/
























































































































Author: Любовицкий В.П.
Tags: техника средств транспорта автодорожный транспорт спорт физическая культура велосипедный спорт
ISBN: 5-217-00580-7
Year: 1989


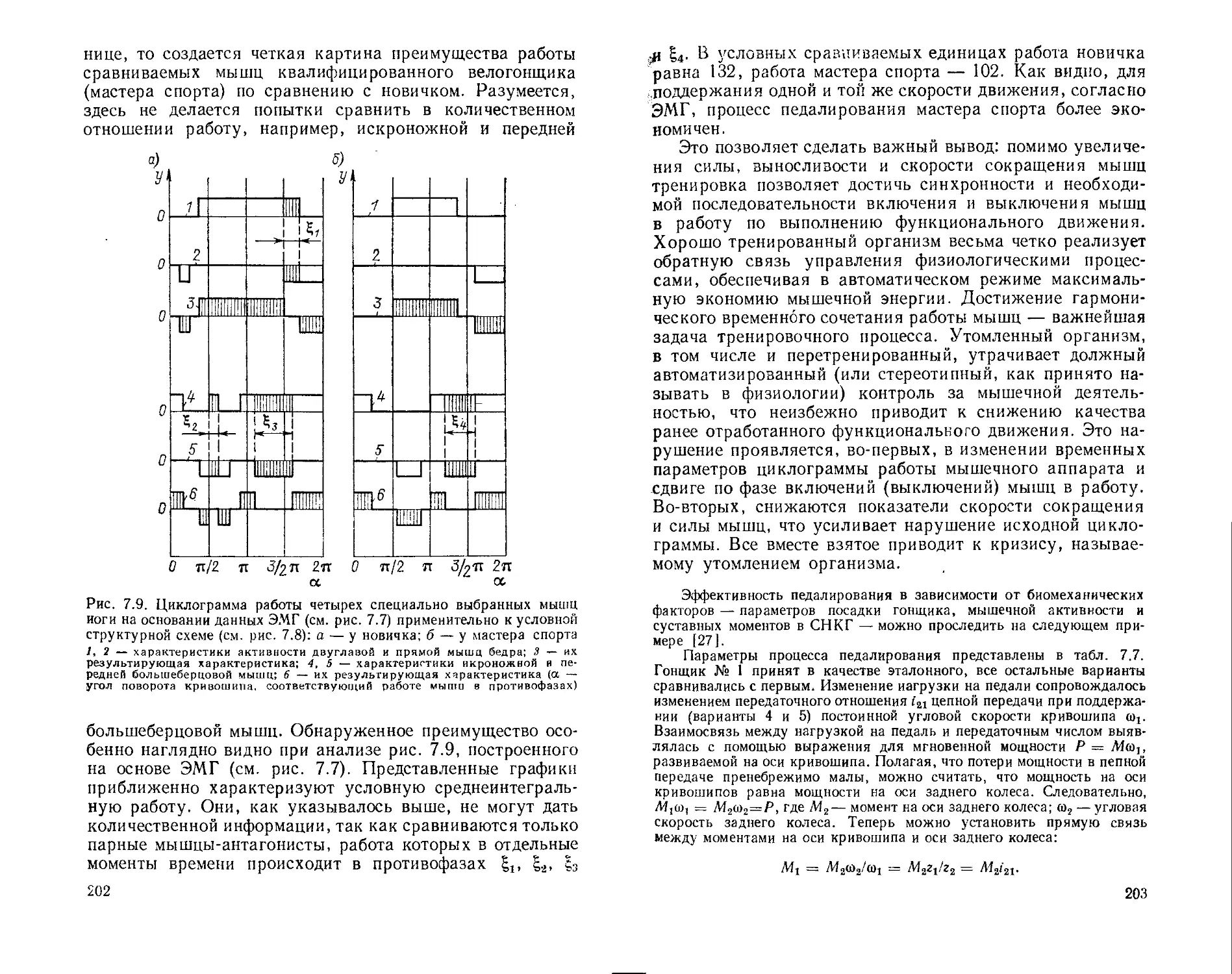
Text
а п. любовицкий
ГОНОЧНЫЕ
ВЕЛОСИПЕОЫ
ОГЛАВЛЕНИЕ
Предисловие .................................................. 3
Глава 1. Обзор развития велосипедного спорта ...... 7
1.1. Краткая историческая справка..................... —
1.2. Классификация велосипедов ...................... 13
1.3. Некоторые технические аспекты правил организа-
ции велосипедных соревнований........................ 18
Глава 2. Размерные параметры гоночного велосипеда ... 21
2.1. Основные размерения гоночного велосипеда ... —
2.2. Тактико-технические аспекты посадки велогоищвка 23
2.3. Анатомо-антропометрические аспекты посадки ве-
логонщика ........................................... 26
2.4. Геодезические аспекты посадки гонщика и основ-
ных размерений гоночного велосипеда............ 41
2.5. Геометрические аспекты посадки велогонщика 46
Глава 3. Устройстао гоночного велосипеда, основные узлы
и детали ..................................................... 52
3.1. Общее конструктивное решение гоночного вело-
сипеда ............................................... —
3.2. Рама............................................ 55
3.3. Передняя вилка.................................. 57
3.4. Руль............................................ 59
3.5. Колеса.......................................... 60
3.6. Каретка ........................................ 64
3.7. Педали.......................................... 69
3.8. Тормоза ........................................ 70
3.9. Задний переключатель передач..................... —
3.10. Передний переключатель передач.................. 75
3.11. Трещотка......................................... —
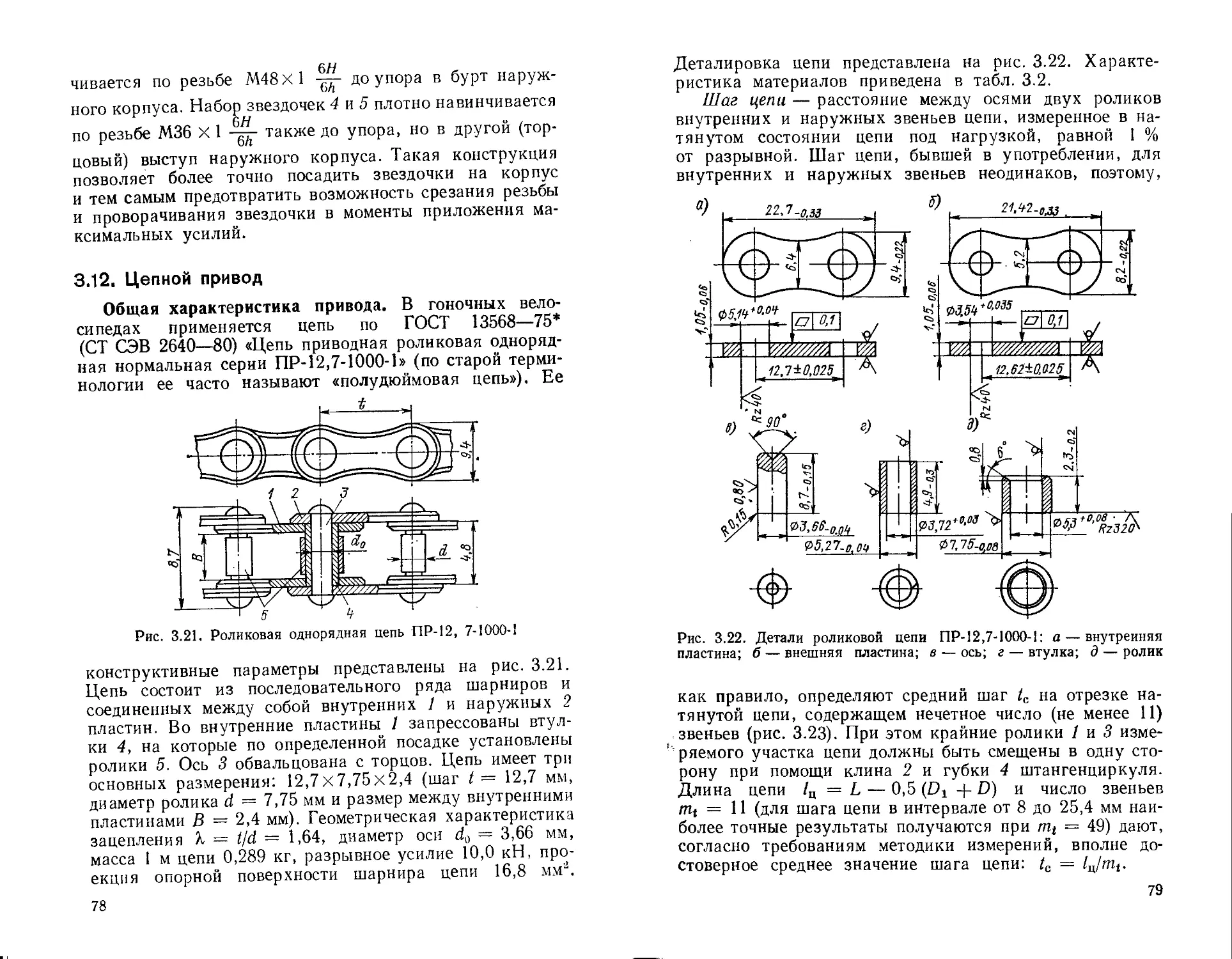
3.12. Цепной привод................................... 78
3.13. Седло........................................... 85
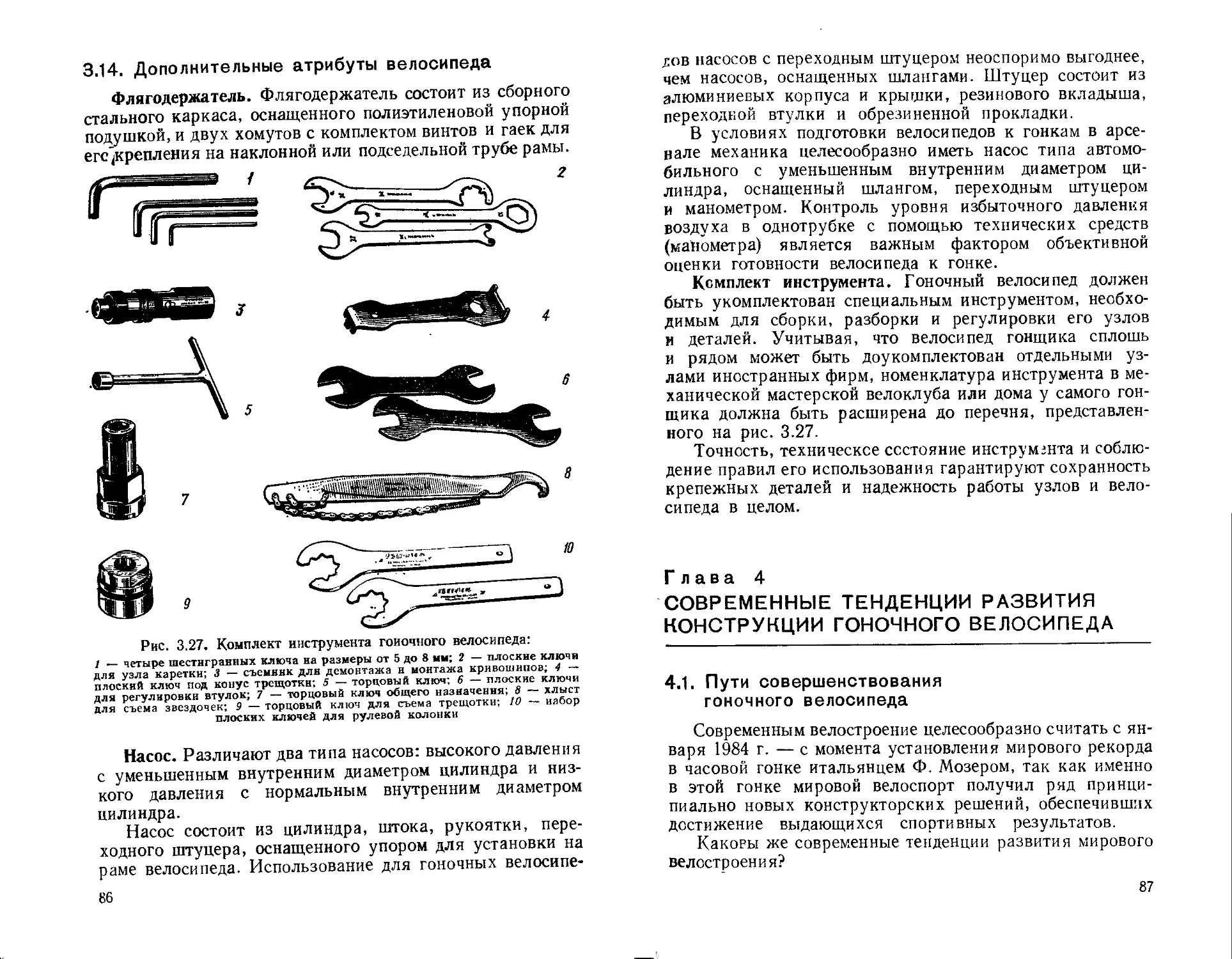
3.14. Дополнительные атрибуты велосипеда ............. 86
Глава 4. Современные тенденции развития конструкции
гоночного велосипеда ...................................... 87
4.2. Перспективные конструкторские решения основных
узлов гоночного велосипеда........................ 91
4.3. Модель велосипеда образца 1985 года ........... 107
318
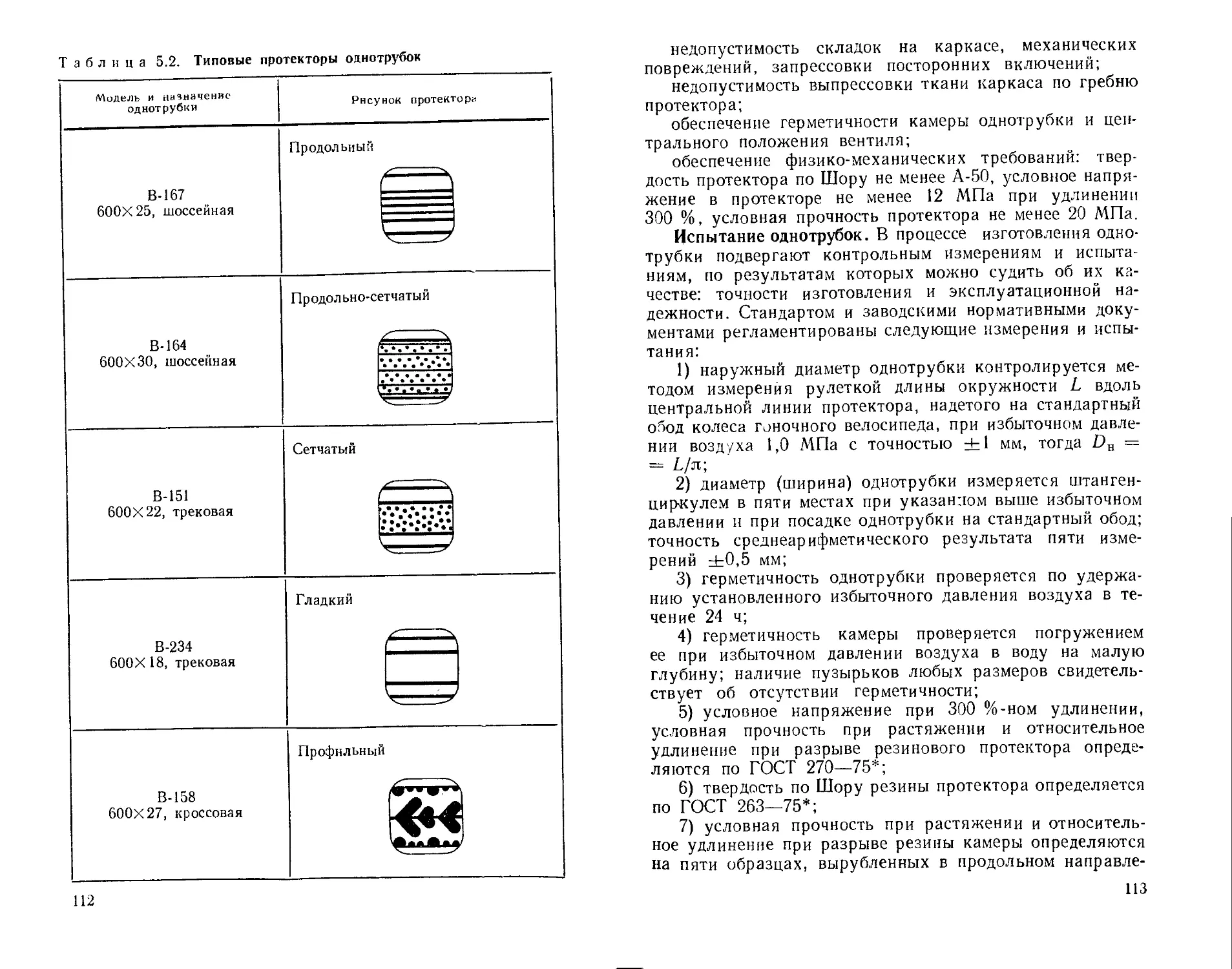
Глава 5. Технология изготовления и конструкция однотру-
бок ...................................................... 110
5.1. Назначение, классификация и технические тре-
бования к однотрубкам................................ —
5.2. Конструкция однотрубок ........................ 114
5.3. Технология изготовления однотрубок............. 116
5.4. Эксплуатационные свойства однотрубки........... 118
Глава 6. Анализ узлов гоночного велосипеда по параметрам
прочности и динамического качества........................ 121
6.1. Динамические качества рамы ...................... —
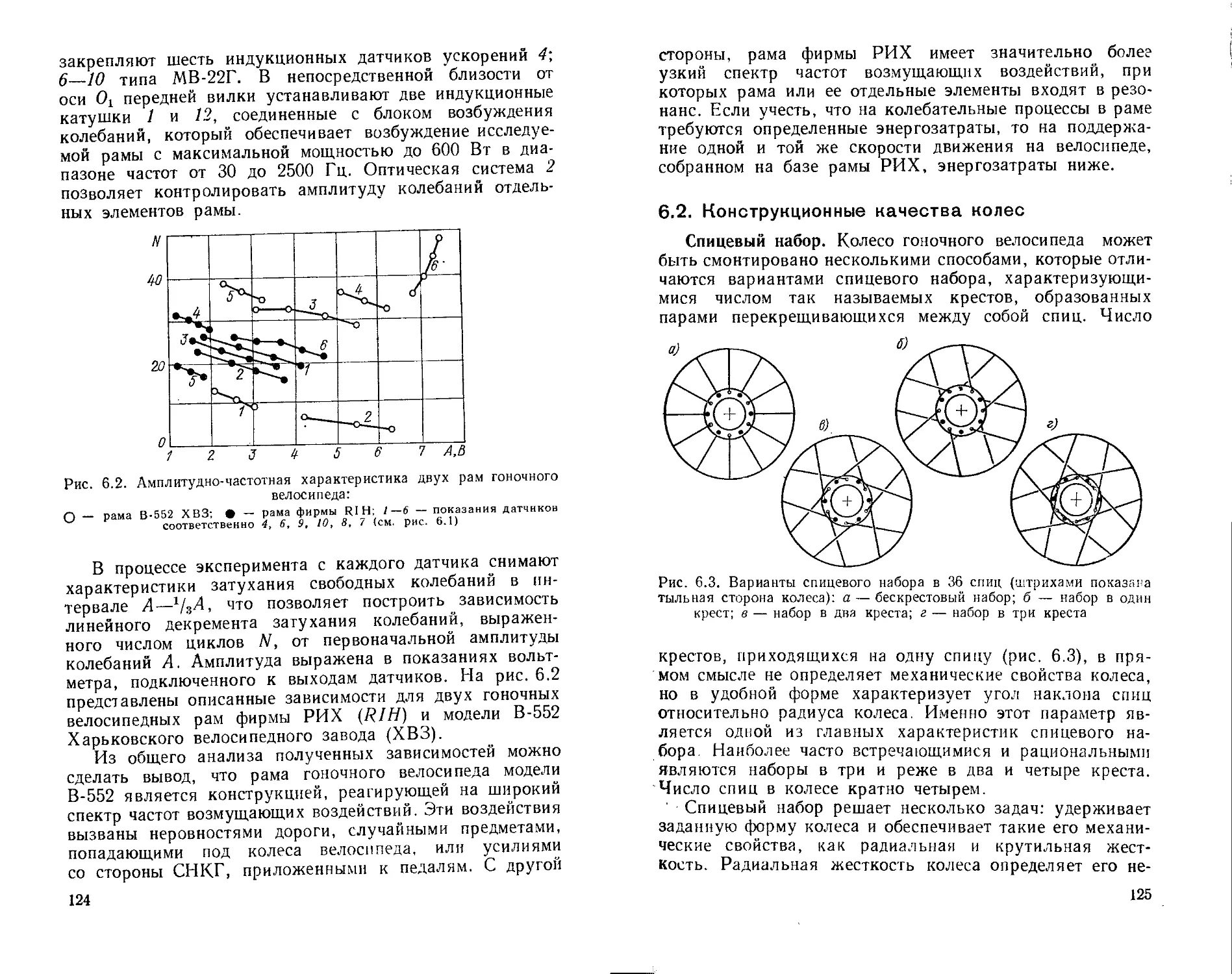
6.2. Конструкционные качества колеса................ 125
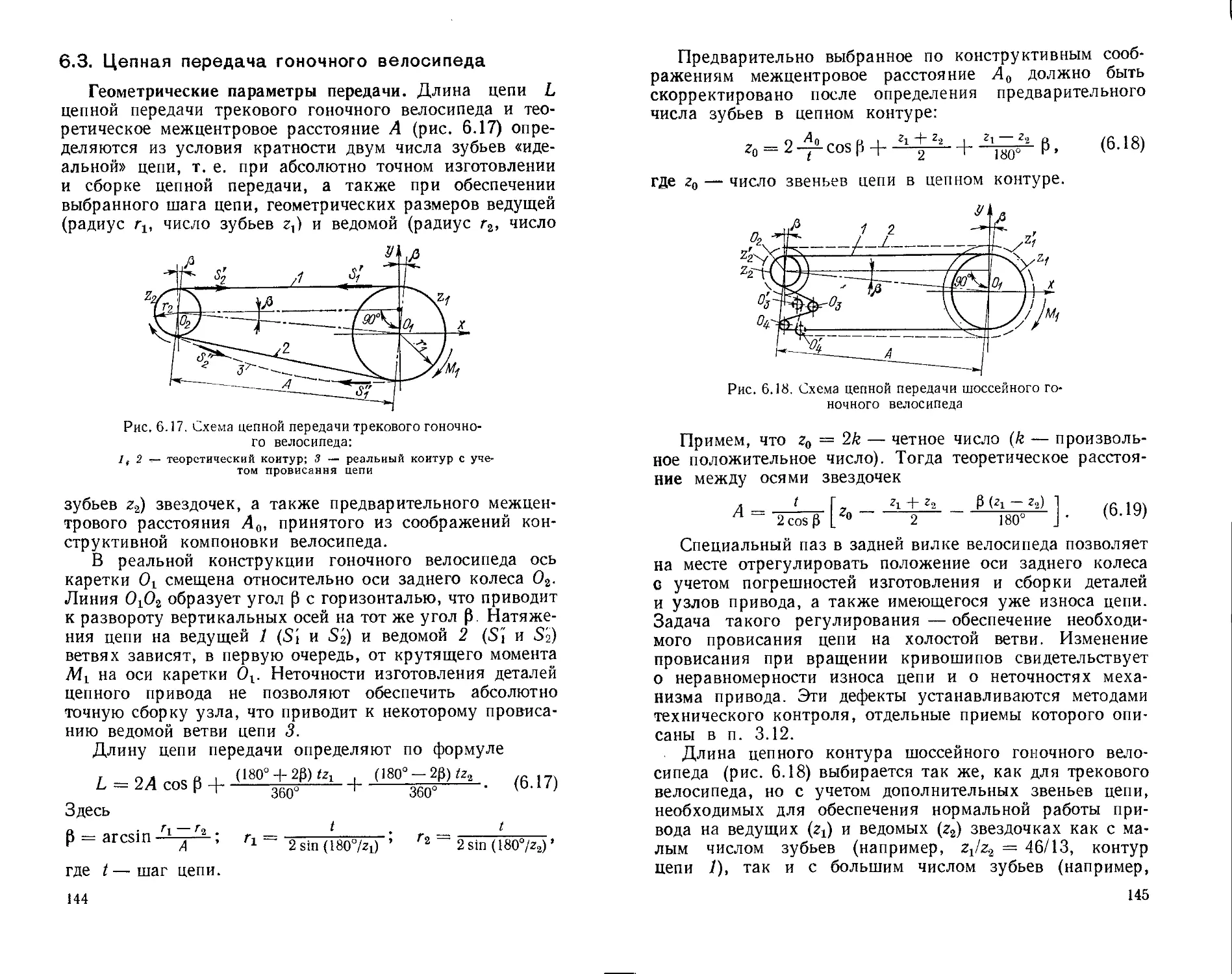
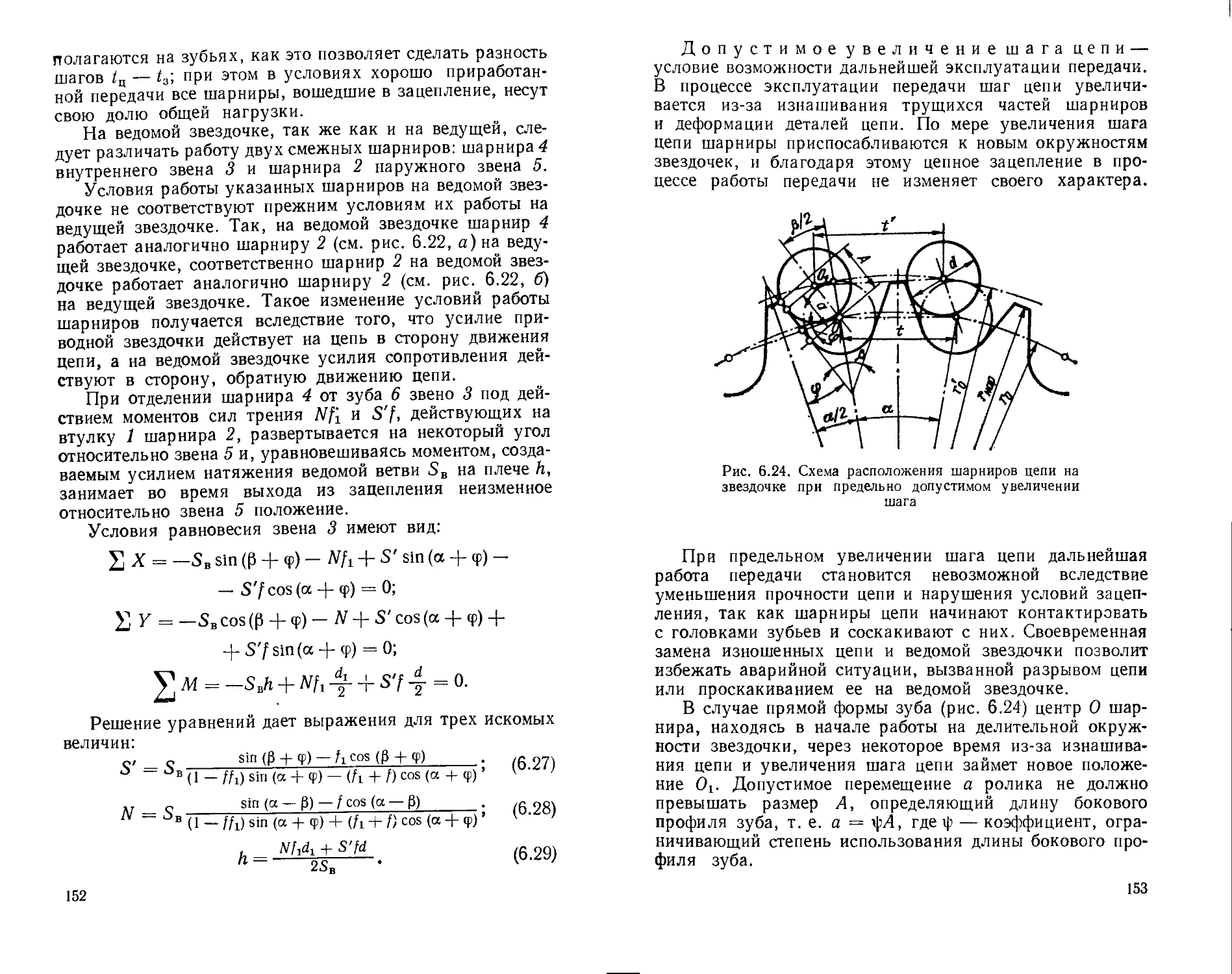
6.3. Цепная передача гоночного велосипеда........ 144
6.4. Соединение вала каретки с кривошипом .... 166
Глава 7. Основы теории педалирования для гоночного вело-
сипеда ............................................... . 169
7.1. Энергетическое обеспечение процесса педалирова-
ния ................................................. —
7.2. Технический анализ процесса педалирования . . 186
7.3. Кинематика и кинетостатика процесса педалиро-
вания ............................................. 212
7.4. Проблемы применения иекруглых зубчатых звез-
дочек в цепных передачах гоночных велосипедов 217
7.5. Тренажеры, конструкции и методы их практиче-
ского применения................................... 228
Глава 8. Кинематика и динамика системы гонщик — ве-
лосипед ................................................ 24}
8.1. Структура системы гонщик — велосипед. .... —
8.2. Кинематика системы гонщик — велосипед .... 245
8.3. Кинетостатика системы гонщик — велосипед . . . 254
8.4. Устойчивость движения системы гонщик — вело-
сипед ............................................. 264
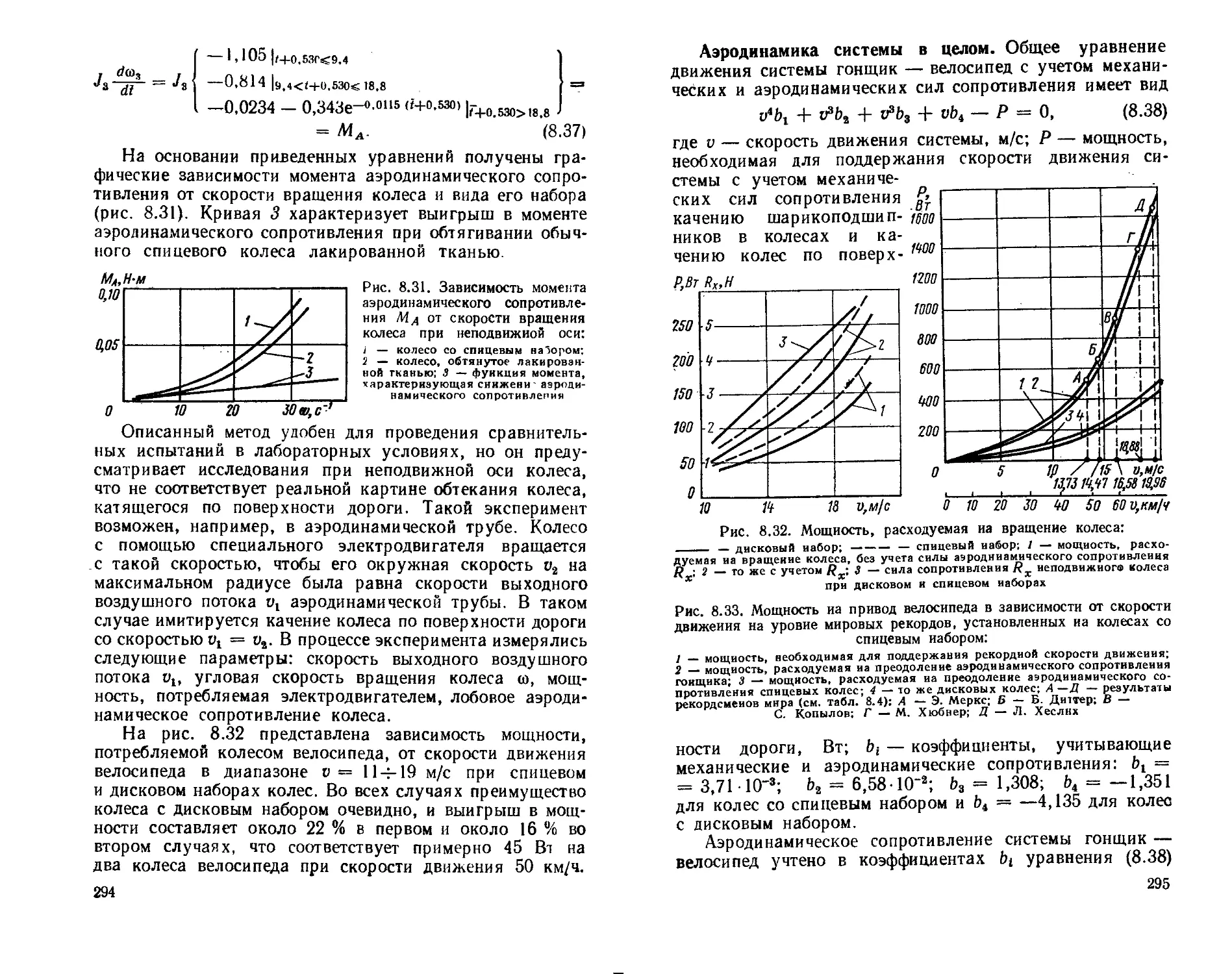
8.5. Аэродинамика системы гонщик — велосипед . . . 279
8.6. Динамика системы гонщик — велосипед.. 300
Заключение................................................... 310
Список литературы............................................ 312
Словарь терминов и профессионализмов в велосипедном спорте 314
ББК 39.363
Л93
УДК 629.118.31
Рецензент А. С. ДЬЯЧЕНКО
Любовицкий В. П.
Л93 Гоночные велосипеды. — Л.: х^ашнностроепие.
Ленингр. отд-ние, 1989. — 319 с.: ил.
ISBN 5-217-00580-7
Книга является первым опытом по созданию теории гоноч-
ного велосипеда. В ней проанализированы проблемы конструи-
рования и эксплуатации, установлены основные требования
к системе гонщик — велосипед и к отдельным узлам велосипеда.
Даны рекомендации и советы спортсменам, тренерам, механикам
по выбору различных параметров, подбору посадки и рациональ-
ных передач. Приведены расчеты, изложены вопросы кинема-
тики и динамики, рассмотрена техника педалирования, осве-
щены тенденции развития узлов велосипеда, проведено сравне-
ние спицевых колес с дисковыми.
Книга предназначена для профессионалов и любителей
велосипедного спорта, конструкторов гоночных велосипедов,
студентов школ тренеров и институтов физической культуры.
2705140200—205
Л 038 (01)—89 205~88
ББК 39.363
ISBN 5-217-00580-7 © Издательство «Машиностроение»,
1989
ПРЕДИСЛОВИЕ
Энтузиасты велосипедной езды, спортсмены-велоси-
педисты, техники-механики и просто любители изобре-
тать велосипед с выходом этой книги получают в свое
распоряжение печатный труд, в котором сделана попытка
обобщить огромный опыт велостроения по созданию сов-
ременных гоночных велосипедов. Необходимость выхода
в свет книги, закладывающей основы теории велосипеда,
давно назрела.
По ходу знакомства с книгой читатель найдет для себя
много интересных сведений. Так, он узнает, почему раз-
мер колес и длина кривошипов (шатунов) именно такие,
какими они приняты на современных велосипедах, или
чем обеспечивается устойчивое движение велосипеда. Да-
лее читатель встретится и с более глубоким анализом важ-
ных технических проблем, связанных с велосипедом.
•Например, он найдет ответы на вопросы о том, в чем преи-
мущество дискового колеса; почему цепь полудюймовая,
а не дюймовая, как это было раньше; что такое динамиче-
ское качество велосипедной рамы. На многие из этих
вопросов ответ дан на основании собственных наблюдений
и исследований автора. Кроме того, использован анализ
обширного технического и методического материала, опу-
бликованного в зарубежной и отечественной литературе.
Не обошлось и без математических выкладок, что придает
материалу еще большую убедительность. Все это позволяет
Сделать книгу интересной широкому кругу читателей —
от юного начинающего спортсмена-велосипедиста до про-
фессионального разработчика самого современного го-
ночного велосипеда.
Представляя читателю настоящую книгу, хочется на-
деяться, что она закладывает первые основы будущей
теории гоночного велосипеда, которая еще не создана в до-
статочном объеме, но необходимость создания которой
давно очевидна. Вместе с тем читатель ощутит определен-
ную неудовлетворенность тем, что объем книги, а вполне
возможно, и отсутствие необходимой информации не
1* 3
позволили коснуться таких важных вопросов, как метро-
логия в велосипедном спорте, спортивная одежда и обувь,
ремонт и эксплуатация гоночного велосипеда. Все это
следует учесть в следующих изданиях.
Книга «Гоночные велосипеды» открывает любителям
и специалистам велосипедного спорта широкие просторы
для творческого анализа и поиска технических и методи-
ческих решений в такой традиционной, хорошо всем из-
вестной области техники, какой является велостроение.
Новый бум, сопровождающий очередное «рождение»
велосипеда за рубежом и в нашей стране, не случаен.
Человеческое общество конца XX в. стоит перед пробле-
мой больших и малых передвижений. Сравнительно быстро
минул этап, когда конструкторы и изобретатели не ску-
пились на затраты энергии, например, на вывод косми-
ческого корабля на орбиту или на установление рекорда
часовой езды на велосипеде. Наступили другие времена,
когда перед каждым человеком и государством стоит
реальный образ энергетической проблемы, требующей
решения задач повсеместной экономии энергии и в пер-
вую очередь на общественных и индивидуальных видах
городского и сельского транспорта. В период всеобщего
энергетического кризиса, наступающей на человечество
гипоксии велосипед с его эмоциональным и физиологи-
ческим факторами признается панацеей от многих болез-
ней и прекрасным дешевым транспортным средством.
О развитии и широком использовании велосипедного
транспорта в нашей стране и за рубежом свидетельствуют
многочисленные примеры. Общий мировой парк велоси-
педов в 1985 г. превысил 450 млн. единиц, в том числе
в США 100 млн. На сегодняшний день выдано свыше 15 тыс.
патентов на различные конструкции велосипедов. В одном
из крупнейших городов мира Нью-Йорке уже построено
свыше 250 км дорог для велосипедного транспорта. Хо-
рошо известно, что в таких странах, как Индонезия,
Вьетнам, Индия, велосипед является основным видом
городского и сельского транспорта. В Литве разрабаты-
ваются и реализуются на практике планы организации
массового движения велосипедного транспорта.
Сегодня ни у кого нет сомнений в том, что велосипедная
езда на работу и обратно или просто езда для отдыха яв-
ляется отличной эмоциональной разрядкой и одновре-
менно тренировкой. Всех приверженцев велосипедной
езды прежде всего прельщают малые затраты энергии,
4
значительная скорость, простота и надежность конструк-
ции, транспортабельность и удобство хранения, низкая
стоимость велосипеда и возможность обслуживания соб-
ственными силами. И здесь на первый план выходит
гоночный велосипед — последнее слово современного ве-
лостроения.
В ряде стран Европы велосипедный спорт по праву
считается одним из наиболее популярных. В Италии,
Франции, Бельгии, Голландии, Англии, Швейцарии,
Дании, ФРГ и социалистических странах ежегодно ор-
ганизуются сотни велосипедных гонок на треках и шоссе,
миллионы подростков мечтают стать выдающимися вело-
гонщиками. В этих условиях достоверная и доступная
информация о велосипеде приобретает особо важное зна-
чение.
Особое место следует отвести велосипедному спорту на
шоссе и треке. Здесь можно говорить только о гоночном
велоси педе самых совершенных конструкций. Практика
показала, что в среднем каждые пять—восемь лет в кон-
струкции гоночного велосипеда происходят заметные
изменения, полностью исключающие возможность исполь-
зования устаревших моделей. Речь, разумеется, идет
прежде всего о велосипедных гонках всесоюзного и меж-
дународного ранга.
Последний период развития конструкции гоночного
велосипеда можно назвать этапом решения энергетических
задач. Появилось много технических новинок, позволяю-
щих повысить аэродинамические качества велосипеда и
одежды гонщика, улучшить динамические качества ве-
лосипедной рамы и колеса или вообще скомпоновать
пс-новому велосипед, как это сделали конструкторы для
Ф. Мозера в 1984 г.
Велосипедный спорт относится к техническим видам
спорта. И хотя физическая подготовка является в этом
виде определяющей, тем не менее в условиях жесткой
спортивной борьбы на всесоюзных и мировых первенствах,
когда речь идет об установлении рекордов, важную роль
играет техническая оснащенность спортсмена, под кото-
рой, в первую очередь, подразумевают конструкцию вело-
сипеда и его отдельных узлов: рамы, руля, седла, колес,
однотрубок, цепного привода, системы передач и т. д.
Удачная комплектация велосипеда — залог успешного
старта спортсмена. И в этом не последнюю роль играет
психологический настрой, вера в совершенство техниче-
5
ской оснащенности, понимание того, что в этом случае
результат зависит только от самого себя.
Можно с полной уверенностью утверждать, что сегодня
велосипед, тем более гоночный, перестал уже быть изде-
лием, в основу которого положена только удачная мысль
отдельного конструктора и изобретателя. Сегодня гоноч-
ный велосипед — продукт творческой деятельности боль-
ших коллективов исследователей, конструкторов и, что
весьма важно, технологов-машиностроителей, обеспечи-
вающих высокое качество изготовления и сборки в усло-
виях массового или серийного производства.
Все сказанное убедило автора в необходимости пред-
ставить в настоящей книге имеющиеся сведения о кон-
струкциях, осветить производственный опыт изготовле-
ния, а также опыт эксплуатации гоночных велосипедов
современных конструкций. Изложение материала сопро-
вождается использованием сведений из смежных областей
знаний—таких, как физиология и анатомия.
В книге преднамеренно не рассматриваются конструк-
ции спортивных велосипедов, предназначенных для гонок
за лидером, велобола, фигурного катания, а также специ-
альные конструкции, предназначенные для установления
рекордов абсолютной скорости с использованием обтека-
телей и других приспособлений, которые делают велоси-
пед отличающимся от общепринятых норм, утвержденных
Международным союзом велосипедистов.
Предлагаемая книга является первой попыткой объ-
яснить с научной точки зрения многие явления, происходя-
щие при езде на велосипеде, явления хорошо нам знако-
мые с детства, но вызывающие затруднения при попытках
объяснить их физическую сущность.
Автор книги «Гоночные велосипеды» в прошлом сам
занимался велосипедным спортом и участвовал в гонках,
а в настоящее время работает в области техники. Сочета-
ние столь важных двух начал — спорта и техники —
в значительной степени предопределило структуру и
содержание книги. Читателю предоставляется возмож-
ность прочесть краткий исторический очерк, получить
представление о правильной посадке велогонщика, кон-
струкции основных узлов гоночного велосипеда и совре-
менных тенденциях их развития. Но главное, на что рас-
считывает автор, — это пробуждение интереса читателей
к велосипеду вообще и гоночному в частности.
Глава 1
ОБЗОР РАЗВИТИЯ
ВЕЛОСИПЕДНОГО СПОРТА
1.1. Краткая историческая справка
История создания и развития гоночного велосипеда
неразрывно связана с историей велосипеда вообще, так
как первые, весьма несовершенные модели велосипедов
вызвали оживленный интерес и сразу же поставили есте-
ственные вопросы:
можно ли использовать велосипед для передвижения
на большие расстояния?
может ли велосипед конкурировать с существовавшими
в то время общепризнанными экипажами с конной тягой?
не пора ли выявить сильнейшего велосипедиста своего
времени?
Таким образом, с момента рождения первого велоси-
педа возникла потребность доказать его право на существо-
вание. И, видимо, самым естественным путем такого до-
казательства был путь организации спортивных состяза-
ний. Разумеется, эти состязания в разные времена носили
различный характер. Так, в 1817 г. немец Карл Драйз
.В состязании с самим собой преодолел на велосипеде ди-
станцию в 14 км за 60 мин, а несколько позже расстояние
в 70 км между городами Карлсруэ и Кель он преодолел
за 4 ч. Известно, что в России крепостной умелец Ефим
Артамонов на велосипеде собственной конструкции со-
вершил длительный велопробег из Свердловска (Екате-
ринбурга) в столицу. Это событие вполне можно отнести
к разряду спортивных достижений.
Историческая хроника официальных спортивных со-
стязаний велосипедистов первой упоминает гонку Па-
риж—Руан на дистанцию в 120 км, выигранную англича-
нином Муром с результатом 10 ч 45 мин. И начиная с
1869 г. эта гонка стала традиционной. Можно считать,
-что именно с этого момента велосипедный спорт получил
официальное признание, так как повсюду — во Франции,
Германии и других странах Европы — стали создаваться
велосипедные клубы. Правда, велосипеды этого периода
мало походили на современный гоночный велосипед, но
тот факт, что в них была заложена и непрерывно разви.
7
валась идея технического совершенствования, ни у кого
не вызывает сомнения.
В начале 1860-х гг. во Франции появились велосипеды,
оснащенные передним колесом большого диаметра и пе-
дальной системой, — так называемые «пауки», а несколько
позже, в 1887 г. благодаря изобретению Джона Данлопа
велосипеды стали оснащаться пневматическими шинами.
В том же году француз Пьер Кармьен предложил модель
со свободным ходом. Это сделало гоночный велосипед
более комфортабельным и быстроходным, и в Европе
начался велосипедный бум. Проводились самые различные
состязания. В 1885 г. Стивенс на «пауке» совершает круго-
светное путешествие, в 1891 г. известный велогонщик
Этли в часовой гонке по треку на «пауке» преодолел 32 км,
в том же году берет начало знаменитая велогонка Бордо—
Париж протяженностью 572 км. Ее первый победитель
англичанин Миле показал результат 26 ч 34 мин 57 с.
Первая гонка Бордо—Париж была одновременно и
сенсацией и революцией в велосипедном спорте. Она
впервые продемонстрировала, что гоночный велосипед
может преодолевать огромные расстояния, совершать
резкие ускорения — спурты, создавать невиданный-ранее
накал спортивной борьбы. Все это создало предпосылки
к интенсивному техническому развитию гоночного велоси-
педа. Велоспорт вышел на широкую дорогу и занял в Ев-
ропе ведущее положение. Каждая европейская страна счи-
тала для себя престижным иметь собственный велотур.
Гонка Париж—Брест—Париж (первая гонка, 1891 г.),
Бордо—Париж (1891 г.), Париж—Брюссель (1893 г.),
Москва—Петербург (1895 г.), Париж—Тур (1895 г.), Па-
риж— Рубэ (1986 г.), «Тур де Франс» (гонка «Вокруг Фран-
ции», 1903 г.), «Джиро» (гонка «Вокруг Италии», 1909 г),
шестидневные гонки на треках в Париже (1894 г.), Нью-
Йорке (1899 г.), Брюсселе (1912 г.) — вот перечень только
основных велотуров и крупнейших трековых состязаний
профессиональных велогонщиков того времени. Из них
«Тур де Франс» — самая престижная и самая сложная
в спортивном отношении гонка. Ее длина в различные годы
составляла от 2428 км (1903 г.) до 5795 км (1926 г.), от-
дельные этапы достигали 467 км (этап Париж—Леон,
1903 г.), число дней отдыха за всю гонку сводилось к ми-
нимальному — двум.
Наряду с крупнейшими шоссейными и трековыми вело-
гонками мирового значения начали проводиться офи-
8
цнальные чемпионаты мира; по спринту — для любителей
(начиная с 1893 г.) и профессионалов (с 1895 г.), за ли-
дерами — для профессионалов (с 1895 г.) и любителей
(с 1893 г.), по шоссе — для любителей (с 1921 г.) и про-
фессионалов (с 1927 г.). Начиная с 1896 г. велосипедный
спорт включен в программу Олимпийских игр. Первым
олимпийским чемпионом по велоспорту был француз
П. Массон. Ведется официальная регистрация мировых
рекордов на треке по основным видам гонок, начиная с ги-
тов на 500 м и кончая часовыми гонками. Регистрируются
рекорды и на сверхдлинные дистанции (например, 500 км
и 24-часовые гонки), а также рекорды в гонках за лидером
на различные дистанции и в часовой гонке. В различные
периоды развития велосипедного спорта популярность
отдельных дистанций изменялась. В последнее время
в центре внимания находятся классические дистанции и
дистанции, входящие в программу Олимпийских игр.
Первое официальное соревнование в России по велоси-
педному спорту зарегистрировано 24 июля 1883 г. Сорев-
нования проводились на ипподроме в Москве. В 1900-е гг.
дистанции на отдельных гонках в России достигли ги-
гантских размеров. Примером может служить одноэтап-
ная гонка Петербург—Москва. Известно выдающееся
спортивно-туристское достижение — кругосветное путе-
шествие на велосипеде, совершенное русским велосипеди-
стом А. Панкратовым в 1911—1913 гг. Спортсмен был
награжден бриллиантовой звездой — высшей наградой
У СИ.
В 1937 г. был проведен первый советский велотур про-
тяженностью более 2500 км. Победителем оказался
М. Рыбальченко. В 1938 г. состоялся второй велотур
протяженностью 3200 км. С 1951 г. в СССР регулярно
проводится всесоюзная многодневная гонка. Первая гонка
проходила по маршруту Москва—Харьков—Москва, ее
победителем стал Р. Чижиков. Начиная с 1954 г. команда
советских велосипедистов принимает активное участие
в Международной велогонке мира, проходящей по трассе
длиной от 2000 до 2500 км между городами Варшава,
Берлин, Прага. Команда СССР неоднократно становилась
победителем гонки в командном зачете, а Ю. Мелихов
в 1961 г. стал первым среди советских гонщиков победи-
телем этой гонки в личном зачете. В настоящее время ши-
роко известны победы советских гонщиков на Олимпий-
ских играх (первым советским олимпийским чемпионом
9
по велоспорту в 1960 г. стал В. Капитонов), чемпионатах
мира, в традиционных многодневных гонках по дорогам
многих стран мира.
С ростом уровня скоростей велосипедных гонок, с обо-
стрением конкурентной борьбы на различных этапах
дистанций, и в первую очередь на финише, постепенно
менялись требования к конструктивным, эргономическим
и эксплуатационным параметрам гоночных велосипедов.
Гонщики перестали останавливаться на питательных пунк-
тах, предпочитая везти запасы питания в специальных
бачках, установленных в держателях на руле, сумках,
переброшенных через плечо, а позднее в карманах вело-
рубашек. Послевоенный период развития велоспорта
ознаменовался широким внедрением различных типов
переключателей скоростей, получивших в нашей стране
общепринятое название «суппер», разработкой современ-
ной компоновки рамы, применением катанных из алюми-
ниевых сплавов ободов, тянутых спиц и эксцентриковой
системы крепления колес. Несмотря на явный прогресс
в технической оснащенности спортивная одежда вело-
гонщиков пока еще была далека от совершенства.
Первый период развития дорожных и трековых гонок
характеризовался громадными дистанциями. Организа-
торы соревнований ставили своей задачей продемонстри-
ровать потенциальные возможности велосипеда и гонщика
преодолевать большие расстояния. Дистанции 500—
800 км и даже 1000 км для однодневных гонок, а точнее,
гонок с одним стартом, так как они растягивались на
сутки и более, были обычным явлением. Для оживления
борьбы на трассах длительных изнуряющих гонок отдель-
ные этапы гонщики стали проходить за лидером, в каче-
стве которого использовались тандемы, триплеты, кварту-
плеты и т. д. Особой популярностью стали пользоваться
трековые гонки за лидером-мотоциклом, в которых се-
годня достигнуты скорости, превышающие 170 км/ч.
В дальнейшем острота восприятия состязаний на вы-
носливость утратилась, на первый план стала выступать
скоростная выносливость, и дистанции постепенно стали
сокращаться, достигнув современных размеров. Напри-
мер, чемпионаты мира в шоссейных гонках проводятся
на 190 км у любителей и 290 км у профессионалов. В сов-
ременных условиях высокой технической оснащенности
гоночных велосипедов и автострад с идеальным покрытием
первостепенное значение приобретают скоростные воз-
10
можности велогонщика. Часто гонки заканчиваются груп-
повым финишным спуртом, в котором для победы крайне
важно хотя бы на диаметр однотрубки быть впереди со-
перников. Полная драматизма победа В. Капитонова на
Римской Олимпиаде над итальянцем Л. Траппе является
ярким примером подобного финиша.
Однако, как показывает статистика, имеется много
примеров, когда подавляющего преимущества отдельные
велогонщики достигали в гонке задолго до финиша.
Подобной тактикой ведения гонок был знаменит выдаю-
щийся итальянский профессиональный гонщик 1940—
50 гг. Фаусто Коппи, долгое время возглавлявший, сог»
ласно мировой классификации, список лучших гонщиков
мира. На Московской Олимпиаде в 1980 г. С. Сухорученков
своей тактикой и финишем с большим преимуществом
блестяще подтвердил звание сильнейшего гонщика мира
среди любителей.
Особое место в истории велосипедного спорта занимают
такие виды, как гонки за лидером, велобол, фигурное ка-
тание на велосипеде. В этих видах разыгрывается офи-
циальное первенство мира, а также устраиваются ско-
ростные заезды на побитие мировых рекордов на велосипе-
дах специальных конструкций и за лидером-автомашиной,
оснащенной специальным плексигласовым колпаком, в
разряженной зоне которого спортсмен способен на корот-
ких участках в 1 км развить невероятно большую для ве-
лосипеда скорость — свыше 240 км/ч. Эти рекорды, а
также рекорды, установленные на велосипедах специаль-
ных конструкций, на которых велогонщик педалирует
лежа на спине или животе, с 1938 г. не регистрируются
УСИ, носят неофициальный характер и преследуют в ос-
новном коммерческие и рекламные цели. Подобные гонки
не проводятся в нашей стране, и федерация велосипедного
спорта СССР подобные рекорды не регистрирует. А весьма
эмоциональные и чрезвычайно интересные в техническом
отношении трековые велогонки за лидером-мотоциклом
в последнее время в нашей стране утратили былую по-
пулярность и проводятся эпизодически. Гонки за лидером
являются прекрасной школой мужества и хорошим сред-
ством тренировки темповиков и спринтеров для отработки
техники педалирования в экстремальных скоростных
условиях.
В 1976 г. была создана международная ассоциация по
развитию средств передвижения, использующих мус-
11
кульную силу человека. Эта организация ставит своей
целью проведение соревнований без ограничений на кон-
струкцию аппарата передвижения, включая отличающе-
еся от установленных правилами УСИ положение гон-
щика, различные обтекатели и т. д.
Учитывая узкую специализацию книги, в кратком
обзоре трудно охватить все исторические аспекты развития
конструкций и моделей спортивных велосипедов различ-
ного назначения. Это является предметом специального
обзора. Поэтому ниже рассмотрены основные этапы
развития только гоночного велосипеда в его современном
представлении, предназначенного для ведения гонок на
шоссе и треке.
Гоночный велосипед с первых шагов своего развития
был вовлечен в очень сложную, насыщенную спортивной
борьбой и жестокой конкуренцией сферу общественной
деятельности. Сотни тысяч велогонщиков, начиная от
юных, фанатично преданных велосипеду спортсменов, и
кончая маститыми профессионалами, без устали вращали
педали на заре нашего века по дорогам всего мира. Сотни
фирм и спонсорных объединений напряженно работали
над решением технических, медицинских и учебно-тре-
нировочных вопросов. Миллионы болельщиков, стоящих
у обочины шоссе, жадно читающих отчеты в многотираж-
ных газетах и журналах, являлись косвенным стимуля-
тором прогресса велосипеда. Но действительно мощным
рычагом развития и технического совершенствования
гоночного велосипеда следует считать миллионные при-
были акционеров, имеющих отношение к организации и
финансированию велогонок, крупные денежные призы
победителей, ореол всеобщей популярности.
Невольно напрашивается сравнение велостроения с
такими отраслями, как авиа- и автомобилестроение. В этих
отраслях, по общему мнению, итоговые результаты более
значительны. За последние 30—40 лет в авиации появи-
лись принципиально новые конструкторские решения,
основанные на разработке и внедрении новых видов двига-
тельных аппаратов, например реактивных двигателей.
Для автомобилестроения также характерен большой про-
гресс в двигателестроении, в достижении комфортабель-
ности и экономичности моделей автомашин. А велосипед,
в первую очередь гоночный, внешне остался, на первый
взгляд, без особых изменений. В нем по-прежнему основ-
ным связующим звеном является рама хорошо известной
12
компоновки, колеса, цепной привод, круто изогнутый
руль, ручные тормоза, скромный комплект вспомогатель-
ной оснастки и неизменный со дня зарождения велосипеда
биологический двигатель — человек, поглощающий про-
дукты питания и поставляющий энергию для вращения
кривошипов велосипеда с помощью собственных ног.
Факт неизменности биологического двигателя, а также
жесткие ограничения на конструкции гоночных велосипе-
дов, введенные УИС в 1938 г., по-видимому и определили
сравнительно скромные изменения в конструкциях го-
ночных велосипедов.
Современный этап развития велосипеда, начиная с
1970-х гг., ознаменовался попытками техническими сред-
ствами решить энергетическую проблему за счет исполь-
зования новых легких материалов, аэродинамических
профилей труб рамы и спиц, обтекаемой одежды, новой
компоновки велосипеда в целом, а также за счет других
технических усовершенствований, позволяющих поднять
КПД гоночного велосипеда и всей системы «гонщик—
велосипед». Одновременно впервые в велосипедном спорте
встал вопрос о регистрации рекордов, установленных на
высокогорных и равнинных велотреках. Поэтому, сог-
ласно решению УСИ 1984 г., рекорд итальянца Ф. Мо-
зера в часовой гонке, установленный на треке города
Мехико на высоте 2200 м над уровнем моря и равный
51,151 км, открыл новую таблицу высокогорных рекордов.
1.2. Классификация велосипедов
Как свидетельствует статистика, в 1980 г. мировой парк
велосипедов составил свыше 315 млн. единиц. На сегод-
няшний день в мире выдано свыше 15 тыс. патентов на
велоконструкции. Такое обилие велопродукции несом-
ненно удовлетворяет запросы населения на велосипеды
как средство передвижения, транспортировки, отдыха,
туризма и спорта. Поэтому классификация велосипедов
достаточно сложна (табл. 1.1).
К наиболее распространенному классу относится д о-
р о ж н ы й велосипед в мужском и женском исполне-
ниях общего назначения для езды на работу, в магазин,
для прогулок и местного туризма. В этот класс входит
большая группа велосипедов транспортного назначения
с багажниками различной конструкции, прицепными
тележками и в трехколесном исполнении. Велика но-
13
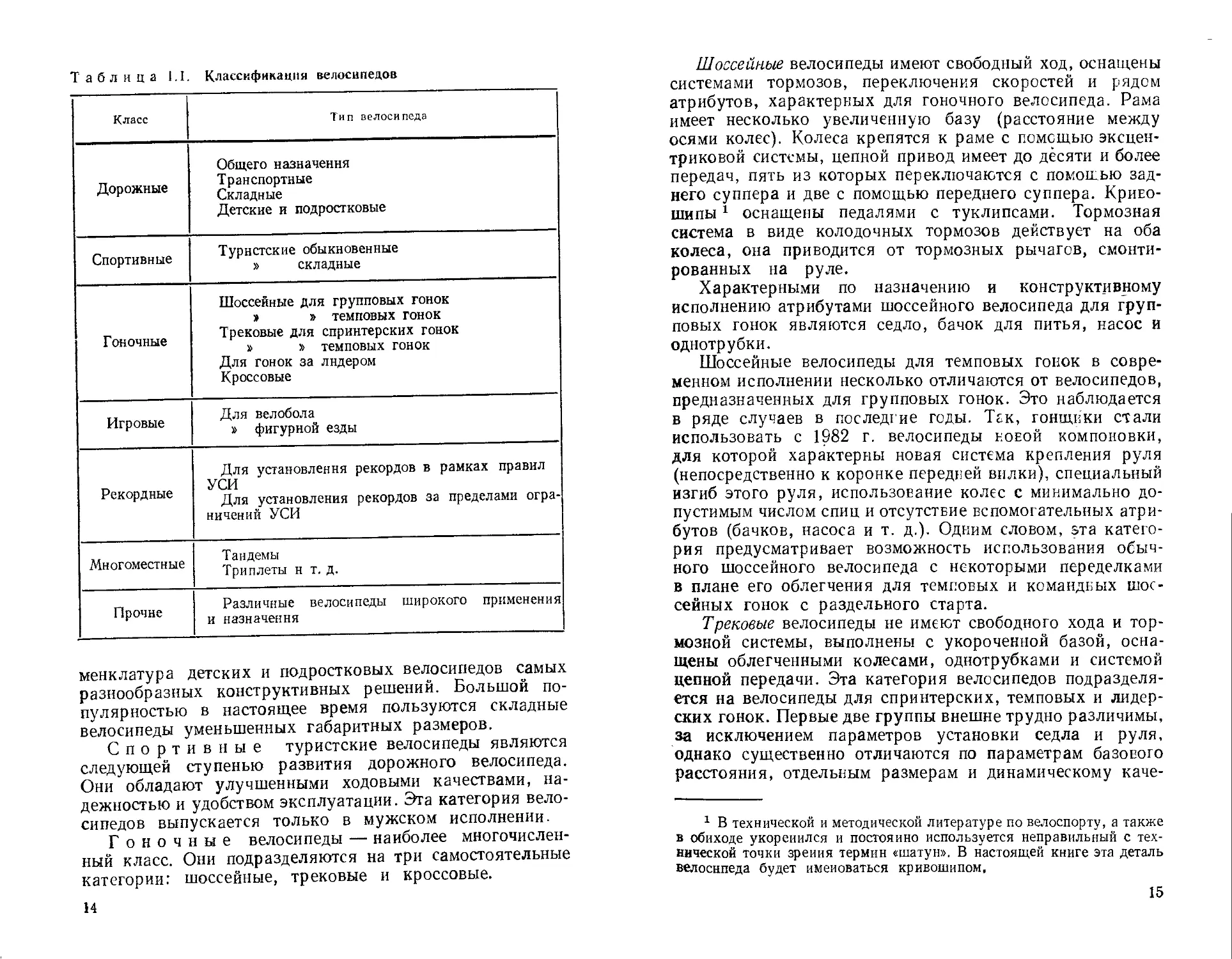
Таблица I. I. Классификация велосипедов
Класс Тип велосипеда
Дорожные Общего назначения Транспортные Складные Детские и подростковые
Спортивные Туристские обыкновенные » складные
Гоночные Шоссейные для групповых гонок » » темповых гонок Трековые для спринтерских гонок » » темповых гонок Для гонок за лидером Кроссовые
Игровые Для велобола » фигурной езды
Рекордные Для установления рекордов в рамках правил УСИ Для установления рекордов за пределами огра- ничений УСИ
Многоместные Тандемы Триплеты н т. д.
Прочие Различные велосипеды широкого применения и назначения
менклатура детских и подростковых велосипедов самых
разнообразных конструктивных решений. Большой по-
пулярностью в настоящее время пользуются складные
велосипеды уменьшенных габаритных размеров.
Спортивные туристские велосипеды являются
следующей ступенью развития дорожного велосипеда.
Они обладают улучшенными ходовыми качествами, на-
дежностью и удобством эксплуатации. Эта категория вело-
сипедов выпускается только в мужском исполнении.
Гоночные велосипеды — наиболее многочислен-
ный класс. Они подразделяются на три самостоятельные
категории; шоссейные, трековые и кроссовые.
14
Шоссейные велосипеды имеют свободный ход, оснащены
системами тормозов, переключения скоростей и рядом
атрибутов, характерных для гоночного велосипеда. Рама
имеет несколько увеличенную базу (расстояние между
осями колес). Колеса крепятся к раме с помощью эксцен*
триковой системы, цепной привод имеет до десяти и более
передач, пять из которых переключаются с помощью зад-
него суппера и две с помощью переднего суппера. Криво-
шипы 1 оснащены педалями с туклипсами. Тормозная
система в виде колодочных тормозов действует на оба
колеса, она приводится от тормозных рычагов, смонти-
рованных на руле.
Характерными по назначению и конструктивному
исполнению атрибутами шоссейного велосипеда для груп-
повых гонок являются седло, бачок для питья, насос и
однотрубки.
Шоссейные велосипеды для темповых гонок в совре-
менном исполнении несколько отличаются от велосипедов,
предназначенных для групповых гонок. Это наблюдается
в ряде случаев в последние годы. Так, гонщики стали
использовать с 1982 г. велосипеды новой компоновки,
для которой характерны новая система крепления руля
(непосредственно к коронке передней вилки), специальный
изгиб этого руля, использование колес с минимально до-
пустимым числом спиц и отсутствие вспомогательных атри-
бутов (бачков, насоса и т. д.). Одним словом, эта катего-
рия предусматривает возможность использования обыч-
ного шоссейного велосипеда с некоторыми переделками
в плане его облегчения для темповых и командных шос-
сейных гонок с раздельного старта.
Трековые велосипеды не имеют свободного хода и тор-
мозной системы, выполнены с укороченной базой, осна-
щены облегченными колесами, однотрубками и системой
цепной передачи. Эта категория велосипедов подразделя-
ется на велосипеды для спринтерских, темповых и лидер-
ских гонок. Первые две группы внешне трудно различимы,
за исключением параметров установки седла и руля,
однако существенно отличаются по параметрам базового
расстояния, отдельным размерам и динамическому каче-
1 В технической и методической литературе по велоспорту, а также
в обиходе укоренился и постоянно используется неправильный с тех-
нической точки зрения термин «шатун». В настоящей книге эта деталь
велосипеда будет именоваться кривошипом.
15
ству рамы. Третья группа трековых велосипедов для ли-
дерских гонок имеет принципиально отличающуюся ком-
поновку рамы: вилка изогнута назад, уменьшен диаметр
переднего колеса, специальная конструкция однотрубок,
специфическая установка седла и руля. Все это позволяет
приблизить гонщика к лидеру и улучшить аэродинамиче-
ское качество системы «лидер—гонщик».
Кроссовые велосипеды — обычные шоссейные гоночные
велосипеды, переоборудованные для кросса. Специфика
такого переоборудования зачастую состоит в изменении
положения седла и руля, в изменении передаточных от-
ношений (рекомендуется диапазон соотношений цепной
передачи от 24x42 до 14x48), в использовании колес
повышенной прочности и однотрубок увеличенной массы
(0,5 кг и выше).
Игровые велосипеды в настоящем издании не
рассматриваются, так как не относятся к категории го-
ночных, т. е. к категории велосипедов, предназначенных
для достижения максимальных или рекордных скоростей.
Рекордные велосипеды — класс велосипедов,
которые последние полтора десятилетия все более на-
поминают о потенциальной возможности технического
прогресса даже в такой, казалось бы, устоявшейся и кон-
сервативной области техники, как велостроение. Если
сравнительно недавно уменьшение массы однотрубки на
несколько десятков граммов, уменьшение числа спиц
в колесе и общее снижение массы велосипеда на 1—3 кг
являлось важным и значительным, то в 1980-е гг. техниче-
ские решения по дальнейшему совершенствованию уровня
подготовки рекордного велосипеда достигли новых, не-
виданных ранее высот.
Основное направление работ в этой области — сниже-
ние КПД механической системы гонщик — велосипед.
Следует отметить работы по совершенствованию аэроди-
намики как системы в целом, так и отдельных узлов вело-
сипеда (труб, рамы, спицевого набора колес, облегающих
аэродинамических комбинезонов и т. д.), а также работы
по общему снижению масс и моментов инерции вращаю-
щихся частей и узлов за счет использования новых сверх-
легких и сверхпрочных конструкционных материалов
(титановых сплавов, углепластиков, СВМ-волокна и т. д.).
Рекордный велосипед, подготовленный для установления мирового
рекорда в часовой гонке для Ф. Мозера в январе 1984 г., являет собой
пример практической реализации на высоком уровне современной тех-
16
нологин конструкционных материалов и знания конструктивных осо-
бенностей гоночного велосипеда в целом (см. рис. 8.28) и его узлов.
Использование этого велосипеда помогло Ф. Мозеру не только уста-
новить мировые рекорды среди профессионалов одновременно на ди-
станциях 5, 20 км и в часовой гонке, но и обеспечило победы в много-
дневных гонках, в регламент которых входили этапы с раздельным
стартом. Автор далек от мысли подвергнуть сомнению спортивные до-
стижения Ф. Мозера или поставить их в зависимость от уровня исполь-
зуемых им технических средств. Ф. Мозер в настоящее время является
одним из ведущих профессиональных гонщиков и его мировые рекорды
находятся вне всяких подозрений. Однако необходимо отметить важ-
ный факт наличия в его арсенале самых современных научно-техниче-
ских решений, сопутствующих процессу подготовки и непосредствен-
ному установлению рекордов. Это относится к использованию увели-
ченного заднего и уменьшенного переднего (по сравнению с принятым
международным стандартом) колес велосипеда, к необычной компоновке
рамы и руля, использованию дискового набора колес вместо спицевого
и замене пневматической однотрубки жестким металлическим профилем.
Конструкция рекордного гоночного велосипеда не
противоречит регламенту УСИ. Более подробная оценка
и рассмотрение эффективности отдельных элементов этой
конструкции выполнен в гл. 7.
Как уже отмечалось, с 1938 г. УСИ не регистрирует
рекорды скорости, установленные на велосипедных кон-
струкциях, отличающихся от регламентированных норм.
Поэтому отметим только тот факт, что такие велосипедные
конструкции существуют, совершенствуются, их рекорды
регистрируются по линии международной ассоциации
развития средств передвижения, использующих мус-
кульную силу человека. Подробное рассмотрение этих
конструкций не входит в задачу настоящей книги.
Многоместные велосипеды, в первую очередь
тандемы, на протяжении многих десятилетий пользова-
лись большой популярностью в мировом велосипедном
спорте. Ранее их применяли в качестве лидеров, и до
1972 г. спринтерские гонки на тандемах на дистанции
2 км входили в программу Олимпийских игр.
В последнее десятилетие интерес к гонкам на тандемах
в связи с исключением их из программы Олимпийских
игр значительно снизился. Однако популярность много-
местных велосипедов, используемых в рекламных целях,
для участия в различных конкурсах, для туризма и мест-
ных прогулок, по-прежнему остается на высоком уровне.
Это относится, в первую очередь, к странам Западной
Европы, где отдельные энтузиасты-изобретатели продол-
жают конструировать и испытывать свои самодельные
«монстры». Например, известен вариант многоместного
17
велосипеда конструкции датчанина А. Вестергенда, рас-
считанного на 34 человека.
Особенность тандема состоит в том, что он имеет удли-
ненную и более прочную конструкцию рамы по сравнению
с обычным велосипедом, усиленные колеса, сдвоенный
привод цепной передачи и двойной комплект седел, руля
и кривошипного привода. Вся система управления сосредо-
точена в руках первого гонщика. За ним остается решаю-
щее право маневра и принятия тактического решения
в гонке. Второй гонщик обычно выполняет функции
исполнителя. Совместная работа двух гонщиков — залог
успеха в соревнованиях.
Прочие конструкции велосипедов — за-
ключительный класс в рассматриваемой классификации.
Он не имеет никакого отношения к гоночным велосипе-
дам, а его конструктивные решения, реализованные в на-
туральных моделях, лишний раз показывают огромные
потенциальные возможности и безграничное многообра-
зие практического воплощения идеи велосипеда. В книге
С. Охлябинина [16] приведено описание большого числа
конструкций этого класса. Книга написана с большим
интересом к рассматриваемой проблеме и рекомендуется
для ознакомления.
1.3. Некоторые технические аспекты правил
организации велосипедных соревнований
Правила организации велосипедных соревнований со-
ставлены на основе действующих правил соревнований
в СССР с учетом общего и технического регламентов пер-
венства мира и установления рекордов, утвержденных
УСИ и ФИАК. Эти правила являются обязательными для
всех видов соревнований по велосипедному спорту на
территории СССР [13].
В рамках настоящей книги рассматриваемые техниче-
ские вопросы касаются только регламента конструкции
и оснастки гоночного велосипеда, а также регламента тех-
нической экипировки гонщика. Ниже приведены сведения,
которые являются формальной выпиской из официаль-
ного документа «Велосипедный спорт. Правила соревно-
ваний» [2], утвержденного Федерацией велосипедного
спорта СССР.
Требования к велосипедам. В велосипедных соревно-
ваниях разрешается пользоваться велосипедами любой
18
конструкции, снабженными или нет такими приспособле-
ниями, как переключатель скорости, трещотка и т. д.
(за исключением гонок на треке), при условии, что вело-
сипеды приводятся в движение исключительно человече-
ской мускульной силой, не имеют приспособлений для
уменьшения сопротивления воздуха и не превышают
2 м в длину и 0,750 м в ширину.
Кроме того, велосипеды должны отвечать следующим
требованиям:
1) расстояние между осью каретки и землей должно
быть не менее 0,240 м;
2) расстояние между вертикалями, проведенными через
ось каретки и ось переднего колеса, должно быть не менее
0,540 м и не более 0,600 м;
3) расстояние между вертикалями, проведенными че-
рез переднюю точку металлической части седла и ось ка-
ретки, не должно превышать 0,150 м;
4) расстояние между вертикалями, проведенными через
ось каретки и ось заднего колеса, должно быть не менее
0,550 м;
5) колеса велосипеда могут быть разного диаметра,
как компактными (дисковый набор), так и со спицами
(спицевый набор) в количестве от 16 до 40;
6) запрещается применение каких-либо устройств в
компактных колесах в целях ускорения их вра-
щения;
7) в индивидуальных и командных гонках преследо-
вания, гитах, в командных гонках и гонках на время на
шоссе велосипед может быть оборудован рулем в виде
«рогов быка» (кроме спринтерских, групповых, лидерских
и многодневных гонок);
8) в гонках на треке запрещаются тормоза, трещотки,
гайки-барашки и переключатель скоростей (в индивиду-
альных гонках на побитие рекорда применение свобод-
ного хода и переключателя скоростей официально раз-
решается);
9) в гонках на шоссе, если велосипед не имеет свобод-
ного хода, обязательно наличие одного хорошо работаю-
щего тормоза, а если велосипед имеет свободный ход
заднего колеса, обязательно наличие двух хорошо работаю-
щих тормозов;
10) концы осей передней и задней втулок должны
быть выполнены заподлицо с гайкой или могут выступать
не более чем на 5 мм;
19
11) концы труб руля должны быть обтянуты лентой,
отверстия труб руля и выноса должны быть заделаны
пробкой, выступающей наружу не менее чем на 5 мм.
Запрещается всякое толкание вперед гонщика, произ-
водимое руками: круговое, попеременное или какое-либо
другое.
Требования к одежде и снаряжению гонщика. Костюм
гонщика состоит из комбинезона, верхняя часть которого
заканчивается у шеи, а нижняя (трусы) должна быть
на 0,1 м выше коленей, или из велорубашки и трусов,
а также велотуфель, носков, велошлема (каски) и вело-
перчаток (по желанию).
Трусы должны быть только черного цвета, с боков
разрешается полоса другого цвета шириной не более 90 мм.
Носки — однотонного белого цвета; для гонщиков-шос-
сейников носки обязательны.
Для советских велосипедистов, выступающих за пре-
делами СССР в составе сборной команды страны, УСИ
установил обязательный цвет велорубашек — красный.
На велорубашках для спортсменов-любителей не допу-
скаются надписи и другие рекламные символы, кроме
названия своей спортивной организации. Членам сборной
команды СССР разрешается надевать установленную для
них спортивную форму только в тех соревнованиях, где
участвуют сборные команды СССР.
По утвержденному регламенту МОК и УСИ в белой
велорубашке олимпийского чемпиона с пятью перепле-
тенными кольцами, в белой велорубашке чемпиону мира
с пятью традиционными полосами и в красной велору-
башке с гербом и надписью «Чемпион СССР» могут вы-
ступать только сами чемпионы в период владения этими
титулами и только в соревнованиях того вида, где были
завоеваны эти звания.
Гонщики командных, парных и многодневных сорев-
нований обязаны иметь форму одинакового цвета.
На всех видах соревнований на шоссе, треке и в кроссе
гонщики-любители обязаны выступать в шлеме, который
может быть сплошным из твердого литого материала (кас-
ка) или состоящим из полос-валиков, отстоящих друг от
друга на расстояние не более 45 мм. Любой шлем должен
быть снабжен плотно затягивающимся подбородочным
ремнем. Во время соревнований не допускается установка
каких-либо передаточно-приемных устройств как на по-
верхности, так и внутри шлема.
20
Глава 2
РАЗМЕРНЫЕ ПАРАМЕТРЫ
ГОНОЧНОГО ВЕЛОСИПЕДА
2.1. Основные размерения
гоночного велосипеда
При разработке машинного аппарата технические спе-
циалисты стремятся реализовать главную задачу — увя-
зать на приемлемых условиях функциональное решение
машины с энергетическим источником посредством системы
механизмов и агрегатов, обеспечивающих передачу энер-
гии от двигателя к исполнительному органу с минималь-
ными потерями, т. е. с наивысшим КПД. Разработка
такой машины, как велосипед, когда в качестве биологи-
ческого двигателя выступает человек, является задачей
особой сложности. Это объясняется прежде всего тем, что
человеческий организм не имеет стабильной энергетиче-
ской характеристики. Кроме того, мгновенная энергети-
ческая характеристика является сугубо индивидуальной,
зависящей не только от физиологического и анатомиче-
ского состояний индивидуума, но и от психологической,
физической подготовки и эмоциональной ситуации.
Поэтому при расчете, проектировании и выборе кон-
структивных параметров гоночного велосипеда необхо-
димо в первую очередь исходить из анатомических осо-
бенностей строения спортсменов, занимающихся велоси-
педным спортом и достигших определенных результа-
тов. В отдельных случаях, когда велосипед проектируется
и изготовляется для определенного спортсмена, выбор
параметров велосипеда сугубо индивидуальный. Проекти-
рование и производство серийных гоночных велосипедов
в нашей стране ведутся в соответствии с действующими
стандартами ГОСТ 6693—83* Е «Велосипеды. Основные
параметры и размеры», ГОСТ 5503—87 Е «Велосипеды.
Общие технические условия», ОСТ 37.005.025—83 «Вело-
сипеды, требования безопасности, методы контроля и ис-
пытаний».
Основными размерениями гоночного велосипеда сле-
дует считать радиус колеса R, нормализованный в рамках
международных стандартов, и основные геометрические
размерения рамы: базовую длину L и размеры Lj— L9,
между узлами (рис. 2.1), которые полностью определяют
21
геометрию рамы. Дополнительные размеры Ьы—Ll2 оп-
ределяют положение седла и руля относительно рамы и
выбираются в зависимости от антропометрических данных
и особенностей телосложения спортсмена.
Для считывания и контроля размеров рамы применяют
различные способы. Наиболее удобным, пожалуй, явля-
ется приспособление, показанное на рис. 2.2. Оно состоит
из двух жестких стальных профилей 1 и 5. Профиль 1
устанавливают на оси переднего А и заднего В колес,
Ьз
Рис. 2.1. Основные размерения го-
ночного велосипеда современной
традиционной компоновки
ночного велосипеда традицион-
ной компоновки (точки А, В, С,
D, Е см. на рис. 2.1)
лишняя длина устраняется с помощью подвижной ка-
ретки 7 со стороны укороченной части 8. Профиль 5
устанавливают подвижной кареткой 10 на ось О каретки
велосипеда так, чтобы полочка 4 располагалась на верх-
ней трубе CD без люфта. Крестовина 3 соединяет профили
5 и 1, на которых нанесены шкалы линейных размеров 2,
6, 9 и 11 с ценой деления 1 мм. Приспособление устанав-
ливают на раму, тщательно выверяют и затем производят
измерения по шкалам линейных размеров. Для большей
точности отсчета измерения целесообразно сделать не-
сколько раз и результаты усреднить.
На рассмотренном рисунке показан основной совре-
менный конструктивный вариант рамы, когда верхняя
труба CD параллельна линии базы АВ и радиусы колес
одинаковы (см. рис. 2.1). Однако это приспособление мо-
жет с таким же успехом применяться и для конструкций
рам, отличающихся от традиционной компоновки, когда
труба CD занимает наклонное положение.
2.2. Тактико-технические аспекты
посадки велогонщика
Под термином «посадка» в велосипедном спорте пони-
мают положение тела, в частности туловища, рук и ног
велогонщика, относительно велосипеда.
В зависимости от условий гонки различают три харак-
терных типа посадки: низкую, среднюю и высокую.
Низкую посадку велогонщики используют в экстре-
мальные моменты гонки или в темповых гонках, когда
требуется обеспечить минимальное лобовое сопротивление
набегающему воздушному потоку, определяемое в грубом
приближении миделем системы «гонщик—велосипед». От-
дельные элементы посадки — такие, как положение рук,
туловища, головы и, что особенно важно, профиль спины
в грудной и поясничной областях, — имеют ярко выра-
женный характер и направлены на создание упругого зам-
кнутого контура, образуемого гонщиком совместно с ве-
лосипедом. Такая посадка жестко фиксирует положение
таза гонщика на седле, создает упор седалищных бугров
в специальный профиль седла и позволяет создать условия
для эффективного педалирования, исключающего движе-
ния таза относительно седла и раскачивание велосипеда
в поперечных направлениях. При этом качество педали-
рования, а следовательно, и КПД всей системы отвечают
наивысшим показателям. По приближенным расчетным
данным площадь мидель-сечения системы гонщик — ве-
лосипед при низкой посадке велогонщика среднестатисти-
ческих размерений составляет около 0,3 м2.
Среднюю посадку используют чаще всего в такие мо-
менты гонки, когда потенциальные возможности гонщика
или сравнительно невысокие скорости позволяют вести
гонку, предоставляя некоторый отдых мышцам спины,
шеи, рук и т. д. Средняя посадка весьма эффективна при
езде на подъемах и спусках. На подъемах при сравнительно
низких скоростях сопротивление воздушного потока ста-
новится минимальным, а повышенное потребление кисло-
рода требует расслабить мышцы грудной клетки и обе-
спечить более свободное дыхание. При этом улучшаются
условия для варьирования методов педалирования в це-
лях расслабления и включения в работу новых групп
мышц. На спусках средняя посадка улучшает маневрен-
ность системы «гонщик—велосипед», увеличивает обзор
и обеспечивает хорошие условия для расслабления и
23
кратковременного отдыха. По ориентировочным расчет-
ным данным площадь мидель-сечения при средней по-
садке составляет около 0,4 м2.
Высокая посадка характеризуется прежде всего при-
ближающимся к вертикальному положением корпуса
гонщика, руки гонщика могут удерживать горизонтальную
трубу руля или стойки тормозных ручек. Высокую по-
садку используют при езде на малых скоростях на тре-
нировке, в периоды затишья борьбы в гонках или в эк-
стремальных ситуациях, когда в короткие интервалы вре-
мени требуется выполнить спурт с использованием малой
передачи, как это часто делается на финишах на стадио-
нах. В этих условиях скорости въезда на стадионы сравни-
тельно невелики и еще больше понижаются при прохожде-
нии виража перед выходом на финишную прямую. Ско-
рость прохождения виража на стадионе составляет 30—
40 км/ч, и сопротивление воздушного потока невелико.
Здесь первостепенное значение приобретает возмож-
ность обеспечения маневра и удержание велосипеда от
заноса. Это удобнее всего сделать при средней и высокой
посадках. Финишная прямая обычно составляет около
50 м, и на этом отрезке необходимо развить максимальную
скорость. Для предотвращения проскальзывания заднего
колеса и обеспечения движения по прямому кратчайшему
пути полноценный финишный бросок может быть вы-
полнен только в седле велосипеда с использованием
малой передачи. По приближенным данным площадь
мидель-сечения при высокой посадке составляет около
0,6 м2.
Тип посадки не является для гонщика чем-то неиз-
менным и, как отмечалось, в первую очередь определяется
условиями гонки: скоростью движения, положением гон-
щика в группе или в так называемой «струне», необхо-
димостью обеспечения быстрого маневра, остротой фи-
нишной ситуации. Во всех случаях гонщик понимает и
ощущает необходимость и возможность экономии энергии
за счет посадки для уменьшения сопротивления набегаю-
щему воздушному потоку. В отдельные моменты времени
эта экономия энергии незначительна, и ее практически
невозможно оценить. Но если учесть, что гонка длится
4—5 ч и более и что этапы многодневной гонки ежед-
невно следуют один за другим, экономия энергии за
счет посадки может составить существенную вели-
чину.
24
Выбор посадки следует рассматривать как компромиссную задачу.
Действительно, не вдаваясь в глубокий анализ, попытаемся априорно
рассмотреть проблемы, возникающие при этом.
Исходя из желания максимально экономить энергию за счет по-
садки и снижать сопротивление набегающему воздушному потоку,
гонщик проводит всю многочасовую гонку в низкой посадке. Это влечет
за собой целый ряд потерь энергии, связанных с худшей восстанавли-
ваемостью закрепощенного низкой посадкой организма, затруднениями
с питанием в гонке и усвоением пищи, плохим обзором, потерей общей
ориентации в гонке и, как следствие, необходимостью постоянных ли-
квидаций разрывов в группе. Возможны и другие многочисленные и зна-
чительные потери, которые сопровождают гонщика, утратившего гиб-
кость тактики ведения гонки, т. е. сохраняющего неизменной низкую
посадку в течение всей гонки.
Разумеется, в арсенале велосипедного спорта имеются такие виды
гонок, которые с самого старта в силу своей специфики и высоких ско-
ростных требований предусматривают обязательное использование низ-
кой посадки. К ним относятся практически все классические трековые
и командные шоссейные гонки. В командных шоссейных гонках время
прохождения дистанций 50 и 100 км сравнительно невелико и состав-
ляет соответственно около 1 и 2 ч, однако темп гонки чрезвычайно вы-
сок и требует обеспечения наивысшего аэродинамического качества
посадки.
При анализе типа посадки с точки зрения участия в ее
формировании скелета и мышц велогонщика надо иметь
в виду, что кроме лобового аэродинамического сопротив-
ления, . косвенно характеризуемого размерами миделя,
имеют место сопротивление продольного обтекания тела
гонщика воздушным потоком и сопротивление вихревого
следа, вызванное возмущением масс окружающего воз-
духа. В общем виде полное сопротивление характеризуется
коэффициентом С, который, в свою очередь, может быть
условно определен коэффициентами Сх при продольном,
Су при вертикальном и Cz при поперечном обтекании
велогонщика воздушным потоком.
Тело велогонщика, находящегося в посадке на вело-
сипеде, представляет собой сложный аэродинамический
объект с переменными параметрами, не имеющий таких
классических аэродинамических аналогов, как шар, ци-
линдр, пластина конечных размеров и т. д., для которых
существуют теории, описывающие кинематику и динамику
воздушных потоков, обтекающих эти предметы. Кроме
того, необходимо помнить, что антропометрические раз-
меры тела и параметры посадки являются сугубо индиви-
дуальными характеристиками каждого гонщика.
Вопросы аэродинамики посадки подробно изложены
в гл. 8. Здесь ограничимся только рассмотрением некото-
рых антропометрических и анатомических вопросов, свя-
25
занных с обеспечением минимального значения миделя
системы в условиях низкой посадки.
Не пытаясь доказывать или оспаривать оптимальность
общего принципа организации посадки гонщика, вырабо-
танной столетним опытом многочисленных гонок, можно
еще раз с уверенностью сказать, что общепринятое по-
ложение тела гонщика на велосипеде позволяет реализо-
вать главную задачу эффективного ведения гонки с непре-
рывными спуртами, темповой ездой, финишными брос-
ками и ездой «танцовщицей». Сам многообразный характер
велогонки определил и отработал общие черты современной
посадки. Однако параметры посадки у каждого гонщика
индивидуальные, и эта индивидуальность находит свое
выражение в конструкции деталей и узлов велосипеда и
в их взаиморасположении на раме. К таким деталям и
узлам относятся рама, руль и его вынос, седло и штырь
для его установки, кривошипы, педали и цепной привод.
Массовый велосипедный спорт требует унифицирован-
ного подхода к установлению размерных параметров го-
ночного велосипеда, так как массовость спорта преду-
сматривает крупносерийный промышленный выпуск го-
ночных велосипедов. В СССР производством гоночных ве-
лосипедов занят Харьковский велосипедный завод. Ес-
тественно, в условиях столь крупного промышленного
производства вопросы нормализации конструктивных и
технологических параметров, унификации и типизации
деталей и узлов являются важнейшими факторами увели-
чения объема производства велосипедов при установлен-
ных требованиях к обеспечению точности и эксплуатаци-
онным качествам. Лучшими моделями, спроектирован-
ными в ЦКТБ велостроения и Харьковским велосипедным
заводом, обеспечиваются ведущие гонщики страны.
2.3. Анатомо-антропометрические аспекты
посадки велогонщика
Многочисленные исследования, проведенные в различ-
ных видах спорта, показали, что в выполнении основного
функционального движения спортсмена принимает уча-
стие большинство мышц, обеспечивая ориентацию тела
в пространстве и точность выполнения движений. Под
функциональным движением спортсмена следует понимать
основное движение (комплекс движений), направленное
непосредственно на достижение спортивного результата.
26
Так, основным функциональным движением велогонщика
является педалирование, штангиста — рывок и толчок
штанги, бегуна—движение ног во время бега и т, д.
Эффективность (по спортивному результату) и экономич-
ность (по затратам энергии) функционального движения
в велосипедном спорте достигается в первую очередь за
счет посадки. Чем удобнее, комфортабельнее и выше уро-
вень эргономических показателей посадки, тем рацио-
нальнее и с меньшими потерями используется работа
мышц, с меньшими затратами энергии обеспечиваются ус-
тойчивость, требуемые скорости и ускорения системы
«гонщик—велосипед».
Каждый гонщик и его тренер имеют определенные на-
выки подбора посадки, исходя из индивидуальных осо-
бенностей антропометрических данных. Методов и прие-
мов такого подбора известно достаточно много, и они
широко освещены в литературе по велосипедному спорту.
Все специалисты сходятся на том, что посадку следует
подбирать индивидуально и в два этапа: установку седла
и установку руля. Второй этап выполняется после за-
вершения первого, причем коррекция на установку седла
и руля может вноситься в процессе тренировки или уча-
стия в соревнованиях.
Известные приемы формирования посадки. Некоторые
приемы установки седла и руля, рекомендуемые в различ-
ных литературных источниках, показаны на рис. 2.3.
Можно легко убедиться, что эти рекомендации носят
сугубо индивидуальный и априорный характер, зависят
в основном от опыта гонщика и не содержат объективной
информации, основанной на методах научного расчета
и оптимизации. Действительно, на рис. 2.3, а, б не учи-
тываются высота каблука велотуфель и подъем ступни.
На рис. 2.3, в, г не учитываются отдельные размеры вело-
сипеда, в частности длина и профиль седла. На рис. 2.3, д
не учитывается длина плеча гонщика. На рис. 2.3, е
рассматривается только фаза установки седла в продоль-
ном направлении.
Расчет параметров посадки. Известны рекомендации
подбора параметров посадки на основе статистической
обработки антропометрических данных спортсменов раз-
личного роста и имеющих достаточно высокую спортив-
ную квалификацию [22]. По измеренному росту А гон-
щика (рис. 2.4) с помощью графика выбирают параметры
установки седла h и руля I. Для практического выбора
27
параметров установки седла и руля и длины выноса /г
предлагаются следующие корреляционные зависимости:
Л = 13,667 4-0,6974г;
Z =—23,538 — 0,456Л3 4- 1,ЗЗЗД2; (2.1)
1г = —32,972 + 0,572/,
где Alt А.,, А3 — размеры, показанные на рис. 2.4.
Рис. 2.3. Рекомендуемые в различных изданиях варианты установки
седла и руля на гоночном велосипеде (я—а — отвес)
Итак, мы видим, что посадка велогонщика на велоси-
педе зависит от многих факторов и в первую очередь от
геометрических размеров элементов системы нижних ко-
нечностей гонщика (СНКГ), геометрических размеров
рамы велосипеда и биомеханических характеристик
СНКГ, определяемых наиболее эффективными углами
взаимного перемещения элементов СНКГ. Теория вело-
сипедного спорта в настоящее время делает только первые
шаги на пути своего развития и пока еще не располагает
достаточно надежным методом описания и комплексной
оценки посадки гонщика. Ниже предлагается еще один
метод комплексной оценки посадки.
28
Метод комплексной оценки посадки. Сформированная
и принятая к реализации посадка гонщика может быть
оценена процентным параметром П на рис. 2.5. Расстоя-
ние от точки М на поверхности седла 1 до точки N на
поверхности педали 2 при условии совпадения продоль-
ной линии кривошипа 3 с осью подседельной трубы 4
рамы принимается за вы-
Рис. 2.4. Определение параметров
установки седла h и руля I на ве-
лосипеде в зависимости от роста
гонщика
Рис. 2.5. Схема определения про-
центного параметра П посадки
гонщика на велосипеде
где Н —длина вертела СНКГ, определяемого расстоя-
нием от оси большого вертела скелета гонщика до подошвы
стопы при полном выпрямлении ноги (рис. 2.5, б).
Очевидно, что при П « 100 % посадка является близ-
кой к оптимальной.
Предлагаемый метод оценки посадки гонщика является
комплексным, т. е. оценивающим процесс в совокупности
посредством расчета соотношения, характеризующего по-
садку в процентах. Вместе с тем метод практически не
29
учитывает ряда параметров СНКГ (размера стоны, раз-
меров бедра и голени, мышечную активность СНКГ),
а также конструктивных параметров кривошипно-пе-
дального механизма гоночного велосипеда, Эти замеча-
ния сделаны не в порядке критики, а в порядке критиче-
ского обсуждения потенциальных возможностей метода,
предназначенного во всей совокупности охватить проб-
лему посадки гонщика на велосипеде.
Все существующие методы не охватывают в достаточно полном объ-
еме проблемы формирования посадки гонщика, ее описания, оценки
и выбора параметров установки седла и руля для каждого конкретного
гонщика, так как каждый из этих методов является лишь некоторым
статистическим обобщением опыта выбора посадки без указаний на
пределы изменения ее параметров с учетом конструкции велосипеда,
антропометрических и биомеханических особенностей гонщика. Ра-
бота по созданию комплексного метода оценки посадки гонщика яв-
ляется, по-видимому, делом ближайшего будущего.
Предлагаемый вариант организации посадки. Прини-
мая рассмотренные рекомендациг! в качестве исходных
предпосылок, сформулируем и подробно опишем эмпири-
ческий! метод практического подбора посадки гонщика,
с помощью которого в какой-то мере можно одновременно
учесть особенности антропометрических данных гонщика,
конструкции рамы велосипеда и параметров кривошипно-
педального механизма.
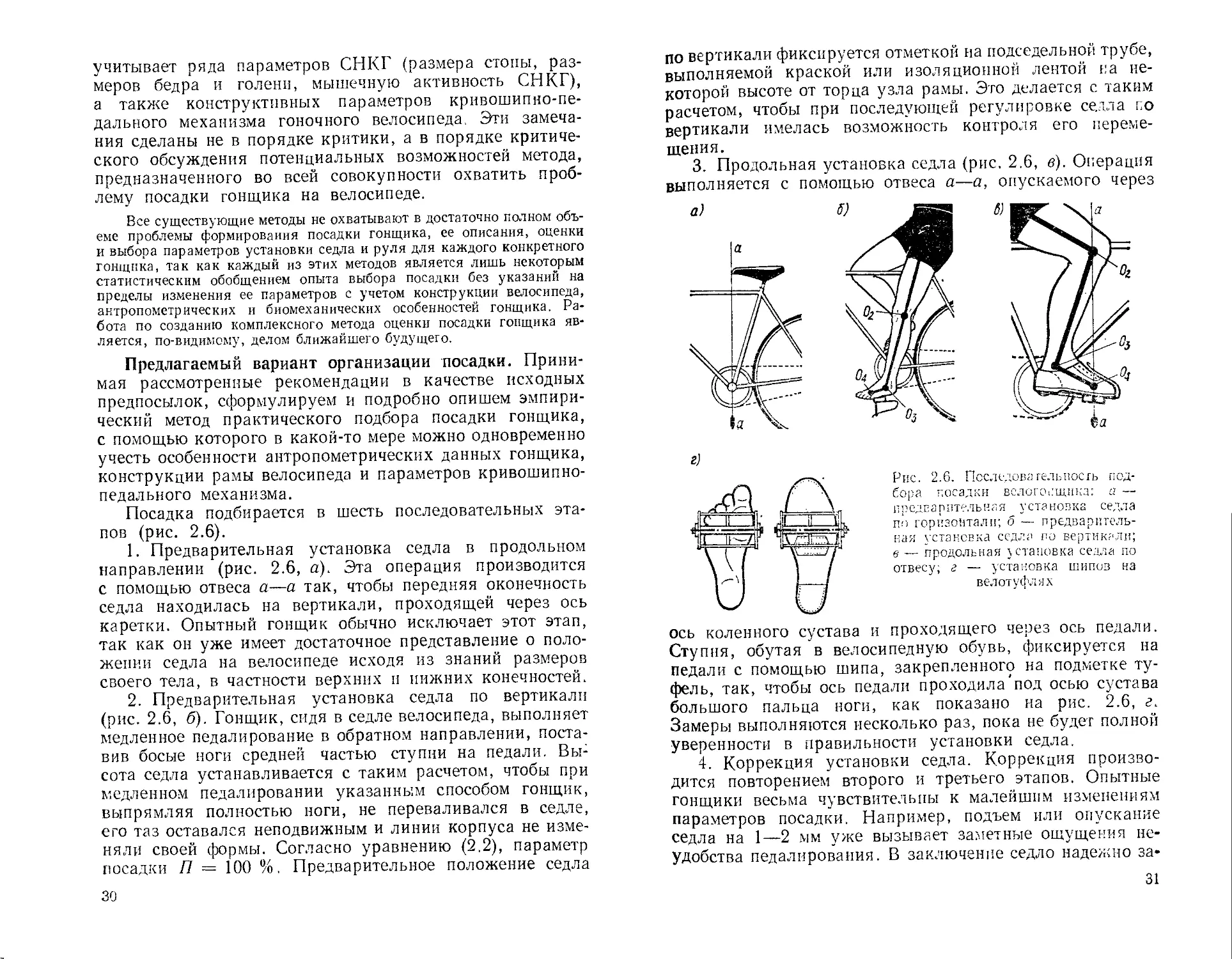
Посадка подбирается в шесть последовательных эта-
пов (рис. 2.6).
1. Предварительная установка седла в продольном
направлении (рис. 2.6, а). Эта операция производится
с помощью отвеса а~а так, чтобы передняя оконечность
седла находилась на вертикали, проходящей через ось
каретки. Опытный гонщик обычно исключает этот этап,
так как он уже имеет достаточное представление о поло-
жении седла на велосипеде исходя из знаний размеров
своего тела, в частности верхних и нижних конечностей.
2. Предварительная установка седла по вертикали
(рис. 2.6, б). Гонщик, сидя в седле велосипеда, выполняет
медленное педалирование в обратном направлении, поста-
вив босые ноги средней частью ступни на педали. Вы:
сота седла устанавливается с таким расчетом, чтобы при
медленном педалировании указанным способом гонщик,
выпрямляя полностью ноги, не переваливался в седле,
его таз оставался неподвижным и линии корпуса не изме-
няли своей формы. Согласно уравнению (2.2), параметр
посадки П = 100 %. Предварительное положение седла
30
по вертикали фиксируется отметкой на подседельной! трубе,
выполняемой краской или изоляционной лентой на не-
которой высоте от торца узла рамы. Это делается с таким
расчетом, чтобы при последующей регулировке седла по
вертикали имелась возможность контроля его переме-
щения.
3. Продольная установка седла (рис. 2.6, в). Операция
выполняется с помощью отвеса а—а, опускаемого через
Рис. 2.6. Псследовагельвосгь под-
бора посадки велогонщика: а —
предварительная установка седла
по горизонтали; б — предваритель-
ная установка седла по вертикали;
в — продольная установка сеяла по
отвесу; г — установка шипов на
велотуфлях
ось коленного сустава и проходящего через ось педали.
Ступня, обутая в велосипедную обувь, фиксируется на
педали с помощью шипа, закрепленного на подметке ту-
фель, так, чтобы ось педали проходила'под осью сустава
большого пальца ноги, как показано на рис. 2.6, г.
Замеры выполняются несколько раз, пока не будет полной
уверенное™ в правильности установки седла.
4. Коррекция установки седла. Коррекция произво-
дится повторением второго и третьего этапов. Опытные
гонщики весьма чувствительны к малейшим изменениям
параметров посадки. Например, подъем или опускание
седла на 1—2 мм уже вызывает заметные ощущения не-
удобства педалирования. В заключение седло надежно за-
31
крепляют на подседельной трубе, а трубу — на раме.
Для жесткого и надежного крепления седла рекомендуется
применять гайки увеличенной высоты и накидные ключи.
5. Установка руля по высоте и в продольном положе-
нии. Ситуация зависит от положения уже установленного
седла, длины верхней трубы рамы, длины верхних конеч-
ностей и корпуса гонщика, конструкции руля. Предвари-
тельно руль устанавливают с таким расчетом (рис. 2.5),
чтобы горизонтальная линия с—с, проходящая над го-
ризонтальным участком трубы руля, находилась ниже
горизонтальной линии Ь—Ь, проходящей по поверхности
седла, на величину z (для шоссейного велосипеда 2 »
л; 30ч-50 мм; для трекового велосипеда z 50 мм).
Указанные величины сугубо ориентировочные и приведены
только для общего сведения. Окончательная подборка
выноса по длине и установка руля производятся с таким
расчетом, чтобы при самой низкой посадке линия плеча
приближалась к вертикальному положению и была пер-
пендикулярной к линии корпуса. Предплечье должно
составлять с горизонталью угол около 15°.
6. Окончательная коррекция посадки. Этот этап вы-
полняется в процессе тренировок. Гонщику рекомендуется
отработать индивидуальные приемы определения по-
ложения седла и руля на своем велосипеде, как, напри-
мер, показано па рис. 2.3, и пользоваться этими приемами
при необходимости контроля или при смене седла, руля
и т. д.
Подобранная описанным методом посадка не должна
быть единственным и окончательным решением для гон-
щика, так как каждый гонщик в силу специфики телосло-
жения, особенности работы мышц, гибкости и строения
корпуса может и должен внести коррекции в параметры
своей посадки, если он испытывает определенные и ясно
осознанные неудобства и если приложение сил в про-
цессе педалирования не будет достаточно эффективным.
В таком случае описанный принцип так называемого цент-
рового педалирования может быть нарушен. Из индиви-
дуальных соображений посадка может быть изменена
так, чтобы отвес а—а (рис. 2.6, в) проходил спереди или
сзади оси педали. При этом педалирование будет называть-
ся соответственно «под себя» или «от себя». На рис. 2.7
представлен наиболее распространенный вариант центро-
вого педалирования, когда вертикаль одновременно про-
ходит через центр коленного сустава и центр сустава
32
большого пальца ступни при переднем горизонтальном
положении кривошипа. На основе этого варианта дана
разметка посадки велогонщика с обозначением стержне-
вого замещающего контура.
Требования к седлу. В зависимости от вида гонок
(трековые или шоссейные), их длительности и качества
дорожного покрытия выбирают тип и профиль седла.
Описание конструкции седла дано в гл. 3. Здесь же от-
метим только, что таз гонщика располагается на гоноч-
Рис. 2.7. Типичная посадка велогонщика при темповой езде (а)
и ее разметка (б)
ном седле так, чтобы седалищные бугры опирались на
специальный профиль седла в самом широком его месте.
Завышение ширины седла приводит к увеличению опор-
ной поверхности и увеличению контактной зоны седла
и промежной области. Уменьшение ширины седла при-
водит к его провалу между седалищными буграми и по-
вышенному давлению на внутренние органы в области
Таза. Такое седло может быть использовано в коротких
спринтерских и гитовых гонках на треке.
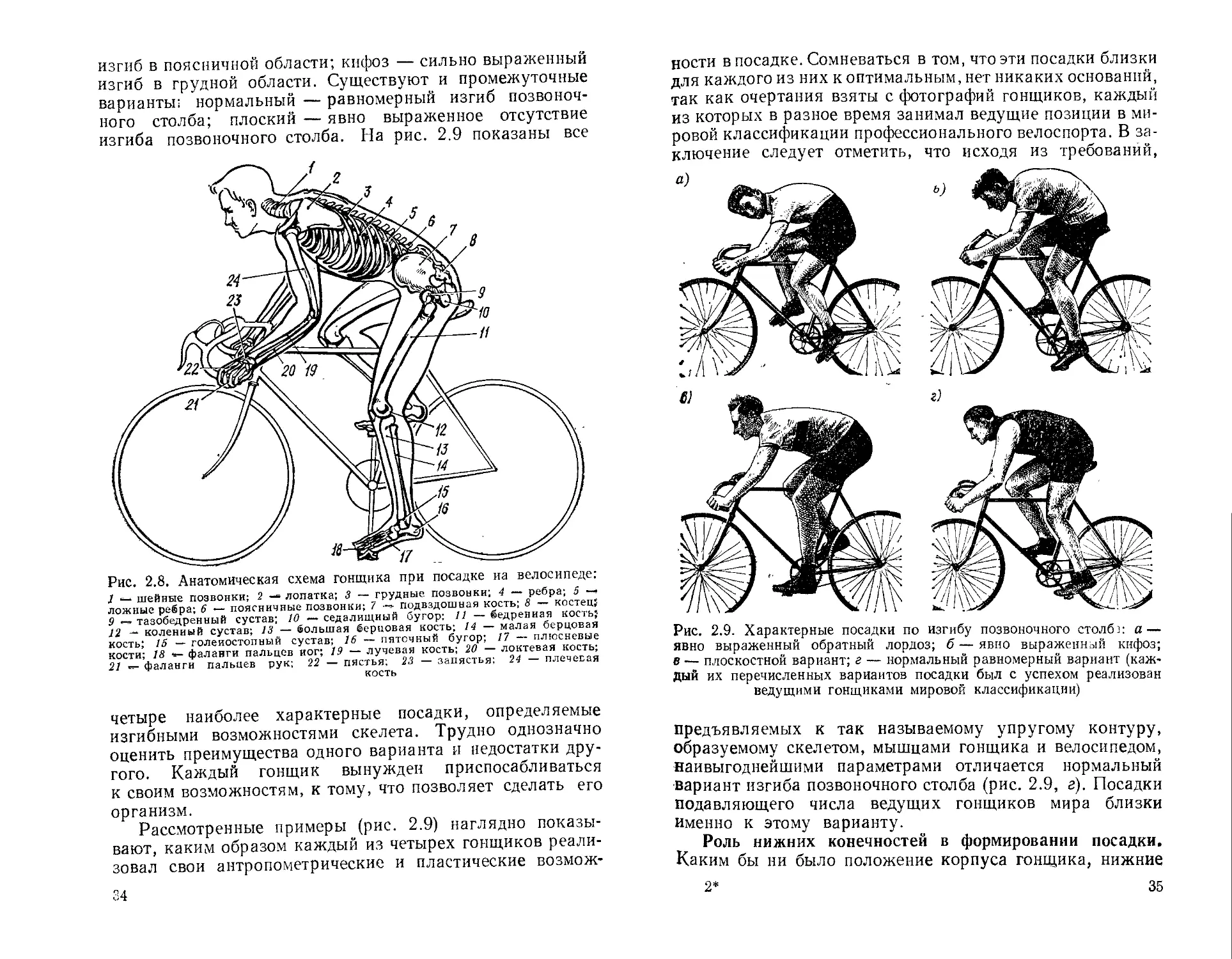
Положение корпуса гонщика. Положение туловища
И линии его формы зависят от многих факторов и в общем
случае являются индивидуальными, трудно поддающи-
мися изменению в ту или иную сторону. Здесь решающую
роль играет позвоночный столб (рис. 2.8), эластичность
мышц и связок спины. Важным фактором является спо-
собность позвоночного столба принимать естественные
изгибы в характерных областях. Эти изгибы имеют вполне
определенные названия: лордоз — сильно выраженный
2 Любовицкий В. П. 33
изгиб в поясничной области; кифоз — сильно выраженный
изгиб в грудной области. Существуют и промежуточные
варианты: нормальный — равномерный изгиб позвоноч-
ного столба; плоский — явно выраженное отсутствие
изгиба позвоночного столба. На рис. 2.9 показаны все
Рис. 2.8. Анатомическая схема гонщика при посадке иа велосипеде:
/ “ шейные позвонки; 2 — лопатка; 3 — грудные позвонки; 4 — ребра; 5 —»
ложные ребра; 6 — поясничные позвонки; 7 подвздошная кость; 8 — костец;
9 тазобедренный сустав; 10 — седалищный бугор: И — бедренная кость;
12 коленный сустав; 13 — большая берцовая кость; 14 — малая берцовая
кость; 15 — голеностопный сустав; 16 — пяточный бугор; 17 — плюсневые
кости; 18 фаланги пальцев йог; 19 — лучевая кость; 20 — локтевая кость;
21 «- фаланги пальцев рук; 22 — пястья; 23 — запястья: 24 — плечесая
кость
четыре наиболее характерные посадки, определяемые
изгибными возможностями скелета. Трудно однозначно
оценить преимущества одного варианта и недостатки дру-
гого. Каждый гонщик вынужден приспосабливаться
к своим возможностям, к тому, что позволяет сделать его
организм.
Рассмотренные примеры (рис. 2.9) наглядно показы-
вают, каким образом каждый из четырех гонщиков реали-
зовал свои антропометрические и пластические возмож-
34
ности в посадке. Сомневаться в том, что эти посадки близки
для каждого из них к оптимальным, нет никаких оснований,
так как очертания взяты с фотографий гонщиков, каждый
из которых в разное время занимал ведущие позиции в ми-
ровой классификации профессионального велоспорта. В за-
ключение следует отметить, что исходя из требований,
Рис. 2.9. Характерные посадки по Изгибу позвоночного столбз: а —
явно выраженный обратный лордоз; б — явно выраженный кифоз;
в— плоскостной вариант; г — нормальный равномерный вариант (каж-
дый их перечисленных вариантов посадки был с успехом реализован
ведущими гонщиками мировой классификации)
предъявляемых к так называемому упругому контуру,
образуемому скелетом, мышцами гонщика и велосипедом,
наивыгоднейшими параметрами отличается нормальный
вариант изгиба позвоночного столба (рис. 2.9, г). Посадки
подавляющего числа ведущих гонщиков мира близки
именно к этому варианту.
Роль нижних конечностей в формировании посадки.
Каким бы ни было положение корпуса гонщика, нижние
2* 35
конечности принимают активное участие в формировании
посадки в зависимости от антропометрических размеров
отдельных костей: бедренной, большой и малой берцовых,
плюсневых ифалангов пальцев. Основным антропометриче-
ским размером элементов скелета в настоящей работе при-
нят размер между осями двух суставов, принадлежащих
одной кости. Например, размер бедренной кости опреде-
ляется между осями тазобедренного и коленного суставов.
Рис. 2.10. Анатомическая
схема стопы (а) и положение
стопы относительно оси пе-
дали (б):
I — бугристость плюсневой ко*
сти пятого пальца; 2 — кубовид-
ная кость: 3 — пяточная кость;
4 — продольная ось стопы; 5 —
таранная кость; 6 — ладывид*
ная кость; 7 — клиновидные ко-
сти: 8 — плюсневая кость треть-
его пальца; 9— плюсневая кость
второго пальца; 10 — плюсневая
кость первого пальца; 11 — ось
педали; 12 — фаланги пальцев;
13 — контур подошвы обуви;
14 — продольная ось подошвы
обуви; 15 — кривошип; 16 —
область максимального давле-
ния стопы на педаль
Положение стопы относительно педали определено
длительной практикой подбора рациональных посадок.
В настоящее время существует единое мнение о том:, что
продольная ось стопы (рис. 2.10) должна быть параллельна
кривошипу, а ось педали в вертикальной плоскости дол-
жна совпадать с осью сустава большого пальца ноги.
Такое положение стопы создает наилучшие условия для
приложения усилий к педали в вертикальном и, что
особенно важно, в горизонтальном направлёниях. Извес-
тен опыт смещения оси педали вперед на различные рас-
стояния до 15—20 мм. Это увеличивает подвижность стопы
во время педалирования и позволяет несколько поднять
частоту вращения педалей, однако наблюдается замет-
ный проигрыш в передаче усилий на педаль. Высказанное
суждение является результатом анализа ограниченного
опыта и не может быть рекомендовано к безоговорочному
практическому применению.
36
Положение рук и плечевого пояса. Если положение
корпуса диктуется условиями гонки и требованиями
создания наилучшей аэродинамической формы (путем
уменьшения мидель-сечения системы «гонщик—велоси-
пед») или обеспечения удобства высокочастотного педа-
лирования (на передаче с малым передаточным отношением
при подъеме в гору), то скелетная и мышечная части рук
и плечевого пояса обеспечивают формирование требуемой
посадки и удержание этой! посадки в течение длительного
времени.
.Лопаточная, плечевая, лучевая, локтевая кости, а
также кости запястья, пястья и фаланги пальцев состав-
ляют жесткую основу части упругого контура, удержива-
ющего корпус в заданном положении. Наклон лучевой и
локтевой костей, образующих с горизонталью угол по-
рядка 15°, позволяет смягчать удары, передаваемые через
переднее колесо, раму, руль и руки на корпус. Качество
посадки в смысле амортизации корпуса и удобства управ-
ления велосипедом опытные гонщики проверяют следую-
щим образом: на скорости около 30 км/ч гонщик, приняв
низкую посадку, отпускает руль и продолжает двигаться
без рук в зафиксированной низкой посадке. Если такой
эксперимент удается без особых усилий и велосипед оста-
ется достаточно управляемым, то можно считать, что по-
добранная посадка в плане загрузки рук выбрана близкой
к оптимальной. При длительных гонках в низкой и сред-
ней посадках мышцы рук, плеч, шеи и спины уставать
будут умеренно.
Мышечная анатомия. Мышечная анатомия человече-
ского тела применительно к велоспорту настолько сложна
и разнообразна, что в рамках настоящего издания под-
робно рассмотреть ее не представляется возможным.
Ограничимся только ссылкой на общую анатомическую
схему мышц при посадке гонщика 120] и рассмотрим от-
дельные мышцы нижних конечностей, принимающие ак-
тивное участие в процессе педалирования. В общей слож-
ности их насчитывается 29. В рассмотрение не входят мыш-
цы других групп, также проявляющих активность, на-
правленную на процесс педалирования (например, мышцы
корпуса при силовой работе) и процесс управления вело-
сипедом (например, мышцы рук). Для удобства рассмотре-
ния мышцы разделены на две группы: мышцы, работающие
при нажиме на педаль, и мышцы, работающие при
подтягивании педали. В свою очередь, каждая группа
37
подразделяется на мышцы-сгибатели и мышцы-разгиба-
тели.
Мышцы первой группы, работающие при на-
жиме на педаль (рис. 2.11, а):
мышцы разгибания бедра расположены сзади тазо-
бедренного сустава и идут от таза на бедро и на голень —
большая ягодичная, двуглавая бедра, полусухожильная,
полуперепончатая и большая приводящая;
Рис. 2.11. Схема мышц гонщика, работающих при нажиме на педаль (а)
и при подтягивании педали (б):
1 — большая ягодичная мышца; 2 — четырехглавая мышца бедра; 3, 14 —-
двуглавая мышца бедра; 4, 15 — полусухожильная мышца; 5, 16 — полу-
перепончатая мышца; 6, 17 — подошвенная мышца; 7, 18 — икроножная
мышца; 8 — камбаловидная мышца; 9 — длинная малоберцовая мышца; 10 —
короткая малоберцовая мышца; 11 — портняжная мышца; 12 — натягива-
тель широкой фасции бедра; 13 — прямая мышца бедра; 19 — длинный общий
разгибатель пальцев; 20 —- длинный разгибатель большого пальца; 21 «— пе-
редняя большеберцовая мышца
мышца разгибания голени располагается на передней
поверхности бедра; это четырехглавая мышца, одна го-
ловка которой (прямая мышца бедра) начинается на тазо-
вой кости и участвует в сгибании бедра, три остальные
начинаются на бедре и участвуют в разгибании го-
лени;
мышцы сгибания стопы располагаются на задней и
наружной верхней поверхностях голени — трехглавая
голени, подошвенная, задняя большая берцовая, длинный
сгибатель большого пальца, длинный сгибатель пальцев,
длинная и короткая малоберцовые.
28
Мышцы второй группы, работающие при под-
тягивании педали (рис. 2.11, б):
мышцы сгибания бедра расположены впереди тазобед-
ренного сустава — подвздошнопоясничная, портняжная,
натягиватель широкой фасции, гребешковая и прямая
бедра;
мышцы сгибания голени расположены сзади коленного
сустава—двуглавая бедра, полусухожильная, полу-
перепончатая, портняжная нежная, подколенная, икро-
ножная и подошвенная; .
мышцы разгибания стопы расположены впереди го-
леностопного сустава — передняя большеберцовая, длин-
ный разгибатель пальцев и длинный разгибатель большого
пальца.
На основании исследований биоэлектрических потен-
циалов мышц установлено, что активность мышц нижних
конечностей различна и определяется частотой педали-
рования, физической и технической подготовкой гон-
щика. Учитывая, что мышцы ног подразделяются на одно-
и двухсуставные и что работа последних во многом зави-
сит от взаимного положения суставов, можно утверждать,
что и посадка гонщика также определяется активностью
работы мышечного аппарата.
В целом при педалировании происходит гармонич-
ный и весьма согласованный процесс последовательного
и одновременного включения и выключения отдельных
мышц и целых групп мышц. Эта работа напоминает хорошо
настроенный многозвенный механизм с большим числом
миниатюрных приводных двигателей, работающих по
заданной программе. Чем лучше эта программа отлажена,
тем ритмичнее, плавнее и эффективнее работа мышечного
аппарата. Как показали многочисленные исследования
в области физиологии мышечной деятельности, при опре-
деленных условиях согласованность работы мышц нару-
шается, происходит сдвиг их работы по фазе, эффектив-
ность биологического двигателя, каким является человек,
резко падает. Эти вопросы подробнее рассмотрены в гл. 7.
Размерные параметры человеческого тела. Для анализа
геометрических размерений типовых посадок и разработки
рекомендаций по основным геометрическим размерам
велосипедных рам используются среднестатические антро-
пометрические данные по спортсменам, привлекаемым
к занятиям спортом вообще и велосипедным в частности
[7]. Эти данные близки к среднестатистическим данным
39
взрослого населения в возрасте от 18 до 30 лет в среднеев-
ропейской части СССР. В качестве важнейших антропо-
метрических размерений тела человека, играющих глав-
ную роль в организации посадки велогонщика, приняты
(рис. 2.12):
А — рост спортсмена;
— длина корпуса, измеренная между осями плече-
вого и тазобедренного суставов;
а)
б)
z
08
05
Звено
Масса
звена
At 0,43т
А2 0,12т
А3 0,05т
А4 0,02т
Аб 0,03m
А6 0,03m
A-i 0,07т
ех
Jyi
Ot
1,40
0,48
0,05
0,17
0,20
0,60
0,42Ае
А
04
Xs~340mm; zs ~ /Омм
Рис. 2.12. Важнейшие антропометри-
ческие размерения тела человека,
играющие главную роль в формиро-
вании посадки велогонщика:
4 . — линейные размеры: О. — оси суста-
вов; S- — центры масс; т — масса гонщи-
ка; $ — положение центра масс гонщика
в посадке; J . — момент инерции /-го
У ь
звена:
Л2 — Длина бедра, измеренная между осями тазобед-
ренного и коленного суставов;
Ая — длина голени, измеренная между осями колен-
ного и голеностопного суставов;
40
t A4 — длина стопы, измеренная между осями голено-
стопного сустава и сустава основания большой фаланги
ноги;
Л5 — длина плеча, измеренная между осями плече-
вого и локтевого суставов;
Ав — длина предплечья, измеренная между осями
локтевого сустава и сжатого запястья;
Д7— расстояние от оси плечевого сустава до темени.
2.4. Геодезические аспекты посадки гонщика
и основных размерений гоночного велосипеда
Под геодезическими понимаются параметры микро*
и макрорельефа велосипедных гоночных трасс, оказываю-
щие влияние на посадку гонщика и основные размерения
гоночного велосипеда.
В качестве микрорельефа рассматриваются неровности,
вызванные произвольным или упорядоченным (регуляр-
ным) расположением элементов дорожного покрытия.
К таким элементам относятся щебенка, гравий, клинкер,
булыжник и т. п. В качестве макрорельефа рассматри-
вается профиль трассы, образованный брошенными на
дороге посторонними предметами (кирпич, бревно, рельс
и Др.) или большими ямами на дорожном покрытии, ка-
навами, волнообразным рельефом эпизодического и не-
прерывного характера.
При анализе влияния геодезических факторов автор
не хотел подвергнуть ревизии геометрию современного
гоночного велосипеда, отработанного столетней мировой
практикой его совершенствования и эксплуатации в ус-
ловиях жесткой конкуренции профессиональных и лю-
бительских гонок, но ставил задачу с позиций современной
теории и практики объяснить рациональность существую-
щих конструкций, наметить пути объективного их анализа
и методов расчета.
В пп. 2.2 и 2.3 были рассмотрены тактико-технические
аспекты выбора рациональных посадок и анатомо-антропо-
метрические методы расчета параметров посадки исходя
из размерений основных антропометрических данных вело-
гонщика. Но посадка предусматривает оценку положения
„гонщика не только относительно велосипеда, направления
основного движения вдоль трассы и встречного воздуш-
ного потока, но и относительно поверхности трассы гонки.
Последний аспект является важным моментом в вопросе
41
определения таких размерений велосипеда, как диаметр
колес, координаты положения оси каретки, параметры и
ступенчатость цепной передачи и т. д.
Судя по эволюции конструкций, диаметры колес го-
ночного велосипеда претерпели значительные изменения.
Практика начальных этапов развития велосипеда убеди-
тельно показала, что колеса большого диаметра, напри-
мер велосипед модели «паук», создают непреодолимые
трудности посадки на него, управления и безопасности
при падении. Применение колес такого диаметра в первую
очередь объяснялось необходимостью увеличения переда-
точного отношения примитивного механизма привода.
Комфортабельность езды по дорогам с булыжным покры-
тием, улучшающаяся при увеличении диаметра колес,
учитывалась, по-видимому, в последнюю очередь. Приме-
нение колес малого диаметра приводит к повышенной
тряске на булыжных мостовых и дополнительным затра-
там энергии, связанным с многоступенчатыми переда-
чами и увеличенной частотой вращения колес, что требует
дополнительной работы на преодоление сил трения в ско-
ростных узлах шарикоподшипников.
Целесообразно начать с анализа основного размерного
параметра колеса — его диаметра 2R. Задача выбора диа-
метра является компромиссной и весьма ответственной,
так как этот размер нормализован международным стан-
дартом в целях полной взимозаменяемости однотрубок,
ободов и спиц.
С одной стороны, уменьшение диаметра колеса пони-
жает положение центра масс системы гонщик—велосипед и
увеличивает его устойчивость при движении, улучшает
маневренность, однако возрастают потери на преодоление
дополнительных сил трения. С другой стороны, увеличе-
ние диаметра колеса улучшает комфортабельность езды
по дороге с неровным покрытием, но увеличивает массу
велосипеда, повышает положение центра масс системы
гонщик—велосипед, ухудшает условия эксплуатации.
Вопрос выбора рационального диаметра целесообразно
решать для наихудших условий макрорельефа поверхности
дорожного покрытия, каковым следует считать булыж-
ную мостовую. В современных условиях это покрытие
практически исчезло с городских улиц и лишь иногда
встречается в сельской местности. Но анализ контакта
такого покрытия с колесом является наиболее ярким при-
мером построения механической модели их взаимодейст-
42
вия. На рис. 2.13 представлена расчетная схема такого
взаимодействия при условии, что однотрубка, обод и на-
бор спиц не имеют податливости, булыжник в сечении
имеет правильную форму окружности радиусом г, два
смежных булыжника располо-
жены на расстоянии 2а друг
от друга и взаимодействие
происходит без проскальзы-
вания. Линия наружной по-
верхности колеса 1 контак-
тирует с аналогичными ли-
ниями смежных булыжников 2
и 3 в точках А и В. Ось ко-
леса описывает укороченную
циклоиду 4 в интервалах 0
< х < Х/2 и Х/2 < х < X.
Естественно, рассматривать
этот процесс в функции вре-
мени без учета динамики не-
целесообразно, и поэтому ура-
внение движения оси колеса
Рис. 2.13. Расчетная схема
взаимодействия колеса вело-
сипеда с поверхностью до-
роги, мощенной булыжником
представлено в форме:
У = + г) [ 1 — cos (arcsin ;
хе[0; 4 = г + а]. (2.3)
Аналогично может быть рассмотрена кинематика взаи-
модействия колеса с клинкерным дорожным покрытием.
В этом случае радиус г и параметр 2а будут иметь меньшие
численные значения. Результаты аналитического расчета
и анализа представлены на рис. 2.14. Зависимость макси-
мально, й амплитуды колебаний оси колеса утлх в процессе
его движения и обкатывания по регулярному макрорелье-
фу поверхности дорожного покрытия от радиуса колеса R
носит асимптотический характер. Анализ семейства кри-
вых yfflax (Р) при различных значениях параметров г
и 2а показывает, что с увеличением радиуса колеса R
максимальная амплитуда колебания оси колеса умень-
шается. При R — 0,34 м и г — 0,10 м, что соответствует
реальному диаметру колеса и макрорельефу типа клин-
кера, утах = 0,55-10”3 м. Для покрытия дороги типа
булыжника (г = 0,075 м) утяУ = 8,47-10-3 м. Не пы-
таясь решить вопрос оптимального выбора радиуса колеса,
ограничимся тем, что отметим: радиус R = 0,34 м при-
43
близительно соответствует границе заметного изменения
значений производной функции dymaxjdR (штриховая ли-
ния). Следовательно, радиус гоночного колеса R = 0,34 м
следует считать вполне рациональным.
Рис. 2.14. Зависимость максимальной амплитуды колебаний оси колеса
t/max (-----) и производной dy tna^/dR — const (------) от радиуса
колеса при макронеровностях типа булыжного покрытия при 2а ==
= 0,020 м (X) и 2а = 0,010 м (О):
1 «- г «= 0,010 м; 2 — г — 0,025 м; 3 — Г = 0,050 м; 4 — Г = 0,075 м; 5 —
г= 0,100 м
При анализе влияния макрорельефа гоночной трассы
на конструктивные размеры велосипеда основное место
занимает параметр Н — так называемый клиренс, являю-
щийся наименьшим расстоянием между низшей точкой
велосипеда (за исключением педали) и дорожным покры-
тием (рис. 2.15). Подобный анализ целесообразно вести
для типовых условий, наиболее часто встречающихся в
гонках. Прежде всего это относится к случаям, когда на
44
малой скорости приходится преодолевать такие препят-
ствия, как кирпич, рельс, бревно и т. п. На больших
скоростях эти предметы преодолеваются обычным прыж-
ком с одновременным отрывом обоих колес от дороги. На
малых скоростях подобные препятствия преодолеваются
последовательным подбрасыванием сначала переднего, а
затем заднего колеса. В средней фазе клиренс Н определяет
возможность успешного прохождения велосипеда над
препятствием. Расчетное значение клиренса шоссейного
Рис. 2.15. Три фазы преодоления препятствий на малой скорости ме-
тодом последовательного перебрасывания колес велосипеда
велосипеда принимают равным Н = + ht, где —
зазор, гарантирующий безопасность движения; НА —
высота препятствия.
Не менее важной величиной является просвет между
нижней точкой педали и поверхностью дороги. Его зна-
чение /г = 0,1 м гарантирует безопасное прохождение
педали велосипеда в нижнем положении над препятствием
Типа кирпича (рис. 2.16).
Другим видом препятствий, встречающихся на го-
ночных трассах, являются глубокие рытвины, ямы и ка-
навы. Техника преодоления этих препятствий изучается
при обучении приемам езды на велосипеде, и поэтому в на-
стоящем издании они не рассматриваются, однако геомет-
рия макропрофиля гоночной трассы является определяю-
щим критерием при выборе основных размерений шоссей-
ного велосипеда.
45
Рассмотрим типовое препятствие в виде волнообразной
поверхности, характерной для пересеченной местности
(рис. 2.17). Велосипед, преодолевая это препятствие ме-
тодом обкатывания, т. е. без отрыва колес от поверхности
трассы, будет иметь переменный клиренс, определяемый
минимальным расстоянием между профилем трассы 1
и нижней точкой К передней звездочки цепного привода
велосипеда. При анализе необходимо рассматривать че-
тыре системы координат: неподвижную Оху; подвижную
Рис. 2.16. Просвет между
нижней точкой педали и по-
верхностью дороги
Рис. 2,17. Схема расчета клиренса го-
ночного велосипеда при движении по
пересеченной местности
О1х1у1, связанную с осью заднего колеса и параллельную
системе Оху; подвижные ОЛУх и О2х2Уг, связанные соот-
ветственно с задним и передним колесами и имеющие на-
чало в точках контакта колес с профилем трассы. Обозна-
чим: а — угол наклона рамы велосипеда относительно Oyty,
«1 — угол поворота системы координат Огхгуг относительно
OjXii/i; сс2 — угол поворота системы О2х2у2 относительно
Орай', ц — а — а2 — угол давления, заключенный меж-
ду нормалью к профилю у2 в точке контакта колеса с по-
верхностью и вектором относительной скорости V.
2.5. Геометрические аспекты
посадки велогонщика
Схема посадки велогонщика, являющаяся геометриче-
ским аналогом реального гонщика, представлена на
рис. 2.7, б. В упрощенном варианте схема представляет
46
собой шарнирно-стержневую многозвенную плоскую ки-
нематическую цепь, образованную составными звеньями—
аналогами частей человеческого тела: корпусом Л, и
углом его наклона к горизонту плечом Д5 и углом
фх_5, предплечьем Лв и углом ф5_в, бедром А2 и углом его
наклона к горизонту ф0_2, голенью А3 и углом ф2_3, сто-
пой Л4 и углами ф3_4 и ф0_4. Точкой привязки положения
тела гонщика относительно рамы велосипеда является
точка Ох, совпадающая с осью тазобедренного сустава.
Рис. 2.18. Расчетная схема голеностопного сустава, учитывающая кон-
структивные параметры обуви и педали, а также строение ступни
велогонщика:
3 голень; 2 — обувь; 3 — кривошип; 4 — педаль; 5 — шип; 6 — подошва
обуви
Рассмотренная кинематическая цепь, если включить
в нее неподвижное звено — велосипед, образует два
независимых друг от друга механизма. Первый и наиболее
важный в функциональном отношении механизм—нижние
конечности гонщика и кривошипно-педальная система;
второй — корпус и верхние конечности велогонщика.
Но прежде чем перейти к детальному рассмотрению
условного шарнирно-стержневого механизма, моделирую-
щего механизм нижних конечностей гонщика, необходимо
сделать дополнительный анализ положения стопы на
педали. Расчетная схема, учитывающая конструктивные
параметры велотуфель, педали и строение ступни велогон-
щика, представлена на рис. 2.18. Ось сустава большого
пальца О4 находится на расстоянии As от подошвы туф-
47
ли 6. С учетом толщины подошвы Л1о, половины высоты
педальной рамки Лп и толщины шипа /1Й ось О4 смещена
относительно оси педали 08 на величину Л4_7. Таким об-
разом, создаются два треугольника: O4OSO3, образованный
стержнями Ait А, и А4_7, и О4О8О, образованный стерж-
нями Ц, 1\ и А4_7. Первый треугольник жесткий и изменяет
свое положение в плоскости педалирования в зависимости
от угла поворота кривошипа /4 и разворота ступни от-
носительно голени на угол ф3_4. Второй треугольник
содержит стержень переменной длины 1\, которая зависит
от угла поворота кривошипа параметров посадки гон-
щика и педалирования.
Механизм, образованный с учетом нижних конечностей
гонщика и кривошипно-педальной системы, включающий
кривошип аналоги стопы Л4, голени Л3 и бедра. Л2,
имеет число степеней свободы, равное двум:
W = з (/г _ 1) _ 2 (g + h + k) — с = 2, (2.4)
где п = 5 — число звеньев механизма, включая непод-
вижное звено OOj, являющееся рамой велосипеда; g =
= 5 — число шарниров механизма, обеспечивающих вра-
щательное движение; h = k ~ с = 0 — число поступа-
тельных н высших пар с чистым качением и скольже-
нием.
Следовательно, этот механизм не способен работать
без введения одного ограничения, исключающего одну из
двух степеней свободы. Таким ограничением чаще всего
является угол между стопой и голенью, который не оста-
ется фиксированным, а изменяется в цикле педалирования
по характерному для каждого гонщика в определенных
условиях езды закону, при этом основная подвижность
приходится на два звена: бедро Л2 и голень Ая — наиболее
способные к передаче энергии и обеспечивающие провора-
чиваемость кривошипа. Введение независимого ограни-
чения на подвижность других звеньев может привести
к разрыву кинематической цепи, непроворачиваемости
кривошипа или к неэффективной в энергетическом отно-
шении работе отдельных мышц.
В целях приведения рассматриваемого механизма
к четырехзвенному введем дополнительные ограничения,
вытекающие из расчетной схемы, представленной на
рис. 2.19. Вместо реальных звеньев А3, А4 и размера А4_7
может быть использовано звено /2 с переменным парамет-
48
ром — длиной, изменяющейся согласно уравнению
1'2 — < Аз 4" Л4 — 2Л3Л4 COS \p3_4 (с&1)
4- arcsin
____________^4-7 sin (ip,, + л/2)
Mi’ ' - ^4-7 - 2Л4Л4-7 C0S (I’o 4
(2-5)
где а1 — угол поворота кривошипа; 4'о — угол наклона
к горизонтали линии, соединяющей ось тазобедренного
сустава (\ гонщика и ось каретки велосипеда О (см.
рис. 2.20).
Теперь можно перейти к схеме обычного четырехзвен
ного плоского кривошипно-шатунного механизма с пере-
менным параметром 1.2, удобной для расчетов (рис. 2.20).
В схеме этого механизма: О — ось каретки велосипеда;
А — ось педали; В — ось коленного сустава; Ох — ось
49
Рис. 2.21. Изменение углов между
звеньями приведенного механизма:
— угол между голенью и сто-
пой; т|)2_з — угол между голенью и
бедром; i|j0_4 — угол между стопой
и горизонталью; т|)0_2 — угол между
бедром и горизонталью; а2 — угол
поворота стержня Z2 относительно
горизонтали; а3 — угол поворота
стержня 1а относительно горизон-
тали; р — угол передачи давления
между звеньями /2 и ls (см. рис. 2.7,6
и 2.20)
тазобедренного сустава; —
кривошип; /2 — аналог си-
стемы голень — стопа ABD,
имеющей переменный размер
в функции угла поворота
кривошипа «д 13 — аналог
бедра гонщика. Штрихами
показано промежуточное по-
ложение механизма ОА' B'OY.
Положение звеньев в пло-
скости чертежа определяется соответственно углами alt
а2 и а3 и углом Ц передачи давления между звеньями /2
и 13. Взаимное положение шарниров О и определяется
размером I и углом ф0.
Если линейные размеры конечностей для каждого
конкретного гонщика остаются неизменными, то их вза-
имное расположение может изменяться в зависимости от
особенностей работы мышечного аппарата гонщика, при-
нятой и отработанной им посадки, тактико-технических
приемов ведения гонки, спортивной формы, рельефа
местности, вида гонок и спортивного инвентаря.
Анализ геометрических параметров посадки можно
выполнить на основе статистических наблюдений на при-
мере ведущих гонщиков, добившихся высоких спортивных
результатов. Такое исследование было выполнено с ис-
пользованием кинограмм, одна из которых принята для
детального анализа и последующего практического ис-
пользования.
Расшифровка кинограммы одного из ведущих гонщиков
мировой классификации позволила получить графики из-
менения углов между звеньями приведенного механизма
(рис. 2.21) в функции угла поворота кривошипа велоси-
педа а.х. Приведенные графики являются только общей
50
Рис. 2.22. Варианты компоновки педали: а — традиционная
педаль; б — модернизированный вариант педали; в — оптималь-
ный вариант компоновки
системы привода гоночного
педалирования весьма огра-
иллюстрацией процесса педалирования и точно могут
быть реализованы только конкретным гонщиком, которому
они принадлежат. Однако такая закономерность харак-
терна для гонщиков высокого класса, и поэтому эти гра-
фики могут быть использованы при постановке педалиро-
вания и его совершенствовании.
Пути совершенствования
велосипеда за счет условий
ничены. Один из вариан-
тов, предлагаемый японс-
кой фирмой «Шимано», пре-
дусматривает такую ком-
поновку педали, в которой
уменьшается расстояние
Л4_-( между центрами оси
педали Оа и сустава боль-
шого пальца стопы О4
(рис. 2.22). Велотуфля 1
Рис. 2.23. Схема искажения
траектории движения оси педали
при Л4_7 — 48 мм (/™ах —
= 210 мм тД = 170 мм<
^/1min= 1зо мм);
1 — традиционная педаль; 2 — мо-
дернизированная педаль; 3 — оп-
тимальная педаль
51
при традиционном варианте конструкции педали 2 кре-
пится с помощью шипа 3. Образующееся при этом сме-
щение оси О4 относительно О8 составляет примерно Л4_7=
= 30-4-50 мм, что приводит к изменению фактической
длины кривошипа от до 1\ и к искажению траекто-
рии 2 (рис. 2.23) по сравнению с номинальной траек-
торией 1.
Некоторое смещение оси педали относительно пло-
скости контакта велотуфли и педали (рис. 2.22, б) умень-
шает отмеченные искажения траектории движения номи-
нальной оси педали (траектория 2 на рис. 2.23). Оптималь-
ным решением конструктивной компоновки педали можно
считать такое, когда Л4_7 = 0, что соответствует совпаде-
нию номинальной и фактической длин кривошипа и сов-
мещению траекторий движения оси педали О4 и оси су-
става большого пальца О8 стопы (траектория 3 на
рис. 2.23).
Глава 3
УСТРОЙСТВО ГОНОЧНОГО ВЕЛОСИПЕДА,
ОСНОВНЫЕ УЗЛЫ И ДЕТАЛИ
3.1. Общее конструктивное решение
гоночного велосипеда
Одним из важнейших показателей технологичности
конструкции любого изделия является число деталей и
узлов, входящих в состав этого изделия. Чем меньше этот
показатель при условии достижения требуемого техниче-
ского и функционального результата, тем точнее, надежнее
и совершеннее может быть выполнено изделие. Современ-
ный гоночный велосипед по праву следует отнести к вы-
дающимся достижениям конструкторской мысли. Блестя-
щие идеи, заложенные при его создании еще в прошлом
веке, в своей основе сохраняются в современных конст-
рукциях и получают лишь более глубокое техническое
развитие на современном уровне механики, технологии
и эргономики.
Гоночные велосипеды, выпускаемые многочисленными
велосипедными фирмами мира, имеют унифицированные
52
конструкцию и номенклатуру узлов благодаря регла-
менту, установленному УСИ. Такая международная стан-
дартизация типоразмеров основных деталей и узлов
сделала их взаимозаменяемыми, позволила обеспечить
сравнительно низкую стоимость и, что наиболее важно
для массового потребителя, повсеместное распространение
в торговой сети. Взаимозаменяемость узлов, возможность
их монтажа и регулировки собственными силами способ-
ствуют массовому использованию гоночных велосипедов
не только в спортивных целях, но и для туризма и от-
дыха.
Рассмотрим подробнее конструкцию гоночного велоси-
педа на примере серийно выпускаемой Харьковским вело-
сипедным заводом шоссейно-гоночной модели В-552И
«Спорт-шоссе». Велосипед выполнен в традиционной ком-
поновке, оснащен колесами со спицевым набором и пол-
ным комплектом узлов и деталей современного гоночного
велосипеда (рис. 3.1).
Рама 6 является основным несущим и связующим уз-
лом велосипеда. Она определяет его назначение (шоссей-
ный или трековый) и облает^ применения (например, для
групповых или командных шоссейных гонок). На раме
смонтированы все остальные узлы велосипеда: передняя
вилка 11, руль 7, передне^ 9 и заднее 3 колеса, узел
каретки 15, включающий Два кривошипа и комплект ве-
дущих звездочек, левая 13 и правая 16 педали, седло 5,
тормоза 8 переднего и 4 заднего колес, задний 17 и перед-
ний 12 переключатели передач, трещотка 1, насос 14
и однотрубки 2 заднего и 10 переднего колес.
Серийно выпускаемый гоночный велосипед модели
В-552И при неизменной базе L = 1015 мм имеет один потре-
бительский размерный параметр, регламентированный дей-
ствующими техническими условиями. Таким параметром
является ростовый размер Л, “который в выпускаемом
ассортименте ранжирован через 20 мм в интервале 520
< А 600 мм. Конструкция узлов этого велосипеда
рассмотрена в последующих параграфах настоящей
главы.
Модель В-552И продолжает совершенствоваться на базе
современных достижений отечественного и зарубежного
велостроения. Созданная в настоящее время в ЦКТБ
велостроения модель «Тахион» является логическим раз-
витием и завершением доводки серийно выпускаемых об-
разцов гоночных велосипедов.
53
Рис. 3.1. Шоссейный гоночный велосипед Харьковского велозавода модели В-552И
Б4
3.2. Рама
Рама велосипеда (рис. 3.2) состоит из собственно остова
и задней вилки.
Остов рамы — плоский четырехугольник из стальных
труб, связанных в углах жесткими узлами и расположен-
ных под углами а, р, у, <р, а». В состав остова входят:
головная 1, верхняя 4, нижняя 16 и подседельная 8 трубы;
верхний 2, нижний 17 и подседельный 6 узлы головки;
каретка 14\ две направляющие скобы 15 для тросов заднего
п переднего переключателей; упоры 3 и 5 для троса задне-
го тормоза; стойка 7 для крепления насоса. Трубные де-
тали изготовляют из стали ЗОХМА, узловые детали —
из стали ЗОЛ.
Задняя вилка образует с подседельной трубой два
жестких треугольника в двух плоскостях, расположен-
ных под некоторым углом к плоскости остова рамы.
В состав задней вилки входят: две подседельные стойки 10,
два пера вилки 12, левый и правый наконечники 11,
верхний 9 и нижний 13 мостики. Трубные детали изго-
товляют из стали ЗОХМА, наконечники — из стали 10.
Геометрия рамы шоссейного гоночного велосипеда
модели В-552И определяется совокупностью линейных
и угловых размеров (табл.3.1), зависящих от основного
потребительского размера А — высоты подседельной
трубы, определяемой антропометрическими данными гон-
щика: А т Н — — h1 — h2, где И — длина вертела
СНКГ; — длина кривошипа; — высота седла; h
~ 100 мм — длина подседельного пальца.
Маршрутная технология изготовления рамы преду-
сматривает предварительную операцию получения заго-
товок, последующую механическую обработку комплек-
тующих деталей, сборку в специальном приспособлении
с фиксацией узлов рамы в отдельных точках и после-
дующую пайку припоем ПСР-40. Пропаянные рамы под-
вергают контролю точности в специальном приспособле-
нии, в случае необходимости выполняют ручную правку
с использованием рычага.
Затем готовые рамы подвергают выборочным испыта-
ниям на прочность и жесткость. При прочностных испы-
таниях оценивают прочность соединения в узлах и проч-
ность отдельных труб на разрыв. При жесткостных испы-
таниях контролируют поперечную податливость рамы
при трехопорном подвесе на одном из наконечников зад-
55
&b
Таблица 3.1. Геометрические размеры рамы шоссейного
гоночного велосипеда В-552И
А Б В Г Е Ж И
520 536 545 485,5 92 32,7 616
540 555 550 504,7 112 52,8 619
560 573 555 522,5 129 70,2 622
580 592 560 541,7 149 90,3 622
600 612 570 560,9 168 109,5 629
л м а ₽ V <р (0
615 478 58° 20' 59° 20' 68° 10'
620 491 58° 45' 59° 45' 68° 30'
630 630 504 518 73° 30' 73° 30' 58° 35' 58° 35' 70°00' 71° 40'
640 532 60° 20' 60° 26' 73° 13'
Примечание. Размеры даны в привязке к одной из моди-
фикаций модели В-552И.
ней вилки и на головной трубе и при поперечном нагру-
жении рамы на каретке. Поперечная деформация каретки
рамы до 4 мм при нагрузке 600 Н считается допустимой
при условии исчезновения остаточных деформаций, ко-
торые не должны превышать 0,3 мм.
3.3. Передняя вилка
Узел передней вилки состоит из двух перьев 8 и 9
(рис. 3.3), выполненных из труб переменного сечения из
стали ЗОХМА и оснащенных соответственно левым 10
и правым 11 наконечниками из стали 10, коронки 12
из стали ЗОЛ, стержня 1 и шарикоподшипникового узла,
.£ помощью которого передняя вилка монтируется на
раме.
Технологический маршрут изготовления передней
вилки предусматривает получение заготовок, последу-
ющую их механическую обработку, сборку в приспособ-
лении и предварительную пайку, окончательную пайку
57
наконечников и коронки латунью Л6 в соляной ванне.
Контроль точности готовой передней вилки выполняется
в специальном приспособлении с помощью шаблона.
Контроль технического состояния вилки выполняется
одним из методов неразрушающего контроля — ультра-
звуковой дефектоскопией или методом оценки параметров
затухания свободных колебаний.
Шарикоподшипниковый узел включает нижний 7 и
верхний 5 конусы из стали 20Х, нижнюю 6 и верхнюю 4
чашки из стали 10Х, шайбу 3 с внутренним упорным
носком и шлицевую контргайку 2 из стали 35. Шарики
диаметром 4 мм в количестве 58 шт. устанавливаются по
29 шт. в каждый подшипник. Контроль точности сборки
подшипникового узла выполняется путем визуальной
оценки величины зазора в подшипниках рулевой колонки.
Подшипник регулируют с помощью двух накидных клю-
чей, установленных в плоскостях шлицев верхней чашки
и контргайки и подаваемых навстречу друг другу. Плот-
ная затяжка контргайки предохраняет узел рулевой
колонки от случайного развинчивания, увеличения за-
зора в подшипниках и, как следствие, от появления удар-
ных воздействий шариков на поверхность шариковых
дорожек.
Влага, грязь и абразивная пыль, поднимаемые с по-
верхности дороги, пагубно влияют на состояние нижнего
подшипникового узла рулевой колонки, резко сокращая
срок его службы. Если этот узел изолировать от внеш-
них воздействий (закрыть специальным поясом из резины,
предусмотреть лабиринтное устройство или замотать обык-
новенной изоляционной лентой), то срок его службы су-
щественно увеличивается.
3.4. Руль
Конструкция руля гоночного велосипеда определяется
его назначением и конкретным использованием. Для шос-
сейных велосипедных гонок доминирующей остается тра-
диционная изогнутая вперед—вниз—назад форма руля,
испытанная десятилетиями в самых разнообразных гон-
ках (рис. 3.4). Такая форма руля позволяет гонщику
занимать три наиболее характерные посадки на вело-
сипеде: если держаться за поперечную часть руля — высо-
кая посадка, за тормозные ручки — средняя посадка,
За ручки руля — низкая посадка. Все три типа посадок
59
в разной степени используются в самых массовых шос-
сейных групповых гонках.
В конструкцию такого руля входят два основных
узла: труба руля и вынос.
Труба 1 диаметром 24 мм из алюминиевого сплава
в средней части дополнена усилителем 2 в виде патрубка
длиной 120 мм, плотно посаженного на развальцованную
изнутри часть трубы. После придания требуемой формы
труба подвергается естественному старению до достиже-
Рис. 3.4. Руль шоссейного гоночного велосипеда
ния поверхностной твердости не менее 100 HRB. Поверх-
ность трубы полируют до шероховатости °’3\/ , за исклю-
чением концов руля, и анодируют.
Вынос состоит из ряда деталей: стального стержня 7,
нижняя часть которого заканчивается цанговым разре-
зом 8, литого замка 3 из стали ЗОЛ, стальной трубы 4,
стального стержня 6, конуса 9 и бонки 5. Стыковку замка,
трубы и стержня выполняют в специальном приспособле-
нии с последующей пайкой латунью. Замок выноса стя-
гивают крепежным комплектом (болт, шайба и гайка).
Рули данной конструкции выпускаются одного типо-
размера. Исключение составляет труба выноса, длина
которой может меняться от 20 до 100 мм. Использование
более длинных выносов считается нерациональным, так как
снижается жесткость рулевой системы, что особенно
важно в моменты выполнения рывков и спуртов. Для
увеличения жесткости конструкции помимо усилителя
трубы руля используют дополнительные накладки, напаи-
ваемые на поверхность трубы.
3.5, Колеса
Переднее и заднее колеса гоночного велосипеда состоят
из четырех узлов: втулки, эксцентриковой системы кре-
пления, обода и спицевого комплекта.
60
Втулки переднего и заднего колес (рис. 3.5) имеют иден-
тичную конструкцию и содержат корпус 8 из алюминие-
вого сплава В95, две чашки 6 и два конуса 5 из стали
шх 15 с поверхностной твердостью шариковых дорожек
60—65 HRC (61,0—65,8 HRC3), шарики 7 в количестве
18 шт. (диаметром 5 мм для переднего колеса и 6 мм для
заднего), пустотелую ось 9 из стали ЗОХМА, две шайбы 3
с внутренним носиком и две контргайки 2 из стали 45.
Узел шарикоподшипников закрыт пылеуловителем 4 из
листовой стали 10, запрессованным в гнездо втулки.
Задняя втулка дополнительно укомплектована распор-
ной втулкой 18, длина которой определяется шириной
трещотки. Диаметр оси задней втулки увеличен по сравне-
нию с диаметром оси передней втулки, контргайки имеют
специальную конструкцию: на одной торцовой поверх-
ности выполнены радиальные насечки для обеспечения
лучшего крепления заднего колеса в задней вилке рамы.
Задняя втулка имеет посадочный под трещотку вы-
ступ 17 с резьбой М35 X 1
61
Во фланцах втулок и ободах просверлены отверстия
диаметром 2,1 ф- 0,12 мм. На противоположных фланцах
эти отверстия смещены друг относительно друга на поло-
вину шага. Число отверстий в обоих фланцах зависит от
спицевого набора, который может иметь разное число
спиц, кратное четырем. Для гонщиков малой массы до-
статочно 24 спицы, для гонщиков средней массы — 28—
32 спицы, для гонщиков большой массы — 36—40 спиц.
Число спиц и тип набора (количество крестов) зависят
также от вида гонок, гонки преследования на треке,
индивидуальные и командные гонки на шоссе позволяют
использовать колеса с минимальным числом спиц. Зад-
нее колесо целесообразно усиливать дополнительным
количеством спиц и крестов в спицевом наборе (см.
рис. 6.3).
Точность сборки и регулировки втулки зависит от
многих факторов и, в первую очередь, от точности изго-
товления шарикоподшипникового комплекта: оси, кону-
сов, чашек, корпуса втулки и шарикового набора. Те-
кущее техническое состояние комплекта, определяемое
местным и общим износом, а также деформацией отдель-
ных деталей, оказывает существенное влияние на пара-
метры точности узла втулки.
Для обеспечения точности к деталям комплекта предъ-
являют повышенные требования. Так, для оси втулки
несоосность отверстия относительно среднего диаметра
резьбы не должна превышать 0,2 мм, биение среднего
диаметра резьбы относительно наружной поверхности
оси не более 0,1 мм. Для конуса биение поверхности ша-
риковых дорожек относительно среднего диаметра резьбы
не более 0,03 мм. Для чашки втулки биение поверхности
шариковых дорожек относительно наружной посадочной
поверхности не должно превышать 0,03 мм. Для корпуса
втулки биение радиальной поверхности гнезда относи-
тельно оси втулки также не должно превышать 0,03 мм.
Регулировка втулки выполняется, как правило, вруч-
ную. Диаметры шариков контролируют микрометром
или оптиметром, и шариковый комплект из 18 шт. под-
бирают в интервале допуска 0,01 мм. Плотность запрес-
совки чашек в гнезда корпуса втулки по диаметру
25 мм (передняя втулка) и 28-^1?’ мм (задняя
+0,048 +0,048
втулка) в обычных условиях контролируют вручную,
точность оси проверяют индикатором при установке оси
62
в центрах. Профиль шариковых дорожек и степень их
изнашивания контролируют специальными шаблонами
на просвет. Учитывая невозможность абсолютно точной
регулировки втулки, необходимо при затягивании контр-
гаек оставлять некоторый люфт в шарикоподшипниковом
комплекте. Его величину окончательно оценивают при
Рис. 3.6. Некоторые типы конструкций ободов гоночного
велосипеда (сечения обода)
установке колеса в раму, когда затягивают эксцентри-
ковое крепление. Таким образом, люфт в шарикоподшип-
никовом комплекте, приведенный к радиусу обода, не
должен превышать 1 мм
Отсутствие люфта во втул-
ке на радиусе обода сви-
детельствует, как прави-
ло, о чрезмерной затяж-
ке шарикоподшипникового
комплекта.
Эксцентриковая систе-
ма крепления включает
в себя тягу 10, конус 15,
муфту 12, две торцовые
регулировочные пружи-
ны 1, эксцентриковый ры-
чаг 11 и крепежный ком-
плект, в состав которого
входят пружинная шай-
ба 13, стопорная гайка 14
и полукольцо 16 (рис. 3.5).
Обод колеса (рис. 3.6)
выполняется в виде прока-
та специального профиля 2
из алюминиевого спла-
Рис. 3.7. Спицевый комплект
гоночного велосипеда
при полном обороте колеса.
63
ва Д1М, имеет необходимое число отверстий под ниппели
спиц (от 24 до 40), согласующееся с числом отверстий под
спицы во фланцах втулок. Одни типы ободов предусматри-
вают дополнительные шайбы 1 под головку ниппеля
спицы, другие снабжены пистонами 5, третьи — гнездами 4
в виде пистонов глубокой вытяжки. Серийно выпускаемые
гоночные велосипеды комплектуются колесами диаме-
тром 0,685 м (27 дюймов).
Спицевый комплект состоит всего из двух деталей:
спицы и ниппеля (рис. 3.7). Спица 1 изготавливается из
стали и выполняется переменного сечения методом рас-
катки. Один конец спицы изогнут и отштампован в виде
головки 3, другой заканчивается резьбой, по которой
ниппель 2, изготавливаемый из латуни, соединяется со
спицей.
3.6. Каретка
Каретка гоночного велосипеда состоит из двух узлов:
шарикоподшипникового узла и кривошипной системы.
Шарикоподшипниковый узел каретки (рис. 3.8) вклю-
чает пустотелый вал 3 из стали 12ХНЗА, левую 2 и пра-
вую 4 чашки из стали ШХ15, контргайку 1. К шарико-
подшипниковому узлу каретки предъявляются высокие
требования точности сборки и долговечности работы.
Так, биение поверхностей шариковых дорожек вала
относительно его оси не должно превышать 0,03 мм,
смещение осей квадратов относительно оси вала не должны
превышать 0,025 мм, твердость поверхности вала 60—
65 HRC обеспечивается цементированием на глубину
0,6—0,8 мм. Биение поверхностей шариковых дорожек
и среднего диаметра резьбы чашек относительно оси
чашек не должно превышать 0,05 мм, поверхностная
твердость шариковых дорожек 60—65 HRC.
Регулировку узла выполняют вручную путем завин-
чивания левой чашки до устранения люфта вала, после
чего затягивают контргайку накидным ключом.
Кривошипная система включает левый (рис. 3.9) и
правый (рис. 3.10) кривошипы из алюминиевого сплава
В95, пару ведущих (малую и большую) звездочек, кре-
пежные комплекты, состоящие из двух болтов с двумя
шайбами (для затяжки кривошипов на валу каретки),
и пять втулок с пятью специальными винтами для кре-
пления звездочек на лапках правого кривошипа.
64
Непараллельность оси резьбового отверстия под оси
педали и квадратного отверстия под вал каретки не
должна превышать 0,5 мм на длине 100 мм; отклонение
диагонали квадрата отверстия под вал относительно осн
симметрии кривошипа не превышает 30'; радиальное и
боковое биение звездочек относительно оси вала каретки
не должно превышать 0,3 мм; кривошипы в сборке должны
находиться в одной плоскости (предельно допустимое
отклонение не более 2°),
3 ЛюОоьицкии В. П.
65
Рис. 3.9. Левый кривошип
М1Ч*1,25~6Н М22*1-ВН
левая
66
L*0,5
Рис. 3.10. Правый кривошип
3*
67
фипь svB'a
Рис. 3.11. Передняя звездочка,
входящая в комплект ведущих
звездочек цепного привода гоноч-
ного велосипеда
68
Гоночный велосипед модели В-552И комплектуется
набором ведущих звездочек цепного привода с числом
зубьев 42—56. Звездочки имеют единые присоединитель-
ные размеры (рис. 3.11), изготовляются из алюминиевого
сплава В95 и имеют ряд регламентированных требований
на торцовое биение (не более 0,1 мм) и радиальное биение
(не более 0,05 мм).
3.7. Педали
Левая и правая педали имеют идентичную конструк-
цию, включающую собственно педаль, туклипс и ремен-
ный комплект.
Рис. 3.12. Левая педаль гоноч-
ного велосипеда
Педаль (рис. 3.12) состоит из стальной рамки 11
и двух пластин 5, стального корпуса 6, оси 10 из стали
12ХНЗА, шариков 9 диаметром 4 мм в количестве 20 шт.,
конуса 4 из стали ШХ15, шайбы с внутренним носиком
и контргайки 12, гайки-колпачка 13. Шарики в количе-
стве 11 шт. засыпаются во внутренний подшипник, а
в количестве 9 шт. — во внешний подшипник.
Туклипс 3 выполнен в виде пластины сложной конфи-
гурации из листовой стали 65Г, он крепится к рамке
69
педали двумя винтами с гайками 8 и накладной стальной
пластиной 7.
Ременный комплект включает собственно ремень 2
и пряжку 1.
3.8. Тормоза
Передний (рис. 3.13) и задний (рис. 3.14) тормоза
имеют одинаковую конструктивную реализацию, но отли-
чаются некоторыми деталями крепления и отдельными
исполнительными размерами. Каждый тормоз включает
три узла: собственно тормоз, тормозные колодки и при-
вод тормоза.
Собственно тормоз состоит из кронштейна 9, наруж-
ной 15 и внутренней 14 скоб, соединенных с кронштей-
ном 9 пальцами. Кронштейн 9 с помощью специальных
болта 8 и шайбы 7 крепится к мостику верхней подвески
задней вилки (для заднего тормоза) или к коронке пе-
редней вилки (для переднего тормоза). Левая и правая
пружины 10 разводят наружную 15 и внутреннюю 14
скобы в разные стороны, обеспечивая нормальное поло-
жение тормоза открытым.
Тормозная колодка состоит из держателя 17, собственно
колодки 16, специального крепежного винта 18 и гай-
ки 19. Колодка устанавливается в пазу скоб; возможны
вертикальная и угловая регулировки.
Привод тормоза включает следующие детали: корпус 3,
хомут 4, рукоятку 11, штуцер 2 для регулирования на-
тяжения троса, трос в оболочке 1, установочный крон-
штейн 6 с фиксатором троса 5, скобу 12 и петлю троса 13,
концы которой заводятся в гнезда внутренней и наруж-
ной скоб.
3.9. Задний переключатель передач
Задний переключатель передач (задний суппер) состоит
из трех узлов: корпуса, двух роликов с пластинами и
переключателя передач (манетки).
Корпус (рис. 3.15) представляет собой сборную кон-
струкцию в виде шарнирного параллелограмма и состоит
из кронштейна 19. собственно корпуса 24. левого 18
п правого 2.1 рычагов, изготовленных из алюминиевого
става Д16 и соединенных между собой в шарнирах с по-
мою ью запрессованных в рычаги латунных втулок, и
1918 17 18
70
71
#s о
Вид А
19 18 П 16
72
стальных осей 23, расклепанных с обеих внешних сторон.
Корпус переключателя подвешивается к правому нако-
нечнику рамы велосипеда с помощью специального вин-
та 20 из стали 45. Крайнее правое (номинальное) положе-
ние переключателя обеспечивается стальной пружи-
Рис. 3.15. Задний переключатель
передач
ной 22, установленной на винте 7. Диапазон поперечного
перемещения переключателя устанавливается и регули-
руется с помощью подпружиненных винтов 4 и 9. Привод
переключателя осуществляется тросом 3 манетки, за-
крепленным винтом 1 и фигурной шайбой 2 на выступе 8
правого рычага 21.
Корпус 24 содержит ряд деталей, входящих в меха-
низм поворота пластин с роликами: специальный винт 11
73
из стали 45, цилиндрическую витую стальную пружи-
ну 14, втулку 12 из полиамида, колпачок 15 из стали 15
и упорный винт 25.
Механизм поворота регулируется путем частичного
вывинчивания винта 5, отвинчивания винта 11, вывода
торцового отростка 10 пружины 14 из гнезда правой
пластины 16 и одновременного удержания радиального
отростка 13 пружины 14 в специальном пазу корпуса 24.
___ Поворачивая колпачок 15
против часовой стрелки, вво-
дя торцовый отросток 10 пру-
жины 14 в требуемое гнездо
пластины 16 и затягивая
винт 11 при удержании ра-
диального отростка 13 в пазу
корпуса 24, можно увели-
чить или (обратными дей-
ствиями) уменьшить натяже-
ние цепи в системе привода
велосипеда. Натяжение тро-
са 3 регулируется винтом 5
и контргайкой 6.
Ролики с пластинами со-
стоят из собственно роли-
ков 27, изготовленных из
Рис. 3.16. Узел привода пере- стабилизированного поли-
ключателя передач (манетка) формальдегида, втулки сколь-
жения 29 из стали 45, запрес-
сованной в тело ролика, распорной втулки 28 из антифрик-
ционного материала, двух стальных пылеуловителей 30,
левой 31 и правой 17 пластин из алюминиевого спла-
ва Д16 и двух болтов 26 для стягивания пластин 31 и 17.
Все шарниры и узлы трения переключателя передач
смазывают литолом 24.
Манетка (рис. 3.16) включает хомут 1, стягиваемый
винтом и гайкой на нижней трубе рамы, два рычага 2
и 4 для привода соответственно переднего и заднего пере-
ключателей передач. Рычаги смонтированы на пальцах
хомута 1, и с помощью шайб 5 и специальных винтов 6
устанавливаются необходимые моменты сил трения для
обеспечения нормальной работы переключателей. Тросы
привода переключателей заводятся через отверстия 3
и канавки 7 в рычагах манетки, огибают направляющие
скобы рамы и присоединяются к переключателям.
74
3.10. Передний переключатель передач
Передний переключатель передач (передний суплер)
состоит (рис. 3.17) из корпуса 5 и хомута 3 из алюминие-
вого сплава Д1, вилки 9 из стали 10, левого 14 и пра-
вого 7 рычагов, образующих совместно с корпусом и вил-
кой единую систему параллелограмма, соединенную в шар-
нирах стальными осями 8, расклепанными с обеих на-
ружных сторон. Концы вилки соединены между собой
с помощью распорной втулки 11, винта 10 и гайки 12.
Рис. 3.17. Передний переключатель передач
Хомут 3 крепится к корпусу 5 с помощью запрессованной
в корпус оси 4 и винта с гайкой 15. Номинальное (крайнее
левое) положение переключателя обеспечивается витой
пружиной 13. Диапазон перемещения вилки 9 регулиру-
ется двумя подпружиненными винтами 6, установленными
в выступе корпуса 5. Приводной трос от манетки крепится
к правому рычагу 7 с помощью болта 1 и профильной
шайбы 2.
3.11. Трещотка
Трещотка (рис. 3.18) включает в себя наружный 3
и внутренний 10 корпуса, конус 2, две собачки 11 и пять
звездочек 4—8. Все эти детали изготавливают из
стали 15Х с последующей химико-термической обработ-
кой — цианированием на глубину до h = 0,34-0,5 мм,
поверхностная твердость 58—62 HRC (59,0—62,9 HRCg).
75
Кроме того, в состав трещотки входят комплект из 70 ша-
риков 9 диаметром 3 мм, регулировочная шайба 1, пру-
жина 12 и ось 13.
Трещотка комплектуется звездочками с различным
числом зубьев в зависимости от вида гонок, рельефа
трассы и особенностей самого гонщика (некоторые склонны
к использованию больших передач, другие, наоборот, —
малых). Для шоссейных гонок с рельефом трассы уме.
ренной крутизны наиболее рациональными следует счи.
Рис. 3.18. Трещотка гоночного велосипеда
тать наборы звездочек 13х 15х 17Х 19x21 и 13х 14х 16х
х 18x20. Второй вариант набора заслуживает внимания
вследствие возможности обеспечения меньшей удельной
нагрузки и меньшего изнашивания звездочек с числом
зубьев 13 и 14 благодаря примерно одинаковому пере-
даточному отношению, которое можно получить за счет
соответствующего набора передних ведущих звездочек.
Действительно, передача z1xz2 =46x13 дает переда-
точный параметр k = 95,53 (см. табл. 3.3), а передача
zxXz2 = 50х 14 — передаточный параметр k ~ 96,42. Для
гонок в горной местности необходимо предусматривать
звездочки с числом зубьев 22 и даже 24, особенно при
кроссовых соревнованиях.
В целях удобной и быстрой замены звездочек на
трещотке в случае их изнашивания или из-за требований
предстоящей гонки звездочки посажены на наружный
корпус по резьбовым поверхностям двух диаметров
(рис. 3.19 и 3.20). Набор звездочек 6—8 плотно навин-
76
Рнс. 3.20. Звездочка левого комплекта звездочек трещотки
77
чивается по резьбе М48Х1 до упора в бурт наруж-
ного корпуса. Набор звездочек -4 и 5 плотно навинчивается
по резьбе М36 X 1 также до упора, но в другой (тор-
цовый) выступ наружного корпуса. Такая конструкция
позволяет более точно посадить звездочки на корпус
и тем самым предотвратить возможность срезания резьбы
и проворачивания звездочки в моменты приложения ма-
ксимальных усилий.
3.12. Цепной привод
Общая характеристика привода. В гоночных вело-
сипедах применяется цепь по ГОСТ 13568—75*
(СТ СЭВ 2640—80) «Цепь приводная роликовая одноряд-
ная нормальная серии ПР-12,7-1000-1» (по старой терми-
нологии ее часто называют «полудюймовая цепь»). Ее
Рис. 3.21. Роликовая однорядная цепь ПР-12, 7-1000-1
конструктивные параметры представлены на рис. 3.21.
Цепь состоит из последовательного ряда шарниров и
соединенных между собой внутренних 1 и наружных 2
пластин. Во внутренние пластины 1 запрессованы втул-
ки 4, на которые по определенной посадке установлены
ролики 5. Ось 3 обвальцована с торцов. Цепь имеет три
основных размерения: 12,7x7,75x2,4 (шаг t— 12,7 мм,
диаметр ролика d = 7,75 мм и размер между внутренними
пластинами В = 2,4 мм). Геометрическая характеристика
зацепления % — tjd = 1,64, диаметр осн d$ — 3,66 мм,
масса 1 м цепи 0,289 кг, разрывное усилие 10,0 кН, про-
екция опорной поверхности шарнира цепи 16,8 мм2.
78
Деталировка цепи представлена на рис. 3.22. Характе-
ристика материалов приведена в табл. 3.2.
Шаг цепи — расстояние между осями двух роликов
внутренних и наружных звеньев цепи, измеренное в на-
тянутом состоянии цепи под нагрузкой, равной 1 %
от разрывной. Шаг цепи, бывшей в употреблении, для
внутренних и наружных звеньев неодинаков, поэтому,
Рис. 3.22. Детали роликовой цепи ПР-12,7-1000-1: а — внутренняя
пластина; б — внешняя пластина; в — ось; г — втулка; д — ролик
как правило, определяют средний шаг 1е на отрезке на-
тянутой цепи, содержащем нечетное число (не менее 11)
звеньев (рис. 3.23). При этом крайние ролики 1 и 3 изме-
няемого участка цепи должны быть смещены в одну сто-
рону при помощи клина 2 и губки 4 штангенциркуля.
Длина цепи /ц = L — 0,5 (Dt -(-О) и число звеньев
mt = 11 (для шага цепи в интервале от 8 до 25,4 мм наи-
более точные результаты получаются при mt = 49) дают,
согласно требованиям методики измерений, вполне до-
стоверное среднее значение шага цепи: tc —
79
00
о
Т а б л и ц а 3.2. Материалы деталей цепного привода гоночного велосипеда
Деталь привода Материал, стандарт Термообработка Прочность НРС (НРСэ) Масса, кг
Пластина цепи 81 (см. рис. 3.22, а, б) Лента 50-Т-С-Н1-1,05, ГОСТ 2284—79* — 41—51 (42,5—52,2) 0,001010
Ось (см. рис. 3.22, в) Калиброванная стальная проволока 3,70-20Х, ТУ 14-4-1087—80 Азотонауглероживание на глубину 0,15—0,4 мм 60—65 (61,0- 65,8) 0,000810
Втулка (см. рис 3.22, г) Стальная лента 10-0 74X4,75 ТУ 3-1096—80 Азотонауглероживание на глубину 0,08— 0,23 мм 60—66 (61,0—66,8) 0,000375
Ролик (см. рис. 3.22, д) Стальная лента 08-10-ОМ- Т-2-К1,25, ГОСТ 503—81 * А зотон ау гл ер оживан не на глубину 0,08— 0,25 мм 55—63 (56,1—63,9) 0,000400
Звездочка перед- няя *2 (см. рис. 3.11) Алюминиевый сплав В95, ГОСТ 4784—74* — — ~0,150
Звездочка задняя *3 (см. рис. 3.20) Сталь 15Х ГОСТ 4543—71* Цианирование на глу- бину 0,3—0,5 мм 58—62 (59,0—62,9) 0,035
* 1 Внутреннюю н внешнюю пластины цепи изготовляют из холоднокатаного проката высокой точности по толщине q учетом требований минимальной податливости. * 2 Диаметр передней ведущей звездочки цепного привода в несколько раз больше диаметра задней ведомой звез- дочки, и поэтому нагрузки, действующие на отдельно взятый зуб передней звездочки, примерно во столько же раз меньше. Срок службы передней звездочки составляет один год и более. Это обстоятельство позволяет широко применять легкие алюминиевые сплавы для нх изготовления. * 3 Материал для изготовления задних звездочек выбирают из специфических условий эксплуатации цепной пе- редачи с учетом того факта, что, как правило, требуется одновременная замена цепи и звездочки. Поэтому задние звез- дочки изготовляют из стали 15Х
передаточное отношение (ГОСТ 16.530—83), определя-
ющее работу только одной цепной передачи, т. е. z12 =
= oJi/oJa = a2/Zj (®j, ю2 — угловые скорости; zx, z2 —
числа зубьев передней и задней звездочек), и параметр,
определяющий работу привода в целом. Такое разделение
близких по значению понятий оказалось вполне уместным
в данном случае, так как более чем вековая практика
велосипедного спорта выработала свои методы расчета
привода велосипеда. Ниже рассматриваются существу-
Рис. 3.25. Схема определения
эффективного диаметра колеса
для расчета передаточного от-
ношения:
1 — обод колеса; 2 — однотрубка;
3 — недеформнрованная часть одно-
трубки; 4 — пятно контакта: 5 —
поверхность дорожного покрытия
ющие и предлагаемые варианты расчетов с учетом более
полного представления об этом параметре системы при-
вода велосипеда.
Традиционный метод расчета кинематики привода
учитывает общепринятый диаметр заднего колеса вело-
сипеда D = 27 дюймов (0,686 м) и не учитывает длину
кривошипов:
k = D-^ = Di2l. (3.2)
г2
Параметр k фактически показывает, сколько диаметров
заднего колеса в дюймах соответствует одному обороту
кривошипа. Однако это понятие, неправильно назы-
ваемое в практике велосипедного спорта передаточным
отношением, является наиболее распространенной фор-
мой характеристики привода велосипеда.
Существует еще один традиционный метод определе-
ния параметра кинематики привода, показывающего,
какое расстояние проходит велосипед за один оборот
кривошипа при диаметре заднего колеса 27 дюймов:
L = n£)13- = 2,154i21, (3.3)
г2
где L — в м.
Укладка L, именно так называется этот параметр
в велосипедном спорте, является менее удобной в прак-
тическом применении по сравнению с параметром k.
82
В рассмотренных случаях диаметр колеса D соответ-
ствует номинальному состоянию однотрубки, которая
в реальных условиях деформируется на некоторую вели-
чину h (рис. 3.25) под действием внешней нагрузки.
Эффективный диаметр с учетом этой деформации соста-
вляет D = D — 2/i, и величина параметра изменяется.
Например, при zjz2 = 48/14 и h = 0,010 м:
kx = Di21 = 27 = 92,57 дюйм;
k2 — Di21 ~ 26,2 = 89,87 дюйм;
' Lj = nOi2i — л0,686 4т- — 7,389 м;
L2 = nDi21 = л (0,686 - 0,02) = 7,173 м.
Для более полного расчета всей системы привода вело-
сипеда вводится безразмерный параметр «относительный
шаг велосипеда», который в полном объеме оценивает
влияние всех элементов привода, включая длину криво-
шипа 4, диаметр однотрубки d, диаметр обода DQ и де-
формацию однотрубки h под действием нагрузки. Отно-
сительный шаг велосипеда Lo равен отношению длины
пробега велосипеда Lx за один оборот кривошипа к длине
окружности L2, описываемой осью педали, т. е.
г _ М _ n[Dc + 2(d — h)] гх D 0
Lq ~ - 2^4 V W 21' (о‘4)
Для ориентировочной оценки в табл. 3.3 даны резуль-
таты расчета традиционным и вновь предлагаемым мето-
дами для наиболее часто используемых во время гонок
передач. Численные значения получены для фиксиро-
ванных величин: диаметр колеса D = 0,686 м (27 дюймов),
деформация однотрубки равна нулю (h = 0), длина кри-
вошипов 4 = 0,170 м. Относительный шаг Lo отражает
все особенности педально-цепного привода велосипеда
и поэтому может стать наиболее употребляемой его ха-
рактеристикой.
83
Таблица 3.3. Сравнительные данные расчета кинематических
параметров привода велосипеда
*2
Параметр г.
13 14 15 16 17
46 95,53 88,71 82,80 77,62 73,05
47 97,61 90,64 84,60 79,31 74,64
48 99,69 92,57 86,40 81,00 76,23
49 101,76 94,49 88,20 82,68 77,82
k = 27«21 = 50 103,84 96,42 90,00 84,37 79,41
= 27-^, 51 105,92 98,35 91,80 86,06 80,99
г'2 52 108,00 100,28 93,60 87,75 82,58
ДЮЙМ 53 110,07 102,21 95,40 89,43 84,17
54 112,15 104,14 97,20 91,12 85,76
55 114,23 106,07 99,00 92,81 87,35
56 116,30 108,00 100,80 94,50 88,94
46 7,621 7,077 6,605 6,192 5,828
47 7,787 7,231 6,749 6,327 5,955
48 7,953 7,385 6,892 6,462 6,081
49 8,118 7,538 7,036 6,596 6,208
Д, -= 50 8,284 7,692 7,180 6,731 6,335
= л0,686 -51-, 51 8,450 7,846 7,323 6,865 6,461
г2 52 8,615 8,000 7,467 7,000 6,588
53 8,781 8,154 7,610 7,135 6,715
54 8,947 8,308 7,754 7,269 6,842
55 9,113 8,462 7,898 7,404 6,968
56 9,278 8,616 8,042 7,539 7,095
46 7,147 6,638 6,194 5,807 5,466
47 7,303 6,781 6,329 5,934 5,585
48 7,458 6,926 6,463 6,060 5,704
Г — Ll _ L0 — 49 7,614 7,069 6,958 6,186 5,822
^2 50 7,769 7,214 6,733 6,132 5,941
7>7— 121 — 51 7,925 7,358 6,868 6,438 6,059
52 8,079 7,503 7,002 6,565 6,179
0,686 ?! 53 8 235 7 647 7 137 6 691 6 298
2-0,170 г2 54 8,391 7,791 7,272 6,817 6,416
55 8,546 7,935 7,406 6,943 6,535
56 8,701 8,079 7,541 7,070 6,654
84
3.13. Седло
Седло гоночного велосипеда включает два узла
(рис. 3.26): собственно седло и замок седла с подседель-
ным пальцем.
Собственно седло состоит из сборного стального кар-
каса 2, натяжного винта 3, втулки 4, натяжной гайки 5
и покрышки 1 из полиамида 68, расположенной поверх
пенопропиленовой подушки.
Замок седла с подседельным пальцем состоит из соб-
ственно подседельного пальца 11, двух (левого 13 и пра-
вого 14) кронштейнов и двух прижимов 6 и 8 из алюми-
ниевого сплава В95; двух осей 9 и 12, одной оси 10 кор-
пуса замка и двух крепежных болтов 7 из ста-
ли 45.
Положение седла по вертикали регулируется опуска-
нием подседельного пальца вовнутрь подседельной трубы
рамы с последующей фиксацией крепежным болтом в под-
седельном узле рамы. Положение седла по горизонтали
регулируется с помощью двух болтов 7. Натяжение по-
крышки 1 на каркасе 2 регулируется с помощью натяж-
ной гайки 5.
85
3.14. Дополнительные атрибуты велосипеда
Флягодержатель. Флягодержатель состоит из сборного
стального каркаса, оснащенного полиэтиленовой упорной
подушкой, и двух хомутов с комплектом винтов и гаек для
еге^крепления на наклонной или подседельной трубе рамы.
Рис. 3.27. Комплект инструмента гоночного велосипеда:
1 — четыре шестигранных ключа на размеры от 5 до 8 мм; 2 — плоские ключи
для узла каретки; 3 — съемник для демонтажа и монтажа кривошипов; 4 —
плоский ключ под конус трещотки; 5 — торцовый ключ; 6 — плоские ключи
для регулировки втулок; 7 — торцовый ключ общего назначения; 8 — хлыст
для съема звездочек; 9 — торцовый ключ для съема трещотки; 10 — набор
плоских ключей для рулевой колонки
Насос. Различают два типа насосов: высокого давления
с уменьшенным внутренним диаметром цилиндра и низ-
кого давления с нормальным внутренним диаметром
цилиндра.
Насос состоит из цилиндра, штока, рукоятки, пере-
ходного штуцера, оснащенного упором для установки на
раме велосипеда. Использование для гоночных велосипе-
86
дов насосов с переходным штуцером неоспоримо выгоднее,
чем насосов, оснащенных шлангами. Штуцер состоит из
алюминиевых корпуса и крышки, резинового вкладыша,
переходной втулки и обрезиненной прокладки.
В условиях подготовки велосипедов к гонкам в арсе-
нале механика целесообразно иметь насос типа автомо-
бильного с уменьшенным внутренним диаметром ци-
линдра, оснащенный шлангом, переходным штуцером
и манометром. Контроль уровня избыточного давления
воздуха в однотрубке с помощью технических средств
(манометра) является важным фактором объективной
оценки готовности велосипеда к гонке.
Комплект инструмента. Гоночный велосипед должен
быть укомплектован специальным инструментом, необхо-
димым для сборки, разборки и регулировки его узлов
и деталей. Учитывая, что велосипед гонщика сплошь
и рядом может быть доукомплектован отдельными уз-
лами иностранных фирм, номенклатура инструмента в ме-
ханической мастерской велоклуба или дома у самого гон-
щика должна быть расширена до перечня, представлен-
ного на рис. 3.27.
Точность, техническое состояние инструмента и соблю-
дение правил его использования гарантируют сохранность
крепежных деталей и надежность работы узлов и вело-
сипеда в целом.
Глава 4
СОВРЕМЕННЫЕ ТЕНДЕНЦИИ РАЗВИТИЯ
КОНСТРУКЦИИ ГОНОЧНОГО ВЕЛОСИПЕДА
4.1. Пути совершенствования
гоночного велосипеда
Современным велостроение целесообразно считать с ян-
варя 1984 г. — с момента установления мирового рекорда
в часовой гонке итальянцем Ф. Мозером, так как именно
в этой гонке мировой велоспорт получил ряд принци-
пиально новых конструкторских решений, обеспечивших
достижение выдающихся спортивных результатов.
Каковы же современные тенденции развития мирового
вел остр оен и я?
87
Прежде всего следует отметить общее мнение специа-
листов о том, что важнейшим фактором в энергетическом
балансе привода гоночного велосипеда является аэро-
динамика системы гонщик — велосипед. Так, на пре-
одоление аэродинамических сил сопротивления расхо-
дуется от 70 до 85 % общей полезной мощности, разви-
ваемой гонщиком. Введенные ранее УСИ жесткие ограни-
чения на возможность использования аэродинамических
систем оказались искусно обойденными с помощью удач-
ных конструкторских решений, среди которых в первую
очередь следует назвать дисковые колеса. Вслед за этим
успехом последовали серии конструкторских разработок
по совершенствованию аэродинамики всех узлов вело-
сипеда: начиная с рамы, руля, педалей, кривошипов,
тормозов и кончая одеждой и такими атрибутами гон-
щика, как велошлем, бачок, велотуфли. Аэродинамиче-
ские исследования как отдельных частей и узлов вело-
сипеда, так и всей системы гонщик—велосипед позволили
наметить научно обоснованные пути повышения аэродина-
мического качества велосипеда, о чем свидетельствуют
современные модели гоночных велосипедов, представлен-
ные многочисленными велосипедными фирмами на круп-
нейших международных соревнованиях.
Второй тенденцией современного развития гоночного
велосипеда является дальнейшее уменьшение его массы.
Так, масса гоночного велосипеда с 13—15 кг в 1960-х гг.
снизилась до 8—10 кг и менее в 1980-х гг. за счет умень-
шения плотности применяемых материалов (легкие
сплавы на основе алюминия, титана и магния, пластики
на основе угольных и других сверхвысокомодульных
волокон), повышения прочностных характеристик при-
меняемых стальных сплавов и в связи с этим утонения
стенок труб рамы, использования профиля переменного
сечения (рационального с точки зрения аэродинамики и
прочности), максимального облегчения путем высверли-
вания отверстий в малонагруженных деталях, сокраще-
ния числа механических узлов (например, замена роли-
ков суппера на шарикоподшипниках на ролики из фторо-
пласта на основе подшипника скольжения), снижения
числа спиц в колесах (с традиционного 36 до минималь-
ного 24—28), выполнения радиального бескрестового
набора передних колес, попытки использования стандарт-
ных подшипников качения вместо традиционных металло-
емких насыпных подшипников, изменения общей гео-
88
метрик рамы и уменьшения ее металлоемкости, умень-
шения диаметра колес и в первую очередь передних
(с традиционного диаметра 0,685 м (27 дюймов) до 0,609 м
(24 дюйма)], сокращения числа и уменьшения размеров
крепежных деталей.
Третьей тенденцией является совершенствование меха-
нических характеристик отдельных узлов и всего вело-
сипеда в целом. В первую очередь необходимо отметить
увеличение числа звездочек на трещотках заднего колеса
с традиционных пяти до шести-семи, а также, как уже
отмечалось, переход на более точные и надежные стан-
дартные подшипники качения и радиальный набор спиц
передних колес, в которых практически существуют только
радиальные нагрузки.
Исследования системы гонщик—велосипед как много-
массовой динамической механической системы позволили
установить, что эта система весьма чувствительна к воз-
мущающим воздействиям как со стороны гонщика, при-
водящего в движение велосипед, так и со стороны дорож-
ного покрытия. Стало очевидным, что рама, колеса, одно-
трубки и привод по своим механическим характеристикам
должны подбираться для каждого конкретного гонщика
в зависимости от его антропометрических параметров,
массы, качества педалирования, вида предстоящих гонок,
дорожного покрытия и рельефа местности. Все это в боль-
шой степени пока еще является задачей будущего, но
компьютерное обеспечение выбора механических пара-
метров велосипеда является посильной задачей заро-
ждающейся науки о велосипеде.
Четвертая тенденция — улучшение эргономического
обеспечения системы гонщик—велосипед, т. е. оптимиза-
ция условий для выполнения основного функциональ-
ного движения — педалирования на уровне достижения
рекордного спортивно-технического результата и обеспе-
чение гонщика комфортабельным велосипедом. Новая
геометрия рам, новые конструкции седел и рулей, системы
тормозов и переключения передач в едином комплексе
►обеспечивают гонщику максимальные удобства в условиях
кратковременных и длительных гонок.
Пятой тенденцией современного развития мирового
велостроения является совершенствование технологии из-
готовления отдельных деталей, узлов и гоночного велоси-
педа в целом. Современная технология позволила создать
дисковые колеса, получить тонкостенные трубы высокого
89
качества (с аэродинамическим профилем переменного
сечения), надежные стыковые соединения труб, тонко-
стенное литье. Созданы предпосылки для организации
технологических процессов изготовления и сборки вело-
сипедов на самом высоком современном уровне.
В основе развития современной техники и технологии
лежит использование новых материалов, позволяющих
создавать новые конструкции узлов и деталей, отлича-
ющиеся не только меньшей массой, ио и повышенными
Рис. 4.1. Относительные характери-
стики некоторых перспективных
конструкционных материалов в
велостроении:
Точка 1 Матернах £, МПа | р. КГ/М'' °пч МПа
1 2 3 4 5 6 7 Угле- пластик То же Алюминие- вый сплав Сталь Титан Стекло 160 000 120 000 90 000 70 000 210 000 112 000 30 000 1500 1500 1500 2700 7800 4300 1500 850 1100 1100 430 1500 900 1000
динамическими качествами и показателями надежности.
На рис. 4.1 даны сравнительные характеристики некото-
рых видов конструкционных материалов, применяемых
в современном велостроении. Анализируя эти данные,
можно сделать вывод, что такие традиционные для вело-
строения материалы, как сталь, алюминий и титан, су-
щественно уступают новым композиционным материалам
(углепластикам различных модификаций) по относитель-
ным показателям: отношениям модуля упругости к плот-
ности Е/р и предела прочности к плотности опч/р. Угле-
пластик при одних и тех же массах конструкции имеет
значительно более высокие удельные прочностные пока-
затели, что позволяет создавать самые рациональные
аэродинамические конструкторские формы при одновре-
менном снижении общей массы велосипеда и обеспечении
необходимой жесткости и динамического качества его
конструкции.
90
В последнее десятилетие наметилось мощное конструк-
торско-технологическое наступление по пути практиче-
ской реализации идеи «изобретения велосипеда». Позна-
комимся с отдельными, наиболее яркими техническими
решениями, которые предложены различными велосипед-
ными фирмами и которые уже взяты на вооружение
ведущими гонщиками мира.
4.2. Перспективные конструкторские решения
основных узлов гоночного велосипеда
Прежде всего необходимо отметить, что в велостроении
определяющим типом всегда был шоссейный гоночный
велосипед. Этот тип велосипеда совершенствовался в са-
мых сложных условиях конкурентной борьбы как среди
гонщиков, так и среди ведущих велостроительных фирм.
Наилучшие конструкторские решения распространялись
затем, как правило, на другие типы велосипедов, включая
туристские и обыкновенные дорожные. Не будем забы-
вать, что определенную лепту в развитие велостроения
внесли также конструкторы трековых велосипедов.
Компоновочная схема. Компоновка гоночного вело-
сипеда на протяжении многих десятилетни (вплоть до
1980-х гг.) практически не изменялась или изменялась
незначительно. К числу таких незначительных изменений
относятся, как правило, результаты поиска более рацио-
нальных углов рам и передних вилок. Определенный
застой в решении этих проблем объясняется качеством
шоссейных дорог того периода, которые в силу плохого
дорожного покрытия требовали вполне определенных
жесткостных свойств рамы — основного несущего узла
велосипеда
Интересно проанализировать традиционную схему ком-
поновки современного шоссейного гоночного велосипеда,
оснащенного по последнему слову техники велостроения.
Велосипед такой компоновки остается и будет еще не-
которое время оставаться основным в шоссейных много-
дневных и однодневных групповых гонках. Характер-
ными особенностями этого велосипеда являются тенден-
ция увеличения жесткостных свойств рамы за счет умень-
шения изгиба передней вилки, уменьшения размеров
задней вилки и поджатия заднего колеса вплотную к под-
седельной трубе рамы; введение тросов тормозов и пере-
ключателей передач внутрь труб рамы; установка аэро-
91
существенно отличающаяся от традиционной
92
Рис. 4.3. Велосипед с усовер-
шенствованной аэродинамикой,
рулевой колонки рамы, тормо-
зов, передней вилки и т. д.
динамических тормозов за
задней и перед передней
вилками по ходу движения
колес; применение спи-
цевого набора колес с
уменьшенным числом спиц
(до 28); отсутствие штат-
ного насоса; установка
аэродинамических педа-
лей, смещенных относи-
тельно своей оси, и ис-
пользование современных легких и прочных материалов.
Дальнейшее развитие традиционной компоновочной
схемы гоночного велосипеда в начале 1980-х гг. привело
к принципиальным изменениям как у шоссейных, так
и у трековых велосипедов (рис. 4.2). К числу основных
изменений относятся увеличение жесткости рамы за счет
уменьшения высоты рулевой колонки и превращения
четырехугольного остова рамы в треугольный; установка
дисковых колес; замена ажурной конструкции системы
передних звездочек на сплошные дисковые звездочки на
трековых велосипедах; установка рулей, изогнутых только
вперед; замена труб рамы круглого сечения на трубы
аэродинамического профиля 2 и 3 на рулевой колонке 1
и передней вилке 4 велосипеда (рис. 4.3).
Дальнейшее рассмотрение перспективных конструктор-
ских решений связано с описанием отдельных узлов го-
ночного велосипеда.
Втулки колес. Втулки гоночного велосипеда прошли
длительный путь развития: от втулок на подшипниках
скольжения до точного конструкторского исполнения на
базе насыпного шарикоподшипника. В основе решения
задачи обеспечения точности лежат технология изгото-
вления, термическая обработка, доводка и последующая
сборка шарикоподшипникового узла. Несмотря на тща-
тельно отработанную технологию и ювелирную сборку
точность и надежность этого узла не отличаются высо-
кими показателями, когда речь идет о массовом или
крупносерийном изготовлении гоночных велосипедов. Ос-
новными дефектами являются радиальное биение среднего
93
диаметра резьбы оси втулки относительно центров оси,
шариковых дорожек конусов относительно средних диа-
метров их резьб; радиальное и торцовое биение шарико-
вых дорожек чашек относительно их внешних диаметров;
микротрещины и погрешности формы в чашках и конусах
после термообработки.
Конструкторы вновь вернулись к уже известной с на-
чала нашего века компоновке шарикоподшипникового
узла втулки гоночного велосипеда, предложив исполь-
зовать стандартные высокоточные шарикоподшипники 1
Рис. 4.4. Шарикогодшипииковый узел втулки:
] — со стандартными шарикоподшипниками; 2 — традиционная
конструкция
(рис. 4.4). По сравнению с традиционным вариантом 2
новая конструкция обладает рядом существенных пре-
имуществ, основное из которых — высокий уровень со-
блюдения режимов термообработки, доводки и сборки
стандартных шарикоподшипников на заводах-изготови-
телях. А узел втулки собирают на велосипедном заводе
с соблюдением требований посадки шарикоподшипника
в гнездо и на ось втулки. При этом существенно сокра-
щается число составляющих звеньев сборочной размерной
цепи (РЦ), и благодаря фиксации замыкающего размера
(люфтов в шарикоподшипнике) сложную пространствен-
ную РЦ удается фактически перевести в две плоские РЦ,
замыкающими размерами которых являются торцовое
и радиальное биение стандартного шарикоподшипника,
состоящего всего из трех деталей: внутреннего и внешнего
колец и набора шариков. Масса такой втулки существенно
меньше традиционной. Однако использование стандарт-
ных шарикоподшипников требует тщательной проверки
и испытаний.
Вопрос о диаметре фланцев втулок долгое время оста-
вался открытым. Как конструкторы, так и гонщики
предпочитали в различные времена различные диаметры
94
фланцев. Так, в 1950-е гг. доминировали малые фланцы
втулок, в 1960-70-е гг. — большие фланцы, в 1980-е гг.
явно обозначилась тенденция к использованию фланцев
умеренных размеров, приближающихся к минимально
возможному.
Оптимальный вариант, как всегда, следует искать
в промежуточном решении, а именно: передние колеса
оснащают втулками с малыми фланцами, задние колеса —
с увеличенными. Такое решение объясняется тем, что
заднее колесо находится под действием крутящего мо-
мента и радиальной нагрузки, переднее же колесо —
только под действием радиальной нагрузки. Эго позво-
лило в передних колесах вообще отказаться от кресто-
вого набора спиц и ограничиться их радиальным распо-
ложением и ввинчиванием резьбовой части спицы в пери-
ферийную часть фланца.
Цепной привод. Исторически сложилось так, что при-
вод велосипеда прошел несколько этапов развития: нож-
ной привод К. Драйза, когда гонщик, сидя в седле, от-
талкивался ногами от земли, сменился педальным при-
водом с непосредственной установкой педального ком-
плекта на переднем колесе велосипеда типа «Паук»;
современный же педально-цепной привод находится на
заднем колесе велосипеда. Известны и другие системы
привода, которые не получили практического развития
из-за низкого КПД и сложности конструкции. Педально-
цепной привод — наиболее совершенное на сегодняшний
день конструкторское и технологическое решение задачи
передачи энергии в велосипеде. Но технический прогресс
наблюдается и в этой области. Стало известно, что го
Франции успешно прошла испытание передача на базе
зубчатого ремня, выполненного из высокопрочных воло-
кон, обладающих малой податливостью.
Цепной привод характеризуется рядом свойств, ис-
ключительно ценимых конструкторами гоночных велоси-
педов: относительно малой податливостью системы, воз-
можностью продольных перекосов цепи, передачей зна-
чительных по величине усилий, возможностью рацио-
нального подбора требуемого передаточного отношения,
сравнительно малой неравномерностью хода пепи, высо-
кими КПД.
Недостатками цепных передач гоночных велосипедов
, являются неравномерность движения цепи и ведущей
звездочки, повышенное изнашивание звеньев цепи и
95
звездочек, необходимость постоянного промывания, чи-
стки и смазывания открытой цепной передачи.
Рассмотрим современные тенденции развития привода
гоночного велосипеда.
Во-первых, привод остается пока еще цепным; во-вто-
рых, принцип его организации и компоновки на вело-
сипеде остается на уровне 1950-х гг. Однако имеются и
заметные изменения в отдельных деталях и узлах привода.
Эти изменения направлены на расширение диапазона
передач за счет установки наборов передних звездочек
с числом зубьев от 44 до 56 (перепад зубьев в паре —
от 6 до 12), а также увеличения числа зубьев трещотки
с пяти до шести и даже семи. Таким образом, общее число
передач вместо традиционных 10 возросло до 14. Это
позволяет не только расширить диапазон передач, но
также иметь совпадающие или перекрываемые числа
передач, что снижает износ отдельных, наиболее часто
употребляемых и интенсивно нагруженных звездочек
трещотки.
Трещотка — достаточно сложный в изготовлении узел,
подверженный интенсивному изнашиванию. Поэтому ее
конструкция должна обеспечивать замену изношенных
звездочек. Такие конструкции трещоток со шлицевой
посадкой четырех звездочек выпускались Харьковским
велосипедным заводом в 1950-х гг. Затем они были сняты
с производства и заменены традиционной конструкцией
с пятью звездочками. Сегодня ведущие велосипедные
фирмы мира вновь концентрируют внимание на шлицевых
трещотках, но уже в новом конструктивном исполнении,
обеспечивающем более высокую технологичность изгото-
вления и сборки.
Наметились некоторые конструктивные изменения и
в каретке гоночного велосипеда, имеющие непосред-
ственно отношение к цепному приводу. Эти изменения
направлены на то, чтобы увеличить крутильную жесткость
системы соединения правого кривошипа и ведущих звез-
дочек (рис. 4.5). В традиционной конструкции (рис. 4.5, а)
кривошип 1 расположен симметрично относительно смеж-
ных лапок 2, образуя с ними угол срг = л/5. В новой
конструкции (рис. 4.5, б), предлагаемой иностранными
фирмами, <р2 < фг — л/5. Кроме того, заделка оси педали
в резьбовом отверстии 3 усилена за счет увеличения
диаметра этого отверстия. Важная роль отводится
также аэродинамике всей системы, ее улучшают за
96
счет обтекаемого профиля самого кривошипа и его
лапок.
Задний суппер. Переключатель скоростей — суппер —
один из узлов гоночного велосипеда, имеющих наиболее
‘низкие показатели надежности. Функции заднего суп-
пера — переключение передач, компенсация излишков
(недостачи) цепи при переходе с большой на малую веду-
щую звездочку, поджатие движущейся цепи к рабочей
звездочке трещотки, обеспечение заданного натяжения
в контуре цепи.
а)
Рис. 4.5. Варианты конструктивного исполнения правого кривошипа:
а — традиционная конструкция; б — предлагаемая
Практическая реализация этих функций заднего суп-
пера дала большое число конструкторских решений, из
которых на сегодняшний день в мировом велосипедном
спорте явно доминирует конструкция итальянской фирмы
.«Компаньола» {«Campagnola»), появившаяся в начале
-1950-х гг. Последующие модификации, выполненные раз-
личными фирмами, практически не изменили существа
этой конструкции, а лишь расширили диапазон их при-
менения с учетом специфики гонок и самого гонщика.
На примере трех модификаций суппера фирмы «Сим-
плекс» {«Simplex») можно проследить общие закономер-
ности современных тенденций развития конструкции
этого узла (рис. 4.6).
Прежде всего, традиционный унифицированный гео-
метрический параллелограмм, образованный кронштей-
ном 1, корпусом 5, левым 3 и правым 6 рычагами, лежит
-в основе конструкции всех модификаций. Отличительной
4 ЛюОивицкий В. П.
97
особенностью модификаций Б и В по сравнению с модифи-
кацией А является конструкция кронштейна (модифика-
ция В) и подвески узла роликов с пластинами (модифи-
кации Б и В). Так, во всех модификациях высота под-
вески Н, определяемая расстоянием по вертикали между
осью 2 кронштейна 1 и осью верхнего ролика 4 раз-
лична и зависит от числа зубьев звездочек трещотки.
А Б
Если число зубьев звездочек больше 22, предпочтение
следует отдавать модификации В. Однако эта конструк-
ция ухудшает условия работы цепи на звездочках с ма-
лым (13—15) числом зубьев, так как условия ввода
звеньев цепи в зацепление с зубьями звездочки трещотки
обеспечивают меньшую надежность работы цепного при-
вода. В этом случае модификации А и Б являются более
п редпочтител ьными.
Педали. Педальный комплект является узлом вело-
сипеда, на который, как правило, гонщик обращает
внимание в последнюю очередь и с точки зрения аэро-
динамики допускает при этом серьезную ошибку, так как
при частоте педалирования 100 об/мин и скорости дви-
98
жения велосипеда 50 км/ч педали в верхнем положении
движутся со скоростью 56,4 км/ч. Поэтому аэродинамика
педалей имеет существенное влияние на общий энергети-
ческий баланс системы гонщик—велосипед.
Традиционные рамочные педали в понимании конструк-
торов, занятых перспективным проектированием гоноч-
ных велосипедов, уже являются анахронизмом. Пред-
Рис. 4.7. Современная конструкция педали (литой корпус уменьшает
массу педали и увеличивает жесткость конструкции)
лагаемая в рекламных проспектах и новых моделях
гоночных велосипедов конструкция педали представляет
собой литой корпус 2 (рис. 4.7) из алюминиевого сплава,
иа котором с помощью двух винтов монтируется туклипс 3.
Ремень 1 с пряжкой остается неотъемлемым атрибутом
педали.
. Педаль представляет собой хорошо обтекаемую объем-
ную форму 4 с минимальными показателями аэродинами-
ческого сопротивления при взаимодействии со встречным
потоком 5.
Идея оптимизации параметров цепного привода по
критериям кинематики п динамики коснулась и педалей.
В гл. 2 эти вопросы уже были рассмотрены, и некоторые
4* 99
Рис. 4.8. Новое решение кон-
струкции педали гоночного ве-
лосипеда — педаль с углепласти-
ковым корпусом
результаты анализа пред-
ставлены на рис. 2.22 и 4.8,
где показаны перспектив-
ные конструкции, в кото-
рых ось педали имеет уко-
роченный размер и сме-
щена относительно поверх-
ности опоры педали.
Пластические материа-
лы на основе высокомо-
дульных угольных волокон позволили сделать очередной
шаг в совершенствовании конструкции педали. Корпус 2
(рис. 4.8), сформованный из углепластика, имеет укоро-
ченные размеры, так как центр эпюры давления стопы
гонщика на педаль расположен в непосредственной бли-
зости от кривошипа. Аналогичные размеры имеет и ось 4.
Туклипс 3 смонтирован на корпусе с помощью двух
винтов. Ремень 1 с пряжкой выполнен традиционно
Описанная конструкция педали помимо уменьшенной
массы обладает еще одним важным свойством — позво-
ляет проходить виражи с большим наклоном велосипеда
относительно поверхности трека или шоссе. На рис. 4 9
показаны предельные углы наклона виража трека при
прохождении велосипеда, оснащенного традиционной ра-
мочной педалью (рис. 4.9, а) и педалью перспективной
конструкции (рис, 4.9, б). Новый вариант конструкции
педали позволяет уменьшить угол наклона велосипеда
на 15° при прохождении плоского виража (рис. 4.9, в).
В перспективных разработках все чаще встречаются
предложения отказаться от системы туклипсов и ремней
и ограничиться фиксацией велотуфли на педали с помощью
специальной жесткой системы крепления. При установке
велотуфли в педаль система крепления срабатывает после
разворота рычага в требуемом направлении и фиксации
его. Плотность посадки стопы гонщика в велотуфлю
обеспечивается шнуровкой и дополнительной верхней
накладкой.
Аналогичные решения уже встречались и ранее.
Особенно часто к подобным решениям прибегали при
установлении рекордов в гонках на время в стайерских
100
заездах, в том числе итальянец Ф. Мозер в январе 1984 г.
Утверждать безоговорочно преимущество таких педалей
и велотуфель нет оснований, так как они могут оказаться
значительно массивнее традиционных. Подавляющее боль-
шинство гонщиков, в том числе спринтеров, пока предпо-
читают педали с туклипсами и ремнем, считая, что они
более жестко и надежно удерживают стопу в велотуфле
и в педали. Существует, однако, мнение, что бестуклипс-
ный вариант крепления велотуфли в педали обеспечивает
Рис. 4.9. Иллюстрация преимущества новой конструкции педалей
перед традиционной
лучшее кровообращение в стопе гонщика, освобождая ее
от затяжки ремнем. В любом случае рассмотренный
вариант применим только на треке и шоссе в командных
или индивидуальных гонках на время.
Седло. Седло гоночного велосипеда является предметом
особого обсуждения, так как именно оно в первую оче-
редь обеспечивает удобство посадки, уменьшая колеба-
тельные воздействия на организм гонщика и усталостные
явления в костно-мышечном аппарате, непосредственно
охватывающем область таза гонщика. Прежде всего необ-
ходимо говорить о седле для гонщика, специализиру-
ющегося в многодневных шоссейных и трековых гонках.
Здесь качество и точность индивидуального его подбора
во многом определяют самочувствие гонщика, его работо-
способность и возможность обеспечения высокого каче-
ства педалирования.
Длительное время на мировом рынке спортивного
велосипедного инвентаря доминировали модели кожаных
седел английской фирмы «Брукс» («Brooks»). Начиная
с 1970-х гг. широкое распространение получили седла
из искусственных материалов. Подобные седла устана-
вливаются и на современных гоночных велосипедах
Харьковского велосипедного завода.
101
Конструкторы постоянно работают над совершенство-
ванием этого узла, пытаясь снизить его массу, обеспечить
удобство посадки гонщика, сократить номенклатуру де-
талей, входящих в этот узел. Один из перспективных
вариантов седла (рис. 4.10) помимо традиционного про-
волочного каркаса 2, натяжного устройства 3, дуги /
и покрышки 4 из полимерного материала дополнительно
имеет пористый поролоновый слой 5 переменной толщины
и чехол 6 из натуральной или искусственной кожи.
Рис. 4.10. Перспективная конструкция седла гоночного велосипеда
Чехол можно легко заменить в случае его изнашивания
или повреждения.
Всеохватывающие попытки снизить общую массу го-
ночного велосипеда коснулись и таких узлов седла, как
замок и подседельный штырь. Важнейшей особенностью
в перспективных
вариантах конструкции замка является
возможность фиксации седла
одним винтом по двум основ-
ным направлениям перемеще-
ния: продольно-поступательно-
му и вращательному в продоль-
но-вертикальной плоскости.
Винт 6 (рис. 4.11), специальная
шайба 5, шлицевой мостик 4,
кронштейн 3, прижим 2 и спе-
циальная гайка 1 монтируются
на подседельном пальце 7.
Предлагаемый вариант кон-
струкции замка седла допол-
нен усовершенствованным под-
седельным штырем 10 с про-
фрезерованными пазами 9 и уто-
ненной верхней частью 8.
Руль. В шоссейном гоноч-
ном велосипеде руль по-преж-
Рис. 4.11. Узел крепления седла
102
нему остается в рамках установившихся традиционных
форм с некоторой индивидуальной подгонкой гонщиком
согласно его антропометрическим особенностям. Уста-
новка на руле специальных туго натянутых чехлов из
кожи или других материалов является новым и перспек-
тивным решением, избавляющим гонщика от обматыва-
Рис. 4.12. Последовательные раз-
работки конструкции выноса руля
ния руля лентой, что не
всегда удается выполнить с
надлежащей точностью и на-
дежностью.
Объектом достаточно ин-
тересных разработок являет-
ся вынос руля (рис. 4.12).
Традиционной формы за-
мок 3 и круглая труба 1
(рис. 4.12, а) заменяются зам-
ком 4 с повышенными аэродинамическими характеристи-
ками (рис. 4.12, б). Вариант на рис. 4.12, в предусматривает
Новейшую конструкцию замка со встроенным сухарем
внутри и сплюснутой формой трубы выноса 5. Надежная
М хорошо зарекомендовавшая <ебя в прошлом цанговая
система 6 крепления в трубе передней вилки заменяется
Клиновой системой 2, которая технологичнее в изготовле-
нии, сборке и эксплуатации.
Тормоза. В перспективных разработках гоночных вело-
сипедов тормоза принципиально остаются практически на
ЮЗ
уровне моделей 1950-х гг. Доминирующим вариантом
является асимметричная конструкция хорошо зарекомен-
довавшая себя как легкая, компактная и хорошо на-
страиваемая. Однако появились интересные решения,
связанные с нетрадиционным расположением тормозов
на велосипеде. Например, создана конструкция, в кото-
рой на задней вилке тормоз размещен с тыльной стороны
по ходу вращения заднего колеса, а на передней вилке —
с фронтальной стороны по ходу вращения переднего
колеса. Такое решение диктуется, с одной стороны,
соображениями снижения аэродинамического сопротивле-
ния, особенно на передней вилке, с другой — лучшей
компоновки велосипеда в целом.
Фляги. Компактные емкости в виде бачков или фляг,
используемые гонщиками для жидкого питания или
питьевой воды, также подвергаются анализу специалистов
с позиции снижения аэродинамического сопротивления.
Традиционная фляга цилиндрической формы емкостью
около 0,5 л имеет большое лобовое сопротивление и с успе-
хом может быть заменена компактными плоскими фля-
гами, их емкость не менее 0,5 л. Плоская фляга удачно
вписывается в габариты рамы и укрывается за наклонной
трубой рамы в зоне разрежения набегающего воздуш-
ного потока.
Дисковые колеса. Колеса, собранные на основе тканых
дисков из высокомодульных волокон, являются вершиной
достижений современной творческой мысли конструк-
торов и изобретателей велосипеда. Сейчас, когда дисковые
колеса стали реальностью и с каждым днем все больше
завоевывают велосипедный мир, стало очевидным, что
именно колеса велосипеда всегда нуждались в самом
пристальном внимании специалистов, ибо большая окруж-
ная скорость создает значительную силу аэродинамиче-
ского сопротивления. И тем не менее именно колеса —
наиболее уязвимые в аэродинамическом отношении узлы
велосипеда на протяжении последних пятидесяти лет
оставались практически без принципиальных изменений,
если не считать их последовательную доработку в плане
совершенствования конструкции ободов, спиц и увели-
чения точности втулок.
В настоящее время достаточно четко обозначились
три направления развития конструкции дисковых колес,
связанные в первую очередь с технологией их изгото-
вления.
104
Рис. 4.13. Три варианта конструктивного
исполнения дискового колеса: а — колесо
со спицевым набором, оснащенное аэроди-
намическим кожухом; б — колесо в форме
оболочки; в — колесо в форме оболочки
с наполнителем
Первое направление предусмат-
ривает решение задачи чисто аэро-
динамического плана. Для этих
целей может быть использовано
обычное колесо 1 (рис. 4.13, а)
со спицевым набором 2. Для при-
дания ему улучшенных аэродина-
мических свойств на наружную
поверхность спицевого набора на-
тягивают тонкий аэродинамическ ий
кожух 3. Материал этого кожуха и его изготовление
полностью диктуются возможностями технологии. Здесь
главная проблема состоит в использовании такой тонкой
пленки или такого текстильного материала, которые,
улучшая аэродинамические характеристики колеса, не
приводят к существенному увеличению его массы и мо-
мента инерции. Одновременно к такой конструкции
аэродинамического кожуха предъявляются повышенные
требования точности изготовления, равномерного натя-
жения и отсутствия складок и волнений на его поверх-
ности .
В качестве материалов для изготовления аэродинами-
ческого кожуха могут быть использованы высокомодуль-
ные пленки, тонкие текстильные материалы, например
батист, с последующей поверхностной пропиткой лаком.
В качестве несущей конструкции здесь по-прежнему
остается спицевый набор. Недостаток этого решения —
заметное увеличение массы и момента инерции колеса.
Второе направление предусматривает принципиально
иную компоновку колеса, в котором роли несущей кон-
'Струкции и аэродинамического кожуха объединены
'(рис. 4.13, б). На фланце втулки 4 особой конструкции
Наформован тканый диск 5. Ткань в нем имеет радиальный
набор основных нитей. Периферийная часть диска зафор-
чиована в обод 6 особой конструкции. В качестве исходных
материалов для изготовления дисков применяют напри-
мер, нити на основе СВМ-волокон и угольных воло-
кон.
105
Рис. 4.14. Один из вариантов
маршрутной технологии из-
готовления дискового коле-
са: а — формование диска на
втулке; б — то же на ободе;
в — соединение полувтулок;
г — соединение полуободов;
д — механическая обработка
втулки; е — то же обода
Третье направление,
являясь дальнейшим
развитием второго, пре-
дусматривает полное
или частичное заполне-
ние сформованной обо-
лочки (рис. 4.13, в) спе-
циальным сверхлегким
пенопластом 7 перемен-
ной плотности по радиу-
су колеса. Такое технологическое решение позволяет уве-
личить крутильную и радиальную жесткость колеса,
уменьшить толщину ткани оболочки, создает возможность
отказаться от тканой конструкции диска и перейти
к использованию сверхтонких специальных пленок.
Во всех рассмотренных случаях успех дела решает
современная технология изготовления дисковых колес.
Известны различные варианты технологических маршру-
тов. Остановимся только на одном, дающем представле-
ние о принципиальных особенностях процесса изгото-
вления дискового колеса.
Тканый диск 1 (рис. 4.14, а) в радиально натянутом
состоянии под действием равномерно распределенной
нагрузки q заформовывается во фланец половины втулки 2.
Аналогичным образом периферийная часть диска зафор-
мовывается в половину обода 3 (рис. 4.14, б). Далее
формуются две половины втулок в единую втулку 4
(рис. 4.14, в) и единый обод 5 (рис. 4.14, г). Операция по
обеспечению точности обработки втулки и обода состоит
в первоначальной механической обработке втулки (ин-
струмент 6) при базировании колеса по ободу 7
(рис. 4.14, д) и в последующей механической обработке
обода (инструмент 9) при базировании по уже обработан-
ным поверхностям 8 втулки (рис. Ф14, е). Заключитель-
ная операция — статическая и динамическая баланси-
ровка собранного колеса (см. гл. 6).
106
4.3, Модель велосипеда образца 1985 года
Опыт показывает, что интенсивные поиски техниче-
ских решений в каких бы то ни было направлениях неиз-
бежно приводят к качественно новым, на первый взгляд
неожиданным, но вполне объяснимым решениям, явля-
ющимся вершиной творческой мысли на данный момент
времени. Именно такой качественный скачок получило
развитие велосипеда в последний период времени.
12 11 10 д 8 7
Рис. 4.15. Модель гоночного велосипеда образца 1985 года для рекорд-
ных заездов — своеобразный рекорд творческой мысли
С 1938 г. УСИ сдерживал инициативу изобретателей,
пытавшихся в различной форме усовершенствовать стан-
дартную конструкцию велосипеда. В 1976 г. незначи-
тельное ослабление позиции УСИ в этом вопросе вновь
•привело в движение изобретательский ум, и в 1984 г.
•Ф. Мозер потряс велосипедный и не только велосипедный
мир своим велосипедом (см. рис. 8.28) и своими миро-
-выми рекордами. Последовавший за этим двухгодичный
.период можно считать финишным спуртом этой техниче-
ской гонки, апофеозом которой явилась модель вело-
сипеда 1985 года, разработанная итальянскими специа-
листами (рис. 4.15). Именно на таком велосипеде в часо-
-вой гонке в итальянском городе Вероне в 1985 г. пытался
-стартовать итальянец Висентини. Конструкция его вело-
сипеда выглядела настолько необычно, что судьи не ре-
шились допустить гонщика к старту, и для этого у них
было достаточно оснований.
107
Велосипед Висентини (в спорте обычно спортивному
снаряду неофициально присваивают имя спортсмена,
впервые выступившего на нем) действительно на первый
взгляд необычен. Он представляет собой цельноформован-
ную из углепластика раму 16 сложной аэродинамической
формы. Передняя нижняя часть рамы в виде обтекаемого
клина 8 непосредственно примыкает к переднему диско-
вому колесу 7. Аналогичный верхний клин 6 нависает над
передним колесом 7, образуя плавный аэродинамический
переход переднего колеса в раму велосипеда. Заднее
колесо 14 установлено в задней вилке 13, выполненной
в виде пустотелого туннельного короба. Здесь рама также
непосредственно примыкает к заднему колесу аэродина-
мическими клиньями 12 и 15. Плавный изгиб 9 нижней
части рамы обеспечивает минимальный клиренс велоси-
педа. Овалоподобное отверстие 2 в центре рамы служит
для удобства транспортировки велосипеда и снижения
его массы. Руль 4, изогнутый ручками вперед, имеет аэро-
динамические обтекатели 5, установленные перед руч-
ками, и аэродинамический клин 3, примыкающий к раме
сверху. Седло 1 выполнено в традиционной форме.
Особого внимания заслуживает привод велосипеда.
Традиционные кривошипы в нем заменены жесткими
дисками-кривошипами И, на которых смонтированы пе-
дали 10. Цепной привод традиционной конструкции смон-
тирован на тыльной стороне диска-кривошипа И.
Появление велосипеда Висентини на гонках в Вероне
взбудоражило всю велосипедную общественность, кото-
рая пыталась уяснить себе суть этой новинки. Убеди-
тельный ответ на этот вопрос дала выставка велосипедов
в Милане, где крупнейшие велосипедные фирмы показали
несколько образцов велосипедов, изготовленных из угле-
пластика. Подобная технология характерна для современ-
ного гоночного автомобиля «Формула-1». Как известно,
такие гоночные автомобили проектируют с учетом четы-
рех основных принципов: аэродинамичности, прочности,
легкости и мощности. Первые три принципа пригодны
и для современного велостроения. Велосипеды продувают
в аэродинамических трубах, их отдельные детали и узлы
исследуют по параметрам прочности, жесткости и аэро-
динамического качества, над внешним оформлением вело-
сипедов трудятся дизайнеры. Является ли велосипед
этой модели действительно неожиданностью для спе-
циалистов велосипедного спорта? И да и нет!
108
Следует выделить три важных особенности в конструк-
ции этого велосипеда, которые учитывают современные
достижения в таких областях науки и техники, как аэро-
динамика, конструкционные материалы и их технология.
Эти особенности неразрывно связаны между собой и прак-
тически не могут быть реализованы в велосипеде по
отдельности. Так, о существовании аэродинамического
фактора в велосипедном спорте специалисты знали еще
в прошлом веке с первых велосипедных гонок, когда
приемы «сидения на колесе» однозначно демонстрировали
экономическую нецелесообразность первой позиции гон-
щика в гонке. На этом строится не только тактика, но
и стратегия всей гонки. Однако реализация идеи умень-
шения аэродинамического сопротивления велосипеда по-
требовала почти столетнего периода из-за известного
регламента УСИ на конструкцию велосипеда, с одной
стороны, и из-за отсутствия высокомодульных пластиче-
ских материалов, способных конкурировать с традици-
онными металлами и их сплавами, с другой стороны.
Технология же пластических материалов является пря-
мым следствием их наличия.
Возникает вопрос: каково будущее этих супервелоси-
педов? Пока они обходятся фирмам-изготовителям весьма
недешево, а об индивидуальном приобретении такого
велосипеда гонщиком-любителем пока не может быть
и речи. Еще один вопрос: имеет ли вообще смысл сорев-
новаться на подобных велосипедах, которые недоступны
рядовому гонщику, не превратятся ли велосипедные
гонки в технические состязания фирм, как это фактически
имеет место в автомобильном спорте?
Итальянский журнал «Бичиспорт» предлагает исполь-
зовать эти космические, как он называет, велосипеды
не в обь.ч1ЫХ, а в специальных гонках. Это были бы
гонки «Велоформула-1», в которых проходили бы про-
верку новые прогрессивные идеи, испытывались бы но-
вейшие достижения науки и техники. А массовый вело-
сипедный спорт — как любительский, так и профессио-
нальный — должен пока оставаться в рамках регламента
УСИ 1938 г. В будущем, когда суп ер велосипеды станут
Доступными для каждого гонщика, УСИ вправе будет
пересмотреть установленный регламент. Полная или час-
тичная отмена этого регламента — важный вопрос стра-
тегии развития и популяризации велоспорта. Но не
будем предопределять решения УСИ.
109
Глава 5
ТЕХНОЛОГИЯ ИЗГОТОВЛЕНИЯ
И КОНСТРУКЦИЯ ОДНОТРУБОК
5.1. Назначение, классификация
и технические требования к однотрубкам
Определение и назначение. Однотрубка гоночного вело-
сипеда — пневматическая шина, выполненная за одно
целое с камерой, что обеспечивает быструю ее установку
и съем с колеса. Установка и фиксация однотрубки на
ободе обеспечиваются ее приклеиванием патентованным
клеем, например типа «Клемент» («Clement»), обладающим
хорошими и длительное время сохраняющимися кле-
ящими свойствами. Отечественная- промышленность пока
не выпускает подобных клеев. В качестве заменителя
могут быть использованы клеи типа «Момент», БФ и
другие, однако следует помнить, что эти клеи быстро
высыхают, не обладают требуемой эластичностью и не
способны восстанавливать клеющую способность в случае
локального отрыва однотрубки от обода или ее замены.
Практика мирового велосипедного спорта выработала
достаточно четкие требования к однотрубкам по всем
параметрам конструкции, прочности, точности и методам
испытаний. Присоединительные размеры однотрубок
строго регламентированы и соответствуют присоедини-
тельным размерам колес, что обеспечивает полную взаимо-
заменяемость однотрубок и ободов, выпускаемых различ-
ными фирмами и странами мира. Однако последнее пяти-
летие ознаменовалось появлением новых взглядов на тех-
ническое развитие колеса гоночного велосипеда, что
повлекло за собой ряд принципиальных конструктивных
изменений, включая его размеры и, следовательно, при-
соединительные размеры однотрубки. Начали получать
распространение колеса и однотрубки меньшего диа-
метра, которые в отдельных случаях используются в гон-
ках преследования на треке.
Технические требования. В целях обеспечения точности
присоединительных размеров и качества однотрубок тех-
нические требования к ним в СССР регламентирует
ГОСТ 23834—79* «Шины пневматические для спортив-
ных велосипедов. Технические условия». Постановлением
НО
Госстандарта СССР срок действия этого стандарта про-
длен до 01.01.91 г.
Выпускаются однотрубки следующего назначения: шос-
сейные, трековые и кроссовые. В каждом конкретном
случае при изготовлении того или иного типа решается
ряд вопросов, связанных с ограничением однотрубок по
массе, диаметру, типу каркаса, виду протектора и г. д.
Основная классификация, согласно ГОСТ 23834—79*,
приведена в табл. 5.1. Эта классификация далеко не исчер-
пывает всех моделей однотрубок, выпускаемых Воронеж-
ским шинным заводом, ассортимент которых значительно
шире и определяется главным образом их назначением
и конструктивными особенностями (табл. 5.2).
Таблица 5.1. Технические данные однотрубок по ГОСТ 23834—79*
Обозна- чение одно- трубки*1 Тип протектора Размеры, мм Масса, кг
наруж- ный диаметр диаметр сечения каркас хлопча- тобу- мажный ка ркас шелко- вый
600 X 22 600X 24 600X 25 Трековый Шоссейный универсаль- ный 681+4 22,5+1,0 24,0+1,0 25,0± 1,0 0,240 0,250 0,280 0,200 0,210 0,230
600X 27 Кроссовый 690±4 28,0±1,0 0,350 0,270
600X 30 Шоссейный универсаль- ный Кроссовый 30,0± 1,0 0,500 0,450 0,500 0,450
Примечание. Тип вентиля — ВС-1. Максимально допу- стимая радиальная нагрузка 6000 Н. Избыточное давление воздуха 0,6 МПа. ** Первое число — посадочный (присоединительный) диаметр, мм; второе — диаметр сечения однотрубки, мм.
Стандарт предъявляет также особые технические тре-
бования к однотрубкам:
обеспечение надежности эксплуатации в диапазоне
температур от 0 до 45 °C;
соответствие требованиям нормативно-технической до-
кументации;
Ш
Т а б л и ц а 5.2. Типовые протекторы однотрубок
Мидель и назначение однотрубки Рисунок протектора
Продольный
В-167
bUUX2b, шоссейная 1 J
Продольно-сетчатый
В-164 д,-
600X30, шоссейная » • » • » •
Сетчатый
В-151 f
600X22, трековая • • • • • • •
В-234 Гладкий f
600X18, трековая
у
Профильный
В-158
600X27, кроссовая
112
недопустимость складок на каркасе, механических
повреждений, запрессовки посторонних включений;
недопустимость выпрессовки ткани каркаса по гребню
протектора;
обеспечение герметичности камеры однотрубки и цен-
трального положения вентиля;
обеспечение физико-механических требований: твер-
дость протектора по Шору не менее А-50, условное напря-
жение в протекторе не менее 12 МПа при удлинении
300 %, условная прочность протектора не менее 20 МПа.
Испытание однотрубок. В процессе изготовления одно-
трубки подвергают контрольным измерениям и испыта-
ниям, по результатам которых можно судить об их ка-
честве: точности изготовления и эксплуатационной на-
дежности. Стандартом и заводскими нормативными доку-
ментами регламентированы следующие измерения и испы-
тания:
1) наружный диаметр однотрубки контролируется ме-
тодом измерения рулеткой длины окружности L вдоль
центральной линии протектора, надетого на стандартный
обод колеса гоночного велосипеда, при избыточном давле-
нии воздуха 1,0 МПа с точностью ±1 мм, тогда DH =
= L/л;
2) диаметр (ширина) однотрубки измеряется штанген-
цир-кулем в пяти местах при указанном выше избыточном
давлении и при посадке однотрубки на стандартный обод;
точность среднеарифметического результата пяти изме-
рений ±0,5 мм;
3) герметичность однотрубки проверяется по удержа-
нию установленного избыточного давления воздуха в те-
чение 24 ч;
4) герметичность камеры проверяется погружением
ее при избыточном давлении воздуха в воду на малую
глубину; наличие пузырьков любых размеров свидетель-
ствует об отсутствии герметичности;
5) условное напряжение при 300 %-ном удлинении,
условная прочность при растяжении и относительное
удлинение при разрыве резинового протектора опреде-
ляются по ГОСТ 270—75*;
6) твердость по Шору резины протектора определяется
по ГОСТ 263—75*;
7) условная прочность при растяжении и относитель-
ное удлинение при разрыве резины камеры определяются
на пяти образцах, вырубленных в продольном направле-
на
нии; за толщину образца принимается фактическая тол-
щина камеры, испытания проводятся по ГОСТ 270—75*;
8) сопротивление разрыву резины камеры определяется
по ГОСТ 262—79;
9) сопротивление разрыву однотрубки при избыточ-
ном давлении 2,0—2,4 МПа контролируется выборочно
по нормативу, установленному заводом-изготовителем.
Маркировка однотрубок. Каждая однотрубка марки-
руется. Маркировка включает наименование и товарный
знак предприятия-изготовителя, модель, год и месяц
изготовления, штамп технического контроля и штамп
«шелковая», если каркас однотрубки изготовлен из шелка.
Однотрубки упаковывают в слегка накаченном состоянии
по 50 шт. в виде тора в спиральной бумажной обертке.
Однотрубки со знаком качества упаковывают по 25 шт.
в полиэтиленовую пленку и в тканевые мешки или
в ящики. Предприятие-изготовитель при соблюдении
условий хранения и транспортировки гарантирует успеш-
ную эксплуатацию однотрубок в течение 15 мес. со дня
их изготовления.
6,2. Конструкция однотрубок
Термин однотрубка — условный, объясняющий спе-
цифическую особенность этого изделия, соединяющего
в себе шесть деталей и приспособленного для быстрой
замены во время гонки в случае прокола или другого
повреждения. Превращая традиционные велосипедные
шину и камеру в однотрубку, конструкторы одновременно
с обеспечением возможности оперативной ее замены на
колесе достигли еще одного очень важного результата:
максимально уменьшили ее массу и обеспечили высокое
динамическое качество.
Современные серийные однотрубки всех назначений
имеют одинаковую конструктивную схему, включающу’ю
каркас 1 (рис. 5.1 и 5.2), набранный из отдельных ниток,
резиновый протектор 5, резиновую камеру 2, прокладоч-
ную тесьму 3, отделяющую камеру от соединительного
шва каркаса, выполненного внахлестку, наружную тесь-
му 4, закрывающую снаружи соединительный шов кар-
каса. Воздушный вентиль завулканизирован в резиновую
камеру.
На протяжении многих десятилетий каркас однотрубки
соединялся на внутреннем диаметре стежковым швом,
114
что создавало определенные возможности для выполне-
ния ее ремонта в случае незначительного повреждения,
например прокола. В настоящее время технология сборки
каркаса стала значительно проще и предусматривает
соединение его бортов резиновым клеем внахлестку, что
при не меньшей прочности соединения позволяет достичь
Рис, 5.1. Шоссейная однотрубка 600x27 модели В-231
большей точности и меньших затрат времени и труда при
сборке. Точностью геометрических размеров готовой одно-
трубки в значительной степени определяются ее эксплуа-
тационные свойства.
Конструкция протектора (толщина, ширина и рисунок)
определяется условиями эксплуатации однотрубки: видом
гонок и состоянием трассы. Типовые протекторы, выпу-
скаемые Воронежским шинным заводом (табл. 5.2),
вполне способны удовлетворить самым строгим требова-
115
ниям гонщиков. Так, однотрубки модели В-158 могут
быть рекомендованы только для кросса и тренировок по
грунтовым дорогам, В-167 — для шоссейных гонок,
В-164—для шоссейных гонок при мокром дорожном
покрытии, В-151 —для трековых или шоссейных ко-
Рис. 5.2, Трековая однотрубка 600X20 модели В-233
мандных гонок, В-234 — для трековых гонок. Продоль-
ный рисунок протектора обеспечивает лучшие динами-
ческие качества однотрубки, поперечный рисунок — луч-
шую ее сцепляемость с поверхностью дороги, что особенно
важно в гонках при мокром дорожном покрытии.
5.3. Технология изготовления однотрубок
Процесс изготовления однотрубок начинается с фор-
мования заготовки каркаса на специальном быстроход-
ном валу 1 (рис. 5.3). Пучок нитей 5 под определенным
116
Рнс. 5.3. Схема технологиче-
ского процесса образования за-
готовки каркаса однотрубки
натяжением, создаваемым
тормозом 4, подается с бо-
бины 3 в торцовую зону
свободно движущейся по
валу каретки 2. Навитый
слой ниток промазывается
кистью 7 резиновым клеем
с пигментом желтого цве-
та. После высыхания клея
сформированный слой ни-
тей разрезается ножом 6
по специальному узкому винтовому пазу 8. Два однослой-
ных полотна соединяются вместе и образуют заготов-
ку 9 каркаса размерами Ixh. Нити в каркасе рас-
положены под углом 90° относительно друг дру-
га и под углом а = 45° относительно вертикальной
оси.
Дальнейшую сборку однотрубки выполняют вручную
на специальной оправке в виде обруча в следующем по-
рядке: торцовая стыковка каркаса, закладка камеры и
прокладочной тесьмы, забортовка каркаса, наклеивание
гладкой заготовки протектора и наружной киперной
ленты. Собранную однотрубку помещают в специальную
пресс-форму, в которой при температуре воздуха 153 °C
и его давлении 0,7 МПа в течение 5 мин происходит про-
цесс вулканизации резины. Рисунок протектора форми-
руется в зависимости от рисунка поверхности пресс-
формы.
В качестве исходного сырья для формования каркаса
однотрубки используют хлопчатобумажные нити толщи-
ной 33,33 текс (№ 30), нити крученого хирургического
шелка № 0 (диаметр нити 0,31—0,39 мм) и № 1 (диаметр
нити 0,40—0,49 мм).
Нити каркаса и резина имеют существенно разные
-модули упругости, и поэтому практически только эти
нити обеспечивают удержание установленной формы и
размеров однотрубки. Взаимное расположение нитей
и их положение относительно продольной оси опре-
деляют прочностные свойства и формоустойчивость кар-
каса.
117
5.4. Эксплуатационные свойства однотрубок
Рассмотрим элемент каркаса ABCD (рис. 5.4) с раз-
мерами а и a tg а, при которых в оба сечения АВ и ВС
попадает одинаковое число нитей. Обозначив через Q
усилие в нити, получим равнодействующую силу QBC =
— Qn sin а, где п — число нитей, попавших в сечение ВС.
Для сечения АВ соответствующая равнодействующая бу-
дет равна Qab — Qn cos а. Из теории оболочек известно,
что при нагружении цилиндра
внутренним давлением окружное
среднее напряжение вдвое боль-
ше осевого. Следовательно,
Qab№ tg a)=2QBC/a откуда tg2a =
= 1/2 и а = 35° 16'.
При угле а = 35° 16' цилинд-
рическая форма каркаса сохра-
няется, так как отсутствуют мо-
менты и действуют только растя-
гивающие нити силы. При а >
> 35° 16' в каркасе доминируют
радиальные деформации, при а
< 35° 16' — продольные. Опти-
мальный угол а ~ 35° 16' получен
по условиям равновесного нагру-
жения нити, что является наиболее
важным условием в эксплуатации
Рис. 5.4. Схема нагрузки
элемента каркаса одно-
трубки под действием из-
быточного давления воз-
духа в камере
однотрубок, предназначенных для ограниченного срока
службы, например только для соревнований или рекорд-
ных заездов. Для однотрубок, предназначенных для тре-
нировок или длительной туристской езды, угол а должен
быть определен по условиям усталостной прочности нитей
при переменных напряжениях, возникающих при каче-
нии колеса. Например, для автомобильных покрышек
оптимальный угол а по этим условиям составляет 50—54°,
отклонение угла в ту или иную сторону от оптимального
значения влечет за собой снижение срока службы по-
крышки.
Действительный угол наклона нитей каркаса отно-
сительно вертикальной оси в однотрубках Воронеж-
ского шинного завода равен 45°, что является компромисс-
ным решением между условиями равновесного нагруже-
ния нитей и условиями обеспечения усталостной проч-
ности.
118
При статическом контакте колеса с дорогой (рис. 5.5)
соприкосновение однотрубки 1 с поверхностью дороги
OjOi при радиальной нагрузке QR = 0 происходит в точ-
ке аг. При радиальной нагрузке QR #= 0 однотрубка
деформируется на величину h, контакт происходит по
поверхности О2О2 и в зоне контакта образуется эллипсо-
видное пятно 4 размерами 2аХ2Ь.
Рис. 5.5. Схема взаимодействия однотрубки гоноч-
ного колеса с поверхностью дороги
При скоростном перекатывании колеса перед пятном
контакта образуется область Ьгщт вязкоупругих дефор-
маций каркаса. Скорость распространения деформаций
Достаточно велика и приближается к скорости звука
в материале каркаса. Скорость исчезновения деформаций
значительно ниже, что связано с релаксационными свой-
ствами материала. Это приводит к возникновению об-
ласти сппг релаксируемых деформаций. В результате
с увеличением скорости перекатывания колеса области
этих деформаций расширяются, а эллипсообразное пятно 4
с центром масс а2 (эпюра нагрузки 2) перерождается в ка-
плевидное 5 с центром масс ад (эпюра нагрузки 3), где
фактически и приложена реакция NN. Новая форма пятна
Контакта отличается не только своим положением, но
119
Рис. 5.6. Гистерезис-
ные процессы в де-
формируемом каркасе
однотрубки
в зоне
и смещением центра масс на величину ага3 = fK. Это
смещение в первом приближении можно рассматри-
вать в качестве эквивалента коэффициента трения
качения.
Протекание релаксационных процессов в деформируе-
мом каркасе в зоне его контакта с поверхностью дороги
удобно рассмотреть с помощью рис. 5.6. При нагруже-
нии Q каркас однотрубки деформируется на величину х
по нелинейному закону, отличающемуся от закона Гука
для упругих деформаций, и точка L
примерно соответствует середине
эпюры нагрузки. При снятии на-
гружения (участок LMKO) деформа-
ция каркаса исчезает с некоторым
запаздыванием, а остаточная дефор-
мация Д продолжает оставаться еще
некоторое время при Q = 0 (уча-
сток спг на рис. 5.5). Площадь гисте-
резисной петли OKLMN с учетом
масштаба представляет собой работу,
связанную с необратимыми потерями
в каркасе однотрубки. При качении
колеса деформации в передней части
контакта с дорогой увеличивают-
ся, а в задней части уменьшаются. Поэтому при одной
и той же деформации хм участок шины в передней ее
части нагружен силой QK, а задней части — силой QM.
Работа деформации однотрубки преобразуется в теплоту,
которая рассеивается в пространстве.
На процесс распространения деформаций существен-
ное влияние оказывает пространственная податливость
каркаса, определяемая его диаметром, давлением воз-
духа, модулем упругости каркасных нитей и углом их
взаимного расположения. Чем больше область деформи-
рования каркаса, тем больше затраты энергии на про-
цесс перекатывания колеса. Вместе с тем жесткий по
своим деформационным свойствам каркас требует допол-
нительных энергозатрат на преодоление сил сопротивле-
ний, вызванных колебательными процессами в системе
гонщик—велосипед.
Наблюдать описанный процесс удалось с помощью
скоростной киносъемки, проведенной через прозрачное
толстое стекло, по которому перекатывались колеса гоноч-
ного велосипеда со скоростями до 50 км/ч, нагруженные
120
как радиальной силой (ведомое колесо — пятно контак-
та 3, см. рис. 5.5), так и радиальной силой совместно
с крутящим моментом (ведущее колесо — пятно контак-
та 6, см. рис. 5.5).
Глава 6
АНАЛИЗ УЗЛОВ
ГОНОЧНОГО ВЕЛОСИПЕДА
ПО ПАРАМЕТРАМ ПРОЧНОСТИ
И ДИНАМИЧЕСКОГО КАЧЕСТВА
6.1. Динамические качества рамы
К началу 1900-х гг. сформировалась вполне современ-
ная конструкция рамы гоночного велосипеда, которая
сегодня продолжает совершенствоваться во всех напра-
влениях, включая применение новых материалов, тех-
нологии изготовления и, что особенно важно, сочетания
геометрии рамы с рациональными вязкоупругими свой-
ствами элементов ее конструкции.
Велосипедная рама, по мнению подавляющего боль-
шинства специалистов, стала одним из решающих фак-
торов технического совершенства велосипеда. Она яв-
ляется связующим звеном в системе человек—машина,
обеспечивающим передачу энергии от биологического
двигателя, каким является гонщик, к велосипеду, со-
вершающему передвижение со скоростью, пропорцио-
нальной эффективно приложенному усилию. Коэффи-
циент полезного действия, определяемый отношением
эффективно использованной энергии к затраченной, пред-
полагает учет потерь энергии, связанных как с качеством
педалирования, так и с динамическими качествами вело-
сипеда. Последние характеризуются потерями на пре-
одоление сил внутреннего и внешнего трения, возникаю-
Дцего в результате колебательных процессов в раме и
колесах при различных частотах возбуждающего воз-
.действия, а также потерями на трение качения колес
* и других вращающихся частей.
Динамические качества велосипеда и, в частности,
рамы влияют и на такие важные параметры, как накати-
121
стость и приемистость. Первый термин означает способ-
ность велосипеда удерживать начальную скорость без
приложения крутящего момента со стороны гонщика,
например при спуске или при езде по инерции. Второй
термин означает способность велосипеда быстро набирать
скорость в момент максимального ускорения при спуртах.
Современные методы испытания и оценки качества
гоночных велосипедных рам сводятся в основном к раз-
рушающим многоцикловым или одноцикловым испыта-
ниям, в результате которых устанавливают допустимое
число циклов (при многократных нагружениях) или
разрушающую нагрузку (при однократных нагруже-
ниях). Оба метода важны для оценки работоспособности
и надежности конструкции рамы, однако не дают ни
малейшего представления о динамических качествах,
о которых мы пока можем получать только косвенную
информацию по подчас разноречивым мнениям отдель-
ных спортсменов. При этом отсутствуют какие-либо
объективные параметры такой оценки.
Анализ многочисленных методов технической диагно-
стики механических конструкций позволил сформулиро-
вать основные требования к методике оценки динамиче-
ских качеств гоночной велосипедной рамы:
1) метод должен быть неразрушающим;
2) максимальные нагрузки не должны приближаться
к предельно допустимым и не должны создавать предпо-
сылок для возникновения остаточных деформаций и
напряжений в элементах конструкции рамы;
3) метод испытаний должен позволять использовать
только частично разобранный велосипед, что является
важным фактором при экспресс-испытаниях отдельных
экземпляров рам, включая в первую очередь рамы ино-
странных фирм;
4) метод должен быть статистическим, обеспечивающим
накопление статистических данных в целях создания кар-
тотеки гоночных рам и разработки рекомендаций по
практическому использованию накопленных сведений;
5) метод должен обеспечивать воспроизводимость ре-
зультатов, чтобы можно было проводить контрольные
и сравнительные испытания новых конструкций рам.
В основу рассматриваемого ниже метода положен
метод оценок параметров внутреннего трения, широко
Известный в практике материаловедения конструкцион-
ных материалов.
122
Рис. 6.1. Схема установки
для оценки динамических
качеств велосипедных рам
Из теории механи-
ческих колебаний из-
вестно, что свободные
колебания неизбежно
затухают в конструк-
циях. При этом началь-
ная энергия колеба-
тельного процесса в ко-
нечном итоге превра-
щается в тепловую
энергию. Процессы, про-
исходящие в конструк-
циях при свободных
затухающих колеба-
ниях, в которых имеют
место указанные пре-
образования энергии,
Согласующий
усилитель
Индикатор
Милливольтметр Пересчетний привар
Осциллограф
принято в технике обозначать термином «внутреннее
трение».
В методе используется высокая чувствительность ко-
лебательных процессов в деталях и конструкциях к их
техническому состоянию. Критерием сценки является
декремент затухающих колебаний, возбужденных в ис-
следуемой велосипедной раме и наблюдаемых в опре-
деленных пределах. Частота собственных колебаний и
ее отклонение от номинального значения зависят от ряда
причин, основными из которых являются структурные
дефекты, геометрические отклонения, изменение вязко-
упругих свойств, наличие усталостных явлений в ма-
териале и т. д.
Принципиальная схема испытания рамы показана на
рис. 6.1. Раму 5 устанавливают горизонтально в шарнир-
ных опорах Oj и 02, смонтированных на стальной разме-
‘Точной плите массой около 1500 кг. Передняя вилка кре-
пится на бифилярном подвесе 3 с помощью шарнира О3.
Раму нагружают грузом Q с помощью гибкой тяги 11.
•Груз задают экспериментально, исходя из условий его
-влияния на характер измеряемых параметров или со-
гласно требованиям программы исследований. В харак-
терных точках рамы, выбираемых экспериментально,
123
закрепляют шесть индукционных датчиков ускорений 4;
6—10 типа МВ-22Г. В непосредственной близости от
оси 01 передней вилки устанавливают две индукционные
катушки 1 и 12, соединенные с блоком возбуждения
колебаний, который обеспечивает возбуждение исследуе-
мой рамы с максимальной мощностью до 600 Вт в диа-
пазоне частот от 30 до 2500 Гц. Оптическая система 2
позволяет контролировать амплитуду колебаний отдель-
ных элементов рамы.
Рис. 6.2. Амплитудно-частотная характеристика двух рам гоночного
велосипеда:
q — рама В-552 ХВЗ; • — рама фирмы RIH; 1—6 — показания датчиков
соответственно 4, 6, 9, 10, 8, 7 (см. рис. 6.1)
В процессе эксперимента с каждого датчика снимают
характеристики затухания свободных колебаний в ин-
тервале А—г/зА, что позволяет построить зависимость
линейного декремента затухания колебаний, выражен-
ного числом циклов N, от первоначальной амплитуды
колебаний А. Амплитуда выражена в показаниях вольт-
метра, подключенного к выходам датчиков. На рис. 6.2
представлены описанные зависимости для двух гоночных
велосипедных рам фирмы РИХ (RIH) и модели В-552
Харьковского велосипедного завода (ХВЗ).
Из общего анализа полученных зависимостей можно
сделать вывод, что рама гоночного велосипеда модели
В-552 является конструкцией, реагирующей на широкий
спектр частот возмущающих воздействий. Эти воздействия
вызваны неровностями дороги, случайными предметами,
попадающими под колеса велосипеда, или усилиями
со стороны СНКГ, приложенными к педалям. С другой
124
стороны, рама фирмы РИХ имеет значительно боле?
узкий спектр частот возмущающих воздействий, при
которых рама или ее отдельные элементы входят в резо-
нанс. Если учесть, что на колебательные процессы в раме
требуются определенные энергозатраты, то на поддержа-
ние одной и той же скорости движения на велосипеде,
собранном на базе рамы РИХ, энергозатраты ниже.
6.2. Конструкционные качества колес
Спицевый набор. Колесо гоночного велосипеда может
быть смонтировано несколькими способами, которые отли-
чаются вариантами спицевого набора, характеризующи-
мися числом так называемых крестов, образованных
парами перекрещивающихся между собой спиц. Число
Рис. 6.3. Варианты спицевого набора в 36 спиц (штрихами показана
тыльная сторона колеса): а — бескрестовый набор; б — набор в один
крест; в — набор в два креста; г — набор в три креста
крестов, приходящихся на одну спицу (рис. 6.3), в пря-
мом смысле не определяет механические свойства колеса,
но в удобной форме характеризует угол наклона спиц
относительно радиуса колеса. Именно этот параметр яв-
ляется одной из главных характеристик спицевого на-
бора Наиболее часто встречающимися и рациональными
являются наборы в три и реже в два и четыре креста.
Число спиц в колесе кратно четырем.
Спицевый набор решает несколько задач: удерживает
заданную форму колеса и обеспечивает такие его механи-
ческие свойства, как радиальная и крутильная жест-
кость. Радиальная жесткость колеса определяет его не-
125
сущую способность, крутильная — свойства при передаче
крутящего момента.
Важной частью спицевого набора являются втулки
колеса. Практикой велосипедного спорта отработаны две
типовые конструкции втулки: фланцевая (диаметр окруж-
ности расположения отверстий под спицы 67 мм) и бес-
фланцевая (диаметр 47 мм).
На рис. 6.4 показана схе-
ма формирования спицевого
набора колеса, где спица 2,
соединяющая фланецвтулки 1
Рис. 6.5. Изменение продоль-
ных составляющих радиальной
и тангенциальной сил, действу-
ющих на спицевый набор
Рис. 6.4. Схема формирования
спицегого набора колеса гоноч-
ного велосипеда
и обод 6 соответственно в точках А и В, образует с радиу-
сом фланца г угол 90°. Любое изменение этого угла при-
водит к изменению (в сторону уменьшения) фактического
диаметра набора спиц на фланцах втулки и к изменению
числа крестов. Кривая 4 является графиком изменения
положения точки А (точки соединения спицы 2 и фланца 7)
в зависимости от радиуса фланца в интервале 0 <1 г R,
где R — радиус обода.
Сила Q, действующая вдоль спицы 2, является резуль-
тирующей действия трех сил: QN — силы номинального
натяжения спицевого набора; Q'r — продольной состав-
ляющей силы радиальной нагрузки Qr; Qx — продольной
составляющей силы QT (передаваемого крутящего мо-
мента). График изменения вектора силы Q представлен
126
кривой 7. Сила Q имеет минимальное значение Qmtn при
угле Е,о, соответствующем оптимальному положению спиц
в наборе 3. Этому положению соответствует оптимальный
радиусг0, фланца втулки (кривая 5) с закреплением спицы
в точке Ао.
Указанные на рис. 6.4 силы Qi и Q« изменяются (соот-
ветственно кривые 1 и 2 на рис. 6.5) определенным обра-
зом в зависимости от соотношения r/R, и в предельных
слу< аях (при r/R = 0 и r/R = 1) их сумма Q2 (кривая 3)
стремится к бесконечности. Оптимальный вариант спи-
цевого набора (Q2 -*• min) будет при r/R = 0,68. Однако
конструктивная реализация подобного набора с радиусом
фланцев втулки г = 0,23 м вряд ли будет целесообразной
из-за резкого возрастания полярного момента инерции
колеса = Jo + Jс + mcp2, равного сумме момента
инерции Jo, увеличивающихся фланцев втулки, умень-
шающегося экваториального момента инерции Jc 36 спиц
набора и полярного момента инерции шср2 этих спиц,
радиус р в котором определяется расстоянием от оси
втулки до центра масс каждой спицы (тс — масса спиц).
График 4 иллюстрирует изменение момента J2 в зависи-
мости от увеличения диаметра фланцев втулки толщиной
3 мм и соответствующего уменьшения длины спиц диа-
метром d = 1,8 мм.
Если для переднего колеса, в котором действует только
радиальная нагрузка, диаметр фланцев не играет роли
и его можно принять минимальным, то для заднего колеса
диаметр фланца играет важную роль в снижении нагрузки
на спицы, особенно во время спуртов. В целом для зад-
него колеса существующие диаметры увеличенных флан-
цев (до 150 мм) находятся в оптимальной области, харак-
теризуемой соотношением r/R = 0,11.
Крутильная жесткость спицевого набора колеса яв-
ляется важной динамической характеристикой, так как
она органически входит в динамическую систему гон-
.щик—велосипед и влияет на энергетические потери,
-связанные с колебательными процессами.
Вид спицевого набора по числу крестов, число спиц
их жесткостные свойства, тип обода и его жесткостные
свойства, качество проката, сила номинального натяже-
ния спиц и степень равномерности их натяжения, а также
тип однотрубки и избыточное давление воздуха в ней —
все это вместе взятое определяет жесткостные свойства
колеса гоночного велосипеда, которые могут быть опреде-
127
Рис. 6.6. Тангенциальная деформация
спицевого набора колеса и однотрубок:
1 — спицевый набор; 2,3,4 — шоссейная
однотрубка 600x27 типа В-158 при избы-
точном давлении воздуха р соответственно
19.4-10“ Па: 29.4-10“ Па; 39,2-10“ Па; 5 —
трековая однотрубка 600x24 типа В-152
при р = 39,2- 10“ Па
лены экспериментально. Для
этого обод колеса Об (рис. 6.6)
жестко фиксируется в специаль-
ном приспособлении, рычаг Р
с помощью резьбовой насадки
навинчивается и жестко фикси-
руется на резьбовой части втул-
ки, индикатор И1 показывает
линейные перемещения х под
действием эталонной нагрузки Q. График 1 представляет
собой зависимость тангенциальной деформации спицевого
набора в три креста от приложенного крутящего мо-
мента М для колеса с диаметром фланцев втулки
150 мм, числом спиц п — 36, номинальным натяжением
спиц Q,v.
Аналогичные характеристики могут быть определены
и для однотрубок, находящихся под различным избыточ-
ным давлением воздуха. Для этого дополнительно уста-
навливают индикатор И2 на уровне минимального ра-
диуса R однотрубки Тр. Графики 2—5 иллюстрируют
тангенциальную деформацию х шоссейной и трековой
однотрубок, находящихся под различным избыточным
давлением воздуха.
Радиальная деформация колеса, возникающая под дей-
ствием радиальной нагрузки, может быть определена
экспериментально по следующей схеме (рис. 6.7). Ко-
лесо К без однотрубки, установленное в специальном
приспособлении, нагружается радиальной силой QR: со-
ответствующая этой нагрузке радиальная деформация
спицевого набора х (график 1) фиксируется индикато-
ром И1.
Радиальная деформация однотрубки Тр (график 2)
определяется аналогичным образом, но с размещением
индикатора И2 непосредственно на ободе колеса.
Дисковый набор. Конструкторы спортивного авто-
и мотостроения давно пришли к выводу о нерациональ-
ности использования традиционного спицевого набора
128
колес, и в настоящее время колеса, например, гоночных
шоссейных мотоциклов имеют набор из литых спиц аэро-
динамичного профиля, число которых колеблется от
четырех до шести. Такая конструкция является переход-
ным вариантом от спицевого набора к дисковому, кото-
рый обладает улучшенными динамическими качествами.
Дисковые колеса ряда иностранных фирм, проверенные
по описанной выше методике, показали результаты, су-
щественЕЮ отличающиеся от аналогичных показателей
колес со спицевым набором.
Для дисковых колес характерны повышенные кру-
тильная и радиальная жесткости, имеющие нелинейный
характер, причем с увеличением нагрузки приращение
жесткости на единицу нагрузки возрастает. Эта особен-
ность хорошо проявляется во время гонки, когда при ма-
лых нагрузках колесо достаточно эластично, но при их
возрастании жесткость существенно увеличивается. Глав-
ным достоинством дисковых колес является их высокое
аэродинамическое качество (см. гл. 8), позволяющее
заметно изменить энергетический баланс системы гон-
щик—велосипед.
Конструкционная прочность колеса. Впервые вопрос
о расчете конструкционной прочности велосипедного ко-
леса был рассмотрен в 1902 г. Н. Е. Жуковским, который
получил дифференциальное уравнение упругой оси обода
с учетом ее растяжения — сжатия, при этом обод рас-
сматривался как тонкий кривой брус на упругом основа-
нии, а предварительное натяжение спиц — как непрерыв-
ная упругая среда. Дальнейшее развитие этой теории
[23 ] позволило сформулиро-
вать задачу анализа действу-
ющих в колесе сил.
При действии радиальной
нагрузки QR на элементар-
ный участок R dtp обода
(рис. 6.8) со стороны спиц
действуют внешняя сила&со/?бйр,
внутренние силы N, Q и
Рис. 6.7. Радиальная деформация спи-
цевого набора колеса и шоссейной од-
нотрубки 600X27 типа В-158 при из-
быточном давлении р= 39.2-104 Па
5 Любовицкий В, П.
129
момент М. Дифференциальное уравнение в окончатель-
ном виде
d6m
1 dtp3 1 dtp
(6.1)
где а2 = Rik'(EJ') 4-1; k = £Тп/(2л/?2); F — площадь
поперечного сечения спицы; Е — модуль упругости; J —
момент инерции сечения; п — число спиц в колесе.
Рис. 6.8. Схема дей-
ствующих сил в колесе
со спицевым набором
Решение этого уравнения имеет вид
о = Со 4- ch (аер) cos (Р<р) 4- C2sh (аер) sin (Pep) 4*
4- С3 ch (аир) sin (Р<р) 4- С4 sh (сор) cos (Pep), (6.2)
где ____________ ______________
= С! = С.»0;
р_________QrR3 а ch (ал) sin фл) 4- fl sh (ал) cos фл) ,
1 4£Jafl a [sh2 (ал) -j- sin2 фл)] ’
p ___ QrR3 a sh (ал) cos фл) — ft ch (ал) sin фл)
2 — 4£Vafl a [sh2 (ал) + sin2 фл)]
Выражения для w и М в окончательном виде:
® = ” А Ch (аф) COS + В Sh (аф) Sin ’
L лс* д
(6.3)
м = — ~~ [ + A sh (atp) sin (Рср) 4- В ch (a<p) cos (Р<р) ] ,
(6.4)
где
. _ a ch (ал) sin фл) 4- fl sh (ал) cos фл) .
— a [sh2 (ал) 4-sin2 фл)] ’
о _ a sh (ал) cos фл) — fl ch (ал) sin фл) |
Р a [sh2 (ал) 4- sin2 (flл) ]
130
Усилие, приходящееся на одну спицу, будет равно
Qc = (6.5)
Для условного расчета предположим такое распределе-
ние массы гонщика на велосипеде, что на ось заднего ко-
леса действует нагрузка 400 Н. Примем радиус колеса
7? = 0,310 м; момент инерции сечения обода J = 3 10~® м4;
число спиц п. = 36; диаметр спицы d = 2 • 10-3 м; мате-
риал обода и спицы — сталь. Тогда
а2 = 4^- + 1 = 577,6; а = 24,03;
а = |/_ 3,393;
р = У -24-.°.|+ L = 3,537; sh (ал) « ± №•,
В = 0,326е-10-66.
С учетом полученных констант выражения для мо-
мента (6.4) и усилия в спице (6.5) могут быть переписаны
М = Qr [-8,55. IO-» + sh (а<р) sin (Р<р) -
— sh (atp) cos (рф)] ; (6.6)
Qc = Qr [2,78- IO-2 + ch (atp) cos (рф) +
+ sh (a<P) sin (рф)] . (6.7)
При небольших значениях ф второе и третье слагав
мые в квадратных скобках будут весьма малы и вели
чины М и Qc практически не меняются; в области макси
мальных значении ф ве-
личины М. и Qc изменяют-
ся существенно (рис. 6.9).
Так, при радиальной
внешней силе 400 Н в точке
Рис. 6.9. Эпюры момента М (а)
и усилия в одной спице Qc (б)
при действии на колесо радиаль-
ной нагрузки
5*
131
обода ф = л получим Л1п;,1Х — 8,8-К)-4 Н м и наиболь-
шее усилие на спице Qc 1иах = 112 Н. Интересно отме-
тить, что на большей части обода натяжение спиц
под действием внешней радиальной нагрузки остается
практически одинаковым и весьма незначительным, а
именно Qc — 11,12 Н, т. е. спицевый набор равномерно
распределяет нагрузку между спицами. В полученном
результате не учитывается номинальное натяжение спиц,
которое задается при сборке колеса. Это номинальное
натяжение должно превышать по абсолютной вели-
чине Qc Inax.
Рис. 6.10. Схема системы втулка — спицы — обод
для расчета деформаций
При действии сложной нагрузки (при прохождении
виража) сила реакции поверхности дороги, действующая
на колесо, может быть разложена на вертикальную и го-
ризонтальную составляющие. Горизонтальная сила QT
действует перпендикулярно к плоскости колеса, создает
пространственный изгиб обода и может вызвать разрыв
спиц в спицевом наборе. В качестве аналога обода в спи-
цевом наборе может быть рассмотрен упругий тонкий кри-
вой брус, находящийся в упругой среде. В общем виде
такая задача была рассмотрена в 1939 г. Д. В. Вайнбер-
гом, численные решения даны в работе [21 ].
Втулка / (рис. 6 10), две спицы 2 и 3, а также обод 4
образуют элементарную систему, представляющую собой
четырехзвенный шарнирный механизм NMmn с одной
степенью свободы. Под действием поперечной силы QT
этот механизм сместится на величину v и займет положе-
ние NMm'n'. Между перемещением v и углом р существует
связь: о = R cos a tg ф = (а0/2) Р ctg а. Так как при
действии силы QT одновременно возникают деформации
растяжения — сжатия спиц и деформации изгиба, сжа-
тия и кручения обода, рассматриваемая система NМтп
работает не как механизм, а как система на упругом
132
основании. При малых прогибах вид изогнутой оси обода
определяется перемещением v центра каждого попереч-
ного сечения и его поворотом р вокруг оси, касательной
к линии центров сечений обода.
Дифференциальное уравнение упругой линии обода
. d^v . d'v n
+ + + = (6.8)
Здесь
1 I k*R2 I 2k'R3 ! 2M3 ' k2Ri
— Z Л* ’ - ~Г p ~Г z' г p “г p *
Ск ии и к ьи ь;|
/г.,/?4 , /,2 , , л R4 . , EF
а3 =------gr— + (k} — пяо sm а;
EF EF a- 2
£2 = ~о"р- «2 tg a sin a; k3 = -7^., ~ cos a; kt = k2k3,
где Си — жесткость обода при изгибе; Ск — жесткость
обода при кручении.
В окончательном виде получены следующие выра-
жения.
Перемещения
v = [ inbnch (Хоф) “ch (М cos (ЦФ) “
— f3 sh (X<p) sin(p<p)j, (6.9)
где
fi = (?2 + Si) Уз; /2 = + t.2 (V2 — Vi);
/3 = — 11 (v2 — V,); g, = Z sh (Хл) cos (рл) —
— p ch (А.л) sin (рл);
?2 = ^ch (лл) sin (рл) + p sh (Ал) cos (рл); vx =
= ^0^1 4- ^0^2 4~ ^з>
v2 = [(X2 — p2) — 4X2p2] bj + (X2 — p2) b2 + b3;
v3 = 4 (X2 — p2) Xp bi 2Xp b2;
Ь'~ИС“+-Н^+4(^ЧГ
*’ l4<+l(| + »,j(_£k+2i)] ’
b = кяИ*Ск + (C„ + CK).
t's,[c-+iO+‘-)(^i)]'
133
1.-х - У^+Л_+Л;
и =
S __ *1 "Г *2 а1 .
01- § Г’
'1 4~ ^2 - б; .
2
л ^3
б2 = -Т-
а2
Р = ^--
<-> k4R2
а1 = 2--л_; а
«L.
9 ’
_ «1 _ 0102 _ «з .
4 27 6 6 ’
k3R2 2М3 , .2ML । •
Си Ск Си си
as = W - Ыз)
ък Ьиьк
Угол поворота
₽ = 'Й5' [ аг(Хол)ch ^'оф) ~ ^аЧг+ch (Хф) cos (и<р') “
— (/з^2 — f3v8) sh (Хф) sin (РФ)] . (6.10)
Изгибающий момент
Ми = [ аГ^)-ch (ЬоФ) - (W2 + Yaf3) ch (M cos (рф) +
+ Ыз — W8)sh(tap)sin (РФ)], (6.11)
где
71 = Rv\ — ’ко", 72 = Rvz — (к2 — р2); 7з = Rv3 — 2Хр.
Крутящий момент
Мк = 1П1 sh (Хоф) — ОъХ + ПзН) sh (Хф) cos (рф) +
+ (ПгН — ПА) ch (Хф) sin (рф)], (6.12)
где
Hi = (1 +*1Я) -stT(^~’ TI2 =/г +/? (ZaV2 + W>
Лэ = /з + R (/sV2 + f2v3)-
Поперечная сила
Qn = Ui ch (Аоф) + (t2 + p(3) sh (Хф) cos (рф) +
4-(X/s — p/2) ch (Хф) sin (рф)), (6.13)
134
где
ii = Mo (/? - viXo) ; h = h (л2 - р2) + 2Xp/s -
— R (fM + fs^ h = fs W — H2) — 2Ms — R (fM — fz^).
На рис. 6.11 даны некоторые результаты расчетов де-
формаций и моментов сил, возникающих в ободе колеса
со спицевым набором при разносе спиц на ободе а0 = тп.
При действии на колесо поперечной силы QT нагрузка
на одну спицу составит
Qrc — — &iP)/(2 sin а). (6.14)
В заключение приведем некоторые расчетные данные,
устанавливающие минимальный уровень номинального
Рис. 6.11. Эпюры деформаций (а) и моментов сил (б)
в ободе колеса при действии поперечной силы
натяжения спиц в колесе в зависимости от его радиальной
нагрузки. Эти данные приведены для таких условий, когда
гонщик массой т сидит в седле и едет без касания руками
руля, т. е. его масса полностью воспринимается подсе-
дельной трубкой. В таком случае заднее колесо наиболее
нагружено и реакции Nx и Nt со стороны поверхности
дороги определяются согласно схеме I на рис. 6.12:
Л\ = mgl/L; N2 = mg (L — l)/L.
График 1 представляет собой зависимость минимально
допустимого номинального натяжения спиц при наборе
в три креста с фланцевой втулкой диаметром 67 мм от
радиальной нагрузки колеса. Парные спицы перекрещи-
ваются в таком наборе под углом 30°. График 2 учитывает
дополнительное натяжение, возникающее в спицах под
Действием радиальной нагрузки на колесо.
В реальных условиях номинальное натяжение не-
сколько выше расчетного (как правило, на 15—40 %).
Экспериментально натяжение можно контролировать ди-
намометром, установленным на колесе по схеме II
135
Рис. 6.12. Зависимость минимально
допустимого номинального (/) и
полного (2) натяжения спиц при на-
боре в три креста с фланцевой втул-
кой диаметром 67 мм от радиальной
нагрузки на колесо
(рис. 6.12). Для этого в хоро-
шо отрегулированном колесе
одну из спиц заменяют двумя
половинками Л и В с вмон-
тированным между ними ди-
намометром Д. После замены,
восстановления натяжения
и устранения возникшего
биения обода фиксируют номинальное натяжение. Даль-
нейший контроль уровня натяжения выполняют вручную,
оценивая прогиб двух смежных спиц пальцами или по
звуку при пощипывании натянутой спицы. Эти приемы
в любом случае требуют высокой квалификации. Конеч-
ными параметрами, контролируемыми при регулировке
колеса, являются отсутствие биения обода в пределах
установленного допуска, установленный номинальный
уровень и равномерность натяжения спиц в наборе.
Балансировка колеса. Неоднородность материалов, не-
точности изготовления однотрубки, обода, ниппелей и
спиц при сборке не позволяют получить сбалансирован-
ную систему колеса. Дебаланс колеса в условиях гонки
приводит к нежелательным колебательным процессам,
требующим дополнительных затрат энергии гонщика и
вызывающим повышенное изнашивание рабочих узлов
и однотрубок велосипеда. Статическая и динамическая
балансировка колес позволяет уравновесить силы инер-
ции, устранить вибрацию и избежать шимми.
При равномерном вращении колеса с угловой ско-
ростью со центробежная сила инерции равна Qa = тгоз2,
а главный момент сосредоточенных масс тг, удаленных
от оси вращения на расстояние гг, составляет QH =
— 2тггг<»2 = co2mrp, где т — масса всего колеса; гр —
радиус-вектор центра масс (ЦМ) колеса, равный расстоя-
нию от ЦМ до оси вращения Главный момент инерции
относительно оси вращения в плоскости А равен Л4И —
= со2 У rriir^i = o)2Jrz, где Jrz — центробежный момент
инерции относительно оси вращения г в плоско-
сти А.
136
В зависимости от величин Q„ и Мп различают два вида
неуравновешенности колеса: статическую и динамиче-
скую. Причиной статической неуравновешенности яв-
ляется отличие от нуля главного вектора или статического
момента (Мв = тгр 0), а динамической — неравен-
ство нулю главного момента инерции (Угг 0). Для
того чтобы колесо было статически и динамически урав-
новешено, должны выполняться два условия:
/Ис = U rn^t = 0; Jri = 2 mtriZt = 0, (6.15)
т. е. ось вращения г ротора должна быть главной цен-
тральной осью инерции.
Оба вида балансировки рассматриваются в условиях
вращения колеса относительно неподвижной оси. В реаль-
ных условиях ось вращения колеса движется относи-
тельно поверхности дороги при прямолинейном движении
и разворачивается на некоторый угол при прохождении
виража, а само колесо контактирует с дорожным по-
крытием.
Статическая балансировка предусматривает рассмо-
трение уравнений кинетостатики для вращающегося ко-
леса с одной сосредоточенной массой т, являющейся
источником дебаланса системы: Q„ -f- Ra + Rb =0, где
Ra и Rb — реакции co стороны опор на ось колеса до
уравновешивания; Qa — сила инерции неуравновешенной
массы т. Главный вектор оси инерции Q„ = —(RA -f-
+ Rb)-
В целях уравновешивания системы добавим еще одну
массу тс, которая является противовесом. Тогда уравне-
ние главного вектора примет вид QH + Qc = (R'a + R'b),
где R'a и Rb — реакции опор после уравновешивания.
Согласно условию статической балансировки, Qa + Qc =
= mr -f- пгсгс = 0. Смысл этого уравнения заключается
в том, что у статически сбалансированного колеса центр
его масс лежит на оси вращения. Задача сводится к рас-
чету одного из двух параметров тс или гс при другом за-
данном. Угол ас определяется из построения векторного
многоугольника.
Типичным примером статической балансировки может
служить балансировка колеса на неподвижно закреплен-
ной оси непосредственно в раме велосипеда или в при-
способлении для центрирования колес. Масса колеса т
Как бы сосредоточена в ЦМ и эксцентрично смещена
относительно оси вращения на величину г. Сила инерции
137
этой массы Qa при вращении колеса уравновешивается
соответствующими реакциями RA и RB в раме велосипеда
(рис. 6.13, а). Для уравновешивания силы QH, т. е. для
обращения в нуль радиус-вектора г и реакций RA и RB,
в плоскости вращения добавляют массу тс на расстоя-
нии гс от оси вращения (рис. 6.13, б) так, чтобы удовлетво-
рялось условие /Ис = = 0. Тогда, задав гс =
— гДс (где £с — r!f\ г, гс— радиусы, снятые в масштабе
чертежа, мм), можно будет найти массу противовеса
тс == тг!гс. На рис. 6.13, в дано графическое решение
Рис. 6.13. Статическая балансировка колеса: а — схема действия сил
в неуравновешенном колесе; б — определение положения уравнове-
шивающей массы; в — векторная диаграмма; г — определение урав-
новешивающей массы
уравнения статического момента для рассматриваемого
случая в целях отыскания угла ас. В данном случае
векторные построения весьма просты, и угол ас = л 4- а,
т. е. противовес тс должен размещаться на расстоянии г0
с противоположной стороны (см. рис. 6.13, б), которая
определяется на свободно подвешенном в опорах колесе,
когда оно остановится после качания и ЦМ займет низ-
шее устойчивое положение.
Если в плоскости колеса находится несколько неурав-
новешенных масс mt, удаленных на радиус-векторы rt
от оси вращения, то уравновешивание также может быть
произведено только одной массой тс на основании равен-
ства статического момента нулю и построения векторного
многоугольника статических моментов в целях определе-
ния угла ас.
На практике масса тс неизвестна, так как неизвестен
радиус г. Для определения тс можно установить известную
вспомогательную массу тв так, как показано на
рис. 6.13, г. Тогда из условия равновесия колеса получим
т0 == mB/tg Ф, где <р — угловая координата метки, сде-
ланной при устойчивом положении колеса.
138
Рис. 6.14. Схема баланси-
ровки колеса двумя уравно-
вешивающими массами: а —
при симметричном располо-
жении плоскости вращения;
б — при асимметричном рас-
положении
Учитывая значитель-
ные радиальные разме-
ры колеса, уравновеши-
вающую массу тс рацио-
нально размещать на
внутренней стороне обода радиусом г0. При больших
дебалансах колеса уравновешивающая масса тс дости-
гает заметной величины, что увеличивает момент инерции
колеса. В этом случае целесообразно уравновешивающую
массу разделить на две и разместить, например, на флан-
цах втулки (рис. 6.14). Если для переднего колеса при
симметричном расположении плоскости вращения
(рис. 6.14, а) т'с — tri^ — тс/2, то для заднего колеса
необходимо учесть возможность динамического дисба-
ланса. В таком случае уравновешивающие массы соответ-
ственно составят:
I 1 1а п Г I t
тс = tnтс = т-рг-^-.
гс 1 'с 1
Статическая балансировка имеет низкую точность,
зависящую от момента сил трения качения и покоя в под-
шипниках втулки, что не позволяет обнаружить неурав-
новешенную пару сил.
Балансировка колеса может быть выполнена многими
методами, известными в технике. Здесь предлагается
наиболее удобный метод и описывается аппаратура, из-
вестная как виброскоп Колесника. Прибор основан на
принципе использования механических резонансных ко-
лебаний и стробоскопического эффекта.
Колесо 3 (рис. 6.15) гоночного велосипеда с помощью
эксцентриковой системы 12 устанавливается в стойке 13
и шпинделе 1. Ось колеса внутренним конусом насажи-
вается на посадочный конус, который смонтирован в кор-
пусе шпинделя 1, посаженного на оси электродвигателя
постоянного тока 18. Тяга эксцентриковой системы 12
Ввинчивается в торец шпинделя 7, и с помощью эксцен-
трика ось колеса жестко фиксируется на стойке 13. Для
передачи крутящего момента от электродвигателя 18
к колесу 3 корпус шпинделя 1 имеет два пальца 2, на
139
концы которых надеты полиэтиленовые или резиновые
насадки, входящие в перфорацию фланца втулки колеса
или (при малых диаметрах фланца) в пространство между
спицами. Электродвигатель 18 смонтирован на стальной
раме 17 и основании 16. Стойка 13 с помощью болтов 14
Рис. 6.15. Система балансировки колес гоночного велосипеда
имеет возможность продольного перемещения для регу-
лировки размера А в зависимости от длины оси втулки
колеса. Вся аппаратура устанавливается на полу или
верстаке на регулируемых демпфирующих опорах 15.
Для контроля наличия дебаланса в колесе служит
виброскоп 11, жестко смонтированный на стойке 13.
Основной частью виброскопа является плоская пружин-
ная балочка 6 с закрепленным на ее конце грузом. Ниж-
140
лв
балансировки
Рис. 6.16. Схема
колеса: а — схема действующих
сил; б — векторная диаграмма
ний конец этой балочки жестко закреплен в станине
прибора. Подвижная опора 5при передвижении с помощью
рукоятки 9 изменяет длину вылета балочки 6 (измеряется
по шкале 10) и, как следствие, частоту ее собственных
колебаний, что позволяет настраивать прибор в резонанс
с измеряемыми колебаниями всей аппаратуры. Шкала 10
проградуирована по частотам собственных колебаний
балочки 6. Для замыкания электрической цепи виброскопа
имеется подвижный контакт
7, который входит в сопри"
косновение с колеблющей-
ся балочкой 6 и, таким обра-
зом, периодически замыкает
электрическую цепь стробо-
скопа 5. Частота вспышек
стробоскопической ламы 4
равна или кратна частоте
вынужденных колебаний
стойки 10.
Балансировка произво-
дится следующим образом.
Колесо 1 (рис. 6.16, а) разго-
няют до частоты вращения
примерно 500—700 об/мин, что соответствует максимальным
скоростям движения гонщика в обычных гонках. Неурав-
новешенная масса т вращающегося колеса создает цен-
тробежную силу QH, вызывающую колебания стойки.
Регулированием подвижной опоры устанавливают по
шкале виброскопа максимальную амплитуду колебаний
балочки. Подвижным контактом виброскопа добиваются
зажигания стробоскопической лампы, что создает стро-
боскопический эффект, позволяющий зафиксировать поло-
жение 2 метки 3, предварительно нанесенной на колесо 1.
В качестве такой метки удобно использовать вентиль
однотрубки.
Затем на остановленное колесо в произвольном месте
прикрепляют вспомогательный груз массой тв, который
при повторном вращении создает центробежную силу QB.
Геометрическое сложение векторов Qu и QB дает силу Q,
в общем случае отличающуюся по величине от вектора
силы Q„ и направленную к ней под углом а. Изменению
центробежной силы с Qa на Q соответствует смещение
метки 3' в стробоскопическом свете в новое положение 2'
также на угол а. Для полного уравновешивания воз-
141
мущающей силы QH необходимо уравновешивающую си-
лу QB переместить на угол 0 и изменить ее так, чтобы по
величине она была равна QH. Основываясь на допущении,
что амплитуда колебаний пропорциональна возмущаю-
щей силе инерции, можно определить уравновешивающую
массу тс и угол 0:
А
те — тв -г ;
КЛ2 + S2 - 2АВ cos а
РВ, sin а /с
= arcsin r : - —, (о.16)
/Л2 + В2 — 2ЛВсова
где А — амплитуда колебаний, пропорциональная цен-
тробежной силе без вспомогательной массы; В — ампли-
туда колебаний, пропорциональная центробежной силе
со вспомогательной массой.
Возможно графическое решение задачи, предваритель-
ные процедуры которого аналогичны описанным выше:
1) измеряют амплитуду А колебания балочки вращаю-
щегося колеса;
2) устанавливают и отмечают положение метки или
другого выбранного на колесе ориентира, например вен-
тиля, в стробоскопическом свете;
3) в направлении положения метки откладывают век-
тор А в масштабе геометрических построений (рис. 6.16, б);
4) в произвольном месте колеса устанавливают вспо-
могательную массу (удобно использовать- пластилин, при-
клеивая его на внутреннюю поверхность обода) и колесо
вновь приводят во вращение с прежней частотой вра-
щения;
5) измеряют новую амплитуду В колебаний балочки
вращающегося колеса с установленной на нем вспомо-
гательной массой и угол а смещения метки в стробоскопи-
ческом свете;
6) вектор В в принятом масштабе откладывают на век-
торной диаграмме в направлении, противоположном
углу а; _
_ 7) полученный вектор АВ (АВ = АВ/% где £ = А/А;
А и АВ — значения, снятые с чертежа, мм), разверну-
тый на угол 0 в указанном на рис. 6.16, б направлении,
дает угловую координату размещения уравновешивающей
массы тс;
8) уравновешивающую массу определяют по формуле
тс = твА/АВ.
142
Таблица 6.1. Расчетные данные для балансировки колес
велосипеда
Угол переме- Амплитуда
щевия
ориен- тира, ° 0,25 0,5 0,75 1.0 (1.25 >,50 1,75 2,0
1,3 2,0 4,0 4,0 3,0 2,0 1,5 1,0
и 0° 10° 0° 0° 180° 180° 180° 180°
15 1,3 2,0 2,8 4,0 2,6 1,7 1,2 1,0
7° 15° 30° 90° 125° 140° 150° 155°
1,2 1,6 2,0 2,0 1,6 1,2 1,0 0,8
OV ’ 12° 25° 45° 75° ~95s” 110° 120° 125°
ПЯ 1,2 1,3 1,3 1,3 1,2 1,0 0,8 0,7
15° 30° 50° 65° 80° 95° 105° 110°
1,1 1,1 1,1 1,0 0,9 0,8 0,7 0,6
DU 15° 30° 50° 65° 75° 80° 85° 90°
1,0 1,0 0,9 0,8 0,7 0,6 0,6 0,5
/О 20° 30° 45° "55s 65° 70° 75° 80s
1,0 0,9 0,8 0,7 0,6 0,5 0,5 0,4
20° 80°' 40° 50° 55° 60° 60° 65°
105 0,9 0,8 0,7 0,6 0,6 0,5 0,4 0,4
15° 25° 35° 40° 45° 50° 50° 55“
120 0,9 0,8 0,7 0,6 0,5 0,5 0,4 0,4
15° 25° 30° 35° 45° 40° 40° 45°
135 0,8 0,7 0,7 0,6 0,5 0,4 0,4 0,3
10° 20° 20° 25° 25° 30° 30° 35°
150 0,8 0,7 0,6 0,5 0,5 0,4 0,4 0,3
5° 10° 15° 15° 20° 20° 25° 25°
165 0,8 0,7 0,6 0,5 0,5 0,4 0,4 0,3
5° 5° 5° 5° 10° 10° 10° 10°
180 0,8 0,7 0,6 0,5 0,4 0,4 0,3 0,3
0° 0° 0° 0° 0° 0° 0° 0°
Возможен третий (табличный) способ расчета. Если
после установки вспомогательной массы тв амплитуда
колебаний, например, увеличилась на 25 % (т. е. на 0,25),
а метка в стробоскопическом свете переместилась в ка-
ком-либо направлении на 45°, то, просматривая табл. 6.1,
находим на пересечении амплитуды 1,25 с горизонтальной
строкой 45° дробь 1,2/80°. Это значит, что для достижения
баланса колеса уравновешивающий груз тс надо уве-
личить в 1,2 раза и переместить его на 80° в направлении,
обратном перемещению метки.
143
6.3. Цепная передача гоночного велосипеда
Геометрические параметры передачи. Длина цепи L
цепной передачи трекового гоночного велосипеда и тео-
ретическое межцентровое расстояние А (рис. 6.17) опре-
деляются из условия кратности двум числа зубьев «иде-
альной» цепи, т. е. при абсолютно точном изготовлении
и сборке цепной передачи, а также при обеспечении
выбранного шага цепи, геометрических размеров ведущей
(радиус rlt число зубьев г,) и ведомой (радиус г2, число
Рис. 6.17. Схема цепной передачи трекового гоночно-
го велосипеда:
it 2 теоретический контур; 3 — реальный контур с уче-
том провисания цепи
зубьев z2) звездочек, а также предварительного межцен-
трового расстояния Ао, принятого из соображений кон-
структивной компоновки велосипеда.
В реальной конструкции гоночного велосипеда ось
каретки (Д смещена относительно оси заднего колеса 02.
Линия 0102 образует угол р с горизонталью, что приводит
к развороту вертикальных осей на тот же угол р Натяже-
ния цепи на ведущей 1 (Sj и Si) и ведомой 2 (Si и Si)
ветвях зависят, в первую очередь, от крутящего момента
Мг на оси каретки 0v Неточности изготовления деталей
цепного привода не позволяют обеспечить абсолютно
точную сборку узла, что приводит к некоторому провиса-
нию ведомой ветви цепи <3.
Длину цепи передачи определяют по формуле
L — 2А cos р + - (6.17)
Здесь
р = arcsin 1 л ; ri = 2sin (i80°/Zi) > rz = 2sin (180o/2,2) •
где t—шаг цепи.
144
Предварительно выбранное по конструктивным сооб-
ражениям межцентровое расстояние Ло должно быть
скорректировано после определения предварительного
числа зубьев в цепном контуре:
Zo = 2ACosp + A+^ + 2izz^p, (6.18)
где г0 — число звеньев цепи в цепном контуре.
Рис. 6.18. Схема цепной передачи шоссейного го-
ночного велосипеда
Примем, что г0 = 2k — четное число (k — произволь-
ное положительное число). Тогда теоретическое расстоя-
ние между осями звездочек
А — 1 Г? — 4 + Р(21 ~ 1 (6 19)
л ~ 2cos? LZ° 2 180° J '
Специальный паз в задней вилке велосипеда позволяет
на месте отрегулировать положение оси заднего колеса
с учетом погрешностей изготовления и сборки деталей
и узлов привода, а также имеющегося уже износа цепи.
Задача такого регулирования — обеспечение необходи-
мого провисания цепи на холостой ветви. Изменение
провисания при вращении кривошипов свидетельствует
о неравномерности износа цепи и о неточностях меха-
низма привода. Эти дефекты устанавливаются методами
технического контроля, отдельные приемы которого опи-
саны в п. 3.12.
Длина цепного контура шоссейного гоночного вело-
сипеда (рис. 6.18) выбирается так же, как для трекового
велосипеда, но с учетом дополнительных звеньев цепи,
необходимых для обеспечения нормальной работы при-
вода на ведущих (гх) и ведомых (г2) звездочках как с ма-
лым числом зубьев (например, z{/'z.> = 46/13, контур
цепи 1), так и с большим числом зубьев (например,
145
zj/z2 = 52/21, контур цепи 2). При этом излишек (не-
достаток) цепи компенсирует суппер, образованный парой
роликов О3 и О4 для контура цепи 1, способных занимать
положения Оз и О) для контура цепи 2. Регулировка
суппера описана в п. 3.9.
Важным геометрическим параметром цепной передачи
шоссейного гоночного велосипеда является характери-
стика допустимого продольного перекоса цепи, вызван-
ного поперечным взаимным смещением а (рис. 6.19)
Рис. 6.19. Схема учета некоторых погрешностей цепной
передачи гоночного велосипеда
ведущей гг и ведомой z2 звездочек, перекосом осей ка-
ретки у, и втулки у2 заднего колеса, а также торцовыми
биениями ведущей и ведомой звездочек относительно
продольных плоскостей ЬЬ и сс. Перечисленные геометри-
ческие погрешности цепной передачи рассмотрены в го-
ризонтальной плоскости.
Угол допустимого разворота каждого звена цепи опре-
деляется [4] диаметральным зазором Sm в соединении
ось — втулка и зазором S6 между пластинами цепи:
[6] = kBK, (6.20)
где k = 0,8 — коэффициент, учитывающий характер ра-
боты привода при скорости движения цепи и < 3 м/с;
0к — возможный угол разворота звена цепи:
0к = ( arctg ; arctg 1 « 0,2 4- 0,3°.
( о <\Ц J
Механика цепной передачи. Цепь входит в зацепление
с зубьями звездочек наружной поверхностью своих шар-
ниров. Способ зацепления характеризуется взаимным
расположением шарниров и зубьев, которое зависит от
соотношения шага цепи и шага звездочки. Возможны
четыре варианта зацепления: теоретическое (шаг цепи
равен шагу звездочки), нормальное (шаг цепи больше
145
шага звездочки), специальное (шаг цепи меньше шага
звездочки) и смешанное (совмещение нормального и спе-
циального зацепления).
Теоретическое зацепление практически не может быть
реализовано и рассматривается только в кинематических
расчетах. Специальное зацепление характеризуется удар-
ным проскальзыванием цепи по звездочке при сходе
с последнего зуба и, как правило, не рекомендуется для
Рис. 6.20. Схема располо-
жения цепи на звездочке
при нормальном зацепле-
нии:
ii 2 « в статике; 3 в дви»
женин
применения. Смешанное зацепление практически воз-
можно, но по мере изнашивания цепи оно непременно
превратится в нормальное. Стандартами и техническими
условиями на приводные цепи и звездочки предусмотрен
нормальный способ зацепления. Допускаемые отклонения
(положительные для цепи и отрицательные для звездочек)
не должны превышать 0,225 %.
При наложении цепи на звездочку с полным ее охва-
том нормальное зацепление обеспечивает полный контакт
по боковым поверхностям зуба только для одного шар-
нира 1 (рис. 6.20), а остальные свободно располагаются
во впадинах между зубьями (ветвь 2). Однако такое рас-
положение шарниров на звездочке возможно только в не-
подвижном состоянии. Оно нарушается при движении,
Когда звенья цепи последовательно, одно за другим, вхо-
дят в зацепление под нагрузкой Si на ведущей и S2 на
ведомой ветвях цепи. В таком случае при правильной
форме зубьев звездочек и хорошо приработанном зацеп-
лении цепь автоматически устанавливается на определен-
147
цепь. Максимальный
Рис. 6.21. Изменение усилий
в звеньях цепи на ведущей
звездочке при нормальном
зацеплении
ную линию движения,
соответствующую шагу
цепи и шагу звездочки
(ветвь 3). С увеличе-
нием разницы шагов
радиус зацепления со-
ответственно увеличи-
вается. Этому процессу
дополнительно способ-
ствуют центробежные
силы, действующие на
дуги зацепления опре-
деляется условиями зацепления. Таким образом, при
движении звездочки под действием момента все
звенья цепи одновременно воспринимают нагрузку,
которая распределяется между ними по закону геомет-
рической прогрессии (рис. 6.21): от So (на ведущей
ветви цепи) до S6 (нагрузка на шестое звено); при этом
S6 > S5, так как на шестое звено добавляется нагрузка
от свободно висящей ведомой ветви.
Звенья цепи, набегая и сбегая со звездочки, совер-
шают около оси шарнира относительные повороты на
угол а = 3607г (г — число зубьев звездочки). Каждый
из шарниров, состоящий из оси, втулки и ролика, при
зацеплении по-разному воспринимает давление от зуба
звездочки и вследствие этого имеет различный износ.
Зацепление на ведущей звездочке
представлено на рис. 6.22 [3, 4]. При зацеплении шар-
нира 2 цепи (рис. 6.22, а) давление от зуба 4 ведущей
звездочки воспринимает втулка 3 внутреннего звена 5
цепи, а при зацеплении шарнира 6 давление восприни-
мает ось 7 наружного звена 1. Начальный момент зацеп-
ления шарнира с зубом звездочки сопровождается ударом.
При дальнейшем вращении ведущая звездочка и располо-
женные на ней звенья цепи займут вполне определенные
промежуточные положения.
В соответствии с условием нормального зацепления
(4, > ta, где — шаг цепи; ta — шаг звездочки) входя-
щий в зацепление шарнир не ложится на дно впадины
148
зуба звездочки, а располагается несколько выше. Шарнир
остается в этом положении в течение всего периода за-
цепления, так как ведомая ветвь находится под натяже-
нием $в. Положение зуба для этого момента зацепления
Рис. 6.22. Зацепление шарнира цепи с зубом ведущей
звездочки: а — внутреннего звена; б — наружного
звена
определяется углом р. В момент начала зацепления р = а,
а в момент завершения этого процесса р = 0. От начала
до конца входа в зацепление угол поворота звена 5
постепенно увеличивается, составляя значение а — р.
При этом повороте происходят вращение оси во втулке
и одновременно скольжение между роликом и втулкой,
укрепленной неподвижно в пластинах внутреннего звена 5.
149
Ролики остаются неподвижными относительно рабочей
поверхности зубьев и предотвращают их изнашивание,
вызываемое скольжением.
Силы трения и износ соприкасающихся поверхностей
зависят от действующих на них нормальных давлений.
Звено 5 в процессе входа в зацепление находится в рав-
новесии под действием внешних сил, определяемых уси-
лием ведущей ветви SB. Неизвестные силы S' и а также
плечо h можно определить с учетом действующих сил
трения между роликом и втулкой, S'f и SBf между
осью диаметром d и втулкой диаметром dt. Массой цепи
и центробежными силами можно пренебречь ввиду их
незначительного влияния.
Условие равновесия внутреннего звена 5 запишется
в следующем виде:
S X = —<SB sin (Р ф) + SBf cos (р + ф) — Nfi 4“
4- S' sin (а 4- р) 4- S'f cos (а 4- ф) = 0;
2 Y = —SBcos (р 4- ф) - SBf sin (р 4- ф) + У 4-
4- S' cos (а 4“ ф) — Sf sin (а 4~ ф) = 0;
= Nf^ + S'f - SBh- SBf + t) =0,
где t — шаг зацепления.
Решение этих уравнений дает выражения для трех
искомых величин:
с,__ о (1 + /А) sin (Р + ф) + (fi — f) cos (Р -4- ф) . /к on
~ в (1— /А) sin (а + ф) + (Л + f) cos (а + ф) ’ '
w _ О (1 — Л) sill (а — Р) + 2/ cos (а — Р) . fi ™
°в(1— /А) sin (а + ф) + (Л +/) cos (а + ф) ’ '
_ NA^i 4- S /d Sb/ (d 4~ 2/) (6 23)
2SB
Наружное звено 1 (рис. 6.22, б) в процессе входа в за-
цепление находится в равновесии под действием уже
других сил. Неизвестные силы S', N и момент MD можно
определить с учетом силы трения SBf между осью и втул-
кой и усилия SB ведущей ветви. Условие равновесия
наружного звена 1 запишется в следующем виде:
JjX = — SBsin (р 4- ф)—SB/:cos(p + ф) + S'sln(a + ф) = 0;
S Y = — 5всо8(Р4-ф)4-Зв/81п (Р4-ф)4-
4- N 4" S' cos (а 4- Ф) = 0;
= 5^4 = 0.
150
Решение уравнений дает выражения для трех искомых
величин:
S' = SB
sin (P + <p) + / cos (P + <p) .
SB
sin (а + <р) ’
sin (а — Р) — / cos (а — Р) .
sin (а + <р) ’
(6.24)
(6.25)
(6.26)
Зацепление н
Показано на рис. 6.23.
а ведомой звездочке
Основной особенностью работы
Рис. 6.23. Условии выхода внутреннего звена цепи из зацеп'
ления с зубьями ведомой звездочки
цепи здесь является то, что со звездочки сбегает нагру-
женная ведущая ветвь SB. Поэтому работа цепи на ведо-
мой звездочке возможна только при условии, если шаг
цепи равен или больше шага звездочки (/ц /3). Другого
соотношения шагов здесь не может быть вследствие не-
возможности входа в зацепление шарниров при набегании
их на звездочку. Это положение особенно важно соблюдать
на шоссейном гоночном велосипеде со свободной холостой
ветвью цепи, где к качеству зацепления предъявляются
повышенные требования надежности.
При набегании холостой цепи на ведомую звездочку
в условиях нормального зацепления шарниры так рас-
151
полагаются на зубьях, как это позволяет сделать разность
шагов /ц — t3; при этом в условиях хорошо приработан-
ной передачи все шарниры, вошедшие в зацепление, несут
свою долю общей нагрузки.
На ведомой звездочке, так же как и на ведущей, сле-
дует различать работу двух смежных шарниров: шарнира 4
внутреннего звена 3 и шарнира 2 наружного звена 5.
Условия работы указанных шарниров на ведомой звез-
дочке не соответствуют прежним условиям их работы на
ведущей звездочке. Так, на ведомой звездочке шарнир 4
работает аналогично шарниру 2 (см. рис. 6.22, а) на веду-
щей звездочке, соответственно шарнир 2 на ведомой звез-
дочке работает аналогично шарниру 2 (см. рис. 6.22, б)
на ведущей звездочке. Такое изменение условий работы
шарниров получается вследствие того, что усилие при-
водной звездочки действует на цепь в сторону движения
цепи, а на ведомой звездочке усилия сопротивления дей-
ствуют в сторону, обратную движению цепи.
При отделении шарнира 4 от зуба 6 звено <3 под дей-
ствием моментов сил трения Nf[ и S'f, действующих на
втулку 1 шарнира 2, развертывается на некоторый угол
относительно звена 5 и, уравновешиваясь моментом, созда-
ваемым усилием натяжения ведомой ветви SB на плече h,
занимает во время выхода из зацепления неизменное
относительно звена 5 положение.
Условия равновесия звена 3 имеют вид:
У X = —SB sin (р + ф) — Nfi + S' sin (а + ф) —
— S'f cos (а ф) = 0;
У Y = —SB cos (р 4- ф) — N 4- S' cos (а 4- ф) 4-
4- S'/sin (а 4- ф) = 0;
М = ~SBh 4- Nf, + S'f 4 = °-
Решение уравнений дает выражения для трех искомых
величин:
OZ _ о sin (ft + Ф) — 71 cos (ft + ф) . _ _
В(1 — 77i) sin (а + Ф) — (/! + /) cos (а + <р) ’ ’
Д7 е Sin (а — ft) — 7 cos (а — ft)__. fi
в (1 — 77i) Sin (а + <р) + (7i + 7)cos (а + ф)’ '' ’
h= N^ + S'.f±t (6.29)
152
Допустимое увеличение шага цепи —
условие возможности дальнейшей эксплуатации передачи.
В процессе эксплуатации передачи шаг цепи увеличи-
вается из-за изнашивания трущихся частей шарниров
и деформации деталей цепи. По мере увеличения шага
цепи шарниры приспосабливаются к новым окружностям
звездочек, и благодаря этому цепное зацепление в про-
цессе работы передачи не изменяет своего характера.
Рис. 6.24. Схема расположения шарниров цепи на
звездочке при предельно допустимом увеличении
шага
При предельном увеличении шага цепи дальнейшая
работа передачи становится невозможной вследствие
уменьшения прочности цепи и нарушения условий зацеп-
ления, так как шарниры цепи начинают контактировать
с головками зубьев и соскакивают с них. Своевременная
замена изношенных цепи и ведомой звездочки позволит
избежать аварийной ситуации, вызванной разрывом цепи
или проскакиванием ее на ведомой звездочке.
В случае прямой формы зуба (рис. 6.24) центр О шар-
нира, находясь в начале работы на делительной окруж-
ности звездочки, через некоторое время из-за изнашива-
ния цепи и увеличения шага цепи займет новое положе-
ние 0х. Допустимое перемещение а ролика не должно
превышать размер А, определяющий длину бокового
профиля зуба, т. е. а = фЛ, где ф — коэффициент, огра-
ничивающий степень использования длины бокового про-
филя зуба.
153
Согласно принятым на рис. 6.24 обозначениям,
А ^0>5 tg ф cos ф J 4" 2 cos <р [ sin (а/2) tg (а/2) ] ’
= r’0 — r = cd
cos (Р/2) cos (Р/2) ’
(6.30)
где b — коэффициент высоты зуба; с — коэффициент,
ограничивающий допустимое увеличение радиуса окруж-
ности расположения центров шарниров:
Ь = ГнаР~Г°; С = -J-COS ф/2) Л.
Предельно допустимое увеличение шага цепи
Ы = t' — t = 2 sin 4 (го — г0) ~ 2 —cd = 2 — ф cos А.
Z Z Z т 2
(6.31)
После подстановки величин р/2 = 30°; <р = 30° —
— 180°/z; b = 0,40 и а = 360°/z выражение для Д / упро-
стится:
М = 5,44 4- (1^ + (6-32)
где 2
H°0.5.g(30°-^)+cos(^|80.ft);
Е _ 0,5 Г 1 1 ]
ё — cos (30° — 1807г) L sin (1807г) tg (1807г) J '
Таким образом, предельно допустимое увеличение шага
зависит от числа зубьев звездочки, диаметра ролика и
шага цепи.
Передаточное отношение цепной
передачи устанавливает соотношение параметров
движения звездочек передачи. Необходимо различать
среднее передаточное отношение top, определяемое от-
ношением средних угловых скоростей, средних углов
поворотов, средних частот вращения, а также чисел
зубьев ведущей zL и ведомой z2 звездочек, и мгновенное
передаточное отношение i12, определяемое мгновенными
значениями угловых скоростей, углов поворотов и ча-
стот вращения ведущей zt и ведомой z2 звездочек:
_ <°ср 1 _ кср 1 _ ”ср t _ гг .
°Р 12 ®ср 2 аср 2 пср 2 Z1
i12 = -^JL = ^i- = -2>_. (6.34)
1 сог а2 лг 4 '
154
Велосипед, гоночный в частности, является одним из
немногих механизмов, в котором применяют ускоряющую
цепную передачу. Например, для велосипедов, предназна-
ченных для трековых гонок за лидером, возможное зна-
чение передаточного отношения составляет /ср]2 *= 0,23,
для спринтерских гонок—icpl2 = 0,15, для шоссейных
гонок в горной местности — icp)2 = 0,5 и менее.
Передаточное отношение цепной передачи гоночного
велосипеда может быть изменено сменой передней и зад-
ней звездочек на трековом велосипеде или переключением
скоростей на шоссейном велосипеде. Изменение переда-
точного отношения производится на ходу задним и перед-
ним супперами.
Трековый гонщик обязан иметь в арсенале своего тех-
нического обеспечения целый набор передних звездочек
с числом зубьев от 46 до 56 и задних звездочек с числом
зубьев от 13 до 18. Далеко не все из них будут использо-
ваны гонщиком в реальных гонках, но на тренировках
они обязаны быть опробованы в самых различных со-
четаниях, чтобы можно было выбрать оптимальное.
Шоссейный гонщик располагает более маневренной
системой подбора передач. В его арсенале имеются, как
правило, пара передних звездочек с числом зубьев в диа-
пазоне 46—54 и набор из пяти задних звездочек на тре-
щотке с числом зубьев в диапазоне 13—24. Ряд иностран-
ных фирм предлагает новые конструкции трещоток, со-
держащих шесть и даже семь звездочек.
Кинематика цепной передачи. Характерной особен-
ностью цепного привода является кинематическая не-
равномерность движения цепи. В таком случае кинемати-
ческий привод, обеспечивая установленный закон дви-
жения ведущей звездочки, вызывает неравномерность
вращения ведомой звездочки и наоборот. Неравномер-
ность обусловлена хордальным расположением звеньев
цепи на зубьях звездочек, а также рассогласованием
начала входа первого звена цепи в зацепление с ведущей
звездочкой и начала выхода последнего звена из зацеп-
ления с ведомой звездочкой.
Привод велосипеда является силовым, и характери-
стика двигателя (гонщика) представляет собой зависи-
мость движущего момента от угла поворота кривошипа.
При равномерном движении велосипеда ведомая задняя
звездочка вращается с постоянной скоростью, а нерав-
номерность ведущей ветви цепи, вызванная условиями
155
схода цепи с ведомой звездочки, увеличивает уже имею-
щуюся неравномерность вращения ведущей звездочки,
обусловленную условиями входа цепи на ведущую звез-
дочку. Неравномерность вращения ведущей звездочки,
а следовательно, и кривошипов слабо ощущается гон-
щиками из-за демпфирующих способностей мускульной
системы ног. Эти высокочастотные возмущения являются
в любом случае нежелательными и при определенных
условиях могут быть сведены к минимуму.
Рис. 6.25. Схема кинематического расчета цепного
привода гоночного велосипеда
Неравномерность хода ведущей
звездочки цепной передачи рассмотрена с помощью
схемы кинематического расчета привода велосипеда
(рис. 6.25). Центр 0г ведущей звездочки смещен относи-
тельно центра 02 ведомой звездочки на величину межцен-
трового расстояния А и имеет в системе — уг коорди-
наты X и У. В схеме принято важное условие: <о2 = const
при равномерном движении велосипеда. Кроме того,
в расчете не учитывают податливость цепи и звездочек,
инерционные эффекты, погрешности изготовления и сборки
деталей и узлов привода. Для удобства рассмотрения ки-
нематики система координат х — у выбрана так, что ось х
параллельна ведущей ветви цепи.
Возможны многочисленные варианты настройки цеп-
ного привода по числу звеньев в ведущей цепи. Два из
этих вариантов являются наиболее важными:
1) число звеньев в ведущей ветви цепи — целое число:
zB = k; такое движение цепи называют синфазным',
2) число звеньев в ведущей ветви — не целое число:
zB = k + 0,5; такое движение цепи называют асинфазным.
156
Шарнир цепи Л2, находящейся в зацеплении с ведомой
звездочкой z2, движется со скоростью и2 = <о2г2, которая
может быть разложена по осям координат на скорости
Vix и viy. В рассматриваемом случае v2x = vlx. Следо-
вательно,
Гл COS ССл ,л г»^\
(й1 = ®2—-------6.35)
1 fj COS Я; ' ’
Уравнение (6.35) является функцией двух переменных!
«1 и а2, которые изменяются в следующих пределах:
О ai -С n/2i; 0<а2<л/г2.
Условно обозначим исследуемую область од—а2 через
ОАВС, где О — начало координат системы аг—а2. Усло-
вия экстремума внутри исследуемой области:
бац
да2
ды1
да2
--------—— sm а2 = 0; sin а2 = 0;
Гг COS СД z
dcoj
dat
бац
det!
co2r2 sin «1 cos a2
cos2
0; sina1cosa2=0.
Система уравнений
sin аг = 0; sin a2 = 0
дает решение = 0; a2 = 0, которое не принадлежит
исследуемой области, а находится в начале координат,
т. е. в точке О.
Система уравнений
sin a2 = 0; cos a2 = 0
не имеет решения. Следовательно, внутри этой области
экстремумов нет, они возможны на ее границах.
При а2 ~ 0 и 0< од л/zj имеем да>1/да1 — 0 и
sin од — 0. Экстремум может быть только в точках О
(0; 0) и Л (0; л/гг).
При 0 < а2 л/г2 и = л/гг имеем = 0 и
sin a2 = 0. Экстремум может быть в точках А (0; л/гг)
и В (л/г2; л/?1).
При а2 = л/г2 и 0 С л/Zj имеем йод/йод = 0 и
sin од = 0. Экстремум может быть в точках В (л/г2;
я/?1) и С (л/г2; 0).
Значения од в точках О, А, В и С составляют:
Г2 . G cos(n/z,)
W1O — ®2—, (ЛгБ — (О2 — cos ,
= ; = 0)2 7Г C0S
(6.36)
Гг
157
В порядке уменьшения угловые скорости оь для рас-
сматриваемых четырех точек стоят в следующем порядке'
®1А, ®ibi ®ю и ®ic- Очевидно, скорости со1А и ®1С от-
носятся к асинфазному режиму работы цепи, «1В и ®10 —
к синфазному режиму. Следовательно, обозначая индек-
сом а асинфазный режим работы и индексом с — синфаз-
ный, можно записать Лсоа > Дсос, где Л<ва = ®1А — ®1С
и Л®с = и1В — <п10, т. е. в асинфазном режиме нерав-
номерность вращения ведущей звездочки больше на ука-
занную величину.
Мгновенное передаточное отношение i12 и неравномер-
ность вращения 6 звездочки определяются по формулам.’
__ <ot гг cos gg _ sin (л/z,) cos cx2 .
*12 ~ co2 ri cos otj sin (n/z2) cos a2 ’
g __ 2 ютпах —
wmax + ®min
Соответственно мгновенные значения передаточного
отношения в синфазном и асинфазном режимах:
*12 с <0ч « 1В “ (02 “ tg(n/Zl) . tg(n/z2) ’ il2o = юю __ Sin (л/Zi) . co2 sin (n/z2) ’ (6.39)
/12 а Ю1А (02 tg W?i) . sin (л/г2) * Й2 a = mic _ sin (n/Zi) tg (л/г,) * (6.40)
Неравномерность вращения ведущей звездочки в син-
фазном и асинфазном режимах:
co1B — ю1О Z cos (n/Zt) + cos (л/г2) ’
2 miA~~mic _ о I — cos (n/zj cos (л/г2)
“ia + “ic Z 1 + cos (я/г1) cos (n/z2) •
Как видно из уравнений (6.41) и (6.42), неравномер-
ность хода зависит только от шага цепи и с увеличением
шага увеличивается. Этим объясняется нерациональность
применения на гоночных велосипедах так называемых
дюймовых цепей с шагом t — 25,4 мм, которые получили
широкое распространение в 1930—50-е гг. в гонках
на треке. Помимо увеличения неравномерности хода
ведущей звездочки в случае применения этих цепей за-
труднен подбор рационального передаточного отношения
цепной передачи.
Сравнительные данные по неравномерности хода ве-
дущей звездочки для наихудших условий асинфазного
158
Таблица 6.2. Характеристика привода гоночного велосипеда
с шагом цепи t = 12,7 мм
Со че- та ние звез- дочек г*Х2, Параметр передачи k e «= = 27 — . г, ДЮЙМ Неравномерность хода ведущей звез- дочки при движении е1а max ПРИ v = 13,88 м/с и (02 = = 40,82 с“‘ ^2дин’ Н Ф2СОП’ Н
асин- фазиом 6а-1°2 син- фазном б • Ю2
12X41 92,25 3,760 3,172 127,57 473 566
13X44 91,38 3,203 2,693 118,89 407 522
14X48 92,57 2,753 2,324 108,89 307 522
16X55 92,81 2,103 1,777 95,14 264 424
17X58 92,11 1,864 1,571 90,22 236 399
18X61 91,50 1,663 1,398 85,79 212 377
7Х241* 14 92,57 Вариант цега 11,276 е тагом 9,562 = 25,4 mw 217,49 г 1383 484
и синфазного движений приведены в табл. 6.2 для ряда
сочетаний звездочек, дающих приблизительно одинаковое
значение передаточного параметра k привода велосипеда.
Угловое ускорение ведущей звез-
дочки цепной передачи с учетом выражения для ©,
составляет
81 =
dee»!
ИГ
. (tg “1 cos2 а2-^- — sin а2 cos аЛ ,
Т1 LVo И,] у 11 /
(6.43)
Максимальное изменение угловой скорости происхо-
дит при асинфазном режиме, следовательно, именно при
этом режиме будет иметь место 81шах. Рассмотрим два
возможных значения угла аь т. е. а, = 0 и = nlzr.
Для первого значения этого угла («1 = 0) будет иметь
место следующее соотношение:
81 = 81 (а2)а,=о = —®2 -т2- Sin а2; (6.44)
ri
и очевидно, что
| тах(а2)а,=о| = ei ( -7-) = а>2 — Sin (л/и2); (6.45)
\ *2 / (Х1=0 Zj
| 81 min (0^2)а,=0 | — 0.
(6.46)
Уравнение (6.45) соответствует асинфазному режиму,
Уравнение (6.46) — синфазному.
159
Для второго значения угла aL (04 = n/zj будет иметь
место следующее соотношение:
е? = ej (а2)а,=л/г1 = Х
X — tg (я/zj cos2 а2 — cos (n/zt) sin а2 • (6-47)
L r i J
Зависимость (a2) — монотонно убывающая функция
на участке 0 а2 я/г.г, причем
е, = a cos2 а2 — b sin а2 = а (1 — sin2 а2) — b sin а2,
где а, b — постоянные.
На этом участке можно выделить две точки’
Б' = г- CO^fa/z'i tS(JX/Z1) = (6‘48)
I j LU3 |«11/41 )
e'mi" = г1Со?(л/г1) [-7Г cos2 -
— cos (л/Z]) sin (л/г2)] = ejc. (6.49)
Уравнение (6.48) соответствует асинфазному режиму,
уравнение (6.49) — синфазному.
Таким образом, при асинфазном режиме угловое уско-
рение ведущей звездочки sla достигает своего наибольшего
значения.
Определим, при каких значениях углов 04 и аа будет
ela = eia max- С учетом уравнений (6.45) и (6.48) имеем
eia - eJa = Sin (л/zi) Г s’n~ (n/^s — 1 ] . (6.50)
Для конкретного случая (при zt = 48 и z2 = 14)
получим е''а — е'а л; 0,06 ю2. Следовательно,
eiamax= ®2Sin (Л/Zi). (6.51)
Из анализа уравнения (6.51) видно, что максимальное
угловое ускорение ведущей звездочки не зависит от пере-
даточного отношения и от числа зубьев ведомой звездочки
и возрастает с уменьшением числа зубьев ведущей звез-
дочки. Максимальное значение углового ускорения до-
стигается при 04 = 0 и 04 = л/г2. В табл. 6.2 приведены
угловые ускорения ведущей звездочки е1а шах (а значит,
и кривошипа) при различных сочетаниях звездочек г2Х
X zx. Для сравнения показан вариант дюймовой цепи
с шагом t = 25,4 мм. Эта цепь имеет значительно худшие
160
характеристики: неравномерность хода, угловые ускоре-
ния ведущей звездочки и кривошипа, а также динамиче-
ские характеристики цепной передачи. В таблице указаны
данные и для передачи с z? = 12, хотя подобные цепные
передачи не используются- на практике, так как в них
возникают большие нагрузки (Q231,„ = 473 Н; Qacon =
= 566 Н) и резко ухудшаются условия зацепления.
Динамика цепной передачи. Неравномерность движе-
ния ведущей звездочки, вызванная неравномерностью
хода цепи, приводит к возникновению в цепи дополни-
тельной динамической нагрузки, которая при макси-
мальном ускорении в асинфазном режиме с учетом обра-
щенного движения равна
(?2дин =-^г-51П-^-(-4я2 г1+;| 4- (6.52)
где тц — масса отрезка цепи длиной в 1 м; /ц — длина
цепи в приводе гоночного велосипеда; — момент инер^
ции кривошипно-педального комплекта с набором звез-
дочек шоссейного гоночного велосипеда; тпр — приве-
денная масса голеностопной части (включая обувь) ног
гонщика с учетом полного демпфирования колебательных
процессов в голеностопном суставе.
В табл. 6.2 даны результаты расчета динамических
нагрузок в цепной передаче, вызванных неравномерностью
хода ведущей звездочки и соответственно кривошипа.
Как видно, динамические силы <22дин соизмеримы с си-
лами сопротивления Q,con, которые возникают при дви-
жении велосипеда со скоростью 50 км/ч. Исключение
составляет цепная передача с шагом I = 25,4 мм, в которой
наблюдаются значительно более высокие динамические
нагрузки.
Уравнение (6.52) не учитывает упругость цепи при ее
продольном деформировании и провисании, а также демп-
фирование мышечной системой ног гонщика колебатель-
ных процессов, возбуждаемых кинематической неравно-
мерностью движения кривошипа.
Все звенья цепи, расположенные на вращающейся
звездочке, подвержены действию центробежных сил. На
каждое звено действует сила
Qn = тоа?г cos (2л/г), (6.53)
Где т0 — масса одного звена цепи; w — угловая скорость
вращения звездочки с числом зубьев г; г — радиус дуги
6 Любовицкий В. П, 161
нительное натяжение
Рис. 6.26. Деформация х цепей, выпу-
скаемых различными фирмами для го-
ночного велосипеда с параметрами
12,7X7,75X2,4;
1 — Даугавпилский завод; 2 — ИВИС;
3 — «Броитон» (Англия); 4 — сРенолд»
(Англия); 5 — «Цубуки» (Япония)
движения звена цепи, равный
в первом приближении радиу-
су делительной окружности
звездочки.
Кроме того, центробежные
силы создают в цепи допол-
набегающей и сбегающей ветвей,
которое составляет
<3д = р^2>
(6.54)
где т0 — масса одного звена цепи; v — линейная скорость
цепи; р — коэффициент, учитывающий влияние числа
зубьев звездочки:
Z ........ 12 13 14 15 16 17 18 19 20
Ц......... 0,966 0,971 0,975 0,978 0.981 0,983 0,985 0,986 0,987
Таким образом, натяжение цепи под действием цен-
тробежных сил с увеличением числа зубьев звездочки
увеличивается.
Упругость цепной передачи. Упругие свойства цепи
и цепного привода в целом оказывают существенное
влияние на работу привода и на энергозатраты, вызван-
ные упругой податливостью деталей, в первую очередь,
осей шарниров и пластин цепи. Упругость, определяемая
по формуле С = dQ/d (Ах) (где Q — действующая на-
грузка; Ах = х — I — соответствующая ей деформация
цепи длиной I при удлинении х), является одним из важ-
нейших факторов при оценке динамического качества
гоночного велосипеда.
Следует отметить, что вопросы упругости цепей изучены
недостаточно, и поэтому в настоящем параграфе приве-
дены только эмпирические зависимости для цепей с ша-
гом t = 12,7 мм (рис. 6.26). Из приведенных графиков
видно, что упругие свойства цепей в зависимости от дей-
ствующих нагрузок Q изменяются по-разному, причем
с увеличением нагрузки податливость уменьшается. В про-
цессе приработки продольная податливость цепи не-
сколько изменяется в сторону уменьшения, но это изме-
нение незначительно и не превышает, как правило 5 %,
162
При работе цепи в условиях, когда звездочки располо-
жены в разных плоскостях, как это имеет место на шос-
сейном гоночном велосипеде, продольная податливость
существенно возрастает с увеличением расстояния а
Рис. 6.27. Деформация цепной передачи,
в которой плоскости шестерен смещены
относительно друг друга: а — схема нагру-
жения; б — приведенная к одному звену
деформация цепи с параметрами 12,7 X
X 7,75X2,4 при А ~ 0,5 м и а = 0,025 м:
1—5 — то же, что на рис. 6.26
между плоскостями звездочек (рис. 6.27, о). Эксперимен-
тальные исследования позволили получить графики де-
формаций, приведенных к одному звену цепи (рис. 6.27, б).
На рис. 6.28 экспериментальные данные обработаны при-
менительно к цепи Даугавпилского завода при различных
соотношениях а/А для шоссейного велосипеда. Из ана-
лиза графиков видно, что наименьшей податливостью,
как и следовало ожидать, обладает цепная передача со
звездочками, расположенными в одной плоскости. Сле-
довательно, именно к подобной компоновке привода сле-
дует стремиться при расположении цепи на ведомых
звездочках с минимальным числом зубьев.
Помимо продольной податливости существует еще
податливость, связанная со свободным провисанием ве-
дущей ветви цепи. Эта податли-
вость особенно заметно проявляется
при оценке приведенной податливо-
сти привода велосипеда.
Под действием силы тяжести
цепь, подобно однородной гибкой
Рис. 6.28. Приведенная к одному звену про-
дольная деформация для цепи Даугавпилско-
го завода с параметрами 12,7X7,75X2,4 при
следующих соотношениях а/А:
I — 0; 2 — 0,01; 3 — 0,02; 4 — 0,03; 5 — 0,04;
6 — 0,05
163
6*
тяжелой нити с закрепленными концами, примет форму,
показанную на рис. 6.29, где точка /И2 соответ-
ствует точке схода ведущей ветви цепи с ведомой звез-
дочкой, а точка Mlt выполненная в виде блока с радиусом
г = 0, — точке набегания на ведущую звездочку. На дугу
AMi действуют три силы: натяжения Т и t на концах
отрезка и сила тяжести Q. Обозначая длину дуги
AM-l = S, линейную массовую плотность mg/S = у, па-
раметр Т/у = а и учитывая, что dS/dx = |/Л 1 + (dy/dx)2,
Рис. 6.29. Схема расчета податливости цепной передачи
при провисании цепи
получим дифференциальное уравнение, которое назы-
вается уравнением цепной линии:
dFy/dx2 = -I- / 1 + (dy/dx)2. (6.55)
Решение этого уравнения имеет вид
у = a ch (х/а).
Длина цепной линии на рассматриваемом участке
S = J У1 + (dy/dx)2 dx —
о
= J ch dx = a sh (х/а) = — а2. (6.56)
о
Натяжение t цепи в точке может быть определено
из условий t — ay/cos а и 1/cosa = j/ 1 + tg2 а:
t — ау 1 + tg2 а = ау 4- (dy/dx)2 = ay ch (х/а) = yy,
(6.57)
т. e. сила натяжения t в произвольной точке равна весу
отрезка цепи, длина которого равна ординате этой точки.
Связь между параметром а и стрелой провисания h
может быть установлена следующим образом. Из рис. 6.29
164
следует, что h = a [ch (b/d) — 1 ]. Практически всегда
h < ft и а = Т/у >1, тогда
. 1 ь2 , 1 , 62
П = -7П-----Н-п---=- ИЛИ ft»-»—,
2! а 1 41 а3 ’ 2а ’
откуда а ж Ь2/21г и, следовательно,
t — ay ch (b/a) m у ch (2h/b).
(6.58)
Установим связь между a, h и S. В соответствии с урав-
нением (6.56) S = ]/ (ft + d)2 — а2, откуда
Тогда
S2—/г2 _ Ь2
‘21г ~ 2й '
S ==}/ h2 + b2.
а =
Последнее решение при стреле прогиба ft <0,1 м
и b — 0,2 м дает ошибку не более 5 %. Поскольку в ре-
альных условиях ft < 0,03 м, то принятым приближением
можно пользоваться для дальнейших расчетов и силу
натяжения цепи вычислять по формуле
м
t = у — — ch
2/S2 — Ь2
2 |Л$2 — Ь2
Ь
(6.59)
Введя обозначение z = 2h/b, получим
t = -j- ch z.
Условие экстремума
-4- =----4г ch г — sh г = 0,
dz z2 1 г
откуда
z sh z — ch z = 0; г4 + Зг3 — 6 = 0; г = 1,07.
При Ь = 0,2 м и у = 3,1 Н/м получим минимальную
стрелу прогиба ftmln = 0,107 м и минимальное натяжение
<mta = 1 Н.
На основании уравнения (6.59) упругость натянутой
цепи
dt _ ybS / , 2 К-S2 - ______Ь , 2 VS2 — b2 \
<iS ~ S2 — Ь2 I S b 2 (TS2 — b2 С ь ) ’
(6.60)
165
Если учесть, что 10 у S2— b2 1, а это условие
выполняется при S/b < 1,005, т. е. при h = 0,02 м;
уравнение (6.60) упростится:
I dt yb2S /с ai\
Т dS ~ 2(S2 —ft2)3'"2 • (O-6I)
1 График зависимости dt/dS (Sib) построен
\ (рис. 6.30, кривая 2) в логарифмическом
S —\ масштабе, и так как dUdS <0 вплоть
\ до Sib = 1,12, т. е. до
\ минимальной точки кри-
^'т вой / (S), то при вы-
D 1.005 | , числениях бралась ве-
1,03 },12 № личина 1g \dt/dS\, ибо
логарифм чисел ме-
6.30.
Рис.
(кривая 1)
цепи
Зависимость натяжения
и жесткости (кривая
от соотношения S/b
сы свободно висящей цепи
нее нуля не суще-
ствует.
Функция t (S/b) по-
казывает (рис. 6.30,
кривая /), что натя-
жение цепи зависит от
двух факторов: про-
(правая часть графика).
висания при
значениях h
часть графика) и мас-
при больших значениях h
2)
малых
(левая
6.4. Соединение вала каретки с кривошипом
В современном гоночном велосипеде применяют ква-
дратное сочленение вала 1 (рис. 6.31) с кривошипом 2.
Для обеспечения надежности соединения дополнительно
устанавливают винт 3.
Если принять, что напряжения смятия на гранях
квадратного вала распределяются по линейному закону
(Флах — максимальное напряжение), условие прочности
по крутящему моменту М можно записать в виде
Л4 = ±^ = ±^<±^/[осм], (6.62)
где М — расчетный крутящий момент на валу каретки;
N = 4A^j — общее усилие от действующего крутящего
166
момента; [осм] — допустимое напряжение смятия кри-
рошипа; I, b — см. рис. 6.31.
Учитывая, что обычно Ь « 0,75d, где d — диагональ
квадратного сечения вала (см. рис. 6.31), получим
2-3 V;.М , = 0,015M<d = 0,016,
* 1 L^CMj
(6.63)
где М — 250 Н м; [<том] = 340 МПа для алюминиевого
сплава В95; I = 0,017 м.
М
—
Рис. 6.31. Соединение кривошипа с квадратным
валом каретки
Известно и широко используется в велостроении соеди-
нение кривошипа 2 и вала 1 каретки по лыске (рис. 6.32)
с помощью дополнительного клина 3 и крепежного ком-
плекта (шайбы 4 и гайки 5). Такое соединение обеспечи-
вает более высокую точность центрирования кривошипа
на валу каретки, чем соединение кривошипа с квадрат-
ным валом. Посадка выполняется по диаметру d =
== 16-jy- /2ГоТиб" V ^словие прочности по крутящему
\—0,034 /
моменту М при максимальном напряжении смятия ошах
можно записать в виде
= +4-^<-ТаЬ2^м] + 4-ясР/ИстсмЬ (6.64)
где [осм] — допустимое напряжение смятия материала
Клина; N2 — результирующая сила на эпюре нагрузки;
167
F — сила трения между поверхностями контакта кри-
вошипа и вала; f — коэффициент трения в зоне сухого
контакта вал — кривошип; a, b, I — см. рис. 6.32.
Учитывая, что обычно b = 0,8d, получим
2.1 , rn ,-----г = 0,011 M<d = 0,016 м, (6.65)
Г (а + nlf) [осм] \ /
где [осм] = 250 Н м; а — 0,005 м; I = 0,017 м; f = 0,15
(сталь по стали); [осм] = 700 МПа для закаленного
стального клина.
Рис. 6.32. Соединение кривошипа с валом ка-
ретки посредством клина
Результаты расчета ио условиям (6.65) показывают,
что сила трения покоя в зоне контакта вала каретки и
кривошипа оказывает значительное влияние на напряже-
ние в клине, возникающее от приложенного крутящего
момента М. В данной задаче преднамеренно не учиты-
вается предварительная затяжка клина, чтобы можно
было сравнивать между собой рассмотренные два варианта
крепления кривошипа к валу каретки. В результате
можно констатировать, что несмотря на меньший запас
прочности и меньшую точность центрирования первый
вариант конструкции является предпочтительным, так
как он обеспечивает более равномерное распределение
контактных напряжений по плоскостям четырехугольного
вала, а также лучше условия монтажа и демонтажа узла.
168
Глава 7
ОСНОВЫ ТЕОРИИ ПЕДАЛИРОВАНИЯ
ДЛЯ ГОНОЧНОГО ВЕЛОСИПЕДА
7.1. Энергетическое обеспечение
процесса педалирования
Источники биологической энергии. Большинство по-
следних достижений в изучении механизма мышечного
сокращения явилось следствием интеграции биохимиче-
ских, биофизических и электронно-микроскопических под-
ходов исследователей в этой области. Мышцу следует
рассматривать как высокоэффективную и универсальную
машину, обладающую замечательными техническими ха-
рактеристиками, в ряде случаев значительно превосхо-
дящими характеристики машин, созданных самим чело-
веком. Сократительная система клетки обеспечивает пре-
вращение химической энергии в механическую энергию
движения.
Волокна скелетных мышц представляют собой сильно
вытянутые многоядерные клетки, покрытые плазматиче-
ской мембраной — сарколеммой (рис. 7.1). Большую
часть объема мышечной клетки занимают миофибриллы,
состоящие из функциональных сократительных элемен-
тов — саркомеров, которые содержат параллельные нити
двух типов. Под микроскопом видно, как темные А-диски
длиной около 1,6 мкм (анизотропные или двулучепрелом-
ляющие) образованы системой параллельно расположен-
ных толстых филаментов, тогда как светлые 1-диски дли-
ной около 1,0 мкм (изотропные с нормальным лучепре-
ломлением) образованы системой тонких филаментов.
Отсюда название мышцы — поперечно-полосатая. Целая
продольная единица ограничена двумя Z-линиями длиной
около 80 нм [12, 14, 241.
Толстые филаменты образованы пучками нитевидного
белка миозина, а тонкие — двумя скрученными a-спи-
ральными цепями фибриллярного белка F-актина. Каж-
дый толстый филамент окружен шестью тонкими. Кроме
этих двух основных белков сократительная система со-
держит тропомиозин и комплекс тропонина. Миофибриллы
окружены внутриклеточной жидкостью — саркоплазмой,
содержащей гликоген, гликолитические ферменты, аде-
нозинтрифосфат, креатинфосфат, неорганические элек-
169
4
Схема микроскопиче-
7.-линия
1
Рис. 7.1
ского строения поперечно-поло-
сатого мышечного волокна и пу-
ти движения молекул кислорода
из межтканевой жидкости внутрь
митохондрий:
1 *- цистерна; 2 — саркоплазма;
3’кровеносные капилляры 4 —
ыиофибриллы*. 5 •- сарколемма; 6 **
нервно-мышечное соединение
1-диск
А-диск
тролиты, а также значительное количество аминокислот
и пептидов. Вдоль миофибрилл расположено большое
количество митохондрий. При сокращении филаменты
двух типов скользят относительно друг друга, не изменяя
своей длины. Изменяется
только расстояние между
Z-линиями. При максималь-
ном сокращении саркомер
укорачивается на 20—50 %
своей нормальной длины.
Всю структуру скелетной
мышцы пронизывают крове-
носные капилляры и много-
численные Т-трубочки, вхо-
дящие в систему нервно-
мышечных соединений.
Единство организма чело-
века с внешней средой про-
является прежде всего в по-
стоянном обмене веществ и
энергии, который выражает-
ся в процессах ассимиляции
и диссимиляции. Эти про-
цессы проявляются, с одной
стороны, в освоении посту-
пающих в организм пита-
тельных веществ и кисло-
рода и накоплении потен-
циальной энергии, с другой
стороны, в постоянном рас-
паде усвоенных сложных
химических веществ на более
простые с высвобождением
химической энергии, кото-
рая затем переходит в теп-
ловую, механическую и био-
электрическую.
Обмен веществ в организме может быть подразделен
на три стадии: 1) поступление в организм питательных
веществ и кислорода; 2) усвоение питательных веществ
и кислорода тканями человеческого тела и протекание
окислительных биохимических процессов; 3) выведение
из тканей и организма продуктов распада. Кислород
поступает в организм через органы внешнего дыхания,
170
а питательные вещества (белки, жиры, углеводы, мине-
ральные соли, микроэлементы, витамины и вода) — через
органы пищеварения.
Белки являются основными носителями жизни и
основной составной частью клеток. Они необходимы для
обеспечения многих процессов жизнедеятельности орга-
низма: образования белков плазмы, многочисленных фер-
ментов, гормонов, антител, хромопротеидов (гемоглобин)
и других биологически активных соединений; стимуля-
ции трофических процессов в организме; поддержания
его реактивности и повышения уровня окислительных
процессов. При недостатке углеводов и жиров в случае
больших энергозатрат белки могут использоваться орга-
низмом как энергетический материал. Так, при окислении
1 г белков в организме выделяется 17,2 кДж теплоты.
Белки являются единственным источником азота для
организма человека.
Основным источником белков для человека служат
белки животного и растительного происхождения. Они
усваиваются после предварительного расщепления в пи-
щевом канале до аминокислот, из которых впоследствии
строятся собственные белки организма. В состав белков
входит свыше 20 аминокислот. Восемь из них (валин,
лейцин, изодейцин, треонин, метионин, фенилаланин,
триптофан, лизин) не могут образовываться в организме
человека и являются незаменимыми, поэтому их поступле-
ние с пищей жизненно необходимо. Остальные амино-
кислоты являются заменимыми, так как могут син-
тезироваться в организме в процессе азотистого об-
мена.
Для взрослых людей оптимальная норма белков в су-
точном рационе в среднем составляет 1,5 г на 1 кг массы
тела. При интенсивных спортивных тренировках и сорев-
нованиях потребность организма в белках может уве-
личиваться до 2,5—3 г на 1 кг массы тела в сутки.
Жиры относятся к группе простых липидов и пред-
ставляют собой сложные эфиры жирных кислот и трех-
атомного спирта глицерина.
Источниками для образования жира в организме
человека являются жиры пищевых продуктов животного
и растительного происхождения. Кроме того, они могут
синтезироваться в организме из углеводов и в меньшей
степени из белков. Жиры с низкой температурой плавле-
ния (растительные масла, рыбий жир и др.) усваиваются
/71
легче, чем с высокой температурой плавления (говяжий
бараний, свиной и др.).
При недостаточном введении углеводов с пищей и
низкой ее калорийности жиры, в первую очередь резерв-
ные, могут расходоваться как высокоэнергетический ма-
териал, так как при окислении в организме 1 г жира
выделяется 38,9 кДж теплоты.
В состав жиров входят насыщенные (пальмитиновая,
стеариновая, масляная, капроновая и др.) и ненасыщен-
ные (олеиновая, линолевая, линоленовая, арахидоновая)
жирные кислоты. В растительных маслах (подсолнечном,
кукурузном, хлопковом, льняном, соевом, конопляном
и др.) содержатся преимущественно ненасыщенные жир-
ные кислоты, а в животных жирах (бараньем, говяжьем,
свином и др.) — главным образом насыщенные.
Биологическая ценность жиров для организма в зна-
чительной мере определяется содержанием высоконена-
сыщенных жирных кислот; линоленовой, линолевой, ара-
хидоновой. Они не образуются в организме и поэтому
являются незаменимыми факторами питания. Основными
поставщиками высоконенасыщенных жирных кислот яв-
ляются растительные масла (подсолнечное, кукурузное,
соевое, хлопковое) и некоторые животные жиры (птичий,
рыбий жир, жир костного мозга).
На долю жиров должно приходиться 28—30 % ка-
лорийности суточного рациона. Суточная потребность
человека в жирах должна покрываться на 30 % за счет
растительных и на 70 % за счет животных жиров. Потреб-
ность человека в жирах за сутки составляет 1,5 г на
1 кг массы тела. Потребность взрослого человека в неза-
менимых жирных кислотах составляет 7—10 г в сутки
(20—30 г растительного масла).
Углеводы — органические вещества, состоящие
из углерода, водорода и кислорода. Углеводы являются
основным энергетическим материалом. По весу они со-
ставляют 60—74 % общего количества питательных ве-
ществ суточного рациона, на их долю приходится при-
близительно 50—60 % калорийности. При сгорании 1 р
углеводов выделяется 17,2 кДж теплоты. Углеводы не-
обходимы для нормального течения обменных процессов.
В частности, достаточное обеспечение организма чело-
века углеводами способствует полному окислению жиров.
За счет расхода энергии, доставляемой преимущественно
углеводами, обеспечивается возможность функциониро-
172
вания различных систем и органов. Углеводы, усваивае-
мые организмом человека, способствуют поддержанию
постоянного уровня сахара в крови (нормальное содер-
жание 3,3—5,5 ммоль/л).
При достаточном обеспечении организма углеводами
глюкоза откладывается в виде гликогена (животного
крахмала) преимущественно в клетках печени (около
100 г) и мышц (около 250 г). Гликоген представляет
собой резервный источник углеводов. По мере необхо-
димости гликоген расщепляется и обеспечивает организм
необходимым количеством глюкозы, которая поступает
в кровь и используется тканями.
Потребность организма в углеводах должна покры-
ваться на 1/3 за счет легкоусвояемых (моносахаридов и
дисахаридов) и на 2/3 за счет медленноусвояемых (крах-
мал) углеводов. При полном отсутствии углеводов в пище
они могут синтезироваться в организме человека из жиров
и белков (гликонеогенез). При кратковременных значи-
тельных энергозатратах важно использование легкоус-
вояемых углеводов.
Витамины — вещества с высокой биологической
активностью, которые являются незаменимыми для орга-
низма и ничтожно малые количества которых играют
важнейшую роль в процессах его жизнедеятельности.
Тесная связь витаминов с ферментами определяет их
роль как биологических катализаторов всех жизненных
функций организма. Витамины подразделяются на две
группы: водорастворимые (С, В3, В1( В2, РР, Вв, В12,
В15, Р, U, F и др.) и жирорастворимые (A, D, Е, К).
Минеральные вещества играют важней-
шую роль в поддержании и регулировании многочислен-
ных жизненных процессов в организме человека и под-
разделяются на макро- и микроэлементы. Макроэлементы
в организме (натрий, калий, кальций, магний, фосфор,
хлор, сера) имеют высокую концентрацию, микроэле-
менты (железо, медь, марганец, цинк, кобальт, йод,
фтор) содержатся в очень небольших количествах. Мине-
ральные вещества поступают в организм человека в со-
ставе пищевых продуктов и жидкостей.
Вода в качестве растворителя органических и ми-
неральных веществ является главным компонентом чело-
веческого организма, обеспечивающим почти все биохи-
мические и биофизические реакции, она выполняет роль
транспортной системы. Общее содержание воды в теле
173
человека массой 70 кг составляет примерно 42 л, т. е,
около 60 %, из которых на внутриклеточное простран-
ство приходится примерно 28 л (40 %), а на внеклеточ-
ное — 14 л (20 %, из них 3,5 л, т. е. 5 %, приходится
на долю плазмы). В нормальных условиях суточная по-
требность в воде составляет 2,3—2,8 л, в условиях спортив-
ной деятельности она возрастает до 3,5 л и более.
Энергетический баланс. Баланс энергии есть мера
жизнедеятельности человеческого организма, устанавли-
вающая соотношение между количеством энергии, посту-
пающей в организм, и энергозатратами, расходуемыми на
поддержание жизнедеятельности организма и выполнение
функциональной работы. Современный рацион нормаль-
ного питания в среднем рассчитан на 16 700 кДж в сутки.
Затраты энергии в большинстве случаев меньше. Напри-
мер, у работников умственного труда энергозатраты со-
ставляют примерно 12 500—14 700 кДж, у работников,
занятых физическим трудом, — 18 800—21 000 кДж,
у спортсменов высокой квалификации в циклических
видах спорта (бег на длинные и средние дистанции, лыж-
ные гонки, шоссейные велосипедные гонки и т. д.) —
до 29 000 кДж и более в сутки.
Объем суточных энергозатрат зависит не только от
количества выполненной функциональной работы, позво-
ляющей достигнуть того или иного спортивного резуль-
тата, но и от уровня рациональности в организации этой
работы, от массы и размеров звеньев тела спортсмена,
особенностей процессов обеспечения его жизнедеятель-
ности, а также от технической оснащенности и уровня тех-
ники выполнения функционального движения (например,
педалирования применительно к велосипедному спорту).
В различных видах спорта фактор биологической энер-
гии играет свою, присущую каждому виду, роль. В одних
видах, например художественной гимнастике, стрельбе
из лука, прыжках с трамплина и т. п., энергетические
возможности спортсмена не являются определяющим фак-
тором. В других видах, например велосипедном спринте,
прыжках в высоту, фехтовании и т. п., влияние энергети-
ческого фактора становится весьма заметным, поскольку
рассматриваемые виды соревнований предполагают мно-
гократный выход на старт в течение одного дня. В третьих
видах, например шоссейных велогонках, марафонском
беге, лыжных гонках и т. п., энергетический фактор
является определяющим.
174
Источником, способным генерировать биологическую
энергию в человеческом организме, является аденозин-
трифосфорная кислота (АТФ). В структуре ее молекулы
имеются три макроэргические фосфатные связи, при раз-
рыве которых выделяется энергия, способствующая сокра-
щению мышц.
При мышечном сокращении АТФ реагирует с белками
мышечных клеток (миозином и актином), теряет одну из
трех макроэргических фосфатных групп и превращается
в аденозиндифосфатную кислоту (АДФ), а освободив-
шаяся энергия обеспечивает сокращение мышечных во-
локон. Эту реакцию условно можно записать следующим
образом:
АТФ + актомиозин = АДФ +
+ сокращенный актомиозин + HSPO4.
Концентрация АТФ в клетке любого организма по-
стоянна, и ее запас в организме ограничен. Воспроизвод-
ство АТФ происходит в процессе ресинтеза, когда АДФ
«возвращается» утраченная фосфатная группа. Этот важ-
ный процесс происходит в организме тремя различными
путями.
1. Имеющийся в клетках в ограниченных количествах
креатинфосфат (КрФ) может вступать в реакцию с АДФ,
передавая ей фосфатную группу по схеме
АДФ + КрФ = АТФ + Кр,
где Кр — креатин
Запасы КрФ в клетках организма невелики, и поэтому
ресинтез большого количества АТФ невозможен.
2. Глюкоза образуется в кишечном тракте при пере-
варивании пищи, в основном углеводов. В кишечнике
молекулы глюкозы всасываются в кровь и разносятся по
всему организму. Концентрация глюкозы в крови удер-
живается на относительно постоянном уровне и в состоя-
нии покоя составляет 4,44—6,66 ммоль/л. Во время мы-
шечной работы концентрация глюкозы в крови повы-
шается до 11,10—13,87 ммоль/л Во время работы запаса
гликогена, образованного действием инсулина на глю-
козу, в организме хватает в среднем на 45—60 мин. При
более длительной работе требуется дополнительное пи-
тание, основным содержанием которого является глюкоза.
Процесс поглощения глюкозы организмом происходит
следующим образом. Глюкоза, находящаяся в крови,
175
проникает через поры сосудистых стенок и мышечных
мембран внутрь мышечной клетки, где она реагирует с фос-
фатными соединениями и превращается в сложные соеди-
нения с наличием фосфатных групп. Затем следует про-
цесс переноса фосфатных групп в АДФ, которая ресинте-
зируется в АТФ, а субстрат, лишенный фосфатных групп,
превращается в пировиноградную кислоту (ПВК). В оп-
ределенных условиях ПВК реагирует с частицами водо-
рода и превращается в молочную кислоту. Совокупность
этих реакций без участия кислорода называется глико-
лизом (анаэробный процесс).
3. ПВК, образовавшаяся в протоплазме мышечной
клетки в процессе реакций гликолиза, проникает внутрь
митохондрий, где в сложном цикле реакций распадается
на воду, углекислый газ и свободный водород. В цикле
внутримитохондриальных реакций создаются условия для
ресинтеза АТФ. Совокупность этих реакций с участием
кислорода получила название окислительного фосфори-
лирования (аэробный процесс). Продукты распада — вода
и углекислый газ — удаляются из организма через лег-
кие, а также в виде пота, мочи и кала.
Из рассмотренных процессов наиболее емкий — ресин-
тез АТФ при наличии кислорода. При отсутствии кисло-
рода окислительное фосфорилирование частично или пол-
ностью блокируется. Ресинтез АТФ продолжается, но уже
в анаэробной форме. Частицы водорода при этом уже не
нейтрализуются кислородом, они реагируют с ПВК и
образуют молочную кислоту, в организме резко повы-
шается концентрация водородных ионов и накопление
молочной кислоты. Организм быстро теряет работоспо-
собность.
При дыхании воздух попадает в легкие и омывает
альвеолы, кислород поступает по капиллярам в кровь,
а из крови в легкие выделяется углекислый газ, который
выдыхается в атмосферу. Кислород, проникший в кровь,
попадает в эритроциты и связывается там гемоглобином.
Поток обогащенной крови устремляется от легких
к сердцу, а оттуда — в различные органы и ткани орга-
низма. Достигнув периферийных капилляров, кислород
освобождается от гемоглобина, проникает через стенки
эритроцита, преодолевает слой плазмы, проникает через
стенки капилляра и попадает в межтканевую жидкость,
омывающую мышечную клетку. В мышечных клетках
небольшая часть кислорода связывается миоглобином,
176
основная часть кислорода проникает внутрь митохондрий
и вступает в реакцию с водородом. Происходит очень
важный для жизнедеятельности организма процесс —
нейтрализация водорода.
Сокращение мышц происходит от электрического им-
пульса, приходящего от двигательного нерва через мотор-
ную концевую пластинку или нервно-мышечное соедине-
ние. Этот импульс передается мышечной клетке, быстро
распространяется по всей сарколемме, и происходит де-
поляризация, т. е. изменение разности потенциалов между
наружной и внутренней областями сарколеммы. Обычно
разность потенциалов удерживается на уровне 60 мВ.
Электрический импульс передается внутрь мышечной
клетки через многочисленные Т-трубочки (см. рис. 7.1),
которые находятся в контакте почти со всеми миофибрил-
лами. При возбуждении сарколеммы и деполяризации
Т-системы увеличивается проницаемость саркоплазмати-
ческой сети. В результате ионы Са2+ выбрасываются из
цистерн саркоплазматической сети, где они обычно изо-
лированы, когда мышцы находятся в состоянии покоя.
Считается, что очень быстрое выделение ионов Са2+ в сар-
коплазму является сигналом начала взаимодействия АТФ
с миозином и актином.
После прохождения возбуждающего импульса и вы-
свобождения Са2+ саркоплазма и саркоплазматическая
сеть возвращаются в первоначальное поляризованное
состояние при избыточном потенциале в 60 мВ. Изоляция
Са2+ в цистернах саркоплазматической сети происходит
за счет действия «кальциевого насоса». Способность сар-
коплазматической сети изолировать Са2+ вызывает рас-
слабление мышц.
Таким образом, биологическая энергия, необходимая
как для мышечного сокращения, так и для любого про-
цесса жизнедеятельности организма, образуется при рас-
паде АТФ до АДФ. Запасы АТФ в организме ничтожны,
но в нем постоянно действуют механизмы ресинтеза АТФ
из АДФ, благодаря чему концентрация АТФ в клетках
поддерживается во время мышечной работы на относи-
тельно постоянном уровне. АТФ ресинтезируется из
АДФ в циклах креатинфосфокиназных реакций, в реак-
циях гликолиза и окислительного фосфорилирования.
Из них, как отмечалось, самый емкий и определяющий —
процесс окислительного фосфорилирования. Изменить
в сторону увеличения концентрацию АТФ в организме
177
средствами спортивной тренировки практически невоз-
можно, но в процессе спортивного совершенствования
возрастает мощность реакций ресинтеза АТФ.
Общая временная картина действия анаэробных и
аэробных процессов в мышцах представлена на рис. 7.2.
Энергия для процессов сокращения и расслабления по-
стоянно образуется в мышцах, так как в них содержатся
небольшие количества АТФ и креатинфосфата (КрФ).
Этого запаса хватает на 10 —
12 с работы благодаря ин-
тенсивному расщеплению
АТФ (кривая /) и КрФ (кри-
вая 2). Анаэробное расще-
пление достигает максимума
через 40—50 с непрерывной
работы мышцы (кривая 4).
Через 60—70 с доминируют
уже аэробные процессы (кри-
вая <?) благодаря увеличению
подачи О2 (вследствие дей-
ствия окислительных реак-
ций) в работающую мышцу,
Очевидно, что потенциальные
возможности аэробных про-
цессов несколько ниже ана-
U,%
100
Рис. 7.2. Временное соотноше-
ние действия анаэробных и аэ-
робных процессов в мышцах
(U — доля поставляемой энер-
гии)
эробных, которым более свойственен взрывной характер.
Энергетические возможности спортсмена. Основными
компонентами, необходимыми для ресинтеза АТФ, яв-
ляются глюкоза и кислород. Следовательно, эти компо-
ненты должны подаваться в организм в требуемом коли-
честве. Для интенсификации биологических процессов
требуются дополнительные многочисленные ферменты и
гормоны, которые не могут заменить АТФ, но участвуют
в ее ресинтезе. При распаде одной молекулы глюкозы
ресинтезируется до 38 молекул АТФ, причем на долю
аэробных реакций приходится до 36 из них. Это означает,
что чем больше во время мышечной работы окисляется
глюкозы, тем большее количество АТФ ресинтезируется
и тем большую мощность может развить гонщик, т. е.
аэробные возможности спортсмена определяют уровень
окислительных процессов глюкозы аэробным путем. По-
вышение аэробных возможностей спортсмена в основном
обусловливается формированием слаженной деятельности
тех механизмов организма, которые связаны в первую
178
очередь с транспортировкой кислорода к работающим
мышцам в возможно большем объеме. Эти функции вы-
полняют три важнейшие вегетативные системы: дыхание,
кровообращение и кровь. Регулирует эти процессы цен-
тральная нервная система (ЦНС).
Работа системы внешнего дыхания спортсменов в со-
стоянии покоя и состоянии интенсивной мышечной ра-
боты отличается в первую очередь количественными пока-
зателями, поскольку содержание кислорода во вдыхаемом
воздухе составляет около 21 %, в выдыхаемом — около
17 %, что обеспечивает насыщение крови на 95—98 %.
Некоторые опытные данные по количественным показате-
лям системы внешнего дыхания приведены в табл. 7.1.
Таблица 7.1. Параметры системы внешнего дыхания спортсмена
Состоя- ние спорт- смена Нагруз- ка Число циклов дыхания в 1 мин Объем вдыхае- мого возду- ха, л Расход возду- ха, л/мин Расход кисло- рода, л/мин Насыщение кровя, % J Глубина дыха- ния, %
Покой — 10—16 0,5 5—8 1,5— 1,7 95—98 10
Мышеч- ная работа Легкая Средняя Тяже- лая 35—40 45—50 55—75 0,5—1,0 1,0—1,8 1,8—2,2 40—50 60—70 80—120 8,4— 12,4 12,6— 14,7 16,8— 25,2 95—98 10—20 20—35 35—45
Необходимо отметить, что для нормального функциони-
рования организма во время умеренной работы требуется
примерно до 5 л кислорода в минуту, т. е. через легкие
должно проходить 50—100 л атмосферного воздуха. Такой
объем вентиляции за минуту способны обеспечить легкие
с жизненной емкостью (ЖЕЛ) 3,5—4 л. Именно такую
ЖЕЛ имеют физически здоровые люди без специальной
тренировочной подготовки. Однако одной из основных
задач каждого гонщика является специальная подготовка
и тренировка системы внешнего дыхания, чтобы снизить
мышечные напряжения при одном и том же уровне легоч-
ной вентиляции. У велогонщиков высокого класса, как
179
правило, ЖЕЛ достигает 6—6,5 л и больше, а макси-
мальная вентиляция легких — свыше 200 л/мин.
Система тканевого дыхания с повышением тренирован-
ности организма существенно совершенствуется. Возра-
стает число капилляров на единицу поперечного сечения
мышечной ткани, улучшается снабжение мышц кровью,
кислородом и другими веществами, в каждом мышечном
волокне увеличивается число митохондрий, возрастает
биологическая активность многочисленных ферментов, ка-
тализирующих окислительные процессы.
Кровь — жидкая ткань, циркулирующая в кровенос-
ной системе, обеспечивающая жизнедеятельность клеток
и тканей организма и выполняющая многочисленные фи-
зиологические функции. Кровь состоит из плазмы и взве-
шенных в ней форменных элементов: эритроцитов, лейко-
цитов, тромбоцитов. В нормальных условиях в 1 л крови
содержится (3,94-5,0) 1012 эритроцитов [у мужчин (4,0-4-
4-5,0) 1012, у женщин (3,94-4,7) 10121; (4,04-9,0) 109 лей-
коцитов; (1804-320) 109 тромбоцитов. Средняя скорость
движения крови в артериальных сосудах 0,2—0,5 м/с,
в венозных — 0,1—0,2 м/с, в капиллярных — 0,0005—
0,0020 м/с.
Количество крови составляет 7—8 % от массы тела
(например, в организме человека массой 70 кг содержится
5—6 л крови). В состоянии покоя 40—50 % крови вы-
ключается из кровообращения и удерживается в печени,
селезенке, сосудах кожи, мышц и легких. При мышечной
работе запасной объем крови включается в кровообраще-
ние. Наибольший объем крови рефлекторно направляется
к работающему органу. Такое перераспределение крови
осуществляет ЦНС.
Кровь, циркулирующая в кровеносной системе, выпол-
няет следующие основные функции:
— трофическую (т. е. функцию питания тканей) —
переносит кислород благодаря нестойкому соединению его
с гемоглобином и питательные вещества;
— регулярную — переносят гормоны и другие веще-
ства, изменяющие функционирование отдельных органов
и целых систем;
— теплообменную — охлаждает работающие мышцы и
другие перегретые ткани, нагревает охлажденные мышцы
и ткани;
— защитную — борется синеродными телами, болезне-
творными микробами и ядовитыми веществами благодаря
180
фагоцитозной способности лейкоцитов, блокирует места
повреждения тканей благодаря тромбоцитам, способству-
ющим процессу свертывания крови.
Систематические тренировки организма способствуют
увеличению гемоглобина и эритроцитов в крови, что по-
вышает кислородную емкость крови. Кроме того, кровь
тренированного человека, находящегося в хорошей спор-
тивной форме, обеспечивает значительно более высокую
сопротивляемость организма простудным и инфекционным
заболеваниям, ускоряет процессы восстановления после
предельных нагрузок как в рамках цикла функциональ-
ного движения, так и после больших физических нагрузок
в период отдыха после гонки или тренировки.
Система кровообращения — важный энергетический
тракт, связывающий системы внешнего и внутреннего
дыхания. Главный показатель работы сердца — объем
крови, перекачиваемый за единицу времени. Эта величина
определяется частотой сердечных сокращений (ЧСС) и
объемом систологического выброса (ОСВ). ОСВ трениро-
ванного спортсмена вдвое превышает аналогичный пока-
затель новичка и составляет соответственно примерно
110—115 и 170—205 мл. Это позволяет при одной и той же
частоте сердечных сокращений обеспечить больший уро-
вень минутного объема кровообращения. Следовательно,
сердечно-сосудистая система поддается тренировке, и по-
вышение ОСВ — единственный путь совершенствования
системы кровообращения, а значит, и энергетического по-
тенциала организма спортсмена. В табл. 7.2 приведены
Т а б л и ц а 7.2. Данные по анализу системы кровообращения
Состояние спортсмена Мощность, Вт ЧСС, уд/мнн ОСВ, мл Объем* крово- обращения, л/мин
Покой — 70 75 5,25
100 100 90 9,0
133 120 135 15,6
166 130 175 20,8
Мышечная 200 150 175 26,3
работа 250 160 175 28,0
333 180 175 31,5
416 200 155 31,0
500 210 130 27,3
181
обобщенные данные многочисленных исследований по ана-
лизу работы системы кровообращения.
Анализ приведенных данных показывает, что ОСВ вы-
растает только до некоторого уровня мощности (примерно
160 Вт), а ЧСС непрерывно продолжает возрастать с уве-
личением мощности. При работе с повышенной мощностью
(свыше 400 Вт) возникает диссоциация: ЧСС продолжает
увеличиваться, а ОСВ снижается. Наибольшие значения
ОСВ соответствуют такой мощности, при которой ЧСС
составляет 130—180 ударов в минуту. У нетренирован-
ного человека, как отмечалось выше, ОСВ значительно
меньше и явление диссоциации возникает при меньших
уровнях мощности. В целях совершенствования сердечно-
сосудистой системы тренировки должны проходить на
таком уровне мощности, который соответствует макси-
мальным значениям ОСВ.
Повышение объема транспортированного и усваивае-
мого кислорода зависит от мощности рассмотренных си-
стем, согласованности их потенциальных возможностей и
слаженности их функционирования при ведущей роли
ЦНС. В итоге при реализации субмаксимальной мощ-
ности для данного спортсмена наступает кислородный
предел, который характеризуется максимальным объемом
кислорода (МПК), потребляемого в единицу времени. Этот
показатель является основным критерием аэробных энер-
гетических возможностей спортсмена. Здесь речь идет
только об энергетических возможностях и совершенно
не рассматривается их функциональная реализация. Ме-
ждународная федерация спортивной медицины считает
МПК самым надежным показателем энергетического по-
тенциала организма спортсмена. В табл. 7.3 даны некото-
рые экспериментальные данные по МПК для спортсменов
различной квалификации, специализирующихся в цикли-
ческих видах спорта.
Теоретически рассчитано, что максимальное значение
МПК может достигать 8—8,5 л/мин, этот показатель соот-
ветствует подаче крови сердцем 40 л/мин. Самые высокие
показатели МПК, зарегистрированные на практике, со-
ставляют 6 5 л/мин.
Активная мышечная деятельность вызывает усиление
деятельности сердечно-сосудистсй, дьхетельной и других
систем организма, которые действуют согласованно, в тес*
ном единстве. Эта взаимосвязь осуществляется гумораль-
ной регуляцией и нервной системой. Гуморальная регуля-
182
Таблица 7.3. Значения МПК для спортсменов различной
квалификации
Квалификация спортсмена МПК
Мужчины Женщины
л/м и и мл/(кг«мии) л/мин мл/(кг- мин)
Мастер спорта, мастер спорта международного класса 5,2—6,2 78-85 4,2—5,3 64—72
Первый разряд 4,4—6,0 70—75 3,0—4,2 58-62
Второй разряд 4,0—4,5 66—70 2,6—3,0 54—58
Третий разряд 3,5—4,0 63—66 2,2—2,6 48—54
ция осуществляется через кровь посредством особых хи-
мических веществ — гормонов, выделяемых железами вну-
тренней секреции. Главенствующая роль в системе регу-
ляции принадлежит ЦНС, которая осуществляет регуля-
цию деятельности организма посредством биоэлектриче-
ских импульсов. Основными нервными процессами
являются возбуждение и торможение, инициируемые
в нервных клетках.
В ходе тренировки совершенствуется ЦНС, улучшаются
процессы взаимодействия возбуждения и торможения, при
этом взаимодействие нервных центров, регулирующих со-
кращение и расслабление различных групп мышц, стано-
вится все более четким, обеспечивая гармонический про-
цесс мышечных сокращений. Двигательные навыки ста-
новятся более устойчивыми и управляемыми, спортсмен
получает возможность более широко и глубоко созна-
тельно оценивать выполняемые им функциональные дей-
ствия. Постепенно вырабатывается стереотип основного
функционального движения велогонщика. Качество этого
движения и определяет в основном потенциальные воз-
можности спортсмена.
Утомление — защитная реакция организма, вы-
званная его насыщением веществами, циркуляция которых
в крови приводит к появлению этого симптома. Именно
утомление заставляет уменьшить или вообще прекратить
расходование энергии, чтобы не исчерпать полностью все
резервы организма и не привести его к необратимым по-
следствиям. Однако спортсмен сознательно пренебрегает
этим и заставляет свой организм преодолевать барьер
183
утомления искусственным стимулированием функциональ-
ной деятельности. Это стимулирование в подавляющем
большинстве организуется целенаправленной деятель-
ностью ЦНС, но, к сожалению, встречаются случаи и
часто трагические, когда спортсмен прибегает к стимули-
рованию более активной деятельности своего организма
с помощью допинга.
Допинг — медицинский препарат, способный до-
полнительно возбудить на некоторое, весьма ограниченное
время нервно-мышечную активность спортсмена. Произво-
дит ли допинг эйфорическое или успокаивающее действие,
как наркотик, повышает ли нервный тонус или стимули-
рует нейровегетативную систему, как амфетамины и дру-
гие психоактиваторы, влияет ли непосредственно на сер-
дечную мышцу или органы дыхания — в любом случае
допинг снижает порог бдительности организма и маски-
рует симптомы недостаточности, вызываемые мышечной
деятельностью и стрессом. Допинг как бы уменьшает
болезненное ощущение перегрузок, снижает или вообще
снимает состояние тревоги. Спортсмен оказывается за пре-
делами своей выносливости, истощает свои последние ре-
зервы, не чувствуя этого. Организм перестает реагировать
на утомление и сам себя отравляет, что в ряде случаев,
широко известных в мировой практике велоспорта, при-
вело к летальному исходу.
Первая международная конференция Европейского со-
вета по допингам в спорте состоялась в 1965 г. На ней
были определены группы веществ, воздействующих на
центральную нервную, сердечно-сосудистую, дыхатель-
ную и другие системы организма, и утверждены методы
обнаружения допинга в биологических жидкостях (моче,
крови, слюне). Список допинг-препаратов из года в год
пополняется, методы анализа постоянно совершенствуют-
ся, и современная газовая хроматография позволяет об-
наружить допинг в организме даже в незначительных дозах
в течение 36—48 ч после приема.
Количественный газохроматический анализ позволяет
определить состав многокомпонентной смеси, содержание
в ней одного или нескольких компонентов и общее содер-
жание остальных веществ. Эволюционная хроматограмма
представляет собой ряд пиков (рис. 7.3, а). Каждый пик,
соответствующий определенному веществу, характери-
зуется следующими параметрами: высотой ОС, шириной
его основания АВ и площадью АСВ (рис. 7.3, б), которая
184
фактически пропорциональна количеству вещества. По
фазе выделения вещества, представляющей собой время
удержания вещества в колонке хроматографа, находят
качественную характеристику, т. е. вид допинга. По пара-
метрам пика хроматограммы определяют его дозу.
УСИ одним из первых начал энергичную борьбу с при-
менением допинга. На первенствах мира по велосипед-
ном удержания 0| t | t
£=70мин £=70мин
Рис. 7.3. Хроматограммы биологических проб: а — типичная эволю-
ционная; б, в — взятые у спортсменов, получившего (б) и не получив-
шего (в) дозу допинга из группы барбитуратов:
2 — растворитель; 2 — барбитал; 3 — амбарбитал; 4 — пентобарбитал; 5
сенобарбитал; 6 — фенобарбитал
ному спорту антидопинговый контроль начал проводиться
с 1965 г., а с 1971 г. антидопинговый контроль введен на
международных официальных соревнованиях, проводи-
мых в СССР, и на первенствах СССР по шоссе и треку.
Он осуществляется в соответствии с международными пра-
вилами. В декабре каждого года в официальном бюллетене
УСИ публикуются списки веществ-допингов на сезон пред-
стоящего года. На основании этого списка и решается
вопрос о применении допинга спортсменом при обнару-
жении препарата в его моче, взятой на исследование.
185
В СССР официальным учреждением является антидопин-
говая лаборатория при Московском врачебно-физкуль-
турном диспансере.
7.2. Технический анализ
процесса педалирования
Техника педалирования. Термин «техника педалиро-
вания», принятый в велосипедном спорте, представляет
собой весьма емкое понятие и включает уровень исполне-
ния основного функционального движения гонщика —
педалирования, а также сопутствующих ему других дви-
жений — таких, как прием «танцовщица», приемы преодо-
ления препятствий, прохождения виражей, сложных
участков трассы и других движений, обеспечивающих
высокий уровень эффективности использования энергети-
ческого потенциала гонщика. Важнейшим из всех пере-
численных движений, бесспорно, является педалирование,
обеспечивающее скоростной режим ведения гонки.
Техника педалирования велогонщика различными спе-
циалистами оценивается по-разному. Существует много
методов контроля и измерений, форм трактовки получен-
ных результатов, а также рекомендаций по их практиче-
скому использованию. В любом случае перед специали-
стами-тренерами, исследователями и преподавателями ста-
вится задача овладения достаточно надежной и научно
обоснованной методикой оценки качества педалирования
велогонщика, на основании которой можно увязать много-
образные факторы, влияющие на этот весьма сложный
циклический процесс.
Циклический характер основного функционального
движения велогонщика — педалирования — является
определяющим фактором при рассмотрении проблемы
техники педалирования.
Многочасовые велогонки, особенно многодневные, тре-
буют от спортсмена осмысленной экономии энергии, нахо-
дящей свое выражение в рациональной технике педали-
рования. Экономичное педалирование — залог успеха гон-
щика при прочих равных условиях. В моменты макси-
мальной усталости организма оно позволяет при незна-
чительных усилиях поддерживать высокую скорость дви-
жения, а на решающих этапах гонки — выполнять работу
с наивысшей отдачей. Еще более повышенные требования
к качеству педалирования предъявляются в индивидуаль-
186
вых, командных и Титовых гонках на треке, в которых
быстрая утомляемость организма гонщика сильно ска-
зывается на характере педалирования в заключительной
фазе гонки и, как следствие этого, снижает КПД системы
гонщик—велосипед.
Таким образом, объективная оценка качества педали-
рования велосипедиста является решающей задачей в ана-
лизе этого процесса.
Основным фактором, обеспечивающим движение вело-
сипеда, является крутящий момент, создаваемый от уси-
лия, приложенного велосипедистом к педали. В дальней-
шем этот момент принят в качестве основного показателя,
характеризующего количественную и качественную взаи-
мосвязь «биологического» двигателя (организма велосипе-
диста, совершающего работу) и велосипеда как механиче-
ской системы, потребляющей эту работу с определенной
эффективностью, в основе которой лежит качество педа-
лирования.
На качество педалирования при общепринятой кон-
струкции гоночного велосипеда может оказывать влияние
целый ряд факторов: посадка велосипедиста, степень его
тренированности, физиологические, эмоциональные ха-
рактеристики и т. д. При этом необходимо отметить, что
далеко не все перечисленные факторы могут быть учтены
в полном объеме.
Для анализа комплексного влияния перечисленных
факторов на качество педалирования может быть исполь-
зован хорошо известный тензометрический метод, различ-
ные варианты и результаты использования которого не-
однократно описывались в литературе. Такой метод позво-
ляет регистрировать крутящие моменты на обоих криво-
шипах велосипеда и углы их поворота, а также воспроиз-
водить фазовую картину изменения крутящего момента
на велосипеде, установленном на обычном велостанке.
Для оценки педалирования предусмотрена индукционная
установка, смонтированная на оси заднего ролика вело-
станка. Установка позволяет плавно менять и контроли-
ровать момент сопротивления, создаваемый в процессе
исследования.
Для иллюстрации эффективности данного метода проанализируем
качество педалирования двух спортсменов: гонщика низкой квалифи-
кации на обычном велостаике (рис. 7.4, а); этого же гонщика на вело-
станке, нагруженном моментом сопротивления (рис. 7.4, б); гонщика
высокой квалификации на обычном велостанке (рис. 7.4, в).
187
Особенностью представленных графиков является преднамеренное
отсутствие масштаба исследуемых функций, так как в процессе экспе-
римента перед гонщиками ставилась только одна задача — продемон-
стрировать характерное для них качество педалирования.
Как видно из графиков, характер педалирования в рассматриваемых
трех случаях различен. У гонщика низкой квалификации при форси-
Рис. 7.4. Функции, определяющие качество педалирования: а, б —
гонщик низкой квалификации; в — гонщик высокой квалификации:
7 — крутящий момент Mt, создаваемый на левом кривошипе; 2 — крутящий
момент М2< создаваемый на правом кривошипе; 3 — результирующий крутя-
щий момент М; 4 — крутящий момент относительно среднеинтегрального его
значения; 5 — производная функции движущего момента; а — угол поворота
кривошипа; t — время
ровании нагрузки наблюдается отрицательный крутящий момент на
левом кривошипе (см. рис. 7.4, б), область которого заштрихована.
При увеличении частоты вращения путем снятия нагрузки и переходе
на более легкий режим педалирования область отрицательного момента
хотя и сужается (см. рис. 7.4, о), но остается по-прежнему в каждом
цикле педалирования. Кривые результирующего крутящего момента
характеризуются существенным перепадом экстремальных значений
Л4щах и Мпип. Наилучшие показатели крутящего момента наблюдаются
у гонщика более высокой квалификации (см. рис. 7.4, в).
188
Полученные экспериментальные данные позволяют вы-
явить два критерия и К2) оценки качества педалиро-
вания, отвечающие требованиям, предъявляемым ко вся-
ким критериям (они должны быть безразмерными, эффек-
тивными, универсальными и иметь физический смысл):
д’ I Мmax М 1Т||П | д. (7 1)
J / (Л4) dt
о
тг | (d.M/d/)max (dM/dt)tnin | /7
r'2 — Гм - м " i 1 • -£)
I lv‘ max m min I
Рассматриваемые критерии имеют следующий физиче-
ский смысл: Л1—неравномерность крутящего момента,
определяемого относительно его среднеинтегрального зна-
чения; — относительная скорость изменения отклоне-
ния суммарного крутящего момента за цикл педалирова-
ния Т.
Обработка полученных результатов содержит ряд по-
следовательных математических операций, связанных
с разложением в ряд Фурье функции крутящего момента,
выделением функций его отклонения, вычислением ее про-
изводной, определением экстремумов, расчетом численных
значений критериев качества педалирования и табулиро-
вания полученных функций.
Результаты расчета для рассмотренного выше примера представ-
лены в табл. 7.4. Анализируя результаты, можно констатировать, что
критерии Кл и К2 чувствительны к изменению условий педалирования.
Это хорошо видно на примере критерия К±- Критерий К2 также до-
статочно чувствителен. При этом надо иметь в виду, что на его численное
значение большое влияние оказывает период цикла педалирования,
определяющий скорость изменения функции отклонения крутящего мо-
мента. Значение критерия К2 для рассматриваемого третьего случая
Таблица 7.4. Сравнение критериев качества педалирования
Анализируемый спортсмен Критерий Период Т, с
к, Кг
Гонщик низкой квалификации на велостанке (см. рис. 7.4, а) 0,687 1,263 0,640
Гонщик низкой квалификации при возросшей нагрузке (см. рис. 7.4, б) 1,016 1,394 0,869
Гонщик высокой квалификации (см. рис. 7.4, в) 0,249 0,907 0,589
189
существенно снизилось бы, а для второго случая повысилось при ус-
ловии равенства периодов педалирования.
Описанный метод оценки качества педалирования до-
статочно трудоемок в практическом применении и требует
сложного технического оснащения. Метод становится эф-
фективным при возможности реализации оперативного
контроля качества педалирования и оперативной обрат-
ной связи с гонщиком во время испытательного заезда.
На практике характеристика крутящего момента
(ХКМ), оцениваемая рассмотренными критериями каче-
ства педалирования, является важным инструментом пе-
дагогической работы в учебно-тренировочном процессе.
Этой характеристикой удобно оперировать как при ко-
личественных оценках, так и при текстуальном описании
качества педалирования того или иного гонщика.
Механический аспект процесса педалирования. Про-
цесс педалирования характеризуется тремя основными
параметрами: частотой, шагом и характеристикой крутя-
щего момента (ХКМ), создаваемого на оси каретки вело-
сипеда. Идеальным следует считать такого гонщика, ко-
торый способен обеспечить ХКМ типа турбинной харак-
теристики при частоте педалирования в диапазоне, тре-
буемом условиями гонки.
Однако практика показала, что характеристика крутя-
щего момента существенно отличается от турбинной, а ча-
стота педалирования не может увеличиваться беспре-
дельно. Особенно это относится к темповым гонкам, в ко-
торых фактор продолжительного времени гонки оказывает
определяющее влияние на частоту педалирования.
Механизмом, избирательно регулирующим скоростно-
силовые параметры педалирования, является цепная пе-
редача гоночного велосипеда. Особенности его техниче-
ского оснащения позволяют варьировать передаточное
отношение привода и тем самым дают возможность подойти
весьма тонко и дифференцированно как к формированию
двигательного стереотипа, в первую очередь, по частоте,
так и к его поддержанию. На трековом велосипеде пара-
метры передачи устанавливаются гонщиком непосред-
ственно перед гонкой с учетом вида гонки, характеристики
велотрека, состава участников, тактических задач и лич-
ного самочувствия. На шоссейном велосипеде вопросы
выбора параметров цепной передачи решаются значи-
тельно проще с помощью переключателя скоростей.
В обоих случаях решение о скоростно-силовой нагрузке
190
ври ведении гонки принимает сам гонщик. Его опыт и
квалификация (точнее, потенциал мощности) являются
определяющими в выборе передаточного отношения цеп-
ной передачи.
Гонщиков и тренеров многих поколений волновал и
продолжает волновать вопрос о таком соотношении ука-
занных выше основных параметров процесса педалирова-
ния (частоты, шага педалирования и ХКМ), которое
позволило бы достичь наивысшего качества педалирова-
ния и более высокой скорости движения. Вопрос этот
является достаточно сложным потому, что биологический
двигатель — организм гонщика — не имеет стабильной
энергетической характеристики, а двигательный аппарат
(система кривошип—педаль—стопа—голень—бедро) имеет
большое число степеней свободы. Следовательно, суще-
ствует еще один неявный параметр педалирования, увя-
зывающий три перечисленных выше фактора, — мощность
педалирования.
Этот параметр является функцией многих переменных,
в том числе общей тренированности гонщика, его физиоло-
гического состояния, технической оснащенности и т. д.
Мощность педалирования Р характеризует потенциальные
возможности организма и является основным показателем
скоростно-силовой подготовки гонщика:
а
P = MKV(a)da, (7.3)
о
где Мкр (а) — функция крутящего момента; а> — круго-
вая частота педалирования; а — угол поворота криво-
шипа.
Шаг и частота педалирования являются параметрами,
неразрывно связанными с биологическими и антропоме-
трическими особенностями человека. Опыт более столет-
него существования мирового велосипедного спорта вы-
работал, можно с уверенностью утверждать, оптимальные
или близкие к оптимальным шаг и частоту педалирования.
Эти параметры зависят от размеров ног гонщика и соот-
ветствуют наилучшим условиям напряжения и расслабле-
ния мышц в рамках цикла функционального движения.
В качестве шага педалирования в дальнейшем будем
рассматривать четырехкратную длину кривошипа, соот-
ветствующую расстоянию между двумя крайними (напри-
мер, задним и передним) положениями одной педали.
m
В качестве частоты педалирования — число оборотов кри*
вошипа в минуту. Задача выбора длины кривошипа и ча-
стоты педалирования является компромиссной задачей.
Ее решение сводится к отысканию рационального соот-
ношения этих параметров по критерию минимизации за-
трачиваемой мощности при длительном педалировании
или максимизации мощности при кратковременном педа-
лировании.
Вопросы минимизации затрачиваемой мощности в каж-
дом виде велосипедных гонок надо рассматривать с учетом
специфики каждой гонки.
Например, в гите на 1 км, который разыгрывается в один заезд,
вопрос экономного расходования энергии может рассматриваться только
в рамках тактики этого единственного заезда с позиции требований под-
держания заданной скорости на протяжении всей дистанции.
В спринте с учетом многократных стартов экономное расходование
энергии приобретает важное стратегическое значение для финальных
заездов. В этих гонках в каждом заезде первостепенную роль играет
фактор достижения максимально возможной мощности, что необходимо
для победы. Фактор непрерывной экономии энергии отступает на вто-
рой план и рассматривается только с позиции стратегии спортивной
борьбы в предстоящих заездах.
Иная картина наблюдается в индивидуальной гонке преследова-
ния, например на дистанции 4 км и особенно в рекордных заездах на
стайерских дистанциях 10 , 20 , 50, 100 км, и в часовой гонке. Здесь
непрерывная экономия энергии становится главной задачей гонщика
при неизменных требованиях поддержания заданной графиком ско-
рости движения, т. е. ставится задача достижения рекордной скорости
при минимальной мощности педалирования.
Частота педалирования является показателем скорост-
ных возможностей гонщика. Это относится в первую оче-
редь к таким видам гонок, как спринт или финишные
спурты шоссейных гонок. В темповых гонках, начиная
с гита на 1 км, гонки преследования на 4 км и кончая
часовой гонкой, частота педалирования стабилизируется
с увеличением дистанции и становится важным фактором,
иллюстрирующим постоянство биологических способно-
стей организма человека.
Анализ развития мировых рекордов в классической
часовой гонке на треке является наилучшим подтвержде-
нием относительной стабильности частот педалирования
у ведущих гонщиков мира на протяжении по крайней
мере тридцати лет. В табл. 7.5 приведены некоторые дан-
ные по передачам и частотам педалирования при уста-
новлении мировых рекордов в часовой гонке среди про-
фессионалов. Из таблицы видно, что на протяжении 30 лет
частота педалирования практически оставалась неизмен-
192
Таблица 7.5. Выборочные данные по мировым рекордам в часовой
гонке на треке среди профессионалов
Гонщик н 05 5 Ф» о. ч о о о о и а л Рекордное расстояние, км Переда- ча Укладка, м Частота педалирова- ния. об/мии
Ф. Копии 1942 45,848 52Х 15 7,40 103,26
. Ж. Анкетиль 1956 46,159 52Х 15 7,40 103,96
: Э. Балдина 1956 46,396 52Х 15 7,40 104,48
Р. Ривьер 1957 46,923 52Х 15 7,40 105,68
Р. Ривьер 1958 47,346 53Х 15 7,54 104,65
Ф. Бракке 1967 48,093 53Х 15 7,54 106,20
О. Риттер 1968 48,653 . 54Х 15 7,69 105,44
Э. Меркс 1972 49,431 52Х 14 7,93 103,89
Примечание. Передача указана для ров колес гоночного велосипеда: 0,68 м (27"). ста нда рт ных разме-
ной в диапазоне 103,26—106,30 об/мин. Можно предпо-
ложить, что при установлении этих рекордов размеры
кривошипов также оставались в пределах от 0,171 м (6,75")
до 0,184 м (7,25"). Изменилась в сторону постоянного уве-
личения только мощность педалирования. При этом тех-
ническая оснащенность и техника педалирования несом-
ненно повысили КПД системы гонщик—велосипед.
Рассмотренные положения могут быть проиллюстри-
рованы с помощью рис. 7.5, построенного на основании
данных табл. 7.6. В этой таблице представлен анализ
отдельных рекордов мира на классических дистанциях
трековых гонок среди любителей. Факт достижения в каж-
дой! гонке максимальных мощностей является неоспоримой
истиной, так как эти данные соответствуют уровню разви-
тия велоспорта на рассматриваемый момент и, следова-
тельно, предельным мощностным возможностям сильней-
ших велосипедистов мирового любительского спорта.
Интересно проследить изменение мощностей и частот
педалирования по мере увеличения длительности езды при
условии стремления гонщика к достижению максималь-
ного спортивного результата. Кривая 1 — изменение ча-
стот f педалирования во времени при прохождении ди-
станций 500 м, 1, 4, 5, 10 и 20 км со стартом с места и
в часовой гонке; кривая 2— дистанций 200 м с хода;
прямая 3 — асимптота, иллюстрирующая процесс стаби-
7 Люйсвицкий В. П. 193
лизации частоты при переходе к длительному педалирова-
нию (/дл > 12 мин) на уровне рекордных скоростей; кри-
вая 4 — изменение мощности Р, расходуемой на обеспе-
чение движения без учета КПД системы гонщик—вело-
сипед при рекордных скоростях движения; прямая 5 —
асимптота, иллюстрирующая процесс стабилизации мощ-
ности при переходе к длительному педалированию (/дл £>
/об/мин,
|1д,>72мин
-J--1—40--:—>-
1 23IgT
Рис. 7.5. Изменение рациональной
частоты и мощности педалирования
в зависимости от длины дистанции
при условии достижения спортив-
ного результата на уровне рекор-
дов мира в гонках иа треке (для
шкалы 1g t значение t выражено
в секундах)
!> 12 мин) также при уровне рекордных скоростей; кри-
вая 6 — изменение мощности педалирования во времени
в условиях достижения рекордного результата.
Мгновенная максимальная мощность приближается
к значению Ртах ж 2000 Вт, ей соответствует частота
педалирования /тах « 205 об/мин. При длительном педа-
лировании обеспечивать большую мощность гонщик не
в состоянии, и ее асимптотическое значение (прямая 7)
достигает значения Рлл « 290 Вт при частоте педалиро-
вания /дл т 100 об/мин. Здесь следует еще раз подчерк-
нуть, что эти результаты являются среднестатистическими
и что у каждого гонщика — рекордсмена мира (прошлого
1-94
Таблица 7.6. Сравнительные данные анализа иекоторых рекордов мира в трековых гонках среди любителей
(по данным на 01.01.1983)
7*
195
или будущего) — свои характеристики педалирования и
потенциальные возможности по параметрам мощности и
частоты.
Важным фактором организации тренировочного про-
цесса является постоянная работа над развитием скорост-
ных возможностей гонщика. Эта работа обычно начи-
нается ранней весной при использовании малых передач
и продолжается в течение всего года. Хорошо отработан-
ное педалирование и высокий скоростной потенциал гон-
щика — залог экономного и эффективного расхода энер-
гии на затяжных и крутых подъемах, а также при отры-
вах и финишных спуртах.
Рассматриваемые параметры педалирования — частота
и шаг — имеют свои аналоги и в других видах функцио-
нальных движений, например при ходьбе. Анализ ходьбы
показал [1], что работа А на единицу пути, мощность Р,
развиваемая при ходьбе, и оптимальная длина шага LonT
могут быть подсчитаны по формулам:
Л = ^ + 4|1^(ГгЛ (7.4)
^ОПТ = 2g/n/p(Fr); (7.5)
P = ^-u + 4P-^uS; (7.6)
1-опт ~ МА/S’ (7.7)
где т — масса человека; g — ускорение свободного паде-
ния; L — длина шага; h — координата положения центра
масс по вертикали; р = тя1тк — отношение массы ноги
к массе корпуса; Fr = vly^gh—число Фруда; v — ско-
рость передвижения.
Первые члены правых частей уравнений (7.4) и (7.6)
определяют работу и мощность, затрачиваемые на под-
держание тела, вторые члены — на перенос ноги. Числен-
ные решения уравнений показали, что при v = 1,25 м/с
(4,5 км/ч), /1=1 ми р — 0,2 оптимальная длина шага
при ходьбе составляет £опт = 0,7 м при частоте шага
/опт = Ю5,3 шаг/мин. При этом мощность будет РШ1П =
= 150 Вт. Важно отметить, что оптимальный шаг при
ходьбе приблизительно равен шагу педалирования, т. е.
четырехкратной длине кривошипа. Длина кривошипа,
согласно существующему стандарту, равна 0,171 м (6,75")
или 0,178 м (7,0"). Таким образом, шаг педалирования
составляет соответственно 0,684 или 0,712 м. При анало-
196
гичной мощности (Р = 150 Вт) езда на велосипеде с ча-
стотой педалирования f = 105 об/мин позволяет развить
скорость 24 км/ч.
Нет достаточных оснований считать такое совпадение
случайным. В этом совпадении есть определенная законо-
мерность — стремление конструкторов велосипедов и ве-
логонщиков к максимально экономичной организации
функционального движения. В теории ходьбы и педали-
рования на велосипеде человек шел разными путями
в; поиске оптимальных решений и пришел к общему ре-
зультату — оптимальные по мощности шаг ходьбы и шаг
педалирования приблизительно равны между собой при
одинаковой частоте функциональных движений.
Таким образом, мощность Р педалирования может быть
рассмотрена как амплитудно-частотная характеристика на
основании выражения
Р = kMf, (7.8)
где М — крутящий момент на оси каретки, Н м; f —
частота вращения кривошипов, об/мин; k — коэффициент
пропорциональности.
Потенциальные возможности гонщика зависят от его
силовой (амплитудная часть мощностной характеристики)
и скоростной (частотная часть мощностной характери-
стики) подготовки. Такое разделение является искус-
ственным, так как мало кого может интересовать чисто
силовая (статическая сила) или чисто скоростная (без-
нагрузочное скоростное педалирование, например с от-
ключенным цепным приводом) подготовка гонщика. Такие
упражнения часто используются гонщиками на трени-
ровках для развития силы и скорости движений или в ка-
честве контрольных тестов общефизической подготовки.
Интерес в первую очередь представляет так называемая
скоростно-силовая выносливость, определяемая развивае-
мой мощностью и временем ее поддержания. Графически
это иллюстрирует рис. 7.6, где условные кривые 1 и 2
построены на основании зависимости P^tt = const. В ма-
лом интервале времени, примерно t < 1 мин, спринтер
способен кратковременно развивать значительно большую
мощность (1°Гкв > Р^кв), чем стайер. В большем интер-
вале времени, примерно />5 мин, спринтер, как пра-
вило, проигрывает в мощности стайеру (Р™дл < Р™*)-
Вместе с тем существует область времени гонки, примерно
от t > 2 мин до t < 3,5 мин, в которой мгновенные мощ-
197
ности спринтера и стайера приблизительно равны (Рг «
« Pi). Эти соображения часто вносят существенные раз-
ногласия при комплектовании состава команд в гонках
преследования на 4 км, в которых пытаются использовать
спринтеров со стайерскими наклонностями.
Итак, спортивная подготовка гонщика определяется
уровнем его скоростно-силовой выносливости. Это отно-
сится к гонщикам любых специализаций: как к спринте-
рам, обладающим кратковременной скоростно-силовой вы-
Рис. 7.6. Условные графики мощностных возможностей
гонщика:
1 — спринтера; 2 — стайера
носливостью на высоком уровне мощности, так и к стайе-
рам, обладающим длительной скоростно-силовой вынос-
ливостью на менее высоком уровне мощности. Обеспече-
ние способности поддержания высокого уровня мощности
на протяжении всей гонки и на наиболее ответственных
ее участках является предметом учебно-тренировочного
процесса гонщика.
Как отмечалось выше, мощность является амплитудно-
частотной характеристикой, и, следовательно, необходимо
обеспечить такие условия работы СНКГ, когда при опти-
мальной частоте педалирования для данного гонщика
мышечный аппарат способен выполнить наибольшую ра-
боту. Многочисленные исследования работоспособности
СНКГ показали, что при разных взаимных положениях
элементов СНКГ гонщик будет развивать разные усилия
и обеспечивать разную частоту циклических движений.
Это свидетельствует о необходимости выбора рациональ-
ной посадки гонщика на велосипеде в целях обеспечения
198
максимальной мощности педалирования за время про-
хождения дистанции гонки.
Биомеханический аспект педалирования. Биомеха-
ника СНКГ является доминирующим объектом анализа
в общей биомеханике велосипедного спорта. К функцио-
нальным биомеханическим характеристикам гонщика сле-
дует отнести характеристики СНКГ (длины А2, А3 и А4
и массы элементов СНКГ, представленные на рис. 2.12),
условия работы СНКГ (параметры посадки гонщика на
велосипеде, определяющие взаимные положения элемен-
тов СНКГ С ПОМОЩЬЮ УГЛОВ ф0-2, ’Н-З, Фз-4 и ф0_4 — см.
рис. 2.7) и мощностные параметры СНКГ, определяемые
амплитудно-частотной характеристикой мышечного аппа-
рата СНКГ. Если размерные и массовые характеристики
СНКГ определены природными данными каждого инди-
видуума, то их взаимное расположение обусловлено па-
раметрами посадки гонщика на велосипеде, которые и
определяют выходную мощность и время ее поддержания
на требуемом уровне.
В целом центральная нервная система человека всегда
стремится осуществить свою деятельность наиболее эко-
номичным путем. При этом по мере многократного повто-
рения функционального движения в коре больших полу-
шарий головного мозга организуются связи, которые
устанавливают определенный порядок возбудитель-
ных и тормозных процессов — вырабатывается автома-
тический стереотипный навык, который не нарушает-
ся или почти не нарушается даже в состоянии утом-
ления.
Несмотря на общность принципов организации, ЦНС
каждого индивидуума имеет свои, присущие только ей
характерные признаки, которые проявляются, в частно-
сти, и в организации функционального движения вело-
гонщика — педалировании. Эти характерные признаки
могут быть обнаружены только с помощью технических
средств, позволяющих регистрировать биосигналы и их
временные характеристики. В периоды сокращения мышц
при выполнении функционального движения в их клетках
возникают биотоки, которые могут быть зарегистриро-
ваны с помощью специальных электродов, наложенных
сверху или введенных в мышцу. Полученные сигналы
регистрируются специальной аппаратурой. В мышцах,
находящихся в состоянии покоя, биотоки отсутствуют.
Напряжение в мышцах и интенсивность его нарастания
199
s
Сц
к к
сс сс
s я
200
Рнс. 7.8. Схематическое изображение СНКГ для к
иллюстрации действия двух пар мышц-антаго-
нистов:
/ — таз; 2 — прямая мышца бедра; 3 — бедренная
кость; 4 — двуглавая мышца бедра; 5 — большая и Tflbl
малая берцовые кости голени; 6 — икроножная мыш-
ца; 7 — плюсневые кости стопы; 8 — передняя боль- 9
шеберцовая мышца у \
пропорциональны в определенных пре- гА / 5А4
делах величине биосигнала и интенсив- / / Vх
ности его изменения. А
Подобный метод исследования по-
зволяет в общих чертах проанализиро- у>
вать активность работы отдельных кАл
мышц и их групп, а также оценить Хд У
координационные характеристики, фа- Х_ \
зовые сдвиги и построить общую цикло- ^-7 \ *7
грамму работы основных мышечных V
групп. На рис. 7.7 представлена ком- Aj®/
плексная контрастная картина ЭМГ —
отдельных мышц рук, корпуса и ног “
двух спортсменов, один из которых является новичком,
а другой имеет классификацию мастера спорта.
Для удобства анализа целесообразно выделить группу
мышц ног, разделив их на сгибатели и разгибатели, по-
строить временную циклограмму на базе условной модели
ноги велогонщика, представленной схематично в виде
прямолинейных стержней, оснащенных дополнительными
кронштейнами и пружинами (рис. 7.8). Кронштейны ими-
тируют места крепления мышц к надкостнице, а пру-
жины — мышцы, работающие только в режиме периоди-
ческого сжатия. При построении циклограммы ставилась
задача наглядной демонстрации взаимосвязанной работы
отдельных мышц-антагонистов. Такой анализ выборочно
взятых мышц-антагонистов не позволяет давать количе-
ственную оценку из-за сложности расчета пространствен-
ной схемы рабочего органа (в данном случае ноги), явно
нелинейной характеристики ЭМГ, наличия биотоков на-
сыщения и отсутствия достаточного количества экспери-
ментальных данных.
Если выделить в СНКГ для анализа всего четыре
мышцы (двуглавую бедра 4, прямую бедра 2, икронож-
ную 6 и переднюю большеберцовую 8) и построить для
них качественную диаграмму биотоков в виде временной
циклограммы с нормированной амплитудой, равной еди-
201
нице, то создается четкая картина преимущества работы
сравниваемых мышц квалифицированного велогонщика
(мастера спорта) по сравнению с новичком. Разумеется,
здесь не делается попытки сравнить в количественном
отношении работу, например, искроножной и передней
Рис. 7.9. Циклограмма работы четырех специально выбранных мышц
иоги на основании данных ЭМГ (см. рис. 7.7) применительно к условной
структурной схеме (см. рис. 7.8): а — у новичка; б — у мастера спорта
1, 2 — характеристики активности двуглавой и прямой мышц бедра; 3 — их
результирующая характеристика; 4,5 — характеристики икроножной и пе-
редней большеберцовой мышц; 6 — их результирующая характеристика (а —
угол поворота кривошипа, соответствующий работе мыши в противофазах)
большеберцовой мышц. Обнаруженное преимущество осо-
бенно наглядно видно при анализе рис. 7.9, построенного
на основе ЭМГ (см. рис. 7.7). Представленные графики
приближенно характеризуют условную среднеинтеграль-
ную работу. Они, как указывалось выше, не могут дать
количественной информации, так как сравниваются только
парные мышцы-антагонисты, работа которых в отдельные
моменты времени происходит в противофазах
202
,01 |4. В условных сравниваемых единицах работа новичка
равна 132, работа мастера спорта — 102. Как видно, для
поддержания одной и тон же скорости движения, согласно
ЭМГ, процесс педалирования мастера спорта более эко-
номичен.
Это позволяет сделать важный вывод: помимо увеличе-
ния силы, выносливости и скорости сокращения мышц
тренировка позволяет достичь синхронности и необходи-
мой последовательности включения и выключения мышц
в работу по выполнению функционального движения.
Хорошо тренированный организм весьма четко реализует
обратную связь управления физиологическими процес-
сами, обеспечивая в автоматическом режиме максималь-
ную экономию мышечной энергии. Достижение гармони-
ческого временного сочетания работы мышц — важнейшая
задача тренировочного процесса. Утомленный организм,
в том числе и перетренированный, утрачивает должный
автоматизированный (или стереотипный, как принято на-
зывать в физиологии) контроль за мышечной деятель-
ностью, что неизбежно приводит к снижению качества
ранее отработанного функционального движения. Это на-
рушение проявляется, во-первых, в изменении временных
параметров циклограммы работы мышечного аппарата и
сдвиге по фазе включений (выключений) мышц в работу.
Во-вторых, снижаются показатели скорости сокращения
и силы мышц, что усиливает нарушение исходной цикло-
граммы. Все вместе взятое приводит к кризису, называе-
мому утомлением организма.
Эффективность педалирования в зависимости от биомеханических
факторов — параметров посадки гонщика, мышечной активности и
суставных моментов в СНКГ — можно проследить на следующем при-
мере [27].
Параметры процесса педалирования представлены в табл. 7.7.
Гонщик № 1 принят в качестве эталонного, все остальные варианты
сравнивались с первым. Изменение нагрузки на педали сопровождалось
изменением передаточного отношения цепной передачи при поддержа-
нии (варианты 4 и 5) постоинной угловой скорости кривошипа <Bj.
Взаимосвязь между нагрузкой на педаль и передаточным числом выяв-
лялась с помощью выражения для мгновенной мощности Р = Ma>j,
развиваемой на оси кривошипа. Полагая, что потери мощности в пепной
передаче пренебрежимо малы, можно считать, что мощность на оси
кривошипов равна мощности на оси заднего колеса. Следовательно,
Мри, = М2(и2=Р, где М2— момент на оси заднего колеса; <в2 —угловая
скорость заднего колеса. Теперь можно установить прямую связь
между моментами на оси кривошипа и оси заднего колеса:
Mi = М2й>2/<В1 = Л-!,г1/г2 = Л42;21.
203
Таблица 7.7. Параметры процесса педалирования в условиях
эксперимента
Гонщик об/мин t’ai п, % ДР1Й. %
1 80 52/19 100 0
2 63 52/15 100
3 97 52/23 100 —
4 80 52/23 100 21,05
5 80 52/15 100 —21,05 .
При м е ч а н и е. Принятые обозначения: f — частота педа-
лироваиня, об/мин; i21 = гх12г — передаточ ное отношение цепной пе-
редачи; П - - процентный параметр посадки гонщика (см. гл. 2): ДР!Ь-
процентное изменение мощности педалирования А-го гонщика по срав-
нению с гонщиком № I.
В таком случае процентное изменение мощности для вариантов,
отличающихся от № 1, принятого в качестве эталона в данном экспе-
рименте, составит (в %)
Ы>1к = (/h/'li) 100- <7-9)
Таким образом, получен выигрыш в мощности на 21,05 % для
варианта № 4 и проигрыш на 21,05 % для варианта № 5 по сравнению
с эталонным № 1. Варианты № 2 и 3 предусматривали такие режимы
педалирования, при которых мощность на выходе остается неизменной-
Это требование достигалось сохранением соотношения cojt21 = const.
Биомеханический аспект последующего анализа со-
стоит в учете изменения активности мышц СНКГ при из-
менении передаточного числа цепной передачи i21 в цикле
педалирования или в случае изменения посадки гонщика
с учетом ее процентного параметра П, значения которого
приведены в табл. 7.7.
Оценка биомеханического потенциала гонщика была
выполнена 127] на основании комплексного анализа: тен-
зометрирования касательной и нормальной составляющих
силы, приложенной к педали со стороны СНКГ, потенцио-
метрирования углов поворота кривошипа и педали и ре-
гистрации активности мышц СНКГ с помощью поверх-
ностных электродов (синхронная запись ЭМГ). Типичная
картина мышечной активности представлена на рис. 7.10.
В процессе измерений этих параметров имела место высо-
кая степень повторяемости не только при выполнении не-
прерывной серии циклов педалирования, но и в раздель-
ных попытках, что еще раз подтверждает стабильность
стереотипных процессов в организме спортсмена при вы-
204
Рис. 7.10. Диаграмма активности мышц иыиша
СНКГ (темные зоны — фазы макси-'
мальной активности): 7 ,
1 — большая ягодичная мышца; 2 — пря-
мая мышца бедра; 3 — медиальная широ-
кая мышца бедра; 4 — латеральная ши-
рокая мышца бедра; 5 — передняя боль-
шеберцовая мышца; 6 — икроножная мыш-
ца; 7 — двуглавая мышца бедра; 8 — по-
луперепончатая мышца (ccj — 0 — верхнее
положение кривошипа)
6
полпенни функциональных, в 7 ' “ я '
первую очередь циклических -Д -<....... ।—।
движений. ----1——।____।____
Анализ мышечной активно- ° 90 -в0 270
ста с использованием специ- **
ального программного обеспечения ЭВМ выполнялся от-
носительно ЭМГ, принятой за эталон у гонщика № 1
(см. табл. 7.7), и производился методом нормализации
уровней интегральных значений ЭМГ каждой мышцы
относительно максимального уровня интегрирования ЭМГ
этой же мышцы. Процентная разность интегрированных
ЭМГ каждой мышцы в каждом интервале угла поворота
кривошипа учитывалась в дальнейших расчетах.
Кривошипно-педальный механизм образует с СНКГ
систему, которую можно рассматривать в виде замкнутого
пятизвенного контура (рис. 7.11), в котором 1 — бедро;
2—голень; 3 — стопа, 4—кривошип, 5 — велосипед.
Для расчета углов подвижных связей уравнение пяти-
звенного контура имеет вид
/=е
£ ljeiei = + /2е‘е* + /Зе‘е’ + Z4e‘e* + /5е1’я72 + /ве,я = 0.
I
(7.Ю)
Поскольку контур состоит из пяти звеньев, то необхо-
димо наложить ограничения на два параметра. Один
из них — угол положения кривошипа (04), который яв-
ляется функцией времени. Другой — угол поворота сто-
пы 93, зависящий от угла поворота кривошипа. Уравнение
ограничений имеет вид
94 +9з — У — л/2 = 0.
(7.11)
Угол наклона стопы 03 может быть определен экспери-
ментально, так как он характерен для каждого гонщика
и является результатом многолетних тренировок. График
205
изменения 03 может быть аппроксимирован синусоидой
с помощью рядов Фурье.
Углы наклона бедра 04 и голени 02 рассчитывают по
следующим формулам:
e,_2tr . (7.12)
(7J3>
Рис. 7.11. Совместная система СНКГ и кривошипно-педального меха-
низма: а — пятизвенный контур; б — кинетостатика свободных эле-
ментов СНКГ
где
А = 1й 4- Z4 cos 04; В = Z2 cos 0; С = Z5 4- Z4 sin 04;
Е = (А - В)2 4- (С - £>)2 4- I2 - /2; D = /2 sin 02;
F = 2 (А — В) li; G = 2 (С — D) 1г.
Выражения для угловых скоростей 0, и 02, а также
для ускорений 04 и 02 имеют вид:
01 = IQi (—k cos 0г) — (~Л Sin 02) ] X
X [—/4 sin 04 (—/2 sin 02) — lj cos 0, (—12 sin 02) I-1;
(7.14)
02 = IQ2 (—к sin 04) — Qi (—li cos 04)1 X
X [—/4 sin 0j (—Z2 cos 02) — li cos 04 (—Z2 sin 02) J-1,
(7.15)
206
0Х = <2з (4 sin 0! — /2 sin 0a)-1; (7.16)
02 = Qi (4 cos 01 + /2 cos 0г)-1, (7-17)
где
Qi = —Z404 sin 04 4- /303 sin 03;
Qi = —Л04 cos 04 — Z303 cos 03;
Qi — — /404 cos 04 — /o03 cos 03 + Z362 sin 02 + 1101 cos 0i +
+ ^202 cos 02;
Q4 = —/104 sin 04 4- /.-,03 sin 0з — /3O3COS 0з -j-
4“ /101 Sin 0] 4“ /202 Sin 02-
Угловое ускорение кривошипа может быть принято
04 = 0, поскольку расчеты ведутся для наиболее про-
стого случая — равномерного движения велосипеда.
Аналогично уравнения положений центров масс звеньев
СНКГ (бедра, голени и стопы соответственно) имеют вид!
fi = d1efG*;
г2 = /iei01 + d2e‘e*;
г3 = /1е1'0’ 4- d3eie»,
где dlt d2, d3 — расстояния от проксимального сустава до
центров масс соответственно бедра, голени и стопы.
Уравнения ускорений для центров масс указанных
звеньев:
г, =dI(-0?4-/0?)eie*;
г 2 = — 4- 1 Zi0e<e’ - d2022eie2 + iT^e'02;
Гз = -Z^e*6* + i/iOie'6* - /20^е‘Л 4- 17202е,б! -
— dsslee’ 4- id.,(be'0’.
Зная угловые ускорения звеньев, нормальные и тан-
генциальные силы, действующие на педали, и ускорения
центров масс (ЦМ) звеньев, можно определить суставные
моменты, используя диаграмму на рис. 7.11, б:
для тазобедренного сустава
АЛ = —J10[ 4" Al2 + sin 0i — Z?i5 cos 0i) di 4“
+ (/?i2sin Oi — Z?f2cos 0i) (/1 — di); (7.18)
207
для коленного сустава
Л1з = —J202 4“ М4 -f- ( /?23 Sin 02 — /?23 COS 0г) (li — dz) -f-
-4- (/?21 Sin 02 — /?21 Cos 82)4/2; (7-19)
для голеностопного сустава
AI5 = —J3G3 4“ (Т?з2 sin 0з — /?32 cos 0з) 4/3 4"
4- (R34 cos у — /?34 Sin у) (/3 — 4/з). (7.20)
В дальнейшем анализе целесообразно суммарные су-
ставные моменты Mi разделить на моменты кинематиче-
ские Aft, обусловленные только движением СНКГ, и на
моменты статические М], обусловленные только силами,
действующими на педаль для обеспечения движения си-
стемы гонщик—велосипед с заданной скоростью. В таком
случае
Мс = М + Мс£. (7.21)
Выражения для статических суставных моментов:
для голеностопного сустава
А?5 = cos у — RX3il sin у; (7.22)
для коленного сустава
= М1 4* RzaIz sin 02 — cos 82’, (7.23)
для тазобедренного сустава
М1 = м 4- RmR Sin 0, - R^li COS 01, (7.24)
где
/?34 = Rm sin (0з + у) — Я34 cos (0з + у);
/?34 = R34 COS (Оз 4- Y) 4- Rm Sin (03 -j- у).
При выполнении биомеханического анализа предло-
женное разделение момента на кинематический и статиче-
ский целесообразно по двум причинам. Во-первых, оно
облегчает возможность описания и изучения функции
мышц, которая заключается в управлении СНКГ и созда-
нии усилий на педалях. Совместный анализ мышечной
активности СНКГ и приложенной к педали силы позво-
ляет сравнивать их между собой и устанавливать корре-
ляции между ними. Во-вторых, суперпозиция кинемати-
ческого и статического моментов позволяет глубже про-
никнуть в суть биомеханики процесса педалирования.
208
Биомеханический анализ гонщика № 1 (эталонный вариант, см.
табл. 7.7) показывает, что, хотя имеется полная картина суставных мо-
ментов и действующих сил (рис. 7.12), а также соответствующая им
диаграмма мышечной активности (см. рис. 7.10), принять однозначное
решение об эффективности работы мышечного аппарата СНКГ при
педалировании пока не удается.
Сложный биомеханический анализ должен заканчи-
ваться критериальной формой оценки качества педали-
суммарные суставные моменты в СНКГ; г
д — угловые ускорения:
/—з — моменты в тазобедренном (/), коленном (2) и . . „
вах: 4, 5 — тангенциальная и нормальная силы соответственно; 6—8 — угло
вые ускорения стопы (6‘), голени (7) и бедра (8)
Рис. 7.12. Суставные
моменты и действу-
ющие силы для гон-
щика № 1 (эталонный
вариант, см. табл.7.7):
а — статические мо-
менты; б—кинематиче-
ские моменты; в —
нагрузки на педаль;
голеностопном (3) суета.
кпд процесса педалирования. КПД, согласно обще-
принятому определению, есть отношение полезно выпол-
ненной механической работы Еа к общим затратам энер-
гии Ео при выполнении этой работы:
Л = 100 % = тП’АПЛПвП?. (7-25)
где т]1 — КПД педалирования; т]2 — КПД цепной пере-
дачи; т]3 — КПД механической системы, включая раму,
колеса, однотрубки и т. д.; ф — аэродинамический КПД;
т]5 — КПД организации функционального движения; т]6 —
КПД управления движением системы гонщик—велосипед;
т]7— КПД жизнеобеспечения организма гонщика во вре-
мя гонки.
209
Наиболее сложным для анализа и значительным по
величине является КПД педалирования, который учиты-
вает качество педалирования, определяемое ХКМ, и по-
тери на преодоление инерционного сопротивления СНКГ.
Опыты показали, что при различных режимах работы,
выполняемой в различных условиях, КПД велосипедиста
по некоторым данным колеблется от 8 до 29 %, а по дру-
гим данным достигает 40 % Т Причем он увеличивается
с ростом тренированности, квалификации спортсмена и
уровня его технической оснащенности.
Разность Ео — Еп составляет объем потерь, которые
и характеризуют эффективность системы гонщик—велоси-
пед. Эти дополнительные потери определяют затратами
на обеспечение ряда процессов, сопутствующих выполне-
нию функциональной работы. В полном объеме эти про-
цессы невозможно да и нет надобности перечислять. Вот
некоторые из них: затраты энергии на жизнеобеспечение
организма в период выполнения работы, потери энергии,
связанные с теплообменом, несовершенством работы дви-
гательного аппарата, низким качеством педалирования
гонщика, механическим трением в узлах велосипеда,
а также косвенные потери энергии, связанные с органи-
зацией движения системы гонщик—велосипед.
Не останавливаясь подробно на всех компонентах
энергетических потерь системы гонщик—велосипед, огра-
ничимся разбором некоторых из них.
Последний из перечисленных выше факторов — орга-
низация движения — имеет немаловажное значение, так
как расчет итогового показателя работы Еп предусматри-
вает идеальное движение велосипеда по установленной
траектории, например по линии разметки полотна вело-
трека. Фактически траектория движения велосипеда, вы-
званная недостаточной квалификацией гонщика, суще-
ственно отличается от расчетной, которая, как было ска-
зано, является зачетной при определении спортивного
результата.
Так, при радиусе виражей велотрека 30 м и при про-
хождении этих виражей на расстоянии 0,1 м выше линии
разметки гонщик в гонке преследования на 4 км фактиче-
1 Для сравнения: КПД двигателя внутреннего сгорания автома-
шины достигает 30 %, паровоза — 7 %, человека при ходьбе — 44 %,
лебедки ручной с одной парой шестерен — 80 %, электродвигателя —
82-98 %.
210
ски пройдет лишних 7,5 м. В расчете же затраты энергии,
связанные с периодическим подъемом на некоторую вы-
соту при входе в вираж, не учитываются.
Приведем другой пример влияния организации движе-
ния в командной гонке преследования на конечное зна-
чение КПД системы гонщик—велосипед. Известно, что
для поддержания максимальной скорости лидирующий
гонщик меняется через один круг или половину круга.
Каждая смена обходится команде примерно в трехметро-
вое отставание по сравнению с условным движением
команды, в которой лидер не меняется. За дистанцию 4 км
при лидировании по 0,5 круга набегает суммарное уве-
личение дистанции на 72 м. Исключение этих потерь при
условии прохождения дистанции, предположим, без смены
лидера позволило бы команде вместо результата, напри-
мер, 4 мин 30 с иметь результат 4 мин 25 с.
В гонках, особенно продолжительных, велики суммар-
ные потери энергии в двигательном аппарате спортсмена.
Спортивный опыт, тренированность и техника выполне-
ния отдельных движений позволяет спортсмену суще-
ственно экономить энергию, затрачиваемую организмом
на организацию функционального движения. Например,
квалифицированный бегун, владеющий более совершенной
техникой бега, имеет лучшие по сравнению с новичком
показатели по амплитуде колебаний центра масс тела
в вертикальной плоскости в цикле бегового движения.
Бегун, обладающий большой массой, в том числе нижних
конечностей, затрачивает больше энергии, чем менее мас-
сивный бегун.
Аналогичные проблемы экономии энергии имеются и
у велогонщиков, и в первую очередь это касается КПД
педалирования, одной из особенностей которого являются
инерционные сопротивления СНКГ. Полная мощность Р,
развиваемая гонщиком при педалировании, определяется
полезной мощностью Рп, необходимой для преодоления
сопротивления движения системы гонщик—велосипед, и
мощностью Рп, необходимой для преодоления инерцион-
ного сопротивления СНКГ. Возникает еще одно понятие
так называемого динамического КПД, зависящего от инер-
ционных характеристик СНКГ:
КПДд = (Р - Ра)/Р. (7.26)
Динамический КПД характеризует потери мощности
при педалировании в зависимости от длины и массы эле-
211
ментов СНКГ, параметров посадки гонщика на велоси-
педе, длины кривошипов, их частоты вращения и (в слу-
чае применения эллиптической системы цепного привода)
параметров эллиптического делительного контура ведущей
звездочки и угла смещения его осей относительно криво-
шипа. Из соотношения (7.26) следует, что чем меньше
масса СНКГ, тем меньше потери на инерционное сопро-
тивление и тем выше динамический КПД. Однако СНКГ
с малой мышечной массой не обладает необходимой сило-
вой возможностью, что, как известно из практики вело-
сипедного спорта, компенсируется частотой педалиро-
вания.
В заключение необходимо еще раз подчеркнуть значи-
тельные трудности определения КПД системы гонщик—ве-
лосипед как экспериментальными, так и теоретическими
методами. Значительно легче поддается расчету КПД ме-
ханических систем гоночного велосипеда, и некоторые
методы и результаты даны в следующих параграфах.
7.3. Кинематика и кинетостатика
процесса педалирования
Кинематика педалирования. В основу кинематического
анализа процесса педалирования положен наиболее на-
глядный графо-аналитический метод. В качестве примера
рассмотрен условный гонщик массой 72 кг, равномерно
движущийся со скоростью v = 50 км/ч в условиях часовой
гонки на треке. Частота педалирования при этом =
= 107 об/мин, длина кривошипов = 0,170 м, переда-
точное отношение цепной передачи i12 = z2/zl = 14/51.
Координаты посадки гонщика приняты согласно схеме на
рис. 2.20: х = 0,254 м; уо, = 0,816 м. Размеры заме-
щающего механизма: /3 = 0,492 м; размер /2 рассчитан
согласно уравнению (2.6) при длине бедра Ая = 0,461 м
и длине стопы Л4 = 0,150 м. В качестве замещающего
принят сдвоенный четырехзвенный кривошипно-коромыс-
ловый механизм OABO-JS' А' О (рис. 7.13, а) с переменным
параметром 12 (ар, обоснование перехода к которому
изложено в п. 2.5 (ем. рис. 2.20). Расчетная схема допол-
нена координатами S; положений центров масс элементов
механизма.
Ниже рассмотрен пример анализа традиционного при-
вода с круглой ведущей звездочкой для случая равно-
мерного движения велосипеда со скоростью 13,88 м/с
212
(50 км/ч), что обеспечивает для ведомой звездочки заднего
колеса постоянную угловую скорость вращения со2 =
= const и постоянство скорости схода ведущей ветви
цепи с ведомой звездочки z2. Необходимо отметить, что
выполненный анализ относится только к механике СНКГ
и ни в коем случае не касается биомеханического аспекта,
т. е. приводных функций СНКГ.
Рис. 7.13. Механизм, замещающий систему СНКГ—
педально-кривошипный механизм условного гонщи-
ка: а — план положений; б — план скоростей;
в — план ускорений
Кинематический анализ механизма СНКГ предусма-
тривает построение планов скоростей и ускорений на
основе графо-аналитического метода.
План линейных скоростей выполнен на рис. 7.13, б
в масштабе kB = vA/vA, где vA — фактическая скорость
оси шарнира педали, м/с; vA — вектор скорости в мм,
взятый в масштабе чертежа. Текущее значение угловой
скорости кривошипа определяется с учетом возмож-
ной неравномерности его вращения (в данном случае
= const). Скорость точек Л и В:
Уд = ®i/i; vA = Уд/^; Уд _L ОЛ;
VB = VA + VBA-
213
На основании теоремы подобия (фигуре точек на звене
механизма соответствует подобная фигура на плане относи-
тельных скоростей) находим скорости центров масс S2 и Ss:
% OtS3 . vba~vs2b AS,
vb °'в ’ vab Ав '
Для так называемых мертвых положений механизма,
показанных на чертеже штриховой линией, когда одно
из звеньев (/3) оказывается в таком положении, что другие
звенья (/i и /2) располагаются на одной линии, план ско-
ростей представлен одним вектором Va. По плану скоро-
стей определяются угловые скорости звеньев механизма:
V„. Vn
= ; ©3=^-7-. (7.27)
12 13
Линейное ускорение точки А (рис. 7.13,в) склады-
вается из нормального и касательного ускорений с учетом
углового ускорения кривошипа:
шА = Мао + Шао'* &ао = м>\', w\o^r(i>Y. (7.28)
Линейное ускорение wB (рис. 7.13, в) точки В склады-
вается из ускорения точки А, нормального и касательного
ускорений точки В относительно точки А. С другой сто-
роны, ускорение точки В складывается из нормального
и касательного ускорений относительно точки Таким
образом,
wB = WA -f- wnBA + Wba'i Wb = Wbo,+wbo,- (7.29)
Векторы нормальных ускорений определяются с по-
мощью переходного масштабного коэффициента при мас-
штабе построения плана kw = м/(с2-мм):
п 9 -2 , 9 9 ' ' 'JKJf
-п wBOt VBO, _ vBOtkv _ , vBOt
WBOt — ~b ~ —I — I 11 ~~j ’
«CO J3 *3 *3
где k — kl/kw — переходный масштабный коэффициент;
величины с черточкой вверху — векторы в масштабе чер-
тежа, мм.
Для мертвого положения механизма, показанного
штриховой линией на рис. 7.13, а,
2
Wba = k —Т~ > ® ВО, = 0; Wb = Wa 4- WBA + Z&BA- (7-31)
214
Угловые ускорения звеньев /2 и ^з:
Юо л вл
е2 = «А. kw-, е3 = kw. (7.32)
*2 *3
Векторы скоростей и ускорений, соединенные плавной
линией, образуют годографы, по характеру которых можно
анализировать работу СНКГ в целом и в отдельные мо-
менты рабочего цикла.
Кинетостатика педалирования. В задачу кинетостати-
ческого анализа входит определение реакций в кинемати-
ческих парах сочленений звеньев и момента или движущей
силы, необходимых для преодоления действующих в каж-
дом конкретном положении СНКГ сопротивлений, ха-
рактерных для выбранной скорости движения велосипеда,
а также сил инерции звеньев СНКГ и сил их тяжегги.
Процесс педалирования, выполняемый гонщиком вы-
сокой квалификации, имеет такую ХКМ, в которой отсут-
ствуют отрицательные значения крутящего момента. Сле-
довательно, такой процесс можно анализировать по ча-
стям, разделив его на отдельные фрагменты. В частности,
рассмотрим случай, когда действуют только инерционные
нагрузки, определяемые массами звеньев и их ускоре-
ниями. При этом, учитывая значительность массы СНКГ,
можно в первом приближении принять условие, что
в цикле педалирования велосипед и ведущая ветвь при-
водной цепи движутся с постоянной скоростью, а угловая
скорость кривошипа является функцией угла поворота ах
в зависимости от конструктивных особенностей цепного
привода. Для круглой ведущей звездочки (ал) = const.
Инерционная нагрузка со стороны каждого звена учи-
тывается двумя параметрами: силой инерции Qs = mw,
и моментом инерции М = Jse, где т — масса звена
СНКГ; ws — линейное ускорение его ЦМ; Js — момент
инерции звена относительно ЦМ; е — угловое ускорение
этого звена. Анализ выполняется для положений меха-
низма, рассмотренных в кинематическом исследовании
(см. рис. 7.13).
Рассмотрим так называемую двухповодковую группу
ABOi замещающего механизма (рис. 7.14, а), которая
подвержена воздействию инерционных и гравитационных
сил G2 и Gs, определяемых массой звеньев. Сопро-
тивления в виде сил трения и качения, аэродинамические
и другие сопротивления, вызванные движением системы
гонщик—велосипед, в данном анализе не рассматриваются,
215
так как их сумма остается, можно считать, постоянной для
любой системы привода при одной и той же скорости дви-
жения велосипеда и может быть учтена дополнительно.
Нормальные Nx и тангенциальные Tt составляющие
реакции в шарнирах А и Ot направлены соответственно
вдоль звеньев и перпендикулярно к ним. Направление
действия сил инерции Q; и моментов инерции Л4; установ-
Рис. 7.14. Кинетостатический анализ замещающего механизма привода
велосипеда: а — план и годограф положений; б — план сил для звеньев
АВ и ВО]; в — план сил для звеньев А'В' и В'О^, г — план сил для
кривошипа (звено 04)
лены в соответствии с планом ускорений. На основании
п
уравнений моментов У? Л4; = 0 относителью шарниров
( = 1
В а В' для каждого звена в отдельности имеем тангенци-
альные реакции:
М2 -р Л4 (G2) + М
L.
M2-M(G2)-M{QSi)
k
M3+M(G3)-M(QsJ
0-3-
мз~ M (G3) — M (Q'sJ
Л Q = —- ' -" ----
(7.33)
216
Уравнения действующих сил в звеньях АВ и BOif
образующих двухповодковые группы ABOt и А'В'О^
N1—2 + т 1—2 -I- G2 4- Qs, 4- Qss 4* G3 4- То—з 4- Уо—з = 0; 'I
У1—2 4- Т1-2 4- G2 4- Qs, + Qs3 + G3 4- 74—3 + Л4—з = 0; J
(7.34)
Построив план этих сил (рис. 7.14, б, в) относительно
полюсов лэ и лэ методом силового многоугольника, можно
определить реакции /?1_2 и 7?i_a со стороны кривошипа.
Для кривошипа (рис. 7.14, г) уравнение моментов
будет иметь вид
з
2 m(=mi-/1z>r(/?L2 + /?;l2) = o) (7.35)
1—1
где Мг — движущий момент; kR — масштаб плана сил.
При выполнении кинетостатического анализа по всему
циклу педалирования может быть построена функция
движущего момента Мх (aj по углу поворота кривошипа.
Практическое использование функции движущего момента
при анализе процесса педалирования рассмотрено в п. 8.6.
Концы векторов сил, действующих в системе СНКГ,
соединенные плавной линией, образуют годографы.
7.4. Проблемы применения
некруглых зубчатых звездочек
в цепных передачах гоночных велосипедов
Велосипед, в частности гоночный, представляет собой
уникальную по простоте конструктивного решения ма-
шину, которая прошла испытание временем в условиях
жесткой спортивной конкуренции. В настоящее время,
когда проблема транспортных и пассажирских перевозок,
можно сказать, практически решена, когда современный
комфортабельный автомобиль стал доступен любому част-
ному лицу, поток людей, пытающихся «изобрести» или
по крайней мере усовершенствовать велосипед в целях
наиболее эффективного использования его в быту, ни-
сколько не убывает. Одним из центров внимания изобре-
тателей является узел привода велосипеда. Их многочис-
ленные попытки увеличить КПД системы привода тем
не менее не дали однозначных положительных резуль-
татов.
Практика использования велосипеда показала, что
наиболее эффективной системой привода является цепной
217
липсами, позволяет даже в
Рис. 7.15. Известное конструк-
торское решение привода гоноч-
ного велосипеда с эллиптической
передней звездочкой
привод с кривошипно-педальным механизмом. Признавая
оптимальность этого конструктивного решения, изобре-
татели и рационализаторы обратили внимание на цикличе-
ский характер системы привода и на наличие так называе-
мых мертвых зон при движении кривошипов в цикле
педалирования, когда кривошипы находятся в вертикаль-
ном положении. Эти зоны можно назвать мертвыми весьма
условно, так как конструкция педалей, оснащенных тук-
мертвых зонах создавать кру-
тящий момент на оси карет*
ки гоночного велосипеда.
Равенство крутящего мо-
мента нулю или наличие
отрицательного момента в
этих зонах свидетельствует
о низком качестве педали-
рования, что недопустимо
для гонщика даже низших
спортивных разрядов.
Одновременно в цикле педалирования имеются наибо-
лее активные зоны, когда кривошипы расположены гори-
зонтально и создаются условия максимального приложе-
ния усилий со стороны СНКГ. В этих условиях целесооб-
разно иметь такую систему привода, которая автомати-
чески изменяла бы передаточное отношение между криво-
шипом и колесом с учетом положения кривошипа: когда
кривошип приближается к горизонтальному положению,
передаточное отношение плавно уменьшается, а когда
к вертикальному — увеличивается, так как ('i.2 = z2/z1.
Известны многочисленные патенты, предлагающие реа-
лизацию синхронного изменения передаточного отношения
системы кривошипно-педального цепного привода.
Наиболее удачное решение, дающее возможность ре-
ально использовать эту идею, представлено на рис. 7.15.
Решение предусматривает применение эллиптической звез-
дочки \ установленной на оси каретки велосипеда, со-
вместно с компенсатором изменения длины цепи в виде
обычного суппера, применяемого на шоссейном гоночном
велосипеде. Эллиптическая звездочка 1 развернута на
1 Идея использования эллиптических ведущих звездочек в при-
воде велосипеда была известна еще в прошлом веке, когда одна из
европейских фирм выпустила партию велосипедов с таким приводом,
а американский гонщик Тейлор применял эллиптические звездочки
в спринтерских гонках.
218
некоторый угол (в данном случае л/2) относительно кри-
вошипа 2. Изменение длины цепи 3, вызванное изменением
передаточного отношения от эллиптической звездочки 1
к звездочке 5 заднего колеса, компенсируется натяжной
системой суппера 4.
Другое известное решение предусматривает примене-
ние эксцентрично посаженных на кривошипы педалей.
Ось педали установлена в кольце, смонтированном в обойме
кривошипа, так, что при горизонтальном положении кри-
вошипа его длина достигает наибольшего значения, на-
пример 0,200 м, а при вертикальном положении — наи-
меньшего, например 0,140 м. Французская фирма «Коль-
ру», выпускающая велосипеды, оснащенные подобным
приводом, гарантирует в рекламном проспекте снижение
энергозатрат при педалировании на 12 % по сравнению
с традиционным приводом. Кинематика этого конструк-
тивного решения не ясна из опубликованных материалов
фирмы, но сама идея решения интересна и может быть
использована в реальных конструкциях гоночных вело-
сипедов.
В первом и втором случаях решается задача изменения
передаточного отношения по закону, определяемому эл-
липсом передней звездочки цепного привода или эллип-
сом, по которому изменяется длина кривошипа. Особен-
ностью первого случая является непостоянство в цикле
педалирования угла, заключенного между вертикалью
и радиусом-вектором точки приема цепи на эллиптическую
ведущую звездочку, особенностью второго случая — по-
стоянство этого угла. Преимущество того или иного кон-
структорского решения может быть оценено только с уче-
том динамики процесса педалирования.
Привод с эллиптической ведущей звездочкой позволяет
наиболее просто решить задачу синхронного изменения
передаточного отношения при неизменных остальных де-
талях механизма. Сложность проблемы состоит в том,
чтобы установить, насколько целесообразно применять
такой вид передачи вообще, и в том, чтобы в случае поло-
жительного ответа на этот вопрос определить оптимальное
соотношение полуосей эллиптической звездочки и угол
сдвига осей звездочки относительно кривошипа. На
рис. 7.16 представлена схема цепного привода гоночного
велосипеда с эллиптической ведущей звездочкой. Цепь 2,
сходящая в точке N2 с ведомой звездочки 3 в направлении
стрелки v, набегает на ведущую эллиптическую звез-
219
дочку / в точке Л\ с радиусом-вектором г,. Эффективным
радиусом ведущей звездочки, определяющим действитель-
ное передаточное отношение цепной передачи, будет ра-
диус /у, являющийся функцией угла поворота криво-
шипа аг. Излишек (недостаток) цепи компенсирует суп-
пер 4. Кривошип 5 в данном случае совпадает с малой
осью эллиптической ведущей звездочки.
Рис. 7.16. Схема цепного привода с эллиптической
ведущей звездочкой
Задача анализа сводится к определению закономер-
ности изменения угловой скорости вращения кривошипа
при постоянной скорости схода цепи с ведомой звездочки
в условиях равномерного движения велосипеда.
Для того чтобы оценить эффективность применения
эллиптических ведущих звездочек в цепном приводе, рас-
смотрим его конструктивную схему, в которой ведущая
звездочка имеет изменяющиеся оси 2а и 2Ь (рис. 7.16),
причем О,5го b •< г0, где г0 — радиус окружности экви-
валентной звездочки. Условие эквивалентности состоит
в постоянстве среднеинтегрального значения передаточ-
ного отношения цепной передачи за один оборот криво-
шипа, т. е. длина делительной окружности круглой звез-
дочки Lo = 2лг0 равна длине делительного контура эллип-
220
тической звездочки L.d w я, [3/2 (a -f- b) — ^/^ab]. Зада-
ваясь малой осью эллипса 2Ь в указанном интервале,
можно получить большую ось 2а:
а = (—В ± / В2 - 94 )/2,25, (7.36)
где
А == (*/3Ь - 2г0)2; В = У2Ь - 6г0.
Ведущая ветвь цепи на участке Л\Л(2 в первом при-
ближении может быть рассмотрена в качестве прямой,
касательной к эллипсу и проходящей через неподвижную
точку Л/2 (х2, у2)- Используя уравнение эллипса
х = b cos Р; у — a sin р, (7.37)
уравнение касательной
х2х/Ь2 -|- у2у1аг = 1 (7.38)
и выражения для координат точки N3 в подвижной си-
стеме х'О^' при повороте этой системы в обращенном
движении на угол —аг
х2 = х2 cos «1 — «г sin ап )
, ? (7.39)
у2 = — х2 sin ai -f- у2 cos ai, )
получим
—cos [J -f- — sin В = 1.
b r 1 a r
Тогда выражения для определения угла р имеют вид:
sin р =
ab'y., ± ах., Ка2Хб Ь'-'у!, — ab'‘
а‘!х-> + Ь-у$ ’
COSP =
a-bx2 Т by., YaL*2 + V’-yl — а-62
а2х?! + &-I/5
(7.40)
Верхний знак перед корнем в выражениях (7.40) соот-
ветствует верхней касательной и углу р, нижний — ниж-
ней касательной и углу р'. Нас интересует только верхняя
касательная, совпадающая с ведущей ветвью цепи.
Угол р лучше определять по синусу, так как он может
находиться в первом или четвертом квадрантах.
Определим учитываемые в расчете углы у, I и б.
Согласно уравнениям (7.37), проекции точки касания Л4
на оси координат неподвижной системы хО^у имеют вид:
Xi = x'l cos ai — у\ sin ац
yi = x't sin a, -|- y\ cosa,.
(7.41)
221
Тогда
= = Y = arctgT;
*2 x, (7.42)
g = л — (y + ₽ + ax); 6 = y-|-04-a1 — л/2.
Мгновенные значения кинематических параметров точ-
ки ведущей ветви цепи, движущейся со скоростью
v = const, определяются окружной скоростью vr, угло-
выми скоростью с»! и ускорением ех;
vr = v sin (ax 4- ₽ 4- у); сох = vr/ri,
61 = 'Йг ®i = (dVr ‘ ~ dri ’ "ТГ •
Здесь
dvr = v cos (ax 4- 0 4- у) (1 4. dp 4- dy);
dv = dT • dT — dyi ~ + ~ f/1> dlC1 •
7 1 + P ’ (X2 — Xj)2 ’
dxi = dx'\ cos ai — xi sin cq — dy\ sin ои — y\ cos ои;
dz/i = dx'i sin ai 4- xi cos он -|- dyi cos aj — yisin cq;
dS . ,c _ d (SC)-(SK) ~d(SK)-(SC) .
“ /T^s2 ’ MF
d(SK) = 2(xia2 dxi 4- yd>2 dyi)’,
(7.43)
d(SC) = a(b'4yi + SQdxi 4- )
SQ = ]/"a2x2 4- b2yl — ab2,
где SC, SK — числитель и знаменатель выражения (7.40).
Выражения (7.43), полученные для таких кинематиче-
ских параметров, как угловая скорость и ускорение вра-
щения кривошипа, зависящие от линейной скорости дви-
жения цепи и параметров эллиптического делительного
контура ведущей звездочки, позволяют перейти к анализу
эффективности передачи.
Современный привод велосипеда характеризуется ком-
бинацией трехзвенной биомеханической СНКГ и механи-
ческой педально-кривошипной цепной системы. Если ки-
нематические параметры механической части общей си-
стемы привода — вполне определенные и стабильные, то
222
параметры биомеханической части этой системы являются
переменными в пределах одного цикла педалирования.
Последнее обстоятельство позволяет выделить два важ-
ных для процесса педалирования аспекта. Первый — су-
губо биомеханический, т. е. связанный с эффективностью
использования мышечной работы в различных фазах и
положениях СНКТ, определяемых углом поворота кри-
вошипа. Второй — сугубо механический, т. е. связанный
с рационализацией кинетостатики СНКГ. Биомеханиче-
ский аспект педалирования индивидуален для каждого
гонщика и весьма сложен для анализа из-за отсутствия
необходимого объема достоверной информации, на осно-
вании которой можно было бы построить и рассчитать био-
механические модели. Некоторые сведения из этой области
исследований изложены в гл. 2 и п. 7.2. В настоящем
параграфе рассматривается только механический аспект,
что позволяет ответить на вопрос: можно ли совершенство-
вать механизм привода велосипеда с целью уменьшения
энергозатрат на организацию его движения? Но, с другой
стороны, не приведет ли применение эллиптических веду-
щих звездочек в приводе к дополнительным затратам
энергии гонщика? Другими словами, можно ли оптими-
зировать параметры привода велосипеда для конкретного
гонщика с учетом особенностей СНКГ?
В механическом аспекте СНКГ можно представить (см.
рис. 7.13, а) в виде коромысла 13 (бедро) и шатуна /2
(система голень—стопа) совместно с кривошипом lY вело-
сипеда, образующих плоский сдвоенный кривошипно-
шатунный механизм с переменным параметром /2. Вектор-
ный контур механизма позволяет записать векторное
уравнение:
1=5
S it = Л + h — h — Уо, — xo, = 0- (7-44)
i
Проекции векторов на оси координат хО^у:
ха + h cos а2 — l3 cos а3 — х0, = 0; )
. . . . . „ f (7.45)
У а + l2 sin а2 — /з sm а3 — Уо, = 0. )
где
хА = I, cos «f, уА = lx sin at.
Введем передаточную функцию vA/<aL = dxAldat. Обо-
значив dxA/dtxi — Рха и d2xAlda2i = РРхд и выполнив
223
дифференцирование уравнений (7.45) по аргументу
получим выражения
РРхд — /2cosa2,/’«2 — h sin а2-РРа2 — 1
— Pl2 sin а2 • Ра2 ф- /3 cos аз • Pal ф- /3 sin а3 • РРаз = 0; j
РРул — h sin а2 • Pal ф- Z2 cos а2 • РРа2 ф-
ф Ph cos а2 • Ра2 h sin а3 • Pal — /3 cos а3 • РРаз — 0.
(7-46)
СНКГ обладает весьма значительной распределенной
массой. Так, при массе гонщика 72 кг общая масса СНКГ
составляет (см. рис. 2.12) 27,4 кг. Отдельные элементы
СНКГ движутся с большими скоростями и ускорениями,
что приводит к большим инерционным нагрузкам, поэтому
преодоление сопротивления инерции требует от гонщика
дополнительных энергозатрат. Эти энергозатраты могут
быть использованы для оценки эффективности привода
в системе гонщик—велосипед.
Для рассматриваемой схемы механизма привода (см.
рис. 7.13, а) введены следующие обозначения: 5г— ЦМ
сбалансированной кривошипно-педальной системы; S2 —
приведенный ЦМ системы голень—стопа; S3 — ЦМ бедра.
Аналогично приведенным выше зависимостям получим
следующие уравнения:
для ЦМ звена /2:
xs2 = хд ф- AS2 cos а2; Pxs, = Рхд — AS2 sin а2-Ра2',
ys2 = у а ф- AS2 sin а2; Pys, = Ру а + AS2 cos а2-Ра2,
PPxs2 = РРха — AS2 cos а2-Ра2 — AS2 sin a2-PPa2',
PPys„ = РРул — AS2 sin a2 • Pal ф- AS2 cos a2 • PPa2,
для ЦМ звена /3:
xss = хА + O1S3 cos a3; PxSa = PxA — OiS3 sin a3- Раз',
ys, = У a + O1S3 sin a3; Pys, = Рул + O1S3 cos a3-Pa3
PPxss = PPxa — OiS3cosa3-Pa3 — OiS3sin a3-PPa3,
PPys3 = PPyA — OiS3sin ссз-Дссз ф- OiS3cosa3-PPa3.
Центр масс Si сдвоенного звена hh лежит на оси шар-
нира О.
Дальнейший кинетостатический анализ действующих
сит можно выполнить согласно методике, изложенной
224
(7.50)
в п. 7.3, в соответствии с рис. 7.14. В результате получим
выражения для сил инерции F, и моментов инерции Л4;:
F2 = ~M2-PPxs2-a2r, Fy2 = ~M2-PPys2-ar, (7А7)
Fx3 = ~M3-PPysa-^, F^ = ~M3-PPys3-al (7.48)
где
Л4г = —J2'РРа2- ®ь Л4з = —7з-РРссз-со|.
Из рассмотрения двухзвенной группы АВОХ на осно-
вании уравнений моментов и сил
S Л4 (В)2 = 0; S М (В)3 = 0; £ F* = 0; £ F- = 0
(7.4 У)
определяются реакции в шарнирах и, в частности, в шар-
нире А (см. рис. 7.14):
/?Ь—2 = Fl—2COSOC2 — 2V1—2Sin«2 = /?2— ь'
Ri-2 = Fi_2sina2 + (V1-2COS a2 = —M-i-
Из рассмотрения кривошипа АО на основании урав-
нений моментов и сил
£Л4(О) = 0; £]F? = 0; Е F? = 0 (7.51)
определяются составляющие Fo-i и Fo-i реакции в шар-
нире О, а также движущая сила Q и движущий момент М.
Расчет рассматриваемой системы был выполнен для условного
гонщика, обладающего следующими антропометрическими данными:
масса 72 кг; длина бедра Л2 = 0,433 м; длина голени Л3 — 0,448 м;
длина стопы Л4 — 0,147 м (см. рис. 2.7).
Параметры цепного привода (длина кривошипа Z, = 0,170 м, со-
отношение звездочек г, X z2 = 51 X 14 и частота педалирования / =
= 107 об/мин) соответствуют результату в часовой индивидуальной
гонке на треке около 50 км (точно 50,371 км).
На примере кинограммы педалирования /К. Анкетиля составлена
таблица параметров Z2 и Z2, которые идентичны друг другу и сдвинуты
по фазе на угол л (табл. 7.8). Угол а, — 0 (см. рис. 7.13, а) соответствует
вертикальному верхнему положению кривошипа Z4. Таблица построена
для восьми положений кривошипа. При расчетах это число принималось
равным 16. Угол <р между кривошипом и малой осью эллипса варьиро-
вался в интервале 0 <1 ф <1 л. Малая полуось эллипса изменялась
в пределах 0,5r0 b га.
Расчеты показали, что в цепном приводе с эллиптической ведущей
звездочкой энергозатраты на преодоление инерционного сопротивле-
ния СНКГ существенно зависят от параметров эллипса (рис. 7.17).
Кривая 1 характеризует привод с круглой ведущей звездочкой, когда
а = b = 0,08246. Часть кривой, расположенная выше оси абсцисс, ха-
8 Любовицкий в. П. 225
Таблица 7.8. Параметры 12 и Гг замещающего механизма
в соответствии с кинограммой Ж. Анкетная
Рис. 7.17. Крутящий момент М привода СНКГ в функции от угла
поворота кривошипа аг для ряда соотношений параметров эллипса
ведущей звездочки цепного привода:
Кривая а. м Ь, м
1 0,8 0246 0,08246
2 0,07216 0,09277
3 0,09277 0,07215
4 0,11339 0,05154
5 0,05154 0,11339
растеризует момент, необходимый для привода СНКГ, часть кривой ,
расположенная ниже оси абсцисс, — момент, возникающий в резуль*
тате действия сил инерции и способствующий движению СНКГ.
Наиболее эффективным из рассмотренных вариантов, т. е. обеспе-
чивающим минимальную работу в цикле педалирования для привода
СНКГ, является привод с эллиптической ведущей звездочкой с пара-
метрами а — 0,07215 м и b — 0,09277 м (кривая 2). Последующие рас-
четы в целях оптимизации угла ф (угла сдвига осей эллипса относитель-
но кривошипа) показали, что из рассмотренных вариантов наиболее
эффективным является угол ф = 165° (рис. 7.18). Последующее уточ-
нение этого параметра дало результат ф = 155° и соответственно Ь/г0 =
= 0,82, откуда Ь — 0,08450 м. На рис. 7.19 приведены графики оптими-
226
8*
227
зации параметров природа с эллиптической ведущей звездочкой. Из
рисунка видно, что процесс педалирования является оптимальным по
параметру Маг (работа, затраченная в одном цикле педалирования)
при b = 0,0804 м (кривая 1).
Рис. 7.19, Графики оптимизации параметра о эл-
липса ведущей звездочки привода СНКГ при <р =
= 155°. Значения Ь, м:
1 •*. 0,08040; 2 — 0,08450; 3 — 0,08660: 4 — 0,10308
7.6. Тренажеры, конструкции и методы
их практического применения
Спортивно-технический результат велогонщика зави-
сит в первую очередь от эффективности приложения его
физических усилий, т. е. от качества педалирования. На-
блюдать и оценивать качество процесса педалирования
в условиях езды по велотреку и тем более по шоссе ви-
зуально или даже с помощью технической аппаратуры
весьма затруднительно из-за большой скорости движения
и изменения угла наблюдения. Велосипедные тренажеры
позволяют устранить эти трудности, являются прекрас-
ным средством тренировки в условиях спортивного зала
в зимний период и в непогоду и широко используются
гонщиками для разминки перед заездами на велотреках.
Первые системы, напоминающие современные велотре-
нажеры, появились уже на рубеже нашего столетия, и их
назначение было отнюдь не спортивное, а сугубо техни-
228
ческое. С помощью велосипедного привода вращали ротор
динамомашины или водяной насос. Первые велосипедные
тренажеры были весьма несовершенными, так как их
конструкция не учитывала устойчивость велосипеда при
вращении колес и они были выполнены статическими,
т. е. велосипед или его приводная часть жестко фиксиро-
вались в неподвижной раме.
Современные велотренажеры представляют собой весь-
ма разнообразные по сложности и назначению техниче-
Рис. 7.20. Тренировочный велостаиок
ские средства, начиная с обычных механических трени-
ровочных велостанков и кончая системами управления
тренировочным процессом на базе компьютерной техники.
Велотренажеры для тренировок. В велосипедном спорте
эту категорию тренажеров называют велостанками. Они
представляют собой простую, но достаточно эффективную
в динамическом и функциональном отношениях механи-
ческую систему. Неотъемлемой частью такого тренажера
является обыкновенный шоссейный или трековый гоноч-
ный велосипед.
Велостанок (рис. 7.20) состоит из сварной трубной
рамы 2 и трех роликов 1, изготовленных из армированного
пластика и смонтированных на шарикоподшипниках,
установленных на осях, закрепленных в гнездах на про-
тивоположных трубах рамы. Два ролика соединены при-
водным пасикохм 4, представляющим собой обыкновенное
229
Рис. 7.21. Механическая си-
стема торможения ролика ве-
лосипедного станка
моноволокно диаметром
1—1,5 мм, широко ис-
пользуемое в качестве
рыболовной жилки. Все
шесть опор велостанка
имеют резиновые амор-
тизаторы 3.
В целях искусствен-
ного создания допол-
нительных сил сопро-
тивления, имитирующих естественные сложности вело-
сипедной гонки, велостанки оснащают специальными
системами различного технического исполнения. Наиболь-
шее распространение получили механическая, инерцион-
ная и индукционная системы.
Механическая система может быть выполнена
(рис. 7.21) в виде подпружиненного обрезиненного ка-
точка 2, установленного на системе рычагов 3 и катяще-
гося по поверхности ролика 1 обыкновенного велостанка.
Силовая загрузка каточка осуществляется пружиной 5
и регулировочной гайкой 4. Контроль уровня загрузки
ведется с помощью индикаторного динамометра 6. Увели-
чивая или уменьшая загрузку каточка 2 с помощью регу-
лировочной гайки 4 по градуированному динамометру,
можно дозировать дополнительное сопротивление в про-
цессе тренировки.
Существенный недостаток этой системы — невозмож-
ность практического обеспечения достаточной точности
изготовления и сборки узла торможения, что отрица-
тельно сказывается на характеристике момента сопро-
тивления в цикле каждого оборота ролика.
Инерционная система монтируется на обычном
велостанке в виде дополнительного массивного стального
диска 10 (рис. 7.22), закрепленного на торце одного из ро-
ликов 9 велостанка. Инерционная система приводится
в движение с помощью цепного привода велосипеда, вклю-
чающего кривошип 5, звездочки 4 и 1, цепь 2 и заднее
колесо 3, которое контактирует с парой роликов 9 и 8
велостанка (рис. 7.22, а). Переднее колесо велосипеда 6
приводится во вращение роликом 7 велостанка.
230
Для создания подобной системы можно использовать
стандартный велостанок без конструктивных изменений.
Инерционный диск 10 изготавливают такимобразом, чтобы
его можно было смонтировать (рис. 7.22, б) с помощью
установочного гнезда на торцовой поверхности ролика 9
Рис. 7.22. Инерционный тренажер иа безе стандарт-
ного велостанка: а — кинематическая схема; б —
схема монтажа инерционного диска
при существующих зазорах между этим роликом и ра-
мой 11. Единственным дополнением может быть увеличе-
ние высоты амортизаторов 12, чтобы высота Н обеспечи-
вала свободное проворачивание инерционного диска диа-
метром D.
Размеры инерционного диска 10 — толщина h и диа-
метр D — определяют его инерционные свойства и могут
быть выбраны в зависимости от задач, которые предстоит
решить с использованием тренажера данной конструкции.
231
Использовать инерционную систему для отработки уско-
рений с малых скоростей движения нецелесообразно, так
как на малых скоростях резко снижается устойчивость
велосипеда на роликах велостанка. При больших скоро-
стях движения эффективность инерционной системы для
целей тренировки возрастает, так как возникает возмож-
ность имитации реальных ускорений.и финишных спуртов
за счет необходимости преодоления инерционных сопро-
тивлений всей приводимой в движение системы. Дина-
мика этого процесса может быть описана уравнением
з
т=S Mh (7-52)
i=l
где J— приведенный момент инерции масс системы
з
к оси 0А (рис. 7.22, о); — суммарный момент от дви-
1=1
жущих сил, сил аэродинамического сопротивления и сил
механического трения, приведенный к оси 0t.
Величина Jllp определяется выражением
где индексы 1—5 — номера звеньев системы (на рис. 7.22, а
эти звенья характеризуются радиусами, соответственно
г1( г.,, г3, r4, г21, г35 — передаточные отношения между
соответствующими звеньями; Jlt Ja, J4, — моменты
инерции звеньев; /пц — масса цепи привода велосипеда.
Опыт многолетней эксплуатации подобранных трена-
жеров показывает, что геометрические размеры сталь-
ного инерционного диска D — 350 мм и h, = 10 мм вполне
позволяют решать задачи отработки ускорений и финиш-
ных спуртов на велостанках с инерционной системой
нагрузки.
Индукционная система также монтируется
на обычном велосипедном станке и может быть сделана
в двух исполнениях: стационарной и нестационарной.
Стационарная система (рис. 7.23, а) предусматривает
монтаж индукционных катушек 1 и 2 непосредственно
на раме 3 велостанка. На ролике 5 монтируют диск 4
из алюминиевого сплава с геометрическими размерами
D = 300 мм и h — 10 мм (рис. 7.23, б). Сердечники индук-
ционных катушек 1 и 2 устанавливаются так, что между
232
их торцовыми поверхностями и диском 4 имеется зазор
А = 2 мм. При подаче напряжения на обмотку кату-
шек 1 и 2 в диске 4 индуцируются вихревые токи, магнит-
ное поле которых, взаимодействуя с магнитным полем
катушек, создает противодействующий момент. Момент
сопротивления можно менять в зависимости от подан-
ного на катушки напряжения. Число катушек жела-
тельно иметь не менее четырех для выравнивания напря-
жений и деформаций в диске.
Рис. 7.23. Индукционный тренажер на базе стандартного
велостанка: а — схема монтажа индукционных катушек;
б — схема установки индукционной системы на ролик ве-
лостанка; в — схема контроля нагрузочного момента
В нестационарной системе (рис. 7.23, в) для контроля
величины нагрузочного момента индукционные катушки
монтируют на каретке 7, вращающейся относительно
оси ролика 5. На каретке установлен груз 6 массой т,
который под действием электромагнитных сил смещается
на угол р в положение 6'. Момент сопротивления, приве-
денный к оси каретки велосипеда Оь составляет
МТ. пг = mg sin
1 Z2
Эта конструкция принудительного нагружения позво-
ляет дозировать нагрузки и управлять, таким образом,
тренировочным процессом.
Функциональные велотренажеры. Под термино.м функ-
циональные велотренажеры понимают системы, предна-
значенные для отработки или контроля отдельных или
целой группы функциональных параметров, энергети-
ческих характеристик, качества выполнения функцио-
233
нальных движений велогонщика в процессе тренировки
или лабораторного исследования. Эта категория велотре-
нажеров насчитывает значительное количество систем,
имеющих различное назначение, конструктивное испол-
нение и практическое использование. Наиболее инте-
ресные конструкции описаны ниже.
Велоэргометр — универсальная стационарная
установка, предназначенная для оценки функциональ-
ных способностей спортсменов в режиме кратковремен-
ных нагрузок. Система и сопутствующая аппаратура
обеспечения позволяют наблюдать визуально и регистри-
ровать в автоматическом режиме механические параметры
(частоту педалирования, линейную скорость условного
движения, момент сопротивления, полезную мощность
привода) и медико-биологические характеристики сердеч-
но-сосудистой системы (частоту пульса, давление крови)
и легочно-дыхательного тракта (частоту и объем дыхания,
компоненты выдыхаемой смеси). Велоэргометр такого
типа может быть использован только в лабораторных ис-
следованиях и не пригоден для тренировок высококвали-
фицированных спортсменов.
Визуальный велотренажер предназна-
чен для отработки техники педалирования под собствен-
ным наблюдением гонщика за посадкой и процессом педа-
лирования. В состав визуального тренажера входят
гоночный велосипед, стандартный велостанок и система
зеркал, которая позволяет получить отражения, удобные
для визуального анализа сбоку, спереди и сзади.
Эргонометрические велотрена-
жеры составляют обширную группу систем, изго-
товленных рядом исследователей для обеспечения как
процесса тренировки, так и функционального контроля
процесса педалирования, качество которого неизменно
связано с факторами нагрузки и утомляемости. Такие
велотренажеры промышленность не выпускает, они в еди-
ничных экземплярах находятся в лабораториях своих
создателей. Вместе с тем, учитывая перспективы их при-
менения, целесообразно ознакомиться с их конструкцией
и областью практического использования.
Во всех трех описанных ниже и наиболее интересных
в техническом отношении конструкциях использованы
обычный стандартный велостанок, гоночный велосипед
(как правило, трековый) и система измерения параметров
процесса педалирования.
234
1. Частота педалирования — один из наиболег доступ-
ных для измерения параметров процесса педалирования.
Возможны многочисленные технические решения реги-
страции этого параметра. Например, в конструкции,
описанной в работе [181, использованы ферритные
магниты 2 (рис. 7.24), закрепленные на кривошипах. При
прохождении магнита вблизи приемника 1, установлен-
ного на раме, в приемнике наводится э. д. с., под дей-
ствием которой запускают-
ся триггер Шмидта и ре-
гистратор импульсов, на-
пример частотомер, от-
градуированный в значе-
ниях частоты или скоро-
сти условного движения
велосипеда. Индикаторное
табло прибора может быть
расположено непосред-
ственно перед гонщиком
или на пульте управле-
ния тренировочным про-
цессом.
2. В качестве анализи-
руемого параметра про-
цесса педалирования мо-
жет бьнь принят кру-
тящий момент, создаваем рис. 7.24. Датчик частоты недели-
мый гонщиком. Его можн рования
регистрировать методом
оценки тягового усилия в ведущей ветви цепи [10).
Схема такой системы представлена на рис. 7.25, а. Веду-
щая ветвь цепи 1 под некоторым углом огибает ролик 2,
установленный на упругом элементе 3 кольцеобразной
формы, который верхней частью жестко смонтирован на
раме велосипеда. Этот упругий элемент 3 является дат-
чиком, фиксирующим изменение натяжения цепи. Про-
волочные тензопреобразователи 4, собранные в мостовую
схему, преобразуют деформацию датчика 3 в электриче-
ский сигнал, который после промежуточного усилителя
поступает в блок регистрирующей аппаратуры, например
в осциллограф. Сопоставление получаемого сигнала с цик-
лограммой педалирования возможно благодаря фикса-
ции еще одного параметра — угла поворота сд криво-
шипа 5 с помощью фотодиодной системы и перфорацион-
235
ных отверстий в большой звездочке z1 цепного привода.
Возможна фазовая и непрерывная запись процесса педа-
лирования. Система градуируется по моменту Л4гр =
= mglY при горизонтальном положении кривошипа 5.
Подобная система имеет два существенных недостатка.
Первый — ее градуирование выполняется, как правило,
в статических условиях, в то время как в динамике дей-
ствующие силы перераспределяются, так как появляются
Рис. 7.25. Схема измерения усилий в ведущей ветви
цепи: а — общая схема компоновки системы; б —
схема взаимодействия роликов цепи и ролика дат-
чика
дополнительные силы трения в ролике датчика и равно-
действующая перераспределенных сил меняет свое напра-
вление и величину. Второй недостаток — цепь 1 огибает
ролик 2 датчика (рис. 7.25, б), контактируя с ним одним
(контур А ЕВ) или двумя соседними (контур ACDB)
роликами цепи 6. Это вызывает дополнительную дефор-
мацию активного участка ведущей ветви цепи, увеличи-
вает в ней напряжение и искажает исследуемый параметр
педалирования— натяжение ведомой ветви цепи.
3. Одним из наиболее сложных в техническом отно-
шении является эргонометрический тренажер, основанный
па тензометрировании педали гоночного велосипеда 16;
25]. На велостанке используют обычный трековый вела*
236
сипед, на котором установлены педали специальной кон-
струкции (рис. 7.26, а). Особенность этой конструкции
состоит в том, что педаль оснащена двумя упругими пла-
стинами, являющимися датчиками сил, приложенных
вдоль вертикальной (Qv) и горизонтальной (QH) осей
коробки педали 3. На этих пластинах наклеены тензо-
метрические преобразователи соответственно 2 и 4, соб-
ранные в мостовые схемы, сигналы дисбаланса которых
Рис. 7.26. Схема реализации системы вектор-динамометрии
на педалях гоночного велосипеда: а — схема установки
датчиков и тензопреобразователей на педалях; б — век-
тор-динамограмма педалирования
подаются в усилители и затем на регистрирующую аппа-
ратуру (осциллограф). Система дополнительно осна-
щена датчиками углов поворота: аг — угла поворота
кривошипа 1 относительно вертикальной оси; сс2 — угла
поворота вертикальной оси коробки педали 3 относи-
тельно кривошипа 1. Датчики углов поворота могут иметь
различное исполнение, например реохордное.
Снимаемые осциллограммы обрабатываются в удобном
для анализа виде, например в виде вектор-динамо-
граммы (рис. 7.26, б), где из центра Ог строится семейство
векторов равнодействующей силы Q, приложенной к оси
педали. Годограф силы Q иллюстрирует процесс ее изме-
нения. Кроме того, возможны фазовые изображения изме-
нения вектора силы на экране катодного осциллографа.
Существенным недостатком данного метода является
отсутствие критерия качества педалирования и, как
следствие этого, невозможность дать однозначную оценку
этому процессу.
237
Системы обеспечения тренировочного процесса. Тре-
нажерный класс является важным техническим комплекс-
ным средством функциональной групповой тренировки
гонщиков. Как правило, такие классы оснащены вело-
станками различных модификаций и системами обеспе-
чения тренировочного процесса: контроля деятельности
сердечно-сосудистой (пульс) и дыхательной (воздухооб-
мен) систем, замера частоты педалирования, визуального
контроля посадки, телефонной оперативной связи с каж-
Рис. 7.27. Схема установки фотодатчика на велостанке
дым гонщиком и т. п. Предлагаемая ниже система [81
прошла апробирование и рекомендуется для оснащения
тренажерного класса.
Гоночный велосипед устанавливают на обычный вело-
станок (рис. 7.27). Параметры движения в процессе тре-
нировки считывают с помощью направленного источника
света 4, модулятора (перфорированного диска) 3 и фото-
транзистора 2. Модулятор приводится во вращение от
среднего ролика / велостанка с помощью фрикционного
диска. На табло индикации фиксируется пройденная
дистанция, время ее прохождения и мгновенная скорость
движения. Дистанция может быть заранее ограничена
установкой ручки переключателя.
Для того чтобы можно было самостоятельно изгото-
вить и настроить подобную систему, в работе [8] приве-
дены подробные принципиальные электронные схемы
измерителя пройденной дистанции, времени, скорости
и источника питания.
Датчиком измерителя скорости и дистанции является
фотоэлектрическое устройство, состоящее из направлен-
238
кого источника света и фотоэлемента. Модулятор пред-
ставляет собой алюминиевый диск с обрезиненным ободом
и тремя прорезями для прохождения светового луча
от источника к фототранзистору.Прорези расположены
под углом 120°. Длина окружности по ободу 300 мм.
Модулятор, установленный в шарикоподшипниках, пру-
жиной прижимается к среднему- ролику велостанка.
Во время вращения ролика вращается и модулятор,
обеспечивая подачу световых импульсов на фототран-
зистор, частота импульсов пропорциональна окружной
скорости ролика. Модулятор поворачивается на 120°
при прохождении велосипедом 0,1 м пути.
Время прохождения задаваемой на пульте управления
дистанции измеряют с помощью мультивибратора с точ-
ностью ±1,0 с/ч, что соответствует точности механиче-
ских секундомеров. Счетчик времени принят семиразряд-
ным с индикацией шести цифр в часах, минутах и секун-
дах с десятичными долями.
Скорость измеряют с помощью трехразрядного счет-
чика того же типа, что и счетчик времени, но с периоди-
ческой индикацией скорости в единицах км/ч. Цикл инди-
кации 7,2 с.
Велотренажеры на базе компьютерной техники. Созда-
ние и практическое применение систем управления про-
цессом педалирования является более сложной техниче-
ской задачей, которую можно решить только на основе
современной электронной и компьютерной техники. Вело-
сипедный спорт пока еще не знает примеров практически
реализованных и действующих систем подобного назна-
чения. Рассмотрим вариант системы на основе критери-
альной оценки качества педалирования, описанной
в п. 7.2.
Основными параметрами процесса педалирования
в этой системе являются крутящий момент на валу ка-
ретки и угол поворота кривошипов. Структурная схема
управления процессом представлена на рис. 7.28.
Крутящий момент определяют с помощью тензометри-
ческих преобразователей сопротивления по 200 Ом каж-
дый, наклеенных на кривошипы и собранных в мостовые
схемы. Питание мостовых схем производится от мало-
габаритных аккумуляторов, размещенных на кривоши-
пах. Таким образом, левый и правый кривошипы яв-
ляются датчиками крутящего момента. Кроме этих дат-
чиков система имеет датчик, фиксирующий начало оче-
239
редного оборота кривошипа и датчик, фиксирующий
дискретный угол его поворота.
Аналоговые сигналы с четырех датчиков поступают
в модулятор, который модулирует амплитудный сигнал
в частотный, передаваемый в эфир передатчиком, уста-
новленным на раме велосипеда.
Приемник, установленный, например, в центре вело-
трека, принимает сигнал и дешифрует его в широтно-им-
Рис. 7.28. Структурная схема системы управления процессом педали-
рования
пульсную модуляцию. Интерфейс преобразует широтно-
импульсный сигнал в цифровой код по каждому из четы-
рех каналов и организует прерывание программы в зави-
симости от угла поворота кривошипов.
Процессор работает по программе обсчета и анализа
информации с выдачей результатов на внешнюю память
для ее хранения. Оперативная информация выводится
на экран дисплея (для оперативного управления процессом
педалирования) и на автоматическое цифропечатающее
устройство (для фиксирования и анализа результатов
как в анализируемом отрезке времени, так и всего трени-
ровочного заезда). Внешняя память позволяет произво-
дить полный анализ результатов с выдачей графиков и
табличных данных.
240
Принцип организации системы управления процес-
сом педалирования позволяет осуществить обратную опе-
ративную связь тренера-оператора с гонщиком через
дополнительную систему радиосвязи звукового диапа-
зона. Гонщик в виде устных команд получает информа-
цию, например, об изменении параметров движения
СНКГ по углу ф3_7, что приводит к непременному изме-
нению углов ф,_3 и ф0_2 (см. п. 2.5). Последовательный
поиск оптимального по принятым критериям процесса
педалирования позволяет гонщику и тренеру-оператору
зафиксировать удачный вариант функционального дви-
жения и продолжить работу над его закреплением для
выработки устойчивого стереотипа. Важную роль данная
система будет играть в научных биомеханических и физио-
логических исследованиях в велосипедном спорте.
Глава 8
КИНЕМАТИКА И ДИНАМИКА СИСТЕМЫ
ГОНЩИК - ВЕЛОСИПЕД
8.1. Структура системы гонщик — велосипед
Структурная схема системы гонщик — велосипед
(рис. 8.1) состоит из двух объектов — управляющего
(гонщик) и управляемого (велосипед) — и ряда таких
воздействующих внешних условий, как аэродинамические,
механические и кинематические воздействия.
Управляющий объект — гонщик, воспринимая инфор-
мацию о состоянии дорожного покрытия, кинематических
(траектория, скорость, ускорение), аэродинамических,
тактико-технических и других условий гонки, формирует
с помощью центральной нервной системы (ЦНС) целе-
направленное воздействие на объект управления таким
образом, чтобы создать наиболее эффективные условия
передачи энергии от биологического двигателя — гон-
щика к потребителю — велосипеду в целях достижения
наивысшего спортивно-технического результата. Это целе-
направленное воздействие, сформированное ЦНС в виде
команды нервно-мышечному аппарату, с помощью испол-
нительных органов (нижних и верхних конечностей,
а также всего тела гощика) создает функциональное дей-
241
Рис. 8.1. Структурная схема системы гонщик — велосипед
242
ствие, осуществляемое по двум самостоятельным каналам,
соответствующим функциям педалирования и управления.
Функция педалирования характеризуется двумя пара-
метрами; крутящим моментом, определяемым касатель-
ной силой при педалировании, и частотой педалирова-
ния, совокупность которых является своеобразной ампли-
тудно-частотной характеристикой гонщика. Регулятором
совмещенного действия этих двух факторов являются
переключатель скоростей на шоссейном велосипеде или
предварительно установленные звездочки на трековсм
велосипеде. Такой регулятор позволяет получать рацио-
нальные передаточные отношения, с использованием кото-
рых гонщик может в экстремальные моменты гонки разви-
вать максимальную мощность, а в остальные периоды
гонки педалировать с минимальными затратами энергии.
Учитывая, что шоссейные гонки продолжаются в течение
нескольких часов, целенаправленное управление функ-
циональными действиями гонщика приобретает решающее
значение.
Функция управления фактически сводится к трем
основным процессам: маневрированию (с учетом поддер-
жания равновесного устойчивого движения системы),
торможению и переключению скоростей. Обратная связь
по каналам этой функции осуществляется с использова-
нием параметров и характеристик трассы гонки.
В действительности все элементы рассматриваемой
системы сами по себе представляют весьма сложные и недо-
статочно изученные объекты, между которыми осуще-
ствляются многоканальные связи, позволяющие реализо-
вывать гармоничные и близкие к оптимальным действия
гонщика по достижению наивысшего спортивно-техни-
ческого результата.
Энергетическое обеспечение функционального движе-
ния гонщика также может быть описано структурной
схемой (рис. 8.2), в которой установлен баланс энерго-
затрат условного энергетического двигателя (с учетом
КПД мышечной и центральной нервной систем), системы
педалирования и механической системы велосипеда. Рас-
сматриваемая схема энергозатрат является условной и не
охватывает в полном объеме все виды энергозатрат,
например теплообменные процессы. Каждый вид энерго-
затрат представляет собой сложные и недостаточно изу-
ченные процессы, которые в совокупности характери-
зуют человеческий организм.
243
Рис. 8.2. Структурная схема энергозатрат на обеспечение движения системы гонщик — велосипед
244
8.2. Кинематика системы гонщик — велосипед
Кинематика системы в целом. Траектория движения
системы гонщик — велосипед ограничена трассой — по-
верхностью трекового полотна, шоссе или кроссовой до-
роги. Во всех случаях, за исключением свободного полета
(прыжков) при преодолении препятствий, движение
велосипеда предполагает непрерывный контакт с поверх-
ностью трассы. Именно этот контакт лежит в основе меха-
ники движения велосипеда и его управления.
Согласно законам механики, изменения скорости и
направления движения системы гонщик — велосипед не
могут происходить без воздействия на нее внешних сил.
При отсутствии последних система стремится сохранить
состояние покоя или равномерного прямолинейного дви-
жения. В этом случае вектор скорости системы v0 совпа-
дает с направлением движения ab (рис. 8.3, а).
Для изменения скорости и направления движения
системы необходима внешняя сила F, тем большая, чем
больше масса системы пг и ускорение w, которое ей тре-
буется сообщить. Масса системы является мерой ее инерт-
ности, т. е. способности сохранять неизменными пара-
метры движения. Так, при воздействии внешней силы F
со стороны дорожного покрытия в зоне контакта ведущего
колеса с дорогой система получает ускорение w в течение
245
времени А/ и скорость движения становится равной щ ~
— v0 + wAt (рис. 8.3, б).
Действие внешней силы способно изменить не только
скорость, но и направление движения. Так, под действием
силы F, направленной перпендикулярно к траектории
движения, система приобретает дополнительную ско-
рость v2. Суммарная скорость v3 = v0 + v2, будучи сум-
мой двух векторов (рис. 8.3, в), является скоростью дви-
жения системы по траектории ab' в отличие от скорости v0
Рис. 8.4. Схема оценки условий, обе-
спечивающих поворот велосипеда
прямолинейного движе-
ния.
Итак, только нали-
чие внешней силы по-
зволяет осуществить по-
ворот велосипеда, т. е.
изменить первоначаль-
ную траекторию дви-
жения системы. Для
анализа действия этой
силы будем считать, что
велогонщик, двигаясь
прямолинейно со скоростью v (рис. 8.4), повернул руль
в точке А на угол dtp. Пусть этот поворот осуществлен
в момент времени t. Можно считать, что в момент времени
t + dt переносная скорость системы спер в силу закона
инерции практически не изменится ни по величине, ни по
направлению. При повороте на угол dtp абсолютная ско-
рость точки А контакта колеса с дорогой уже не равна
нулю, так как переносная скорость оси vnep и относи-
тельная скорость уОтн точки А колеса не лежат на одной
прямой. Скорость точки А становится равной dv и на-
правлена в сторону угла поворота dtp.
Для изменения скорости движения на величину dv
необходимо приложить внешнее усилие, которым может
быть только сила трения колеса о поверхность дороги.
Следовательно, при повороте колеса появляется сила
трения dF, действующая на колесо в направлении dv,
чем и обеспечивается необходимое ускорение системы.
Очевидно, что при отсутствии сил трения или при недо-
статочных их значениях контролируемый поворот стано-
вится невозможным
1 Примером может служить попытка выполнить поворот на скольз-
кой обледенелой дороге, когда разворот колеса не изменяет траекторию
движения, а приводит только к падению из-за потери устойчивости.
246
Практика показывает, что одновременно с поворотом
необходимо осуществить наклон велосипеда в сторону
центра кривизны, чтобы компенсировать центробежные
силы инерции. Требуемый угол наклона ф приближенно
можно определить из известного равенства
ctgip= tfHgR) < [pl, (8.1)
где Ip] — допустимое значение коэффициента сцепления
колеса с дорожным покрытием; R — радиус кривизны
Рис. 8.5. Система гонщик — ве-
лосипед при прохождении вира-
жа: а — вариант 1; б — вариант
2; в — схема действующих сил;
1 — план сил для варианта 1; 2
план сил для варианта 2
виража; v — скорость движения; g — ускорение свобод'
ного падения.
Это равенство получено на основании анализа сил,
возникающих в системе гонщик — велосипед при про-
хождении поворота с плоским дорожным покрытием
(рис. 8.5). Ясно, что гонщик должен находиться верти-
247
кальне, иначе он упадет. Но его вертикаль аа не совпа-
дает с земной Оу, она наклонена под некоторым углом ф,
который не зависит от массы т гонщика, а зависит от
радиуса кривизны поворота и скорости его прохождения.
Однако масса системы определяет величину силы реак-
циии N дорожного полотна на колеса велосипеда и вели-
чину силы трения F в зоне контакта колеса с дорогой.
Устойчивость системы гонщик -— велосипед обеспечи-
вается балансом моментов центробежной силы Fu =
= nwyR и гравитационной силы Fr = mg.
Для обеспечения предельной скорости прохождения
виража, определяемой допустимым значением [р], при-
меняют прием смещения центра масс (ЦМ) системы в сто-
рону, противоположную центру кривизны виража
(рис. 8.5, б). Это позволяет сместить ЦМ вниз на величину
Др = pi — р2, что, однако, не изменяет условий взаимо-
действия системы с поверхностью дороги, определяемых
углом гр, который образован линией аа, проходящей через
точку опоры О и ЦМ системы, с горизонталью Ох. Допол-
нительный угол наклона велосипеда у и вертикальное
положение корпуса значительно повышают мобильность
гонщика в управлении велосипедом и в достижении пре-
дельных значений угла гр. Максимально возможные ско-
рости прохождения виражей при различных покрытиях
и состоянии дороги показаны на рис. 8.6.
Аналогичный анализ может быть проведен и для усло-
вий прохождения наклонных виражей велосипедного
трека (рис. 8.7), где система координат хгОуг полотна
трека развернута на угол р относительно горизонта.
В зависимости от скорости движения системы радиус
кривизны R траектории движения ЦМ изменяется от Rmax
при v = 0 до /?т1п при v = vmax. Уравнение (8.1) в дан-
ном случае требует уточнения в связи с учетом радиуса
кривизны траектории движения ЦМ системы гонщик —
велосипед. В таком случае скорость прохождения виража
в зависимости от угла ф выразится уравнением
v = g(Rmax — н Sin ф) tg <р. (8.2)
Уравнение (8.2) приближенно описывает мгновенное
значение скорости движения в данной точке виража.
Общая картина изменения кинематических характери-
стик системы при прохождении виражей значительно
сложнее и зависит от целого ряда параметров: таких,
как радиус кривизны виража, координаты его положений,
248
Рис. 8.6. Скорости прохождения виража с минимальным радиусом /?min
при различных покрытиях и состоянии дороги:
Кривая Покрыт ие (М>1. ‘
1 ГpdBH й сухой 0,4 О'»
2 Асфальт мокрый 0,5 иЗ
3 » сухой 0,7 51
4 Бетон мокрый 0,8 17
5 » сухой 0,9 43
профиль виража, вид покрытия его поверхности, меха-
нические характеристики системы гонщик — велосипед.
Приемы прохождения плоского виража существенно
отличаются от приемов прохождения наклонного виража.
Плоский вираж — типовой вариант виража шоссей-
ной трассы (рис. 8.8). Наиболее сложные условия про-
хождения плоских виражеи
ных участков трассы, где
скорость движения может
превышать 70 км/ч. Воз-
можно бесчисленное мно-
жество вариантов траек-
торий прохождения пло-
ского виража, из которых
рассмотрим сначала две,
имеющие общий центр
Рис. 8.7. Схема действующих
сил в системе гонщик — вело-
сипед при прохождении на-
клонного виража
встречаются на спусках гор-
249
кривизны Op АВС (траекторию движения с радиусом Rt
на расстоянии h от левого контура дорожного полотна
шириной Н) и ВнСн (траекторию движения с радиусом R2
на расстоянии h от правого контура дорожного полотна).
Прохождение виража по этим траекториям возможно
в случае одновременного подхода к виражу двух гонщиков
Рис. 8.8. Схема оценки кинематики прохождения велогонщиком пло-
ского виража
соответственно в позициях А и Вн. Согласно уравне-
нию (8.1) гонщики должны снизить скорость входа в вираж
от начального значения v0 до допустимых пределов: соот-
ветственно vA и уВн. Так, при R = 15 м, Н = 8 м, h =
— 0,5 м и сухом асфальтированном покрытии (р = 0,4)
максимальные скорости входа в вираж соответственно
равны: для первого гонщика vA = 7,79 м/с (28 км/ч);
для второго гонщика Увн = 9,39 м/с (33,8 км/ч). Несмотря
на более высокую скорость прохождения по внешней
траектории ВнСн проигрыш в расстоянии составит
250
СнСн = 11,92 м. Этот проигрыш будет ликвидирован
только в точках Е и Еп при тех же скоростях движения
лишь через 7,44 с с момента выхода первого гонщика
из виража в точке С, т. е. на расстоянии L3 = 58 м. При-
веденный расчет показывает, что вариант прохождения
виража по внешней траектории является проигрышным.
Рассмотрим дополнительный вариант траектории дви-
жения AjB'hBhBCh, которая описывается дугой окруж-
ности радиуса R3 = 20,7 м. Центр кривизны О2 этой
траектории смещен относительно центра на расстоя-
нии х и у. Расчетная длина дуги ограничена углом
Два сравниваемых гонщика движутся из одной точки At
по рассматриваемой траектории и по траектории А] А ВС.
Можно считать, что путем предварительного торможения
(тормозной путь первого гонщика Li, второго — L2 <
< оба гонщика окажутся в исходных точках входа
в вираж А и Вн с предельно допустимыми скоростями
движения: va = 7,79 м/с (28 км/ч); vB- — 9,01 м/с
(32 км/ч). Первый гонщик, идущий по внутренней траек-
тории АВС, на выходе из виража в точке С окажется
через 6,25 с. В это время второй гонщик, идущий по
траектории ВКВЯВСЯ, окажется в точке Сн, проигрывая
первому гонщику в расстоянии СНСН = 8,72 м. Однако
имея большую скорость на выходе из виража, второй
гонщик догонит первого на расстоянии = 55,68 м.
В реальных условиях прохождения плоского виража
возможны и другие, более рациональные траектории дви-
жения с переменными радиусами кривизны и режимами
торможения, поиск и расчет которых достаточно сложны
и в данном случае не рассматриваются.
Кинематика колеса. Движение колеса имеет сложную
структуру. Колесо перекатывается по поверхности дороги
теоретически без проскальзывания, в то время как в дей-
ствительности проскальзывание существует, но соста-
вляет сравнительно небольшую величину.
Введем три системы координат (рис. 8.9): ху — непо-
движную относительно поверхности дороги; хху} — под-
вижную и связанную с рамой велосипеда или осью колеса;
хаУ2 — подвижную и связанную непосредственно с колесом,
которая, таким образом, совершает сложное движение.
Система координат х}ух совершает переносное поступа-
тельное движение, в котором все точки имеют одинако-
вую скорость v. Система координат х2у2 совершает отно-
251
сительное вращательное движение, в котором каждая
точка колеса движется с окружной скоростью vp = wp,
где io — угловая скорость относительного движения;
р — расстояние от начала координат 0} до рассматривае-
мой точки. Векторная сумма переносной и относительной
скоростей любой точки колеса равна абсолютной [ско-
рости: va = v + vp.
Точка С является точкой касания колеса с поверх-
ностью дороги и является неподвижной при принятом
выше условии — отсутствии проскальзывания колеса
относительно дороги и деформации однотрубки. Ско-
рость точки С, принадлежащей колесу (р = R), равна
vc = v — vR — 0; следовательно, v = vR = &R. Угло-
вая скорость вращательного движения w = v/R. Ско-
рость отдельных точек обода, например А, В, D, соста-
вляет:
va = vB = /и2 + Vr = v рл2; vD = v + vR = 2v.
Для произвольной точки Е колеса, находящейся на
расстоянии р — 0lE от оси колеса, скорость определится
как векторная сумма vE — v + ирЕ. Численное значение
скорости точки Е может быть определено с помощью вы-
ражения ____________________
Ve = / tr -j- VpE + 2ииР£ cos а.
252
С другой стороны, плоскопараллельное движение
колеса в каждый момент времени можно представить как
вращение около мгновенного центра вращения. В данном
случае мгновенным центром вращения является мгновен-
ный центр скоростей в точке С, в котором скорость равна
нулю. Положение мгновенного центра скоростей можно
определить также как точку пересечения перпендикуля-
ров к направлениям векторов абсолютных скоростей двух
произвольных точек колеса, например А и Е.
Тогда скорость любой точки колеса определяется
выражением v = ир, где ы — угловая скорость вращения
колеса вокруг мгновенного центра скоростей, равная
угловой скорости вращения колеса вокруг своей оси Ох;
р — расстояние от рассматриваемой точки до мгновен-
ного центра вращения. Так, для точки D это расстояние
составляет pD = 2R, для точек А и В будет Рв = Ра =
= для произвольной точки Е
Ре = ЕС = V рв + R2 — 2рв R cos а.
Направлен вектор абсолютной скорости в сторону
вращения перпендикулярно к соответствующему от-
резку р, соединяющему мгновенный центр скоростей
с рассматриваемой точкой.
Окружная скорость любой i-й точки vRi направлена
по касательной к траектории ее движения относительно
оси вращения колеса По мере увеличения угла а
точка А последовательно занимает положения С, В и D,
а вектор vRi, оставаясь постоянным по величине, меняет
свое направление. Это объясняется наличием нормального
ускорения движения даже при равномерном вращении
колеса, т. е. при тангенциальном ускорении, равном
нулю. При бесконечно малом угле поворота Да, на кото-
рый колесо поворачивается за бесконечно малый отрезок
времени Д/, скорости в точках К и представляют собой
равные по величине векторы vRK и vRKt, касательные
к окружности в этих точках. Перенеся вектор скорости
vRK в точку получим вектор Ду, представляющий собой
изменение скорости точки К при переходе в положе-
ние за время ДД Из подобия треугольников и с учетом
того, что At -> 0, можно записать
Ду = RR^uri^I R — KKyVfru/R.
253
Отсюда следуег, что нормальное ускорение точки К
WnK = VrK/R = /-(О2.
Это ускорение направлено к центру колеса и назы-
вается центростремительным.
В случае неравномерного движения полное ускорение
складывается из нормального и тангенциального, которые
взаимно перпендикулярны: w = [(du/di)2 ц2//?)]1/2.
8.3. Кинетостатика системы гонщик — велосипед
При движении велогонщик и велосипед образуют еди-
ную движущуюся систему, в которой силы взаимодей-
ствия являются внутренними и сами по себе не могут
Рис. 8.10. Схема действующих сил на веду-
щем колесе велосипеда
обеспечить движения общего центра масс системы. Для
движения необходимы внешние силы, которые в данном
случае сводятся к силам тяжести, силам трения колес
о дорожное покрытие и силам аэродинамического сопро-
тивления.
Рассмотрим отдельно взятые ведущее и ведомое колеса
велосипеда, а затем систему гонщик — велосипед в целом.
Ведущее колесо. К ведущему колесу (рис. 8.10) мас-
сой т1 с моментом инерции приложен движущий мо-
мент Мя, под действием которого со стороны дороги
возникает сила трения скольжения = fNt, где —
254
сила нормального давления; / — коэффициент трения
скольжения. Точка Дх является мгновенным центром вра-
щения и ее скорость равна нулю. Поэтому f есть коэффи-
циент трения покоя, величина которого неопределенна
и может принимать значения от 0 до /тах- Эпюра скоро-
стей / в диаметральном сечении колеса является
фактически эпюрой скоростей набегающего воздушного
потока, сила сопротивления которого Fc, приложенная
в центре масс эпюры 2 суммарного лобового и вихревого
(поверхностного для дисковых колес) сопротивлений, со-
здает момент полного аэродинамического сопротивле-
ния Мс.
Колесо, имеющее пневматическую шину в виде одно-
трубки, деформируется в зоне контакта с поверхностью
дороги (см. пп. 5.2 и 5.3), что приводит к смещению реак-
ции Nr на некоторую величину fK, называемую коэффи-
циентом трения качения. При этом возникает момент тре-
ния качения МкХ = Учитывая малость величины fK,
в дальнейшем будем считать реакцию приложенной
в точке Дх.
Уравнения движения колеса запишутся в виде:
m1x1 = Fx — sin а — Ес;
= Л\ — niig cos а;
У1Ф1 = Мя - Fxrx - МкХ - Мс,
(8.3)
где хх, z/i — координаты положения оси колеса Ох; <рх —
угол поворота ведущего (заднего) колеса; а — угол на-
клона поверхности дороги к горизонтали.
Если колесо катится без проскальзывания, то хх =
= У1 = 0; Ni — tnxg cos а. Сила трения Ех без учета
сил аэродинамического сопротивления
Л = [Мя— mxg(7Kcosa ——-cosoQ] X
х М1 (8’4)
L \ i ' J
Движущий момент Мд в правой части уравнения (8.4)
может принимать различные значения, но если правая
часть уравнения станет больше, чем fmax Nlt то появится
проскальзывание колеса относительно дороги и увеличе-
ние Мд оказывается нецелесообразным. Максимальное
ускорение составляет величину
%L max — g (/max COS tt Since). (8-5)
255
жения имеют вид:
Рис. 8.11. Схема действующих
сил на ведомом колесе велоси-
педа
Характерно, что под ук-
лон (а < 0) можно обеспе-
чить движение без проскаль-
зывания с большими ускоре-
ниями.
Ведомое колесо. Движе-
ние ведомого колеса массой т»
с моментом инерции J2 про-
исходит под действием си-
лы Q, приложенной со стороны передней вилки рамы
велосипеда. В соответствии с рис. 8.11 уравнения дви-.
т2х2 = Q cos р — F2 m2g sin а — Fc; '
т2у2 — —Q sin p -J- N2 — m2g cos a;
^2^2 = F 2Г 2 Л4ка Л4с,
(8-6)
где x2, y2 — координаты положения оси колеса О2; ф2 —
угол поворота ведомого (переднего) колеса; р — угол
наклона линии передней вилки к горизонтали.
Из уравнений (8.6) в случае у 2 — 0 и N2 = Q sin Р 4-
4- m2g cos а при отсутствии аэродинамического сопро-
тивления и проскальзывания колеса относительно дороги,
т. е. при х2 = г2ф2, получим силу трения
F2 — ^Qcosp — m2gsina 4- (Qsin p 4- m2gcosa)J x
x (l _ (8.7)
В уравнении (8.7), если отсутствует скольжение, долж-
но выполняться условие F2 /шах N2. Максимальное
ускорение
*2 max = ~ [Q cos р — /гоах (Q sin р 4- m2g cos а)] — g sin а.
*'*2 ’
(8.8>:
В уравнение (8.8) необходимо подставлять значение Q,
определяемое из уравнения (8.7) при F2 — fmax N2.
Рассмотренные случаи показывают исключительной
важную роль сил трения скольжения при движении колес
256
велосипеда. Так, для ведущего колеса при отсутствии
трения скольжения (Fx = 0) движение из состояния покоя
невозможно при а = 0, а при а. > 0 ускорение х напра-
влено в обратную сторону. Для ведомого колеса при Fa =
= 0 невозможно его вращение из состояния покоя. Кроме
того, от сил трения скольжения зависят максимальные
ускорения, которые можно сообщить центрам масс колеса
при отсутствии проскальзывания.
Рис. 8.12. Схема действующих сил в системе гонщик — велосипед
Система гонщик — велосипед в целом. Рассмотрим дви-
жение системы гонщик — велосипед (рис. 8.12), сохранив
для колес и действующих на них сил прежние обозначе-
ния, а массу гонщика и велосипеда обозначим через т3
и сосредоточим ее в точке с координатами х3 и у3. Общая
часса всей системы т„ = тл -|- тг -f- т3 будет сосредото-
ена в центре масс ЦМ с координатами х0 и у0. Уравнения
вижения с учетом общей массы т„ и силы аэродинами-
чского сопротивления Fc, приведенной к центру массы
истемы, имеют вид:
= Ft — F2 + mog sin a — FCx;
moyi = Л\ + N2 ~ fflogcosa — Fcy;
Лф1 = Мя — Fxr, — MK1;
J 2ф2 = — Л^к2-
9 Любовицкий В. П.
257
Считая уг = 0, хг = гхФ1 и х2 = г2ф2, получим урав-
нение движения центра масс
(т0 +-4-+ -4-)*! =-т5- — mog cos а + sin а) —
\ '1 '2 ' Г1
-(Fcx + FCBK), (8.Ю)
где
К = fK (1/Гх + 1/г2).
Интегрируя в пределах от 0 до t, получим уравнение
энергетического баланса в следующем виде:
Т + 4 + 4) 1*‘ (0 - $ (°)1 =
t
= J ^7Гdt - т^к ю -Х1 (°)1 -
о
t
— ftiog si па [%!(/) —Хх(0)]— J (Fcx + ^cyK) xAdt. (8.11)
о
Левая часть уравнения (8.11) выражает приращение
кинетической энергии системы, первый член правой
части — работу движущего момента, а остальные члены —
соответственно работу на преодоление сил трения каче-
ния, работу сил тяжести и работу сил сопротивления
воздуха.
Для конкретного использования уравнения (8.11)
функцию Хх (t) представим в следующем виде:
(о = (Шй + 4+4 Г' 14 J M*dt ~
— (К cos а + sin а) / — J (Fcx + FCyK) dt] + Съ (8.12)
где произвольную постоянную Сх найдем из условия
*1 (0) = *10-
Движущий момент Мя в первом приближении яв-
ляется заданной функцией времени, зависящей от тех-
ники педалирования гонщика и условий движения. В об-
щем виде это достаточно сложная функция, и количе-
ственные закономерности движения аналитически полу-
чить затруднительно.
Ограничимся только качественным анализом движения
системы, приняв закон изменения движущего момента
в виде
Мд — Мо ф- ДА1 cos pt, (8.13)
258
где JW0 — среднеинтегральное значение движущего мо-
мента; АЛ4 — амплитуда изменения этого момента; р —
круговая частота изменения движущего момента.
Приняв значения Fcx и FCy постоянными, из уравне-
ния (8.12) получим
• /J\ ( I 1 I \ 1 Г л , I ДЛ1 . .
Xi(t) = + ^ — /4-_-sinp/-~
— (mpg/Ccosa+Wogsina+Fex—^сЛ)^]+ ^ю- (8-14)
Из уравнения (8.14) следует, что если сумма коэффи-
циентов при t больше нуля, то скорость с течением вре-
мени будет возрастать и наоборот. Поэтому движение
с постоянной средней скоростью должно характеризо-
ваться зависимостью
%i(/) = (т0 +-^- + -4-) ‘-^-sln/rf + xw. (8.15)
\ '1 г 2 / rlP
Из уравнения (8.15) следует, что амплитуда колебаний
скорости уменьшается с увеличением массы системы и мо-
ментов инерции колес. Кроме того, поскольку частота р
может быть принята пропорциональной скорости хг (t),
то можно сделать вывод, что с ростом скорости хг (/) не-
равномерность хода уменьшается при прочих равных
условиях.
Зная закон изменения ускорения системы, можно
определить реакции Ni и N2, для чего необходимо прило-
жить к центрам масс тг, т2 и /тг3 соответствующие силы
инерции и использовать условия равновесия системы
(см. рис. 8.12). После преобразований получим:
= /n0gcosa 4- Fcy — N2,
= ТсЬГу cos cos Y + тзхз + fKtn0) —
— (*i + g sin a) (m^ + m2r2 + m^s) — fKFKy —
— РсхУо + F eyx0],
(8.16)
где cos у = >/ 1 — ((ту — r2)/2 ]2; L — база велосипеда,
x„, Уо — координаты центра масс системы.
Из уравнения (8.16) следует, что реакция N2, дей-
ствующая на переднее колесо велосипеда, уменьшается
при ускоренном движении (х > 0) и на участках подъема
(а > 0) и зависит от соотношения радиусов ту и г2 колес
велосипеда. В то же время уменьшение реакции N2 всегда
9:
259
приводит к увеличению реакции Nlt действующей на зад-
нее, ведущее колесо.
Полученные результаты относятся к движению по пря-
молинейному участку дороги, когда процесс педалирова-
ния является установившимся. Движущий момент Мя
пропорционален усилию Q, приложенному к педали по
касательной к траектории ее движения. Мощность
(/), развиваемая гонщиком, является ограниченной
величиной, она не может превзойти некоторого значения
Рmax, Т. е.
Q<Pmax/[-4 (0J-
Сравнительные оценки на основе кинетостатических
зависимостей. Приведенные кинетостатические зависимо-
сти раскрывают основные закономерности движения си-
стемы гонщик — велосипед и создают предпосылки для
более глубокого анализа отдельных проблем. К таким
проблемам можно отнести сравнение кинематических
возможностей двух гонщиков, отличающихся, например,
массой и телосложением (а следовательно, на систему
гонщик — велосипед будут действовать разные по вели-
чине гравитационные и аэродинамические силы), или
сравнительные оценки сил трения качения колес в зоне
контакта однотрубок с поверхностью дороги. Необходимо
отметить, что исходные данные (коэффициенты трения
качения, кинематической вязкости воздуха, аэродинами-
ческого сопротивления, площади миделя и другие пара-
метры системы гонщик — велосипед), получаемые, как
правило, экспериментальным путем, содержат значитель-
ные погрешности. Уменьшить влияние этих погрешностей
можно, если проводить испытания двух сравниваемых
систем, оценивая только конечный результат, как это
делается при свободном движении двух гонщиков на
спуске (оценивается длина свободного выбега).
Спуск — один из важнейших моментов шоссейной
гонки, и квалифицированный гонщик стремится исполь-
зовать его для обострения спортивной борьбы. Педали-
руя на больших передачах или на малых, но периодически
с высокой частотой (малыми сериями), гонщик одновре-
менно использует возможность увеличения скорости за счет
действия гравитационной силы, вызывающей движение
велосипеда на спуске. К силам внешнего сопротивления
необходимо относить силу аэродинамического сопроти-
вления, силы трения качения колес по поверхности до-
260
роги, силы трения качения в шарикоподшипниках втулок,
силы трения однотрубок о поверхность дороги и силы
аэродинамического сопротивления набора колес.
Для того чтобы упростить задачу расчета максимально
возможных скоростей движения системы гонщик — вело-
сипед при свободном спуске, исключим из рассмотрения
силы трения качения в подшипниках и ограничимся
приближенной оценкой аэродинамического сопротивле-
Рис. 8.13. Схема действующих сил при расчете кинематики свсбодною
спуска
ния. Тогда уравнение действующих сил, согласно схеме
на рис. 8.13 [191, можно записать в виде
Рi = — -jp- то + mog sin а +
+ 2 fK cos а — Сх -Др- у2 = О,
(8.17)
где т0 — масса системы гонщик — велосипед, кг; а —
угол наклона полотна шоссе, °; g — ускорение свободного
падения, м/с2; /к — коэффициент трения качения колеса
велосипеда по поверхности полотна шоссе (табл. 8.1), м;
г — радиус колеса, м; Сх— коэффициент аэродинамиче-
ского сопротивления системы гонщик — велосипед; S —
площадь миделя системы гонщик — велосипед, м2; р —
кинематический коэффициент вязкости воздуха, Н-с2/м4;
v — скорость движения системы гонщик — велосипед при
261
Таблица 8.1. Коэффициенты трения качения колес
Конта кти руемые поверхности 'к> "
Стальное колесо по стальному рельсу Стальное колесо по деревянному покрытию Шарикоподшипник Велосипедное колесо * по асфальту » » » бетону » » » естест- венному грунту в хорошем состоянии Велосипедное колесо по утрамбо- ванному снегу Велосипедное колесо по деревян- ному покрытию велотрека Велосипедное колесо по булыжной мостовой * Величина /к зависит также от из велосипедного колеса, рисунка и качеств 0,0005 0,0015—0,0025 0,00001—0,00004 0,001—0,004 0,004 0,006 0,008 0,001 0,01—0,04 быточного давления в камере а протектора однотрубки.
свободном спуске (относительная скорость с учетом встреч-
ного или попутного ветра), м/с.
Перепишем уравнение (8.17) с учетом того, что
cos а « 1:
т° = = OT°g(sina —-V5-) — (818)
Введя обозначения
(sm.-Jb.)-* = Л
получим
(8.19)
„ dv gk2 .
Разделяя переменные v • ~ ~г dx и интегрируя
обе части равенства, найдем
1п(рг-ог) = -^х + С1, (8.20)
где при х = 0 и v — 0 постоянная интегрирования Cj =
= In рг.
После подстановки значения Сг в уравнение (8.20)
получим
. р2 —р« 2gP pi — vi f 2gk“ Л
_^_x, или — = exp(--Jr-xJ,
262
откуда
v = р 1 — ехр (—х). (8.21)
При х -► оо имеем v -> vinax = р- Следовательно, ма-
ксимально достижимая скорость свободного движения
системы гонщик — велосипед на спуске при рассмотрен-
ных выше условиях и с учетом указанных допущений
будет определяться уравнением
„„„ = l/WME. (8.22)
Общее уравнение, описывающее изменение скорости
в процессе разгона системы на спуске, в функции прой-
денного пути имеет вид
V - 1/1 - exp I ЗаЯ" » - W х]. (8.23)
|/ L vmax J
При массе гонщика 72 кг, массе велосипеда 10 кг, общей массе
системы т0 = 72 + 10 = 82 кг, отсутствии ветра, р= 1,25Н-с2/м4,
Сх = 0,8, S = 0,5 м2, г = 0,34 м, g = 9,81 м/с2, fK = 4-Ю"3 м и
а = 10° максимально достижимая скорость движения составляет
22,26 м/с, или 80,16 км/ч.
Гонщику трудно контролировать момент достижения
максимальной скорости. Поэтому полезно знать примерно
расстояние и время, когда такая скорость будет дости-
гнута. Для исследования изменения скорости в функции
времени преобразуем уравнение (8.19):
= (8-24)
du dk^
Разделяя вновь переменныеd/ и инте-
грируя обе части равенства, получим
±2Tctg^ = ^-t + Clt (8.25)
откуда при t = 0 и v = 0 находим Сх = 0. Следовательно,
arctg 1, Umax = Р и arctg t.
Р Р vmax vmax
Окончательно выражение для текущего значения ско-
рости имеет следующий вид:
и = Umax th Г t]. (8.26)
L ^грях J
263
Ряд решений этого уравнения при различных уклонах
дороги представлен на рис. 8.14, откуда видно, что для
достижения максимально возможных скоростей при сво-
бодном спуске необходимо значительное время и расстоя-
ние. Поэтому гонщик в целях достижения максимального
Рис. 8.14. Изменение скорости свободного спуска велосипедиста мас-
сой т = 82 кг при различных углах наклона поверхности дороги:
1 — а = 2,5е; 2 — а = 5°; -3 — а — 10°; 4 — а = 15е
спортивного результата должен форсировать разгон на
спусках с использованием увеличенных передач или педа-
лирования короткими сериями.
8.4. Устойчивость движения системы
гонщик — велосипед
Устойчивость движения системы гонщик — велосипед
в настоящей книге рассматривается в упрощенной форме
в рамках анализа действующих сил с целью выяснения
природы и причин их возникновения, а также анализа!
их баланса, обеспечивающего устойчивое движение си-
стемы.
Согласно структурной схеме (см. рис. 8.1), управление
устойчивостью движения обеспечивается по 2-му ка-
налу, контролирующему выполнение маневра или тормо-
жения. Эти две функции управления устойчивостью дви-
жения выполняются по командам ЦНС с учетом внешней
264
обстановки, аэродинамических, механических и динами-
ческих параметров системы, а также тактики и техники
ведения спортивной борьбы. Предлагается несколько
гипотез, объясняющих устойчивость движения системы
гонщик — велосипед. Каждая из них убедительно опи-
сывает отдельные конкретные случаи, что в общем сви-
детельствует об одновременном действии всех рассма-
триваемых факторов с переменным долевым участием
в зависимости от скорости движения системы.
Гипотеза 1. Гипотеза предполагает обеспечение устой-
чивости движения только за счет принудительного пере-
мещения центра масс системы путем изменения положения
тела гонщика относительно точек опоры колес. Типич-
ными примерами, подтверждающими эту гипотезу, служат
езда на велосипеде, с заклиненной рулевой колонкой
или цирковой трюк езды на велосипеде по жесткому
прямолинейному профилю под куполом цирка с приме-
нением поперечно-расположенного шеста, гантелей и дру-
гих массивных вспомогательных средств.
Наиболее достоверно подтверждают данную гипотезу
приемы обеспечения устойчивости при движении велоси-
педа в узкой колее разбитой дороги или при попадании
(рис. 8.15) колес 1 велосипеда во время гонки в желоб
трамвайного рельса 2. При этом система выходит из рав-
новесия и отклоняется от вертикальной плоскости аа
на угол у (в плоскость bb). Для возвращения системы
в равновесие и обеспечения устойчивости движения гон-
щик выполняет маневр, состоящий в том, что он предна-
меренно отталкивается от велосипеда в сторону, противо-
положную первоначальному отклонению, перенося ЦМ
из плоскости bb в плоскость аа. Таким образом, центр
масс вновь возвращается в плоскость аа, в которой распо-
ложена точка опоры О, и равновесие восстанавливается.
Гипотеза 2. Эта гипотеза предлагает обратное дей
ствие, т. е. изменение положения точек опоры и Л2
системы гонщик — велосипед на поверхности дороги.
Эти точки расположены в вертикальной плоскости аа
(рис. 8.16, а).
Аналогов подобного действия в практике повседнев-
ной жизни встречается немало. Например, для обеспе-
чения устойчивости стержня (рис. 8.16, б) достаточно
сместить точку его опоры А, развернув стержень на угол у
(в положение bb) относительно вертикальной оси аа по
стрелке Б. Обеспечение устойчивости такого вертикально
265
расположенного стержня является полной аналогией
сюрпляса, когда за счет разворота переднего колеса гон-
щику удается находить
полотне трека, что центр
кальной плоскости аа,
проходящей через точ-
ки контакта Л1 перед-
него и А2 заднего ко-
лес с поверхностью
трека.
для него такое положение на
масс системы остается в верти-
Рис. 8.16. Сюрпляс на вираже трека —
пример гипотезы управления устойчи-
востью системы гонщик — велосипед
изменением точки опоры (гипоте-
за 2)
Рис. 8.15. Схема обеспече-
ния устойчивости движения
системы гонщик — велосипед
при попадании колес вело-
сипеда в желоб рельса—изме-
нением положения центра
масс (гипотеза 1)
Эту гипотезу можно пояснить схемой реального дви-
жения, приведенной на рис. 8.17. В начальный момент
времени центр масс системы гонщик — велосипед (ВГ —
проекция ЦМ на вертикальную плоскость гу) и его проек-
ция Л1 на горизонтальную плоскость ху расположены
в одной вертикальной плоскости xz. Под действием внеш-
266
ней силы F происходит нарушение равновесия системы
(проекция В? смещена относительно Л2 на величину /ц)
и возникает опрокидывающий момент Л40 = mgH sin у,
который нарастает с увели-
чением угла у.
Маневр гонщика (предпо-
лагается, что в данном слу-
чае действуют факторы, соот-
ветствующие только дайной
гипотезе) для восстановления
равновесия сводится к обе-
спечению движения велоси-
педа по траектории 1 для
Рис. 8.17. Схема обеспечения
устойчивости движения системы
гонщик — велосипед согласно ги-
потезе 2
Рис. 8.18. Схема обеспечения
устойчивости движения системы
гонщик — велосипед согласно ги-
потезе 3
267
переднего колеса и по траектории 2 для заднего. Одно-
временно центр масс системы в плоскости ху описывает
траекторию 3, а в плоскости уг — траекторию 4. В момент
времени, соответствующий положению Л4—В4, возникает
восстанавливающий момент Мв = mgH sin у. В заклю-
чительной фазе, соответствующей положению
равновесие восстановлено и движение системы продол-
жается по траектории, смещенной относительно первона-
чальной на величину у0. Время регулирования при равно-
мерной скорости движения v для представленного на
схеме случая составит приближенно tp = x0/v. В общем
случае процесс восстановления равновесия по гипотезе 2
зависит от таких факторов, как импульс силы внешнего
воздействия, масса системы, время запаздывания реак-
ции гонщика, параметры велосипеда, и обеспечивается
благодаря возможности сообщить точкам опоры большее
ускорение, чем ускорение центра масс системы гонщик —
велосипед.
Гипотеза 3. Гипотеза учитывает изменение условий
взаимодействия однотрубок гоночного велосипеда с по-
верхностью дороги при изменении положения центра
масс системы гонщик — велосипед.
В случае совпадения положения центра масс системы
с вертикальной плоскостью аа (рис. 8.18, а) однотрубка 1
деформируется симметрично относительно вертикальной
оси аа, вдоль которой действует сила тяжести mg. Эпюра
давлений 2 в этом случае также симметрична, и велоси-
пед 3 движется прямолинейно.
В случае смещения центра масс относительно верти-
кальной плоскости аа (рис. 8.18, б) эпюра давлений в зоне
контакта однотрубки с поверхностью дороги перераспре-
деляется в связи с возникновением дополнительной силы
скольжения, равной mg sin у. В результате сила нормаль-
ного давления N смещается на величину h относительно
вертикальной плоскости, что вызывает возникновение
восстанавливающего момента Мв = Nh и момента MF —
= Fh. Последний приводит к изменению траектории 4
движения велосипеда. Далее для восстановления равно-
весия и обеспечения устойчивости движения может быть
применена, например, гипотеза 2.
Гипотеза 4. Эта гипотеза связана с особенностью кон-
структивного решения узла передней вилки велосипеда
и диаметром переднего колеса. Практические испытания
различных конструкций показали, что из всего их много-
268
образия можно выделить такие решения, которые опре-
деляют устойчивость направленного движения системы
гонщик — велосипед (табл. 8.2). Принципиально важным
для конструкции рамы велосипеда является угол X на-
клона оси рулевой колонки, которая пересекается с по-
верхностью дороги в точке А, и изгиб передней вилки,
определяющий положение точки 5, которая является
пересечением плоскости дороги и вертикали, проходящей
через ось переднего колеса.
Значение угла 1 < 0 и взаимное расположение то-
чек Л и В в последовательности АВ (варианты 1 и 2)
относительно вектора скорости велосипеда v обеспечи-
вают повышенную устойчивость при прямолинейном дви-
жении и недостаточную маневренность на ходу. Значе-
ние угла X > 0 и взаимное расположение точек А и В
в последовательности АВ (варианты 3 и 4) обеспечивают
устойчивость и маневренность при криволинейном дви-
жении. Сказанное хорошо подтверждается схемой реаль-
ной модели (табл. 8.2), где стабилизирующий момент
Л4СТ = Fi-plав tg 4', возникающий под действием сил тре-
ния скольжения FTp, удерживает систему в устойчивом
положении. Эту гипотезу подтверждает поведение меха-
нического аналога, у которого масса т, подвешенная на
стержне 1АВ, благодаря стабилизирующему моменту
MCT=mglAB sin находится в так называемой потенциаль-
ной яме, соответствующей нижнему положению точки В.
Значение угла А. 0, совмещение точек А и В или
взаимное расположение в последовательности ВА (ва-
рианты 5 и 6) дают неустойчивое движение велосипеда.
Езда без рук на таком велосипеде невозможна, а нормаль-
ная управляемая рулем езда крайне затруднительна.
Минимальное внешнее воздействие выводит систему из
равновесия, и, как показано на реальной модели
(табл. 8.2), возникающий и быстро нарастающий дестаби-
лизирующий момент Л4Д = FrplBA tg 4 приводит к паде-
нию. Механический аналог также характеризуется неус-
тойчивостью в вертикальном верхнем положении стерж-
ня 1ВА.
Гипотеза 5. Гипотеза учитывает особенность конструк-
ции рамы велосипеда (рис. 8.19, а), состоящую в том, что
в узле рулевой колонки В происходит излом линии рамы
на две части, первая из которых (ВА2) объединяет перед-
ние колесо и вилку, вторая (ВЛХ) — собственно раму и
заднее колесо.
269
Таблица 8.2. Схема обеспечении устойчивости движения системы гонщик—велосипед по гипотезе
270
В 1-й фазе прямолинейного движения в направлении аа
вертикаль, проходящая через центр масс системы гон-
щик :— велосипед, располагается в вертикальной пло-
скости, проходящей через линию Д1Д2, соединяющую точ-
Рис. 8.19. Схема обеспечения устойчивости движения системы гон-
щик — велосипед согласно гипотезе 5: а — временные фазы; б —
график изменения положения ЦМ и точки А
При воздействии внешней силы ЦМ смещается иа вели-
чину 4-^шах, например в правую сторону, относительно
точки А (2-я фаза) и система выходит из состояния равно-
весия, что вызывает естественную реакцию гонщика (3-я
фаза): ои прикладывает момент управления А4р к рулю
велосипеда. Возникающие боковые силы трения сколь-
жения F в зоне контакта с дорогой переднего и заднего
271
колес обеспечивают возникновение момента Мс, напра-
вленного в сторону, противоположную действию Л4р.
Моменты Мр и Л1с создают излом линии рамы в шар-
нире В, что приводит к смещению ЦМ влево относительно
линии Л1Л2 на величину — z/raax.
Следующая, 4-я фаза характеризуется последующим
совмещением ломаной линии АГВА2 с прямой AtA2 путем
создания обратных моментов Л4Р и Л4С. При совмещении
ЦМ и точки Л (5-я фаза) процесс восстановления равно-
весия системы заканчивается и продолжается устойчивое
движение в направлении bb.
Весь процесс регулирования графически показан на
рис. 8.19, б, где 1—5 — рассмотренные временные фазы;
кривая 6 качественно иллюстрирует движение ЦМ, а кри-
вая 7 — движение точки Л.
Гипотеза 6. Гипотеза рассматривает влияние гироско-
пического момента на устойчивость движения системы
гонщик — велосипед. Эта проблема вызывает наиболь-
ший интерес читателей при обсуждении устойчивости
движения велосипеда, и поэтому остановимся на ней более
подробно.
При движении со скоростью v по прямолинейной тра-
ектории b'b' (рис. 8.20) переднее колесо 1
велосипеда вращается с угловой скоростью ф = v/R,
где R — радиус колеса, относительно оси втулки аа
(вектор скорости ф показан вдоль оси аа).
Первое правило при обучении езде на велосипеде гла-
сит: поддерживай скорость движения и поворачивай руль
в сторону падения. Для перевода движения колеса с пря-
молинейной траектории b'b’ (в случае смещения центра
масс влево и возникновения возможности падения на ле-
вую сторону) на криволинейную b'b" рулевая колонка 2
вместе с вилкой 3 совершает вращательное движение с уг-
ловой скоростью ф вокруг своей оси сс (вектор скорости
показан вдоль линии сс). Каждая элементарная масса,
сосредоточенная в произвольной точке К колеса, распо-
ложенная на расстоянии г от оси втулки аа и I от оси bb,
с учетом поворотного ускорения дает силу инерции Рк,
направленную в сторону, противоположную поворотному
ускорению хиК. Эта сила создает гироскопический момент,
который с учетом распределения конечного числа эле-
ментарных масс, т. е. полярного Jn и приведенного эква-
ториального /э моментов инерции, равен
Л1г = (Jn + Зэ) ФФ-
272
Вектор этого момента направлен вдоль оси bb по ходу
движения. Гироскопический момент является восстанав-
ливающим, т. е. он как бы стремится повернуть ось ко-
леса аа вокруг оси bb таким образом, чтобы она кратчай-
шим путем совместилась с осью сс, вокруг которой осу-
ществляется вынужденный поворот руля на угол 'Г
Гироскопический момент M'v вызывает реакцию Гтр
со стороны дороги в точке контакта колеса с поверхностью
дороги (в точке В). Реакция создает реактивный мо-
мент Мр, который разворачивает систему в обратную сто-
рону на угол у относительно оси b'b' (наклонное положе-
ние колеса 4, показанное штриховой линией).
При отклонении осн рулевой колонки сс на угол у
в положение с'с' возникает гироскопический момент М”,
вектор которого в начальный момент времени направлен
вдоль оси сс, а ось аа стремится кратчайшим путем совмес-
титься с осью bb. При этом система гонщик — велосипед
273
изменяет траекторию движения с прямолинейной b'b'
на криволинейную b'b". Рассмотренное явление наблю-
дается при езде на велосипеде, когда руки убраны с руля,
особенно это становится очевидным прн спуске по изви-
листой дороге, когда для входа в очередной вираж доста-
точно наклонить корпус в сторону центра кривизны вира-
жа— и велосипед будет двигаться по криволинейной траек-
тории, соответствующей скорости движения и наклону
велосипеда.
Гироскопические моменты при постоянной скорости
движения велосипеда действуют только при условии
dxp2/d/2 Ф 0 или d^/dt? =^= 0. В случае равенства их нулю
гироскопические моменты отсутствуют.
Заднее к о л е с о 2 велосипеда (рис. 8.21) жестко
закреплено в задней вилке 1 и имеет всего одну степень
свободы относительно рамы (в то время как переднее —
два). Кроме вращения в раме со скоростью ф заднее ко-
лесо вместе с рамой может совершать вращательное дви-
жение со скоростью t вокруг оси bb .(в подвешенном со-
стоянии велосипеда), со скоростью I' вокруг оси b'b'
(при движении по дороге) и со скоростью ф вокруг оси сс
(при изменении направления движения, например, с тра-
ектории b'b' на траекторию b'b"). Проследим работу зад-
него колеса в последовательности, в которой рассматри-
вали работу переднего.
В случае поворота руля и изменения траектории дви-
жения с b’b' на b'b” заднее колесо также начнет двигаться
по новой траектории b'b” и будет совершать разворот
относительно вертикальной оси сс со скоростью ф. При
этом возникает гироскопический момент М'т, вектор
которого направлен вдоль оси bb по ходу движения.
Гироскопический момент М'г является восстанавливаю-
щим, и ось втулки заднего колеса аа стремится кратчай-
шим путем совместиться с осью сс. Реакция Втр со сто-
роны дороги в точке контакта колеса с ее поверхностью
(в точке В), вызванная действием гироскопического мо-
мента Mr, создает реактивный момент А4Р, который разво-
рачивает систему в обратную сторону на угол у относи-
тельно оси b'b' (наклонное положение заднего колеса 3,
показанное штриховой линией).
При отклонении оси сс заднего колеса на угол у в по-
ложение с'с' возникает гироскопический момент М’т, век-
тор которого в начальный момент времени направлен
вдоль оси сс, и ось аа стремится кратчайшим путем сов-
274
меститься с осью bb. Однако ось втулки заднего колеса аа
закреплена в раме с помощью шарикоподшипников, гиро-
скопический момент Мт гасится в ннх.
Таким образом, гироскопические эффекты, возникаю-
щие на передних и задних колесах, имеют одинаковую
Рис. 8.21. Схема определе-
ния гироскопического мо-
мента в заднем колесе вело-
сипеда (гипотеза 6)
направленность и способствуют обеспечению устойчи-
вости системы гонщик — велосипед или созданию усло-
вий, при которых может действовать механизм, работа
которого описана в других гипотезах.
Гироскопические явления возникают и при прямоли-
нейном движении системы гонщик — велосипед. Имеют
место случаи, когда при увеличении скорости движения
переднее колесо велосипеда начинает совершать колеба-
ния с довольно высокой частотой (примерно 5—10 Гц
275
и выше). Эти самовозбуждающиеся колебания управляе-
мого переднего колеса возникают при действии на него
внешней силы и известны под названием шимми. Они
ухудшают управляемость велосипедом на больших ско-
ростях. В отдельных случаях эти колебания могут иметь
большие амплитуды, способные привести к срыву одно-
трубки с обода колеса, разрыву спицы или группы спиц.
Причиной возбуждения шимми может быть неровность
дороги, камень или любой другой предмет, попавший под
колесо велосипеда, катящегося с угловой скоростью ф.
При ударе переднего колеса 1 о препятствие 2 происхо-
дит поворот оси колеса аа на угол г| относительно про-
дольной плоскости велосипеда (рис. 8.22, а). Обратимся
к схеме, иллюстрирующей шимми колеса в отдельных
фазах движения. Колесу, вращающемуся вокруг оси аа
(рис. 8.22, б) с угловой скоростью ф, в момент наезда на
препятствие сообщается дополнительная скорость i выну-
жденного поворота колеса вокруг оси bb, что приводит
к возникновению гироскопического момента Мг
(рис. 8.22, в). Вследствие этого колесо начинает повора-
чиваться вокруг оси сс, стремясь кратчайшим путем
совместить ось аа с осью bb, при этом прямолинейная
траектория b'b' начинает меняться на криволинейную
(штриховая линия) (17].
276
Приобретая угловую скорость ф вокруг оси сс, колесо
поворачивается вокруг оси bb, чтобы кратчайшим путем
(рис. 8.22, г) совместить ось аа с осью сс. Изменение поло-
жения колеса в пространстве по сравнению с первона-
чальным приводит к упругим деформациям передней вилки
и возникновению момента упругих сил. Под влиянием
возрастающего момента упругих сил колесо замедляет
свой поворот вокруг вертикальной оси и, достигнув макси-
мального отклонения + z/raax, будет иметь скорость
g = 0, при этом момент упругих сил — максимальный.
С этого момента времени на колесо будет действовать
только момент упругих сил, под влиянием которого
колесо будет двигаться вокруг оси сс со скоростью, напра-
вленной в противоположную сторону по сравнению с пре-
дыдущей фазой. Максимальная скорость j достигается
в момент выхода на траекторию b'b' при моменте упругих
сил, равном нулю (рис. 8.22, д). Однако в силу инерции
всей системы, включая колесо, руль, раму и другие детали
велосипеда, колесо продолжает свое движение по криво-
линейной траектории (штриховая линия), и весь полу-
цикл повторится с максимальной амплитудой —у,тх
(рис. 8.22, е).
Внутренние силы трения в системе гонщик — велоси-
пед — дорога постепенно гасят возникшие колебания
(рис. 8.22, ж), однако при определенных условиях шимми
может стать столь значительным, что колесо не выдержит
нагрузки и разрушится.
Гипотеза 7. При прямолинейной траектории движе-
ния bb системы гонщик — велосипед вектор гравитацион-
ной силы mg проходит по вертикальной линии аа в точке
опоры А переднего и заднего колес (рис. 8.23, а, поло-
жение центра масс ЦМ и вектора mg показано штри-
хами). При повороте руля или при выходе центра масс
из вертикальной плоскости аа в плоскость а а' (эти два
процесса взаимосвязаны согласно гипотезе 6) траекто-
рия сс движения центра масс изменяется на криволи-
нейную (штриховая линия с’с' с радиусом кривизны R).
В этом случае устойчивость движения обеспечивается
благодаря балансу действующих сил: момента сил инер-
ции и момента гравитационных сил. Уравнение моментов
имеет вид m (v~h}/R — gh2) = 0. Выбирая угол р наклона
оси а’а' к горизонту или радиус кривизны R траектории
движения, гонщик автоматически (благодаря точной ра-
боте вестибулярного аппарата) находит оптимальное их
277
соотношение и обеспечивает тем самым устойчивость
движения системы.
Гипотеза 8. Эта гипотеза связана с анализом действую-
щих сил в случае изменения траектории движения с пря-
молинейной аа на криволинейную (рис. 8.23, б), на кото-
рую переходит система гонщик — велосипед в случае
поворота руля или отклонения центра масс системы от
вертикальной плоскости аа (эти два процесса взаимо
связаны согласно гипотезе 6). Колеса велосипеда начи-
* и
Рис. 8.23. Схема баланса сил при криволинейном движении системы
гонщик — велосипед: а — по гипотезе 7; б — по гипотезе 8
нают двигаться по различным траекториям: переднее —
по аЬ, заднее — по ad, а центр масс ЦМ — по ас. В таком
случае возникают два момента. Например, в положении А'\
и ЦМ возникают моменты опрокидывающий Л!оп = .
— mghi и восстанавливающий Л4В = RaJi?, где Ra, —
реакция опоры в точке А] (точке касания переднего колеса
с поверхностью дороги). Особенность гипотезы состоит
в том, что благодаря изгибу передней вилки вперед по
ходу движения скорость нарастания восстанавливающего
момента больше скорости нарастания опрокидывающего
момента, т. е.
dAfB/dp>dAfon/dp.
В заключение можно сказать, что если под понятием
«устойчивость движения» иметь в виду способность системы
гонщик — велосипед сохранять заданную форму движе-
ния, то рассматриваемая система неустойчива в статике,
а ее абсолютно прямолинейное движение невозможно.
Траектории движения точек опоры (точек контакта колес
с поверхностью дороги) колеблются относительно неко-
278
торой прямой линии, выбранной в качестве основного
направления движения системы. Хорошо подтверждают
это положение безуспешные попытки езды с заклиненной
рулевой колонкой, хотя, казалось бы, именно при закли-
ненной колонке велосипед должен двигаться прямоли-
нейно.
8.5. Аэродинамика системы гонщик — велосипед
Аэродинамические эффекты. Аэродинамика движу-
щихся объектов всегда была в центре внимания изобрета-
телей, конструкторов и эксплуатационников. Свидетель-
ством этому, может быть огромное число исследователь-
ских работ, направленных на улучшение аэродинамиче-
ских качеств самолетов, автомобилей, поездов и других
видов транспорта. Спорт, в частности велосипедный, дол-
гое время игнорировал аэродинамические влияния,
в большей мере полагаясь на потенциальные возможности
человеческого организма.
Такому положению в велосипедном спорте способ-
ствовал принятый УСИ в 1938 г. запрет на любые кон-
структивные изменения традиционного гоночного вело-
сипеда, направленные на достижение аэродинамического
преимущества. Этот запрет, с одной стороны, значительно
задержал развитие аэродинамики аппаратов, приводимых
в движение мускульной силой человека, но, с другой
стороны, позволил сохранить массовость и спортивный
характер велосипедного спорта, устранив технические
трудности, преодоление которых не под силу подавляющей
массе спортсменов. Такое решение позволило вовлечь
в занятие велосипедным спортом миллионы спортсменов,
сделав нх практически равноценными в техническом
отношении конкурентами.
Можно представить, к каким последствиям привело бы
отсутствие подобного запрета со стороны УСИ. Так,
уже в 1899 г. американский гонщик Ч. Мерфи получил
мировую известность, проехав на велосипеде 1 милю
(1,6 км) со скоростью 101,8 км/ч. Ч. Мерфи ехал за поез-
дом по специальному деревянному настилу на железно-
дорожной линии, используя аэродинамический экран
последнего вагона. В 1973 г. А. Аббот развил скорость
223,168 км/ч в гонке за специальным автомобилем с аэро-
динамическим колпаком. Или, например, рекорд аппа-
рата А. Войгта «Вектор тандем» (101,26 км/ч), установлен-
279
иый в 1980 г. На этом аппарате два гонщика, находясь
в лежачем положении спинами друг к другу, были укрыты
прочным высокоэффективным аэродинамическим обтека-
телем. Во всех рассмотренных случаях спортивное пре-
имущество было достигнуто за счет дорогостоящих тех-
нических решений, недоступных массовому спорту.
Вместе с тем, в 1976 г. УСИ разрешил применение неко-
торых технических средств, улучшающих аэродинамику
системы гонщик — велосипед. Права «гражданства» полу-
чили облегающие эластичные комбинезоны, обтекае-
мые шлемы, рамы с каплевидными профилями труб, обте-
каемые рукоятки тормозов, профилированные плоские
спицы и другие элементы с улучшенной аэродинамикой.
Аэродинамическое сопротивление — важный фактор,
определяющий энергозатраты на перемещение велоси-
педа. Как показали исследования [5], при движении
велосипеда со скоростью 30 км/ч аэродинамическое сопро-
тивление составляет примерно 80 % полной силы сопро-
тивления. При такой скорости движения вытесняется
и приводится в возмущенное состояние около 450 кг
воздуха в минуту. За движущимся велосипедом и гон-
щиком образуется вихревой след, на формирование кото-
рого затрачивается значительная часть энергии спорт-
смена.
На скоростные качества системы гонщик — велосипед
оказывают влияние три вида аэродинамического сопро-
тивления. Первый вид обусловлен характером распреде-
ления давления, определяемым обтекаемой формой. Поло-
жение корпуса гонщика, особенности его телосложения
в значительной степени определяют характеристику рас-
пределения статического давления. Второй вид обусло-
влен аэродинамическим трением о поверхность обтека-
ния. Здесь важную роль играют вязкость воздуха и пара-
метры обтекаемой поверхности, в непосредственной бли-
зости к которой формируется пограничный слой. Третий
вид обусловлен аэродинамическим возбуждением вихре-
вого следа, вызванного отрывом воздушного потока, сле-
дующего по контуру обтекаемого тела. При отрыве потока
за спиной гонщика и в тыловой части велосипеда обра-
зуются области пониженного давления, что приводит
к подсасыванию воздуха из окружающего объема и фор-
мированию вихревого следа (рис. 8.24), в котором можно
выделить ядро и пограничный слой. В лобовой части
системы возникает избыточное давление р, которое при-
280
водит к некоторому снижению скорости воздушного
потока v согласно уравнению Бернулли для несжимае-
мого газа. Детали велосипеда в основном имеют цилин-
дрическую форму л, как следствие, плохие аэродинами-
ческие характеристики, поскольку на их поверхностях
происходит отрыв воздушных потоков. Возникающие силы
вихревого сопротивления во много раз превышают силы
трения о воздух.
Рис. 8.24. Схема вихреобразования системой гонщик —
велосипед:
/ — ядро вихревого следа; 2 — пограничный слой вихревого
следа
Учесть аэродинамические эффекты в полном объеме
практически невозможно, однако можно дать прибли-
женную количественную оценку увеличения мощности
для наращивания скорости с учет-ом необходимости пре-
одоления только сопротивления воздушного потока, вли-
яние которого можно принять пропорциональным второй
степени скорости.
Так, для гонщика уровня квалификации мастера спорта езда на
скорости 30 км/ч не требует существенных усилий, и если условно при-
нять уровень мощности, необходимой для поддержания этой скорости,
за единицу, то для достижения скорости 40 км/ч потребуется увеличе-
ние мощности в 2,4 раза, скорости 50 км/ч — в 4,6 раза, а для дости-
жения рекордной скорости в часовой гонке на треке 51,15135 км, уста-
новленной Ф. Мозером в январе 1984 г., каждому желающему повторить
рекорд потребуется увеличить мощность энергоотдачи примерно в 4,9
раза.
Приведенные результаты расчета не учитывают многих факторов,
в том числе плотности воздуха. Например, в Мехико на высоте 2240 м,
где плотность воздуха составляет примерно 80 % плотности на уровне
моря, рекордные скорости на 3—5% больше, чем внизу. На Луне,
к примеру, где нет атмосферы, а сила тяжести составляет лишь одну
шестую часть земной, велосипед мог бы развить теоретическую ско-
рость 383 км/ч при затрате мощности порядка 73,5 Вт.
281
Установлено, что из мощности, расходуемой гонщиком
на преодоление аэродинамического сопротивления, при-
мерно 70 % расходуется на преодоление сопротивления
самого спортсмена, а 30 % — велосипеда. Поэтому гон-
щику, согласно правилам УСИ, остается немного возмож-
ностей улучшить аэродинамику системы гонщик — вело-
сипед. В настоящее время скоростные рекорды прибли-
жаются к пределу, который из расчета мощности 735,5 Вт
составляет примерно 55 км/ч [51.
V.
км/ч
128
. ЛВскторг-
Н/
112
SS
вол
«4
32
/J4
Велогонка
за лидером
Велогонка
S низкой
посадке -
Дорожный
велосипед
Рис. 8.25. Влияние площади F
мидель-сечения системы гон-
щик — велосипед на скорост-
ные показатели при различной
затрачиваемой мощности
Велогонка
3 высокой
посадке
0,55 Г,мг
у ^Мощность,Вт
551,6
361,1
233,2
220,6
131,1
13.5
36,7
В табл. 8.3 и на рис. 8.25 приведены некоторые резуль-
таты анализа влияния аэродинамики на скоростные воз-
можности различных конструктивных решений велоси-
педа, включая велосипеды с аэродинамическими обтека-
телями типа «Зиппер», тандемы, велосипеды систем «Изи
рейсер» и «Вектор сингл», рекордные велосипеды для
гонок за лидером-мотоциклом и лидером-автомашиной,
а также теоретические варианты велосипедов: с горизон-
тальным расположением гонщика и «лунный», «предна-
значенный» для испытаний на Луне — при отсутствии
атмосферы. Эта таблица содержит экспериментальные и
расчетные данные и позволяет получить общее предста-
282
вление о влиянии аэродинамических сопротивлений на
скоростные показатели велосипедов различных кон-
струкций.
Основные элементы велосипеда имеют форму цилин-
дра. Аналогичную форму имеют нижние конечности гон-
щика, а его туловище в посадке приближается к сфере.
Особенностью обтекания подобных форм является отрыв
пограничного слоя и создание циркуляционных течений
на кормовой стороне. Представление о действительной
картине течения воздушного потока, возникающего позади
кругового цилиндра после отрыва пограничного слоя,
дает серия рисунков с фотографий, полученных Д. Пр^ндт-
лем (рис. 8.26). 1261. При малых скоростях движения
(рис. 8.26, а) линия тока полностью соответствует невяз-
кому потенциальному течению. На рис. 8.26, б показан
момент начала отрыва пограничного слоя. Увеличение
скорости движения приводит к свертыванию течения в
два концентрированных вихря (рис. 8.26, в, г). В даль-
нейшем эта пара вихрей становится неустойчивой,
внешнее течение отрывает их и увлекает за собой
(рис. 8.26, д, е).
Образование вихрей связано со значительными изме-
нениями давления около цилиндра в процессе нараста-
ния скоростей его движения. Для тел обтекаемой формы,
например эллиптического профиля или профиля Жуков-
ского, рассмотренные явления отрыва пограничного слоя
наблюдаются в значительно меньшей степени. Именно
поэтому для тонких хорошо обтекаемых тел распределе-
ние давления по их контуру обычно довольно точно
совпадает с теоретическим потенциальным распределе
ни ем.
На рис. 8.27 показано распределение важнейших аэро-
динамических характеристик типовых профилей вдоль 1—
5 (цилиндрических, эллиптических и плоских) таких кон-
структивных элементов гоночного велосипеда, как спицы,
трубы рамной конструкции, руль, ручки тормозов и т. д.
В качестве аэродинамических характеристик набегаю-
щего воздушного потока использованы:
v = v/Va, — относительная скорость потока, где v —
местная скорость воздушного потока; от — скорость набе-
гающего потока;
o==-j-yvxl/v —толщина вытеснения пограничного
слоя, где v — кинематическая вязкость воздуха;
283
<» Таблица 8.3. Экспериментальные и расчетные данные по велосипедам различных систем
Схема Характеристика системы гонщи к — велосн пед F, м2 «а- Н «к. Н )к, м итах’ км/ч иПр’ км/ч ₽тр, % • исп max* км/ч
Гоночный велосипед (тв = 9 кг; тг = 72 кг; рв = 0,74 МПа) 0,36 14,8 2,4 0,83 0,0030 55,7 24,1 73 51,8
Гоночный велосипед с об- текателем «Зиппер» ' (тв = = 9,5 кг; тг = 72 кг; рв = — 0,74 МПа) 0,38 13,5 2,4 0,70 0,0030 57,4 24,8 25 54,5
i Гоночный тандем (тв = = 19 кг; тг = 72X2 = = 144 кг; рв = 0,63 МПа) 0,48 24,1 7,3 1,00 0,0045 58,4 24,5 66 56,6
«Лежачий» велосипед «Изи рейсер» (тв = 12,2 кг; тг = 72 кг; рв = 0,63 МПа) 0,35 13,5 4,3 0,77 0,0050 56,6 23,2 75 54,2
1111 Велосипед для гонок за лидером (тв = 9 кг; тг = = 72 кг; рв = 0,74 МПа) 0,36 37,6 2,4 0,50 0,0030 66,0 28,5 47 67,1
Трехколесный велосипед «Вектор сингл» (тв = = 30,8 кг; тг = 72 кг; рв — 0,63 МПа) 0,42 2,3 4,6 0,11 0,0045 98,5 35,1 29 145
NS
00
В Рекордный велосипед для гонок за автомашиной (тв = 19 кг; тг — 72 кг; рв = 0,49 МПа) 0,40 0 * * 5,5 0 * * 0,0060 — 47,3 23
Теоретический вариант (тв = 9 кг; тг = 72 кг) 0,07 2,3 0 0.6 0 :05. 48,9 10 105,1
Теоретический вариант с обтекателем (тв = 12 кг; тТ = 72 кг) 0,13 0,3 0 0,05 0 202.6 93,8 1 202,6
Теоретический вариант «лунного» велосипеда (тв = = 11,3 кг; mv = 72 кг) 0,36 0 0,07 0 0,0030 — 383 — —
Примечание. Принятые обозначения: т?в — масса велосипеда; mr — масса гонщика, условно принятая ран- ной 72 кг для возможности сравнения результатов. рв — давление воздуха в однотрубке; F — площадь мидель-сечения: R , R — силы сопротивления при скорости 32 км/ч: аэродинамическая и качения соответственно, Сж - коэффициент аэродинамического сопротивления; / — коэффициент сопротивления качению; t>max — максимальная скорость при мощности 735,5 Вт; опр — прогулочная скорость при мощности 73,5 Вт; Ртр — требуемая мощность; г>сп тах — макси- мальная скорость свободного спуска при 5 %-ном уклоне. ♦ Мощность, необходимая для поддержания скорости 32 км/ч, указана в % от условной мощности, РД^ой 73,5 Вт. *• Аэродинамическое сопротивление условно приравнено к нулю из-за отсутствия сведения об аэродинамическом обтекании лидирующего объекта.
Рис. 8.26. Образование вихря при обтекании круглого цилиндра при
нарастающих скоростях движения
т0 = Vvj/y— касательные напряжения на
стенке профиля, где р — плотность воздуха; у — коор-
дината нормали к профилю;
Л =--------------формпараметр, характеризующий
отношение сил давления к силам трения, где р —
давление на поверхности профиля; р— коэффициент тре-
ния воздуха о поверхность профиля.
Во всех рассмотренных случаях предпочтение по сово-
купности показателей следует отдать профилю Жуков-
266
Рис. 8.27. Аэродинамические характеристики типовых профилей конструктивных элементов велосипеда: а — форма
профилей; б — распределение скоростей воздушного потока; в — распределение толщины вытеснения погранич-
ного слоя; г — распределение касательных напряжений; д — распределение формпараметра;
1—6 — кривые, соответствующие номерам профилей
287
ского, который наряду с хорошими аэродинамическими
качествами одновременно обладает достаточными и срав-
нимыми с цилиндром конструкционными жесткостными
свойствами во всех направлениях. Аэродинамические про-
фили уже широко применяют в современном велостроении,
в первую очередь при проектировании спиц и трубных
конструкций рам.
Аэродинамика колеса. Колесо гоночного велосипеда
с точки зрения аэродинамики представляет собой сложную
систему, в состав которой входят втулка с фланцами,
набор спиц, обод и однотрубка. Колесо вращается в по-
токе воздуха, набегающего под различными углами. Пре-
имущественное движение воздушного потока происходит
в плоскости колеса. Рама велосипеда, ноги гонщика,
совершающие циклические движения с частотой около
2 Гц, встречный или встречно-боковой ветер создают
сложную аэродинамическую картину обтекания колес
воздушным потоком, которая практически не поддается
строгому анализу.
О попытках уменьшить аэродинамическое сопротивле-
ние колес велосипеда свидетельствует достаточно долгая
история развития и совершенствования конструкции го-
ночного колеса, начиная с первых конструкций колес
с деревянными спицами велосипедов Драйза, кончая со-
временными колесами с профилированными спинами.
Последней новинкой технической мысли в этом направле-
нии явилась конструкция колес рекордного велосипеда,
на котором Ф. Мозер установил ряд мировых рекордов
в январе 1984 г. (рис. 8.28).
Натурные исследования аэродинамики колеса сопря-
жены со значительными трудностями. Поэтому предла-
гается методика стендовых испытаний. Подобные испы-
тания могут охватывать ряд направлений. Например,
аэродинамическое сопротивление колеса можно оценить
по параметрам потребляемой мощности, по времени сво-
бодного выбега колеса или по анализу частотных харак-
теристик выбегающего колеса. Опыт показал, что первые
два направления не дают эффективных результатов, так
как аэродинамическое сопротивление колеса пропорцио-
нально квадрату, а при высоких скоростях третьей сте-
пени относительной скорости. Погрешности измерения
времени выбега соизмеримы с темпом изменения скорости
вращения колеса Попытки контроля потребляемой мощ-
ности для стендового привода колеса сопряжены с тех-
288
ническими трудностями точных измерений и стабилиза-
ции величин технических параметров.
Достаточно эффективным методом оценки аэродинами-
ческого сопротивления колеса в условиях стендовых испы-
таний оказался метод комплексной оценки свободного
выбега в заранее обусловленном диапазоне скоростей.
Метод позволил оценить как аэродинамику самого колеса,
так и влияние на ее изменение таких факторов, как смена
Рис. 8.28. Рекордный гоночный велосипед, на котором итальянец
Ф. Мозер в январе 1984 г. установил мировой рекорд на бетонном треке
В г. Мехико в часовой гонке, достигнув результата 51,15135 км. По-
путно им были установлены мировые рекорды на 5 км (5 мнн 47,16 с)
и на 20 км (23 мин 21,59 с)
одного типа однотрубки на другой, замена спицевого
набора дисковым, уменьшение числа спиц в наборе и т. д.
Аэродинамический стенд (рис. 8.29) предназначен для
определения динамических параметров колеса, момента
трения в подшипниках качения и аэродинамического
сопротивления. Стенд представляет собой сварную кон-
струкцию, позволяющую установить колесо 1 осью в спе-
циальные гнезда подобно креплению колеса на велоси-
педе. На втулке 7 колеса смонтирован шкив 2 радиусом г.
Шкив 2 предназначен для разгона колеса с помощью
электродвигателя 6 и плоскоременной передачи 5. Этот же
шкив используют для определения динамических пара-
10 Любовицкий в. п. 289
метров колеса. Гибкая нить 3, закрепленная на поверх-
ности шкива 2, проходит через эмалированный напра-
вляющий глазок 10, вмонтированный в отверстие стойки.
На нити прикреплен груз 12 массой т.
Метод измерения момента инерции колеса Jx и мо-
мента трения Л4тр состоит в том, что груз массой т под
действием собственного .веса опускается из точки А
в точку В, т. е..на расстояние Л, и раскручивает колесо 1
Рис. 8.29. Схема стенда
для исследования аэроди-
намики колес гоночного
велосипеда
с помощью гибкой нити 3. При достижении грузом ниж-
ней точки В нить 3 начинает наматываться на шкив 2.
С этого момента колесо 1 движется по инерции и подни-
мает груз из точки В в точку С, т. е. на высоту Л,.
Для более точного определения момента инерции ко-
леса н момента трения в подшипниках качения Л4тр
предназначена специальная система отсчета времени, со-
стоящая из двух фокусирующих источников света 11 и
14, а также двух фотодатчиков 13 и 15, расположенных
соответственно так, чтобы фиксировать момент прохожде-
ния груза 12 в положениях А и D. Сигналы фотодатчи-
ков 13 и 15 усиливаются системой 16 на базе триггеров
Шмидта до требуемого уровня, запускают и выключают
счетчик импульсов частотомера 18. Эталонная частота
задается генератором импульсов 17.
290
' Для определения кинематики выбегающего колеса
предназначена вторая часть стенда. Сигнал, подаваемый
источником света 4, проходит через отверстия <8 фланце-
вой втулки 7 и поступает в фотодатчик 9: Дискретная
регистрация частоты сигналов производится частотоме-
ром 18. Учитывая, что реальная рабочая скорость колеса
находится на уровне 6—7 Гц, а разрешающая способ-
ность частотомера соизмерима с этой частотой, целесооб-
разно использовать возможно большее число отверстий
втулки для получения более устойчивого счета.
При измерении сделаны следующие допущения:
1. Момент сил трения, а значит, и коэффициент тре-
ния в подшипниках качения принят постоянным.
2. Трение в направляющем глазке и масса нитй не
учитываются.
3. Угол у определяется из условия sin у « г[1.
В таком случае момент сил трения равен
Мтр = т — Л2)я/(«1 + «г)- (8.27)
Здесь g = 9,81 м/с* — ускорение свободного падения;
ai, а2 — величины, определяемые по формулам:
Л1~ Л0|/п Л» — Ло । / л \
«1=^-7-^+(т-тф
(8.28)
где hg = г — I (1 — cos у) — перемещение груза массой т
за время перехода точки закрепления нз положения N
в положение К-
Момент инерции колеса
Ji = {mgr — Мтр) г^Дгйз), (8.29)
где t— время опускания груза массой т из точки А
в точку D.
Задача поставленного эксперимента сводится к оценке
эффективности аэродинамики дисковых колес гоночного
велосипеда, подобных колесам, установленным на вело-
сипеде Ф. Мозера, а также к оценке аэродинамики колес
с другими конструктивными особенностями.
В порядке эксперимента обычное колесо гоночного
велосипеда было обтянуто с двух сторон тонким полотном
бязи и покрыто слоем спиртового лака. Все остальные
элементы колеса остались без изменения. В процессе
исследований сравнивали такое «дисковое» колесо с обыч-
ным. С помощью описанного выше стенда изучались про-
Ю* 291
цессы выбега колес и оценивались кинематические откло-
нения выбега «дискового» колеса по сравнению с выбегом
обычного колеса Первый эксперимент [а> — (/)] был
проведен на колесе, оснащенном трековой однотрубкой;
второй [<о = <о2 (/) | — на том же колесе, оснащенном
дополнительным тканевым покрытием без лака, третий
[<о = (о3 (/) 1 — на колесе с лаковым покрытием.
Заключительный этап эксперимента сводится к расче-
там эмпирической функции выбега путем аппроксимации
зависимости <о = <о (/). Многочисленные поиски наилуч-
ших приближений показали, что практически ни одна
из известных элементарных функций не пригодна для ап-
проксимации функции выбега в силу низкой точности.
Поэтому применяют кусочную аппроксимацию, разбивая
выбег на три временных интервала, в каждом из которых
используют следующие зависимости:
в интервале t <; 9,4 с;
шИО = 42,340- 1,492/;
<о2(/) = 42,495 - 1,506/;
<о3(/) = 42,599— 1,129/;
в интервале 9,4 < / 18,8 с:
coj/) = 37,200-0,945/;
®2 (/) = 37,074 — 0,929/,
®3 (/) = 39,875 - 0,838/;
в интервале /> 18,8 с:
(/) = 27,188е~°>0179/;
®2 (/) = 25,275е-0'0135/;
<о3(/) = 29,887е~°'0115Z.
(8.30)
(8.31)
(8.32)
Точность эксперимента оценивалась относительным
отклонением результата 6г, коэффициентом корреляции Rt
между расчетными и фактическими значениями, средней
суммой квадратов отклонений
ЮО %; Rt = г (®i( ®г);
£ (<о0 — шо)2
где — экспериментальное значение ю в i-м варианте;
— расчетное значение <о по аппроксимирующей функ-
ции,
292
Графическая интерпретация экспериментальных дан-
ных в реальном масштабе времени представлена на
рис. 8.30, а. При переходе к единому приведенному мас-
штабу времени ? характер графиков несколько меняется
(рис. 8.30, б). Приведенное время для каждого из рас-
сматриваемых случаев определяется с учетом постоянных
приведения Сг:
? = t — Ct, (8.33)
где = 0,228 с (для кривой 7); С2 = 0,329 с (для кри-
вой 2); С3 = 0,530 с (для кривой 3).
а) w,c'1
«-са-чГ
Рис. 8.30. Схемы расчета выбега колеса: а — в реальном масштабе
времени; б — в приведенном масштабе времени:
I — колесо обычной конструкции со спицевым набором; 2 — колесо, обтяну-
тое тканью; 3 —- колесо, дополнительно покрытое лаком
Уравнение, описывающее динамику выбега колеса
с учетом только механических сопротивлений, при мо-
менте сил трения /Итр = 1,776-10-3 Н-м и его линейной
зависимости от скорости примет вид
Ji-^-^-Mi. (8.34)
Уравнения динамики для случая только аэродинами-
ческого сопротивления примут вид:
—1,436 |?+0,228<9,4
—0,916 |9,4<?+0.228<18,8 =
. —0,0286 - 0,486е~0-0179</+0-228) |?+0,228>18,8
= Мл, (8.35)
—1,482 ]?4-0,329<9,4
—0,905 |9,4<?+0,329<18,8 =
. -0,0237 - 0,341 е-о-о*31 <г+°-329> |г+о,329>18.8
= Л4а; (8.36)
293
' rf(0l
1 dt
Г d(°2 1
*~dT-J*
f ^мз _ /
a"dT~ •'s
— 1,105 |/+о.53Г<9,4
—0,814 |9
,4<H-0.530«; 18,8 [ =
-0,0234 - 0,343e_°-0115 <'+°-530> |h-o.53o>i8.8
= MA. (8.37)
На основании приведенных уравнений получены гра-
фические зависимости момента аэродинамического сопро-
тивления от скорости вращения колеса и вида его набора
(рис. 8.31). Кривая 3 характеризует выигрыш в моменте
аэродинамического сопротивления при обтягивании обыч-
ного спицевого колеса лакированной тканью.
Рис. 8.31. Зависимость момента
аэродинамического сопротивле-
ния Мд от скорости вращения
колеса при неподвижной оси:
1 — колесо со спицевым набором:
2 — колесо, обтянутое лакирован-
ной тканью; 3 — функция момента,
характеризующая снижени аэроди-
намического сопротивления
0 10 20 30 а, с''
Описанный метод удобен для проведения сравнитель-
ных испытаний в лабораторных условиях, но он преду-
сматривает исследования при неподвижной оси колеса,
что не соответствует реальной картине обтекания колеса,
катящегося по поверхности дороги. Такой эксперимент
возможен, например, в аэродинамической трубе. Колесо
с помощью специального электродвигателя вращается
с такой скоростью, чтобы его окружная скорость о2 на
максимальном радиусе была равна скорости выходного
воздушного потока аэродинамической трубы. В таком
случае имитируется качение колеса по поверхности дороги
со скоростью г»! = и2. В процессе эксперимента измерялись
следующие параметры: скорость выходного воздушного
потока »!, угловая скорость вращения колеса <о, мощ-
ность, потребляемая электродвигателем, лобовое аэроди-
намическое сопротивление колеса.
На рис. 8.32 представлена зависимость мощности,
потребляемой колесом велосипеда, от скорости движения
велосипеда в диапазоне v = 114-19 м/с при спицевом
и дисковом наборах колес. Во всех случаях преимущество
колеса с дисковым набором очевидно, и выигрыш в мощ-
ности составляет около 22 % в первом и около 16 % во
втором случаях, что соответствует примерно 45 Вт на
два колеса велосипеда при скорости движения 50 км/ч.
294
Аэродинамика системы в целом. Общее уравнение
движения системы гонщик — велосипед с учетом механи-
ческих и аэродинамических сил сопротивления имеет вид
v*b4 + v3^ + — Р = 0, (8.38)
где и — скорость движения системы, м/с; Р — мощность,
необходимая для поддержания скорости движения си-
стемы с учетом механиче-
ских сил сопротивления
качению шарикоподшип-
ников в колесах и ка-
чению колес по поверх-
Рис. 8.32. Мощность, расходуемая на вращение колеса:
—— — дисковый набор; ——-- — спицевый набор; 1 — мощность, расхо-
дуемая иа вращение колеса, без учета силы аэродинамического сопротивления
Rx; 2 — то же с учетом 3 — сила сопротивления неподвижного колеса
при дисковом и спицевом наборах
Рис. 8.33. Мощность иа привод велосипеда в зависимости от скорости
движения на уровне мировых рекордов, установленных иа колесах со
спицевым набором:
1 — мощность, необходимая для поддержания рекордной скорости движения;
2 — мощность, расходуемая иа преодоление аэродинамического сопротивления
гонщика; 3 — мощность, расходуемая иа преодоление аэродинамического со-
противления спицевых колес; 4 — то же дисковых колес; А —Д — результаты
рекордсменов мира (см. табл. 8.4); А — Э. Меркс; Б — Б. Дилтер; В —
С. Копылов; Г — М. Хюбнер; Д — Л. Хеслнх
ности дороги, Вт; Ьг — коэффициенты, учитывающие
механические и аэродинамические сопротивления: bt =
= 3,7110“3; Ь2 = 6,58-Ю'2; Ь3 = 1,308; Ь4 = —1,351
для колес со спицевым набором и Ь4 — —4,135 для колес
с дисковым набором.
Аэродинамическое сопротивление системы гонщик —
велосипед учтено в коэффициентах bt уравнения (8.38)
295
с помощью усредненного коэффициента Сх = 0,83, а аэро-
динамическое сопротивление одного гонщика без учета
аэродинамического сопротивления колес — с помощью
коэффициента Сх = 0,2778 + 0,0168 v, определенных экс-
периментально. Мидель-сечение всех рассмотренных гон-
щиков взято усредненным (0,36 м2).
Общая картина энергозатрат на привод велосипеда
со скоростями, соответствующими мировым рекордам
на треке в отдельных видах велосипедных гонок
(табл. 8.4) представлена на рис. 8.33, где видно соотно-
шение между мощностями, затрачиваемыми на преодоле-
ние аэродинамических сопротивлений спицевых и диско-
вых колес.
В табл. 8.4 приведены результаты теоретического пере-
счета мировых рекордов применительно к тем и другим
колесам для условного гонщика, стартующего и прохо-
дящего дистанцию при тех же мощностях педалирования.
Из таблицы видно, что применение дисковых колес дает не-
оспоримое техническое преимущество при прочих равных
условиях.
Особый интерес представляет анализ условий устано-
вления Ф. Мозером (Италия) в январе 1984 г. феноменаль-
ного рекорда .в часовой гонке— 51 151,350 м. Этот вид
велосип дных гонок (табл. 8.5) является старейшим в исто-
рии спортивных соревнований вообще. Датой его «рожде-
ния» считается 25 марта 1876 г., когда англичанин Доддж
в течение I ч гонки прошел дистанцию 25 508 м. С тех
пор ведущие гонщики мира, в первую очередь профессио-
налы, постоянно пытаются побить существующий рекорд.
Среди рекордсменов мира в этом виде спорта за четыре
последних десятилетия были выдающиеся гонщики совре-
менности: Ф. Коппи, Р. Ривьер, Э. Бальдини, Ж. Анке-
тиль, Э. Меркс, Ф. Мозер.
Анализ рекордных результатов в часовой гонке наибо-
лее интересен с точки зрения оценки энергозатрат: они
имеют тенденцию приближаться к некоторому пределу
человеческих возможностей, которые, по-видимому, ни-
когда не будут исчерпаны полностью. Кривая аппрокси-
мации (рис. 8.34) этого процесса, показанная штриховой
линией, позволяет предсказать рекордный результат бли-
жайшего будущего. Так, в начале 1972 г. на 1984 г. ожи-
дался рекорд на уровне 49 900 м. Фактический результат
Ф. Мозера (51 151,350 м) значительно превзошел ожи-
даемое. Но если учесть, что этот рекорд достигнут на диско-
296
297
Таблица 8.5. Рекорды мира в часовой гонке среди
профессионалов
Число, Результат
Год месяи Гонщик Страна м
1876 25.03 Доддж Англия 25 508
1877 25.05 Чэпп Англия 26 960
1878 10.05 Вуэй Англия 28 542
1879 09.06 Кристи Англия 30 374
1884 11.09 Инглиш Англия 32 707
1887 16.09 Форниволь Англия 32 797
1893 11.05 Н. Дегранж Франция 35 225
1894 31.10 Ж. Дюбуа Франция 38 220
1897 30.07 М. Ван Деи ЭнДеи Бельгия 39 240
1898 09.07 В. Гамильтон США 40 781
1905 24.08 Л. Пти-Бретон Франция 41 ПО
1907 20.06 М. Берте Франция 41 520
1912 22.08 О. Эгг Швейцария 42 360
1913 07.08 М. Берте Франция 42 741
1913 21.08 О. Эгг Швейцария 43 525
1913 20.09 М. Берте Франция 43 775
1914 18.06 О. Эгг Швейцария 44 247
1933 29.08 М. Ришар Франция 44 777
1935 31.10 Дж. Ольмо Италия 45 090
1936 14.10 М. Ришар Франция 45 325
1937 29.09 Ф. Слаатс Голландия 45 485
1937 03.11 М. Аршамбо Франция 45 767
1942 07.11 Ф. Копии Италия 45 848
1956 29.06 Ж. Анкетиль Франция 46 159
1956 09.09 Э. Бальдини Италия 46 396
1957 18.09 Р. Ривьер Франция 46 923
1958 23.09 Р. Ривьер Франция 47 346
1967 30.10 Ф. Браске Бельгия 48 093
1968 10.10 О. Риттер Дания 48 653
1972 25.10 Э. Меркс Бельгия 49 431
1984* Январь Ф. Мозер Италия 51 151
* УСИ принял решение раздельно фиксировать мировые ре-
корды, остановленные иа равнинных н высокогорных треках. Поэтому
рекорд Ф. Мозера, равный 51 151,350 м и установленный в Мехико
иа высоте 2200 м 5ад уровнем моря, является первым в таблице ре-
кордов. установленных ня высокогорных треках.
вых колесах, и пересчитать его с учетом аэродинамики
на колеса со спицевым набором, то результат пересчета,
равный 49 906,800 м (см. табл. 8.4), будет весьма близок
к результатам графической экстраполяции.
На основании изложенного может быть сделан доста-
точно определенный вывод: дисковые колеса — техниче-
ская и в настоящий момент недоступная подавляющему
числу спортсменов разработка, дающая ее пользователю
вполне ощутимое спортивное преимущество. Применение
298
дисковых колес формально не противоречит регламенту
УСИ на конструкцию велосипеда, допускаемого к сорев-
нованиям, так как, например, в Правилах соревнований
по велосипедному спорту, утвержденных Комитетом по
физической культуре и спорту при Совете Министров
СССР 16 ноября 1976 г., сказано: «Запрещается также
применение защитных щитов, фюзеляжей, ветрорезов или
других средств, уменьшающих сопротивление воздуха
Рис. 8.34. Эволюция мирового рекорда в часовой гонке среди профес-
сионалов:
1 — полигон рекордных результатов (Q—данные табл. 8.5); 2 — кривая еп-
проксимации; 3 — экстраполяционный участок графика
при движении вперед». В редакции правил соревнований
по велосипедному спорту, утвержденных Государствен-
ным комитетом СССР по физической культуре и спорту
издания 1987 г. [2], перечень указанных выше ограниче-
ний отсутствует. Спорным в этом вопросе может быть
лишь тот факт, что дисковый набор не является дополне-
нием к стандартному велосипеду, а является органиче-
ской и неотъемлемой частью колеса, которая, тем не
менее, позволяет достичь технического преимущества.
Трудно предрекать будущее дисковых колес, которые
являются естественным продуктом современного техни-
ческого прогресса. Вполне возможно ожидать их массо-
299
вый выпуск и снижение стоимости до приемлемого уровня.
Но сегодня стало ясно, что меры, принятые УСИ (газета
«Правда» № 7 от 07.01.85) по отдельной регистрации рекор-
дов, установленных на высокогорных треках, недоста-
точны. Очевидно, отдельно должны регистрироваться
рекорды, установленные на велосипедах, имеющих такое
техническое преимущество, как дисковые колеса.
В заключение необходимо отметить целесообразность
проведения научно-технических экспертиз всех новых
разработок, внедряемых в велосипедный спорт с целью
контроля точности выполнения регламента УСИ.
8.6. Динамика системы гонщик — велосипед
Кинетостати чески й анализ, например выполнен-
ный в п. 8.2, проводится без учета упругих свойств звень-
ев и, как правило, приводит к результатам, не в полной
мере соответствующим наблюдаемым в действительности.
Поэтому практический интерес представляет изучение
влияния упругих свойств отдельных элементов и всей
системы гонщик — велосипед на ее динамические харак-
теристики.
Из всего многообразия возможных динамических моде-
лей рассмотрим модель привода, учитывающую упругие
свойства основных его звеньев. При этом ограничимся
только изучением влияния крутильных и изгибных дефор-
маций, а также деформаций растяжения элементов при-
вода.
Для такой динамической модели введем обозначения:
*^о» ^01 — момент инерции периферийной части одно-
трубки, соприкасающейся с дорожным покрытием, и ее
приведенная крутильная жесткость; Jx, k12 — суммарный
момент инерции однотрубки, обода и спицевого набора
и их приведенная крутильная жесткость; J2 — момент
инерции втулки колеса и системы ведомых звездочек;
k23 — крутильная жесткость цепной передачи; П (<р3) —
функция положения цепной передачи; Js — момент инер-
ции системы ведущих звездочек, кривошипов, педалей
и части нижних конечностей гонщика; —движущий
момент; <р0, <рх, <р2, Фз — угловые координаты вращения
элементов модели вокруг своих осей.
На основании уравнений Лагранжа второго рода,
кинетической и потенциальной энергий рассматриваемой
300
системы получены уравнения движения:
ЛФо + koi (фо — Ф1) = —ГоГо'<
Лф1 — k01 (ф0 — <pt) + k12 (фх — ф2) = 0;
^гфг — k12 (ф1 ф2) -j- k2S [ф2 П (фз)] =
Афз k2S [ф2 — П (ф3)] П (фз) = Мд.
Величины Fo — Fx и r0 = rt соответствуют величинам,
найденным при кинетостатических исследованиях. Учи-
тывая это, а также пренебрегая величиной Jo вследствие
ее малости, систему (8.39) можно записать в упрощенной
форме:
Лф1 + (ф1 — ф2) = — Fyw
Афг — ki2 (фх — ф2) 4~ /г2з 1фг — П (фа)] — 0;
Лфз — k2S [ф2 — П (ф3)] ГТ (фз) = Мд.
(8.40)
В системе уравнений (8.40) Fi = где TV, опре-
деляется равенством, (8.16). Рассматривая упрощенный
вариант движения велосипеда по горизонтальному участ-
ку (а = 0) и случай одинаковых колес (у = 0), а также
полагая, что Su — 0, найдем
/ А.х, — A.g 4- S u„ \
Fi = /к ( W? + ---[- -x-s~) , (8.41)
где
Лх = («1 4- т2) 4- т3у3,
А2 = т2Ь 4- tn.Ax2 — /кт0-
В равенстве (8.41) хх = гхфх и, следовательно, урав-
нения (8.40) запишутся в виде:
Н JФ1 4" ^12 (ф1 Фг) —
= — fKritnog 4- (A2g — Sxy3);
J2if2 — ki2 (фх — ф2) 4- k23 [ф2 — П (ф8)] = 0;
4фз- МФг- П ((рз)]П’ (фа) = Мд. )
(8.42)
Обозначим закон угловых перемещений кривошипа
через фз (/), тогда получим
фз = Фз (t) 4- уз (t), (8.43)
где q3 (t) '— малые отклонения колебательного типа.
301
Используя уравнение (8.43), произведем линеаризацию
функции положения цепной передачи П (ф3) и ее произ-
водной П' (фз):
П (фз) = П (фз + 9з) « П (фз) 4- П' (фз) <?з! )
П' (фз) = /7'(фз +<7з) « П’ (фз) + П"№)Чъ- J (8’44)
Функции ф^) и фг(0 также представили как сумму
их координат фГ (/) и ф? (С) и соответствующих откло-
нений (/) и (/):
Ф1 (0 = Ф1 (0 + Ч\ (О = П (фз) + t/ь |
Ф2 (0 = Ф2 (/) + £72 (0 = П (ф^) + £?2. J {Ь’45)
В первом приближении силу сопротивления набегаю-
щего воздушного потока 5Я [см. выражение (8.41)] можно
считать постоянной и соответствующей средней скорости
движения хср = фз£Г1, где i = П'Ср (фз) — передаточное
отношение цепного привода. Тогда правая часть первого
уравнения системы (8.42) тоже будет постоянной и рав-
ной А3:
Аз = —f^mog + (A2g — S^a).
Движущий момент Л4Я будем считать функцией частоты
вращения кривошипа ра:
Мд = Л4о + AM cos фз (t). (8.46)
В результате система уравнений (8.42) преобразуется
к виду:
+ *12 (91 — 9г) = 4з — Л [П" (ф3) фз2 + П' (фз) ф3];
Л92 — *12 (91 — 9г) + *23 [92 — п (фз) £?з] —
= -Л [/7" (фз) фз’2 + П' (фз’) фз’];
7з9з — *23 [92-/7' (фз)9з] П' (ф3)=Мо + AM cos фз (/)—Лфз,
(8.47)
где
Л = Л +
Кроме того, в системе уравнений (8.47) опущены сла-
гаемые второго порядка малости относительно величин
9г и 93-
Решение системы линейных, неоднородных, с перемен-
ными коэффициентами уравнений найдем с помощью ме-
тода разложения по формам собственных колебаний, для
302
чего рассмотрим систему с нулевыми правыми частями
и определим переменные собственные частоты и неста-
ционарные коэффициенты форм колебании a.jr (j — I,
2, 3). Решение однородной системы (8.47) соответствую-
щее частоте ©г, будем искать в виде
q} = ajr (т) cos Фг (т), (8.48)
где т — параметр, соответствующий времени, причем
Фг (т) = Wr (т).
При этих условиях из уравнения (8.48) можно полу-
чить
<7/= —а/га>г cosOz. (8.49)
Для существования отличных от нуля значений aJr
необходимо выполнить равенство
Д(0 =
k\2— /]©?(/) ---Л12 О
—kl2 &12 4-^23—Л®?(0 —^23^7’(фз) =0.
0 —(фз) Агз77' (фз)—/з®’(0
(8.50)
Раскрыв частотный определитель, получим алгебраи-
ческое уравнение третьей степени относительно (/),
из которого могут быть найдены три группы значений
собственных частот: ©х (/), ©2 (0 и ©3 (/), причем м, (/) =
= 0. Отметим, что при П' (фз) = const = i из системы
уравнений (8.50) определяются три действительных зна-
чения собственных частот ©л, ш2 и ®э.
Для нахождения коэффициентов форм собственных
колебаний положим а1г — 1 и решим следующую систему
уравнений:
^12 ~ Л©’(/) — = 0; )
—k23n’ (фз) а2г 4- [Л23/7'’ (фз) — JafiUr (01 «з, = 0. I
Преобразуя систему уравнений (8.51), найдем:
303
Из системы уравнений (8.52) видно, что коэффициенты
форм собственных колебаний а7, переменны, так как
они зависят от значений П' (фз) и со, (/)-
В этом случае решение системы уравнений (8.52) будем
искать в виде
/•=3
<7/ = X а/гЛ-
Г=1
После соответствующих подстановок найдем:
г=3 _ г=3
«Л X ^rT г + Xi (air ®2г) Tr — fi (0>
Г=1 Г=1
г—3 г=3
Ji X г 2 X (alr ®2r) Tг 4"
Г=’ Г=1
г=3
+ /ггз X |а2г — П’ (фз)азг|Л = /2 (0;
г=1
г=3 г=3
Уз X азгТг — fe3/7' (фз) X 1®2г — П’ (фз)азг] Tr = /3(/).
Г=1 Г=1
(8.53)
Из условия ортогональности форм собственных коле-
баний следует, что при s =# г, где s, г — номера форм
колебаний, получим
/=з
X Jfljs^jr = 0- (8.54)
/=1
На основании уравнений (8.53) с учетом (8.54) имеем
Т, + (0 Т„ = Л (V (-Ц^ + азг. = Fr (Z), (8 55)
J1 + Jia2r + ^3а3г
где /i (t), fz (0> /з (0 — правые части системы уравне-
ний (8.53).
Рассмотрим реализацию уравнения (8.55) на основе
приближенных методов решения. Если выполняется ус-
ловие
1°>5 А#- О-75 Л# « 1.
I <о_’ (0 (0
то удобно воспользоваться приближенным методом, в соот-
ветствии с которым частные решения уравнения
Тг + ®2(0Л = 0 (8.56)
304
записываются в виде:
__________________________ t
Ун = V "StTsln J “г (/) dZ;
г о
_____ t
у™ = У ~5ttcos S “г (/) dt'
о
Общее решение однородного уравнения
ставляется в следующей форме:
(8.57)
(8.56) пред-
Тг, о = Схуг1 + С2ут2. (8.58)
На основе частных решений (8.57) общее решение не-
однородного уравнения (8.55) может быть построено по-
средством метода вариации производных и постоянных:
t t
Tr = —Уп J dt + yr2 J dt + (\yrl + C2yr2, (8.59)
о 0
где
Wr = yrlyr2 — УпУг2 = —(0) = const.
Определив функцию Tr и воспользовавшись соотноше-
ниями (8.52), (8.45) и (8.43), найдем:
(8.60)
Три последних уравнения (8.60) определяют переме-
щения, скорость и ускорения системы гонщик — велоси-
пед в поступательном движении.
Анализ рассмотренной динамической модели показы-
вает, что данная задача достаточно сложна и не допускает
решения в конечном общем виде. Поэтому для исследова-
ния кинематики динамической модели необходимо ввести
в уравнения движения конкретные значения всех пара-
метров в виде функций /7 (<р3), П' (<р3).
805
Рассмотрим динамическую задачу в несколько упро-
щенной постановке, считая, что /7' (фз) = i = const.
Предварительно установим закон изменения фз (/), для
чего приведем все моменты инерции и внешние силы к оси
ведущей звездочки:
4р = (Л + Л) i2 + А; м = Ai 4- мп.
Тогда уравнение движения ведущей звездочки запи-
шется в виде
ЛрФз = Мд 4- Ai = Мо 4- ДМсовфз (t) 4- Ai. (8.61)
Для того чтобы движение системы было установив-
шимся, необходимо выполнение равенства Мо 4- Ai = 0.
В противном случае будет происходить или ускорение
системы (при Мо4-Д1‘>0), или ее торможение (при
Мо 4- Ai < 0). В итоге получим нелинейное дифферен-
циальное уравнение
фз----7^- cos фз = 0. (8.62)
'> пр
Для решения уравнения (8.62) примем фз = ptf 4-
4- Дфз, где рз — средняя частота вращения кривошипа;
Дфз — малые периодические отклонения угловых пере-
мещений фз в функции p3t. С учетом принятых допущений
получим
cos фз = cos (p3t 4- Дфз)« cos p3t — Дфз sin p3t. (8.63)
После подстановки найденного значения cos фз в урав-
нение (8.62) получим:
фз 4- АФз sin prf = cos p3t. (8.64)
J пр •'пр
Для решения уравнения (8.64) воспользуемся методом
гармонического баланса, причем при поиске периодиче-
ского решения ограничимся двумя первыми гармони-
ками, т. е.
Дф3 fti Ао + Ai cos p3t 4- Bi sin p3t 4*
4- A2 cos 2 p3t 4* B2 sin 2p3t. (8.65)
После соответствующих подстановок получим
. . 87 дм2 , о .
Аф3 ~ ~ 1бРпрр43-ДМ2 C°SP3/ 16J2/3 - ДМ2 Sln 2p3t'
(8.66)
306
Так как значение Дфз определялось из кинетостати-
ческих представлений, то следует сделать вывод, что даже
без учета упругих свойств привода возможны колебания
кинематических характеристик с высшими гармониками.
Обозначим коэффициенты уравнения (8.66) через Лг
и В.2. При постоянных параметрах системы «>г (0 =
— <ог (0) частные решения (8.57) представляются в виде
Уп = sin (лг1 и Угг = cos ®ГЛ С учетом постоянства
1Г (фз*) зависимости Д (0, /2 (0 и f3 (/) будут иметь вид.
ft (0 = А + Jii (Atplcosp3i 4- B24pl sin 2/W)i
/2 (0 — Jii (A ips cos p3t 4- ZMpI sin 2p3/);
fa (0 = Mo 4- ДM [cos p3t — (Лх cos p3t 4-
4- B2 sin 2ps0 sin p30 4- A ( A\pl cos pat 4- Вг4рз Sin 2p3/).
(8.67)
При полученных выражениях для возмущающих фак-
торов интегралы, входящие в уравнение (8.59), могут
быть найдены в конечном виде и функции времени Опи-
шутся следующим уравнением:
Tr = Q(ffl2-p2) C°S Pat ~ <2(W2_4p2) Sin -
-------Q (ш^'эр2) C0S 3p!>t Sin coS ®’ (8-68)
где
P = Л 4- /W0a3r;
Q = —<or (/| 4- J2ОС2Г 4” Jз®зг)>
R = Aiip3(Jt 4- J2<X2r) + (ДМ 4- J3Ajp3 —ДМВ2^ азг',
5 = 4B2p3 (Jii 4- Jiitxzr 4- ^зосзг —% ДМ Л tasrj ;
M = 4 ДМВ2.
Поскольку входящие в уравнение (8.68) величины
известны, задачу определения параметров движения си-
стемы гонщик — велосипед с учетом упругих свойств
привода можно считать решенной. Из уравнения видно,
что колебательный процесс имеет составляющие с соб-
ственными частотами ®г и три гармоники от внешнего
возмущения со средней частотой р3. Для устойчивой
307
работы привода необходимо обеспечить выполнение усло-
вия, определяющего возможные значения низшей соб-
ственной частоты колебаний т. е. Зр3.
Необходимо отметить, что основным фактором, влияю-
щим на амплитудные значения функции Тг, а следова-
тельно, и на интенсивность колебательных процессов,
является величина АЛ4 переменной части движущего
момента. Так, при АЛ1 = 0 величины R, S и М равны
нулю и колебания с частотой р3 или с частотами, крат-
ными ей, отсутствуют. Остаются только колебания с соб-
ственной частотой, которые могут возбуждаться только
Рис. 8.35. Схема эксперименталь-
ного определения приведенной же-
сткости цепного привода гоночного
велосипеда
случайными причинами, но, как известно, эти колебания
достаточно быстро затухают и при установившемся дви-
жении их можно не учитывать.
При проектировании и сравнительной оценке конструк-
ции гоночных велосипедов и их приводных систем важ-
нейшими характеристиками являются частотный спектр
и чувствительность собственных частот к изменению пара-
метров отдельных элементов системы, в частности при-
водной передачи. Проанализируем степень влияния жест-
костей /г]2 (крутильной жесткости заднего ведущего ко-
леса) и k13 (приведенной крутильной жесткости цепного
привода) на значения собственных частот ю2 и ®з при
со. = 0.
Исходные значения параметров, необходимых для
расчета, были определены экспериментально на стандарт-
ном цепном приводе. Так, жесткостные характеристики
спицевого набора и однотрубок были определены согласно
схеме измерений на рис. 6.6. Жесткостные характери-
стики цепного привода были определены согласно схеме
на рис. 8.35. Для этого ведомую звездочку 1 жестко фик-
сировали в специальном приспособлении. Цепь 2 имела
возможность свободного провисания (положение 2') в меру
общего натяжения цепи при настройке системы привода.
Ведущее колесо 3 при приложении к педали 4 усилия Q
разворачивалось по часовой стрелке. Приведенная дефор-
308
мация х фиксировалась индикатором 5. В проведенном
эксперименте приведенная жесткость k2S складывалась
из продольной жесткости цепи (см. рис. 6.26), жесткости
провисающей цепи на участке АВ (см. рис. 6.30 и 6.31), из-
гнбной и крутильной жесткости кривошипа и изгиб-
ной жесткости оси педали.
Номинальные значения экспериментально определен-
ных жесткостей: /г12 = 1770 Н/м; k23 = 202 Н/м. Изме-
нение каждой из жесткостей рассматривалось в диапазоне
Рис. 8.36. Графики изменения собственных частот си:темы привода
гоночного велосипеда в функции жесткостей
0, ikij -С ku Ю ktj, где через кц обозначены их но-
минальные значения. Моменты инерции элементов рас-
считываемой модели были приняты: Jr = 0,72 кг-м2;
J2 = 7-10’3 кгм2; J3 = 60 •10-3 кг-м2; /7 (<р3) — i21 =
= Zj/z2 = 48/14 = 3,43.
На рис. 8.36, а показаны рассчитанные зависимости
®2 и ®3 от k12. Как видно, изменение жесткости kl2 от
177 до 17 700 Н/м вызывает увеличение собственной ча-
стоты <о2 только в начале диапазона, а затем, начиная
с kl2 = 1500 Н/м, происходит «насыщение» и величина ю2
асимптотически стремится к значению <о2 = 200 с-1. Это
свидетельствует о том, что существующие значения жест-
кости k12 достаточны и, например, применение более
жестких по параметрам крутильной жесткости дисковых
колес не увеличивает значение собственной частоты ю2.
В то же время очевидно сильное влияние величины k12
на значение высшей собственной частоты ю3. Последняя,
однако, мало влияет на динамическую характеристику
привода велосипеда.
На рис. 8.36, б дана аналогичная зависимость частот
и ®з от жесткости k23, изменяющейся в диапазоне 20—
309
2020 Н/м. Из графиков видно, что значения собственной
частоты ®2 более чувствительны к изменению жесткости
Л23, чем значения ю3. Вместе с тем изменение жесткости 123
вблизи ее номинальных значений не позволяет сущест-
венно изменить низшую собственную частоту.
В связи с изложенным при необходимости увеличения
низшей собственной частоты ©а целесообразно одновре-
менное увеличение жесткостей /?12 и /?23- Так, при увеличе-
нии каждой из них в 1,5 раза по сравнению с номиналь-
ными значениями собственные частоты становятся рав-
ными: ©2 = 230 с"1; м3 = 660 с-1.
ЗАКЛЮЧЕНИЕ
«Пока меня не спрашивали об этом, я знал, что это
такое» — сказал древний философ. И пока автор не
брался за написание настоящей книги, он знал, как каза-
лось ему, практически все о гоночном велосипеде, кото-
рому в прошлом посвятил свои молодые годы. Сейчас,
когда книга написана, автор испытывает определенное
чувство озабоченности открывшимся масштабом техни-
ческих и технологических проблем.
Возникает естественный вопрос: как решить техниче-
ские проблемы, связанные с велосипедом вообще и с гоноч-
ным в частности? НИИ подобных проблем не существует,
единственное ЦКБ велостроения в г. Харькове занято
в основном конструкторскими разработками моделей ши-
рокого профиля, начиная с детских и кончая взрослыми
велосипедами бытового назначения. Малочисленная
группа, занятая проектированием гоночных велосипедов,
несмотря на имеющиеся успехи в создании современной
модели «Тахион» пока еще далека от решения вопросов,
связанных с выпуском гоночных велосипедов, отвечаю-
щих современным требованиям мирового стандарта. А го-
ночный велосипед — это сгусток современной технологии
и научно-технической мысли, реализованной во внешне
простой и всем доступной, с первого взгляда, форме. Но,
как замечено практикой, за внешней простотой всегда
скрыты сложнейшие проблемы. Как падающая капля
310
воды своей внешне простой формой породила глубокие
физико-механические исследования ее состояния, так и
гоночному велосипеду предстоит его очередное «открытие»:
научное объяснение его механической сущности.
В работе над книгой автор собрал много материала,
который хотя и не вошел в данное издание, но убеди-
тельно показал, что теория велосипеда может и должна
быть создана. Эта теория позволит не просто глубже
проникнуть в механизм движения системы гонщик —
велосипед, но позволит оптимизировать многофакторные
процессы, протекающие при движении велосипеда, и ука-
зать пути и методы совершенствования его конструкции.
В заключение хочется поставить вопрос: будет ли про-
должена работа над теорией велосипеда? Ответ можно
сформулировать вполне определенно: тема чрезвычайно
интересна, в настоящей книге предприняты попытки изло-
жить только некоторые начала такой теории, поэтому ее
обобщение — весьма заманчивая идея для человека, лю-
бящего велоспорт и пытающегося проникнуть в суть его
многообразных явлений.
СПИСОК ЛИТЕРАТУРЫ
1. Белецкий В. В. Двуногая ходьба. — М.: Наука, 1984. — 267 с.
2. Велосипедный спорт. Правила соревнований. — М.: Физкуль-
тура и спорт, 1987. — 128 с.
3. Воробьев Н. В. Цепные передачи.—М.: Машиностроение,
1968. — 252 с.
4. Готовцев А. А., Котенок И. П. Проектирование цепных пере-
дач: Справочник. —М.: Машиностроение, 1982. — 158 с.
5. Гросс А., Кайл Ч., Майлуики Д. Аэродинамика аппаратов,
движимых мускульной силой человека//В мире науки. — 1984. — № 2.
С. 74—83.
6. Ердаков Е. В., Гайфулии С. М. Повышение устойчивости тех-
ники педалирования в состоянии утомления//Велосипед. спорт: Еже-
годник.— М.: Физкультура и спорт, 1973.—С. 76—85.
7. Ердаков С. В., Нижегородцев А. Д. Возрастные и конститу-
ционные характеристики сильнейших велосипедистов мира//Велосипед.
спорт: Ежегодник. — М.: Физкультура и спорт, 1974. — С. 73—74.
8. Иванов Н. Электронный тренажер велосипедиста//В помощь
радиолюбителю/Киев, ДОСААФ СССР. — 1986. — Вып. 86. — 80 с.
9. Козлов А. М. Комплексный стенд для тестирования велосипе-
дистов//Велосипед. спорт: Ежегодник. — М.: Физкультура и спорт,
1984. — С. 49—53.
10. Котельникова Е. Г., Захарьянц Ю. 3. Исследование педалиро-
вания на велостанкеУУВелосипед. спорт: Ежегодник. — М.: Физкуль-
тура и спорт, 1962. — С. 32—35.
11. Крылатых Ю. Г. Определение величины передач на велосипе-
де//Велосипед. спорт. Ежегодник. — М.: Физкультура и спорт, 1981. —
С. 27—28.
12. Михайлов В. В. Аэробные возможности велосипедовУ/Вело-
сипед. спорт: Ежегодник. — М.: Физкультура и спорт, 1974. — С. 99—
117.
13. мок и международные спортивные объединения: Справочник/
Н. П. Агапитов, С. Н. Баландин, А. А. Вербин и др. —
М.: Физкультура и спорт, 1979. — 263 с.
14. Муси Я., Новакова О., Кунц К. Современная биохимия в схе-
мах. — М.: Мир, 1984. — 214 с.
15. Нижегородцев А. Д., Ердаков С. В. Формирование темпа пе-
далирования у велосипедистов-преследователей/УВелосипед. спорт: Еже-
годник. — М.: Физкультура и спорт, 1974. — С. 75—82.
16. Полиевский С. А. Гигиена спортивной одежды и снаряжения. —
М.: Физ-ра и спорт, 1987. — 111 с.
17. Павлов В. А. Гироскопический эффект, его проявление и ис-
пользование. — Л.: Судостроение, 1985. — 176 с.
312
18. Пальцев М. Л., Попов Э. М. Датчики темпа педалирования//
Велосипед, спорт: Ежегодник.—М.: Физкультура и спорт, 1984.—
С. 53—64.
19. Петров В. А., Татин Ю. А. Механика спортивных движений. —
М.: Физкультура и спорт, 1974. — 233 с.
20. Седов А. В. Техника велосипедиста. — М.: Физкультура и
спорт, 1972. —С. 142.
21. Тарнопольскнй Ю. М. Прочность и жесткость основных узлов
велосипеда: Дис... канд. техн. наук. — Защищена 1956. — 108 с. —
Библиогр.: с. 57—104.
22. Тимошенков В. В. Установка рациональной посадки на вело-
сипеде//Велосипед. спорт: Ежегодник.—М.: Физкультура и спорт,
1985. — С. 42—44.
23. Федосеев В. И. Избранные задачи и вопросы по сопротивлению
материалов. — М.: Наука, 1967.— 373 с.
24. Физиологические основы экономизации в велосипедном спорте/
В. В. Михайлов, Н. А. Левенк о, Р. Н. Рагимов и др.//
Велосипед, спорт: Ежегодник.—М.: Физкультура и спорт, 1973.—
С. 44—62.
25. Чхаидзе Л. В. Очерки по технике педалирования//Велосипед.
спорт: Ежегодник.—М.: Физкультура и спорт, 1962.—С. 18—31.
26. Шлихтинг Г. Теория пограничного слоя. — М.: Наука, 1974.
711 с.
27. Hull М., Jorge М. A method for biomechanical analysis of bi-
cycle pedaling//J. of biomechanics. — 1985. — № 9. — P. 631—644.
СЛОВАРЬ ТЕРМИНОВ И ПРОФЕССИОНАЛИЗМОВ
В ВЕЛОСИПЕДНОМ СПОРТЕ
АНАБОЛИКИ —медицинские препараты, относящиеся к группе
запрещенных стимулирующих средств.
БАЗА — расстояние между осями колес велосипеда.
БАРАШЕК — специальная гайка с рукоятками, предназначенная
для крепления колес на велосипедах и их быстрого съема без приме-
нения гаечного ключа.
БОНИФИКАЦИЯ — премиальное время, присуждаемое за победу
на промежуточном и окончательном финише и вычитаемое из общего ре-
зультата.
БОНУС — приз, вознаграждение, поощрение.
БОРТ (ТРЕКА) — деревянное обрамление внешней линии полотна
велосипедного трека.
БРОСОК — маневр, тактический прием ведения гонки, связанный
с резким ускорением в целях изменения позиции гонщика в группе
или скорейшего достижения финиша (финишный бросок).
ВАГОН — небольшая группа гонщиков в групповой шоссейной
гонке.
ВЕЛОКРОСС — вид велосипедных гонок по пересеченной мест-
ности на дистанции от 15 до 50 км.
ВЕЛОМОПЕД — специальный вариант обычного мопеда, движе-
ние которого от двигателя внутреннего сгорания совмещено и неразрыв-
но связано с педальным приводом для обеспечения плавного хода
и контроля скорости движения. Веломопед широко используется для
тренировок на треке команд и отдельных гонщиков при отработке
скорости.
ВЕЛОПЕРЧАТКИ — перчатки специального покроя, применяе-
мые гонщиками для улучшения контакта ладони с рулем велосипеда и
предотвращения травматизма при падениях.
ВЕЛОРУБАШКА — трикотажная рубашка специального покроя
со съемными рукавами, карманами на пояснице, применяемая для вело-
сипедных шоссейных гонок; для трековых гонок применяют велору-
башку гладкого покроя, которая может быть изготовлена совместно
с трусами в виде комбинезона.
ВЕЛОСИПЕД — «быстрая нога» — таков буквальный перевод
слова «велосипед» с латинского языка. Это транспортное средство,
приводимое в движение мускульной силой человека.
ВЕЛОСТАНОК — приспособление для тренировки велогонщика
на месте в условиях, приближенных к реальной езде иа велоси-
педе.
ВЕЛОТУР — крупная велосипедная шоссейная многодневная гон-
ка, обычно организуемая по традиционному маршруту между горо-
дами.
ВЕЛОТУФЛИ — туфлн специального покроя, применяемые для
велосипедных гонок.
314
ВЕЛОШЛЕМ — специальный головной убор велогонщика, пред-
назначенный для защиты от ударов при падении.
ВЕЛОЭРГОМЕТР — устройство с приводом велосипедного типа,
предназначенное для экспериментов по оценке энергозатрат при вы-
полнении работы.
ВИЛКА — передняя (задняя) часть рамы для установки колес.
ВИРАЖ — поворот велосипеда, в спортивной терминологии чаще
употребляется применительно к наклонной части полотна велосипед-
ного трека или к повороту полотна дороги.
ВОСЬМЕРКА —торцовое биение колеса.
ВТУЛКА — шарикоподшипниковый узел колеса велосипеда, в ко-
тором смонтирована ось колеса и фланцы для набора спиц.
ВЫНОС — кронштейн Г-образной формы для установки руля.
ГАНДИКАП — вид гонок, в которых одному нлн группе юищиков
предоставляется преимущество во времени илн в расстоянии.
ГИТ — вид велосипедной гонки иа треке со стартом с места; клас-
сическим видом гита является гонка на 1000 м.
ГЛУХАРЬ — велосипед без свободного хода.
ГОЛОВКА — небольшая группа гонщиков, идущая впереди основ-
ной группы.
ГОНКА — соревнование в скоростных видах велосипедного спорта.
— однодневная — проводится в течение одного дня.
— многодневная — проводится в течение нескольких дней.
— шестидневная — проводится в течение шести суток для профес-
сионалов и шести дней для любителей.
— парная — проводится командами из двух гонщиков, из которых
попеременно одни обязательно ведет гонку, а другой отдыхает.
— с выбыванием — проводится командой, каждый гонщик кото-
рой проведя свой круг выбывает из состязания, нлн проводится груп-
пой, когда на каждом очередном промежуточном финише последний
гонщик выбывает.
ГОНЩИК — спортсмен, выступающий в скоростных велосипед-
ных гонках.
— активный — набравший максимальное количество премиального
времени или очков за активное ведение гонки или победу на финише.
— горный — набравший максимальное количество премиального
времени илн очков иа горных участках гонки.
ГРЕГОРИ — спортсмен, подчиняющий свои личные интересы ко-
мандной борьбе илн интересам лидера команды (термин характерен для
профессионального спорта).
ДОПИНГ — препарат, употребляемый для искусственного воз-
буждения организма гонщика.
ДРАЙЛЕР - см. СУППЕР.
КАРАВАН — большая общая группа гонщиков в шоссейной вело-
сипедной гонке.
КАРЕТКА — узел рамы велосипеда, в котором смонтирована ось
кривошипов.
КВАРТУПЛЕТ — четырехместный велосипед.
КВИНТУПЛЕТ — пятиместный велосипед.
КЛИРЕНС — минимальное расстояние между поверхностью до-
роги и нижней точкой велосипеда — передней шестерней пепного при-
воде.
КОРОБОЧКА — прием тактической борьбы, выражающийся в
преднамеренном окружении соперника заинтересованными гонщиками-
315
конкурентами, что исключает возможность его свободного перемещения
в группе в данный момент гонки.
КРИВОШИП — стержневая деталь, монтируемая на ось каретки
велосипеда, иа которую устанавливается педаль. На протяжений всей
истории отечественного велосипедного спорта ошибочно используется
термин ШАТУН.
КРОССИНГ — запрещенный прием ведения гонки, выражающийся
в резком изменении направления движения гонщика и создающий опас-
ность падения для других гонщиков.
ЛИКВИДАТОР — гонщик, избравший тактикой ведения гонки
ликвидацию отрывов, предпринимаемых соперниками.
ЛИМИТ — время, устанавливаемое судейской коллегией для
ограничения отставания гонщика (команды или группы гонщиков)
от лидеров.
ЛИЦЕНЗИЯ — документ, официально утверждающий профессио-
нальный или любительский статус гонщика согласно регламенту УСИ.
ЛЯГУШКА — специальный быстродействующий замок на ремие
педали.
МАНЕТКА — узел рычага переключателя передач гоночного ве-
лосипеда.
МАТЧ — заезд двух гонщиков, например спринтерский матч,
по результатам которого победителю начисляются очки.
МЕНЕДЖЕР — тренер, попечитель, начальник команды.
МОК — Международный олимпийский комитет основан 23 июня
1894 г. СССР является членом МОК с 1951 г.
МСФ — международные спортивные федерации по видам спорта.
МУЧЕТТА — сумка для еды, передаваемая гонщикам на питатель-
ных пунктах дистанции.
НОК — Национальный олимпийский комитет. НОК СССР основан
в 1951 г.
ОДНОТРУБКА — пневматическая шина гоночного велосипеда,
выполненная за одно целое с камерой, что обеспечивает быструю ее
установку и съем с колеса.
ОМНИУМ — велосипедное многоборье, включающее несколько ви-
дов гонок.
ОТРЫВ — уход вперед малочисленной группы или одного гон-
щика от основной или головной группы.
ПЕЛЕТОН—основная группа велогонщиков в групповой шос-
сейной гонке.
ПЕРЕХОДНИК — устройство, соединяющее насос и вентиль од-
нотрубки.
ПИЛОТ — мотоциклист, ведущий велогонку по трассе и инфор-
мирующий гонщиков о ее ходе.
ПИСТОН — вкладыш чашеобразной формы, устанавливаемый в
ободе для крепления спицы.
ПОДДУЖНЫЙ — гонщик, активно работающий на лидера своей
команды.
ПОСАДКА — расположение гонщика на велосипеде, обеспечива-
ющее наилучшие условия ведения гонки.
ПОЧТАЛЬОН — гонщик, избегающий активной спортивной борь-
бы и предпочитающий пассивный вариант ведения гонки.
ПРЕСЛЕДОВАНИЕ — индивидуальная или командная гонка на
треке на дистанцию 4 км, когда одновременный старт дается на противо-
положных прямых; тактический прием, связанный с необходимостью
ликвидировать дистанционную фору соперника или группы гонщиков.
316
ПРОЛОГ — традиционная гонка с раздельного старта на короткую
дистанцию (около 4—10 км), которой открывается многодневная гонка;
пролог обычно проводится с целью индивидуального представления
гонщиков зрителям и определения лидера для первого этапа.
ПРОТЕКТОР — наружная резиновая поверхность однотрубки,
имеющая специальный профиль в зависимости от вида гонок, типа
дорожного покрытия и его состояния.
РЕГЛАМЕНТ — устав, свод правил, утвержденный порядок про-
ведения гонки.
РОЛИК — трубчатая конструкция, ограничивающая продольное
передвижение переднего колеса велосипеда при езде за лидерским мо-
тоциклом (машиной).
РЫВОК — резкое ускорение, предпринимаемое в целях решения
тактических задач гонки или финиша (финишный рывок).
СВОБОДНЫЙ ХОД — движение велосипеда при неподвижных
кривошипах, возможен только при наличии трещотки; трековые вело-
сйпеды не имеют свободного хода.
СПРИНТ — гонка на короткую дистанцию (два-три круга, 1 км)
без учета времени, в которой главную роль играет место гонщика на
финише.
СПУРТ —см. РЫВОК.
СТАКАН — передний узел рамы, в котором смонтировано устрой-
ство передней вилки.
СТВОР (ФИНИШНЫЙ) — ширина проезжей части дороги, огра-
ниченная финишными стойками.
СТРЕЛОЧНИК — гонщик, не выдержавший накала спортивной
борьбы в струне, покинувший струну и тем самым создавший условия
для отрыва впереди идущим.
СТРУНА — езда гонщиков цепочкой в гонке при встречном или
боковом ветре при движении на скоростях, близких к предельно воз-
можным для участников гонки.
СУППЕР — переключатель скоростей гоночного велосипеда, раз-
личают передний и задний супперы.
СЮРПЛЯС — тактический прием ведения гонки, выражающийся
в стоянии на велосипеде на одном месте.
ТАНДЕМ — двухместный велосипед.
ТАНЦОВЩИЦА — прием езды на велосипеде стоя на педалях.
ТЕЛЕГА—гонщик, предпочитающий темповую езду.
ТЕМПОВИК — гонщик, предпочитающий тактику ведения гонки
на высоких скоростях в целях выматывания соперников.
ТРЕЩОТКА — устройство цепного привода, обеспечивающее сво-
бодный ход гоночного велосипеда без вращения кривошипов.
ТУКЛИПС — стальная деталь, изогнутая по профилю носка ве-
лосипедных туфель, устанавливаемая на педаль в целях жесткой фик-
сации ноги с помощью ремня.
УСИ — Международный союз велосипедистов (Union Cicliste in-
ternationle — UC1). Основан в 1900 г. по данным 1979 г. в союз входят
112 национальных федераций велосипедного спорта. СССР принят в
УСИ в 1952 г.
ФИАК — Международная любительская федерация велосипедного
спорта. Основана в 1965 г.. По данным 1979 г. в федерацию входят 111
национальных федераций. СССР является членом ФИАК с 1965 г.
ФИКП — Международная федерация профессионального велоси-
педного спорта. Основана в 1900 г. СССР является членом ФИКП
с 1988 г,
317
ОГЛАВЛЕНИЕ
Предисловие ................................................. 3
Глава 1. Обзор развития велосипедного спорта ...... 7
1.1. Краткая историческая справка..................... —
1.2. Классификация велосипедов ...................... 13
1.3. Некоторые технические аспекты правил организа-
ции велосипедных соревнований......................... 18
Глава 2. Размерные параметры гоночного велосипеда ... 21
2.1. Основные размерения гоночного велосипеда ... —
2.2. Тактико-технические аспекты посадки велогоищвка 23
2.3. Анатомо-антропометрические аспекты посадки ве-
логонщика ........................................... 26
2.4. Геодезические аспекты посадки гонщика и основ-
ных размерений гоночного велосипеда............. 41
2.5. Геометрические аспекты посадки велогонщика 46
Глава 3. Устройстао гоночного велосипеда, основные узлы
и детали ................................................... 52
3.1. Общее конструктивное решение гоночного вело-
сипеда ................................................ —
3.2. Рама............................................ 55
3.3. Передняя вилка.................................. 57
3.4. Руль............................................ 59
3.5. Колеса.......................................... 60
3.6. Каретка ........................................ 64
3.7. Педали.......................................... 69
3.8. Тормоза ........................................ 70
3.9. Задний переключатель передач..................... —
3.10. Передний переключатель передач.................. 75
3.11. Трещотка......................................... —
3.12. Цепной привод................................... 78
3.13. Седло........................................... 85
3.14. Дополнительные атрибуты велосипеда ............. 86
Глава 4. Современные тенденции развития конструкции
гоночного велосипеда ..................................... 87
4.2. Перспективные конструкторские решения основных
узлов гоночного велосипеда........................ 91
4.3. Модель велосипеда образца 1985 года ........... 107
318
Глава 5. Технология изготовления и конструкция однотру-
бок ......................................................... 110
5.1. Назначение, классификация и технические тре-
бования к однотрубкам................................... —
5.2. Конструкция однотрубок ......................... 114
5.3. Технология изготовления однотрубок.............. 116
5.4. Эксплуатационные свойства однотрубки............ 118
Глава 6. Анализ узлов гоночного велосипеда по параметрам
прочности и динамического качества........................... 121
6.1. Динамические качества рамы ....................... —
6.2. Конструкционные качества колеса................. 125
6.3. Цепная передача гоночного велосипеда........ 144
6.4. Соединение вала каретки с кривошипом .... 166
Глава 7. Основы теории педалирования для гоночного вело-
сипеда ............................................... . 169
7.1. Энергетическое обеспечение процесса педалирова-
ния .................................................... —
7.2. Технический анализ процесса педалирования . . 186
7.3. Кинематика и кинетостатика процесса педалиро-
вания ................................................ 212
7.4. Проблемы применения иекруглых зубчатых звез-
дочек в цепных передачах гоночных велосипедов 217
7.5. Тренажеры, конструкции и методы их практиче-
ского применения................................... 228
Глава 8. Кинематика и динамика системы гонщик — ве-
лосипед ................................................... 24}
8.1. Структура системы гонщик — велосипед. .... —
8.2. Кинематика системы гонщик — велосипед .... 245
8.3. Кинетостатика системы гонщик — велосипед . . . 254
8.4. Устойчивость движения системы гонщик — вело-
сипед ................................................ 264
8.5. Аэродинамика системы гонщик — велосипед . . . 279
8.6. Динамика системы гонщик — велосипед. 300
Заключение................................................... 310
Список литературы............................................ 312
Словарь терминов и профессионализмов в велосипедном спорте 314
ПРОИЗВОДСТВЕННОЕ ИЗДАНИЕ
ЛЮБОВИЦКИЙ Владимир Петрович
ГОНОЧНЫЕ ВЕЛОСИПЕДЫ
Редактор В. М. Рошаль
Переплет художника А. А. Парушкина
Художественный редактор С. С. Венедиктов
Технические редакторы Й. В. Шиканова и А. И. Казаков
Корректор 3. П. Смоленцева
ИБ № 4875
Сдано в набор 31.10.88. Подписано в печать 27.02.89. М-28916.
Формат 84Х1081/аа» Бумага типографская Хе 1. Гарнитура литературная.
Печать высокая. Усл. печ. л. 16,8. Усл. кр.-отт, 17,22. Уч.-изд. л. 17,48.
Тираж 85 500 экз. Заказ 607. Цена 1 р, 70 К.
Ленинградское отделение ордена Трудового Красного Знамени
издательства «Машиностроение».
191065, Ленинград, ул. Дзержинского, 10.
Ленинградская типография № 6 ордена Трудового Красного Знамени
Ленинградского объединения «Техническая книга» им. Евгении Соколовой
Союзполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли,
193144, г. Ленинград, ул. Моисеенко* 1Q.