС и БП соответственно.
Векторы фазовых координат буферной платформы и агрегата сбора
ограничены
*б^б(*а); *а^а(*б, и/£),
замкнутыми областями РА и РБ на плоскости OgXgQZgQ, Они представ-
ляют собой множества допустимых позиций АС и БП. Зона предыдуще-
го сбора 1ГА'С задается множеством точек х?’с, z7'c, х?’с, z£,c,
z^‘c аппроксимирующей ломаной линии. Зоны препятствий на пути АС
IVА также определяются координатами точек аппроксимирующего
многоугольника.
255
Множество ^а=^*а(хб) и ?б ~?б (*а) допустимых позиций
АС по отношению к БП и БП по отношению к АС формируются в соот-
ветствии с условиями безопасности и имеют вид, показанный на рис. 7.28.
При пересечении Рд с ^а'си множество допустимых позиций АС
имеет вид
Ра = Ра ~Ра № U И^)-
Управляющими воздействиями объектов в задаче формирования со-
гласованных траекторий являются векторы скоростей
Кд(КАг, ?ах), КБ(КБг, РБХ)) и Гс(Гс2, Исх),
ограниченные условиями:
Ра е {/А(ГБ, УА); ЙБ е иБ (уА, вБ),
которые отражают специфику динамических характеристик объектов
(инерционные свойства, задаваемые векторами Рд и РБ и условия
взаимного движения.^Множество U& — допустимых управлений АС за-
висит от управлений КБ БП и, наоборот, множество допустимых управ-
лений UB зависит от Кд.
Данные, на основе которых формируется траектория для каждого
объекта в любой момент времени, содержатся в информации о текущей
позиции комплекса П =П(?) = [%д (f), хБ(/Д, *с(0]> полученной в
фиксированные моменты времени (?0 Л i •••) *
Требования к координированной траектории формируются следую-
щим образом:
при некоторой начальной позиции П(^) АС должен, оставаясь в
пределах области Рд и избегая областей 1Тд и И^д’0, двигаться таким об-
разом, чтобы отклонения его коорди-
нат от полосы предыдущего про-
хождения были бы минимальными
при перемещении к заданному пунк-
ту маршрута.
Для буферной платформы эти
требования несколько иные: в сло-
жившейся позиции П (Г) БП необхо-
димо двигаться к заданному пункту
маршрута, оставаясь в пределах об-
ласти РБ К(Ад). Специфика задач опре-
деления координированных траекто-
рий такова, что множества t/д и UB
Рис. 7.28. Множества допустимых
позиций буферной платформы и аг-
регата сбора.
можно аппроксимировать системами
линейных ограничений в простран-
стве управляющих воздействий, а для
256
Рис. 7.29. Функциональная схема системы управления движением океанского до-
бычного комплекса.
17—510
257
вычисления самих управлений использовать линейные условия функции.
Расчет характеризуется последовательным определением фиксированных
позиций П(Г1),ПЦ2)5 Для принятого интервала прогнозирования
движения комплекса.
Формирование и прогнозирование координированных траекторий
позволяет оперативно управлять движением комплекса при возникнове-
нии аварийных ситуаций. Так как управления разных объектов взаимо-
связаны, то отклонение от количественной программы одного из них
приведет к согласованному изменению траектории других. Так как в ог-
раничениях £/д и учтены динамические свойства объектов В В б ,
то физическая реализуемость формируемых траекторий достигается
уже исходной постановкой задачи.
На рис. 7.29 представлена функциональная схема системы управле-
ния движением комплекса добычи с эрлифтным способом подъема ТПИ.
Предполагается, что управляемые объекты ДС, БП, АС и ТПА имеют
свои бортовые вычислительные средства навигационного обеспечения и
управляющие ЦВМ. Совокупность параметров векторов фазовых коор-
динат судна Хс, агрегата сбора Хд, буферной платформы Xg, телеуправ-
ляемого подводного аппарата XTwn.A, а также характеристики внешних
возмущений, формируются в навигационной ЦВМ, куда вводится инфор-
мация от систем навигационного обеспечения судна, АС, БП и ТПА.
Алгоритмы управления комплексом формируются по иерархическо-
му принципу и делятся на три уровня:
1. Алгоритмы А17-21, А24, А27-А28 локальных систем управления
осуществляют управление приводами исполнительных механизмов ДС,
АС и ТПА.
2. Алгоритмы А12-А16, А22-А23, А25-А26 систем управления объек-
тами, обеспечивают слежение за координированными программными
траекториями движения объектов.
3. Алгоритмы А1-А11 координированного управления формируют
программные траектории движения АС, БП и ДС для их согласованного
движения по программе добычных работ, при обходе препятствий АС и
при аварийных ситуациях.
Контрольные вопросы
1. Что отличает многообъектные комплексы исследования и осврения океана
от одиночных МПО? Что общего между различными типами этих комплексов?
2. Из каких составных частей состоит сейсморазведочный комплекс? Каково
назначение системы управления движением этого комплекса?
3. Какие элементы входят в поисково-разведочный комплекс? Каким образом
осуществляется управление его движением?
4. Перечислите движущиеся объекты, составляющие комплекс добычи твер-
дых полезных ископаемых? Какие функции должна выполнять его система управ-
ления движением?
5. Назовите основные допущения, используемые при формировании математи-
ческих моделей гибких протяженных буксируемых объектов.
258
6, Какие векторы характеризуют состояние гибкой нити в произвольный мо-
мент времени? Приведите для них уравнение связи.
7. Какие силы действуют на движущийся в жидкости элемент нити? Приведите
уравнения равновесия этих сил.
8. Какой вид имеет уравнение динамики движения гибкой нити в потоке жид-
кости?.
9. Какие уравнения составляют математическую модель пространственного
движения гибкого протяженного буксируемого объекта?
10. Что понимается под пространственной конфигурацией гибкого буксируе-
мого объекта? Какие уравнения позволяют их рассчитать?
11. Какие специфические особенности буксировки сейсмографных кабелей по-
зволяют получить для них упрощенные статические и динамические модели
движения?
12. Каким образом можно перейти от динамических моделей сейсмографных
кабелей в виде дифференциальных уравнений в частных производных к их пред-
ставлению обыкновенными дифференциальными уравнениями?
13. Расскажите об особенностях движения кабель-троса при буксировке под-
водного аппарата. Что позволяет рассматривать изолировано его боковое и про-
дольное движения?
14. Какие факторы и особенности движения следует учитывать при моделиро-
вании процессов в движущейся колонне труб?
15. Приведите упрощенную передаточную функцию по скорости для колонны
труб добычного комплекса и изобразите соответствующую ей переходную характе-
ристику. Как изменяются параметры передаточной функции?
16. Перечислите задачи, решаемые в процессе управления движением сейсмо-
графного кабеля.
17. Как рассчитать требуемое боковое отклонение судна от заданного профи-
ля при буксировке сейсмографного кабеля?
18. Что позволяет свести расчет оптимальной траектории движения сейсмо-
разведочного комплекса к классической задаче оптимального управления? Дайте
математическую формулировку применительно к рассматриваемой задаче.
19. Какова структура алгоритмов в системе управления движением сейсмо-
разведочным комплексом?
20. Какие задачи решаются в процессе управления движением поисково-раз-
ведочного комплекса? Дайте математическую формулировку задачи формиро-
вания желаемой боковой скорости движения судна-буксира и длины буксирного
кабель-троса.
21. Дайте характеристику навигационного обеспечения системы управления
движением поисково-разведочным комплексом.
22: Дайте ^характеристику управляющих алгоритмов в системе управления
движением поисково-разведочным комплексом. Как они объединяются ро иерар-
хическим уровням?
23. В чем заключается функция управления движением комплекса добычи
твердых полезных ископаемых? Каковы требования к траекториям движения
агрегата сбора и буферной платформы?
24. Каковы функции управляющих алгоритмов различных иерархических
уровней в системе управления движением комплекса добычи твердых полезных ис-
копаемых?
ПРИЛОЖЕНИЕ
Указания по самостоятельной работе
1. При изучении дисциплины ,,Системы управления морскими
подвижными объектами” рекомендуется выполнить цикл расчетов, связанных
с анализом и синтезом конкретной системы управления. Их целью является провер-
ка глубины усвоения теоретического материала, а также развитие практических на-
выков и умения определять структуру и рассчитывать параметры автоматических
систем управления движением. Тип рассчитываемой системы и исходные данные
читатель может выбрать самостоятельно, использовав материал настоящей книги
и справочники (например [ 14, 15]), или воспользоваться исходными данными, ко-
торые приводятся ниже.
2. Целесообразно, чтобы расчеты включали в себя:
2.1. Постановку задачи, в ходе которой уточняются технические требования
к рассчитываемой системе, выявляются возможные структурные решения и осу-
ществляется математическая формулировка задачи.
2.2. Анализ модели движения объекта, в процессе которого на основании
нелинейных дифференциальных уравнений рассчитываются точки балансировочно-
го режима и определяются области устойчивости движения объекта, а также прово-
дится линеаризация модели и рассчитываются передаточные функции, их нули
и полюса, частотные характеристики. По этим результатам устанавливается воз-
можность компенсации внешних возмущений заданной интенсивности.
2,3. Аналитическое конструирование автоматической системы для определе-
ния параметров обратных связей.
2.4. Анализ свободных процессов в синтезированной системе, который заклю-
чается в определении полюсов замкнутой системы и расчете компенсации начально-
го отклонения управляемой переменной.
2.5, Анализ характеристик движения системы при ветро-волновых возмуще-
ниях., состоящей в определении математических ожиданий и среднеквадратичных
отклонений управляемых координат, а также управляющих воздействий, при за-
данном уровне возмущений, на основании чего делается заключение о соответст-
вии системы техническим требованиям,
2,6, Разработку принципиальной электрической схемы системы, включающей
в себя преобразование сигналов датчиков переменных состояния объекта в сигнал
управления исполнительного механизма.
3. В качестве возможного примера может быть рассмотрена автоматическая
система стабилизации путевого угла морского подвижного объекта, заданного диф-
ференциальными уравнениями, в которой используется вертикальный руль, управ-
ляемый электрогидравлической рулевой машиной.
Уравнения движения рыскания МПО и рулевого привода в форме переменных
состояния:
260
Таблица П. 1
№ ® 22 . аз 2 ^21 Й31 с21 С2 2 С3 1 С3 2
1 0,016 1 0,05 "0,024 0,38 0,09 0,03 0,6
2 -0,038 1 0,06 0,016 0,067 0,09 0,051 0,354
3 -0,063 1 0,4 0,07 0,21 0,22 0,044 0,625
4 -0,093 1 0,8 0,08 0,57 0,22 0,071 0,38
5 -0,013 1 0,14 0,04 0,053 0,16 0,044 0,63
6 -0,023 1 0,14 0,02 0,072 0,16 0,056 0,344
ip — (х>;
сЬ = аг2 uj + 1Р1 (р) + Ь21 8 + c2i w + с220 у;
. * г Щ-1)
Р = 32 #2 (0) + ^31 $ *' С31 + ^32 7 >
5 =
X
где ip - угол рыскания, рад; со - углова^ скорость рыскания, рад • с"1; (3 - угол
дрейфа, рад; § - угол перекладки руля, рад; и - скорость перекладки руля,
рад, с1"1 ; w — относительная величина постоянного возмущения; 0 у — переменная
составляющая возмущения.
Постоянные коэффициенты уравнений приведены в табл, П1, а нелинейные за-
висимости 1 (0), <р 2 (0) в табл, П2.
Таблица П. 2
№ 0 рад 0,08726 0,17452 0,2 6178 0,3409 0,4363
град 5 10 15 20 25
1 4>i -0,027 -0,0486 -0,054 -0,027 0,001555
-0,018 -0,03744 -0,0567 -0,0765 — 0,0972
2 -0,033 -0,0594 -0,066 -0,033 0,00431
$2 -0,021 -0,04368 -0,06615 -0,08925 -0,1134
3 <Р1 -0,087 -0,1566 -0,174 -0,087 0,008813
#2 -0,024 -0,05 -0,0756 -0,102 -0,1296
4 -0,121 -0,2178 -0,242 -0,121 0,01406
^2 -0,028 -0,05824 -0,0882 -0,119 — 0,1512
5 -0,062 -0,1116 -0,124 -0,062 0,001334
&2 -0,019 -0,039952 -0,06 -0,080 -0,1026
6 Ч?1 -0,07 -0,126 -0,14 -0,07 0,00261
ч>г -0,021 -0,04368 -0,06615 -0,08925 -0,1134
261
Технические требования к системе:
- статическая ошибка стабилизации путевого
угла при $ <0,3 не должна превосходить 1°, а его
среднеквадратичное значение 2,5° при волнении
моря до IV баллов;
- статический угол перекладки руля при
этом не должен превосходить 15°, а среднеквад-
ратичное значение 10°;
— система должна, работать при наличии на
судне бортовой сети переменного тока 115 В,
400 Гц и постоянного тока 27 В;
Рис. П.1. Определение зна-
чений угловой скорости
рыскания и угла дрейфа в
б алансир ов очных р ежимах,
— в системе можно использовать датчики
углов рыскания, дрейфа, перекладки руля и
датчик угловой скорости рыскания;
- система должна работать с электрогидрав-
лической рулевой машиной.
4. Порядок выполнения работы:
4,1. Анализ модели движения объекта. Анализ начинается с расчета точек ба-
лансировочного режима при отсутствии внешних воздействий (6 =0, w =0, 0 у = 0).
Условие балансировочного режима-равенство нулю производных кинематиче-
ских параметров движения (^ = со = 3 = 5 -0) - позволяет записать на основании
(ПД) уравнение для его определения:
#22 со + (3) = 0 = а32 со + v?2 (3).
откуда
(3) <^2(3)
- -------- = - ---------- (П.2)
Я22 fl32
В соответствии с видом кривых (3) и <р2 ((3) условие (П.2) выполняется
при со0 =0, Зо =0, а также при (Зх и сох, значения которых могут быть получены пу-
тем графического построения, как показано на рис. ПЛ.
Точкой балансировочного режима прямолинейного движения может считаться
начало координат (соо =0, 30 =0), а точка 1 соответствует циркуляции корабля
С УГЛОВОЙ СКОРОСТЬЮ GJj .
Линеаризация уравнений (ПЛ) в окрестностях точек (lo0, 30) и (сог, зх)
приводит к линейной модели объекта вида
= со;
#22to + #32 3 + b2l8 + c21w+ с2207;
3= #32 со + #33 3 + 5 + c3Jw + с33 0у;
8 —и,
(П.З)
где коэффициенты #23 /д(3, #33 = д<р2/д{3 определяются в окрестностях соот-
ветствующих точек. Рассчитав собственные числа матрицы А с помощью характе-
ристического уравнения 0
р 1 0
0 Р-о22 — а 23 0 = 0,
0 — ^31 Р- а33 0
0. 0 0 Р
262
можно убедиться., что точка (со0, 0О) является точкой устойчивого равновесия,
а точка (со*, (31) - точкой неустойчивого равновесия. При этом вся плоскость
слО/3 делится на области устойчивого и неустойчивого движения. В пределах об-
ласти устойчивости любое начальное отклонение сопровождается свободным про-
цессом, сходящимся к началу координат. За пределами области устойчивости уп-
равляемого объекта любое начальное отклонение фазовых координат gj, (3 приво-
дит к расходящемуся переходному процессу.
При выполнении расчета по заданным исходным данным требуется рассчи-
тать особые точки (0,1) нелинейной модели объекта, параметры линейной модели
в окрестностях каждой из особых точек и корни характеристического уравнения.
Кроме того, требуется рассчитать фазовый портрет МПО в плоскости а>О (3, кото-
рый позволяет определить область устойчивости.
Другая задача предварительного анализа объекта заключается в расчете ба-
лансировочного режима при постоянном возмущающем воздействии w, величина
которого определяется заданием. Уравнения (П.1) для этого случая (при^=оэ =
= j3=w = 0) имеют вид:
(0) + Ь2Х Б + с21 w = 0 ;
<Р2 (0) + 6 + с31 w = 0
(П.4)
Решение (П.4) может быть выполнено графически по аналогии с решением (П.2)
на основе соотношения:
6 = - — ((3) + ~ [<р2((3) + c31w ]. (П.5)
В результате решения (П,5) надо получить значение перекладки руля 52, соот-
ветствующее компенсации постоянного возмущения, и сравнить его с величиной,
определенной техническим заданием. Кроме того, требуется определить величину
установившегося дрейфа корабля (32 и оценить устойчивость этого балансировочно-
го режима, рассчитав корни характеристического уравнения, для которого коэф-
фициенты а2Ъ ия33 определяются в точке/32,
Еще одна задача анализа - расчет передаточных функций по линейной модели
управляемого объекта (П.З) выполняется в соответствии с методикой, изложенной
в разделе 2.4, Следует также рассчитать частотные характеристики объекта. При
этом использование ЭВМ является желательным, так как читатель может проверить
свои знания в области использования вычислительных машин и программи-
рования,
4,2, Аналитическое конструирование автоматической системы стабилизации
МПО, Задача аналитического конструирования заключается в определении коэф-
фициентов обратных связей, в форме
u = Gx,
когда неизменяемая часть системы задается линейной моделью в
х=Ах + Ви,
а среднеквадратичный критерий имеет вид
j _ _J__ J" (хт\хх + ит\ии) dt,
О
В соответствии с уравнениями (П.З) матрицы неизменяемой части рассчиты-
ваемой системы
263
а сигнал управления является скалярным. Поэтому искомая матрица обратных свя-
зей представляет собой строку из четырех элементов G = [gn , g J2, g13, g14 ] и за-
кон управления соответствует регулятору состояния
При выборе весовых матриц и \и исходим из того, что стабилизируемой ве-
личиной является отклонение путевого угла;
J = ~~ J + Xg62 + и2) dt.
О
Выразив путевой угол через переменные состояния о = (р - /3, получим
^=~ J (XoV2 + W2--2Лст1₽0 + +Х562 +U2) Л,
о
откуда следует выражение для весовой матрицы переменных состояния
О
~ ^ст
О
О - О
О О
О О
О О х5
в то время как весовая матрица управления в данном случае обращается в скаляр-
ную единицу 1. Варианты рекомендуемых значений весовых множителей при-
водятся в табл. П.З,
При аналитическом конструировании могут применяться все приемы, подроб-
но описанные в гл. 5. Расчеты следует выполнять на ЭВМ, но они поддаются и руч-
ному счету.
4.3. Анализ синтезированной системы. Определение структуры и параметров
обратных связей методами аналитического конструирования должно быть дополне-
но расчетом математических ожиданий и среднеквадратичных отклонений кинема-
тических параметров движения ст, 0, и и угла перекладки руля 6 при заданном
Таблица П. 3
№ ^6
1 3600 0 3
2 1000 0 3
3 3600 400 3
4 3600 400 0
5 1000 0 0
уровне внешних возмущений, а также анализом динами-
ческих характеристик синтезированной системы (полю-
са, переходный процесс компенсации начального от-
клонения) , Эти расчеты в сопоставлении с техническими
требованиями позволяют оценить качество предлагае-
мой для реализации системы. В том случае, если систе-
ма не удовлетворяет требованиям, расчет следует повто-
рить при других весовых множителях критерия качества.
Анализ синтезируемой системы выполняется в
два этапа. Первый включает расчеты по линейной моде-
ли: определение полюсов замкнутой системы, т. е
264
собственных чисел матрицы А + В G; расчет математических ожиданий й дисперсий
(или среднеквадратичных отклонений). Эти расчеты выполняются с помощью
соответствующих программ на ЭВМ или вручную по методике, изложенной в
параграфе 5,10,
Второй этап анализа состоит в моделировании переходных процессов на ЭВМ
с использованием нелинейной модели объекта, при учете ограничений на величину
(I 5 | < 0,611 рад) и скорость ( I 5 | < 0,26 2 рад/с) перекладки руля и наличии син-
тезированного регулятора, В ходе моделирования оценивается качество процессов
в замкнутой системе при различной интенсивности внешних возмущений.
4.4. Разработка функциональной и принципиальной схемы системы стабилиза-
ции. Необходимо предусмотреть возможность синхронного управления двумя вер-
тикальными рулями ВР в режимах следящего управления СУ от штурвала и авто-
матической стабилизации путевого угла АвтПУ, В режиме СУ в системе использу-
ется закон управления
U(t) = £14(6(Г) -60),
где 60 - задаваемый штурвалом угол перекладки руля.
Законы управления реализуются на базе интегральных операционных усили-
телей ОУ серии К140УД1Б, К153УД2 или др. Могут быть использованы также
микропроцессорные средства.
В схеме предусматриваются следующие датчики первичной информации:
гирокомпас, дрейфолаг, датчик угловой скорости, датчик угла поворота пера руля,
датчик угла поворота штурвала и датчик заданного угла курса.
Следует ввести электрическое ограничение заданного угла перекладки пера
руля ±35°, а также переключения режимов работы системы с соответствующей
сигнализацией.
Датчик положения пера руля ДР состоит из датчика обратной связи ДОС,
с выхода которого снимается сигнал, пропорциональный углу поворота пера ВР,
выпрямителя В, фильтра низкой частоты ФНЧ и делителя Д. Принципиальная схема
ДР представлена на рис. П.2. ДОС представляет собой линейный вращающийся
трансформатор ЛВТ с коэффициентом трансформации, равным 0,373 В/град, меха-
нически связанный с баллером ВР. Общий коэффициент передачи ДР от угла пово-
рота пера ВР до выхода ДР равен 0,075 В/град,
Датчик угла поворота штурвала ДШ состоит из ЛВТ, ротор которого механи-
чески связан со штурвалом, выпрямителя, ФНЧ и делителя. Принципиальная схема
ДШ аналогична показанной на рис. П.2. ЛВТ, используемый в ДШ имеет те же ха-
рактеристики, что и ЛВТ ДОС. Общий коэффициент передачи ДШ от угла поворота
штурвала до выхода делителя равен 0,027 В/град.
Датчик угла дрейфа ДД состоит из дрейфолага (доплеровского измерителя
скорости), выходом которого является обмотка ЛВТ, фазочувствительного вы-
прямителя ФЧВ, ФНЧ и делителя. Принципиальная схема ДД представлена на
рис, П.З. Общий коэффициент передачи ДД от угла дрейфа до выхода делителя ра-
вен 0,009 В/град,
Датчик угла курса ДК формирует сигнал пропорциональный разности угла
курса и заданного угла курса и состоит из гирокомпаса, механически связанного
с ротором первого синусно-косинусного вращающегося транформатора СКВТ, за-
датчика угла курса, механически связанного с ротором второго СКВТ, ФЧВ, ФНЧ
и делителя, СКВТ в ДК включены в трансформаторном режиме. Принципиальная
схема ДК представлена на рис. П.4. Общий коэффициент передачи ДК от угла
курса (от заданного угла курса) до выхода делителя равен 0,09 В/град,
Датчик угловой скорости рыскания ДУС состоит из чувствительного элемен-
та, механически связанного с движком потенциометра, питаемого постоянным
напряжением 27 В, и делителя. Принципиальная схема ДУС приведена на
рис. П.5. Общий коэффициент передачи ДУС До выхода делителя равен
0,041 В.с/град.
265
Рис. П.2. Принципиальная схема датчика угла пере-
кладки руля.
Рис. П.4, Принципиальная схема датчика угла курса.
Рис. П.З. Принципиальная схема датчика
угла дрейфа.
Рис. П.5. Принципиальная схема датчика уг-
ловой скорости.
Рис. П.6, Принципиальная схема соединения усилителя
мощности и обмоток управления гидроусилителя.
Для перемещения ВР используется электр огидравлическая рулевая машина
РМ, обеспечивающая скорость перекладки пера ВР до 15 град/с. Электромеханиче-
ский гидроусилитель РМ имеет обмотку возбуждения, подключенную в сети посто-
янного напряжения 27 В и обмотку управления. Для согласования выходного сиг-
нала суммирующего усилителя и обмотки управления используется усилитель
мощности УМ, Принципиальная схема электромеханического гидроусилителя РМ
с УМ приведена на рис, П,6. Совокупность УМ, гидроусилителя и силовых приводов
БР представляет собой интегрирующее звено с единичным коэффициентом усиле-
ния, который обеспечивается соответствующей настройкой переменных резисторов
АЗ,Л4.
На основе данных об основных элементах составляется развернутая функцио-
нальная схема соединения датчиков, устройства суммирования сигналов, усилителя
мощности и рулевой машины, в общую систему, которая должна обеспечивать син-
хронное управление двумя вертикальными рулями в следящем и автоматическом
режимах.
R2,R3 ~ 22 кОм
- 200к0м
R8.R11 ~560 кОм
R9}R10-^7k0m
01, С2 ~3300пФ
СЗ - О.ОЗЗ мкФ
У - К1И0УД16
Рис. П.7. Пример формирования сигнала управления на
операционном усилителе.
267
На основе функциональной схемы системы управления составляется принци-
пиальная схема системы управления. Пример схемы формирования сигнала пропор-
ционального заданному значению угла перекладки ВР на базе ОУ серии К140УД1Б
приведен на рис, П.7.
Располагая значениями коэффициентов законов управления ВР в режимах
СУ и Авт ПУ приводится расчет значений входных сопротивлений RBX и сопротив-
лений обратной связи 7?ос суммирующих операционных усилителей. При этом не-
обходимо иметь в виду следующее:
- сопротивления Квх и ^о.с нельзя выбирать малыми, так как ток, протекаю-
щий через них является выходным током усилителя и может превысить значение,
допустимое для линейного режима работы операционного усилителя;
- сопротивления /?вх и Аос нельзя выбирать большими, так как разность
входных токов в этом случае может вызвать значительное напряжение на выходе
операционного усилителя;
— коэффициент усиления операционного усилителя определяется соотношени-
ем ’ «о.с/Лвх.
В заключение следует рассчитать значения выходных напряжений суммирую-
щих усилителей, соответствующих граничным значениям заданного угла переклад-
ки пера руля (±35°), а также выбрать используемые в принципиальной схеме ре-
зисторы, конденсаторы, диоды, реле, лампы индикации и напряжения питания.
5. Примерное содержание отчета по самостоятельной работе
В отчет следует включать:
а) задание, исходные данные и технические требования к рассчитываемой сис-
теме;
б) план выполнения расчета с краткой характеристикой используемого метода
решения по каждому пункту работы;
в) результаты расчета, в том числе:
— точки балансировочных режимов и области устойчивости управляемого
объекта (графики) ;
- линеаризованную модель управляемого объекта и таблицу численных значе-
ний коэффициентов, определенными в окрестностях различных балансировочных
режимов, а также корни характеристического уравнения;
— передаточные функции и частотные характеристики управляемого объекта;
- структуру синтезированной системы с численными значениями коэффициен-
тов обратных связей;
- значения математических ожиданий и среднеквадратичных отклонений путе-
вого угла, углов рыскания, дрейфа и перекладки руля (таблица);
- результаты моделирования переходных процессов в синтезированной систе-
ме (графики);
г) краткий анализ полученных результатов;
д) функциональную структуру и принципиальную схему автоматической сис-
темы;
е) выводы по работе,
СПИСОК ЛИТЕРАТУРЫ
1. Автоматические подводные аппараты/М. Д. Агеев, Б. А. Касаткин, Л. В. Ки-
селев и др,: Л.: Судостроение, 1981. 224 с.
2. Астапов Ю. М,, Медведев В, С. Статистическая теория систем автоматическо-
го регулирования и управления, М.: Наука, 1982. 304 с.
3. Бахилина И. М., Гольмшток В, Я, Особенности динамики бурового судна
как объекта цифрового управления//Изв. Ленингр, электротехн, ин-та, 1983.
Вып. 334, С. 55-56.
4. Бородай Н. К,, Нецветаев Ю. А, Мореходность судов. Л.: Судостроение,
1982. 288 с,
5. Катханов М. Н, Теория судовых автоматических систем. Л.: Судостроение,
1985,376 с.
268
6. Квакернаак X., Сиван Pf Линейные оптимальные системы управления: Пер.
с англ, М.: Мир, 1977. 650 с.
1 .Кухлинг X. Справочник по физике: Пер. с нем, М,: Мир, 1985. 520 с.
8. Матханов П. Н. Основы анализа электрических цепей. Линейные цепи. М.:
Высш, шк,, 1981. 333 с,
9. Моделирование на аналоговых вычислительных машинах/Е. А. Архангель-
ский, А. А, Знаменский, Ю. А, Лукомский и др. Л.: Энергия, 1972. 208 с,
10, Норенков Я, 77. Системы автоматизированного проектирования. Принци-
пы построения и структура, М,: Высшая школа, 1986. 127 с,
И, Основы теории судов на воздушной подушке/Ю, Ю. Бенуа, В, К. Дьяченко,
Б, А, Колызаев и др, Л.: Судостроение, 1970. 456 с.
12. Пантов Е, Hf, Махин 77 Н., Шереметов Б, Б. Основы теории движения под-
водных аппаратов. Л,: Судостроение, 1973. 216 с,
13. Першиц Р> Я, Управляемость и управление судном. Л.: Судостроение,
1983.272 с.
14. Справочник по теории корабля. В 3-х т. Т. 3. Л.: Судостроение, 1985. 544 с.
15, Суевалов Л, Ф. Справочник по расчетам судовых автоматических систем.
Л.: Судостроение, 1977, 376 с.
16. Управ лен ие морскими подвижными объектами/Д. М. Дернер, Ю. А. Лу-
комский, В, А. Михайлов и др. Л.: Судостроение, 1979. 272 с,
17. Успокоители качки судов/А. Н. Шмырев, В. А. Мореншильдт, С, Г. Иль-
ина и др. Л.: Судостроение, 1972. 478 с,
18. Фрейдзон И, Р. Судовые автоматизированные электроприводы и системы
Л.: Судостроение, 1980. 440 с.
19. Шуп Т. Решение инженерных задач на ЭВМ: Пер с англ. М.: Мир, 1982.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Авторулевой 114, 121
Алгоритм Ньютона—Рафсона 164
” Рунге-Кутта 165
” управления 140
” Эйлера 165
Амплитуда волны 89
Астатизм оптимальной линейной сис-
темы 153
Вектор возмущающих воздействий 40
” главный аэродинамических
сил 27
” ” внешних сил 19
” ” гидродинамических
сил 26
” количество движения 19, 24
” момента количества движе-
ния 19, 24
” переменных состояния 40,
138, 139
” сигналов управления 13 8,
139
” скорости вращательного дви-
жения 7,12
” поступательного движения
7, 15
” сопряженный 147, 183
” управляющих воздействий
40, 138, 139
Движение МПО пространственное 53
Дисперсия волновой ординаты 95
Длина волны 89
Закон управления 120, 127, 129, 136,
140, 151, 170
Идентификатор состояния 174
Качка бортовая 54
” вертикальная 54
” килевая 54
Колонка движительно-рулевая 31, 36,
131
Конструирование регуляторов аналити-
ческое 154
Коэффициент редукционный 91, 94,
104
Критерий дисперсионный 120, 127,
141
” квадратичный 143, 145
” оптимальности 120, 127
Масса присоединенная 23
Матрица весовых множителей 141
” инерции 21
Матрица кинематическая 14, 16
” корреляционная 193, 197
” обратных связей 151, 156,
161
269
Волна гравитационная 88
” долгопериодическая 88
” приливная 88
Волнение нерегулярное 94
” регулярное 88
Высота волны 89
” ”3 %-ной обеспеченности 95
Движение МПО боковое 55
” ” вертикальное 54
” ” поступательное 54
” ” продольное 55
Момент гидродинамических сил 26
” главных внешних сил 19
” инерции 21
” ” присоединенных масс
22, 23
” силы водоизмещения 28, 29
Наблюдатель 174
” дрейфа полного порядка 177
” ” редуцированный 182
Обеспечение информационное 116, 120,
127, 133, 136
Объект управляемый 115, 138
Органы исполнительные 115, 138
Ордината волновая 89
Оценка состояния 174, 175, 181
Параметры движения кинематические
11, 14, 138
Принцип максимума 146
Процесс ветро-волновой 86
Р егу лятор пр опор циональн о-интегра ль-
но-дифференциальный 120, 185
” состояния 148, 151
Режим балансировочный 47
” глубокого маневрирования 47
” малого маневрирования 46
” стабилизации 46
Руль гидродинамический 34
Рыскание 55, 124
Семейство устойчивых экстремалей
154, 156
Сила аэродинамическая 27
” веса 29
” водоизмещения 29
” гидродинамическая 26
Система динамического позициониро-
вания 133
” координат геоцентрическая 9
” ” земная 10
” ” полусвязанная 10
” перекрестных связей 56
подобия 149, 161
” Риккати 161
” собственная бокового движе-
ния 56
” ” продольного
движения 56
” спектральных плотностей 193
” фундаментальная 149
Метод комплексных амплитуд 71, 168
Момент аэродинамических сил 27
Система координат связанная 10
” максимального быстродейст-
вия 182
” оптимальная линейная 148, 151
Система стабилизации боковых откло-
нений 128
” ” курса 116
” ” путевого угла
125
Скорость распространения волны 89, 90
Снос боковой 54
Соотношения кинематические 12, 14,
16
Теорема разделения 17 9
Угол атаки 15
” дифферента 13
” дрейфа 15
” крена 13
” путевой 17
” рыскания 13
Уравнения Ляпунова 197
” Риккати 161
Фильтр формирующий 100
Функция автокорреляционная 144
” корреляционная 95
” передаточная МПО 60, 61
” управления 116, 128, 132
Характеристика спектральная 95
Частота волнения истинная 91
” ” кажущаяся 91
” собственная 69
Шаг винта 31
Шквал 109
Шум белый 100
” цветной 100
Энергия кинетическая 20, 21, 23
ОГЛАВЛЕНИЕ
Предисловие.......................................................... 3
Введение........................................................... 5
Глава 1. Уравнения динамики морских подвижных объектов ............... 7
1.1. Предварительные замечания ............................... 7
1.2. Системы координат, используемые в задачах управления МПО 8
1.3. Кинематические параметры и уравнения связи вращательного
движения .................................................... И
1,4. Кинематические параметры и уравнения связи поступательного
движения.................................................... 14
1.5. Общая форма уравнений движения МПО..........., '........ 18
1.6, Гидродинамические и аэродинамические силы и моменты .... 25
1.7. Вес и водоизмещение МПО ................................ 28
1,8. Силы и моменты средств управления МПО................... 31
1.9. Характеристика нелинейной модели пространственного движе-
ния МПО .................................................... 39
Контрольные вопросы ,.................................... 42
Глава 2. Линейные модели морских подвижных объектов................. 43
2,1. Балансировочные режимы и режимы движения МПО............ 43
2.2. Линеаризация уравнений движения......................... 47
2.3. Разделение движений ......................•............. 53
2.4. Линейная модель рыскания надводного водоизмещающего
судна..................................................... 58
2.5. Линейные уравнения бокового движения судна на воздушной
подушке..................................................... 63
2.6, Уравнения продольного движения судна на подводных крыльях 72
2.7. Уравнение пространственного движения автономного подвод-
ного аппарата .............................................. 77
Контрольные вопросы...................................... 84
Глава 3. Ветро-волновые возмущения.................................. 86
3.1. Общая характеристика ветро-волновых возмущений.......... 86
3.2. Регулярное волнение..................................... 88
3.3. Кажущаяся частота и редукционные коэффициенты........... 91
3.4, Нерегулярное волнение .................................. 94
3.5, Расчетные спектры морского волнения.................... 98
3.6. Кажущиеся спектры морского волнения.................... 102
3,7. Характеристика воздушного потока в приводном слое атмо-
сферы ..................................................... 106
3.8. Силы и моменты ветро-волновых воздействий.............. 109
Контрольные вопросы...................................... ИЗ
Глава 4. Функциональные структуры систем управления МПО............ 114
4.1, Общая функциональная структура СУ МПО............. . 114
4.2. Система стабилизации курса............................ 116
4.3. Система стабилизации путевого угла.................... 125
4,4, Стабилизация боковых отклонений судна.................. 128
4.5. Динамическое позиционирование......................... 130
4,6. Стабилизация продольного движения судна на подводных
крыльях................................................... 134
Контрольные вопросы..................................... 136
271
Глава 5. Синтез автоматических систем управления движением.............. 138
5.1, Математическая формулировка задачи............... . . . 138
5.2. Эквивалентная детерминированная задача и ее решение... 143
5,3. Оптимальная линейная система Регулятор состояния...... 148
5.4. Аналитическое конструирование на основе расчета устойчивых
экстремалей................................................. 154
5,5. Аналитическое конструирование на основе уравнения Риккати 161
5,6. Оптимизация линейной системы, подверженной узкополосному
возмущению ................................................. 167
5.7. Идентификация кинематических параметров движения МПО 174
5.8. Оптимальные релейные системы ........................... 182
5.9. Параметрическая оптимизация регуляторов................... 185
5.10. Расчет математических ожиданий и дисперсий переменных
состояний систем управления движением ...................... 191
Контрольные вопросы........................................ 198
Глава 6. Элементы автоматизации проектирования СУ МПО ........... 202
6.1. Общие сведения о проектировании СУ МПО ................... 202
6.2. Основные понятия о системах автоматизированного проек-
тирования . .............................................. 205
6.3, Содержание пакета прикладных программ для исследователь-
ского проектирования СУ МПО................................ 207
6,4. Базовые алгоритмы исследовательского проектирования
СУ МПО . ................................................... 211
6,5. Автоматизированная система исследовательского проектирова-
ния систем управления МПО.................................. ,214
Контрольные вопросы..................................... 219
Глава 7. Управление многообъектными комплексами исследования и ос-
воения океана..................................................... 221
7.1. Особенности процессов управления судами, осуществляющими
исследование и освоение минерально-сырьевых ресурсов океана 221
7.2. Общая форма уравнений динамики и статических пространст-
венных конфигураций гибких протяженных буксируемых
объектов............................................. . , 225
7.3. Статические и динамические модели буксируемых сейсмограф-
ных кабелей ................................................ 232
7.4, Статические пространственные конфигурации и динамическая
модель кабель-троса при буксировке глубоководных аппаратов 235
7.5. Статические конфигурации и динамические характеристики бук-
сируемой колонны труб....................................... 239
7.6, Управление движением сейсморазведочного комплекса..... 246
7.7. Управление движением поисково-разведочного комплекса . . . 251
7.8. Управление движением добычного комплекса.................. 254
Контрольные вопросы......................................... 258
Приложение. Указание по самостоятельной работе...........................260
Список литературы...................................................... 268
Предметный указатель.................................................... 269