/
















































































































































































































Author: Луков Н.М. Космодамианский А.С.
Tags: тяга поездов на железных дорогах подвижной состав железнодорожный транспорт системы управления локомотивы
ISBN: 978-5-89035-475-4
Year: 2007




Text
ПРОФЕССИОНАЛЬНОЕ ОБРАЗОВАНИЕ
локомотивы
7М“)
у sirry
И>о)
АВТОМАТИЧЕСКИЕ
СИСТЕМЫ УПРАВЛЕНИЯ
ЛОКОМОТИВОВ
Учебник
УДК 629.42.054.2 (075)
ББК 39.23
Л 84
Рецензенты: зам. начальника отдела Департамента технической политики ОАО
«РЖД», канд. техн, наук А.Н. Мелихов; преподаватель кафедры «Локомотивы и локо-
мотивное хозяйство» ПГУПСа, д-р техн, наук, проф. А.В. Грищенко
Луков Н.М., Космодамианский А.С.
Л84 Автоматические системы управления локомотивов: Учебник для ву-
зов ж.-д. транспорта — М.: ГОУ «Учебно-методический центр по об-
разованию на железнодорожном транспорте», 2007. — 429 с.
ISBN 978-5-89035-475-4
Дана классификация обычных и микропроцессорных локомотивных автомати-
ческих систем управления, регулирования и защиты с широким использованием
практических примеров. С позиций теории автоматических систем рассмотрены
статика и динамика элементов автоматики, автоматических регуляторов и систем
регулирования, методы расчета систем на устойчивость, методы и средства настрой-
ки автоматических регуляторов.
Учебник предназначен для студентов вузов железнодорожного транспорта по
специальности «Локомотивы», а также может быть полезен аспирантам, докторан-
там, инженерно-техническим работникам и специалистам железнодорожного транс-
порта.
УДК 629.42.054.2 (075)
ББК 39.23
JS \ 978-5-89035-475-4
© Луков Н.М., Космодамианский А.С ,
2007
© ГОУ «Учебно-методический центр
по образованию на железнодорож-
ном транспорте, 2007
Введение
С ростом мощности локомотивов и повышением требований к их тех-
нико-экономическим показателям повышаются требования к уровню и
качеству автоматизации агрегатов и систем, которые в большой степени
зависят от принципов построения автоматических систем управления,
регулирования и защиты, алгоритмов их функционирования, парамет-
ров настройки, а также от элементной базы.
Любая автоматическая система состоит из двух основных частей:
объекта автоматизации и соответствующих средств автоматизации. Зна-
ние физических основ технологического процесса, протекающего в объек-
те является необходимым, но недостаточным условием правильного ре-
шения задач его автоматизации и последующей эксплуатации. Поэтому
курс «Автоматические системы управления локомотивов» содержит две
части: основы теории линейных автоматических систем и автоматизация
агрегатов и систем локомотивов. Для грамотной эксплуатации автомати-
ческих систем необходимо знать общие законы их построения и действия,
методы исследования и настройки. Эти вопросы освещает теория авто-
матических систем.
Теория автоматических систем (автоматика) является составной час-
тью кибернетики — науки об общих законах управления объектами
живой и неживой природы. Раздел этой науки, изучающий законы уп-
равления объектами неживой природы, называется технической кибер-
нетикой. Теория автоматических систем является одной из составных
частей технической кибернетики.
Автоматикой называется наука об общих принципах и методах постро-
ения автоматических систем, выполняющих заданные функции без не-
посредственного участия человека. Автоматика охватывает совокупность
методов и средств, освобождающих человека от непосредственного вы-
3
полнения операций по контролю и управлению производственными про-
цессами и техническими устройствами. Применение методов и средств
автоматики называется автоматизацией
Управление функция, обеспечивающая необходимое по целевому
назначению протекание процессов преобразования энергии, вещества и
информации, поддержание работоспособности и безаварийности функ-
ционирования объекта путем сбора и обработки информации о состоя-
нии объекта и внешней среды для выработки решений о воздействии на
объект и их исполнение.
Объект управления (регулирования) — определенное техническое
устройство, для функционирования которого необходимы специально
организованные воздействия. Объекты, на которые подаются эти воздей-
ствия, называются управляемыми Они могут быть как отдельными, вы-
деленными по определенным признакам (конструктивным, функциональ-
ным и др.), так и представлять собой целые комплексы.
Регуляторы или устройства управления - совокупность устройств, с
помощью которых осуществляется управление главными технологичес-
кими параметрами (физическими)
Глава 1. ПРИНЦИПЫ ПОСТРОЕНИЯ
АВТОМАТИЧЕСКИХ СИСТЕМ
1.1. Фундаментальные принципы построения
автоматических систем
Условия протекания любого технологического процесса характеризу-
ются переменными значениями физических величин (частоты вращения,
температуры, давления, расхода, концентрации, напряжения, тока и др ).
Чтобы технологическое оборудование (аппараты, агрегаты, системы,
машины) надежно работало в требуемом режиме, необходимо поддер-
живать определенные значения (уровни) физических величин, характе-
ризующие данный технологический процесс.
Физическая величина, значение которой необходимо поддерживать по-
стоянным или изменять по определенному заданному закону, называется
регулируемой величиной <р.
Значение регулируемой величины, которое следует поддерживать в
данный момент по условиям правильного протекания технологического
процесса, называется заданным значением регулируемой величины <рэ.
Измеренное в данный момент времени значение регулируемой вели-
чины называется текущим значением регулируемой величины <рт.
Под влиянием различных воздействий регулируемая величина откло-
няется от заданного значения. Разность между заданным и текущим зна-
чениями такой величины называегся рассогласованием (отклонением}
или ошибкой регулируемой величины Д<р.
Любой технологический агрегат, система или машина должны рабо-
тать в так называемом установившемся или стационарном режиме, ког-
да в них полностью сохраняются материальный и энергетический ба-
лансы. Значения основных физических величин, характеризующих уело-
вия протекания техно топического процесса при у становившемся режи
ме соответствуют заданным значениям.
В реальных эксплуатационных устовиях установившийся режим по-
стоянно нарушается вследствие изменения условий протекания процес-
са. те в результате действия различных внешних возмущающих воздей-
ствий ?. . что сопровождается изменением значений физических вели
чин, характеризующих технологический процесс. При этом наступает
режим, называемый остановившимся или нестационарным.
Машину, агрегат, систему, в которой должен поддерживаться задан-
ный технологический процесс, принято называть !правтемой системой,
объектом роллирования (ОР) или объектом управления (ОУ).
Устройство, осуществляющее автоматическое изменение воздействия
р. на объект регулирования при отклонении регулируемой величины гр
от заданного значения гр принято называть управляющей системой или
автоматическимреллятором (АР) Значение срз устанавливается с по-
мощью изменения сигнала задания т), подаваемого в регулятор.
Таким образом, задача автоматического ведения технологического процесса
состоит в том, чтобы автоматически поддерживать в объекте регулирования
требуемые условия протекания этого процесса, восстанавливая их каждый
раз, кома они бывают нарушены Эта задача решается автоматической си-
стемой регулирования (АСР) или управления (АСУ), которая представля-
ет собой совокупность объекта регулирования (нли управления) и автома
тического регулятора (или устройства управления), соединенных линия-
ми связи и механизмами сочленения и взаимодействующих между собой.
АСР предназначена для регулирования какой-либо физической величи-
ны объекта, а АСУ для управления объектом по какой-либо величине
В процессе регулирования автоматический регулятор, воздействуя на
объект и изменяя тем самым текущее значение регулируемой величины,
стремится сделать его равным или близким заданному, те. свести рас-
согласование к нулю или минимуму.
Все известные автоматические системы созданы на основе общих
фундаментальных принципов построения, определяющих, каким обра-
зом соединены н взаимодействуют между собой объект регулирования
(управляемая система) и регулятор (управляющая система) в процессе
Иг функционирования В технике известны и широко используются че-
тыре фундаментальных принципа построения автоматических систем:
разомкнутого управления компенсации возмущения, отрицательной об-
ратной связи и комбинированный
«
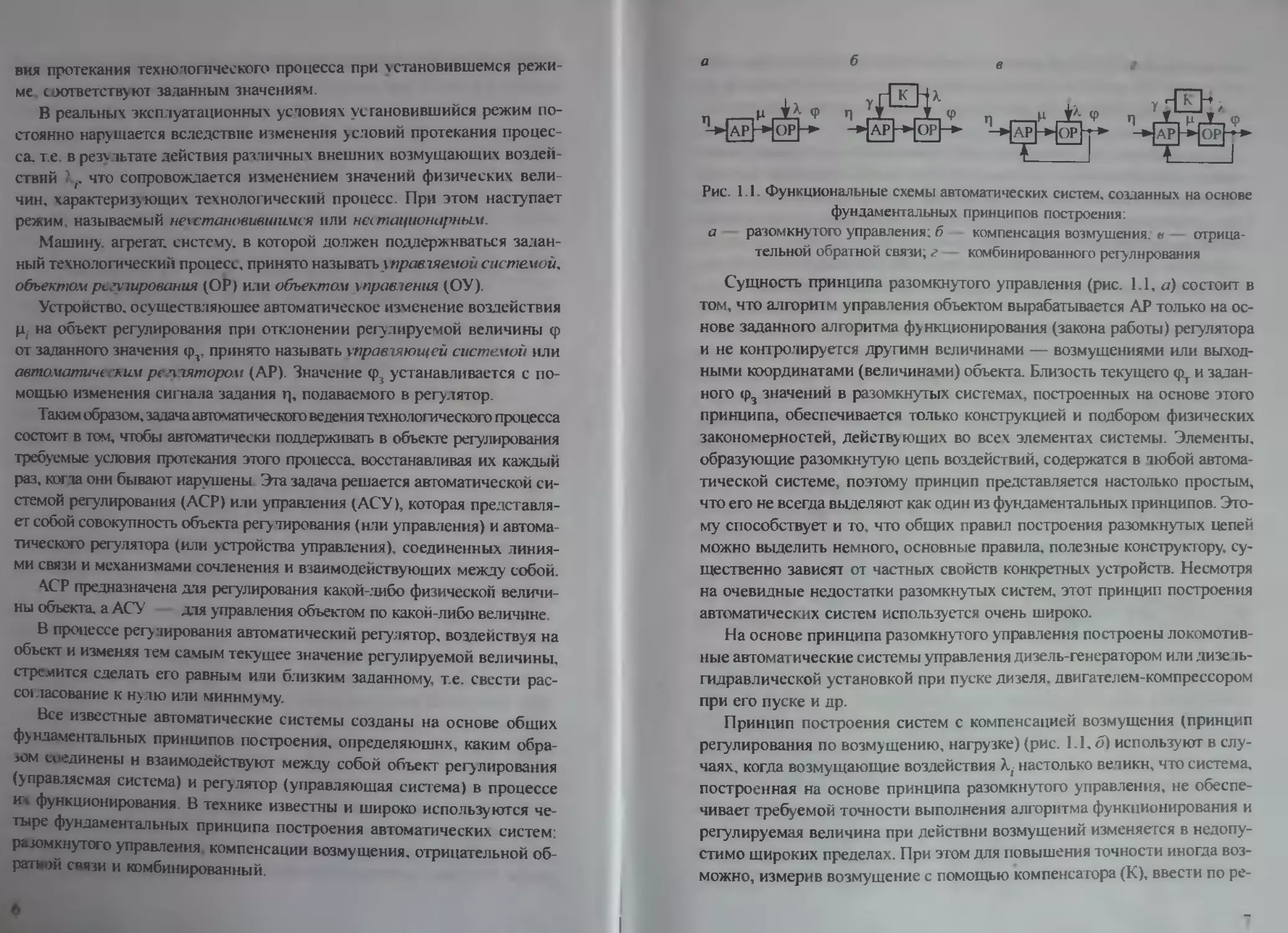
б
Рис 1 I Функциональные схемы автоматических систем, созданных на основе
фундаментальных принципов построения:
а разомкнутого управления; б компенсация возмущения, в отрица
тельной обратной связи; г комбинированного регулирования
Сущность принципа разомкнутого управления (рис. 1.1, а) состоит в
том, что алгоритм управления объектом вырабатывается АР только на ос-
нове заданного алгоритма функционирования (закона работы) регулятора
и не контролируется другими величинами — возмущениями или выход-
ными координатами (величинами) объекта. Близость текущего фт и задан-
ного <р3 значении в разомкнутых системах, построенных на основе этого
принципа, обеспечивается только конструкцией и подбором физических
закономерностей, действующих во всех элементах системы. Элементы,
образующие разомкнутую цепь воздействий, содержатся в любой автома-
тической системе, поэтому принцип представляется настолько простым,
что его не всегда выделяют как один из фундаментальных принципов. Это-
му способствует и то, что общих правил построения разомкнутых цепей
можно выделить немного, основные правила, полезные конструктору, су-
щественно зависят от частных свойств конкретных устройств. Несмотря
на очевидные недостатки разомкнутых систем, этот принцип построения
автоматических систем используется очень широко.
На основе принципа разомкнутого управления построены локомотив-
ные автоматические системы управления дизель-генератором или дизеть-
гидравлической установкой при пуске дизеля, двигателем-компрессором
при его пуске и др.
Принцип построения систем с компенсацией возмущения (принцип
регулирования по возмущению, нагрузке) (рис. 1.1,6) используют в слу-
чаях, когда возмущающие воздействия настолько ветикн, что система,
построенная на основе принципа разомкнутого управления, не обеспе-
чивает требуемой точности выполнения алгоритма функционирования и
регулируемая величина при действии возмущений изменяется в недопу-
стимо широких пределах. При этом для повышения точности иногда воз-
можно, измерив возмущение с помощью компенсатора (К), ввести по ре-
зультатам измерении у коррективы в алгоритм управления, которые ком-
пенсировали бы вызываемые возмущениями отклонения алгоритма фун-
кционирования. Необходимо отмезить, что компенсация достигается толь-
ко по измеренным возмущениям.
На основе принципа регулирования по возмущению построены локо-
мотивные автоматические системы регулирования напряжения тяговых
генераторов постоянного тока, применяемые на тепловозах ТЭМ2, ЧМ ЭЗ
и др., напряжения генераторов-возбудителей переменного тока, приме-
няемые на современных тепловозах
Принцип построения автоматических систем с отрицательной обрат-
ной связью выхода ОР с его входом (принцип построения систем регули-
рования по от» юнению текущего значения регулируемой величины от
ее заданного значения) применяют для повышения точности выполне-
ния алгоритма функционирования без измерения возмущений (рис. 1.1, в).
Для этого в систему вводят устройство передачи сигнала с выхода ОР на
вход регулятора, которое становится частью регулятора и содержит эле-
менты для измерения <рт. При этом АР выполняет функции устройства
отрицательной обратной связи выхода объекта с его входом. В результа-
те коррективы в алгоритм управления вносятся по значениям (pr и систе-
ма представляет собой замкнутый контур регулирования
К первым промышленным автоматическим устройствам относятся
регуляторы по отклонению уровня воды в котле паровой машины
И.Н Ползунова, по отклонению частоты вращения вала паровой маши-
ны Уатта, система программного управления станком Жоккара. Основ-
ная заслуга И Н Ползунова и Уатта состоит именно в промышленном
применении регуляторов, сами же идеи, иа которых основана конструк-
ция этих регуляторов, использоватись намного раньше.
Принцип построения систем с отрицательной обратной связью ши-
роко распространен не только в технике, но и в системах управления
заложенных в живых орзанизмах природой (системы регуляции различ-
ных функции температуры, ритма кровообращения и др ). В управле-
нии общественными организациями этот принцип реализуется в виде
проверки исполнения принятых решений и распоряжении, израющих роль
управляющих воздействий.
На основе принципа регулирования по отклонению построены мно-
гие локомотивные автоматические системы: АСР частоты вращения ва-
лов энергетических установок, АСР напряжения тяговых генераторов,
вспомогательных генераторов и стартер-гснераторов, АСР температуры
теплоносителей (воды, масла, падлу ночною воздуха), Л( Р дан гения в
пневмосистеме локомотива и др.
Принцип построения систем комбинированною pciулироваиия по
возмущению и по отклонению используется при создании более ючных
и качественных автоматических систем. Iакне системы объединяют дос-
тоинства систем, построенных по принципам регулирования ио вотму-
тцению и по отклонению, быстрота реакции на итмеиение возмуще-
нии и точное ретулирование независимо оттого, какая причина вызвала
отклонение регулируемой величине! от заданного значения I акие систе-
мы мотут быть инвариантны, так как в них может быть обеспечена неза-
висимость (инвариант ность)ретулируемой величины т измеряемых воз-
мущении.
Абсолютно инвариантным системам, созданным но принципу комби-
нированного регулирования, в отличие от систем ретулирования по от-
клонению, не присуще противоречие между условиями инвариант пости
и устойчивости В мим проявляется болыпое преимущество комбиниро-
ванных систем ио сравнению с системами регулирования по отклоне-
нию. Комбинированные системы являются «грубыми» по высказыванию
А.А. Андронова, те. при малых озклоззетзиях от условий абсолютной
инвариантности качественные изменения в них не возникают. Комбини-
рованную автоматическую систему ио структурному при знаку можнзт
разделить на две части (рис. 1 !,<");
подсистему, работаюззтую по отклонению, г.е. по принципу обрат-
ззой связи, и образованную ОР и АР, замкнутый контур;
подсистему, работающую по сит налу возмущения и образованную
компенсатором К и компенсируемьзми каналами ОР, разомкнуззлй
кон зур.
Введение компенсирующих связей позволяет значительззо повысить
качество работы автоматической системы при действии измеряемых
возмущении. При зтом систему можно построить гак, что величина<р
будет регулироваться т данным образом компенсирующей связью; роль
АСР, действующею по отклонению, сводится к окончательной кор-
рекции процесса регулирования, необходимой из-за несовершенства
компенсации или действия неизмеряемых возмущении С .тсдоватс ть-
но, при компенсации основных возмущений в системе можно снизить
требования к работе замкнуюто контура, что позволяет в некоторы-
случаях применить более простой АР и повысить устойчивость замк
9
нутого контура, не ухудшая показатели качества работы всей комби-
нированной системы. В комбинированных автоматических системах
применяются два вида компенсации возмущении: силовая (сюналь-
ная) и параметрическая. В системах с силовой компенсацией действие
сигнала возмущения через К, АР и ОР уменьшает или сводит к нулю
изменения регулируемой величины В системах с параметрической
компенсацией возмущения параметры (статические или динамичес-
кие) АР меняются при изменении возмущений таким образом, чтобы
обеспечивался постоянный запас устойчивости системы.
На основе принципа комбинированного регулирования по возмуще-
нию и по отклонению построены такие локомотивные автоматические
системы, как АСР напряжения тяговых генераторов, применяемые на
тепловозах типов ТЭ10, ТЭ116, ТЭП70 и др., АСР температуры теплоно-
сителей (воды, масла и наддувочного воздуха дизеля, обмоток или высо-
конагретои детали тяговой электрической машины и др ) и т п
1.2. Схемы и классы автоматических систем
При построении и исследовании автоматических устройств и систем
в автоматике широко используются три вида схем: функциональная, прин-
ципиальная и структурная (или динамическая).
На функциональной схеме показывается, какие функции выполняют
>лементы, составляющие автоматическую систему или устройство (см.
рис 1 I)
Функциональная схема содержит сведения о функциональном назна-
чении элементов в устройстве или системе и о том, какая физическая
величина является регулируемой, какое из внешних воздействий задаю-
щее и какие из них являются возмущающими и др По этой схеме можно
определить взаимодействие элементов.
В простейшем случае замкнутая одноконтурная автоматическая сис-
тема содержит шесть функциональных элементов: объект регулирова-
ния (ОР), измерительное устройство (ПУ) (датчик регулируемой вели-
чины). задающее устройство (ЗУ) (задатчик регулируемой величины),
сравнивающее устройство (СУ), исполнительный механизм (ИМ) (сер-
вомеханизм сервомотор или усилитель мощности) и регулирующий орган
(РО) (рис. 12)
Все функциональные элементы системы, кроме ОР, образуют АР.
В свою очередь регулятор удобно разделить на две составные части:
10
Рис 1.2. Функциональная схема замкнутой одноконтурной
автоматической системы
управляющий орган (УО), содержащий датчик задатчик и сравниваю-
щее устройство (а иногда еще и часть усилителя мощности) и исполни-
тельно-регулирующее устройство (ИРУ), содержащее исполнительный
механизм и регулирующий орган.
Основные функции элементов регулятора:
- датчик проводит непрерывное измерение текущего значения регу-
лируемой величины <рт и преобразует его в сигнал хд, удобный для пода-
чи в сравнивающее устройство;
- задатчик вырабатывает сигнал х,, соответствующий заданному зна-
чению регулируемой величины <р3 и определяемый значением задающе-
го воздействия т) При этом сигнал г] постоянен во времени или изменя
ется во времени по определенной программе, поступая от носителя про-
граммы или от датчика независимой величины, принадлежащей друго-
му объекту регулирования или другой автоматической системе.
Сравнивающее устройство выполняет алгебраическое суммирование
сигналов хд и х3, в результате чего формируется сигнал рассогласования
ДхСу, соответствующий отклонению текущего значения регулируемой
величины от заданного значения:
AvCy S V U
Этот сигнал подается в регулирующий орган (в регуляторах прямого
действия) или в исполнительный механизм (в регуляторах непрямого
действия).
11
ИМ преобразует сигнал \vc>. усиливает его по мощности за счет ис-
пользования энергии постороннего источника и приводит в действие РО.
РО оказывает регулирующее воздействие р на ОР путем изменения
подачи в него регулирующей среды (вещества или энергии).
Функциональные злементы замкнутой автоматической системы обра-
зуют замкнутую цепь, называемую контуром регулирования (см. рис. 1.2).
Контур регулирования является основой при рассмотрении любой авто-
матической системы. Автоматическая система регулирования одной ре-
гулируемой величины при условии, что составляющие ее элементы со-
единены связями, образующими только один контур, называется одно-
контурной.
Два или больше регуляторов, установленных на одном объекте регу-
лирования, регулирующих различные величины, не связанные внешни-
ми связями, взаимодействие между которыми возможно только через тех-
нологический процесс данного объекта, образуют с объектом соответ-
ственно две или больше одноконтурных несвязанных АСР. Однако зада-
ча существенно усложняется, если регулируемые величины оказывают-
ся взаимосвязанными. При этом объект регулирования является много-
мерным, а автоматическая система, содержащая такой объект и несколь-
ко автоматических регуляторов взаимосвязанных величин, называется
многоконтурной системой связанного регулирования.
Характерной особенностью замкнутой автоматической системы яв-
ляется то, что в ней воздействие, приложенное к какой-либо точке, мо-
жет обойти всю систему и вернуться в первоначальную точку, следуя
только по одному пути обхода (контуру). Контур обладает двумя свой-
ствами. контур автоматической системы замкнут; воздействие в контуре
может распространяться только в одном направлении (например, по ча-
совой стрелке) (см. рис. 1.2). Второе свойство называют детектирова-
нием. Связь выхода объекта с его входом является главной, так как кроме
нее могут быть местные внутренние связи между элементами объекта
или регулятора. Главная связь называется обратной, так как сигнал с
выхода объекта, пройдя контур регулирования, возвращается обратно на
вход (конечно, претерпев определенные преобразования). Главная обрат-
ная связь выхода объекта с его входом должна быть обязательно отрица-
т> льной так как для правильной работы системы необходимо, чтобы,
например, при увеличении <рт сигналы в элементах регулятора преобра-
зовывались таким образом и изменяли р так, чтобы ср уменьшалась, и
наоборот
12
Необходимо отметить, что возмущающее воздействие может действо-
вать на любую точку системы, как в объекте, так и в регуляторе, а задаю-
щее воздействие прилагается в строго определенных точках регулятора
В простейшем случае на систему действуют два внешних воздействия:
возмущающее X, подаваемое в объект, и задающее г], подаваемое в perv-
лятор Задающее воздействие может быть изменено вручную (переста-
новкой соответствующего элемента задатчика) или автоматически Для
автоматизации объектов применяются автоматические регуляторы раз-
личных типов.
Классификация регуляторов проводится по ряду признаков.
По способу выравнивания технологического процесса различают ре-
гуляторы. действующие на «притоке», и регуляторы, действующие на
«стоке» (вещества или энергии) объекта. Регуляторы первого типа изме-
няют подачу вещества или энергии в объект, а регуляторы второго типа
изменяют отвод вещества или энергии из объекта. Например, регулятор
частоты вращения вала дизель-генератора изменяет подачу (приток) ве-
щества (топлива) в дизель, а регулятор температуры воды на выходе из
дизеля изменяет отвод (сток) теплоты из системы охлаждения дизеля.
По способу действия различают регуляторы прямого и непрямого дей-
ствия. Регуляторы прямого действия работают без усиления по мощнос-
ти выходного сигнала сравнивающего устройства. В них датчик регули-
руемой величины непосредственно воздействует на регулирующий орган.
Регуляторы непрямого действия содержат исполнительный механизм. Они
сложнее регуляторов прямого действия, но обеспечивают более качествен-
ную работу автоматических систем. В тепловозных автоматических сис-
темах применяются в основном регуляторы непрямого действия.
По характеру воздействия на объект существует разделение на регу-
ляторы непрерывного и прерывистого (дискретного, релейного) действия.
Первые работают без остановки от начала до конца переходного процес-
са. Вторые действуют толчками с интервалами покоя. Такие регуляторы
называются релейными. В релейных регуляторах сигнал на исполнитель-
ный механизм подается или не подается в зависимости от значения от-
клонения. Регуляторы, в которых сигнал в исполнительный механизм
подается в виде импульсов различной амплизуды и длительности, назы-
ваются импульсными.
Регуляторы, содержащие цифровые программно-управляемые вычис-
лительные устройства, в которых сигналы преобразуются в цифровые
коды, называются цифровыми. Эти регуляторы находят все большее при-
13
меиение в автоматических системах. В локомотивных автоматических
системах применяются в основном регуляторы непрерывного действия.
11о виду энергии, используемой в исполнительных механизмах, регуля-
торы делятся на механические, гидравлические, пневматические, элект-
рические и т.п.
По характеру изменения во времени сигнала задания г) (а значит, и
регулируемой величины <р) все автоматические системы делятся на
четыре класса:
1) системы автоматической стабилизации, у которых сигнал задания,
а значит, и регулируемая величина постоянны во времени. К классу этих
систем относятся АСР частоты вращения валов энергетических устано-
вок, напряжения вспомогательного генератора, температуры теплоноси-
телей, скорости движения, тормозной силы и др.;
2) системы программного регулирования или управления, у которых
сигнал задания, а значит, и регулируемая величина изменяются во време-
ни по определенному заранее заданному закону (программе). К классу этих
систем относятся АСУ дизель-генератором при пуске дизеля, двигателем-
компрессором при его пуске, поездом при его движении и др.;
3) системы следящие, у которых сигнал задания, а значит, и регулиру-
емая величина изменяются в зависимости от некоторой физической ве-
личины, принадлежащей другому объекту или другой автоматической
системе; на тепловозах такие системы не применяются;
4) системы оптимального управления, это обычно многоконтурные си-
стемы, у которых сигналы задания регуляторов (а значит, и регулируемые
величины) изменяются в процессе работы автоматической системы таким
образом, чтобы обеспечивать работу объекта или всей системы с наилуч-
шими технико-экономическими показателями. Регуляторы таких систем
содержат цифровые программно-управляемые вычислительные устройства.
Частным случаем этих систем являются системы экстремального регули-
рования. Есть системы оптимального управления, способные накапливать
опыт работы, анализировать его и использовать в дальнейшей работе, из-
меняя в случае необходимости свои статические и динамические свойства,
т.е. эти системы способны приспосабливаться к новым условиям работы.
Поэтому эти системы называют адаптивными. самообучающимися.
Для локомотивов разрабатываются автоматические системы ведения по-
езда, которые можно отнести к классу систем оптимального управления.
Если расстояние между объектом управления и регулятором таково,
что необходимо применение специальных телемеханических средств для
14
передачи сигналов от объекта к регулятору и от регулятора к объекту, то
в этом случае автоматическая система является телемеханической. На-
пример, телемеханическими системами являются системы управления
локомотивами по радиоканалам.
Принципы действия элементов отражаются на принципиальных схе-
мах. Иногда используются принципиальные блок-схемы, на которых эле-
менты показывают в виде блоков (на схемах эти блоки обозначают пря-
моугольниками).
Структурной схемой в теории автоматических систем называют гра-
фическое изображение математической модели автоматического устрой-
ства или системы в виде соединений звеньев. Звено на структурной схе-
ме условно обозначают в виде прямоугольника с указанием сигналов, а
также передаточной функции внутри него. Иногда вместо передаточной
функции указывают дифференциальное уравнение или динамическую
характеристику звена. Звенья могут быть пронумерованы, а их переда-
точные функции, уравнения или характеристики представлены вне струк-
турной схемы. Входные и выходные величины записывают в форме изоб-
ражений. Если же передаточные функции задают в операторной форме
или звенья описывают дифференциальными уравнениями, то входные и
выходные величины записывают в виде оригинала. Сравнивающие и сум-
мирующие звенья изображают в виде круга, разделенного на секторы.
В сравнивающем звене сектор, на который подается «вычитаемое», за-
темняют или перед входом ставят знак «минус». Структурную схему ши-
роко используют на практике при создании и исследовании автоматичес-
ких устройств и систем так как она дает наглядное представление о ди-
намике звеньев, связях между ними, прохождении и преобразовании сиг-
налов в системе. Звено на структурной схеме не обязательно изображает
модель какого-либо отдельного конструктивного элемента. Оно может
изображать модель одного элемента, соединения элементов или вообще
любой части системы. При упрощении схемы используют правила пре-
образования структурных схем.
1.3. Алгоритмы (законы) работы
автоматических регуляторов
В автоматических регуляторах входной величиной является текущее
значение регулируемой величины <р, а выходной — регулирующее воз-
действие р (см. рис. 1.1). Зависимость выходного сигнала регулятора р
от входного <р в установившемся и неустановившемся режимах называ-
15
ется законам работы или алгоритмам функционирования регулятора
р(<р, /). В линейных автоматических системах наиболее широко приме-
няются линейные регуляторы со следующими законами работы
Автоматические регуляторы, у которых отклонение регулируемой ве-
личины от ее заданного значения вызывает перемещение регулирующе-
го органа на значение, пропорциональное значению этого отклонения,
называются пропорциональными или статическими (11-регуляторами).
Закон их работы называется пропорциональным (обозначаемым П).
Пропорциональная зависимость между перемещением регулирующего
органа и отклонением регулируемой величины от ее заданного значения
в П-регупяторе достигается за счет действия жесткой обратной связи. По
этой причине П-регуляторы называются также регуляторами с жесткой
обратной связью.
Закон работы П-регулятора описывается выражением
р = £рД<р, (1-2)
где ц — регулирующее воздействие регулятора (относительное перемещение
регулирующего органа);
kf — статический коэффициент передачи (усиления) регулятора;
Д(р — сигнал рассогласования отклонение регулируемой величины от ее
заданного значения или разность между ее заданным <рз и текущим <рт значения-
ми в относительных единицах, т.е. Д<р <р3 <рг
Величина, обратная коэффициенту передачи регулятора, т е I /кр, назы-
вается коэффициентам статической неравномерности регулятора. Ко-
эффициент передачи П-регулятора является величиной, устанавлива-
емой в процессе наладки регулятора при настройке автоматической сис-
темы, и поэтому считается статическим параметром наст ройки системы
с П-регулятором.
Разность между максимальными и минимальным установившимися
значениями регулируемой величины, поддерживаемая автоматической
системой, называется абсолютной статической неравномерностью
П-регулятора. Максимальная статическая неравномерность соответствует
такому диапазону изменения регулируемой величины, который необхо-
дим для перемещения регулирующего органа из одного крайнего поло-
жения в другое.
Статическую неравномерность П-регулятора чаще всего принято вы-
ражать в относительных (безразмерных) единицах. В этом случае абсо-
лютное значение статической неравномерности обычно относят к тако-
16
му номинальному значению регулируемой величины, в долях которой вы-
ражают относительное отклонение этой величины. Такая неравномерность
П-регулятора называется относительной статической неравномерностью
или спштизмом и определяется выражением 8 (ч>тах <Рт,п^ч>ном
(где <ртах, <pmjn и <рном — максимальное, минимальное и номинальное
(заданное) значения регулируемой величины).
Автоматические системы, содержащие статические П-регуляторы,
называются статическими. Наличие у П-регуляторов статической не-
равномерности приводит к тому, что значение регулируемой величины
не остается постоянным при различных нагрузках Л( объекта, а изменя-
ется с изменением последней (в пределах статической неравномернос-
ти). Объясняется это тем, что значение р, соответствующее новой на-
грузке, может быть только при новом значении регулируемой величины.
Такое свойство П-регулягора повышает устойчивость автоматической
системы и с этой точки зрения считается положительным фактором.
П-регуляторы применяются в локомотивных автоматических системах
регулирования температуры гешюносителей, скорости движения локомо-
тива при работе его в тяговом режиме, тормозной силы локомотива и др.
Автоматические регуляторы, у которых одному и тому же положению
регулирующего органа могут в различное время соответствовать разные
значения регулируемой величины или. наоборот, одно и то же значение
регулируемой величины может быть при разных положениях регулиру-
ющего органа, называются астатическими (интегральными).
Автоматические системы, содержащие астатические регуляторы, на-
зываются астатическими. Эти системы поддерживают постоянное ус-
тановившееся значение регулируемой величины на заданном уровне не-
зависимо от нагрузки объекта. При отклонении регулируемой величины
от заданного значения астатический регулятор будет перемещать регу-
лирующий орган до тех пор, пока не восстановится значение регулируе-
мой величины на уровне задания.
Важнейшей особенностью астатического регулятора непрерывного
действия является то, что скорость перемещения регулирующего органа
dp/dz пропорциональна сигналу рассогласования Дгр (отклонению регу-
лируемой величины от заданного значения).
На основании этого динамические свойства астатического регулято-
ра описываются уравнением
Гп dp/dz - > Агр
(1.3)
Г к 7 коэффициент пропорциональности представляющий собой время, зат-
рачиваемое исполнительным механизмом на перемещение регу щруюшего орга-
на Из одного крайнего положения в др} ю. после максимального изменения ре-
1у1Ируемой ве шчины
Знак в правой части уравнения (1.3) зависит от того, должен ли с рос-
том регулируемой величины регулирующий орган уменьшить или уве-
личить подачу регулирующей среды в объект.
Если уравнение (1.3) проинтегрировать, то будет получен закон рабо-
ты астатического регулятора - - зависимость во времени регулирующего
воздействия (выходной величины регулятора) р от его входной величи-
ны Д<р:
р = (1/Ги) Ja«P dr+p0, (1.4)
или в частном случае при р0 = 0:
р = (1/Ги)| Дфбг, (15)
где Цр начальное положение регулирующего органа до начала возмущения.
Из уравнений (1.4) и (1.5) видно, что регулирующее воздействие
астатического регулятора пропорционально интегралу отклонения регу-
лируемой величины от ее заданного значения, т.е. это воздействие будет
тем больше, чем больше отклонится регулируемая величина от заданно-
го значения и чем длительнее будет это отклонение. Поэтому астатичес-
кие регуляторы по закону работы называют также интегральными или
сокращенно И-pt -шторами В И-регуляторах отсутствует жесткая связь
выходной величины с входной.
Скорость перемещения регулирующего органа 1 /Ги в выражениях (1.4)
и (1 5) является величиной, устанавливаемой в процессе наладки регуля-
тора при настройке автоматической системы, поэтому считается дина-
мическим параметром настройки системы с И-регулятором.
Положительной особенностью И-регулятора является то, что зна-
чение регулируемой величины в установившемся режиме поддержи-
вается системой на заданном уровне независимо от нагрузки объекта,
г.е у И-регу тятора и астатической системы статическая неравномер-
ность равна нулю
Одним из средств обеспечения высокого качества работы автомати-
чсскгж системы является наличие в АР устройства обратной связи выхо-
|В
да регулятора с входом исполнительного механизма Однако, чтобы из-
бежать при этом ухудшения статических свойств регулятора и системы,
обратная связь должна быть осуществлена не по положению регулирую-
щего органа, как у П-регулятора, а по скорости его перемещения В этом
случае действие обратной связи полностью проявляется в переходном
процессе и затем исчезает (снимается) в установившемся режиме, вслед-
ствие чего автоматический регулятор с обратной связью по скорости пе-
ремещения регулирующего органа не имеет остаточной неравномернос-
ти. Такую обратную связь называют упругой, гибкой или изодранной, а
регуляторы, содержащие устройство такой связи, изодранными
Таким образом, система, содержащая изодромный регулятор, анало-
гично системе с И-регутятором поддерживает постоянное установивше-
еся значение регулируемой величины на заданном уровне независимо от
нагрузки объекта. При отклонении регулируемой величины от заданного
значения И-регулятор в начальный момент времени переместит регули-
рующий орган на значение пропорциональное отклонению, но если после
этого регулируемая величина не придет к заданному значению, то И-ре-
гулятор будет продолжать перемещать регулирующий орган до тех пор,
пока регулируемая величина не достигнет своего заданного значения.
Действие регулятора с гибкой обратной связью можно рассматривать
как совместное действие статического (П) и астатического (И) регулято-
ров. На основании этого закон работы регулятора с гибкой обратной свя-
зью выражается следуюшим дифференциальным уравнением:
ц = Ар(Дф + 1 Ги)|Дфс1/, (16)
1де Ги — время гибкой обратной связи, называемое временем изодрома
Уравнение (1.6) содержит две составляющие регулирующего воздей-
ствия: кр Дф - - пропорциональную составляющую, кр (1/Ги) J Дф d/ —
интегральную составляющую.
Из уравнения (1.6) следует, что регулирующее воздействие изодром-
ного регулятора пропорционально отклонению регулируемой величины
от заданного значения и интегралу' от этого отклонения по времени На
этом основании изодромные регуляторы по их закону работы называют-
ся пропорционально-интегральными или ПИ-регуляторами.
Из уравнения (1 6) также следует, что за время равное Ги интеграль-
ная составляющая регулирующего воздействия достигает значения, рав-
19
ного пропорциональной составляющей. Таким образом, сигнал регули-
рующего воздействия ПИ-регулятора за время равное 7'и удвоится по срав-
нению с сигналом пропорциональной составляющей за счет действия
устройства гибкой обратной связи в регуляторе. На этом основании вре-
мя изодрома называют также временем удвоения.
Статический коэффициент передачи Ар и время изодрома в диффе-
ренциальном уравнении П-регулятора являются величинами, значения
которых устанавливаются в процессе наладки регулятора при настройке
автоматической системы, и поэтому считаются статическим и динами-
ческим параметрами настройки системы с ПИ-регулятором. ПИ-регуля-
торы в тепловозных автоматических системах не применяются.
Существенное повышение качества работы автоматической системы
может быть достигнуто за счет использования в качестве входного сиг-
нала для исполнительного механизма, наряду с величиной, пропорцио-
нальной отклонению регулируемой величины от заданного значения Дф,
также и сигнала, пропорционального скорости этого отклонения (произ-
водной), т.е. d(p/d/.
Автоматические регуляторы с дополнительным воздействием по про-
изводной отклонения регулируемой величины называются регулятора-
ми с предварением. Сочетание в регуляторе пропорционального воздей-
ствия с дополнительным воздействием по производной дает пропорцио-
нально-дифференциальный (статический с предварением) регулятор или
сокращенно ПД-регулятор. Закон работы ПД-регулятора описывается
дифференциальным уравнением
ц = к (Д<р ± Т (1.7)
I
Уравнение (1.7) содержит две составляющие регулирующего воздей-
ствия: Ар Дф — пропорциональную и Ар Гд бф /d/ — дифференциальную.
Коэффициент 7д в уравнении (1.7) есть время дифференцирования
или время предварения. Он характеризует степень влияния воздействия
по производной на значение регулирующего воздействия. Знак «плюс»
или «минус» в уравнении (1.7) свидетельствует о том, что предварение
может быть прямым (+) или обратным (-).
Статический коэффициент передачи Ар и время предварения 7Д в диф-
ференциальном уравнении ПД-регулятора являются величинами, значе-
ния которых устанавливаются в процессе наладки регулятора при настрой-
ке автоматической системы, и поэтому являются статическим и динами-
ческим параметрами настройки системы с ПД- регулятором.
20
Дополнительное воздействие по скорости отклонения регулируемой
величины оказывает положительное влияние на переходной процесс в
автоматических системах, даже содержащих объекты со значительным
запаздыванием. Благодаря применению дополнительного воздействия по
производной, время переходного процесса (время регулирования) и амп-
литуды колебаний регулируемой величины при этом существенно умень-
шаются за счет эффекта предварения. ПД-регуляторы применяются в
автоматических системах регулирования напряжения тяговых генерато-
ров постоянного тока (на тепловозах ТЭ10, М62 и др.) и переменного
тока (на тепловозах ТЭМ7, 2ТЭ116, ТЭП70 и др.).
При введении в изодромный регулятор дополнительного воздействия
по производной регулируемой величины будет получен пропорциональ-
но-интегрально-дифференциальный регулятор или ПИД-регулятор. Дей-
ствие ПИД-регулятора может рассматриваться как совместное действие
статического и астатического регуляторов с дополнительным воздействи-
ем по скорости изменения регулируемой величины (производной). Закон
работы ПИД- регулятора описывается дифференциальным уравнением
и = кр (Д<р + (1 /Г„) f л<р dz ± Т, d<p/dz). (1.8)
Уравнение (1.8) содержит три составляющих регулирующего воздей-
ствия: кр Дф — пропорциональную, Ар (1/^) f Дф dz — интегральную и
Ар(Гдйф /dz) — дифференциальную. Знак «плюс» или «минус» в уравне-
нии (1.8) так же, как и в уравнении (1.7), свидетельствует о том, что пред-
варение может быть прямым или обратным.
Параметрами настройки автоматических систем, содержащих ПИД-ре-
гуляторы, являются: статический коэффициент передачи кр, время
изодрома Ги и время предварения Т .
ПИД-регуляторы применяются в локомотивных автоматических сис-
темах регулирования частоты вращения валов дизель-генераторов и ди-
зель-гидравлических установок, что обеспечивает высокое качество ра-
боты этих систем.
Значительное повышение качества работы автоматических систем
достигается применением в них комбинированных регуляторов, содер-
жащих регуляторы по возмущению (нагрузке) и по отклонению. Если
регулятор по возмущению статический, то его закон работы описывает-
ся уравнением
21
I ie kf коэффициент п фсдачи pen, 1ятора по возмущению
В с лучае применения комбинированных регуляторов в автоматичес-
ких системах с силовой (сигнальной) компенсацией возмущения регули-
рующее воздействие зависит как от отклонения регулируемой величины
Дф, так и от изменения нагрузки ДХ. т.е. р = + Ру. Поэтому закон рабо-
ты комбинированного регулятора, осуществляющего в автоматической
системе сигнальную компенсацию действия возмущения, описывается
уравнением
ц = ХрДф + ХруДХ. (1-10)
Комбинированные регуляторы, осуществляющие сигнальную компен-
сацию действия возмущения, применяются в локомотивных автомати-
ческих системах регулирования частоты вращения валов дизель-генера-
торов. напряжения тяговых генераторов постоянного и переменного тока,
температуры теплоносителей и др.
В случае применения комбинированных регуляторов в системах с
параметрической компенсацией от возмущения зависит не только ре-
гулирующее воздействие, ио и коэффициент передачи П-регулятора
ц[Дф, ДХ. Хр>| Поэтому закон работы данного комбинированного регу-
лятора описывается уравнением
Р - Хр (X) Дф + ХрХДХ (1.11)
Комбинированные регуляторы, осуществляющие параметрическую
компенсацию действия возмущения, применяются в локомотивных ав-
томатических системах регулирования температуры теплоносителей.
Кроме рассмотренных регуляторов непрерывного действия, в автома-
тических системах применяются регуляторы релейного действия. По ха-
рактеру регулирующего воздействия они являются астатическими. Если
время Ти астатического регулятора будет достаточно малым, то даже при
незначительном отклонении регулируемой величины от заданного зна-
чения регулирующий орган займет одно из крайних положений, напри-
мер, откроется или закроется.
Режим работы, при которох регулирующий орган практически не оста-
ется в промежуточном положении и регулирующее воздействие бывает
лишь максимальным или минимальным (например, равным нулю), назы-
вается ре. зейным или двухпозиционным, а регулятор с таким режимом ра-
боты в. (Ывается регу затором релейного или двухпозиционного действия
Регуляторы релейного действия характеризуются зоной нечувствитель-
ности Дфнч, в пределах которой изменение регулируемой величины не
вызывает срабатывания регулятора. Наличие в регуляторе релейного дей-
ствия зоны нечувствительности обусловливает включение и выключе-
ние регулирующего воздействия на объект при разных значениях сигна-
ла рассогласования. Эта разность будет тем больше, чем больше зона
нечувствительности.
Увеличение зоны нечувствительности Дфнч приводит к увеличению
амплитуды колебаний регулируемой величины. Однако это увеличение
Д<рнч иногда является вынужденным, например, при применении элект-
рических регуляторов, так как это приводит к уменьшению числа вклю-
чений пусковой аппаратуры исполнительных механизмов и соответствен-
но к увеличению срока ее службы. В локомотивных автоматических сис-
темах применяются релейные регуляторы температуры теплоносителей
в системах охлаждения дизеля (на тепловозах ТЭМ2, ТГМ4, ТГМ6,
2ТЭ116 и др.), напряжения вспомогательных генераторов и давления воз-
духа в пневматических системах локомотивов.
1.4. Особенности алгоритмов работы
автоматических микропроцессорных регуляторов
В автоматических микропроцессорных регуляторах используются циф-
ровые программно-управляемые вычислительные устройства или микро-
процессоры. В настоящее время микропроцессоры получили широкое рас-
пространение в регуляторах различного назначения. Автоматические мик-
ропроцессорные системы регулирования выполняют функции логических
и следящих систем, систем регулирования соотношения переменных, адап-
тивного регулирования, каскадного, многосвязанного, комбинированного
с упреждением и запаздыванием, с подстройкой обратной связи, с компен-
сацией чистого запаздывания, цифровой фильтрации и т.п.
Аналоговые регуляторы обладают «жесткой» структурой и реализу-
ют строго определенные алгоритмы. Смена алгоритмов или расшире-
ние диапазонов настройки параметров с выходом за обусловленные
пределы недопустимы. Регуляторы сложны в настройке. При решении
непростых задач увеличивается их аппаратное обеспечение и усложня-
ется структура.
Автоматические микропроцессорные регуляторы обладают гибко-
стью и сопрягаемостью, легкостью изменения параметров и характе-
ристик благодаря программируемости. Усложнение атгоритмов не вли-
23
яет на аппаратное обеспечение и практически на надежность Точность
реализации алгоритмов работы определяется разрядностью микропро-
цессора Так. для восьмиразрядного микропроцессора noipeuiHOCTb со-
ставляет 0.8 для двенадиатиразрядного - 0.05 0 >. для шестнадцати-
разрядного 0.003 0 Быстродействие таких регуляторов определяет-
ся продолжительностью программного цикла и тактовой частотой.
Системы, базирующиеся на распределенной сети мнкропроцессо-
ров. могут объединяться для реализации алгоритмов более высокого
уровня и быть непосредственно связаны с ЭВМ АСУ При этом измери-
тельные. цифровые программно-управляемые вычислительные и испол-
нительно-регулирующие устройства максимально приближены к объек-
там регу шрования и составляют локальные микропроцессорные авто
магические системы регулирования, объединенные в единую сеть с
мощной ЭВМ АСУ.
Автоматические микропроцессорные регуляторы обладают большим
быстродействием, высокой точностью, широкими диапазонами измене-
ния параметров настройки (коэффициента передачи кр, периода кванто-
вания Т. постоянной интегрирования времени изодрома Г , постоян
ной дифференцирования времени предварения TR и т.д.).
Алгоритмы работы таких регуляторов подобны алгоритмам аналого-
вых (непрерывных) АР, ио принцип формирования их несколько иной,
поскольку вычислительные операции в этих регуляторах осуществляют-
ся в дискретные моменты времени.
В теории автоматических систем широко используются типовые иде-
альные дискретные алгоритмы (унифицированные алгоритмы): П (про-
порциональный). С (суммарный), ПС (пропорционально-суммарный). ПР
(пропорционально-разностный) и ПСР (пропорционально-суммарно-раз-
ностный) аналоги соответственно функционирования П-, И-, ПИ , ПД- и
ПИД-perx тя торов. Кроме цифровых к дискретным регуляторам специа-
листы относят также импульсные с квантованием сигнала по времени и
релейно-импульсные с квантованием по уровню В цифровых автома
тических микропроцессорных регуляторах квантование осуществляется
по времени и по уровню.
Глава 2. СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ
АВТОМАТИЧЕСКИХ СИСТЕМ
И ИХ ЭЛЕМЕНТОВ
2.1. Режимы работы систем и их элементов
Каждый режим работы автоматической системы или ее элементов харак-
теризуется совокупнос тью многих физических величин, отражающих те пли
иные свойства элемент а или системы. Например, для энергетической уста
новки локомотива к числу таких величин относятся: У мощность; М
вращающий момент; <ов - частота вращения вала;р давление наддувоч-
ного воздуха; Т - температура теплоносителя; положение органа топ-
ливоподачи; q - положение органа изменения задания регулятора и др.
Режим работы элемента или системы является установившимся, если
значения всех координат (входных и выходных величин) сохраняются
постоянными во времени Такая работа элемента или системы в устано-
вившемся режиме возможна лишь при выполнении ряда условий. Эти
условия могут быть выражены уравнениями статического равновесия.
Так, вал дизель-генератора может сохранять постоянство частоты вра-
щения <ов только при условии равенства вращающего момента дизеля
(М) и момента сопротивления (Л/.) потребителя (тягового генератора и
вспомогательных механизмов и машин):
А/д - Л/с = 0. (2 1)
Напряжение тягового генератора (при постоянном токе) останется
постоянным во времени лишь при условии равенства энергии, выраба-
тываемой генератором и потребляемой тяговыми электродвигателями:
25
Рг Ра^о. <22)
Температура теплоносителя (воды, масла или наддувочного воздуха
дизеля) останется постоянной во времени при выполнении условия
QP = °- (23)
где q и q — соответственно количество теплоты, поступающей в систему ох-
лаждения в единицу времени, и количество теплоты, отдаваемой охлаждающе-
му воздуху в ту же единицу времени
Уравнения статического равновесия (2.1) -(2.3) также часто исполь-
зуются для описания элемента или системы при работе их в установив-
шихся режимах, при которых обеспечивается равновесие в общем слу-
чае притока и расхода энергии, массы, теплоты и т.д.
Между координатами, характеризующими работу элемента или сис-
темы в установившемся режиме, существует определенная закономер-
ная связь, которой в обобщенной форме можно придать определенный
вид, например, для дизельной энергетической установки
%, р; Т; Лр; ...). (2.4)
Каждый установившийся режим установки всегда определяется по-
стоянством во времени всех координат, входящих (и не входящих) в за-
висимость (2.4). Эту зависимость можно представить в виде некоторой
многомерной поверхности, каждая точка которой определяется совокуп-
ностью конкретных значений всех координат, входящих в зависимость
(2.4) и соответствующих определенному установившемуся режиму.
Однако во многих случаях нет необходимости учитывать все возмож-
ные координаты, характеризующие работу элемента или системы в уста-
новившемся режиме. В этих случаях выбирают одну или несколько ко-
ординат; представляющих наибольший интерес. Например, к числу та-
ких координат дизеля можно отнести вращающий момент Л/д, частоту
вращения вала ыв, положение регулирующего органа Лр, определяющего
подачу топлива и т.д.
Если иеобходимо подчеркнуть те или иные взаимосвязи между коор-
динатами, справедливые для установившихся режимов, из всего много-
образия взаимосвязей выбирают лишь необходимые и на их основе стро-
ят стат ические характеристики элемента автоматики или системы.
Каждая точка любой статической характеристики соответствует только
одному установившемуся режиму, а каждая статическая характеристика
представляет собой последовательную совокупность точек, характеризу-
26
ющих разные установившиеся режимы, описываемые определенными ко-
ординатами при определенных условиях Один установившийся режим
определяется одной точкой любой статической характеристики. Устано-
вившийся режим работы элемента или системы может поддерживаться в
течение конечного интервала времени только при выполнении соответству-
ющих условий уравнений статического равновесия (2.1)—(2.3).
Значительную часть рабочего времени элементов и систем составляют
такие режимы работы, которые являются следствием изменения входных
сигналов, например регулирующих, возмущающих или задающих воздей-
ствий При таких режимах постоянство во времени значений тех или иных
координат, входящих в функциональную зависимость типа уравнения (2.4),
нарушается, и все они (или некоторые из них) меняют свои значения с
течением времени. Изменение во времени одной, нескольких или всех ко-
ординат, характеризующих режим работы элемента (или системы), явля-
ется единственным и исчерпывающим признаком появления в процессе
эксплуатации так называемых неустановившихся режимов работы. Практи-
ка показывает, что неустановившиеся режимы часто занимают значительно
больше рабочего времени, чем установившиеся режимы. Основным при-
знаком появления неустановившегося режима работы служит наруше-
ние условий статического равновесия, например уравнений (2 1)—(2.3).
Это является результатом нарушения баланса вырабатываемой и потреб-
ляемой энергии, теплоты, приходящей и расходуемой массы рабочего тела.
Например, избыток энергии в виде вращающего момента дизеля Л/д рас-
ходуется на изменение частоты вращения сов дизель-генератора, которое
определяется дифференциальным уравнением, связывающим между со-
бой функции Л/д, Мс и скорость изменения <ов.
В связи с нарушением условий статического равновесия уравнения
(2 1), (2 2) или (2.3) и появлением изменений, определяемых соответству-
ющими дифференциальными уравнениями, все или некоторые коорди-
наты, входящие в зависимость (2.4), при неустановившихся режимах
получают приращения и их значения становятся зависимыми от време-
ни. В связи с этим зависимость (2.4) применительно к неустановившим-
ся режимам работы элемента или системы должна быть дополнена коор-
динатой времени t и представлена в виде
W=/(M wB; р: Т; Лр; ...;?) (2.5)
Наличие времени t в функциональной зависимости свидетельствует о
том, что определенные значения координат, входящих в зависимость.
имеют смыс I лишь ня конкретно выбранного мгновения времени. В за-
висимость (2.5). таким образом, должны входить мгновенные значения
коор шпат, меняющихся во времени. Следовательно, один неустановив-
шийся режим соответствует только одному значению времени, и эзо об-
стоятельство является одним из основных признаков неустановнвшихся
режимов, отличающих их от установившихся режимов.
Во многих случаях наибольший интерес при оценке неустановнвшихся
режимов представляют не все координаты, входящие в функциональную
зависимость (2 5), а только некоторые из них или одна. Если такой коор-
динатой является, например, частота вращения вала, то говорят о неуста-
новившемся скоростном режиме, если такой координатой является тем-
пература Т, то говорят о неустаповившемся температурном режиме. При
этом изменения во времени других координат можно не рассматривать
Процесс изменения во времени координат шемента или системы
вследствие изменения входных величин называется переходным. Пере-
ходный процесс по своему смыслу всегда является переходом от одного
(начального) установившегося режима к другому (конечному) установив-
шемуся режиму. Конечный установившийся режим часто является ре-
жимом, вновь заданным. Таким образом, переходный процесс всегда про-
текает во времени и при зтом аргументом является время Каждая точка
переходного процесса представляет собой неустановившийся режим в
данный момент времени, а сам переходный процесс последователь-
ная во времени совокупность неустановнвшихся режимов.
В общем случае при переходном процессе изменяются все или мно-
гие координаты, характеризующие работу шемента или системы. Если
необходимо подчеркнуть или выявить зависимость от времени той или
иной координаты, характеризующей работу элемента, при неустановив-
шихся режимах строят или экспериментально записывают процессы из-
менения во времени этой координаты, например, <ов hp T=fit)
и др. Эти зависимости также называются переходными процессами.
Каждый переходный процесс можно рассчитать с той или иной степе-
нью точности путем составления и решения дифференциального уравне-
ния исследуемой системы. Решение такого дифференциального уравне-
ния дает общий интеграл в виде зависимостей <oR Т f(t) или других,
являющихся математическим выражением переходных процессов.
Таким образом, для оценки динамических свойств системы необхо-
димо составить дифференциальное уравнение, прежде всего для каждо-
го • и-мента, входящего в автоматическую систему, и на их основе диф-
2Я
ференпиальнос уравнение автоматической системы в целом. Анализ и
решение такого уравнения дадут представление о переходных процессах
в этой системе и. следовательно, о ее динамических свойствах
2.2. Математические основы теории линейных
автоматических систем
В общем случае динамические свойства автоматической системы опи-
сываются дифференциальным уравнением
°„d" гВых7 d/” + ап ld" ' vB,.,xd'” ' + 2d" 2 xB,.,x/d/" 2 +
+ "ld ^BUX/d/ + °Ль,х = 4xdd" +
+ Ьт id"’-l-’rBx/d/"' 1 + *- М S,K/d' + Vex’ (2 6>
где хвьж выходная величина системы (регулируемая величина <р),
хвх — входная величина системы (сигналы задания ц или возмущения к).
Сложная автоматическая система содержит большое количество эле-
ментов, которые могут соединяться последовательно, параллельно и
встречно-параллельно. Из этого ясно, насколько трудоемкой работой яв-
ляется определение дифференциального уравнения АСР по дифферен-
циальным уравнениям ее элементов Еще более трудной, а в ряде случа-
ев и не решаемой является задача определения корней дифференциаль-
ного уравнения.
В связи с этим в теории автоматических систем для исследования АСР
применяется математическая операция - преобразование Лапласа. в де-
сятки раз упрощающее решение практических задач синтеза, анализа и
определения оптимальных параметров настройки АСР.
Сущность преобразования Лапласа состоит в том, что вместо пере
менной х(Г) рассматривается одношачно соответствующая ей перемен-
ная А'(/>) (здесьр комплексная переменная, называемая оператором)
В связи с этим преобразование Лапласа часто называют операторным
исчислением. В операторном исчислении функцию времени т(/) называ-
ют оригиналом функции V(p), а соответствующую ей функцию Х(р) —
изображен чей функции x(t).
Операцию перехода от искомой функции т(Г) к ее изображению Л(/Л
называют прямым преобразованием Лапласа. Математически оно запи-
сывается условно с помощью символа L.
29
£[.Ц/)] = Х(р). (2.7)
Операцию перехода от изображения Afp) к искомом функции (нахожде-
ние оригинала по изображению) называют обратным преобразованием Лап-
часа. Матемагически оно записывается условно с помощью символа L 1.
£|[Х(р)]=х(/). (2.8)
При операторном исчислении путем прямого преобразования Лапласа
переходят от оригиналов функций к их изображениям, производят вычис-
ления, получают результирующее изображение, а затем с помощью обрат-
ного преобразования Лапласа находят оригинал результата. При этом все
расчеты существенно упрощаются, так как операции дифференцирования
оригиналов при нулевых начальных условиях dx/df, d2x/d/2, ..., d"x/d/”
заменяются операцией умножения изображения Х(р) на оператор р в со-
ответствующей степени, т.е. на рХ(р), р2Х(р). рпХ(р); операции интегри-
рования Jx/d/, jjxd/ и т.д. заменяются операциями деления изображе-
ния на оператор р, т. е. Х(р)/р, Х(р)/р? и т.п.
С учетом изложенного приведем дифференциальное уравнение (2.6)
в преобразованном по Лапласу виде
апР" *вЫх (Р)+ «и-1 Р^' (р) + ... + а, Хвь[> (р) + «0 Хвь1х (р) =
= ^РтХвх(Р) + Ь^Р^'Хт(Р)+ +Ь1рХт(р) + Ь0Хвк(р). (2.9)
Изображение Х(р) и оригинал x(t) связаны уравнением
СО
X(p)=J x(/)e-P'd/. (2.10)
о
Такое сложное соотношение между изображением и оригиналом, ка-
залось бы, еще больше усложняет дифференциальное уравнение в функ-
ции x(t). Однако именно такое соотношение позволяет при переходе от
оригиналов к изображениям существенно упростить все расчеты и свес-
ти дифференциальное уравнение оригиналов (2.6) к однозначно соответ-
ствующему ему алгебраическому уравнению изображений (2.9).
При этом следует отметить, что при практических расчетах нет необ-
ходимости пользоваться сложным выражением (2.10) при переходе от
оригиналов к изображениям и обратно.
30
Таким образом, задача при расчетах АСР сводится к тому, чтобы пре-
образовать по Лапласу дифференциальные уравнения элементов систе-
мы, выполнить необходимые вычисления с изображениями и перейти от
изображения результата к его оригиналу. Так как возможность однознач-
ного перехода от дифференциального уравнения к алгебраическому зна-
чительно упрощает все расчеты АСР (это является математической ос-
новой инженерных расчетов АСР), то очень важно психологически убе-
диться в правомерности такого перехода.
Обозначим в уравнении (2.6) производную dx/dZ=y(t), согласно выра-
жению (2.10) найдем изображение
оо со
Y(p) = £[dx/dz] = J = je^'dx (2 j ц
0 0
Согласно правилу интегрирования по частям
Judv = wv + jvdw (2.12)
Обозначив в выражении (2.11) е~Р' = u, dr = dv, в соответствии с фор-
мулой (2.12) находим
30 СО
У(р) = [х (Z) e-pq + Jpe^x(z)dz = рJх(/)е“'р' - х(0)
о о
При нулевых начальных условиях х (0) = 0 и с учетом выражения (2 10)
получаем
y(p) = £[dx/dZ]=pA'(p).
Таким образом, выполнен переход от дифференциальной формы за-
писи производной к ее записи в операторной форме путем формальной
замены символа дифференцирования d/dz на комплексную переменную р
(при нулевых начальных условиях). Так как d2x/dz2 = (dr/dz) (dx/dz), то
/.[d2x/dz2| =р2 Х(р) и т.д.
Следовательно, операции дифференцирования оригинала соответ-
ствует операция умножения изображения этого оригинала на комплекс-
ное число р. Это является одним из важнейших свойств преобразова-
ния Лапласа.
31
Аналогично можно доказать, что операции интегрирования оригинала
соответствует операция деления изображения этого оригинала на комп-
лексное число р. Так при нулевых начальных условиях £[>(Г) d/J =Х(р')/р.
Так как интеграл суммы (разности) равен сумме (разности) интегралов
от отдельных выражений, а постоянный множитель можно выносить за знак
интеграла, то преобразование Лапласа обладает свойствами линейности.
В связи с тем, что изложенные преобразования Лапласа действитель-
ны только при нулевых начальных условиях, следует особо уточнить, что
под этим понимается. Под нулевыми начальными условиями для диффе-
ренциального уравнения и-го порядка понимается то, что при t = 0 значе-
ния функции д'(г) и всех ее производных до п - 1 включительно равны
нулю, т.е. .т(0) = dr(O)/dz = d2.v(0)/dz2 = ... = d”-1 x(0)/d/”-1 = 0.
Физически это означает, что такой переход от оригиналов к изобра-
жениям правомерен, если до поступления задающего или возмущающе-
го воздействия на систему она находилась в состоянии равновесия. Это
состояние и принимается за нулевое. При поступлении задающего или
возмущающего воздействия счет значений х(/) производится от устано-
вившегося (нулевого) состояния, а времени t — с момента поступления
воздействия. Такое условие при применении преобразования Лапласа не
создает каких-либо трудностей, так как именно в этих координатах и
происходит собственно процесс регулирования.
В преобразованных по Лапласу выражениях с комплексной перемен-
ной р, как и с другими членами алгебраического уравнения, можно про-
изводить различные действия: умножение, деление, возведение в степень,
вынесение за скобки и т.д. С учетом этого, вынося за скобки в уравнении
(2.9) ^вых(Р) и получаем
Ч ₽" + а„ I Р"~' + • + ° I Р + °0 ) W =
= <*mP" + VlP^1+ - + *1P + *o)^(P)- (2.13)
Определим из уравнения (2.13) отношение изображения выходной
величины к изображению входной:
= (bmp^ + V, //" 1 +...
... + i|P + i0)/4P" + a„-|P"_' + --- + O|P + a0) = ir(p). (2.14)
Отношение изображения выходной величины элемента системы к
изображению его входной величины при нулевых начальных условиях
32
называют передаточной функцией элемента системы. Соответственно
отношение изображения выходной величины звена к изображению его
входной величины называют передаточной функцией звена.
Передаточная функция является дробно-рациональной функцией ком-
плексной переменной р:
W(p) = Q(p)/ Р(р), (2.15)
где Р(р) = апрп + //'’ + ..+ а, р + — полином степени и;
Q(p) = b рт + Ьт ! рт 1 + ... + 6| р + bQ — полином степени т.
Из уравнения (2.14) следует, что передаточная функция элемента сис-
темы W(p) и изображение его входной величины определяют изображе-
ние выходной величины:
^вых(Р)=^)^)- (2.16)
Так как передаточная функция системы полностью определяет ее
динамические свойства, то первоначальная задача расчета АСР сводит-
ся к определению ее передаточной функции. Вследствие того, что эле-
менты системы обладают свойством детектирования (однонаправлен-
ности), с учетом выражения (2.16) передаточную функцию системы
можно найти по передаточным функциям ее отдельных элементов. Для
упрощения задачи нахождения передаточных функций элементов сис-
темы целесообразно систему предварительно представить в виде струк-
турной схемы с элементарными, желательно типовыми в динамичес-
ком отношении, звеньями.
2.3. Статические характеристики и параметры
Состояние автоматической системы или каждого из входящих в нее
элементов может быть охарактеризовано, если известны соответствую-
щие физические величины или так называемые обобщенные координа-
ты. Для электрических систем или элементов обобщенными координата-
ми могут служить напряжения, токи и их производные. В механических
системах обобщенными координатами являются перемещения, скорос-
ти, ускорения и т.д.
Чтобы охарактеризовать состояние автоматической системы или ее
элемента, выбирают одну обобщенную координагу на входе системы или
элемента и одну на выходе и называют их соответственно входной или
выходной величиной системы или ее элемента. Входную величину можно
33
'вых
Рис. 2.1. Схема элементарного звена (или системы) и графики возможных переход-
ных процессов после скачкообразного однократного изменения входной величины
обозначать твх или х,, выходную — хвых или х2 (рис. 2.1); в общем случае
обе эти величины представляют собой функции времени.
Выбор координат определяется характером задачи изучения элемен-
тов системы.
Обычно автоматические системы обладают свойством направленно-
о действия (однонаправленности), т.е. передают воздействие только в
одном направлении — от входа к выходу. Это обусловлено направленно-
стью действия составляющих систему элементов. Направленным дей-
ствием обладает элемент, пропускающий воздействие только в одном
направлении и не оказывающий обратного воздействия на предшеству-
ющий элемент. Примером элемента направленного действия может слу-
жить термопара, измеряющая температуру теплоносителя (например,
воды, масла или наддувочного воздуха дизеля). Термоэлектродвижущая
сила определяется температурой, сама же термопара влияния на темпе-
ратуру не оказывает.
В общем случае, кроме входной величины, на выходную величину
элемента могут оказать влияние и некоторые другие параметры.
Зависимость выходной величины элемента от входной в установив-
шемся стационарном режиме называется статической характеристи-
кой элемента.
Статическая характеристика элемента обычно изображается графи-
чески в плоскости координат хр х2 и может быть снята эксперименталь-
но или вычислена. Экспериментальное определение статической харак-
теристики осуществляют следующим образом. Входной величине эле-
34
6
Рис 2.2. Статические характеристики элементов автоматики:
а экспериментальная; б — при различных постоянных значениях величины lj;
в — линейная; г — типичная для двухтактного (реверсивного) элемента;
б — типичная для однотактного элемента; е — релейного элемента
мента придают постоянное значение Х| = Хщ. По истечении времени, не-
обходимого для затухания переходного процесса (т.е. наступления уста-
новившегося режима), определяют установившееся значение выходной
величины элемента х2 = х20 и получают первую точку характеристики
(xI0, х20). Повторив эти измерения для различных значений величины Х|
и соединив полученные точки плавной кривой, получают статическую
характеристику элемента (рис. 2.2, а). Таким образом, совокупность пар-
ных значений выходной и входной величин при работе элемента или си-
стемы в стационарном установившемся режиме образует статическую
характеристику. По этой характеристике для каждого значения входной
величины элемента х(, можно определить соответствующее установив-
шееся значение выходной координаты х2. В том случае, когда выходная
35
величина элемента зависит еще и от некоторой величины элемент харак-
теризуется семейством статических характеристик, построенных для раз-
личных постоянных значений Е, (рис. 2.2,6).
Для аналитического определения статической характеристики следу-
ет составить уравнения, описывающие работу элемента в установившемся
режиме. Разрешив эти уравнения относительно величин Х| и х2, полу-
чим уравнение статической характеристики в явном х-^ =/(х,), неявном
F(x2,X|) = 0 или параметрическом ,г1=х1(6), х2 = х2(6) видах. В этих урав-
нениях 6 обозначает некоторый параметр.
На практике статические характеристики элементов обычно нелинейны.
Линейные статические характеристики (рис. 2.2, в) встречаются редко
В зависимости от вида статических характеристик все элементы де-
лятся на линейные и нелинейные. Система, содержащая линейные эле-
менты, называется чиненной Если автоматическая система содержит хотя
бы один нелинейный элемент, то она является нечинейной. Линейные
системы освещает теория линейных автоматических систем, а теория
нелинейных систем — нелинейные автоматические системы Здесь мы
рассматриваем только осиовы первой теории.
В зависимости от вида статических характеристик элементы делятся
на двухтактные и однотактные.
Типичная статическая характеристика двухтактного элемента показа-
на на рис. 2.2, г. У однотактных элементов знак выходной величины по-
стоянен и не зависит от знака входной величины. Типичная статическая
характеристика однотактного элемента показана на рис. 2.2, д.
Многие нелинейные элементы имеют неоднозначные статические
характеристики Типичными нелинейными элементами являются реле, ста-
тические характеристики которых имеют петлеобразный вид (рис 2.2, е).
При значении входной величины Хц реле включается, а при х|2 выклю-
чается. Отношение х)2/ Хц называется коэффициентом возврата реле.
Статическая характеристика (или семейство статических характерис-
тик) полностью характеризует поведение элемента (или системы) в уста-
новившихся режимах.
Статическая характеристика линейного элемента автоматики в общем
явном виде описывается уравнением
х2 = £х] + ар
где к - постоянная, имеющая размерность х2/ х,;
°1 постоянная, имеющая размерность х^.
36
Так как реальные автоматические системы нелинейны, то интегриро-
вание описывающих их динамические свойства дифференциальных урав-
нений в общем случае невыполнимо Это затрудняет исследование дина-
мики реальных систем. Поэтому возникает необходимость замены сис-
темы нелинейных уравнений более простыми, приближенными систе-
мами линейных уравнений. При изучении динамики нелинейные авто-
матические системы делят на две группы:
— системы с несущественно выраженной нелинейностью, при кото-
рой действительный процесс близок к процессу в приближенной, но бо-
лее простой линейной модели;
системы, обладающие существенной или типичной нелинейностью,
коренным образом влияющей на их динамические свойства.
При исследовании нелинейных систем первой группы и в случае ма-
лых отклонений нелинейных систем от положения равновесия можно
спрямить (линеаризовать) реальные характеристики отдельных элемен-
тов, используя определенные приемы При этом исходные уравнения
динамики заменяются приближенными линейными уравнениями. Такая
замена во многих случаях не вносит значительных погрешностей в ре-
зультаты исследования.
Применяются два метода линеаризации: метод перехода к малым воз-
мущениям и метод осреднения нелинейных характеристик.
Рассмотрим первый метод. Пусть задана нелинейная зависимость
*2 =./(xf)- Если эта функция и ее производные непрерывны в некоторой
области значений Х|, то ее можно разложить в ряд Тейлора в окрестнос-
тях любой точки X|q, принадлежащей этой области
,, . „ . /'(*10 ) д /'(*10 ) д 2
/(х,)=/(х10) + —- —Дх,+ 2! Дх| + ...
При малых значениях ДХ| можно принять
/(*|)=/(*ю) + оД*1’
где а — постоянный коэффициент.
После переноса начала координат в точку/ (х|0) получим линейную
зависимость
ДД(Х|) =/(х,) - / (х, 0) = аДх,.
Рассмотренный метод неприменим к функциям, имеющим точки раз-
рыва в них самих и в их производных
37
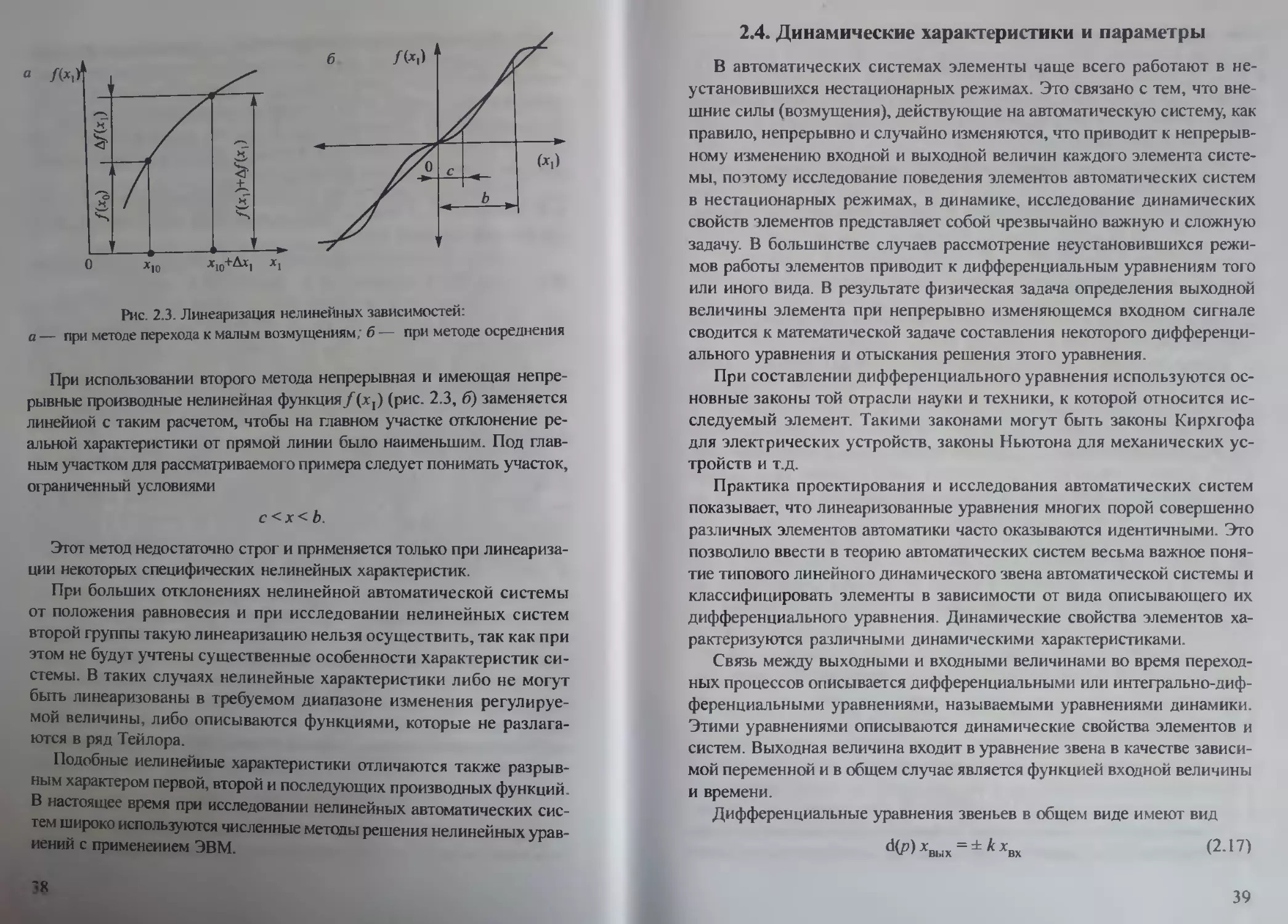
Рис. 2.3. Линеаризация нелинейных зависимостей:
а — при методе перехода к малым возмущениям; б — при методе осреднения
При использовании второго метода непрерывная и имеющая непре-
рывные производные нелинейная функция/(х,) (рис. 2.3, б) заменяется
линейной с таким расчетом, чтобы на главном участке отклонение ре-
альной характеристики от прямой линии было наименьшим. Под глав-
ным участком для рассматриваемого примера следует понимать участок,
ограниченный условиями
с <х< Ъ.
Этот метод недостаточно строг и применяется только при линеариза-
ции некоторых специфических нелинейных характеристик.
При больших отклонениях нелинейной автоматической системы
от положения равновесия и при исследовании нелинейных систем
второй группы такую линеаризацию нельзя осуществить, так как при
этом не будут учтены существенные особенности характеристик си-
стемы. В таких случаях нелинейные характеристики либо не могут
быть линеаризованы в требуемом диапазоне изменения регулируе-
мой величины, либо описываются функциями, которые не разлага-
ются в ряд Тейлора.
Подобные нелинейные характеристики отличаются также разрыв-
ным характером первой, второй и последующих производных функций
В настоящее время при исследовании нелинейных автоматических сис-
тем широко используются численные методы решения нелинейных урав-
нений с применением ЭВМ.
38
2.4. Динамические характеристики и параметры
В автоматических системах элементы чаще всего работают в не-
установившихся нестационарных режимах. Это связано с тем, что вне-
шние силы (возмущения), действующие на автоматическую систему, как
правило, непрерывно и случайно изменяются, что приводит к непрерыв-
ному изменению входной и выходной величин каждого элемента систе-
мы, поэтому исследование поведения элементов автоматических систем
в нестационарных режимах, в динамике, исследование динамических
свойств элементов представляет собой чрезвычайно важную и сложную
задачу. В большинстве случаев рассмотрение неустановившихся режи-
мов работы элементов приводит к дифференциальным уравнениям того
или иного вида. В результате физическая задача определения выходной
величины элемента при непрерывно изменяющемся входном сигнале
сводится к математической задаче составления некоторого дифференци-
ального уравнения и отыскания решения этого уравнения.
При составлении дифференциального уравнения используются ос-
новные законы той отрасли науки и техники, к которой относится ис-
следуемый элемент. Такими законами могут быть законы Кирхгофа
для электрических устройств, законы Ньютона для механических ус-
тройств и т.д.
Практика проектирования и исследования автоматических систем
показывает, что линеаризованные уравнения многих порой совершенно
различных элементов автоматики часто оказываются идентичными. Это
позволило ввести в теорию автоматических систем весьма важное поня-
тие типового линейного динамического звена автоматической системы и
классифицировать элементы в зависимости от вида описывающего их
дифференциального уравнения. Динамические свойства элементов ха-
рактеризуются различными динамическими характеристиками.
Связь между выходными и входными величинами во время переход-
ных процессов описывается дифференциальными или интегрально-диф-
ференциальными уравнениями, называемыми уравнениями динамики.
Этими уравнениями описываются динамические свойства элементов и
систем. Выходная величина входит в уравнение звена в качестве зависи-
мой переменной и в общем случае является функцией входной величины
и времени.
Дифференциальные уравнения звеньев в общем виде имеют вид
Ш.„: = ±Чх (2.17)
39
или
<WBb,x
где d(p) и *(p) функции оператора, в большинстве случаев представляющие
собой многочлены (см. выражение 2.15),
к постоянная величина.
Дифференциальные уравнения высоких порядков решаются опера
торным методом.
Считается, что многочлены d(p) и к(р) могут быть приведены к виду
d(p) = aop" + a1p" 1 + +а„ 1Р+ > =
+ 1+ + /’+ 1
Свободный член в этих уравнениях равен единице. Степень много-
члена d(p) выше степени многочлена к(р). т.е. п> т.
Правая часть уравнения показывает, какие величины подаются на вход
и с каким усилием >ти величины передаются на выход звена. Левая часть
уравнения дает закон, определяющий характер переходно! о процесса, т.е.
показывает, как реагирует звено на входное во действие. Звенья, описы-
ваемые уравнениями типа (2.17), называют просты ми, а уравнением типа
(2.18), правая часть которых представляет собой функцию от р, диф-
ференцирующими. Дифференцирующее звено реагирует не только на ве-
личину х[1Х, но и на ее производные.
Звенья автоматической системы различаются по характеру переход-
ных процессов, возникающих в них при внесении возмущения на входе.
Характер изменения выходной величины по времени определяется на-
чальным состоянием звена, внутренними свойствами его и характером
изменения входной величины. При исследовании звеньев рассматрива-
ются переходные процессы, происходящие в них после нанесения воз-
мущения на входе в виде единичной скачкообразной функции (толчка)
^х<0 = /1(/) = [1]. (2.19)
удовлетворяющей условиям
Х|(/) = 0 при / < 0;
X|(Z) 1 при t > 0.
Во многих практических случаях этот вид возмущения для элементов
и сиоем является наименее благоприятным. Возмущение в виде единич-
40
ною толчка наносится при нулевых начальных условиях, когда звено
находится в покое. Функцию, выражающую закон изменения выходной
величины при них условиях, называют переходной функцией звена и
обозначают хвь|Х(/) или Переходная функция представ зяет собой
решение дифференциального уравнения звена при xBX(/) - [1J и нулевых
начальных условиях. В том случае, когда дифференциальное уравнение
звена неизвестно, переходная функция может быть определена зкспери-
ментально, по записи во времени изменения х после скачкообразного
единичного и вменения хвх, т.е. по переходной характеристике. Характер
возможных переходных характеристик представлен на рис. 2.1.
Величину к в уравнениях (2.17) и (2.18) называют козффициентом
передачи или коэффициентом усиления. Он равен отношению прираще-
ния выходной величины к приращению входной величины в установив-
шемся режиме работы А = Дхвь|х/Дхвх. Величина А является статическим
параметром звена, характеризует его статические свойства и определя-
ется утлом наклона статической характеристики линейного звена к оси
абсцисс.
В звеньях, имеющих одинаковую размерность входной и выходной
величин, коэффициент передачи размерности не имеет. В случае разной
размерности входной и выходной величин коэффициент передачи имеет
размерность.
Отношение выходной величины к входной в переходном процессе
характеризуется передаточной функцией звена W(p) = хвых(р)/хвх(р). Пе-
редаточная функция звена при нулевых начальных условиях равна так-
же отношению координаты звена к величине воздействия па звено, т.е.
W(p) = ^вых^^вх^ Хвых/хвх-
Найдя от ношение хвых/хвх из уравнений (2.17) и (2.18), можно записать
fV(p) = ± A/d(p) и AF(/j) ± A(/?)/d(p). Передаточные функции так же, как и
дифференциальные уравнения, характеритуют динамику звеньев. При ис-
следовании систем особое значение имеет многочлен d(p) или Р(р), сто-
ящий в знаменателе передаточной функции и называемый характеристи-
ческий полиномом. Из выражения d(/>) 0 получается характеристическое
уравнение звена, соответствующее дифференциальному уравнению.
Ранее было указано, что при исследовании звеньев рассматриваются
переходные процессы, во шикающие после внесения единичного скач-
кообразного возмущения. Существуют и другие методы исследования
Подадим на вход звена гармонические колебания, т.е. возмущение с час-
тотой ш и амплитудой хвх. Если звено устойчиво, то по истечении неко-
41
Рис. 2.4. Изменения выходной величины звена при гармоническом
возмущении на входе
торого времени после начала возмущения все колебания, вызванные пе-
реходным процессом, затухнут и на выходе звена установится периоди-
ческое изменение выходной величины с амплитудой лвь|х и некоторым
сдвигом по времени В и фазе у (рис. 2.4).
Амплитуда х и сдвиг по фазе v зависят от свойств звена и частоты.
С уменьшением периода Т и увеличением частоты <о угол сдвига по фазе
будет увеличиваться, а амплитуда хвь|Х уменьшаться. График зависи-
мости отношения амплитуды выходных колебаний хвь|х к амплитуде вход-
ных хвх от частоты <в называют амплитудно-частотной характеристи-
кой (АЧХ) звена. График зависимости угла ф от частоты <о называют фазо-
частотной характеристикой (ФЧХ) звена.
Если в передаточной функции звена заменить р на у'ш (j = ), то
получится выражение, называемое комплексной частотной функцией или
амплитудно-фазочастотной функцией (АФЧФ) звена. Комплексную ча-
стотную функцию можно представить в декартовых координатах как гео-
метрическую сумму вещественной М(а>) и мнимой JN(w) частей:
Wfyco) = Л/(<о) + уЛ'(ы) (2.20)
или в полярных координатах в показательной форме с модулем А(а) и
фазой зр(ь>):
ИХ/со) = Л(со)е (2.21)
Следовательно,
Mod |Ж(уш)| = Л(<о) = ^M2(k) + )V2(co) ; (2.22)
42
Л/(ш)
Рис. 2.5. Амплитудно-фазочастотные характеристики звеньев:
а первого порядка; б второго порядка в - третьего порядка
Arg |FF(/со)| = v(w) = arctg (Mto)/M(to)). (2.23)
Модуль вектора амплитудно-фазовой функции равен отношению
амплитуды вынужденных колебаний на выходе звена к амплитуде гармо-
нического возмущающего воздействия на входе. Аргумент (фазовый угол)
равен углу сдвига фаз между возмущающими и вынужденными колеба-
ниями. Амплитудно-фазовые функции также служат динамическими
характеристиками звеньев (систем).
При изменении частоты со от - со до + со конец вектора И^со) опишет
на комплексной плоскости кривую, называемую годографом вектора ком-
плексной частотной функции Эту кривую называют также аиплитудно-
фазочастотной характеристикой (АФЧХ) звена. Так как эта характе-
ристика симметрична относительно вещественной оси, то для получе-
ния полного представления о ней достаточно построить лишь ветвь, со-
ответствующую изменению со от оо до + со, т. е. для положительных
частот. Вторая ветвь является зеркальным отражением первой относи-
тельно вещественной оси. Примеры частотных амплитудно-фазовых ха-
рактеристик звеньев приведены на рис. 2.5. Число квадрантов комплекс-
ной плоскости, в которых располагается характеристика, равно порядку
дифференциального уравнения звена (системы).
Большое значение в практике имеют амплитудно-фазовые и ампли-
тудно-частотные функции и характеристики звеньев. Частотные харак-
теристики звеньев могут быть определены на основании анализа диффе-
ренциальных уравнений звеньев или экспериментально
Для практических расчетов особенно широко используются частотные
характеристики, построенные в логарифмическом масштабе в виде лома-
ных линий из прямолинейных отрезков. Логарифмируя выражение (2.21)
комплексной частотной функции, получаем 1g И/(/<в)= 1g Л(со) + (<в) 1g е.
43
Логарифмической единицей усиления или ослабления мощности сигна-
ла при прохождении его через >лемент или какое-либо устройство при вы-
ражении десятичным логарифмом значения отношения мощности на выхо-
де Р к мощности на входе Рвх считается бел (Б) (по имени американского
изобретателя А. Белла). Так как мощность сигнала пропорциональна квад-
рату его амплитуды, то 1g (Р^ = 'ё <гвых/твх)“ = 2 lg ^вых/ *вх)- 1ак как
бел является достаточно крупной единицей усиления (ослабления) мощ-
ности (увеличение мощности в 10 раз равно I Б), то в теории автоматичес-
ких систем за единицу принят децибел: 1 дБ 0.1 Б. С учетом этого имеем
10-2 lg (v v ) = 20 ig Л(<о) - Л(®)-Величину логарифма амплитудно-
частотной функции, выраженную в децибелах, /.(со) = 20 1g Дсо) называют
логарифмической амплитудно-частотной функцией, а график ее — лога-
рифмической амплитудно-частотной характеристикой (ЛАЧХ).
Фазочастотную функцию т|/(со). выражающую зависимость угла в
градусах (или радианах) от 1g со, называют логарифмической фазочас-
тотной функцией. а график ее логарифмической фазочастотной ха-
рактеристикой (ЛФЧХ).
За единицу частоты принята логарифмическая единица октава или
более крупная декада. Октавой называют диапазон частот между ка-
ким-либо значением частоты и ее удвоенным значением. В логарифмичес-
ком масштабе частот отрезок в одну октаву имеет одну и ту же длину, не
зависящую от значения со и равную 1g 2ш - 1g со = 1g 2 + lg со - 1g со = 1g 2.
Декадой иазывают интервал частот между каким-либо значением часто-
ты и ее десятикратным значением. В логарифмическом масштабе частот
отрезок в одну декаду, так же как и в одну октаву, не зависит от частоты
и имеет длину lg 1 Осо lg со = 1g 10 = 1.
Так как с помощью часто тных характеристик можно решать большое
количество практических задач по анализу, синтезу и определению оп-
тимальных параметров настройки АСР, то для этого важно знать частот-
ные функции и характеристики типовых динамических звеньев и их со-
единений, наиболее широко встречающихся в автоматических системах.
2.5. Понятие о типовых динамических линейных звеньях
Очень часто автоматическая система представляет собой замкнутую
динамическую систему (см. рис. 1.2).
Регулятор, входящий в систему, состоит из ряда элементов (в зависи-
мости от его типа). Отклонение регулируемой величины <р, вызванное
изменением нагрузки X объекта регулирования (ОР), воспринимается
44
измерительным устройством (ИУ)— датчиком. В СУ выходные сигна 1Ы
датчика и задатчика складываются алгебраически, и вырабатывается сиг-
нал рассогласования. Далее этот сигнал передается на ИМ, к которому
подводизся энергия от постороннего источника и который перемешает
регулирующий орган (РО). Последний изменяет расход регулирующей
среды, компенсируя изменения нагрузки А.
Автоматическая система может находиться в динамическом равнове-
сии при котором регулируемая величина имеет постоянное значение, или
в состоянии переходного процесса, при котором регулируемая величина
изменяется во времени. Если система устойчива, то спустя некоторый
промежуток времени после изменения возмущения она вновь придет в
равновесие, соответствующее новой нагрузке объекта.
При исследовании динамики автоматических систем конструктивное
различие составляющих ее элементов не имеет большого значения. Раз-
личные по принципу действия и конструкции элементы систем могут
описываться одинаковыми дифференциальными уравнениями. Следова-
тельно, эти элементы при одинаковых возмущениях будут иметь одина-
ковый характер переходного процесса. На этом основании при исследо-
вании динамики автоматических систем все элементы могут быть заме-
нены небольшим числом звеньев, одинаковых по характеру переходных
процессов. Таким образом, звеньями называют элементы системы, раз-
личающиеся видом дифференциальных уравнений, описывающих их
поведение в переходном процессе. Идея расчленения автоматических
систем на звенья, различающиеся по динамическим свойствам, впервые
была высказана А.В. Михайловым. Такое расчленение не представляет
трудности, если составлены дифференциальные уравнения элементов
системы или экспериментально исследованы переходные процессы в них.
Однако не все элементы системы могут быть заменены одним звеном
Иногда один элемент заменяют комбинацией двух или трех звеньев.
Встречается и обратный случай, когда несколько элементов заменены
одним звеном.
Элементарныи динамическим звеном называют элемент автоматичес-
кого устройства или системы, обладающий одной степенью свободы или
одной обобщенной координатой и описываемый дифференциальным
уравнением первого или второго порядка. Обобщенной координатой на-
зывают переменную величину, определяющую состояние звена.
Для линейных автоматических систем можно назвать шесть видов
элементарных звеньев, различающихся по их динамическим свойствам:
пропорциональное, интегрирующее, инерционное, второго порядка, диф-
ференцирующие звенья и звено запаздывания.
Наличие обратной связи в системе является причиной определенного
ухудшения ее регулировочных возможностей. Действительно, так как в та-
кой системе регулятор вступает в работу только после появления определен-
ного рассогласования между действительным и заданным значениями регу-
лируемой величины, то отклонения регулируемой величины здесь принци-
пиально не могут быть совершенно устранены. Речь может идти только о
том, чтобы свести эти отклонения к допустимому минимуму. Нетрудно ви-
деть, что уменьшение ошибки регулирования (повышение точности работы
системы) может быть получено путем увеличения усиления в регуляторе.
Эго позволит повысить необходимое регулирующее воздействие за счет
меиьшего значения рассогласования. Однако значение возможного усиле-
ния сигнала в регуляторе ограничено как техническими возможностями ап-
паратуры, так и тем обстоятельством, что системы с обратными связями при
определенных условиях (и, в частности, при увеличении усиления сигнала
в контуре) могут потерять устойчивость. Это значит, что такая система мо-
жет самовозбудиться и начать генерировать незатухающие или даже расхо-
дящиеся колебания, так что регулируемая величина от цикла к циклу будет
все больше удаляться от заданного значения.
Автоматическая система, в которой самостоятельно возникают неза-
тухающие колебания или колебания с нарастающим от цикла к циклу
размахом, считается неработоспособной. Одним из главнейших т ребо-
ваний, которое предъявляется к автоматической системе, является тре-
бование устойчивости, которое заключается в том, что система, выве-
денная из состояния равновесия, должна стремиться самостоятельно
прекратить движение и вновь прийти в состояние равновесия (т.е. вер-
нуть регулируемую величину к заданному значению).
Свойства системы и в первую очередь ее устойчивость определяются
статическими и динамическими свойствами каждого элемента, входящего
в контур регулирования системы Разбиение автоматических систем на
звенья существенно упрощает их расчет и конструирование. Образно
говоря, звенья это те кирпичи, из которых строится автоматическая
система. Обычно при конструировании системы некоторые звенья не
могут быть изменены (например, звенья, относящиеся к объекту регули
роваиия). Задача расчета системы заключается в подборе и правильном
расположении в структурной схеме системы наиболее подходящих зве-
ньев регулятора так, чтобы показатели качества работы автоматической
системы соответствовали поставленным требованиям.
46
2.6. Особенности математического описания статики
и динамики автоматических
микропроцессорных регуляторов
В дискретных регуляторах квантование непрерывного сигнала может
осуществляться по времени, уровню или
одновременно по обоим параметрам.
Пусть непрерывный сигнал x(t) из-
меняется во времени так, как показано
на рис. 2.6. При квантовании сигнала x(t)
по времени происходит выделение его
значений в определенные моменты вре-
мени. Эти моменты времени, как прави-
ло, отстоят друг от друга на постоянную
величину Т— период квантования (дис-
кретизации). Информацию об исходной
непрерывной величине х(1) могут нести
изменяющиеся амплитуды (рис. 2.7) или
Рис. 2.6. Изменение во време-
ни непрерывного сигнала xft)
ширина импульсов (рис. 2.8). В первом случае осуществляется ампли-
тудно-импульсная модуляция (АИМ) непрерывного сигнала х(1), во вто-
ром — широгно-импульсная модуляция (ШИМ).
Рис. 2.8 Информация об исходной непре-
рывной величине x(t) в виде изменяющейся
ширины импульсов
Рис 2 7 Информация об исход-
ной непрерывной величине х(г) в
виде изменяющейся амплитуды
импульсов
При квантовании сигнала x(t) по уровню происходит выделение зна-
чений при достижении им определенных, заранее заданных уровней, от-
стоящих друг от друга, как правило, на постоянную величину, называе-
мую интервалом квантования по уровню (рис. 2.9).
47
*<л
Pin. 2.4 l\i*.i(ii<*n.iinie всхолноп вепре
pi.iunoii не>||ги||<ы нп по уровни*
Рис. 2.10 К н,1111ОИ.1П11С исходной не-
прерывной величины *(Л по примени
и но уровню
При kh.’iiiiob.iiiihi сипы (.1 ф) одновременно по времени и уровню про-
исходи! выделение в окре'(елейные момешы времени HinneiHiii сшпала,
ближайших к (.(ранее (.(Данным уровням (рис. 2.10). iaxoe KBainoiiaiiiie
HpiiMciiBcicB во всех цифровых iipoiраммно-укривлясмых вычисли 1ель-
HI.IX ycipoliciBax
Очной и» iii.iniii.ix hi (an. решаемых при кипи(онаини (днекрепна-
i(iiif) ст нала ф) biiiimcicm (плача паиоолес пол hoi о сохранения инфор-
мации при переходе oi непрерывного ciuiia ia к дискрепюму. В циф-
ровых iipoi раммно-унравляемых вычисли юльных усiрокеiпах все
операции выполпя101ся < chi налами, предс laBjicmii.iMH iojii.ko к циф
ровон форме. По ному в цифровое iipoi раммно-унравляемое вычис-
Л1пел1.нос уел роисто должна iiociynan. (locjicaonaiejii.iiocii. цпфро
вых ciiiiiujioii, cooiHCiciByiouinx чанному aiiajioiоному ст налу На
пример, при ампли|у н1о-импу'Н.спон модуляции aiia.iioioBOio ст па
ла i(f) (рис ? 11) осушес1вляегся операция умножения (качений аиа
лоювою сипы la ф) на ст на л с(/), предс laBJiBioiimii собой поеле-
ло№11елыюс11. одинаковых единичных импульсов б(|(/) При ном б()(1) I
при / 0 и 6()(П 0 при / * 0 В ре iyjii.Ttiic получим ст на л v (/), кою-
рып 1акжс являекя после lOBaiCJii.iiocn.K) импульсов, пос шмепяю
шейся aMiuiHlyuoii. oipaniPieinioH функцией >(») как oi нбающей. ( т
на I i(/) nan.iiiaioi шиЦ т/п нт/ии, ст пал г(0 иесги(ии или фшьт
/>1'к1щим а ст нал *,(/) uMmnim iliin wx>vшринанныч Лпалоювып
сшил можел (чаи. полноеii.io Bocciaiioiuieii но ею дискрешо-вре
меиному пре (сiaiiленню i с mi повеппым iiia'iemiBM. снимаемым че-
рс< равные промежу|кп времени )io положение О|ражас| суп. (со-
p. мы Koicjii.hiikoh.i Hleiiiiona
4Н
Рис. 2.11 Лмплшудно-имнульспая модуляция апалоювого cm пала U/).
« блок. ocymeci ваяющий амцли I удно-имнульсную модуляцию aiiaaoronoio
сниыла с(х); б (вменение но времени аиалоювото сипыла »()), и - ситал
V) (носледока1елыюсг1. одиннковых единичных импулыюн fi(|(/)); . ст н.п г ,(т)
(11оследо|<.11ел1>11оси. импульсов с и (меняющейся амцлигудои)
В cocian С1руктуры любою авюма( инсскою микропроцессорною
регулятора входит временной кнап1ова|ель аналоговых chi палов, кото-
рый можно рассматривав. как ключ, который (амыкаю) мере) промежу-
ток времени 7'па бесконечно малое время (рис 2.12). Выходной сигнал
кв<пнова1сля можно прелоiаки п. в виде 1юследова1елыюс|и импульсов,
ри (деленных ингерпалими Т и имеющих амплитуду х[кТ).
При исследовании дискрециях сиеiем pei улирошиия применяются
ра (личные модели дискретных chi палов. 11аиболее распространенной яв-
ляется решетчатая г/лпкдия. которая определена только в некоторых точ-
ках времени / кТ. В >гом случае реальный
темейi chcicmm шменяс1ся неким прсобра-
юкагслем мгновенного шачепия непрерыв-
ного aiiaiioiOBOIO сшпала в дискреппай, и
паоборо!.
Для peiiicriaii.ix функций были введены
ПОПЯ1ПЯ конечных рашостей и сумм, в пеко-
х(/>
х,(<)
Рис 2.12 Временной кввнто-
шгель аиа ютовых си> налов
4Q
тором смысле соответствующие понятиям производной и интеграла, при-
меняемых для обычных непрерывных функций.
Так, например, выражение
(2-24>
называется конечной разностью первого порядка (первой разностью) ре-
шетчатой функции, а
Д2/[*7] =2У((Л +1)71- 4/1*7] =/[(* + 2)71 - УК* + 1)71 +Л*71 (2.25)
— второй разностью и т.д.
Функция
и—1
F(hT)=S[ZT1 (2 26)
*=0
называется первообразной для решетчатой функции f[kT\.
Роль дифференциальных уравнений в дискретных системах выпол-
няют разностные уравнения. Всякое соотношение, связывающее решет-
чатую функцию/[^7] и ее разности до некоторого порядка п, называется
разностным уравнением.
Так, например, уравнение
<х„ b”f(kT) + an] Д”-1/(*7) +...+ d| bf(kT) + cxq bf(kT) = 0 (2.27)
является однородным линейным разностным уравнением л-го порядка.
Выражая разности Nf (тГ) через отсчеты решетчатой функции прн
разных значениях аргумента (для VI*?] и Д2/[*7] это формулы 2 24 и
2.25), можно получить более удобную для решения практических задач
форму записи разностного уравнения
₽„/[(* + и)7] + ₽„_| /[(* + и - D7] +-+₽!/[(*+ 1)Л + ₽оЛ*7] = 0(2.28)
или
Гт<[*7] + у,/[(*-1)7] +..,+ у„_]/[(Л- п + 1)7] + уп/[(*_ „)7] = о, (2.29)
если разность записывается как
W7] = ДМ/[Л7] - Д7-'Л(Л - 1)7]. (2.30)
50
Для решения прикладных задач, связанных с решетчатыми функция-
ми и разностными уравнениями, используется дискретное преобразова-
ние Лапласа, определяемое формулой
Г(9) = 1/(А-Пе
*=о
(231)
где q = рТ — комплексная переменная или z-преобразование (преобразование
Лорана),
F(z)Yf(kT)z-k,
k=0
(2.32)
где z = е .
В специальной литературе можно найти таблицы (см. табл. 2.1) с ча-
сто встречающимися в задачах управления непрерывными функциями
fit), их преобразованиями по Лапласу F(p), ^-преобразованиями F(z) со-
ответствующих решетчатых функций, а также модифицированными пре-
образованиями F* (с, z) (0 < с < I)
оо
F*(z. c) = z1^/[(A +c)r]z-*, (2.33)
to
позволяющими определить значения непрерывной величины объек-
та регулирования в интервале между точками отсчета, а также учесть
некратную Т часть запаздывания в объекте или алгоритме регулиро-
вания.
При этом
lim zF* (z. с) = F* (z).
с—>0
(2.34)
Обобщенная схема, иллюстрирующая способ цифровой реализации
непрерывных алгоритмов, приведена на рис. 2.13. Регулятор содержит
аналого-цифровой преобразователь (АЦП), цифровое вычислительное
51
Таблица преобразований Лапласа и /-преобразований
Л
ТАЙМЕР
Рис 2 13. Схема цифровой реализации автоматического регулятора
устройство (ВУ) и цифроаналоговый преобразователь (ЦАП). Входная
и выходная переменные регулятора являются непрерывными функция-
ми времени ф(/) и р(/). Вычислительное устройство описывается раз-
ностными уравнениями, имеющими для типовых алгоритмов следую-
щий вид:
П-алгоритм
М = *р Ф (2 35)
ПИ-алгоритм
И + 1) Ф 1*7] - кр ф [W] + ц [(Л - 1 )7]; (2.36)
ПИД-алгоритм
ц[*7] = ц[(* 1)7] + *р(Г/т11+1 + 7’/Г)Ф[*Л-
- кр (1 + 2Т/Г) ф [(*- 1 )7] + кр (Т/Г) ф [(* - 2)7]. (2 37)
Глава 3. ТИПОВЫЕ ДИНАМИЧЕСКИЕ
ЗВЕНЬЯ АВТОМАТИЧЕСКИХ СИСТЕМ
3.1. Пропорциональное звено
Пропорциональным называют звено, у которого выходная величина в
каждый момент времени пропорциональна входной. Это звено называют
также звеном нулевого порядка, безынерционным или усилительным.
Связь между входной и выходной величинами у пропорционального зве-
на определяется алгебраическим уравнением
Авы\“^Лвх’ (31)
где к = const — коэффициент усиления или передачи звена (статический пара-
метр звена).
После скачкообразного изменения входной величины в момент вре-
мени /0 переходный процесс в безынерционном звене также носит скач-
кообразный характер. Переходная функция при двх = [1]
*вых (') = *. (3.2)
График такой функции (временная переходная характеристика) приве-
ден на рис. 3.1, а, б.
Передаточная функция звена
^)=ABbIx(^)/'VBx(^) = ^ (3 3)
т. е. является постоянной величиной.
Комплексная частотная функция будет иметь такое же значение
W(j-ta) = k, (3.4)
54
a
j7V(w)
О со = О - оо
Л/(со)
б
Л(ш) ‘
Рис. 3.1. Характеристики изменения во времени величин пропорционального звена:
а — входной; б — выходной.
Частотные характеристики пропорционального звена:
в — амплитудно-фазовая; г — амплитудная
а амплитудно-частотная (модуль) и фазочастотная (аргумент) функции
Л(©) = к
ц/(со) = О
(3-5)
Следовательно, амплитуда выходных колебаний не зависит от часто-
ты входных колебаний (рис. 3.1, в, г). Амплитудно-фазовая характерис-
тика звена сводится к точке к на действительной оси
Логарифмическая амплитудно-частотная характеристика звена опи-
сывается выражением £(со) = 20 1g к и представляет собой прямую, па-
раллельную оси абсцисс и проходящую от нее на расстоянии 20 1g к.
Логарифмическая фазочастотная характеристика при всех частотах
совпадает с осью абсцисс, так как угол сдвига по фазе при всех частотах
равен нулю [см. (3.5)].
Примерами элементов автоматики, обладающих динамическими свой-
ствами пропорционального звена, могут служить (рис. 3.2) рычаг (без
учета массы и упругости), пружины, сильфонные и мембранные короб-
55
в
Рис. 3.2. Схемы элементов автоматики, обладающих динамическими свойствами
пропорционального звена:
а — манометрическая пружина; б — рычаг; в — короткий соединительный
трубопровод; г — зубчатый редуктор; д — электронный усилитель
ки, зубчатый редуктор (без учета упругости и люфта), электронный уси-
литель (без учета емкости и индуктивности), датчик частоты вращения
центробежного типа, индуктивный датчик перемещения, потенциомет-
рический датчик перемещения, датчики тока и напряжения тягового ге-
нератора и др.
Пружина как элемент автоматики преобразует перемещение (или угол
поворота) в силу. Статическая характеристика ее представляет зависи-
мость силы от прогиба. Цилиндрические пружины имеют линейные ста-
тические характеристики и коэффициент передачи их является величи-
ной постоянной, равной жесткости пружины. У нецилиндрических пру-
жин статические характеристики нелинейны и коэффициент передачи
является величиной переменной, зависящей от прогиба пружины.
Сильфонные или мембранные камеры преобразуют давление в силу.
Статические характеристики их представляют собой зависимость силы от
давления; обычно эти характеристики линейны. Значение коэффициента
передачи сильфона (или мембраны) равно его эффективной площади.
Зубчатые и червячные редукторы изменяют соотношение между час-
тотой вращения входного и выходного валов. Статическая характеристи-
ка редуктора представляет зависимость частоты вращения выходного вала
56
от частоты вращения входного вала; характеристика линейна, а коэффи-
циент передачи равен отношению числа зубьев ведущего зубчатого коле-
са к числу зубьев ведомого.
Пример 3.1. В качестве пропорционального звена рассмотрим стати-
ческие и динамические свойства потенциометрического датчика пере-
мещения.
Такой датчик перемещения применялся в системах регулирования
напряжения тягового генератора тепловозов ТЭ10 и др. Потенциометри-
ческие датчики предназначены для преобразования углового или линей-
ного перемещения в электричес-
кое напряжение (ток).
Простейший потенциометри-
ческий датчик перемещения пред-
ставляет собой резистор с пере-
менным сопротивлением, вклю-
ченным по схеме делителя напря-
жения (рис. 3.3, а). Движок / ре-
зистора кинематически соединя-
ется с источником входного сиг-
нала, так что измеряемым переме-
щением можно считать координа-
ту х, характеризующую положение
движка относительно начала об-
мотки 2 потенциометра. Рассмот-
рим работу датчика в режиме хо-
лостого хода, когда сопротивление
нагрузки zM = [zH] = оо.
Выходное напряжение в ре-
жиме холостого хода
Рис. 3.3. Принципиальная схема про-
стейшего однотактного потенциомегри-
ческого датчика перемещения (а) и его
статическая характеристика в режиме
холостого хода (б)
и - 1RX = z/0 RJ R,
где Rx — сопротивление введенной части потенциометра;
R — полное сопротивление датчика.
Если /—длина обмотки потенциометра, то при постоянном сопротивле-
нии проволоки на единицу длины и при равномерной намотке RJ R = х/1.
Следовательно, в режиме холостого хода выходное напряжение датчи-
ка связано с входным перемещением х линейной зависимостью и кх
при 0 < х < /, где коэффициент передачи датчика к = uQ //.
57
Эта зависимость (статическая характеристика датчика) показана на
рис. 3.3, б. Датчик позволяет измерять перемещения только одного знака
и является однотактным.
Для построения датчика, реагирующего на знак входного перемеще-
ния, необходимо иметь сопротивление с отводом от некоторой промежу-
точной (обычно средней) точки обмотки.
3.2. Интегрирующее звено
Интегрирующим называют звено, у которого скорость изменения выход-
ной величины пропорциональна входной величине, а сама выходная вели-
чина в каждый момент времени пропорциональна интегралу от выходной
величины по времени. Это звено называют также нейтральным или астати-
ческим звеном первого порядка. Оно не имеет устойчивых состояний.
Дифференциальное уравнение звена
r = ^^ = fcBX, (3.6)
то же в операторной форме
ГРхвых = Чх’ (3-7)
где Т — постоянная времени звена, с;
к — коэффициент передачи.
Введем коэффициент пропорциональности к& = к!Т — р хвых /хвх.
Интеграл выражения (3.6) примет вид
t
Хвых =(£/ЛрВх<^ (3-8)
о
t
Хвых =^aJXBX^-
О
Здесь выходная величина пропорциональна интегралу по времени от
входной величины. Интегрирующее звено характеризуется двумя посто-
янными параметрами: динамическим Т и статическим к и/или только
одним параметром к& — отношением скорости изменения выходной ве-
личины к входной.
Переходная функция интегрирующего звена получается подстанов-
кой хвых = [1] в уравнение (3.8) и имеет вид
*b«x(') = V (З-9)
58
a
Рис. 3.4. Характеристики изменения во времени величин интегрирующего звена:
а — входной; б — выходной.
Частотные характеристики интегрирующего звена:
в — амплитудно-фазовая; г — амплитудная
Характер переходного процесса после единичного изменения вход-
ной величины (рис. 3.4, а) изображен на рис. 3.4, б. Временная переход-
ная характеристика является лучом, выходящим из начала координат,
угловой коэффициент которого равен коэффициенту передачи звена.
Передаточная функция интегрирующего звена
W = ^вых(Р^вх(Р) = кз /р = к 1ТР- (31°)
Комплексная частотная функция звена
H'Vco) = ka/ja> = - кг /(£>. (3.11)
Действительная часть комплексной функции М (со) = 0, мнимая часть
Мео) = - к& /ш = к /Ты.
59
Амплитудно-частотная функция
Я(со) = Ага/со (3.12)
и фазочастотная функция
\|/(cd) = arctg [М®)/Л/(®)] = - я/2. (3.13)
Амплитудно-фазовая характеристика интегрирующего звена (рис. 3.4, в)
представляет собой прямую линию, совпадающую с отрицательной мни-
мой осью. При изменении частоты со от 0 до + х конец вектора lF(/co)
движется по отрицательной мнимой оси от - ос до 0. При подаче на вход
интегрирующего звена гармонических колебаний входной величины ко-
лебания выходной величины отстают от них на угол = - л/2. Логариф-
мируя А(ю) в формуле (3.12), получаем £(со) = 201g Аа - 201g со. Таким
образом, логарифмическая амплитудно-частотная характеристика пред-
ставляет собой прямую линию, пересекающую при к& = 1 ось абсцисс в
точке со = 1 и имеющую наклон к оси абсцисс 20 дБ/дек. При ка * 1 харак-
теристика перемещается параллельно оси ординат на 201g ка.
Логарифмическая фазочастотная характеристика не зависит от часто-
ты и проходит параллельно оси абсцисс на расстоянии - я/2.
Амплитудная характеристика интегрирующего звена имеет вид, пред-
ставленный на рис. 3.4, г.
На рис. 3.5 приведены примеры элементов автоматики, обладающих
динамическими свойствами интегрирующего звена.
Рис. 3.5. Схемы элементов автоматики, обладающих динамическими свойствами
интегрирующего звена:
a — резервуар без самовыравнивания; б — барабан парового котла; в — порш-
невой гидравлический усилитель с золотниковым управлением; г — электро-
двигатель, tn, tB — температуры пара и воды; б — угол поворота вала; UB — на-
пряжение на обмотке возбуждения
60
Пример 3.2. Определить параметры одноемкостного бака без само-
выравнивания (рис. 3.5, а).
Примем за входную величину изменение притока воды в единицу вре-
мени а за выходную — высоту уровня Н в баке. Считаем далее, что
площадь бака постоянна по высоте. Если отток сохраняется неиз-
менным, а приток меняется мгновенно, то при принятых условиях
Fd/7/d/ = A2n- <314)
Чтобы привести уравнение (3.14) к безразмерному виду, нужно раз-
делить и умножить левую и правую части уравнения соответственно на
Н0 и cn mav тогда
www = (лвп/в„ вп тах,
где Hq — оптимальное значение уровня:
Qn — максимальная подача воды в бак.
В относительных единицах входная величина xnv - AQJQn mav, а вы-
ВА *^11 11 ITIuA'
ходная величина *ВЬ)Х = ЬН/Н^.
После преобразования получаем
^*вых _ С?птах
d/ HqF *вх “ *а *вх’
^а-
Примерами тепловозных элементов автоматики, обладающих дина-
мическими свойствами интегрирующего звена, являются гидравличес-
кие усилители с золотниковым управлением, применяемые в регулято-
рах частоты вращения вала дизель-генератора и в регуляторах темпера-
туры. Одна из схем такого элемента показана на рис. 3.5, в.
Пример 3.3. Определить динамические свойства гидравлического уси-
лителя.
Насос, не показанный на схеме, подает под постоянным давлением
масло в цилиндр 7 (см. рис. 3.5, в) через золотник 2, заставляя переме-
щаться поршень 3, который через шток 4 приводит в движение регулиру-
ющий орган. Входной величиной элемента является перемещение хвх
золотника, выходной — перемещение хвых поршня. Если считать пло-
щадь сечения проходного отверстия золотника пропорциональной его
перемещению, то расход масла, поступающего в цилиндр, пропорциона-
лен хвх. Следовательно, скорость хвых перемещения поршня также про-
порциональна хвх.
61
При постоянном давлении количество масла, поступающего в ци-
линдр. можно считать зависящим только от площади проходного отвер-
стия золотника и не зависящим от статических и инерционных усилий,
действующих на поршень со стороны связанных с ним движущихся час-
тей. Следовательно, практически можно пренебречь механической инер-
цией такой системы и считать, что она не только в статике, но и в дина-
мике описывается уравнением dxBbIX/d/ = £axBV Тогда передаточная фун-
кция гидроусилителя имеет вид В(р) = Лвых Л'вх = ка/р.
В действительности описание процессов в гидравлическом элементе
значительно сложнее, однако учет второстепенных факторов приводит к
сложным и трудно применимым выражениям. Поэтому при изучении
гидравлического исполнительного элемента с поступательным движением
как элемента автоматической системы его практически целесообразно
считать идеальным интегрирующим звеном.
3.3. Инерционные звенья
В тепловозных автоматических системах содержатся также элемен-
ты, обладающие динамическими свойствами инерционных звеньев: инер-
ционного устойчивого апериодического звена и неустойчивого квазиинер-
ционного звена.
Апериодическим называют звено, в котором после однократного скач-
кообразного изменения входной величины выходная величина стремит-
ся апериодически (по закону экспоненты) к новому установившемуся
значению. Это звено называют также статическим инерционным звеном
первого порядка. Оно является самым распространенным в автоматичес-
ких системах. Связь между входной и выходной величинами этого звена
определяется дифференциальным уравнением, описывающим его дина-
мические свойства,
Fdx/ dz + х = к х (3.15)
ОШ Ч DXU.X ВЛ х х
или в операторной форме
(ТР + ^хВых = кхы- <316)
Апериодическое звено характеризуется постоянной времени Т (дина-
мическим параметром), измеряемой в секундах, и коэффициентом уси-
ления (статическим параметром) к.
Решение уравнения (3.15) при .xBX = const и нулевых начальных усло-
виях (I = 0 и хвх = 0) имеет вид
62
Рис. 3.6. Графики изменения величин апериодического звена:
а — входной; б — выходной (временная переходная характеристика)
Частотные характеристики апериодического звена:
в — амплитудно-фазовая; г — амплитудная
вых Л-'вх
1-е Т
Переходная функция апериодического звена находится из уравнения
(3.17) при хвч = [1]. Очевидно, что
ВЫХ ^Вх(О 1 е
Т
(3.18)
Эта функция описывает временную переходную характеристику апе-
риодического звена (рис. 3.6, а, б). За время равное Т выходная величина
изменяется на 63 ° о полного диапазона.
Передаточная функция звена определяется из уравнения (3.16)
"'(?) = Твых(рУ Л,х(р) = kl (Тр + 1). (3 19)
Комплексная частотная функция
63
ИХ/со) = */(77® + !)• (3.20)
Умножая числитель и знаменатель на сопряженное знаменателю чис-
ло (-Тj(£> + 1). получим
И (/со) = к(Т/со + 1) / [(7'/со + 1)(-7усо + 1)]
или
И’(/со) = к /{Т2 со2 + 1) -jkTa /(1 + Т2 со2). (3.21)
Действительная и мнимая части данной комплексной функции
Л/(со) = к /(1 + Т2 со2) и Мео) = кТы /(1 + Г2 со2).
Модуль функции ИЛ(/со), представляющий собой амплитудно-частот-
ную функцию,
|А(со)| = 7л72(ю) + ^(со) = к/л/1 + Г2со2 . (3.22)
Аргумент функции Ж(/со), представляющий собой фазочастотную
функцию,
\|/(со) = arctg [А(со)/Л/(со)] = - arctg (Тео). (3.23)
Амплитудно-фазовая и амплитудно-частотная характеристики апери-
одического звена изображены на рис. 3.6, в, г. Первая имеет вид окруж-
ности, описываемой концом вектора №(/а)) на комплексной плоскости
при изменении со от - со до + оо.
При со > 0 амплитудно-фазовая характеристика представляет со-
бой полуокружность, которая начинается из точки к на действитель-
ной оси (при со = 0). По мере увеличения частоты модуль Ж(/со) умень-
шается, а угол сдвига по фазе увеличивается вплоть до л/2 при со,
стремящейся к бесконечности. Кривая лежит в четвертом квадран-
те. Диаметр окружности равен коэффициенту передачи к. Из графи-
ка амплитудно-фазовой характеристики видно, что при частотах,
близких к нулю, угол сдвига по фазе выходной величины отсутству-
ет. При высоких частотах выходная величина отстает от входной при-
близительно на я/2.
Значение амплитудно-частотной функции Я (со) с ростом частоты бы-
стро убывает. При со < 0 амплитудно-фазовая характеристика лежит в
первом квадранте и представляет собой зеркальное отражение нижней
полуокружности.
64
Рис. 3.7. Схемы элементов автоматики, обладающих динамическими свойствами
апериодического звена:
а — резервуар с самовыравниванием; б — контактный теплообменник;
в — смешивающий теплообменник; г — термопара д — контуры RC и LR;
е — реальный электрогенератор
На рис. 3.7 приведены схемы элементов автоматики, обладающих дина-
мическими свойствами апериодического звена. Кроме того, примерами та-
ких элементов являются: дизель-генератор как объект регулирования часто-
ты вращения вала, магнитный усилитель, система охлаждения дизеля как
объект регулирования температуры теплоносителя, датчик температуры теп-
лоносителя, гидродинамический привод вентилятора, поезд и др.
Пример 3.4. Определить динамические свойства элементов, схемы
которых приведены на рис. 3.7, д. В электрических звеньях (четырехпо-
люсниках) входной величиной является напряжение и(, а выходной —
напряжение на емкости или резисторе и^.
Применив первый закон Кирхгофа к точке a iR = / и подставив сюда
и\ ~ и2 . dw2
^=с At
получим
гт d«2
Т —- + U-)
dr 2 ь
где Т = RC — постоянная времени.
Для звена с индуктивностью уравнение динамики имеет такой же вид,
но T=L/R.
65
Пример 3.5. Определить динамические свойства электродвигателя, если
его механические характеристики являются параллельными прямыми.
Для электродвигателя входной величиной является частота вращения
вала сов.
Рассмотрим динамику двигателя постоянного тока с независимым воз-
буждением Двигатель описывается дифференциальными уравнениями:
, dcoB
Мд. ~ СМ Л’
1Я^Я + Кя1я=и-Ед\
dr
- Ед =
где JB — суммарный момент инерции вращающихся частей, приведенный к валу
двигателя;
Мд — момент, развиваемый двигателем;
Мс — внешний возмущающий момент (момент сопротивления нагрузки);
/ — ток якоря;
Яя — сопротивление якорной цепи;
Ья — индуктивность якорной цепи;
и — напряжение на зажимах якоря;
£д — электродвижущая сила двигателя;
см и се — постоянные коэффициенты.
Из данной системы уравнений можно получить дифференциальное
уравнение, описывающее динамические свойства электродвигателя. При
£я - 0 — это уравнение первого порядка, а при £я * 0 — дифференци-
альное уравнение второго порядка, и двигатель обладает динамически-
ми свойствами апериодического звена.
Кроме рассмотренного выше устойчивого апериодического звена, в
технике встречаются элементы, обладающие динамическими свойства-
ми неустойчивого так называемого квазиинерционного звена. Дифферен-
циальное уравнение, описывающее динамические свойства такого зве-
на, отличается от уравнения (3.15) устойчивого апериодического звена
только знаком перед вторым членом левой части
Tdx / dr - х = kх (3.24)
ВЫЛ ВЫЛ ВЛ ' *
66
Рис. 3.8. Динамические характеристики квазиинерционного звена:
а — временная переходная; б — амплитудно-фазовая; в — амплитудно-
частотная; г — фазочастотная
или в операторной форме
«’-Os»-**.,. (3-25)
Решение уравнения (3.24) прихвх = const и нулевых начальных усло-
виях (/ = 0, хвых = 0) имеет вид
^вых = ^вх(^-П. (3.26)
Переходная функция квазиинерционного звена находится из уравне-
ния (3.26) при xBX = [1], очевидно, что
*выхЮ = *(е'-т-1). (3.27)
Эта функция описывает временную переходную характеристику ква-
зиинерционного звена (рис. 3.8, а). Для линейного неустойчивого квази-
инерционного звена не существует установившегося режима, и с течени-
ем времени при любой входной величине выходная величина стремится
к бесконечности.
67
Передаточная функция звена определится из уравнения (3.25)
W=а;ых(р)/ Хвх(р) = к/(Тр - 1). (3.28)
Комплексная частотная функция
И7(/со) = £/(Г/<о - 1). (3.29)
Амплитудно-частотная функция имеет то же выражение, что и для
устойчивого инерционного звена (см. формулу (3.22)):
|Л(со)| - Л/д/1 + Г2со2. (3.30)
Фазочастотная функция квазиинерционного звена отличается от фа-
зочастотной функции (3.23) инерционного звена:
\у(со) = - л + arctg ыТ. (3.31)
Частотные характеристики квазиинерционного звена показаны на
рис. 3.8, а. Амплитудно-фазовая характеристика (рис. 3.8, б) представля-
ет собой зеркальное отображение относительно мнимой оси характерис-
тики апериодического инерционного звена. Фазочастотная характерис-
тика (рис. 3.8, г) представляет собой зеркальное отображение фазочас-
тотной характеристики инерционного звена относительно прямой \|/ = - л/2.
Примером неустойчивого звена может служить асинхронный двига-
тель при работе на ниспадающей к началу координат ветви механичес-
кой характеристики.
Вторым примером квазиинерционного звена является дизель-генера-
тор как объект регулирования частоты вращения его вала при определен-
ном взаимном расположении моментных характеристик дизеля и тягово-
го генератора. В этом случае дизель-генератор без автоматического регу-
лятора работать не может: он или останавливается, или увеличивает час-
тоту вращения вала до максимального значения, ограничиваемого авто-
матической системой защиты.
3.4. Дифференцирующие звенья
Различают идеальные и реальные дифференцирующие звенья.
Идеальным дифференцирующим называют звено, выходная величина
которого пропорциональна скорости изменения входной величины. Урав-
нение, описывающее динамические свойства звена,
у. _ РА
ВЬ1Х dt
(3.32)
68
Рис. 3.9. Характеристики изменения во времени величин дифференцирую-
щих звеньев:
а — входной; б — выходной.
Частотные характеристики дифференцирующих звеньев:
в — амплитудно-фазовые; г — амплитудные
или в операторной форме
Хвых — к р хвх. (3.33)
После скачкообразного изменения входной величины у такого звена на
выходе получается мгновенный скачок с бесконечно большой амплиту-
дой. Скорость изменения выходной величины в момент скачка бесконечно
велика. Таким образом, переходная функция представляет собой импульс-
ную функцию, график которой условно изображен на рис. 3.9, а, б.
Передаточная функция идеального дифференцирующего звена
(3-34)
Комплексная частотная функция
FK(/co) = А /со.
(3.35)
69
Действительная и мнимая части этой функции
Л/((о) = 0; 7V(co) = Ao. (3.36)
Амплитудно-частотная характеристика
т4(со) = км. (3.37)
Фазочастотная функция
\|/((о) = arctg [А(со)/Л/((о)] = arctg (оо) = тг/2. (3.38)
В результате амплитудно-фазовая характеристика идеального диффе-
ренцирующего звена совпадает с положительной частью мнимой оси.
Следовательно, в этом звене создается опережение выходной величи-
ны по сравнению с входной на угол л/2 при всех частотах. Амплитуд-
но-фазовая и амплитудно-частотная характеристики звена изображены на
рис. 3.9, в, г штрихпунктирной линией. Практически осуществить (реали-
зовать) идеальное дифференцирующее звено можно только приближенно.
Реальным или инерционно-дифференцируюгцим называют дифферен-
цирующее звено, у которого зависимость между входной и выходной ве-
личинами определяется следующим дифференциальным уравнением
T&x! dr + dr ы = кТ dxBX/ dr (3.39)
или в операторной форме
№+1)хвых = *Грхвых. (3.40)
Реальное дифференцирующее звено представляет собой сочетание апе-
риодического и идеального дифференцирующего звеньев. При Т —> 0, но
при конечном кТ уравнение (3.39) переходит в уравнение идеального
дифференцирующего звена (3.32). Искажающее влияние апериодичес-
кой составляющей тем меньше, чем меньше постоянная времени Т. При
малом значении Т коэффициент передачи должен быть увеличен. Это
часто приводит к необходимости применения дополнительного безы-
нерционного усилителя. Решение дифференциального уравнения (3.39)
имеет вид
t
Хвых = ^Хвх е 7 • (3-41)
Переходная функция реального дифференцирующего звена получа-
ется из уравнения (3.41) с учетом xBX = [1] в виде
t
хвм=кеТ- (3.42)
70
График переходной функции реального дифференцирующего звена
показан на рис. 3.9, 6 сплошной линией. В первый момент выходная вели-
чина возрастает до к, а затем убывает по экспоненте. При / -> оо хвых —» 0.
Передаточная функция реального дифференцирующего звена
W(p) = к Тр/(Тр + (3.43)
амплитудно-фазовая частотная функция
И{/со) = (ЛГ2со2 +j к Гео) / (I + Г2®2); (3.44)
амплитудно-частотная функция
Л(®) = А 7'(o/Vl + r2w2; (3.45)
фазочастотная функция
у(®) = arctg (1/7со). (3.46)
Амплитудно-фазовая и амплитудно-частотная характеристики реаль-
ного дифференцирующего звена изображены на рис. 3.9, в, г сплошными
линиями. Для со > 0 амплитудно-фазовая характеристика представляет
собой полуокружность, расположенную в первом квадранте. Начальная
точка характеристики совпадает с началом координат. По мере увеличе-
ния частоты модуль вектора W(jo)) увеличивается и при со = оо достигает
значения к. Сдвиг по фазе с возрастанием со уменьшается, стремясь к
нулю при со > оо. Элементы автоматики, обладающие динамическими свой-
ствами реального дифференцирующего звена, широко применяются в
тепловозных автоматических системах и выполняют функции устройств
местных гибких, т.е. действующих только в переходном процессе, обрат-
ных связей. Эти устройства применяют с целью повышения устойчивос-
ти и качества работы автоматических систем. Примеры некоторых из них
приведены на рис. 3.10.
Пример 3.6. Определить динамические свойства гидромеханическо-
го изодрома (рис. 3.10, а).
За входную величину хвх принимают перемещение точки Л, а за вы-
ходную хвых — точки В. Допустим, что соотношение плеч выходного
рычага в первый момент переходного процесса будет равно перемеще-
нию цилиндра, т.е. хвых = хвх.
Допустим, что скорость перемещения поршня относительно ци-
линдра прямо пропорциональна разности давления в полостях ци-
71
Рис. 3.10. Схемы элементов автоматики, обладающих динамическими
свойствами реального дифференцирующего звена:
а — гидромеханический изодром; б — контуры RL и CR: в — контур СУ?;
г — стабилизирующий трансформатор; / — шток цилиндра; 2 — цилиндр;
3 — поршень; 4 — пружина; 5 — рычаг; 6 — клапан
линдра, т.е. усилию, приложенному к цилиндру со стороны пружины.
В этом случае
dx x/df “ = (3.47)
где а — отношение скорости движения поршня относительно цилиндра к уси-
лию, вызвавшему перемещение поршня;
F — усилие пружины.
Усилие, создаваемое пружиной, пропорционально ее деформации:
F=UXBbIX’
где и — коэффициент пропорциональности (жесткость пружины).
Тогда
dx„v/d/ - dx /d/ = auxoiiv.
da ВЫл оЫ\
Обозначая 1/av = Т, получим:
Td^x/d/ + хвых = 7cLxBX/dr. (3.48)
Уравнение (3.48) аналогично уравнению (3.39) с той лишь разницей,
здесь А:=1. В случае неравенства плеч выходного рычага величину к нуж-
но ввести в уравнение.
Гидромеханический изодром применяется в ПИД-регуляторах часто-
ты вращения тепловозных дизель-генераторов, где он выполняет функ-
ции устройства гибкой отрицательной обратной связи выхода исполни-
тельного механизма с его входом.
Пример 3.7. Определить динамические свойства электрических кон-
туров RLyiCR (рис. 3.10, б и 3.10, в).
72
Если в электрической емкости за входную величину принять прило-
женное к ней напряжение и, а за выходную — протекающий ток /, то
i = Cdu/dt
В реальных схемах включения конденсаторов всегда имеется некото-
рое сопротивление, так что эквивалентная схема цепи может быть пред-
ставлена в виде последовательного соединения емкости и резистора
(рис. 3.10, в). В этом случае ток через резистор и емкость будет в любой
момент одинаков
ZR = ZC = Z’
причем сумма падений напряжений на емкости и резисторе в соответ-
ствии со вторым законом Кирхгофа
= мс = 2вх-
Продифференцировав уравнение
d uR/ dz + d и J d/ = d «вх/ df
и подставив в него uR - Ri nd uj dt - i! С, получим
Rdi/dt+i/C= du / d/,
Ba
что позволяет записать уравнение для цепи в следующем виде:
Т di/ dt + i = к Td и J dt, (3.49)
где Т — постоянная времени (Г = RCy,
к — коэффициент передачи звена (к = 1/R).
В случае, когда выходной величиной звена является не ток, а напря-
жение, снимаемое с резистора wBX = R /, уравнение этого звена примет
вид rdwBbIX/d/ + dwBbIX = Т d wBX/dZ; здесь, очевидно, к = 1.
Цепочки RC (рис. 3.10, б, в) применяются в тепловозных АСР напряжения
тяговых генераторов переменного тока в качестве устройств гибких отрица-
тельных обратных связей, соединяющих выход управляемого выпрямителя
тока возбуждения (УВВ) с входом блока управления выпрямителя (БУВ) Ди-
намическими свойствами реального дифференцирующего звена также обла-
дает цепь стабилизирующего трансформатора (рис. 3.10, г), который в ав
тематической системе регулирования напряжения тягового генератора по-
стоянного тока выполняет функции устройства гибкой отрицательной об-
ратной связи выхода возбудителя В с входом амплистата возбуждения (АВ).
73
Рис. 3.11. Изменения величин колебательного звена:
а— входной, б— выходной.
Частотные характеристики колебательного звена:
в — амплитудно-фазовая; г — амплитудная при разных коэффициентах
затухания а
3.5. Звенья второго порядка
Наиболее сложными динамическими свойствами обладают звенья
второго порядка: колебательное и апериодическое. Их дифференциаль-
ные уравнения схожи, но отличаются значениями отношений динами-
ческих параметров — постоянных времени.
Колебательным называют звено, в котором после однократного скач-
кообразного изменения входной величины (рис. 3.11, а) выходная вели-
чина стремится к новому установившемуся значению, совершая относи-
тельно него колебания с амплитудой, затухающей по закону экспоненты
(пунктир на рис. 3.11, б). Связь между входной и выходной величинами
звена определяется дифференциальным уравнением вида
Го d2xBbIX/d/2 + rdxBbix/d/ + *вых = Чх (3 •50)
или в операторной форме
T2p2 + Tp/dt + 1 =кхт. (3.51)
74
Колебательное звено имеет три параметра (два динамических и один
статический): Го, Т — постоянные времени и к— коэффициент передачи.
Колебательное звено можно получить, соединив две емкости, способ-
ные запасать энергию двух видов и взаимно обмениваться этими запаса-
ми в переходном процессе. Обычно при этом одна из этих емкостей запа-
сает кинетическую энергию, а другая — потенциальную. Обмен запаса-
ми сопровождается переходом одного вида энергии в другой. Если в про-
цессе такого обмена запас энергии, полученный звеном в начале возму-
щения, уменьшается, то звено устойчиво.
Характеристический полином колебательного звена имеет вид
й<Р) = Т^ + ТР+\ (3.52)
Соответствующее ему характеристическое уравнение
Т2р2 + Тр+ 1 =° (3.53)
имеет корни
/’|,2=^Г±^7'2“47»^/270- 0-54)
Эти корни определяют два случая поведения звеньев второго порядка
и разделяют их на две группы.
Первый случай. Динамические параметры звена таковы, что
7'2-47'q<0 или 7’<27’0. (3.55)
В этом случае корни характеристического уравнения (3.53) комплексные
Pl=a+jco и р2 = а -усо, (3.56)
где а — величина, характеризующая затухание переходного процесса, часто на-
зываемая коэффициентом затухания
a = 772 Г2; (3.57)
со — угловая частота затухающих колебаний выходной величины
со = ^4Г02 - Г2 /2 Т2 = д/1-7’2/47’02 /То. (3.58)
Общее решение дифференциального уравнения (3.50) для первого
случая имеет вид
лвых = хвых о + се sin + V)’ (3-59)
где с и vg — постоянные интегрирования, которые находят из начальных условий
(с = - к x^coq/co), при соо = 1/ Го; у = arctg (co/a));
75
со0—собственная частота колебаний или резонансная частота, имеющая место
в частном случае при Т- 0 или а = 0, когда и = со0.
При наличии постоянного возмущения на входе xBX = const будем иметь
х = к vbv Окончательно
л- = к х [ 1 - Ц/ейе а' sin(co/) + arctg(co/a)]. (3.60)
ddia d.v V/
Уравнения (3.59) и (3.60) колебательного звена описывают переход-
ный процесс.
Переходная функция колебательного звена получается из выражения
(3.60) подстановкой лвх = [1] и имеет вид
-гвых ~ (со0/с!>)е~(х/ sin(co/) + arctg(co/a)]. (3.61)
Переходная функция (3.61) описывает переходную временную характе-
ристику колебательного звена (см. рис. 3.11, б). При стремлении t к бес-
конечности хвых (г) стремится к к.
Передаточная функция колебательного звена
”V) = TBb|x(p)/X8x(p) = A7(7-0V + Тр + 1). (3.62)
Комплексная частотная или амплитудно-фазовая характеристика ко-
лебательного звена
И'(/<о) = к/(-Т^ со2 + 7со + 1). (3.63)
Освобождаясь от мнимости в знаменателе, получаем
И(до) = [£ (1 - Т2 со2) -j к Гсо]/[( 1 - Го2 со2)2 j2 + Т2 со2]. (3.64)
Из выражения (3.64) видно, что действительная часть комплексной
функции
Мео) = к (1 - Г2со2)/[(1 - 72со2)2 + Г2 со2];
мнимая часть
Мео) = А7со)/[( 1 - Т^со2)2 + Г2со2].
Модуль функции W(/a>) или амплитудно-частотная функция
Л(со) = к / ^/(1 -Го2со2)2 +r2co2 (3.65)
Аргумент функции И{/со) или фазочастотная функция
\|/(со) = - arctg [7со/( 1 - rjj со2)]. (3.66)
76
Амплитудно-фазовая и амплитудная характеристики колебательного
звена приведены на рис. 3.11, в, г. Ветвь амплитудно-фазовой характери-
стики для отрицательных частот изображена пунктиром.
Второй случай. Параметры звена второго порядка таковы, что
7’2-4Г0>0 или T>2TQ. (3.67)
Характеристическое уравнение (3.53) имеет действительные и отри-
цательные корни (см. (3.54)).
Решение уравнения (3.50) здесь имеет вид
х = се Р|/+сое р- + к . (3.68)
вых 1 2 вх
ИЛИ ДЛЯ X = [1]
х (t) = k+c.e р'‘ + с е р-, (3.69)
вых' ' 1 2
где С| и с2 — постоянные интегрирования.
В рассматриваемом случае переходный процесс не является колебатель-
ным, а представляет собой апериодический сходящийся процесс. Звено
носит название апериодического второго порядка и может быть представ-
лено как совокупность двух последовательно включенных апериодичес-
ких устойчивых инерционных звеньев с постоянными времени Т\ и Т2.
При Т >2Т() переходный процесс имеет апериодический характер, при
Т< 2Tq — характер процесса колебательный. Чем меньше Тпо сравнению
с Tq, тем более колебательным будет переходный процесс. Если неизмен-
ным остается Т, а изменяется То, то процесс будет тем более колебатель-
ным, чем больше величина 27() по сравнению с Т. Постоянная Т характери-
зует демпфирование (сглаживание) колебаний выходной величины звена,
а постоянная Т® — раскачивание колебаний этой величины. Таким обра-
зом, устойчивость звена зависит от а - 772 Го.
Если экспериментально получена амплитудно-фазовая характеристика
(годограф) реального звена, близкого по динамическим свойствам к звену
второго порядка, то параметры соответствующего звена второго порядка
могут быть найдены по точкам характеристики, лежащим на веществен-
ной и мнимой осях (точки 1 и 2 на рис. 3.11, в). По точке 1 находят значе-
ние статического параметра к, а по точке 2 — значение со0 = 1/7 и а.
На рис. 3.12 приведены примеры элементов, обладающих динамичес-
кими свойствами колебательного звена. Кроме того, примерами элемен-
тов, обладающих динамическими свойствами звена второго порядка, яв-
77
Рис. 3.12. Схемы элементов, обладающих динамическими свойствами
колебательного звена:
а — механическая система; б — система, содержащая два сообщающихся
сосуда с жидкостью; в — пневматический мембранный механизм;
г — контур LRC
ляются надрессорное строение локомотива вместе с рессорным подве-
шиванием, гидродинамический привод вентилятора охлаждения, топлив-
ная аппаратура дизеля и др.
Пример 3.8. Определить динамические свойства колебательного кон-
тура (рис. 3.12, г).
Переходный процесс в электрической цепи определяется вторым за-
коном Кирхгофа
d/
L~ + Ri + Uj = и,. (3.70)
dr z 1
Скорость нарастания напряжения u2 на конденсаторе прямо пропор-
циональна значению зарядного тока и обратно пропорциональна его ем-
кости dw2/d/ = И С, откуда
i~ С du2ldt.
Дифференцируя, получим
dz*/d/ = С d2 u2ldfl.
Подставляя эти выражения в уравнение (3.70), будем иметь
LC d2 + RC du2/dt + u2 = Uy
Это есть уравнение колебательного звена, в котором -JbC = 7(); RC= Т\
к=\',их=х^ ^2 = хвых-
При к = 1 хвых 0 = хвх 0, т.е. установившиеся значения входной и вы-
ходной величин одинаковы.
78
3.6. Звено запаздывания
Звеном запаздывания называется такое звено, в котором выходная ве-
личина воспроизводит без искажения изменение входной величины, но
отстает при этом на некоторое постоянное время тзап, называемое време-
нем чистого запаздывания. Пусть на вход звена подано возмущение хвх(/).
Связь между выходной и входной величинами звена запаздывания будет
иметь вид
*вых(') = 0 ПРИ 0<'<тзаП; Хвых</)=^вха-тзап) при тзап</. (3.71)
График изменения входной величины и временная переходная харак-
теристика звена запаздывания приведены на рис. 3.13, а, б. Коэффици-
ент передачи звена запаздывания к = 1.
Для определения передаточной функции звена найдем изображение
выходной величины по Лапласу
эс
Хвых(^) — L [*вх(* — тзап^ ~ JXBx(f ~ тзап) е Р
О
Рис. 3.13. Характеристики изменения во времени величин звена запаздывания:
а — входной; б — выходной.
Частотные характеристики звена запаздывания:
в — амплитудно-фазовая; г — амплитудная
79
Введем новую переменную X = / - тзап, получим
х„ых(р) = Рвх(М С-₽(’-+’’») d(X + Z^).
О
Выносим постоянную величину е ^Пзап за знак интеграла, учитывая, что
dx3an постоянной величины равен нулю:
оо
х,ых(р) = е'рт’“ f ХВХ (М
О
Так как согласно выражению (2.10) интеграл в этом выражении явля-
ется изображением Хт(р), Хзы*(р) - е /Пзап Хзу(р). Таким образом, звено
запаздывания имеет передаточную функцию
JT(p) = е ^Тзап (3.72)
В соответствии с выражением (3.72) частотные функции звена запаз-
дывания имеют вид:
W(усо) = е~7тТзап = cos сот зап - j sin сот зап;
Л/(со) = coscoT3an:
N(w) = -sincoT3atI,
Л(го) = 1;
\g(co) = -coT3an.
(3.73)
Так как значения амплитудно-частотной функции (АЧФ) звена не за-
висят от частоты и равны единице, а значения фазочастотной функции
(ФЧФ) пропорциональны частоте с коэффициентом пропорционально-
сти, равным тэап, то амплитудно-фазовая характеристика звена запаз-
дывания представляет собой окружность единичного радиуса с цент-
ром в начале координат (рис. 3.13, в, г). При со = 0 вектор совпа-
дает с положительной вещественной полуосью и конец его расположен
в точке (1 ,j0). При увеличении частоты вектор поворачивается относи-
тельно начала координат по часовой стрелке, так как \|/(со) < 0.
Таким образом, звено запаздывания на выходе воспроизводит колебания
входной величины без искажения по форме, но с отставанием по фазе.
80
Это отставание тем больше, чем
больше запаздывание звена и чем
больше частота колебаний входной
величины.
Логарифмическая АЧФ звена
£((о) = 20 1g 1 =0 представляет со-
бой прямую, совпадающую с осью
абсцисс. Логарифмическая фазоча-
стотная характеристика строится
по выражению = - тзап <о в по-
лулогарифмическом масштабе.
Схема элемента, обладающего
свойствами звена запаздывания,
приведена на рис. 3.14. Свойства-
ми звена запаздывания обладают
Рис. 3.14. Принципиальная схема объек-
та, обладающего передаточным (транс-
портным) запаздыванием:
1 — бак; 2 — передаточный канал
(лоток)
также системы, содержащие длин-
ные трубопроводы, ленточные транспортеры, тепловые объекты (напри-
мер, системы охлаждения дизеля) и т.п. Из всех звеньев, рассмотренных в
настоящей главе, звено запаздывания имеет наибольшее практическое зна-
чение. Особую роль оно играет при рассмотрении релейных и импульс-
ных автоматических систем. Далее будет показано, что устойчивость и
качество работы непрерывных автоматических систем значительно сни-
жаются под влиянием звена запаздывания.
Кроме типовых линейных звеньев, в автоматических системах встре-
чаются элементы, обладающие динамическими свойствами особых зве-
ньев: неминимально-фазовые звенья, передаточные функции которых
дробно-рациональны и имеют нули в правой комплексной полуплоскос-
ти; неустойчивые звенья, имеющие плюсы в правой полуплоскости; зве-
нья с распределенными параметрами, которые могут быть разделены на
иррациональные, описываемые иррациональными передаточными фун-
кциями, и трансцендентные, описываемые трансцендентными переда-
точными функциями. К числу обоих звеньев относятся звенья: квази-
инерционное и запаздывания.
3.7. Дифференциальные уравнения, переходные
и частотные функции типовых звеньев
В заключение этой главы представим математическое описание дина-
мических свойств типовых звеньев в виде сводной табл. 3.1.
81
Типовые динамические звенья и математическое описание
Звено Дифференциальное уравнение Переходная функция Хвых — хвх(0 Передаточная функция И(р)
Пропорци- ональное гвых = ^-вх у- — к Авых л И\р) = к
Интегри- рующее Т ^ВЫХ dr вх _(к_ А Хвых — 1 у R Тр
Апериоди- ческое dr T_jm+x =кх вых вх *вых ~~ r r" l-e> < J 7р+1
Квазиинер- ционное dx 7—вых_х =кх & вых вх Хвых ~ к ' L ' e T -1 < > И(Р) = ТР -1
Дифферен- цирующее идеальное . dxBX y — к ———- вых .. ш хвых ~
Дифферен- цирующее реальное т ^'вых . „ , т ^VBX 1 , -*ъых “ , dr dr х = кс лвых лс И(р) = -^- Тр +1
Колебатель- ное Т < 2Т0 7 d2x dx 7* - ВЫХ ВЫХ | 0 dr2 dr 4-х - кх вых вх X = вых Г “n t 1—y-e^sinfarh = itl zco +arctg(—) L a 1 И(р) = к Т2р2 + Тр+1
Апериоди- ческое вто- рого поряд- ка Т > 27’0 Т 2 d Хвых , d-vEblx 70 ' > 1 . + dr dr + ХВЫХ ’ X ЫХ Tie T) 1 ? > Tt-T2 _r_Y -T2e T* J. W(p) = к Т02р2 + ТР + 1' (Р(Р) = к (Т}Р + Т)(Т2р +1)
Запазды- вания XBUX (0 - ° при 0 < t < TW1 , XBUX (0 = XBX ~ 111П ) при Г > тЭ1л хвых (0 - -^вх тзап) И/(/г) = Ае"/п,Я1
82
их динамических свойств
Таблица 3.1
Комплексная амплитудно- фазочастотная функция И'(/со) Амплитудно-частотная функция Л(со) Фазочастотная функция У(ю)
B’(jm) = к А = к гр = 0
к Tj(£> Л—0- (Гео) л
1J(£> + 1 А к Vl + 72co2 = -arctg (7(0)
к = -—- 7/(0-1 А к V1 + 7’2(o2 Ф = -я + arctg(7(o)
W(ja>) = Iga А = к(£> Л V=2
= --^Ю 7/co+ 1 А £7(0 V1 + 72(o2 = arctg < 1 <7со.
W (j(£>) = к - Го2со2 + 7/(0 +1 А - к ip = -arctg со7
(1-Г02(о2) + Г2со2 1-7V L о J
И7 (j(o) = к -7Q2co2 +7/(o + l ft А - — к ц/ = —arctg ф= = -arctg! ( аТ ,(7 (о) 1
А =- (1-Т’02(о2) + Т2(о2 к (1-Т32ш2) + Т42(о2
1-Тг(ог L о J Г со) + arctf
(T3J(o + 1X7’4j(o + 1)
W(ja) = Are-'®*™ А = 1 V=-®t3an
83
В табл. 3.1 для апериодического звена второго порядка (при 7’>2Г0)
постоянные времени определяются по выражению
r34 = (T±Jr2-4702 )/2.
Математическое описание (математические модели) динамических
свойств типовых звеньев широко используются при разработке, иссле-
довании устойчивости, качества работы и настройке автоматических си-
стем. Для получения математического описания автоматической систе-
мы обычно составляют описания ее отдельных элементов. Математичес-
кая модель одной и той же системы в зависимости от цели исследования
может быть разной. Более того иногда полезно при решении одной и той
же задачи на разных этапах решения принимать разную математическую
модель: начать исследование с простейшей модели, а затем ее постепен-
но усложнять, с тем чтобы учесть дополнительные явления и связи, ко-
торые на начальном этапе исследования были отброшены как несуще-
ственные. Это обусловлено тем, что к математической модели предъяв-
ляются противоречивые требования: она должна, с одной стороны, как
можно полнее отражать свойства оригинала, а с другой стороны, быть по
возможности простой, чтобы не усложнять ее исследование.
Широко используется для математического описания автоматичес-
ких систем метод передаточных функций и тесно связанные с ним час-
тотные характеристики. Установлено, что по глубине и степени завер-
шенности частотные методы во многих случаях не имеют вполне экви-
валентной замены, а модификация их применительно к ЭВМ позволяет
получать ценную информацию об исследуемой автоматической систе-
ме в сжатые сроки.
Глава 4. ТИПОВЫЕ СОЕДИНЕНИЯ
ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
Математическое описание линейной автоматической системы в виде
системы уравнений, записанных в форме Коши, предопределяет возмож-
ность построения структурной схемы, состоящей из различно соединен-
ных пропорциональных и интегрирующих звеньев. Однако такое пред-
ставление, удобное для моделирования системы, не всегда бывает удоб-
но для ее анализа и синтеза.
Сложное соединение простых звеньев может быть преобразовано в
более простые соединения более сложных звеньев. Определив переда-
точные функции звеньев автоматической системы, можно затем найти
передаточную функцию системы в целом, решая систему элементарных
алгебраических уравнений вида (2.16) методом последовательного ис-
ключения промежуточных входных и выходных переменных координат
звеньев. Однако понятие передаточной функции дает возможность до-
полнительно упростить задачу расчета АСР, так как при этом передаточ-
ную функцию системы, состоящей из нескольких соединений звеньев,
можно определить непосредственно по передаточным функциям ее зве-
ньев, не решая системы алгебраических уравнений. Каждая передаточ-
ная функция соответствует некоторому динамическому звену. А динами-
ческое звено — это математическая модель элемента (или части сложно-
го элемента), которая отображает лишь его динамические свойства, а не
физическую сущность происходящих в нем процессов.
В автоматических системах звенья могут соединяться в самых раз-
личных сочетаниях. Однако систему любой сложности можно всегда рас-
сматривать как совокупность трех видов соединений элементарных зве-
ньев: последовательного, параллельного и встречно-параллельного
85
4.1. Последовательное соединение
При последовательном соединении звеньев выходная величина пре-
дыдущего звена является входной величиной последующего. Так, для трех
последовательно соединенных звеньев, показанных на рис. 4.1, имеем
^1вых =^2вх:^2вых =^вых- Вх°Дной величиной Хвх всего соединения слу-
жит входная величина первого звена. Выходной величиной Авых соеди-
нения является выходная величина последнего звена.
б
*1 ж *2вх »2(р) Х3вх ^3(Р) Х3вых
-Хвх " Х1вых Х2вых Хвх
Рис. 4.1. Структурные схемы:
а — звеньев направленного действия; б — последовательного соединения
трех звеньев
В соответствии с выражением (2.16) имеем
*1вых(Р) = W *1вх(Р): *2вых(Р) » W *2вх(^ ХЪъ^(р) = W.(p) х
X Х3вх(р). Учитывая, что Х3вх(р) = Х2вых(р) и Х2вх(р) = Х1вых(р), находим
А3вых(/9) = W W2^ X2bx^) = W И2<^) W 1(р) А1вх<М Так как пеРе‘
даточная функция соединения W(p) = Хвык(р)/ Хвк(р), то с учетом того,
что ^Звх^) = *вых<Р) и Х1вх<^) = ^вх^)’ получаем
Н'(р) = ^(р) ^2(р)
Таким образом, передаточная функция системы последовательно со-
единенных звеньев
п
= П Wi(p). (4.1)
1=1
При этом модули комплексных частотных функций перемножаются, а
аргументы складываются.
п п
Л(со) = ; = X ’ (4-2)
i=l i=l
При последовательном соединении звеньев логарифмические ампли-
тудно-частотные и фазочастотные характеристики отдельных звеньев
складываются.
86
При последовательном соединении минимально-фазовых звеньев полу-
ченная система также будет минимально-фазовой, т. е. ее передаточная функ-
ция не будет иметь ни нулей, ни полюсов в правой полуплоскости переменно-
го р. Действительно, если каждый из сомножителей произведения (4.1) не
имеет ни нулей, ни полюсов в правой полуплоскости р, то тоже можно сказать
и об их произведении. Аналогично можно показать, что если хотя бы одно из
последовательно соединенных звеньев неминимально-фазовое или неустой-
чивое, то и вся система будет неминимально-фазовой или неустойчивой.
Пример 4.1. Определить характеристики последовательного соеди-
нения интегрирующего и апериодического инерционного звеньев.
Если последовательно соединяются два звена с передаточными функци-
ями Wx(p)= Мр и ff^2(p)= МД + 7р), то передаточная функция соединения
W(p) = ^(р) W2(p) = к/ [р (1 + 7»]. (4.3)
Этой системе соответствует линейная модель тягового электродвигателя
постоянного тока с инерционной нагрузкой на вале, если входной величи-
ной считать напряжение питания якоря, а выходной — угол поворота вала.
Комплексная частотная функция системы
= A/[ /cd (1 + Тусо)].
(4.4)
При 0 < со < оо она описывает характеристику (годограф) системы.
Преобразовав выражение (4.4) и выделив действительную и мнимую
части, получим
ИД/со) = - кТ/(\ + Г 2 со2) -yW(l + Т2ы2).
(4.5)
Из выражения (4.5) видно, что при со —> оо характеристика уходит в
бесконечность, перемещаясь по вертикальной прямой, проходящей че-
рез точку (АТ,уО). Эта прямая является асимптотой для рассматриваемо-
го годографа.
Переходную функцию последовательного соединения находят по его
передаточной функции и получают простым суммированием функций
отдельных звеньев:
t >
к 1
вых к 1 + Тр р
1-е
(4.6)
При последовательном соединении идеального дифференцирующего
и инерционного звеньев получается реальное дифференцирующее звено.
87
Пример 4.2. Определить характеристики последовательного соеди-
нения jeyx инерционных звеньев.
Передаточная функция двух последовательно соединенных звеньев с
передаточными функциями И ( = Л((1 + рТу) и ГК, = к2(\ + рТ2) имеет вид
И(р) = W{(p) W2(p) = kx к2 /[(I +/зГ])(1 +рТ2)]. (4.7)
Комплексная частотная функция системы
#V<o) = к / [(1 + > Ту) (1 + >Г2)1. (4.8)
где к = A j к2.
Выражения (4.7) и (4.8) совпадают с соответствующими функциями
апериодического звена второго порядка, динамическими свойствами ко-
торого обладают гидромуфты. Поэтому частотные характеристики со-
единения аналогичны характеристикам, показанным на рис. 3.11, однако
точка пересечения амплитудно-частотной характеристики с мнимой осью
лежит ближе к началу координат, чем точка 2
По передаточной функции (4.7) находим переходную функцию:
= к 1- 71с
(4.9)
При Ту = Т2 или а = 1 решение получается путем предельного устрем-
ления Т2 -> Ту и раскрытия неопределенности типа 0/0. В этом случае
t
вых (0 ~
1- 1+— е
I 71J
(4.Ю)
Если Т2 —> 0, то система вырождается в одно инерционное звено с
постоянной времени Ту
При 0 < Т2 < Ту временные переходные характеристики системы ле-
жат в промежуточной области между характеристиками, полученными
для Т2 = 0 и Т2 = Ту.
4.2. Параллельное согласное соединение
Параллельное соединение звеньев вст речается двух видов: согласное
(рис. 4.2, а) и встречное (рис. 4.2, б).
88
Рис. 4.2. Структурные схемы соединений звеньев:
а— параллельного согласованного; б — параллельного встречного
Входная величина системы, состоящей из параллельно соединенных
звеньев, одновременно подается на входы всех звеньев, а ее выходная
величина равна сумме выходных величин отдельных звеньев.
На рис. 4.2, а приведена структурная схема системы, состоящей из
трех параллельно соединенных звеньев: xullv =х. _,.¥ + _.lv.
г 1 НЫЛ I выл X. выл J выл
Приведем изображения через их передаточные функции
„uxW = " >1 Хт(рУ. w Хт(рУ А3 вык(р) = ^(р) Хт(р).
Так как Хтт(р) -X, +Л'2 т„(р) + Л'3 вых(р), то находим Х„ых(/>) =
= [^|(р) + W2(p) + W3(p)] ¥вх(р). Передаточная функция системы
п
hw= ^(р) + ^ + и'3о?) = «и)
1=1
Таким образом, передаточная функция системы, содержащей параллель-
но соединенные звенья, равна сумме передаточных функций звеньев.
При параллельном согласном соединении звеньев также складывают-
ся переходные и весовые функции. Комплексная частотная функция сис-
темы получается путем сложения действительных и мнимых частей ком-
плексных частотных функций звеньев:
н п п п
^(/•(1))= £a<(jw) + j£/V,(./m). (4.12)
1=1 z=l /=1 /=1
При параллельном соединении устойчивых звеньев результирующее зве-
но (система звеньев) также оказывается устойчивым. Это вытекает из того,
что общий знаменатель суммы дробей не может иметь иных корней, кроме
корней слагаемых, и, следовательно, отсутствие полюсов слагаемых в пра-
вой полуплоскости исключает возможность появления таковых в сумме.
Иначе обстоит дело с условием минимальной фазы. Сумма минималь-
но-фазовых передаточных функций может иметь нули в правой полу-
89
Рис. 4.3. Схема и характеристики параллельного соединения двух
инерционных звеньев:
а — структурная схема; б — амплитудно-фазовые характеристики (годографы)
плоскости и, следовательно, параллельное согласное соединение ряда
минимально-фазовых звеньев может дать минимально-фазовую систе-
му. Наоборот, при параллельном соединении неминимально-фазовых
устойчивых звеньев может получиться минимально-фазовая устойчивая
система.
Пример 4.3. Определить частотную характеристику согласного па-
раллельного соединения двух инерционных звеньев, включенных с оди-
наковыми знаками (рис. 4.3, а).
Комплексная частотная функция системы
ИХ/м) = А, / (1 + / to 7,) + к2 / (1 + усоГ2). (4.13)
В зависимости от соотношения Т} и Т2 годограф имеет различный
вид. Если Г) » Т2, то частоты, при которых конец вектора ИХ/to) пробе-
гает окружности слагаемых, оказываются различными; суммарный го-
дограф имеет вид двух полуокружностей 1 и 2 радиусов A j и Л2 (рис. 4.3, б).
Если постоянные времени и Тэ мало отличаются, то конец вектора
И'(/со) описывает некоторую плавную кривую 3. Если же Г, = Т2, то го-
дограф имеет вид полуокружности 4 диаметром к^+ к.
Пример 4.4. Определить частотную характеристику согласного па-
раллельного соединения двух инерционных звеньев, включенных с раз-
ными знаками (рис. 4 4, а).
При этом комплексная частотная функция
_ К___________^2 _ (^'1 ~ ^'2)+ 7е0 (^'1Т2 - к2Т\)
W(7to)- 1+7O)7i 1 + 70)г2 (l + >7i)(l + jcor2) • (4J4)
90
Рис. 4.4. Схемы и характеристики параллельного соединения двух инерционных
звеньев, включенных с разными знаками:
а — структурная схема; б — амплитудно-фазовая характеристика при разных
значениях коэффициентов передачи; в — то же при одинаковых значениях коэф-
фициентов передачи
Если кх > к2 и к\Т2 < к2Т\, то система неминимально-фазовая и
имеет нуль в правой полуплоскости. Амплитудно-фазовая характеристи-
ка (годограф) для этого случая показана на рис. 4.4, б.
Если к} = к2, то
IV(Ja) = [j<i>(.klT2-k2 Г|)]/[1 +/<о(Г| + Г2) + (/а)2 Г|Т-2]. (4.15)
Для этого случая годограф принимает вид полной окружности (рис. 4.4, в),
имеющей диаметр - Т2)/(Т1 + Т2) и при частоте со = l/^TjT^, прохо-
дящей через точку /J[A( (7) - Т2)/( Т} + 7’2)], /0.
При A годограф аналогичен изображенному на рис. 3.17, а
и соответствует звену второго порядка.
4.3. Параллельное встречное соединение
Параллельным встречным соединением или соединением с обратной
связью двух звеньев называется такое соединение, при котором выходной
сигнал первого звена подается на вход второго, а выходной сигнал второго
звена с соответствующим знаком суммируется с общим входным сигна-
лом системы и подается на вход первого звена. Общим выходным сигна-
лом системы является выходной сигнал первого звена (см. рис. 4.2, б).
Звено, в котором направление передачи сигналов совпадает с направ-
лением передачи общего сигнала (первое звено), называется звеном пря-
мой связи, а звено, в котором направление передачи сигнала противопо-
91
ложно направлению передачи общего сигнала (второе звено), называет-
ся звена» обратной связи выхода первого звена с его входом.
Если знак выходного сигнала звена обратной связи положителен, т.е.
он суммируется с общим входным сигналом, то обратная связь называет-
ся положительной. Если выходной сигнал звена обратной связи отрица-
телен, т.е. если он вычитается из общего входного сигнала системы (см.
рис. 4.2, б), то обратная связь называется отрицательной.
Параллельное встречное соединение звеньев представляет собой та-
кое сочетание последовательного и параллельного соединений, при ко-
тором звенья прямой и обратной связи соединены между собой последо-
вательно в виде замкнутого кольца, а внешний входной сигнал подается
к общей точке входа первого и выхода второго звеньев. Уравнения парал-
лельного встречного соединения звеньев:
1) входа:
для положительной обратной связи
*1 вх — *вх х2 вых’ (4.16)
для отрицательной обратной связи
*1 вх — Хвх х2 вых’ (4-17)
эти уравнения называются уравнениями замыкания;
2) выхода
Х вых = *1 вых = Х2 вх- (4-18)
В теории колебаний обычно рассматривают цепи с положительной
обратной связью и пользуются уравнением (4.16).
В теории автоматических систем рассматривают соединения звеньев
с отрицательной обратной связью и пользуются уравнением (4.17), кото-
рое принимают за основу в дальнейшем.
Рассматривая совместно уравнения (4.17) и (4.18) и имея в виду, что
Авых(Р>= ^(р)Лгвк(р);Л] вых(р)= (р)^ вх(р);
^2вых(Р)=^2(Р)^2вх(Р)’
(4-19)
получаем
Л'| И(Р) = У внх(рУ <Р) = л;х(р) - И'2 (р) Л-вых(р), (4.20)
откуда
*вых(Р) = (Р) ^вхСрИ1 + (Р) W2 (Р)]
(4.21)
92
или
Хп(р) = И', (₽)/[! + И-| (/>) Ч'2 (₽)]• (422)
Для звеньев с дробно-рациональной передаточной функцией
И' (р) = k}(p)/Dr(py, И2 (р) = k2(p)ID2(p)- (4.23)
уравнение (4.22) может быть записано как
W(p) = k\(p)D2(p) /[ кх(р) к2(р) + D}(p) D2(p)]. (4.24)
Из рассмотрения этого уравнения следует, что нули W (р) совпадают с
нулями и полюсами Иу (р) и W2 (р). Таким образом, устойчивые звенья
при параллельном встречном соединении могут образовать неустойчи-
вую систему. Наоборот, соединение звеньев, среди которых имеются не-
устойчивые, может оказаться устойчивой системой.
Комплексная частотная функция системы
И7 (/со) = (/со)/[1 + Wj (/со) Ж2 (/со)]. (4.25)
Если звено обратной связи представляет собой пропорциональное
звено И^2(р) = к^, то обратная связь называется жесткой или пропорцио-
нальной.
Если звено обратной связи представляет собой дифференцирующее
звено W2(p) = к2Т2р или И^2(р) = к2Т2р/( 1 + рТ2), то обратная связь назы-
вается гибкой или дифференцирующей.
Если звено обратной связи представляет собой интегрирующее $вено
fK2(p) = к21рТ2, то обратная связь называется интегрирующей.
Некоторые из типовых динамических звеньев могут быть приведены
к встречному параллельному соединению более простых звеньев.
Пример 4.5. Определить передаточную функцию системы, содержа-
щей интегрирующее звено, охваченное жесткой обратной связью, при
этом №\(р) = кх/р; W2(p) = к2.
Подставляя JVt(p) и ^2(р) в формулу (4.22), получаем
М(р) = кх/ (кх Л'2 + р) = к/( \ + рТ),
где к = 1/ ку Т= 1/( к} к2).
Таким образом, встречное параллельное соединение интегрирующе-
го (например, гидроусилителя) и пропорционального (например, рыча-
га) звеньев образует инерционное звено (см. п. 3.3) (например, механизм
привода реики гидромуфты вентилятора)
93
Пример 4.6. Определить передаточною функцию системы, содержа-
щей пропорциональное звено, охваченное интегриру юшей обратной свя-
зью, при этом И t(p) = кг И2(р) = к2 р. Подставляя »’j(p) и И’,(р) в фор-
мулу (4.22), получаем
»(р) = к{р (кх к2+р) = кр (1 + рТ).
где к = 1 к2; Т = 1 ( к2)
Таким образом реальное дифференцирующее звено (см. п. 3.4) может
быть получено нулем встречного параллельного соединения пропорцио-
нального и интегриру ющего звеньев.
Пример 4.7. Определить передаточную функцию системы, содержа-
щей последовательное соединение интегриру ющего и инерционного зве-
ньев. охваченное жесткой обратной связью, при этом
JTj(p)=lp, И2(р) = Л2 (1+рГ,) и И3(р) = А3.
Используя формулы (4 1) и (4.11), получаем
1Г(р) = к2р (к2 к3 + р+ р2Т2) = к (1 + 2аТр 4- Т2 р\ (4.26)
где к = 1 i3; 7Г2 ,к1к3 ; а = 1 2 -\1к2кЗТ2
Таким образом, звено второго порядка (см. п. 3.5) может быть получе-
но путем охвата жесткой обратной связью последовательно соединен-
ных интегрирующего и инерционного звеньев. Все рассмотренные в гл. 3
типовые динамические звенья могут быть сведены к различным соеди-
нениям двух простейших элементарных звеньев: пропорционального и
интегрирующего.
Разработанные инженерные методы определения оптимальных парамет-
ров настройки автоматических регуляторов и систем рассчитаны на стан-
дартный вид структурной схемы автоматической системы, содержащей два
звена: объект регулирования и автоматический регулятор с передаточными
функциями соответственно И^р) и Ир(р). В связи с этим, обусловив ис-
ходную структурную схему системы в ваде определенным образом соеди-
ненных ее элементарных звеньев и найдя их передаточные функции, необ-
ходимо последовательно упрощать структуру этой схемы, приводя ее к стан-
дартному виду по правилам эквивалентного преобразования.
С учетом приведенных в этой главе формул для нахождения переда-
точных функций соединений звеньев основными правилами эквивалент-
ного преобразования структурных схем являются:
94
Рис 4.5. Структурные схемы соединений при переносе:
а—г — внешнего воздействия; д—з — точки присоединения отходящей
структурной связи
1) согласно формуле (4.1) и рис. 4.1 звенья, соединенные последова-
тельно. можно заменить одним звеном с передаточной функцией, равной
произведению передаточных функций последовательно соединенных
звеньев;
2) согласно формуле (4.11) и рис. 4.2, а звенья, соединенные парал-
лельно, можно заменить одним звеном с передаточной функцией, рав-
ной сумме передаточных функции параллельно соединенных звеньев;
3) звенья, соединенные встречно-параллельно (см. рис. 4.2, б), можно
заменить одним звеном с передаточной фу нкцией, определяемой по фор-
муле (4.22);
4) внешнее воздействие (возмущающее или задающее), приложен-
ное к выходу звена (рис. 4.5, а) с передаточной функцией И'(, можно пе-
ренести на его вход (рис. 4.5, б), поместив между воздействием и входом
звена дополнительное звено с передаточной функцией 1 IV
5) внешнее воздействие с, приложенное к входу звена (рис. 4.5, в) с
передаточной функцией Ир можно перенести на его выход (рис. 4.5, г).
95
поместив между воздействием и выходом звена дополнительное звено с
той же передаточной функцией Ир
6) точку присоединения любой отходящей структурной связи от вы-
хода звена, имеющего передаточную функцию Wx (рис. 4.5, Э), можно
перенести на его вход, включив в эту связь дополнительное звено с той
же передаточной функцией (рис. 4.5, е);
7) точку присоединения любой отходящей структурной связи от вхо-
да звена с передаточной функцией (рис. 4.5, ж) можно перенести на
его выход, включив в эту связь дополнительное звено с передаточной
функцией l/FPj (рис. 4.5, з).
С помощью перечисленных правил структурные схемы с перекрест-
ными связями можно преобразовать в структурные схемы без перекрест-
ных связей, многоконтурные автоматические системы представить экви-
валентными одноконтурными, а также выделить линейную часть в нели-
нейных автоматических системах.
4.4. Уравнение динамики и характеристики
одноконтурной разомкнутой системы
Одноконтурной называется автоматическая система, состоящая из
последовательно включенных звеньев. Любая автоматическая систе-
ма регулирования представляет собой замкнутую автоматическую си-
стему. Однако в целях облегчения исследования систему удобно рас-
сматривать как разомкнутую. Для превращения замкнутой системы в
разомкнутую необходимо разорвать одну из связей контура воздей-
ствий одного звена на другое. Тепловозные автоматические системы
имеют несколько мест, где возможен условный разрыв контура регу-
лирования. Практически удобнее разрывать контур путем отключе-
ния исполнительного механизма от регулирующего органа или изме-
рительного устройства (датчика) регулятора от объекта регулирова-
ния. Концы нарушенной связи следует рассматривать как вход и вы-
ход разомкнутой системы.
Допустим, что имеется замкнутая одноконтурная динамическая си-
стема (рис. 4.6, а). Разомкнем ее контур между п и первыми звеньями
(рис. 4.6, б). В результате получим соединение, состоящее из последова-
тельно включенных звеньев. Допустим, что соединение содержит п зве-
ньев с различными передаточными функциями вида
W(p) = k-, W(p) = klD(py, W(p) = K(p)-, W(p) = K(p)/D(p).
96
Рис. 4.6. Структурные схемы систем:
а — замкнутой; б — соответствующей ей разомкнутой
Для этой системы последовательно соединенных звеньев передаточ-
ная функция в общем случае представима в виде
^(p)= Wt(p) W2(p)... Wn(p) = K(p)/D(p). (4.27)
Дифференциальное уравнение динамики разомкнутой системы име-
етвидхВыХ=^)хвх
или
ад^вых=ад^вх- (4-28)
Уравнение свободного движения разомкнутой системы
ад*вых = 0- (4-29)
Характеристическое уравнение для такой системы
D(p) = 0. (4.30)
4.5. Уравнение динамики и характеристики замкнутой
одноконтурной системы
Допустим, что имеется разомкнутая система, состоящая из последо-
вательно включенных звеньев (см. рис. 4.6, б).
Замкнем систему, подав выходную величину на вход (см. рис. 4.6, а), и
рассмотрим ее без внешнего возмущения. Следует учесть, что по принципу
действия системы увеличение хвых должно приводить к уменьшению хвх:
*ВХ *ВЫХ ~Х’ (431)
Уравнение движения замкнутой автоматической системы на основа-
нии выражения (4.28)
[D(p) + Х(р)] х = 0. (432)
97
Рис. 4.7. Структурная схема замкнутой системы при наличии внешнего
возмущения на входе первого звена
Под величиной х здесь можно понимать воздействие или величину
любого звена, так как система может быть разомкнута в любом месте.
Разделив почленно равенство (4.32) на D(p), получим уравнение движе-
ния замкнутой системы
[1 + JF(p)]x = 0. (4.33)
Характеристическое уравнение замкнутой системы
1 + И7(Р) = 0. (4.34)
В частотном случае замкнутая система может находиться под воздей-
ствием внешнего возмущения хвх поданного на вход первого звена (рис. 4.7).
В этом случае на вход первого звена действует разность воздействий
^' = xBx-XBUx- <4-35)
Зная передаточную функцию разомкнутой системы, можно написать
уравнение движения для замкнутого состояния
Хвых = *X = W(p) <*вх - Лвых)
или
[WV) + 1] Хвых = Хвх. (4.36)
Отношение хвых/хвх, соответствующее при нулевых начальных усло-
виях отношению ^ВЫХ/А'ВХ, называют передаточной функцией замкнутой
системы и определяют
^ф)=ИН^)+1]. (4.37)
Выражение (4.37) устанавливает связь между передаточными функ-
циями замкнутой и разомкнутой систем для случая внешнего возмуще-
ния на входе первого звена.
В общем случае возмущение может быть приложено к любой точке
контура регулирования автоматической системы. Предположим, что воз-
мущение имеет величину £,(/) и приложено к точке с координатой х^, не-
соответствующей рассматриваемой координате хп (рис. 4.8). Разомкнем
98
Рис. 4.8. Структурная схема замкнутой одноконтурной системы с внешним
возмущением
систему нарушением связи, по которой передается воздействие хп. Пусть
участок разомкнутого контура от входа до точки приложения возмуще-
ния характеризуется Кх(р) и Dx(p), а остальной участок контура — К2(р)
и D2(p). Тогда для первого участка
Dx(p}xf=Kx(p) хвх;
для второго участка
хп = +Л/)]-
Исключая промежуточную координату.^, получаем уравнение разом-
кнутой системы
D(p) хп = К(р) хвх + D,(p) К2(р) (4.38)
где D(p) = Dx(p)D2(pY, К(р) = Кх(р) К2(р).
После замыкания системы, когда xov = получим
[D(p) + ВД] Хп = DX(P) кх(р) (4.39)
Это уравнение описывает динамические свойства одноконтурной зам-
кнутой автоматической системы в общем случае, когда точка приложе-
ния возмущения к системе и точка, соответствующая рассматриваемой
координате, не совпадают.
4.6. Частотные функции и характеристики разомкнутых
и замкнутых автоматических систем
Потребность в частотных функциях и характеристиках возникает как
при проектировании автоматических систем, так и при исследовании,
настройке и эксплуатации спроектированных или уже выполненных си-
стем. Например, амплитудно-частотные характеристики АСР позволяют
99
оценивать воспроизведение гармонического задающего воздействия и
гашение гармонического возмущения при разных частотах.
Логарифмические амплитудно-частотная и фазочастотная характери-
стики разомкнутой системы часто используют для проверки устойчиво-
сти и качества работы систем, а также для выбора элементов, обеспечи-
вающих требуемые динамические свойства системы. По вещественной
частотной характеристике системы легко построить приближенную вре-
менную переходную характеристику.
Для построения АФЧХ должна быть известна передаточная функция
разомкнутой системы или экспериментально полученная АФЧХ объекта
регулирования и передаточная функция регулятора ^(р).
В первом случае по передаточной функции ГГ(р) нужно определить
комплексную частотную функцию РГ(/со) и затем представить ее в алгебраи-
ческом или показательном виде.
После подстановки р = усо в передаточную функцию W(p) = K(p)D(p)
получим
(Л/и +J WpM МР +JNP), (4.40)
где — коэффициент передачи разомкнутой системы, равный произведению
коэффициентов передачи объекта регулирования кр и регулятора £р;
A/p, Np, Мр, ДГр — полиномы от со.
Чтобы представить И (у‘со) в алгебраическом виде, нужно числитель и
знаменатель умножить на комплексное число, сопряженное со знаме-
нателем, и затем отделить действительную часть Л/(со) от мнимой
В результате получим
[(Ми +уАи)( Мр -jNp)] / [(Мр +jNp)( Мр -jNp)] = M+JN.
(4-41)
Затем целесообразно сначала определить характерные точки АФЧХ
при предельных значениях со (со = 0 и со = со) и пересечении характери-
стики с осями координат.
Частоты, при которых характеристика пересекает ось ординат или ось
абсцисс, находят так:
М=0, т.е. Мр Мр + Np = 0; (4.42)
N = 0, т.е. Мр + Np Мр = 0. (4.43)
Искомыми частотами являются действительные положительные зна-
чения частоты. Найденные значения частот позволяют определить по
100
равенствам (4.42) и (4.43) значения ординат и абсцисс, при которых АФЧХ
пересекает эти оси.
После нанесения характерных точек на комплексную плоскость М,
JN вырисовывается приближенное расположение АФЧХ. Если необходи-
мо иметь точное ее расположение, то можно установить, при каких зна-
чениях частоты необходимо вычислять значения М и JN и наносить до-
полнительные точки. Таким образом, предварительное определение ха-
рактерных точек АФЧХ существенно упрощает расчет, особенно если он
производится вручную.
Пример 4.8. Построить АФЧХ разомкнутой АСР, если ее передаточ-
ная функция
W(p) = /срс (Тр + 1)/(«оР4 + а}р3 + а^р2 + а^р + 1),
гдеЛрс=15; Т=0,15с; aQ = 0,0002 с4; а, =0,006 с3; а2 = 0,08с2; а3 = 0,5 с.
Определим комплексную частотную функцию и выделим ее действи-
тельную и мнимую части:
PE(/co) = Арс (1 + jco7)/[(l - «2со2 + «0(о4 )+ /со (а3 - сс/о2)] = М +jN,
где М = к В, /В; W = к В2 /В.
Здесь
В} = 1 + (7а3 - а2) со2 + («0- Та}) со4 = 1 - 5-10~3со2 - 7-1ОЛо4;
В = 1 + (а2 — 2а2) со2 + (а2 + 2а0 - 2Д| а3) со4 +
+ (а2 - 2 я0а2) со6 + со8 = 1 + 0,09 со2 + 8-10Ло4 + 410-6(о6 + 4 1СГ8со8;
В2 = со [(Т- д3) + (а, - Та2) со2] = - со(О,35 + 610Ао2 - 3105со4)
Определим значения MwN при предельных значениях частоты:
Л/(0) = к Вх (0) /В (0) = к = 15; N= к В2 (0) /В (0) = 0;
N И = *рс В\ ^/В (°°) = °’ М00) = *рс В2 (оо) /В (оо) = о.
Составим условие пересечения АФЧХ оси координат:
В} = 0, т.е. 1 - 5 10-Зсо2 — 7-10Ло4 = 0.
Полученное биквадратное уравнение имеет один положительный дей-
ствительный корень СО| = 5,86. Следовательно, АФЧХ пересекает ось ор-
динат при со = со( и 7V((0]) = Лрс В2 (сор IB (coj) = -8,65.
101
Составим условие пересечения АФЧХ оси абсцисс:
В2 = со(0,35 - 610 W - 310 5со4 ) = 0.
Биквадратное уравнение 0,35 - 610-3со2 — 310 5со4 = 0 имеет один
действительный положительный корень со2 = 15,7. Следовательно, АФЧХ
пересекает ось абсцисс при со = со2 и Л/(со2) = Арс В|(со2) /В (со2) = - 2,29.
Полученные результаты и выражения для М и N позволяют сделать
следующее заключение о расположении АФЧХ при разных частотах:
<о = 0; М= 15; А=0;
0 < со <5,86; Л/>0; А<0;
(0 = 5,86; Л/=0; А = -8,65;
5,86 <(о< 15,7; Л/<0; А<0;
(0=15,7; М=-2,29; W=0;
15,7 < со < со; М<0; А>0;
со = со; М= N = 0.
На основании этих сведении построена ориентировочная АФЧХ
системы (рис. 4.9, о). По ней уже можно решить вопрос, например, об
Рис. 4.9. Амплитудно-фазовые частотные характеристики автоматических
разомкнутых систем:
а — четвертого порядка; б — третьего порядка
102
устойчивости данной системы в замкнутом состоянии (см. гл. 5). Для
уточнения АФЧХ следует вычислить значения М и N при со = 2, 4, 10,
13, 25 и 50 с *.
Комплексную частотную функцию системы, определяемую выраже-
нием (4.40), можно представить в показательном виде
ИХ/<о) = Л(ю)е>'»,(“), (4.44)
где Л(со) = А /(Л/2 + А2)(Л/2 + Л'2); v|/(co) = arctg (Л/ Л/)-
Н4, ’у U. р р р. Н г*-
-arctg(Ар/Л/р) = -arctg [(7Vm/^p+7Vp/Mm)/(Mm Wp + Ap/7Vp)]. (4.45)
По формулам (4.45) можно вычислить длины и углы сдвига по фазе
векторов IV (/со) при различных значениях частоты и затем построить
АФЧХ. Предварительно целесообразно определить ее характерные точ-
ки при со = 0, со = со и точки пересечения с осями ординат. Условиями
пересечения характеристикой системы осей ординат и абсцисс являются
соответственно равенства
tg \|/ = оо, т.е. Л/р Л/р + Ар Ар = О-
(4.46)
lg\|/ = 0, т.е. Л/р Л/р - Ар Ар = О-
Пример 4.9. Построить АФЧХ разомкнутой АСР, описываемой пере-
даточной функцией
= ^рс (Тр + 1)/(аоР3 + ахр2 + а^р + 1),
где С =2; 7=0,25; ао = 0,002с3; а. =0,075 с2; а, = 0,2 с.
pt- V 1 а.
Определим комплексную частотную функцию
И (/со) = Арс( 1 + /со7)/( 1 - t/j со2) + /со(а2 - о0со2) А е7^,
где Л(ы) = к J(A/2 + АЪ(Л/2 + A2). \|/(w) = - arctg(A Л/) - arctg(A/Л/).
* 1 г* г* г Н • г* г г
Здесь А = Тео = 0,25 со; Л/ = 1 - я.со2 = 1 - 0,075 со2,
н р
Ар = со (а2 - а0со2) = со(0,2 - 0,002со2).
103
При предельных значениях частоты
Л(0) = к = 2;
\|/(0) = 0; /1(оо) = 0.
Условие пересечения АФЧХ оси ординат:
(1 - 0,075со2) + О,25со2(О,2 - 0,002со2) = 1 - О,О25со2 - 0,005со4 = 0.
Из этого уравнения определим действительное положительное значе-
ние частоты со2 = 5,12.
Условие пересечения АФЧХ оси абсцисс:
0,25со (1 - О,О75со2) - со (0,2 - 0,002 со2) = со(0,005 - 0,01675со2) = 0.
Этому уравнению удовлетворяет действительное положительное зна-
чение частоты (0| = 1,74.
Итак, АФЧХ системы начинается на оси абсцисс и /1(0) = 2. Затем при
СО] = 1,74 эта ось пересекается, и при со2 = 5,12 пересекается ось ординат.
Заканчивается характеристика в начале осей ординат. На основании этих
сведений наметим частоты для вычисления А и у: со = 1; 1,74; 3; 4;
5,12; 7; 10; 20; 30 и 40.
Результаты вычислений, которые удобно свести в таблицу, соответ-
ственно:
А = 2,18; 2,58; 3,93; 4,03; 2,64; 1,46; 0,83; 0,33; 0,18 и 0,04; у = 2; 0;
-22,3; -61,6; -90,0; -104,8; -111,8; -123,8; -133,4 и-140,7 град.
Теперь можно построить АФЧХ (рис. 4.9, б). Для каждой частоты со;
проведем радиус-вектор под углом \|/f (угол отсчитывается от поло-
жительной действительной полуоси по часовой стрелке), на него на-
несем точку на расстоянии Л, от начала осей координат. Полная кри-
вая, соединяющая эти точки, является искомой АФЧХ разомкнутой
системы.
Иногда возникает задача построения АФЧХ разомкнутой АСР по час-
тотным характеристикам (или функциям) Яр(со) и \|/^(cd) объекта регули-
рования и частотным характеристикам /1р(со) и vgp(co) регулятора. Комп-
лексная частотная функция последовательного соединения элементов
равна произведению комплексных частотных функций этих элементов,
поэтому
104
A (co) = Лм(со)Лр(со) и у(со) = Vp(co)v|/p(ro).
Данное соотношение позволяет вычислить значения Л(со) и \|/(со)
при различных частотах и построить АФЧХ разомкнутой системы.
Если частотные характеристики Ар и объекта регулирования по-
лучены экспериментально, то и значения частотных характеристик Ар и
\|/р следует вычислять при тех же частотах, при которых проводился экс-
перимент.
Между частотными характеристиками разомкнутой и замкнутой сис-
тем существуют вполне определенные связи В системе с единичной
обратной связью комплексная частотная функция замкнутой системы
(см. (4.37))
FK3(/cd) = Ж(/со) / [(1 + FK(/w)]. (4.47)
Равенство (4.47) определяет связь между, частотными характеристи-
ками замкнутой и разомкнутой систем. Подставив в равенство (4.47)
ИХ/со) = М +jN~, ^(/сй) ~P+jQ
и разделив его действительную и мнимую части, получим
„ [M(l + M) + №] .. zl .N
(l+Af)W (1 + Л/)2 +N2
(4.48)
Равенства (4.48) определяют зависимость вещественной Р и мнимой Q
частотных функций замкнутой системы от вещественной М и мнимой N
частотных функций разомкнутой системы.
Подставим в равенства (4.48) №3(/со) = и ИХ/со) = М+jQ, выде-
лим модуль и аргумент:
V = 7(Л/2 +А2)/[(1 + Л/2) + А2] ; © = arctg [N/M(l + М) + А2]. (4.49)
Равенства (4.49) определяют зависимость амплитудной V и фазовой 0
частотных функций замкнутой системы от вещественной и мнимой час-
тотных функций разомкнутой системы.
Составим равенства, определяющие зависимость частотных функций
разомкнутой системы от вещественной и мнимой частотных функций
замкнутой системы:
105
(i-P)2+22 (i-P)2+(?2
A =±
P2+Q2
(l-P)2+(?2
v|/ = arctg э
-P)-<T
(4.50)
Для определения частотных характеристик замкнутой системы по
вещественной и мнимой частотным характеристикам разомкнутой сис-
темы вместо формул (4.49) и (4.50) можно использовать графический
метод круговых диаграмм. Точность расчетов при этом ниже, но все же
достаточна для практических целей.
Суть метода круговых диаграмм заключается в следующем. Формулы
(4.49) и (4.50) можно рассматривать как уравнения кривых в системе ко-
ординат Л/, jTV, каждая из которых определяет некоторое постоянное зна-
чение соответственно Р, Q, Гили ц/. Уравнения всех этих кривых есть
уравнения окружностей.
Поэтому, задавшись различными значениями, предположим характе-
ристики Р. можно построить семейство окружностей в системе ординат
М, jN, и это будет вещественная круговая диаграмма. Если затем в этой
же системе ординат построить АФЧХ разомкнутого контура интересую-
щей нас системы, то по точкам ее пересечения с окружностями семей-
ства можно определить вещественную частотную характеристику этой
системы в замкнутом состоянии. Точка АФЧХ, соответствующая некото-
рой частоте со, и совпадающая с окружностью р = Ра, определяет значе-
ния Р при частоте со,, т.е. Р (со,) = Р
Точно так же строят и используют мнимую, амплитудную и фазовую
круговые диаграммы.
Вещественная круговая диаграмма (рис. 4.10, а) состоит из окружно-
стей радиуса г, с центрами, расположенными на действительной полу-
оси на расстоянии dj от начала осей координат:
г,= 1/2|1-Р|; c/f = -(l -2Р)/2(1 -Р). (4.51)
Все окружности пересекают ось абсцисс в критической точке с ко-
ординатами [-1; у0]. При Р-\ окружность вырождается в прямую,
которая проходит через эту точку параллельно оси ординат и делит всю
диаграмму на две области. Левая область соответствует значениям Р > 1,
106
Рис. 4.10. Вещественная круговая диаграмма автоматических систем:
а — полная; б — вблизи точки с координатами [-1, у0]
правая — значениям Р < 1. Область, соответствующая отрицательным
значениям Р, ограничивается окружностью, проходящей через начало
осей ординат и критическую точку. Часть вещественной круговой диаг-
раммы, прилегающая к критической точке, показана на рис. 4.10, б.
Мнимая круговая диаграмма состоит из окружностей радиуса г , цен-
тры которых расположены на прямой, проходящей через критическую
точку [— 1; у'0] параллельно оси ординат, и отстоят от действительной
оси на расстоянии de:
de=U2Q.
(4.52)
107
При Q = 0 окружность вырождается в прямую, совпадающую с осью
абсцисс и делящую диаграмму на две области. Верхняя область соответ-
ствует положительным значениям Q, нижняя — отрицательным.
Амплитудная круговая диаграмма состоит из окружностей радиуса
г центры которых расположены на оси абсцисс на расстоянии с/к от на-
чала осей ординат:
г=Г/1-Г2; d= Г2/(Г2- 1). (4.53)
к к
При И = 1 окружность вырождается в прямую, которая параллельна
оси ординат и пересекает ось абсцисс в точке с координатами [- 0,5, уО].
Область диаграммы слева от этой прямой соответствует значениям И> 1,
справа — значениям I < 1.
Фазовая круговая диаграмма состоит из окружностей, которые прохо-
дят через начало осей координат и критическую точку [- 1; у‘0].
Центры окружностей располагаются на прямой, которая параллельна
оси ординат и имеет абсциссу 0,5. Радиусы окружностей гт и их центры
отстоят от оси абсцисс на расстоянии dm:
гт = 1/2 sin 0; dm = 1/2 tg 0. (4.54)
Масштабы чертежей должны быть одинаковыми и достаточно круп-
ными. Чем крупнее масштаб, тем больше окружностей удается изобра-
зить на круговой диаграмме и тем точнее будет определена соответству-
ющая частотная характеристика замкнутой системы. Участок АФЧХ около
начала осей ординат и соответствующую область круговой диаграммы
обычно вычерчивают отдельно и в более крупном масштабе.
Основное затруднение при использовании круговых диаграмм и при-
чина погрешностей заключаются в определении частот, соответствую-
щих точкам пересечения АФЧХ с окружностями.
4.7. Передаточные функции и характеристики
автоматических микропроцессорных систем
Передаточные функции автоматических микропроцессорных регуляторов
при цифровой реализации алгоритмов, исходя из уравнений (2.35)—(2.37)
(см. п. 2.6), определяются выражениями:
для П-регулятора
(4.55)
108
для ПИ-регулятора
»'Р(р)=<V7/'Xr/r.i+1 -е 7?’>: (4-56)
для ПИД-регулятора
Ир(р) = (*р/7р)[(Г/7-и + 1 + TJT) -(1 + 2TJT) етг + (Г/Т) е
(4.57)
Передаточные функции (4.55) - (4.57) физически реализуемы и им
соответствуют переходные характеристики при 1 > 0:
для П-алгоритма
Лр(0 = (*Р/П[/ "" Л]; (4>58)
для ПИ-алгоритма
V') = (Vnt( 1 + т/т»}‘ -{t -л1; (4-59)
для ПИД-алгоритма
V') = (Лр/П[( 1 + Г/7и + Тд/Т)1"(1 + 2 ТД/Г){' ~Г) + (7д/7)(' “ 2 Л]-
(4.60)
Если аргумент ( непрерывен, то уравнения (4.58) - (4.60) определяют
переходные характеристики аналоговых регуляторов при цифровой реа-
лизации алгоритмов. Переходные характеристики автоматических микро-
процессорных регуляторов, соответствующие разностным уравнениям
(2.35)—(2.37), рассчитываются по уравнениям (4.58)— (4.60) с дискрет-
ным аргументом t (J = кТ, где к = 1,2, ..., оо).
4.8. Примеры составления и преобразования структурных
схем локомотивных автоматических систем
Путем эквивалентных преобразований структурных схем, основан-
ных на замене параллельных и последовательных соединений звеньев
эквивалентными звеньями и перенесения звеньев через узлы суммиро-
вания и ветвления, все структурные схемы тепловозных автоматичес-
ких систем могут быть приведены к общему стандартному виду
встречно-параллельному соединению двух звеньев, в котором встреч-
но-включенное звено выполняет функции устройства отрицательной
обратной связи выхода звена в прямой цепи воздействий с его входом
(см. рис. 4.2, б).
109
Рис. 4.11. Структурные схемы автоматической системы после различных
этапов их преобразования
Рассмотрим процесс преобразования структурной схемы системы, со-
держащей несколько внутренних контуров. На рис. 4.11, а представлена
структурная схема системы, содержащая два устройства местных обрат-
ных связей и устройство главной обратной связи выхода звена с переда-
точной функцией 1^в(р) с его входом. Каждый контур местной обратной
связи содержит определенную группу звеньев, составляющих неразветв-
ленную цепь звеньев. Такие местные обратные связи называются просты-
ми. При преобразовании структурной схемы системы вначале заменяем
два последовательно включенных звена с передаточными функциями И^(р)
и ^2^) и два параллельно включенных звена с передаточными функция-
ми РГ4(р) и ^(р) эквивалентными звеньями с передаточными функциями:
^_2 (р)-= ^(р) w2(p) ; = ^4(Р) + ж5(р).
НО
После этого первого преобразования получаем структурную схему,
представленную на рис. 4.11, б. В новой схеме сохранились две местные
обратные связи Заменяем звено О7)’ охваченное устройством об-
ратной связи с передаточной функцией И'с1 (р), эквивалентным звеном с
передаточной функцией:
, (Р) = W'l -2 (Р)/[ 1 + ^1-2 (Р) И’с1 (Р)]-
Два последовательно включенных звена с передаточными функция-
ми ^4 5 (р) и О’) заменяем эквивалентным звеном с передаточной
функцией:
(р) = И^(р) РК6 (р).
После второго преобразования получаем структурную схему, пока-
занную на рис. 4.11, в. Заменяем звено (/?), охваченное устройством
отрицательной обратной связи с передаточной функцией 1Г 2 (р), эквива-
лентным звеном с передаточной функцией:
^2э (Р) = ^4-6 / [I - ^с2 (Р)^4-6 О’»
В результате замены получим структурную схему, представленную
на рис. 4.11, г. Проведя последнее преобразование, связанное с заменой
трех последовательно включенных звеньев эквивалентным звеном с пе-
редаточной функцией Иг(р) = И'|э(£>) И'3(р) И72э(р), получим окончатель-
ную структурную схему стандартного вида эквивалентной одноконтур-
ной замкнутой автоматической системы (рис. 4.11, б). По полученной
структурной схеме можно найти требуемые передаточные и частотные
функции замкнутой или разомкнутой системы. С помощью подобных
преобразований определяют передаточные и частотные функции любой
системы, содержащей внутренние контуры с простыми местными обрат-
ными связями.
Рассмотрим преобразование структурной схемы автоматической сис-
темы регулирования напряжения (АСРН) вспомогательного генератора
(ВГ) тепловоза (рис. 4.12, а). Объектом регулирования напряжения теп-
ловоза в этой схеме является ВГ с передаточной функцией по регулиру-
ющему воздействию РК (р). АСРН содержит датчик напряжения с пере-
даточной функцией И д| ((р), задающее устройство с передаточной функ-
цией W3 (р), исполнительный механизм регулирующий орган
Иро № и устройство местной отрицательной обратной связи с переда-
точной функцией 1РуС (р).
111
Рис. 4.12. Структурные схемы автоматической системы регулирования напря-
жения вспомогательного генератора, содержащей регулятор типа ТРН-1,
после преобразований
При преобразовании структурной схемы АСРН ВГ заменяем два пос-
ледовательно включенных звена с передаточными функциями И'им(р) и
1Гр0(р) эквивалентным звеном с передаточной функцией ^цРу(р) =
= ^им(Р)»РО<Р)- Заменяем эквивалентное звено, охваченное устройством
отрицательной обратной связи с передаточной функцией РГус(р), экви-
валентным звеном с передаточной функцией
^иру (р)= П + ИИм(Р)^О<Р) ^ус
После этих двух преобразований получаем структурную схему АСРН ВГ,
представленную на рис. 4.12, б.
Дтя получения структурной схемы АСРН ВГ стандартного вида пе-
реносим звено с передаточной функцией И'иру (р) влево через знак сум-
мирования (см. рис. 4.12, б). Затем, заменяя два звена: датчик напряже-
ния с передаточной функцией 1ГдН(р) и исполнительно-регулирующее
устройство с передаточной функцией 1Гнру(р), включенные теперь пос-
ледовательно, одним эквивалентным звеном (автоматическим регулято-
ром напряжения) с передаточной функцией 1Гр(р) = ИдН (р) 1Гнру(р),
получим окончательную структурную схему эквивалентной одноконтур-
ной АСРН ВГ в стандартном виде (рис. 4.12, в).
Рассмотрим процесс преобразования структурной схемы автоматичес-
кой системы регулирования частоты вращения вала (АСРЧ ВВ) дизель-
гидравлической установки тепловозов ТГМ4, ТГМ4А и др., содержащей
112
Рис. 4.13. Структурные схемы автоматической системы регулирования частоты
вращения вала дизель-гидравлической установки, содержащей регулятор типа
ВРН-30, до (а) и после преобразований (б) и (в)
автоматический всережимный гидромеханический регулятор непрямого
действия типа ВРН-30. На схеме (рис. 4.13, а) дизель-гидравлическая
установка тепловоза как объект регулирования частоты вращения вала
представлена двумя звеньями с передаточными функциями: Иу(р) — по
возмущающему воздействию и РГ^(р) — по регулирующему воздей-
ствию. Регулирующий орган, функции которого выполняет топливная ап-
паратура, также представлен двумя звеньями с передаточными функция-
ми: ^ро^О7) — по перемещению реек топливных насосов и И'рО(р(р) —
по частоте вращения вала дизель-гидравлической установки. Исполни-
тельный механизм представлен четырьмя звеньями: гидроусилителем (с
золотниковым управлением) с передаточной функцией ^г(р) и тремя ус-
тройствами отрицательных обратных связей с передаточными функция-
ми И;., (р), И'с2 (р) и И’с3 (р).
Вначале заменим канал, охваченный звеном с передаточной функци-
ей Жс| (р), эквивалентным звеном с передаточной функцией FF (р) = 1/[1 +
+ (р)]. Это эквивалентное звено теперь оказывается последовательно
соединенным со звеном с передаточной функцией Заменяем эти
два звена эквивалентным звеном с передаточной функцией W’rc) (р) =
= Жг(р)/[1 + И'с, (р)].
Заменим это звено, охваченное звеном с передаточной функцией
FFc2 (р), эквивалентным звеном с передаточной функцией И'|гЭ (р) = W } (р) /
/ [1 + FFc| (р) FKc2 (р)]. Это эквивалентное звено, охваченное звеном с
113
передаточной функцией ГГс3 (р), заменяем эквивалентным звеном с пере-
даточной функцией Жс] (р) = И'гс2 (р)/[1 + (р) ^с3 (р)].
В результате проведенных замен получим структурную схему одно-
контурной АСРЧ ВВ дизель-гидравлической установки, представленную
на рис. 4.13, б.
Затем заменяем два последовательно включенных звена с передаточ-
ными функциями Wrc3 и ^рох(р) одним эквивалентным звеном с переда-
точной функцией ИцруСр) Wrc3 Ирох(Р)-
После переноса этого эквивалентного звена влево через знак сумми-
рования и замены теперь двух последовательно соединенных звеньев с
передаточными функциями и ^(р) одним звеном с передаточ-
ной функцией И^р(р) = ^Иру(р)^д(р) получим окончательную структур-
ную схему эквивалентной одноконтурной АСР частоты вращения вала
дизель-гидравлической установки в стандартном виде (рис. 4.13, в).
В заключение следует отметить, что структурную схему автоматичес-
кой системы можно рассматривать как один из видов направленного гра-
фа. Такой граф (граф сигнала, диаграмма прохождения сигнала) пред-
ставляет собой совокупность узлов (вершин) и соединяющих их ветвей
(дуг) с обозначением направления передачи сигналов их пропускной спо-
собности. Рассматривая структурную схему как граф, узлами (вершина-
ми) считают все воздействия — внешние, внутренние и выходное, т.е.
регулируемую величину; ветвями (дугами) — динамические звенья, а
передаточные функции определяют их пропускную способность.
Глава 5. УСТОЙЧИВОСТЬ И КАЧЕСТВО
РАБОТЫ АВТОМАТИЧЕСКИХ СИСТЕМ
5.1. Понятия устойчивости и качества работы
линейных автоматических систем
Как указывалось выше, основным назначением АСР является поддер-
жание заданного постоянного значения регулируемой величины или из-
менение ее во времени по определенному наперед заданному закону (про-
грамме). При отклонении в данный момент времени регулируемой вели-
чины от заданного значения, что может произойти в результате появле-
ния возмущающих воздействий на систему или после изменения задаю-
щего воздействия, автоматический регулятор воздействует на объект ре-
гулирования таким образом, чтобы ликвидировать это отклонение. В си-
стеме возникает переходный процесс, определяемый ее динамическими
свойствами.
Если после окончания переходного процесса система снова приходит
в первоначальное или другое равновесное состояние, то такую систему
называют устойчивой.
Если при тех же условиях в системе или возникают колебания регу-
лируемой величины со все возрастающей амплитудой, или происходит
монотонное увеличение отклонения регулируемой величины от ее задан-
ного равновесного значения, то систему называют неустойчивой.
Таким образом, под устойчивостью системы понимается ее способ-
ность возвращаться к состоянию установившегося равновесия после ус-
транения возмущения, его нарушившего. Устойчивость линейной систе-
мы не зависит от величины начального возмущающего воздействия. Это
значит, что если система, описываемая линейным дифференциальным
уравнением с постоянными коэффициентами, устойчива по отношению
115
Рис. 5.1. Положения шара
на поверхности:
а — устойчивое; б — неус-
тойчивое; в — нейтрально-
устойчивое
к малым возмущениям (устойчива «в ма-
лом»), то она оказывается устойчивой и
при возмущениях, отличных от них. Та-
кие системы устойчивы «в большом», т.е.
при любом внешнем воздействии.
Для нелинейных АСР вопросы устой-
чивости значительно сложнее. Для этих
систем различают устойчивость «в ма-
лом», «в большом» и «в целом» — при
любых начальных условиях.
Для того чтобы определить, устойчи-
ва или неустойчива система, необходимо
изучить ее поведение при малых откло-
нениях от равновесного состояния. Если
при этом система стремится вернуться к
равновесному состоянию, то она устой-
чива. Если в системе возникают силы,
которые стремятся увеличить отклонение
системы от равновесного состояния, си-
стема неустойчива. В качестве примера рассмотрим перемещение шара
по поверхностям различного профиля под влиянием кратковременных
внешних воздействий на него.
На рис. 5.1, а изображен шар, находящийся внутри вогнутой сфери-
ческой поверхности. При отсутствии внешних сил шар устанавливает-
ся в положение 1, и его сила тяжести Р уравновешивается силой реак-
ции сферической поверхности. Если при воздействии внешних сил шар
перемещается в положение И, то сила тяжести разлагается на две со-
ставляющие. Составляющая Рх уравновешивается радиальной силой
реакции, а тангенциальная составляющая Р2 ничем не компенсируется
и стремится вернуть шар в исходное равновесное состояние. Таким
образом, система является устойчивой. На рис. 5.1, б в положении I
шар находится на выпуклой сферической поверхности, касаясь ее в верх-
ней точке. Сила Р уравновешена силой реакции. Если под влиянием
внешних сил шар перемещается в положение II, то появляется неурав-
новешенное усилие Р2, удаляющее шар от исходного равновесного со-
стояния. Следовательно, система (рис. 5.1, б) является неустойчивой,
так как достаточно незначительного внешнего воздействия, чтобы шар
скатился со сферы.
116
На рис. 5.1, в шар лежит на горизонтальной плоскости, и его сила
тяжести в любом положении уравновешивается реакцией плоскости. При
воздействии внешних сил шар катится по плоскости только до тех пор,
пока действуют эти внешние силы. При прекращении их воздействия он
останавливается в том положении, в котором находится в момент исчез-
новения внешних сил (если не учитывать инерцию шара).
Системы, в которых одной и той же величине (воздействию, выводя-
щему систему из равновесного состояния) соответствует бесконечное
множество значений выходной величины (например, положений шара
на плоскости на рис. 5.1, в), называют нейтрально-устойчивыми
Поведение АСР при наличии в ней возмущающих и задающих воз-
действий описывается дифференциальным уравнением. Решение этого
уравнения содержит две составляющие
*вых *0 ВЫХ + Хвых(^’ (5-1)
где х0 вых — вынужденная составляющая изменения выходной (регулируемой)
величины;
х (/) — переходная составляющая изменения выходной величины, изменя-
ющаяся во времени при переходном процессе.
Первая из этих составляющих однозначно связана с изменением вход-
ной величины (возмущения или задания) и является частным решением
дифференциального уравнения системы. Для того чтобы система могла
правильно обрабатывать задающий входной сигнал г)(0, т.е. изменения
заданного значения входной величины, необходимо, чтобы переходный
процесс, протекающий при переходе системы из одного заданного рав-
новесного состояния в другое, был затухающим, т.е. составляющая х (О
с течением времени должна стремиться к нулю. Только в этом случае
регулируемая величина по окончании переходного процесса принимает
новое заданное значение, изменившись на величину изменения задаю-
щего воздействия, или, иными словами, отклонение регулируемой вели-
чины от нового заданного значения становится равным нулю.
Необходимо также, чтобы переходная составляющая хвых(0 с течени-
ем времени стремилась к нулю и при возмущающих систему воздействиях
£,(/), так как только в этом случае отклонение регулируемой величины
Хвых от заданного значения с течением времени становится равным нулю
и равновесное состояние системы восстанавливается.
График изменения во времени переходной составляющей выходной
величины описывается общим решением однородного дифференциаль-
117
него уравнения, которое характеризует собственные динамические свой-
ства системы. Однородное дифференциальное уравнение получается из
полного дифференциального уравнения системы при значениях выход-
ного сигнала и всех его производных, равных нулю:
а„ d" dl" + "П I d"-' -WZ d'"’1 + ••+ "ld w' * + “0 твых = °- <5-2)
Характеристическое уравнение однородного дифференциального урав-
нения (5.2) системы имеет вид
А(р) = а„Рп + ап\ Р”^ + а\Р + я0 = °- (5-3)
Уравнение (5.3) соединения звеньев (системы) можно получить, при-
равнивая нулю знаменатель его (ее) передаточной функции D(p). Харак-
теристическое уравнение в общем случае может иметь I одинаковых кор-
ней и, помимо того, п - i неодинаковых корнейР],р2’ 'Рп-г
Определив все корни характеристического уравнения, общее реше-
ние однородного дифференциального уравнения можно найти по извест-
ной формуле
Хвых (0 = cl ePlt + с2еР' + •" + cn-iePn~‘l + •••
... + ер'1 (Л| + A2t + + ... + Aj А '), (5.4)
где С], с2, ..., Л,, А2, Aj — постоянные интегрирования, которые
находятся из начальных условий.
Корни в общем случае могут быть нулевыми = 0; вещественными
р- = ± а4; комплексными сопряженными рк= ± ак ± усок. Как следует из
уравнения (5.4), переходная составляющая определяется суммой чле-
нов. каждый из которых содержит экспоненциальную составляющую
, где а представляет собой корень характеристического уравнения, если
он вещественный, или вещественную часть этого корня, если он комплекс-
ный. Число экспоненциальных слагаемых, входящих в выражение переход-
ной составляющей, равно числу корней характеристического уравнения.
Таким образом, чтобы каждый член выражения (5.4) стремился к
нулю, необходимо и достаточно, чтобы все вещественные корни харак-
теристического уравнения (5.3) были отрицательными, а в комплекс-
ных корнях должны быть отрицательными вещественные части. Тогда
показатели степени всех экспонент будут отрицательными, а их абсо-
лютное значение будет возрастать пропорционально времени, в резуль-
118
тате чего со временем абсолютные значения всех экспоненциальных
слагаемых будут стремиться к нулю.
Из изложенного выше следует, что корни характеристического уравне-
ния в полной мере определяют устойчивость автоматической системы.
Линейная АСР устойчива, если все вещественные корни и вещественные
части комплексных корней характеристического уравнения отрицательны.
Если хотя бы один корень характеристического уравнения или веще-
ственная часть одного из комплексных корней положительны, система
неустойчива. В этих случаях член переходной составляющей, соответ-
ствующей этому корню, содержит экспоненту в положительной степени,
значение которой со временем беспредельно возрастает, следовательно,
теоретически значение регулируемой величины стремится к бесконеч-
ности. Практически неустойчивость автоматической системы приводит
к аварийному режиму работы системы, в результате чего она теряет свою
работоспособность либо вследствие отключения ее специально предус-
мотренным устройством защиты или машинистом, либо по причине вы-
хода из строя того или иного элемента или устройства системы.
Особо следует рассмотреть случай, когда характеристическое урав-
нение системы имеет только один вещественный нулевой или одну
пару сопряженных мнимых корней, т.е. если уравнение имеет один
корень р = 0 или два сопряженных, вещественная часть которых cq = 0.
В этом случае переходная составляющая соответственно *1вых (/) = с
или х2вых (0 = с s’n &t- Следовательно, линейные системы, характеристи-
ческие уравнения которых имеют мнимые сопряженные или нулевые кор-
ни, являются нейтрально-устойчивыми. В линейных нейтрально-устой-
чивых системах с характеристическим уравнением, имеющим один ну-
левой корень, выходная величина принимает произвольное значение: од-
ному и тому же задающему воздействию соответствует бесконечное мно-
жество значений выходной величины, и система не способна выполнять
свои функции.
Примерами нейтрально-устойчивой системы являются тяговый элек-
тродвигатель постоянного тока, если за входную величину принять на-
пряжение, подводимое к якорю двигателя, и за выходную — угол его
поворота, а также все разомкнутые астатические системы, так как их ха-
рактеристические уравнения имеют сомножителем оператор р, а следо-
вательно, и нулевые корни.
Выходная величина линейных систем, характеристическое уравнение
которых имеет одну или несколько пар мнимых комплексных корней, при
119
постоянном значении задающего воздействия совершает относительно
своего заданного значения незатухающие свободные колебания с посто-
янной амплитудой и частотой, т.е. в этом случае системы находятся на
границе устойчивости и работают в режиме автоколебаний. Подобные
системы не отвечают требованиям, предъявляемым к АСР, и поэтому их
практически относят к неустойчивым системам.
Таким образом, чтобы определить устойчива или неустойчива система,
достаточно найти корни ее характеристического уравнения. Однако этим
методом пользоваться во многих случаях практически невозможно, так как
искать корни алгебраических уравнений высоких степеней очень трудно,
а уравнения степеней выше четвертой вообще аналитически не решаются.
Кроме того, найдя корни характеристического уравнения, определим только
устойчива или неустойчива система, но не сможем установить, как тот или
иной параметр или совокупность параметров системы влияют на ее устой-
чивость. В связи с этим в современной теории автоматических систем и на
практике широко применяются косвенные методы исследования систем
на устойчивость. Каждый метод сводится к определенным правилам и со-
держит критерии, с помощью которых можно исследовать системы на ус-
тойчивость без решения характеристического уравнения.
По виду характеристического уравнения (5 3) сравнительно просто ус-
тановить необходимый признак устойчивости системы. Преобразуем урав-
нение (5.3) в вид ап (р-P\Xp-p2Y ...,(р-рп) = 0, гдеррр2, --,рп — корни
характеристического уравнения.
Так как у устойчивой системы все вещественные корни характерис-
тического уравнения отрицательные, а комплексные корни имеют отри-
цательную вещественную часть, то при этом все сомножители
п
Г1 (Р ~ Pt) при перемножении образуют положительные коэффициен-
i=l
ты при переменной р. Очевидно для действительных корней, а в случае
комплексных корней это легко доказать. Действительно, так как комп-
лексные корни всегда сопряженные, то корню р} ~ - а +у'Р всегда соот-
ветствует кореньр2 = - а -у’Р. Произведение сомножителей (р-р\)(р-р2)=
= (р + a -jfiXp + а + УР) всегда дает положительные коэффициенты при
переменной р.
Таким образом, в случае отрицательных вещественных корней и ком-
плексных корней с отрицательной вещественной частью характеристи-
ческое уравнение не может иметь отрицательных коэффициентов.
120
Если характеристическое уравнение имеет отрицательные коэффи-
циенты, то при этом оно обязательно имеет положительные веществен-
ные корни или комплексные корни с положительными вещественными
частями.
Следовательно, необходимым условием устойчивости системы яв-
ляется требование, заключающееся в том, чтобы все коэффициенты
ее характеристического уравнения были положительными. Это усло-
вие является необходимым, но недостаточным. Как будет показано
ниже, уже для системы выше второго порядка только положительность
коэффициентов характеристического уравнения еще не гарантирует
устойчивость системы. Необходимые и достаточные условия устой-
чивости системы определяются с помощью критерия устойчивости
Рауса—Гурвица, критерия Михайлова и амплитудно-фазового крите-
рия Найквиста—Михайлова.
К автоматическим системам предъявляются требования не только от-
носительно устойчивости. Для их работоспособности не менее необхо-
димо, чтобы процесс автоматического регулирования некоторой величи-
ны осуществлялся при определенных качественных показателях. Требо-
вания к качеству работы автоматических систем в каждом конкретном
случае могут быть самыми разнообразными, однако из всех показателей
качества можно выделить несколько наиболее существенных, которые с
достаточной полнотой характеризуют качество работы почти всех авто-
матических систем.
Качество работы системы, как правило, оценивают по ее временной
переходной характеристике (рис. 5.2). Основными показателями каче-
ства работы системы являются: динамический коэффициент регулиро-
вания; остаточное отклонение регулируемой величины от заданного
значения, т.е. статическая неравномерность; максимальное динамичес-
кое отклонение регулируемой величины от заданного значения или пере-
регулирование; относительное перерегулирование; время регулирова-
ния; колебательность.
Показателями качества работы системы, определяемыми по час-
тотным характеристикам, являются запасы устойчивости по модулю
и по фазе.
Кроме того, в конкретных условиях к качеству работы систем могут
предъявляться и другие требования, например, максимальная скорость
изменения регулируемой величины (для дизель-генератора или дизель-
гидравлической установки), основная частота ее колебаний и т. п.
121
Рис. 5.2. Изменение входного сигнала (а) и характеристики переходных
процессов в объектах регулирования и автоматических системах:
б — затухающего колебательного с 20 %-м перерегулированием без остаточно-
го отклонения регулируемой величины; в — то же с остаточным отклонением
регулируемой величины; г — апериодического с минимальным временем регу-
лирования; д — апериодического с затянутым временем регулирования;
е — затухающего колебательного с минимальными отклонениями регулируе-
мой величины; ж — то же с минимальным временем регулирования;
1 — заданное значение регулируемой величины <р0; Г — остаточное отклонение
регулируемой величины; 2 — переходные процессы при автоматическом регу-
лировании; 3 — отклонение регулируемой величины в статическом объекте;
4 — то же в астатическом объекте
Важнейшим показателем качества работы системы является значе-
ние максимального динамического отклонения регулируемой величи-
ны в переходном процессе. Это отклонение носит временный переход-
ный характер.
Наибольшим динамическим отклонением регулируемой величины в
сходящемся (затухающем) процессе будет в основном первое отклоне-
ние Лр непосредственно следующее за возмущением. Величина этого
отклонения особенно существенна в тех случаях, когда по условиям тех-
122
нологического процесса значительное отклонение регулируемой вели-
чины недопустимо, даже если оно временное.
Значение максимального динамического отклонения At зависит
от статических и динамических свойств объекта, величины возмуще-
ния, принятого закона работы регулятора и параметров настройки
системы
Степень воздействия регулятора, понижающего максимальное дина-
мическое отклонение регулируемой величины в автоматической системе
по сравнению с отклонением ее у объекта регулирования (без регулято-
ра), характеризуется динамическим коэффициентом регулирования к^.
Он представляет собой отношение максимального отклонения А} регу-
лируемой величины <р от заданного значения в переходном процессе,
вызванное однократным скачкообразным возмущением ц или X, к мак-
симальному (потенциальному) отклонению Af этой же величины <р при
том же возмущении, но без воздействия регулятора, т.е.
*дс = АЧо. (5.5)
где А । — максимальное динамическое отклонение, равное разности между мак-
симальным значением регулируемой величины и заданным ее значением <р0, т.е.
^1 = Ф1-Фо’.
Ах — потенциальное отклонение (линия 3 на рис. 5.2, б, в), характеризующее
динамические свойства объекта и величину возмущения (Аж = к^ ц);
к^ — коэффициент передачи объекта регулирования по регулирующему воз-
действию;
ц — величина возмущающего воздействия.
Остаточное отклонение регулируемой величины от заданного зна-
чения. На рис. 5.2 представлены временные переходные характеристики
(графики переходных процессов) автоматических систем. В переходном
процессе, представленном на рис. 5.2, б регулируемая величина по его
завершении полностью возвращается к своему заданному значению, а
на рис. 5.2, в ее новое установившееся значение отличается от заданного
на величину остаточного отклонения <рост.
Остаточное отклонение регулируемой величины от заданного значе-
ния после окончания процесса регулирования называется статической
неравномерностью. Для многих технологических процессов остаточная
статическая неравномерность недопустима, как например, в АСР часто-
ты вращения валов дизель-генераторов, АСР напряжения вспомогатель-
ных генераторов локомотивов и др.
123
Остаточная неравномерноегь присуща автоматическим системам, со-
держащим пропорциональные (II) регуляторы, т.е. статическим систе-
мам. Возвращение регулируемой величины к заданному значению мо-
жет быть достигнуто лишь за счет интегральною (И) воздействия регу-
ляюра. Таким образом, если выбран регул я гор пропорционального и ш
пропорционально-дифференциального действия, всегда будет иметь ме-
сто остаточная статическая неравномерность ФосТ- Значение ее зависит
от величины возмущения X, при котором наступило новое установивше-
еся значение регулируемой величины, а также от выбранного коэффици-
ента передачи (параметра настройки) регулятора (для систем, содержа-
щих астатические объекты регулирования) или от козффициента переда-
чи объекта и регулятора (для систем, содержащих статические объекты).
Максимальное динамическое отклонение регулируемой величины от
заданного значения или перерегулирование равно разности значений
первого максимального отклонения и нового установившегося значения ре-
гулируемой величины. Этот показатель качества выражается в единицах из-
мерения регулируемой величины и не всегда удобен для сравнения качества
раб<лы систем. По ному применяет ся относительный показатель— отно-
сительное перерегулирование.
Относительное перерегулирование характеризует степень колебатель-
ное г и переходного процесса. Для систем без остаточного отклонения
регулируемой величины от заданного значения (астатических систем)
относите льны м перерегулированием фа называется отношение ампли-
туды колебаний А? второго полупсриода к амплитуде Л, первого полупе-
риода и выражается в процентах:
(5.6)
Для систем с остаточным отклонением регулируемой величины от
заданного значения относительным перерегулированием фст называ-
ется отношение между максимальным отклонением регулируемой ве-
личины (перерегулирования) и новым установившимся значением, т.е.
Л1 <рОС7 = А к величине остаточног о отклонения регулируемой величи-
ны фоСТ. Отношение ио выражается уравнением
1 ।
=—-100. (5.7)
Фост
124
Колебательность переходного процесса характеризуется также чис-
лом колебаний регулируемой величины за время регулирования / Этот
показатель важен в тех случаях, когда к системе предъявляются требова-
ния, ограничивающие число колебаний регулируемой величины и время
регулирования.
Изменяя параметры настройки автоматического регулятора при лю-
бом законе его работы, можно получи г ь ра {личное относительное пере-
регулирование от нуля при апериодическом переходном процессе до
100% при расходящемся колебательном процессе. Чем больше относи-
тельное перерегулирование и чем более колебателен переходный про-
цесс, тем он продолжительнее. Но в то же время следует иметь в виду,
что чем больше значение относительного перерегулирования, тем мень-
ше первая ампли1уда колебаний Л,, в переходном процессе; при этом,
естественно, увеличивается амплитуда Л2 отклонения регулируемой ве-
личины в противоположном направлении.
Выбирая необходимое значение относительного перерегулирования,
следует исходить из условий оптимальности технологического процес-
са, т.е. из условий целесообрашости меньших максимальных отклоне-
ний регулируемой величины при более колебательном и длительном пе-
реходном процессе регулирования или односторонних отклонений с боль-
шой амплитудой, но при более быстром возвращении регулируемой ве-
личины к заданному значению.
Время регулирования определяет продолжительность переходного про-
цесса. 11роцесс регулирования охватывает период времени / с момента воз-
мущения, вызывающего отклонение регулируемой величины от заданного
значения, до возвращения ее системой к установившемуся значению. Тео-
ретически переходный процесс длится неограниченно долго. На практике
считают, что в системе он заканчивается в тот момент времени, с которого
отклонение регулируемой величины от нового установившегося значения
становится меньше половины зоны нечувствительности регулятора. Время
регулирования зависит от статических и динамических свойств обьекга ав-
томатизации, принятого закона работы и значений параметров настройки
регулятора. Продолжительность воздействия регулятора на объект обычно
характеризуется не абсолютным значением времени регулирования t , а его
отношением к времени запаздывания объекта регулирования т
При любом законе работы регулятора продолжительность / переход-
ного процесса в зависимости от параметров настройки регулятора мо-
жет быть различной, но не менее минимального значения для системы с
125
регулятором данного типа Это минимальное время z mjn свойствен-
но так называемым граничным апериодическим переходным процес-
сам регулирования (см. рис. 5.2, г). При всех других процессах (в за-
тянутом апериодическом (см. рис. 5.2, д) или сходящихся колебатель-
ных (см. рис. 5.2, б, в)) время регулирования увеличивается.
Желательно, чтобы переходный процесс при прочих равных нокага-
телях качества работы системы был как можно менее продолжительным.
Однако если возмущения в условиях эксплуатации возникают с высокой
частотой через промежутки времени, меньшие, чем то переходные
процессы не успевают закончиться и тогда может иметь место длитель-
ное отклонение регулируемой величины от заданного значения.
Высокоэффективным способом уменьшения времени регулирования
является применение комбинированного принципа построения автома-
тических систем.
Если динамические свойства системы задаются экспериментально
Рис. 5.3. Определение запасов устойчивости
по модулю и фазе замкнутой автоматической
системы по амплитудно-фазовой характери-
стике этой системы в разомкнутом состоянии
снятыми частотными характеристиками или она содержит звено запаз-
дывания, то качество работы системы удобнее определять непосредствен-
но по степени удаления амплитудно-фазовой характеристики разомкну-
той системы от «опасной» точки (- 1, j 0). В этом случае показатели ка-
чества работы системы определяются двумя числовыми величинами: за-
пасом устойчивости по модулю и запасом устойчивости по фазе.
Запасом устойчивости сис-
темы по модулю обычно назы-
вают длину отрезка Л (рис. 5.3),
равную расстоянию от точки
пересечения амплитудно-фа-
зовой характеристикой разом-
кнутой системы с отрицатель-
ной вещественной полуосью
до точки (-1 ,j 0). Численно та-
кой запас показывает, на сколь-
ко должен измениться модуль
амплитудно-фазовой функции
разомкнутой системы при не-
изменных фазовых соотноше-
ниях, чтобы система в замкну-
том состоянии вышла на гра-
ницу устойчивости.
126
Запасом устойчивости системы по фазе называется угол, между
вещественной отрицательной полуосью и лучом, проведенным из на-
чала координат через точку пересечения амплитудно-фазовой характе-
ристики с окружностью единичного радиуса с центром в начале коор-
динат. Численно запас устойчивости по фазе показывает, на сколько
должно увеличиться отставание по фазе в разомкнутой системе при
неизменном модуле амплитудно-фазовой функции, чтобы замкнутая
система вышла на границу устойчивости.
Система считается практически работоспособной, если ее запасы ус-
тойчивости по модулю и по фазе были не менее заранее заданных значе-
ний. Такие значения зависят от класса автоматической системы и требо-
ваний к качеству ее работы. Ориентировочно должно быть у = 30 - 60° и
h = 6—20 дБ.
5.2. Критерии устойчивости
Исследование устойчивости и качества работы автоматических сис-
тем ведут обычно с помощью оценок, выражающих с математической
точки зрения условия, определяющие расположение всех корней харак-
теристического уравнения системы в левой полуплоскости комплексно-
го переменного. Преимущество этого способа состоит в том, что он по-
зволяет судить об устойчивости по коэффициентам характеристического
уравнения без вычисления его корней. Эти оценки получили название
критериев устойчивости.
Существует несколько критериев устойчивости. Все они математи-
чески эквивалентны, так как решают вопрос — лежат ли все корни ха-
рактеристического уравнения в левой комплексной полуплоскости или
нет. Пракзическое применение того или иного критерия определяется
характером задачи и средствами, которыми располагает исследователь.
Существующие критерии делятся на две группы: алгебраические и час-
тотные.
Критерий устойчивости И. А. Вышнеградского. Одним из первых кри-
териев, получивших применение при исследовании автоматических сис-
тем, описываемых линейным дифференциальным уравнением третьего
порядка, был графоаналитический критерий И.А. Вышнеградского.
Графическое изображение условий устойчивости И.А. Вышнеградс-
кий представил в координатах X и Y, получивших название характерис-
тических чисел Вышнеградского. Области устойчивого и неустойчивого
состояния системы, изображенные в этих координатах, известны в лите-
127
ратуре под названием диаграммы Вышнеградского. Пользуясь этой ди-
аграммой, можно судить об устойчивости и качестве работы системы, не
решая ее дифференциального уравнения, и получать наглядную картину
влияния на ее динамические свойства изменяющихся статических и ди-
намических параметров элементов.
Дифференциальное уравнение системы, имеющей третий порядок,
может быть преобразовано так, чтобы коэффициент у члена с третьей
производной был равен единице. Характеристическое уравнение такой
системы будет иметь вид
р3 + Я]/?2 + = 0. (5.8)
Вышнеградский И.А. ввел обозначения
Х=аг
(5.9)
Рассмотрим предельный случай, при котором характеристическое
уравнение третьего порядка (5.8) будет иметь один действительный ко-
рень и пару сопряженных мнимых корней вида
= - а; р2 = +усо; р2 = -усо.
Можно доказать, что при указанных значениях корней условием ус-
тойчивости рассматриваемой системы будет неравенство
aj а2-а3> 0. (5.10)
Неравенство (5.10) после подстановки характеристических чисел
И.А. Вышнеградского примет вид
Рис. 5.4. Диаграмма
И.А. Вышнеградского
АТ- 1 >0.
(5.П)
Если на плоскости с координатами
X и Y нанести равнобокую гиперболу
XY= 1, полученную как предельное зна-
чение для неравенства (5.11), то она вы-
делит на плоскости (рис. 5.4) (при Х> 0 и
Y > 0) области неустойчивых I и устой-
чивых II состояний системы. Система
считается неустойчивой, если XY < 1, и
устойчивой, если XY > 1. Граница устой-
128
чивости определяется равенством ХУ = I, при наличии которого система
будет иметь незатухающие гармонические колебания регулируемой вели-
чины, т.е. будет находиться на границе устойчивости. Второй предельный
случай определяется тем, что комплексные корни характеристического урав-
нения превращаются в вещественные и отрицательные. В этом случае ха-
рактеристическим является выражение
4(Х3+У3) = Х2У2-18ХУ+27 = 0. (5.12)
Можно доказать, что при наличии вещественных отрицательных корней
должно соблюдаться неравенство
4(Х3 + У3)=Х2У2 — 18ХУ+27<0, (5.13)
а при наличии комплексных корней с отрицательной вещественной час-
тью — неравенство
4(Х3 + У3)=Х2У2 — 18ХУ+27>0. (5.14)
Уравнение (5.12) позволяет построить граничные кривые АВ и ВС в ко-
ординатах Хи Y(см. рис. 5.4). Эти кривые выделяют из области II в область
III. Для значений Хи У, лежащих внутри области III, ограниченной кривыми
АВ и ВС, все три корня характеристического уравнения системы будут ве-
щественными, отрицательными и разными, что соответствует устойчивому
апериодическому переходному процессу. Для значений Хи У, лежащих на са-
мой кривой АВС, два из трех вещественных корней будут равны. В точке В,
соответствующей Х= У - 3, все три вещественных корня будут иметь одина-
ковое значение. Для значений X и У, лежащих внутри области II, один из
корней будет вещественный и отрицательный, а два других — сопряжен-
ные комплексные с отрицательной вещественной частью, что соответствует
затухающим колебательным переходным процессам в системе.
Для расчета устойчивости исследуемой автоматической системы тре-
тьего порядка необходимо определить значения параметров Вышнеград-
ского X и У, а затем произвести проверку устойчивости в соответствии с
условием (5.П).
Критерий устойчивости Гурвица. Критерий А. Гурвица выражает
условия устойчивости в форме определителей, составленных из коэффи-
циентов характеристического уравнения замкнутой системы. Приведем
формулировку критерия Гурвица без доказательства. Пусть характерис-
тическое уравнение п-й степени имеет вид
+ +а2рР~2+ ... +ап_хр + ап = Ъ. (5.15)
129
Чтобы все корни уравнения (5.15) имели отрицательные веществен-
ные части, т.е. система была устойчивой, необходимо и достаточно, что-
бы при о0 > 0 определители Гурвица Дп и все его диагональные миноры
Др Лэ, ... Д^р были положительны.
Главный определитель Гурвица составляется следующим образом:
- по главной диагонали выписываются все коэффициенты характери-
стического уравнения, начиная со второго U] до последнего afJ в порядке
возрастания индексов;
- столбцы дополняются вверх ог диагонали путем вписывания коэф-
фициентов с последовательно возрастающими индексами;
- вниз от диагонали столбцы дополняются вписыванием коэффици-
ентов с последовательно убывающими индексами;
- на место коэффициентов, имеющих индексы больше w и меньше
нуля, подставляются нули.
Последний столбец главного определителя Гурвица содержит только
один элемент ап, отличающийся от нуля, поэтому определители связаны
равенством Д . = ап Д . Приравняв последний определитель нулю, при
условии положительности всех предыдущих определителей получим
уравнение границы устойчивости системы Д^ = 0.
Из критерия Гурвица следует, что все коэффициенты характеристи-
ческого уравнения устойчивой системы должны быть положительны. Кри-
терий Гурвица иногда называют критерием Рауса-Гурвица. Раусом был
предложен критерий в виде неравенств, составленных по особым прави-
лам (алгоритмам) из коэффициентов характеристического уравнения
(5.15) замкнутой системы. Пользуются этим критерием, прибегая к спе-
циальной таблице.
В приведенном виде критерий Гурвица (а также и критерий Рауса)
позволяет лишь найти устойчивость системы при определенном значе-
нии ее параметров. Сложность вычислений резко возрастает с повыше-
нием порядка уравнения. В ряде практических случаев требуется оце-
нить влияние изменения того или иного параметра системы на ее устой-
чивость. Для решения этой задачи удобнее пользоваться графическими
приемами, менее трудоемкими и обладающими большой наглядностью.
Критерий устойчивости Михайлова. А.В. Михайловым был предло-
жен частотный критерий устойчивости, который отличается простотой и
наглядностью. В характеристическом уравнении (5.15), разделенном на
коэффициент <я0, многочлен F(p} в левой части может быть разложен на
множителиF(p) = (p-p[){p-p2) ••• (Р~Рп }), гд.ер1,р2,..., рп — корни
характеристического уравнения.
130
Как известно, при замене р на величинуусо корни характеристического
уравнения могут быть представлены в виде точек на комплексной плоско-
сти или в виде векторов, начало которых лежит в начале координат, а кон-
цы — в указанных точках, но тогда и многочлен F(j(n) представляет собой
вектор, модуль которого равен произведению модулей элементарных век-
торов (/со -р.), а аргумент — сумме аргументов отдельных векторов.
При изменении частоты со от - оо до 4- оо каждый вектор (/со -ру) корня,
лежащего слева от мнимой оси, повернстся на угол + л, а вектор корня,
расположенного справа от мнимой оси, — на угол -л. Пусть уравне-
ние F(p) - 0 имеет т корней в правой полуплоскости и, следовательно,
(л - т) корней в левой. Тогда при изменении частоты от - оо до + ос вектор
F (/со) повернется на угол (п - т)л - гил = (и - 2ги)л. Если все корни
лежат слева от мнимой оси, то пт = 0 и вектор повернется на угол ил.
Расположение корней в левой полуплоскости является необходимым и
достаточным условием устойчивости системы. На основании этого мож-
но сформулировать критерий: для устойчивости системы необходимо и
достаточно, чтобы при изменении частоты со от — оо до + оо вектор
F (/со) повернулся в положительном направлении на угол, равный ил.
Если аргумент вектора будет меньше ил, то система неустойчива. Так
как годограф вектора F (/со) при изменении со от - ос до + оо представляет
собой симметричную относительно оси абсцисс кривую, то можно су-
дить об устойчивости системы, анализируя одну ее часть для со = 0 - оо.
При этом в случае устойчивой системы годограф Михайлова должен пос-
ледовательно пройти п квадрантов, нигде не обращаясь в нуль.
Порядок исследования устойчивости систем по критерию Михайлова:
- в соответствии с дифференциальным уравнением замкнутой систе-
мы находят характеристическое уравнение F(p) = 0;
- производят подстановку в характеристическое уравнениеусо вместо р;
— представляют характеристическое уравнение в виде комплексного
числа F (/со) = Л/(со) + jN (со);
— строят годограф Михайлова F (/со), изменяя частоту от 0 до оо;
— по расположению годографа F (/со) определяют устойчивость замк-
нутой системы.
Амплитудно-фазовый критерий устойчивости. Использование рас-
смотренных критериев устойчивости обычно встречает затруднения в
связи с тем, что для их применения необходимо располагать уравнени-
ем системы. Если динамические свойства элементов системы заданы
131
Рис. 5.5. Структурные схемы автоматических систем:
а— замкнутой; б— разомкнутой; в — амплитудно-фазовые характеристики
разомкнутой системы
экспериментальными характеристиками, то оказывается удобнее пользо-
ваться критерием устойчивости Найквиста— Михайлова, который позво-
ляет судить об устойчивости замкнутой системы (рис. 5.5, а) по форме и
расположению на комплексной плоскости амплитудно-фазочастотной ха-
рактеристики разомкнутой системы (рис. 5.5, б). Изучение амплитудно-
фазочастотной характеристики облегчает процесс исследования. Это
объясняется тем, что в большинстве случаев исследовать систему в ра-
зомкнутом состоянии проще, чем в замкнутом. При этом появляется воз-
можность исследовать устойчивость системы в случае, когда дифферен-
циальные уравнения всей системы или некоторых из ее звеньев неизвес-
тны, а даны лишь экспериментально снятые с них амплитудно-фазочас-
тотные характеристики. Исследование устойчивости и качества работы
системы по амплитудно-фазочастотным характеристикам можно произ-
водить одновременно.
Для исследования составляется комплексная частотная, т.е. амплитуд-
но-фазочастотная функция разомкнутой системы ИХ/со). Оценивается
расположение годографа вектора ИХ/со) относительно точки (-1, 0/), при
изменении со от - оо до + оо.
Этот критерий формулируется следующим образом: если линейная
система (см. рис. 5.5, б) в разомкнутом состоянии (без обратной связи)
устойчива и ее амплитудно-фазочастотная характеристика ИИ(/€о) при из-
менении частоты не охватывает точку в комплексной плоскости с коор-
динатами (-1, /0), то после замыкания этой системы отрицательной об-
ратной связью (см. рис. 5.5, а) она также будет устойчивой. Строгое до-
казательство амплитудно-фазового частотного критерия устойчивости
можно найти в любом пособии по теории автоматических систем. Оста-
новимся здесь только на некоторых физических соображениях.
132
Если на вход устойчивой разомкнутой системы подать гармонические
колебания от какого-нибудь внешнего генератора, то ее выходная величина
через некоторый промежуток времени достигнет установившегося режима
и начнет совершать гармонические колебания с частотой, равной частоте
входных колебаний. Однако эти колебания будут в общем случае отличаться
от колебаний входной величины по амплитуде и по фазе. Меняя частоту
колебаний, можно получить различные фазовые сдвиги между колебания-
ми входной и выходной величин Допустим, что при некоторой частоте уда-
стся получить фазовый сдвиг, равный 180°. Если теперь мысленно убрать
внешний генератор колебаний и вместо него подать на вход системы через
отрицательную образную связь колебания ее выходной величины, то при
этой частоте колебания входной величины, получаемые системой от обрат-
ной связи, будут совпадать по фазе с колебаниями, которые ранее получала
система от генератора. Здесь возможны три случая.
1. Амплитуда колебаний выходной величины равна амплитуде коле-
баний входной величины, получаемой от внешнего генератора. Замена
воздействия от генератора воздействием от отрицательной обратной свя-
зи ничего не изменит в поведении системы, так как обратная связь будет
подавать на вход точно такие же колебания, какие ранее подавал генера-
тор. Следовательно, в системе после замыкания будут существовать не-
затухающие колебания, причем эти колебания будут генерироваться са-
мой системой (система находится на границе устойчивости).
Равенство амплитуд колебаний входной и выходной величин разомк-
нутой системы при фазовом сдвиге между ними, равном 180°, свидетель-
ствует о том, что модуль ее амплитудно-фазовой частотной характерис-
тики при фазовом угле, равном 180°, равен единице, те. амплитудно-фа-
зовая характеристика разомкнутой системы проходит через точку с коор-
динатами (- 1,70) (например, характеристика И? (/со) на рис. 5.5, в).
2. Амплитуда выходных колебаний при фазовом сдвиге 180° больше
амплитуды входных колебаний, получаемых от внешнего генератора. За-
мыкание системы через отрицательную обратную связь равноценно под-
ключению внешнего генератора, амплитуда колебаний которого растет от
периода к периоду. Поэтому система после замыкания окажется неустой-
чивой. Так как амплитуда выходных колебаний разомкнутой системы при
фазовом сдвиге 180° больше амплитуды входных, то модуль амплитудно-
фазовой частотной характеристики при этом сдвиге больше единицы, сле-
довательно, такая характеристика разомкнутой системы охватывает точку
с координатами (-1; j0) (например, характеристика W3 (/со) на рис. 5.5, в).
133
3. Амплитуда выходных колебаний меньше амплитуды входных. В этом
случае замена внешнего генератора отрицательной обратной связью эк-
вивалентна подключению генератора с уменьшающимися от периода к
период} амплитудами котебаний, т.е. в системе после ее замыкания ко-
лебания затухают, и она поэтому является устойчивой При фазовом сдви-
ге 180° модуль амплитудно-фазовой характеристики разомкнутой систе-
мы меньше единицы, т.е. такая характеристика разомкнутой системы
не охватывает точку с координатами (- 1 , /0) (например, характеристи-
ка Ц j (/со) на рис. 5.5, в).
Помимо того, что критерий Найквиста—Михайлова позволяет иссле-
довать устойчивость систем, динамические свойства которых могут быть
получены только экспериментально, с его помощью можно также нагляд-
но представить, как влияет на устойчивость системы изменение того или
иного параметра.
Пример 5.1. Система, состоящая из трех последовательно включен-
ных одинаковых инерционных звеньев первого порядка с передаточны-
ми функциями
И](р)=И2(р)=И3(р)= Тр + Х
охватывается отрицательной обратной связью. Определим, как влияет на
устойчивость полученной таким путем замкнутой системы изменение
коэффициентов передачи и постоянных времени звеньев.
Амплитудно-фазовая частотная функция разомкнутой системы
W(j(o) =
к3 к3
К Л g-jarctgro?’
(7/co + l)3 (1 + тЛо2)
При изменении частоты от со = 0 до со = оо ее вектор поворачивается на
угот - 3 arctg ос = 270°. Так как характеристика пересекает отрицатель-
ную вещественную полуось, то система после замыкания может оказать-
ся неустойчивой. Найдем критические точки значения параметров сис-
темы, при которых она будет находиться на границе устойчивости. Усло-
виями, из которых определяются эти параметры, являются требования,
чтобы при некоторой критической частоте со значение фазочастотной
функции разомкнутой системы было равно 180°, а амплитудно-частот-
ной — единице-
134
3 arctg ci)Kp T = 180°;
(5.16)
тг,2 2 \3 2
(2 + T ® )
(5.17)
Из уравнения (5.16) находим
1 УЗ
m n = - tg6() = - -
кр у ° у
Подставив полученное выражение в уравнение (5.17), найдем А3 = 8
или к ~ 2.
Таким образом, в нашем примере устойчивость системы зависит толь-
ко от значения коэффициента передачи звеньев: система после замыкания
будет устойчивой, если общий коэффициент передачи разомкнутой систе-
мы не будет превышать 8. Значения постоянных времени звеньев, не влияя
на устойчивость системы, определяют частоту возможных колебаний в
системе. Чем больше их значения, тем меньше частота этих колебаний.
5.3. Устойчивость систем, содержащих последовательно
включенные апериодические инерционные звенья
Системы, содержащие одно или два апериодических инерционных
звена, устойчивы при всех параметрах звеньев и режимах работы. Сис-
темы, содержащие не более трех апериодических звеньев, структурно
устойчивы. АСР называют структурно неустойчивой, если ее нельзя
сделать устойчивой только изменением статических и динамических па-
раметров (изменением их значений, но не знаков), а необходимо измене-
ние структуры, т.е. введение в АСР новых звеньев и связей, или измене-
ние типа имеющихся звеньев и связей.
Устойчивость системы, содержащей три апериодических звена.
Разомкнем цепь воздействия в точке А (рис. 5.6, а). Тогда передаточ-
ные функции звеньев будут иметь вид
(р) = kxl(Txp + 1); (р) = к2/(Т2р + 1); W3 (р) = + 1).
Уравнение разомкнутой системы
(Т}р + 1)(Т2р + 1)(Т3р + 1)хвых = кхЪК,
где к — коэффициент передачи разомкнутой системы (к - кх к2 к3).
135
Рис. 5.6. Схема и частотные характеристики автоматической системы, содержа-
щей три последовательно включенных инерционных звена:
а — структурная схема; б — амплитудно-фазовая в замкнутом состоянии;
в— вещественные и мнимые в замкнутом состоянии; г— амплитудно-фазовые
в разомкнутом состоянии
Полагая для замкнутого состояния системы хвых = хвх и произведя
некоторые преобразования, получаем характеристическое уравнение зам-
кнутой системы
Т2Т3р2 + (Т\ Т2 + 1\ Т3 + Т2Т3)р2 + (Т} + Т2 + Т3)р + \ + к = 0. (5.18)
Введем обозначения
^1 Т2 ^3 = °о; т\ ^2 + Л ^з + ^2 = °1;
+ ^2 + ^3 ~ °2’ 1 + = аУ
Тогда характеристическое уравнение замкнутой системы примет вид
а^р2, + а^р2 + а2р + а3 = 0. (5.19)
Выясним условия устойчивости для рассматриваемой системы. По
Гурвицу имеется два условия устойчивости:
Пд > 0, a j > 0, £72 > б, а3 > 0,
Л2
а1
а0
а3
а2
= й] а2 - а0 а3 > 0
(5-20)
136
и (T}T2+Tl+T3 + T2T3)(Tl+T2+T3- т{т2т3)(\+к)>0.
Первое условие выполняется, так как все постоянные времени и ко-
эффициент передачи существенно положительны. Согласно второму ус-
ловию передаточный коэффициент системы не должен превышать неко-
торою критическою тначения к , определяемого из условий (5.20):
Лкр = Н/Г1 + 1/72+1/ГзХГ1 + 72 + 7’з) -1- (5-21>
Таким обратом, система будет устойчивой, если выполняется неравен-
ство к < ккр. В частном случае, как было показано выше, при Ту = Т2 - Т3
ккр = 8. Этот случай соответствует наименьшему значению критического
коэффициента передачи и является наихудшим с точки зрения устойчи-
вости.
По Михайлову будем иметь следующее уравнение годографа:
F(/co) = -jГ| Т2Т3 (£? (ТуТ2 + ТуТ3 + Т2Т3) со2 +
+j (Ту + т2 + Т 3)W + 1 + к, (5.22)
откуда
М (оэ) = —(^^ + Тх13 + ^2^3 +1 + к,
N(a) = [-TyT2T3^2 +(7] + Т2 +Г3)]й). (5‘23)
Точки пересечения годографа с осями координат определяются кор-
нями Л/(со) и N(di).
Для положительных частот корень функции Л/(со) = 0 о)| ~ 0; сп32 =
- (Ту + Т2 + Т3)/ ТуТ2Т3, а корень функции N(w) = 0 сэ22 — (1 + к^КТуТ^
+ ТуТ3+ Т2Т3). Корни будут чередоваться, если со2 < со3. Критическое
значение коэффициента передачи, при котором чередование корней
нарушается, находится из равенства со2 = <о3. Можно показать, что вы-
ражение для &кр совпадает с ранее найденным.
Годограф Михайлова для устойчивой системы изображен на рис. 5.6, б
линией 7, а для неустойчивой — линией 2. Оба годографа одинаковы по
форме и имеют лишь различные вещественные характеристики Л/(ьэ). При
увеличении к годограф сдвигается вправо, и в конце концов чередование
корней нарушается. Изображение вещественной и мнимой характерис-
тик замкнутой системы показано на рис. 5.6, в.
137
При увеличении к график мнимой функции 7V(co) (линия 4) остается
на месте, а график вещественной функции Л/(со) (линия 3) поднимается
вверх (линия 5). Корни уравнения при этом сближаются. При уменьше-
нии коэффициента передачи корень М(ы) начинает сближаться с нуле-
вым корнем Мео). Наибольшей устойчивости системы соответствует не-
которое среднее значение к между 0 и АК[).
Выражение для амплитудно-фазовой функции разомкнутой системы
можно привести к виду
И'(До) = к [1 - со2( 7,Т2 + 7, Т3 + 7273)] / [(1 + со21 + со27?)( 1 + со2732)] -
-j<ok [со27,7273 - (7, + 72 + 73)] / [(1 + со272)(I + о)272)(1 + со2Т2)].
(5.24)
Вещественная ось (при положительных частотах) пересекается амп-
литудно-фазовой характеристикой дважды: при со = 0 и при со2 = (7, + 72 +
+ 73)/7,7273.
Мнимая ось пересекается характеристикой при одной положитель-
ной частоте со2 = 1/ (7,72 + 7,73 + 7273).
При со = оо характеристика приходит в начало координат (линия 6)
(рис. 5.6, г). С увеличением коэффициента передачи к характеристика
может охватить точку с координатами (- 1, /0) (линия 7). На границе
устойчивости, когда характеристика проходит через эту точку, веществен-
ная часть Л/(ос) равна единице, а мнимая — нулю.
Подставляя значение со2 = (7, + 72 + 73)/ 7(7273 в выражение веще-
ственной части и приравнивая ее единице, находим выражение для к ,
совпадающее с полученным ранее.
Пример 5.2. Определить комплексную частотную (амплитудно-фазо-
вую), амплитудную, вещественную и логарифмические частотные харак-
теристики автоматической системы, содержащей три апериодических зве-
на с разными постоянными времени: 7( = 90 с, Т2 = 10 с, 73 = 3 с и к = 20.
С использованием этих характеристик оценить устойчивость и показате-
ли качества работы системы.
Передаточная функция системы в разомкнутом состоянии
W(p) = kl[(1\p + 1)(Г2р+ 1ХГ3р+ I)]. (5.25)
Заменяя в выражении (5.25) р на/со, получаем комплексную частот-
ную функцию разомкнутой системы
W®) = к / [(I +/со7,) (1 + jcd72) (1 + /со73)], (5.26)
138
Умножив числитель и знаменатель правой части выражения (5 26) на
сопряженные множители знаменателя и разделив мнимую и действитель-
ную части, получим
FKC/w) =
^Ц-И2(Г|Г2 + 7,7, +Г2Л)]->ВД + 72 4-73)-И27,7273|
(1 + и 2Т2 )(1 + о 2Г2 )(1 + ш 2Т2 )
(5-27)
откуда
Л/(со) = к
I - to2 (Т]Г2 + 7]?з + ТдТз)
(1 + со 2Tj2 )(1 + со2Т22)(1 + со2?’/)'
(5.28)
(1 + со2?/ )(1 + со 2Г22 )(1 + со2?/ )
Подставив в выражение (5.27) значения постоянных времени и коэф-
фициента передачи, имеем
ИХ/со) = 20 / [(1 - 1200со2) - 103 усо(1 - 26,2со2)] / [(1 + 81 ООсо2) х
х(1 + 100со2)(1 + 9со2)]. (5.29)
Задаваясь различными значениями со от 0 до +оо, получаем для каж-
дой частоты определенные значения комплексной частотной функции,
приведенные в табл. 5.1.
Приняв в выражении (5.28) Л/(со) = 0, получаем значения тех частот,
при которых характеристика пересекает мнимую ось
1 - со2!?’! Т2 + Тх Т3 + Т2 Т3) = 0,
откуда
СО 12 = ± V^/^2 +Л^3 +^2^3 = ± 0,0289 с-1.
Полагая 7V(co) = 0, из формулы (5.28) находим, что действительная ось
пересекается характеристикой в трех точках: при со3 = 0
и
со45 = ±/(7’1+7’2+?’3)/7’17’27’3 = ± 0,0195 с'1.
139
Тайиица 5. /
Знпчення елн1псмы% частотой функции системы
<11 1 1200 «.г 1 26,2 <n 1 >8100 1 1 100 <«r 1 19 <o Л/(и>) \ (u>)
0 1 1 1 1 1 20 0
0.005 0.97 1 1.2 1 1 16.2 8.6
0.0 ю 0.88 0,988 1.81 1 01 1 9.6 114
0.010 0.695 0,993 3,06 1.03 1 U 10 1
0.022 0.4 1 0.98 3 4.92 1,05 1 l,o7 8.6
0.02X9 0 0,979 7.75 1,08 1.01 0 (i.9
0.040 0,92 0.95s 14 1 16 1,014 1.12 4.8
0.080 6.7 0.93 52.8 1,64 1,057 1.16 1.5
0.140 22.5 0,49 160 2.96 1,175 0.81 0.25
0.195 44,6 0 309 I 8 1.34 0,148 0
0.50 299 5.58 2030 26 3.25 0.3 5 0.0 3
« ос OQ o0 «00 too 00 0 0
Полученная комплексная частотная характеристика представлена па
рис. 5.7, а. Предс галим выражение (5.26) в виде
И‘(./(о)
______________ к______________________________________________
7?iV ► le/вгс,»<йГ« /д2со2 4 1е,1,,е,8*о/; У/’Гы2 4 |е ’
откуда с учетом юно, что II (/со) = J((o) е ч получим амплитудно-
частотную функцию
1 ((о) - А' /^(| + /j2<n2)(| + 7’22о)2)(1 + 7,2м2) (5.30)
и фа 1очасюп1ую функцию
44<о)» arctg «оТ*! arctg со/’2 arctg мТу (5.31)
140
I’nc S Час 101111,1c хариктеристнкн раюмкнутоп iihiomui ической chcicmi.i, co
Чержащси ipn апериодических «вена с раинами hociohiiib>imii времени
<i— .IMIUIII гудно <|>.i юная о — имилшудпан;« вещее i венная. югарнф
мпческая
Иоде талия в выражении (5.30) и (5.31) шипения соответствующих
величин, получим ___________________________
1(<о)«20/д/о ь81ОО(02)(1 + 100<о2)(1 + 9gi2) (5J2)
н
Ч/((о) = - arctg 9О(о arctg 10<о arctg 3<d. (5.33)
Амплитудно-частотная характеристика, построенная в cooibcicibiih
с выражением (5.32), представлена па рис. 5.7, о.
Согласно формуле (5.28) вещественная часто гнал функция
Л/((о) 20(1 1200аг)/|(| f 8IOO(o2)(I t 100иг)(| г 9 нг)|. (5.34)
141
Вещее।ценная частотная характеристика, построенная в соотвстст ним
с выражением (5.34), предоавлена на рис 5.7, «.
Логарифмируя амплитудно-частотную функцию (5.30), находим ло-
гарифмическую амплитудно-частотную функцию (ЛАЧФ)
/.(то) 201g к 201g т 7,2сп 2 20 lg + 7'22m2 20 lg + /’2(n2 (5.35)
It it и uij a 5.2
hiH'iciiMH кригичсскок) коэффициент u передачи системы, содержащей
апериодические hichkh с раинами о 1 ношениями их iiociohiiiii.ix времени
От ношение нос гоя иных времени Число ineiu.cu
3 4 5 6
1 R 4 2,89 2,37
5 37 30 29 28
К) 122 НО ПО 100
100 10200 10100 10098 10097
( онрят атотние чаеготы в точках перелома логарифмической амттли-
1 удно-част(Ут ной харакгсрис т икн
<!>! = 1/7", 1/90 = 0,011 с со2 I/ Г2= 1/10 = 0,10 с
(»-,= 1/Г3 1/3 0,33 с1.
Асимптотическая ЛАЧФ представляется ломаной линией, образован-
ной отрезками четырех прямых в диана топе часто г: 0 £ (л £ 0,0011 с 1 —
прямая, параллельная оси абсцисс с ординатой 20 1g к 20 1g 20 = 26 дБ;
0,011 £ то £ 0,10 с 1 — прямая с наклоном 20 дБ/дек; 0,1 £ от <, 0,33 с 1 —
прямая с наклоном 40 дЬ/дек; 0,33 £ со £ оо — прямая с наклоном 60 дБ/дск.
Логарифмические амплитудно-частотная и фазочастотные характери-
стики, пос троенные в соответствии с выражениями (5.35) и (5.33), пред-
ставлены на рис. 5.7, г.
По амплитудно-фазовой характеристике (см. рис. 5.7, а) запас устой-
чивости ни модулю, который система будет иметь при работе в тамкну-
том состоянии, I 0,448 = 0,552 или 5,16 дБ, что является минимально
необходимым тапасом. Определенный но этой характерце гике тапас ус-
142
т ой ч и ио ст и но фазе составляс! 23°, чю также является минимально до-
пустимым значением. Блиисие к ним значения эапасов устойчивости
нолучакнся и при определении их по ло<арифмичсским частотным ха-
рактеристикам (см. рис. 5.7,,’). Но ним характеристикам достаточно точно
определяется и частота среза (<ос 0,12 с '), при ко юрой ЛАЧХ пересе-
кает oct. абсписс.
Устойчивость системы, содержащей п апериодических шеиьев с
одинаковыми постоянными времени. По апало! ии с предыдущим мож-
но доказан., чю устойчивость системы, содержащей п апериодических
шеньев с одинаковыми посюянными времени, эависит от шачения кри-
1ичсского коэффициента передачи
А = I /сох"(л/п). (5.36)
кр
Значения А для различною числа апериодических эвеньев приведе-
ны в табл. 5.2.
Современные авюматические системы должны иметь большие зна-
чения ко эффициенга передачи, поэтому одноконтурные системы, содер-
жащие более двух апериодических звеньев с одинаковыми постоянными
времени, оказываются малопршодними для практических целей. При
использовании таких систем применяю! приспособления, изменяющие
(компенсирующие) некоюрые постоянные времени. Значение компенса-
ции можно проследить на следующем примере. Допустим, чю постоян-
ные времени последовательно включенных апериодических шеньев со-
ставляю! I еометрическую прогрессию
Т{/Т2=Т2/Т. ...=Tnl/Tn v.
С истема, содержащая последовательно включенные апериодические
пэепья, может находиться как в устойчивом, гак и в неустойчивом состо-
янии в эависимости от гою, больше или меньше критическое шачение
ко эффициента передачи. Система может быть переведена иг неустойчи-
вою в устойчивое состояние изменением ко эффициента передачи за счет
постоянных времени звеньев без включения дополнительных элсмснюв
(бег изменения структурной схемы). Такие системы называются струк-
турно устойчивыми.
11а практике также встречаются системы, которые не мо! у г быть сде-
ланы устойчивыми без изменения структурной схемы Такие системы
называются структурно неустойчивыми.
143
5.4. Устойчивость систем, содержащих последовательно
включенные апериодические, колебательные
и интегрирующие звенья
Устойчивость системы, содержащей п посчедовательно вклю-
ченных апериодических и колебатечьных звеньев. Пусть система со-
держит п последовательно включенных звеньев, из которых 5] аперио-
дических и S2 колебательных. Можно доказать, что такая система струк-
турно устойчива. Для доказательства этого воспользуемся критерием
Михайлова.
Характеристическое уравнение системы имеет вид
ОД + Х = 0, (5.37)
п п
где D{p) = | | к, — характеристические полиномы звеньев;
/=1 /=1
— коэффициенты передачи звеньев.
Уравнение годографа Михайлова F(/co) = £>(/со) + К. Модуль векторов
апериодических и колебательных звеньев ни при каких значениях часто-
ты в пределах от 0 до х в нуль не обращается. Аргумент вектора каждого
апериодического звена при увеличении частоты от 0 до со растет от нуля
до п/2, а для колебательного звена — от 0 до я. Аргумент вектора рас-
сматриваемой системы F(/co), равный сумме аргументов составляющих
его сомножителей, будет расти от 0 до S}Tt/2 + S2k/2 = (S{+ 2 S2)ti/2.
Степень характеристического уравнения рассматриваемой системы бу-
дет т = 5] + 2S2. Уменьшением коэффициента передачи можно придви-
нуть начало годографа Михайлова при со = 0 к началу координат настоль-
ко, чтобы оно попало внутрь первого витка годографа. При этом система
будет устойчивой.
Устойчивость систем с интегрирующими звеньями. Пусть имеется
структурно устойчивая система, содержащая апериодические и колеба-
тельные звенья, амплитудно-фазовая характеристика которой изображе-
на на рис. 5.8. Включим в систему последовательно с другими звеньями
одно интегрирующее звено.
Амплитудно-фазовая функция интегрирующего звена имеет вид
И1[/со) = k/jo = - jk/ea. Включение одного интегрирующего звена приво-
дит к повороту всех векторов амплитудно-фазовой характеристики сис-
темы дополнительно на угол -я/2, т.е. по часовой стрелке. Одновремен-
но модули векторов должны быть умножены на величину Л/со. При этом
144
точка амплитудно-фазовой характери-
стики, соответствующая частоте со -- О,
уходит в бесконечность, а она сама
приближается к точке с координата-
ми (-1, у'О). Это ухудшает условия ус-
тойчивости системы. Однако система
остается структурно устойчивой, чего
всегда можно достигнуть, выбрав дос-
таточно малый коэффициент передачи.
Включение в соединение звень-
ев системы двух интегрирующих
звеньев вызывает поворот на угол л
по часовой стрелке всех векторов
амплитудно-фазовой характеристи-
ки системы, содержащей до этого
апериодические и колебательные
звенья. Характеристика уходит в
бесконечность во втором квадранте
(см. рис. 5.8). Точка с координатами
плитудно-фазовой характеристикой
Рис. 5.8. Амплитудно-фазовые час-
тотные характеристики разомкнутых
автоматических систем, содержащих:
/ — апериодические и колебатель-
ные звенья; 2 — дополнительно
одно интегрирующее звено; 3 — до-
полнительно два интегрирующих
звена
(—1,у0) всегда охватывается ам-
такой системы. Такая система
структурно неустойчива. Для практического использования ее необ-
ходимо применить средства стабилизации, изменяющие структур-
ную схему системы.
5.5. Влияние на устойчивость и качество работы системы
последовательно включенного звена запаздывания
Передаточные функции автоматических систем со звеньями запазды-
вания содержат члены с е рТзап, где тзап — время запаздывания.
Допустим, что в состав разомкнутой системы последовательно вхо-
дит звено запаздывания (рис. 5.9, а). Заменив звено запаздывания жест-
кой единичной связью, получим систему без запаздывания с передаточ-
ной функцией W(p) (рис. 5.9, б). Такая система называется предельной.
Передаточная функция исходной разомкнутой системы с запаздыванием
равна произведению передаточных функций предельной системы и зве-
на запаздывания
= W(p) ^ап(р); (5.38)
145
Рис. 5.9. Схемы и характеристики автоматических систем:
а — структурная схема с запаздыванием; б — то же без запаздывания;
в — амплитудно-фазовые; г — определение критического времени запаздывания;
1 — предельной системы; 2 —- системы с запаздыванием
так как передаточная функция звена запаздывания трансцендентна
1Гза» = то Wx(p) = W(p)e~px™ .
Уравнения, описывающие динамические свойства систем, содержа-
щих звенья запаздывания, называются дифференциально-разностными.
Характеристическое уравнение системы с запаздыванием
ад = Г>(р) + аде-/Пзал =0 (5.39)
может быть получено из знаменателя передаточной функции И т(/;).
Условием устойчивости системы с запаздыванием является отсутствие
корней характеристического уравнения в правой полуплоскости перемен-
ного р. В этом отношении системы с запаздыванием ничем не отличают-
ся от систем без запаздывания. Однако характеристическое уравнение
для системы с запаздыванием (5.39) трансцендентное. Это делает невоз-
можным применение алгебраических критериев устойчивости. Исполь-
зование принципа аргумента при р = jo приводит к обычной формули-
ровке критерия Михайлова для характеристического вектора F(/co), го-
дограф которого для устойчивой системы при 0 < со < оо обходит п квад-
рантов, где п — порядок полинома D(p) в выражении (5.39).
146
Естественно, что для систем с запаздыванием сохраняется также фор-
мулировка амплитудно-фазового критерия устойчивости Найквиста—
Михайлова относительно частотного годографа:
И'рс (/’«) = [/С(/соУЛ/w)] е’7“Хзап. (5.40)
Этот критерий наиболее удобен для определения устойчивости и ка-
чества работы систем с запаздыванием. Комплексная частотная функция
разомкнутой системы с запаздыванием в соответствии с (5.40)
Wx (/со) = ИХ/со)е->Хмп • (5.41)
Представим функции И^'со) в виде
FFfrco) = ^(o)e’7v(<o).
тогда
(/со) = Л(со)е~,МсйНот-’1 (5.42)
Так как к системам с запаздыванием применим амплитудно-фазовый
критерий, то для устойчивости системы с запаздыванием необходимо и
достаточно, чтобы точка с координатами (-1, J0) находилась вне контура
годографа вектора Wx (/со). Модули векторов Иг(/со) и W (/со) для любого
значения частоты одинаковы и равны Л(со), а аргументы отличаются на
сотзап- Следовательно, вектор W (/со) повернут относительно вектора
И(/со) на угол сотзап по часовой стрелке. При со = 0 этот угол равен нулю,
т.е. оба годографа исходят из одной точки. С возрастанием частоты угол
сдвига сотзап также возрастает. Годографы этих систем представлены на
рис. 5.9, в. При повороте вектора Л(со) по часовой стрелке годограф
Wx (/со) приближается к точке с координатами (-1; /0). Это показывает,
что устойчивость и качество работы системы под влиянием звена запаз-
дывания ухудшаются.
Для исследования устойчивости системы построим на комплексной
плоскости амплитудно-фазовую характеристику предельной системы и ок-
ружность единичного радиуса с центром в начале координат (рис. 5.9, г).
Эта окружность пересекает годограф в точке Л, в которой частота равна
со0|. Угол наклона радиуса, проведенного в точку пересечения из начала
координат к вещественной оси, обозначим vg01.
147
Если время запаздывания системы тзап таково, что со0|Тза11 < Vor r0
годограф вектора (/со) не захватит точку с координатами (- 1; у’О) и
система будет устойчивой. Если <оО1тзап = у01, то годограф пройдет через
точку с координатами (-1 ;j0) и система будет находиться на границе ус-
тойчивости. Если со0|Тзап > Von то система будет неустойчивой.
Равенство соО|тзап = v()| определяет критическую частоту сокр и кри-
тическое время запаздывания
TKP = Voi/®Kp.
Таким образом, если тзап < т , то система устойчива. Окружность
единичного радиуса может пересекать годограф вектора W(ja>) в несколь-
ких точках, которым будет соответствовать ряд критических времен за-
паздывания т р ткр, и т.д. (пунктирная линия на рис. 5.9, г).
Для систем с относительно небольшим временем запаздывания кри-
терий устойчивости формулируется следующим образом: система с за-
паздыванием устойчива, если время запаздывания меньше наименьшего
критического значения.
5.6. Способы повышения устойчивости и качества работы
Проблема создания (синтеза) линейных непрерывных АСР с хоро-
шими динамическими свойствами является многосторонней и сложной.
В ней прежде всего можно выделить следующие задачи: обеспечение ус-
тойчивости, повышение запасов устойчивости; а также точности в уста-
новившихся режимах (уменьшение статической неравномерности и обес-
печение астатизма), и качества работы (уменьшение перерегулирования,
времени регулирования) в переходных процессах.
Иногда две или несколько частных задач могут быть решены совмес-
тно, в других случаях они оказываются противоречивыми. В зависимос-
ти от назначения и условий эксплуатации системы одни задачи становят-
ся основными, другие — второстепенными. Простой способ обеспече-
ния устойчивости и необходимого качества работы системы — это со-
ответствующий выбор основных элементов системы или изменение в
нужном направлении их статических и динамических свойств с приме-
нением устройств местных обратных связей.
Выбор типа и конструкции исполнительного механизма может при-
вести к тому, что его динамические свойства, прежде всего инерцион-
ность, не будут отрицательно влиять на свойства системы в целом
148
Другой путь — создание дополнительных воздействий на регулятор
или объект регулирования. Если это воздействие осуществляется извне, то
получается система комбинированного регулирования. Дополнительные
воздействия могут быть созданы и внутри замкнутого контура регулиро-
вания. Например, дополнительное воздействие создается величиной объек-
та регулирования, которая реагирует на возмущение быстрее, чем регули-
руемая величина. При этом регулятор под действием этой величины уст-
раняет в основном влияние возмущения на регулируемую величину.
В некоторых объектах регулирования можно и целесообразно созда-
вать дополнительное регулирующее воздействие. Это воздействие при-
кладывается ближе к регулируемой величине и форсирует переходные
процессы в системе.
Для уменьшения влияния возмущений применяются компаундирую-
щие связи, которые будут рассмотрены ниже. С помощью устройств,
выполняющих функции фильтров и местных связей, может быть обеспе-
чена различная реакция системы на задающее воздействие и возмуще-
ние для того, чтобы подавлять как высокочастотные помехи, поступаю-
щие с задающим воздействием, так и возмущение, приложенное к объекту
регулирования.
Основной путь повышения устойчивости и качества работы автома-
тических систем — это дополнение их специальными элементами. К ним
относятся элементы, обеспечивающими астатизм, автоматическую на-
стройку системы, а также ряд других.
Повышение статической точности. Ошибка (отклонение регулиру-
емой величины) в установившихся режимах системы слагается из ошиб-
ки, создаваемой несовершенством (прежде всего низкой чувствительно-
стью) отдельных элементов регулятора, ошибки воспроизведения зада-
ющего воздействия и ошибки, создаваемой возмущением. Уменьшение
первой составляющей достигается использованием более совершенных
элементов и сопровождается, как правило, увеличением сложности и сто-
имости регулятора. Для уменьшения остальных двух составляющих
ошибки в основном используют рассматриваемые ниже пути.
Увеличение коэффициента передачи разомкнутой АСР. Это универ-
сальный и эффективный способ уменьшения ошибки во всех установив-
шихся режимах. Увеличения коэффициента передачи Арс достигают чаще
всего введением усилителей. Иногда оказывается достаточным увели-
чить коэффициенты передачи отдельных элементов, например, исполни-
тельного механизма.
149
В большинстве случаев увеличение Арс ведет к уменьшению запасов
устойчивости, и для того чтобы система не потеряла устойчивости, зна-
чение Арс не должно превосходить некоторого значения Акр. Однако при-
ближение к этому граничному значению обычно невозможно из-за рез-
кого ухудшения показателей качества работы системы. Таким образом,
имеется противоречие между точностью и устойчивостью замкнутой
системы. Это противоречие может быть устранено, если одновременно с
увеличением £ до значения, обеспечивающего необходимую точность,
создавать и необходимый запас устойчивости с помощью корректирую-
щих и компенсирующих устройств.
Обеспечение астатиз.иа. Данный метод также весьма широко исполь-
зуется для улучшения статических свойств АСР. Все следящие системы и
системы программного регулирования должны быть астатическими. Ина-
че при усилении задающего воздействия с постоянной скоростью ошибка
будет нарастать, а при сколько-нибудь длительном воздействии это недо-
пустимо. Статическими системами мшут бьпь только системы стабилизации.
Чаще всего астатизм достигается включением интегрирующих звень-
ев в прямую цепь системы. К сожалению, это неблагоприятно может ска-
заться на ее устойчивости. При двух интегрирующих звеньях, как было
показано выше, система уже может оказаться структурно неустойчивой.
Поэтому одновременно с обеспечением астатизма может оказаться необ-
ходимым проведение мероприятий, повышающих запас устойчивости до
достаточного уровня.
Наиболее действенным способом обеспечения необходимых динами-
ческих свойств АСР является введение в нее дополнительного элемента,
который исправляет (корректирует) ее статические и динамические свой-
ства. Такой элемент называют корректирующим элементом, или коррек-
тирующим устройством.
Итак, корректирующее устройство — это функциональный элемент
автоматической системы, построенной на основе принципа регулирова-
ния по отклонению, обеспечивающий необходимые свойства этой систе-
мы, устойчивое и качественное ее действие. Ранее уже рассматривались
такие устройства, изменяющие статические и динамические свойства
соединений звеньев (а значит, и всей системы), теперь остановимся на
некоторых их общих свойствах.
Корректирующее устройство можно включать в прямую цепь системы
(в контур регулирования) последовательно (рис. 5.10, а). Такое устройство
ff'Kl(p) включают непосредственно после сравнивающего устройства или
после предварительного усилителя выходного сигнала этого устройства.
150
Рис. 5.10. Структурные схемы АСР с разным корректирующим устройством:
а — последовательным; б — встречно-параллельным; в — прямым параллельным
Последовательно включенное корректирующее устройство, например,
может вводить производную по времени от сигнала рассогласования, что
увеличивает запасы устойчивости и качество работы автоматической
системы. Это использовано, например, в ПД- и ПИД-регуляторах. При
введении сигналов по интегралу и производной рассогласования обеспе-
чивается астатизм и одновременно сохраняются устойчивость и качество
работы системы. Чаще используются более сложные последовательно
включаемые корректирующие устройства. Они оказывают разносторон-
нее влияние на статические и динамические свойства систем.
Широко используется также способ включения корректирующего ус-
тройства (^к2(р) в виде обратной связи, чаще всего отрицательной, выхо-
да какого-либо последовательно включенного элемента системы с его
входом (рис. 5.10, б). Такое корректирующее устройство называют па-
раллельным. Оно часто охватывает обратной связью оконечный каскад
усилителя (исполнительный механизм).
Передаточная функция участка контура регулирования системы с па-
раллельным корректирующим устройством
W + ^(р) №2(р)]. (5.44)
Обычно параллельное корректирующее устройство выполняют так,
чтобы в достаточно широком и наиболее существенном для качества ра-
боты системы диапазоне частот выполнялось неравенство
L (5.45)
151
Тогда в этом диапазоне частот
1Гэ(р) I/^(р), (5-46)
т.е. при соблюдении неравенства (5.45) свойства участка контура регу-
лирования определяются только свойствами самого корректирующего
устройства.
Указанное обстоятельство является большим преимуществом парал-
лельно включаемого корректирующего устройства, так как свойства уча-
стка контура регулирования и изменение его параметров влияют на свой-
ства системы. Преимущество такого включения также в том, что на кор-
ректирующее устройство поступает сигнал с выхода мощного элемента
и после преобразования сигнала его усиления не потребуется. Параллель-
ное корректирующее устройство может быть включено и в участок ос-
новной обратной связи выхода объекта регулирования с его входом.
Применяют и третий вариант включения корректирующего устрой-
ства й'к3(р) параллельно одному из участков контура регулирования сис-
темы (рис. 5.10, в). В этом случае корректирующее устройство следует
называть прямым парапечьным.
Прямое параллельное корректирующее устройство имеет меньшие
возможности, чем два предыдущих, и используется реже. Однако иног-
да оно при меньшей сложности создает необходимое преобразование
сигнала.
Пусть, например, И’3(р) = А3 и И к^(р) = - Ак3 /(Гр + 1). Тогда пере-
даточная функция участка контура регулирования с прямым парал-
лельным корректирующим устройством И'э(р) = кэ/(Т р + 1) /(Тр + 1),
где кэ = А3 - Ак3 и Тэ = к^Т ( А3 - Ак3). Следовательно, этот участок
обладает динамическими свойствами реального форсирующего звена и
при малой разности А3 - Ак3 его постоянная времени дифференцирова-
ния может быть весьма значительной.
В ряде случаев возникает задача выбора вида корректирующего уст-
ройства. Приводимые ниже формулы позволяют по передаточной функ-
ции, которую должно иметь корректирующее устройство одного вида,
определить передаточную функцию эквивалентного ему корректирую-
щего устройства другого вида. Корректирующие устройства различного
вида эквивалентны, если они создают один и тот же эффект, одно и то же
преобразование сигнала на участке контура регулирования с корректи-
рующим устройством. Кроме того, на участке контура регулирования с
параллельным или прямым параллельным корректирующим устройством
152
должно осуществляться преобразование сигнала, соответствующее пе-
редаточной функции W2 или И
Формулы эквивалентности корректирующих устройств
Ж,|(р) = 1 / [1 + ^2(Р)1 = 1 + ”й<Р) »з(Р): <5-47)
»к2<Р> = В * 7 ^1<P) W = - »'кз(Р) W х
х[^к3(р)+»Р3(р)]; (5.48)
»'ri(p) = »W-1] = - W'k2(p) ^2(p) »S(p)/[l + ^(p) Ж/р)Ц5.49)
Если значение передаточной функции И^(р) отрицательное, это оз-
начает, что параллельное корректирующее устройство реализует поло-
жительную обратную связь.
Во многих случаях необходима сложная коррекция динамических
свойств АСР, поэтому тогда вместо одного корректирующего устройства
удобнее использовать два более простых.
Последовательному корректирующему устройству эквивалентно со-
четание параллельного и прямого параллельного устройств, передаточ-
ные функции которых удовлетворяют равенству
[1 + ^(р) / РГ3(р)] / [1 + И^(р) W2(p)] = ^(р). (5.50)
Параллельному корректирующему устройству эквивалентно сочета-
ние последовательного и прямого параллельного корректирующих уст-
ройств, передаточные функции которых удовлетворяют равенству
’ + »’к2(Р) 7 »з(РИ = 1 7 [1 + И'к2<Р) »2<Р)]- <5-51)
Прямому параллельному корректирующему устройству эквивалент-
но сочетание последовательного и параллельного корректирующих уст-
ройств, передаточные функции которых удовлетворяют равенству
^к|(р) 7 [1 + »;2(р) »’,(р)] = 1 + И'Й(Р) / И'3(р). (5.52)
При выводе формул (5.50)—(5.52) предполагалось, что параллельное кор-
ректирующее устройство охватывает обратной связью звено РГ2(р), а прямое
параллельное корректирующее устройство включено параллельно звену 1Е3(р).
В некоторых объектах регулирования могут быть две физические ве-
личины, которые зависят от одних и тех же внешних воздействий и вза-
имосвязаны. Если одна из этих величин является регулируемой, то дру-
гая может осуществлять дополнительное воздействие на элементы регу-
153
лятора. Такая дополнительная связь внутри замкнутого контура регули-
рования по отклонению называется компаундирующей.
Например, в системе охлаждения дизеля как объекте регулирования
температуры теплоносителя есть две физические величины, зависящие
от внешнего возмущения — мощности дизеля: это температура теплоно-
сителя и частота вращения вала дизеля, а значит, и вентилятора охлажде-
ния. Если в АСРТ регулирующим органом является вентилятор перемен-
ной подачи (с поворотными лопастями), то для повышения качества ее
работы можно использовать зависимость угла наклона лопастей венти-
лятора относительно частоты вращения.
Для дальнейшего улучшения динамических свойств АСР влияние зам-
кнутого контура регулирования по отклонению дополняется компенса-
тором с дополнительной связью по возмущению (см. рис. 1.1, г); при
этом может быть достигнута инвариантность (независимость) регулиру-
емой величины от возмущения. Дополнительная связь по задающему воз-
действию позволяет приблизиться к инвариантности рассогласования
относительно задающего воздействия. В многоконтурной системе инва-
риантность, вообще говоря, может быть достигнута и без дополнитель-
ной связи по внешнему воздействию.
Комплекс проблем, связанных с реализацией принципа инвариантно-
сти, составляет теорию инвариантности. Решение проблемы инвариант-
ности в той или иной АСР начинается с определения условия инвариант-
ности, которое может быть удовлетворено не менее, чем при двух кана-
лах воздействия возмущения на регулируемую величину. Лишь в этом
случае воздействие возмущения по одному каналу может быть скомпен-
сировано противоположным по знаку воздействием этого же возмуще-
ния по другому каналу (или по другим каналам). Принцип двухканаль-
ности — это необходимый, но недостаточный критерий реализуемости
условия инвариантности. Дополнительные связи в комбинированных
системах (см. рис. 1.1, г) и являются необходимыми вторыми каналами
влияния внешних воздействий на регулируемую величину.
Наиболее благоприятным способом удовлетворения условия инвари-
антности является изменение лишь параметров какого-то элемента (эле-
ментов) АСР. Однако эти изменения физически осуществимы, если ос-
тается справедливым соотношение
т < п, (5.53)
где т и п — порядок соответственно правой и левой частей дифференциального
уравнения, т.е. степень числителя и знаменателя его передаточной функции.
154
Соотношение (5.53) должно выполняться и для всех реальных эле-
ментов, вводимых в АСР с целью обеспечения инвариантности. Таким
образом, достаточным критерием реализуемости условия инвариантно-
сти является возможность физической осуществимости необходимых для
этого реальных элементов АСР.
Трудности реализации условия инвариантности определили целесо-
образность создания систем и с приближенным его удовлетворением.
Поэтому в зависимости о г степени реализации такого условия и получа-
емых результатов различают следующие виды инвариантности: абсолют-
ную, полную (с точностью до переходной составляющей), частичную (до
и-й производной включительно) и с точностью до малой величины е.
При абсолютной инвариантности регулируемая величина системы
совершенно не зависит от начального значения возмущения и его произ-
водных момента времени, когда возмущение начинает воздействовать на
систему, и его последующего изменения. Предполагается, конечно, огра-
ниченность значения этого возмущения.
Вследствие неточности расчета или выполнения необходимых эле-
ментов часто достигается только приближение к абсолютной, полной или
частичной инвариантностям, т.е. влияние возмущения на регулируемую
величину оказывается существенно уменьшенным, но все же имеет мес-
то как в переходных процессах, так и в установившихся режимах. В этом
случае достигается инвариантность с точностью до малой величины е.
Результат, вообще говоря, может быть таким же, как при регулировании
по отклонению. Различие заключается в том, что он достигается не улуч-
шением динамических свойств замкнутого контура регулирования по
отклонению, а созданием дополнительной связи по возмущению.
Следует иметь в виду, что из-за неточностей в определении характе-
ристик и параметров объекта регулирования и в выполнении компенси-
рующей цепи, а также вследствие изменения характеристик и парамет-
ров системы при эксплуатации практически обеспечивается полная или
частичная инвариантность лишь с точностью до е.
Компенсирующую цепь целесообразно подключать к замкнутому кон-
туру регулирования так, чтобы участок контура, параллельный ей, со-
держал исполнителыю-регулирующее устройство. При этом не возника-
ет необходимость иметь усилитель в компенсирующей цепи и легче вы-
полнить ее дифференцирующий элемент.
При достаточно эффективной компенсирующей цепи появляется воз-
можность иметь меньший коэффициент передачи разомкнутого контура
155
регулирования и. следовательно, легче обеспечить устойчивость системы.
Устойчивость замкнутого контура и качество его работы не зависят от ком-
пенсирующей цепи. Однако сама эта цепь должна быть устойчивой.
Синтез системы комбинированного регулирования может осуществ-
ляться по частям. Сначала следует выполнить синтез замкнутого кон-
тура регулирования одним из известных методов. Затем можно рассчи-
тать компенсирующую цепь: выбрать измерительное устройство (дат-
чик) для измерения возмущения; выбрать точку включения этой цепи в
замкнутый контур; составить условие инвариантности; выбрать вид и
параметры передаточной функции цепи и элементы для физической
реализуемости цепи.
После синтеза комбинированной системы следует оценить каче-
ство ее работы. Кроме показателей качества, характеризующих свой-
ства замкнутого контура, нужно выяснить, насколько эффективно ком-
пенсируется влияние измеряемого возмущения. Для оценки влияния
в установившемся режиме гармонически изменяющегося возмущения
целесообразно построить амплитудно-частотную характеристику. По
ней можно выяснить, достаточно ли хорошо компенсируется такое
возмущение в рабочем диапазоне частот. Степень компенсации воз-
мущения в переходных процессах оценивают по временной переход-
ной характеристике системы.
5.7. Методы оценки качества работы
автоматических систем
Показатели качества работы автоматических систем можно опреде-
лить непосредственно из графика переходного процесса, т.е. по времен-
ной переходной характеристике системы. Однако для построения этой
характеристики необходимо решить дифференциальное уравнение сис-
темы или экспериментально получить график переходного процесса в
ней. Численное решение дифференциального уравнения и проведение
эксперимента являются трудоемкими задачами, так как по условиям тех-
нологического процесса эксперимент не всегда возможно осуществить и
он требует наличия специальной аппаратуры.
В связй с этим, кроме определения показателей качества работы
систем по переходной характеристике, в инженерной практике нахо-
дят широкое применение косвенные методы оценки качества. Кос-
венными оценками называют некоторые величины, в той или иной
156
степени характеризующие отдельные особенности переходного про-
цесса. Эти величины можно определить сравнительно просто без вы-
полнения трудоемкой работы по построению графика переходного
процесса.
Метод оценки качества работы системы по распределению корней
характеристического уравнения системы. Из решения характеристичес-
кого уравнения следует, что чем дальше корни этого уравнения системы
находятся слева от мнимой оси, тем быстрее заканчиваются переходные
процессы в системе. При приближении системы к границе устойчивости
корни характеристического уравнения системы перемещаются на комп-
лексной плоскости по направлению к мнимой оси. На границе устойчи-
вости один вещественный корень или два сопряженных комплексных
корня выходят на мнимую ось, а при дальнейшем переходе системы в
неустойчивое состояние они перемещаются в правую комплексную
полуплоскость.
Одним из косвенных показателей качества работы устойчивых ав-
томатических систем является степень удаленности корней характе-
ристического уравнения замкнутой системы, лежащих в левой комп-
лексной полуплоскости, от мнимой оси. Расстояние от ближайшего
из этих корней до мнимой оси характеризует запас устойчивости сис-
темы и называется степенью устойчивости этой системы. Значение
степени устойчивости равно вещественной части корня, ближайшего
к мнимой оси. Наибольший из углов, образованных отрицательной
действительной полуосью и лучами, проведенными из начала коор-
динат через корни, характеризует колебательность системы. Котан-
генс этого угла называется коэффициентом затухания колебаний или
степенью колебательности.
Оценка качества работы по амплитудно-частотной характеристи-
ке замкнутой системы. Комплексная частотная функция по каналу зада-
ющего воздействия замкнутой системы Ф(/со), выраженная через такую
же функцию разомкнутой системы имеет вид
Ф(/щ) = И{/со)/[1 + ИХ/со)]- (5.54)
Амплитудно-частотную функцию замкнутой системы можно найти
из выражения (5.54) в виде
Ф(со) = |Ф(/со)| = | ИХ/со)/[ 1 + ИХ/со)]|. (5.55)
157
Рис. 5.11. Оценка качества работы системы по амплитудно-частотной характе-
ристике замкнутой системы:
а — определение амплитудно-частотной характеристики замкнутой системы по
комплексной частотной характеристике разомкнутой системы; б — амплитудно-
частотные характеристики замкнутых автоматических систем
Числитель этого выражения равен модулю |СЬ4К| вектора комплексной
частотной функции разомкнутой системы (рис. 5.11, а) при некоторой
частоте сок.
Так как на рис. 5.11, а вектор ВАК определяется из соотношения
|Я4К| = |Я0 + Лк| = |1 + HVcoK)|, (5.56)
следовательно,
ф(“к) = 1°Лк1 / IW (5.57)
Таким образом, амплитудно-частотную характеристику замкнутой
системы можно получить в виде графика или таблицы по графическому
изображению комплексной частотной функции разомкнутой системы,
определяя отношение (5.57) для различных значений частоты.
Из выражения (5.55) следует, что чем ближе комплексная частотная ха-
рактеристика разомкнутой системы И'(/<л) подходит к точке В (-l,j'O), тем
меньше отрезок ВАк и тем больше будет максимум Ф(ц>) (см. рис. 5.11, а).
Если она проходит при некоторой частоте сок через точку В, то длина
отрезка ВА* становится равной нулю и величина Ф(со) достигает макси-
мума, равного со (линия 1 на рис. 5.11, б). При этих условиях система в
замкнутом состоянии находится на границе устойчивости, а регулируе-
мая величина совершает незатухающие колебания с частотой со^.. Следо-
вательно, максимум отношения Ф(со) = 0JK / QB или максимум модуля
комплексной частотной функции замкнутой системы характеризует ко-
158
лебательность системы и его называют показателем колебательности.
Чем больше показатель колебательности М, т.е. максимум амплитудно-
частотной характеристики замкнутой системы, тем больше колебатель-
ность системы.
Обычно считается, что система обладает необходимым запасом ус-
тойчивости, если ее показатель колебательности не превышает значения
М~ 1,1-г 1,6. Приближенная оценка значения показателя колебательнос-
ти, на которое следует ориентировать расчет, может быть получена сле-
дующим образом.
Амплитудно-частотная характеристика замкнутой системы относитель-
но задающего воздействия подобна амплитудно-частотной характеристи-
ке колебательного звена. Поэтому можно предположить, что и переходные
процессы в них также должны в некоторой мере быть похожими друг на
друга; в частности, иметь близкое затухание (это отражает тот факт, что
основное влияние на переходный процесс оказывают только ближайшие к
мнимой оси корни характеристического уравнения). В свою очередь, для
системы второго порядка (колебательного звена) имеется строгое соответ-
ствие между значением показателя колебательности и степенью затухания
переходного процесса. Например, если автоматическая система имеет по-
казатель колебательности 1,55, то ее переходный процесс должен быть
похож на переходный процесс в колебательном звене, степень затухания
которого равна 0,9. И наоборот, если подобрать желаемое затухание пере-
ходного процесса, то тем же путем имеется возможность оценить необхо-
димое значение показателя колебательности.
Основное значение для переходного процесса имеют лишь несколько
ближайших к мнимой оси корней характеристического уравнения систе-
мы, т.е. это означает, что переходный процесс в системе близок к пере-
ходному процессу второго порядка.
Оценка качества работы замкнутой системы по комплексной час-
тотной и логарифмическим частотным характеристикам разомкнутой
системы. Так как при приближении точки пересечения комплексной
частотной характеристикой действительной оси к точке с координатами
(—1, j0) устойчивая система приближается к границе устойчивости, то
степень устойчивости замкнутой системы находится в прямой зависи-
мости от степени удаленности точки пересечения характеристики с от-
рицательной вещественной полуосью от точки (-1,у0).
Для обеспечения заданного запаса устойчивости замкнутой системы
по модулю h комплексная частотная характеристика разомкнутой систе-
159
Рис. 5.12. Амплитудно-фазовые харак-
теристики разомкнутых автоматических
систем
мы 1Е(/со) должна пересекать веще-
ственную отрицательную полуось
на расстоянии h от точки В (- 1,у0)
справа от нее (линия 1 на рис. 5.12).
Таким образом, точка О, харак-
теризует степень устойчивости си-
стемы по модулю. Если характери-
стика И (До) пересекает веществен-
ную отрицательную полуось спра-
ва от точки (Л - 1 ,у0) (линия 2 на
рис. 5.12), то система имеет запас
устойчивости по модулю больше
заданного, а если точка пересече-
ния расположена слева от этой точ-
ки, то — меньше заданного. Сле-
довательно, условие обеспечения необходимого запаса устойчивости по
модулю h имеет вид
1 - h + Иг(/(о) = 0.
(5.58)
Для обеспечения заданного запаса устойчивости по фазе необходимо,
чтобы комплексная частотная характеристика разомкнутой системы W(/a))
проходила через точку D, пересечения луча 0Z>2, проведенного из начала
координат под углом у к вещественной отрицательной полуоси, с ок-
ружностью единичного радиуса, имеющей центр в начале координат (см.
линию 1 на рис. 5.12).
Если при заданном запасе устойчивости по фазе у характеристика
W(/(o) пересекает луч 0D, левее точки Z>?, то при действии на систему
возмущения и неизменном модуле |И%/оэ)| характеристика охватывает
точку В (-1,у0) и, следовательно, система неустойчива. Если характерис-
тика lF(/(o) пересекает луч 0Z>2 правее точки Z>2,то ПРИ действии на сис-
тему такого же возмущения она проходит правее точки В (-1, у’О), и в
этом случае система сохраняет некоторый запас устойчивости (см. ли-
нию 2 на рис. 5.12).
Таким образом, точка Z>2 ( cos у, - j sin у) полностью характери-
зует запас устойчивости системы по фазе. Система имеет требуе-
мый запас устойчивости системы по фазе у при W(/a)) = D2 0. Так как
D2 0 = (-cos у, -j sin у), то условие необходимого запаса устойчиво-
сти по фазе имеет вид
160
cos у -г j sin у + ИХ/со) = 0.
С учетом того что cos со/ + j sin tat = получаем
e>Y + W(fta) = 0.
(5-59)
(5.60)
Для одновременного обеспечения заданных запасов устойчивости по
модулю и фазе необходимо, чтобы характеристика прошла через точку
пересечения луча 0£>2 с окружностью радиуса R = 1 - h, центр которой
совпадает с началом координат (точка D^\ - (1 - h) cos у, -j (1 - h) sin у | на
рис. 5.12).
Приведем условие обеспечения необходимых запасов устойчивости
по модулю h и по фазе у при одновременно действующих возмущениях,
изменяющих модуль и фазу, JF(/co) = D. 0.
Так как £>3 0 = - 1 (1 - Л) (cos у +j sin у), то окончательно (1 - h) +
+ W(jta) = 0. Между оценкой запаса устойчивости системы по величине
максимума ее амплитудно-час-
тотной характеристики и оцен-
кой запаса устойчивости по мо-
дулю и по фазе можно устано-
вить определенную взаимо-
связь; в частности, можно точ-
но установить, каков будет наи-
меньший из возможных запас
системы по модулю и фазе, если
амплитудно-частотная характе-
ристика имеет заданное значе-
ние максимума. На рис. 5.13, я
показан этот предельный слу-
чай расположения комплексной
частотной характеристики ра-
зомкнутой системы, когда она
касается окружности с некото-
рым заданным индексом М и,
кроме того, имеет минимально
возможный запас по модулю и
фазе. Из этого графика видно,
что запас устойчивости по мо-
дулю для этого случая опреде-
ляется как
Рис. 5.13. Оценка наименьшего запаса ус-
тойчивости системы по модулю (а)
и фазе (б) по заданному максимуму ампли-
тудно-частотной характеристики
161
h = I - (/?0-r)= I -Л/2/(Л/2- 1) + Л//(Л/2- 1) = (M- 1) /(Л/2 - 1). (5.61)
Запас устойчивости но фазе находим из условия пересечения окружно-
сти с заданным индексом М: R2 + /2 - ZRM2 / (Л/2 - 1) + М~ / (Л/~ - 1) = О
с окружностью единичного радиуса с цен гром в начале координат
R2 + /2 = 1
Из последних двух уравнений находим I -2R^f2/(hf2 1)+ (А7(ЛЛ- 1) = О,
т.е. /?| = I — 1/2 М. Следовательно, минимально возможный запас сис-
темы по фазе определяется выражением
у = arccos (1 — 1/2 Л/)- (5.62)
Ниже приведены значения максимума амплитудно-частотной харак-
теристики замкнутой системы и минимального гарантированного запаса
устойчивости по модулю и фазе в зависимости от нескольких значений
степени затухания \|/ переходного процесса в колебательном звене, кото-
рое имеег такое же значение максимума амплитудно-частотной характе-
ристики:
v 0.65 0,70 0,75 0,80 0,85 0.90 0,95
М 3,09 2.70 2,38 2,09 1.08 1,55 1,29
h . 0.25 0,28 0,30 0,33 0.36 0,39 0,44
у . 19° 21° 24° 28° 32° 38° 45°
Следует иметь в виду, что эти значения вычислены для случая, когда
амплитудно-частотная характеристика замкнутой системы при <л = 0 равна
единице (регулятор имеет в законе работы интегральную составляющую
либо объект регулирования астатический). При системе, содержащей
статический объект регулирования и П-регулятор, следует проверить,
насколько амплитудно-частотная характеристика замкнутой системы при
(0 = 0 отличается от единицы, и при необходимости внести в расчет соот-
ветствующие коррективы.
Запасы устойчивости по модулю и фазе можно определить и по лога-
рифмическим амплитудным (ЛАЧХ) и фазовым (ЛФЧХ) частотным ха-
рактеристикам разомкнутых устойчивых систем. Если при частоте (0| < сос
(см. рис. 5.13) у((0|) = - я, то абсолютное значение отрицательной ампли-
туды на амплитудной характеристике при зтой частоте определяет запас
устойчивости по модулю Ас в децибелах, а запас устойчивости по фазе
равен значению фазового сдвига при частоте среза сос, т.е. у = V|/(<oc) + я.
Если (ос > (Ор то система неустойчива.
162
Для оценки качества работы автоматических систем также использу-
ется метод определения показателей по переходной характеристике сис-
темы, построенной на основании вещественной частотной характерис-
тики замкнутой системы. Этот метод не требует решения дифференци-
ального уравнения.
Кроме рассмотренных выше, в инженерной практике применяются и
тругие оценки качества работы автоматических систем, например, ин-
гст ральные.
5.8. Моделирование автоматических устройств и систем
Моделированием называется процесс исследования свойств реальной
системы или отдельных ее »лементов некоторой моделью, по своим свой-
ствам воспроизводящей свойства реальной системы. Моделирование ши-
роко применяется при разработке, доводке и модернизации автоматичес-
ких систем (АС). Использование моделей, заменяющих систему или часть
ее, существенно сокращает сроки разработки головного образца АС и ма-
териальные затраты на его создание. Наличие модели, с достаточной дос-
товерностью воспроизводящей основные свойства системы или ее отдель-
ных элементов, позволяет выявить причины неустойчивой или некачествен-
ной работы АС и наметить рациональные пути ее совершенствования.
Способы моделирования делятся на физические, математические и
смешанные.
Физическое моделирование выполняют на моделях одной физической
природы с исследуемым оригиналом. Физическая модель позволяет ис-
следовать даже те явления, аналитическое описание которых затрудни-
тельно или невозможно. Вместе с гем физические модели дороги, трудо-
емки в изготовлении и требуют изменения конструкции при изменении
исследуемых параметров. Все эго ограничивает применение такого спо-
соба моделирования.
От этих недостатков свободен метод математического моделирования,
который основывается на идентичности дифференциальных уравнений,
описывающих процессы в реальной системе и модели. Мето ты матема-
тического моделирования обеспечивают сравнительную простоту под-
готовки задачи к решению (в зависимости от сложности модели), быст-
роту перехода от одной задачи к другой, возможность введения перемен-
ных параметров и начальных условий, позволяют изменять параметры
исследуемой системы путем изменения числовых значений коэффици-
ентов дифференциальных уравнений и т.д.
163
Математическое моделирование может осуществляться построени-
ем прямых аналогий или с помощью аналоговых или цифровых ЭВМ.
В моделях первого типа используется аналогия между явлениями раз-
личной физической природы, например, аналогия между механически-
ми и электрическими явлениями и т. п. Как правило, эти модели отлича-
ются невысокой точностью, жесткой структурой и применимы лишь в
самых простейших случаях.
Сметанное .моделирование включает в себя как физическое, так и
математическое моделирование.
Динамические свойства большинства АС даже при условии полной
линеаризации всех нелинейных характеристик описываются линейны-
ми дифференциальными уравнениями высоких порядков, что существен-
но затрудняет или делает невозможным создание на их базе моделей пря-
мой аналогии. Эти затруднения во многом можно преодолеть, если в ка-
честве технических средств математического моделирования использо-
вать цифровые ЭВМ.
Однако в ряде случаев (особенно при доводке опытных образцов эле-
ментов АС) с помощью математических моделей невозможно с достаточ-
ной точностью воспроизвести динамические свойства того или иного эле-
мента и его взаимодействие с другими элементами системы. Кроме того,
иногда не удается получить приемлемую математическую модель автома-
тического устройства аналитическим путем, и требуется проведение до-
полнительных натурных испытаний элементов или части АС в целях по-
лучения данных для составления математической модели В таких случа-
ях используют методы смешанного (полунатурного) моделирования.
Внедрение микропроцессоров в автоматические системы, наряду с
простой заменой элементной базы и некоторым расширением функций
аппаратуры, создает также принципиально новые возможности в пост-
роении децентрализованных и распределенных комплексов. При этом де-
централизация предполагает не только рассредоточение аппаратуры, но
и распределение функций обработки информации и управления между
автономными управляющими устройствами или программируемыми ре-
гулирующими микроконтроллерами (ремиконтами).
Ремиконт МРНЗЗЗЗ (рис. 5.14) содержит микропроцессор (МП), па-
мять, модули ввода вывода, фильтры (Ф), АЦП с мультиплексером, ЦАП
с мультиплексором- и дисплей Д.
Ремиконт обеспечивает автоматическое регулирование по закону про-
порционально-интегральпо-дифференциальному (ПИД), но может реа-
164
Рис. 5.14. Блок-схема рсмиконта
лизовать и другие законы, которые будут заложены в его программу ра-
боты. Он может генерировать уставки (задания), выполнять операции
интегрирования, дифференцировании, фильтрации, умножения и г. п.
Рабочие программы позволяют реализовать сложные процедуры уп-
равления и регулирования, например, параметрическую оптимизацию,
автоматический выбор переменных, компенсацию нелинейностей и т. п.
С помощью ремиконтов реализуются системы экстремального и опти-
мального управления и регулирования, а также системы с моделями, вклю-
ченными в контур регулирования.
Программируемые регулирующие микроконтроллеры являются уни-
версальными техническими средствами широкого применения.
На основе результатов тщательного изучения задач автоматического
регулирования физических величин большого числа объектов различных
отраслей промышленности был создан регулирующий микропроцессор-
ный контроллер «Ремиконт Р-100», который в принципе заменяет пользо-
вателю набор из 64 работающих приборов. Архитектура ремиконта пред-
ставляет собой изделие, настраиваемое и функционирующее привычным
для специалиста по автоматике образом. Виртуальная (возможная) струк-
тура ремиконта состоит из алгоритмических блоков (алгоблоков), биб-
лиотеки алгоритмов, средств ввода-вывода информации и средств связи
с оператором.
165
Алгоблок реализован программно и в функциональном отношении
эквивалентен отдельно взятому аналоговому прибору.
В ремиконте может быть задействовано до 64 алгоблоков, работаю-
щих независимо друг от друга либо образующих многосвязную систему.
Библиотека алгоритмов управления ремиконта, так же как и алгобло-
ка, реализована программно. Ее состав сформирован на основе тщатель-
ного изучения задач автоматического регулирования физических вели-
чин большого числа объектов регулирования и управления различных
отраслей промышленности.
Алгоритм настраивается на решение конкретной задачи путем измене-
ния коэффициентов, наименования которых хорошо знакомы наладчикам
традиционных автоматических систем. Алгоритм в процессе программиро-
вания можно помещать в любой алгоблок и использовать многократно.
Настройка и контроль алгоблоков ремиконта осуществляется с исполь-
зованием панели оператора, которая подключается к контроллеру через
разъем и может быть удалена от него на расстояние до 3 м. При работе с
панелью используется принцип избирательного управления: оператор
устанавливает на панели номер алгоритма и проводит его настройку.
В процессе настройки выбирается алгоритм, устанавливается конфигу-
рация, определяющая связи входов и выходов алгоблока, коэффициенты
и сигналы задания, выбирается режим регулирования или управления.
Все эти действия выполняются на основе простых правил без привлече-
ния методов и средств формального программирования. После того как
алгоблок настроен, панель оператора может использоваться для избира-
тельного оперативного контроля за его работой.
5.9. Особенности определения устойчивости
и показателей качества работы автоматических
микропроцессорных систем
На основе прямого и обратного ^-преобразования можно определить
передаточные функции объекта и системы регулирования, алгоритмы
работы регуляторов, проверить устойчивость системы, рассчитать про-
цессы на выходе системы, вычислить дисперсию ошибки регулирова-
ния, провести синтез оптимального алгоритма управления и т.д. Однако
к описанию «дискретных процессов в виде решетчатых функций не при-
менимы частотные методы, нашедшие благодаря простоте и нагляднос-
ти широкое применение в теории и практике автоматического регулиро-
вания при выборе настроек регуляторов, оценке качества работы сис-
166
тем регулирования, расчета процессов регулирования. Это определяет-
ся «нулевой мощностью» (площадью) ординат решетчатой функции в
рассматриваемой модели дискретного сигнала. Более реалистичной мо-
делью этого сигнала является модель в виде последовательности 5-фун-
кций, которая пропорциональна площади реальных импульсов, т.е. их
амплитуде при амплитудно-импульсной модуляции или длительности
при широтно-импульсной модуляции. При такой постановке задачи
АЦП заменяется ключом-модулятором 5-функций, а ЦАП — демоду-
лятором (см. рис. 2.13) с передаточной функцией
1-е-г"
»Up) = —— (5-63)
Переход к новой модели дискретных сигналов не означает отказа
от использования математического аппарата, отраженного в табл. 2.1
(см. п. 2.6), ибо дискретное преобразование Лапласа (выражение 2.31)
можно рассматривать как обычное преобразование Лапласа (а значит, и
преобразование Фурье) функции, состоящее из последовательности
5-функций. Это, в свою очередь, позволяет использовать понятия частот-
ных характеристик в обычном смысле с учетом некоторых особенностей,
обусловленных их периодичностью, вызванной дискретизацией. В част-
ности, дискретный спектр F*(jus) модулированной f[kT\ последовательно-
сти 5-импульсов и непрерывный спектр F{jed) связаны соотношением
(5.64)
Приведем вывод формул для расчета запасов устойчивости по огра-
ничению на расположение корней характеристического уравнения — по
ограничению на т (степень колебательности) с использованием матема-
тического аппарата /)-разбиения.
Характеристическое уравнение замкнутой дискретно-непрерывной
автоматической системы регулирования, какой, по сути, является авто-
матическая микропроцессорная система регулирования, имеет вид
। + = 0. (5.65)
причем
(5.66)
167
где И'Ц- (z) — ^-преобразование произведения соответствующих импульсных
характеристик объекта регулирования и демодулятора, функции которого выпол-
няют устройства цифроаналогового преобразования.
Пусть
2 = е-^о7-е7йГ (5.67)
тогда выражение (5.66) примет вид
ИрС(>и, А до) = И’р(т, Аусо)Ир И'дм(т. T.Jw). (5.68)
Для дискретного ПИД-алгоритма регулирования комплексная частот-
ная характеристика запишется следующим образом:
у । _ -тлТ+ja>T
Г» = Л-„ + К„ + Кд------------. (5.69)
Здесь и далее А'п, Ад и т.д. — соответственно коэффициенты переда-
чи для составляющих пропорциональной, интегральной, дифференци-
альной и т.д.
Расширенную комплексную частотну ю характеристику объекта регу-
лирования представим через Мнимую и действительную составляющие
T.jv>)+jJJ (т. T.ja) (5.70)
и с учетом того, что
е-7®г= cos соА-у sin соА. (5.71)
Здесь и далее R nJ — соответственно действительные и мнимые состав-
ляющие комплексных частотных характеристик.
Подставив (5.68)—(5.71) в (5.66) и приравняв к нулю действи-
тельную и мнимую составляющие, получим систему из двух урав-
нений:
Т
A? A R (m, Т, усо) + К ----------~-------------—7-х
п и даА 7 и 1-2е-"ИйГсо8®7 + е2"'ыГ
х [Ар Адм(/и, Т, со)( 1 - е "Ko7cos со Г) + J^m, А со) е "I“7sin со А] +
+ А?д — [ Ар Адм(тл, А соХ 1 - е w(!,/cos со Т) - J^(m. А со) е "'w7sin со А] +1 = 0;
168
т
КП Jp Т- J№> + К« . с т 2таТ *
1 — ze cos to / + е
х IZ. *Л« ("?> A w)( 1 е W(l7cos со Л + R.. Я,.. (m, Т. со) е "Iw7sin со А] +
+ А ^[Я. Я (ш, 7?w)eW(o7sin<or JJ (ли, Асо)(1 -eW0,7cos со7)]+1 = 0.
Решив приведенную систему уравнений относительно А"п и Ки, полу-
чим формулы для границы заданного запаса устойчивости по критерию m
(степень колебательности), выраженные через расширенные веществен-
ную и мнимую комплексные частотные характеристики дискретного
объекта регулирования:
1 Л Лм 0»- А.со)(1 - 2e^T cos со Т + е2'”'1,Г)
К,.(tn, Т, со) = - -----=------------=----------------------------+
Т с,,1м1 sinco7’(AuA2 (zn.7',(o) +Ju./2 (ли.Г,со))
+ Кл (1 - 2е т1йТ cos соГ + е 2mwT);
(5.72)
А'п(т. Г, со) =
(w.Г, (й)епк>зТ sin со Г - Удм (/и. Т, со )(1 - е"к')Г cos to Т)
епк^т s-n ю у (АМАДМ (ди.Г,со) + (/и,Г,со))
-2А’ — (1 -e^coscoT)-
л Т
(5.73)
Формулы (5.72) и (5.73) можно переписать через расширенные амп-
литудно-частотную и фазочастотную характеристики, используя извест-
ные выражения
Ядм(/л, Т, со) = A^A^tn. Т, co)cos <рц <РДМ(^, А со), (5.74)
7р7дм <w’ Я ю) = - 4млдм("7> w>sin Фи Т> “)• <5-75)
Здесь А — амплитуда, ср — фаза.
169
Тогда
1 1 - 2е"КйТ cosco Т ч- е2л>коГ sinqypJM(m,T,co)
Т е”™г sin со Т ЛЛм
+ Кд
Дг (1 - 2е пКйТ cosco Г + е 2 "“°7');
Т2
(5.76)
cos ФцСРдм (W. г,со) елнюГ sin со Т
К {tn, Т, со) — -ГЛ J , Т
п е sin co/Jp Лдм(т./.со)
sin ФцСрдм (т.7\со)(1 - етп&Т cos со Г)
е"^Т sjnw7^ j (m г (0)
Ц ДМ v z
-2К -(1-е"'^ coscoT). (5-77)
д Т
Из (5.72) и (5.73) можно получить формулы для ПИ- и ПД-алгорит-
мов работы регуляторов, как частных случаев формул ПИД-алгоритма:
для ПИ-алгоритма
1 .7„ЛМ (ш, Г,со) (1 - 2е"коГ cos со Г + e2mwT )
Д-----------------------------------т-------(5-78)
Г sin со Г (V?2M(W,T-,co) + JyiJ2M (zn,T,co))
Kn{tn, т; co) =
АрАдм (tn. Г,со)етиГ sin co Г - Jp/дм (m,7» (1 -
cos co T)
e"""'1 sin и T(RllR2„(m.T,a) +
(5.79)
или
1 1_2епкоГ
^и(/д,Г,со) = у
т 2tna>T
cos co T + e
ПКйТ _• ,, 'r
e sin со/
sincppCpaM(m,T,co)
(5.80)
170
cos(p..ipnM (ти,Г,со)сикоГ sin со Г
Кп (m, T, co) =----------------------------------+
ewo/ sin co ТА ЦЯДМ (w. Г,co)
81П1р^срдм(/и,Лсо)(1 -е/лкоГ cos co Г)
е,/иоГ sincoTX A (w,7’.co)
Ц дмv
(5.81)
для ПД-алгоритма
K}X{tnJ\vi) = -
Те-"коГУц./дм(^Лсо)
sin co Г(/?р/?дм (w, Г,co) + ./p/дМ (w. 7, co))
1
(5.82)
Kn(m. T, w)=----------------z---------------------------x
sin co T(7?ц7?дМ (w, T, co) + J iM (m. T, co))
D D . T . -/р-/Дм(^^’тХе /И“Г-coscoT)
smcoF
(5.83)
или
Ге "'(orsincp срдм(ш,Лсо)
KJjn. Г cd) -------------------------
(5.84)
Kn(m, T, ~ A^(tnT^x
( . smcp ср (ш,Г,со)(е "коГ-coscoT)
X cos ФрСрдм (w,r,co) +---t:---------------------------
sin co /
(5-85)
Переходя к частным случаям ПИ-алгоритма, получим:
171
для И-алгоритма
| 71-2ет°)"Гсо5ЮиГ + е2,,ю"7'
Ки(т. Т, <о) = у АцЛт(т.Т.ак)
(5.86)
где сои — частота, при которой выполняется условие
(Рр(Рдм^Г’(йи) =
Л
— + arctg
l-CWKD"rCOStoHr
е"К0«Г sm®H7
(5.87)
для П-алгоритма
1
^(m’Л “") ^Лям(т.7>п)'
(5.88)
где to — частота, при которой выполняется условие
<Рц Фдм<^ Т’ °и) = л‘ (5-89)
Принимая в этих формулах m = 0, получим выражения для определе-
ния устойчивости, к которой можно применить метод введения запаса
устойчивости посредством пересчета границы этой области.
При Т —> 0 формулы расчета настроек алгоритмов регулирования сво-
дятся к известным формулам расчета настроек непрерывных регуляторов.
Сигнал на выходе автоматической микропроцессорной системы регу-
лирования является непрерывным, поэтому при определении показате-
лей качества работы этой системы используют те же прямые и косвен-
ные критерии качества системы регулирования, как и в непрерывных
системах, в частности, интегральные критерии для ступенчатых возму-
щающих воздействий и дисперсию для случайных воздействий.
5.10. Определение устойчивости и качества работы систем
с использованием ЭЦВМ
Необходимость решения задач анализа и синтеза сложных автомати-
ческих систем привела к применению для этих целей ЭЦВМ.
При исследовании автоматических систем высокого порядка реша-
ются задачи построения областей в пространстве параметров, внутри
которых заданный критерий, отражающий какие-либо качественные
172
характеристики и показатели системы, отвечает заранее поставленным
требованиям Это, в частности, области устойчивости системы в про-
странстве интересующих исследователя параметров; области с заданны-
ми показателями качества работы системы; области оптимальности в
смысле выбранного интегрального критерия и др.
В развитии вычислительных методов анализа и синтеза автоматичес-
ких систем имеются два основных направления:
• машинная реализация сложившихся, опробованных при ручном сче-
те и хорошо зарекомендовавших себя на практике методов с резким уве-
личением количества обрабатываемой информации;
• разработка и использование на ЭЦВМ новых или известных, но не
применявшихся ранее из-за большой трудоемкости методов исследова-
ния автоматических систем.
К первому направлению относится реализация на ЭЦВМ частотных
методов, широкое использование алгебраических критериев устойчиво-
сти, а также анализ и синтез линейных систем большой размерности
с помощью непосредственного вычисления всей совокупности корней
характеристического уравнения.
В качестве примера использования на ЭЦВМ достаточно хорошо про-
веренных при ручных вычислениях методов необходимо указать на ма-
шинную реализацию метода £>-разбиения, построение амплитудно-фа-
зовых частотных характеристик в обычном и логарифмическом масшта-
бах, построение границ областей устойчивости с использованием крите-
риев Гурвица и Рауса, исследование систем методами прямого вычисле-
ния корней характеристических уравнений
К второму направлению относят градиентные и статистические мето-
ды оптимизации, методы линейного и нелинейного программирования,
динамическое программирование Веллмана, методы оценки устойчиво-
сти и качества работы систем, основанные на элементарных матричных
операциях, и др.
Существующие численные методы интегрирования обыкновенных
дифференциальных уравнений позволяют непосредственно получать
временные переходные характеристики, однако реализация их на ЭЦВМ
в случае систем большой размерности не всегда эффективна из-за боль-
ших затрат машинного времени. Весьма перспективно комбинирован-
ное использование моделирующих установок и ЭЦВМ. В последнее вре-
мя значительное развитие получило моделирование динамических сис-
тем на цифроаналоговых комплексах, а также на более совершенных гиб-
173
ридных вычислительных системах (ГВС). ГВС позволяют быстро вы-
полнять интегрирование как обыкновенных дифференциальных уравне-
ний, так и уравнений в частных производных. Они особенно эффектив-
ны при взаимодействии оператора-исследователя и машины в «разговор-
ном» режиме (диалоговые вычисления). Этот режим позволяет органи-
зовать общение исследователя с машиной со скоростью, близкой к темпу
диалога.
Современные ГВС работают в естественном темпе времени, имея
высокую производительность при той же точности, что и соответствую-
щие ЭЦВМ, обладают развитыми алгоритмическими языками высокого
уровня, усовершенствованными средствами отображения информации.
ГВС позволяют решать более сложные проблемы создания сложных мно-
гоконтурных автоматических систем, чем соответствующие ЭЦВМ. Име-
ются примеры эффективного использования ГВС для решения сложных
задач: исследование системы управления ракетного двигателя в процес-
се стыковки космического корабля, моделирование поведения двух кос-
мических аппаратов, стыкующихся на орбите, один из которых потерпел
аварию, моделирование завода ядерного топлива, моделирование авто-
матических систем регулирования скорости и тормозной силы локомо-
тива, автоматических систем ведения поезда и др.
Гибридные вычислительные системы весьма эффективны для реше-
ния дифференциальных уравнений в частных производных. Решение
подобных уравнений на ЭЦВМ при сложных граничных условиях пред-
ставляет значительные вычислительные трудности, в ряде случаев не-
разрешимые. ГВС, содержащая цифровой процессор и сеточную модель
при надлежащей структуре и алгоритме функционирования, позволяет
эффективно решать такие задачи.
Приведенные примеры указывают на высокую эффективность ГВС, что
позволяет их считать весьма перспективным инструментом для автомати-
зации проектирования автоматических систем различного назначения.
Наиболее распространенным в настоящее время способом решения
задач на ЭЦВМ является пакетный. Основу такого способа составляют
пакеты прикладных программ. Задачи собираются, а затем решаются по
одной в порядке очередности.
Глава 6. КЛАССИФИКАЦИЯ
ЛОКОМОТИВНЫХ АВТОМАТИЧЕСКИХ
СИСТЕМ УПРАВЛЕНИЯ, РЕГУЛИРОВАНИЯ
И ЗАЩИТЫ
6.1. Признаки классификации систем и задачи
автоматизации локомотивов
Анализ и синтез локомотивных автоматических систем осложняются
большим разнообразием их выполнения Классификация локомотивных
систем по ряду признаков позволяет выделять принципиально общие
черты и свойства при различных способах выполнения систем. Наибо-
лее существенными признаками для классификации локомотивных ав-
томатических систем являются: цель и задачи автоматизации, принцип
построения системы, алгоритм работы регулятора, род регулируемой
величины, вид автоматизируемого агрегата или системы.
По целям и задачам автоматизации агрегатов и систем все локомотив-
ные автоматические системы делятся на три больших класса: системы
управления агрегатами, системы регулирования физических величин и
системы защиты агрегатов и систем локомотива от аварийных режимов
работы. На эти классы системы делятся в зависимости от характера про-
цессов, протекающих в них.
Процесс, при котором операции по управлению агрегатом выпол-
няются посредством системы, функционирующей без вмешательства
человека и в соответствии с заранее заданным алгоритмом, называ-
ется автоматическим управлением. Системы, в которых протекает
такой процесс управления, относят к автоматическим системам
управления (АСУ).
175
Автоматическим регулированием называется процесс поддержания по-
стоянной или изменения по заданному закону некоторой физической вели-
чины, характеризующей технологический процесс в агрегате, осуществляе-
мый при помощи измерения состояния величин агрегата или действующих
на него возмущений и воздействия на ретуширующий орган. Системы, осу-
ществляющие процесс регулирования физической величины в агрегате, на-
зываются автоматическими системами регулирования (АСР).
Системы, в которых процесс управления начинается только после
достижения контролируемой физической величиной заранее заданного
предельного значения и приводит к включению или выключению опре-
деленных элементов защищаемого агрегата, предотвращающих его ра-
боту в аварийных режимах, называются автоматическими системами
защиты (АСЗ).
В связи со значительным повышением интенсивности работы желез-
нодорожного транспорта необходимо скорейшее решение задач комплек-
сной автоматизации всех его элементов и звеньев. При этом также возни-
кает задача полной комплексной автоматизации всех агрегатов и систем
локомотивов на основе применения новейших технических средств и в
первую очередь микропроцессорных средств и систем.
Кроме экономических соображений, объем комплексной автоматиза-
ции локомотивов определяется совершенством и подготовленностью к
автоматизации агрегатов и систем локомотива, а также наличием мето-
дов построения и расчета автоматических систем и технических средств
автоматизации. Поэтому для каждого локомотива объем автоматизации
должен устанавливаться отдельно.
Наибольший объем автоматизации предусматривается для локомоти-
вов большой мощности и локомотивов, обслуживаемых в одно лицо.
Причем в настоящее время автоматизация агрегатов и систем локомоти-
вов немыслима без предварительного расчета всех характеристик и па-
раметров автоматических систем и без применения в них микропроцес-
сорных средств и систем
6.2. Виды локомотивных автоматических систем
Для автоматизации агрегатов и систем локомотивов применяются раз-
личные автоматические системы управления и регулирования, защиты и
технической диагностики. Локомотивные автоматические системы удобно
классифицировать по принципу построения, роду регулируемой физи-
ческой величины, типу регулятора (рис. 6.1), При создании этих систем
176
Уровню
теплоносителей
Давлению
Температуры
теплоноси гелей
Тока короткого замыкания
Частоты вращения вала
Бортовые
технической диа» ностики
Скорости движения и силы локомотива
Давления воздуха
в пневмосистеме
£
5
m
3
а
S
&
s
S
2
о
В-
rt
§
Температуры теплоносителя
Напряжения генератора
Частоты вращения вала энергетической установки
Локомотивом при его движении
Гидропередачей мощности
Электропередачей мощности
Тяговыми электродвигателями
Эле ктроком прессором при его пуске
Силовой установкой при ее пуске
________Воты в расширительном бакс____
Воздуха в тормозной магистрали локомотива
Г азов в картере дизеля
Масла в масляной системе ди >еля
Масла на выходе из дизеля
Воды на выходе и j дигеля
Электропередачи мощности
Тяювой выпрямительной установки
Тяювого генератора
—| 1яговых ыекгродви) аз елей переменно» о токТ
Тяювых злекгродвш аз елей постоянного гока
Дизсль-i ндравлической установки
Турбогеператорной установки
Дизс-|ь-1енсраторной установки
В тормозном режиме
В тяговом режиме
—[ Высоконагретой детал и электрической машины
Наддувочного воздуха на входе в дизель
Масла на выходе из дизеля
Воды на выходе из ди зеля
Вс п ом огател ьного
Возбудителя переменного гока
Тяговою переменного тока
Тяювого постоянного гока
Ди зель-ги дравчичеекой
’Турбогенераторной
Ди зель-генераторной
В тормозном режиме
В тяговом режиме
Гидрообъемнон
Гидродинамической
Переменного тока
11еременно-посгоянно-переменно1 о тока
Постоянно-переменного тока
Перемснио-пос гояниого тока
Пос гояиного тока
Переменного гока, асинхронными
—| Постоянного тока независимого возбуждения
—| Постоянного тока последовательного возбуждения
Турбокомпрессором
Дизель 1енера тором
Рис. 6.1. Классификация тепловозных автоматических систем управления, регулирования и защиты
177
используются все четыре фундаментальных принципа построения авто-
матических систем. На локомотивах применяются системы трех клас-
сов: автоматической стабилизации, программного регулирования и уп-
равления и оптимального управления.
Для автоматизации агрегатов и систем локомотивов наиболее часто
применяются системы автоматической стабилизации различных физи-
ческих величин и системы программного управления.
Системы автоматической стабилизации. Автоматические системы
регулирования частоты вращения валов (АСРЧВВ) энергетических уста-
новок: дизель-генераторных (на тепловозах с электрической передачей
мощности) и дизель-гидравлических (на тепловозах и дизель-поездах с
гидравлической передачей мощности) создаются при автоматизации ди-
зель-генераторов и дизель-гидравлических установок. В таких системах
сигнал задания изменяется вручную ступенчато или непрерывно с помо-
щью контроллера машиниста. На маневровых тепловозах применяются
8 ступеней сигнала (а значит, и частоты вращения вала), а на магистраль-
ных — 15. Эти системы в основном построены на основе принципа ре-
гулирования по отклонению, но есть системы, построенные на основе
принципа комбинированного регулирования.
Автоматические системы регулирования напряжения (АСРН) тягово-
го генератора, построенные на основе принципа комбинированного ре-
гулирования с сигнальной компенсацией действия измеряемых возму-
щений, создаются при автоматизации тяговых генераторов. В качестве
сигналов измеряемых возмущений в этих системах используются ток
тяговых электродвигателей, частота вращения вала дизель-генератора и
положение элемента органа топливоподачи (рейки топливного насоса)
дизеля. В этих системах применяются различные регуляторы напряже-
ния, содержащие электрические машины, магнитные усилители, тирис-
торные усилители, микропроцессорные устройства и др.
Автоматические системы регулирования напряжения (АСРН) вспо-
могательного генератора или стартер-генератора, построенные на осно-
ве принципа регулирования по отклонению, создаются при автоматиза-
ции вспомогательных генераторов. В этих системах используются регу-
ляторы напряжения по отклонению.
АСР температуры теплоносителей (высоконагретой детали, воды,
масла, наддувочного воздуха, топлива и др.), построенные на основе прин-
ципов регулирования по отклонению и комбинированного регулирова-
ния как с сигнальной, так и с параметрической компенсацией действия
178
основных измеряемых возмущений, создаются при автоматизации сис-
тем охлаждения дизелей и агрегатов передач мощности. В качестве сиг-
налов измеряемых возмущений используются температура наружного
воздуха, частота вращения вала и мощность дизеля, гок тяговых элект-
родвигателей и др.
АСР давления сжатого воздуха в пневматической системе построены
на основе принципа регулирований по отклонению и содержат релейные
регуляторы давления прямого действия. Разрабатываются также непре-
рывные регуляторы давления непрямого действия.
АСР скорости движения поезда, построенные на основе принципа
регулирования по отклонению, создаются при автоматизации локомоти-
ва с составом. В них используются как релейные, так и непрерывные
статические регуляторы скорости движения. В необходимых случаях
используются пропорционально-релейные (с переключателем режима
работы) и астатические регуляторы скорости движения поезда. При ав-
томатизации локомотива также создаются АСР скорости движения поез-
да при электрическом торможении, построенные на основе принципа
регулирования по отклонению. Эти системы предназначены для поддер-
жания на заданном уровне или скорости движения, или тормозной силы
в зависимости от скорости движения. С целью обеспечения автомати-
ческой работы локомотива при разгоне поезда создаются АСР силы тяги
локомотива.
АСР давления наддувочного воздуха дизеля на тепловозах пока не
нашли применения, поэтому они здесь не рассматриваются.
Автоматические системы управления. АСУ дизель-генератором при
пуске дизеля является системой программного управления. Программа
работы системы по времени осуществляется с помощью различных дат-
чиков, реле управления и реле времени. АСУ двигателем-компрессором
при его пуске также является системой программного управления, про-
грамма работы которой обеспечивается применением блока пуска двига-
теля-компрессора, релейного пневмоэлектрического управляющего орга-
на устройств связи системы с АСР напряжения стартер-генератора.
АСУ тяговыми электродвигателями, содержащие в качестве управля-
ющих органов реле переходов, измеряющих сигналы тока и напряжения
тягового генератора, создаются при автоматизации электрических пере-
дач мощности. В зависимости от соотношения значений этих двух вели-
чин осуществляется переключение электродвигателей и ступеней изме-
нения их магнитного потока.
179
АСУ гидропередачами мощности, применяемые в основном на манев-
ровых и промышленных тепловозах и дизель-поездах, создаются при ав-
томатизации тепловозов с гидропередачами. АСУ гидропередачи мощно-
сти обычно релейные и служат для переключения ступеней скорости в рас-
четных точках тяговой характеристики тепловоза. Переключения ступе-
ней скорости выполняются в зависимости от соотношений скорости дви-
жения тепловоза и частоты вращения вала дизеля. Для измерения скорос-
ти и частоты вращения в этих системах применяют механические датчики
центробежного типа, гидравлические (поршневые или центробежные на-
сосы) датчики и электрические тахогенераторы. Сравнивающие устрой-
ства, применяемые в этих системах, обычно релейного действия.
Автоматические системы ведения (автоведения) поезда, относящие-
ся к классу систем программного управления, создаются при автомати-
зации локомотива с составом. Управление поездом ведется по заранее
разработанной программе с корректировкой в зависимости от выходных
сигналов датчиков пути, скорости движения и времени. При этом поезд
выполняет функции объекта управления, а локомотив и автоматическая
система управления им — функции регулятора.
Автоматические системы защиты по предельным значениям физичес-
ких величин. АСЗ дизель-генератора по предельному значению (максималь-
ному) частоты вращения вала содержит объект защиты (дизель-генератор) и
устройство защиты, содержащее управляющий орган с датчиком частоты
вращения и топливную аппаратуру.
АСЗ по предельному (наименьшему) значению давления масла в ди-
зеле содержит в качестве управляющего органа реле давления. В зависи-
мости от предельных значений давления масла и режима работы дизель-
генератора система осуществляет операции в системе пуска дизеля, сброса
нагрузки и даже остановки дизеля.
АСЗ дизеля по предельному (наибольшему) давлению газов в картере
содержит в качестве управляющего органа электрический дифференци-
альный манометр. При превышении предельного значения давления га-
зов система выполняет операции по остановке дизеля и отключению си-
стемы возбуждения тягового генератора.
АСЗ дизеля по предельным (наибольшим) значениям температурами воды
на выходе из дизеля и масла на входе в дизель содержат в качестве управля-
ющих органов термореле и выполняют операции по отключению системы
возбуждения тягового генератора при достижении температуры воды и мас-
ла предельных значений. На некоторых тепловозах применяются.
180
АСЗ дизеля по предельным наименьшим значениям температуры воды
и масла. При значениях температуры ниже предельных нельзя осуще-
ствить пуск дизеля.
АСЗ тяговой выпрямительной установки по предельным (наибольшим)
значениям тока внешнего короткого замыкания или тока перегрузки в
тяговом режиме содержат в качестве управляющих органов реле макси-
мального тока; они отключают систему возбуждения генератора при до-
стижении предельных значений тока.
АСЗ тяговой выпрямительной установки по значению тока между нуле-
выми точками «звезд» тягового генератора содержит в качестве управляю-
щего органа электромагнитное реле. При пробое плеча выпрямительной
установки система отключает регуляторы напряжения тягового генератора.
АСЗ электропередачи мощности по предельному (наименьшему) зна-
чению сопротивления изоляции содержат в качестве управляющих орга-
нов реле заземления. При нарушении изоляции высоковольтных цепей,
круговом огне на коллекторах тяговых электродвигателей и коротких за-
мыканиях в них системы также отключают регуляторы напряжения тяго-
вого генератора.
АСЗ тепловоза по предельному (наименьшему) значению давления
воздуха в тормозной магистрали содержат в качестве управляющего орга-
на пневмоэлектрическое реле давления. Системы отключают поездньге
контакторы и регуляторы напряжения тяговых генераторов при давле-
нии воздуха ниже предельно допустимого значения.
АСЗ тяговых электродвигателей по предельным (наибольшим) значе-
ниям частоты вращения содержат в качестве управляющих органов элек-
тромагнитные реле (реле боксования), которые срабатывают не в зависи-
мости от частоты вращения валов тяговых электродвигателей, а в зави-
симости от разности потенциалов между их электрическими цепями.
Разрабатываются также системы с непосредственным измерением час-
тоты вращения и ускорения вращения валов тяговых электродвигателей.
При возникновении боксования система ступенчато уменьшает мощность
тепловоза. Эти системы часто называют противобоксовочными.
Для контроля и анализа технического состояния агрегатов локомоти-
ва в процессе их функционирования создаются бортовые автоматичес-
кие системы централизованного контроля управления и технической ди-
агностики. Примером такой системы может служить «Унифицированная
микропроцессорная система управления и диагностики» (МСУД), раз-
работанная специалистами ВЭлНИИ и ВНИКТИ.
181
Глава 7. АВТОМАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ
ВАЛОВ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК
7.1. Задачи автоматизации дизель-генераторов
и дизель-гидравлических установок
Во многих случаях применения дизелей на локомотивах статические
и динамические свойства элементов дизеля оказываются несовместимы-
ми для широких диапазонов режимов и обеспечивают согласование их
работы лишь в каком-то режиме, наиболее часто встречающемся в эксп-
луатации.
Отклонение от этого режима приводит к неизбежным потерям, сни-
жающим эффективность применения дизеля на локомотиве в качестве
источника энергии. Последнее обстоятельство усугубляется еще в
большей степени несогласованностью свойств элементов в неустано-
вившихся режимах работы, в переходных процессах, составляющих в
ряде случаев значительную часть времени эксплуатации. Изменение
режимов работы дизель-генераторов и дизель-гидравлических устано-
вок осуществляется циклически: холостой ход—нагрузка—холостой
ход, причем последовательность чередования нагрузок, их значения
по циклам и продолжительность циклов весьма неравномерны; на-
пример, у дизель-генераторов тепловозов типа ТЭ10 по времени ре-
жимы работы составляют: при частичных нагрузках -30—40 %, пе-
реходные процессы -20 %; холостого хода -35—40 %, а режимы ра-
боты с полной нагрузкой не превышают 10 %; суммарный эксплуата-
ционный расход топлива при работе дизель-генераторов на частич-
ных нагрузках и неустановившихся режимах достигает -85 % всего
расходуемого топлива.
182
Для исключения этих и других нежелательных явлений необходимо
стремиться к согласованию характеристик элементов двигателя, а также
двигателя и потребителя энергии (тягового генератора или гидропереда-
чи) во всех встречающихся в эксплуатации режимах работы или в боль-
шинстве из них. Задача эта может быть решена путем целенаправленно-
го изменения характеристик отдельных элементов дизель-генераторов и
дизель-гидравлических установок, а также путем их автоматизации и в
первую очередь путем создания АСР частоты вращения их валов. В этих
системах функции объектов регулирования частоты вращения вала вы-
полняют дизель-генераторы и дизель-гидравлические установки, стати-
ческие и динамические характеристики которых зависят от статических
и динамических свойств как дизеля, так и передачи мощности. На локо-
мотивах применяются различные АСР частоты вращения, различающи-
еся по принципу построения, типу регулятора частоты вращения, харак-
теру его связей с АСР напряжения тягового генератора или с АСУ гидро-
передачей мощности.
В АСР частоты вращения валов дизель-генераторов и дизель-гид-
равлических установок применяются как статические П-регуляторы,
так и астатические ПИ- и ПИД-регуляторы (на тепловозах ТГМ4,
ТГМ6, ТЭМ2, ТЭ10 и др.). Статические регуляторы применяются как
прямого действия (механические), так и непрямого действия (гидро-
механические). Ведутся большие работы по созданию электрогидрав-
лических и электронных (микропроцессорных) регуляторов частоты
вращения.
При автоматизации дизель-генераторов и дизель-гидравлических ус-
тановок, в частности при создании АСР частоты вращения их валов, учи-
тываются следующие основные технические требования:
1. Относительная статическая неравномерность астатической систе-
мы регулирования должна быть не более 1 %.
2. После полного изменения нагрузки система регулирования должна
обеспечивать: относительное перерегулирование не более 8 %; время ре-
гулирования не должно быть более 5 с.
3. Динамический заброс (перерегулирование) частоты вращения дол-
жен быть в пределах 40—80 об/мин.
4. Отклонения частоты вращения в установившемся режиме от за-
данных значений не должны превышать ±0,25 с-1.
5. В соответствии с требованиями, предъявляемыми к локомотивам,
приемистость дизеля по мощности должна быть в пределах 70—90 кВт/с.
183
Создаваемая или настраиваемая АСР частоты вращения должна отве-
чать и общим требованиям, изложенным в стандартах.
Этим требованиям наиболее полно отвечает регулятор непрямого
действия изодромного типа (ПИД-регулятор). Задание на проектирова-
ние автоматического регулятора частоты может быть определено кри-
териями, характеризующими необходимое качество работы автомати-
ческой системы. Основные критерии для проектирования регулятора:
максимальное значение относительного перерегулирования частоты
вращения при 100 %-м изменении нагрузки, время регулирования пос-
ле 100 %-го изменения нагрузки. К заданию на разработку АСР часто-
ты вращения прилагаются данные о статических и динамических свой-
ствах дизель-генератора или дизель-гидравлической установки как
объекта регулирования частоты вращения вала. На основании задан-
ных показателей качества работы автоматической системы затем опре-
деляют оптимальные значения статических и динамических парамет-
ров регулятора частоты вращения.
Точный метод определения параметров регулятора состоит в состав-
лении дифференциальных уравнений динамики дизель-генератора или
дизель-гидравлической установки и элементов регулятора с последую-
щим решением уравнения системы регулирования. Исследование урав-
нения динамики системы для различных параметров регулятора позво-
ляет выбрать такие значения его параметров, при которых обеспечива-
ются заданные показатели качества работы системы.
7.2. Функциональные схемы систем регулирования
частоты вращения
В АСР частоты вращения вала дизель-генератора или дизель-гидрав-
лической установки функции ОР выполняет дизель-генератор или ди-
зель-гидравлическая установка (рис. 7.1). В обоих случаях регулируе-
мой величиной является частота вращения вала сов, внешним возмущаю-
щим воздействием X — изменение момента сопротивления на валу дизе-
ля Мс (т.е. фактора нагрузки L) и регулирующим воздействием р — изме-
нение подачи топлива £ц. Таким образом, ОР имеет два входных сигнала
(Мс и gu) и один выходной сигнал (сов).
Функции ИУ выполняет обычно механический датчик частоты вра-
щения (ДЧВ) центробежного типа, преобразующий сигнал сов в силу
F , создаваемую центробежными силами, действующими на грузики
датчика.
184
Функции ЗУ выполняют кон-
троллер машиниста, электропнев-
матический (или электрогидрав-
лический) механизм затяжки пру-
жины задания и пружина задания.
Это устройство преобразует сиг-
нал задания — положение руко-
ятки контроллера Пк в силу за-
тяжки пружины задания F3.
Функции СУ выполняет та-
релка золотника. На ней сравни-
ваются (алгебраически суммиру-
ются) силы и Fr При наруше-
нии равенства этих сил на выхо-
де сравнивающего устройства об-
Рис. 7.1. Функциональная схема автома-
тической системы регулирования часто-
ты вращения валов дизель-генераторов и
дизель-гидравлических установок с регу-
лятором непрямого действия
разуется сигнал z — перемещение
золотника, который усиливается по мощности ИМ.
Функции ИМ выполняет обычно гидравлический поршневой усили-
тель с золотниковым управлением. Для повышения устойчивости и ка-
чества работы АСР ИМ может дополнительно содержать местные уст-
ройства, выполняющие функции жестких и гибких обратных связей.
ИМ воздействует на РО, изменяя положение реек топливных насосов hp.
Функции РО выполняет топливная аппаратура дизеля: насосы и форсун-
ки. РО изменяет подачу регулирующей среды (топлива) в объект g|f из-
меняя тем самым регулирующее воздействие ц на объект.
Регулятор частоты вращения прямого действия (см. рис. 7.1) содер-
жит четыре функциональных элемента (ИУ, ЗУ, СУ и РО), а регулятор
непрямого действия — пять функциональных элементов (ИУ, ЗУ, СУ,
ИМ и РО), не считая устройств, выполняющих функции местных об-
ратных связей в исполнительном механизме. Автоматический регуля-
тор, так же как и объект регулирования, имеет два входных сигнала (сов
и Пк) и один выходной сигнал (gu). Причем выходной сигнал объекта
(сов) является входным сигналом регулятора, а выходной сигнал регу-
лятора (gu) является входным сигналом объекта, в результате чего АСР
представляет собой замкнутый контур регулирования, т.е. является зам-
кнутой динамической системой, свойства которой характеризуются как
свойствами объекта регулирования, так и свойствами автоматического
регулятора.
185
7.3. Статические и динамические характеристики
и параметры дизель-генераторов
и дизель-гидравлических установок
Поддержание заданного значения частоты сов во времени может быть
обеспечено при выполнении определенных условий. Одно из таких ус-
ловий (сов = const) — равенство вращающего момента дизеля М момен-
ту сопротивления потребителя тягового генератора или дизель-гидрав-
лической установки и связанных с дизелем вспомогательных механиз-
мов и машин Мс, которое может быть описано уравнением статического
равновесия, характеризующим установившийся режим работы (рис. 7.2),
Чо-Чо = °- (7Л)
Задача определения динамических характеристик и параметров объек-
та заключается в нахождении дифференциального уравнения. Решая та-
кую задачу, необходимо устано-
вить, динамическими свойства-
ми какого типового звена обла-
дает объект и каковы коэффи-
циенты (статические и динами-
ческие параметры) дифферен-
циального уравнения.
Дифференциальное уравне-
ние объекта, как и любого дру-
гого динамического звена авто-
матической системы, составля-
ют на основе физических зако-
номерностей, присущих ему.
В случае дизель-генератора
(или дизель-гидравлической
установки) мы имеем дело с ем-
костями кинетической энергии — маховыми массами дизеля, тягового
генератора (или гидропередачи) и механизмов и машин, связанных с ними.
Уравнение динамики дизель-генератора или дизель-гидравлической
установки в переходном процессе на основании принципа Д’Аламбера
запишется
Рис. 7.2. Статические характеристики:
1, 2, 3 — дизеля при разных положениях
органа топливоподачи; 4, 5, б — потреби-
теля энергии
dcoB
в d/ д с
(7.2)
186
Уравнение в вариациях получим путем вычитания уравнения (7.1) из
уравнения (7.2):
dcoR
Jb dt
= ЬМ-ЬМС,
(7.3)
так как
“в = ®в0 +
TO
dcoB = d(AcoB),
где JB — приведенный к валу дизеля момент инерции всех вращающихся и дви-
жущихся масс;
(Ов0 — частота вращения вала в установившемся режиме;
(ов — текущее значение частоты вращения вала.
Дальнейший вывод дифференциального уравнения объекта целесооб-
разно выполнить для двух случаев его движения (т.е. изменения соД: после
изменения момента Мс; после изменения регулирующего воздействия.
При изменении возмущающего воздействия регулирующее воздей-
ствие сохраняется постоянным.
В общем случае
где £ц — цикловая подача топлива, определяемая положением рейки топливного
насоса йр, а поэтому Л/д(Ар, сов);
L — изменение момента сопротивления потребителя энергии.
При = const следует принять Л/д(а>в), Л/С(сов, L). Тогда уравнение
(7.3) после разложения приращений функции Л/д и Мс в ряд Тейлора по
приращениям аргументов и использования первого линейного прибли-
жения получит вид
в
dAccfe
dt
Д(0в
5(оп .
амс
___V
~дГ
о
или
dAco„
г ------5-
в dr
'дМс'
I J
(7.4)
Ы.
О
187
(дМ
с
Гал/
п
да
\ в /0_
= F
дг
— фактор устойчивости системы «дизель-по-
требитель», т.е. дизель-генератора или дизель-гидравлической установки;
^д
СХОВ Jq
= F
Дф
— фактор устойчивости дизеля по регулируемой величине,
который определяется по статическим характеристикам в точке установившего-
ся режима и соответствует tg уд (см. рис. 7.2);
Г 1
I ото J = ^пф — фактор устойчивости потребителя по частоте вращения,
который определяется по его статическим характеристикам в точке установив-
шегося режима и соответствует tg ус (см. рис. 7.2).
Переходя к относительным координатам ф = Awb/cobV и Л = А/./Ад,
(где совЛ и Ln — соответственно номинальные значения частоты вра-
щения и параметра нагрузки), получим уравнение простого апериоди-
ческого звена
dtp
d7
(7-5)
где Ту — постоянная времени дизель-генератора или дизель-гидравлической ус-
J
_____________________в
тановки (здесь Тх = р );
ДГ
ку — коэффициент передачи дизель-генератора или дизель-гидравлической
(дМ >
------ Z.
dL N
V Jo
установки (здесь Ад =------------).
F со
дг nN
После изменения регулирующего воздействия процесс движения дизель-
генератора (или дизель-гидравлической установки), т.е. процесс изменения
сов, можно описать с помощью уравнения (7.3), установив, что А/Д((ов, /?р),
а Л/С(сов), L = const. Тогда, разложив эти функции в ряд Тейлора, получим
188
и
ДМд =
'амл'
ч ^®В >0
Дсов +
Р 70
АЛ
Р
ал/с =
в 70
Асов.
Ж
. дсо
Подставив соответствующие выражения для АЛ/Д и АЛ/. в уравнение (7.3),
получим
'дм^
< в > о
dAcoR
J ------
в dt
ем
____д_
а со
В 70.
Лео
АЛр.
в
< Р >0
Введем в уравнение безразмерную координату ц = (где hpN —
номинальное перемещение рейки топливного насоса от положения, со-
ответствующего подаче холостого хода до положения, соответствующе-
го полной подаче) и получим уравнение апериодического звена
+<р = _^,
(7.6)
где — постоянная времени (Т = JJF^y,
— коэффициент передачи дизель-генератора или дизель-гидравлической
установки по регулирующему воздействию — положению элемента органа топ-
ливоподачи;
"ал/
Эй ^рЛ'Z ^дг WbA'-
\ Р Л
Сопоставляя выражения для динамических и и статических к} и
/Гр параметров, видим, что для постоянных времени объекта они по обоим
воздействиям одинаковы, а для коэффициентов передачи различны.
Из анализа выражений для 7\ и следует, что чем больше фактор
устойчивости Far, тем меньше инерционность системы «дизель-потре-
битель» и тем быстрее она приходит к новому установившемуся режиму.
189
На величину F большое влияние оказывает фактор устойчивости по-
требителя F . На тепловозе величина £Пф определяется в основном ста-
тическими характеристиками тягового генератора и вспомогательных
механизмов и машин, связанных с ним.
Момент сопротивления тягового генератора зависит от машинной
постоянной сг, магнитного потока Фг и тока 1Г:
Мг = сгФг1г. (7.7)
При движении локомотива с малой силой тяги магнитная система тя-
говых электродвигателей не насыщена и их магнитный поток Фд про-
порционален току / . При этом электродвижущая сила (ЭДС) тягового
генератора
£г = w СдФдv + (c'v + £ц) 1Г = с'гФгсов, (7.8)
где т — число последовательно соединенных электродвигателей;
v — скорость движения тепловоза;
Лц — эквивалентное сопротивление силовой цепи передачи мощности.
С учетом формул (7.7) и (7.8) определим выражение для момента со-
противления тягового генератора
Л/г = сгс'гФ>в/(с'р + Лц). (7.9)
Из этого выражения видно, что Mv = ( сов, г).Поэтому составляющая
Fr фактора устойчивости потребителя F зависит не только от частоты
вращения вала дизель-генератора, но и от скорости движения тепловоза
г
дМг
Jo
fdMr'
сгсгФгО
c'v0 + Яц
С ^г^гФгрЮвО
(c'v0 +7?ц)2
(7-Ю)
о
Из этого выражения видно, что скорость движения локомотива влия-
ет на динамические свойства дизель-генератора.
Момент сопротивления вспомогательных механизмов и машин (вен-
тиляторов охлаждения, насосов, генераторов, возбудителей и др.), соеди-
ненных с дизелем, определяется частотой вращения его вала
Л/„ « А „со;?.
В в в
(7-11)
Поэтому составляющая £в фактора устойчивости £П(р определится из
выражения
190
Рис. 7.3. Временные переходные характеристики дизель-генератора или
дизель-гидравлической установки при разных факторах устойчивости:
а-Гдг>0;6-Гдг<0;в-Гдг = 0 '
0=2^в%0-
(7-12)
>
С учетом выражений (7.10) и (7.12) фактор устойчивости потребите-
ля тягового генератора и вспомогательных механизмов и машин
. _ сгсгФг0
"Ф CVq+Яц
<^гсгФг0сов0
( , - <2 + 2 Ав^вО- <7-13)
(cvo+Яц)
Из уравнения (7.13) видно, что фактор устойчивости, а значит, и динами-
ка дизель-генератора зависят от частоты вращения его вала, магнитного по-
тока тягового генератора и скорости движения тепловоза. Значение фактора
устойчивости дизель-генератора влияет на сам характер его динамических
свойств (рис. 7.3). При F > 0 дизель-генератор обладает свойствами апери-
одического звена и может работать устойчиво без регулятора (рис. 7.3, а).
При F = 0 он обладает свойствами интегрирующего звена (рис. 7.3, в),
а при Far < 0 он имеет апериодический расходящийся переходный про-
цесс (рис. 7.3, б). Очевидно, что при Рдг < 0 дизель-генератор не может
работать без регулятора, так как обладает динамическими свойствами
квазиинерционного апериодического звена.
Уравнения динамики (7.5) и (7.6) запишем в операторной форме:
(7\^+ 1)ф = -£хХ;
(J\lP+ V-
(7-14)
(7-15)
191
\<0,
Рис 7 4 Структурная схема uiu n>-ieite
ритора или ime n.-i и 1ран тчеемн! уста-
новки как объекта per % шротыния частоты
вращения Hal a
С учетом уравнении (7.14) и
(7 15) по тучим iiqxuai очные фу и
клин ти зе ть-тснсратора и ти wi-
re и. I идранличсскои установки но
возмущающему во стене т мню
И (Р> * (Ткр 1) (7 16)
и по регулирующему но» теп-
ел в ию
"Л” *и<ги/’ " (7|7>
В соответствии с выражениями (7.|б) и (7 17) получена структурная
схема вис н. тенора юра и пт ти»е ть-ти транлической установки (рис. 7.4).
Часлопнас функции и характеристики тите ть-геиератора и титеть-
I и травлическои установки адекватны стчпветсгвукмцим функциям и ха-
рактеристикам типовых тинамических звеньев, инерционною аперио-
дичсскот о, интегрирх вицею и ти ква тиинершюнною апериодическою. II т
результатов рассмотрения статических и тинамических свойств тите ть-
iciicpaiopa и тите тьтидравличеекой установки теп .топота видно, чго от
вида и втаимиого рас по. тожения статических характеристик дизеля и тя-
ювою т оператора и ти т идропере.мчи тависят не только значения их ста-
тических (факторов устойчивости, ко тффициентов передачи) и тинами-
ческих (постоянных времени) параметров, но даже сам характер тина-
мнческих свойств, вид типовою динамического звена, тинамическим
свойствам которою сооптслствуюг итнамические свойства тите ть-теие
ритора или тите ть-титравличсской установки теп товота.
7.4. ( татнческие it динамические харакчерипики
и napaMetpbt автоматических регуляторов
частоты вращения
На теп товотах применяются автоматические pci . тяторы час юш вра
щеним прямого (рис 7 5. а) и непрямою (р»к 7 5. 6) теист вин. после-
lune бо ice сложны. чем регх тяторы прямого теист вия, так как со тержат
исполнительный механизм и тру i не у строиства Наиболее широко при-
меняю тся пропорциона тьно-ин тетра тьно-дифференты тьные (НИД)
(июдромные) лсипические рету тяторы с гидрав тическим нетто. инне ть-
ным механизмом >ги рету иторы являются рс > тыатом развития стати
ЧССКНХ ре;\ ТЯ ТОрОВ
И2
и
(Л₽)
I"1'
РО
К,
Pjk * ФунК'ЦИОМЛ iLHblC 1ЛЛ.-МЫ ЛИР ЧМГГИ'НЧ ► Н • Pl . KtikpOB •> ЧЫ ВриШ НИЯ
а премии» iCMCTHH* встреч1(рл
ПрИНЦИНИЯТЬМЫС схемы ли Г' >М.« | Hico И • II pct > I» • р-t» Чл. I. Н[ 1 НИЯ
ПНС»М< МСХЛНИЧССа1>«О ПрЯМОТО ГН 1р«м.».»(|И<* 1Л<>И> Нсиря
МОН» л'Ис НИЯ »-игре • tep М- .1И..И t Д . , !СК1|КМТНО» < JTHMCUiHH МС»»
НН <М 1*ТЯЖКН ПръАИНЫ. 3 Ш4И >1 аерхням 4 пружина задняя
гр\ 1Ы 6 ' дрс IM ’ II ры‘«41И. 4 П арик» >П« .ШИННИК
V траверса, hi I шт.ин /2 ю.? нник < .; •> сид»т<и»। поршня,
h uHiHH.ip./J пр> • <ihu №>ршсмь s ' .и>»<'ая ашкраг.ра
<> стр}Kiyptaa схема aat м ничсс».. и о о л кче» » >п» > и |р»>ме\аиичсскот регу-
лятора час:пты врашендя непрям* » . &ия
ГВ
Автоматический всережимный статический П-регулятор частоты вра-
щения прямого действия (рис. 7.5, в) применяется на тепловозах с гид-
равлической передачей мощности (ТГМ23) в АСР частоты вращения вала
дизель-гидравлической установки. Он наиболее просто построен и со-
держит четыре функциональных элемента (см. рис. 7.5, а).
Функции измерительного устройства выполняет механический
датчик частоты вращения центробежного типа с шаровыми грузами 5
(рис. 7.5, в) Функции задающего устройства выполняют контроллер ма-
шиниста 7, представляющий собой пневматический редуктор давления,
электропневматический механизм затяжки пружины 2 и пружина зада-
ния 4. Выходные сигналы измерительного и задающего устройств силы
Fa и F3 действуют на рычаг 77. выполняющий функции СУ. Сила растя-
жения пружины задания F3 действует на рычаг в точке А, а сила F^, про-
порциональная центробежной силе Fr грузов, действует на него в точке Б.
На рычаге сравниваются моменты сил F и F3. При нарушении равенства
этих моментов рычаг поворачивается и перемещает рейку топливных
насосов на величину Лр
Функцию ЗУ в статическом регуляторе непрямого действия (рис 7.5, г)
выполняют контроллер машиниста 7, механизм затяжки пружины 2, шайба
(или рычаг) 3 и пружина задания 4. Эти элементы преобразуют сигнал поло-
жения рукоятки контроллера Пк в силу затяжки пружины задания 4 F.
Выходной сигнал ЗУ равен сумме силы F3 и силы веса (7ДТ подвиж-
ных деталей 3, 4, 6,8,9 и 10.
Функцию ИУ выполняет механический датчик частоты вращения,
содержащий детали 5, 7—10. Выходным сигналом его является приве-
денная к подшипнику 8 центробежная сила грузов 5:
Fr = Мв: •
где кц — коэффициент, зависящий от массы грузов, их числа, передаточного от-
ношения между валом дизеля и осью вращения траверсы 9 с грузами, от соотно-
шения длины плеч рычага 7 или 77 и его положения.
При сов = const Fn = Fr и z = const. Каждому установившемуся значе-
нию сов соответствует определенное значение выходного сигнала z (при
Пк = const) датчика (рис. 7.6, а):
Дд = ^иуАсов. (7.18)
Функцию ИМ в регуляторе непрямого действия (см. рис. 7.5, г) вы-
полняет гидравлический усилитель с золотниковым управлением, охва-
194
Рис. 7.6. Статические характеристики управляющего органа и статического
регулятора частоты вращения:
а — при постоянном значении сигнала задания; б — при сигналах задания,
соответствующих разным прогибам пружины: / — 0 мм; 2 — 2, 3 — 4; 4 — 6;
5 — 10; 6— 14; 7— 18 мм
ченный жесткой отрицательной обратной связью. Динамические свой-
ства гидроусилителя описываются уравнением
7^ dAAp/d/= (7.19)
где 7’гу — постоянная времени;
к — коэффициент передачи;
Дйок — величина открытия окна золотников.
Динамические свойства устройства жесткой обратной связи (рычаг 11
на рис. 7.5, г) описываются уравнением
-“ос = *ос ДАР’ (7.20)
где kQC — коэффициент передачи (обратной связи) устройства, равный отноше-
нию плеч рычага 11;
ДЛ0С — перемещения золотника, обусловленные изменением Лр.
Так как ИМ, гидроусилитель и устройство обратной связи соединены
встречно-параллельно, то ИМ обладает свойствами апериодического зве-
на, поэтому при изменении сов изменяются z, Ар и подача топлива.
При приближенном описании динамика датчика частоты вращения ха-
рактеризуется передаточной функцией 1Уиу(р) пропорционального звена.
При точном описании датчика и при учете массы подвижных час-
тей и упругости пружины задания FFHy(p) соответствует передаточ-
195
ной функции колебательного звена. Передаточная функция устройства
обратной свят И’ (/>) = А Обычно регулирующий орган относят к
объекту регулирования и его передаточную функцию И’ро(/>) не рас-
сматривают отдельно.
При точном описании динамики топливной аппаратуры установлено,
что она обладает динамическими свойствами колебательного звена. Эго
обусловлено тем, что топливная аппаратура содержит две емкости, спо-
собные запасать энергию двух видов (кинетическую и потенциальную)
и обмениваться запасами энергии в псрехотном процессе: подвижные
детали топливной аппаратуры способны запасать кинетическую энер-
гию, а упругие — потенциальную.
С учетом соединений эзементов регулятора (см. рис 7.5, г) опреде-
лим его передаточную функцию по каналу действия <ов:
»р(Р)= Ицу(/') »,>(/•)/[! + "»..(/>)]• (7.21)
Из выражения (7.21) видно, что если Ицу (/О — передаточная функ-
ция пропорционального звена, то регулятор обладает динамическими
свойствами апериодического звена с постоянной времени Т = Т / А^ Аос
и коэффициентом передачи Ар = Ацу / Аос (рис. 7.5, г)).
Если считать, что датчик частоты вращения и топливная аппаратура с
передаточной функцией Иро(р) обладают щнамическими свойствами
колебательных звеньев, то в этом случае регулятор будет описываться
дифференциальным уравнением пятого порядка.
Известно, что АСР со статическими регуляторами поддерживают регу-
лируемую величину в пределах статической неравномерности и работают
в переходных процессах недостаточно качественно. Для повышения каче-
ства работы АСР применяют астатические ПИД-регуляторы. Задания та-
ких АСР, а значит, и регулиру емые величины поддерживаются постоянны-
ми на многих режимах. На маневровых тепловозах используется 8, а на
магистральных 15 заданий режимов работы АСР частоты вращения вала
дизель-генератора или дизель-гидравлической установки.
Функциональная схема астатического регулятора ничем не отличает-
ся от схемы статического регулятора (рис. 7.5, б). Однако принципиаль-
ная схема астатического регулятора отличается тем, что исполнительный
механизм содержит устройство, выполняющее функции не жесткой, а
гибкой отрицательной обратной связи. Это устройство обладает динами-
ческими свойствами реального дифференцирующего звена (рис. 7.7, а) и
описывается уравнением
196
Рис. 7.7. Схемы автоматического гидромеханического регулятора частоты
вращения и системы регулирования
а — принципиальная схема автоматического астатического гидромеханического
регулятора частоты вращения. 1 — контроллер машиниста: 2 — электрохгехани-
ческий механизм, 3 — шайба; 4 — пружины гадания; 5 — грхзы; 6 — тарелка
пружины; 7. 15 — штоки; 8 — золотник; 9 — втулка золотника; 10 — изодромная
игла; 11, 17—пружины; 12— поршень силовой; 13 —поршень; 14 —аккумулятор;
16 — топливная аппаратура.
Сгруктурные схемы:
б— автоматического астатического (ПИД) гидромеханического регулятора час-
тоты вращения; в — автоматической системы регулирования частоты вращения
вала дизель-генератора или дизель-гидравлической установки
197
Tx dAAB /dt + ДЛ„ = Toc кос dAAp /dt, (7.22)
где Тос — постоянная времени;
kQC — коэффициент передачи.
Регулятор работает следующим образом. При уменьшении Мс и уве-
личении (дв золотник 8, поднимаясь на величину Дг вместе с тарелкой
пружины 6, открывает отверстие во втулке 9 на величину ДЛОК, и пор-
шень 12 начинает опускаться, уменьшая ДАр и подачу топлива g|f Одно-
временно с поршнем 12 опускается поршень 13, в полости над которым
образуется разряжение, а в полости под ним избыточное давление. Под
действием этого давления жидкости золотниковая втулка 9 перемещает-
ся вверх на величину Д/?в, сжимая пружину 1, и частично закрывает от-
верстие, открытое золотником 8. Это происходит потому, что масло из по-
лости под поршнем 13 не успевает перетекать через изодромную иглу 10
в полость над ним.
В переходном процессе в результате увеличения скорости перемеще-
ния поршней 12 и 13 и втулки 9 и снижения скорости тарелки 6 и золот-
ника 8 увеличение открытия окна hQK прекращается и начинается его
уменьшение. Однако, когда движение поршней 72 и 73 и тарелки 6 с зо-
лотником 8 к концу переходного процесса становится медленным, втул-
ка 9 под действием сжатой пружины 7 7 возвращается в первоначальное
положение за счет перетекания жидкости из полости над поршнем втул-
ки в полость под ним через игольчатую иглу 10.
В установившемся режиме втулка 9 всегда занимает положение, когда
обе шайбы пружины 77 упираются в корпус. Состояние равновесия
регулятора возможно при возвращении золотника 8 в первоначальное
положение перекрытия отверстия во втулке (Дг = О, ДЛОК = 0). Таким
образом, положение тарелки 6, золотника 8 и частота вращения вала
дизель-генератора или дизель-гидравлической установки не зависят от
положения поршня 72 и Мс. Поэтому регулятор является астатическим.
В регуляторе функции исполнительного механизма выполняет гид-
равлический поршневой усилитель с золотниковым управлением, соеди-
ненный встречно-параллельно с устройством, обладающим динамичес-
кими свойствами реального дифференцирующего звена (рис. 7.7, а).
С учетом соединения элементов регулятора (см. рис. 7.5, б, 7.7, а и
7.7, б) определим его передаточную функцию при Пк - const:
«'per (?) = »ИУ (Р) (7осР + 1) ^РО(РУ(Т^ ТКр> + Т^р + тх к:у кК). (7.23)
198
Отметим, что коэффициент передачи устройства обратной связи оп-
ределяется отношением площадей поршня 13 S13 и поршня втулки 9 S9
по формуле
*ОС = Д/>В/ДАР = ЗД- (7.24)
Величина Тос является постоянной времени реального дифференци-
рующего звена (изодрома) и для известной конструкции регулятора оп-
ределяется величиной открытия иглы 10 (см. рис. 7.7, а). Из выражения
(7.23) видно, что ПИД-регулятор обладает динамическими свойствами
сложного соединения звеньев
7.5. Устойчивость, качество работы и настройка
автоматических обычных и микропроцессорных систем
регулирования частоты вращения
Устойчивость и качество работы автоматических систем зависят от
статических и динамических свойств объекта и регулятора, т.е. от стати-
ческих и динамических характеристик и параметров всех элементов, вхо-
дящих в контур регулирования автоматической системы. Динамические
свойства системы описываются дифференциальным уравнением, кото-
рое составляется с учетом дифференциальных уравнений ее элементов и
связей между ними.
Уравнение замкнутой АСР частоты вращения вала дизель-генератора
или дизель-гидравлической установки, составленное с учетом уравне-
ний: объекта регулирования (7.6), датчика (7.18), гидроусилителя (7.19),
устройства обратной связи (7.22) и зависимости ДАв = Az - ААОК, в опера-
торной форме имеет вид
[7ц Тжр> + (Tv + 7р Гос + (Т^ - ТК кюк^ 7р +
+ Гос кгукОС)Р - *ИУ *гу У ф = °’ С7-25)
Используя функциональную схему и дифференциальные уравнения
элементов АСР, получим ее структурную схему (рис. 7.7, в).
При разработке и настройке АСР может получиться так, что для ана-
лиза ее устойчивости и качества работы будут составлены уравнения зве-
ньев, входящих в систему, но не для всех звеньев могут быть найдены
точные значения коэффициентов. Так, например, на практике встреча-
ются трудности в определении постоянной времени дизель-генератора
или дизель-гидравлической установки либо коэффициентов трения в
199
управляющем органе (ЗУ, НУ, СУ). В гаком случае возникает вопрос, в
каком диапазоне можно изменять значение того или иного коэффициен-
та без потери устойчивости АСР. Иногда для сохранения устойчивости
АСР появляется необходимость ввести некоторые конеiруктивныс изме-
нения в регулятор, например, измешпь жесткость пружины н др. Ila titm-
ice простое решение них задач в ряде случаев можст быть получено
нулем опрс (слепня области устойчивости системы при изменении одно-
го или (ву.ч параметров, входящих в коэффициенты дифференциальных
уравнений АСР.
Наиболее удобным для оценки устойчивости н качества рабоп.1 ЛСР
часгО1ы вращения является метод оценки по частотным характеристи-
кам разомкнутой АСР Наличие дифференциального уравнения, переда-
точной функции или характеристически)о уравнения системы pei ул про-
нация позволяет рассчитать значения коордипаг точек частотных харак-
теристик на )ВМ. Часто) ныс характеристики дави возможность пред-
ставить резулыап.) расчета в виде i рафиков на комплексной плоскости
Пусть, например, необходимо построить Л<!>ЧХ Л( I’ частоты враще
ния вала дизель-гидравлической установки, содержащей регулятор пря-
мою действия (см. рис. 7.5, «). Динамические свойства объекта оинсыва
вися частотной функцией апериодическою звена, а рс|улятора час-
тотной функцией колебательно)о звена, но ному вещественная и мнимая
частошые функции разомкнутой системы имею) вид
АиАр|| 0>2(/р/р2 + ^p2j )1
и<0) (Г^2/;?)|(1 ы2/;?1) + (0^;
МФ) = ,,,, 2/2 un 2'.-2 > 2Т2 |
(1+(о /ц)|(1— <п /р|) ) (о /р2 I
Параметры объекта и регулятора: 4М 2,72; Г « 5,34 с; Ар-4,1;
Гр! 0,036 с; Г 0,22 с, 0 £ со £ 200
Воспользовавшись выражениями для определения Л/(<ч) и по-
дучим следующие значения действиicjh.iioh и мнимой частей комплекс-
ной частотной харакlepuciики разомкнутой системы: Л/т х(<о) =
0,0X832, <п 0,0004549, 7Vwm(<o) 0,045299, о> - 0,52598; Л/П1)|1(<о) =
0,0017313, <о 0,083436;/Vmnx((D) 0,0000037462, <о 0,00019378.
200
Рсзулышы расчетов показывают, что при шданных гначениях парамет-
ров разомкну юй системы частотная характеристика не oxnaibinaei юч-
ку с координатами ( I, 0) и система будет устойчива в гамкнуюм со-
стоянии. По точке пересечения харак терне шки е окружностью радиу-
са, равною единице, определяю! запасы устойчивости системы по мо-
дулю и по фазе, которые должны бып. в пределах 6 29 дЬ и 30 60‘
cool вс ют ней но. В случае необходимости по шачениям гапасов устой-
чивое in Moryi бып. определены и другие показатели качества работы
системы: относительное nepepciулировапие, показа! ель колебательно-
сти, время регулирования и др.
Настройка АС Р часкны крашения вала состоит из двух панов: pciy-
лировки и настройки регуляторов; настройки системы регулирования.
Регулировка и настройка регуляторов сложный мноюсгупспчагый
процесс, коюрын последовательно выполняю! па специальных стендах
швода-н п о!они геля, ыгем па двшагсле при сто сборке, обкатке и, нако-
нец, при рабою* двш а юля под нагругкой. Регулировка и настройка регу-
ляторов требуют проведения цело) о ряда точных гамеров мощности, что
возможно при нагружении дизель-генератора на реостат, имитации раз
личных давлении, изменении и регулировке большою числа ходов, Та-
горов и т.н. Настройка АСР частоты вращения вала на поддержание
гаданпых уровней частоты вращения выполняется изменением длины
пн и рычагов в задающем устройстве регулятора. Па устойчивость и
качество работы системы влияют путем изменения постоянной време-
ни устройства гибкой отрицательной обратной свяш в регуляторе с
помощью июдромноп иглы.
Настройка локомотивных автоматических микропроцессорных си-
стем pciулировапия частоты вращения валов rneprei ических устано-
вок производится iiyieM внесения изменений в upoi рамму работы ре-
|уляторов. Это достигается выбором значений cooi веге жующих ко-
)ффициен1ов, определяющих параметры настройки регуляторов, а
шачит, и показатели качества работы систем pciулировапия. Суще-
ствует два направления развития микропроцессорных А( РЧВ. Пер-
вое включает разработки, преднашаченпыс для испольювапия тра-
диционной юплнвоиодаюшей аппаратуры с воздействием па рейку
ЮПЛИВН01 о насоса высокою давления, а второе ориентировано па
применение форсунок глсктрома! пи 1 ною юна. «Функциональная схема
микропроцессорного АРЧИ содержи! датчики выходных величин (<о
/', />, N и др.) и ыеменгы, предназначенные для выработки соответ-
201
сгвующих выходных сш налов. Значения задающих воздействии вы-
рабатываются соответствующими «датчиками. В микропроцессорных
АРЧВ выходные сигналы датчиков подаются в микропроцессорный
контроллер, где используются заложенные в него программы для вы-
работки воздействий па ИМ.
Микропроцессорный контроллер обеспечивает вотможность целево-
10 программирования процедур обработки данных, получаемых от дат-
чиков и «датчиков, и формирования соответствующих управляющих
сигналов, воспринимаемых ИМ. Знание результатов комплексного воз-
юйствия совокупное।и многих физических величин па работу шсргети-
ческой установки с ДВС позволяет ра фабатывагь соответствующие про-
граммы для микропроцессорного контроллера, оптимизировать pel ул и-
рующие воздействия, например, для обеспечения минимального расхода
топлива на каждом режиме. )то трудно или лево «можно реализовать в
системах с механическими, гидравлическими, пневматическими или элек-
трическими АРЧВ.
Микропроцессорный АРЧВ строится па основе микро )ВМ, по-
лому может обрабатывать сигналы датчиков и задатчиков только в
цифровой форме. Эта часть системы регулирования называется дис-
кретной. Энергетическая установка, ИМ, игтчики. задатчики имеют
непрерывные (аналоговые) характеристики и в совокупности обра-
зуют непрерывную часть системы. Для передачи сигналов из непре-
рывной части в дпекрешую и обратно они должны соответствую-
щим образом преобразовываться. С угон целью в регулятор вводят-
ся аналого-цифровой преобразователь (АЦ11) и цифроаналоговый
преобразователь (ЦА11).
На локомотивах вместо гидромеханических регуляторов частоты вра-
щения вала и мощности ДВС (4-7РС2 и 10Д100) в последние годы уста-
навливают хорошо зарекомен довавшие себя в условиях жсплуатации (на
тепловозах ЧМ )3 и 2ТЭ116) электронные (микропроцессорные) регуля-
торы, разрабокшные сиециалиаами «Дизельав тематики» (г. Саратов) с
участием сотрудников ВНИИЖЛ Они позволяют существенно повысить
показатели качества работы АСРЧВ на режимах, связанных с увеличени-
ем час юты вращения коленчатого вала и мощности дизелей, и как след-
ствие, повысить их жономичность. Автоматические системы, содержа-
щие эти регуляторы, обеспечивают:
• автоматическое поддержание заданной частоты вращения коленчато-
го вала и мощности дизеля на каждой по индии контроллера машиниста;
202
• работу дизеля по ограничительной характеристике на переходных
режимах; изменение тепловозной характеристики в зависимости oi тем-
пера луры наружною вощу ха;
• дискретное или плавное изменение частоты вращения коленчатою вала;
• программную шщиу дизеля но давлению масла; подачу топлива в
цилиндры дизеля в процессе пуска только при достижении заданной ча-
стоты вращения коленчатого вала;
• задание величины цикловой подачи топлива при пуске дизеля;
• автоматическое регулирование напряжения тяювого генератора при
движении тепловоза в режиме тяги или электрического торможения;
• автоматическое регулирование напряжения тягового генератора при
работе дизеля па холостом ходу;
• защиту тяговых электрических машин при боксовании колесных пар;
• уменьшение мощности, используемой натягу поезда, при отключе-
нии неисправного тяговою электродвигателя;
• непосредственное управление силовыми контактными аппаратами;
• управление локомотивом в режимах поддержания скорости и сек-
ционной силы тяги.
Система управления локомоиизом содержи! базовые блоки и набор
дополнительных датчиков. Базовые блоки унифицированы для магист-
ральных и маневровых тепловозов и содержат злектронный блок управ-
ления, злектрогидравлпческос исполин тельное устройство, датчик час-
тоты вращения коленчатого вала дизеля, программатор. Модификации
системы управления для ра зных локомотивов отличаются друг от друга
программами, заложенными в память микропроцессора, а также номен-
клатурой дополни тельных датчиков. Система управления, предназначен-
ная для магистральных локомотивов, помимо базовых блоков имеет дат-
чики частоты вращения ротора турбокомпрессора и давления наддувоч-
ного воздуха, а также аналоговый датчик давления масла. Применитель-
но к локомотиву 2ТЭ116 систему управления дополнительно оборудуют
датчиками частоты вращения колесной нары и температуры наружного
воздуха. )лек! ройный блок управления служиi для приема и програм-
мной обработки команд управления и сигналов, поступающих oi датчи-
ков, Кроме того, он формирует сигналы, поступающие в электрогидрав-
лическос исполин тельное устройство и па штатный блок управления воз-
буждением (БУ В) гигового генератора. Функция исполни тельного уст-
ройства — преобразование электрическою сигнала электронного блока
управления в механическое перемещение (поворот) его вала, связанного
203
------- Потоки информации
Потоки энергии
Рис. 7.8. Блок-схема системы управления и энергетической цепи тепловоза
2ТЭ116-1360:
КМ — контроллер машиниста; ОУ — органы управления тепловозом (тумблеры
и кнопки); ДЧД — датчик частоты вращения коленчатого вала;
ДДМ — датчик давления масла; ДДН — датчик давления наддува;
ДЧТ — датчик частоты вращения турбокомпрессора; ДТВ — датчик температу-
ры наружного воздуха; РДМ — штатное реле давления масла РДМ-4;
ДЧК — датчик частоты вращения колесной пары; ИУ — исполнительное уст-
ройство; ДПР — датчик положения реек ТНВД; ТНВД — топливные насосы
высокого давления; Д — дизель; СВ — синхронный возбудитель;
БУВ — блок управления возбуждением типа БА-520; СГ — тяговый синхрон-
ный генератор; УВВ — управляемый выпрямитель возбуждения типа
БВК-1012; ТЭД — тяговые двигатели; ДТ — датчик выпрямленного тока СГ;
ВУ — тяговый выпрямитель; ДН — датчик выпрямленного напряжения СГ;
П — программатор
с рейками топливных насосов высокого давления. На рис. 7.8 представ-
лена блок-схема системы управления и энергетической цепи тепловоза
2ТЭ116
204
Глава 8. АВТОМАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ
ТЯГОВЫХ ГЕНЕРАТОРОВ
8.1. Классификация систем регулирования напряжения
тяговых генераторов
Тяговый генератор является одной из основных составных частей элек-
трической передачи мощности от вала теплового двигателя к осям движу-
щих колес локомотива или дизель-поезда. Зависимость силы тяги локомо-
тива от скорости движения определяется зависимостью напряжения зяго-
вого генератора 1/ от тока нагрузки /г (тяговых электродвигателей). При
постоянной частоте вращения вала дизель-генератора и мощности дизеля
график зависимости Ц.(/г) имеет вид гиперболы. На этот график наклады-
ваются ограничения по максимально допустимым значениям Ц и /г.
Внешние характеристики тяговых генераторов (7Г(/Г) постоянного и
переменного тока значительно отличаются от зависимости Ц(/г), требу-
емой по условиям сов = const и Л7Д = const (рис. 8.1, а). Для обеспечения
требуемой зависимости L7 (/) к тяговому генератору подключаются один
или несколько регуляторов напряжения. Совокупность тягового генера-
тора и регуляторов его напряжения, соединенных линиями связи и ме-
ханизмами сочленения и взаимодействующих между собой в процессе
работы, представляет собой автоматическую систему регулирования на-
пряжения (АСРН) тягового генератора. Эта система должна автомати-
чески обеспечивать требуемые по условиям работы локомотива как тяго-
вой транспортной машины зависимости Ur(Ir, сов) (рис. 8.1, б).
Локомотивные АСРН тяговых генераторов подразделяются:
• по типу тягового генератора: на АСРН тяговых генераторов посто-
янного тока и АСРН тяговых генераторов переменного тока;
205
Рис. 8.1. Статические характеристики:
а — тягового генератора и системы регулирования напряжения при сов = const;
б — автоматической системы регулирования напряжения тягового генератора
при разных сов; 1 — тягового генератора постоянного тока; 2 — то же перемен-
ного тока; 3 — системы регулирования напряжений при сов = const; 4, 5 и 6 —
то же при разных wB
• по фундаментальным принципам построения: на системы регулирова-
ния по возмущениям (току нагрузки и частоте вращения вала дизель-генера-
тора) и комбинированные системы, построенные на основе принципа ком-
бинированного регулирования по возмущениям (току нагрузки, частоте вра-
щения вала дизель-генератора, перемещению реек топливных насосов) и по
отклонению текущего значения напряжения от его заданного значения.
Требуемые характеристики Ц.(/г, сов) (см. рис. 8.1, б) можно получить,
изменяя ток возбуждения, а значит, магнитный поток и магнитодвижущую
силу тягового генератора в зависимости от отклонения от заданного значе-
ния напряжения, тока нагрузки, частоты вращения вала, разности мощно-
сти генератора и свободной мощности дизеля. При увеличении тока от
нуля магнитный поток (а значит, и напряжение) должен оставаться при-
близительно постоянным, затем уменьшаться приблизительно обратно
пропорционально току, после чего уменьшаться при почти постоянном токе.
Во второй зоне характеристик важно не получение определенной формы
их, а обеспечение полного использования свободной мощности дизеля тя-
говым генератором. Требуемые характеристики Ц(/г, %) могут быть реа-
лизованы с разной точностью как АСРН по возмущениям (/г, сов), так и с
помощью специальных комбинированных АСРН тяговых генераторов.
206
8.2. Схемы систем регулирования напряжения тяговых
генераторов постоянного и переменного тока
На тепловозах ТЭМ2 и ЧМЭЗ применяются АСРН тягового генератора
постоянного тока, построенные на основе принципа регулирования по воз-
мущениям: току нагрузки генератора (двигателей) и частоте вращения вала
дизель-генератора. Это системы разомкнутые, неточные, но они просты и
достаточно надежны. В них функции регулятора напряжения тягового гене-
ратора выполняют специальные машины постоянного тока — генераторы-
возбудители (В) и даже АСРН вспомогательного генератора (ВГ). В таких
системах регулируемая величина Ur не измеряется и информация о ее теку-
щем значении не подается в автоматический регулятор напряжения (АРН).
Требуемые статические характеристики Ur(Jr, сов) в этих системах по-
лучаются путем соответствующего подбора характеристик генератора-
возбудителя и изменения сопротивления резисторов в цепях его системы
возбуждения (7?|, А2) (рис. 8.2).
Недостатками систем регулирования по возмущению являются низкая
точность и плохое качество работы. Известно, что более высокое качество
Рис. 8.2. Схемы автоматичес-
ких систем регулирования на-
пряжения тяговых генерато-
ров постоянного тока, постро-
енных по принципу регулиро-
вания по возмущениям:
а — функциональная;
б— принципиальная систе-
мы, содержащей генератор-
возбудитель с продольно-
расщепленными полюсами;
в— принципиальная систе-
мы, содержащей генератор-
возбудитель с радиально-
расщепленными полюсами
207
Рис. 8.3. Функциональные схемы комбинированных автоматических систем
регулирования напряжения тяговых генераторов:
а — сокращенная; б — развернутая.
Принципиальные схемы тепловозных комбинированных автоматических
систем регулирования напряжения тяговых генераторов:
в — постоянного тока; г — переменного тока
208
работы может быть достигнуто путем построения систем на основе прин-
ципа комбинированного регулирования по отклонению и по возмущению.
Эти положения теории автоматических систем и были использованы при
создании АСРН тяговых генераторов постоянного и переменного тока
мощностью 2000 кВт и более. В комбинированных АСРН тяговых гене-
раторов в качестве сигналов по возмущениям используются ток, частота вра-
щения вала дизель-генератора и положение органа топливоподачи дизеля
(рис. 8.3, а). Для измерения текущих значений регулируемой величины Ц.
и сигналов возмущений Ц.(/г сов, hp) используются измерительные уст-
ройства ИУ1—ИУ4 (рис. 8.3, б). Для сравнения, отбора и суммирования
сигналов заданий т] • и выходных сигналов измерительных устройств при-
меняется сумматор С. Функции регулирующего органа выполняет генера-
тор-возбудитель (рис. 8.3, в) или управляемый выпрямитель тока возбуж-
дения (УВВ) (рис. 8.3, г). Для повышения устойчивости и качества работы
АСРН тягового генератора в регуляторах таких систем используются уст-
ройства местных отрицательных обратных связей (УОС) (см. рис. 8.3, б).
Функции датчиков напряжения (ДН) и тока (ДТ) (см. рис. 8.3, в) обычно
выполняют простейшие магнитные усилители (ИУ1, ИУ4); датчика час-
тоты вращения ДЧВ (ИУ2) — бесконтактный тахометрический блок; дат-
чика положения органа топливоподачи ДП (ИУЗ) — индуктивный дат-
чик перемещения.
Элементы цепи датчика скорости (ДС) изменения тока возбуждения
тягового генератора выполняют функции устройства обратной отрица-
тельной гибкой связи выхода генератора-возбудителя или управляемого
выпрямителя УВВ с входом амплистата возбуждения (АВ) или блока
управления (БУВ) управляемого выпрямителя. Датчик скорости (ДС) —
обычный трансформатор или 7?С цепочка, а АВ — магнитный усилитель
с несколькими обмотками управления, который выполняет функции сум-
матора выходных сигналов датчиков и выходного сигнала селективного
устройства (СУ) и функции усилителя мощности.
Для настройки регулятора напряжения (7 по отклонению и регулято-
ров напряжения по возмущениям (см. рис. 8.3, в, г) применены резисто-
ры с переменными сопротивлениями, выполняющие функции задающих
устройств.
Таким образом, АСРН тягового генератора предназначена для форми-
рования определенных зависимостей J7r(/r, WB) путем изменения тока
возбуждения генератора. Основные требования, предъявляемые к АСРН
тягового генератора:
209
• обеспечение полного использования свободной мощности дизеля для
гяги независимо от изменения сопротивления движению, мощности, от-
бираемой от дизеля на привод вспомогательных механизмов и машин,
атмосферных условий и других факторов;
• обеспечение режимов частичных нагрузок (пониженной мощнос-
ти) дизеля при условии наиболее экономичной его работы;
• ограничение тока тяговых электродвигателей при трогании поезда
с места с возможностью изменения его значения в широких пределах
для обеспечения требуемой по условиям трогания поезда силы тяги. При
этом желательно поддержание примерно постоянного в процессе разго-
на поезда тока тяговых электродвигателей. Для сокращения времени тро-
гания и разгона поезда должно быть обеспечено ускоренное увеличение
тока электродвигателей до его максимального значения;
• обеспечение высоких противобоксовочных свойств локомотива за
счет взаимодействия с автоматической системой защиты тяговых элект-
родвигателей;
• ограничение предельных значений параметров электропередачи —
максимальных тока и напряжения.
Обеспечение стабильности характеристик и параметров, устойчивос-
ти и высокого качества работы АСРН, достаточного быстродействия
АСРН тягового генератора должна с наибольшей полнотой выполнять
все требования, так как от этого зависят тяговые свойства, производи-
тельность, надежность и экономичность локомотива.
8.3. Статические и динамические характеристики
и параметры тяговых генераторов
Тяговый генератор в АСР является одной из основных составных ча-
стей. Статические и динамические свойства тягового генератора как
объекта регулирования напряжения во многом определяют выбор не толь-
ко принципиальных схем построения АРН и системы регулирования в
целом, но и статических и динамических характеристик и параметров
регуляторов напряжения.
Регулирование напряжения тяговых генераторов постоянного и пере-
менного тока осуществляется путем изменения тока возбуждения. На
тяговый генератор действуют следующие основные внешние возмущаю-
щие воздействия: изменение тока нагрузки генератора и частоты враще-
ния вала дизель-генератора (см. рис. 8.3, а). Ток возбуждения генератора zB
210
Рис. 8.4. Статические характеристики тягового генератора независимого возбуждения:
а — статические характеристики по регулирующему воздействию при различ-
ных значениях тока генератора и частоты вращения; 1 — I г1= 0; 2 — I г2, <ов1;
3 — I г2, %; 4 — I г2, <пв2; б — статические характеристики по возмущающему
воздействию при разных значениях частоты вращения и тока возбуждения;
“вР'вР 2 —юв1’'в2’ 3~ %2’ZBP 4~ wb2’*в2’
является его регулирующим воздействием ц. Статические характеристи-
ки тягового генератора постоянного тока описываются так:
Ч = сгфг“в-;Л (8!)
или
C/r = CAZBWrC0B-/r7?r’ <8-2)
где Zy — магнитная проводимость магнитной системы тягового генератора;
wp — число витков обмотки возбуждения генератора.
Характеристики холостого хода и нагрузочные являются статичес-
кими характеристиками генератора по регулирующему воздействию
(рис. 8.4, а). Коэффициент передачи генератора по регулирующему
воздействию
Д17г
= =^r’“в-U (8-3)
^в
является величиной переменной.
Статические характеристики генератора по возмущающему воздей-
ствию — току нагрузки генератора мало изменяются при изменении /г
(рис. 8.4, б). Коэффициенты передачи генератора по возмущающим воз-
действиям также являются величинами переменными:
211
*л!=^= д/рг <8-4>
*Х2 = *гз=дУ; =Ж %•-„) (8-5)
Л«в
Если принять, что генератор нагружается активной нагрузкой (подклю-
чен к реостату) и пренебречь индуктивностью обмотки якоря, то можно
считать, что он обладает динамическими свойствами апериодического зве-
на. Дифференциальное уравнение тягового генератора в этом случае
(7-в р + IЖг = kri А <, + кг2 Д <ов - kri А /г (8.6)
где Тв — постоянная времени системы возбуждения генератора (Гв = LJR^
Lr — индуктивность),
а передаточная функция
WTi(p) = t/r(py<r(p) = кг11(Т*р + 1). (8.7)
Передаточная функция генератора при нагружении его активно-ин-
дуктивной нагрузкой, т.е. при соединении с тяговыми электродвигателя-
ми, более сложная:
<8'8>
где Тя — постоянная времени якоря (Г = (L* + £Н)/(ЛЯ + RH), £я и LH — индук-
тивность цепи якоря и нагрузки, Ra и 7?н — активные сопротивления якоря и
нагрузки).
Из выражения (8.8) видно, что тяговый генератор при работе с
тяговыми электродвигателями обладает свойствами апериодическо-
го звена второго порядка, а это значит, что нагрузка генератора ока-
зывает влияние не только на его статические свойства, но и на дина-
мические.
С учетом функциональных схем (см. рис. 8.3, а и б), статических и ди-
намических характеристик составлена структурная схема тягового генера-
тора независимого возбуждения (рис. 8.5), из которой видны статические
и динамические свойства его относительно воздействий zB, /г и сов.
В соответствии с выражением (8.7) комплексная частотная функция
тягового генератора
212
Рис. 8.5. Структурная схема тягового генератора независимого возбуждения
^rl(/w) = *rl /(^7(0+1). (8.9)
При нагружении тягового генератора активно-индуктивной нагрузкой
в соответствии с выражением (8.8) его комплексная частотная функция
Гг1(/а)) = ^г1/[(7'в7(о+ 1)(Гя7со+ 1)]. (8.10)
Из сравнения выражений (8.9) и (8.J0) видно, что при прочих равных
условиях устойчивость АСРН тягового генератора при работе с тяговы-
ми электродвигателями будет меньше, чем при нагружении генератора
реостатом.
Статические и динамические свойства тяговых генераторов перемен-
ного тока (синхронных) вместе с тяговой выпрямительной установкой
могут быть описаны передаточными и частотными функциями, анало-
гичными таким функциям для тяговых генераторов постоянного тока,
однако выражения для статических и динамических параметров в этом
случае имеют другой вид.
8.4. Статические и динамические свойства автоматических
регуляторов напряжения
Комбинированные АСР напряжения тяговых генераторов мощных
тепловозов, кроме объекта регулирования — тягового генератора, содер-
жат по четыре регулятора напряжения: по отклонению напряжения от
заданного значения, по току нагрузки генератора, по частоте вращения
вала дизель-генератора и по положению элемента (рейки) органа топли-
воподачи дизеля.
213
Регуляторы напряжения по отклонению содержат датчик напряжения,
задающее устройство, сравнивающее (селективное) устройство, сумми-
рующий усилитель (магнитный или полупроводниковый), регулирующий
орган (генератор-возбудитель или управляемый полупроводниковый вып-
рямитель) и устройство гибкой отрицательной обратной связи. Функции
датчика напряжения обычно выполняют магнитные усилители, а функ-
ции задающего устройства — резисторы с изменяемым сопротивлени-
ем. Сравнивающее устройство содержит резисторы и диоды. Функции
устройства гибкой отрицательной обратной связи выхода возбудителя с
входом магнитного усилителя (амплистата возбуждения АВ) или выхода
управляемого выпрямителя УВВ с входом блока управления выпрямите-
лем (БУВ) выполняют трансформаторы или четырехполюсники RC.
Регуляторы напряжения тяговых генераторов по току нагрузки, кро-
ме датчика тока ДТ, содержат те же элементы, что и регуляторы напряже-
ния по отклонению.
Функции датчика тока тягового генератора обычно выполняют маг-
нитные усилители.
Регуляторы напряжения тяговых генераторов по частоте вращения
вала, кроме датчика частоты вращения (ДЧВ), содержат обычно те же
элементы, что и регуляторы напряжения по отклонению. В них функции
датчика частоты вращения выполняют синхронный подвозбудитель (СПВ)
с приводом (или синхронный возбудитель (СВ) с приводом) и бесконтакт-
ное устройство преобразования частоты напряжения f в ток, называе-
мое бесконтактным тахометрическим устройством (БТУ) или блоком за-
дания возбуждения (БЗВ).
Регуляторы напряжения тяговых генераторов по положению элемента
органа топливоподачи, кроме датчика перемещения (ДП), содержат те же
элементы, что и регуляторы напряжения по отклонению. Функции датчика
перемещения, например реек топливных насосов дизеля, выполняет обыч-
но бесконтактный индуктивный датчик перемещения или угла поворота.
Статические характеристики датчиков напряжения (магнитных уси-
лителей) обычно линейны в рабочем диапазоне Ц. (рис. 8.6, а). Коэффи-
циент передачи датчиков почти не зависит от Ц..
Уравнение статической характеристики датчика напряжения
'i=Vr (8-И)
Магнитный усилитель обладает свойствами апериодического звена,
поэтому передаточная функция датчика напряжения имеет вид
214
Рис. 8.6 Статические характеристики (/ и 2) и зависимости коэффициентов
передачи от напряжения (3) и от тока (4) датчиков:
а — напряжения тягового генератора (магнитного усилителя ТПН-ЗА);
б — тока тягового генератора (магнитного усилителя ТПН-4Б)
^„0>) = *;1,Л7д,,/'+') (8.12)
Постоянная времени датчика напряжения
т Г \2
Ly 1 ну Ян
Тдн - я ~4Г и, я ’ (8.13)
/vy 7 I p J у
где £у — индуктивность обмотки управления;
f— частота напряжения питания, Гц;
wy и wp — число витков обмотки управления и рабочей;
и RH — активное сопротивление обмотки управления и нагрузки, Ом.
Селективное устройство функционально входит и в регулятор по от-
клонению, и в регулятор по току. В него, кроме сигнала от датчика на-
пряжения, подается еще выходной сигнал датчика тока (ДТ) /2.
Статическая характеристика датчика тока (магнитного усилителя)
имеет малую нелинейность, поэтому коэффициент передачи его являет-
ся величиной переменной (рис. 8.6, б). Уравнение статической характе-
ристики датчика тока
Д,2 = *ДтЧ- (8-14)
Расчетное значение коэффициента передачи датчика тока получается
из выражения
215
жения тяговых генераторов:
а — постоянного тока; б — переменного тока
*дт = н’у/и’р- (8.15)
Передаточная функция датчика тока имеет вид
»;т(р)=м(гд^+1)- <8-16)
Постоянная времени Т определяется по выражению (8.15). Так как
значения постоянных времени 7ДН и Т г на два-три порядка меньше зна-
чения постоянной времени тягового генератора Тг, то приближенно мож-
но принять их равными нулю и считать, что датчики напряжения и тока
обладают динамическими свойствами пропорционального звена с пере-
даточными функциями И'дн(р) = кдн и №дт(р) = кдт.
Селективное устройство в КАСРН тяговых генераторов переменного
тока функционально входит во все четыре регулятора напряжения и,
кроме того, еще содержит элементы задающих устройств этих регулято-
ров. В него подаются сигналы от датчиков: напряжения ДН, тока нагруз-
ки ДТ, частоты вращения ДЧВ и перемещения ДП.
Выходной сигцдл селективного устройства /с (рис. 8.7), применяемо-
го в КАСРН тяговых генераторов постоянного тока, зависит от выход-
ных сигналов датчиков напряжения z‘j и тока /2 и их соотношения. При
этом возможны три режима работы селективного устройства.
216
Режим 1. При « /2 вентиль В1 запирается. Для этого режима рабо-
ты селективного устройства справедливы равенства
'с = '2-'ст- <817>
'сЛу = 'сЛт- (8.18)
Из этих выражений определим уравнение статической характеристи-
ки селективного устройства
'c = V2> (8-19)
гдеАс1
1/
— коэффициент передачи селективного устройства при ра-
боте в первом режиме (при /| « /2)-
При этом ток /| не воздействует на / . Это значит, что в этом режиме
замкнутая система регулирования напряжения по отклонению не дей-
ствует (регулятор по отклонению отключен путем запирания вентиля В1),
а действует разомкнутая система регулирования напряжения генератора
по току; так, выходной сигнал селективного устройства определяется
только выходным сигналом датчика тока.
Режим 2. При соотношениях токов и i2, когда вентили В1 и В2
открыты, падения напряжения в цепи управляющей обмотки ОУ амп-
листата АВ и на сопротивлениях резисторов 7?н и RT приблизительно
одинаковы. Для этого режима работы селективного устройства справед-
ливы равенства
zc = /l-zcH + /2-zcTi
(8.20)
ZC^y ZCH ZCT •
(8.21)
Из выражений (8.20) и (8.21) определим уравнение статической ха-
рактеристики селективного устройства
/с = Лс2 0*1 +/2)’
(8.22)
R R \
R R
н т)
где кс2 =
— коэффициент передачи селективного устройства при
217
Из уравнения (8.21) видно, что при этом втором режиме работы се-
лективного устройства действуют и регулятор по отклонению напряже-
ния, и регулятор по току нагрузки, т.е. действует комбинированная АСР
напряжения тягового генератора по отклонению и по возмущению
Режим 3. При /] »i2 вентиль В2 запирается Для этого режима рабо-
ты селективного устройства справедливы равенства
< = (8.23)
'Ау = icu R„. (8.24)
Из выражений (8.23) и (8.24) определим уравнение статической ха-
рактеристики селективного устройства
'с = *с3'1- (8.25)
где kci = 1/(1 + 7?у//?н) — коэффициент передачи селективного устройства при
работе в третьем режиме (при » z‘2).
Из уравнения (8.25) видно, что при третьем режиме работы селектив-
ного устройства действует только регулятор по отклонению, так как ic
зависит лишь от
Таким образом, при этом третьем режиме работы селективного уст-
ройства действует только замкнутая АСРН по отклонению напряжения
от заданного значения.
Коэффициенты передачи селективного устройства можно изменять
путем изменения сопротивлений резисторов 7?н и 7?т В этом заключается
функция селективного узла как задающего устройства. Перемещения
ползунков резисторов R}, /?н и 7?т являются входными сигналами ЗУ.
Выходные сигналы ЗУ (токи / и /ст) сравниваются с выходными сигна-
лами датчиков напряжения и тока. В результате формируется выходной
сигнал селективного устройства СУ — ток z'c.
Таким образом, СУ выполняет функции выбирающего, задающего и
сравнивающего устройств КАСРН.
Выходной сигнал СУ (ток z ) является входным сигналом амплистата
возбуждения АВ (суммирующего магнитного усилителя с внутренней по-
ложительной обратной связью). Статическая характеристика амплистата (в
рабочем диапазоне) имеет некоторую нелинейность (рис. 8.8, о) и описыва-
ется выражением (при постоянных значениях других входных сигналов)
Ч = *МУ1 Ч> (8-26)
где £му( — коэффициент передачи амплистата по каналу действия тока /с.
218
Рис. 8.8. Амплистат возбуждения:
а — статическая характеристика по выходному сигналу СУ; б — структур-
ная схема
Амплистат возбуждения имеет, кроме ic, еще три входных сигнала
(см. рис. 8.3, г), поэтому
Ч = *му1 Ч + *муЗ Ч + АмУ4 Ч + кму5 Ч’ <8-27)
где /гму3, ^му4, Аму5 — коэффициенты передачи амплистата по каналам действия
соответствующих входных сигналов.
Амплистат, так же как и обычный магнитный усилитель, обладает
динамическими свойствами апериодического звена, которые описываются
уравнением
(Гмур + 1)А/ВВ = £му1 А/с + Аму3 Az3 + Аму4 Az4 + Аму5 Az5, (8.28)
где Гму — постоянная времени амплистата.
Постоянная времени зависит от конструктивных параметров и опре-
деляется так:
Ч = 7?1нАгмУ/2/т1нир(н^ / Ry + vv2 I Ro3 + и-2 / T?o4 + и-2/ T?o5), (8.29)
где 7?|Н — сопротивление нагрузки амплистата;
f— частота напряжения питания;
Пн — коэффициент намагничивания (qH = Я,н/ /?а; здесь /?а — активное со-
противление, равное сумме сопротивления обмотки возбудителя, рабочей обмотки
амплистата и вентилей);
Wp, и-у, и’3, w4, и’5 — число витков рабочих и управляющих обмоток;
/?у, /?о3, R^, Ro5 — сопротивление цепей рабочих и управляющих обмоток.
Структурная схема амплистата содержит четыре динамических звена
(рис. 8.8, б).
219
Выходной сигнал амплистата — ток /в является входным сигналом
возбудителя (см. рис. 8.3, в). Функции возбудителя выполняет генератор
постоянного тока с независимым возбуждением. Его статические и ди-
намические свойства аналогичны свойствам тягового генератора. Посто-
янная времени возбудителя
,. ( 2 2 А
, =2 <1Фв °в1ив1 + ав2и'в2
в rb1 rb2 }
(8.30)
где рв — число пар полюсов возбудителя;
ав1 и ав2 — коэффициенты магнитного рассеяния обмоток;
wb1 и н’в2 — число витков на полюс обмоток возбуждения;
/?в1 и Яв2 — сопротивления обмоток возбуждения.
Структурная схема возбудителя представлена на рис. 8.9.
Рис. 8.9. Структурная схема возбудителя
Скорость изменения выходного сигнала возбудителя — тока возбуж-
дения генератора /2 измеряется датчиком скорости, функции которого
выполняет цепь стабилизирующего трансформатора. Это устройство
местной гибкой отрицательной обратной связи выхода возбудителя с вхо-
дом амплистата возбуждения обладает свойствами реального дифферен-
цирующего звена Если пренебречь рассеянием, то при /?о5 ~ оо его пере-
даточная функция
^(^дс^сМ1), (8.31)
где АдС — коэффициент передачи ДС (кас = А'тр £1с /(/?о + R{), к — коэффициент
трансформации);
— постоянная времени ДС (Тс = £)с /(Т?5 + 7?1с), £1с — индуктивность
первичной обмотки, R5 — входное сопротивление, 7?1с — сопротивление пер-
вичной обмотки).
220
Коэффициент трансформации = и’2с /wlc (w2c и wlc — числа вит-
ков вторичной и первичной обмоток).
При конечном значении сопротивления нагрузки передаточная функ-
ция датчика скорости
а^осР
^> = (?к + Г2^+Г <8-32*
где а — постоянный коэффициент (а = /?о5 /(/?2с + ^о5^: 3Десь ^2с — сопротив-
ление вторичной обмотки);
Г2с — постоянная времени ДС (Т2с = £2с /(/?2с + /?о5); здесь £2с — индуктив-
ность вторичной обмотки).
С использованием функциональных (см. рис. 8.3, а и б) и принци-
пиальных (см. рис. 8.3, в, г) схем КАСРН и описания статических и дина-
мических свойств элементов регулятора напряжения по отклонению со-
ставлена его структурная схема (рис. 8.10, а). На схеме для краткости
передаточные функции записаны без знака (р).
Рис. 8.10. Структурные схемы регуляторов напряжения тягового генератора
постоянного тока:
а — по отклонению напряжения; б — по току нагрузки; в — по положению
органа топливоподачи; г — по частоте вращения вала дизель-генератора
221
При первом (z'j «z2) и втором режимах работы селективного устройства
действует регулятор по току. Структурная схема его показана на рис. 8.10, б
Регулятор напряжения по мощности дизеля содержит в качестве дат-
чика положения органа топливоподачи индуктивный датчик перемеще-
ния ДП (см. рис. 8.3, в, г). Датчик обладает динамическими свойствами
апериодического звена. Однако, учитывая то, что его постоянная време-
ни на несколько порядков меньше постоянной времени генератора, мож-
но считать его пропорциональным звеном. Так как выходной сигнал дат-
чика зависит не только от перемещения якоря и изменения сопротивле-
ния резистора задания R4, но и от частоты переменного тока (т.е. и от сов),
структурная схема датчика содержит две передаточные функции, входя-
щие в структурную схему регулятора напряжения по мощности дизеля
(рис. 8.10, в).
В регуляторе напряжения по частоте вращения вала дизель-генерато-
ра функции ДЧВ выполняют синхронный подвозбудитель с приводом и
бесконтактное тахометрическое устройство. Статическая характеристи-
ка датчика линейна в рабочем диапазоне изменения сов. Коэффициент
9 А -с
передачи составляет (1,2ч-1,4) 10 z-. Приближенно можно считать,
рад
что датчик обладает динамическими свойствами пропорционального зве-
на. Структурная схема регулятора напряжения тягового генератора по
частоте вращения вала дизель-генератора показана на рис. 8.10, г.
Таким образом, КАСРН тягового генератора содержит четыре регуля-
тора напряжения: один регулятор по отклонению и три регулятора по
возмущению: току генератора, мощности дизеля и частоте вращения вала
дизель-генератора.
Передаточная функция регулятора напряжения по отклонению
(см.рис. 8.10)
"pl (l + V^Bl)
или
______________^р1(^дСР + 1)___________
= [(Гму/> + 1)(7’дс/> + 1)(Гв1/> + 1) + 4му5А-вЛс/’]’ (8'33)
где А:р] = Ада Ас3 Аму1 Ав| — коэффициент передачи регулятора.
222
В регуляторах напряжения тяговых генераторов переменного тока
функции сравнивающих, суммирующих и задающих устройств выпол-
няет СУ потенциометрически-диодного типа (см. рис. 8.7). В это устрой-
ство подаются выходные сигналы датчиков: напряжения ТПН. тока ТПТ,
перемещения ДП и частоты вращения БЗВ. Сигналы задания регулято-
рам вводятся пуз ем изменения сопротивлений резисторов задания (ус-
тавки) —/?6. Функции датчиков напряжения и тока также выполняют
простейшие магнитные усилители.
Выходной сигнал селективного устройства СУ — ток управлении /.
(см. рис. 8.7) зависит от сигналов задания, которые при работе КАСРН
постоянны во времени, и от выходных сигналов датчиков: jj, i2, i$ и z4.
Статические характеристики селективного устройства по каналам действия
выходных сигналов датчиков могут быть описаны уравнениями по:
• каналу действия напряжения генератора
*У1 — 41 + ^нс Ц-»
• каналу действия тока генератора
z - = i ~ + к I'
у2 з2 тс г’
• каналу действия перемещения элемента органа топливоподачи ди-
зеля
zy3 Чз + ^нс + ^тс ^г’
где ^нс’ ^тс’ Чс’ ^тс — коэффициенты передачи по напряжению и току генерато-
ра для датчиков тока и напряжения совместно с соответствующим каналом се-
лективного устройства, которое по всем каналам обладает динамическими свой-
ствами пропорционального звена.
В этих уравнениях токи z31,/з2 и г'з3 зависят не только от сопротивле-
ний резисторов задания, но и пропорциональны частоте вращения (£>в.
Кроме того, сигнал /з3 зависит еще от положения элемента органа топли-
воподачи.
Ток управления z является входным сигналом блока управления БУВ,
управляемого выпрямителем УВВ тока возбуждения тягового генератора.
При изменении тока управления z изменяются моменты подачи элек-
трических импульсов z'HM с выхода БУВ на вход УВВ, что приводит к
изменению угла закрытия тиристоров УВВ ау. При изменении тока уп-
равления от нуля до максимального значения происходит постепенное
закрывание управляемого выпрямителя.
223
Максимальному значению тока управления соответствует закрытое
состояние управляемого выпрямителя (ау = 180°). Статические характе-
ристики БУВ и УВВ ay(zy) и z/B(ay) в широком диапазоне изменения сиг-
налов существенно нелинейны.
Зависимость напряжения на обмотке возбуждения тягового генерато-
ра zzB от угла ау в стационарном режиме работы АСРН имеет вид
zz =£ (1 +cos а )/2,
D Up у
где £ср — ЭДС синхронного возбудителя, пропорциональная о»в.
БУВ и УВВ обладают инерционностью, обусловленной в основном
инерционностью магнитного усилителя БУВ, поэтому их динамические
свойства описываются передаточной функцией:
= т^р+ I), (8.34)
где Ауу — коэффициент передачи системы БУВ и УВВ;
Г — постоянная времени системы БУВ и УВВ, которая зависит от режимов
работы и изменяется в пределах 0,2—0,6 с.
Для повышения устойчивости и качества работы АСРН, особенно
при низком напряжении, в регуляторе напряжения по отклонению при-
менено устройство местной гибкой отрицательной обратной связи УС
выхода УВВ с входом БУВ. Это устройство содержит последователь-
но включенные конденсатор С , резистор /?д и обмотку управления
блока БУВ (рис. 8.11). Конденсатор С и резистор /?д выполняют фун-
кции датчика скорости изменения тока возбуждения генератора zB. На
Рис. 8.11. Принципиальная схема устройства местной гибкой отрицательной
обратной связи КАСРН тягового генератора переменного тока
224
вход этой цепочки подается напряжение, снимаемое с потенциометра
/?п, включенного параллельно выходу выпрямителя УВВ, т.е на на-
пряжение wB. Так как напряжение на выходе УВВ имеет значитель-
ную пульсацию с частотой в несколько сотен герц, которая оказывает
отрицательное воздействие на работу БУВ, то для сглаживания сни-
маемого напряжения параллельно части потенциометра включен кон-
денсатор Сф. Под действием высокочастотной переменной составля-
ющей напряжения в цепи, содержащей резистор и конденсатор Сф,
протекает переменная составляющая тока. Конденсатор Сф выбран
таким образом, что емкостное сопротивление при высокой частоте
значительно меньше сопротивлений 7?^ и 7?" поэтому напряжение
высокой частоты приложено главным образом к резистору и не посту-
пает на вход цепи Сд—7?д.
Автоколебания, которые могут возникнуть в неустойчивой
КАСРН, имеют низкую частоту (около нескольких герц), при кото-
рой сопротивление конденсатора Сф много больше сопротивления
7?" Поэтому шунтирующее действие конденсатора Сф незначитель-
но, и на вход цепи Сд—7?д будет поступать низкочастотная составля-
ющая напряжения иъ, снимаемая с потенциометра R . При этом в
обмотке управления БУВ будет протекать ток, который, изменяя мо-
мент открытия (угол ау) тиристоров выпрямителя УВВ, препятству-
ет колебаниям напряжения ив. Тем самым устройство УС оказывает
демпфирующее действие на систему регулирования и предотвраща-
ет возникновение в ней незатухающих колебаний напряжения тяго-
вого генератора.
Это происходит потому, что устройство УС обладает динамическими
свойствами реального дифференцирующего звена, которые описывают-
ся передаточной функцией
’Мр) = Сд к„р КГфР + ')( Тлр + 1)], (8.35)
где кп — коэффициент передачи (кп = R"U/ R );
Гф — постоянная времени фильтра (7^ = Сф 7?"п 7?'п / R п = Сф 7?ф);
Тд — постоянная времени дифференцирующей цепи (Гд = Сд 7?д).
Передаточная функция регулятора напряжения тягового генератора
переменного тока по отклонению
"'pl = "ди "'ey "уу /О + "уу "ус)* (8-36)
225
8.5. Устойчивость, качество работы и настройка
автоматических обычных и микропроцессорных систем
регулирования напряжения
Автоматические системы регулирования напряжения тяговых генераторов
локомотивов по условиям обеспечения устойчивости делятся на две группы.
К первой группе относятся системы, которые всегда устойчивы, так как явля-
ются разомкнутыми системами и не содержат неустойчивых динамических
звеньев (например, интегрирующих). Системы построены по принципу ком-
пенсации действия основных возмущений: тока нагрузки, частоты враще-
ния вала дизель-генератора, перемещения органа топливоподачи дизеля.
Ко второй группе относятся КАСРН тяговых генераторов, построен-
ные на основе принципа регулирования по отклонению регулируемого
напряжения от заданного значения. Это системы, в которых регулятор на-
пряжения выполняет функцию устройства отрицательной обратной связи
выхода генератора по сигналу Ur или Свг с его ВХ°Д°М (по сигналу zB).
Комбинированную АСРН (рис. 8.12, а) по структурному признаку
можно разделить на две части:
- подсистему, работающую по отклонению, т.е по принципу обрат-
ной связи и образованную генератором с передаточной функцией и ре-
гулятором напряжения по отклонению — замкнутый контур (рис. 8.12, б);
- подсистемы, работающие по сигналам возмущений и образованные
компенсаторами и компенсирующими каналами регулятора по отклоне-
нию и тягового генератора — разомкнутые контуры системы.
Компенсатор тока генератора имеет передаточную функцию =
= ^дт^Су2^Му1 (см- Рис- 8.10 и 8.12); компенсатор частоты вращения
вала дизель-генератора — = ^ДЧв^муЗ’ компенсатоР мощности —
=^лу4-
Без применения компенсаторов тока генератора, частоты вращения
вала дизель-генератора и мощности дизеля невозможно получить требу-
емые статические характеристики АСРН.
Введение компенсирующих связей позволяет значительно повысить
качество работы системы при действии измеряемых возмущений /г, сов, Лр.
Следовательно, при компенсации основных возмущений (/г, сов, hp)
в КАСРН можно снизить требования к работе замкнутого контура
(см. рис. 8.12), что позволяет применить более простой регулятор напря-
жения по отклонению и повысить запас устойчивости замкнутого конту-
ра, не ухудшая качества работы системы
226
Рис. 8.12. Структурные схемы автоматических систем регулирования
напряжения тягового генератора:
а — комбинированной автоматической системы регулирования напряжения
тягового генератора; б — по отклонению напряжения тягового генератора
Так как в КАСРН тяговый генератор и регулятор напряжения по отклоне-
нию образуют замкнутый контур регулирования, то они при определенных
условиях не могут работать устойчггво, т.е. оказываются неработоспособны-
ми. Для обеспечения устойчивой и качественной работы таких систем необ-
ходимо подобрать характеристики и значения статических и динамических
параметров элементов замкнутого контура системы, т.е. определить, при ка-
ких условиях она может быть устойчивой и работает качественно.
Входными величинами системы регулирования являются задающие
(JR ’ 6?/ ) и возмУЩающие (/г, гов, Ад(Лр)) воздействия, отклоне-
ния которых вызывают переходный процесс в системе. Характеристи-
ческое уравнение системы при приближенном рассмотрении динамики
+ (TrT, + 7-г7-му + VMy - V, + (7-г + гв + Гму -
-Г|с*в|)Р + *г*,Ч1=0- *8'37>
227
Условия устойчивости системы, характеристическое уравнение кото-
рой имеет третий порядок, как известно, заключаются в том, чтобы все
коэффициенты были положительны и произведение средних коэффици-
ентов было больше произведения крайних. Первое условие всегда вы-
полняется. В коэффициенте при члене перво! о порядка ела! аемые Тн, 7’
и Г|С Ав| обычно намного меньше I ели пренебречь ими, го можно
приближенно оцени 1ь условие устойчивост и по неравенству (7’ Тв + Т +
+ Г17-|<:*в)Г1>Т|7вТму*1*.*му|.
Разделив обе части неравенства на 7^7 , получим условие в более
удобном виде:
1с^и
Г
1 м} ;
+ 1>А! МмуГ
(8.38)
Условие устойчивости может быть нарушено при большом значении
А р ю,гоРое определяется крутизной статической характеристики амп-
листата. Для повышения устойчивости системы следует уменьшать 7* .
Применение цепи стабилизирующего трансформатора способствует зна-
чительному увеличению запаса устойчивости системы.
Рассмотренные условия устойчивости АСРН не учитывают влияния
АСР частоты вращения вала дизель-генератора, а также режимов работы
тяговых электродвигателей. В целом для всей энергетической установки
эти условия значительно сложнее. Однако для обеспечения устойчивой
работы тепловоза важно в первую очередь обеспечить устойчивость от-
дельных автоматических систем. Установлено, что КАСРН с селектив-
ным узлом без цени стабилизирующего трансформатора неустойчива.
Статические характеристики КАСРН тягового генератора (рис. 8.13)
Ц(/г, сов) можно изменять путем изменения задающих воздействий: Д/^,
Д/у^, Д/л , Д/^ , при этом изменяются сопротивления резисторов /?(1> Rv
/?3 и /?4 (см. рис. 8.3). Кроме того, изменять настройку системы можно
путем изменения сопротивлений резисторов /?[ и /?5.
Переходные процессы в применяемых на локомотивах автоматичес-
ких системах регулирования напряжения и в электрических передачах
мощности могут иметь колебательный характер, что возможно при недо-
статочных ^запасах устойчивости систем регулирования. Возмущения в
виде скачкообразного изменения тока нагрузки тягового генератора, ко-
торые происходят после подключения или отключения резисторов ос-
лабления тока возбуждения тяговых двигателей, являются наиболее тя-
228
Рис. 8.13. Сгагические характеристики КАСРН тягового генератора постоянного гока
при раигых изменениях сигналов задания or их номинальных значений (/) при:
а— уменьшении R} (2); увеличении Rf (Зу, б — уменьшении R (4); увеличении
/?н (5); в — уменьшении R} (6); увеличении R} (7); ,• уменьшении (Ry,
увеличении R$ (9); <)— при включенном регуляторе напряжения по положению
реек топливных насосов (10)
желыми для систем регулирования. В этих случаях относительное пере-
регулирование напряжения генератора может достигать 90 %. Колеба-
тельные переходные процессы в системах регулирования напряжения и
в электрических передачах мощност и значительно ухудшают тяговые
свойства локомотивов, что приводит к снижению силы тяги и увеличению
расхода топлива. Недостаточные запасы устойчивост и и низкие показате-
ли качества работы применяемых автоматических систем регулирования
напряжения тягового генератора при разных режимах работы систем обус-
ловлены нелинейными зависимостями статических параметров (котффи-
циентов передачи) элементов системы регулирования от регулируемой ве-
личины — напряжения генератора и возмущающих воздействий тока на-
грузки тягового генератора и скорости вращения вала дизель-генераго-
ра. Введение в систему регулирования устройства местной гибкой от-
рицательной образной связи не влияет заметно на качество ее работы, так
как такие обратные связи увеличивают инерционность апериодических зве-
ньев (в нашем случае, инерционность встречно-параллельною соедине-
ния возбудителя и устройства гибкой отрицательной обратной связи).
229
С увеличением тока нагрузки тягового генератора время регулирования
возрастает. Большое перерегулирование является одной из причин сни-
жения экономичности дизель-генератора в неустановившихся режимах
работы и повышенной склонности тепловоза к боксованию на малых и
средних скоростях движения.
Микропроцессорная автоматическая система регулирования электро-
передачи УСТА, широко внедряемая на локомотивах, эксплуатирующихся
на сети железных дорог, содержит тяговый генератор, возбудитель для
питания его обмотки возбуждения; модуль процессора; датчики напряже-
ния тягового генератора, тока нагрузки тягового генератора, скорости вра-
щения вала дизель-генератора и подачи топлива. Что касается динамичес-
ких характеристик системы УСТА, то в соответствии с программой, зало-
женной в память ее микропроцессорного модуля, она обеспечивает увели-
чение тока, питающего обмотку возбуждения тягового генератора, если
текущее значение его напряжения меньше заданного значения, и умень-
шение в противном случае темпам, зависящим от абсолютного значения
разности текущего и заданного значений напряжения тягового генера-
тора. Но в этом случае фактически не изменяется способ автоматического
регулирования, не корректируются статические и динамические характе-
ристики системы регулирования напряжения тягового генератора в зави-
симости от степени влияния возмущающих воздействий и, значит, не под-
держиваются постоянными запасы устойчивости системы регулирования.
Автоматические микропроцессорные системы регулирования напря-
жения тягового генератора за счет программных средств могут обеспе-
чить поддержание постоянными заданных запасов устойчивости ав-
томатической системы регулирования по модулю и фазе путем коррек-
ции статических и динамических характеристик. Функциональная схе-
ма такой системы в этом случае должна содержать следующие функцио-
нальные элементы: тяговый генератор ТГ1 (рис. 8.14), выполняющий
функции объекта регулирования напряжения ОРН; возбудитель В2, вы-
полняющий функции РО, изменяющий ток возбуждения /вг тягового ге-
нератора (регулирующее воздействие pj на ОРН); датчик напряжения тя-
гового генератора 3 Ur (регулируемой величины (рр, выполняющий фун-
кции пёрвого измерительного устройства ИУ1; датчик тока нагрузки тя-
гового генератора 4 /г (возмущающего воздействия Zj), выполняющий
функции второго измерительного устройства ИУ2; датчик скорости вра-
щения вала дизель-генератора 5 содг (возмущающего воздействия Л,2 для
автоматического регулятора напряжения тягового генератора и регули-
230
руемой величины ip2 Для автоматического регулятора скорости вращения
вала дизель-генератора АРСДГ, 6, выполняющий функции третьего из-
мерительного устройства ИУЗ; датчик подачи топлива 8 hm (регулирую-
щего воздействия ц2 Для АРСДГ, подаваемого на вход объекта регулиро-
вания скорости вращения вала дизель-генератора ОРС ДГ, выполняю-
щий функции четвертого измерительного устройства ИУ4; блок возбуж-
дения возбудителя БВВ, выполняющий функции исполнительного уст-
ройства ИУ, изменяющего ток возбуждения 7вн возбудителя; задающие
устройства ЗУ 1—ЗУ4 10—13 соответственно; сравнивающие устройства
СУ5 14, СУ1—-СУ4 15—8 соответственно; устройства коррекции коэф-
фициента передачи регулятора напряжения УК1 и УК2 19 и 20; датчик
тока возбуждения возбудителя 27, выполняющий функции пятого изме-
рительного устройства ИУ5; датчик тока возбуждения тягового генера-
тора 22, выполняющий функции шестого измерительного устройства
ИУ6. Функциональные элементы ИУ1, ЗУ1, СУ1, ИУ5, ИУ6, УК1. УК2,
СУ5, ИУ и РО образуют автоматический регулятор напряжения тягового
генератора по отклонению текущего значения напряжения от заданного,
элементы ИУ2, ЗУ2, СУ2, СУ5, ИУ и РО — по току нагрузки, элементы
ИУЗ, ЗУЗ, СУЗ, СУ5, ИУ и РО — по скорости вращения вала дизель-гене-
ратора, элементы ИУ4, ЗУ4, СУ4, СУ5, ИУ и РО по подаче топлива h .
Таким образом, автоматическая микропроцессорная система регулиро-
вания напряжения тягового генератора локомотива является комбини-
рованной системой регулирования по отклонению напряжения от заданно-
го значения и по возмущающим воздействиям: току нагрузки генератора 7
скорости вращения вала дизель-генератора со и по подаче топлива hm.
Автоматический регулятор скорости вращения (АРСДГ) и объект ее ре-
гулирования (ОРС) образуют автоматическую систему регулирования ско-
рости вращения вала дизель-генератора. Автоматические системы регу-
лирования напряжения тягового генератора и регулирования скорости вра-
щения вала дизель-генератора связаны между собой по каналам действия
двух сигналов: скорости вращения вала содг дизель-генератора и подачи
топлива hm. На рис. 8.14 гц—т|4 — сигналы задания, Х|—хз4—выход-
ные сигналы задающих устройств ЗУ1—ЗУ4, ху — выходной сигнал
измерительного устройства ИУ, хд1—х 6 выходные сигналы измери-
тельных устройств ИУ 1—ИУ6, хсу5 — выходной сигнал сравнивающе-
го устройства СУ5, хсу1— хсу4 — выходные сигналы сравнивающих
устройств СУ 1—СУ4, хуК|—хук2 — выходные сигналы устройств кор-
рекции УК1—УК2.
231
Рис. 8.14. Функциональная схема автоматической микропроцессорной системы регулирования напряжения тягового
генератора
232
Принципиальная блок-схема автоматической микропроцессорной сис-
темы регулирования напряжения тягового генератора локомотива содер-
жит следующие элементы (см. рис. 8.15): тяговый генератор /, приводи-
мый дизелем и подключенный к тяговым электродвигателям; возбудитель 2
для питания обмотки возбуждения 11 тягового генератора, вал возбудите-
ля соединен с валом дизеля, а обмотка возбуждения возбудителя 12 под-
ключена к блоку возбуждения возбудителя 8; датчик напряжения тягового
генератора 3; датчик тока нагрузки тягового генератора 7; датчик скорости
вращения вала дизель-i енератора 5; датчик подачи топлива 4; датчик тока
возбуждения возбудителя 9; датчик тока возбуждения тягового генератора 10;
блок управления блоком возбуждения возбудителя 13; блок управления
дизелем 14; микропроцессорный контроллер 15. Выходы датчиков 3, 4, 5,
7, 9 и 10 подключены к входам микропроцессорного контроллера 11, к
выходам которого подключены блоки управления 13 и 14. Функции эле-
ментов ЗУ1—ЗУ4, СУ1—СУ5, УК1, УК2 (см. рис. 8.14) выполняют уст-
ройства микропроцессорного контроллера 15 (см. рис. 8.15).
Рис. 8.15. Принципиальная схема автоматической микропроцессорной системы
регулирования напряжения тягового генератора
Тяговый генератор 1 и возбудитель 2 (рис. 8.15) обладают динамичес-
кими свойствами апериодических звеньев второго порядка. Таким обра-
зом, автоматическая система регулирования напряжения тягового гене-
ратора даже в простейшем случае является динамической системой чет-
вертого порядка. Причем значения всех четырех постоянных времени
233
тягового генератора Тг1 и Гр и возбудителя Гв1, Гв2 зависят только от
величин активных сопротивлений и индуктивностей силовых цепей и
цепей возбуждения. Однако, статические характеристики тягового гене-
ратора Lv “ возбудителя UB = /j(/HB) по регулирующему воздей-
ствию— току возбуждения (те. нагрузочные харакзерпсткп) существен-
но нелинейны и описываются нелинейными алгебраическими уравнени-
ями. Поэтому коэффициенты передачи возбудителя Ав = (dUB Р/в) и тяго-
вого генератора А ~ («’Ц. '^3 1,0 Р^гУ-'1нрУк>ЩемУ воздействию суще-
ственно зависят от тока возбуждения (?нв и 7В|. соответственно) и имеют
различные значения при разных режимах работы возбу цлеля и тягового
генератора.
Статические (нагрузочные) характеристики возбудителя и тягового
генератора по регулирующему воздействию (току возбуждения) t7H(/BB)
и L' (/„ ) с достаточной точностью описываются выражениями вида
1„=Ав^в,1т.
Ur = 4,. arctg Я, /вг. (8.40)
Коэффициенты передачи возбудителя и тягового генератора опреде-
ляются как производные от выражений (8.39) и (8.40):
(М2)
где Ав. Аг Вв и В{ — постоянные коэффициенты, значения которых подбираются
при аппроксимации статических характеристик
Поскольку объект регулирования напряжения — тяговым генератор и
регулирующий орган — возбудитель имеет существенно нелинейные
статические характеристики, то система регулирования напряжения яв-
ляется нелинейной и показатели качества ее работы в большой степени
зависят от режимов работы. Коэффициент передачи такой автоматичес-
кой системы (находящейся в разомкнутом состоянии) А' изменяется в
широких пределах при изменении тока нагрузки /г и напряжения Ц тя-
гового генератора. Это значит, что при разных режимах работы система
234
регулирования будет иметь различные запасы устойчивости и показате-
ли качества работы. Известно, что при предельном значении коэффици-
ента передачи автоматической системы регулирования линейная
система регулирования находится на границе устойчивости и работает в
режиме автоколебаний Если заданное значение коэффициента ,(ад
меньше предельного и соответствует определенным запасам устойчиво-
сти системы по модулю и по фазе, го система имеет заданные показатели
качества работы. При величинах коэффициента к несколько превыша-
ющих Арс ад, система работает с большим перерегулированием, а если
они несколько меньше Л ы (, то с малым или нулевым перерегулиро-
ванием, но с увеличенным временем регулирования. Большой диапазон
изменения значений коэффициента Л приводит к тому, что при одних
режимах работы в системе наблюдаются затянутые переходные процес-
сы, а при других значительные колебания напряжения Ц и тока /
что может приводить к возникновению процесса боксования локомоти-
ва, к снижению его тяговых свойств и экономичности.
Наиболее тейсгвенным способом обеспечения необходимых динами-
ческих свойств автоматической системы является введение в нее допол-
нительных корректирующих элементов, влияющих на ее статические и
динамические характеристики. Передаточная функция цепи с параллель-
ным корректирующим элементом
»«(?) = "’к,.(/')/[! + (8.43)
где и ”ocV’) — передаточные функции подлежащей коррекции неизменя-
емой части системы регулирования и корректирующего элемента (устройства
обратной связи) соответственно.
Применение коррекции в виде устройства местной жесткой отри-
цательной обратной связи повышает устойчивость и качество работы
системы регулирования. Это непосредственно вытекает из уравнения
(8.43) для комплексной частотной функции в диапазоне частот, когда
И ни(А°)Иос ^°) *•
В зтом случае
Иск(/(о) ' 1 Иое(/то), (8.44)
поэтому характеристики системы и шеньев, практически охваченных
обратной снятью, независимы и определяются в основном характеристи-
ками корректирующего элемента. Указанное обстоятельство является
большим достоинством параллельного корректирующею элемента.
235
Для обеспечения высокого качества работы автоматической микро-
процессорной системы регулирования напряжения тягового генерато-
ра необходимо при всех режимах автоматически поддерживать посто-
янным значение коэффициента передачи £рс. Реализация этого требо-
вания тостшается применением параметрической компенсации дей-
ствия токов возбуждения / и /вг на значение коэффициента передачи
к которая осуществляется с помощью устройств коррекции УК1 и
УК2 (см. рис. 8.14). УК1 и УК2 должны обладать динамическими свой-
ствами пропорционального безынерционного звена, т.е. эти устройства
в системе должны обеспечивать создание местных жестких отрицатель-
ных обратных связей выхода блока возбуждения возбудителя с его вхо-
дом (УК1) и выхода возбудителя с входом блока возбуждения возбуди-
теля (УК2). Коэффициенты передачи устройств коррекции должны быть
связаны с аналогичными параметрами возбудителя (kR) и тягового ге-
нератора (Ajp) обратно пропорциональной зависимостью, т.е. произве-
дения соответствующих коэффициентов остаются постоянными при
всех режимах рассматриваемой системы регулирования. Применение
нелинейных элементов значительно расширяет возможности повыше-
ния качества работы автоматических систем. Устройство УК1 включе-
' но параллельно блоку возбуждения возбудителя (БВВ) и передаточная
функция такого соединения будет иметь вид
Wck1(^) =
^БВв(Р)
1 + WБВВ (Р^УК1 (Р)
(8.45)
(8.45)
Устройство УК2 — параллельно БВВ и возбудителю, а соответствующая
передаточная функция будет иметь вид
^БВВ^.О’)
(8-4б)
Подбор статических нелинейных характеристик (т.е. нелинейных ал-
гебраических уравнений) устройств коррекции УК1 и УК2 осуществля-
ется с учетом статических характеристик БВВ, возбудителя и тягового
генератора и является главной задачей при разработке математического
описания рассматриваемой системы регулирования и программы рабо-
ты микропроцессорного контроллера.
236
AL/r
Рис. 8.16. Структурная схема автоматической микропроцессорной системы
регулирования напряжения тягового генератора
В соответствии со структурной динамической схемой автоматичес-
кой микропроцессорной системы регулирования напряжения тягового
генератора по отклонению в разомкнутом состоянии, приведенной на рис. 8.16,
передаточная функция такой системы будет иметь вид
(р)
W (р) =-----------------------*-----------------,
рс 1 + W (/7)^ук1(р) + 1Г (P)W(P)W (р) (8.47)
БВВ БВВ
а ее комплексная частотная функция
, (1 х=_____БВВ ^в >*ИУ1______
РС 1 + ^БВВ^УК1^вв^ + ЛБВВ^^®^УК2^вг^
Статические нелинейные характеристики устройств УК1 и УК2 дол-
жны быть подобраны такими, чтобы амплитудно-фазовая частотная ха-
рактеристика разомкнутой системы регулирования напряжения тягового
генератора по отклонению, описываемая (8.48), не изменялась, если токи
возбуждения возбудителя /вв и тягового генератора / находятся в рабо-
чем диапазоне.
Автоматическая микропроцессорная система регулирования напряже-
ния тягового генератора локомотива работает следующим образом. Она
построена на принципах комбинированного регулирования напряжения.
Только в этом случае такая система может иметь статические характери-
стики, состоящие из трех участков: ограничения напряжения по макси-
мальному току нагрузки, по мощности дизеля и по максимально допус-
тимому значению напряжения. Требуемые ее статические характеристики
237
Рис. 8.17. Статические характеристи-
ки автоматической микропроцессор-
ной системы регулирования напря-
(7 (/,, со,ц) можно получить, изменяя
ток возбуждения /в генератора, следо-
вательно его магнитный поток и маг-
нитодвижущую силу, влияя таким об-
разом на отклонения напряжения от
заданного значения, тока нагрузки /
1енератора, скорости вращения его
вала сотд и подачи топлива Лнт.
На первых участках (участки I)
статических характеристик системы
регулирования, где имеются ограниче-
ния на характеристиках по максималь-
ному значению тока нагрузки /г пдах
(рис. 8.17), действуют два регулято-
жения тягового генератора (линии
1—3)— зависимости напряжения на
зажимах L7 от тока нагрузки / генера-
тора при различных скоростях враще-
ра напряжения: по скорости враще-
ния вала со)Д и току нагрузки 7Г гене
ратора. В этом случае /г остается при
близительно постоянным при изме
ния его вала сотд нении напряжения Ur от нуля до зна-
чения Ц. min. При таком способе ре-
гулирования Ц генератора его мощность Рг изменяется пропорциональ-
но току нагрузки /г. На этих участках при номинальной скорости враще-
ния вала сот, статическая характеристика системы регулирования описы-
вается уравнением
= - 1,4 Мг
(8.49)
или
Ч=Чт,п-1-4(4-/,^). (8.50)
На режимах работы, соответствующих рассмотренным участкам дан-
ная система всегда работает устойчиво, так как она содержит устойчи-
вые звенья, и контур регулирования системы разомкнут.
На вторых участках (участки II) статических характеристик системы
регулирования (см. рис. 8.17), где имеются ограничения на характерис-
тиках по мощности теплового двигателя, ток нагрузки / и напряжение
генератора U находятся в обратно пропорциональной зависимости друг
от друга при изменении напряжения от значения t/rmin до значения Ц
а тока нагрузки от /г тах до /г min, поэтому
238
Г'г-10<хЛ. (8.51)
Г
На этих участках действуют все четыре регулятора напряжения: но
отклонению напряжения от заданного значения, току нагрузки /г , ско-
рости вращения вала гоГ( и по подаче топлива hm. Здесь мощность Рг
остается приблизительно постоянной, равной свободной мощности ди-
геля, при изменении Uf от значения Ц min до значения Ur max.
На третьих участках (участки III) статических характеристик систе-
мы регулирования (см. рис. 8.17), где имеются ограничения на характе-
ристиках по максимальному значению (/ оно остается приблизительно
постоянным при изменении тока нагрузки от значения /г. П1ах до нуля и
действуют два регулятора напряжения: по отклонению напряжения от
заданного значения и по скорости вращения вала согд. Статическая ха-
рактеристика системы регулирования напряжения по отклонению опи-
сывается выражением
ДЦ = -0,0166 Д/г (8.52)
или
^=^та, + 0-01«6(/гт1п-/,)- <««)
При таком способе регулирования напряжения генератора Р изменя-
ется пропорционально /г.
На режимах работы, соответствующих вторым и третьим участкам
статических характеристик (см. рис. 8.17), контур системы регулирова-
ния по отклонению замкнут и система регулирования напряжения может
работать неустойчиво несмотря на то, что она содержит устойчивые зве-
нья. Наиболее тяжелыми с точки зрения устойчивости являются режимы
работьг, соответствующие началам вторых участков, т.е. где возникают
большие токи и низкие напряжения генератора. На этих режимах работьг
токи возбуждения возбудителя и генератора невелики, а значения коэф-
фициентов передачи очень большие. При этом система регулирования
имеет большие значения коэффициента передачи в разомкнутом состоя-
нии А , а значит, очень малые запасы устойчивости.
Автоматическая микропроцессорная система регулирования напряже-
ния тягового генератора является нелинейной. Она относится к классу
нелинейных систем, которые можно представить в виде встречно-парал-
лельного соединения двух частей: линейной части (ЛЧ), описываемой
239
линейными обыкновенными дифференциальными уравнениями с посто-
янными коэффициентами, и нелинейного элемента (НЛ).
В рассматриваемой системе регулирования (см. рис. 8.15) выходные
сигналы датчиков 3, 4, 5,7,9 и 10 подаются в микропроцессорный кон-
троллер 15, где они обрабатываются в соответствии с заложенной про-
граммой. При этом обеспечивается автоматическая настройка системы
регулирования программным способом, что значительно упрощает ее и
повышает качество работы системы в целом.
Настройка локомотивных автоматических микропроцессорных си-
стем регулирования напряжения тяговых генераторов производится
путем изменения в программах работы регуляторов значений соот-
ветствующих коэффициентов, определяющих значения параметров
настройки регуляторов, а значит, и показатели качества работы сис-
тем регулирования.
Глава 9. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ
И ПЕРЕДАЧАМИ МОЩНОСТИ
9.1. Классификация систем управления тяговыми
электродвигателями и передачами мощности
и предъявляемые к ним требования
Классификация систем управления передачами мощности и требова-
ния, предъявляемые к этим системам, обусловлены основными принци-
пами управления передачами и условиями их применения на локомоти-
вах и дизель-поездах.
Основные принципы управления передачей мощности определяются
условиями ее работы на локомотиве. Тяговая характеристика автономно-
го транспортного средства (тепловоза, газотурбовоза) или дизель-поезда
(рис. 9.1) имеет три характерных участка: АБ, БВ и ВГ. В соответствии с
этим управление передачей должно быть различным при скоростях ло-
комотива, соответствующих этим разным участкам тяговой характерис-
тики.
При работе тепловоза в режиме, соответствующем первому участку
АБ тяговой характеристики, вращающий момент на осях движущих ко-
лес Мк, а значит, и сила тяги FT тепловоза мало зависит от изменения
скорости движения от нуля до vmjn- Следовательно, в первом режиме
работы локомотива осуществляется принцип управления передачей,
соответствующий выполнению условия v = var (переменная величина
при FT ® const). При этом мощность на выходном валу передачи увели-
чивается пропорционально скорости движения и достигает номиналь-
ного значения при vmin. В данном режиме работы основными входны-
ми сигналами АСУ передачей мощности являются вращающий момент
241
Рис. 9.1. Тяговая характерис-
тика тепловоза
на ее выходном валу Мк и скорость дви-
жения тепловоза v. АСУ передачей мощ-
ности должна измерять вращающий мо-
мент и скорость движения и воздейство-
вать на элементы передачи таким обра-
зом, чтобы в диапазоне скоростей от
нуля до v j значение момента остава-
лось приблизительно постоянным, т.е.
должно осуществляться автоматическое
регулирование момента с помощью си-
стемы его стабилизации.
При работе тепловоза в режиме, со-
ответствующем второму участку БВ тяговой характеристики, мощ-
ность, передаваемая от вала дизеля входному валу передачи, остается
приблизительно постоянной. В этом режиме работы вращающий мо-
мент на выходном валу передачи (сила тяги) и частота вращения его
(скорость движения тепловоза) изменяются в обратно пропорциональ-
ной зависимости друг от друга. При этом режиме работы основными
входными сигналами АСУ передачей мощности являются момент на
выходном валу и скорость движения тепловоза. АСУ передачи долж-
на измерять эти величины и воздействовать на ее элементы таким об-
разом, чтобы в диапазоне изменения скоростей от vm|n до v враща-
ющий момент на выходном валу передачи изменялся приблизительно
в обратно пропорциональной зависимости от частоты вращения его
Л/к = 1/сок.
При работе тепловоза в режиме, соответствующем третьему уча-
стку ВГ тяговой характеристики, вращающий момент на осях дви-
жущих колес должен изменяться таким образом, чтобы скорость теп-
ловоза оставалась приблизительно постоянной и равной vmax. Сле-
довательно, в этом режиме работы должен реализоваться закон ра-
боты АСУ передачей, соответствующий выполнению условия; Мк =
= var при v = const, т.е. должно осуществляться регулирование ско-
рости движения.
Эти три закона работы АСУ передачей реализуются разными спосо-
бами и средствами в зависимости от типа передачи и тепловоза. На теп-
ловозах применяются АСУ передачами мощности: механическими, гид-
ромеханическими, гидравлическими, электромеханическими и электри-
ческими.
242
Для управления механической передачей АСУ содержит датчики час-
тоты вращения вала дизеля и скорости движения тепловоза: задающие,
сравнивающие, усилительные и регулирующие органы. Таким образом,
АСУ механической передачей работает под действием двух основных
сигналов.
АСУ гидропередачей предназначена для автоматического переключе-
ния ступеней скорости в расчетных точках тяговой характеристики теп-
ловоза. АСУ должна обеспечивать реализацию высоких тяговых и эко-
номических свойств тепловоза в зоне переключения смежных ступеней
скорости при работе дизеля на всех режимах мощности и при изменяю-
щихся условиях движения. Практически это требование определяется
мерой использования тяговой мощности тепловоза в зоне переключения
ступеней скорости.
Тяговые и экономические свойства тепловоза зависят как от особен-
ностей дизель-гидравлической установки, так и от выбора моментов пе-
реключения ступеней, представляемых на тяговой характеристике в виде
графика переключения ступеней скорости. Расчетный график может быть
реализован только при высокой точности и устойчивости АСУ переда-
чей мощности. Все существующие АСУ гидропередачей по физической
природе датчиков скорости могут быть разделены на три группы: меха-
нические, гидравлические и электрические. Применяются также смешан-
ные АСУ, например, электрогидравлические.
В механических и гидравлических АСУ датчиком скорости обычно
является датчик частоты вращения центробежного типа и масляный ше-
стеренчатый или центробежный насос.
В известных электрических АСУ передачей мощности функции дат-
чика скорости выполняет, как правило, электрический генератор (тахо-
генератор). Электрические АСУ передачей мощности по сравнению с ме-
ханическими и гидравлическими обладают рядом положительных ка-
честв: большим быстродействием, возможностью реализации устойчи-
вого расчетного графика переключения ступеней скорости, простотой
монтажа и настройки системы управления.
АСУ передачей мощности могут быть односигнальными, когда сту-
пени скорости переключаются в зависимости от скорости движения теп-
ловоза, и двухсигнальными, когда момент переключения определяется
не только скоростью локомотива, но и частотой вращения вала дизель-
гидравлической установки.
243
Рис. 9.2. Классификация АСУ гидропередачами мощности
Классификация АСУ гидропередачей мощности представлена на рис. 9.2.
Для управления электрическими передачами мощности применя-
ются электрические АСУ. В АСУ тяговыми электродвигателями по-
стоянного тока и передачами мощности переменно-постоянного и
постоянного тока используются два основных сигнала: напряжение
на тяговом электродвигателе и его ток, так как эти величины косвен-
но характеризуют скорость движения и вращающий момент на осях
движущих колес тепловоза. В зависимости от тока тяговых электро-
двигателей изменяется напряжение тягового генератора, а в зависи-
мости от их соотношения осуществляется переключение тяговых элек-
тродвигателей относительно тягового генератора или ослабление маг-
нитного потока возбуждения тяговых электродвигателей. В АСУ пе-
редачами мощности, содержащими тяговые электродвигатели пере-
менного тока (например, асинхронные с короткозамкнутым ротором),
дополнительно еще используются сигналы магнитного потока и час-
тоты вращения вала тяговых электродвигателей.
АСУ передачами мощности тепловозов должны быть устойчивыми и
иметь установленные показатели качества работы при всех режимах;
обеспечивать наиболее полное согласование характеристик передач мощ-
ности с характеристиками дизелей при всех режимах работы тепловоза;
содержать органы, удобные для настройки при испытаниях и обслужи-
вании.
Кроме того, все элементы АСУ передачами мощности должны быть
виброустойчивыми; обладать высокими показателями надежности; обес-
печивать широкую универсальность применения на тепловозах с различ-
ными видами передач мощности.
244
9.2. Схемы автоматических систем управления
На тепловозах управление тяговыми электродвигателями постоян-
ного тока с последовательной системой возбуждения осуществляется
путем плавного изменения пи-
тающего напряжения С/ и сту-
пенчатого изменения тока воз-
буждения /д. В АСУ тяговыми
электродвигателями (рис. 9.3, а)
датчики ИУ! и ИУ2 измеряют
напряжение и ток двигателя.
Эти датчики, задатчик ЗУ,
сравнивающее устройство (СУ) и
усилитель (У) конструктивно об-
разуют управляющий орган —
реле переходов. Функции ис-
полнительно-регулирующего
устройства ИРУ выполняет
контактор. На тепловозах серии
ТЭ10 и др. для двухступенчато-
го ослабления магнитного по-
тока тяговых электродвигате-
лей используется два двухкату-
шечных реле переходов РП1 и
РП2 (рис. 9.3, б), которые уп-
равляют индивидуальными или
групповыми контакторами П1,
Ш1, Ш2. Реле РП1 и РП2 оди-
наковы. Реле имеет катушку
напряжения (Н) (ИУ1), которая
последовательно с добавочными
резисторами включена на напря-
жение тягового генератора (Г), и
токовую катушку (Т), присоеди-
ненную вместе с добавочными
резисторами параллельно обмот-
ке добавочных полюсов (ДП) тя-
гового генератора.
Рис. 9.3. Схемы автоматической системы
управления тяговыми электродвигателями
постоянного тока с последовательным
возбуждением:
а — функциональная; б — принципиальная
245
Рис 9 4 ( хема pe те переходов
К — кииi.ik 1. II и Г — кап шкн; 11 пружина. CH, (' 1 сердечники;
51 якорь
Катушки размещены на сер денниках СИ и С Г (рис. 9.4), расположен-
ных по обе стороны опоры поворотного якоря (Я). Силы пружины (II) н
катушки I по i юком действуют в направлении размыкания контактов
(К); сила притяжения, сот тавасмая катушкой II. тействует в направлении
замыкания их. Срабатывание реле происходи!, koi та момент 1/|( силы
катушки II при наличии воуту miioi о за тора оказывается больше, чем сум
ма моментов W( и сил пружины И (она выполняет функции задатчика
(X ) и катушки Г (она вт.пю птяст функции татчнка гока HV2).
АО тяговыми )аскгро твита тс. тями (см рис. 9.3) являе тся разомкну
той pc iciiiioro тейетвня. При увеличении касательной мощпоепт тепло-
возов с тяговыми ) icKipo твшж тями последовательною возбуждения
вошикас! проблема по лною использования сцепною веса тепловозов.
)ксплуагацня мощных тепловозов покатала, что они нс в состоянии реа
лизовать расчетное значение силы imi и из-за интенсивною боксования.
В результате приходится уменьшать массу поезда. \ тучшигь тяговые
свойства тепловозов можно при использовании тяговых тлекгродвнга те-
зой нетавненмою возбуждения. Передача мощиосш с такими злекгро-
ишгагслями была разработка и непышна учеными и специалистами
Московскою юсу таре т венною университета путей сообщения (МНИТ)
па ген топоте 2Г )10Л (рис 9.5).
Гоки якорей злск1родвшлгелей /, 76 итмсрятогся датчиками ДГ1
ДГб. функции которых выполняю! магнитные уенлнгелн Напряжения
I ( I иропорцнона п.ныс токам /| /(v по тво тятся к блоку максималь-
ною сш нала ВМС ныде тения напряжения I м. пронорцпона льпою паи
большему нт токов якорей. Блок ЬМС выполняет функции сравтпптато-
246
Рис. 9.5. Нрниципиалымя схема анитышческон сиосмы управления 1 я го вы-
мп wiehiродшпа 1 елями не »аписнмого возбуждения
»цею устройства. Напряжение I м »1одноди»ся к юлите по напряжения
Ц11 и к форм ирона i ено напряжения »а гания фа» ФИЗ
Для со» лаеования характеристик системы управления тяговыми мтек-
тро твит а гелями и К \<'РН »я»ово»о генератора на промежуточных пози-
циях контроллера машиниста на второй вход ФИЗ о» датчика частоты
вращения вала дн»ел»»-гспсритора ДЧВ подводится напряжение ( . Сиг-
нал напряжения используется нс только в АСУ тяговыми тпемродвш а-
гелямн. по и в К \CP1I тягового i cnepawpa. Такая схема выбрана потому,
что наибольший iok имсе» злею родвнга» ель. колесная пара которого не
боксусг или боксусг с менынсн по сравнению с другими колесными па-
рами скоростью. В резу плате ю »ех пор. пока не боксусг хотя бы одна
колесная пара, АС\ двигателей и КАСРН »я» оного генератора будул по-
дучат». сигнал I н. соо»не»ству тощий действительной скорости движения
тепловоза.
Напряжение I от тели геля ДН и напряжения t । С6 о» киников
ДГ! ДГб подводятся к сслекшвпым устройствам С! Сб. на выходе
которых выделяется больший из сигналов. Выходные напряжения се-
лективных устройств С1 Сб сравниваются с напряжениями гадания
I t в сравнивающих устройствах СУ 1 СУ 6. ратное гн At \( |6 »»с-
иолыуюгся для унратстения блоками УТ1—У Гб тиристорных регуля-
юров юка возбуждения тяговых нтектродвигателей РВ1 РВб, сило-
вые выпрямители ПИ— ГВб которых включены в цепи обмоток воз-
буждения тлскгродвн» а»слен 0131 ОВб. АСУ выполнена гак. что уве-
П1чсние юка якоря тлекгро.двита»еля приводи» к увеличению ею тока
возбуждения.
247
При отсутствии боксования на выходах устройств С1—С6 выделяют-
ся напряжения U\—U& пропорциональные токам якорей соответствую-
щих электродвигателей. АСУ представляет собой совокупность регуля-
торов тока возбуждения и тяговых электродвигателей.
При возникновении боксования ток якоря электродвигателя боксую-
щей колесной пары уменьшается. Как только этот ток станет меньше тока
ведущего электродвигателя на величину, определяемую делит елем ДН, на-
пряжение на выходе соответствующего устройства Cl- С6 будет опреде-
ляться напряжением делителя ДН. С этого момента при боксованни колес-
ной пары ток возбуждения, а также и магнитный поток связанного с ней
электродвигателя поддерживаются постоянными. Это позволяет эффектив-
но ограничивать скорость скольжения колесных пар при боксовании.
Прогивобоксовочные свойства тепловоза значительно повышаются
при использовании асинхронных короткозамкнутых электродвигателей
в качестве тяговых (рис. 9.6, а, 6).
Сигналы задания в АСР ЧВВ дизель-генератора ДГ /?3 и в передачу
мощности /3 (сигнал задания тока тягового генератора) подаются от кон-
троллера машиниста ЗУ (см. рис. 9.6, «). Сигнал /3 подводится к устрой-
ству СУТ, где он сравнивается с сигналом датчика ДТ тягового синхрон-
ного генератора ТСГ. Сигнал рассогласования Д/ст подводится к задаю-
щему генератору ЗГ, который в зависимости от А/С| изменяет частоту
в сторону увеличения или уменьшения. В ЗГ подается также сигнал /?р от
регулятора частоты вращения РЧВ. Если дизель перегружен, то сигнал
Ар препятствует увеличению ^г. Сигнал действует на: преобразова-
тель частоты ПЧ, частота на выходе которого/п пропорциональна часто-
те ^г; систему переключения НС тяговых асинхронных двигателей ТАД
(при /зг < 13 Гц обмотка статора ТАД соединена по схеме «треугольник»,
а при f = 13 Гц автоматически происходит переключение на схему «звез-
да»); функциональный преобразователь ФП, который в зависимости от
значения /зг изменяет закон Ur =/(^г).
Сигнал U3 с выхода ФП подается на устройство сравнения напряже-
ний СУН, в котором сигнал заданного значения напряжения тягового ге-
нератора Ur сравнивается с сигналом текущего его значения Сдн (сигна-
лом датчика напряжения ДН). В зависимости от знака сигнала рассогла-
сования напряжений А/ происходит увеличение или уменьшение тока
возбуждения возбудителя В и возбуждения генератора z’r. Таким образом,
в этой системе (см. рис. 9.6, а) используются сигналы Ur и /г. Сигнал 1Г
используется не только для регулирования U, но и для регулирования
248
Рис. 9.6. Принципиальные схемы автоматических систем регулирования частоты
вращения вала дизель-генератора и передач мощности тепловозов:
а — с передачей переменно-постоянного тока английского тепловоза; б — теп-
ловоза ТЭ120 с передачей переменно-переменного тока; в—тепловоза с гидропере-
дачей; ДЗ — датчик сигнала задания; ЗУ1, ЗУ2 — задающие устройства;
РЧВ — регулятор частоты вращения; Д — дизель, ГПМ — гидравлическая пере-
дача мощности; ИРУ — исполнительно-регулирующее устройство, ДЧВ — дат-
чик частоты вращения; У — усилитель; ИУ — измерительное устройство;
СУ — сравнивающее устройство
249
частоты fn. Однако в этой системе не используется сигнал, соответству-
ющий текущему значению частоты вращения вала тягового асинхронно-
го двигателя ид, что при определенных режимах ухудшает условия его
работы. Поэтому были разработаны системы управления передачей мощ-
ности с использованием сигналов по частоте вращения ид (от датчика
частоты вращения ДЧВ2) и магнитному потоку Фд (от датчика магнит-
ного потока ДМП) ТАД (см. рис. 9.6, б). В такой системе на вход селек-
тивного устройства СУ 1 (см. рис. 9.6, б) подводятся сигналы отдатчиков
тока ДТ, напряжения ДН, частоты вращения ДЧВ1 и положения органа
топливоподачи дизеля ДП. Выходной сигнал СУ1 z'cl подается в блок
управления возбуждением БУВ возбудителя В, воздействующего на воз-
буждение тягового синхронного генератора ТСГ. В результате получает-
ся необходимая статическая характеристика АСРНТСГ.
Частота напряжения^, питающего электродвигатель ТАД определя-
ется частотой f3r, которая зависит от выходного сигнала /зг блока управ-
ления преобразователем частоты БУП. Регулирование частоты fn осуще-
ствляется с использованием сигналов по току и напряжению тягового
генератора ТСГ, магнитному потоку и частоте вращения электродвигате-
ля ТАД. В сравнивающем устройстве СУ2 сравниваются сигналы по /г,
Лр и Фд, что позволяет осуществлять автоматическое управление тяго-
вым электродвигателем ТАД по соответствующему закону частотного
управления в зависимости от режимов (зон) работы передачи мощности
(/г » const, Ir яг var, Ur ~ var; Ur = const). Системы управления передачей
мощности переменно-переменного тока являются системами непрерыв-
ного действия.
Системы управления гидропередачами мощности являются система-
ми релейного действия (рис. 9.6, в). Управление переключением ступе-
ней гидропередачи ГПМ осуществляется с использованием сигналов i
датчика частоты вращения ДЧВ выходного вала гидропередачи игп, т.е.
скорости движения тепловоза и h3, соответствующего положению руко-
ятки контроллера (ЗУ 1), т.е. частоте вращения вала дизель-гидравличес-
кой установки Д и ГПМ сов. Сигнал управления гидропередачей GM оп-
ределяется выходным сигналом / сравнивающего устройства СУ, в кото-
рое подводятся сигналы, соответствующие частотам вращения сов и игп и
сигналу задания системы управления гидропередачей т]3. Часть системы
(элементы ГПМ, ДЧВ, ИУ, СУ, У и ИРУ) образует замкнутый контур воз-
действий, который при несоблюдении условий устойчивости может ра-
ботать в режиме автоколебаний.
250
93. Статические и динамические свойства тяговых
электродвигателей, передач мощности
и элементов систем управления ими
Статические свойства и характеристики тяговых электродвигате-
лей хорошо известны. Рассмотрим кратко только их динамические
свойства. Сигналами управления двигателем постоянного тока явля-
ются напряжение на зажимах С'д и ток возбуждения /д. Инерционность
двигателя обусловлена индуктивностью его обмоток, маховыми мас-
сами якоря и связанных с ним агрегатов (тепловоза и состава), поэто-
му динамические свойства электродвигателя постоянного тока опи-
сываются передаточной функцией типового динамического звена вто-
рого порядка
»;,(₽) = ид(р)С/д(р) = *д|/<Гэ Т«Р2 + ТиР+ !), (9.1)
гае Лд| - коэффициент передачи (Лд1 = Пд иом = Лд НО^(С/Я ном - /я ном Я„».
Электромагнитная постоянная времени якорной цепи
(9-2)
где £я — индуктивность якорной цепи (£я = Ся ном ty 1Я ном пд номр; здесь kQ —
опытный коэффициент, значение которого зависит от конструкции электродви-
гателя; р — число пар полюсов).
Электромеханическая постоянная времени электродвигателя
7м =А А /*е Фд ном = Л Я. «д „ом ' „ом - 7„ ном Я,)2, (9.3)
где /я — момент инерции якоря и связанных с ним агрегатов;
— коэффициент пропорциональности;
Фд ном — номинальный магнитный поток электродвигателя.
Обычно у электродвигателей Тм » Т. Пренебрегая электромагнит-
ной инерцией якоря, т.е. полагая Тэ = 0, получим передаточную функцию
тягового электродвигателя, обладающего динамическими свойствами
апериодического звена
(9-4)
При управлении электродвигателем с независимым возбуждением
изменением тока возбуждения i передаточная функция его имеет вид
W&<P) = na(p)UB(p) = к&/{(Тър + 1 )(ТМ р + 1)], (9.5)
251
Коэффициент передачи электродвигателя
*д2 = ЧИд2й»/('вД.£/я>. <9«
где М — электромагнитный момент электродвигателя, Н-м;
R — сопротивление обмотки возбуждения, Ом;
ия — напряжение на обмотке якоря, В.
Постоянная времени системы возбуждения электродвигателя
T„~LJRV (9.7)
где индуктивность обмотки возбуждения
£в = 2^ида<Ов(1Фд/ d/B’
здесь о — коэффициент рассеяния главных полюсов (о = 1,1—1,2).
Поскольку Т » Т, то
^2(Р) = £д2/(£мР+1)- (9-8)
У электродвигателя последовательного возбуждения индуктивность £в
значительно меньше, чем у электродвигателя независимого возбуждения,
поэтому величиной Т обычно пренебрегают и считают, что электродвига-
тель последовательного возбуждения при управлении изменением / обла-
дает свойствами апериодического звена с передаточной функцией
^дз(р) = «д(р) ia(p) = *дЗ /(£э К Р2 + гм р + 1). (9.9)
В этом случае электромеханическая постоянная времени
Г'м = Л (*, + *вЖФд ном)2; <91°)
коэффициент передачи
*дЗ = «яЧ</<«ЛФдО>. <9”)
где с — коэффициент, зависящий от свойств магнитопровода электродвигателя
и числа витков его обмотки возбуждения.
Для тягового асинхронного трехфазного электродвигателя перемен-
ного тока (рис. 9.7, а) выведем уравнение движения и определим переда-
точную функцию. Для этого составим уравнение равновесия моментов
электродвигателя и связанных с ним агрегатов в переходном процессе
/д-^=мд(о-мс(О- (9Л2)
Вращающий момент электродвигателя зависит от напряжения пита-
ния статора, частоты вращения вала (см. рис. 9.7, б, линии 1—3) и харак-
теризуется зависимостью
252
Рис. 9.7. Принципиальная схема асинхронного короткозамкнутого электродви-
гателя (а) и механические характеристики (б):
1, 2, 3 — электродвигателя; 4 — агрегатов его нагрузки
Мд(1) = Мд(пд, UJ, (9.13)
а момент сопротивления изменяется по кривой 4 (см. рис. 9.7, б) и
определяется
л/с(0 = Ч<"д)- (9.U)
Учитывая значительную нелинейность характеристик и ли-
неаризуем их в относительно небольшом диапазоне изменения лд (между
точками Aj и А2) (см. рис. 9.7, б). В точке/! имеем установившиеся значения
Чо = Чо- (9'5)
где — вращающий момент электродвигателя при пд0 и мд0;
Л/с0 — момент сопротивления при ид0.
Разлагая зависимости Ma(t) и Mc(f) в окрестности точки А в ряд Тей-
лора, получим
= Чо+
4(0 = 4о+
(9.16)
(9.17)
253
Возьмем первые два члена ряда, т.е. ограничимся рассмотрением ли-
нейной части характеристик М (I) и М (/), и, подставив полученные со-
отношения (9.16) и (9.17) в уравнение (9.12), получим
адлд
д^Г=л/« +
Jo
Jo
А"д-Чо-
ал/с
____V
"!д Jo
Ди
(9.18)
д
Имея в виду соотношение (9.15), уравнение (9.18) можно записать в виде
Д di
алл
___V
дип
д Уо
“д Jo.
Ди
Д"д
(9.19)
д
или
д
аАлд
”до
d/
'дМсУ (дМд^ Лид
l^Jo "до
цд0 ГдМл}
nj$ I ^д Jo мд0
(9.20)
откуда получим
да 17 + <Р0 = *да Н('),
(9.21)
дМ
___с
дп
aJo
(р — регулируемая величина (<р = Дид /и^);
(дМ /Г(
___д /
>„/4 дп /
ДО\ Д >0/ ['
где Гда — постоянная времени
ил0
к — коэффициент передачи к = -^~
п
(дМ \
___Д
дп
V Д 'О.
дМ
___с
дп
(дМ
__Д
дп
д >0 < Д
ц — регулирующее воздействие (р = Дпд /нд0).
Применив к уравнению (9.21) преобразование Лапласа, найдем пере-
даточную функцию тягового асинхронного электродвигателя
254
^да(р) = ф(Р)Щр) = + 1). (9.22)
В выбранной точке А] (см. рис. 9.7, б) фактор устойчивости системы
электродвигатель—агрегаты нагрузки F, равный разности факторов ус-
тойчивости агрегатов нагрузки
ал/с
дип
д 70
и двигателя
аид
Л
больше
нуля, и поэтому система электродвигатель—агрегаты нагрузки является ус-
тойчивой и обладает динамическими свойствами апериодического звена.
Если точку Ар относительно которой проводится линеаризация, пе-
ренести в точку Б, то Fc =
ал/с
аип
д 70
Мо.
< 0 и передаточная фун-
кция (9.22) примет вид
^да(р) = ^/(Гдар-1). (9.23)
В этом случае система электродвигатель—агрегаты нагрузки будет
обладать свойствами неустойчивого квазиапериодического звена. Поэтому
система управления электродвигателем должна быть построена так, что-
бы точка А всегда находилась на рабочей части характеристики Л/д(ид).
В системах управления тяговыми электродвигателями, электро- и гид-
ропередачей мощности используются датчики частоты вращения, элект-
ромашинные и бесконтактные статические.
Электромашинными датчиками частоты вращения являются тахоге-
нераторы. Действие тахогенераторов основано на пропорциональности
ЭДС генератора и частоты вращения при постоянном значении потока
возбуждения. Различают тахогенераторы постоянного и переменного тока
(асинхронные и синхронные). Эти датчики обладают динамическими
свойствами пропорционального звена.
Коэффициент передачи тахогенератора постоянного тока
k = Np$>l2qn = сФ = U /и
V л пим п ним
где N— число проводников обмотки якоря;
р — число пар полюсов;
q — число параллельных ветвей.
Значение к лежит в пределах 0,06—0,15 Вс.
255
С учетом падения напряжения в якорной цепи коэффициент передачи
к
*1= (1+ЯДЯ,,)’
где А’и — сопротивление якоря. Ом;
7? — сопротивление нагрузки. Ом;
При работе тахогенератора на активно-индуктивную ши рузку и с уче-
том индуктивности якорной цепи передаточная функция тахогенератора
И(р) = Л,/(Гр+ 1)
Постоянная времени тахогенератора постоянного тока
где Ля и LH — индуктивности якоря и нагрузки. Гн.
Статическая характеристика асинхронных тахогенераторов t/BbIX =/(и)
линейна только при условии, что угловая скорость ротора со «(1,26— 1,85)/j,
где /j —частота переменного тока в обмотке возбуждения.
У синхронных тахогенераторов с изменением частоты вращения ро-
тора меняются как индуктируемая ЭДС, так и частота ее. Поэтому стати-
ческая характеристика таких тахогенераторов нелинейна. Коэффициент
передачи синхронных тахогенераторов, работающих на выпрямительный
мост, подсчитывается так:
к — 0,9 U* ном /т?я ном-
Функции датчиков тока и напряжения в АСУ тяговыми электродвига-
телями и передачами мощности выполняют магнитные усилители и реле
переходов.
По опытным данным ток срабатывания реле переходов
ср = Ч ср ' йн ср = 'Н от + *т 'г ср- (9-24>
где RH ср — эквивалентное сопротивление цепи катушки Н;
кт — коэффициент, зависящий от сопротивлений обмотки ДП и кагушки Т и
от числа витков последней.
Характеристика срабатывания реле в координатах напряжения Ur ср и
тока /г ср генератора (рис. 9.8) может быть описана уравнением
Ч ср = йн ср'ног ЧА ср'г ср- (9-25)
Так как после срабатывания реле переходов воздушный зазор между
якорем и сердечником СН (см. рис. 9.4) уменьшается, го сила катушки Н
256
возрастает, а сила катушки Т тп-за увеличения за юра между ее сердеч-
ником и якорем уменьшается. Для oi падания реле необходимо уменьше-
ние / Так как катушка Г с греми гея притянуть якорь, то при увеличении
/ отпадание происходи г при большем / т.е. при более высоком напря-
жении тягового генератора. Следовательно, характеристика отпадания
реле может быть описана уравнением
Г - П jf I JL R J
I OI н от 1 Н ОГ Л| Лп от 'юг*
(9.26)
Для получения требуемых статических характеристик срабатывания I
it отпадания C,D|, (см. рие. 9 8) реле переходов Pl 11 (см. рис. 9.3) изменяют
сигналы задания АСУ итектро-
двит а гелями ni (см. рис. 9.3, </),
т.е. изменяют сопротивления до-
бавочных ре тис торов в цепи ка-
тушек Н (см. рис. 9.3, 6) на бо лее
низкое напряжение, чем для по-
лучения характеристик А2В2 и
С2Г>2 (см. рис. 9.8) реле переходов
РП2 (см. рис. 9.3, б). Реле перехо-
дов является типичным нелиней-
ным элементом автоматики. Стати-
ческим параметром реле является
коэффициент возврата А|13, равный
оз ношению токов отпадания и сра-
батывания Для устойчивой рабо-
Рис. 9.8. Характеристики KACPII тяго-
вого генератора (/— 6) и характеристи-
ки переключения реле переходов и АСУ
тяговыми электродвигателями переда-
чи мощности постоянною и перемен-
но-переменного тока
ты реле и системы управления, в
которую оно входит, необходимо,
чтобы кт < 1. Для тепловозных со-
временных реле переходов Д =
= 0,29—0,39.
Контакторы и вентили также
являются типичными нелинейны-
ми элементами и статические характеристики их имеют петлеобразный вид.
9.4. Статические и динамические свойства
автоматических систем управления
При движении поезда изменяются силы сопротивления и скорость дви-
жения, что приводит к возникновению переходных процессов в передаче
мощности, АСУ тяговыми электродвигателями, КАСРП тягового генера-
257
Рис. 9.9. Временные переход-
ные характеристики передачи
мощности тепловоза:
а — после ослабления магнит-
ною потока; б — после усиле-
ния магнитною потока;
1.3 — изменение гока;
2. 4 — изменение напряжения
тора, АСР частоты вращения и в других
автоматических системах. При увеличе-
нии скорости движения поезда, когда г(
достигает значений, соответствующих
липин (см. рис. 9.8), конiакты реле
переходов РПI замыкают цепь катушки
контактора 111 I (см. рис. 9.3, о). К обмот-
кам возбуждения тяговых электродвига-
телей параллельно подключаются резис-
торы. Токи / увеличиваются, а / умень-
шаются. Увеличение I приводит к умень-
шению V|. Так как инерционность сис тем
возбуждения тяговых электродвигателей
и тяговою генератора намного больше
инерционноегн якорных обмоток, го на-
чальный ток после подключения резис-
торов увеличивается до значения больше-
го, чем при установившемся режиме, а
затем снижается по мере падения напря-
жения Ц (рнс. 9.9, о/ При дальнейшем уве-
личении скорости напряжение Ur вновь
увеличивается и при значениях, соответ-
ствующих линии 1->/Л (см. рис. 9.8), совер-
шается аналогичный переход на вторую
ступень ослабления магнитного потока.
Если скорость поезда уменьшается
(например, при движении по подъему),
го ток генератора/! увеличивается. При значениях/] и Ц, соответствующих
линии С2/>2 (см. рис. 9.8), отпускается реле переходов PI12 (см. рис. 9.3, б) и
переводит электродвигатели со второй ступени ослабления магнитною
потока на первую. При этом ток /я уменьшается, а напряжение (J увели-
чивается, но опять с отставанием по времени от тока (рис. 9.9, б). Раз-
Hoci ь между минимальным и установившимся значениями юка /( здесь
относительно больше, чем при ослаблении магнитного потока Ф , гак
как постоянная времени гягового генератора при большом напряжении
Ur меньше из-за насыщения его магнитной системы. Полому сглажива-
ющее влияние изменения напряжения Ц сказывается при переходе на
ослабленный магнитный поток Ф сильнее, чем при обратном переходе.
258
При дальнейшем увеличении гока /( до значении, соответствующих ли-
нии (см. рис. 9.8), н уменьшении скорости поезда таким же обра-
зом происходя! переключения в АСУ электродвигателями с помощью
реле переходов 1*112 (см. рис. 9.3, о).
Микропроцессорной системой автоматического регулирования элек-
тропередачи УСТА, как и в штатной АСУ тяговыми wickiродвгнaiеля-
ми, решаются задачи управления кон i акторами ослабления возбуждения
тяговых электродвигателей, ликвидации боксовапия, ограничения мощ-
ности тягового теператора при отключении гяювою тлектродвш а геля.
Развитием системы УС ГА являемся система пооспого регулирования
касательной силы тяги. На рис. 9.10 представлена блок-схема электри-
ческой передачи тепловоза 2 Г) )116 с такой системой. При тгом мощ-
ность, подведенную к тяговым электродвигателям, при отсутствии бок-
сования колесных пар регулирую! гак же, как и у серийного тепловоза,
i.e. посредством изменения гока обмотки возбуждения тяговою генера-
тора в зависимости от соотношения заданною и фактическою положе-
Дагчнки
частоты
вращения
Управляемая колесных
вынрямиюльная Гяювые нар
Рис. 9.10. Блок-схема электрической передачи тепловоза с системой поосното
регулирования касательной силы тяги
259
ния реек топливных насосов высокого давления. О текущем положении
реек таких насосов вычислительная часть системы получает информа-
цию от датчика линейных перемещений. При боксовании напряжение на
тяговом электродвигателе, а следовательно, и его мощность снижаются,
чтобы воспрепятствовать увеличению частоты вращения колесной пары.
Для этого каждый тяговый электродвигатель подключен к тяговому ге-
нератору через индивидуальную управляемую выпрямительную установ-
ку (на рис. 9.10 УВМ1 — УВМ6).
В АСУ гидропередачей тяговые свойства и экономические показате-
ли тепловоза зависят как от особенностей энергетической установки, так
и от выбора моментов переключения ступеней скорости. Расчетный гра-
фик может быть реализован только при высокой точности и устойчивос-
ти АСУ гидропередачей. Графики переключения ступеней скорости стро-
ятся в предположении безынерционности элементов АСУ и не отражают
влияния ее основных параметров на качество работы. Практически в зам-
кнутой АСУ наиболее инерционным звеном является гидропередача.
Переключение ступеней скорости осуществляется путем наполнения
и опорожнения смежных гидроаппаратов. Если эти процессы не совме-
щены и растянуты во времени, то в переходном процессе АСУ будет зна-
чительно уменьшаться передаваемый вращающий момент, а значит, сила
тяги и скорость движения тепловоза. В условиях эксплуатации измене-
ние коэффициента возврата релейных элементов АСУ является единствен-
ным эффективным способом влияния на тягово-экономические свойства
гидропередачи.
Глава 10. АВТОМАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ
ВСПОМОГАТЕЛЬНЫХ ГЕНЕРАТОРОВ
ТЕПЛОВОЗОВ
10.1. Классификация автоматических систем
регулирования напряжения вспомогательных генераторов
и предъявляемые к ним требования
Некоторые элементы регуляторов напряжения тягового генератора
получают питание от вспомогательного генератора, напряжение которо-
го (7ВГ (в отличие от Ur) должно поддерживаться на заданном уровне не-
зависимо от изменения возмущающих воздействий.
Необходимость автоматического поддержания напряжения вспомога-
тельного генератора на заданном уровне (75 или 110 В) обусловлена дву-
мя факторами: длительной работой аппаратов управления, рассчитанных
на определенное напряжение; обеспечением условий полного использо-
вания свободной мощности дизеля, так как ряд элементов АСРН тягово-
го генератора включен на напряжение вспомогательного генератора и его
изменения приводят к изменению мощности тягового генератора.
АСРН вспомогательных генераторов содержит генераторы или стар-
тер-генераторы постоянного тока с независимым возбуждением и АРН.
Требования, предъявляемые к АСРН:
• автоматическое поддержание напряжения вспомогательного гене-
ратора на заданном уровне независимо от изменения тока нагрузки, час-
тоты вращения и температуры охлаждающего воздуха;
• полная статическая неравномерность системы не должна пре-
вышать 2 В;
261
• достаточная устойчивость и высокие показатели качества работы;
• простота и надежность конструкции;
• низкая стоимость изготовления, обслуживания и ремонта;
• простота и удобство настройки регулятора и системы.
АСРН вспомогательного генератора построены по принципу регули-
рования по отклонению и относятся к классу систем автоматической ста-
билизации.
По характеру изменения регулирующего воздействия (тока возбужде-
ния) все АСРН вспомогательного генератора делятся на два вида: непре-
рывного и релейного действия.
В зависимости от принципа действия и технического исполнения ре-
гуляторы напряжения делятся на следующие виды: контактно-реостат-
ные, вибрационные; электромашинные; бесконтактные магнитные; бес-
контактные полупроводниковые и бесконтактные магнитно-полупровод-
никовые.
На тепловозах и дизель-поездах широко применялись вибрационные
контактно-реостатные АРН типов СРН-7 и ТРН-1. Вибрационные регу-
ляторы напряжения типа СРН-7У-3 применяются на электровозах пере-
менного тока до настоящего времени.
Бесконтактные магнитные АРН применялись на тепловозах и на
газотурбовозах. Они обладают всеми достоинствами магнитных уси-
лителей.
Бесконтактные электронные АРН выполняют полностью на полупро-
водниковых приборах. Большое достоинство регуляторов напряжения
этого типа — отсутствие контактов, высокое качество работы и малые
затраты на обслуживание. На тепловозах широко применяются бескон-
тактные АРН типов БРН, РНТ и др. Эти регуляторы обладают эксплуата-
ционными свойствами, удовлетворяющими требованиям их работы на
тепловозах.
10.2. Схемы автоматических систем регулирования
напряжения
АСРН вспомогательных генераторов тепловозов содержат в качестве
объектов регулирования генераторы постоянного тока с независимым
возбуждением и АРН (рис. 10.1, а).
По виду автоматических регуляторов АСРН вспомогательных гене-
раторов можно разделить на системы, содержащие бесконтактные и кон-
тактные регуляторы.
262
Рис. 10.1 Функциональные схемы автоматических систем регулирования
напряжения вспомогательного генератора.
а — с бесконтактным регулятором; б — с контактным регулятором
Регуляторы серии ТРН-1 изменяют регулирующее воздействие zB не
непрерывно, а ступенчато. Приближенно их можно считать регулятора-
ми непрерывного действия.
В настоящее время в АСРН вспомогательных генераторов применя-
ют бесконтактные регуляторы (типов БРН. РНТ и др.). По характеру из-
менения iB их можно отнести к регуляторам релейного действия.
Функции объекта регулирования в системах выполняет вспомогатель-
ный генератор, регулируемой величиной которого является С’г, регулиру-
ющим воздействием z’B, а внешними возмущающими воздействиями —
частота вращения вала сов и ток нагрузки /н.
В контактном регуляторе функции датчика напряжения Ц выполня-
ют подвижная КППО и неподвижная КНПО катушки (рис. 10.1, б) па-
раллельных обмоток; функции задатчика — пружинное устройство и
регулируемые резисторы в цепи этих обмоток. Выходным сигналом дат-
чика напряжения является электромагнитная сила FH. создаваемая тока-
ми в параллельных обмотках, а выходным сигналом задатчика — сила
затяжки пружины F Подвижная катушка КППОС последовательной
обмотки выполняет функции устройства отрицательной обратной связи
выхода регулирующего органа, функции которого выполняет реостат РИВ,
с входом подвижной магнитной системы ПМС, выполняющей функции
263
исполнительного механизма. Выходные сигналы (силы) FH, F , F , Foc
действуют на подвижную систему, которая выполняет также функции
сравнивающего устройства СУ. Сила FHM равна алгебраической сумме
сил, действующих на подвижную систему, и вызывает ее перемещение 5,
что приводит к изменению сопротивления в цепи обмотки возбуждения
вспомогательного генератора (ВГ) и к изменению тока / .
В бесконтактном АРН (например, типа БРН) функции катушек изме-
рительного и сравнивающего устройств выполняет стабилитрон, а функ-
ции задающего устройства — потенциометр; функции ИМ исполнитель-
ного механизма выполняют транзисторы, а регулирующего органа —
тиристоры.
10.3. Статические и динамические свойства
вспомогательных генераторов и регуляторов
их напряжения
На ВГ действуют два основных внешних возмущения (сов и /н). Из
рис. 10.2 видно, что для поддерживания напряжения (7ВГ на заданном
уровне при изменении сов и / в полном диапазоне необходимо изменить
ток iB в пределах от /в] до /в2. Из статических характеристик видно так-
же, что коэффициент передачи вспомогательного генератора по регули-
рующему воздействию является величиной переменной, изменяющейся
в пределах от Лвг1 (соответствует характеристике I на рис. 10.2) до Анг2
(соответствует характеристике 2 на рис. 10.2).
Динамические свойства ВГ описывают-
Рис. 10.2. Статические харак-
теристики вспомогательного
генератора по регулирующему
воздействию
ся уравнением
(твгр+№вг = ^ (ю-i)
где Т — постоянная времени, приблизитель-
но равная постоянной времени Тя цепи якоря и
нагрузки (Гя = £я / 7?я; здесь Ья — индуктив-
ность цепи якоря и нагрузки; 7?я — сопротив-
ление нагрузки).
Передаточные функции вспомогатель-
ного генератора (рис. 10.3, а):
• по каналу регулирующего воздей-
ствия
^вгм(р) = *8Г,Жгр+>); (ю.2)
264
• по каналу действия частоты вращения вала сов
(ЮЗ)
• по каналу действия тока нагрузки 7Н
FFBrz(P) = W7'»P+1). (10.4)
Приближенно можно считать, что ВГ по каналам всех воздействий обла-
дает динамическими свойствами апериодического звена (см. рис. 10.3, а).
Он имеет три статических параметра — коэффициенты передачи по ка-
Рис. 10.3. Структурные схемы вспомогательного генератора автоматического ре-
гулятора и замкнутой системы регулирования напряжения вспомогательного
генератора
265
налам трех воздействий (zB, сов и /н) и три динамических параметра —
постоянные времени, значения которых очень близки.
Датчик напряжения контактного АРН обладает динамическими свой-
ствами апериодического звена
^) = Ли/(Гир+ 1). (10.5)
Статическая характеристика датчика /7м = ( (w ) линейна в рабочем
диапазоне изменения пвг, поэтому коэффициент передачи Аи является ве-
личиной постоянной. Постоянная датчика 7^ определяется индуктивно-
стью и сопротивлениями цепи подвижной и неподвижной катушек па-
раллельных обмоток.
Подвижная магнитная система (ИМ) имеет линейную статическую
характеристику б =/(F ), так как в заДаюШем устройстве ЗУ применены
цилиндрические пружины, а перемещение 8 составляет несколько мил-
лиметров. Эта система содержит две емкости, способные запасать энер-
гию двух видов (сама подвижная система при движении запасает или
отдает кинетическую энергию, а пружины — потенциальную) и обмени-
ваться этими запасами в переходном процессе. Поэтому подвижная сис-
тема обладает динамическими свойствами колебательного звена и опи-
сывается передаточной функцией
+ (10.6)
Реостат изменения тока возбуждения (РО) фактически имеет нели-
нейную статическую характеристику z =/(8), при плавном изменении 8
сопротивление реостата изменяется ступенчато. Однако из-за значитель-
ной индуктивности системы возбуждения вспомогательного генератора
ток zB возбуждения изменяется плавно. Поэтому приближенно можно
считать реостат регулирующим органом непрерывного действия с ли-
нейной характеристикой z’B(8). Реостат обладает динамическими свойства-
ми пропорционального звена с передаточной функцией FFpo(p) = к
Для повышения устойчивости и качества работы АСРН вспомогатель-
ного генератора в автоматическом регуляторе применено устройство от-
рицательной обратной связи КППОС (см. рис. 10.1, б), динамические
свойства которого описываются передаточной функцией
ЗД = *ЛР+1), (10.7)
Постоянная времени устройства обратной связи Тос определяется ин-
дуктивностью подвижной катушки последовательной обмотки и сопро-
тивлением ее цепи.
266
Динамические свойства автоматического регулятора напряжения по
каналу действия {7вг определяются динамическими свойствами его эле-
ментов (кроме ЗУ) (рис. 10.3, б). Передаточная функция регулятора по
каналу действия напряжения СВ1
Pei(/7)_ 1 + ^им(р)Гро(р)^ос(р)
{Ткр + 1)[СП2 р2 + Т2Р + 1)(7осР +1) + A’HM£po*oc ] ’ (108)
10.4. Устойчивость и качество работы автоматических
систем регулирования напряжения вспомогательных
генераторов
Статические и динамические свойства, устойчивость и качество рабо-
ты АСРН вспомогательных генераторов определяются статическими и
динамическими свойствами вспомогательного генератора и автоматичес-
кого регулятора. На основе функциональной схемы АСРН (см. рис. 10.1, б)
и структурных схем вспомогательного генератора (см. рис. 10.3, а) и авто-
матического регулятора (см. рис. 10.3, б) составлена структурная схема
замкнутой АСРН (рис. 10.3, в). Передаточная функция замкнутой АСРН
вспомогательного генератора относительно (7В по задающему воздействию
______________^им(Р)^ро(Р)^вгц(Р)____________
1 + ^им(р)^Ро(р)^ос(р) + ^и(Р)^им(Р)^ро(Жвгр(Р)
=____________________(Г12/+Г2р + 1)(Гвгр + 1)___________________
1с 1с 1с 1с 1с 1с 1с
। Лимароавг аиЛимЛроЛвгц
(Г2Р2 + Т2р + 1)(Госр +1) + (Т„р + 1)(Г|2р2 + Т2р + 1)(Гвгр +1)
(Ю.9)
Передаточная функция разомкнутой АСРН равна произведению пе-
редаточных функций регулятора и вспомогательного генератора:
267
^ИМ ^рО ^BI №оср + О
И ,(п) ------------.
(7 „/• +1)1(7 Г/>2 + Г2Р + 1)<7™Р + 1) + *«м *1» *« 1(7’» /’ +1)
(10.10)
Из анализа формул (10.9) и (10.10) видно, что выражение пере/щноч-
ной функции для разомкнутой АСРН вспомогательного генератора про-
ще, чем для замкнутой. По ному последовать устойчивость и качество
работы АСРН лучше частотным методом Найквиста Михайлова, ис-
пользуя передаточную функцию разомкнутой системы. Для АСРН
вспомогательною генератора с регулятором типа ТРН-1 значения пара-
метров следующие: 7Н|. = 0,2 с; Тц = 0,007 с; 7’ос = 2-10 6 с; Г| » 0,0001 с;
Т2 0.002 с, Аи Аим Аро АВ| м = 1 .6; А(1М Аро Аос = 0,4.
Частотную функцию разомкнутой АСРН можно патин из переда точ-
ной функции (10.10), если в ней положить р До. Частотную функцию
можно пре тставнть в виде следующего отношения полиномов
•Дуа» -г 77()
ИрС(/0 - ------?-------4 1 Г""2-----------------’ (,0-1 »
* «5/со +04(0 -тц/m «2(0 +с7[./(0+Оо
*l-7ocV
7’(> ^рс ^и\тм^ро^н1’
115 7’и7вг7ос7'Г;
«4 - 7Л Л2 + 7'и V12 + Vi2 + ЛЛ. Лс^
‘Ч ЛЛ,2 + Л. Г!2 + ЛЛ 2 + + TJn Т2 + ЛЛЛ +
<4 ’ Л/ое 4 ТиТ2 + Т’в. Т’ос + 7ш Т2 + Т^2 + Л"’
111 Ти + ГВ1 + rot + Т2 + ( Г.т+ 7вг) *нм *ро *ос’
4,0 ^нм ^ро ^ос
Отделив в числителе и знаменателе функции (10.11) вещественную
часть от мнимой, получим
= <»(«) +/А(со)
с'((о) + jj(<o)
где а (то) 60,
/)((о)-Л|(о:
фо)в о() - о,(о- + а 4то4;
</(<о) иро про3 + о5<о5.
268
11мея эго в виду, частотную функцию (10.11) можно разделить на дей-
ствительную и мнимую части, тогда
... . п(<о) + у/>((о)
(10.12)
где 4/(<о)« />0;
/>(<о) » бро;
с(<о) И(( - <ьиг + </4и)4;
</(ш) = про — + ярв5;
Имея это в виду, частотную функцию (10.11) можно разделить на дей-
ствительную и мнимую части, тогда получим
,Урс 0<°) = М«) + уМ<о). (10.12)
где
а(шк*(ш) + />(<£»)</(<«»)
Л До) - — -------------------—. (10.13)
с* (ат) + </“ (го)
/>((о)с((в) — a((rt )J((o)
Л'(ш) = -------Т-—7—-------------- (10.14)
C*'((o) + i/“((o)
С помощью зависимое ги (10.12) в декартовой системе координат с тро-
ится амплигудно-фазочас годная характеристика (годограф) разомкнутой
АСРН вспомогательного генератора, по которой можно определить ус-
тойчивость и качество работы ее в замкнутом состоянии.
После правильной настройки АСРН ВГ работают устойчиво при всех
частотах вращения вала дизель-генератора или дизель-гидравлической
установки и токах нагрузки. АСРН, содержащие контактные регуляторы
напряжения типа ТРН-1, работают устойчиво и поддерживаю! напряже-
ние вспомогательною генератора в пределах ±1 В.
АСРН вспомогательных генераторов, содержащие бесконтактные ре-
гуляторы напряжения типа БРН-3, поддерживают напряжения на задан-
ном уровне (75 или 110 В) в пределах ±1 В.
АСРН, содержащие бесконтактные регуляторы тина PH Г-6. обеспе-
чивают стабилизацию напряжения сгартср-юнератора (например, на теп-
ловозе 2ТЭ116) на уровне 1loti В во всем диапазоне изменения ею то-
ковой нагрузки и часто гы вращения вала дизель-генератора.
269
АСРН, содержащие регулятор типа РНТ-6, обладают эксплуатацион-
ными качествами, удовлетворяющими требованиям работы на теплово-
зах и дизель-поездах. Значение амплитуды колебаний напряжения, под-
держиваемого АСРН ВГ, зависит от точности настройки и быстродей-
ствия мультивибратора в регуляторе. Длительность переходного процес-
са (время регулирования) после скачкообразного изменения тока нагруз-
ки стартер-генератора (например, после включения двигателя-компрес-
сора) не превышает 3 с, частота колебаний тока возбуждения стартер-
генератора в зависимости от значения возмущений изменяется от 11 до
22 Гц, что вполне приемлемо для тепловозных систем.
В микропроцессорной системе автоматического регулирования элек-
тропередачи УСТА в дополнение к регулированию напряжения вспомо-
гательного генератора тепловоза выполняется еще несколько функций.
Так, при отключении тормозного компрессора регулятор напряжения
снижает напряжение вспомогательного генератора с целью уменьшения
динамического заброса. Регулятор осуществляет контроль собственной
работоспособности и, в случае выхода его из сгроя, включает в работу
резервный регулятор напряжения.
Глава 11. АВТОМАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ ТЕМПЕРАТУРЫ
ТЕПЛОНОСИТЕЛЕЙ ЭНЕРГЕТИЧЕСКИХ
УСТАНОВОК
11.1. Оптимальные температурные режимы
энергетических установок
Значения температуры теплоносителей (высоконагретой детали, воды,
масла, воздуха и др.), охлаждающих узлы и агрегаты дизеля и передачи мощ-
ности, определяются особенностями работы охлаждаемых узлов, допуши-
мыми значениями температур их деталей, требованиями, предъявляемыми
к физико-химическим свойствам теплоносителей и влиянием их темпера-
тур на показатели рабочего процесса и износ дизеля и передачи мощносги.
Температуры охлаждающей воды Т и масла Г' на выходе из двига-
теля существенно влияют на экономичность и срок службы двигателей
(рис. 11.1). Оптимальные значения этих величин устанавливают для каж-
дого типа двигателя. В большинстве случаев для двигателей температу-
ры Т и Т' принимались в пределах 70—90 и 70- 85 °C, соответственно
одинаковые для всех нагрузок.
Для предотвращения возникновения в двигателе значительных тем-
пературных деформаций (и уменьшения запаздывания в системах охлаж-
дения) разность температур Т', Т' , Т"ъ и Г" принимается сравнительно
небольшой: 6 —10 °C (для воды) и 10—15 °C (для масла).
Влияние Т' на мощность, расход топлива и износ двигателя заключа-
ется в том, что от нее зависят температуры стенок цилиндров Т и теп-
ловыделение в воду QB. Влияние этих факторов на мощность дизеля N
противоположно Уменьшение приводит к увеличению индикаторной
работы, а повышение Гст — к снижению коэффициента наполнения (ве-
271
Рис. 11.1. Зависимости N дизеля
типа ДЮО (/ и 2) и износа цилинд-
ров (3) при постоянном расходе топ-
лива от температуры воды (/, 3)
и масла (2)
сового заряда воздуха — у дизелей),
вследствие чего мощное гь Ni умень-
шается. Суммарное влияние этих
двух факторов различно у разных
двигателей. У большинства (шпате-
лей мощность N с ростом Т' увели-
чивается, так как уменьшается мощ-
ность, затрачиваемая на трение. При
повышении Г" увеличивается темпе-
ратура Т а следовательно, и темпе-
ратура масла, находящегося на стен-
ках. При этом снижается вязкость
масла и уменьшаются потери на тре-
ние. С повышением температуры Т'в
и увеличением механического КПД
возрастает также и эффективный
КПД, а удельный расход топлива
уменьшается. При пониженных зна-
чениях температуры Т и Т' особенно резко уменьшается экономичность
двигателя на малых нагрузках и холостом ходе. Это объясняется тем, что в
процессе такта сжатия относительные тепловые потери при малой нагруз-
ке двигателя во много раз больше, а коэффициент выделения теплоты топ-
лива при сгорании существенно ниже, чем при номинальной мощности.
Основная причина износа деталей цилиндропоршневой (руины дви-
гателя — это коррозийное воздействие на них топлива и масла, завися-
щее как от их химического состава, так и от температуры стенок цилин-
дров TCJ. Чем больше серы содержат топливо и масло и чем ниже темпе-
ратура Тст, тем сильнее проявляется коррозийное их воздействие. Кроме
того, при снижении температур Т'в, Т'м и температуры воздуха T'Bi увели-
чение скорости изнашивания двигателя обусловливается еще возраста-
нием давления газов на цикл и скорости нарастания давления. Для улуч-
шения работы двигателя иногда применяют высокотемпературное охлаж-
дение, при котором Т'в > 100 °C.
Испытания дизелей показывают, что повышение Т'в уменьшает теп-
ловыделение в воду (на 4—5 % на каждый 10 °C), несколько повышает
тепловыделение в масло (при сохранении температуры Т'м постоянной),
увеличивает КПД дизеля на 2—3 %. Высокотемпературное охлаждение
применяется также для получения более компактного теплообменника.
272
Анализ влияния температуры воды на технике-экономические пока-
затели двигателя убедительно подтверждает необходимость поддержа-
ния ее на оптимальном уровне. Однако вода, охлаждающая двигатель,
является промежуточным теплоносителем между двигателем и окружа-
ющим воздухом; она ограничивает температуры высоконагретых дета-
лей двигателя. Поэтому целесообразно поддерживать на оптимальном
уровне не температуру воды на выходе двигателя Г*, а температуру вы-
соконагретых дезалей двигателя (например, цилиндра или его головки).
Оптимальные шачения температур Т, Т'а, Т'м и Г определяются режи-
мами работы двигателей, и они различны для ратных режимов.
Исследования влияния тепловых режимов дизелей показывают, чю
при сохранении тепловой напряженности двигателя на уровне, соответ-
ствующем режиму Ne 1Н)М, оптимальные значения температуры Т' и Т'
увеличиваются при уменьшении W Зависимости оптимальных значе-
ний Т' и Т'м от /? , wB и N должны быть такими, при которых на каждом
режиме работы двигателя обеспечивается экономически оптимальное
сочетание расхода топлива, скорости износа и расхода масла.
Значительного технико-экономического эффекта следует ожидать от
повышения уровня температуры в системе охлаждения при переходе от
номинальных нагрузок к час-
тичным.
Например, исследования
дизеля 64СГ1 18/22 мощностью
100 кВт при Т'3, поддерживае-
мой статической АСРТ, и при
Т'к, определяемой постоянной
температурой стенки цилиндра,
показали, что во взором случае
увеличивается экономич-
ность двигателя. При умень-
шении нагрузки температура
Т' повышается линейно от
В
76»Спри^ = ^1Юмдо95»С
при л; = 0,25л; ном (рис. 11.2).
Для обеспечения такой зави-
симости температуры Гв оз
мощности Ае АСРТ должна
иметь отрицательную нерав-
номерность по Л/
Рис 11.2. Зависимости удельного расхода
топлива дизеля 64СП 18/22 от мощности при
п ( 750 об/мин при:
1 — статической АСРТ; 2— постоянной
температуре воды Тв const; 3 — постоян-
ной температуре стенки Т\ const
273
Оптимальное регулирование температуры Т’ способствует сглажива-
нию неравномерности температурного поля цилиндра. Для напряжен-
ных в тепловом отношении дизелей, у которых неравномерность темпе-
ратурных полей выражена резче, это имеет существенное значение.
Исследования эффективности промежуточного охлаждения наддувоч-
ного воздуха дизеля при различных степенях наддува и системах охлаж-
дения воздуха показывают, что оптимальная степень понижения темпе-
ратуры наддувочного воздуха Ts зависит от режима работы дизеля. С по-
нижением нагрузки эффект от охлаждения воздуха уменьшается. Начи-
ная с некоторой нагрузки охлаждение воздуха отрицательно влияет на
показатели работы дизеля, и требуется подогрев воздуха.
Необходимость регулирования температуры Т вызывается как харак-
теристиками системы охлаждения, так и характером изменения коэффи-
циента избытка воздуха в зависимости от мощности N. Значение опти-
мальной температуры наддувочного воздуха Т определяется только зна-
чениями р и частоты вращения вала двигателя сов. При уменьшении на-
грузки значение Tso обычно увеличивается. Таким образом, и АСРТ над-
дувочного воздуха должна иметь отрицательную неравномерность по N.
При поддержании оптимальной температуры двигателя не только уве-
личивается его экономичность и надежность, но и повышается надежность
устройств системы охлаждения. Например, большие колебания темпера-
туры в системе охлаждения тепловоза приводят при низких значениях Т'ъз
к появлению в радиаторах знакопеременных напряжений, значительно
снижающих долговечность радиатора. Ручное релейное регулирование
температуры на тепловозах является одной из основных причин частого
выхода из строя радиаторов. Кроме того, в приводе вентилятора наблюда-
ются периодические перегрузки при его включении. Периодическая рабо-
та вентилятора является дополнительным источником возмущений для
АСРН тягового генератора и частоты вращения вала дизель-генератора.
Таким образом, анализ исследований по определению оптимальных
температурных режимов ДВС показывает, что оптимальные значения
температур Т, Т'м и Ts увеличиваются при уменьшении Ад и сов. Это зна-
чит, что АСРТ, построенные по принципу отрицательной связи, т.е. по
отклонению, не могут обеспечить качественное поддержание оптималь-
ных температурных режимов дизеля. Поэтому в последние годы усилен-
но ведутся разработки новых АСРТ ДВС, в том числе микропроцессор-
ных, с использованием комбинации принципов регулирования по откло-
нению и по возмущению.
274
11.2. Классификация и функциональные схемы
автоматических систем регулирования температуры
и предъявляемые к ним требования
Система охлаждения (СО) в совокупности с автоматическим регуля-
тором температуры (APT) образуют АСРТ. На тепловозах применяются
одно- и многоконтурные АСРТ.
Одноконтурные системы (рис. 11.3, а) можно разделить на четыре груп-
пы по закону (алгоритму) работы регулятора: по отклонению регулируе-
мой температуры от заданного значения; по отклонению и производной
от отклонения регулируемой температуры; по отклонению и интегралу
Рис. 11.3. Типовые функциональные схемы автоматических систем регулирова-
ния температуры:
а — одноконтурной; б — комбинированной; в — несвязанного регулирова-
ния; г — связанного регулирования
от отклонения; по отклонению, производной и интегралу от отклонения.
АСРТ первой и второй групп статические, а третьей и четвертой — аста-
тические.
АСРТ с использованием сигнала по возмущению называются комби-
нированными (инвариантными) системами (КАСРТ) (рис. 11.3, б).
Наиболее простыми КАСРТ являются системы с внутренней компа-
ундирующей связью. В этих системах один из элементов регулятора вы-
полняется таким, что его выходной сигнал изменяется под действием не
275
только выходного сигнала предыдущего элемента, но и сигнала, завися-
щего от возмущающего воздействия Второй разновидностью КАСРТ
являются системы с силовой (сигнальной) компенсацией возмущения
(см. рис. 11.3, б). Сущность принципа регулирования по возмущению
заключается в том, что специальное устройство (компенсатор) измеряет
возмущение X(z) (мощность, частоту вращения вала дизеля или темпера-
туру Г' ) и воздействует на объект для компенсации (уравновешивания
влияния данного возмущения). Наряду с силовой компенсацией возму-
щения, в КАСРТ применяется параметрическая компенсация, при кото-
рой параметры регулятора температуры изменяются в зависимости от
возмущений (/V сов и Гвз) так, чтобы обеспечивался постоянный запас
устойчивости КАСРТ.
На практике часто встречаются системы охлаждения с несколькими
регулируемыми температурами (воды Т', масла Т'м, наддувочного возду-
ха 7\). Такие объекты регулирования называются многомерными. Если
регулируемые температуры независимы одна от другой, задача их регу-
лирования сводится к построению соответствующего числа систем, каж-
дая из которых является системой с одной регулируемой величиной. Та-
кая сложная система называется системой несвязанного регулирования
(рис. 11 3, в). Однако задача существенно усложняется, если регулируе-
мые температуры оказываются взаимосвязанными (рис. 11.3, г). Физи-
ческой причиной появления взаимных связей между регулируемыми тем-
пературами является наличие общих входных воздействий (сов, Ne, T'BV
р), изменение каждого из которых приводит к одновременному измене-
нию температур.
При построении многоконтурных АСРТ важно различать взаимосвязь,
обусловленную наличием общих возмущений, и взаимосвязь, обуслов-
ленную наличием общих регулирующих воздействий.
Для автоматизации систем охлаждения, в которых регулируемые тем-
пературы связаны через общие регулирующие воздействия, могут при-
меняться две схемы многосвязанных АСРТ:
• схема сложного независимого регулирования — между регулятора-
ми температуры отсутствуют специальные перекрестные связи, но закон
работы каждого регулятора выбирается с учетом наличия перекрестных
связей в системе охлаждения (см. рис. 11.3, в);
• схема сложного связанного регулирования — между регулято-
рами температуры устанавливаются перекрестные связи (см. рис.
11.3, г).
276
При выборе схемы конкретной АСРТ учитывают схему и свойства сис-
темы охлаждения. Статические АСРТ обычно характеризуют регулируемой
величиной Т ; статической характеристикой, зоной статических характе-
ристик, частной (остаточной) неравномерностью 8Гр, статической неравно-
мерностью АТрст, номиналом регулирования 7р N, перерегулированием (ди-
намическим забросом регулируемой температуры) ДТрд; временем переход-
ного процесса или ре1улирования /р, относительным перерегулированием.
Статическая характеристика АСРТ — зависимость между устано-
вившимися значениями Тр и мощностью двигателя Ас> определенная при
фиксированной настройке регулятора температуры и постоянной темпе-
ратуре Т^г Зона статических характеристик АСРТ — поле установив-
шихся значений Т , ограниченное статическими характеристиками АСРТ
ПРИ Лп max и Ли min'
Частная неравномерность — интервал изменения температуры Тр
при полном изменении N„ и Т' = const или при полном изменении Т' и
Д/д = const.
Неравномерность АСРТ — интервал изменения температуры Тр при
полном изменении Ае и Т' . Полная неравномерность складывается из
частных, обусловленных полным изменением соответствующих возму-
щений (Ае, сов, Твз). Частная неравномерность по N или сов должна быть
отрицательной (при уменьшении А'е или сов значение Тр должно увели-
чиваться), а по Твз — равной нулю. Для уменьшения частной неравно-
мерности без изменения статизма (неравномерности) регулятора темпе-
ратуры по отклонению применяют дополнительный регулятор темпера-
туры по соответствующему возмущению.
Номинальное значение Тр — значение регулируемой температуры при
50 %-й нагрузке двигателя и температуре Гвз равной 20 °C.
Для обеспечения оптимального температурного режима двигателя
АСРТ должна удовлетворять следующим требованиям:
• регулируемая температура должна поддерживаться в пределах не-
равномерности регулирования при любом изменении режима работы
двигателя, температуры наружного воздуха и др.;
• неравномерность АСРТ воды, масла и наддувочного воздуха по мощ-
ности двигателя должна быть отрицательной, а по температуре наруж-
ного воздуха — равной нулю;
АСРТ должна быть устойчивой при всех режимах работы дизеля и
тепловоза и условиях работы системы охлаждения и иметь высокие по-
казатели качества работы.
277
11.3. Классификация и схемы систем охлаждения
Функциональная схема ОР применяется для того, чтобы показать, ка-
кие величины являются входными, а какие — выходными; какие из вход-
ных величин — возмущающими, а какие — регулирующими.
В простейшем случае СО является объектом регулирования темпера-
туры одного теплоносителя (рис. 11.4, а). На систему охлаждения дей-
ствует не менее трех возмущений: (ов, ЛГ и Т'вГ Редко встречаются сис-
темы охлаждения как объекты регулирования температуры одного теп-
лоносителя (одномерный объект). Система охлаждения — многомерный
объект регулирования, в котором необходимо регулировать температуры
двух (рис. 11.4, б) или даже трех (рис. 11.4, в) теплоносителей. При этом
регулирующих воздействий должно быть не меньше, чем регулируемых
температур.
Рис. 11.4. Функциональные схемы систем охлаждения дизеля как объектов
регулирования температуры теплоносителей:
а — одномерного; б — двухмерного; в — трехмерного
Тепловозные системы охлаждения являются воздушно-жидкостными и
в них в качестве регулирующих воздействий используются изменения рас-
хода охлаждающего наружного воздуха, проходящего через радиаторы.
Система охлаждения наддувочного воздуха имеет обычно одно регу-
лирующее воздействие — изменение расхода охлаждающей воды или
воздуха. При подогреве наддувочного воздуха используется второе регу-
лирующее воздействие; обычно этим воздействием является изменение
расхода горячего теплоносителя Gn, перепускаемого в контур системы
охлаждения для подогрева наддувочного воздуха (СОПНВ) из контура
системы охлаждения двигателя.
В воздушно-жидкостных системах охлаждения перепуск горячего теп-
лоносителя используется также для повышения температуры второго
теплоносителя (например, масла).
278
На тепловозах применяются воздушно-жидкостные системы охлаж-
дения двигателя: воздушно-водяные (ВВСО), воздушно-масляные
(ВМСО) и воздушно-водомасляные (ВВМСО). ВВСО является объектом
регулирования температуры воды Т'в на выходе из дизеля. Система со-
держит следующие элементы, участвующие в процессе теплообмена меж-
ду газами в цилиндрах дизеля (Д), нагружаемого агрегатом нагрузки (АН)
и наружным воздухом: часть металла дизеля (крышки цилиндров, ци-
линдровые гильзы и рубашки, часть металла блока и др.), часть металла
радиаторов, трубопроводов и насоса НВ, воды, циркулирующей в систе-
ме охлаждения (СО) (рис. 11.5, а).
Рис. 11.5. Принципиальные схемы тепловозных систем охлаждения дизеля:
а — воздушно-водяной; б — воздушно-масляной; в — воздушно-водомасля-
ной; Д— дизель; АН —агрегаты нагрузки; Р1 — радиаторы воздушно-водяные;
Р2 — радиаторы воздушно-водомасляные; ВМТ — водомасляный теплообмен-
ник; НВ — насос водяной; НМ — насос масляный
ВМСО и ВВМСО являются объектами регулирования температуры мас-
ла на выходе из дизеля Т'. ВМСО содержит следующие элементы, массы
которых участвуют в процессе теплообмена между нагретыми деталями и
наружным воздухом: поршни, шатуны, коленчатый вал, часть металла бло-
ка, радиаторы Р2, трубопроводы, насос НМ и масло, циркулирующее в
СО (рис. 11.5, б). ВВМСО содержит, кроме элементов ВМСО, еще водо-
масляный теплообменник ВМТ, водяные трубопроводы и насос НВ, воду,
циркулирующую между теплообменником и радиаторами (рис. 11.5, в).
279
С целью поддержания температуры Т'м на заданном уровне при низ-
ких N и Т'т соединяют воздушно-водяную и воздушно-водомасляную
СО с помощью трубопроводов. Причем перепуск горячей воды дизеля
может изменяться автоматически.
Для охлаждения и подогрева наддувочного воздуха применяются раз-
личные системы охлаждения (СОНВ) и подогрева (СПНВ). Наиболее
простая из них воздушная система охлаждения (ВСОНВ) (рис. 11.6, а),
Рис. 11.6. Принципиальные схемы тепловозных систем охлаждения и подогрева
наддувочного воздуха дизеля:
а — воздушной; б — воздушно-водяной; в — водяной системы охлаждения и
подогрева: Д — дизель; АН — агрегат нагрузки; Т — турбина; К — компрес-
сор; ОНВ — воздушный охладитель наддувочного воздуха; Р — радиатор;
НВ— насос водяной,-В ВТ— воздушно-водяной теплообменник; ВМТ— водо-
масляный теплообменник; НМ — насос масляный
которая является объектом регулирования температуры наддувочного
воздуха на входе в дизель Ts, и содержит дизель (Д), агрегат нагрузки
(АН), агрегат наддува, состоящий из турбины (Т) и компрессора, воз-
душный охладитель наддувочного воздуха (ОНВ) и воздухопроводы.
ВСОНВ применена на тепловозе ТЭП75 и др. Воздушно-водяная систе-
ма охлаждения наддувочного, воздуха (ВВСОНВ) (рис. 11.6, б) содержит
вместо воздушного водяной охладитель наддувочного воздуха (ОНВ), ра-
диатор (Р), насос НВ и водяные трубопроводы. ВВСОНВ применены на
тепловозах ТЭМ2 и др. На тепловозах серии ТЭ10, М62, 2ТЭ116, ТЭМ7
I
280
и др водяной охладитель наддувочного воздуха включен в ВВМСО и
выполняет функции не только охладителя, но и подогревателя надду-
вочного воздуха, т.е. функции воздушно-водяного теплообменника ВВТ
(рис. 11.6, в).
11.4. Статические и динамические свойства систем
охлаждения как объектов регулирования температуры
При выборе закона работы, статических и динамических параметров
автоматического регулятора температуры, расчете настроек и определе-
нии режимов работы АСРТ используются статические и динамические
характеристики и параметры системы охлаждения как объекта регули-
рования температуры.
Статические характеристики системы охлаждения по регулирующе-
му воздействию ц представляют собой зависимости регулируемой тем-
ператур (Гв, 7'^ или Г5) от расхода охлаждающего воздуха wB ((или воды)
через охладитель или радиатор при разных значениях N (ын) и ТвГ
Статические характеристики по возмущающим воздействиям пред-
ставляют собой зависимости температур Т' Т' или Тс от А„(ы„) и Т*
при постоянном ц
Закономерности статических характеристик системы охлаждения оп-
ределяются характеристиками составляющих его звеньев двигателя и
охладителя.
Статической характеристикой двигателя как теплообменника являет-
ся зависимость тепловыделения в охлаждающую жидкость или воздух
от ее температуры Q^T') Опытами установлено, что тепловыделения в
воду рв и масло Q увеличиваются с понижением Т’в и Т'.
Например, повышение температуры Т' дизеля типа Д100 с 65 до 85 °C
при Т'м = 72—74 °C и Гвэ - - 20 °C приводит к снижению QB на 6 %
(с 560 000 до 525 000 ккал/ч), т.е. на 1°С изменения Т' приходится 0,33 %
изменения QB. Изменение Т'м также существенно влияет на Q При ис-
пользовании данных QB, QM, а также QHB следует обратить внимание на
значение 7'((, при котором определялись эти величины, так как они су-
щественно зависят от Т'вз при Ts = const.
При рассмотрении процесса передачи тепла охлаждающей жидкости
двигатель принимают за теплообменник, у которого тепло отводится от
газа в цилиндрах, нагретого до температуры Т, которая постоянна во
времени. В действительности процесс теплопередачи в двигателе явля-
ется квазистационарным, и поэтому Т представим как средневзвешен-
281
кую величину но тепловыделению в охлаждающую жидкое и При i 1
ком допущении уравнение теплопередачи для двигателя будет имен, вид
с>л w <н|)
где А( средннн коэффициент гспионсредачн от iai.i к пхлиж/т.нощсП жидко-
сти;
/*’л — приведенная площадь поверхности тсплооОмена двнипсля.
Гак как средняя температура охлаждают цен жидкости 7* отличается
от Т не более чем на 5°С, а температура 1 составляет сотни градусов
можно гамет ши. в формуле (11.1) 7Ж ср на Т'й<
Характеристики Сд(^ж) н соответствии с уравнением (III) представ
ляют собой отрезки прямой (рис. 11,7). описываемой уравнением
“л"
(11.2)
1Ж"д V/r W'fl-
Аналитически в общем виде установить денетвнтелытын характер
зависимости £?Д(ГЖ) невозможно, так как явления теплопередачи крайне
сложны и во многом индивидуальны для каждою ДВС. Однако во мно-
гих случаях с достаточной для практики точностью можно принимать
эту функцию в линеаризованном виде. 11ри пом для каждой т руины дни
Рис 11 7. ( тэтические характеристики дви-
гателя как теплообменника (2' 4,2 7,9 7,
3' 5, V 8'и /О 12). радиатора (/ 2, / 3.
6 7, б Л) и воздушно-жидкостной систе-
мы охлаждения при енмовыравиипании
(.?' 2' 7 Л') и АСРТ (.Г 7' 7 8")
га гелей могут быть свои птачс-
ттия Ь и для каждой натру аки
свои значения </д. Гак как пара
метро однозначно связан с тем
пера турой / , то характерме тики,
построенные в соответствии с
уравнением (11.2), будут парал-
лельны одна другой, причем каж-
дая из них будет соответствовать
определенной пат рузке дни» ате-
ля (рис 11.7) |.|кис характори
стики можно получип. н т осмо
не жспсриметпальпых данных
Стат ические характерис т ики
во тдушно-жндкост поп системы
охлаждения двигателя представ
ляют собой тлрезки прямой, на
читытотиисся в точках на оси аб
282
сннсс, i де / /(, и имеющие угловые ко >ффинн( и 1 ы равные к J Jim
рис II ) При ном верхняя лирикlepiK niKiifiy/jt i com иг н iboiuiii. m.ik
ciimiiiii.iioii (i>(| (n.ini /Vryy), максимальной рясчс i ион i мнгратург p, । ннж
ним наименьшим <n и <«>
н mm n min
( короси. ichbooiдачи ДВС по нмнер.пуре кп/п<н1п
<Vn
*л di п
f,/ж
iiaibinaioi iiiK/кс t/xihin<iptiyt усгнпцчиымmu р ( < )i рннак 111.110г iii.ririiih
ею означает ч 10 jimiiiiicjn. ютикюбменннк обладает самопыранниванн
см на входе 1начснпя p точнее всею определявши iKciiepiiMeniaai.iio
по 1 рафикам таниенмости £>д( Г*) или по формулам (11 I), (11 1|ц шнч<*
,,,,ям Р.г 7 г 7 ж-
Но зависимое । н (?/( oi Г* онределченя ко m|h|>iiiiiivii 1 передачи (фак
юр ycioipiiinociii)
<Jp( / '( ) МОЖС1
( учетом выраженпп (II 3) и (11.4) уригик пне (III) будет им< и. вид
е«,. р«<7; 1 р','.„pi. <н 5)
1ЛС р imriciiiK. при рае чепцах иигк пнях /'t
Входной величиной радна1ора C4iiiaioi 1сплоо|нод Апачитичсс
кос выражение условий равновесною режима pannaiop.i
бып. получено и» уравнений баланса icinia
Сж (?.в 7’? гн/'н,(Г»,
ИЛИ (II 6)
Сж Св, ^жЛ/ж ^юЛ/в1
и уравнения 1снлонсрсдачп радиаюра
Часто в приближенных инженерных расчетах вместо средне лот ариф-
мичсското температурною напора t> иснолт.туют срслнсарифмс1нчсский
и
7 ж 7 ж 7 и । 7 в I
(II К)
11
2Я1
В целях упрощения методики теплового расчета физические парамет-
ры воздуха и жидкости принимают при Т'вз и Т'ж , а коэффициент теп-
лопередачи кр относят к иа. Это позволяет получить в явном виде выра-
жение
Агр = иж ’ (119)
где /4] — коэффициент, зависящий от физических параметров жидкости и возду-
ха при температурах их на входе в радиатор, от значений гидравлических диа-
метров и показателей степени и «2, которые определяются характером тече-
ния теплоносителей.
С учетом выражений (11.6)—(11.8) получим
Qp = (Т’ж - ^з) /(1 Vp + 1/2РГж + 1/2РГвз)- о L1°)
Если принять, что знаменатель выражения (11.10) не зависит от тем-
пературы теплоносителей и обозначить \/knFn + 1/2ЕР' + 1/2 ИС, = 1/ИС,
то характеристики радиатора относительно и Т'вз — это прямые ли-
нии, описываемые уравнением
Qp=wp^-t'J- (11л1)
Поле характеристик равновесных режимов системы охлаждения скла-
дывается из точек пересечения характеристик радиатора и двигателя,
соответствующих равным значениям Т*, T'bV Qa, Qp и расхода жидкости
G через радиатор и двигатель (см. рис. 11.7). Линии 6—7 и 6—8 пред-
ставляют характеристики радиатора при Т'вз соответствующие макси-
мальным (линия 6—7) и минимальным (линия 6—8) значениям Сж и GB3.
Таким же значениям 6Ж и GB3 соответствуют характеристики радиатора
(линия 1—2 и 1—5) при температуре Т'вз min. Характеристики двигате-
ля при Твз даны линиями 9—7 (номинальная мощность Ne) и 10—12
(Ne = 0). Подобные характеристики двигателя при Т'вз min проходят ниже
(линии 2—4 и 3—5).
Характеристика системы охлаждения Тж(£)д) при Твз представлена ли-
нией 7—8. Точка 7 соответствует номинальным расчетным значениям пара-
метров Твз, Тж, 2Д* и Свз- Характеристики, подобные линии 7—8,
получают при теплотехнических испытаниях.
Четырехугольник 7—8'—3'—2' представляет поле характеристик си-
стемы охлаждения относительно возмущающего воздействия или сов.
284
Высота поля определяет пределы изменения £>р, а ширина — пределы
изменения температуры Т* при самовыравнивании. Поле характеристик
выходит за границы рекомендуемых оптимальных значений Т'.
Из характера протекания характеристик радиатора и двигателя вбли-
зи точки их пересечения видно, что система охлаждения обладает поло-
жительным самовыравниванием при любом режиме работы двигателя (в
пределах допустимых значений Т^.), так как ее фактор устойчивости
= _________
Рсо атж атж
(11.12)
Это означает, что при изменении режима работы двигателя устанав-
ливается новая характерная для данного режима равновесная темпе-
ратура Т^.
Поскольку система охлаждения обладает меньшим значением рсо при
малых значениях Ne, сов и Т'вз, то АСРТ при этом будет наименее устойчива.
Функцией регулятора температуры является автоматическое измене-
ние GB3 в зависимости от Тж и тем самым уменьшение ширины поля
характеристик до определенной величины. При этом поле характерис-
тик радиатора ограничивается линиями 11—7 и 11—7', соответствующи-
ми р max и ^вз р min* Точки пересечения характеристик радиатора с
характеристиками ДВС образуют поле характеристик системы охлажде-
ния (четырехугольник 7—8—8"—7') при автоматическом регулировании
Т* (т.е. поле характеристик АСРТ); ширина поля при этом определяется
значением неравномерности регулятора, равной интервалу температуры
Тж, за который GB3 изменится от номинального значения до нуля.
Так как в равновесном режиме QA - Qp, то из выражения (11.10) мож-
но получить уравнение характеристики системы охлаждения
= О Vp + 1/2РГж + 1/2Жвз) Сд + Кг 0
где и И’в.( — водяные тепловые эквиваленты жидкости и воздуха соответ-
ственно.
Таким образом, статические характеристики системы охлаждения
двигателя представляют собой зависимости Т' от основных факторов,
которые влияют на Тр и определяют условия ее работы. Наиболее важны-
ми характеристиками являются характеристики по ц, т.е. по скорости
воздуха в радиаторе пвз. С учетом выражений (11.9) и (11.13) уравнение
характеристик по мвз будет иметь вид
285
a
Рис. 11.8. Статические характеристики систем охлаждения:
а — воздушно-водяной системы охлаждения дизеля типа Д100 по регулирующе-
му воздействию скорости воздуха в радиаторе при разных ик; б — воздушно-
водяной системы охлаждения дизеля типа Д100 тепловоза по углу наклона лопастей
вентилятора при разных «к
+т'№ (н.п»
гдеЛ2 = u^-/AxF^ Л3=1/2сю/ю; Л4 = иж'/2 сж/ж (здесь/ж и/ю — площади
сечений радиатора для прохода жидкости и воздуха соответственно).
Из уравнения (11.14) видно, что характеристики по ц, в широком ди-
апазоне изменения wB3 и Т* существенно нелинейны (рис. 11.8, а).
В результате коэффициент передачи (статический параметр) системы
охлаждения по ц сильно зависит от и'
ST* . ..
вз
Из уравнения (11.15) видно, что при Т'*. = const значения увеличи-
ваются при уменьшении пВ!, т.е. при уменьшении @д (спв) и Гю. При посто-
286
янных сов и Твз увеличение Т* приводит к уменьшению ивз, а значит, к
увеличению к„ .
Статические характеристики системы охлаждения определяются на
основе данных, полученных при тепловом и аэродинамическом расчетах
охлаждающего устройства тепловоза, а также с использованием данных
испытаний двигателя.
Из расчетных характеристик ВВСО дизеля типа ДЮО Тв(« 3) при раз-
личных пК (сов) и Гвз (см. рис. 11.8, а) видно, что система охлаждения как
объект регулирования Т' является существенно нелинейным звеном в
АСРТ. При этом коэффициент передачи = дТ'в1дивз изменяется при пе-
реходе от nK = 16 (при Т’з = 40 °C) к пк = 1 (при Г’вз = 0 °C) почти в 50 раз.
Статические характеристики объекта относительно положения регули-
рующего органа зависят от способа изменения ивГ
Расчетные [по уравнению (11.14)] характеристики ВВСО дизеля типа
ДЮО по регулирующему воздействию — углу наклона лопастей венти-
лятора ав (при Твз = 25 °C) и соответствующие им коэффициенты пере-
дачи ЛОа согласуются с экспериментальными зависимостями (рис. 11.8, б).
Некоторое расхождение расчетных и экспериментальных характеристик
объясняется загрязнением радиатора тепловоза, на котором проводились
испытания.
Уравнение статических характеристик ВВМСО (см. рис. 11.5, в), по-
лученное из уравнений теплового баланса и теплопередачи двигателя,
теплообменника и радиатора, имеет вид
Гм = QM (1 Vp + 1/АЛ + "2^3 + 1/2^м) + Г'3, (11.16)
где кт и FT — коэффициент теплопередачи и площадь поверхности теплообмена
теплообменника;
и WM — водяные тепловые эквиваленты воздуха и масла соответственно.
Уравнение ВВМСО, содержащей теплообменник наддувочного воз-
духа (см. рис. 11.6, в), имеет вид
Тм = бм(1 Vp + 1 Vt + "2^ + 1/2FFM) + Снв(1 Vp + 1/2^з+
+l/2FrB) + r. (11.17)
Динамические характеристики системы охлаждения двигателя опре-
деляют характер изменения Г', Т или Ts после заданного изменения
287
z/BJ или )V и wB во времени Динамические характеристики относительно
Т'и нс представляю! интереса, так как во времени изменяются очень мед-
ленно Исходным дифференциальным уравнением для описания дина-
мики системы охлаждения является математическое выражение закона
сохранения нтертии. Уравнение тен юною баланса системы для случая
итменения регулируемой температуры на величину ИГ^от лействня воз-
мущения
cc()dr;dr -дед Д(?Р (IL,8)
Гспловыделение двигателя теп торассеивающая способность ра-
диатора р и приведенная теплоемкость системы Сс() являются нелиней-
ными функциями ряда переменных:
Ctf) <pmp4Wl + l»m» СИ.19)
тде <„. < с„ теплоемкости ра тиатора, метал, та двигателя, жидкости.
|1 [ Ла I 1 I* I»
теплообменников, трубопроводов, насосов;
т , т . т . т , т , т массы радиатора, металла твшагечя. жидкости,
р Ч Ж Г 1р н г г
теплообменников. трубопроводов, насосов.
Теплоотвод QaQ,) также зависит от V (со ), Т' Г' т.е.
<? .о.«%>•г;. <"-20)
Теплоотвод также зависит от Т’*., ГВ|, 5'д(сов), скорости и направле-
ния ветра, скорости движения тепловоза, т.е.
еРо>в).г;.г;,./). (иго
Линеаризуя уравнения (11.20) и (11.21), получаем
Д£).- — -^7- Д'ж+ Д/вз’ (11.22)
“^в /р 1 1 ж /о с 1 вз 70
тде
<Л,в
дТ'
ж 'о
факторы устойчивости двигателя как тепло-
о
обменника по сов, Т'ж и 7"В(. значения которых определяются опытным путем для
каждого двигателя по статическим харакзгристикам;
^В у о
Дсов +
‘ * 7 ж 'о
ДГ
ж
1 1 вз 7о
дг'в,+ер(/), (Н.23)
I де
Ап
в
' Р
ОТ'
ОО
Е
ОТ'
Ж 70 В1/0
факторы устойчивости радиатора соотвсг-
о
ственно но (»в, Т'ж и Т'О1. значения их легко определяются по соответствующим
статическим характеристикам и зависят от характера функции нвД<ов,).
В случае включения в систему охлаж тения теплообменников масла
двигателя или гидропередачи и на тдувочното воздуха двигателя необхо-
димо в учитывать тепловыделения (2м, (?мп и £>нв, а также их зависи-
мости от Т'м, Г и Гв1, скорости движения тепловоза и влияние них
зависимостей на факторы устойчивости твигателя как теплообменника.
Для упрощения задачи рассмотрим переходный процесс системы ох-
лаждения для случая постоянных значений Т'т и тов (нк). В тгом случае
зависит от Т'ж, которая изменяется во времени:
Q, -Дг;.,).
(11.24)
Теплоотвод Q зависит от и uBJ, а последняя определяется положе-
нием регулирующего орт ана ав:
0Р’/<г«а»’
(11.25)
Линеаризуя уравнения (11.24) и (11.25), получим
АСД= ттг- Д^Д^а);
\ с 1 ж 'о
' <Х?р'
< с > о
д2р
дгж
‘Ч?р ]
ОХв
Дав.
Так как
dr; d/ d(Гж T^0)/d/ - d(ДГ )/dz.
сО
d(A/ж)
d/
<Ч?р
‘ 'о
ДГ
ж
Аав+Д£Цг). (11-26)
о
<сЛк /0
289
Таким образом, получено линеаризованное дифференциальное урав-
нение системы охлаждения в приращениях, выраженных в абсолютных
единицах. Перейдем к безразмерным координатам. Для этого выберем
некоторые постоянные значения для каждой координаты, например, от-
носящиеся к номинальному режиму. Разделив и умножив на них соот-
ветствующие приращения, получим
. «КДГжПо
сО * жО
вО
Аав
ав0
рей
+ ДСд(О,
АГ'
Л\
(11.27)
Д^жО
ж
где — температура жидкости;
ав0— положение регулирующего органа при нормальном режиме.
Обозначим
<р = Ц = Дав/ав0.
Разделив обе части уравнения (11.27) на коэффициент при втором
члене левой части, получим
49 +(р
dt
Р +/(')•
Величина
дг
(11.28)
имеет размерность времени и является постоянной времени СО.
Величина
7ж0 ~
290
является безразмерным коэффициентом передачи линейной модели сис-
темы охлаждения.
Таким образом, уравнение модели объекта имеет вид
d<p
d7 + 'р = б + М’ 01-29)
где/(/) — безразмерное отклонение ре1улируемой температуры, вызванное вне-
шним возмущением (например, изменением Nr(mb)).
Система охлаждения в отличие от других звеньев АСРТ, кроме звена на-
стройки регулятора, имеет не менее двух входов. Поэтому уравнение дви-
жения объекта (11.29) содержит в правой части две переменные: к^, ц —
изменение Т’ж от действия регулирующего воздействия на объект; f (/) —
изменение Т' от действия возмущения.
Система охлаждения является объектом с распределенными парамет-
рами, поэтому Т'ж начинает изменяться спустя некоторое время после
действия возмущения, называемое временем запаздывания т0. Величина
запаздывания то складывается из транспортного (передаточного) и пере-
ходного запаздывания. Анализ экспериментальных временных переход-
ных характеристик показывает, что основную часть тоб составляет пере-
даточное запаздывание. В результате система охлаждения с точностью,
достаточной для выбора типа регулятора и вычисления значений пара-
метров настройки АСРТ, может быть заменена моделью, состоящей иг
двух последовательно соединенных типовых динамических звеньев: апе-
риодического звена с постоянной времени То и коэффициентом усиле-
ния А()[1 и звена чистого запаздывания с тоб и описываемой передаточны-
ми функциями по каналам воздействий:
регулирующего
р+ I); (11.30)
г* г* г*
возмущающего по сов
"х1(р) = ^в^'(Д1Р+1>; (изо
возмущающего по Т'ъз
W^{p} = kte^2(T^p+\\ (П.32)
где к , кмв, nkt— коэффициенты передачи системы охлаждения по воздействиям
р, сов и Т'вз соответственно;
Г , ^Л.2 и ТХ1’ ТХ2 — постоянные времени и время запаздывания по
воздействиям р, шв и Т'вз соответственно.
291
Рис. 11.9. Структурная схема системы
охлаждения тепловозного дизеля
чения можно считать постоянными
Структурная схема системы ох-
лаждения состоит из шести типо-
вых динамических звеньев: трех
звеньев запаздывания и трех апери-
одических (рис. 11.9).
Статические (коэффициенты
передачи) и динамические (посто-
янные времени и время запаздыва-
ния) параметры системы не оста-
ются постоянными при изменении
режима и условий работы. Их зна-
лишь при небольших отклонениях
от расчетной точки; при каждом режиме, отличном от базового, они при-
нимают новые значения, что является следствием зависимости факторов
устойчивости двигателя и радиатора от режимов и условий работы.
ВМСО и ВВМСО являются более инерционными; у них больше зна-
чения динамических параметров, например, если динамический пара-
метр = тр ВВСО дизеля типа Д100 составляет 0,04—0 10, то у
ВМСО он достигнет 0,3—0,6. Чем меньше параметр тем лучше дина-
мические свойства объекта регулирования.
Статические характеристики системы непосредственного охлаждения
или подогрева наддувочного воздуха (см. рис. 11.6. а) по ц представляют
собой зависимости Т от расхода воздуха GB3 через охладитель при раз-
ных значениях А’е(сов) и Твз, а по возмущающим воздействиям — зависи-
мости Ts от .V и Т'ю. Статические характеристики по возмущающим воз-
действиям практически линейны. Характеристики СОНВ по ц существен-
но нелинейны.
Система охлаждения двигателя является многомерной, в которой тре-
буется регулировать температуру нескольких теплоносителей. В случае,
когда количество контуров системы охлаждения превышает количество
вентиляторов, образу ется многосвязная система охлаждения. 1 акие систе-
мы охлаждения имеются, например, у дизелей тепловозов серии ТЭ10,
ТЭМ2, М62 ТЭМ7 и др. К многомерным несвязным системам можно от-
нести системы охлаждения дизелей тепловозов ТЭП70, ТЭП75, 2ТЭ116 и
др. Строго говоря, все системы охлаждения двигателей являются много-
связными, так как существуют связи по двигателю между температурами
теплоносителей. Однако с целью упрощения будем считать многосвязной
системой такую, которой осуществляется связь между' температурами теп-
лоносителей посредством регулирующих воздействий. В многосвязной
292
системе обычно температура одного теплоносителя изменяется с помо-
щью вентилятора, а других — с помощью вспомогательных регу лиру ю-
щих органов (створок жалюзи, клапана и др.). Поэтому статические харак-
теристики таких систем по ц необходимо определять по положению как
основного, так и вспомогательных регулирующих органов, а также учи-
тывать их взаимное влияние на температуры теплоносителей.
11.5. Схемы, статические и динамические свойства
автоматических обычных и микропроцессорных
регуляторов температуры
В тепловозных АСРТ применяются статические (пропорциональные)
и комбинированные регуляторы температуры непрямого действия, ре-
лейные и непрерывные. Регулятор статический состоит из двух частей:
управляющего органа (УО) (термореле или терморегулятора) и исполни-
тельно-регулируюшего устройства (ИРУ) (привода вентилятора и венти-
лятора, привода жалюзи и створок жалюзи или привода клапана и клапа-
на) (рис. 11.10, а). Управляющий орган содержит ИУ, ЗУ. СУ и усили-
тельно-преобразующее устройство (УУГ).
Комбинированный регулятор температуры (рис. 11.10, б), кроме элемен-
тов статического регулятора, содержит еше компенсаторы возмущающих
воздействий, в состав которых входят ИУ, ЗУ, СУ, УУ и сумматор сигналов С.
Рис. 11 10 Фу нкциональные схемы тепловозных регуляторов температуры:
а — статического; б — комбинированного
293
Рис. 11.11. Классификация приводов вентилятора и их элементов
Комбинированные регуляторы, кроме сигнальной компенсации, могут осу-
ществлять в КАСРТ и параметрическую компенсацию действия Лд и Т'ю.
Приводы вентилятора, жалюзи или клапана выполняют функции ИМ, а
вентилятор, створки жалюзи или клапан — функции РО. В тепловозных
регуляторах применяются различные типы привода вентилятора (рис. 11.11).
Функциональные схемы управляющих органов (рис. 11.12, а), не име-
ющих У У, состоят обычно из трех устройств: измерительного, задающе-
го и сравнивающего. При наличии в управляющем органе УУ схема со-
стоит из четырех элементов.
Основной частью ЗУ у неэлектрических управляющих органов обыч-
но является пружина или винт, а у электрических — потенциометр. Фун-
кцию СУ в неэлектрических органах выполняют шайбы, втулки и т.п., а
в электрических — мосты сопротивлений. Управляющие органы (термо-
реле и терморегуляторы) с диэлектрическими и биметаллическими дат-
чиками обычно имеют пневматические, гидравлические или электричес-
кие УУ, так как выходные сигналы этих датчиков малой мощности.
Датчики температуры с твердым наполнителем используются в терморе-
гуляторах перемещения (ТРП) и в терморегуляторах давления воздуха (ТРД).
В АСРТ дизелей тепловозов с гидрообъемным приводом вентилято-
ра (ГОПВ) применяется терморегулятор перемещения (рис. 11.12, б).
Терморегулятор состоит из корпуса 1, золотника (клапана) 2, датчика 4,
294
Рис. 11.12. Схемы управляющего органа — терморегулятора перемещения:
а — функциональная; б — принципиальная
рычага 5 и штока 3. При уве-
личении температуры переме-
щаются вверх шток 3 и золот-
ник 2, уменьшая площадь от-
верстия для слива жидкости.
Расход жидкости на слив
уменьшается, а подача жидко-
сти в гидродвигатель увеличи-
вается. Изменение задающего
воздействия терморегулятора
производится в узких пределах
винтом, расположенным в
штоке 3. Рычаг 5 служит для
ручного управления золотни-
ком. Такие терморегуляторы
применяются в АСРТ дизелей
тепловозов ТЭП70 (рис. 11.13)
и дизель-поездов ДР1. Выход-
ным сигналом ТРП является
перемещение штока или кла-
пана Ак. Этот сигнал малой
мощности, его неудобно пе-
редавать на расстояние и сум-
мировать с другими сигнала-
ми, например, по А'д или Т'вз.
С учетом этих недостатков
Рис. 11.13. Терморегулятор перемещения:
1 — манжета; 2 — кольцо; 3 — втулка;
4 — патрубок; 5,6 — кольца; 7 — кольцо сто-
порное; 8 — опора; 9 — пружина; 10 — кор-
пус; 11 — клапан; 12 — винт регулировоч-
ный; 13—колпачок; 14—фланец; 15— шток;
16 — корпус датчика; 7 7 — пробка;
18— мембрана; 19— наполнитель
295
разработаны УО с пневматическим выходным сигналом— терморегу-
ляторы так тения вот духа (ТРД) (рис 11.14).
Рис 11.14 Схемы терморету лядххра дав тения вотду ха
а функциональная; б принципиальная; I — баллон; 2 — сильфон;
л /О шайбы. 4 пружина; ? — клапан тву хос те тьчатын; 6 — мембрана;
головка мембранная. < — пружина тающая; 9—стакан рету тнровочнын
// - штанги; 12 —. корпус. 13— шток, к терыорет у.шгор так тения водах ха
пита ГРД11; 1 6*li тон; 2 — сильфон; 5 — шайбы; 4 — мембрана; 5 — дву х-
се тельчатый к тапан; б прхжина по т терживаюшая; ' - пружина задания,
s стакан насгройкн; 10 — корпус. II — мембранная головка. 2 шток
структурная схема терморегу ля гора давления воддуха
Они применяются в тептовонтых \СРГ для управления поворотом
лопастей веши «я гора. створок жалюш. клапанов. перемещением к тапа-
нов в реп 1я горах темперагу ры с механическим, г и ipo щнамическим. гид
роооъемным и »тектричеекнхт приводами венти«ягора
УО с пневматическим выхо шым сигналом также широко примени
югся в промыт «енносгн. О тнако они имеют ортанический не тоста
ток: усилительно преобразующее устройство их содержит преоора
ювате 1Ь типа «сопло- ас тонка». изменение дав. гния воздуха на вы
ходе которого осу тесiк«яегея «а счет тросеелирования его через отвер-
стия очень ма rw тиамстра (0.1 — 0.3 мм) и мере? me 1Ь между соплом и
ис.тонкой Терморегу я гор ГРД работает по принципу х равновешнна-
ния (компенсации) сил. действующих в нем (см рис И 14.11 15) Наиоо-
Рнс 1114* Ирмншшмальнач схема (о) и конструкция lol терморегу «ягора
ывлення во то ха типа ДТПМ
I - оаллон;? ентьфон; 3 — наложитеть. пружина ладанн»; 5 тайка
настройки, б мембрана.” мембранная головка. ' корпус. 4 лвухсе-
летьчагый клапан. 10 пог»срж.<ч.шчиая пружина
лее простыми ТРД являются отечественные типа ТРДО (см. рис. 11.14, б),
ТРДП (см. рис. 11.14, в) и ДПТМ (см. рис. 11.15).
Входным сигналом ИУ является температура среды Гр, а выходным —
сила /7И (см. рис. 11.14, а и б). Входным сигналом ЗУ является сигнал
настройки п3, а выходным — сила пружины F3. СУ сравнивает силы F ,
Fn и на выходе вырабатывает сигнал (F = F - F ). У У преобразует его в
выходной сигнал — давление воздуха р2, к УУ подводится воздух под
давлениемр}. Таким образом, ТРД имеет два входных сигнала Тр и и
один выходной (р2).
В ТРД действуют три основные силы: давление F паров наполните-
ля (эфира, ацетона или др.) на дно сильфона 2; усилие F3 затяжки задаю-
щей пружины 8, давление Fc воздуха на мембрану 6. Эти силы действу-
ют на шайбу 10: две (FH и Fc) направлены вверх и одна (F3) вниз, поэтому
F3~ F^ + Fc. При изменении любой из трех сил система ТРД приходит в
движение.
Если температура среды низкая F^ - 0, то сила F3 должна уравнове-
шиваться силой Fc и, следовательно,
(11.33)
где SM — эффективная площадь мембраны.
Таким образом, давление Р2 на выходе ТРД зависит от температуры.
Кроме того, р2 можно изменять, варьируя силу F, т.е. можно сдвигать
статическую характеристику ТРД по темперагуре. Из ТРД обратного дей-
ствия (ТРДО) (см. рис. 11.14, б) можно получить ТРД прямого действия
(ТРДП) (см. рис. 11.14, в), если поменять местами (относительно корпу-
са 12) (см. рис. 11.14, б) задающее и измерительное устройства. С целью
упрощения конструкции ТРД были разработаны терморегуляторы типа
ДТПМ (см. рис. 11.15), в которых отсутствуют штанги И (см. рис. 11.14, б).
Эти ТРД серийно изготовляются Орловским приборостроительным за-
водом. В отечественных ТРД перемещения элементов, связанные с изме-
нением температуры, отсутствуют. Максимальные перемещения подвиж-
ных деталей при работе ТРД составляют 0,02—0,05 мм, что является ос-
новным фактором, обеспечивающим надежность сильфона и мембраны,
а также высокую точность ТРД.
Статические и динамические характеристики и параметры системы
охлаждения меняются в широких пределах в зависимости от режимов и
условий работы двигателей. Для обеспечения устойчивости и качествен-
ной работы АСРТ применяют более сложные управляющие органы, ис-
298
пользующие дополнительные сиг-
налы управления (Т'п, ид или сов),
а также такие, ко эффициент пере-
дачи которых зависит от дополни-
тельных сигналов (для обеспече-
ния постоянства коэффициента
передачи АСРТ).
Характеристики ТРД в широ-
ком диапазоне изменения темпера-
туры нелинейны из-за нелинейно-
сти характеристики наполнителя.
Экспериментальные статические
характеристики ТРД в диапазоне
температур 5—10 °C (т.е. в зоне
статической неравномерности
АСРТ) практически линейны. При-
Рис. 11.16. Статические характеристи-
ки терморегулятора давления воздуха
при разных сигналах задания
чем, изменяя п3, т.е. силу Fv мож-
но получить семейство характеристик ТРД (рис. 11.16). Характеристики
1—4 сняты при различных значениях F$, причем F.j4 > F^ > F32 > F3l.
Зона нечувствительности ТРД составляет 0,3—0,5 °C.
Постоянная времени терморегулятора приближенно может быть вы-
числена по формуле
т с + т с
НН мм
(11.34)
и
где т , тм — массы соответственно наполнителя и корпуса;
с см — теплоемкости соответственно наполнителя и корпуса;
а — коэффициент теплоотдачи от среды к ИУ;
S — площадь поверхности ИУ, омываемой водой.
Экспериментальные переходные характеристики ТРД имеют вид, по-
зволяющий аппроксимировать сложную систему ТРД звеном запаздыва-
ния, соединенным последовательно с апериодическим звеном.
Передаточная функция ТРД равна произведению передаточных фун-
кций звеньев, которыми замещается ТРД в соответствии с его структур-
ной схемой (рис. 11.14, г).
Входным сигналом баллона ТРД с наполнителем является температу-
ра среды, а выходным — температура наполнителя. Термосопротивле-
299
ние и теплоемкость наполнителя обусловливают запаздывание измене-
ния температуры наполнителя 7н относительно температуры среды Т
после однократного скачкообразного изменения последней Поэтому этот
участок ТРД может быть замещен звеном запаздывания с передаточной
функцией
W}(p)=ke (11.35)
и апериодическим звеном с передаточной функцией
W2(p) = k/(TTp+ 1). (11.36)
Действие наполнителя замещаем действием усилительного звена,
входной величиной которого является температура наполнителя, а вы-
ходной — давление пара внутри баллона с передаточной функцией
^(р) = кн, (11.37)
где кн — коэффициент передачи наполнителя.
Сильфон имеет на входе изменение давления пара наполнителя Дрн, а
на выходе — изменение силы F Этот участок ТРД может быть пред-
ставлен усилительным звеном с передаточной функцией
W4(p) = kc, (11.38)
где кс — коэффициент передачи сильфона, численно равный его эффективной
площади.
УУ ТРД имеет передаточную функцию
W5(p) = ky, (11.39)
где ку — коэффициент передачи УУ, численно равный значению, обратному пло-
щади мембраны.
Динамика ЗУ ТРД может быть описана (без учета массы подвижных
деталей ТРД) передаточной функцией
W6(p) = kr (11.40)
Структурная схема ТРД по температурному сигналу представляет со-
бой цепочку, состоящую из пяти последовательно включенных звеньев
(см. рис. 11.14, г) с передаточной функцией
w = ^1(р) ^2(р) W W ^5(р). <11 -41)
зоо
С учетом вышеизложенного передаточная функция ТРД
ИЛт(р) = Лге-/,Хт/(7'тр+1).
(11-42)
Применяемые на тепловозах ТРД имеют кт от 0,01 до 0,05 МПа/К;
тт = 1 с и Тт = 5—10 с при снятии переходной характеристики в воде.
Выходной сигнал УО подается в исполнительно-регулирующее устрой-
ство (ИРУ) АСРТ, которое состоит из двух функциональных элементов
ИМ и РО. В АСРТ непрерывного действия с электромеханическим при-
водом вентилятора применяются индукторные муфты скольжения (ИМС).
Работа всякой муфты основана на трех законах электродинамики: элект-
ромагнитной индукции, полного тока и электромагнитных сил. ИМС пред-
ставляет собой две, не связанные между собой вращающиеся части —
индуктор 1 и якорь 2 (рис. 11.17, а), поверхности которых образуют коль-
д
Рис. 11.17. Принципиальные схемы элементов ИРУ АСРТ:
а — индукторная муфта скольжения; б — гидродинамический привод;
в — гидрообъемный привод; г — вентилятор переменной подачи (с поворотными
лопатками); д — асинхронный двигатель-вентилятор с внешним ротором
301
цевой зазор и выполнены зубчатыми. При полном возбуждении муфты
скольжение составляет 3—5 0 о, а КПД — 97—95 %. Изменяя в обмотке
возбуждения 3 ток 7В, можно влиять на скольжение, т.е. частоту вращения
ведомого вала п2. Входными сигналами муфты являются и У а выход-
ными — н2- Для увеличения компактности привода вентилятора иногда
муфту встраивают в вентилятор. Муфта имеет некоторый остаточный мо-
мент при 1В = 0, что является причиной остаточного значения и2-
Гидродинамические муфты (ГДМ), применяемые в гидродинамичес-
ких приводах вентиляторов (ГДПВ) АСРТ, делятся на муфты с регули-
рованием наполнения на выходе и на входе. В ГДМ насосное колесо 4
(рис. 11.17, б) сообщает с помощью лопаток 5 определенную энергию
турбинному колесу б Регулирование наполнения муфты на выходе осу-
ществляется с помощью поворотной черпаковой трубки 8. Масло непре-
рывно поступает в рабочую полость муфты по полому ведущему валу
И, а через зазор между колесами выбрасывается в полость d, откуда оно
отчерпывается через трубки 7 в полость 5; из полости 8 масло за счет
скоростного напора откачивается трубкой 8 через трубу 10. Положение
конца трубки 8, а следовательно, и наполнение муфты с маслом и ее сколь-
жение изменяют с помощью механизма 9, преобразующего перемеще-
ние ftp рейки (на рис. 11.17 не показана) в поворот трубки. Таким обра-
зом, в муфте входными сигналами являются п2 и ftp, а выходным — п2.
Муфта с регулированием на входе проще муфты с регулированием на
выходе, так как у нее нет черпаковых трубок и механизма их поворота; в
ней входными сигналами являются и перемещение ftK дроссельного
клапана, а выходным — п2.
В гидрообъемном приводе вентилятора применяются гидрообменные
машины аксиально-поршневого типа (рис. 11.17, в). Внутри корпуса 14 на
подшипниках 17 установлен блок цилиндров 15. В цилиндрах расположе-
ны поршни 19, соединенные шатунами 20 с диском 21, жестко укреплен-
ным на валу 12. Корпус имеет каналы выпускной 16 и впускной 18 масла.
С внутренней стороны с каналами могут сообщаться полости цилинд-
ров. Блок 75 соединен с валом 12 с помощью карданного вала 13. В нере-
гулируемых машинах угол между осями вала и блока обычно равен 150°.
В регулируемых машинах этот угол может меняться, что приводит к из-
менению расхода масла через машину. При ГОПВ вал насоса соединяет-
ся (обычно через редуктор) с валом дизеля. На вал двигателя устанавли-
вают вентилятор. В нерегулируемых машинах п2 изменяется при пере-
пуске масла, подаваемого насосом, минуя двигатель на слив с помощью
302
клапана. В таком приводе входными сигналами являются частота и у и /?к,
а выходным — и2.
На тепловозах ТЭ116 и ряде других применен электрический (на пе-
ременном токе) привод, содержащий синхронный генератор и асинхрон-
ный двигатель-вентилятор, в котором в одной конструкции объединены
двигатель с внешним ротором и осевой вентилятор (рис. 11.17, д). АДВ
опирается на раму шахты холодильника пятой 1 и станиной 2, на кото-
рую надет сердечник 3 статора с обмоткой 6. Вал 9 закреплен в станине
на двух подшипниках 8 и 10. На валу крепится кок 7 вентилятора с лопа-
стями 4, к которому приваривается ротор 5. Однако такой привод позво-
ляет регулировать температуру теплоносителей только релейно.
При механическом (МПВ) и электрическом (ЭПВ) (на переменном
токе) приводе вентилятора непрерывное изменение подачи его осуще-
ствляется поворотом лопастей. Наиболее часто применяют пневматичес-
кие механизмы поворота лопастей, расположенные в коке вентилятора
(рис. 11.17, г). Мембрана 23 прикреплена к крышке кока 26 и лежит на
ползуне 24, который соединен с рычагами лопаем ей 22 и может переме-
щаться вдоль направляющего конца вала 27 вентилятора. На вал 27 наса-
жена втулка 28 со шкворнями 29, на которых закреплены поворотные
лопасти с противовесами 30. Между втулкой и ползуном установлена
пружина 25. При ЭПВ применяют синхронный генератор и двигатель-
вентиляторы, объединяющие в одной конструкции двигатель и вентиля-
тор переменной подачи (ВПП) с пневматическим мембранным механиз-
мом поворота лопастей. Используют две разновидности АДВПП: с рас-
положением мембраны со стороны двигателя или со стороны, противо-
положной вентилятору.
Статические характеристики осевых вентиляторов. Регулирование
осевых вентиляторов имеет свои особенности. Кривая полных напоров их
при малых ав близка к прямой. При увеличении ав на кривой напора полу-
чается характерная впадина, которая особенно резко выражена для высо-
конапорных многолопастных вентиляторов. Регулирование (изменение)
подачи осевого вентилятора дросселированием более невыгодно, чем та-
кое же регулирование центробежного вентилятора, так как потребляемая
осевым вентилятором мощность не падает при уменьшении подачи.
При дросселировании также меняется характеристика сети, что мо-
жет сместить рабочую точку вентилятора в неустойчивую зону. Поворот
лопастей позволяет регулировать подачу вентилятора в широких преде-
лах при незначительном изменении КПД, который особенно снижается
303
пв, об/мин 1000 800 600 0 5 10 15 20 ав,°
Рис. 11.18. Статические характеристики осевого
вентилятора охлаждения дизеля тепловоза
(относительно номи-
нального) в зоне ма-
лых углов, причем тем
сильнее, чем больше
густота решетки коле-
са (произведение ши-
рины лопасти на их
число). При этом целе-
сообразно уменьшить
количество лопастей,
что также упрощает
механизм их поворота.
Зависимости пода-
чи (7ВЗ от ив и ав вен-
тилятора являются его
статическими характе-
ристиками, наклон которых определяет его коэффициент передачи Агро.
Коэффициент к?о вентилятора, работающего совместно с сетью, зависит
не только от характеристик сети. Он тем больше, чем меньше сопротив-
ление сети и ав и больше пц. Для построения характеристик вентилятора
необходимо построить аэродинамические характеристики (зависимости
напора Н от объемной подачи £>в) вентилятора для разных «в и <хв, нало-
жить на них характеристику сети, получив в точках их пересечения необхо-
димые значения Q и Н, и построить зависимости QB =f(n , ав) (рис. 11.18).
При регулировании подачи вентилятора изменением ив коэффициент
передачи вентилятора не зависит от ив, а при регулировании изменением
ав он возрастает с увеличением ив и уменьшением ав (см.рис. 11.18).
Статическими характеристиками ГДПВ являются зависимости часто-
ты и-, от входного сигнала (расхода масла Gj, хода Ир рейки или клапана
либо ). Эти характеристики получают наложением характеристики вен-
тилятора на характеристики муфты или снятием при непосредственном
нагружении ее вентилятором. Статические характеристики ГДПВ тепло-
возов серии ТЭ10 практически однозначны и линейны в диапазоне изме-
нения хода рейки от 8 до 33 мм (рис. 11.19, а). Коэффициент передачи
привода снижается с 28 до 13 (об/мин)/мм при уменьшении ид от 850 до
400 об/мин, что положительно сказывается на устойчивости АСРТ.
При полном опорожнении ГДМ вентилятор имеет остаточную часто-
ту вращения, которая при открытом клапане составляет 30 %, а при зак-
304
Рис. 11.19. Статические характеристики гидравлических приводов:
а — ГДПВ тепловоза серии ТЭ10 при открытом и при закрытом запорном клапане;
б — ГОПВ тепловоза при различных значениях Пк
рытом — 20 % от полной для данной сов. Остаточная частота пв повыша-
ется при росте температуры масла и приводит к увеличению времени
прогрева дизеля.
Статическими характеристиками ГОПВ с дроссельным регулировани-
ем двигателя являются зависимости ив (п2) от положения клапана /гк при
разных значениях «р они практически линейны (рис. 11.19, б) и изменя-
ются при изменении ид (И|), а коэффициент передачи ГОПВ падает с умень-
шением и , что способствует увеличению запаса устойчивости АСРТ.
Статическая характеристика механизма ВПП описывается зависимо-
стью ав от управляющего сигнала, например, от давления воздуха р-> в
надмембранной полости (см. рис. 11.17, г). Вид статической характерис-
тики О-В(Р2) зависит от соотношения крутящих моментов лопасти и ее
противовеса, перестановочных сил и сил трения в механизме. При пра-
вильно подобранных значениях массы противовеса и его угла установки
относительно лопасти и при относительно малых силах трения зона не-
чувствительности механизма может быть меньше 1 % (рис. 11.20).
Динамические характеристики. Электромеханический привод венти-
лятора с ИМС обладает свойствами апериодического звена с постоянной
времени 1,5—2 с. Поэтому приближенно можно считать, что он облада-
ет свойствами пропорционального звена.
305
Рис. 11.20. Экспериментальные статические ха-
рактеристики пневматического мембранного
механизма поворота лопастей вентилятора:
1 — при пв = 0; 2 — при = 1380 об/мин
ГДПВ обладает разными ди-
намическими свойствами при
опорожнении и наполнении
ГДМ. При опорожнении ГДМ,
регулируемой на выходе, ГДПВ
обладает свойствами последова-
тельного соединения звена за-
паздывания и апериодическою
звена. При этом запаздывание
т|Л1, например ГДПВ тепловоза
2ТЭ ЮЛ, составляет 1 —2 с, а по-
стоянная времени Т равна 5 с
при Пк = 15 и 14 с при Пк = 0.
Переходные характеристики
ГДПВ при наполнении ГДМ
значи гельно отличаются от экс-
поненты. Они имеют участок
запаздывания, равный 4 с при
Пк = 0 и 2 с при Пк = 15, а в сред-
ней части характеристики — ли-
нейный участок большой про-
тяженности. В этом случае ГДПВ точно можно описать наклонной пере-
даточной функцией с запаздыванием, а приближенно — передаточной
функцией соединения звена запаздывания и двух апериодических звеньев
с одинаковыми постоянными времени, равными 5 с при Пк = 15 и 9 с при
Пк = °-
Для привода рейки ГДМ используется поршневой гидроусилитель с
золотниковым управлением, охваченный жесткой отрицательной обрат-
ной связью (функции ее выполняет рычаг). Приближенно можно счи-
тать, что он обладает свойствами пропорционального звена.
Если динамика ГДПВ с ГДМ, регулируемой на выходе, зависит от
щ (сов), то динамика ГДПВ с ГДМ, регулируемой на входе, зависит от Н|
и от п-) (ив). Поэтому при определенных условиях этот 17(11 В может об-
ладать свойствами колебательного звена.
По виду переходной характеристики I ОПВ можно считать, что он
обладает свойствами пропорционального звена.
Пневматический ИМ ВПП с учетом упругости пружины и массы под-
вижных частей можно аппроксимировать колебательным звеном. Однако,
306
Рис. 11.21 Принципиальная схема НИСВМЛ1ИЧССКО1 nil регулятора ivMlicpuiypbieBIU'l
/— лопасть, 2 — кок; 1 пол тун; 4 пружина; 5 пиеимоусилтсль,
б — 1 РДО; 7 — реле; д' — контакт
поскольку тснловошыс А( PI работаю! при пн «кич частотах 0,01 0,05 1/с 1
п время переходного процесса ИМ ВПП составляс! 3 5 с, то прибли-
женно он может быть аппроксимирован пропорциональным «веном
В релейных регуляторах температуры функции УО выполняю! iep
мореле. Па тепловозах П М4, Г)М2, ЧМ’)3 и др. применяю! релейные
регуляторы температуры воды и масла цисля. В них вешипятор вклю-
чается и выключается термореле. Ручное регулирование температуры
также релейное. Релейные регуляторы более просил, чем регуляторы
непрерывного действия. Однако но сравнению с последними они имею!
существенные недостатки. Релейная (периодическая) работа вешиляго-
ра отрицательно сказывается на прочности и надежности дизеля и ради
а торов. Релейное регулирование приводи! также к шачительному пере-
расходу энергии на привод вентилятора.
Па тепловозах 21)116 применяю! групповые релейные регуляторы
темпераауры воды и масла с Г)ПВ. Опп имею! сущееi венные недостат-
ки, по н ому позднее на тепловозах были применены непрерывные регу
ля торы температуры с )ПВПП
Регулятор температуры с ВПП содержи! (рис. 11.21) осевой вентиля-
тор ВПП, ГРДОб, пневмоусилитель 5 и реле давления 7 При низкой гсм-
307
пературе Тр давление на выходе ТРДО наибольшее; при этом контакты 8
реле разомкнуты и жалюзи закрыты; ползун 3 вентилятора находится в
крайнем нижнем положении, угол наклона лопастей 1 наименьший.
При увеличении температуры давление р2 снижается, и при некото-
ром его значении, определяемом настройкой реле 7, контакты 8 замыка-
ются, и жалюзи открываются. При дальнейшем повышении температу-
ры и понижении давления /?2 ниже значения, определяемого характерис-
тикой механизма ВПП, измерительная пружина 4 начинает поднимать
ползун вверх, угол ав и подача вентилятора увеличиваются.
Примером регулятора непрерывного действия с ГДМ, регулируемой
на выходе, является регулятор температуры, применяемый на теплово-
зах серии ТЭ10 и М62 (рис. 11.22, а). На тепловозе имеются два регуля-
тора температуры при одном основном регулирующем органе — венти-
ляторе. Управляющий орган регулятора температуры воды ТРП-11 име-
ет в штоке два регулировочных винта. Винт 12 может упираться в травер-
су рычага 13 гидроусилителя 7, соединенного с ГДМ 3. Второй винт 15
воздействует на контакты микропереключателя 14, управляющего меха-
низмом привода жалюзи радиатора воды дизеля. Регулятор температуры
масла также имеет ТРП. Один винт его штока может упираться в травер-
су рычага 13; второй винт воздействует на контакты микропереключате-
ля, управляющего механизмом привода жалюзи радиатора воды тепло-
обменников. Створки жалюзи являются РО в регуляторе температуры
масла.
С целью повышения надежности на тепловозах серии ТЭ 10 были при-
менены пневмогидравлические регуляторы температуры (рис. 11.22, б),
в которых ТРП 11, отличающиеся низкой надежностью, были заменены
ТРДП 16 и мембранными пневмоприводами 17, а для управления жалю-
зи применены реле 18.
В случае применения в регуляторе температуры ГДПВ с ГДМ, регу-
лируемой на входе, дроссельный клапан перемешается с помощью пнев-
матического мембранного привода, управляемого ТРДП. Такие регуля-
торы температуры применены на тепловозах ТЭМ7, ТГМ9, ТГМ12 и др.
В регуляторе температуры с ГОПВ (рис. 11.23) подача вентилятора 4
регулируется изменением количества масла, подаваемого в двигатель 3 с
помощью клапана 5. Такие регуляторы температуры применяются на теп-
ловозах ТЭП70 и ТЭП75 и др. В этих регуляторах используются вместо
ТРП (рис. 11.23, а) терморегуляторы давления воздуха (рис. 11.23, б) ти-
пов ТРДП и ДТПМ.
Рис. 11.22. Принципиальные схемы П-регуляторов температуры с ГДПВ
и терморегуляторами:
а — перемещения; б — давления воздуха; 1 — вентилятор; 2—6 — редукторы;
3 — ГДМ; 4 — рейка; 5 — трубка черпаковая; 7 — гидроусилитель;
8 — золотник; 9 — поршень; 10 — вентиль; 11 — ТРП; 12, 15 — винты:
13 — рычаг; 14 — микропереключатель; 16 — ТРДП; 17 — пневмопривод;
18 — реле
309
Рис. 11.23. Принципиальные схемы П-регулятора температуры с ГОПВ
и с терморегуляторами:
а — ТРП; б — ТРДП; 1 — редуктор; 2 — насос; 3 — двигатель; 4 — вентиля-
тор; 5 — клапан; б — фильтр; 7 — теплообменник; 8 — бак; 9 — датчик
температуры; 10 — трубопровод; 11 — ТРДП; 12 — пневмопривод клапана
310
Рис. 11.24. Принципиальная схема пневмоэлектрического П-регулятора
температуры с электроприводом ВПП:
1 — кок; 2 — электродвигатель; 3 — пускатель; 4 — синхронный генератор;
5 — Д Г11М; 6 — усилитель мощности; 7 — коробка; 8, 10 — пружина; 9 — гайка
С целью повышения надежности и увеличения монтажной гибкос-
ти в тепловозных АСРТ применяют регуляторы температуры с ЭПВПП
(рис. 11.24). Часть механизма поворота лопастей АДВПП (поворотные
лопасти с рычагами и противовесами, траверсами, траверса и подшип-
никовый узел) расположена в коке вентилятора 1, а часть (мембрана, пол-
зун и пружина) — в коробке 7. Части механизма соединены с помощью
штанги, расположенной в полом валу электродвигателя 2. Обмотки элект-
родвигателя через пускатель 3 подключены к синхронному генератору 4.
Давление воздуха р2 на выходе УО 5 типа ДТПМ изменяется пропорцио-
нально изменению температуры Т, а давление воздухар2 на выходе уси-
лителя мощности 6 типа УМП (а значит, и в механизме поворота лопас-
тей) изменяется обратно пропорционально изменению р2, а значит, и Т .
В результате при увеличении Тр увеличивается ав. Регуляторы темпера-
туры с ЭПВПП применены на тепловозах 2ТЭ116 и др.
311
Рис. 11.25. Принципиальная схема комбинированного регулятора температуры:
1 — ТРДО; 2 — датчик мощности; 3 — клапан двухседельчатый; 4 — мембран-
ная головка; 5 — пружина; 6 — шток; 7 — регулятор дизеля; 8 — сумматор;
9 — вентилятор; 10 — привод вентилятора; 11 — реле
В КАСРТ применяются комбинированные регуляторы, осуществля-
ющие сигнальную (рис. 11.25) или параметрическую компенсацию дей-
ствия основных возмущений: Ад(сов) и Т'3. При этом УО по Лд(<он) и Т'вз
выполняют функцию компенсаторов.
Автоматические микропроцессорные регуляторы благодаря програм-
мируемости обладают рядом преимуществ по сравнению с обычными
регуляторами, одно из таких преимуществ — возможность использо-
вания математических моделей различных процессов. В таких регуля-
торах температуры за счет программных средств могут быть существен-
но улучшены технико-экономические показатели исполнительно-регу-
лирующих устройств, содержащих осевые вентиляторы. Примером
может служить устройство согласованного автоматического управле-
ния приводами осевого вентилятора, содержащее: систему управления
10 (рис. 11.26, а) с математической моделью совместной работы рабо-
чего колеса вентилятора с сетью вентиляторной установки, собственно
вентилятор с рабочим колесом 3, привод рабочего колеса 4, позволяю-
щий плавно изменять скорость вращения вала, привод механизма по-
312
Рис. 11.26. Блок-схема устройства согласованного автоматического управления
приводами осевого вентилятора (начало):
а — с поворотными лопатками рабочего колеса; б — с гидравлическим
приводом вала
313
св
«и
са
е
о
CQ
QJ
О
О
X
I
§
со
X
а
с
X
X
<и
§
св
г
g
о
(D
2
X
Л
е
о
X
X
св
п
о
о
св
Р
&
>Х
(окончание): в — с электрическим приводом вала
св
2
<u
X
О
I
X
о
чб
СЧ
О
X
сх,
314
ворота лопаток 1 рабочего колеса, предназначенный для плавного из-
менения угла поворота лопаток, блок вычисления мощности потока
подаваемого охлаждающего воздуха (первый блок вычисления мощно-
сти) 11, блок вычисления мощности, затрачиваемой на привод рабоче-
го колеса (второй блок вычисления мощности) 7, блок сравнения мощ-
ностей 8, датчики скорости вращения вала рабочего колеса 5, угла по-
ворота лопаток рабочего колеса 2, скорости вращения входного вала
привода рабочего колеса 6, напора 12, подачи 14 и температуры охлаж-
дающего воздуха 15. Математическая модель совместной работы рабо-
чего колеса вентилятора с сетью вентиляторной установки предназна-
чена для приведения подачи охлаждающего воздуха в соответствие с
входным сигналом задания и формирования сигналов управляющих
воздействий, поступающих на входы привода рабочего колеса и приво-
да механизма поворота лопаток рабочего колеса. Такая модель допол-
нительно содержит программу выбора значений скорости вращения вала
рабочего колеса и угла поворота его лопаток, которые обеспечивают
максимальный КПД системы «рабочее колесо—привод рабочего коле-
са» при заданной подаче охлаждающего воздуха. Блок сравнения мощ-
ностей предназначен для вычисления КПД этой системы, который ра-
вен произведению КПД рабочего колеса и его привода. В систему управ-
ления входит монитор 9 для визуального представления информации.
Устройство согласованного автоматического управления гидравличес-
ким (гидродинамическим или гидрообъемным) приводом осевого вен-
тилятора (рис. 11.26, б) может содержать блок возведения в квадрат вы-
ходного сигнала датчика скорости вращения вала рабочего колеса (тре-
тий блок вычисления мощности) 16, блок 7 перемножения выходных
сигналов датчика скорости вращения входного вала привода рабочего
колеса и блока 16, соединенный с блоком сравнения мощностей 8.
Устройство согласованного автоматического управления электричес-
ким (постоянного или переменного тока) приводом осевого вентилято-
ра (рис. 11.26, в) может содержать датчики тока 17, напряжения 18 и
частоты напряжения 19 (для электрического привода переменного тока),
блок вычисления электрической мощности 7, затрачиваемой на привод
рабочего колеса, соединенный с блоком сравнения мощности потока
подаваемого охлаждающего воздуха и электрической мощности, затра-
чиваемой на привод рабочего колеса (или механической мощности на
валу генератора электрического привода рабочего колеса) вентилятор-
ной установки 8.
315
11.6. Устойчивость, качество работы и настройка
автоматических систем регулирования температуры
На тепловозах применяются системы регулирования температуры ста-
тические (АСРТ) (рис. 11.27, а), и комбинированные (инвариантные)
(КАСРТ) с использованием дополнительных сигналов управления N (со )
и Т'вз (рис. 11.27, б).
Рис. 11.27. Функциональные схемы автоматических систем регулирования
температуры теплоносителя:
а — статическая; б — комбинированная
Так как при проектировании АСРТ динамические свойства СО чаще
всего бывают заданы, на динамику АСРТ можно влиять только путем
выбора типа регулятора и параметров его настройки. Выбор параметров
настройки регулятора, т.е. коэффициентов в его уравнении, должен обес-
печить получение такого характера процесса регулирования, который для
данных условий работы СО принят оптимальным.
Зная функциональную и принципиальную схемы и передаточные фун-
кции элементов АСРТ можно составить ее структурную схему, необхо-
димую для определения устойчивости и качества ее работы (рис. 11.28).
Используя структурную схему (рис. 11.28, а), можно получить пере-
даточную функцию разомкнутой АСРТ:
w^p) = 7r-----1V7-2 2 т--------(".43)
(7„P+ +^м2Р + 1)
где к^, — коэффициент передачи разомкнутой АСРТ (к = ки куу ким к^ к^).
316
Рис. 11.28. Структурные схемы тепловозных автоматических систем регулирования температуры воды дизеля:
— одноконтурная статическая, содержащая вентилятор переменной подачи; б— комбинированная, содержащая
гидродинамический привод вентилятора
317
Так как АСРТ содержит звенья запаздывания, то удобно определять
ее устойчивость и качество работы частотными методами.
Однако так как в большинстве случаев систему охлаждения можно
аппроксимировать последовательным соединением звена запаздывания
и апериодического звена первого порядка, то для расчета АСРТ можно
применять следующий менее трудоемкий графоаналитический метод.
Степень воздействия регулятора, уменьшающего статическое (потен-
циальное) отклонение температуры при самовыравнивании, характери-
зуется динамическим коэффициентом регулирования
^С = ДГРД/ДГРО’ (И-44)
где АГрд — первое максимальное отклонение Тр от начального значения.
Степень колебательности переходного процесса для статических сис-
тем характеризуется относительным перерегулированием:
(АГ -8Т )
... - РД Р 1ЛЛО/
^рст gy °‘ (11.45)
Р
Время регулирования / зависит от динамических свойств СО, алго-
ритма работы и параметров настройки регулятора температуры. Воздей-
ствие регулятора на СО обычно характеризуется не абсолютным значе-
нием /р, а отношением /p/tp.
Для выбора типа регулятора (алгоритма его работы) необходимо иметь
следующие исходные данные:
- динамические параметры СО: т , Т х /Т и статический пара-
Г* г* г* г*
метр
- максимально возможные значения возмущений (сов, Ад, Твз), выра-
женные в процентах, р(«в, ав или ар);
- показатели качества работы АСРТ: АТр ст, АТр д, ур ст, 8Тр, и /р.
При графоаналитическом расчете АСРТ, пользуясь исходными дан-
ными, определяют необходимое значение кдс = АТр д /к^ ц, при котором
может быть получено требуемое значение ЛГр д. Зная кдс и задавшись
типом оптимального переходного процесса по графикам (рис. 11.29), на-
ходят простейший тип регулятора, обеспечивающего при заданном
необходимое значение vj/p ст.
318
При П-регуляторе значение
ти/Гм является минимальным и
зависит только от типа переход-
ного процесса: при апериодичес-
ком процессе оно равно 4,5, при
20 %-м перерегулировании 6,5 и
при 40 %-м — 9.
Значение 5Тр при П-регулято-
ре можно определить по формуле
8Гр = 4рДц/(1+4рс). (11.46)
Допустимое значение к = кр кр
зависит от характера принятого пе-
реходного процесса и от тр/Тр
(рис. 11.30).
Для определения 8Тр с помо-
щью графиков (рис. 11.31) удобно
пользоваться не абсолютным его
значением, а отношением остаточ-
ного отклонения к потенциально-
му отклонению:
S7' = (5Гр/ДГр0 )100%. (11.47)
Рис 11.29. Зависимость динамического
коэффициента регулирования при стати-
ческом регуляторе температуры от отно-
шения времени запаздывания и постоян-
ной времени системы охлаждения при
разных переходных процессах в АСРТ:
7 — граничный апериодический; 2 — с
20 %-м перерегулированием; 3 — с 40 %-м
перерегулированием
Из рис. 11.31 видно, что значение
5Тр заметно уменьшается как с понижением тр/Тр, так и с увеличением \ур ст.
Таким образом, П-регулятор целесообразно применять при малых
значениях тр/Тр, а при больших значениях близких к единице, П-регуля-
тор использовать менее целесообразно; остаточное отклонение в этих слу-
чаях превышает 50 % потенциального. Пользуясь графиком (см. рис. 11.31)
или формулой (11.47), нетрудно определить значение 87^; сравнив его с
заданным допустимым значением, можно выяснить пригодность П-ре-
гулятора для данной СО; в соответствии с уравнением П-регулятора па-
раметром настройки его является кр. Оптимальные значения кр для раз-
личных переходных процессов могут быть определены по рис. 11.30.
Так как СО является объектом регулирования с переменными пара-
метрами, то при расчете настройки регулятора следует выбирать значе-
ния г/71 и к , соответствующие наиболее трудным условиям работы
АСРТ и характеру их зависимости от сов(А ), Т'ъ и ц.
319
Рис. 11.30. Зависимость коэффициента пере-
дачи разомкнутой статической АСРТ от отно-
шения времени запаздывания и постоянной
времени систем охлаждения при разных пере-
ходных процессах в АСРТ:
1 — граничный апериодический; 2 — с 20 %-м
перерегулированием; 3 — с 40 %-м перерегули-
рованием; 4 — со 100 %-м перерегулированием
Рассмотренный графоана-
литический метод расчета
устойчивости и качества ра-
боты одноконтурных АСРТ
используется в случае, ког-
да П-регулятор является
безынерционным звеном
или его инерционность
можно включить в инерци-
онность СО. Таким свой-
ством обладают регулято-
ры, содержащие в качестве
исполнительных механиз-
мов, например, механизм по-
ворота лопастей вентилятора
или поворотного распредели-
теля перепускного клапана,
индукторную муфту или гид-
рообъемный привод вентиля-
тора (см. рис. 11.17).
В том случае, когда П-ре-
гулятор содержит инерцион-
ный исполнительный меха-
низм, например, гидромуф-
ту переменного наполнения, расчеты по приведенной методике дают не-
достаточно точные результаты и для определения устойчивости и каче-
ства работы АСРТ может быть применен более точный, но более трудо-
емкий аналитический или частотный метод.
Для того чтобы АСРТ поддерживала температуру теплоносителя, про-
изводят настройку системы при нагружении тягового генератора водя-
ным реостатом или при работе тепловоза с гидропередай в стоповом ре-
жиме. Перед этим снимают статические характеристики и настраивают
управляющие органы: термореле, терморегуляторы перемещения или
давления воздуха, для чего используют термостаты с водой, индикаторы
и образцовые манометры.
После настройки АСРТ на поддержание заданного стационарного тем-
пературного режима определяют показатели качества работы по экспе-
риментальным временным переходным характеристикам.
320
Возмущения в систему
вносятся:
- размыканием и замы-
канием АСРТ, т.е. включе-
нием ее во время работы
двигателя при минималь-
ных и номинальных сов и Л?;|
и различных значениях Лр и
T'Bi (испытания АСРТ при
минимальных эксплуатаци-
онных значениях Т'вз обяза-
тельны);
- быстрым изменением
со , а значит, N от мини-
мальных до номинальных
значений и обратно с выдер-
жкой времени до окончания
переходного процесса;
- быстрым сбросом или
набросом нагрузки (от нуля
до номинала и обратно) при
сов = const;
-ступенчатым или сину-
Рис 11.31. Зависимость остаточной неравно-
мерности АСРТ от отношения времени запаз-
дывания и постоянной времени системы ох-
лаждения при разных переходных процессах
в АСРТ:
1 — граничный апериодический; 2 -— с 200 о-м
перерегулированием; 3 — с 40 %-м перерегу-
лированием
соидальным изменением задания регулятора с помощью генератора.
В случае экспериментальных исследований и настройки многокон-
турных и комбинированных АСРТ возмущения вносятся в каждый кон-
тур или канал регулирования поочередно. Объем испытаний при этом
увеличивается.
Все известные вышеописанные регуляторы и системы регулирования
температуры охлаждающей среды тепловой машины или двигателя внут-
реннего сгорания имеют общие очень существенные недостатки.
Во-первых, все они предназначены для регулирования температуры
одного или двух теплоносителей двигателя. Однако в системах охлажде-
ния двигателей с наддувом требуется плавно и непрерывно регулировать
температуру трех теплоносителей: воды или высоко нагретой детали:
(цилиндра либо головки цилиндров), масла и наддувочного воздуха.
В этих условиях вопрос решается, если каждый регулятор имеет соб-
ственное независимое исполнительно-регулирующее устройство. Про-
321
блема возникает в случае, когда есть одно главное исполнительно-регу-
лирующее устройство (привод вентилятора и вентилятор) и два допол-
нительных исполнительно-регулирующих устройства.
Во-вторых, в этих регуляторах и системах регулирования температу-
ры охлаждающей среды нет возможности достаточно точно учесть ста-
тические характеристики и параметры (изменяющиеся в широких диа-
пазонах) систем охлаждения и обеспечить требуемые зависимости тем-
ператур теплоносителей (воды, масла и наддувочного воздуха) от мощ-
ности двигателя и температуры наружного воздуха.
В-третьих, для регуляторов температуры, осуществляющих компен-
сацию влияния мощности двигателя и температуры наружного воздуха
на температуру охлаждающей среды, должны быть известны не только
статические, но и динамические характеристики и параметры, определя-
емые аналогичными характеристиками и параметрами систем охлажде-
ния по соответствующим каналам регулирования. Это свидетельствует о
том, что такие регуляторы и системы регулирования не обеспечивают
требуемых высоких показателей качества работы. От подобных недостат-
ков могут быть свободны только автоматические комбинированные мик-
ропроцессорные регуляторы и системы регулирования температуры.
Принципиальная схема автоматической микропроцессорной системы
регулирования температуры, которая является сложной связанной ком-
бинированной системой регулирования температуры теплоносителей
(воды, масла и наддувочного воздуха), представлена на рис. 11.32. Она
содержит три системы охлаждения (три объекта регулирования темпера-
туры): воздушно-водяную, воздушно-водомасляную и воздушно-водяную
систему охлаждения и подогрева наддувочного воздуха двигателя 1 и
три автоматических комбинированных микропроцессорных регулятора
температуры: на выходе из двигателя — воды 7’1 и масла Т'2 и наддувоч-
ного воздуха на входе в двигатель.
Воздушно-водяная система охлаждения двигателя является объектом
регулирования температуры воды на выходе из двигателя и содержит
охлаждаемые полости двигателя 1, воздушноводяной радиатор 2, соеди-
ненный трубопроводом 3 с водяным насосом 4 и двигателем 1.
Воздушно-водомасляная система охлаждения двигателя является
объектом регулирования температуры масла Г2 на выходе из двигателя и
содержит охлаждаемые и смазываемые полости двигателя 1, соединен-
ные трубопроводом 5 с масляным насосом 6 и водомасляным теплооб-
менником 7, воздушно-водяной радиатор 8, соединенный трубопровода-
ми 9 с водяным насосом 10 и водо-масляным теплообменником 7.
322
Ц 61
11.32. Принципиальная схема автоматической микропроцессорной комбинированной системы регулирования
температуры воды, масла и наддувочного воздуха дизеля
323
Воздушно-водяная система охлаждения и подогрева наддувочного
воздуха двигателя является объектом регулирования температуры над-
дувочного воздуха 73 на входе в двигатель и содержит воздушно-водя-
ной радиатор 8, соединенный трубопроводами 9 с водяным насосом 10 и
с водовоздушным теплообменником наддувочного воздуха 11.
Автоматический комбинированный микропроцессорный регулятор
температуры воды Т\ содержит датчик температуры воды 12, установ-
ленный в трубопровод воды 3 на выходе из двигателя 7 и соединенный
посредством микропроцессорного контроллера 13 и первого блока уп-
равления 14 с приводом 15 вентилятора 16, который подключен к синх-
ронному генератору 17, датчик температуры 18 наружного воздуха, ус-
тановленный перед радиатором 2 и соединенный посредством микро-
процессорного контроллера 13 и первого блока управления 14 с приво-
дом 75 вентилятора 16, второй блок 19 управления двигателем 7, под-
ключенный к микропроцессорному контроллеру 13.
Автоматический комбинированный микропроцессорный регулятор
температуры масла Т2 содержит датчик температуры масла 20, установ-
ленный в трубопровод масла 5 на выходе из двигателя 7 и соединенный
посредством микропроцессорного контроллера 13 с третьим блоком уп-
равления 21 механизма 22 поворота распределительного клапана перво-
го трехходового перепускного устройства 23, датчик температуры 18 на-
ружного воздуха, установленный перед радиатором 2 и соединенный
посредством микропроцессорного контроллера 13 с третьим блоком уп-
равления 27 механизма 22 поворота распределительного клапана перво-
го трехходового перепускного устройства 23, второй блок 19 управления
двигателем 7, подключенный к микропроцессорному контроллеру 13.
Автоматический комбинированный микропроцессорный регулятор
температуры наддувочного воздуха содержит датчик температуры 24
наддувочного воздуха, установленный в трубопровод 25 наддувочного
воздуха на входе в двигатель 1 и соединенный посредством микропро-
цессорного контроллера 13 с четвертым блоком управления 26 механиз-
ма 27 поворота распределительного клапана второго трехходового пере-
пускного устройства 28, датчик температуры 18 наружного воздуха, ус-
тановленный перед радиатором 2 и соединенный посредством микро-
процессорного контроллера 13 с четвертым блоком управления 26 меха-
низма 27 поворота распределительного клапана второго трехходового
перепускного устройства 28, второй блок 19 управления двигателем 7,
подключенный к микропроцессорному контроллеру 13.
324
Для управления двигателем 1 и агрегатом его нагрузки — синхрон-
ным генератором 17 применены второй блок 19 управления двигателем 7,
соединенный с двигателем 7 и микропроцессорным контроллером 73, и
пятый блок 29 управления синхронным генератором 77, соединенный с
синхронным генератором 77 и с микропроцессорным контроллером 73.
На рис. 11.32 видно, что все три системы охлаждения двигателя 7 свя-
заны между собой с помощью второго трехходового перепускного уст-
ройства 27. Устройство содержит механизм 28 поворота распределитель-
ного клапана, управляемый четвертым блоком управления 26, подклю-
ченным к выходу микропроцессорного контроллера 73.
Каждый из трех регуляторов температуры содержит по одному ис-
полнительно-регулирующему устройству. Так, регулятор температуры
воды содержит привод 75 вентилятора и собственно вентилятор 16, регу-
лятор температуры масла содержит механизм 22 поворота распредели-
тельного клапана, перепускающего масло, трехходового перепускного
устройства 23, а регулятор температуры наддувочного воздуха содержит
механизм 28 поворота распределительного клапана, перепускающего воду,
трехходового перепускного устройства 27.
Автоматическая микропроцессорная система регулирования темпе-
ратуры теплоносителей двигателя внутреннего сгорания (см. рис. 11.32)
работает следующим образом.
При значениях температур воды Ту, масла Г2 и наддувочного воздуха
ниже заданных минимальных значений диапазона регулирования пода-
ча вентилятора 16 равна нулю, расход масла на перепуск в первом треххо-
довом перепускном устройстве 23 равен нулю и расход воды на перепуск
во втором трехходовом перепускном устройстве 27 также равен нулю.
После превышения температурой воды Г, минимального заданного
значения увеличиваются: выходной сигнал датчика 72 температуры воды,
входной сигнал микропроцессорного контроллера 73, скорость враще-
ния выходного вала привода 75 вентилятора 16 и подача вентилятора.
Если при этой подаче вентилятора 75 и при новой температуре воды Ту
температура масла Т2 начнет снижаться, то уменьшатся сигналы на выхо-
де датчика 20 температуры масла и микропроцессорного контроллера 73,
а первое трехходовое перепускное устройство 23 начнет перепуск масла
мимо водомасляного теплообменника 7. Если при этом также будет сни-
жаться температура наддувочного воздуха Г3, то уменьшатся сигналы на
выходе датчика температуры 24 наддувочного воздуха и микропроцес-
сорного контроллера 73. При этом второе трехходовое перепускное ус-
325
тройство 27 начнет перепускать воду по трубопроводу 9 к насосу 4, что
приведет к перепуску горячей воды двигателя из трубопровода 3 в тру-
бопровод 9 к насосу 10. Это приведет к повышению температуры воды
в теплообменнике 11 наддувочного воздуха и к прекращению сниже-
ния температуры наддувочного воздуха. Когда теплоотвод в радиато-
рах 2 и 8 станет равным тепловыделениям двигателя 1 в воду, масло и
от наддувочного воздуха, тогда наступит установившийся температур-
ный режим.
Установившийся температурный режим может быть нарушен в ре-
зультате изменения мощности двигателя (путем изменения позиции Пк
контроллера машиниста — блока управления 79) или температуры на-
ружного воздуха Г4 .
Изменение температуры Т4 повлияет на выходной сигнал ее датчика 18,
подаваемый в контроллер 13. Это приведет к соответствующим измене-
ниям его выходных сигналов, подаваемых в привод 75 вентилятора 16, в
третий блок 27 управления механизмом 22 поворота клапана первого
трехходового перепускного устройства 23, а также в четвертый блок 26
управления механизмом 27 поворота распределительного клапана вто-
рого трехходового перепускного устройства 28. В результате действия в
регуляторах температуры сигнала по температуре наружного воздуха Т4
алгоритмами работы этих регуляторов, заложенными в контроллер 13,
обеспечиваются независимость регулируемых температур воды, масла и
наддувочного воздуха от температуры Т4 и соответствующие статичес-
кие и динамические параметры регуляторов температуры, обеспечиваю-
щие независимость устойчивости и качество работы системы регулиро-
вания температур от температуры Т4.
При изменении мощности двигателя изменяется выходной сигнал
второго блока управления 79, подаваемый в микропроцессорный кон-
троллер 75.
11.7. Технико-эксплуатационные показатели
автоматических систем регулирования температуры
теплоносителей
В релейных АСРТ применяют релейные двухпозиционные регулято-
ры температуры, которые проще регуляторов непрерывного действия.
Однако релейные регуляторы и АСРТ имеют ряд существенных недо-
статков.
326
Релейная (периодическая) работа вентилятора отрицательно сказыва-
ется на надежности АСРТ и особенно двигателя и радиаторов, так как
обусловливает колебательный характер изменения их термических на-
пряжений; например, релейное регулирование температуры на теплово-
зах типов ТЭМ2, 2ТЭ116 и др. — одна из основных причин выхода из
строя радиаторов и двигателей-вентиляторов. Кроме того, в приводе вен-
тилятора наблюдаются периодические перегрузки при включении. Вслед-
ствие инерционности регулятора напряжения тягового генератора по
положению реек топливных насосов не используется полностью мощ-
ность двигателя для увеличения мощности генератора при отключениях
двигателей вентиляторов. Периодическая работа вентилятора является
дополнительным источником возмущений для систем регулирования ча-
стоты вращения вала энергетической установки и напряжения тягового
генератора. Главный недостаток заключается в том, что при релейном
регулировании температуры значительно (в 2—6 раз) увеличивается рас-
ход энергии на привод вентиляторов охлаждения.
В непрерывных АСРТ труднее всего обеспечить качественное регу-
лирование температуры при применении гидродинамического привода
вентилятора, так как гидромуфта переменного наполнения имеет наи-
худшие статические и динамические свойства из всех исполнительных
механизмов, применяемых в АСРТ. На тепловозах серии ТЭК) и М62
применяются АСРТ, в которых используются регуляторы с гидродина-
мическим приводом вентилятора (см. рис. 11.22, а). Терморегуляторы
перемещения, применяемые в них, содержат датчики температуры с твер-
дым наполнителем (церезином) и обладают высокой нечувствительнос-
тью и инерционностью. При большой инерционности регулятора темпе-
ратуры и при неравномерности статической АСРТ более 5 °C при темпе-
ратурах Т'вз < 10 °C система работает в режиме автоколебаний (т.е. пере-
регулирование составляет 100 %).
Для обеспечения устойчивости АСРТ и предотвращения переохлаж-
дения радиаторы зачехляют и ограничивают перемещение рейки гидро-
муфты. Поэтому, например, на тепловозах серии ТЭ10 при работе дизеля
под нагрузкой на 15-й позиции контроллера при Г = -15 °C зачехление
радиаторов на 1/2 фронта приводит к увеличению мощности, затрачива-
емой на привод вентилятора, более чем в 2 раза (с 26 до 56 кВт). С целью
повышения устойчивости, качества работы и надежности в АСРТ тепло-
возов серии ТЭ10 вместо терморегулятора перемещения применены тер-
морегуляторы давления воздуха типа ДТПМ (см. рис. 11.15, 11.22, 6).
327
Для дальнейшего повышения камее та работы сне гем регулирования,
содержащих гидродинамический привод вентилятора, в них устанавли-
ваются комбинированные регуляторы температуры, использующие до-
полнительные сигналы управления но мощности и температуре атмос-
ферною воздуха (см. рис 11.25 и 11.27, б).
По значениям срсднсэксплуатационнопо КПД прерывные регулягоры
температуры располагаются в следующем порядке: 0,42- 0,30 — с меха-
ническим приводом вентилятора переменной подачи; 0,Зб 0,26— с элек-
троприводом вентилятора, 0,27—0,21 — с гидродинамическим приво-
дом вентилятора и 0,24 — 0,18 — с гидрообъемным приводом вентилятора
Эффективность применения АСРГ определяется также надежностью
ее элементов. Наименее надежны терморегуляторы перемещения, у ко-
торых наполнитель (церезин) удерживается в полости датчика с помо-
щью пробки. Срок службы таких терморегуляторов менее 1000 ч. Более
надежны терморегуляторы перемещения, у которых это уплотнение осу
щесгвляегся с помощью резиновой мембраны. Еще надежнее в эксплуа-
гации герморегулягоры давления воздуха типов ТРД и ДТНМ. Более того,
у них стабильны во времени статические и динамические характеристи-
ки. Значительной нестабильностью характеристик отличаются пневма-
тические датчики температуры и терморегуляторы расходного типа, при-
меняемые на некоторых тепловозах.
Наибольший моторесурс имеют АСРТ, содержащие регулягоры с элек-
гроприводом ВПП. Для АСРТ, содержащих регуляторы с гидрообъем-
ным приводом вентилятора, он определяется сроком службы аксиально-
поршневых гидромашин, который в сильной степени зависит от каче-
ства фильтрации масла.
Часто статические одноконтурные АСРТ (воды, масла и даже надду-
вочного воздуха) работают некачественно и даже неустойчиво, особенно
при низких Т* и /V Поэтому в последние юды начинают применять
КАСРТ, коптрые работают устойчиво и более качественно. У таких сис-
тем может быть отрица тельная неравномерность по N ((<ов) и равная нулю
по Т' время регулирования в таких системах в 2—3 раза меньше, чем в
статических.
Глава 12. АВТОМАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ ТЕМПЕРАТУРЫ
ТЯГОВОГО ЭЛЕКТРООБОРУДОВАНИЯ
12.1. Автоматическое регулирование температуры тяговых
электродвигателей
Проблеме автоматизации систем охлаждения тяговых электродвига-
телей (ТЭД) электровозов и тепловозов посвящены многочисленные на-
учные исследования, выполненные во ВНИИЖТе, ВЭлНИП, ВНИКТИ и
др. В результате специалистами были разработаны предложения по мо-
дернизации систем охлаждения ТЭД электровозов и тепловозов. В тече-
ние ряда лег на железных дорогах России эксплуатируются электровозы
переменного гока (серии ВЛ80 и ВЛ85) и постоянного тока (ВЛ10), сис-
темы охлаждения ТЭД которых оборудованы системами регулирования
подачи вентиляторов (АСУВ и СДУВ). Подача воздуха вентиляторами в них
автоматически изменяется в зависимости от сигнала электронного модели-
рующего устройства — блока теплового контроля. Начиная с 1997 г. в тече-
ние нескольких лет проводилась модернизация систем охлаждеггия ТЭД
тепловозов (серии М62, ТЭ10, 2ТЭ116). Подача воздуха в них изменя-
лась по сигналу, пропорциональному разности температур охлаждающего
воздуха на выходе и входе ТЭД. Одггако все эти системы ориентированы
на электровозы и тепловозы, в системах охлаждения тягового электро-
оборудования которых применяются только центробежные (радиальные)
вентиляторы. Кроме того, во всех системах регулирования производи-
тельности вентиляторов в системах охлаждения ТЭД количество подава-
емого охлаждающего воздуха может изменяться ступенчато.
Автоматическую систему регулирования образуют взаимодействую-
щие между собой ОР и АР. С позиций теории автоматического регули-
329
Рис. 12.1. Структурная схема системы
охлаждения ТЭД как объекта регулирования
температуры
рования систему охлаждения
ТЭД следует рассматривать
как ОР температуры. Регули-
рующим воздействием р в
данном случае будет являть-
ся подача охлаждающего воз-
духа GKi, а регулируемой ве-
личиной — температура об-
мотки (сильно нагретой дета-
ли) ТЭД /р, основными воз-
мущающими воздействиями
\ — нагрузочный ток I, тем-
пература охлаждающего воз-
духа / и скорость вращения
вала п ТЭД (рис. 12.1).
АР состоит из управляю-
щего органа и исполнительно-регулирующего устройства. При разработке
локомотивных АСРТ непрерывного действия применение микропроцес-
сорных средств открывает широкие возможности. Микропроцессорные
устройства с блоками, реализующими математические модели, позволя-
ют определять и рассчитывать температуру (как среднюю, так и макси-
мальную локальную) неподвижных и вращающихся обмоток ТЭД по из-
меренным значениям их тока и напряжения, скорости вращения вала ТЭД,
температуры и количества охлаждающего воздуха. Функциональная схема
управляющего органа с микропроцессорным устройством, обеспечива-
ющим измерения и расчет температуры неподвижных и вращающихся
обмоток ТЭД, представлена на рис. 12.2.
Такое устройство (рис. 12.3) содержит: канал для охлаждающей сре-
ды; вентилятор с управляемым приводом; датчик 5 температуры /В( ох-
лаждающей среды с преобразователем 6; датчики 7 и 8 падения напряже-
ния АЦП и ДС/дп соответственно на обмотках главных 9 и добавочных 10
полюсов ТЭД; датчик 11 частоты вращения п вала ТЭД; датчик 12 тока 7
и датчик 13 напряжения Z7 на зажимах ТЭД; датчик 14 частоты враще-
ния ив вала вентилятора, пропорциональной подаче GB3 вентилятора; бло-
ки 15 и 16 расчета значений омического сопротивления в горячем состо-
янии 7?гП и Адп соответственно обмоток главных и добавочных полюсов
ТЭД; блок 17 расчета (измерений БИ) значений средней температуры
330
обмоток главных (г££)и и
добавочных (/дР)и полю-
сов (являющихся изме-
ренными значениями
температуры этих обмо-
ток в соответствии с пра-
вилами измерения темпе-
ратуры обмоток электри-
ческих машин стандарт-
ным методом сопротив-
ления), в него вводят зна-
чения сопротивления об-
моток главных 7? 20 и до-
бавочных Яда полюсов в
холодном состоянии;
блок 18 расчета величи-
ны мощности Рд ТЭД;
блок 19 вычислений, ре-
ализующий математичес-
кую модель системы ох-
лаждения ТЭД как объек-
та регулирования темпе-
ратуры, позволяющую
Рис. 12.2. Функциональная схема управляющего
органа с микропроцессорным устройством для
измерения и расчетного определения температу-
ры неподвижных и вращающихся обмоток ТЭД:
Д — датчики; Ms — многоканальный коммутатор
аналоговых сигналов; АЦП — аналого-цифровой
преобразователь; CPU — программируемый кон-
троллер; ПУ — пульт управления; ЦАП — цифро-
аналоговый преобразователь; У — усилитель вы-
ходного аналогового сигнала; П—преобразователь
определять нестационар-
ное поле распределения температур в элементах ТЭД при работе локо-
мотива в условиях эксплуатации и расчетным путем находить значения
максимальной локальной температуры вращающейся якорной обмотки
tР , обмоток главных tfn и добавочных полюсов ТЭД в зависимости
от регулирующего (подача охлаждающей среды GB3) и возмущающих (на-
пряжение t/д, ток / ТЭД, скорость п вращения вала ТЭД и температура
?вз охлаждающей среды) воздействий, в блок 19 вводятся заданные зна-
чения максимальной локальной температуры якорной обмотки /я, обмо-
ток главных и добавочных /?1П полюсов ТЭД; монитор для визуаль-
ного представления информации.
Другой задачей, решаемой при разработке микропроцессорных непре-
рывных автоматических систем регулирования температуры, улучшение
331
332
характеристик исполнительно-регулирующих устройств. Статические и ди-
намические характеристики таких устройств могут быть значительно улуч-
шены за счет применения различного вида дополнительных обратных свя-
гей, создаваемых программными средствами. Определенные результаты
могуг быть получены также в направлении повышения их экономичности.
Экономичность систем охлаждения тягового электрооборудования, где при-
меняются вентиляторы с управляемым приводом, будет определяться глав-
ным образом экономичностью режимов работы ИРУ (систем вентилятор-
привод) самых энергоемких звеньев систем регулирования температуры. По-
этому важно, чтобы в зоне оптимальных по экономичности режимах рабо-
тал не только вентилятор, но и его привод. На рис. 12.4 представлена прин-
ципиальная схема APT ТЭД с независимым электрическим приводом осе-
вого вентилятора и раздельньгм регулированием скорости вращения вала и
угла наклона лопаток вентиляторного колеса. В математической модели фун-
кционирования ИРУ, содержащего осевой вентилятор, реализующей один
из методов многокритериальной оптимизации, может бьгть предусмотрен
вьгбор оптимальных значений параметров работы такого вентилятора —
скорости вращения вала и угла поворота лопаток рабочего колеса, соответ-
ствующих наилучшим экономическим показателям (наименьшей потребля-
емой мощности и наибольшему КПД системы вентилятор-привод) с учетом
КПД данного типа привода. В модели могут учитываться также факторы,
оказывающие влияние на экономичность ИРУ, такие, как температура ох-
лаждающего воздуха и смещение характеристики сети.
12.2. Автоматическое регулирование температуры тяговых
полупроводниковых преобразовательных установок
Применяемые в электрических передачах отечественных локомоти-
вов тяговые полупроводниковые преобразовательные установки — вып-
рямители (управляемые и неуправляемые), инверторы, преобразователи
частотьг имеют принудительное воздушное охлаждение. В штатном ис-
полнении системы охлаждения таких установок должны обеспечить по-
дачу охлаждающего воздуха, соответствующую расчетньгм режимам ра-
боты электрических передач. Однако как электровозы, так и тепловозы
(особенно маневровые) редко работают на расчетных режимах. Несоот-
ветствие между количествами подаваемого охлаждающего воздуха и теп-
лоты, отводимой от силовых полупроводниковых приборов (неуправля-
емых вентилей, тиристоров, транзисторов), приводит к тому, что их тем-
пература изменяется в широких пределах. Как показали исследования,
333
Рис. 12.4. Принципиальная схема микропроцессорного APT ТЭД с независимым
электрическим приводом осевого вентилятора и раздельным регулированием
скорости вращения вала и угла наклона лопаток вентиляторного колеса:
/ и 2—датчики; 3 — многоканальный коммутатор аналоговых сигналов; 4 — АЦП;
5 — контроллер программируемый; 6 — ЦАП; 7 — управляемый привод осевого
вентилятора с электродвигателем; 8 — управляемый привод механизма поворота
лопаток вентиляторного колеса с электродвигателем; 9 — осевой вентилятор
334
выполненные специалистами ВНИИЖТа, ресурс силовых полупровод-
никовых приборов зависит не только и не столько от температуры, сколь-
ко от амплитуды и частоты ее циклических изменений. Стабилизацию
температурных режимов работы и защиту от перегрева силовых полу-
проводниковых приборов может обеспечить АСРТ непрерывного дей-
ствия, имеющая определенные преимущества перед замкнутыми систе-
мами регулирования релейного действия или разомкнутыми системами
регулирования. О возможности и целесообразности введения систем, ав-
томатически изменяющих количество воздуха в системах охлаждения тя-
говых полупроводниковых преобразовательных установок локомотивов,
отмечалось еще в 1970-х гг. (ВНИИЖТ). Актуальность этой проблемы
сохраняется и в настоящее время, поскольку тяговые полупроводнико-
вые преобразовательные установки находят все более широкое примене-
ние в электрических передачах современного подвижного состава.
Функциональная схема непрерывной АСРТ непрерывного действия
тяговой полупроводниковой преобразовательной установки представлена
на рис. 12.5. Обозначения на схеме: ОР — объект регулирования (поз. 7);
ИУ 1, ИУ2 — измерительные устройства — датчики регулируемой вели-
чины (температуры) (поз. 2 и 3); ИУЗ, ИУ4 — измерительные устрой-
ства — датчики основных возмущающих воздействий (поз. 4 и 5); ИУ5 —
измерительное устройство — датчик регулирующего воздействия (поз. б);
СУ1, СУ2, СУЗ — сравнивающие устройства (поз. 7, 8 и 9); ЗУ1, ЗУ2,
ЗУЗ — задающие устройства — задатчики заданных значений величин
(поз. 10, 11 и 72); У В — устройство выбора максимального значения
выходного сигнала датчика регулируемой величины (поз. 73); УК — ус-
тройство коррекции коэффициента передачи регулятора, содержащее
математическую модель системы охлаждения тяговой полупроводнико-
вой преобразовательной установки (поз. 74); РО — регулирующий орган
(поз. 75); ИМ — исполнительный механизм (поз. 76); ИМ и РО образуют
ИРУ; фц , Ф)2 — регулируемые величины; А,,, А,2 — основные возмуща-
ющие воздействия на объект регулирования ОР; ц — регулирующее воз-
действие на ОР; Лим — выходной сигнал ИМ; X — выходные сигналы
датчиков; Х3- — выходные сигналы задатчиков; A¥cy — выходные сигна-
лы сравнивающих устройств; ЛА^ — выходной сигнал устройства коррек-
ции коэффициента передачи регулятора; rj р т]2, г)3 — сигналы задания.
Все функциональные элементы системы регулирования (кроме ОР)
образуют регуляторы температуры: по отклонению регулируемой темпе-
ратуры от заданного значения (ИУ 1, ИУ2, ЗУ 1, СУ 1, ИУ5, УК, ИМ и РО) и
335
Рис. 12.5. Функциональная схема непрерывной ACPI тяговою статическою преобразователя
336
по основным возмущениям: току нагрузки тяговой полупроводниковой
преобразовательной установки (IГУЗ. ЗУ2, СУ2. ИМ и РО) и температуре
наружного охлаждающего воздуха (ИУ4, ЗУЗ, СУ 3. ИМ и РО). Регулятор
по отклонению вместе с ОР образу ет замкнутый контур в системе регули-
рования. а регуляторы по возмущениям — разомкнутые контуры.
В системе регулирования используются два дополнительных сигнала
управления для компенсации возмущающих воздействий: по току нагруз-
ки тягового статического преобразователя и температуре наружного ох-
лаждающего воздуха, поэтому эта система является автоматической ком-
бинированной системой регулирования с сигнальной компенсацией дей-
ствия основных возмущении: тока нагрузки тягового статического пре-
образователя и температуры наружного охлаждающего воздуха. Исполь-
зование дополнительных сигналов управления позволяет значительно
увеличить запасы устойчивости системы и показатели качества ее рабо-
ты (относительное перерегулирование, время регулирования и др.), т.е.
уменьшить амплитуду колебаний температуры силовых полупроводни-
ковых приборов и затраты энергии на охлаждение.
Устойчивость и качество работы системы регулирования зависят от зна-
чения такого ее статического параметра, как коэффициент передачи систе-
мы регулирования А (в разомкнутом состоянии), который равен произве-
дению коэффициента передачи ОР Аор и коэффициента передачи регулято-
ра по отклонению кр, т.е. при постоянном значении кр коэффициент А
будет изменяться пропорционально коэффициенту кр. Известно, что ко-
эффициент Аор систем охлаждения как тепловых объектов регулирования
увеличивается при уменьшении тепловой нагрхзки, что приводит к увели-
чению коэффициента Аср и к уменьшению устойчивости и качества рабо-
ты. т.е. к значительным колебаниям регулируемой величины <р. Для систе-
мы регулирования температуры тяговой полупроводниковой преобразова-
тельной установки это означает, что при уменьшении тока нагрузки /, или
температуры наружного охлаждающего воздуха Г, будет увеличиваться А .
что приведет к росту коэффициента Аср и к уменьшению устойчивости и
качества работы системы, те. к значительным колебаниям регулируемой
температуры силовых полупроводниковых приборов Гр
В автоматической системе регулирования коэффициент передачи ав-
томатического регулятора Ар может изменяться в соответствии с зало-
женной программой в зависимости от регулирующего воздействия ц (по-
дачи Q вентилятора) с помощью измерительных устройств НУ5 и УК
таким образом, чтобы коэффициент передачи системы регулирования (по
ЗЗ7
замкнутому контуру) £ оставался постоянным при любых токах нагрузки
тяговой полупроводниковой преобразовательной установки 7 и любых
температурах Т->\ Применение устройств ИУ5 и УК позволяет осуще-
ствить параметрическую компенсацию действия основных возмущений:
тока нагрузки тяговой полупроводниковой преобразовательной установ-
ки и температуры наружного охлаждающего воздуха.
12.3. Автоматическое регулирование температуры тяговых
трансформаторов
Для охлаждения тяговых трансформаторов и другого тягового электро-
оборудования применяют воздушные и воздушно-жидкостные системы
охлаждения. На тяговом электрическом подвижном составе переменного
тока не применяются индивидуальные системы охлаждения и регулирова-
ния температуры тяговых трансформаторов, которые имеют воздушно-
масляное охлаждение. Регулирование температуры масла на выходе из бака
трансформатора осуществляется при постоянном расходе охлаждающего
воздуха через воздушно-масляные теплообменники путем включения и
выключения электропривода масляного насоса (20—45 включений в час),
что приводит к колебаниям температуры масла в значительном (10—20 °C)
диапазоне. Превышение температуры масла над температурой охлаждаю-
щего воздуха составляет 15—37 °C. Установлено, что наиболее вероятны-
ми причинами массового выхода из строя масляных насосов на электрово-
зах ВЛ65 и попадания металла в трансформаторное масло являются пере-
охлаждение трансформаторного масла в зимний период эксплуатации и
работа масляного насоса на масле с недопустимо высокой вязкостью (из-
за очень низкой температуры масла), а также увеличенное (по сравнению
с электровозом ВЛ85) в два раза количество включении масляного насоса,
особенно в зимний период эксплуатации.
Для исключения массового выхода из строя масляных насосов и попа-
дания металла в трансформаторное масло целесообразно поддерживать
постоянную температуру трансформатора на уровне примерно 45—50 °C
(подтверждается мировым опытом электровозостроения), тогда как в
настоящее время поддерживается постоянным перегрев, при этом тем-
пература трансформатора изменяется в зависимости от температуры на-
ружного охлаждающего воздуха в пределах примерно (-30—+60 °C), что
негативно сказывается не только на работоспособности масляного насо-
са. но и трансформатора в целом.
338
АСРТ тягового трансформатора тягового транспортного средства со-
держит следующие основные элементы (рис. 12.6): провод 1 контактной
сети; токоприемник 2; бак 4 с охлаждающей жидкостью; тяговый транс-
форматор, имеющий магнитопровод 3, сетевую обмотку 5, тяговую обмот-
ку 6 для питания тяговых выпрямителей, обмотку собственных нужд (рас-
щепители фаз, электродвигатели насосов и вентиляторов, полупроводни-
ковые преобразователи и др.) 7; трубопроводы охлаждающей жидкости
(масла, смеси этиленгликоля с дистиллированной водой и др.) 8 и 9; ин-
дуктивное сопротивление тяговой нагрузки (реакторы, тяговые электро-
двигатели и др.) 10; активное сопротивление тяговой нагрузки 11; датчик
тока нагрузки тягового трансформатора 12; датчик температуры охлажда-
ющей жидкости на выходе из бака трансформатора 13; охладитель (воз-
душные охладители охлаждающей жидкости — теплообменники) 14; дат-
чик температуры наружного охлаждающего воздуха 15; осевой вентиля-
тор 19; электропривод 22 осевого вентилятора; насос 24 с электроприво-
дом 25. Данная АСРТ тягового трансформатора тягового транспортного
средства дополнительно содержит: датчик подачи осевого вентилятора 16;
датчик угла наклона лопастей осевого вентилятора 17; механизм поворота
лопастей осевого вентилятора 18; датчик 20 частоты вращения вала осево-
го вентилятора; микропроцессорный контроллер 21 с программой мини-
мизации затрат энергии на электропривод осевого вентилятора; датчик 23
мощности, потребляемой электроприводом осевого вентилятора.
Рассматриваемая АСРТ работает следующим образом. При темпера-
туре Т| охлаждающей жидкости на выходе из бака 4 с охлаждающей
жидкостью ниже заданного значения сигнал Ц на выходе датчика тем-
пературы 13 охлаждающей жидкости, а также сигналы и на выходе
микропроцессорного контроллера 21 такие, что включен электропривод
25 насоса 24 и частота вращения пв и подача Q осевого вентилятора 19
равны нулю. При повышении температуры Ту охлаждающей жидкости
выше заданного значения выходные сигналы L । датчика температуры 13
охлаждающей жидкости и микропроцессорного контроллера 21 уве-
личиваются, что приводит к росту частоты вращения пв подачи Q осево-
го вентилятора 79 и теплоотвода в охладителе 14. Увеличение подачи Q
осевого вентилятора 79 происходит до тех пор пока температура Г, не
достигнет заданного значения.
Если ток нагрузки 7н тягового трансформатора начнет увеличиваться,
то это приведет к увеличению выходных сигналов С2 датчика 72 тока
нагрузки и Ug микропроцессорного контроллера 27, что в свою очередь
339
•нет рост чэстоты вратети ж*, полачи (? осевого вентилятора в
тсплоотмаэ в охладителе /4 без изменения температуры Гр Такое изме-
;-h.<v ги-н J пхм»схелит каждый рал при измеиенмм тока нагрузки /.
’чгового трансформатора
Возрастание температуры Г3 наружного склыивкажгс вехл ха прнао-
-jc кувеличению выходных ежгнхх* 1 ; латчи» 5 температуры наруазю-
го оалжж_июе*ел? в?иуи п I * ыввфокфоигсеерного импржкра 21. Это в
свою окре» прмвожт к увеличат» частоты арапктм гмиа Q осе-
вого вентилятора 19 в теозолво* вскщанеае /» Это юмеяате вотчв
<2 осевого вентилятора 19 црсмстяп г^т-чз^ рю прн мзмевеивв темкре-
туры Г$ наружного охляждмсааего возтухж
Такны образом. изменен» тока нагрузки /в тягового грант уылтора
нлм температуры Г3 наружного оиажлвотего мгауха привозят к соот-
зетствуюшны вменениям частоты вращения вв в гюдзчи р осевого вен-
тилятора 19 при егхрд е.хту 'нгуешов п-ыигратурм Г, на залитом
х гхттпм -< циттюитерщум ' - .-
пользоамтем дооожюгтедьных сигналов управления по току шаружм
гжового трансформатора и температуре наружного остяемвотеп» везду-
хх юторкае су-мэафуются о стиалом по регулируемом пмперагууе Г . ооех -
печатает точное похзержатве ее на заттмм уровне бет vc- тегоний Нэ-
эесгно. что только коыбяннроаахяые системы регуляроваякя теткрв-
гуры имеют большие запасы .нойнмисш и высокне тжамлеш каче-
ства работы Это зтгжио поаытает тленность тяговою трансфер*
его системы охллжленмя
Непрерывное регупнроаанне температуры Г, снижает затраты знер-
- г V. _ к_с - е чл _ - > •. „ г* . • - г-. > .< - . . -«
w (4—b> tux КПД осевого вентилятора зависит от частоты вратения
ват и* и от угла наклона лопастей cl Эти заамеиместх КПД iсмеют ммг-
еммумы при опрезелемных зннктнх м, и а. По «тому в АСРТ тягового
гхчефермлто-м тчгсао-: трзнсп средства прямемема лх тхмы_
минимизации затрат энергии на хэектрспривот *_* осежхо веитижворв
АСРТ в соответствии с tikdw программой выбирает значения «в и а
три зххяшюй кедз т О сеэо вентилятора . при которых. КПД ле-
вого веитжжгтора и его пектроцитпав аритвавот максттзьлые имче-
u Мзксиызльнь^е я э =чмя КПД осгрелс а« • сг по мг лмумч мосшос-
ти. потребляемой « -ектрлприволом вентиля’ери. при лдкягы реж гме
?лботы сютемьи хтя чего Here;ьзуетсе ллгчмк моьцностм потребляе-
мой электроарнвхюм осевого аентилахора.
Глава 13. АВТОМАТИЧЕСКИЕ СИСТЕМЫ
РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ
В ПНЕВМАТИЧЕСКИХ СИСТЕМАХ
ЛОКОМОТИВОВ
13.1. Классификация и функциональные схемы
автоматических систем регулирования давления
в пневматических системах локомотивов
и предъявляемые к ним требования
Пневматическая система локомотива вместе с автоматическим регу-
лятором давления (АРД) образуют автоматическую систему регулирова-
ния давления (АСРД), в которой пневматическая система локомотива
выполняет функции объекта регулирования давления (ОРД).
В зависимости от алгоритма работы АРД в АСРД делятся на два клас-
са: системы релейного и системы непрерывного действия. Наиболее ча-
сто на локомотивах применяются АСРД релейного действия.
К АСРД предъявляются следующие требования, в соответствии с кото-
рыми она должна обеспечить:
• поддержание регулируемого давления воздуха в пневматической
системе локомотива с требуемой точностью, при наиболее экономичной
работе компрессора и его привода при любых возмущениях, которые
могут иметь место в работе локомотива;
• наиболее рациональное использование привода компрессора для
изменения им подачи воздуха при различных возмущениях, действую-
щих на пневматическую сеть локомотива;
• ограничение до допустимых пределов значений кратковременных
(динамическая ошибка регулирования) и длительных (статическая ошибка
регулирования) отклонений давления от заданного значения;
342
• способность реализовать требуемый характер переходного процес-
са во всем диапазоне нагрузок, которые могут иметь место при работе
локомотива;
• надежность элементов АСРД, устойчивую и качественную работу
системы в целом;
• возможность использования АСРД для разгрузки компрессора при
пуске и под действием внешнею сигнала.
На автономном тяговом подвижном составе применяются следующие
приводы компрессоров: механический, неотключаемый от главного теп-
лового двигателя; электрический, регулируемый рслейно; гидродинами-
ческий с регулируемой муфтой; гидродинамический с нерегулируемой
муфтой; от вспомогательного теплового двигателя (неотключаемый).
Эксплуатация компрессорных установок на локомотивах и в стацио-
нарных условиях значительно отличаются. Из-за специфики поездной
работы, конструкционных особенностей локомотивов и типов привода
компрессоров это отличие характеризуется переменными скоростью вра-
щения вала, давлением нагнетания, температурными условиями, часты-
ми пусками и остановками или сменами рабочего и холостого ходов.
Известно, что из всех применяемых способов изменения подачи воз-
духа и давления рк поршневых компрессоров наиболее эффектив-
ным является способ, при котором это достигается путем изменения
скорости вращения вала компрессора (ок. Однако для поддержания дав-
ления воздуха рк в пневматических сетях локомотивов широко приме-
няются релейные АСРД, в которых функции исполнителъно-регулиру-
ющих устройств (ИРУ), т.е. исполнительных механизмов (ИМ) в сово-
купности с регулирующими органами (РО), выполняют привод комп-
рессора и собственно компрессор (рис. 13.1). АРД содержит, кроме ИРУ,
управляющий орган (УО), состоящий из измерительного устройства
(ИУ), задающего (ЗУ), сравнивающего (СУ) и усилительио-преобразу-
ющего (УУ) устройств.
На ОРД действуют внешние возмущающие воздействия: расход воз-
духа из пневматической системы локомотива РДХД, температура Та(Х2)
и давление ра(ХД атмосферного (всасываемого) воздуха.
Анализ свойств АРД релейного и непрерывного действия показывает,
что при непрерывном регулировании давления компрессор работает доль-
ше при пониженных wK и рк, что способствует уменьшению скорости
износа деталей цилиндро-поршневой группы и расхода смазки (стоимость
которой на порядок выше стоимости дизельного топлива).
343
Рис. 13.1. Функциональная схема автоматической системы регулирования
давления в пневматической системе локомотива
13.2. Схемы пневматических систем локомотивов
как объектов регулирования давления
Пневматическая система локомотива состоит из тормозной системы,
системы элементов автоматики и системы подачи песка (рис. 13.2). В пнев-
матической системе локомотива источником сжатого воздуха является пор-
шневой или винтовой компрессор 1 с приводом 2. Засасываемый компрес-
сором воздух нагнетается в главные резервуары 3 до давления 0,9 ± 0,2 МПа,
после чего компрессор останавливается под действием управляющего орга-
на. Сжатый воздух на локомотиве потребляется элементами систем авто-
матики 4, подачи песка 5 и тормозными приборами 7. Кроме того, на неко-
торых маневровых тепловозах его потребителем является также система
разгрузки саморазгружающихся вагонов. Когда давление в резервуарах по-
низится до 0,75 ± 0,2 МПа, компрессор включается снова.
13.3. Статические и динамические свойства
пневматических систем локомотивов
Пневматическая система локомотива представляет собой емкость со
сжатым воздухом, в которой запасена потенциальная энергия сжатого
воздуха. Она является объектом регулирования с одновременным само-
выравниванием на притоке и стоке энергии. Так как сжатый воздух попа-
344
Рис. 13.2. Принципиальная блок-схема пневматической системы локомотива:
1 — компрессор, 2 — привод компрессора, 3 — главные резервуары; 4 — тормоз-
ная пневматическая система; 5 — пневматическая система подачи песка; 6 — ре-
гулятор давления; 7 — система пневмоавтоматики; ра — давление атмосферного
воздуха; — давление воздуха на выходе компрессора; р-, — давление воздуха
на входе регулятора давления; р3 — давление воздуха на выходе регулятора дав-
ления; — расход воздуха из главных резервуаров, Q-, — подача воздуха комп-
рессором; ^2|, и — утечки воздуха
дает в систему, находящуюся под давлением, то приток энергии в нее
зависит не только от подачи компрессора как РО, но и от давления возду-
ха в системе, т.е. от значения регулируемой величины рк.
В установившемся режиме
(при £>20 = о) Давление рк ос-
тается постоянным. Если увели-
чить подачу 0, от £>10 Д° 012’то
в первый момент времени это
обусловит увеличение притока
воздуха в систему и рост давле-
ния рк. В свою очередь это при-
ведет к повышению расхода воз-
духа на стоке . Статические ха-
рактеристики системы представ-
лены на рис. 13.3. Установивший-
ся режим соответствует точке А
Рис. 13.3. Статические характеристики
пневматической системы локомотива при
расходе сжатого воздуха: 4 — на стоке;
1, 2, 3 — на притоке
на этом рисунке. На рис. 13.4, а
представлены экспериментальные
статические характеристики пнев-
матической системы локомотива
при расходе воздуха на стоке.
345
a
Pill I II ( I ill H“l> < I II’’ • Iplll. |( pl1< till’ll ( »l<< IltpHM* II HllllJIi.H J IIIU HMillll’H < l-oll
I Mt H MI I l< .I'-.Mi 11II Ini Pl) И l-OMIIpt I I Uptlll ((>)
13.4 ( ‘itMJJ, ГГМ1МЧССКИе И /IHNUMHMITKMI* cnnlic I llil
an I <»Mit i n*i<-<R и x pel yntiopon jmhihiiiim
( I hiич< ' i ll'- ар и* i« pin iiwn UM niipt ar/iuiiri biinti iiMiit in > in hi.iMwi
Holo i.lilll.i/hi ( I'opot ill hjiiiiiH null niiilii MoMlipiit 4 Оря <ti Ol ВЫ MOllloi i»
' in пили V< > И i кирш in lipaiiiciiMH пхолною пани нринола i <i/inp<'< t при m(|(£
( I HI И'П I MUN • 1p.ll- li-plll И1КН КОМПр ( I "I’ll ППрСЛХИИ». I I<IHI1<I1M<H II.
IKMBI'IH ИМ HOViyXH (Л III l I'Opiit 111 lipiillHIlHH HO IbHla <nfc ll»i pm I I ‘1, b
Hii.iiKi, <i i и i и I il'Hi ► ii< «.iplip i* ри< i in* и пн ‘i< । in* иных iHiMilp*t i opoii
tlp.ll- 1ЧЧ1-1 I’ll >II1II< Ины
/fun luuijit-ржании pi i у/шруем<»й игаичипы нпик nini /^(<р) и ш
д>ц||Н1М /Н1.Н1.1 i«»ii< А1'/1 и 1М<*ня< 1 р< 1 /лир711 .uni и<1 lyttfik।мн» ннлмчу
ho Vi >* a (Ml1) •’ пненма ill'll < кой < и< icmc hoxomoi iiuti Ьннп iiMCn II. ПР
a.i'iii i-oMiipri < ори (/.(p) ‘Л Л'Ипн иии // Ь(») Mii.ini к и < laiirii i т»Й oip.ix
i< pin иной AI7I ♦ biiirb 1 мне '.iptii' li pin «ими AI7I пир* ;i< ииюк я i ы
U6
I H'1‘1 II II И11 > ;lp>ll- I* pill | lit* >1
III II II HlttMl 1111*11 ( |) V ( V
I IM II l*< >)
< HU ll'll < I till XIlpHN 11 pill
lliKii 11V nilpcii* iliu i tiihiK ii
Min I it ci и in.i * । ill in и и ( iii Пинц
III /lilllll* inni p
( Illi I1'1< । Ц |l< * ilpllll l< pill
llll'll ( I lillpi ,'U lllll<i| Inlllli ||
-HI! III I III HI.I IlilIHlHl I III ЦНИИ
hi iiiiiim пни /*( и iii.iui/hhiih
i in ii.niii IV l ini in и.iii.i tn
Линий Alyi
l*> ii< iiin.ili A171 им»** 1 V< >
|H hi linui n in hi 1 инн по nu
My l I <1 < III 111*1* < lull! * .11 Illi* 11
pin I III- .1 UMl < I НИ л III! nil
(pm H *>) 11 pi 1 put ion A< I7I
iu:iiii*iiiiiii и imi пи* к и и npi
ll< НИ» (II // j /Hi // , I IlillUlll*
iiii< /iiiniH ник / (( tn /1^1 ;i.<i p .
ill ,1111 > llllllK n .1 llpll p.lhnir
Hf lllp! 1 I При 1 • l.ll'i III4.IiII.IHiH
<i-ii|Mn ii.nilip.iilli 11IIH iiiiniiii^
11 Mill'1 HMillll.lli ill IIII/U'H Il 0,
• Hl.I
Inn.1 inт нс num iii.iHi! in pr
.lilllHiin А171 (/IHl|ii|i> pl llllll
IIII pl* III* ) pillllhl pit llllll Hl Jlilli
ННИИ V'|tl| . /*(.| I*'»
l<||l|lilllH< III НИ три I II P> lit /l)((
p.HH II III lllllllr IIIIHl /\|7\ (1
/1 I
III
A< 17I и< up* pi-iiHHn (1 iiiit
' IIIHH I o/|i prl III dll 11 iMil I H*H 1
nil' pci /llinopl.l HllHIIC HUH * III
lirirllilli » Ip.lh || pill nil'll |<ll
inpi.ix имени НИИ IHH1H Kill
lll.lll lid pill I < 6
l‘l|l I i /1 ( I II il'H I 1‘ III Blip'll- H pill 1111*11 ,llllll
UIIH'll 1 I- 11* p< 1 , НПорпн ||.|||/1» НИИ Ih lip* pl 111
iiniii n> in num / iipii ni.iii 1 кi*i> iiiiii iipinin
Jill I <|MH|H <* Iip.| npll < - 0 ' При tll.ll* IHI
*H HIHl lipillHHlil I *1».111|1Г' i **pil llpll - HI*P'H 111
111 (0 I i 0 I /) и,
» ' » 1*1*,»
Автоматические регуляторы давления с механическим приводам ком-
прессора. На локомотивах применяются АРД с УО двух типов: пневма-
тические. предназначенные для управления компрессором при механи-
ческом приводе или для управления гидродинамической муфтой пере-
менного наполнения при гидродинамическом приводе; пневмоэлектри-
ческие — для > правления электрическим приводом компрессора.
Пневматический УО типа ЗРД применяется на тепловозах для вклю-
чения и выключения компрессора при механическом приводе или управ-
ления клапаном подачи масла в гидродинамическую муфту (рис. 13.7).
Средняя камера А сообщается с главным резервуаром. В левый ниж-
ний канал (вход УО) подводится воздух под давлением рк от комп-
рессора, а правый нижний канал (выход УО) с выходным давлением р
подключен к разгрузочному устройству компрессора или к клапану на-
полнения гидромуфты. УО работает следующим образом (рис. 13.7, б).
При давлении в главном резервуаре рк min клапаны 2, 14 и 12 зак-
рыты. Воздух из главного резервуара по каналам АЗ проходит в по-
лость А и через набивку фильтра 6 поступает по каналам Al, А2 к
выключающему клапану 2 и к клапану 12. Так как пружина задания 4
затягивается на давление тах, то клапан 2 прижат к седлу. Пружи-
ной задания 10 прижаты к седлам и клапаны 14 и 12. Канал, связан-
ный с разгрузочным устройством компрессора, через калиброванное
отверстие в пробке Ат сообщается по каналам А4, В1 и В2 с атмосфе-
рой. При этом компрессор нагнетает воздух в главные резервуары. При
достижении давления в них р тах клапан 2 быстро поднимается, сжи-
мая пружину задания 4 до упора в регулировочную шпильку 5. При
этом соединяются каналы А2 и Е. Воздух поступает под клапан 14,
который поднимается и своей верхней конусной кромкой перекрыва-
ет канал В1. Связь разгрузочного устройства с атмосферой прекраща-
ется. Одновременно с этим поднимается клапан 12 и воздух из пита-
тельной магистрали по каналам А1 и А2 поступает в канал Е2, а затем
к разгрузочному устройству, которое имеет каждая клапанная короб-
ка компрессора. Подвижные части разгрузочного устройства переме-
щаются вниз под воздействием воздуха, поступающего от УО. Вык-
лючение всасывающих клапанов происходит вследствие отжатия пла-
стин от седел упорами. При этом сжатие воздуха прекращается, комп-
рессор работает вхолостую и мощность, потребляемая им, уменьша-
ется в три раза. Воздух по каналам Б2 и Б1 поступает в полость Б,
давление воздуха с обеих сторон клапана 2 уравновешивается, и кла-
348
Рис. 13.7. Функциональная (а) и принципиальная (б) схемы пневматического
управляющего органа типа ЗРД: 1 — корпус; 2 — выключающий клапан;
3, 15 — гнезда клапанов; 4, 10 — пружины задания; 13 поддерживающая
пружина; 5,9 — регулировочные шпильки; 6 фильтр; 7 — контргайки;
8 — регулировочные гайки; 11 — седло включающего клапана; 12 обратный
клапан; 14 — включающий клапан; 16 — приваленная плита; 1” прокладка;
А, Б, В — камеры; А1—А6, Б1, Б2, В1, В2, Е. El, Е2 каналы
пан под действием пружины задания 4 садится на седло. Клапан 14 не
сядет на седло до тех пор, пока давление в каналах А5 и А2 не снизит-
ся до давления рк min. При достижении давления />к min сила пружины
задания 10 преодолевает силу давления воздуха снизу и клапан 14,
349
прижимая клапан 12, садится на седло. Далее цикл работы УО по-
вторяется. Принципиальная схема АРД в пневматической системе локо-
мотива с механическим приводом компрессора представлена на рис. 13.8.
Рис. 13.8. Принципиальная схема АРД в пневматической системе локомотива
с механическим приводом компресссора: 1 — УО типа ЗРД; 2 — компрессор;
3 — зубчатый редуктор; 4 — дизель
Рис. 13.9. Статические характеристики АРД
с пневматическим УО типа ЗРД тепловоза
М62 с механическим приводом компрессо-
ра при разных скоростях вращения вала
дизеля: 1 — 750 об/мин; 2 — 400 об/мин
В данном пневматическом УО
типа ЗРД поршень 2 выполняет
функции ИУ1, а поршень 14 вы-
полняет функции ИУ2; они преоб-
разуют сигналы давления в си-
лы FHy] и FW1 (см. рис. 13.7, а).
Функции ЗУ 1 выполняет пружи-
на задания 4, гайка 8 и регулиро-
вочная шпилька 5, а функции ЗУ2
выполняет пружина задания 10,
гайка 8 и регулировочная шпиль-
ка 9. Поршни 2 и 14 одновремен-
но выполняют функции СУ1 и
СУ2. На них сравниваются вы-
ходные сигналы ИУ 1 и ИУ2 силы
^ИУ1 и ^ИУ2 и выходные сигна-
лы ЗУ1 и ЗУ2 силы затяжки пру-
350
жин задания 4 и 10 Гзу| и F3y2.
В результате такого сравнения и со-
ответствующего перемещения пор-
шней 2 и 14 /] и /2 выходной сиг нал
УО будет равен рк или ра.
В результате статические ха-
рактеристики АРД с пневмаз ичес-
ким УОтипа ЗРД и механическим
приводом компрессора имеют
вид, представленный на рис. 13.9.
Автоматические регуляторы
давления с гидродинамическим
приводом компрессора. На тепло-
возах типа ЧМЭЗ, ЧМЭЗТ и
ЧМЭЗЭ в АРД применяются
пневматические УО для управле-
ния гидродинамическим приво-
дом компрессора (рис. 13.10).
Пневматический УО (см. рис.
13.10) и АРД с гидродинамическим
приводом компрессора (рис. 13 11)
работают следующим образом.
При рк < 0,85 МПа клапан 2
под действием пружины задания 4
и стержня 3 прижат к седлу в кор-
пусе 7. При этом канал б УО раз-
грузочного устройства комп-
рессора и привод клапана управ-
ления гидродинамической муф-
той сообщаются с атмосферой.
Рис. 13.10. Пневматический УО АРД теп-
ловозов ЧМЭЗ, ЧМЭЗТ и ЧМЭЗЭ:
7 — корпус; 2 — клапан; 3 — игольча-
тый стержень; 4 — пружина задания;
5 — стопорный винт; б — фиксирующая
планка; 7 — гайка; 8 — контргайка;
9 — головка с ержня 3; 10 — квадрат-
ный хвостовик; 11. 12 — регулировоч-
ная и лабиринтная втулки
Гидродинамическая муфта полностью заполняется маслом и компрессор
работает в нагрузочном режиме.
При достижении давления рк = 0,85 МПа клапан 2 отжимается от своего
седла. За счет резкого увеличения площади клапана 2, на которую давит воз-
дух, происходит быстрое прижатие клапана к его верхнему седлу, т.е. включе-
ние УО, разобщающего канал б, соединяющий разгрузочное устройство ком-
прессора и привод клапана управления гидродинамической муфтой. Гид-
родинамическая муфта опорожняется, и компрессор останавливается.
351
Рис. 13.11. Принципиальная схема АРД в пневматической сис!еме тепловозов
ЧМЭЗ, ЧМЭЗТ и ЧМЭЗЭ с гидродинамическим приводом компрессора:
/ — дизель; 2 — зубчатый редуктор; 3 — вал насосного колеса гидромуфты;
4 — колокол гидромуфты; 5 — насосное колесо; 6 — турбинное колесо; 7—устрой-
ство подвода масла; 8 — вал турбинного колеса; 9 — зубчатое колесо; 10 — корон-
чатая шестерня; 11 — вал компресссора; 12 — компрессор; 13 — корпус золотни-
ка;/^ — золотник; 15 — возвратная пружина; 16 — управляющий орган
Рис. 13.12. Статические характеристики АРД
с пневматическим УО тепловозов ЧМЭЗ,
ЧМЭЗТ и ЧМЭЗЭ с гидродинамическим
приводом компрессора при разных скорос-
тях вращения вала дизеля: / — 750 об/мин;
2 — 350 об/мин
Новое включение компрес-
сора произойдет при снижении
давления рк до 0,75 МПа, при
котором клапан 2 под действи-
ем пружины задания 4 сядет на
свое седло в корпусе 1, разоб-
щив разгрузочные устройства и
полость над поршнем привода
золотника наполнения гидро-
муфты с главного резервуара и
сообщив их с атмосферой.
В результате статические ха-
рактеристики АРД с пневмати-
ческим УО тепловозов ЧМЭЗ,
ЧМЭЗТ и ЧМЭЗЭс гидродина-
мическим приводом компрессо-
ра имеют вид, представленный
на рис. 13.12.
352
Рис. 13.13. Принципиальная схема АРД в пневматической системе тепловоза
ТГМ6А с гидродинамическим приводом компрессора: 1 — дизель, 2 — зубчатый
редуктор; 3 — вал насоснот о колеса гидромуфты; 4 — колокол гидромуфты; 5 —
насосное колесо; б — тарированная пружина; 7 — центробежный клапан;
8 — турбинное колесо; 9 — трубка подвода масла к мембранному клапану ускорен-
ного опорожнения гидромуфты; 10 — мембранный клапан; II — вал турбинного
колеса; 12 — компрессор; 13 — корпус золотникового клапана; 14 — золотник;
15 — возвратная пружина; 16 — УО типа ЗРД
На тепловозах ТГМ6А применяются пневматические АРД с гидроди-
намическим приводом компрессора более сложные (рис 13.13), чем на
тепловозах ЧМЭЗ, ЧМЭЗТ и ЧМЭЗЭ. На тепловозах ТГМ6А компрес-
сор приводится во вращение от дополнительного вала отбора мощности
гидропередачи посредством гидродинамического привода компрессора.
АРД работает следующим образом. До скорости вращения вала дизеля
слд = 550 об/мин рабочая полость гидродинамической муфты полностью
заполнена маслом, и вал компрессора вращается со скоростью, близкой к
скорости вращения насосного колеса, достигая при (од = 550 об/мин но-
минальной скорости вращения со = 1450 об/мин. Для поддержания в
диапазоне <од = 550 -1000 об/мин приблизительно одной и той же ско-
рости ш служат три центробежных клапана 7, обеспечивающих слив
части масла из полости гидродинамической муфты при увеличении сод. При
достижении турбинным колесом 8 скорости вращения озкн = 1450 об/мин
центробежная сила, действующая на клапаны 7, становится достаточной
для того, чтобы они, преодолев силы тарированных пружин 6, перемести-
лись и своими кромками открыли окна в корпусах клапанов для слива масла
из рабочей полости. В результате скорость вращения вала компрессора не
353
Рис. 13.14. Зависимости скорости вращения
вала дизеля о>д (линия 7), вала компрессора
<ок (линия 2) и КПД ГДПК (линия 3) теплово-
за ТГМ6А от позиции контроллера машинис-
Рис. 13.15. Статические характеристики АРД с
пневматическим УО тепловозов ТГМ6А с гид-
родинамическим приводом компрессора при
разных скоростях вращения вала дизеля:
/ — 550—1000 об/мин; 2 — 350 об/мин
увеличивается. В дальнейшем
по мере рос га скорости со окна
клапанов остаются постоянно
открытыми, поддерживая тем
самым закую степень заполне-
ния полости гидродинамичес-
кой муфгы, которая обеспечи-
вает примерно номинальную
скорость (окн (рис. 13.14).
При достижении р =
= 0,85 МПа У О подает воздух
в разгрузочное устройство и в
цилиндр золотника 74; золот-
ник 74 переводится в положе-
ние, при котором прекращает-
ся подача масла в полость гид-
родинамической муфты (см.
рис. 13.13). При этом снима-
ется давление, прижимающее
мембранный клапан 10 к его
седлу, и клапан открывает от-
верстие для слива масла из по-
лости гидродинамической
муфты. По мере ее опорожне-
ния компрессор замедляет ход
и останавливается.
При достижении рк =
= 0,75 МПа УО прекращает
подачу воздуха в цилиндр над
золотником 14 и пружина 75
переводит его в положение,
обеспечивающее подачу мас-
ла в полость гидродинамичес-
кой муфты. АРД имеет стати-
ческие характеристики, пред-
ставленные на рис. 13.15.
АРД непрерывного дей-
ствия с гидродинамическим
354
Рис. 13.16. Принципиальная схема автоматического непрерывного регулятора
давления с гидродинамическим приводом компрессора: 1 — компрессор;
2 — турбинное колесо; 3 — колокол; 4 — турбинное колесо; 5 — зубчатый редук-
тор; 6 — дизель; 7 — золотник; 8 — мембрана; 9 — пружина задания; 10 — гайка
приводом компрессора работает следующим образом. При рк ниже рк1
(рис. 13.16) пружина 9 удерживает золотник 7 в крайнем верхнем положе-
нии. Отверстие для подачи масла Gj в колокол 3 гидродинамической муф-
ты полностью открыто золотником 7. Рабочая полость гидродинамичес-
кой муфты 3 полностью заполнена маслом, и турбинное колесо 2 и вал
компрессора вращаются со скоростью сок . Компрессор имеет подачу
02 шах’ и Давление рк повышается. После достижения рк значения рк] сила
давления рк на мембрану 8 управляющего органа становится больше силы
измерительной пружины 9. Мембрана начинает прогибаться вниз, а золот-
ник 7 — перекрывать отверстие для подачи масла Gj в колокол 3 гидродина-
мической муфты. Это приводит к уменьшению степени ее наполнения, ско-
рости сок и подачи компрессора Q-,. Если рк становится равным р^, золот-
ник 7 перекрывает подачу масла G] в колокол 3 гидродинамической муфты,
компрессор останавливается и подача его становится равной нулю. Поскольку
компрессор дает заметную подачу при сок > (0,13 -Ю, 17) сок тах, то АРД можно
настраивать так, чтобы гидродинамическая муфта опоражнивалась при до-
стижении этой минимальной скорости вращения. АРД непрерывного дей-
ствия является статическим, имеет простую схему и конструкцию, в нем
355
Рис 13.17. Принципиальная схема автоматического микропроцессорного регу-
лятора давления с гидродинамическим приводом компрессора: 1 —компрессор;
2 — туроинное колесо; 3 — колокол; 4 — турбинное колесо. 5 — зубчатый ре
туктор; 6 — дизель; 7 — золотник; 8 — мембрана; 9 — пружина задания,
10 — гайка; 11 — тарелка со шгоком; 12 — корпус УО; 13, 21 — датчики давле-
ния и скорости вращения; 14, 22 — АЦ11; 15 — микропроцессорный конзрол-
лер; 16 — ЦАП; 17— усилитель; 18, 19 — обмотка и сердечник электромагнита;
20 — преобразователь силы в пневматический сигнал
функции датчика давления выполняют мембрана 8 и измерительная пру-
жина 9 управляющего органа. Этот датчик давления преобразует измене-
ние регулируемой величины рк в изменение перемещения золотника 7.
В микропроцессорном АРД с гидродинамическим приводом компрес-
сора (рис. 13.17) датчик давления 13 имеет выходной аналоговый сиг-
нал, подаваемый на вход первого аналого-цифрового преобразователя
(АЦП!) 14, и далее в бортовой микропроцессорный контроллер 15, вы-
ходной цифровой сигнал которого выводится на цифроаналоговый пре-
образователь (ЦАП) 16. Выходной аналоговый сигнал ЦАП 16 усили-
вается в усилителе 77 и подается на обмотку 18 тягового электромагнита 79.
Давление р подается на вход преобразователя 20 электрического сигна-
ла (ток в обмотке 18) в пневматический (давление воздухар{), а также на
356
вход датчика давления 13. Преобразователь 20 преобразует ток в обмот-
ке 18 (значит, и силу) тяювого электромагнита 19 в давление воздуха рр
управляющее перемещением регулирующего золотника 7. С целью уче-
та условий и режимов работы пневматической системы и компрессор-
ной установки в микропроцессорном АРД применен датчик 21 скорости
вращения вала компрессора гок, который посредством второго АЦП
(АЦП2) 22 соединяется с вторым входом бортового микропроцессорно-
го кон । роллера 15. Управляющая программа бортового микропроцессор-
ною кон троллера 15 содержит требуемый алгоритм работы АРД. Напри-
мер, программа может содержать такое задание при скорости уменьше-
ния рк больше заданного значения микропроцессорный АРД должен бы-
стро увеличить сок и подачу воздуха компрессором до максимальных
значений. Эта функция может быть реализована только в микропроцес-
сорной АСРД.
Автоматические регуляторы давления с пектрическим приводом
компрессора. АСРД в пневматической системе локомотива с механичес-
ким или гидродинамическим приводом компрессора имеют малую мон-
тажную гибкость из-за наличия валопровода между дизелем и компрес-
сором. Для значительного увеличения монтажной гибкости применяют
электрический привод компрессора (в основном постоянного зока). Од-
нако все АСРД локомотивов с электрическим приводом компрессора —
релейного действия. АСРД непрерывного действия позволяет не только
значительно уменьшить скорость износа деталей цилиндро-поршневой
группы компрессора и расход смазки, но имеет большую монтажную
гибкость, что очень важно для облегчения размещения оборудования на
локомотиве.
На локомотивах с электрическим приводом компрессора в АРД при-
меняется пневмо электрический УО типа АК-НБ-1 (рис. 13.18).
УО работает следующим образом. При повышении давления до рк mdX
воздух давит на мембрану 72, которая, прогибаясь вверх, преодолевает
силу затяжки пружины задания 4 и поднимает тарелку 11 со штоком, по-
ворачивая рычаг с осями 5, б и 8 и размыкая контакты 9 и 10. При пони-
жении давления до рк контакты замыкаются под действием пружины
задания 7. Пружина 7 обеспечивает четкость переключения контакта 9.
В результате статическая .характеристика пневмоэлектрического У О типа
АК-11Б-1 имеет вид, представленный па рис. 13.19.
Элементы автоматики (УО) релейного типа имеют такие статичес-
кие параметры, как зона нечувствительности (дифференциал реле) и
357
Рис. 13.18. Функциональная (а) и принципиальная (б) схемы пневмоэлектричес-
кого УО типа АК-11Б-1:1 и 10 — неподвижные контакты; 2 и 3 — регулировочные
винты; 4 — пружина задания; 5, 6 и 8 — оси; 7 — пружина переброса контакта;
9 — мембрана; 10 — фланец; 11 — тарелка со штоком; 12 — мембрана;
13 — входной воздухопровод
Рис. 13.19. Статическая ха-
рактеристика пневмоэлект-
рического УО типа АК-1 Б-1
358
10
Рис. 13.20. Принципиальная схема электропневматического разгрузочного устройства:
1,8 — входные воздухопроводы; 2, 4 — пружины: 3, 6 — клапаны; 5,9 — вы-
ходные воздухопроводы; 7 — поршень; 10 — электропневматический вентиль
Рис. 13.21. Принципиальная схема АРД с пневмоэлектрическим УО и элект-
рическим приводом компрессора: 1 — УО типа АК-11 Б; 2 — электропневма-
тический вентиль; 3 — блок пуска компрессора; 4 — контактор пуска комп-
рессора; 5 — обмотка возбуждения электродвигателя; 6 — электродвигатель;
7 — компрессор; 8 — разгрузочное устройство
коэффициент возврата реле. Для УО типа АК-11 Б-1 эти параметры име-
ют значения: 0,15 МПа и 0,833 МПа.
При включении компрессора для облегчения его разгона открывается на
некоторое время клапан разгрузочного устройства (холостого хода) (рис. 13.20).
Принципиальная схема АРД в пневматической системе локомотива
типа ТЭМ7 с пневмоэлектрическим УО и ЭПК приведена на рис. 13.21.
359
Pin H i iditi'Ht । n< x.i
p.ll ILplH IIIFB ЛР/1 IIIHHM'l
Kl< > IpH'iri HIM y< > И KK e ipn
leCHHM npiihlWlDM KOMIiptL.il>
pu При p<l Illi IX ( l«>poLIH* llp.l
III НИЯ H.oid 1И1ГЯЯ /
1000 uO/miHI ’ I'Oirtl/MBH
("lain'itc i M> dp.ih input пн и AP/l в im< HMdiHM < г и tin itMax лом»
moihbob niiia I JM7 i пнсимн i.n i ipipH-ii MM УО и iici i ричк хим при
волом । tiMiipi ct opa нрс в i ав к hi.i на pni 11 '
13.5. Принниниа iliilic и < ipyxiурные схемы,
уС1ОЙчии<н il, mrcimi pufioiLi И iiacipoHica
aiiiouai и'нских обычных и микропроцессорных iiicicm
регулирования laii к мня
В А( 1*/1 с > и I 1рич«। им криво шм компр< с< ора искре рывною в и
С1ВИЯ(рИС 13 JLOMIIpC сор / ЛрИВОЛИН И Ol вала асинхронною дницис
ля 2 соединенною с ва и> 1 р<*| у iiipyi<iiH< и машины |км ЮЯННО1О л>ха 3
( I а юркая о6м<ика i иихронною iiiiiiaii tn поп кочена i ciaiopnoii
oOmoiki синхронною itii paiopa 4 прино ihmoio hi на ы >ия чя 5, а ро
1орная оомон а а ин ронною шт.и и к выпрямил но 6 ш по
Ч< иному В НИН. лКорНОИ ОВМШКИ Р<J ПИр,ИИЛ' И ddlHHHIJ НОС1оЯИИОЮ
юга 3 Jimi'ИИ' / к в пн в ла!ИЧ4 • । ои *-И> |см« н»1<омо1ива И1М<ржня
1а1чиюм ывасния 8 ио о ноч< ины м iioi р« д< 1вом Первою анв;ии (> ннф
ровою ирсоора шиал ы(А11111)9|' первому входу мш ропроп* <ч орною
npoipaM' 1Ир /СМОЮ J оИ|ро J irpa //> ( юро( IL bpdiiit НИЯ на la JUKI ал
1Я р< Г 1Ир,ЮН1' И fdIHHHLI HOLIOHHHOIO IOI.1 1 И HiMHp сора / И1М<
рЯ' 1СЯ Н11ЧИЮ-.1 С1-орОС1И BfldllH НИЯ И HOJJ- ЛОЧСННЫМ HOI р< К IBOM
J(II /- . О ВЛ)р I ВХОД 1Их ропрлц :L' ори<л О I он ipo 1.К ра /О По* I
шин не,срок гном п< рвою нифроана иловою Ир< <<ираювал ix HlAlll)
/ оелинсн н pBi.iM блоком нрав» иия 14 н >н<1и>ч иным • (Я<мо1И
ВЛ' J..-ИИЯ / 1 > 1И[. 1О1П< И МаН/И1И,1 HOLHiMIHHMO |Old / НО'рСД11ВОМ
60
Ри< H i 11| иипипиаш пая < ма dKKM diH л <и < и* ы p i inpi в.шия ib
И НИИ В lull BMdl И'Н I I чИ IMolVH. ЛИ JlflKilH 1ЯЮВО1П IpllH HopiHLio . j. Kilt.
/ rOMlip 'l . Op ' aiMHXpOHIILlH ЛВИ1 «К Л1. I pel', inp , .oil I >Я машин.. Но
LI OH 11 HOI О ЮК.1 / СИМ pjllllllf I ие|,1|1 |> I 11 I )BI If ,h!1l l IL (ЛИ . ill ,
6 выпрями» и. пн НМ41И i'। > ая и j i, И i i in l.b.i ми* 9 и p
1П.Н1 dild.loiO НифроВчИ пр. otipdtuBdl* ЛЬ Hl llpui р4М>4Ир>< Ml,lll МИмрОНро
Ill i < I,pill 1И . OHIpO III p // /Idl'iH. . pO IИ Вращения /2 Bl«.p И 4lh Hu
цифровой up <6|MIOI4lL IL IJ ll< рВЫИ ПИфрКаНа I KOBLlH Hp O| On O< HL
// и рвниЬкп yiijioB i ни / of a a * . - ии j ihj. ion1 и
4аШИН1.1 ши 1ОЯНИОИ» pj»a /6 вюроИ цифроаПа ioioBMH up ort.p . м.в. i< н
/7 в юрой б.'ю» управления !Н > Н1а»н р /9 tp-inn пифрап. н.ювыи
Up*, jfidi Ht.ii И b Ip* 1ИИ I lip hl‘lln<
11/11.' /6 I 4 niOpLIM IlIOHIM ) np.lll.lt ЧИЯ I . oHJdi lopt^ I / ’1 И 1141 p I
i /пом ЦА1H lli i ip ilh iGhb i правпния ш. ia
Анаши i ijh it ни HHjKib нокрь н юр кмны шр» pa ihi<h <ih
IHi/HlHa HOH> coclaild И Мм/шшни» p ;/ЛЫаН1Ь IB рим* HbiJILHLI* И‘ .!
ЮВ.1НИИ III/I 'dlMIMlOl 410 При pd'K»|. НОрШИ<Ш-1* О >1Ц 'ОР'Ш‘ IKpM'H
IK/И шм и Н1 1ОЯИНЫМ / ip.ti icpnt 1и|<и им имени пи I нр юн к ши ли на
ри< I 4 Нани, и л< (и «лн</. ип iLHia пп1о‘1и ы. nip- *ра |Ц ц iuh
1Я. I ЛИНИИ / И i .Н<Л. И14 ЛИНИЯ. lOHilio |И .о И.Л . НИЯ 0> И1Р роННО
ID IBHIal М ЛИНИЯ I И 1OIJIHO 1И на B4J Ч ИИ Р ни<||< /И1И1 И I-!
1ИНИЯ oji/iHi ик нн'.И it >\<> «ивраш ния в iao) И»ри< и. i в ил но
Рис. 13.24. Зависимость относительной мощности компрессора от относитель-
ной скорости вращения вала компрессора (линия /); зависимость относительно-
го вращающего момента на валу компрессора от относительной скорости враще-
ния вала компрессора (линия 2); зависимости относительной мощности комп-
рессора, относительной мощности скольжения асинхронного двигателя и отно-
сительной мощности на валу асинхронного двигателя от относительной скорос-
ти вращения вала компрессора и скольжения асинхронного двигателя
(линии 3, 4 и 5 соответственно)
что мощность, потребляемая компрессором, пропорциональна скорости
вращения вала сок и в диапазоне относительной скорости вращения вала
сок = (0-Ю, 17) щк она практически равна нулю. Максимальная мощность
скольжения асинхронного двигателя при S = 0,4, и она в пять раз меньше
номинальной мощности компрессора. Мощность скольжения асинхронного
двигателя возвращается на вал компрессора с помощью выпрямителя б и ре-
гулирующей машины постоянного тока 3, поэтому мощность на валу асинх-
ронного двигателя изменяется по характеристике 5. При значениях сок, близ-
ких к 1,0, момент на валу компрессора создается главным образом асинхрон-
ным двигателем, но по мере снижения сок все большую часть нагрузки вос-
принимает регулирующая машина постоянного тока. Однако так как с умень-
шением сок падает мощность компрессора, то мощности скольжения асинх-
ронного двигателя и регулирующей машины постоянного тока уменьшаются.
Описанный электрический привод компрессора характеризуется ря-
дом положительных качеств:
1) он представляет собой привод переменного тока, т.е. подключается
непосредственно к источнику переменного тока без промежуточных пре-
образователей; преобразователи в роторной цепи служат лишь для регу-
лирования скорости вращения;
2) основу привода составляет асинхронный двигатель, более простой,
надежный и не требующий такого ухода в эксплуатации, как машины
постоянного тока;
362
3) этот привод экономичен, поскольку КПД асинхронного двигателя
несколько выше КПД машины постоянного тока, а преобразованию под-
вергается лишь часть энергии, пропорциональная скольжению;
4) привод обеспечивает плавное регулирование скорости и момента и
не требует большого количества силовой контактной аппаратуры;
5) привод имеет малую мощность управления, легко поддается авто-
матизации, обладает хорошими динамическими качествами; КПД и ко-
эффициент мощности такого привода мало зависят от скорости враще-
ния вала (ок, а определяются главным образом моментом компрессора;
при изменении скорости вращения вала иэк в рабочем диапазоне эти ко-
эффициенты изменяются в пределах 0,80—0,85.
Электрический привод компрессора значительно выигрывает по сво-
им техническим и эксплуатационным качествам, если асинхронный дви-
гатель, регулирующая машина постоянного тока и выпрямитель выпол-
няются в виде одного комплексного агрегата, конструктивная схема ко-
торого приведена на рис. 13.25. Ротор 2 асинхронного двигателя и якорь 3
регулирующей машины постоянного тока расположены на одном валу.
Рис. 13.25. Конструктивная схема комплексного агрегата для привода компрессора,
объединяющего в одном корпусе асинхронный двигатель, регулирующую машину
постоянного тока и выпрямитель: / — статор асинхронного двигателя; 2 — ротор
асинхронного двигателя; 3 — якорь регулирующей машины постоянного тока;
4 — обмотка возбуждения регулирующей машины постоянного тока; 5 — кол-
лектор регулирующей машины постоянного тока; 6 — щетки регулирующей ма-
шины постоянного тока; 7 — выпрямитель; 8 — контактные кольца; 9 — щетки
асинхронного двигателя, 10 — станина (корпус) агрегата; 11 — вал агрегата
363
Полюсы регулирующей машины постоянного тока и статор асинхронно-
го двигателя смонтированы в общей станине. Обмотка ротора асинхрон-
ного двигателя соединена с кольцами Л’. Напряжение ротора через кольца
и выпрямитель подается на якорь регулирующей машины постоянного
тока 3 (см. рис. 13.23). Выпрямитель смонтирован внутри станины 10.
АСРД в пневматической системе локомотива работает следующим
образом При р ниже рх (ем. рис. 13.23) ток возбуждения регулирую-
щей машины постоянного тока 3 равен нулю и валы асинхронного дви-
гателя 2, регулирующей машины постоянного тока 3 и компрессора 1
вращаются со скоростью wk П1ах, компрессор имеет подачу воздуха Q2 ,
и давление рк повышается. При достижении давлением р значения рк|
начинается регулирование скорости вращения вала <ок изменением тока
возбуждения регулирующей машины постоянного тока 3. Если при уста-
новившейся скорости (ок увеличить ток возбуждения регулирующей ма-
шины постоянного тока, то возрастет ее ЭДС, что приведет к уменьше-
нию тока в цепи выпрямителя бив роторной обмотке асинхронного дви-
гателя 2. В результате у меньшится вращающий момент асинхронного дви-
гателя, и скорость сок начнет падать. Уменьшение а>к происходит до тех
пор, пока момент, развиваемый асинхронным двигателем и регулирую-
щей машиной постоянного тока, не возрастет до значения момента со-
противления компрессора 1 и ток в выпряхштельной цепи не достигнет
установившегося значения. При этом сок будет меньше, чем до момента у вели-
чения тока возбуждения регулиру ющей машины постоянного тока 3. На-
оборот, при уменьшении тока возбуждения регулирующей машины по-
стоянного тока <ок увеличится. Повышение давлениярк приводит к уве-
личению тока возбуждения регулирующей машины постоянного тока,
у меньшению сок и подачи воздуха компрессором Q^. Когда станет рав-
ной расходу насту пит установившийся режим работы АСРД и давле-
ние р будет постоянным. Когда давление р становится равным значе-
нию /?кэ, ток возбуждения регулирующей машины постоянного тока 3
становится максимальным, компрессор останавливается и подача им воз-
ду ха становится равной нулю. Поскольку компрессор дает заметную пода-
чу сжатого воздуха при скорости вращения вала сок > (0,1 З-Д), 17) сок тах,
то АСРД можно настраивать так, чтобы ток возбуждения регулирующей
машины постоянного тока 3 становился максимальным при достижении
этой минимальной скорости вращения (см. рис. 13.24). Таким образом,
при разных расходах воздуха из пневматической системы локомотива
АСРД всегда будет поддерживать подачу воздуха Q-., равную расходу
воздуха Oj при изменении давления в диапазоне от рк| до р.-,.
Управляющая прщрамма бортового микропроцессорного контролле-
ра реализует гребуемый алгоритм работы микропроцессорного АРД.
Например. нрО1рамма может содержать такое задание: при скорости
уменьшения рк, повышающей iaтайное значение. АРД должен быстро
увеличить скорость юк и подачу воздуха компрессором Q-, до максималь-
ных значений. И а фу нкция не может быть реализована в cvшествующих
АСРД
АСРД в пневматической сети локомотива является замкнутой автома-
тической энергетической системой. Известно, что такие системы при
определенном сочетании значений статических и динамических пара-
метров их элементов, условий и режимов работы могут работать некаче-
ственно и шже неустойчиво, например, в режиме автоколебаний. Задачи
обеспечения устойчивости и качественной работы микропроцессорных
систем решаются программными средствами с использованием методов
теории автоматических систем.
С целью уменьшения времени разгона при пуске электрического при-
вода компрессора в микропроцессорной АСРД применен разгрузочный
клапан 27. подключенный посредствоУ! ЦАП4 22 к четвертому выходу
микропроцессорного контроллера 10 (рис. 13.26). При включении с по-
мощью контактора 18 включается клапан 2/ и соединяет нагнетатель-
ную полость компрессора 1 с атмосферой. При достижении скорости вра-
щения вала сок, например, значения сок = (0,13-Ю,17) сок клапан 21
выключается и компрессор подает сжатый воздух в пневматическую
систему 7.
Однако, несмотря на применение в релейных АСРД разгрузочных
клапанов, наблюдается большое число выходов из строя ЭПК на элект-
ровозах по причине перегрева обмоток электродвигателей. Данная мик-
ропроцессорная АСРД может быть применена и на элекгрическоу! тяго-
вом подвижном составе. При этом используются другие источники пере-
менного тока (рис. 13.27). Источник переменного напряжения в этом слу-
чае содержит понижающий трансформатор 5 и машинный расщепитель
фаз 4. На электровозах двойного питания (рис. 13.28) в микропроцессор-
ной АСРД источник переменного напряжения содержит два преобразо-
вателя, состоящих из регуляторов напряжения 23, промежуточных кон-
туров и инверторов 24. Регулятор напряжения понижает напряжение зве-
на постоянного напряжения тягового преобразователя с 2800—4000 В
365
Рис. 13.26. Принципиальная схема автоматической системы регулирования дав-
ления в пневматической системе дизельного тягового транспортного средства
с разгрузочным клапаном:
I — компрессор: 2 — асинхронный двигатель: 3 — регулиру ющая машина по-
стоянного тока; 4 — синхронный генератор; 5 — тепловой двигатель (дизель);
6 — выпрямитель; 7 — пневматаческая система; £ — датчик давления; 9 — пер-
вый аналого-цифровой преобразователь; 10— программируемый микропро-
цессорный контроллер; 11 — датчик скорости вращения; 12 — второй аналого-
цифровой преобразователь; 13 — первый цифроаналоговый преобразователь;
14 — первый блок управления: 15 — обмотка возбуждения регу трующей маши-
ны постоянного тока; 16 — второй цифроаналоговый преобразователь: 1 ~ — вто-
рой блок управления; 18 — контактор; 19 — третий цифроаналоговый пре-
образователь; 20 — третий блок управления; 27 — разгрузочный клапан;
22 — четвертый цифроаналоговый преобразователь
до 1050 В. а инвертор 24 формирует из полученного напряжения посто-
янного тока трехфазну ю сеть с номинальными напряжением S20 В и ча-
стотой 50 Гц. К выходу каждого вспомогательного преобразователя под-
ключены трехфазные трансформаторы 25. понижающие напряжение до
3S0 В. Вспомогательные цепи переменного тока разделены на сеть для
потребителей, питаемых регулируемым напряжением и частотой, и на
366
Рис. 13.27. Принципиальная схема автоматической системы регулирования давле-
ния в пневматической системе электровоза переменного тока-
1 — компрессор; 2 — асинхронный двигатель; 3 — регулирующая машина по-
стоянного тока; 4 — машинный расщепитель фаз; 5 — понижающий транс-
форматор; 6 — выпрямитеть; " — пневматическая система; 8 — датчик давле-
ния; 9 — первый аналого-цифровой преобразователь; 10 — программируемый
микропроцессорный контроллер; 11 — датчик скорости вращения; 12 — второй
аналого-цифровой преобразователь; 13 — первый цифроаналоговый преобразо-
ватель: 14 — первый блок управления; 15 — обмотка возбуждения регулирую-
щей машины постоянного тока; 16 — второй цифроаналоговый преобразова-
тель: 1 ~ — второй блок у правления; 18 — контактор; 19 — третий цифроанало-
говый преобразователь; 20 — третий блок управления тяговым транспортным
средством; 21 — токоприемник; 22 — контактная сеть
сеть для потребителей, питаемых фиксированным напряжением 380 В.
50 Гц (насосы, компрессоры и вспомогательное оборудование).
В пневматической системе локомотивов при работе АСРД давление
р изменяется в пределах от до р^. Компрессор включается при рк =
= ркХ и отключается при рк =р^>- При этом компрессор работает с макси-
мальной подачей сжатого воздуха Q-, и максимальной скоростью вра-
щения вала _av.
К 1НАЛ
367
Рис. 13.28. Принципиальная схема автоматической системы регулирования
давления в пневматической системе злектровоза двойного питания.
I — компрессор; 2 — асинхронный двигатель; 3 — регулирующая машина
постоянного тока; 6 — выпрямитель; 7 — пневматическая система. 8— датчик
давления; 9 - первый аналого-цифровой преооразователь, 10— программи-
руемый микропроцессорный контроллер; // датчик скорости вращения;
12 — второй аналого-цифровой преобразователь; 13 — первый цифроанало-
говый преобразователь; 14 — первый блок управления; 15 — обмогка воз-
буждения регулирующей машины постоянною тока, 16 — второй цифроанало-
говый преобразователь; /7 — второй блок управления тятовым транспортным
средством; 18— контактор; 19 — третий цифроаналоговый преобразователь;
20 — третий блок управления, 21 — токоприемник, 22 — контактная сель; 23 —
регулятор напряжения; 24 инвертор; 25 — понижающий трансформатор
Глава 14. АВТОМАТИЧЕСКАЯ ЗАЩИТА
АГРЕГАТОВ И СИСТЕМ ЛОКОМОТИВОВ
14.1. Классификация автоматических систем защиты
и предъявляемые к ним гребования
Aiperaibi и системы юпловоза нормально функционируют только при
определенных значениях физических величин, характеризующих их состо-
яние. Эти значения должны быть равны номинальным заданным и ни мало
отличаться аг них, г.е. отклонения их должны нахо ппься в определенных
допустимых по условиям работы агрегата или системы пределах При зна-
чительных отклонениях могул возникая» аварийные условия работы. Для
тою чтобы при ном сохранить рабглоспособносгь агрегатов или систем,
применяются различные автомат чес к не системы зашиты (АСЗ) от аварий-
ных режимов работы агрегата тепловоза по предельным значениям вели-
чин, определяющих их состояние. АСЗ ио физической природе величин,
предельные значения которых используются для приведения в гействие ав-
юмшическою устройспза защиты (АУЗ), делятся на классы АСЗ по пре-
дельным значениям частоты вращения вала, юка короткого замыкания, тем-
пературы теплоносителей, давления, уровня теплоносителей (см рис. 6.1).
АСЗ состоит из двух основных частей (рис. 14.1): объекта автомати-
ческой защиты (ОЗ) и АУЗ. Она содержит такие же функциональные >ле-
менты, как и АС Р или АСУ. О гнако существенное от гичие функциональ-
ной схемы АСЗ от схемы АСР заключается в том, что такие ттемен гы,
как ОЗ, регулирующий орган РО и исполнительный механизм ИМ, мо-
гут входить в состав разных АСР, так как часто объект защиты явчяезся и
объектом регулирования. Подавляющее большинство \СЗ являются ус-
тройствами релейного действия, но пому они содержа! нелинейные ) ie
меты автоматики (различные реле).
369
Рис. 14.1. Функциональные схемы автоматической системы защиты:
а — сокращенная; б — подробная
Эффективность действия АЗС зависит от статических и динамичес-
ких свойств как объекта защиты, так и автоматического устройства за-
щиты. Одним из основных требований к устройствам защиты является
обеспечение необходимого быстродействия и надежности. Они должны
содержать элементы для быстрого и удобного включения в работу после
срабатывания.
К АСЗ дизель-генераторов и дизель-гидравлических установок по
предельному значению частоты вращения вала предъявляется требова-
ние мгновенного выключения органа подачи топлива в дизель при дос-
тижении частоты вращения на 10—15%, превышающей номинальное
значение.
Для обеспечения надежной работы электропередачи локомотив должен
быть оборудован АСЗ, удовлетворяющими следующим требованиям.
Быстродействие. Цепь короткого замыкания должна отключаться с
возможно большей скоростью для ограничения размеров разрушения тя-
гового электрооборудования. Полное время отключения складывается из
времени срабатывания управляющего (измерительного, сравнивающего и
усилительного устройств) и исполнительного органов — регулирующего
устройства (исполнительного механизма и регулирующего органа).
Чувствительность. Для того чтобы АСЗ реагировала на отклонения
от нормального режима, которые возникают при коротких замыканиях,
она должна обладать определенной чувствительностью в пределах уста-
новленной зоны ее действия. Система защиты должна действовать не
только при металлическом коротком замыкании, но и при замыкании че-
рез переходное сопротивление, определяемое электрической дугой. Чув-
370
ствительность системы защиты должна быть такой, чтобы срабатывание
происходило при коротком замыкании в минимальных режимах работы
системы, т.е. в таких, когда изменение величины, на которую реагирует
система (ток, напряжение и др.), будет наименьшим. Для электропереда-
чи тепловозов такими режимами будет работа на первых позициях кон-
троллера машиниста.
Надежность. Система защиты должна безотказно работать в преде-
лах установленной зоны при коротких замыканиях и не должна работать
неправильно в непредусмотренных режимах. Надежность системы за-
щиты обеспечивается принципом построения, качеством конструкции,
количеством элементов в ней, качеством монтажных материалов, их мон-
тажа и контактных соединений, а также техническим обслуживанием ее
в процессе эксплуатации.
Селективность. Селективностью или избирательностью системы за-
щиты считается ее способность отключать при коротких замыканиях толь-
ко поврежденный участок электропередачи или тот, который может быть
поврежден. Так при пробое вентилей в параллельной ветви плеча выпря-
мительной установки с предохранителями перегорание плавкой вставки
предохранителей приводит к отключению только поврежденной ветви.
При этом сохраняется работоспособность силовой части электропереда-
чи мощности, и аварийный режим устраняется автоматически.
Кроме того, автоматические устройства защиты агрегатов и систем
локомотивов и дизель-поездов должны иметь небольшие габариты и мас-
су, быть устойчивыми к вибрациям и тряске, просты в техническом об-
служивании и ремонте.
14.2. Автоматические системы защиты дизеля
Дизель-генератор (или дизель-гидравлическая установка) является
объектом защиты по предельному (максимальному) значению частоты
вращения вала, статические и динамические свойства которого были оп-
ределены при рассмотрении его функций как объекта регулирования (ов.
Скорость увеличения <ов, как известно, обратно пропорциональна посто-
янной времени Ту, поэтому она тем меньше, чем больше момент инер-
ции и меньше фактор устойчивости дизель-генератора. Методика опре-
деления этих величин рассмотрена ранее.
Дизель-генератор в совокупности с АУЗ (предельным регулятором и
выключателем) образуют замкнутую АСЗ, которая размыкается при сра-
батывании устройства защиты. В АЗС дизель-генератора (или дизель-
371
Рис. 14.2. Принципиальная схема автома-
тической системы защиты дизель-гене-
ратора по предельному (максимальному)
значению частоты вращения его вала:
1 — тяговый генератор; 2 — вал дизель-
генератора; 3 — пружина задания;
4 — дизель; 5 — топливная аппаратура;
6, 10—-тяги; 7, 9,11 — рычаги; 8 — пру-
жина силовая; 12—кольцо: 13— грузик
гидравлической установки) по пре-
дельному (максимальному) значе-
нию (ов функции измерительного
устройства (ИУ) выполняют меха-
нические датчики центробежного
типа, выходным сигналом х кото-
рых является сила, пропорциональ-
ная центробежной, создаваемой
грузиками 13 (рис. 14.2). Эта сила
сравнивается с силой х затяжки
пружины задания 3, которая явля-
ется составной частью задающего
устройства ЗУ. Выходным сигна-
лом сравнивающего устройства
(кольцо 12) обычно является пере-
мещение х , которое с помощью
рычажной системы (детали б, 7 и
9) преобразуется в движение тяги
10, обеспечивающего воздействие
сжатой пружины 8 — исполнитель-
ного механизма ИМ на механизм перемещения реек топливных насосов
в положение нулевой подачи топлива, функции регулирующего органа
РО выполняет топливная аппаратура 5. Таким образом, при достижении
сов значения (1,104-1,15) сов ном приходит в действие АУЗ и выключает
подачу топлива в дизель.
Системы смазки и масляного охлаждения двигателя являются объектом
защиты по предельным (наименьшим) значениям давления масла. Динами-
ческие свойства системы смазки двигателя определяются характером изме-
нения давления масла во времени после скачкообразного изменения часто-
ты вращения вала дизеля. Можно считать, что такая система обладает свой-
ствами пропорционального звена. Она в совокупности с автоматическими
устройствами защиты образует АСЗ дизеля по давлению масла.
В АСЗ дизеля 10 по предельным (наименьшим) значениям давления мас-
ла р функции управляющего органа (УО) выполняют реле давления 8 и 13
(рис. 14.3). При давлении масларм нижерм1 (например, 300 ±25 кПа) запре-
щается работа дизеля под нагрузкой на позициях Пк > Пк] (например, на /7),
а при давлении рм ниже (например, 50 ±10 кПа) дизель должен быть
остановлен. Реле давления 8 настраивается на срабатывание при /?м =рм1.
372
Рис. 14.3. Принципиальная схема автоматической системы защиты дизеля
по предельным значениям давления масла:
1.4 реле промежуточные; 2 — контроллер машиниста; 3 — тяговый генера-
тор; 5, 7 — контакторы в цепях возбуждения; 6 — возбудитель; 8, 13 — реле
давления; 9— регулятор частоты вращения; 10 — дизель; 11 —теплообменник;
12 — насос
При давлении ниже рм1 замыкаются контакты реле 13 в цепи питания ка-
тушки промежуточного реле 1. Если в это время рукоятка контроллера 2
находится на позициях выше Пк1, то в цепи катушки реле 1 замкнуты также
контакты реле 4 и реле 1 включается. Реле 1 разрывает цепь питания кату-
шек контакторов 5 и 7, через контакты которых подаются токи возбуждения
к возбудителю 6 и тяговому генератору 3. Кроме того, реле 1 включает сиг-
нализацию. Если р станет меньше pN12, то разомкнутся контакты реле дав-
ления 13 в цепи питания катушки электромагнита (блок-магнита) выключе-
ния регулятора частоты вращения вала дизель-генератора 9.
В АСЗ дизеля по предельному (наибольшему) давлению газов в карте-
ре функции УО выполняют электрические дифференциальные маномет-
ры. При предельно допустимом давлении газов контакты манометра сма-
чиваются поднявшейся жидкостью (водяным раствором хромпика и соли)
и электрическая цепь питания промежуточного реле замыкается; реле вклю-
чается и своими контактами разрывает цепь питания катушки электромаг-
нита выключения регулятора частоты вращения вала дизель-генератора.
Дизель (вернее, его системы охлаждения) также является объектом
защиты по предельным (максимальным и минимальным) значениям тем-
373
Рис. 14.4. Принципиальная схема автоматической системы защиты дизеля по
предельному значению температуры теплоносителя:
1.3 — контакторы; 2 — возбудитель; 4 — реле промежуточное; 5 — термореле;
6 — дизель; 7 — датчик температуры; 8 — термобаллон; 9 — теплообменник;
10 — насос; // — тяговый генератор
пературы теплоносителей. Статические и динамические свойства сис-
тем охлаждения были определены при рассмотрении их функций как
объектов регулирования температуры. Скорость изменения регулируе-
мой температуры Т обратно пропорциональна постоянной времени, по-
этому она тем меньше, чем больше теплоемкость и меньше фактор ус-
тойчивости СО. Методика определения этих величин рассмотрена ра-
нее. С повышением Т'ъз скорость изменения Тр возрастает, так как умень-
шается постоянная времени, это усложняет условия работы устройства
защиты. СО в совокупности с устройством защиты образуют замкнутую
АСЗ, которая размыкается при срабатывании устройства защиты.
В АСЗ дизеля 6 (рис. 14.4) по предельным (максимальным) значени-
ям температуры теплоносителей (воды на выходе из дизеля, масла или
наддувочного воздуха на его входе) функции УО выполняет термореле 5.
Контакты термореле включены в цепь катушки реле 4. При достижении
теплоносителем температуры Г предельного значения контакты термо-
реле 5 замыкаются и включают реле 4, которое своими контактами раз-
рывает цепи питания катушек контакторов 7 и 3 в цепях возбуждения
возбудителя 2 и тягового генератора 11. Эффективность работы системы
защиты в данном случае зависит от скорости изменения Г и инерцион-
ности (постоянной времени) датчика температуры термореле 5. Для по-
вышения эффективности работы системы защиты необходимо применять
в УО (термореле) малоинерционные датчики температуры и улучшать
условия теплопередачи от теплоносителя к термобаллону 8 датчика тем-
374
пературы. На некоторых локомотивах применяются АСЗ дизеля по пре-
дельным (минимальным) значениям температуры воды и масла. При тем-
пературах ниже предельных нельзя осуществить пуск дизеля.
Для защиты дизеля от перегрева при работе с недостаточным ко-
личеством воды в системах охлаждения на локомотивах и дизель-по-
ездах иногда применяют АСЗ по уровню воды в расширительном баке.
В этом случае функции УО выполняют реле уровня обычно с датчи-
ком уровня поплавкового типа. Датчик является безынерционным зве-
ном системы. При уровне воды в баке ниже предельного система за-
щиты останавливает дизель.
14.3. Автоматические системы защиты
передачи мощности
Для предотвращения серьезных последствий при возникновении ава-
рийных режимов электропередачи мощности должны иметь АСЗ, обес-
печивающие работоспособность передачи наиболее надежными и про-
стыми средствами. АУЗ должны обеспечивать защиту всех агрегатов пе-
редачи. Учитывая, что самым чувствительным к коротким замыканиям
агрегатом является тяговая выпрямительная установка, техническая про-
блема ее защиты является основной, а защита остальных агрегатов осу-
ществляется попутно. Поскольку максимальные значения токов корот-
кого замыкания достигаются в течение полупериода питающего напря-
жения после начала короткого замыкания, особое внимание уделяется
повышению быстродействия АУЗ.
Тяговая выпрямительная установка как объект защиты является ма-
лоинерционной, например, максимальное значение выпрямленного тока
44 кА наблюдается через 0,005 с после короткого замыкания.
Защита тяговой выпрямительной установки от внешних коротких за-
мыканий осуществляется тремя способами: размыканием силовой цепи,
коротким замыканием цепи между тяговым генератором и тяговой вып-
рямительной установкой, отключением системы возбуждения тягового
генератора. Первые два способа получили широкое распространение на
электрическом подвижном составе. Они обеспечивают достаточно высо-
кое быстродействие, но на автономных локомотивах вызывают необхо-
димость применения дополнительного тягового электрооборудования
(быстродействующие выключатели, короткозамыкатели, фидерные пре-
дохранители), что значительно увеличивает габариты и стоимость элек-
тропередачи.
375
В тепловозной электропередаче наиболее просто защита от внешних
коротких замыканий достигается отключением системы возбуждения
тягового генератора при помощи реле максимального тока и промежу-
точного реле с размыкающими контактами в цепи катушек контактора
возбуждения. При таком устройстве зашиты время срабатывания состав-
ляет менее 0,1 с. Исследованиями установлено, что если время срабаты-
вания устройства защиты превышает 0,005 с (время достижения макси-
мума тока короткого замыкания в первом импульсе), то с точки зрения
защиты вентилей тяговой выпрямительной установки, она не является
эффективной. В этом случае для обеспечения надежной работы выпря-
митель должен иметь запас по току, чтобы в эксплуатации р-и-переходы
вентилей не нагревались до предельной температуры, а воздействие тока
короткого замыкания не вызывало бы ее превышения.
Не менее важное значение имеет защита от внутренних коротких за-
мыканий. В этом случае также имеет большое значение время срабаты-
вания АУЗ. Высокая кратность токов внутреннего короткого замыкания
через исправные вентили повышает вероятность выхода их из строя.
Кроме того, прохождение больших токов через пробитый вентиль может
привести к его разрыву и повреждению выпрямительной установки.
Наибольшее распространение получили устройства защиты с приме-
нением реле, включенных по специальной схеме, чувствительных к появ-
лению внутренних коротких замыканий и воздействующих на контактор
возбуждения тягового генератора. Быстродействие этих устройств недо-
статочно для ограничения максимума тока короткого замыкания. Кроме
того, после срабатывания системы защиты необходимо обнаружить и от-
ключить пробитое плечо, на что потребуется значительное время.
Более эффективно применение для защиты от внутренних коротких
замыканий быстродействующих плавких предохранителей. Такие пре-
дохранители изготавливают на ток одного вентиля и включают в каждую
параллельную цепь вентилей. В случае сквозного пробоя плеча весь ток
короткого замыкания будет протекать через поврежденную ветвь, что
приведет к перегоранию плавкой вставки и отключению повреждений
ветви. При этом цепь короткого замыкания отключится раньше, чем ток
достигнет максимального значения, а выпрямительная установка сохра-
нит работоспособность, хотя допустимая мощность ее уменьшится. Про-
битые вентили и предохранители заменяются на стоянке локомотива или
в депо. Так как быстродействующие малогабаритные предохранители не
изготавливаются серийно, а при большом количестве параллельных вет-
376
вей их требуется много, то эти устройства защиты пока не нашли широ-
кого применения.
Все современные тепловозы содержат системы защиты от коротких
замыкании в силовой цепи электропередачи. Защита электропередач ло-
комотивов с силовыми неуправляемыми вентилями может осуществлять-
ся как с помощью реле перегрузок, реле максимального тока, так и с по-
мощью быстродействующих предохранителей. На локомотивах, элект-
ропередачи которых содержат тиристоры, защита осуществляется при
помощи быстродействующих предохранителей или быстродействующих
выключателей.
На отечественных локомотивах применяются следующие АСЗ пере-
дач мощности. В АСЗ тяговой выпрямительной установки по предельно-
му (наибольшему) значению тока внешних коротких замыканий или тока
перегрузки в тяговом режиме функции УО выполняют реле с катушками,
включенными в выходную цепь датчика выпрямленного тока генерато-
ра, а функции ЗУ — резисторы, с помощью которых настраивают систе-
мы защиты. Реле при срабатывании включает промежуточное реле, пос-
леднее самоблокируется, разрывает цепь питания катушек контакторов в
цепях возбуждения возбудителя и тягового генератора, включая свето-
вую сигнализацию о сбросе нагрузки.
В АСЗ тяговой выпрямительной установки по значению тока между
«нулевыми» точками «звезд» тягового генератора функции УО выполня-
ет электромагнитное реле, катушка которого включена между нулевыми
точками «звезд» статорной обмотки генератора. При пробое плеча тяго-
вой выпрямительной установки реле срабатывает и своими контакта-
ми разрывает цепь питания катушек контакторов в цепях возбуждения
возбудителя и тягового генератора и включает световую сигнализацию.
Во включенном положении реле удерживается защелкой.
В АСЗ электропередачи мощности по предельному (наименьшему)
значению сопротивления изоляции функции УО выполняет электромаг-
нитное реле (реле заземления), катушка которого включена между кор-
пусом тепловоза и проводами силовой цепи, связанными с клеммами
«минус» тягового генератора или выпрямительной установки. Последо-
вательно с катушкой реле включены токоограничиваюший резистор, вы-
полняющий функции задающего устройства, и выключатель реле. Реле
включается при пробое изоляции на корпус в любой точке силовой цепи
от клемм «плюс» выпрямительной установки или тягового генератора
до клемм зажимов якорей тяговых электродвигателей, а также при «круго-
377
вом огне» на коллекторе любого тягового электродвигателя. В данной
АСЗ ток катушки реле является косвенным показателем сопротивления
изоляции. При включении реле его контакты размыкают цепи питания
катушек контакторов в цепях возбуждения возбудителя тягового генера-
тора и включают световую сигнализацию. Реле удерживается во вклю-
ченном положении защелкой.
В АСЗ тяговых электродвигателей по предельным (наибольшим) зна-
чениям частоты вращения функции УО выполняют различные реле (реле
боксования), которые срабатывают не в зависимости от частоты враще-
ния валов тяговых электродвигателей, а в зависимости от разности по-
тенциалов между цепями электродвигателей. При срабатывании реле
мощность тягового генератора снижается.
В АСЗ локомотива или дизель-поезда по предельному (наименьше-
му) значению давления воздуха в пневмосистеме (тормозной магистра-
ли) функции УО выполняют пневмоэлектрические реле давления. При
давлении воздуха ниже допустимого значения контакты реле разрывают
цепи питания катушек контакторов в цепях возбуждения возбудителя
тягового генератора и включают световую сигнализацию. Контакты реле
замыкаются при давлении воздуха в пневмосистеме 500 кПа.
14.4. Автоматические бортовые системы
технической диагностики
Для контроля и анализа технического состояния агрегатов тепловоза в
процессе их функционирования используются бортовые автоматические
устройства и системы технической диагностики. Первый опыт примене-
ния их на подвижном составе связан с разработкой машин централизован-
ного контроля и управления (МЦКУ): машина ПУМА-Э и МЦКУ «Дель-
та» (СССР), машины SEARCH и DAS (США). В задачи автоматизирован-
ного контроля этих систем входило: аналого-цифровые преобразования
результатов измерения контролируемых величин, обнаружение и анализ
их отклонений от заданных значений, выдача сигналов устройствам уп-
равления, регулирования, защиты и сигнализации. Результаты аналого-
цифрового преобразования сигналов измеряемых величин использовались
для цифровой регистрации измерений по вызову и ввода данных в ЭВМ.
Бортовая (встроенная) система (установка) централизованного конт-
роля и управления УЦКУ-Т содержала четыре основных блока (рис. 14.5):
ввода и преобразования информации БВПИ; обработки информации БОИ;
вывода информации БВИ; питания БП. Кроме того, система содержала
378
, датчики аналоговых сигналов с
измерительными преобразова-
телями ИП аналоговых сигна-
лов в сигнал напряжения со
стандартным уровнем 0—5 В
или тока 0—5 мА, датчики дис-
кретных сигналов с релейными
повторителями РП, а также вы-
носные устройства: пульт уп-
равления П, цифровое табло
ЦТ, табло сигнализации ТС и
внешнее запоминающее уст-
ройство ВЗУ.
Аналоговые выходные сиг-
налы датчиков от ИП подава-
лись на вход коммутатора сиг-
налов высокого уровня КСВУ
В качестве коммутирующих эле-
ментов в КСВУ использовались
бесконтактные МОП-транзис-
торные ключи, обладающие вы-
соким быстродействием и боль-
шой надежностью. С выхода
КСВУ эти сигналы поступали на
вход аналого-цифрового преоб-
разователя АЦП, представляю-
щего собой программный авто-
мат, управляемый внешним сиг-
налом. Дискретные сигналы по-
От датчиков От контрольных точек
аналоговых сигналов (дискретные сигналы)
Рис. 14.5. Принципиальная блок-схема ав-
томатической бортовой комплексной си-
стемы контроля, управления, диагности-
ки и защиты локомотива (типа УЦКУ-Т)
давались на вход коммутатора дискретных сигналов КДС.
Функции устройства управления в УЦКУ-Т выполнял программиру-
емый контроллер ПК, содержащий микропроцессор МП, оперативное
ОЗУ, постоянное ПЗУ или полупо стоя иное ППЗУ запоминающие уст-
ройства. В ПЗУ и ППЗУ хранились программы обработки информации и
нормативно-справочная информация: заданные значения контролируе-
мых величин, масштабные коэффициенты, адреса контрольных точек.
Обмен информацией между модулями контроллера осуществлялся по
внутреннему интерфейсу.
379
На рабочем месте машиниста локомотива был установлен специаль-
ный пульт управления П, на котором располагались тумблеры и кнопки,
с помощью которых производилось обращение в ПК, для ввода и вывода
информации.
В качестве средств представления информации использовалось два
табло световой сигнализации ТС на 20 величин каждое для индика-
ции отклонений текущих значений контролируемых величин от за-
данных предельных. Если отклонение выходило за пределы заданно-
го предупредительного диапазона, то это сигнализировалось ровным
светом, а аварийного — мигающим. Здесь же были расположены три
цифровых табло ЦТ.
В качестве ВЗУ использовался кассетный накопитель на магнитной
ленте (КНМЛ), который имел следующие основные технические данные:
длина магнитной ленты 90 м; скорость движения ленты 0,3—0,5 м/с;
ширина ленты 12,7 мм; плотность записи 32 бит/мм; число дорожек 9;
емкость кассеты 25 Мбит; скорость записи и считывания 1400 байт/с.
Для питания системы УЦКУ-Т от бортовой сети на тепловозе был
предусмотрен преобразователь напряжения (ПН) мощностью 2,5 кВ А.
Он содержал выпрямители и стабилизаторы напряжения постоянного
тока, которым питались различные блоки системы. Для уменьшения вли-
яния помех в схему системы были включены специальные модули с галь-
ваническим разделением цепей (МГР).
К встроенной системе предъявлялись высокие требования по надеж-
ности и точности измерений, особенно по каналам управления и защи-
ты. Необходимые характеристики надежности могли быть достигнуты
при использовании соответствующей элементной базы и введении аппа-
ратурной избыточности путем резервирования наиболее ответственных
узлов. В частности, в экспериментальном образце системы резервирова-
ние контроллера было выполнено путем организации работы двух сис-
тем УЦКУ-Т от одного ПК, который управлял двумя установками, осу-
ществлял обмен информацией между двумя установками и обрабатывал
информацию о состоянии обеих секций тепловоза. При этом второй ПК
находится в режиме «горячего» резервирования. Переключение систем
на резервный контроллер производил модуль контроля (МК) в случае
обнаружения неисправностей ПК, ОЗУ или ПЗУ. При получении сигна-
ла о неисправности в системе контроля и управления резерва формиро-
вался сигнал повторного пуска управляющего ПК и, если при этом сиг-
нал неисправности повторялся, формировалась команда на включение
380
резервного ПК. Установка централизованного контроля и управления
представляла собой комплексную автоматическую систему контроля,
управления, диагностирования и защиты, которая позволяла на единой
информационной базе обеспечить решение различных задач.
К современным автоматическим системам защиты следует отнести
«Унифицированную микропроцессорную систему управления и диаг-
ностики» (МСУД), разработанную специалистами ВЭлНИИ и ВНИКТИ.
В МСУД совмещены функции управления и диагностирования. МСУД
состоит из унифицированной и специализированной частей (см. рис. 14.6).
Унифицированная часть неизменна для всех типов и серий локомотивов,
а специализированная является блочно-модульной, и ее состав зависит
от конкретного типа локомотива. Унифицированная часть состоит из сле-
дующих конструктивно законченных функциональных частей: блок цен-
тральный координирующий (БЦК), дисплейный модуль (ДМ) со встро-
енной клавиатурой или координатно-указательным устройством, изме-
ритель температурный (ИТ), блок управления локомотивом (БУЛ), уст-
ройство энергонезависимое запоминающее (УЭНЗ), программное обес-
печение, отладочные программно-аппаратные средства. МСУД обеспе-
чивает бесконтактное управление электрической схемой локомотива, кон-
троль режимов работы локомотивного оборудования, диагностику основ-
ных систем и агрегатов с выдачей информации машинисту о состоянии
локомотивного оборудования.
Во ВНИКТИ разработаны локальные специализированные блоки
МСУД применительно к тепловозу переменно-постоянного тока, блок
регулирования мощности тягового генератора, регулятор напряжения
бортовой сети, блок управления тормозным компрессором, преобразова-
тели температуры теплоносителей в системах охлаждения. Все эти бло-
ки являются полностью автономными устройствами. Каждый из них
имеет свой набор датчиков и выполняет конкретные функции управле-
ния и диагностики. Так, например, регулятор напряжения бортовой сети
помимо поддержания постоянного напряжения в локомотивной сети осу-
ществляет ограничение тока заряда аккумуляторной батареи, определе-
ние сопротивления изоляции цепей управления, контроль режимов ра-
боты, в том числе и температурных, стартер-генератора. Вся управляю-
щая и диагностирующая информация передается по локомотивной шине
в БЦК для анализа и далее в ДМ и УЭНЗ для регистрации. Унификация
локальных блоков достигается применением однотипных входных и вы-
ходных модулей и отдельных элементов.
381
382
Электровоз ЭП1 — первый российский серийный электровоз, обору-
дованный микропроцессорной системой управления и диагностики
МСУД1, обеспечивающей управление тяговым и вспомогательным при-
водом и оборудованием, диагностику силового оборудования и цепей
управления, управление режимами движения электровоза в ручном и
автоматическом режимах, а также в режиме автоведения (автомашинис-
та), работу с машинистом в диалоговом режиме с сообщением о сбоях в
работе оборудования, запись диагностической информации на энергоне-
зависимый накопитель.
Глава 15. АВТОМАТИЧЕСКОЕ ТОРМОЖЕНИЕ
ЛОКОМОТИВОВ
15.1. Классификация автоматических систем
регулирования скорости движения локомотивов
при торможении и предъявляемые к ним требования
Автоматические системы регулирования скорости (АСР) движения
поезда при работе тепловоза в тормозном режиме предназначены в ос-
новном для магистральных локомотивов с целью уменьшения времени
движения поезда на спусках, повышения надежности его тормозных
средств и обеспечения безопасности движения. Эти системы строятся в
соответствии с принципом регулирования по отклонению текущего зна-
чения скорости движения от заданного значения. Сигнал задания у сис-
темы постоянен во времени (может изменяться машинистом). Данные
системы относятся к классу систем автоматической стабилизации. Такой
системой скорость движения поезда поддерживается на заданном уров-
не за счет автоматического изменения тормозной силы тепловоза при
работе его передачи мощности в тормозном режиме.
АСР скорости движения тепловоза при передаче мощности в тормоз-
ном режиме делятся на два больших класса по типу передачи мощности:
гидравлическая и электрическая.
АСР тормозной силы локомотива или дизель-поезда используются с
целью уменьшения времени торможения поезда и исключения режимов
юза. Эти системы строятся в соответствии с принципом регулирования
по отклонению текущего значения тормозной силы от заданного значе-
ния. При этом сигнал задания может быть постоянным (система отно-
сится к классу систем автоматической стабилизации) или переменным
во времени и зависеть, например, от скорости движения или ускорения
384
(система относится к классу следящих систем). При действии mix сис-
тем передача мощности локомотива или дизель-поезда работает в тор-
мозном режиме.
При электрическом реостатном торможении тепловоза тяговые ззект-
родвигатели работают в генераторном режиме, благодаря чему и создается
тормозной момент на осях тепловоза. Вырабатываемая при торможении
энергия тяговых электродвигателей гасится в тормозных резисторах.
При гидравлическом торможении тепловоза гидроаппараты передачи
мощности выполняют функции тормоза. При этом энергия торможения
в гидропередаче преобразуется в теплоту. Для поддержания температу-
ры масла гидропередачи на заданном уровне при торможении система ее
охлаждения и охлаждающее устройство тепловоза должны обеспечить
отвод теплоты в окружающую среду.
К АСР скорости тепловоза при работе его передачи мощности в тор-
мозном режиме предъявляются следующие требования:
• эффективность действия тормоза в рабочем диапазоне скоростей
движения тепловоза;
• гибкость управления и автоматическое регулирование для реализа-
ции заданных тормозных характеристик тепловоза с учетом ограничений;
• минимальный расход топлива дизелем в процессе торможения;
• короткое время подготовки к торможению;
• устойчивое и качественное поддержание заданной скорости движения;
• минимальное усложнение конструкции передачи мощности и теп-
ловоза;
• невысокая стоимость при требуемой надежности.
Степень реализации этих требований определяет техническую эф-
фективность применения систем электрического и гидравлического тор-
можения.
15.2. Статические и динамические свойства локомотива
с составом как объекта управления
Состояние тепловоза с составом (поезда) как объекта управления ха-
рактеризуется его выходными координатами — скоростью движения v и
пройденным расстоянием 5 (рис. 15.1). Учитывая конечные цели управле-
ния, к выходным величинам относят и критерий оптимальности управле-
ния Н. На поезд также действуют входные переменные величины, т.е. воз-
мущающие и управляющие воздействия К первым относятся удельное
сопротивление движению из-за уклона пути /к, температура 13 и давле-
385
к
П.
Ф,
'.м IК
Поезд
(ОУ)
ние рвз окружающего воздуха, сила
ветра, коэффициент сцепления ко-
лес с рельсами, включение и вык-
лючение вспомогательных механиз-
мов и машин тепловоза и т.д.
V
т
н
Рис. 15.1. Функциональная схема тепло-
воза с составом как объекта управления
Целенаправленное изменение
состояния поезда с учетом искажа-
ющего влияния возмущающих воз-
действий осуществляют с помощью управляющих воздействий: позиции
рукоятки контроллера машиниста Пк и положения тормозного крана ма-
шиниста <рт, определяющих соответственно режим работы энергетичес-
кой установки тепловоза и интенсивность процесса торможения поезда.
Если тепловозом при ведении поезда управляет машинист, то внешняя
цепь передачи воздействия от выходных величин к входным управляю-
щим воздействиям (главная обратная связь) оказывается замкнутой че-
рез него. Машинист принимает решения о том или ином изменении уп-
равляющих воздействий.
Внутренние связи, устанавливающие зависимость между входными
и выходными величинами поезда, представленные в форме математи-
ческих соотношений, образуют математическую модель поезда, которая од-
нозначно определяет поведение его, если известны законы изменения вход-
ных воздействий и заданы начальные значения выходных координат <рг
Различают статическую и динамическую модели, которые соответству-
ют системам уравнений статики и динамики.
В зависимости от целей исследования, а также имеющихся исходных
данных и вычислительных средств используют математические модели
различной сложности. Наиболее полное представление о процессах, про-
текающих при ведении поезда, дают уравнения динамики поезда и авто-
матических систем локомотива.
Уравнение динамики поезда
pv = k[FT- wK(v, iK, S) - B/v, <pT)],
(15.1)
pS= v,
(15.2)
где k — коэффициент передачи;
Fr — сила тяги локомотива;
и’к — сопротивление движению поезда;
2?т — тормозная сила поезда;
р — оператор.
386
В ряде случаев можно пренебречь переходными процессами в авто-
матических системах локомотива, рассматривая только установившиеся
режимы, т.е. статическую модель. Уравнения поезда (15.1) и (15.2) при
этом остаются теми же. Основанием для такого упрощения служит быс-
тродействие автоматических систем локомотива по сравнению с инерци-
онностью поезда. В самом деле, переходные процессы в АСР локомоти-
ва, вызванные, например, изменением Пк, заканчиваются значительно
быстрее, чем изменение по той же причине скорости поезда.
Статическая модель локомотива может быть получена из уравнений
динамики приравниванием нулю производных. Использование такой мо-
дели вместо динамической облегчает расчеты, но затрудняет оценку вли-
яния переходных процессов в АСР локомотива на расход энергии, что
особенно важно для тепловоза.
Широкое распространение получила более простая модель поезда, в
которой энергетические процессы в локомотиве не рассматриваются, а
используются экспериментально полученные характеристики: тяговые
FT (Пк, v), а также расходные Вч (Пк, v). Тогда уравнения приобретают
привычную форму
dv к,,
— = ^- (15.3)
где Е, =---- — коэффициент пропорциональности (величина, обратная мас-
Pji+Q
се поезда и локомотива, Л/п; здесь g — ускорение свободного падения; Рл, Q —
соответственно массы локомотива и поезда);
F — равнодействующая сил, приложенных к поезду.
F = FT( Пк, v) - wjv, iK (S)) - BT(v, <pT); (15.4)
dS=v. (15.5)
d/
^=Вч(Пк,г). (15.6)
Промежуточное по сложности место между рассмотренными уравне-
ниями занимает модель, в которой представлены экспериментально по-
лученные значения мощности и экономические характеристики локомо-
тива. У тепловозов к ним относятся эффективная мощность Ае(Пк), эф-
387
фективный КПД тЦ Пк) или удельный эффективный расход топлива ^(ПД
и КПД передачи мощности г] (Пк, v, Р) (здесь р — коэффициент ослабле-
ния магнитного потока тяговых электродвигателей).
При этом
(15.7)
где Т)всп — коэффициент, учитывающий затраты мощности на привод вспомога-
тельных механизмов и машин.
Часовой расход топлива
B4=kN^ = NeSe.
(15.8)
Характерные свойства поезда как объекта управления выясним из
уравнения динамики (15.3), предварительно преобразовав его. Предста-
вим указанное уравнение в отклонениях от некоторого начального со-
стояния, для чего разложим функцию, стоящую в правой части, в ряд
Тейлора по отклонениям скорости Av, и отбросим члены порядка выше
первого. В результате получим
Л/,,-- 'а/:, Av + Г dF т АП - аи-К> —— Av - <аи,к Д/к ~
п А/ /о ап к К) К 0 1 5v Jo к ) 0
авт Av- "ад/ Асрт,
av /0 0
(15.9)
где
QF
ап
к 'О
ственно по v и Пк;
^а^
IX 1
< Jo Ffl1’
факторы устойчивости локомотива соответ-
а^к
~ - F-y — то же поезда соответсз венно по v и /к при
k dZK 7о
работе л о ком олива в режиме тяги;
гавт
< dv Jo - Fn3’
— то же поезда соответственно по v и <рт
при режиме торможения.
388
После несложных преобразований запишем уравнение (15.9) в виде
dAv
Тп~^~ 1 Av = VnK"*114- к12 Д(Рт’
где Тп =
________________
джЛ ( дВт А ( dFT А
Sv Jo V Sv JQ < Sv Jo
постоянная времени локомотива с
составом (здесь в знаменателе Fnl + F^ - F । = Fm — фактор устойчивости
локомотива с составом);
_ ^л2 . , _ ^п2 , _ ^п4
И J7 Л1 р ' К2 р
1 пд пл ' пл
коэффициенты передачи локомотива с
поездом соответственно по Пк, /к(5) и ipr
Из уравнения (15.10) видно, что локомотив с поездом как объект уп-
равления обладает динамическими свойствами апериодического звена,
выходной величиной которого является v, а входной — изменения управ-
ляющих Пк, срт или возмущающих /к(5) воздействий.
Для режима тяги FnJ - F । = Fnjl > 0, при этом локомотив с составом
представляет собой устойчивый объект управления, способный само-
произвольно приходить к новому установившемуся состоянию (равно-
весной скорости) после ступен-
чатого изменения равнодейству-
ющей F (рис. 15.2).
При режиме торможения все
силы, действующие на локомо-
тив и поезд, направлены в сторо-
ну, противоположную движе-
нию. Так как при этом Fnjl < 0, то
поезд как объект управления не-
устойчив. Скорость поезда
уменьшается, поскольку сила со-
противления возрастает с умень-
шением V.
Постоянная времени прямо
пропорциональна массе локомо-
тива и поезда и обратно пропор-
циональна фактору устойчивости.
Рис 15.2. Статические характеристики.
1 — тепловоза; 2 — состава; 3 — тепло-
воза с составом
389
Рис. 15.3. Зависимости постоянной времени поезда массой 3400 т, ведомого
тепловозом, от:
а — позиции контроллера машиниста; б — скорости движения;
1 — при v = 20 км/ч; 2 — при v = 40 км/ч; 3 — при Пк = 8; 4 — при Пк = 16
А так как Fnn зависит от т и Пк, то постоянная времени является пере-
менным динамическим параметром (рис. 15.3). Значение постоянной вре-
мени Г при движении локомотива в режиме холостого хода значитель-
но превышает Т при работе локомотива в режиме тяги. В соответствии с
функциональной схемой (см. рис. 15.1) и дифференциальным уравнени-
ем поезда, составлена структурная схема, представленная на рис. 15.4.
Если более точно описать динамику поезда и учесть, что он представ-
ляет собой две емкости, способные запасать энергию двух видов (потен-
Рис. 15.4. Структурная схема поезда
циальную и кинетическую), и
обмениваться этими запасами в
переходном процессе, то в этом
случае поезд обладает свойства-
ми колебательного звена.
Статические характеристики
у(Пк, wK) поезда определяются
как совокупность точек пересече-
ния характеристик локомотива
FT(v) и состава wK(v) (рис. 15.5).
Из рис. 15.5 видно, что /гр явля-
ется величиной, зависящей от и’.
К
390
Рис. 15.5. Статические характерце гики поезда и его составных частей:
а — тепловоза и состава; б — поезда; 1-3 — тепловоза; 4 6 — состава;
7- 9 — поезда
15.3. Статические и динамические свойства
автоматических регуляторов скорости поезда
при торможении
При работе тепловозов в тормозных режимах на спусках скорость дви-
жения поездов поддерживается на заданном уровне с помощью АСР ско-
рости, содержащих регуляторы скорости непрерывного действия. Функ-
ции элементов этого регулятора выполняют агрегаты передачи мощности
При гидродинамическом торможении локомотива или дизель-поезда
гидроаппараты передачи мощности выполняют функции тормоза, а вы-
деляемая в них энергия отводится в окружающую среду с помощью сис-
темы охлаждения.
При электрическом реостатном торможении тяговые электродвигате-
ли работают в генераторном режиме, благодаря чему создается тормоз-
ной момент на осях локомотива. Вырабатываемая при торможении гнер-
гия тяговых электродвигателей гасится в тормозных резисторах /?(.
Якоря тяговых электродвигателей подключены к индивидуальным тор-
мозным резисторам. Электродвигатели в тормозном режиме имеют неза-
висимое возбуждение. Скорость движения и тормозная сила локомотива
регулируются путем изменения токов возбуждения и якорей электродви-
гателей. Функции возбудителя выполняют тяговый генератор или тяговый
генератор и выпрямительная установка. Обмотки возбуждения электро-
двигателей соединены последовательно и подключены к тяговому генера-
тору или выпрямительной установке. Для изменения тока возбуждения в
зависимости от скорости или тормозной силы (произведения токов якорей
301
392 *
Рис. 15.7. Статические характеристики
автоматического регулятора тормозной
силы тепловоза при разных сигналах
задания
тяговых электродвигателей и их
токов возбуждения) применяются
дополнительные элементы: датчи-
ки скорости и тока возбуждения,
селективные, множительные и уси-
лительные устройства, функцио-
нальные преобразователи. Функции
датчиков скорости движения поез-
да выполняют тахогенераторы по-
стоянного или переменного тока, а
функции датчиков тока — простей-
шие магнитные усилители.
АСР содержит датчик скорости,
селективные устройства (СУ), блок
управления выпрямителем БУВ, син-
хронный возбудитель, управляемый
выпрямитель УВВ, синхронный ге-
нератор СГ и выпрямительную уста-
новку (ВУ). Так как входной величиной регулятора скорости является частота
вращения оси колесной пары (или вала тягового электродвигателя л), а выход-
ной — ток возбуждения электродвигателя /в, то статические характеристики
его описываются зависимостью/в(и). Коэффициент передачи регулятора ра-
вен произведению коэффициентов передачи его элементов, включенных
последовательно. Динамические свойства регулятора скорости опреде-
ляются динамикой его элементов и схемой их соединения (рис. 15.6).
Автоматический регулятор тормозной силы содержит в основном те
же элементы, что и регулятор скорости. Однако так как он работает при
других режимах торможения и регулируемой величиной является тор-
мозная сила, то он содержит вместо датчика скорости датчики тока якоря
и тока возбуждения. Множительные устройства и другие сигналы тока
якоря и тока возбуждения используются вместо сигнала тормозной силы,
поскольку эту силу трудно измерять, а произведение тока якоря и тока
возбуждения однозначно определяет тормозную силу, создаваемую элек-
тродвигателем. Так как входной величиной регулятора является ток яко-
ря /я, а выходной — ток возбуждения электродвигателя, то статические
характеристики его описываются зависимостью 7В(7Я) (рис. 15.7).
Динамические свойства регулятора тормозной силы можно оценить
по структурной схеме (см. рис. 15.6).
393
15.4. Определение устойчивости и качества работы
автоматических систем регулирования скорости поезда
при торможении тепловоза
Для расчетного определения показателей качества работы АСР, ско-
рости и тормозной силы тепловоза в соответствии с принципиальной
схемой (рис. 15.8) и передаточными функциями элементов составляются
структурные схемы АСР (рис. 15.9).
Рис. 15.8. Схема автоматических систем регулирования скорости и тормозной
силы тепловоза с передачей мощности переменно-постоянного тока:
СГ — синхронный генератор; ВУ — выпрямительная установка; ОВ1—ОВ6 — об-
мотки возбуждения тяговых электродвигателей; Д1—ДС — якоря тяговых элект-
родвигателей; ДТВ — датчик тока возбуждения; ДТ1—ДТ6 — датчики частоты
вращения осей; 7?т]—7?т6 — тормозные резисторы; БВМ1—БВМ6 — блоки выде-
ления максимального сигнала; ЗУ 1—ЗУЗ — задающие устройства; СУ 1—СУ5 —
селективные устройства; ФП1, ФП2 — функциональные преобразователи;
У1—УЗ — усилители; БУВ — блок управления выпрямителем; УВВ — управ-
ляемый выпрямитель; РВПТ —. реле включения пневматического тормоза
394
ли.
Рис. 15.9. Структурные схемы автоматических систем регулирования:
а — скорости движения; б — тормозной силы тепловоза
395
Рис. 15.10. Амплитудно-фазовые характеристики систем регулирования
тепловоза:
а — скорости движения; б — тормозной силы
В результате передаточная функция разомкнутой АСР тормозной силы
«"peW = ^1^Р^кк,/(ТяР+ 1),
где ^Р|фп|(р) — передаточная функция функционального преобразователя ФП1
с учетом коэффициента передачи якоря к тя;
W кор(р) — то же последовательного корректирующего устройства во вход-
ной цепи усилителя У2;
вд^/7) — то же Участка системы: усилитель—блок БУ В—управляемый
выпрямитель—синхронный генератор—обмотка возбуждения электродвигателей;
Авд, кя — коэффициенты передачи электродвигателя по ЭДС и току якоря.
Передаточная функция АСР скорости движения (рис. 15.9, а)
«'кор «'у! «дс «70 + «'кор «2фпД
где ИЛу1 — передаточная функция усилителя У1 с учетом передаточных функ-
ций корректирующих элементов;
— передаточная функция поезда;
^2пф1 — передаточная функция функционального преобразователя ФП1 в
режиме регулирования скорости с учетом коэффициента передачи датчика тока
возбуждения электродвигателей.
Произведение Лбув £увв = куу, причем Аувв = 3 VI sinay / 2л, а Тбув = Гму
(здесь Гму — постоянная времени магнитного усилителя, содержащего-
ся в блоке управления выпрямителем).
396
По передаточным функциям АСР скорости и тормозной силы получа-
ют комплексные частотные функции систем, а по частотным функциям
можно рассчитать амплитудно-фазочастотные характеристики. Такие
расчетные характеристики систем регулирования скорости и тормозной
силы тепловоза приведены на рис. 15.10. Запасы устойчивости для сис-
тем регулирования скорости и тормозной силы составляют по фазе 102°
и 72° и по амплитуде 1,2 и 0,62 соответственно. Запасы устойчивости
больше предельно допустимых значений (30° и 6—20 дБ), и переходные
процессы в системе носят апериодический характер.
Глава 16. АВТОМАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ СКОРОСТИ ДВИЖЕНИЯ
ЛОКОМОТИВА В ТЯГОВОМ РЕЖИМЕ
И ВЕДЕНИЕ ПОЕЗДА
16.1. Классификация автоматических систем
регулирования скорости локомотива и ведения поезда
и предъявляемые к ним требования
Автоматические системы регулирования скорости при работе тепло-
воза в тяговом режиме по назначению и принципам построения делятся
на следующие группы.
АСР силы тяги при разгоне поезда предназначены в основном для
магистральных тепловозов и дизель-поездов с целью уменьшения вре-
мени разгона поезда и исключения режимов боксования локомотива. Эти
системы строятся по принципу регулирования по отклонению текущего
значения силы тяги от заданного значения. При этом сигнал задания си-
стемы может быть постоянным во времени (r|F = const) (система отно-
сится к классу систем автоматической стабилизации) или переменным и
зависеть, например, от скорости движения rjF(v) или ускорения rjF(dv/d/)
(система относится к классу следящих систем).
АСР скорости движения поезда при работе тепловоза в тяговом режиме
предназначены для маневровых (горочных) и магистральных локомотивов и
дизель-поездов с целью уменьшения времени движения поезда по участку.
Действие этих систем основано на принципе регулирования по отклонению
текущего значения скорости движения от заданного значения. Сигнал зада-
ния г|г постоянен во времени, поэтому они относятся к классу систем автома-
тической стабилизации Регуляторы скорости, применяемые в системах, мо-
гут быть релейного, непрерывного или непрерывно-релейного действия.
398
Автоматические системы ведения поезда делятся на две большие под-
группы: программные системы и поисковые — наиболее простыми явля-
ются первые. Процесс движения поезда при этом в общем случае состоит
из трех фаз: разгона, выбега и торможения. Главной задачей системы про-
граммного управления является выбор момента отключения тяги с целью
соблюдения заданного времени прибытия поезда на остановочный пункт.
Автоматические поисковые системы управления локомотивом не тре-
буют для своей работы подробной информации о характеристиках локо-
мотива и условиях движения поезда. Оптимальные режимы управления
локомотивом такие системы выбирают сами в процессе движения поезда
по перегону. Работа поисковых систем основана на принципе максимума,
в соответствии с которым система так изменяет регулирующие воздействия
на локомотив и его системы, чтобы выполнялось условие оптимальности
ведения поезда, характеризуемое определенным критерием
Работы по созданию систем оптимального ведения поезда активно
проводились в 1970—1980-х гг. в Белоруссии (БелИИЖТ). Система пред-
ставляла собой замкнутую систему, содержащую локомотив (тепловоз) с
составом как ОУ собственно регуляторами оптимальных режимов и вре-
мени хода поезда. Первый регулятор содержал устройство для определе-
ния оптимальных режимов ведения поезда, исполнительный механизм и
командный генератор. Основные блоки этого устройства были построе-
ны на базе интегральных микросхем.
Одна из обобщенных принципиальных систем оптимального управ-
ления локомотивом при ведении поезда в соответствии с эталонной мо-
делью приведена на рис. 16.1. Вектор состояния объекта у определяет
Рис. 16.1. Схема автоматической системы оптимального ведения тепловоза
с составом, содержащей эталонную модель поезда
399
исходное состояние модели; вектор внешних воздействий обеспечи-
вает действительные условия протекания процесса. Вектор внутренних
характеристик у элементов aipeiaroB и систем локомотива формирует и
уточняет периодически соответствующие характеристики модели. Блок
постоянных программ (БПП) устанавливает программные значения у
отдельных параметров и условий движения поезда (время хода, ограни-
чения скоростей, наиболее характерные участки профиля пути и т. п.).
Программные значения величин могут также передаваться на локо-
мотив с центрального поста управления. В результате оптими гании про-
цесса ведения поезда модель вырабатывает вектор управляющих воздей-
ствий и, обеспечивающих оптимальное ведение при соблюдении задан-
ных граничных условий. Оптимизация может быть комплексной и охва-
тывать не только процесс движения поезда, но и процессы в агрегатах и
системах локомотива.
АСУ тепловозом должны удовлетворять следующим основным тре-
бованиям. Автоматическая система программного управления должна
обеспечивать соблюдение расписания постоянных ограничений скорос-
ти, на участке при оптимальных режимах работы энергетической уста-
новки измерять расстояния, время и скорость движения с точностью,
которая обеспечивает выполнение установленного перегонного времени
хода с отклонением Кроме того, они должны надежно работать в задан-
ных климатических условиях, при вибрациях, ударах, толчках с часто-
той и амплитудой колебаний частей тепловоза.
Габаритные размеры и масса элементов системы выбираются с уче-
том возможности ее установки на тепловозе, обслуживания и ремонта.
Требования к системам регулирования скорости движения маневро-
во-вывозного (горочного) тепловоза определяются условиями работы
сортировочной станции. Для АСУ расформированием и формированием
поездов на сортировочных станциях важным требованием является обес-
печение заданной скорости надвига и роспуска составов с установлен-
ной точностью в диапазоне от 0,5 до 5,6 м/с, значение ускорения, разви-
ваемого маневровым локомотивом, не должно превышать 0,1 м/с2. Част-
ная статическая неравномерность системы регулирования скорости дол-
жна быть не более 0,07 м/с, а время регулирования после изменения сиг-
нала задания на 5 % — не более 5 с. Во избежание повторной сценки с
составом отделившихся от него вагонов допустим только апериодичес-
кий процесс перехода с одной скорости роспуска на друг ую. Это требо-
вание дополняется допущением: в течение определенного времени (ин-
400
тервала между отцепками) характер переходною процесса не влияет на
вероятость возникновения повторной сцепки отделившихся вагонов с
составом, полому возможен колебательный переходный процесс, закан-
чивающийся за время меньшее /(), а значение относительного перерету-
лирования не превышает 30 %. Такое допущение позволяет реализовать
максимальное быстродействие системы и существенно упростить алго-
ритм работы регулятора скорости.
16.2. Статические и динамические свойства
автоматических регуляторов скорости и устройств
управления поездом при работе локомотива
в тяговом режиме
Как при ручном, так и автоматическом управлении тепловозом воз-
можно использование по крайней мере двух его различных способов —
программного и поискового Первый способ управления связан с пред-
варительным составлением программ для управляющих воздействий, в
соответствии с которыми затем и осуществляется ведение поезда Для
установления расчетным путем требуемого закона изменения таких воз-
действий, обеспечивающего достижение заданной цели, необходимо зна-
ние внутренних связей между выходными и входными величинами По-
исковый способ управления не требует знания внутренних связей поез-
да, который рассматривается как «черный ящик». Оптимальные значе-
ния управляющих воздействий находятся в процессе движения поезда
по реакции его на их пробные изменения. Возможен также комбиниро-
ванный программно-поисковый способ управления поездом.
Установлено, что если функция 7/(лк) выпуклая вверх относительно
оси п ., то оптимальными являются режимы холостого хода и максималь-
ной мощности энергетической установки локомотива, чередованием ко-
торых поддерживается некоторая средняя скорость v поезда, обеспечи-
вающая заданное время хода. Такой процесс движения поезда может быть
реализован с помощью регулятора, имеющею релейный закон работы.
Текущее значение скорости v, получаемое с помощью датчика скорос-
ти ДС (рис. 16.2), сравнивается в суммирующем устройстве (СУ) регуля-
тора с заданным v. Разность Av * v,{ v подается на вход регулирующего
блока (РБ), имеющего в данном случае релейную статическую характери-
стику с зоной нечувствительности 8 (рис. 16.3, а). Если Av > 8/2, то на
выходе РБ возникает сигнал, переводящий энергетическую установку ло-
комотива в режим максимальной мощности, при Av < - 8/2 энергетическая
401
Рис. 16.2. Функциональные схемы:
а — автоматического регулятора скорости поезда; б — релейной автоматичес-
кой системы регулирования скорости поезда
Рис. 16. 3. Статические характеристики автоматических регуляторов скорости
движения поезда:
а — релейного; б — пропорционального (статического); в — пропорциональ-
но-релейного; г — релейно-пропорционального
установка работает в режиме холостого хода. В диапазоне изменения ско-
рости 5/2 < Av < - 5/2 может быть как тот, так и другой режим работы
энергетической установки в зависимости от направления изменения ско-
рости. Значение v3 подсчитывается заранее для каждого перегона, время
движения по которому известно, и программируется в блоке задания ско-
рости (БЗС) в зависимости от пути, измеряемого датчиком пути (ДП). Из-
меняя значение зоны нечувствительности регулятора 5, которая определя-
ет статическую неравномерность регулирования скорости, можно изме-
402
нягь частоту переключений режимов работы энергетической установки
локомотива. Чем больше 8, тем меньшее число переключений необходимо
производить для регулирования скорост и. Он i имальное соотношение меж-
ду точностью регулирования скорости и частотой переключений может
быть установлено расчетным путем с помощью принципа максимума конк-
ретно для каждою типа локомотива. Для этого необходимо иметь досто-
верные данные о влиянии частоты и интенсивности переходных процес-
сов в шергетической установке и передаче мощности локомотива или ди-
зель-поезда на перевозочные затраты.
Для уменьшения колебаний скорости поезда при переходных процес-
сах закон работы ретулятора скорости корректируют путем введения ин-
формации, поступающей oi датчика ускорения (ДУ). В общем случае за-
кон рабюы регулятора скорости описывается выражением Пк /j(Av) +
+ ^(dv/d/). Для повышения качества работы систему регулирования ско-
рости дополняют регуляторы времени хода, вотдейсгву юг цис на величину vr
Если кривая критерия оптимальности /7(ПК) обращена выпуклостью к
оси Пк, то с уменьшением скорости поезда вследствие роста сопротивле-
ния движению ош имальное значение мощности энергетической установ-
ки необходимо повышать. Такой пропорциональный закон регулирования
скорости реализуют с помощью статического регулятора скорости. При
этом каждому значению сигнала рассогласования Av соответствует опре-
деленный режим работы Пк энергетической установки (рис. 16.3, б). Не-
обходимую статическую неравномерность (ошибку) регулирования и тре-
буемую статическую характеристику регулятора скорости Пк(Аг) получа-
ют за счет изменения коэффициента передачи РБ (см. рис. 16.2).
Если график функции //(Пк) имеет точку перегиба, причем вначале
огг обращен выпуклостью от оси Пк, а затем при высоких Пк к оси Пк,
го для реализации оптимального процесса движения поезда применяют
регулятор скорости (релейно-пропорциональный), статическая характе-
ристика которого приведена на рис. 16.3, в. Пока скорость поезда нахо-
дится в пределах v - 8' < v3 + 8', где 8' — устанавливаемая заранее зона
нечувствительности, работает релейный регулятор, поддерживающий
заданную скорость v3, путем чередования режима холостого хода и неко-
торого наиболее экономичного дтя данных конкретных условий движе-
ния промежуточного режима работы шергетической установки локомо-
тива П^. Если в результате возросшего сопротивления движению ско-
рость поезда v станет ниже, чем v( 872, го авгомагически осуществ-
ляется переход на непрерывное статическое регулирование, например,
403
путем включения в РБ (см. рис. 16.2) устройства жесткой отрицательной
обратной связи. Необходимое значение статической неравномерности в
этой зоне регулирования устанавливают за счет изменения коэффициен-
та передачи в указанном устройстве.
Функции //(11к)„ график которой выгну! при низких 11к и выпукл при
высоких, соответствует вначале работа статического регулятора, а за1см
релейного. Статическая характеристика такого регулятора скорости при-
ведена на рис. 16.3, г, где <5' — статическая неравномерность пропорцио-
нального (статическою) регулятора; cS" зона нечувствительности релей-
ного регулятора, а 6 = 5' 4- 5" — суммарная неравномерность непрерыв-
но-релейного регулятора скорости движения поезда.
Наконец, оптимальным законом при критерии Н, не зависящем от
режима Пк работы энергетической установки тепловоза, является интег-
ральный закон работы регулятора скорости Пк = А’р|дтй/, при котором
отсутствует взаимно однозначное соответствие (жесткая связь) между
сигналом рассогласования Ду и выходной величиной регулятора скорос-
ти 11К. При этом мощность тепловоза для поддержания заданной скорос-
ти поезда может быть любой в и ре телах от нуля до номинальною значе-
ния. Регулятор скорости является астатическим. Для уменьшения коле-
баний скорости при переходных процессах в закон работы регулятора
добавляют сигнал по ускорению поезда. В результате регулятор получа-
ется интегрально-дифференциальным.
Применение систем, содержащих регуляторы скорости поезда, упро-
щает техническую реализацию по оптимизации процессов движения,
однако ее точность но сравнению с поисковыми системами при пом сни-
жается, гак как не учитывается влияние меняющихся условий движения
и характеристик тепловоза на оптимальные режимы работы энергети-
ческой установки. При создании автоматических устройств управления
локомотивом и поездом: регуляторов скорости, оптимальных режимов,
времени хода и др., стремятся применять безынерционные, виброустой-
чивые и надежные элементы автоматики. По динамическим свойствам к
этим элементам не предъявляется жестких требований, так как обычно
их постоянные времени (даже датчиков тока и напряжения тяювого ге-
нератора, датчиков перемещения реек топливных насосов) на 3—4 по-
рядка меньше постоянной времени объекта управления — поезда. Мно-
гие элементы регуляторов, выполненные на базе электронных приборов,
можно считать совершенно безынерционными даже по сравнению с та-
404
кими элементами автоматической системы ведения поезда, как энерге-
тическая установка локомотива.
Более тою, применение па локомотивах автоматических систем уп-
равления и регулирования, а также автоматических систем управления
локомотивом и ведения поезда, построенных на базе регулирующих мик-
ропроцессорных контроллеров, позволяет не только значительно улуч-
ши гь статические и динамические свойства автоматических регулято-
ров и систем и реализовать новые принципы их построения, но и на по-
рядок повысить их надежность. Гак, применение в регуляторе оптималь-
ных режимов вместо контактного контроллера машиниста бесконтакт-
ного исполнительного механизма (ИМ) повышает надежность локомо-
тива. Следует отметить, что надежность автоматических регуляторов и
систем, построенных гга базе микропроцессоров, определяется в основ-
ном надежностью датчиков входггых величин.
16.3. Критерии оптимальности управления локомотивом
при автоматическом ведении поезда
Оценку качества управления объектом, качества работы АСУ поез-
дом производят с помощью того или иного критерия. Критерием, наибо-
лее полно отражающим эффективность управления поездом при перево-
зочном процессе, служат приведенные сопоставимые экономические зат-
раты на перевозки. Различают две группы затрат: временные, зависящие
от продолжительности нахождения поезда на участке, и энергетические,
определяемые количеством затраченной механической работы на пере-
мещение поезда
с„ = *(Г+*ЛЯ„. (16.1)
где kt — расходная ставка I ч нахождения поезда на участке, руб/поездо-ч;
Т — время нахождения поезда на участке, ч;
kR — механическая работа силы тяги локомотива, руб/(тс км);
/? — расходная ставка I тс км механической работы локомотива, руб/(тс км).
Конечная цель оптимизации перевозочного процесса состоит в мини-
мизации затрат, определяемых выражением (16.1). Эти затраты, как по-
казывают расчеты, имеют минимум по ходовой скорости поезда. При
заданном в соответствии с графиком движеггия времени хода первое сла-
гаемое в выражении (16.1) не меняется, поэтому минимизации подверга-
ют только затраты:
405
(16.2)
При выполнении работ, целью которых является нахождение оптималь-
ной траектории движения поезда с учетом экономических характеристик
тепловоза, целесообразно в выражении (16.2) вы юлить затраты на топли-
во. Это связано с тем, что механическая работа и рлсхо з. топлива, затрачи-
ваемого на ее совершение, имеют нелинейную зависимость. Последнее
объясняется влиянием КПД энергетической установки тепловоза, который
существенно зависит от ее мощности и скорости движения.
Критерий оптимальности в результате принимает вид
где ке — цена топлива, руб/кг;
Е — расход топлива, кг;
k'R — ко эффициеит механической работы без учета топлива, тс-км
При уменьшении средней скорости движения суммарная механичес-
кая работа на перемещение поезда по участку монотонно падаез из-за
снижения силы сопротивления. Однако расход топлива локомотивом сни-
жается прзз этом только до определенного значения скорости, а затем
начинает возрастать из-за падения КПД прзз уменьшении его мощности
зз скороегзз движения Существусз такая средняя скорость, прзз которой
суммарные затраты, пропорциональные механической работе на пере-
мещение поезда по участку пути, минимальны.
Крззтерием оптимальности может служззть расход энерз изз локомоти-
вом на перемещение поезда. Подобный критерий находит широкое при-
менение в условиях депо, поскольку тругие затраты (кроме эперзип) па
механическую работу здесь не учитываются. Возможно применение и
других показателе!! эффективности перевозочного процесса, например,
времени движения поезда по перегону, используемого в известной зада-
че на быстродействие, или точности соблюдения заданного времени хода
и т.п. Далее в качестве критерия оптимальности принимается зз большин-
стве случаев расход топлива локомотивом.
Математическая формулировка задачи оптимального управления строит-
ся следующим образом. Даны уравнения движения поезда, например, в виде
ch’ „ _. _ .
— = ^0’,Пк,Ф|,/А, ),
at
dS (16.3)
— = v
d/
406
или, если за независимую переменную принять пуль 5, го
dv £ , „
~ = -Г(г,Пк,ф.г,/ь );
d.S у
d/ j_ (16.4)
dS д1
Заданы ограничения
11S ' S W, <'>F, * F «, S «. О S %, S /V, (16.5)
где vinax — допустимая скорость движения поезда
Управляющие воздействия 11к, тр( представляют кусочно-постоянные
функции времени или пути и Moiyr принимать ряд значений в допусти-
мой области
^ПкйП^Ойф^ф,^. (16.6)
Возможны различные постановки задачи Выделим из них вариант с
фиксированным временем / закрепленным концами траектории
v(O) = vo: г(/а) = уа;
Х(0) = 50; SVky = Sk
и функционалом вида
г
B = J/?4d/, (16 8)
о
где Вц — часовой расход топлива двигателем локомотива.
Задача в этом случае формулируется следующим образом: выбрать
из допустимой области (16.6) такую последовательность значений уп-
равляющих воздейст вий Пк, <рг которая переводит поезд в силу уравне-
ний (16.3), (16.4) из начального в конечное состояние (16.7) за время /к
при выполнении ограничений (16.5) и минимальном значении функци-
онала (16.8).
Помимо сформулированной, возможны и другие постановки зада-
чи, а именно: со свободным правым пли левым концом траектории, когда
не заданы конечные или начальные состояния поезда или его огдель-
407
ные координаты; с нефиксированным или минимальным временем хода;
с минимизируемыми функционалами другого вида и т.п., а также их
комбинации.
В соответствии с принципом максимума гамильтониан имеет вид
/7* = -B4 + \|/|^F|+\|/2 v, (16.9)
где Вч — часовой расход топлива тепловозом;
<4/! и — вспомогательные переменные, определяемые из сопряженной си-
стемы уравнений.
Условие оптимальности процесса движения поезда имеет вид (при
= const = X, \|/j = \|/)
max (~ВЧ + \|/S/ - Zv)
Пк,фт
или (16.10)
min (Вч - + Z.v).
Пк.фт
Таким образом, в каждый момент времени необходимо выбирать та-
кое управление (Пк, <рт), которое обеспечивает выполнение одного из при-
веденных условий Практически для решения задачи на ЭЦВМ прини-
мают вторую форму условия (16.10) и подвергают ее дискретизации, раз-
бивая весь исследуемый участок на шаги варьирования режимов. Усло-
вие оптимальности управления на /-м шаге варьирования:
Я,® = min (Вч, - - X,V,") • (16.11)
причем значение н° должно быть отрицательным и постоянным на всем
рассматриваемом участке за исключением отрезков, на которых система
управления поездом находится на границе допустимой области.
16.4. Функциональные схемы автоматических систем
ведения локомотивов
Автоматические системы ведения локомотивов строятся на основе
поискового способа управления. В основу этого способа положен прин-
цип максимума, в соответствии с которым условие оптимальности про-
цесса движения поезда имеет вид
408
max (-Вч + + Av) = Н *°:
min (В - ipf/ + Av) = FE.
П 4 о
К
(16 12)
Если рассматривать только установившиеся процессы движения по-
езда, то условие оптимальности упрощается:
min (В -Ev) = H
П 4
К
Однако при этом снижается точность нахождения оптимальных ре-
жимов, так как сравнение значений критерия оптимальности, соответ-
ствующих различным позициям контроллера машиниста, происходит
только после достижения поездом равновесной скорости. Скорость по-
езда, обладающего значительной массой, изменяется сравнительно мед-
ленно, и условия движения могут за это время существенно измениться.
Поэтому за основу принят критерий, учитывающий состояние системы,
и в переходных режимах Н = Вц - vgt/7.
Так как значения критерия оптимальности можно сравнивать теперь,
не дожидаясь установления равновесной скорости движения поезда, пос-
леднее слагаемой Av исключено из-под знака минимума в формуле (16.12).
Поскольку сопротивление движению поезда не зависит от режима рабо-
ты энергетической установки, его также выносят из-под знака экстрему-
ма. Тогда окончательно условие оптимальности режима управления при-
нимает вид
min (В -уГ ) = Я°,
п
(16.13)
где Fr — сила тяги тепловоза
Введение в выражение для критерия оптимальности Fr вместо рав-
нодействующей сил Е приложенных к поезду, делает его не зависящим
непосредственно от профиля пути. При этом размах колебаний величи-
ны Н уменьшается, что облегчает практическую реализацию поискового
способа управления.
409
Величину вспомогательной переменной определяют по формуле
V/= (Vo " Z7’)c7 + ХТ, (16.14)
полученной в результате решения дифференциального уравнения
d\|> dF
— = -\у^----------Л.
dt dv
(16.15)
Моделирование выражения (16.14) или (16.15) связано с использова-
нием ЭВМ. Однако для участков значительной протяженности величина
\|/ мало отличается от некоторого постоянного для заданного времени хода
значения. Учитывая также, что для этого времени произведение \|/£, мало
зависит от веса поезда, окончательно получают условие оптимальности:
mjn(B4-4/*FT) = ^o, (16л6)
где ц/* - — постоянный коэффициент, зависящий от времени хода по перегону.
Условие (16.16) практически может быть реализовано вручную ма-
шинистом либо автоматически с помощью системы (рис. 16.4), содержа-
щей специальный поисковый регулятор оптимальных режимов. Она яв-
ляется замкнутой и содержит тепловоз с составом как объект управле-
ния, собственно регуляторы оптимальных режимов (POP) и времени хода
поезда (РВХ). Регулятор (POP) содержит устройство для определения
оптимальных режимов (УОР), исполнительный механизм ИМ и команд-
ный генератор КГ (рис. 16.5).
Рис. 16.4. Схема автоматической поисковой системы ведения поезда
410
се
ч
г"
О
о
S
5
са
е
га
и
о
S
X
£
<и
X
X
-0
S
X
к
к
X
<и
5
5
Си
с
о
га
со
!Х
о
CU
2
g
о
о
т
X
сё
S
О
fe
га
га
S
<и
X
о
S
411
Основные блоки УОР построены на базе интегральных микросхем.
Схема учитывает особенности формы кривой Я(Пк) для локомотива. На-
пример, для тепловоза с дизелем типа Д100 зависимость //(Пк) мини-
мум имеет в зоне 11—14-й позиций контроллера. Минимальное значе-
ние критерия Н может быть также на нулевой (при скорости движения
поезда, превышающей некоторое значение) и на позициях выше 14-й (при
скорости ниже определенного значения).
Множительный блок БМ1 вычисляет часовой расход топлива в со-
ответствии с формулой Вц = &ч<7цсов. Напряжение, пропорциональное
цикловой подаче топлива поступает от функционального блока ФБ.
Функциональный блок воспроизводит зависимость <?ц(йр, сов) с учетом
того, что на нулевой позиции дизель работает на пяти топливных насо-
сах (вместо 12).
Датчики перемещения реек (ДПР) и частоты вращения (ДЧВ) изме-
ряют соответственно перемещение реек топливных насосов Лр и частоту
вращения вала дизель-генератора сов.
Функции датчика перемещения реек выполняет дифференциальный
индуктивный преобразователь соленоидного типа.
Функции датчика частоты вращения вала дизель-генератора выпол-
няет частотный индукционный преобразователь. Он установлен на раме
дизель-генератора с помощью кронштейна таким образом, что магнит-
ная система датчика располагается на расстоянии 2—3 мм от зубчатого
венца муфты, соединяющей валы дизеля и генератора. Импульсы с час-
тотой следования /ы, вырабатываемые датчиком, подаются на вход час-
тотно-аналогового преобразователя (АПЧ) (см. рис. 16.5), выполненного
на интегральных микросхемах. Выходным сигналом преобразователя
является напряжение, пропорциональное частоте вращения вала дизель-
генератора.
Сила тяги тепловоза FT вычисляется в множительио-делительном бло-
ке (БМД) в соответствии с формулой FT = kjUJ^v. Эта формула дает при-
ближенное значение силы тяги, так как она не учитывает изменения по-
терь в тяговых электродвигателях. Однако погрешность расчета невели-
ка. Сигналы, пропорциональные току /г и напряжению Ur тягового гене-
ратора, поступают на вход БМД соответственно от датчиков тока (изме-
рительных трансформаторов постоянного тока) и напряжения (трансфор-
матора напряжения).
Функции датчика скорости движения поезда (ДС) выполняет частот-
ный преобразователь фотоэлектрического типа. Датчик содержит источ-
412
ник света (световую пушку), модулятор светового луча и приемник света
(фотоэлемент). Модулятор представляет собой диск с большим количе-
ством прорезей по окружности, установленный с помощью разъемного
фланца на оси скоростемера в пулые управления кабины машиниста.
Корпус датчика закреплен на каркасе пульта. Частота импульсов /с на
выходе датчика пропорциональна скорости движения локомотива. Им-
пульсы затем трансформируются частотно-аналоговым преобразовате-
лем (АПС) в напряжение v .
В основе БМД и БМ лежит компенсационная время—импульсная схе-
ма с принудительным возбуждением на интегральных операционных уси-
лителях. БМ2 служит для перемножения силы тяги FT и коэффициента у*.
Формирование критерия оптимальности в соответствии с выражени-
ем, стоящим под знаком минимума в выражении (16.13), на рабочих по-
зициях осуществляет блок БК01, а на холостом ходу — блок БК02. На-
пряжение смещения UCM устанавливают таким образом, чтобы функция
Я(Пк) имела один и тот же знак при всех возможных в условиях эксплу-
атации значениях переменных Вч, Fv v, а также не выходила из рабочей
зоны суммирующего операционного усилителя.
Запоминающее устройство УП1 предназначено для фиксации значе-
ния критерия оптимальности Н в момент, предшествующий изменению
позиции контроллера, а УП2 — для запоминания скорости движения ло-
комотива после временного прекращения поиска оптимального режима.
Запоминающие устройства изготовлены на фторопластовых конденсато-
рах и операционных усилителях с дифференциальными каскадами, вы-
полненными на полевых транзисторах с выходным сопротивлением не
менее 150 МОм.
Сигнум-реле CPI—СР4 представляют собой компараторы на опера-
ционных усилителях с выходными усилителями мощности на транзис-
торах и электромагнитными реле. Они предназначены для сравнения
показанных на их входах величин и выполнения определенных логичес-
ких операций. Сигнум-реле СРЗ и СР4 имеют регулируемую в широких
пределах зону нечувствительности Ave. Основой реверсирующего уст-
ройства РУ служит триггер с комбинированным входом на микросхеме
К155 с усилителем мощности на транзисторах и электромагнитных реле.
Реверсирующее устройство управляет исполнительным механизмом.
Одновременно блок индикации, установленный на пульте управления,
сигнализирует машинисту о номере позиции контроллера и направле-
нии ее изменения.
413
Отдельные узлы и панели устройства смонтированы в основном бло-
ке. Схема управления блоком позволяет устанавливать нули и масш-
табные коэффициенты операционных усилителей, проверять работос-
пособность отдельных блоков и всего устройства, корректировать зна-
чения //х и время хода поезда по перегону, контролировать и регистри-
ровать любую величину. Устройство питается от специального блока
питания БП (см. рис. 16.5) с тиристорным преобразователем. Блок со-
держит несколько стабилизированных источников постоянного тока для
питания операционных усилителей и реле и неетабилизированных ис-
точников переменного тока и подсоединяется к вспомогательному ге-
нератору локомотива.
Устройство работает следующим образом. При изменении позиции
контроллера на одну позицию в соответствии с сигналом от командного
генератора КГ (см. рис. 16.4) подается напряжение на электронное реле
времени БРВ (см. рис. 16.5) с выдержкой на замыкание, равной 4 с. Про-
должительность задержки принята с таким расчетом, чтобы за это время
переходный процесс в энергетической установке локомотива завершил-
ся. Одновременно с изменением позиции (с некоторым опережением)
запоминается в УП1 значение критерия Я обесточивается сигнальная
лампа БИ и фиксируется в УП2 скорость v3; напряжение, пропорциональ-
ное этой скорости, поступает на вход БМД Через 4 с БРВ включается, и
в СР1 происходит сравнение запомненного УП1 значения критерия с
текущим Н. Однако силу F, входящую в Н, вычисляют при скорости v,
которую имел поезд 4 с назад, т.е. в момент перевода рукоятки контрол-
лера. Это исключает влияние на величину Я изменения скорости движе-
ния поезда за время переходного процесса в энергетической установке.
Далее со сдвигом времени 0,2 с происходит сброс зафиксированного зна-
чения скорости v3, подача на вход БМД текущего значения скорости и
запоминание нового значения Н^.
Если в результате сравнения оказывается, что Н < Н? то сигнум-реле
СР1 не срабатывает, реверсирующее устройство и исполнительный ме-
ханизм остаются в прежнем положении; загорается та же сигнальная лам-
па; подается сигнал на изменение режима в прежнем направлении. Если
Н > то СР1 подает сигналы на УП2, который запоминает скорость
и на СР2 для сравнения значения И, соответствующего данной позиции,
со значением критерия Нк на нулевой позиции, вырабатываемого непре-
рывно блоком БК02.
414
11ри H < Н* поиск прекращается, так как позиция соответствует ми-
нимуму функции Я(Пк). Найденный режим сохраняется до тех пор, пока
скорость движения не изменится на определенную наперед заданную
величину Av. Если скорость в результате изменения условий движения
увеличивается, то срабатывает СР4, реверсирующее устройство РУ пе-
реключается и подает сигнал на ИМ и БИ для возобновления поиска,
причем первый шаг делается в сторону снижения позиции (сигнал оста-
новки при этом гаснет, а стрелка «вниз» загорается). Если имеет место
уменьшение скорости, то срабатывает СРЗ и поиск возобновляется начи-
ная с повышения номера позиции.
При Нк < Н (оптимальная нулевая позиция) включается сигнум-
реле СР2, осуществляющее переход на нулевую позицию (сигнальная
лампа «вниз» в процессе перехода горит непрерывно), при этом пози-
ции изменяются в более быстром темпе. Режим холостого хода сохра-
няется до тех пор, пока скорость поезда не упадет по сравнению со
скоростью, зафиксированной в момент перехода в БМ2 на некоторую
заранее установленную величину, при этом позиции повышаются до
9-й включительно с интервалом 2 с. Для того чтобы при переводе ру-
коятки контроллера с 8-й на 9-ю позицию не мог возникнуть ложный
сигнал на обратный переход вследствие незакончившегося переход-
ного процесса в энергетической установке, к величине Н на позициях
ниже 9-й добавляется постоянная величина ЛЯ. Это искусственно по-
вышает значение критерия на этих позициях и делает невозможным
срабатывание реверсирующего устройства. Начиная с 9-й позиции пе-
реключение режима на очередную позицию осуществляется не быст-
рее, чем через 4 с (в момент смены позиций лампочки гаснут, а необ-
ходимый сигнал загорается только через 4 с).
Если в процессе поиска оптимальной окажется максимальная пози-
ция, то скорость, при которой произошел переход на нее, запоминает УП2.
Режим максимальной мощности сохраняется до тех пор, пока поезд име-
ет более низкую скорость. Как только она превысит значение, зафикси-
рованное в УП2, поиск оптимального режима возобновляется. Если в
результате поиска достигнута 9-я позиция, то сразу осуществляется пе-
реход на нулевую позицию контроллера, о чем сигнализирует непрерыв-
ное свечение стрелки «вниз» после перехода на 8-ю позицию. При двух-
секционном локомотиве регулятор выбирает режим работы, являющий-
ся оптимальным для всего локомотива. С этой целью в БК01 производит-
ся суммирование расходов топлива обеих секций, а напряжение на входе
415
Рис. 16.6. Схема автоматического
регулятора времени хода поезда
БМ2 представляет суммарную
силу тяги локомотива.
Бесконтактный ИМ (см. рис.
16.4) служит для управления энер-
гетической установкой вместо кон-
троллера машиниста. Он содержит
реверсивный электронный счет-
чик, выполненный на интеграль-
ных микросхемах, дешифратор —
на диодах и бесконтактное комму-
тирующее устройство, содержащее
семь электронных ключей на тран-
зисторах. Электронные ключи присоединены параллельно пальцам кон-
троллера машиниста. Иногда применяется также ИМ, содержащий ша-
говый электродвигатель. Командный генератор (КГ) обеспечивает необ-
ходимую последовательность и цикличность работы регулятора опти-
мальных режимов.
Регулятор времени хода выдерживает заданное время движения поез-
да по перегонам за счет изменения величины \|/, т.е. осуществляет кор-
ректировку траектории по конечному состоянию поезда. Установлено
ранее, что коэффициент \|/ пропорционален средней скорости движения
поезда, поэтому он определяется и корректируется в результате деления
в блоке БД (рис. 16.6) расстояния, оставшегося до контрольного пункта,
на время для его прохождения. Заданные графиком движения значения
S3 и /3 получаются из блоков БЗП и БЗВ и автоматически устанавливают-
ся в виде напряжений на делителях с помощью шаговых искателей. S3 и гз
могут быть заданы и вручную декадным переключателем, имеющимся
на пульте управления.
Текущие значения S и t получают от датчиков пути (ДП) и времени
(ДВ) (см. рис. 16.6). Эти датчики построены на интегрирующих усили-
телях и тех же шаговых двигателях. На вход интегрирующего усилителя
ДП подают напряжение, пропорциональное скорости, а на вход ДВ —
постоянное стабилизированное напряжение. Как только выходное напря-
жение усилителя достигнет определенного значения (пропорционально-
го 1 км и 1 мин), срабатывают компаратор и реле, которое переводит ин-
тегратор на нуль и шаговый искатель на один шаг в сторону уменьше-
ния. Таким образом на делителях фиксируются расстояние и время до
контрольного пункта.
416
Напряжение с делителя 5ОСТ с помощью шагового искателя подается
на делитель /ост, с выхода которого вторым шаговым искателем снимает-
ся напряжение, пропорциональное требуемой средней скорости движе-
ния поезда. Это напряжение в некотором масштабе и представляет собой
коэффициент
Управление режимом работы регулятора и его отдельных органов осу-
ществляется с пулы а.
Автоматическая система программного управления локомотивом и
автоматического оптимального ведения поезда была применена на теп-
ловозе 2ТЭ116-003 (УЦКУ-Т). В нее был заложен алгоритм оптимально-
го управления для автоматического ведения поезда с минимизацией рас-
хода топлива при выполнении заданного графиком движения времени
хода (алгоритм был разработан в Белоруссии в БелИИЖТе). В этой сис-
теме функции POP и РВХ (см. рис. 16.4) выполнял программируемый
микропроцессорный контроллер.
Комплекс технических средств, обеспечивающих автоматическое ве-
дение поезда в соответствии с заданной программой движения, называ-
ют автономной системой автоведения поезда. В отличие от централи-
зованной системы автоведения поездов, автономная осуществляет управ-
ление только одним поездом. При этом взаимодействие поездов, находя-
щихся на линии, определяется системой интервального регулирования
движения поездов. Компенсация возмущений реализуется системой ав-
товедения каждого поезда и определяется законами управления, наличи-
ем ресурса регулирования и ограничениями, накладываемыми требова-
ниями безопасности движения.
Требования безопасности движения в системах автоведения поез-
дов являются определяющими. Разработаны и широко внедряются на
подвижном составе специальные устройства безопасности. Примером
может служить комплексное локомотивное устройство безопасности
КЛУБ. Более совершенное по уровню устройство КЛУБ-У является
основой комплексной унифицированной системы обеспечения безо-
пасности и регулирования движения поездов КУРС-Б. В систему
КУРС-Б кроме КЛУБ-У входит система автоматического управления
торможением САУТ-ЦМ. В КЛУБ-У предусмотрено взаимодействие
с системами автоведения и САУТ, а также с системой интервального
регулирования движения поездов (по радиоканалу). Для автоматичес-
кого определения параметров движения поезда (текущее время, гео-
417
графические координаты, скорость) в КЛУБ-У используются устрой-
ства спутниковой навигации.
На электроподвижном составе в настоящее время внедряется борто-
вая унифицированная микропроцессорная система автоведения
(УСАВПП). Это — программно-аппаратный комплекс, обеспечивающий
автоматизированное управление при наборе скорости и движении, по-
зволяющий с высокой точностью соблюдать график движения, обеспе-
чивать энергооптимальный расход электроэнергии и облегчить работу
машиниста. В системе предусмотрены два основных режима работы:
автоведение поезда и выполнение консультативных функций для выбора
оптимального режима движения при ручном управлении.
Рекомендуемая литература
1. Волгин В.В., Ажикин В.А. Расчет настроек дискретно-непрерывных систем
управления / Под ред. В.С. Мухина. — М.: Издательство МЭИ, 2000. — 20 с.
2. Ерофеев А.А. Теория автоматического управления: Учебник для вузов. 2-е
изд перераб. и доп. — СПб.: Политехника, 2001. — 302 с.
3. Кослюдамианский А.С. Автоматические системы регулирования. — М.:
РГОТУПС, 2004. — 40 с.
4. Космодамианскии А.С. Автоматическое регулирование температуры обмоток
тяговых электрических машин локомотивов: Монография. — М. Маршрут,
2005. — 256 с.
5. Костромин А.С. Оптимизация управления локомотивом. — М.: Транспорт,
1979, — 119 с.
6. Либерзон К.Ш. Теория автоматического управления. Дискретные системы:
Учебное пособие. — Самара: Гос. техн. ун-т. 2005. — 74 с.
7. Луков Н.М. Автоматическое ре1улирование температуры двигателей. — М.: Ма-
шиностроение, 1995. — 271 с.
8. Луков Н.М. Автоматизация тепловозов, газотурбовозов и дизель-поездов. —
М.: Машиностроение, 1988. — 272 с.
9. Луков Н.М. Основы автоматики и автоматизации тепловозов. — М.: Транс-
порт, 1989. — 296 с.
10. Луков Н.М., Стрекопытов В.В., Рудая К.И. Передачи мощности теплово-
зов. — М.: Транспорт, 1987. — 279 с.
11. Микропроцессорные системы автоматического регулирования электропере-
дачи тепловозов: Учебное пособие; Под ред. А.В. Грищенко. — М.: Марш-
рут, 2004. — 172 с.
12. Панько М.А. Расчет и моделирование автоматических систем регулирования
в среде Mathcad. — М.: Издательство МЭИ, 2001. — 92 с.
13. Стрекопытов В.В., Грищенко А.В., Кручек В.А. Электрические передачи ло-
комотивов. — М.: Маршрут, 2003. — 310 с.
419
Основные сокращения и обо шачеиии
АВ I1MIIIIIK IIII III* |ЬуЖДГ1ШЯ
АР ainoMiiiii'iri кии pciуляiop
АРД aiiioMai n*i< i кип pii уля iop jihiiik пни
API I <tll ЮМ.11114C< КПП |>-| yiIMKip ПаПрЯЖСПИЯ
API «iiiioMiiiii'ii t кии регуляiop нмпгр.иуры
AP< .нноманрцч кии pci yjiNiop CKl>p<H III
AP’IBB aiiioMaiieici кип [xiуляiop lacioiia вращения папа
At .iinoMiiiit'in кая i нс и ми
А< I .nt।<»м.11пин кая i nt icm.i iniiimia
At P ainoMaiii'i* < кая < hi iim.i pciулпронанп»
Л< РД .iiiiom.iiii'ict кая ch к*ма регулирования i.iiiiiiiiiiH
At PH JiiioM.riii'ict кая cikicm.i регулирования иииряжсния
A< PI апiomih ii'Ici k.’Ih cin iсма регулирования it Miirpaiypi.i
At P’IBB iibiomiiiii'ICCkли ihi icmii pciулнрикания nai 1011.1 крашения вили
A<‘У anioMiii H'irt кая enciCMa управлении
АУ I aiiioMaiH'tci'Koc y< ipoiit 1110 1.11111111.1
АЧФ ;imiiiiiicyano *i u ГОПН1Я функция
A'lX iMiuiliiy/iiio Час юный xap.iKicpij hik i
A'l'4‘1» aMliniilyjiilo i|iaio'iat кнпая фуикцня
A<1’*IX амилшудно ф|ио*1а< киная xnp.iKк pin iiik.i
1>УВ блок упраилспня выпрями н-лс м
В iioitiy/iiiicjii.
Bl m 110M01 airniaii.iii irnt paiop
BBt () Boi/iyniiio нодяпая chcicmh охлаждения
BBMt () iioviyfiliio водома ляпая cut 1 мл охл 1И Д11ШИ
ВМС О в<нду|1111О маслинам <'исн*мл охлиждения
ВМК) водом.к ЛЯ111.И1 ц*плоо(>ме||||ик
В<) пси ГИЛЯ iop охлаждении
ВИН нснп1ИЯ1ор п< |m*m<-iiiioIi подачи (с ноноронпами лопан imh)
В( '<) воздушная ( шнема охлаждения
4 О
В< OHB но 1Л У III Иля till irMil <>М '1НЛ 1К11ИИ Illi <i IMII.'lyXH
111И ОНИ i«> плутни полянин cm ц*ми охиижжиии n.uvivnoiiioio шплухн
I ДНИ 111/1|>ол1111<1МИ'к'< кин прикол nrinii |ию|К1
I О! IB I ИЛрооО|.гМ1Н Hl ПрИНол Н1*П IИ ЛЯ I ори
I НУ । и i<riypooiciicp,i lopii.iH yt i.iiioiiKii
Д лесине
Д1 ЛИ !<• >11. Н Игр.Иор
JII У ЛИ К-HI. I НЛрИМЛИ'К ( КИИ yt 11111010,1
Д11 УШ|*111Н lll'pcMl'IIir ПИИ
Д11 ЛП1'П11 напрял < нии
Д1 Л|Ц*1ИК |< MIK-pinypiJ
ДЧВВ л*н |нк 'ш> ют крошения H.iJi.i
IV HUIHIOIHI'I У' IpoHl IHO ( lit/l ll'IHK)
ИМ HI IKIIlllinrUl.lll.lll MCXXII11IM
HV И IMCpHIl III.not ytlpoHl IIIO (Л>Н*1ИК )
HI’V 111 ПО11ПИ It 'll.Ilo p* I ynilpyiOIIKV yi'IpoHl IIIO
Ml IF Mill poiipoil.ct opill.lll HO|| ipiiJHIcp
О I obi.t к i uiiiiHiu
Ol‘ obl.lKI pci улпроииння
OHB HXJI.VIHH ль 11.1Л lyiio’Hioio iioi'iyxu
< )V обьек i yiip.iiuii нии
11 pl'l уЛИ|Ир
11И pciулятор
11Д p< iynniop
11ИД ptiyjiHiop
iipoiiopiiHoiiajii.iii.iii p< i уляiop
llpoiiopiiiioii • ii.iio Hill i p.iill.llhlH ptiyJIHlop
llpOllopllHOIIIIJII.IIO лнффгр ИНН 1Л1 III 1Й P< I уля iop
npoiiopiiiloilliill ИО ИП 111 pn.n ио лнфф< рении I II III,|H pel >UHlop
1'0 pci yJiiipyioiiiHh opi Hi
( В i инхроппын по|були1 in
( I l |>1]П< p H lll'pillop
( О i in icMii охлнжлепии
< OHB си< i cmh ox Ji i л/кния ii.i;ViyH* **>«»11 i»<>Viyxt
( V cpiiiiHiiiiaioiiirc y< ipoHi i но
II i hi oiii iH i ciirpa iop
I I if I I plllll форм.иор IHK 1ОЯНИО1 О II Ilipw/Hl ПИЯ l/HI'IHK Пмнри/К НИЯ)
Illi I р.11|сформ.1|ор HOI 10ИНП010 IOK.1 (л*11 HIK IOK I)
11’Д icpMopci yjiuiop л цин нии
Г1*Н IcpMOJH I уляюр lirpCMCHICHUH
К I 1Я1ОН1.1Н l Hir-.pi>11111.111 II ll< pnlop
I I 1Я1О1Н.1Н I pill К форм.иор
I АД iHioHiJii in niixpoiiin.Hi унии и11 hi,
I )Д 1И1ОН1.1Й »JI« K. ipoylllHIIlirill.
I >M 1Я1ОНИИ HU H ipil'irlKUII MHIIIIIII.I
УВВ уиринлясмый iii.iiipHMiiif 'ii. юк.i нтбуж к пня
421
УО — управляющий орган
ФЧФ — фазочастотная функция
ФЧХ — фазочастотная характеристика
f— частота напряжения
Н — напряженность магнитного поля
А(/) — переходная функция
1 — ток (электрический)
J— момент инерции
к — коэффициент передачи (усиления) звена, системы и т. п.
к? — коэффициент передачи регулятора
L — индуктивность
£(со) — логарифмическая амплитудно-частотная функция
/ — длина
т — масса
М — вращающий момент
а — коэффициент затухания колебаний (степень колебательности)
F— сила
р — давление
р — комплексная переменная (оператор) преобразования Лапласа
R, г— сопротивление электрическое активное
S — коэффициент статизма системы
S — площадь
Л' — мощность дизеля
Q — теплота
5 — перемещение
Т — температура
Т — постоянная времени звена, системы
Т— период следования импульсов
Т — период колебаний
Тиз — постоянная времени изодрома
Т — постоянная времени дифференцирования
ТК — постоянная времени интегрирования
— постоянная времени объекта регулирования
/ — время
/р — время регулирования
Т — время запаздывания
U — напряжение электрическое
(/(со), М(со) — действительная вещественная часть комплексной частотной функции
и(1) — напряжение электрическое в функции времени
TV(CD) — мнимая часть комплексной частотной функции
422
№(<])) — комплексная частотная функция
W(p) — передаточная функция звена, соединения звеньев, системы
<одг — частота вращения вала дизель-генератора
Х(р) — значение какой-либо величины, записанное в операторной форме (изоб-
ражение по Лапласу)
x(f), х — текущее значение какой-либо величины (оригинал)
хвх — входной сигнал элемента
Хвых — выходной сигнал элемента
хд — выходной сигнал датчика
х3 — выходной сигнал задатчика
Дгсу — выходной сигнал сравнивающего устройства
у — запас устойчивости системы по фазе
h — запас устойчивости системы по модулю
Лим — выходной сигнал исполнительного механизма
ц — регулирующее воздействие
ф — регулируемая величина
фз — заданное значение регулируемой величины
фт — текущее значение регулируемой величины
Дф — ошибка (рассогласование), отклонение регулируемой величины от задан-
ного значения
ф — угол сдвига по фазе
X — возмущающее воздействие
Т| — задающее воздействие
Оглавление
Введение .... .................. 3
Глава!. ПРИНЦИПЫ ПОСТРОЕНИЯ АВТОМАТИЧЕСКИХ СИСТЕМ................... 5
1.1. Фундаментальные принципы построения автоматических систем... 5
1.2. Схемы и классы автоматических систем .................. 10
1.3. Алгоритмы (законы) работы автоматических регуляторов. . 15
1.4. Особенности алгоритмов работы автоматических микропроцессорных
регуляторов . ...................... 23
Глава 2. СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
И ПАРАМЕТРЫ АВТОМАТИЧЕСКИХ СИСТЕМ И ИХ ЭЛЕМЕНТОВ. . 25
2.1. Режимы работы систем и их элементов .... 25
2.2. Математические основы теории линейных автоматических систем. 29
2.3. Статические характеристики и параметры .. 33
2.4. Динамические характеристики и параметры ................ 39
2.5. Понятие о типовых динамических линейных звеньях .. 44
2.6. Особенности математического описания статики и динамики
автоматических микропроцессорных регуляторов................ 47
Глава 3. ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ АВТОМАТИЧЕСКИХ
СИСТЕМ . _________________ .. 54
3.1. Пропорциональное звено.... ............................ 54
3.2. Интегрирующее звено .. .............. .. 58
3.3. Инерционные звенья....... ........... ...................... 62
3.4. Дифференцирующие звенья..... ............................ 68
3.5. Звенья второго порядка.. .. .. ......................... 74
3.6. Звено запаздывания . ................................... 79
3.7. Дифференциальные уравнения, переходные и частотные функции
типовых звеньев . ............................ 81
Глава 4 ТИПОВЫЕ СОЕДИНЕНИЯ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ..................... 85
4.1. Последовательное соединение........................... 86
4.2. Параллельное согласное соединение ...................... 88
4.3. Параллельное встречное соединение....................... 91
424
4.4. Уравнение динамики и характеристики одноконтурной
разомкнутой системы 96
4.5. Уравнение динамики и характеристики замкнутой
одноконтурной сисгемы 97
4.6. Частотные функции и характеристики разомкнутых
и замкнутых автоматических систем 99
4.7. 11ередато'1пыс функции и характеристики автоматических
микропроцессорных систем . 108
4.8. Примеры составлении и преобразования структурных схем
локомотивных автоматических систем ............ 109
Глава 5. УСТОЙЧИВОСТЬ И КАЧЕСТВО РАБОТЫ АВТОМАТИЧЕСКИХ
СИСТЕМ Ц5
5.1. Понятия устойчивости и качества работы линейных автоматических
систем 115
5.2. Критерии устойчивости ......... 127
5.3. Устойчивость систем, содержащих последовательно включенные
апериодические инерционные звенья . 135
5.4. Устойчивость систем, содержащих последовательно включенные
апериодические, колебательные и интегрирующие звенья. 144
5.5. Влияние на устойчивость и качество работы системы последовательно
включенного звена запаздывания . . . . 145
5.6. Способы повышения устойчивости и качества работы 148
5.7. Методы оценки качества работы автоматических систем........156
5.8. Моделирование автоматических устройств и систем .. 163
5.9. Особенности определения устойчивости и показателей качества
работы автоматических микропроцессорных систем................. 166
5.10. Определение устойчивости и качества работы систем
с использованием ЭЦВМ 172
Глава 6. КЛАССИФИКАЦИЯ ЛОКОМОТИВНЫХ АВТОМАТИЧЕСКИХ
СИСТЕМ УПРАВЛЕНИЯ, РЕГУЛИРОВАНИЯ И ЗАЩИТЫ 175
6.1. Признаки классификации систем и задачи автоматизации
локомотивов .................... . . . . 175
6.2. Виды локомотивных автоматических систем .. 176
Глава 7. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ
ВАЛОВ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК 182
7.1. Задачи автоматизации дизель-генерагоров и дизель-гидравлических
установок................. .............................. 182
7.2. Функциональные схемы систем регулирования частоты вращения 184
7.3. Статические и динамические характеристики и параметры
дизель-генераторов и дизель-гидравлических установок 186
7.4. Статические и динамические характеристики и параметры
автоматических регуляторов частоты вращения .......... .......... 192
7.5. Устойчивость, качество работы и настройка автоматических обычных
и микропроцессорных систем регулирования частоты вращения . 199
425
Глава 8. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ
ТЯГОВЫХ ГЕНЕРАТОРОВ.............................................. 205
8.1. Классификация систем регулирования напряжения тяговых
генераторов ................................................. 205
8.2. Схемы систем регулирования напряжения тяговых генераторов
постоянного и переменного тока .............................. 207
8.3. Статические и динамические характеристики и параметры
тяговых генераторов.......................................... 210
8.4. Статические и динамические свойства автоматических
регуляторов напряжения..................................... 213
8.5. Устойчивость, качество работы и настройка автоматических
обычных и микропроцессорных систем регулирования напряжения ... 226
Глава 9. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ТЯГОВЫМИ
ЭЛЕКТРОДВИГАТЕЛЯМИ И ПЕРЕДАЧАМИ МОЩНОСТИ......................... 241
9.1. Классификация систем управления тяговыми электродвигателями
и передачами мощности и предъявляемые к ним требования....... 241
9.2. Схемы автоматических систем управления................... 245
9.3. Статические и динамические свойства тяговых электродвигателей,
передач мощности и элементов систем управления ими .......... 251
9.4. Статические и динамические свойства автоматических систем
управления .................................................. 257
Глава 10. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ
ВСПОМОГАТЕЛЬНЫХ ГЕНЕРАТОРОВ ТЕПЛОВОЗОВ........................... 261
10.1. Классификация автоматических систем регулирования
напряжения вспомогательных генераторов и предъявляемые
к ним требования............................................. 261
10.2. Схемы автоматических систем регулирования напряжения.... 262
10.3. Статические и динамические свойства вспомогательных
генераторов и регуляторов их напряжения...................... 264
10.4. Устойчивость и качество работы автоматических систем
регулирования напряжения вспомогательны, генераторов.......... 267
Глава 11 АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ТЕМПЕРАТУРЫ
ТЕПЛОНОСИТЕЛЕЙ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК.......................... 271
11.1. Оптимальные температурные режимы энергетических установок .... 271
11.2. Классификация и функциональные схемы автоматических систем
регулирования температуры и предъявляемые к ним требования.... 275
11.3. Классификация и схемы систем охлаждения................. 278
11.4. Статические и динамические свойства систем охлаждения
как объектов регулирования температуры....................... 281
11.5. Схемы, статические и динамические свойства автоматических
обычных и микропроцессорных регуляторов температуры.......... 293
11.6. Устойчивость, качество работы и настройка автоматических
систем регулирования температуры............................. 316
426
1! 7 Технико-эксплуатационные показатели автоматических систем
регулирования температуры теплоносителей ............... 326
Глава 12. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ТЕМПЕРАТУРЫ
ТЯГОВОГО ЭЛЕКТРООБОРУДОВАНИЯ 329
12.1 Автоматическое регулирование температуры тяговых
электродвигателей . . 329
12.2. Автоматическое регулирование температуры тяговых
полупроводниковых преобразовательных установок 333
12.3. Автоматическое регулирование температуры тяговых
трансформаторов. 338
Глава 13 АВТОМАТИЧЕСКИЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ
ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКИХ СИСТЕМАХ ЛОКОМОТИВОВ 342
13.1. Классификация и функциональные схемы автоматических систем
регулирования давления в пневматических системах локомотивов
и предъявляемые к ним требования 342
13.2. Схемы пневматических систем локомотивов
как объектов регулирования давления 344
13.3. Статические и динамические свойства пневматических систем
локомотивов. .... ...... 344
13.4. Схемы, статические и динамические свойства автоматических
регуляторов давления 346
13.5. Принципиальные и структурные схемы, устойч 1вость,
качество работы и настройка автоматических обычных
и микропроцессорных систем регулирования давления . 360
Глава 14. АВТОМАТИЧЕСКАЯ ЗАЩИТА АГРЕГАТОВ
И СИСТЕМ ЛОКОМОТИВОВ.......................................... 369
14.1. Классификация автоматических систем защиты и предъявляемые
к ним требования .. 369
14.2. Автоматические системы защиты дизеля.................... 371
14.3. Автоматические системы защиты передачи мощности 375
14.4. Автоматические бортовые системы технической диагностики 378
Глава 15 АВТОМАТИЧЕСКОЕ ТОРМОЖЕНИЕ ЛОКОМОТИВОВ. 384
15.1. Классификация автоматических систем регулирования
скорости движения локомотивов при торможении и предъявляемые
к ним требования........................................ 384
15.2. Статические и динамические свойства локомотива с составом
как объекта управления 385
15.3. Статические и динамические свойства автоматических
регуляторов скорости поезда при торможении 391
15.4. Определение устойчивости и качества работы автоматических
систем регулирования скорости поезда при торможении тепловоза 394
427
I наш» 16 МИОМMil’ll ( KOI PI I VlHIPOBAIIIII ( KOPO( III
ДВ11ЖГНИЯ ЛОКОМОЦ1ВА В 1ЯГОВОМ PI Ж11М1
II Bl ,'U Hill HOI VIA IQH
16 I Классификация niiioMani'icCkiix chcicm pci vnipoiiainiH ckopovtii
lohUMoiiiiui ii не U'iiiih нос via и ирс ii.«ivi«cmi.ic к ним цнОонання МЖ
16 2 Ciiiiipiciкис и iiinaMii’iccMic cuoiiciHa ihiom.ihihcckiix
pci X IN ivpoil I kvpOt III II XCipoilCIB Mip.lH ICIIIIN IIOVV10M при paooie
’lOkOMOIHHa II INI1MIOM режиме |()|
16 1 KpiiivpiiH oitiiiM.rii.iioviii yiiptiii'icniiN lOkOMtniiiioM
при anioM.ii ii'iccKOM не iciniii nocvui IOS
16 4 ‘I’Mihiinoiia ii.iliac схемы лпк»мл|нчсскн\ ciivivm неленнн
ЛОКОМ01 iiimii 40,4
PckiiMcii iscm.in iiiiep.nxpa 4|4
Огненные сокращения н oooiii.i'icihin 420
V /<•( UK •< и It h 1НШ •
Чукой Никочап Михайлович
IP icxil Нау К. профессор, академик \ка демпи rpaiiciiopia России
И Гр НК пор! ПОП Лк 1 ICMIII1 Лкр.1НПЫ
Космо ымиинс кин \п цкй Серп-спич
I р Юхи наук, кики!
МИОМ \П1Ч1 ( Kill ( IK II МЫ
У ПРАВ.’II НИМ Л0К0МО1ИВОВ
А чепчик f> in tn кт
.нее ie/4u<h>p<> ненп о mptuh порта
I’cuiKiop Я I /V
\\ llDKCC IIICIIIIIUI! |X'"<IKH>p / /» A IIIM<irt<l
Коррекюры / H (itxwiUKiin If Ф ( <•«><
kOMIII.KHcpilitH пере Ihii W/»
Ihuiniu ЯИО l« IK-Ullh (И1 <io '00
Формн! 60*M 1 if, Исч ч 1’ирнж U)0(> »ki 1«k N"llrt
ll'\ чУчсбИИ MCll* HCIItp no O(>pilli>nnilllh>
Illi же ЧС Uio lopoAHOM Ipillli liopit'
HWO’K Moekini. I> и miuiiii.uI tu p : ь
Ic ! (4ЧМ ?h.’ I 1 4 ?
I mail nuuki'tiiig«' iiiiii/ill.in
llllp ««« llllli nil III
OriiriiiiMiio u ОАО "M<>i мхи инн i nnoi pni|uiH N"'*
1IA0K8. MiKhii* lOHiiioiiupioiniH , i ?l