





















































































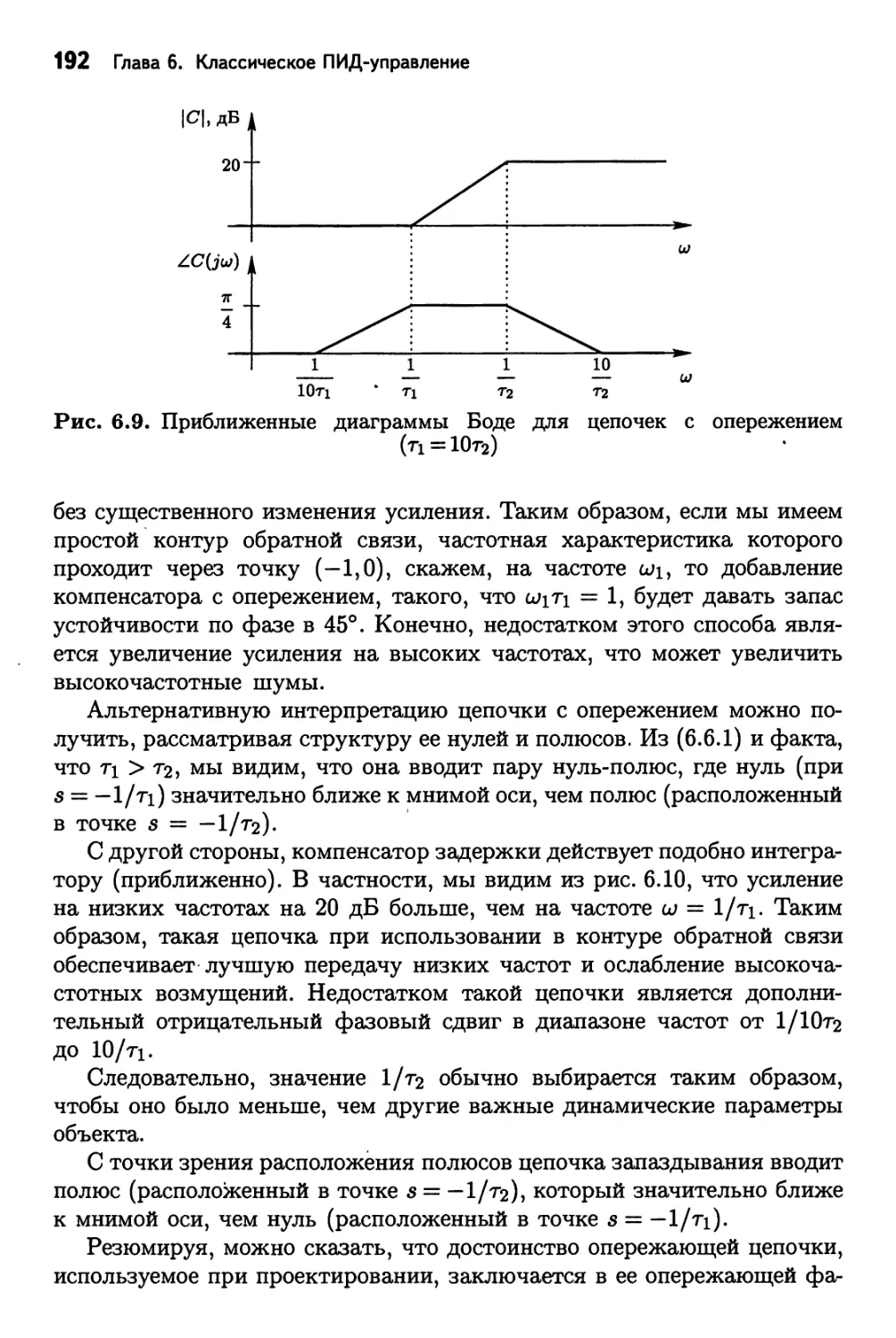












































































































































































































































































































Author: Гудвин Г.К. Гребе С.Ф. Сальгадо М.Э.
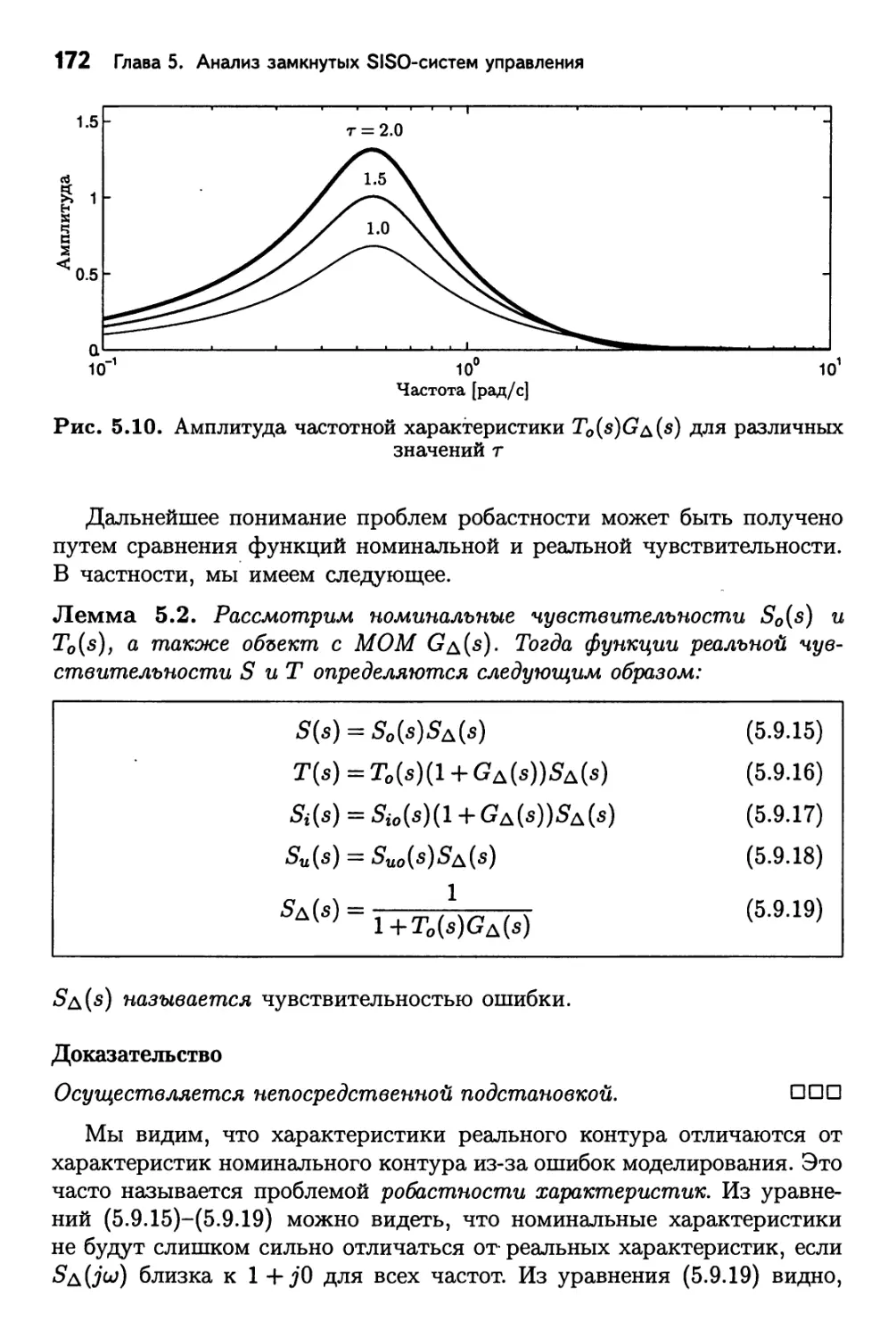
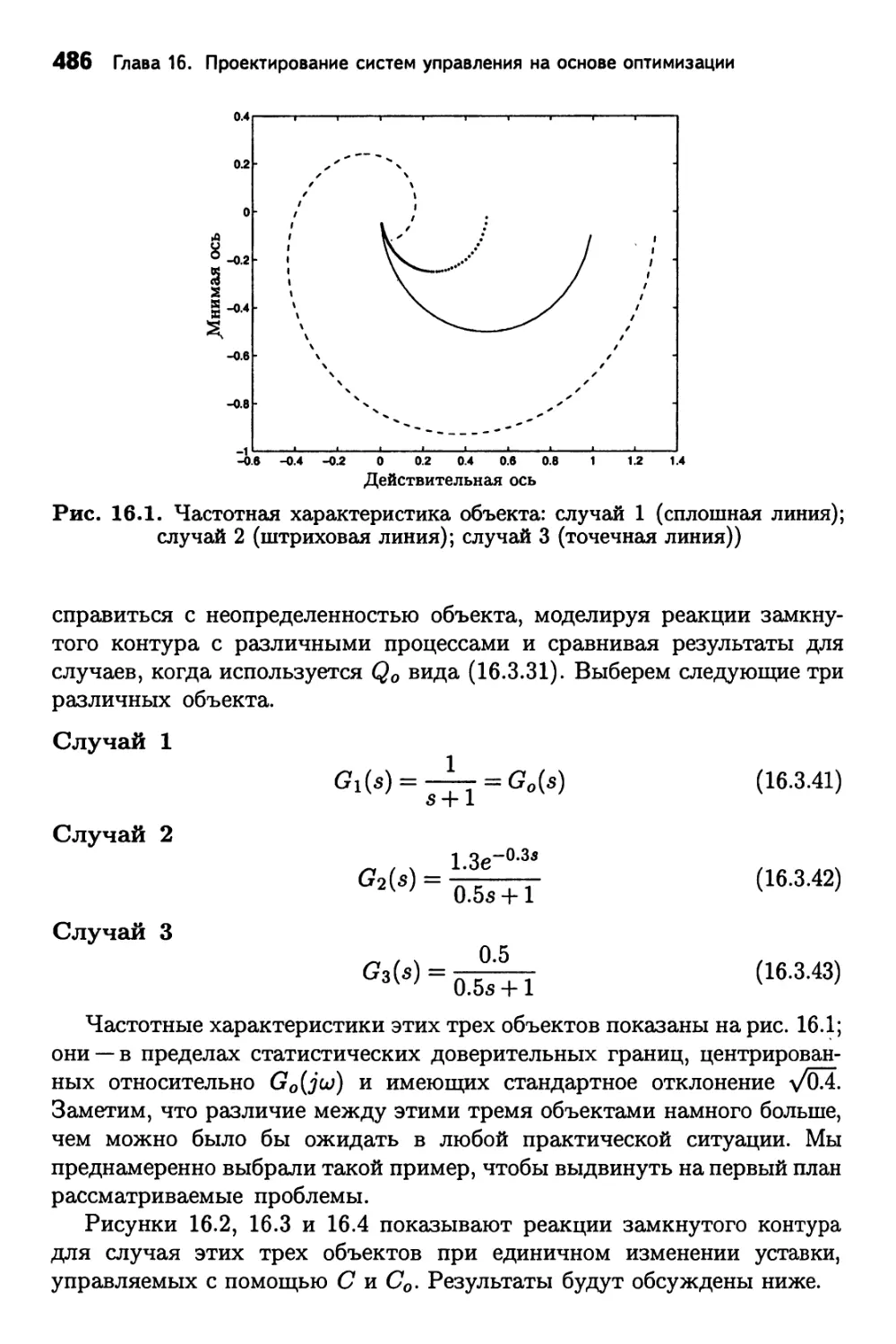
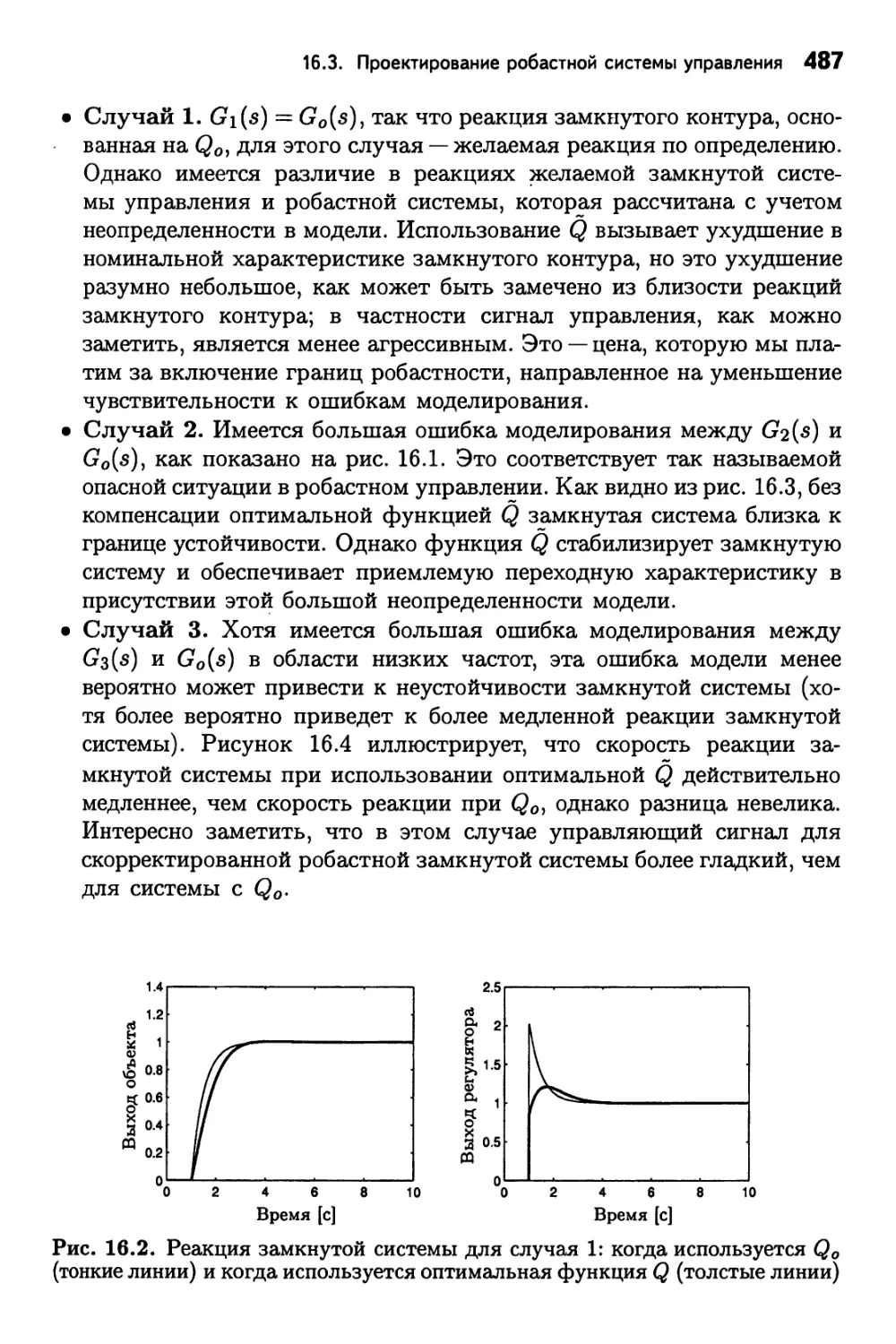
Tags: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика робототехника переводная литература издательство бином
ISBN: 5-94774-128-8
Year: 2004




Г. К. Гудвин
С. Ф. Гребе
М. Э. Сальгадо
—проекты • • i ани -
СИСТЕМ 4 t НИЯ
Классическое
П J -управление
Синтез в пространстве
состояний
Цифровые и гибридные
системы управления
Учет фундаментальных
о аничении при синтезе
Параметризация регуляторов
оптимальное управление
CONTROL SYSTEM DESIGN
Graham C. Goodwin
Centre for Integrated Dynamics and Control
University of Newcastle
Newcastle, AUSTRALIA
Stefan F. Graebe
OMVAktiengesellschaft
Department of Optimization/Automation
Vienna, AUSTRIA
Mario E. Salgado
Departamento de Electrcmica
Universidad Tecnica Federico Santa Maria
Valparaiso, CHILE
Prentice Hall
Upper Saddle River, New Jersey 07458
Г. К. Гудвин
С. Ф. Гребе
М. Э. Сальгадо
проектирование
СИСТЕМ УПРАВЛЕНИЯ
Перевод с английского
А. М. Епанешникова
*
Москва
БИНОМ. Лаборатория знаний
2004
УДК 681.5
ББК 32.965
Г93
Гудвин Г. К.
Г93 Проектирование систем управления/Г. К. Гудвин, С. Ф. Гре-
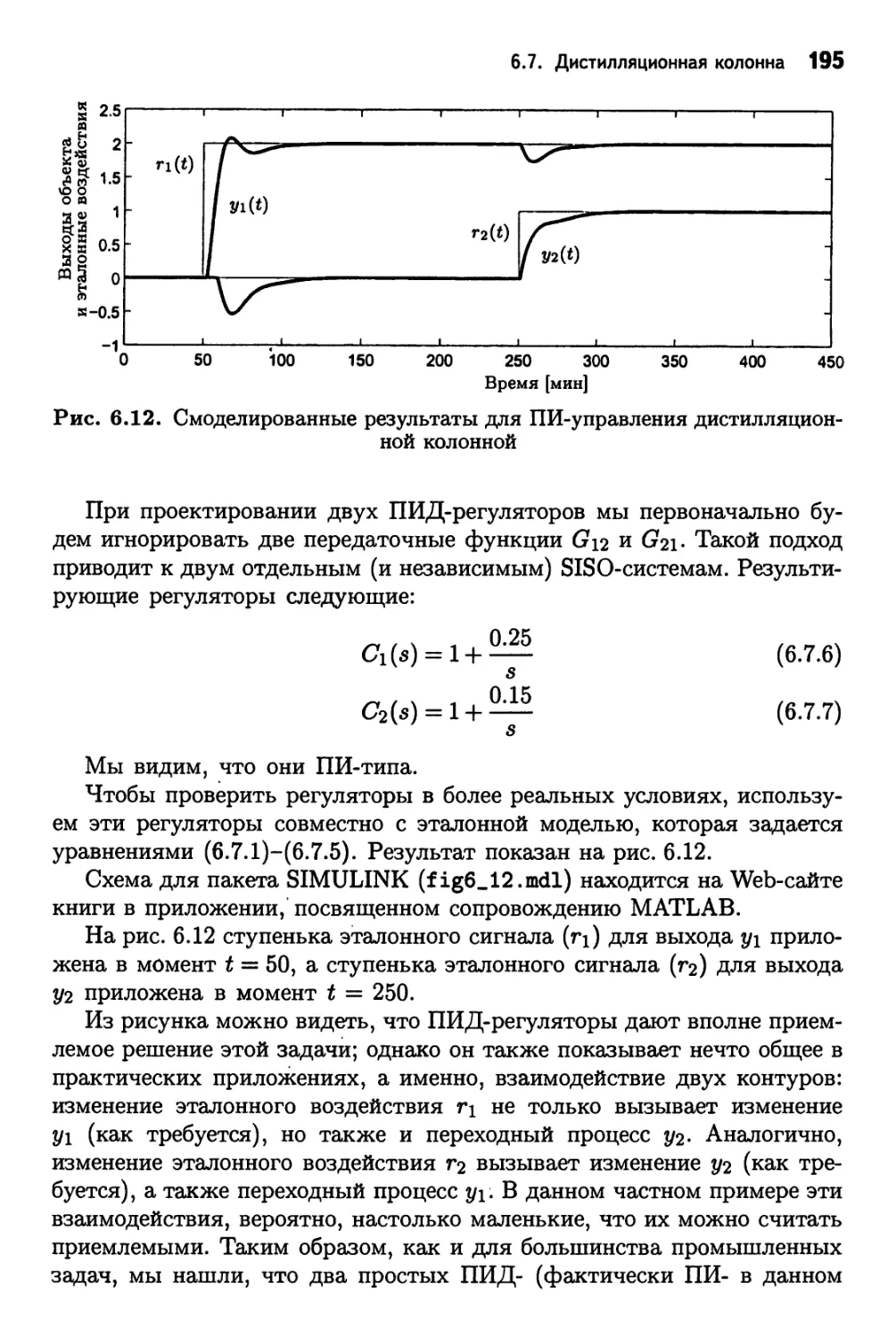
бе, М. Э. Сальгадо. — М.: БИНОМ. Лаборатория знаний, 2004.—
911 с, ил.
ISBN 5-94774-128-8
В книге излагаются современные методы проектирования одномерных
(SISO) и многомерных (MIMO) систем автоматического управления. Синтез
регуляторов основан как на классической теории управления — аппарате
передаточных функций (чувствительностей), так и на современной теории
управления — методах пространства состояний. Рассматриваются
непрерывные (линейные и нелинейные) и цифровые системы. Большое внимание
уделяется проектированию систем управления с использованием критериев
оптимальности.
Прилагаемый к книге CD-ROM содержит обширную дополнительную
информацию, в том числе интерактивные учебные примеры,
иллюстрирующие применение изложенных методов проектирования к реальным
промышленным системам.
Преподавателям, студентам и аспирантам технических вузов, а также
научным работникам и инженерам-практикам, занимающимся
проектированием систем управления.
УДК 681.5
ББК 32.965
Все права защищены. Никакая часть этой книги не может быть
воспроизведена или передана в любой форме или любыми средствами, электронными
или механическими, включая фотографирование, магнитную запись или
иные средства копирования или сохранения информации без разрешения
Pearson Education, Inc.
All rights reserved. No part of this book may be reproduced or transmitted in
any form or by any means, electronic or mechanical, including photocopying,
recording or by any information storage retrieval system, without permission
from Pearson Education, Inc.
По вопросам приобретения обращаться:
«БИНОМ. Лаборатория знаний» (095) 955-03-98, email: lbz@aha.ru
Authorized translation from the English
language edition, entitled CONTROL
SYSTEM DESIGN, 1st Edition by
GOODWIN, GRAHAM C; GRAEBE,
STEFAN F.; SALGADO, MARIO E.,
published by Pearson Education, Inc,
publishing as Prentice Hall,
Copyright © 2001 by Prentice Hall
RUSSIAN language edition published by
BKL PUBLISHERS, Copyright © 2004
ISBN 0-13-958653-9 (англ.) © Перевод на русский язык,
ISBN 5-94774-128-8 (руССК.) БИНОМ. Лаборатория знаний,
Предисловие
к русскому переводу
Предлагаемая читателю книга содержит полезный материал по
вопросам теории и практики создания систем управления.
Конечно же, в первую очередь это учебник для студентов, причем
он построен таким образом, что позволяет рассматривать те или иные
вопросы на разных уровнях сложности. Это также и прекрасное
пособие для преподавателя, предоставляющее возможность идти от
первоначального знакомства с проблемой к ее дальнейшему углубленному
изучению.
В отличие от многих отечественных учебников здесь, как правило,
не «разжевываются» те или иные вопросы, а формулируется проблема
и даются пути ее решения. Поэтому прочтение этой книги еще не
гарантирует успешной сдачи экзамена по соответствующему курсу, а
требует осмысления представленного здесь материала. Таким образом, она
стимулирует студента творчески подойти к рассмотренным вопросам,
задуматься над ними, чего так порой не хватает в наших отечественных
курсах.
Положительным моментом книги является то, что она написана
людьми, которые являются не только преподавателями, но и практиками.
Поэтому многие проблемы здесь не носят академический характер, а
почерпнуты из практической деятельности по созданию систем
управления разнообразного назначения.
Интересны некоторые методические нововведения авторов. Так,
например, параллельное рассмотрение непрерывных и дискретных систем,
кажущееся на первый взгляд непривычным, по-видимому, имеет смысл,
учитывая аргументацию авторов, что подавляющее большинство
современных систем управления — цифровые системы.
Материал сопровождается большим числом примеров, которые
необходимо решить, чтобы быть уверенным, что материал соответствующей
главы достаточным образом усвоен. Примеры тщательно подобраны и
6 Предисловие к русскому переводу
дают преподавателю широкое поле деятельности для формирования
на их основе других примеров различной сложности, которые можно
предложить студентам.
Однако, на наш взгляд, некоторые вопросы можно было бы осветить
более строго. В частности, скорее интуитивные нежели строгие
рассуждения об устойчивости систем, связанные с рассмотрением нахождения
полюсов передаточной функции на комплексной плоскости, было бы
неплохо в первых же глазах заменить определением устойчивости по
Ляпунову (которое в конце концов авторы вынуждены ввести в
последующих главах), откуда непосредственно бы вытекало как следствие
влияние расположения полюсов на устойчивость (да и разночтений с
границей устойчивости — куда ее относить — к области устойчивых или
неустойчивых систем, тогда бы не было).
Текст перевода скорректирован с учетом замеченных опечаток,
приведенных на Web-сайте книги. В русском переводе устранены также
некоторые замеченные нами незначительные опечатки оригинального
текста (конечно же, при этом добавлены другие неточности, будем
надеяться, несущественные).
Книга написана доступным ясным языком, что немаловажно для
учебника. О качестве же перевода судить читателю. Во всяком случае,
мы надеемся, что знакомство с этой книгой будет приятно для читателя.
С благодарностью за поддержку и
понимание посвящается Росслин,
Элис, Мариви
Благодарности
Авторы хотят выразить благодарность большому числу коллег и
друзей, которые работали с нами в области управления на протяжении
ряда лет. Эта книга фактически является синтезом идей, которые
они помогли нам сформулировать. Все три автора работали какое-то
время вместе в Научном центре промышленных систем управления
Университета Ньюкасла, Австралия. Это было плодотворное время для
многочисленных дискуссий о принципах управления. Финансирование
этого центра Австралийским Правлтельством по программе поддержки
государственных центров заслуживает благодарности. Финансовая и
другая поддержка обеспечивалась также Техническим Университетом
Федерико Санта Марии, позволившая, помимо прочего, первому автору
несколько раз посетить Чили в течение написания этой книги. Многие из
студентов и коллег читали черновики книги в течение пяти лет. Авторы
несут полную ответственность за научные положения, отраженные в
книге (и все оставшиеся ошибки). Тем не менее, они желают особенно
поблагодарить за полезные советы Томаса Бринсмида, Артура Конлей,
Сэма Крисафулли, Хозе де Дона, Ари Фойера, Джейма Глариа,
Уильяма Хита, Кацуо Комацу, Дэвида Мейна, Тристана Переса, Марию
Серон, Густаво Вергара, Люпинь Вонг и Стива Веллера. Книга была
подготовлена и напечатана многими людьми, включая авторов; однако
на заключительных стадиях создания книги значительную помощь
оказала Джейн Дисней. Тим Уайли и Адриан Бастиани любезно создали
технические рисунки, приведенные в тексте. Авторы также хотят
поблагодарить сотрудников Prentice-Hall, особенно Эрика Франка, за их
советы, руководство и поддержку в течение создания книги. Авторы
также благодарны за очень ценные и первоначально анонимные
отзывы, полученные от следующих рецензентов первого варианта: Кемина
8 Благодарности
Зоу (Государственный университет штата Луизиана), Рика Джонсона
(Корнельский университет), Дж. Б. Пирсона (Университет Раиса), Чаки
Абдалла (Университет Нью-Мексико), Стивена Чина (Католический
Университет Америки), Энди Грэйса (The Mathworks, Inc.), Джима
Фройденберга (Университет Мичигана), Билла Перкинса (Университет
штата Иллинойс в Урбана-Шампейн) и Хассана Халила (Мичиганский
Государственный университет). Мы полагаем, что окончательная
рукопись в должной мере отражает их очень полезные и проницательные
предложения.
Условные обозначения
Е= равно по определению
t непрерывное время
/(£) непрерывный сигнал
к дискретное время
{/[&]} дискретная последовательность
А период квантования
f{kA) квантованный вариант f(t)
5 дельта-оператор
q оператор сдвига вперед
5к (к) дельта-импульс Кронекера
8{t), Sn(t) дельта-импульс Дирака
£{...} ожидаемое значение ...
Гс матрица управляемости в пространстве состояний
Г0 матрица наблюдаемости в пространстве состояний
Л{...} множество собственных значений матрицы
/i(t — i0) единичная ступенька (непрерывное время) в момент
* = t0
/i[fc — k0] единичная ступенька (дискретное время) в момент
Л/ П/Q
fs{t) дискретная версия f(t) с использованием импульса
Дирака
F[...] преобразование Фурье
£[...] преобразование Лапласа
D[...] дельта-преобразование
Z[...] Z-преобразование
T~l[...] обратное преобразование Фурье
С~1[...] обратное преобразование Лапласа
V~l[...] обратное дельта-преобразование
10 Условные обозначения
Z"l[...] обратное Z-преобразование
s комплексная переменная преобразования Лапласа
ш угловая частота
7 комплексная переменная дельта-преобразования
z комплексная переменная Z-преобразования
F(juj) преобразование Фурье от /(£)
F(s) преобразование Лапласа от f(i)
^(7) дельта-преобразование от {/[&]}
Fq(z) Z-преобразование от {/[&]}
/l(*) * /2(*) свертка }\{t) и /2(f) во временной области
F\{s)*F2{s) свертка F\(s) и i*2(s) в комплексной области
Е{...} вещественная часть
JT{...} мнимая часть
Стхп множество всех матриц размерности mxn с
комплексными компонентами
%2 Гильбертово пространство квадратично
интегрируемых функций вдоль мнимой оси и аналитических в
правой полуплоскости
С\ Гильбертово пространство абсолютно интегрируемых
функций вдоль мнимой оси
£2 Гильбертово пространство квадратично
интегрируемых функций вдоль мнимой оси
Ноо Гильбертово пространство ограниченных функций
вдоль мнимой оси и аналитических в правой
полуплоскости
VSKoq Гильбертово пространство рациональных
ограниченных функций вдоль мнимой оси и аналитических в
правой полуплоскости
£оо Гильбертово пространство ограниченных функций
вдоль мнимой оси
N множество всех натуральных чисел
Ш+ множество вещественных чисел, больших нуля
R" множество вещественных чисел, меньших нуля
Emxn множество всех матриц размерности m x n с
вещественными компнентами
S множество всех вещественных рациональных
функций с (ограниченными) полюсами строго внутри левой
полуплоскости
Z множество всех целых чисел
[a,ik] матрица, у которой элемент в t-й строке и fc-м столбце
обозначен через а^
[A]ik элемент в г-й строке и fc-м столбце матрицы А
Условные обозначения 11
[А],.
[А].*
(•■•Г
Сло(в)
См(я)
я(...)
Hi®Ha(...>
life
г-я строка матрицы А
fc-й столбец матрицы А
комплексно-сопряженная величина
передаточная функция экстраполятора нулевого
порядка
передаточная функция экстраполятора первого
порядка
обозначение оператора преобразования
составной оператор, т. е. Н\{Н2(•••))
единичная матрица вК^л
diag(ai,a2,...,an) диагональная матрица с элементами а,{
det(A)
argQF
minF
AdjA
rank A
S-ШЮСКОСТЬ
SISO-система
MIMO-система
AOM
ЛКР
ЛМДО
ЛПП
МДО
MOM
МОУ
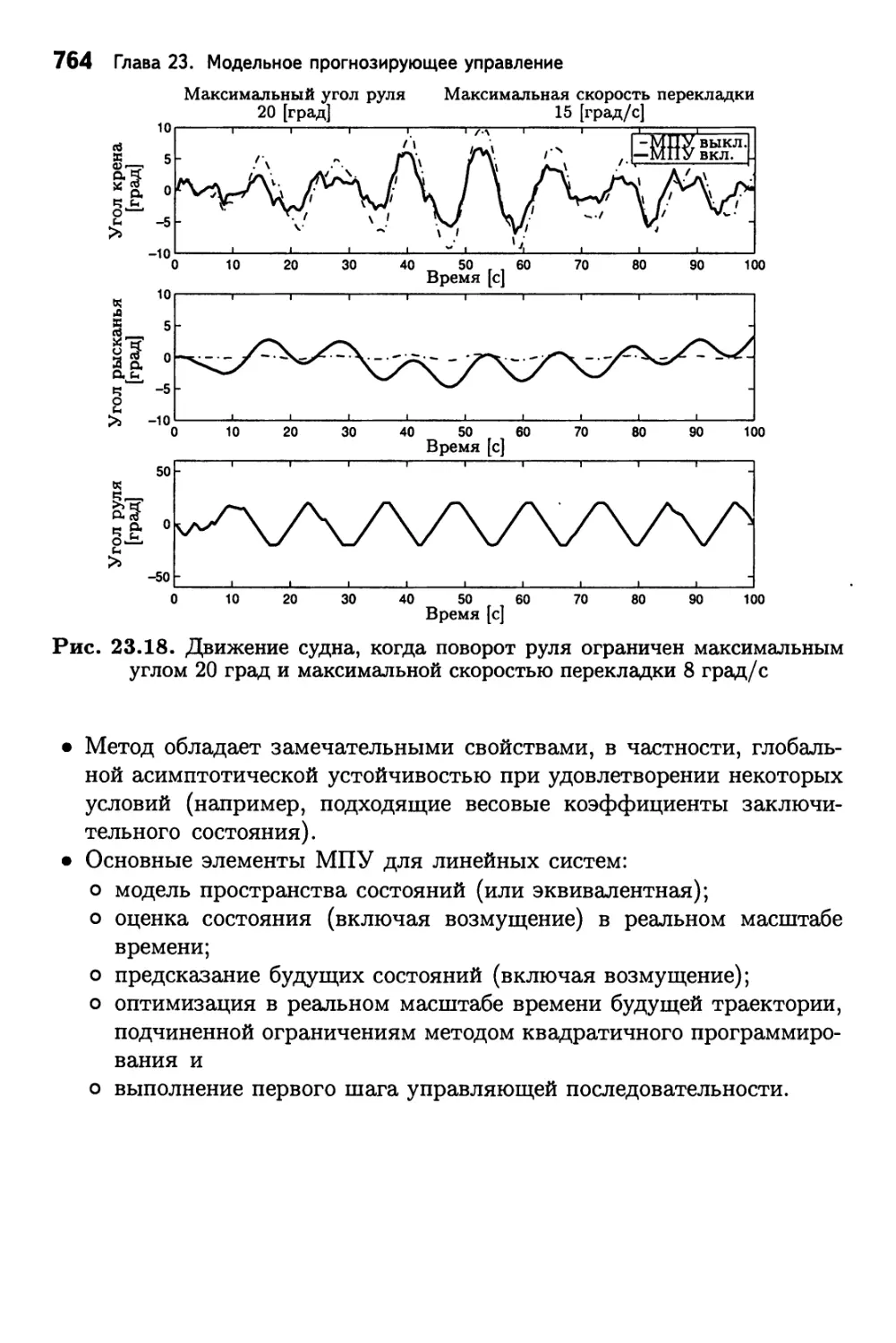
МПУ
ПВМ
ПМДО
ППП
определитель матрицы А
аргумент Q функции F
минимальное значение функции F
присоединенная матрица матрицы А
ранг матрицы А
плоскость комплексного параметра s
система с одним входом и одним выходом (Single-Input
Single-Output)
система со многими входами и многими выходами
(Multi-Input Multi-Output)
аддитивная ошибка моделирования
линейный квадратичный регулятор
левое матричное дробное описание
левая полуплоскость
матричное дробное описание
мультипликативная ошибка моделирования
массив относительных усилений
модельное прогнозирующее управление
принцип внутренней модели
правое матричное дробное описание
правая полуплоскость
Предисловие
Введение в проектирование систем управления
Проектирование систем управления играет важную роль в современных
технологических системах. Выгоды от совершенствования систем
управления в промышленности могут быть огромны. Они включают
улучшение качества изделия, уменьшение потребления энергии, минимизацию
материальных затрат, повышение уровней безопасности и сокращение
загрязнения окружающей среды. Трудность однако здесь состоит в
том, что ряд наиболее передовых идей имеет сложный математический
аппарат. Возможно, математическая теория систем —одно из наиболее
существенных достижений науки двадцатого века, но ее практическая
ценность определяется выгодами, которые она может приносить. По
этой причине мы сделали в книге сильный акцент на практическую
сторону, в конечном счете, несколько нарушив баланс между теорией
и практикой.
Участие авторов в ряде промышленных проектов* систем управления
было одной из побудительных причин написать эту книгу. Из типичных
технических задач мы исследовали динамику жидкостей и тепловых
процессов, негативные воздействия нестабильности частоты
сканирования программируемых контроллеров, занимались вопросами интеграции
систем и протоколов обмена в сети, идентификацией объектов
управления и разрабатывали безопасные схемы исследования опытных
вариантов систем управления для потенциально опасных объектов. Короче
говоря, мы испытали ежедневные волнения, разочарования, препятствия,
неудачи и успехи в разработке продвинутых систем управления, чтобы
внести свой вклад в практические результаты коммерческой компании.
Это —не простая задача. Успех здесь зависит от широкого диапазона
мультидисциплинарных навыков, однако это полезная и захватывающая
работа для тех, кто ей занимается.
Одна из главных целей данной книги — поделиться этими чувствами
с нашими читателями. Мы надеемся оказать влияние на развитие навы-
Введение в проектирование систем управления 13
ков и отношение к проблеме читателей, в первую очередь студентов,
что вооружит их в решении реальных задач. Таким образом, книга
предназначена внести вклад в продолжающуюся реформу учебного
плана специальности «Проектирование систем управления». Эта тема
продолжает серьезно привлекать международное общественное мнение,
поскольку педагоги стремятся отразить привлекательность и важность
разработки систем управления. Действительно, все выпуски Журнала
по системам управления IEEE были посвящены этой теме.
Преобразование учебного плана, однако не может быть обеспечено
одними книгами. Это делается людьми: студентами, преподавателями,
исследователями, практиками, публицистами и рецензентами, а также
требованиями рынка. Кроме того, для эффективности и
жизнеспособности этих усилий нужно, чтобы общество разработчиков систем
управления сообщало о своих достижениях через новые книги,
лаборатории, модели и глобальные вычислительные сети. Следовательно,
требуются различные дополняющие друг друга подходы. В этом смысле
авторы полагают, что книга будет, в некотором роде, полезна, если она
привлечет интерес студентов к захватывающей дисциплине разработки
систем управления.
Мы подчеркиваем, что это — не книга с практическими
рекомендациями. Напротив, мы даем всестороннее, но все же сжатое, представление
строгой разработки систем управления. Мы используем, как и требуется,
математику в качестве средства моделирования процессов для анализа
их свойств под действием обратных связей, для синтеза регуляторов
с требуемыми свойствами и достижения цели с учетом внутренних
компромиссов и ограничений, присущих задаче.
В частности мы полагаем, что успех при проектировании систем
управления зависит от двух ключевых моментов: а) всестороннего
понимания самого процесса, полученного при изучении физических,
химических и других явлений, и б) знания фундаментальных концепций
сигналов, систем и обратной связи. Первый момент обычно занимает
более половины усилий. Это — неизбежный компонент полного цикла
проектирования; однако непрактично описывать все детали процессов,
для которых можно было бы применять системы управления, потому
что они охватывают и химические объекты, и электромеханические
системы, и роботы, и энергетические генераторы и т. д. Таким образом,
мы концентрируемся на фундаментальных аспектах проектирования
систем управления, являющихся общими для любых приложений и
отсылаем читателей дополнить свои знания процессами в собственных
конкретных задачах. Таким образом, книга преимущественно нацелена
на второй компонент разработки систем управления. Конечно же, мы
14 Предисловие
приведем в соответствующем контексте примеры использования
излагаемых методов применительно к некоторым реальным системам.
Центральная тема этой книги — непрерывные системы управления,
однако мы также рассмотрим подробно и цифровое управление, потому
что большинство современных систем управления обычно используют те
или иные средства вычислительной техники. Этот подход естественно
привел к книге большего объема, чем первоначально предполагалось,
однако преимуществом является более полное рассмотрение проблемы в
одном произведении. Естественно, остались специальные темы, которые
не охвачены книгой; однако мы полагаем, что обеспечили достаточную
основу для того, чтобы читатель мог безболезненно перейти к изучению
соответствующей дополнительной литературы.
Цели
Таким образом, при написании этой книги мы выбрали в качестве
основных целей следующие:
• обеспечение возможности работы с серьезным материалом,
выбранным по своему усмотрению;
• концентрация основного внимания на проектировании, включая
методы учета фундаментальных компромиссов и ограничений;
• обеспечение дополнительной поддержки с помощью мощной
интерактивной глобальной вычислительной сети и
• демонстрация достоверности материала на основе рассмотрения
многочисленных промышленных примеров.
Действительно, материал в книге иллюстрирован многочисленными
промышленными системами, к которым авторы имели прямую
причастность. Большинство этих систем было выполнено в сотрудничестве
с промышленностью в Объединенном центре динамики и управления
(Centre for Integrated Dynamics and Control — CIDAC) (специальный
исследовательский центр Британского Содружества) в Университете
Ньюкасла.
Проекты, которые мы выбрали для описания, следующие:
• слежение за спутником;
• управление уровнем рН;
• управление непрерывным литьем;
• управление сахарным отжимным прессом;
• управление колонной дистилляции;
• управление синтезом аммиака;
Краткий обзор книги 15
• оценка массы цинкового покрытия на непрерывных линиях
гальванизации;
• управление толщиной полосы прокатного стана с помощью BISRA-
измерителя1;
• компенсация эксцентриситета валков прокатного стана;
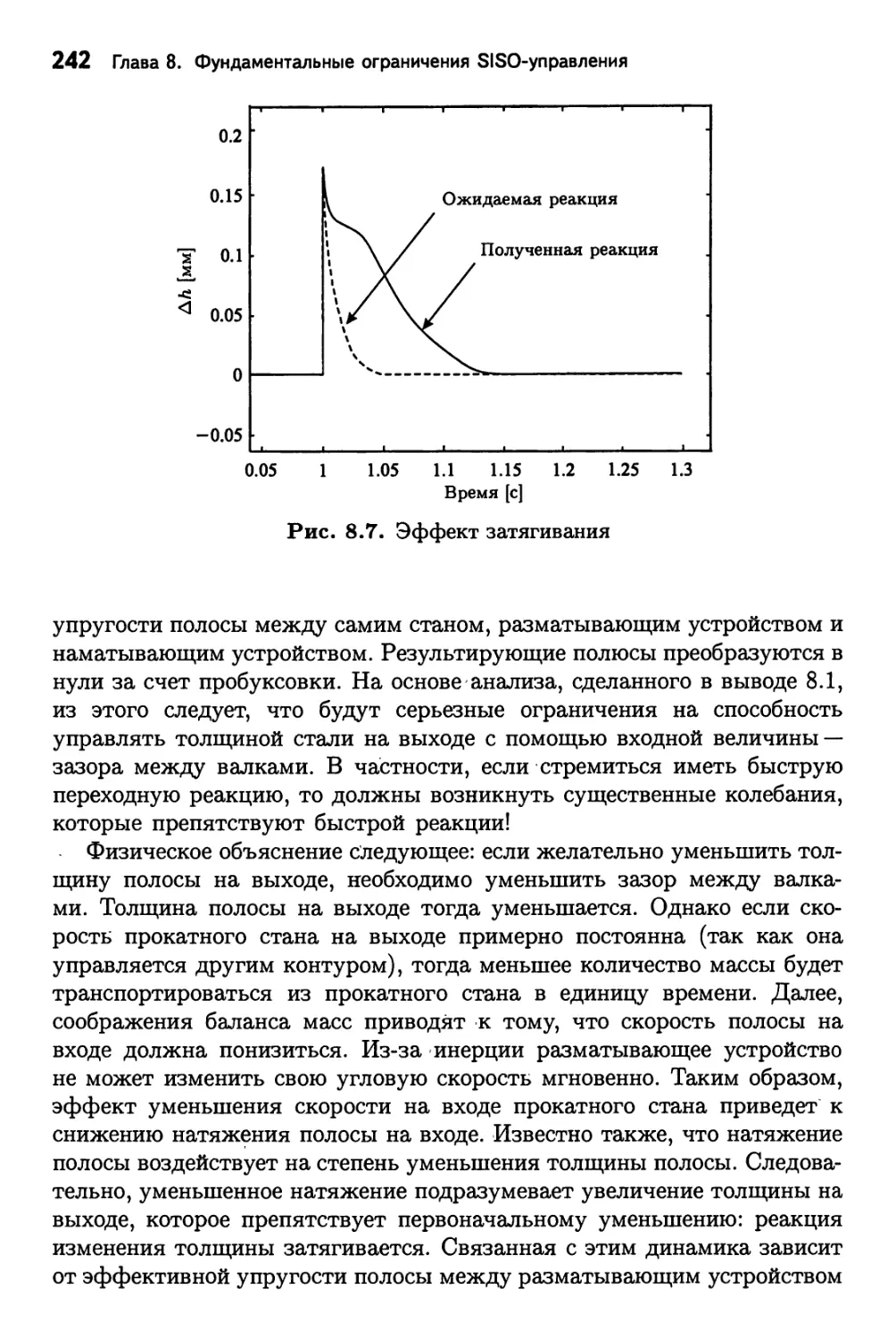
• эффект затягивания на реверсивном прокатном стане;
• управление поверхностью полосы прокатного стана;
• управление вибрацией.
Проектирование —- сложный процесс, который требует принятия
решений и использования итераций. Задача проектирования обычно не
полностью определена, иногда неточно указана и часто не имеет
решения. Ключевой момент в проектировании — понимание тех факторов,
которые ограничивают достижение решения. Это естественно приводит
к выводу о создании системы управления с учетом этих основных
ограничений. К этой точке зрения мы постоянно возвращаемся в течение
всей книги.
Наша цель не состоит в том, чтобы дать исчерпывающие
математические исследования, а в том, чтобы дать читателю такой материал,
который он может сразу же применить на практике. Мы предполагаем,
что читателю доступны современные вычислительные средства,
включая пакет программирования MATLAB-SIMULINK. Это позволяет нам
сосредоточиться в первую очередь на фундаментальных идеях, а не на
прикладных. Каждая глава включает относящиеся к теме примеры и
задачи для читателя.
Краткий обзор книги
Книга разделена на восемь частей. Ниже дается резюме каждой из
частей.
Часть I: Элементы
Эта часть охватывает основные непрерывные сигналы и системы. Ее
можно использовать для вводного курса по этой теме. С другой стороны,
этот материал можно рассматривать как исходный для дальнейшего
серьезного изучения систем управления.
1BISRA (British Iron and Steel Research Association) — Британская исследовательская
ассоциация железа и стали, в которой разработан данный метод.
16 Предисловие
Часть II: Основы SISO-систем управления
Эта часть посвящена системам управления с одним входом и одним
выходом (SISO-системам —- Single-Input Single-Output), включая
классическое пропорционалъно-интегралъно-дифференцирующее (ПИД)
регулирование. Эта часть вместе с первой частью охватывает содержание
многих существующих учебных планов основных курсов теории
управления.
Часть III: Проектирование SISO-систем управления
Эта часть охватывает проблемы проектирования систем управления
с одним входом и одним выходом. Мы .считаем многие из этих идей
очень важными в практических задачах управления. В частности, мы
полагаем, что глава, в которой говорится об ограничениях, должна быть
по возможности во всех вводных курсах. Аналогично и упреждение, и
каскадные структуры, о которых говорится в этой части, очень часто
используются на практике.
Часть IV: Цифровое управление
Эта часть охватывает материал, необходимый для понимания цифрового
управления. Мы здесь отходим от традиционных подходов к этой теме,
рассматривая проблемы поведения системы между моментами
квантования.
Часть V: Продвинутое SISO-управление
Эта часть могла бы стать основой углубленного (после начального)
курса по системам управления. Она посвящена основным понятиям,
которые затем используются в данной книге для систем со многими
входами и многими выходами (MIMO-систем — Multi-Input Multi-Output).
Часть VI: Основы MIMO-управления
Эта часть содержит основы для начального курса по системам
управления со многими входами и многими выходами. В частности она содержит
основы теории MIMO-систем управления. Здесь также показано, как
можно использовать методы SISO-систем управления для некоторых
задач МШО-проектирования.
Использование этой книги 17
Часть VII: Проектирование MIMO-систем управления
Эта часть описывает идеи и средства, которые могут использоваться
при проектировании промышленных МШО-систем. В частности, она
включает теорию линейного квадратичного оптимального управления
и оптимальную фильтрацию. Эти две темы особенно важны в
приложениях. Мы также включаем главу по модельному прогнозирующему
управлению, поскольку считаем этот материал важным из-за широкого
использования его идей в промышленных приложениях.
Часть VIII: Продвинутое MIMO-управление
Эта заключительная часть книги могла бы быть использована для
индивидуального изучения. Она предназначена для проверки усвоения
читателем материала книги, исследуя углубленные вопросы. С
другой стороны преподаватели могли бы использовать эту часть, чтобы
углубить материал частей VI и VII во многих продвинутых курсах по
MIMO-системам управления.
Использование этой книги
Это — всесторонняя книга по проектированию систем управления,
которую можно рекомендовать для многих различных курсов. Если она
используется для начального курса по системам управления, то
неиспользованный материал может быть в дальнейшем с успехом применен
в практической деятельности или для написания обзоров. Если же
она используется для продвинутого курса, то ранний материал дает
превосходную основу для построения такого курса.
Книгу можно использовать для многих различных вариантов курса.
Здесь можно выделить следующие варианты.
1. Сигналы и системы
Его можно было бы преподавать на основе части I книги.
2. Основы теорий систем управления
Его можно преподавать на основе второй части книги совместно с
некоторыми материалами из части I (в зависимости от уровня подготовки
студентов по сигналам и системам) и некоторыми материалами из части
III. В частности, глава по ограничениям проекта (гл. 8) требует только
элементарного знания преобразования Лапласа и дает студентам пони-
18 Предисловие
мание тех проблем, которые ограничивают достижимость цели. Это —
чрезвычайно важный компонент всех задач проектирования реальных
систем управления. Очень важна практически также и гл. 11, в которой
говорится об ограничениях. Наконец, идеи упреждения и каскадных
структур, которые рассмотрены в гл. 10, являются существенными в
задачах проектирования реальных систем управления.
3. Цифровое управление
Этому можно учить на основе части IV. Действительно, мы чувствуем,
что наш подход в большей степени направлен на приложения, чем
многие из традиционных подходов, в связи с рассмотрением поведения
систем между моментами квантования. В различных курсах,
читавшихся авторами этой книги, материал по цифровому управлению обычно
включался в курс основ теории систем управления. Это возможно
потому, что студенты хорошо подготовлены с помощью курса сигналов
и систем, предшествующего курсу систем управления.
4. Продвинутый курс по системам управления
Продвинутый курс по системам управления обычно включает введение
в проектирование на основе пространства состояний, наблюдателей и
обратной связи по переменным состояния. Этот материал можно
преподавать на основе частей V-VII книги. Часть V относительно проста и
служит мостиком от SISO-систем (которым главным образом посвящены
части I—IV) к MIMO-системам (которые в основном описаны в частях
VI-VIII).
Мы считаем гл. 22, посвященную оптимальному управлению и
фильтрации, очень важной и включили в нее много учебных проектов
реальных систем. Важна также и гл. 23, посвященная модельному
прогнозирующему управлению, поскольку эта техника широко используется
в промышленных системах управления.
Двое авторов (Гудвин и Сальгадо) преподавали в Австралии и
Южной Америке начальный и продвинутый курсы упомянутого выше типа,
используя черновой вариант этой книги.
Web-сайт
Мы создали для поддержки книги комплексный Web-сайт. Он содержит
следующую информацию.
Web-сайт 19
• Все приложения (так что этот материал можно читать одновременно
с текстом книги).
• Полная поддержка пакета MATLAB (он может быть загружен и
использован для воспроизведения всех примеров книги).
• Интерактивные Java-лаборатории (они иллюстрируют материал
книги, но могут также использоваться для функционального
взаимодействия).
• Избранные решения задач. (Они позволяют студентам разобраться,
как могут быть решены некоторые ключевые задачи. Конечно,
преподавателям, которые воспользуются книгой, по их просьбе могут быть
высланы копии полного сборника решений, который охватывает весь
набор задач книги.)
• Обсуждение в реальном времени (где могут быть подняты и
обсуждены темы проектирования систем управления, представляющие общий
интерес).
• Секция опечаток (используется, чтобы сообщить подробности о
любых ошибках, найденных в книге).
• Расширенные электронные слайды (приблизительно 2500 слайдов
доступны для использования с книгой).
Нам представляется использование этого материала следующим
образом:
Для преподавателя
Мы полагаем, что поддержка MATLAB и электронные слайды должны
быть особенно полезны для преподавателя. Например, было бы
возможно преподавать курс, полностью используя имеющиеся ресурсы.
Мы также выяснили, что студенты любят использовать интерактивные
лаборатории. Они могут быть показаны в аудитории как часть лекции
или даны студентам для улучшения понимания ими материала.
Для студента
Мы считаем, что электронные слайды хорошо и просто поясняют
содержание книги, обходя при этом все ненужные технические трудности.
Даже если ваш преподаватель не использует эти слайды в своих
демонстрациях, мы полагаем, что они — превосходное средство для целей
изучения. Если вы распечатаете и опишете их, то запоминание
материала должно стать легче. Студенты также должны получить удовольствие
от Java-апплетов. Если вы знаете, как с помощью апплетов выполнить
20 Предисловие
исследования, это приблизит вас к пониманию предмета. К Web-сайту
можно обращаться по любому из следующих адресов:
http://www.prenhall.com/goodwin
http://csd.newcastle.edu.au/control/
Кроме этого, для связи см. индивидуальные страницы авторов.
Обратите также внимание, что Web-сайт непрерывно развивается,
так что ресурсы будут со временем продолжать расти и
совершенствоваться.
Ньюкасл, Австралия
Вальпараисо, Чили
Вена, Австрия
ЧАСТЬ I
ЭЛЕМЕНТЫ
Введение
Проектирование и функционирование автоматического процесса,
предназначенного для обеспечения технических характеристик, таких,
например, как прибыльность, качество, безопасность и воздействие на
окружающую среду, требуют тесного взаимодействия специалистов
различных дисциплин. Сюда входят, например, специалисты по
вычислительной технике, технологи, механики, прибористы и разработчики
систем управления.
Каждая из этих дисциплин рассматривает процесс и управление
им со своей точки зрения, так что каждый специалист выбирает свои
категории или элементы, в терминах которых он думает
относительно автоматической системы. Специалист по вычислительной технике,
например, думает в терминах аппаратных средств компьютера,
инфраструктуры сети, операционной системы и прикладного программного
обеспечения. Инженер-механик подчеркнул бы механические
компоненты, из которых собран процесс; инженер-приборист думал бы в терминах
исполнительных механизмов, датчиков и их электрооборудования.
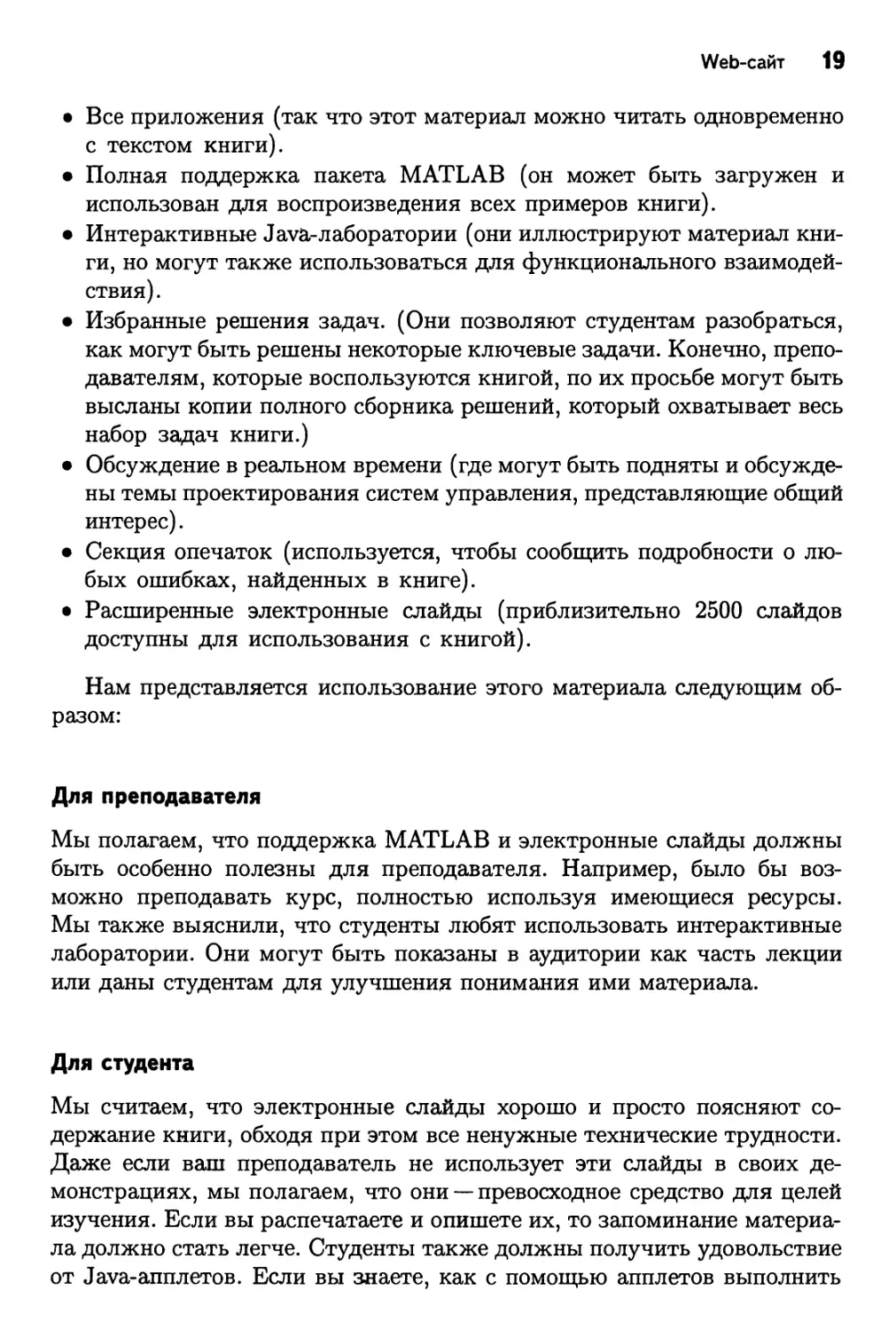
Инженер по системам управления в свою очередь думает об
элементах системы управления в таких абстрактных терминах, как сигналы,
системы и динамические реакции. Эти элементы могут быть далее
заданы их физической реализацией, математической моделью, или их
свойствами (см. табл. 1).
Эта книга отражает точку зрения инженера по системам управления,
одну из точек зрения в процессе автоматизации; однако читатель должен
иметь в виду и другие точки зрения, поскольку только в этом случае
формируется целостное представление предмета.
Первая часть книги — первая стадия нашего путешествия в
разработку систем управления. Она содержит введение в основные
характеристики непрерывных сигналов и систем и описывает ведущую роль обратной
Введение 23
Таблица 1
Системы и сигналы в терминах контура управления
Сигналы
Системы
Физические матемГтТч^ских Примеры
примеры м()делей свойств
уставка,
управляющий сигнал,
возмущения,
измеренные
величины, ...
процесс, регулятор,
датчики,
исполнительные
механизмы, ...
непрерывная
функция,
дискретная
последовательность, случайный
процесс, ...
дифференциальные уравнения,
разностные
уравнения,
передаточные
функции, модели
пространства
состояний, ...
аналитические,
случайные,
синусоидальные
процессы,
стандартные
отклонения,....
непрерывные,
дискретные,
линейные,
нелинейные, ...
связи в проектировании системы управления. Все это —основные блоки,
на которых строится все здание систем управления.
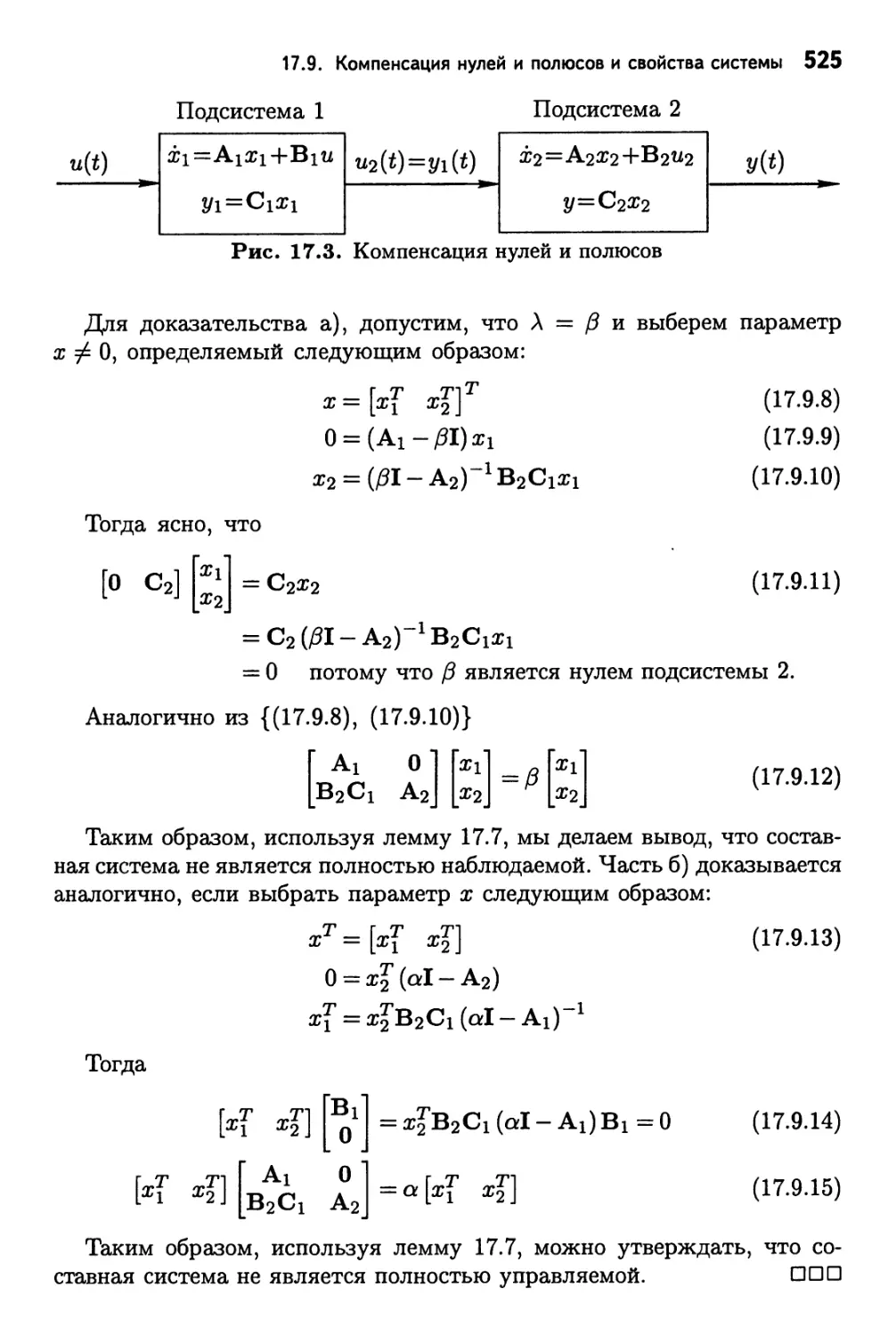
Глава 1
Причины создания
систем управления
1.1. Введение
Эта глава предназначена для обоснования необходимости изучения
вопросов разработки систем управления. В частности, она охватывает:
• краткий обзор возможностей управления,
• исторические периоды в развитии теории управления,
• виды проблем в системах управления,
• введение в системотехнику и
• экономический анализ.
1.2. Причины разработки систем управления
Управление с применением обратной связи имеет длинную историю,
которая началась с давнего желания людей использовать предметы и
силы природы в своих целях. Первые примеры систем управления
включают системы регулирования часов и механизмы направления ветряных
мельниц навстречу ветру.
Ключевой шаг вперед в развитии систем управления произошел в
период промышленной революции. К тому времени получили
широкое развитие машины, которые существенно увеличивали способность
превращать сырье в изделия на благо обществу. Связанные с этим
машины, особенно паровые, использующие большие потоки энергии,
привели к пониманию, что этой энергией нужно управлять, чтобы
системы работали благополучно и эффективно. Главным достижением
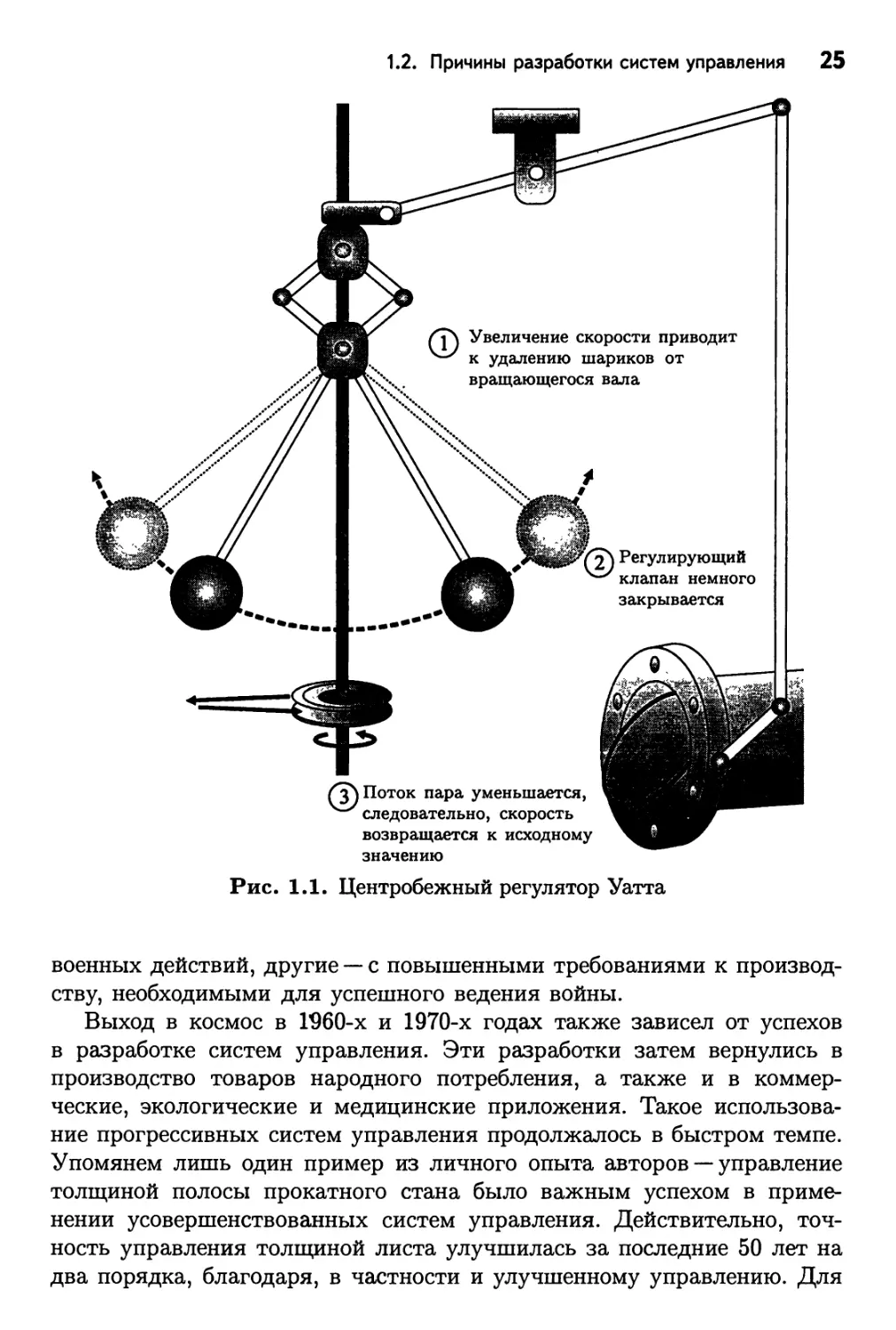
этого времени был центробежный регулятор Уатта. Это устройство
регулировало скорость парового двигателя, ограничивая поток пара; см.
рис. 1.1. Такие устройства работают по сей день.
Мировые войны также привели к прогрессу в разработке систем
управления, некоторые из которых были связаны с системами ведения
1.2. Причины разработки систем управления 25
Рис. 1.1. Центробежный регулятор Уатта
военных действий, другие—-с повышенными требованиями к
производству, необходимыми для успешного ведения войны.
Выход в космос в 1960-х и 1970-х годах также зависел от успехов
в разработке систем управления. Эти разработки затем вернулись в
производство товаров народного потребления, а также и в
коммерческие, экологические и медицинские приложения. Такое
использование прогрессивных систем управления продолжалось в быстром темпе.
Упомянем лишь один пример из личного опыта авторов —- управление
толщиной полосы прокатного стана было важным успехом в
применении усовершенствованных систем управления. Действительно,
точность управления толщиной листа улучшилась за последние 50 лет на
два порядка, благодаря, в частности и улучшенному управлению. Для
26 Глава 1. Причины создания систем управления
многих компаний это оказалось не только доходным, но и жизненно
необходимым.
К концу двадцатого столетия использование систем управления стало
вездесущим (но в значительной степени незаметным) элементом
современного общества. Фактически каждая система, с которой мы имеем
дело, подкреплена сложными системами управления. Среди примеров
можно упомянуть и простые домашние устройства (регулирование
температуры в кондиционерах, термостаты в нагревателях воды и т. д.)
и более сложные системы типа автомобиля (которые имеют сотни
контуров управления) и крупномасштабные системы (типа химических
заводов, самолетов и производственных процессов). Например, рис. 1.2
показывает схему Келлог-процесса на аммиачном заводе. В мире
имеется приблизительно 400 таких заводов. Такой сложный химический завод,
наподобие показанного на рис. 1.2, обычно имеет много сотен контуров
управления. На самом деле для простоты мы не показали на рис. 1.2
многие вспомогательные объекты, которые также имеют существенное
число контуров управления.
Многие из этих промышленных регуляторов используют технологию
режущей кромки. Например, в случае прокатного стана (см. рис. 1.3),
система управления развивает усилия порядка 2000 тонн, скорости до
120 км/ч и (э алюминиевой промышлецности) допустимые отклонения
порядка 5 микрон (1/500-я от толщины человеческого волоса!). Все это
достигнуто с помощью точных аппаратных средств ЭВМ, современного
вычислительного аппарата и сложных алгоритмов управления.
За пределами промышленных примеров механизмы регулирования с
помощью обратной связи являются центральными в жизнедеятельности
биологических систем, сетей связи, национальных экономик и даже в
отношениях между людьми. Действительно, если внимательно подумать,
управление в той или иной форме может быть найдено в каждом аспекте
жизни.
В этом контексте проектирование систем управления связано с
разработкой, созданием и использованием этих систем. Как мы увидим
позже, это — одна из наиболее перспективных и интересных областей
современного проектирования. На самом деле, чтобы успешно разработать
систему управления, требуется объединить много дисциплин, включая
моделирование (чтобы учесть лежащую в основе физику и химию
процесса), технологию датчиков (чтобы измерить состояние системы),
исполнительные механизмы (чтобы выполнить корректирующие действия
в системе), линии связи (чтобы передавать данные), средства
вычисления (чтобы выполнить сложную задачу преобразования измеренных
данных в соответствующие действия исполнительного механизма) и
1.2. Причины разработки систем управления 27
интерфейс (чтобы обеспечить непрерывное взаимодействие различных
компонентов в системе управления).
Таким образом, разработка систем управления — захватывающий
мультидисциплинарный предмет с чрезвычайно большим диапазоном
практических применений. Интерес к системам управления вряд ли
уменьшится в обозримом будущем. Напротив, он станет, вероятно, еще
большим из-за увеличивающейся глобализации рынков и экологических
проблем.
1.2.1. Проблемы рыночной глобализации
Рыночная глобализация становится всеобъемлющей и это означает, что
для того, чтобы остаться в бизнесе, производственные отрасли
промышленности должны обращать большее внимание на проблемы качества
и эффективности. Действительно, в нынешнем обществе немногие из
компаний могут себе позволить быть на вторых ролях. В свою
очередь, это сосредотачивает внимание на развитии усовершенствованных
систем управления, чтобы процессы протекали наилучшим образом.
В частности, улучшенное управление — ключ для совершенствования
технологии, обеспечивающей:
• улучшенное качество изделия,
• минимизацию потерь,
• защиту окружающей среды,
• увеличение производительности для установленных мощностей,
• увеличение продукции,
• отсрочку дорогостоящей модернизации объекта управления и
• более высокие запасы безопасности.
Все эти проблемы присущи управлению сложным объектом типа,
показанного на рис. 1.2.
1.2.2. Экологические проблемы
Все компании и правительства все более и более понимают, что, получая
свои выгоды, не следует забывать о конечности природных ресурсов и
сохранении нашей хрупкой окружающей среды. Опять-таки, разработка
систем управления — основа в достижении этих целей. Можно
упомянуть один широко известный пример, когда изменения в
законодательстве относительно выбросов от автомобилей в Калифорнии потребовали
от изготовителей автомобилей существенных изменений в технологии,
включая усовершенствованную стратегию контроля двигателей
внутреннего сгорания.
Воздух ©-
Воздушный
компрессор
Возвратный
газ
Природный ^_
газ ^~
й\
~У
Сатуратор
Предварительный
нагреватель
щ
Десульфу-
ризатор
Вода ПаР
ЛЬ
Природный газ
и очищенный
горючий газ
м
Бак
с паром
Ш
Преобразователи
Пк
о
гНнП Бойлеи
1U
ш
гР да
и
@
Первичный
преобразователь
Пар
Вторичный
преобразователь
со2
И
Поглотитель
со2
Устройство
возврата |*-|
водорода
Очищенный горючий газ
Возвратный газ
Очищенный газ
4
Синтезатор
метана
Очиститель
со2
Конвертеры синтеза
ft—*
Сепаратор
гз:
*
Компрессор
синтезируемого
газа
Секция
охлаждения
X
Жидкий аммиак
на охлаждение
и хранение
Рис. 1.2. Схема процесса на аммиачном заводе Келлога
1.3. Исторические периоды развития теории управления 29
Таким образом, мы видим, что разработку систем управления
стимулируют в основном экономические, политические и экологические
факторы. Награда для тех, кто обеспечит все это, может быть огромна.
1.3. Исторические периоды
развития теории управления
Ранее мы видели, что главные шаги в развитии систем управления
происходили в критические исторические моменты (например,
индустриальная революция, Вторая Мировая война, выход в космос,
экономическая глобализация, а также биржевые соображения). Каждый из
этих шагов был связан с соответствующим бурным развитием теории
управления.
В начале использования фундаментальной концепции обратной связи
разработчики иногда сталкивались с неожиданными результатами. Это
стало катализатором для строгого анализа. Например, если мы вернемся
к центробежному регулятору Уатта, оказалось, что при некоторых
условиях он может создавать автоколебания. К концу 19-го столетия
ряд исследователей (включая Максвелла) показали, как эти колебания
могли быть описаны через свойства обыкновенных дифференциальных
уравнений.
События периода Второй Мировой войны были также ознаменованы
существенными достижениями в теории управления. Например,
пионерские работы Воде, Найквиста, Никольса, Эванса и других появились
именно в это время, что привело к простым графическим средствам для
анализа систем управления с одним входом и одним выходом. Эти
методы теперь известны под именем «Классическая теория управления».
В 1960-е годы начал развиваться другой подход в теории
управления — пространство состояний, что последовало за публикацией работ
Винера, Калмана и других по оптимальному управлению. Эти работы
позволили подойти в задачам со многими переменными единообразно,
что было трудно, если не невозможно, в классической структуре. Такие
приемы широко называются «Современной теорией управления».
К 1980-м годам эти различные подходы к управлению достигли
сложного уровня и выразительности и переключились на другие
примыкающие проблемы, включая влияние ошибки модели на работу регуляторов
обратной связи. Это можно классифицировать как период «Робастной
теории управления».
Параллельно этому велась серьезная работа по задачам нелинейного
управления. Это обусловлено тем, что многие задачи реальных систем
управления включают нелинейные эффекты.
30 Глава 1. Причины создания систем управления
Есть и другие многочисленные достижения, включая адаптивное
управление, автонастройку и интеллектуальное управление. Они
слишком многочисленны, чтобы их здесь детализировать. Так или иначе,
наша цель состоит не в том, чтобы привести всестороннюю историю,
а просто дать почувствовать эволюцию в этой области.
Ко времени написания этой книги теория управления стала зрелой
дисциплиной. Таким образом, теорию управления можно трактовать
как дисциплину, которая учитывает многие различные точки зрения
и объединяет их в общей структуре. Это —подход, который мы здесь
возьмем на вооружение.
1.4. Виды проектирования систем управления
Проектирование систем управления обычно требует циклической
работы, в которой повторяются моделирование, проектирование, имитация,
испытание и реализация.
Оно может выполняться несколькими различными видами, каждый
из которых требует своего подхода.
Один из факторов, от которого зависит выбор вида, — является ли
назначение системы в основном коммерческим. Примеры, где дело обстоит
не так, включают исследования, образование и задачи типа посадки
первого человека на Луну. Хотя стоимость рассматривается всегда, эти
виды проектов систем управления главным образом диктуются
техническими, педагогическими соображениями, надежностью и безопасностью.
С другой стороны, если проект системы управления определяется
коммерческими соображениями, каждый из них опять-таки может
отличаться от других в зависимости от того, является ли регулятор
компонентом большого коммерческого изделия (типа регулятора скорости или
регулятора отклонения в автомобиле) или это часть производственного
процесса (типа регулятора перемещения в роботах, собирающих
автомобиль). В первом случае нужно учесть стоимость включения регулятора
в каждое изделие; это обычно означает, что желательно иметь меньшую
стоимость всего изделия и, следовательно, желательно использовать
довольно простые регуцяторы. Во втором случае обычно можно
позволить себе значительно более сложные регуляторы, при условии, что они
улучшают производственный процесс таким образом, что значительно
увеличивают объем произведенной продукции.
Во всех этих ситуациях инженер по системам управления имеет с
ними дело на всем их жизненном цикле:
• начальное проектирование «с чистого листа»;
• ввод в действие и настройка;
1.4. Виды проектирования систем управления 31
• улучшение и модернизация;
• экспертные исследования.
1.4.1. Начальное проектирование «с чистого листа»
На этой стадии перед инженером по системам управления — «нетронутое
поле» или так называемый проект «с чистого листа»; таким образом,
проектировщик может начинать работу над системой с начала. Это
дает уверенность, что при проектировании всей системы можно учесть
последующие варианты системы управления. Довольно часто системы
и объекты проектируются на основе одних и тех же установившихся
соображений. Следовательно, неудивительно, что далее могут появиться
эксплуатационные трудности. Мы считаем, что инженеры по системам
управления должны непременно входить во все коллективы
проектировщиков. Инженер по системам управления должен работать с
техническими требованиями проекта и гарантировать, что будут рассмотрены
динамические и статические проблемы.
1.4.2. Ввод в действие и настройка
Как только базовая архитектура системы управления сформирована,
задачей инженера по системам управления становится настройка
системы, чтобы обеспечить требуемые эксплуатационные характеристики
настолько полно, насколько возможно. Эта стадия требует глубокого
понимания принципов обратной связи, чтобы гарантировать, что
настройка системы управления выполнена целесообразным, безопасным и
удовлетворительным способом.
1.4.3. Улучшение и модернизация
Когда система создана и введена в эксплуатацию, работа инженера
по системам управления заключается в ее обслуживании и
усовершенствовании. Поводы для усовершенствования могут прийти из многих
направлений. Они включают следующее:
• внутренние причины —например, возможность с помощью новых
датчиков или исполнительных механизмов улучшить работу;
• внешние причины — например, рыночные давления или новое
законодательство по экологии могут требовать улучшения работы системы
управления.
32 Глава 1. Причины создания систем управления
1.4.4. Экспертные исследования
Экспертные исследования часто играют роль технических консультаций
по системе управления. Здесь цель состоит в том, чтобы предложить
корректирующие действия, которые исправят рассматриваемую
проблему управления. В этих исследованиях важно, чтобы инженер по
системам управления получил целостное представление, ибо успешное
управление обычно зависит от удовлетворительной работы многих
взаимосвязанных компонентов. По нашему опыту, плохая работа системы
управления обычно связана с основными недостатками проекта
объекта, плохими исполнительными механизмами, неадекватными датчиками
или проблемами компьютера, либо результатом плохой настройки
системы управления. Однако все эти проблемы могут и должны быть в поле
деятельности инженера по системам управления. Действительно, часто
только инженер по системам управления имеет необходимые навыки,
чтобы успешно решить эти сложные проблемы.
1.5. Организация систем управления
Как видно из предыдущего рассмотрения, успех в разработке системы
управления зависит от целостного взгляда на нее. Проблемы, присущие
типичной системе управления, включают в себя:
• объект, т. е. процесс, которым нужно управлять;
• цели управления;
• датчики;
• исполнительные механизмы;
• линии связи;
• вычисления;
• структуры и интерфейс;
• алгоритмы;
• анализ возмущений и неточностей.
Эти проблемы кратко рассмотрены ниже.
1.5.1. Объект
Как упоминалось в разд. 1.4.1, физическая природа объекта —
существенный момент задач управления. Таким образом, разработчик
системы управления должен быть знаком с физикой изучаемых процессов.
Это включает начальные знания об основном энергетическом балансе,
балансе масс и материальных потоках в системе. Физические размеры
1.5. Организация систем управления 33
оборудования и то, как они связаны с эксплуатационными
характеристиками, также должны быть понятны. В частности, мы рекомендуем
создать структуру физических моделей, как первый шаг в
проектировании и обеспечении систем управления. Эти модели будут затем
уточняться при изменении одной из них.
1.5.2. Цели управления
Прежде чем разрабатывать датчики, исполнительные механизмы или
структуру системы управления, важно знать ее назначение, т. е.
сформулировать цели управления, что включает следующее:
• что нужно достичь (уменьшение энергетических затрат, увеличение
производительности и т. д.);
• какими переменными следует управлять, чтобы достичь этих целей
управления;
• какой необходим уровень действий (точность, скорость и т. д.).
1.5.3. Датчики
Датчики являются глазами системы управления, позволяющими
видеть, что происходит в ней. Существует утверждение, которое
иногда говорится относительно управления: если вы можете измерить
что-то, то вы можете им управлять. Это, очевидно, упрощенное
утверждение и его не следует понимать буквально. Тем не менее, эта
броская фраза говорит о том, что организация соответствующих
измерений является необходимой важной частью всей задачи управления.
Кроме того, новые технологии датчиков часто открывают возможности
создания систем управления с улучшенными характеристиками.
С другой стороны, в тех случаях, когда особенно важные измерения
недоступны, то часто можно получить эти жизненно важные части
информации из других данных. Это ведет к идее гибкого или виртуального
датчика. Мы увидим, что это —один из наиболее мощных методов в
запасе средств инженера по системам управления. /
1.5.4. Исполнительные механизмы
Если датчики используются только для определения состояния
процесса, то возникает задача так воздействовать на систему, чтобы перевести
процесс из текущего состояния в желаемое. Таким образом, мы видим,
что исполнение действий в системе — другой характерный элемент в
ряду задач управления. Возможность использования новых
усовершенствованных исполнительных механизмов также часто позволяет суще-
2-1782
34 Глава 1. Причины создания систем управления
I Привод регулировки зазора между валками
— Привод регулировки положения валка
—— Приводы распылителей
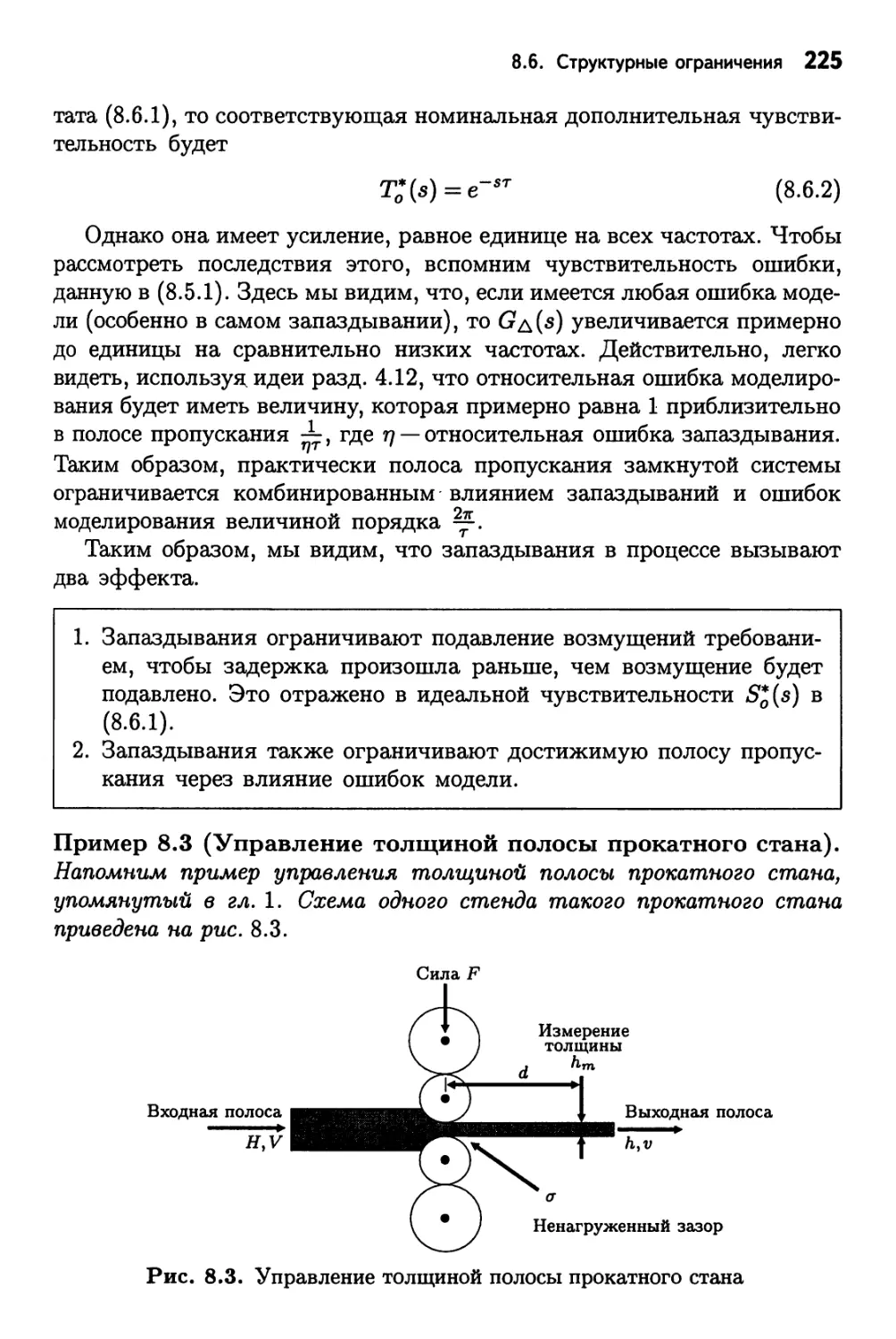
Рис. 1.3. Типичная система управления толщиной полосы прокатного стана
ственно улучшить работу. Наоборот, не удовлетворяющие заданным
требованиям и неудовлетворительные исполнительные механизмы часто
являются причиной трудностей управления. Обычно промышленная
система управления содержит много исполнительных механизмов — см.,
например, систему управления толщиной полосы на рис. 1.3.
1.5.5. Линии связи
Необходимость соединения датчиков с исполнительными механизмами
требует использования систем связи. Типичный объект может иметь
много тысяч разных сигналов, которые нужно передать на большое
расстояние. Таким образом, разработка систем связи и соответствующих
им протоколов — очень важный аспект в проектировании современных
систем управления.
Имеются конкретные проблемы и требования к системам связи в
реальном масштабе времени. Например, в линиях связи для передачи
голоса небольшие задержки и искажения во время передачи часто не
важны, поскольку получатель их отсеет. Однако в
быстродействующих системах управления, работающих в реальном масштабе времени,
эти проблемы могут выйти на первый план. Например, наблюдается
увеличивающаяся тенденция использовать каналы типа Ethernet для
передачи данных в системах управления. Однако тем, кто знаком с этой
технологией, известно, что если на линии передачи происходит
задержка, то передатчик просто пробует снова передать данные несколько
позже в случайное время. Очевидно, что это вносит случайную задержку
1.5. Организация систем управления 35
в передачу данных. Работа всех систем управления зависит от точного
знания не только того, что происходит в ней, но и когда это случилось,
так что внимание к таким задержкам понятно для успешной работы
всей системы.
1.5.6. Вычисления
В современных системах управления связь датчиков с исполнительными
механизмами неизменно осуществляется через тот или иной
компьютер. Таким образом, проблемы вычислений — обязательная часть всего
проекта. Современные системы управления используют разнообразные
вычислительные средства, включая распределенные системы
управления (Distributed Control Systems —DCS), программируемые логические
контроллеры (Programmable Logic Controllers — PLC) и персональные
компьютеры (Personal Computers —PC). В некоторых случаях
использование этих вычислительных средств довольно ограничено по сравнению
с их возможностями. Так же как и с задержками в линиях связи,
задержки при вычислениях могут быть критическими для функционирования
систем управления. Важно правильно выбрать тактовую частоту, так
как может потребоваться многозадачная операционная система
реального времени.
Другой аспект вычислений — точность представления чисел. Мы
знаем несколько систем управления, которые не могли обеспечить
эксплуатационные характеристики просто из-за пренебрежения проблемами
представления чисел. По этой причине мы уделим в дальнейшем данной
проблеме некоторое внимание.
Наконец, последний вопрос использования вычислительной
техники—это удобство ее проектирования и реализации. Современные
средства быстрого моделирования систем управления, использующие
вычислительную технику, обладают интегрированными возможностями для
моделирования систем управления, их проектирования, испытаний и
функционирования. Эти средства, содержащие шаблоны кода в реальном
масштабе времени, позволили уменьшить время разработки сложных
алгоритмов управления с нескольких месяцев до нескольких дней и
даже, в некоторых случаях, часов.
1.5.7. Структура и интерфейс
Проблема, что с чем соединять, при проектировании систем управления
нетривиальна. Может показаться, что лучшее решение будет всегда
состоять в передаче всех сигналов к центральному пункту, чтобы
каждая операция управления была бы основана на полной информации
36 Глава 1. Причины создания систем управления
(так называемый централизованный контроль и управление). Однако
это —редко (если вообще когда-либо) лучшее решение на практике.
Действительно, имеются серьезные основания, почему нежелательно
передавать все сигналы в одну точку. Очевидные возражения этому
включают сложность, стоимость, ограничения по времени вычислений,
ремонтопригодности и надежности.
Таким образом, проблема управления обычно распределяется по
управляемым подсистемам. Определить, как это сделать,— задача
инженера по системам управления. Действительно, как мы увидим в
дальнейшем из упражнений, представленных в книге, эти структурные
проблемы могут быть критическими для выбора окончательного
варианта системы управления.
Один из основных инструментов, который может использовать
разработчик систем управления для улучшения работы системы,
—всесторонне продумать структуру системы управления. В качестве
иллюстрации мы приведем позже реальный пример (см. гл. 8), где качество
управления толщиной проката на реверсивном прокатном стане строго
ограничено специфической структурой. Показано, что никакое
усовершенствование исполнительных механизмов, датчиков или алгоритмов
(в пределах этой структуры) не может улучшить результат. Однако
простое изменение структуры с тем, чтобы включить дополнительные
исполнительные механизмы (а именно управление токами в
наматывающих и разматывающих двигателях), устраняет эту трудность (см.
гл. 10). В качестве более простой иллюстрации предлагаем читателю
сравнить попытку балансировать на пальце метлой с открытыми и
закрытыми глазами. Здесь мы снова видим структурные различия,
связанные с использованием различного набора датчиков. Полный анализ
причин трудностей этих типов задач управления, которые стоят за
выявленными различиями, будет рассмотрен в гл. 8 и 9 этой книги.
Таким образом, мы видим, что структурные проблемы имеют
первостепенную важность среди всех проблем проектирования систем
управления. В дальнейшем сложные структурные проблемы будут решаться
по принципу «разделяй и властвуй». Это ведет к иерархическому
представлению системы управления, как показано в табл. 1.1.
Решив, какие связи должны быть организованы, следует перейти
к проблеме взаимодействия различных компонентов. Это
—нетривиальная задача, потому что часто требуются специальные интерфейсы
между различными элементами оборудования. К счастью, продавцы
оборудования систем управления знают эту трудность и их пристальное
внимание вознаграждено наличием стандартизации интерфейсов.
1.5. Организация систем управления 37
Таблица 1.1
Типичная иерархия управления
Уровень
4
3
2
1
Описание
Интегрированная
оптимизация
производства
Оптимизация
статического
состояния
компонентов
оперативного
уровня
Динамическое
управление
компонентами
оперативного
уровня
Динамическое
управление
на уровне
отдельного
исполнительного
механизма
Цель
Обеспечение
заказов
клиентов и
планирование
поставки
материалов
Эффективное
действие
отдельного
компонента
(например,
колонны
дистилляции)
Достижение
уставок,
определенных
на уровне 3
и быстрое
восстановление после
возмущений
Достижение
нужных
скоростей
потока
жидкости,
полученных
на уровне 2,
манипулируя
соответствующими
исполнительными
механизмами
(например,
приводом
клапана)
Временные
границы
Каждый день
(примерно)
Каждый час
(примерно)
Каждую
минуту
(примерно)
Каждую
секунду
(примерно)
Типичные
средства
проектирования
Статическая
оптимизация
Статическая
оптимизация
Управление
многими
переменными
(например,
модельное
прогнозирующее
управление)
Управление
одной
переменной
(например,
пид-
регулирование)
38 Глава 1. Причины создания систем управления
1.5.8. Алгоритмы
Наконец, мы подходим к настоящему сердцу проектирования систем
управления —алгоритмам, которые соединяют датчики с
исполнительными механизмами. Очень легко недооценить этот заключительный
аспект проблемы.
В качестве простого примера из повседневной жизни рассмотрим
проблему игры в теннис на высоком международном уровне. Понятно,
что для игры на этом уровне нужно хорошее зрение (датчики) и
сильные мускулы (исполнительные механизмы), но этого недостаточно.
Действительно, координация рук и глаз (т. е. управление) также очень
важна для успеха.
Таким образом, вне датчиков и исполнительных механизмов инженер
по системам управления должен заниматься динамикой и управлением
с использованием обратной связи. Эти темы будут фактически
центральными в оставшейся части книги. Как выразился один из наших
коллег: «Датчики обеспечивают глаза, исполнительные механизмы —
мускулы, а теория управления обеспечивает ловкость».
1.5.9. Возмущения и неточности
Один из моментов, который делает теорию управления интересной, то,
что на все реальные системы действуют шумы и внешние возмущения.
Эти факторы могут иметь существенное воздействие на работу системы.
Простыми примерами здесь могут быть самолеты, подверженные
возмущениям в форме порывов ветра, и регуляторы скорости в автомобилях,
которые должны справиться с различными градиентами уровня дороги
и различными загрузками автомобиля. Однако мы увидим, что при
удачном проекте системы управления может быть достигнута
поразительная нечувствительность к внешним возмущениям.
Другая проблема — неточность модели. Все реальные системы имеют
очень сложные модели, однако важным свойством систем управления
с обратной связью является то, что часто можно получить желаемый
результат, используя относительно простые модели. Конечно, именно
проектировщик должен оценить влияние неточности модели на работу
системы управления и решить, приведет ли лучшее моделирование к
достижению лучшего результата.
Решение обеих из вышеупомянутых проблем обеспечивается, в
частности, замечательными свойствами обратной связи. К этой концепции
мы будем в книге обращаться неоднократно.
1.5. Организация систем управления 39
1.5.10. Однородность
Заключительный момент нашего рассмотрения — это то, что все
связанные системы, включая системы управления, являются столь же
хорошими, как их самый слабый элемент. Это означает, что при проектировании
систем управления нужно стремиться, чтобы все компоненты (объект,
датчики, исполнительные механизмы, линии связи, вычислительные
средства, интерфейсы, алгоритмы и т. д.) имели сопоставимые точность
и эксплуатационные параметры. Если это невозможно, то нужно
сосредоточиться на самом слабом компоненте, чтобы получить лучший
возврат данного уровня инвестиций. Например, нет никакого смысла
сосредоточить все внимание на разработке линейной модели (чтобы проще
использовать современную теорию управления), если ограничивающий
фактор —это застревающий клапан, который следует заменить или
разработать виртуальный датчик для важного неизмеряемого параметра.
Таким образом, требуется целостная точка зрения, связанная с точной
оценкой затрат, связанных с каждым компонентом.
1.5.11. Стоимостной анализ
Если мы пытаемся обеспечить лучшую эффективность затраченных
усилий, важно заняться анализом выгод. Разработка систем управления,
так же, как и другие формы разработки, зависит от способности убедить
руководство, что в данном проекте можно произвести выгодные
изменения. Период окупаемости в современных отраслях промышленности
часто не более 6 месяцев, поэтому данный аспект требует осторожного
и детального подхода. Стандартными здесь являются следующие шаги:
• оценка диапазона возможных видов управления;
• разработка краткого списка для более пристального изучения;
• выбор проекта с высоким экономическим или экологическим
эффектом;
• консультации с соответствующим персоналом (управление,
операторы, производственный штат, штат обслуживания и т. д.);
• определение ключевых действий;
• сбор основных данных для дальнейшего сравнения;
• решение о пересмотре эксплуатационных характеристик;
• обновление исполнительных механизмов, датчиков и т. д.;
• разработка алгоритмов;
• проверка алгоритмов с помощью моделирования;
• проверка алгоритмов на объекте, используя быструю систему
макетирования;
40 Глава 1. Причины создания систем управления
• сбор предварительных данных о работе системы для сравнения с
исходным вариантом;
• окончательная реализация;
• сбор окончательных данных о работе системы;
• заключительные выводы о проекте.
1.6. Резюме
. • Разработка систем управления присутствует фактически во всех
современных технических системах.
• Управление — часто скрытая технология, поскольку его полная
эффективность в большой мере зависит от точки зрения.
• Управление— средство, позволяющее технологическому процессу
о улучшить качество изделий,
о минимизировать потери и вложения,
о обеспечить защиту окружающей среды,
о увеличить производительность для установленных мощностей,
6 увеличить производство продукции,
о отсрочить дорогостоящую модернизацию объекта и
о обеспечить более высокие запасы безопасности.
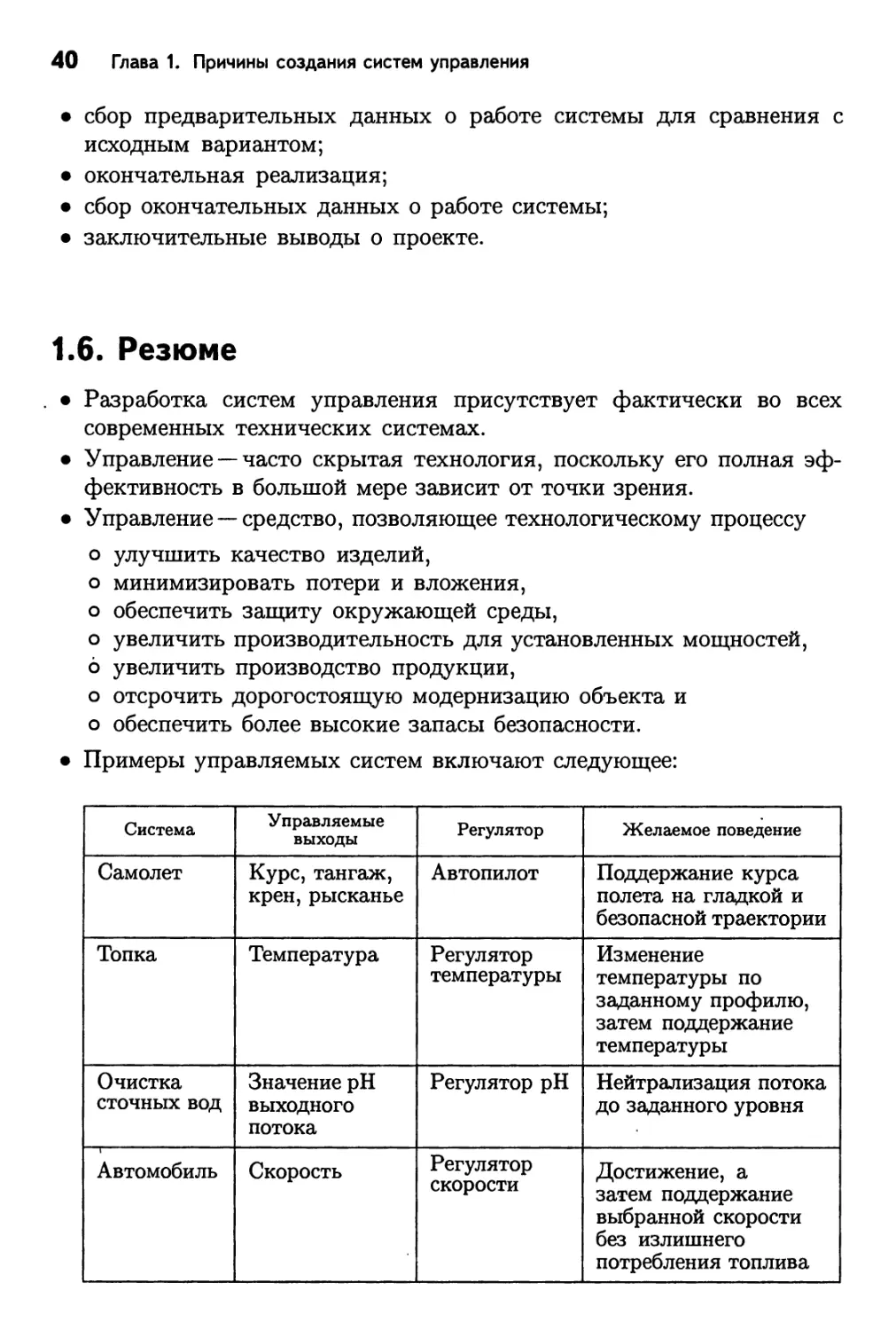
• Примеры управляемых систем включают следующее:
Система
Самолет
Топка
Очистка
сточных вод
Автомобиль
Управляемые
выходы
Курс, тангаж,
крен, рысканье
Температура
Значение рН
выходного
потока
Скорость
Регулятор
Автопилот
Регулятор
температуры
Регулятор рН
Регулятор
скорости
Желаемое поведение
Поддержание курса
полета на гладкой и
безопасной траектории
Изменение
температуры по
заданному профилю,
затем поддержание
температуры
Нейтрализация потока
до заданного уровня
Достижение, а
затем поддержание
выбранной скорости
без излишнего
потребления топлива
1.6. Резюме 41
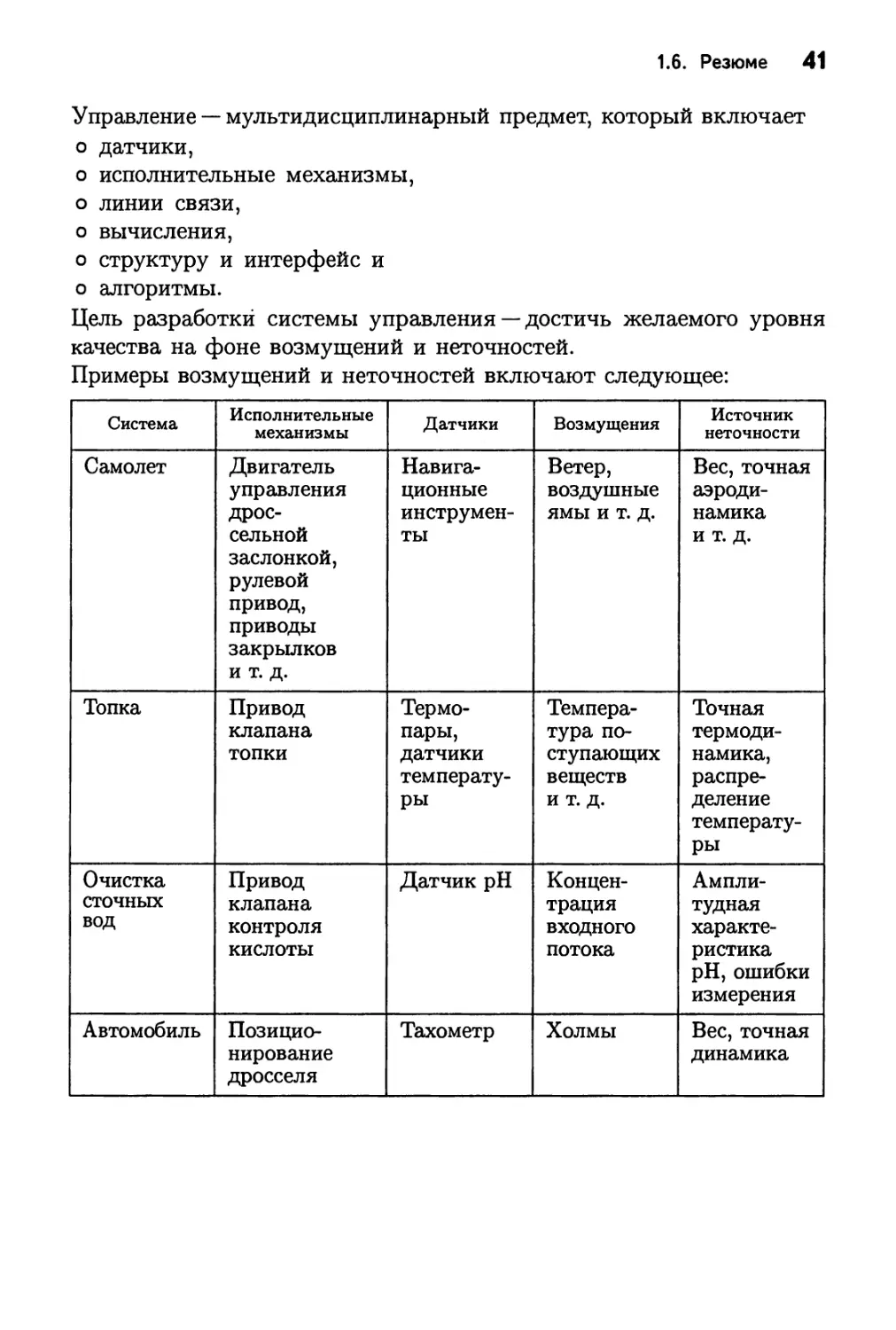
Управление — мультидисциплинарный предмет, который включает
о датчики,
о исполнительные механизмы,
о линии связи,
о вычисления,
о структуру и интерфейс и
о алгоритмы.
Цель разработки системы управления — достичь желаемого уровня
качества на фоне возмущений и неточностей.
Примеры возмущений и неточностей включают следующее:
Система
Самолет
Топка
Очистка
сточных
вод
Автомобиль
Исполнительные
механизмы
Двигатель
управления
дроссельной
заслонкой,
рулевой
привод,
приводы
закрылков
и т.д.
Привод
клапана
топки
Привод
клапана
контроля
кислоты
Позиционирование
дросселя
Датчики
Навигационные
инструменты
Термопары,
датчики
температуры
Датчик рН
Тахометр
Возмущения
Ветер,
воздушные
ямы и т. д.
Температура
поступающих
веществ
и т. д.
Концентрация
входного
потока
Холмы
Источник
неточности
Вес, точная
аэродинамика
и т. д.
Точная
термодинамика,
распределение
температуры
Амплитудная
характеристика
рН, ошибки
измерения
Вес, точная
динамика
42 Глава 1. Причины создания систем управления
1.7. Литература для последующего чтения
Исторические заметки
Исторический центр IEEE и его ресурсы — прекрасный источник для
читателей, интересующихся историей.
Другие полезные источники:
1. Black, H.W. (1934). Stabilized Feedback Amplifiers. Bell Systems Tech.
Journal, 13:1-18.
2. Bode, H. (1969). Feedback: the history of an idea. In Selected Papers on
Mathematical Trends in Control Theory, pages 106-123. Dover, New York.
3. Fuller, A. (1976). The early development of control theory. Trans. ASME, J.
Dyn. Sys. Meas. Contr., 98:109-118, 224-235.
4. James, H.M., Nichols, N.B., and Phillips, R.S., editors (1947). Theory of
Servomechanisms. McGraw-Hill, New York. [Имеется русский перевод:
X. Джеймс, Н. Никольс, Р. Филлипс. Теория следящих систем. — М.: ИЛ.
1951 (1-е изд.), 1953 (2-е изд.)]
5. Maxwell, Т. (1868). On governors. Proc. Royal Soc. London, 16:270-283.
6. Mayr, 0. (1970). The Origins of Feedback Control. MIT Press, Cambridge,
Mass.
Глава 2
Введение в принципы
обратной связи
2.1. Введение
Эта глава прокладывает дорожку, которую мы выбрали для нашего
путешествия в проектирование систем управления. В частности, она
содержит
• поясняющий технический пример,
• формулировку фундаментальной природы задачи управления,
• понятие инверсии (обратного преобразования) как центрального
компонента в решении задач управления и
• переход от инверсии для системы с разомкнутым контуром обратной
связи к решению задачи для системы с замкнутой обратной связью.
2.2. Основная цель управления
Как мы видели в гл. 1, примеры динамических систем с
автоматическими регуляторами имеются в большом количестве: современные
регуляторы процессов работают фактически в каждой промышленной
области; микрорегуляторы проникают в огромное множество
электронных устройств домашнего хозяйства и развлечений; термостаты
регулируют температуру в домашних и промышленных жарочных шкафах, а
автопилоты управляют самолетами.
Проектирование любой из этих систем требует тесного
сотрудничества специалистов различных дисциплин.
Чтобы конкретизировать основную цель разработки систем
управления в рамках усилий этого коллектива, полезно различать
материальную реализацию системы и ее поведение. Физическая реализация
самолета, например, включает фюзеляж, крылья и элероны. Его поведение,
44 Глава 2. Введение в принципы обратной связи
с другой стороны, имеет дело с динамической реакцией на изменения
положения сектора газа, элеронов или закрылков.
Для управления такой системой автоматически, нужно, чтобы
система взаимодействовала с регулятором, который, в свою очередь, также
имеет физическую реализацию и поведение. В зависимости от
назначения, регулятор может быть реализован в чипе, аналоговом электронном
устройстве, программируемом логическом контроллере или компьютере.
Должен также быть канал, по которому регулятор и система могут
взаимодействовать через датчики и исполнительные механизмы: датчики —
чтобы сообщить о состоянии системы, исполнительные механизмы — как
средства воздействия регулятора на систему.
Процесс и инфраструктура системы управления оставляют, однако,
открытым вопрос о поведении регулятора. Применительно к самолету,
например, если регулятор (здесь он называется автопилотом)
обнаруживает отклонение в скорости, высоте или курсе через датчики, то как
выдать команду на дроссель и элероны, чтобы вернуться к исходным
параметрам?
Это —основная забота инженера по системам управления, или,
говоря в общепринятых терминах, фундаментальная цель разработки
системы управления — найти технически, экологически и экономически
осуществимые пути воздействия на системы, чтобы управлять их
выходными параметрами для достижения желаемых значений, обеспечивая
таким образом желаемый уровень функционирования. Как говорилось
ранее,, поиск удачного решения этого вопроса часто требует включения
в процесс проектирования выбора исполнительных механизмов и
датчиков, математического анализа и моделирования.
На примере описанной выше навигационной системы самолета можно
сказать, что инженер по системам управления имеет дело, в частности,
с циклической зависимостью: команды автопилота воздействуют на
самолет, у которого изменяются скорость, высота и курс, которые в свою
очередь влияют на дальнейшие действия автопилота.
Такое циклически зависимое взаимодействие отдельных частей
системы называется обратной связью.
Явление обратной связи существует и в природе, и в технике.
Периодические прирост и сокращение популяции в известных
взаимодействиях «хищник и добыча» являются примером обратной связи,
встречающейся в природе. Высокий свистящий звук, появляющийся в результате
взаимодействия микрофонов и громкоговорителей в концертном зале —
технический пример обратной связи.
В обоих этих случаях, ни одна из двух взаимодействующих систем
не может быть определенно названа диспетчером или процессом, они
просто являются двумя системами, взаимодействующими на основе
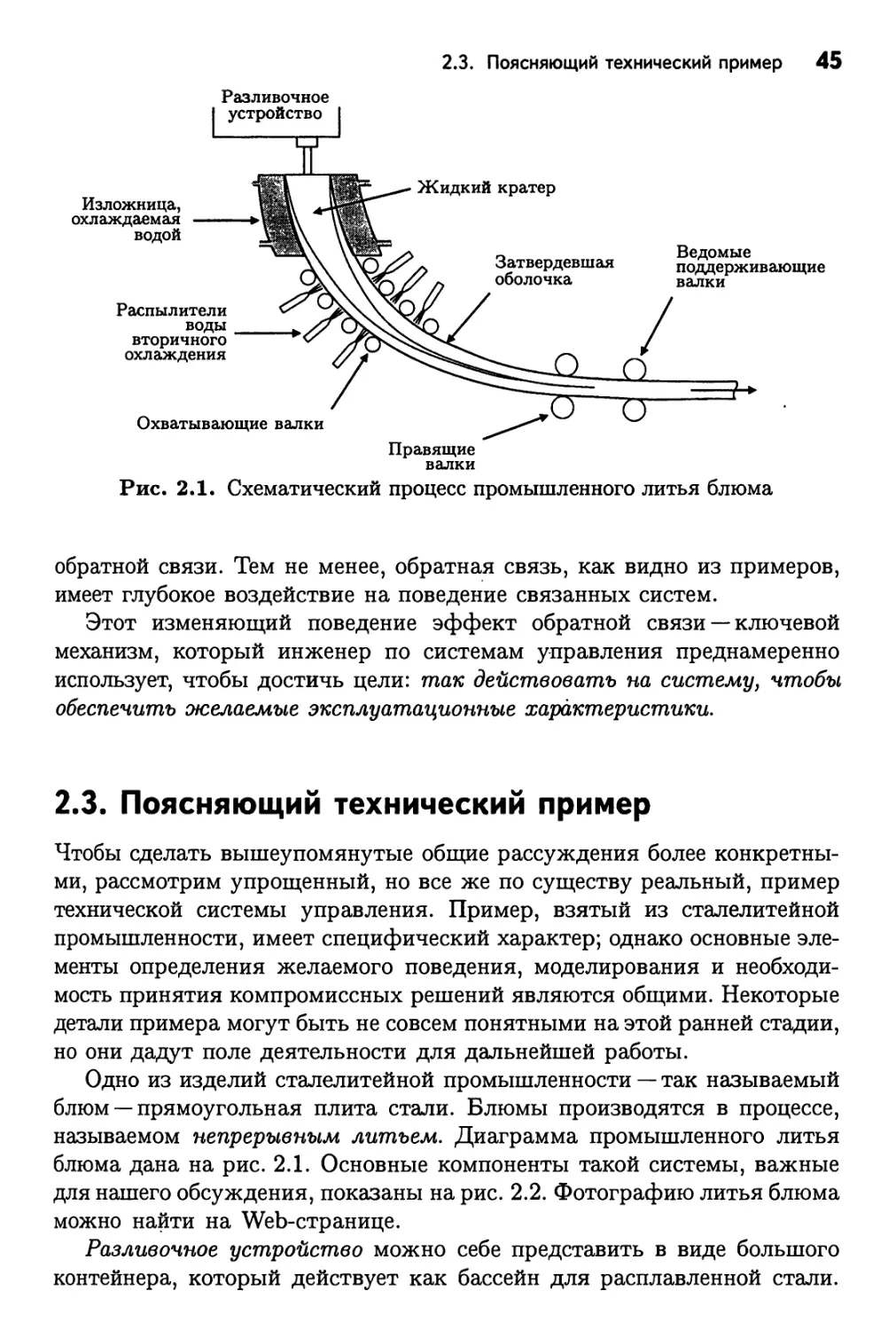
2.3. Поясняющий технический пример 45
Разливочное
устройство
шшкям 1каиа^л Жидкий кратер
Изложница,
охлаждаемая
водой
Распылители
воды
вторичного
охлаждения
Ведомые
поддерживающие
валки
Охватывающие валки
Рис. 2.1. Схематический процесс промышленного литья блюма
Правящие
валки
обратной связи. Тем не менее, обратная связь, как видно из примеров,
имеет глубокое воздействие на поведение связанных систем.
Этот изменяющий поведение эффект обратной связи — ключевой
механизм, который инженер по системам управления преднамеренно
использует, чтобы достичь цели: так действовать на систему, чтобы
обеспечить желаемые эксплуатационные характеристики.
2.3. Поясняющий технический пример
Чтобы сделать вышеупомянутые общие рассуждения более
конкретными, рассмотрим упрощенный, но все же по существу реальный, пример
технической системы управления. Пример, взятый из сталелитейной
промышленности, имеет специфический характер; однако основные
элементы определения желаемого поведения, моделирования и
необходимость принятия компромиссных решений являются общими. Некоторые
детали примера могут быть не совсем понятными на этой ранней стадии,
но они дадут поле деятельности для дальнейшей работы.
Одно из изделий сталелитейной промышленности — так называемый
блюм — прямоугольная плита стали. Блюмы производятся в процессе,
называемом непрерывным литьем. Диаграмма промышленного литья
блюма дана на рис. 2.1. Основные компоненты такой системы, важные
для нашего обсуждения, показаны на рис. 2.2. Фотографию литья блюма
можно найти на Web-странице.
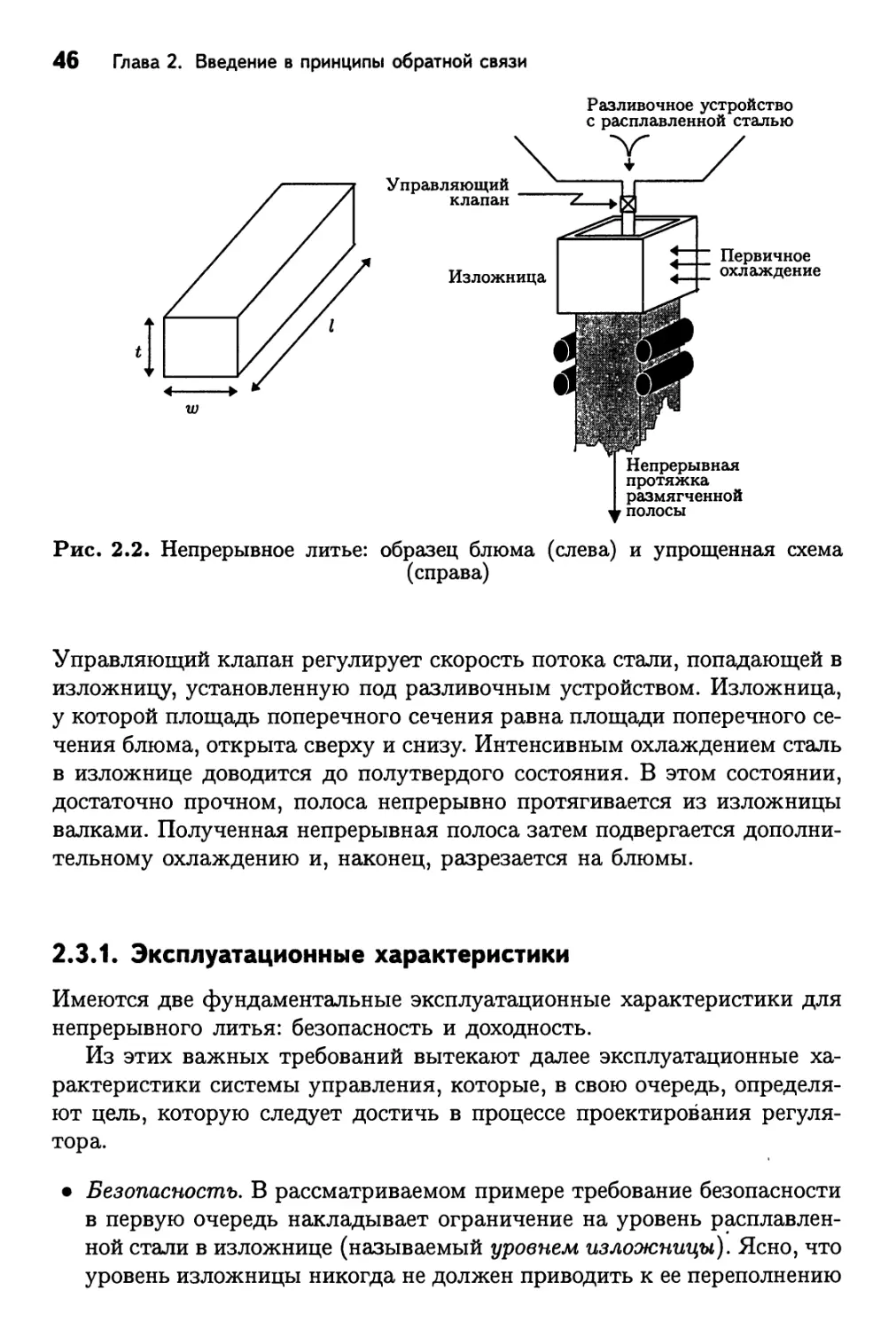
Разливочное устройство можно себе представить в виде большого
контейнера, который действует как бассейн для расплавленной стали.
46 Глава 2. Введение в принципы обратной связи
Управляющий
клапан
Изложница
Разливочное устройство
с расплавленной сталью
V
Первичное
охлаждение
Непрерывная
протяжка
размягченной
полосы
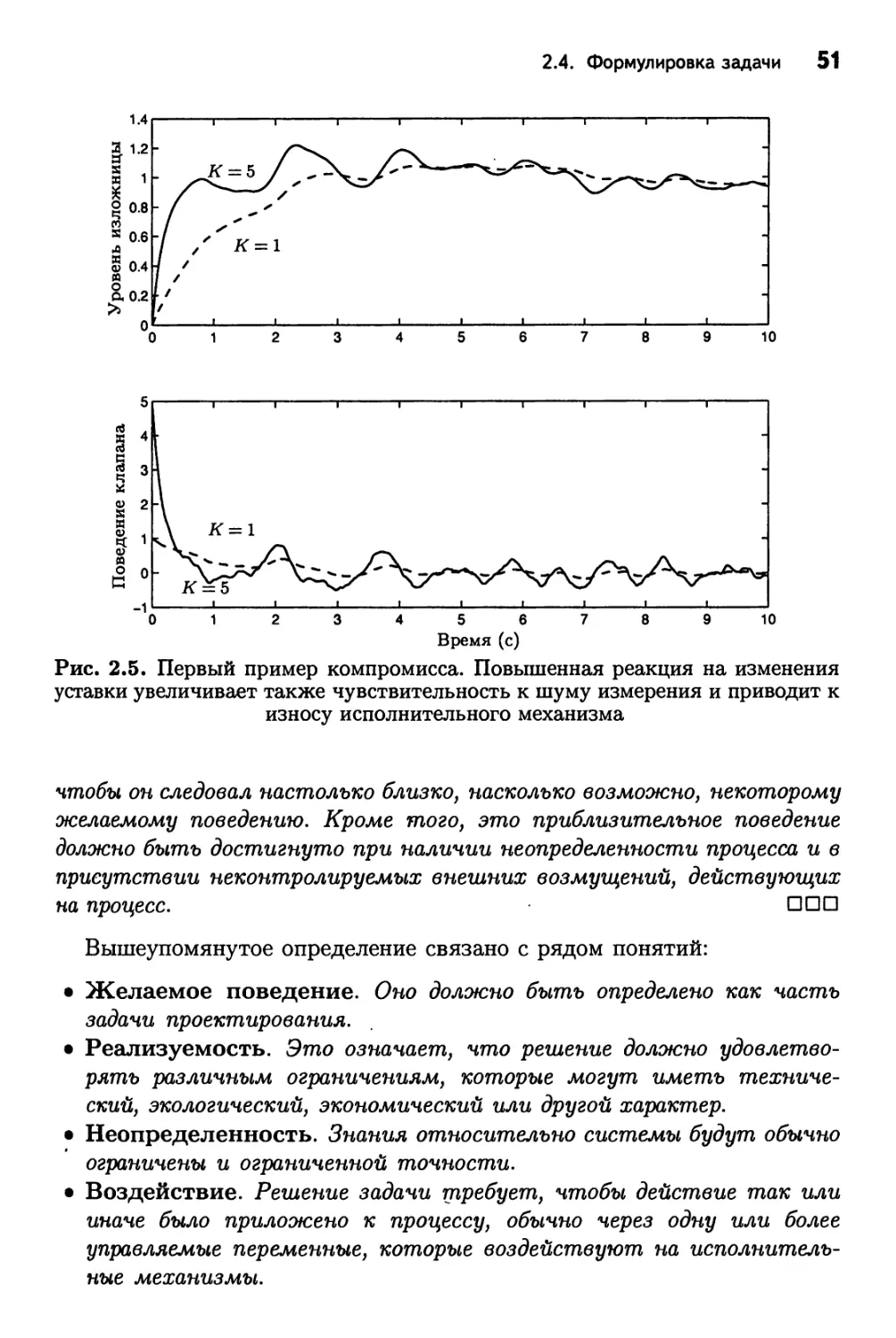
Рис. 2.2. Непрерывное литье: образец блюма (слева) и упрощенная схема
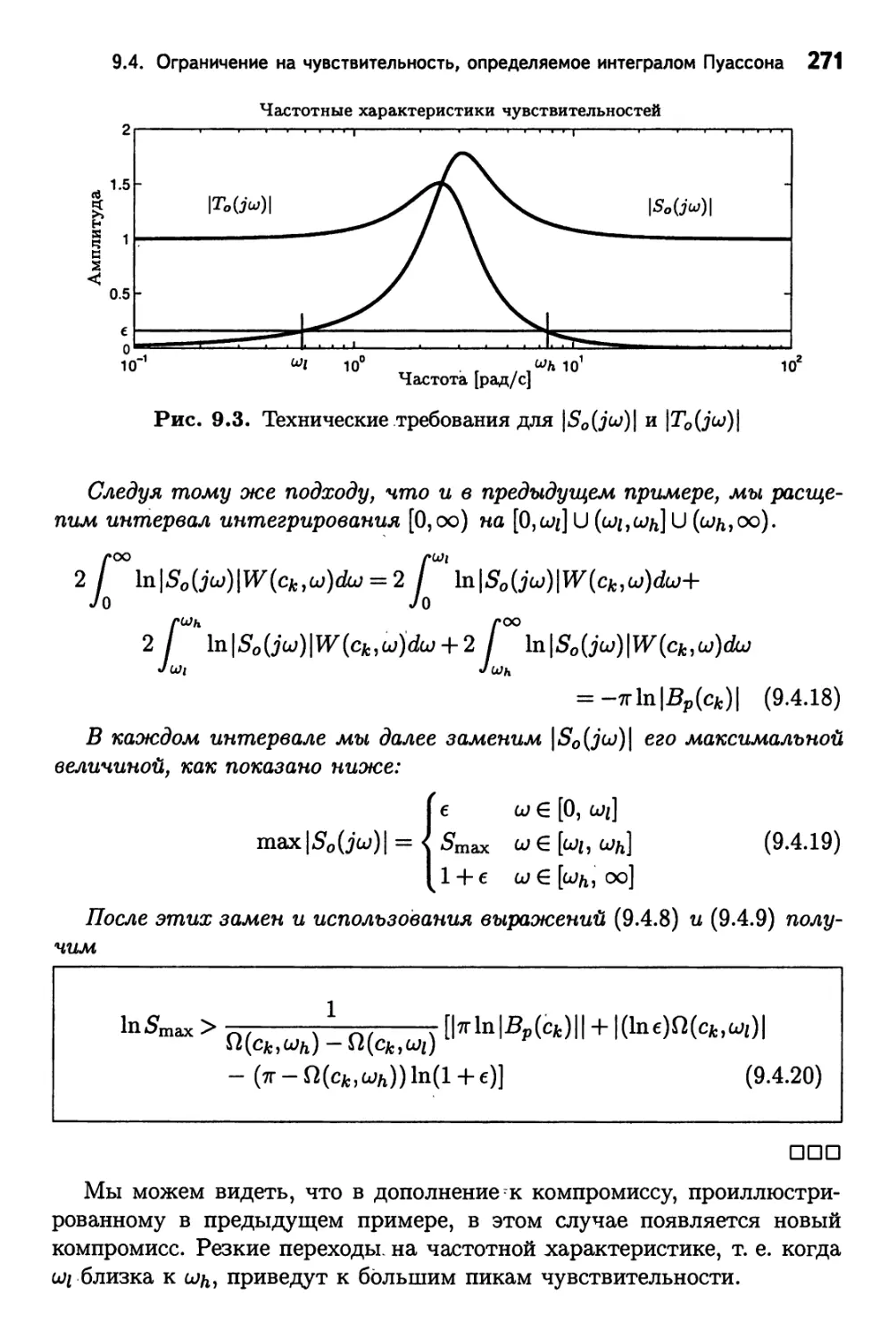
(справа)
Управляющий клапан регулирует скорость потока стали, попадающей в
изложницу, установленную под разливочным устройством. Изложница,
у которой площадь поперечного сечения равна площади поперечного
сечения блюма, открыта сверху и снизу. Интенсивным охлаждением сталь
в изложнице доводится до полутвердого состояния. В этом состоянии,
достаточно прочном, полоса непрерывно протягивается из изложницы
валками. Полученная непрерывная полоса затем подвергается
дополнительному охлаждению и, наконец, разрезается на блюмы.
2.3.1. Эксплуатационные характеристики
Имеются две фундаментальные эксплуатационные характеристики для
непрерывного литья: безопасность и доходность.
Из этих важных требований вытекают далее эксплуатационные
характеристики системы управления, которые, в свою очередь,
определяют цель, которую следует достичь в процессе проектирования
регулятора.
• Безопасность. В рассматриваемом примере требование безопасности
в первую очередь накладывает ограничение на уровень
расплавленной стали в изложнице (называемый уровнем изложницы). Ясно, что
уровень изложницы никогда не должен приводить к ее переполнению
2.3. Поясняющий технический пример 47
или осушению, потому что любой такой случай привел бы к тому, что
металл прольется с пагубными последствиями.
• Доходность. Очевидно, система должна использоваться
рентабельным способом. Аспекты, от которых это зависит, следующие:
о Качество изделия. Оказывается, что частые изменения уровня
изложницы ухудшают качество блюма, потому что расплавленный
металл имеет вязкость, наподобие тому, что есть у воды и
турбулентность замешивает примеси в сталь. Кроме того, при
охлаждении изложницы, колебание уровня приводит к неравномерному
охлаждению стали, что также ухудшает ее качество. Таким
образом, качество изделия требует стабильного поддержания уровня
изложницы.
о Техническое обслуживание. Из-за реакции окисления выпускное
отверстие, через которое металл течет в изложницу, подвержено
интенсивному износу на уровне изложницы. Срок службы
выпускного отверстия максимизируется, если уровнем изложницы
управлять так, чтобы он медленно сползал поперек полосы
износа выпускного отверстия. Затраты на техническое обслуживание
также уменьшаются, если срок службы управляющего клапана
максимизируется за счет относительно неагрессивных (плавных)
управляющих воздействий. Таким образом, чтобы стоимость
технического обслуживания была низкой, требуется устойчивое
регулирование относительно уставки, которая медленно сползает
поперек полосы износа выпускного отверстия, избегая при этом
излишних движений клапана.
о Производительность. Производительность — прямая функция
скорости литья. Скорость литья, в свою очередь, является
функцией многочисленных благоприятных факторов (наличие
необходимых сортов сырья, производительность печи и т. д.), а
также негативных факторов (спрос на продукцию, отгрузочная
способность и т. д.). Таким образом, система управления уровнем
изложницы должна обеспечивать работу при всех скоростях
литья, чтобы избежать возможных ограничений во всем диапазоне
процесса производства.
2.3.2. Моделирование
Чтобы успешно спроектировать систему управления, прежде всего,
как сказано выше, следует понять, как функционирует процесс. Это
понимание обычно выражается в виде математической модели, которая
описывает установившееся и динамическое поведение процесса. Чтобы
48 Глава 2. Введение в принципы обратной связи
построить такую модель, мы сначала выделяем важные параметры
(переменные) процесса. Таким образом, введем следующие параметры:
h*: требуемый уровень стали в изложнице;
h(t): фактический уровень стали в изложнице;
v(t): положение клапана;
a(t): скорость литья;
qin(t): скорость втекания стали в изложницу;
Qout(t)'- скорость вытекания стали из изложницы.
Физика говорит, что уровень изложницы будет пропорционален
интегралу от разности притока и оттока стали:
h(t) = [ («„(т) - q0ut(r)) dr (2.3.1)
J—oo
где мы для простоты приняли сечение изложницы равным единице. Мы
также считаем, снова для простоты, что значения положения клапана
v(t) и скорости литья a(t) отградуированы так, что они фактически
определяют скорости втекания и вытекания стали:
v(t)=qin(t) (2.3.2)
<r(t) = q<mt(t) (2-3.3)
Следовательно, модель процесса будет иметь вид
h(t)= [ (ь(т)-а(т))с1т (2.3.4)
Скорость литья может быть измерена довольно точно, но датчики
уровня изложницы обычно склонны формировать высокочастотный
шум измерения, который мы учтем, добавляя дополнительный
паразитный сигнал n(t):
hm{t)=h{t)+n{t) (2.3.5)
где hm(t) —измеренная величина параметра h(t), искаженная шумом.
Структурная схема всей модели процесса и измеренных величин
показана на рис. 2.3.
Это очень простая модель, но она охватывает сущность задачи.
2.3.3. Обратная связь и упреждение
Мы увидим позже, что основная идея управления — инверсия
(обратное преобразование). Более того, инверсия может быть достигнута
при помощи двух ключевых механизмов (а именно, обратной связи и
упреждения). Эти механизмы дают изящное и робастное (устойчивое к
изменению параметров) решение многих задач управления. В контексте
Измеренная
величина
скорости литья
+
2.3. Поясняющий технический пример 49
Вытекание, определяемое
скоростью литья
¥ "~
о-
Втекание от
управляющего клапана
/
Уровень изложницы
ицы | '
Шум измерения
Измеренный уровень изложницы
Рис. 2.3. Структурная схема упрощенной динамики уровня изложницы,
датчиков и исполнительного механизма
управления уровнем изложницы самый простой регулятор обратной
связи — постоянное усиление К, перемещающий клапан
пропорционально ошибке между требуемым уровнем изложницы h* и измеренной
величиной фактического уровня hm(t):
v(t)=K(h*-hm(t))
(2.3.6)
Опережая вопрос, как создать такой регулятор, отметим, что
отклонение между уставкой и измеренной величиной должно произойти
до того, как регулятор начнет реагировать. Мы знаем однако, что
изменение в скорости литья требует изменения рабочей точки клапана.
Таким образом, вместо того, чтобы допустить изменение скорости литья,
которое ведет к ошибке в уровне изложницы, на которую реагирует
регулятор обратной связи, мы можем улучшить стратегию, изменяя
положение клапана упреждающе. Это называется упреждением. В
результате получим окончательное уравнение регулятора:
= tf(V-M<)]+[-^(<)]) (2-3.7)
v(t)
Заметим, что этот регулятор объединяет обратную связь и
приоритетное действие (упреждение). В частности, второй член дает
предсказывающее действие, необходимое для компенсации изменения скорости
литья, в то время как первый член реагирует на остающуюся ошибку1.
Структурная схема окончательной системы управления показана на
рис. 2.4.
Дальнейшее обсуждение этой задачи, вместе с возможностью
читателю заняться проектированием, находится на Web-странице книги.
1 Такое управление в отечественной литературе называется комбинированным
управлением. — Прим. перев.
50 Глава 2. Введение в принципы обратной связи
Требуемый
уровень
изложницы
+
к-
Измеренная
величина
скорости
литья
1+
+
<УО-~
А —
К
+
Вытекание, определяемое
скоростью литья
f—
Втекание от
управляющего
О
/
Уровень
изложницы
►
клапана
Измеренный уровень изложницы
+ 1
Шум
измерения
9г
Рис. 2.4. Модель упрощенного управления уровнем изложницы с
упреждающей компенсацией скорости литья
2.3.4. Первый пример компромисса
При моделировании работы вышеупомянутого контура управления при
К = 1 и К = 5 (см. рис. 2.5), мы видим, что меньшее усиление регулятора
(К = 1) приводит к более медленной реакции на изменение уставки
уровня изложницы. С другой стороны, большее усиление регулятора
(К = 5) приводит к более быстрой реакции, но также и увеличению
влияния шума измерения, что, как видно, дает менее устойчивый
уровень управления и более агрессивные движения клапана.
Таким образом, требования эксплуатационных характеристик,
полученные в разд. 2.3.1, оказываются в конфликте друг с другом, по
крайней мере, до некоторой степени.
Здесь инженер по системам управления, который не имеет
систематической подготовки в проектировании систем управления, имел бы
затруднения в оценке, является ли этот конфликт просто следствием
наличия такого простого регулятора или это непреодолимо. Сколько
усилий должно быть потрачено для определения подходящего значения
К? Следует ли выбрать более сложный регулятор? Нужно ли более
тщательно смоделировать процесс формирования уровня изложницы?
Оставшаяся часть книги посвящена разработке систематических
ответов на эти и другие подобные вопросы.
2.4. Формулировка задачи
Пример, рассмотренный в разд. 2.3, приводит к следующему более
формальному утверждению о природе задачи управления:
Определение 2.1. Фундаментальная задача управления.
Центральная задача управления состоит в том, чтобы найти
технически реализуемый способ воздействия на данный процесс так,
2.4. Формулировка задачи 51
1.4
3 1.2Ь
§ 1Н
°0.в|-
СО
s О.бН/
5 0.4
п
о
а 0.2
>>
К = 5
К = 1
■л г
8 9 10
5 6 7 8 9 10
Время (с)
Рис. 2.5. Первый пример компромисса. Повышенная реакция на изменения
уставки увеличивает также чувствительность к шуму измерения и приводит к
износу исполнительного механизма
чтобы он следовал настолько близко, насколько возможно, некоторому
желаемому поведению. Кроме того, это приблизительное поведение
должно быть достигнуто при наличии неопределенности процесса и в
присутствии неконтролируемых внешних возмущений, действующих
на процесс. □□□
Вышеупомянутое определение связано с рядом понятий:
• Желаемое поведение. Оно должно быть определено как часть
задачи проектирования.
• Реализуемость. Это означает, что решение должно
удовлетворять различным ограничениям, которые могут иметь
технический, экологический, экономический или другой характер.
• Неопределенность. Знания относительно системы будут обычно
ограничены и ограниченной точности.
• Воздействие. Решение задачи требует, чтобы действие так или
иначе было приложено к процессу, обычно через одну или более
управляемые переменные, которые воздействуют на
исполнительные механизмы.
52 Глава 2. Введение в принципы обратной связи
• Возмущения. Управляемый процесс наряду с входной величиной,
которую формирует регулятор, обычно имеет и другие входные
величины, которые называются возмущениями.
• Приблизительное поведение. Выбранное решение будет редко
совершенным. Неизменно будет присутствовать степень прибли-
эюения в достижении указанной цели.
• Измеренные величины. Они являются ключевыми, позволяя
регулятору знать то, что система фактически делает и как
неизбежные возмущения воздействуют на нее.
В дальнейшем мы будем называть управляемый процесс объектом и
будем говорить, что объект находится под автоматическим
управлением, когда цели управления достигнуты при нечастом человеческом
вмешательстве.
2.5. Решение задач управления через инверсию
Модель решенияОдин довольно простой, но все же интуитивный путь —
рассматривать решение задачи управления через инверсию (обратное
преобразование). Чтобы описать эту идею, предположим следующее:
• пусть мы знаем, как воздействие на входе системы отражается на его
выходе и
• пусть мы имеем желаемое поведение для выхода системы; тогда
следует просто взять инверсию зависимости выхода от входа,
чтобы определить, какое нужно входное воздействие для достижения
желаемого поведения выхода.
Несмотря на очевидную наивность этого аргумента, его красивые
вариации играют важную роль в проектировании систем управления. В
частности, большинство практических трудностей в управлении связано
с поиском стратегии, которая включает вышеупомянутую идею
инверсии, при уважении к несметному числу других взглядов, типа
нечувствительности к ошибкам модели, возмущениям и шуму измерения.
Чтобы быть более определенными, предположим, что требуемое
поведение задается скалярным целевым сигналом (так называемым
эталонным сигналом) r(t) для характерной переменной процесса y(t),
который имеет дополнительное возмущение d(t). Пусть нам также дс?-
ступна единственная управляемая переменная u(t). Обозначим через у
функцию времени: у = {y(t) : t G E}.
Ниже при описании модели решения задачи управления мы будем
делать довольно общее выводы, что, в принципе, можно применить
к нелинейным динамическим системам общего вида. В частности, мы
2.5. Решение задач управления через инверсию 53
I- '
+
О
г1 {°)
/<°>
+ 1
+
О-
Абстрактный
регулятор
Объект
Рис. 2.6. Абстрактный регулятор
будем использовать функцию /(о) для обозначения оператора,
отображающего одно функциональное пространство в другое. Эта общая
интерпретация позволяет ввести следующие обозначения.
Символом у (без скобок) обозначим элемент функционального
пространства: у = {y(t): R-»R} Оператор /(о) тогда будет представлять
отображение одного функционального пространства, скажем, х, в то же
самое пространство х-
Мы советуем читателю при первом чтении просто интерпретировать
/ как статический линейный коэффициент усиления, связывающий
одно вещественное число —вход и с другим вещественным числом —
выходом у. При последующих чтениях можно использовать более общую
интерпретацию, включающую нелинейные динамические операторы.
Предположим также (по тем же причинам), что выход связан со
входом известным функциональным отношением вида
y = f(u) + d
(2.5.1)
где / — преобразование или отображение (возможно динамическое),
которое описывает отношение входа-выхода в объекте1. Назовем
отношение типа 2.5.1 моделью.
Тогда задача управления требует, чтобы мы нашли способ
сформировать и таким образом, чтобы у = г. В духе использования инверсии
прямой, хотя и несколько наивный, способ получить решение, был бы
таким:
y = r = /(ti)+d (2.5.2)
из которого мы могли бы получить закон управления, решая (2.5.2)
относительно и. Это дает
ii = /-1(r_d) (2.5.3)
Данная идея проиллюстрирована на рис. 2.6.
Это абстрактное решение задачи. Однако небольшие размышления
позволяют сделать вывод, что ответ, данный в (2.5.3), предполагает
1 Мы вводим здесь этот термин нестрого. Более строгая трактовка отсрочена до гл. 19.
54 Глава 2. Введение в принципы обратной связи
выполнение некоторых строгих требований, чтобы он был справедлив.
Например, исследование уравнений (2.5.1) и (2.5.3) выдвигает
следующие требования:
1. Ясно, что преобразование / должно описывать объект точно.
2. Преобразование / должно быть хорошо сформулированным в том
смысле, что при ограниченном входе и и выход получается
ограниченным; в этом случае мы говорим, что преобразование устойчиво.
3. Инверсия /_1 должна также быть хорошо сформулирована в смысле,
используемом в условии 2.
4. Возмущение должно быть измеримым, так же, как параметр и
должен быть вычислимым.
5. Результирующее действие и должно быть реализуемым и не должны
нарушаться никакие ограничения.
Конечно, это очень строгие требования. Таким образом, существенная
часть теории автоматического управления имеет дело с проблемой, как
изменить структуру управления так, чтобы получить инверсию, но более
ясным способом и так, чтобы строгие требования, изложенные выше,
могли быть смягчены.
Чтобы проиллюстрировать значение этих требований на практике,
кратко рассмотрим ряд ситуаций.
Пример 2.1 (Теплообменник). Рассмотрим задачу теплообменника,
в котором вода должна быть нагрета паром, имеющим постоянную
температуру. Выход объекта — температура воды на выходе
теплообменника, а управляемая переменная — воздушное давление (от 0.2 до
1 кг/см2), перемещающее пневматический клапан, который
регулирует количество пара, питающего теплообменник.
В решении связанной с этим задачи управления должны быть
рассмотрены следующие моменты:
• Чистое запаздывание могло бы быть существенным фактором,
потому что этот объект включает передачу массы и энергии.
Однако небольшие рассуждения наталкивают на мысль, что чистое
запаздывание не имеет реализуемой инверсии (другими словами —
возможность предсказать будущее) и, следовательно, условие 3 не
будет выполнено.
• Легко может произойти, что для заданного эталонного
сигнала закон управления (2.5.3) приводит к недопустимому значению
управляемой переменной (в данном примере допустимый диапазон —
от 0.2 до 1 кг/см2). Это приведет к насыщению на входе объекта.
Условие 5 в этом случае не будет выполняться. □□□
2.5. Решение задач управления через инверсию 55
Пример 2.2 (Флотация в обработке минералов). В производстве
меди одна из ключевых стадий — процесс флотации. В этом процессе
минеральная пульпа (вода и размолотый минерал) непрерывно
подается в ряд перемешиваемых емкостей, в которые добавлены химикалии,
чтобы отделить (с помощью флотации) частицы с высокой
концентрацией меди. С точки зрения управления цель состоит в том, чтобы
определить соответствующее добавление химикалий и уровень
перемешивания для достиоюения максимального разделения. Характеристики
этой задачи следующие:
• Процесс сложен (физически распределен, изменяется во времени,
высокая нелинейность, много переменных и т. д.) и, следовательно,
трудно получить его точную модель. Таким образом, условие 1
трудно удовлетворить.
• Одно из наиболее существенных возмущений в этом процессе —-
размер минеральных частиц в пульпе. Это возмущение — фактически
выход предыдущей стадии (размол). Чтобы применить закон
управления, вытекающий из (2.5.3), нужно было бы измерить размеры
всех этих частиц или (по крайней мере) получить их некоторый
средний размер. Таким образом, условие 4 трудно удовлетворить.
• Чистое запаздывание также присутствует в этом процессе и
таким образом условие 3 не может быть удовлетворено. □□□
Можно представить и другие различные практические случаи, где
одно или большее количество требований, перечисленных выше, не
могут быть удовлетворены. Таким образом, единственный разумный путь
заключается в том, чтобы принять как должное, что неизбежно будут
внутренние ограничения и искать решение в пределах этих ограничений.
Имея это в виду, мы введем условия, которые позволят нам решать
задачу с ограничениями, которые налагает физическая структура. Обычно
используют следующие условия:
1. ограничить внимание теми задачами, где предписанное поведение
(эталонные сигналы) принадлежит ограниченным классам и где
желаемое поведение достигается только асимптотически;
2. искать приближенные инверсии.
В результате мы сделаем следующее заключение:
В принципе, все регуляторы неявно воспроизводят инверсию
процесса, насколько это можно сделать. Регуляторы отличаются
механизмом, который используется для формирования требуемого
приближения инверсии.
56 Глава 2. Введение в принципы обратной связи
2.6. Глубокая обратная связь и инверсия
Как мы увидим позже, обычно у моделей, используемых для описания
реальных объектов, нельзя получить точную инверсию. Далее мы
покажем однако, что имеется довольно интригующее свойство обратной
связи, которое неявно производит приближенную инверсию
динамических процессов без непосредственного ее получения.
Чтобы развить эту идею, заменим абстрактный регулятор,
показанный на рис. 2.6, реализацией, показанной на рис. 2.7. Как и прежде, /
представляет модель процесса. Преобразование h будет описано ниже.
"N w
J *
Z
Но)
/(»>
и
Объект
У
Рис. 2.7. Реализация абстрактного регулятора
Как и в разд. 2.5, при первом чтении г, и, у могут интерпретироваться
как вещественные величины, a /i(o), /(о)—как скалярные линейные
коэффициенты усиления. При повторном чтении, им можно дать общую
нелинейную интерпретацию, представленную в разд. 2.5.
Из рис. 2.7 мы видим, что
u = h(r-z) = h(r - f(u)) (2.6.1)
Тогда
h~l(u)=r-f(u) (2.6.2)
из которого окончательно получим
ii = /-1(r-/l-1(u)) (2.6.3)
Равенство (2.6.3) означает, что контур на рис. 2.7 выполняет
примерную инверсию от /(о), т. е. и = /_1(г), если
г-ЪГ1(и)яг (2.6.4)
Мы видим, что это достигается, если значение h~l мало, т. е. если h —
преобразование с большим усилением.
Следовательно, если / характеризует наши знания об объекте и
если h — преобразование с большим усилением, то структура на рис. 2.7
эффективно формирует примерную инверсию модели объекта, даже
если эта инверсия и не была явно получена. Проиллюстрируем это на
примере.
2.7. От разомкнутой структуры к структуре с замкнутым контуром 57
Пример 2.3. Предположим, что объект может быть описан моделью
^L + 2^/W) = u{t) (2.6.5)
и требуется закон управления, который обеспечивал бы, что y(t) будет
следовать за медленно изменяющимся эталонным сигналом.
Одним из способов решить эту задачу является построение
инверсии модели, которая справедлива в низкочастотной области.
Используя структуру на рис. 2.7, мы получаем приближенную инверсию при
условии, что h(o) имеет большое усиление в области низких частот.
Простым решением является выбор в качестве h(o) интегратора,
который имеет бесконечное усиление на нулевой частоте. Выход
регулятора затем подается на объект. Результат проиллюстрирован на
рис. 2.8, где изобраоюены эталонный сигнал и выход объекта. Читатель
может далее исследовать этот пример с помощью SIMULINK — файл
tankl.mdl на прилагаемом компакт-диске. □□□
2.7. От разомкнутой структуры
к структуре с замкнутым контуром
На рис. 2.7 была предложена специальная схема для реализации
приблизительного обратного преобразования модели объекта. Хотя регулятор
в этой схеме реализован как система с обратной связью, управление к
объекту фактически приложено в разомкнутой системе. В частности,
мы видим, что управляющий сигнал u(t) не зависит от того, что
фактически происходит в объекте. Это — серьезный недостаток, поэтому
такая методология не даст хорошего решения задачи управления, если
не удовлетворяются следующие условия:
• модель объекта, на которой основано устройство регулятора, очень
хорошо его воспроизводит,
• модель и ее инверсия устойчивы и
• возмущения и начальные условия незначительны.
Все это является поводом искать альтернативное решение задачи, такое,
которое сохраняет ключевые особенности, но не страдает
вышеупомянутым недостатком. Это действительно возможно, если слегка изменить
схему так, чтобы обратная связь охватывала и объект, а не только его
модель.
Чтобы развить эту идею, начнем с основной структуры с обратной
связью, приведенной на рис. 2.9. Далее поступим следующим образом.
58 Глава 2. Введение в принципы обратной связи
80 100 120 140 160 180 200
Время (с)
Рис. 2.8. Управление уровнем в резервуаре с использованием приближенной
инверсии
r(t)
±о~\
Л —
Усиление петли
обратной связи
«w
Модель
Объект
!>(*)
С .
Регулятор с разомкнутым контуром
Рис. 2.9. Разомкнутое управление со встроенной инверсией
Если мы временно предположим, что модель на рис. 2.9 совершенна,.
то мы можем перестроить структуру, получив альтернативную схему,
показанную на рис. 2.10.
Эта схема, которая была получена из структуры разомкнутой
системы, является основанием для управления с обратной связью. Ключевая
особенность этой схемы заключается в том, что выход регулятора
зависит не только от априорных данных, задаваемых моделью, но также и
от того, что фактически происходит на выходе объекта в каждый
момент. Это имеет и другие интересные особенности, которые обсуждены
подробно ниже. Однако сейчас стоит первоначально обсудить сходство и
r(t)
-. e(t)
А
Усиление петли
обратной связи
u(t)
Объект
А'
»(*)
Рис. 2.10. Управление с замкнутым контуром
2.8. Компромиссы, учитываемые при выборе усиления обратной связи 59
различия между разомкнутой и замкнутой структурами, показанными
на рис. 2.9 и рис. 2.10.
• Первый момент, на который следует обратить внимание, состоит в
том, что если модель представляет объект точно и что все сигналы
ограничены (т. е. контур устойчив), то схемы эквивалентны
относительно связи между r(t) и y(t). Принципиальные различия здесь в
реакции систем на возмущения и изменения начальных условий.
• В разомкнутой схеме управления регулятор использует обратную
связь внутренне — возвращается назад сигнал из точки А. В
управлении по замкнутому контуру возвращается назад сигнал из точки А!.
Основное различие здесь в том, что в первом случае все происходит
внутри регулятора (или в компьютере, или в каких-то внешних
связях с аппаратными средствами). Во втором случае сигнал,
подаваемый назад — переменная процесса: используются
измерительные устройства для определения того, что фактически происходит.
Эвристически преимущества последнего варианта несомненно ясны
читателю. Мы разовьем в дальнейшем формальный подход к этим
преимуществ ам.
2.8. Компромиссы, учитываемые при выборе
усиления обратной связи
Предварительные выводы двух предыдущих подразделов могли,
казалось бы, означать, что необходимо только создать регулятор с глубокой
обратной связью вокруг объекта. Это верно, поскольку это так и есть.
Однако ничто в жизни не дается бесплатно — такой вывод применим и
к использованию глубокой обратной связи.
Например, если возмущение, поступающее на объект, приводит к
ненулевой ошибке e{t) '(рис. 2.10), то обратная связь с большим
усилением приведет к очень большому управляющему сигналу u(t). Это
могло бы оказаться вне доступного диапазона входных сигналов и таким
образом лишило бы законной силы решение.
Другая потенциальная проблема с глубокой обратной связью состоит
в том, что она часто сопровождается существенным риском
неустойчивости. Неустойчивость характеризуется самоподдерживающимися (или
возрастающими) колебаниями. Как иллюстрацию подтверждения этого,
читатель может рассматривать высокочастотный свистящий звук,
который слышно, когда громкоговоритель помещен слишком близко к
микрофону. Это — проявление неустойчивости, возникающей при
чрезмерном увеличении обратной связи. Трагическими проявлениями неустой-
60 Глава 2. Введение в принципы обратной связи
чивости можно назвать аварии самолетов и Чернобыль, бедствия, в
которых произошли неудержимо растущие процессы.
Еще на одно потенциальное неудобство глубокой обратной связи мы
намекали в разд. 2.3.4. Там мы видели, что увеличение усиления контура
обратной связи регулятора ведет к увеличенной чувствительности к
шуму измерения.
В итоге, высокое усиление контура обратной связи желательно по
одним причинам и нежелательно по другим. Таким образом, при
определении усиления контура обратной связи следует выбрать. разумный
компромисс между конкурирующими проблемами.
Предыдущее обсуждение может быть подытожено в следующем
утверждении.
Глубокая обратная связь дает приближенную инверсию, которая
является сущностью управления. Однако на практике выбор
усиления контура обратной связи —часть сложной сети компромиссов
проектирования. Понимание и балансировка этих компромиссов —
сущность проектирования систем управления.
2.9. Измеряемые величины
Мы видели, что один из ключевых вопросов в управлении с
использованием обратной связи —это то, что там должны быть
соответствующие измерения величин для формирования сигнала обратной связи.
Действительно, если можно измерить переменную, то имеется хороший
шанс спроектировать регулятор, позволяющий привести этот сигнал к
желаемому эталонному сигналу.
Более подробное описание контура обратной связи системы
управления, включая датчики, показано на рис. 2.11. Из этого рисунка видно,
что то, чем мы фактически управляем, — это измеряемая величина, а не
фактический выход. Они могут существенно различаться.
н:
J
ym(t)
■> ш
J *
1 —
Регулятор
u(t)
Объект
Измерение и система
передач!
1 сигна.
да
У
V !>(*)
Рис. 2.11. Управление по замкнутому контуру с датчиками
2.10. Резюме 61
Следовательно система измерения должна в идеале удовлетворять
следующим требованиям:
• Достоверность. Она должна работать в пределах необходимого
диапазона.
• Точность. Для переменной, имеющей постоянное значение,
измерение должно давать правильное значение.
• Быстрота реагирования. Если переменная изменяется, измерение
должно быть способным следовать за изменениями. Медленные
измерения могут не только затрагивать качество управления, но даже
сделать контур обратной связи неустойчивым. Неустойчивость может
возникать даже в том случае, когда контур был спроектирован
устойчивым в случае точного измерения переменной процесса.
• Шумовая устойчивость. На систему измерения, включая линию
передачи, не должны существенно влиять внешние сигналы, такие,
как шумы измерения.
• Линейность. Если система измерения нелинейна, то, по крайней
мере, эта нелинейность должна быть известна, чтобы можно было
использовать компенсацию.
• «Ненавязчивое» измерение. Устройство измерения не должно
существенно затрагивать поведение объекта.
В дальнейшем обычно мы будем считать систему измерения настолько
хорошей, что следует учитывать только шум измерения. Этот
идеальный контур измерения будет называться контуром с единичной обратной
связью.
2.10. Резюме
• Управление связано с поиском технически, экологически и
коммерчески осуществимых путей воздействия на технологическую систему,
чтобы поддерживать желаемые значения ее выходных параметров
при обеспечении желаемого уровня функционирования.
• Фундаментальной в разработке систем управления является
концепция инверсии.
• Инверсия может быть получена структурой с обратной связью.
• Обратная связь относится к итеративному процессу:
о определение количественных характеристик желаемого
поведения,
о измерение фактических значений важных параметров системы
датчиками,
62 Глава 2. Введение в принципы обратной связи
о восстановление фактического состояния системы по измеренным
величинам,
о сравнение фактического состояния с желаемым,
о вычисление корректирующего действия для приведения системы
к желаемому состоянию,
о приложение корректирующего действия к системе через
исполнительные механизмы и затем
о повторение вышеупомянутых шагов.
• Основные компоненты в контуре обратной связи показаны на
рис. 2.12.
Эталонное
желаемое
значение выхода
Регулятор
Сигнал
управ-
Испол-
нительные
[механизмы!
Возмущения
Фактический
выход
Система
Измерения
Датчики
Шумы
измерения
Рис. 2.12. Типичный контур обратной связи
• Желаемое поведение обычно задается следующими
характеристиками:
о точность, с которой выходные сигналы должны поддерживаться
равными их желаемым значениям;
о требуемый допустимый уровень неточности воздействий,
возмущений и изменений параметров объекта;
о вид переходных процессов;
о ограничения на ускорение, перерегулирование, потребление
энергии и т. д.
• Цели системы управления обычно включают следующее:
о максимизация производительности, скорости, безопасности и др.;
о минимизация потребления энергии, отходов производства,
материальных затрат и др.;
о уменьшение воздействия возмущений, флуктуации шумов,
изменений во времени и т. д.
• Глава дает первые примеры того, что желаемые цели
функционирования системы обычно находятся в конфликте друг с другом и
поэтому формируют сеть компромиссов.
2.11. Литература для последующего чтения 63
• Под проектированием системы управления мы подразумеваем
процесс
о понимания сети компромиссов,
о принятия таких проектных решений, которые совместимы с этими
компромиссами и
о воплощения выбранной цели в регуляторе.
2.11. Литература для последующего чтения
Введение в управление с обратной связью
1. Astrom, К. and Wittenmark, В. (1990). Computer Controlled Systems. Theory
and Design. Prentice-Hall, Englewood Cliffs, N.J., 2nd edition. [Имеется
русский перевод 1-го издания книги: К. Острём, Б. Виттенмарк. Системы
управления с ЭВМ. —М.: Мир, 1987].
2. D'Azzo, J. and Houpis, С. (1988). Feedback Control Systems Analysis and
Synthesis. McGraw-Hill, New York.
3. Doeblin, E.O. (1985). Control System Principles and Design. Wiley, New
York.
4. Dorf, R. (1989). Modern Control Systems. Addison-Wesley, Reading, Mass.,
bih edition. [Имеется русский перевод более позднего, 9-го издания книги:
Р. Дорф, Р. Бишоп. Современные системы управления —М.: Лаборатория
Базовых Знаний, 2002].
5. Franklin, G.F., Powell, J.D., and Emami-Naeini, A. (1991). Feedback Control
of Dynamics Systems. Addison-Wesley, Reading, Mass., 2nd edition,
6. Kuo, B.C. (1995). Automatic Control Systems. Prentice-Hall, Englewood Cliffs,
N.J., 7th edition.
7. Levine, W.S., editor (1996). The Control Handbook. CRC Press, Boca Raton,
FL.
8. Ogata, K. (1997). Modern Control Engineering. Prentice-Hall, Upper Saddle
River, N.J., 3rd edition.
9. Truxal, J.G. (1955). Control Systems Synthesis. McGraw-Hill, New York.
Непрерывное литье
1. Graebe, S.F., Goodwin, G.C., and Elsley, G. (1995). Rapid prototyping and
implementation of control in continuous steel casting. IEEE Control Systems
Magazine, 15(4):64-71.
Глава 3
Моделирование
3.1. Введение
Проектирование системы управления обычно требует деликатного
обращения с основными ограничениями и компромиссами. Чтобы выполнить
это, проектировщик должен всесторонне понимать, как функционирует
процесс. Это понимание обычно проявляется в форме математической
модели. Вооруженный такой моделью, проектировщик может
использовать ее, чтобы предсказать влияние различных проектных решений.
Цель этой главы состоит в том, чтобы дать краткое представление о
моделировании. Здесь рассматриваются следующие темы:
• как выбрать подходящую сложность модели;
• как создать модели для данного объекта;
• как описать ошибки модели;
• как линеаризовать нелинейные модели.
Здесь также дается краткое введение в некоторые наиболее часто
используемые модели, включая
• модели в пространстве состояний и
• модели, основанные на дифференциальных и разностных уравнениях
произвольного порядка.
3.2. Разумное обоснование для моделей
Основная идея обратной связи чрезвычайно привлекательна. Вспомним
задачу управления уровнем изложницы из гл. 2. Фактически там было
только три возможности того, как регулятор мог манипулировать
клапаном: открыть, закрыть или оставить так, как есть. Однако мы уже
видели, что прямое решение связано с неявным компромиссом между
3.3. Сложность модели 65
конфликтующими показателями — скоростью реакции и
чувствительностью к шуму измерения.
Для ряда задач и возможно, и выполнимо найти эти точные
настройки регулятора просто эмпирически. Однако много проблем
препятствуют такому подходу, в том числе сложность, низкая эффективность,
стоимость и даже опасность. Эмпирический подход не может также
ответить перед испытаниями на вопросы следующего типа:
• Даны физический объект и цель управления; какой регулятор может
обеспечить выполнение данной цели? Может ли он вообще быть
получен?
• Даны регулятор и объект; как они будут функционировать в
замкнутом контуре?
• Почему конкретный контур ведет себя таким образом, как мы
наблюдаем? Может он работать лучше? Если да, то с каким регулятором?
• Как будут меняться характеристики контура, если изменятся
параметры системы, или будут больше возмущения, или будет хуже
работать датчик?
Чтобы ответить на эти вопросы, нам нужны средства определения
поведения системы, не зависящие от ограничений физической реальности.
Подходящий способ для достижения этой цели — выразить влияние
начальных условий, управляющих входов и возмущений на внутренние
переменные и на выход с помощью ряда математических уравнений.
Этот набор уравнений называется моделью.
Сила математической модели заключается в том, что она может быть
смоделирована в гипотетических ситуациях, допуская состояния,
которые могли бы быть опасными в реальности и эта модель может
использоваться для синтеза регуляторов.
Однако чтобы выявить эту силу, прежде всего необходимо продумать
модельные эксперименты в диапазоне от тривиальных до почти
невозможных.
Поэтому, так же как и само проектирование систем управления,
моделирование является и искусством, и наукой. Следующие разделы
кратко освещают некоторые из поднятых проблем.
3.3. Сложность модели
При создании модели важно иметь в виду, что все реальные процессы
сложны, и, следовательно, любая попытка построить точное описание
66 Глава 3. Моделирование
объекта — обычно невозможная цель. К счастью, обратная связь
обычно очень великодушна, и, следовательно, в контексте проектирования
системы управления, можно обычно иметь дело с довольно простыми
моделями при условии, что они включают существенные особенности
задачи.
Фактически и искусство, и наука вовлечены в получение модели,
которая, с одной стороны, включает особенности объекта, важные для
проектирования регулятора, однако с другой стороны, не столь сложна,
чтобы замаскировать сущность проблемы. Это — нетривиальная задача
и решению часто предшествуют итерационные и уточняющие процессы.
Обычно лучше всего начать с простой модели, добавляя затем
особенности в процессе развития решения.
Важно также обратить внимание на то, что модели для целей
управления обычно отличаются от тех, которые предназначаются для других
целей, например, проектирования самого процесса. Пригодные для
целей управления модели описываются динамическими количественными
соотношениями между входами и выходами объекта. Прекрасные
внутренние детали объекта уместны только тогда, когда они необходимы
для достижения желаемой цели.
Все реальные системы сколь угодно сложны, поэтому все модели
приблизительно описывают процесс. Введем несколько понятий, чтобы
сделать это ясным:
• Номинальная модель. Это — приблизительное описание объекта,
используемое для проектирования системы управления.
• Эталонная модель. Это —более полное описание объекта. Оно
включает и другие особенности, не используемые для
проектирования системы управления, но имеющие прямое отношение к
полученным характеристикам.
• Ошибка модели. Это —различие между номинальной моделью и
эталонной моделью. Детали этой ошибки могут быть неизвестны, но
можно получить различные оценки ее величины.
В дальнейшем мы будем часто ссылаться на эталонную модель как
на истинный объект. Однако читатель должен обратить внимание, что
эталонная модель также не является точным описанием реального
объекта, и, следовательно, нужно быть осторожным при интерпретации
результатов.
Решить, какая номинальная модель целесообразна, обычно нелегко.
Пока скажем лишь, что она должна включать относящиеся к
управлению особенности динамики объекта и его нелинейности. Авторы
встречались с несколькими примерами в промышленности, где были
разработаны чрезвычайно запутанные физические модели, но они, в ко-
3.3. Сложность модели 67
нечном счете, были ограниченной ценности для проектирования систем
управления или потому что содержали так много свободных параметров,
что их нельзя было определить из реального процесса, или потому что
они не могли описывать некоторые ключевые особенности (типа люфта
клапана), которые, как было в конечном счете найдено, имеют
преобладающее влияние на работу регулятора. Это будет проиллюстрировано
двумя примерами.
Пример 3.1 (Управление температурой в промышленной печи).
Рассмотрим очень большую промышленную печь, которая нагревается
сжиганием нефти. Мы хотим управлять температурой внутри печи,
дросселируя клапаны, которые регулируют нефтяной поток топки.
Номинальная модель в этом случае должна включать динамику
процесса нагревания печи. Как правило, скорость открывания и закрытия
клапанов несущественна по сравнению с относительно более медленной
динамикой нагревания, и, следовательно, включение этого эффекта не
будет добавлять точность к описанию для целей управления. Однако
следует внимательно рассмотреть тот факт, что клапаны могут
насыщаться или залипать и это может привести к трудностям
в получении подходящего закона управления. Таким образом, нужно
включить эти проблемы как часть номинальной модели, если мы
подозреваем, что они важны для действия системы управления. ODD
Пример 3.2 (Управление потоком воды в трубе). Рассмотрим
трубу, в которой нужно управлять потоком воды. На одном конце
установлен клапан и входным управляющим сигналом u(t) является
сигнал, перемещающий устройство позиционирования клапана.
Предполагая, что труба всегда заполнена водой, становится ясно, что
модель этого объекта определяется клапаном, потому что это —
единственный источник динамики. Залипание и насыщение клапана могли
бы быть важными моментами для этой задачи управления. DDD
Примеры, кратко описанные выше, говорят, что ошибки
моделирования и сложность модели — относительные понятия.
Заключительный момент в этом обсуждении касается идеи робастно-
сти (устойчивости к нарушениям исходных предпосылок).
Проектирование системы управления обычно основывается на номинальной модели
объекта. Однако регулятор будет использоваться для управления
реальным объектом. Одна из проблем проектировщика — получить регулятор,
который при работе с реальным объектом продолжает функционировать
так, как предсказано моделью, без существенного ухудшения. Когда
дело обстоит именно так, мы будем говорить, что разработали робастный
регулятор. Чтобы достичь робастности, обычно необходимо иметь меру
ошибки моделирования в форме границ некоторого вида так, чтобы
68 Глава 3. Моделирование
соответствующие предосторожности могли бы быть приняты еще на
стадии проектирования.
3.4. Создание моделей
Первый возможный подход к созданию модели объекта — постулировать
определенную структуру модели и использовать для моделирования
так называемый черный ящик. При этом подходе параметры модели
меняются либо эмпирически, либо на основе какого-то алгоритма, пока
динамическое поведение модели и объекта достаточно хорошо не
совпадут.
Альтернативный подход к задаче моделирования состоит в том,
чтобы использовать физические законы (типа сохранения массы, энергии и
импульса) для построения модели. В этом подходе используется факт,
что в любой реальной системе имеются основные феноменологические
законы, которые определяют отношения между всеми ее сигналами. Эти
законы касаются природы системы и могут включать физику, химию
и экономическую теорию. Можно использовать эти принципы, чтобы
получить модель, как было сделано в разд. 2.3.2.
Практически идеи черного ящика и феноменологические
комбинируются при создании модели. Феноменологическое понимание часто
является ключевым в понимании динамики (включая доминирующие
параметры), нелинейностей и существенных временных изменений в
данной системе. Это может помочь в первоначальном выборе сложности
модели. С другой стороны, подход с использованием черного ящика
часто позволяет выбрать модели для тех частей объекта, где
соответствующая физика процессов настолько сложна, что трудно подобрать
соответствующую феноменологическую модель.
Чтобы проиллюстрировать это, рассмотрим простой цилиндрический
резервуар, содержащий воду и имеющий площадь поперечного сечения
А. Этот резервуар освобождается через отверстие в его основании.
Физические принципы говорят, что вытекающий поток q(t) может быть
приемлемо смоделирован как q(t) = Ky/h(t), где h(t) —уровень воды в
резервуаре, а К — константа, которую нужно определить. Эту константу
можно, с другой стороны, определить, используя физические принципы,
но это будет существенное усилие. Более простой метод состоит в
измерении h(t) каждые Г секунд, где Г выбирается таким, что величина
\h(t)—h(t—Г)| является небольшой. Тогда хорошей оценкой потока будет
q(t) = \h(t) — h(t — T)\A/T. Мы могли бы тогда оценить значение К,
используя линейную связь q(t) и y/h(t) для различных значений t. Мы
можем видеть, что в этом примере окончательная модель комбинирует
3.5. Структуры моделей 69
физические знания с экспериментальными наблюдениями. Эта ситуация
возникает очень часто при моделировании для целей управления.
Другая практически значимая проблема — учет исполнительного
механизма в процессе моделирования. Исполнительные механизмы во
многих случаях очень нелинейны. Они также обычно имеют собственные
динамические характеристики. Действительно, в некоторых случаях
динамика исполнительного механизма может фактически доминировать
над другими характеристиками объекта. Это, например, ситуация,
возникающая с клапанами, гидравлическими приводами и
управляемыми выпрямителями. По этой причине впоследствии, когда мы будем
говорить о модели объекта, следует понимать, что эта модель также
включает и исполнительные механизмы, если это необходимо.
Суммируя, можно сказать:
Модели для систем управления часто весьма просты по сравнению с
истинными процессами и обычно объединяют физические
соображения с экспериментальными данными.
3.5. Структуры моделей
Учитывая динамический характер реальных процессов, стандартное
математическое описание моделей процесса включает, кроме
алгебраических отношений, следующее:
• зависимости от накопленного (или интегрального) эффекта
переменных процесса и
• зависимости от скорости изменения (или дифференциального
эффекта) переменных.
Эти две особенности определяют то, что обычно называется динамикой
объекта, и указывают на тот факт, что поведение реального процесса
не может быть описано удовлетворительно без включения его прошлой
истории и того, как происходят изменения.
Модели могут быть обычно сведены к форме дифференциальных
уравнений (с непрерывным временем), разностных уравнений
(дискретное время), или комбинации их (гибридные или импульсные системы).
Эти модели связывают входы объекта с отдельными его выходами и
имеют дело с ограниченным описанием системы в процессе ее изучения.
В следующих двух разделах мы описываем два возможных пути,
которые обычно используются для описания модели.
70 Глава 3. Моделирование
3.6. Модели пространства состояний
Очень ценный и часто используемый инструмент для моделирования
объекта — описание его переменными состояния. Переменные состояния
представляют собой набор внутренних переменных, который является
полным набором в том смысле, что если эти переменные известны в
некоторое время, то любой выход объекта y(t) может быть вычислен для
любого последующего времени как функция от переменных состояния,
а также настоящих и будущих значений входов.
3.6.1. Общий случай
Если мы обозначим через х вектор, соответствующий конкретному
выбору переменных состояния, то общая форма модели в переменных
состояния следующая:
для непрерывных систем
dx
— = /(*(t),ti(t),t)
y(t)=0(*(t),ti(t),t)
для систем с дискретным временем
x[k + l] = fd(x[k],u[%k) (3.6.3)
У[к]=д*{ф]Ак]>Ь) (З-6-4)
Тот факт, что описание пространства состояний задается векторным
дифференциальным уравнением первого порядка (см. (3.6.1)) часто,
облегчает численные решения различных задач управления. Это
особенно верно в линейном случае, где существенные усилия были
посвящены мощным цифровым методам решения этих задач управления.
Мы посвятим гл. 17 более глубокому рассмотрению линейных моделей
пространства состояний. Здесь же мы даем краткий обзор.
3.6.2. Линейные модели пространства состояний
Мы говорим, что система линейна, если выполняется принцип
суперпозиции. Под этим мы подразумеваем, что если начальные условия xoi и
хо2 вызывают при нулевом входе реакции hoi(t) и /&02(*) соответственно,
а входы щ({) и t*2(*) при нулевых начальных условиях вызывают
выходные реакции hu(t) и hi2(t) соответственно, то реакцией на вход
u\(t) +U2(t) с начальными условиями xoi + £о2 будет /ioi(^) + Лог(*) +
hn{t)+h12{t).
(3.6.1)
(3.6.2)
3.6. Модели пространства состояний 71
Говорят, что система инвариантна по времени, если реакция на
сдвинутый по времени вход просто является сдвинутой по времени исходной
реакцией, т. е. если вход Ui(t) (Vt G К) вызывает реакцию g\(t) (\/t G К),
то вход U2(t) = Ui(t + r) (Vt G К) вызывает реакцию g2(t) = 5i(£ + r)
(Vt 6 R).
В линейном, стационарном (инвариантном по времени) случае,
уравнения (3.6.1) и (3.6.2) будут
ris(t)
dt
= Ax(t)+Bu{t)
y(t) = Cx(t)+Bu(t)
(3.6.5)
(3.6.6)
где А, В, С и D —матрицы соответствующих размерностей.
Проиллюстрируем вышесказанное построением модели пространства
состояний для электрической цепи.
Пример 3.3. Рассмотрим простую электрическую цепь, показанную
на рис. 3.1. Предположим, что мы желаем смоделировать напряжение
v(t).
«/(*)Q
Ri
'i(t)
Яг
У
v(t)
Рис. 3.1. Электрическая цепь —модель пространства состояний
Применяя основные законы электрических цепей, получим
следующие уравнения:
. di{t)
v{t)=L-
dt
Vf(t)-v(t) _ .m , rdv(t) v^
RX -W + b dt + r2
Эти уравнения могут быть преобразованы в следующие:
1
+ ■
\RiC R2C
ЬУ
W + JSo-'W
(3.6.7)
(3.6.8)
(3.6.9)
(3.6.10)
Уравнения (3.6.9) и (3.6.10) имеют форму векторных уравнений
(3.6.1), если в качестве переменных состояния выбрать x\(t) = i(t) и
X2{t) = v(t), т. е. вектор состояния имеет вид x(t) = [xi(t) X2(t)]T.
72 Глава 3. Моделирование
{ZZ>
Va(t)
Рис. 3.2. Упрощенная модель двигателя постоянного тока
Уравнение, соответствующее (3.6.2), дает ничто иное, как y(t) =
v{t)=x2{t).
Итак, уравнения (3.6.9) и (3.6.10) представляют собой линейную
модель пространства состояний, одну из форм уравнений (3.6.5)-(3.6.6), с
матрицами
А =
0
L с \Жс + Жс)
В =
о
1
RiC
С=[0 1]; D = 0
(3.6.11)
DDD
Следующий пример относится к двигателю.
Пример 3.4. Рассмотрим двигатель постоянного тока с независимым
возбуснсдением. Пусть va(t) обозначает напряснсение якоря, 6(t) —угол
поворота вала двигателя. Упрощенная схема этой системы показана
на рис. 3.2.
Пусть
J — момент инерции вала двигателя,
Te(t) —электрический вращающий момент,
ia(t) — ток якоря,
к\, &2 —константы,
R — сопротивление якоря.
Использование известных принципов физики дает следующие связи
этих параметров
J0(t) = Te(t) = kiia(t) (3.6.12)
Vu,{t) = k26{t) (3.6.13)
va{t)-k2e{t)
ta(*) =
R
(3.6.14)
Комбинируя эти уравнения, мы получим следующую модель в виде
дифференциального уравнения второго порядка:
J0(t) = fci
va{t)-k29{t)
R
(3.6.15)
3.7. Решение непрерывных моделей пространства состояний 73
Мы можем легко преобразовать эту модель в пространство
состояний, вводя
xi{t) = 0{t) (3.6.16)
x2{t) = 0{t) (3.6.17)
Модель (3.6.15) может быть переписана в виде:
d_ (ХЩ
dt \x2(t)J
О
1
n -kik2
У JR
xi(t)
а*(*).
+
0
IJRi
Va{t)
(3.6.18)
Это кажется очень простым, однако читатель может быть
удивлен, как часто простые сервомоторы типа, показанного на рис, 3.2
используются на практике. Они — основной элемент многих следящих
систем и роботов, QDD
3.7. Решение непрерывных моделей
пространства состояний
Поскольку модели пространства состояний описываются системой
дифференциальных уравнений первого порядка, их относительно легко
решить.
Ключом к нахождению решения уравнений состояния является
экспоненциальная матрица, определенная как
(3.7.1)
Точное решение линейного уравнения состояния тогда выглядит так:
x{t) = еА^-^х0 + [ еА«-т>Ви(т№т (3.7.2)
Л.
Это утверждение может быть проверено прямой подстановкой (3.7.2)
в (3.6.5). Чтобы выполнить необходимое дифференцирование, заметим,
что
deAt
dt
= AeAt = eAt A
(3.7.3)
а также напомним правило Лейбница:
d Г8®
dt.
/ H(t,T)dT = H(t,9(t))9(t)-H(t,f(t))f(t)+ / ^-H(t,r)dT
J fit) Jf(t) dt
(3.7.4)
74 Глава 3. Моделирование
Использование (3.7.4) и (3.7.3) в (3.7.2) дает
x{t) = AeMt~to)x0 + Bu{t) + A f еА{<ь-^Ви(г)с1г (3.7.5)
Jto
= Ax(t) + Bu(t) (3.7.6)
как и утверждалось.
Заметим, что если u(t) = О \ft > t0) то матрица еА^~т) определяет
переход от х(т) к x(t) \ft > т. Этот вывод объясняет название
«матрица переходов», которое обычно дается матрице eAt. Выход модели y(t),
полученный из (3.6.6) и (3.7.2), будет
у(«) = СеА<*-^х0 + С / eA(t-T)Bw(r)dr + Dti(t) (3.7.7)
Jto
Заметим, что решения для состояния (3.7.2) и для выхода (3.7.7)
состоят из двух членов каждое, а именно, реакции на начальные условия
х0 и принудительной реакции, которая зависит от входа u(t) в интервале
[t0, t]. Приглашаем читателя проверить, что принцип суперпозиции
справедлив для результата, данного в (3.7.7).
Мы будем использовать модели пространства состояний в частях I—III
этой книги достаточно редко. Однако всякий раз, когда это удобно, мы
будем делать побочные комментарии, чтобы показать, как различные
результаты имеют отношение к этим моделям. В частях же V-VIII,
где представлен более продвинутый материал, мы будем использовать
модели пространства состояний часто, потому что они упрощают многие
представления.
3.8. Модели с дифференциальными
и разностными уравнениями
произвольного порядка
Альтернативной моделью, которая часто используется, является
дифференциальное уравнение произвольного порядка, которое
непосредственно связывает входы с выходами. Эти модели обычно называются
моделями входа—выхода.
В случае непрерывного времени эти модели имеют форму
где / — некоторая нелинейная функция.
Простой пример такой модели дан уравнением (3.6.15).
3.9. Ошибки моделирования 75
Аналогично для дискретного случая мы можем написать
т{у[к + п],у[к + п-1],--- ,у[к],и[к + п-1],-~ ,ti[fc])=0 (3.8.2)
где га — нелинейная функция и где мы используем обозначение {у[к]}
для задания последовательности {у[к] : к = 0,1,...}.
Мы опишем этот вид модели более детально в гл. 4.
3.9. Ошибки моделирования
Мы говорили ранее, что модели для реальных процессов неизменно
содержат некоторый уровень приближения. Желательно, если возможно,
включать знание степени приближения в процедуру проектирования.
Пусть истинный объект и его номинальная модель описываются,
соответственно, формулами
у = дМ (3.9.1)
Уо = 9о(и) (3.9.2)
где д и (/о — преобразования общего вида (см. разд. 2.5).
Так называемая аддитивная ошибка моделирования (АОМ) в этом
случае определяется преобразованием де:
У = Уо + 9е(и) (3.9.3)
Сложность с АОМ заключается в том, что она не нормирована
параметрами номинальной модели. С другой стороны, преимуществом
так называемой мультипликативной ошибки моделирования (MOM) зд
является то, что она определяется следующим образом
У = 9о(и + дА(и)) (3.9.4)
Пример 3.5. Пусть выход объекта точно описывается формулой
y = /(sata(u» (3.9.5)
где f (о) — линейное преобразование, a sata означает оператор
а-насыщения:
{a x(t) >a
х \x(t)\<a (3.9.6)
—a x(t) < —a
Если номинальная модель выбрана на основе соотношения д0(°) =
/(о) (т. е. не учитывается насыщение), следует определить
аддитивную и мультипликативную ошибки.
76 Глава 3. Моделирование
VI
—а.
1
а
V
■V
«•)
Аддитивная ошибка моделирования
l\ *
—а
\
Мультипликативная ошибка моделирования
Рис. 3.3. АОМ и MOM для насыщения
Решение
Поскольку f — линейное преобразование, то оно является
дистрибутивным и аддитивным. Следовательно, выход объекта
у = f(u + sa,ta(u) -и)
= f(u) + /(sata(w) - и)
= f(u)+9e{u)
= f(u + sata(w) — и)
= f(u + 9A(u))
АОМ и MOM в этом случае иллюстрируются рис. 3.3. . ODD
Конечно, точные ошибки модели редко известны, поскольку сам
истинный объект точно не известен. Однако некоторую информацию
относительно величины ошибок можно было бы получить. Обычно
это выражается в терминах граничных оценок АОМ и MOM между
номинальной моделью и некоторой другой (более сложной) эталонной
моделью. Например, мы могли бы дать это описание в виде: ||зд|| < е,
где || о || —соответствующая норма.
(3.9.7)
3.10. Линеаризация 77
3.10. Линеаризация
Хотя почти каждая реальная система включает нелинейные
особенности, много систем могут быть с достаточной точностью описаны, по
крайней мере, в пределах некоторых диапазонов функционирования
линейными моделями. Стимулом попытаться приблизить нелинейную
систему линейной моделью является то, что наука и искусство линейного
управления являются более завершенными и более простыми, чем в
нелинейном случае. Полезный способ получить эти линейные модели —
начать с нелинейной модели и затем построить линейное приближение
в окрестности выбранной рабочей точки. Этот подход не специфичен
только для анализа, синтеза и проектирования систем управления, но
является ключевым инструментом моделирования в других областях,
например, в аналоговой электронике.
Стратегия линеаризации может применяться одинаково хорошо к
моделям с непрерывным и дискретным временем, а также к моделям
пространства состояний и моделям входа-выхода (дифференциальные и
разностные уравнения произвольного порядка). Для простоты мы
дальше дадим набросок процесса линеаризации в пространстве состояний.
Итак, рассмотрим
i(t) = f(x(t),u(t)) (3.10.1)
y(t)=g(x(t),u(t)) (З.Ю.2)
Пусть {xQ{t)^UQ{t)^yQ{t)\t G Щ— множество траекторий, которые
удовлетворяют предыдущим уравнениям:
zq(*) = f{xQ(t),uQ(t)); xQ(t0) дано (3.10.3)
yQ(t)=9(xQ(t),uQ(t)) (3.10.4)
Траектория {xQ{t),UQ(t),yQ(t)\t G Щ может соответствовать точке
равновесия модели в пространстве состояний. В этом случае xq, wq, yQ
не будут зависеть от времени, a (xq, j/q) будет удовлетворять условию
xq = 0, т. е.
f(xQ,uQ)=0 (3.10.5)
Пусть теперь мы хотим описать траекторию {x(t),u(t),y(t)]t Е М},
где я(£), u(t) и y(t) близки к {zq(£),uq(£)>2/q(£);£ E Щ. В этом случае
78 Глава 3. Моделирование
для аппроксимации модели мы используем первые члены разложения в
ряд Тейлора. Это приближение дает
y{t)^g{xQ,uQ)+-^-\
(x{t)-xQ)+?f
x=xQ OU
U=Uq
(x(*)-xq)+/
x=xq * du\
U—Uq
(u(t)-uQ) (3.10.6)
X=Xq
U=Uq
(u(t)-uQ) (3.10.7)
X=Xq
U=Uq
Здесь мы использовали обозначение ^£, чтобы обозначить матрицу,
имеющую в качестве у-го элемента gj1. Заметим, что производные
вычислены для номинальной траектории. В случае фиксированной точки
равновесия, эти матрицы производных будут матрицами констант.
Уравнения (3.10.7) и (3.10.6) имеют следующую форму:
x(t) = Ax{t) + Bu{t)+E
y{t) = Cx{t)+T>u{t)+F
где
(3.10.8)
(3.10.9)
(3.10.10)
(3.10.11)
(3.10.12)
(3.10.13)
Обычно А, В, С, D, Е и F зависят от времени. Однако в случае,
когда мы производим линеаризацию в окрестности точки равновесия,
они будут независимы от времени.
Можно также записать приближенные уравнения в терминах
приращений Ax{t) = x{t) -xQ{t), Au{t) = u{t)-uQ(t). Из (3.10.7) и (3.10.6),
используя (3.10.3) и (3.10.4) мы получим
dAx(t)
А=д-1
дх
дх
U=Uq
X=Xq
U=Uq
E = f(xQ,UQ)-
F = 3(z<
Q,Uq)-
ди
в-дд
ди
.21
дх
дх
X=Xq
U=Uq
X=Xq
U=Uq
\ x -^
x=xQ q du
1 U=Uq
X=Xq
U=Uq
dg
? du
UQ
X=Xq ^
1 U=Uq
UQ
X=Xq ^
U=Uq
= AAx(t) + BAu{t)
at
Ay{t) = CAx(t)+T>Au(t)
(3.10.14)
(3.10.15)
3.10. Линеаризация 79
Замечание 3.1. Процедура линеаризации, представленная выше, дает
модель, которая является линейной для приращений входов и
выходов относительно выбранной рабочей точки (т. е. модель для малых
сигналов).
Проиллюстрируем все двумя примерами.
Пример 3.6. Рассмотрим непрерывную систему, имеющую
следующую истинную модель
^ = /(*(*),«(*)) = -у/Щ+ ^ (3.10.16)
Предположим, что вход u(t) колеблется относительно значения
и = 2. Найти рабочую точку при uq = 2 и линеаризованную модель
в ее окрестности.
Решение
1. Рабочая точка вычисляется из формулы (3.10.16) с uq = 2 и при
^р- = 0. Это дает
ч/^-^=0 =**Q = y (3.10.17)
2. Тогда, преобразуя (3.10.16) с помощью разложения в ряд Тейлора,
получим следующую линеаризованную модель:
Используя числовые значения для рабочей точки, мы получаем
следующую линеаризованную модель:
*^B = AAx(t) + ±Au(t) (3.10.19)
Чтобы оценить качество приближения, мы рассмотрим исходную
систему и ее линеаризованную модель и запустим моделирование,
где вход системы — константа, равная 2, плюс последовательность
импульсов с увеличивающейся амплитудой. Результаты показаны на
рис. 3.4. Здесь мы видим, что ошибка от линеаризации увеличивается,
если система отходит от рабочей точки, для которой была
рассчитана линеаризованная модель. □□□
80 Глава 3. Моделирование
Z8
2.6
2.4
2.2
2
1.8
1.6
1.4
1 1 1
-
^—-Isw
L 1 1 1
, .. . т
1
1
^VnlM
1
т
u(t)
1
А
10
Время (с)
Рис. 3.4. Выходы нелинейной системы yni(t) и линеаризованной системы yi(t)
для входа в виде прямоугольных импульсов увеличивающейся амплитуды u(t).
В качестве несколько более сложного примера рассмотрим
следующий.
Пример 3.7 (Перевернутый маятник). Многие читатели знакомы
с возможностью балансирования метлы {или палки) на конце пальца.
Простой опыт показывает, что это — трудная задача управления.
Многие университеты по всему миру создали системы с
перевернутым маятником, чтобы демонстрировать результаты управления.
Фотография одной из них, построенной в Университете Ньюкасла,
Австралия, показана на Web-сайте книги. Причина того, что эта
задача интересна с точки зрения управления, заключается в том,
что она иллюстрирует многие из трудностей, связанных с реальными
задачами управления. Например, модель очень похожа на систему
стабилизации качки судна с помощью перекладки руля. Последняя задача
будет рассмотрена в гл. 23. Схема типичной системы с перевернутым
маятником показана на рис. 3.5.
Рис. 3.5. Перевернутый маятник
3.10. Линеаризация 81
На рис 3.5 используются следующие обозначения:
y(t) —расстояние от опорной точки)
Q(t) —угол маятника)
М —масса тележки)
т —масса маятника {считается, что она сосредоточена на
верхнем конце))
I —длина маятника)
f(t) —силы, приложенные к маятнику.
Использование физики Ньютона в этой системе приводит к
следующей модели:
У =
в=
1
Am+sin20(*)
1
т
+ 6z(t)tsm6(t)-gcos6(t)sm6{t)
(3.10.20)
-#п , • 2оп\\ Г—cos9{t) + e2(t)£sme{t)cos9{t) + {l + \m)gsme{t)
t[Am+sin U(t)\ l m
(3.10.21)
где Am = (M/m).
Эти уравнения нелинейны. Однако для малых отклонений в от
вертикального положения мы мооюем выполнить линеаризацию около
значений в0 = 0, в0 = 0. Используя методы, рассмотренные выше,
получим:
1
лт
1
'/«)
т
-g0(t)
9 =
IK
ш
т
+ (l + \m)ge(t)
(3.10.22)
(3.10.23)
Теперь мы можем преобразовать это в форму пространства
состояний с входом u(t) =/(<) и выходом y(t), вводя
xi(t) = y(t)
x2(t) = №
x3(t) = 9(t)
x4(t) = Щ
Это приводит к линейной модели пространства состояний, как и в
(3.6.5)-(3.6.6), где
ГО 1 0 01
А =
0
0
.0
о =Я?
0 0
n (M+m)g
и Ml
0
1
0.
в =
о
м
о
1 ,
) С=[1 0 0 0] (3.10.24)
В дальнейшем будет дополнительно сказано о проблемах управления,
связанных с этой системой. □□□
82 Глава 3. Моделирование
Замечание 3.2. Современные вычислительные пакеты включают
специальные команды, чтобы вычислить линеаризованные модели
относительно определенной пользователем (заранее определенной) рабочей
точки. В случае MATLAB-SIMULINK соответствующие команды —
это linmod (для непрерывных систем) и dlinmod (для дискретных
и гибридных систем).
Замечание 3.3. Очевидно, что линеаризованные модели являются
приближенными моделями. Таким образом, эти модели должны
использоваться с соответствующей осторожностью (как, разумеется
и все другие модели). В случае линеаризованных моделей, следующий
член разложения в ряд Тейлора может часто использоваться, чтобы
сообщить нам кое-что относительно величины связанной с
линеаризацией ошибки моделирования.
Линейные модели часто дают глубокое понимание и ведут к простым
стратегиям управления. Они могут быть получены линеаризацией
нелинейной модели вблизи рабочей точки. Нужно быть осторожным
с неизбежными ошибками моделирования.
3.11. Изучаемые задачи
Ограниченность места не дает нам возможности представить более
детальное изучение моделирования. Обычно оно относится к сфере
других курсов, которые посвящены непосредственно этой теме. Тем не
менее, простые модели для всех изучаемых задач будут представлены
при их обсуждении. Отсылаем читателя к следующим задачам:
• Отслеживание спутника (гл. 22).
• Управление значением рН (гл. 19 и Web-сайт).
• Непрерывное литье (гл. 2, 8 и Web-сайт).
• Сахарный отжимной пресс (гл. 24 и Web-сайт).
• Дистилляционная колонна (гл. 6 и Web-сайт).
• Синтез аммиака (гл. 20).
• Оценка массы цинкового покрытия (гл. 22).
• BISRA-измеритель (гл. 8 и Web-сайт).
• Эксцентриситет валков (гл. 10, 22 и Web-сайт).
• Эффект затягивания у прокатных станов (гл. 8, 10 и Web-сайт).
• Управление толщиной полосы при прокатке стали (гл. 21 и Web-
сайт).
3.12. Резюме 83
• Управление вибрацией (гл. 22).
• Двигатель постоянного тока (гл. 3).
• Оценка уровня жидкости в резервуаре (гл. 18 и Web-сайт).
• Четыре соединенных резервуара (гл. 21, 24 и Web-сайт).
• Устройство из плоскости и шара (Web-сайт).
• Теплообменник (гл. 4).
• Перевернутый маятник (гл. 3, 9, 24 и Web-сайт).
• Стабилизация качки судна с помощью перекладки руля (гл. 23).
3.12. Резюме
• Чтобы методично проектировать регулятор для конкретной системы,
нужно формальное, по возможности простое описание системы.
Такое описание называется моделью.
• Модель — набор математических уравнений, которые предназначены
для учета влияния некоторых переменных системы на некоторые
другие переменные этой же системы.
• Выделенные выше курсивом фрагменты должны пониматься
следующим образом:
о некоторые переменные системы: обычно и невозможно и не нужно
моделировать действие каждой переменной на каждую же другую
переменную; поэтому ограничиваются некоторым подмножеством.
Типичными примерами здесь могут быть влияние входа на выход,
влияние возмущений на выход, влияние изменения эталонного
сигнала на управляющий сигнал или влияние различных внутренних
неизмеряемых сигналов системы на всякие другие сигналы.
о учет: модель никогда не бывает совершенной, поэтому она всегда
связывается с ошибкой моделирования. Слово «учет» выдвигает
на первый план существование ошибок, но точное определение их
типа и влияния не производится.
о предназначены: это слово — напоминание, что не всегда можно
найти модель с желаемой точностью, и, следовательно, может
потребоваться некоторый итеративный процесс уточнения.
о набор математических уравнений: имеются многочисленные
способы описания поведения системы, например, с помощью
линейных или нелинейных дифференциальных и разностных уравнений.
84 Глава 3. Моделирование
• Модели классифицируются в зависимости от свойств уравнений,
которыми они описываются. Примеры классификации включают
следующее:
Свойства модели
С одним
входом и одним
выходом
Линейная
Изменяющаяся
во времени
Непрерывная
Вход-выход
Сосредоточенные параметры
Противоположные
свойства
Со многими
входами и
многими
выходами
Нелинейная
Инвариантная
во времени
Дискретная
Пространство
состояний
Распределенные
параметры
Означает, что...
... уравнения модели имеют
только один вход и один выход
(имеет несколько входов и/или
несколько выходов)
... уравнения модели линейны
по отношению к переменным
системы (уравнения нелинейны)
... параметры модели
переменные (параметры
постоянные)
... уравнения модели описывают
поведение системы в каждый
момент времени (только в
дискретные моменты времени)
... уравнения содержат только
входы и выходы (включают
так называемые переменные
состояния)
... уравнения модели —
обыкновенные дифференциальные
уравнения (дифференциальные
уравнения в частных
производных)
• Во многих случаях нелинейные модели могут быть линеаризованы
относительно выбранной пользователем рабочей точки.
3.13. Литература для последующего чтения
Моделирование
1. Campbell, D.P. (1958). Process Dynamics. Wiley, New York.
2. Cannon, R. (1967). Dynamics of Physical Systems. McGraw-Hill.
3. Ogata, K. (1998). System Dynamics. Prentice-Hall, Upper Saddle River, N.J.,
3rd edition.
4. Stephanopoulos, G. (1984). Chemical Process Control: An Introduction to
Theory and Practice. Prentice-Hall, Englewood Cliffs, N.J.
3.14. Задачи для читателя 85
Идентификация
1. Bohlin, Т. and Graebe, S.F. (1995). Issues in nonlinear stochastic grey box
identification. International Journal of Adaptive Control and Signal Processing,
9(6):465-490.
2. Goodwin, G.C. and Payne, R.L. (1977). Dynamic System Identification.
Academic Press, New York.
3. Ljung, L. (1999). System Identification. Theory for the User. Prentice-Hall,
Englewood Cliffs, N.J., 2nd edition.
4. Ljung, L. and Soderstrom, T. (1983). Theory and Practice of Recursive
Identification. MIT Press, Cambridge, Mass.
3.14. Задачи для читателя
Задача 3.1. Рассмотрим электронный усилитель с входным
напряжением Vi(t) и выходным напряжением v0(t). Предположим, что
v0{t) = 8vi{t) + 2 (3.14.1)
3.1.1. Покажите, что усилитель не удовлетворяет строго принципу
суперпозиции. Таким образом, эта система не строго линейна. (Лучший
термин для этой системы был бы «аффинная».)
3.1.2. Заметьте, что систему можно также описать следующим образом:
v0{t) = 8vi{t) + 2di{t) (3.14.2)
где di(t) —постоянное смещение (равное единице).
Покажите, что принцип суперпозиции справедлив для вектора
входа [vi(t) di(t)]T.
3.1.3. Получите модель в приращениях для Av0(t) = v0(t)— v0q, Avi(t) =
Vi{t) — ^iQ, где (viQ,v0Q) —любая точка, удовлетворяющая модели
(3.14.1). Покажите, что эта модель в приращениях одна и та же для
любых пар (viQ.Voo).
Задача 3.2. Рассмотрим электронный усилитель, схожий с усилителем
из задачи 3.1, но имеющий входное напряжение Vi(t) и выходное
напряжение v0(t), связанные соотношением
v0(t) = 8(vi(t))2 (3.14.3)
3.2.1. Покажите, что усилитель нелинейный, убедившись, что если мы
представим Vi(t) в виде двух компонентов, например, Vi(t) = vn(t) +
^i2(£)> то реакция на Vi(t) не равна сумме реакций на vn(t) и Vi2(t).
3.2.2. Предположим, что Vi(t) = 5 + cos(100£). Каким будет выход?
86 Глава 3. Моделирование
3.2.3. Получите модель в приращениях для Av0(t) = v0(t)—v0q, Av{(t) =
Vi{t) — ViQ, где (viQ,v0Q)—любая точка, удовлетворяющая модели
(3.14.3). Покажите, что эта модель в приращениях зависит от выбора
пары (viQ,v0Q). Сравните это с результатом в задаче 3.1 и обсудите
результат.
Задача 3.3. Система имеет модель входа-выхода
У(<) = 2|«(*)| (3.14.4)
3.3.1. Постройте модель для малых сигналов в окрестности uq = 5.
3.3.2. Обсудите, почему это не может быть сделано относительно uq =
0.
Задача 3.4. Дискретная система с входом и[к] и выходом у[к]
описывается разностным уравнением
у[к] - 0.8у[к - 1] + 0.15y[fc - 2] = 0.2и[к - г] (3.14.5)
3.4.1. Постройте модель пространства состояний для г = 0.
3.4.2. Повторите это для г = 1.
Задача 3.5. Рассмотрим сберегательный счет, выплачивающий 5%
годового дохода. Предположим, что открывающийся депозит —200
долларов США и что годовой депозит d[i] сделан в конце г-го года. Постройте
модель, которая описывает изменение баланса этого счета в конце fc-ro
года, для fc = 1,2,3,...
Задача 3.6. Рассмотрим механическую систему на рис. 3.6, где u(t) —
внешняя приложенная сила, v (t) — скорость массы М относительно
инерционной системы, связанной со стеной и y(t) — смещение от стены.
i ^ v(t)
Рис. 3.6. Динамическая механическая система
Найдите дифференциальное уравнение, описывающее связь между
входом u(t) и переменными v(t) и y(t).
Задача 3.7. Рассмотрим систему с входом u(t) и выходом у(£),
имеющую эталонную (нелинейную) модель, определяемую выражением
^ + (2 + 0.1 (y(t))2) y(t) = 2u(t) (3.14.6)
3.14. Задачи для читателя 87
Пусть мы связываем с этой системой номинальную (линейную)
модель, определяемую формулой
dy(t)
dt
+ 2y(t) = 2u(t)
(3.14.7)
Смоделируйте эти две системы и получите ошибку модели для u(t) =
Лшз((Ш) при А = 0.1, 1.0 и 10.
Обсудите, почему ошибка моделирования растет, когда А становится
больше.
Задача 3.8. Рассмотрим следующую нелинейную модель пространства
состояний
xi (t) = -2хх {t) + 0.1a;i {t)x2(t) + u{t)
x2(t) = -xl(t)-2x2(t)(x1(t)f
y(t) = x1(t) + (l + x2{t))2
(3.14.8)
(3.14.9)
(3.14.10)
Постройте линеаризованную модель в окрестности рабочей точки,
заданной значением uq = 1.
Задача 3.9. Рассмотрим нелинейный объект, имеющий модель
-|^ + [1 + 0.2sin(y(*))] ^ + 0.5y(t) = 3u(t) - sign(u(t)) (3.14.11)
3.9.1. Найдите примерную инверсию для этого объекта, используя
структуру, показанную на рис. 2.7, с преобразованием h(o), представ-
• ляющим линейное нединамическое усиление.
3.9.2. Настройте моделирование, как показано на рис. 3.7, где /(о)
представляет нелинейную динамическую систему, описанную в
(3.14.11).
О
*-
ft(o)
/<°>
/<°>
о
Рис. 3.7. Схема оценки параметров инверсии
3.9.3. Оцените характеристики инверсии, исследуя е с помощью
SIMULINK на основе рис. 3.7. Используйте синусоидальные
колебания с частотой в диапазоне от 0 до 0.5 рад/с.
88 Глава 3. Моделирование
Задача 3.10. Рассмотрим нелинейную систему, имеющую модель
Постройте линейную модель для малых сигналов в окрестности
точки, определяемой постоянным входным сигналом и = 2.
Задача 3.11. Рассмотрим механическую систему, показанную на
рис. 3.8. Внешняя сила f(t) приложена к одному концу рычага и
уравновешена пружиной, связанной с другим концом. Рычаг вращается вокруг
своего центра, где момент трения пропорционален угловой скорости.
Масса рычага: т
Длина рычага: I
Рис. 3.8. Рычаг
3.11.1. Без формирования какой-либо модели скажите, как много
состояний имеет система.
3.11.2. Постройте линейную модель входа-выхода для системы с входом
Af(t) и выходом A0(t). Примите вя = 0.
3.11.3. Постройте линейную модель пространства состояний.
Глава 4
Непрерывные
сигналы и системы
4.1. Введение
Преимущество представления задачи моделирования в линейном
приближении состоит в том, что последующий анализ, а также
проектирование регулятора, могут использовать богатую информацию относительно
функционирования линейных систем. В этой главе мы рассмотрим
основные принципы этой теории для линейных моделей непрерывных
процессов. Основные темы, которые будут исследованы, следующие:
• модели в виде линейных дифференциальных уравнений
произвольного порядка;
• преобразования Лапласа, которые конвертируют линейные
дифференциальные уравнения в алгебраические уравнения, намного
упрощая таким образом их изучение;
• методы для оценки устойчивости линейных динамических систем и
• частотные характеристики.
4.2. Линейные непрерывные модели
Линейная модель общего вида является линейным вариантом общего
дифференциала произвольного порядка, кратко описанного в разд. 3.8.
Линейная форма этой модели:
^+an_1^M + ... + aoy{t) = bn_1^Lu{t) + ... + bou{t) (4.2.1)
Предлагаем читателю вспомнить модель простого двигателя,
заданную уравнением (3.6.15). Эта модель была в форме (4.2.1).
90 Глава 4. Непрерывные сигналы и системы
Иногда удобно использовать операторную форму, чтобы обозначить
действие дифференцирования. Поэтому мы введем оператор
дифференцирования или оператор Хевисайда р(о), определяемый как
Р(№)=Р№±^ (4.2.2)
Pn(f(t)) = Pnf(t) = p(pn-1(№)) = ^ (4.2.3)
В терминах этого оператора модель (4.2.1) может быть записана:
Pny{t) + an-lPn-ly{t) + • • • + a0y{t)
= bn-lPn-lu{t) + • • • + b0u{t) (4.2.4)
Главное для линейных систем —это то, что для них справедлив
принцип суперпозиции. Как сказано в разд. 3.6.2, это подразумевает,
что если два входных сигнала приложены одновременно, то реакция на
них — просто сумма реакций на действие каждого из них в отдельности.
Это имеет широкий диапазон применения. Например, можно получить
реакцию на сложный входной сигнал, используя разложение его на
элементарные компоненты. Прискорбно, что этот принцип несправедлив
для нелинейных систем и это означает, что нельзя анализировать
реакцию системы по частям, а приходится сразу рассматривать весь входной
сигнал. Таким образом, можно глубже проникнуть в суть линейных
систем (например, рассматривая эталонные входы), чем, в общем случае,
это можно сделать для нелинейных систем.
4.3. Преобразования Лапласа
Изучение дифференциальных уравнений описанного выше типа —
богатый и интересный предмет. Из всех методов, используемых для
изучения линейных дифференциальных уравнений, один, особенно полезный,
обеспечивается преобразованиями Лапласа. Мощное достоинство этого
преобразования —то, что оно преобразовывает линейные
дифференциальные уравнения в алгебраические, что очень полезно для целей
анализа.
4.4. Преобразование Лапласа. Свойства и примеры 91
Определение преобразования Лапласа
Рассмотрим непрерывный сигнал y{t),0 < t < 00. Пара формул
преобразования Лапласа, связанных с у(£), определяется следующим образом:
j С
C[y(t)}
1 [Y(s)] =
= Y(s)
v(*) =
= / е
Jo-
-sty(t)dt
1 r(T+joo
г- / estY(s)ds
(4.3.1)
(4.3.2)
Y(s) называется преобразованием Лапласа от y(t). Пара
преобразований определена, если существуют а ЕШ и положительная константа
к < оо, такие, что
|y(t)|<fce^;Vt>0 (4.3.3)
Область 3i{s} > а известна как область сходимости (конвергенции)
преобразов ания.
Рассмотренная выше пара преобразований может использоваться для
получения таблицы преобразований. Примеры преобразований, часто
используемых в приложениях теории управления, даны в табл. 4.1.
Предлагаем читателю получить некоторые из результатов на основе
исходных формул.
Имеется много интересных свойств, которые вытекают из
определения преобразования. Некоторые из них перечислены в табл. 4.2. Снова •
предлагаем читателю проверить эти свойства или получить их из
исходных формул.
4.4. Преобразование Лапласа.
Свойства и примеры
Уравнения (4.3.1) и (4.3.2) дают способ переводить описания сигналов
и систем в 5-область и назад во временную область. Однако
уравнение (4.3.2) редко используется, чтобы получить обратное
преобразование Лапласа, потому что прямое преобразование Лапласа большинства
интересующих нас сигналов дает дробно-рациональное выражение
относительно s. Обычно и используется это дробно-рациональное
выражение для определения обратного преобразования путем сравнения со
стандартными результатами.
92 Глава 4. Непрерывные сигналы и системы
Таблица преобразований Лапласа
Таблица 4.1
fit) (*>о)
1
5D(t)
t
tn n € Z+
eat a€C
teat a € С
cos(u0t)
sin(cj0t)
eatsin(u0t + P)
tsin(u0t)
tcos(u0t)
£[/(*)]
1
s
1
1
S2
n!
sn+l
1
s- a
1
(5-a)2
s
s2+u;2
s2+u;2
(sin/?)s + cj0 cos/? — a sin/?
(s-a)2+u,2
2cj0s
(*2+u,2)2
(s2+u;2)2
1 - e~ST
s
Область сходимости
<T>0
|<т|<оо
<т>0
<T>0
(j > Ща}
с > Ща}
cr>0
cr>0
с > Ща}
G>0
G>0
\g\<oo
Предлагаем читателю проверить следующий ключевой результат (см.
табл. 4.2) относительно преобразования производной от функции:
\dy(ty
dt
= sY(s)-y(Q-)
(4.4.1)
где £[у(£)] = Y(s). Этот результат можно использовать для
преобразования дифференциальных уравнений в алгебраические относительно
переменной s.
4.4. Преобразование Лапласа. Свойства и примеры 93
Таблица 4.2
Свойства преобразования Лапласа
1 /(*)
dy(t)
dt
dky(t)
dtk
/ y(r)dr
Jo-
y(t-T)(l(t-T)
ty(t)
tky(t)
ft
\J_fl(r)f2(t-T)dT
йй,*')
АУ(<)
h(t)h(t)
eatfi(t)
суш
1=1
sY(s)-y(0-)
_*rM Tk .k-id'-'yit)
" Y4 ^•=1° dti-l
t=o-
]Y(s)
e-*TY(s)
dY(s)
ds
( ^Y(s)
{ > dsk
^(в)ВД
lira sY(s)
s—>0
lim sY(s)
s->oo
i r<r+joo
— Fl(OF2(s-QdC
27Г? y^.joo
Fi(s-a)
Названия
Линейная
комбинация
Закон дифферен-
цирования
Производная
произвольного
порядка
Закон
интегрирования
Задержка
Свертка
Теорема о
конечном
значении
Теорема о
начальном
значении
Произведение
во временной
области
Сдвиг частоты
Обозначения: F{(s) = C[f{(t)]; Y(s) =C[y(t)]\ к € {1,2,3,.
и h(t) = f2(t) = 0 V* < 0.
Проиллюстрируем это примером.
Пример 4.1. Рассмотрим задачу с двигателем постоянного тока,
описанную в примере 3.4. Пусть, для примера, а\ = 2, Ьо = 1- {Заметим,
что в этом примере ао = 0.) Тогда, используя (4.4.1) и взяв
преобразование Лапласа модели, получим
s2B{s) + 2se(s) -{s + 2)0(0") - 0(0") = Va{s)
(4.4.2)
94 Глава 4. Непрерывные сигналы и системы
Пусть начальные условия в(0") = О, 0(О"~) = О и входной сигнал —
единичная ступенька, приложенная в момент t = 0. Тогда
ew=febw (4-4-з)
Раскладывая на простейшие дробив, получим
^«hv+h-h <4-4-5»
Следовательно, используя результаты из табл. 4.1, реакция на
выходе для t > О будет
в(*) = |е-» + |*-| (4.4.6)
□□□
Преобразования Лапласа полезны для изучения линейных систем,
описываемых дифференциальными уравнениями, потому что они
переводят дифференциальные уравнения в алгебраические.
4.5. Передаточные функции
4.5.1. Модели в виде дифференциальных уравнений
произвольного порядка
Рассмотрим снова модель в виде линейного дифференциального
уравнения произвольного порядка (4.2.1). Использование преобразований
Лапласа переводит дифференциальное уравнение в следующее
алгебраическое уравнение:
snY{s) + an-is^Yis) +... + a0Y{s)
= bn-i8n-lU{8) + • • • + b0U{s) + f{s, x0) (4.5.1)
где f(s, x0) обозначает функцию, зависящую от начальных условий. В
случае нулевых начальных условий мы имеем
Y{s) = G{s)U{s) (4.5.2)
1 Используя команду residue пакета MATLAB.
4.5. Передаточные функции 95
где
ад = |Й| (4.5.3)
и
А{з) =sn + an-is71'1 + • • • + оо (4.5.4)
В{з) =bn-i5n^1 + bn-2sn-2 + • • • + Ь0 (4.5.5)
G(s) называется передаточной функцией. Представление (4.5.3) очень
полезно для проникновения в суть различных вопросов проектирования
систем управления.
Пример 4.2. Передаточная функция для системы в примере 4.1 равна
°w-yh; (4-5-6)
4.5.2. Передаточные функции для непрерывных моделей
в пространстве состояний
Мы можем использовать преобразование Лапласа для решения
дифференциальных уравнений, получаемых из модели пространства
состояний. Использование преобразования Лапласа в (3.6.5) и (3.6.6) дает
зХ{з) - я(0) = АХ{з) + BU{s) (4.5.7)
Y{s) = СХ{з) + ВЩз) (4.5.8)
и, следовательно,
Х{з) = (Л - А)-1*^) + (Л - А)-гВЩз) (4.5.9)
Y(s) = [С (Л - А)-ХВ + В]Щз) + С(Л - А)"1*^) (4.5.10)
Фактически, эти уравнения могут быть использованы для получения
формул решения модели пространства состояний. В частности,
уравнение (3.7.7) может быть получено, используя обратное преобразование
Лапласа и, учитывая что
C[eAt]={sI-A)-1 (4.5.11)
Мы видим, что при нулевых начальных условиях преобразование
Лапласа выходного сигнала Y(s) связано с преобразованием Лапласа
входного сигнала U(s) следующим образом:
Y{s) = G{s)U{s) (4.5.12)
G{s) = С(Л - А)_1В + D (4.5.13)
Таким образом G(s) —передаточная функция системы.
96 Глава 4. Непрерывные сигналы и системы
Пример 4.3. Рассмотрим снова перевернутый маятник из гл. 3. Если
мы хотим получить передаточную функцию от U kY, то
G(s) = C(sI-A)"1B (4.5.14)
- 1 (*2-<>2) Мб15)
gdea=jLM$k.b=ft. DDD
Определим некоторые термины, используемые в связи с
передаточными функциями.
Рассмотрим передаточную функцию, данную уравнениями (4.5.3)-
(4.5.5).
Для простоты будем пока считать, что B(s) и A(s) не имеют
одновременно нулей для одного и того же значения s. Пусть также степени
A(s) и B(s) равны пит соответственно. (Это положение будет далее
в гл. 17 разъяснено в связи с управляемостью и наблюдаемостью.) При
этих условиях определим следующие термины.
1. Корни уравнения B(s) = О называются нулями системы.
2. Корни уравнения A(s) = 0 называются полюсами системы.
3. Если уравнение A(s) = 0 имеет щ корней при s = A^, то говорят, что
полюс Afc имеет кратность щ.
4. Различие в степенях полиномов A(s) и B(s) называется
относительной степенью.
5. Если т < п, мы говорим, что модель строго собственная. Это
означает, что относительная степень положительна.
6. Если т = п, мы говорим, что модель бисобственная. Это означает,
что относительная степень нулевая.
7. Если т < п, мы говорим, что модель собственная.
8. Если т > п, мы говорим, что модель несобственная (или имеет
отрицательную относительную степень).
Замечание 4.1. Реальные системы почти всегда строго собственные.
Однако некоторые методы проектирования регуляторов приводят к
бисобственным или даже к несобственным передаточным функциям.
Чтобы быть реализуемыми, эти регуляторы обычно делаются бисоб-
ственными, например, дополняя A(s) сомножителями типа (a{S + l),
где (Х{ е Ш+.
Замечание 4.2. Часто реальные системы имеют запаздывание
между входным и выходным сигналами. Это обычно связывается с
транспортировкой вещества из одной точки в другую. Например, если
4.5. Передаточные функции 97
имеется лента конвейера или труба, соединяющая различные части
объекта, то это непременно введет запаздывание.
Передаточная функция чистого запаздывания имеет следующий вид
(см. табл. 4.2):
Н{8)
_ *sTd
(4.5.16)
где Td — постоянная запаздывания (в секундах). Тд обычно изменяется
с изменением скорости транспортировки.
Пример 4.4 (Система нагревания). В качестве простого примера
системы, имеющей чистое запаздывание, рассмотрим систему,
показанную на рис. 4.1.
Датчик
температуры
Поток
воздуха
Мотор Пропеллер
Рис. 4.1. Система передачи тепла
Передаточная функция от входа (напряжение, прикладываемое
к нагревательному элементу) к выходу (температура, измеряемая
термопарой) примерно равна
Н(з) =
Ке-*Т*
(rs + 1)
(4.5.17)
Заметим, что К, Tdur зависят от скорости вращения пропеллера,
которая изменяет время транспортировки от нагревателя к
измеряемому выходу, а также от различных коэффициентов передачи тепла.
Хотя это очень простой пример, модель, заданная формулой (4.5.17)
чрезвычайно распространена в приложениях. DDD
Наши выводы относительно передаточных функций могут быть
суммированы следующим образом:
Передаточная функция описывает свойства системы от входа к
выходу в алгебраической форме.
98 Глава 4. Непрерывные сигналы и системы
4.6. Устойчивость передаточных функций
Мы выше показали, что реакция системы, имеющей передаточную
функцию G(s), имеет вид:
р nk о
Y(s) = G(s)U(s) + £ £ 7^л? (4.6.1)
k=u=i[s Ак)
где каждый /3^ является функцией начальных условий и где, для
полноты, мы считаем, что каждый полюс при s = А& имеет кратность
rifc. Это последнее предположение подразумевает что щ+щ-) \-пр = п.
Мы говорим, что система устойчива, если любой ограниченный
входной сигнал вызывает ограниченный же выходной сигнал при всех
ограниченных начальных условиях. В частности, мы можем
использовать разложение на сумму рациональных дробей, чтобы разбить всю
реакцию системы на отдельные реакции, связанные с каждым полюсом.
В этом случае мы видим, что устойчивость требует, чтобы полюсы
имели строго отрицательные вещественные части: они должны быть в
открытой левой полуплоскости (открытой ЛПП) комплексной плоскости
(далее мы часто будем называть комплексную плоскость s-плоскостью).
Это также говорит о том, что для непрерывных систем граница
устойчивости—мнимая ось.
Пример 4.5. Рассмотрим систему примера 4.1. Полюсы этой
передаточной функции 2 и 0. Они не лежат в открытой левой половине
комплексной плоскости (0 находится в замкнутой левой половине
комплексной плоскости). Таким образом, система не устойчива.
Действительно, читатель может проверить, что постоянный входной
сигнал, отличный от нуля, приведет к неограниченно возрастающему
выходному сигналу.
4.7. Реакция линейных систем
на импульсные и ступенчатые сигналы
Особый интерес в изучении линейных систем представляет реакция
на дельта-функцию Дирака (импульсная характеристика). Ее можно
рассматривать как предел при Л -> 0 импульса, показанного на рис. 4.2.
Преобразование Лапласа дельта-функции Дирака равно единице (см.
табл. 4.1). Следовательно, если бы мы могли приложить такой входной
сигнал к системе с нулевыми начальными условиями, тогда реакция
4.7. Реакция линейных систем на импульсные и ступенчатые сигналы 99
системы будет просто Y(s) = G(s)U(s) = G(s). Мы можем подытожить
эти наблюдения следующим образом:
Передаточная функция непрерывной системы представляет собой
преобразование Лапласа ее реакции на импульс (представляющий
собой дельта-функцию Дирака) при нулевых начальных условиях.
p(t)
А
* *
Рис. 4.2. Дискретный импульс
Из-за идеализации, неявно заложенной в определение
рассмотренного выше импульса, более приемлемо изучать динамическое поведение
системы при ступенчатом воздействии, то есть когда U(s) = 1/s. Это
приводит к так называемой переходной характеристике (реакции на
ступеньку)
Y(s) = G(s)-s (4.7.1)
Применение предельной теоремы (см. табл. 4.2) показывает, что
установившаяся реакция (если она существует) на ступеньку равна
lim y(t) = уоо = UmsG(s)- = G(0)
t->oo s->0 S
(4.7.2)
Если система устойчива, то переменная часть переходной
характеристики будет экспоненциально затухать до нуля и, следовательно, у^
будет существовать. Заметим, что если G(s) имеет один или более нулей
при s = 0, то Уоо = 0.
Полезно определить ряд показателей, которые кратко описывают
некоторые характерные свойства динамики системы. Чтобы ввести эти
определения, мы рассмотрим устойчивую передаточную функцию и
переходную характеристику системы, показанную на рис. 4.3.
Тогда определим следующие показатели.
100 Глава 4. Непрерывные сигналы и системы
Установившееся значение Ус»: конечное значение переходной
характеристики. (Этот показатель не имеет смысла, если система обладает
полюсами в правой полуплоскости комплексной плоскости.)
Время нарастания tr: время до момента, когда переходная
характеристика впервые достигает значения кгуоо. Константа кг у разных
авторов равна 0.9 или 1.
Перерегулирование Мр: максимальная величина, на которую
переходная характеристика превышает установившееся значение. (Оно
обычно выражается в процентах от j/oq.)
Недорегулирование Ми: максимальная величина (абсолютное
значение), на которую переходная характеристика опускается ниже
значения для нулевого момента.
Время регулирования ts: время до того момента, когда реакция на
ступеньку попадает (без дальнейшего выхода) в полосу отклонений
±5 от установившегося значения. Это отклонение J, как правило,
определяется в процентах от уоо, обычно от 2 % до 5%.
Уоо+Мр
Lr lp Время
Рис. 4.3. Показатели переходной характеристики
4.8. Полюсы, нули и временные характеристики
Далее мы исследуем ряд фундаментальных свойств полюсов и нулей
передаточных функций. При этом мы пока не будем интересоваться тем,
как эти передаточные функции получаются. Позже эти результаты мы
свяжем с передаточными функциями, которые получаются в системах
с обратной связью.
4.8. Полюсы, нули и временные характеристики 101
Рассмотрим сначала передаточную функцию общего вида
Н(з) = кЩ*£^ (4.8.1)
где щ Е С и Pi £ С. Если мы снова предположим, что нет значений
/ и i таких, что а/ = /%, тогда /7i,/fe,...,/7m и ai,a2,...,an—-нули и
полюсы передаточной функции соответственно. Относительная степень
А
тогда пг = п — т.
Нас будут особенно интересовать те нули, которые лежат на мнимой
оси и в ее окрестности, а также те полюсы, которые находятся в правой
половине комплексной плоскости. Полюсы и нули, расположенные
подобным образом, играют фундаментальную роль в динамическом
поведении систем.
Можно выделить специальный класс передаточных функций, у
которых все полюсы и нули лежат в ЛПП s-плоскости. Обычно такие
передаточные функции называются минимально-фазовыми передаточными
функциями. Однако в дальнейшем мы будем использовать этот термин
по отношению к передаточным функциям, у которых нет нулей в правой
полуплоскости (ППП), независимо от того, имеют ли они там полюсы.
Будем говорить, что нуль неминимально-фазовый, если он находится
в замкнутой ППП комплексной плоскости, иначе будем называть его
минимально-фазовым нулем. Передаточная функция называется
устойчивой, если все ее полюсы находятся в открытой ЛПП комплексной
плоскости; передаточная функция называется неустойчивой, если она
имеет, по крайней мере, один полюс в замкнутой ППП комплексной
плоскости. Сами полюсы также называются устойчивыми или
неустойчивыми полюсами в зависимости от того, лежат ли они в открытой ЛПП
или в замкнутой ППП комплексной плоскости1.
Далее мы исследуем переходный процесс в зависимости от
расположения полюсов и нулей.
4.8.1. Полюсы
Читатель может вспомнить, что любая скалярная рациональная
передаточная функция может быть разложена на сумму дробей, каждое
слагаемое при этом содержит либо единственный вещественный полюс,
либо пару комплексно-сопряженных полюсов, либо многократные
комбинации для кратных полюсов. Таким образом, понимание влияния
1 Иногда, злоупотребляя языком, неминимально-фазовые нули также называются
неустойчивыми нулями, потому что они лежат в области s-плоскости, где находятся
неустойчивые полюсы.
102 Глава 4. Непрерывные сигналы и системы
Переходная характеристика
Время
Рис. 4.4. Переходная характеристика системы первого порядка
полюсов на переходный процесс сводится к пониманию переходных
процессов для полюсов первого и второго порядка и их взаимодействий.
Обычный полюс первого порядка дает
ts + 1
Переходная характеристика для этого случая может быть вычислена
следующим образом:
y(t) = c
-г-1
К
s(ts + 1)\
= С
-1
s
Кг
= К(1-е~г) (4.8.3)
Сигнал y(t) из уравнения (4.8.3) может быть представлен так, как
на рис. 4.4.
Из ряс. 4.4 видно, что параметры К (= уоо) и т (постоянная времени)
могут быть определены графически.
Для случая пары комплексно-сопряженных полюсов обычно изучают
каноническую систему второго порядка с передаточной функцией
,2
Щз) =
UZ
(4.8.4)
s2 + 2%j)uns + ul>
где ф (О < ф < 1) называется коэффициентом демпфирования
(коэффициентом затухания) и a;n — собственной или недемпфированной
собственной частотой. На будущее определим также демпфированную
собственную частоту:
u^UnVl-ф2 (4.8.5)
Эта система имеет два комплексно-сопряженных полюса s\ и 52,
которые определяются следующим образом:
*1,2 = -1*>п ± jUd = Шпё^^-Я (4.8.6)
где /3 —угол, такой, что cos/З = ф.
4.8. Полюсы, нули и временные характеристики 103
-tywj
3"d
Уоо +Мр
-jw<t
Рис. 4.5. Расположение полюсов и переходная характеристика канонической
системы второго порядка
Для этой системы преобразование Лапласа переходной
характеристики имеет вид:
Y(s) =
wZ
с£
Разлагая на простейшие дроби, получим
Y(s) = --
S+l()Un
фип
s (s + il)un)2 + u2d {s + %l)U)n)2 + u)2d
(4.8.7)
(4.8.8)
у/Г-ф2
y/l-ф2
S + фЫп
-Ф:
"d
(s + фшп)2 +и2 *(s + фшп)2 + ш2\
(4.8.9)
Используя обратное преобразование Лапласа, окончательно получим
(4.8.10)
е-фипЬ
y{t) = 1 - sm(u)dt + Р)
y/l-ф2
Основные характеристики этой реакции показаны на рис. 4.5. На
этом рисунке у ж = 1 и Тд = 2k/u)(i.
Мы можем также вычислить некоторые показатели, показанные на
рис. 4.3.
Время нарастания
Для этого случая используем кг = 1 (см. рис. 4.3); тогда имеем, что
e-tl>LJnti
^/^г^
: sm(udtr + /3) = 0
(4.8.11)
104 Глава 4. Непрерывные сигналы и системы
Отсюда получаем
tr = ^?- (4.8.12)
Перерегулирование
Максимальное перерегулирование Мр и момент, в который оно
достигается, £р, можно вычислить, дифференцируя y(t) и приравнивая
производную нулю.
dv(t) e-1*>nt
^ = --—^[^unsm(udt + P)+udcos(udt + p)} (4.8.13)
Таким образом, приравнивая эту производную нулю, мы получим,
что Udtp = 7г и время достижения максимального перерегулирования tp
равно
'-£=? <4-8л4>
В свою очередь, перерегулирование определяется выражением
Mp = y(tp)-1 = - G/ "'=sin(7r + ff) = e ^^ (4.8.15)
у/1-ф2
Вышеприведенные выражения говорят, что небольшой коэффициент
демпфирования ф приводит к небольшому времени нарастания за счет
большого перерегулирования. Мы можем также видеть, что скорость
затухания и, следовательно, время переходного процесса определяются
произведением фшп.
Каждый полюс генерирует специальную составляющую или
собственное движение в составе реакции системы на импульсный сигнал.
Эти виды движения присутствуют в реакции системы на любой
заданный входной сигнал (за исключением очень специфичных случаев, когда
полюсы совпадают с нулями).
Обычно мы будем называть быстрыми полюсами те полюсы, которые
расположены намного дальше от границы устойчивости, чем другие
полюсы системы. Это эквивалентно * высказыванию, что переходные
процессы, связанные с быстрыми полюсами, затухают быстрее, чем
те, которые связаны с другими полюсами. С другой стороны, мы
будем использовать выражение доминирующий или медленный полюс(ы),
принадлежащий совокупности полюсов, находящихся в открытой ЛПП
комплексной плоскости, если он (они) ближе к границе устойчивости,
чем остальные полюсы системы. Это эквивалентно высказыванию, что
переходные процессы, связанные с доминирующими полюсами,
затухают медленнее, чем для остальных полюсов.
4.8. Полюсы, нули и временные характеристики 105
Если, например, полюсы системы — (—1;— 2 ± j'6;— 4; — 5 ± j'3), мы
можем назвать доминирующим полюсом —1, а быстрыми полюсами —
-5±j3.
4.8.2. Нули
Влияние нулей на реакцию передаточной функции несколько более
хитрое, чем полюсов. Одна из причин заключается в том, что, в то
время как полюсы связаны с отдельными независимыми состояниями,
нули являются результатом добавочных взаимодействий этих состояний,
связанных с различными полюсами. Кроме того, нули передаточной
функции зависят от того, где приложено входное воздействие и каким
образом формируется выходной сигнал как функция состояний.
В то время как расположение полюсов определяет характер
видов движений системы, расположение нулей определяет пропорцию, в
которой эти составляющие объединены. Эти комбинации собственных
движений могут быть совершенно разными.
Аналогично определениям для системы полюсов определим быстрые
и медленные нули. Быстрые нули —это те, которые расположены
намного дальше от границы устойчивости, чем доминирующие полюсы.
С другой стороны, медленные нули —те, которые находятся намного
ближе к границе устойчивости, чем доминирующие полюсы системы..
Чтобы проиллюстрировать некоторые из обсужденных проблем,
рассмотрим следующий пример.
Пример 4.6. Рассмотрим систему с передаточной функцией
ям-.<.+?(£+в (4-8лб)
Эта структура позволяет нам изучить влияние располоэюения
изменяющегося нуля, не меняя располоэюения полюсов и усиления на
нулевой частоте.
В этой системе мы видим, что имеются две составляющие
собственного движения е~г и e~~2t, определяемые двумя полюсами — 1 и —2
соответственно. Первое из них практически перестает действовать,
когда с приближается к — 1. То же повторяется для второй
составляющей, когда с приближается к —2.
В большей степени ситуация может быть оценена из рис. 4.6.
На этом рисунке соответствующее значение с указано около каждой
из реакций на ступеньку. Мы можем видеть, что быстрый нуль,
например, \с\ » 1, не имеет никакого существенного воздействия на
переходный процесс. Когда нуль медленный и устойчивый, возникает
существенное перерегулирование, в то время как при медленном и
106 Глава 4. Непрерывные сигналы и системы
неустойчивом нуле — существенное недорегулирование.
Действительно, влияние расположения нуля в этом примере может быть весь-
ма впечатляющим: в зависимости от его местоположения мооюно
наблюдать от 400% перерегулирования до 500% недорегулирования.
Читатель мог бы проверить, что мооюно достигнуть еще большего
эффекта, если нуль переместить еще ближе к границе устойчивости.
Эти свойства фактически являются универсальными, как мы пока-
оюеМ/ ниоюе.
Проблему недорегулирования легко понять, используя следующую
лемму, которая является элементарным следствием определения
преобразования Лапласа.
Лемма 4.1. Пусть H(s) —строго собственная функция переменной
Лапласа s в области сходимости 3i{s} > —а. Обозначим
соответствующую функцию времени через h(t):
H(a) = C[h{t)] (4.8.17)
Тогда для любого значения zq, такого, что №{zq} > --а, получим
Г
Jo
h(t)e-Zotdt = lim H(s) (4.8.18)
S-+Zq
Доказательство
Из определения преобразования Лапласа мы имеем, что для всех s в
области сходимости преобразования, т. е. для №{s} > —о;
/•00
#(<?)= / h{t)e~stdt (4.8.19)
Jo
Отсюда следует утверждение леммы, поскольку zq из области
сходимости преобразования. □□□
Проиллюстрируем результат простым примером.
Пример 4.7. Рассмотрим сигнал
y(t) = e+2t t > 0
'■да
У(«) = —Ц для Эф}>2
S с»
Теперь рассмотрим
00
I(z0) = je-Zoty(t)dt
(4.8.20)
(4.8.21)
(4.8.22)
4.8. Полюсы, нули и временные характеристики 107
2.5 3
Время (с)
4.5
Рис. 4.6. Влияние расположения нуля на переходную характеристику
Ясно, что для zq = 3 мы имеем
оо с»
e~zte2tdt = I e-ldt = 1
о о
I(3)=[e-3te2tdt=[<
(4.8.23)
Заметим, что это правильно предсказано леммой 4.1, поскольку
У(3) =
1
3-2
= 1
(4.8.24)
Однако если мы возьмем zq = 1, то Y(\) = — 1. С другой стороны
ясно, что I(zq) равно оо. Это также находится в соответствии
с леммой 4.1, поскольку zq = 1 не лежит в области сходимости
преобразования. □□□
Вышеупомянутая лемма используется дальше для определения
количественных соотношений между нулями и некоторыми ключевыми
показателями динамики системы.
Лемма 4.2 (Неминимально-фазовые нули и недорегулирова-
ние). Рассмотрим линейную устойчивую систему с передаточной
функцией H(s), имеющей единичное усиление на нулевой частоте и
нуль при s = с, где с G М"1". Далее предположим, что реакция на
единичную ступеньку, y{t), имеет время регулирования ts (см. рис. 4.3),
т. е. 1 + 6 > \y(t)\ > 1 - S (6 «Г 1), Vt > ts. Тогда y(t) обладает
недорегулированием Ми, которое удовлетворяет условию
Ми>
1-6
ects _ i
(4.8.25)
108 Глава 4. Непрерывные сигналы и системы
Доказательство
Введем v(t) = 1 — y{t), тогда
V(s) = (l-H(s))- (4.8.26)
s
Заметим, что область сходимости для V(s) определяется
соотношением 3i{s} > 0. Тогда с находится в этой области и мы мооюем
применить лемму 4.1, что дает
V{c) = 1-Я(с) = i = Г v{t)e-ctdt (4.8.27)
с с J0
Разделим интервал интегрирования на [0,£s]U(£s,oo). Тогда (4.8.27)
дает
/ v{t)e~ctdt+ \v{t)\e-ctdt>- (4.8.28)
Jo Jta с
Далее, используя определение времени регулирования ts, заметим,
что \v{t)\ < S <gC l \/t>ts. Если мы также заметим, что
max{v(t)} = Vmax = 1+ MU > 0 (4.8.29)
то из (4.8.28) получим
-</ Vmaxe~ctdt+ Se-ctdt = Vmax + (4.8.30)
с Jo Jta с с
Окончательно, используя (4.8.29), получим требуемый
результат. DQQ
Если мы дальше рассмотрим случай cts <SC 1 (или, перефразируя —
S < 1), то из (4.8.25) следует
Ми > -|- (4.8.31)
Рассмотренная лемма устанавливает, что если система содержит
неминимально-фазовые нули, то имеется компромисс между
увеличением скорости реакции на ступеньку и уменьшением недорегули-
рования.
Подобный же результат может быть установлен для вещественного
нуля, расположенного в левой полуплоскости, когда этот нуль имеет
величину (вещественную часть) намного меньше, чем доминирующий
полюс (его вещественная часть) системы. Этот результат приводит к
следующей лемме.
4.8. Полюсы, нули и временные характеристики 109
Лемма 4.3 (Медленные нули и перерегулирование). Рассмотрим
линейную устойчивую систему с передаточной функцией H(s),
имеющую единичный коэффициент усиления на нулевой частоте и нуль
при s = с, с < 0. Определим v(t) = 1 — y(t), где y(t) —переходная
характеристика. Далее, предположим следующее.
1. Система имеет доминирующий полюс(ы) с вещественной частью,
равной —р, р > 0.
2. Нуль и доминирующий полюс связаны соотношением
А
Т) =
< 1 (4.8.32)
3. Значение 8, определяющее время регулирования {см. рис. 4.3),
выбирается таким, что существует параметр 0 < К, который
удовлетворяет условию1
\v{t)\<Ke-pt Vt>ts (4.8.33)
Вывод: переходная характеристика имеет перерегулирование,
которое ограничено снизу соотношением
»,^(l-^) (4.8.34)
Доказательство
Сначала вычислим
1 Г°°
V(s) = C[v{t)] = (l-H{s))-= / v{t)e~stdt (4.8.35)
s Jo
Заметим, что область сходимости для V(s) определяется
соотношением $l{s} > —р. Таким образом, с находится внутри этой области
(см. (4.8.32)), следовательно, мы можем использовать лемму 4.1, что
дает
1 ГОО rta ГОО
-=/ v{t)e~ctdt = v(t)e~ctdt + \ v{t)e~ctdt • (4.8.36)
c Jo Jo Jta
Пусть минимальное значение v(t) в диапазоне [0; ts] равно —Мр\
заметим при этом, что v(t) > —Ke~pt, \ft> ts. Тогда оба интеграла в
1 Заметим, что значение К существенно зависит от доминирующего полюса, т. е. тесно
связано с р.
110 Глава 4. Непрерывные сигналы и системы
правой части равенства (4.8.36) могут быть заменены своими
минимальными значениями, что даст
г*.
1 pta roo
->-Мр e~ctdt-K e-^+^dt
1 rta roc
--<MP e-ctdt + K e-(p+c)tdt (4.8.37)
Тогда требуемый результат (4.8.34) вытекает из этих интегралов
и формулы (4.8.32). DDD
Заметим, что если cts <§C 1 и Кг) <С 1, примерная нижняя граница
для Мр равна
Мр > — (4.8.38)
cts
Рассмотренная лемма устанавливает, что если устойчивая система
содержит медленные нули, то имеется компромисс между
увеличением скорости реакции на ступеньку и уменьшением
перерегулирования.
Мы используем ряд соображений, подобных тем, которые находятся в
начале гл. 8, когда будем изучать влияние полюсов и нулей разомкнутой
системы на переходный процесс системы управления с обратной связью.
4.9. Частотная характеристика
Далее мы изучим реакцию системы на гармонический входной сигнал.
Причина этого в том, что реакция на гармонические колебания также
содержит богатую информацию о реакции и на другие сигналы. Это
может быть оценено с помощью анализа Фурье, который позволяет
любой сигнал, определенный на интервале [£0, £/], представить в виде
линейной комбинации гармонических сигналов частот 0,о;о/,2а;о/,За;о/,...,
где u0f = 2п/(tf—10) называется основной (фундаментальной) частотой.
Принцип суперпозиции тогда позволяет нам объединить реакции на
отдельные гармонические сигналы, чтобы определить реакцию на сигнал
сложной формы.
Рассмотрим линейную устойчивую систему, описанную передаточной
функцией
Н^=К^п-\ , (4-9.1)
5 + 2_/fe=i °*5
4.9. Частотная характеристика 111
и пусть входной сигнал системы экспоненциальный — eSot. Для простоты
мы предположим, что полюсы различны и что ни один из них не равен
s0. Тогда преобразование Лапласа реакции системы можно вычислить,
используя декомпозицию с помощью дробно-рационального
разложения:
П*) = —+ ВД (4.9.2)
S — S0
где первое слагаемое —реакция, вызванная входным сигналом
(вынужденная составляющая), а второе — затухающая реакция, определяемая
начальными условиями (собственная составляющая). Соответствующая
реакция во временной области выглядит следующим образом:
п
y(t) = H(s0)e^ + J2CkeXkt (4.9.3)
k=i
где Afc,& = 1,2,... ,п — собственные частоты системы, то есть полюсы
#(s), а величины Ск зависят от начальных условий.
Ясно, что второй член правой части равенства (4.9.3) уменьшается
до нуля, если система устойчива.
Далее заметим, что
sinM) = ^ (е*1* - е-*1*) (4.9.4)
Следовательно, реакция системы на гармонический входной сигнал
(частотная характеристика) может быть вычислена объединением
реакции на eSot C5fl = ju и eSot C50 = —ju.
Заметим, что вычисление H(s) при s = ju дает комплексную
величину, которая может быть представлена амплитудой и фазой в полярных
координатах:
H{ju) = \H{ju>)\J+M (4.9.5)
Тогда установившаяся реакция на гармонический входной сигнал
получается из (4.9.3), (4.9.4) и (4.9.5):
»(') = Yj [Я^)^ - H(-j")e-jut] (4.9.6)
= ^т [\Ниш)\^и1+ф^ - \H(ju)\e-№+(t>M] (4.9.7)
= \H{jw)\sm(u>t + <l>(u>)) (4.9.8)
112 Глава 4. Непрерывные сигналы и системы
Таким образом, мы делаем следующий вывод:
Гармонический входной сигнал вызывает гармонический выходной
сигнал той же частоты. Кроме того, амплитуда выходного сигнала
изменяется по отношению к амплитуде входного сигнала на
множитель, равный модулю частотной характеристики ЯО'о;), а фаза
сдвигается на величину, равную фазе H(ju).
Интересное наблюдение: если H(ju) известна по крайней мере для
q различных частот, отличных от нуля, где q = 1 + часть целого
числа [(т + п)/2], тогда характеристика H(s) однозначно определена
для всех других частот.
Замечание 4.3. Если система содероюит запаздывание, то есть если
передаточная функция изменена таким образом, что
H(s) = e~ST ^=° i , (4.9.9)
то может быть доказано, что уравнение (4.9.8) будет иметь вид
(t) = < еслиКт /4д10ч
Н) \|Я0-о;)|8т(^ + ^(а;)) + ^=1СЛеЛ^*-т) если1>т К ' ' )
где ф(ш) теперь включает дополнительное слагаемое —тш. Последнее
слагаемое в (4.9.10) определяется собственными движениями, а
константы Ck зависят от начальных условий. □□□
Частотная характеристика — очень полезный инструмент для всех
аспектов анализа, синтеза и проектирования регуляторов и фильтров.
Из-за их важности используются специальные графические
характеристики. Они обычно изображаются или в форме графиков амплитуды
и фазы (обычно называемыми диаграммами Воде) или в форме
годографа (обычно называемым годографом Найквиста). Более подробно о
годографах Найквиста будет сказано в гл. 5. Поэтому здесь мы о них
говорить не будем. Сейчас же кратко рассмотрим диаграммы Воде.
4.9.1. Диаграммы Боде
Диаграммы Боде состоят из пары графиков. Один из них изображает
модуль частотной характеристики как функцию угловой частоты;
другой изображает аргумент этой же характеристики, тоже как функцию
угловой частоты. Обычно диаграммы Боде изображаются в
специальных осях:
4.9. Частотная характеристика 113
• Ось абсцисс линейна относительно lg(o;), где используется
десятичный логарифм. Это дает компактное представление частотной
характеристики в широком диапазоне частот. Единица на этой оси —
декада, где декада — расстояние между ш\ и IOcji для любого значения
071.
• Модуль частотной характеристики измеряется в децибелах дБ, т. е.
в единицах 201g|^(jo;)|. Это имеет ряд преимуществ, включая
хорошую точность для малых и больших значений \H(ju)\, возможность
получать простые аппроксимации для 201g|^(jo;)| и тот факт, что
частотная характеристика системы из последовательного соединения
элементов может быть получена суммированием частотных
характеристик отдельных элементов.
• Фазовый сдвиг измеряется в линейном масштабе в радианах или
градусах.
Пакеты программ типа MATLAB содержат специальные команды для
вычисления частотных характеристик и построения диаграмм Воде.
Однако некоторые простые правила позволяют делать приближенный
набросок амплитудной и фазовой характеристик. Рассмотрим
передаточную функцию в следующем виде:
т-к*ъ!*£\) (4-9а)
Тогда
т
201g^(^)| = 201g(|^|)-2pfclgM + 2201gl^a; + 1|-
г=1
п
£201ё|садо; + 1| (4.9.12)
г=1
т п
Z (H(ju>)) = Z(K)-k^ + £ Z(Pdu; + 1) - £Z(<4jw +1) (4.9.13)
г=1 г=1
Таким образом, мы видим, что диаграмма Воде любой передаточной
функции может быть получена сложением или вычитанием амплитуд
(в дБ) или фаз отдельных простых сомножителей. При этом нужно
учесть следующее:
• Простое усиление К имеет постоянную амплитудную и фазовую
характеристики Воде. Амплитудная характеристика — горизонтальная
линия, имеющая значение 201g|Jf| дБ, а фазовая характеристика —
горизонтальная линия либо имеющая значение 0 рад (когда К G М"1"),
или 7Г рад (когда К Е К").
114 Глава 4. Непрерывные сигналы и системы
• Сомножитель sk имеет амплитудную характеристику, которая
является прямой линией с наклоном, равным 20А; дБ/дек и постоянную
фазовую характеристику, равную ктг/2. Первая из этих линий
пересекает горизонтальную ось (0 дБ) при и = 1.
• Сомножитель as + 1 имеет амплитудную характеристику, которая
может быть асимптотически приближена следующим образом:
о Для \аи\ <§С 1, 20lg \aju +1| ~ 201g(l) = 0 дБ — то есть для низких
частот, эта амплитудная характеристика — горизонтальная линия.
Она называется низкочастотной асимптотой.
о Для |ocj| ;» 1, 201g|aja; + 1| и 201g(|aa;|) — то есть для высоких
частот эта амплитудная характеристика — прямая линия с
наклоном 20 дБ/дек, которая пересекает горизонтальную ось (0 дБ) на
частоте и = |о|-1. Она называется высокочастотной асимптотой.
0 Фазовая характеристика более сложна. Грубо говоря, она
изменяется примерно в диапазоне двух декад. На декаду левее частоты
|сг| х фаза примерно равна нулю. На одну декаду правее
частоты \а\~1 фаза примерно равна sign(a)0.57r рад. Соединяя точки
(0.1|а|-1,0) и (lOjcil-"1,0) прямой линией, получим на частоте и =
|а|-1 значение фазы sign(a)0.257r. Это довольно грубое
приближение.
• Для а = a\+ja2 фазовая характеристика Воде для сомножителя as+1
соответствует аргументу комплексного числа с вещественной частью
1 — ша2 и мнимой частью а\ш.
Пример 4.8. Рассмотрим передаточную функцию
H(s) = 640т л,(8+}), т^т (4.9.14)
v ; (5+ 4) (5+ 8) (5+ 10) v ;
Чтобы изобразить асимптотическое поведение характеристик,
сначала представим H(s) в форме уравнения (4.9.11); это даст
Я(5) = 2 (0.255 + 1)(0.125* + 1)((Ш + 1) (4'9Л5)
Таким образом, мы имеем один постоянный сомножитель (К = 2)
и четыре сомнооюителя типа as + 1. Используя правила, описанные
выше, мы получаем асимптотическую амплитудную характеристику
и асимптотическую фазовую характеристику. Обе они показаны на
рис. 4.7 вместе с точными диаграммами Боде.
4.9. Частотная характеристика 115
Частота [рад/с]
Рис. 4.7. Точные (толстые линии) и асимптотические (тонкие линии)
диаграммы Боде
Замечание 4.4. Хотя в недалеком прошлом существенные усилия
затрачивались на построение асимптотических приближений
описанного выше типа, появление мощных пакетов программирования сделало
их не особенно важными. Тем не менее, фундаментальное понимание
воздействия полюсов и нулей на характеристики Боде часто дает
ценную информацию для инженера по системам управления.
4.9.2. Фильтрация
У идеального усилителя частотная характеристика (H(ju) = К) была
бы постоянной для любых частот, то есть каждая частотный компонент
пройдет через систему с одним и тем же коэффициентом усиления и
без каких-либо фазовых сдвигов. Однако все физические системы и
устройства имеют конечную скорость, с которой они могут реагировать
на воздействия и это в первую очередь подразумевает, что H(ju) не
может быть постоянной для всех и. Один из способов интерпретировать
тот факт, что H(ju)) не равна константе для всех о;, состоит в том,
что система фильтрует входные сигналы различных частот, чтобы
получить выходной сигнал, то есть система поступает с различными гар-
116 Глава 4. Непрерывные сигналы и системы
моническими компонентами селективно в соответствии с их частотами.
В этом контексте обычно выделяют три набора частот:
• полоса пропускания, в которой все частоты передаются через систему
приблизительно с одним и тем же усилением (или затуханием) и с
фазовым сдвигом, примерно пропорциональным и\
• полоса подавления, в которой все частоты подавляются, значение
\H(ju)\ здесь мало по сравнению со значением \H(ju)\ в полосе
пропускания;
• переходная полоса(ы) является промежуточной между полосой
пропускания и полосой подавления.
Заметим, что система может иметь несколько полос пропускания и
подавления. Приведенные определения являются основой для
традиционных терминов фильтрации: фильтр низких частот, полосовой
фильтр, фильтр высоких частот и полосовой режекторный фильтр.
Чтобы далее уточнить эти определения, обратимся к некоторым
количественным характеристикам:
• Граничная частота о;с —это значение и, при которой \H(juc)\ =
где Н определяется следующим образом:
о |Я(0)| для фильтров низких частот и полосовых режекторных
фильтров;
о |if(oo)| для фильтров высоких частот;
о максимальное значение \Н(]ы)\ в полосе пропускания для
полосовых фильтров.
• Ширина полосы пропускания Bw — это мера диапазона частот
полосы пропускания (или полосы фильтрации). Она определяется
как Bw = иС2 — и)с\, где шС2 > ojci > 0. В этом определении uci и шС2 —
граничные частоты с обеих сторон полосы пропускания или полосы
фильтрации (для фильтров низких частот, например, uci = 0).
Вышеупомянутые определения иллюстрируются частотной
характеристикой полосового фильтра на рис. 4.8. Здесь нижняя граничная
частота uci = а « 50 рад/с, а верхняя граничная частота — шС2 = Ь «
200 рад/с. Таким образом, полоса пропускания может быть вычислена
как Вцг = Uc2 — ^ci = 150 рад/с.
Система, которая имеет постоянную амплитудно-частотную
характеристику, называется всечастотным фильтром. Лучший из известных
всечастотных фильтров — чистое запаздывание. Заметим, что
соответствующая амплитуда сигнала на выходе равна амплитуде сигнала на
4.9. Частотная характеристика 117
Uc\ " (jJc2
Частота [рад/с]
Рис. 4.8. Частотная характеристика полосового фильтра
входе независимо от частоты сигнала. Рациональные устойчивые всеча-
стотные фильтры имеют общую форму
Р(-*)
Hap{s) = Кар-
pis)
(4.9.16)
где Кар — константа и p(s) —любой устойчивый многочлен.
4.9.3. Искажения и точность воспроизведения
Когда система имеет неидеальную частотную характеристику, мы
говорим, что она вносит искажения. Чтобы описать различные виды
искажений, которые мы обычно встречаем на практике, рассмотрим
сигнал /(£), заданный выражением
nf
f{t) = ^Aisin(u)it + ai)
(4.9.17)
i=l
Пусть этот сигнал — входной для линейной устойчивой системы
(например, звуковой усилитель). Тогда мы говорим, что система
обрабатывает этот сигнал точно, если амплитуды всех гармонических
компонентов усилены (или ослаблены) приблизительно в одно и то же число раз
и отдельные реакции имеют одно и то же запаздывание. Это требует,
чтобы частотная характеристика удовлетворяла следующим условиям:
тм)\=н0
ф(щ) -k0Ui
постоянен для г = 1,2,...,п/ (4.9.18)
где коэффициент к0 постоянен для г = 1,2,... ,п/
(4.9.19)
При этих условиях форма колебаний на выходе системы идентична
колебаниям на входе, но выходные колебания задержаны по времени
118 Глава 4. Непрерывные сигналы и системы
на к0. Когда одно или оба условия не выполняются, форма выходного
сигнала системы будет отличаться от формы /(£) и говорят в этом
случае, что система искаснсает сигнал. Могут быть либо амплитудные
искажения (когда не выполняется условие (4.9.18)), либо фазовые
искажения (когда не выполняется условие (4.9.19)), либо и амплитудные,
и фазовые искажения одновременно (когда не выполняется ни условие
(4.9.18), ни условие (4.9.19)).
Интерпретация этого свойства в терминах фильтрации означает,
что имеются незначительные искажения, если интересующий нас набор
частот {o;i,a;2,...,ci;n/} находится внутри полосы пропускания системы.
Заметим, что чистое запаздывание не вызывает искажений. Однако
рациональные всечастотные фильтры дают фазовые искажения за
исключением очень низких частот.
4.10. Преобразование Фурье
Обобщение понятия частотной характеристики можно сделать с
помощью преобразований Фурье. Они дают способ представления широких
классов сигналов в частотной области. Преобразования Фурье к тому
же тесно связаны с преобразованиями Лапласа. Однако в то время как
преобразования Лапласа односторонние (т. е. определены для t e [0,оо)),
преобразования Фурье являются двусторонними (т. е. определены для
t Е (—оо,оо)). Это различие ведет к некоторым различиям в
интерпретации. Например, преобразования Лапласа включают влияния начальных
условий и ППП-полюсы соответствуют экспоненциально
увеличивающимся сигналам; в то время как в преобразованиях Фурье начальные
условия обычно не учитываются и ППП-полюсы соответствуют
беспричинным (нереальным) сигналам (т. е. сигналам, определенным для
t E (—оо,0)). Для полноты мы кратко рассмотрим ниже ключевые
аспекты преобразования Фурье.
4.10.1. Определение преобразования Фурье
Рассмотрим непрерывный сигнал /(£), определенный для —оо < t < оо.
Тогда пара преобразований Фурье, связанная с /(*), определяется
следующим образом:
/оо
e-^f(t)dt (4.10.1)
-С»
1 Г°°
Т~х [F(M] = f(t) = — J et^FWdu (4.10.2)
4.10. Преобразование Фурье 119
F(jw) называют преобразованием Фурье сигнала f(t). Пара
преобразований определена, если сигнал /(£) абсолютно интегрируем, то есть
Г»оо •
|/(«)|Л<ор (4.10.3)
/
С»
Фактически, чтобы быть строгими, на /(£) следует наложить
некоторые дополнительные условия. Например, в литературе часто требуется,
чтобы функция /(£) удовлетворяла условиям Дирихле, которые в самой
простой форме требуют, чтобы /(£) и fr(t) были кусочно-непрерывны.
Тогда обратное преобразование дает значение [f{t~) + f(t+)]/2 в точках
разрыва. В более простом случае мы могли бы потребовать только
абсолютной интегрируемости F(ju), но это исключило бы некоторые
интересные для нас случаи.
Можно использовать некоторые дополнительные ограничения,
чтобы расширить преобразование Фурье на ряд сигналов, которые не
удовлетворяют условию (4.10.3). Это, например, случай ограниченных
периодических сигналов. Преобразования Фурье для некоторых общих
сигналов показаны в табл. 4.3, а свойства преобразования приведены в
табл. 4.4.
4.10.2. Применения преобразований Фурье
В дополнение к основному свойству линейности ряд полезных свойств
этого преобразования приведен в табл. 4.4. Все эти свойства, вместе
взятые,' могут использоваться для решения широкого круга задач
анализа систем и сигналов. Чтобы проиллюстрировать это, рассмотрим
следующий пример.
Пример 4.9. Рассмотрим линейную систему, имеющую вход u(t) и
выход у (£), связанные моделью
ML + Zy(t) = 2u(t) (4.10.4)
Известно также, что u(t) = —O.Ssign(t)1 и что у(0) = 0. Нужно
вычислить y(t) Vi.
Решение
Если применить преобразование Фурье к (4.10.4), мы получим
ju>Y(ju) + ЗУ{ju) = 2U{ju) <* Y{ju) = ^—U{ju) (4.10.5)
jw + Z
1 Напомним, что функция sign определена как —1 для отрицательного аргумента и +1
для положительного аргумента.
120 Глава 4. Непрерывные сигналы и системы
Таблица преобразований Фурье
Таблица 4.3
№ Vt <= R
1
foW
/Ф)
М(0-М*-*о)
eet/x(0 &{<*} < 0
teaV(*) &{<*} < 0
j е"а1*1 a € R+
cos(u;0£)
sin(u70£)
cos(u0t)fi(t)
sin(u0t)fj,(t)
e-atcos(u0t)fi(t) aER+
e-a*sin(woOM(*) a€R+
Л/W] 1
2тг<5(и;)
1
7t8(u) + T—
1 _ e-i«to
1
ju-a
1
(jw - a)2
2a
w2 + a2
7Г (J(a; + a;0) + S(u - u0))
jn (S(u + u0) - S(w - u0))
7Г (S(U + W0) + J(W - W0)) + £—j
jtt (8(u + u0) - S(u - w0)) + *
j w + a 1
(jw + a)2 + a;2
^o
(ja; + a)2+a;2
где U(jw) = -0.5;F[sign(i)] = -0.5^[2/i(t) - 1] = ^. 7Wa
JOJ
Y(ju>) = --
2
-Ife-GcW) (41M>
(ju+3)ju) 3ju 3(ju+3)
откуда, используя обратное преобразование Фурье, окончательно
получим
y(t) = ~sign(t) + le-3tn(t) (4.10.7)
ODD
Свойства преобразований Фурье
4.10. Преобразование Фурье 121
Таблица 4.4
I /(*)
I J
dy(t)
dt
dky(t)
dtk
/ y(r)dr
J—oo
y(t-r)
y(at)
v(-t)
Г /i(T)/a(t-T)dr
J-oo
y(t) cos(w0t)
y(t)sin(u}0t)
F(t)
/i(*)/a(*)
в"*Л(*)
ЛЯ*)]
i
^aiFi(jw)
i=i
jtjy(jtj)
(j«)^0'«)
■±-Y(juj) + TrY(0)6(Lj)
e-*""y(jw)
rW'-)
|a| V a/
r(-i")
2 O^O" - 3"o) + Г(jw + M>)}
— {Y(ju - ju0) - Y(ju + jw0)}
27rf(-ju)
1 /,+°°
^ у Fi(jOF2(3"-JQd{
Fxiju-a)
Описание
Линейность
Закон
дифференцирования
Производная
произвольного
порядка
Закон
интегрирования
Задержка
Масштабирование
времени
Обращение
времени
Свертка
Модуляция (коси-
нусоидальная)
Модуляция
(синусоидальная)
Симметрия
Произведение во
временной области
Смещение частоты
Здесь Fi(ju) = T[fi(t)] и Y(ju) = T[y(t)]
Одна из наиболее привлекательных особенностей преобразования
Фурье —его связь с частотной характеристикой: выражение (4.10.2)
описывает f(t) как линейную комбинацию экспонент вида e?ut:, где ш
непрерывно изменяется от — оо до оо. Эта связь позволяет нам
интерпретировать преобразование как описание относительного содержания
частот данного сигнала. Например, F(jue) соответствует плотности
компонента с частотой ие. Следовательно, когда вход u{t) подается на
линейную систему с моделью (4.2.1), выход y{t) имеет преобразование
122 Глава 4. Непрерывные сигналы и системы
Фурье, определяемое формулой
Y(ju>) =H(ju>)U(ju) (4.10.8)
где H(joj) имеет ту же интерпретацию, что и в разд. 4.9, а именно, —
комплексный коэффициент усиления системы для гармонического
сигнала угловой частоты и.
Предупреждаем читателя от искушения сделать вывод, исходя из
подобия уравнений (4.5.2) и (4.10.8), что мы можем получить
преобразование Фурье из преобразования Лапласа простой заменой переменной
s => ju). Эта интерпретация дает правильные результаты только для
случая, когда входной сигнал абсолютно интегрируем, т. е. если он
удовлетворяет условию (4.10.3) и система устойчива (см., например,
преобразования Лапласа и Фурье для единичной ступеньки). Это
предупреждение может быть понято в большей степени, рассматривая пример
системы с передаточной функцией (по Лапласу) вида
Я(в>=-~ (4.10.9)
s — о
Это означает, что реакция системы на u(t) = £#(*) (при нулевых
начальных условиях) -—у(t) = 2e3t/i(t). Если мы просто заменим s
на ju в (4110.9) и затем применим обратное преобразование Фурье,
реакция системы на u(t) = £#(*)> казалось бы, будет y(t) = 2e3t/i(—£) —
упреждающая (до появления входного сигнала) реакция. Эта ошибка
вызвана тем, что преобразование Фурье для 2e3t/i(£) не существует,
потому что интеграл (4.10.1) не сходится. Фактически, в пределах
области сходимости преобразование Фурье соответствует беспричинному
(см. выше) сигналу.
В Фурье-анализе часто используется теорема Парсеваля. Для
полноты представим ее здесь.
Теорема 4.1. Пусть F(ju) и G(ju) обозначают преобразования Фурье
f(t) и g(t) соответственно, где предполагается, что f(t) и g(t)
квадратично интегрируемы на вещественной оси. Тогда
/ОО 1 ЛОО
f(t)g(t)dt = — J_ F{jb>)G{-Mdu (4.10.10)
Доказательство
Используем формулу обратного преобразования
/оо гоо I Г гоо
g(t) dt (4.10.11)
4.11. Часто встречающиеся модели 123
Изменим порядок интегрирования:
/OO I /«OO Г /«OO
du (4.10.12)
1 f°°
= — / F(yu>)G(-ju>) du (4.10.13)
DDD
Особый случай будет, когда f(t) = #(£); тогда
/oo 1 /*оо
{/(<)}2 dt = - J \F{ju,)\2 du (4.10.14)
Замечание 4.5. Читатель может легко проверить, что теорема
Парсеваля справедлива и тогда, когда f(t) и g(t) —матрицы (векторы)
соответствующих размерностей.
4.11. Часто встречающиеся модели
Многие системы, встречающиеся на практике, могут быть
смоделированы сравнительно простыми линейными компонентами первого и второго
порядка. Важно уметь выделить эти компоненты.
В табл. 4.5 приведены временные и частотные характеристики
простых линейных моделей. Предлагаем читателю вычислить некоторые из
этих реакций, чтобы проверить результаты, потому что знакомство с
этими реакциями может быть полезно при решении задач управления
или для оценки моделей, на основании которых может быть
сконструирован регулятор.
Для каждого компонента таблица содержит реакцию на ступеньку
и диаграммы Воде. Только один параметр одновременно изменяется и
все из них являются положительными. Эффект изменения параметра
показан на каждом графике стрелкой, которая указывает направление,
по которому параметр увеличивается.
Некоторые качественные выводы из табл. 4.5 следующие:
К
TS+1
о Переходная характеристика — простая растущая экспонента.
о Параметр К — усиление на нулевой частоте. Увеличение К
приводит к увеличению конечного значения переходной
характеристики.
о Параметр т — постоянная времени. Увеличение т увеличивает
время нарастания.
124 Глава 4. Непрерывные сигналы и системы
Таблица 4.5
Модели систем и влияние изменений параметров
Система
Параметр
Реакция
на ступеньку
Диаграмма Боде
(амплитудная)
Диаграмма Боде
(фазовая)
К
TS + 1
К
и"
s2 + 2фипз + а>2
(формула
колебательного
звена)
ф
,ф
шп
Ь>п
Ж
.Vi —7Г
as + 1
—as + 1
у$7~
Ж
uZ
52 + 2^o;ri5 + a;2
о Переходная характеристика — колебания (при ф <£1).
о Параметр ф — демпфирование. Увеличение ф заставляет колебания
затухать быстрее.
о Параметр шп — недемпфированная собственная частота.
Увеличение шп приводит к колебаниям с более коротким периодом.
as + 1
(ТПр
4.12. Ошибки моделирования линейных систем 125
о Переходная характеристика имеет перерегулирование без
колебаний (для а-1 < 1).
о Параметр —а"1—-минимально-фазовый нуль. При увеличении а
увеличивается перерегулирование.
-as + l
WW
о Переходная характеристика имеет недорегулирование и не имеет
колебаний.
о Величина а-1 является неминимально-фазовым нулем. При
увеличении а увеличивается недорегулирование.
Конечно, использование этих простых моделей будет обычно
приводить к некоторому уровню приближения. Этот факт нужно иметь
в виду при использовании этих моделей для проектирования систем
управления. Более подробно описание ошибок моделирования,
связанных с аппроксимацией линейных моделей, дано в следующем разделе.
4.12. Ошибки моделирования линейных систем
В разд. 3.9 выдвинута идея рассмотрения ошибок между номинальной
и эталонной моделями. Если линейная модель используется для
аппроксимации линейной системы, то ошибки моделирования из-за ошибок в
параметрах и/или сложности могут быть выражены в виде
передаточной функции как
Y(s) = G(s)U(s) = (G0(s) + Ge(s))U(s) = G0(s)(l + GA(s))U(s) (4.12.1)
где Ge(s) обозначает аддитивную ошибку моделирования (АОМ), а
G&(s) — мультипликативную ошибку моделирования (MOM), введенные
в разд. 3.9.
АОМ и MOM — два разных способа задания одной и той же ошибки
моделирования. Преимущество MOM в том, что она дает относительное
значение, в то время как АОМ — абсолютное значение. Это можно
видеть из выражения
G£(s) G(s)-G0(s)
Ga(s) = G^)= G0(s) (412-2)
Обычно линейные модели точнее описывают поведение объекта в
низкочастотной области — когда входы объекта постоянны или медленно
изменяются во времени. Это иллюстрируется в следующем примере.
Пример 4.10. Элементы запаздывания не приводят к рациональным
функциям в области оператора Лапласа. Поэтому обычно стараются
126 Глава 4. Непрерывные сигналы и системы
аппроксимировать запаздывание подходящим рациональным
выражением. Одно из возможных приближений
V rs + 2k J
*€<1,2,-)
(4.12.3)
где к определяет точность аппроксимации.
Для этой аппроксимации нужно определить MOM частотной
характеристики.
Решение
Мы имеем, что
G„(s)
r-rs + 2k\'
~\ rs + 2k J
-k
G(s)=e-TSF{s)
Следовательно,
„ , ч _TSf-TS + 2k\~K ,
с модулем частотной характеристики, равным
1<ЗД")1 =
F(s) (4.12.4)
(4.12.5)
,-jrw _ p-j1k<l>
Ф = а1СЬё2к
(4.12.6)
4 6 8 10 12 14 16 18 20
Нормализованная частота (ит)
Рис. 4.9. MOM для всечастотной рациональной аппроксимации
запаздывания
Результат изображен на рис. 4.9, где ит — нормализованная часто-
та. ППП
Некоторые типичные ошибки линейного моделирования включают
следующие случаи.
4.12. Ошибки моделирования линейных систем 127
Числовая неточность в описании полюсов и нулей
Рассмотрим в качестве примера объект, описываемый выражениями:
Здесь нет ошибок, связанных со сложностью и усилением на нулевой
частоте, но есть ошибка в задании полюса. Тогда
ЗД) = 7 1W/* гч 77*Х5) и GA{s) = -^— (4.12.8)
w (as + l)({a + 6)s + l) w w as + l v '
Заметим, что АОМ исчезает и на низких частотах, и на высоких.
Модуль MOM частотной функции также мал на низких частотах, но
он увеличивается до максимального значения, равного |, на высоких
частотах.
Числовые погрешности создают довольно специфические структуры
G$ и <2д. Одна из таких ситуаций возникает, когда реальный объект
имеет неустойчивые полюсы. Если неустойчивый полюс известен
неточно, то и АОМ, и MOM будут неустойчивы.
Пример 4.11. Рассмотрим объект с G(s) и G0(s) из (4.12.7) при
а = —1, 6 = 0.2; тогда АОМ и MOM задаются формулами
Неустойчивость АОМ и MOM очевидна. DDD
Пропущенный полюс
Пусть истинный объект и его номинальная модель определяются,
соответственно, формулами
G(s) = —!—F(s) и G0{s) = F(s) (4.12.10)
as + l
где F(s) —заданная передаточная функция.
Здесь снова нет ошибки усиления на нулевой частоте, однако
G^ = ТГГ?^) и ga(s) = -TZ7 (412Л1)
as + l as + l
Если, как обычно и бывает, |G0(ja;)| стремится к нулю на высоких
частотах, то АОМ снова имеет в частотной области характеристику
типа полосы пропускания. Модуль частотной функции MOM тоже снова
будет типа фильтра высоких частот и для очень больших частот будет
стремиться к 1.
128 Глава 4. Непрерывные сигналы и системы
Ошибка времени запаздывания
Пусть реальный объект и его номинальная модель даны, соответственно,
выражениями
G(s) = e-TSF(s) и G0(s) = e-T°sF(s) (4.12.12)
Здесь нет ошибки усиления на нулевой частоте, а ошибки
моделирования в частотной области определяются соотношениями
G€(ju) = 2je~XjuJ sm(Ku)F(ju) GA(ju) = 2je-^-T^ju sin(«a;)
(4.12.13)
где
t0-t _ r0 + т
к =
Л =
Соответствующие модули равны
\G((ju)\=2
\GA(ju>)\=2
sin
sin
e?K))
(fH))
\FU<*)\
(4.12.14)
(4.12.15)
(4.12.16)
Эти выражения, вместе с предположением, что |F(jo;)| стремится к
нулю на больших частотах (это имеет место в большинстве реальных
объектов), указывают, что АОМ также исчезает, когда и —> оо. Другая
ситуация для MOM — эта ошибка очень мала для низких частот, но если
и увеличивается, возникают колебания между 0 и 2.
Вышеприведенные выражения также показывают, что большей абсолютной ошибкой
(измеренной в \т — т0\) раньше (по частоте) становится MOM.
Неучет эффекта резонанса
Неучет резонансных явлений обычен при моделировании некоторых
классов систем, таких как руки робота, антенны и другие большие
гибкие структуры. Эта ситуация может быть описана следующим образом:
,2
G(s) =
ш„
s2 + 2t(>ujns + oj2l
F(s)
G0(s)=F(s) 0<V<1
(4.12.17)
Ошибки моделирования тогда определяются выражениями
-s(s + 2^a>„)
G<(S)= •Г'(о,+ ЗМ>)а*'(')
€К ' s2 + 2ij;u}ns+ul v '
GA(s) =
s2 + 2xj)U)ns+u2l
(4.12.18)
В предположении, что |G0(jw)| стремится к нулю при больших
частотах, АОМ для частотной функции имеет вид полосового фильтра. В
4.14. Резюме 129
Нормализованная частота и/ип
Рис. 4.10. Частотная характеристика MOM для неучтенного резонанса при
различных значениях коэффициента демпфирования ф
противоположность этому MOM представляет фильтр высоких частот с
резонансным пиком, который может быть очень большим в зависимости
от величины коэффициента демпфирования ф. На рис. 4.10 показаны
модули частотных функций для различных значений ф.
4.13. Границы ошибок моделирования
При проектировании систем управления часто желательно тем или
иным способом оценить ошибки моделирования. К сожалению, ошибки
моделирования редко известны точно. Однако рассмотрение примеров
в разд. 4.12 указывает, что обычно MOM имеет модуль, котррый мал
на малых частотах и увеличивается до 1 или 2 на высоких частотах с
пиками, вызываемыми неучетом резонансных явлений и других
явлений в полосе пропускания. Таким образом, неплохо иметь некоторую
информацию о MOM в форме ограничений. Типичным ограничением
здесь могло бы быть
. \GA(ju)\<e(u) (4.13.1)
где е(и) — некоторая заданная положительная функция и.
4.14. Резюме
• В конечном счете, все физические системы обладают некоторой
степенью нелинейности.
130 Глава 4. Непрерывные сигналы и системы
• Однако имеются серьезные причины использовать модель, которая
о линейна и тем не менее
о достаточно точна для наших целей.
Эти причины обусловлены следующими свойствами линейных
моделей:
о Теория и практика линейных систем существенно более просты и
легче в применении.
о Имеется большое количество разработанных решений и легко
используемых программных средств.
о Суперпозиция позволяет, в частности, представить реакцию на
одновременно действующие изменения уставки и возмущения как
сумму реакций на эти воздействия, рассматриваемые отдельно.
о Мощными средствами исследования в частотной области являются
полюсы, нули, передаточные функции, а также диаграммы Воде и
Найквиста со связанными с ними свойствами и характеристиками.
о Для линейных систем легче определить и проанализировать
относительную степень, инверсию, устойчивость и устойчивость
инверсии.
• Средства аппроксимации физических систем линейными моделями
включают следующее:
о преобразования типа,замены переменной;
о приближения типа ряда Тейлора в окрестности рабочей точки и
идентификация с помощью черного ящика.
• Эти моменты объясняют причину предположения о линейности,
используемого в нескольких последующих главах; в следующих же
за ними главах представлены методы для существенно нелинейных
систем.
• Имеются два основных подхода к линейным динамическим моделям:
о так называемая временная область и
о так называемая частотная область.
• Хотя эти два подхода в значительной степени эквивалентны,
каждый из них имеет свои собственные специфические преимущества и
поэтому важно хорошо владеть каждым.
• Во временной области
о системы моделируются дифференциальными уравнениями,
о системы характеризуются изменением своих переменных (выход
и т. д.) во времени и
о изменения переменных во времени определяются решением
дифференциальных уравнений.
4.14. Резюме 131
• Устойчивые временные реакции обычно характеризуются
следующими показателями:
Показатель
Усиление для
установившегося режима
Время нарастания
Время регулирования
Перерегулирование
Недорегулирование
Определяет
Как система после переходного процесса
усиливает или ослабляет постоянный сигнал
Как быстро система реагирует на изменение
на своем входе
Как быстро у системы затухает переходный
процесс
Насколько реакция может превысить
установившееся значение во время переходного
процесса
Насколько переходный процесс может
опуститься в направлении, противоположном
установившемуся значению
• В частотной области можно получить следующее:
о Моделирование использует ту основную особенность линейных
систем, что установившаяся реакция на гармонический сигнал
тоже является гармонической той же самой частоты; система
изменяет амплитуду и фазу по отношению к входному сигналу;
эти изменения определяются только характеристиками системы
на соответствующей частоте.
о Системы моделируются передаточными функциями, которые
учитывают эти влияния как функции частоты.
• Показатели, которыми обыкновенно характеризуются системы в
частотной области, включают следующее:
Показатель
Полоса пропускания
Полоса подавления
Переходная полоса
Ширина полосы
пропускания
Граничная частота
Определяет
Диапазон частот, где система имеет
минимальное воздействие на амплитуду
синусоидального входного сигнала
Диапазон частот, где система существенно
подавляет синусоидальные входные сигналы
Диапазон частот между полосой пропускания
и полосой подавления
Диапазон частот полосы пропускания системы
Частота, обозначающая (несколько
произвольно) границу между полосой
пропускания и переходной полосой системы
132 Глава 4. Непрерывные сигналы и системы
• В частотной области обычно используются следующие
характеристики.
Характеристика
Частотные диаграммы
Полюсы
Нули
Относительная
степень
Строго собственная
система
Бисобственная
система
Несобственная
система
Назначение
Графическое представление влияния системы
на амплитуду и фазу синусоидального входного
сигнала как функции частоты
Корни полинома знаменателя передаточной
функции; они определяют устойчивость
и, совместно с нулями, характеристики
переходного процесса
Корни полинома числителя передаточной
функции; они не влияют на устойчивость,
но определяют инверсную устойчивость и
недорегулирование, а также, совместно с
полюсами, существенно воздействуют на
характеристики переходного процесса системы
Число полюсов минус число нулей; определяет,
является ли система строго собственной,
бисобственной или несобственной
Система имеет больше полюсов, чем нулей;
это допустимо и, следовательно, реализуемо;
она имеет несобственную инверсию и нулевой
коэффициент усиления на высокой частоте
Система имеет равное число полюсов и
нулей; она реализуема, имеет бисобственную
инверсию и имеет прямую передачу сигнала,
т. е. ненулевое и ограниченное усиление на
высоких частотах
Система имеет больше нулей, чем полюсов;
она недопустима, не может быть реализована,
имеет строго собственную инверсию и имеет
неограниченное усиление на высоких частотах
• Особо важными линейными моделями являются следующие:
о усиление;
о модель первого порядка;
о модель второго порядка;
о интегратор;
о чистое запаздывание (иррациональное) и его рациональное
приближение.
• Важность этих моделей определяется следующим:
о Они часто встречаются на практике.
о Более сложные системы можно разбить на эти компоненты с
помощью разложения на простейшие дроби.
4.14. Резюме 133
• Вычисление передаточной функции на любой частоте дает
соответствующее комплексное число.
о Его модуль определяет усиление на этой частоте,
о Аргумент же этого числа дает фазовый сдвиг системы на этой
частоте.
• Относительно важной характеристики непрерывной системы —
устойчивости — можно сказать следующее:
о система устойчива тогда и только тогда, когда вещественные части
всех полюсов строго отрицательны;
о система на границе устойчивости, если, по крайней мере, один
полюс находится на мнимой оси комплексной плоскости и нет
полюсов, имеющих строго положительную вещественную часть;
о система неустойчива, если вещественная часть по крайней мере
одного полюса строго положительна и
о система неминимально-фазовая, если вещественная часть, по
крайней мере, одного нуля строго положительна.
• Реакция линейных систем на произвольный входной сигнал может
быть представлена в виде суммы двух составляющих:
о собственная составляющая, являющаяся функцией начальных
условий и не зависящая от входного воздействия; если система
устойчива, собственная составляющая стремится к нулю;
о вынужденная составляющая, являющаяся функцией входного
воздействия, но не зависящая от начальных условий.
• Следующие модели являются эквивалентными модели на основе
передаточной функции:
о модель преобразований Лапласа системы дифференциальных
уравнений; . . ,
о преобразование Лапласа реакции системы на дельта-импульс;
о модель, полученная непосредственно из экспериментального
наблюдения.
• В принципе, время регулирования может быть получено из
передаточной функции с помощью обратного преобразования Лапласа
выхода системы; однако на практике почти всегда предпочитают
перевести передаточную функцию во временную область и решать
дифференциальные уравнения численными методами.
• Основные преимущества моделей во временной области следующие:
о они особенно удобны для моделирования и решения на цифровом
компьютере;
о они могут быть расширены на более общие классы моделей, типа
нелинейных систем;
о они играют фундаментальную роль в теории пространства
состояний, рассматриваемой в последующих главах.
134 Глава 4. Непрерывные сигналы и системы
• Основные преимущества моделей в частотной области (передаточных
функций) следующие:
о они подчиняются простым алгебраическим правилам; так,
например, можно легко вычислить передаточные функции для
параллельного, последовательного соединения и для структур с
обратной связью;
о свойства типа инверсии, устойчивости, инверсной устойчивости и
даже качественное понимание переходных процессов легко
получаются из знания полюсов и нулей.
• Модели временной и частотной области легко могут быть
преобразованы друг в друга.
• Все модели содержат ошибки моделирования.
• Ошибки моделирования могут быть представлены как аддитивные
ошибки моделирования (АОМ) или мультипликативные (MOM).
• Ошибки моделирования неизвестны и часто оцениваются верхними
границами.
• Некоторые виды обычно встречающихся ошибок моделирования,
типа числовой погрешности, пропущенных полюсов, неучтенных
резонансных пиков или запаздывания, имеют некоторые характерные
особенности.
• Можно вообще предполагать, что ошибки моделирования
увеличиваются с частотой; MOM обычно обладают характеристиками
фильтров высоких частот.
4.15. Литература для последующего чтения
Преобразование Лапласа
1. Doetsch, G. (1971). Guide to the applications of Laplace and Z-Transform.
D. van Nostrand. Van Nostrand-Reinhold, London, New York, 2nd English
edition.
2. Lathi, B. (1965). Signals, Systems and Communication. Wiley, New York.
3. Oppenheim, A.V., Wilsky, A.S., and Hamid, N.S. (1997). Signals and Systems.
Prentice-Hall, Upper Saddle River, N.J., 2nd edition.
Влияние нулей на переходный процесс
1. Middleton, R.H. (1991). Trade-offs in linear control systems design.
Automatica, 27(2):281-292.
2. Middleton, R.H. and Graebe, S.F. (1999). Slow stable open-loop poles: to
cancel or not to cancel. Automatical 35:877-886.
4.16. Задачи для читателя 135
Частотные характеристики и преобразование Фурье
1. Distefano, J., Stubberud, A., and Williams, I. (1976). Feedback and Control
Systems. McGraw-Hill, New York.
2. Papoulis, A. (1977). Signal Analysis. McGraw-Hill, New York.
3. Willems, J.C. (1970). Stability theory of dynamical systems. Nelson, London.
4.16. Задачи для читателя
Задача 4.1. Передаточная функция системы имеет вид
H(s) = -^- (4.16.1)
4.1.1. Определите условия, при которых переходная характеристика
протекает быстрее, чем е-4*.
4.1.2. Определите полосу пропускания системы.
Задача 4.2. Передаточная функция системы имеет вид
-s + 1
(, + 1)2
Определите момент времени tu, при котором переходная
характеристика достигает своего максимального перерегулирования.
Н(*) = 7TT-TW (4Л6-2)
Задача 4.3. Переходная характеристика системы при нулевых
начальных условиях равна
y(t) = 3 - 2e~2t - e~3t Vt > 0 (4.16.3)
4.3.1. Определите передаточную функцию системы.
4.3.2. Определите реакцию системы на единичный J-импульс.
Задача 4.4. Нелинейная система имеет модель входа-выхода, заданную
уравнением
dy(t)
dt
+ y(t) (l - 0.2 (y(<))2) = 2u(t) (4.16.4)
4.4.1. Определите передаточную функцию линеаризованной модели
как функцию рабочей точки.
4.4.2. Найдите рабочую точку, для которой линейная модель
неустойчива.
136 Глава 4. Непрерывные сигналы и системы
Задача 4.5. Передаточная функция системы имеет полюсы —2, —2 и
—1 ± jl и нули, равные 1 и —3.
4.5.1. Определите доминирующий полюс(ы).
4.5.2. Если коэффициент усиления на нулевой частоте равен 5,
запишите передаточную функцию.
Задача 4.6. Передаточная функция системы имеет вид
Щ*) = / 8+.},+ €«s (4.16.5)
v ; (з + 1)(з + 2) v '
4.6.1. Определите переходную характеристику.
4.6.2. Проанализируйте результаты для е £ [—1,1].
Задача 4.7. Модель входа-выхода системы имеет вид
Ъи+7т+т<)=М1) (4.,б.б)
4.7.1. Определите передаточную функцию системы.
4.7.2. Определите переходную характеристику при нулевых начальных
условиях.
4.7.3. Повторите это же при начальных условиях у(0) = — 1 и у(0) = 2.
Задача 4.8. Пусть преобразование Фурье сигнала f(t) равно
™>]-*м-{; ™::: <«« >
Покажите, что если /(t) —реакция системы на единичную ступеньку,
то система беспричинная, т. е. система начинает реагировать до того, как
приложен входной сигнал.
Задача 4.9. Передаточная функция устойчивой линейной системы
имеет вид
Если вход системы u(t) = 2cos(0.5£), найдите выходной сигнал в
установившемся режиме.
Задача 4.10. Определите сигнал /(£), который имеет преобразование
Фурье
F(ju) = гдеаеШ (4.16.9)
4.16. Задачи для читателя 137
ад = ТТ7Г-^Г (4-!6-Ю)
Задача 4.11. Определите преобразования Фурье следующих сигналов
(если они существуют):
/i(t) = 2 + cos(2i) f2{t) = (2 + cos{2t))fx{t) /3(t) = /t(«) - /a(t - T)
/4(i) = e-3tcos(0.5f)/i(0 /e(*) = <e-* f6{t) = sign(t)
Задача 4.12. Рассмотрим функцию
_1
4.12.1. Найдите полюсы функции Fn(s).
4.12.2. Найдите устойчивую функцию Hn(s), такую, что
Hn(s)Hn(-s) = Fn(s). .
Задача 4.13. Проанализируйте для /3 £ Ш частотную характеристику
АОМ и MOM, если истинная и номинальная модели даны
передаточными функциями
соответственно.
Задача 4.14. Рассмотрим линейную систему с истинной моделью,
заданной передаточной функцией
ы2
G{s) = F{s) 9 " =■ (4.16.12)
где 0 < ф < 1. Определите MOM для номинальной модели
Со(*) = F00 2x0/^ л. 2 (4'16ЛЗ)
s2 + 2il)0u)nos + ш20
в следующих ситуациях:
1) шпо = ып, но ф ф ф0\
2) ф = </>0, но о;по ^ ^п-
Задача 4.15. Рассмотрим структуру, показанную на рис. 2.7.
4.15.1. Найдите линейные преобразования h(o) и /(о) такие, что
структура дает устойчивую приближенную инверсию для системы,
имеющей модель
ад=ёт4у (41б14)
4.15.2. Найдите ошибку моделирования по отношению к точной
инверсии.
138 Глава 4. Непрерывные сигналы и системы
Задача 4.16. Рассмотрим следующие две передаточные функции:
0.0625 v (4 16Ш
2^'~s4 +1.3066s3 + 0.8536s2+0.3266*+ 0.0625 \ • - )
4.16.1. Постройте диаграммы Воде для этих систем и проверьте, что
каждая из них обладает свойствами фильтра низких частот.
Вычислите полосу пропускания для каждого фильтра
4.16.2. Определите переходные характеристики для каждого случая и
' показатели, приведенные на рис. 4.3. Сравните и обсудите
полученные результаты.
Задача 4.17. Рассмотрим следующие передаточные функции:
«(•i-TTFT h*> = 7t£f (416Л7)
4.17.1. Для каждого случая определите полюсы системы.
4.17.2. Для каждого случая получите график зависимости модуля
частотной характеристики от частоты. Определите характеристики
фильтрации.
4.17.3. Используйте SIMULINK для получения переходной
характеристики каждой системы.
Задача 4.18. Найдите импульсную и переходную характеристики для
следующих передаточных функций:
ед=?тЬт (41вЛ8)
ем=я^тт (41в'20)
°<*>-7+55+1 <41М1>
Прокомментируйте наблюдаемые различия.
4.16. Задачи для читателя 139
Задача 4.19. Вычислите установившуюся реакцию на единичную
ступеньку для следующих систем:
1
G(s) =
G(s) =
s3 + 3s2 + 3s + l
s2 + 2s
s3 + 3s2 + 3s + 1
Прокомментируйте наблюдаемые различия.
(4.16.22)
(4.16.23)
Задача 4.20. Переходная характеристика системы (первоначально
находящейся в покое) имеет вид:
y{t) = 1 - 0.5е"* - 0.5е"2' * (4.16.24)
Какой передаточной функцией обладает система?
Задача 4.21. (Инициирована вопросом коллеги из промышленности.)
Переходная характеристика системы изображена ниже.
0.1
0.2
о.з
0.7
0.8
0.4 0.5 0.6
Время (с)
Рис. 4.11. Переходная характеристика
Как может получиться, что мы можем иметь перерегулирование на
переходной характеристике без каких-либо колебаний? Как вы думаете,
какую форму имеет модель?
Задача 4.22. На рис. 4.12 показано параллельное соединение двух
систем.
Рис. 4.12. Параллельное соединение двух систем
140 Глава 4. Непрерывные сигналы и системы
4.22.1. Какова передаточная функция от и до у?
4.22.2. Каковы полюсы системы?
4.22.3. Каковы нули системы (если они есть)?
4.22.4. Вычислите переходную характеристику системы и
прокомментируйте результат.
ЧАСТЬ 11
ОСНОВЫ SISO-СИСТЕМ
УПРАВЛЕНИЯ
Введение
В предыдущей части книги говорилось о моделях систем. Это элементы,
в терминах которых инженер по системам управления осмысливает
контур управления.
Теперь мы сосредоточим наше внимание на свойствах самого контура
управления. В частности, мы обратимся к проблемам чувствительности,
устойчивости и синтеза контура управления. Эти кирпичики
проектирования и будут основной темой следующей части книги.
Глава 5
Анализ замкнутых
SISO-систем управления
5.1. Введение
Проектирование систем управления использует два ключевых метода:
анализ и синтез. Анализ имеет дело с воздействием, которое данный
регулятор оказывает на данную систему, когда они взаимодействуют в
контуре обратной связи; синтез же занимается вопросом, как создать
регуляторы с некоторыми свойствами. В данной главе рассматривается
анализ. Для данных регулятора и объекта, соединенных в контуре
обратной связи, здесь решаются следующие вопросы.
• Устойчив ли контур управления?
• Какова чувствительность к различным возмущениям?
• Каково влияние ошибок линейного моделирования?
• Как небольшие нелинейности влияют на контур?
Мы также представим несколько методов анализа, в частности:
• метод корневого годографа,
• анализ устойчивости методом Найквиста.
5.2. Структуры систем с обратной связью
Вспомним предварительное представление управления с
использованием обратной связи, данное в гл. 2. Сейчас мы разовьем это представление
применительно к линейным системам управления с одним входом и
одним выходом (single-input single-output — SISO). Мы увидим, что
обратная связь может обеспечить многие желаемые свойства, типа
возможности уменьшить влияние возмущений, уменьшения чувствительности
к ошибкам модели системы или стабилизации неустойчивой системы.
Однако мы также заметим, что неправильно используемая обратная
144 Глава 5. Анализ замкнутых SISO-систем управления
—гО—•
C(s)
U(s)
Di(s) Xo D0(s)
i_ I
Ym(s)
&4
I D„
Go(s)
O
■W
Рис. 5.1. Простая система управления с обратной связью
связь может сделать устойчивую систему неустойчивой, добавить
колебательность в ранее гладкую реакцию или привести к увеличению
чувствительности к шуму измерения.
Начнем анализ систем с обратной связью с линейной SISO-системы,
показанной на рис. 5.1. Первоначально рассмотрим так называемый
номинальный контур, т. е. влияние регулятора, взаимодействующего с
номинальной моделью в контуре обратной связи; позже, в разд. 5.9, мы
вернемся к влиянию ошибок моделирования, которые возникают, когда
регулятор взаимодействует с реальной системой, а не с моделью.
В контуре, показанном на рис. 5.1, мы используем передаточные
функции и преобразования Лапласа, чтобы описать отношения между
его сигналами. В частности, C(s) и G0(s), обозначают передаточные
функции регулятора и номинальной модели объекта соответственно,
которые могут быть представлены в виде дробей:
С(в)
G0(s) =
P(s)
4s)
Bg(s)
A0(s)
(5.2.1)
(5.2.2)
где P(s), L(s), B0(s) и A0(s) —полиномы от s. R(s), U(s) и Y(s)
обозначают преобразования Лапласа уставки, управляющего сигнала и выхода
объекта соответственно; A(s), D0(s) и Dm(s) обозначают
преобразования Лапласа возмущения, приложенного к входу объекта (в дальнейшем
для простоты будем называть входным возмущением), возмущения,
приложенного к выходу объекта (также для простоты будем называть
его далее выходным возмущением) и шума измерения соответственно.
Используем также х0 для обозначения начальных условий модели.
5.2. Структуры систем с обратной связью 145
Между переменными на рис. 5.1 имеются следующие соотношения:
Y(s) = G0(s)U(s) + D0(s) + G0(s)Di(s) + ^^Г (5-2-3)
U{s) = C{s)R(s) - C(s)Y(s) - C(s)Dm(s) (5.2.4)
= C(s)'(r(s) - Dm(s) - G0(s)U(s) - D0(s) - G0(s) Д (*) - ^щ*)
(5.2.5)
где f(s,x0) — линейная функция, зависящая от начальных условий. Из
предыдущих уравнений можно получить:
"<•> = нЦод (*<*> - D™<s> - D°<s> - G°«B<<S> - трг)
(5.2.6)
и
\со(з)С(8)(Щз)-Вт(8))+В0(8)+С0(8)Вг(8)+П8'Хо)
Y(s)=
l+G0(s)C(s)
A(s) J
(5.2.7)
Конфигурация замкнутой системы, показанной на рис. 5.1,
называется структурой с одной степенью свободы. Этот термин отражает тот
факт, что есть только одна степень свободы, доступная для
формирования передаточных функций от R(s) и Dm(s) к Y(s) и от D0(s) и
Di(s) к Y(s). Следовательно, если передаточная функция регулятора
C(s) спроектирована таким образом, чтобы получить конкретную связь
эталонного сигнала и реакции системы, например,
Y(s)= G0(s)C(s)
R{s) l + G0(s)C(s) { -0'
тогда это приводит к однозначной реакции на выходное возмущение:
Y(s) 1
D0(s) l + G0(s)C(s)
(5.2.9)
без какой-либо возможности ее скорректировать.
Однако часто желательно иметь возможность формировать реакцию
на эталонный сигнал и возмущение отдельно. Это достигается
структурой с двумя степенями свободы, как показано на рис. 5.2. Первая
степень свободы — регулятор обратной связи C(s), a H(s) — вторая степень
свободы, представляющая собой устойчивую передаточную функцию,
которая иногда называется фильтром уставки или эталонным фильтром.
146 Глава 5. Анализ замкнутых SISO-систем управления
R(s)
H(s)
R(s) E(s)
—rO—■
C(s)
Ym(s)
Di(s) x0 D0{s)
1 Ж 1
G0(s)
О
Dm(s)
Рис. 5.2. Замкнутая система с двумя степенями свободы
Аналогично формуле (5.2.7), мы видим, что контур с двумя
степенями свободы определяется выражением:
rM-^'ff'W
+
l + G0(s)C(s)
G0(s)
l + G0(s)C(s)
l + G0(s)C(s)
G0(s)C(s)
A(S)-1 + G0(S)C(S)^(S)
(5.2.10)
Передаточная функция C(s) может быть спроектирована, чтобы
получить нужную реакцию на возмущение (не отличающуюся от (5.2.7)),
a H{s) может быть использована для получения реакции на эталонный
сигнал независимо:
Y{s) _ G0(s)C{s)H{s)
R{s) l+G0{s)C{s)
(5.2.11)
Заметим однако, что даже в случае контура управления с двумя
степенями свободы все еще остаются передаточные функции, чью динамику
нельзя получить независимо.
Так, регулятор С может быть использован для получения реакции
на одно из возмущений £)г, D0 или Dm, но как только это будет сделано,
реакции на другие возмущения будут тоже однозначно определены.
Итак, соответствующая реакция на выходе регулятора равна
и{а)шт£№Мт.
C(s)
l + G0(s)C{sY
G0(s)C(s)
l + G0(s)C{s)
Di(s)-
l+G0(s)C(s)
C(s)
l + G0(s)C(s)
Dm(s)
(5.2.12)
которая, как видно, фиксирована при выбранных H(s) и C(s).
5.3. Функции номинальной чувствительности 147
5.3. Функции номинальной чувствительности
Из уравнений (5.2.10) и (5.2.12) видно, что реакция замкнутой системы
задается четырьмя передаточными функциями, которые все вместе
известны как функции чувствительности. Используя уравнения (5.2.1)
и (5.2.2), эти функции чувствительности следующие:
^ G0(s)C(s) B0(s)P(s)
о[■ ' l + G0(s)C(s) A0(s)L(s) + B0(s)P(s) К°0' '
?мА 1 A0{s)L(s)
0{ ' l + G0(s)C(s) A0(s)L(s) + B0(s)P(s) ^ '
q M^ G°(3) - B0(a)L(a) . .
°ю{а) l + G0(s)C(s) A0(s)L(s) + B0(s)P(s) {°°0>
Л C(s) _ A0(s)P(s)
°uoW l + G0(s)C(s) A0(s)L(s)+B0(S)P(s) {°-°-V
Эти функции получили специальные имена.
T0(s): номинальная дополнительная чувствительность;
S0(s): номинальная чувствительность;
Si0(s): номинальная чувствительность к входному возмущению1;
SUo(s): номинальная чувствительность по управлению.
Полином Ad = A0{s)L(s) + B0(s)P(s) называется номинальным
характеристическим полиномом замкнутого контура.
Функции чувствительности алгебраически зависимы. Эти
отношения—одно из ключевых проявлений компромиссов, свойственных
контуру обратной связи и могут быть получены из определений (5.3.1)-
(5.3.4). В частности, мы имеем
S0{s)+T0{s) = l (5.3.5)
Si0(s) = S0(s)G0(s) = ^ (5.3.6)
SU0(s) = S0(s)C(s) = ^ (5.3.7)
00(s)
1 В дальнейшем, если это не вызовет разночтения, будем называть ее номинальной входной
чувствительностью. — Прим. перев.
148 Глава 5. Анализ замкнутых SISO-систем управления
С помощью этих функций чувствительности для замкнутого контура,
изображенного на рис. 5.2, можно написать
Y(s) = T0(s){H(s)R(s) - Dm(s)) + S0(s) (do(s) + ^щ^) + Sio(s)Д(«)
(5.3.8)
U(s) = Suo(s) (h(s)R(s) - Dm(s) - D0(s) - G0(s) Д (я) - ^щ^)
(5.3.9)
Видно, что воздействия начальных условий на выход объекта и выход
регулятора соответственно равны
f(s,x0) f(s,x0)L(s)
S0(s)
—Suo{s)
A0{s) A0(s)L(s) + B0(s)P(s)
f{s,x0) __ f{s,x0)P{s)
(5.3.10)
(5.3.11)
A0{s) A0{s)L{s) + B0{s)P{s)
Из этих равенств, а также из уравнений (5.3.1)—(5.3.4), можно
заметить фундаментальную роль, которую играет полином Лс/. Он
определяет как устойчивость, так и, совместно с собственными нулями L(s),
P(s), B0(s) и A0(s), переходные характеристики номинального контура
управления.
Уравнения (5.3.1)-(5.3.4) могут быть представлены в более
компактной форме
ад
U0(s)
G0{s)C{s) G0(s) 1 -G0{s)C(s)
C(s) -G0(s)C(s) -C{s) -C{s)
l + G0(s)C(s)
H(s)R(s)
Di(s)
D0(s)
Dm(s)
(5.3.12)
Пример 5.1. Объект имеет номинальную модель G0(s) — /д+1\1+2\2 •
На него действует выходное возмущение в виде d0{t) = к + а\,(Ь), где
dv (t) — составляющая с нулевым средним значением и полосой частот
Bd : (О, 4) рад/с.
Регулятор обратной связи C(s) таков, что
а
To{s) = (> + 1.2uv»« + «g)(« + l)2 (5-313)
Сомножитель (rs + I)2 добавлен, чтобы регулятор был строго
собственным (проверьте, что этот выбор достаточен, чтобы
гарантировать требуемое свойство!). Нужно выбрать а и ип с точки
зрения компенсации выходного возмущения и амплитуды требуемого
управляющего воздействия.
5.4. Устойчивость в зависимости от характеристического полинома 149
Решение
Нам нужно, чтобы T0(ju)) « 1 {что, в соответствии с (5.3.5) дает
SoiJu) ~ 0) на частоте и = 0 и в полосе Вд. Чтобы получить это,
предположим следующее:
• а = <4;
• ип больше, чем 4 рад/с; скажем, ип = 10 рад/с;
• г = 0.01 (что много меньше, чем и~г).
Это дает
To(s) = (S2 + l2S + 100)(0.0b + l)2 (5,ЗЛ4)
Далее оценим для этого случая номинальную чувствительность по
управлению Suo{s). Для, выбранной выше Т0 имеем
S м- Г°(*) 125 (* + 1)(* + 2)2 ,5315)
buo{$) " G0(s) ~ 1Ъ(в2 + 12s + 100)(0.0Ь +1)2 [Ъ-6ЛЬ)
На частоте 3 рад/с мы имеем \Suo{ju)\ « 20 дБ. Это означает, что
если dv(t) имеет синусоидальную составляющую на частоте 3 рад/с,
то на выходе регулятора будет составляющая той же частоты, но с
амплитудой в десять раз больше, чем у возмущения.
Это может привести к насыщению на входе объекта. Осмыслив
это, мы можем прийти к выводу, что данная задача возникла потому,
что выходное возмущение имеет спектр частот, который намного
больше полосы пропускания разомкнутого объекта.
Чтобы понизить чувствительность системы по управлению в
полосе Bd, у проектировщика возмооюен лишь один вариант — увеличить
чувствительность к возмущениям в полосе Bd, что создает
компромисс при проектировании. * □□□
5.4. Устойчивость замкнутой системы
в зависимости от характеристического полинома
Этот и последующие разделы содержат различные средства для анализа
как номинальной устойчивости, так и робастной устойчивости1.
Введем следующие определения.
1 Номинальный контур управления представляет собой соединение регулятора и
номинальной модели.
150 Глава 5. Анализ замкнутых SISO-систем управления
Определение 5.1 (Внутренняя устойчивость). Мы говорим,
что номинальный контур внутренне устойчив тогда и только
тогда, когда все восемь передаточных функций в уравнении (5.3.12)
устойчивы.
Это определение эквивалентно требованию, чтобы все сигналы в
контуре были ограничены для любого множества ограниченных сигналов
r(£), di(t), d0(t) и dm(t). Сравнение (5.3.12) с (5.3.1)— (5.3.4) показывает,
что номинальный замкнутый контур внутренне устойчив тогда и только
тогда, когда полином A0(s)L(s) + B0(s)P(s) имеет устойчивые
сомножители. Резюмируем это следующей леммой.
Лемма 5.1. Номинальная внутренняя устойчивость.
Рассмотрим номинальный замкнутый контур, изображенный на
рис. 5.2, с моделью и регулятором, задаваемыми уравнениями (5.2.2) и
(5.2.1) соответственно. Номинальный замкнутый контур внутренне
устойчив тогда и только тогда, когда все корни его
характеристического уравнения
Ao{s)L(s)+Bo{s)P(s)=0 (5.4.1)
находятся в открытой ЛПП.
Доказательство
Оно следует непосредственно из уравнения (5.3.12) и определения
внутренней устойчивости. DDD
Заметим, что понятие внутренней устойчивости значит несколько
больше, чем устойчивость передаточной функции от эталонного сигнала
к выходу системы. В первом случае дополнительно требуется, чтобы не
было никаких компенсаций неустойчивых полюсов при взаимодействии
регулятора и объекта. Проиллюстрируем это следующим примером.
Пример 5.2. Предположим, что
ад = (8 + 4)(-, + 2) СМ = ^ <5А2>
Видно, что T0(s) устойчива; однако номинальная входная
чувствительность неустойчива, поскольку
**>-(-. + a)(5+4. + ») <5АЗ>
Таким образом, эта система не является внутренне устойчивой и
не удовлетворяет условиям леммы 5.1, так как A0(s)L(s)+B0(s)P(s) =
(-S + 2)(52+4s + 3).
5.5. Устойчивость и анализ полиномов 151
5.5. Устойчивость и анализ полиномов
5.5.1. Определение задачи
Рассмотрим полином p(s), определенный следующим образом:
p(s) = sn + an-isn~l + • • • + агз + aQ (5.5.1)
где щ £ Ш.
Рассматриваемая задача связана с вопросом, есть ли у полинома
какой-либо корень с неотрицательной вещественной частью. Очевидно,
что на этот вопрос можно ответить, просто вычислив п корней p(s);
однако во многих приложениях .интересно рассмотреть взаимосвязь между
расположением корней и некоторыми коэффициентами полинома.
Полиномы, имеющие все свои корни в замкнутой ЛПП (т. е. корни с
неположительными вещественными частями), называются полиномами
Гурвица. Если мы ограничимся, случаем, когда корни имеют
отрицательные вещественные части, то такой полином называется строгим по
Гурвицу.
5.5.2. Некоторые интересные свойства полиномов
Из (5.5.1) вытекают следующие важные свойства.
Свойство 1.. Коэффициент ап-\ удовлетворяет равенству
п
где Аь А2, ..., Ап — корни p(s).
Чтобы доказать это свойство, заметим, что p(s) можно
представить в виде
п
P{s) = Ti(s-*i) (5.5.3)
г=1
Раскрывая произведение (5.3.3) и объединяя коэффициенты при
s в степени (п — 1), получим (5.5.2).
Свойство 2.. Коэффициент его удовлетворяет условию
п
ао = (-1)пПА* (5.5.4)
г=1
Это свойство также может быть получено, раскрывая произведение
(5.5.3) и исследуя полученную константу.
152 Глава 5. Анализ замкнутых SISO-систем управления
Свойство 3.. Чтобы все корни p(s) имели отрицательные
вещественные части, необходимо чтобы а,{ > О, г £ {0,1,... ,п — 1}.
Доказательство этого свойства проведем следующим образом.
а) Корни p(s) или вещественные, или комплексные и, если какие-то
из них комплексные, то эти комплексные корни будут
образовывать сопряженные пары (это является следствием того, что p(s) —
полином с вещественными коэффициентами).
б) Таким образом, без потери общности можно предположить, что
имеются п\ вещественных корней и n*i пар комплексно
сопряженных. При этом п\ + 2ri2 = п.
в) Если все эти корни имеют отрицательные вещественные части,
они могут быть представлены следующим образом:
\i = -\ai\ i = l,2,...,ni (5.5.5)
Кг+г = Кг+712+i = ~Ы +М * = 1,2,... ,П2 (5.5.6)
г) Следовательно,
Til 7l2
р(*)=П(*+м) Ш*+м)2+*?) (5-5-7)
г=1 ^=1
где во втором произведении мы сгруппировали комплексные пары
в квадратичные сомножители.
д) Из (5.5.7) мы видим, что p(s) соответствует произведению
полиномов первого и второго порядка, все из которых имеют
вещественные и положительные коэффициенты. Коэффициенты p(s)
являются суммами произведений коэффициентов этих полиномов
первого и второго порядка, что доказывает свойство.
Заметим, что это свойство необходимое для полиномов, строгих
по Гурвицу, но не достаточное, за исключением случаев, когда п = 1
и п = 2, когда это условие и необходимое и достаточное.
Свойство 4.. Если какой-либо из коэффициентов полинома
неположительный (отрицательный или равен нулю), тогда один или более
корней имеют неотрицательную вещественную часть.
Это свойство — прямое следствие предыдущего свойства.
5.5.3. Алгоритм Рауса
Одним из наиболее распространенных алгоритмов определения,
является ли полином строгим по Гурвицу, можно назвать алгоритм Рауса.
5.5. Устойчивость и анализ полиномов 153
Приведем его здесь без доказательства. Снова рассмотрим полином p(s)
степени п, определенный следующим образом:
Р(*) = J^fte1
(5.5.8)
г=0
Алгоритм Рауса основан на следующей числовой таблице
sn
sn-2
sn-3
sn-4
S2
S1
S°
Таблица 5.1
Таблица Рауса
7o,i
7i,i
72,1
7з,1
74,1
7n-2,l
7n-i,i
7n,i
70,2
71,2
72,2
73,2
74,2
7n-2,2
7о,з
7i,3
72,3
7з,з
74„3
70,4 • • •
71,4 • • •
72,4 • • •
73,4 • • •
74,4 • • •
где
7o,i = a>n+2-2i\ i = l,2,...,mo и 7i,i = an+i-2i; t = l,2,...,mi
(5.5.9)
с mo = (n + 2)/2 и mi = mo — 1 для четных n и mi = mo для нечетных
п. Заметим, что элементы 7о,г и 71,» — коэффициенты полинома,
дополняющие друг друга.
Далее
7* j =
7fc-i,i 7fc-2,j+i ~ 7fc-2,i 7fc-i,j+i .
7*-i,i
fc = 2,....,n j = l,2,...,mj
(5.5.10)
где rrij = max{mj_i,mj_2} — 1 и где нужно считать нулевыми
коэффициенты 7fc-i,j+i> если их нет в таблице Рауса (см. табл. 5.1).
Заметим, что коэффициенты (5.5.10) могут быть представлены с
помощью детерминантов:
7*,j = -;
7A;-2,1 7fc-2,j+l
7*-1,1 lk-lj+1
7А;-1,1
Основное утверждение выглядит следующим образом:
(5.5.11)
Рассмотрим полином p(s), заданный выражением (5.5.8) и связанную
с ним табл. 5.1. Тогда число корней с вещественными частями больше
нуля равно числу изменений знаков в первом столбце таблицы.
154 Глава 5. Анализ замкнутых SISO-систем управления
Рассмотрим далее несколько примеров
Пример 5.3. Пусть p(s) = s4 + s3 + 3s2 + 2s + 1. Непосредственное
исследование полинома не позволяет нам сказать, является ли он
полиномом Гурвица. Воспользуемся таблицей Рауса.
s4 1 3 1
S3
S2
S1
S0
1
1
1
1
2
1
Из таблицы мы замечаем, что в первом столбце нет изменений знака.
Согласно критерию Рауса это означает, что p(s) — полином, строгий
по Гурвицу. □□□
Пример 5.4. Пусть p{s) = s5 + 5s4 + 12s3 + 13s2 + 3s + 6. Заметим
вначале, что все коэффициенты этого полинома больше нуля,
следовательно, мы не можем исключить возможность, что он является
полиномом Гурвица. Чтобы проверить это, построим таблицу Рауса.
S5
S4
S3
S2
1
S*
S0
1
5
47
5
566
47
8160
235
6
12
13
9
—
5
6
3
6
Из этой таблицы мы замечаем, что есть два изменения знака в первом
столбце. Согласно критерию Рауса это означает, что p(s) имеет два
корня с положительной вещественной частью. Следовательно, p(s) не
является полиномом Гурвица. DDD
При использовании таблицы Рауса возможны некоторые особые
случаи, которые требуют приложения дополнительных усилий. Например,
мы видим, что при построении таблицы нельзя двигаться дальше, если
один из элементов первого столбца равен нулю. Здесь можно пойти
следующими путями.
Случай 1
Сначала рассмотрим случай, когда первый элемент строки,
соответствующий sn""*, равен j
ненулевой элемент.
ющий sn k, равен нулю, но в этой строке есть по крайней мере один
5.5. Устойчивость и анализ полиномов 155
S5
S4
S3
S2
S1
S0
1
3
0
2
6
2
3
3
S5
S4
S3
S2
S1
S0
1
3
N
6~ч
2 + Д-т
г + Т=Щ
3
2
6
2
3
3
3
В этом случае заменим элемент 7fc,i величиной б, где б —очень
маленькое число с тем же знаком, что и элемент 7fc-i,i> T- е- используем
либо |б|, либо — |б|. Тогда таблицу можно завершить, а критерий Рауса,
позволяющий определить, является ли полином строгим по Гурвицу,
используется для случая |б| —> О"1".
Пример 5.5. Рассмотрим полином p(s) = s5 + 3s4 + 2s3 + 6s2'+ 3s + 3.
Для него имеем таблицу Рауса:
(5.5.12)
Отсюда видим, что при \е\ —> 0+ есть два изменения знака, т. е.
p(s) не является полиномом Гурвица, потому что имеет два корня
с положительными вещественными частями. □□□
Случай 2
Рассмотрим теперь случай, когда все элементы строки, соответствующей
sn~k, нулевые, т. е. 7*,1 = 7*,2 = ••• = °-
В этом случае из исходного полинома можно выделить полином
Pa(s) = Jk-i}isn~k+l + 7*-i,2tfn"*"^ + "Yk-i}3Sn~k~3 H . Заметим, что
это полином только четных или только нечетных степеней 5, где
коэффициенты соответствуют членам строки таблицы, находящейся
непосредственно над строкой с нулями. Таким образом, полином pa(s) и,
соответственно, p(s) не являются полиномами^ строгими по Гурвицу.
Пример 5.6. Рассмотрим полиномp(s) = s6+5s5+2s4+5s3+4s2+15s+3.
Соответствующая ему таблица Рауса равна
se 1 2 4 3
s5 5 5 15
s4 1 1 3
s3 О О
s2
s1
s°
Тогда pa{s) = s4 + s2 + 3. Разделив на него исходный полином, получим,
4mop(s) = pa(s)(s2 +5s + l). Заметим, что корни полиномаpa{s) равны
±0.7849 ±jl.0564. □□□
156 Глава 5. Анализ замкнутых SISO-систем управления
Алгоритм Рауса можно применить к знаменателю передаточной
функции, чтобы определить, является ли система устойчивой, однако
его можно использовать для изучения влияния изменения параметров на
устойчивость системы. Для иллюстрации этого рассмотрим следующий
пример.
Пример 5.7. Пусть в замкнутом контуре управления G0(s)C(s) =
s(Jli)2 - Мы хотим определить, какие значения К соответствуют
устойчивому замкнутому контуру.
Сначала определим характеристический полином замкнутой
системы, который равен p(s) = s3 + 2s2 + s + K, а затем построим таблицу
Рауса.
S3
S2
S1
s°
1
2
1 - 0.5К
К
1
К
Мы можем видеть, что неустойчивых полюсов у замкнутой системы
не будет тогда и только тогда, когда 1 — 0.5К > О и К > 0. Объединяя
эти требования, заключаем, что замкнутая система устойчива тогда
и только тогда, когда 0 < К <2. □□□
Критерий Рауса можно также использовать для изучения, как быстро
затухают процессы в системе.
Пример 5.8. Замкнутая система управления имеет передаточную
функцию в разомкнутом состоянии G0(s)C(s) = Д/Д4)а • Нужно
узнать, имеется ли какой-то диапазон значений К, при которых все
процессы в замкнутой системе затухают быстрее, чем е^ь. Другими
словами, нужно, чтобы все полюсы замкнутой системы имели
вещественные части меньше — 1.
Стратегия решения этой задачи заключается в том, чтобы
рассмотреть вертикальную линию s = — 1 в качестве новой границы
устойчивости на сдвинутой комплексной плоскости. Если мы назовем
эту сдвинутую плоскость w-плоскостью, то в примере мы просто
делаем подстановку w = 5 + 1. Далее применяем критерий Рауса к этой
новой комплексной плоскости.
Для рассматриваемого примера получим характеристический
полином замкнутой системы: p(s) = s^+8s2+16s+K. Для новой комплексной
переменной он станет pw(w) = p(w — 1) = ги3 + 5w2 + 3w + К — 9. Далее
таблица Рауса для pw(w) даст
w3 1 3
w2 5 К-9
w1 4.8 - 0.2К
w° K-9
5.6. Корневой годограф 157
Мы видим, что для того, чтобы полином Ргу(^) был строгим по
Гурвицу, нужно, чтобы 9 < К < 24. Следовательно, мы делаем вывод,
что этот диапазон К соответствует полюсам замкнутой системы,
у которых вещественные части меньше — 1, как и требовалось. □□□
5.6. Корневой годограф
Другим классическим инструментом, который обычно используется для
изучения устойчивости уравнений типа (5.4.1), является метод
корневого годографа. Корневой годограф может использоваться, чтобы
исследовать расположение корней характеристического полинома при
изменении одного параметра. Предположим, например, что
номинальная модель объекта задана передаточной функцией G0(s), а регулятор —
передаточной функцией C(s) = KCa(s), где Ca{s) — известное, частное
двух нормированных полиномов от 5, а К — положительная, но
неизвестная константа. Тогда полюсы замкнутой системы являются корнями
уравнения
l + KCa{s)Go(s)=0 (5.6.1)
Множество всех точек на комплексной плоскости, которые
удовлетворяют уравнению (5.6.1) для различных положительных значений
К, называется корневым годографом. Эту конкретную задачу можно
рассматривать как часть более общей задачи.
Рассмотрим следующее уравнение
1 + AF(S)=0, где F(s) = ^l (5.6.2)
с А > 0 и
т
M(s) = sm + bm-is™-1 + • • • + hs + bo = Y[{s - a) (5.6.3)
i=l
n
D{s) = sn + an_i5n_1 + • • • + ais + a0 = Д (s -pi) (5.6.4)
г=1
где коэффициенты полиномов M(s) и D(s) являются вещественными
числами. Тогда задача корневого годографа связана с нахождением
множества всех точек на комплексной плоскости, являющихся решением
уравнения (5.6.2) для всех неотрицательных значений Л.
158 Глава 5. Анализ замкнутых SISO-систем управления
Мы видим, что решение уравнения (5.6.2) является одновременно и
решением уравнения
п т
В(з) + Ш(з) = Ц(з-Рг) + \1[(з-а) = 0 (5.6.5)
г=1 г=1
До появления современных компьютеров метод корневого годографа
< был важным инструментом, котЬрый позволял опытному пользователю
определить, как один параметр (обычно коэффициент усиления
регулятора) влияет на устойчивость и динамическое поведение замкнутого
контура. Сегодня корневой годограф любой системы легко получить с
помощью удобного программного обеспечения типа MATLAB. Однако
понимание основных принципов поведения корневого годографа все еще
дает ценную информацию. Правила построения корневого годографа
включают следующее:
1. Число корней уравнения (5.6.5) равно max{m,n}. Таким образом,
корневой годограф имеет max{m,n} ветвей.
2. Из уравнения (5.6.2) следует, что so принадлежит корневому
годографу А > О тогда и только тогда, когда выполняется условие
argF(s0) = (2fc + l)7r для fceZ. (5.6.6)
3. Из уравнения (5.6.2) следует также, что если so принадлежит
корневому годографу, соответствующее значение Л, которое обозначим
через Ло, будет равно
Л.= ^ (5.6.7)
4. Точка на вещественной оси, so € М, тогда и только тогда принадлежит
корневому годографу (для Л > 0), когда она расположена левее
нечетного числа полюсов и нулей (что следует из (5.6.6)).
5. Когда Л близко к нулю, тогда п корней уравнения (5.6.1)
располагаются вблизи полюсов F(s), т.е. у pi, P2i---,Pn> и если п < т,
оставшиеся т—п корней стремятся к бесконечности (более подробное
исследование мы проведем ниже).
6. Когда Л стремится к оо, т корней уравнения (5.6.1) стремятся к
нулям F(s), т.е. к ci, сг,...,^ и если п > т, оставшиеся п — т
корней стремятся к бесконечности (более подробное исследование мы
проведем ниже).
7. Если п > т и Л стремится к оо, то п — гп корней стремятся к оо,
приближаясь к асимптотам, пересекающимся в точке (<т,0), где
о = i=lPi ^i=li (5.6.8)
п — т
5.6. Корневой годограф 159
Углы этих асимптот 771, *72,---?*7п-т определяются выражениями
г)к = -—^^; fc = l,2,...,n-m (5.6.9)
п — т
8. Если п < т и Л стремится к нулю, то т — п корней стремятся к оо,
приближаясь к асимптотам, пересекающимся в точке (<7,0), где
a=ZtiPi-Z?=ia (5б10)
т — п
Углы этих асимптот t?i , r?2, — rfm-n определяются выражениями
^=(2&-1)тг; fc = 1,2,...,m-n (5.6.11)
п — т
9. Когда годограф пересекает мнимую ось, например, в точках s = ±jo;c,
тогда ис можно вычислить либо используя алгоритм Рауса—Гурвица,
либо учитывая тот факт, что s2 + ш2 делит нацело полином D(s) +
\M(s) для некоторого положительного значения Л.
Пример 5.9. Рассмотрим,объект с передаточной функцией GQ(s) и
регулятор обратной связи с передаточной функцией C(s), где
°M=(S-m + 2) • «W=4i±H (5.6.12)
Мы хотим узнать, как изменяется расположение полюсов
замкнутой системы при изменении.а в К"1".
Заметим сначала, что полюсы замкнутого контура являются
корнями уравнения
s + a s(s2 + s — 2)+4s + 4a Л /9 Лч
1+V + *-2)- s^ + s-2) -O-M^ + q+to-O
(5.6.13)
После деления на s(s2 + S + 2) получим уравнение (5.6.2), если
Л=4а " F(s)=^rai <5-6-14>
Если мы используем описанные выше правила, то получим
следующее:
1. Корневой годограф имеет три ветви (гп = 0 «п = 3).
4. Отрицательная часть вещественной оси принадлежит годографу.
5. Для а близких к нулю, т. е. Л.близких к нулю, корнями являются
полюсы F(s), т. е. значения О, — 0.5 ±j0.5\/7.
160 Глава 5. Анализ замкнутых SISO-систем управления
i
-~3 ^ 4i О Г" 2 3
Действительная ось
Рис. 5.3. Годограф для полюсов замкнутого контура, когда изменяется нуль
регулятора
7. Когда*астремится к оо, т. е. когда А стремится к оо, три корня
стремятся к оо, следуя асимптотам, которые пересекаются на
вещественной оси в точке (сг,0), где а = — |. Углы наклонов этих
- асимптот— 7г, 7г/3 w 27г/3. Это означает, что две ветви попадают
в правую полуплоскость.
9. Характеристический полином-— s3 + s2 + 2s + Л. Когда две ветви
пересекают мнимую ось, этот полином должен нацело делиться
на s2 +и%, давая частное s +1 с остатком (2 — u^)s + X — u2. Если
мы приравняем остаток нулю, то получим ис = у/2 и Ас = 2.
Вышеупомянутые правила позволяют сделать эскиз корневого
годографа. Его можно также получить, используя команду Hocus пакета
MATLAB] результат показан на рис. 5.3. Мощная оболочка rltool
пакета MATLAB позволяет провести разносторонний анализ корневого
годографа, включая изменение и добавление полюсов и нулей. □□□
5.7. Определение номинальной устойчивости
с помощью частотной характеристики
Классический и давно используемый инструмент для оценки
устойчивости замкнутых систем — теория устойчивости Найквиста. Здесь
устойчивость замкнутой системы предсказывается по виду частотной
характеристики разомкнутой системы. Для этого изображается годограф
2
5
Я
X
2
-1
-2
5.7. Определение номинальной устойчивости 161
s-плоскостъ
s-плоскость
а) б)
Рис. 5.4. Функция с единственным нулем и анализ Найквиста
произведения G0(s)C(s) и затем подсчитывается число охватов этой
характеристикой точки (—1,0). Ниже мы покажем, как это выглядит.
Сначала рассмотрим произвольную передаточную функцию F(s) (не
обязательно связанную с замкнутой системой управления).
Теория устойчивости Найквиста основана на отображении одной
комплексной плоскости в другую:
• плоскости независимой переменной s,
• плоскости зависимой переменной F.
Основная идея анализа устойчивости Найквиста состоит в следующем.
Предположим, что имеется замкнутая ориентированная кривая Cs
в 5-плоскости, которая охватывает Z нулей и Р полюсов функции
F(s). Предположим также, что нет никаких полюсов, непосредственно
лежащих на кривой Cs.
Если мы будем перемещаться вдоль кривой Cs в определенном
направлении, то функция F(s) отобразит кривую Cs в другую
ориентированную замкнутую кривую Cf на F-плоскости.
Ниже мы покажем, что число охватов кривой Cf начала координат
F-плоскости определяется разностью Р и Z. Если G0(s)C(s) будет
изменяться, мы можем наблюдать, как будут изменяться эти охваты
или как близко мы находимся к их изменению.
Впоследствии будет полезно вспомнить, что каждый охват
переменной на комплексной плоскости начала координат по часовой стрелке
(против часовой стрелки) приводит к тому, что аргумент переменной
изменится на — 2п рад (2п рад).
Сначала рассмотрим случай простой функции F(s) = s — с, когда с
находится внутри области, охватываемой кривой Cs. Это
проиллюстрировано на рис. 5.4, а.
162 Глава 5. Анализ замкнутых SISO-систем управления
Видно, что при перемещении s вдоль кривой Cs по часовой стрелке
аргумент F(s) изменяется на — 2п рад, т. е. кривая Cf охватит начало
координат F-плоскости один раз по часовой стрелке.
На рис. 5.4, б изображен случай, когда с находится вне области,
охватываемой кривой Cs. В этом случае аргумент F(s) не изменит своего
значения, когда s пройдет вдоль кривой Cs, и, следовательно, никакого
охвата начала координат F-плоскости не произойдет.
Используя подобное рассуждение, мы видим, что для функции
F(s) = (s —p)~l (где полюс р находится внутри области, охватываемой
кривой Cs) угол изменяется на +2п рад, когда s движется по часовой
стрелке вдоль кривой Cs. Это эквивалентно утверждению, что кривая
Cf охватывает.начало координат F-плоскости против часовой стрелки.
Изменение аргумента нулевое, если р находится вне области,
охватываемой кривой Cf,; это опять приводит к тому, что начало координат
F-плоскости не охватывается.
Рассмотрим теперь случай, когда F(s) имеет следующий, более
общий, вид:
F{8)=k№i('-«) (5.7.1)
ll*=i(*-P*)
Тогда полное изменение аргумента F(s) равно сумме изменений
аргумента за счет сомножителей (s—Ci) минус сумма изменений аргумента
за счет сомножителей (s — р^). Это приводит к следующему результату.
Рассмотрим функцию F(s), заданную выражением (5.7.1) и
замкнутую кривую Cs в 5-плоскости. Предположим, что F(s) имеет Z
нулей и Р полюсов внутри области, охваченной кривой Cs. Тогда
при перемещении параметра s вдоль кривой Cs по часовой стрелке
результирующая кривая Cf охватит начало координат F-плоскости
Z — Р раз по часовой стрелке.
Пока этот результат кажется довольно абстрактным; однако как мы
намекали ранее, это имеет прямую связь с проблемой устойчивости
замкнутой системы. Конкретно, чтобы. использовать этот результат,
рассмотрим специальную функцию F(s), связанную простым
соотношением с передаточными функциями объекта GQ(s) и регулятора C(s)
разомкнутой системы:
F(s) = l + G0{s)C(s) (5.7.2)
Заметим, что нули F(s) являются полюсами замкнутой системы
управления с единичной обратной связью. Полюсы же функции F(s)
9l7. Определение номинальной устойчивости 163
I yfSS-ПЛОСКОСТЬ
т—>~оо 1 £>-
Рис. 5.5. Контур Найквиста
являются полюсами объекта и регулятора разомкнутой системы.
Предположим, что функция G0(s)C(s) строго собственная, так что F(s) в
(5.7.2) удовлетворяет условию
lim F{s) = 1
\s\-+oo
В контексте оценки устойчивости нас особенно интересует число
полюсов замкнутой системы (если они есть), которые находятся в правой
полуплоскости, поэтому мы выберем в качестве специальной кривой Cs
кривую, которая полностью охватывает правую полуплоскость (ППП)
в 5-плоскости по часовой стрелке.
Эта кривая включает мнимую ось С% и кривую возврата Сг
(полуокружность бесконечного радиуса), как показано на рис. 5.5. Такая
кривая Cs называется контуром Найквиста.
Далее определим замкнутую кривую Ср на F-плоскости, которая
получается при вычислении F(s) для каждого s £ Cs. F(s) удовлетворяет
уравнению (5.7.3), так что вся кривая Сг стягивается в точку (1,0) на
F-плоскости. Таким образом, следует определить только отображение
кривой Ci, т. е. нам нужно лишь изобразить частотную
характеристику F(jcj) на F-плоскости. Эта диаграмма для частотной характеристики
называется диаграммой Найквиста.
Мы выбрали F(s) = 1 + G0{s)C(s) так, что нули F(s)
соответствуют полюсам замкнутого контура. Кроме того, мы видим, что F(s) и
G0(s)C(s) имеют одни и те же полюсы (полюсы разомкнутого контура).
Видно также, что начало координат F-плоскости соответствует точке
(—1,0) С0С-плоскости. Таким образом, диаграмма Найквиста для F
может быть заменена диаграммой для GQC просто путем подсчета
(5.7.3)
164 Глава 5. Анализ замкнутых SISO-систем управления
охватов точки —1. Основная теорема Найквиста, которая вытекает из
предыдущего анализа, выглядит следующим образом:
Теорема 5.1. Если собственная передаточная функция
разомкнутой системы G0{s)C(s) имеет Р полюсов в открытой ППП и ни
одного полюса на мнимой оси, то замкнутый контур имеет Z
полюсов в открытой ППП тогда и только тогда, когда амплитудно-
фазовая характеристика G0(ju))C(ju)) охватывает точку (—1,0) по
часовой стрелке N = Z — Р раз.
Из этой теоремы можно сделать следующие выводы.
• Если система в разомкнутом состоянии устойчива, то для внутренней
устойчивости замкнутой системы необходимо и достаточно, чтобы не
было никаких компенсаций неустойчивых полюсов и чтобы
диаграмма Найквиста для G0{s)C(s) не охватывала точку (—1,0).
• Если система в разомкнутом состоянии неустойчива и имеет Р
полюсов в открытой ППП, то для внутренней устойчивости замкнутой
системы необходимо и достаточно, чтобы не было никаких компенсаций
неустойчивых полюсов и чтобы диаграмма Найквиста для G0{s)C(s)
охватывала точку (—1,0) Р раз против часовой стрелки.
• Если диаграмма Найквиста для G0{s)C(s) проходит через точку
(—1,0), то существует w0GE, такая, что F(ju0) = 0, т. е. замкнутая
система имеет полюсы, расположенные точно на мнимой оси. Такая
ситуация называется условием критической устойчивости (гранью
устойчивости)*
Осталась еще одна важная проблема, а именно, как применить
теорию Найквиста, когда имеются полюсы разомкнутой системы точно на
мнимой оси. Основная трудность здесь может быть видна из рис. 5.4 а.
Если точка с расположена точно на кривой Cs, то изменение угла
вектора s—c невозможно определить. Чтобы разобраться с этой задачей,
используется модифицированный контур Найквиста, как показано на
рис. 5.6. Модификация показана для простого случая, когда имеется
один полюс разомкнутой системы в начале координат.
Контур Найквиста Cs теперь состоит из трех составляющих: Сг,
Са и Сь- Окончательная замкнутая кривая Cf будет отличаться от
предыдущего случая только тогда, когда s перемещается по С&. Это —
полуокружность радиуса б, где б —бесконечно малая величина. (Таким
образом, охваченная область — все еще вся ППП за исключением
бесконечно малого участка.)
Используя анализ, разработанный выше, мы видим, что необходимо
вычислить изменение угла вектора (s—p), когда s перемещается вдоль Сь
5.7. Определение номинальной устойчивости 165
S-ПЛОСКОСТЬ
Рис. 5.6. Модифицированный контур Найквиста
при р = 0. Это дает +7Г рад, т. е. сомножитель s"1 отображает кривую
Сь в полуокружность бесконечного радиуса с направлением по часовой
стрелке.
Чтобы определить число и направление охватов, необходимо
рассматривать эти полуокружности бесконечного радиуса, потому что они
являются существенной частью диаграммы Найквиста.
Этот анализ может быть расширен, чтобы включить любое конечное
число полюсов G0{s)C(s) на Cs.
Преобразованная форма теоремы Найквиста, приспособленная к
вышеупомянутым изменениям, проиллюстрирована на рис. 5.6.
Сама же модифицированная теорема будет выглядеть следующим
образом.
Теорема 5.2 (Теорема Найквиста). Дана передаточная функция
разомкнутой системы G0(s)C(s) с Р полюсами в открытой ППП.
Тогда замкнутая система содержит Z полюсов в открытой ППП в
том и только том случае, когда диаграмма G0{s)C(s) охватывает
точку (—1,0) по часовой стрелке N = Z — Р раз, когда s
перемещается по модифицированному контуру Найквиста.
Замечание 5.1. Чтобы использовать теорему Найквиста для оценки
внутренней устойчивости, нужно иметь дополнительную
информацию о том, что между C(s) и G0{s) не происходит никакой
компенсации неустойчивых полюсов. Это следует из того факта, что теорема
Найквиста применима только к произведению G0(s)C(s), в то время
как внутренняя устойчивость зависит также от факта, что нет
компенсации неустойчивых полюсов и нулей (см. лемму 5.1).
166 Глава 5. Анализ замкнутых SISO-систем управления
5.8. Относительная устойчивость: запасы
устойчивости и максимальная чувствительность
При проектировании систем управления часто недостаточно только
исследование устойчивости в замкнутом состоянии. В частности,
обычно желательно получить некоторые количественные оценки того, как
далеко номинальный контур управления находится от границы
устойчивости, т. е. определить относительную устойчивость. Это
достигается введением количественных оценок, описывающих расстояние от
частотной характеристики разомкнутой системы до критической точки
(—1;0), определяющей устойчивость.
На рис. 5.7 изображены два варианта показателей относительной
устойчивости для случая, когда разомкнутая система не имеет полюсов в
открытой ППП. Рисунок. 5.7, а изображает запас устойчивости по
амплитуде М9 и запас устойчивости по фазе Mf, которые определяются
следующим образом:
Mg = -20lg(\a\) (5.8.1)
Mf = ф (5.8.2)
Таким образом, запас устойчивости по амплитуде определяет
дополнительное усиление, которое приведет замкнутую систему в состояние
критической устойчивости. Запас устойчивости по фазе определяет
чистый фазовый сдвиг, который следует добавить, чтобы достигнуть
того же критического состояния.
Рисунок 5.7,6 дает другой показатель для относительной
устойчивости. Сначала напомним, что вектор из точки (—1;0) к
кривой G0(ju)\)C(j<jJi) при и = ш\ соответствует 1 + G0(jwi)C(jui),
т. е. ISoiJwi)]'1 (величине, обратной номинальной чувствительности).
G0{ju)C{ju) "• G0(ju))C(ju)
а) б)
Рис. 5.7. Запасы устойчивости и максимальная чувствительность
5.8. Относительная устойчивость 167
Диаграммы Боде
Частота (рад/с)
Рис. 5.8. Запасы устойчивости на диаграммах Боде
Таким образом, радиус г} окружности, касающейся характеристики
Go{jw)C(ju), есть величина, обратная максимуму номинальной
чувствительности. Чем больше максимальная чувствительность, тем
ближе замкнутая система к границе устойчивости.
Максимальная чувствительность — более компактный показатель
относительной устойчивости, чем запасы устойчивости по амплитуде и
по фазе. Предлагаем читателю найти пример, где запасы
устойчивости по амплитуде и фазе достаточно велики, однако очень большая
максимальная чувствительность предупреждает о необходимости более
внимательно подойти к условиям устойчивости. Обратное неверно:
обеспечение нужной чувствительности подразумевает минимальные
величины запасов устойчивости по амплитуде и фазе. Это точно описывается
следующим соотношением:
Mf >2axcsin(|) (5.8.3)
Запасы устойчивости могут быть также описаны и количественно
оценены с помощью диаграмм Боде.
Рассмотрим диаграммы Боде на рис. 5.8; здесь шр — частота, на
которой амплитуда равна 0 дБ. Это позволяет вычислить запас по фазе М/,
как показано на рис. 5.8. Вторая частота — шд соответствует ситуации,
когда фаза равна —180°. Это позволяет определить запас по амплитуде
Мд, как показано на рис. 5.8.
168 Глава 5. Анализ замкнутых SISO-систем управления
5.9. Робастность
Пока мы только рассмотрели функционирование регулятора в
номинальном замкнутом контуре, который включает номинальную модель
объекта. Практически, однако, нас интересуют не только номинальные
характеристики, но также и истинные характеристики, когда
регулятор взаимодействует с истинным объектом. Это —так называемая
проблема «ошибкоустойчивости» (робастности). Ниже мы покажем, что
номинальные чувствительности действительно сообщают нам кое-что
относительно истинных или реальных чувствительностей.
5.9.1. Реальные чувствительности
Мы противопоставляем полученным ранее номинальным функциям
чувствительности реальные (или истинные) функции чувствительности,
когда регулятор C(s) взаимодействует с некоторой эталонной моделью
G(s). Такой подход приводит к следующим эталонным функциям
чувствительности.
a G(s)C(s) _ B(s)P(s)
{> l + G{s)C{s) A(s)L(s)+B(s)P(s) { >
S(s) = * = A(s)L(s)
W l + G(s)C(s) A{s)L(s) + B{s)P(s) ( '
A G(s) B(s)L(s)
lW l + G(s)C(s) A{s)L{s) + B{s)P{sl ( '
5ЫА C(s) A(s)P(s)
u[ > " l + G(s)C(s) " A(s)L(s) +B(s)P(s) { '
где передаточная функция эталонной модели равна
В дальнейшем мы будем использовать термин «истинный объект»
для эталонной модели, однако читатель должен вспомнить
комментарии, сделанные в разд. 3.9, относительно возможных причин, почему
эталонная модель не может описать истинное поведение объекта.
Заметим, что обычно G(s) ф G0(s), так что Т0^Тит.д. Трудность,
которую мы рассмотрим позже, состоит в том, что G(s) обычно точно не
известна. Таким образом, мы должны говорить относительно реальной
чувствительности на основе только наших знаний о номинальной
чувствительности и информации относительно вероятных ошибок модели.
Это рассмотрено ниже.
5.9. Робастность 169
5.9.2. Робастная устойчивость
Обратимся к случаю, когда номинальная модель и истинный объект
отличаются друг от друга. Тогда необходимо, чтобы в дополнение к
номинальной устойчивости мы проверили, что устойчивость сохраняется,
когда истинный объект управляется тем же самым регулятором. Мы
называем это свойство робастной устойчивостью.
Достаточные условия того, чтобы контур обратной связи был робаст-
но устойчивым, задаются следующим положением.
Теорема 5.3 (Теорема о робастной устойчивости).
Рассмотрим объект с номинальной передаточной функцией G0{s) и
истинной передаточной функцией G(s). Предположим, что C(s)
—передаточная функция регулятора, который обеспечивает номинальную
внутреннюю устойчивость. Предположим также, что G(s)C(s) и
G0(s)C(s) имеют одно и то же число неустойчивых полюсов. Тогда
достаточное условие устойчивости истинного контура обратной
связи, получаемого при взаимодействии регулятора с истинным
объектом, следующее:
G0{ju)C{ju)
\T0(ju>)\\GA(ju,)\ =
\GA{ju)\<l Vw (5.9.6)
l + Go{ju)C(ju)
где G&(ju) —частотная характеристика мультипликативной
ошибки моделирования (MOM).
Доказательство
G€(JLJ)C(JLJ)
G(JLJ)C(JLJ)
Go(ju)C(ju)
Рис. 5.9. Диаграммы Найквиста для номинального и истинного контуров
170 Глава 5. Анализ замкнутых SISO-систем управления
Сначала вспомним, что, в соответствии с предположением,
номинальный контур устойчив и что G(s)C(s) и G0(s)C(s) имеют одно
и то же число неустойчивых полюсов. Это означает, что реальный
контур будет устойчив тогда и только тогда, когда диаграмма Най-
квиста для G(ju)C(juj) охватывает точку (—1,0) то же число раз (и
в том же направлении), что и диаграмма Найквиста для G0{ju)C(ju).
Мы такснсе имеем, что
G(s)C(s) = G0(s)C(s) + Ge(s)C(s) (5:9.7)
га. е. изменение в передаточной функции разомкнутого контура равно
Ge(s)C(s), где Ge(j и) — частотная характеристика аддитивной
ошибки моделирования (АОМ).
Рассмотрим теперь рис. 5.9.
Из этого рисунка видно, что то же самое число охватов будет, если
\Ge(ju>)C(ju)\ < \l + G0(ju>)C(ju>)\ Vo; (5.9.8)
Напомним, что Ge(s) = G0(s)G&(s), и мы видим, что (5.9.8)
эквивалентно выражению
\GA(ju)G0(ju)C(ju>)\
\1+с0(мс(зш)\ <х (5'y-yj
Это эквивалентно (5.9.6) при использовании определения
номинальной дополнительной чувствительности. □□□
Замечание 5.2. Теорема 5.3 дает только достаточное условие робаст-
ной устойчивости. Это иллюстрируется примером 5.10.
Замечание 5.3. Теорема 5.3 такснсе справедлива и для дискретных и
импульсных систем при условии, что используется соответствующая
частотная характеристика (в зависимости от того, используются ли
операторы сдвига или дельта-операторы).
Замечание 5.4. Можно расширить теорему 5.3 такснсе и на
случай, когда Сд($) неустойчива. Все, что требуется, это сохранить
соответствующее число охватов, чтобы обеспечить устойчивость
истинной системы.
Замечание 5.5. При рассмотрении робастной устойчивости обычно
\Ga(ju)\ заменяется какой-нибудь верхней границей, скажем, е(и).
Достаточное условие тогда заменяется на \T0(ju))e(u)\ < 1, \/ш. DDD
Пример 5.10. Для замкнутого контура управления передаточная
функция в разомкнутом состоянии равна
Go(S)C(S)=^Tl)2 (5-9Л0)
5.9. Робастность 171
а передаточная функция истинного объекта
G(s) = e-STG0(s) (5.9.11)
5.10.1. Найти точное значение г, при котором замкнутая система
окажется на грани устойчивости.
5.10.2. Используя теорему 5.3 о робастной устойчивости, получить
оценку для этого критического значения т.
5.10.3. Обсудить, почему результат в пункте 5.10.2 отличается от
результата в пункте 5.10.1.
Решение
5.10.1. Элемент запаздывания дает изменение фазы, равное —шт, но
не влияет на модуль частотной характеристики. Таким образом,
условие критической устойчивости возникает, когда этот сдвиг
равен запасу устойчивости по фазе М/, т. е. когда постоянная
запаздывания равна
т = & (5.9.12)
где величина шр определена на рис. 5.7 и такова, что \G0(jwp)\ = 1.
Это дает шр = 0.424 рад/с и Mj = 0.77 рад. Следовательно,
критическое значение постоянной запаздывания равно г = 1.816 с.
5.10.2. Номинальная дополнительная чувствительность равна
G0(s)C(s) 0.5
Io[S)~ l + G0(s)C(s)~ Ss + 2si + s + 0.5 [™Л6)
и мультипликативная ошибка моделирования равна
GA(s) = е~°Т - 1 =► \GA(ju)\ = 2 jsin (^) | (5.9.14)
Теорема о робастной устойчивости утверждает, что
достаточным условием робастной устойчивости является
\T0{j^)G^{j(jS)\ < 1, \/ш. Были исследованы несколько значений г.
Некоторые из этих результатов показаны на рис. 5.10.
Рисунок 5.10 показывает, что \T0{ju)G^{ju)\ < 1, \fu для г < 1.5.
5.10.3. Можно видеть, что меньшее значение постоянной
запаздывания получается при использовании теоремы о робастной
устойчивости. Получается это потому, что теорема устанавливает
достаточное условие для робастной устойчивости, т. е. это наихудшее
требование. □□□
172 Глава 5. Анализ замкнутых SISO-систем управления
Частота [рад/с]
Рис. 5.10. Амплитуда частотной характеристики T0(s)G&(s) для различных
значений г
Дальнейшее понимание проблем робастности может быть получено
путем сравнения функций номинальной и реальной чувствительности.
В частности, мы имеем следующее.
Лемма 5.2. Рассмотрим номинальные чувствительности S0(s) и
T0(s), а также объект с MOM G&(s). Тогда функции реальной
чувствительности S иТ определяются следующим образом:
S{s) = S0(s)SA{s) (5.9.15)
T(s) = T0(s)(l + GA(s))SA(s) (5.9.16)
Si{s) = Si0{s){l + GA{s))SA{s) (5.9.17)
Su(s) = SU0(s)SA(s) (5.9.18)
1+T0(s)Ga(s)
SA(s) называется чувствительностью ошибки.
Доказательство
Осуществляется непосредственной подстановкой. □□□
Мы видим, что характеристики реального контура отличаются от
характеристик номинального контура из-за ошибок моделирования. Это
часто называется проблемой робастности характеристик. Из
уравнений (5.9.15)—(5.9.19) можно видеть, что номинальные характеристики
не будут слишком сильно отличаться от- реальных характеристик, если
Sa(Jv) близка к 1 + jO для всех частот. Из уравнения (5.9.19) видно,
5.10. Резюме 173
что это будет в том случае, если частотная характеристика |T0(jo;)|
уменьшается до того, как MOM \G&(jw)\ станет существенной; тогда
это гарантирует \T0(j<jj)G&(ju))\ <§C 1.
Мы замечаем, что робастность устойчивости — менее строгое
требование, чем робастность характеристик. Для первого требуется, чтобы
выполнялось условие \TQ{ju))G&{ju))\ < 1, в то время как для второго
требуется \T0(ju)Ga{Ju)\ < 1.
Как мы увидим позже, робастная устойчивость и робастность
характеристик вносят дополнительный компромисс в процесс
проектирования.
5.9.3. Линейное управление нелинейными объектами
Анализ робастности, приведенный выше, имел дело только с
линейными ошибками моделирования. Конечно, на практике объект обычно
нелинейный, и, следовательно, ошибки моделирования нужно было бы
описывать нелинейными операторами. Как следовало бы ожидать (и
это можно показать), небольшие нелинейные искажения соответственно
слабо влияют на характеристики замкнутой системы. Можно также
количественно определить величину нелинейной ошибки
моделирования, совместимой с сохранением устойчивости замкнутой системы. Эти
проблемы будут рассмотрены в гл. 19, когда мы займемся детальным
изучением нелинейного управления. Более продвинутый читатель может
уже сейчас предварительно посмотреть разд. 19.2.
5.10. Резюме
• Эта глава содержит основные принципы анализа SISO-систем
управления с обратной связью.
• Обратная связь представляет собой циклическое взаимодействие
регулятора и системы:
о регулятор воздействует на выходы системы и
о выходы системы действуют на регулятор.
• Что бы там ни было, эта ситуация оказывает необыкновенно сложное
влияние на сформированный замкнутый контур.
• Хорошо спроектированная обратная связь может
о делать неустойчивую систему устойчивой;
о увеличить скорость реакции;
о уменьшить влияние возмущений;
о уменьшить эффект неточности параметров системы и т. д.
174 Глава 5. Анализ замкнутых SISO-систем управления
• Плохо спроектированная обратная связь может
о внести неустойчивость в предварительно устойчивую систему;
о добавить колебания в предварительно гладкую реакцию;
О: вызвать высокую чувствительность к шуму измерения;
о повысить чувствительность к структурным ошибкам
моделирования и т. д.
• Конкретные характеристики поведения динамической системы
включают:
о во временной области: устойчивость, время нарастания,
перерегулирование, время регулирования, установившиеся ошибки и др.;
о в частотной области: полоса пропускания, граничные частоты,
запасы устойчивости по амплитуде и фазе и др.
• Некоторые из этих свойств имеют строгие определения; другие —
качественные.
• Любая характеристика или анализ могут далее быть
сформулированы как с термином «номинальная», так и «робастная»:
о «номинальная» означает временное идеализированное
предположение, что модель является совершенной;
о «робастная» указывает на явное исследование эффекта ошибок
моделирования.
• Влияние регулятора C(s) = ^Ш на номинальную модель GQ{s) =
A°)sl в контуре обратной связи показано на рис. 5.1 и описывается
уравнениями
Y = TTkc{R - Dm) + u^cD°+Т^ксDi
В0Р ,„,... A0L _ , B0L
(Я" Dm) + л г Г р РА> + , г ■ о „А
A0L + B0P" ™' A0L + B0P ° A0L + B0P
U= 1 + G c(R-Do-GoDi-Dm)
А°оР ,„ „ „ ч В0Р
(R-D0-Dm)- л ° Di
A0L + B0P" ° "*' A0L + B0P
• Интерпретация, определения и замечания:
о Реакция номинальной системы определяется четырьмя
передаточными функциями.
о В связи с особой важностью они имеют специальные названия и
обозначения:
So := 1—7Г7> = р п> функция номинальной чувстви-
1 + G0C AoL + B0P тельности.
5.10. Резюме 175
G С В Р
To'-=z—7Г7? = л г ° п г>> номинальная дополнительная чув-
1 + G0C A0L + B0P'
G0 B0L
ствительность;
Sio := -— = — 55-7:, номинальная входная чувствитель-
1 + G0C A0L + B0P ность;
с С AQP
Ьио := -— = ——: 5~Б> номинальная чувствительность по
1 + G0C A,L + 50P уПравЛению.
Все вместе они называются поминальными чувствительностями.
о Все четыре функции чувствительности имеют те же полюсы, что
и корни полинома AQL + В0Р.
о Полином A0L + B0P также называется номинальным
характеристическим полиномом.
о Повторим, что устойчивость передаточной функции определяется
только корнями характеристического полинома.
о Следовательно, номинальный контур устойчив тогда и только
тогда, когда вещественные части всех корней характеристического
полинома A0L +.B0P строго отрицательны. Эти корни сложным
образом связаны с полюсами и нулями регулятора и объекта.
о Свойства четырех функций чувствительности, а следовательно, и
свойства номинального замкнутого контура, зависят от сочетания
полюсов характеристического полинома (общий знаменатель) и
нулей A0L,B0PyB0L и А0Р соответственно.
Линейные ошибки моделирования обладают следующими
свойствами.
о Если тот же самый регулятор воздействует на линейную систему
G(s), которая отличается от модели следующим образом: G(s) =
G0(s)Ga{s), to получающийся контур остается устойчивым при
условии, что \T0(jJ)\\Gb(ju))\ < 1, \fu.
о Это условие также известно как теорема о малых приращениях.
о Очевидно, что это выражение не так легко проверить, потому что
мультипликативная ошибка моделирования Сд обычно
неизвестна. Чаще всего вместо G&(ju>) используются ее оценки.
о Тем не менее, это дает ценные представления. Например, мы
видим, что полоса пропускания замкнутого контура должна быть
так настроена, чтобы быть меньше, чем частоты, где ожидаются
существенные ошибки моделирования.
Нелинейные ошибки моделирования приводят к следующему.
Если тот же самый регулятор воздействует на систему Gnj(o),
которая отличается от модели не только линейными искажениями, но
и нелинейностями (поскольку реальные системы всегда до некоторой
степени таковы), тогда строгий анализ обычно становится очень
176 Глава 5. Анализ замкнутых SISO-систем управления
сложным, однако может быть получено качественное понимание
функционирования системы путем анализа влияния ошибок
моделирования.
5.11. Литература для последующего чтения
Корневой годограф
1. Evans, W. (1950). Control systems synthesis by root locus methods. Trans.
AIEE, 69:66-69.
Критерий Найквиста
1. Brockett, R. and Willems, J.С. (1965а). Frequency domain stability criteria-
Part I. IEEE Transactions on Automatic Control, 10(7):255-261.
2. Brockett, R. and Willems, J.C. (1965b). Frequency domain stability criteria-
Part II. IEEE Transactions on Automatic Control, 10(10):407-413.
3. Nyquist, H. (1932). Regeneration theory. Bell Sys. Tech J., 11:126-147.
Полюсы и нули
1. Maddock, R. (1982). Poles and zeros in Electrical and Control Engineering.
Holt Rinehart and Winston.
5.12. Задачи для читателя
Задача 5.1. Рассмотрим замкнутый контур управления с номинальной
моделью GQ(s) = > _^2. Предположим, что регулятор C(s) такой, что
дополнительная чувствительность
W=(Sy (5121)
5.1.1. Покажите, что контур управления внутренне устойчив.
5.1.2. Определите передаточную функцию регулятора C(s).
5.1.3. Если эталонным сигналом является единичная ступенька,
определите входной сигнал объекта.
Задача 5.2. Рассмотрим тот же контур управления, что и в задаче 5.1.
Нужно определить максимальную текущую ошибку.
5.12. Задачи для читателя 177
Задача 5.3. Рассмотрим следующие возможные варианты
передаточной функции разомкнутой системы G0(s)C(s):
. (8 + 2) ^ е-0-8' , 1
а) ТГГТТ: б) 7Т7ТТ7 в)
(s + l)s (s + l)s ' s2 + 4
^ 4 s2 + 4 8
s(s2 + s + l) "' (s + 1)3 ' (s-l)(s + 2)(s-3)
5.3.1. Для каждого случая постройте диаграмму Найквиста и,
используя теорему Найквиста, определите устойчивость соответствующих
замкнутых контуров.
5.3.2. Для всех случаев, когда замкнутая система устойчива,
определите запасы устойчивости и максимальную чувствительность.
5.3.3. Повторите 5.3.1 и 5.3.2, используя диаграммы Боде.
Задача 5.4. В номинальном контуре управления чувствительность
равна
w-£i£-s . <"">
Предположим, что эталонный сигнал — единичная ступенька,
выходное возмущение — d0(t) = 0.5sin(0.2£).
Найдите выражение для выходного сигнала объекта в
установившемся режиме.
Задача 5.5. Рассмотрим контур управления, где C(s) = К.
5.5.1. Постройте корневые годографы, описывающие поведение
полюсов замкнутого контура при изменении К от 0 до оо для следующих
номинальных объектов:
ч 1 а 1 , 1
(e + l)(e-2) ' (s + 1)4 ' s2(s + 2)
(-s + lX-s + 4) s2 + 2s + 4 1
8(8+ 2)(8 +10) ' (s + l)(s + 6)(s + 8) ' S2-4s + 8
5.5.2. Для каждого случая найдите диапазон значений К, если он
существует, при которых номинальный контур устойчив.
Задача 5.6. В номинальном контуре управления
аМт(.+Ч-1) " cw-e£T! (5123)
Используя метод корневого годографа, определите изменение
полюсов замкнутой системы для а € [0,оо).
178 Глава 5. Анализ замкнутых SISO-систем управления
Задача 5.7. Рассмотрим систему, имеющую следующие эталонную и
номинальную модели
G(s) = F(S)-i- и Go(s) = F(s)-?- (5.12.4)
5 — 1 5 — 1
где F(s) — собственная (см. разд. 4.5.2), устойчивая и
минимально-фазовая передаточная функция. Докажите следующее:
5.7.1. <3д(2) = -1.
5.7.2. S&(s) = -— неустойчива, имеет полюс при 5 = 2,
1+Т0(5)&д(5)
где Т0(s) —дополнительная чувствительность внутренне устойчивого
контура управления.
5.7.3. Реальная чувствительность S(s) = S&(s)S0(s) может быть
устойчивой даже тогда, когда Sa(s) неустойчива.
Задача 5.8. Рассмотрим контур управления с обратной связью, у
которого номинальная дополнительная чувствительность — Т0(s).
Предположим, что в истинном контуре управления с обратной связью система
измерения неидеальна и измеренный выходной сигнал Ym(s) можно
представить в виде
Ym(s) = Y(s) + Gm(s)Y(s) (5.12.5)
где Gm(s) —устойчивая передаточная функция.
5.8.1. Получите выражение для истинной дополнительной
чувствительности T(s) как функции от T0(s) и Gm(s).
5.8.2. Найдите Gm(s) для частного случая, когда измерение идеально,
но имеется чистое запаздывание т > 0.
5.8.3. Проанализируйте связь между этими типами ошибок и этими же
типами, возникающими из-за ошибок моделирования объектов.
Задача 5.9. Рассмотрим объект со входом u(i), выходом y(t) и
передаточной функцией
G(s) = 9 Л6 77 (5.12.6)
v ' 52+ 4.85+ 16 v '
5.9.1. Получите выходной сигнал объекта для u(t) = 0, Vi > 0, у(0) = 1
и 2/(0) = 0.
5.9.2. Тот же объект с теми же начальными условиями помещен в
контур управления с r(t) = 0, V£ > 0. Получите выходной сигнал
5.12. Задачи для читателя 179
объекта, если регулятор выбран таким образом, что дополнительная
чувствительность равна
а2
T(s) = 9 , 0 т> (5.12.7)
v ' s2 + 1.3as + a2 v '
Исследуйте различные значения a G R+, в частности, а <§С 1 и
а > 1.
5.9.3. По результатам, полученным выше, обсудите влияние обратной
связи на улучшение поведения системы в зависимости от начальных
условий.
Задача 5.10. Рассмотрим замкнутую систему управления, имеющую
^(5) = (s-f i)(s+2) > с эталонньш сигналом r(t) = /i(t), входным
возмущением di(t) = Asin(t + a) и регулятором, имеющим передаточную функцию
C(a) = 600(s+1»(; + ?'S' + ^+5) (5.12.8)
V ' s(s2 + l)(s + 100) V '
5.10.1. Покажите, что номинальный контур обратной связи устойчив.
5.10.2. Объясните, используя принцип инверсии и функции
чувствительности, почему регулятор, определяемый выражением (5.12.8)
имеет повышенную чувствительность.
5.10.3. Предположим, что передаточная функция истинного объекта
отличается от номинальной модели мультипликативной ошибкой,
которая удовлетворяет следующему ограничению:
|СдЫ1<-7=1ТЖ (5Л2'9)
V шг + 400
Проанализируйте контур с точки зрения робастной устойчивости
и робастных характеристик.
Задача 5.11. Рассмотрим замкнутую систему управления, в которой
регулятор выбран таким образом, чтобы получить дополнительную
чувствительность T0(s). Выбранный регулятор имеет передаточную
функцию C0(s), однако реальный регулятор имеет передаточную функцию
Ci{s)^C0{s). Если
(5.12.10)
где F(s) — рациональная функция с F(0) Ф 0 и а > 0, исследуйте
устойчивость реального контура управления.
Глава б
Классическое
ПИД-управление
6.1. Введение
В этой главе мы рассмотрим конкретную структуру управления,
которая стала почти универсальной в промышленных системах. Она
основана на специфическом семействе регуляторов с фиксированной
структурой, так называемом семействе ПИД-регуляторов. Аббревиатура
«ПИД» означает Пропорциональное, Интегральное и
Дифференциальное управление. Можно доказать, что они будут робастными для многих
важных приложений.
Простота таких регуляторов — одновременно и их слабость: это
ограничивает диапазон объектов, которыми они могут удовлетворительно
управлять. Действительно, существует много неустойчивых объектов,
которые не могут быть стабилизированы никаким ПИД-регулятором.
Тем не менее, удивительная многосторонность ПИД-управления (на
самом деле ПИД-управление означает использование регулятора вплоть
до второго порядка) обеспечивает в течение длительного времени
значимость и популярность данного регулятора. Эти настройки второго
порядка следует также рассматривать как один из случаев
использования современных методов проектирования, о чем сказано, например,
в гл. 7 и 15. Данная глава охватывает классические подходы к
проектированию ПИД-регуляторов; при этом отдадим должное историческому
и практическому значению методов и их длительному использованию в
промышленности.
6.2. ПИД-структура
Рассмотрим простую SISO-систему управления, показанную на рис. 6.1.
Обычно ПИ- и ПИД-регуляторы описываются своими
передаточными функциями, связывающими ошибку E(s) = R(s) — Y(s) и выход
6.2. ПИД-структура 181
регулятора 17(5) следующим образом:
CP(s) = Kp
(6.2.1)
(6.2.2)
(6.2.3)
(6.2.4)
где Тг и Та известны как время восстановления и время
дифференцирования соответственно.
Как видно из (6.2.1)-(6.2.4), члены этого семейства включают в
различных сочетаниях три режима управления или действия:
пропорциональный (Я), интегральный (И) и дифференциальный (Д).
Надо быть осторожным при использовании правил настройки ПИД-
регулятора, так как имеются различные варианты параметризации
(задания параметров). Уравнение (6.2.4) называют стандартной формой.
Альтернативная, последовательная форма, имеет следующий вид:
CSeries(s)=Ks(l + ^\(
Еще одна, параллельная, форма:
1+ D'S )
jsDss + lJ
Dps
Cparallel (s) = ifp + — +
F s jpDps + l
(6.2.5)
(6.2.6)
Терминология, такая как П-усиление, неоднозначна и может означать
либо Ks в (6.2.5), либо Кр в (6.2.6), либо, наконец, Кр в (6.2.4).
Поэтому важно знать, какой из способов параметризации используется
в конкретном техническом устройстве и если это другой способ, то
следует соответствующим образом преобразовать параметры. Прежде чем
рассматривать ПИД-регулятор просто как регулятор второго порядка,
посмотрим на ПИД-настройку в терминах П-, И- и Д-параметров. Хотя
их воздействие в замкнутом контуре далеко не независимо друг от друга,
их действие можно рассматривать следующим образом.
R(s)
О
Е(з)
C(s)
U(s)
Объект
Y(s)
А -
Рис. 6.1. Основной контур управления с обратной связью
182 Глава 6. Классическое ПИД-управление
• Пропорциональное действие обеспечивает составляющую,
которая зависит от текущего значения ошибки управления.
Пропорциональный регулятор может управлять любым устойчивым объектом,
но это приводит к ограниченным характеристикам и ненулевой
установившейся ошибке. Это последнее ограничение связано с тем, что
его частотная характеристика ограничена для всех частот.
Для описания пропорционального воздействия традиционно
используют также выражение «диапазон пропорциональности» (ДП),
определяемый формулой
РВЩ^Ш. (6.2.7)
Диапазон пропорциональности определяется как ошибка (в
процентах от полного диапазона), которая вызовет 100-процентное
изменение выхода регулятора.
• Интегральное действие, с другой стороны, формирует выходной
сигнал регулятора, пропорциональный накопленной ошибке; такое
действие подразумевает, что это — медленный способ управления.
Это действие также очевидно, исходя из низкочастотного участка
частотной характеристики. Интегральный способ играет
фундаментальную роль в достижении идеальной инверсии объекта на частоте
и = 0. Он дает нулевую установившуюся ошибку при ступенчатом
эталонном сигнале и ступенчатом возмущении. Интегральный способ,
рассматриваемый в изоляции от других способов, имеет два главных
недостатка: его полюс в начале координат вреден для устойчивости
контура и это также вызывает нежелательный эффект (в
присутствии зоны насыщения исполнительного механизма), известный как
«накопление» (wind-up), который мы подробно обсудим в гл. 11.
• Дифференцирующее действие определяется скоростью
изменения ошибки управления. Следовательно, это — быстрый способ
управления, который, в конечном счете, исчезает при наличии
постоянных ошибок. Такой способ иногда называется прогнозирующим
способом из-за его зависимости от тенденции изменения ошибки.
Главным ограничением дифференцирующего способа,
рассматриваемого в изоляции от других способов, является его тенденция
формировать большие управляющие сигналы в ответ на высокочастотные
сигналы ошибки, типа ошибок, вызванных изменениями уставки или
шумом измерения. Его создание требует реализуемой передаточной
функции, поэтому обычно к дифференцированию добавляется полюс,
как можно заметить в уравнениях (6.2.3) и (6.2.4). В отсутствии
других ограничений, дополнительная постоянная времени г о обычно
выбирается такой, что 0.1Г^ < т& < 0.2Г^. Эта постоянная назы-
6.2. ПИД-структура 183
вается постоянной времени дифференцирования; чем она меньше,
тем больше диапазон частот, где фильтрованное дифференцирование
соответствует точному дифференцированию, с равенством в пределе:
lim uPID(t) = Kpe{t) + ^ / e{r)dr + KpTd^- + const. (6.2.8)
td—>0 lr Ji at
Классический аргумент выбора td Ф 0, кроме обеспечения
надлежащих характеристик регулятора, — уменьшить высокочастотный
шум. Последний момент проиллюстрирован на рис. 6.2, который
показывает, что фильтрованное дифференцирование хорошо
приближает точное дифференцирование на частотах до -£- рад/с, однако это
приводит к ограниченному усилению на высоких частотах, в то время
как точное дифференцирование имеет неограниченное усиление.
20 lg
А
TD
^^^
— Частота [рад/с
Рис. 6.2. Амплитудная характеристика Боде точного дифференцирования
(пунктирная) и фильтрованного дифференцирования (сплошная)
Поскольку было показано, что т& ф 0 является необходимым
злом, т. е. как необходимый отход от чистого пропорционального,
интегрального и дифференциального действия, почти у всех
промышленных ПИД-регуляторов однажды устанавливают td как
фиксированную долю Тр, а не рассматривают ее как независимый
параметр проектирования со своим собственным назначением. Однако
впоследствии стало ясно, что постоянная времени
дифференцирования является важной степенью свободы, доступной проектировщику.
Замечание 6.1. Из-за частых недоразумений мы повторяем, что
имеются другие задания параметров ПИД-регулятора, чем
представленные выражением (6.2.4). Некоторые явились результатом
физической реализации регулятора. Последовательная структура, задаваемая
уравнением (6.2.5), например, появилась по существу из-за первых
физических реализаций с пневматическими элементами.
184 Глава 6. Классическое ПИД-управление
Сравнивая (6.2.4), (6.2.5) и (6.2.6), можно получить точные (в
некоторых случаях приблизительные) формулы перевода из одной модели в
другую. Важно осознать существование разных видов параметризации
и, следовательно, различных определений П-, И- и Д-усилений.
6.3. Эмпирическая настройка
Один из традиционных путей проектирования ПИД-регулятора —
использовать эмпирические правила настройки, основанные на
измерениях, сделанных на реальном объекте. Он предпочтителен для ПИД-
проектировщика, который применяет методы, основанные на
использовании моделей, наподобие тех, которые описаны в разд. 7.3,15.4 и 15.6.2.
Если необходимо, эти правила могут быть объединены в пакеты простых
процедур. Классические методы все еще упоминаются практиками,
поэтому в следующих разделах рассмотрены лучшие классические методы
настройки.
6.4. Метод колебаний Зиглера—Никольса (3—Н)
Эта процедура применима только для устойчивых объектов и
выполняется посредством следующих шагов.
• Взять реальный объект с пропорциональным управлением и очень
маленьким усилением.
• Увеличивать усиление, пока в контуре не начнутся колебания.
Заметим, что требуются линейные колебания и они должны быть
обнаружены на выходе регулятора.
• Зарегистрировать критическое усиление регулятора Кр = Кс и
период колебаний Рс на выходе регулятора.
• Отрегулировать параметры регулятора согласно табл. 6.1;
имеются некоторые расхождения в отношении разных способов ПИД-
параметризации, для которых был разработан 3—Н метод, но
вариант, описанный здесь и который авторы лучше знают, применим к
параметризации (6.2.4).
Мы вначале видим, что рассматриваемая ниже модель, получаемая
в эксперименте, представляет собой только одну точку на
частотной характеристике, а именно ту, которая соответствует фазе —7г рад
и амплитуде, равной К~1, поскольку характеристика Найквиста для
KpG(ju) попадает в точку (—1,0), когда Кр = Кс.
6.4. Метод колебаний Зиглера—Никольса (3—Н) 185
* 1.5
£ 0.5
Настройки Зиглера—Никольса (метод колебаний)
для различных значений отношения х = t0/is0
' ' I
I 1 1" 1 1 -■ 1 I"
/^ ^х = 0.5 ^Sw
i \ "■■ ' ' ]
jf ж = 2.0
Г 1 ,.. 1. 1 „1 ..1
L J
4 5 6
Время [t/то]
10
Рис. 6.3. Контур управления с ПИ-регулятором, настроенным по 3—Н
(методу колебаний) для различных значений отношения х = —
Настройки в табл. 6.1 были получены Зиглером и Никольсом,
которые стремились получить демпфированную (апериодическую) реакцию
на ступеньку для объектов, удовлетворительно описываемых моделью
G0(s) =
K0e-ST°
где
ио>0
(6.4.1)
v0s + l
На рис. 6.3 показаны переходные характеристики контура
управления с ПИ-регулятором, настроенным по 3—Н методу. Время на этом
рисунке измеряется в единицах постоянной запаздывания т0, при этом
рассматриваются различные отношения х = jf-.
Пример 6.1. Рассмотрим объект, описываемый следующей моделью
1
G0(s) =
(s + 1)3
(6.4.2)
Таблица 6.1
Настройка Зиглера—Никольса,
использующая метод колебаний
Пп
пи
пид
1 КР
I 0.50КС
0.45^
О.бОДГс .
тг
Рс
1.2
0.5РС
Td
Рс
8
186 Глава 6. Классическое ПИД-управление
Найти параметры ПИД-регулятора, используя 3—Н метод
колебаний. Получить график реакции на единичный ступенчатый эталонный
сигнал и единичное ступенчатое входное возмущение.
Решение
Сначала определим критическое усиление Кс и критическую частоту
cjc. Эти величины должны удовлетворять соотношению
KcG0(juc) = -l^ifc = -(ju)c +1)3 (6.4.3)
Из этого уравнения мы получим, что Кс = 8 и ис = л/3.
Следовательно, критический период Рс « 3.63. Если мы теперь используем
настройки из таблицы 6.1, то получим следующие значения:
Кр = 0.6 * Кс = 4.8; Тг = 0.5 * Рс « 1.81; Td = 0.125 * Рс « 0.45
(6.4.4)
Дифференциальная составляющая будет ослаблена быстрым
полюсом с постоянной времени td = 0.1 * Т^ = 0.045. Таким образом,
окончательная передаточная функция контура будет
_ (Td + TD)s2 + (l + !f)s + ±- _ 52.8s2 + 109.32s+ 58.93
beW°W"Kp 5(тд5 + 1)(5 + 1)3 Г~ 5(5 + 22.2)(5 + 1)3
(6.4.5)
С помощью SIMULINK был смоделирован контур при единичном
ступенчатом входном эталонном сигнале в момент t = 0 и
единичном ступенчатом входном возмущении в момент t = 10. Результат
показан на рис. 6.4.
ПИД-управление, настроенное по 3—Н методу (методу колебаний)
20
8 10 12
Время [cj
Рис. 6.4. Реакция на ступенчатый эталонный сигнал и входное возмущение
6.4. Метод колебаний Зиглера—Никольса (3—Н) 187
Реакция, показанная на рис. 6.4, обладает существенным
перерегулированием, которое могло бы быть недопустимым в некоторых
приложениях; однако 3—Н настройка обеспечивает отправную точку для
более хорошей настройки. Предлагаем читателю проверить, используя
файл pidl.mdl пакета SIMULINK, что Тд = 1 дает лучший
результат. Конечно, если присутствует существенный шум измерения, то
нужно еще проверить, приводит ли увеличение дифференцирующего
действия ко все еще хорошему функционированию. Подобное
предостережение можно высказать и относительно насыщения на выходе
регулятора. Эвристическая природа этих аргументов проливает свет на
ограничения настройки ПИД-регулятора в терминах его классических
П-, И- и Д-настраиваемых параметров.
Замечание 6.2. Рисунок 6.3 показывает, что 3—Н настройка очень
чувствительна к отношению постоянной запаздывания и постоянной
времени. Другой недостаток этого метода — то, что он требует
достижения колебаний объекта; это может быть опасно и дорого. По
этой причине были разработаны другие стратегии настройки, которые
не требуют такого эксплуатационного режима. Некоторые из них
рассмотрены ниже.
Замечание 6.3. Как упомянуто ранее, ключевой вопрос при
применении к ПИД-регуляторам правил настройки (типа 3—Н настроек) —
это к какой структуре они применяются. Некоторые авторы
утверждают, что эксперименты Зиглера и Никольса и их заключения были
получены на основании использования регулятора последовательной
структуры типа (6.2.5).
Чтобы получить оценку этих различий, мы исследуем ПИД-контур
управления для того же объекта, что и в примере 6.1, но с 3—Н
настройками, применяемыми к последовательной структуре, используя
обозначения из (6.2.5). Тогда получим
#5 = 4.8 /5 = 1.81 £>5 = 0.45 7^ = 0.1 (6.4.6)
Если теперь сравнить уравнения (6.2.4) и (6.2.5), мы имеем, что
rD = 0.045 Кр = 5.99 Tr = 2.26 Td = 0.35 (6.4.7)
Наконец, смоделируем те же самые эталонный сигнал и
возмущение, что и в примере 6.1. Результаты показаны на рис. 6.5.
Рисунок 6.5 показывает, что в этом частном случае никаких
существенных различий не возникает; однако этот вывод может
измениться для других систем, которыми нужно управлять. Таким
образом, всегда желательно проверить параметризацию ПИД-регулятора,
188 Глава 6. Классическое ПИД-управление
3—Н настройка (метод колебаний) с различными ПИД-структурами
~г
6 8 10 12 14 16 18 20
Время [с]
Рис. 6.5. 3—Н настройки ПИД-регулятора для последовательной структуры
(толстая линия) и стандартной структуры (тонкая линия)
если предполагается использовать настройки, полученные при решении
конкретной задачи синтеза.
6.5. Методы, основанные на использовании
кривой отклика процесса
Многие объекты, особенно используемые в перерабатывающих
отраслях промышленности, могут быть удовлетворительно описаны моделью
(6.4.1). Линеаризованные количественные характеристики этой модели
можно получить в эксперименте с разомкнутой системой, используя
следующую процедуру.
1. Зададим объекту в разомкнутой системе стандартную рабочую
точку вручную. Пусть выходная величина объекта устанавливается на
значении y(t) = у0 при входном постоянном сигнале u(t) = и0.
2. В начальный момент времени t0 приложим ко входу объекта
ступенчатое воздействие от и0 до Uqq (оно должно быть в диапазоне от 10
до 20% полного масштаба).
3. Зафиксируем изменение выходного сигнала до прихода его в новую
рабочую точку. Предположим, что мы получили кривую, показанную
на рис. 6.6. Эта кривая известна как кривая отклика процесса.
На рис. 6.6 т. м. н. означает тангенс максимального наклона.
4. Вычислим параметры модели следующим образом:
Ко=Уоо-Уо re = ti-te; i/e = fe-ti (6.5.1)
6.5. Методы, основанные на использовании кривой отклика процесса 189
А Т
Уоо
уо
to t\ £2
. м.н.
Время [с]
Рис. 6.6. Реакция объекта на ступеньку
Полученная модель может использоваться с различными методами
настройки ПИД-регуляторов. Один из этих методов был также
предложен Зиглером и Никольсом. По их плану цель проектирования состоит
в том, чтобы достичь конкретного демпфирования для переходной
характеристики замкнутой системы. Более определенно цель состоит
в том, чтобы получить отношение 4 : 1 для первого и второго
максимумов на этой характеристике. Предложенные параметры показаны в
табл. 6.2.
Правила задания параметров, данные в табл. 6.2, применяются к
модели (6.4.1), где мы снова нормализуем время в единицах
постоянной запаздывания. Переходные характеристики замкнутой системы для
разных значений отношения х = ^ показаны на рис. 6.7.
Рисунок 6.7 показывает чрезвычайную чувствительность результата
к значениям отношения х. Чтобы улучшить это ограничение, Коэн и
Кун выполнили дополнительные исследования, чтобы найти настройки
регулятора для той же модели (6.4.1), но такие, чтобы они давали мень-
Таблица 6.2
Настройки Зиглера—Никольса при
использовании кривой отклика
П
пи
пид
]_ КР
1 у°
К0Т0
0.9ио
К0т0
1 КоТо
Тг
Зт0
2т0
Td
0.5то
190 Глава 6. Классическое ПИД-управление
Настройки Зиглера—Никольса (кривая отклика)
для разных значений отношения х = t0/v0
Время [t/то]
Рис. 6.7. Контур управления с ПИ-регулятором, настроенным по 3—Н (метод
кривой отклика)
шую зависимость от отношения постоянной запаздывания к постоянной
времени. Их результаты приведены в табл. 6.3.
Чтобы сравнить настройки, предложенные в табл. 6.3, с настройками,
предложенными Зиглером и Никольсом, на рис. 6.8 и 6.7 приведены
результаты, соответствующие этим двум вариантам.
Сравнение табл. 6.2 и 6.3 объясняет, почему настройки регулятора,
предложенные Зиглером—Никольсом и Коэном—Куном, для малых
значений х совпадают. Это подобие также очевидно из соответствующих
кривых на рис. 6.7 и 6.8; однако из этих рисунков также очевидно, что
настройки Коэна—Куна дают более однородную реакцию системы для
того же диапазона значений х.
Таблица 6.3
Настройки Коэна—Куна при использовании кривой отклика
п
пи
пид
| Кр
| К0т0
— ['
| К0т0 [
| К0т0
[1+тЧ
Э.9+ —
12i/0
1.3 4i/0J
тг
то[30ь>о + Зго]
9vo + 20to
t0[32v0 + 6t0]
13i/0 + 8t0
Td
4r0i/0
11i/0 + 2t0
6.6; Компенсаторы опережения-задержки 191
Настройки Коэна—Куна (кривая отклика) для разных значений отношения х = T0jv0
Время [t0/То]
Рис. 6.8. Контур управления с ПИ-регулятором, настроенным по
Коэну—Куну (метод кривой отклика)
В любом случае читатель должен знать, что, если решено выполнить
эмпирическую настройку ПИД-регулятора, настройки, полученные
с рассмотренными выше стратегиями, — только отправные точки в
процессе получения нужного регулятора. В частности, мы советуем
читателю познакомиться с разд. 7.3, 15.4 и 15.6.2, которые дают
современное представление о проектировании ПИД-регуляторов.
б.б. Компенсаторы опережения-задержки
Тесно связана с ПИД-управлением идея компенсации с опережением-
задержкой. Эта идея часто используются на практике, особенно, когда
компенсаторы1 построены на электронных компонентах. Передаточная
функция этих компенсаторов имеет вид
TiS + 1
C(s) =
(6.6.1)
T2S + 1
Когда т\ > Т2, это — цепочка опережения, когда т\ < Т2, это —
цепочка задержки. Прямолинейная аппроксимация диаграмм Воде для
этих цепочек дана на рис. 6.9 и 6.10 (где значения т\ и Т2 находятся в
отношении 10 : 1).
Компенсатор с опережением действует наподобие
дифференцирующего звена (приближенно). В частности, мы видим из рис. 6.9, что эта
цепочка дает приблизительно 45° опережения фазы на частоте и = \jr\
1 В отечественной литературе по теории управления вместо термина компенсатор обычно
используется термин корректирующее устройство (последовательное). — Прим. ред.
192 Глава 6. Классическое ПИД-управление
1 _1_ _1_ 10
10Т1 * Т\ Т2 Т2
Рис. 6.9. Приближенные диаграммы Боде для цепочек с опережением
(Т1 = 10т2)
без существенного изменения усиления. Таким образом, если мы имеем
простой контур обратной связи, частотная характеристика которого
проходит через точку (—1,0), скажем, на частоте cji, то добавление
компенсатора с опережением, такого, что cjiti = 1, будет давать запас
устойчивости по фазе в 45°. Конечно, недостатком этого способа
является увеличение усиления на высоких частотах, что может увеличить
высокочастотные шумы.
Альтернативную интерпретацию цепочки с опережением можно
получить, рассматривая структуру ее нулей и полюсов. Из (6.6.1) и факта,
что т\ > Т2, мы видим, что она вводит пару нуль-полюс, где нуль (при
s = — 1/ti) значительно ближе к мнимой оси, чем полюс (расположенный
в точке s = — I/T2).
С другой стороны, компенсатор задержки действует подобно
интегратору (приближенно). В частности, мы видим из рис. 6.10, что усиление
на низких частотах на 20 дБ больше, чем на частоте и = 1/ri. Таким
образом, такая цепочка при использовании в контуре обратной связи
обеспечивает лучшую передачу низких частот и ослабление
высокочастотных возмущений. Недостатком такой цепочки является
дополнительный отрицательный фазовый сдвиг в диапазоне частот от 1/10т2
ДО 10/-Г1.
Следовательно, значение 1/т2 обычно выбирается таким образом,
чтобы оно было меньше, чем другие важные динамические параметры
объекта.
С точки зрения расположения полюсов цепочка запаздывания вводит
полюс (расположенный в точке s = —I/T2), который значительно ближе
к мнимой оси, чем нуль (расположенный в точке s = —1/ri).
Резюмируя, можно сказать, что достоинство опережающей цепочки,
используемое при проектировании, заключается в ее опережающей фа-
6.7. Дистилляционная колонна 193
|С|,дБА _L.il
Т ЮТ2 Т2 Tl
-20"
7Г
~4
[
\
10
о;
ш
Рис. 6.10. Приближенные диаграммы Боде для цепочек с запаздыванием
(т2 = 10п)
зовой характеристике. Цепочка запаздывания, в свою очередь, полезна
из-за своей амплитудной характеристики на низких частотах.
Когда требуются оба эффекта, они могут быть получены
последовательным подключением компенсаторов опережения и запаздывания.
6.7. Дистилляционная колонна
ПИД-управление очень широко используется в промышленности.
Действительно, довольно затруднительно найти контур управления,
который бы не использовал какой-либо вариант этой формы управления.
Здесь мы проиллюстрируем, как ПИД-регуляторы могут
использоваться в реальной установке на примере дистилляционной колонны.
Дистилляционные колонны — чрезвычайно распространенные
устройства, используемые в химических процессах/объектах. Их цель
состоит в разделении жидкостей, используя различную летучесть
компонентов.
Для детального знакомства с теорией и практикой дистилляционных
колонн, используя диалоговое моделирование, отсылаем читателя к
Web-сайту, связанному с этой книгой. Пример, который мы выбрали
здесь, —экспериментальный объект, описанный на Web-сайте.
В этом примере дистилляционная колонна используется, чтобы
отделить этанол от воды. Система изображена на рис. 6.11.
Все основные переменные управляются с помощью двух входных и
двух выходных параметров.
Мы выберем отток (ui), чтобы управлять мольной долей этанола в
выходном продукте, находящегося в верхней части колонны (yi) и поток
в кипятильнике (г^) для управления смесью продукта в нижней части
194 Глава 6. Классическое ПИД-управление
Л
£ ) \ Холодная вода
[АС 1)—-^"Конденсатор
cz>©
Подача смеси
е—
Отток
-е
Дистиллят
—(тт)-—-(аСЯ
^ Пар
Остаток
Рис. 6.11. Дистилляционная колонна смеси этанола и воды
колонны. (Она определяется величиной у2 — температурой нижней
пластины.)
Линеаризованная для конкретного состояния модель выглядит
следующим образом:
где
ад
Gn(e) =
Gi2(s) =
G2l{s) =
G22(s) =
'Gn (в) Оф)] \\
G21(s) G22(s)\ [i
О.ббе
-2.6s
6.7s +1
-0.049e-8
9.065 + 1
-0.347e~9-2s
8.15s+ 1
0.87(11.6s + l)e-s
(6.7.1)
(6.7.2)
(6.7.3)
(6.7.4)
(6.7.5)
(3.89s+ 1) (18.8s+ 1)
Заметим, что время здесь задается в минутах.
Отметим также, что г*1 влияет не только на yi (через передаточную
функцию Gn), но также и на у2 (через передаточную функцию G21).
Аналогично и2 воздействует на у2 (через передаточную функцию G22)
и на yi (через передаточную функцию G12).
6.7. Дистилляционная колонна 195
I
[ ri(t)
_ f_ (
/ »i(«)
[ XT'
1 1 I
— -, , , , ,
га(0
1 J
\s~~
/»(*) j
1 Г 1 1
О 50 100 150 200 250 300 350 400 450
Время [мин]
л
2 <■>
Й*
К <D
VO О
О Й
3 ф
*3
о и
ЯЯ
«1з
Й
?
1.5
1
0.5
0
Рис. 6.12. Смоделированные результаты для ПИ-управления дистилляцион-
ной колонной
При проектировании двух ПИД-регуляторов мы первоначально
будем игнорировать две передаточные функции G\2 и G21. Такой подход
приводит к двум отдельным (и независимым) SISO-системам.
Результирующие регуляторы следующие:
п 9е*
С1(а) = 1 + — (6.7.6)
S
C2(s) = l + — (6.7.7)
s
Мы видим, что они ПИ-типа.
Чтобы проверить регуляторы в более реальных условиях,
используем эти регуляторы совместно с эталонной моделью, которая задается
уравнениями (6.7.1)-(6.7.5). Результат показан на рис. 6.12.
Схема для пакета SIMULINK (f ig6_12.mdl) находится на Web-сайте
книги в приложении, посвященном сопровождению MATLAB.
На рис. 6.12 ступенька эталонного сигнала (г\) для выхода у\
приложена в момент t = 50, а ступенька эталонного сигнала (гг) для выхода
г/2 приложена в момент t = 250.
Из рисунка можно видеть, что ПИД-регуляторы дают вполне
приемлемое решение этой задачи; однако он также показывает нечто общее в
практических приложениях, а именно, взаимодействие двух контуров:
изменение эталонного воздействия г\ не только вызывает изменение
2/1 (как требуется), но также и переходный процесс г/2- Аналогично,
изменение эталонного воздействия Г2 вызывает изменение г/2 (как
требуется), а также переходный процесс у\: В данном частном примере эти
взаимодействия, вероятно, настолько маленькие, что их можно считать
приемлемыми. Таким образом, как и для большинства промышленных
задач, мы нашли, что два простых ПИД- (фактически ПИ- в данном
196 Глава 6. Классическое ПИД-управление
случае) регулятора дают весьма приемлемое решение этой задачи.
Читатель может в интерактивном режиме попробовать другие регуляторы
для данной задачи на Web-сайте.
Наконец, читатель мог бы задаться вопросом, могли бы
взаимодействия, замеченные в вышеупомянутом примере, стать проблемой, если
бы потребовалось большее от регуляторов (например, более быстрые
реакции). При этих условиях взаимодействия могут стать важным
фактором. Поэтому приглашаем читателя прочитать части VI, VII и VIII,
где мы покажем, как с этими видами взаимодействий можно разобраться
строго в процессе проектирования систем управления. □□□
6.8. Резюме
• ПИ- и ПИД-регуляторы широко используются в промышленных
системах управления.
• С точки зрения современных взглядов ПИД-регулятор — просто
регулятор (до второго порядка включительно), содержащий интегратор.
Исторически, однако ПИД-регуляторы настраиваются в терминах
своих П-, И- и Д-компонентов.
• Экспериментально было найдено, что ПИД-структура часто имеет
достаточную гибкость, чтобы обеспечить отличные результаты во
многих приложениях.
• Базовая пропорциональная составляющая П формирует
корректирующее управляющее воздействие, пропорциональное ошибке.
• Интегрирующая составляющая И дает корректирующее воздействие,
пропорциональное интегралу от ошибки. Это имеет ту
положительную особенность, что в конечном счете можно обеспечить нулевую
ошибку слежения; однако интегрирующее действие имеет тенденцию
к дестабилизации в связи с увеличением фазового сдвига.
• Дифференцирующая составляющая Д дает прогнозирующую
способность, формирующую управляющее действие, пропорциональное
скорости изменения ошибки. Это обеспечивает стабилизирующий
эффект, однако часто приводит к большим управляющим сигналам.
• Можно использовать различные эмпирические методы настройки
ПИД-параметров для конкретного приложения. Они должны
рассматриваться как первое приближение в процессе проектирования.
• Нужно также обратить серьезное внимание на структуру ПИД-
регулятора.
• Систематические, основанные на моделировании процедуры для
ПИД-регуляторов будут рассмотрены в последующих главах.
6.10. Задачи для читателя 197
6.9. Литература для последующего чтения
1. Astrom, К. and Hagglund, T. (1984). A frequency domain method for
automatic tuning of simple feedback loops. In Proceedings of the 23rd IEEE
Conference oh Decision and Control, Las Vegas, NV, (l):299-304.
2. Astrom, K. and Hagglund, T. (1995). PID controllers: theory, design and
tuning. Instrument Society of America, 2nd edition.
3. Mellquist, M., Crisafulli, S., and MacLeod, I.M. (1997). Derivative filtering
issues for industrial PID controllers. In Proceedings of the I.E. Aust. Control
'97 Conference, Sydney, pages 486-491.
4. Mellquist, M., Crisafulli, S., and MacLeod, I.M. (1997). An investigation
of derivative filtering for PID controllers. Technical Report, Centre for
Control Engineering, University of the Witwatersrand, Johannesburg, South
Africa.
5. Rivera, D., Morari, M., and Skogestad, S. (1986). Internal model control. PID
controller design. Ind. Eng. Chem. Process Des. Dev., 25:252-265.
6. Voda, A. and Landau, I.D. (1995). A method for the auto-calibration of PID
controllers. Automatica, 31(l):41-53.
7. Ziegler, J. and Nichols, N.B. (1942). Optimum settings for automatic
controllers. Transactions of the ASME, 64:759-768.
6.10. Задачи для читателя
Задача 6.1. Рассмотрим следующие номинальные модели объекта G0 :
10
а)
б)
в)
г)
(5 + 1) (5+10)
1
(5 + 1)(5-2)
1
(*2 + 5 + 1)
1
(5 + 1)5
Найдите подходящие значения для параметров элементов ПИД-
семейства, чтобы управлять каждой из этих моделей.
Задача 6.2. Рассмотрим модель
Используйте стратегию настроек Коэна—Куна для синтеза ПИД-
регулятора при различных значениях а в интервале [0.1; 20].
Задача 6.3. Обсудите, существуют ли линейные объекты, которые
нельзя стабилизировать никаким ПИД-регулятором.
Проиллюстрируйте ваши заключения конкретными примерами.
198 Глава 6. Классическое ПИД-управление
Задача 6.4. Рассмотрим объект, устойчивый в разомкнутом состоянии,
со сложной динамикой и насыщением на входе. Предположите, что вы
моделируете экспериментальную установку в файле pidemp.mdl и что
вы хотите настроить ПИД-регулятор.
Не зная модель объекта, выполните следующее.
6.4.1. Найдите критическое усиление и период колебаний. Обсудите
использование колебаний параметра и, а также параметра у.
6.4.2. Определите настройки ПИД-регулятора.
6.4.3. Смоделируйте контур управления с настроенным регулятором.
Обсудите результат.
Задача 6.5. Рассмотрим объект с номинальной моделью
G»w=(jSp . (6Л0'2)
Определите настройки регулятора, которые можно получить методом
максимального усиления Зиглера—Никольса. •
Задача 6.6. Рассмотрим объект с номинальной моделью
Go(s) = §f^ (6.10.3)
Предположим, что вы используете метод настроек Коэна—-Куна.
6.6.1. Найдите запасы устойчивости по амплитуде и фазе для
различных отношений г/Т.
6.6.2. Найдите максимальную чувствительность для различных
отношений г/Т.
Задача 6.7. Синтезируйте ПИ-регулятор для объекта, имеющего
номинальную модель
ам = 7?тЬт? (в10-4)
таким образом, чтобы Мд > 10 дБ и М/ > 7г/4.
Задача 6.8. Рассмотрим объект с номинальной моделью
6.8.1. Синтезируйте ПИД-регулятор, чтобы получить дополнительную
чувствительность с шириной полосы, равной 2 рад/с.
6.8.2. Сравните ваши результаты с результатами, полученными с
помощью стратегии Коэна—Куна. Используйте временные и частотные
тесты.
Глава 7
Синтез SISO-регуляторов
7.1. Введение
В гл. 5 показано, что функционирование замкнутой системы управления
и ее устойчивость могут быть описаны четырьмя функциями
чувствительности. Главная особенность этих функций —то, что все из них
имеют одни и те же полюсы, называемые полюсами замкнутой системы.
Следовательно, эти полюсы определяют устойчивость и собственные
движения замкнутых систем. Основной вопрос синтеза поэтому звучит
так: дана модель; можно ли систематически синтезировать
регулятор, такой, что полюсы замкнутой системы будут иметь заданное
расположение? Данная глава покажет, что это действительно возможно.
Мы называем это назначением полюсов, которое является
фундаментальной идеей в синтезе систем управления.
В этой главе мы будем использовать описание систем полиномами,
что органично вытекает из анализа в гл. 5. В следующей главе мы
рассмотрим описание системы в пространстве состояний. Это обеспечит
естественный переход от SISO- к MIMO-системам управления (см. часть
VI) в последующих главах.
В данной главе также показано, как оба этих подхода могут быть
приспособлены к другим требованиям проекта, таким как нулевые ошибки
слежения в установившемся режиме и подавление возмущений.
Наконец, в эту общую структуру помещены ПИД-регуляторы и
показано, как их можно синтезировать, используя методы назначения
полюсов.
Вопрос, как выбирать значения полюсов замкнутой системы, чтобы
обеспечить требуемые эксплуатационные характеристики, является,
конечно, ключевой проблемой. Это — нетривиальный вопрос, который
следует рассматривать как часть сложной сети компромиссов
проектирования, связанных со всеми контурами обратной связи. Последнее будет
обсуждаться в следующей главе, посвященной задаче проектирования.
200 Глава 7. Синтез SISO-регуляторов
7.2. Подбор полинома
Напомним здесь описание объекта полиномами, данное в гл. 4.
Обозначим номинальную передаточную функцию объекта следующим образом:
B0(s)
G0(s) =
7.2.1. Основная формулировка
A0(s)
(7.2.1)
Рассмотрим номинальный контур, показанный на рис. 5.1. Напомним,
что в номинальном контуре управления передаточные функции
регулятора и номинальной модели имеют вид:
C(s) =
L(s)
G0(s) =
B0(s)
A0(s)
соответственно, с
-IS p +•
P(S) =PnpSn> +Pnp-lS"*-± + ■ ■ ■ +Po
L(s) = lniSni + fn,-!*"'-1 + • • • + k
B0(s) = bn-is"-1 + bn-2sn-2 + ■ ■ ■ + b0
A0(s) = ansn + an_isn_1 + • • • + o0
(7.2.2)
(7.2.3)
(7.2.4)
(7.2.5)
(7.2.6)
где мы считаем, что номинальная модель является строго собственной.
Рассмотрим теперь желаемый характеристический полином замкнутой
системы:
Ad(s) = acncsn< + al^s"'-1 + ■ • • + a§ (7.2.7)
Обсудим следующий вопрос: существует ли для произвольного
полинома Aci(s) соответствующая передаточная функция C(s), которая
приводит к тому, что Ad(s) будет характеристическим полиномом
замкнутой системы? Чтобы пояснить эту идею, рассмотрим
следующий пример.
Пример 7.1. Пусть G0(s) = ^44 — номинальная модель объекта с
A0(s) = s2 + 3s + 2, B0(s) = 1. Рассмотрим регулятор вида
C(s) =
L(s)'
P(s)=Pis+po; L(s) = hs + lo
(7.2.8)
Мы видим, что A0(s)L(s)+B0(s)P(s) = (s2+Zs+2)(hs+lo)+(pis+po) ■
Пусть мы хотим, чтобы он был равен полиному s3 + 3s2+3s + l; тогда
коэффициенты уравнения дают
0 0
0 0
1 0
0 1
h
lo
Pi
Ро
1
3
3
1
(7.2.9)
7.2. Подбор полинома 201
Легко проверить, что матрица размерности 4x4 невырожденная',
это означает, что мы можем решить систему относительно l\, lo, р\
и ро, что дает h = l, lo = 0, р\ = 1 и ро = 1. Следовательно, эюелаемый
характеристический полином моэюно получить с помощью регулятора
C(s) = (s + l)/s. □□□
В вышеупомянутом примере мы видели, что возможность задать
полюсы замкнутой системы зависит от невырожденности собственной
матрицы. Далее мы обобщим результат, однако чтобы сделать это,
нам потребуются следующие математические результаты относительно
взаимно простых полиномов.
Теорема 7.1 (Теорема Сильвестра). Рассмотрим полиномы
A{s) = ansn + an-is71-1 + •• • + а0 (7.2.10)
B(8) = bn8n + bn-i8n-1 + ---+b0 (7.2.11)
совместно со следующей результирующей матрицей
MG =
" ап 0
an_i ап
do
0
ао
0 0
0
0
Ьп 0
bn-i Ьп
ап 60 bi
an-i 0 &о
ао
0 0
О *
0
Ьп
Ьп-1
а0 J
(7.2.12)
Полиномы A(s) и B(s) взаимно просты тогда и только тогда, когда
det(Me)^0.
Доказательство
Тогда: Предположим, что A(s) и B(s) не взаимно простые. Тогда
существует общий корень г.
Запишем
(7.2.13)
(7.2.14)
А{8) = {8-гЖ_18п-1 + - + аЬ)
B(s) = (s-r)(b'n_1sn-l + ... + b'o)
Исключая (s — г), получим
A(s)(b'n_1sn-1 + --- + b'Q)-B(s)(a'n_1sn-1 + ---+a'0) = 0 (7.2.15)
Приравнивая коэффициенты у обеих сторон равенства, получим
Ме0 = О
(7.2.16)
202 Глава 7. Синтез SISO-регуляторов
где
0Т=К-1
Ь'о ~4-i
-<]
(7.2.17)
Однако (7.2.16) имеет нетривиальное решение тогда и только
тогда, когда det(Me) ф 0.
Только тогда: Доказывается отрицанием предыдущего
утверждения. DDD
Вооруженные этим результатом, мы теперь можем обобщить
пример 7.1, чтобы показать, что назначение полюсов обычно возможно при
условии удовлетворения некоторых минимальных требований.
Лемма 7.1 (Расположение полюсов характеристического
полинома SISO-системы). Рассмотрим замкнутый контур,
имеющий одну степень свободы, с регулятором и номинальной моделью,
заданными уравнениями (7.2.2)-(7.2.6). Предположим, что B0(s) и
A0(s) взаимно просты, т. е. не имеют никаких общих
сомножителей. Пусть Ad(s) — произвольный полином степени пс = 2га — 1.
Тогда существуют полиномы P(s) и L(s) степеней пр = гц = п — 1,
такие, что
A0(s)L(s) + B0(s)P(s) = Acl(s)
(7.2.18)
Доказательство
Приравнивая коэффициенты в левой и правой части (7.2.18), получим
"Jn-1
к
Рп-1
L Ро .
а\
2п-1
с 5 =
<*>п
0>п-\
ао
<*>п
, Gn-1
0
Ьп-1 ''•
Ьо
•.
•• о
Ьп-1
ао
Ьо J
(7.2.19)
В соответствии с теоремой Сильвестра (теорема 7.1) матрица S
невырожденная тогда и только тогда, когда полиномы В0 и Ао взаимно
просты. Это доказывает лемму. DDD
Рассмотрим теперь два дополнительных случая.
7.2. Подбор полинома 203
Случай 1, гас = 2га - 1 + к, где к — положительное целое число
Легко видеть, что в этом случае приемлемое решение получается, если
мы выберем щ = га — 1 + к. Тогда
L(s) = Lad(s) + L(s) (7.2.20)
Lad(s) = в^п-г+кв"-1 + •••+*„) (7.2.21)
L(5) = ^i5n-4--- + Z0 (7.2.22)
Прежде всего, коэффициенты Lad{s) можно получить,
приравнивая коэффициенты, соответствующие высшим к степеням s в
уравнение (7.2.18). Тогда лемма 7.1 может быть применена при замене L(s)
на L(s) и Aci(s) на Ad(s) — A0(s)Lad{$). Таким образом, решение всегда
существует, если A0(s) и B0(s) взаимно простые.
Случай 2, гас < 2га - 1
В данном случае нет решения, за исключением очень специального
выбора характеристического полинома Aci(s) замкнутой системы. Это
можно заметить, исходя из следующего.
• Номинальная модель строго собственная, а регулятор должен быть,
по крайней мере/бисобственным1. Отсюда мы имеем, что щ = пс — п.
• Тогда окончательно мы имеем, что пр = щ = гас — га. Это означает,
что есть по крайней мере т = 2гас — 2га+2 коэффициентов регулятора
для получения желаемого характеристического полинома замкнутой
системы. Заметим, что т = гас + 1 + (гас - 2га + 1), откуда, учитывая,
что для этого случая гас - 2га + 1 < 0, получим т < гас + 1.
• Приравнивание коэффициентов в (7.2.18) дает гас + 1 уравнений;
однако мы уже показали, что число неизвестных меньше, чем гас + 1.
Таким образом, набор уравнений в общем случае противоречив. DDD
Замечание 7.1. Мы не потеряем в общности, если предположим, что
полиномы A0(s), L(s) и Aci(s) являются нормированными. В
дальнейшем мы будем рассматривать именно этот случай. DDD
Замечание 7.2. Лемма 7.1 устанавливает условие, при котором
существует решение задачи назначения полюсов в случае, когда регулятор
является бисобственным. Однако когда требуется строго собственный
регулятор, тогда минимальные степени P(s) и L(s) долоюны быть
пр = п—1 ищ—п соответственно. Таким образом, чтобы моэюно было
произвольным образом выбирать характеристический полином Ad{s)
замкнутой системы, его степень должна быть равна 2га. DDD
1 Напомним, что рациональная передаточная функция бисобственная, если ее числитель
и знаменатель являются полиномами одной и той же степени.
204 Глава 7. Синтез SISO-регуляторов
Замечание 7.3. Никаких компенсаций неустойчивых полюсов и нулей
не допускается1. Это можно аргументировать следующим образом.
Любая компенсация нулей и полюсов между регулятором и моделью
объекта будет приводить к появлению соответствующего
сомножителя в A0(s)L(s) и B0(s)P(s). Однако для того чтобы уравнение
(7.2.18) удовлетворялось, таксисе необходимо, чтобы тот же самый
сомножитель присутствовал и в Aci(s). Так как Aci(s) выбран как
устойчивый полином, этот общий сомножитель также должен быть
устойчив. Только в этом случае гарантируется, что номинальный
замкнутый контур будет внутренне устойчив, то есть все четыре
функции чувствительности будут устойчивы. DDD
7.2.2. Ограничение решения
В последующих главах мы часто будем сталкиваться с тем, что
эксплуатационные характеристики системы могут потребовать, чтобы
регулятор удовлетворял некоторым дополнительным ограничениям. Когда
используется подход назначения полюсов полинома, некоторые из этих
требований могут быть удовлетворены добавлением дополнительных
полюсов или нулей. Проиллюстрируем это несколькими примерами.
Обеспечение интегрирования в контуре обратной связи
Стандартным требованием является то, что в установившемся состоянии
замкнутая система управления должна иметь нулевую ошибку по
отношению к постоянной составляющей эталонного сигнала либо входного
или выходного возмущения. Чтобы это обеспечить, необходимым и
достаточным условием является то, что номинальный контур должен быть
внутренне устойчив, а регулятор иметь, по крайней мере, один полюс
в начале координат. Это приведет к наличию нуля у соответствующей
функции чувствительности на нулевой частоте.
Чтобы получить это, выберем
L(s)=sL(s) (7.2.23)
Тогда уравнение (7.2.18) для замкнутой системы может быть
переписано следующим образом:
A0{s)L{s)+B0{s)P{s) = Ad{s) с A0{s) = sA0{s) (7.2.24)
Решение задачи назначения полюсов можно теперь рассматривать
как эквивалентную задачу для модели степени п = п + 1. Предыдущие
1 Впоследствии, пока мы не скажем что-то другое, выражение «компенсация нулей и
полюсов» будет означать компенсацию полюса объекта нулем регулятора и наоборот.
7.2. Подбор полинома 205
результаты могли бы означать, что Ac[(s) может быть произвольно
определен тогда и только тогда, когда его степень по крайней мере
2п — 1 = 2п+1; однако в данном случае дело упрощается, потому что мы
можем допустить степень P(s) на единицу больше, чем степень Z(s),
потому что регулятор будет все еще собственный. Это означает, что
минимальная степень Ad(s) равна 2п.
Обеспечение компенсации полюсов и нулей
Иногда желательно, чтобы регулятор компенсировал некоторые
устойчивые полюсы и/или нули модели объекта. Чтобы проиллюстрировать,
как это можно включить в стратегию назначения полюсов, рассмотрим
специальный случай, когда только один полюс номинальной модели,
скажем, s = —р, должен быть скомпенсирован.
Чтобы скомпенсировать сомножитель {s+p) в A0(s)1 этот
сомножитель должен также присутствовать и в P(s). Уравнение (7.2.18) тогда
имеет решение, когда тот же самый сомножитель присутствует в Aci(s).
Чтобы решить уравнение (7.2.18), сомножитель {s+p) можно удалить
из обеих сторон уравнения.
Расширение на многократные компенсации очевидно.
Замечание 7.4. Скомпенсированные полюсы и нули номинальной
модели будут тем не менее присутствовать в качестве полюсов и нулей в
некоторых передаточных функциях замкнутой системы. Приведенное
выше обсуждение показывает, что любая компенсация приведет к
наличию этого скомпенсированного сомножителя в характеристическом
полиноме Aci(s) замкнутой системы.
Чтобы быть более точным, любой скомпенсированный полюс модели
объекта будет полюсом в номинальной входной чувствительности
Sio{s) и нулем в номинальной чувствительности по управлению Suo(s).
Аналогично, любой скомпенсированный нуль модели объекта будет
полюсом в номинальной чувствительности по управлению Suo(s) и нулем
eSi0(s). DDD
Следующие примеры иллюстрируют технику назначения полюсов
характеристического полинома.
Пример 7.2. Рассмотрим номинальную модель, заданную следующим
образом:
Первоначальное проектирование без ограничений требует выбора
степени Aci(s), равной, по крайней мере, трем. Например, мы могли
бы выбрать Aci(s) = (s2 + 5s + 16)(s +40). Полиномы P(s) и L(s) име-
206 Глава 7. Синтез SISO-регуляторов
ют тогда степень 1. Уравнение для характеристического полинома,
которое нужно решить, будет
{s + l){s + 3){s + l0) + 3(pis+po) = {s2 + 5s + 16){s + 40) (7.2.26)
которое после приравнивания коэффициентов даст
4Q ^17
/о = 41 pi = y po = ^L (7.2.27)
С другой стороны, если ввести ограничение, что регулятор должен
обладать интегрирующими свойствами, то Aci(s) нужно выбрать,
по крайней мере, степени 4. Примем также, для иллюстрации, что
полюс модели при s = — 1 должен быть скомпенсирован. Уравнение
для характеристического полинома, которое теперь нужно решить,
становится следующим:
5(5 + l)(5+3)(5+*o)+3(5 + l)(pi5+Po) = (s + l)(s2+5s + 16)(s+40) (7.2.28)
После удаления общего сомножителя (s +1) и приравнивания
коэффициентов, мы окончательно получим
1 АО п чп п 64° =ыи\ (* + 1)(90* + 640)
/0 =42 Р1=30 ро = — =>С{з)= (7.2.29)
DDD
Пример 7.3. Объект имеет номинальную модель, заданную
выражением G0(s) = ^зр Цель управления — отследить синусоидальный
эталонный сигнал частоты 2 рад/с неизвестной амплитуды и фазы.
Спроектировать регулятор, который стабилизирует объект и
формирует нулевую ошибку в установившемся состоянии.
Решение
Будем использовать назначение полюсов характеристического
полинома. Сначала рассмотрим порядок полинома Ad(s) который следует
сформировать. Требование нулевой установившейся ошибки для
данного эталонного сигнала означает:
S0{±j2) =0<=> G0{±j2)C{±j2) = oo (7.2.30)
Ограничение в уравнении (7.2.30) может быть удовлетворено для
данного объекта тогда и только тогда, когда регулятор C(s) имеет
полюсы при ±j2. Таким образом,
C(s) = Щ= , g P}*} , ч (7.2.31)
KJ L(s) (s2+4)Lad(s) y
Это означает, что Ad(s) можно произвольно задать, если его
степень, по крайней мере, равна 3. Выберем Ad(s) = (s2 +4s + 9)(5 + 10).
Это приводит к Lad(s) = 1 и P(s) =P2S2 +p\s +po-
P(s) = 15s2 + 455 + 94 => C(s) = 2 "A (7.2.33)
7.3. ПИ- и ПИД-синтез; повторное рассмотрение с позиций назначения полюсов 207
Тогда уравнение назначения полюсов равно:
{s-l){s2+4)+p2s2+pls+p0 = {s2 + 4s + 9){s + 10) (7.2.32)
Раскрывая произведения полиномов и приравнивая коэффициенты,
окончательно получим
15s2 + 45s + 94
52+4
С другими многочисленными задачами читатель может
познакомиться, используя программу рад.т пакета MATLAB на прилагаемом
CD-ROM. DDD
Идея относительно выбора C(±j2) = oo в вышеупомянутом
примере—фактически особый случай принципа внутренней модели (ПВМ).
Это будет детально рассмотрено в гл. 10. Вышеупомянутый подход
назначения полюсов вводит дополнительную динамику в контур
управления. Основная концепция такого подхода заключается в том, что,
используя обратную связь, можно собственные частоты системы сдвинуть
в произвольные положения при условии, что выполняются некоторые
условия.
Чтобы решить уравнение для полиномов, требуется, чтобы полиномы
А0 и В0 были взаимно просты. Мы дали алгебраическое обоснование
этого требования. Можно также дать этому результату интерпретацию
на основе, пространства состояний. Действительно, взаимная простота
А0 и В0 оказывается эквивалентной полной управляемости и
наблюдаемости соответствующей модели пространства состояний. Мы исследуем
эти проблемы пространства состояний в гл. 18.
7.3. ПИ- и ПИД-синтез; повторное рассмотрение
с позиций назначения полюсов
Напомним читателю, что синтез ПИ- и ПИД-регуляторов,
использующий классические методы, был рассмотрен в гл. 6. В данном разделе мы
оформим эти результаты более современным способом, обсуждая синтез
ПИ- и ПИД-регуляторов с позиций назначения полюсов.
В этом разделе мы рассмотрим замкнутые системы управления с
одной степенью свободы, включающие ПИ-регуляторы вида
CPI{s)=Kp + ^ (7.3.1)
и собственные ПИД-регуляторы вида
Cpid(s)=Kp + ^ + -^- (7.3.2)
s tds +1
208 Глава 7. Синтез SISO-регуляторов
В дальнейшем мы воспользуемся следующим альтернативным
представлением ПИД-регулятора.
Лемма 7.2. Любой регулятор вида
C{S) ~ d2s> + dls (7ЛЗ)
идентичен ПИД-регулятору (7.3.2), где
Kp = nldl^n0d2 (?34)
*/ = £ (7.3.5)
П2<1\ - nidid,2 + п0^2 ,- 0 дч
Ад = ^3 (Y.d.bj
тс = | (7.3.7)
Доказательство
Следует непосредственно из сравнения (7.3.2) с (7.3.3). □□□
Как видно из (7.3.1), проектирование ПИ-регулятора требует
настройки двух констант, Кр и Kj, в то время как ПИД-регулятор требует
двух дополнительных констант Кр и тр. Однако вместо
непосредственной их настройки можно автоматически их синтезировать, используя
назначение полюсов.
Если мы предположим, что объект может быть (по крайней мере,
приблизительно) представлен моделью второго порядка, то мы
можем сразу же использовать назначение полюсов для синтеза ПИД-
регулятора. Ссылаясь на разд. 7.2.2, мы просто выберем
степень А0 (s) =2
степень B0(s) <1
степень L(s) =1
степень P(s) =2
степень Лс/($)=4
Если объект содержит запаздывание, как в (6.4.1), то мы должны
получить приблизительную модель второго порядка прежде, чем сможем
перейти к основным действиям. Один из способов сделать это состоит в
том, чтобы аппроксимировать запаздывание системой первого порядка,
имеющей постоянное усиление на всех частотах. В этом случае (6.4.1)
будет приблизительно смоделировано в виде
G(s) =
Ке
—ST
V0S + l
К 1 Г-^ + 1
2
V0S + l\ I ^ + 1
^ G0{s) (7.3.8)
7.4. Упредитель Смита 209
Пример 7.4. Объект имеет номинальную модель, заданную
выражением 2
Синтезируйте ПИД-регулятор, который обеспечивает замкнутую
систему с динамикой, определяемой сомножителем s2 + 45 + 9.
Решение
Регулятор синтезируется решением уравнения назначения полюсов со
следующими количественными характеристиками:
Ac/(s) = (s2 + 4s + 9)(s + 4)2; B0{s) = 2; A0(a) = s2 + 3s + 2 (7.3.10)
где сомножитель (s + 4)2 был добавлен для гарантии, что уравнение
назначения полюсов имеет решение. Заметим, что этот
сомножитель формирует составляющие в процессе, которые быстрее, чем те,
которые формируются сомножителем s2 + 4s + 9.
Решение уравнения назначения полюсов дает
P(s) _14s2 + 59s + 72
C{S) -7Щ- s(s + 9) (7-3-U)
Учитывая лемму 7.2, мы видим, что C(s) — ПИД-регулятор с
параметрами
Кр = 5.67; Kj = 8; #я = 0.93; rD = 0.11 (7.3.12)
Важно заметить, что решение этой задачи для
рассматриваемой модели G0(s) дает структуру ПИД-регулятора. Для более
высокого порядка G0(s) полученный регулятор, вообще говоря, не будет
ПИД-регулятором. ' DDD
7.4. Упредитель Смита
Временные задержки довольно обычны в реальных задачах управления,
так что важно исследовать, можно ли улучшить функционирование,
полученное с помощью простого ПИД-регулятора. Это особенно важно,
когда запаздывание доминирует в реакции системы.
Для случая устойчивых объектов хороший результат
обеспечивается упредителем Смита. Основная идея здесь состоит в том, чтобы
создать параллельную модель, которая компенсирует запаздывание (см.
рис. 7.1). На этом рисунке мы предполагаем, что модель объекта имеет
вид
G0(s)=e~STG0(s) (7.4.1)
210 Глава 7. Синтез SISO-регуляторов
Из рис. 7.1 можно видеть, что проектирование регулятора C(s) может
быть выполнено путем использования части модели, не содерэюащей
запаздывание — (50(s), потому что запаздывание будет скомпенсировано
параллельной моделью. Таким образом, мы можем спроектировать
регулятор с псевдо-дополнительной функцией чувствительности Tzr(s)
между сигналами г и г, которая не имеет никакого запаздывания в контуре.
Это можно было бы сделать с помощью стандартного ПИД-регулятора,
который дает
G0(s)C(s)
Tzr(s) =
l + G0(s)C(s)
(7.4.2)
В свою очередь, это дает номинальную дополнительную
чувствительность между сигналами г и у в виде
T0(s) = e-°TTzr(s) (7.4.3)
Относительно этого результата можно сделать четыре вывода.
1. Хотя схема выглядит вроде «затычки», в гл. 15 будет показано,
что такая структура неизбежна, поскольку она входит в набор всех
возможных стабилизирующих регуляторов для номинальной системы
(7.4.1)._
2. Если G0(s) проста (например, не имеет никаких неминимально-
фазовых нулей), то C(s) может быть выбрана такой, что Tzr(s) « 1;
однако из (7.4.3), мы видим, что это приводит к идеальному
результату T0(s) = е~5т.
3. Имеются существенные проблемы робастности, связанные с этой
структурой. Они будут рассмотрены в разд. 8.6.2.
4. Нельзя использовать вышеупомянутую структуру, когда
разомкнутая система неустойчива.
Регулятор
R(s)\
+
о-
♦ -
C(s)
U(s)
Объект
\e-3TGo(s)
G0(s)
Y(s)
-<s
+
1+
О
\Z(3)
Рис; 7.1. Структура упредителя Смита
7.5. Резюме 211
7.5. Резюме
• Эта глава посвящена вопросам синтеза и задает следующий общий
вопрос.
Дана модель Gq(s) = д4и- Как можно синтезировать регулятор
C(s) = jffi, такой, что замкнутая система управления будет обладать
конкретными свойствами?
• Напомним следующее.
о Полюсы серьезно влияют на динамику передаточной функции.
о Полюсы четырех чувствительностей, определяющих замкнутый
контур, одни и те же, а именно, они являются корнями
характеристического уравнения A0(s)L(s) +B0(s)P(s) = 0.
• Следовательно, основной вопрос синтеза выглядит так:
Дана модель; можно ли синтезировать регулятор, такой, что
полюсы замкнутой системы (т. е. полюсы чувствительностей) имеют
заранее заданное положение?
• Математическая формулировка этого вопроса такова:
Даны полиномы A0(s),B0(s) (определяющие модель) и задан
полином Ad(s) (определяющий желаемое расположение полюсов
замкнутой системы); можно ли найти полиномы P(s) и L(s), такие,
что A0(s)L(s) +B0{s)P(s) = Aci(s)? Эта глава показывает, что такое,
действительно, возможно.
• Уравнение A0(s)L(s) + B0(s)P(s) — Aci(s) известно как диофантово
уравнение.
• Синтез регулятора путем решения диофантова уравнения известен
как метод размещения полюсов. Имеется несколько эффективных
алгоритмов и коммерческое программное обеспечение для их
реализации.
• Синтез гарантирует, что созданная замкнутая система управления
обладает некоторыми конструктивными свойствами.
о Однако полная реализация системы определяется рядом
дополнительных свойств, вытекающих из технических требований.
о Сочетание конструктивных и дополнительных свойств приводит к
компромиссам.
• Проектирование связано с решением следующих проблем:
о эффективно определить, возможно ли решение, адекватно
удовлетворяющее техническим требованиям и каковы препятствующие
факторы;
о выбор конструктивных характеристик такими, что поведение
системы, обусловленное взаимодействием конструктивных и
дополнительных свойств, удовлетворяет техническим требованиям.
212 Глава 7. Синтез SISO-регуляторов
• Это —тема следующей главы.
7.6. Литература для последующего чтения
Общие вопросы
1. Horowitz, I. (1991). Survey of quantitative feedback theory (qft). International
Journal of Control, 53(2):255-291.
2. Stephanopoulos, G. (1984). Chemical Process Control: An Introduction to
Theory and Practice. Prentice-Hall, Englewood Cliffs, N.J.
Проектирование ПИД-регуляторов
1. Astrom, К. and Hagglund, T. (1995). PID controllers: theory, design and
tuning. Instrument Society of America, 2nd edition.
Проектирование ПИД-регуляторов с использованием модели
1. Graebe, S.F. and Goodwin, G.C. (1992). Adaptive PID design exploiting partial
prior information. Preprints of the J^th IFAC Symp. on Adaptive Systems in
Control and Signal Processing, AC ASP '92, Grenoble, Prance, 395-400.
2. Isaksson, A.J. and Graebe, S.F. (1993). Model reduction for PID design.
In Proceedings of the 12th IFAC World Congress, Sydney, Australia, 5:467-
472.
3. Isaksson, A.J. and Graebe, S.F. (1999). Analytical PID parameter expressions
for higher order systems. Automatica, to appear.
4. Morari, M. and Zafiriou, E. (1989). Robust process control Prentice-Hall,
Englewood Cliffs, N.J.
• 5. Rivera, D., Morari, M., and Skogestad, S. (1986). Internal model control. PID
controller design. Ind. Eng. Chem. Process Des. Dev., 25:252-265.
Упредитель Смита
1. Smith, О. (1958). Feedback control systems. McGraw-Hill, New York.
7.7. Задачи для читателя
Задача 7.1. Рассмотрим объект, имеющий номинальную модель G0{s).
Допустим, что замкнутый контур управления представляет собой
контур с одной степенью свободы и регулятором с передаточной функцией
C(s), где
G»<<> = (7TT5W CW = ^ ("Л)
Найдите условия для а и 6, при которых номинальный контур
обратной связи устойчив.
7.7. Задачи для читателя 213
Задача 7.2. Тот же самый номинальный объект, что и в задаче 7.1,
управляется таким образом, чтобы обеспечить нулевую установившуюся
ошибку при ступенчатых возмущениях, а замкнутый контур обладает
тремя доминирующими полюсами при s = — 1.
7.2.1. Найдите передаточную функцию регулятора C(s), которая
удовлетворяет этим требованиям.
7.2.2. Почему ваш результат специфический?
Задача 7.3. Найдите регулятор C(s) для следующих данных
Во (а)
1
-S + 6
S + 1
A0(s)
(s + l)(s+-2)
(s + 4)(s-l)
(s + 7)s2
Acl(s)
(s2+4s + 9)(s + 8)
(s + 2)3
(s + l)(s + 7)(s + 4)3
Задача 7.4. Объект имеет номинальную модель, заданную выражением
G0(s)
— (5+4)3(5+2) • Используя технику размещения полюсов полинома
для синтеза регулятора, следует получить:
• нулевые установившиеся ошибки для постоянных возмущений;
• компоненты переходного процесса замкнутого контура, затухающие
быстрее, чем е~3*.
Задача 7.5. Замкнутая система синтезирована для управления
объектом, имеющим номинальную модель G0(s) = * ГЛ^л, таким образом,
чтобы достигнуть следующие цели:
• нулевую установившуюся ошибку при постоянном эталонном входном
сигнале;
• нулевую установившуюся ошибку для синусоидального возмущения
частоты 0.25 рад/с;
• бисобственную передаточную функцию регулятора C(s).
Используйте метод размещения полюсов, чтобы получить
соответствующий регулятор C(s).
Задача 7.6. Рассмотрим объект, имеющий номинальную модель
8
Go(s) =
(s + 2)(s + 4)
(7.7.2)
7.6.1. Синтезируйте регулятор C(s) такой, что характеристический
полином замкнутой системы будет Ad(s) = (s+a)2(s + 5)2 для а = 0.1
и а = 10.
214 Глава 7. Синтез SISO-регуляторов
7.6.2. Обсудите ваши результаты относительно структуры размещения
полюсов и нулей передаточной функции C(s).
Со(*) = 77ГШ (7-7-3)
Задача 7.7. Номинальная модель объекта дается выражением
J_
(* + 1)2
Этот объект должен управляться контуром обратной связи с одной
степенью свободы. Используя подбор полюсов полинома, спроектируйте
строго собственный регулятор C(s), который размещает полюсы
замкнутой системы в точках, соответствующих корням уравнения Aci(s) =
(s2 + 4s + 9)(5 + 2)к, к € N (Выберите подходящее значение к.)
Задача 7.8. Номинальная модель объекта дана выражением
g-W-(.+i)('-.+a) <"-4>
Предположим, что этот объект должен управляться контуром
обратной связи с одной степенью свободы таким образом, что
характеристический полином замкнутой системы имеет доминирующие полюсы,
определяемые сомножителем s2 + 7s + 25.
Используя подбор полинома, выберите подходящую минимальную
степень Ad(s) и синтезируйте бисобственный регулятор C(s).
Задача 7.9. Рассмотрим линейный объект с входом u(t), выходом y(t)
и входным возмущением d(t). Предположим, что модель объекта имеет
вид
Y(s) = -\(U(s) + D(s)) (7.7.5)
Далее предположим, что возмущение — синусоидальное, частоты
2 рад/с, имеющее неизвестную амплитуду и фазу.
Используйте подход назначения полюсов для синтеза регулятора
C(s), который обеспечивает нулевые установившиеся ошибки для
данного возмущения и постоянной уставки.
Используйте подход, связанный с подбором полинома, для
определения подходящего характеристического полинома замкнутой системы
Ad(s). (Подсказка: используйте программу paq.m пакета MATLAB на
прилагаемом CD-ROM.)
Задача 7.10. Рассмотрим объект с номинальной моделью
Постройте такой упредитель Смита, при котором доминирующие
полюсы замкнутой системы имеют значения s = —2± j0.5.
ЧАСТЬ 111
ПРОЕКТИРОВАНИЕ
SISO-СИСТЕМ УПРАВЛЕНИЯ
Введение
В предыдущей части книги мы представили основные методы синтеза
систем управления. Они являются элементами, используемыми для
расчета регуляторов с целью достижения заданных характеристик.
Однако это выявляет, что желаемые эксплуатационные свойства
нельзя рассматривать независимо, потому что они формируют
переплетенную сеть компромиссов и ограничений. Быстрая компенсация
возмущений не может рассматриваться, например, независимо от общих
требований нечувствительности к ошибкам моделирования или
ограничения сигнала управления и сохранения энергии. Таким образом,
инженер по системам управления должен уметь выбрать подходящее
решение в этой сложной сети взаимодействий, компромиссов и
ограничений. Выполнять это систематическим и преднамеренным способом —
вот что мы называем проектированием систем управления.
Проектирование, которое является ключевой задачей инженера по
системам управления, основывается на глубоком понимании анализа,
синтеза и ограничений проектирования. Первые две главы этой части
книги охватывают основные ограничения проектирования во временной
и частотной областях. В третьей главе рассматриваются идеи, которые
обычно используются на практике, включая упреждение и каскадные
структуры. Заключительная глава обсуждает пути решения проблем,
связанных с насыщением на входе и ограничениями скорости
нарастания сигнала. Это — типичные задачи реального проектирования систем
управления.
Глава 8
Фундаментальные
ограничения
SISO-управления
8.1. Введение
Результаты предыдущих глав позволяют нам определять отношения
между переменными в контуре управления. Мы также познакомились
с некоторыми ключевыми передаточными функциями, которые можно
использовать для количественной оценки функционирования замкнутой
системы и которые показывают, что при разумных условиях полюсы
замкнутой системы могут быть заданы произвольно; однако все эти
операции относятся скорее к синтезу, нежели проектированию.
Связанный с проектированием вопрос: где следует разместить полюсы
замкнутой системы? Это и является теми проблемами, которые мы
начинаем изучать. Оказывается, что вопрос о том, где разместить
полюсы замкнутой системы — часть более емкого вопроса относительно
фундаментальных законов разрешения компромиссов при
проектировании систем управления с обратной связью. Эти фундаментальные
законы, или ограничения, говорят нам, что достижимо и, наоборот, что
не достижимо в системах управления с обратной связью. Ясно, что
это находится в самом сердце разработки систем управления. Поэтому
мы настоятельно рекомендуем студентам прочувствовать эти проблемы.
Фундаментальные законы связаны, с одной стороны, с природой контура
обратной связи (например, имеется ли интегрирование) и, с другой
стороны, со структурными особенностями самого объекта.
Ограничения, которые мы исследуем здесь, включают следующее:
• датчики;
• исполнительные механизмы:
о максимальные перемещения,
о минимальные перемещения;
• неточности модели;
• структурные вопросы, включая следующее:
о полюсы в открытой ППП,
о нули в открытой ППП,
218 Глава 8. Фундаментальные ограничения SISO-управления
о нули, которые являются устойчивыми, но близки к началу
координат комплексной плоскости,
о полюсы на мнимой оси,
о нули на мнимой оси.
Мы также кратко рассмотрим возможные способы учета этих
ограничений.
8.2. Датчики
Датчики — ответственная часть любого проекта системы управления,
потому что они обеспечивают необходимую информацию, на основе
которой функционирует регулятор. Они —глаза регулятора.
Следовательно, любая ошибка или существенный дефект в системе измерения
будут существенно влиять на работу. Напомним, что для номинального
объекта G0(s) и заданного регулятора C(s) при единичной обратной
связи функции чувствительности имеют, вид:
G0(s)C(s) • B0(s)P(s)
0{S) l + G0(s)C(s) A0(s)L(s)+B0{s)P(s) {°^4
? ,_ч 1 ■■ A0(s)L(s)
°oW l + G0(a)C(s) A0(s)L(s)+B0(s)P(s) {°^ >
G0(s) B0(s)L(s)
• *°W l + G0(s)C(s) A0(s)L(s) + B0(s)P(s) ^^
<? (*= CW = Ms)P(s) .
uo{ ' l + G0(s)C(a) A0(s)L(s) + B0(s)P(s) K°"6' >
где Goto = J$ и C(s) = Щ.
Мы исследуем два аспекта ограничений датчика — проблему шумов
и динамику датчика.
8.2.1. Шумы
Одна из наиболее общих проблем датчика — это шум измерения. В гл. 5
было показано, что влияние шума измерения в номинальном контуре
можно задать следующим образом:
Ym(a) = -T0(s)Dm(s) (8.2.5)
Um(s) = SU0(s)Dm(s) (8.2.6)
где ym(t) и um(t) —соответственно компоненты выходных сигналов
объекта и регулятора, обусловленные шумом измерения.
8.3. Исполнительные механизмы 219
Из уравнения (8.2.5) мы можем заметить, что вредный эффект шума
может быть уменьшен если |T0(jo;)| мал в том диапазоне частот, где
\Dm(ju)\ велик. Таким образом, мы можем сделать следующий вывод:
Учитывая факт, что шум измерения обычно находится в диапазоне
высоких частот, он, как правило, устанавливает верхнюю границу
полосы пропускания контура.
8.2.2. Динамика датчика
Другим общим ограничением, накладываемым системами измерения,
является тот факт, что датчики сами часто имеют динамические
характеристики. Как простой пример, большинство термопар помещено
для их защиты в специальные корпуса, однако такой корпус дает
дополнительную задержку в реакцию термопары и может даже доминировать
в ее реакции. Это может быть смоделировано в предположении, что
измеренная выходная величина ym(t) связана с истинной выходной
величиной y(t) следующим образом:
¥М = —ГГ7П*) (8-2.7)
TiS + l
Можно было бы подумать, что это ограничение легко исключить,
пропуская ym(t) через соответствующий высокочастотный фильтр.
Например, мы могли бы использовать
Ymf = ^±jym(5) 7i > r2 (8.2.8)
J r2s +1
Однако если мы снова вернемся к проблеме шума измерения, то
можно увидеть, что высокочастотный фильтр (8.2.8) будет существенно
усиливать высокочастотный шум и это снова приведет к ограничению
полосы пропускания.
8.3. Исполнительные механизмы
Если датчики являются глазами системы управления, то
исполнительные механизмы являются ее мускулами; однако исполнительные
механизмы также являются и источниками ограничений в
функционировании системы. Мы исследуем два аспекта ограничений исполнительных
механизмов. Ими являются максимальное перемещение и минимальное
перемещение.
220 Глава 8. Фундаментальные ограничения SISO-управления
8.3.1. Максимальное перемещение
исполнительного механизма
Практически все исполнительные механизмы имеют ограничения
максимального перемещения в форме насыщения по амплитуде или
ограничения скорости нарастания. Чтобы видеть, как ограничения
максимального перемещения определяют доступное функционирование, заметим, что
пики управляющих действий обычно происходят в результате больших
быстрых изменений или эталонного входного воздействия, или
выходного возмущения (входные возмущения обычно фильтруются самим
объектом). Напомним, что в контуре с одной степенью свободы выход
регулятора определяется следующим образом:
где
U(s) = SU0(s)(R(s)-D0(s))
■ s Ы^^-
(8.3.1)
(8.3.2)
Если полоса пропускания контура много больше, чем у модели
объекта G0(s)} то передаточная функция Suo(s) значительно увеличит
высокочастотные компоненты R(s) и D0(s). Это проиллюстрировано в
следующем примере.
Пример 8.1. Рассмотрим объект и замкнутый контур, заданные
выражениями
10 "ч 100
G0{s) =
(s + 10)(s + l)
и T0(s) =
s2 + 12s +100
(8.3.3)
Частотная характеристика
чувствительности по управлению
Частота [рад/с]
Реакция на ступенчатое
выходное возмущение
0.4 0.6
Время [с]
Рис. 8.1. Влияние большого отношения полос пропускания замкнутого
контура и объекта
8.3. Исполнительные механизмы 221
Заметим, что полосы пропускания объекта и замкнутого
контура имеют отношение примерно 10 : 1. Это отразится на большой
чувствительности по управлению \SU0(ju))\ на высоких частотах,
которая, в свою очередь, приведет к большому начальному воздействию
на объект при наличии высокочастотных эталонных сигналов или
возмущений. Данная ситуация иллюстрируется на рис. 8.1, где
показаны величина чувствительности по управлению и выходная величина
регулятора при единичном ступенчатом выходном возмущении. DDD
В этом примере мы видим, что если полоса пропускания замкнутого
контура в 10 раз больше полосы пропускания разомкнутой системы,
начальное воздействие на объект в 10 раз больше установившегося
значения при ступенчатом воздействии на систему. Эта связь между
полосой пропускания и величиной входного воздействия на объект —
очень грубая приближенная оценка. Предлагаем читателю посмотреть
различные учебные примеры на Web-сайте и попробовать изменять
полосу пропускания путем изменения коэффициента усиления регулятора,
наблюдая влияние этого изменения на максимальное значение входа
объекта.
Исполнительные устройства часто также обладают и ограниченной
максимальной скоростью, с который они могут изменять положение.
Это обычно называется ограничением скорости нарастания. Если такое
ограничение присутствует, оно будет причиной отличия от
функционирования, определяемого полностью линейным проектом.
Мы можем получить качественное понимание влияния ограничения
скорости нарастания, замечая, что входной сигнал объекта определяется
выражением
U(s) = Suo(s)[R{s) - D0{s)] (8.3.4)
Следовательно, скорость изменения входного сигнала объекта равна
sU(s) = Suo(s)[sR(s) - sD0{s)} = ^\[sR(s) - sD0(s)} (8.3.5)
Таким образом, если полоса пропускания замкнутой системы намного
больше, чем у объекта, то скорость изменения сигнала на входе объекта
будет непременно больше для быстрых изменений r(t) и d0(t).
Следовательно, мы можем сделать следующий вывод:
Чтобы устранить проблемы насыщения исполнительного механизма
или ограничения скорости нарастания, обычно необходимо
ограничить сверху полосу пропускания замкнутого контура.
222 Глава 8. Фундаментальные ограничения SISO-управления
8.3.2. Минимальное перемещение исполнительного механизма
В разд. 8.3.1 мы узнали, что качество контура управления ограничено
максимальным перемещением, доступным исполнительному механизму.
Это эвристически разумно. Что является, возможно, менее очевидным,—
это то, что системы управления часто также ограничиваются
минимальными перемещениями исполнительного механизма. Действительно,
в опыте авторов много реальных задач управления, связанных именно
с этим.
Минимальные перемещения исполнительного механизма часто
связываются с эффектами трения, когда исполнительный механизм
залипает. Когда исполнительный механизм находится в таком состоянии,
интеграторы (и у объекта, и у регулятора) будут накапливать выходную
величину, пока не сформируется достаточное усилие, чтобы преодолеть
статическое трение. Проявление этой проблемы — обычно в
возникновении автоколебаний, поскольку исполнительный механизм проходит
цикл: залипания, перемещения, залипания и т. д. Частота колебаний
обычно на/или около частоты, где фазовый сдвиг контура равен 180°.
Пример 8.2 (Непрерывное литье). Рассмотрим снова регулятор
уровня изложницы, описанный в разд. 2.3. Известно, что многие
регуляторы уровня изложницы в промышленности обладают плохими
характеристиками из-за автоколебаний (см. для примера реальные
данные, показанные на рис. 8.2). Много объяснений было дано этому
явлению; однако по крайней мере, в системе, с которой авторы знакомы,
трудность была непосредственно связана с проблемами минимального
перемещения исполнительного механизма (привод клапана). DDD
4 5
Время [мин]
Рис. 8.2. Диаграмма самописца, показывающая колебания в обычной системе
управления уровнем изложницы
8.4. Возмущения
Другой источник ограничения функционирования в реальных системах
управления — возмущения. Этот эффект также может быть оценен с
помощью соответствующих функций чувствительности контура. Чтобы
8.5. Ограничения, связанные с неточностью модели 223
быть более точным, рассмотрим выражение, уже полученное в гл. 5 для
влияния возмущений на выход объекта:
Y(s) = Si0{s)Di{s) + S0{s)D0(s) (8.4.1)
Предположим, что входные и выходные возмущения имеют
существенную мощность только в полосах частот Bw{ и Bwo
соответственно. Тогда ясно, что желательно иметь маленькие значения \S0(ju)\ и
\Si0{ju)\ в этих же полосах частот Bw{ и Bwo соответственно. Поскольку
G(s) фиксирована, это может быть достигнуто только при условии, что
So(ju) ~ 0 и, следовательно, T0(ju) « 1 в полосе частот, объединяющей
И
Отсюда можно сделать следующий вывод.
Чтобы обеспечить приемлемое функционирование в присутствии
возмущений, обычно нужно выбрать соответствующую нижнюю
границу полосы пропускания замкнутого контура.
8.5. Ограничения,
связанные с неточностью модели
Другой ключевой источник ограничений функционирования связан с
неадекватностью модели, используемой в качестве основы для
проектирования системы управления. Чтобы проанализировать эту задачу,
нам нужно различать номинальное функционирование и истинное, или
реальное, функционирование. Обычно проектирование базируется на
номинальной модели, а затем добавляется требование, чтобы
функционирование было нечувствительно к различию между истинной и
номинальной моделью. Это свойство, определенное в гл. 5, обычно
называется робастностью (ошибкоустойчивостью).
Мы видели в гл. 5, что эти различия могут быть выражены как
различия между номинальной и соответствующей истинной
чувствительностью. Основная функция для количественного определения этих
различий, введенная в той главе, называлась чувствительностью ошибки
Sa(s), которая определяется выражением
Sa(s) = . ,ТДГ м (8.5.1)
1+T0(s)Ga{s)
где Ga{s) — мультипликативная ошибка моделирования.
Моделирование обычно является хорошим на низких частотах и
ухудшается при увеличении частоты, потому что тогда динамические
224 Глава 8. Фундаментальные ограничения SISO-управления
особенности, которыми пренебрегают в номинальной модели, становятся
существенными. Это подразумевает, что \Ga{Jv)\ обычно становится все
более и более существенным с повышением частоты.
Из этого можно сделать следующий вывод.
Чтобы достигнуть приемлемого функционирования в присутствии
ошибок модели, желательно выбрать соответствующую верхнюю
границу-полосы пропускания замкнутого контура.
8.6. Структурные ограничения
8.6.1. Общие соображения
В предыдущих разделах были рассмотрены ограничения, определяемые
датчиками, исполнительными механизмами, возмущениями и ошибками
моделирования. Все эти аспекты должны рассматриваться при
выполнении проектирования номинальной системы управления; однако
функционирование номинальной линейной замкнутой системы управления
также подчиненно и неизбежным ограничениям, которые вытекают
непосредственно из специфической структуры номинальной модели.
Цель данного раздела состоит в том, чтобы проанализировать эти
структурные ограничения и их влияние на функционирование системы.
8.6.2. Запаздывания
Несомненно, наиболее общим источником структурных ограничений в
системах управления производственными процессами являются
запаздывания в этих процессах. Такие запаздывания обычно связывают с
транспортировкой материалов от одного пункта к другому.
Ясно, что в то время, когда наблюдается действие выходного
возмущения, должен пройти период, равный величине запаздывания, прежде
чем это действие будет подавлено. Таким образом, функция
чувствительности выхода может, в лучшем случае, иметь вид
5S(e) = 1-е-г (8.6.1)
где г —постоянная запаздывания.
Мы фактически видели в разд. 7.4, что можно получить
вышеупомянутый идеализированный результат соответствующим проектированием
системы управления, используя структуру типа упредителя Смита.
Другая трудность — обеспечить робастность относительно ошибок
моделирования. Если мы должны достичь идеализированного резуль-
8.6. Структурные ограничения 225
тата (8.6.1), то соответствующая номинальная дополнительная
чувствительность будет
TZ(s) = e-
(8.6.2)
Однако она имеет усиление, равное единице на всех частотах. Чтобы
рассмотреть последствия этого, вспомним чувствительность ошибки,
данную в (8.5.1). Здесь мы видим, что, если имеется любая ошибка
модели (особенно в самом запаздывании), то G&(s) увеличивается примерно
до единицы на сравнительно низких частотах. Действительно, легко
видеть, используя идеи разд. 4.12, что относительная ошибка
моделирования будет иметь величину, которая примерно равна 1 приблизительно
в полосе пропускания ^, где г/ — относительная ошибка запаздывания.
Таким образом, практически полоса пропускания замкнутой системы
ограничивается комбинированным влиянием запаздываний и ошибок
моделирования величиной порядка ^.
Таким образом, мы видим, что запаздывания в процессе вызывают
два эффекта.
Запаздывания ограничивают подавление возмущений
требованием, чтобы задержка произошла раньше, чем возмущение будет
подавлено. Это отражено в идеальной чувствительности S*(s) в
(8.6.1).
Запаздывания также ограничивают достижимую полосу
пропускания через влияние ошибок модели.
Пример 8.3 (Управление толщиной полосы прокатного стана).
Напомним пример управления толщиной полосы прокатного стана,
упомянутый в гл. 1. Схема одного стенда такого прокатного стана
приведена на рис. 8.3.
Сила F
Измерение
толщины
Входная полоса
Выходная полоса
h.v
Ненагруженный зазор
Рис. 8.3. Управление
толщиной полосы прокатного стана
226 Глава 8. Фундаментальные ограничения SISO-управления
На рис. 8.3 мы использовали следующие символы: F — сила,
создаваемая валками, а — зазор между ненагруоюенными валками, Н — входная
толщина проката, V — входная скорость, h — выходная толщина
проката, v — выходная скорость, hm — измеренная выходная толщина, d —
расстояние от валков до места измерения выходной толщины.
Расстояние от валков до места измерения, выходной толщины
представляет {зависящее от скорости) запаздывание величиной (^).
Оно вносит основное ограничение на качество управления, как описано
выше. DDD
Мы видели раньше, что запаздывания (где реакция не изменяется в
течение данного периода) представляют очень важный источник
структурных ограничений в проектировании систем управления. Из этого мы
могли бы догадаться, что неминимально-фазовое поведение (где реакция
первоначально идет по неправильному направлению) могло бы создать
даже более серьезную проблему проектирования системы управления.
Это действительно имеет место, как мы покажем в следующем разделе.
8.6.3. Интерполяционные ограничения
Перед чтением этого раздела читатель должен вспомнить выводы,
сделанные в гл. 4 относительно воздействия нулей на основные
передаточные функции. Чтобы связать эти общие свойства нулей (как описано
в гл. 4) с замкнутыми системами, прежде всего необходимо понять
характер и происхождение полюсов и нулей функций чувствительности.
Напомним, что соответствующие номинальные функции
чувствительности для номинального объекта G0(s) = ^44 и заданного регулятора в
контуре с единичной обратной связью C(s) = -44 имеют вид:
G0(s)C(s) B0(s)P(s)
0{) l + G0(s)C(s) A0(s)L(s) + B0(s)P(s) [°-00)
г,/.ч 1 = ' A0(s)L(s)
оК) l + G0(s)C(s) A0(s)L(s) + Bo(s)P(s) yo'°' ]
°loW l + G0(s)C(s) A0(s)L(s)+B0(s)P(s) . ^Л'0)
С (A- C& - M*)P(*) /ofifiN
йио W l + G0(s)C(s) A0(s)L(s) + B0(s)P(s) К*ЛЛ)
Заметим, что полюсы всех этих передаточных функций совпадают
с множеством (или, в случае компенсации полюсов и нулей,
подмножеством) полюсов замкнутой системы. Хотя только полюсы определяют
8.6. Структурные ограничения 227
устойчивость замкнутой системы, точные переходные характеристики
зависят от сочетания полюсов и нулей.
Одним из важных выводов, вытекающих из свойств функций
чувствительности замкнутой системы, является то, что все
нескомпенсированные полюсы объекта и нескомпенсированные нули объекта налагают
алгебраические, или интерполяционные, ограничения на функции
чувствительности. В частности, мы имеем следующее: >
1. Номинальная дополнительная чувствительность T0(s) равна нулю
во всех некомпенсированных нулях G0(s).
2. Номинальная чувствительность S0(s) равна! во всех
некомпенсированных нулях G0{s) (это следует из п. 1, учитывая равенство
зд+ад = i).
3. Номинальная чувствительность S0(s) равна нулю во всех неском-*
пенсированных полюсах G0(s).
4. Номинальная дополнительная чувствительность T0(s) равна 1 во
всех некомпенсированных полюсах G0(s) (это следует из п. 3 и
равенства S0(s) +T0(s) = 1).
Введем типичные ограничения проектирования. В частности, мы
предположим, что проектирование обеспечивает точную инверсию
модели объекта на нулевой частоте. Это гарантирует точное отслеживание
выходным сигналом уставки и подавление постоянных входных и
выходных возмущений. Чтобы достичь этого, мы требуем L(0) = 0, что
приводит к
Ао{0Щ0) = 0 <& So{0) = 0 <& То(0) = 1 (8.6.7)
Заметим, что Ао(0) = 0 само по себе не ведет к полной компенсации
постоянного входного возмущения, потому что нули Si0(s) не
включают полюсы объекта, следовательно, Ао(0) = 0 не подразумевает,
что Sio(0) равна нулю.
Продолжим исследовать связь между полюсами и нулями
объекта и временными характеристиками замкнутой системы. Основным
результатом этого раздела является то, что полюсы и нули объекта
управления, особенно находящиеся в ППП, существенно и предсказуемо
влияют на переходные характеристики.
Начнем с напоминания леммы 4.1, которая устанавливает связь
интегралов от временных характеристик (экспоненциально нормируемых)
и значений соответствующих преобразований Лапласа в конкретной
точке. ^ v i
228 Глава 8. Фундаментальные ограничения SISO-управления
Конкретными передаточными функциями, которые нас здесь будут
интересовать, станут различные номинальные функции
чувствительности. Чтобы мы могли применить лемму 4.1, предположим, что полюсы
замкнутой системы лежат левее —а для некоторого, а > 0, которое
всегда существует для устойчивых замкнутых систем. Сначала исследуем
влияние интеграторов. Чтобы сделать эту тему более интересной для
читателя, сошлемся на небольшую историю одного из наших коллег, чья
первая работа в промышленности была проектированием регулятора с
одной степенью свободы, обеспечивающего компенсацию линейно
изменяющихся возмущений, который обладал бы также нулевым
перерегулированием на переходной характеристике. Уравнение (8.6.12), которое
будет приведено ниже, показывает, что эти характеристики проекта
нарушают фундаментальные законы систем с обратной связью. Ясно,
что большое потраченное впустую время можно было бы сэкономить,
зная, что это невозможно (т. е. оценивая фундаментальные ограничения
проекта).
8.6.4. Влияние интеграторов разомкнутой системы
Лемма 8.1. Предполоснсим, что объект управляется системой с одной
степенью свободы и что разомкнутый объект и регулятор
удовлетворяют соотношениям:
к A0(s)L(s) = 54^0(5)^(5))' г>1 (8.6.8)
lim{A0{s)L{s))' = с0 ^ О (8.6.9)
s—>0
]\m(B0(s)P(s)) = ci ф О (8.6.10)
т. е. что комбинация объекта и регулятора имеет г полюсов в начале
координат. Тогда для ступенчатого выходного возмущения или
ступенчатой уставки ошибка управления e(t) удовлетворяет условиям
limeM = 0 Vi>l (8.6111)
t->oo
00
fe(t)dt = 0 Vi>2 (8.6.12)
0
Аналогично для отрицательного линейно меняющегося (с
коэффициентом наклона —1) выходного возмущения или положительного
линейно меняющегося (с коэффициентом наклона 1) эталонного сигнала
8.6. Структурные
ошибка управления e(t) удовлетворяет условиям
lim e(t) = — для г = 1
lim e(t) = О Vi > 2
00
fe{t)dt = 0 Vi>3
о
Доказательство
Сначала напомним, что ошибка управления удовлетворяет равенству
E(s) = S0(s)(R(s)-D0(s)) (8.6.16)
Тогда выражение для Hindoo e(t) является следствием теоремы о
конечном значении преобразования Лапласа. Интегральные же
результаты следуют из леммы 4.1, где h(t) долэюна быть заменена на e(t) и
z0 = 0. □□□
В случае входных возмущений получится подобный же результат.
Однако следует сделать предостережение, что числитель Si0(s) равен
B0(s)L(s), а не A0(s)L(s), как имело место для S0(s). Это подразумевает,
что интеграторы объекта не влияют на установившуюся компенсацию
входных возмущений. Таким образом, мы должны изменить лемму 8.1
следующим образом:
Лемма 8.2. Предположим, что регулятор удовлетворяет условиям
t>l (8.6.17)
(8.6.18)
(8.6.19)
Сам регулятор имеет г полюсов в начале координат. Тогда для
ступенчатого входного возмущения ошибка управления e(t) удовлетворяет
условиям
lim elt) = О Vt > 1 (8.6.20)
t->00 "
oo
fe(t)dt = 0 Vi>2 (8.6.21)
о
ограничения 229
(8.6.13)
(8.6.14)
(8.6.15)
ад = .•№(«))'
lim(L(5))' = ^0
lim(P(s))=po^0
230 Глава 8. Фундаментальные ограничения SISO-управления
Аналогично, для отрицательного линейно меняющегося входного
возмущения (с коэффициентом —1) ошибка управления e(t)
удовлетворяет условиям
lim e(t) = — для г = 1
*->оо р^
lim elt) = О Vt > 2
oo
fe{t)dt = 0 Vi>3
о
Доказательство
В этом случае ошибка управления удовлетворяет равенству
E{s) = -Sio{s)Di{s) (8.6.25)
Оставшаяся часть доказательства аналогична лемме 8.1. DDD
Замечание 8.1. Зйметим, что, когда интеграл от ошибки равен нулю,
то из этого следует, что ошибка имеет равную площадь выше и ниже
нуля. Следовательно, перерегулирование на выходе объекта
неизбежно. В частности, ясно, что невозмоэюно спроектировать замкнутую
систему с одной степенью свободы, с двумя интеграторами у
регулятора (дающими нулевую установившуюся ошибку при линейно
изменяющемся входном сигнале), которая бы не имела перерегулирования
при ступенчатом эталонном сигнале. Это объясняет невыполнимость
технических требований в небольшой истории, приведенной несколько
ранее.
8.6.5. Более общие влияния полюсов
и нулей разомкнутой системы
Вышеприведенные результаты зависят от нулей различных функций
чувствительности, расположенных в начале координат; однако
оказывается, что нули в ППП имеют даже более серьезное воздействие на
получаемые переходные характеристики замкнутых систем. Мы
покажем это ниже. Как прелюдия к этому, мы обращаем внимание, что
лемма 4.1 применима к любым нулям. Этот факт используется ниже,
нтобы разработать ряд общих ограничений переходной характеристики
замкнутых систем, имеющих различные комбинации полюсов и нулей в
разомкнутом состоянии.
Лемма 8.3. Рассмотрим контур управления с обратной связью,
имеющий в замкнутом состоянии устойчивые полюсы, расположенные левее
(8.6.22)
(8.6.23)
(8.6.24)
8.6. Структурные ограничения 231
—а для некоторого а> 0. Предположим также, что регулятор имеет,
по крайней мере, один полюс в начале координат. Тогда для
некомпенсированного нуля объекта zo или некомпенсированного, полюса объекта
щ, расположенных правде полюсов замкнутой системы, т. е.
удовлетворяющих условиям 9ft{2o} > —а или 9£{т?о} > —а соответственно,
мы имеем следующее.
1. Для положительного единичного ступенчатого эталонного сигнала
или отрицательного единичного ступенчатого выходного
возмущения справедливы соотношения
оо
fe(t)e-Zotdt=— (8.6.26)
J *о
о
оо
/•
оо
e(t)e-flotdt = 0 (8.6.27)
о
2. Для положительного единичного ступенчатого эталонного сигнала
и для zo, расположенного в ППП, имеем
оо
y{t)e-Zotdt = 0 (8.6.28)
о
3. Для отрицательного единичного ступенчатого входного
возмущения имеем
оо
fe(t)e-Zotdt = 0 (8.6.29)
о
оо
/'е(«)е-*'Л=-^т (8.6.30)
о
Доказательство
Доказательство определяется основным моментом, что полюсы и
нули разомкнутой системы, которые мы рассматриваемг находятся в
области сходимости преобразования, т. е. они лежат справа от
полюсов замкнутой системы. Это подразумевает, что даже если е~*°* (или
e-,?oi) растет экспоненциально, произведение e(t)e~Zot асимптотически
затухает.
1. В этом случае ошибка управления удовлетворяет выражению
E{s) = S0(s)(R($) - D0(s)l (8.6.31)
232 Глава 8. Фундаментальные ограничения SISO-управления
или для R(s) = j, или для —D0(s) = j. Заметим также, что
S0(zo) = 1, S0{rjo) = 0. Тогда результат следует из леммы АЛ, если
h(t) заменить на e(t).
2. В этом случае выход объекта удовлетворяет выражению
Y(s)=T0{s)R(s) (8.6.32)
с R(s) = j. Заметим также, что T0(zo) = 0. Результат тогда
следует из леммы 4.1, где /&(£) заменена на y(t).
3. Б эшол< случае ошибка управления удовлетворяет выражению
E(s) = -Si0(s)Di(s) (8.6.33)
с —Di(s) = j. Заметим также, что Si0(zo) = 0, Si0{r)o) = pfc£y- ^е~
зультат тогда следует из леммы 4.1, где h(t) заменена на e(t). DDD
Вышеупомянутые результаты важны, потому что они обеспечивают
связь между характеристиками объекта в разомкнутом состоянии и
переходной характеристикой замкнутой системы. Следующие
качественные наблюдения связаны с выводами из этих результатов. (Читатель
может сначала вспомнить разд. 8.6.3.)
1. Из-уравнения (8.6.26), мы видим, что, если zo — отрицательное
вещественное число (т. е. zo — фактически минимально-фазовый нуль),
то ошибка должна изменить знак, потому что первоначально она
положительна, а интеграл отрицателен. Это подразумевает, что
реакция объекта должна иметь перерегулирование. Кроме того, величина
перерегулирования увеличивается, когда величина нуля
уменьшается. Величина перерегулирования порядка (£5|zo|)~ > гДе *« — время
регулирования (см. лемму 4.3).
С другой стороны, если 2о — положительное вещественное число
(т. е. zo — неминимально-фазовый нуль), тогда ошибке не нужно
менять знак; однако, если zo — небольшой, то интеграл от ошибки будет
большой и положительный. Кроме того, для zo, находящегося в ППП,
мы видим из уравнения (8.6.28), что при ступенчатом изменении
уставки реакция должна иметь недорегулирование. Это
подразумевает, что ошибка достигнет максимума по величине больше, чем ее
начальное значение. Действительно, максимум ошибки и величина
недорегулирования имеют порядок (tskol)-1) где ts — время
регулирования (см. лемму 4.2).
2. Из уравнения (8.6.27) мы видим, что любой полюс разомкнутой
системы, который находится правее всех полюсов замкнутой
системы, должен привести к изменению знака ошибки, а, следовательно,
к перерегулированию. Кроме того, для большого положительного
8.6. Структурные ограничения 233
щ относительно местоположения полюсов замкнутой системы,
экспоненциальная добавка затухает быстрее, чем время переходного
процесса замкнутой системы. Следовательно, для получения
нулевого интеграла от ошибки необходимо, чтобы выполнялись или
оба следующих условия, или одно из них: ошибка быстро изменяет
знак в начале переходного процесса, или ошибка имеет большую
отрицательную величину, чт.обы скомпенсировать начальную
положительную величину.
3. Мы видим из уравнения (8.6.29), что возмущения будут вести к
ошибке, которая изменяет знак, и, следовательно, вызывать
перерегулирование для любых вещественных нулей разомкнутой системы,
которые лежат правее всех полюсов замкнутой системы.
4. Имеются тонкие взаимодействия между различными ограничениями.
Например, перерегулирование, вызванное полюсами разомкнутой
системы, которые лежат правее полюсов замкнутой системы, обычно
связано с устойчивыми нулями, которые введены в регулятор при
назначении полюсов. Эти виды проблем автоматически включены
в ограничения, потому что они используют тот факт, что сумма
числителей чувствительности и дополнительной чувствительности
равна знаменателю, и, следовательно, имеется необходимая связь
влияния полюсов разомкнутой системы, нулей разомкнутой системы
и полюсов замкнутой системы.
Вышеупомянутый анализ лежит в основе следующих компромиссов
характеристик:
• Если величина вещественной части доминирующих полюсов
замкнутой системы больше, чем самый маленький нуль в ППП, то большое
недорегулирование неизбежно. Это обычно означает, что при
проектировании необходимо выполнение следующего условия:
Полоса пропускания должна быть меньше, чем самый маленький
неминимально-фазовый нуль1.
• Если величина вещественной части доминирующих полюсов
замкнутой системы больше, чем величина самого маленького устойчивого
нуля разомкнутой системы, то произойдет существенное
перерегулирование. Альтернативой должна быть компенсация этих нулей в
замкнутой системе путем помещения их в знаменатель передаточной
функции регулятора; однако в этом случае они будут появляться в
1 Такое сравнение полосы пропускания и нуля (полюса) передаточной функции
правомерно, так как нуль (полюс) имеет размерность частоты. — Прим. перев.
234 Глава 8. Фундаментальные ограничения SISO-управления
числителе входной чувствительности. Это могло бы быть приемлемо,
так как входные возмущения могут быть значительно уменьшены при
прохождении через объект.
Если величина вещественной части доминирующих полюсов
замкнутой системы меньше, чем величина самого большого неустойчивого
полюса разомкнутой системы, то произойдет существенное
перерегулирование, или ошибка быстро изменит знак. Таким образом, можно
сделать вывод:
Желательно задать полосу пропускания замкнутой системы
больше, чем вещественная часть любого неустойчивого полюса.
• Если величина вещественной части доминирующих полюсов
замкнутой системы больше, чем величина самого маленького устойчивого
полюса разомкнутой системы, то снова произойдет
перерегулирование. Этого можно избежать, компенсируя такие полюсы в замкнутой
системе, помещая их в числитель передаточной функции регулятора;
однако в этом случае они будут присутствовать в знаменателе
входной чувствительности и этот эффект обычно нежелателен, так как
он означает, что влияние возмущений затухает медленно.
• Заметим, что, для реакции на уставку часто можно избежать
вредного эффекта перерегулирования, обусловленного нулями устойчивого
объекта или регулятора. Этого можно достигнуть, компенсируя их
вне контура в случае проектирования с двумя степенями свободы
(см. разд. 5.2), которое позволяет избежать компромисса с
характеристиками реакции на возмущение.
Некоторые из проблем, рассмотренных выше, иллюстрируются
следующим примером.
Пример 8.4.. Рассмотрим номинальную модель объекта, заданную
выражением
Полюсы замкнутой системы заданы значениями {—1,-1,-1}. Тогда
обычно структура регулятора определяется передаточной функцией
C(s) = Kc^^ (8.6.35)
S-Pc
Рассмотрим пять различных случаев. Они описаны в табл. 8.1.
Различные проекты были проверены с единичным ступенчатым
эталонным воздействием и в каэюдом случае наблюдался выходной сигнал
объекта. Результаты показаны на рис. 8.4. Результаты наблюдений
следующие.
8.6. Структурные ограничения 235
Таблица 8.1
Описание рассмотренных случаев
~#п
Рс
*с |
Случай 1
рр = -0.2
| zp = -0.5
L47
-1.33
-1.36
Случай 2
рр = -0.5
zp = -0.1
20.63
18.13
-0.48
Случай 3
рр = -0.5
zp = 0.5
-3.75
-6.25
-0.53
Случай 4
рр = 0.2
zp = 0.5
-18.8
-22.0
-0.11
Случай 5
рр = 0.5
zp = 0.2
32.5
29.0
0.15
Случай 1. (маленький устойчивый полюс). Наблюдается небольшое
перерегулироване, как предсказано уравнениями (8.6.26) и (8.6.27).
Случай 2. (очень маленький устойчивый нуль). Здесь мы видим очень
большое перерегулирование, как предсказано уравнением (8.6.26).
Случай 3. (неустойчивый нуль, устойчивый полюс). Здесь, мы видим
существенное недорегулирование. Это вызвано нулем в ППП. Мы
также наблюдаем небольшое перерегулирования, связанное с
устойчивым полюсом, равным —0.5. Это предсказано уравнением (8.6.27).
Случай 4. (неустойчивый нуль, маленький неустойчивый полюс). Мы
сначала наблюдаем существенное недорегулирование из-за нуля в
ППП и как предсказано уравнением (8.6.28). Мы также наблюдаем
Время [с].
D 5 м 10
Время [с]
Рис. 8.4. Выходной сигнал y(t\ объекта для пяти различных конфигураций
полюсов и нулей
236 Глава 8. Фундаментальные ограничения SISO-управления
существенное перерегулирование, которое связано с неустойчивым
полюсом, как предсказано уравнением (8.6.27).
Случай 5: (маленький неустойчивый нуль, большой неустойчивый
полюс). Здесь недорегулирование обусловлено нулем в ППП, а
перерегулирование — полюсом в ППП, как предсказано уравнениями (8.6.28)
и (8.6.27) соответственно. В этом случае перерегулирование
значительно больше, чем в случае 4, потому что неустойчивый полюс
находится правее в ППП. DDD
Другая иллюстрация этого набора идей представлена в следующем
примере.
Пример 8.5. Рассмотрим объект и регулятор с одной степенью
свободы. Объект имеет номинальную модель, которая содержит
вещественный неминимально-фазовый нуль при s.=-zq и вещественный
неустойчивый полюсе при s — щ. Предположим также, что регулятор
имеет один полюс в начале координат.
8.5.1. Определить ограничения во временной области для выхода
регулятора u(t), считая, что эталонный сигнал является единичной
ступенькой.
8.5.2. Если выход регулятора ограничен таким образом, чтобы быть
в диапазоне [0,С/тах]; где Umax —большое положительное число, то
нужно показать, что неустойчивый полюс приведет к насыщению
u(t) для любого ступенчатого эталонного воздействия.
Решение
8.5.1. Сначала вспомним, что
1 Г°°
U(s) = Suo(s)- = / u(t)e-stdt (8.6.36)
s Jo
Вспомним также, что любой неустойчивый полюс разомкнутой
системы является нулем Suo(s). Тогда, применяя лемму 4.1,
получим
-~> 1
u(t)e-ZQtdt = Suo(zo)— (8.6.37)
/
Jo
г
Jo zo
oo
> 1
u{t)e^otdt = Suo{r]o)— = 0 (8.6.38)
/o Vo
8.5.2. Заметим, что интеграл (8.6.38), равный нулю, подразумевает,
что u(t) должен быть отрицательным в течение каких-то
ненулевых интервалов времени. Это означает, что будет достигнут
нижний предел насыщения. Дополнительные наблюдения приведут
к выводу, что это случится для любого ограниченного эталонного
сигнала.
8.6. Структурные ограничения 237
8.6.6. Влияние полюсов и нулей, находящихся на мнимой оси
Интересен частный случай леммы 8.3, когда объект имеет полюсы или
нули на мнимой оси. При этих условиях получается следующее.
Вывод 8.1. Рассмотрим замкнутую систему, как и в лемме 8.3. Тогда
для единичного ступенчатого эталонного входного воздействия,
а) если объект G(s) имеет пару нулей dtjuo, то
f
Jo
I
Jo
e(t) cos u)otdt = 0
oo 1
e(t)smu)otdt = —
о ^o
б) если объект G(s) имеет пару полюсов ±juo, то
>
Г
Jo
Г
Jo
e(t) sinuotdt = 0
где e(t) — ошибка управления, т. е.
e(t) = l-y(t)
Доказательство
а) Из (8.6.26) мы имеем
Г°° 1
/ e{t)e±iujQtdt = -^-
Jo ±7^0
Требуемый результат следует, учитывая, что
coscj0*=^(e^°4e-^
mu0t = ^(ejo,ot-e-^ot)
2j
sin
(8.6,39)
(8.6.40)
(8.6.41)
(8.6.42)
(8.6.43)
(8.6.44)
(8.6.45)
(8.6.46)
DDD
б) Следует непосредственно из (8.6.27).
Вышеупомянутые ограничения особенно существенны в случае
мнимых нулей около начала координат (относительно полосы пропускания
замкнутой системы). Это иллюстрируется следующим примером.
Пример 8.6. Рассмотрим п. а) вывода 8.1. Пусть точное время
регулирования (предположим, что оно существует) системы есть
ts = inf{|e(t)|=0; W>T} (8.6.47)
238 Глава 8. Фундаментальные ограничения SISO-управления
Тогда из (8.6.40) мы имеем
f
Jo
ts i
e(t) sinuotdt = —
(8.6.48)
7Г
Считая, что ts< —, получим
u>o
rts rts 1
/ emax (sinwo) dt> e(t) sinuotdt = — (8.6.49)
Jo Jo шо
где emax —максимальная величина \e(t)\ на интервале (0,t5). Из (8.6.49)
— [1 — coscj(j£5] emax > —
u0 ^o
или
бтях -^
(8.6.50)
(8.6.51)
1 — COS U^s
Га?сил< образом, мы видим, что при u)$ts —> 0 emax стремится к
оо / DDD
Пример 8.7. Б качестве простого числового примера рассмотрим
замкнутую систему с передаточной функцией дополнительной
чувствительности, равной
100s2 +1
T(s) =
(8.6.52)
s3 + 3s2 + 3s + l
Заметим, что все полюсы замкнутой системы равны —1, в то
время как нули равны ±j'0.1. Смоделированная реакция e(t) для единичного
ступенчатого входного воздействия показана на рис. 8.5.
Время [с]
Рис. 8.5. Ошибка управления для замкнутой системы при единичном
ступенчатом эталонном воздействии и мнимых нулях
Мы можем видеть, что максимальная ошибка имеет более 2000%
недорегулирования и 800% перерегулирования! QDQ
8.6. Структурные ограничения 239
В этой главе происхождение всех ограничений проекта было связано
с линейной природой системы управления, потому что мы использовали
передаточные функции чувствительности и дополнительной
чувствительности. Таким образом, разумный вопрос — будут ли эти ограничения
все еще иметь силу, когда используются другие способы управления
(например, нелинейное, адаптивное, нейронное или нечеткое управление).
Ответ на этот вопрос не очевиден, кроме некоторых случаев. Один из
них — неминимально-фазовые нули, как показано ниже.
Рассмотрим линейный объект с номинальной моделью, обозначенной
через G0 (s), чей выход должен поддерживаться на постоянной величине.
Предположим, что G(z0) = 0 для z0 £ R+. Тогда для ступенчатых
возмущений и ступенчатых эталонных воздействий система управления
(независимо от ее типа) должна формировать сигнал на входе объекта
в виде
u(t)=uOQ + Au(t). (8.6.53)
где Uoo — установившаяся величина входного сигнала и Ли(t) —
необходимое переходное воздействие, которое должно подводить выход
объекта к желаемой уставке, т. е. Дгх(оо) = 0. Таким образом, преобразование
Лапласа входа объекта сходится для всех cr = 5ft{s}>0. С другой
стороны, минимальное требование к системе управления —ее устойчивость,
так что преобразование Лапласа выхода объекта также сходится для
всех а = 5ft{s} > 0. Следовательно,
/»оо
Y(z0) = G(z0)U(zo) = 0 = / y(t)e-Zotdt (8.6.54)
Jo
Уравнение (8.6.54) говорит, что выход объекта, у(£), должен изменить
знак так, чтобы интеграл в [0, оо) равнялся бы нулю. Другими словами,
(8.6.54) подразумевает, что y(t) должен развиться в направлении,
противоположном направлению изменения желаемой величины, в течение по
крайней мере одного интервала времени, отличного от нуля. Это ведет
к термину обратной реакции для поведения неминимально-фазовых
систем. Этот результат — тот же самый, что и (8.6.29); однако имеется
принципиальное различие: на сей раз никакого определенного
предположения (линейное классическое управление или другое) не было сделано
относительно методологии управления.
Отсюда заключение, что неминимально-фазовые системы будут
вести к ограничениям характеристик независимо от вида используемого
управления и структуры управления. Таким образом, можно заметить
(и это довольно важно), что проектировщики, понимая эти ограничения
и не стремятся достигать таких эксплуатационных характеристик,
которые находятся в противоречии с фундаментальными законами обратной
связи.
240 Глава 8. Фундаментальные ограничения SISO-управления
8.7. Промышленный пример (эффект затягивания
на реверсивном прокатном стане)
Здесь мы рассмотрим реверсивный прокатный стан. В этом варианте
прокатного стана полосу последовательно пропускают с одной стороны
на другую так, чтобы толщина уменьшалась на каждом проходе.
Схема реверсивного прокатного стана с одной полосой проката
показана на рис. 8.6.
Для этой системы мы определим следующие переменные:
he(t): толщина полосы на выходе;
he: номинальное значение he(t)\
h{(t): толщина полосы на входе;
ic{t): электрический ток двигателя наматывающего устройства;
гс: номинальное значение гс(£);
iu{t)'- электрический ток двигателя разматывающего устройства;
Jc(t): момент инерции наматывающего устройства;
Jc: номинальное значение Jc(£);
к: коэффициент вращающего момента двигателя
наматывающего устройства;
<r(t): зазор между валками при отсутствии нагрузки;
T{(t): натяжение полосы на входе;
re(t): натяжение полосы на выходе;
u)c(t): угловая скорость двигателя наматывающего устройства;
шс: номинальное значение uc{t)\
uu{t)'- угловая скорость двигателя разматывающего устройства.
Рабочие валки сжимают металл так, чтобы обеспечить уменьшение
толщины. Набор валков большого диаметра (называемых опорными
валками) установлены выше и ниже рабочих валков. Для изменения
вертикального положения опорных валков (в ненагруженном
состоянии) относительно станины, в которой они установлены, используется
гидравлический цилиндр. Вертикальное положение опорных валков по
отношению к станине называется зазором между ненагруженными
валками. Традиционно толщина стальной полосы на выходе h управляется
изменением параметра <j{t).
В примере 8.3 мы видели, что имеются существенные трудности
проектирования, связанные с запаздыванием измерения толщины на
выходе; однако эти трудности могут в значительной степени быть
преодолены при помощи виртуальных датчиков типа, рассмотренного
в разд. 8.8.1.
Имеются также серьезные проблемы, связанные со скоростью
реакции исполнительного механизма, который обычно обладает
ограничением скорости нарастания выходной величины; однако современные
8.7. Промышленный пример (эффект затягивания на прокатном стане) 241
Разматывающее
устройство
Двигатель
разматывающего
устройства
Наматывающее
устройство
LJc(t)
Двигатель
наматывающего
устройства
Рис. 8.6. Стенд прокатного стана
гидравлические исполнительные механизмы позволяют иметь времена
реакции для задания зазора между валками порядка 5-10 мс. Когда
это объединяется с быстрыми реакциями, полученными от современных
виртуальных датчиков, то можно прийти к заключению, что необходимо
проектировать такую систему управления с обратной связью, чтобы
можно было получить реакцию замкнутой системы порядка 5-10 мс.
Можно заметить, к большому удивлению, что, несмотря на большие
усилия при разработке подходящего проекта, реакция такой замкнутой
системы стремится начаться быстро, но затем затягивается. Типичная
реакция на ступенчатое входное возмущение схематически показана на
рис. 8.7.
Многие виды гипотез могли бы быть сделаны относительно
источника трудности (нелинейные эффекты, несмоделированные пределы
скорости нарастания выходной величины исполнительного механизма
и т. д.). Читатель может сделать паузу и поразмышлять над тем, что
могло бы быть источником проблемы. Вот намек: передаточная
функция от зазора междуч.валками (а) до толщины полосы на выходе (h)
оказывается следующей (мы взяли конкретный реальный случай):
26.24(5 + 190)(s + 21 ±jll)(s + 20)(s + 0.5 ±j86)
Gha(s) =
(8.7.1)
(s + 143)(s + 162±j30)(s + 30±jl5)(s + 21±j6)
Мы видим (возможно, неожиданно) что эта передаточная функция
имеет два нуля, расположенные в точках s = —0.5 ± J86, которые
находятся (почти) на мнимой оси. Эти нули являются результатом
242 Глава 8. Фундаментальные ограничения SISO-управления
0.2
0.15
Т 0.1
2L
-с
< 0.05
0
-0.05
0.05 1 1.05 1.1 1.15 1.2 1.25 1.3
Время [с]
Рис. 8.7. Эффект затягивания
упругости полосы между самим станом, разматывающим устройством и
наматывающим устройством. Результирующие полюсы преобразуются в
нули за счет пробуксовки. На основе анализа, сделанного в выводе 8.1,
из этого следует, что будут серьезные ограничения на способность
управлять толщиной стали на выходе с помощью входной величины —
зазора между валками. В частности, если стремиться иметь быструю
переходную реакцию, то должны возникнуть существенные колебания,
которые препятствуют быстрой реакции!
Физическое объяснение следующее: если желательно уменьшить
толщину полосы на выходе, необходимо уменьшить зазор между
валками. Толщина полосы на выходе тогда уменьшается. Однако если
скорость прокатного стана на выходе примерно постоянна (так как она
управляется другим контуром), тогда меньшее количество массы будет
транспортироваться из прокатного стана в единицу времени. Далее,
соображения баланса масс приводят к тому, что скорость полосы на
входе должна понизиться. Из-за инерции разматывающее устройство
не может изменить свою угловую скорость мгновенно. Таким образом,
эффект уменьшения скорости на входе прокатного стана приведет к
снижению натяжения полосы на входе. Известно также, что натяжение
полосы воздействует на степень уменьшения толщины полосы.
Следовательно, уменьшенное натяжение подразумевает увеличение толщины на
выходе, которое препятствует первоначальному уменьшению: реакция
изменения толщины затягивается. Связанная с этим динамика зависит
от эффективной упругости полосы между разматывающим устройством
■ » i
Ожидаемая реакция
Полученная реакция
8.7. Промышленный пример (эффект затягивания на прокатном стане) 243
и прокатным станом. Математически эти эффекты отражаются нулями,
находящимися почти на мнимой оси (8.7.1).
Нули, находящиеся почти на мнимой оси, соответствуют
частоте 86 рад/с, так что из (8.6.51) мы видим, что получение эффективного
времени регулирования намного меньше, чем 50 мс, будет приводить к
затянутой реакции ошибки. (Для ts = 50 мс, u)Qts = 0.68.) Таким образом,
даже учитывая, что система позиционирования зазора между валками
могла бы функционировать быстро (7 мс — ограничения времени,
типичные для современных гидравлических систем), эффективное время
реакции замкнутой системы ограничивается величиной приблизительно
50 мс из-за наличия нулей на мнимой оси.
Чтобы проиллюстрировать этот эффект, рассмотрим объект,
заданный выражением (8.7.1). Было выполнено моделирование со
следующими тремя ПИ-регуляторами (Они были выбраны несколько произвольно,
но ключевой момент заключается в том, что основным считался эффект
затягивания. В частности, никакой регулятор не может улучшить
ситуацию, по крайней мере, без некоторой радикальной перемены!):
-,ч 5 + 50 " ч 5 + 100 _/ч 5 + 500 ,__
Ci(s) = . C2{s) = С3(«) = (8-7-2)
S S S
Для примера, данного в (8.7.1), передаточная функция (разомкнутой
системы) между толщиной полосы на входе Hi(s) = C[h{(t)] и толщиной
полосы на выходе He(s) = C[he(t)] (см. рис. 8.6) равна
_0.82(5 + 169)(5 + 14S)(5 + 109)(5 + 49)(5 + 27)(5 + 24±j7) K
ie^~ (5 + 143)(5 + 162±j30)(5 + 30±jl5)(5 + 21±j6)
(8.7.3)
Тогда, если прокатный стан управляется системой с обратной
связью, номинальная передаточная функция между входной и выходной
толщинами полосы дается выражением' Т0{s)Gie(s), где
Г0(5)—дополнительная чувствительность и Gie{s) определяется выражением (8.7.3).
Заметим, что нули T0(s) включают и те, которые расположены близко
к мнимой оси 0.5±j86.
Далее предположим, что ступенчатое изменение входной толщины
величиной в 0.2 мм происходит в момент t = 1. Реакции приведены на
рис. 8.8.
Как и предсказано, время реакции ограничено значением
приблизительно 50 мс. Ключевым моментом здесь является то, что в
соответствии с выводом 8.1 задача является фундаментальной и не может
быть преодолена никаким проектом системы управления в пределах
рассматриваемой SISO-cmpyKmypu.
244 Глава 8. Фундаментальные ограничения SISO-управления
Толщина полосы на выходе [мм]
0.15 0.2 0.25
Время [с]
Рис. 8.8. Реакция на ступенчатое изменение толщины полосы на входе
Замечание 8.2. Интересно обратить внимание, что в этом примере
достижимая характеристика управления существенно ограничена
блокирующим действием нулей объекта. Кроме того, эти нули являются
результатом физического взаимодействия в пределах объекта.
Замечание 8.3. Выводы, сделанные в предыдущем замечании, в общем
случае означают следующее. Обычно имеется физическая причина,
почему возникают некоторые неприятные нули. Иногда возмоэюно
переместить нули, изменяя физическую схему объекта.
8.8. Технические средства
Следующий вопрос, который мы обсудим, —какие меры следует
предпринять, чтобы преодолеть ограничения, обсужденные выше. Поскольку
они — фундаментальные ограничения, имеются только два выбора:
1) жить с ограничениями, но гарантировать, что проект делает лучшее
в терминах желаемой цели, или
2) изменить саму природу задачи, преобразуя систему, используя любую
из следующих возможностей:
8.8. Технические средства 245
• новые датчики,
• новые исполнительные механизмы или
• альтернативные структурные меры.
Ниже мы подробно остановимся на пункте 2).
8.8.1. Альтернативные датчики
Если датчики являются камнем преткновения, то можно было бы
использовать альтернативные датчики. Одна из идей, которая широко
используется в разработке систем управления, состоит в том, чтобы
использовать вместо датчиков, обладающих недостатками, другие. Когда
используются какие-то другие датчики в сочетании с моделью,
позволяющей получить значение отсутствующего или неудовлетворительного
датчика, мы говорим, что это виртуальный или программный датчик.
Пример 8.8 (Управление толщиной полосы прокатного стана;
повторное рассмотрение). Проиллюстрируем использование
виртуальных датчиков, возвращаясь снова к примеру 8.3. Вспомним, что в
том примере задержка между валками и устройством, измеряющим
толщину, была источником основного ограничения, накладываемого на
систему обеспечения толщины проката.
Обычная практика преодоления этой проблемы состоит в том,
чтобы получить измеренную величину hm с помощью виртуального
датчика, полученного из модели. Две возможности здесь следующие.
1. Сила F может быть связана с толщиной h и зазором между
валками а через простое уравнение упругости вида
F(t) = M{h(t)-a{t)) (8.8.1)
(Коэффициент упругости М обычно называется модулем Милла.)
F(t) и a(t) могут быть измерены, так что по существу можно
получить мгновенную оценку h(t), инвертируя (8.8.1), что приводит к
h(t) = ^ + a(t) (8.8.2)
Это устройство для оценки действительной толщины
называется BISRA-измерителем и используется на практике чрезвычайно
часто1.
2. Другой возможный виртуальный датчик работает следующим
образом.
1BISRA (British Iron and Steel Research Association) — Британская исследовательская
ассоциация железа и стали, в которой разработан данный метод.
246 Глава 8. Фундаментальные ограничения SISO-управления
Оказывается, что у большинства прокатных станов ширина
полосы существенно постоянна. В этом случае, сохранение массы
поперек зазора между валками ведет к отношению
V{t)H{t)~v(t)h{t) (8.8.3)
где V,H,v и h означают скорость на входе, толщину на входе,
скорость на выходе и толщину на выходе соответственно.
Можно измерить V и v, используя контактные диски на полосе
или лазерными методами. Н можно также измерить заранее до
валков, а затем задержать это значение в соответствии со
входной скоростью. Наконец, мы можем оценить толщину на выходе
, V(t)H(t)
h{t) —^щ- { ]
Это называется расходомером массы и использует упреждение
измеренной заранее толщины полосы на входе.
И эта идея также очень широко используется на практике. DDD
8.8.2. Исполнительные механизмы
Если основным ограничивающим фактором функционирования системы
управления является исполнительный механизм, то следует подумать о
замене или перекалибровке исполнительного механизма.
Некоторые потенциальные меры для смягчения недостатков
исполнительного механизма включают следующее:
1. Иногда можно смоделировать эффект насыщения и применить
соответствующее преобразование (см. гл. 2), чтобы гарантировать, что
соответствующее управление обеспечивается несмотря на недостатки
исполнительного механизма; однако это обычно трудно, из-за
сложности реальных моделей трения.
2. В некоторых случаях можно использовать местный контур обратной
связи с большим коэффициентом усиления, охватывающий
исполнительный механизм, характеристики которого следует улучшить. Это
обычно называется каскадным управлением. Как мы знаем, системы
управления с большим коэффициентом усиления имеют тенденцию
к уменьшению влияния нелинейностей; однако чтобы получить
положительный эффект из этого-решения, требуется измерять
положение исполнительного механизма с высокой степенью точности и
это может быть невыполнимо. (Подробнее будет сказано о каскадном
управлении в гл. 10.)
3. В отдельных случаях можно так организовать технические средства,
что ограничения исполнительного механизма будут устранены или,
8.8. Технические средства 247
по крайней мере, уменьшены. Примером может быть переход от
намотки с помощью шнековых двигателей прокатных станов (которые
имеют недостатки, связанные с люфтом) на современные
гидравлические исполнительные механизмы и использование антилюфтовых
приводов в телескопических направляющих системах.
8.8.3. Механизмы противонакопления
Когда исполнительный механизм имеет ограничения на максимальное
значение или скорость нарастания сигнала, часто можно избежать
неприятности, понижая требования к характеристикам, как рассмотрено
в разд. 8.3.1; однако в ряде приложений желательно все-таки обеспечить
достижение исполнительными механизмами ограничений, чтобы
максимально использовать имеющиеся у них возможности. Это позволяет
выбрать лучшее в конкретной ситуации; однако в такой стратегии есть
и обратная сторона.
В частности, одной из расплат за перемещение исполнительного
механизма в предельное положение является накопление интегратором
величины. Напомним, что интеграторы очень часто используются в
замкнутых системах управления, чтобы исключить установившиеся
ошибки. Однако функционирование интегратора зависит от того, остается
ли контур управления в линейном диапазоне. Если исполнительный
механизм находится в предельном состоянии, то выходная величина
интегратора, вероятно, будет стремиться к большому значению. Когда
входной сигнал возвращается в линейную область, эти начальные
условия вызовут большой переходный процесс. Такой эффект называется
накоплением (wind-up). Подробнее будет сказано относительно способов
борьбы с этим (и другими связанными проблемами) в гл. 11. В данный
же момент важно заметить, что основной идеей, используемой для
защиты систем от негативных влияний накопления является отключение
интегратора всякий раз, когда входной сигнал достигает своего предела.
Это может быть сделано или с помощью выключателя, или
модификацией интегратора таким образом, что он автоматически отключается,
когда входной сигнал достигает предела. В качестве простой
иллюстрации рассмотрим контур, приведенный на рис. 8.9.
Если мы заменим ограничитель элементом с коэффициентом
усиления, равным единице, то, исходя из рис. 8.9, передаточная функция от
е до и будет равна
U{s) pis+pp
W)= ~^— (8,8,5)
248 Глава 8. Фундаментальные ограничения SISO-управления
e(t)
+
О
Pi
►Ограничитель]
u(t)
Ро
Pl(pi5+P0)
Рис. 8.9. Замкнутый контур с ограничителем
Таким образом, структура на рис. 8.9 представляет простой ПИ-
регулятор. Заметим, что интегрирующие свойства здесь были
получены с помощью положительной обратной связи вокруг устойчивой
передаточной функции. Если и достигает предела, то интегрирование
будет временно приостановлено, чем будет обеспечен механизм
противонакопления. Как иллюстрацию такого вида ограничителя, который
можно использовать в структуре на рис. 8.9, мы приводим конкретный
ограничитель на рис. 8.10, который в структуре на рис. 8.9 обеспечивает
механизм противонакопления по отношению к ограничению амплитуды
входного сигнала.
Альтернативный ограничитель, который достигает как ограничения
скорости нарастания, так и амплитуды, показан на рис. 8.11.
А
Выход
^тах
Вход
Рис. 8.10. Ограничитель для достижения насыщения
т -
f
S ^
;0 -
1
ДОтах '
-/■
i
" Л0Ып
*л
1 +
S *
J *
Лл
е '—
1
Umax
\
wmin
u(t)
Рис. 8.11. Комбинированная модель ограничений насыщения и скорости
нарастания
8.8. Технические средства 249
Дополнительная информация на эту тему приведена в гл. 11.
В данный же момент читатель может исследовать учебные
примеры на Web-странице, чтобы посмотреть, какое воздействие оказывает
защита против накопления на практические приложения.
8.8.4. Средства для минимальных перемещений
исполнительного механизма
Минимальные перемещения исполнительного механизма трудно
исправлять. В некоторых приложениях возможно использовать регуляторы
с двойным диапазоном, у которых большой регулятор используется,
чтобы выполнить основную операцию управления, а малый регулятор
используется, чтобы выполнить тонкую настройку. Пример
использования этой идеи приведен на Web-сайте, где рассматривается задача
управления значением рН.
В других приложениях мы должны довольствоваться
существующими исполнительными механизмами. Пример дается ниже.
Пример 8.9 (Непрерывное литье; повторное рассмотрение).
Вспомним задачу незатухающих, колебаний из-за минимальных
перемещений исполнительного механизма, описанных в примере 8.2.
В этом приложении нельзя использовать управление с двойным
диапазоном, потому что клапан малой и высокой точности сразу же
засорился бы, затвердевшей сталью. Решение, которое мы использовали
для получения значительного эффекта в этом приложении, состоит в
том, чтобы добавить клапану небольшую высокочастотную вибрацию.
Это держит клапан в движении и, следовательно, минимизирует
эффект залипания. Высокочастотная вибрация на входе фильтруется
динамикой процесса и таким образом существенно не влияет на
качество конечного продукта. Естественно, мы платим дополнительным
износом клапана из-за присутствия вибраций] однако эти издерэюки
возмещаются существенным улучшением качества изделия, как видно
на выходе. Некоторые реальные данные приведены на рис. 8.12. DDD
8.8.5. Изменения структуры
Фундаментальные ограничения, которые мы описали, относятся к
конкретной установке. Ясно, что если каким-то образом изменяется
физическая система, то ситуация меняется. Действительно, эти виды
изменений — очень мощный инструмент в руках проектировщика
систем управления. Конечно, прежде чем обдумывать любое изменение,
250 Глава 8. Фундаментальные ограничения SISO-управления
л
X
ф
и
о
Вибрация Вибрация Изменение
удалена добавлена рабочей точки
Рабочая точка
Время
Рис. 8.12. Реальные данные, показывающие эффект
дополнительной вибрации
желательно понять источник ограничений —следовательно, необходимо
рассмотрение фундаментальных ограничений, как сделано выше.
Чтобы проиллюстрировать, как даже небольшие структурные
изменения оказать сильное воздействие, вспомним из разд. 8.6:5, что
нули и полюсы разомкнутой системы имеют глубокое и предсказуемое
влияние на характеристики замкнутой системы. В данном разделе мы
рассмотрим только структуры с одной степенью свободы. Конечно, при
не поддающихся измерению возмущениях всегда нужно использовать
именно эту структуру, потому что здесь нет дополнительных степеней
свободы; однако иногда полезно использовать и структуру с двумя
степенями свободы, когда имеются дополнительно и изменения эталонного
сигнала. Например, полюсы разомкнутой системы в открытой ППП
обычно приводят к слабо устойчивым нулям в регуляторе и это, в
свою очередь, создает проблемы в перерегулировании при реакции на
ступенчатый входной сигнал. С регулятором, имеющим две степени
свободы, имеется возможность удалить эти нули из контура. Заметим,
что внутри контура они создают трудности и, следовательно, вносят
вклад в компромиссы проекта, связанные с робастностью, подавлением
возмущений и т. д. Проиллюстрируем это на простом примере.
Пример 8.10. Рассмотрим замкнутую систему управления объектом
с номинальной моделью G0(s) и ПК-регулятором C(s), где
G0(s) = -; C(s) = ^±Ll (8.8.6)
s s
Тогда полюсы замкнутой системы равны (—1;—1) и регулятор
имеет нуль при s = —0.5. Уравнение (8.6.12) правильно предсказывает
перерегулирование для проекта с одной степенью свободы] однако,
если мы предварительно профильтруем эталонный сигнал с помощью
фильтра H(s) = 55+1; то никакое перерегулирование не происходит в
ответ на ступенчатое изменение эталонного сигнала. Рисунок 8.13
8.9. Однородность проекта; повторное рассмотрение 251
т г
Одна степень свободы
Две степени свободы
5 6
Время [с]
10
Рис. 8.13. Эффект структуры с двумя степенями свободы
изображает выход объекта для структур с одной и двумя степенями
свободы. Ключевое различие в том, что в проекте с двумя степенями
свободы нет перерегулирования; это улучшение является следствием
того, что теперь передаточная функция от R(s) к E(s) = R(s) — Y(s)
имеет только один нуль в начале координат. □□□
Пример 8.11 (Эффект затягивания; повторное рассмотрение).
Вспомним пример, рассмотренный в разд. 8.7. Там мы выяснили, что
эффект затягивания в пределах SISO-структуры был неизбежен. Мы
увидим в гл. 10, что фактически возможно преодолеть проблему, но
это требует использования новой структуры для системы
управления.. □□□
8.9. Однородность проекта;
повторное рассмотрение
Мы видели выше, что ограничения являются результатом различных
эффектов. Например, следующие факторы обычно накладывают
верхний предел на допустимую полосу пропускания:
• ограничения исполнительного механизма по скорости нарастания и
амплитуде входного сигнала;
• ошибки модели;
• запаздывания;
• нули в ППП или на мнимой оси.
Это ведет к очевидному вопросу: какие из этих ограничений, если
таковые вообще имеются, необходимо рассмотреть? Ответ таков: ясно,
что лучше всего сосредоточиться на той конкретной проблеме, которая
имеет наибольшее воздействие. Другими словами, если присутствие
252 Глава 8. Фундаментальные ограничения SISO-управления
нулей в ППП ограничивает полосу пропускания величиной, значительно
ниже величины полосы, где ошибки модели становятся существенными,
то будет мало выгоды добиваться робастности регулятора или
улучшения модели. Предлагаем читателю сравнить эти комментарии с теми,
которые сделаны в разд. 1.5.10, где предварительно была рассмотрена
проблема однородности.
8.10. Резюме
• Эта глава рассматривает проблемы проектирования SISO-систем с
обратной связью.
• Показано, что следующие свойства замкнутого контура не могут
быть независимо учтены при проектировании регулятора (линейного,
стационарного):
о скорость подавления возмущения;
о чувствительность к шуму измерения;
о накопленная ошибка управления;
о требуемая амплитуда сигнала управления;
о требуемая скорость изменения сигнала управления;
о перерегулирование, если разомкнутая система неустойчива;
о недорегулирование, если система неминимально-фазовая;
о чувствительность к параметрическим ошибкам моделирования;
о чувствительность к структурным ошибкам моделирования;
• Скорее всего, настройка на одно из этих свойств автоматически
воздействует и на другие.
• Например, независимо от того, каким образом регулятор
синтезирован и настроен, если эффект шума измерения на выходе
определяется величиной T0(s), то воздействие выходного возмущения —
обязательно 1 —T0(s). Таким образом, любая конкретная частота не
может быть одновременно подавлена и в выходном возмущении, и в
шуме измерения, потому что одно из них потребовало бы, чтобы T0(s)
была близка к 0 на этой частоте, в то время как другое потребовало
бы T0(s) быть близкой к 1. Можно поэтому или подавить что-то одно
за счет другого, или выбрать компромиссное решение.
• Таким образом, более существенное подавление возмущения обычно
связывается с
о большей чувствительностью к шуму измерения;
о меньшей ошибкой управления;
о большей амплитудой и скоростями нарастания управляющих
действий;
8.10. Резюме 253
о более высокой чувствительностью к структурным ошибкам
моделирования;
о большим недорегулированием, . если система неминимально-
фазовая;
о меньшим перерегулированием, если система неустойчива.
• Компромиссы становятся точно определенными в соответствии с их
следующими фундаментальными законами:
1) S0(s) = 1 — T0(s) — т. е. выходное возмущение подавляется только
на частотах, где |T0(ja;)| « 1;
2) Y(s) = — T0(s)Dm(s) — т. е. шум измерения dm(t) подавляется
только на частотах, где |T0(ja;)| « 0;
3) Suo(s) = T0(s)[G0(s)]~~l' — т. е. большой сигнал управления
возникает на частотах, где |T0(jo;)| « 1, но \G0(ju))\ <S 1, что бывает в
случаях, когда замкнутый контур намного более чувствительный,
чем разомкнутый контур.
4) Sio{s) = S0(s)G0(s) —т. е. полюсы разомкнутого объекта или
обязательно появляются как нули в S0(s) (что приводит к
перерегулированию, когда подавляются ступенчатые выходные возмущения
и увеличению чувствительности) или, если они устойчивы, могут
быть приняты проектировщиком вместо этого как полюсы в Si0{s)
(где они влияют на подавление входных возмущений).
5) S(s) = S0{s)SA(s), где SA{s) = {l+T0{s)GA(s))~1-т. е. высокая
чувствительность к изменениям эталонного сигнала и в отношении
возмущений на частотах с существенными ошибками
моделирования опасна для устойчивости. Заметим, что относительная
(мультипликативная). ошибка моделирования GA обычно накапливает
фазу и амплитуду на высоких частотах.
6) Попытка сделать замкнутый контур быстрее, чем неустойчивые
нули, обязательно приводит к существенному недорегулированию.
• Рассмотрение фундаментальных законов компромисса гарантирует,
что неосторожно заданные, но недостижимые характеристики могут
быть быстро идентифицированы без потраченных впустую усилий
на настройку.
• Они также говорят, где дополнительные усилия были бы выгодны
или потрачены впустую:
о Если проект полностью не использует возможности
исполнительных механизмов и подавление возмущений ухудшается ошибками
моделирования (т. е. контур сформирован в соответствии с
фундаментальным законом компромисса 5), то дополнительные усилия
моделирования имеют смысл.
254 Глава 8. Фундаментальные ограничения SISO-управления
о Если, с другой стороны, характеристика контура ограничена
неминимально-фазовыми нулями и требованиями к недорегули-
рованию (т.е. контур сформирован в соответствии с
фундаментальным законом компромисса 6), то усилия по подбору лучших
исполнительных механизмов или лучших моделей были бы
потрачены впустую.
• Важно обратить внимание на то, что компромиссы проекта
о фундаментальны для линейных стационарных систем управления;
о независимы от любых конкретных используемых методов синтеза
систем управления.
• Однако различные методы синтеза
о выбирают разные свойства замкнутого контура в качестве своих
конструктивных свойств
о и поэтому обеспечивают различные окончательные свойства.
• Некоторые ограничения проекта, типа обратной реакции из-за
неминимально-фазовых нулей, существуют не только для линейных
систем управления, но также и для любого другого подхода к
управлению и структуре.
• Средства борьбы с фундаментальными ограничениями существуют,
но они неизбежно требуют радикальных перемен, например:
о поиск альтернативных датчиков;
о поиск альтернативных исполнительных механизмов;
о изменение основной структуры объекта или регулятора.
8.11. Литература для последующего чтения
Общие вопросы
1. Doyle, J.C, Francis, В.A., and Tannenbaum, A.R. (1992). Feedback Control
Theory, Macmillan Publishing Company.
2. Skogestad, S. and Post let hwaite, I. (1996). Multivariable Feedback Control:
Analysis and Design. Wiley, New York.
Ограничения во временной области
1. Middleton, R.H. (1991). Trade-offs in linear control systems design.
Automatica, 27(2):281-292.
Медленные устойчивые полюсы
1. Middleton, R.H. and Graebe, S.F. (1999). Slow stable open-loop poles: To
cancel or not to cancel. Automatical 35:877-886.
8.12. Задачи для читателя 255
Управление прокатным станом
1. Bryant, G. (1973). Automation of tandem mills. Iron and Steel Institute.
2. Dendle, D. (1978). Hydraulic position-controled mill and automatic gauge
control. Flat rolling — a comparison of rolling-mill types. In Proceedings of
International Conference held by the Metal Society, University College, London,
pages 26-29.
3. Edwards, W.J. (1978). Design of entry strip thickness control for tandem cold
mills. Automatica, 14(5):429-44Г.
4. Edwards, W.J., Goodwin, G.C.; G6mez, G., and Thomas, P. (1995). A review
of thickness control on reversing cold rolling,mill. I.E. Aust. Control, pages
129-134.
5. King, W. (1973). A new approach to cold mill gauge control. Iron and Steel
Engineering, pages 40-51.
Эффект накопления на прокатном стане
1. Clark, M. and Mu, Z. (1990). Automatic gauge control for modern high-speed
strip mills. In Proceedings of the 5th International Rolling Conference, Imperial
College, London, pages 63-72.
2. Goodwin, G.C., Woodyatt, A., Middleton, R.H., and Shim, J. (1999).
Fundamental limitations due to jcj-axis zeros in SISO systems. Automatica,
35(5):857-863.
3. Kondo, K., Misaka, Y., Okamato, M., Matsumori, Y., and Miyagi, T. (1988).
A new automatic gauge control system for a reversing cold mill. Trans. ISIJ,
28:507-513.
8.12. Задачи для читателя
Задача 8.1. Рассмотрим те же .самые условия, что и в лемме 8.2.
8.1.1. Докажите, что для ступенчатого входного возмущения и г > 2
/°° 1 / e^dT }dt = 0 (8.12.1)
>
te{t)dt = 0 (8.12.2)
/о '
/0
8.1.2. Изобразите ограничения (8.12.1) графически.
Задача 8.2. Рассмотрим те же самые условия, что и в лемме 8.3, за
исключением факта, что полюс s = r/0 и нуль s = z0 — многократные.
8.2.1. Докажите, что для единичного ступенчатого эталонного сигнала
или единичного ступенчатого, возмущения на выходе объекта
справедливо следующее:
/»00
/ te^e'^dt = 0 (8.12.3)
Jo
256 Глава 8. Фундаментальные ограничения SISO-управления
8.2.2. Докажите, что для единичного ступенчатого эталонного сигнала
и z0 в ППП справедливо следующее:
/»оо
/ ty(t)e-Zotdt = 0 (8.12.4)
Jo
Задача 8.3. Номинальная модель объекта включает неминимально-
фазовый нуль при s = zo. Характеристики системы управления
требуют, чтобы ошибка управления при единичном ступенчатом эталонном
сигнале удовлетворяла условию
|в(*)| < е"0^"*^ а>0 * > *i > 0 (8.12.5)
8.3.1. Оцените нижнюю границу для
#max = max e(t) (8.12.6)
8.3.2. Проанализируйте зависимость вычисленной границы от
параметров а и t\.
Задача 8.4. Номинальная модель объекта дана в виде
Этот объект должен управляться в замкнутом контуре с одной
степенью свободы.
8.4.1. Определите ограничения во временной области для входа
объекта, выхода объекта и ошибки управления в контуре. Считайте,
что при ш = 0 имеется точная инверсия, а эталонный сигнал и
возмущения по форме близки к ступенчатым.
8.4.2. Почему управление этим номинальным объектом особенно
трудно? Обсудите результату.
Задача 8.5. Рассмотрим замкнутую систему управления с устойчивым
объектом, имеющим неминимально-фазовый нуль (единственный) при
5 = 5 (a G М+). Предположим также, что соответствующий регулятор
может быть спроектирован так, что дополнительная чувствительность
дается выражением
8.5.1. Вычислите реакцию на единичную ступеньку для различных
значений а в диапазоне 0 < а < 20.
8.5.2. Для каждого случая вычислите максимальное недорегулирова-
ние Ми и нарисуйте график зависимости Ми от а. Обсудите
результаты.
8.12. Задачи для читателя 257
Задача 8.6. Рассмотрим объект, имеющий номинальную модель в виде
Предположим, что контур управления должен быть спроектирован
таким образом, чтобы доминирующие полюсы замкнутой системы
являлись корнями многочлена s2 + 1.3шпз + и%.
8.6.1. Используя назначение полюсов, синтезируйте регулятор для
различных значений ип.
8.6.2. Протестируйте ваш проект для ступенчатого эталонного сигнала
и ступенчатого входного возмущения.
8.6.3. Сравните с реализацией ПИД-регулятора, настроенного по
критерию Коэна—Куна.
8.6.4. Проанализируйте недорегулирование, полученное в переходной
характеристике.
Задача 8.7. Рассмотрим управление с обратной связью неустойчивым
объектом. Докажите, что выход регулятора u(t) обладает недорегули-
рованием для любого ступенчатого эталонного сигнала и для любого
ступенчатого выходного возмущения.
Задача 8.8. Рассмотрим два объекта, имеющих устойчивые
номинальные модели Ga и Gbj заданные выражениями
<™т=ЯГ в^'ш <81210>
где а Е М+ и d(s) — устойчивый полином. Далее предположим, что эти
объекты находятся в замкнутом контуре управления, доминирующие
полюсы которого имеют вещественные части меньше, чем —а.
Сравните фундаментальные ограничения проектирования для двух
контуров управления.
Задача 8.9. Рассмотрим эксперимент с шариком и
перекладиной, рассмотренный на Web-сайте книги. Известно, что эта система
неминимально-фазовая. Объясните физически, что это справедливо.
(Подсказка: рассмотрите центростремительную силу, когда перекладина
вращается.)
Как вы думаете, что случится с шариком, если вы повернете
перекладину внезапно, когда шарик около ее конца?
Отсюда дайте физическую интерпретацию ограничению на время
реакции, наложенному неминимально-фазовым нулем.
Глава 9
Ограничения проекта
в частотной области
9.1. Введение
В главе 8 с помощью элементарных рассуждений во временной
области, основанных на преобразовании Лапласа, было показано, что у
достижимых характеристик линейных систем управления существуют
фундаментальные ограничения. В частности, было показано, что
вещественные нули объекта разомкнутого контура, лежащие в ППП, всегда
приводят к недорегулированию в переходной характеристике замкнутой
системы. Кроме того, степень этого недорегулирования увеличивается
вместе с уменьшением времени переходного процесса замкнутой
системы. Это означает, что нули объекта, лежащие в ППП, неизбежно
задают верхний предел достижимой полосы пропускания замкнутого
контура, если следует избежать чрезмерного недорегулирования. Точно
так же было показано, что вещественные полюсы объекта в разомкнутом
состоянии, лежащие в ППП, всегда приводят к перерегулированию в
замкнутых системах с одной степенью свободы1. Цель данной главы
состоит в том, чтобы разработать эквивалентные ограничения в частотной
области и исследовать их интерпретацию.
Результаты, которые будут представлены здесь, имеют давнюю и
богатую историю, начинающуюся с оригинальной работы Воде,
опубликованной в 1945 г. в его книге по синтезу цепей. Начиная с того
времени, результаты были украшены исследованиями многих авторов.
В этой главе мы суммируем результаты для SISO-систем. В главе 24 мы
расширим результаты на случай МШО-систем.
Все результаты следуют из предположения, что функции
чувствительности являются аналитическими в замкнутой ППП (т. е. требуется,
1 Напомним, что все это справедливо при наличии у системы интегрирующего звена. —
Прим. перев.
9.2. Интегральные ограничения Боде, накладываемые на чувствительность 259
чтобы они были устойчивы). Аналитическая теория функций тогда
подразумевает, что функции чувствительности не могут быть определены
произвольно, а должны удовлетворять некоторым точным
интегральным ограничениям.
Основой, необходимой для оценки этих результатов, является
элементарная теория аналитических функций. Возможно, не все читатели
раньше встречались с этой теорией, поэтому мы представляем ее
краткий обзор в приложении С, находящемся на Web-сайте книги. Данную
главу можно читать одним из двух способов. Или математика может
считаться сама собой разумеющейся, тогда акцент будет на
интерпретации результатов, или, что предпочтительней, читатель может
получить полное понимание, рассмотрев вначале результаты, приведенные
в приложении С. Ключевой результат здесь — интегральная формула
Коши и ее прямое следствие — формула Пуассона—Йенсена. Данная
глава делает частые ссылки на эти и другие результаты приложения С.
Поэтому полезно было бы открыть приложение С на вашем компьютере,
чтобы его можно было читать одновременно с чтением этой главы.
Большинство результатов, которые будут обсуждены ниже, основано
на общих характеристиках (т. е. интегрированных или суммированных)
ln|£0(ju;)| и ln.|T0(jo;)|. Амплитудные логарифмические характеристики
функций чувствительности изменяют знак, когда эти величины
пересекают единичное значение. Напомним, что 1 —ключевая величина в
анализе чувствительности.
9.2. Интегральные ограничения Боде,
накладываемые на чувствительность
Боде был первым, кто установил, что интеграл логарифма
чувствительности должен быть нулевым (при некоторых умеренных условиях).
Это означает, что если чувствительность достигает малых значений в
некотором диапазоне частот (\S0(ju)\ < 1 =>lg\S0(ju)\ <0), тогда она
где-нибудь должна иметь большие значения, чтобы сохранить нулевое
значение для интеграла логарифма. Гюнтер Стейн в лекции,
посвященной памяти Боде на Конференции IEEE по принятию решений и
управлению, назвал его принципом сохранения массы чувствительности.
Это представление рассматривает область функции чувствительности
наподобие какого-то количества массы. Если часть массы удалить из
некоторой области (т. е. уменьшить чувствительность в какой-то
полосе частот), то она накапливается где-нибудь еще (т. е. увеличивается
чувствительность на других частотах). Формальное определение этого
результата следующее.
260 Глава 9. Ограничения проекта в частотной области
Лемма 9.1. Рассмотрим устойчивый контур управления с одной
степенью свободы и передаточной функцией в разомкнутом состоянии
G0(s)C(s) = e-STHol(s) т>0 (9.2.1)
где H0i(s) — дробно-рациональная передаточная функция с
относительной степенью (см. разд. 4.5.2) пг>0и пусть параметр к определяется
следующим образом
*=lim sHol{s) (9.2.2)
5—>00
Предположим, что H0i(s) не имеет полюсов в открытой ППП.
Тогда функция номинальной чувствительности удовлетворяет
условию
ГЬ№№,)|*'-{-«| £r-Q <8'2-3>
Доказательство
Сначала рассмотрим случай г = 0.
Введем следующие изменения в обозначениях: s —> z, H0i(s) —> l(z) и
g(z) = (l + l(z))-\
Тогда мы видим, что
S0(z) = (l + l(z))-1=g(z) (9.2.4)
Учитывая предположения относительно H0i{s), видно, что
функция lng(z) — аналитическая в замкнутой ППП] тогда, в
соответствии с теоремой С. 7 " -
I lng(z)dz = 0 (9.2.5)
где С = Ci U Соо — контур, определенный на рис. С.4. Тогда
f lng(z)dz = j / lng(ju)du - / ln(l + l(z))dz (9.2.6)
J С J-OO J Coo
Для первого интеграла в правой части равенства, учитывая
сопряженную симметрию g(z), получим
/ОО /»00
Ing(ju)cL) = 2 / ]n\g(ju))\du) (9.2.7)
-оо ./0
Для второго интеграла заметим, что на кривой С^ значение l(z)
можно аппроксимировать выражением
i (9-2.8)
9.2. Интегральные ограничения Боде, накладываемые на чувствительность 261
Результат следует из примера С.7, если учесть, что а = к для пг =
1. Расширение на случай г ф 0 аналогично и использует результаты
примера С.8. □□□
Из леммы 9.1 мы делаем вывод, что независимо от способа
проектирования регулятора, низкая чувствительность в некоторых заданных
диапазонах частот приведет к значениям чувствительности больше единицы
в других диапазонах частот. Графически вышеупомянутое утверждение
может быть хорошо представлено на рис. 9.1.
Частотная характеристика чувствительности
4
2
0
-2
-А
-6
мх
1 1 1 1 1
Ум*
\
1 1 : 1 1 1
2 4 6 8 10
Частота [рад/с]
Рис. 9.1. Графическая интерпретация интеграла Боде
12
На рис. 9.1, когда область А\ (=> \S0{ju>)\ < 1) равна области Аъ
(=> \S0(ju))\ > 1), интеграл в выражении (9.2.3) равен нулю (или, в
более общем случае, А\ — А2 = я§).
Теоретически это не серьезное ограничение, потому что достаточно
иметь \S0(ju)\ только немного больше единицы на большом (фактически
бесконечном) диапазоне частот. Мы говорим «теоретически», потому
что робастность и устойчивость к шумам, среди других факторов,
потребуют, чтобы значение |T0(jo;)| было очень маленьким за некоторой
частотой. Таким образом, согласно фундаментальному свойству T0(juj)+
S0{jw) = 1, от этой частоты и далее \S0(juj)\ не будет вносить никакого
существенного вклада в баланс, требуемый выражением (9.2.3). Это
означает, что на практике компенсация должна быть достигнута в
пределах конечной полосы частот. Ниже об этом будет сказано подробнее.
Вышеприведенный результат предполагает, что разомкнутый контур
устойчив. Далее будет приведено расширение на случай неустойчивых
разомкнутых контуров.
Лемма 9.2. Рассмотрим замкнутый контур управления с
передаточной функцией, как в лемме 9.1 и имеющей неустойчивые полюсы в точ~
262 Глава 9. Ограничения проекта в частотной области
ках pi,...,pn, чистым запаздыванием г и относительной степенью
пг>1. Тогдамоминальная чувствительность удовлетворяет условию:
/»оо ■"
/ In \S0(ju) \(1ш = жУ2^{р{} для пг>1 (9.2.9)
Г°° 7Г ^
\n\S0{ju})\du)=-K- + 7rS2^{pi} для пг = 1 (9.2.10)
где к = lim5^oo sH0i (s).
Доказательство
Рассмотрим сначала случай г = 0.
i^aw u в лелше 9.1, сделаем изменения обозначений s —> z, H0i(s) —>
l(z) ug(s) = (l + l(z))-1.
Заметим вначале, что In g(z) не является теперь аналитической
функцией в ППП (потому что неустойчивые полюсы разомкнутого
контура pi,... ,Pn становятся нулями g{z)). Тогда определим
Таким образом, Ing(z) аналитическая в замкнутой ППП. Тогда мы
мооюем использовать интеграл Коти по контуру С, изобраэюенному
на рис. С А, и получим
I ln$(s)<fe = 0= / lng{z)dz + У* { In^^dz (9.2.12)
J с Jc ы\*с z~Pi
Первый интеграл правой части можно представить следующим
образом:
ф lng(z)dz = 2j / ]n\g(ju))\du) + / lng(z)dz (9.2.13)
Jc Jo JCoo
где, используя пример С.7, получим
[О для пг > 1
1ng(z)dz = \. д (9.2.14)
Coo (Jktt для nr = l where к = lim^oo zl(z)
Второй интеграл правой части равенства (9.2.12) может быть
вычислен следующим образом:
/1П£±^^ = ;-Г1П^±Р1^+/ inf±J^ (9.2.15)
Jc z-Pi J-oo 3u-Pi JCoo z-pi
L
9.3. Интегральные ограничения на дополнительную чувствительность 263
Заметим, что первый интеграл правой части равен нулю, а второй,
в соответствии с примером С.9, равен —2jnpi. Таким образом,
результат следует из того факта, что, раз g(z) — вещественная функция z,
то
N N
$> = $>{«} (9.2.16)
Если g(z) = (1 +e~ZTl(z))~ для г > 0, то доказательство
получается таким же образом, что и в примере С.8. ППП
Замечание 9.1. Формулы Воде (и связанные с ними результаты)
предполагают, что рассматриваемая функция аналитическая не
только внутри области D, но таксисе и на ее границе С. При
проектировании систем управления, однако, могут существовать особенности на
С, типа интеграторов или чисто мнимых полюсов регулятора
(предназначенных для подавления конкретных возмущений — см. гл. 10). Их
можно учесть, используя бесконечно малые полуокруснсности на С,
построенные для того, чтобы оставить особенность вне области D.
Для функций, интересных нам, интеграл по полуокруснсности обычно
стремится к нулю. Это проиллюстрировано в примере С.6 для
логарифмической характеристики, когда D — ППП и имеется особенность
в начале координат. ППП
9.3. Интегральные ограничения
на дополнительную чувствительность
Выражение (9.2.3) относится к номинальной чувствительности.
Естественный вопрос — существует ли подобный результат для других трех
номинальных функций чувствительности. Препятствие для такого
расширения состоит в том, что логарифмы |T0(s)| и |Si0(s)| не ограничены
для больших значений |s|, потому что T0(s) и Si0(s) — строго собственные
функции. (Вспомним, что S0(s) — бисобственная.) Мы можем обойти
проблему в случае функции дополнительной чувствительности,
интегрируя cj-2lg|T0(jcj)|.
Снова мы находим, что принцип сохранения справедлив и здесь.
Конкретно это выглядит следующим образом.
Лемма 9.3. Рассмотрим устойчивый контур управления с одной
степенью свободы' и передаточной функцией в разомкнутом состоянии
G0{s)C{s) = e-STH0i{s) т>0 (9.3.1)
264 Глава 9. Ограничения проекта в частотной области
где H0i(s) —дробно-рациональная функция с относительной степенью
пг>1, удовлетворяющая условию
Но^ОГ^О (9.3.2)
Далее предположим, что H0i(s) в разомкнутом состоянии не имеет
нулей в открытой ППП.
Тогда функция номинальной дополнительной чувствительности
удовлетворяет условию
J —ln\T0(ju)\du = 7TT-— (9.3.3)
где kv — постоянная скорости разомкнутой передаточной функции,
которая удовлетворяет условию
1 1. dT(s)
— = - lim —^ (9.3.4)
kv 5->o as
1
= — lim
5->о sH0i(s)
Доказательство
Заметим, что
T0(s) = (l + Hol(s)-1eSTr1 (9-3.5)
Рассмотрим функцию
Р(,)йЩ& (9.3.6)
S
Обратим внимание, что F(s) аналитическая в замкнутой ППП, за
исключением начала координат. Применим к этой функции теорему
об интеграле Коти С.7. Используем контур, подобный показанному
на рис. С А, вместе с бесконечно малой правой полуокружностью С€
в начале координат. Тогда мы имеем, что
1Щ!1Лз=0=[ ьщ&ь+гъщй^г ади* (9.з.7)
Jc s JCi- s Jct s JCoo s
где С{- —мнимая ось минус полуокружность С€. Далее мы можем
показать, используя (9.3.2); что интеграл вдоль С€ равен — 7rlim3.^o £*'.
Таксисе просто доказать, что интеграл вдоль Cqq равен 2тгт. Тогда
результат (9.3.3) следует из использования сопряэюенной симметрии
подынтегрального выражения в (9.3.3) и перестановки членов. ППП
£>|T.(*,)|*,-j["ln|T.(i)
9.3. Интегральные ограничения на дополнительную чувствительность 265
Выражение (9.3.3) имеет такой же смысл, как и (9.2.3), потому что
оно дает аналогичное понимание ограничений проекта. Лучше всего это
видно из
dv = Ц. (9.3.8)
где v = ±.
Лемма 9.3 предполагает, что нет никаких нулей разомкнутого
контура в ППП. Результат может быть расширен на случай, когда имеются
нули в ППП, как показано в следующей лемме, аналогичной лемме 9.2.
Лемма 9.4. Рассмотрим устойчивый контур управления с одной
степенью свободы и передаточной функцией в разомкнутом состоянии
G0{s)C(s) = e-STH0i{s) с т>0 (9.3.9)
где H0i(s) —дробно-рациональная передаточная функция
относительной степени пг > 1 и удовлетворяющая условию
Ны{0Гг=0 (9.3.10)
Дальше предположим, что H0i(s) имеет в разомкнутом состоянии
нули в открытой ППП, находящиеся в точках ci,C2,...,cm; тогда
Г°° 1 ^ 1
^^bpiWI*,.^^--^- (9.3.11)
Доказательство
Сначала определим
м
f0(s) ul[il^T0(s) (9.3.12)
Заметим, что \T0(ju))\ = |T0(jo;)| и что s~2lnT0(s) —аналитическая
функция в замкнутой ППП за исключением начала координат. Таким
образом,
btW, I 1пГ„(.)^. , ( InfiW^, [ 1пГ„(.)л
Jc s Jc{- s Jct s Jc
с *2
(9.3.13)
266 Глава 9. Ограничения проекта в частотной области
где Ci- —мнимая ось минус полуокружность С€ (в обозначениях
рис. С.4 С{ = С€ U Ci-). Тогда мы видим, используя (9.3.10), что
интеграл вдоль С€ равен нулю. Заметим также, что
Первый интеграл правой части исчезает, а второй может быть
вычислен из
где s = Ч и С$ — бесконечно малая полуокружность с движением
против часовой стрелки. Результат следует из того, что 1п(1+ж) —> х
для\х\->0. ППП
Мы видим из (9.3.11), что присутствие нулей (маленьких) в ППП
делает компромисс в распределении дополнительной чувствительности
по частотам более трудным. Заметим также, что исходя из (9.3.11), нули
объединяются как сумма обратных величин нулей (подобно
параллельному соединению резисторов в электротехнике).
9.4. Ограничение на чувствительность,
определяемое интегралом Пуассона
Результат, полученный в лемме 9.2, показывает, что чем больше
вещественная часть неустойчивых полюсов, тем труднее обеспечить
компенсацию чувствительности; однако по крайней мере, теоретически,
компенсация все еще может быть достигнута на бесконечном диапазоне
частот.
Когда включено действие неминимально-фазовых нулей, тогда
ограничение становится более точным, как показано ниже в формуле
Пуассона—Йенсена (см. лемму С.1).
Далее нам будет нужно преобразовывать передаточные функции
/(s), имеющие нули в ППП (при с*;; к = 1, ••• ,М) и/или полюсы в
ППП (при pi\i = 1, ••• N) в такие функции, как, например, ln(/(s)),
которые являются аналитическими в ППЦ. Прием, который мы будем
использовать,—выразить f(s) в виде произведения функций,
являющихся неминимально-фазовыми и аналитическими в ППП, умноженных
9.4. Ограничение на чувствительность, определяемое интегралом Пуассона 267
на следующие произведения Блашке (а иногда и обратных величин этих
произведений):
Действительно, этот прием уже был использован при доказательстве
леммы 9.2 и леммы 9.4 —см. (9.2.11) и (9.3.12).
Тогда мы имеем следующую лемму, которая связывает (с весами)
интеграл ln\S0{jw)\ с расположением и нулей, и полюсов разомкнутого
контура в ППП.
Лемма 9.5 (Интеграл Пуассона для S0(juj)). Рассмотрим контур
управления, имеющий в разомкнутом состоянии
неминимально-фазовые нули, расположенные в точках ск = 7fc + 3$k> & = 1>2,...,М;
и неустойчивые полюсы, расположенные в точках pi,P2,---,PN- Тогда
номинальная чувствительность удовлетворяет условию
f
ln\S0(ju})\ 2 .Tfc -2<^ = -7г1п|ЯРЫ| Алл /; = 1,2,...,М
(9.4.2)
а для вещественного неустойчивого нуля, т. е. когда Sk = 0, выражение
(9.4.2) упрощается:
f
Jo
1 2"у*
ln\S0(ju)\-^-^du =-7г1п\Вр(ск)\ для fc = l,2,...,M
(9.4.3)
где Bp(s) —произведение Блашке, определенное в (9.4.1).
Доказательство
Сначала вспомним, что любой неминимально-фазовый нуль
разомкнутого контура должен быть нулем T0(s) и, следовательно,
T0(ck) =0<=> S0(ck) = 1 <=> lnS0(ck) = 0 (9.4.4)
Заметим таксисе, что функция S0(s) устойчива, но неминимально-
фазовая, потому что ее числитель обращается в нуль во всех
неустойчивых полюсах разомкнутого контура. Мы удаляем неустойчивые
полюсы, используя произведение Блашке, определяя [S0(s)]Smp следующим
образом:
S0{s) = [S0{s)]smpBp{s) . (9.4.5)
где [S0(s)]smp — устойчивая и минимально-фазовая.
268 Глава 9. Ограничения проекта в частотной области
Результат (9.4.2) тогда следует из применения леммы С.1, взяв
z = s, g(s) = [So(s)]8mp ug(s) = S0{s).
Выражение (9.4.3) получается из (9.4.2), учитывая, а) что 6к = 0 и
б) сопряженную симметрию S0(jd). DDD
Заметим, что — ln|J5p(cfc)| > 0 и что он неограниченно возрастает
при приближении одного из неминимально-фазовых нулей разомкнутого
контура к одному из неустойчивых полюсов разомкнутого контура.
Выражение (9.4.2) говорит, что независимо от того, как
спроектирован регулятор, должна быть достигнута взвешенная компенсация
областей высокой и низкой чувствительности. Обратим внимание, что
функция веса уменьшается с ростом частоты, означая, что эта
компенсация должна по существу быть достигнута на конечном диапазоне частот.
Из (9.4.2) мы видим, что весовая функция в этих интегралах
*<**-4+11-и? Р.4.6)
Мы также видим, что
/оо
-оо
W(ck,u))du} = n (9.4.7)
Кроме того, мы можем определить взвешенную длину оси частот:
2 rCW(ck,u>)du> = 2aictg (?°^**\ +2arctg (^\ = П(ск,ис) (9.4.8)
Заметим, что если Ш2 > ш\ > 0, то
2 / W{ck,u)du = Щск,и2) - П(ск,шг) (9.4.9)
JiJl
Аналогично для вещественных неминимально-фазовых нулей, т. е.
когда 6к = 0, мы имеем
Щскушс) = 2arctg (^Л (9.4.10)
ft(cjfc,oo) = 2 lim arctgf — ) =тг (9.4.11)
а,е_юо \jkJ
Это можно интерпретировать как задание длины (меры), равной
7г, для оси частоты. Чтобы лучше понять результат, полученный в
лемме 9.5, рассмотрим два специальных случая. Для простоты мы
предположим, что неминимально-фазовые нули являются вещественными,
т. е. 5к = 0.
9.4. Ограничение на чувствительность, определяемое интегралом Пуассона 269
Частотная характеристика чувствительности
10
"«10е КЗ-
Частота [рад/с]
Рис. 9.2. Технические требования для \S0(jw)\
ю'
Пример 9.1. Пусть технические требования таковы, что \S0(ju)\ <
б < 1 в диапазоне частот [0,o;j]. Найдем ниэюнюю границу максимума
чувствительности Sniax-
Чтобы получить эту границу, мы используем лемму 9.5 и
вышеупомянутые определения. Тогда, после расщепления интервала
интегрирования [0,оо) на [0,cjj]U (cjj,oo) получим
/•СО pUJi
2/ ln\S0(ju)\W(ck,u>)du = 2 ]n\S0(ju)\W(ck,u)dw+
Jo Jo
2 rin\S0(ju)\W(ck,u>)cLj (9-412)
Jlji
= -7Tln\Bp{ck)\
Затем мы подставим верхние границы для \S0(juj)\ в обоих
интервалах. Используя (9.4.8)-(9.4.11), получим
/*оо
2 / hL\S0(ju))\W{ck,u))du) = -тг1п|5р(сЛ)|
Уо
<1п(е)/ 2W(ck,cj)dcj + \nSmax / 2W(ck,u)dw
Jo Jwi
= \n(e)Sl(ck,Ut) + (7T-fi(Cfc,Wj))lll1S'max
что приводит к
1
(9.4.13)
(9.4.14)
(9.4.15)
InSn
ir-Q{ck,u)i)
[|тг1п|ВРЫ|| +-|(1пб)П(с*,и1)|] (9.4.16)
где мы использовали то, что \Вр(ск)\ < 1 <=$■ 1п(\Вр(ск)\) < 0 для любого
ск>0.
270 Глава 9. Ограничения проекта в частотной области
Обсуждение
1. Рассмотрим график чувствительности в зависимости от частоты,
показанный на рис. 9.2. Пусть нам нужно, чтобы полоса пропускания
замкнутого контура была больше чем модуль нуля (вещественного),
находящегося в~ППП. В терминах обозначений, используемых выше,
для этого должно быть и)1>"ук- Мы можем тогда показать, что
обязательно имеется очень большой пик чувствительности, возникающий
за щ. Чтобы оценить этот пик, предположим, что di = 2jk и е = 0.3.
Тогда, не рассматривая влияние каждого возможного
неустойчивого полюса разомкнутого контура^ мы можем сказать, что пик
чувствительности будет ограничен снизу (см. выражение (9.4.16)).
lnSmax> J [|(ln0.3)n(cfc,2cfc)|] . (9.4.17)
п-Щск,2ск)
После использования (9.4.10) мы получим £2(сд;,2сд.) = 2arctg(2) =
2.21, что приводит к Smax > 17.7. Заметим, что это, в свою очередь,
дает ограничение снизу пика дополнительной чувствительности
значением Smax — 1 = 16.7.
2. Наблюдение, сделанное в п. 1, совместимо с анализом, выполненным
в разд. 8.6.5. В обоих Случаях можно сделать заключение, что
полоса пропускания замкнутого контура не должна превышать модуля
самого маленького неминимально-фазового нуля разомкнутого
контура. Цена невыполнения этого требования такова: появится очень
большой пик чувствительности, приводящий к хрупким контурам
(неробастным) и большим недорегулированию и перерегулированию.
3. В присутствии неустойчивых полюсов разомкнутого контура задача
решается через сомножитель |ln|Bp(cfc)||. Этот сомножитель
неограниченно растет, когда какой-либо неминимально-фазовый нуль
приближается к неустойчивому полюсу разомкнутого контура. □□□
Пример 9.2. Рассмотрим графики, приведенные на рис. 9.3. Пусть в
дополнение к требованиям в предыдущем примере мы требуем, чтобы
\T0(ju)\ был меньше е для всех частот, больших иь > щ и 0 <
б <S 1. Это условие обычно возникает из потребности гарантировать
шумовую устойчивость и робастность от ошибок моделирования (см.
гл. 5).
Снова найдем нижнюю границу пика чувствительности.
Сначала заметим, что требование \T0(juj)\ < е подразумевает
\So(jw)\ < 1 + б, поскольку S0(s)+T0(s) = 1.
9.4. Ограничение на чувствительность, определяемое интегралом Пуассона 271
Частотные характеристики чувствительностей
"h 101
10
Частота [рад/с]
Рис. 9.3. Технические требования для \S0(ju>)\ и |T0(jo7)|
Следуя тому же подходу, что и в предыдущем примере, мы
расщепим интервал интегрирования [0,оо) на [0,ui] U (ui,Uh] U (cj/^oo).
/•CO rUJi
2 / ln\S0(ju)\W{ck,u)du = 2 / ln\S0(ju)\W(ck,u>)du>+
Jo Jo
2 \n\S0(jcj)\W(ck,cj)dcj + 2 ln\S0(ju)\W(ck,u)duj
JuJi Ju)h
= -тг1п|Вр(с*)| (9.4.18)
В каждом интервале мы далее заменим \S0(juj)\ его максимальной
величиной, как показано ниже:
{€ U G [0, Dl]
Smax ue[uUUh) (9.4.19)
1 + б uG [u^ oo]
После этих замен и использования выражений (9.4.8) и (9.4.9)
получим
1п5„
Щск,шн)-ЩскуШ1)
-(тг-П(ск)ин))\п(1 + е)]
[|7г1п|Вр(Ь011 + |(1п€)П(сьа;|)|
(9.4.20)
Мы можем видеть, что в дополнение к компромиссу,
проиллюстрированному в предыдущем примере, в этом случае появляется новый
компромисс. Резкие переходы, на частотной характеристике, т. е. когда
(^близка к cj/j, приведут к большим пикам чувствительности.
272 Глава 9. Ограничения проекта в частотной области
9.5. Ограничение
на дополнительную чувствительность,
определяемое интегралом Пуассона
Аналогично тому, как было сделано в разд. 9.4, мы можем получить
ограничения для дополнительной чувствительности.
Результат, соответствующий лемме 9.5, следующий.
Лемма 9.6 (Интеграл Пуассона для T0(ju)).' Рассмотрим контур
управления, имеющий запаздывание г > 0, а таксисе содероюащий как
неустойчивые полюсы в разомкнутом состоянии, расположенные в
точках pi,P2>- • • ,Pn (где pi = щ + jpi), так и нули в разомкнутом
состоянии, находящиеся в открытой ППП и расположенные в точках
Ci,C2,...,CM-
Тогда номинальная дополнительная чувствительность
удовлетворяет условию
/°° а-
ln\T0{ju)\ 2 г -(L) = -7Г\п\Вг(рг)\+7ГТаг
■оо af + ifii-uy
для i = l,2,...,iV (9.5.1)
Доказательство
Вышеупомянутый результат — почти прямое применение леммы С.1.
Если запаздывание отлично от нуля, то ln\T0(juj)\ не удовлетворяет
граничным условиям 4 в лемме С.1. Итак, мы сначала определяем
f0(s) = T0(s)e°T =* 1п|ЗДо;)| = ln|T0(jo;)| (9.5.2)
Результат тогда следует из применения леммы C.I kT0(s) и после
учета, что
1п(То(р{))=0 i = l,2,...,iV (9.5.3)
ППП
Последствия этого результата иллюстрируются в следующем
примере. Для простоты мы предполагаем, что неустойчивый полюс
вещественный, т. е. fa = 0.
Пример 9.3. Пусть технические требования таковы, что \T0(ju)\ <
б < 1 для всех частот, больше Uh- Это требование определяет полосу
пропускания замкнутого контура и могло бы быть получено из
рассмотрения робастности и шумовой устойчивости. Мы ищем нижнюю
9.5. Ограничение на дополнительную чувствительность 273
границу пика чувствительности Ттах. Этот пик будет лежать в
области частот, ниже и^.
Для получения этой границы можно использовать лемму 9.6.
Расщепим интервал интегрирования [0,оо) на [0,0^] U (cj/^oo). Тогда из
выражения (9.5.1) мы имеем
Г°° 2а
/ ln\T0(ju)\ 2 ' 2du) = -тг1п|В,(а*)| + тгтщ
Jo °i + и1
-f. u™")iaTTj^+L ыы^«ф^
<Щаиик)\пТтм + {\пе)(п-П(аиин)) (9.5.4)
где функции fi(o,o) были определены в (9.4.6)-(9.4.11).
Переставляя члены в (9.5.4), мы получим
1пТтах>— -[n\ln\Bz(ai)\\ + 7rrai + \\ne\(7r'-Q(auuh)] (9.5.5)
Обсуждение
1. Мы видим, что нижняя граница пика дополнительной
чувствительности больше для систем с чистым запаздыванием и что влияние
запаздывания увеличивается для неустойчивых полюсов, которые
находятся далеко от мнимой оси, то есть для больших щ.
2. Пик Ттах неограниченно растет, когда неминимально-фазовый нуль
приближается к неустойчивому полюсу, потому что тогда |ln|Bz(pj)||
становится неограниченным.
3. Пусть нам нужно, чтобы полоса пропускания замкнутого контура
была намного .меньше, чем модуль полюса (вещественного) в ПЦП. В
терминах обозначений, используемых ранее, мы тогда имеем и^ <С оц.
При этих условиях значение Vt(puu)h) будет очень маленьким,
приводя к очень большому пику дополнительной чувствительности.
Заметим, что это совместимо с результатами в разд. 8.6.5, основанными
на анализе во временной области. Там показано, что при выполнении
этого условия возникает большое перерегулирование. □□□
Существование больших пиков чувствительности имеет
интерпретацию во временной области, а именно, что переходная характеристика
замкнутого контура имеет большие отклонения и медленное
нарастание. В частотной области эта нежелательная особенность будет обычно
отражаться в небольших запасах устойчивости.
274 Глава 9. Ограничения проекта в частотной области
Результаты, представленные выше, устанавливают компромиссы
проектирования, происходящие из природы систем с обратной связью в
присутствии неминимально-фазовых нулей и неустойчивых полюсов
в разомкнутом состоянии. Конечно, подобные ограничения
возникают и из-за полюсов и нулей в регуляторе. Если желательно иметь
ограничения, которые независимы от регулятора, то знак равенства в
выражениях (9.2.9), (9.2.10), (9.4.2), (9.4.3) и (9.5.1) следует изменить
на знак >, потому что компоненты в этих уравнениях должны также
включить и влияние неустойчивых полюсов или неминимально-фазовых
нулей регулятора.
Один из общих выводов, который может следовать из
вышеупомянутого анализа, — это то, что задача проектирования становится более
трудной для больших неустойчивых полюсов разомкнутого контура и
маленьких неминимально-фазовых нулей. Понятия «большой» и
«маленький» берутся относительно величины требуемой полосы
пропускания замкнутого контура.
Замечание 9.2. Прилагаемый CD-ROM включает две программы
smax.m и tmax.m пакета MATLAB для вычисления нижних границ
чувствительности и дополнительной чувствительности в
соответствии с некоторыми характеристиками полосы пропускания. □□□
9.6. Пример компромиссов проекта
Чтобы проиллюстрировать применение вышеупомянутых идей, мы
рассмотрим пример перевернутого маятника. Это —учебный пример, но
подобная динамика используется для стабилизации качки судна с
помощью перекладки руля —см. гл.23. Мы рассмотрим два варианта
действий: один —в котором измеряется угол маятника и другой —в
котором это дополнительное измерение недоступно.
Пример 9.4 (Перевернутый маятник без измерения угла).
Рассмотрим систему, показанную на рис. 9.4.
Детали моделирования этой системы даны в гл. 3. Вспомним, что,
применяя классические методы механики, мы получаем следующую
(нелинейную) модель:
У<*К л. * 2^J^+(Ht))2lsme(t)-gSme(t)coSe(t)) (9.6.1)
l(\m+smz0(t)) \ т )
(9.6.2)
где \т = М/т, ад— ускорение силы тяжести.
9.6. Пример компромиссов проекта 275
М
КХУ
№
>-
y(t)
Рис. 9.4. Перевернутый маятник
Если вышеупомянутую нелинейную модель линеаризовать около
рабочей точки 0q = 0; yQ = 0 и /q = 0, мы получим следующую
передаточную функцию от входа f к выходу у:
Y(s)= (s-b)(s + b)
F{s) s2(s-a)(s + a)
где
(9.6.3)
K=b 6=\/f; -
(9.6.4)
Мы видим, что имеется неминимально-фазовый нуль,
расположенный в s = b (который находится левее неустойчивого полюса,
расположенного в s = a. Это вызывает конфликт проектирования системы
управления, потому что, с одной стороны, полоса пропускания
замкнутого контура должна быть меньше, чем Ь, но, с другой стороны,
она должна быть больше, чем самый большой неустойчивый полюс,
т. е. больше, чем а. Чтобы оценить количественно влияние этого
неразрешимого конфликта, мы зададим М = т = 0.5 кг, I = 1 м и
приблизительно j«10 м/с2. Эти значения дадут
Y(S) (8-у/Ш)(8 + у/Ш) ,Qfi,v
F(s) s*(s-V20)(s + V20) ( }
Наличие неминимально-фазового нуля и неустойчивого полюса
приводит к пикам чувствительности с нижними границами, которые
могут быть вычислены на основе формул, представленных выше.
Рассмотрим схематические графики чувствительности и
дополнительной чувствительности, приведенные на рис. 9.3. В частности,
вспомним определения щ, u)h и е. Рассмотрим различные варианты для Ш£ и
Uh при 6 = 0.1.
276 Глава 9. Ограничения проекта в частотной области
• u)i = л/16» и ин = 100— тогда выражение (9.4.16) предсказывает
Smax > 432. В этом случае и^ намного больше, чем неустойчивый
полюс, таким образом, большая величина для границы получается
из-за ui = слишком близкой к неминимально-фазовому нулю.
• Когда cjf = 1 и (Jh = 100, мы имеем из (9.4.16), что значение Smax >
16.7, которое значительно меньше, чем в предыдущем случае (хотя
все еще очень большое), потому что теперь di много меньше, чем
неминимально-фазовый нуль.
• Если ц = 1 u w/j = \/20, мы получаем из (9.5.5) Ттах > 3171
вследствие того, что и^, слишком близко к неустойчивому полюсу.
• Если ui = \ и (Jh = 3, мы получаем из (9.5.5), что Ттах > 7.2 х 105.
Эта огромная нижняя граница происходит из-за двух факторов:
первый — то, что и^ меньше неустойчивого полюса] второй — что
ui и Uh очень близки.
Мы можем видеть из только что представленных значений
чувствительности, что управление перевернутым маятником, когда
измеряется только положение тележки, чрезвычайно трудно (и,
вероятно, почти невозмооюно практически). Альтернативное объяснение
этого требования, основанное на аргументах корневого годографа, дано
на Web-сайте.
Web-сайт также содержит следующий регулятор:
C(s) = P3S!^P2.f^PlS+f° (9-6.6)
где
6
Ро
Pi
Р2
Ръ
Но
il
h
>S+i2
_
=
=
=
=
=
=
s2 + lia + £0
-74.3
-472.8
7213.0
1690.5
-8278.9
-2682.3
41.5
Этот регулятор приводит к графикам чувствительности и
дополнительной чувствительности, изображенным на рис. 9.5.
Конечно, графики на рис. 9.5 показывают очень большие пики,
означающие, что проект слишком чувствителен к шумам, возмущениям,
ошибкам моделирования и т. д. Легко проверить, что для данного
проекта {использующего е = 0.1), где ui « 0.03 и Uh ~ 60, выражение
(9.4.16) предсказывает 5тах > 6.34, а выражение (9.5.5) — Гтах > 7.19.
Из рис. 9.5 видно, что эти нижние границы у данного проекта
действительно превышены. Ключевым моментом здесь является то, что
эти трудности являются характерными и не могут быть обойдены
9.7. Резюме 277
Частота [рад/с]
Рис. 9.5. Чувствительности для перевернутого маятника
никаким проектом системы управления. (Предлагаем читателю
посмотреть соответствующие реакции на ступеньку, представленные
на Web-сайте и попробовать самому спроектировать лучший SISO-
регулятор. Читатель, возможно, оценит трудность задачи, пробуя
балансировать метлу на пальце, когда закрыты глаза!) □□□
Замечание 9.3. Читателю может показаться, что трудность, с
которой сталкиваются в вышеупомянутом примере, легко может
быть преодолена, если создать некий виртуальный датчик для
отсутствующего измерения угла. Это может быть хорошей идеей в выборе
закона управления. Однако в конце концов регулятор будет иметь дело
опять-таки с переменными f и у, т. е. мы опять возвращаемся к
SISO-контуру обратной связи. Так что опять возникают идентичные
проблемы!
Читателю может показаться, что эти аргументы противоречат
замечательному успеху, который мы получили в разд. 8.8.1, где
говорилось об использовании датчика вертикального перемещения для оценки
толщины полосы на выходе прокатного стана. Однако существенное
отличие последнего случая в том, что там мы использовали
дополнительную измеренную величину (силу), чтобы определить толщину,
т. е. изменили структуру системы управления. Это не происходит в
случае перевернутого маятника, когда мы пробуем оценить в с
помощью у, потому что не используются никакие новые измерения. □□□
9.7. Резюме
• Имеется целый класс ограничений проекта, которые связаны с
характерными частотами.
278 Глава 9. Ограничения проекта в частотной области
• Таким образом, мы можем рассматривать закон S(ju) = l-T(ju) на
основе частотных соображений. Это означает, что никакая отдельная
частота не может быть подавлена одновременно и в чувствительности
S(j(j), и в дополнительной чувствительности T(jcj).
• Имеется, однако, дополнительный ряд соображений по
проектированию, которые вытекают из так называемых интегральных
ограничений в частотной области; см. табл. 9.1.
• В данной главе исследуется происхождение и природа этих
интегральных ограничений и определяются их значения для реализации
системы управления:
о Ограничения — прямое следствие требования, чтобы все функции
чувствительности были устойчивы.
о Математически это означает, что чувствительности должны быть
аналитическими в ППП комплексной плоскости.
о Тогда из теории аналитических функций следует, что взвешенные
интегралы частотной характеристики неизбежно постоянны.
о Таким образом, если проектируется регулятор, чтобы иметь
низкую чувствительность в конкретном диапазоне частот, то
чувствительность обязательно увеличится в других диапазонах —
следствие постоянства взвешенных интегралов; это явление также
называется эффектом водяной кровати. (Надавливание на водяную
кровать в одном месте поднимает ее в других местах.)
• Эти компромиссы показывают,, что системами будет все труднее
управлять, если
о неустойчивые нули станут медленнее;
о неустойчивые полюсы станут быстрее или
о запаздывание станет больше.
9.8. Литература для последующего чтения
Оригинальная работа Боде
1. Bode, H. (1945). Network analysis and feedback amplifier design. Van Nostrand,
New York.
Ограничения в частотной области
1. Preudenberg, J.S. and Looze, D.P. (1985). Right-half plane poles and zeros
and design tradeoffs in feedback systems. IEEE Transactions on Automatic
Control, 30(6):555-565.
2. Preudenberg, J.S. and Looze, D.P. (1988). Frequency Domain Properties of
Scalar and Multivariable Feedback Systems. Lecture Notes in Control and
Information Sciences, Vol. 104, Springer-Verlag, New York.
Таблица 9.1
Интегральные ограничения для SISO-систем
Обозначения
Pi, полюсы в ППП
с», нули в ППП
W(cfc,cj), весовая функция;
Bp(ck), произведение Блашке
W(pi,u), весовая функция;
Bz(pi), произведение Блашке
Ограничения
/ l7l\S0(ju)\(hj = 7Г J2^{Pi}
Jo "2 ^ a 2kv
rOO
2 / ln\So(jw)\W(ck,w)du> = -7rfn|Bp(cfc)|
•/0
/»oo
2 / /п|Го0^)|^(р£,а;)Л; = -irfn|jB,(pO|
./о
Интерпретация
Области, где чувствительность
меньше 1 (т. е. ln\S0\ < 0), должны
соответствовать областям, где
чувствительность больше 1
Области, где дополнительная
чувствительность меньше 1, должны
соответствовать областям, где
дополнительная чувствительность
больше единицы
Вышеуказанные компромиссы
чувствительности связаны с областями
вблизи нулей в ППП
Вышеуказанные компромиссы
чувствительности связаны с областями
вблизи полюсов в ППП
280 Глава 9. Ограничения проекта в частотной области
3. Seron, M.M., Braslavsky, J.H., and Goodwin, G.C. (1997). Fundamental
limitations in filtering and control Springer-Verlag.
4. Zames, G. and Francis, B.A. (1983). Feedback, minimax sensitivity, and
optimal robustness. IEEE Transactions on Automatic Control, 28(5):585-601.
Теория комплексного переменного
1. Churchill, R.V. and Brown, J..W. (1990). Complex Variables and Applications.
McGraw-Hill, New York, 5th edition.
2. Krzyz, J.G. (1971). Problems in Complex Variable Theory. Elsevier, New
York.
3. Levinson, N. and Redheffer, R.M. (1970). Complex Variables. Holden-Day,
San Francisco.
Общие проблемы проектирования
1. Doyle, J.С, Francis, B.A., and Tannenbaum, A.R. (1992). Feedback Control
Theory. Macmillan Publishing Company.
2. Skogestad, S. and Postlethwaite, I. (1996). Multivariable Feedback Control-
Analysis and Design. Wiley, New York.
3. Horowitz, I. (1963). Synthesis of Feedback Systems. Academic Press. [Имеется
русский перевод: А. М. Горовиц. Синтез систем с обратной связью. — М.:
Советское радио, 1970.]
4. Horowitz, I. and Shaked, U. (1975). Superiority of transfer function over
state-variable methods in linear, time-invariant feedback systems design. IEEE
Transactions on Automatic Control 20:84-97.
9.9. Задачи для читателя
Задача 9.1. Рассмотрим замкнутый контур управления, где
Go(s)C(s) = -^— (9.9.1)
5(5 + 4)
9.1.1. Проверьте лемму 9.1 прямым вычислением интеграла (9.2.3).
„ , Л ^т „ „, ^ 175 + 100
9.1.2. Повторите это для G0C(s) =
5(5 + 4) *
Задача 9.2. Модель объекта дана в виде
G(s) = -^- (9.9.2)
5 + 1
Используйте для запаздывания аппроксимацию Паде второго
порядка. Затем, используя лемму 9.5 и результаты примера 9.1 при е = 0.1
и u)i = 3, определите нижнюю границу для пика номинальной
чувствительности.
9.9. Задачи для читателя 281
Задача 9.3. Номинальная модель объекта дана в виде
Этот объект управляется в контуре с одной степенью свободы.
Допустим, что известны точная инверсия при о; = 0, а эталонный сигнал и
возмущения по форме близки к ступенчатым.
9.3.1. Допустим, что контур должен удовлетворять условиям
\S0(ju)\ <0.2 для ш<2 \To(ju))\<0.2 для и > 8
(9.9.4)
Используя результаты данной главы (и прилагаемые программы
smax.m и tmax.m пакета MATLAB), получите возможно лучшую
оценку для нижней границы пика номинальной чувствительности и
дополнительной чувствительности.
9.3.2. Почему управление этим номинальным объектом особенно
трудно? Обсудите результаты.
Задача 9.4. Предположим, что для контура управления с одной
степенью свободы и объектом, имеющим номинальную модель, заданную
передаточной функций G0(s), неустойчивой и неминимально-фазовой,
спроектирован бисобственный регулятор. Определите частотные
ограничения для номинальной чувствительности по управлению SUo-
Глава 10
Структурные проблемы
SISO-систем управления
10.1. Введение
Анализ в предыдущих главах был посвящен основным свойствам
контура обратной связи и синтезу регулятора обратной связи. В этой
главе мы расширим возможности анализа, сосредоточившись также и
на структурных проблемах, которые связаны с точной компенсацией
некоторых типов детерминированных возмущений и точным
отслеживанием специфических эталонных сигналов. Здесь будет показано, что
по сравнению с системами, основанными только на обратной связи,
использование упреждения и/или каскадных структур дает во многих
случаях преимущество. Идеи интегрального воздействия будут также
распространены на более общие классы компенсации возмущений.
10.2. Модели для детерминированных
возмущений и эталонных воздействий
В этой главе нам нужно рассмотреть некоторые классы возмущений и
эталонных сигналов. Эти сигналы интересны тем, что они могут быть
представлены как выходы линейных динамических систем с нулевыми
входами и некоторыми конкретными начальными условиями. Самый
простой пример такого сигнала — константа, которая может быть
описана моделью:
irf = 0 ; Xd{0) заданная величина (10.2.1)
Обобщение этой идеи включает любое возмущение, которое может
быть описано дифференциальным уравнением вида:
г=0
10.2. Модели для детерминированных возмущений и эталонных воздействий 283
Эта модель дает следующее выражение для преобразования Лапласа
возмущения:
п , ч Nd{s)xd{0)
°9{8)= Td(s) ' (1°-2-3)
где Td(s) — полином, формирующий возмущение, определяемый
выражением
a q~l
I\f(*) = ** + ]>>*' . (Ю.2.4)
г=0
Этот полином соответствует знаменателю преобразования Лапласа
от d9(t) и может быть разложен на множители в соответствии с
составляющими возмущения. Проиллюстрируем это простым примером.
Пример 10.1. Возмущение имеет следующий вид:
d9(t) =Kl+K2 sin(3t + K3) (10.2.5)
где K\,K*i и К$ — константы. Формирующий полином равен:
Td(s) = s(s2 + 9) (10.2.6)
Заметим, что.К\, К2 и К$ определяются начальными условиями
xd(0) в модели пространства состояний. □□□
Аналогичным образом мы определяем и эталонные сигналы, т. е.
представляем эталонный сигнал как выход динамической системы,
имеющей нулевой вход и некоторые заданные начальные условия. Это
означает, что эталонный сигнал удовлетворяет однородному
дифференциальному уравнению вида
-^+Х>Н«Г=» (10.2.7)
г=0
Данная модель приводит к
Гг(«)
где Тr (s) —полином, формирующий эталонный сигнал, определяемый
выражением
л ' «-1
Тг(з)й8я + ^2^ (Ю.2.9)
г=0
Полином соответствует знаменателю преобразования Лапласа для
r(t) и может быть разложен на множители в соответствии с
составляющими эталонного сигнала. Для использования в дальнейшем представим
Tr(s) в виде двух сомножителей
ГГ(5) = Г?(5)Г~(5) (10.2.10)
284 Глава 10. Структурные проблемы SISO-систем управления
Dg(s)
-\ ^
J—0'
Т ""
C(s)
U(s)^
Goi(s)
1
Ч-
;0 -
Go2(s)
Y('l
Рис. 10.1. Контур управления с обобщенным возмущением
где Г^ —полином с корнями, находящимися строго внутри ЛПП, а
r£°(s) — полином с корнями в замкнутой ППП, расположенными в
точках s = бг, г = 1,2,...,пе. Для простоты будем считать эти корни
различными.
10.3. Принцип внутренней модели применительно
к возмущениям
10.3.1. Входные точки возмущений
В предыдущих главах мы делали различие между входным и выходным
возмущениями, чтобы выдвинуть на первый план проблемы, связанные
с местом приложения возмущения. Здесь мы примем объединенное
описание, обобщающее и входное и выходное возмущение. В частности,
для номинальной модели G0(s) со входом U(s) и выходом Y(s) мы
предположим, что возмущение Dg(s) действует на объект в некоторой
промежуточной точке, т. е. мы моделируем выход следующим образом:
Y(s) = Go2(s)(Gol(s)U(s) + D9(s)) где G0(s) = Gol(s)Go2(s)
(10.3.1)
Эта структура изображена на рис. 10.1.
Случай входного возмущения обеспечивается заданием G0i(s) = 1
и G0(s) = G02{s). Случай выходного возмущения получается, если
Go2(s) = 1 и G0(s) = Gol(s).
10.3.2. Компенсация возмущения в установившемся состоянии
Заметим, что для приведенного выше обобщенного описания
возмущения в предположении, что замкнутый контур устойчив, выход номиналь-
10.3. Принцип внутренней модели применительно к возмущениям 285
ной модели и выход регулятора можно выразить соответственно -
Y{s) = S0(s)Go2(s)Dg(s) (10.3.2)
U(s) = -SuoGo2(s)Dg(s) = §^D9(*) (Ю-3-3)
Из уравнения (10.3.2) видно, что влияние возмущения на выход
модели асимптотически затухает, когда, по крайней мере, выполняется
одно из следующих условий:
• dg(t) ->• 0 при t ->• оо;
• полином Tfi{s) является сомножителем числителя S0(s)G02(s).
Первый случай неинтересен с точки зрения установившегося состояния
реакции, хотя и будет рассматриваться в контексте переходной
характеристики.
Когда корни I\j(s) лежат в замкнутой ППП, тогда только второе
условие гарантирует нулевую установившуюся ошибку из-за
возмущения. Это требование может быть выполнено, если сомножители I\j(s)
находятся в знаменателе регулятора C(s) и/или в знаменателе G0i(s).
Заметим, что для входного возмущения, т. е. G0i(s) = 1, единственный
возможный вариант —это то, что I\j(s) будет сомножителем
знаменателя C(s).
Мы видим, что когда I\j(s) является сомножителем знаменателя
(7(5), неустойчивые компоненты d9(t) будут асимптотически
компенсироваться как в номинальном контуре обратной связи, так и в истинном
контуре, при условии, что номинальный контур робастно устойчив.
Причина этого сильного свойства в том, что S0(s) обратится в нуль
для неустойчивых корней T^s), что вместе со свойством робастной
устойчивости гарантирует также и стремление к нулю S(s) для тех же
корней.
Таким образом, мы можем сделать следующий вывод.
Компенсация возмущения в установившемся режиме требует, чтобы
формирующий полином был включен как часть знаменателя
регулятора. Это известно как принцип внутренней модели (ПВМ). Корни
формирующего полинома, особенно неустойчивые, порождают те же
самые компромиссы характеристик замкнутого контура, как если бы
эти полюсы были частью объекта.
Когда используется принцип внутренней модели, T0(s) и T(s)
включают корни Tfi(s). Таким образом, из уравнения (10.3.3) мы видим, что
выход регулятора u(t) будет, вообще говоря, содержать составляющие
возмущения.
286 Глава 10. Структурные проблемы SISO-систем управления
Принцип внутренней модели может быть явно использован на стадии
синтеза. Далее мы исследуем один путь, которым это может быть
достигнуто.
10.3.3. Назначение полюсов
Вспомним теорию, представленную в разд. 7.2. Для номинальной модели
объекта и регулятора, заданных выражениями (7.2.2), т. е. G0(s) =
4|f и C(s) = 2Ш1 мы имеем, что принцип внутренней модели будет
А0
обеспечен, если L(s) является произведением Td(s)L(s). Это приводит к
уравнению назначения полюсов:
A0(s)rd(s)L(s) + B0(s)P(s)=Acl(s) (10.3.4)
где'L(e) = Td(s)L{s).
Если степень A0(s)—n) то полином Aci(s) может быть произвольно
определен тогда и только тогда, когда его степень, по крайней мере,
2п — Г+g. Заметим, что в разд. 7.2.2 эта идея была использована для
специального случая Td(s) = 5.
Проиллюстрируем процедуру следующим примером.
Пример 10.2. Рассмотрим номинальную модель G0(s) = ^5 и входное
возмущение dg(t) = K\ + K2sin(2t + К^). Требуется построить такой
регулятор C(s), чтобы принцип внутренней модели удовлетворялся
для этого класса возмущений.
Сначала заметим, что q = 3, I\j(s) = s(s2 + 4) и п = 1. Это
означает, что Aci(s) должен по крайней мере быть степени пс = 4.
Предположим, что мы выбираем Ad(s) = (s2 + 4s + 9)(s + 5)2. Далее
сделаем так, что регулятор будет иметь форму,
c{s) ф*П) (10-3'5)
Соответствующее уравнение назначения полюсов имеет вид
5(52+4)(5 + 3)+3(^з53+^252+^15 + А) = (52+45 + 9)(5 + 5)2 (10.3.6)
откуда следует, что fa — Ц-, Р2 = Ц-, Pi = ^jp u A) = 75 (используя
программу paq.m).
Выражение (10.3.2) для этого примера дает
где Ng(s) —полином числителя Dg(s). Мы таксисе использовали факт,
что G02(s) =G0(s). Заметим однако, что ценой компромисса, которая
10.3. Принцип внутренней модели применительно к возмущениям 287
должна быть оплачена, чтобы достичь полной компенсации этого
конкретного возмущения, является то, что полином, формирующий
возмущение, будет обязательно появляться в качестве нулей функции
чувствительности и затрагивает реакцию на ступенчатое выходное
возмущение и дополнительную чувствительность соответственно.
Интересно следующее наблюдение. Предположим, что для этого
входного возмущения мы имели такие передаточные функции
номинальной модели и регулятора:
GoW = - и . C(s)= (g + 3)(g2 + 4) (Ю-3.8)
Заметим, что объединенная передаточная функция объекта и
регулятора G0(s)C(s) имеет те же самые полюсы, что и выше, но теперь
сомножитель s появляется в G0(s), а не в C(s).
Полином замкнутого контура Aci(s) и номинальная
чувствительность S0(s) остаются неизменными] однако теперь G02(s) = | и
таким образом
_ 3(* + 3)(з2 + 4) _ Z(s + Z)N9(s)
Y{S) ~ Ad(s) ^" sAd(s) (10l3-9)
Отсюда очевидно, что на выходе остается постоянная составляющая,
приводя к установившейся ошибке, отличной от нуля. Это
происходит вследствие того, что принцип внутренней модели
удовлетворяется для составляющей возмущения, представленной сомножителем
52+4, но не для составляющей, представленной сомносисителем s. □□□
10.3.4. Промышленный пример:
компенсация эксцентриситета валков прокатного стана
Обычная технология, используемая для измерений на прокатных станах
(см. разд. 8.8.1), —определение толщины проката по измерениям силы
воздействия валков. Этот способ обычно называется BISRA-измерите-
лем. Однако на эти измерения влияет эксцентриситет валков. Мы
можем объяснить, почему эксцентриситет влияет на измерение толщины,
следующими физическими соображениями. Обычно увеличение силы
означает, что толщина выходной полосы увеличилась (отталкивая при
этом валки); однако, если валки эксцентричны, то, когда самый большой
радиус проходит через зазор между валками, сила увеличивается, а
толщина выходной полосы фактически уменьшается. Следовательно,
изменение силы истолковывается неверно, когда присутствует
эксцентриситет.
288 Глава 10. Структурные проблемы SISO-систем управления
Довольно распространенная стратегия, относящаяся к этой задаче, —
моделирование компонентов эксцентриситета как многочисленные
синусоиды , (обычно используется десять периодов на один поворот валков;
для четырех валков это возрастает до сорока периодов синусоиды). Эти
синусоиды можно смоделировать, как в (10.2.4), где
т
Td(s)=l[(s2 + u>?) (10.3.10)
г=1
В этом случае можно использовать принцип внутренней модели,
чтобы удалить возмущения от выхода измерителя. Одна такая схема —
запатентованная технология, известная как AUSREC, была разработана
в соавторстве одним из авторов этой книги.
Отсылаем читателя к примеру прокатного стана, приведенному на
Web-сайте книги. Там показано, что такой вид регулятора — очень
эффективный инструмент для решения проблемы с эксцентриситетом
валков.
10.4. Принцип внутренней модели
для отслеживания эталонного воздействия
Для отслеживания эталонного воздействия мы рассмотрим структуру
с двумя степенями свободы, показанную на рис. 5.2, с нулевыми
возмущениями. Тогда характеристики отслеживания могут быть определены
количественно с помощью следующих уравнений:
Y(s) = H(s)T0(s)R(s) (10.4.1)
E(s) = R{s) - Y(s) = (1 - H(s)T0{s))R(s) (10.4.2)
U{s) = H{s)SU0(s)R{s) (10.4.3)
Элемент с передаточной функцией H(s) (который должен быть
устойчив, так как он действует в разомкнутом контуре) известен как
передаточная функция с упреждением эталонного сигнала. Такая
структура обычно называется контуром управления с двумя степенями
свободы. Рассмотрим проблемы установившегося состояния и переходных
процессов в этой структуре.
Если мы должны использовать принцип внутренней модели для
отслеживания эталонного воздействия, достаточно задать H(s) = 1 и
затем включить полином, формирующий эталонный сигнал, в
знаменатель C(s)G0(s). Это приведет к S0{ei) = 0, где е% = 1,... ,пг —полюсы
полинома, формирующего эталонный сигнал. Это, в свою очередь,
подразумевает, что реальная чувствительность S(ei) = 0 для е% = 1,...,пг.
10.5. Упреждение 289
Следовательно, реальная дополнительная чувствительность
удовлетворяет условию Т(бг) = 1 и из (10.4.2) мы имеем, что для H(s) = 1
lime(t)=0 (10.4.4)
t->oo
Можно резюмировать это следующим образом.
Чтобы достичь робастного отслеживания, полином,
формирующий эталонный сигнал, должен быть в знаменателе произведения
C(s)G0(s), т. е. принцип внутренней модели также должен быть
удовлетворен для эталонного воздействия. Когда полиномы,
формирующие эталонный сигнал и возмущение, содержат некоторые общие
корни, тогда эти общие корни могут быть включены только однажды
в знаменатель C(s), чтобы одновременно удовлетворить принципу
внутренней модели и для эталонного воздействия, и для возмущения.
10.5. Упреждение
Использование принципа внутренней модели, как отмечено выше,
обеспечивает полную компенсацию возмущения и отслеживание эталонного
сигнала в установившемся состоянии; однако без ответа остается
проблема переходного процесса: как система себя ведет в течение начальной
стадии после изменения возмущения или эталонного сигнала.
Мы видели, что компенсация в установившемся состоянии не зависит
от точной динамики объекта при условии, что замкнутый контур
устойчив; однако переходный процесс — функция динамики системы и таким
образом подчинена свойственным системе компромиссам, которые мы
изучали в другом месте. В частности, переходный процесс зависит от
нулей передаточной функции между точкой приложения возмущения
или эталонного воздействия и выходом, полюсов передаточной
функции между выходом и точкой приложения возмущения или эталонного
воздействия и расположения полюсов замкнутого контура.
На переходный процесс можно повлиять различными способами.
Наиболее очевидный путь состоит в том, чтобы изменить
местоположение полюсов замкнутого контура, изменяя регулятор; однако в
некоторых случаях возможно измерить возмущения или эталонные сигналы
непосредственно. Разумное использование этих измерений в структуре
управления дает нам дополнительные механизмы для воздействия на
переходную характеристику.
Далее мы обсудим упреждение эталонного воздействия и упреждение
возмущения.
290 Глава 10. Структурные проблемы SISO-систем управления
10.5.1. Упреждение эталонного воздействия
Мы можем использовать структуру с двумя степенями свободы для
отслеживания эталонного сигнала. Вспомним, что модель, описывающая
эту структуру для эталонных сигналов, дана выражениями (10.4.1)-
(10.4.3). Основная идея упреждения эталонного воздействия состоит
в том, чтобы использовать H(s) для получения инверсии T0(s) на
некоторых существенных частотах, так, чтобы H(s)T0(s) = 1 в полюсах
модели эталонного сигнала (т. е. в б;; t = 1,..., пе). Заметим, что при этой
стратегии можно не использовать обратную связь с большим усилением,
чтобы обеспечить Т0(в{) близкой к единице. Это имело бы преимущества
с точки зрения робастной устойчивости. С другой стороны, если мы
используем #(s), чтобы получить Н(ег)Т0(вг) = 1, то характеристики
для реального объекта будут зависеть от различий между номинальной
чувствительностью T0(s) и истинной или реальной чувствительностью.
Это, в свою очередь, подразумевает чувствительность к различиям
между истинным объектом и номинальной моделью G0(s).
Пример 10.3. Рассмотрим объект, имеющий номинальную модель
вида
G°W = ?rb2 (10-61)
Цель управления заключается в том, чтобы обеспечить, насколько
это возможно, отслеживание выходным сигналом объекта эталонного
воздействия вида
r(t)=K1sm(t) + K2 + ra(t) (10.5.2)
где К\ и К2 —неизвестные константы, a ra(t) —сигнал с полосой
частот [0,5] рад/с. Пусть также присутствует шум измерения,
который ограничивает полосу пропускания замкнутого контура величиной
3 рад/с.
Требуется спроектировать систему управления, чтобы получить
нулевую ошибку управления в установившемся состоянии и хорошее
динамическое отслеживание эталонного воздействия.
Заметим сначала, что спектр эталонного сигнала содержит
частоты ш = 1 рад/с и 0 рад/с. Он также имеет составляющие в полосе
частот [0,5] рад/с. (Заметим, что это находится вне допустимой
полосы пропускания замкнутого контура, так что структура с двумя
степенями свободы будет необходима.)
Следует также обратить внимание на проблему выбора
относительной степени, потому что C(s) и H(s) должны быть
собственными.
10.5. Упреждение 291
Требования к проекту можно суммировать следующим образом:
1. Полоса пропускания Т0 должна быть по крайней мере 3 рад/с.
2. Полоса пропускания НТ0 должна быть по крайней мере 5 рад/с.
3. Передаточная функция регулятора обратной связи C(s) должна
иметь полюсы при 5 = 0 и s = ±j.
Сначала мы синтезируем регулятор обратной связи, используя
метод размещения полюсов полинома. Заметим, что
характеристический полином замкнутого контура должен тогда быть выбран, по
крайней мере, степени 6, чтобы разместить полюсы передаточной
функции C(s) в точках 0,±jl. Для простоты мы скомпенсируем
полюсы модели объекта.
Таким образом, мы выберем
ОД=ад s(s2 + l)(s + a) (1°-5-3)
Полином замкнутого контура выбран в виде Aci(s) = (s2+3s+2)(s2 +
35+ 4)(5 + I)2. Такой выбор сделан эмпирическим путем, чтобы
ограничить полосу пропускания замкнутого контура величиной 3 рад/с;
это ограничение приводит к появлению в Aci(s) медленных полюсов.
Заметим также, что сомножитель s2+3s+2 помещен в Ad(s), чтобы
скомпенсировать полюсы разомкнутого контура.
После сокращения сомножителя s2 + 3s + 2 уравнение назначения
полюсов понижается до
s(s2 + l)(s + a) + 2{/32s2 + /3lS + ft) = (s2 + 3s + 4)(s + l)2 (10.5.4)
Оно дает
a = 5; ft = 5; ft=3; A> = 2 (10.5.5)
откуда мы получим
T°{S) ~ (52 + 3, + 4)(5 + 1)2 (1°-5-6)
Далее спроектируем блок упреждения эталонного воздействия
H(s), чтобы получить полное отслеживание эталонного воздействия,
по крайней мере, до частоты 5 рад/с. Относительная степень T0(s) —
2, так что это таксисе и минимальная относительная степень
H(s)T0(s), в противном случае H(s) будет несобственной. Предполо-
жим, мы выберем
"«r°W = (aoI7TIF (10-5'7)
292 Глава 10. Структурные проблемы SISO-систем управления
которая превышает требуемую полосу пропускания 5 рад/с. Это дает
(52 + 35 + 4)(5 + 1)2
Я(*) =
(l0s2+6s + 4)(0.01s + l)2
(10.5.8)
DDD
10.5.2. Упреждение возмущения
Далее мы покажем, как идеи упреждения могут быть применены к
подавлению возмущений.
Структура для упреждения измеряемого возмущения показана на
рис. 10.2. Заметим, что это —точно та же конфигурация, что и
используемая в книге ранее (см. разд. 2.3 с примером, относительно уровня
изложницы) для компенсации изменения скорости литья.
Из рис. 10.2 видно, что и выход модели, и реакция на выходе
регулятора подвержены воздействиям возмущения, которые определяются
выражениями
Yd(s) = S0(s)Go2(s)(l + G0l(s)Gf(s))Dg(8) (10.5.9)
Ud{s) = Suo{s)Go2{s)D9{s) + S0{s)Gf{s)D9{s) (10.5.10)
Предложенная структура имеет следующие особенности:
1. Передаточная функция блока упреждения Gf(s) должна быть
устойчивой и собственной, потому что она действует в разомкнутом
контуре.
2. Уравнение (10.5.9) показывает, что в идеале блок упреждения должен
инвертировать часть номинальной модели, т. е.
G/(e) = -[GoiW]-1 (10.5.11)
3. Обычно G0i(s) имеет низкочастотную характеристику, так что мы
должны ожидать, что Gf(s) будет иметь высокочастотную
характеристику.
Использование упреждения возмущения проиллюстрировано в
следующем примере.
R(s)
о
C(s)
+ Y
U(s)
G/W
Goi(s)\
Dg(s)
t +
O—H^w
Y(s)
Рис. 10.2. Схема упреждения возмущения
10.5. Упреждение 293
Пример 10.4. Рассмотрим объект, имеющий номинальную модель
G°M = 2?T¥TT G"'w =
5 + 1
G02(S) =
25 + 1
(10.5.12)
Мы не будем обсуждать регулятор обратной связи (он фактически
имеет структуру учредителя Смита —см. разд. 7.4).
Предположим, что возмущение dg(t) представляет собой нечасто
возникающие ступенчатые изменения. Выберем —Gf(s) как
приближение инверсии G0i(s), т. е.
Gf{s)=-Kwri (105лз)
где (3 допускает компромисс меснсду эффективностью упреэюдения и
величиной управляющего воздействия. Заметим, что К номинально
равен единице.
Было выполнено моделирование с помощью SIMULINK для контура
с единичным ступенчатым эталонным воздействием при t = 1 и
единичном ступенчатым возмущением при t = 5. Типичные результаты
показаны на рис. 10.3 для /3 = 0.2 и К = 0 (нет никакого упреэюдения)
и К = 1 (полное упреждение).
Из рисунка можно видеть, что упреждение явно улучшает
переходную характеристику.
Интересный результат состоит в том, что во многих случаях
упреждение возмущения выгодно, даже если Gf(s) является
постоянной величиной, т. е. точной инверсией G0i(s) только в точке и; = 0.
Предлагаем читателю попробовать этот и другие варианты для Gf(s)
и оценить их влияние, например, на u(t). Схема этого примера для
SIMULINK находится в файле distff.mdl.
Влияние упреждения возмущения
Время [с]
Рис. 10.3. Контур управления с (К = 1) и без (К = 0) упреждения
возмущения
294 Глава 10. Структурные проблемы SISO-систем управления
Идеальное упреждение возмущения требует инверсии, так что
главные трудности возникают, когда G0i{s) содероюит запаздывание
или неминимально-фазовые нули, потому что они не могут быть
инвертированы. С другой стороны, упреждение возмущения особенно
полезно для некоторых объектов, подобных рассмотренному в этом
примере, где G02(s) содероюит существенное запаздывание, в то время
как G0i(s) —нет. Это часто происходит в перерабатывающих
отраслях промышленности. DDD
Упреждение возмущения может также использоваться для
нелинейных объектов, как показано в следующем примере.
Пример 10.5. Рассмотрим объект, где отношение между входом u(t),
возмущением dg(t) и выходом y(t) определяется моделью
y(t) = Go2{d9{t)+w(t)) с w(t) = Gol{u(t)) (10.5.14)
где G02{°) —линейный, не зависящий от времени оператор, a G0i(°) ~~
нелинейный оператор, такой, что
^Р- + (2 + 0.2u(t))w(t) = 2u{t) (10.5.15)
at
Предположим, что мы хотим использовать структуру
упреждения возмущения, показанную на рис. 10.2. Нужно определить
подходящую функцию Gf.
Решение
Идеальный результат будет в том случае, когда Gf — нелинейный
оператор, такой, что
Gol(Gf(d9(t))) = -d9(t) т. е. Gf(dg(t)) = G^i-d^t)) (10.5.16)
Тогда
Gf(d9(t))=G;11(-d9(t)) =
^♦нм"
-2 + 0.2dg{t)
(10.5.17)
Однако этот оператор не может быть реализован, поскольку
требуется чистое дифференцирование. Чтобы устранить это
ограничение, введем быстро меняющуюся составляющую
-*™*+а/М,М>-
*й+ад
-2 + 0.2d9(t)
(10.5.18)
где T'Cl.
10.5. Упреждение 295
Оператор, определенный равенством (10.5.18), используется для
вычисления ошибки упреждения возмущения ef(t), определяемой
следующим образом:
ef(t) = d9(t) + w(t) = d9{t) + G0l ® Gf(d9{t)) (10.5.19)
Этот пример иллюстрирует, как упреждение возмущения моэюет
использоваться в нелинейных моделях; однако следует сделать
предостережение, потому что устойчивость механизма упреждения
зависит от величины используемых сигналов. В данном примере, если
величина dg(t) будет близка к 10, моэюет произойти насыщение, потому
что член, содержащий —2 + 0.2dg(t), неограниченно растет. □□□
Другая проблема с использованием этой структуры —то, что
измеренная величина возмущения может включать шум, который имел бы
вредное воздействие на характеристики контура. Это
проиллюстрировано в следующем примере.
Пример 10.6. Рассмотрим объект с обобщенным возмущением (как
на рис. 10.1), где
где а — неизвестная константа.
10.6.1. Нужно спроектировать упреждение возмущения, предполагая,
что полоса пропускания дополнительной чувствительности не
может превышать 3 рад/с.
10.6.2. Предположим теперь, что полоса пропускания замкнутого
контура не ограничена. Если используется управление только с
одной степенью свободы, то возможно ли получить реализацию,
подобную полученной в предыдущем случае?
10.6.3. Предположим, что шум измерения имеет полосу частот
[2,20] рад/с и появляется при измерении возмущения. Нужно
обсудить влияние этого шума на выход объекта.
Решение
10.6.1. Блок упреждения возмущения G/(s) должен представлять
собой приближение отрицательной инверсии G0i(s). Возмущение
имеет существенную энергию в диапазоне частот [0,8] рад/с, так
что мы должны обеспечить удовлетворительную инверсию именно
в этом диапазоне частот. Выберем
"'М—тйг1 (10-5-21)
296 Глава 10. Структурные проблемы SISO-систем управления
-^1о—
\\
-1
-Г
Q(s)
2s2 + 6s + 4
s2 + 3s + 4
\ e~2s
^Go2(s)
1 1
s+1
Goi(s)
1 +J
-10(5 + 1)
(5 + 10)
U/(s)
|+0
s + 1 f
Goi(s)
+ '
24
(s + 3)(5 + 8)
»g(s)
i
>W V(5)
e-25
Go2(s)
-, входная
ступенька
Y(s)
Рис. 10.4. Проект системы управления с первой и третьей степенями свободы
Мы не будем описывать проектирование регулятора
обратной связи C(s), потому что это не относится к данной теме
(фактически моделирование использует структуру регулятора с
упредителем Смита —см. разд. 7.4).
Характеристики контура приведены на рис. 10.5. На этом
рисунке показан выходной сигнал объекта для единичного ступенчатого
эталонного воздействия в момент времени t = 1 с и возмущения (с
а = 1), которое начинается в момент t = 10 с.
10.6.2. Нет. Потому что из-за запаздывания объекта в течение
первых двух секунд любые изменения возмущения будут появляться без
ослабления на выходе объекта. Приглашаем читателя подтвердить
это, удаляя блок упреждения в структуре, набранной в пакете
SIMULINK (находящейся в файле dffZ.mdl), соответствующей
рис. 10.4.
8 10
Время [с]
Рис. 10.5. Характеристики системы с первой и третьей степенями свободы
10.6. Промышленные примеры управления с упреждением 297
10.6.3. Блок упреждения с передаточной функцией Gf(s) имеет
высокочастотную характеристику с усилением в пределах от 10 дБ на
частоте ш = 3 рад/с до почти 19 дБ на частоте и = 20 рад/с. Это
значительно усилит шум измерения возмущения.
Замечание 10.1, Упреоюдение возмущения иногда называют третьей
степенью свободы контура управления. DDD
10.6. Промышленные примеры
управления с упреждением
Управление с упреждением, собственно говоря, является
единственной более-менее полезной концепцией в практическом проектировании
систем управления без использования элементарных идей обратной
связи. Ясно, что если можно измерить мешающие возмущения, то,
передавая их вперед, можно получить упреждающее воздействие
управления, которое компенсирует возмущение, накладываемое на процесс.
Достоинство этой идеи было проиллюстрировано в учебном примере,
приведенном на рис. 10.3. Важное предупреждение: упреждение зависит
от использования инверсий разомкнутого контура и, следовательно,
восприимчиво к ошибкам модели. Таким образом, обычно требуется
сочетать управление с помощью упреждения с какой-то формой
управления с использованием обратной связи, чтобы исправить любой просчет,
связанный с организацией упреждения.
Другой положительный момент использования управления через
упреждение — можно использовать другие входы управления, чтобы
помочь получить желаемые характеристики. Действительно, это — первый
шаг к управлению со многими входами и многими выходами (тема,
которой будут посвящены в полной мере части VI, VII и VIII). Как
иллюстрация достоинств управления через упреждение, мы рассмотрим
следующие промышленные случаи.
10.6.1. Эффект затягивания у реверсивного прокатного стана;
повторное рассмотрение
Рассмотрим снова задачу прокатного стана, обсужденную в разд. 8.7.
Там мы видели, что присутствие нулей на мнимой оси было
фундаментальным ограничением, препятствующим достижению быстрой реакции
между ненагруженным положением зазора валков и толщиной выходной
полосы. Мы назвали это эффектом затягивания. Физическая причина
проблемы — взаимодействие между натяжением полосы и ее толщиной.
298 Глава 10. Структурные проблемы SISO-систем управления
Чтобы проверить это утверждение, модель прокатного стана была
изменена так, чтобы натяжение оставалось постоянным. Физически это
невозможно получить, но можно сделать с помощью моделирования,
чтобы проверить гипотезу. Эффект затягивания исчезает, когда нет
никакого взаимодействия натяжений. Итак, как было аргументировано в
гл. 8, трудность не может быть преодолена без радикального изменения
структуры системы управления, потому что этот недостаток будет
присутствовать в любом SISO-регуляторе, независимо от того, как он
был спроектирован! Однако если мы откажемся от SISO-структуры,
тогда можно получить положительные результаты. Ключом к тому,
как это могло бы быть достигнуто, является тот факт, что фактически
имеется три доступных входа (зазор валков, ток двигателя
намоточного устройства и ток двигателя разматывающего устройства). Кроме
того, нули на мнимой оси появляются только в передаточной функции
между разгруженным зазором валков и толщиной полосы на выходе.
Следовательно, кажется возможным использовать другие входы для
организации упреждения, чтобы избежать эффекта затягивания.
Вооруженные этой идеей, мы опишем схему управления с
упреждением и обратной связью, которая будет минимизировать изменения
натяжения.
Чтобы сформулировать идею, заметим, что имеется сохранение
массы в направлении, перпендикулярном зазору валков. Это подразумевает,
что
М*М*) = М*М*) (10.6.1)
где М*)> М*)> ve(t) и V{(t) —входная толщина, выходная толщина,
входная скорость и выходная скорость соответственно. Заметим, что
выходная скорость поддерживается (примерно) постоянной с помощью
другой системы управления, действующей на валки. Следовательно,
(10.6.1) может быть выражено в форме приращений следующим
образом:
(h°e + ДМ*)) v°e = (Л? + Ahi(t)) К + Ач(*)) (Ю.6.2)
где /ig, Vg, h\ и v\ — номинальные значения. Также
Kv°e = hW (10.6.3)
Кроме того, известно, что в отсутствии изменений натяжения
толщина на выходе связана с положением валков статическим отношением
вида
ДМ*) = ci Д<т(*) + с* ДМ*) (10.6.4)
где ci,C2 —константы, связанные с жесткостью прокатного стана, а
Aa(t) —изменение зазора между ненагруженными валками.
10.6. Промышленные примеры управления с упреждением 299
Упреждающее
управление
Входная
толщина
Ы
Регулятор
обратной
Зазор
ненагру-
женных
Выходная
толщина
h0
Ток 1и
Двигатель
разматывающего
устройства
Двигатель
наматывающего
устройства
Рис. 10.6. Регулятор упреждения на реверсивном прокатном стане
Подставляя (10.6.4) и (10.6.3) в (10.6.2) и пренебрегая членами
второго порядка, получим
(10.6.5)
= — [c^Aa(t) + c2v°eAhi(t) - v?Ahi(t)]
h°
Анализ физики этой задачи приводит к выводу, что изменения
натяжения происходят, потому что угловая скорость разматывающего
устройства не поддерживается должным образом при изменении
скорости на входе. Этого можно избежать, если относительное изменение
угловой скорости разматывающего устройства будет равно
относительному изменению входной скорости, т. е. нужно, чтобы
Avi(t) Auu{t)
(10.6.6)
где ши означает угловую скорость разматывающего устройства.
Следовательно, из (10.6.5) требуется
А^ = -?Т5 ММ*) + c2v0eAhi(t) - v?Ahi(t)]
г г
(10.6.7)
Теперь простая модель динамики разматывающего устройства будет
иметь вид:
du)u(t)
Л-
dt
= Kmiu{t)
(10.6.8)
300 Глава 10. Структурные проблемы SISO-систем управления
где iu(t)— ток двигателя разматывающего устройства, Ju — момент
инерции разматывающего устройства и Кт — коэффициент
вращающего момента двигателя.
Подставляя (10.6.8) в (10.6.7), мы окончательно видим, что изменения
натяжения можно избежать, выбрав
iu(t) =
v?h?Kn
r„oMt),rndhi(t)
civ0-^r-+c2v0
dt
dt
-Щ
0dhi(t)
dt
(10.6.9)
Выражение (10.6.9) дает сигнал упреждения, связывающий зазор
разгруженных валков a(t) и входную толщину полосы hi(t) (точнее, их
производные) с током двигателя разматывающего устройства.
Этот проект был проверен на конкретном прокатном стане и было
достигнуто существенное сокращение эффекта затягивания. Эта идея
теперь является частью нескольких коммерческих систем управления
толщиной. Идея схематически представлена на рис. 10.6.
10.7. Каскадное управление
Далее мы займемся альтернативной структурой, связанной с
возмущениями. Основная идея здесь — передать в обратную связь некоторые
промежуточные переменные, которые находятся между точкой
приложения возмущения и выходом. Это дает так называемое каскадное
управление.
Поясняющий пример показан на рис. 10.7. В этом примере мы
предполагаем, что нужно управлять переменной y(t) с помощью изменения
скорости потока q(t). Самая простая структура для достижения этого
показана в части а) рис. 10.7. Заметим, что выход регулятора управляет
давление
текучей
среды
Vs(t)
4m{t)
а) б)
Рис. 10.7. Пример применения каскадного управления
10.7. Каскадное управление 301
Dg(s)
^Lrv^
+ т
/
CiW
Ui(s) r
iV"
[_ I
C2(s)
-*
I
G»i{s)
г ~
-idr
1
GQ2{s)
Ga(s) I
-1—»'
Gb(s)
\Y(»)
Рис. 10.8. Структура каскадного управления
открытием клапана; однако в этом случае изменения в давлении текучей
среды ps(t) приведут к изменению скорости потока при одном и том же
значении u(t) и, таким образом, будут влиять на цель управления.
Другая, каскадная структура, показана в части б) рис. 10.7. Здесь
введен второй контур управления скоростью потока q(t). Для контура
требуется измерение величины q(t), которая на рисунке обозначается
через qm(t). Заметим, что выход первого регулятора формирует
эталонный сигнал для второго контура.
Обобщение этой идеи показано на рис. 10.81.
В этой структуре имеются два контура управления: первичный
контур с первичным регулятором Ci(s) и вторичный контур со вторичным
регулятором C2(s). Вторичный регулятор предназначен для того, чтобы
уменьшить влияние возмущения прежде, чем оно окажет значительное
воздействие на выход объекта y(t).
Основные преимущества каскадного управления получаются в
следующих обстоятельствах:
а) когда Ga{s) содержит существенные нелинейности, ограничивающие
характеристики контура, или
б) когда Gb(s) ограничивает полосу пропускания в основной структуре
управления.
Второй вариант, рассмотренный выше, используется, когда Gb{s)
имеет неминимально-фазовые нули и/или чистые запаздывания, как
показано в гл. 8. Тогда преимущества вторичного контура станут
очевидными. Эти преимущества могут быть определены количественно, как
видно из рис. 10.8, считая, что регулятор Ci(s) должен быть
спроектирован для управления эквивалентным объектом со входом (/1(5), выходом
1 В отечественной литературе каскадное управление часто называется использованием
параллельного корректирующего устройства. — Прим. перев.
302 Глава 10. Структурные проблемы SISO-систем управления
Y(s) и возмущением Dg(s):
Y{s) = Go2(s)So2(s)D9(s) + C2{s)G0(s)So2{s)Ul(s); G0(s) = G0i{s)Go2(s)
(10.7.1)
где So2{s) — функция чувствительности для вторичного контура.
Заметим также, что если мы обозначим через To2(s) дополнительную
чувствительность вторичного контура, то уравнение (10.7.1) может быть
переписано так:
Y(s) = Go2(s)S02(s)D9(s) + Gb(s)To2(s)U1(s) (10.7.2)
Тогда мы можем сравнить это с моделью для первоначального
объекта, помещенного в контур на рис. 10.1, где
Y(s) = Go2(s)Dg(s) + G0(s)U(s) (10.7.3)
Из этого сравнения мы видим, что в каскадной структуре
возмущение, с которым регулятор Ci(s) должен иметь дело, предварительно
компенсировано чувствительностью вторичного контура. Таким
образом, можно ожидать лучшее подавление возмущения.
После того, как будет спроектирован вторичный регулятор C2(s)>
первичный регулятор C\(s) может быть разработан для эквивалентного
объекта с передаточной функцией
Goeq = Gb(s)To2(s) (10.7.4)
Выгоды от этой структуры существенны во многих приложениях.
Следующий пример иллюстрирует эти выгоды количественно.
Пример 10.7. Рассмотрим объект, имеющий ту же номинальную
модель, что и в примере 10.4 и пусть измеренная величина вторичного
контура является входом Go2(s)] тогда
Go^ = J^l' °°^ = Цл^ <?«(«) = 1; Gb{a) = G<a{s) = £^i
(10.7.5)
Сначала выберем вторичный регулятор, являющийся ПИ-
регулятором, для которого
C2(s) = 8-^±У- (10.7.6)
Этот регулятор был выбран для получения удовлетворительной
компенсации возмущения во .вторичном контуре. Дополнительная
чувствительность вторичного контура тогда равна
Т°2(*) = 7ТТ (10-7-7)
5 + 0
10.7. Каскадное управление 303
6 8 10
Время [с]
Рис. 10.9. Подавление возмущения с каскадным контуром управления
и первичный регулятор работает с эквивалентным объектом,
имеющим передаточную функцию
a-M-»?n.+s (10-78)
Теперь можно разработать первичный регулятор. Здесь снова мы
используем упредитель Смита — см. разд. 7.4.
Качество компенсации возмущения оценено для единичного
ступенчатого возмущения. Результаты показаны на рис. 10.9. Единичное
ступенчатое эталонное воздействие было приложено в момент t= 1.
Затем, в момент t = 10 прикладывалось единичное ступенчатое
возмущение. Мы моснсем теперь сравнить эти результаты с показанными
на рис. 10.3. Каскадное управление явно лучше, чем основная
конфигурация системы управления с одной степенью свободы и сопоставимо с
полученным от упреждения. □□□
Основные достоинства каскадного управления следующие:
1. Каскадное управление — стратегия обратной связи.
2. Требуется второе измерение переменной процесса; однако само
возмущение не нужно измерять. Действительно, вторичный контур
может интерпретироваться как наличие наблюдателя, чтобы оценить
возмущение.
3. Должен быть рассмотрен шум измерения во вторичном контуре,
потому что он может ограничить достижимую полосу пропускания
этого контура.
4. Хотя каскадное управление (подобно упреждению) требует инверсии,
его можно сделать менее чувствительным к ошибкам моделирования,
используя преимущества обратной связи. □□□
304 Глава 10. Структурные проблемы SISO-систем управления
Замечание 10.2. Много практических задач управления связано с
регулированием потока с помощью клапана. Одно из решений состоит
в том, чтобы, зная характеристики клапана, просто использовать
закон управления для перемещения клапана в некоторое положение
(которое в соответствии с характеристиками клапана обеспечивает
желаемый поток). Однако в этом случае будут существенно
влиять недостатки клапана (залипание, гладкие нелинейности и т. д.)
и изменения давления (текучей среды, чей поток регулируется). Это
наводит на мысль об иерархической структуре управления, при
которой основной закон управления обеспечивает желаемый поток, а
вторичный регулятор подстраивает этот поток вторичным
контуром, в котором измеряется реальный поток и используется обратная
связь (сравните две структуры, приведенные на рис. 10.7). Структура
с каскадным регулятором обычно предпочтительней для управления
с одной степенью свободы. Конечно, отрицательная сторона этого
варианта — это то, что нужно измерять фактический поток,
полученный в результате управления. В некоторых приложениях это не
удается просто сделать. Вспомните, например, регулятор уровня
изложницы, рассмотренный в разд. 8.3.2, где нереально измерить поток
стали. □□□
Замечание 10.3. Другой подход к каскадному управлению — то, что
здесь используется быстродействующий контур обратной связи,
чтобы передать некоторые выходы процесса (или переменные процесса)
на «псевдовходы» (или «псевдоуправляемые переменные»). Например,
в варианте, обсужденном в замечании 10.2, материальный поток
становится псевдовходной переменной. Причина таких действий
заключается в том, что часто управление всем процессом может быть
легче сформулировано и реализовано в терминах псевдовходов, чем при
использовании первоначальных входов. DDD
10.8. Резюме
• В этой главе рассматриваются материалы предыдущей главы с
точки зрения специальных вопросов обеспечения высоких показателей
качества приложения:
о внутренняя модель компенсации возмущений для отдельных
классов эталонных сигналов и возмущений;
о упреждение;
о каскадное управление;
о структуры с двумя степенями свободы.
• Модели сигналов:
10.8. Резюме 305
Некоторые классы эталонных сигналов или возмущений могут
быть явно смоделированы их преобразованиями Лапласа:
Тип сигнала
Ступенька
Линейный
Парабола
Синусоидальный
Преобразование
1
S
ais + 1
a252-bai5-bl
7*
ais + l
s2 -\-u2
о Такие эталонные сигналы (возмущения) могут асимптотически
отслеживаться (подавляться) тогда и только тогда, когда у
замкнутого контура в чувствительность S0 входит соответствующее
преобразование Лапласа.
о Это эквивалентно тому, как если бы у преобразований Лапласа
системы были неустойчивые полюсы в разомкнутом состоянии и
они стабилизировались бы регулятором.
о Можно сделать вывод, что принцип внутренней модели
увеличивает число полюсов передаточной функции разомкнутого контура
G0(s)C(s). В свою очередь, это подразумевает возникновение тех
же самых компромиссов проектирования, как будто эти полюсы
были в объекте с самого начала.
о Таким образом, управление внутренней моделью не бесплатно, но
должно рассматриваться как способ разрешения части
компромиссов проекта.
Упреждение эталонного сигнала:
о Простой, но очень эффективный способ улучшения реакции на
изменения уставки —ее предварительная фильтрация (рис. 10.10).
о Это — так называемая структура с двумя степенями свободы,
потому что предварительный фильтр Н обеспечивает дополнительную
степень свободы. Если, например, имеется существенный шум
измерения, то контур не должен иметь слишком широкую полосу
пропускания. В этой ситуации отслеживание эталонного сигнала
может быть ускорено предварительной фильтрацией.
о Аналогично, если эталонный сигнал содержит высокочастотные
компоненты (сигнал типа ступенчатого воздействия, например),
которые во всяком случае находятся вне полосы пропускания
контура, то можно было бы также их отфильтровать, чтобы
не возбудить колебаний, а для исполнительных механизмов они
излишни.
306 Глава 10. Структурные проблемы SISO-систем управления
о Важно обратить внимание, однако, на то, что разные
недостатки проекта (малые запасы устойчивости, плохие
характеристики) нельзя скомпенсировать предварительной фильтрацией. Это
является следствием того, что предварительная фильтрация не
затрагивает динамику контура, сформированного для подавления
возмущений.
Упреждение возмущения:
Компромиссы относительно чувствительностей к эталонному
воздействию, шуму измерения, входному и выходному возмущениям,
рассмотренные в предыдущих главах, относятся к случаю, когда эти
возмущения невозможно измерить по техническим или
экономическим соображениям..
Измеримые возмущения могут быть явно скомпенсированы
(рис. 10.11), ослабляя таким образом одно из ограничений
компромисса и давая проектированию больше гибкости.
Каскадное управление:
о Каскадное управление — хорошо подтвержденная техника,
применимая, когда две или больше систем воздействуют
последовательно друг на друга (рис. 10.12).
о Для него справедливы все ранее рассмотренные компромиссы и
понятия.
я
л *j с И Go —| »
Г_ I 1 I 1
Рис. 10.10. Структура с двумя степенями свободы
для улучшения отслеживания
4 -
Gf
¥>
+
Goi
| +
^О—ч G°2
Рис. 10.11. Структура упреждения возмущения
-^О
Э—
Ci
и^ч
1
\
с2
—^
GQ\
У\
—^
Go2
У
Рис. 10.12. Структура с каскадным управлением
10.10. Задачи для читателя 307
о Если внутренний регулятор (С?2 на рис. 10.12) не используется,
то внешний регулятор (С\ на рис. 10.12) будет неявно или явно
использовать у\ как внутреннее состояние всей системы (G0iG02)-
Эта оценка, однако, унаследовала бы неопределенность модели,
связанную с G02- Поэтому использование доступной для измерения
величины J/1 уменьшает общую неопределенность и может дать
связанные с этим выгоды.
10.9. Литература для последующего чтения
Принцип внутренней модели
1. Francis, В.A. and Wonham, W. (1976). The Internal Model Principle of control
theory. Automatical 12:457-465.
Упреждение и каскадное управление
1. Shinskey, F. (1998). Process control systems: application, design and
adjustment McGraw-Hill Book Company, New York, 3rd edition.
2. Stephanopoulos, G. (1984). Chemical process control: an introduction to theory
and practice. Prentice-Hall, Englewood Cliffs, N.J.
10.10. Задачи для читателя
Задача 10.1. Вычислите полиномы, формирующие возмущения, Г^я),
для каждого из следующих сигналов:
а) З + t б) 2cos(0.1* + tt/7)
в) 3(sinl.5*)3 г) e-°-ucos(0.2*)
Задача 10.2. В замкнутой системе управления минимально-фазовым
устойчивым объектом эталонное воздействие и возмущения —
синусоиды частот 0, 1 и 2 рад/с. Даны следующие возможные передаточные
функции дополнительной чувствительности:
9 25s4 + 175s3 + 425s2 + 425s + 150
a' s2 + 4s + 9 ' s5 + 25s4 + 180s3 + 425s2 + 429s + 150
4s2 + 20s+ 16 30s3 + 420s2 + 1680s + 1920
B^ s3 -I- 4s2 + 21s +16 Г^ s4 + 31s3 + 424s2 + 1684s + 1920
Проанализируйте, для каких из этих функций выполняется принцип
внутренней модели в отношении всех трех частот.
308 Глава 10. Структурные проблемы SISO-систем управления
Задача 10.3. Рассмотрим объект с номинальной моделью
G°W=(S+~2)£U (ИШЛ)
Синтезируйте регулятор, чтобы удовлетворить принципу внутренней
модели для и = 0 и ш = 2 рад/с.
Задача 10.4. Рассмотрим объект с входным сигналом и(£),
возмущением dg(t), выходным сигналом y(t) и номинальной моделью
Y(s) = Gb(s)V(s), где V(s) = Ga(s)(Dg(s) + Gol(s)U(s))
и где v(t) — измеряемая переменная объекта.
Для объекта, заданного передаточными функциями
<ЗД=е-°-2*; Gb(s) = ^-; Gol(s) = -L- (Ю.10.2)
5+1 5+1
номинальная дополнительная чувствительность должна быть
ад=рта (1оло-з)
Известно также, что возмущение — сигнал с резкими изменениями.
10.4.1. Разработайте контур управления с первой степенью свободы
(т. е. регулятор обратной связи) и третьей степенью свободы (т. е.
упреждение по возмущению). Подсказка: используйте регуляторы
Смита.
10.4.2. Повторите разработку, только вместо третьей степени
свободы используйте каскадное управление (измеряя v(t)). Вы должны
стремиться получить предписанную чувствительность Т0 и достичь
степени компенсации возмущения как можно ближе к полученной в
10.4.1.
Задача 10.5. Рассмотрим рис. 10.2, где объект имеет модель
Gol(s) = -^- и Go2(s) = -±- (10.10.4)
5 — 2 5 + 1
Эталонный сигнал постоянен, а возмущение удовлетворяет
выражению dg(t) =Kd + dv{t), где Kd — константа, a dv{t) — сигнал со спектром
в полосе частот [0,4] рад/с.
Разработайте первую (регулятор обратной связи C(s)) и третью
(упреждение по возмущению G/(s)) степени свободы. Обратите особое
внимание на неустойчивый характер G0i{s). (Этот результат не так
прост, как может показаться на первый взгляд.)
Используйте файл distffun.mdl программы SIMULINK, чтобы
оценить ваши результаты.
10.10. Задачи для читателя 309
Задача 10.6. Рассмотрим каскадную структуру, показанную на
рис. 10.8, где
Gol(s) = 1; Ga(s) = -; Gb(s) = -^- (10.10.5)
S 5 + 1
Предположим, что эталонный сигнал — константа, а возмущение d9(t)
такое же, что и в задаче 10.5.
Разработайте первичный и вторичный регуляторы при двух
различных структурных требованиях для вторичного регулятора:
а) C2{s) должна иметь полюс в начале координат;
б) C2(s) должна быть устойчивой, т. е. все ее полюсы должны
находиться в открытой ЛПП.
Сравните два результата. Обсудите их.
Задача 10.7. Рассмотрим контур управления с обратной связью для
объекта с номинальной моделью
с°<" = (,+1к'+з) (1010в)
Эталонный сигнал имеет существенный спектр только в диапазоне
частот [0,10] рад/с, однако в связи с ограничениями из-за шума полоса
пропускания замкнутого контура понижена до 3 рад/с.
Разработайте регулятор обратной связи C(s) и передаточную
функцию упреждения по эталонному воздействию H(s), такие, чтобы было
обеспечено хорошее отслеживание эталонного воздействия.
Задача 10.8. Нужно синтезировать замкнутую систему управления
объектом, имеющим номинальную модель G0(s) = т^щ£^щ> чтобы
достичь следующие цели:
а) нулевую установившуюся ошибку для постоянного эталонного
воздействия;
б) нулевую установившуюся ошибку для синусоидального возмущения
частоты 0.25 рад/с;
в) бисобственную передаточную функцию регулятора C(s).
Используйте метод размещения полюсов, чтобы получить
подходящий регулятор.
Задача 10.9. Рассмотрим объект с номинальной моделью
<зд=(Г7тта (1010-7)
Спроектируйте систему управления с одной степенью свободы такую,
чтобы контур управления с обратной связью отслеживал ступенчатый
эталонный сигнал в присутствии ошибки измерения со спектром в полосе
частот [5,50] рад/с.
Глава 11
Работа при наличии
ограничений
11.1. Введение
Вездесущая проблема управления состоит в том, что все реальные
исполнительные механизмы ограничены по своим возможностям. Это
означает, что они ограничены по амплитуде и/или скорости нарастания
сигнала. Пренебрежение такой особенностью может кончиться
серьезным ухудшением характеристик, когда входной сигнал достигает этих
ограничений. Ясно, что это очень важная проблема. Имеются два пути
обойти ее:
а) уменьшить требования к характеристикам так, чтобы линейный
регулятор никогда не нарушал эти пределы;
б) изменить проект в соответствии с этими пределами.
Вариант а) —более общая стратегия; однако он подразумевает, что
или исполнительный механизм был негабаритен, или он выбран без
учета компромиссов в отношении качества системы. Во всяком случае,
мы увидим ниже, что вариант б) весьма легко обеспечить.
Данная глава дает первый взгляд на вариант б), основанный на
модификации данного линейного проекта. Это будет особенно успешно
для скромных нарушений имеющихся ограничений (скажем, до 100%).
Если же происходят более серьезные нарушения ограничений, то можно,
наверное, сказать, что исполнительный механизм недостаточен по своим
характеристикам для данного приложения.
Мы также покажем, как те же самые идеи могут использоваться,
чтобы избежать простых видов ограничений переменных состояния.
Здесь мы предполагаем, что законы управления бисобственны и
минимально-фазовые. Это будет вообще справедливо для SISO-систем.
Бисобственность может быть достигнута добавлением при
необходимости дополнительных нулей. Методы, которые не зависят от этих
предположений, будут описаны в гл. 18.
Также, в более поздней главе (гл. 23) мы опишем другие методы
работы с ограничениями управления и переменных состояния, основанные на
11.2. Накопление 311
теории ограниченного оптимального управления. Эти последние методы
в целом называются «модельным прогнозирующим управлением» и их
можно рассматривать как более общую версию идей, представленных в
этой главе.
11.2. Накопление
Одним довольно общим последствием ситуации, когда входной сигнал
попадает в границы насыщения, является то, что интегратор в
регуляторе (предположим, что он один) продолжит интегрировать в то время,
когда входной сигнал ограничен. Это означает, что состояние
интегратора может достигнуть недопустимо высокой величины, ведущей к плохой
переходной реакции. Проиллюстрируем это простым примером.
Пример 11.1. Рассмотрим следующую номинальную модель объекта:
Пусть дополнительная чувствительность создаваемой системы бу-
100
дет
T0(s) =
s2 + 13s + 100
(11.2.2)
Легко видеть, что ее можно получить с помощью следующего
регулятора:
50(5 + 1)(5 + 2)
C(s) =
(11.2.3)
5(5 + 13)
Единичное ступенчатое эталонное воздействие прикладывается в
момент времени t = 1, а отрицательное ступенчатое выходное
возмущение возникает в момент t = 10. Вход объекта насыщается,
1.5
ев
VO
О
I
3
PQ
1h
0.5
0.5
\] У
8 10 12
Время [с]
14
16
18
20
Рис. 11.1. Реакция контура с (толстая линия) и без (тонкая линия)
насыщения на входе объекта
312 Глава 11. Работа при наличии ограничений
когда он за границами диапазона [—3,3]. Выход объекта y(t) показан
на рис. 11.1. Из рис. 11.1 мы видим, что на выходе объекта возникает
неэюелательное переходное поведение, не соответствующее линейной
номинальной полосе пропускания приблизительно в 10 рад/с. Этот
несоответствие происходит из-за насыщения, потому что единичный
ступенчатый эталонный сигнал сразу же вызывает требуемое
изменение выходного сигнала регулятора величиной 50, и, следовательно,
происходит насыщение; линейная же теория проектирования C(s) не
берет это последствие во внимание. DDD
Простой для данного случая механизм накопления в ПИ-регуляторах
был описан в разд. 8.8.3. Ниже мы покажем, как это может быть
обобщено.
11.3. Схема противонакопления
Имеется много альтернативных путей защиты от накопления. Все эти
методы предполагают, что состояния регулятора обладают двумя
ключевыми свойствами:
1. На состояние регулятора должен влиять фактический (т. е.
ограниченный) входной сигнал объекта.
2. Состояния регулятора должны иметь устойчивую реализацию при
управлении фактическим входным сигналом объекта.
Этого особенно легко достичь, когда регулятор бисобственный и
минимально-фазовый. Пусть регулятор имеет передаточную функцию
C(s); тогда мы расщепим ее на элемент прямой передачи (усилительный
элемент) Cqq и строго собственную передаточную функцию C(s):
C(s) = Coo + C(s) (11.3.1)
Далее рассмотрим контур обратной связи, показанный на рис. 11.2.
® «ад
е№
О
Соо
ICW]-1-^1
Рис. 11.2. Бисобственный регулятор в форме обратной связи
11.3. Схема противонакопления 313
tn
t -
Coo
Г/^«\1—1 .-—1
[c(s)\ -
^oo
желаемый вход
фактический вход
Рис. 11.3. Желаемый и фактический вход объекта
Передаточная функция от e(t) к u(t) на рис. 11.2, как легко видеть,
равна
U(s) Coo
E(s) l + ([C(s)}^-c^l)c0
Cqo
(11.3.2)
№)]
-i/
= C(s)
Нижний блок на рис. 11.2, управляемый сигналом u(t), устойчив,
потому что передаточная функция [C(s)]_1 устойчива (мы предполагаем
в данный момент, что C(s) минимально-фазовая). Он также содержит
и всю динамику регулятора. Следовательно, условия 1 и 2, упомянутые
выше, удовлетворяются.
Далее преобразуем структуру на рис. 11.2 в структуру,
изображенную на рис. 11.3.
В случае ограниченного входа, все, что теперь нужно сделать —
обеспечить правильное отношение между желаемым и фактическим
входом на рис. 11.3. Если мы обозначим через u(t) желаемый вход, а
через u(t) — фактический вход, то насыщение и ограничение скорости
нарастания сигнала могут быть описаны следующим образом.
Насыщение
{Umax еСЛИ U(t) > UmaX)
U(t) еСЛИ Umin < U(t) < Umax, (11.3.3)
Umin еСЛИ U(t) < Umin
где u(t) —неограниченный выход регулятора, a u(t) —эффективный
вход объекта.
Ограничение скорости нарастания
Г СГтах еСЛИ u(t) > СГщах)
u(t) = Sat(u{t)) = {
U(t) еСЛИ CJmin < U(t) < C7max, (11.3.4)
0"min if U(t) < CJmin
314 Глава 11. Работа при наличии ограничений
Ограничения скорости нарастания могут быть смоделированы так,
как показано на рис. 11.4, где используется приближение Эйлера для
моделирования производной.
Комбинированные насыщение и ограничение скорости нарастания
могут быть смоделированы так, как показано на рис. 11.5.
Насыщение и ограничения скорости нарастания могут также
относиться и к внутренним переменным объекта. В этом случае их
называют насыщением переменных состояния и ограничениями скорости
нарастания переменных состояния соответственно. Эти проблемы будут
рассматриваться позже в данной главе.
Сравнивая рис. 11.3 с рис. 11.2, мы видим, что единственное, что
нужно сделать для того, чтобы нижний блок на рис. 11.3 управлялся
фактическим входом, — это разместить соответствующую
ограничивающую цепочку в точке А на рис. 11.2.
Это приводит к окончательной реализации, приведенной на рис. 11.6,
где Ыт обозначает соответствующую ограничивающую цепочку
(насыщение, ограничение скорости нарастания или оба сразу).
u(t)
он
1
• До-min
t(
* V
A[s]
Запаздывание
I +
«(*)
Рис. 11.4. Модель ограничения скорости нарастания
«(О
О
■ю
♦ +
u(t)
Рис. 11.5. Комбинированная модель насыщения
и ограничения скорости нарастания
11.3. Схема противонакопления 315
r(t) r^ e(t)
« ПЧ f~\ ev-L Г\
"\_J
x~n
Coo
u(t)
»-
Lim
J i/VcM—i --1 L
1 [b\s)\
*-oo Г
Lim
«w
G(s)
y(t)
Рис. 11.6. Упрощенный контур управления противонакоплением (С-форма)
Чтобы проиллюстрировать эффективность схемы, повторим
пример 11.1.
Пример 11.2. Рассмотрим тот же самый объект, что и в примере
11.1, с идентичными эталонным сигналом и возмущением. Однако на
сей раз мы сформируем контур управления, как показано на рис. 11.6.
Результаты моделирования такой системы показаны на рис. 11.7,
где изображен график выходного сигнала объекта.
1.4
1.2
Ё 1
vg 0.8
О
СС 0.6
8
Я 0.4
PQ
0.2
0
2 4 6 8 10 12 14 16 18 20
Время [с]
Рис. 11.7. Реакция контура с регулятором противонакопления (толстая
линия) по сравнению с реакцией системы без противонакопления (тонкая линия).
Последняя соответствует толстой линии на рис. 11.1.
Рисунок 11.7 иллюстрирует существенное улучшение, достигнутое
с помощью предложенной схемы противонакопления.
Файл qawup.mdl пакета SIMULINK содержит схемное решение,
используемое при этом моделировании. Заметим, что разложение
C(s) выполнено с помощью утилиты awup.m пакета SIMULINK
(включенной в сопровождающий CD-ROM). □□□
Другой пример использования ограничения скорости нарастания
рассмотрен ниже.
316 Глава 11. Работа при наличии ограничений
Пример 11.3. Рассмотрим объект, имеющий линейную модель
Y(s)
--(г-1
1):
;U(S)+D9(S)
(11.3.5)
где U(s) и Dg(s) —преобразования Лапласа входного сигнала объекта и
обобщенного возмущения.
Предположим, что ПИ-регулятор с Кр = 0.5 и Тг = 1.5 с был
настроен для линейного диапазона функционирования этой модели, т. е.
игнорируя любую нелинейную динамику исполнительного механизма.
Если входной сигнал u(t) не может изменяться быстрее, чем
0.2 с-1, нуэюно проверить, что реализация регулятора, изобраэюенного
на рис. 11.6, обеспечивает лучшую характеристику, нежели
игнорирование этого ограничения скорости нарастания.
Решение
Сформируем контур управления со структурой регулятора,
показанного на рис. 11.6, где элемент Ыт заменен ограничителем скорости
нарастания сигнала, показанным на рис. 11.4.
<„ = *, = 0.5; №,]-'■ -
c-J = -
Kp(Trs + l)
(1.55 + 1)
(11.3.6)
Было выполнено моделирование при r(t) = /j,(t — 1) и dg(t) = /j,(t — 20).
Результаты моделирования показаны на рис. 11.8.
На рис. 11.8 кривая, помеченная символом 1, описывает
характеристику номинального проекта (нет ограничения скорости нарастания).
Кривая 2 описывает характеристику управления для объекта с огра-
15 20 25 30 35 40
Время [с]
Рис. 11.8. Реакция ПИ-контура управления: когда нет ограничения скорости
нарастания сигнала (1); когда достигается ограничение скорости нарастания
сигнала, но нет ее компенсации (2) и с противонакоплением для ограничения
скорости нарастания сигнала (3)
11.3. Схема противонакопления 317
ничением скорости нарастания, но линейным регулятором. Наконец,
кривая 3 описывает характеристику контура для объекта с
ограниченной скоростью нарастания сигнала и противонакапливающим ПИ-
регулятором. Сравнение кривых 2 и 3 подтверждает преимущество
использования нелинейной реализации регулятора с противонакоплени-
ем.
Читатель может оценить робастность схемы и другие
особенности проекта, используя файл slewl.mdl пакета SIMULINK.
11.3.1. Интерпретация в терминах обеспечения условий
Далее мы дадим альтернативное объяснение структуры, разработанной
в предыдущем разделе. Эта альтернативная точка зрения называется
обеспечением условий. Здесь мы задаем следующий вопрос: какие
следует обеспечить условия для уставки г, чтобы в первую очередь избежать
попадания входного сигнала й за границы насыщения?
В этом разделе мы покажем, что стратегия противонакопления,
разработанная выше, эквивалентна созданию условий, таких, чтобы всегда
выполнялось соотношение u(t) =u(t). Рассмотрим регулятор, имеющий
вход e(t) и выход u(t). Мы предполагаем, что передаточная функция
C(s) бисобственная и может, следовательно, быть расщеплена на строго
собственную передаточную функцию и элемент непосредственной
передачи (усилительный элемент):
C{s) = C(s) + Coo (11.3.7)
где C{s) — строго собственная функция, a Cqo ф 0 — усиление на высоких
частотах.
Предположим, что нужно избежать насыщения, заменяя e(t) на e(t).
В этом случае мы выбираем е так, чтобы выполнялось условие
С(е) = usat = Sat(C(e) + c^e) = С(ё) + с^е (11.3.8)
Ясно, что это требует, чтобы мы выбрали е таким:
ё = с£ [5а*(С(ё) + Соое)-Сё] (11.3.9)
Такая зависимость представлена на рис. 11.9.
Чтобы показать, что это эквивалентно предыдущему проекту,
заметим, что на рис. 11.9
7(0 = c^C(usat(t) -j(t)) & Cool(t) = С(щаг(г))-СШ) (11.3.10)
Отсюда, используя (11.3.7), окончательно получим
7W = -CootC"1 - c^)(usat(t)) (11.3.11)
318 Глава 11. Работа при наличии ограничений
\USat(t)
-И-
^ *
Sat(.)
C(s)
+ r
- v
^ а ш
1_
c-J
щ,
е«„
Соо
tt
"V
Рис. 11.9. Эквивалент обеспечения условий для регулятора
с противонакоплением
Аналогично
fi(t) = Соов(«) +7(*) = Ссх) (e(t) - (С"1 - с"1)^*))) (11.3.12)
и
usat(t) = Sat(p{t)) (11.3.13)
Используя (11.3.12), окончательно получим
",«*(*) = &»*<<*> (e(«) - (С"1 -с"1)^*)))) (11.3.14)
Следовательно, схема на рис. 11.9 представляет тот же самый
регулятор, что и на рис. 11.6.
11.4. Насыщение переменных состояния
Как дальнейшую иллюстрацию применения процедур противонакоп-
ления рассмотрим далее, как они могут применяться для работы с
ограничениями переменных состояния.
Пусть мы хотим задать ограничение на внутреннюю переменную z(t).
(Мы, конечно, предполагаем, что это ограничение не препятствует
достижению в установившемся состоянии выходом объекта того значения,
которое задается эталонным сигналом.) Имеется много практических
причин, почему это может быть крайне желательно. Например, нас
может интересовать, ограничена ли данная переменная процесса (или
скорость ее изменения).
Рассмотрим объект с номинальной моделью
Y(s) = G0(s)U(s); Z(s) = G0Z(s)U(s) (11.4.1)
Предположим, что мы либо можем измерить z(t), либо восстановить
ее с помощью доступных величин u(t) и у(£), используя некоторую
форму виртуального датчика, т. е. мы используем наблюдатель, чтобы
получить оценку z(t) для z(t). Этот виртуальный датчик будет зависеть
11.4. Насыщение переменных состояния 319
от входа u(t) и величины y(t) и, следовательно, может быть выражен,
используя преобразования Лапласа, в виде
Z(s)=Tlz(s)U(s)+T2z(s)Y(s) (11.4.2)
Покажем, как эта оценка может использоваться для расширения
разработанной стратегии на ограничения переменных состояния путем
переключения между двумя регуляторами. Один из этих регуляторов
(главный регулятор) — стандартный регулятор, предназначенный для
достижения главной цели управления: чтобы выходной сигнал
объекта y(t) отслеживал заданный эталонный сигнал, скажем, ry(t).
Задача вторичного регулятора состоит в том, чтобы держать переменную
z(t) в пределах предписанных границ. Это достигается при помощи
вторичного замкнутого контура, предназначенного для регулирования
восстанавливаемого состояния £(£), используя фиксированную уставку.
Наша стратегия будет состоять в том, чтобы переключать первичный
и вторичный регуляторы. Однако можно заметить, что имеется большая
возможность накопления, потому что один из этих двух регуляторов
в любой момент времени находится в разомкнутом контуре. Будем
бороться с этим с помощью противонакопления.
Для простоты предположим, что ограничение накладывается на
\z(t)\, т. е. что z(t) симметрично ограничена.
Общая структура предложенной схемы управления показана на
рис. 11.10.
Эта стратегия имеет следующие особенности:
1. Переключение между этими двумя регуляторами осуществляется
согласно методике, основанной на величине \z(t)\. Переключение
выполняется блоком VV(.).
2. Оба регулятора были выполнены по схеме рис. 11.6. Таким образом,
главный (линейный) регулятор имеет передаточную функцию Cy(s)
вида
с^ = иЛы; я» W = Iе» W]"1 - «й» (11АЗ)
Аналогично вторичный (линейный) регулятор имеет
передаточную функцию Cz(s):
ад=иЛм' Нг{з)=[ад]_1 -с™ (и-4-4)
^-rCzooiiz(s)
Регуляторы разработаны так, чтобы обеспечить
удовлетворительные характеристики в управлении y(t) и z(t) соответственно. Мы
также предполагаем, что Cy(s) и Cz(s) — минимально-фазовые би-
собственные передаточные функции. Это предполагает, что Hy(s) и
Hz(s)— устойчивые передаточные функции.
320 Глава 11. Работа при наличии ограничений
НуМ
ry(t)
тО-гоЧ"^
Uy{t)
W(.) Н Sat(.)
1 $"
Виртуальный I-*-1
датчик
u(t)
Объект
y(t)
Рис. 11.10. Стратегия переключения для насыщения переменной состояния
3. Насыщение входа объекта учитывается блоком Sat(o). Противона-
копление обеспечивается для обоих регуляторов, гарантируя, что
каждый динамический блок (т. е. Hy(s) и Hz(s)) управляется
истинным входом объекта независимо от того, какой из регуляторов
является активным в управлении реальным объектом.
Можно предложить различные стратегии для определения закона
переключения. Две возможности рассматриваются ниже.
11.4.1. Переключение замещением с гистерезисом
Простой подход состоит в том, чтобы передавать формирование
реального входа объекта u(t) от одного регулятора к другому таким
образом, чтобы в любое время u(t) определялся или параметром %(£),
или параметром uz(t).
Если мы хотим поддерживать значение \z(t)\ ограниченным заданной
постоянной zsat > 0, то этот подход может быть осуществлен, используя
переключатель с гистерезисом, где уровни переключения z\ и Zh
выбраны так, что 0 < z\ < Zh < Zsat- Когда работает регулятор переменной
состояния, контур управляется уставкой zspi заданной выражением
zsp{t) = sign(z(t))rz где 0 < rz < z\ < zsat (11.4.5)
В этой схеме вторичный регулятор Cz(s) перехватывает первичный
регулятор Cy(s), когда \z(t)\ становится больше z^. Управление
возвращается первоначальному регулятору Cy(s), когда \z(t)\ становится
11.4. Насыщение переменных состояния 321
меньше z\. Мы видим, что этот последний переход обеспечивается
соответствующим выбором (11.4.5).
11.4.2. Взвешенное переключение
Далее описана стратегия переключения, которая является
усовершенствованием представленной в разд. 11.4.1. Она также основала на
использовании уровней переключения ^ и ^, но с принципиальным
различием, что теперь ненасыщенный вход объекта u(t) является линейной
комбинацией uy(t) и uz(t):
u(t) = Sat(Xuz(t) + (1 - X)uy(t)) (11.4.6)
где A £ [0,1] — весовой коэффициент. Один из способов определения А
может быть следующим:
для \z(t)\ <zi
АН |*ч*л ~Zl для*Л>|*(*)|>Ч (11.4.7)
для \z(t)\ >zh
Эта стратегия иллюстрируется следующим примером.
Пример 11.4. Рассмотрим объект с моделью, как и в (11.4.1), где
°«('>%+2)(Л64)(,+1г а-м-ъ+тщ(11А8)
Эталонный сигнал — прямоугольные колебания единичной
амплитуды и частоты 0.3 рад/с. Желательно, чтобы переменная состояния
z(t) не выходила за границы диапазона [—1.5; 1.5]. Кроме того, вход
объекта насыщается вне диапазона [—2; 2].
Для этого объекта разработанные первичный и вторичный
регуляторы имеют передаточные функции
_ Щ8 + 1){8 + 2){8 + 4) _ 16(3s + 10)(s + 4)
Cy[S)~ 16ф2 + 15* + 59) ' Uz[S)~ s(s+ 14)
(11.4.9)
Основные принципы, используемые при разработке
вышеупомянутых регуляторов, заключаются в том, что вторичный контур
управления должен быть быстрее, чем первичный контур, с тем, чтобы
переменную состояния z(t) можно было бы быстро вогнать в
допустимые границы.
Виртуальный датчик для z(t) фактически основан на линейном
наблюдателе, разработанном таким образом, чтобы он имел полюсы
322 Глава 11. Работа при наличии ограничений
левее —10 (см. гл. 18). После некоторых простых испытаний были
выбраны следующие параметры для стратегии переключения:
zi = 1.2;
*h = 1-5;
zsp = 0.9
(11.4.10)
Характеристика контура показаны на рис. 11.11, где дано сравнение
между поведением переменной состояния z(t) с и без стратегии
переключения.
8 10 г , 12
Время [с]
Рис. 11.11. Переменная процесса z(t) при наличии насыщения переменной
состояния (zc) и без насыщения (zu)
Влияние стратегии переключения на выходной сигнал объекта
показано на рис. 11.12.
Рисунок 11.12 явно показывает несколько более медленное
управление выходом объекта из-за ограничений, наложенных на переменную
состояния z(t).
1.5
*-*.
;э>
е
объев
1
0.5
0
|-05
3
PQ
-1
-1.5
[■■111
V
1 1 1 1
(/-
1
1.- 1 1 1 .... 1 ,., 1 1.
Уи
Ус
•••• ref
1
-
i.
6
12
14
16
18
20
8 10
Время [с]
Рис. 11.12. Выход объекта при (ус) и без (уи) насыщения переменной
состояния
Изменение весового коэффициента X(t) показано на рис. 11.13.
11.5. Введение в модельное прогнозирующее управление 323
т 1 1 1 1 1 1 1 1 1
I
, , J I I I I I I I I
О 2 4 6 8 10 12 14 16 18 20
Время [с]
Рис. 11.13. Поведение весового коэффициента
Рисунок 11.13 показывает, что стратегия использует вес, который
не достигает своего максимального значения, т. е. верхний уровень z^
никогда не достигается. □□□
Приглашаем читателя попробовать различные проекты, используя
схемное решение, находящееся в файле newss.mdi пакета SIMULINK.
Наблюдатель в этом схемном решении включает возможность
ступенчатых входных возмущений.
11.5. Введение в модельное
прогнозирующее управление
Другой класс стратегий, связанных с ограничениями, — так называемые
алгоритмы модельного прогнозирующего управления (МПУ). Основная
идея этих алгоритмов состоит в том, чтобы сформулировать
проектирование регулятора как задачу оптимизации с расширяющимся
диапазоном в реальном масштабе времени, которая решается (обычно
методами квадратичного программирования) при условии заданных жестких
ограничений. Идея широко использовалась в нефтехимических отраслях
промышленности, где часто встречаются различные ограничения. До
недавнего времени МПУ и стратегии противонакопления
рассматривались как альтернативные и весьма различные схемы решения одной и
той же задачи. Однако недавно было признано (к большому удивлению),
что схемы очень близко связаны, а иногда идентичны. Мы дадим более
полное рассмотрение МПУ в гл. 23.
0.4
о.з
S о.2
0.1
о
324 Глава 11. Работа при наличии ограничений
11.6. Резюме
• Ограничения вездесущи в реальных системах управления.
• Имеются две возможных стратегии обращения с ними:
о Задать характеристики ак, чтобы ограничения никогда не были
превышены,
о Выполнить проектирование с учетом ограничений.
• Здесь мы дали краткое представление о последней идее.
• Очень полезна для понимания схема, показанная на рис. 11.2, которая
может быть помещена в общую структуру инверсии:
о X — бисобственная, устойчивая, минимально-фазовая
передаточная функция.
о Жоо — усиление X на высоких частотах: Xqq = Нт5_^00Х(5).
о Если X — бисобственная, то Xqq ф 0 и, следовательно, значение
х~^ ограничено.
о Вся структура эквивалентна Х-1.
о Занятное и полезное свойство структуры на рис. 11.14 —то, что
она инвертирует X эффективно, но не явно.
х-1
\
)
жоо
X — Х<х
)
, Рис. 11.14. Неявная инверсия X г
• Здесь мы использовали эту идею, чтобы описать механизмы проти-
вонакопления для достижения насыщения и ограничения скорости
нарастания входного сигнала.
• Мы также показали, как могут быть достигнуты ограничения
переменных состояния.
• В последующих главах мы будем использовать эту же идею для
многих других целей.
11.7. Литература для последующего чтения 325
11.7. Литература для последующего чтения
Исполнительные механизмы с насыщением
1. Bernstein, D. and Michel, A. (1995). A chronological bibliography on saturation
actuation. Int. J. of Robust and Nonlinear Control, 5:375-380.
2. Hanus, R., Kinnaert, M., and Henrotle, J. (1987). Conditioning technique, a
general anti-wind-up and bumpless transfer method. Automatical 23(6):729-
739.
3. Kothare, M., Campo, P., Morari, M., and Nett, C. (1994). A unified framework
for the study of anti-wind-up designs. Automatical 30(12):1869-1883.
4. Seron, M.M., Graebe, S.F., and Goodwin, G.C. (1994). All stabilizing
controllers, feedback linearization and anti-wind-up: a unified review. In
Proceedings of the 1994 American Control Conference, Baltimore, Maryland,
2:1685-1689.
Устойчивость противонакапливающих и переключающих схем
1. De Don£, J.A., Feuer, A., and Goodwin, G.C. (1998). A high performance
controller incorporating over-saturation of the input signal. Technical Report,
Department of E&CE, University of Newcastle, Australia.
2. Kapoor, N., Teel, A.R., and Daoutidis, P. (1996). On anti-integrator-windup
and global asymptotic stability. In Proceedings of the 13th World Congress of
IFAC, Volume D, pages 67-72.
3. Teel, A.R. (1998). Anti-wind-up for exponentially unstable linear systems.
Technical Report, CCEC, University of California at Santa Barbara.
Модельное прогнозирующее управление (МПУ)
1. Garcia, C.E., Prett, D.M. and Morari, M. (1989). Model Predictive Control:
Theory and practice-a survey. Automatica, 25(3):335-348.
2. Keerthi, S.S. and Gilbert, E.G. (1988). Optimal, infinite horizon feedback laws
for a general class of constrained discrete-time systems: Stability and moving-
horizon approximations. Journal of Optimization Theory and Applications,
57(2):265-293.
3. Mayne, D.Q. and Michalska, H. (1990). Receding horizon control of non-linear
systems. IEEE Transactions on Automatic Control, 35(5):814-824.
4. Rawlings, J.B. and Muske, K.R. (1993) Model Predictive Control with linear
models. AIChE Journal, 39(2):262-287.
Связь МПУ и противонакопления
1. De Dona, J.A., Goodwin, G.C, and Seron, M.M. (1998). Connections
between Model Predictive Control and anti-wind-up strategies for dealing with
saturating actuators. In Proceedings of the 1999 European Control Conference.
326 Глава 11. Работа при наличии ограничений
11.8. Задачи для читателя
Задача 11.1. Рассмотрим следующие передаточные функции
регулятора C(s).
, 9(5 + 1) ^ 12(*2 + 55 + 4)
St) О) ; гт
• 5 ' 55 + 3 ^
v 11.8.1
R^ 8S + 7 Г) 6(5-1)(5 + 7)
' 5(5-4) ' 5(5 + 8)
Получите для каждого случая форму, показанную на рис. 11.2.
Обсудите результаты, особенно случаи в) и г).
Задача 11.2. В контуре обратной связи с насыщением на входе объекта
регулятор имеет строго собственную передаточную функцию вида
C(.)-i?fc±fi (U.8.2)
v ' 5(5 + 2) v '
Поскольку использование стратегии противонакопления,
разработанной в этой главе, требует бисобственного регулятора, предлагается
сделать регулятор бисобственным, добавляя большой нуль, что приводит к
изменению передаточной функции Cm(s):
_12(Д + 4)(тд + 1)
Cm{s) ~ —^Щ— (1L8"3)
где г «: 1.
Проанализируйте предложение.
Задача 11.3. Рассмотрим собственный регулятор (обладающий
интегрированием), имеющий передаточную функцию C(s), заданную
выражением
sL{s) 5 L(S)
Предлагается в качестве механизма противонакопления
замораживать действия интегратора регулятора во время насыщения выхода
регулятора.
11.3.1. Реализуйте эту идею, учитывая ту же самую задачу
управления, что и в примере 11.1. Используйте файл piawup.mdl пакета
SIMULINK.
11.3.2. Является ли этот механизм, вообще, эквивалентным
предложенному в разд. 11.3?
11.8. Задачи для читателя 327
Задача 11.4. Рассмотрим объект с номинальной моделью, заданной
выражением
G0(s) =
(11.8.5)
(s + l)2
Контур имеет единичное ступенчатое эталонное воздействие и
выходное возмущение, представляющее собой резкие изменения величиной 0.5.
Вход объекта u(t) ограничен в интервале [—2,2].
11.4.1. Спроектируйте линейный бисобственный регулятор, такой, что
замкнутый контур будет иметь доминирующие полюсы в точках
-OJu^i j0.7un.
11.4.2. Выберите шп такой, чтобы вход объекта никогда не насыщался.
11.4.3. Выберите шп такой, чтобы вход объекта насыщался для данной
комбинации эталонного сигнала и возмущений. Оцените
характеристики этого контура при данных условиях.
11.4.4. Примените механизм противонакопления и сравните
характеристики контура со случаем без специального механизма
противонакопления.
Задача 11.5. Изобретите контур, подобный показанному на рис. 11.5,
который позволил бы вам ограничивать ускорение (скорость изменения
скорости) входного сигнала.
Задача 11.6. Расширьте ваш ответ в задаче 11.5 так, чтобы вы могли
одновременно ограничивать ускорение, скорость и амплитуду входа.
Задача 11.7. Проверьте ваш контур, повторяя пример 11.3, где
требуется, чтобы сигнал u(t) удовлетворял ограничениям по ускорению,
скорости и амплитуде.
Задача 11.8. Альтернативный контур, который иногда используется,
чтобы защитить от накопления, показан на рис. 11.15, где д — постоянное
усиление. Объясните действие этого контура.
4-.
Ч Г
е L
1 д
С(«)
^
~*j\±
и
Ограничитель
Рис. 11.15. Альтернативная схема противонакопления
328 Глава 11. Работа при наличии ограничений
Задача 11.9. Проверьте контур, приведенный в задаче 11.8 и сравните
его характеристику с результатами, приведенными, скажем, в
примере 11.2.
Задача 11.10. Пусть C(s) — простой интегрирующий регулятор вида
C(s) = - (11.8.6)
s
11.10.1. Преобразуйте C(s) в бисобственный регулятор, добавляя член
(es + 1) в числитель, когда параметр е — мал.
11.10.2. Запишите модифицированный бисобственный регулятор в виде
[C'(s)]-1 = [Coo]"1 + {[C'(s)]-1 - [Coo]"1} (11.8.7)
11.10.3. Исходя из этого, покажите, что когда действует ограничитель,
схема на рис. 11.6 приводит к
и = и + <кее - \-^— | и\ (11.8.8)
Задача 11.11. Снова рассмотрим простой интегрирующий регулятор
из задачи 11.10.
11.11.1. Поместив регулятор в контур обратной связи, приведенный на
рис. 11.15, покажите, что
и = и+\—*!_е-[-^"|4 (11.8.9)
гДе s = jk-
11.11.2. Сравните этот результат с результатом, полученным в
задаче 11.10.
Задача 11.12. Пусть другой альтернативной схемой защиты от
накопления простых регуляторов является замораживание выхода
интегратора во время, когда происходит насыщение управления.
Сравните этот ответ с результатами, полученными в задачах 11.10 и
11.11 для маленького е.
Задача 11.13. (Эта задача была предложена коллегой из
промышленности. Она — несколько более трудная.)
11.13.1. Рассмотрим структуру, показанную на рис. 11.16.
Требуемый исполнительный механизм имеет ограничения
амплитуды и скорости нарастания. Однако сам исполнительный механизм
11.8. Задачи для читателя 329
.^,-л J Регулятор
объекта
^н
Требуемое
положение
исполнительного
механизма
Каскадный)
регулятор
C(s)
U
Динамика
исполнительного
механизма
-> 1 Объект г-г-
Действительное
положение
исполнительного
механизма
Рис. 11.16. Каскадное управление исполнительным механизмом
управляется с помощью каскадного контура, чей выход и
воздействует на систему исполнительного механизма. Пусть передаточная
функция от входа и к положению исполнительного механизма уа
имеет вид
¥т = "2—^ (И-8.10)
U (в) s2 + ais + a0 v '
Предположим, что переменные состояния уа и уа измеримы.
Заметим также, что ограничения уа и уа соответствуют ограничениям
состояния.
Пусть у каскадного контура полоса пропускания — \Уь, а и
обозначает требуемый вход и кроме того выбран параметр Д ~ щГ.
Наша цель состоит в том, чтобы создать для этой системы контур
противонакопления. Один способ приведен ниже.
Можно рассматривать bu—aiya—a0ya как требование к ускорению
исполнительного механизма уа. Таким образом, если сформировать
Уа = Уа + А[6й - aiya - а0Уа] (11.8.11)
то можно считать это выражение прогнозированием требуемой
скорости исполнительного механизма. Тогда можно ограничить эту
скорость, ЧТОбы ПОЛУЧИТЬ {ya)cons-
Аналогично
Уа=Уа + &{Уа)сош (11.8.12)
можно рассматривать как прогнозирование требуемого положения
исполнительного механизма. Тогда мы можем ограничить уа, чтобы
ПОЛУЧИТЬ (уа) cons-
Вышеупомянутые шаги могут теперь быть рассмотрены с
противоположной стороны, чтобы оценить управляющее входное
воздействие, которое является совместимым с ограничениями на j/fl и уа.
Таким образом, преобразование (11.8.12) дает
\Уа icons — д [(ya)cons Уа\
(11.8.13)
330 Глава 11. Работа при наличии ограничений
Аналогично преобразование (11.8.11) дает требуемое входное
воздействие и1 в виде
д/ = [ЩУа)соп8 - У а] + а\Уа + 0>оУа] ГЦ 8 14)
6
Уравнения (11.8.11)—(11.8.14) дают специальный вид входного
ограничителя.
Используйте SIMULINK для реализации этого ограничителя.
11.13.2. Как бы вы объединили ограничитель, описанный выше, с
противонакопительной формой регулятора C(s) так, чтобы параметр
й был также ограничен?
11.13.3. Проверьте ваш проект, используя передаточную функцию
исполнительного механизма
°М = 7^ЬГ2 <11815>
вместе с регулятором
C{S) ~ ф + 4) (1L8-16)
Выберите Д = 0.1 и исследуйте переходную характеристику с учетом
ограничений:
Ы<0.5 (11.8.17)
Ы < 1 (11.8.18)
|iz|<1.5 (11.8.19)
(Отступление от темы. Фактически, вышеупомянутый проект может
рассматриваться как процедура для предсказания двух шагов вперед,
чтобы «видеть» влияние текущего требуемого управления на будущие
состояния системы. Если эти состояния ограничены, то вход изменяется
так, чтобы ограничения не были нарушены. Это приводит к специальной
форме входного ограничителя. Закон управления тогда реализуется с
помощью обратной связи, как на рис. 11.6, так, чтобы на регулятор
поступал фактический входной сигнал объекта, который является также
выходным сигналом этого ограничителя.
Это — один из возможных способов включить ограничения на
переменные состояния в контур противонакопления. Ключевой идеей,
используемой здесь, как можно заметить, является предсказание будущей
реакции состояния системы. Действительно, мы увидим в гл. 23, что
идею предсказания, описанную выше, можно использовать для оценки
воздействия текущего входного сигнала на будущие ограничения
состояния системы — ключевая идея в модельном прогнозирующем
управлении.)
ЧАСТЬ IV
ЦИФРОВОЕ УПРАВЛЕНИЕ
Введение
До сих пор в этой книге мы обращались только к непрерывным (или
аналоговым) системам управления. Однако в действительности почти
все современные системы управления снабжаются цифровыми
компьютерами той или иной формы. Таким образом, в этой четвертой
части книги мы опишем существенные различия между аналоговым
и цифровым управлением. Некоторые авторы посвящают целые книги
этой теме. Есть тенденция выдвигать на первый план различия между
аналоговым и цифровым управлением. Однако наша цель совсем другая.
Мы хотим показать читателю, что эти системы на самом деле имеют
удивительно тесную связь. Мы покажем, например, что все
соответствующим образом спроектированные цифровые регуляторы сводятся к
тождественному непрерывному регулятору, когда период квантования
стремится к нулю. Мы также укажем на моменты, когда цифровое
и аналоговое управление различны — особенно при малых скоростях
квантования.
Глава 12
Модели дискретных систем
12.1. Введение
Современные системы управления почти всегда снабжаются цифровым
компьютером. Таким образом, важно уметь оценить влияние
реализации конкретного закона управления в цифровой форме. В этой главе
мы приведем фундаментальные средства моделирования, необходимые
для описания квантованных реакций непрерывных объектов. Основные
темы включают:
• дискретные по времени сигналы;
• Z-преобразования и дельта-преобразования;
• квантование и восстановление;
• наложение спектров и сглаживающие фильтры;
• цифровые системы управления.
Обычно во многих курсах по управлению рассмотрение квантования
откладывается на более поздний срок или даже выносится в отдельный
курс, специально посвященный цифровому управлению. Однако на наш
взгляд, имеется так много общего у непрерывного и цифрового
управления, что целесообразно ввести идеи квантования пораньше и затем, по
существу, рассматривать обе идеи одновременно.
12.2. Квантование
Компьютеры работают с последовательностями чисел, а не с
непрерывными функциями времени. Поэтому, чтобы соединить аналоговый
объект с компьютером, нужно квантовать выходной сигнал системы (таким
образом, преобразовывая непрерывную функцию в последовательность
чисел). Мы будем использовать нотацию {/[&]}, чтобы обозначить
последовательность /[0],/[1],/[2],... Когда {/[&]} является результатом
квантования непрерывного сигнала f(t) через фиксированный интервал
А, мы будем писать
f[k] = f{kA) fc = 0,l,2,... (12.2.1)
334 Глава 12. Модели дискретных систем
С точки зрения управления нас интересует, среди других вещей,
процесс кодирования непрерывного сигнала в такую последовательность
чисел (процесс квантования) и восстановление непрерывного сигнала по
последовательности чисел (процесс восстановления).
Всегда имеется потеря информации из-за осуществления
квантования. Однако степень этой потери зависит от метода квантования и
связанных с этим параметров. Например, предположим, что
последовательность квантованных величин сигнала f(t) получается каждые А
секунд; тогда частота квантования должна быть больше по сравнению
с максимальной скоростью изменения f(t). В противном случае
высокочастотные компоненты будут ошибочно интерпретироваться как низкие
частоты в последовательности квантованных величин.
Проиллюстрируем это простым примером.
Пример 12.1. Рассмотрим сигнал
f(t) = 3cos2nt + cos (20тг* +?-) (12.2.2)
Если мы выберем период квантования А равным 0.1 с, то
f(kA) = 3cos(0.2for) + cos (2kn + ^) (12.2.3)
= 3cos(0.2for)+0.5 (12.2.4)
откуда очевидно, что высокочастотный компонент преобразуется в
константу, т. е. высокочастотный компонент возникает как сигнал
низкой частоты (здесь нулевой). Это явление называется наложением
спектров.
Результат изображен на рис. 12.1, где квантованный сигнал
отображен последовательностью маленьких кружков.
Рис. 12.1. Эффект наложения спектров при использовании низких скоростей
квантования
12.3. Восстановление сигнала 335
Мы можем видеть на рис. 12.1, что квантованный
высокочастотный компонент появляется как постоянная составляющая, что было
предсказано в (12.2.4). DDD
Чтобы смягчить эффект наложения спектров, скорость квантования
должна быть высока по отношению к скорости изменения интересующих
нас сигналов. Обычное эмпирическое правило —требуется, чтобы
скорость квантования была в 5-10 раз больше полосы пропускания системы.
Если это правило нарушено, наблюдаемые квантованные величины
могут очень плохо отражать исходный непрерывный сигнал. Эта проблема
будет далее детально изучаться в книге.
Даже когда вышеупомянутое эмпирическое правило выполняется,
следует защитить процесс квантования от других засоряющих сигналов
высокой частоты, типа шумов. Чтобы предохранить преобразование
этих сигналов к низким частотам, обычно до процесса квантования
помещается аналоговый фильтр. Этот фильтр называется сглаживающим
фильтром и его цель состоит в том, чтобы избежать наложения спектров
для высокочастотных сигналов шума в процессе квантования.
12.3. Восстановление сигнала
Выход цифрового регулятора — другая последовательность чисел {u[fc]},
являющихся квантованными величинами планируемого сигнала
управления. Эти квантованные величины должны быть преобразованы опять
в непрерывную функцию, прежде чем будут поданы на объект. Обычно
это делается экстраполяцией их в кусочно-постоянную функцию u(t),
как показано на рис. 12.2.
5 1
а 0.5
S
0)
О
-0.5
и[0)
и[1]
,
«и
и[3]
и[4]
2 3
Время [периоды квантования]
Рис. 12.2. Ступенчатое восстановление
336 Глава 12. Модели дискретных систем
Управляемые компьютером системы обычно рассматривают только в
моменты квантования (опасность такого подхода, а также более общее
описание будут рассмотрены в гл. 14). В простом случае, когда нас
интересуют только моменты квантования, описание объекта
преобразуется в связь между входной квантованной последовательностью {u[fc]}
и выходной квантованной последовательностью {у[А;]}. Таким образом,
нам нужны удобные способы описания динамических моделей, которые
связывают одну последовательность (вход) с другой
последовательностью (выход).
12.4. Линейные дискретные модели
Полезная дискретная модель типа, упомянутого выше,— линейная
версия модели разностных уравнений старших порядков, упоминавшейся в
разд. 3.8. В дискретном случае эта модель принимает вид
y[k + n] + On-iy[k + n-l]+ ••• + a0y[k] (12.4.1)
= bn-iu[k + п - 1] Н + b0u[k]
Пример 12.2. Рассмотрим так называемый ПИ-регулятор, который
формирует управляющую последовательность и[к] как сумму
составляющей, пропорциональной ошибке управления и составляющей,
пропорциональной накопленной (интегральной) ошибке. Это может быть
смоделировано следующим образом:
e[k+l] = e[k] + cie[k] (12.4.2)
u[k] = c2e[k] + e[k] (12.4.3)
Сдвиг на один шаг вперед в (12.4.3) дает
и[к + 1] = с2е[к + 1] + е[к + 1] (12.4.4)
Вычитая (12.4.3) из (12.4.4) и используя (12.4.2), получим
следующую модель разностного уравнения старших порядков:
и[к + 1] - и[к] = с2 (е[к + 1] - е[к]) + е[к + 1] - е[к] (12.4.5)
= c2(e[k + l]-e[k])+cie[k]
В обозначениях (12.4.1) мы имеем Щ = — 1, Ъ\ = с2, Ьо = с1 — 02-
Заметим, что старший член с2е[к + 1] появляется в правой части
потому, что регулятор бисобстенный (левая и правая части уравнения
(12.4.5) имеют один и тот же порядок). Заметим также, что здесь
{и[к]} — выход, а {е[к]} — вход. □□□
12.6. Z-преобразование 337
12.5. Оператор сдвига
При описании далее дискретных моделей нам будет удобно использовать
обозначение оператора сдвига вперед. Мы определим оператор сдвига
вперед следующим образом:
*(/[*]) = /[*+!] (12-5.1)
В терминах этого оператора модель (12.4.1) будет иметь вид
qny[k] + an.iqn-ly[k]+ ••. + а0у[к] = bmqmu[k) + ••. + Ь0и[к] (12.5.2)
Для дискретных систем можно также ввести дискретные модели
пространства состояний. В области оператора сдвига эти модели имеют
вид
qx[k] = Aqx[k] + Bqu[k] (12.5.3)
y[k] = Cqx[k] + T>qu[k] (12.5.4)
где {#[&]}, {UM} и {у [к]} — последовательности состояния, входа и
выхода соответственно.
Решение уравнений (12.5.3) и (12.5.4) легко получается с помощью
итерации уравнения (12.5.3).
к-1
х[к] = Ajs(O) + 53 КВяи1к -1" Ч (12.5.5)
1=0
к-1
у[к] = С9 А{*(0) + Cq J] A.lqBqu[k - / -1] (12.5.6)
1=0
Пример 12.3. Рассмотрим дискретный ПИ-регулятор из
примера 12.2. Фактически уравнения (12.4.2) и (12.4.3) уже имеют форму
дискретного пространства состояний, где
A9 = l; Bq = ci; Cq = 1; Bq = c2 (12.5.7)
□□□
12.6. Z-преобразование
Таким же образом, как преобразования Лапласа переводят
дифференциальные уравнения в алгебраические уравнения, мы можем
использовать Z-преобразования, чтобы преобразовать разностные уравнения в
алгебраические.
338 Глава 12. Модели дискретных систем
Таблица Z-преобразований
Таблица 12.1
/М
Z[f[k}}
Область сходимости
6к[к]
к
к2
ак
как
cos кв
sinkO
akcosk6
aksink6
к cos кв
/i[fc]-/i[fc-fc0], k0 E
z-\
1
z
(z-1)»
z(z+l)
(z-1)3
z
z — a
az
{z-aY
z(z-cos0)
z2-2zcos0+l
zsin0
z2-2zcos0 + l
z(z — acos0)
z2 -2azcos6 + a2
az sinO
z2 — 2azcos6 + a2
z(z2 cos0 - 2z + cos0)
z2-2zcos0+l
l + z + z2 + --- + zk°-1
?ke-l
\z\>\
\z\>Q
\z\>\
\z\>\
и>н
M>i
И>1
|z|>a
\z\>a
\z\>l
\z\>0
Рассмотрим последовательность {y[k]; к = 0,1,2,...}. Тогда пара
Z-преобразований, связанная с {у[А;]}, определяется следующим
образом:
z[y[k]) = Y(z) = y£z~kyW
(12.6.1)
fc=0
Z~l [Y(z)] = y[k] = -^ &zk-1Y(z)dz (12.6.2)
2тг? J
12.6. Z-преобразование 339
Таблица 12.2
Свойства Z-преобразования. Заметим, что F{(z) = £ [/*[&]], fi[k)
означает обычно единичную ступеньку, значение у[оо] должно быть
вполне определенным и что свойство свертки справедливо при
условии, что /i[fc] = f2[k] = 0 для всех к < О
1 __ м
i
i—1
f[k + i]
к
Е/и
1—0
/[*-Ц
у[к-1]ф-1]
kf[k]
I™
lim y[k]
K-tOO
lim y[k]
Jfe-Ю L
iE/iMui*-*]
1=0
fi[k]fa[k]
Wkh[k]
Z[f[k}}
i
Е^вд
i—1
zF(z)-zf(0)
-^Fiz)
z — \
z-1F(z) + f(-l)
z~lY{z)
dF(z)
dz
jf^c
\im(z-l)Y(z)
lim Y(z)
z-too
Fi(z)F2(z)
=?/*«» (?)f
'.({)
Названия
Простейшие дроби
Сдвиг вперед
Суммирование
Сдвиг назад
Единичная ступенька
Теорема о конечном значении
Теорема о начальном значении
Свертка
Сложная свертка
Масштабирование частоты
где контур интегрирования является окружностью с центром в начале
координат и радиусом р.
Y(z) называется Z-преобразованием y(t). Пара преобразований
полностью определена, если существует параметр р Е М+, такой, что
\у[к]\<рк Vfc>0 (12.6.3)
Z-преобразования различных распространенных сигналов приведены
в табл. 12.1. Некоторые полезные свойства Z-преобразования собраны в
табл. 12.2.
340 Глава 12. Модели дискретных систем
Пример 12.4. Рассмотрим дискретный ПИ-регулятор из примера 12.2
и пусть и[0] = 0, а е[к] — единичная ступенька, приложенная при к = 0.
Тогда, взяв Z-преобразование от (12.4.5), получим
zU(z) - zu[0] - U(z) = с2 (zE(z) - E(z) - ze[0]) + ciE(z)
Следовательно1,
U{z) = C^-C2)E{z)- E{z) = ^-l (12.6.4)
-^-(jrip + ^n- ^)-(^T)2 + ^i (12-6-5)
Следовательно, u[k] = ci& + c2; A; > 0. □□□
Z-преобразование можно использовать для преобразования
разностных уравнений в алгебраические уравнения.
12.7. Дискретные передаточные функции
Взяв Z-преобразование от обеих сторон модели в виде разностного
уравнения старших порядков (12.5.2), получим
Aq(z)Yq(z)=Bq(z)Uq(z) + fg(z,x0) (12.7.1)
где Yq(z) и Uq(z) — Z-преобразования последовательностей {у[к]} и
{u[fc]} соответственно.
Заметим, что
Aq{z) =zn + an^zn-1 + • • • + а0 (12.7.2)
Bq(z) = bmzm + bm^z™-1 + • • • + b0 (12.7.3)
и fq(z,x0) — слагаемое, зависящее от начальных условий, аналогичное
f(s,x0) в (4.5.1).
Уравнение (12.7.1) может быть переписано в виде
Yg(z) = Gg(z)Ug(z) + y^ (12.7.4)
где
1 Заметим, что ti[0] = сге[0].
12.7. Дискретные передаточные функции 341
называется дискретной (в форме оператора сдвига) передаточной
функцией. Так же как и для непрерывного времени, передаточная функция
однозначно определяет поведение входа-выхода в дискретные моменты
квантования при нулевых начальных условиях.
Мы можем также использовать Z-преобразование для получения
передаточной функции, соответствующей дискретной модели
пространства состояний в форме оператора сдвига. Взяв Z-преобразования в
(12.5.3) и (12.5.4) и пренебрегая начальными условиями, получим
Gq(z) = Cq(zl - А^В, + D, (12.7.6)
Роль дискретных передаточных функций в описании динамического
поведения аналогична роли передаточных функций для непрерывных
систем. В частности, расположение полюсов (корни Aq(z)) определяет
собственные движения системы. Хотя непрерывные и дискретные
передаточные функции имеют много общего, есть некоторые специальные
особенности у дискретного случая, как иллюстрируется следующими
двумя примерами.
Пример 12.5 (Полюсы в начале координат — конечное время
переходного процесса). Вычислим переходную характеристику
дискретной системы с передаточной функцией
0#м_«ш^Ц*±М (im)
z
Решение
Z-преобразование реакции системы у[к] на входной сигнал и[к]
определяется формулой
Yq(z) = °'5z ~lzsZ + ^Uq{z) = 0.5z-lUq(z) - 1.2z-2Uq(z) + 0.9г~%{г)
(12.7.8)
Следовательно,
y[k] = 0.5u[k - 1] - 1.2u[k - 2] + 0.9u[k - 3] (12.7.9)
Тогда, если и[к] =/i[fc], реакция системы определяется выражением
'О к = 0
»м-<"7 tl (12-710)
0.2 Vfc > 3
342 Глава 12. Модели дискретных систем
Принципиальная особенность этой системы — то, что ее реакция
на ступеньку имеет конечное время установления. Это получается
благодаря полюсам в начале координат. □□□
Пример 12.6 (Устойчивые отрицательные вещественные
полюсы— пульсации). Найдем переходную характеристику системы,
имеющей передаточную функцию вида
а<М = 7Ш (12'7Л1)
Решение
Z-преобразование реакции на ступеньку у [к] имеет вид
ВД =
0.5
z + 0.5
ад =
0.5*
(z + 0.5)(z-l)
(12.7.12)
Раскладывая на простейшие дроби (с помощью команды residue пакета
MATLAB), получим
Yq(z) =
- y[fc] = |(l - (-0-5)*) M[fc] (12.7.13)
3(s-l) 3(z + 0.5)
Заметим, что реакция содержит компонент (—0.5)*, который
соответствует колеблющейся реакции {известной как пульсации). В
дискретном времени это может произойти (как в данном примере) для
единственного отрицательного вещественного полюса, в то время как
при непрерывном времени необходима пара комплексно-сопряэюенных
полюсов для получения этого эффекта.
Это поведение можно оценить по рис. 12.3, где показана реакция на
ступеньку (12.7.13). DDD
0.5
Й 0.4
0.2
0Ф-
4 ij> -р -<j>- р 9- ф
4 5 6
Время
10
Рис. 12.3. Переходная характеристика системы, обладающей реакцией
с колебаниями
12.8. Дискретные модели в дельта-области 343
12.8. Дискретные модели в дельта-области
Оператор сдвига вперед q, определенный в разд. 12.5, является
наиболее часто используемым дискретным оператором. Однако в некоторых
приложениях оператор сдвига вперед приводит к трудностям. Причина
этих трудностей объясняется ниже.
Хотя наблюдается явное подобие между моделью с
дифференциальным оператором, задаваемой уравнением (4.2.4) и моделью оператора
сдвига, определяемой уравнением (12.5.2), имеются тонкие (но далеко
идущие) различия между этими представлениями. Чтобы
проиллюстрировать это, рассмотрим непрерывное уравнение первого порядка
py(t) + У (*) = ^ + у (*) = u(t) (12.8.1)
и дискретное уравнение в области оператора сдвига
a2qy{tk) + aiy(tk) = bxu(tk) (12.8.2)
Представляя дифференциал как предельную операцию в (12.8.1) мы
получим
Urn^"-^-"'") +^-.(«) (12.8.3)
Если мы теперь сравним (12.8.1) с расширенной формой (12.8.2),
а2у(t + Д) + aiy{t) = blU(t); где Д = tk+x - tk (12.8.4)
то увидим, что принципиальное различие между непрерывным и
дискретным временем ощутимо улавливается в операции взятия предела
у выражения (12.8.3). Кроме этого, мы также замечаем, что (12.8.3)
принципиально основано на относительном и временном смещении
у{ + y-y(t) 0T абсолютного значения у(£), в то время как (12.8.4)
моделирует ту же самую динамику двумя абсолютными значениями y(t)
и y(t + Д). В дальнейших главах мы увидим, что это тонкое отличие
приводит к тому, что дискретные результаты, основанные на операторах
смещения, отличаются от соответствующих непрерывных результатов
при Д -» 0.
Эту принципиальную трудность можно избежать, используя
альтернативный оператор, называемый дельта-оператором:
д/((* + 1)Д)-/(*Д)
S (/(АгД)) 4 J "" *'"' ' * "' (12.8.5)
где Д означает период квантования.
344 Глава 12. Модели дискретных систем
Для квантованных сигналов важная особенность этой операции в
том, что
tim[6{f(kA)}]=p(f(t)) (12.8.6)
т. е., когда период квантования стремится к нулю, J-оператор стремится
к оператору дифференцирования. Заметим, однако, что мы не будем
применять никакие приближения при использовании дельта-оператора
для конечного периода квантования, потому что мы получим точные
описания модели, соответствующей этому оператору, при конкретной
скорости квантования.
Пример 12.7. Рассмотрим ПИ-регулятор из примера 12.4 и пусть
Д означает период квантования. Деление обеих частей выражения
(12.4.5) на Д приведет к следующей дельта-форме регулятора:
5и(кА) = с25е{кА) + ^е(йД) (12.8.7)
□□□
В дельта-форме основная дискретная модель (12.4.1) будет иметь вид
6пУ [к] + «df^y [*] + • • • + а'0у[к] = Ь'т6ти[к] + • • • + Ь'0и[к] (12.8.8)
Заметим, что существуют простые однозначные отношения между
коэффициентами (а*,6*) в (12.4.1) и (а[,Ь[) в (12.8.8).
Дискретные модели пространства состояний могут также быть
описаны в дельта-форме. Соответствующий вид модели пространства
состояний следующий:
6х[к] = А5х[к] + В5и[к] (12.8.9)
у[к] = Csx[k] + Bsu[k] (12.8.10)
Мы можем без труда преобразовать дискретную модель пространства
состояний, данную в форме оператора смещения, в модель в дельта-
форме (и наоборот). Например, (12.5.3) и (12.5.4) дают
«*М-*Ю = {-^Лх[к] + %и[к] (12.8.11)
y[k] = Cgx[k] + T>gu[k]
Эта модель представлена в форме (12.8.9) и (12.8.10), где
AS = ^£^; Bj = ^; Cs = Cg; T>5 = Dg (12.8.12)
Пример 12.8. Для ПИ-регулятора из примера 12.7 мы имеем
А* = 0, В* = ^, Q = l, D* = c2 (12.8.13)
DDD
12.9. Дискретное дельта-преобразование 345
Решением (12.8.9) и (12.8.10), как легко видеть, будет
к-1
х[к] = (Г + As Д)*я[0] + Y1Л ? + AsA)lBsu[k -1-1] (12.8.14)
1=0
к-1
у[к] = С6<[ + А6 Д)**[0] + С*^ Д ^ + A* Д)'В*и[* - / - 1] + D^[fc]
(12.8.15)
12.9. Дискретное дельта-преобразование
Как можно видеть, сравнивая результаты в табл. 12.1 и в табл. 4.1,
выражения в преобразованиях Лапласа и Z-преобразования не
обладают явной структурной эквивалентностью. Интуитивно, мы могли бы
ожидать, что такая эквивалентность будет существовать при получении
дискретной последовательности с помощью квантования непрерывного
сигнала. В частности можно было бы ожидать, что преобразование
Лапласа должно получаться из Z-преобразования при увеличении
частоты квантования. Мы покажем, что это действительно происходит, если
будем использовать альтернативный дельта-оператор. Чтобы показать,
как это происходит, рассмотрим последовательность {у[к] = у(А;Д)},
являющуюся результатом квантования непрерывного сигнала y(t)
каждые Д секунд. Вспомним, что преобразование Лапласа определяется
формулой
£[У(*)]= Г e-sty(t)dt (12.9.1)
Jo-
Естественно искать дискретный вариант этого преобразования
Лапласа в форме суммы Римана
оо
ад =5>-'**у(**)Д ** = *Д (12.9.2)
А;=0
По причинам, о которых сейчас говорилось, желательно также
использовать изоморфное изменение аргумента
esA = l+7A (12.9.3)
е5Л-1
7=—г— (12.9.4)
346 Глава 12. Модели дискретных систем
Таблица дельта-преобразований
Таблица 12.3
/И (*>о)
V[f[k]]
Область сходимости
/i[*]-/i[fc-l]
fc2
DaAfc
aGC
fceaA* aeC
sin(u70Afc)
cos(cj0Afc)
I + A7
7
1
J_
A
I + A7
Д72
(1 + A7)(2 + A7)
Д273
1 + Д7
7 Д
(HA7)ettA
a(t-^)2
(1 + A7)a;0sinc(a;0A)
72 + Аф(ш0, Д)7 + 0(cjo, A)
sin(cj0A)
где smc(o70A) = —-
u>0A
2(1 - cos(cj0A))
иф(ш0,А) =
A2
(l + A7)(7-bO.5A0(a;o?A))
72 + Аф{ш0, Д)7 + ф(ш0, А)
7 +
1
A
|7|<oo
|7|<00
1
>д
^+д
1
7+д
7+'
7+Д
7+Д
д
д
0аД
1
>д
^+д
1
>д
В терминах аргумента j определим пару дискретных дельта-
преобразований :
2>[у(*Д)]=У,(7) = ]£(1+7Д)"*У(*Д)Д (12.9.5)
А;=0
^ [П(7)] = У (*Д) = 2^7 /С1 + ТД)*""1^)*/ (12.9.6)
Дискретное дельта-преобразование связано с Z-преобразованием
соотношением
У,(7) = ДВД
2=Д7+1
(12.9.7)
12.9. Дискретное дельта-преобразование 347
Таблица 12.4
Свойства дельта-преобразования. Заметим, что Fi(j) = 22[/*[&]]> 1*Щ
означает, как обычно, единичную ступеньку, параметр /[оо] должен
быть полностью определен и что свойство свертки справедливо при
условии, что /i[fc] = /2[fc] = 0 для всех к < О
1 /и
5>лм'
г=1
А
fc-i
Е/мд
1=0
f[k~l)
f[k-l]ix[k-l]
kf[k]
lim f[k]
fc-Ю l J
fc-i
Елшь-цд
(=0
лили .
(1 + аД)*Д[*]
*>[/[*]]
5>я(7)
(Д7 + 1)(А(7)-ЛМ)
7F1(7)-(1 + 7A)/1[0]
±F(7)
(l + 7A)-1F(7) + /[-l]
(1+7Д)-^(7)
1 + jAdFij)
A dj
Г^-dc
lim7F(7)
lim ?Щ
^1(7)^2(7)
2ttj / uu 2Vl + CA/l + CA
Fl(l+s)
Названия
Простейшие дроби
Смещение вперед
Масштабированная
разность
Сумма Римана
Смещение назад
Теорема
о конечном значении
Теорема
о начальном значении
Свертка
Сложная свертка
где Yq(z) ~Z[y{kA)]. Обратно,
Yq(z) = -Y8(j)
7=i
(12.9.8)
Выражения (12.9.7) и (12.9.8) позволяют получить таблицу дельта-
преобразований из соответствующих Z-преобразований в табл. 12.3.
Свойства дельта-преобразования даны в табл. 12.4.
348 Глава 12. Модели дискретных систем
Принципиальное свойство дельта-преобразований заключается в том,
что они сходятся к соответствующим преобразованиям Лапласа при Д ->
О, так что
ШпУ,(7)=У(з)
Д->0
5=7
(12.9.9)
Далее мы проиллюстрируем это на простом примере.
Пример 12.9. Пусть последовательность {у[к]} получена при
квантовании с периодом А непрерывной экспоненциальной функции е&1. Тогда
и из таблицы 12.3
П(т) =
у[к) = е^
1+7А
'"[«Г1]
(12.9.10)
(12.9.11)
В частности, заметим, что при А
преобразование Лапласа е&ь.
о,П(т)
7-/3
— есть
□□□
Для нас основным свойством дельта-преобразования будет
следующее:
Дельта-преобразование может использоваться для преобразования
разностного уравнения в алгебраическое, дельта-преобразование
также позволяет легко перейти от дискретного к непрерывному времени
с помощью увеличения скорости квантования.
Исторически анализ дискретных систем начался с
использования дельта-преобразования. Позже акцент переместился к
Z-преобразованию. Совсем недавно опять вернулись к
дельта-преобразованию. Это связано с применением более быстрых компьютеров,
которые позволяют использовать меньшие периоды квантования; в
этом случае дельта-преобразование имеет большие числовые и
концептуальные преимущества, как мы покажем ниже. Действительно, мы
догадываемся, что причиной того, что цифровое управление считалось
отличающимся от непрерывного управления, частично являются
недоразумения, связанные с широким использованием Z-преобразования
и операторов сдвига. Эти концептуальные проблемы разрешаются
при использовании дельта-преобразования, которое показывает, что
цифровое и непрерывное управление фактически весьма близки.
12.11. Передаточные функции и импульсные характеристики 349
12.10. Дискретные передаточные функции
(форма дельта-преобразования)
Применяя дискретное дельта-преобразование и его правило разности к
разностному уравнению высокого порядка в дельта-форме (12.8.8), мы
получим
ЫчШт) = BsWsb) + fs(l,Xo) (12.10.1)
где Ys^) и Usij) —дельта-преобразования последовательностей {у[А;]} и
{и[А;]} соответственно.
Здесь, аналогично (12.7.2) и (12.7.3),
А5(7) = 7П + «CiT11-1 + •••+< (12.10.2)
ВвЬ) = C7m + C-iT""1 + • • • + Ь'0 (12.10.3)
a fsiy^o) —компонент, зависящий от начальных условий, аналогичный
f{s,x0) в (4.5.1) и fq(z,x0) в (12.7.1).
Уравнение (12.10.1) может быть переписано в виде
Y,b) = G,W,in) + Щ^- (12.10.4)
где
ам&Мй (12.10,,
называется дискретной передаточной функцией (в дельта-форме).
Мы можем также использовать дельта-преобразования для
получения передаточной функции, соответствующей модели пространства
состояний в дельта-области, задаваемой уравнениями (12.8.9) и (12.8.10).
Взяв дельта-преобразование и пренебрегая начальными условиями,
получим
G*(t) = С6Ц1 - As)~lBs + Т>6 (12.10.6)
12.11. Передаточные функции
и импульсные характеристики
Для каждого из трех преобразований, введенных ранее (а именно,
преобразование Лапласа, Z-преобразовывание и дельта-преобразование),
существует характерный сигнал, имеющий преобразование, равное
единице. Эти сигналы следующие:
5р(£) (дельта-функция Дирака) для преобразования Лапласа;
6к[Щ (единичый импульс или дельта-импульс Кронекера) для Z-npe-
образования;
350 Глава 12. Модели дискретных систем
З^М (масштабированный единичный импульс) для дельта-
преобразования.
Тогда видно, что передаточная функция в каждой из этих трех
областей является соответствующим преобразованием реакции системы
на единичный характерный сигнал при нулевых начальных условиях.
12.12. Устойчивость дискретных систем
12.12.1. Связь с полюсами
Мы видели, что реакция дискретной системы (в области оператора
сдвига) на входное воздействие U(z) имеет форму
Y(z) = Gq(z)U(z) + /«(«'*«> (12.12.1)
(z-ai)(z-a2) ••• (z-On)
где c*i,..., an — полюсы системы.
Тогда, используя разложение на простейшие дроби, выражение для
Y(z) можно записать следующим образом:
п Bz
Y(z) = 5^ —" *~ слагаемые> зависящие от U(z) (12.12.2)
л Z OLj
где, для простоты, мы предполагаем что все полюсы являются
различными.
Соответствующая реакция во времени
у[к] = /3j [ctj] + члены, зависящие от входного воздействия. (12.12.3)
Устойчивость обеспечивается, если [ctj]k -> 0, что выполняется в
случае, если |ау| < 1. Следовательно, устойчивость требует, чтобы
полюсы имели модули меньше единицы, т. е. находились внутри единичной
окружности с центром в начале координат.
12.12.2. Устойчивость в дельта-области
Фактически, дельта-область — просто сдвинутый и отмасштабирован-
ный вариант Z-области, что вытекает, например, из (12.9.7) и (12.9.8).
Из этого следует, что граница устойчивости дельта-области —
окружность радиуса ^ с центром в точке — ^ в 7-пл0СК0СТИ- Снова
обратим внимание на тесную связь между непрерывной s-областью и
дискретной J-областью: область 5-устойчивости приближается к области
5-устойчивости (открытая ЛПП) при Д —> 0.
12.13. Дискретные модели для квантованных непрерывных систем 351
12.13. Дискретные модели
для квантованных непрерывных систем
Как было упомянуто в разд. 12.2, регулятор в большинстве современных
систем управления реализован в цифровом компьютере, в то время как
сам процесс развивается в непрерывном времени.
Таким образом, наша цель в данном разделе состоит в том, чтобы
получить дискретные модели, которые связывают квантованный выход
непрерывной системы с квантованным входом. Сначала мы вспомним,
как цифровой регулятор связан с непрерывным объектом.
Типичный вариант создания этой взаимосвязи показан на рис. 12.4.
Аналого-цифровой преобразователь (на рисунке — АЦП) осуществляет
процесс квантования (обычно с некоторым фиксированным интервалом
Д). Перед квантованием могли бы быть также включены
сглаживающие фильтры. Цифроаналоговый преобразователь (на рисунке — ЦАП)
экстраполирует дискретное управляющее воздействие в функцию,
пригодную для использования на входе объекта. На практике это обычно
достигается поддержанием дискретного сигнала в течение всего периода
квантования. Такой вариант называется экстраполятором (фиксатором)
нулевого порядка. Он дает кусочно-постоянный входной сигнал (или
сигнал в виде ступенек), показанный ранее на рис. 12.2.
Если используется экстраполятор нулевого порядка для
формирования u(t), то
u(t) = и[к] для kA<t<(k + 1) Д
(12.13.1)
Дискретные модели обычно связывают квантованный сигнал у [к] с
квантованным входным сигналом и[к]. Цифровое управление обычно
также вычисляет и[к] на основе y\j] и r[j], где {г(кД)} — эталонная
последовательность и j < к.
вход
ЦАП
Объект
выход
АЦП
Цифровой
регулятор
Рис. 12.4. Цифровое управление непрерывным объектом
352 Глава 12. Модели дискретных систем
12.13.1. Использование моделей
непрерывных передаточных функций
Мы видим, что формирование кусочно-постоянного сигнала u(t) из
последовательности {w[fc]} можно смоделировать структурой, показанной
на рис. 12.5.
На рис. 12.5 импульсный квантователь формирует
последовательность Дирака us(t), определяемую выражением
us(t)= ]T u[k]S(t-kA)
(12.13.2)
А:=—оо
Эта последовательность при прохождении через экстраполятор
нулевого порядка (ЭНП) формирует кусочно-постоянный сигнал u(t). Важно
подчеркнуть, что система на рис 12.5 имеет смысл только тогда, когда
рассматривается в целом; импульсный квантователь сам по себе не имеет
никакого физического значения.
Теперь мы видим, что цифровой регулятор управляет эквивалентной
дискретной системой, как показано на рис. 12.6.
На рис. 12.6 изображена дискретная система со входом и[к] и
выходом у[к] = у(кА). Мы знаем (из разд. 12.11), что передаточная
функция дискретной системы в форме Z-преобразования является Z-
преобразованием выходного сигнала (последовательность {у[&]}), когда
на входе и[к] —дельта-импульс Кронекера при нулевых начальных
условиях. Из рис. 12.6 мы также видим, что если и[к] = 8к[&], то us{t) = 5(t).
Если мы обозначим через Hoq(z) передаточную функцию от Uq(z) к
Yq(z), то получим следующий результат.
и[к]
/ u'(t)
А
l-e~sA I
5 1
ЭНП
m(t)
Рис. 12.5. Экстраполятор нулевого порядка
и(кА)
У ua(t\
А
Gho(s)
G0(s)
y(t).
у(кА)
А~~*"
Рис. 12.6. Дискретный эквивалент модели с экстраполятором
нулевого порядка
12.14. Использование непрерывной модели пространства состояний 353
Дискретная передаточная функция на рис. 12.6 вычисляется как
гт / \ _ ~ Г квантованная импульсная ] ho1QQv
**oqW - * [харакТеристика Gh0{s)Go{s)\ (и.ил)
_ (л -ь ~ [квантованная переходная] (л 0 л Q ,ч
-{l-z )Z[ характеристика G0(s) J (илбЛ)
(Вторая строка вышеупомянутого выражения может быть также
получена, учитывая, что дельта-импульс Кронекера эквивалентен
ступеньке при к = 0, сопровождаемой шагом задержки до к = 1).
Передаточная функция Hoq(z) иногда записывается в виде [GhoG0]q]
это следует понимать так же, как и в (12.13.3).
Дискретная передаточная функция обычно называется импульсной
передаточной функцией непрерывной системы. Эта терминология
является результатом того, что дельта-импульс Дирака, приложенный
к квантователю и экстраполятору нулевого порядка, преобразуется в
импульс (единичной величины и длительности, равной A[s]) на входе
исходной непрерывной системы.
Пример 12.10. Рассмотрим двигатель постоянного тока из
примера 3.4. Его непрерывная передаточная функция
с-м=ет (12135>
Используя (12.13.3), мы видим, что
Hoq(z) = (£z!) * (*»(д.д) _ % + Ье-*Л (1213.б)
_ (z -1) Г aoftpzA bpz b0 1
a2Q t(z-l)2 z-\ z-e-aoA/
(60a0A + 60e-aoA -b0)z- b0a0Ae-a°A - b0e-aoA + b0
= - тг,——^r, x^ UUU
a§(z-l)(z-e-a«>A)
12.14. Использование непрерывной модели
пространства состояний
Далее мы покажем, как получить дискретную модель пространства
состояний, когда выход экстраполятора нулевого порядка подается на
непрерывный объект (описанный в форме пространства состояний).
Рассмотрим непрерывный объект, у которого вход u(t) формируется экс-
354 Глава 12. Модели дискретных систем
траполятором нулевого порядка из входной последовательности. {u[fc]}.
Это подразумевает что
u(t)=u[k] для kA<t<(k + l)A (12.14.1)
Если объект описывается непрерывной моделью в пространстве
состояний х
^Р = Ax{t) + Bu(t) (12.14.2)
at
y(t) = Cx(t) (12.14.3)
то, используя решение (3.7.2), получим квантованную реакцию
переменной состояния
х((к +1) Д) = еААх(кА) + / еА(А~т)Ви(т + kA)dr (12.14.4)
Jo
и, используя (12.14.1), можем записать
х((к +1) Д) = Aqx(kA) + Bqu(kA) (12.14.5)
где
Aq = eAA (12.14.6)
ГА
Bq = eA(A~r)BdT (12.14.7)
Jo
Аналогично, выход
y{kA) = Cqx{kA) где Cq = С (12.14.8)
12.14.1. Результат в форме оператора сдвига
Обычно дискретная модель (12.14.5)—(12.14.8) может быть выражена
сжато, используя оператор сдвига вперед q, следующим образом:
qx[k] = Aqx[k] + Bqu[k] (12.14.9)
у[к] = Cqx[k] (12.14.10)
где
A^eAA = f;^- (12.14.11)
Jfe=0
Bg = / eA(A"T)Bdr = A"1 [eAA -1] B, (12.14.12)
Jo
если А невырожденная матрица
Cg = С (12.14.13)
D9 = D (12.14.14)
12.14. Использование непрерывной модели пространства состояний 355
12.14.2. Результат в форме дельта-оператора
С другой стороны, если мы определим tk = &Д, то (12.14.4)—(12.14.8)
могут быть выражены в форме дельта-оператора:
Sx(tk) = A6x{tk) 4- B6u{tk) (12.14.15)
y{tk) = C6x(tk) + Bsu{tk) (12.14.16)
где Сд = Cq = С, D* = D9 = D и
л eAA _ т
A* = ^-^ (12.14.17)
Bj = OB (12.14.18)
k A AA A2A2
eArdT = I+AA + A_^_ + ... (12.14.19)
" = i/'
12.14.3. Некоторые сравнения формы
оператора сдвига и дельта-оператора
Имеется несколько преимуществ формулировки (12.14.15) по сравнению
с (12.14.9). Например, мы можем ясно видеть, что для формы дельта-
оператора >
lim As = A lim В* = В (12.14.20)
А->0 Д-»0
где (А,В)—исходные непрерывные величины.
Это совпадает с интуитивными представлениями, что дискретная
модель должна сходиться к исходной непрерывной модели, когда период
квантования стремится к нулю. С другой стороны, можно подумать о
выражении (12.14.15) как о конечном приближении разности к
непрерывной производной. Эти интуитивные представления не справедливы
для формулировки (12.14.11), поскольку
lim А0 = I lim B„ = 0 (12.14.21)
А->0 Ч А->0 Ч
Другие преимущества дельта-формы включают следующее:
• Можно показать, что при быстрых условиях квантования
выражение (12.14.15) в количественном отношении лучше обусловлено, чем
(12.14.9).
• Более существенно то, что (12.14.9) моделирует абсолютное
смещение вектора состояния на один интервал, в то время как исходная
непрерывная модель основана на дифференциале, то есть бесконечно
малых приращениях состояния. Эта характеристика лучше у
выражения (12.14.15), которое также описывает приращение состояния в
один интервал времени.
356 Глава 12. Модели дискретных систем
12.15. Частотные характеристики
импульсных систем
Понятие частотной характеристики применимо и для импульсных
систем. Рассмотрим непрерывную систему, имеющую экстраполятор
нулевого порядка на входе. Тогда вход квантователя и экстраполятора и
выход системы представляют собой сигналы, квантованные каждые Д
секунд. Рассмотрим теперь синусоидальный входной сигнал, заданный
следующим образом:
и(кА) = sin{ukA) = sin (**к£\ = ^ (e>2nkZ - еЧ2жк^ (12.15.1)
27Г
где us = %.
Следуя той же процедуре, что и для непрерывных систем (разд. 4.9),
мы видим, что реакция системы на выходе при входном сигнале (12.15.1)
будет иметь вид
у(кА) = a{L))sin(DkA + (f){u))) (12.15.2)
где
#9(е*"А) = а(и;)е^И (12.15.3)
или .
Н6 (^д"1) = <*{иУФ{ш) (12.15.4)
и где Hq(z) или Н$(7) —дискретная передаточная функция системы в
z- или J-форме соответственно.
Частотная характеристика импульсной системы может также быть
изображена, используя диаграммы Боде. Однако Нд(е^шА)—
иррациональная функция частоты cj, так что некоторые простые правила
для диаграмм Боде непрерывных систем здесь не применимы. Сегодня
эта трудность потеряла часть своего традиционного значения, потому
что современные вычислительные пакеты позволяют непосредственно
представить частотные характеристики дискретных систем графически.
Характерная особенность частотной характеристики импульсной
системы—ее периодичность (по частоте cj). Это свойство является
результатом того, что функция е?шА является периодической по частоте
ш с периодом 27г/Д. Периодичность, естественно, сохраняется как для
амплитуды, так и для фазы частотной характеристики. Иллюстрируя
эту идею, на рис. 12.7 показана частотная характеристика импульсной
системы, имеющей передаточную функцию
ад=7?fj (12Л5-5)
12.15. Частотные характеристики импульсных систем 357
i
Я
ч
с
<
1.2
1
0.8
0.6
0.4
0.2
0
Частотная характеристика импульсной
I i i ill i
i
1 1 1 1
системы
i i i
-I !■■■■ !
10
12
14
16
500
9
е
-500
6 8 10
Частота [шА]
12
14
16
Рис. 12.7. Периодичность частотной характеристики импульсной системы
Другая интересная особенность заключается в том, что частотная
характеристика импульсной системы сходится к характеристике
непрерывного аналога при А -> 0, и, следовательно, много информации
можно получить просто из характеристик непрерывной системы. Это
иллюстрируется ниже.
Пример 12.11. Рассмотрим две системы, показанные на рис. 12.8.
Сравним частотные характеристики систем в диапазоне [0,cjs].
Решение
Для системы 1 частотная характеристика равна
а
*M±yw
(12.15.6)
U(jtj) ju + а
Для системы 2 частотная характеристика равна
(12.15.7)
358 Глава 12. Модели дискретных систем
Система 1
«w
s + a
y(t)
Система 2 ■
l-e~sA
s
а
s + a
Уд[к]
Рис. 12.8. Непрерывная система и импульсная система
Заметим, что если ш <С cjs ua< us, т. е. и A <C 1 и аА <С 1, шо лш
л*оэ/сел* использовать разлоэюение в ряд Тейлора первого порядка для
экспонент е""аА и е^шА, что дает
тт (• л \ 1 - 1 + а Д а
Ha(jL)A) « —: = -
qKJ ' 1+juA-l + aA ju + a
= H{ju)
(12.15.8)
Следовательно, обе частотные характеристики будут
асимптотически (по частоте ujs) приближаться друг к другу. Чтобы
проиллюстрировать это асимптотическое поведение, получим функцию
ошибки He(ju)), которую определим как
He(ju) = H(ju)-Hq[^]
(12.15.9)
На рис. 12.9 показана амплитуда частотной характеристики
He(j(j) для двух различных величин периода квантования А и для а = 1.
Мы видим, что для малых значений А непрерывные и дискретные
частотные характеристики действительно очень близки.
Полный анализ этой проблемы в рамках цифрового управления будет
сделан в гл. 14. □□□
0.35
аз
_ 0.25
Д 0.2
^ 0.15
0.1
0.05
А = 0.4
Частота [рад/с]
Рис. 12.9. Асимптотическое поведение передаточной функции
импульсной системы
12.16. Резюме 359
12.16. Резюме
• Очень немного объектов, с которыми сталкивается инженер по
системам управления, являются цифровыми; чаще они непрерывны.
Следовательно, сигнал управления, воздействующий на процесс, так
же как и измерения процесса являются обычно непрерывными во
времени.
• Современные системы управления, однако, почти исключительно
реализованы на цифровых компьютерах.
• По сравнению с историческим аналоговым регулятором, цифровой
компьютер обеспечивает
о намного большую возможность осуществления сложных
алгоритмов;
о удобные (графические) человеко-машинные интерфейсы;
о регистрацию данных, анализ тенденций и диагностику
внутреннего регулятора и
о гибкость выполнения фильтрации и других форм обработки
сигналов.
• Цифровые компьютеры работают с числовыми
последовательностями во времени, а не с непрерывными функциями времени.
• Поэтому
о входные сигналы цифрового регулятора, особенно процессы
измерений, должны быть квантованными;
о выходы цифрового регулятора, особенно сигналы управления,
должны быть экстраполированы из цифровой последовательности
величин к непрерывной функции времени.
• Квантование (см. рис. 12.10) выполняется аналого-цифровым
преобразователем (АЦП).
АЦП
непрерывный
сигнал
аналого-цифровой
преобразователь
х^^хххх*
квантованный
сигнал
Рис. 12.10. Результат квантования
• Обратное восстановление непрерывного сигнала из цифровых
квантованных величин выполняется цифроаналоговым
преобразователем (ЦАП). Имеются различные способы экстраполяции дискретных
360 Глава 12. Модели дискретных систем
квантованных величин, однако наиболее часто используется так
называемый экстраполятор нулевого порядка (см. рис. 12.11).
ххх*
±хх
*хххх
ЦАП
квантованный
сигнал
цифро аналоговый
преобразователь
восстановленный
сигнал
Рис. 12.11. Результат восстановления сигнала
• При квантовании непрерывного сигнала
о должна быть выбрана соответствующая скорость квантования;
о следует включать сглаживающий фильтр (низкочастотный),
чтобы избежать эффекта транспонирования (кажущегося
уменьшения) частоты высокочастотных сигналов типа шума.
• Анализ цифровых систем основан на дискретной версии
непрерывных операторов/
• В главе представлены два дискретных оператора:
о оператор смещения q, определяемый выражением qx[k] =x[k + 1];
о дельта-оператор J, определяемый выражением
6х[к] й Ф+ч-ф].
Таким образом, S
q-1
или q = 5А + 1.
Благодаря этой возможности простого преобразования, выбор
варианта в значительной степени определяется предпочтением и опытом
разработчика. Сравнения даны ниже.
Оператор смещения q:
о традиционный оператор;
о оператор, с которым многие инженеры более знакомы;
о используется в большинстве литературных источников.
дельта-оператор S имеет следующие преимущества:
о он подчеркивает связь между непрерывными и дискретными
системами (похож на дифференциальный оператор);
о выражения сходятся к знакомым непрерывным выражениям,
когда Д -> 0, что понятно интуитивно;
о он значительно лучше в числовом плане при больших скоростях
квантования, когда должным образом используется.
12.17. Литература для последующего чтения 361
• Анализ цифровых систем основывается на дискретной версии
непрерывных операторов.
о Дискретная версия дифференциального оператора — разностный
оператор.
о Дискретной версией преобразования Лапласа является или
Z-преобразование (связанное с оператором сдвига) или
7-преобразование (связанное с дельта-оператором).
• С помощью этих операторов
о непрерывные модели дифференциальных уравнений могут быть
преобразованы в дискретные модели разностных уравнений;
о непрерывные передаточные функции или модели пространства
состояний могут быть преобразованы в дискретные передаточные
функции или дискретные модели пространства состояний (либо в
операторах смещения, либо в дельта-операторах).
12.17. Литература для последующего чтения
Квантование
1. Feuer, A. and Goodwin, G.C. (1996). Sampling in Digital Signal Processing
and Control Birkausser Boston, Cambridge, Mass.
2. Kwakernaak, H. and Sivan, R. (1991). Modern Signals and Systems. Prentice-
Hall, Englewood Cliffs, N.J.
3. Oppenheim, A.V., Wilsky, A.S., and Hamid, N.S. (1997). Signals and Systems.
Prentice-Hall, Upper Saddle River, N.J., 2nd edition.
Оператор смещения и Z-преобразование
1. Astrom, К. and Wittenmark, В. (1990). Computer Controlled Systems. Theory
and Design. Prentice-Hall, Englewood Cliffs, N.J., 2nd edition. [Имеется
русский перевод 1-го издания этой книги: К. Острём, Б. Виттенмарк.
Системы управления с ЭВМ. — Мир, 1987.]
2. Cadzow, J. (1985). Signals, Systems and Transforms. Prentice-Hall, Englewood
Cliffs, N.J.
Дельта -преобразование
1. Feuer, A. and Goodwin, G.C. (1996). Sampling in Digital Signal Processing
and Control. Birkausser Boston, Cambridge, Mass.
2. Goodwin, G.C, Middleton, R.H., and Poor, H.V. (1992). High-speed digital
signal processing and control. Invited paper in: IEEE Proceedings, 80(2):240-
259.
3. Middleton, R.H. and Goodwin, G.C. (1990). Digital Control and Estimation.
A Unified Approach. Prentice-Hall, Englewood Cliffs, N.J.
362 Глава 12. Модели дискретных систем
12.18. Задачи для читателя
Задача 12.1. Вычислите Z-преобразование и дискретное дельта-
преобразование для дискретных последовательностей, которые
получаются квантованием следующих сигналов с частотой 1 Гц.
a) ii(t) -ii(t-3) б) e-°ltcos(0.5t + тг/4)
в) t2e~025t г) te-°Atcos(t)
Задача 12.2. Рассмотрим следующие рекурсивные уравнения,
описывающие отношение между входом и[к] и выходом у[к] различных
дискретных систем (с квантованными данными).
а) у[к] - 0.8у[к - 1] = 0Ли[к - 2] (12.18.1)
б) у[к] - 0.5у[А; - 1] + 0.06у[А; - 2] = 0.6u[k - 1] + 0.3и[к - 2] (12.18.2)
в) у[к] - 0.5у[к - 1] + 0.64у[А; - 2] = и[к - 1] (12.18.3)
12.2.1. Для каждого случая определите передаточную функцию.
12.2.2. Для предыдущего результата вычислите реакцию каждой
системы на единичный дельта-импульс Кронекера.
Задача 12.3. Определите реакцию на ступеньку дискретной системы,
которая имеет следующие передаточные функции в Z-форме:
2-0.5 z
z2(z + 0.5) z2- 0.52 + 1
1 z+1
(г-0.6)2 z2- 0.42 + 0.64
(12.18.4)
(12.18.5)
Задача 12.4. Рассмотрим непрерывную систему, имеющую
передаточную функцию
GW = 7T2lJT4 (12Л8'6>
Найдите скорость квантования, такую, что импульсная передаточная
функция [GGho]qiz) имеет только один полюс.
Задача 12.5. Предположим, что на рис. 12.6 G0(s) имеет вид
C°W=(S+l)l + 2) (1218'7)
12.5.1. Вычислите дельта-преобразование передаточной функции от
и[к] к у [к]} jyoj(7), как функцию интервала квантования Д.
12.18. Задачи для читателя 363
12.5.2. Проверьте, что при Д -> О
limtf0*(7)| =G0{s) (12.18.8)
Д->0
7=5
Задача 12.6. Выход y(t) непрерывной системы с входным единичным
ступенчатым сигналом квантуется каждую секунду. Выражение для
последовательности {у[к]} имеет вид
у[к] = 0.5 - 0.5(0.6)* VA; > 0 (12.18.9)
12.6.1. Определите Yq(z).
12.6.2. Определите передаточную функцию от Uq(z) к Yq(z).
12.6.3. Из предыдущего результата получите разностное уравнение,
связывающее {у[&]} с {u[&]}.
Задача 12.7. Рассмотрим установку, показанную на рис. 12.6, где
интервал квантования Д = 0.5 с. Предположим, что передаточная
функция от Uq(z) к Yq(z) равна
д-м-(.-£)£-м) (121810)
12.7.1. Найдите G0(s). (Используйте команду d2c пакета MATLAB.)
12.7.2. Объясните, почему предыдущее решение не единственное и
получите какие-нибудь альтернативные выражения для G0(s), которые
также удовлетворяют (12.18.10).
Задача 12.8. Рассмотрим установку, показанную на рис. 12.6, где
GW = 7S8 (121811)
Найдите передаточную функцию от Uq(z) к Yq(z) сначала для
Д = 1 с, а затем для Д = 0.75 с.
Задача 12.9. Передаточная функция импульсной системы (в дельта-
форме) задана выражением
°'М-(т-ац(У+м) <121812>
12.9.1. Если Д = 3.5 с, будет ли система устойчивой?
12.9.2. Найдите соответствующую передаточную функцию для Z-
преобразований при Д = 3.5 с.
12.9.3. Повторите 12.9.1 и 12.9.2 для Д = 1.5 с.
364 Глава 12. Модели дискретных систем
Задача 12.10. Рассмотрим непрерывный и дискретный фильтры
низких частот, имеющие передаточные функции H(s) и Hs(y)
соответственно. Предположим, что для цифрового фильтра частота квантования и3
выбрана равной 25 рад/с и что
нм=7^кп н^=^ш^1 <121813>
12.10.1. Сравните частотные характеристики для фильтров в
диапазоне частот [0;3cj5]. Прокомментируйте результат.
12.10.2. Может ли цифровой фильтр использоваться в качестве
сглаживающего фильтра?
Задача 12.11. Рассмотрим две передаточные функции G\{s) и G2(s):
G^ = 7TT и G*(*) = 7To (12.18.14)
5+1 5+I
Сравните частотные характеристики следующих двух передаточных
функций:
[GMGiG2]q{z) и [Gh0Gl]q(z)[Gh0G2]q(z) (12.18.15)
для двух различных периодов квантования А = 0.05 с и А = 0.5 с.
Обсудите основные проблемы, возникшие в этом примере.
Глава 13
Цифровое управление
13.1. Введение
Модели дискретных систем были описаны в гл. 12. Там мы видели,
что цифровые и непрерывные системы фактически весьма близки.
Следовательно, обычно справедливо, что цифровые реакции
приближаются к соответствующей непрерывной реакции при стремлении периода
квантования к нулю. По этой причине в оставшейся части книги мы
будем представлять непрерывные и дискретные идеи параллельно. Цель
данной главы состоит в том, чтобы обеспечить плавный переход к
такому подходу, выдвигая на первый план специальные проблемы,
связанные с цифровым управлением. В частности, в главе рассматриваются
вопросы:
• почему мы не можем просто обращаться с цифровым управлением,
как будто оно точно такое же самое, что и непрерывное управление и
• как спроектировать цифровую систему управления так, чтобы в
моменты квантования ее реакция точно совпадала с реакцией
непрерывной системы.
13.2. Дискретные функции чувствительности
Предлагаем читателю вспомнить результаты, представленные в гл. 12
по моделям дискретных систем.
Предположим (как бывает почти всегда на практике), что объект
работает в непрерывном времени, в то время как регулятор реализован
в цифровой форме. Наличие регулятора, реализованного в цифровой
форме, вносит несколько ограничений в задачу:
а) регулятор чувствует реакцию выхода только в моменты
квантования;
б) обычно будет необходим сглаживающий фильтр (см. разд. 12.2) до
процесса квантования выходного сигнала, чтобы избежать
преобразования высокочастотных сигналов (типа шума) в сигналы более
низких частот, где они будут неправильно восприняты, и
366 Глава 13. Цифровое управление
Д«(*)^Яг(2)
■+9 '
Цифровой
регулятор
C„{z)
Экстра-
полятор
Gh0(s)
\ ВД \
квантователь
>
F(s) I
Объект
I Go(s)
Y(s)
Сглаживающий
фильтр
Рис. 13.1. Контур управления с квантованными данными
в) непрерывный вход объекта просто связывается с цифровым
(квантованным) выходом регулятора, например, с помощью экстраполятора
нулевого порядка.
Основная идея гл. 12 состоит в том, что если нас интересует реакция
только в моменты квантования, эти квантованные величины могут быть
описаны дискретными моделями или с помощью дельта-оператора, или
с помощью оператора сдвига. Например, рассмотрим контур управления
с квантованными данными, показанный на рис. 13.1.
Заметим, что на рис. 13.1 мы использовали переменную Лапласа
5, чтобы описать непрерывные передаточные функции и переменную
Z-преобразования z для описания цифрового регулятора.
Если нас интересует только квантованная реакция, то легко получить
эквивалентную дискретную модель для квантованной реакции с
помощью комбинации экстраполятор — объект — сглаживающий фильтр.
Это может быть сделано или через передаточные функции, или через
методы пространства состояний. Для удобства мы здесь используем
форму передаточной функции, которая представлена в (12.13.3).
г п п л ( \ ь_ ~[ квантованная импульсная \
\b b0Uho\q (z) - * | характеристика F{s)G0{s)Gho(s)j
\п п 1 ( \ А ^ / квантованная импульсная \
[bobh0\q [z) - * |характеристика G0{s)Gho(s)]
(13.2.1)
(13.2.2)
Учитывая эквивалентную дискретную передаточную функцию
объекта, мы можем сразу же записать другие соответствующие
передаточные функции замкнутого контура:
Дискретная функция чувствительности —
Soq(z) =
ад
q\*J _
W (l + Cg(z)[FGoGft0]g(*))
(13.2.3)
13.3. Нули импульсных систем 367
Дискретная функция дополнительной чувствительности —
Я.Н (l + C,MiPG„GM],(z))
Пока это все кажется аналогичным непрерывному случаю (и,
действительно, это так). Конечно, приведенные передаточные функции
описывают только квантованные реакции. Дополнительно будет сказано об
этом в гл. 14, когда мы будем исследовать межтактовую реакцию
цифрового контура управления. Термин «межтактовая реакция» означает
реальную, но недоступную (для компьютера) непрерывную реакцию
основного процесса.
13.3. Нули импульсных систем
Как показано в гл. 8, нули разомкнутого контура системы существенно
влияют на достижимую характеристику замкнутого контура. Поэтому
важность понимания значения нулей в дискретных моделях не
удивительна. Оказывается, что здесь существуют некоторые тонкие
проблемы, которые мы и рассмотрим.
Если мы используем модели с оператором сдвига, то трудно заметить
связь между непрерывной и дискретной моделями. Однако если мы
используем эквивалентное описание в дельта-области, то станет ясно,
что дискретные передаточные функции сходятся к соответствующим
непрерывным описаниям. В частности, отношения между
непрерывными и дискретными полюсами (в дельта-области) представлены
выражением (12.14.17). Например, мы видим, что
Р? = —д—; f = l,...n (13.3.1)
где pi и pi означают дискретные (в дельта-области) полюсы и
непрерывные полюсы соответственно. В частности, мы видим, что pf -> р^
когда А —> 0.
Однако отношения между непрерывными и дискретными нулями
более сложны. Возможно, удивительно, но все дискретные системы,
оказывается, имеют относительную степень, равную единице, независимо от
относительной степени первоначальной непрерывной системы1.
1 Бывают исключения, когда квантованные непрерывные системы имеют или чистое
запаздывание, или неминимально-фазовые нули (при особом выборе периода
квантования).
368 Глава 13. Цифровое управление
Следовательно, если непрерывная система имеет п полюсов и т{< п)
нулей, то соответствующая дискретная система будет иметь п
полюсов и (п — 1) нулей.
Ввиду сходимости дискретных нулей к непрерывным нулям, мы
делим (несколько искусственно) все дискретные нули на два множества.
1. Системные нули: zf, •••, zbm имеют такое свойство, что
lim z\ = Zi i = 1,..., m (13.3.2)
д->о г J
где z\ — дискретные нули (выраженные для удобства в дельта-
области) a Zi — нули соответствующей непрерывной системы.
2. Нули квантования: z^+1, •••, ^_1имеют такое свойство, что
lim
д-ю
= 00 г = m +1,..., п - 1 (13.3.3)
Конечно, если у непрерывной системы т = п — 1, то нулей
квантования нет. Заметим также, что раз нули квантования
стремятся к бесконечности, то они определяют относительную степень
непрерывной системы.
Пример 13.1. Рассмотрим непрерывную сервосистему из примера 3.4;
имеющую непрерывную передаточную функцию
где п = 2 и т = 0. Тогда мы моэюем ожидать, что дискретизация
приведет к одному нулю квантования, что мы проверим следующим
образом.
С периодом квантования 0.1 с точная цифровая модель в области
оператора смещения будет
где К = 0.0048, zq0 = -0.967 иа0 = 0.905.
Соответствующая точная цифровая модель в дельта-области
имеет вид:
где К' = 0.0048, zs0 = -19.67 и а0 = -0.9516.
Нуль квантования,
область оператора смещения
2 4 6 8г
Период квантования [с]
10
13.3. Нули импульсных систем 369
Нуль квантования,
дельта-область
1 2 3 4
Период квантования [с]
Рис.
13.2. Расположение нуля квантования с различными периодами
квантования (пример 13.1)
Расположение нулей квантования в области оператора смещения
и дельта-области как функция периода квантования А определяется
соответственно выражениями
zq =
(1 + Д)е-д-1
Д + е~А - 1
о-Д
-1
и
Z° Д + е-д-
(13.3.7)
откуда легко проверить, что для очень маленького A, z% —> (—1)+ и
z^ —¥ оо. Аналогично для очень большого A, z% —> 0"
изменения показаны на рис. 13.2.
и z° -> 0"
Эти
□□□
При управлении дискретными системами следует особое
внимание обращать на нули квантования. Например, эти нули могут
быть неминимально-фазовыми даже если исходная непрерывная
система минимально-фазовая. Рассмотрим, например, минимально-фазовую
непрерывную систему с передаточной функцией
G0(a) =
s + 4
(s + 1)3
(13.3.8)
Для этой системы нули в области оператора смещения функции
[G0Gho]q{z) при двух различных периодах квантования будут
следующими:
А = 2 с =*• нули при -0.6082 и -0.0281
Д = 0.5 с =*• нули при -1.0966 и 0.1286
Заметим, что для Д = 0.5 с импульсная передаточная функция имеет
нуль вне области устойчивости.
370 Глава 13. Цифровое управление
13.4. Является ли специальная теория
цифровых систем действительно необходимой?
В разд. 13.3 мы видели, что при разумных условиях дискретная модель
системы будет сходиться при увеличении скорости квантования к
исходной непрерывной модели.
Это неизбежно приводит к вопросу: нам действительно нужна
отдельная теория цифрового управления? Интуитивно понятно, что
ограничения а), б), в) в разд. 13.2 почти незаметны, если квантование
осуществляется достаточно часто. Из разд. 13.3 мы также видим, что
дискретные полюсы (в дельта-области) и нули сходятся к непрерывным
при Д —> 0. Хотя эти наблюдения абсолютно правильны, требуемая
скорость квантования, вероятно, определяется не только практическими
соображениями. На практике скорости квантования обычно выбираются
в 5-10 раз больше полосы пропускания замкнутого контура, чтобы
сделать влияние квантования незначительным, в то время как на
самом деле влияние квантования будет несущественным, если скорости
квантования на порядок больше.
Поэтому следует думать о цифровом управлении с учетом его
внутренних особенностей. Три возможных варианта проектирования
следующие:
1) Спроектировать регулятор в непрерывном времени, дискретизиро-
вать результат перед реализацией и гарантировать, что ограничения
квантования существенно не затронут окончательную
характеристику.
2) Работать в дискретном времени, делая точный анализ реакции в
моменты квантования и гарантировать, что межтактовая реакция
не слишком удивительна.
3) Выполнить точный проект, оптимизируя непрерывную реакцию при
наличии (ограниченного) цифрового регулятора.
Первые два из этих вариантов будут проанализированы в следующих
разделах.
13.5. Приближенные непрерывные проекты
Здесь, мы используем идею просто выполнить обычное непрерывное
проектирование, а затем перевести полученный регулятор в дискретную
область.
13.5. Приближенные непрерывные проекты 371
Чтобы проиллюстрировать эффект обычного перевода проекта
системы управления из непрерывной в дискретную область, мы упомянем три
метода, почерпнутых из литературы по цифровой обработке сигналов.
1. Просто взять непрерывный регулятор, выраженный в терминах
переменной Лапласа s и затем заменить каждое вхождение s
соответствующим оператором j в дельта-области. Это приводит к следующему
закону цифрового управления:
Ci(l) = C(S)\s=y (13.5.1)
где C(s) —передаточная функция непрерывного регулятора, Ci(j) —
результирующая передаточная функция дискретного регулятора в
дельта-форме.
2. Преобразовать регулятор в дискретный эквивалент с экстраполято-
ром нулевого порядка. Это называется ступенчато-инвариантным
преобразованием. В результате получаем
£2(7) = ^ [квантованная импульсная характеристика{C(s)Gho{s)}]
__ (13.5.2)
где C(s), Gho(s) и £2(7) — передаточные функции непрерывного
регулятора, экстраполятора нулевого порядка и окончательного
дискретного регулятора соответственно.
3. Можно использовать более сложный переход от s к 7-
Например, можно выполнить следующее преобразование, обычно
называемое билинейным преобразованием с предварительной деформацией.
Пусть сначала
Т7 + 1 a-fe
Дискретный регулятор тогда определяется следующим образом:
СзЬ) = С(з)\3= о^ (13.5.4)
Затем выбираем а так, чтобы частотные характеристики этих
двух регуляторов совпадали на некоторой желаемой частоте, скажем,
и*. Например, можно было бы выбрать ш* как частоту, на которой
непрерывная функция чувствительности имеет максимальное
значение.
Далее вспомним из гл. 12, что дискретная частотная
характеристика на частоте ш* получается заменой 7 = (eJCJ*A — l) /Д, а
непрерывная частотная характеристика получается заменой s на^оЛ
Следовательно, чтобы приравнять дискретную и непрерывную ча-
372 Глава 13. Цифровое управление
стотные характеристики на частоте cj*, нам нужно, чтобы параметр
а удовлетворял условию
J U = — L ^
Результат будет следующим:
и*А
а =
sincj*A
1 — coscj*A
ш*А
-ctg
и*А
(13.5.5)
(13.5.6)
Проиллюстрируем это следующим примером.
Пример 13.2. Объект имеет номинальную модель следующего вида:
1
G0(s) =
(s-iy
(13.5.7)
13.2.1. Нуэюно синтезировать непрерывный ПИД-регулятор, такой,
что доминирующие полюсы в замкнутом состоянии являются
корнями полинома s2 + 3$ + 4.
13.2.2. Используя полученный результат, нуэюно получить
дискретный ПИД-регулятор. Предположим, что частота квантования
может быть такой, какой потребуется и что на входе объекта
помещен экстраполятор нулевого порядка.
13.2.3. Используя SIMULINK, нуэюно сравнить реакции на единичный
ступенчатый эталонный сигнал для непрерывного и дискретного
контуров.
Решение
13.2.1. Характеристический полином замкнутого контура Ad(s)
выбран в следующем виде
Acl(s) = {s2 + 3s + 4)(s2 + 10s + 25)
(13.5.8)
где сомножитель s2 + 10$ + 25 добавлен, чтобы получить для Ad{s)
степень, равную 4, что является минимальной степенью для
возможности произвольного выбора Aci(s).
Решая уравнение назначения полюсов, мы получим P(s) = 88s2 +
100s +100 и L(s) = 5 + 15. Это дает следующий ПИД-регулятор:
C(s) =
88s2 + 100s +100
s{s + 15)
(13.5.9)
13.5. Приближенные непрерывные проекты 373
13.2.2. Мы моэюем использовать высокие скорости квантования,
поэтому простейшей процедурой получения дискретного ПИД-
регулятора является замена s на j в (13.5.9):
СбЬ) =
8872 +ЮОу+ Ю0
7(7 + 15)
(13.5.10)
гыи в форме Z-преобразований
Cq(z) =
88z2- 166z + 79
(z-l)(z + 0.5)
(13.5.11)
где мы предполагаем интервал квантования Д = 0.1.
13.2.3. Непрерывный и дискретный контуры смоделированы в пакете
SIMULINK для единичного ступенчатого эталонного сигнала в
момент t = 1 и единичного входного возмущения в момент t = 10.
Разность выходных сигналов объекта показана на рис. 13.3.
0.1
-0.4
п , , , , , , , г
i i
_j i i i i
6
12
14
16
18
8 10
Время [с]
Рис. 13.3. Различие в выходах объекта под действием дискретизации
регулятора (период квантования = 0.1 с)
20
Читателю предлагается проверить, что для меньших периодов
квантования, скажем, Д = 0.01, различие с непрерывным вариантом
было бы едва заметным. Оба контура включены в файл Icodi.mdl
пакета SIMULINK. □□□
Однако факт, что ни одно из специальных преобразований,
перечисленных выше, не является полностью удовлетворительным с более
скромными скоростями квантования, иллюстрируется в следующем
примере.
374 Глава 13. Цифровое управление
Пример 13.3. Номинальная передаточная функция системы имеет
вид
ам = нЬг) (13"2>
а непрерывный регулятор задан выражением
„, ч 0.4165 + 1 /..« к ..«ч
°м = оШП (13513)
Заменить этот регулятор цифровым регулятором с Д = 0.157 с,
перед которым находится квантователь, а за ним — экстраполятор
нулевого порядка, используя каждую из трех аппроксимаций,
перечисленных выше. Протестировать реакцию на ступенчатый эталонный
сигнал для каждой такой аппроксимации.
Решение
1. Заменяя в C(s) s на у, получим
Sl(7) = £«*L±l (13.5.14)
к" 0.1397 + 1
2. Эквивалент C(s) с экстраполятором нулевого порядка имеет вид
^ 0-6947 + 1 м,,.„
С2(7) = 02327ТТ (13-5'15)
3. Для билинейного преобразования с предварительной деформацией
сначала получим непрерывную функцию чувствительности
Soijw) = z—^,.* ,. ч (13.5.16)
Найдем, что |50(jcj)| имеет, максимум на частоте
и* = 5.48 рад/с.
Тогда, используя формулу (13.5.6), получим а = 0.9375.
С этим значением а найдем приближение
Переходные характеристики замкнутого контура, полученные с
непрерывным регулятором C(s) и тремя дискретными
регуляторами С\ (7)^2(7) u Сз(7) представлены на рис. 13.4.
Из рисунка мы видим, что ни одно из приближений точно не
воспроизводит реакцию замкнутого контура, полученную с непрерывным
регулятором. Фактически, для этого примера мы видим, что простая
13.6. Цифровое проектирование в моменты квантования 375
Время [с]
Рис. 13.4. Характеристики различных проектов систем управления:
непрерывной (2/с(0)> простой подстановки (j/iOO), ступенчатой инвариантности
((2/2(0) и билинейного преобразования (уз(0)
замена, кажется, дает лучший результат и что нет смысла
получать здесь результат более причудливыми методами. Однако было бы
опасно делать из этого примера общие заключения. DDD
Вышеупомянутый пример показывает трудность получения
дискретных законов управления специальными средствами. Поэтому мы
продолжим исследовать проектирование дискретных и цифровых систем
управления.
13.6. Цифровое проектирование
в моменты квантования
Следующий вариант, который мы исследуем, —точное цифровое
проектирование системы управления для квантованной реакции.
Напомним, что квантованная реакция точно описывается
соответствующими дискретными моделями (выраженными или с помощью
оператора сдвига, или с помощью дельта-операции).
Здесь можно было бы использовать много разных возможных
стратегий. Мы кратко рассмотрим некоторые из временных и частотных
методов.
13.6.1. Проектирование во временной области
Любая алгебраическая технология (типа назначения полюсов) имеет
непосредственный цифровой аналог. По существу, все, что здесь
необходимо, — работать с параметром z (или 7) вместо переменной Лапласа
376 Глава 13. Цифровое управление
s и иметь в виду различные области устойчивости замкнутого контура.
Напомним следующие области устойчивости замкнутого контура:
непрерывный: 3?{s} < 0;
дискретный в г-области: Ы < 1;
дискретный в (J-области: \6 4- ^| < ^.
Как уже обсуждалось в гл. 7, при определении полюсов замкнутого
контура мы устанавливаем характеристики собственных движений
замкнутого контура. Таким образом, общие подходы назначения полюсов,
описанные в гл. 7, могут применяться с очевидными модификациями
в синтезе цифровых систем управления. Однако дискретные системы
имеют привлекательную особенность обладать конечным временем
переходного процесса (что невозможно достичь точно в непрерывных
системах). Это достигается, когда все полюсы передаточной функции
чувствительности расположены при z = 0 или, что эквивалентно, при
7 = — ^ (см. пример 12.5). Было предложено несколько вариантов
синтеза для получения контура цифрового управления с конечным
временем переходного процесса (при ступенчатом эталонном воздействии),
измеренного в моменты квантования. Мы кратко исследуем два из этих
подходов для следующей структуры.
Рассмотрим непрерывный объект, имеющий импульсную
передаточную функцию в виде
Goq(z) = [G0Gho}q(z) = ^4$ (13.6.1)
Aoq (Z)
и цифровой регулятор с передаточной функцией
Ся(*) = Ш (13.6.2)
Lq[z)
где Аод(г), Boq(z), Lq(z) и Pq(z) — полиномы в z-плоскостй с
нормированными Aoq(z) и Lq(z). Степени Aoq(z) и Boq(z)—n и т (га < п)
соответственно. Дальше мы будем считать, что разомкнутый контур
обладает накапливающим эффектом (интегрирующее свойство), т.е.
что Aoq(z)Lq(z) имеет по крайней мере один корень при z = 1, чтобы
гарантировать нулевую ошибку в установившемся состоянии при
ступенчатом эталонном сигнале и ступенчатом выходном возмущении.
13.6.2. Минимальная модель
Основная идея этой стратегии проектирования систем управления
состоит в том, чтобы достичь нулевой ошибки в моменты квантования
13.6. Цифровое проектирование в моменты квантования 377
за минимальное число периодов квантования при ступенчатых
эталонных воздействиях и ступенчатых выходных возмущениях (при нулевых
начальных условиях). Это подразумевает, что дополнительная
чувствительность должна иметь вид
Т0(г) = Щ (13.6.3)
где / Е N, p(z) —полином степени, меньшей, чем / и р(1) = 1. Это
последнее условие гарантирует что Toq{\) = 1; оно является необходимым
и достаточным условием получения нулевой установившейся ошибки.
Синтез регулятора можно тогда выполнить, используя методы
назначения полюсов (см. разд. 7.2). Рассмотрим два случая.
Случай 1. Предполагается, что у импульсной передаточной функции
объекта Goq(z) все полюсы и нули находятся строго внутри области
устойчивости. Тогда регулятор может скомпенсировать числитель
и знаменатель Goq(z) и уравнение назначения полюсов становится
следующим:
Lq{z)Aoq{z) + Pq(z)Boq(z)=Adq{z) (13.6.4)
где
Lq(z) = (z- l)Boq(z)Lq(z) (13.6.5)
Pq(z) = K0Aoq(z) (13.6.6)
Adq(z) = zn-mBoq(z)Aoq(z) (13.6.7)
Заметим, что степени полиномов были выбраны в соответствии с
теорией, представленной в разд. 7.2.
Используя (13.6.5)—(13.6.7) в (13.6.4) и упрощая, получим
[z - l)Lq{z) +K0 = zn-m (13.6.8)
Уравнение (13.6.8) можно теперь решить относительно К0,
вычисляя выражение при z = 1. Это приводит к К0 = 1 и регулятору и
дополнительной чувствительности, равным
ад-^мгр^^у и ад=^ (13.6.9)
Проиллюстрируем этот случай на примере.
Пример 13.4. Рассмотрим непрерывный объект с передаточной
функцией
°°(5)% + 2)(8 + 5) <13'6Л0>
Нужно синтезировать регулятор с минимальной моделью, когда
период квантования Д = 0.1 с.
378 Глава 13. Цифровое управление
Решение
Импульсная передаточная функция имеет вид
0.0398(z + 0.7919)
Goq(z) =
(z - 0.8187) (z- 0.6065)
(13.6.11)
Заметим, что Goq(z) —устойчивая и минимально-фазовая с
га = 2 un = 3. Используя (13.6.9), получим
Г(*\ 25.124(*-0.8187)(*- 0.6065) rM-X mfii-n
C*{Z) = (z-l)(z + 0.7»19) " Toq{z) ~ z (ШШ)
Характеристика окончательного контура управления
рассмотрена при единичном ступенчатом эталонном воздействии при t =
0.1 с. Выход объекта показан на рис. 13.5.
0.3 0.4
Время с
Рис.
ла и
13.5. Выход объекта для единичного ступенчатого эталонного сигна-
цифрового управления с минимальной моделью; объект устойчивый
Мы видим, что квантованная реакция устанавливается точно
за один период квантования. Так и ожидалось, потому что Toq(z) =
z-1. Однако рис. 13.5 иллюстрирует одну из слабостей управления с
минимальной моделью: совершенное отслеэюивание гарантируется
только в моменты квантования. Действительно, мы наблюдаем
существенные меэютактовые биения! Проанализируем причину этой
проблемы в следующей главе. Другой недостаток этого подхода —
большая требуемая величина управления: поскольку регулятор би-
собственный, он мгновенно реагирует на ступенчатое эталонное
воздействие с начальной величиной, равной увеличенной в 48.73 раза
амплитуде ступеньки. □□□
Случай 2. Пусть объект минимально-фазовый и устойчивый за
исключением полюса при z = 1, т. е. Aoq(z) = (z — l)Aoq(z). В этом случае
13.6. Цифровое проектирование в моменты квантования 379
идея минимальной модели не требует, чтобы регулятор имел полюс
при z = 1. Тогда уравнения (13.6.5)—(13.6.7) дадут
Lq{z) = Boq(z)Lq(z) (13.6.13)
Pg(z) = КоАф) (13.6.14)
Асф) = zn-mBoq(z)Aoq(z) (13.6.15)
Уравнение (13.6.8) такое же, как и в случае 1. Таким образом,
К0 = 1 и
ад=р-м]-1^ =Щ^1 <13-6-16)
^^ (13.6.17)
Вод(г)(гп-т-1 + z«-™-2 + zn-m-z +... + z + !)
ТояМ = ^ (13-6.18)
Этот случай иллюстрируется следующим примером.
Пример 13.5. Рассмотрим сервомотор из примера 3.4. Напомним,
что его передаточная функция равна
G°<s) = ^TT) <ши9)
Нужно, синтезировать регулятор с минимальной моделью,
имеющий период квантования Д = 0.1 с.
Решение
Из примера 13.1 мы имеем, что импульсная передаточная функция
системы {при А = 0.1 с); заданная выражением (13.3.5), равна
О..М- 0.0048 (г_^г°19607905) (13.6.20)
Тогда
Boq(z)=0.0048(z + 0.967) и Aoq(z) = z-0.905 (13.6.21)
и, используя (13.6.16), получим
Cg(^)=208.33^|P (13.6.22)
Toq(z) = - (13.6.23)
Z
380 Глава 13. Цифровое управление
О)
s
ю
si
%$
8 ш
Зо
1.5
1
0.5
■ 1 т 1 г т 1 г- ■—|
^/ 1 1 1 1
-уи
О у[к]
•
i i I
0.1
0.2
0.3 0.4
Время [с]
0.5
0.6
0.7
0.8
Рис. 13.6. Выход объекта для единичного ступенчатого эталонного сигнала
и цифрового управления с минимальной моделью; объект с интегрированием
Характеристика окончательного контура управления оценена
для единичного ступенчатого эталонного воздействия при t = 0.1 с.
Выход объекта показан на рис. 13.6.
Снова мы видим, что квантованная реакция устанавливается
за один период квантования. Однако рис. 13.6 также
подтверждает главные характеристики управления с минимальной моделью:
ненулевые ошибки в межтактовые периоды и большие амплитуды
управляющего воздействия. DDD
Примечательная общая особенность в обоих случаях —
межтактовая реакция имеет слабо затухающие колебания частоты, равной
половине частоты квантования. Мы исследуем причины этого в гл. 14.
Дальнейшее понимание подхода с использованием минимальной
можно получить, анализируя поведение выхода регулятора и[к]. Из (13.6.3)
мы имеем, что
ВД = Toq(z) = ^RQ(z) <=> Uq(z) = [Goq(z)]-%(z) = ^^LRq(z)
°Я (13.6.24)
Для вышеупомянутых примеров p(z) = 1 и ! равно относительной
степени Goq(z) (это обычно имеет место). Таким образом, собственные
движения в и[к] будут зависеть от расположения нулей Goq(z), т.е.
корней Boq(z) (включая и нули квантования!). Это подразумевает, что
и[к] не приходит к своему установившемуся значению за конечное
время. Поскольку нули квантования вообще имеют отрицательные
вещественные части, этот переходный процесс будет включать колебательные
движения; это явление (иллюстрируется примером 12.6) известно как
пульсации, и оно нежелательно из-за изнашивания исполнительных
механизмов.
13.6. Цифровое проектирование в моменты квантования 381
13.6.3. Оптимальное по времени апериодическое управление
Основная идея проектирования апериодического управления подобна
случаю с минимальной моделью: достичь нулевой ошибки в моменты
квантования за конечное число периодов квантования для
ступенчатых эталонных воздействий и ступенчатых выходных возмущений (при
нулевых начальных условиях). Однако в этом случае мы добавляем
требование, чтобы для этого вида эталонного сигнала и возмущения,
выход регулятора и[к] также достиг своей установившейся величины за
то же самое число интервалов.
Рассмотрим контур с цифровым управлением со ступенчатым
эталонным воздействием и в котором у [к] должен достичь своей
установившейся величины (с нулевой ошибкой управления в моменты
квантования) за п моментов квантования, где п является степенью полинома
знаменателя. Тогда полином Y(z) должен иметь вид
ВД = ^ЗД <=► Toq{z) = ^ (13.6.25)
Z Z
w(z) = wnzn + wn-izn-1 + • • • + wiz + w0 (13.6.26)
Чтобы достичь совершенного отслеживания установившегося
состояния в моменты квантования (для ступенчатых эталонных воздействий и
ступенчатого выходного возмущения), нам нужно, чтобы Toq{\) = 1, т. е.
п
w(1) = J2vh = 1 (13.6.27)
г=0
Мы также требуем, чтобы выход регулятора и[к] достиг
установившегося состояния за п периодов квантования. Это условие позволит нам
вычислить1 полином w(z), поскольку
Uq(z) = [Goq{z)]-%{z) = Suoq{z)Rq{z) = A°*{Z^Rq{z) (13.6.28)
Далее, чтобы переменная и[к] достигала своей установившейся
величины за п периодов, нужно, чтобы полинома Boq(z) не было в
знаменателе последнего выражения равенства (13.6.28). Следовательно, мы
должны выбрать w(z) в виде
w{z) = aBoq{z) где а = —-^ (13.6.29)
1 Заметим: чтобы чувствительность SUoq(z) была собственной, степень w(z) должна быть,
по крайней мере, равна степени Boq(z).
382 Глава 13. Цифровое управление
Окончательно мы видим, что
ВД = ^Ф-Ш (13-6.30)
z
Это равенство достигается с помощью следующего закона управления:
Апериодическое управление иллюстрируется следующим примером.
Пример 13.6. Рассмотрим сервомотор из примеров 3.4 и 13.5,
который имеет передаточную функцию
Нужно синтезировать оптимальное по времени апериодическое
управление с интервалом квантования А = 0.1 с.
Решение
Из примера 13.5 мы имеем, что импульсная передаточная функция
(при А = 0.1 с), учитывая (13.6.20), имеет вид
z + О Q67
G-W = 0-°04Vl)(.- 0.905) =* а = 105-49 (13-6-33)
Следовательно, используя (13.6.31,), получим
гы_ «4*(*) _ 105.49^-95.47
С« W ~ zn-aBoq(z) ~ , + 0.4910 (13'6-34)
Характеристика этого регулятора показана на рис. 13.7 для
единичного ступенчатого эталонного сигнала, прикладываемого в момент
времени t = 0.
Видно, что непрерывный выход объекта y(t) достигает
установившейся величины после двух периодов квантования, как и ожидалось.
Кроме того, межтактовая реакция теперь весьма приемлема. Чтобы
оценить управляющее воздействие, используем (13.6.30), чтобы
получить
Uq{z) = ^MRqiz) = 105.49 (*-1)(7°-905) ад (13-6.35)
z z
Решая уравнение, мы получим управляющую последовательность:
и[0] = 105.49, и[1] = —95.47 и и[к] = 0 Vfc > 2. Заметим, что
нулевые значения управляющего сигнала получаются потому, что объект
13.6. Цифровое проектирование в моменты квантования 383
обладает интегрирующими свойствами. Обратим такоюе внимание
на то, что первые две квантованные величины сигнала управления
могут в практических приложениях привести к насыщению исполни-,
тельного механизма: в этом отношении апериодическое управление не
отличается от управления с минимальной моделью или непрерывного
управления; быстрое управление (относительно полосы пропускания
объекта) будет всегда требовать больших амплитуд управления (как и
случилось в этом примере) — этот компромисс не зависит от
структуры управления или философии управления (см. гл. 8).
0.3 0.4 0.5 0.6 0.7 0.8
Время [с]
Рис. 13.7. Оптимальное по времени апериодическое управление для объекта
второго порядка
Замечание 13.1. Рассмотренный выше регулятор был получен для
устойчивых объектов или объектов самое большее с одним полюсом
в начале координат, потому что допускается компенсация Aoq(z).
Однако апериодическая философия может такоюе применяться и к
неустойчивым объектам, при условии, что результат достигается
более чем за п периодов квантования. Чтобы сделать это, мы просто
используем назначение полюсов и размещаем все полюсы замкнутого
контура в начале координат. DDD
13.6.4. Проектирование цифровых систем
с помощью назначения полюсов
Подходы с использованием минимальной модели и апериодического
управления — специфические приложения назначения полюсов. Если,
например, нужно уменьшить управляющее воздействие, требуемое
апериодическим проектированием, мы можем обратиться к синтезу с
помощью назначения полюсов, перемещая полюсы в начало координат,
384 Глава 13. Цифровое управление
чтобы ослабить требование к числу периодов квантования по сравнению
со случаем размещения полюсов в точке (1;0). При этой стратегии мы
жертвуем скоростью управления (полоса пропускания контура) в пользу
уменьшения управляющего воздействия (амплитуда и[к]). Эта идея
используется в следующем примере применительно к задаче сервосистемы.
Пример 13.7 (Общий синтез с помощью назначения полюсов).
Рассмотрим ту же самую сервосистему, что и в предыдущих
примерах. Она имеет непрерывную передаточную функцию, приведенную в
(13.6.33) и импульсную передаточную функцию, заданную выражением
(13.6.34) {для А = 0.1 с).
Синтез с помощью назначения полюсов выполнен с полиномом
замкнутого контура Aciq{z) = (z — 0.905)(z — 0.8)(z — 0.6). Если мы
сравним этот выбор с апериодическим синтезом, то видим, что все
еще компенсируем полюс при z = 0.905; но на сей раз другие полюсы
замкнутого контура были перемещены из начала координат в точки
z = 0.8 и z = 0.6. Тогда уравнение назначения полюсов будет иметь вид
Adq(z) = (z- l)(z-0.№)Lq(z) + 0.0048(z + 0M7)Pq(z)
= (z- 0.905) (z - 0.6)(z - 0.8) (1ЛЛ.М)
где
Lq(z) =z-a0 Pq(z) =pi(z-0.905) =>• Cq(z) = &(*-°-905)
z — ao
(13.6.37)
Если решить уравнения (13.6.36) и (13.6.37), то получим
8.47(z-0.905) 8.47(z - 0.905) (z - 1)
C"{Z)- z-О.Ц ^S«°*M- (,_о.в)(»-0.8) (Ш5-38)
Читатель может проверить, что с этим регулятором реакция
контура на единичное ступенчатое эталонное воздействие
укладывается в 2%-ый диапазон от установившейся величины приблизительно
за 20 с. Заметим, что это в десять раз больше времени переходного
процесса, полученного при оптимальной по времени апериодической
стратегии управления. Однако компромисс становится очевидным,
когда мы используем чувствительность по управлению Suoq(z) из
(13.6.38), чтобы вычислить величину управляющего воздействия для
того же самого эталонного сигнала. Для этого случая управляющая
последовательность
{и[к]} = {8.47,4.19,1.80,0.51, -0.15, -0.45, -0.56, -0.57, -0.52,...,0}
Сравнивая это с управляющими воздействиями при
апериодическом проекте, мы видим явные преимущества. Компромисс между
13.6. Цифровое проектирование в моменты квантования 385
временем реакции и величиной управляющего воздействия в этом и
предыдущем примере — полностью в соответствии с компромиссами,
рассмотренными в гл. 8. DDD
Еще один пример цифрового проектирования с помощью назначения
полюсов приведен ниже.
Пример 13.8. Рассмотрим непрерывный объект, имеющий
номинальную модель
а°<-°) = (. + ц(.+а) (13°9)
Нужно спроектировать цифровой регулятор Cq(z), который
обеспечивает полосу пропускания замкнутого контура приблизительно в
3 рад/с. Контур должен также обладать нулевой ошибкой в
установившемся состоянии при постоянных эталонных сигналах.
Решение
Мы хотим выполнить проект, используя дельта-преобразование и
затем перевести полученный регулятор Cs(j) в Z-форму Cq(z). Период
квантования Д выбран равным 0.1 с. (Заметим, что эта частота
квантования значительно выше, чем требуемая полоса пропускания.)
Мы сначала используем программу c2del.m пакета MATLAB
(находится на прилагаемом CD-ROM), чтобы получить дискретную
передаточную функцию (в дельта-форме) системы, состоящей из
непрерывного объекта и экстраполятора нулевого порядка. Это дает
Далее выберем полином замкнутой системы Adsfr) в виде
А«(7) = (7 + 2.5)2(7 + 3)(7 + 4) (13.6.41)
Четвертый порядок полинома выбран потому, что нам нужны в
регуляторе интегрирующие свойства. Окончательное уравнение для
назначения полюсов имеет вид
(72+2.7647+1.725)7^(7) + (0.04537+0.863)РИ7) = (7+2.5)2(7+3)(7+4)
(13.6.42)
Для решения этого уравнения используется программа paq.m
пакета MATLAB, что дает передаточную функцию Cs(j), которая в
386 Глава 13. Цифровое управление
конце концов преобразуется в Cq(z). Регуляторы в дельта-области и
в области оператора смещения имеют вид
с9ь) =
29.172 +ЮО.07 + 87.0 Ps(y)
72 + 7.97 lU (7)
4_29.1z2- 48.3^ + 20.0
М*)-ч (z_i)(z_o.21)
(13.6.43)
(13.6.44)
Проект проверен путем моделирования эталонного сигнала в
виде прямоугольных колебаний с помощью файла dcpa.mdl пакета
SIMULINK. Результат показан на рис. 13.8.
з/М
i i |_
3.5
4.5
1.5 2 2.5 3
Время [с]
Рис. 13.8. Реакция цифрового контура управления
Предлагаем читателю использовать файл dcpa.mdl пакета
SIMULINK, чтобы проверить, что полоса пропускания контура
(используя команду dlinmod) превышает требуемую величину.
Интересно также оценить, как изменяется положение полюсов
замкнутого контура при изменении периода квантования (без изменения
Cq(z)). DDD
13.7. Принцип внутренней модели
для цифрового управления
Большинство идей, представленных в предыдущих главах, можно
перенести на цифровые системы. Просто нужно учесть такие особенности,
как различные области устойчивости и типы модели.
В качестве иллюстрации мы рассмотрим здесь принцип внутренней
модели применительно к цифровому управлению. Пусть возмущение
моделируется дискретной моделью с помощью полинома (см. 10.2) Vdq(z)
(или Г'<^(7) для дельта-операторов). Tdq(z) будет обычно иметь полюсы
13.7. Принцип внутренней модели для цифрового управления 387
в единичном круге, a Tfds{j)— в смещенном круге 7 : It + ^;l = 5-
Принцип внутренней модели тогда обеспечивается помещением Tdq(z)
или Г'<^(7) в знаменатель передаточной функции регулятора. Например,
дискретное интегрирующее действие достигается размещением (Tdq(z) =
z—1) или (Г'<^(7) = 7) в знаменателе передаточной функции регулятора.
Проиллюстрируем это простым примером.
Пример 13.9. Непрерывный объект управляется цифровым
регулятором. Выход объекта долэюен отслеэюивать синусоидальный эталонный
сигнал частоты 0.2 рад/с в присутствии ступенчатых возмущений.
Нужно определить полином [который следует включить в
знаменатель передаточной функции цифрового регулятора), необходимый для
достижения нулевых установившихся ошибок. Пусть период
квантования равен 1 с.
Решение
Заметим сначала, что квантованный эталонный сигнал—r[k] =
Kisin(0.2k + К2), где К\ и К2 — неизвестные константы. Таким
образом, полиномы, формирующие эталонный сигнал, в форме
оператора смещения или дельта-форме соответствуют знаменателям
Z-преобразования и дельта-преобразования сигнала r[k]
соответственно. Тогда мы получаем
Trq{z) =z2- 1.96z + 1; Tr6(j) = 72 + 0.047 + 0.04 (13.7.1)
Соответственно полиномы, формирующие возмущение, имеют вид
Tdq(z)=z-1; 1^(7) =7 (13.7.2)
Чтобы получить нулевые установившиеся ошибки, необходимо
удовлетворить принципу внутренней модели. Это требует, чтобы
знаменатель передаточной функции регулятора включал любой
сомножитель Trq(z)Tdq{z) = (z2 — 1.96z + l)(z — 1) (для формы с использованием
оператора сдвига) или сомножитель Гг$ (7)1^(7) = (72 + 0.047 + 0.04)7
(для дельта-формы). DDD
13.7.1. Периодическое управление
Интересен особый случай принципа внутренней модели в цифровом
управлении при периодических сигналах. Легко видеть, что любой
квантованный периодический сигнал, чей период разбит на Np тактов
квантования, может быть смоделирован дискретной моделью (в области
оператора сдвига) с помощью формирующего полинома
Г*я(я) = {я"*-1) (13-7.3)
388 Глава 13. Цифровое управление
Следовательно, любой эталонный сигнал с периодом в Np тактов
может быть точно отслежен (по крайней мере, в моменты квантования)
включением Tdq{q) в знаменатель передаточной функции регулятора.
Эта идея — основа технологии, известной как периодическое управление,
цель которого — научить систему тому, как выполнить повторяющуюся
(периодическую) задачу.
Она нашла приложение во многих областях, например, в
робототехнике. Авторы этой книги использовали ее в реальных приложениях
сталелитейной промышленности.
Основная идея, как это изложено выше, проста и интуитивно
понятна. В приложениях обычно приходится модифицировать схему
управления при возникновении практических требований. Одна такая
проблема — обеспечение робастности.
Помещение (13.7.3) в знаменатель передаточной функции
регулятора гарантирует, что функция дополнительной чувствительности будет
точно равна единице на частотах
Wi = FA; i = 0,l,...,Np-l (13.7.4)
где А —период квантования. Эти идеи иллюстрируются следующим
примером.
Пример 13.10. Рассмотрим непрерывный объект с номинальной
передаточной функцией G0(s), имеющей вид
ад = (7Тет <13'7'5>
Пусть этот объект управляется цифровым регулятором с
периодом квантования А = 0.2 с таким образом, что выход объекта
отслеживает периодический эталонный сигнал r[k], имеющий вид
оо 10
r[k] = Y,Mk - Юг] <=► Rq(z) = RTq{z)-^— (13.7.6)
где {rT[k]} = {0.0; 0.1; 0.25; 0.6; 0.3; 0.2; -0.1; -0.3; -0.4; 0.0} u1 RTq{z) =
Z[rT[k}].
Нужно синтезировать цифровой регулятор, который обеспечивает
нулевую установившуюся ошибку в моменты квантования.
1 Заметим, что Rt4(z) — полином относительно z
13.7. Принцип внутренней модели для цифрового управления 389
Решение
Из (13.7.6) мы видим, что полином, формирующий эталонное
воздействие, Tqr(z) имеет вид z10 — 1. Таким образом, принцип внутренней
модели приводит к следующей структуре регулятора:
Cq{z) =
_ад_
ад
ад Lq{z)Yqr{z)
(13.7.7)
Далее используем принцип назначения полюсов для
характеристического полинома, имеющего вид Aciq(z) =z12(z — 0.2). Решение диофан-
това уравнения дает
Pq(z) =13.0zn + 11.8z10 - 24.0z9 + 19.7z8 - 16.1z7 + 13.2z6-
- 10.8z5 + 8.8z4 - 7.2z3 + 36.4z2 - 48.8z +17.6
(13.7.8)
L9(z) = (z10-l)(z + 0.86) (13.7.9)
Рисунок 13.9 показывает характеристику окончательного
цифрового контура управления.
0>
S
п
g| 0.5
*!
°о> 0
Зо
Ǥ-0.5
н
-1
1 1 г-
I О ^тщ^
о )
.- 1 .1 1
1 I I 1 I I 1
о оу V/ \ f \ / M
1
О r[k]
— y(t)
"1
1 1 1 1 1
0.5
1.5
2 2.5 3
Время [с]
3.5
4.5 5
Рис. 13.9. Периодическое управление
На рис. 13.9 мы видим, что после переходного периода выход объекта
y(t) точно следует за периодическим эталонным сигналом в моменты
квантования. Отметим опасность анализа и синтеза только в
моменты квантования. Меэютактовое поведение в этом примере моэюет
быть предсказано методами для гибридных систем, которые будут
рассмотрены в гл. 14. DDD
Совершенное отслеживание в установившемся режиме для
эталонного сигнала с высокочастотными гармониками, может нарушить ро-
бастность номинального проекта. Это может быть оценено, добавляя
несмоделированное запаздывание величиной 0.02 с в контур управления,
390 Глава 13. Цифровое управление
g I*
gl 1
2 5 0.5
^§ о
PQ5
-0.5
-1.5
0.5
1.5
3.5
4.5
2 2.5 3
Время [с]
Рис. 13.10. Контур периодического управления при наличии несмоделиро-
ванного запаздывания
разработанный в примере 13.10. Для этого случая поведение контура
изображено на рис. 13.10.
Такое поведение может быть легко истолковано. В частности,
совершенное отслеживание требует, чтобы чувствительность Т0 равнялась
1 на всех интересующих частотах. Однако мы знаем из теоремы 5.3,
что робастная устойчивость обычно требует, чтобы \Т0\ уменьшался на
высоких частотах. Это может быть достигнуто несколькими способами.
Например, можно было бы пересмотреть внутреннюю модель в (13.7.3),
чтобы включить периодические компоненты только до некоторой
максимальной частоты, определяемой проблемой робастности, что мы и будем
делать1
Г^(д) = (д-1)Ц ^-2сов^)д + 1); ЛГ,
< ~-2-
тах _ь ,
JV„ —1
(13.7.10)
13.8. Фундаментальные ограничения
характеристик
Результаты, представленные в гл. 8 и 9, связанные с
фундаментальными компромиссами проектирования, непосредственно распространяются
также и на дискретный случай.
Например, выводы, аналогичные тем, которые представлены в
разд. 8.6.5, могут быть получены для дискретных систем.
1 Напомним, что корни полинома (13.7.3) равны е?1вt I = 0,1,...,ЛГР
■1,где0=#-.
13.8. Фундаментальные ограничения характеристик 391
Таким образом, свойства во временной области могут быть получены
из леммы, эквивалентной лемме 4.1, которая формулируется следующим
образом.
Лемма 13.1. Пусть H(z) —рациональная функция z и аналитическая
для \z\ > р. Пусть также соответствующая дискретная функция
имеет вид
H{z)=Z{h[k]} (13.8.1)
Тогда для любого z0, такого, что \z0\ > р, мы имеем, что
00
^h[k] [zoyk = lim H{z) (13.8.2)
Доказательство
Из определения Z-преобразования мы имеем, что для всех z в области
сходимости преобразования, т. е. для \z\ > р,
оо
H(z) = J2hlk]z~k (13.8.3)
Отсюда следует результат, потому что z0 — из области
сходимости преобразования. DDD
Использование этой леммы приводит к тем же самым выводам, как
и в непрерывном случае. Это происходит потому, что в обоих случаях
ключевые моменты следующие:
1. Функция чувствительности должна равняться нулю для
неустойчивых полюсов разомкнутого контура, а функция дополнительной
чувствительности должна равняться единице для тех же величин.
2. Функция дополнительной чувствительности должна равняться нулю
в неминимально-фазовых нулях, а функция чувствительности
должна быть равна единице для тех же величин.
3. Мы используем совокупную меру интересующих сигналов. Это
приводит к той же самой совокупности аргументов относительно
компенсации положительных и отрицательных накопленных величин.
Для иллюстрации этой параллели ниже сформулирован дискретный
аналог леммы 8.3.
Лемма 13.2. Рассмотрим контур управления с обратной связью,
имеющий устойчивые полюсы замкнутого контура, расположенные
392 Глава 13. Цифровое управление
внутри окружности с центром в начале координат и радиусом р для
некоторого р < Ъ. Предполооюим также, что регулятор C(z) = -^rfy
имеет, по крайней мере, один полюс в точке (1,0). Тогда, для нуля
объекта z0 и полюса объекта щ, удовлетворяющих условиям \z0\ > р
и \г}о\ > р соответственно, имеет место следующее:
1. Для положительного единичного ступенчатого эталонного сигнала
или отрицательного единичного ступенчатого выходного
возмущения имеем
оо 1
£e[fc](z0)-* = - ^ (13.8.4)
fc=0 L ~~ Zo
оо
X>M(7,o)-* = 0 (13.8.5)
2. Для положительного единичного ступенчатого эталонного
воздействия и для z0 вне круга единичного радиуса имеем
оо
^УМЫ^О (13.8.6)
k=Q
3. Для отрицательного единичного ступенчатого входного
возмущения имеем
!*|ы-'=(г4чк) (1з-8-7)
Доказательство
Доказательство основано на ваэюном факте, что полюсы и нули,
которые мы рассматриваем, находятся в области сходимости
преобразования, га. е. их модули больше, чем модули всех полюсов замкнутого
контура.
1. В этом случае ошибка управления удовлетворяет уравнению
E{z) = Soq{z) {Rq{z) - D0{z)) (13.8.8)
где или Rq{z) = (1 — z"1)"1, или D0(z) = (1 — г-1)"1. Заметим
также, что Soq(z0) = 1 и Soq(ri0) = 0. Тогда результат следует
из леммы 13.1, если h[k] заменить на е[к].
2. В этом случае выходной сигнал объекта удовлетворяет выражению
Yq{z)=Toq{z)Rq{z) (13.8.9)
при Rq{z) = (1 — z~l)~~l. Заметим также, что Toq(z0) = 0. Тогда
результат следует из леммы 13.1, если h[k] заменить на у[к].
13.8. Фундаментальные ограничения характеристик 393
3. В этом случае ошибка управления удовлетворяет условию
E(z) = -Sioq(z)Di(z) (13.8.10)
где —D{(z) = (1—z~l)~~l. Заметим также, что Si0(z0) = 0 и Si0{Vo) =
р]Р°1. Тогда результат следует из леммы 13.1, если h[k] заменить
нае[к]. □□□
Оставим как задачу для читателя, получить дискретные аналоги
другим результатам, представленным в разд. 8.6.5. Эти дискретные
ограничения, однако, требуют осторожной интерпретации. Например,
условие (13.8.6) не обязательно подразумевает, что система имеет недо-
регулирование, потому что сумма в левой части равенства может быть
равна нулю, если z0GK", даже если у[к] никогда не изменяет знак. Это
будет в случае, когда z0 — нуль квантования.
Можно также расширить результаты частотной области гл. 9 на
дискретный случай. Предлагаем читателю посмотреть приложение С на
Web-сайте по этому вопросу.
Чтобы показать особенности дискретных результатов, приведем
следующую лемму, которая является дискретной версией леммы 9.2.
Лемма 13.3. Рассмотрим дискретный устойчивый контур
управления с одной степенью свободы, который имеет в разомкнутом
состоянии рациональную передаточную функцию Hoq(z).
Предположим, что Hoq(z) имеет q полюсов вне единичного круга,
расположенных в точках СьС2» • • • »Сд- Тогда функция номинальной
чувствительности удовлетворяет условию
1 r2ir Л Г* q
— ln|50(e*w)|cfc; = -/ \n\S0{e?»)\dw = J>|Ci| (13.8.11)
2тг Jo тг Jo f^
Доказательство
Доказательство следует из непосредственного использования формулы
Иенсена для единичного круга (теорема С.11). Заметим, что h(z)
следует заменить на S0(z), которая по определению является би-
собственным устойчивым частным двух нормированных полиномов,
Kf = l ит = т <—> га' = 0. DDD
Выражение (13.8.11) очень похоже на (9.2.9); оба указывают на
необходимость уравнять область с низкой чувствительностью
(отрицательный логарифм) с областью с высокой чувствительностью
(положительный логарифм). Они также показывают, что существование больших
394 Глава 13. Цифровое управление
неустойчивых полюсов разомкнутого контура существенно смещает этот
баланс в сторону о,бласти, где чувствительность больше, чем 1. Главное
различие заключается в том, что для дискретного случая компенсация
чувствительности должна быть достигнута в конечном диапазоне частот
[0,2тг].
Другие параллельные результаты для дискретных систем —более
или менее прямые следствия леммы С.2 и теоремы СП.
Вышеупомянутый результат иллюстрируется следующим примером.
Пример 13.11. Объект с номинальной моделью G0{s) = ^_4g+i3 Vn'PaQ~
ляется цифровым регулятором. Используются период квантования А
и экстраполятор нулевого порядка. Предположим, что номинальная
чувствительность должна удовлетворять условию
|S0(e*"A)|<e<l Vw^T = ^k (Ш5Л2)
Используя лемму 13.3, нужно определить нижнюю границу пика
чувствительности Sm3x-
Решение
Заметим, что номинальная модель имеет два неустойчивых полюса,
располоэюенных в точкахр\$ = 2±j3. Когда будет получена дискретная
модель, эти неустойчивые полюсы отобразятся в £i,2 = e^2±^A. Тогда
применим лемму 13.3, используя нормализованную частоту. Это даст
[ ln\S0{ejuJ)\dw = 4nA (13.8.13)
Jo
Если мы разделим интервал интегрирования на [0,7г] = [0, |] U (§,7г],
то
lnSmax>4A-ln(e) (13.8.14)
Эта граница становится меньше, если увеличивается частота
квантования. Предлагаем читателю исследовать использование
теоремы С. 10 для получения меньшей границы для Smax.
13.9. Резюме
• Имеется множество путей проектирования цифровых систем
управления:
о проектирование в непрерывном времени, а затем дискретизация
регулятора перед реализацией;
о моделирование процесса цифровой моделью и выполнение
проектирования в дискретном времени.
13.9. Резюме 395
• Непрерывный проект может быть дискретизирован для дальнейшей
реализации с помощью следующих этапов:
о Для проекта сначала используются непрерывные сигналы и
модели.
о Перед реализацией регулятор заменяется эквивалентной
дискретной версией.
о Эквивалентность означает простую замену s на S (где S — дельта-
оператор).
о Следует сделать предостережение: анализ был выполнен в
непрерывном времени и поэтому ожидаемые результаты будут при
условии, что скорость квантования достаточно высока, чтобы
замаскировать эффекты квантования.
о Если интервал квантования выбран грамотно, особенно
относительно динамики разомкнутого и замкнутого контура, то
результаты должны быть приемлемы.
• Дискретный проект может быть основан на модели дискретизиро-
ванного процесса:
о Сначала модель непрерывного процесса дискретизируется.
о Затем на основе дискретного процесса разрабатывается и
реализуется дискретный регулятор.
о Нужно быть осторожным с межтактовым поведением системы:
анализ, очевидно, полностью основан на поведении в дискретные
моменты времени, однако процесс обладает непрерывными
характеристиками между моментами квантования.
о Проблемы можно избежать, воздерживаясь от проектных
решений, которые кажутся выполнимыми в дискретном анализе, но,
как известно, являются недостижимыми в непрерывном анализе
(типа удаления неминимально-фазовых нулей из замкнутого
контура!).
• Следующие эмпирические правила помогут избежать проблем в
промежутках между моментами квантования, если выполнен полностью
цифровой проект.
о Квантование должно быть в 10 раз чаще желаемой полосы
пропускания замкнутого контура.
о Использовать простые сглаживающие фильтры, чтобы избежать
чрезмерных фазовых сдвигов.
о Никогда не следует пытаться удалить или каким-либо другим
способом скомпенсировать дискретные нули квантования.
о Всегда следует проверять межтактовую реакцию.
396 Глава 13. Цифровое управление
13.10. Литература для последующего чтения
Общие вопросы
1. Astrom, К. and Wittenmark, В. (1990). Computer controlled systems. Theory
and design. Prentice-Hall, Englewood Cliffs, N.J., 2nd edition. [Имеется
русский перевод —см. литературу к гл. 2, 12.]
2. Feuer, A. and Goodwin, G.C. (1996). Sampling in Digital Signal Processing
and Control Birkausser Boston, Cambridge, Mass.
3. Franklin, G.F., Powell, J.D., and Workman, M. (1990). Digital control of
dynamic systems. Addison-Wesley, Reading, Mass., 2nd edition.
4. Jury, E. (1958). Sample Data Control Systems. Wiley, New York. [Имеется
русский перевод: Э. Джури. Импульсные системы автоматического
регулирования.—М.: Физматгиз, 1963.]
5. Kuo, B.C. (1992). Digital control systems. Oxford Series in Electrical and
Computer Engineering, 2nd edition. [Имеется русский перевод 1-го издания
книги: Б. Куо. Теория и проектирование цифровых систем управления. —
М.: Машиностроение, 1986.]
6. Ogata, К. (1987). Discrete-time Control Systems. Prentice-Hall, Englewood
Cliffs, N.J.
Нули импульных систем
1. Astrom, К., Hagander, P., and Sternby, J. (1984). Zeros of sample-data systems.
Automatica, 20(l):31-38.
2. Weller, S.R., Moran, W., Ninness, B.M., and Pollington, A. (1997). Sampling
zeros and the Euler-Frobenius polynomials. In Proceedings of the 36th IEEE
CDC, pages 1471-1476.
Проблемы цифрового управления
1. Keller, J. and Anderson, B. (1992). A new approach to the discretization
of continuous-time controllers. IEEE Transactions on Automatic Control,
37(2):214-233.
Периодическое управление
1. Longman, R.W. and Lo, C-P. (1997). Generalized holds, ripple attenuation, and
tracking additional outputs in learning control. Journal of Guidance, Control,
and Dynamics, 20(6):1207-1214.
2. Middleton, R.H., Goodwin, G.C, and Longman, R.W. (1989). A method
for improving the dynamic accuracy of a robot performing a repetitive task.
International Journal of Robotics Research, 8(5):67-74.
3. Ryu, Y.S. and Longman, R.W. (1994). Use of anti-reset windup in integral
control based learning and repetitive' control. In Proceedings of IEEE
International Conference on Systems, Man and Cybernetics, San Antonio, TX,
3:2617-2622.
13.11. Задачи для читателя 397
13.11. Задачи для читателя
Задача 13.1. Частотная характеристика квантователя и экстраполято-
ра нулевого порядка вычисляется по формуле
1 — е~эшА
Gh0(ju>) = : (13.11.1)
13.1.1. Нарисуйте график модуля этой частотной характеристики для
различных значений А.
13.1.2. Какова связь полученных результатов и ступенчатой природы
входа объекта u(t)l
Задача 13.2. Непрерывный объект имеет передаточную функцию вида
13.2.1. Определите положение нулей квантования для Д = 0.2 с.
13.2.2. Как меняются эти нули при изменении А в диапазоне [0.02; 2]?
Задача 13.3. Непрерывный объект имеет передаточную функцию
е°«=(ттет (mu)
13.3.1. Есть ли такая частота квантования, при которой в импульсной
передаточной функции нет нулей?
13.3.2. Синтезируйте регулятор с минимальной моделью для А = 0.5 с.
Оцените реакцию контура управления для единичного ступенчатого
выходного возмущения.
Задача 13.4. Непрерывный объект имеет номинальную модель,
имеющую передаточную функцию
13.4.1. Синтезируйте оптимальное по времени апериодическое
управление при А = 0.2 с. Оцените реакцию контура управления.
13.4.2. Предположим, что истинная передаточная функция имеет
дополнительный полюс при s = — 8 (без изменения усиления на нулевой
частоте). Оцените робастность исходного синтеза. Останется ли
апериодической реакция?
398 Глава 13. Цифровое управление
Задача 13.5. Рассмотрим оптимальное по времени апериодическое
управление, приведенное в разд. 13.6.3.
13.5.1. Докажите, что здесь, вообще-то, нет апериодического поведения
для ступенчатого входного возмущения.
13.5.2. Покажите, что апериодическое управление (для ступенчатого
входного возмущения), которое завершается за 2п периодов
квантования, может быть синтезировано, используя технологию назначения
полюсов, где п — число полюсов модели объекта.
13.5.3. Используйте ваши результаты для синтеза апериодического
регулятора, если объект имеет номинальную модель
Задача 13.6. Рассмотрим следующие номинальные модели объекта:
^ 9 2
а) ,2 , л. , о б)
s2 + 4s + 9 ' -5 + 2
ч -5 + 8 ч -5+4
В) /„ ■ oW„ , оч Г)
(5 + 2)(5 + 3) ' (-5 + 1)(5 + 4)
13.6.1. Для каждого случая синтезируйте регулятор, обеспечивающий
апериодическое управление (для ступенчатых выходных
возмущений) за минимальное число периодов квантования. Используйте
А = 0.1 с.
13.6.2. Обсудите трудности, с которыми вы встретились в случаях б),
в) и г) и предложите общую процедуру синтеза апериодического
управления для систем с неустойчивыми полюсами и неминимально-
фазовыми нулями.
Задача 13.7. Рассмотрим объект, имеющий номинальную модель
ам=ттк (Ш1-6)
13.7.1. Выберите Д = 0.2 с и синтезируйте цифровой регулятор, такой,
что ошибка управления е[к] для ступенчатого входного возмущения
затухает быстрее, чем (0.5)*.
13.7.2. Используя упредитель Смита, спроектируйте непрерывный
регулятор, который обеспечивает тот же результат. Сравните и
обсудите результаты.
13.11. Задачи для читателя 399
Задача 13.8. Распространите механизм противонакопления,
описанный в гл. 11, на контуры цифрового управления, имеющие бисобствен-
ные цифровые регуляторы.
Задача 13.9. Сформируйте структуру противонакопления, показанную
на рис. 11.6, для следующих регуляторов.
2z-l ^ z(z-0.2)
а) Т-7ПГ б)
z-0.5 ' z2- 0.8z+ 0.5
ч (z-0.4)3 ч z + 1.2
В) —?— Г) 7^08
Проанализируйте трудности, возникшие в случае г).
Задача 13.10. Рассмотрим объект с номинальной моделью
G»W=(277T)(477I) <13ЛЬ7>
13.10.1. Используя метод настройки Коэна—Куна как первую
итерацию, найдите непрерывный ПИД-регулятор C(s).
13.10.2. Сформируйте цифровой регулятор в дельта-форме, взяв
С*(т) = C(j), и сравните реакцию непрерывного и дискретного
контуров управления для ступенчатого эталонного сигнала и
ступенчатых входных возмущений для периода квантования Д = 0.1 с.
13.10.3. Повторите то же самое для А = 1 с. Сравните и обсудите
результаты.
Задача 13.11. Рассмотрим цифровой контур управления с обратной
связью, у которого передаточная функция в разомкнутом состоянии
имеет вид
Cq{z) [Gh0Go]q (z) = (z5i)2(J-o.7) (13Л1-8)
13.11.1. Зафиксируйте а = 0.4 и изучите устойчивость замкнутого
контура, используя критерий Найквиста.
13.11.2. Зафиксируйте К = 2 и изучите устойчивость замкнутого
контура, используя метод корневого годографа.
400 Глава 13. Цифровое управление
Задача 13.12. Рассмотрим цифровой контур управления, для которого
[GW4(*) = 7TU9 (13Л1'9)
Предположим, что цифровой регулятор Cq(z) спроектирован так,
чтобы получить дополнительную чувствительность, равную
Toq(z) = l—^- с 0<ро<1 (13.11.10)
Z—Po
13.12.1. Определите чувствительность по управлению Suoq(z).
13.12.2. Используя SIMULINK, убедитесь, что быстрый контур
управления при малом значении р0 приводит к большим амплитудам
выхода регулятора и[к].
13.12.3. Задайте р0 = 0.1 и изобразите на одном графике амплитудные
частотные характеристики объекта и дополнительной
чувствительности.
Задача 13.13. В цифровом контуре управления непрерывным
объектом мы имеем, что
{GmGA(*)=(,_0*2-;_06) (И.11.11)
13.13.1. Докажите, что если а > 1, то выходной сигнал объекта будет
всегда обладать недорегулированием при реакции на ступенчатый
эталонный сигнал.
13.13.2. Будет ли сказанное выше истинным для а < — 1?
Задача 13.14. Рассмотрим цифровой контур управления с А = 0.1 с
для объекта, имеющего номинальную модель
°'М-(-. + ц(.+,) (131112>
Синтезируйте цифровой регулятор, который в установившемся
режиме обеспечивает совершенное отслеживание в моменты квантования
для эталонного воздействия r(t) = 2 + cos(27rt).
Глава 14
Гибридное управление
14.1. Введение
Глава 13 дает традиционную трактовку цифрового управления,
основанного на анализе реакции в моменты квантования. В целом мы
поняли, что это простой и беспроблемный подход к проектированию
цифровых систем управления. Однако несколько раз мы предупредили
читателя, что результирующая непрерывная реакция может содержать
неприятные неожиданности, если в исходную непрерывную систему
вводится цифровой регулятор. Цель этой главы состоит в том, чтобы
проанализировать эту ситуацию и объяснить следующее:
• почему непрерывная реакция может очень отличаться от
предсказанной в моменты квантования;
• как избежать этих трудностей при цифровом управлении.
Общее название для этого вида анализа, в котором мы смешиваем
цифровое управление и непрерывные реакции, — гибридное управление.
14.2. Гибридный анализ
В этой главе мы исследуем, что является причиной неожиданных
различий между непрерывными и квантованными реакциями. Мы поймем
это, анализируя основное непрерывное поведение. Будем использовать
термин «гибридный анализ», чтобы описать такие понятия, которые
позволяют рассмотреть использование цифрового управления для
непрерывного процесса в объединенной структуре.
14.3. Модели для гибридных систем управления
Гибридный контур управления, содержащий и непрерывные и
дискретные элементы, показан на рис. 14.1.
402 Глава 14. Гибридное управление
епрерьи
шый вход
u(t)
[Экстраполятор
S нулевого
порядка
Gh0(s)
i
1
Непрерывный
Go(s)
и[к]
Дискретный
регулятор
Cq(z)
Непрерывный выход
v(«)
Т
Сглаживающий
фильтр
F(s)
v/W
Период
\квантования
N Д
УГчШ
е[к] V
"г[к)
Рис. 14.1. Контур управления с квантованными данными
(структурная схема)
Чтобы выполнять гибридный анализ этого контура, нам будет нужно
смешивать непрерывные и дискретные сигналы и части системы.
Используя обозначения разд. 12.13, мы обозначим дискретную
эквивалентную передаточную функцию комбинации {экстраполятор
нулевого порядка+непрерывный объект+фильтр} через [FG0Gho]q- Из (12.13.3)
мы имеем
[FG0Gho]q
= Z{квантованная импульсная характеристика F(s)G0(s)Gho(s)}
(14.3.1)
В этом разделе мы будем смешивать Z-преобразование и
преобразование Лапласа. Будем использовать нижний индекс д, чтобы отличать
первое из них.
Поставим также в соответствие последовательности {у/[к]}
фиктивную кусочно-постоянную функцию у/(£), которая равна
со
»/(*) = £»/[*] (М(* - *Д) - М(* - (* +1)А)) (14.3.2)
к=0
где fj,(t — r) — единичная ступенчатая функция, начинающаяся в момент
т. Связь между y/(i), у/[к] и у/(£) для конкретного случая
иллюстрируется рис. 14.2.
Заметим также, что из-за экстраполятора нулевого порядка u(t) уже
кусочно-постоянная функция:
со
u(t) = u(t) = ^2и[к] (fi{t - кА) - fi(t-{k +1)Д)) (14.3.3)
fc=0
14.3. Модели для гибридных систем управления 403
Рис. 14.2. Связь между y/(t), y/[k] и yf(t) для y/(t) = sin(27r£), Д = 0.1
Причина введения y/(t) в том, что она имеет преобразование Лапласа
(подобно функции u(t)). Например, преобразование Лапласа u(t) может
быть связано с Z-преобразованием {w[fc]} следующим образом:
гоо
U{s) = C{u{t)} = / e'stu(t)dt (14.3.4)
Jo
roo °°
= / e-5t^w[fc](/i(t-fcA)-/i(t-(fc + l)A))^
k=o
Меняя местами суммирование и интегрирование, получим
'e-kAs _ e-(k+l)As\
U(s) = U(s) = Y,uW
k=0 \
oo
(14.3.5)
1-е
-As-\
= Uq(eAs)Gh0(s)
где Uq(z) — Z-преобразование {w[fc]}. Ясно, что
Y{s) = G0{s)U{s) (14.3.6)
Мы также знаем, что переменная Yjq{z) связана с Uq(z) и
квантованным эталонным входом Rq(z) через стандартную дискретную
передаточную функцию, т. е.
Uq(z) = Cq{z) [ад - Yfq(z)} (14.3.7)
Умножая обе части на Gho{s) и подставляя z = e5A, получим
[Gh0(s)Uq(esA)) = -Cq(esA)GM(s)Yfq(esA) (14.3.8)
+ С(е'А)С/10(в)адд)
404 Глава 14. Гибридное управление
U = U
[FGoGhoL
ФЧ
Ои l5
Рис. 14.3. Форма передаточной функции контура управления
с квантованными данными
(14.3.9)
(14.3.10)
и, используя (14.3.5) для U(s), окончательно получим
U(s) = -Cq(esA)Yf(s) + С(,(евД)СЛ0(Я) Л,(е»А)
Аналогично, мы можем видеть, что
Yf(s) = [FG0GM]q(e'A)U(8)
Следовательно, для целей анализа мы можем изменить контур из
рис. 14.1 так, как показано на рис. 14.3, где все дискретные функции (с
нижним индексом q) зависят от е5Л, а все другие функции —от 5.
На рис. 14.3 показана гибридная система, содержащая и дискретные
и непрерывные сигналы. Эта структура может использоваться для
различных гибридных вычислений.
Например,
Преобразование Лапласа непрерывного выхода гибридного контура
имеет вид
Y(s) =
Cq(esA)G0(s)Gho(s)
l + Cq(e'*)[FG0Gho]q(e'*)
Д*(0
(14.3.11)
Замечание 14.1. Хотя непрерывная передаточная функция G0(s) на
рис. 14.3, казалось бы, находится в разомкнутом контуре, фактически
обратная связь обеспечивается дискретным контуром. Таким образом,
обратная связь будет гарантировать, что неустойчивые
составляющие G0(s) будут стабилизированы.
Замечание 14.2. Заметим, что даэюе когда эталонный вход — чистая
синусоида, непрерывный выход не будет, вообще говоря,
синусоидальным. Это связано с тем, что Ня(е^Шо) —периодическая функция, и,
14.4. Анализ межтактового поведения 405
как следует из (14.3.11), Y(ju) будет иметь компоненты с частотами
{w = Wo + ^;* = ...,-lAl,...}. DDD
14.4. Анализ межтактового поведения
Отправной точкой для анализа межтактового поведения являются
результаты, полученные в разд. 14.3 для непрерывного выхода гибридного
контура. Здесь мы работаем с фильтрованным выходом yf(t).
Из этих результатов получаем
_ Cq(e°*)F(s)G0(s)GM(s) A
Yf{s)~ l + Cq(e°*)[FGoGh0Ue°*)R'{e > (14A1)
Напомним также, что квантованная выходная реакция имеет вид
Yfq(esA)=Toq(esA)Rq(esA) (14.4.2)
где Toq(z) —дополнительная чувствительность в области оператора
сдвига:
ад (i+c,w[ro„GM],M)
Итак, кусочно-постоянное приближение квантованного выхода имеет
вид
ВД = Gh0(s)Yfq(esA) (14.4.4)
Из уравнений (14.4.1) и (14.4.4) отношение непрерывной реакции на
выходе к кусочно-постоянной форме квантованной реакции на выходе
имеет вид
Yf(s) F(s)G0(s)
Yf(s)~[FG0Gho}q(e°*) U4'4^
Временно будем игнорировать влияние фильтра сглаживания. (Это
разумно, потому что обычно фильтр проектируется таким образом,
чтобы быть достаточно прозрачным к динамике.)
406 Глава 14. Гибридное 'управление
Тогда из (14.4.5) видно, что отношение непрерывной реакции на
выходе к кусочно-постоянной форме квантованной реакции на выходе
зависит от отношения
ew=ITO^I (144-в»
Как показано в разд. 13.3, дискретная передаточная функция
[G0Gho] обычно будет иметь нули квантования. Влияние этих нулей
будет особенно существенным на частотах, близких к половине частоты
квантования. Следовательно, можно ожидать, что отношение 6(s),
данное в (14.4.6), станет большим вблизи половины частоты квантования.
Проиллюстрируем эту особенность, рассматривая систему сервомотора
в примере 13.5.
Пример 14.1. Сравнить непрерывную и дискретную реакции для
примеров 13.5 и 13.6.
Решение
Модуль отношения Q(ju) для примера 13.5 показан на рис. 14.4. Из
рисунка видно, что это отношение равно единице на низких
частотах, но на частоте ш = ^ отношение приблизительно равно 23 : 1
между компонентами этой частоты в непрерывной реакции и кусочно-
постоянной форме квантованного выхода.
30
Частота [рад/с]
Рис. 14.4. Частотная характеристика ©(jcj), Д = 0.1
Далее мы используем вышеупомянутый анализ для сравнения
непрерывной частотной характеристики проекта, использующего
минимальную модель и частотной характеристики системы с
апериодической реакцией для того же самого объекта.
14.5. Периодическое управление; повторное рассмотрение 407
а) Проект с использованием минимальной модели.. Напомним,
что при таком проектировании устраняются нули квантования,
что приводит к Toq(z) = z~l, которая является передаточной
функцией с постоянным усилением на всех частотах.
Следовательно, квантованный синусоидальный входной сигнал вызовет
квантованный синусоидальный сигнал на выходе той же самой
амплитуды. Однако рис, 14.4 предсказывает, что соответствующий
непрерывный выход будет иметь в 23 раза большую амплитуду
при частоте синусоиды ш = ^ рад/с. Причину этого пика легко
понять. В частности, метод минимальной модели компенсирует
нуль квантования в дискретной системе. Однако этот нуль
квантования примерно соответствует частоте ш = ^ рад/с.
Следовательно, как следует из (14.4.6), на частоте и = ^ рад/с
будет существенный размах колебаний.
б) Оптимальный по времени апериодический проект.. В
противоположность этому оптимальный по времени апериодический
проект из примера 13.6 не компенсирует нули квантования
и приводит к следующей дискретной функции дополнительной
чувствительности:
Модуль частотной характеристики этой дополнительной
чувствительности показан на рис. 14.5. Мы видим, что в этом случае
дискретное усиление существенно уменьшается на частоте и =
2j рад/с, и, хотя особенности рис. 14.4 и имеют место по
отношению к Q(ju), незначительная дискретная реакция на частоте
2 рад/с приводит к подавлению межтактовых пульсаций.
Мы видим, что при таком проектировании не делается никаких
попыток компенсировать нуль квантования, и, следовательно, нет
никаких неприятных различий между квантованной реакцией и
полной непрерывной реакцией. ODD
14.5. Периодическое управление;
повторное рассмотрение
Вспомним периодический регулятор, описанный в разд. 13.7.1. Там мы
выяснили, что цифровую систему управления можно разработать для
отслеживания (в моменты квантования) любого произвольного
периодического эталонного сигнала. Однако мы заметили, что это вызывает
бесконечное усиление контура на высоких частотах (относительно периода
408 Глава 14. Гибридное управление
т 1 1 1 г
О 10 20 30 40 50 60
Частота [рад/с]
Рис. 14.5. Частотная характеристика дополнительной чувствительности для
оптимального по времени апериодического проекта
квантования), и это было нежелательно из-за необходимости сохранить
робастность. Поэтому было предложено изменить идею так, чтобы
точно отслеживались только компоненты до некоторой максимальной
частоты.
Другая причина, чтобы не использовать идеализированную форму
периодического управления, связана с проблемами межтактовой
реакции. Мы видели в разд. 13.7.1, что возникнет существенная межтактовая
реакция, если попробовать получить ощутимую дискретную реакцию
при приближении частоты к 7г/Д. Однако это как раз то, что
идеализированная форма периодического регулятора стремится делать.
Таким образом, если периодический регулятор должен применяться в
непрерывной системе, то снова хорошей идеей является ограничение
полосы пропускания, в которой происходит точное отслеживание.
14.6. Формула суммирования Пуассона
В заключение мы приведем результат, который часто полезен в
контексте гибридного управления. В частности, пусть мы хотим явно оценить
Z-преобразование последовательности {/(&Д)}, полученной
квантованием непрерывного сигнала f(t) при заданном периоде Д.
Используем F(s) и Fq{z), чтобы обозначить преобразование Лапласа f(t) и
Z-преобразование {/(&Д)} соответственно:
F{s) = f f{t)e~stdt (14.6.1)
Jo
оо
ВД = £/(**)*"* (14.6.2)
fc=0
14.6. Формула суммирования Пуассона 409
Тогда в соответствии с различными условиями регулярности, мы
получим
к=—оо
Этот результат известен как формула суммирования Пуассона. Эта
формула полезна для анализа гибридных систем управления. Например,
она показывает, что частотная характеристика квантованного сигнала
является суперпозицией бесконечного числа копий соответствующей
непрерывной частотной характеристики.
Чтобы установить это, запишем
i е '(•+*?)-sa;t /"/(.)«-(«*«)'* (14.6.4)
к=—оо х ' k=—n u
'ъЛг.Г'^*)''** <14'6-8)
где ип (^) —специальная функция, определяемая формулой
°»(ь)-2^е д- sin(^)
к=—п v ^'
(14.6.6)
Функция Dn (^) очень часто используется в доказательствах,
касающихся сходимости преобразований Фурье. Она известна как ядро
Дирихле. Чтобы показать, как эта функция выглядит, на рис. 14.6
приведен ее график для случая п = 8.
1.5 2
Время [t/A]
Рис. 14.6. Ядро Дирихле (п = 8)
410 Глава 14. Гибридное управление
Интересным фактом, который легко установить, является то, что для
всех п
Когда п —» со, можно видеть, что интегрирование функции (не
слишком причудливой), умноженной на Dn (§), даст значения функции
при t = А,2Д,..., нормированные значением Д и значение функции при
t = О, нормированное значением у.
Таким образом, можно представить, что (14.6.5) просто дает
= Fq(e-*)-lB (14.6.9)
Это —важный вывод из (14.6.3).
Замечание 14.3. Вышеупомянутое рассмотрение несколько
эвристическое, но формальное доказательство результата (при достаточно
общих условиях) дается в упомянутой в конце главы литературе.
Фактически, если функция f (t) такова, что e~~at f (t) имеет равномерно
ограниченную вариацию для некоторого a Е Ш, то выражение (14.6.3)
справедливо для любого s, такого, что 5R{s} > <т.
14.7. Резюме
• Гибридный анализ позволяет смешивать свойства непрерывных и
дискретных систем.
• Гибридный анализ должен всегда использоваться, когда технические
требования особенно строги и требуется достичь возможных
пределов.
• Отношение амплитуды непрерывной реакции на частоте ш к
амплитуде гармонической составляющей на этой же частоте кусочно-
постоянной формы квантованного выхода определяется формулой
G0(s)
Q(s) =
[G0GMUe°*)
14.8. Литература для последующего чтения 411
• Данная формула позволяет объяснить очевидные различия между
квантованной и непрерывной реакциями цифровых систем
управления.
• Нули квантования обычно приводят к уменьшению [G0Gho]q {е^шА)
в окрестности частоты и = ^, т. е. к увеличению |6(jcj)| на этих
частотах.
• Поэтому обычно необходимо быть уверенным, что дискретная
дополнительная чувствительность существенно уменьшена по сравнению с
единицей для сигналов чрезмерно большой частоты (см. разд. 12.2).
• Это часто интерпретируется так, что полоса пропускания замкнутого
контура должна быть, по крайней мере, на 20% меньше максимально
допустимой частоты сигнала (см. там же).
• В частности, никогда не следует в дискретном проекте явно или
неявно компенсировать нули квантования; это неизбежно приведет
к существенным межтактовым пульсациям.
14.8. Литература для последующего чтения
Межтактовые проблемы
1. Araki, M., Ito, Y., and Hagiwara, T. (1996). Frequency response of sample-data
systems. Automatica, 32(4):483-497.
2. Chen, T. and Francis, B.A. (1995). Optimal Sample-Data Control Systems.
Springer-Verlag.
3. Feuer, A. and Goodwin, G.C. (1996). Sampling in Digital Signal Processing
and Control Birkausser Boston, Cambridge, Mass.
4. Goodwin, G.C. and Salgado, M.E. (1994). Frequency-domain sensitivity
function for continuous-time systems under sample data control. Automatical
30(8):1263-1270.
Фундаментальные ограничения в гибридных системах управления
1. Braslavsky, J.H., Middleton, R.H., and Freudenberg, J.S. (1995). Frequency
response of generalized sampled-data hold function. Proceedings of the 34th
CDC, New Orleans, LA, 4:3596-3601.
2. Freudenberg, J.S., Middleton, R.H., and Braslavsky, J.H. (1995). Inherent
design limitations for linear sampled-data feedback systems. International
Journal of Control, 61(6):1387-1421.
3. Goodwin, G.C. and Salgado, M.E. (1994). Frequency domain sensitivity
function for continuous-time systems under sample data control. Automatica,
30(8):1263-1270.
412 Глава 14. Гибридное управление
Формула квантования Пуассона
1. Braslavsky, J.H., Meinsma, G., Middleton, R.H., and Freudenberg, J.S. (1997).
On a key sampling formula relating the Laplace and Z-transforms. Systems
and Control Letters, 29(4):181-190.
14.9. Задачи для читателя
Задача 14.1. Рассмотрим объект, имеющий номинальную модель с
передаточной функцией
a°is)=(rmb; <14-9Л>
Найдите выражение для расположения нулей квантованной функции
[G0Gho]q{z) как функцию периода квантования Д.
Задача 14.2. Предположим, что [G0Gho]q{z) имеет вид
'с'с"1'М'(г-^№-о.8) (14-92)
Если G0(s) —передаточная функция системы третьего порядка,
найдите G0{s) для Д = 0.1, Д = 0.5 и Д = 1 с.
Задача 14.3. Оцените функцию Q(ju) так же, как в (14.4.6) для
функций и периодов квантования, приведенных ниже.
e-0.4s
С°(*) = (* + 0.5)(* + 0.25) Д = °-20
°°м=гаштт д=0-25
Задача 14.4. Цифровой контур управления с обратной связью
спроектирован для объекта, имеющего номинальную модель
G°W = (lte + l)(5, + l) <14M>
Период квантования равен 0.5 с. Однако вместо экстраполятора
нулевого порядка используется экстраполятор первого порядка. Импульсная
реакция этого экстраполятора показана на рис. 14.7.
14.9. Задачи для читателя 413
A hi(t)
Рис. 14.7. Импульсная реакция экстраполятора первого порядка
Синтезируйте регулятор, обеспечивающий нулевую ошибку в
моменты квантования за минимальное время для постоянных эталонных
сигналов. Обсудите ваши результаты.
Задача 14.5. Предположим, что нужен цифровой регулятор для
объекта, имеющего номинальную модель
-0.255 + 1
G0(s) =
(0.25s+ l)(s + l)
(14.9.4)
14.5.1. Синтезируйте цифровой регулятор, такой, что контур
управления будет отслеживать точно, насколько это возможно,
периодический треугольный эталонный сигнал периода 10Д, где период
квантования Д = 0.05.
14.5.2. Смоделируйте и оцените ваш проект. Обсудите результаты.
Задача 14.6. Идея, которая описана в литературе по теории
управления, — использовать более сложные, чем нулевого порядка, экстраполя-
торы. Вспомним из разд. 12.13.1, что экстраполятор нулевого порядка
имеет модель, показанную на рис. 14.8.
Рис. 14.8. Экстраполятор нулевого порядка
Это может быть обобщено простой заменой преобразования Лапласа
импульсной реакции экстраполятора нулевого порядка более общей
передаточной функцией, как показано на рис. 14.9.
414 Глава 14. Гибридное управление
Рис. 14.9. Обобщенный экстраполятор
14.6.1. Используя эти идеи, покажите, что дискретная модель,
соответствующая непрерывному объекту G0(s) с обобщенным экстраполято-
ром Gh9{s) имеет вид
Hoq{z) = Z [квантованная импульсная реакция Ghg(s)G0{s)]
(14.9.5)
14.6.2. Одним из способов формирования обобщенного экстраполятора
является использование кусочно-постоянной функции. Рассмотрим
импульсную характеристику, изображенную на рис. 14.10.
h9h(t)
92
91
93
(m-l)A
-► Г
9т
Рис. 14.10
Покажите, что для обобщенного экстраполятора мы имеем
C4lW=J£^bZl (14.,6)
fc=l S
Задача 14.7. Рассмотрим обобщенный экстраполятор, описанный в
(14.9.6). Пусть он используется с непрерывной моделью (в форме
пространства состояний)
x(t) = Ax(t) + Bm{t) (14.9.7)
y(t) = Cx(t) (14.9.8)
Покажите, что соответствующая дискретная модель имеет вид
х[к +1] = Aqx[k) + Bgqu[k) (14.9.9)
у[к] = Сдх[к] (14.9.10)
14.9. Задачи для читателя 415
Ад = еАЛ (14.9.11)
где
V
т
Вдд = ^9^1 (14.9.12)
»=1
где
г-
Г{= I еА(А~т)Вс1т (14.9.13)
J у-*)*
m
Задача 14.8. Обобщенные экстраполяторы могут фактически
использоваться для произвольного перемещения дискретных нулей. Для
иллюстрации рассмотрим непрерывную систему, описываемую матрицами
А =
-1 О
О -2
В =
С =[2 -3] (14.9.14)
14.8.1. Получите соответственную дискретную передаточную функцию
с экстраполятором нулевого порядка и Д = 0.1.
14.8.2. Покажите, что эта дискретная модель неминимально-фазовая с
нулем, равным 1.10573 и полюсами 0.90484 и 0.81873.
14.8.3. Используя обобщенный экстраполятор, как в (14.9.6), с т =
2, получите дискретную модель, имеющую нуль, равный 0.90484.
Этот нуль компенсирует устойчивый полюс и приводит к дискретной
передаточной функции
°^ = 7^Шп (149Л5>
Задача 14.9. Задачи 14.6 и 14.8 говорят о том, что можно устранить
влияние дискретных неминимально-фазовых нулей, используя
обобщенный экстраполятор, что позволяет увеличить полосу пропускания
замкнутой системы по сравнению с полосой, которую можно получить
с помощью экстраполятора нулевого порядка.
Объясните, почему это не очень хорошая идея (в общем случае),
исследуя различие между квантованным и непрерывным выходом с
помощью (14.4.6). (Это довольно тонкий эффект. Оказывается, что
непрерывная система имеет меньшую реакцию на выходе, чем
дискретная система. Таким образом, реакция дискретной системы должна
быть обеспечена недопустимо большими частотами (высокочастотными
составляющими, которые преобразуются в более низкие частоты) из-за
эффекта квантования.)
416 Глава 14. Гибридное управление
Задача 14.10. Проиллюстрируйте идею задачи 14.9 проектированием
регулятора методом минимальной модели для Ggq(z), данной в (14.9.15).
Смоделируйте дискретную реакцию замкнутого контура и сравните
ее с реакцией непрерывной системы, используя те же экстраполятор и
регулятор.
Обсудите результат.
ЧАСТЬ V
ПРОДВИНУТОЕ
SISO-УПРАВЛЕНИЕ
Введение
В пятой части книги мы акцентируем внимание на некоторых несколько
более продвинутых темах SISO-управления. В частности, мы покажем,
как параметризовать все линейные стационарные регуляторы, которые
обеспечивают устойчивость данной линейной системы.
(Параметризация—описание реальных процессов с помощью параметров модели.)
Параметризация будет использоваться для введения методов
оптимизации в проектирование систем управления. Затем будут рассмотрены
альтернативные методы проектирования систем управления,
основанные на моделях пространства состояний. Эти методы обеспечивают нас
плавным переходом к системам управления со многими переменными,
которые будут предметом рассмотрения оставшихся частей книги.
Наконец, мы представим некоторые основные идеи, связанные с управлением
нелинейными системами.
Глава 15
Параметризация
SISO-регуляторов
15.1. Введение
До этого момента в книге мы познакомились с большим количеством
методов проектирования регуляторов различных типов. При чтении
всего этого материала напрашивался вопрос, существует ли какой-нибудь
легкий путь, который мог бы определить все возможные регуляторы,
которые, по крайней мере, обеспечивают устойчивость данной системы.
Это выглядит, на первый взгляд, неподъемной задачей. Однако в этой
главе мы покажем, что фактически весьма легко дать относительно
простое описание всех регуляторов, обеспечивающих устойчивость
замкнутых систем как для устойчивых, так и для неустойчивых в
разомкнутом состоянии линейных объектов. Это ведет к аффинной
параметризации всех возможных номинальных функций чувствительности.
Такая аффинная структура, в свою очередь, дает ценное понимание
задачи управления и открывает дверь к различным стратегиям
оптимизации в проектировании. Проектирование систем управления на основе
аффинной параметризации часто называется Q-синтезом. Главные идеи,
представленные в этой главе, включают следующее:
• причины использования аффинной параметризации и идей инверсии
разомкнутого контура;
• аффинная параметризация и управление на основе внутренней
модели;
• аффинная параметризация и эксплуатационные характеристики;
• ПИД-синтез, использующий аффинную параметризацию;
• управление объектами с запаздыванием и аффинная
параметризация; связь с регулятором Смита;
• подбор параметров для компенсации нежелательных полюсов разо-"
мкнутого контура.
420 Глава 15. Параметризация SISO-регуляторов
15.2. Инверсия разомкнутого контура;
повторное рассмотрение
В предыдущих главах мы обсудили основную природу проектирования
систем управления, задачи моделирования, ключевые особенности
контуров управления с обратной связью, ограничения характеристик
систем управления и различные методы синтеза. Учитывая эти моменты,
был рассмотрен ряд основных концепций, включая ключевое понятие
того, что управление явно или неявно зависит от инверсии модели
объекта. Таким образом, инверсия — удобное понятие для разработки
альтернативных решений задачи проектирования систем управления.
В разомкнутых системах управления входной сигнал объекта U(s)
может быть сформирован из эталонного сигнала R(s) с помощью
передаточной функции Q(s). Это приводит к передаточной функции от
входа к выходу следующей формы:
T0{s)=G0{s)Q{s) (15.2.1)
Эта простая формула — основа аффинной параметризации, которая
будет рассмотрена в данной главе. Она выдвигает на первый план
фундаментальную важность инверсии: T0(jw) будет равняться единице
только на тех частотах, где Q{jw) инвертирует модель. Заметим, что
это совместимо с моделью решения задачи управления, описанной в
разд. 2.5.
Ключевой момент заключается в том, что уравнение (15.2.1) аффин-
но в Q(s). С другой стороны, с обычным регулятором обратной связи
C(s) передаточная функция замкнутого контура имеет вид
G0(s)C(s)
T°{S) ~ l + G0(s)C(s) (15-2-2)
Это выражение нелинейно относительно С($), что делает трудной
настройку C(s) для достижения желаемых свойств замкнутого контура.
Это побуждает задуматься, можно ли сохранить простоту (15.2.1) для
более общего случая системы с обратной связью. Фактически,
сравнивая (15.2.1) и (15.2.2), мы видим, что прежние аффинные отношения
сохраняются, если бы можно было параметризовать C(s) следующим
образом:
«"=щ|й (15-23)
Это —сущность идеи, представленной в данной главе. В частности,
мы будем использовать идею инверсии сначала для проектирования Q(s)
в (15.2.1), а затем использовать (15.2.3), чтобы определить
соответствующую функцию C(s).
15.3. Аффинная параметризация: случай устойчивого объекта 421
15.3. Аффинная параметризация:
случай устойчивого объекта
15.3.1. Параметризация
Начальной точкой здесь будет отношение (15.2.3) между Q(s) и C(s).
Можно инвертировать это отношение, чтобы выразить C(s) через Q(s)
и G0{s):
| °Ц-1-д<мкм (16-ЗЛ)1
Это соотношение известно как параметризация Йола всех
регуляторов, обеспечивающих устойчивость замкнутых систем, в случае
устойчивых объектов. Результат формализуется в следующей лемме.
Лемма 15.1 (Аффинная параметризация устойчивых систем).
Рассмотрим объект, имеющий устойчивую номинальную модель
G0(s), управляемый контуром обратной связи с одной степенью
свободы и соответствующим регулятором. Тогда номинальный контур
(рис. 5.1) внутренне устойчив тогда и только тогда, когда Q(s) —
любая устойчивая собственная передаточная функция, если
передаточная функция регулятора C(s) параметризуется так, как показано в
выражении (15.3.1).
Доказательство
Вначале заметим, что четыре функции чувствительности,
определенные в (5.3.1)-(5.3.4), могут быть записаны, используя (15.3.1), в
виде
T0(s) = Q(s)G0(s)
S0(S) = l-Q(s)G0(s)
Sio(s) = (l-Q(s)G0(s))G0(s)
SUo{s) = Q(s)
(15.3.2)
(15.3.3)
(15.3.4)
(15.3.5)
Необходимость и достаточность тогда могут быть установлены
следующим образом.
Необходимость
Из уравнения (15.3.5) мы немедленно заключаем, что устойчивость
Q(s) необходима для внутренней устойчивости.
422 Глава 15. Параметризация SISO-регуляторов
Достаточность
Выражения (15.3.2)-(15.3.5), вместе с предположением об
устойчивости G0(s), подразумевают, что устойчивость Q(s) достаточна,
чтобы гарантировать устойчивость этих четырех функций
чувствительности и, следовательно, гарантировать внутреннюю
устойчивость контура. DDD
Ключевой момент параметризации (15.3.1)—то, что она описывает
все возможные линейные стационарные регуляторы, обеспечивающие
устойчивость замкнутой системы, для данного линейного стационарного
объекта G0{s). Все, что мы должны сделать (в свете леммы 15.1) —это
гарантировать, что Q(s) является устойчивой передаточной функцией.
Вышеупомянутая параметризация может быть представлена явно, если
контур обратной связи преобразован так, как показано на рис. 15.1.
Это описание регулятора может также использоваться, чтобы
получить выражения для реальных (или истинных) чувствительностей.
Используя выражения (5.9.15)—(5.9.19) гл. 5, мы получим
S(s) =
T(s) -
Si(s) -
Su(s) --
Sa(s) ~-
= (1 - Q(s)G0(s))SA(s) = S0(s)SA(s)
= Q(s)G0(s)(l + GA(s))SA(s)
= (1 - Q(s)G0(s))(l + GA(s))SA(s)G0(s)
= Q(s)SA(s)
1
l + Q(s)Ge(s)
(15.3.6)
(15.3.7)
(15.3.8)
(15.3.9)
(15.3.10)
где Ge(s) и G&(s) — аддитивная и мультипликативная ошибки
моделирования соответственно, как отмечено в разд. 4.12.
15.3.2. Соображения насчет проекта
Из выражений (15.3.2)—(15.3.5) видно, что при помощи Q(s) мы можем
сформировать одну из четырех номинальных чувствительностей. Тогда
оставшиеся три, конечно, определяются этим выбором. Обычное
стремление—первоначально сосредоточиться на формировании S0(s).
Типичное требование — это чтобы |50(jfo;)| был маленьким на низких частотах
и затем увеличивался до единицы на высоких частотах. Последнее
требование используется для того, чтобы уменьшить |T0(jfo;)| на высоких
частотах; это обычно требуется, чтобы гарантировать, что
высокочастотный шум измерения будет подавляться контуром управления и
чтобы обеспечить робастность по отношению к ошибкам моделирования.
15.3. Аффинная параметризация: случай устойчивого объекта 423
Регулятор
Рис. 15.1. Параметризация Йола всех регуляторов, обеспечивающих
устойчивость замкнутой системы, для устойчивых объектов
При этих обстоятельствах, казалось бы, что разумный выбор для Q(s)
мог бы быть
Q(s) = FQ(s)[G0(s)}-1 (15.3.11)
где [(-^(s)]"1—точная инверсия G0(s). Мы снова убеждаемся, что
инверсия играет центральную роль в этой модели решения.
Как мы увидим, передаточная функция Fq(s) играет ключевую роль
в проектировании регулятора. Хотя проект, предложенный в (15.3.11), —
полезная отправная точка, обычно его в дальнейшем будет нужно
уточнить, чтобы учесть более детальные моменты. В частности мы
исследуем следующие проблемы:
• неминимально-фазовые нули;
• относительная степень модели;
• подавление возмущений;
• управляющее воздействие;
• робастность.
15.3.3. Неминимально-фазовые нули
Вспомним, что если G0(s) устойчива, лишь Q(s) должна быть
устойчивой, чтобы гарантировать устойчивость замкнутого контура. Однако
это подразумевает, что если G0(s) содержит неминимально-фазовые
нули, то они не могут быть включены в [(^(s)]"1 в уравнении (15.3.11).
Поэтому можно было бы подумать о замене (15.3.11) на
Q(s)=FQ(s)Gl0(s)
(15.3.12)
424 Глава 15. Параметризация SISO-регуляторов
где Gl0(s) —устойчивое приближение [<30(s)] l- Например, если G0(s)
можно представить в виде сомножителей следующим образом
G0{8) = Bos{*)?™{8) (15.3.13)
где Bos(s) и Bou(s) —устойчивый и неустойчивый сомножители
числителя соответственно при Вои(0) = 1, то подходящий выбор для Gl0(s)
мог бы быть
в>)=Ш (15-зл4)
15.3.4. Относительная степень модели
Чтобы регулятор был собственным, необходимо, чтобы Q(s) была также
собственной. Таким образом, учитывая (15.3.12) и (15.3.14), необходимо,
чтобы формирующий фильтр Fq(s) имел относительную степень, по
крайней мере, равную отрицательному значению относительной степени
[^о(5)]-1- Концептуально это может быть достигнуто включением
сомножителей вида (rs+l)nd (tG1+)b знаменатель. В этом выражении п<*
выбирается таким, чтобы сделать Q(s), по крайней мере, бисобственной,
а величина г должна быть выбрана такой, чтобы выполнить
необходимые компромиссы проекта.
15.3.5. Подавление возмущений
а) Ошибки в установившемся состоянии
Ошибки в установившемся состоянии из-за входных и выходных
возмущений могут быть уменьшены до нуля, если Q(ju) —точная инверсия
G0(ju) во всей полосе частот, где входные и выходные возмущения
имеют существенное значение. Это обеспечит в данной полосе нулевую
чувствительность и нулевую входную чувствительность. Аффинная
параметризация может быть обобщена на случай, когда энергия входного
и выходного возмущений сконцентрирована на некоторых известных
частотах. В частности, из C(s) = Q(s) (1 — Q(s)G0(s))"1 мы имеем, что
регулятор обладает интегрирующими свойствами тогда и только тогда,
когда Q(0) = [^о(О)]""1. Заметим однако, что этот способ формулировки
задачи подавления возмущения не охватывает решения проблемы о
степенях свободы, доступных проектировщику. Такая параметризация
обеспечивается следующим результатом.
Лемма 15.2. Рассмотрим устойчивую модель G0(s) с возмущением
на нулевой частоте (на входе или выходе объекта или обоих). Тогда
15.3. Аффинная параметризация: случай устойчивого объекта 425
контур управления с одной степенью свободы, дающий нулевую
установившуюся ошибку слежения, будет устойчивым тогда и только тогда,
когда регулятор C(s) моэюет быть выраэюен формулой (15.3.1), где
Q(s) удовлетворяет условию
Q(s) = sQ(s) + [Со{0))'^а(з) (15.3.15)
где Q(s) —любая устойчивая передаточная функция, a Qa{s) —любая
устойчивая передаточная функция, которая удовлетворяет условию
Qa(0) = l.
Доказательство
• Достаточность
Мы видим, что, если Q(s) и Qa{s) устойчивы, то устойчива и
Q(s), а это подразумевает, что контур устойчив. Мы также видим
из (15.3.15), что C(s) содержит интегратор.
• Необходимость
Рассмотрим регулятор, который обеспечивает устойчивость
замкнутого контура, а также обладает нулевой ошибкой в
установившемся состоянии на нулевой частоте. Это эквивалентно
утверждению, что номинальная дополнительная чувствительность
равна единице на нулевой частоте. Из уравнения (15.3.2) мы видим,
что это также эквивалентно условию Q(0) — [^(О)]""1 = 0, т. е.
Q(s)—[Go(0)]~l — произвольная устойчивая функция, которая имеет
нуль при 5 = 0. Характеристика всех таких передаточных функций
Qb(s)'
Q(s)-[Go(0)}-1=s
Q(s) +
где Qb(0)=0 (15.3.16)
Выражение (15.3.16) показывает, что любая Q(s), дающая
нулевую ошибку в установившемся состоянии при постоянном
эталонном сигнале или возмущении (или обоих), может быть записана
в виде
Q(s)=sQ(s)+[Go(0)]-1[l+Go(s)Qb(s)] где Qb(0) = 0 (15.3.17)
Результат следует из
Qa(s) = l + G0(s)Qb(s) (15.3.18)
□□□
Замечание 15.1. Мы видим, что самый простой выбор в (15.3.15) —
Qa(s) = 1.
Лемма 15.3. Рассмотрим устойчивую модель G0(s) и
предположим, что входное возмущение имеет составляющие на частотах
426 Глава 15. Параметризация SISO-регуляторов
Ш1,Ш2,... ,Ш1. В этом случае контур управления с одной степенью
свободы обладает нулевой ошибкой слеэюения в установившемся состоянии
тогда и только тогда, когда регулятор C(s) моэюет быть представлен
выражением (15.3.1), где Q(s) удовлетворяет условию .
Dq{s) Dq{s)
где Nq(s),Ni(s),N2(s) и Dq(s) —вещественные полиномы
относительно s, Dq(s) устойчива и
N2(juH)=DQ(jcoi)[G0(jui)}-1 где г = 1,2,...,/ (15.3.20)
Доказательство
• Достаточность
Мы видим, что раз Dq(s) —устойчивый полином, Q(s) также
устойчива и это подразумевает, что контур устойчив. Также из
(15.3.19) и (15.3.20) мы видим, что Q(ju)i) = [G0{jwi)]~l и, таким
образом, C(±jwi) = оо для г = 1,2,...,/—т. е. на этом наборе
частот обеспечивается совершенная инверсия модели.
• Необходимость
Рассмотрим регулятор, который обеспечивает устойчивость
замкнутого контура, а также обладает нулевой ошибкой в
установившемся состоянии по отношению к возмущениям на частотах
Ш = Cdi,Cd2,...,Cdj.
Обозначим числитель Q(s) через Nq(s), а ее знаменатель через
Dq(s). Если мы поделим Nq(s) на полином Pd{s) = П^=1(52+а;?), то
получим в результате N\(s) и остаток N2{s):
1^=N1{S) + JUSJ (15-3'21)
Отсюда (15.3.19) следует при замене Ni(s) на N\(s) и ^(s) на
N2(s).
Кроме того, условие нулевой ошибки в установившемся
состоянии эквивалентно утверждению, что номинальная входная
чувствительность равна нулю при s = ±jo;2 для г = 1,2,...,/. Из
выражения (15.3.4) мы видим, что это также эквивалентно условию
Q(±jui) = [G0(±jwi)]~l, которое требует, чтобы условие (15.3.20)
было удовлетворено. DDD
15.3. Аффинная параметризация: случай устойчивого объекта 427
Замечание 15.2. Заметим, что в (15.3.19) возможный выбор для
N2{s) следующий:
21 _ •
N2(s) = DQ(s)y£(rM + l)2l-1[Go(M)r1 П ,-,', 37, (15-3-22)
ы k&t,tJWi~3Wk
где т > О, cjj+i = -cjj для i = l,2,...,l, Q2l,i = {1,2,...,21} - {i} и
DQ(s) = Dq(s)(ts +1)2'"1 (15.3.23)
Тогда мы можем параметризовать Q(s) следующим образом:
Q(s) = Q(s)f[(s2 + wb + f2[G0(M)]-i JJ -^f- (15.3.24)
Вышеупомянутые леммы позволяют нам параметризовать задачу
управления, удовлетворяющую ограничениям установившегося
состояния при сохранении аффинной структуры функций чувствительности в
параметре проекта Q(s). Мы используем эти параметризации в гл. 16 в
контексте проектирования систем управления через оптимизацию.
б) Компромиссы подавления возмущений
Обращаясь только к возмущениям и шумам из гл. 5, мы видим, что
номинальная реакция на выходе имеет вид
Y0(s) = - T0(s)Dn{s) + S0{s)D0{s) + Si0(s)Di{s)
= - Q{s)G0{s)Dn{s) + (1 - Q{s)G0{s))D0(s) (15.3.25)
+ (l-Q(8)G0(8))G0(8)Di(8)
Используя (15.3.12) и (15.3.14), мы видим, что
Y0(s) = - {FQ{a)Bm{8))Dn{8) + (1 - FQ(s)B0U(s))D0(s)
+ (1-Ра(з)Вои(з))С0(8Щ(з) 1 • • >
Как мы знаем, первые две передаточные функции в правой части
уравнения равны в сумме 1: S0(s) +T0(s) = 1.
Более тонкий компромисс происходит между D0 и Д. Мы можем
использовать Fq(s), чтобы скомпенсировать любые желаемые полюсы
разомкнутого контура в S2(s), но тогда эти полюсы обязательно появятся
в качестве нулей в 50, как показано в разд. 8.6.3. Так как и полюсы и
нули воздействуют на свойства ситемы, как сказано в гл. 8, мы видим,
что имеется определенный компромисс между работой с входными
возмущениями и работой с выходными возмущениями. Например, если
428 Глава 15. Параметризация SISO-регуляторов
имеется медленный полюс в G0(s), то он появляется или как медленный
полюс в Si0(s), что приводит к большому времени переходного процесса,
или как медленный нуль в S0{s) с последующим появлением пика
чувствительности. Это будет рассмотрено далее в разд. 15.5 и 15.6.
Случай, когда присутствуют возмущение и шум измерения, а объект
является неминимально-фазовым, иллюстрируется в следующем
примере.
Пример 15.1 (Неминимально-фазовый объект). Рассмотрим
контур управления с одной степенью свободы, где объект имеет
номинальную модель вида
°'M-(.+"^a+D (15'3-27)
Предположим, что имеется выходное возмущение, которое
представляет собой нечастые резкие изменения. Шум измерения — сигнал
с существенной энергией только в области частот выше 5 рад/с.
Нужно спроектировать регулятор C(s), используя подход
аффинной параметризации, такой, что выход регулятора u(t) не содероюит
существенных шумовых компонентов.
Решение
Рассматривая только выходное возмущение, мы требуем, чтобы
• регулятор включал интегрирование {т. е. Q(0) = [<2о(0)]_1 = 1),
чтобы гарантировать нулевую ошибку в установившемся
состоянии и
• полоса пропускания замкнутого контура была как можно больше,
чтобы обеспечить быструю компенсацию возмущения.
Однако наличие шума устанавливает верхнюю границу полосы
пропускания контура, скажем, ис = 5 рад/с. Заметим, что шумовая
составляющая на выходе регулятора определяется
чувствительностью (15.3.5). Тогда можно использовать теорию синтеза фильтра,
потому что функция Fq(s) должна быть низкочастотным фильтром
с граничной частотой шс = 5 рад/с. После итераций с различными
типами фильтра (Баттерворта, Чебышева и эллиптического) различных
порядков был выбран фильтр Баттерворта четвертого порядка:
625
Fq^ = 54 + 13.0656s3 + 85.3553s2 + 326.64075 + 625 (15-3-28)
Предлагаем читателю проверить другие выборы Fq(s), используя
схему в файле qaffl.mdi пакета SIMULINK. DDD
15.3. Аффинная параметризация: случай устойчивого объекта 429
15.3.6. Управляющее воздействие
Из (15.3.3) и (15.3.1) видно, что если мы обеспечиваем S0 = О на
конкретной частоте (например, с помощью QG0 = 1), то в этом случае
имеем бесконечное усиление регулятора С на той же самой частоте.
Например, скажем, объект является минимально-фазовым; тогда мы
могли бы выбрать Gl0{s) = G^1. Однако, используя (15.3.12), мы тогда
имели бы
C{S) - 1-FgW (15'3-29)
Для иллюстрации выберем
*>w-&zw (15-3'30)
Тогда усиление регулятора на высокой частоте К^с и усиление
модели на высокой частоте Khfg соотносятся следующим образом:
Khfc = —}— (15.3.31)
1 т Khfg
Таким образом, если мы делаем Fq(s) быстрее (т. е. г становится
меньше), то это увеличивает К^с. Это, в свою очередь, подразумевает,
что энергия управления увеличивается. Этот результат можно оценить
на основе того факта, что, согласно предположению, G0(s) минимально-
фазовая и устойчивая, откуда
SUs) = Q(s)=[^^r (15.3.32)
15.3.7. Робастность
Проблема ошибок моделирования была рассмотрена в разд. 4.12.
Основным результатом было то, что ошибки моделирования обычно
существенны на высоких частотах. Это наблюдение было самым важным
в анализе робастности, выполненном в разд. 5.9. Фундаментальный
результат этого анализа заключается в том, что для того, чтобы
гарантировать робастность, полоса пропускания замкнутого контура
должна быть такой, чтобы частотная характеристика |T0(jfo;)| достаточно
уменьшилась бы прежде, чем станут существенны эффекты ошибок
моделирования.
Предположим, что мы выбрали Q(s) как в (15.3.12); тогда
T0{s) = FQ{s)B0U{s)
(15.3.33)
430 Глава 15. Параметризация SISO-регуляторов
Таким образом, в структуре аффинной параметризации, которую мы
здесь обсуждаем, требование робастности может быть удовлетворено,
если Fq(s) уменьшает усиление T0(ju) на высоких частотах. Это обычно
достигается включением соответствующих полюсов в Fq(s). Конечно,
уменьшение |T0(jfo;)| до величин <§: 1 после некоторой частоты неизбежно
означает, что S0(s) стремится к единице после той же самой частоты.
15.3.8. Выбор передаточной функции Q.
Выводы для случая устойчивых полюсов
разомкнутого контура
Мы видели, что модель выбора Q(s)— просто инверсия передаточной
функции объекта в разомкнутом состоянии G0(s). Однако это
«идеальное» решение должно быть изменено на практике, чтобы учесть
следующее:
• Неминимально-фазовые нули. Внутренняя устойчивость не
допускает компенсацию этих нулей, так что они должны появиться в
T0(s). Это подразумевает, что усиление Q(s) должно быть уменьшено
на этих частотах, чтобы избежать слабой переходной реакции, как
было рассмотрено в гл. 8.
• Относительная степень. Избыточные полюсы в модели
определяют нижнюю границу относительной степени T0(s), потому что Q(s)
должна быть собственной, чтобы гарантировать, что регулятор C(s)
будет также собственным.
• Компромиссы возмущений. Всякий раз, когда мы уменьшаем
Т0, чтобы обеспечить подавление шума измерения, мы обязательно
увеличиваем чувствительность к выходным возмущениям на тех
же частотах. Аналогично, медленные полюсы разомкнутого контура
должны появиться или как полюсы Sio(s), или как нули S0(s) и в
любом случае расплатой является ухудшение качества системы.
• Энергия управления. Объекты обычно являются инерционными.
Следовательно, любая попытка сделать Q(s) близкой к инверсии
модели обязательно дает передаточную функцию от D0(s) к ?7(s),
соответствующую фильтру высоких частот. Это приведет к большим
сигналам на входе регулятора и может вызвать его насыщение.
• Робастность. Ошибки моделирования обычно становятся
существенными на высоких частотах; следовательно, чтобы сохранить
робастность, необходимо уменьшить Т0 (и, следовательно, Q) на этих
частотах.
15.4. Синтез ПИД-регулятора с помощью аффинной параметризации 431
15.4. Синтез ПИД-регулятора
с помощью аффинной параметризации
В этом разделе мы проиллюстрируем применение аффинной
параметризации, используя ее для разработки стратегии синтеза ПИ- и
ПИД-регуляторов, когда все полюсы разомкнутой системы устойчивы
(и, следовательно, приемлемы как полюсы замкнутого контура).
Неудивительно, что можно проектировать ПИД-регуляторы, выби1
рая Q(s); формула (15.3.1) охватывает все регуляторы, обеспечивающие
устойчивость замкнутых систем в случае устойчивой модели объекта,
так что она должна также включить и ПИД-структуру в применении к
устойчивым объектам.
15.4.1. Модели объектов для ПИД-управления
Далее мы будем рассматривать следующие модели:
ту-
^о(^) = ^-г первого порядка (15.4.1)
v0s + \
п (s) = K°e~ST° первого порядка (1^4 2)
°* ' v0s + \ с запаздыванием \ °- • )
р / ч Ко колебательная /- - 4 «ч
°^5' ~ s2 + 2(0u0s + и2 относительной степени 2 ^ '
Г ( \ — K0(b0s + 1) колебательная (лъ л д\
^o(s) - s2 + 2£0uoS + ш2' относительной степени 1 У^лл)
K0{-b0s + l)
s +z{0uj0s + u0 колебательная
G0(s) = 2 °n/m —^; b0 > О неминимально-фазовая (15.4.5)
В этих моделях предполагается, что все коэффициенты
положительны. При совместном применении эти модели могут покрыть многие
промышленные системы. В частности, (15.4.2) обычно встречается в
приложениях с транспортными задержками, а (15.4.3)—(15.4.5) обычно
связаны с электромеханическими системами, имеющими резонансные
структуры.
15.4.2. Модели первого порядка
В этом разделе мы рассмотрим модель (15.4.1):
Go(s) = -^г
V0S+l
432 Глава 15. Параметризация SISO-регуляторов
Используем технологию аффинного синтеза. У модели нет
неустойчивых нулей, так что она точно инвертируема. Тогда мы выберем
&0(з) = [00(з)]-1 = Ц±± (15.4.6)
Чтобы Q(s) была бисобственной, Fq(s) должна иметь относительную
степень, равную 1, например,
'«w-=Vt (15А7)
Следовательно,
и регулятор (15.3.1) получается в виде
W l-Q{s)G0(s) K0as K0a K0as K '
который является ПИ-регулятором с параметрами
К0а К0а
С этими параметрами регулятора номинальная дополнительная
чувствительность будет иметь вид
Т0{8) = Q(s)G0(s) = FQ(s) = -—-j (15.4.11)
где а —параметр настройки: выбирая а меньше, мы делаем контур
быстрее, большая величина а замедляет контур. С этим регулятором
выходные возмущения подавляются номинальной функцией
чувствительности ач
S0(s) = 1 - ВД = 1 - FQ(s) = —— (15.4.12)
as + l
Снова, маленькая величина а подавляет выходное возмущение
быстрее, чем большая величина. Этот эффект показан на рис. 15.2, где
реакция на ступенчатое выходное возмущение приведена для а = 0.1,0.5,1.0
и 2.0.
Однако, как обсуждалось в гл. 8, коэффициент а не может быть
выбран произвольно маленьким из-за ограничений исполнительного
механизма и соображений робастности. Однако выполняя эксперимент,
который показан на рис. 6.6 (при условии, что to ~ h), можно видеть, что
отношения в (15.4.10) обеспечивают простой метод для проектирования
ПИ-регулятора с единственным легко настраиваемым параметром а.
15.4. Синтез ПИД-регулятора с помощью аффинной параметризации 433
«} 0.8
н
$
£ 0.6
vo
о
X
3
« 0.2
1*4. '
"I * \
" \ 0.1
1 1
40.5
i ^Т—-—
1 1 1
^1.0 ""
—1—1 1 1
J 1 ■ 1 1
J
а = 2.0 J
"- 1 1—- 1 1
0.5
3.5
4.5
I 1.5 2 2.5 3
Время [с]
Рис. 15.2. Влияние а на подавление выходных возмущений
Кроме того, если постоянную времени v0 или усиление К0 нужно
изменять во времени известным способом, регулятор можно легко настроить,
потому что Кр и Кj в (15.4.10) явно выражены в терминах этих
величин.
15.4.3. Модели второго порядка со средним демпфированием
Далее рассмотрим проектирование ПИД-регуляторов для моделей
второго порядка вида (15.4.3)—(15.4.5). В данном разделе мы предполагаем,
что объект средне-демпфированный. Точное значение среднего
демпфирования для проекта зависит от величины преобладающих ошибок
моделирования; однако обычно результаты проектирования, описанные
в данном разделе, применимы для коэффициентов демпфирования,
больших чем, скажем, 0.6.
Рассмотрим сначала модель с относительной степенью, равной 2
(15.4.3).
Поскольку там нет никаких неустойчивых нулей, мы можем выбрать
An
(15.4.13)
Чтобы гарантировать бисобственность Q(s) = Fq(s)G%0(s), Fq(s)
должна иметь относительную степень, равную 2, —обычно
Fq(s) = Т-Г ГТ (15.4.14)
Эквивалентный регулятор в системе с единичной обратной связью
будет таким:
г1л= Q(*) = Fq(s)G>) =s2 + 2(0u0s + u20 n,41,,
°W l-Q(s)G0(s) l-FQ(8)Gi(8) K0(a2s* + alS) {l°' ' °}
434 Глава 15. Параметризация SISO-регуляторов
и эквивалентный ПИД-регулятор имеет пропорциональное усиление
К0а\
интегральное усиление
КР = ^°Ш01\2 ° (15.4.16)
K0ai
усиление по производной
a\-2(j0u)0aia2 + o^l
К0а\
и постоянную времени дифференцирования
ы2
Кт = —^ (15.4.17)
KD = «i-W£i°2 + a#,0 (15 4 18)
rD = — (15.4.19)
ai
Снова полезно параметризовать номинальную функцию
дополнительной чувствительности замкнутого контура непосредственно в
терминах желаемых собственной частоты wci и демпфирования фС1
замкнутого контура, выбирая
а2 = 4-; о1 = ^ (15.4.20)
т. е. 2
T0(s) = FQ(s) = - , "d —5- (15.4.21)
Тогда, подставляя (15.4.20) в (15.4.16)—(15.4.19), получим следующие
коэффициенты усиления ПИД-регулятора:
Кр-—щ%— (15-422)
td = TT— (15.4.25)
По сравнению с классическими ПИД-методами гл. 6, этот подход,
основанный на моделировании, имеет несколько преимуществ. В
частности, коэффициенты усиления ПИД-регулятора (15.4.22)-(15.4.25) —
явные функции желаемой модели замкнутого контура (15.4.21), что
позволяет систематически решать компромиссы. Они также явно
выражены в параметрах модели, что позволяет без дополнительных усилий
учесть изменения параметров.
15.4. Синтез ПИД-регулятора с помощью аффинной параметризации 435
Подобные выражения можно получить для моделей с относительной
степенью, равной 1 (15.4.4), используя инверсию
и фильтр с относительной степенью, равной 1,
Для неминимально-фазовой модели (15.4.5), соответствующее
устойчивое приближение инверсии имеет вид
Gio{s) = s2 + 2(°»o*+"2o (15.4.28)
Ко
поскольку неустойчивый нуль не может быть инвертирован. Чтобы
гарантировать бисобственность Q(s), фильтр Fq(s) должен иметь
относительную степень, равную 2 и тогда (15.4.14)—снова подходящий
выбор.
15.4.4. Слабо демпфированные модели
В этом разделе мы рассмотрим модели объекта типа (15.4.3) с очень
маленькой величиной коэффициента демпфирования £0. Мы должны
предупредить читателя, что управление слабо демпфированными
системами—чрезвычайно трудная задача. Цель этого раздела состоит в
том, чтобы обсудить главные пути ее решения и выявить трудности,
связанные с ними.
Проблема слабо демпфированных систем заключается в
чувствительности на резонансных пиках, которая становится все больше при
уменьшении демпфирования. Эта особенность приводит к серьезным
изменениям характеристик даже для маленьких ошибок в параметрах
модели, когда замкнутый контур обладает резонансными свойствами
в разомкнутом состоянии. Чтобы лучше оценить характер проблемы,
применим регулятор общего вида, основанный на модели (15.3.1), к ре-
альйой модели объекта G(s). Как обычно, достигнутая дополнительная
чувствительность
G(s)C(s) G(s)Q(s)
К) l + G(s)C(s) l + Q(s)(G(s)-G0(s)) { ' ;
Чтобы избежать загромождения анализа включением других
ограничений объекта, типа неминимально-фазовых нулей, мы примем для
436 Глава 15. Параметризация SISO-регуляторов
ясности, что модель —точно инвертируема; таким образом, мы можем
выбрать
GUs) = [G0(5)]-1 (15.4.30)
и также
Q(s)=FQ(s)[G0(s)}-1 (15.4.31)
Это дает
FQ(s)G(s) FQ(s)G(s)
[ ] FQ(s)(G(s)-G0(s)) + G0(s) FQ(s)G(s) + (l-FQ(s))G0(s)
(15.4.32)
Напомним, что для обычной цели управления — отслеживания
уставки—требуется, чтобы T(ju) равнялась единице на существенных
частотах. Выражение (15.4.32) подсказывает, что это может быть достигнуто
двумя альтернативными способами. Один, очевидный, путь —сначала
использовать очень хорошую модель на тех частотах где Ge = G — G0
мало, затем сформировать фильтр -Fq(s), усиление которого близко к
единице на этих частотах.
Заметим, что T(ju) также близка к единице на тех частотах, где
значение \G0(ju))(l — Fq(ju))\ мало. Если демпфирование
номинальной модели близко к демпфированию реальной системы, то полоса
пропускания Fq(s) должна быть очень большой, чтобы достичь этого.
Большая полоса пропускания Fq(s) имела бы серьезные последствия с
точки зрения робастности контура. Альтернативная стратегия состоит
в том, чтобы использовать сильно демпфированную модель, даже если
реальная система не хорошо демпфирована. Следует иметь в виду, что
при этом подходе необходимо гарантировать робастную устойчивость.
Эти аргументы требуют, чтобы на существенных частотах
отслеживания Fq и G0 были такими, чтобы значение \G0(ju))(\ - Fq(jw)\ было
мало.
Чтобы посмотреть последствия для слабо демпфированных систем,
мы вернемся к модели (15.4.3) и предположим, что истинная система
имеет вид
G(s) = 9 * 7 (15.4.33)
Предположим также, что фильтр Fq(s) тот же самый, что и в
предыдущем разделе:
«Л
fq(8) = о о/ 2 (15.4.34)
Рассмотрим номинальную модель, у которой нет никакой ошибки
в коэффициенте демпфирования (£0 = £). Предположим также, что
усиление на нулевой частоте и в истинной системе, и в номинальной
15.4. Синтез ПИД-регулятора с помощью аффинной параметризации 437
модели равно 1, т. е. К = w\ и К0 = и2. Если мы будем измерять частоту
в единицах cj0, то получим
1
G0(s) =
G(s) =
52 + 2Cs + l
2
ЯГ
s2 + 2(xs + x2
v2
FQ(5) = 8* + 2il>dv8 + v2
Ge{s) = {x-l)s
(x + l)s + 2(x
GA{s) = (x-l)s
{s2 + 2(s + l){s2 + 2<;xs + x2)
(x + l)s + 2(x
' s2 + 2(xs + x2
где теперь s — нормализованная переменная Лапласа и
A Un
х = —;
Wo
A Wcl
и0
(15.4.35)
(15.4.36)
(15.4.37)
(15.4.38)
(15.4.39)
(15.4.40)
Чтобы проиллюстрировать характер и амплитуду ошибки
моделирования из-за несоответствия между ип и cj0, т. е. когда х Ф 1, вычислим и
изобразим \Ge(ju)\ как функцию нормализованной частоты для х = 0.9
и х = 1.1. Результаты показаны на рис. 15.3.
Частота [шп/шо]
Рис. 15.3. Аддитивная ошибка моделирования для слабо демпфированной
системы (С = 0.01)
Рисунок 15.3 показывает, что амплитуда ошибки имеет пик
приблизительно в 33 дБ в обоих случаях. Однако подобие между случаями
для х = 0.9 (переоценка собственной частоты) и х = 1.1 (недооценка
собственной частоты) вводит нас в заблуждение. Чтобы иметь более
точную картину влияния ошибок моделирования, вспомним выражение
438 Глава 15. Параметризация SISO-регуляторов
Переоценка собственной частоты
Недооценка собственной частоты
3
2
о 1
о
S
-2
-3
ft"
U..Li L^
: ^ : \
я=:0.9
-2-1012
Действительная ось
2I
А Л L
8 П
1 01-
S
-2
-3
1.1
-10 12
Действительная ось
Рис. 15.4. Анализ корневого годографа для 5д(в) при переоценке и
недооценке собственной частоты
для достигнутой или истинной чувствительности (15.3.6). Если в это
выражение мы подставим (15.3.10), (15.3.12) и (15.4.30), то получим
S0(s)
S(s) = (l-Q(s)G0(s))SA(s) =
(15.4.41)
l + FQ(s)GA(s)
Таким образом, поскольку номинальная модель устойчива, робастная
устойчивость обеспечивается тогда и только тогда, когда годограф
Найквиста функции Fq(ju))G&(ju)) не будет охватывать точку (—1,0)
на комплексной плоскости. Это совпадает с требованием устойчивости
эквивалентного замкнутого контура, в котором передаточная функция
разомкнутого контура дается выражением
•■2 {x + l)s + 2(x
FQ(s)GA(s) =
;(X~1)S-
(15.4.42)
s2 + 2^civs + v2 s2 + 2(xs + x2
На рис. 15.4 показаны два корневых годографа. Они соответствуют
случаям х = 0.9 и х = 1.1; в обоих случаях £ = 0.01, фС1 = 0.7 и v = 2.
Мы видим, что для первого случая (переоценка) реальный контур будет
неустойчив даже для маленьких ошибок. В противоположность этому
недооценка всегда дает устойчивый контур. Результат для последнего
случая должен интерпретироваться с осторожностью, потому что были
рассмотрены только ошибки в собственной частоте. Однако из этого
анализа кажется разумным в случае неопределенности в величине истинной
собственной частоты выбирать номинальную собственную частоту
равной нижней границе диапазона.
Вышеупомянутый анализ выдвигает на первый план одну из главных
трудностей в управлении слабо демпфированными системами:
чрезвычайную чувствительность к ошибкам моделирования. Другая главная
15.4. Синтез ПИД-регулятора с помощью аффинной параметризации 439
проблема возникает в присутствии входных возмущений, когда полюсы
модели скомпенсированы. Полюсы, не поддающиеся управлению,
появляются во входной чувствительности и связанные с ними движения
слабо демпфированы.
15.4.5. Модели с запаздыванием,
использующие аппроксимацию Паде
Далее мы рассмотрим модели первого порядка с запаздыванием,
описываемые выражением (15.4.2). Главная трудность в этом типе систем
связана с сомножителем е~"5То, который является неинвертируемым и
иррациональным. Вначале представим запаздывание с помощью так
называемой аппроксимации Паде первого порядка, определяемой
выражением
9 _ ст.
(15.4.43)
st0 „ 2-ДГ0
2 + sto
Если мы подставим (15.4.43) в (15.4.2), то получим аппроксимацию
в виде рациональной модели
Эта модель устойчива, но неминимально-фазовая, так что мы
используем приближенную инверсию, определяемую выражением
(r0i/0)s2 + (т0 + 2v0)s + 2
2К0
0%, = ""*>• т^т^'т' (15.4.45)
Бисобственная функция Q(s) получается, если выбрать фильтр Fq(s)
с относительной степенью 2, скажем,
FQ(s) = —!: (15.4.46)
Тогда регулятор с единичной обратной связью будет иметь вид
rt-л- Q{s) _ ЪМ&орМ
°pU l-Q(s)Gop(s) l-FQ(s)Gip(s)Gop(s)
(15.4.47)
{t0v0)s2 + {t0 + 2v0)s + 2
(2K0a2)s2 + (2К0ах + t0K0)s
440 Глава 15. Параметризация SISO-регуляторов
который, согласно лемме 7.2, является ПИД-регулятором типа (7.3.2) с
параметрами
Кр = AKovl + AKoV^ + rlKo (15A48)
Kj = ——- — (15.4.49)
K = (2K0al+r0K0)2{r0u0) - {2K0a2)(2K0a1 + t0K0)(t0 + 2v0) +8К*с%
D рКоаг+ТоКо)*
(15.4.50)
rD = 0 2a2 (15.4.51)
Еще раз обратим внимание, что коэффициенты ПИД-регулятора
даются непосредственно в терминах параметров модели (15.4.2) и
фильтра проекта (15.4.46). Довольно запутанный и нелинейный
характер этих выражений объясняет, почему эмпирическая настройка
ПИД-регулятора для систем с запаздыванием, как известно, является
громоздкой. Выражения, данные здесь, однако, непосредственно
приводят к окончательному проекту.
Другое преимущество этих явных выражений заключается в том,
что запаздывания изменяются во времени. Дело обстоит таким образом,
например, там, где запаздывание связано со скоростью
транспортировки, которая изменяется в связи с требованиями производства. Если
скорость измерима, запаздывание может быть вычислено в реальном
масштабе времени и коэффициенты ПИД-регулятора (15.4.48)—(15.4.51)
могут быть соответствующим образом адаптированы.
Альтернативный подход — регулятор Смита, представленный в
следующем разделе. Преимущество регулятора Смита над ПИД-
регулятором (15.4.48)—(15.4.51) состоит в том, что аппроксимация Паде
не используется; это дает преимущество, если постоянная запаздывания
т0 сопоставима (или даже больше) с доминирующей постоянной времени
замкнутого контура. Однако полученный регулятор, строго говоря,
не будет ПИД-типа, потому что содержит элемент запаздывания в
параллельной модели.
15.5. Аффинная параметризация для систем,
содержащих запаздывание
Классическим методом, позволяющим работать с чистым
запаздыванием, является использование компенсатора мертвого времени. Эта
15.5. Аффинная параметризация для систем, содержащих запаздывание 441
Регулятор
дм
гО
Q(s)
U{s)
Di{s)
♦ +
+
Объект
D0{s)
t+
^6
Y(s)
1
e-"TG0(s)
Ym(s)
—о
+
t +
)
Рис. 15.5. Регулятор Смита (Q-форма)
идея была предложена Отто Смитом в 1950-х годах. Здесь мы даем ее
современную интерпретацию через аффинную параметризацию.
Регулятор Смита основан на двух ключевых идеях: аффинный синтез
и тот факт, что характеристики запаздывания не могут быть
инвертированы. Структура традиционного регулятора Смита может быть
получена из схемы на рис. 15.6, которая является частным случаем
общей схемы, показанной на рис. 15.1.
На рис. 15.5 номинальная модель задается произведением
запаздывания и рациональной передаточной функции:
G0(s)=e-STG0(s)
(15.5.1)
Тогда из (15.3.2) номинальная дополнительная чувствительность
равна
T0{s)=e-STG0{s)Q{s) (15.5.2)
Выражение (15.5.2) наводит на мысль, чтобы передаточная функция
Q(s) была спроектирована, учитывая только рациональную часть
модели, G0(s), потому что запаздывание не может быть инвертировано.
Для выполнения проектирования могут использоваться процедуры и
критерии, обсужденные в предыдущих разделах. В частности, нам
нужна приближенная (устойчивая, причинно-следственная и собственная)
инверсия для G0{s) = e~srG0(s). Задержка не имеет никакой причинной
инверсии, поэтому мы ищем приблизительную инверсию для G0{s). Это
можно получить непосредственно, как в (15.3.14). Альтернативно можно
использовать идею обратной связи, чтобы получить устойчивую инвер-
442 Глава 15. Параметризация SISO-регуляторов
Регулятор
R(s)
о
С{8)
Ща)
1+
О
Объект
^о
D0{s)
Лж Dn(s)
Ym(s)
(e-ar-l)G0(s)
1 +
о
Рис. 15.6. Регулятор Смита (традиционная форма)
сию. Таким образом, мы могли бы подумать об оценке Q(s) в виде
С(8)
Q(s) =
l + C{s)G0{s)
(15.5.3)
Когда значение |C(ja;)| большое, тогда Q(ju) « [G0(ju)]~~l.
Если Q(s) реализуется через (15.5.3), то получается структура,
изображенная на рис. 15.6. Это — традиционная форма регулятора
Смита, как было показано в разд. 7.4. Однако форма, представленная на
рис. 15.5, также подходит.
Замечание 15.3. Иногда кажется, что нельзя использовать
регуляторы Смита из-за их чувствительности к ошибкам
моделирования. Однако лемма 15.1 показывает, что структура, приведенная на
рис. 15.5, покрывает всех регуляторы, обеспечивающие устойчивость
системы. Следовательно, единственным вопросом остается выбор
Q(s). В этом контексте имеются неизбежные проблемы ограничения
полосы пропускания, связанные с робастностью. Предлагаем читателю
перечитать разд. 8.6.2.
Представленные выше идеи использованы в следующем примере.
Пример 15.2. Рассмотрим объект с номинальной моделью, имеющей
вид
G0(s) =
(15.5.4)
2s+ 1
Нужно синтезировать регулятор, который обеспечивает
хорошее отслеживание эталонного воздействия в диапазоне частот
[0,1] рад/с.
15.6. Нежелательные полюсы замкнутого контура 443
Решение
Используем структуру, показанную на рис. 15.5 и обратим внимание
только на рациональную часть G0(s). Простое приближение дает
«м-тЗзЬ (15'56)
что приводит к
Характеристика этого проекта моэюет быть оценена с помощью
моделирования в SIMULINK, файл qaff2.mdl. С помощью этого
схемного решения читатель, помимо прочего, моэюет оценить влияние
ошибок моделирования.
Более сложное решение моэюет быть получено, если компенсация
полюса объекта недопустима, что мы рассмотрим в следующем
разделе. DDD
Пример 15.3 (Управление толщиной листа на прокатном стане).
Вспомним из примера 8.3, что имеется неизбежная задержка в
измерении, связанная с использованием сдвинутой по направлению
движения полосы рентгеновской установки для измерения толщины.
Следовательно, если желательно использовать это измерение для
управления с обратной связью, то структура с упредителем Смита,
показанная на рис. 15.6, могла бы подойти. Два практических комментария:
1. Постоянная запаздывания т фактически является функцией
скорости металлической полосы и таким образом можно получить
постоянную запаздывания в регуляторе на основе скорости этой
полосы.
2. Проблемы робастности не позволяют использовать чрезмерно
большую полосу пропускания для регулятора C(s). DDD
15.6. Нежелательные полюсы замкнутого контура
15.6.1. Интерполяционные ограничения
До сих пор неявно предполагалось, что все полюсы разомкнутого
контура были устойчивы и, следовательно, могут быть допустимы в функции
входной чувствительности замкнутого контура Si0(s). На практике нам
нужно делать различия между устойчивыми полюсами и желаемыми
полюсами. Например, слабо демпфированная резонансная пара полюсов
могла бы быть устойчивой, но, вероятно, нежелательной. Пусть объект
444 Глава 15. Параметризация SISO-регуляторов
разомкнутого контура содержит некоторые нежелательные (включая и
неустойчивые) полюсы. Единственный способ удалить полюсы из
дополнительной чувствительности состоит в том, чтобы выбрать функцию
Q(s) такую, чтобы она содержала эти полюсы в качестве своих нулей.
Это приводит к компенсации таких полюсов в произведении Q{s)G0(s) и,
следовательно, в S0(s) nT0(s) (см. выражения (15.3.1) и (15.3.2)). Однако
мы видим из (15.3.4), что скомпенсированные полюсы все еще могут
появляться в качестве полюсов номинальной входной чувствительности
Si0(s) в зависимости от нулей 1 — Q{s)G0(s) (т. е. нулей Si0(s)). Чтобы
устранить эти полюсы и из S{0(s), мы должны гарантировать, что
эти нежелательные полюсы также являются нулями [1 — Q{s)G0(s)].
Следующая лемма суммирует вышеупомянутые рассуждения.
Лемма 15.4 (Интерполяционные ограничения, связанные с
удалением нежелательных полюсов). Рассмотрим номинальный
контур управления с обратной связью и одной степенью свободы;
предположим, что G0(s) содержит нежелательные (включая и неустойчивые)
полюсы разомкнутого контура. Тогда мы имеем следующее:
1. Каждая из функций чувствительности T0(s), S0{s), Si0{s) и Suo(s)
не будет иметь никаких нежелательных полюсов тогда и только
тогда, когда регулятор C(s) имеет вид, приведенный в (15.3.1), где
Q(s) удовлетворяет следующим ограничениям:
(а) Функция Q(s) собственная, устойчивая и имеет только
желаемые полюсы.
(б) Любые нежелательные полюсы G0(s) являются нулями Q(s),
имеющими по крайней мере ту же кратность, что и у GQ{s).
(в) Любые ^нежелательные полюсы G0(s) являются нулями
1 — Q(s)G0(s), имеющими по крайней мере ту же кратность,
что и у G0(s).
2. Когда условия (б) и (в) удовлетворены, все результирующие
компенсации неустойчивых полюсов и нулей в C(s), заданной выражением
(15.3.1), должны быть выполнены аналитически до реализации
регулятора.
Доказательство
Пункт 1 следует непосредственно из выражений (15.3.2)-(15.3.5).
Пункт 2 устраняет нежелательные {неустойчивые) компенсации
полюсов и нулей внутри регулятора. DDD
Замечание 15.4. В связи с пунктом 2 вышеупомянутого
результата, читатель должен обратить внимание на различие Meoicdy
аналитической компенсацией нулей и полюсов и той же компенсацией
15.6. Нежелательные полюсы замкнутого контура 445
непосредственно в реализованной системе. Это может быть лучше
понято, если рассмотреть пример, который использует следующие
три передаточные функции:
'<•>-5+155+4)' я-(*) = (*+1)(-*+2); *«-w
(15.6.1)
Мы видим, что H(s) = H\(s)H2(s). Если компенсация выполнена до
реализации передаточной функции H(s) (аналитическая компенсация),
никаких проблем не возникает. Однако если мы последовательно
соединим реализацию H\(s) и реализацию H2(s), возникает внутренняя
неустойчивость, потому что в этом случае компенсация будет
осуществлена в реализации.
Это различие объясняет, почему структура на рис. 15.1 не может
использоваться для реализации регулятора в случае неустойчивых
систем. Вместо этого компенсация полюсов и нулей, характерная для
интерполяционных ограничений, данных в лемме 15.4, должна быть
выполнена до реализации. DDD
Проиллюстрируем лемму 15.4 простым примером.
Пример 15.4. Рассмотрим номинальную модель G0(s), имеющую вид
°'М-(. + 1)8(. + щ <15-6'2>
Предположим, что шум измерения ограничивает полосу
пропускания замкнутого контура частотой и = 10 рад/с. При этих условиях
возможный вариант Q(s) имеет вид
QM = W*+"iS + 6> Л F„W = 1000- Л' + 1
(s2 + Us + 100) (5 + 10)
(15.6.3)
где fa — произвольный коэффициент, который будет выбран позже.
Относительная степень Fq(s) была выбрана равной 2, чтобы
сделать Q(s) бисобственной. T0(s) = Fq(s), так что выбор Fq(0) = 1
гарантирует точную инверсию на частоте ш = 0, т. е. C(s) будет
иметь полюс в начале координат.
Мы видим, что регулятор фактически имеет вид
Q(s) =FQ(S)[G0(s)}-1 _ (ft8 + l)(a + l)(8 + 6) .
U l-Q(s)G0(s) I-Fq(s) 6s(s2 + 24s + 240-1000/?i)
(15.6.4)
Далее предположим, что простая компенсация медленного полюса
объекта при s = — 1 в S0(s) недостаточна, потому что это привело
бы к (относительно) медленному полюсу в Si0(s), который, в свою
446 Глава 15. Параметризация SISO-регуляторов
очередь, даст медленную реакцию на входное возмущение. Чтобы
избежать это, желательно далее ограничить Q(s) так, чтобы s = — 1 был
бы нулем S0(s). Чтобы получить это, мы ищем величину $\, такую,
что So(-l) = 0 (=» Т0(-1) = Fq{-1) = 1). Используя (15.6.3), мы
потребуем
iW-D-^P-Al-i-A.^ (15.6.5)
Видно, что с этой величиной /?i знаменатель C(s) в (15.6.4) может
быть разлоэюен на мноэюители 6s(s + 23)(s + 1). Далее мы видим, что
(5 + 1) компенсируется в числителе и знаменателе регулятора] это
приводит к
v ' 60005(5 + 23) v '
Из этого последнего выражения мы видим, что только полюс в
5 = — 6 будет не поддающимся управлению со стороны эталонного
сигнала и управляемым со стороны входного возмущения. DDD
15.6.2. Проектирование ПИД-регулятора;
повторное рассмотрение
Вернемся к проектированию из разд. 15.4.2, где синтезировался ПИ-
регулятор для объекта первого порядка. Мы выяснили, что это
проектирование (основанное на компенсации полюсов разомкнутого
контура в C(s)) дало превосходное подавление выходного возмущения. В
химических процессах, однако возмущения часто лучше смоделировать,
как появляющиеся на входе объекта. Вспомним, что реакция на входное
возмущение, У^(з), определяется следующим образом:
Yd(s)=Sio(s)Di(s) (15.6.7)
Sio{s) = S0{s)G0{s) (15.6.8)
Следовательно, когда какой-либо полюс объекта скомпенсирован в
регуляторе, он остается управляемым со стороны входного возмущения
и все еще наблюдаемым на выходе. Поэтому переходный процесс от
входного возмущения будет иметь составляющую, связанную с этим
полюсом. Таким образом, компенсация медленных полюсов имеет
вредное воздействие на реакцию. Для примера снова рассмотрим проект,
определяемый выражениями (15.4.6) и (15.4.7). Реакция на единичное
ступенчатое входное возмущение показана на рис. 15.7. Здесь время
выражено в единицах v0 и рассмотрены три случая. Кривые были
получены для различных значений а (измеренных в относительных
величинах и0). Эти величины были выбраны равными 1, 2 и 5. В каждом
случае усиление модели объекта на нулевой частоте было взято равным
15.6. Нежелательные полюсы замкнутого контура 447
2 2.5 3
Время [t/v0]
Рис. 15.7. Подавление входного возмущения с компенсацией полюса объекта
для различных величин а
единице. Мы видим, что реакция имеет длинный хвост и что изменение
а лишь масштабирует реакцию, не меняя ее форму.
Причина этой проблемы — компенсация полюса в G0(s) нулем C(s).
Как показано в разд. 15.6, единственный способ удалить полюс из Si0(s)
состоит в том, чтобы выбрать Fq(s) таким образом, чтобы
нежелательный полюс был бы нулем S0(s) = 1 — Q(s)G0(s), т. е. мы требуем
а = - (15.6.9)
v0
So{-a) = О =* Т0{-а) = Fq (-а) = 1 где
Следующий результат показывает, как это можно получить.
Лемма 15.5. Рассмотрим модель объекта (15.4.1) и схему
управления, приведенные на рис. 15.1, где Q(s) = [G0(s)]~1Fq(s). Тогда
ПИ-регулятор, который не компенсирует полюс объекта, имеет вид
C(s) = KP+^-
s
КР =
2фс1шс1и0 -1
Kj = £<£ (15.6.10)
где фс1 и шС1 выбраны таким образом, чтобы получить
характеристический полином замкнутого контура в виде
Ad(s)=(—) +2фс1(—)+1
\U)clJ \ШС1/
(15.6.11)
Доказательство
Сначала параметризуем Fq(s):
ft*+ 1
OL2S2 +OL\S + \
где для обеспечения (15.6.11) мы выберем
1
а2 =
w;
<cV
а\ = 2—
(15.6.12)
(15.6.13)
448 Глава 15. Параметризация SISO-регуляторов
Тогда заметим, что
*м-1-«*>-*Штог (15614)
Это приводит к
S0{s) K0s[pL2S + а\ - pi)
Таким образом, чтобы получить ПИ-регулятор, который
компенсирует вклад полюса разомкнутого контура —v~x в реакцию на входное
возмущение, необходимо, чтобы
-oft +1
а2с*2 — аа\ + 1
FQ(-a)= - "^ , =1 (15.6.16)
Это приводит к выражению
а = ^^ (15.6.17)
/Зх = ах = я (15.6.18)
"о I/o^rf
Б эгаоле случае результат следует непосредственно из (15.6.15), что
дает
ow_^^i Aj*+_!* i (15.6.W)
G0(s)(1-Fq{s)) a2K0 a2K0s
DDD
Лемма 15.5 позволяет свести задачу проектирования к выбору одного
параметра. Чтобы сделать это, мы сначала масштабируем время
значением v0\ это приведет к масштабированию частоты множителем [^о]""1-
Если выбрать коэффициент демпфирования фС1 = 0.7, то, используя
(15.6.10), будем иметь
Go(*)C(s) = V , ' (15.6.20)
5(5 + 1)
где v — нормализованная величина шс^ а переменная s также должна
быть нормирована величиной uci.
Из (15.6.20) очевидно, что выбор одного параметра (uci) определяет
характеристику контура. Вспомним, что и^ — мера полосы пропускания
замкнутого контура в единицах полосы пропускания модели объекта и
таким образом становится определяющим параметром настройки.
Чтобы проиллюстрировать применение вышеупомянутого
результата, мы повторим моделирование, показанное на рис. 15.7, но на сей раз
15.6. Нежелательные полюсы замкнутого контура 449
-0.1
0.5 1 1.5 2 2.5г 3 3.5 4 4.5 5
Время [t/v0]
Рис. 15.8. Подавление входного возмущения без компенсации полюса объекта
будем использовать регулятор, определяемый выражением (15.6.10). В
этом случае (15.6.11) имеет вид
(—) + 2фы (—) + 1 = (fas +1) + sXo(voS + 1) (15.6.21)
Реакция на единичное ступенчатое входное возмущение показана на
рис. 15.8 для трех различных (нормализованных) значений о;с/, которые
равны 1, 2 и 5.
В отличие от результатов на рис. 15.7, когда использовалась
компенсация полюса, мы теперь видим, что реакция на входное возмущение
может быть изменена и по форме и по масштабу. Различие можно
оценить, исследуя рис. 15.8 и 15.7 для случая, когда выбрано значение
5 для отношения между полосами пропускания замкнутого контура и
объекта. Заметим однако, что [y0s +1) теперь появляется в числителе
S0{s). Si0(s) = S0(s)G0(s), так что неизбежно любой полюс разомкнутого
контура появляется или как полюс в S{0) или как нуль в S0(s).
15.6.3. Модели с интегрированием
В данном разделе мы рассмотрим модель первого порядка в сочетании
с интегратором:
G°<S> = OT) <15-6-22>
Чистый интегратор такого типа часто моделирует накопление массы,
угол поворота ротора двигателя или положение перемещающегося
объекта. Конечно, интегрирование нежелательно (по сути дела,
неустойчиво) в качестве полюса замкнутого контура, Следовательно, мы должны
применить методологию, приведенную в разд. 15.6.
450 Глава 15. Параметризация SISO-регуляторов
Вспомним из леммы 15.4, что параметризация (15.3.1) все еще имеет
силу, но функция Q(s) должна удовлетворять дополнительным
ограничениям подбора параметров. В этом случае имеются только два
ограничения, которые происходят из-за наличия полюса в начале
координат. В частности, внутренняя устойчивость требует, чтобы и Q(s) и
1 — Q{s)G0(s) должны иметь нуль в начале координат.
Поскольку (15.6.22) не имеет неустойчивых нулей, мы можем выбрать
Gi(s) = ^±^ (15.6.23)
которое требует (для собственной функции Q(s)), чтобы фильтр Fq(s)
имел относительную степень, по крайней мере, равную 2. При этом
выборе Q(s) = Fq(s)G10(s) автоматически удовлетворяет одному из
ограничений (Q(0) = 0). Второе ограничение удовлетворяется, если
Fq(s) выбран таким, что Fq(0) = 1. Подходящий вариант для Fq(s)
дан, например, в (15.4.46). Это приводит к
gM.F„M[O.M]-'_ /»-"> (,5.6.24)
v ' l-FQ{s) K0s{a2s + a1) K }
Снова мы замечаем, что регулятор (15.6.24) получен после
компенсации неустойчивых полюсов и нулей. Эта компенсация должна быть
выполнена аналитически, т. е. до реализации (см. замечание 15.4).
С точки зрения проекта, (15.6.24) все еще имеет недостаток, так как
не подавляет постоянные входные возмущения. Это происходит потому,
что Si0(s) не имеет нуля в начале координат, даже несмотря на то, что
он имеется в S0(s). Это можно исправить, если выбрать такой фильтр
Fq(s)) который приведет к тому, что чувствительность S0(s) будет иметь
два полюса в начале координат; тогда S{0(s) будет иметь один нуль в
начале координат. Самый простой выбор Fq(s)) приводящий к этому
желаемому результату, следующий:
Fq{s) = Ш = з ai\+1 г (15.6.25)
Заметим, что коэффициенты в числителе совпадают с
коэффициентами при тех же степенях s в знаменателе. Функция чувствительности
тогда имеет вид
Se(.) = 1 - FQ(s) = з+(а3*2+°2) (15.6.26)
a$s6 + a2s2 + a\S + 1
Окончательно входная чувствительность равна
Sio(s) = S0(s)G0(s) = 3^Ko2{°ZS + °2l, j_u (15-6.27)
(a353 + a2s2 + ais +1) (v0s +1)
15.6. Нежелательные полюсы замкнутого контура 451
Следовательно, постоянные входные возмущения действительно
подавляются, давая нулевую ошибку в установившемся состоянии.
Соответствующий регулятор с единичной обратной связью имеет вид
= Kd^ + K+^ + i ( 6 28)
v ' K0s(a3s + a2) У '
который опять-таки является ПИД-регулятором с коэффициентами
настройки
КР = ("о + *1)с*-сь (15 б 29)
К0&2
Kj = ^— (15.6.30)
к __ c%cl\Vq - о?з^2^о - о?з^2^1 + qj (15 6 31)
К0а\
rD = ^ (15.6.32)
Как и в предыдущих случаях, параметры ПИД-регулятора (15.6.29)-
(15.6.32) задаются непосредственно в терминах параметров
интегрирующей модели (15.6.22) и фильтра проекта (15.6.25). Этот фильтр, в
свою очередь, предназначен для первоначального выбора
характеристического полинома замкнутого контура — аз^3 + OL2S2 + a\s + 1, который
вызывает появление нуля a\s +1. Вспомнив, что общий
характеристический полином третьего порядка может быть получен объединением
комплексно-сопряженной пары и простого вещественного полюса, мы
можем записать
FD(s) = (\s2 + ^s +1) (acs +1) (15.6.33)
\шы ша J
FN(s)=(4d + acUds + l\ (15.6.34)
V ucl J
что приводит к
Обычно простой вещественный полюс размещается на том же
расстоянии от начала координат, что и комплексная пара, т. е.
ас = — (15.6.35)
а коэффициент демпфирования выбирается фС1 = 0.7; таким образом,
фильтр третьего порядка, а следовательно и ПИД-регулятор
параметризуются в терминах единственного удобного параметра настройки о^.
Если реальная система совпадает с моделью, дополнительная
чувствительность определяется фильтром Fq(s). У этой чувствительности
452 Глава 15. Параметризация SISO-регуляторов
имеется нуль, расположенный в точке
Следовательно, характеристический полином замкнутого контура
приводит к появлению нуля, который медленнее (меньше), чем меньший
из cjd, а более медленные нули приводят к большим
перерегулированиям, как было отмечено в гл. 8. Заметим, что ответственный за
перерегулирование нуль Fq(s) был вызван желанием получить нулевую
ошибку в установившемся состоянии в ответ на ступенчатое возмущение
на входе интегрирующего объекта.
15.7. Аффинная параметризация:
случай неустойчивого разомкнутого контура
В примерах, приведенных выше, мы столкнулись с некоторыми
неприятностями, когда обеспечивали расположение полюсов всех функций
чувствительности замкнутого контура (особенно входной чувствительности
S{0) в желаемой области комплексной плоскости. В данном разделе мы
упростим эту процедуру, рассматривая общую задачу проектирования,
в которой объект разомкнутого контура может иметь один (или
несколько) полюсов в нежелательных областях. Мы не будем давать
формальное определение нежелательной области, но эвристически можно было
бы ожидать, что она включает все неустойчивые полюсы, устойчивые
полюсы, которые находятся «близко» к началу координат (т. е. приводят
к замедлению переходных процессов) и слабо демпфированные полюсы
(т. е. приводящие к колебательным переходным процессам).
В предыдущем разделе мы пришли к выводу, что требуются
дополнительные интерполяционные ограничения на Q(s), чтобы устранить
нежелательные полюсы из входной чувствительности Si0(s). В примерах
проектов, представленных ранее, мы выбирали Q(s) так, чтобы явно
обеспечить ограничения подбора параметров. Однако это —
утомительная задача и приводит к следующему вопросу: можем ли мы
параметризовать C(s) таким способом, чтобы интерполяционные ограничения,
данные в лемме 15.4, удовлетворялись бы автоматически? Ответ —да
и решение дано в следующей лемме.
Лемма 15.6 (Аффинная параметризация нежелательных
полюсов разомкнутого контура). Рассмотрим контур управления с одной
степенью свободы для объекта с номинальной моделью G0(s) = ^Tffy-
Мы предполагаем, что B0(s) и A0(s) — взаимно простые полиномы
и что G0(s) может содержать нежелательные полюсы {включая и
неустойчивые полюсы).
15.7. Аффинная параметризация: случай неустойчивого разомкнутого контура 453
В этом случае номинальный замкнутый контур будет внутренне
устойчив, а все функции чувствительности будут содержать только
эюелаемые полюсы тогда и только тогда, когда передаточная функция
C(s) параметризована следующим образом:
где
а) Qu{s) — собственная устойчивая передаточная функция,
содержащая эюелаемые полюсы и
б) P(s) и L(s) — полиномы, удовлетворяющие следующему уравнению
назначения полюсов:
A0{s)L(s) + В0(з)Р(з) = E{s)F(s) (15.7.2)
где E(s) и F(s) — полиномы подходящих степеней, которые имеют
нули, находящиеся в желаемой области комплексной плоскости, но,
с другой стороны, произвольны.
Доказательство
Для простоты мы предполагаем, что все полюсы в A0(s) лежат в
нежелательной области (см. замечание 15.7 для более общего случая, в
котором рассматривается смесь полюсов). Без потери общности, мы
запишем Q(s) в виде отношения двух полиномов:
ew-Й <15ХЗ)
что дает
°[S) ~ 1 - Q(»)G0(s) ~ B(s) - P(s)B0(s) [lbJA)
Из выражения (15.7.3) мы видим, что необходимые и достаточные
условия для интерполяционных ограничений леммы 15.4
удовлетворяются, если:
1) нули E(s) лежат в желаемой областщ
2) A0(s) является сомножителем P(s), т. е. существует полином
P(s) такой, что P(s) = A0(s)P(s) и
3) A0(s) является сомножителем [l — Q(s)G(s)].
454 Глава 15. Параметризация SISO-регуляторов
Однако
l-Q(S)G0(s) = l-%S\BAo{(S\ (15.7.5)
E(s)A0(s)
P(s)B0(s)
= E(s)-P(s)B0(s)
E(s)
Следовательно, чтобы удовлетворить 3), должен существовать
полином L(s), такой, что
E{s)-P(s)B0(s)=L{s)A0{s) (15.7.6)
или _ ___
L{s)A0{s) + P(s)B0(s) = E(s)F(s) (15.7.7)
где мы задаем E(s) = E(s)F(s).
Рассмотрим (15.7.7) как стандартное уравнение назначения
полюсов из гл. 7. Тогда, выбирая порядки E(s)}F(s),L(s)^P(s), мы найдем
единственное решение L(s) и P(s).
Получение единственного решения (L(s),P(s)) уравнения (15.7.7) -
стандартный алгебраический^ результат, из которого можно
получить любое другое решение (L(s),P(s)) следующим образом:
L(s)_L(s) B0(s)
W)~W)~Qu{)lm { ]
E(s)-E(s)+Qu{s)E(s) (15J-9)
где Qu{s) —устойчивая собственная передаточная функция, не
имеющая нежелательных полюсов. (Проверьте, что это решение
удовлетворяет (15.7.7).)
Подставляя (15.7.7) в (15.7.4), видим, что
C(s) = Щ (15.7.10)
L{s)
Окончательно, используя (15.7.8) и (15.7.9) в (15.7.10), мы видим,
что любой регулятор, удовлетворяющий эюелаемым условиям, моэюет
быть параметризован, как в (15.7.1) и (15.7.2). DDD
Замечание 15.5. Уравнение (15.7.2) обеспечивает связь между
аффинным параметризованным результатом и методами назначения
полюсов, рассмотренными в гл. 7. □□□
15.7. Аффинная параметризация: случай неустойчивого разомкнутого контура 455
Замечание 15.6. Фактически, лемма 15.6 просто дает
автоматический путь параметризации Q(s) так, чтобы интерполяционные
ограничения, данные в лемме 15.4, были удовлетворены. Действительно,
подставляя (15.7.7), (15.7.8), (15.7.9) в (15.7.3), мы получаем, что
исходное выражение Q(s) теперь ограничено формой
Q(s) = A°{S)
+ Qu{s)
(15.7.11)
F{s) [E{s) ™v ' E{s) J
где Qu{s) содерэюит желаемые полюсы. Показано, что эта форма для
Q(s) автоматически гарантирует интерполяционные ограничения (а)-
(в) леммы 15.4. DDD
Замечание 15.7. Если A0(s) содерэюит сочетание желаемых и неэюе-
лаемых полюсов, то мы моэюем записать
A0{s)=Ad{s)Au{s) (15.7.12)
где Au(s) содерэюит нежелательные полюсы. В этом случае мы моэюем
записать, что E(s) = Ad(s)E(s) и (15.7.2) дает
Ad(s)Au(s)L{s) + B0{s)P(s) = Ad(s)E(s)F{s) (15.7.13)
Ясно, что это уравнение требует существования такого P(s), что
P(s) = P(s)Ad(s), и, следовательно, (15.7.2) понижается до
Au{s)L{s) + B0{s)P{s)=E{s)F{s) (15.7.14)
Если A0(s) содерэюит только желаемые полюсы, то A0(s) = E(s),
Au(s) = 1 и E(s) = 1 и можно взять L(s) = F(s) и P(s) = 0.
Результат леммы 15.6 тогда сводится к результату леммы 15.1.
Итак, в этом случае мы имеем
Q{s) = Qu{s) (15.7.15)
DDD
Проиллюстрируем использование леммы 15.6 следующим примером.
Пример 15.5. Рассмотрим номинальную модель объекта
G°W=(S-l)~('+4) <15X16>
Пусть требуется, чтобы все полюсы замкнутой системы лежали
на комплексной плоскости левее точки —0.5. Потребуем также,
чтобы регулятор обладал интегрирующими свойствами.
а) Надо найти конкретный регулятор, который удовлетворяет этим
условиям.
б) Следует параметризовать все регуляторы, которые
удовлетворяют этим условиям.
456 Глава 15. Параметризация SISO-регуляторов
Решение
а) Заметим, что полюс разомкнутого контура в точке —4 находится
в желаемой области. Кроме того, так как требуется, чтобы
регулятор обладал интегрирующими свойствами, то функция L(s) в
(15.7.10) должна иметь форму sL(s).
Решение (15.7.14) дает
з(з - l)L(s) + (s- A)P{s) = E{s)F{s) (15.7.17)
Для единственного решения выберем степени E(s)F(s), L(s) и
P(s), равными 3, 1 и 1 соответственно. Для определенности
выберем _
E(s)F(s) = (s2 + 4s + 9) (s + 10)
Найдем, что
Tt Ч 263
L{s)=8 + —;
P(s) =--(173s+ 135)
о
(15.7.18)
(15.7.19)
Следовательно, частное решение будет
c(s)=J173S + 135)(s + 4)
,(6*+ 263) (15'7-20»
б) Все возмооюные решения могут быть выраэюены как в (15.7.1) и
после некоторых упрощений получим
С(в) = т
' (173s +135)
6(s2 + 4s + 9)
Г s(6s + 263) 1
[б(«2-
-t-4s + 9)(s + 4)J
+ Qu(s)
-Qu(«)[
Г (s-1) "
[(s2 + 4s + 9)
(s-4) 1
(s2+4s + 9)(s
+ 4)J
(15.7.21)
любая собственная передаточная функция, имеющая
DDD
где Qu(s)
полюсы в желаемой области.
Параметризация выражения (15.7.1) приводит к следующему
параметризованному варианту номинальных чувствительностей:
A0(s)L(s) B0(s)A0(s)
E(s)F(s)
B0(s)P(s)
T°{S)= E(s)F(s)+QM
5io(5)-^sTF(sT"Qu()
fS_A0(s)P(s) , „
UmW~ E(s)F(s) +Qu[S)
E(s)F(s)
B0{s)A0{s)
E(s)F(s)
(B0(s))2
E(s)F(s)
(A0(s))2
mm
(15.7.22)
(15.7.23)
(15.7.24)
(15.7.25)
15.7. Аффинная параметризация: случай неустойчивого разомкнутого контура 457
Структура, обеспечивающая устойчивость
Рис. 15.9. Q-параметризация неустойчивых объектов
Параметризация регулятора, разработанная выше, может быть
также описана в форме структурной схемы. Выражение для C(s)
непосредственно подразумевает, что регулятор такой, как на рис. 15.9.
Мы видим, что на основе принципа суперпозиции входной сигнал
U(s) на рис. 15.9 может быть записан как сумма двух сигналов: один,
идущий от верхнего контура через -^rfy и другой, идущий через Qu{s).
Интересно также исследовать класс всех регуляторов,
обеспечивающих устойчивость системы, для предварительно
стабилизированного объекта. Для этого рассмотрим конфигурацию, показанную
на рис. 15.10. Заметим, что предварительно стабилизированный
объект имеет в замкнутом состоянии передаточную функцию ^°лу, где
A0(s)L(s) + B0(s)P(s) = E(s)F(s). Следовательно, структура на
рис. 15.10 соответствует структуре на рис. 15.1, где G0{s) заменена
предварительно стабилизированным объектом.
Простое вычисление показывает, что эквивалентный регулятор с
единичной обратной связью на рис. 15.10 будет
^ ,Qx(s)E(s)F(s)+P(s)(F(s)-Qx(s)B0(s))
C(s) =
L(s)(F(s)-Qx(s)B0(s))
(15.7.26)
Используя равенство A0(s)L(s) + B0(s)P(s) = E(s)F(s), это
выражение можно упростить следующим образом:
с(») =
Qx(s)A0(s)L(s) + P(s)F(s)
L{s)F(s) - L(s)Qx{s)B0{s)
(15.7.27)
458 Глава 15. Параметризация SISO-регуляторов
Предварительно
стабилизированный объект
О
Номинальная модель
замкнутого контура
Рис. 15.10. Q-интерпретация предварительно стабилизированного объекта
Тогда получим следующий результат:
Лемма 15.7. Рассмотрим структуры систем управления, показанные
на рис. 15.9 и 15.10.
1. Если передаточная функция Qx{s) устойчива, то структура на
рис. 15.10 всегда может быть представлена структурой рис. 15.9,
где Qu{s) имеет следующее значение:
Qu(s) =
Qx(s)L(s)
F(s)
(15.7.28)
2. Если передаточная функция у*Ду устойчива, то структуру на
рис. 15.9 можно преобразовать в структуру рис. 15.10, где Qx{s)
имеет следующее значение:
F(s)Qu(s)
Qx(s) =
ад
(15.7.29)
Доказательство
Приравнивая C(s) и C(s), мы найдем, что отношение меэюду Qu{s) и
Qx{s) задается равенством (15.7.28). Отсюда следует искомый
результат. DDD
Замечание 15.8. Часть 1 из вышеупомянутого результата
неудивительна; контур на рис. 15.10 явно устойчив для устойчивой Qx{s),
так что по лемме 15.6 регулятор может быть выражен так, как на
рис. 15.9, для некоторой устойчивой Qu(s)- Обратное преобразование,
15.8. Дискретные системы 459
данное в части 2, является более интересным, так как оно
показывает, что существуют структуры типа, показанного на рис. 15.9,
которые не могут быть выраэюены структурой, представленной на
рис. 15.10. Однако рассмотрение выражения (15.7.22) указывает, что
будет низкая чувствительность, если Qu{s) выбрать близкой к В^?К
в интересующем диапазоне частот. Таким образом, может быть
разумно выбрать Qu(s) так, чтобы %^ была устойчивой. В этом
случае, часть 2 леммы 15.7 показывает, что можно предварительно
стабилизировать объект и затем просто использовать лемму 15.1.
15.8. Дискретные системы
На протяжении всей главы мы иллюстрировали аффинную
параметризацию, используя случай непрерывных объектов. Однако все методы
являются алгебраическими, поэтому они могут быть расширены и на
дискретные системы. В качестве простой иллюстрации рассмотрим
следующий пример.
Пример 15.6. Рассмотрим дискретный контур управления, где
модель объекта
Goq{z) = %*& (15.8.1)
и Aoq(z) имеет, по крайней мере, один корень вне открытого
единичного круга.
Нужно сформулировать эквивалентную форму леммы 15.2 для
дискретных неустойчивых в разомкнутом состоянии систем.
Решение
Сначала заметим, что аффинная параметризация в неустойчивом
дискретном случае дает
Tog{z)- Eq(z)Fq(z)+Q"{z) Eq{z)Fq{z) ■ (15,8-2)
где
Aoq(z)Lq(z) + Boq{z)Pq(z) = Eq(z)Fq(z) (15.8.3)
и где мы предполагаем, что Boq(z) не обращается в нуль на
единичной окружности. Тогда при постоянном входном возмущении нулевая
ошибка отслеживания в установившемся состоянии может быть
получена только если
SioQ(z)\z=i = 0 => Lq(l) - Qq(l)Boq(l) = 0 (15.8.4)
460 Глава 15. Параметризация SISO-регуляторов
Таким образом, дискретный аналог (15.3.15) выглядит так:
Qq(z) = (z- \)Qq{z) + |^Щ«г) (15.8.5)
где Qq{z) —любая устойчивая передаточная функция, a Qaq(z)
—также любая устойчивая передаточная функция, которая дополнительно
удовлетворяет условию Qaq(l) = 1-
Заметим, что дельта-форма выражения (15.8.5) имеет вид
Qsto) = Шч) + J£§)Q*sW <15-8-6)
где Qs(j) —любая устойчивая передаточная функция, a Qasil) —любая
устойчивая передаточная функция, которая дополнительно
удовлетворяет условию Qadity = 1- DDD
Заключительный момент в связи с цифровым Q-синтезом — это то,
что нули квантования должны всегда рассматриваться как
нежелательные значения полюсов замкнутого контура (независимо от того,
устойчивы они или нет). Это следует из выводов, сделанных в гл. 14
относительно межтактовой реакции.
15.9. Резюме
• В предыдущей части книги было установлено, что свойства
замкнутого контура связаны сетью компромиссов. Следовательно, настройка
одного свойства автоматически воздействует на другие свойства. Это
требует понимания взаимосвязей и сознательных решений
компромисса.
• Фундаментальные законы компромиссов, представленные в
предыдущих главах, позволяют определить недостижимые условия и
установить, где дальнейшие усилия имеют смысл, а где будут потрачены
впустую.
• Однако при максимальном приближении проекта к тонкому
компромиссу, предыдущие формулировки фундаментальных законов не
оправдывают ожиданий, потому что трудно реализовать
характеристики проекта, настраивая систему в терминах коэффициентов
числителя и знаменателя передаточной функции регулятора,
поскольку влияние полюсов и нулей чувствительности на разрешение
компромиссов очень нелинейно, сложно и тонко.
15.9. Резюме 461
Этот недостаток стимулирует потребность в альтернативном
представлении регулятора, которое
о позволяет проектировать его более явно в терминах интересующих
свойств (чувствительностей);
о делает проблему устойчивости ясной и
о объясняет влияние регулятора на компромиссы.
Эта потребность реализуется аффинной параметризацией, известной
также как параметризация Йола.
Перечень результатов для устойчивых систем:
о С = Q(l — QG0)~l, где проектирование выполняется выбором
передаточной функции Q.
о Номинальные чувствительности:
T0 = QG0 (15.9.1)
S0 = l-QG0 (15.9.2)
Sio = {l-QG0)G0 (15.9.3)
SU0 = Q (15.9.4)
о Реальные чувствительности1:
Sa = l + QG0GA = Y^QGe (15'9'5)
T = QGSA (15.9.6)
S = S0SA (15.9.7)
Si = GS0SA (15.9.8)
Su = QSA (15.9.9)
Отметим следующие преимущества аффинной параметризации:
о Смысл номинальной устойчивости более понятен.
о Известная характеристика G0 и характеристика, которую
определяет инженер по системам управления (Q), находятся в тесной
взаимосвязи, Т0 = QG0 (мультипликативная в частотной
области); независимо от того, будет ли проектировщик работать с
этой характеристикой с самого начала или предпочтет начать с
техологии синтеза, а затем преобразует полученные результаты,
простое мультипликативное отношение QG0 обеспечивает глубокое
понимание компромиссов конкретной задачи и предлагает прямые
средства реализации проекта, формируя Q.
о Чувствительности обладают аффинным свойством в Q, что
является большим преимуществом для методов синтеза, основанных
См. определения ошибок моделирования в разд. 3.9.
462 Глава 15. Параметризация SISO-регуляторов
на критериях численной минимизации (см. гл. 16 для детального
обсуждения методов оптимизации, которые используют эту
параметризацию).
• Следующие моменты важны для того, чтобы избежать некоторых
общих неправильных представлений:
о Связанные компромиссы — не последствие аффинной
параметризации: они существуют сами по себе и имеют место для любого
линейного стационарного регулятора, включая ЛКР, ПИД,
регулятор на основе размещения полюсов и Hqq.
о Мы использовали аффинную параметризацию, чтобы сделать
общие компромиссы более видимыми и выработать прямые средства
разрешения компромиссов для инженера по системам управления;
это не следует смешивать с методами синтеза, которые
позволяют в аффинной параметризации выбрать конкретные параметры,
чтобы синтезировать регулятор.
о Тот факт, что функция Q должна аппроксимировать инверсию
модели на частотах, где чувствительность предполагается
маленькой, имеет всеобщий характер и выдвигает на первый план
фундаментальную важность инверсии в управлении. Это не обязательно
подразумевает, что регулятор С должен содержать эту
приблизительную инверсию как сомножитель, и не нужно смущаться всеми
«за» и «против» этого конкретного выбора проекта.
• ПИ- и ПИД-проекты основаны на аффинной параметризации:
о ПИ- и ПИД-регуляторы традиционно настраиваются в терминах
своих параметров.
о Однако систематическое проектирование, решение компромиссов
и решение, является ли ПИ(Д)-регулирование достаточным,
становятся значительно более легкими в аффинной структуре,
основанной на моделировании.
о Помещение модели первого порядка в аффинную структуру
автоматически формирует ПИ-регулятор.
о Помещение модели второго порядка в Q-структуру автоматически
формирует ПИД-регулятор.
о Все компромиссы и понятия предыдущих глав применимы также
и к ПИД-контурам управления.
о Вопрос, является ли ПИ(Д)-регулирование достаточным для
конкретного процесса, непосредственно связан с тем, может ли модель
первого (второго) порядка хорошо приблизить процесс до частот,
где характеристика ограничена другими факторами типа
задержек, насыщений исполнительного механизма, шума датчика или
существенно неизвестной динамикой.
15.9. Резюме 463
о Модели первого и второго порядка легко могут быть получены на
основании временных (переходных) характеристик (гл. 3).
о Глава дает явные формулы для процессов первого порядка, с
запаздыванием, второго порядка и интегрирующих.
о Используя этот метод, инженер по системам управления работает
непосредственно в терминах свойств наблюдаемых процессов
(время нарастания, усиление и т. д.) и параметров замкнутого контура;
этот подход обеспечивает понятные основания для решения
компромиссов. ПИ(Д)-параметры получаются автоматически.
о Поскольку формулы ПИ(Д)-параметров выражаются явно в
терминах физических параметров процесса, ПИ(Д)-усиления могут
быть скорректированы в соответствии с измеренными
изменениями параметров без особых усилий. (Это возможно, например,
применить к запаздываниям, зависящим от скорости.)
о Подход не останавливается только на компенсации или только
на смещении полюсов разомкнутого контура —оба возможны и
связаны с различными компромиссами.
• Перечень результатов для систем, имеющих запаздывания:
о Ключевой вопрос —это то, что запаздывания не могут быть
инвертированы.
о В этом смысле запаздывания похожи на неминимально-фазовые
нули объекта, которые также не могут быть устойчиво
инвертированы.
о Запаздывания величины Т вызывают компромиссы, подобные тем,
которые возникают от неустойчивых нулей при s = Т/2.
о Один из первых регуляторов, имеющий дело с неинвертированно-
стью задержек, — известный упредитель Смита.
о Компромиссы упредителя Смита могут быть просто
проанализированы в аффинной структуре. Действительно, структуры очень
похожи. Следует однако предостеречь, что не нужно путать
формируемое при аффинной параметризации представление
регулятора с конкретной технологией синтеза упредителя Смита.
• Перечень результатов для неустойчивых систем:
о Все стабилизирующие регуляторы неустойчивого объекта имеют
форму
P(s),n (Ms)
ад Уи^ад"
где Qu (s) — любая собственная рациональная устойчивая
передаточная функция.
464 Глава 15. Параметризация SISO-регуляторов
о Полиномы A0(s), B0(s), E(s), P(s) и L(s) удовлетворяют условию
A0{s)L{s) + B0{s)P{s) = E{s)F{s) (15.9.11)
где E(s) и F(s) -—полиномы подходящих степеней, являющиеся
произвольными за исключением того, что они должны содержать
желаемые нули,
о Любые стабилизирующие регуляторы могутv использоваться для
получения исходных полиномов {E(s), P(s), L(s)}.
15.10. Литература для последующего чтения
Общие вопросы
1. Doyle, J.С, Francis, B.A., and Tannenbaum, A.R. (1992). Feedback Control
Theory. Macmillan Publishing Company.
2. Francis, B.A. (1987). A Course in #oo Control Theory. Lecture Notes in
Control and Information Sciences, Vol. 8, Springer-Verlag, New York.
3. Morari, M. and Zaiiriou, E. (1989). Robust Process Control. Prentice-Hall,
Englewood Cliffs, N.J.
4. Vidyasagar, M. (1985). Control System Synthesis: A Factorization Approach.
MIT Press, Cambridge, Mass.
5. Zhou, K., Doyle, J.C., and Glover, K. (1996). Robust and Optimal Control
Prentice-Hall, Upper Saddle River, N.J.
Проектирование ПИД-регуляторов на основе моделирования
1. Graebe, S.F. and Goodwin, G.C. (1992). Adaptive PID design exploiting partial
prior information. Preprints of the J^th IFAC Symp. on Adaptive Systems in
Control and Signal Processing, AC ASP '92, Grenoble, France, 395-400.
2. Morari, M. and Zafiriou, E. (1989). Robust process control. Prentice-Hall,
Englewood Cliffs, N.J.
3. Rivera, D., Morari, M., and Skogestad, S. (1986). Internal model control. PID
controller design. Ind. Eng. Chem. Process Des. Dev., 25:252-265.
Проектирование ПИД-регуляторов на основе моделирования
для моделей выше второго порядка
1. Isaksson, A.J. and Graebe, S.F. (1999). Analytical PID parameter expressions
for higher order systems. Automatical to appear.
2. Person, P. (1992). Towards Autonomous PID Control. PhD Thesis. Lund
University.
3. Rivera, D., Morari, M. (1987). Control-relevant model reduction problems for
SISO %, Woo and /i-controller synthesis. International Journal of Control,
46(2):505-527.
15.11. Задачи для читателя 465
Упредитель Смита
1. Astrom, К. (1977). Frequency domain properties of Otto Smith regulator.
International Journal of Control, 26:307-314.
2. Smith, 0. (1958). Feedback Control Systems. McGraw-Hill, New York.
V
Аффинная параметризация
1. Desoer, С, Liu, R., Murray, J., and Saeks, R. (1980). Feedback systems
design: The fractional representation approach to analysis and synthesis. IEEE
Transactions on Automatic Control, 25(3):399-412.
2. Youla, D., Jabr, H., and Bongiorno, J. (1976). Modern Wiener-Hopf design
of optimal controllers. Part II: The multivariable case. IEEE Transactions on
Automatic Control, 21(3):319-338.
15.11. Задачи для читателя
Задача 15.1. Для объекта, имеющего номинальную модель
опишите класс регуляторов Q(s), которые имеют нулевую
установившуюся ошибку для постоянных возмущений.
Задача 15.2. Для того же объекта, что и в задаче 15.1, найдите
функцию Q(s), такую, что дополнительная чувствительность имеет
доминирующие полюсы, расположенные в точках —2±jl.5.
Задача 15.3. Для данного объекта с номинальной моделью G0(s) =
(s + 1)~2 охарактеризуйте класс регуляторов, которые обеспечивают
нулевую установившуюся ошибку для синусоидального эталонного
сигнала частоты 0.5 рад/с.
Задача 15.4. Рассмотрим неустойчивый объект, имеющий
номинальную модель G0{s) = (s — I)""1. Опишите с использованием простейших
P(s) и L(s) класс всех стабилизирующих регуляторов. Подсказка:
заметьте, что этот объект может быть стабилизирован использованием
простого пропорционального регулятора.
Задача 15.5. Рассмотрим объект, имеющий модель, заданную
выражением
Go{s) ~ (*+1)(в+з) (151L2)
Предположим, что выход этого объекта должен поддерживаться
постоянным в присутствии входного возмущения. Далее предположим,
466 Глава 15. Параметризация SISO-регуляторов
что входное возмущение имеет постоянную составляющую и переменную
составляющую со спектром, распределенным в полосе частот [0,4] рад/с.
15.5.1. Синтезируйте Q(s) путем компенсации устойчивых полюсов
G0{s). Доминирующим компонентом в знаменателе T0(s) должен
быть сомножитель s2 + 6s + 16.
15.5.2. Проверьте ваше решение с помощь jo схемы моделирования в
файле nmpq.mdl пакета SIMULINK.
15.5.3. Измените спроектированный регулятор так, чтобы улучшить
компенсацию возмущения, не повлияв существенно на отслеживание
ступенчатого эталонного сигнала.
Задача 15.6. Рассмотрим структуру управления на основе внутренней
модели, показанную на рис. 15.1, и ваш окончательный проект из задачи
15.5. Предположим, что истинная модель объекта имеет вид
G(s) = G0(s)-±- = , 2}'0ul8o^f1) 1N (15.11.3)
v ' 0K Jrs + 1 (s + l)(s + 3)(rs + l) v }
Проанализируйте характеристики вашего проекта для г = 0.05 и
г = 0.2. Если необходимо, заново спроектируйте ваш регулятор.
Задача 15.7. Рассмотрим дискретный регулятор, имеющий
передаточную функцию
ЗгМ = Z~^4- (15-П-4)
z — i
Найдите общую характеристику для передаточных функций всех
дискретных объектов, которые стабилизируются этим регулятором.
(Подсказка: используйте в обратной форме параметризацию всех
стабилизирующих регуляторов для неустойчивых объектов — т. е. поменяйте
ролями объект и регулятор.)
Задача 15.8. Рассмотрим непрерывный объект, имеющий модель
5 + 1
Предположим, что желательно управлять этим объектом в цифровой
форме, с квантователем и экстраполятором нулевого порядка и
интервалом квантования А = 0.1 с; тогда нам потребуется дискретная модель,
которая (см. рис. 12.6) определяется формулой
GhoG0(z) = J'f^i) (15Л1-6)
Используя структуру управления на основе внутренней модели,
спроектируйте Qq(z) таким образом, чтобы составляющие реакции
замкнутого контура были по крайней мере быстрее, чем (0.6)*. Заметьте, что
15.11. Задачи для читателя 467
это требование должно также быть удовлетворено при компенсации
входного возмущения.
Задача 15.9. Рассмотрим объект, имеющий номинальную модель
"•И" (.Ж2) W °£R+' (15П'7)
15.9.1. Предложите метод синтеза ПИД-регуляторов, следуя
рассуждениям разд. 15.4, Оцените вашу методологию с помощью
моделирования для a Е [0.1,20]. Включите в ваш анализ идеи, представленные
в гл. 8.
15.9.2. Сравните ваши результаты с полученными с помощью настроек
Коэна—Куна и оцените результаты для того же самого диапазона
значений а.
Задача 15.10. Предположим, что неустойчивый объект имеет
передаточную функцию G0{s) = B0(s)/A0{s)) такую, что полином A0(s)+B0(s)
имеет все корни с отрицательными вещественными частями.
Параметризуйте все стабилизирующие регуляторы для этого объекта
как функцию A0(s) и B0(s).
Задача 15.11. Разработайте механизм противонакопления для
структуры управления на основе внутренней модели в параллель к структуре,
разработанной в гл. 11.
Глава 16
Проектирование систем
управления на основе
оптимизации
16.1. Введение
До сих пор мы видели, что ограничения проекта являются результатом
множества различных источников:
• структурные свойства объекта типа неминимально-фазовых нулей
или неустойчивых полюсов;
• возмущения — их частотный спектр, точка приложения и
возможность измерить;
• структурные свойства системы и вытекающие отсюда законы
компромисса и
• интегральные ограничения и вытекающие отсюда интегральные
законы компромисса.
Тонкость и сложность сети появляющихся компромиссов, которую
проектировщик должен разрешить, определяет интерес к тому, что
называется проектированием систем управления на основе заданных
критериев или теорией оптимального управления: задача здесь состоит в
том, чтобы выразить цель управления в математическом критерии и
решить его для регулятора, который (в зависимости от формулировки)
максимизирует или минимизирует этот критерий.
Возникают три вопроса:
1. Является ли оптимизация критерия математически осуществимой?
2. Насколько хорош полученный регулятор?
3. Может ли ограничение сети компромиссов быть обойдено
оптимизацией?
Вопрос 1 имеет утвердительный ответ для множества критериев. В
частности, квадратичные формулировки позволяют удобно
манипулировать ими. Аналогично, и аффинная параметризация из гл. 15 является
16.2. Оптимальный 0-синтез (аффинный) 469
средством достижения, потому что она дает функции чувствительности,
аффинные в искомой переменной Q.
Ответ на вопрос 2 имеет два аспекта: а) Насколько хорош регулятор в
соответствии с критерием? Ответ: он оптимален по своей конструкции;
однако б) Насколько хороша реализация контура управления
относительно исходных эксплуатационных требований? Ответ: столь же
хороша или столь же плоха, насколько используемый критерий обеспечивает
цели проектирования и разрешение действующих компромиссов. Плохо
сформулированный критерий просто приведет к регулятору, который
оптимально осуществляет слабые цели. Однако когда критерий проекта
выбран хорошо, можно синтезировать регулятор, который было бы
трудно осуществить методами, рассмотренными нами к настоящему времени;
это особенно касается систем со многими переменными, рассмотренных
в следующей части книги.
На вопрос 3 можно просто ответить — нет: все линейные
стационарные регуляторы, синтезировались ли они эмпирическим методом,
методом назначения полюсов или с помощью оптимизации, подчинены
одним и тем же фундаментальным законам компромиссов.
16.2. Оптимальный Q-синтез (аффинный)
16.2.1. Общие идеи
В гл. 15 было показано, как Q-синтез может использоваться для
управления устойчивыми и неустойчивыми объектами. Главные трудности
методов связаны с требованием обеспечить внутреннюю устойчивость
и в то же самое время получить приемлемые характеристики контура.
Требование устойчивости приводит к некоторым структурам
функций чувствительности. Довольно трудно одновременно удовлетворить и
структурным требованиям, и заданным эксплуатационным
характеристикам. Альтернативным подходом к вышеупомянутым методам может
быть такой: сначала определить целевую характеристику для свойств
контура, т. е. дополнительную чувствительность. Тогда функция Q(s)
может быть найдена в пределах класса всех Q(s), которые гарантируют
внутреннюю устойчивость таким образом, что расстояние от реальной
дополнительной чувствительности до целевой характеристики будет
минимизировано. Этот подход облегчен тем фактом (уже рассмотренным),
что функции номинальной чувствительности — аффинные функции от
Q(s). Для определения расстояния используется специальная мера,
представляющая собой специфическую процедуру оптимизации.
Существует широкое разнообразие возможных вариантов. Мы проиллюстри-
470 Глава 16. Проектирование систем управления на основе оптимизации
руем это, используя конкретный подход, основанный на квадратичной
оптимизации. Она была выбрана из-за своей простоты и потому, что
может быть использована без обращения к сложным математическим
вопросам кроме тех, которые уже рассмотрены.
16.2.2. Квадратичный оптимальный Q-синтез
Предположим, что целевая функция H0(s) выбрана для
дополнительной чувствительности T0(s). Мы видели в гл. 15, что, если мы имеем
некоторый стабилизирующий регулятор C(s) = P(s)/L(s)) тогда все
стабилизирующие регуляторы могут быть выражены, как в (15.7.1),
для устойчивой функции Qu{s). В этом случае функция номинальной
дополнительной чувствительности на основе (15.7.23) будет иметь вид:
T0(s) = Hl(s) + Qu(s)V(s) (16.2.1)
где Hi(s) и V(s) — устойчивые передаточные функции вида
адррр b0(s)a0(s)
Я1(5)-ВДВД' V{S)~ E(s)F(s) (16-2'2)
Пусть S обозначает множество всех вещественных рациональных
устойчивых передаточных функций; тогда задача квадратичного
оптимального синтеза может быть представлена следующим образом:
Задача (Задача квадратичного оптимального синтеза).
Найти Qu{s) Е S, такую, что
Q°u(s) = arg mm ||#e-Te|g = arg min \\Н0-Нг-QUV|g (16.2.3)
Qu[s)€S Qu{s)€S
где квадратичная норма (также называемая #2-нормой) функции1 X(s)
определяется следующим образом:
п-[Н
_ 1
оо > * -
X{ju)X(-ju)du
2
(16.2.4)
Замечание 16.1. Оптимизационный подход может также
использоваться и для синтеза дискретных регуляторов. В этом случае
квадратичная норма функции Xq(z) определяется следующим образом:
М|2= [^ f** Xg(e1»)Xq(e-ndv
г2тг
(16.2.5)
DDD
1 Мы предполагаем, что X(s) — вещественная функция s.
16.2. Оптимальный Q-синтез (аффинный) 471
Чтобы решить эту задачу, нам сначала нужен предварительный
результат, который является расширением теоремы Пифагора.
Лемма 16.1. Пусть S0CS есть множество всех вещественных
строго собственных устойчивых рациональных функций и пусть S^ —
множество всех вещественных строго собственных рациональных
функций, аналитических в области 5R{s} < 0. Кроме того, предположим,
что Xs(s) G 50 и Xu(s) Е S^~. Тогда
\\Xs + Xu\\l = \\Xs\\l + \\Xu\\l (16.2.6)
Доказательство
[1 г°° 1
— j_JC9{ju)Xu{-jv)du>\
(16.2.7)
но
±- Г Xs{joj)Xu{-ju)<kj = -^ / Xs{s)Xu{-s)ds (16.2.8)
где С —замкнутый контур, показанный на рис. С.4 в приложении С.
Заметим, что произведение Xs(s)Xu(—s) является аналитическим в
закрытой области, ограниченной контуром С. Тогда после применения
теоремы С.7 мы видим, что интеграл в (16.2.8) равен нулю, откуда
следует требуемый результат. DDD
• Далее нам нужно расщепить общую функцию X(s) на устойчивую
часть Xs(s) и неустойчивую часть Xu(s). Мы можем сделать это с
помощью дробно-рационального разложения. Устойчивые полюсы и их
вычеты составляют устойчивую часть.
Заметим, что функция стоимости, данная в (16.2.3), имеет общую
форму
Q°u(s) = arg min \\W(s) - Qu(s)V(s)f2 (16.2.9)
где W(s) = H0(s)—Hi(s), H0(s) — искомая дополнительная
чувствительность, a Hi(s)— такая же, как в (16.2.2).
Решение вышеупомянутой задачи тогда описывается следующей
леммой.
Лемма 16.2. Если V(s) не имеет никаких нулей на мнимой оси, то
arg min \\W(s) - Qu(s)V(a)\\l = (^(e))-1^^)"1 W(e)], (16.2.10)
где
V(s) = Vm(s)Va(s) (16.2.11)
такая, что Vm(s) является сомножителем с полюсами и нулями в
открытой ЛПП и Va{s) —сомножитель с единичным усилением, по-
472 Глава 16. Проектирование систем управления на основе оптимизации
стоянным на всех частотах и где [X]s обозначает устойчивую часть
X.
Доказательство
Подставляя (16.2.11) в (16.2.10), получим
\\W-QuVmVa\\22 = \\Va(V-lW-QuVm)\\l = ^V~lW-QuVm\\l (16.2.12)
где мы используем тот факт, что \Va\ является константой (потому
что Va имеет постоянное усиление на всех частотах).
Далее, разложим V~l (s)W(s) на устойчивую составляющую
[^a"1(5)^(5)]s и неустойчивый составляющую \yal{s)W(s)\Ui т. e.
запишем
V-\S)W{s) = [V-l{s)W{s))s + [V-\s)W{S))u (16.2.13)
Учитывая декомпозицию (16.2.13), мы получим
\\V~lW - QuVm\\l = \\[V-lW]u + [V^W], - QuVmf2 (16.2.14)
Если теперь применить лемму 16.1, то
\\W - QuVmVa\\l = WiV-'WluWl + WW^W]. - QuVm\\l (16.2.15)
Отсюда оптимальное значение Qu{s) равно
Q°U(S) = (Ут(з)Г1[(Уа(з)Г^(з)]3 (16.2.16)
Замечание 16.2. Разложение (16.2.11) в литературе также
называется внутренне-внешним разложением.
Замечание 16.3. Решение будет собственным только в том случае,
если V имеет нулевую относительную степень или если V имеет
относительную степень, равную единице, a W имеет относительную
степень, по крайней мере, равную единице. Однако несобственные
решения можно легко превратить в приблизительно собственные решения,
добавляя соответствующее число быстрых полюсов к Q£(s). DDD
Возвращаясь к рассматриваемой задаче, сформулированной в
уравнении (16.2.3), мы видим, что лемма 16.2 дает непосредственное
решение, если принять
W{s)=H0{s)-H!{s) (16.2.17)
V(s)=Vm(s)Va(s) (16.2.18)
Заметим, что в этом случае полюсы [Vra"1(5)W(5)] совпадают с
полюсами W(s) (потому что это устойчивая передаточная функция).
16.2. Оптимальный О-синтез (аффинный) 473
Замечание 16.4. Вышеупомянутую процедуру моэюно изменить,
включив весовую функцию il(ju). В этом контексте функция
стоимости теперь будет иметь вид
||(Я0-Т0)П||* (16.2.19)
При этом не возникает никаких дополнительных трудностей,
потому что довольно просто переопределить V(s) и W(s), чтобы
получить форму выражения (16.2.9).
Замечание 16.5. Также воз моэюно ограничить область решения,
чтобы удовлетворить дополнительным техническим требованиям.
Например, обеспечивая интегрирование с помощью параметризации
Q(s), как в (15.3.15), и представляя весовую функцию в виде Q(s) = s"1
{также требуется Но(0) = 1). Это не изменяет аффинный характер
T0(s) для неизвестной функции. Следовательно, процедура синтеза,
разработанная выше, может применяться при условии, что мы
сначала переопределим функции V(s) и W(s).
Замечание 16.6. Программа MATLAB для нахождения решения
задачи квадратичного оптимального Q-синтеза включена в файл oph2.m
на прилагаемом CD-ROM.
Процедура синтеза иллюстрируется следующими двумя примерами.
Пример 16.1 (Неустойчивый объект). Рассмотрим объект с
номинальной моделью
G°W= (*-!)(, +2) <16-2-20»
Предположим, что целевая функция для T0(s) имеет вид
"•«-JI+5+5 (16'2-21)
Сначала выберем полином наблюдателя (о наблюдателе см. гл. 18)
E(s) = (5+ 4) (5+ 10) и полином регулятора F(s) = s2 + 4s + 9. Заметим,
что для простоты F(s) был выбран равным знаменателю H0(s).
Затем решим уравнение назначения полюсов A0(s)L(s)+B0(s)P(s) =
E(s)F(s), чтобы получить предварительный стабилизирующий закон
управления, выраженный в терминах P(s) и L(s). (Используйте
программу paq.m, находящуюся на прилагаемом CD-ROM.)
Окончательные полиномы следующие:
P(s) = 1155 + 270; L{s) = s2 + 17s + 90 (16.2.22)
Теперь рассмотрим какой-либо регулятор из класса реализующих
стабилизирующий закон управления, параметризованных уравнением
474 Глава 16. Проектирование систем управления на основе оптимизации
(15.7.1). Квадратичная функция стоимости тогда будет такой же,
как и в (16.2.9), где
B0(s)P(s) 9s2 - 1045 -180
W(s) = H0(s)-
E(s)F(s)
E(s)F(s)
Соответственно
s-1
s + 1
2(s + 2)(s + l)
E(s)F(s)
\K-l(»)W(s)].= (j)
1\ 5s3 + 158s2 + 18s - 540
(16.2.23)
(16.2.24)
(16.2.25)
E(s)F(s)
Оптимальное значение Qu(s) тогда получается из (16.2.16):
not \ «r I \\-Ч(лг i w-Uxn х\ ( 1 \ 5з3 + 158s2 Ч-Ш-540
Qu(s) = (Vm(s)) [(Va(s)) W(s)]s=^-j (, + !)(,+ 2)
(16.2.26)
Мы видим, что передаточная функция Q£(s) несобственная. Однако
мы можем аппроксимировать ее субоптимальной (но собственной)
передаточной функцией Q(s), добавляя один быстрый полюс к Q^{s):
Q(s) = Q°u(s)-^-T где т«1 (16.2.27)
TS + 1
Предлагаем читателю исследовать полученный регулятор и
связанные с ним характеристики замкнутого контура — см. задачу
16.11. DDD
Пример 16.2 (Неминимально-фазовый объект). Рассмотрим
объект с номинальной моделью
с»« = етТз) (16'2'28)
Нужно синтезироватьj используя "К^-оптимизацию, контур
управления с одной степенью свободы и целевой функцией
16
H0(s) =
S2 + 5s + 16
(16.2.29)
и обеспечить точную инверсию модели при и = 0.
Решение
Применим стратегию, предложенную в замечании 16.5. Функция
стоимости тогда определяется следующим образом:
J{Q) = \\(H0(s) - (sQ(s) + [Go(0)]-1)Go(s))fi(s
где
ВД = -
(16.2.30S)
16.3. Проектирование робастной системы управления 475
Тогда функция стоимости будет иметь вид
где
J(Q) = \\W-QV\\l (16.2.31)
V(s) = G0(s) = —— —; W(s) =
5 + 6 5 + 3' v ' (s2+5s + 16)(s2 + 9s + 18)
(16.2.32)
Сначала заметим, что
s+b s+6
Оптимальное значение Q(s) может тогда быть получено,
используя (16.2.16)
у <Ш<Ш'+0.82Ш + 4.6260
откуда Q°{s) может быть получена как Q°(s) = sQ (s)+l. Один
быстрый полюс был добавлен, чтобы сделать эту функцию собственной.
Снова предлагаем читателю исследовать полученный регулятор и
связанные с ним характеристики замкнутого контура — см. задачу
16.12.
16.3. Проектирование
робастной системы управления
с доверительными границами
Далее кратко покажем, как методы оптимизации могут использоваться,
чтобы изменить номинальный регулятор так, чтобы окончательная
характеристика была более робастной по отношению к ошибкам модели.
Методы реализации этого находятся в диапазоне от предназначенных
непосредственно для этого случая процедур до сложных методов
оптимизации, которые сохраняют устойчивость в присутствии некоторых
типов ошибок модели. Наша цель состоит в том, чтобы раскрыть
«изюминку» этих методов.
16.3.1. Статистические доверительные границы
В разд. 3.9 мы аргументировали, что никакая модель не может дать
точное описание реального процесса. Это понятие — ключевая
движущая сила современной идеи проектирования робастных систем
управления. Методы проектирования робастных систем управления включают
476 Глава 16. Проектирование систем управления на основе оптимизации
^ос-методы, jCi-методы и %2-методы. Здесь мы будем использовать
последний подход, потому что он удачно вписывается в структуру,
описанную выше.
Нашей отправной точкой будет предположение о существовании
статистических доверительных границ на ошибки моделирования.
Получение этих доверительных границ — отдельная область исследования, но
приближения могут быть взяты из оценок неопределенности, связанной
со стандартными методами идентификации систем. Заинтересованного
читателя отсылаем к литературе, приведенной в конце главы.
Мы покажем, как эти статистические доверительные границы
могут использоваться для проектирования робастных систем управления.
Основная идея этой процедуры состоит в том, чтобы модифицировать
номинальный регулятор так, чтобы минимизировать ожидаемое
отклонение (дисперсию) фактической характеристики системы от априорной
желаемой характеристики.
Предположим, что мы имеем номинальную частотную
характеристику G0(jw) вместе со статистическим описанием связанных с ней ошибок
в виде
G(ju) = G0(ju) + Ge(ju) (16.3.1) I
где G(ju) —истинная (но неизвестная) частотная характеристика, а
Ge(ju) —как обычно, представляет аддитивную ошибку моделирования.
Будем считать, что Ge имеет следующие вероятностные характеристики:
£{Ge{ju)}=0 (16.3.2) I
£{Ge{ju)Ge{-ju)} = a{ju)a{-ju) = а2{и) (16.3.3)
В (16.3.3) a(s) —устойчивая минимально-фазовая спектральная
плотность, а а —данная мера ошибки моделирования. Для того чтобы
использовать эту меру при проектировании системы управления,
необходимо, чтобы она была рациональной функцией.
16.3.2. Проектирование робастных систем управления
Основываясь на номинальной модели G0(jfcj), мы предполагаем, что
проектирование выполняется таким образом, чтобы получить
приемлемую номинальную характеристику. Это проектирование будет, как
правило, включать обычные проблемы, такие как неминимально-фазовое
поведение, доступный диапазон входного воздействия и неустойчивые
полюсы. Пусть это было получено с помощью номинального регулятора
16.3. Проектирование робастной системы управления 477
С0 и что соответствующая функция номинальной чувствительности
есть S0. Конечно, предполагается, что истинный объект удовлетворяет
выражениям (16.3.1)—(16.3.3); следовательно, величина S0 на практике
не будет достигнута из-за отличия реальной чувствительности S от
S0. Предположим для начала, что разомкнутая система устойчива.
(Более общий случай будет рассмотрен в разд. 16.3.6.) Мы можем, таким
образом, использовать простую форму параметризации всех
стабилизирующих регуляторов, чтобы выразить С0 и S0 в терминах устойчивого
параметра Q0:
«.и
ад=г^;
(16.3.4)
Шо(8)
S0(s) = l-G0(s)Q0(s) (16.3.5)
Реальная чувствительность Si при использовании номинального
регулятора С0 вместе с реальным объектом будет равна
Ы») = <1+п°№г(* (163-6)
Наш план проектирования робастной системы управления теперь
заключается в том, чтобы скорректировать регулятор так, чтобы
минимизировать расстояние между окончательной реальной
чувствительностью ^2 и S0. Если мы заменим Q0 на Q и, следовательно, С0 на С,
то достигнутая чувствительность изменится на
S2{$) = 1 + GeWQW (16-37)
где
и
ЗД -S0(s) = \~g°J$%$ " (1" G0(s)Q0(s)) (16.3.9)
Мы видим, что 5г обозначает реальную чувствительность, когда
объект — G и регулятор параметризован функцией Q, a S0 обозначает
реальную чувствительность, когда объект — G0 и регулятор параметризован
функцией Q0. К сожалению, (S2 — S0) —нелинейная функция Q и Ge\
однако в следующем разделе мы покажем, что эта проблема может быть
исправлена путем использования взвешенной ошибки чувствительности.
478 Глава 16. Проектирование систем управления на основе оптимизации
16.3.3. Частотные взвешенные ошибки
Вместо минимизации некоторой меры ошибки чувствительности, данной
в (16.3.9), мы рассмотрим взвешенный вариант с W2 = 1 + GeQ. В этом
случае рассмотрим
W2(s)(S2(s) - S0(s)) = (1 - G0(s)Q(s)) - (1 - G0(s)Q0(s))(l + 0€Ш(з))
= -G0(s)Q(s) - S0(s)Q0(s)Gf(s) - S0(s)Q(;s)Ge(s).
(16.3.10)
где Q(s) = Q(s) — Q0(s) — желаемое приближение к Q0(s) в соответствии
с Ge{s).
Прежде чем продолжать дальше, рассмотрим интерпретацию
(16.3.10).
Лемма 16.3. Взвешенная ошибка чувствительности имеет смещение
математического ожидания
£ {W2(ju) (S2(ju>) - S0(ju))} = -G0(ju)Q(ju) (16.3.11)
и дисперсию
£{\W2(ju) (S2(ju) - S0(ju)) |2} = \G0(ju)\2\Q(ju)\2
+ \S0{joj)Qo{joo) + S0{ju)Q{ju)\2a2{u) (16.3.12)
Доказательство
Чтобы доказать (16.3.11) и (16.3.12), мы видим, что
W2(s)(S2(s) - S0(s)) = -G0(s)Q(s) - S0(s)Q0(s)Ge(s) - S0(s)Q(s)Ge(s).
(16.3.13)
Результат следует из использования свойств Ge. DDD
Процедура, которую мы теперь предлагаем для выбора Q, — найти
величину, которая минимизирует
J = \\W2(S-S0)\\l= Г £{\W2Uu)(S2(ju)-S0(ju))\2}dw
«/—00
= Г \G0(ju)\2\Q(ju)\2 + \S0(ju)Q0(ju) + S0(ju)QUuj)\2a\u)(b
«/— оо
(16.3.14)
Замечание 16.7. Эта функция потерь имеет интуитивное
толкование. Первое слагаемое правой части представляет ошибку смещения
математического ожидания. Можно заметить, что этот член равен
нулю, если Q = 0 (т.е. когда мы оставляем регулятор неизменным).
16.3. Проектирование робастной системы управления 479
Второе слагаемое в (16.3.14) представляет ошибку дисперсии. Этот
член равен нулю, если Q = —Q0j т. е. если мы выбираем разомкнутое
управление. Эти рассуждения приводят к выводу, что имеются два
крайних случая. Для а = 0 (нет никакой неопределенности в модели)
мы оставляем регулятор неизменным] когда а —> оо (большая
неопределенность модели), мы выбираем разомкнутое управление, которое
естественно является робастпым для случая, когда объект в
разомкнутом состоянии устойчив.
Замечание 16.8. Можно было бы задуматься о значении весовой
функции W<i- Для \Ge(ju)Q(jcj)\ <£ 1 мы имеем, что \W2(jw)\ « 1.
Однако \Ge(ju))Q(jcj)\ < 1 —достаточное условие робастной устойчивости
и таким образом взвешенная функция не будет существенно влиять
на результат (см. также замечание 16.10). DDD
Лемма 16.4. Предположим, что
1) функция G0 строго собственная, не имеющая нулей на мнимой оси и
2) £{Ge(ju)Ge(— ju)} имеет спектральное разложение, как в (16.3.3).
Тогда ol(s)ol(—s)S0(s)S0(—s) + G0(s)G0(—s) имеет спектральную
плотность, которую мы обозначим через Н и оптимальное значение
Q определяется выражением
0°*(8) = arg min \\W2(S2 - S0)h
<Э(*)€5
1 v ,™^„«„„ „„,.„,.. <x(sM-s)So(s)S0(-s)Q0(s)
— x устойчивая часть
H{s) H(-s)
(16.3.15)
Доказательство
Сначала докажем, что
F(s) = a(s)a{-s)S0{s)S0(-s) + G0(s)G0(-s) (16.3.16)
имеет спектральную плотность. По предположению a(s)a(—s) имеет
спектральную плотность В, так что
F(s) = B(s)B(-s)S0(s)S0(-s) + G0(s)G0(-s) (16.3.17)
В(оо) ф 0 и, по предположению, G0(oo) = 0 и S0(oo) = 1, так что
F(oo) = B(oo)2>0 (16.3.18)
и, так как G0 не имеет нулей на мнимой оси, ясно, что и F тоже их
не имеет. Наконец, просто доказать, что F(—s)=F(s)] это говорит о
480 Глава 16. Проектирование систем управления на основе оптимизации
том, что F имеет спектральную плотность, которую мы обозначим
через Н.
Чтобы завершить квадратичную оценку, выражение (16.3.14)
можно записать следующим образом
-г
\H(ju)Q(ju) +
c?{u>)\S0(ju)\*Q0{ju)
2
du> +
H(-ju>)
jy*(u)\S0(ju)\>\Q0(ju)f (l - «M|MJ!) &,. (16.3.19)
Тогда
a(S)a(-s)S0(s)S0(-s) G0(s)G0(-s) П«Ч9ГЛ
1 H(s)H(-s) = H(s)H(-s) (16-3-20)
имеет относительную степень, по крайней мере, равную двум; таким
образом, мы видим, что второе слагаемое в правой части выражения
(16.3.19) ограничено. Более того, это слагаемое не зависит от Q,
поэтому мы можем минимизировать функцию стоимости,
минимизируя первое слагаемое правой части:
aWa(-«)S„(«)S„(-«)g„(s)
V(s) у v
W(s)
2
(16.3.21)
H — спектральная плотность, так что V = Н не имеет нулей на
мнимой оси и моэюет не рассматриваться. Это такэюе означает, что
W не имеет полюсов на мнимой оси. В соответствии с леммой 16.2
решение оптимизационной задачи доказано. DDD
Замечание 16.9. Величина Q, найденная в лемме 16.4, дает
оптимальный, в смысле (16.3.14), компромисс между ошибкой смещения
математического оэюидания (первое слагаемое в (16.3.14)) и дисперсией
(второе слагаемое в (16.3.14)).
Замечание 16.10. Заключительная проверка робастной
устойчивости (которая автоматически не гарантируется алгоритмом)
требует, чтобы мы убедились, что \Ge(jw)\\Q(jw)\ < 1 для всех и и всех
«вероятных» значений Ge(jw). Чтобы сделать это более явным,
предположим, что Ge(ju) имеет гауссовское распределение с нулевым
математическим ожиданием _и коэффициентом ковариантности
(второй центральный момент) Р(ш). (Заметим, что это обеспечивается
автоматически, если модель оценивается в присутствии гауссовского
шума измерения] для детального рассмотрения см. литературу по
идентификации, приведенную в конце главы.)
16.3. Проектирование робастной системы управления 481
Обозначим действительную и мнимую составляющие Ge(ju) через
Зя(о;) и gi(u) соответственно. Пусть также д(и) = (<7л(^),<7/(с^))т-
Наконец, пусть коэффициент ковариантности д(и) будет Р{и).
Тогда—это известный результат из статистики — д(ш)ТР{ш)~1д{и))
имеет распределение хи-квадрат с двумя степенями свободы. С
помощью этого распределения мы можем найти скалярную величину /3,
такую, что 99% (например) значений д(и) удовлетворяет условию
g(u)TP{u)-lg{u)<P (16.3.22)
Если мы теперь убедимся, что \Q(ju))\ < [(3\maxP(v)]~l для всех и,
то это будет означать, что \Ge(jw)\\Q(jw)\ < 1 с вероятностью 0.99.
Чтобы проверить это утверждение, заметим, что из выражения
(16.3.22) 99% значений g (и) удовлетворяет следующему более строгому
условию:
(9Т9)<Р\тмР(и) (16.3.23)
Следовательно, если
\Q{jw)\<\p\nmP{b>)]-1 (16.3.24)
тогда, объединяя (16.3.23) и (16.3.24), мы видим, что вероятность
того, что \gTg\\Q{jv)\ < 1 равна 0.99, как и требовалось. В принципе,
необходимо проверить (16.3.24) для всех и. Однако разумный
практический компромисс говорит о том, что нужно проверить (16.3.24) для
каждого дискретного значения и, используемого в исходной
квадратичной оптимизации. DDD
Замечание 16.11. Конечно, процедура, рассмотренная в замечании
16.10, позволяет проверить лишь то, является ли данный проект
Q(ju)) совместимым с робастной устойчивостью для данных
вероятностных доверительных границ. Если проверка неудачна, то можно
искусственно увеличить неопределенность на стадии проекта, чтобы
сместиться к более благоприятному результату. Альтернативно,
возможно включить уравнение (16.3.24) как ряд дополнительных
ограничений непосредственно в саму процедуру квадратичной
оптимизации, но мы не станем этого делать. DDD
Замечание 16.12. Как мы видели в гл. 15, обычно необходимо
делать различие между устойчивыми полюсами замкнутого контура
и желаемыми полюсами замкнутого контура. Предлагаем читателю
обратить внимание на замечание относительно реакции на входное
возмущение в разд. 15.4.4. Можно изменить представленный здесь
алгоритм, чтобы гарантировать, что все полюсы лежат в желаемых
областях. Например, предварительное преобразование s -¥ s' = s+(3 при
/3 > 0 может использоваться, чтобы преобразовать область, левее —(3
вЛПП.
482 Глава 16. Проектирование систем управления на основе оптимизации
16.3.4. Добавление интегрирующих свойств
Методология, описанная в разд. 16.3.3, может быть расширена, чтобы
включить интегрирующие свойства. Считая, что Q0 обеспечивает это
свойство, окончательный регулятор будет обладать такими
характеристиками, если Q имеет вид
Q{s) = sQ'{s) (16.3.25)
где функция Q' — строго собственная (см. лемму 15.2).
Существует ряд способов преодолеть это ограничение.
Сравнительно простой путь — воспользоваться замечанием 16.5, изменив функцию
стоимости на
,. Г*{№*№»)-*№?)^ (163.26)
Лемма 16.5. Предположим, что
1) G0 — строго собственная функция, не имеющая нулей на мнимой
оси и
2) Е{Ge(ju)Ge(— ju)} имеет спектральное разложение, приведенное в
(16.3.3).
Тогда a(s)a(—s)S0(s)S0{—s) + G0{s)G0(—s) имеет спектральную
плотность, которую обозначим через Н и
. , s „ a{s)a{-s)So{s)S0(-s)Q0(s)
arg mm J — — rr, ч x устойчивая часть —^——-— ч ——
*Q{s)es H(s) y sH(-s)
(16.3.27)
Доказательство
Во-первых, существование Н следует из леммы 16.4. Во-вторых,
используя (16.3.25), мы имеем
o?(u)\S0(joj)\*Q0{juy2
/ОО I
\H{3u)Q'{ju) +
-ОО |
du+
juH(-ju)
f tfMia.WPW^)!' Л _ *гИ WU (ie.3.28)
J-oo Ы2 V \н(зи)\2 J
Из предположения, что С0 обладает интегрирующими свойствами,
следует, что S0 имеет нуль в начале координат и потому, что
t(-s)S0(s)S0(-s)\
a(s)a(-s)S0(s)S0{-s)Qo(s)Q0(-s) f a(s)a<
-s2 { i
H(s)H(-8)
16.3. Проектирование робастной системы управления 483
имеет по крайней мере относительную степень, равную двум,
второе слагаемое в предыдущем интеграле ограничено. Это слагаемое не
зависит от Q1, поэтому мы можем минимизировать функцию
стоимости, минимизируя первое слагаемое в правой части выражения, а
именно,
|я(5) Qf{s) + <x(s)a(-s)S0(s)S0(-s)Q0(s)}l2-
sH(-s)
V(s)
w
H — спектральная плотность, так что V = Н не имеет нулей на
мнимой оси и может не рассматриваться. Это также означает, что
W не имеет полюсов на мнимой оси. В соответствии с леммой 16.2
оптимальное значение Q1 Е 7?/Ноо равно
1 х устойчивая часть /^)^(^)^)5o(-.)Qo(.) | (1б ^
H(s) \ sH{-s) J
W — строго собственная функция, откуда следует, что Q' также
строго собственная и, следовательно, Q(s) = sQ1 {s) — собственная
функция, что и требовалось доказать.
16.3.5. Простой пример
Рассмотрим систему первого порядка, имеющую постоянную дисперсию
для ошибки модели в частотной области:
G°^ = T7TT (16-3-3°)
Qo(s) = ^i±l (16.3.31)
TclS + 1
s°^ = :Г7ГТ (16-3-32)
TdS + l
a2(u)=e>0 Vcj (16.3.33)
Заметим, что выбор постоянного значения а является
аппроксимацией случая, когда идентификация выполнена посредством модели с
ограниченной импульсной характеристикой при входном сигнале в виде
белого шума и таким же возмущением.
484 Глава 16. Проектирование систем управления на основе оптимизации
а) Случай без ограничения,
связанного с интегрирующими свойствами
В этом случае, используя а\ и аг, являющиеся подходящими функциями
от т0, Td и б, мы можем.записать
H(s)H(-s) =
1 . <~Ф2)
г2„2
Л (Л _i_^o2 . ^2^2„4
1 - T02S2
(1-T02S2) (1-Тс252)
(1 + y/a[s)(l + y/aes)(l - у/Щ>)(1 - y/a^s)
(16.3.34)
(1 + t„s)(1 + rds)(l - t0s)(1 - Tds)
Тогда существуют Ai, А%, Аз и А^, также подходящие функции от
т0, тС1 и е, такие, что
a(s)a(-s)S0(s)S0(-s) (1-T0s)(l-Tds) 6(-t2,s2)(1 + t0s)
H(-S) 4o(S) (l-^s)(l-^5) (1-Tde)(l + Tde)2
= Л + ^4=7 + ^=т + тг^тто + т^ (16.3.35)
l-\/^"5 l-y/a^s (l + rc/5)2 1-f Tcis
Оптимальное значение Q тогда будет иметь вид:
Q(s) = -
(1 + T0s)(l + Tds)
A0 +
A3
■ + ■
AA
(16.3.36)
(1 + Tds)2 l + Tds\
Чтобы проверить этот пример количественно, возьмем т0 = 1, rd = 0.5
и б = 0.4. Тогда из (16.3.34)-(16.3.36) получим оптимальную функцию
Q в виде
0.316s3 + 1.072s2 + 1.285s + 0.529
Q(s) =
0.158s3 + 0.812s2 + 1.491s + 1.00
(16.3.37)
Интересно исследовать, как эта оптимальная функция Q влияет на
уменьшение функции потерь (16.3.14). Если Q(s) = 0, тогда
/оо
\S0(joj)Q0(ju)\2edu:
-ОО
: ОО,
а если оптимальное значение Q дано выражением (16.3.37), то общая
ошибка равна J = 4.9, которая включает ошибку смещения
математического ожидания, равную
Г°° \G0(ju)Q(ju)\2du = 4.2
«/-с
16.3. Проектирование робастной системы управления 485
а ошибка от дисперсии равна
\S0{jb>)Qotib>) + S0(ju)Q(ju)\2e<kj = 0.7.
/
б) Случай при наличии ограничения,
связанного с интегрирующими свойствами
Следуя разд. 16.3.4, запишем
a(s)a{-s)S0{s)S0{-s) ( . {l-T0s){l-Tds) e{-T%s){l + T0s)
Я(-5) 4o[s) (i-V5re)(i-V55«)(i-w)(i + rde)2
В\ , В2 Вз В±
l-^Jals l-y/ais (l + Tc/5)2 l + rds
Тогда из (16.3.25) и леммы 16.5 оптимальное значение Q дается
формулой
a, __s{l + T0s)(l + Tds)
(l + 4/oT5)(l + v^5)
Б3 В4
(1 + Tds)2 l+TcfS
(16.3.38)
Для того же набора параметров процесса, что и раньше, мы получим
формулу оптимальной функции Q в виде •
am. s(0.184s2+0.411s + 0.227)
УИ " "0.158*3 +0.812*2 +1.491, + 1.00 [ >
и функция Q для реализации регулятора просто равна
Q(s) = Qo(s) + Q(s) = (0^-fl)(,-fl)
^u Wj ^u 0.316s2+ 0.9915 + 1 v }
Заметим, что полюс разомкнутого контура при —1 был
скомпенсирован. Если это нежелательно (из-за соображений, связанных с
входным возмущением), то следует применить предложение, сделанное в
замечании 16.12. Для этого примера, если Q = 0, то функция потерь,
приведенная в (16.3.26), дает J' = 1.4. Используя оптимальную функцию
Q, определяемую выражением (16.3.39), полная ошибка уменьшается до
J' = 0.94, где составляющая ошибки от смещения математического
ожидания равна 0.22 и составляющая ошибки от дисперсии — 0.72.
в) Результаты моделирования замкнутых систем
Для тех же самых параметров процесса, что и выше, мы далее
исследуем, как робастный регулятор, данный выражением (16.3.40), может
486 Глава 16. Проектирование систем управления на основе оптимизации
-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4
Действительная ось
Рис. 16.1. Частотная характеристика объекта: случай 1 (сплошная линия);
случай 2 (штриховая линия); случай 3 (точечная линия))
справиться с неопределенностью объекта, моделируя реакции
замкнутого контура с различными процессами и сравнивая результаты для
случаев, когда используется Q0 вида (16.3.31). Выберем следующие три
различных объекта.
Случай 1
Случай 2
Случай 3
GiW=—т=ад
5+1
G2(s) =
1.3е
-0.35
0.55 + 1
Gs(s) =
0.5
(16.3.41)
(16.3.42)
(16.3.43)
0.55 + 1
Частотные характеристики этих трех объектов показаны на рис. 16.1;
они —в пределах статистических доверительных границ,
центрированных относительно G0(ju) и имеющих стандартное отклонение у/ОА.
Заметим, что различие между этими тремя объектами намного больше,
чем можно было бы ожидать в любой практической ситуации. Мы
преднамеренно выбрали такой пример, чтобы выдвинуть на первый план
рассматриваемые проблемы.
Рисунки 16.2, 16.3 и 16.4 показывают реакции замкнутого контура
для случая этих трех объектов при единичном изменении уставки,
управляемых с помощью С и С0. Результаты будут обсуждены ниже.
16.3. Проектирование робастной системы управления 487
• Случай 1. G\(s) = <30(s), так что реакция замкнутого контура,
основанная на Q0, для этого случая — желаемая реакция по определению.
Однако имеется различие в реакциях желаемой замкнутой
системы управления и робастной системы, которая рассчитана с учетом
неопределенности в модели. Использование Q вызывает ухудшение в
номинальной характеристике замкнутого контура, но это ухудшение
разумно небольшое, как может быть замечено из близости реакций
замкнутого контура; в частности сигнал управления, как можно
заметить, является менее агрессивным. Это —цена, которую мы
платим за включение границ робастности, направленное на уменьшение
чувствительности к ошибкам моделирования.
• Случай 2. Имеется большая ошибка моделирования между G2{s) и
Go(s), как показано на рис. 16.1. Это соответствует так называемой
опасной ситуации в робастном управлении. Как видно из рис. 16.3, без
компенсации оптимальной функцией Q замкнутая система близка к
границе устойчивости. Однако функция Q стабилизирует замкнутую
систему и обеспечивает приемлемую переходную характеристику в
присутствии этой большой неопределенности модели.
• Случай 3. Хотя имеется большая ошибка моделирования между
С?з(5) и G0{s) в области низких частот, эта ошибка модели менее
вероятно может привести к неустойчивости замкнутой системы
(хотя более вероятно приведет к более медленной реакции замкнутой
системы). Рисунок 16.4 иллюстрирует, что скорость реакции
замкнутой системы при использовании оптимальной Q действительно
медленнее, чем скорость реакции при Q0) однако разница невелика.
Интересно заметить, что в этом случае управляющий сигнал для
скорректированной робастной замкнутой системы более гладкий, чем
для системы с Q0.
а
н
к
а;
vo
о
fcf
о
X
3
PQ
1.4г
1.г[
if
0.81
0.61
0.41
0.21
°0 2 4 6 8 10 "О 2 4 6 8 10
Время [с] Время [с]
Рис. 16.2. Реакция замкнутой системы для случая 1: когда используется Q0
(тонкие линии) и когда используется оптимальная функция Q (толстые линии)
488 Глава 16. Проектирование систем управления на основе оптимизации
4 6
Время [с]
4 6
Время [с]
Рис. 16.3. Реакция замкнутой системы для случая 2: когда используется Q0
(тонкие линии) и когда используется оптимальная функция Q (толстые линии)
4 6
Время [с]
4 6
Время [с]
Рис. 16.4. Реакция замкнутой системы для случая 3: когда используется Q0
(тонкие линии) и когда используется оптимальная функция Q (толстые линии)
Замечание 16.13. Мы не хотим создать впечатление, что нуоюпо
всегда выполнять формальный, основанный на критерии робастности
проект. Мы тщательно подбирали этот пример, чтобы выдвинуть на
первый план имеющиеся проблемы. Однако практически, осторожное
номинальное проектирование, выполненное с оглядкой на проблемы
робастности, вероятно, даст адекватное решение, особенно потому,
что точные границы для ошибок модели будет трудно получить. DDD
16.3.6. Неустойчивый объект
Далее мы кратко покажем, как робастный метод проектирования
может быть расширен на случай неустойчивого объекта в разомкнутом
состоянии. Как и раньше, мы обозначим номинальную модель через
G0(s) = д7Ш> номинальный регулятор через C0{s) = jjQ, номинальную
чувствительность через 50, чувствительность, когда остается объект
16.3. Проектирование робастной системы управления 489
G0(s) (но регулятор меняется на C(s)), через S\ и реальную
чувствительность, когда объект меняется на G(s) (а регулятор меняется на С),
через 52. Параметризуем модифицированный регулятор:
E(s)+E(s)QW
c(s)" ад _ ад (16-3-44)
E(s) E(s) VW
где Q(s) —устойчивая собственная передаточная функция.
Тогда, так же как и в гл. 15, получим, что
М*Ш») + Bo(s)P(s) ov y A0(s)L(s) + B0(s)P(s)
(16.3.45)
g0(s)£0(s)Q(s)
ад
(16.3.46)
a(«) = &M(i-:H^) ^(5) = т0(5) +
5i(e) _ &(«)
S2(s)
i+tiWgaW 1+Т1(в)Лф10е(в)
•Do («)
5o(s)_ А,(*)Д»(*№(«)
A0(s)L(s)+£0(s)P(s)
/ A0(s)P(s) A0(s)2Q(s) \
+ Uo(«)i(«) + B0(s)P(s) + i4o(e)L(e) + B0(s)P(s) J Ue{S)
(16.3.47)
где Ga(s) и G£(s) означают MOM и АОМ (см. разд. 3.9) соответственно.
Как и раньше, мы использовали взвешенную меру величины S2(s) —
S0(s), где весовая функция теперь выбирается следующим образом:
W2(s) = (l + T1(s)GA(s)) (16.3.48)
В этом случае
A0(s)B0(s)Q(s)
W2(s)[S2(s)-S0(s)} = -
A0(s)L(s) + B0(s)P(s)
L(S)[P(sHA0(S)Q(s)} Gc{$) (16>3>49)
[A0(s)L(s)+B0(s)P(s)Y
Характерный момент, который будет понятен тем, кто изучил
вопросы идентификации, заключается в том, что идентификация для неустой-
490 Глава 16. Проектирование систем управления на основе оптимизации
чивых объектов обычно использует дробные модели. Таким образом,
номинальная модель обычно представляется в виде |=р, где
No(s) = Щ^- (16.3.50)
D0(s) = ^ (16.3.51)
для некоторого устойчивого полинома E(s). Аналогично реальный
объект обычно может быть представлен в виде wfy, где
N(s) = N0(s) + ^ (16.3.52)
D(s)=D0(s) + ^ (16.3.53)
При этих условиях аддитивная ошибка моделирования Ge(s) будет
иметь вид:
JV(s) N0(s) B0(s)+Be(s) B0(s)
Ue(S)-D(s) D0(s)-A0(s)+Ae(s) A0(s) [Ж6™>
A0(s)B£{s) B0(s)A£(s)
~ A0(s)* A0(s)*
Подставляя (16.3.54) в (16.3.49), получим
A0{s)B0(s)Q(s)
(16.3.55)
W2(s)[S2(s)-S0(S)} = -
A0(s)L(s)+B0(s)P(s)
L(s)[P(s)+A0(s)Q(s)}
г. ,м,^я tw ^(Ms)Be(s)-B0(S)A£(s)) (16.3.56)
[A0(s)L(s) + B0(s)P(s)Y
Тогда мы можем продолжать по существу так же, как и в случае,
когда разомкнутый контур устойчив.
Замечание 16.14. Комментарии, сделанные в замечании 16.12,
применимы также и здесь.
16.4. Фундаментальные ограничения
управления с минимальными затратами
Рассмотрим стандартный SISO-контур управления с обратной связью,
показанный, например, на рис. 5.1. Нас будет интересовать минимизация
16.4. Фундаментальные ограничения управления с минимальными затратами 491
квадратичной стоимости (связанной с реакцией на выходе), имеющей
ВИД: , ЛОО
J==2j0 y{t)2dt (16A1)
Заметим, что здесь мы не будем обращать внимание на «размер»
управляющих воздействий. Отсюда этот класс задач обычно называется
«дешевое управление» или «управление с минимальными затратами».
Очевидно, непрактично допускать произвольно большие сигналы
управления. Однако не ограничивая управляющее воздействие, мы получаем
эталон, относительно которого другие, более реалистические, варианты
могут быть оценены. Таким образом, эти результаты дают
фундаментальный предел достижимой характеристики. Мы рассмотрим два типа
возмущений, а именно
1) импульсный шум измерения (dm(t) = S(t)) и
2) ступенчатое выходное возмущение (d0(t) = /i(£)).
Тогда мы имеем следующий результат, который выражает связь
между минимальной достижимой величиной для функции стоимости (16.4.1)
и свойствами разомкнутой системы.
Теорема 16.1. Рассмотрим SISO-контур управления, изобраэюенный
на рис. 5.1 и функцию стоимости «дешевого» управления (16.4.1).
Тогда
1. Для импульсного шума измерения минимальное значение
стоимости (16.4.1) равно
N
•Г = 5> (16.4.2)
г=1
где pi,... ,рлт обозначают полюсы разомкнутого контура,
находящиеся в ППП\
2. Для ступенчатого выходного возмущения минимальное значение
стоимости (16.4.1) равно
м
t=i ^
где ci,... ,см обозначают нули разомкнутого контура, находящиеся
в ППП.
Доказательство
1. Передаточная функция от шума измерения до выхода равна
{—Т($)}. Следовательно, для импульсного шума преобразование
Лапласа выходного сигнала равно
Y{s) = -T(s) (16.4.4)
492 Глава 16. Проектирование систем управления на основе оптимизации
Следовательно, на основании теоремы Парсеваля (теорема 4.1)
функция стоимости (16.4.1) будет
J=— / \T0(ju)\2dw (16.4.5)
Далее используем Q-параметризацию всех стабилизирующих
регуляторов, чтобы записать T0(s) так, как в (15.7.23), т. е.
Т(0\ B0(s)P(s) + Qu(s)B0(s)A0(s)
T0(s) = -^ (16.4.6)
где A*(s) = A0(s)L0(s) + B0(s)P{s).
Следовательно, функция стоимости имеет вид:
- J_ Г
~ 4тг /_с
\W(jw) - Qu(ju)V(joj)\zduj (16.4.7)
t±/t J—oo
где
ИЧ.)-**$!>; V(.)-*^ (16.4.8)
Используя равенства (16.2.15) и (16.2.16) из леммы 16.2, мы
видим, что оптимальный регулятор удовлетворяет условию
1 Г°°
J* = ^J_J(Va(ju)-1W(ju))u\2du (16.4.9)
Замечая, что B0(s)P(s) = A*(s) в нулях полинома A0(s) и
используя интегральную формулу Коти (теорема С.8 приложения С), мы
имеем
N
J* = J> (16.4.10)
г=1
где pi — полюсы разомкнутого объекта, находящиеся в ППП.
2. Доказательство аналогично части 1. ППП
Полученный результат означает, что минимально возможная энергия
выхода, получаемая при импульсном шуме измерения, определяется
суммой полюсов, находящихся в ППП и что минимально возможная
энергия выхода, получаемая при единичном ступенчатом выходном
возмущении, определяется суммой обратных величин нулей, находящихся
в ППП. Результат эвристически разумен. Например, чтобы
скомпенсировать выходное возмущение, мы должны инвертировать объект.
Трудность выполнения этой операции обусловлена наличием нулей объекта,
расположенных в ППП. Точно так же, когда мы имеем дело с
импульсным шумом измерения, требуется обеспечить минимальные колебания
управляющего воздействия, чтобы держать объект в устойчивом
состоянии. А это является функцией полюсов, находящихся в ППП.
16.5. Ограничения в частотной области; повторное рассмотрение 493
16.5. Ограничения в частотной области;
повторное рассмотрение
Мы видели ранее в гл. 9 (лемма 9.2 и лемма 9.4) что функции
чувствительности и дополнительной чувствительности удовлетворяют
следующим интегральным уравнениям в частотной области:
к N
Чады)|Ж; + -£ = 5> (16.5.1)
1 г=1
где kh означает HindoosH0i(s) и H0t(s) — передаточная функция
разомкнутого контура.
2) 1 /-00 1 1 м 1
-Jo -ЧЗД^ + ^=£- (16.5.2)
где kv = lims-+osH0i{s).
Можно заметить интересную взаимосвязь между правыми частями
уравнений (16.5.1), (16.4.2), (16.5.2) и (16.4.3). Это не случайно, как
показано в следующей теореме:
Теорема 16.2. Рассмотрим стандартный SISO-контур,
представленный на рис. 5.1, в котором передаточная функция в разомкнутом
состоянии H0i(s) является строго собственной и Hoi(0)~~l = О (т. е.
она обладает интегрирующими свойствами). Тогда:
1) Для импульсного шума измерения справедливо следующее
неравенство:
-J y(t)2>-± + - ln\S0(ju)\dw = ^Pi (16.5.3)
гдер1,...,рм означают полюсы объекта, расположенные в ППП.
2) Для единичного ступенчатого выходного возмущения справедливо
неравенство
1 Г°° 1 1 Г°° At 1 ^ Л
\ y(t)2>± + 4 b|TeMS = £r (16-5-4)
2J0 2kv 7Г Jo ш ^°i
где с\,..., см означают нули объекта, расположенные в ППП.
Доказательство
Фактически, результат следует немедленно из сравнения (16.5.1),
(16.4.2), (16.5.2) и (16.4.3). Однако прямое доказательство также
возможно, как показано ниже:
к Jo
494 Глава 16. Проектирование систем управления на основе оптимизации
1) Мы знаем, что передаточная функция от шума измерения до
выхода объекта равна —T0(s), где T0(s) —функция дополнительной
чувствительности. Для импульсного шума преобразование Лапласа
выходного сигнала равно
Y{s) = -T0{s) (16.5.5)
Следовательно, теорема Парсеваля (теорема 4.1) дает
-J y(t)2dt = ^Jo |ЗД«)|2&/ (16.5.6)
Прибавляя и вычитая £ f£°$l{T0(ju)}du), получим
1 ГОО 1 ГОО
-J y(tfdt=—J_ T0(ju)du> (16.5.7)
1 Г°°
+ 2^/0 [-24To(3")} + \To(ju)\2]cko
где мы использовали тот факт, что Im{T0(jcj)} —нечетная
функция.
Далее мы используем условие 1п(1 + х) < х. Следовательно,
1 ГОО 1 ГОО
Ц y(t)2dt>—J T0(ju>)du (16.5.8)
+ l.JC°ln{l- 2K{T0(ju)} + |T0(;M|2) du>
1 ГОО 1 /»00
=W_ To{JU))dU} + 2^L 1п|1-ВД")|2<^
Теперь, используя технологию, подобную той, которую мы
использовали при доказательстве леммы 9.3 и учитывая, что для
больших значений s T0(s) ~ ^, мы имеем, что
^/^ад«)Д; = ^ (16.5.9)
Также мы знаем, что S0 + Т0 = 1. Результат следует из
использования выражения (9.2.3).
2) Это моэюно установить, используя те эюе самые рассуждения, что
и в части \), с помощью выражения (9.3.11) и то, что
преобразование Лапласа выходной реакции на единичное ступенчатое выходное
возмущение равно
y(e) = ^f) (16.5.10)
о
где S0(s) —функция чувствительности. DDD
16.7. Литература для последующего чтения 495
16.6. Резюме
• Оптимизация часто используется, чтобы помочь разобраться с
некоторыми аспектами проектирования систем управления.
• Результат, полученный с помощью стратегии оптимизации, настолько
хорош, насколько хорош сам заданный вопрос, т. е. насколько
критерий оптимизации охватывает существенные технические требования
и компромиссы.
• Оптимизацию следует использовать аккуратно: нужно иметь в виду
сложную сеть компромиссов, вовлеченных в проектирование систем
управления.
• Квадратичная оптимизация — довольно простая стратегия и
приводит к полному решению.
• Квадратичная оптимизация может использоваться для оптимального
Q-синтеза.
• Мы также показали, что квадратичная оптимизация может
использоваться эффективно, чтобы формулировать и решать задачи робаст-
ного управления, когда неопределенность модели задается в форме
частотной вероятностной ошибки.
• В пределах этой структуры, робастный регулятор смещает
номинальное решение, чтобы обеспечить защиту в отношении ожидаемой
неопределенности модели, стараясь минимизировать отклонение
реальной характеристики от желаемой.
• Это можно рассматривать как формальный путь сокращения полосы
пропускания, который был обсужден ранее в качестве механизма
обеспечения запаса робастности при проектировании систем
управления.
16.7. Литература для последующего чтения
Оптимизация
1. Doyle, J.C, Glover, К., Khargonekar, P.P., and Francis, B.A. (1989). State
space solutions to standard #2 and #oo control problems. IEEE Transactions
on Automatic Control, 34(8):831-847.
2. Youla, D., Jabr, H., and Bongiorno, J. (1976). Modern Wiener-Hopf design of
optimal controllers. Part I. IEEE Transactions on Automatic Control, 21(2):3-
13.
3. Zhou, K., Doyle, J.C, and Glover, K. (1996). Robust and Optimal Control
Prentice-Hall, Upper Saddle River, N.J.
Робастное управление
1. Dorato, P.E. (1987). Robust Control IEEE Press, New York.
496 Глава 16* Проектирование систем управления на основе оптимизации
2. Dorato, P.E., Tempo, R., and Muscato, G.M. (1993). Bibliography on robust
control. Automatica, 29(1):201-213.
3. Doyle, J.C., Francis, B.A., and Tannenbaum, A.R. (1992). Feedback Control
Theory. Macmillan Publishing Company.
4. Francis, B.A. (1987). A Course on Hoo Control Theory. Lecture Notes in
Control and Information Sciences, Vol. 8, Springer-Verlag, New York.
5. Francis, B.A. and Zames, G. (1984). On H^ optimal sensitivity theory for SISO
feedback systems. IEEE Transactions on Automatic Control, 29(1):9-16.
6. Graebe, S.F. (1994). Control of an Unknown Plant: A Benchmark of New
Format. Automatica, 30(4):567-575.
7. Morari, M. and Zafiriou, E. (1989). Robust process control Prentice-Hall,
Englewood Cliffs, N.J.
8. Zhou, K. and Doyle, J.C. (1998). Essentials of Robust Control Prentice-Hall,
Upper Saddle River, N.J.
9. Zhou, K., Doyle, J.C, and Glover, K. (1996). Robust and Optimal Control
Prentice-Hall, Upper Saddle River, N.J.
Идентификация
1. Bohlin, T. and Graebe, S.F. (1995). Issues in nonlinear stochastic grey box
identification. International Journal of Adaptive Control and Signal Processing,
9(6) :465-490.
2. Goodwin, G.C. and Payne, R.L. (1977). Dynamic System. Identification:
Experiment Design and Data Analysis. Academic Press, New York.
3. Ljung, L. (1999). System Identification. Theory for the User. Prentice-Hall,
Englewood Cliffs, N.J. 2nd edition.
Выбор статистических доверительных границ,
связанных с моделированием
1. Goodwin, G.C, Gevers, M., and Ninness, B.M. (1992). Quantifying the error
in estimated transfer functions with application to model order selection. IEEE
Transactions on Automatic Control, 37(7).913-928.
2. Goodwin, G.C, Braslavsky, J.H., and Seron, M.M. (1999). Non-stationary
stochastic embedding for transfer function estimation. In Proceedings of the
14th IFAC World Congress, Beijing, China.
Робастное проектирование и вероятностные ошибки
1. Boyd, S.P., Balakrishnan, V., Barratt, C.H., Khraishi, N., Li, X., Meyer, D.
and Norman, S.A. (1988). A new CAD method and associated architectures
for linear controllers. IEEE Transactions on Automatic Control, 33(3):268-283.
2. Goodwin, G.C. and Miller, D.E. (1998). Robust performance optimization based
on stochastical model errors: The stable open-loop case. Technical report, Dept.
of Electrical and Computer Engineering, University of Newcastle, Australia.
3. Goodwin, G.C, Wang, L., and Miller, D.E. (1999). Bias-variance tradeoff issues
in robust controller design using statistical confidence bounds. In Proceedings
of the 14th IFAC World Congress, Beijing, China.
16.8. Задачи для читателя 497
Фундаментальные ограничения управления с минимальными затратами
1. Qui, L. and Davison, E.J. (1993). Performance limitations for nonminimum
phase systems in the servomechanism problem. Automatica, 29(2):337-349.
2. Saberi, A. and Sannuti, P. (1987). Cheap and singular controls for linear
quadratic regulators. IEEE Transactions on Automatic Control, 32(3):208-219.
3. Middleton, R.H. and Braslavsky J.H. (2000). On the relationship between
logarithmic sensitivity integrals and limiting optimal control problems.
Technical report, Dept. of Electrical and Computer Engineering, University
of Newcastle, Australia.
16.8. Задачи для читателя
Задача 16.1. Рассмотрим задачу квадратичной оптимизации
min \\W(S)-Q(S)V(s)\\l (16.8.1)
Q{s)es
где V(s) и W(s) — устойчивые и собственные передаточные функции.
Решите задачу оптимизации (т. е. найдите минимальную, устойчивую
и (если возможно) несобственную передаточную функцию Q(s)) для
следующих пар:
V(s)
W{s)
Случай 1
1
(s + D
s + 3
5 + 5
Случай 2
(s + ir
s2 + 4s + 2
2
(s + 1)2
Случай З
1
s + 2
(-s + 1)
(s + 6)(s + 2)
Задача 16.2. Рассмотрим объект, имеющий номинальную модель с
передаточной функцией
GM=wm^T) (16-8-2>
Требуется спроектировать контур управления с одной степенью
свободы для отслеживания эталонного сигнала с ненулевым средним
значением и существенной энергией в полосе частот [0,3] рад/с.
Синтезируйте Q(s) как оптимальную квадратичную норму инверсии
G0(s). (Подсказка: используйте подходящую весовую функцию и ряд
задач, таких, как задача стандартной квадратичной минимизации, затем
используйте программу oph2.m пакета MATLAB.)
498 Глава 16. Проектирование систем управления на основе оптимизации
Задача 16.3. Рассмотрим объект, имеющий номинальную модель G0(s).
Целевая дополнительная чувствительность — H0(s). Предположим, что
G°W=V"~l)(^8) " **)-* + 1%. + 1> <16АЗ»
16.3.1. Вычислите оптимальную (в смысле квадратичной оценки)
передаточную функцию Q(s) для Ь = 0.5.
16.3.2. Повторите вычисления для 6 = 6.
16.3.3. Сравните два решения и обсудите их в связи с
фундаментальными ограничениями проекта, связанными с неминимально-фазовыми
нулями.
Задача 16.4. Рассмотрим объект, имеющий номинальную модель G0(s).
Целевая дополнительная чувствительность — Н0(s). Предположим, что
g'w-ViK.4+») ж нм=^штг4 (ИА4>
Вычислите оптимальную (в смысле квадратичной оценки)
передаточную функцию Q(s) с дополнительным ограничением, что ее полюсы
должны иметь вещественные части, меньше или равные —2. Подсказка:
сделайте подстановку v = s + 2 и затем решите эквивалентную
оптимизационную задачу в области комплексной переменной v.
Задача 16.5. Найдите лучшее (в смысле квадратичной оценки)
устойчивое приближение для неустойчивой передаточной функции
в полосе частот [0,4] рад/с. Чтобы сделать это, возьмите задачу
оптимизации как
min \\W(a)(1 - [F(a)]-lX(s))\f2 (16.8.6)
где X(s) — оптимальное устойчивое приближение, a W(s) — подходящая
весовая функция.
Задача 16.6. Схема упреждения возмущения (как на рис. 10.2)
используется в управлении с двумя степенями свободы объектом с номинальной
моделью
°-М-(ГП55Ь) <16А7)
Известно также, что возмущение dg(t) —сигнал с энергией,
распределенной в полосе частот [0,4] рад/с.
16.8. Задачи для читателя 499
Спроектируйте блок упреждения Gf(s), используя квадратичную
оптимизацию, т. е. найдите передаточную функцию (2* ($), такую, что
G°f(s) = arg min ||(1 - G0iX)il\\2 (16.8.8)
где S — множество всех вещественных рациональных и устойчивых
передаточных функций, a tt(s) — подходящая весовая функция, которая
учитывает частотный спектр возмущения.
Задача 16.7. Рассмотрим объект с номинальной моделью
Спроектируйте регулятор с одной степенью свободы, такой, чтобы
он отслеживал ступенчатый эталонный сигнал в присутствии шума
измерения с энергией в полосе частот [5,50] рад/с.
Задача 16.8. Контур обратной связи предназначен для объекта с
номинальной моделью
G°(s>%+l)(S + 2) <16-8Л0>
так, чтобы компенсировать входное возмущение с ненулевым средним
значением и переменными составляющими со спектром в полосе частот
[0,5] рад/с.
16.8.1. Спроектируйте номинальный регулятор Q0{s), используя
квадратичную оптимизацию.
16.8.2. Используйте стратегию робастного управления, рассмотренную
в данной главе, чтобы спроектировать робастный регулятор Q(s),
если мы дополнительно знаем, что частотная характеристика
аддитивной ошибки моделирования удовлетворяет условию
«{O.IWO.H»)} = а»м = (ц, + <4№, + 1) (16.8.П)
Задача 16.9. Разработайте теорию синтеза с помощью квадратичной
оптимизации передаточной функции Q, подобную той, что разработана
в разд. 16.2.2 для случая дискретного управления. Чтобы получить это,
предположите, что вы хотите синтезировать цифровой регулятор Qq(z)
для непрерывного объекта, такой, что дополнительная
чувствительность Toq(z) находится на минимальном расстоянии (в смысле
квадратичной нормы) от заданной целевой функции проекта Hoq{z).
500 Глава 16. Проектирование систем управления на основе оптимизации
Задача 16.10. Используйте методологию, разработанную в задаче 16.9,
для случая, когда объект имеет номинальную модель
с»<"=(7?та (16-812>
Выход цифрового регулятора связан с входом объекта через
квантователь и экстраполятор нулевого порядка, а выход объекта квантуется
каждые 0.2 с.
Синтезируйте регулятор Qq(z), который минимизирует ||Яод —Тод||2,
где целевая дополнительная чувствительность Hoq(z) дается
выражением
0.1(z + 0.7)
Ho"iz)- «а-1.2»+ 0.45 (16"8ЛЗ)
Задача 16.11. Вспомним пример 16.1. Вычислите окончательную
дополнительную чувствительность T0(s) и сравните ее с целевым
значением H0(s). Сравните частотные характеристики и смоделируйте
переходные характеристики. Обсудите результаты.
Задача 16.12. Повторите задачу 16.11 для примера 16.2.
Глава 17
Линейные модели
пространства состояний
17.1. Введение
Мы уже видели, что имеется много альтернативных видов моделей,
которые могут использоваться для линейных динамических систем.
Для простых SISO-задач, по-видимому, всякое представление столь же
хорошо, как любое другое. Однако поскольку мы двигаемся к более
сложным задачам (особенно для мультипеременных задач), желательно
использовать специальные виды моделей. Одна из наиболее гибких и
полезных структур — модель пространства состояний. Как мы видели в
гл. 3, эта модель имеет форму системы дифференциальных (или
разностных) уравнений первого порядка. Этот вид модели особенно полезен
для численных расчетов.
Модели пространства состояний были кратко представлены в гл. 3.
Здесь мы исследуем линейные модели пространства состояний несколько
более глубоко для SISO-случая. Заметим однако, что многие из
рассмотренных идей непосредственно будут перенесены на мультипеременный
случай, представленный позже. В частности мы изучим:
• преобразования подобия и эквивалентные представления состояний;
• свойства модели пространства состояний:
о управляемость, достижимость и стабилизируемость,
о наблюдаемость, реконструируемость и определяемость;
• специальные (канонические) формы модели.
Основными инструментами, используемыми при изучении линейных
методов пространства состояний, являются линейная алгебра и векторные
пространственные методы. Предлагаем читателю кратко рассмотреть
эти концепции перед чтением данной главы.
502 Глава 17. Линейные модели пространства состояний
17.2. Линейные непрерывные модели
пространства состояний
Как мы видели в гл. 3, непрерывная линейная стационарная модель
пространства состояний имеет форму
x(t) = Ax(t) + Bu(t) x(t0) = x0 (17.2.1)
y{t) = Cx{t) + Bu{t) (17.2.2)
где x G.W1 — вектор состояния, и G Mm — управляющий сигнал, у G.W —
выходной сигнал, х0 Е W1 — вектор состояния в момент t = t0 (начальные
условия), а А,В, С и D —матрицы соответствующих размерностей.
Уравнение (17.2.1) называется уравнением состояния, а (17.2.2) —
уравнением выхода.
17.3. Преобразование подобия
Легко заметить, что определение состояния системы неоднозначно.
Рассмотрим, например, линейное преобразование x(t) в x(t), определенное
следующим образом:
x{t) = T'lx(t) x{t) = Tx{t) (17.3.1)
где Т —любая невырожденная матрица, называемая преобразованием
подобия. Если (17.3.1) подставить в (17.2.1) и (17.2.2), будет получено
следующее альтернативное описание состояний:
Щ =Ax{t) +Bu(t) x{t0) = Т_1ж0 (17.3.2)
y{t)=Cx{t) + Bu{t) (17.3.3)
где
A = T_1AT B = T_1B C = CT D = D (17.3.4)
Модель {(17.3.2), (17.3.3)} является эквивалентным описанием
системы. Действительно, имеется бесконечное число (эквивалентных)
способов выражения модели пространства состояний для данной системы. Все
эквивалентные модели связаны через преобразование подобия (17.3.4).
Ниже мы увидим, что некоторые варианты преобразования Т делают
различные стороны поведения системы более легкими для рассмотрения
и вычисления.
В качестве иллюстрации пусть матрица А переводится
преобразованием подобия Т к диагональному виду; тогда
A = A = T_1AT (17.3.5)
17.3. Преобразование подобия 503
и если Ai,A2,... ,ЛП —собственные значения матрицы А, то
A = diag(AbA2,...,An) (17.3.6)
Так как Л —диагональная, то мы имеем
Jto
(17.3.7)
где нижний индекс % означает г-й компонент вектора состояния.
Выражение (17.3.7) дает прямую связь выходного сигнала системы с
собственными значениями матрицы А. Заметим, что в случае комплексно-
сопряженных собственных значений, Xi(t) также будет комплексным,
хотя выходной сигнал y(t) —обязательно вещественный:
y{t) = Y^cieXi(t-t°)x0 + Y^ci / ех^-тЩи{т)(1т+ Bu{t) (17.3.8)
г=1 ^*°
г=1
Пример 17.1. Рассмотрим систему, для которой описание в
пространстве состояний имеет вид
А =
-4
0
1
-1
-3
1
1
у—\
-3
; в =
-1
1
0
С=[-1 1 0] D = 0 (17.3.9)
Используя команду eig пакета MATLAB, мы найдем, что
собственные значения матрицы А равны —5, —3 и —2. Матрицу А можно
привести к диагональному виду, используя матрицу преобразования
подобия Т, чьи столбцы представляют собой набор линейно
независимых собственных векторов матрицы А. Матрицу Т также можно
получить, используя команду eig пакета MATLAB, которая дает
Т =
0.8018 0.7071 0.0000
0.2673 -0.7071 0.7071
-0.5345 -0.0000 0.7071
(17.3.10)
Используя (17.3.4) г* (17.3.10), мы получим подобное описание
системы в пространстве состояний в виде
А = Л =
-5 0 0
0-3 0
0 0-2
в =
0.0
-1.414
0.0
С =[-0.5345 -1.4142 0.7071]; D = 0
(17.3.11)
(17.3.12)
504 Глава 17. Линейные модели пространства состояний
17.4. Передаточные функции;
повторное рассмотрение
Как можно было бы ожидать, передаточная функция системы не
зависит от базиса, используемого для пространства состояний.
Рассмотрим, например, альтернативное описание, данное выражениями (17.3.2)-
(17.3.4).
Решение уравнения (17.3.3) с помощью преобразования Лапласа
имеет вид
y(5) = [C(5I-A)-1B+D]C/(5) + C(5l-A)-1x(0) (17.4.1)
= [CT(5l-T-1AT)-1T-1B+D]C/(5) + CT(5l-T-1AT)-1T-1rr(0)
(17.4.2)
= [C(5l-A)-1B+D]C/(5) + C(5l-A)-1x(0) (17.4.3)
которое идентично (4.5.10), как и ожидалось.
Предыдущий анализ показывает, что различный выбор переменных
состояния приводит к различным описаниям модели, но к одной и той
же модели входа-выхода, потому что
С(Л - A)-XB + D = С(Л - A)"XB + D (17.4.4)
для любой невырожденной матрицы Т.
Следовательно, для заданной передаточной функции имеется
бесконечно много эквивалентных относительно входа-выхода моделей
пространства состояний.
Это согласуется с физическими представлениями, как
иллюстрируется в следующем примере.
Пример 17.2. Рассмотрим снова двигатель постоянного тока из
примера 3.4. Физически, угол поворота вала двигателя — объективная
величина, которая явно не зависит от единиц измерения другого
состояния — угловой скорости. Если X2{t) — измеренная величина угловой
скорости в одних единицах, a X2{t) —то эюе, но в других единицах с
коэффициентом пропорциональности a, X2{t) =ax2{t), тогда
x(t) =
'xi{tj
x2(t)
= T
Xl$\=T-lz(t) где Т-1 = Г1 °1
X2{t)j v ' [0 aj
(17.4.5)
Отношение эюе входа-выхода в обоих случаях физически и
математически не зависит от этого преобразования. DDD
17.5. Переход от передаточной функции к пространству состояний 505
В этом примере мы осуществили преобразование из одного набора
физических состояний в другой (а именно, те же самые величины,
измеренные в различных единицах). Обычное применение таких
преобразований подобия приводит к такому вектору состояния, когда матрица
А имеет специфические свойства; при этом связанные с этим состояния
могут даже потерять свой физический смысл (если они его имели), но
первоначальное состояние может быть всегда восстановлено обратным
преобразованием.
Например, мы можем выполнить преобразование, чтобы выдвинуть
на первый план набор собственных частот системы, которые
соответствуют собственным значениям матрицы А. Заметим, что
det(sl - А) = det(sl - Т"1 AT) (17.4.6)
которое подтверждает, что собственные значения инвариантны
относительно преобразования подобия.
Пример 17.3. Рассмотрим набор 4-х матриц (A,B,C,D),
используемый в примере 17.1. Передаточная функция G(s), полученная с
помощью формулы (4.5.13), имеет вид
gW-<. + iw+M.+» (17A7)
Заметим, что вычисление G(s) моэюет быть сделано с помощью
команды ss2tf пакета MATLAB. DDD
Замечание 17.1. Мы видим, что передаточная функция G(s) моэюет
быть выражена в виде
СА$(з1-А)-*В
G{S)= det(sI-A) (17-48)
Следовательно, полюсы G(s) являются собственными значениями
матрицы А, т. е. корнями характеристического полинома матрицы А
п
det(sl - А) = Д (5 - Х{) (17.4.9)
i=i
где Ai, A2,...,Лп — собственные значения матрицы А.
17.5. Переход от передаточной функции
к представлению в пространстве состояний
Ранее мы видели, как .можно перейти от описания в пространстве
состояний к соответствующей передаточной функции. Обратная операция
506 Глава 17. Линейные модели пространства состояний
сталкивается со следующим вопросом: дана передаточная функция G(s);
как можно получить для этой системы представление в пространстве
состояний? В этом разделе мы дадим один ответ на этот вопрос.
Рассмотрим передаточную функцию G(s) как в (4.5.3)-(4.5.5). Мы
можем тогда записать
J-i
Y(s) = Y,bi-iVi(s) где Vi(s) = —-U(s)
i=i
A(s)
Заметим, что из этих определений вытекает
dvi-i(t)
vi(t) = C-1[V(s)} =
dt
для г = 1,2,...,п
(17.5.1)
(17.5.2)
Мы можем тогда выбрать в качестве переменных состояния ж» (4) =
Vi(t), что при использовании (17.5.1) дает
А =
О
О
1
о
о
1
о
о
о
о
в =
(17.5.3)
(17.5.4)
А =
В =
(17.5.5)
_—ао —ai —02 • • • — а-п-2 — Gn-iJ
С=[Ь0 W Ь2 ••• b„-i] D = 0
Это иллюстрируется следующим примером.
Пример 17.4. Рассмотрим построение описания из примера 17.3 в
пространстве состояний, используя (17.5.1)—(17.5.4). Это приводит к
0 1 0
0 "0 1
[-30 -31 -10J
С =[20 14 2] D = 0 (17.5.6)
В качестве упражнения для читателя мы предлагаем задачу
нахождения преобразований подобия для конвертирования этого описания
в другие два заранее данных описания той же самой системы,
определяемых уравнениями (17.3.9) и (17.3.11). DDD
Конечно, подобная процедура применима и к дискретным моделям.
Например, рассмотрим передаточную функцию Gq(z), данную
выражениями
Yq{z) = Gq{z)Uq{z)
Gq(z) =
_ Bq(z) _ bn-iz"-1 + bn-2zn-2 + ■ ■ ■ + hz + b0
Aq(z)
zn + an_izn_1 H \-a\z + a0
(17.5.7)
(17.5.8)
17.6. Управляемость и стабилизируемость 507
Это может быть выражено в виде
ВД = 5>-^(*) гДе VM = T7^Uq(z) (17.5.9)
z=l A(*(Z)
Из предыдущих определений мы имеем, что
vi[k] = Z-1[V{z)]=qvi-l[k] для г = 1,2,...,п (17.5.10)
где q — оператор сдвига вперед.
Тогда мы можем выбрать в качестве переменных состояния Х{[к] =
V{[k], что приведет к
А,=
0 1 0
0 0 1
о
о
—ао —а\ — а.2 • • • —ctn-2 ~Qn-i
Cq = [bo h &2 • • • bn-i];
о -
0
2 —On-1.
Dg=0
; B9 —
-Q-
0
0
.1.
(17.5.11)
(17.5.12)
17.6. Управляемость и стабилизируемость
Центральный вопрос управления с использованием моделей
пространства состояний — можем ли мы с помощью управляющих входных
сигналов перевести систему в некоторое конкретное состояние. Технически эта
возможность называется управляемостью или достижимостью. Тесно
связанная с этим — проблема стабилизируемости. Начнем с
управляемости.
Проблема управляемости гласит: можно ли данное начальное
состояние х0 перевести в начало координат за конечное время, используя
входной сигнал u(t).
Формально мы имеем следующее:
Определение 17.1. Говорят, что состояние х0 управляемо, если
существует конечный интервал [0,Т] и вход {u(t),t G [0,Т]} такой, что
х(Т) = 0. Если все состояния управляемы, то говорят, что система
полностью управляема. DDD
Замечание 17.2. Связанное с этим понятие — достиэюимость. Это
понятие иногда используется в дискретных системах. Формально оно
определяется следующим образом:
508 Глава 17. Линейные модели пространства состояний
Определение 17.2. Говорят, что состояние х Ф 0 достиэюимо (из
начала координат), если для х(0) = 0 существует конечный интервал
времени [0,Т] и вход {u(t),t G [0,Т]} такой, что х(Т) = х. Если все
состояния достижимы, то говорят, что система полностью
достижима. DDD
Для непрерывных, стационарных, линейных систем нет никакого
различия между полной управляемостью и полной достижимостью.
Однако следующий пример показывает, что имеется тонкое различие
в дискретном случае.
Рассмотрим следующую модель пространства состояний с
использованием оператора сдвига:
ф + 1]=0 (17.6.1)
Эта система, очевидно, полностью управляема: состояние
немедленно переходит в начало координат. Однако никакое состояние,
отличное от нулевого, не достиэюимо. DDD
Ввиду тонкого различия между управляемостью и достижимостью
при дискретном времени, мы будем использовать термин
«управляемость» для обозначения более сильного из этих двух понятий.
Доказательства приведенных ниже результатов для дискретного случая
выполнить немного легче. Поэтому мы докажем результаты для следующей
дискретной модели (в области дельта-оператора):
Sx[k] = A6x[k] + B6u[k] (17.6.2)
y[k] = Cdx[k] + Bsu[k] (17.6.3)
где x G Rn,u eRm и у GRl.
Для упрощения обозначений мы опустим нижний индекс S у матриц
А$,В$,С$ и Ds в оставшейся части этого раздела.
Наш следующий шаг —получить простую алгебраическую
проверку управляемости, которую можно легко применить к данной модели
пространства состояний. При получении этого результата мы будем
использовать результат из линейной алгебры, известный как теорема
Кэли—Гамильтона. Для удобства читателя, мы кратко рассмотрим этот
результат.
Теорема 17.1 (Теорема Кэли—Гамильтона). Каэюдая матрица
удовлетворяет своему собственному характеристическому уравнению,
т. е. если
det(sl - А) = sn + an-xs"-1 + • • • + а0 (17.6.4)
то
Ап + an_i А""1 +... + а01 = 0 (17.6.5)
17.6. Управляемость и стабилизируемое™ 509
Доказательство
Пусть
Adj(sl - А) = Bnsn + Вп-гв71-1 + • • ■ + Во (17.6.6)
где Adj означает присоединенную матрицу.
Тогда [det(sl — A)]I = (Adj[sl — A]) (si — А), так что мы имеем
(5n + an_i5n-1 + -- + ao)I=(Bn5n + Bn_i5n-1 + --+Bo)(5l-A)
(17.6.7)
Приравнивая коэффициенты, получим
В„ = 0 (17.6.8)
Вп_1=1 (17.6.9)
-В„_1 А + Bn_2 = a„_il (17.6.10)
-Вп_2 А + Вп_з = an_2I (17.6.11)
-BiA + B0 = aiI (17.6.12)
-B0A = a0I (17.6.13)
Последовательно исключая матрицы В, получим (17.6.5). DDD
Вооруженные этим результатом, мы теперь можем легко установить
следующее условие управляемости.
Теорема 17.2. Рассмотрим модель пространства состояний (17.6.2)-
(17.6.3).
1) Множество всех управляемых состояний совпадает с
пространством значений матрицы управляемости ГС[А,В], где
ГС[А,В]=[В АВ А2В ... АП-ХВ] (17.6.14)
2) Модель полностью управляема тогда и только тогда, когда ГС[А,В]
имеет максимальный строчный ранг.
Доказательство
Решением уравнения (17.6.2) является
N
x[N] = (I + АД)^х[0] + Д 2(1 + AA){-lBu[N - i] (17.6.15)
и, следовательно,
x[N] = {I + AA)Nx[0] + A[B АВ А2В ... A^BjSc (17.6.16)
510 Глава 17. Линейные модели пространства состояний
где
„А
III
0 Д1 2AI
О О Д21
О О
О
.Л/-11
д
•«[JV -1]
u[N - 2]
. «[0] J
(17.6.17)
Так как матрица S невырожденная, результат следует из
применения теоремы Кэли—Гамильтона (теорема 17.1). DDD
Пример 17.5. Рассмотрим модель пространства состояний
А =
-3 1
-2 О
В =
1
-1
(17.6.18)
Нужно проверить, является ли она полностью управляемой.
Решение
Матрица управляемости имеет вид
ГС[А,В] = [В,АВ] =
1 -4
-1 -2
(17.6.19)
Ясно, что ранг ГС[А,В] = 2; таким образом, система полностью
управляема. DDD
Пример 17.6. Нужно повторить те же исследования для модели
А =
-1 1
2 О
В =
1
-1
(17.6.20)
Решение
ГС[А,В] = [В,АВ] =
1 -2
-1 2
(17.6.21)
Ранг ГС[А,В] = 1 < 2; таким образом, система не является
полностью управляемой. DDD
Замечание 17.3. Хотя мы получили данный результат для дельта-
модели, он будет справедлив и для модели с оператором сдвига, и для
непрерывной модели.
Замечание 17.4. Мы видим, что управляемость — контрастная
проблема: модель или полностью управляема, или нет. Ясно, что знание
кое-чего о неуправляемости как таковой является ценной
информацией. Однако знание об управляемости не дает нам ничего о
степени управляемости, т. е. относительно трудности, которая могла
17.6. Управляемость и стабилизируемость 511
бы быть встречена при достижение некоторой цели. Эта проблема
лежит в основе фундаментальных компромиссов проектирования
систем управления, которые рассматривались в гл. 8 и 9.
Замечание 17.5. Мы замечаем, что управляемость — свойство
системы, которое не зависит от конкретного выбора переменных
состояния. Это можно легко заметить из следующего:
• Рассмотрим преобразование, определяемое невырооюденной
матрицей Т, например, x(t) = T-1a;(t), что дает
А = Т-ХАТ (17.6.22)
А^Т-^Т (17.6.23)
В = Т"1В (17.6.24)
AiB = T"1AiB (17.6.25)
• Из уравнений (17.6.22)-(17.6.25) видно, что
Гс[ А,В ] = Т-ХГС[А,В] (17.6.26)
и это говорит о том, что Гс[ А,В ] и ГС[А,В] имеют одинаковый
ранг.
Если система не полностью управляема, ее можно разложить на
управляемую и полностью неуправляемую подсистемы, как сказано
ниже.
Лемма 17.1. Рассмотрим систему, имеющую ранг {ГС[А,В]} = к < п;
тогда существует преобразование подобия Т, такое, что х = Т~~1х,
А _ *П — 1
А = T_i AT;
в = т-хв
иА,В имеют вид
А =
О
А-12
Anc
в =
Вс
о
(17.6.27)
(17.6.28)
где Ас имеет размерность к и система (АС,ВС) полностью
управляема.
Доказательство
Пусть Ti —какой-нибудь базис в пространстве значений Гс. Выберем
произвольную матрицу Т2, за исключением того, что Т = [Ti T2]
должна быть невырооюденной. Определим
T-i =
fSil
s2
(17.6.29)
512 Глава 17. Линейные модели пространства состояний
Тогда Т_1Т = I дает
SlT!=I
SiT2 = 0 S2Ti = 0
S2T2 = I
(17.6.30)
После использования выражений (17.6.27) преобразованная система
будет иметь вид:
В =
Si
s2
в =
SiB
о
А =
Si
s2
A[Ti T2] =
(17.6.31)
(17.6.32)
SiATi SiAT2l
0 S2AT2J
Нулевые входы в (17.6.31) получаются потому, что значения В
принадлеоюат пространству значений Гс и S2Ti = 0. Аналогично,
нулевые элементы в (17.6.32) —следствие того, что столбцы ATi
принадлежат пространству значений Гс в соответствии с теоремой
Кэли—Гамильтона и что S2Ti =0. Это доказывает (17.6.28). Кроме
того, мы видим что
■Dg AqIJq . . . A.Q lJQ
0 0
Гс[Ас,Вс] АС*ВС .
0
= Т-1ГС[А,В]
Следовательно,
rank{Tc[ AC,BC ]} = гапА;{Гс[А,В]} = k
.. Ас»-^;
0
(17.6.33)
(17.6.34)
(17.6.35)
DDD
Полученный результат имеет для управления важное значение.
Чтобы оценить это, выразим уравнения (преобразованные) состояния и
выхода в расчлененной форме:
и[к]
у[к]=\Сс Спс]
+ Т)и[к]
(17.6.36)
(17.6.37)
хс[к] 1 = ГАС Ai21 Г хс[к] 1 ГВС
Хпс[к]\ [ 0 AncJ [хпс[к]\ [ О
\хс[к]~\
\Xnc[K\j
Графическое представление этих уравнений показано на рис. 17.1.
Уравнения (17.6.36), (17.6.37) и рис. 17.1 показывают, что нужно быть
осторожным при управлении системой (или при проектировании
регулятора с моделью, которая не полностью управляема), потому что выход
имеет составляющую Спсхпс[к], который не зависит от управляющего
воздействия и[к]. Например, если х_пс[к] неограниченно растет (одно или
несколько собственных значений Апс —вне области устойчивости), то
объект не может быть стабилизирован обратной связью, используя вход
u[k]
Управляемая
часть
Неуправляемая
часть
17.6. Управляемость и стабилизируемость 513
1«м
хс[к]
Xnc[k]
I D I
5
+ у[к]
Рис. 17.1. Разложение на управляемую и неуправляемую части
и[к]. Однако имеются ситуации, в которых преднамеренное
использование моделей с подмножеством не поддающихся управлению выходов
является разумным —см. замечание 17.6.
Определение 17.3. Управляемое подпространство модели
пространства состояний представляет собой любую возможную линейную
комбинацию состояний хс. Устойчивость этого подпространства
определяется расположением собственных значений Ас.
Определение 17.4. Подпространство модели пространства
состояний, не поддающееся управлению, состоит из всех состояний,
получаемых с помощью любой возмоэюной линейной комбинации состояний
хпс. Устойчивость этого подпространства определяется
расположением собственных значений Апс.
Определение 17.5. Говорят, что модель пространства состояний
«стабилизируема», если его подпространство неуправляемых
состояний устойчиво.
Факт, который будет полезным в будущем, заключается в том, что
если система, задаваемая уравнениями (17.6.2) и (17.6.3), является
полностью управляемой, существуют преобразования подобия, которые
переводят ее в специальную форму, называемую канонической формой.
Это устанавливается следующими двумя леммами.
Лемма 17.2. Рассмотрим полностью достижимую модель
пространства состояний для SISO-системы. Тогда существует преобразование
подобия, которое переводит модель пространства состояний в следу-
514 Глава 17. Линейные модели пространства состояний
ющую каноническую форму управляемости:
ГО 0 ... О -а0
-Oil
А':
О О
О
О -а2
В' =
(17.6.38)
где An + an_iAn_i +
полином А.
1 -an_d L0J
+ а\ А + ао = det(AI — А) — характеристический
Доказательство
Сначала заметим, что ГС[А',В'] = I. Используя этот результат
и уравнение (17.6.26), мы видим, что преобразование подобия
обеспечивается матрицей Т = ГС[А,В]. Далее проверим, что это
преобразование дает (17.6.38). Сравнивая первый столбец в обеих частях
уравнения (17.6.26), мы видим, что такой выбор Т преобразует В в
В', как указано в (17.6.38). Затем заметим, что
ГС[А,В]А'=[АВ А2В ••• А^В -(aoI + aiA + .-. + a^iA^^B]
(17.6.39)
Применяя теорему Кэли—Гамильтона, мы имеем — (aoI+aiAH Ь
an_iAn-1)=An. Тогда
ГС[А,В]А' = АГС[А,В] гФГ^А^А'Г^В]-1 = А (17.6.40)
что завершает доказательство. DDD
Лемма 17.3. Рассмотрим полностью управляемую модель
пространства состояний для SISO-системы. Тогда существует преобразование
подобия, которое переводит модель пространства состояний в
следующую каноническую форму регулятора:
А" =
-Oin-l
1
0
о
о
1
о
—а\ — ао
0 0
0 0
1
0
В" =
(17.6.41)
где An + an_iAn_i + '
полином А.
+ ai А + ао = det(AI — А) — характеристический
Доказательство
Используя (17.6.26) и свойство управляемости SISO-системы,
заметим, что существует единственное преобразование подобия, перево-
17.6. Управляемость и стабилизируемость 515
дящее модель (17.6.41) в модель (17.6.38). Соответствующее
преобразование подобия
я = Гс[А,В]Мя" (17.6.42)
где
"1 an_i ... а2 ос\
мй
OL2
1
(17.6.43)
Преобразование подобия дает
(17.6.44)
или
А'^М^А'М
В'^М^В'
(17.6.45)
где А' = Г^1[А,В]АТС[А,В], В' = Г'^А^В представлена в форме
управляемости, следуя лемме 17.2. Из определения М следует, что
М-1 — также верхняя треугольная матрица с единичными
диагональными элементами. Таким образом,
в'^м-^в^
о
.0J
(17.6.46)
Доказательство следует из раздельного подсчета матриц МА" и
А'М и проверки, что они идентичны. Поскольку М — невырооюденная
матрица, лемма доказана. DDD
Замечание 17.6. В заключение отметим, что, как мы видели в гл. 10,
это действительно довольно общий случай, когда включаются
неуправляемые модели в проект системы управления. Это удобно для описания
различных часто встречающихся возмущений. Например, постоянное
возмущение может быть задано следующей моделью пространства
состояний:
xd = 0 (17.6.47)
которое, естественно, является нестабилизируемым.
Возмущения более общего вида обычно описываются моделями вида
t(xd)=Adxd (17.6.48)
где f — соответствующий оператор (дифференциальный, оператор
сдвига, дельта-оператор), a Ad — матрица, которая обычно имеет
корни на границе устойчивости.
516 Глава 17. Линейные модели пространства состояний
Эти модели могут комбинироваться с другими моделями, чтобы
включить возмущения в общее описание системы. Например, система
с входным возмущением моэюет быть смоделирована матрицами А' и
В' вида
Га в'
[о Ad
; в' =
i 1
• •
17.7. Наблюдаемость и определяемое™
Рассмотрим снова модель пространства состояний {(17.6.2), (17.6.3)}.
В общем случае, размерность наблюдаемого выхода у может быть
меньше, чем размерность состояния х. Однако можно догадаться, что,
если наблюдать выход через некоторые конечные интервалы времени, то
можно получить некоторую информацию относительно всего состояния.
Связанные с этим свойства называются наблюдаемостью (или рекон-
струируемостью). Связанная с ней проблема называется определяемо-
стью. Мы начнем с наблюдаемости.
Наблюдаемость связана с вопросом, что можно сказать относительно
состояния процесса по измерениям выхода объекта.
Формальное определение следующее:
Определение 17.6. Говорят, что состояние х0 ф О «ненаблюдаемое
если для заданных х(0) = х0 и и[к] = 0 для к > О следует, что
у[к] = 0 для к>0. Говорят, что система полностью наблюдаема, если
не существует никакого ненулевого начального состояния, которое
является ненаблюдаемым.
Замечание 17.7. Понятием, связанным с наблюдаемостью, является
реконструируемость. Это понятие иногда используется в
дискретных системах. Реконструируемость связана с вопросом, что можно
сказать относительно х(Т) на основе предыдущих значений выхода,
т. е. у[к] для О < к < Т. Для линейных стационарных
непрерывных систем различие между наблюдаемостью и реконструируемостъю
несущественно. Однако следующий пример иллюстрирует, что для
дискретного времени эти две концепции различны. Рассмотрим
систему
x[k + l}=0 x[0]=xo (17.7.1)
У[к} = 0 (17.7.2)
Ясно, что эта система реконструируема для всех Т > 1, потому
что мы знаем наверняка, что х[Т] = 0 для Т > 1. Однако она
17.7. Наблюдаемость и определяемость 517
полностью ненаблюдаема, потому что у[к] = 0 Vfc независимо от
значения х0. DDD
Ввиду тонкого различия между наблюдаемостью и реконструиру-
емостью, мы будем использовать термин «наблюдаемость» для более
сильного из этих двух понятий.
Наблюдаемость системы определяется следующей теоремой.
Теорема 17.3. Рассмотрим модель пространства состояний ^(17.6.2)
и (17.6.3);.
1) Множество всех ненаблюдаемых состояний равно множеству
нулевых элементов матрицы наблюдаемости Г0[А,С], где
Г0[А,С] =
С
СА
СА
п-1
(17.7.3)
2) Система полностью наблюдаема тогда и только тогда, когда
Г0[А,С] имеет столбцевой ранг, равный п.
Доказательство
Результат справедлив и для непрерывного, и для дискретного времени]
здесь мы сосредоточим внимание на доказательстве для дискретного
времени (область дельта-оператора). Для нулевого входа решение
уравнения (17.6.2)
х[к + 1] = (I + АА)х[к] (17.7.4)
Следовательно, для N > п — 1
YN±
■у[0У
УМ
№
с
С(1 + ДА)
С(1 + ДА)2
С(1 + АА)^
х[0]
(17.7.5)
I 0
I AI
I 2AI
0 ..
0 ..
А21 ..
0
0
0
Д"1
с
СА
СА2
СА
N
х[0]
(17.7.6)
518 Глава 17. Линейные модели пространства состояний
Первая матрица в (17.7.6) невырожденная, и, следовательно, Yn
равно нулю тогда и только тогда, когда х[0] находится в нулевом
пространстве [СТ АТСТ ... (А^)ТСТ]Т. По теореме Кэли—Гамильтона
это то же самое, что и нулевое пространство Г0[А,С]. DDD
Что касается управляемости, полученный результат также
справедлив и для непрерывных операторов, и для дискретных (в области
оператора сдвига).
Пример 17.7. Рассмотрим следующую модель пространства
состояний:
А =
В =
-3 -2|
[ Х °
Нужно проверить ее на наблюдаемость.
С=[1 -1]
(17.7.7)
Решение
Г0[А,С] =
С
СА
1 -1
-4 -2
(17.7.8)
Следовательно, ранг матрицы Г0[А,С] = 2 и система полностью
апп
наблюдаема.
Пример 17.8. Нужно повторить решение для модели
А =
-1 -2
1 О
В =
С=[1 -1]
Решение
Г0[А,С] =
1 -1
-2 -2
(17.7.9)
(17.7.10)
Следовательно, ранг матрицы Г0[А,С] = 1 < 2 и система не
является полностью наблюдаемой. ODD
Мы видим поразительное подобие результатов теоремы 17.2 и
теоремы 17.3. Можно формализовать это следующим образом:
Теорема 17.4 (Двойственность). Рассмотрим модель пространства
состояний, описанную четырьмя матрицами (A,B,C,D). Эта
система полностью управляема тогда и только тогда, когда дуальная
{двойственная) система (AT,CT,BT,DT) полностью наблюдаема.
Доказательство
Результат непосредственно вытекает из теорем 17.2 и 17.3. DDD
Данная теорема часто используется, чтобы перейти от результатов
относительно управляемости к результатам относительно
наблюдаемости и наоборот. Например, двойственной к лемме 17.1 будет следующая:
17.7. Наблюдаемость и определяемость 519
Лемма 17.4. Если ранг {Г0[А,С]} =_к < п, существует преобразование
подобия Т, такое, что сж = Т""1^, А = Т"1 AT, С = СТ, СиА имеют
вид
А=|^° х° I С=[С0 0] (17.7.11)
где А0 имеет размерность к, а пара (С0,А0) полностью наблюдаема.
Доказательство
Рассмотрим пару (А', В') = (АТ,СТ) и применим лемму 17.1.
Результат следует из свойства двойственности.
DDD
Полученный результат столь же важен, что и свойство
управляемости и связанная с ним декомпозиция. Чтобы оценить это, мы применим
лемму, двойственную к лемме 17.1, чтобы изобразить (преобразованные)
уравнения состояния и выхода в расчлененной форме следующим
образом:
х0[к]
А0
A2i
у[*]=[Со 0]
_0
Ап0
х0[к]
хпо [к\
х0[к]
и[к]
+ Du[k]
(17.7.12)
(17.7.13)
Графическое изображение этих уравнений показано на рис. 17.2.
Уравнения (17.7.12) и (17.7.13) вместе с рис. 17.2 показывают, что
могут возникнуть проблемы, когда для управления объектом
используются только выходы или когда проектируется регулятор по модели,
которая не является полностью наблюдаемой. Происходит это оттого,
что выход не дает всей информации относительно яп0[&]. Например, если
хпс[к] неограниченно растет, то объект не может быть стабилизирован
обратной связью по выходу системы.
и[к]
D
и
[к]
1 ^
Наблюдаемая
часть
Ненаблюдаемая
часть
х0[к]
Хпо[к]
^
Со
W (
+
+1 »[*]
Рис. 17.2. Разложение на наблюдаемую и ненаблюдаемую части
520 Глава 17. Линейные модели пространства состояний
Определение 17.7. Наблюдаемое подпространство объекта
представляет собой любую возможную линейную комбинацию состояний х0.
Устойчивость этого подпространства определяется расположением
собственных значений А0.
Определение 17.8. Ненаблюдаемое подпространство объекта
составлено из всех состояний, получаемых с помощью любой возможной
линейной комбинации состояний хпо. Устойчивость этого
подпространства определяется расположением собственных значений Апо.
Определение 17.9. Говорят, что объект «определяемый», если его
ненаблюдаемое подпространство устойчиво.
В разд. 17.6 мы отметили, что неуправляемые (на самом деле неста-
билизируемые) модели часто используются при проектировании систем
управления. Это не так для неопределяемых моделей. По существу, все
модели, используемые в дальнейшем, можно считать определяемыми без
потери общности.
Имеется также дуализм канонических форм, приведенных в
леммах 17.2 и 17.3. Например, лемма, двойственная лемме 17.3, выглядит
так:
Лемма 17.5. Рассмотрим полностью наблюдаемую SISO-систему,
заданную уравнениями (17.6.2) и (17.6.3). Тогда существует
преобразование подобия, которое преобразует модель к канонической форме
наблюдаемости
6x'[k] =
-<*п-\
1
L -<*о О
У[Щ=[1 О
х'[к] +
V
и[к]
L ь0
0}х'[к}+Ви[к]
(17.7.14)
(17.7.15)
Доказательство
Заметим, что есть связь: (С,А) —наблюдаема <& (АТ,СТ)
—управляема. Поэтому рассмотрим дуальную систему
6х[к] = АТх[к] + Сти[к] (17.7.16)
у[к] = Втх[к] + Т>и[к] (17.7.17)
и преобразуем ее к виду регулятора, что и в лемме 17.3. Наконец,
второе применение дуальности дает вид, приведенный в {(17.7.14),
(17.7.15)}. DDD
17.8. Каноническое разложение 521
Замечание 17.8. Заметим, что {(17.7 А), (17.7.5)7 является другим
способом записи разностного уравнения п-го порядка. Непрерывный
вариант {(17.7 А), (17.7.Ъ)} является другим способом записи
дифференциального уравнения п-го порядка.
17.8. Каноническое разложение
Дальнейшее знакомство со структурой линейных динамических систем
будет связано с предположением, что эти системы являются лишь
частично наблюдаемыми или управляемыми. Эти системы могут быть
разложены на полностью наблюдаемые и полностью управляемые
системы.
Результаты двух лемм 17.1 и 17.4 могут быть объединены следующим
образом.
Теорема 17.5 (Теорема канонического разложения). Рассмотрим
систему, описанную в форме пространства состояний. Тогда всегда
существует преобразование подобия Т такое, что^ преобразованная
модель для х = Т~1х имеет вид
А=|~21 ~22 ^23 ~24|; B=|~2I; C=[Ci О С2 0]
(17.8.1)
где
1) Подсистема [AC0,Bi,Ci] и полностью управляема, и полностью
наблюдаема и имеет ту же передаточную функцию, что и исходная
система (см. лемму 17.6).
■"■со
A2i
0
0
0
А22
0
0
Aw _0 "
А2з А24
Азз _0
А34 А44.
; в =
Bi
в2
0
0
2) Подсистема
|АС0 _0
[A2i А22
полностью управляема.
3) Подсистема
[Aco Ai31
L 0 Азз]
>
*
[Bi
1.В2
Bi]
0 J
[Ci 0]
[Ci C2]
(17.8.2)
(17.8.3)
полностью наблюдаема.
Доказательство
Является результатом лемм 17.1 и 17.4. DDD
Каноническое разложение, описанное в теореме 17.5, приводит к
лемме.
522 Глава 17. Линейные модели пространства состояний
Лемма 17.6. Рассмотрим матрицу передаточных функций Н($),
определяемую выражением
Y{s)=H(s)U{s) (17.8.4)
Тогда ' _ _ _
H = C(5l~A)"1B + D = Ci(5l~Aco)"1Bi+D (17.8.5)
где Ci, Асо и Bi такие же, как и в уравнениях (17.8.1).
Доказательство
Вытекает непосредственно из определений матриц и использования
формулы инверсии для треугольных блочных матриц. DDD
Замечание 17.9. Лемма 17.6 показывает, что неуправляемые и
ненаблюдаемые части линейной системы не появляются в передаточной
функции. Наоборот, учитывая передаточную функцию, возможно
описать пространство состояний, которое является и полностью
управляемым и полностью наблюдаемым. Тогда мы говорим, что это
описание состояния — минимальная реализация передаточной функции. Как
упоминалось ранее, неминимальные модели часто используются при
проектировании систем управления, чтобы включить возмущения.
Замечание 17.10. Если М —любая квадратная матрица и мы
обозначим через Л{М} множество собственных значений М, тогда
Л{А} = Л{Асо} U Л{А22} U Л{А33} U Л{А44} (17.8.6)
где
Л {А} собственные значения системы,
Л{Асо} собственные значения управляемой и наблюдаемой подсистемы,
А{А2г} собственные значения управляемой, но ненаблюдаемой подсистемы,
А{Азз} собственные значения неуправляемой, но наблюдаемой подсистемы,
A{A44} собственные значения неуправляемой и ненаблюдаемой подсистемы.
Хотя определение свойств системы относится к состояниям
конкретных подсистем, общепринято использовать ту же самую
терминологию для собственных значений и собственных движений,
связанных с этими подсистемами. Например, если управляемая, но
ненаблюдаемая непрерывная подсистема имеет два различных собственных
значения, \а и \ь, то обычно говорят, что движения eXat и eXht, a
также собственные значения Ха и \ь управляемы, но ненаблюдаемы.
Замечание 17.11. Мы видим, что управляемость для данной системы
зависит от структуры входных портов: точек, где в системе
приложены воздействующие входные сигналы. Таким образом, состояния
данной подсистемы могут быть неуправляемыми для одного данного
17.9. Компенсация нулей и полюсов и свойства системы 523
входа, но полностью управляемыми для другого. Это различие имеет
фундаментальное значение при проектировании систем управления,
потому что не все входы объекта могут (рассмотрим, например,
возмущения) перевести объект в заданное состояние.
Точно так же свойство наблюдаемости зависит от того, какие
выходы рассматриваются. Некоторые состояния могут быть нена-
блюдаемы из одного выхода, но они могут быть полностью наблюдаемы
из некоторого другого выхода. Это также имеет существенное
влияние на системы управления с обратной связью по выходу, потому что
некоторые состояния могут не проявиться на выходе объекта, чтобы
их можно было измерить и подать через обратную связь. Однако они
могут проявляться во внутренних критических переменных и таким
образом быть важными для задачи управления.
17.9. Компенсация нулей и полюсов
и свойства системы
Свойства системы, описанные в предыдущих разделах, также глубоко
связаны с проблемами компенсации нулей и полюсов. Эта проблема была
рассмотрена в гл. 15 (в частности, см. замечание 15.4), когда мы сделали
различие между аналитической (или точной) компенсацией и
компенсацией при реализации. Чтобы облегчить последующее рассмотрение, мы
введем следующий тест, который будет полезен для изучения проблем
управляемости и наблюдаемости.
Лемма 17.7 (РВН-тест, тест предполагаемого
местонахождения). Рассмотрим модель пространства состояний (А,В,С).
1) Система не является полностью наблюдаемой тогда и только
тогда, когда существуют ненулевой вектор х Е C71 и скалярная
величина A Е С, такие, что
Ах = Хх (17.9.1)
Ся = 0
2) Система не является полностью управляемой тогда и только
тогда, когда существуют ненулевой вектор х Е О1 и скалярная
величина A Е С, такие, что
хТА = ХхТ (17.9.2)
ятВ = 0
524 Глава 17. Линейные модели пространства состояний
Доказательство
1) Тогда: Данные условия подразумевают
ГСП
СА
х = 0
(17.9.3)
LCA"-1]
Это означает, что система не полностью наблюдаема.
Только тогда: Предположим, что система не полностью
наблюдаема. Тогда она моэюет быть разложена, как показано в
{{П.ТЛ.2), (17.7.13)7- Далее выберем \, равное собственному
значению Апо и определим
' О
х =
Хп
(17.9.4)
где хпо Ф О — собственный вектор А.п0, соответствующий А. Ясно,
что мы тогда имеем
Ао
A2i
_0
А*по
[Со 0]
о
' о
= А
О
= 0
(17.9.5)
(17.9.6)
2) Доказательство аналогично 1), но используются свойства
управляемости. DDD
Далее используем полученные результаты для изучения свойств
каскадных систем.
Рассмотрим структуру, состоящую из последовательно соединенных
подсистем, изображенную на рис. 17.3.
Предположим, что u(t),U2(t),y\(t),y(t) G R, обе подсистемы
минимальные (см. разд. 17.8) и что
подсистема 1 имеет нуль в точке а и полюс в точке /3,
подсистема 2 имеет полюс в точке а и нуль в точке ft.
Тогда объединенная модель обладает следующими свойствами:
а) полюс системы в точке (3 не наблюдаем со стороны у и
б) полюс системы в точке а не управляем со стороны и.
Чтобы установить это, мы заметим, что объединенная модель имеет
описание в пространстве состояний
А!
В2С1
0
А2
В!
о
[о с2]
(17.9.7)
u(t)
17.9. Компенсация нулей и полюсов и свойства системы 525
Подсистема 1 Подсистема 2
^2 СО=2/1 СО
ii=Airri+Biw
2/i = CiZi
±2 = А2Я2+В21*2
у=С2Х2
Рис. 17.3. Компенсация нулей и полюсов
y(t)
Для доказательства а), допустим, что А = /3 и выберем параметр
х ф О, определяемый следующим образом:
x=[xj х%]
0 = (Ах-/31) *!
а^СЗГ-Аг^ВзСю;!
Тогда ясно, что
[о с2]
Х2
= С22:2
(17.9.8)
(17.9.9)
(17.9.10)
(17.9.11)
= С2(/31-А2Г1В2С1х1
= 0 потому что /3 является нулем подсистемы 2.
Аналогично из {(17.9.8), (17.9.10)}
Аг 0
B2Ci A2
= Р
Xi
Х2
(17.9.12)
Таким образом, используя лемму 17.7, мы делаем вывод, что
составная система не является полностью наблюдаемой. Часть б) доказывается
аналогично, если выбрать параметр х следующим образом:
хт=[х1 4] (17.9.13)
0 = х\ {а\ - А2)
xf = ^B2Ci (oJ - Ai)-1
Тогда
[х{ 4]
Bi
О
[х1 х2 \
Ai О
B2Ci A2
= а^ВгС! (а! - АО Bi = 0
= a[xf x%]
(17.9.14)
(17.9.15)
Таким образом, используя лемму 17.7, можно утверждать, что
составная система не является полностью управляемой. DDD
526 Глава 17. Линейные модели пространства состояний
17.10. Резюме
• Переменные состояния — система внутренних переменных, на
которых может быть построена полная модель поведения системы.
Переменные состояния можно представить в виде вектора состояния.
• Для линейной системы выбор переменных состояния не однозначен,
однако
о минимальная размерность вектора состояния инвариантна для
системы,
о существует невырожденная матрица, которая определяет
преобразование подобия между любыми двумя векторами состояния и
о любой выход спроектированной системы может быть выражен в
виде линейной комбинации переменных состояния и входов.
• Для линейных стационарных систем модель пространства состояний
описывается следующими уравнениями:
непрерывные системы
£(«) = Ax(t) + Bu(t) (17.10.1)
y(t) = Cx{t)+Bu{t) (17.10.2)
дискретные системы в форме оператора сдвига
х[к +1] = Аях[к] + Вяи[к] (17.10.3)
у[к] = Сях[к] + Вяи[к] (17.10.4)
дискретные системы в дельта-форме
бх[к] = А6х[к]+В6и[к] (17.10.5)
у[к] = С6х[к] + Т>6и[к] (17.10.6)
• Устойчивость и собственные характеристики системы могут быть
изучены на основании собственных значений матрицы А (А9, А$).
• Модели пространства состояний облегчают изучение некоторых
свойств системы, которые являются первостепенными в решении
задач проектирования систем управления. Эти свойства связаны со
следующими вопросами:
о Можно ли соответствующим выбором входа и перевести текущее
состояние системы в желаемое состояние (конкретную точку)?
(Управляемость.)
о Если некоторые состояния неуправляемы, то дадут ли они
затухающие компоненты процесса? (Стабилизируемость.)
о Если известен вход u(t), для t > to, то можем ли мы определить
состояние при t = to> измеряя выход системы y(t) при t > to?
(Наблюдаемость.)
17.11. Литература для последующего чтения 527
о Если некоторые из состояний ненаблюдаемы, то дадут ли они
затухающие компоненты процесса? (Определяемость.)
• Управляемость говорит нам о реализуемости попытки управлять
объектом.
• Наблюдаемость говорит нам, возможно ли узнать о том, что
происходит внутри данной системы, наблюдая ее выходы.
• Вышеупомянутые свойства инвариантны для системы. Однако
изменения в числе входов, в точках их приложения, в числе измеряемых
параметров и в выборе переменных, которые будут измерены, могут
привести к различным результатам.
• Передаточную функцию можно всегда получить из модели
пространства состояний.
• Модель пространства состояний может быть построена из модели в
виде передаточной функции. Однако только полностью управляемая
и наблюдаемая часть системы будет описана в этой модели
пространства состояний. Таким образом, модель в виде передаточной функции
может быть только частичным описанием системы.
• Свойства отдельных систем не обязательно переходят без изменений
к объединенным системам. В частности, для двух систем, полностью
наблюдаемых и управляемых, их последовательное соединение:
о не является полностью наблюдаемым, если полюс первой системы
совпадает с нулем второй системы (компенсация полюса нулем);
о не является определяемым, если компенсация полюса нулем
связана с неустойчивым полюсом;
о не является полностью управляемым, если нуль первой системы
совпадает с полюсом второй системы (компенсация нуля полюсом)
и
о не является стабилизируемым, если компенсация нуля полюсом
связана с неминимально-фазовым нулем.
• Эта глава дает основание для критерия проектирования, который
гласит, что никогда нельзя пытаться компенсировать неустойчивые
полюсы и нули.
17.11. Литература для последующего чтения
Линейные модели пространства состояний
1. Chen, С-Т. (1984). Introduction to Linear System Theory. Holt, Rinehart and
Winston.
2. Kailath, T. (1980). Linear Systems. Prentice-Hall, Englewood Cliffs, N.J.
3. Ogata, K. (1967). State Space Analysis of Control Systems. Prentice-Hall,
Englewood Cliffs, N.J.
528 Глава 17. Линейные модели пространства состояний
4. Rosenbrock, H. (1970). State Space and Multivariable Theory. Wiley, New
York.
5. Schultz, D. and Melsa, J. (1967). State Function and Linear Control Systems.
McGraw-Hill, New York.
6. Wiberg, D. (1971). Theory and Problems of State Space and Linear Systems.
McGraw-Hill, New York.
Управляемость, наблюдаемость и канонические формы
1. Gilbert, E.G. (1963). Controllability and observability in multivariable control
systems. SIAM Journal of Control and Optimization, 1:128-151.
2. Kailath, T. (1980). Linear Systems. Prentice-Hall, Englewood Cliffs, N.J.
3. Kalman, R.E., Ho, Y.C., and Narendra, K.S. (1962). Controllability of linear
dynamical systems. Contrib. Differ. Equations, 1(2):189-213.
4. Luenberger, D. (1967). Canonical forms for linear multivariable systems. IEEE
Transactions on Automatic Control, 12(6):290-293.
Полюсы и нули
1. Brockett, R. (1965). Poles, zeros, and feedback: State space interpretation.
IEEE Transactions on Automatic Control, 10:129-135, April.
2. Kailath, T. (1980). Linear Systems. Prentice-Hall, Englewood Cliffs, N.J.
Наблюдатели
1. Kwakernaak, H. and Sivan, R. (1972). Linear Optimal Control Systems. Wiley-
Interscience, New York. [Имеется русский перевод: Кваркернаак X., Си-
ван Р. Линейные оптимальные системы управления. — М.: Мир, 1977.]
2. Luenberger, D. (1964). Observing the state of a linear system. IEEE Trans.
Military Electr., 8:74-80.
3. Luenberger, D. (1971). An introduction to observers. IEEE Transactions on
Automatic Control, 16(6):596-602.
17.12. Задачи для читателя
Задача 17.1. Рассмотрим следующие дифференциальные уравнения,
описывающие отношения входа и выхода:
^-2j,(t)=u(t) (17.12.2)
£gi+i«m+5ylt)^+^+Mt) (1,12.4)
Для каждого случая постройте модель пространства состояний.
17.12. Задачи для читателя 529
Задача 17.2. Постройте модель пространства состояний для системы,
имеющей переходную характеристику
y(i) = 2-3e-* + e-*-te-* (17.12.5)
Задача 17.3. Постройте модель пространства состояний для систем со
следующими передаточными функциями:
2
(-5 + 2)2
-5+4
5 + 4
0.4
z\z -0.8)
Задача 17.4. Рассмотрим контур управления с одной степенью
свободы, включающий регулятор C(s) и номинальную модель объекта
G0(s). Модели пространства состояний для объекта и регулятора —
(Ао,Во,Со,0) и (Ac,Bc,Cc,Dc) соответственно.
17.4.1. Докажите, что для бисобственного регулятора необходимым и
достаточным условием будет то, что Dc является ненулевой
скалярной величиной.
17.4.2. Постройте модель пространства состояний для всего контура,
рассматривая эталонный сигнал как вход, выходной сигнал объекта
как выход объединенной системы.
Задача 17.5. Непрерывная система имеет модель пространства
состояний
(17.12.6)
C=[ci c2]; D = 0 (17.12.7)
17.5.1. Вычислите передаточную функцию системы.
17.5.2. Проверьте, что при е —> 0 передаточная функция приближается
к условию компенсации полюса и нуля. Интерпретируйте это в
терминах управляемости.
17.5.3. Придумайте подобный пример относительно наблюдаемости.
а)
в)
Д)
9
s2 + 4s + 9
-s + 8
(s + 2)(s + 3)
z-0.5
(г+ 0.5) (г-0.4)
б)
г)
е)
А =
-3 1
0 -2
В =
530 Глава 17. Линейные модели пространства состояний
Задача 17.6. Непрерывная
яний в виде
А =
С =
-3 1
-1 2
> 0];
>
система имеет модель пространства состо-
b-[-J
D = 0
(17.12.8)
(17.12.9)
17.6.1. Определите, устойчива ли система.
17.6.2. Вычислите передаточную функцию.
17.6.3. Исследуйте свойства системы (управляемость, стабилизируе-
мость, наблюдаемость и определяемость).
Задача 17.7. Дискретная система имеет модель входа-выхода в виде
62у[к] + 56у[к] + 6у[к] =6и[к] + и[к] (17.12.10)
Постройте модель пространства состояний.
Задача 17.8. Рассмотрим описание пространства состояний
(A,B,C,D), где В = 0, D = 0.
17.8.1. Определите пару матриц А и С и начальные условия х(0) такие,
что y(t) = 5, VJ > 0.
17.8.2. Повторите это для y(t) = -3 + 2sin(0.5t+ 7г/3).
17.8.3. Попытайтесь обобщить задачу.
Задача 17.9. Рассмотрим систему в виде последовательного
соединения элементов, представленную на рис. 17.3. Предположим, что
передаточные функции равны
Докажите, что на выходе подсистемы 1 имеется неограниченная
составляющая е*, которая не может быть определена на выходе
объединенной системы (т. е. на выходе подсистемы 2).
Задача 17.10. Рассмотрим ту же систему, изображенную на рис. 17.3.
Предположим, что теперь подсистемы соединены в обратном порядке:
°'W-?^5=- G*<S> = (J^5) <171212>
Докажите, что для ненулевых начальных условий выход
подсистемы 2 содержит неограниченную составляющую, на которую не
воздействует вход u(t) всей системы в целом.
17.12. Задачи для читателя 531
Задача 17.11. Рассмотрим систему, составленную из непрерывного
объекта и экстралолятора нулевого порядка на его входе. Передаточная
функция объекта имеет вид:
°о(8) = 7Т^ (17.12.13)
5 + U.5
Предположим, что вход и выход этой объединенной системы
квантуются каждые А с.
17.11.1. Постройте дискретную модель пространства состояний для
квантованной системы, когда Д = 0.5 с.
17.11.2. Повторите то же самое для Д = 0.75 с.
17.11.3. Предположим, что желательно построить непрерывную
модель пространства состояний для G0{s). В чем будет основная
трудность?
Задача 17.12. Рассмотрим снова задачу 12.4. Интерпретируйте явную
потерю полюса при некоторых скоростях квантования, строя
дискретную модель пространства состояний первоначальной непрерывной
системы, и затем проверьте ее на наблюдаемость и управляемость.
Глава 18
Синтез с помощью методов
пространства состояний
18.1. Введение
В этой главе мы дадим с точки зрения пространства состояний
интерпретацию многим из результатов, описанных ранее в гл. 7 и 15. В некотором
смысле это дублирует предыдущую работу. Однако причина для этого
состоит в том, чтобы получить более глубокое понимание линейных
систем с обратной связью. Кроме того, окажется, что использование
пространства состояний будет более естественным для случая систем
со многими переменными.
Результаты, которые будут здесь представлены, включают
следующее:
• назначение полюсов системы с помощью обратной связи по
переменным состояния (в дальнейшем будем называть ее обратной связью по
состоянию — прим. перев.);
• проектирование наблюдателей для восстановления неизвестных
переменных состояния по доступным измерениям выхода;
• объединение обратной связи по состоянию и наблюдателя;
• интерпретация передаточной функции;
• учет возмущений в обратной связи по состоянию;
• другая интерпретация аффинной параметризации всех
стабилизирующих регуляторов.
18.2. Назначение полюсов системы
с обратной связью по состоянию
Начнем с исследования задачи назначения полюсов замкнутого
контура. В данном случае сделаем упрощающее предположение, что все
18.2. Назначение полюсов системы с обратной связью по состоянию 533
переменные состояния системы можно измерить. Далее в разд. 18.4 мы
откажемся от этого предположения. Предположим также, что система
полностью управляема. Следующий результат тогда говорит о том,
что полюсы замкнутой системы могут быть произвольно назначены с
помощью обратной связи по состоянию через соответственно выбранный
вектор постоянных коэффициентов.
Лемма 18.1. Рассмотрим поминальную модель пространства
состояний
x{t) = A0x{t) + B0u{t)
y{t) = CQx{t)
Пусть r(t) означает внешний сигнал.
(18.2.1)
(18.2.2)
Тогда, при условии, что пара (А0,В0) полностью
ществует обратная связь по состоянию в виде
u{t)=f-Kx{t)
K = [fc0,fci,...,fcn_i]
управляема, су-
такая, что характеристический полином замкнутого
есть Aci(s), где Ad(s) — произвольный полином степени п.
(18.2.3)
(18.2.4)
контура
Доказательство
Модель полностью управляема, так что она может
быть.преобразована в форму регулятора (см. гл. 17), используя преобразование подобия:
X •— -L Xq '•
где
АС = Т~1А0Т- Вс^Т^Во;
xc(t) = Acxc{t) +Bcu(t)
y(t) = Ccxc(t)
CC = C0T (18.2.5)
(18.2.6)
(18.2.7)
A,=
-On-i
1
—Oo'
0
0 J
Bc =
(18.2.8)
Тогда, если использовать обратную связь по состоянию вида
u(t) = -Kcxc(t) + r{t) (18.2.9)
534 Глава 18. Синтез с помощью методов пространства состояний
где
Кс =[*£-i K-2 ••• *8] (18-2.Ю)
представление замкнутого контура в пространстве состояний будет
—ool
xc(t) =1 . xc(t) +
0
.0.
(-Kcxc(t)+f(t)) (18.2.11)
xc{t) =
-a„_i - к^_г
1
1
-ao - Щ'
0
xc(t) +
r(t) (18.2.12)
Тогда полюсы замкнутого контура удовлетворяют уравнению
sn + (an-l + kcn_1)sn-l + ... + (a0 + kc0) = 0
(18.2.13)
Следовательно, ясно, что выбором Кс характеристический полином
замкнутого контура и, следовательно, полюсы номинального
замкнутого контура могут быть назначены произвольно. Мы мооюем также
выразить этот результат в терминах исходного описания
пространства состояний, обращая преобразование (18.2.5). Это дает
u(t) = -KcT"1 x{t)+f{t) = -Kx{t)+f(t)
где К = КСТ"1 (18.2.14)
DDD
Заметим, что обратная связь по состоянию не вносит дополнительную
динамику в контур, потому что схема основана только на
пропорциональной обратной связи по некоторым переменным системы. Мы можем
легко определить полную передаточную функцию от r(t) до y(t). Это
приводит к выражению
Ш - С(Л - а„+ад-в. = Ъ*Ня-а.+вл}в.
R{s) F{8)
где
F(s) = det{sl - А0 + В0К} (18.2.16)
а Adj означает присоединенную матрицу.
Можно упростить выражение (18.2.15). Чтобы сделать это, следует
воспользоваться следующими двумя результатами из линейной алгебры.
18.2. Назначение полюсов системы с обратной связью по состоянию 535
Лемма 18.2 (Лемма об обратной матрице). Рассмотрим три
матрицы A G СГ1ХП; В G Uixm иСе Cmxn. Тогда, если матрица А+ВС
невырожденная, мы получим
(А + ВС)"1 = А"1 - А^В (I + СА^В)-1 СА-1 (18.2.17)
Доказательство
Следует умножить обе части равенства на (А + ВС). DDD
Замечание 18.1. Для случая, когда В = g G Rn и СТ = h € W1
выраэюение (18.2.17) дает
(A + 9*T1=(i-A-'tt|^)a-> (18.2.18)
Лемма 18.3. Дана матрица W G Rnxn и пара произвольных векторов
(f>i€Rn и <f>2 G Mn; тогда при условии, что W uW + cfricffi
невырожденные,
Adj(W + фхф1)фх = Adj{W)<b. (18.2.19)
$Adj{W + фхф%) = <%Adj{W) (18.2.20)
Доказательство
Используя определение обратной матрицы и применяя лемму 18.2 об
обратной матрице для обращения матрицы W + ф\ф2, получим
(w+^ ф1= ^hw+ф^1 (18-2'21)
= W-X<h - . JrVr, j. (18.2.22)
l + flW-ifa
1 + ф$\¥-1ф1
Известно также, что
(18.2.23)
1 + $W- Vi = det(l + ifiW-ifa) = det(J + W'1^) (18.2.25)
_ detjW + фгфТ)
~ det(W) (18-2-26)
Сначала используем (18.2.24) и (18.2.26) для правой части
уравнения (18.2.23). Затем, сравнив полученное выраэюение с правой частью
536 Глава 18. Синтез с помощью методов пространства состояний
уравнения (18.2.21), получим результат (18.2.19). Доказательство
(18.2.20) следует из тех же рассуждений. DDD
Применение леммы 18.3 к уравнению (18.2.15) дает
C0Adj{sl - А + В0К}В0 = C0Adj{sl - A0}B0 (18.2.27)
Тогда мы видим, что правая сторона вышеупомянутого выражения
совпадает с числителем B0(s) номинальной модели G0(s).
Следовательно, обратная связь по состоянию назначает полюсы замкнутого контура
в предписанные положения, в то время как нули всей передаточной
функции остаются теми же самыми, что и у модели объекта.
Обратная связь по состоянию охватывает сущность многих
фундаментальных идей проектирования систем управления и находится в
центре многих стратегий проектирования. Однако этот подход требует,
чтобы все переменные состояния могли быть измерены. В большинстве
случаев это — нереальное требование. По этой причине далее
представлена идея наблюдателей, как механизма восстановления переменных
состояния с помощью доступных измерений.
18.3. Наблюдатели
В предыдущем разделе мы выяснили, что обратная связь по состоянию
может назначать произвольные полюсы замкнутого контура. Однако
часто не все переменные состояния могут быть измерены. Поэтому мы
вводим идею наблюдателя. Это основной механизм для восстановления
неизмеряемых переменных состояния по доступным измерениям выхода.
Это — специальная форма виртуального датчика.
Рассмотрим снова модель пространства состояний
x(t) = A0x{t) + BQu{t) (18.3.1)
y(t) = C0x{t) (18.3.2)
Тогда линейный наблюдатель общего вида будет следующим:
£(t) = AQx{t) + BQu{t) +J{y{t) - CQx(t)) (18.3.3)
где матрица J называется усилением наблюдателя, а х(t) —
восстановленным состоянием. Заметим, что в частном случае, когда J =
0, наблюдатель (18.3.3) превращается в модель разомкнутой системы
(18.3.1). Выражение
v(t)=y(t)-C0x(t) (18.3.4)
18.3. Наблюдатели 537
называется инновационным процессом. Для ненулевой матрицы J
параметр v(t) в (18.3.3) представляет ошибку между наблюдением и
предсказанным выходом модели.
Следующий результат показывает, как усиление наблюдателя J
может быть выбрано так, чтобы ошибка #(£), определяемая как
x{t)=x{t)-x{t)
(18.3.5)
затухала с любой желаемой скоростью.
Лемма 18.4. Рассмотрим модель пространства состояний (18.3.1)-
(18.3.2) и связанный с ним наблюдатель вида (18.3.3).
Тогда ошибка восстановления x(t), определяемая выражением
(18.3.5), удовлетворяет условию
Z{t) = {A0-JC0)x(t)
(18.3.6)
Кроме того, если модель полностью наблюдаема, то
собственные значения (А0 — JCQ) могут быть произвольно назначены
выбором 3.
Доказательство
Вычитание (18.3.1) и (18.3.3) и использование (18.3.2) и (18.3.5) дает
(18.3.6).
Аналогично, если модель полностью наблюдаема, то всегда
существует преобразование подобия
X — A. Xq
А = Т 1А0Т-
В^Т^Во;
С = С0Т (18.3.7)
что дает описание состояния системы в канонической форме
наблюдаемости (см. гл. 17). Это
x0(t) = Ax0{t) + Bu(t)
y(t) = Cx0(t)
(18.3.8)
(18.3.9)
где
A =
-an-i 1
—O-n-2
-a0 0 .
1
• o.
; в =
"V-i"
bn-2
. b0 .
; C=[l 0 ... 0]
(18.3.10)
538 Глава 18. Синтез с помощью методов пространства состояний
В этой форме наблюдатель имеет уравнение
£0{t) = Ax0{t) + Bu(t) + Jo{y{t)-Cx0(t))
Пусть теперь
Jo=[fc-l fn-2 "• ft]'
Тогда ошибка равна
что приводит к
x0(t) = x0(t) - x0(t)
(18.3.11)
(18.3.12)
(18.3.13)
x0(t) = (A-JoCo)x0(t) =
Г-а„_1-.?'£_!
\-an-2-Jn-2
I -ao-Jo
1
0 .
1
.. 0.
x0(t) (18.3.14)
Динамика ошибки, следовательно, определяется корнями
следующего характеристического уравнения:
det(^-A-JoC)=5n + (an_i+^_1)5n"-1 + --- + (a0+^)=0 (18.3.15)
Следовательно, выбором 30 может быть произвольно задана
динамика ошибки.
Наконец, преобразуя состояние к первоначальному виду, получим,
что в уравнении (18.3.3) требуется
J = TJC
(18.3.16)
ааа
Пример 18.1 (Оценка уровня жидкости в резервуаре). В
качестве простого применения линейного наблюдателя для
восстановления состояния рассмотрим задачу двух соединенных резервуаров, в
которых фактически можно измерить только высоту оюидкости во
втором резервуаре, однако нас такэюе интересует и оценка высоты
оюидкости в первом резервуаре. Спроектируем виртуальный датчик
для этой задачи.
Система такого типа такэюе рассмотрена на Web-странице книги,
где приведена фотография реальной системы.
Схематическое изображение показано на рис. 18.1.
Вода течет в первый резервуар через насос 1 со скоростью fi(t),
что, очевидно, влияет на высоту воды в резервуаре 1 (обозначенную
через h\(t)). Вода вытекает из резервуара 1 в резервуар 2 со скоростью
fi2(t), воздействуя и на h\(t), и на h,2{t). Наконец, вода вытекает из
резервуара 2 со скоростью /2, управляемой насосом 2.
18.3. Наблюдатели 539
Насос 1
Насос 2
Рис. 18.1. Схематическое изображение двух соединенных резервуаров
Зная эту информацию, нужно сформировать виртуальный датчик
(или наблюдатель), чтобы восстанавливать значение высоты
жидкости в резервуаре 1 в зависимости от измерений высоты жидкости в
резервуаре 2 и скоростей f\(t) и f2(t).
Прежде чем мы продолжим проектирование наблюдателя, сначала
сформируем модель системы. Высота жидкости в резервуаре 1 может
быть описана уравнением
^-±<ЛМ-Л,М>
Аналогично /1г(<) описывается уравнением
-ir-J{fn{t)-f2)
(18.3.17)
(18.3.18)
Скорость жидкости между двумя резервуарами может быть
примерно описана скоростью свободного падения для разности высот воды
между двумя резервуарами:
/и(*) = \Z2g(h1(t)-h2(t))
(18.3.19)
Далее, если мы измеряем высоты жидкости в резервуарах в
процентах {где 0% — пустой, а 100% — полный резервуар), то можем
преобразовать скорости потока в эквивалентные величины в процентах
в секунду {где f\{t) —эквивалентный поток в резервуар 1, а /г(£) —
эквивалентный поток вытекания из резервуара 2). Тогда модель для
системы будет иметь вид
d_
dt
hi(tj
-дум<)-М*)
Ky/h1(t)-h2{t)
0
hit)
hit)
(18.3.20)
540 Глава 18. Синтез с помощью методов пространства состояний
где
К=^Щ = 0.26
(18.3.21)
Мы мооюем линеаризовать модель относительно номинальной
установившейся разности высот (или рабочей точки). Пусть
(18.3.22)
Тогда
hl{t)-h2(t)=Ah(t)=H + hd(t)
Ky/hi(t)-h2{t) = K\/Ah
= K^H + hd{t)
(18.3.23)
= kVhJi +
«Ял/Я(1 +
hd{t)
H
hd(t)\
2# J
потому что
л/ЬЙ
и тогда
Ч
^(1+^1)=^+^(()
К
= kVh+—=(/ц(<) - h2(t) - н)
= К\/И +
2у/Й
К
2VH
{hi(t)-h2(t))-
к
2\/Н
(18.3.24)
(18.3.25)
Я
*^ + -L(M*)-M*))
2 " 2ч/Я
Это приводит к следующей линейной модели
d
dt
=
'-к к 1
* ~к\
[h2(t)
+
"1 О]
0 -1J
/2(*) + ^F.
где
к =
К
2\/#
(18.3.26)
(18.3.27)
Предположим, что высота h2(t) может быть измерена, a hi(t) —
нет; тогда мы зададим С = [0 1] и D = [0 0]. Окончательная
система является и управляемой, и наблюдаемой (что легко проверить).
Далее нам нужно спроектировать наблюдатель
J =
(18.3.28)
18.4. Объединение обратной связи по переменным состояния с наблюдателем 541
чтобы оценивать значение h2(t). Очевидно, что характеристический
полином наблюдателя имеет вид
s2 + {2k + J2)s + J2k + Jik
(18.3.29)
так что мы можем выбрать полюсы наблюдателя:, этот выбор дает
нам значения для J\ и J2. Если мы предположим, что рабочая точка
Н = 10%, то к = 0.0411. Если мы хотим иметь полюсы при s = —0.9291
и s = —0.0531, то можно вычислить, что J\ = 0.3 и J2 = 0.9. Если же
нам нужно иметь два полюса при s = —2, то J2 = 3.9178 и J\= 93.41.
Окончательно уравнение наблюдателя будет иметь вид
dt
l*2(«).
Г-* *l[*i(t)l.
[ k -k\ [h2(t)\ +
1 0
0 -1
kVh
/2(0 +
/l(*) 2
kVh
2 J
+ J(h2(t)-h2(t))
(18.3.30)
Заметим, что этот наблюдатель позволяет нам оценивать высоту
h\(t), используя измерения h2(t) и значения скоростей f\(t) и f2(t).
Таким образом, он является виртуальным датчиком для h\(t).
Читатель может в интерактивном режиме .поэкспериментировать с
этим наблюдателем на Web-странице книги.
18.4. Объединение обратной связи
по переменным состояния с наблюдателем
Разумный вывод, являющийся результатом последних двух разделов,
заключается в том, что неплохо при наличии неизмеряемых переменных
состояния перейти к их восстановлению с помощью наблюдателя, а
затем завершить стратегию управления с помощью обратной связи,
используя эти восстановленные значения вместо истинных значений
переменных. Такая стратегия, действительно, очень привлекательна,
потому что она отделяет задачу проектирования наблюдателя от
проектирования самого регулятора. Априорно однако неясно, как
взаимодействуют полюсы наблюдателя и обратная связь по состоянию. Неясно
также, как они затрагивают замкнутый контур. Следующая теорема
показывает, что полюсы замкнутого контура являются комбинацией
полюсов наблюдателя и полюсов обратной связи по состоянию.
Теорема 18.1 (Теорема разделения). Рассмотрим модель
пространства состояний (18.3.1)-(18.3.2) и предположим, что она
полностью управляема и полностью наблюдаема. Рассмотрим также сея-
542 Глава 18. Синтез с помощью методов пространства состояний
занный с ней наблюдатель вида (18.3.3) и обратную связь по состоянию
вида (18.2.3)
u{t)=r{t)-Kx{t) (18.4.1)
К=ф0 h ... Avi-i]
(18.4.2)
Тогда
1. Полюсы замкнутого контура представляют собой комбинацию
полюсов наблюдателя и полюсов, которые получались бы при
использовании той эюе самой обратной связи при истинных значениях
переменных состояния, а конкретно, полином замкнутого контура
Aci(s) имеет вид
Acl{s) = det(sl - А0 + В0К) det(sl - Ас + JCQ)
(18.4.3)
2. Ошибка восстановленного состояния x(t) не мооюет управляться
внешним сигналом f(t).
Доказательство
1) Из леммы 18.4 следует, что x(t), x(t) и x(t) удовлетворяют
уравнениям
x(t) = {A0-JC0)x{t) (18.4.4)
x{t) = A0x{t) + B0[f(t) - Kx{t)] (18.4.5)
= AQx{t) + B0[f (t) - K{x(t) - x(t))] (18.4.6)
Уравнения (18.4.4) и (18.4.6) могут быть записаны совместно
следующим образом:
dt
x(t)
x(t)
B0K
BoK 1 \x(t)]
-JCoJ [x(t)\
+
Bo
0
y(t) = [c0 o]
x(t)
x(t)
f(t) (18.4.7)
(18.4.8)
Результат следует из того, что собственные значения блочной
треугольной матрицы совпадают с комбинацией собственных
значений диагональных блоков.
2) Структура уравнения (18.4.7) сразу же дает, что ошибкой
восстановленного состояния x(t) нельзя управлять с помощью внешнего
сигнала r(t), что легко проверить, используя матрицу
управляемости. Это замечание говорит о том, что ошибка восстановленного
состояния не мооюет быть улучшена, используя для этого
величину f(t). □□□
18.5. Интерпретации передаточной функции 543
Эта теорема отмечает положительные моменты использования
обратной связи по восстановленному состоянию. Однако следует предостеречь
читателя о том, что расположение полюсов замкнутого контура является
только одним среди многих других факторов, которые должны
учитываться при проектировании системы управления. Действительно, как
мы увидим позже, обратная связь по восстановленному состоянию — не
панацея, потому что и здесь будут те же самые проблемы
чувствительности к возмущениям, ошибкам модели и т. д., как и для всех случаев
обратной связи. Оказывается, что все схемы, по существу, идентичны.
Эти связи — предмет следующего раздела.
18.5. Интерпретации передаточной функции
В материале, представленном выше, мы разработали, казалось бы,
новый подход к синтезу линейных SISO-систем управления. Это могло
заставить читателя задуматься, какова связь между этим подходом и
идеями передаточной функции, рассмотренными ранее в гл. 7. Далее мы
покажем, что эти два метода — фактически различные пути выражения
одного и того же.
18.5.1. Передаточная функция наблюдателя
Сначала дадим интерпретацию передаточной функции наблюдателя.
Вспомним из (18.3.3), что наблюдатель пространства состояний имеет
форму
it{t) = AQx{t) + BQu{t) + 3{y{t) - CQx{t)) (18.5.1)
где J —усиление наблюдателя, a x(t) —восстановленное состояние.
Интерпретация передаточной функции этого наблюдателя дается
следующей леммой:
Лемма 18.5. Преобразование Лапласа восстановленного состояния
(18.5.1) обладает следующими свойствами:
а) Оно может быть выражено в виде передаточной функции
X{s) = {sI-A0 + JC0)-1{B0U{s) + JY{s))=T1{s)U{s)+T2{s)Y{s)
(18.5.2)
где T\(s) и T2{s) —следующие две устойчивые передаточные
функции:
Тг{з) = (Л - Ао + JCoJ^Bo (18.5.3)
Т2{з) = {si - А0 + ЛСоГ1 J (18.5.4)
544 Глава 18. Синтез с помощью методов пространства состояний
Заметим, что T\(s) и T2{s) имеют общий знаменатель
E{s) = det(sl - А0 + JC0) (18.5.5)
б) Восстановленное состояние по отношению ко входу и начальным
условиям имеет вид
М») = («I - Ао^ВоСф) - Щ (18.5.6)
где fo{s) — вектор полинома, где коэффициенты линейно зависят от
начальных условий ошибки x(t).
в) Восстановленное состояние не смещено в том смысле, что
Тг (*) + T2{s)G0{s) = {si - Ао^Во (18.5.7)
где G0(s) — номинальная модель объекта.
Доказательство
а) Уравнение (18.5.2) получается непосредственным применением
преобразования Лапласа к уравнению (18.5.1) и использованием
определений T\(s) и T2(s). Предполагаются нулевые начальные условия.
б) Уравнение (18.5.6) получим из
X{s)=X{s)-X{s) (18.5.8)
используя тот факт, что X(s) = (si — A0)^1'B0U(s), а также
используя уравнение (18.4.7), чтобы найти выражение для X(s).
в) Используя тот факт, что GQ(s) = CQ(sI — А0)-1В0 и
уравнения (18.5.3) и (18.5.4), мы видим, что
Ti(5)+T2(5)G0(5) = (5l-A0 + JC0)"-1(Bo + JCo(5l-A0)-1B0)
(18.5.9)
= (5l-A0 + JC0)"1(5l-A0 + JC0)(5l-A0)-1B0
(18.5.10)
откуда следует результат. DDD
Часть б) этой леммы известна как свойство асимптотической
несмещенности оценки. Она показывает, что передаточная функция от U
до X совпадает с передаточной функцией от U до X. Таким образом,
единственное различие (после того, как затухнут переходные процессы)
между истинным состоянием и восстановленным состоянием состоит в
эффектах, которые мы еще не включили (например, шум, возмущения
и ошибки модели).
18.5. Интерпретации передаточной функции 545
18.5.2. Передаточная функция обратной связи
по оценкам переменных состояния
Далее дадим интерпретацию в виде передаточной функции для
взаимосвязи наблюдателя с обратной связью по состоянию, как было сделано
в разд. 18.4. Основной результат дается следующей леммой.
Лемма 18.6. а) Закон обратной связи по восстановленному
состоянию может быть выражен в виде передаточной функции
следующим образом:
тш=-Щп$)+Ж8) (ииш)
где E{s) —полином, определенный в (18.5.5) и
Ш = 1 + КЗД = ^(Л"А°адСо + ВоК) (18-5.12)
Р^ = KT2(s) = KAffff-AJJ (lg 5 13)
E(s) ^ ' E(s)
Р ^ = К[Л - А0 + JC0 + B0K]_1 J (18.5.14)
L(s)
где К — усиление обратной связи и J — усиление наблюдателя.
б) Характеристический полином замкнутого контура равен
Ad(s) = det(sl - А0 + В0К) det(sl - А0 + JCQ) (18.5.15)
= F{s)E{s) = A0{s)L{s) + B0{s)P{s) (18.5.16)
в) Передаточная функция от R(s) до Y(s) равна
Y(s) B0(s)E(s)
R(s) A0{s)L(s) + B0{s)P(s)
B0(s)
det(sI-A0 + B0K)
B0(s)
(18.5.17)
F(s)
где B0{s) и A0(s) — числитель и знаменатель номинального контура
соответственно. P(s) и L(s) —полиномы, определенные в (18.5.12) и
(18.5.13) соответственно. F(s) —полином, определенный в (18.2.16).
546 Глава 18. Синтез с помощью методов пространства состояний
Доказательство
а) Подставляя (18.5.2) в (18.4.1), получим
U(s) = -K[Ti(e)tf(e) +T2(s)Y(s)] + R(s)
Ф=> (l + KTi(s))U(s) = -KT2(s)Y(s) + R(s) (18.5.18)
Далее заметим, что
l+K(5l-A0+JC0)_1B0 = det(I+(sI-A0+JCo)_1B0K) (18.5.19)
= det([sI-A0+JC0]-1(sI-A0+JC0+B0K))
(18.5.20)
KAdj(sI-A0+JC0)J = KAdj(sI-A0)J (18.5.21)
где выражение (18.5.21) было получено, используя лемму 18.3.
Наконец, требуемый результат получается после двукратного
применения леммы 18.3, которое дает
KAdj(sI-A0)J = KAdj(sI-A0 + JC0 + B0K)J (18.5.22)
б) Используя (18.4.3), полином замкнутого контура получим в виде
Ad(s) = det(sl - А0 + В0К) det(sl - А0 + JCD) (18.5.23)
= F(s)E{s) = A0{s)L(s) + B0(s)P(s) (18.5.24)
в) Из уравнения (18.5.11) и номинальной модели G0(s) = Bo(s)/A0(s)
следует
Y(s) _ B0(s)E(s)
R(s) A0(s)L(s) + B0(s)P(s) l ]
Отсюда искомый результат получается, если использовать
(18.5.16) для упрощения выражения (18.5.25). DDD
Данная лемма показывает, что назначение полюсов полинома и
обратная связь по восстановленному состоянию приводят к одному и
тому же результату. Таким образом, единственное различие здесь —в
способах реализации. Фактически, в той форме, как мы это
представили, формулировка пространства состояний делает некоторые
предположения относительно способа представления полинома. В частности,
мы видим из уравнений (18.5.2)-(18.5.4), что наблюдатель основан на
строго собственных передаточных функциях. Согласно замечанию 7.2
это требует, чтобы полином замкнутого контура был выбран, по крайней
мере, степени 2п.
Заметим, что компенсация сомножителя det(sl—A0+JC0) в (18.5.17)
совместима с тем фактом, что переменные состояния наблюдателя не
управляемы внешним сигналом f(t).
18.5. Интерпретации передаточной функции 547
+
Г—
в(,)
Go(s)
Y(s)
R{sln
+s
[
P(s)
He)
Go(s)
Y(s)
a) 6)
Рис. 18.2. Теорема разделения в'форме стандартного контура
Комбинация наблюдателя и обратной связи по восстановленному
состоянию имеет некоторые простые интерпретации в терминах
стандартного контура обратной связи. Первая возможная интерпретация
вытекает непосредственно из уравнения (18.5.11), если выразить выход
регулятора в виде
т
U(s) =
L(s)
С
ад-ЩУМ)
(18.5.26)
Это представлено графически в части а) рис. 18.2. Мы видим, что это
контур управления с двумя степенями свободы. Стандартный контур
с одной степенью свободы получится, если мы выразим f(t) через
эталонный сигнал контура r(t) следующим образом:
ад=Щад
Тогда выражение (18.5.26) может быть записано в виде
Y(s))
U(s) = ^(R(s)
L(s)
(18.5.27)
(18.5.28)
Это соответствует контуру с одной степенью свободы, показанному
в части б) рис. 18.2.
Заметим, что в части а) рис. 18.2 передаточная функция от R(s) до
Y(s) дана выражением (18.5.17), в то время как в части б) того же
рисунка передаточная функция от R(s) до Y(s) определяется выражением
Щ = МШ (18.5.М)
R{s) E{s)F{s) v }
где F(s) дается выражением (18.2.16). Здесь E(s) появляется в
знаменателе, благодаря конкретному выбору выражения R(s), которое заново
вводит этот полином.
Замечание 18.2. Заметим, что из (18.5.14) следует, что
регулятор обратной связи может быть реализован в форме пространства
548 Глава 18. Синтез с помощью методов пространства состояний
состояний, как система из 4-х матриц (А0 — JCQ — BQK, J,K,0).
(MATLAB имеет специальную команду reg для получения
передаточной функции.)
18.5.3. Передаточная функция для инновационного процесса
В заключение дадим интерпретацию инновационного процесса,
определенного в (18.3.4). Напомним, что
v(t) = y(t)-CQx{t) (18.5.30)
Это уравнение можно также выразить в терминах лапласовских
передаточных функций, используя (18.5.2) в (18.5.4):
El/(s)=£[u(t)] = Y(S)-C0[T1(s)U(s) + T2(s)Y(s)}
= (l-C0T2(s))Y(s)-C0T1(s)U(s) { •• }
Мы можем использовать этот результат, чтобы выразить
инновационный процесс v{t) в терминах исходной передаточной функции объекта.
В частности, есть следующая лемма.
Лемма 18.7. Рассмотрим модель пространства состояний (18.3.1)-
(18.3.2) и соответствующую номинальную передаточную функцию
G0(s) = B0(s)/A0(s). (Напомним, что матрицы описания пространства
состояний выделены полуэюирным шрифтом, чтобы отличить их от
полиномов, определенных теми же самыми символами.) Тогда
инновационный процесс v(t) может быть выражен следующим образом:
где E(s) —полином, определенный в (18.5.5) и называемый
характеристическим полиномом наблюдателя.
Доказательство
Мы видим, что сомножитель у Y(s) в (18.5.31) равен
1 - C0T2(s) = 1 - C0(sl - А0 + JCo)-1 J (18.5.33)
= det(I - (si - A0 + JCo)"1 JC0) (18.5.34)
= det((sI-A0 + JC0)_1)det(sI-Ao + JC0-JC0)
(18.5.35)
det(sl —A0)
det(sI-A0 + JC0)
A0(s)
E(s)
(18.5.36)
(18.5.37)
18.6. Иное толкование аффинной параметризации 549
Аналогично, сомножитель у U(s) в (18.5.31) — отрицательное
значение выражения
CoTi (а) = C0(sl - А0 + JCj^Bo
Adjjsl-A0 + JC0)
°det(sI-A0 + JC0) °
(18.5.38)
(18.5.39)
(18.5.40)
(18.5.41)
Adjjsl - А0)
°det(sI-A0+JC0) °
Во(в)
где лш г/спользовалг/ лемму 18.3, чтобы получить (18.5.40) ш
(18.5.39). DDD
Пока этот результат — просто интересная диковинка. Однако мы
покажем, что он имеет очень интересные следствия. Например, мы
используем его в следующем разделе, чтобы дать иное толкование
параметризации всех стабилизирующих регуляторов, которая была введена
ранее в гл. 15.
18.6. Иное толкование аффинной параметризации
всех стабилизирующих регуляторов
Напомним, что понятие параметризации всех стабилизирующих
регуляторов дано в разд. 5.7 (особенно обратите внимание на рис. 15.9).
Далее будем считать, что R(s) = 0, потому что эталонный сигнал можно
всегда при необходимости добавить. Заметим, что входной сигнал U(s)
на рис. 15.9 удовлетворяет условию
W)UM = -W)ns)+Q'{s)
E{s) v ' E{s) v \
(18.6.1)
Мы можем соединить результат обратной связи по восстановленному
состоянию и инновационной обратной связи от наблюдателя, используя
результаты разд. 18.5. В частности, существует следующая лемма:
Лемма 18.8. Класс всех линейных стабилизирующих регуляторов
моэюет быть выраэюен в форме пространства состояний следующим
образом:
Щз) = -KX(s) - Qu{s)El/(s) (18.6.2)
где К — усиление обратной связи по состоянию, X(s) —
восстановленное состояние, полученное каким-либо устойчивым линейным
наблюдателем и Eu(s) обозначает соответствующий инновационный процесс.
550 Глава 18. Синтез с помощью методов пространства состояний
Щз)
-Ц Объект
*\ Наблюдатель №
X(s)
Обратная связь
по оценкам
переменных
состояния
К
б-
Y(s)
^6
Qu(s)
Е„(з)
Инновационная
обратная связь
Рис. 18.3. Интерпретация всех стабилизирующих регуляторов с помощью
обратной связи по оценкам переменных состояния
Доказательство
Результат следует непосредственно из сравнения (18.6.1) с (18.5.32)
и (18.5.26). DDD
Альтернативная форма класса всех стабилизирующих регуляторов
показана на рис. 18.3.
18.7. Интерпретация принципа внутренней модели
в пространстве состояний
Обобщением вышеупомянутых идей относительно обратной связи по
восстановленному состоянию является принцип внутренней модели
(ПВМ), описанный в гл. 10. Далее мы исследуем форму пространства
состояний для принципа внутренней модели с двух точек зрения.
а) Обратная связь по восстановленному возмущению
Один вариант, которым принцип внутренней модели может быть
сформулирован в пространстве состояний, состоит в том, чтобы
предположить, что мы имеем общее детерминированное входное возмущение d(t)
с формирующим полиномом r*d(s).
18.7. Интерпретация принципа внутренней модели в пространстве состояний 551
В этом случае мы формируем наблюдатель для восстановления
состояния модели x0(t) и восстановления возмущения d(t). Эти
восстановленные значения могут затем быть объединены в закон управления вида
u(t) = -K0x0(t) - d(t) + f(t)
(18.7.1)
Мы видим, что этот закон обеспечивает асимптотическую
компенсацию входного возмущения с помощью входного сигнала при условии,
что восстановленное возмущение d(t) устойчиво и не смещено. Далее
мы покажем, что закон управления (18.7.1) автоматически гарантирует,
что полином Td(s) присутствует в знаменателе L(s) соответствующей
передаточной функции регулятора.
Перед рассмотрением общей ситуации, мы сначала обратимся к
простому примеру, чтобы проиллюстрировать основные идеи.
Пример 18.2. Рассмотрим линейный объект со входом u(t), входным
возмущением d(t) и измеряемым выходом y(t), где
Y(s) = — (U(s)+D(s))
5 + 1
(18.7.2)
и где d(t) — «постоянный», но «неизвестный» сигнал. Нужно
использовать наблюдатель для оценки d(t), а затем спроектировать закон
управления по обратной связи вида (18.7.1).
Решение
Основная идея заключается в том, чтобы смоделировать d(t) как
выход некоторой системы, которая отражает наши знания
относительно характера возмущения.
Как только будет построена полная модель, состояние модели,
производящей возмущение, может быть наблюдаемо со стороны y(t),
и, следовательно, возмущение может быть восстановлено.
Объединенное представление состояния для постоянного
возмущения имеет вид
x2(t)
1 ll \Xl(t)
. 0 J Ь
x2(t)
ti(t);
y(t)
d(t)
0
|*i (*) I
lj [x2(t)\
(18.7.3)
где состояние x\(t) —состояние объекта, a x2(t) —состояние модели,
формирующей возмущение.
552 Глава 18. Синтез с помощью методов пространства состояний
Далее восстановленное состояние x(t) и восстановленное
возмущение d(t) могут быть выражены следующим образом:
x(t) = /Г1 [Tl(s)U(s)+T2(s)Y(s)] (18.7.4)
d(t) = x2(t) = [0 l]x(t) (18.7.5)
где Ti(s) и Гг(5) — передаточные функции, определенные в (18.5.3) и
(18.5.4) соответственно.
Если усиление наблюдателя J = [ji j2] , то характеристический
полином наблюдателя, определенный в (18.5.5), будет.
E(s)=s2 + (l+ji)s+j2
(18.7.6)
Как обычно, ji и j2 выбираются такими, чтобы сделать E(s)
устойчивым.
После вычисления Ti(s) и T2(s) мы получим, что
d(t)=z2(t)=£
-i
М* + 1Уу(8) + д1-и(з)
L ВД
E(s)
(18.7.7)
То, что d(t) стремится к d(t) при t —> оо, легко доказать, подставив
(18.7.2) в (18.7.7) и учитывая, что возмущение удовлетворяет условию
D(s) = — для некоторого неизвестного /3, который следует получить.
(18.7.8)
Это дает
h /51
d(t) = С
-1
(18.7.9)
[s2 + (l+ji)s + j2 s
Отсюда, применяя теорему о конечном значении, мы имеем, что
\imd(t)=/3 (18.7.10)
t->oo
Переходный процесс d(t) представляет собой линейную комбинацию
собственных движений наблюдателя. Следовательно,
x(t) = С
-1
^+»Уг(з) + -Е^и(э)
т
E(s)
(18.7.11)
Мы видим, что передаточная функция от U(s) к X(s) равна j^y,
кок и требуется. Итак, выбрав К таким образом, чтобы разместить
полюсы регулятора в точке —2, что дает К = 1, получим
окончательный закон управления в виде
u(t) = -x(t) - d(t)
(18.7.12)
18.7. Интерпретация принципа внутренней модели в пространстве состояний 553
В терминах передаточных функций управление имеет вид
U(s) = -
^+^Y(s)+'u(s)
E(s) v ' E(s) v 'J [ E(s)
Это выражение упрощается до
'(ji+J2)s + 2j2
^s + 1)y(s)_ *L_tf(s)
E(s)
U(s) = -
ф+Л + 2)
Y(s)
(18.7.13)
(18.7.14)
Таким образом, как и ожидалось, регулятор обладает
интегрирующими свойствами, а характеристический полином замкнутого
контура равен (s + 2)(s2 + (ji + l)s+j2). □□□
Возвращаясь к общему случаю, мы начнем с рассмотрения описания
объединенного состояния, которое включает состояние модели объекта,
как и в (18.2.1)—(18.2.2) и состояние модели возмущения:
xd(t) = Adxd(t)
d(t) = Cdxd{t)
(18.7.15)
(18.7.16)
Заметим, что соответствующими четверками матриц отдельных
моделей будут (Ао,Во,Со,0) и (Ad,0,Crf,0) для объекта и возмущения
соответственно. Для объединенного состояния x(t) = [а£(£) ж^(<)] мы
имеем
x(t) = Ax(t) + Bu(t) где
А =
А0 B0Crf
О Ad
В =
Выход модели объекта определяется формулой
y(t) = Cx(t) где С=[С0 0]
В01
oj
(18.7.17)
(18.7.18)
Заметим, что эта объединенная модель будет, вообще-то, наблюдаема,
но не управляема (из-за собственных движений возмущения). Таким
образом, мы будем только пытаться стабилизировать собственные
движения объекта, выбирая К0 таким образом, чтобы (А0 — В0К0) была
матрицей устойчивости.
Наблюдатель и усиление обратной связи по состоянию могут тогда
быть разделены следующим образом:
J =
[Jol
К=[К0 Kd]
(18.7.19)
554 Глава 18. Синтез с помощью методов пространства состояний
Когда используется закон управления (18.7.1), тогда ясно, что Кд =
Cd. В этом случае мы получим
5l-A =
sI-A0 -B0Cd
О si - Ad
JC =
JoC0 0 тэт/* — BoK0 B0Cd
JdC0 0j; ar^-[ о 0
(18.7.20)
Окончательно закон управления, как видно, соответствуете
следующей передаточной функции:
ОД = Щ=[к0 к,]
sI-A0 + B0K0 + J0C0 О
JdC0 sI-Ad
1 Jo
[Jdj
(18.7.21)
Отсюда мы видим, что знаменатель закона управления в форме
полинома имеет вид
L(s) = det(sl - А0 + J0C0 + B0K0) det(sl - Ad)
(18.7.22)
Используя (18.7.15) в (18.7.22), мы окончательно видим, что Td(s)
действительно является сомножителем L(s), как и в полиномиальной
форме принципа внутренней модели.
б) Обеспечение принципа внутренней модели с помощью
дополнительной динамики
Другим методом обеспечения принципа внутренней модели в
пространстве состояний является фильтрация выхода системы путем
пропускания его через модель возмущения. Чтобы проиллюстрировать это,
предположим, что система имеет вид
x(t) = A0x(t) + B0u{t) + B0di{t)
y(t) = C0x(t)
xd(t) = Adxd(t)
di{t) = Cdxd(t)
(18.7.23)
(18.7.24)
(18.7.25)
(18.7.26)
Далее модифицируем систему, пропуская ее выходной сигнал через
следующий фильтр:
x'(t) = A^x'(t) + C^y(t)
(18.7.27)
где наблюдаемость (С^,А^) подразумевает управляемость (A^Cj).
Тогда восстановление x(t) с использованием стандартного наблюдателя
без учета возмущения дает
x(t) = A0x(t) + B0u(t) + J0(y(t) - C0x(t))
(18.7.28)
18.8. Компромиссы обратной связи по состоянию и наблюдателей 555
Общий закон управления получается с помощью обратной связи как
по x(t), так и по #'(£), что дает
u(t) = -K0x(t) - Kdx'(t) (18.7.29)
где матрица [К0 К^] выбрана так, чтобы стабилизировать составную
систему (18.7.23), (18.7.24), (18.7.27).
Действительно, результаты разд. 17.9 говорят, что каскадированная
система полностью управляема, если исходная не имеет нулей,
совпадающих с каким-либо собственным значением А^.
Окончательно закон управления, как видно, имеет следующую
передаточную функцию:
ОД = щ = [Ко к,]
Л - А0 + В0К0 + J0C0 B0K0
О *1-All
-i
Jo
PS*
(18.7.30)
Полином знаменателя тогда равен
ОД = det(sl - А0 + J0C0 + В0К0) det(sl - Ad) (18.7.31)
и мы снова видим что r^s), определяемое выражением (10.2.4),
является сомножителем L(s), как и требуется. Действительно, можно
видеть, что имеется интересная связь между результатами (18.7.21)
и (18.7.30). Они —просто альтернативные пути достижения одного и
того же результата.
18.8. Компромиссы обратной связи
по состоянию и наблюдателей
В разд. 18.2 было показано, что при условии управляемости и
подходящем выборе усиления обратной связи К, полюсы замкнутого
контура могли быть размещены любым желаемым образом. Однако если
собственные движения замкнутого контура выбраны намного быстрее,
чем у объекта, то усиление К будет большим, что приведет к большим
амплитудам сигнала на входе объекта u(t). Таким образом, мы снова
столкнулись с известным компромиссом между скоростью и требуемой
величиной входного сигнала.
Подобная (двойная) задача возникает и при восстановлении
состояния. Чтобы проиллюстрировать это, рассмотрим модель пространства
состояний, данную уравнениями (18.3.1)—(18.3.2) и предположим, что
556 Глава 18. Синтез с помощью методов пространства состояний
присутствует шум измерения v(t)\ в этом случае модель будет
следующая:
x(t) = AQx(t) + BQu(t) (18.8.1)
y(t) = C0x(t)+v{t) (18.8.2)
Тогда восстановление состояния и оценка ошибки будут
соответственно выглядеть следующим образом:
i(t) = AQx(t) + BQu(t) + JC0(x(t) - x(t)) + 3v(t) (18.8.3)
£(t) = (A0 - JCo)s(t) - 3v(t) (18.8.4)
Применение преобразования Лапласа к (18.8.4) дает
X(s) = [si - Ао + JCo]-1^) - [si - A0 + JCo]"13V{s) (18.8.5)
Уравнение (18.8.5) определяет компромисс при проектировании
наблюдателя. Мы видим, что, если J выбрать так, чтобы собственные
значения А0 —JC0 находились далеко в левой полуплоскости комплексной
плоскости, то быстро устраним влияние начальной ошибки х(0). Однако
это будет почти однозначно требовать большого значения J. Но тогда мы
видим, что второе слагаемое в правой части уравнения (18.8.5) будет, как
правило, увеличивать влияние шума измерения, потому что он обычно
является высокочастотным сигналом.
Задача усложняется, если в дополнение к шуму измерения имеются
также немоделируемые возмущения, т. е. сигналы, которые появляются
в аддитивной форме в уравнении состояния (18.8.1).
Приведенный анализ говорит, что во многих реальных случаях
задача проектирования наблюдателя требует, чтобы был выбран компромисс
между скоростью реакции и невосприимчивостью к шуму.
Таким образом, мы видим, что и обратная связь по переменным
состояния и проектирование наблюдателя требуют, чтобы были решены
компромиссы между противоречивыми требованиями. Один из способов
разрешения этих компромиссов состоит в том, чтобы изложить их
как задачи оптимизации с подходящей функцией стоимости, которая
балансирует конкурирующие требования. Особенно хороша функция
стоимости, использующая квадратичные компоненты, потому что это
упрощает решение задачи. Поэтому квадратичная оптимальная теория
управления и квадратичная теория оптимальной фильтрации стали
широко используемыми инструментами в проектировании систем с
обратной связью.
Теоретическая основа проектирования квадратичного оптимального
управления и фильтра будет приведена позже в гл. 22 части VII.
18.10. Резюме 557
18.9. Ограничения на входе в контексте обратной
связи по восстановленному состоянию
В заключение мы дадим интерпретацию в пространстве состояний для
схемы противонакопления, рассмотренной в гл. 11.
Напомним читателю о двух условиях, учитываемых при реализации
регулятора с противонакоплением, приведенных в разд. 11.3:
1) переменные состояния регулятора должны управляться
фактическими входами объекта;
2) переменные состояния должны иметь устойчивую реализацию при
управлении фактическим входом объекта.
Эти требования легко реализуются в контексте обратной связи по
состоянию. Они приводят к схеме противонакопления, показанной на
рис. 18.4.
и
Усиление
i
i
Ограничение
Ограничение
X
Объ
ект
Устойчивый
наблюдатель
У
Рис. 18.4. Схема противонакопления
На рис. 18.4 состояние х должно также включать и восстановленные
возмущения. Фактически, чтобы получить структуру с одной степенью
свободы для эталонного воздействия, нужно вычесть эталонный сигнал
до подачи выхода объекта на наблюдатель.
Таким образом, мы видим, что противонакопление имеет особенно
простую интерпретацию в пространстве состояний.
18.10. Резюме
• Мы показали, что синтез регулятора с помощью размещения полюсов
может быть представлен и в форме пространства состояний:
Для данной модели в форме пространства состояний и желаемого
расположения полюсов замкнутого контура можно вычислить набор
постоянных коэффициентов усиления (по одному на каждую переменную
состояния), такой, что обратная связь по состоянию через постоянные
558 Глава 18. Синтез с помощью методов пространства состояний
коэффициенты усиления дает заданное расположение полюсов
замкнутого контура.
• С теоретической точки зрения этот результат дает дополнительную
информацию для понимания взаимосвязи передаточной функции и
моделей пространства состояний, которые эквивалентны в отношении
размещения полюсов либо путем синтеза регулятора через
передаточную функцию с помощью диофантовых уравнений, либо через
обратную связь по состоянию с постоянным усилением.
• С практической точки зрения реализация такого регулятора
потребовала бы измерения величины каждой переменной состояния. Однако
из-за физических, химических и экономических ограничений вряд
ли когда-либо имеется возможность провести фактические измерения
всех переменных состояния системы.
• Это требует поиска альтернативы фактическим измерениям и вводит
понятие так называемых наблюдателей, иногда называемых также
гибкими датчиками, виртуальными датчиками, фильтрами или
расчетными данными.
• Цель наблюдателя состоит в том, чтобы вывести величину
неизмеренной переменной состояния через другие переменные состояния,
связанные с ней и которые можно измерить.
• Наблюдатели имеют много общего с системами управления:
о они являются динамическими системами;
о с ними можно работать как в частотной, так и во временной
области;
о они могут быть проанализированы, синтезированы и
спроектированы;
о они имеют свойства, такие, как устойчивость, переходные
процессы и чувствительности;
о эти свойства определяются полюсами и нулями их чувствитель-
ностей.
• Восстановление состояния, выполняемое наблюдателем, используется
для нескольких целей:
о контроль ограничений;
о получение данных и анализ тенденций;
о контроль условий и характеристик;
о обнаружение ошибок;
о управление с помощью обратной связи.
• Чтобы реализовать регулятор обратной связи по состоянию, как
рассмотрено выше, можно использовать восстановленное состояние
с помощью наблюдателя вместо недоступных измерений; взаимодей-
18.10. Резюме 559
ствие динамических свойств системы, регулятора и наблюдателя,
определяет поведение созданного замкнутого контура.
• Взаимодействие количественно определяется третьим основным
результатом, представленным в этой главе: номинальные полюсы всего
замкнутого контура представляют собой объединение полюсов
наблюдателя и полюсов замкнутого контура, определяемых
коэффициентами усиления обратной связи, если все переменные состояния
могут быть измерены. Этот результат также известен как теорема
разделения.
• Напомним, что синтез регулятора связан с тем, как его рассчитать
таким образом, чтобы полученный замкнутый контур обладал
нужными свойствами — конструктивными свойствами.
• Главная тема главы — синтез регуляторов с наперед заданным
размещением полюсов замкнутого контура; это — специфическое
конструктивное свойство, которое позволяет получить некоторые проектные
решения.
• Существуют, однако и другие полезные конструктивные свойства.
• Примеры конструктивных свойств, для которых существуют
решения:
о достижение конкретного состояния системы за минимальное время
при ограниченной энергии;
о минимизация взвешенного квадрата ошибки управления и
потребления энергии;
о достижение минимального отклонения в управлении.
• Один из подходов к синтезу состоит в том, чтобы поместить
конструктивные свойства в так называемый стоимостной функционал
(целевую функцию или критерий), который затем минимизируется
количественно.
о Этот подход иногда называется оптимальным управлением, так
как оптимизируется критерий.
о Однако нужно помнить, что результат не может быть лучше
критерия.
о Оптимизация переносит техническую задачу с непосредственного
проектирования регулятора на проектирование критерия, из
которого регулятор получается автоматически.
о Оба подхода имеют свои достоинства и могут выбираться исходя
из личного предпочтения и опыта проектировщика.
560 Глава 18. Синтез с помощью методов пространства состояний
18.11. Литература для последующего чтения
Общие вопросы
1. Chen, C-T. (1984). Introduction to Linear System Theory. Holt, Rinehart and
Winston.
2. Doyle, J.C., Francis, B.A., and Tannenbaum, A.R. (1992). Feedback Control
Theory. Macmillan Publishing Company.
3. Kwakernaak, H. and Sivan, R. (1972). Linear Optimal Control Systems. Wiley-
Interscience, New York. [Имеется русский перевод: Квакернаак X., Сиван Р.
Линейные оптимальные системы управления. — Мир, 1977Л
4. Fortmann, T. and Hitz, К. (1977). An Introduction to Linear Control Systems.
Marcel Dekker, New York.
Проектирование фильтра и наблюдателя
1. Seron, M.M., Braslavsky, J.H., and Goodwin, G.C. (1997). Fundamental
limitations in filtering and control Springer-Verlag.
18.12. Задачи для читателя
Задача 18.1. Модель пространства состояний линейной системы дана
матрицами (Ас, В0, С0, 0), где
А0 =
-3 2
0 -1
В0 =
*о
-1
1
cj =
-1
а
(18.12.1)
18.1.1. Определите усиление К обратной связи по переменным
состояния, если оно существует, такое, что полюсы замкнутой системы
находятся в точках —5 и —6.
18.1.2. Определите усиление К обратной связи по переменным
состояния, если оно существует, такое, что собственные движения
замкнутого контура имели бы вид /3ie-2tcos(0.5£+ /З2).
18.1.3. Определите диапазон значений а, при которых система
полностью наблюдаема.
18.1.4. Выберите конкретное значение а, при котором система
полностью наблюдаема и создайте наблюдатель, у которого ошибка
затухает быстрее, чем ё~ы.
Задача 18.2. Предположим, что измеряемый сигнал f(t) имеет вид
f(t) = ao +/3i sin(2£) +/З2 cos(2£), где ао, /3i и /% — неизвестные константы.
18.2.1. Создайте модель пространства состояний для формирования
сигнала f(t). Заметьте, что в этой модели внутреннее состояние
является функцией ао, /?i и /?2-
18.12. Задачи для читателя 561
18.2.2. Используя эту модель, создайте наблюдатель для оценки ао,
/?i и fa- Ошибка оценки должна быть пренебрежимо малой по
прошествии 2 с.
Задача 18.3. Рассмотрим дискретную линейную систему, имеющую
передаточную функцию
*'<'>" (г-оХ-О-б) <18-122)
18.3.1. Постройте модель пространства состояний для этой системы.
18.3.2. Спроектируйте наблюдатель состояния системы, который дает
нулевую ошибку восстановления точно за три момента времени.
Задача 18.4. Предположим, что нам нужно восстановить постоянный
сигнал, который измеряется в присутствии шума. Далее предположим,
что энергия шума сосредоточена в окрестности частоты 0.5 рад/с.
Спроектируйте наблюдатель для восстановления неизвестной
константы. Попытайтесь создать наблюдатель с полюсом, расположенным в
точке s = —5; затем повторите проектирование, но расположите полюс в
точке s = —0.1. Сравните и обсудите полученные результаты. (Считайте
шум чистой синусоидой частоты 0.5 рад/с.)
Задача 18.5. Рассмотрим объект со входом u(t), входным возмущением
d(t) и выходом y(t). Номинальная модель этого объекта имеет вид
Y(s) = G0(s)(U(s)+D(s)) ' где G0(s) = -г^— (18.12.3)
(5 + 2)
18.5.1. Если возмущение постоянно, но неизвестно, постройте
наблюдатель, который формирует восстановленные возмущение и состояние
модели. Характеристический полином наблюдателя следует выбрать
. в виде E(s) = s2 + 8s + 40.
18.5.2. Используйте предыдущий результат, чтобы сформировать
управление с помощью обратной связи по восстановленному
состоянию в виде
u(t) = -kixi(t)-d(t)+f{t) (18.12.4)
где х\ (t) — восстановленное состояние объекта, a d(t) —
восстановленное возмущение. Выберите подходящее значение к\.
18.5.3. Вычислите P(s) и L(s), как определяется в лемме 18.6 и
сформируйте окончательный контур управления в виде, показанном в части
б) рис. 18.2. Проанализируйте результирующий характеристический
полином замкнутого контура.
562 Глава 18. Синтез с помощью методов пространства состояний
Задача 18.6. Непрерывный объект, имеющий передаточную функцию
<j?0(s), должен управляться цифровым регулятором. Для этого
используются квантователь и экстраполятор нулевого порядка с периодом
квантования Д. Предположим, что
e-0.5s
G0(a) = г и А = 0.25 (18.12.5)
5 + 1
18.6.1. Постройте модель пространства состояний для дискретной
передаточной функции.
18.6.2. Постройте наблюдатель для переменных состояния. Ошибка
оценки должна затухать со скоростью порядка (0.5)*.
Задача 18.7. Рассмотрим объект, имеющий линейную модель G0(s),
управляемый регулятором C(s) с одной степенью свободы, где
Найдите, если это возможно, вектор усиления наблюдателя J и
вектор усиления регулятора К, такие, что регулятор может
интерпретироваться как результат проекта, основанного на обратной связи по
восстановленному состоянию.
Задача 18.8. Линейный объект имеет номинальную модель вида
G0(5) = 6(5 + 3)-2.
18.8.1. Постройте контур управления, использующий обратную связь
по восстановленному состоянию. Контур должен обеспечивать
нулевую установившуюся ошибку для постоянных входных возмущений,
а полюсы замкнутого контура должны иметь вещественные части
меньше или равные —4.
18.8.2. Спроектируйте регулятор, используя метод размещения
полюсов, такой, что контур удовлетворяет тем же требованиям, что и в
предыдущем случае. Сравните и обсудите результаты.
Задача 18.9. Рассмотрим систему, имеющую вход u(t), выход y(t) и
передаточную функцию
18.9.1. Постройте модель пространства состояний.
18.9.2. Спроектируйте наблюдатель для восстановления сигнала y(t)-
2y(t). Ошибка оценки должна затухать по крайней мере быстрее e~2t.
Глава 19
Введение в нелинейное
управление
19.1. Введение
За исключением ограничений исполнительного механизма весь
предыдущий материал книги был нацелен на линейные системы. Это оправдано
тем, что большинство систем обладает (приблизительно) линейными
характеристиками в пределах ограниченного рабочего диапазона и что
суть линейного случая значительно более ясна для понимания. Однако
иногда встречаются задачи, когда нелинейности являются настолько
важными, что они не могут игнорироваться. В этой главе дается краткое
представление о нелинейном управлении. Наша цель не состоит во
всестороннем рассмотрении проблемы, а просто в стремлении привести
некоторые основные расширения линейных стратегий, которые могли бы
дать проектировщику начала решения нелинейной задачи. Насколько
возможно, мы будем пользоваться линейными методами, чтобы
максимально извлечь выгоду из линейных представлений. Мы также бросим
беглый взгляд на более строгую нелинейную теорию в разд. 19.10.3,
чтобы дать читателю представление об этой очаровательной и
развивающейся теме. Однако этот раздел, возможно, следует пропустить при
первом чтении, так как здесь используются более серьезные
математические понятия.
19.2. Линейное управление нелинейным объектом
Перед тем как непосредственно обратиться к нелинейному
проектированию систем управления, у читателя мог бы возникнуть разумный
вопрос, что случится, если линейный регулятор применяется к
нелинейному объекту. Мы знаем из опыта, что во многих случаях это
разумная стратегия, так как известно, что все реальные объекты обладают
некоторой (возможной) степенью нелинейности, а почти все реальные
регуляторы основаны на линейном проектировании.
564 Глава 19. Введение в нелинейное управление
Мы видели в разд. 3.10, что можно получить примерную линейную
модель для нелинейной системы методами линеаризации. Остаточная
ошибка моделирования, конечно, является нелинейным оператором.
Таким образом, мы исследуем здесь влияние нелинейных аддитивных
ошибок моделирования на характеристики линейного регулятора.
Чтобы выполнить такой анализ, мы должны комбинировать
линейные и нелинейные описания. Концепция передаточной функции, таким
образом, здесь не подойдет. Поэтому мы будем основывать анализ на
операторах (преобразованиях).
Определим нелинейный динамический оператор / как отображение
одного функционального пространства в другое. Таким образом, /
отображает одни функции времени в другие функции времени. Возьмем,
например, временные функции, имеющие конечную энергию; тогда мы
говорим, что они принадлежат пространству L<i и также говорим, что
/ отображает функции из L<i в L^ Так же, как и в разд. 2.5, мы
будем использовать символ у (без скобок) для обозначения элемента
функционального пространства, т. е. у Е L<i имеет форму {y(t) : К ->
Щ. Мы также используем обозначение у = /(гх), чтобы представить
отображение (преобразование) и в у через /.
Чтобы учесть различные компоненты контура, регулятор
представляется линейным оператором С, а номинальный объект — линейным
оператором G0\ ошибка моделирования будет характеризоваться
добавочным нелинейным оператором Ge.
Мы рассмотрим эталонный вход и входное возмущение, потому что с
обоими можно обращаться последовательным способом.
Номинальный и реальный контуры с одной степенью свободы
показаны на рис. 19.1.
Начиная с контуров, показанных на рис. 19.1, мы будем получать
выражения для следующих сигналов ошибки:
• ошибка выхода объекта уе = у — у01
• ошибка выхода регулятора ие = и — и0.
19.2.1. Влияние ошибок моделирования
Чтобы упростить обозначения, мы сгруппируем внешние сигналы в один
входной сигнал, определив его следующим образом:
di' = C(r)+di (19.2.1)
Заметим, что это возможно, потому что для линейной части контура
на рис. 19.1 а) справедлив принцип суперпозиции.
19.2. Линейное управление нелинейным объектом 565
т9Н
^
Ge
+ \
+ w и
* +
гО-
О:
+ т -
а) Реальный контур
—-О—«4 Go
1 + и0 ' •
Уо
б) Номинальный контур
Рис. 19.1. Реальный и номинальный контуры управления
Из рис. 19.1 а) мы видим, что
y = (G0 + G€)(u) (19.2.2)
u = -C(y)+di' (19.2.3)
Подставляя (19.2.3) в (19.2.2), получим
y = (G0 + Ge)(-C(y} + di') (19.2.4)
= -G0(C(y)) + G0(di') + Ge(-C(y) + di') (19:2.5)
Аналогично для номинального контура на рис. 19.1 б) мы имеем
yo = -G0(C(y0)) + G0(di') (19.2.6)
u0 = -C{y0)+di' (19.2.7)
Вычитая (19.2.6) из (19.2.5), получим
у£ = -G0(C(ye)) + Ge(-C(y) + di') (19.2.8)
Как обычно, мы определим линейные номинальные чувствительности
через
(19.2.9)
5.(о>=
Suo(o) =
l + G0(C(o))
С(о)
(19.2.10)
l + G0(C(o)>
Следовательно, переупорядочивая линейные слагаемые в (19.2.8) и
используя (19.2.9), мы имеем
ye = S0{Ge{-C{y) + di')) (19.2.11)
566 Глава. 19. Введение в нелинейное управление
к'
о-
«е
Т +
о-
G€
Уе
Рис. 19.2. Контур обратной связи для ошибки
Тогда, заменив у на у0 + Уе, мы имеем
y€ = 50<G€<-C(y0 + ye) + di,» (19.2.12)
и используя линейный результат в (19.2.6), имеем
Уе = S0(Ge(-C(y€) + S0(di'))) (19.2.13)
Аналогично, вычитая (19.2.7) из (19.2.3), получим
щ = -С(уе) (19.2.14)
Уравнения (19.2.13) и (19.2.14) могут быть показаны схематически,
как это сделано на рис. 19.2.
Перепредставление г и d{ через уравнение (19.2.1) и использование
{(19.2.9), (19.2.10)} дает окончательное представление, приведенное на
рис. 19.3.
Рисунок 19.3 —компактный способ изображения влияния несмоде-
лированных нелинейностей объекта на робастность и
характеристики контура обратной связи. Устойчивость, робастность и робастность
характеристик можно исследовать, используя это представление.
Например, в разд. 19.10.3 мы покажем, что устойчивость сохраняется в
случае достаточно малых нелинейных компонентов модели. Конечно,
нелинейные системы вообще очень трудно анализировать. Однако при
некоторых упрощающих предположениях можно использовать рис. 19.3.
r(t)
±&
di
f+
О
G<
— Ьио
So
«e
У',
Рис. 19.3. Контур эквивалентных сигналов, описывающий ошибки
моделирования
19.2. Линейное управление нелинейным объектом 567
Например, для Ge обычна ситуация, когда его выход будет мал при
малом входном сигнале. В этом случае уравнения (19.2.13) и (19.2.14)
предполагают, что ошибки в контуре обратной связи из-за нелинейных
ошибок моделирования зависят от того, будут ли
• |5о0^)| мал в Диапазоне частот, где входное возмущение существенно
и
• \SUo{ju)\ мал в диапазоне частот, где эталонный сигнал существенен.
Эти требования могут быть в противоречии. Например, если требуется,
чтобы IS'oO'o;)! был мал в диапазоне частот, который значительно
превышает полосу пропускания объекта, тогда \Suo(juj)\ будет почти всегда
большим за пределами полосы пропускания объекта. Эта ситуация,
вероятно, означает, что линейное управление не подходит для этого
случая.
Замечание 19.1. Конечно, рис. 19.3 также годится и в случае
линейных ошибок моделирования. Таким образом, например, этот рисунок
мог бы использоваться, чтобы повторно доказать теорему 5.3.
Рисунок мог бы также использоваться для уяснения робастных
характеристик, как в линейном, так и в нелинейном случаях.
Пример 19.1. Рассмотрим нелинейный объект, имеющий модель
пространства состояний вида
^ = x2(t) + (x2(t))3 (19.2.15)
^й = -2Xl(t) - 3x2(t) +u(t) +0.l{xl(t))2u{t) (19.2.16)
y(t)=xx(t) (19.2.17)
Предположим, что для этого объекта спроектирован линейный
регулятор и также предположим, что проект был основан на
линеаризованной модели для малых сигналов. Эта линеаризованная модель
была получена для рабочей точки, определяемой постоянным входным
сигналом u(t) =uq = 2 и (линейный) проект обеспечивает номинальные
чувствительности
ад=^тт9 ад^-ад-?^ (19-218)
Проанализируем характеристики проекта, когда он используется с
истинным (нелинейным) объектом.
Решение
Мы сначала должны получить линеаризованную модель для малых
сигналов. Это сделано, используя схемное решение softpll.mdl пакета
568 Глава 19. Введение в нелинейное управление
SIMULINK. Для ступенчатого входного сигнала, равного 2, рабочая
точка будет иметь значения
X\Q =VQ= Ит si(') = 1-13 и X2Q = Um X2(t) =0 (19.2.19)
t-+oo
t-+oo
Тогда значения uq, x\q и x<iq в сочетании с командами linmod и
ss2tf пакета MATLAB дадут линеаризованную модель G0(s), которая
имеет вид
"м-яш+ш (19-220)
Чтобы получить желаемую чувствительность T0(s),
передаточная функция регулятора должна иметь вид
С(3) . [О.(.)]"'Ш- 7.96s2 + «•«• + »•»
(19.2.21)
S0{s) """ s(s + 4)
Затем используем SIMULINK, чтобы реализовать структуру,
показанную на рис. 19.3, где чувствительность Suo(s) равна
,52 +3.05+ 1.55
Suo(s) = [G0(s)]-lT0(s) = 7.96
(19.2.22)
52 + 45 + 9
Модель запускается с эталонным сигналом r(t), который имеет
среднюю величину, равную 2 и добавленные прямоугольные колебания
амплитуды 0.3. Колебания добавлены в качестве входного возмущения.
Рисунок 19.4 показывает ошибку выхода объекта ye(t)>
Предлагаем читателю оценить характеристики линейного проекта
при других эксплуатационных режимах и при другом выборе T0(s).
Эта задача упрощается использованием схемного решения в файле
amenl.mdl пакета SIMULINK. DDD
2.5
2
0.5
0
-0.5
1
[
V,
1 1
*(*)
■
1 1
1 1 1
r(t)
»«(*)
\1
• •
1 1 1
Л
1 1 1
1
1 1 ill
\1
10
20
30
40 50 60
Время [с]
70
80
90
100
Рис. 19.4. Влияние линейного моделирования нелинейного объекта на
характеристику проекта линейной системы управления
19.3. Переключаемые линейные регуляторы 569
Из вышеупомянутого анализа мы видим, что линейные проекты
могут хорошо функционировать с нелинейными объектами при условии,
что нелинейность достаточно маленькая. Однако если требования к
характеристикам увеличиваются, неизбежно приходится выполнить
существенно нелинейное проектирование. Первый шаг в этом направлении
описан в следующем разделе, где мы все еще используем линейный
регулятор, но для различных рабочих точек (или различных областей
пространства состояний) выбираются различные линейные регуляторы.
19.3. Переключаемые линейные регуляторы
Полезная стратегия для нелинейных систем состоит в том, чтобы
разбить пространство состояний на маленькие области, внутри которых
ограниченная линейная модель дает разумное приближение для
реакции. Тогда можно спроектировать ряд фиксированных линейных
регуляторов, по одному на каждую область. Остается решить две проблемы:
1) как узнать, в какой области мы находимся и
2) как переключаться между регуляторами.
Первая из проблем часто разрешается, если существует
некоторая измеряемая переменная, которая является ключевым индикатором
динамики системы. Такие переменные могут использоваться, чтобы
планировать нужные регуляторы. Например, в быстродействующем
управлении самолетом, число Маха и высота часто используются как
планирующие переменные.
Вторая проблема требует, чтобы каждый регулятор был в устойчивом
режиме независимо от того, подключен ли он к объекту. Это может быть
достигнуто с помощью стратегии противонакопления, описанной в гл. 11
или разд. 18.9.
Альтернативная структура для схемы противонакопления показана
на рис. 19.5. Здесь регулятор (Ci(s)) используется, чтобы заставить г-й
выход регулятора отслеживать истинный вход объекта. Чтобы показать,
как это можно использовать, скажем, что мы имеем кс регуляторов
и что переключение между регуляторами обеспечивается устройством,
которое мы назовем супервизором. Таким образом, в зависимости от
состояния системы в любой данный момент времени, супервизор может
выбрать один из кс регуляторов, чтобы сделать его активным
регулятором. Другие кс — 1 регуляторов будут в резервном режиме.
Мы хотим организовать плавный переход от регулятора к регулятору,
который выбирает супервизор. «Плавный» переход означает
требование, чтобы не произошел никакой толчок в сигнале управления при
570 Глава 19. Введение в нелинейное управление
>г
X
см
Ci(s)
«ч(0
—С
■>+
«(*)
Объект
y(t)
Рис. 19.5. Плавное переключение регуляторов
переключении с одного регулятора на другой. Для линейных
регуляторов, имеющих подобную структуру, это может быть достигнуто,
позволяя всем регуляторам иметь общий набор переменных состояния
и просто переключать выходные коэффициенты усиления, связанные с
этими переменными. Однако в общем случае регуляторы могут иметь
различные структуры, в том числе различное количество переменных
состояния и включать нелинейные элементы. Чтобы справиться с этой
общей ситуацией, мы размещаем каждый из резервных регуляторов в
отдельный контур управления с обратной связью так, чтобы их выходы
отслеживали выход активного регулятора, Это показано на рис. 19.5.
На рис. 19.5 u(t) обозначает выход активного регулятора (этот
регулятор не показан в структуре) и Ci(s) обозначает резервный регулятор,
имеющий эталонный сигнал r(t) для конкретного выхода объекта y(t).
На рисунке Ci(s) обозначает регулятор для г-го регулятора Ci(s). Таким
образом, в некотором смысле Ci(s) — регулятор регулятора. Этот
регулятор регулятора сравнительно легко спроектировать: объект в этом
случае известен — в этом качестве выступает г-й регулятор. Для данного
контура сигналы r(t) и y(t) действуют как возмущения.
В конкретном случае, когда г-й регулятор бисобственный и
минимально-фазовый, оказывается, что совершенное отслеживание
выходов активного регулятора возможно. Действительно, это точно то же
самое, что и для структуры, изображенной на рис. 11.6.
Примеры приложений общей структуры на рис. 19.5:
• насыщение исполнительных механизмов (где супервизор реагирует
на насыщение входа);
• регуляторы с ограниченными состояниями (где супервизор
реагирует на приближающиеся ограничения переменных состояния) — см.
разд. 11.4;
• планирование усиления (где супервизор реагирует на некоторые
измеренные переменные, например, высоту самолета или число Маха
для выбора регулятора);
19.4. Управление системами с гладкими нелинейностями 571
• адаптивное управление (где супервизор реагирует на оцененные
параметры модели).
Заключительный момент — это то, что активное управление не
должно определяться только выходом одного из кс регуляторов, но может
быть любым сигналом управления, включая ручные воздействия, или
же быть комбинацией выходов всех регуляторов. Таким образом, можно,
например, взять
где 0 < Xj(t) < 1 и EfciAj = 1, Vt.
Это может использоваться, когда супервизор осуществляет плавные
переключения, формируя индивидуальные веса для каждого из
регуляторов. Эти веса могли бы, например, быть вероятностями того, что
каждый регулятор является работоспособным, или некоторой другой
функцией принадлежности.
Читатель может заметить, что мы уже использовали эту идею
объединения регуляторов при ограничении переменных состояния в
разд. 11.4.
Третья проблема, поднятая в начале этого раздела, частично
относится к нелинейному анализу робастности, как рассмотрено в разд. 19.2.
Другая связанная с этим проблема —то, что требуется
проанализировать влияние изменяющихся во времени линейных регуляторов. Первый
шаг в этом направлении будет дан в разд. 19.10.
19.4. Управление системами
с гладкими нелинейностями
Когда нелинейности существенны, вышеупомянутое переключение
могло бы привести к проекту с ограниченными возможностями. Если дело
обстоит именно так, то следует рассматривать при проектировании
принципиально нелинейные стратегии. Чтобы выдвинуть на первый
план некоторые интересные особенности нелинейных задач, мы начнем с
рассмотрения простого сценария, с котором модель является и
устойчивой и инверсно устойчивой. Далее мы рассмотрим более общие задачи.
В последующем анализе нам будет нужно описать взаимосвязи
линейных и нелинейных систем; поэтому, как мы делали в гл. 5, обратимся
к использовалию операторов. Одним из этих операторов для
непрерывного по времени случая будет оператор Хевисайда р.
572 Глава 19. Введение в нелинейное управление
19.5. Статические нелинейности на входе
Сначала исследуем нелинейную задачу управления как расширение идей
гл. 15.
r(t)
О
Регулятор
ко
+ т
Q<°>
«(*)
*(*)
f+
*-Q »Ьбъект
+
нк>
♦+
г/№
Ge(o)
f +
)
e„(t)
-О
Рис. 19.6. Структура на основе принципа внутренней модели для управления
(гладкими) нелинейными системами
Рассмотрим структуру, показанную на рис. 19.6. Мы видим, что
выходные возмущения имеют ту же самую точку приложения, что и
эталонный сигнал. Это делает анализ более простым, нежели для
входных возмущений. В частности, предполагая, что объект в разомкнутом
состоянии устойчив, a di(t) = 0, видно, что ошибка eg(i) будет сходиться
(для номинальной модели) к величине выходного возмущения.
Напомним также, что в гл. 15 для линейного случая устойчивых и
минимально-фазовых объектов Q(s) выбирался следующим образом:
Q(s) = FQ(s)[G0(s)]-1
(19.5.1)
где Fq(s) —подходящий формирующий фильтр, который гарантирует,
что функция Q(s) будет собственной и который косвенно разрешает
связанные с этим компромиссы. Самый простой выбор —это сделать
[Fq(s)]""1 устойчивым полиномом степени, равной относительной
степени G0(s). В линейном случае это приводит к результату
y(t) = FQ(u(t))
(19.5.2)
Тот же самый базовый принцип можно применить и к нелинейным
системам. Самая простая ситуация —это когда объект имеет
статическую нелинейность на входе и имеется только выходное возмущение;
тогда выход номинальной модели имеет вид
y(t) = G0{u(t)) + d0(t) = в0{ф{и)) + d0(t)
(19.5.3)
где G0 — линейный^ оператор и ф()— статическая инвертируемая
функция от и. Вводя Fq как линейный устойчивый оператор соответству-
19.6. Гладкие динамические нелинейности 573
ющей относительной степени, получим нелинейный вариант (19.5.1) в
виде _ _
Q(°) = <t>-1{G;1(FQ(o))) (19.5.4)
Следовательно,
U(t) = r1(G0-1(FQM<)))) (19.5.5)
Заметим, что функция ф~г является обратной функции ф объекта.
Таким образом, уравнение (19.5.5) представляет собой
приближенную инверсию нелинейного объекта и непосредственно приводит к
y(t) = FQ(u(t)) + d0(t) (19.5.6)
19.6. Гладкие динамические нелинейности
для устойчивых и инверсно устойчивых моделей
Для этого класса систем мы по существу можем использовать структуру
на основе принципа внутренней модели, показанную на рис. 19.6.
Параллельную модель легко построить. Поэтому мы сосредоточим внимание
на приближенной инверсии в Q(o).
. Рассмотрим класс нелинейных систем, в которых нелинейные
особенности не обязательно ограничены входом объекта. В частности,
рассмотрим объект, имеющий номинальную модель вида
px{t)u^ = f(x)+g{xMt) (19.6.1)
y(t) = h{x) (19.6.2)
где х G Mn, у G Ш и и G R Предположим, что /(ж), д(х) и h(x) —
гладкие отображения, в том смысле, что их первые к производных по х
полностью определенные, где значение к по крайней мере равно
относительной степени нелинейной системы. Эта концепция определяется
следующим образом.
Определение 19.1. Рассмотрим нелинейную систему, описанную
уравнениями (19.6.1) и (19.6.2). Тогда относительная степень
системы — минимальная величина т/ G N, такая, что
P"y(t) = /Зг,(х) + ar,(x)u(t) (19.6.3)
где р — оператор Хевисайда, а функция av{x) не равна всюду нулю.
574 Глава 19. Введение в нелинейное управление
Пример 19.2. Рассмотрим систему, имеющую модель
pxi(t) = -ari(t) - 0.l(x2(t))2 (19.6.4)
px2(t) = -2a?i(t) - Zx2(t) - 0.125(x2(t))3 + [l + 0.1 (zi(*))2] u(t) (19.6.5)
y(t) = xi(t) (19.6.6)
Тогда, вычислив первую и вторую производные по времени от y(t),
получим
py(t) =pxx(t) = -*i(t) -0.l(x2(t))2 (19.6.7)
p2y(t) =lAXl(t) +0.6x2(t) +Q.lx2{t)2 + 0.25*2 (t)3
- [0.2 + 0.02*i (t)2] ti(t) (19.6.8)
откуда мы видим, что относительная степень системы равна 2. DDD
Для системы, описанной уравнениями (19.6.1) и (19.6.2), имеющей
относительную степень, равную 77, если г-я производная у(£), г = 0,1,2,... ,7/
имеет вид
pS/(t) =А(*) + а*(*)и(«), . (19.6.9)
то мы получим, что cti(x) = 0 для г = 0,1,2,... ,77 — 1. Рассмотрим теперь
полином от оператора р(р) = £^=0РгРг; ТОГДа можно видеть, что
p(p)y(t) = Ь(х) + a(x)u(t) (19.6.10)
где
•п
b(X) = ^2PiPi(x) и а(ж) = JV*r?(z) (19.6.11)
г=0
Далее мы покажем, как методы проектирования гл. 15 можно
расширить на нелинейный случай. Вспомним, что в линейном случае нам
нужно было инвертировать модель объекта (после использования F(s),
чтобы привести ее к бисобственной форме). Расширение этих идей на
нелинейный случай — фактически весьма очевидно. В частности, мы
видим из (19.6.10), что если а(х) нигде не равна нулю для любого
состояния * в рабочей области, приближенная инверсия для объекта
получается просто, приравнивая в (19.6.10) p(p)y(t) величине u(t). Это
дает (после замены аргумента в уравнении) следующий результат для
u(t):
u(t) = {aix))'1 (u(t) - b(x)) = Q(u) (19.6.12)
где переменная v(t) определена на рис. 19.6. Тогда, объединяя (19.6.10)
и (19.6.12), мы имеем, что
p(p)v(t) = *>{t) ^=> y(t) = Ир)]'1 И (19.6.13)
19.6. Гладкие динамические нелинейности 575
О
x(t)
№
Р-1
9(°)
кг
-
ц
J
1
Рис. 19.7. Нелинейный наблюдатель
Это означает, что если мы определим
FQ(o)u\p(p)]-i(o) (19.6.14)
то _
y(t) = FQ(v(t)) (19.6.15)
Наконец, чтобы получить точную инверсию на нулевой частоте, мы
задаем ро = 1- Стратегия управления (19.6.12) обычно называется
линеаризацией обратной связи входа-выхода, потому что, как можно
заметить из (19.6.15), это ведет к линейной замкнутой системе от входа
u(t) к выходу y(t).
Читатель может увидеть, что вышеупомянутая процедура
формально аналогична случаю с линейной системой, описанному в гл. 15. Однако
как говорилось ранее, должны быть удовлетворены требования
устойчивости, внутренней устойчивости и требования к относительной степени.
Они соответствуют нелинейному обобщению линейной устойчивости и
требованию, чтобы функция Q была собственной.
Оставшаяся проблема —как реализовать Q(o) в соответствии с
(19.6.12), потому что это зависит от состояния объекта, которое обычно
является недоступным. Следуя той же самой философии, как и в
линейном случае, мы можем восстановить состояние посредством
нелинейного наблюдателя. Сейчас мы предположим, что объект является
устойчивым в разомкнутом состоянии, так что мы можем использовать
наблюдатель разомкнутого контура. (Более общий случай исследован
в разд. 19.8.1.) Наблюдатель разомкнутого контура управляется только
входом объекта u(t); его структура показана на рис. 19.7, где р-1
обозначает интегральный оператор.
С этим наблюдателем мы можем использовать уравнение (19.6.12),
чтобы сформировать блок Q, как показано на рис. 19.8. Наблюдатель
представлен блоком, помеченным символом О.
Далее проиллюстрируем эту концепцию двумя простыми примерами.
576 Глава 19. Введение в нелинейное управление
"(О
О
«(о
к°>г
6(0)
*(*)
о
Рис. 19.8. Реализация блока Q
Пример 19.3. Рассмотрим нелинейный объект, имеющий модель
пространства состояний в виде
^^ = -2xi(t) - Zx2(t) + u(t) + 0.l(Xl(t))2u(t)
y(t) = x1(t)
(19.6.16)
(19.6.17)
(19.6.18)
Нужно создать нелинейный регулятор, основанный на результатах
разд. 19.6. Желаемая полоса пропускания — примерно 3 рад/с.
Решение
Используя структуру, реализующую принцип внутренней модели,
показанную на рис. 19.6, нам сначала ну окно вычислить приблиэюенную
инверсию объекта в соответствии с процедурой, описанной в разд. 19.6.
Таким образом, из (19.6.16)—(19.6.18) мы имеем, что
fry{t)=x2{t) + {x2{t))Z
Л(') = (1 + 3(*2(*))2)^
(19.6.19)
(19.6.20)
= -(1 + 3a|(t))(2a;i(t) + Зя2(*)) + (1 + 3(ж2(*))2)(1 + O.lfo (t))2)u(t)
(19.6.21)
Далее мы должны выбрать оператор F(o), чтобы обеспечить
желаемую полосу пропускания. Для этого выберем полином от оператора
р(р) в виде
р(р) = (р2+4р + 9)/9 (19.6.22)
19.6. Гладкие динамические нелинейности 577
и тогда мы можем получить а(х) и Ь(х) из уравнения (19.6.10) в виде
oM=(i+3feW)')(i+0.i(IlWft (И623)
j.) = Tl1(l) + l2(()-5(l2(t))3-6;ti(i)(l;(i))2 6
Наконец, контур управления, представленный на рис. 19.6, может
быть реализован с Q(o), как на рис. 19.8. Объект устойчив, так что
требуемый наблюдатель состояния может быть построен, используя
(нелинейную) модель объекта в пространстве состояний.
Чтобы оценить характеристику этого проекта, сравним его с
линейным проектом, основанным на линеаризованной модели объекта
(см. пример 19.1). В этом случае мы используем ту же самую рабочую
точку, как в примере 19.1, определяемую значением uq = 2. Это
приводит к линейной модели
G«<^ + 3Xo!3+1.55 <1M-25>
Линейный регулятор спроектирован таким образом, чтобы
обеспечить требуемую полосу пропускания. Далее выберем
соответствующую дополнительную чувствительность, скажем,
которая даст
Г(,\-\Г ^M-iTo(s) 7nfi^2+ 3-03 +1-55 поят
C(s)-[G0(s)] ад=7-96 s(s + 4) (Ш5-27)
Линейный и нелинейный контуры управления смоделированы с
использованием SIMULINK. Эталонный сигнал выбран в виде суммы
постоянной величины, равной 2 и прямоугольных колебаний амплитуды 1.
Результаты моделирования изображены на рис. 19.9. Этот рисунок
показывает, что характеристика отслеживания у нелинейного
проекта лучше.
Оба контура управления находятся в файле softloopl.mdl
пакета' SIMULINK. Читатель может использовать этот файл,
чтобы исследовать устойчивость обоих контуров с различными
эталонными сигналами, качество компенсации возмущения, робастность к
ошибкам модели в нелинейном случае, влияние насыщения на входе
и т. д. DDD
Пример 19.4 (Нейтрализация значения рН). Управление
значением рН — чрезвычайно трудная задача в практических ситуациях, из-за
578 Глава 19. Введение в нелинейное управление
§3.5
А ■
4 т
g | 2.5
3 о
Й5 1
1
0.5
6
Время [с]
10
12
Рис. 19.9. Характеристика отслеживания линейного (у{) и нелинейного (yni)
проекта системы управления для нелинейного объекта
большого динамического диапазона, необходимого в регуляторе. Чтобы
справиться с этой проблемой, часто необходимо делать структурные
изменения в физической установке — например, обеспечивая
дополнительные резервуары для смешивания и многочисленные клапаны для
реактивов. Интересующегося читателя приглашаем, например, к
широкой дискуссии по этой задаче на Web-странице книги. Здесь же мы
рассмотрим довольно идеализированную форму задачи. Используем ее
как средство иллюстрации методов, основанных на принципе
внутренней модели, нежели как практическое решение проблемы управления
значением рН.
Можно показать, исходя из элементарных соображений баланса
масс, что соответствующая модель пространства состояний для
нейтрализации значения рН типа «сильная кислота — сильное основание»
дается выражениями
^ = ^ (си - *№) +1 (а + d(t) - со®)
dt
dpm(t)
dt =>(')-*»(*))
Po(t) = ~lg
Уо.25(с0(<))2 + 10-14 + 0.5co(t)
(19.6.28)
(19.6.29)
(19x.6.30)
где
<H>c0,Cu : —избыток водорода во входном потоке, выходящем потоке и
потоке кислоты, используемой для управления, соответственно;
q: — скорость входного потока;
V : — объем емкости;
19.6. Гладкие динамические нелинейности 579
d:— возмущение входного потока]
и: —скорость потока кислоты, используемой для управления]
Ро,Рт'- ~~ истинное и измеренное значение рН потока соответственно.
Цель системы управления состоит в том, чтобы регулировать
значение рНp0(t) потока, в соответствии с величиной уставки,
управляя скоростью потока u(t) кислоты, используемой для управления.
Заметим, что сам процесс — нелинейная система первого порядка с
датчиком, обладающим задержкой и представляющим вторую
переменную состояния.
Далее мы видим, что уравнения (19.6.28)-(19.6.30) соответствуют
уравнению (19.6.1), где x\(t) = c0(t) и X2(t) = pm(t)- Аналогично,
уравнение (19.6.2) соответствует уравнению y(t) =X2(t).
Тогда относительная степень этой нелинейной системы равна 2,
за исключением случая, когда с0 = Су,. Практически, эту особую точку
можно обойти соответствующим выбором Си.
Используя теорию, представленную в разд. 19.6, с
р(р)=а(Зр2 + (а + (3)р+1 (19.6.31)
мы имеем, что вычисленная приближенная инверсия получена для
d = 0, если
■*> - щ^лигх^м-ш + qJZ^
(19.6.32)
Реализация этой инверсии требует, чтобы с0 и р0 были заменены
их восстановленными значениями с0 и р0, которые получаются с
помощью нелинейного наблюдателя.
Вышеупомянутый проект был осуществлен в схемном решении
пакета SIMULINK (файл phloop.mdl). Чтобы оценить эту стратегию
проектирования применительно к рассматриваемой задаче управления
значением рН, моделирование было выполнено со следующими
параметрами:
V
Я
(Н
Си
а
83.67 л
1 л/мин
-ю-3
10"4
1 с
0.5 с
В этом случае не было никакого управления до t = 2 с, когда
прикладывается ступенчатая уставка, чтобы регулировать уровень рН
580 Глава 19. Введение в нелинейное управление
12
11
ю
И 9
— рН (измеренный)
— рН (в потоке)
01 23456789 10
Время [с]
Рис. 19.10. Управление уровнем рН с использованием стратегии
проектирования нелинейной системы управления — показаны рН в потоке (толстая
линия) и измеренный уровень рН (тонкая линия)
потока на значении 7. (Заметим, что начальный уровень рН равен 11.)
Результаты показаны на рис. 19.10. □□□
19.7. Проблемы возмущений при нелинейном
управлении
В гл. 8 мы видели, что возмущения нуждаются в особом внимании при
проектировании систем управления. В частности, мы выяснили, что
имеются тонкие проблемы, связанные с различием между входными
и выходными возмущениями. В нелинейном случае —это те же самые
проблемы, но здесь есть дополнительное осложнение, связанное с
нелинейным поведением системы. Сущность этой трудности отображена на
рис. 19.11.
В линейном случае эти две стратегии дают один и тот же результат:
с\ = С2. Однако в нелинейном случае обычно с\ ф С2. Например, если
f(a) = а2, то с\ = а2 + Ь2, в то время как c<i = (а + Ь)2. Вывод из
этого наблюдения таков, что если в линейном случае можно свободно
перемещать возмущения с входа на выход с помощью линейного пре-
/<°>
/<°>
* +
о-
с\
JH
/<°>
С2
Рис. 19.11. Нелинейные операторы
19.7. Проблемы возмущений при нелинейном управлении 581
*(<) I do{t) |
-iirO—H Ga(o> h—rO—Ч
^b(o>
3/'W
Рис. 19.12. Возмущения в нелинейных системах
образования, то в общем случае это не справедливо для нелинейной
системы.
Для иллюстрации рассмотрим структуру на рис. 19.12.
На рис. 19.12 Ga{°) и <7&(о) представляют нелинейную динамику, u(t),
y(t) и y'(t) представляют сигналы и di(t) и d0(t) —входное и выходное
возмущения соответственно. В этой структуре элемент <7&(о) может,
например, представлять систему измерения.
Мы рассмотрим случай входного и выходного возмущений отдельно.
1) Входные возмущения
Здесь мы можем работать с y'{t) и гл(£), чтобы восстановить di(t), затем;
компенсировать его на входе объекта управлением с помощью обратной
связи. Это ведет к стратегии, которая проиллюстрирована на рис. 19.13.
На рис. 19.13 Ща и На —приближенные инверсии для Gb(Ga(°})
и Ga(o) соответственно. В частности, если оператор, который будет
инвертирован, такой же, как в {(19.6.1), (19.6.2)}, то приближенная
инверсия определяется выражениями {(19.6.10), (19.6.12)}. Наконец, F
на рис. 19.13 — фильтр, добавленный для того, чтобы избежать
алгебраического (нединамического) контура.
r(t)
На
+ u(i) '
~ i
\
[ +
^
Ga
y(t)
^
Сь
Р
y'(t)
^■
Ща
1
J
- S
Рис. 19.13. Стратегия управления для входных возмущений
582 Глава 19. Введение в нелинейное управление
2) Выходные возмущения
Здесь мы можем работать с yf(t) и u(t), чтобы оценить d0(t), которое
объединяется с эталонным сигналом r(t) и пропускается через
(приближенную) инверсию для <7а(о), чтобы компенсировать возмущение и
привести к тому, что y(t) приблизится к r(t). Это приводит к стратегии,
которая изображена на рис. 19.14.
т + .
На
«(<)
С
Ga
io(t)
+ '
[y(t)
Т0^
J Gb
Ga
y'it)
щ
ff
*V-
Рис. 19.14. Стратегия управления для выходных возмущений
На рис. 19.14 Щ и На — приближенные инверсии для (?& и Ga
соответственно, сформированные в соответствии с той же самой
методологией, что и используемой для случая входного возмущения. Читатель
может проверить, что в линейном случае можно перемещать
различные инверсии вдоль контуров на рис. 19.13 и i9.14, чтобы получить
идентичные результаты. Однако комментарии, сделанные в отношении
рис. 19.11, указывают, что это не будет справедливо в нелинейном
случае.
Проиллюстрируем это, продолжая пример 19.4.
Пример 19.5. Рассмотрим рН-задачу примера 19.4, где Ga
определяется выражениями (19.6.28) и (19.6.30) (при у = р0), в тпо время как Gb
определяется выраоюением (19.6.29) (при у1 =рт). Снова рассмотрим
полином (19.6.31), который мы перепишем следующим образом:
p(p) = f2P2 + fiP + l (19.7.1)
Используя (19.7.1), выражение (19.6.32) представим в виде
_У1п(1(У(со(*))2+4х10-14
u(t)
ha{c0{t)-Cu)
[с? (v(t)-y'(t)) - (y'(t) -y(t))(f2-«h)}
+g(ci(t)-c0(t)) (1972)
co\t)— Си
где v — управляющий вход, поступающий на элемент инверсии, а у1,
у и с0 — восстановленные переменные состояния, формируемые
наблюдателем разомкнутого контура, как на рис. 19.7 и 19.8. Для величин
19.7. Проблемы возмущений при нелинейном управлении 583
/l и /г общего вида в (19.7.1) выраоюение (19.7.2) дает Ньа- Выбрав
/i = а + /3, /г = а/3, где а — постоянная времени датчика в (19.6.29), а
/3 является свободным параметром, (19.7.2) формирует На. Наконец,
Щ легко выбрать в виде
Яб(в) = ^^; т<а (19.7.3)
TS + 1
Дргх моделировании мы выберем f\ = 0.2, /2 = 0.01 для Ща, /3 = 0.5
для На ит = 0.2 длл Щ. Наконец, фильтр F на рис. 19.13 выберем так:
™-ЕЕ+Т (197-4)
Чтобы проиллюстрировать нелинейные характеристики зада,чи,
мы рассмотрим несколько случаев с уставкой г = 7.5.
Случай 1
Конфигурация 1) (рис. 19.13) —проект для входного возмущения, где:
а) входное возмущение — ступенька величины 0.005 в момент *=20;
б) выходное возмущение — ступенька величины —1.886 в момент
t = 20.
Заметим, что оба возмущения дают одно и то же отклонение рН
от установившегося состояния.
Результаты показаны на рис. 19.15.
Заметьте, что реакция на входное возмущение
удовлетворительная, в то, время как реакция на выходное возмущение плоха. Это
понятно, ведь конфигурация была предназначена для входного
возмущения.
Реакция на входное возмущение
Реакция на выходное возмущение
8.5
8
, 7.5
И 7
а 7
6.5
6
0.0
15
•
,
Г
20
Время
i
25
с]
30
8.5
8
7.5
И 7
а 7
6.5
6
0.0
15
■ ■
^ J
/
20 25 3
Время [с]
Рис. 19.15. Реакция на входное (слева) и выходное (справа) возмущения в
контуре управления, спроектированном для компенсации входного
возмущения (di = 0.005, d0 = -1.886) [Случай 1]
584 Глава 19. Введение в нелинейное управление
Случай 2
Конфигурация 2) (рис. 19.14) —проект для выходного возмущения, где:
а) входное возмущение — ступенька величины 0.005 в момент t = 20;
б) выходное возмущение — ступенька величины —1.886 в момент
*=20.
Результаты показаны на рис. 19.16.
Заметим, что в этом случае реакция на выходные возмущения
удовлетворительна, в то время как реакция на входные возмущения
плоха. Это понятно, ведь конфигурация спроектирована для выходного
возмущения.
Далее рассматривались еще два случая (3 и 4). Эти случаи —
повторение случаев 1 и 2, за исключением того, что возмущения
были увеличены до 0.05 (для входного возмущения) и до —2.8276 (для
выходного возмущения). Результаты показаны на рис. 19.17 и 19.18.
Заметим, что те же самые общие комментарии справедливы, как и
в случаях 1 и 2. Также, сравнивая рис. 19.15 и 19.16 с рис. 19.17 и 19.18,
мы видим явное свидетельство нелинейного поведения: сам характер
реакций изменяется с «величиной» возмущений.
Этот пример выдвигает на первый план вывод, что в нелинейных
системах некоторые линейные понятия больше не справедливы,
потому что не имеет силы принцип суперпозиции. Таким образом, здесь
должна быть проявлена особая осторожность. Мы видели, что
должны внимательно рассматриваться входные и выходные возмущения
Реакция на входное возмущение
Реакция на выходное возмущение
8.5 г
8[
7.5 [
7[
6.5
5.5
—|1г
I V I
15
20 25
Время [с]
30
20 25
Время [с]
Рис. 19.16. Реакция на входное (слева) и выходное (справа) возмущения в
контуре управления, спроектированном для компенсации выходного
возмущения (d{ = 0.005, d0 = -1.886) [Случай 2]
19.8. Более общие объекты с гладкими нелинейностями 585
Реакция на входное возмущение
Реакция на выходное возмущение
20 25
Время [с]
20 25
Время [с]
Рис. 19.17. Реакция на входное (слева) и выходное (справа) возмущения в
контуре управления, спроектированном для компенсации входного
возмущения (di = 0.05, d0 = -2.8276) [Случай 3]
Реакция на входное возмущение
Реакция на выходное возмущение
B7l
5
15
20 25 30 15 20 25
Время [с] Время [с]
Рис. 19.18. Реакция на входное (слева) и выходное (справа) возмущения в
контуре управления, спроектированном для компенсации выходного
возмущения (di = 0.05, d0 = -2.8276) [Случай 4]
и что амплитуда сигналов также играет роль. Это —лишь часть
проблем, связанных с управлением нелинейными системами. □□□
19.8. Более общие объекты
с гладкими нелинейностями
Чтобы выдвинуть на первый план ключевые вопросы, ранее
обсуждение касалось объектов, которые являются и устойчивыми и инверсно
устойчивыми. Далее мы кратко исследуем более общую ситуацию. По
586 Глава 19. Введение в нелинейное управление
аналогии с линейным случаем (например, в разд. 18.4) можно было
бы задумать решение общей задачи в виде комбинации (нелинейного)
наблюдателя и N (нелинейной) обратной связи по оценке переменных
состояния. Мы выяснили, что это было очень выгодной стратегией в
линейном случае. Например, мы нашли в разд. 18.4, что полюсы
замкнутого контура — просто объединение динамики наблюдателя и обратной
связи по переменным состояния, рассматриваемых отдельно. К
сожалению, это не годится в нелинейном случае, где, между прочим, обычно
будет иметься взаимодействие между наблюдателем и обратной связью
по состоянию. Это делает нелинейную задачу намного более труднрй;
на самом деле —это все еще предмет продолжающегося исследования.
Мы предупреждаем читателя, что методы, описанные ниже, будут иметь
ограниченное применение из-за линейных приближений, используемых
для отклонений.
19.8.1. Нелинейный наблюдатель
Рассмотрим объект вида, данного в (19.6.1) и (19.6.2). Пусть имеется
восстановленное состояние x(t) во время t. Будем использовать методы
линеаризации, чтобы посмотреть, как можно было бы распространить
это значение.
Линеаризованные формы (19.6.1) и (19.6.2) относительно x(t)
соответственно имеют вид
px(t)af(x) +
81
дх
y(t)*h(x)+ —
[x(t)-x(t)]+g{x)u(t) +
[x(t)-x(t))
Для удобства обозначения примем
дх
дх
в-*,-*
с =
dh
дх
D-«*>-|
Е = /(*)-
дЦ
дх\
u(t)
x(t)
x(t)
С
x(t)
di
дх
[x(t) -x{t)]u(t)
19.8. Более общие объекты с гладкими нелинейностями 587
где А, В, С, D, Е — изменяющиеся во времени и зависящие от х и и. Тогда
линеаризованная модель имеет вид
рх = Ах + Ви + Е
„ т-ч 19.8.1
у = Сх + В v '
Это дает следующий линеаризованный наблюдатель:
рх = Ах + Ви + Е + 3(у - Сх - D)
Прежде чем продолжить, заметим, что имеются два общих пути
проектирования усиления наблюдателя J. Один путь состоит в том,
чтобы взять фиксированные номинальные величины для A,B,C,D,E
(скажем, A0,Bo,Co,Do,E0) и использовать их, чтобы спроектировать
единственную фиксированную величину JQ, воспользовавшись линейной
теорией наблюдателя. В более серьезных нелинейных задачах можно
спроектировать различные J в каждый момент времени,.основанные на
текущих величинах A,B,C,D,E, которые зависят от текущего
восстановленного значения x(t). Например, если используется квадратичная
оптимизация (см. гл. 22) для проектирования J, то это приводит к так
называемому расширенному фильтру Калмана (РФК).
Подставляя значения A,B,C,D,E, получим следующее компактное
представление для наблюдателя:
рх = /(£)+ д(х)и + 3[у - h(x)]
Этот результат интуитивно понятен, потому что нелинейный
наблюдатель, полученный таким образом, представляет разомкнутую
нелинейную модель с (линейным) усилением обратной связи, увеличиваю-,
щим различие между фактическими наблюдениями у и полученными с
помощью нелинейной модели h(x).
Отсылаем читателя к Web-сайту книги, где этот нелинейный
наблюдатель применяется к задаче оценки уровня воды в соединенных
резервуарах.
19.8.2. Проектирование нелинейной обратной связи
Здесь имеются бесчисленные возможности. Например, если система
имеет устойчивую инверсию, то можно было бы использовать линеаризацию
обратной связи, как в (19.6.12), с параметром ж, замененным на х, как
в разд. 19.8.1. Другой возможный алгоритм управления, связанный с
линеаризованной обратной связью по состоянию, будет описан далее.
Мы вернемся к линеаризованной модели (19.8.1) и добавим
интегральные свойства, определяя дополнительное состояние
рх2 = г - у
588 Глава 19.' Введение в нелинейное управление
где г — эталонное входное воздействие. Составная линеаризованная
модель тогда будет иметь вид
Г X
LZ2.
=
А 0
-С 0
X
+
В
0
и +
' Е 1
_-dJ
Спроектируем в этом случае обратную связь по восстановленному
состоянию в виде
ti = -[Ki К2][ж1
Более подробно мы будем говорить об этой (линейной) стратегии в
разд. 22.4 гл. 22.
Как и в случае наблюдателя, имеется несколько путей, которыми мы
могли бы спроектировать усиление обратной связи [Ki K2]. Три из
этих возможностей следующие:
1. Базировать проект на фиксированном наборе номинальных величин
для A,B,C,D,E.
2. Выбрать набор характерных величин переменных состояния и
выполнить проектирование для каждого соответствующего набора
параметров A,B,C,D,E. Далее, использовать некоторую форму
супервизора и переключатель противонакопления, чтобы выбрать
соответствующий регулятор (см. разд. 19.3, содержащий детали того, как это
могло бы быть сделано).
3. Использовать проектирование изменяющегося во времени усиления
на основе А, В, С, D, Е, рассчитанных для текущей оценки состояния.
19.9. Негладкие нелинейности
Стратегии управления, описанные выше, требуют, чтобы нелинейности
были «гладкими», т. е. дифференцируемыми и инвертируемыми. Во
многих практических случаях встречаются негладкие нелинейности,
например, типа зоны нечувствительности или залипания (см., например,
регулятор уровня изложницы, описанный в гл. 8).
С этими видами нелинейностей очень трудно иметь дело из-за
специфических проблем их моделирования. (Заметим, что мы встречались
с простой вибрацией в разд. 8.8.4, где имели дело с залипанием.) В
некоторых случаях можно смоделировать нелинейный элемент, а затем
предпринять корректирующие воздействия. Мы проиллюстрируем это
по отношению к зонам нечувствительности.
Зона нечувствительности — явление, обычно встречающееся на
практике в связи со свойствами механических исполнительных механизмов.
19.9. Негладкие нелинейности 589
«№
А и
J /
е
/
/
и
—е
«w
А т
—б
/
/
с
/
U
"»(*)
Рис. 19.19. Предкомпенсатор зоны нечувствительности
Маленькие зоны нечувствительности могут игнорироваться, потому что
они не будут производить существенное ухудшение характеристик.
Однако когда размер существенен, необходима некоторая форма
компенсации.
Для наших целей здесь будет достаточно определить зону
нечувствительности т = VZ(u) в виде
m{t)=VZ(u(t)) = {
О если € > u(t) > —€,
u(t) — б если u(t) > б,
[ u(t) + € если u(t) < —е.
(19.9.1)
где € —положительное число, которое определяет нелинейность.
Заметим, что зона нечувствительности — негладкая нелинейность;
она имеет разрывную первую производную. Однако существует
предкомпенсатор для этой нелинейности, как показано на рис. 19.19.
Из рис. 19.19 просто проверить, что m(t) =u(t). Преимущество этой
компенсации иллюстрируется на следующем примере, где размер зоны
нечувствительности был преувеличен, чтобы подчеркнуть различие.
Пример 19.6. Рассмотрим объект, имеющий модель вида
y(s)=K(^M(s)+A?(s)) c m{t)=vz{u) (i9-9-2)
Предположим, что зона нечувствительности определяется
параметром в = 0.5. Dg(s) обозначает преобразование Лапласа обобщенного
возмущения dg(t).
Управление с одной степенью свободы разработано, учитывая
линейную часть модели. Используется стратегия размещения полюсов
с интегрированием в регуляторе для характеристического полинома
замкнутого контура Aci(s) = (s2 + 3s + 4)(s + 5)2, что дает регулятор
С{$) = 4.625^ Н-14.375, +12.5 ^
590 Глава 19. Введение в нелинейное управление
Контур моделируется с компенсацией зоны нечувствительности
и без нее. Эталонный сигнаЛ — прямоугольные колебания частоты
0.025 Гц и единичной амплитуды. Возмущение взято в виде dg(t) =
fi(t — 10). Результаты показаны на рис. 19.20.
Рис. 19.20. Влияние компенсации зоны нечувствительности на
характеристику контура
На рис. 19.20 график, помеченный через y\(t), описывает выход
объекта без компенсации зоны нечувствительности. График, помеченный
через y2{t), описывает выход объекта, когда используется компенсация
зоны нечувствительности, вида, показанного на рис. 19.19. Сравнение
yi(t) и угМ показывает преимущества компенсации зоны
нечувствительности.
Заметим, что различие характеристик менее существенно для
ступеньки эталонного сигнала при t = 20 с. Причина этому — то,
что из-за возмущения, отличного от нуля, установившийся вход зоны
нечувствительности больше не равен нулю в отличие от случая, когда
t = 0. Таким образом, эффект зоны нечувствительности в основном
эквивалентен изменению усиления процесса на нулевой частоте.
Читатель может проверить другие идеи проекта, используя файл
deadl.mdl пакета SIMULINK. В частности, читатель может
изменить схемное решение, реализуя регулятор в форме, требуемой,
чтобы добавить управление для противонакопления в присутствии
насыщения входа (как на рис. 11.6). □□□
19.10. Устойчивость нелинейных систем
Наконец, кратко взглянем на проблему устойчивости нелинейных систем
с обратной связью. Мы рассмотрим две формулировки устойчивости
таких систем — а именно, методы Ляпунова и методы функционального
пространства.
19.10. Устойчивость нелинейных систем 591
19.10.1. Устойчивость по Ляпунову
Основная идея устойчивости по Ляпунову состоит в том, чтобы
показать, что существует положительно определенная функция (наподобие
энергии) состояний, которая уменьшается вдоль траекторий системы.
Положительно определенная функция обычно называется функцией
Ляпунова. Основная трудность применения метода Ляпунова заключается
в нахождении подходящей функции Ляпунова; как только это сделано,
устойчивость следует сразу же.
Прежде чем дать некоторые дальнейшие детали, мы сначала
определим понятие глобальной асимптотической устойчивости для нелинейных
систем. Сделаем это для дискретных систем, но аналогичные результаты
имеются и для непрерывных систем, где разности заменены
производными. '
Определение 19.2. Рассмотрим дискретную систему вида
х[к +1] = / (х[к\); х[к0] = х0 (19.10.1)
Будем говорить, что система глобально асимптотически устой-
чива, если для всех начальных состояний х[к0] и для любого е > 0
существует значение Т, такое, что \\ x[k0+r] \\<е для всех т>Т. DDD
Учитывая это определение, проверка на глобальную устойчивость
облегчается, если мы можем найти функцию V(x) E Ш (функцию
Ляпунова), обладающую следующими свойствами:
1) V(x) -г- положительно определенная функция от х: т. е. V(x) > 0 для
всех х ф 0,V(x) непрерывная и строго возрастающая функция от
\х\ и V(x) — радиально неограниченная, т.е. |V(a;)| —> оо для всех
||я|| -> оо.
2) V уменьшается по траекториям (19.10.1), т. е.
— (V(f(x)) — V(x)) положительно определенная. (19.10.2)
Тогда мы имеем следующую теорему Ляпунова.
Теорема 19.1 (Устойчивость по Ляпунову). Нулевое решение
(19.10.1) глобально асимптотически устойчиво, если существует
функция Ляпунова для системы, удовлетворяющая свойствам 1) и 2),
приведенным выше.
Доказательство
Поскольку система инвариантна по времени, мы можем взять к0 = 0.
Также, для ||#(0)|| < oo,V(a;(0)) < оо. Предполоэюим обратное, что
теорема ложна\ то есть что имеется е > 0, для которого не
существует Т, такого, что ||ж(А;)|| < € для всех к>Т.
592 Глава 19. Введение в нелинейное управление
При этих условиях существует неограниченная
последовательность целых чисел S = {к{}, таких, что \\x(ki)\\ > е для всех k{ E S.
Используя (19.10.2), получим, что
V(f(x(ki))) - V(x(ki)) < -б2 (19.10.3)
для некоторого €2 > 0. Следовательно, если мы добавим достаточное
количество таких слагаемых, то можем заставить сумму стать
меньше — V(x(0)). Пусть N обозначает индекс последнего момента,
используемого в этой сумме. Тогда
£ (ПЯФМ) - V(x(ki))) < -V(x(0)) (19.10.4)
fct€S
k{<N
Вдоль траектории (19.10.1) мы имеем
N-1
V(x(N)) = V(x(0)) + ]Г (V(x(k +1)) - V(x(k))) (19.10.5)
fc=0
< V(x(0)) + £ (У(х(Ь +1)) - Тф(^)))
fct€S
ki<N
= V(x(0)) + £ (V(f(x(ki))) - V(x(ki))) < 0
k>i<N
где мы использовали (19.10.4).
Однако это противоречит положительной определенности V(x).
Теорема доказана. .□□□
Применение методов Ляпунова будет дано в. гл. 23, где мы
используем этот подход для доказательства устойчивости нелинейной модели
общего вида с прогнозирующим алгоритмом управления.
19.10.2. Круговой критерий
Использование критерия Ляпунова для анализа нелинейных систем
является мощным инструментом. Главная трудность, однако, заключается
в нахождении подходящей функции Ляпунова. Имеется один класс
задач, для которых существует изящное рещение проблемы нелинейной
устойчивости — это системы с обратной связью, включающие линейный
динамический блок вместе со статической (или с малым объемом
памяти) нелинейной обратной связью. Это часто называется задачей Лурье —
см. рис. 19.21.
В дальнейшем мы должны будем использовать следующее следствие
теории оптимального управления, которое приведем без доказательства.
19.10. Устойчивость нелинейных систем 593
у(0
1 1 ?(«.у(0) h '
Рис. 19.21. Задача Лурье для SISO-системы
Лемма 19.1 (Лемма Калмана—Якубовича). Дана устойчивая
линейная SISO-система, определяемая набором матриц (A,B,C,D), с
управляемыми (А,В); даны также вещественный вектор v, скалярные
величины 7 > 0 и е > 0, а также полооюительно определенная
матрица Q; тогда существует полооюительно определенная матрица Р ut
вектор q такие, что
ATP + PA = -ggT-eQ (19.10.6)
и
PB-v = j2Q (19.10.7)
тогда и только тогда, когда значение е достаточно мало и скалярная
функция
Н(з) = 7 + 2vT(sl - A)_1B (19.10.8)
удовлетворяет условию
U{H(ju))} > 0, для всех и) (19.10.9)
где 5R{-} означает вещественную часть функции. □□□
Отсюда вытекает следующий результат относительно устойчивости.
Теорема 19.2 (Круговой критерий). Рассмотрим систему Лурье,
представленную на рис. 19.21. Если
1) линейная система х = Аж + В£; у = Ca; + D£ устойчива, полностью
управляема, полностью наблюдаема и имеет диаграмму Найквиста,
которая находится строго правее от — £, к > 0 и
2) нелинейность <p(t,y) принадлеоюит сектору (0,/с) в том смысле, что
0<y<p(t,y)<ky2 VyGM, Vt>0 ' (19.10.10)
то контур обратной связи на рис. 19.21 глобально асимптотически
устойчив.
«(0 = <у-ч«0
о
i(t)=Ax(i) + Bf(t)
y(t) = Cx(t) + D«t)
594 Глава 19. Введение в нелинейное управление
Доказательство
Рассмотрим функцию Ляпунова
V(x)=xTPx (19.10.11)
Вычисление производной V вдоль решений системы, приведенной на
рис. 19.21, дает
V(x) = хТРх.+ хтРх , (19.10.12)
= ят(АтР + РА)ж + 2ятРВ£
Легко видеть, что справедливо следующее равенство:
к£хТСТ + (1 + Ш)£2 - £(ку + 0 = 0 (19.10.13)
Вычитая (19.10.13) из (19.10.12), получим
V(x) =ят(АтР + РА)я + 2£ст(РВ - \кСТ) (19.10.14)
Так как (р удовлетворяет условию (19.10.10), мы имеем, что
0 < "f^A < k, для всех у ^ 0 (19.10.15)
У
Уравнение (19.10.15) означает, 4motp(t,y) uky—tp(t,y) всегда имеют
один и тот же знак, т. е.
<p(t,y)[ky-<p{t,y)]>0 для всехуеШ (19.10.16)
Напомним, что (см. рис. 19.21)
£ = -ф,у) (19.10.17)
и, подставляя его в уравнение (19.10.16), получим
£(% + £)< 0 (19.10.18)
Подстановка (19.10.18) в/(19.10.14) дает
V(x) < жт(АтР + РА)ж + 2£ст(РВ - \кСТ) - (1 + Ш)£2 (19.10.19)
Далее, условие 1) формулировки теоремы предполагает, что
Щ[С(в1 - А^В + D] + у} > 0; s = ju) (19.10.20)
к
или, потому что к>0,
&{k[C(sI - А^В + D] + 1} > 0; s = ju) (19.10.21)
19.10. Устойчивость нелинейных систем 595
Тогда определим 7 = (1 + kD) и v = ^кСт. Заметим, что (19.10.21)
в этом случае дает
Щ<у + 2vT(sl - А^В} > 0; a = ju) (19.10.22)
т. е. условие 1) эквивалентно (19.10.9) леммы Калмана—Якубовича.
Обращаем также внимание на то, что часть 1) условий теоремы,
вычисленная при ш = оо дает 7 = (1 + &Р)Х> 0.
Следовательно, из леммы Калмана—Якубовича мы имеем, что для
данной положительно определенной матрицы Q существует
положительно определенная матрица Р и вектор q такие, что
АГР + РА = -qqT - eQ (19.10.23)
РВ - hcT = (1 + Ш) 2 q (19.10.24)
для любого е>0.
Подставляя (19.10.23) и (19.10.24) в (19.10.19), получим
V{x) < - exTQx - xTqqTx (19.10.25)
-2ZxT(l + kB)2q-(l + kT>)(2
= - exTQx - {xTq - (1 + Ш) if)2
< — exTQx
Результат тогда следует из непрерывного варианта
теоремы 19.2. ' DDD
Предыдущий результат может быть расширен на случай, когда
нелинейность находится в секторе (fei,^) в том смысле, что
kiy2<y<p{t,y)<k2y2 (19.10.26),
Например, мы им<еем следующий вывод для случая 0 < к\ <к2.
Вывод 19.1. Рассмотрим систему Лурье, показанную на рис. 19.21,
с G(s) = C(sl — А)~1В + D. При условии, что линейная система
(х = Аж+В£, у = Ca;+D£) имеет пс неустойчивых полюсов, полностью
управляема, полностью наблюдаема и имеет диаграмму Найквиста,
которая не попадает в круг с центром frfcX и радиусом 2k[k2 ^
но охватывает его пс раз против часовой стрелки,,контур является
глобально асимптотически устойчивым.
596 Глава 19. Введение в нелинейное управление
Доказательство
Рассмотрим преобразованный контур, показанный на рис. 19.22. В
этом случае определим
Й(5» = 1Т$Ь ' (1910-27)
и
Ш = Ш-к1У (1.9.10.28)
Мы можем видеть, что ф(у) удовлетворяет уравнению (19.10.10)
при к= (/ь2 — к\). Таким образом, мы можем применить теорему 19.2
при условии, что передаточная функция G(s) устойчива и имеет
диаграмму Найквиста, которая находится правее /k ~~^k \ • Обращаясь
подобным образом к уравнениям (19.10.20) и (19.10.21), мы имеем
Щк2 - fci)G(jw) + 1} > 0 (19.10.29)
Используя (19.10.27) в (19.10.29) и записав G(ju)) = a + j(3, получим
(l + k2a)(l + kia) + kik2/32
(l + fcia)2 + /32Jfc2
>0 (19.10.30)
Знаменатель (19.10.30) всегда больше нуля. Следовательно,
(19.10.30) дает
(а + 1)(а+1)+/32>0 (19.10.31)
#1 К2
Это подразумевает, что диаграмма Найквиста для G(s) должна
лежать вне круга, данного в формулировке вывода. Наконец, пс охватов
против часовой стрелки гарантируют, что G(s) устойчива.
Результат следует из теоремы 19.2. □□□
Проиллюстрируем полученный результат следующим примером.
Пример 19.7. Рассмотрим нелинейную систему
±i = lOzi - 10я2 (19.10.32)
±2/= 16.925Ж1 - 16^2 + 0.1 tg"1^) - O.lii (19.10.33)
у = х2 (19.10.34)
Покажем, что эта система глобально асимптотически устойчива.
19.10. Устойчивость нелинейных систем 597
6(8)
Рис. 19.22. Преобразованный контур
Решение
Система может быть представлена в виде структуры Лурье с
параметрами
10 -10
16.925 -16
0
-0.1
(19.10.35)
(19.10.36)
(19.10.37)
(19.10.38)
А — I AV xul • В —
. [16.92Г *"1,
С=[0 1]
v(v)=tgTl(v)
Можно видеть, что
0<у(р(у)<у2
Легко проверить, что диаграмма Найквиста для (19.10.35),
(19.10.36) лежит справа от точки — 1. Результат следует из
теоремы 19.2. DDD
19.10.3. Определение устойчивости от входа к выходу
с помощью методов функционального пространства
Здесь мы рассмотрим метод использования нелинейного оператора,
приведенный в разд. 19.2. Будем использовать х> чтобы обозначить
банахово пространство1 и / для обозначения нелинейного оператора в х>
1 Говорят, что нормированное векторное пространство является банаховым
пространством, если все последовательности Коши сходятся к предельным точкам в этом
пространстве.
598 Глава 19. Введение в нелинейное управление
т. е. отображение из области определения V(f) С хз область х- Область
определения и область значений / определяются следующим образом:
4f) = {x€X:f(x)eX} (19.10.39)
K(f) = {f(x):x<=V(f)} (19.10.40)'
Обозначим также через /_1(^) прообраз множества У, полученного
с помощью оператора /:
f-\Y) = {xe V(f): f(x) e Y} (19.10.41)
Используя эти определения, можно утверждать следующее.
Определение 19.3. Оператор называется устойчивым от входа к
выходу, если его областью определения является х-
Определение 19.4. Оператор называется неустойчивым от входа к
выходу, если его областью определения является строгое
подмножество х-
Определение 19.5. Оператор называется неминимально-фазовым от
входа к выходу, если замыкание его области значений является
строгим подмножеством х-
Замечание 19.2. Чтобы пояснить смысл вышеупомянутой концепции
неминимально-фазового нелинейного оператора, обратимся к случаю
линейных стационарных систем. В этом случае,, если оператор f
имеет неминимально-фазовый нуль, то область значений такого
оператора — набор операторов в х, которые имеют нуль на той же самой
частоте, т. е. строгое подмножество х-
Нам нужно также определить усиление оператора. Мы будем
использовать усиление Липшица, которое определяете^ следующим образом:
II/IU = sup{l/(^iy :s,y€P(/Wy} (19.10.42)
где | о | — норма в х-
Определение 19.6. Говорят, что оператор f устойчив по Липшицу,
если V(f) = xu II/IIl < оо.
Далее определим инверсию оператора.
Определение 19.7. Оператор f, устойчивый по Липшицу, является
инвертируемым по Липшицу, если существует устойчивый по
Липшицу оператор f~l, такой, что f~l (/(о)) = I (оператор
идентичности). DDD
19.10. Устойчивость нелинейных систем 599
Замечание 19.3. Заметим, что необходимым условием для того,
чтобы R(f) совпадала с х, является то, что оператор f долэюен быть
инвертируем по Липшицу; таким образом неминимально-фазовый
оператор не является инвертируемым по Липшицу.
Следующий математический результат приведем без доказательства.
(Доказательство см. у Мартина (1976).)
Теорема 19.3. Пусть х — банахово пространство и пусть оператор f
устойчив по Липшицу. Предположим, что \\f\\b < 1; тпогда (1 + /) —
инвертируем по Липшицу и
на+л^Нь^а-н/Ньг1 (i9.io.43)
□□□
Вышеупомянутый результат может использоваться для анализа
некоторых вопросов устойчивости в нелинейных системах с обратной связью.
Для иллюстрации используем его, чтобы расширить теорему робастной
устойчивости из гл. 5 на нелинейный случай. В частности мы имеем
Теорема 19.4. Рассмотрим установку, описанную в разд. 19.2. В
частности, рассмотрим эквивалентный контур сигнала, приведенный на
рис. 19.2, где Ge — нелинейный оператор, описывающий влияние
аддитивных нелинейных ошибок моделирования. Достаточное условие
для робастной (по Липшицу) устойчивости состоит в том, чтобы
дператор g был устойчивым по Липшицу и '
И\ь<1
где g —нелинейный оператор прямой цепи (см. рис. 19.3):
g(o) = Ge(s0(C(o))) (19.10.45)
Доказательство
Сначала заметим, что на рис. 19.3 символом г обозначены все входные
сигналы, рассматриваемые как эталонный сигнал,
e = r-g{e) (19.10.46)
Следовательно,
(I + g)(e)=r (19.10.47)
Теперь, используя предположение (19.10.44) и теорему 19.3, мы
видим, что величина I+g — инвертируема по Лифшицу. (Следовательно,
из замечания 19.3 TZ(I+g) = x u ^(I+ff) = Х-) Доказательство следует
из определения 19.7. ODD
(19.10.44)
600 Глава 19. Введение в нелинейное управление
В качестве непосредственного применения полученного результата,
мы можем повторно доказать теорему 5.3. В частности, в случае
линейных операторов в пространстве L2 усиление по Лифшицу сводится к
норме в пространстве Ню1 Таким образом, в линейном случае условие
(19.10.44) становится следующим:
sup \Ge(ju)S0(juj)C(juj)\ < 1 (19.10.48)
Заметим, что это идентично условию, данному ранее в
выражении (5.6.6).
19.11. Обобщенная линеаризация обратной связи
для инверсно-неустойчивых объектов
Напомним из разд. 19.6, что схема линеаризации обратной связи, в
сущности, дает значение p(p)y(t) для рабочей точки сигнала v{t)—см.
уравнение (19.6.13)—где р(р) —дифференциальный оператор степени,
равной относительной степени нелинейной системы. Недостаток схемы,
однако, состоял в том, что она компенсировала динамику, связанную с
нулями и, следовательно, требовала, чтобы система имела устойчивую
инверсию. Здесь мы покажем, как схема может быть обобщена, чтобы
охватить классы инверсно-неустойчивых систем. В частности, заметим,
что основная схема линеаризации обратной связи дает
P(p)v(t) = "(t) (19.11.1)
Однако трудность инверсно-неустойчивого случая состоит в том, что
соответствующий вход не будет ограничен. Временно сосредоточивая
внимание на входе, по-видимому, желательно, чтобы условию (19.11.1)
соответствовало некоторое подобное требование на входе. Таким
образом, мы могли бы потребовать, чтобы вход удовлетворял линейной
динамической модели вида
£(p)u{t)=us (19.11.2)
где ^(0). = 1, a us — установившийся входной сигнал, которому
соответствует значение у(£), равное установившемуся значению vs параметра
u{t).
Конечно, (19.11.1) и (19.11.2) в общем случае не будут одновременно
совместимы. Это говорит о том, что мы могли бы определить вход,
как некоторую комбинацию (19.11.1) и (19.11.2). Например, мы могли
1 Норма передаточной функции F(s) в пространстве Ноо определяется как ||F||oo =
8upw€R|F(jw)|.
19.11. Обобщенная линеаризация обратной связи 601
определить вход как ту величину u(t), которая удовлетворяет линейной
комбинации (19.11.1) и (19.11.2) вида
(1 - X){p(p)y(t) - u(t)) + (X)(£(p)u(t) -us)=0 (19.11.3)
где 0 < A < 1.
Замечание 19.4. Уравнение (19.11.3) мооюет создать ложное
впечатление, что это соответствует линейной стратегии обратной связи.
Однакоp(p)y(t) фактически кодирует будущую реакцию системы. (Это
имеет точно такую же интерпретацию в дискретном случае.) Кроме
того, эта «будущая» реакция, в общем, нелинейная функция
состояния и управляющих воздействий. Следовательно, в нелинейном случае
(19.11.3) фактически соответствует причинной нелинейной обратной
связи. Конечно, в специальном линейном случае «будущая» реакция
мооюет быть оценена как линейная функция состояний и управляющих
воздействий. Таким образом, в этом конкретном случае (19.11.3)
соответствует причинной линейной стратегии обратной связи. Последний
случай далее будет обсужден подробнее. □□□
Замечание 19.5. Ясно, что закон управления, неявно определенный с
помощью (19.11.3), —более общий, чем основная линеаризованная схема
обратной связи. Действительно, легко заметить, что это ведет к
внутренне устойчивому контуру управления в следующих специальных
случаях:
1) все инверсно-устойчивые системы (являются ли они устойчивыми
или нет) — взять А = О,
2) все устойчивые системы (являются ли они инверсно-устойчивыми
или нет) — взять А = 1 и
3) произвольные линейные системы. Чтобы проверить последнее
требование, заметим, что если разомкнутый объект имеет линейную
передаточную функцию дИу, тпо уравнение (19.11.3) эквивалентно
(1 - Л)(Р(а°()/?)ц^ ~ у(*)) + (а№(рМ*) - и<) = ° (1Э-11.4)
Это показывает, что характеристическое уравнение замкнутого
контура
(1 - X)p(s)B(s) + (\)£(s) A(s) = О (19.11.5)
Тогда, используя принцип назначения полюсов, можно видеть,
что существует значения X, р ut, которые стабилизируют любую
конкретную линейную систему — см. гл. 7. (Надо взять степень (р)
равной степени (А), а степень (£) —равной степени (В).)
602 Глава 19. Введение в нелинейное управление
Данное обсуждение говорит, что закон управления (19.11.3) имеет
возможность стабилизировать широкий класс нелинейных систем,
который включает класс инверсно-устойчивых систем, к которым
применима основная схема линеаризации обратной связи. ODD
Чтобы разработать закон управления, неявно определенный в
(19.11.3), мы добавим фиктивный вход гс(£), определенный следующим
образом:
£(p)u{t)=u(t) (19.11.6)
Пусть £(р) имеет степень h и нелинейная система имеет
относительную степень га. Тогда нелинейная система между u(t) и y(t) будет
иметь относительную степень m+h. Следовательно, если мы используем
оператор р(р) степени (m+h), тогда p(p)y(t) будет явно зависеть от u(t).
После операций, которые дают (19.11.3), мы можем записать:
р(р)у = Ь(х) + а(х)й (19.11.7)
Подстановка в (19.11.3) дает следующий закон управления с
нелинейной обратной связью:
(1-A)a + A v '
Замечание 19.6. Конечно, эффективность такого закона управления
зависит от разумного выбора £(р) и р(р). Уравнение (19.11.5)
предлагает один из подходов, состоящий в том, чтобы выбрать £(р),р(р)
с помощью назначения полюсов, используя линеаризованную модель
системы. DDD
Этот закон управления не компенсирует динамику, обусловленную
нулями, за исключением случая Л = 0. Ясно, что для А -> 0
уравнение (19.11.3) сводится к закону управления с помощью линеаризованной
обратной связи (19.6.12), а для А г-* 1, u(t) становится стратегией
управления с разомкнутым контуром £(p)u(t) = us. Поскольку, когда А -> 1,
закон управления становится управлением с разомкнутым контуром,
то из этого следует, что один класс систем, для которых эта схема,
конечно, подходит, — все устойчивые разомкнутые нелинейные системы
независимо от того, являются ли они инверсно-устойчивыми или нет.
Чтобы проиллюстрировать, как система могла бы использоваться
на практике, мы ограничимся в дальнейшем устойчивыми системами в
разомкнутом состоянии, чтобы можно было использовать наблюдатель
разомкнутого контура для оценки состояний. БудеЛг следовать общей
философии, представленной на рис. 19.14, чтобы оценить выходные
возмущения (и эталонный вход). Это проиллюстрировано на рис. 19.23.
19.11. Обобщенная линеаризация обратной связи 603
«W
Нелинейный
объект
Уо(Ь)
do(t)
r(t)
1
W)
Состояния
регулятора
Модель
нелинейной
системы
J
№
е(0
1+
о
Оцененные
состояния
объекта
и (1-А)а+А
-"(*)
Нелинейный закон управления
с обратной связью
Рис. 19.23. Обобщенная линеаризация обратной связи для устойчивого
разомкнутого объекта
Интересное свойство вышеупомянутой схемы заключается в том,
что она включает интегрирующие свойства, т. е. выход объекта y(t) —
см. рис. 19.23-—совпадает с эталонным сигналом r(t) в установившемся
состоянии, если устойчивое установившееся состояние существует. Это
можно видеть следующим образом. Если устойчивое установившееся
состояние существует, тогда u(t) будет сходиться к постоянной величине
(скажем, vs). Мы организовали закон управления так, чтобы us был
выбран как вход, который вынуждает выход модели быть равным vs.
Если мы обозначим установившееся нелинейное усиление модели через
#(•), то vs = g(us). Тогда в установившемся состоянии закон управления
(19.11.3) будет иметь вид
(1-А)(0(и)-1/,) + (А)(и-и,)=О
(19.11.9)
и ясно, что и = us является решением этого уравнения. Это
подразумевает, что в установившемся состоянии y(t) на рис. 19.23 равно vs.
Отсюда сразу же следует, что e(t) = 0, т. е. y(t) = r(t), независимо от
отношений между моделью и нелинейным объектом. (Если, конечно,
установившееся состояние достигнуто.)
Мы иллюстрируем эту схему следующим примером.
604 Глава 19. Введение в нелинейное управление
Пример 19.8. Рассмотрим нелинейную систему
Ai = Htei - 10ж2 (19.11.10)
±2 = 16.925Ж1 - 16ж2 - 0.1(и - tg"1 х2) (19.11.11)
y = x2 + d0 , (19.11.12)
где d0 представляет постоянное выходное возмущение.
1) Оценить динамику, обусловленную нулями, и, следовательно,
показать, что система инверсно-неустойчива.
2) Показать, что система в разомкнутом состоянии устойчива.
3) Проверить основной закон управления с линеаризованной обратной
связью при р(р) = 0.2222р + 1.
4) Спроектировать обобщенный закон управления с линеаризованной
обратной связью, чтобы скомпенсировать неизмеряемое выходное
возмущение d0 и сформировать выходной сигнал у, который должен
отслеживать постоянный эталонный сигнал г.
5) Оценить проект с помощью моделирования.
6) Проверить робастность проекта, умнооюив на 2 усиление реального
объекта на нулевой частоте, не изменяя модель.
7) Расширить алгоритм, включив схему противонакопления, чтобы
учесть ограничение скорости нарастания входного сигнала.
Решение
1) Динамика за счет нулей может быть оценена, если задать у = 0
с d0 = 0. Это приводит к
*i = 10a;i (19.11.13)
Ясно, что динамика за счет нулей — неустойчивая; это
указывает на то, что объект не имеет устойчивой инверсии.
2) Система изучалась в разд. 19.10.2, где было показано, что
разомкнутый контур устойчив.
3) Выполним процедуру разд. 19.6. Система имеет относительную
степень, равную 1. Также
у = х2 (19.11.14)
у = 16.925x1 - 16ж2 + 0.1 tg"1 X2 - O.lii (19.11.15)
Следовательно, в терминах обозначений разд. 19.6, мы имеем
Ь = 0.2222(16.925ж1 - 16ж2 + 0.1 tg"1 x2) + х2 (19.11.16)
а = -0.02222 (19.11.17)
19.11. Обобщенная линеаризация обратной связи 605
Тогда система может быть смоделирована, как на рис. 19.23
cA = 0ix^(p) = l. Было приложено ступенчатое эталонное
воздействие. Результаты показаны на рис. 19.24. Заметим, что
реакция на выходе следует по желаемой траектории, однако входной
сигнал растет неограниченно. Последнее — результат
неустойчивой инверсии системы.
4) Мы следуем предполооюениям, сделанным в замечании 19.6 и
учитываем линеаризованную систему. Это предполагает выбор р(р),
данный в части (3) задачи, вместе с &(р) = 1, что, в свою очередь,
приводит к закону управления, определяемому уравнением (19.11.8),
ей = и и параметрами a ub, как в уравнениях (19.11.16) и (19.11.17).
5) Система моделировалась, как показано на рис. 19.23, при различных
значениях А и при единичном ступенчатом эталонном сигнале в
момент t = 1 и ступенчатом возмущении величиной 0.5 в момент
t = 4. Результаты показаны на рис. 19.25. Заметим, что при
уменьшении А реакция становится быстрее, но увеличивается недо-
рёгулирование. Конечно, имеется нижний предел А, определяемый
другими ограничениями.
6) Реакция, показанная на рис. 19.26, соответствует А = 0.2.
Заметим, что нет никакой ошибки в установившемся состоянии, даже
если имеется несоответствие 2 : 1 меоюду усилениями на нулевой
частоте объекта и модели.
7) Заметим, что все состояния регулятора содержатся в
параллельной модели, используемой в регуляторе. Следовательно, в свете
обсуждения стратегии противонакопления в гл. 11 кажется, что
все, что мы должны сделать, — ограничить входной сигнал,
подаваемый и на объект, и на параллельную модель. Эффективность этого
предложения показана на рис. 19.27, где учтено ограничение
скорости нарастания \й\ < 20. Мы видим, что нелинейное управление
с противонакоплением приводит к достаточно хорошему решению
без нежелательных переходных процессов. DDD
Замечание 19.7. Чтобы не создать ложного представления,
единственной причиной, по которой мы требовали в предыдущем примере
устойчивости разомкнутого контура, было то, что использовался
наблюдатель разомкнутого контура для оценки состояний системы. Если
бы состояния можно было непосредственно измерить или оценить
некоторыми средствами, то метод был бы также применим и к
некоторым неустойчивым системам в разомкнутом состоянии. ODD
Предыдущий пример показывает, что обобщенный закон управления
с линеаризованной обратной связью применим для более широкого
класса нелинейных систем, чем основная схема линеаризованной обрат-
606 Глава 19. Введение в нелинейное управление
1.5 2
Время [с]
1.5
Время [с]
Рис. 19.24. Моделирование основной схемы с линеаризованной обратнрй
связью
3 4
Время [с]
25
20
В
s15
I-
PQ
0
Время [с]
Рис. 19.25. Моделирование обобщенной схемы с линеаризованной обратной
связью
!
1 ■ i
1
i 1.,. _.. _.j .
1
— Л = 0.2 \\
— Л = 0.1 II
f
V
i _..
19.11. Обобщенная линеаризация обратной связи 607
1.5
I
I 1
О
§0.5
X
3
PQ
L/^1
Время [с]
Рис. 19.26. Оценка робастности обобщенной схемы с линеаризованной
обратной связью: (толстая линия) номинальная характеристика и (тонкая линия)
реакция при несоответствии усилений модели и объекта
1.5
с*
g0.5
3
,J. ,.„_! 1
I
_ J.
1
1 I 1
Г
— (1)
(2)
(3)
i
-
Время [с]
Рис. 19.27. Моделирование стратегии противонакопления:
(1)—моделирование обобщенной стратегии с линеаризованной обратной связью при А = 0.2,
когда нет ограничений скорости нарастания, (2)—с ограничением скорости
нарастания, но без компенсации, (3) — с использованием противонакопления
при ограничении скорости нарастания
ной связи. Однако остаются системы, не поддающиеся исследованию в
пределах этой обобщенной структуры. Существенная трудность состоит
в том, что проект имеет ограниченную структуру. Более трудные задачи
и альтернативные схемы будут описаны в гл.23. Там мы исследуем
алгоритм, который включает оценки будущей реакции. Эта так
называемая нелинейная схема модельного прогнозирующего управления
может применяться по существу ко всем нелинейным системам за счет
существенного увеличения сложности. Чтобы избежать эту сложность,
мы советуем по крайней мере начинать, пробуя более простые схемы
типа основной стратегии линеаризации обратной связи или обобщенной
схемы линеаризации обратной связи, которые мы только что описали.
608 Глава 19. Введение в нелинейное управление
19.12. Резюме
• До сих пор книга имела дело с линейными системами и регуляторами.
• Эта глава обобщает возможности включения различных типов нели-
нейностей.
• Многие свойства, которые являются очень полезными при линейном
управлении, не могут или не могут непосредственно быть применимы
к нелинейному случаю.
о Частотный анализ: реакция на синусоидальный сигнал не
обязательно является синусоидальной; поэтому частотный анализ,
диаграммы Боде и т. д. не могут быть перенесены непосредственно
из линейного случая.
о Передаточные функции: понятие передаточных функций,
полюсов, нулей и их соответствующая компенсация непосредственно не
применимы.
о Устойчивость становится более сложной проблемой.
о Инверсия: в гл. 15 было выяснено при параметризации регулятора,
что независимо от того, содержит ли регулятор инверсию модели
как сомножитель и независимо от того, инвертируется ли модель
явно, управление существенно связано со способностью
инвертировать модель. Однако многочисленные нелинейные функции, с
которыми приходится сталкиваться, не инвертируемы (например,
типа насыщения).
о Суперпозиция не применима; т. е. результаты действия двух
сигналов (типа уставки или возмущения), действующих на систему
отдельно, не могут просто быть суммированы (добавлены), чтобы
получить результат от сигналов, действующих одновременно на
систему.
о Коммутативность также не применима.
• Как следствие, математика для нелинейного управления более
сложна, решения и результаты не такие всеобъемлющие, как для
линейных систем, а интуиция может не помочь, как в линейном случае.
• Однако нелинейности часто встречаются и очень важно уметь с ними
разобраться.
• Гладкие статические нелинейности от входа к выходу
о часто являются последствиями нелинейного исполнительного
механизма или характеристик датчика;
о самая простая форма нелинейностей для компенсации;
о можно скомпенсировать, применяя обратную функцию к
соответствующему сигналу, таким образом получая линейную систему с
предварительно компенсируемым сигналом (Нужно, однако, быть
19.13. Литература для последующего чтения 609
осторожными с особыми точками, такими как те, в которых
необходимо делить на нуль при конкретных величинах сигнала.)
• Негладкие нелинейности нельзя в общем случае точно
компенсировать или линеаризовать.
• Эта глава дает нелинейное обобщение аффинной
параметризации гл. 15, чтобы конструировать регулятор, который обеспечивает
управление с линеаризованной обратной связью, если модель
обладает гладкой нелинейностью с устойчивой инверсией.
• Нелинейная устойчивость может быть исследована с помощью
разнообразных методов. Две общие стратегии:
о методы Ляпунова;
о методы функционального пространства.
• Расширения линейного анализа робастности на нелинейный случай
возможны.
• Существуют нелинейные ограничения чувствительности, которые не
имеют места для линейного случая.
19.13. Литература для последующего чтения
Нелинейное управление
1. Isidori, A. (1995). Nonlinear Control Systems. Springer-Verlag, 3rd edition.
2. Khalil, H.K. (1996). Nonlinear Systems. Prentice-Hall, Upper Saddle River,
NJ, 3rd edition.
3. Seron, M.M., Goodwin, G.C., and Graebe, S.F. (1995). Control system design
issues for unstable linear systems having saturated input. IEE Proceedings
Part Д 142(4):335-344.
4. Sepulchre, R., Jankovi6, M. and Kokotovic, P. (1997). Constructive Nonlinear
Control. Springer.
5. Vidyasagar, M. (1993). Nonlinear Systems Analysis. Prentice-Hall, Englewood
Cliffs, N.J., 2nd edition.
Гладкие нелинейности и возмущения
1. Graebe, S.F., Seron, M.M., and Goodwin, G.C. (1996). Nonlinear tracking and
input-disturbance rejection with application to pH control. Journal of Process
Control. 6(2-3):195-202.
Множественные регуляторы и плавное переключение
1. Graebe, S.F. and Ahlen, A. (1996). Dynamic transfer among alternative
controllers and its relation to anti-wind-up controller design. IEEE
Transactions on Control Systems Technology, 4(l):92-99.
2. Graebe, S.F. and Ahlen, A. (1996). Bumpless Transfer. In The Control
Handbook, W.S. Levine ed., p.381. CRC Press.
610 Глава 19. Введение в нелинейное управление
3. Rodriguez, J.A., Romagnoli, J.A., and Goodwin, G.C. (1998). Supervisory
multiple model control. In Proceedings of the 5th IF AC Sytmposium on
Dynamics and Control of Process Systems, Corfu, Greece.
4. Rodriguez, J.A., Villanueva, H., Goodwin, G.C, Romagnoli, J.A., and
Crisafulli, S. (1997). Dynamic bumpless transfer mechanism. In Proceedings of
the I.E. Aust. Control '97 Conference, Sydney.
5. Rodriguez, J.A., Romagnoli, J.A., and Goodwin, G.C. (1998). Model-based
switching policies for nonlinear systems. In Proceedings of the 1999 European
Control Conference.
Проектирование на основе критерия устойчивости Ляпунова
1. Krsti6, M., Kanellakopoulos, I., and Kokotovi6, P. (1995). Nonlinear and
adaptive control design. John Wiley and Sons.
Устойчивость
1. Desoer, C, and Vidyasagar, M.(1975). Feedback systems: Input-output
properties. Academic Press.
2. Martin, Jr, R. (1976). Nonlinear operations and differential equations in
Banach spaces. John Wiley and Sons Inc., New York.
3. Sastry, S. (1999). Nonlinear systems. Springer-Verlag, New York.
Нелинейные компромиссы реализации
1. Seron, M.M., Braslavsky, J.H., and Goodwin, G.C. (1997). Fundamental
limitations in filtering and control, Chapter 13, Springer-Verlag, Berlin.
Определение усиления
1. Shamma, J. (2000). Linearization and gain scheduling. In Control System
Fundamentals, W.S. Levine ed., CRC Press.
Робастный анализ
1. Sandberg, J. (1965). An observation concerning the application of the
contraction mapping fixed-point theorem and a result concerning the norm-
boundedness of solutions of nonlinear functional equations. Bell Systems
Technical Journal, 44:1809-1812.
2. Zames, G. (1966). On the input-output stability of time-varying nonlinear
feedback systems. Part I. IEEE Transactions on Automatic Control, 11:228-
238.
3. Zames, G. (1966). On the input-output stability of time-varying nonlinear
feedback systems. Part II. IEEE Transactions on Automatic Control, 11:465-
476.
19.14. Задачи для читателя 611
19.14. Задачи для читателя
Задача 19.1. Рассмотрим нелинейный объект, имеющий модель вида
*Ш + 7Ш + 12y(t) = u(t) + 0.5 (u(t)f (19.14.1)
Используйте теорию аффинной параметризации, разработанную в
этой главе для гладких входных нелинейностей и спроектируйте
регулятор, обеспечивающий для замкнутой системы полосу пропускания,
примерно равную 5 рад/с.
Задача 19.2. Рассмотрим нелинейную функцию 2/ = /d(w)>
определяемую следующим образом:
|0 еслиМ-сД
\и если \и\ > D
где D е Е.
19.2.1. Определите подходящую нелинейную функцию и = g(r), такую,
что д(о) является хорошей примерной инверсией /я (о).
19.2.2. Используя полученный результат, спроектируйте регулятор с
одной степенью свободы для объекта, имеющего модель в виде
y(t) = Golin(fD{u)) с Golin(s) = -т4тп (19.14.3)
S{S + 1)
где D = 0.3.
19.2.3. Оцените характеристику отслеживания вашего проекта для
синусоидального эталонного сигнала различных амплитуд и частот.
19.2.4. Оцените характеристику компенсации возмущения вашего
проекта при ступенчатом входном возмущении различных амплитуд.
Задача 19.3. Рассмотрим нелинейный объект, имеющий модель
^Р + (1 + 0.2sin(y(t))) ^ + 0.5у(«) = 3u(t) - sign{u(t)) (19.14.4)
19.3.1. Постройте модель в пространстве состояний и определите ее
относительную степень.
19.3.2. Найдите приблизительную инверсию для этого объекта.
Предположим, что эта приближенная инверсия должна иметь
приемлемую точность в полосе частот [0,0.5] рад/с.
612 Глава 19. Введение в нелинейное управление
Задача 19.4. Рассмотрим тот же объект, что и в задаче 19.3, и его
приближенную инверсию.
19.4.1. Спроектируйте нелинейный регулятор, основанный на
результатах, полученных в разд. 19.6, для отслеживания синусоидальных
колебаний частоты, находящейся в полосе [0,0.5] рад/с.
19.4.2. Сравните характеристику этого проекта с характеристикой
контура, использующего линейный регулятор (см. задачу 3.9).
Задача 19.5. Дискретная линейная система имеет модель пространства
состояний
\xi[k+l]'
\х2[к+1]
=
'0.8 0.3]
0.2 O.sJ
[х2[к]\
19.5.1. Определите, какие из перечисленных ниже функций являются
функциями Ляпунова.
a) *i[fc] + (*2[fc])2 б) (х2[к})2
в) Чх1[к])2 + (х2[к))2 г) (х1[к]+х2[к])2 + (х2[к))2
19.5.2. Выберите подходящую функцию Ляпунова и докажите, что
приведенная система глобально асимптотически устойчива.
ЧАСТЬ VI
ОСНОВЫ
MIMO-УПРАВЛЕНИЯ
Введение
В этой части книги мы переходим к системам, имеющим много входов
и/или много выходов. Конечно, большинство (если не все) систем,
встречающихся на практике, будут иметь этот тип. К счастью, часто
можно сгруппировать входы и выходы в пары и обращаться с ними,
как будто они представляют задачи с одним входом и одним выходом
(так называемые SISO-системы). Именно поэтому мы так детально
разбирались с SISO-контурамиуправления в предыдущих частях книги.
Однако в других случаях могут происходить значительные
взаимодействия между многими входами и выходами . В таких случаях нет
никакого другого выбора, как заняться проектированием управления как
подлинной задачи со многими входами и многими выходами (multi-input
multi-output — MIMO). Это является темой данной части книги.
Глава 20
Анализ MIMO-контуров
управления
20.1. Введение
В предыдущих главах мы рассматривали SISO-проблемы. Другие
сигналы в контуре управления были возмущениями. Однако часто бывает,
что сигналы, которые мы назвали возмущениями в данном контуре
управления, на самом деле формируются в других контурах управления
и наоборот. Это явление известно как взаимодействие или связанность.
В некоторых случаях взаимодействие можно игнорировать или
потому, что сигналы связи слабы, или потому, что существует очевидное
временное или частотное разделение. Однако в отдельных случаях
может быть необходимо рассмотреть все сигналы одновременно. Это
приводит нас к структурам со многими входами и многими выходами
(МШО-структурам).
На протяжении этой главы мы будем строго следовать соглашению,
которое будет использоваться и в остальной части книги, — применять
полужирный шрифт для обозначения матриц.
20.2. Поясняющие примеры
Все реальные системы включают многочисленные взаимодействующие
переменные. Предлагаем читателю вспомнить примеры из собственного
опыта: например, попытку увеличить поток воды в душе, открывая
горячий кран, однако тогда увеличивается температура; желательно
иметь побольше выходных дней, но тогда потребуется провести больше
времени на работе, чтобы заработать больше денег; попытки
правительства снизить инфляцию, сокращая правительственные расходы, но тогда
возрастает безработица и так далее. Более физический пример выглядит
следующим образом:
616 Глава 20. Анализ Ml МО-контуров управления
Пример 20.1 (Аммиачный завод). Типичный промышленный
объект производства аммиака из природного газа — Келлог-процесс. На
химическом комбинате этого типа будут иметься сотни (возмосисно
тысячи) переменных, которые в некоторой степени
взаимодействуют. Даже если рассмотреть одну отдельную единицу процесса,
например, конвертер для синтеза аммиака, он все еще содержит от 5
до 10 тесно связанных переменных. Типичный конвертер для синтеза
аммиака показан на рис. 20.1. Процесс является экзотермическим)
таким образом, температура повышается поперек каждой пластины
катализатора. Для снижения температуры используется смешивание
с охлаждающими потоками. Обычно проводится много различных
измерений, например, температуры с обеих сторон каждой пластины.
Характер взаимодействий можно наблюдать следующим образом.
Пусть непрерывно открывается охлаждающий клапан 1; тогда это
будет воздействовать на все другие потоки, температура в зоне 1
понизится, что будет передано конвертером от пластины к пластине)
поскольку реакция постепенно замедляется, изменение температуры
будет перемещаться к различным рабочим точкам и, наконец, это
будет воздействовать на температуру питающего потока в верхней
части конвертера. Таким образом, окончательно все переменные
отреагируют на изменение в единственной управляющей переменной.
Чтобы подчеркнуть широкий диапазон физических систем,
обладающих мультипеременным взаимодействием, рассмотрим второй пример.
Пример 20.2 (Небольшой самолет). Небольшой самолет должен
поддерживать заданную скорость и курс, но может подниматься на
значительную высоту) новая высота достигается управлением рулями
высоты) эта управляющая переменная независимо от других дает один
выходной параметр (высоту), однако это неизбежно вносит ошибку в
другой, до того правильный, выходной параметр (снижение скорости))
таким образом, одна управляющая переменная оказывает влияние на
несколько выходов. Чтобы противодействовать такой распыленности
управления и изменять высоту без воздействия на скорость, влияние
рулей высоты должно сопровождаться дополнительными
воздействиями сектора газа.
Рассмотрим теперь тот же самый небольшой самолет, готовый
к взлету) при всех нейтральных управляющих поверхностях,
ступенчатое изменение управляющей переменной сектора газа ускорит
самолет, подъемная сила крыла изменит высоту. Если, однако (как
обычно делается для обеспечения безопасной скорости взлета), хвостовой
руль высоты опустить вниз, то ступенчатое изменение сектора газа
ускорит самолет вдоль взлетно-посадочной полосы, но без влияния на
20.2. Поясняющие примеры 617
Питающий
поток
Охлаждающие
трубки
Стояк
Термоканал
Пластина 1
Пластина 2
Пластина 3
Пластина 4
Обменник
Плотная
Вытекающий оболочка
поток
А
Охлаждающий ^S<l
клапан VI"^
Охлаждающий
клапан V2
Охлаждающий
клапан V3
Охлаждающий
клапан V4
Основной
впускной
клапан V5
Теплообменник
(смеситель)
Питающий Выходной
газ газ
Рис. 20.1. Конвертер для синтеза аммиака
высоту (пока не отпущен руль высоты!). Таким образом, ступенчатое
изменение управляющей переменной сектора газа временно блокировано
от воздействия на высоту.
Очевидно, эти виды взаимодействия сложны для понимания и, как
результат, они делают проектирование системы управления интересным
(мягко говоря). Конечно, можно было бы попытаться использовать
несколько SISO-контуров управления, но это может оказаться
неудовлетворительным. Например, при синтезе аммиака можно было бы
попробовать управлять температурами Ti, Т2, Т3 и Т± в начале пластин
катализатора с помощью управления четырьмя охлаждающими
клапанами с индивидуальными ПИД-регуляторами. Однако это оказывается
довольно нетривиальной задачей из-за связанных с этим
взаимодействий.
Читатель может заинтересоваться, как взаимодействие описанного в
предыдущих примерах типа будет воздействовать на характеристики
регуляторов.
618 Глава 20. Анализ MIMO-контуров управления
20.3. Модели для мультипеременных систем
Большинство идей, представленных в предыдущих частях книги,
применимы (хотя и с некоторыми небольшими корректировками) к муль-
типеременным системам. Главная трудность в МШО-случае связана
с тем, что мы должны работать с матрицами, а не со скалярными
передаточными функциями. Это означает, что нужно заботиться о таких
проблемах, как порядок, в котором появляются передаточные функции
(в общем случае матрицы не коммутативны).
Ниже мы заново рассмотрим идеи относительно моделей
пространства состояний, передаточных функций и матричного дробного
описания (МДО).
20.3.1. Модели пространства состояний;
повторное рассмотрение
Линейные MIMO-системы могут быть описаны, используя идеи
пространства состояний, представленные в гл. 17. Единственное
изменение—увеличение размерности векторов входных и выходных
переменных. В частности, если система имеет вектор входа u(t) G Em и вектор
выхода y(t) E Ж™, то ее модель пространства состояний может быть
написана как
x(t) = Ax(t) + Bu(t) x(t0) = x0 (20.3.1)
y(t) = Cx{t)+Bu{t) (20.3.2)
где x £Шп является вектором состояния, х0 Е Кп —вектором состояния
в момент времени t = t0, A G Rnxn,B G Rnxm,C G Emxn и D G Rmxm.
Мы просим читателя освежить понятия свойств системы,
представленных в разд. 17.6 и 17.7, которые также используются и в МШО-
случае.
Конечно, если мы начинаем с SISO-системы и делаем ее мультипере-
менной, добавляя дополнительные входы или выходы, то такие
свойства системы как управляемость, стабилизируемость, наблюдаемость
и определяемость следует также изменить. Это можно представить,
например, так, что при добавлении входов мы изменяем матрицу В
(добавляя столбцы) и таким образом имеем потенциальную возможность
уменьшить неуправляемое (недостижимое) подпространство. Точно так
же, добавляя выходы, мы изменяем матрицу С (добавляя строки), что
может повлиять на размерность ненаблюдаемого подпространства.
20.3. Модели для мультипеременных систем 619
20.3.2. Модели в виде передаточных функций;
повторное рассмотрение
Как и в разд. 17.4, легко непосредственно преобразовать модель
пространства состояний в модель передаточных функций.
Преобразования по Лапласу уравнений (20.3.1) и (20.3.2) дают
sX{s) - х(0) = АХ (а) + BU(a)
Y(s) = CX(s)+BU(s)
(20.3.3)
(20.3.4)
Отсюда, после предположения, что х(0) = 0, мы имеем, что
Y(a) = (C(sl - А)_1В + B)U(s) (20,3.5)
Матричная передаточная функция G(s) тогда определяется
следующим образом:
G(a) = C(sl - A)-XB + D (20.3.6)
Заметим, что если размерность ненаблюдаемого и/или
неуправляемого подпространства отлична от нуля, то матрица G(s) будет
неполностью описывать систему, поскольку она описывает только свойства
связи между входом и выходом при нулевых начальных условиях.
Для дальнейших ссылок мы будем использовать Gik(s) для
обозначения передаточной функции от fc-ro компонента U(s) к г-му компоненту
Y(s). Тогда G(s) можно выразить следующим образом.
G(*) =
Gu(s)
G2i(s)
Gn(s)
Gml(s)
Gu(*)
G22{s)
Gi2(s)
Gm2(s)
■■ Glk(s)
■■ G2k(s)
■ • Gik(s)
• • Gmk(s)
•• Gim(s)
■■ G2m(s)
•• Gim(s)
"771771 \S)
(20.3.7)
Определение 20.1. Говорят, что матрица передаточных функций
G(s) является «собственной матрицей», если каждый из ее элементов
является собственной передаточной функцией.
Полезное наблюдение состоит в том, что, когда fc-й компонент u(t)
является импульсом, Gik(s) является преобразованием Лапласа г-го
компонента y(t). Это приводит к следующему определению.
Определение 20.2. «Матрица импульсных характеристик» g(t) си-
стемы является обратным преобразованием Лапласа матрицы переда-
620 Глава 20. Анализ MIMO -контуров управления
точных функций G(s). Для дальнейших ссылок представим g(t) в виде
g(*) =
[9u(t)
92l(t)
9il(t)
L9ml(<)
9n{t)
922(t)
9i2(t)
9m2(t)
•• 9lk(t)
•• 92k(t)
■■ 9ik(t)
■■ 9mk(t)
•• 9lm(t)
•• 92m(t)
■■ 9im(t)
• • 9mm \*)
^/--1
£-1[G(s)] (20.3.8)
где
9ik(t)=C-l[Gik(S)}
Заметим, что для модели пространства состояний с D
СеА*В.
(20.3.9)
О g(t) =
20.3.3. Матричное дробное описание
Ясно, что все матричные описания передачи сигналов включают
элементы, имеющие полиномы в знаменателе и числителе. Эти матрицы
рациональных функций полиномов могут быть разложены различными
способами.
Рассмотрим матрицу передаточных функций G(s) размерностью
(п х га). Пусть d\(s) обозначает наименьшее общее кратное полиномов
знаменателей в г-й строке. Пусть также ei(s), обозначает полином Гур-
вица той же самой степени, что и d[(s). Тогда мы можем записать
G(5)=[Gz?(S)]-1[GJV(S)]
где
GD(a) =
GN(s) =
ei(a)
"u (s)
ei(e)
nml(s)
■ em(s)
(20.3.10)
(20.3.11)
em(s)
ei(s)
em{s)
(20.3.12)
где nn(s),...,nmm(s) —полиномы. Ясно, что G#(s) и Gn(s) —
устойчивые собственные передаточные функции.
20.3. Модели для мультипеременных систем 621
Выражения (20.3.10), (20.3.11) и (20.3.12) описывают специальную
форму, называемую левым матричным дробным описанием (ЛМДО)
для G(s).
Чтобы получить правое матричное дробное описание (ПМДО), мы
должны быть несколько осторожными; в общем случае матрицы не
коммутативны.
Итак, пусть d^(s) обозначает наименьшее общее кратное полиномов
знаменателя в г-м столбце G(s). Пусть также ej(s) обозначает полином
Гурвица той же самой степени, что и d%(s). Тогда мы можем записать
G(a) = [GIf(a)][GD(»)]-1
(20.3.13)
где
GD(s) =
GN(s) =
dt(s)
e[(s)
n'n(s)
dc
(*)
e'm(s),
(20.3.14)
n
lm
(s)
n:
ml
(*)
п„
M
»«
e[(s)
e'm(s) J
(20.3.15)
где n'u(s),... ,nmm(s) — полиномы; Опять Gd(s) и Gn(s) —устойчивые
собственные передаточные функции.
Выражения (20.3.13), (20.3.14) и (20.3.15) представляют специальную
форму, называемую правым матричным дробным описанием (ПМДО)
для G(s).
20.3.4. Связь между моделями пространства состояний
и матричными дробными описаниями
Фактически, ПМДО и ЛМДО могут быть получены из описания
пространства состояний данной системы при проектировании
стабилизирующей обратной связи по переменным состояния и наблюдателя
соответственно. Чтобы проиллюстрировать это, рассмотрим модель
пространства состояний
x(t) = Ax{t) + Bu(t) (20.3.16)
y(t) = Cx(t) (20.3.17)
622 Глава 20. Анализ Ml МО-контуров управления
Мы предполагаем, что модель пространства состояний
стабилизируема. Если это не так, мы сначала должны устранить нестабилизируемые
компоненты.
Пусть u(t) = — Kx(t) + w(t) является стабилизирующей обратной
связью. Тогда систему можно описать следующим образом, добавляя
и вычитая BKx(t):
x(t) = (А - BK)x{t) + Bw(t) (20.3.18)
y(t) = Cx{t) (20.3.19)
w(t)=u(t)+Kx(t) (20.3.20)
Мы можем выразить эти уравнения в области преобразований
Лапласа при нулевых начальных условиях следующим образом:
U(а) = (I - K[sl - А + BK]-lB)W(s) (20.3.21)
Y(a) = C[al - А + BK]-lBW{s) (20.3.22)
Эти уравнения имеют форму
U(a) = GB(s)W(s)i Y(s) = GN(s)W(s); Y(a) = GN(a)[GD(a)]"lU(a)
(20.3.23)
где Gn(s) и Gd(s) — следующие две устойчивые матрицы
передаточных функций:
GN(s) = C[sl - А + BK]-XB (20.3.24)
GD (s) = I - K[sl - A + BK]-XB (20.3.25)
Мы видим из (20.3.23)-(20.3.25), что (GN(s), GD(s)) является ПМДО.
Точно так же мы можем использовать наблюдатель, чтобы получить
ЛМДО. Предположим, что модель пространства состояний
определяема. Если это не так, сначала устраним неопределяемые компоненты.
Затем рассмотрим следующее описание наблюдателя (20.3.16) и (20.3.17):
£{t) = Ax(t) + Bu(t) + 3{y(t) - Cx{t)) (20.3.26)
y(t) = Cx(t) + v{t) (20.3.27)
Мы можем выразить эти уравнения в области преобразований
Лапласа:
Ф(а) = С [v(t)] = (I - C[sl - А + JC]"13)Y(s) - C[sl - A + JC]-1BC/(5)
(20.3.28)
Известно, что для устойчивого наблюдателя u(t) -> 0 по
экспоненциальному закону, следовательно, в установившемся состоянии мы можем
записать
GD(s)Y (5) = GN(s)U(s) (20.3.29)
20.3. Модели для мультипеременных систем 623
Cp(s) CN(s)
-Gn(s) Gd(s)
' Cp(s) CN(s)
-GN(s) GD(s)J
= 1 (20.3.32)
где
GN(s)=C(sI-A + JC)-1B (20.3.30)
GI)(s)=I-C(sI-A + JC)-1J (20.3.31)
Следовательно, (Gn(s),Gd(s)) является ЛМДО системы.
ПМДО и ЛМДО, введенные выше, обладают следующим интересным
свойством.
Лемма 20.1. Всегда существуют ПМДО и ЛМДО для системы,
имеющей следующее взаимно простое разложение на множители:
[GD(s) -Cn(s)1
|Gn(s) Cd(s)
[Gd(s) -Cn(s)]
[Gn(s) Cd(s)
где Cn(s), Cd(«), Cn(s) и Cd(«) — устойчивые передаточные функции,
определенные следующим образом:
CN(s) = K[sI-A + BK]-1J (20.3.33)
CD(s)=I + C[sI-A + BK]-1J (20.3.34)
CN(s) = K[sI-A + JC]-1J (20.3.35)
CD(s) = I + K[sI-A + JC]-1B (20.3.36)
о Gn(s), Grj(s), Gn(s) и Gd(s) определены так же, как в (20.3.24)-
(20.3.25) и (20.3.30)-(20.3.31).
Доказательство
Используем ту же конструкцию, что и в (20.3.18), но применим ее для
наблюдателя (20.3.26). Это дает
x(t) = (А - BK)x(t) + Bv'(t) + 3u{t)
где
v'(t)=u(t)+Kx(t) или u(t) = -Kx(t)+v'(t)
v(t) = y(t) - Cx(t) или y(t) = Cx(t) + u(t)
Следовательно, мы можем записать
(20.3.37)
(20.3.38)
(20.3.39)
U(s)
Y(s)
GD(s) -CN(s)
GN(s) CD(s)
Ф(я)
где V'(s) =£[v'(t)], Ф(«) = C[u(t)]. Аналогично мы имеем
ум
CD(s) Cn(s)
U(s)
L-GN(e) GD(s)J [Y(s)
Отсюда следует результат.
(20.3.40)
(20.3.41)
DDD
624 Глава 20. Анализ Ml МО-контуров управления
20.3.5. Полюсы и нули MIMO-систем
Читатель может вспомнить, что в SISO-случае характеристики систем
управления заметно зависели от местоположения нулей разомкнутого
контура. Таким образом, казалось бы, было важным расширить понятие
нулей на MIMO-случай. В качестве первой гипотезы, как это могло бы
быть сделано, можно догадаться, что нули могли бы быть определены
в терминах полиномов числителя в (20.3.12) или (20.3.15). Хотя это и
может быть сделано, оказывается, что это не адекватно охватывает
«блокирующую» природу нулей, которая была столь важна в SISO-случае.
Альтернативное описание нулей, которое охватывает это
«блокирующее» свойство, — определить нули MIMO-передаточной функции как
те величины s, которые приводят к тому, что матрица G(s) теряет
ранг. Это означает, что существует, по крайней мере, один постоянный
ненулевой вектор v (нулевое правостороннее направление), такой, что
G{c)v = 0 (20.3.42)
и по крайней мере один постоянный ненулевой вектор w (нулевое
левостороннее направление), такой, что
wTG{c)=0 (20.3.43)
где s = с —один из нулей G(s). Векторы v и wT — части нулевых
пространств, формируемых столбцами или строками матрицы G(c)
соответственно. Заметим, что число линейно независимых векторов,
которые удовлетворяют (20.3.42), зависит от уменьшения ранга матрицы
G(s), оцененного в s = с. Это число известно как геометрическая
кратность нуля и равно размерности нулевого пространства, произведенного
столбцами G(s).
Дополнительная информация о влиянии нулей может быть получена
при рассмотрении специального входа системы U(s), данного
выражением -
U(s)=v (20.3.44)
S С
где V — вектор, который удовлетворяет выражению (20.3.42). Заметим,
что (20.3.44) означает, что вход содержит только один форсирующий
член ect. В этом случае выход системы Y(s) имеет вид
Y(s) = G(c)v-|- + Yad(s) (20.3.45)
S С
где Yad(s) —преобразование Лапласа собственных компонентов реакции.
Если теперь применить (20.3.42), мы видим, что форсирующий член ect
блокирован системой; он не появляется на выходе. Это свойство нулей
приводит к термину нулей передачи.
Нули системы, как определено выше, не всегда очевидны при
рассмотрении передаточной функции. Это иллюстрируется следующим
примером.
20.3. Модели для мультипеременных систем 625
Пример 20.3. Рассмотрим матричную передаточную функцию
4 -1
G(a) =
(а + 1)(« + 2)
(s + 1)
(20.3.46)
(5 + 1) 2(s + l)(s + 2).
Трудно определить по внешнему виду, где ее нули. Однако
оказывается, что имеется один нуль при s = —3, как можно заметить из
матрицы
2
G(-3) =
-1 -т
11
2
1
4J
(20.3.47)
которая, как видно, имеет ранг, равный 1. DDD
Пример 20.4 (Аппарат с четырьмя резервуарами). Очень
интересный пример лабораторного оборудования, основанного на
четырех соединенных резервуарах, недавно был описан Карлом Хендриком
Юханссоном (см. ссылки, приведенные в конце главы). Фотография и
обсуждение такой системы, построенной в университете Ньюкасла,
дается на Web-странице.
Схематическая диаграмма дана на рис. 20.2.
Физическое моделирование дает следующую (линеаризованную)
передаточную функцию, связывающую (u\,U2) с (уьуг):
3.771 3.7(1-72)
G(s) =
625 + 1
4.7(1-71)
(23s + l)(62s + l)
4.772
(20.3.48)
.(30s + l)(90s + l) 905 + 1
где 71 и (1—7i) представляют пропорцию потоков от насоса 1, которые
идут в резервуары 1 и 4 соответственно (подобно и для 72 u (1 ~72))-
Фактически, постоянные времени немного изменяются с изменением
рабочей точки, но это нас здесь не интересует.
Система имеет два мультипеременных нуля, которые
удовлетворяют уравнению det(G(s)) = 0;
(23s + l)(30s + l)-r/ = 0 где т?= ^ ~71^1 ~12\ (20.3.49)
7172
Простое исследование корневого годографа показывает, что система
неминимально-фазовая для ц > 1, т. е. для 0 < 71+72 <1 и минимально-
фазовая для г) <1, т. е. для 1 < 71 + 72 < 2.
Кроме того, нулевое направление связано с нулем с>0,
удовлетворяющим выражению (20.3.43). Из этого следует, что если параметр 71
мал, нуль связан главным образом с первым выходом, в то время как
626 Глава 20. Анализ Ml МО-контуров управления
Рис. 20.2. Схема аппарата с четырьмя резервуарами
в случае, когда 7i близок к 1, нуль связан главным образом со вторым
выходом. DDD
Возможно также связать нули со свойствами взаимно простого
разложения на множители данной матрицы передаточных функций. В
частности если мы запишем
G(«) = Gn^HGd^)]-1 = [Gd^-^Gn^)] (20.3.50)
где Gn(s),Gd(s),Gd(s),Gn(s) УД°влетв0Ряют взаимно простой
идентичности, данной в (20.3.32), то нули G(s) соответствуют тем значениям
5, при которых или Gn(s), или Gn(s) (или обе) теряют ранг.
Точно так же мы можем определить полюсы G(s) как те значения s,
при которых Gd(s) или Gd(s), или обе понижают ранг.
20.3.6. Формы Смита—МакМиллана
Дальнейшее понимание полюсов и нулей объекта можно получить из
формы Смита—МакМиллана для передаточной функции. Этот
результат основан на серьезных математических идеях, которые находятся за
пределами этой книги. Поэтому отсылаем интересующегося читателя к
приложению В, где развиваются эти идеи.
20.4. Основной MIMO-контур управления
В этом разделе мы разовьем идеи передаточных функций, включенных
в основной MIMO-контур управления.
20.4. Основной MIMO-контур управления 627
Если не будет оговорено особо, рассматриваемые системы будут
квадратными (вектор входа имеет то же самое число компонентов, что
и вектор выхода). Кроме того, будем предполагать в процессе
изучения, что все матрицы передаточных функций будут невырожденными
почти везде; это означает, что матрицы будут вырожденными только в
конечном множестве «нулей».
Мы рассмотрим управление объектом, имеющим номинальную
модель (с выходом Y(s)) в виде
Y(s) = D0{s) + GQ(s){U(s) + Di(s)) (20.4.1)
где Y(s), U(s), D{(s) и D0(s) —векторы размерности га,
соответствующие выходу, входу, входному возмущению и выходному возмущению
соответственно. G0(s) — матрица размерности тхт (номинальная
передаточная функция), имеющая элементы Gik(s).
Мы рассмотрим ту же самую основную структуру с обратной связью,
как и в SISO-случае, т. е. структуру, показанную на рис. 20.3.
Подчеркнем мультипеременную природу этих систем, используя
полужирный шрифт, чтобы обозначить матричные передаточные
функции.
Номинальный MIMO-контур управления на рис. 20.3 может быть
описан, как в SISO-случае, некоторыми ключевыми передаточными
функциями. В частности, мы определим
S0(s): (матричная) передаточная функция, связывающая D0(s) с Y(s)]
T0(s): (матричная) передаточная функция, связывающая R(s) с Y(s)\
Suo(s): (матричная) передаточная функция, связывающая R(s) с U(s)]
Si0(s): (матричная) передаточная функция, связывающая Di{s) с Y(s).
Как и в SISO-случае, мы называем S0,T0,SU0,Sj0 номинальной
чувствительностью, номинальной дополнительной чувствительностью,
номинальной чувствительностью по входу (по управлению) и
номинальной чувствительностью к входному возмущению соответственно.
Рис. 20.3. MIMO-контур с обратной связью
628 Глава 20. Анализ Ml МО-контуров управления
Выражения для этих величин могут быть легко получены из
рис. 20.3. Однако следует не забывать о векторной природе всех
сигналов. Результат этого анализа следующий:
Y(s) =
U(s)--
E(s) =
= T0(s)R(s)-
= Suo(s)R(s)
= S0(s)R(s)-
- T0(s)Dm(s) + So(s)D0(s) + S,
-Suo{s)Dm{s)-
S0(s)Dm(s)-S
■ Suo(s)D0(s) -
o(s)D0(s) - Sk
0(s)Di(s)
Suo(s)G0
>(s)A(s)
(20.4.2)
(s)Di(s)
(20.4.3)
(20.4.4)
где
S0(s) = [I+G0(s)C(s)]-1 (20.4.5)
T0(s)=Go(s)C(s)[I+Go(s)C(s)]-1=[H-G0(s)C(s)]-1G0(s)C(s) (20.4.6)
=I-S0(s) (20.4.7)
Suo(s)=C(s)[I+Go(s)C(s)]-1=C(s)S0(s) = [G0(s)]-1T0(s) (20.4.8)
Si0(s) = [I+G0(s)C(S)]-1G0(S)=G0(S)[H-C(S)G0(3)]-1=S0(s)G0(S)
(20.4.9)
Из выражений (20.4.5)-(20.4.9) мы можем также получить истинные,
или достижимые, матричные функции чувствительности, заменяя
передаточную функцию номинальной модели G0(s) передаточной функцией
истинной системы G(s). Это дает
S(«)
Т(а)
Su(s)
Si(s)
= [I+G(S)C(S)]"1
= G(s)C(s)[I+G(s)C(s)]-1 = [I+G(s)C(s)]-
=I-S(s)
= C(s)[l+G(s)C(s)]-
= [I+G(s)C(s)]-1G(fi
1 «[Gwr1^.)
) = G(e)|l+C(e)G(e)]-
XG'(5)C(S)
(20.4
(20.4
(20.4
(20.4
1 = S(s)G(s) (20.4
1.10)
Lll)
1.12)
1.13)
1.14)
Замечание 20.1. Заметим, что из-за того, что произведения матриц
в общем случае не коммутативны, надо быть особенно
внимательными при операциях с этими выражениями.
20.5. Устойчивость замкнутого контура 629
Замечание 20.2. Заметим, что SQ(s) + TQ(s) = I и S(s) +T(s) = I.
Это мультипеременные версии выражения (5.3.5).
20.5. Устойчивость замкнутого контура
Далее мы расширим понятия устойчивости, описанные в разд. 5.4 для
SISO-случая, на МШО-случай.
Мы говорим, что MIMO-система устойчива, если все ее полюсы —
строго внутри области устойчивости (ЛПП для непрерывных систем
и круга единичного радиуса для дискретных систем в случае
использования оператора сдвига). Однако как и в SISO-случае, взаимосвязь
систем, наподобие элементов контура с обратной связью на рис. 20.3,
может привести к скрытым неустойчивым компонентам, т. е. к
внутренней неустойчивости. Это возникает из-за компенсации потенциально
неустойчивых полюсов и нулей.
Воспроизведем лемму 5.1 для данного случая следующим образом:
Лемма 20.2. Рассмотрим номинальный контур управления,
представленный на рис. 20.3. В этом случае номинальный контур внутренне
устойчив тогда и только тогда, когда три независимых функции
чувствительности, определенные в (20.4.11)-(20.4.14), плюс SU0(s)G0(s)
устойчивы.
Доказательство
Если все входные сигналы, т. е. r(t), di(t), d0(t) и dn(t) ограничены,
тогда мы видим из (20.4.2)-(20.4.4), что устойчивость четырех функций
чувствительности достаточна, чтобы ограничить выходы y(t), u(t) и
e(t). Мы также видим, что условие является необходимым, так как
Suo(s)G0(s) = [Go(s)]-1T0(s)G0(s) устойчива тогда и только тогда,
когда устойчива T0(s). DDD
20.5.1. Устойчивость МДО-формы
Устойчивость может быть также выражена, если использовать
матричные дробные описания (МДО). Рассмотрим ПМДО- и ЛМДО-описания
для объекта и регулятора:
G0(s) = GoN(5)[GoD(s)]-1 = [GodWJ^GonM (20.5.1)
C(5) = Cn(5)[Cd(5)]-1 = [Cd(5)]""1Cn(5) (20.5.2)
630 Глава 20. Анализ Ml МО-контуров управления
Тогда передаточные функции, входящие в (20.4.2)-(20.4.4), могут
быть переписаны в виде
S0(5) = Cd(5)[G0d(5)Cd(5) + GoN(5)CN(5)]"1GoD(5) (20.5.3)
T0(s) = GoN(s) [CdWGodW + CnWGonWJ^CnW (20.5.4)
Suo(5)=CN(5)[GoD(5)Cd(5) + GoN(5)CN(5)]"1G0d(5) (20.5.5)
Sio(5)=CD(5) [GoD(5)CD(5) + GoN(5)CN(5)]"1GoN(5) (20.5.6)
Suo(5)G0(5) = CN(5) [GoD(5)CD(5)+GoN(5)CN(5)]"1GoN(5) (20.5.7)
Напомним, что матрицы Gqn(s), G0d(s), Cn(s) и Cd(s) — матрицы с
устойчивыми рациональными элементами. Тогда лемма 20.2 может быть
выражена в следующей эквивалентной форме.
Лемма 20.3. Рассмотрим замкнутый МШО-контур управления с
одной степенью свободы, как показано на рис. 20.3. Пусть номинальная
модель объекта и регулятор выражены в форме МДО, как в (20.5.1)
и (20.5.2). В этом случае номинальный контур внутренне устойчив
тогда и только тогда, когда характеристическая матрица замкнутого
контура Aci(s)
Aci(e) = GoD(s)Cd(s) + GoN(5)Cn(5) (20.5.8)
имеет все ее нули строго в ЛПП, где нули определены как нули
det{Aci(s)}. DDD
Замечание 20.3. Заметим, что матрица Ac\(s) играет для MIMO-
контуров управления такую же роль, что и полином Aci(s) для SISO-
контуров управления.
Замечание 20.4. Пусть регулятор определяется выражениями
(20.3.33)-(20.3.36). Тогда лемма 20.1 дает Ac\(s) =1 и, следовательно,
контур управления является устойчивым. Фактически, это можно
также увидеть и из (20.3.38), если задать &{s) = 0. Тогда (20.3.40)
дает отношение между U(s) и Y(s) (т. е. регулятор обратной связи)
в виде:
Щз) = -CN(5)[CD(5)]-1y(5) (20.5.9)
Однако этот регулятор на самом деле обеспечивает
стабилизирующую обратную связь по восстановленным переменным состояния,
произведенным устойчивым наблюдателем. Следовательно,
устойчивость замкнутого контура следует из свойства разделения, как в
разд. 18.4.
20.5. Устойчивость замкнутого контура 631
Пример 20.5. Предложен диагональный регулятор C(s) для
управления MIMO-объектом с номинальной моделью G0(s). Если C(s) и G0(s)
имеют вид
2 1
G0(e) =
я + 1
1
(я + 1)(я + 2)
2
ОД =
Г* О
S
о I
S-
(20.5.10)
.(s + l)(s + 2) s + 2
то нужно определить, является ли замкнутый контур устойчивым.
Решение
Для проверки устойчивости используем лемму 20.3. Таким образом,
нам нужны ЛМДО и ПМДО для модели объекта и регулятора
соответственно. Простой выбор следующий:
G0n(s) =
2(s + 2) l
1 2(5 + 1)
G0d(«) = (« + !)(«+ 2)1 (20.5.11)
CN(«) =
2 0
0 1
CD(s)=sI
Тогда
Aci(s) = GoD(s)Cd(s) + GoN(s)CN(s)
\2s3 + 10s2 + 18s + 8 s2 + 3s + 2
s2 + 3s + 2 2s3 + 8s2 +1 Is + 4
(20.5.12)
(20.5.13)
Мы теперь должны проверить, находятся ли все нули этой мат-
рицы полиномов внутри открытой ЛПП. Aci(s) является матрицей
полиномов, так что это можно легко проверить, вычислив корни ее
детерминанта. Мы имеем
det (Acl(s)) = 4s6 + 36s5 + 137s4 + 272s3 + 289s2 + 148s + 28 (20.5.14)
Все корни det (Aci(s)) имеют отрицательные вещественные части.
Таким образом, контур устойчив.
20.5.2. Устойчивость и частотные характеристики
Читатель может задаться вопросом, применимы ли средства анализа
SISO-систем для проверки устойчивости MIMO-систем. Вообще-то,
ответ — «да», но возникают существенные осложнения из-за мультипере-
менной природы проблемы. Мы покажем, как можно расширить теорию
Найквиста (см. разд. 5.7) на MIMO-случай. Если мы предположим,
что в MIMO-контуре обратной связи возможна компенсация только
632 Глава 20. Анализ MIMO-контуров управления
устойчивых нулей и полюсов, то внутренняя устойчивость номинального
контура будет обеспечена, если чувствительность SQ(s) будет
устойчивой.
Рассмотрим теперь функцию F0(s), определенную следующим
образом:
т
F0{s) = det(I + G0(s)C(s)) = Д (1 + Xi(s)) (20.5.15)
г=1
где Aj(s), i = 1,2,... ,га, являются собственными значениями GQ(s)C(s).
Полярные графики Aj(jgj), г = 1,2,...,т на комплексной плоскости
называются характеристическими траекториями.
Сравнивая (20.5.15) и (20.4.5), мы видим, что чувствительность SQ(s)
устойчива тогда и только тогда, когда все нули F0(s) лежат строго
внутри ЛПП.
Если выбран контур Найквиста Cs = CiUCr, показанный на рис.5.5,
то можно сформулировать следующую теорему, являющуюся аналогом
теоремы Найквиста 5.1.
Теорема 20.1. Если собственная передаточная функция разомкнутого
контура GQ(s)C(s) имеет Р полюсов в открытой ППП, то замкнутый
контур имеет Z полюсов в открытой ППП тогда и только тогда,
когда полярный график, который включает комбинацию всех
характеристических траекторий (вдоль модифицированного контура
Найквиста), охватывает точку (—1,0) по часовой стрелке N = Z — P раз.
Доказательство
Мы видели ранее, что поскольку F0(s) —собственная функция, то Сг в
s-плоскости отображается в одну точку на Р0-плоскости\ это
означает, что нас интересует лишь отображение мнимой оси С{. На этой
линии
т
arg(F0(iw)> = 53arg((l + Ai(jw))> (20.5.16)
г=1
Таким образом, любое изменение угла F0(jw) является результатом
комбинации изменений фазы сомножителей l + \i(ju)). Следовательно,
охват начала координат в Р0-плоскости может быть получен из
охватов точки (—1;0) комбинацией характеристических траекторий.
Отношение между числом охватов и полюсов с нулями функции
F0(s), расположенных в ППП, можно тогда получить так же, как и
в гл. 5. □□□
Использование этого результата для проектирования находится вне
пределов этой книги. Отсылаем читателя к ссылкам в конце главы.
20.6. Реакция в установившемся состоянии для ступенчатых входных сигналов 633
20.6. Реакция в установившемся состоянии
для ступенчатых входных сигналов
Реакции в установившемся состоянии также имеют много общего с
SISO-случаем. Здесь, однако мы имеем векторные входы и выходы.
Таким образом, мы рассмотрим ступенчатые воздействия, поступающие
от конкретных направлений — т. е. приложенные к различным
комбинациям входов во входном векторе. Это можно получить, определяя
R(s) = Кг-] Di(s) = K&-\ D0(s) = Kd0- (20.6.1)
s s s
где Kr e Mm, Kdi еГи Кd0 e Rm —постоянные векторы.
Отсюда следует, что если контур устойчив, то все сигналы в контуре
достигнут постоянных величин в установившемся состоянии. Эти
величины могут быть вычислены из (20.4.2)-(20.4.4) на основании теоремы
о конечном значении, что дает
lim y{t) = To{0)Kr + So(0)Kdo + Sio{0)Kdi (20.6.2)
t—>oo
lim u{t) = Suo{0)Kr - Suo(0)K,to - Suo(0)Go(0)Krfi (20.6.3)
t—>oo
lim e(t) = So{0)Kr - So(0)Kdo - Sio(0)Kdi (20.6.4)
t—>oo
Можно также исследовать условия, которые приводят к нулевым
ошибкам в установившемся состоянии. Чтобы проиллюстрировать это,
получим следующий результат для случая ступенчатого эталонного
сигнала.
Лемма 20.4. Рассмотрим устойчивый MIMO-контур обратной связи,
показанный на рис. 20.3. Предположим, что эталонный сигнал R(s) —
вектор, задаваемый выраоюением (20.6.1). Ошибка в установившемся
состоянии i-го канала, ej(oo), равна нулю, если i-я строка
чувствительности So(0) нулевая. При этих условиях i-я строка
чувствительности То(0) — элементарный вектор е» = [0 010 0]т.
Доказательство
Рассмотрим эталонный вектор, как в (20.6.1). Тогда ошибка в
установившемся состоянии ej(oo) удовлетворяет условию
е*((х>) = [8(0)]**#г = 0 (20.6.5)
где [So(0)]i* — i-я строка So(0). Однако ei(oo) = 0 для каждого
постоянного вектора Кг, в то время как (20.6.5) удовлетворяется, только если
[S(0)]j* имеет все нулевые элементы, т. е. SQ теряет ранг при s = 0.
Это — точное определение нуля MIMO-системы, как объясняется в
разд. В.5.
634 Глава 20. Анализ MIMO-контуров управления
Свойство i-й строки чувствительности То(0) — прямое следствие
условия SQ(s) + T0(s) = I и свойства i-й строки чувствительности
So(0). DDD
Аналогичные результаты имеются для входных возмущений. Мы
оставляем читателю получение соответствующих условий.
20.7. Анализ в частотной области
Для SISO-случая мы выяснили, что частотная область дает ценную
информацию для понимания реакции замкнутого контура на
различные входные воздействия. Это верно и в MIMO-случае. Однако чтобы
использовать эти возможности, мы должны расширить понятие
усиления в частотной области на мультипеременный случай. Это —предмет
следующего раздела.
20.7.1. Главные усиления и главные направления
Рассмотрим MIMO-систему с т входами и т выходами, которая имеет
матричную передаточную функцию G(s) размерностью га х га:
Y{s) = G{s)U{s) (20.7.1)
Получим соответствующую частотную характеристику, задав s = ju.
Это приводит к вопросу: Как можно определить усиление MIMO-
системы в частотной области? Чтобы ответить на этот вопрос, будем
следовать той же идее, которая использовалась для описания усиления в
SISO-системах, где мы использовали частное абсолютной величины
(скалярной) выхода объекта |y(ja;)| и абсолютной величины (скалярной)
входа объекта \U(jw)\. Для МШО-случая это определение усиления не
подходит, потому что мы должны сравнить вектор выходов с вектором
входов. Чтобы преодолеть эту трудность нужно использовать нормы
векторов вместо абсолютных величин. Могла бы быть использована
любая подходящая норма. Для обозначения нормы вектора v будем
записывать ||v||. Например, мы могли использовать евклидову норму,
определяемую следующим образом:
И| = V>i|2 + N2 + --- + k|2 = v^ (20.7.2)
где vH обозначает сопряженное транспонирование.
Кроме того, нужно понимать, что в MIMO-случае мы имеем проблему
направленности: амплитуда выхода зависит не только от амплитуды
входа (как в скалярном случае), но также и от относительных амплитуд
компонентов входа. На некоторое время зафиксируем частоту о;, тогда
20.7. Анализ в частотной области 635
можем заметить, что для фиксированной частоты ш матричная
передаточная функция представляет собой простую комплексную матрицу G.
Один из возможных способов определить усиление МШО-системы
на частоте о; —это выбрать норму матрицы G, которая использует
максимизирующее направление, связанное с входом U. Таким образом,
мы определим
iigh= sup S1 (2o-7-3)
\\и\\?о WW
Мы называем ||G|| индуцированной нормой G, соответствующей
норме вектора ||!7||. Например, когда в качестве нормы вектора выбрана
евклидова норма,
\\x\\ = Vx**x (20.7.4)
то мы имеем индуцированную спектральную норму G, определяемую
следующим образом:
llG^ll /UHGUGU ,^*es
\\G\\= sup 1\т77Пи= sup J (20.7.5)
\\u\№ \\u\\ \\u\№v u u
Фактически, понятие индуцированной нормы близко связано с
понятием «вырожденные значения». Чтобы показать эту связь, вспомним
определение вырожденных значений комплексной матрицы Г
размерности т х I. Множество вырожденных значений Г есть множество
мощности k = min(/,ra), определенное следующим образом:
{V собственные значения Г Г при т < I
(20.7.6)
v собственные значения ГГН при т > I
Заметим, что вырожденные значения — вещественные
положительные числа, потому что ГНГ и ГГН являются эрмитовыми матрицами.
Напомним, что ft{ju)) называется эрмитовой матрицей, если flK(ju)) =
nT(—juj) = Ct(ju)). Принято упорядочивать вырожденные значения
следующим образом:
<*тах = °\ > 0"2 > СГ3 ... > <Jk = Vmin - (20.7.7)
Когда нам нужно будет сделать явной связь между матрицей Г
и ее вырожденными значениями, мы будем обозначать вырожденные
значения как 0";(Г) для % = l,2,...,fc.
Другой интересный результат заключается в том, что, если Атах и
Amin являются максимальным и минимальным собственными
значениями эрмитовой матрицы А соответственно, то
__ хнАх __ . хнАх .
Лтах— sup ., ||2 ; Amjn = 1Ш , |2 (20.7.8)
\\xU0 1И2 \\xU0 \\х\\2
636 Глава 20. Анализ MIMO-контуров управления
Эти идеи мы применим к ||G||, которая определена в (20.7.5). Взяв
Л = GHG. получим, что
IUHGKGU I
HGII = SUP У ттнтт = VA-ax{GHG} = amax (20.7.9)
\\и\№ V UnU v -
где (т^ах — максимальное собственное значение GHG. Значение сгтах
дает максимальное вырожденное значение G. Таким образом,
индуцированная спектральная норма G есть максимальная вырожденная
величина G. Некоторые свойства вырожденных величин, интересные
для MIMO-анализа и проектирования, будут обобщены позже.
Рассмотрим две матрицы Пи А размерности га х га и вектор х размерности
га х 1. Обозначим через Ai(fi),A2(n),...,Am(n) собственные значения
ft. Тогда вырожденные величины этих матриц обладают следующими
свойствами:
svl а{П) = атах(П) = <л(П) = max ^-y^ и
|x|€R ||Ж||
а (А) = атах(А) = аг(А) = max-тг-тг-.
|x|eR ||ж||
\\Пх\\
sv2 а{П) = amin{n) = am{ft) = min ^ТГ и
l*|€R INI
а(А) = <Jmin(A) = ат(А) = min -гг-тг-
l*|€R If||
sv3 a(ft) < |А»(П)| <а(П), для г = 1,2,...,га.
sv4 Если ft является невырожденной, то z(ft) = \a(ft~l)]~l
и a{il) = [а{П~1)]-1
sv5 Для любой скалярной величины a, ai(aft) = \a\<Ji(ft),
для г = 1,2,...,га.
sv6 а{П + А) < a{ft) + а(А).
sv7 а(ПА) < а(П)а{А).
sv8 \а{П)-а{А)\ <а{П + А) <а(П)+а{А).
svP тах[П]^ < a(ft) < га х тах[П]^
svi0 Если П = I —единичная матрица, то a(ft) = а(П) = 1.
Некоторые из вышеупомянутых свойств следуют из факта, что
максимальная вырожденная величина является нормой матрицы; другие —
из факта, что вырожденные величины являются квадратными корнями
собственных значений матрицы.
Возвращаясь к описанию системы G в частотной области,
вырожденные значения G станут (вещественными) функциями частоты и и
известны как главные усиления. Важное замечание состоит в том, что
20.7. Анализ в частотной области 637
вырожденные значения и собственные значения матричных
передаточных функций не являются рациональными функциями параметра s
(или и в случае частотной характеристики).
Важное следствие вышеупомянутых определений — это
,(СЫ) < l|Q,^g)l' <*(GM) V« 6 R (20.7.10)
Это подразумевает, что минимальное и максимальное главные
усиления дают соответственно нижнюю и верхнюю границы для значения
усиления по любому входу.
Предположим теперь, что когда и) = gjj, мы выберем U(s) таким,
чтобы Ui = U(ju)i) был собственным вектором Gh(jgjj)G(jgjj), т. е.
GB(juJi)G(jUi)Ui = afUi (20.7.11)
Тогда мы имеем, что
||У||=<7«|| (20.7.12)
и Ui известно как главное направление, связанное с единичным
значением 0{.
Норма, определенная в (20.7.5), — норма, «знающая» о частоте.
Другими словами, это —норма, которая зависит от cj.
20.7.2. Отслеживание
Далее мы рассмотрим, какие условия в частотной области необходимо
обеспечить для хорошего отслеживания эталонных сигналов. Напомним,
что E(s) = SQ(s)R(s). Таким образом, мы можем получить
объединенную меру амплитуды ошибок во всех каналах, рассматривая евклидову
норму E(ju)). Поэтому рассмотрим
,№j)"2 = ^^^^\\R^)\\^^8o(MW(M\\2 (20.7.13)
Из этого выражения мы видим, что маленькие ошибки
гарантируются, если величина a(SQ(ju))) мала в диапазоне частот, где ||JJ(jcj)||2 имеет
существенное значение. Заметим, что S0(s)+T0(s) = I и, следовательно,
a{S0(ju>)) < 1 «=» a(T0(jw)) « a(T0(jw)) « 1 (20.7.14)
Пойдем дальше, используя соответствующим образом свойства
вырожденных значений, представленные в предыдущем разделе.
Рассмотрим, например, свойство 4; тогда
a(S0(jcj)) =a([I + G0(iw)C0(iw)]-1) = (a(I + G0(jcj)C0(jcj)))-1
(20.7.15)
638 Глава 20. Анализ Ml МО-контуров управления
а используя свойства 8 и 10, мы получим, что
HI + GoywJCoywJJJ-^I^Goy^CoOw))-!!"1 (20.7.16)
Таким образом, мы видим, что для обеспечения маленьких ошибок
во всех каналах нужно величину &.(G0(ju))C0(juj)) сделать как можно
больше в диапазоне частот, где значение ||i?(jo;)||2 существенно.
Замечание 20.5. Можно установить интересную связь с анализом
установившегося состояния, выполненным в разд. 20.6. Там мы
определили, что нулевая ошибка отслеэюивания на нулевой частоте будет
получена, если So(0) =0. Это подразумевает, что
a(So(0))=a(So(0)) = 0 и a(Go(0)C(0)) =a(Go(0)C(0)) =оо
(20.7.17)
DDD
Далее мы посмотрим, во что обходится хорошее отслеживание в
смысле величины энергии выходного сигнала регулятора.
Вспомним из (20.4.8) и (20.4.3), что 17(e) = [G0(s)]"1T0(s).R(s). Тогда
||^^)||2<a([G0(^)]-1T0(^))||^(ja;)||2 (20.7.18)
Используя свойства 4 и 7, это уравнение может быть записано
следующим образом:
\Мзш)\\2 < ^^у1ТО«)Ня (20-7-19)
Таким образом, хорошее отслеживание (т. е. a(TQ(jw)) «1 в
диапазоне частот, где a(G0(jo;)) «С 1) может привести к большим сигналам
управления. С другой стороны, если используется безопасный подход к
проектированию, такой, что a(TQ(ju))) и &.(GQ(ju)))) не отличаются
существенно в полосе частот эталонного воздействия, то можно ожидать,
что чрезмерных управляющих воздействий на будет.
20.7.3. Компенсация возмущений
Далее мы рассмотрим вопросы подавления возмущений. Для
иллюстрации рассмотрим только случай входного возмущения. Если исследовать
уравнение (20.4.4), то можно сделать вывод, что проблема компенсации
выходных возмущений подобна проблеме обеспечения отслеживания,
потому что диапазон частот эталонного воздействия и диапазон частот
выходного возмущения обычно не пересекаются. Тот же самый подход
применяется и к диапазону частот входного возмущения, где
соответствующая передаточная функция —Si0(s) вместо SQ(s). Для случая
входного возмущения мы имеем, что
\\Е\\2 < a(S0(jw)G0(jw))||A||2 (20.7.20)
20.7. Анализ в частотной области 639
Кроме того, после применения свойства 7 это выражение можно
переписать следующим образом:
l№ <W(S0(ju))a(G0(ju))\\Di\\2 (20.7.21)
Результаты нашего анализа мы можем теперь использовать для
обеспечения отслеживания с малыми искажениями.
Хорошая компенсация входного возмущения может быть достигнута,
если Qi(G0(ju))C0(ju))) » 1 в диапазоне частот, где a(G0(jcd))||Z);||2
имеет большое значение. Сравнение со случаем отслеживания
показывает, что подавление входного возмущения как правило является
более слабым требованием, потому что a(GQ(jw))) обычно сама имеет
свойства фильтра низких частот и, следовательно, GQ сама обеспечит
предварительное ослабление возмущения.
20.7.4. Подавление шума измерения
Влияние шума измерения на характеристику MIMO-контура можно
также оценить количественно, используя вырожденные значения, как
показано ниже. Из (20.4.2) мы имеем, что для шума измерения
\\Y\\2<a{T0{ju))\\Dm\\2 (20.7.22)
Таким образом, хорошее подавление шума получается, если
a(TQ(ju))) «С 1 в диапазоне частот, где шум существенен. Это
эквивалентно требованию, что a(SQ(ju))) « 1. Шум измерения обычно
существенен в более высоком диапазоне частот, нежели у эталонного
сигнала и возмущений, так что это требование устанавливает
фактический предел полосе пропускания замкнутого контура (измеряемой
значением a(T0(jcj))).
20.7.5. Направленность в анализе чувствительности
Предыдущий анализ дал верхние и нижние границы, которые могут
использоваться как индикаторы характеристики контура. Однако этот
анализ пока не подчеркнул одну из наиболее существенных особенностей
MIMO-системы, а именно, направленность: пропорция, в которой
каждый компонент канала появляется в векторе сигнала (эталонного или
возмущения). Чтобы оценить, как это связано с предыдущим анализом,
мы снова рассмотрим проблему отслеживания.
Предположим, что эталонные сигналы всех контуров имеют
единственную частоту cjr. Тогда, после завершения переходного процесса,
640 Глава 20. Анализ Ml МО-контуров управления
вектор ошибки (в форме фазора — вектора, вращающегося с
определенной частотой) может быть вычислен из выражения
E{ju>r) = S0{ju)r)R{ju>r) (20.7.23)
где R{ju)r) — вектор эталонного сигнала (в форме фазора).
Предположим теперь, что R(ju)r) совпадает с главным направлением (см.
разд. 20.7.1), связанным с минимальным вырожденным значением
S0(jcjr); тогда
IW^)||2 = a(So(icjr))|TOa;r)||2 (20.7.24)
Сравнивая это с результатом в (20.7.13), мы видим, что если
минимальное и максимальное вырожденные значения S0(jur) существенно
различаются, то верхняя граница в (20.7.13) будет действительной
границей для фактического результата.
Это краткое обсуждение выдвигает на первый план важность
направленности в MIMO-проблеме. К этой теме мы впоследствии вернемся.
Чтобы проиллюстрировать основные проблемы, рассмотрим
следующий пример.
Пример 20.6. В MIMO-контуре управления дополнительная
чувствительность имеет вид
То(*) =
s2 + 5s + 9 s2 + 5s + 9
s 3(s + 3)
(20.7.25)
.s2 + 5s + 9 s2 + 5s + 9J
Контур имеет выходные возмущения, определяемые выражениями
d0(t) = [Xisin(cjdi + ai) K2sin{cjdt + a2)]T (20.7.26)
Нужно определить частоту щ, отношение К\/К2 и разность фаз
&1 — <*2, которые максимизируют евклидову норму установившейся
ошибки \\Е\\2.
Решение
В установившемся состоянии ошибка — вектор синусоидального
колебания частоты и)д- В этом случае можно использовать анализ с
помощью фазоров. Представление выходного возмущения в виде фазора
следующее:
D0=[Kie?a* К2е^]Т (20.7.27)
Из (20.4.4) мы видим, что ошибка от выходных возмущений имеет
противоположный знак по сравнению с ошибкой для эталонного
сигнала. Тогда из уравнения (20.7.13) мы имеем, что для любого отношения
К\/К2, такого, что ||А>|| = 1; справедливо условие:
\\E{jud)\\2 = mag\\E(ju)\\2 < maxa(S0(ju)) = ЦБ^ (20.7.28)
20.7. Анализ в частотной области 641
1.4
I 1
м
«0.8
s
5 о.б
§0.4
& °-2
г
-
-
. . . . . 1
i i ,,,.,.,-
/ ^и
-j
А
10"
10'
10е
Частота [рад/с]
Рис. 20.4. Вырожденные значения функции чувствительности
Верхняя граница в (20.7.28) точно достигается, когда направление
фазора возмущения совпадает с главным направлением, связанным с
максимальным вырожденным значением SQ(jud) (см. разд. 20.7.1).
Сначала получим SQ(s), используя равенство TQ(s) + SQ(s) = I.
So(*) =
5(5 + 5) 5
52 + 55 + 9 52 + 55 + 9
-5 5(5 + 2)
l-52 + 55 + 9 52 + 55 + 9,
(20.7.29)
Мы можем теперь вычислить величину ш, при которой a(SQ(ju)))
имеет максимальное значение. Вырожденные значения SQ(ju))
показаны на рис. 20.4.
Отсюда мы можем видеть, что a(SQ(jw)) имеет максимум при
о; «4.1 рад/с. Таким образом, частота, максимизирующая подавление
возмущения, а;^ = 4.1 рад/с.
Напомним, что вырожденные значения матрицы ft являются
собственными значениями матрицы ft ft. Таким образом, чтобы
вычислить главные направления SQ(jud), мы должны вычислить
собственные значения S0(ju)d)S0T (—jud) (может использоваться команда svd
пакета МАТЬ А В).
Главные направления, связанные с этими двумя вырожденными
значениями a(SQ(juJd)) и (l(So(jwd)), соответственно равны
щ = [0.884+ J0.322 -0.219+ j0.260]T
и2 = [-0.340 + jO.003 -0.315 +j0.886]T
(20.7.30)
(20.7.31)
642 Глава 20. Анализ Ml МО-контуров управления
Нас интересует только значение и\, которое можно записать в
виде
til = [0.944Z0.35 0.340/2.27]' (20.7.32)
(Здесь первый параметр каждого элемента (до знака /.) означает
модуль, а второй параметр (после знака /.) — аргумент (в радианах)
комплексного числа. — Прим. перев.)
Таким образом, максимизированное решение (т. е. самый плохой
случай) будет, когда
Кл 0 944
—- = —— = 2.774 и ai - а2 = 0.35 - 2.27 рад = -1.92 рад (20.7.33)
К2 0.Л4 ппп
20.7.6. Направленность в связи
с компенсацией полюсов и нулей
Проблемы направленности проявляются также и в связи с
компенсацией полюсов и нулей и потерей управляемости или наблюдаемости.
Рассмотрим, например, установку, используемую в разд. 17.9, где были
представлены две каскадированные минимальные системы (Ai,Bi,Ci)
и (А2,В2,С2). Здесь мы предположим, что и Е Rm, ич = у\ Е Rp и
у Е Rr, ранг В2 совпадает с числом столбцов, а ранг Ci совпадает с
числом строк.
Составная система имеет вид (А,В,С), где
Ai ° 1. Р1-ЛВ1
В2Сх А2 Г 10
А =
(20.7.34)
С = [0 С2] = 0 (20.7.35)
Из гл. 3 мы знаем, что компенсация полюсов и нулей вызывает
потерю наблюдаемости или управляемости. Однако в МШО-случае
также важны и направления, как показано в следующей лемме.
Лемма 20.5. Составная система теряет наблюдаемость тогда и
только тогда, когда /3 является полюсом системы 1 и нулем
системы 2 таким, что существует х\, который принадлежит нулевому
пространству матрицы (/31 —Ai); a Ci^i принадлежит нулевому
пространству матрицы С2 (/31 — А2)~~ В2.
Доказательство
Тогда: следует непосредственно из проверки (20.7.34), (20.7.35) с
помощью леммы 17.7.
Только тогда: единственными величинами X, удовлетворяющими
уравнению
(А-А1)ж = 0 (20.7.36)
20.7. Анализ в частотной области 643
являются собственные значения Ai или Аг- Рассмотрим отдельно
два случая.
а) (Л —собственное значение А\) =^ (соответствующий
собственный вектор — [xj X2Y, где х\ — собственный вектор А\ и Х2 =
(Л1 —Аг)"" В2С1Ж1). Далее Ci^i ф 0 на основании
минимальности (Ai,Bi,Ci). Следовательно, значение С2Я2 равно нулю
(как требуется при потере наблюдаемости для составной
системы), только если Ci^i ф 0 находится в нулевом пространстве
С2(Л1 —Аг)"" Вг- Однако это подразумевает, что А является
нулем системы 2 и что Circi является нулевым направлением.
б) (Л — собственное значение Аг) =Ф* (соответствующий собствен-
ный вектор — [0 х%]Т, где x<i —собственный вектор Аг). Тогда
недостаток наблюдаемости для составной системы требует
С2Я2 = 0- Однако это нарушает минимальность системы 2.
Следовательно, условие а) —единственная возможность. ODD
Соответствующий результат для управляемости следующий.
Лемма 20.6. Составная система теряет управляемость тогда и
только тогда, когда а — нуль системы 1 и полюс системы 2 такие,
что существует хТ^, принадлеэюащий левому нулевому пространству
матрицы (al — A2) и ж^В2; пРинадлежащий левому нулевому
пространству Ci (al — Ai)~1Bi.
Доказательство
Доказательство аналогично такому же доказательству
относительно наблюдаемости, приведенному выше. DDD
Проблемы компенсации полюсов и нулей, рассмотренные в этих двух
леммах, иллюстрируются следующим примером.
Пример 20.7. Рассмотрим две системы S\ и S2, имеющие,
соответственно, передаточные функции
Gi(e) =
Ga(e) =
2s+ 4
-2
(я + 1)(а + 3) (я + 1)(я + 3)
-3s-1 -5s-7
L(s + l)(s + 3) (я + 1)(я + 3).
4 -1
(s + l)(s + 2)
2
s + 1
8 + 1
-1
2(s + l)(s + 2)J
(20.7.37)
(20.7.38)
644 Глава 20. Анализ Ml МО-контуров управления
Сначала сформируем для системы S\ представление в пространстве
состояний, используя команду ss пакета MATLAB. Таким образом,
получим структуру из 4-х матриц (Ai,Bi,Ci,0).
Тогда можно непосредственно [используя команду eig пакета
MATLAB) вычислить собственные значения системы, которые
расположены в точках — 1 и —3, с собственными векторами w\ и W2,
определяемыми следующим образом:
w{ = [0.8552 0.5184]; v$ = [-0.5184 0.8552] (20.7.39)
Система также не имеет никаких нулей.
С другой стороны, система <?2 имеет три полюса, расположенные в
точках —1, —2 и —2, и один нуль, расположенный в точке —3. Этот
нуль имеет левостороннее направление /i и правостороннее
направление h, определяемые выражениями
/iT = [l 2]; hT = [l -4] (20.7.40)
Мы видим, что один полюс S\ совпадает с одним нулем S2- Чтобы
исследовать последствия этого совпадения, рассмотрим два случая
последовательного соединения.
Выход <Si является входом <5г:
Чтобы исследовать возможную потерю наблюдаемости, мы должны
вычислить C1W2 и сравнить результат с h. Сначала получим C\W2 =
[—1.414 5.657]т, откуда мы видим, что этот вектор линейно зависим
от h.
Таким образом, при этом соединении будет ненаблюдаемый компо-
нент е .
Выход с>2 является входом S\i
Чтобы исследовать возможную потерю управляемости, нам нужно
вычислить w^Bi и сравнить результат с /л. Мы имеем, что w^Bi =
[—0.707 — 0.707]. Таким образом, этот вектор линейно независим
от /i, и, следовательно, никакой потери управляемости при этом
соединении не происходит.
20.8. Проблемы робастности
В заключение мы расширим результаты относительно робастности,
полученные в разд. 5.9 для SISO-систем, на MIMO-случай. Так же, как
и для SISO-случая, МШО-модели обычно будут только приблизительно
20.8. Проблемы робастности 645
описывать любые реальные системы. Таким образом, характеристика
номинального контура управления может значительно отличаться от
истинной или достигнутой характеристики. Чтобы получить некоторое
понимание этой проблемы, рассмотрим линейные ошибки
моделирования, как мы делали для SISO-систем. Однако теперь мы имеем
дополнительную ошибку, связанную с матрицами, для которых произведения
не коммутативны. Поэтому рассмотрим две эквивалентных формы для
мультипликативных ошибок моделирования (MOM):
G(«) = (I + GA,(e))G0(e) = G0(e)(I + GAr(e)) (20.8.1)
где Gai(s) и Gaf(s)-левая и правая МОМ-матрицы соответственно.
Из (20.8.1) мы видим, что эти матрицы связаны следующими
соотношениями:
Gai(*) = Go WGapWIGoW]-1; GAr(s) = [GoMJ^GaiMGoM
(20.8.2)
Эта эквивалентность позволяет нам получать выражения, используя
любое из описаний. Для простоты выберем левую МОМ-матрицу и
исследуем только две главных чувствительности: чувствительность и
дополнительную чувствительность.
Тогда мы можем получить выражения для достижимых чувстви-
тельностей в (20.4.10)—(20.4.11) как функции ошибки моделирования.
Используя (20.8.1), мы получим
S(s) = [I + GWC(e)]-1 = [I + G0(s)C(s) + Ga1(5)G0(5)C(5)]-1
= [I + G0(5)C(5)]-1 [I + Gai WTo(e)]-1 = S0(s)[I + Gai WTo(e)]-1
(20.8.3)
T(5) = G(5)C(5)[I + G(5)C(5)^
(20.8.4)
Обратим внимание на подобие этих выражений и выражений для
SISO-случая —см. уравнения (5.9.15)—(5.9.19). Мы можем также
использовать эти выражения, чтобы получить результаты относительно
робастности.
Например, следующая теорема о робастной устойчивости является
аналогом теоремы 5.3.
Теорема 20.2. Рассмотрим объект с номинальной и истинной
передаточными функциями G0(s) и G(s) соответственно. Предположим,
что они связаны соотношением (20.8.1). Предположим также, что
регулятор C(s) обеспечивает номинальную внутреннюю устойчивость
и что G0(s)C(s) и G(s)C(s) имеют одинаковое число Р неустойчивых
полюсов. Тогда достаточное условие для устойчивости контура обрат-
646 Глава 20. Анализ MIMO-контуров управления
ной связи, полученного, когда регулятор воздействует на истинный
объект, имеет вид
^(GaiO'oOToO'w)) < 1 Vw € К
Доказательство
Определим функцию
F(a) = det(H-G(a)C(a))
(20.8.5)
(20.8.6)
Тогда из теоремы 20.1 мы имеем, что устойчивость замкнутого
контура с истинным объектом требует, чтобы &rg(F(juj)) изменился
на —2Рп рад при изменении ш от —оо до оо.
Кроме того, используя (20.8.1) и (20.8.15), мы замечаем, что
функция F(s) может также быть выражена следующим образом:
F(s) = det(I+G0(a)C(a)) det(I+GA1(e)T0(a)) = F0(a) det(I+GA1(s)T0(s))
(20.8.7)
Таким образом,
aig(F(jw)> = axg(F0{ju)) + arg(det(I + GAi(jw)T0(jw))> (20.8.8)
Обозначим максимум (или модуль) собственного значения
G&i(jw)T0(ju) через \\\тах- Тогда из свойства 3 разд. 20.7.1 мы имеем,
что
5tGAi(jo;)T0(jw)) < 1 =» |A|moi < 1 (20.8.9)
Это подразумевает, что приращение arg(det(I + G&i(ju)T0(ju))))
при изменении ш от — оо до оо равно нулю. Отсюда следует требуемый
результат. DDD
Пример, который иллюстрирует количественно эти ошибки, приведен
далее.
Пример 20.8. MIMO-объект имеет номинальную и истинную модели
G0(s) и G(s) соответственно, где
G0(a) =
5 + 1
1
(я + 1)(а + 2)
2
G(5) =
(а + 1)(а + 2)
20
s + 2
1
(20.8.10)
(а + 1)(а + 10) (а + 1)(а + 2)
1 40
(а + 1)(а + 2) (s + 2)(s + 20)
(20.8.11)
20.9. Резюме 647
Нужно найти левую МОМ-матрицу G/±\(s) и график вырожденных
значений.
Решение
Из уравнения (20.8.1) мы видим, что G/^\(s) можно вычислить по
формуле
GAi(5) = G(5)[G0(5)]-1-I (20.8.12)
Это дает
GA\(s) =
-4s3 - 12s2
2s2 + 4s
4s3 + 52s2 + 127s + 70 4s3 + 52s2 + 127s + 70
2s2 + 2s -4s3 - 12s2 + 8s
4s3 + 92s2 + 247s + 140 4s3 + 92s2 + 247s +140
(20.8.13)
Заметим, что для s = 0 все элементы матрицы равны нулю. Это
согласуется с природой ошибки, поскольку G(0) = Go(0).
Я
X
О)
s
X
to
0)
Я
x
x
I
a
Я
PQ
-10 Ь
-30 h
-AOt
-60
10'
Частота [рад/с]
Рис. 20.5. Вырожденные значения МОМ-матрицы
Выроэюденные значения G/±\(s), вычисленные с помощью команд
пакета MATLAB, дают график, показанный на рис. 20.5.
20.9. Резюме
• В предыдущих главах мы рассмотрели проблему управления
единственным выходом с помощью единственного входа (SISO-системы).
• Однако в ряде случаев проблемы управления требуют, чтобы многие
выходы управлялись одновременно; чтобы это обеспечить, должны
использоваться много входов, обычно при этом искусно
организованных (MIMO-системы).
о Примером может быть автопилот самолета: должны
поддерживаться скорость, высота, углы тангажа, крена и рысканья; ком-
648 Глава 20. Анализ Ml МО-контуров управления
пенсаторы, несколько рулей и крылья могут рассматриваться как
управляющие переменные,
о Пример химического процесса: должны регулироваться выработка
и производительность; тепловая энергия, исполнительные
механизмы клапанов и различные обслуживающие параметры могут
использоваться как управляющие переменные.
• Основная трудность в достижении необходимого гармоничного
сочетания входов заключается в мультипеременном взаимодействии,
известном также как связность.
• С точки зрения входа-выхода два фундаментальных явления
являются результатом связности (см. рис. 20.6):
wi^-—- J/1 и\ *- yi
а) ^ у" б) "3
Рис. 20.6. Два явления, связанные
с мультипеременными взаимодействиями
а) единственный вход воздействует на несколько выходов;
б) несколько входов затрагивают единственный выход.
• Мультипеременные взаимодействия в форме, показанной на рис. 20.6,
добавляют существенную сложность в МШО-управление.
• И модель пространства состояний, и модель передаточной функции
могут быть обобщены на МШО-модели.
• MIMO-матрица передаточных функций может быть получена из
модели пространства состояний с помощью выражения G(s) = C(sl—
• Вообще, если модель имеет га входов и G Шт и I выходов у G Ш1, то
о матрица передаточных функций состоит из I x га SISO-
передаточных функций и
о для n-мерного вектора состояния х € W1 матрицы модели
пространства состояний имеют размерности A G RnXn, В G Knxm,
С G K'xn, D G Rlxm.
• Некоторые свойства MIMO-моделей и результаты их анализа прямо
следуют из SISO-теории:
о преобразования подобия в реализациях пространства состояний;
о наблюдаемость и управляемость;
о полюсы.
• Другие MIMO-свойства, обычно из-за взаимодействий или того
факта, что матрицы не коммутативны, являются более тонкими или
сложными, чем их SISO-аналоги — например,
о нули;
о левые и правые матричные дроби.
20.10. Литература для последующего чтения 649
20.10. Литература для последующего чтения
Мультипеременные линейные системы
1. Callier, F. and Desoer, С. (1982). Multivariable Feedback Systems. Springer-
Verlag.
2. Kailath, T. (1980). Linear Systems. Prentice-Hall, Englewood Cliffs, N.J.
3. Maciejowski, J.M. (1989). Multivariable Fedback Design. Addison-Wesley,
Wokingham, England.
4. Morari, M. and Zafiriou, E. (1989). Robust Process Control. Prentice-Hall,
Englewood Cliffs, N.J.
5. Skogestad, S. and Postlethwaite, I. (1996). Multivariable Feedback Control-
Analysis and Design. Wiley, New York.
6. Zhou, K., Doyle, J.C., and Glover, K. (1996). Robust and Optimal Control.
Prentice-Hall, Upper Saddle River, N.J.
Матричные дробные описания
1. Kailath, Т. (1980). Linear Systems. Prentice-Hall, Englewood Cliffs, N.J.
2. Vidyasagar, M. (1985). Control System Synthesis: A Factorization Approach.
MIT Press, Cambridge, Mass.
Анализ MIMO-систем в частотной области
1. Hung, Y. and MacFarlane, A. (1982). Multivariable feedback. Lecture notes in
Control and Information Science, 40. Springer-Verlag.
2. MacFarlane, A. (1979). Frequency-Response Methods in Control Systems. IEEE
Press.
3. Maciejowski, J.M. (1989). Multivariable Fedback Design. Addison-Wesley,
Wokingham, England.
4. Mayne, D.Q. (1973). The design of linear multivariable systems. Automatica,
9(2):201-207.
5. Rosenbrock, H. (1970). State Space and Multivariable Theory. Wiley, New
York.
6. Skogestad, S. and Postlethwaite, I. (1996). Multivariable Feedback Control:
Analysis and Design. Wiley, New York.
Робастность MIMO-систем
1. Glover, K. (1986). Robust stabilization of linear multivariable systems.
International Journal of Control, 43(3):741-766.
2. Green, M. and Limebeer, D. (1995). Linear Robust Control. Prentice-Hall,
N.J.
3. McFarlane, D. and Glover, K. (1990). Robust controller design using normalized
coprime factor plant descriptions. Lecture notes in Control and Information
Science, 138. Springer-Verlag.
4. Whittle, P. (1990). Risk-sensitivity Optimal Control. Wiley, New York.
5. Zhou, K. and Doyle, J.С (1998). Essentials of Robust Control. Prentice-Hall,
Upper Saddle River, N.J.
6. Zhou, K., Doyle, J.C., and Glover, K. (1996). Robust and Optimal Control.
Prentice-Hall, Upper Saddle River, N.J.
650 Глава 20. Анализ MIMO-контуров управления
Управление конвертером синтеза аммиака
1. Bastiani, A. (2000). Advanced control and optimization of an ammonia
synthesis loop. ME Thesis, Department of Electrical and Computer
Engineering, The University of Newcastle, Australia.
20.11. Задачи для читателя
Задача 20.1. Рассмотрим следующие MIMO-передаточные функции:
-2s+ 1
(s + 1)2
s + 3
L(s + 4)(s + 2)
(s + 4)(s + 2)
2
s + 4
s + 3
-s + 1
s + 3
(s + l)(s + 2)
2
(s + l)(s + 2)2
s + 2
(20.11.1)
20.1.1. Для каждого случая постройте форму Смита—МакМиллана.
20.1.2. Вычислите полюсы и нули.
20.1.3. Вычислите левосторонние и правосторонние направления,
связанные с каждым нулем.
Задача 20.2. Для каждой из систем задачи 20.1 выполните следующее.
20.2.1. Постройте модель пространства состояний.
20.2.2. Постройте левое и правое матричное дробное описание.
Задача 20.3. Рассмотрим строго собственную линейную систему,
имеющую модель пространства состояний в виде
А =
-3 -1
1 -2
В =
с =
(20.11.2)
20.3.1. Является ли эта система минимально-фазовой?
20.3.2. Постройте левое и правое матричное дробное описание.
20.3.3. Вычислите график вырожденных значений передаточной
функции.
Задача 20.4. Объект, имеющий устойчивую и минимально-фазовую
номинальную модель G0(s), управляется контуром обратной связи с одной
степенью свободы. Действительная дополнительная чувствительность
T0(s) имеет вид
4 as(s + 5)
То(а) =
s2 + 3s + 4 (s2 + 3s + 4)(s2+4s + 9)
9
О
s2 + 4s + 9
(20.11.3)
20.11. Задачи для читателя 651
Предположим, что а = 1.
20.4.1. Вычислите нули замкнутой системы, если они есть.
20.4.2. Исследуя T0(s), мы видим, что она устойчива, но является ли
внутренне устойчивым номинальный замкнутый контур?
20.4.3. Исследуйте характер взаимодействия, используя ступенчатые
входные возмущения в обоих каналах (в разное время).
Задача 20.5. Для того же самого объекта, что и в задаче 20.4, сделайте
следующее.
20.5.1. Вычислите его вырожденные значения для а = 0.1, а = 0.5 и
а = 5.
20.5.2. Для каждого случая сравните результаты с амплитудной
частотной характеристикой диагональных элементов.
Задача 20.6. В контуре управления с обратной связью передаточная
функция в разомкнутом состоянии равна
s + 2 0.5
GQ(s)C(s) =
(s + 4)s
0.5
s(s + 2) s{s + 4){s + 2)
s(s + 2)
2(5 + 3)
(20.11.4)
20.6.1. Является ли замкнутый контур устойчивым?
20.6.2. Вычислите график вырожденных значений TQ(s).
Задача 20.7. Рассмотрим МШО-систему размерностью 2x2, имеющую
номинальную модель G0(s) вида
120
GQ(s) =
(s + 10)(s + 12)
G2i(s)
Gn(s)
100
(20.11.5)
s2 + 13s+ 100.
Определите ряд необходимых условий для Guis) и (?2i(s), когда
выполняется следующее.
20.7.1. Система существенно развязана по каналам на всех частотах.
20.7.2. Система полностью развязана по каналам на нулевой частоте и
на частоте cj = 3 рад/с.
20.7.3. Система слабо связана в диапазоне частот [0 , 10] рад/с.
Для каждого случая проиллюстрируйте ваш ответ подходящими
значениями G\2(s) и (?2i(s).
652 Глава 20. Анализ Ml МО-контуров управления
Задача 20.8. Рассмотрим дискретную передаточную функцию системы
Gq(^), имеющую вид
3* 20{z-0A)2(z-0.8)
[60z2(z-0A)(z-0.8)2 12(z-0.4)(*-0.8)
(20.11.6)
Gq(*) =
0.01
z*{z-0A)2{z-0.8)2
20.8.1. Проанализируйте тип связи в этой системе для различных
диапазонов частоты.
20.8.2. Найдите форму Смита—МакМиллана и вычислите полюсы и
нули системы.
20.8.3. Определите вырожденные значения системы.
Задача 20.9. Рассмотрим управление с одной степенью свободы MIMO-
устойчивым объектом. Матрица передаточных функций регулятора
C(s) имеет вид
\Сп(а) С12(5)1
[C2i{s) C22{s)\
Требуется получить нулевую установившуюся ошибку при
постоянных эталонных сигналах и входных возмущениях в обоих каналах.
Определите, какой из четырех элементов матрицы регулятора должен
обладать интегрирующими свойствами, чтобы обеспечить это
техническое требование.
Задача 20.10. Рассмотрим MIMO-объект, имеющий передаточную
функцию
C(s) =
(20.11.7)
G0(e) =
(s + l)(s + 2)2
0.25(s + l)2
-0.5(s + 2)2
s + 2 s+1
-s + 2 0.5(s + l)(s + 2)
0 4(s + l)
(20.11.8)
Предположим, что этот объект должен в цифровой форме
управляться через квантователи и экстраполяторы нулевого порядка во всех
входных каналах. Интервал квантования выбран равным Д = 0.5 с.
Найдите дискретную передаточную функцию Нч(г) = [G0Gho]g(-z).
(Намек: используйте команду c2dm пакета MATLAB для модели
объекта в пространстве состояний.)
Задача 20.11. Рассмотрим MIMO-объект, имеющий передаточную
функцию вида
Р / х 1 Г 2 0.25e-*(s + l)
o(S)~ (s + l)(s + 2) |o.5(s + 2) 1
(20.11.9)
20.11. Задачи для читателя 653
Можно ли эту систему стабилизировать, используя диагональный
регулятор с передаточной функцией C(s) = H2 при к Е К? (Намек:
используйте характеристические траектории.)
Задача 20.12. Рассмотрим дискретный контур управления,
чувствительность которого имеет вид
SoqW =
z-l
(2г —0.4)(2г —0.5)
Z 2-0.6
2-0.4 2 + 0.2
(20.11.10)
Предположим, что оба эталонных сигнала — синусоидальные.
Найдите самые плохие направление и частоту эталонного вектора. (См.
решенную задачу 20.6.)
Глава 21
Использование
SISO-технологий
в MIMO-управлении
21.1. Введение
В случае SISO-управления мы выяснили, что можно было
использовать широкое многообразие методов синтеза. Некоторые из них
переносятся непосредственно на МШО-случай. Однако имеется несколько
сложностей, которые возникают в МШО-ситуации. По этой причине
часто желательно использовать процедуры синтеза, которые являются
в некотором смысле автоматическими. Это будет предметом следующих
нескольких глав. Однако прежде чем мы внедримся в полную сложность
МШО-проектирования, стоит остановиться и посмотреть, когда, если
это вообще возможно, SISO-методы могут применяться к МШО-задачам
непосредственно. В этой главе мы рассмотрим, когда можно
использовать SISO-проектирование в МШО-случае. В частности мы изучим
1. децентрализованное управление как механизм для непосредственного
использования SISO-методов в МШО-установках;
2. проблемы робастности, связанные с децентрализованным
управлением.
21.2. Полностью децентрализованное
управление
Прежде чем рассматривать полностью взаимодействующий мультипе-
ременный проект, часто полезно проверить, может ли полностью
децентрализованный проект обеспечить желаемые характеристики. Когда это
возможно, преимущество полностью децентрализованных регуляторов
по сравнению с полным MIMO-регулятором заключается в том, что
их проще понять, легче обслуживать и можно легко модернизировать
прямым способом (в случае модернизации объекта).
21.2. Полностью децентрализованное управление 655
Основное упрощающее предположение полностью
децентрализованного управления —то, что с взаимодействиями можно обращаться как
с некоторыми видами возмущения. Например, если первый выход y\(t)
MIMO-объекта размерности га х га может быть описан (в форме
преобразования Лапласа) следующим образом
т
lri(5) = Gii(5)C/1(5) + 2(?H(5)C/i(5) (21.2.1)
г=2
то вклад каждого входа, отличного от ixi, мог бы рассматриваться
как выходное возмущение Gu(s)Ui(s) для первого SISO-контура. Этот
подход, конечно, строго говоря, некорректен; сущность истинных
возмущений в том, что они являются независимыми входами. Однако при
некоторых условиях (в зависимости от амплитуды и спектра частот),
эта точка зрения может дать приемлемые результаты. Заметим, что
идея рассмотрения MIMO-объекта как множества SISO-объектов может
преобразовать полностью мультипеременную систему в набор более
простых SISO-систем, которые проявляют небольшое взаимодействие друг
с другом. Однако для простоты в дальнейшем мы будем использовать
децентрализованное управление просто в смысле полностью
децентрализованного управления.
Читатели, знакомые с практическим управлением, поймут, что
существенная доля реальных систем использует децентрализованные
структуры. Отсюда возникает вопрос, существуют ли такие ситуации,
при которых децентрализованное управление не будет давать
удовлетворительное решение? Позже, в гл. 22, мы приведем несколько
реальных примеров, которые требуют MIMO-подхода, чтобы получить
удовлетворительное решение. В качестве учебного примера, где
децентрализованное управление может не подойти, рассмотрим следующий
MIMO-пример.
Пример 21.1. Рассмотрим объект с двумя входами и двумя выходами,
имеющий передаточную функцию
G0(e) =
о
П° М -
Gll(s)-S2 + 3S + 2
G° (-,)- kn
G2l(S)-S2 + 2s + l
<*<•>-£
G° M-—■■ —
^22 W — "J
s
+ 5s + 6
(21.2.2)
(21.2.3)
(21.2.4)
656 Глава 21. Использование SISO-технологий в Ml МО-управлении
Пусть к\2 и &21 зависят от рабочей точки (обычная ситуация на
практике). Мы рассмотрим четыре рабочие точки.
Рабочая точка 1 (ku = foi = 0)
Ясно, что в этой рабочей точке нет никакого взаимодействия.
Таким образом, мы можем благополучно проектировать два SISO-
регулятора. Для определенности скажем, что мы стремимся к следу-
ющим дополнительным чувствительностям:
9
T0i(s)=To2(s) =
s2 + 4s + 9
(21.2.5)
Соответствующие передаточные функции регулятора C\(s) и C2{s)
будут
Сг(8) =
4.5(s2 + 3s + 2)
5(5 + 4) ;
С2(з) =
1.5(52+55 + 6)
5(5 + 4)
(21.2.6)
Эти независимые контуры определяются, как и было предсказано,
выбором дополнительных чувствительностей.
Рабочая точка 2 (ku = foi = 0.1)
Оставим тот же регулятор, что и для рабочей точки 1. Зададим
единичный ступенчатый эталонный сигнал для выхода 1 в момент
t = 1 и единичный ступенчатый эталонный сигнал для выхода 2 в
момент t = 10. Реакция замкнутого контура показана на рис. 21.1.
Эти результаты, вероятно, следует рассматривать довольно прием-
лемыми, даоюе с учетом того, что эффекты связи теперь в реакции
очевидны.
а
о п
3" м
х х
1.5
1
0.5
О
-0.5
-1
-1.5
Г\
-
/j/iW
-
1 1
■г —1 1
r2{t)
.1 1
1 1 II
\и(«) "
1 1 1 1
12
14
16
18
20
2 4 6 8 10
Время [с]
Рис. 21.1. Влияние слабого взаимодействия в контурах управления
при SISO-проектировании
21.2. Полностью децентрализованное управление 657
Рабочая точка 3 (к\2 = — 1, &21 = 0.5)
С теми же самыми регуляторами и при тех же испытаниях, что
и для рабочей точки 2, мы получим результаты, приведенные на
рис. 21.2.
Я
s
VO О
о и
1.5
0.5
На
«3-1
S -1.5
Т 1 I I - ■ 1 л " 1 1 1 1
/
-
yi
1 1
»ч(*)
1 1
N- :
... 1 1 1 1
8 10 12
Время [с]
14
16
18
20
Рис. 21.2. Влияние сильного взаимодействия в контурах управления
при SISO-проектировании
Мы видим, что теперь изменение эталонного сигнала в одном
контуре существенно воздействует на выход в другом контуре.
Рабочая точка 4 (к\2 = — 2, A^i = — 1)
Теперь моделирование с теми же самыми эталонными сигналами
показывает, что вся система становится неустойчивой. Мы видим, что
исходный SISO-проект стал недопустимым в этой заключительной
рабочей точке. Чтобы получить более глубокое понимание проблемы
устойчивости, мы должны вычислить четыре передаточных функции,
которые моделируют отношение между двумя эталонными сигналами
R\(s) и R2{s) и двумя выходами Y\(s) и Y2(s). Эти передаточные
функции могут быть представлены в матричной форме
Гя(«).
= (I + G0(S)C(S))-1G0(S)C(s)
Ri(s)
где
G0(a) =
'Gn (e) G12(s)
G2i(s) G22(s)J'
C(s) =
'Ci(e) 0
0 C2(s),
(21.2.7)
(21.2.8)
Если мы рассмотрим случай, в котором ki2 = — 2 и к2\ — — 1
и подставим (21.2.3), (21.2.4) и (21.2.6) в (21.2.7), то получим, что
658 Глава 21. Использование SISO-технологий в MIMO-управлении
выражение (I + G0(s)C(s))-1G0(s)C(s) будет равно
T9s4 + 40.5s3 + 67.5s2 - 18s - 81 -3s5 - 30s4 - 105s3 - 150s2 - 72s
-4.5s4 - 31.5s3 - 63s2 - 36s 9s4 + 40.5s3 + 67.5s2 - 18s - 81
(21.2.9)
d(s)
где
d{s) = s6 + 10s5 + 51s4 + 134.5s3 + 164.5s2 + 18s - 81 (21.2.10)
которое, очевидно, является неустойчивым. (Фактически, имеется
полюс замкнутого контура в точке 0.5322.)
Мы видим, что хотя независимое проектирование регуляторов и
гарантирует устойчивость для «невзаимодействующих контуров»,
когда возникает взаимодействие в модели объекта, может
возникнуть неустойчивость или недопустимая характеристика.
Предлагаем читателю использовать схемное решение в файле
mimol.mdl пакета SIMULINK, чтобы исследовать другую динамику
взаимодействия. П П П
Из этого примера видно, что могут возникнуть неожиданные
проблемы, когда игнорируются МШО-взаимодействия.
21.3. Объединение в пары входов и выходов
Если нужно использовать децентрализованную структуру, то следует
соединить парами входы и выходы. В случае передаточной функции
объекта размерности тхт имеется га! возможных соединений. Однако
часто можно использовать физические соображения, чтобы предложить
осмысленные пары или устранить пары, которые будут мало полезны.
Один из методов, который можно использовать, чтобы предложить
соединения, — параметр, известный как массив относительных
усилений (МОУ). Для MIMO-систем с матричной передаточной функцией
G0(s) МОУ определяется как матрица Л с ij-u элементом
Ьц = [Ъо(0)]ц[Оо-Ч0)]ц (21-3.1)
где [Go(0)]i7 и [Go_1(0)]i7 обозначают ij-й элемент матрицы усилений
объекта на нулевой частоте и ji-й элемент обратной матрицы усилений
на нулевой частоте соответственно.
Заметим, что [Go(0)]ij соответствует усилению на нулевой частоте от
г-го входа щ к j-uy выходу j/j, в то время как остальная часть входов
щ при / Е {1,2,..., г — 1, г+1,..., га} сохраняется постоянной. Аналогично
[G0_1 (0)]ij является обратной величиной усиления на нулевой частоте от
г-го входа щ к j-uy выходу у^, в то время как остальная часть выходов
4 21.3. Объединение в пары входов и выходов 659
yi при / Е {1,2,...,j — 1J + l,...,m} сохраняется постоянной. Таким
образом, параметр Л^- указывает на то, насколько весома пара г-го входа
с j-м выходом.
В частности, обычно стремятся выбрать пары таким образом, чтобы
диагональные элементы Л были большими. Однако при этом пытаются
также избежать соединений, которые приводят к отрицательным
диагональным элементам в Л.
Ясно, что эта мера взаимодействия рассматривает только
установившееся состояние. Тем не менее, эмпирические наблюдения показывают,
что она хорошо работает во многих практических случаях.
Проиллюстрируем это простым примером.
Пример 21.2. Рассмотрим снова систему, изучаемую в примере 21.1.
Это MIMO-система, имеющая передаточную функцию
2 kl2
Go(e) =
s2 + 3s + 2
*21
5 + 1
6
(21.3.2)
.s2 + 2s + l s2 + 5s + 6.
Тогда массив относительных усилений имеет вид
1 -*12*21 1
А =
1 — /и12&21 1 "~ ^12^21
-*12*21 1
(21.3.3)
Ll-fcl2fc21 1 —&12&21 J
Для 1 > k\2 > О, 1 > &2i > 0 массив относительных усилений
предлагает пары (щ^ух), (гл2,Уг)- Напомним из разд. 21.2, что эти пары
действительно работали очень хорошо для kx2 = &21 =0.1 и весьма
удовлетворительно для кх2 = —1, &21 = 0.5. В последнем случае массив
относительных усилений равен
ч
(21.3.4)
Однако для км = —2, foi = — 1 мы выяснили в разд. 21.2, что
централизованный- регулятор, основанный на парах (щ,у\), («2,2/2)7 уже
был неустойчив. Соответствующий массив относительных усилений
в этом случае
Г-1 2
2 -II
Л =
(21.3.5)
который указывает, что, вероятно, следует изменить пары на («1,3/2),
(u2,yi). □□□
660 Глава 21. Использование SISO-технологий в Ml МО-управлении
Пример 21.3 (Аппарат с четырьмя резервуарами,
продолжение) . Рассмотрим снова аппарат с четырьмя резервуарами из
примера 20.4. Напомним, что эта система имела приближенную
передаточную функцию
G(«) =
3-771
62s+ 1
4.7(1-71)
3.7(1-72)
(23s + l)(62s + l)
4J72
(21.3.6)
|_(30s + l)(90s + l) 90s + l
Напомним также, что выбор 71 и 72 мог переместить один из
нулей системы из левой в правую полуплоскость комплексной плоскости.
Массив относительных усилений для этой системы
А =
А
1-А
1-А
А
где А =
7172
(21.3.7)
71+72-1
Вспомним из примера 20.4, что для 1 < 71+72 < 2 система является
минимально-фазовой. Если мы возьмем, например, 71 = 0.7 и 72 = 0.6,
то массив относительных усилений равен
1.4 -0.41
-0.4 1.4
Л =
(21.3.8)
Это говорит, что мы можем выбрать пары (щ,у\) и (иг,У2).
Поскольку система минимально-фазовая, проектировать
децентрализованный регулятор в этом случае относительно легко. Например,
следующий децентрализованный регулятор дает результаты,
показанные на рис. 21.3
c""-s(1+iE)i ftW-"(1+«s) <2U-9)
Из того же примера 20.4 напомним, что для 0 < 71+72 < 1 система
неминимально-фазовая. Если мы возьмем, например, 71 = 0.43 и 72 =
0.34, то система имеет неминимально-фазовый нуль при s = 0.0229 и
массив относительных усилений становится следующим:
Г—0.64 1.64 1
1.64 -0.64
Л =
(21.3.10)
Это наводит на мысль переключить {у\,у2) для целей
децентрализованного управления. Физически это понятно, так как потопи в
этом случае протекают именно так. Гокал ситуация ведет к новому
массиву относительных усилений
1.64 -0.641
-0.64 1.64
Л =
(21.3.11)
21.3. Объединение в пары входов и выходов 661
к
S
«
* н
и
* о>
0) fc£
(Q гс
\D 0
0 W
3"«
х «
Яр
м!з
К
2
1.5
1
0.5
0
I " ''
Г n(t)
1
.._. .
/j/i«
i
i'
ГЯ(*)
1
I
/ ie(0 \
1 . . J
О 50 100 150 200 250 300
Время [с]
Рис. 21.3. Децентрализованное управление минимально-фазовой системой
из четырех резервуаров
«
S
»
ев о
й«
К о>
5? кг
(Q Ю
\о о
о «
22
0 53
X S
я я
Л
2.5
2
1.Ь
1
0.5
0
i
Г n(t)
к
т i
^
i г 1" ■■' 1 -т" ' ■—т
Ыг)
^
/ УгУ) 1
1 —1. .. 1 ...1... 1 I — 11 I .._!
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Время [с]
Рис. 21.4. Децентрализованное управление неминимально-фазовой системой
их четырех резервуаров
Заметим однако, что управление будет все же более тяжелым,
чем в случае минимально-фазовой системы. Например, следующие
децентрализованные регуляторы дадут результаты1, показанные на
рис. 21.4.
c'<s> = a5(1 + ib); <*W-««(> + js) (21-«2>
Сравнивая результаты на рис. 21.3 и 21.4, мы видим свидетельство
большего взаимодействия и более медленных реакций в неминимально-
фазовом случае на рис. 21.4. DDD
Заметим, что на рис. 21.3 и 21.4 разные масштабы по времени.
662 Глава 21. Использование SISO-технологий в MIMO-управлении
21.4. Проблемы робастности
при децентрализованном управлении
Один из способов реализовать децентрализованный проект управления
состоит в том, чтобы использовать диагональную номинальную модель.
Недиагональные элементы тогда оказываются немоделируемыми в
терминологии гл. 3. Пусть мы имеем модель G0(s), тогда номинальная
модель для децентрализованного управления могла быть выбрана как
Gi(s) = dia9{g0n(s),...,g°mm(s)} (21.4.1)
и аддитивная ошибка моделирования была бы
G€(s) = GQ(s) - G*(s); GAl(s) = G€(s)[GZ(s)}-1 (21.4.2)
С этой основой концепцией мы можем заняться проверкой
робастности, описанной в разд. 20.8. Напомним, что достаточным условием для
робастной устойчивости является
e(GAl(jw)T0{ju))) < 1 Vw € R (21.4.3)
где a(GAi(jw)T0(jw))—максимальное вырожденное значение
Gai(j'w)To0'w).
Проиллюстрируем это на примере.
Пример 21.4. Рассмотрим снова систему из примера 21.2. В этом
случае
2
Gt(s) = ' "
То(а) =
9
s2 + 4s + 9
1 0
0 1
s2 + 3s + 2
0
о
6
G€(s) =
0
&21
Ls2 + 2s + l
fcl2
в + 1
0
GAl(s) =
0
Ы«+ 2)
s2 + 5s + 6
(21.4.4)
ku(s2 + 5s + 6)
GAi(e)T0(e) =
0
9k2i(s + 2)
L 2(e + l)
3k12(s2 + 5s + 6)
2(s + l)(s2 + 4s + 9)
0
6(e + l)
0
(21.4.5)
(21.4.6)
L2(s + l)(s2+4s + 9)
Вырожденные значения в этом случае — просто модули двух
недиагональных элементов. Они показаны на графике рис. 21.5 для
нормализованных значений км = A&i = 1.
21.4. Проблемы робастности при децентрализованном управлении 663
к
S
X
5 1-5
М
1Ь
о
а
3
П
0.5
(- ^ч.
h ^:^::^^
<ti (cj)
-I
<ti (cj) 1
S. ^s. H
10"
10'
Частота [рад/с]
Рис. 21.5. Вырожденные значения GaiQcjJToO'cj)
Мы видим, что достаточным условием для робастной
устойчивости децентрализованного управления с выбранными парами (u\,yi),
(^2jУ2) является \k\2\ < 1 и \к2\\ < 1. Заметим, что это
осторожная оценка, но совместимая с результатами, представленными
выше. DDD
Пример, который показывает взаимосвязь массива относительных
усилений и концепций робастности, следующий.
Пример 21.5. Рассмотрим MIMO-систему с параметрами
GW =
1
0.25
s + 1
10s+ 1
(e + l)(e + 2)
0.25
10s+ 1
(s + l)(s + 2)
2
s + 2
G0(s) =
1
s + 1
0
s + 2j
(21.4.7)
Сначала заметим, что массив относительных усилений для
номинальной модели G0(s) имеет вид
Л =
1.0159 -0.0159
-0.0159 1.0159
(21.4.8)
Это значение массива относительных усилений могло бы привести
к предположению, что был сделан правильный выбор пар входов и
выходов и что взаимодействие является слабым. Предположим, что
мы продолжаем делать децентрализованный проект, который дает
диагональный регулятор C(s), чтобы получить дополнительную чув-
664 Глава 21. Использование SISO-технологий в MIMO-управлении
ствительность T0(s), где
±o[S) S2 + 4s + 9[0 lj'
C(s)=
'9(д + 1)
s(s + 4)
0
0
9(s + 2)
2s(s + 4)J
(21.4.9)
Однако этот регулятор, используемый для управления реальным
объектом G(s), дает полюсы замкнутого контура, расположенные в
точках —6.00, —2.49 ± J4.69, 0.23 ± j'1.36 и —0.50 — «неустойчивый
замкнутый контур».
Недостаток робастности в этом примере моэюет быть отнесен
к факту, что требуемая полоса пропускания замкнутого контура
включает диапазон частот, где частотная характеристика
недиагональных элементов является существенной. Таким образом, в этом
примере устойчивость замкнутого контура с децентрализованным
управлением моэюет быть достигнута только, если мы делаем
замкнутый контур медленнее, значительно сокращая полосу пропускания
диагональных элементов в TQ(s). DDD
21.5. Упреждающее воздействие
в децентрализованном управлении
Хотя это обычно и не будет помогать робастной устойчивости,
характеристики децентрализованных регуляторов часто значительно
улучшаются разумным выбором упреждающих воздействий, чтобы уменьшить
связность. Сошлемся на уравнение (21.2.1) и для простоты рассмотрим
только влияние j-ro контура на г-й контур. Тогда можно применить
идеи упреждения, разработанные в гл. 10, чтобы получить структуру,
показанную на рис. 21.6.
Усиление упреждения G3jAs) должно быть выбрано таким образом,
чтобы связь от j-ro контура к г-му контуру компенсировалась бы в
GfrMK
■±&
Щ{8)
им
Gu(s)
Uj(s)
Gij(s)
-6
+ ViW
Рис. 21.6. Упреждающее воздействие при децентрализованном управлении
21.5. Упреждающее воздействие в децентрализованном управлении 665
конкретном, зависящем от рассматриваемой задачи диапазоне частот
[О w/f], т. е. если
Gj;f(ju>)Gii(jcu) + Gijiju) «О Vu; e [0 uff] (21.5.1)
Уравнение (21.5.1) можно также записать следующим образом:
Gfyijw) » -[GuiJu^GijiJu) Vo; G [0 W//] (21.5.2)
откуда мы видим, что опять следует формировать инверсию, и,
следовательно, связанные с этим проблемы возникают снова.
Проиллюстрируем это примером.
Пример 21.6. Рассмотрим снова систему из примера 21.4 с ки = —1
и &21 = 0.5. Напомним результаты для этого случая, представленные
на рис. 21.2. Мы видим, что имеется небольшая связь от первого
ко второму контуру, но относительно сильная связь от второго к
первому контуру. Это подсказывает использовать упреждение от
второго входа на первый контур. Мы такэюе выберем G3L{s) так,
чтобы обеспечить полную компенсацию связи на нулевой частоте,
т. е. G3jAs) выбираем в виде константы G^As) = a, удовлетворяющей
уравнению
абУц(О) = -Gi2(0) =» а = 1 (21.5.3)
Тогда модифицированная MIMO-система моделируется следующим
образом:
Y(s) = G0(a)
\Ui(s)
U2(s)
= GQ(s)
где
G'0(s) =
U[(s)
U2(s)\
—s
= G'oW
U[(s)
[U2(s)
s2 + 3s + 2 s2 + 3s + 2
0.5 6.5s2 + 14.5s + 9
(21.5.4)
(21.5.5)
_s2 + 2s + 1 (s2 + 2s + 1) (s2 + 5s + 6) J
Массив относительных усилений теперь имеет вид Л = diag(l,l)
и когда мы перепроектируем децентрализованный регулятор, то
получим результаты, представленные на рис. 21.7.
Эти результаты превосходят результаты на рис. 21.2, где
показана децентрализованная характеристика регулятора для того оюе
самого случая. DDD
Пример 21.7 (Эффект затягивания на реверсивном
прокатном стане). В качестве промышленного прилооюения управления
с упреоюдением напомним читателю пример, рассматриваемый в
666 Глава 21. Использование SISO-технологий в MIMO-управлении
1.5
«
х
п
S§ o.5
rP CO
VD О
ои 0
as
«5
Ih
■1г
-1.5
-
н(«
Г"
-
., 1 1
— 1 1— —г ■ i 1 т г
га (О
1 . 1
IftW -|
\w(0 J
i .i .... i i . J
8
Время
fc°]
12
14
16
18
20
Рис. 21.7. Характеристика децентрализованного MIMO-контура управления
с упреждением взаимодействия
разд. 10.6.1. Там мы выяснили, что упреждение было важным
фактором в преодолении эффекта затягивания и, следовательно, в
достижении удовлетворительного управления замкнутого контура. DDD
Вышеупомянутые примеры указывают, что небольшая связность,
вводимая в регулятор, может быть весьма полезна. Однако здесь же
возникает вопрос, как мы можем систематически проектировать
соединенные регуляторы, которые учитывают мультипеременное
взаимодействие, что побуждает нас изучить эту проблему, которая и будет темой
следующей главы. Перед завершением этой главы мы исследуем,
существуют ли простые пути преобразования характерных для МШО-систем
задач к ряду SISO-задач.
21.6. Преобразование MIMO-задач в SISO-задачи
Многие MIMO-задачи могут быть изменены так, что
децентрализованное управление будет более жизнеспособным (или привлекательным)
вариантом. Например, можно иногда использовать предварительный
компенсатор, чтобы преобразовать результирующую систему так, что
у нее будет почти диагональная передаточная функция.
Чтобы проиллюстрировать это, возьмем номинальную передаточную
функцию объекта GQ(s). Если мы введем предварительный компенсатор
P(s), то контур управления будет иметь вид, показанный на рис. 21.8.
Тогда проектирование Cp(s) на рис. 21.8 можно выполнить, исходя
из эквивалентного объекта
H(e) = G0(e)P(e)
(21.6.1)
Несколько комментариев по поводу этой стратегии:
21.6. Преобразование MIMO-задач в SISO-задачи 667
~> ! -
•? ■
Ср(з)
^
P(s)
[ C(s)
— *«
. J
Go(s)
Рис. 21.8. Управление с обратной связью при использовании
предварительного компенсатора объекта
1. Первой попыткой выбрать P(s) могло бы быть приближение каким-
либо образом Go(s)""1. Например, можно было бы в качестве
предварительного компенсатора использовать матрицу усилений на нулевой
частоте Gq(O)""1, предполагая, что она существует. Эту стратегию мы
использовали в примере 21.6.
2. Если используется динамический предварительный компенсатор, то
требуется проверить, что никакие неустойчивые нули и полюсы не
были скомпенсированы между предварительным компенсатором и
исходным объектом, — см. разд. 20.7.6.
3. Можно ввести различные меры результирующего взаимодействия
отдельных частей системы. Например, следующая терминология часто
используется в этом контексте.
Динамически развязанные системы
Здесь, каждый выход зависит от одного и только одного входа. Матрица
передаточных функций H(s) — диагональная для всех s. В этом случае
задача понижается до отдельных SISO-контуров управления.
Развязанные в полосе частот и статически развязанные системы
Когда матрица передаточных функций H(jo;) диагональна только в
конечном диапазоне частот, мы говорим, что система развязана в этом
диапазоне. В частности, мы будем говорить, что если Н(0)
диагональная, система является статически развязанной.
Треугольно соединенные системы
Система треугольно соединена, когда входы и выходы можно
упорядочить таким образом, что матрица передаточных функций H(s) будет
или верхней, или нижней треугольной для всех s. В этом случае
связность иерархическая. Рассмотрим случай нижней треугольной матрицы.
Первый выход зависит только от первого входа; второй выход зависит
только от первого и второго входов; и вообще, к-й выход зависит только
от первых к входов. Такими системами относительно легко управлять
с помощью SISO-регуляторов, объединенных с действием упреждения,
чтобы компенсировать связность.
668 Глава 21. Использование SISO-технологий в MIMO-управлении
Диагонально доминирующие системы
Говорят, что МШО-система является диагонально доминирующей, если
ее передаточная функция H(jcj) размерностью га х га такова, что
га
\Hkk(ju>)\>Y,\Hik(Ju)\ VweM (21.6.2)
г=1
Такие системы относительно развязанные, потому что условие
(21.6.2) подобно ситуации в коммуникационных сетях, когда
информация в данном канале более емкая, чем объединенный эффект
перекрестной информации от других каналов.
21.7. Изучение промышленной установки
(управление поверхностью полосы)
Как иллюстрацию использования простого предварительного
компенсатора для преобразования MIMO-задачи в SISO-технологию рассмотрим
задачу управления поверхностью полосы прокатного стана. Мы
рассматривали задачи управления прокатным станом ранее. См., в частности,
пример 8.3, пример 8.8 и разд. 8.7. Однако наша предыдущая работа
была сосредоточена на задачах продольного (т. е. по полосе) управления.
При этом мы предполагали, что поперек полосы происходит однородное
изменение полосы. Но на практике это не всегда так, поэтому требуется
рассмотреть задачи поперечного (т. е. поперек полосы) управления. На
этом мы здесь и сосредоточимся.
Если прокатка приводит к неоднородному сокращению толщины
полосы поперек ее ширины, то появится остаточное напряжение и может
произойти коробление конечного продукта. Практическая трудность
заключается в том, что дефекты поверхности вызываются приложенными
напряжениями полосы, которые невидимы оператору прокатного стана.
Однако коробление станет очевидным, если катушка будет раскручена,
или после того, как полоса будет разрезана вдоль или поперек на
последующих обрабатывающих операциях.
Имеется несколько источников проблем коробления, включая
следующее:
• термическая бочкообразность валка;
• возмущения, связанные с подаваемым сырьем (профиль, твердость,
толщина);
• поперечные температурные градиенты;
21.7. Изучение промышленной установки (управление поверхностью полосы) 669
• отклонения валков;
• неправильные изгибы оснований валков;
• износ валков;
• неправильная настройка стана (коэффициент вытяжки, натяжение,
сила, регулировка зазора между валками);
• эффекты смазывания.
С другой стороны, имеются резонные экономические причины
управления поверхностью полосы, включая следующее:
• улучшенный выпуск полос высшего качества;
• увеличенная производительность, из-за увеличения допустимого
ускорения, уменьшения задержки обработки, увеличения скорости
прокатки продукции допустимой формы;
• более эффективная перенастройка и действие на таких последующих
операциях, как отжиг и непрерывные линии;
• уменьшенная переработка материала на выравнивающих
напряжения линиях или прокатных станах с отпуском напряжений.
В этом контексте имеется несколько вариантов управления для
получения улучшенной поверхности. Они включают управление наклоном
валка, регулировку зазора между валками и распыление охлаждающих
сред. Обычно они различаются предварительной обработкой
измеренной формы. Здесь мы рассмотрим распыление охлаждающей среды.
Заметим, что дефекты поверхности могут быть измерены в
поперечном направлении с помощью специального инструмента, называемого
измерителем формы. Типичная конфигурация управления показана на
рис. 21.9.
В этой конфигурации многочисленные распылители охлаждающей
среды расположены поперек валков и поток через каждый распылитель
управляется клапаном. Охлаждающая вода, распыляемая на валки,
уменьшает тепловое расширение. Интересный момент состоит в том,
что каждый распылитель воздействует на большую часть валка, а не
только на часть, расположенную непосредственно под ним. Это ведет к
связанной MIMO-системе вместо ряда несвязанных SISO-систем.
Упрощенная модель для этой системы (без учета нелинейных
эффектов передачи тепла и т. д.) показана на структурной схеме рис. 21.10, где
U обозначает вектор положения клапанов распылителей, a Y обозначает
вектор толщин проката. (Линии указывают векторы, а не единственные
сигналы.)
670 Глава 21. Использование S ISO-технологий в Ml МО-управлении
zrs
X
Датчики
профиля и
температуры
Привод регулировки зазора между валками
Привод регулировки положения валка
Приводы распылителей
Рис. 21.9. Типичная установка управления поверхностью полосы прокатного
стана
"9-
C(s)
U
м-
TS+1
Рис. 21.10. Упрощенный контур обратной связи управления поверхностью
Распылители воздействуют на толщину проката и их воздействия
описываются матрицей М:
М =
1
а
а2
;
а
1
...
а2
1
а
...
;
а
1
(21.7.1)
Параметр а представляет уровень взаимодействия в системе и
определяется числом имеющихся распылителей и тем, как близко они
расположены друг к другу.
Интересный момент относительно этой упрощенной модели состоит в
том, что взаимодействие полностью определяется матрицей М усилений
на нулевой частоте. Это означает, что мы могли бы спроектировать
приблизительный предварительный компенсатор, просто инвертируя
21.7. Изучение промышленной установки (управление поверхностью полосы) 671
эту матрицу, что дает
г 1
М-1 =
-а
1 - а2 1-а2
-а 1 + а2
\ — а2 1 — а2
О
1 + а2
О
—а
1-а2 1-а2
-а 1
(21.7.2)
1-а2 l-a2J
Использование этой матрицы для развязывания системы означает,
что нужно отключить окружающие распылители, когда
рассматриваемый распылитель включен.
Таким образом, мы можем (приблизительно) развязать систему,
просто умножая вектор управления на эту инверсию. Такая установка
показана на структурной схеме рис. 21.11.
Л *
J *
от
Cp(s)
'.- регул ят
ор
М"1
P(s)
и
м-±-
TS + 1
У
Рис. 21.11. Управление поверхностью с предварительным
компенсатором
Номинальная развязанная система тогда становится просто H(s) =
diag fT*+l\. С этой новой моделью регулятор может быть разработан,
используя SISO-методы. Например, мог бы подойти набор простых
ПИ-регуляторов, связывающих каждый измеритель формы с
соответствующим распылителем. (Мы предполагаем, что измерители формы
измеряют поверхность проката идеально.)
Приглашаем читателя поработать с моделью этой системы
управления, размещенной на Web-странице.
Фактически, задачи управления, почти идентичные
вышеупомянутым, могут быть найдены во многих других промышленных ситуациях,
где имеется продольный и поперечный эффекты. Упомянем в качестве
другого примера подобные проблемы, возникающие в производстве
бумаги.
672 Глава 21. Использование SISO-технологий в М1МО-управлении
Интересная проблема робастности, связанная с поперечной частотной
характеристикой возникает во всех этих системах.
Может показаться, что можно получить лучшее усиление и лучшую
точность, добавляя все больше датчиков поперек полосы. Однако на
практике это не всегда так. Причина в том, что если представить
расстояние поперек полосы как псевдо-время, то имеются и связанные
с этим диапазоны частот. Следовательно, добавление большего
количества исполнительных механизмов соответствует попытке увеличить
псевдо-временное разрешение, т. е. полосу пропускания поперечного
механизма. Однако как мы видели в разд. 8.5, ошибки модели
устанавливают верхний предел достижимой полосы пропускания. Таким образом,
мы могли бы ожидать, что ошибки модели в виде двуразмерной задачи
управления, обсужденной выше, подобным образом ограничат степень
псевдо-временного разрешения. Это можно также проанализировать,
используя обычные MIMO-методы робастности. В частности, как
только мы увеличим число приводов поперечного механизма и датчиков,
степень взаимодействия возрастет и матрица М (21.7.1) станет плохо
обусловленной. Можно проиллюстрировать влияние этой плохой
обусловленности, утверждая, что а имеет маленькую ошибку. Тогда мы
можем записать истинную матрицу М через номинальную матрицу М0
в виде
М = [М0 + Д] (21.7.3)
Следовательно, используя инверсию номинальной матрицы М~* в
качестве компенсатора, мы получим остаточную связь, как показало в
М^М = [I + М"1 Д] (21.7.4)
Заметим, что в этом случае правая мультипликативная ошибка
моделирования имеет вид
GAr(5) = M^1A (21.7.5)
М0 — почти вырожденная матрица, поэтому М"1 Д может быть
чрезвычайно большой. Таким образом, робастная устойчивость может быть
легко потеряна (см. разд. 20.8 для дальнейшего обсуждения).
Имеется несколько средств, которые обычно используются, чтобы
устранить эту проблему. Можно ограничивать число пар «датчик -
исполнительный механизм», или можно ограничить поперечную полосу
пропускания, ограничивая управление уменьшением числа гармоник
поперечного измерения. Снова приглашаем читателя исследовать эти
проблемы робастности моделированием на Web-сайте. □□□
21.8. Резюме 673
21.8. Резюме
• Фундаментальное решение MIMO-синтеза связано с выбором
децентрализованного варианта полного МШО-управления.
• Полностью децентрализованное управление -характеризуется
следующим.
о При полностью децентрализованном управлении МШО-система
аппроксимируется набором независимых SISO-систем.
о Чтобы обеспечить это, мультипеременные взаимодействия
рассматриваются как возмущения; это является приближением,
потому что взаимодействия вовлекают обратную связь, в то время как
анализ возмущений фактически предполагает, что возмущения
являются независимыми входами.
о Если это применимо, преимущество полностью
децентрализованного управления состоит в том, что можно применить более
простую SISO-теорию.
о Применимость этого приближения зависит от пренебрегаемой
динамики взаимодействия, которая может рассматриваться как
ошибки моделирования; чтобы определить их воздействие, можно
использовать анализ робастности.
о Шансы успеха возрастают при разумном объединении в пары
множества входов и выходов (например, используя массив
относительных усилений) и использовании упреждения.
о Упреждение — часто очень эффективное средство в MIMO-
задачах.
о Некоторые MIMO-задачи могут быть проще преобразованы в
SISO-задачи, если сначала используется предварительный
компенсатор.
• Имеется несколько способов определить количественно
взаимодействия в мультипеременных системах, включая их структуру и их
влияние.
о Взаимодействия могут иметь наиболее общую структуру (каждый
вход потенциально воздействует на каждый выход) или
отображать специфические модели типа треугольной или доминирующей
диагонали; они могут также отражать частотно-зависящие модели
типа статически несвязанных или независимых в диапазоне частот.
о Чем меньше влияние взаимодействий, тем более система ведет себя
подобно набору независимых систем, которые могут
анализироваться и управляться отдельно.
о Слабая связность может определяться природой
взаимодействующей динамики или разделением диапазона частот или временным
масштабом.
674 Глава 21. Использование SISO-технологий в MIMO-управлении
о Чем сильнее взаимодействие, тем более важным становится
рассмотрение системы как MIMO-системы и ее взаимодействия в
целом.
о MIMO-системы и их взаимодействия в целом по сравнению с
SISO-методами, обсуждаемыми до сих пор, требуют обобщенного
синтеза и понимания методов проектирования. Они будут темами
следующих двух глав.
21.9. Литература для последующего чтения
Общие вопросы
1. Skogestad, S. and Postlethwaite, I. (1996). Multivariable Feedback Control-
Analysis and Design. Wiley, New York.
Децентрализованное управление
1. Hovd, M. and Skogestad, S. (1994). Sequential design of decentralized
controllers. Automatica, 30(10):1601-1607.
2. Sourlas, D. and Manousiouthakis, V. (1995). Best achievable decentralized
performance. IEEE Transactions on Automatic Control, 40(11):1858-1871.
3. Zames, G. and Bensoussan, D. (1983). Multivariable feedback, sensitivity, and
decentralized control. IEEE Transactions on Automatic Control, 28(11):1030-
1035.
Массив относительных усилений (МОУ)
1. Bristol, E. (1966). On a new measure of interaction for multivariable process
control. IEEE Transactions on Automatic Control, 11:133-134
2. Stephanopoulos, G. (1984). Chemical Process Control: an Introduction to
Theory and Practice. Prentice-Hall, Englewood Cliffs, N.J.
21.10. Задачи для читателя
Задача 21.1. Рассмотрим снова систему, изученную в примере 21.1 при
fci2 = -2 и fc2i = -1.
21.1.1. Используя стратегию упреждения (см. разд. 21.5), получите
эквивалентную передаточную функцию объекта Gq(s) в нижней
треугольной форме для полосы частот [0 и)//] рад/с сначала для
u)ff = 1, а затем для cjff = 10.
21.1.2. Повторите вычисления, получив верхнюю треугольную форму
связи.
21.10. Задачи для читателя 675
Задача 21.2. Рассмотрим верхнюю треугольную форму связи,
полученную в задаче 21.1.
Протестируйте, используя SIMULINK, характеристику
децентрализованного ПИ-регулятора, полученного в примере 21.1, сначала с u)ff =
1, а затем с u)ff = 10.
Задача 21.3. Предположим, что имеется MIMO-система размерностью
2x2 общего вида.
Докажите, что, если вы используете идеи упреждения,
рассмотренные в разд. 21.5, чтобы получить диагональный эквивалентный
объект (сначала получив верхнюю треугольную форму связи, а затем
использовать упреждение, чтобы новая система стала диагональной, или
наоборот), то это даст предварительно скомпенсированный объект.
Проверьте это для системы из задачи 21.1.
Задача 21.4. Предположим, что объект имеет номинальную модель в
виде
2e-o.5S
GQ(s) =
s2 + 3s + 2
0.5
L(s + 2)(/3s + l) 52 + 5s + 6j
(21.10.1)
21.4.1. Спроектируйте независимые SISO ПИ-регуляторы для двух
диагональных компонентов.
21.4.2. Оцените характеристику вашего проекта сначала для /3 = 0.2, а
затем для /3 = —0.2. Обсудите результаты.
Задача 21.5. Рассмотрим верхнюю треугольную форму связи MIMO-
системы размерностью га х га.
Докажите, что внутренне устойчивый контур, основанный на SISO-
проектах для га диагональных элементов, может быть получен тогда и
только тогда, когда все недиагональные передаточные функции
устойчивы.
Задача 21.6. Рассмотрим МШО-систему, имеющую передаточную
функцию
8 0.5
GQ(s) =
s2 + 6s + 8
/5
s + 8
6(5 + 1)
s + 4 s2 + 5s + 6.
(21.10.2)
21.6.1. Используя /3 = —2, постройте предварительный компенсатор
P(s) для этой системы, чтобы получить диагональный предвари-
676 Глава 21. Использование SISO-технологий в Ml МО-управлении
тельно скомпенсированный объект GQ(s)P(s). Спроектируйте ПИД-
регуляторы для диагональных передаточных функций и оцените
характеристику, наблюдая выходы и входы объекта.
21.6.2. Повторите все для /3 = 2. Обсудите результаты. (Подсказка:
используйте команду zero пакета MATLAB для GQ(s).)
Задача 21.7. MIMO-система имеет номинальную модель
Г -s + 8 0.5(-д + 8)
г (Q\-\s2 + 3s + 2 (s + l)(s + 5)
Ls2 + 2s + l s2 + 5s + 6
21.7.1. Проанализируйте трудности, с которыми сталкиваются при
использовании предварительной компенсации, чтобы сделать объект
диагональным.
21.7.2. Разложите передаточную функцию следующим образом:
Г s + 8 (s + 8) 1
s2 + 3s + 2 (s + l)(s + 5)
1 6
Ls2 + 2s + l s2 + 5s + 6 J
(21.10.4)
и постройте приближенный (устойчивый и собственный)
предварительный компенсатор P(s) для G02(s).
21.7.3. Спроектируйте ПИ-регуляторы для диагональных элементов
предварительно скомпенсированного объекта и оцените ваш проект.
(21.10.3)
Go(s) = G0i(s)Go2(5) =
-5 + 8
s + 8
0
ЧАСТЬ VII
ПРОЕКТИРОВАНИЕ
MIMO-СИСТЕМ
УПРАВЛЕНИЯ
Введение
Далее мы исследуем методы, конкретно нацеленные на проблемы
MIMO-управления, в которых взаимодействие не может
игнорироваться, если хотим достичь наилучших характеристик. Первая глава в этой
части охватывает линейные оптимальные методы управления. Эти
методы очень часто используются в продвинутых приложениях управления.
Действительно, мы опишем несколько реальных приложений этих идей.
Следующая глава охватывает модельное прогнозирующее управление.
Оно является расширением методов оптимального управления, включая
ограничения состояний и исполнительных механизмов. Эти идеи имели
большое воздействие на промышленное управление, особенно в
нефтехимических отраслях промышленности.
Заключительная глава охватывает фундаментальные ограничения
проекта при МШО-управлении. Как и в SISO-случае, МШО-проект
системы управления сталкивается с запутанной сетью компромиссов.
Действительно, многие из основных спорных вопросов, которые мы
видели в случае SISO-систем, имеют прямые аналоги в МШО-случае:
например, полюсы разомкнутого контура, нули разомкнутого контура,
функции чувствительности, возмущения и робастность. Однако в
отличие от SISO-систем эти проблемы здесь имеют отчетливо выраженный
оттенок — теперь имеет значение, какая комбинация входов и выходов
вовлечена в конкретное свойство. Эти направленные проблемы требуют,
чтобы мы были несколько более осторожными в анализе, синтезе и
проектировании МШО-контуров управления. Это как раз и является
полем деятельности для следующих пяти глав.
Глава 22
Проектирование через
методы оптимального
управления
22.1. Введение
В предыдущей главе дано представление о синтезе MIMO-систем
управления и показано, как SISO-методы могут иногда использоваться для
решения МШО-проблемы. Однако некоторые МШО-проблемы требуют
принципиально других методов. Они и являются темой данной главы.
Мы подчеркнем, что эти методы основаны на теории оптимального
управления. Имеются три причины для этого выбора:
1. Оптимальное управление относительно легко понять.
2. Оно используется в несметном числе приложений. (Действительно,
авторы использовали эти методы приблизительно в 20
промышленных приложениях.)
3. Оно является ценным предшественником для других продвинутых
методов, например, модельного прогнозирующего управления,
которое объясняется в следующей главе.
Анализ, представленный в этой главе, использует результаты гл. 18,
где были кратко описаны методы проектирования в пространстве
состояний, применительно к SISO-системам. Напомним, что в этой главе
были два ключевых элемента:
• оценка состояния наблюдателем;
• обратная связь по восстановленному состоянию.
Теперь рассмотрим аналоги этих элементов для МШО-случая.
680 Глава 22. Проектирование через методы оптимального управления
22.2. Обратная связь по оценке состояний
Рассмотрим следующую MIMO-модель пространства состояний,
имеющую т входов и р выходов.
x(t) = AQx{t) + BQu{t) (22.2.1)
y(t) = C0x(t) (22.2.2)
где x(t) e W1, u(t) e Rm и y(t) e Rp.
По аналогии с обратной связью по оценке состояния в SISO-случае
(как в гл. 7) мы ищем матрицу К Е Mmxn, такую, что Ас — В0К имеет
собственные значения в ЛПП и усиление наблюдателя J, такое, что
А0 — JС0 имеет собственные значения в ЛПП. Далее мы будем обычно
требовать, чтобы полюсы замкнутого контура располагались в
некоторой заданной области левой половины комплексной плоскости. Средства
типа MATLAB обеспечивают решения этих проблем. Проиллюстрируем
это простым примером.
Пример 22.1. Рассмотрим MIMO-объект, имеющий номинальную
модель
1 [2(5+ 1) -0.5s(s + l)]
s(s + l)(s + 2) [ s 2s
GoW =
(22.2.3)
Пусть этот объект имеет ступенчатые входные возмущения в
обоих каналах. Используя идеи обратной связи по восстановленному
состоянию, нужно спроектировать мультипеременный регулятор,
который стабилизирует объект и в то же самое время гарантирует
нулевую ошибку в установившемся состоянии для постоянных
эталонных сигналов и возмущений.
Решение
Сначала построим модели пространства состояний (Ар,Вр,Ср,0) и
(Ad,Bd,Cd,0) для объекта и для входных возмущений
соответственно. Следуя той же самой основной идее, как и в SISO-случае (в
разд. 18.7), мы оцениваем не только состояние объекта xp(t), но также
и вектор возмущений di(t). Затем сформируем закон управления
u(t) = -Kpx(t) - di(t) +f{t) (22.2.4)
Напомним, что возмущения наблюдаемы с выхода объекта, хотя
недостижимы со стороны входа объекта. Одна пара возможных мо-
22.2. Обратная связь по оценке состояний 681
делей пространства состояний имеет вид
де
АР =
xp(t) = Аржр(*) + Bpu(t)
±d{t) = AdXrf(t) + Bdu(t)
"-3 -2 0 0"
10 0 0
0 0-2 2
0 0 0 0_
; Bp —
"1
0
0
1
y(t)
= Cpxp(t)
di(t) = Cdxd{t)
2 "
0
-0.5
0
; Cp —
"0
0
(22.2.
5)
(22.2.6)
0 1 0"
1 0 0.
(22.2.7)
Ad = 0; Bd = 0; Cd = I2 (22.2.8)
где 1г — единичная матрица в пространстве R2x2.
Тогда расширенная модель пространства состояний (А,В,С,0)
может быть представлена в виде
А =
BpCd
Ad
О
в =
Ва
■и
с =
Ср О
(22.2.9)
что приводит к модели с шестью состояниями
Затем рассчитаем усиление наблюдателя 3, выбрав шесть полюсов
наблюдателя, расположенных в точках —5,—6,—7,—8,-9 и —10. Это
мооюно выполнить, используя команду place пакета MATLAB для пары
матриц (АТ, Ст).
Далее вычислим усиление обратной связи К. Заметим, что из
(22.2.4) это эквивалентно {при f(t) = 0) выражению
u(t) = -[Kp Cd]
xp(t)
K=[KP I2]
(22.2.10)
m. е. нуэюно лишь вычислить Кр. Это сделано с помощью команды
place пакета MATLAB для пары матриц (Ар,Вр). Полюсы в этом
случае выбраны равными —1.5±jl.32, —3 и —5. Напомним, что два других
полюса соответствуют неуправляемым состояниям возмущения. Они
находятся в начале координат.
Проект проверен при использовании следующих ступенчатых
эталонных сигналов и возмущений в обоих каналах:
n(t)=ji(t-2);
r2(t) = -М«-5); 41\*) = М(*-10); df\t) = /i(*-15)
(22.2.11)
682 Глава 22. Проектирование через методы оптимального управления
8 ю 12
Время [с]
Рис. 22.1. МШО-проект, основанный на обратной связи по оцененному
состоянию
20
№<
7(2),
где d\ }(t) и d\ }(t) —первый и второй компоненты вектора входного
возмущения соответственно.
Результат показан на рис. 22.1.
Проектирование было основано на произвольном выборе полюсов
наблюдателя и регулятора [полиномы E(s) и F(s) соответственно).
Таким образом, очевидный треугольный характер связи параметров не
был целью проекта. Однако выбор закона управления гарантирует, что
возмущения полностью компенсируются в установившемся
состоянии.
Файл mimo2.mdl пакета SIMULINK содержит схемное решение
MIMO-контура управления для этого примера. DDQ
Мы не будем в дальнейшем развивать идею назначения полюсов.
Вместо этого обратимся к альтернативной процедуре, которая имеет дело с
MIMO-случаем, использующей методы оптимизации. Особенно хорош
для проектирования матриц К и J метод квадратичной оптимизации,
потому что он дает простые решения в аналитическом виде. Детали
рассматриваются в следующих разделах.
22.3. Динамическое программирование
и оптимальное управление
Рассмотрим нелинейную систему общего вида со входом u(t) Е
описанную в форме пространства состояний
dx{t)
dt
= f{x(t)Mt)J)
(22.3.1)
22.3. Динамическое программирование и оптимальное управление 683
где x(t) Е Мп, вместе со следующей задачей оптимизации:
Задача (Основная задача оптимального управления).
Нужно найти оптимальный вход u°(t) для t Е [t0,tf], такой, что
u°(*) = argmini / V{x,u,t)dt + g{x(tf))\ (22.3.2)
где V(x, и, t) и g(x(tf)) —неотрицательные функции.
Одним из возможных путей решения этой задачи является
использование динамического программирования; этот подход основывается на
следующем результате.
Теорема 22.1 (Принцип оптимальности Беллмана). Если {u(t) =
u°(t), t Е [tp,tf]} —оптимальное решение предыдущей задачи, то u°(t)
является такэюе и оптимальным решением для (под)интервала [t0 +
At,tf], где t0<t0 + At< tf.
Доказательство (От противного)
Обозначим через x°(t) поведение состояния, возникающее в результате
использования u°(t) на всем интервале, т. е. для t E \t0,tf\- Тогда мы
можем описать оптимальную стоимость на интервале в виде
rt0+At rtf
/ V(x°,u°,t)dt+ / V{x°,u0,t)dt + g{x°{tf)) (22.3.3)
J t0 Jt0+At
Предположим теперь, что существует exodu(t), такой, что
u(£) = argmini / V{x,u,t)dt + g(x(tf))\ (22.3.4)
«(*) Uu+ы J
с соответствующей траекторией состояния x(t), такой, что x(t0 +
At) = x°(t0 + At). Предположим также, что
Г V(x,u,t)dt + g(x(tf))< f V(x°,u°,t)dt + g(x0(tf)) (22.3.5)
Jt0+At Jt0+At
Рассмотрим теперь стратегию использования u(t) = u°(t) на
интервале [t0,t0+At] и затем примем u(t) = u(t) на интервале [t0+At,tf].
Суммарная стоимость на всем интервале будет
rto+At ptf
I V(x°,u°,t)dt+ / V{x,u,t)dt + g{x{tf)) (22.3.6)
Jto Jto+At
Сравнивая (22.3.3) и (22.3.6), учитывая (22.3.5), мы заключаем, что
стратегия использования u(t) = u°(t) для t E [t0,t0 + At) и u(t) для
684 Глава 22. Проектирование через методы оптимального управления
t E [t0+At,tf] даст меньшую стоимость, чем использование u(t) = u°(t)
на всем интервале. Однако это противоречит оптимальности u°(t) на
всем интервале. DDD
Далее мы будем использовать теорему 22.1, чтобы получить
необходимые условия для оптимального и. Идея состоит в том, чтобы
рассмотреть общий интервал времени [*,*/]> гДе * £ \toJf] и затем
использовать принцип оптимальности с бесконечно малым интервалом
времени [t,t + At].
Обозначим через J°(x(t),t) оптимальную (минимальную) стоимость
в интервале [£,£/] с начальным состоянием x(t):
J°{x(t),t) = min ( [ ' V(x,u,T)dT + g(x{tf))\ (22.3.7)
Ф) Ut J
r€[t9t,]
Тогда, применяя теорему 22.1, мы получим
J°{x(t),t)= min { / V(x,u,T)dr + J0(x(t + At),t + At)}
Ф) Ut J
Te[t,t+At]
(22.3.8)
Далее рассмотрим небольшие отклонения от точки (x(t),t), считая At
малой величиной. Чтобы получить это, разложим J°(x(t + At),t + At) в
ряд Тейлора. Таким образом, мы получим
J°(x{t),t) = min\v(x{t),u{t),t)At+
u(t) I
^(1((),()+^Ш)Д(+
dJ°{x(t),t)]
дх
(x(t + At)-x(t))+0{x,t)}
(22.3.9)
где 0(x,i) включает члены высоких порядков в разложении Тейлора.
Если теперь положим At -*• dt, уравнение (22.3.9) даст
-дГ{Х£],*] =rnin{W(x(t),u(t),t)} (22.3.10)
Оь u(t)
где
'dJ°{x{t),t)lT
дх
Заметим, что мы использовали тот факт, что
«(t+A«)-«(t)_jga (22.3.12)
д<->о At dt
W(x{t),u{t),t) = V(x(t),u{t),t) +
f(x(t),u(t),t) (22.3.11)
и выражение (22.3.1).
22.4. Линейный квадратичный регулятор (ЛКР) 685
Оптимальное значение u(t), удовлетворяющее правой части
уравнения (22.3.10), может быть выражено символически в виде
uo{t) =ц (д3°^]^\х{г)Л - (22.3.13)
которое при подстановке в (22.3.10) приводит к следующим уравнениям
для оптимальной стоимости:
dJ°{x{t),t) v,,,w.rt,
— = V{x{t),U,t) +
dj°(x(t),t)
лТ
f{x(t),U,t) (22.3.14)
дх
Решение этого уравнения должно удовлетворять следующим
граничным условиям:
J°(x{tf),tf)=g{x{tf)) (22.3.15)
На этой стадии мы не можем идти далее без уточнения
первоначальной проблемы. Заметим также, что мы неявно предположили,
что функция J°(x(t), t) хорошо обусловлена, а это означает, что она
непрерывна относительно своих аргументов и может быть разложена в
ряд Тейлора. Было доказано (см. ссылки в конце главы) что эти условия
достаточны, чтобы (22.3.13) давало оптимальное решение.
22.4. Линейный квадратичный регулятор (ЛКР)
Далее мы применим вышеупомянутую общую теорию к следующей
задаче.
Задача (ЛКР-задача). Рассмотрим линейную стационарную
систему, имеющую модель пространства состояний следующего вида:
^Р- = Ax(t) + Bu(t) x(t0) = х0 (22.4.1)
at
y(t) = Cx{t)+T>u(t) (22.4.2)
где x E W1 является вектором состояния, и Е Шт — входом, у Е Шр —
выходом, х0 Е W1 — вектором состояния в момент t = t0, а А,В, С и
D — матрицы соответствующих размерностей.
Предположим, что мы хотим перевести начальное состояние х0
в минимально возможное состояние как можно скорее в интервале
[to^tf], но без затраты слишком больших управляющих усилий
(измеряемых амплитудой и) для достиэюения этой цели. Тогда задача
оптимального регулятора определяется как задача нахождения опти-
686 Глава 22. Проектирование через методы оптимального управления
мального управления u(t) на интервале [t0,tf], такого, чтобы была
минимизирована следующая функция стоимости:
Mx{to),t0) = / [x(t)TVx(t) + и{г)ТФи{г)] dt + x(tf)TVfx(tf)
Jt0
(22.4.3)
где Ф € Шпхп и Ф/ € Rnxn — симметричные неотрицательно-
определенные матрицы, а Ф Е Штхт — симметричная положительно-
определенная матрица. DDD
Для решения этой задачи может использоваться теория, полученная
в разд. 22.3. Сначала усталовим следующие связи между общей задачей
оптимальности и ЛКР-задачей:
f(x(t),u(t),t) = Ax(t) +Bu{t)
V(x, и, t) = x{t)TVx{t) + и(г)ТФи{г)
g(x(tf)) = x(tf)T*fx(tf)
(22.4.4)
(22.4.5)
(22.4.6)
Тогда
W(a;(t),ti(t),t)=V(a;(t),ti(t),t) +
dJ°{x{t),t)
dx
f(x(t)Mt),t)
= x(t)T&x{t) + и{г)тФи(г) +
dJ°(x{t),t)
dx
(Ax{t) + Bu(t))
(22.4.7)
Таким образом, чтобы получить оптимальное значение и,
определяемое выражением (22.3.13), мы должны минимизировать W(x(t),u(t),t).
Это требует, чтобы мы вычислили градиент W(x(t),u(t),t) относительно
и и затем приравняли его нулю.
ди ох
(22.4.8)
Теперь, приравняв ^ = 0, мы видим, что оптимальный вход u°(t)
определяется выражением
w 2 дх
(22.4.9)
Мы видим также, что определитель Гессе для W относительно и
равен матрице Ф, которая, в соответствии с первоначальным
предположением, положительно определена. Это подтверждает, что (22.4.9) дает
минимум для W.
22.4. Линейный квадратичный регулятор (ЛКР) 687
Далее заметим, что J°(x°{tf),tf) = [ж°(£/)]тФfx°(tf). Мы видим, что
это квадратичная функция состояния в момент tf. Можно по индукции
показать, что это истинно для любого момента t. Далее предположим,
что оптимальная стоимость имеет вид
J°{x{t),t) = xT(t)P{t)x(t) с P(t) = [P(t)f (22.4.10)
Тогда мы имеем, что
dJ°(x(t),t)
дх
= 2Р(*)ж(*) (22.4.11)
aj-ш,,)^ {1)ЩХ(1) (22412)
ot at
Если мы теперь используем в (22.4.9) выражение (22.4.12), то
оптимальное управление может
гдеКгД*)-
нием
u°{t) =
быть выражено
-Ku{t)x(t)
- изменяемое во времени усиление,
Ku(t) = *-lB,TY{t)
в виде
(22.4
.13)
определяемое выраже-
(22.4.14)
Мы также имеем из (22.4.7), что
W(x(t)y{t),t)=xT{t)(V-P{t^-lBTP{t) + 2P{t)A)x{tf (22.4.15)
Чтобы вычислить Kw(£), нам сначала нужно получить Р(£), что
можно сделать, используя (22.4.12) и (22.4.15) в (22.3.14); это дает
-*Т№^^я(*) = хт(t)(Ф - Р^Вф-^Р^) + 2Р(*)A)x{t) (22.4.16)
Заметим также, что 2xT(t)P{t)Ax{t) = xT{t)(P(t)A + ATP{t))x{t).
Чтобы выражение (22.4.16) выполнялось для всех ж(£), нам .требуется
Уравнение (22.4.17) известно как непрерывное динамическое
уравнение Риккати. Это уравнение следует решить относительно времени,
чтобы удовлетворить граничным условиям (22.4.6), (22.4.10):
Р(*/) = ф/ (22.4.18)
Вышеупомянутая теория также хороша и для нестационарных
систем, т. е. когда А,В, Ф, Ф являются функциями времени. Однако в
стационарном случае можно сказать намного больше относительно свойств
решения. Это является предметом рассмотрения в следующем разделе.
688 Глава 22. Проектирование через методы оптимального управления
22.5. Свойства линейного квадратичного
оптимального регулятора
Предположим, что А, В, Ф, Ф являются стационарными. Будем в первую
очередь интересоваться тем, что произойдет, когда t —> оо. Здесь мы
суммируем основные результаты. Однако отсылаем читателя также и
к приложению D, где дается более глубокое рассмотрение результатов.
Выделим два варианта результатов. В разд. 22.5.1 мы дадим краткий
обзор основных свойств, используемых в простых задачах. В разд. 22.5.2
будут выделены более продвинутые результаты, такие, которые могли
бы понадобиться в более сложных ситуациях.
22.5.1. Краткий обзор свойств
Во многих простых задачах используются два ключевых
предположения:
1) Система (А, В) стабилизируема по отношению к u(t). (Читатель
может почувствовать, что это предположение разумно,— в конце
концов, если система не стабилизируема, то ясно, что оптимальное
управление не сможет исправить ситуацию.)
2) Все состояния системы соответственно представлены в функции
стоимости (22.4.3). Технически это означает, что система (Фз,А)
является определяемой. 7
При этих условиях решение непрерывного динамического уравнения
Риккати Р(£) сходится к установившемуся пределу Р^ при tf -> оо.
Этот предел имеет два основных свойства:
• P^q — единственное неотрицательное решение матричного
алгебраического уравнения Риккати (22.5.1); в разд. 22.5.2 оно будет получено,
если положить —JP- = 0 в выражении (22.4.17).
• Когда эта установившаяся величина используется в законе
управления с обратной связью, как в выражении (22.4.14), то полученная
замкнутая система будет устойчива.
Ясно, что последнее свойство является особо важным.
22.5.2. Более детальный обзор свойств
Здесь мы будем часто ссылаться на приложение D, так что советуем
читателю рассматривать приложение на своем компьютере в процессе
чтения этого раздела.
22.5. Свойства линейного квадратичного оптимального регулятора 689
В некоторых приложениях полезно знать немного больше
относительно свойств решения задачи оптимального управления, чем это дается в
разд. 22.5.1. Такие результаты отражены здесь.
Лемма 22.1. Если Р(£) сходится, когда tf -> oo, тогда предельное
значение Pqo удовлетворяет следующему непрерывному алгебраическому
уравнению Риккати:
О = Ф - РооВФ-^Роо + Poo A + АтРоо (22.5.1)
Кроме того, если (А,В) стабилизируема и (А,фз) не имеет
никаких ненаблюдаемых составляющих на мнимой оси, то
существует единственное положительное полуопределенное решение Р^ для
непрерывного алгебраического уравнения Риккати, обладающее тем
свойством, что матрица системы для замкнутого контура А —
ВФ^В-^Р^ имеет все свои собственные значения в открытой ЛПП.
Назовем это решение стабилизирующим решением непрерывного
алгебраического уравнения Риккати. Другие свойства стабилизирующего
решения следующие:
а) Если (А,Фа) определяема, стабилизирующее решение —
единственное неотрицательное решение непрерывного алгебраического
уравнения Риккати.
б) Если (А,Фг) имеет ненаблюдаемые компоненты в открытой ЛПП,
то стабилизирующее решение не является
положительно-определенным.
в) Если (А, Ф 2) имеет ненаблюдаемый полюс вне открытой ЛПП, то в
дополнение к стабилизирующему решению существует, по крайней
мере, одно другое неотрицательное решение непрерывного
алгебраического уравнения Риккати. Однако в этом случае стабилизирующее
решение удовлетворяет условию P?q—Poo ^ 0; &де Роо — любое другое
решение уравнения Риккати.
Доказательство
См. приложение D. □□□
Сходимость решения непрерывного динамического уравнения
Риккати к стабилизирующему решению непрерывного алгебраического
уравнения Риккати рассмотрена в следующей лемме.
690 Глава 22. Проектирование через методы оптимального управления
Лемма 22.2. Если (А,В) стабилизируема, (А,Ф5) не имеет никаких
ненаблюдаемых полюсов на мнимой оси, а такэюе если Р(£/) = Ф/ >
Р^о, то
•lim P(0 = PSoo (22.5.2)
If—>00
(При условии, что (А,Фа) определяема, справедливо, что Р(£/) =
Ф/>0 .)
Доказательство
См. приложение D. □□□
Проиллюстрируем вышеупомянутые свойства простым примером.
Пример 22.2. Рассмотрим скалярную систему
x(t)=ax(t) + u(t) (22.5.3)
и функцию стоимости
ft/
J = ipfx(tf)2 + / (ipx{t)2 + u{t)2) dt (22.5.4)
Jo
22.2.1. Обсудить эту задачу оптимального управления в свете
леммы 22.1 и леммы 22.2.
22.2.2. Обсудить сходимость решений непрерывного алгебраического
уравнения Риккати Р^.
Решение
22.2.1. Связанное с этим непрерывное динамическое уравнение
Риккати имеет вид
P(t) = -2aP(t) + P(t)2 - <ф; P(tf) = i/;f (22.5.5)
а непрерывное алгебраическое уравнение Риккати —
(РЬ)2-2аР^-ф = 0 (22.5.6)
Случай 1. ф ф 0
Здесь (А,фз) полностью наблюдаема (и поэтому определяема).
Из леммы 22.1, часть а), имеется только одно неотрицательное
решение непрерывного алгебраического уравнения Риккати. Это
решение совпадает со стабилизирующим решением. Выполнив
вычисления, мы находим, что единственное неотрицательное решение
уравнения равно
p4=W4^+5 (22.5.7)
22.5. Свойства линейного квадратичного оптимального регулятора 691
которое приводит к следующему усилению обратной связи:
К*00 = а+у/а2+ф
Соответствующий полюс замкнутого контура равен
рс1 = -у/а2+ф (22.5.9)
Ясно, что он находится в ЛПП, подтверждая, что решение
является действительно стабилизирующим решением.
Случай 2. ф = О
Здесь, мы рассмотрим три значения параметра а; одно —
положительное, второе — отрицательное и третье — равное нулю.
1) а > 0. В этом случае (А, фз) имеет наблюдаемый полюс вне
области устойчивости. Тогда из части в) леммы 22.1 в дополнение к
стабилизирующему решению существует, по крайней мере, одно
другое неотрицательное решение непрерывного алгебраического
уравнения Риккати. Произведя вычисления, мы находим, что
имеются два неотрицательных решения уравнения:
стабилизирующее решение Р^ = 2а и другое решение Р^.
Мы видим, что Р^ — Р^ >0 и что Р^ дает усиление К^ =
2а, что приводит к полюсу замкнутого контура прирс\ = —а. Он
лежит в ЛПП, подтверждая, что Р^ действительно является
стабилизирующим решением.
2) а < 0. Здесь (А, фз) снова определяема. Таким образом, из
леммы 22.1, часть а), имеется только одно неотрицательное
решение непрерывного алгебраического уравнения Риккати. Это
решение совпадает со стабилизирующим решением.
Произведя вычисления, мы находим, что Р^ = 0 и
соответствующее усиление обратной связи — К^ = 0, что приводит к
полюсам замкнутого контура при рс\ = а, которые являются
устойчивыми, потому что по предположению а < 0.
3) а = 0. Здесь (А, фз) имеет ненаблюдаемый полюс на границе
устойчивости. Эта ситуация не охватывается леммой 22.1.
Однако можно проверить, что непрерывное алгебраическое
уравнение Риккати имеет только одно решение, а именно Pqo, которое
не является стабилизирующим.
22.2.2. Чтобы изучить сходимость решений, мы снова рассмотрим
два случая.
Случай 1. ф ф 0
Здесь (А,фз) полностью наблюдаема. Тогда P(t) сходится к
значению Р^, задаваемому выражением (22.5.7), для любого Р(£/) > 0.
(22.5.8)
692 Глава 22. Проектирование через методы оптимального управления
Случай 2. ф = О
1) а > 0. Здесь (А, фз) не имеет ненаблюдаемых полюсов па мнимой
оси ju), но они не определяемы. Таким образом, Р(£) сходится к
Р^ при условии, что мы выберем Р(£/) > Р^.
2) а < 0. Здесь (А,Фз) снова определяема и Р(£) сходится кР^ для
любого Р(£/) > 0.
3) а = 0. Здесъ (А,фз) гшеет ненаблюдаемый полюс на мнимой оси
ju). Таким образом, лемма 22.2 не применима. Фактически, Р(£)
сходится к 0 для любого Р(^/) > 0. Однако в этом случае нуль —
не стабилизирующее решение. □□□
Теория линейного квадратичного регулятора — мощный инструмент
в проектировании систем управления. Мы проиллюстрируем его
универсальность в следующем разделе, используя теорию ЛКР для решения
так называемой проблемы подбора модели (ППМ).
22.6. Подбор модели, основанный на линейных
квадратичных оптимальных регуляторах
22.6.1. Формулировка проблемы
Многие проблемы в синтезе управления могут быть сведены до задачи
следующего типа:
Даны две устойчивые передаточные функции M(s) и N(s); нужно
найти устойчивую передаточную функцию r(s), такую, что N(s)r(s)
близка к M(s) в смысле квадратичной нормы.
Мы называем это проблемой подбора модели. Когда M(s) и N(s) —
матричные передаточные функции, нам нужно определить подходящую
норму для измерения близости. В качестве иллюстрации мы
рассмотрим матрицу А = [aij] G C?xm, для которой определим норму Фробениуса
следующим образом
IAIIf = VtraceAHA =
р т
л,£2>*12 (22-6Л)
\ i=l j=l
При этой норме подходящим критерием синтеза мог бы быть
r° = argminJr (22.6.2)
Г€5
22.6. Подбор модели, основанный на оптимальных регуляторах 693
где
Jr=2W_ llM(iw)-NOw)r(;w)||J.dw (22.6.3)
и 5 —класс устойчивых передаточных функций.
Эту проблему можно преобразовать в векторную форму, представляя
М и Г в виде векторов. Например, пусть Г является нижней треугольной
матрицей и М, N и Г являются матрицами размерностей 3x2, Зх2и2х2
соответственно; тогда мы можем записать
1 Г°°
j0 = 2W- HVk'w)-W(jw)e(jw)||*dw (22.6.4)
конкретном случае
V(*) =
"Mn(s)"
Mi2(s)
M2i(s)
М2г(в)
M31(s)
.M32(s).
; W(s) =
'JVn(s) Nn(s) 0
0 0 Nl2(s)
N2i(s) N22(s) 0
0 0 N22(s)
JVsi(e) N32(s) 0
0 0 N32(s)
где || ||2 обозначает обычную евклидову векторную норму и где в этом
Гиф"
; ©(5)=|г21(5)
(22.6.5)
22.6.2. Преобразование к временной области
Далее мы выберем модель пространства состояний для V(s) и W(s)
в виде
V(s) = Ci[5l - AiJ^Bi (22.6.6)
W(s) = C2[sl - A2]_1B2 (22.6.7)
где в случае векторов вида (22.6.5) Ai, Bi, Ci, A2, B2 и С2 —матрицы
размерностей п\ xni, щ xl, 6xni, П2ХП2, П2ХЗ и 6xri2 соответственно.
Перед продолжением решения проблемы подбора модели сделаем
небольшое обобщение. В частности, иногда желательно ограничить
размерность 0. Мы сделаем это, обобщая (22.6.4) с помощью добавления
дополнительного члена, который взвешивает 0. Такой подход дает
где Г и R — неотрицательные симметричные матрицы.
694 Глава 22. Проектирование через методы оптимального управления
Тогда мы можем применить теорему Парсеваля (в разд. 4.10.2),
чтобы преобразовать J© во временную область. Передаточные функции
в (22.6.6) и (22.6.7) устойчивы и строго собственные, так что это дает
/*оо
J@ = JQ {\\vi(t)-V2(t)\\l + \Ht)&}dt (22.6.9)
где
±i(t)
x2(t)
'vi(tj
V2{t)
Ai 0
0 A2
\Xl(t)
\x2(t)
+
0
B2
u(t);
xi (0)
x2(0)
Ci 0 \xi(t)
0 C2 \x2(t)
Используя (22.6.10) и (22.6.11) в (22.6.9), мы получаем
лоо
J& = / {x(t)T4fx{t) +u{t)TKu(t)} dt
Jo
где x(t) = [Xl{t)T x2(tf] и
r[Ci -Ca]
Ф =
C^
-C2J
Bi
oj
(22.6.10)
(22.6.11)
(22.6.12)
(22.6.13)
Мы можем считать (22.6.10)-(22.6.12) стандартной задачей
линейного квадратичного регулятора, как в разд. 22.4, где
А =
Ах О
О А2
В =
О
В2
(22.6.14)
Замечание 22.1. Заметим, что для получения преобразования задачи
подбора модели в задачу линейного квадратичного регулятора основным
шагом должна быть связь £-1 [0(e)] с u(t).
22.6.3. Решение
Нас интересует выражение u(t) как функция от x(t), т. е.
\xi(tj]
u(t) = -Kx(t) = -[Ki K2]
x2(t)
(22.6.15)
такое, что Jq в (22.6.12) минимизируется. Оптимальная величина К —
как и в (22.4.14). Мы также предположим, что значения А, В, Ф и т. д. —
такие, что К соответствует стабилизирующему решению.
22.7. Дискретные оптимальные регуляторы 695
Окончательно вход u(t) удовлетворяет уравнениям
x{t) = Ax(t) + Bu{t) х{0)=[Вгт 0]Т (22.6.16)
u(t) = -Kx(t) (22.6.17)
В форме передаточной функции это дает выражение
U{s) = ®{s) = -К (si - А + ВК)
-1
Bi
О
(22.6.18)
которое после задания конкретной структуры А, В и К дает
0(5) = [-1 + К2 (Л - А2 + В2К2Г1 B2] Ki (si - Ai)_1 Bi (22.6.19)
22.7. Дискретные оптимальные регуляторы
Теория оптимальных квадратичных регуляторов для непрерывных
систем может быть непосредственно расширена таким образом, что будет
пригодна для дискретных систем. Мы кратко суммируем основные
результаты без приведения доказательств — они аналогичны
непрерывному случаю, описанному выше.
Рассмотрим дискретную систему, имеющую следующее описание в
пространстве состояний:
х[к + 1] = Aqx[k] + Bqu[k] (22.7.1)
у[к] = Cqx[k] (22.7.2)
где х Е Rn,u e Шт и у G W.
Для упрощения обозначений мы в оставшейся части раздела опустим
нижний индекс q у матриц А9,В9 и Cq. Рассмотрим теперь функцию
стоимости
к,
Ju{x[k0],k0) = ]Г [х[к]ТФх[к]+и[к]ТФи[к]) +x[kf]TVfx[kf] (22.7.3)
к0
Оптимальный квадратичный регулятор имеет вид
и°[к) = -Ки[к]х[к] (22.7.4)
где Ки [к] — изменяющееся во времени усиление, равное
Ки[к] = (Ф + BTP[fc]B)"1BTP[fc]A (22.7.5)
696 Глава 22. Проектирование через методы оптимального управления
где P[fc] удовлетворяет следующему дискретному динамическому
уравнению Риккати:
P[fc] = AT (р[А;+1]-Р[А;+1]В(Ф+ВтР[А;+1]В)~1ВтР[А;+1]) А+Ф
(22.7.6)
Заметим, что это уравнение также должно быть решено при
граничных условиях
p[kf] = Ф/ (22.7.7)
Вариант закона управления (22.7.4) для установившегося состояния
(kf -» oo) имеет вид
и°[к) = -Кооф] где Кос = (Ф + ВТР00В)""1ВТР00А (22.7.8)
где Kqo и Pqo удовлетворяют соответствующему дискретному
алгебраическому уравнению Риккати:
Ат(роо-РооВ(Ф + ВтРооВ)"1ВтРоо)а + Ф-Роо = 0 (22.7.9)
обладающему свойством, что A —BKqq имеет все свои собственные
значения внутри границы устойчивости, при условии, что (А, В)
стабилизируема, а (А,фа) не имеет ненаблюдаемых составляющих в единичном
круге.
22.8. Связь с технологией назначения полюсов
Заметим, что при разумных условиях установившееся состояние ЛКР
гарантирует устойчивость замкнутого контура. Однако связь с точной
динамикой замкнутого контура косвенная; она зависит от выбора Ф и Ф.
Таким образом, на практике обычно требуется выполнить некоторую
эмпирическую процедуру, чтобы получить удовлетворительную динамику\
замкнутого контура.
При некоторых обстоятельствах можно определить область, в
которой должны находиться полюсы замкнутого контура, чтобы обеспечить
нужное решение. Простой пример этого —когда мы требуем, чтобы
полюсы замкнутого контура имели вещественную часть левее s = —а
для aGK+. Это можно получить перемещением мнимой оси с помощью
преобразования
v = s + a (22.8.1)
Тогда Щв} = -а => Щу} = 0.
22.8. Связь с технологией назначения полюсов 697
Чтобы проиллюстрировать применение этого преобразования,
возьмем представление в форме преобразований Лапласа (22.2.1)
аХ(а) = AQX{s) + BQU(s) (22.8.2)
в то время как в v-форме это же выражение
vX(v) = (А0 + al)X(v) + BQU(v) = AQ'X{v) + BQU(v) (22.8.3)
Следовательно, если полюсы замкнутого контура находятся в ЛПП
и-плоскости, они будут левее а в 5-плоскости. Заметим однако, что эта
процедура сама по себе не вызывает никакого изменения в
демпфировании полюсов. Это — хороший пример операции, которая гарантирует
конкретное конструируемое свойство (вещественная часть полюсов
замкнутого контура находится левее от заданной области), но не говорит
ничего относительно связанного с этим свойства демпфирования.
Несколько более интересное требование — чтобы полюсы замкнутого
контура лежали внутри круга с радиусом р и. центром в (—а,0) при
a > р > О, т. е. в круге, полностью находящемся в пределах ЛПП.
Это может быть получено с помощью двухступенчатой процедуры:
1) Сначала мы преобразуем переменную Лапласа s в новую переменную
£, определенную следующим образом:
С = — (22.8.4)
Р
Это преобразует исходный круг в 5-плоскости в единичный круг
в (^-плоскости. Соответствующая преобразованная модель
пространства состояний имеет вид
С-У (С) = \ И + Ао)Х(С) + -вои(0
р р
(22.8.5)
2) Далее обращаемся к (22.8.5) как к описанию пространства
состояний дискретной системы. Таким образом, решение соответствующей
дискретной оптимальной задачи управления дает усиление обратной
связи К, такое, что ^ (al + A0 — В0К) содержит собственные
значения внутри единичного круга. Это в свою очередь подразумевает, что
если тот же самый закон управления применяется к непрерывному
времени, полюсы замкнутого контура будут располагаться в
исходном круге в 5-плоскости.
Пример 22.3. Рассмотрим мультипеременную систему
размерностью 2x2, имеющую модель пространства состояний
А0 =
1
2
3
1 1
-1 0
-2 2
; В0 —
0
1
2
1
0
-1
с0 =
о
1
Do = 0
(22.8.6)
698 Глава 22. Проектирование через методы оптимального управления
Нужно найти матрицу К усилений обратной связи по переменным
состояния, такую, что все полюсы замкнутого контура расположены
в круге в центром в (—а;0) и радиусом р, где а = 6 и р = 2.
Решение
Используем подход, предложенный выше: преобразуем комплексную
переменную s согласно (22.8.4) и затем решим дискретную задачу
оптимального регулятора.
Сначала нужно представить пространство состояний в
преобразованном пространстве. Это выполняется с помощью уравнения (22.8.5),
которое дает
Ac = i(al + A0) и ВС = ^В0 (22.8.7)
Р Р
Для получения оптимального усиления К^ используется команда
dlqr пакета MATLAB с весовыми матрицами Ф = 1г и Ф = 1з, что
дает
Г7.00 -4.58 7.73 1
3.18 7.02 -4.10
К,=
(22.8.8)
Когда это оптимальное усиление используется в исходной
непрерывной системе, полюсы замкнутого контура, вычисленные из
уравнения det(sl — А0 + В0К^) = 0, расположены в точках —5.13, —5.45 и
—5.59. Все эти полюсы лежат в предписанной области, как и
ожидалось. □□□
Заметим, что вышеупомянутые идеи могут быть расширены на
другие случаи, в которых желаемая область может быть преобразована
в область устойчивости для непрерывного или дискретного случая
посредством подходящего рационального преобразования. Предлагаем
читателю исследовать другие возможности.
22.9. Проектирование наблюдателя
Далее мы рассмотрим задачу оценки состояния. Здесь мы ищем матрицу
J g Rnxp, такую, что A —JC имеет собственные значения внутри
области устойчивости. Снова удобно использовать квадратичную
оптимизацию.
Как первый шаг, заметим, что наблюдатель можно разработать для
пары (С, А), просто рассматривая эквивалентную (называемую дуаль-
22.10. Линейные оптимальные фильтры 699
ной) задачу управления для пары (А,В). Чтобы проиллюстрировать,
как это сделать, рассмотрим дуальную систему с
А' = АТ В' = СТ (22.9.1)
Тогда, используя любой метод для проектирования обратной связи по
состоянию, мы можем найти матрицу К' Е Wxn, такую, что А' —В'К'
имеет собственные значения внутри области устойчивости.
Следовательно, если выбрать J = (К')т, то мы гарантируем, что A —JC имеет
собственные значения внутри области устойчивости. Таким образом, мы
завершили проектирование наблюдателя.
Процедура приводит к оценке устойчивого состояния в виде
jk(t) = Aox(t) + B0u(t) + 3{y(t) - Cx(t)) (22.9.2)
Конечно, при использовании описанных выше приемов для обратной
связи по переменным состояния можно также применять и приемы
преобразования, чтобы гарантировать, что полюсы наблюдателя
размещаются в любой области, которая может быть связана или с непрерывным,
или с дискретным случаем рационального преобразования.
Мы покажем, как вышеупомянутая процедура может быть
формализована, используя теорию оптимальной фильтрации. Полученный
оптимальный фильтр называется фильтром Калмана, в честь плодотворного
вклада Калмана в эту проблему.
22.10. Линейные оптимальные фильтры
Мы рассмотрим два альтернативных подхода к оптимальным
фильтрам—один, основанный на вероятностном моделировании шума
(разд. 22.10.1) и другой, основанный на детерминированных
предположениях (разд. 22.10.2). Читатели могут выбрать или любой из этих
подходов, или оба в зависимости от точки зрения, которую они желают
использовать.
22.10.1. Подход, основанный на вероятностной модели шума
В этом разделе мы покажем, как проектирование оптимального фильтра
может быть основано на задаче квадратичной оптимизации. Она
показывает, что фильтр является оптимальным при некоторых
предположениях относительно механизма формирования сигнала. На практике
это свойство, вероятно, менее важно, чем наличие у сформированного
фильтра средств настройки, которые позволяют гибко применять его
для большого диапазона практических задач. Однако читатель должен
700 Глава 22. Проектирование через методы оптимального управления
понять, что это и есть основная идея фильтра Калмана; это,
возможно, один из наиболее ценных инструментов проектировщика систем
управления.
Рассмотрим линейную вероятностную систему вида
dx(t) = Ax(t)dt + dw(t) (22.10.1)
dy(t) = Cx(t)dt + dv(t) (22.10.2)
где dv(t) и dw(t) известны как ортогональные приращения процессов.
Поскольку формальное обращение с вероятностными
дифференциальными уравнениями вне возможностей этой книги, мы ограничимся здесь
формальным обозначением через w(t) и v(t) процессов белого шума с
импульсной корреляцией:
£{w(t)w((f} = QS{t - С) (22.10.3)
£{v(t)v(0T} = R5(t - С) (22.10.4)
где £ {о} обозначает математическое ожидание, а 5(о) —дельта-функция
Дирака. Мы можем тогда неформально записать модель (22.10.1)-
(22.10.2) в виде
Ш=Кх{г)+Ш (22.Ю.5)
•(,)-4!|fl-0«*) + «U . (22.10.6)
Предположим также, что w(t) и v(t) взаимно некоррелированы. Для
читателей, знакомых с понятием спектральной плотности для
случайных процессов, мы просто требуем, чтобы спектральные плотности для
w(t) и v(t) были Q и R соответственно.
Наша цель будет состоять в том, чтобы найти линейный фильтр,
управляющий параметром ?/(£), который формирует оценку состояния
x(t). Оптимизируем фильтр, минимизируя квадратичную функцию
Jt=£{x(t)x{tf} (22.10.7)
где
x(t)=x(t)-x(t) (22.10.8)
является ошибкой оценки.
Выполним решение этой задачи в четыре шага.
а также
€{wz(t)wz(<:)T} = Qz(t)S(t-C) (22.10.11)
22.10. Линейные оптимальные фильтры 701
Шаг1
Рассмотрим нестационарный вариант модели (22.10.5), имеющей вид
^й = Ax(t)x(t) + wz{t) (22.10.9)
at
y'z{t) = ^- = Cz(t)xz(t) + vz(t) (22.10.10)
где wz(t) и t)z(£) имеют нулевое среднее значение и они некоррелированы,
£{vz(t)vz(()T} = Rz(t)5(t-() (22.10.12)
Для этой модели мы хотим вычислить Р(£) = £{xz(t)x2(t)T}.
Предположим, что £{xz(0)xz(0)T} = P0, где параметр wz(t) некоррелирован
с начальным состоянием xz(0) = xoz.
Решение
Решение для (22.10.9) имеет вид
xz(t) = <f>z{t,0)xoz + [ ф2(^т)шг{т)(1т (22.10.13)
Jo
где <t>z(t2,t\) G Wixn —переходная матрица состояния для системы
(22.10.9).
Тогда, взяв квадрат (22.10.13) и вычислив математические ожидания,
получим
Щг) = £{х^)хг(г)т} = ф^0)Роф2(^0)т+ [ ФЛ^т)ях(г)ф2(^т)т(1г
Jo
(22.10.14)
где мы использовали (22.10.11).
Заметим, что, применяя правило Лейбница (3.7.4) к (22.10.14),
получим __
^- = А2Р(*) + P(t) AZT + Qz(t) (22.10.15)
at i
где мы также использовали тот факт, что —0(£,т) = Az(£)<£(£,r).
at
Шаг 2
Вернемся опять к первоначальной задаче: получить оценку x{t) для
состояния x(t) в (22.10.5). Допустим, что фильтр имеет следующую
линейную форму:
^ = Ax(t) + J(t)[y'(t) - Cx(t)} (22.10.16)
at
702 Глава 22. Проектирование через методы оптимального управления
где J (t) — изменяющееся во времени усиление, которое следует
определить. Заметим, что (22.10.16) имеет ту же самую структуру, что
и стандартный линейный наблюдатель, за исключением того, что она
содержит изменяющееся во времени усиление наблюдателя.
ШагЗ
Предположим, что мы также имеем оценку начального состояния х0
статистической характеристики
£{(х(0) - хо)(х(0) - х0)т} = Р0, (22.10.17)
и временно предположим, что имеем усиление J (г) для 0 < т < t.
Получим выражение для
P(t)=£{(x(t)-x(t))(x(t)-x(t)f}
= S{x(t)x(tf}
Решение
Вычитая (22.10.16) из (22.10.5), получим
dx(t)
(22.10.18)
dt
= (А - 3(t)C)x(t) + 3(t)v(t) - w(t) (22.10.19)
Мы видим, что (22.10.19) — нестационарная система и поэтому можем
сразу же применить решение шага 1 после выполнения следующих
подстановок:
xg(t)-* x(t); A.(t)-+(A-J(i)C); wx(t)-*3(t)v(t)-w{t)
(22.10.20)
чтобы получить
Щр- = (А - J(t)C)P(t) + P(t)(A - 3{t)C)T + J(i)RJ(i)T + Q
at
(22.10.21)
при условии, что Р(0) = P0. Заметим, что мы использовали тот факт,
что Qz(t) = J(t)RJ(t)T + Q.
Шаг 4
Затем мы выбираем J(£) для каждого момента времени так, чтобы
параметр Р был как можно меньше.
22.10. Линейные оптимальные фильтры 703
Решение
Завершим формирование квадрата в правой части (22.10.21), определив
J(t) = J*(t) + J(t), где J*(i) = P(t)CTK"\ Подставляя в (22.10.21),
получим
=(А - J(t)C - 3(t)C)P(t) + P(t)(A - J(i)C - J(t)C)J
(22.10.22)
+ (J*(*) + J(*))R(J* (t) + 3(t)f + Q
=(A - J(t)C)P(i) + P(i)(A - J(t)C)T
+ 3*(t)R3*(t) + Q + 3(t)R(3(t)f
Мы ясно видим, что P(t) минимизируется в каждый момент
времени, если выбрать 3(t) = 0. Таким образом, значение 3*(t) является
усилением оптимального фильтра, потому что оно минимизирует Р(£)
(и, следовательно, Р(£)) для всех t.
Окончательно, оптимальный фильтр удовлетворяет условию
^ф- = Ax(t)+3*(t)[y'(t) - Crc(t)] (22.10.23)
at
где оптимальное усиление 3*(t) удовлетворяет условию
3*(t) = P(i)C7 R-1 (22.10.24)
и P(t) является решением уравнения
^ = (A-3*(t)C)P(t) + P(t)(A-3*(t)Cf
+ 3*(t)R(3*(t))T + Q (22.10.25)
при условии Р(0) = Р0.
Уравнение (22.10.25) может быть также упрощено следующим
образом:
^- = Q - P(t)CTBTlCP(t) +P(t)AT + AP(t) (22.10.26)
at
Читатель узнает, что решение задачи оптимальной линейной
фильтрации, представленное выше, имеет очень тесную связь с задачей
линейного квадратичного регулятора, представленной в разд. 22.4.
704 Глава 22. Проектирование через методы оптимального управления
Замечание 22.2. Ваоюно заметить, что в вышеупомянутом решении
нет никакого различия, является ли система нестационарной (т. е.
A,C,Q,R и др. являются функциями времени) или нет. Это часто
ваоюно в приложениях.
Замечание 22.3. Когда мы говорим о свойствах, они обычно
ограничиваются стационарным случаем (или тесно связанными с ним
случаями, например, периодические системы). Таким образом, при
обсуждении фильтра в установившемся состоянии обычно ограничиваются
случаем, когда A,C,Q,R и т. д. не являются явными функциями
времени.
Свойства оптимального фильтра, следовательно, вытекают
непосредственно из оптимальных решений линейного квадратичного регулятора
согласно соответствиям, приведенным в табл. 22.1.
Таблица 22.1
Соответствие между квадратичными
регуляторами и фильтрами
Регулятор
Г
А
В
Ф
Ф
*/
Фильтр
t-T
о
-АТ
-Ст
Q
R
Ро
Например, часто интересен случай оптимального фильтра в
установившемся состоянии, полученного, когда A,C,Q и R независимы во
времени и границы фильтрации стремятся к бесконечности. Дуальной
к задаче оптимального управления является фильтр установившегося
состояния, который имеет вид
= Ах + 3?{з/ - Сх) (22.10.27)
где
3™ = Р%0СТ1Г1 (22.10.28)
22.10. Линейные оптимальные фильтры 705
и P^j — стабилизирующее решение следующего непрерывного
динамического уравнения Риккати:
Q-PooCTR-1CPoo + PooAT + APoo = 0 (22.10.29)
Мы не будем здесь разбираться с нестационарными свойствами; их
легко получить из соответствующих свойств оптимального регулятора.
Для иллюстрации приведем без доказательства следующие факты,
которые соответствуют данным в разд. 22.5.1 для оптимального регулятора:
1) Пусть система (С, А) определяема из y(t) (читатель может судить,
что это предположение разумно,— в конце концов, если система
не определяема, то имеются неустойчивые состояния, чья реакция
не может быть замечена на выходе и эвристически понятно, что
тогда невозможно сказать что-нибудь существенное относительно
этих состояний по поведению выходного сигнала); и
2) пусть все состояния системы подвержены шуму, тогда невозможно
оценить их раз и навсегда и затем с помощью модели разомкнутого
контура предсказать все будущие значения. (Технически для этого
требуется, чтобы (A,Qa) была стабилизируема.)
Тогда оптимальное решение уравнения фильтрации Риккати
(22.10.26) стремится к установившемуся пределу Р^, когда t -> оо.
Этот предел имеет два основных свойства:
• P^q является единственным неотрицательным решением
матричного алгебраического уравнения Риккати (22.10.29), полученным при
подстановке ^^ в (22.10.26).
• Когда эта установившаяся величина используется для
формирования наблюдателя установившегося состояния, как в {(22.10.27),
(22.10.28)}, тогда наблюдатель обладает тем свойством, что (А —
J£°C) является устойчивой матрицей.
Это последнее свойство важно в приложениях. В частности, мы
напомним, что ошибка x(t) между x(t) и x(t) удовлетворяет условию (22.10.19).
Вариант установившегося состояния этого уравнения устойчив, если
(А — J£°C) — устойчивая матрица.
22.10.2. Фильтр установившегося состояния
как детерминированная задача подбора модели
Далее мы дадим альтернативу — вполне детерминированное
представление оптимального фильтра как задачи подбора модели. Рассмотрим
706 Глава 22. Проектирование через методы оптимального управления
модель пространства состояний, как в {(22.10.1), (22.10.2)} без шума:
• ^L = Ax(t); x(0)=xo (22.10.30)
at
y0(t) = Cx(t) (22.10.31)
Пусть нас интересует оценка скалярной комбинации состояния,
которую мы обозначим через
z0(t)=-yTx(t) (22.10.32)
или в форме передаточной функции
Z0(s) = 7T(sI - A)-1^ (22.10.33)
Наш фильтр должен быть линейной стационарной системой, которой
управляет у0- Это мы выразим в форме передаточной функции, требуя,
чтобы
Z0(s) = F{s)Y0(s) (22.10.34)
где F(s) — вектор-строка размерности lxm, соответствующий
передаточной функции фильтра и
Y0(s) = C(sl - A)"1^ (22.10.35)
Нам остается найти оптимальную величину для передаточной
функции F(s). С этой целью мы рассмотрим все возможные начальные
состояния х0. Известно, что все такие состояния могут быть
сформированы как линейная комбинация базисных векторов ei,...,en, где
ei = [0,...,0,1,0... ,0]т. Таким образом, мы представляем в виде
векторов выражения (22.10.33), (22.10.34), (22.10.35), заменяя х0 каждым из
вышеупомянутых векторов, т. е. мы вводим векторы-строки
Z = [zu...,zn] (22.10.36)
Z = [5Ь... ,5*] (22.10.37)
и матрицу размерности т х п
Y = [yu...,yn] (22.10.38)
где
Zi(s) = 7T(sI - A)_1ei (22.10.39)
yi(s) = C(sI-A)-1ei (22.10.40)
Zi(e) = P(e)Y1(e) (22.10.41)
Мы хотели бы, чтобы вектор-строка Z(s) был в некотором смысле
близок к Z(s). Кроме того, мы хотим задать некоторый вес величине
22.10. Линейные оптимальные фильтры 707
фильтра, чтобы избежать больших значений F, которые увеличили бы
высокочастотные компоненты в измерении возмущений.
Критерий, который определяет близость Z к Z с учетом величины
F, —следующий квадратичный критерий в частотной области:
3=/10z°'w)T" ^)tIIq+llF(^) IIr) *» (22Л0-42)
где мы несколько произвольно ввели веса Q и R, чтобы иметь
возможность смещать баланс между вариантами близости Z к Z при большом
усилении фильтра. С учетом (22.10.33), (22.10.34), (22.10.35) критерий
будет иметь вид
J = |_~ (\\ЪТ - (FY)% + |И£)А* (22.10.43)
Интересно транспонировать величины в вышеупомянутом
выражении. Это сохраняет норму, но смещает F к интуитивно более
интересному значению. Эта операция дает
J==/-l(l|zT"YTFT||Q+l|FT^)dw (221044)
Мы можем теперь думать о FT как о векторе управления. В этой
форме мы рассматриваем (22.10.44) как простую стандартную проблему
подбора модели точно так, как это было рассмотрено в разд. 22.6 со
следующими соответствиями:
YT = (si - А7)-1^ = W = C2(sl - A2)_1B2 (22.10.45)
ZT = (si - A71)-^ = V = Ci(sl - Ai^Bi (22.10.46)
где C2 = Ci = I, Ai = A2 = AT, B2 = Ст и Bi = 7.
Из разд. 22.6 оптимальное решение
F(sf = -[I - K2(sl - AT + CTK2)"lCT][K1(sl - АТ)'1Ц (22.10.47)
или
F(s) = 7T[sI - Aj^K^f-I + C(sl - A + K2TC)-1K2T] (22.10.48)
Теперь из-за конкретной структуры задачи уравнение Риккати и
оптимальные усиления имеют специальную форму. Конкретно, мы имеем,
что уравнение Риккати имеет вид
О = Ф - РВФ_1ВТР + РА + АТР (22.10.49)
708 Глава 22. Проектирование через методы оптимального управления
которое после использования конкретной структуры А, В, Ф и Ф дает
0 =
Q -Q
-Q Q
PaC^R^CPe РзСЫ^СРг
РгСГр^СРз1, P2CTR-1C1?2
(22.10.50)
PiAT P3AT
[Р3ТАГ Р2АТ
где мы использовали
+
APi АР3
АР3Т АР2
А =
W о
О А2Э
В =
О
ст
р =
Pi Рз
Рзг Р2
Ф = И
(22.10.51)
Заметим, что в нашей задаче Ai = А2 = Ат, В2 = Ст и что Р = Р2
удовлетворяет следующему частному уравнению:
0 = Q-PCTR-1CP + PAT + AP
(22.10.52)
Мы также имеем, что Рз удовлетворяет уравнению
О = -Q - PcPR^CPa7" + РзТАт + АР3Т (22.10.53)
Сложение (22.10.52) и (22.10.53) дает
-PCTR-1C(P3T + Р) + (РзТ + Р) Ат + А(Р3Т + Р) = 0 (22.10.54)
[Ki К2] = Ф_1[0 В2
которое приводит к РзТ = —Р = Рз-
Окончательно
|Pi Рз
|Рз Рг
= Ф-1[В2ТР3 В2ТР2]
= [-R_1CP R-XCP]
Задание Зт = — Кх = К2 тогда дает
(22.10.55)
J = PC R
Г-D-l
(22.10.56)
22.10. Линейные оптимальные фильтры 709
Наконец, подставляя (22.10.56) в (22.10.48), мы имеем
р(я) = <yT[sI - A]"1 J[I - C(sl - А + JC)-1 J] (22.10.57)
= 7T[5l-A]-1[I-JC(5l-A + JC)-1]J
= 7T(5l-A)-1[sI-A + JC-JC](sI-A + JC)-1J
= 77>I-A + JC]-1J
Мы замечаем, что 7Т появляется как сомножитель вне фильтра.
Таким образом, мы фактически нашли результат, который может быть
сведен к случаю, не зависимому от выбора 7- В частности, заметим из
(22.10.32) и (22.10.34), что оптимальный фильтр для оценки х просто
равен (si — A + JC)_1J. Эта передаточная функция может быть
реализована в форме пространства состояний
£(t) = (А - 3C)x(t) + 3y(t) (22.10.58)
что, как можно видеть, идентично фильтру установившегося состояния,
данному в (22.10.27).
Замечание 22.4. Вышеупомянутый результат дает чисто
детерминированное представление оптимальной фильтрации и позволяет
нам находить компромисс между величиной ошибки и параметрами
фильтра.
Другие связи с детерминированной теорией оптимального
управления исследуются в разд. D.5 приложения. DDD
22.10.3. Дискретный оптимальный квадратичный фильтр
Так же как мы делали в разд. 22.7 для задачи управления, можно
разработать дискретные формы для оптимального фильтра. Как в
разд. 22.7, мы просто приведем результат, эквивалентный непрерывному
случаю.
Рассмотрим дискретную систему, имеющую следующее описание
пространства состояний:
х[к + 1] = Ах[к] + Ви[к] + w[k] (22.10.59)
y[k] = C[k]+v[k] (22.10.60)
710 Глава 22. Проектирование через методы оптимального управления
где w[k] G Шп nv[k]E W —некоррелированные стационарные случайные
процессы с ковариацией, данной выражениями
£{w[k]wT[£]} = QSK[k - С] (22.10.61)
S{v[k]vT[C]} = RSK[k - С] (22.10.62)
где Q G Rnxn —симметричная неотрицательно-определенная матрица и
R g Шрхр — симметричная положительно-определенная матрица.
Рассмотрим теперь следующий наблюдатель для оценки состояния
системы:
х[к + 1] = Ах[к] + Ви[к] + 30[к](у[к] - Сх[к]) (22.10.63)
Кроме того, предположим, что начальное состояние х[0]
удовлетворяет условию
S{(x[0]-x[0]){x[0]-x[0]f} = Po (22.10.64)
Тогда оптимальный выбор (в квадратичном смысле) для 30[к]
определяется формулой
J0[Jb] = AP[Jb]CT(R+CP[fc]CT)"1 (22.10.65)
где Р[к] удовлетворяет следующему дискретному динамическому
уравнению Риккати:
P[fc+1] = A(P[Jb]-P[Jb]CT(R+CP[A;]CT)"1CP[fc])AT+Q (22.10.66)
которое может быть решено для последующих моментов при условии
Р[0]=Ро (22.10.67)
Замечание 22.5. Заметим снова, что A, C,Q,R и т. д. для
общего случая фильтра могут изменяться во времени. Однако когда мы
обсуоюдаем фильтр установившегося состояния, обычно требуется,
чтобы задача была стационарной во времени [или, по крайней мере,
изменяемая в таком виде, как имеет место для периодических систем).
Установившееся состояние (к -> оо) усиления фильтра удовлетворяет
дискретному алгебраическому уравнению Риккати, имеющему вид
A[P00-P00CT(R+CP00CT)"1CP00]AT + Q = P00 (22.10.68)
22.10. Линейные оптимальные фильтры 711
Вышеупомянутые результаты показывают, что соответствие между
оптимальными регуляторами и оптимальными фильтрами также
справедливо и для дискретных систем.
22.10.4. Вероятностные модели шумов
В предыдущих разработках мы просто представляли шум как
последовательность белого шума ({cj(fc)}) и как последовательность белого
шума измерения ({v(k)}). Фактически, это более общий случай, чем
может показаться на первый взгляд. Например, он может включать
цветной шум, имеющий произвольный рациональный спектр. Основная
идея — смоделировать этот шум как выход линейной системы (т. е.
фильтра), управляемой белым шумом. Таким образом, пусть система
описана уравнениями
х(к +1) = Ах(к) + Ви(к) + шс(к) (22.10.69)
у(к) = Сх(к) +v(k) (22.10.70)
где {шс(к)} представляет цветной шум, который получается из белого
шума, пропущенного через фильтр. Тогда мы можем добавить к
описанию дополнительную модель шума {(22.10.69), (22.10.70)}. Например,
пусть фильтр шума будет
х'(к +1) = А'х(к) + ш(к) (22.10.71)
шс(к) = С'х'(к)
(22.10.72)
где {ш(к)} —последовательность1 белого шума.
Сочетание (22.10.69)-(22.10.72) дает составную систему, которая
управляется белым шумом и имеет вид
х(к + 1) = Ах(к) + Ви(к) +ш(к)
y(k) = Cx(k) + v(k)
(22.10.73)
(22.10.74)
где
А =
а с
0 А'
х(к) = [х(к)Т, х'{к)т)т
ш{к) = [0Мк)Т]
в =
С=[С 0]
(22.10.75)
(22.10.76)
(22.10.77)
22.10.5. Оптимальное упреждение
В случае гауссовского шума фильтр Калмана фактически
производит среднее значение условного распределения для х(к), определяемое
712 Глава 22. Проектирование через методы оптимального управления
предыдущими данными: {у(^),гх(^); t = О,... ,fc — 2, А; — 1}. Это может
быть записано как
х(к)=Е{х(к)/у(1),и(*)и> 1 = 0,...,к-1}
йх{к\к-1) (22.10.78)
Непредсказуемость белого шума приводит к тому, что оптимальное
упреждение будущих состояний получается простой итерацией модели
с последующим набором белого шума, равным его математическому
ожиданию, которое равно нулю. Итак, рассмотрим составную модель
{(22.10.73), (22.10.74)}; тогда для известного входа {и(к)}
предсказанные будущие состояния удовлетворяют условию
x(j + l) = Ax(j) + Bu(j); j = k,k + l,k + 2>... (22.10.79)
с начальными условиями х(к) = х(к\к — 1). Заметим, что x(j) можно
также записать следующим образом:
x(j)=E{x(j)\y(t)MtY, ^ = 0,...,fc-l}; j>k
= £(j|fc-l); j>k (22.10.80)
22.10.6. Оценка состояния с непрерывными моделями
и квантованными наблюдениями
Задача, которая часто встречается на практике, является результатом
того, что у непрерывной системы данные берутся в дискретные моменты
квантования. Действительно, моменты квантования в некоторых
приложениях могут быть неравномерно распределены. Это все еще подпадает
под общую дискретную нестационарную задачу фильтрации.
Все, что мы должны сделать —это аппроксимировать непрерывную
систему между моментами квантования, а затем скорректировать в
моменты квантования, используя соответствующую дискретную модель.
В качестве иллюстрации пусть система описывается (формально)
уравнениями (22.10.5) и (22.10.6):
х = Ах + ш (22.10.81)
y' = Cx + i> (22.10.82)
где Со и v имеют спектральную плотность Q и R соответственно.
Прежде чем мы сможем использовать квантованную величину г/,
ее сначала следует передать через соответствующий сглаживающий
фильтр. Один такой фильтр — так называемый интегрирующий и
усредняющий фильтр. В этом случае к-я квантованная величина имеет вид
У W = 7—^ [ к y'V)dt (22.10.83)
Ч-Ч-l Jtk-г
22.11. Обратная связь по оценке состояния 713
где tk обозначает время fc-ro такта квантования.
Дискретное наблюдение у [к] может быть связано с дискретной
моделью пространства состояний вида
х[к + 1]=Ад[к]х[к]+й[к] (22.10.84)
ф] = Сд[к]х[к] + €[к] (22.10.85)
Интегрируя модель {(22.10.81), (22.10.82)}, можно заметить, что
Aq[k] = eAttk+*-tk^I + A{tk+l-tk) (22.10.86)
1 ~ ^ ' ~ (22.10.87)
СЛк]=ъ^Г)ГСеА'^с
Е{й[к]й[к]т} = Q - Qftfc+i - tk) (22.10.88)
E{v[k]v[k]T} = R ~ 7 ?— (22.10.89)
(*fc+l —tk)
Дискретная модель может затем использоваться, чтобы получить
оценки состояния в моменты квантования. Непрерывное же состояние
может быть интерполировано между моментами квантования,
используя модель разомкнутого контура
ik(t) = Ax(t); для te[tk,tk+{\ (22.10.90)
с начальными условиями
x(tk)=x[k] (22.10.91)
22.11. Обратная связь по оценке состояния
Наконец, мы можем объединить оценку состояния, выполняемую с
помощью (22.9.2), с обратной связью по переменным состояния, чтобы
обеспечить следующий закон управления с обратной связью по
восстановленному состоянию:
u(t) = -Kx(t) +r(t) (22.11.1)
Заметим, что теорема 18.1 также может быть здесь применена;
полюсы замкнутого контура, получаемые при использовании (22.11.1),
представляют собой объединение собственных значений, которые
получаются при использовании обратной связи по состоянию, и собственных
значений, связанных с наблюдателем. Заметим, на всякий случай, что
доказательство теоремы 18.1 не зависит от скалярного характера задачи.
(22.12.4)
714 Глава 22. Проектирование через методы оптимального управления
22.12. Интерпретация с помощью
передаточной функции
Kajc и в разд. 18.5, описанный выше закон обратной связи по оценке
состояния можно интерпретировать с помощью полиномов.
В частности, лемма 18.5 справедлива и для наблюдателя в
установившемся состоянии, т. е. X(s) можно выразить в виде
Х(з) = (si - А0 + JCo)-1 (B0U(a) + JY(a)) = Тг (s)U(s) + T2(a)Y(a)
(22.12.1)
где Ti (s) и T2(s)— две устойчивые матрицы передаточных функций,
имеющие вид
ТЧ (а) = (51 - А0 + JCo^Bo (22.12.2)
Т2 (я) = (51 - А0 + JCo)"1 J (22.12.3)
Таким образом, закон управления, использующий обратную связь по
оценке состояния, имеет вид
U{a) = -KX(a)-R{a)
= -KTi(s)U(s) - KT2(a)Y(a) + R(a)
Это можно записать в эквивалентной форме
Cj>{a)U{a) = -CN(s)Y(s) + R(s) (22.12.5)
где Cd(s) и Cn(а) — устойчивые матрицы вида
CD (а) = I + K[al - А0 + JCj^Bo = ^ffi (22.12.6)
CN W = K[5I - A0 + JCo]"1 J = N™[S) (22.12.7)
Ь(з)
где Nqd(5) и Ncn (а) — матрицы полиномов, a E(s) — полином
наблюдателя, имеющий вид
Е(а) = det(5l - AQ + JCQ) (22.12.8)
Из (22.12.5), мы видим, что С(з) ='[Cd(5)]_1Cn(5) является левым
матричным дробным описанием регулятора (см. разд. 20.3.3). Кроме
того, этот регулятор удовлетворяет следующей лемме.
Лемма 22.3. Рассмотрим регулятор С(з) = [Cd(5)]_1Cn(5) с Cd(5)
и Cn(s), определенными в (22.12.6) и (22.12.7) соответственно. Тогда
реализация в пространстве состояний для этого регулятора дается
4-мя компонентами — (А0 — JCQ — ВСК, J, К, 0):
С(з) = К[з1 - А0 + JC0 + ВоК]"1 J. (22.12.9)
22.12. Интерпретация с помощью передаточной функции 715
Доказательство
Сначала применим лемму об инверсии матрицы, чтобы получить
[Cd(s)]-1 = I - K[sl - А0 + JC0 + BoKj^Bo (22.12.10)
Далее формируем произведение [Cd(s)]_1Cn(s) u используем
(22.12.10) и (22.12.7), в результате чего после некоторых прямых
матричных преобразований получим требуемое. DDD
Реализация регулятора в пространстве состояний позволяет
непосредственно использовать результаты формирования наблюдателя и
синтеза обратной связи по состоянию. Это полезно не только при
моделировании, но также и при практической реализации регулятора.
Можно также получить и правое матричное дробное описание (см.
разд. 20.3.3) для регулятора. В частности, из леммы 20.1 следует, что
PdWI^Cn W = CnWICdM]"1 (22.12.11)
где
- CD(s) = I - С0(Л - А0 + ВоК)-1 J = Np?iS>> (22.12.12)
CN(s) = K(sl - A0 + ВоК)"1 J = Ne?vg) (22.12.13)
где Ncd(s) и Ncn(s) ~матрицы полиномов и F(s) —полином обратной
связи по состоянию, имеющий вид
F(a) = det(sl - А0 + В0К) (22.12.14)
Точно так же, используя (20.3.24), (20.3.25) и лемму 20.1,
передаточную функцию объекта можно записать в виде
G0(a) = C0[sI-A0]~1B0
= [G0d(5)]-1GoN(5) = Gon(5)[GoD(5)]-1
где
(22.12.15)
GoN(s) = C0(sl - A0 + JC0)-1B0 (22.12.16)
GoD(s) = I - C0(sl - A0 + JCo)"1 J (22.12.17)
Gon(s) = C0(el - A0 + B0K)"1B0 (22.12.18)
G0D (s) = I - K(sl - A0 + BoK)4B0 (22.12.19)
Тогда мы имеем следующий результат.
716 Глава 22. Проектирование через методы оптимального управления
Лемма 22.4. Чувствительность и дополнительная
чувствительность, следующие из закона управления 22.12.5 равны соответственно
SQ(s) = CD(5)GoD(s) = I - GoN(s)CN(s) (22.12.20)
T0(s) = G0n(s)Cn(5) =1- Cd(s)GoD(s) (22.12.21)
Доказательство
Из леммы 20.1 мы имеем, что
God(5)Cd(5) + GoN(5)Cn(5) = CD(5)GoD(5) + CN(5)Gon(5)=I
(22.12.22)
Используя (22.12.22) в (20.5.3) и (20.5.4), получим требуемый
результат. DDD
Из леммы 22.4 мы снова видим, что полюсы замкнутого контура
расположены в нулях E(s) и F(s), как и в SISO-случае.
22.13. Получение интегрирующих свойств
при синтезе линейного квадратичного регулятора
Важный момент, пока еще не рассмотренный, —это то, что оптимальное
управление и оптимальная обратная связь по оценке состояния
автоматически не обеспечивают интегрирующих свойств. Это свойство —
структурная проблема, которая должна быть включена в решение.
Отсылаем читателя к разд. 18.7, где обсуждены различные
способы задания интегрирующих свойств (или общий принцип внутренней
модели) в обратной связи по оценке состояния. Например, из части б)
разд. 18.7 мы видели, что один способ задания интегрирующих свойств
состоит в том, чтобы поместить набор интеграторов на выходе объекта.
Это может быть описано в форме пространства состояний
следующим образом:
x(t) = Ax{t) + Bu{t) (22.13.1)
y(t) = Cx(t)
z(t) = -y(t)
Как и раньше, мы можем использовать наблюдатель (или фильтр
Калмана), чтобы оценить х через и и у. Следовательно, в дальнейшем
мы будем считать (без дополнительных комментариев), что х и z
непосредственно измеряются. Составная система может быть описана
в форме пространства состояний в виде
x\t) = AV(t) + B'ti(t) (22.13.2)
22.13. Получение интегрирующих свойств при синтезе регулятора 717
где
х =
x(t)
z(t)
А' =
А О
-С О
В' =
(22.13.3)
Далее мы определим обратную связь по состоянию (из #'(£)), чтобы
стабилизировать составную систему. Конечно, главный вопрос
—является ли составная система управляемой. Достаточное условие этого
определяется следующей леммой.
Лемма 22.5. Каскадированная система (22.13.2)-(22.13.3) полностью
управляема при условии, что исходная система управляема и у нее нет
нулей в начале координат.1
Доказательство
Результат непосредственно следует из леммы 20.6.
DDD
Заключительная структура системы управления будет тогда такой,
как изображено на рис. 22.2.
«(«)
—^>
Объект
Наблюдатель
Усиление
обратной
С]
зязи
-^—
y(t) __ }
-«—
У'
(«)
e(t)
параллельные
интеграторы
z(t) = e(t)
z{t)
Рис. 22.2. Интегрирующие свойства в МШО-управлении
Легко видеть, что эта идея может быть расширена на любую модель
возмущения или эталонного воздействия, включая соответствующие
полиномы, формирующие возмущение (принцип внутренней модели)
вместо параллельных интеграторов на рис. 22.2. Соответствующая
версия леммы 22.5 просто требует, чтобы полюсы возмущений/эталонных
сигналов не были нулями исходной системы, точно так же, как в
разд. 20.7.6.
1 Напомним, что если объект имеет один или несколько нулей в начале координат, его
выход не может управляться постоянным ограниченным сигналом.
718 Глава 22. Проектирование через методы оптимального управления
Проиллюстрируем эту идею следующим примером.
Пример 22.4. Рассмотрим систему с описанием в пространстве
состояний, представленном матрицами (А,В,С,0), где
А =
-1
-5
2
-3
; В =
) *-*
-1 0
-1 2
С =
) w
-1 0
1 1
(22.13.4)
Нужно синтезировать линейный квадратичный оптимальный
регулятор, который обладает интегрирующими свойствами и где функция
стоимости определяется параметрами Ф и Ф, где Ф = I и Ф =
0.01**00(0.1,1).
Решение
Сначала выберем полюсы для наблюдателя состояния объекта, которые
будут расположены в точках —5 и —10. Это приводит к
3 =
(22.13.5)
Тогда регулятор будет формировать вход объекта в виде линейной
комбинации оценок состояния объекта и интегратора. Мы хотим
создать оптимальный регулятор, формирующий полюсы замкнутого
контура, расположенные в круге с центром в s = —3 и радиусом,
равным единице (см. разд. 22.8). Так мы получаем оптимальное усиление
обратной связи, имеющее вид
К =
-4.7065 -2.0200 -8.0631 0.0619
-4.8306 0.3421 -8.0217 -4.0244
(22.13.6)
Этот проект смоделирован в контуре с той же самой структурой,
что и на рис. 22.2 (см. файл cint.mdl пакета SIMULINK).
Характеристика отслеживания изображена на рис. 22.3, где прикладывались
ступенчатые эталонные воздействия.
22.14. Промышленные приложения
Мультипеременные проекты, основанные на теории линейного
квадратичного регулятора и фильтре Калмана, составляют тысячи
реальных приложений. Действительно, недавно было сообщено, что имеется
приблизительно 400 патентов в год, основанных на фильтре Калмана.
Авторы данной книги также применяли эти методы в многочисленных
реальных приложениях. Мы считаем, что фильтр Калмана является
22.14. Промышленные приложения 719
«
S
«
со о
ь«
* V
« и;
VO О
О «
as
с*2
3"«
х «
а о
h
т
1.5
1
0,5
0
-0.5
-1
.... , , , .
I n(t)
i •
1 -' ■ 1
/^ wW
r2(t)
• 1
... , , , ... , ,
\ю(0 J
1 1 1 1 1
6
8
9
10
0 12 3 4 5
Время [с]
Рис. 22.3. Характеристика отслеживания проекта линейного квадратичного
регулятора с интегрированием
одним из наиболее мощных инструментов, доступных проектировщику
систем управления.
Основной вопрос в использовании этих методов на практике
заключается в формулировке задачи; как только проблема должным образом
изложена, решение — обычно довольно очевидно. Большая доля успеха в
применении этой теории зависит от формулировки, поэтому мы
заключим эту главу краткими описаниями четырех реальных приложений, с
которыми авторы были лично связаны. Наша цель представления этих
приложений не состоит в том, чтобы описать все детали, что было бы за
пределами возможностей этой книги. Вместо этого мы надеемся дать
достаточную информацию такого плана, чтобы читатель мог видеть
методологию, используемую в применении этих методов к различным
типам задач.
Конкретные приложения, которые мы здесь рассмотрим, следующие:
• Отслеживание геостационарного спутника.
• Оценка массы цинкового покрытия на непрерывных линиях
гальванизации.
• Оценка эксцентриситета валков при управлении толщиной на
прокатных станах.
• Управление вибрацией в гибких структурах.
22.14.1. Отслеживание геостационарного спутника
Известно, что так называемые геостационарные спутники, фактически,
как будто колеблются на небе. Период этого колебания — одни звездные
сутки. Если желательно направить приемную антенну точно на спутник,
чтобы максимизировать полученный сигнал, то необходимо отследить
это воспринимаемое движение. Требуемая точность наведения обычно в
720 Глава 22. Проектирование через методы оптимального управления
Рис. 22.4. Спутник и определение угла поворота антенны
пределах нескольких сотых градуса. Физическая установка такова, как
показано на рис. 22.4.
Можно было бы выполнить решение этой задачи с использованием
разомкнутого контура следующим образом: дана модель (например,
список углов наведения в зависимости от времени), антенна могла
быть направлена в нужном направлении, определяемом кодирующими
устройствами положения. Эта техника используется на практике, но она
связана со следующими проблемами:
• Она требует высокой абсолютной точности в кодирующих
устройствах положения, антенне и структуре отражателя.
• Она также требует регулярного технического обслуживания для
ввода новых параметров модели.
• Она не может обеспечить компенсацию ветра, теплового и других
изменяющихся во времени влияний на антенну и отражатель.
Все это объясняет использование для решения замкнутого контура. В
таком решении идея состоит в том, чтобы периодически перемещать
антенну, чтобы найти направление максимальной силы сигнала.
Однако данные, полученные таким образом, забиты шумом по нескольким
причинам, включая следующее:
• шум в полученном сигнале р;
• изменения в интенсивности сигнала, передаваемого со спутника;
• неточные знания о диаграмме излучения антенны и
• влияние порывов ветра на конструкцию и отражатель.
Разумной гипотезой является использование сглаживания данных с
помощью фильтра Калмана. С этой целью мы должны сначала построить
модель для орбиты. Далее, как видно с Земли, спутник совершает
периодическое движение в двух осях антенны (азимут и высота над гори-
22.14. Промышленные приложения 721
зонтом). Имеется несколько гармоник, но доминирующая гармоника —
фундаментальная. Это дает модель вида
y(t) = Ф5(£) =xi +x2smu)t + X3COsut (22.14.1)
где Ф5(£) назовем углом азимута как функцию времени. Частота и) в этом
приложении известна. Имеется несколько путей описания этой модели в
форме пространства состояний. Например, мы могли бы использовать
= 0 (22.14.2)
.y(t) = C(t)x(t) (22.14.3)
где
C(t) = [l,sinart,cosart] (22.14.4)
Эта система нестационарная (фактически периодическая). В этом
случае мы можем сразу же применить фильтр Калмана, чтобы оценить
х\,Х2 и жз по измерениям параметра у(£), подверженным шуму.
Трудность с вышеупомянутой формулировкой в том, что
уравнение (22.14.2) имеет нули на границе устойчивости. Следовательно,
использование леммы 22.2 указывает, что создание фильтра
установившегося состояния могло бы встретить трудности. Эта проблема
разрешается добавлением маленького количества фиктивного шума к
правой стороне уравнения модели (22.14.2), чтобы объяснить
несовершенство орбиты. Заметим также, что это —пример задачи, упомянутой
в разд. 22.10.6, потому что данные относительно положения спутника
могут поступать в дискретные моменты времени, которые неоднородно
распределены.
Чтобы завершить проектирование фильтра, должна быть получена
следующая информация:
• предположение о текущем положении спутника;
• предположение о ковариации ошибки начального состояния (Р(0));
• предположение об интенсивности шума измерения (R) и
• грубая оценка интенсивности добавленного шума процесса (Q).
Коммерческая система, построенная на основе вышеупомянутых
принципов, была разработана и создана в Университете Ньюкасла,
Австралия. Эта система помечена торговым названием ORBTRACK® и
использовалась во многих реальных приложениях от Австралии до Индонезии
и Антарктики. DDD
722 Глава 22. Проектирование через методы оптимального управления
22.14.2. Оценка массы цинкового покрытия
на непрерывных линиях гальванизации
Схема непрерывной линии гальванизации показана на рис. 22.5.
Интересная особенность этого приложения заключается в том, что
гальванизированный лист имеет ширину в метр и более и много сотен метров
длины.
Полоса проходит через цинковый тигель (как на рисунке).
Впоследствии избыток цинка удаляется воздушными ножами. Затем полоса
проходит через секцию охлаждения, и, наконец, масса покрытия измеряется
поперечным рентгеновским измерительным устройством— см. рис. 22.6.
Если комбинировать поперечное перемещение рентгеновского
измерительного устройства с продольным движением полосы, то получается
зигзагообразная форма измеренной величины, показанная на рис. 22.7.
Из-за дискретных мест измеренной величины крайне желательно
сгладить и интерполировать измерения массы покрытия. Фильтр Кал-
мана —возможный инструмент для выполнения этой функции
сглаживания данных. Однако прежде чем применить этот инструмент, нам
Выходной Наматывающее
аккумулятор устройство
Рис. 22.5. Схема непрерывной гальванической линии
Область измерения
Верхняя часть
рентгеновского
. измерительного
устройства
оценки массы
Рис. 22.6. Поперечное рентгеновское измерительное устройство
Гальванизированная
полоса
22.14. Промышленные приложения 723
Поперечное перемещение измерительного прибора
Скорость полосы
Рис. 22.7. Зигзагообразная форма измерения
нужна модель для соответствующих компонентов в распределении
массы покрытия. Эти компоненты включают следующее.
• Нарушения формы (являющиеся результатом ошибок формы в
процессе вращения).
Они могут быть описаны компонентами шума, пропущенного
через полосовой фильтр, в виде модели
Х\ = — UJ\X\ —
U)20J\
U)2 — CJi
n
X2 = — Cd2#2 —
CJo
Vsd
-Ks)
CJi —U)2
П
(22.14.5)
(22.14.6)
(22.14.7)
• Поперечное искривление (квадратичный член, являющийся
результатом эффектов неоднородного покрытия). Это — квадратичная
функция расстояния поперек полосы и моделируется уравнениями
Vd> = {d(t)[d(t)-W]}xz
(22.14.8)
(22.14.9)
где d(t) означает расстояние от левого края полосы, a W — общую
ширину полосы.
• Скошенность (из-за невыравненности струи ножа).
Этот член линейно увеличивается с расстоянием от края. Таким
образом, он может быть смоделирован следующим образом:
±4 =0
(22.14.10)
(22.14.11)
724 Глава 22. Проектирование через методы оптимального управления
• Эксцентриситет (из-за биений валков).
Пусть скорость полосы — vs и радиус валка — г. Тогда этот
компонент может быть смоделирован в виде
£5 = 0
(22.14.12)
(22.14.13)
ye = {sin(^)t,cos(^)f}(^) (22.14.14)
• Удар полосы (из-за бокового движения полосы в вертикальной части
линии гальванизации).
Пусть f(t) обозначает модель удара; тогда этот компонент
моделируется следующим образом:
£7 = 0 (22.14.15)
V/= {/(«)}*? (22.14.16)
• Средняя масса покрытия (средняя величина цинкового слоя).
Она может быть просто смоделирована с помощью
£8 = 0 (22.14.17)
ут = х& (22.14.18)
Объединение всех уравнений вместе дает модель 8-го порядка вида
х = Ах + Вп
(22.14.19)
z = y = C(t)x + v
(22.14.20)
А =
-Wl
0
0
0
0
0
0
0
0
-0>2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
(Г
0
0
0
0
0
0
0
в =
\U2-UlJ
\Ul-W2J
о
о
о
о
о
о
(22.14.21)
С = [l,l,d(t)[d(t) - W],d(t),sin Qt) ,cos (j±t) ,/(<),!] (22.14.22)
22.14. Промышленные приложения 725
Учитывая вышеупомянутую модель, можно применить фильтр Кал-
мана, чтобы оценить модель толщины покрытия. Результирующая
модель тогда может использоваться, чтобы интерполировать измеренную
величину толщины. Заметим, что фильтр Калмана в этом случае
фактически периодический, отражая периодический характер поперечной
рентгеновской системы.
Практическая форма этого алгоритма — часть коммерческой
системы управления массой покрытия, разработанной в сотрудничестве с
авторами этой книги компанией Industrial Automation Services Pty.
Ltd. Система доказала, что является очень выгодной с точки зрения
сокращения времени точной оценки массы покрытия.
22.14.3. Компенсация эксцентриситета
валков прокатного стана
Читатель может вспомнить, что проблемы управления толщиной полосы
прокатного стана были описаны в гл. 8. Схемное решение установки
показано на рис. 22.8.
h{t-d)
• Опорный валок
Рабочий валок **
Рис. 22.8. Управление толщиной листа прокатного стана
На рис. 22.8 мы использовали следующие обозначения:
F(t)
h(t)
u(t)
сила;
измеренная величина выходной толщины
зазор ненагруженных валков (управляющая переменная)
В гл. 8 обсуждалось, что может использоваться виртуальный датчик
(называемый BISRA-измерителем) для оценки толщины выхода, что
устраняет транспортную задержку от валков до измеренной величины.
h(t) = ^-+u(t) (22.14.23)
726 Глава 22. Проектирование через методы оптимального управления
Однако есть одна трудность, которую мы раньше не упомянули в
связи с этим виртуальным датчиком; она состоит в том, что наличие
эксцентриситета валков (см. рис. 22.9) существенно влияет на результат.
Чтобы проиллюстрировать это, предположим, что е означает
эксцентриситет валка. Тогда истинная сила валка равна:
F(t) = M(h(t) - u(t) + e(t)) (22.14.24)
В этом случае предыдущая оценка толщины, полученной от
приложения силы, фактически равна
h(t) = h(t) + e(t) (22.14.25)
Таким образом, e(t) представляет ошибку, или элемент возмущения,
на выходе виртуального датчика из-за влияний эксцентриситета.
Ошибка e(t) на выходе виртуального датчика, оказывается, очень
важна в данном конкретном приложении. Таким образом, имеется
сильное побуждение попробовать удалить эффект эксцентриситета из
оценки h(t).
Ключевое свойство, которое позволяет нам успешно решить
проблема—это то, что параметр e(t) является фактически (почти)
периодическим, потому что он является результатом эксцентриситета в
четырех валках прокатного стана (два рабочих валка и два опорных).
В этом приложении легко измерить угловые скорости валков, используя
кодирующие устройства положения. Из этих данных можно получить
мультигармоничёскую модель эксцентриситета в виде
N
e(t) = Y2aksinu)kt + (3kcosu)kt (22.14.26)
где oti и /% являются неизвестными, a cji,... ,cdyy — известны.
Идеальная форма валка
Фактическая форма валка
Рис. 22.9. Эксцентриситет валка
22.14. Промышленные приложения 727
Кроме того, каждый синусоидальный вход может быть смоделирован
в пространстве состояний следующим образом:
xkl{t)=u)kx%(t) (22.14.27)
x%{t) =-u)kxkx{t) (22.14.28)
Наконец, рассмотрим любую измеренную величину, например, силу
F(t). Мы можем рассматривать F(t) как результат сравнения
вышеупомянутых компонентов эксцентриситета с наложенным шумом:
N
y(t) = F(t) = ^2xi(t) + x2(i)+n(t) (22.14.29)
*=i
Тогда можно, в принципе, использовать фильтр Калмана, чтобы
оценить {x\(t),X2(t)\k = 1,...,JV} и, следовательно, скорректировать
измеренную силу для эксцентриситета.
Окончательная система управления показана на рис. 22.10.
Измеритель-
регулятор
Оценка
толщины
Оценка
эксцентриситета
h{t-d)
Опорный валок
' Рабочий валок
Рис. 22.10. Окончательная система управления с компенсацией
эксцентриситета валков
Интересная особенность этой задачи —то, что имеется некоторая
практическая выгода в использовании общей нестационарной формы
фильтра Калмана по сравнению с фильтром установившегося
состояния. Причина заключается в том, что в установившемся состоянии
фильтр действует как набор узкополосных фильтров, сосредоточенных
на гармонических частотах. Эвристически это правильное решение для
728 Глава 22. Проектирование через методы оптимального управления
установившегося состояния. Однако интересный факт, который
читатель может легко проверить, —то, что время переходного процесса
узкополосного фильтра обратно пропорционально его полосе пропускания.
Это означает, что в установившемся состоянии имеется следующий
фундаментальный компромисс проекта:
• С одной стороны, хотелось бы иметь узкую полосу пропускания,
чтобы получить хорошую селективность частоты и, следовательно,
хорошее шумовое подавление.
• С другой стороны, хотелось бы иметь широкую полосу пропускания,
чтобы минимизировать начальный переходный период.
Это — неизбежное раздвоение в случае любого стационарного фильтра.
Возможно, проницательный читатель мог бы сказать: хорошо, почему
бы не начать- с широкополосного фильтра, чтобы минимизировать
переходный процесс, а затем сузить диапазон фильтра, когда сигнал
сформирован? Если вы думаете так, то вы совершенно правы.
Действительно, это именно то, что делает изменяющийся во времени фильтр
Калмана. В частности, если начать с решения уравнения Риккати, задав
начальным условиям P(t0) некоторую большую величину, то
результирующий фильтр будет первоначально иметь широкую полосу
пропускания. Как только решение уравнения Риккати будет достигнуто, P(t)
уменьшится вместе со связанной с ней полосой пропускания фильтра.
Действительно, нестационарный фильтр Калмана дает оптимальный
изменяющийся во времени компромисс между уменьшением времени
переходного процесса и точным охватом гармонических компонентов.
Таким образом, операция получения лучшего компромисса между
избирательностью фильтра и временем переходной реакции должна
использовать изменяющийся во времени фильтр.
Другой вопрос, который читатель может задать: насколько узкой, в
конечном счете, станет окончательная полоса пропускания фильтра?
Ответ на этот вопрос выдвигает другой фундаментальный компромисс
проектирования оптимального фильтра.
Читатель может проверить, что модель, описанная в {(22.14.27),
(22.14.28)}, имеет неуправляемые компоненты (из-за шума процесса) на
границе устойчивости. Внимательное чтение свойств уравнения,
связанного с фильтром Риккати, данное в приложении D, показывает, что P(t)
в этом случае сходится к установившейся величине, но это происходит,
если матрица нулевая. Кроме того, соответствующий фильтр в этом
случае неустойчив. Вы могли бы спросить: что же здесь не так, как
надо? На самом деле, ничего. Мы рассматривали фильтр в идеальной
форме, когда не было никакого шума процесса. В этом случае фильтр
мог (асимптотически) оценить состояния с нулевой ошибкой. Далее,
22.14. Промышленные приложения 729
как только состояния будут определены, они могут быть предсказаны
на будущее, используя резонансную модель {(22.14.27), (22.14.28)}. Эта
модель имеет полюсы на границе устойчивости и таким образом не
является устойчивой! (Действительно, полоса пропускания фильтра была
уменьшена до нуля.)
Трудность состоит в том, что мы имеем сверх-идеализированную
проблему. Практически, частоты в сигнале эксцентриситета точно не
будут известны (например, из-за скольжения). Гармонические
компоненты также не будут стационарными (например, из-за эффекта
нагревания валков). Моделируя эти эффекты, мы можем просто добавить
небольшой шум процесса к правой части уравнения модели {(22.14.27),
(22.14.28)}. В этом случае модель становится стабилизируемой со
стороны шума. Тогда решение установившегося состояния уравнения Риккати
оказывается положительно определенным, а окончательный фильтр
будет устойчив и с конечной полосой пропускания.
Это приводит нас к другому компромиссу проектирования. В
частности, если, например, модель {(22.14.27), (22.14.28)} неточно известна
(заданная интенсивность шума процесса Q большой величины), то
окончательная полоса пропускания фильтра будет большой. С другой стороны,
если, например, модель {(22.14.27), (22.14.28)} имеет высокую степень
точности (заданная интенсивность шума процесса малой величины),
тогда окончательная полоса пропускания фильтра будет маленькой.
Можно было бы подумать, что на практике для проектов, подобных
рассматриваемому, часто возможно реализовать основные идеи более
простым способом. Действительно, дело обстоит именно так. Для
окончательной реализации решение уравнения Риккати в реальном масштабе
времени обычно не используется. Вместо этого используется
изменяющийся во времени набор фильтров, который охватывает сущность
формального оптимального проектирования. Этот вид заключительных
упрощений типичен в приложениях.
Окончательная система, описанная выше, была запатентована под
названием AUSREC® и доступна как коммерческий продукт Industrial
Automation Services Pty. Ltd.
22.14.4. Управление вибрацией в гибких структурах
Как было указано во введении к этой книге, новые исполнительные
механизмы часто открывают удивительные новые возможности для
усовершенствованного управления. Например, имеется существенный
интерес к новым типам электромагнитных исполнительных механизмов
и устройств, которые обладают высокой плотностью энергии
преобразователей на основе современных материалов. Преобразователи на основе
730 Глава 22. Проектирование через методы оптимального управления
Vtip(t)
Лу
Рис. 22.11. Управление вибрацией с использованием пьезоэлектрического
исполнительного механизма
современных материалов включают пьезоэлектрические, электрострик-
ционные, магниторестрикционные и запоминающие форму сплавы.
Многие прикладные области существуют благодаря этим
технологиям, особенно в управлении слабо развязанными системами.
Чтобы проиллюстрировать принципы, используемые в
приложениях этого вида, мы рассмотрим проблему проектирования регулятора
для пьезоэлектрической слоистой балки, изображенной на рис. 22.11.
В этой системе измерения производятся датчиком смещения, который
приложен к концу балки, а пьезоэлектрическая накладка используется
как исполнительный механизм. Цель регулятора состоит в том, чтобы
минимизировать колебания балки. Легко видеть, что это задача
регулирования; следовательно, можно разработать линейный квадратичный
регулятор для уменьшения нежелательных колебаний.
Чтобы определить динамику структуры типа балки на рис. 22.11,
нужно найти частное решение дифференциального уравнения в частных
производных, которое известно как уравнение Бернулли—Эйлера для
балки. Используя технику анализа методом нормальных волн, можно
показать, что передаточная функция балки состояла бы из
бесконечного числа слабо демпфированных колебательных элементов второго
порядка, т. е. передаточная функция от напряжения, приложенного к
исполнительному механизму, до смещения конца балки, может быть
записана следующим образом:
ед=£
OLi
^52 + 2C^5+Cj/
.?•
(22.14.30)
Обычно интересно спроектировать регулятор только для
конкретной полосы пропускания. Поэтому часто (22.14.30) усекается, сохраняя
первые N членов, которые находятся в пределах интересующей полосы
пропускания.
В этом примере мы рассматриваем специфическую систему,
описанную в приложениях, приведенных в конце главы. Рассмотрим только
первые шесть членов этой системы.
Тогда передаточная функция будет иметь вид
б
G(s)=Us2+2^s+wr
t
1
2
3
4
5
6
«t
9.72 х Ю-4
0.0122
0.0012
-0.0583
-0.0013
0.1199
w,- (рад/с)
18.95
118.76
332.54
651.660
1077.2
1609.2
Здесь считается, что коэффициент £ равен 0.002, а а; приведены в
таблице, расположенной выше. Сначала спроектируем линейный
квадратичный регулятор. Здесь Ф — матрица, равная
* = 0.1483dmg(cj?,l,...,o;|,l).
Причина выбора такой матрицы весов состояний в том, что при этом
выборе Ф квадратичная форма x(t)Ti&x(t) представляет общую энергию
балки в любой момент времени, соответствующую ее шести
колебательным звеньям. Матрица весов управления также выбрана несколько
произвольно kclk Ф = 10~~8. Далее устройство оценки состояния фильтра
Калмана разработано при Q = 0.081 и R = 0.005.
Чтобы показать характеристику регулятора в замкнутом контуре,
мь* изобразили на рис. 22.12 импульсные характеристики системы с
разомкнутым и замкнутым контуром. Можно видеть, что линейный
квадратичный регулятор значительно уменьшает структурные
колебания. На рис. 22.13 мы изобразили частотные характеристики балки при
разомкнутом и замкнутом контурах. Можно видеть, что линейный
квадратичный регулятор существенно заглушил первые три колебательных
звена структуры.
22.15. Резюме
• Полное мультипеременное управление использует динамику
взаимодействия строго и явно.
• Фундаментальный результат SISO-синтеза, гласящий, что при
умеренных условиях полюсы номинального замкнутого контура могут
быть назначены произвольно, переносится и на MIMO-случай.
• Эквивалентность расположения полюсов обратной связи по
состоянию и в частотной области при решении (мультипеременного) дио-
фантова уравнения также переносится на MIMO-случай.
22.15. Резюме 731
(22.14.31)
732 Глава 22. Проектирование через методы оптимального управления
хЮ
х10
2 2.5 3
Время [с]
3.5
2 2.5 3
Время [с]
Рис. 22.12. Импульсные характеристики балки с разомкнутым
и замкнутым контуром
Частота [рад/с]
Рис. 22.13. Частотные характеристики балки с разомкнутым
и замкнутым контуром
22.15. Резюме 733
• Сложности мультипеременных систем являются причиной
использования синтеза, основанного на критерии (он кратко упоминался в
SISO-случае), чтобы получить дополнительный мотив.
• Популярное семейство критериев — функционалы, включающие
квадратичные формы ошибок управления и управляющих
воздействий.
• В случае общей нелинейной формулировки оптимальное решение
описывается двухточечной краевой задачей.
• В линейном случае (так называемый линейный квадратичный
регулятор) общая проблема сводится к решению непрерывного
динамического уравнения Риккати, которое может быть решено с
использованием нестационарной обратной связи по состоянию.
• После затухания начальных условий оптимальное нестационарное
решение сходится к постоянной обратной связи по состоянию, так
называемому решению установившегося линейного квадратичного
регулятора.
• Часто достаточно пренебречь начальным переходным процессом
точного линейного квадратичного регулятора и реализовать только
установившийся линейный квадратичный регулятор.
• Установившееся состояние линейного квадратичного регулятора
эквивалентно
о соответствующему подбору модели, где задана желаемая
дополнительная чувствительность и регулятор выбирается так, чтобы он
соответствовал настолько близко, насколько возможно, некоторой
выбранной мере и
о размещению полюсов, где задается характеристический полином
замкнутого контура и регулятор выбирается так, чтобы получить
этот полином.
• Таким образом, линейный квадратичный регулятор, подбор модели
и размещение полюсов математически эквивалентны, хотя они
предлагают различные параметры настройки.
Эквивалентная
технология синтеза
Линейный квадратичный
регулятор
Подбор модели
Назначение полюсов
Параметры настройки
Относительные штрафы за ошибки
управления в зависимости от управляющих
воздействий
Эталонная модель дополнительной
чувствительности замкнутого контура
и взвешенный штраф за отличия контура
управления
Характеристический полином замкнутого
контура
734 Глава 22. Проектирование через методы оптимального управления
• Эти методы могут быть расширены на дискретные системы.
• Имеется очень тесная связь с двойственной проблемой фильтрации:
получение состояния из связанного (но не точно соответствующего)
набора измерений.
• Проектирование оптимального фильтра, основанное на квадратич-
. ных критериях, снова приводит к уравнению Риккати.
• Фильтры могут быть эквивалентно синтезированы и
интерпретированы в рамках
о линейных квадратичных,
о подбора модели или
о размещения полюсов.
• По-видимому, наиболее известной формулировке оптимального
фильтра, фильтра Калмана, можно дать вероятностную или
детерминированную интерпретацию в зависимости от вкуса.
• Линейный квадратичный регулятор автоматически не включает
интегрирующие свойства; таким образом, подавление постоянного
возмущения или возмущения в виде другого полийома должно быть
обеспечено через принцип внутренней модели.
22.16. Литература для последующего чтения
Общие вопросы оптимального управления
1. Bellman, R. (1957). Dynamic Programming. Princeton University Press.
[Имеется русский перевод: Беллман Р. Динамическое программирование. —
М.: ИЛ, I960.]
2. Bryson, A. and Но, YC. (1969). Applied Optimal Control Blaisdell.
Линейный квадратичный регулятор
1. Anderson, В. and Moore, J. (1971). Linear Optimal Control Prentice-Hall,
Englewood Cliffs, N.J.
2. Athans, M. and Falb, P. (1966). Optimal control McGraw-Hill. [Имеется
русский перевод: Атанс М., Фалб П. Оптимальное управление. — М.:
Машиностроение, 1968.]
3. Kalman, R.E. (1960b). When is a linear control systems optimal. ASME
J.Basic Eng., 86:51-60.
4. Kwakernaak, H. and Sivan, R. (1972). Linear Optimal Control Systems. Wiley-
Interscience, New York.
5. Zhou, K., Doyle, J.C., and Glover, K. (1996). Robust and Optimal Control.
Prentice-Hall, Upper Saddle River, N.J.
22.16. Литература для последующего чтения 735
Линейный оптимальный фильтр
1. Anderson, В. and Moore, J. (1979). Optimal Filtering. Prentice-Hall,
Englewood Cliffs, N.J.
2. Bucy; R. and Joseph, P. (1968). Filtering for Stochastic Process with
Applications to Guidance. Wiley-Interscience.
3. Goodwin, G.C. and Sin, K. (1984). Adaptive Filtering Prediction and Control.
Prentice-Hall, Englewood Cliffs, N.J.
4. Kailath, T. (1968). An innovations aproach to least-square estimation. Part I:
Linear filtering in additive white noise. IEEE Transactions on Automatic
Control, 13(6):647-655.
5. Kailath, T. (1974). A view of three decades of linear filtering theory. IEEE
Trans, on information theory, 20(6):145-181.
6. Kalman, R.E. and Bucy, R. (1961). New results in linear filtering and prediction
theory. Trans ASME J.Basic Eng., 83:95-107.
7. Feuer, A. and Goodwin, G.C. (1996). Sampling in Digital Signal Processing
and Control. Birkhousser, Boston.
Свойства уравнения Риккати
1. Bittanti, S., Laub A.J., and Willems, J.С (1996). The Riccati Equation.
Springer-Verlag, Berlin.
2. Chan, S., Goodwin, G., and Sin, K. (1984). Convergence properties of the
Riccati difference equation in optimal filtering of nonstabilizable systems. IEEE
Transactions on Automatic Control, 29(2):110-118.
3. De Souza, C, Gevers, M., and Goodwin, G.C. (1986). Riccati equation in
optimal filtering of nonstabilizable systems having singular state transition
matrices. IEEE Transactions on Automatic Control, 31:831-839.
4. Kucera, V. (1972). The discrete Riccati equation of optimal control.
Kibernetika, 8(5):430-447.
5. Lancaster, P. and Rodman, L. (1995). Algebraic Riccati equations. Oxford
University Press, Oxford.
6. Willems, J.С (1970). Stability Theory of Dynamical Systems. T. Nelson,
London.
7. Wimmer, H.K. (1985). Monotonicity of maximal solution of algebraic Riccati
equations. Systems and Control Letters, 5(5):317-319.
8. Zhou, K., Doyle, J.C., and Glover, K. (1996). Robust and Optimal Control.
Prentice-Hall, Upper Saddle River, N.J.
Теорема вероятностного разделения
1. Simon, H. (1956). Dynamic programing under uncertainty with a quadratic
criterion function. Econometrica, 24:74.
Управление пьезоэлектрической слоистой балкой
1. Moheimani, S.O.R., Pota, H.R., and Petersen, I.R. (1998). Active control
of vibrations in a piezoelectric laminate cantilevered beam-A spatial LQG
approach. Proc. IEEE CDC, Tampa, Florida.
736 Глава 22. Проектирование через методы оптимального управления
22.17. Задачи для читателя
Задача 22.1. MIMO-объект имеет номинальную передаточную
функцию G0(s) и управляется замкнутым контуром. Синтезируйте MIMO-
регулятор, такой, что доминирующие полюсы замкнутого контура
являются корнями полинома 52 + 13s + 100. Возьмите
G0(s) = l
2 -1
(а + 4)(я + 5) [0.5 3
(22.17.1)
Задача 22.2. Для того же объекта, что и в задаче 22.1, синтезируйте
оптимальный регулятор, такой, что все полюсы замкнутого контура
находятся внутри круга с центром в точке (—8,0) и с радиусом, равным 2.
Задача 22.3. Рассмотрим объект, имеющий модель
G0(*) =
1
53-252-б5 + 7
35-2 s2 - 2s + 3'
(22.17.2)
[s2 - 35 + 3 25-6
Определите регулятор в форме передаточной функции, который дает
нулевые установившиеся ошибки для постоянных эталонных сигналов и
возмущений и в то же время обеспечивает, что собственные движения
замкнутого контура затухают быстрее, чем e~2t.
Задача 22.4. Повторите предыдущую задачу, но предположите, что
следует спроектировать цифровой регулятор. Выберите период
квантования, равный А = 0.1 с.
Задача 22.5. Разработайте модификацию синтеза дискретного
линейного квадратичного регулятора, который дает расположение полюсов
замкнутого контура внутри круга заданного радиуса р (р < 1).
Задача 22.6. Рассмотрим объект, имеющий модель
Go (*) =
5 + 2
е-0.5*
-0.2
0.5
D-0.25s
(22.17.3)
22.6.1. Используя подход с применением линейного квадратичного
регулятора, основанный на обратной связи по восстановленному
состоянию, спроектируйте цифровой регулятор с периодом квантования
А = 0.25 с такой, что полюсы замкнутого контура расположены
внутри круга радиуса 0.5. (Используйте Ф = I и Ф = I).
22.6.2. Вычислите полученные полюсы замкнутого контура.
22.6.3. Повторите проектирование, используя метод назначения
полюсов таким образом, чтобы полюсы замкнутой системы были такими
же, как и при использовании метода проектирования линейного
квадратичного регулятора.
22.17. Задачи для читателя 737
Задача 22.7. Рассмотрим объект, описанный в пространстве состояний
четырьмя матрицами (Ао,Во,Со,0). Предположим, что этот объект
полностью управляем и полностью наблюдаем. Предположим далее,
что полюсы замкнутого контура, используемого для управления этим
объектом, размещены с помощью метода линейного квадратичного
регулятора. Функция стоимости дана выражением (22.4.3), где
*/ = оо; Ф/ = 0; Ф = С£С0; Ф = р21 (22.17.4)
где р — положительная скалярная константа.
22.7.1. Докажите, что полюсы замкнутого контура являются корнями
выражения, расположенными в ЛПП,
det
(l + ±G0(s)G0(-s)A (22.17.5)
где G0(s) —матрица передаточных функций системы, т. е. GQ(s) =
C0[sl — AoI^Bq. (Подсказка: вспомните, что полюсы замкнутого
контура с линейным квадратичным регулятором являются
собственными значениями матрицы Гамильтона, приведенной в (D.1.8).)
22.7.2. Используйте результат 22.7.1 для анализа расположения
полюсов замкнутого контура в случае малых (слабое управление) и
больших (существенное управление) значений р. Рассмотрите, в
частности, случаи неустойчивых и неминимально-фазовых объектов.
Задача 22.8. Используйте результаты, полученные в задаче 22.7, для
управления объектом, имеющим модель вида
G0(e)= *
(s + 3)(s + 5)
3(-s + 5) 2
1.5 1
(22.17.6)
Задача 22.9. Дискретный шум измерения у[к] удовлетворяет модели
y[k]=a + v[k] (22.17.7)
где а — неизвестная константа, a v [к] — некоррелированный
стационарный процесс с дисперсией а2.
22.9.1. Найдите оптимальный фильтр для оценки а.
22.9.2. Постройте схему пакета SIMULINK для оценки вашего фильтра
в установившемся состоянии.
738 Глава 22. Проектирование через методы оптимального управления
Задача 22.10. Рассмотрим случай дискретного шума измерения у[к]
синусоидальной формы известной частоты, но неизвестной амплитуды
и фазы:
у[к] = Asm(u0k + a) +v[k] (22.17.8)
где v[fc] —некоррелированный стационарный процесс с дисперсией а2.
22.10.1. Постройте модель в пространстве состояний для
формирования синусоидальных колебаний.
22.10.2. Найдите оптимальный фильтр для оценки А и а.
22.10.3. Постройте схему пакета SIMULINK для оценки вашего
фильтра в установившемся состоянии.
Задача 22.11. Рассмотрим следующую задачу подбора модели:
J = — I \M(jlj) - N{ju)Q{ju)\2 dw (22.17.9)
где
M(s) = -r—-A -; N{s) = , ""**8 оч (22.17.10)
v ; s2 + 4s + 9' v } (s + 8)(s + 2) v }
22.11.1. Преобразуйте задачу в задачу линейного квадратичного
регулятора, который использует R — 10~3.
22.11.2. Решите задачу линейного квадратичного регулятора и найдите
оптимальное значение для Q(s).
Глава 23
Модельное прогнозирующее
управление
23.1. Введение
Как было упомянуто в гл. 11, все реальные проблемы управления
подчинены различного типа ограничениям. Наиболее общими являются
ограничения исполнительного механизма (ограничения амплитуды и
скорости нарастания). Кроме того, многие задачи имеют также
ограничения на переменные состояния (например, максимальные давления,
которые нельзя превышать, минимальные уровни резервуаров).
Во многих задачах проектирования эти ограничения могут
игнорироваться, по крайней мере, на начальной стадии проектирования. Однако
в других задачах эти ограничения — неизбежная часть формулировки
общей проблемы, потому что система работает вблизи ограничений.
Действительно, во многих задачах управления производственным
процессом оптимальная рабочая точка установившегося состояния часто
находится на границе рабочей области. В этих случаях желательно при
проектировании включить ограничения с самого начала.
В гл. 11 описаны методы (имеющие дело с ограничениями),
основанные на стратегиях противонакопления. Они, вероятно, совершенно
адекватны для простых задач, особенно, для SISO-задач. Эти методы могут
быть также расширены на некоторые MIMO-задачи, как мы увидим в
гл. 26. Однако в более сложных MIMO-задачах, особенно тех, которые
имеют входные ограничения и ограничения состояния, часто желательно
иметь более формальный механизм обращения с ограничениями при
проектировании MIMO-систем управления.
Мы опишем здесь один такой механизм, основанный на модельном
прогнозирующем управлении (МПУ). Это фактически было главным
успехом в применении современного управления. В литературе были
сообщения более чем о 2000 применений этого метода, в основном, в
нефтехимической области. Метод также все более и более используется
в электромеханических задачах, когда системы управления работают
740 Глава 23. Модельное прогнозирующее управление
на границе рабочей области. Его главными преимуществами являются
следующие:
• Он обеспечивает для MIMO-управления учет ограничений «одним
махом», т. е. комплексно.
• Это один из немногих методов, которые позволяют работать с
ограничениями состояния.
• Имеется несколько коммерческих пакетов, которые дают
промышленные робастные варианты алгоритмов в области управления
химическими процессами.
Имеется много альтернативных путей описания модельного
прогнозирующего управления, включая методы использования полиномов и
пространства состояний. Здесь мы дадим краткое введение в метод,
используя описание в пространстве состояний. Оно предназначено ознакомить
читателя с основными идеями модельного прогнозирующего управления
(например, понятие оптимизации с расширяющимися условиями). Это
также служит иллюстрацией некоторых идей оптимального управления,
рассмотренных в гл. 22, стимулирующих использование модельного
прогнозирующего управления.
Один из нас (Гребе) имеет значительный практический опыт
использования модельного прогнозирующего управления в промышленности,
где оно финансируется, позволяя получать существенные ежегодные
сбережения за счет улучшенных характеристик управления. Другой
из нас (Гудвин) применил метод в нескольких промышленных задачах
управления (включая дополнительное управление водой на сахарном
заводе, стабилизацию качки судна с помощью перекладки руля и
управление питанием машины для литья под давлением), где учет ограничений
был ключевым соображением.
Прежде чем рассматривать подробности модельного
прогнозирующего управления, мы повторно обратимся к стратегии противонакопления,
представленной в гл. 11.
23.2. Противонакопление;
повторное рассмотрение
Предположим на некоторое время, что все состояние системы
непосредственно измеряется. Тогда, если есть стационарная модель системы и
если цели и ограничения также стационарны, то из этого следует, что
стратегия управления может быть выражена как определенное отобра-
23.2. Противонакопление; повторное рассмотрение 741
жение состояния на управление; т. е. оптимальная стратегия управления
может быть выражена в виде
uZ(t) = h(x{t)) (23.2.1)
для некоторого статического отображения h(o). Остается лишь
охарактеризовать отображение h(o). Для общей проблемы ограничений
будет трудно дать простое описание h(o). Однако мы можем считать
стратегию противонакопления в гл. 11 как частный пример простого
(для данного случая) описания h(o). Конечно, если задача управления
сформулирована в отсутствии ограничений, как линейный
квадратичный регулятор, то мы знаем из гл. 22, что стратегия расширяющихся
условий без ограничений имеет форму уравнения (23.2.1), где h(o) имеет
простую линейную форму
h°(x{t)) = -Koox(t) (23.2.2)
для некоторой матрицы постоянных усилений Kqq (cm. раздел 22.5).
Если мы затем рассматриваем SISO-задачу, в которой ограничено
только управление, тогда форма противонакопления (23.2.2) (в разд. 18.9)
просто имеет вид
h(x(t)) = sat{h°{x{t))} (23.2.3)
Мы видели в гл. 11, что вышеупомянутая схема работает очень
хорошо, по крайней мере, в простых ситуациях.
Проиллюстрируем сказанное следующим простым примером.
Пример 23.1. Рассмотрим непрерывный объект с двойным
интегратором, который квантуется с интервалом А = 1 с.
Соответствующая дискретная модель имеет вид
x{k + l) = Ax{k) + Bu{k) (23.2.4)
y(k) = Cx{k) (23.2.5)
где
A =
1 1
0 1
B =
0.5
1
C=[l 0] (23.2.6)
Выберем использование теории линейного квадратичного регулятора
с расширяющимися условиями для получения закона управления. В
пределах этой структуры мы используем следующие весовые матрицы:
Ф = СГС, Ф = 0.1 (23.2.7)
Стратегия оптимального управления без ограничений, как в
(23.2.2), может быть найдена с помощью методов, описанных в гл. 22.
Далее исследуем характеристику этого закона управления при
различных сценариях. Сначала рассмотрим случай, когда управление не
имеет ограничений.
742 Глава 23. Модельное прогнозирующее управление
10 IS
моменты квантования (к)
моменты квантования (к)
Рис. 23.1. Реакция на выходе без Рис. 23.2. Реакция на входе без
ограничений ограничений
Рис. 23.3. Фазовая траектория без ограничений
Тогда для начальных условий х(0) = (—10,0)г реакция на выходе и
входной сигнал объекта будут такими, как показано на рис. 23.1 и 23.2.
Рисунок 23.3 показывает оптимальную реакцию на фазовой плоскости.
Далее предположим, что вход должен удовлетворять умеренному
ограничению \и(к)\ < 5. Применение стратегии противонакопления
дает реакцию, показанную на рис. 23.4 с соответствующим сигналом на
входе объекта, представленном на рис. 23.5. Реакция такоюе показана
на фазовой плоскости на рис. 23.6.
Рассмотрение рис. 23.4, 23.5 и 23.6 показывает, что простая
стратегия противонакопления — уравнение (23.2.3) — дала в этом случае
вполне приемлемую реакцию. DDD
Вышеупомянутый пример, казалось бы, говорит, что нет потребности
в более причудливых методах. Действительно, можно показать, что за-
23.2. Противонакопление; повторное рассмотрение 743
моменты квантования (к) моменты квантования (к)
Рис. 23.4. Реакция на выходе с Рис. 23.5. Реакция на входе с огра-
ограничением на входе \и(к)\ < 5 ничением \и(к)\ < 5
И
XI
Рис. 23.6. Фазовая траектория с ограничением \и(к)\ < 5
кон управления, заданный уравнением (23.2.3), фактически оптимален
при некоторых условиях, — см. задачу 23.10 в конце главы. Однако если
мы сделаем ограничения более строгими, ситуация изменяется, как мы
увидим в следующем примере.
Пример 23.2. Рассмотрим ту же самую установку, что и в
примере 23.1, за исключением того, что вход теперь удовлетворяет более
серьезному ограничению \и(к)\ < 1. Заметьте, что это ограничение
составляет 10% от начального неограниченного входа, показанного на
рис, 23.2. Таким образом, это довольно серьезное ограничение. Закон
управления, задаваемый уравнением (23.2.3), теперь даст реакцию,
показанную на рис, 23.7 с соответствующим входным сигналом,
показанным на рис, 23.8, эквивалентный график на фазовой плоскости
показан на рис, 23.9.
744 Глава 23. Модельное прогнозирующее управление
моменты квантования (к)
моменты квантования (к)
Рис. 23.7. Реакция на выходе с Рис. 23.8. Реакция на входе с огра-
ограничением на входе \и(к)\ < 1 ничением \и(к)\ < 1
Рис. 23.9. Фазовая траектория с ограничением |тх(А;)| < 1
Рассмотрение рис. 23.7 указывает, что простая стратегия,
определяемая уравнением (23.2.3), не работает удовлетворительно, и,
действительно, дает в этом случае большое перерегулирование. DDD
Читатель может задаться вопросом, что в вышеупомянутом примере
произошло не так, как надо. Ключ к разгадке дается на рис. 23.9. Мы
видим, что начальные ступеньки входа приводят к тому, что скорость
растет до большой величины. Если бы управление было
неограниченным, эта большая скорость помогла бы нам быстро перейти к началу
координат. Однако из-за ограниченных возможностей управления
тормозящая способность системы ограничена, и, следовательно, происходит
большое перерегулирование. Отсюда вывод, что стратегия управления,
определяемая уравнением (23.2.3), слишком близорука и не способна
объяснить тот факт, что будущие управляющие входы будут ограничены
23.3. Что такое модельное прогнозирующее управление? 745
так же как и текущий управляющий вход. Решением, казалось бы, была
бы попытка смотреть вперед (т. е. предсказывать будущую реакцию) и
принимать во внимание текущие и будущие ограничения при получении
стратегии управления. Это приводит нас к идее модельного
прогнозирующего управления.
23.3. Что такое модельное
прогнозирующее управление?
Модельное прогнозирующее управление — алгоритм управления,
основанный на решении задачи оптимального управления в реальном
масштабе времени. Используется подход с расширяющимися условиями,
который может быть получен в итоге следующих шагов:
1) Во время к и для текущего состояния х(к) решить в реальном
масштабе времени для разомкнутого контура задачу оптимального
управления для некоторого будущего интервала, учитывая текущие
и будущие ограничения.
2) Применить первый шаг для последовательности оптимального
управления.
3) Повторить процедуру для момента (& + 1), используя текущее
состояние х(к + 1).
Решение приводится к стратегии замкнутого контура, используя
измеренную величину х(к) как текущее состояние. Когда х(к)
непосредственно измерить нельзя, можно получить стратегию замкнутого
контура, заменяя х(к) восстановленной величиной, полученной
некоторой формой наблюдателя. Последняя ситуация рассмотрена в разд. 23.6.
Пока же предположим, что величина х(к) может быть измерена. Тогда
в общем нелинейном варианте метод выглядит следующим образом.
Дана модель
x(i +1) = /(s(€),u(€)), x{k) = х (23.3.1)
Модельное прогнозирующее управление для (х,к) вычисляется путем
решения задачи ограниченного оптимального управления:
VN(x): Vfi{x) = min VN(x,U) (23.3.2)
U€Un
где
^ = {u(fc),u(fc + l),...,u(fc + JV-l)} (23.3.3)
k+N-l
VN{x,U)= J2 L(x(i),u(*)) + F(x(k + N)) (23.3.4)
t=k
746 Глава 23. Модельное прогнозирующее управление
и Un — подмножество С/, которое удовлетворяет ограничениям на всем
интервале [к, к + N — 1]:
u{t)e\J t = k,k + l,...,k + N-l (23.3.5)
x{t)eX l = k,k + l,...,k + N (23.3.6)
вместе с граничным условием
x(k + N)eW (23.3.7)
Обычно множество U С Кт выпукло и компактно, множество X С Rn
является выпуклым и замкнутым и W — множество, которое может быть
соответственно выбрано, чтобы достичь устойчивости.
В вышеупомянутой формулировке модель и функция стоимости
инвариантны во времени. Следовательно, получается закон управления со
стационарной обратной связью. В частности, без потери общности мы
можем задать к = 0 в задаче управления с разомкнутым контуром.
Тогда, для (х,к) мы решаем
VN(x): V&{x) = min VN(x,U) (23.3.8)
UGUn
где
,^ = {u(0),u(l),...,u(Ar-l)} (23.3.9)
VN{x,U) = ^2L(x{e),u{^)) + F{x{N)) (23.3.10)
при соответствующих ограничениях. Для решения вышеупомянутой
задачи используются стандартные методы оптимизации.
Пусть минимизирующая управляющая последовательность равна
l/» = K(0),<(l),...,<(JV-l)} (23.3.11)
Тогда фактическое управление, прикладываемое в момент А;,
—первый элемент этой последовательности, т. е.
и = и°х{0) (23.3.12)
Далее время смещается вперед на единицу и вышеупомянутая
процедура повторяется для другого диапазона оптимизации на N шагов
вперед. Теперь первый вход новой последовательности из N шагов
вперед используется в качестве управления. Вышеупомянутая
процедура повторяется неограниченно. Идея иллюстрируется на рис. 23.10.
Заметим, что только заштрихованные входы фактически подаются на
объект.
23.3. Что такое модельное прогнозирующее управление? 747
02(0)
j и-*k
U2(i)
0 12 3 4
iJ]
0 1 2 3 4 5
щт
■
-►k
1 1
0 1
2
3
4
5
Г~1 .
6
1 Ь 1г
Рис. 23.10. Принцип управления с расширяющимися условиями
Вышеупомянутое модельное прогнозирующее управление неявно
определяет стационарную стратегию управления /&(о), как в (23.2.1), т. е.
статическое отображение h : X -> U вида
h(x)=u°x(0)
(23.3.13)
Метод первоначально возник в промышленности как реакция на
потребность учитывать ограничения. Посвященная этому вопросу
литература может быть разделена на четыре поколения следующим образом:
• Первое поколение (1970-е годы) —импульсные или линейные модели
с реакцией на ступеньку, квадратичной функцией стоимости и для
специальной обработки ограничений.
748 Глава 23. Модельное прогнозирующее управление
• Второе поколение (1980-е годы) — линейные модели пространства
состояний, квадратичная функция стоимости, входные и выходные
ограничения, выраженные как линейные неравенства и квадратичное
программирование, используемое для решения задачи оптимального
управления с ограничениями.
• Третье поколение (1990-е годы) — несколько уровней ограничений
(мягкие, жесткие, упорядоченные), механизмы выявления
неосуществимых решений.
• Четвертое поколение (в конце 1990-х годов) — нелинейные задачи,
гарантированная устойчивость и робастные модификации.
23.4. Устойчивость
Замечательное свойство модельного прогнозирующего управления
заключается в том, что можно обеспечить устойчивость результирующей
замкнутой системы (по крайней мере, при наличии полной
информации о состоянии). Это оказывается возможным потому, что функция
стоимости задачи оптимального управления действует как функция
Ляпунова для замкнутой системы. Напомним читателю, что краткое
представление устойчивости по Ляпунову дано в гл. 19.
Для ясности описания сделаем следующие упрощающие
предположения.
1. Вводится дополнительное ограничение для заключительного
состояния задачи оптимизации с расширяющимися условиями, а именно,
что
x(N) = 0 (23.4.1)
где x(N) — предельное состояние, получающееся из управляющей
последовательности Щ, как в (23.3.11).
2. Функция L(x,u) положительно определена для обоих аргументов.
Теорема 23.1. Рассмотрим систему (23.3.1), управляемую па основе
алгоритма модельного прогнозирующего управления с
расширяющимися условиями, описываемого выражениями (23.3.8)-(23.3.11) и
удовлетворяющую предельному ограничению (23.4.1). Этот закон управления
переводит замкнутую систему в разряд абсолютно асимптотически
устойчивых.
Доказательство
Согласно предположениям регулярности, функция стоимости V^(-)
положительно определенная и собственная: Vfi(x) -> оо когда ||х|| ->• оо.
23.4. Устойчивость 749
Поэтому для этой задачи она может использоваться как функция
Ляпунова. Мы вспоминаем, что для (х,к) модельное прогнозирующее
управление с учетом ограничений будет следующим:
VN(x): V&(x) = min VN(x,U) (23.4.2)
U£Un
N-l
VN{x,U)=4£fL{z(l)Mt)) + F(*{N)) (23-4.3)
£=0
Обозначим оптимальную управляющую последовательность
разомкнутого контура, дающую Рлг(х), через
С7ж° = К(0),<(1),...,<(^-1)} (23.4.4)
Напомним, что для стратегии модельного прогнозирующего
управления фактическое управление, прикладываемое во время А;, является
первой величиной этой последовательности
u = h(x) = u°x{0) (23.4.5)
Пусть х(1) = f(x,h(x)) и пусть x(N) — предельное состояние,
полученное воздействием Щ. Заметим, что мы считаем x(N) — 0.
Подходящее решение (но не оптимальное) для второго шага в
решении с расширяющимися условиями Vn(xi) тогда будет:
йх = {их(1),и°(2),...,u°x(N -1),0} (23.4.6)
В этом случае приращение функции Ляпунова при использовании
истинного оптимального входа в модельном прогнозирующем управлении
и при переходе от х к х(1) = f(x,h(x)) будет равно
AhV&(x) й V£(*(l)) - V$(x) (23.4.7)
= VN(x(l),U21)-VN(x,U2)
Однако величина UXl оптимальна, так как мы знаем, что
VN{x{\),U°xJ < VN(x(l),Ux) (23.4.8)
где Ux является условно оптимальной последовательностью,
определенной в (23.4.6). Следовательно, мы имеем
*hV&{x)<VN(x(l),Ux)-VN{x,U£) (23.4.9)
Учитывая, что Ux состоит из (i\T — 1) членов, включая £/£, мы можем
видеть, что правая часть (23.4.9) удовлетворяет условию
VN(x{l),Ux) - VN(x,U°x) = -L{x,h{x)) (23.4.10)
750 Глава 23. Модельное прогнозирующее управление
где мы использовали то, что Щ дает x(N) = 0 (в соответствии с
предположением) и, следовательно, Ux дает x(N + 1) = 0.
Наконец, используя (23.4.9) и (23.4.10), мы имеем
ДлУ#(ж) < -L(x9h(x)) (23.4.11)
Когда функция Цх^и) положительно определена для обоих
аргументов, устойчивость следует сразу же из теоремы 19.1. DQQ
Замечание 23.1. Для ясности мы использовали в вышеупомянутом
доказательстве довольно ограничительные предположения, чтобы
сделать его простым. Фактически, оба предположения, 1 и 2, могут быть
значительно смягчены. Например, предположение 1 может быть
заменено предположением, что x(N) входит в предельный набор, в
котором находятся «хорошие свойства». Точно так же
предположение 2 может быть смягчено до требования, что система является
определяемой функцией стоимости. Мы оставляем
заинтересованного читателя разобраться с этими усовершенствованиями в ссылках,
приведенных в конце главы. DDD
Замечание 23.2, Не касаясь проблемы устойчивости, пользователь
модельного прогнозирующего управления мог бы заинтересоваться,
есть ли преимущества характеристик, если они вообще существуют,
связанные с использованием этого алгоритма. Чтобы {частично)
ответить на этот вопрос, мы сделаем паузу и повторно рассмотрим
пример 23.2.
Пример 23.3. Рассмотрим снова задачу, описанную в примере 23.2, с
ограничением входа \и(к)\ < 1. Вспомним, что «близорукая» стратегия,
используемая в примере 23.2, вела к большому перерегулированию.
Здесь мы рассмотрим функцию стоимости, приведенную в (23.3.10)
с N = 2 и такую, что F(x(N)) является оптимальной неограниченной
бесконечно увеличивающейся стоимостью и L(x(£),u(£))
—возрастающая стоимость, связанная с основной задачей линейного
квадратичного регулятора, как описано в примере 23.1.
Существенное различие между примером 23.2 и текущим
примером — то, что в примере 23.2 мы рассмотрели при оптимизации
только ограничение входа в текущем управлении, теперь мы рассматриваем
ограничение на текущем и следующем шаге. Таким образом, источник
управления совсем не такой, как в случае «близкого взгляда», что было
в предыдущем случае.
На рис. 23.11 показана результирующая характеристика, а на
рис. 23.12 показан соответствующий входной сигнал.
Характеристика на фазовой плоскости показана на рис. 23.13. Сравнение рис. 23.11
23.5. Линейные модели с квадратичной функцией стоимости 751
в
4
г
-4
-в
•в
С
S
10 IS
20 2S
j
J
\
\
за
моменты квантования (к)
моменты квантования (к)
Рис. 23.11. Реакция на выходе при Рис. 23.12. Реакция на входе при
использовании модельного прогнози- использовании модельного
прогнозирующего управления рующего управления
-10 -в -в -4 -2 0 2 4 ■
Рис. 23.13. Фазовая траектория при использовании модельного
прогнозирующего управления
и 23.13 с рис. 23.7 и 23.9 подтверждает преимущества учета будущих
ограничений при формировании стратегии управления. QQQ
23.5. Линейные модели
с квадратичной функцией стоимости
До сих пор мы описывали алгоритм модельного прогнозирующего
управления в общем нелинейном случае. Однако разумно было бы
ожидать, что дальнейшее понимание проблемы может быть получено,
если рассмотреть специализированный алгоритм, охватывающий
линейный случай с квадратичной функцией стоимости. Это и будет темой
текущего раздела. Снова мы будем использовать схему пространства со-
752 Глава 23. Модельное прогнозирующее управление
стояний. Предположим, что система описывается следующей линейной
стационарной моделью:
x{t+l) = Ax{i) + Bu{e) (23.5.1)
y{t) = Cx(t) (23.5.2)
где x(t) Е Rn, u(€) е Km и у(€) е 1™.
Мы предполагаем, что система (А,В, С) стабилизируема и
определяема и что 1 не является собственным значением А. Итак, чтобы
проиллюстрировать используемые принципы, мы расширим схему, описанную
в разд. 23.2, включив отслеживание эталонного сигнала и подавление
возмущения. Таким образом, рассмотрим задачу отслеживания
постоянной уставки ys и подавления изменяющегося во времени выходного
возмущения {d(£)}: мы хотим свести к нулю ошибку
еЮ=УЮ + (<*Ю-У*) (23-5.3)
В дальнейшем будет удобно не делать никакого специального
различия между выходным возмущением и уставкой, так что мы определяем
эквивалентное выходное возмущение de как внешний сигнал:
de{i) = d(t)-ya (23.5.4)
Без потери общности мы возьмем текущее время, равное 0.
Наша цель заключается в том, чтобы для данного знания
внешнего сигнала de и текущей измеренной величины состояния х(0)
(сигналы, которые будут позже заменены оценками в реальном
масштабе времени) найти управляющую последовательность из М шагов
(u(0),u(l),... ,п(М — 1)}, которая минимизирует показатель
характеристики с конечным диапазоном:
J0 = [x(N) - xs]T4>f[x{N) - xs]
N-l
+ J2 еГ(*)*е(£)
1=0
Af-l
+ £[и(/)-и.]гФ[и(/)-«,]
e=o
(23.5.5)
где Ф > 0, Ф > 0, Ф/ > 0. Заметим, что эта функция стоимости —
небольшое обобщение функции, данной в уравнении (22.7.3) гл. 22.
В (23.5.5) N — диапазон предсказания, М < N — диапазон
управления.
23.5. Линейные модели с квадратичной функцией стоимости 753
Мы предполагаем, что de(£) содержит изменяющиеся во времени
компоненты наряду с постоянной составляющей. Пусть de обозначает
постоянную (в установившемся состоянии) составляющую.
Пусть тогда в уравнении (23.5.5) us и xs обозначают соответствующие
установившиеся значения и и х:
us = -[C(I - А)-^]"1 de (23.5.6)
ха = (1-А)-гВиа (23.5.7)
Минимизация (23.5.5) выполняется при условии, что управление
достигает своего установившегося значения после М шагов, т. е. u(l) = uSl
W > М.
В присутствии ограничений на входе и выходе эта задача
динамической оптимизации просто определяет нахождение решения
нединамической ограниченной квадратичной программы. Действительно, из (23.5.1)
и используя Bus = (I — A)xs, мы можем записать
X-Xs=TU + Ax{0)-J(s
где
Х =
х(1)'
х(2)
[x{N)
Xs =
Xg
Xg
Xe
u =
u(0)
«(1)
|_u(M-l)J
A =
A
A2
A"
(23.5.8)
(23.5.9)
Г =
В
AB
am-ib
AMB
A^B
0
В
AM"2B ..
AM"!B ..
A""2B ..
0
0
AB
A2B
0
0
в
AB
j^N-M
X,
в
Тогда, используя (23.5.8), (23.5.9) и
Ф = diag[CT*C,..., СТФС, Ф/]
Ф = д1щ[Ф,...,Ф]
Us = [и* uj ... uj],
t) = [de{0)T-%,de(l)T-%,...,de{N-if-de,Q?
Z = с!1а§[СтФ, СТФ,..., СТФ]
Xs
Xg
Xg
Ax
s
AN
-м„
(23.5.10)
(23.5.11)
(23.5.12)
(23.5.13)
(23.5.14)
754 Глава 23. Модельное прогнозирующее управление
мы можем выразить (23.5.5) в виде
J0 = ег(0)Фе(0) + (X - XS)T*(X - Ха) + (U- US)T*{U - US)
+ 2{Х - XS)TZB + DT diag[*,..., Ф]б
=J0 + UTWU + 2UTV (23.5.15)
В (23.5.15) значение J0 не зависит от U и
W = TT*r + ¥, У = ГтФ[Лж(0)-Х5]-Ф17в + Гт^Р. (23.5.16)
. Из (23.5.15) видно, что если проект без ограничений, J0
минимизируется при условии
U = -W~1V
(23.5.17)
Далее мы вводим ограничения в формулировку задачи.
Ограничения по амплитуде и скорости на входе и выходе объекта
могут быть выражены следующим образом:
«min < и(к) < ttmax; fc = 0,l,...,M-l (23.5.18)
2/min <у(к) <ymax; k = l,2,...,N-l (23.5.19)
A^min < u{k) -u{k- 1) < Aumax; k = 0,l,...,M- 1 (23.5.20)
Эти ограничения могут быть выражены как линейные ограничения
U следующего вида
ъи<к
(23.5.21)
Замечание 23.3. Как иллюстрация для SISO-случая L и К имеют
следующий вид
L =
Г I
-I
D
-D
W
L-w.
; к =
^тах
^min
J^max
J^min
У max
.У minj
(23.5.22)
где I — единичная матрица размерности М х М (М — диапазон
управления).
23.5. Линейные модели с квадратичной функцией стоимости 755
W — следующая матрица размерности М х М
1
W =
-1
О
(23.5.23)
О -1 1J
D — следующая матрица размерности (N — 1) х М
СВ
CAB
D =
cam-ib
САМВ
CA"-2B
CAB CB
CAB
САлг-мв can-m-ib
(23.5.24)
Un
un
u„
t-'min —
-U„
-«n
(23.5.25)
•'max —
■* тях —
u(0) + Anmax
Утах - CAx0 - d\
v min —
Утах-СА 1X0 — <1n-1
. -ЕЙ"~2СА'Ви. .
> J mm —
-ymin + CA^"1^ + dN-i
+ ZN=-M-2CAiBUs
(23.5.27)
u итгх, ит\п, Aumax, Aumm, Утах; Утт — верхние и нижние границы
u(k), (u(k) — u(k — 1)) и у(к) соответственно. QQQ
-u(0) - Aumin
-Aumin
-Aumin ^
(23.5.26)
-ymin + С Ax0 + di
756 Глава 23. Модельное прогнозирующее управление
Оптимальное решение
UOPT = [(йОРТ(0))т, (t2OPT(l))T,..., (йОРТ(М - 1))Т]Т (23.5.28)
может быть количественно получено с помощью следующей задачи
статической оптимизации:
UOPT = arg min UTWU + 2UTV (23.5.29)
LU<K
Таким образом, оптимизация является выпуклой задачей благодаря
квадратичной стоимости и линейным ограничениям. К тому же можно
•для решения этой подзадачи использовать стандартные числовые
процедуры (называемые алгоритмами квадратичного программирования
или для упрощения QP — Quadratic Programming). Многие пакеты
программирования (например, MATLAB) дают стандартные средства для
решения QP-задачи. Таким образом, мы не будем здесь останавливаться
на этом аспекте.
Заметим, что мы используем только первый элемент управления
иОРТ(0). Затем вся процедура повторяется для следующего момента
времени с постоянным диапазоном оптимизации.
Замечание 23.4. В вышеупомянутой разработке мы
предположили, что 1 —не собственное значение А. Имеется несколько способов
учесть случай, когда 1 —собственное значение А. Например, в SISO-
случае, когда имеется единственное собственное значение, равное 1, то
щ — 0. Такэюе мы моэюем записать модель пространства состояний
таким образом, чтобы интегратор был перемещен к выходу, т. е.
х{к + 1) = Ах{к) + Ви{к) (23.5.30)
х'{к + 1) = Сх{к)+х'{к)
У(к) = х'(к)
где А, В и С соответствуют модели пространства состояний
объекта с уменьшенным порядком, т. е. объекта без интегратора.
С этим преобразованием матрица [А — I] невыроэюдена и,
следовательно,
Г* "
X
Iх'.
S
- о -I
.—de\
Задача модельного прогнозирующего управления тогда решается в
терминах этих преобразованных переменных состояния. Предлагаем
читателю рассмотреть более общие случаи. □□□
23.6. Восстановление состояния и предсказание возмущения 757
23.6. Восстановление состояния
и предсказание возмущения
В вышеупомянутом описании алгоритма модельного прогнозирующего
управления мы приняли для простоты внутреннего представления, что
состояние системы (включая все возмущения) было доступно. Однако
относительно легко расширить все на случай, когда переменные
состояния непосредственно не измеряемы. Основная идея в этом варианте
модельного прогнозирующего управления заключается в том, что
требуются только выходные данные для замены неизмеряемого состояния
оценкой в реальном масштабе времени с помощью подходящего
наблюдателя. Например, можно было бы использовать фильтр Калмана (см.
гл. 22), чтобы восстановить текущее состояние х(к) по наблюдениям
выхода и входа {y(f),u(t)\(. = ... ,& — 2,& — 1}. Возмущения также
могут быть включены в эту стратегию добавлением соответствующих
фильтров, формирующих шум, как описано в разд. 22.10.4.
Алгоритм модельного прогнозирующего управления также требует,
чтобы были предсказаны будущие состояния и возмущения для
выполнения оптимизации для следующих диапазонов. Чтобы сделать это,
мы просто распространим на этот случай детерминированную модель,
полученную от объединения системы и модели шума, как описано в
разд. 22.10.5 —см., в частности, уравнение (22.10.80).
Г^"
QP
„ОРТ
Go
х(е)
1 а\Ч
»,(0\ '
тшГ
•L
Наблюдатель
d(t)
IV.
-1 .1„\
А
и
t-W
Рис. 23.14. Структура модельного прогнозирующего управления с одной
степенью свободы
23.6.1. Регулятор с одной степенью свободы
Регулятор с обратной связью по выходу и с одной степенью свободы
получается включением уставки в переменные, которые будут
восстановлены. Стратегия модельного прогнозирующего управления с
результирующей обратной связью по выходу схематично изображена на рис. 23.14,
758 Глава 23. Модельное прогнозирующее управление
где G0{z) = C(zl — А)"1 В — передаточная функция объекта, а
наблюдатель имеет структуру, рассмотренную в разделах 22.10.4 и 22.10.5. На
рис. 23.14 QP обозначает квадратичную программу, используемую для
решения задачи оптимального управления с ограничениями.
23.6.2. Интегрирующие свойства
Важный вывод состоит в том, что структура, изображенная на
рис. 23.14, обладает интегрирующими свойствами. В частности
параметр у, взятый в качестве уставки у5, независим от реального описания
объекта (при условии, что достигнуто установившееся состояние и что
в этом установившемся состоянии параметр и не ограничен). Чтобы
показать это, сделаем следующее.
Пусть {d(t}} содержит только постоянные величины: тогда
наблюдатель, предназначенный для восстановления этих неизвестных констант,
будет иметь вид
de(t + 1) = de{t) + Jd{e{i) - Сх{£) - de{£)) (23.6.1)
где {£(£)} обозначает восстановленные значения других состояний
объекта.
Мы видим, что если достигнуто установившееся состояние, то должно
быть истинно, что de(£ + 1) = de(t), и, следовательно, при Jd ф 0, имеем
e(t) = Cx{l) + de(() (23.6.2)
Теперь закон управления обладает таким свойством, что выход
модели Сх(£)+de(t) в установившемся состоянии принимает значение, равное
нулю. Таким образом, исходя из (23.6.2), должно быть также истинно то,
что фактическое значение {е(£)}> измеренное на выходе объекта, должно
также быть равно нулю в установившемся состоянии. Однако рис. 23.14
тогда указывает, что при этих условиях в установившемся состоянии
ошибка отслеживания нулевая.
23.7. Стабилизация качки судна
с помощью перекладки руля
Здесь мы приведем реальное приложение модельного прогнозирующего
управления для стабилизации качки судна с помощью перекладки руля.
Мы используем алгоритм, описанный в разд. 23.5 и 23.6. Причина
рассмотрения этого конкретного случая следующая.
Желательно уменьшить качку судна (вызываемую воздействием
волн), чтобы предотвратить повреждение груза, повысить эффектив-
23.7. Стабилизация качки судна с помощью перекладки руля 759
ность работы экипажа и обеспечить комфорт пассажирам. Обычные
методы для стабилизации качки судна включают водяные резервуары,
стабилизирующие бортовые рули и боковые кили. Другая
альтернатива—использовать руль для стабилизации качки наряду с обеспечением
заданного курса. Однако использование руля одновременно для
обеспечения курса и уменьшения качки нетривиально, потому что доступен
только один исполнительный механизм, чтобы иметь дело с двумя
целями. Поэтому требуется частотное разделение этих двух моделей, а
компромиссы проектирования ограничат достижимую характеристику.
Тем не менее, стабилизация качки рулем привлекательна, потому что не
нужно добавлять никакого дополнительного оборудования.
Важная проблема заключается в том, что механизм руля обычно
ограничен по амплитуде и скорости. Следовательно, это подходящая
задача для модельного прогнозирующего управления.
Чтобы описать движение судна, необходимы шесть независимых
координат. Первые три координаты и их производные по времени
соответствуют положению и поступательному движению; другие три
координаты и их производные по времени соответствуют ориентации и
вращательному движению. Для морских транспортных средств, шесть
различных компонентов движения названы продольным сносом,
боковым сносом, вертикальным смещением, бортовой качкой, килевой
качкой и рысканьем. Наиболее часто для этих параметров используются
обозначения х,у,г,ф,в и ф соответственно. Рисунок 23.15 показывает
шесть определенных координат и наиболее часто используемые
обозначения.
Угол поворота
руля (<*)-^
Инерциальные
координаты
/Т^ ""' Килевая Г^'''Т::::::^^-Т^:=^ Бортовая
/\ ^х качка \,Л ! ^^=^^/ качка (</>)
7. * CD(iM Gr—
Огыс
м - *
Боковой i Продольный
снос {у) » снос (ж)
Вертикальное
смещение
м
Рис. 23.15. Величины и их обозначения для описания движения судна
760 Глава 23. Модельное прогнозирующее управление
На рис. 23.15 также показан угол поворота руля, который обычно
обозначается через 8.
Бортовой крен под действием руля представляет более быструю
динамическую реакцию, чем произведенное рулем рысканье, из-за различных
моментов инерции корпуса, связанных с каждым направлением. Это
свойство используется в стабилизации качки с помощью перекладки
руля.
Общий метод моделирования движения судна основан на
использовании уравнений Ньютона для продольного сноса, поперечного сноса
и вертикального смещения. С помощью этого подхода была получена
нелинейная модель, для которой можно сформировать
линеаризованную модель пространства состояний, зависящую от пяти состояний:
[»>г}р}ф,ф]Т.
Модель является функцией скорости судна. Однако это не очень
большая проблема, так как она квазипостоянна для разумного
диапазона скоростей. Это позволяет использовать планирование усиления для
корректировки модели при различных диапазонах скоростей.
Нежелаемые изменения углов бортового крена и рысканья возникают
главным образом из-за действия волн. Эти возмущения от волн обычно
рассматриваются на выходе и полная модель динамики судна, включая
уравнение выхода, имеет форму
x = Ax + BS (23.7.1)
y = Cx + dB0JlH (23.7.2)
Как правило, непосредственно измеряются только крен и рысканье:
у := [ф,ф]т. В уравнении (23.7.2) dB0JIH — вызванное волнами возмущение,
влияющее на переменные выхода.
Возмущения от волн могут быть охарактеризованы в терминах
спектра частот. Этот спектр частот может быть смоделирован путем
использования фильтрованного белого шума. Фильтр, используемый
для аппроксимации спектра, обычно второго порядка:
Н(з) = 9 *w* , (23.7.3)
где Kw — константа, определяющая интенсивность волн, £ является
коэффициентом демпфирования и о;0 — доминирующая частота волн. Эта
модель формирует затухающие возмущения, подобные синусоидальным.
Результирующий «цветной» шум, представляющий влияние возмущения
от волн, добавлен к двум компонентам у с соответствующими
коэффициентами. (Фактически, движение волны воздействует главным образом
на боковую качку.)
23.7. Стабилизация качки судна с помощью перекладки руля 761
Цели проектирования системы стабилизации качки за счет
перекладки руля следующие:
• увеличить демпфирование и уменьшить амплитуду качки;
• управлять курсом судна.
Рулевое устройство ограничено по амплитуде и скорости.
Для торговых судов, скорость руля находится в пределах от 3
до 4 град/с;
Для военных судов она находится в диапазоне от 3 до 8 град/с.
Максимальный поворот руля обычно в диапазоне от 20 до 35 градусов.
Воспользуемся алгоритмом модельного прогнозирующего
управления, описанным в разд. 23.5.
Для судна использовалась следующая модель —см. ссылки,
приведенные в конце главы.
А =
0.1795
0.0159
0.0354
0
0
-0.8404
-0.4492
-1.5594
0
1
0.2115
0.0053
-0.1714
1
0
0.9665
0.0151
-0.7883
0
0
О'
0
0
0
0.
(23.7.4)
В =
• 0.2784'
-0.0334
-0.0894
0
0
(23.7.5)
Эта система была квантована с экстраполятором нулевого порядка и
интервалом квантования, равным 0.5 с.
Параметры критерия оптимизации модельного прогнозирующего
управления для уравнения (23.4.6) были следующие:
Ф =
90
0
Ф = 0.1
(23.7.6)
Диапазон оптимизации N = 20; диапазон управления М = 18.
Замечание 23.5. Заметим, что непрерывная система (23.7.4), (23.7.5)
содерэюит чистый интегратор. Следовательно, дискретная система
имеет собственное значение в точке 1; однако для этого случая мы
приняли нулевую уставку на выходе и возмущение с нулевым средним
значением. Таким образом, задача сводится к задаче регулирования,
когда xs = 0, us = 0. DDD
Предполагалось, что могут быть непосредственно измерены только
бортовая качка ф и рысканье ф, так что фильтр Калмана используется
762 Глава 23. Модельное прогнозирующее управление
Случай без ограничений
10
s_ s
jaS, о
-10
40 50 60
Время [с]
100
90 100
0 10 20 30 40 50 60 70 80 90 100
Время [с]
Рис. 23.16. Движение судна без ограничений на поворот руля
для восстановления в составной модели пяти переменных состояния и
двух переменных состояния, связанных с шумом. Выходное возмущение
предсказывалось с помощью методологии, описанной в разд. 23.6.
Уставки для двух выходов системы были взяты нулевыми и не было
никаких постоянных смещений в модели возмущения. Таким образом,
задача сводится к задаче регулирования.
На следующих графиках показаны угол крена (с и без стабилизации
качки с помощью руля), угол рысканья (с и без стабилизации качки с
помощью руля) и угол руля при стабилизации качки.
На рис. 23.16 показаны результаты для случая, когда нет никаких
ограничений амплитуды или скорости руля. В этом случае было
получено 66% сокращение стандартного отклонения угла крена по отношению к
случаю без какой-либо стабилизации. Цена, заплаченная за это,
—умеренное увеличение стандартного отклонения угла рысканья. Заметим
также, что угол руля достигает 60 градусов и имеет очень высокую
скорость нарастания.
23.8. Резюме 763
К
Максимальный угол руля
30 [град]
Максимальная скорость перекладки
15 [град/с]
-Ю
л.
< /Л
■- Mli'y выкл\
—МПУвкл.
10
20
30
40 50
Время [с]
70
90
100
40 50 60
Время [с]
Рис. 23.17. Движение судна, когда поворот руля ограничен максимальным
углом 30 град и максимальной скоростью перекладки 15 град/с
На рис. 23.17 показаны результаты для максимально допустимого
угла руля 30 градусов и максимальной скорости-перекладки 15 град/с.
В этом случае было достигнуто 59% сокращение стандартного
отклонения угла крена по отношению к случаю без какой-либо стабилизации.
Заметим, что угол руля удовлетворяет заданным ограничениям в связи
с использованием алгоритма МПУ.
На рис. 23.18 показаны результаты для максимально допустимого
угла руля 20 градусов и максимальной скорости перекладки 8 град/с. В
этом случае было достигнуто 42% сокращение стандартного отклонения
угла крена по отношению к случаю без какой-либо стабилизации.
Заметим, что более серьезные ограничения на характеристики руля снова
удовлетворены с помощью алгоритмов МПУ. DDD
23.8. Резюме
• МПУ обеспечивает систематическую процедуру работы с
ограничениями (и входными, и ограничениями состояния) в задачах MIMO-
у правления.
• Это широко используется в промышленности.
764 Глава 23. Модельное прогнозирующее управление
Максимальный угол руля
20 [град]
Максимальная скорость перекладки
15 [град/с]
40 50 60
Время [с]
Рис. 23.18. Движение судна, когда поворот руля ограничен максимальным
углом 20 град и максимальной скоростью перекладки 8 град/с
• Метод обладает замечательными свойствами, в частности,
глобальной асимптотической устойчивостью при удовлетворении некоторых
условий (например, подходящие весовые коэффициенты
заключительного состояния).
• Основные элементы МПУ для линейных систем:
о модель пространства состояний (или эквивалентная);
о оценка состояния (включая возмущение) в реальном масштабе
времени;
о предсказание будущих состояний (включая возмущение);
о оптимизация в реальном масштабе времени будущей траектории,
подчиненной ограничениям методом квадратичного
программирования и
о выполнение первого шага управляющей последовательности.
23.9. Литература для последующего чтения 765
23.9. Литература для последующего чтения
Основы оптимального управления
1. Bellman, R. (1957). Dynamic Programming. Princeton University Press.
[Имеется русский перевод: Беллман Р. Динамическое программирование. —
М.: ИЛ, I960.]
2. Kajman, R.E. (I960). Contributions to the theory of optimal control. Boletin
Sociedad Matemdtica Mexicana, 5:102-119.
3. Lee, E. and Markus, L. (1967). Foundations of Optimal Control Theory. Wiley,
New York.
Модельное прогнозирующее управление
с расширяющимся диапазоном
1. Cutler, С. and Ramaker, В. (1989). Dynamic matrix control. A computer
control algorithm. Proceedings Joint Automatic Control Conference, San
Francisco, California.
2. Garcia, C.E. and Morshedi, A. (1986). Quadratic programming solution of
dynamic matrix control (QDMC). Chemical Engineering Communications,
46:73-87.
3. Grosdidier, P., Proisy, B. and Hammann, M. (1988). The IDCOM-M controller.
Proceedings of the 1988 IF AC Workshop on Modzl Based Process Control, pp.
31-36.
4. Keerthi, S.S. and Gilbert, E.G. (1988). Optimal, infinite horizon feedback laws
for a general class of constrained discrete time systems: Stability and moving-
horizon approximations. Journal of Optimization Theory and Applications,
57:265-293.
5. Mayne, D.Q., Rawlings, J.B., Rao, C.V., and Scokaert, P. (2000). Model
Predictive Control: A review. Automatica, to appear.
6. Michalska, H. and Mayne, D.Q. (1993). Robust receding horizon control of
constrained nonlinear systems. IEEE Trans, on Automatic Control, 38:1623-
1632.
7. Qin, S. and Badgwell, T. (1997) An overview of industrial Model Predictive
Control technology. Chemical Process Control-V, CACHE, AIChE, 232-
256.
8. Richalet, J., Rault, A., Testud, J., and Papon, J. (1978). Model predictive
heuristic control: Applications to industrial processes. Automatica, 14:413-
428.
9. Thomas, Y. (1975). Linear quadratic optimal estimation and control with
receding horizon. Electronics Letters, 11:19-21.
Устойчивость МПУ
1. Chen, C.C. and Shaw, L. (1982). On receding horizon feedback control.
Automatica, 18:349-352.
2. De Done,, J.A. and Goodwin, G.C. (1999). Characterisation of regions in which
Model Predictive Control polices have a finite dimensional parameterisation.
SIAM Journal of Control and Optimization, Submitted.
766 Глава 23. Модельное прогнозирующее управление
3. Gilbert, E.G. and Tan, K.T. (1991). Linear systems with state and control
constraints: The theory and application of maximal output admissible sets.
IEEE Trans, on Automatic Control, AC-36:1008-1020.
4. Jadbabaie, A., Yu, J., and Hauser, J. (1999). Unconstrained receding
horizon control of nonlinear systems. IEEE Trans, on Automatic Control,
Submitted.
5. Keerthi, S.S. and Gilbert, E.G. (1988). Optimal, infinite horizon feedback laws
for a general class of constrained discrete time systems: Stability and moving-
horizon approximations. Journal of Optimization Theory and Applications,
57:265-293.
6. Kleinman, B. (1970). An easy way to stabilize a linear constant system. IEEE
Trans, on Automatic Control, 15(12):693.
7. Mayne, D.Q., Rawlings, J.B., Rao, C.V., and Scokaert, P.O.M. (1999).
Constrained Model Predictive Control: Stability and optimality. Automatica,
36: Accepted.
8. Polak, E. (1997). Optimization: Algorithms and Consistent Approximations.
Springer-Verlag, New York.
9. Rawlings, J.B. and Muske, K.R. (1993). Stability of constrained receding
horizon control. IEEE Trans, on Automatic Control, 38(10):1512-1516.
10. Scokaert, P.O.M. and Rawlings, J.B. (1998). Constrained linear quadratic
regulation. IEEE Trans, on Automatic Control, 43(8): 1163-1169.
Стабилизация качки с помощью перекладки руля
1. Fossen, Т. (1994). Guidance and Control of Ocean Vehicles. John Wiley and
Sons Ltd.
2. Perez, Т., Tbeng, C-Y., and Goodwin, G.C. (1999). Model predictive rudder
roll stabilization control for ships. Technical Report No. 9946, Department of
Electrical and Computer Engineering, The University of Newcastle, Australia
(submitted for publication).
3. Blanke, M. and Christensen, A. (1993). Rudder-roll damping autopilot
robustness to sway-yaw-roll couplings. SCSS, Proceedings, 10</l SCSS, Ottawa,
Canada.
23.10. Задачи для читателя
Задача 23.1. Рассмотрим задачу дискретного линейного регулятора
с одним входом, для которого должно быть разработано управление
через линейную квадратичную функцию стоимости. Пусть вход должен
удовлетворять ограничению вида \и(к)\ < А. Используйте для этой
задачи структуру МПУ с расширяющимся диапазоном. Покажите, что
если в решении задачи оптимизации насыщается только первый элемент
управления, то
и{к) = -sat{Kx{k)) (23.10.1)
23.10. Задачи для читателя 767
является оптимальным управлением с ограничением, где и(к) =
—Кх(к) — оптимальное управление без ограничений. (Намек:
используйте динамическое программирование и исследуйте последний шаг
аргумента.)
Задача 23.2. Почему результат, полученный в задаче 23.1, в общем
случае не справедлив, если последующие элементы управления в задаче
оптимизации также достигают уровней насыщения?
Задача 23.3. Расширьте результат задачи 23.1 на случай с двумя
входами.
Задача 23.4. Рассмотрим следующую скалярную модель пространства
состояний:
х(к +1) = ах{к) + Ьи(к); х(0) дано (23.10.2)
Рассмотрим следующую функцию стоимости с расширяющимся
диапазоном:
N
j = YjX{k)2 (23.10.3)
к=о
Используйте динамическое программирование, чтобы показать, что
оптимальный закон управления имеет вид
и(к) = ~х(к) (23.10.4)
о
Обратите внимание, что он приводит состояние в нуль за один шаг,
т. е. х(1) = 0.
Задача 23.5. (Сложнее) Рассмотрим ту же самую структуру, что и
в задаче 23.4, за исключением того, что мы теперь требуем, чтобы
вход удовлетворял ограничению \и(к)\ < А. Покажите, что оптимальное
управление с расширяющимся диапазоном имеет вид
u(k) = -8at£x(k)) (23.10.5)
о
(Намек: используйте динамическое программирование.)
Задача 23.6. Сравните результаты в задачах 23.4 и 23.5 с результатом
в задаче 23.1. Объясните сходства и различия.
Задача 23.7. Рассмотрим квадратичную функцию стоимости
J = (Г - nUf{T - QU) (23.10.6)
где Г и U — векторы и ft — матрица размерности N х М.
768 Глава 23. Модельное прогнозирующее управление
23.7.1. Покажите, что минимум J достигается (когда U не ограничен)
при
U = U0 = {ПТПУ1ПТГ (23.10.7)
23.7.2. Пусть вектор U должен удовлетворять следующему набору
ограничений в виде линейного равенства:
LU = C (23.10.8)
где С —вектор размерности S (S < М), a L —матрица размерности
S х М. Покажите, что функция стоимости J минимизируется при
этом ограничении, когда
U = U'0 = U0- (nTn)"1LT(L(nrn)-1Lr)-1(LC/0 - С) (23.10.9)
где U0 — решение для неограниченного случая, найденное в (23.7.1).
Задача 23.8. Используя результаты задачи 23.7, покажите, что
оптимальное решение для линейного квадратичного регулятора с
расширяющимся диапазоном при ограничениях в виде линейных неравенств всегда
имеет следующую аффинную форму:
и{к) = -Кх{к) + Ь (23.10.10)
где К и Ъ зависят от того, какие из ограничений являются активными
(т. е. те неравенства, которые фактически являются равенствами для
этого конкретного начального состояния х(к)).
Задача 23.9. Модели, представленные ниже, связаны с примерами,
взятыми из реальных случаев. Авторы нашли, что эти модели полезны в
испытании различных стратегий проектирования MIMO-систем.
Предполагается, что читатель использует эти примеры для проверки своего
понимания MIMO-управления. Здесь вы можете испытать
1) проектирование децентрализованных SISO-систем;
2) проектирование централизованного квадратичного регулятора;
3) применение различных ограничений к входам систем и
использование методов противонакопления или модельного прогнозирующего
управления для проектирования регуляторов, которые учитывают
эти ограничения.
23.9.1. Этот пример связан с системой рулевого управления судна. У1 —
угол курса судна, У2 — угол крена судна, 171 — угол руля и 172 — угол
бортовых рулей. Теоретически руль используется, чтобы управлять
курсом судна, а бортовые рули используются, чтобы управлять углом
крена судна. Конечно, имеется связь между этими двумя сигналами
23.10. Задачи для читателя 769
управления. Модель, охватывающая эту ситуацию, имеет вид:
0.034(21.65+1)
0.00662(14.1s+l)
s(-59.1s+l)(8.1s+l)
-0.416(11.4s+l)(-6.8s+l)
s(-59.1s+l)(8.1s+l)
-0.245
(-51.9s+l)(8.1s+l)(45.118s2+0.903s+l)
(45.118s2 +0.903s+l)J
(23.10.
U(s)
1)
23.9.2. Эта задача касается дистилляционной колонны. Модель,
которая часто используется для описания этого вида систем, имеет вид
Y(s) =
0.66e"26s -0.61e-3-5*
6.7s +1
l.lle-6-5'
3.25s +1
-0.3468e"9-2s
8.64s +1
-2.36e~3'
5s+ 1
0.462e"9-4s
-0.49e-s
9.06s +1
-1.2e-b2s
7.09s +1
(10.1007s+ 0.87)e"
U(s)
8.15s+ 1 10.9s+ 1 73.132s2 + 22.69s+ 1.
(23.10.12)
23.9.3. Этот пример связан с системой горной промышленности,
называемой AG-заводом (autogenous grinding —самоизмельчение). Цель
этой системы состоит в том, чтобы брать большие камни и заставлять
их размалывать друг друга, чтобы получить камни небольшого
размера. Модель обычно описывается уравнением
Y(s) =
0.105e~65s -0.082e-80s -0.0575e_460s
83s+ 1
-0.0468e-140s
1864s +1
0.00253
1766s +1
0.00122
167s +1
0.115е-120д
1984s +1
-0.00299
U(s)
(23.10.13)
Глава 24
Фундаментальные
ограничения
в MIMO-управлении
24.1. Введение
Возможно, лучшим способом изучить реальные проблемы
проектирования является рассмотрение практических приложений. Мы надеемся,
что из чтения различных учебных примеров, которые мы представили,
читатель получил некоторое представление, что для всестороннего
подхода к вопросу обычно необходимы наиболее реальные задачи. В
частности, мы обращаем внимание на четыре учебных примера МШО-систем,
описанных в гл. 22.
В этой главе мы применим более абстрактный подход и расширим
вопросы проектирования, рассмотренные в гл. 8 и 9, на МШО-случай.
Как прелюдия к этому, мы напомним из гл. 17, что комбинацией
наблюдателя и обратной связи по восстановленному состоянию полюса
замкнутого контура MIMO-системы могут быть точно (или приблизительно)
назначены в зависимости от используемого метода синтеза. Однако как
и в SISO-случае, это оставляет открытым два ключевых вопроса: где
должны быть помещены полюсы и каковы связанные с этим
проблемы компромисса чувствительности. Это поднимает фундаментальные
проблемы проектирования, которые являются MIMO-вариантами тем,
обсужденных в гл. 8 и 9.
В гл. 8 и 9 было показано, что свойства SISO-объекта в разомкнутом
состоянии налагают фундаментальные и непреодолимые ограничения
на достижимые характеристики замкнутого контура. Например, мы
видели, что для контура с одной степенью свободы, двойной интегратор
в передаточной функции разомкнутого контура подразумевает, что
интеграл ошибки из-за ступенчатого эталонного воздействия должен
равняться нулю. Мы также видели, что вещественные нули в ППП
обязательно подразумевают недорегулирование в ответ на ступенчатое
эталонное воздействие.
Как можно было ожидать, подобные понятия применимы и к мульти-
переменным системам. Однако в то время как в SISO-системах имеется
24.2. Передаточная функция замкнутого контура 771
только частотная (или временнная) ось, по которой осуществляются
ограничения, в MIMO-системах существует пространственное
измерение: могут быть компромиссные ограничения между различными
выходами так же как и между частотами. Это означает, что необходимо
также принимать во внимание взаимодействия между выходами, а не
сосредотачиваться только на одном выходе.
Эти проблемы будут исследоваться ниже.
24.2. Передаточная функция замкнутого контура
Рассмотрим MIMO-контур вида, показанного на рис. 24.1.
Опишем модель объекта GQ(s) и регулятор C(s) в ЛМДО- и ПМДО-
форме:
G0(s) = Gon^MGodW]-1 = [ God(s)] Gon(s)
(24.2.1)
C(a) = CN(*)[CD (в)]"1 = [ CD W] CN W
(24.2.2)
Напомним, что из леммы 20.3 для устойчивости замкнутого контура
необходимо и достаточно, чтобы матрица Ac\(s) была
инверсно-устойчивой, где
Aci(s) = GoD(s)CD(s) + GoN(s)CN(s)
(24.2.3)
Для целей анализа в этой главе мы будем продолжать считать, что
MIMO-объект квадратен, т. е. его модель является матрицей
передаточных функций размерности гахга. Мы также предполагаем, что матрица
G0(s) невырожденная для почти всех 5 и, в частности, что det Go(0) ф 0.
R(s) E(s)
♦-
C(.)
Ym(s)
Di($)
U(s)
±*0—H G°(s) h-K>—i—
D0(s)
ot
+ ♦
Dm(s)
Рис. 24.1. Замкнутый MIMO-контур
772 Глава 24. Фундаментальные ограничения в MIMO-управлении
Для использования в будущем мы обозначим г-й столбец матрицы
S0(s) через [S0(s)]*i и &-ю строку матрицы TQ(s) через [T0(s)]b, так что
1T0(S)]U
So(e) = [[So(a)].i [S0(e)].2 ••• [So(e)]*m]; To(e)
[To(s)]2.
[To(s)\
m*
4
(24.2.4)
В гл. 20 мы видели, что хорошее номинальное отслеживание, как и в
SISO-случае, связано с проблемой низкой чувствительности в некоторых
диапазонах частот. Исследуя это требование, мы видим, что оно может
быть удовлетворено, если будет выполняться условие
[I + G0(ju)C0(ju)]-lG0(ju))C0(ju) «I (24.2.5)
для всех со в интересующих диапазонах частоты.
24.3. Принцип внутренней модели
для MIMO-случая
При проектировании SISO-управления основной целью обычно является
достижение нулевых ошибок установившегося состояния для некоторых
классов эталонных сигналов и возмущений. Однако мы также видели,
что это требование может производить вторичные воздействия на
переходные процессы этих ошибок. При проектировании МШО-управления
появляются аналогичные особенности, как мы далее покажем.
В гл. 20 мы показали, что для достижения нулевых ошибок
установившегося состояния при ступенчатых эталонных входных сигналах в
каждом каналенеобходимо, чтобы
To(0)=I«=*So(0)=0 (24.3.1)
Ранее в книге мы видели, что достаточное условие для получения
этого результата состоит в том, что мы можем представить регулятор
в виде
C(e) = -С(в) где det(C(0)) ф 0 (24.3.2)
s
На практике это обычно достигается путем помещения по одному
интегратору в каждом канале ошибки сразу же после того, как будет
сформирован e{(t) = r{(t) — yi{t), i — 1,2,... ,m.
Вышеупомянутая идея может быть обобщена, чтобы охватить более
сложные эталонные входные сигналы (линейные сигналы, синусоиды
и т. д.) и возмущения. Все, что необходимо, это добавить
соответствующие функции, формирующие эталонный сигнал или возмущение, что
приводит к М1МО:варианту принципа внутренней модели.
24.5. Полюсы и нули в ППП 773
24.4. Стоимость принципа внутренней модели
Как и в SISO-случае, принцип внутренней модели требует затрат. Как
иллюстрация этого, следующий результат расширяет лемму 8.1 на муль-
типеременный случай.
Лемма 24.1. Если требуются нулевые ошибки установившегося
состояния при линейном входном эталонном сигнале на r-м канале,
необходимо, чтобы
limi[So(s)]*r = 0 (24.4.1)
s->0 s
и, как следствие, в контуре с одной степенью свободы
/»00
/ e?{t)dt = 0 1 = 1,2,...,™ (24.4.2)
Jo
где е\(Ь) обозначает ошибку в г-м канале, возникающую от входного
ступенчатого эталонного воздействия в г-м канале.
Доказательство
Аналогично доказательству леммы 8.1. ППП
Интересно обратить внимание на существенно мультипеременный
характер результата леммы 24.1: интеграл ошибок всех каналов равен
нулю в ответ на ступенчатое эталонное воздействие только в одном
канале. Мы будем наблюдать подобные ситуации и в случае полюсов
и нулей, расположенных в ППП.
Более того, лемма 24.1 показывает, что все компоненты выхода
МШО-объекта будут иметь перерегулирование относительно своих
установившихся значений, когда происходит ступенчатое изменение
эталонного воздействия в г-м канале. Мы подчеркиваем, что это происходит
из-за присутствия двойного интегратора в данном канале. Единственное
исключение из этого явления будет для выходов тех каналов, для
которых нет никакой связи с каналом г.
24.5. Полюсы и нули в ППП
В случае SISO-объектов мы нашли, что ограничения характеристики
тесно связаны с наличием в разомкнутом состоянии полюсов и нулей,
расположенных в ППП. Мы увидим дальше, что это также истинно
и в МШО-случае. Прежде чем получить эти результаты, мы сначала
напомним соответствующие определения полюсов и нулей из гл. 20.
774 Глава 24. Фундаментальные ограничения в MiMO-управлении
Рассмотрим модель объекта GQ(s), заданную выражением (24.2.1).
Вспомним из гл. 20, что z0 является нулем GQ(s), с соответствующими
левосторонними направлениями Л?1,^,...,^, если
det(G0N(*o)) = 0 и h[ (Gon(*o)) =0 i = 1,2,...,/i, (24.5.1)
Точно так же мы говорим, что т)0 — полюс GQ(s), с соответствующими
правосторонними направлениями 51,02>--->Р/хр, если
det(GoD(%))=0 и (GoD(%))Pz = 0 г = 1,2,... ,/ip (24.5.2)
Если мы теперь предположим, что z0 и rj0 не компенсируются
регулятором, то справедлива следующая лемма.
Лемма 24.2. С z0 и г}0, определенными выше,
Soivotei =o
T0(j70)5i =9i
hjTo(z0) =0
hfSo(z0)=h[
. = 1,2,.
г = 1,2,.
г = 1,2,.
г = 1,2,.
..Цр
..Цр
•■Vz
•■Hz
(24.5.3)
(24.5.4)
(24.5.5)
(24.5.6)
Доказательство
Следует непосредственно из формул (20.5.3), (20.5.4), (24.5.1), (24.5.2)
и равенства SQ(s) + T0(s) = I. DDD
Мы видим, что как и в SISO-случае, полюсы разомкнутого контура
(т. е. полюсы G0(5)0(5)) станут нулями SQ(s) и нули разомкнутого
контура (т. е. нули GQ (5)0(5)) станут нулями Т0(5). Однако мы должны
теперь рассмотреть свойства, связанные с нулевыми направлениями,
чтобы лучше понять проблемы МШО-характеристик.
24.6. Ограничения во временной области
Мы видели в лемме 8.3, что присутствие полюсов и нулей в ППП
имело определенное значение для временных характеристик замкнутых
систем. Существует следующий MIMO-вариант леммы 8.3.
Лемма 24.3. Рассмотрим MIMO-контур управления с обратной
связью, имеющий устойчивые полюсы в замкнутом состоянии,
расположенные левее от —а для некоторого а > 0. Предполооюим также, что
для эталонных ступенчатых входных сигналов во всех каналах ошибка
24.6. Ограничения во временной области 775
в установившемся состоянии равна нулю. Тогда, для нуля объекта z0
с левосторонними направлениями Л^,/^,...,/^ и полюса объекта rj0 с
правосторонними направлениями Рърг?--->5/хр> которые
удовлетворяют условиям $l(z0) > —а и Щг]0) > —а, справедливо следующее:
1) Для полооюительного единичного ступенчатого эталонного сигнала
в r-ом канале
I
Jo
оо и.
hje(t)e-z°ldt = ^; г = 1,2,... ,/i, (24.6.1)
где hir —r-и компонент hi.
2) Для (полооюительного или отрицательного) единичного
ступенчатого выходного возмущения в направлении gi, i — 1,2,...,/ip;
результирующая ошибка e(t) удовлетворяет условию
/•00
/ e{t)e-T>°tdt = 0 (24.6.2)
Jo
3) Для (полооюительного или отрицательного) единичного
ступенчатого эталонного воздействия в r-ом канале и при условии, что z0
находится в ППП,
I
Jo
00
hJy(t)e-Zotdt = 0; г = 1,2,... ,/i* (24.6.3)
Доказательство
1) Мы знаем, что
E(s) = SQ(s)R(s) = f e(t)e~stdt . (24.6.4)
Jo
Если мы умножим слева на hf обе стороны равенства, то
получим
h[E(s) = hfS0(s)R(s) = h(S0(s)^ = Гh[e(t)e-stdt (24.6.5)
5 Jo
где R0 — постоянный вектор. Вычисляя выражение (24.6.5) при s =
z0 (который находится в области сходимости преобразования
Лапласа) и используя (24.5.6), мы имеем, что
hjE{z0) = ftf So(z0)— = /if— = / hje^e-^dt (24.6.6)
zo zo Jo
откуда результат получим, если все эталонные сигналы задать
равными нулю, за исключением сигнала в r-ом канале.
776 Глава 24. Фундаментальные ограничения в MIMO-управлении
2) Мы знаем, что для данного выходного возмущения D0(s) = \gi
ошибка определяется выражением
1 Г°°
E{s) = -So(s)D0(s) = S0{s)-gi = / e{t)e~stdt (24.6.7)
* Jo
откуда результат получим, вычислив (24.6.7) при s = rj0 и используя
(24.5.3).
3) Доказательство основывается на факте, что область сходимости
преобразования Лапласа для y(t) и r(t) включает открытую ППП,
где находится z0.
Тогда
/»00
Y(s) = T0{s)R{s) = / y(t)e-stdt (24.6.8)
Jo
Если мы умножим слева обе части равенства на hf, то получим
гоо
hjY{s) = h[TQ{s)R{s) = / h[y{t)e-stdt (24.6.9)
Jo
Результат следует из вычисления (24.6.9) при s — z0 и
использования (24.5.5). □□□
Замечание 24.1. Когда z0 и щ находятся в ППП, части 2) и 3)
леммы 24.3 справедливы для любого входного сигнала, чье преобразование
Лапласа сходится для Щв) > 0. DDD
Сравнение леммы 24.3 с леммой 8.3 ясно показывает мультиперемен-
ный характер этих ограничений. Например, (24.6.2) выполняется для
возмущений, поступающих из конкретного направления. (24.6.1) также
применяется к конкретным комбинациям ошибок. Таким образом,
свойство недорегулирования может (иногда) разделяться среди различных
каналов ошибки, в зависимости от направленности нулей.
Пример 24.1 (Аппарат с четырьмя резервуарами,
продолжение). Рассмотрим снова аппарат с четырьмя резервуарами из
примера 20.4 и примера 21.3. Для случая 7i = 0.43, 72 = 0-34 имеется
неминимально-фазовый нуль z0 = 0.0229. Связанное с ним левосторонне
нулевое направление — приблизительно [1 — 1].
Следовательно, из леммы 24.3 мы имеем
г оо
Ы*)-Ы*))е-**Я = 0 (24.6.10)
[
C°{e1(t)-e2{t))e-z°tdt=<< ^ (24.6.11)
/о zo
для единичного эталонного сигнала в %-м канале
24.6. Ограничения во временной области 777
Нуль в этом случае является нулем взаимодействия]
следовательно, мы не обязательно получаем недорегулирование в реакции. Однако
имеются ограничения на степень взаимодействия, которое должно
произойти. Это объясняет высокий уровень взаимодействия,
наблюдаемого на рис. 21.4.
Из (24.6.10) и (24.6.11) мы видим, что фактически имеются два
пути, позволяющие справиться с этим ограничением.
1) Если мы допускаем связь в заключительной реакции, то мооюем
распределить ограничение между выходами; т. е. мооюем
удовлетворить (24.6.10) и (24.6.11) при наличии реакции y2{t) и,
следовательно, e2(t), когда ступенька эталонного сигнала прикладывается
к первому каналу и наоборот. Это могло бы позволить нам
избегнуть недорегулирования за счет наличия взаимодействия.
Величину взаимодействия необходимо увеличивать, если полоса
пропускания увеличивается за z0.
2) Если мы проектируем, обеспечивая {приблизительно) развязку
каналов, то только один из выходов может быть отличен от нуля
после каждого из возможных эталонных изменений.
Это подразумевает, что в таком случае должно произойти
недорегулирование. Мы также видим, что недорегулирование
произойдет в обоих каналах (т. е. эффект единственного нуля в ППП
теперь влияет на оба канала). Это — пример растекания,
происходящий из-за динамической развязки.
Как обычно, величина недорегулирования, требуемого, чтобы
удовлетворить (24.6.10) и (24.6.11), растет при увеличении полосы
пропускания за z0. DDD
Интересно пронаблюдать воздействие динамической развязки на
(24.6.1). Если мы можем получить проект с этим свойством (тема будет
более глубоко проанализирована в гл. 26), то это приведет к тому, что
для эталонной ступеньки в r-ом канале не будет никакого воздействия
на другие каналы:
ek(t)=0 для Vfc^r, V*>0 (24.6.12)
Тогда (24.6.1) дает
/ hirer{t)e-Zotdt = —; i = 1,2,... ,/i* (24.6.13)
или, для h{r ф 0,
er{t)e-Zotdt = — (24.6.14)
z0
которое является точным ограничением, применяемым в SISO-случае.
L
778 Глава 24. Фундаментальные ограничения в MIMO-управлении
Таким образом, мы заключаем, что динамическая развязка
устраняет возможность распределения нулевого ограничения среди различных
каналов ошибки. Другое интересное наблюдение —то, что (24.6.14)
выполняется для любого z0, имеющего направление с любым компонентом,
отличным от нуля в r-ой позиции. Таким образом, в то время как
(24.6.1) используется для комбинации ошибок, (24.6.14) применяется
для скалярной ошибки и имеется отдельное ограничение для каждого
нуля, имеющего направление с любым компонентом, отличным от нуля
в r-ой позиции. Таким образом, (24.6.14) подразумевает, что один нуль
может появиться более чем в одном ограничении ошибки. Это можно
рассматривать как плату за развязку. Единственный случай, когда нуль
не распространяет свое влияние на многие каналы — это когда
соответствующее нулевое направление имеет только один компонент, отличный
от нуля. Тогда мы называем соответствующее нулевое направление
каноническим.
Пример 24.2. Рассмотрим следующую передаточную функцию:
5-1 2(s-l)-
GQ(s) =
(s + 1)2
1
L(s + 1)2 (S + 1)2 J
{8 + 1)*
б
(24.6.15)
Мы видим, что z0 = 1 — нуль с направлением К{ = [1 0], которое,
очевидно, является каноническим. В этом случае (24.6.1) дает
/»00 /»00
/ [1 0]те(<)е-*<Й = / ei(t)(
Jo Jo
e-*dt = — = 1
(24.6.16)
для ступенчатого входа на первом канале. Заметим, что в этом
случае результат тот же самый, что и в (24.6.14), т. е. не нужна
никакая плата за развязку. Однако если мы вместо этого рассмотргш
объект
Г я-1
G0(«) =
(s + 1)2
2(5-1)
1
(s + iy
(s + iy
(24.6.17)
L(* + l)2
то ситуация кардинально меняется.
В этом случае z0 = 1 — нуль с направлением hj = [е — 1], как мы
видим, не каноническим. Таким образом, (24.6.1) дает для ступенчатого
эталонного воздействия в первом канале
[е- 1]Те{г)е~1сИ = / (eei (t) - е2(<))е_'^ = — = е (24.6.18)
Jo Jo to
24.7. Ограничения интеграла Пуассона на дополнительную чувствительность 779
и для ступенчатого эталонного воздействия во втором канале
[ (6ei(*)-e2(*))e-'<ft = — =-1 (24.6.19)
JO zo
Если, с другой стороны, нам необходима динамическая развязка,
то получаем для единичного ступенчатого эталонного воздействия в
первом канале
00 1
ei{t)e-ldt = — = 1 (24.6.20)
/
Jo
г
Jo
0 zo
и для ступенчатого эталонного воздействия во втором канале
00 1
е2(*)е-'<й = — = 1 (24.6.21)
О zo
Видно, что в этом примере небольшая связь от канала I к каналу 2
мооюет быть очень полезна для удовлетворения условия (24.6.18), если
б ф 0, в то время как (24.6.20) и (24.6.21) .требуют, чтобы нуль был
абсолютным в обоих скалярных каналах. □□□
Ограничения во временной области, рассмотренные выше, также
согласуются с ограничениями в частотной области, которые
являются MIMO-расширениями результатов для SISO-случая, приведенных в
гл. 9. Они будут рассмотрены далее.
24.7. Ограничения интеграла Пуассона
на MIMO-дополнительную чувствительность
Разработаем MIMO-вариант результатов, представленных в разд. 9.5.
Заметим, что вектор T0(s)gi может быть умножен слева на матрицу
Bj(s), чтобы получить вектор Ti(s):
Ti(s)=Bi(s)T0(s)ft =
Tim{s)J
г = 1,2,...,Мр (24.7.1)
где Bi(s) —диагональная матрица, в которой каждый диагональный
элемент [Bi(s)]jj — инверсия скаляра произведения Блашке,
построенного так, чтобы функция 1п(г^(5)) была аналитической функцией в
открытой ППП. Это означает, что
[В'(*)Ь- = П тг# (24-7-2)
fe=l S ZJk
780 Глава 24. Фундаментальные ограничения в MIMO-управлении
где Zjk, к = 1,2,...,г^ являются неминимально-фазовыми нулями j-to
элемента вектора TQ(s)gi.
Аналогично определим вектор-столбец #j(s) следующим образом:
gi{s) = Bi{s)gi
[Bi(s)]n9n{s)
9n{s)'
9im(s)
(24.7.3)
[[Bi(s)]mmgim(s)j
Далее определим набор целых чисел Vj, соответствующих индексам
элементов вектора pi, отличных от нуля:
Vi = {r|ftr96 0}; г = 1,2,...,Мр (24.7.4)
Теперь мы можем сформулировать теорему, которая описывает
ограничения, наложенные на дополнительную чувствительность наличием
неустойчивых полюсов разомкнутого контура.-
Теорема 24.1 (Дополнительная чувствительность и
неустойчивые полюсы). Рассмотрим МШО-систему с неустойчивым полюсом,
расположенным es = rj0 = a + j/3u имеющим связанные с ним
направления д\, g<i, • • • > 9\iv • Тогда
1) 1
1 Г°°
- / ln\[To{ju)]r*gi\d^r}0,u) = ln\Bir{r}o)gir\; reV;; г = 1,2,... ,/ip
2)
(24.7.5)
1 Г°°
- / ln\[To{ju)]r*gi\dn{r)0,u))>ln\gir\; r 6 Vi; % = 1,2,... ,/ip
(24.7.6)
где
<«(%,w) = 2^/* m2^ => Г d^o^) = тг (24.7.7)
Доказательство
1) Сначала заметим, что ln(Tjr(s)) = ln([Bi(s)]rr[T0(s)]r*<7i)
—скалярная функция, аналитическая в открытой ППП.
Если мы вычислим ln(rir(s) при s = rj0, то после использования
(24.5.4) и (24.7.3) получаем
НПгШ) = H\Bl(Vo)]rr[T0(Vo)]r*9i) =9ir(Vo) (24.7.8)
Затем можно использовать формулу Пуассона—Иенсена,
приведенную в лемме С.1. Отсюда следует требуемый результат.
2) Заметим, что из-за нахождения Z{j и rj0 в ППП |[Bi(ry0)]rr| > 1;
тогда
ln|[Bi(r7o)]rrPir| = ln|[Bi(r/0)]rr|ln|pir| > ln|pir| (24.7.9)
24.8. Ограничения интеграла Пуассона на MIMO-чувствительность 781
Замечание 24.2. Хотя (24.7.5) —более точное условие, чем (24.7.6),
это ограничение зависит от регулятора. Результат, представленный
в следующем выводе, независим от регулятора. □□□
Вывод 24.1. Рассмотрим теорему 24.1; тогда (24.7.6) можно такоюе
записать в виде
г0° ' [T0(ju;)]rrftr
/ОО /»00
1п\[То(1ш)]Гг\ст(г)0,и)> / In
■ОО ./-00
EkeviTo(Ju)]rk9ik
d£l(r)0,u))
(24.7.10)
Доказательство
Сначала заметим, что
ln|[T0(jw)]r*ft| = ln
X^fc[T0(jw)]fcr
-In
= ln|[To0'a;)]rr| + ln(5ir)
gir [T0 (ju>)]rr
iv- r™ /• x, i (24.7.11)
Требуемый результат следует после использования (24.7.11) в
(24.7.6) и после использования свойства ядра Пуассона в (24.7.7). DDD
24.8. Ограничения интеграла Пуассона
на MIMO-чувствительность
Когда объект имеет неминимально-фазовые нули, результат, подобный
полученному в теореме 24.1, может быть установлен для функции
чувствительности SQ(s).
Сначала заметим, что вектор hfS0(s) может быть умножен справа
на матрицу Bj(s), чтобы получить вектор Vi(s):
Vi{s) = h[S0{s)B[(s) = [vn(s) vi2{s) ... vim(s)]i i = 1,2,... ,ц2
(24.8.1)
где Bj(s) — диагональная матрица, в который каждый диагональный
элемент [Bj(s)]jj — скалярная инверсия произведения Блашке,
сконструированная так, чтобы ln(vij(s)) была аналитической функцией в
открытой ППП. Это означает, что
(24.8.2)
где pjk, к — 1,2,..., г'—неустойчивые полюсы j-ro элемента вектора-
строки hfS0(s).
782 Глава 24. Фундаментальные ограничения в MIMO-управлении
Определим также вектор-строку h{(s), где
KWPBjwu
Ы(3)=Ь?(8)В[(8) =
= \hii(s) ... him(s)] (24.8.3)
Далее определим набор целых чисел VJ, соответствующий индексам
ненулевых элементов вектора hf.
V;. = {r|/4r9t0}; г = 1,2,...,^
Тогда мы имеем следующий результат.
(24.8.4)
Теорема 24.2 (Чувствительность и неминимально-фазовые
нули). Рассмотрим MIMO-объект, имеющий неминимально-фазовый
нуль при s = z0 = 7 + j& c соответствующими направлениями
hjjh^j... ,/iJ/, тогда чувствительность в любом контуре управления
для этого объекта удовлетворяет условиям
1)
1 Г°°
- / in|/i?,[So0w)]*r|dn(^,w)=in|/4r[B/l(^)]rr|; rev's, t=i,2f...f/ip
(24.8.5)
г/
2)
1 Г00
- / fo\hT[Sotiu)]„\dfl(z0lu))>\n\hir\i reV{; г = 1,2,...,/хр
(24.8.6)
где
d£l(z0,u))
7
72 + (w-<*)
da; =
/oo
dfi(^0,w)=7T (24.8.7)
-OO
Доказательство
Доказательство осуществляется по той эюе самой схеме, что и у
теоремы 24.1. □□□
Вывод 24.2. Рассмотрим схему в теореме 24.2. Тогда условие (24.8.6)
может также быть записано в виде
/оо /»оо I
ln|[S0(jw)]rr|<Kl(2e,w)> / In
■ОО J— ОО
Uir[S0(jw)]r
Efc€V'^**[So(iw)]*r
dfi(z0,u;)
(24.8.8)
24.9. Интерпретация 783
Доказательство
Сначала заметим, что
ln\h?[S0(ju)]*r\=ln
X) hik[So(jw)]kr
kew
-In
= ln|[S0(jo;)]rr|+ln(/iir)
hir[S0(ju)]rr
,„ ire /■ м i (24.8.9)
\L,keWthik[So{j4\kr\
Результат получается после использования (24.8.9) в (24.8.6) и
использования свойства ядра Пуассона (24.8.7). DDD
24.9. Интерпретация
Теорема 24.2 показывает, что в МШО-системах, как и в SISO-системах,
имеется компромисс чувствительности по оси частот. Чтобы исследовать
эту проблему, рассмотрим следующую лемму.
Лемма 24.4. Рассмотрим 1-й столбец (I Е V^) в выражении (24.8.6),
т. е. 1-й столбец чувствительности [SQ]*j. Кроме того, предположим,
что по техническим требованиям необходимо, чтобы
|S0(jw)|« < Ш «1 Vw e [0,wc];k = 1,2,... ,т (24.9.1)
Тогда справедливо следующее неравенство:
ф(ис)
(24.9.2)
т
l|[Soblloo+E
1
">ik
h...
l|[So]fcl||oo >
m
«« + E
i
Ык
h,,
\
ш
7T-^(WC)
к=1 ' '"" ' \ к=1 ' '"" ' /
где
Ф(Шс) = / ' [т2 + ("-*)2 + 72 + ("+*)2.
duj
Доказательство
Сначала заметь
IM, <
imo
(24.9.3)
|ЛП8оО^)Ь||<£|/ц*|[8о(;а;)]«
fc=i
< f^c = E£=ll^i*l6«
для —u)c <u)<u{
C^w/Ji wc
kA» = XX=i l^**lll[So]w||oo ^л \u\ > uc (24.9.4)
784 Глава 24. Фундаментальные ограничения в MIMO-управлении
Рассмотрим теперь выражение (24.8.6). Сначала разделим
интервал интегрирования (—оо,оо) на (—оо, —cjc) U [—gjc,0)U[0,cjc)U[u;c,oo) и
затем применим (24.8.6), заменяя \hj[S0(ju;)]*r| его верхней границей
на каждом интервале:
- Г in\hf[so(ju)u\<m(z0,u) < ^^ / Wcdn(z0,u)
= над г da(S)+над-чад г л,^, (24.9.5)
Я" У-оо * J-uc
Тогда заметим после использования (24.8.7) и (24.9.3), что
МАО-Мад Л"- , . ln(Lc)-ln(£oo)
7Г
■ Г Л1(*,о|) = М^)^1п(Хос)^ы (24 9 6)
а после использования (24.8.7)
^^- Г dtl(z0,u>) = ln(Loo) . (24.9.7)
Я" У-оо
J?cviu лш теперь используем (24.9.4)-(24.9.7) б (24.8.6), то получим
7г1п(|Лй|) < (7r-t/;(a;c))ln(L00)+^(a;c)ln(Lc) (24.9.8)
Окончательный результат следует после использования
определения Lc и Lqo из (24.9.4). DDD
Эти результаты подобны аналогичным для SISO-контуров
управления, так как мы также получаем нижние границы для пиков
чувствительности. Кроме того, эти границы растут с требованиями к полосе
пропускания, т. е. когда мы хотим, чтобы параметр ем стал меньше
и/или когда мы задаем большее значение ис.
Однако главное различие заключается в том, что в МШО-случае
граница в (24.9.2) является линейной комбинацией пиков
чувствительности. Эта комбинация определяется направлениями, связанными с
рассматриваемыми неминимально-фазовыми нулями. Мы уточним этот
результат в разд. 26.6, где добавим дополнительное ограничение, что
система замкнутого контура должна быть полностью развязана по
диагонали.
24.10. Промышленное приложение: сахарный отжимной пресс 785
24.10. Промышленное приложение:
сахарный отжимной пресс
24.10.1. Описание модели
В этом разделе мы рассмотрим проект регулятора для типичного
промышленного процесса. Он был выбран потому, что включает
существенное мультипеременное взаимодействие, несаморегулируемый характер и
неминимально-фазовое поведение. Детальное описание процесса
моделирования и управления можно найти в ссылках, приведенных в конце
главы.
Рассматриваемый сахарный отжимной пресс представляет одну из
многочисленных стадий во всем процессе. Схематическая диаграмма
отжимной линии показана на рис. 24.2. Отдельная ступень этой отжимной
линии показана на рис. 24.3.
На этом отжимном прессе жом (в промежуточной форме), который
является размолотым сахарным тростником, подается с помощью
промежуточного транспортера от предыдущей ступени процесса. Далее он
подается в накопительный желоб. Материал подается в загрузочный
лоток, находящийся под давлением, через клапанный механизм и
задающие валки под давлением. Клапанный механизм может управляться
гидравлическим приводом, изменяющим геометрию выхода и объем
накопительного желоба. Задающие валки под давлением захватывают жом
и подают его в загрузочный лоток, также находящийся под давлением.
подготовленный
тростник
первый
отжимной
пресс
четвертый
отжимной
пресс
загрузочная воронка
четвертого отжимного
пресса
Рис.. 24.2. Сахарная отжимная линия
от
резательного|
устройства
и входных
конвейеров
786 Глава 24. Фундаментальные ограничения в MIMO-управлении
ОТЖИМНЫЕ
ВАЛКИ
Рис. 24.3. Одна ступень отжимного пресса
Тростник далее подается в загрузочный лоток, находящийся под
давлением, через отжимные валки. Загрузочный лоток, находящийся
под давлением, увеличивает степень давления жома, потому что
вращательная скорость загрузочных валков несколько выше, чем скорость
отжимных валков. Отжимные валки имеют такие пазы, чтобы выжатый
сок не мог убежать. Углубления формируют грубую поверхность так,
чтобы отжимные валки отжимного пресса могли захватывать тростник.
Отжимные валки отжимного пресса и задающие валки под давлением
управляются паровой турбиной через зубчатую передачу. Скорость
паровой турбины управляется через регулятор обратной связи с
настраиваемой уставкой.
С целью максимального извлечения сока процесс требует управления
двумя параметрами: высотой в накопительном буфере h(t) и крутящим
моментом отжимного пресса т(£). Для управления этими переменными
можно использовать положение клапана f(t) и уставку скорости
турбины u(t). Для целей управления этот объект, таким образом, может
быть смоделирован как MIMO-система с 2 входами и 2 выходами. В
этой системе главное возмущение d(t) возникает в переменной подачи
накопительного желоба.
У этого примера регулирование высоты в накопительном желобе
менее важно для процесса, чем регулирование крутящего момента.
24.10. Промышленное приложение: сахарный отжимной пресс 787
/W
d(t).
+
О
♦+
♦ +
-5
255 + 1
s
7+Т
-0.005
255 + 1
-0.0023
5
*Q
* +
-iQ
А +
т(«)
+Л+ *(«>
Рис. 24.4. Линеаризованная структурная схема сахарного отжимного пресса
Действительно, цель этого желоба обычно состоит в том, чтобы
отфильтровать внезапные изменения величины подачи.
Используя феноменологические соображения и выполнив различные
эксперименты с возрастающими ступенчатыми входами, была получена
линеаризованная модель объекта. Результаты моделирования показаны
на рис. 24.4.
Из рис. 24.4 мы можем вычислить номинальную модель объекта в
форме ПМДО (см. раздел 20.3.3), связывая входы f(t) и u(t) с выходами
r(t) и h(t) в виде
G0(5) = Gon(5)[G0d(5)]"1
где
Gqn(s) =
-5
1
52- 0.0055 -0.005
-0.0023(5 + 1)
GoD(s) =
255 +1
0
(24.10.1)
0
s{s + 1)J
(24.10.2)
Теперь мы можем вычислить полюсы и нули GQ(5). Полюсы
G0(5) являются нулями Gqd(s), т.е. (—1,-0.04). Нули GQ(5)
являются нулями Gqn(s), т. е. значениями 5, которые являются корнями
det(GoN(<s)) =0; это дает(—0.121,0.137). Заметим, что модель объекта
имеет неминимально-фазовый нуль, расположенный в точке s = 0.137.
Мы также имеем, что
•Go(0.137) =
-1.13 0.084
0.226 -0.0168
(24.10.3)
Из (24.10.3) мы имеем, что направление, связанное с неминимально-
фазовым нулем, имеет вид
hT=[l 5] (24.10.4)
788 Глава 24. Фундаментальные ограничения в MIMO-управлении
24.10.2. SISO-проект
Прежде чем попытаться создать какой-нибудь MIMO-проект, мы
начнем с исследования SISO-проекта, используя два отдельных ПИД-
регулятора. При этом подходе мы первоначально игнорируем взаимные
связи в передаточной функции модели GQ(s) и создаем независимые
ПИД-проекты для полученных двух SISO-моделей.
Gn(s) =
-5
и G22(s) =
-0.0023
(24.10.5)
255 +1'
Использовалась повторяющаяся процедура для определения
окончательного проекта. Повторения первоначально были связаны с желанием
получить быстрые реакции в обоих контурах. Однако затем проект
был скорректирован ограничением полосы пропускания контура, чтобы
не превысить модуль неминимально-фазового нуля. (Была получена
ширина полосы пропускания примерно в 0.1 рад/с.)
Заметим, что для второго контура мы решили использовать ПИД-
вместо ПИ-регулятора, потому что C?22(s) имеет один полюс в начале
координат, а два нуля регулятора более удобны для частичной
компенсации дополнительной задержки. Окончательные регуляторы имеют вид
20s2 + 10s+ 0.2
Ci(*) = -
0.55 + 0.02
C2(s) = -
(24.10.6)
S ' ' S2 + S
Для иллюстрации этого вида ограничений и связанных с ними
компромиссов на рис. 24.5 показаны характеристики контура при
использовании SISO-разработанных ПИД-регуляторов.
К
~«
н о «
К* Я
Ч 8-я
°sl
2 a) S
8 я«
3§я
2h
1 ■ ]
ZZ~—,
• 1
1 1 1 1 1
1^- " 0.1 *d(t)
R" 1/
1 ^—
i i i
»a(«)
1
wW
1 1
50
100
150
200 250
Время [с]
300
350
Рис. 24.5. Характеристики контура с SISО-прОектом
400
При этом моделировании (ступенчатые) эталонные сигналы и
возмущение были заданы следующими:
n(t)=/i(t-l); r2(*)=/x(*-100); d{t) = -10ц(«-250) (24.10.7)
24.10. Промышленное приложение: сахарный отжимной пресс 789
Из результатов, приведенных на рис. 24.5, можно сделать следующие
выводы.
1) Взаимодействие между контурами сильное. В частности, мы видим,
что эталонное изменение в канале 2 (высота) вызывает сильные
колебания выхода в канале 1 (крутящий момент).
2) Оба выхода обладают неминимально-фазовым поведением. Однако
из-за наложенного проектом ограничения на полосу пропускания,
это не очень сильно проявляется на каждом из выходов в ответ на
изменение собственного эталонного сигнала. Заметим однако, что
возникает явно неминимально-фазовый переходный процесс у\ в
ответ на эталонное изменение r<i из-за пренебрежения взаимодействия
в проекте.
3) Результаты возмущения на выходах содержат главным образом
низкочастотные компоненты. Происходит это потому, что резкие
изменения скорости подачи фильтруются накопителем.
Вышеупомянутый проект страдает тем недостатком, что управление
относительно обеих переменных считалось одинаково важным. Это
приводит к нежелательной особенности: характеристика канала 1 сильно
зависит от изменений во втором канале. По этой причине мы далее
используем такое проектирование, при котором учитывается
взаимодействующая природа этого объекта.
Замечание 24.3. Читатель может попробовать для этой задачи
различные уставки ПИД, используя файл sugpid.mdl пакета SIMULINK.
Также интересно проверить, что, вводя насыщение входа в обоих
каналах, мооюно наблюдать значительное замедление динамики обоих
контуров.
24.10.3. MIMO-проект. Предварительные соображения
Далее рассмотрим полный MIMO-проект. Начнем с анализа основных
проблем, которые затрагивают MIMO-проект. Они могут быть получены
из следующих соображений.
1) Компенсация входного возмущения требует, чтобы в проектируемый
регулятор было включено интегрирование.
2) Чтобы гарантировать внутреннюю устойчивость, неминимально-
фазовый нуль не должен быть скомпенсирован регулятором. Таким
образом, функция C(s) не должна иметь полюсы при s = 0.137.
3) Чтобы избежать насыщения на входе, должна быть ограничена
полоса пропускания. Мы будем работать в диапазоне 0.1-0.2 рад/с.
4) Расположение неминимально-фазового нуля предполагает, что
доминирующая составляющая в канале(ах), определяемая этим нулем, не
может быть быстрее, чем е-0,137*. В противном случае реакции на сту-
790 Глава 24. Фундаментальные ограничения в MIMO-управлении
пенчатые эталонные воздействия и ступенчатые входные возмущения
будут обладать существенным недорегулированием (см. раздел 24.6).
5) Из (24.10.4) видно, что левостороннее направление hT = [l 5],
связанное с неминимально-фазовым нулем, не является каноническим
направлением. Следовательно, если будет предпринята динамическая
развязка, неминимально-фазовый нуль затронет оба канала (см.
раздел 26.5). Таким образом, в случае регулятора, имеющего
треугольную структуру, желательно ограничить неминимально-фазовый нуль
только одним каналом.
24.10.4. MIMO-проект. Динамическая развязка
Анализ в предыдущем разделе приводит к заключению, что
треугольный проект является лучшим выбором. Однако мы сначала
рассмотрим полностью развязанный динамический проект, чтобы обеспечить
эталонный вариант, с которым можно будет сравнить треугольный
развязанный проект.
Выберем г ,
M(s) = G0(s)C(s)^\Mn{s)
0
0 M22(s)j
что приводит к следующей дополнительной чувствительности:
_Mu(s)
ГГц (в) 0
То(в) =
Тогда
с(*)
Аналогично
[Go(s)]-1 =
0
T22(s)
"Си (в) Сф)
Сц(з) C22(s)
i+МпОО
о
о
M22(s)
25s +1
0
1 + M22(s)
= [Go(e)]-1M(«)
nn(s) ni2(s)
(24.10.8)
(24.10.9)
d-(s)d+(s) d-(s)d+(s)
"21 (s) n22(s)
где
_d-(s)d+(s) d-(s)d+(s).
m2(s) = s2 - 0.005s - 0.005
«22(e) = 5(s +1)
d+{s) = s -0.137
Тогда из (24.10.8) и (24.10.10) регулятор будет иметь вид
(25s + l)nii(s)Mn(s) (25s + l)ni2(s)M22(s)-
nn(s) = 0.0023(s + l)
n2i(s) = s + l
d~(s) = s + 0.121
C(s) =
d-{s)d+(s)
sn2iMu(s)
d-{s)d+(s)
d-(s)d+(s)
Sri22(s)M22{s)
d-{s)d+{s)
(24.10.10)
(24.10.11)
(24.10.12)
(24.10.13)
(24.10.14)
(24.10.15)
24.10. Промышленное приложение: сахарный отжимной пресс 791
К
н <-> к '
°al c
X * w
-2
г- г 1 1 —1 г* ■ 1
1/
1/
«
[\
\ Ы*)
1
0.1 *d(t)
\s-
Л 1
П(«)
1 1 1
50
100
150 200 250
Время [с]
300
350
400
Рис. 24.6. Характеристики контура динамически развязанного проекта
Передаточная функция C(s) не должна иметь полюсы при s =
0.137, так что полином d+(s) должен быть скомпенсирован в четырех
элементах дробной матрицы (24.10.15). Это означает, что
Мц(0.137)=М22(0.137)=0
(24.10.16)
Кроме того, мы должны полностью скомпенсировать входное
возмущение, поэтому требуется наличие в регуляторе интегратора (в
дополнение к интегрированию объекта). Таким образом, выбираем следующие
значения:
Mn(s) =
(s-o.m)pn(s)
И M22(s) =
(5-0.137)^22(5)
s2ln{s) " *"zzv"' 52/22(5)
(24.10.17)
ще Рп(5),^11(5),/22(5) и £22(5) выбраны, исходя из методов размещения
полюсов полинома (см. гл. 7). Для простоты, мы выберем тот же самый
полином знаменателя для Tn(s) и T22{s) — Ad(s) = (5 + 0.1)2(5 + 0.2).
Заметим, что при этом выборе мы учитываем ограничение, связанное с
наличием доминирующей составляющей со скоростью затухания,
ограниченной (сверху) неминимально-фазовым нулем. Это приводит, после
решения уравнения назначения полюсов, к
Рп(5)=Р22(5) =-(0.4725 + 0.0015); 1п (в) =/22(5) = 5 + 0.872
(24.10.18)
С этими величинами регулятор рассчитан на основе формулы
(24.10.15). Было выполнено моделирование этого проекта с теми же
самыми условиями, что и в децентрализованном случае ПИД-регуляторов,
т. е.
П (t) = fi(t - 1); r2(t) = fi{t - 100); d(t) = — 10/i(* - 250) (24.10.19)
Результаты показаны на рис. 24.6.
792 Глава 24. Фундаментальные ограничения в MIMO-управлении
Результаты, показанные на рис. 24.6, подтверждают два основных
момента, лежащих в основе этой стратегии проектирования: каналы
являются динамически развязанными и неминимально-фазовый нуль
воздействует на оба канала.
24.10.5. MIMO-проект. Треугольная развязка
Результаты предыдущего раздела показывают, что динамическая
развязка—не идеальное решение в этой конкретной проблеме, потому
что неминимально-фазовое поведение объекта распространяется на оба
выхода, а не связано только с менее важным выходом — высотой У2(0-
Поэтому мы будем формировать треугольную структуру, где более
важный канал, связанный с крутящим моментом, будет выбран в качестве
развязанного контура. Результирующая треугольная структура будет
иметь вид
\Ми(з) 0 ]
|M2i(s) M22(s)J
M(s) = G0(s)C(s)
(24.10.20)
что дает дополнительную чувствительность
_Mn(s)
Гт..^о\ T.-fo\1 I 1
ТоЫ =
Гц (в) Г12(в)
T2i(s) T22(s)
1 + Afn(e)
M2i(s)
0
M22{s)
Тогда
(1 + Mn(s))(l + M22(s)) l + M22(s)J
(24.10.21)
C(s) =
Следовательно,
'Cn(e) Cn(s)
C2i{s) C22(s)
= [GoW]-1M(e)
(24.10.22)
25s +1
0
nn(s)
ni2(s)
где
nn(s)=0.0023(s + l)
n2i(s) = s + l
(Г(а) = з + 0.121
d-(s)d+(s) d-{s)d+(s)
n2l(s) n22{s)
d-{s)d+(s) d-(s)d+(s)]
n12(s) = s2 - 0.005s - 0.005
"22(s) = 5(s + l)
d+(s) = s + 0.137
(24.10.23)
(24.10.24)
(24.10.25)
(24.10.26)
24.10. Промышленное приложение: сахарный отжимной пресс 793
Тогда из (24.10.20) и (24.10.22) регулятор будет иметь вид
'(25s + l)(nii(s)Mii(s)+ni2(s)M2i(s)) sni2(s)M22(s)
C(s) =
d-(s)d+(s) d-(s)d+(s)
(25s + 1) (n2i (s)Mn (s) + n22(s)M2i (s)) sn22(s)M22(s)
d-(s)d+(s)
d-(s)d+(s) J
(24.10.27)
Передаточная функция C(s) не должна не иметь полюсов при
s = 0.137, так что полином d+(s) должен быть скомпенсирован в
четырех элементах дробной матрицы (24.10.27). Это дает, что
М22(0.137)=0
nn{s)Mn(s) +ni2(s)M2i(s)
n2i (s)Mn (s) + n22 (s)M2i (s)
s=0.137
U=0.137
Уравнения (24.10.29) и (24.10.30) дают
0
0
M21(s)
Mn(s)
M21(s)
nn(s)
s=0.137
Mu(s)
ni2(s)
П21(«)
s=0.137
(24.10.28)
(24.10.29)
(24.10.30)
(24.10.31)
(24.10.32)
s=0.137
U=0.137 n22(«) I
соответственно. Заметим, что (24.10.31) и (24.10.32) удовлетворяются
одновременно — для каждого нуля z0 функции G0(s) мы имеем, что
nn(s)n22(s) -ni2(s)n2i(s)
0
(24.10.33)
На следующем шаге нужно сделать некоторый выбор.
1) Mu(s), M2i(s) и M22(s) должны быть выбраны так, чтобы иметь
два полюсы в начале координат. Один из них получается из модели
объекта, а другой добавляется, чтобы обеспечить компенсацию в
установившемся состоянии ступенчатых входных возмущений.
2) Mn(s) выбирается таким образом, чтобы обеспечить полосу
пропускания около 0.15 рад/с в канале 1. Возможный выбор следующий:
Mn(s) =
0.15s+ 0.01
Tn(s) =
0.15s+ 0.01
(24.10.34)
s< " • ' s2 +0.15s+ 0.01
3) Простейший выбор M2i(s) — назначить два полюса в начале
координат, т. е.
M2i(s) =
а
(24.10.35)
где а —параметр, который нужно определить.
794 Глава 24. Фундаментальные ограничения в MIMO-управлении
4) M22(s) выбирается таким образом, чтобы иметь два полюса в начале
координат и удовлетворять выражению (24.10.28). Выберем
(5-0.137)p22(s) /ол 1П„.
M22(s) = оГ~Г\ (24.10.36)
где P22(s) и /22(5) — полиномы от 5, которые следует определить.
С учетом этого выбора и характеристик проекта мы можем
продолжить определение регулятора.
Сначала выберем а из (24.10.35) так, чтобы удовлетворить (24.10.30);
это дает а = —0.0061, что, в свою очередь, приводит к
ft|M_ -0.0058(^ + 0.0678) ^^
Из (24.10.36) мы также имеем, что дополнительная чувствительность
в канале 2 равна
т (~\- М™^ -- (s-0-137)p22(s) год in Ш
i22(S) - 1 + М22(а) - s422(s) + (s-0.U7)p22(s) W-w-M)
Тогда р22(5) и '22(5) можно вычислить, используя методы назначения
полюсов полинома, как мы делали в развязанном проекте. Выберем
полином знаменателя T22(s) равным (s + 0.1)2(5 + 0.2). В этом случае
получим
Это дает
-(25а + 1)(а2 -0.005а-0.005)(0.4715а + 0.0146) Г941П4П
C12(S) = а*(* + 0.121)(а + 0.8715) (2410-41)
Г- Г И -5(g + l)(0-4715a +0.0146) (oa^a0\
C22{S) = а(а + 0.121)(а +0.8715) (24Л0'42)
Для спроектированного регулятора было выполнено моделирование,
чтобы оценить характеристики МШО-контура управления, связанные с
отслеживанием эталонных воздействий и компенсацией возмущения.
Используемые единичные ступенчатые эталонные воздействия и
единичное ступенчатое возмушение имеют вид:
n(t)=/x(* —1); r2(t) = —А»(* —100); d(t) = — 10/х(« —250) (24.10.43)
Результаты моделирования, показанные на рис. 24.7, приводят к
следующим выводам.
24.11. Неквадратные системы 795
1 1 1 1 1 1 1 I
j w(«)
П—
■
\ 0.1*d(t)
' " i
1 »(*) 1
iiil
0 50 100 150 200 250 300 350 400
Время [с]
«
к
~«
ев Н
НО 0!
кя в
о 52 а"
3 CD ?
ЫХОД
онны
и воз
ш5
н
л
1
0
-1
Рис. 24.7. Характеристики контура с треугольным проектом
1) Выход канала 1 теперь не связан с изменениями в эталонном сигнале
канала 2. Однако на выход канала 2 изменения в эталонном сигнале
канала 1 воздействуют. Асимметрия объясняется выбором нижней
треугольной дополнительной чувствительности TQ(s).
2) Неминимально-фазовое поведение очевидно в канале 2, но не
наблюдается на выходе канала 1. Это также было достигнуто выбором
нижней треугольной формы TQ(s); то есть неминимально-фазовый
нуль разомкнутого контура является каноническим нулем
замкнутого контура.
3) Переходная компенсация возмущения в канале 1 также улучшена
относительно полностью развязанного контура. Сравните результаты
с показанными на рис. 24.6.
4) Ступенчатое возмущение полностью компенсируется в
установившемся состоянии. Происходит это из-за эффекта интегрирования в
управлении по обоим каналам.
5) Выход канала 1 обладает существенным перерегулированием (около
20%). Это было предсказано в разд. 24.6 для любого контура,
имеющего двойной интегратор. DDD
Читатель может оценить характеристики контура для своего
проекта, используя файл sugmill.mdl пакета SIMULINK.
24.11. Неквадратные системы
В большинстве рассматриваемых ранее систем мы считали, что число
входов и выходов равно. Однако на практике бывает или избыток входов
(избыточные системы), или дополнительные измеренные величины
(многоуровневые системы). Ниже мы кратко обсудим эти два варианта.
796 Глава 24. Фундаментальные ограничения в MIMO-управлении
Избыток входов
Пусть мы имеем т входов и р выходов, где т > р. В широком
смысле варианты проектирования могут быть определены четырьмя
названиями.
1) Квадрирование за счет входов
Поскольку мы имеем дополнительные степени свободы на входе,
можно управлять дополнительными переменными (даже если их не
нужно измерять). Одна из возможных стратегий состоит в том, чтобы
использовать наблюдатель для оценки отсутствующих переменных.
Действительно, когда наблюдатель оценивает оставшиеся т—р
переменные, мы можем спроектировать регулятор для системы
размерностью тхт. Заметим, что наблюдатель будет обычно простым и что
передаточная функция от входа до оцененных переменных обычно
идентична передаточной функции до истинных, но неизмеряемых
переменных. Следовательно, не добавляется никакая дополнительная
сложность.
2) Скоординированное управление
Другая и очень частая ситуация состоит в том, что р входов
выбираются как основные управляющие переменные, а оставшиеся т— р
входов используются в некотором фиксированном или, возможно,
динамическом отношении к основным управляющим переменным.
Довольно общий случай такого подхода — это когда поток топлива
используется как первичная управляющая переменная (например,
для управления температурой), а тогда поток воздуха связан с
первичной переменной фиксированным отношением, чтобы достичь
полного сгорания.
3) Мягкое разделение нагрузки
Если решено просто управлять доступными измеряемыми
величинами, то можно разделить бремя достижения этого управления
между избыточными входами. Это может быть достигнуто различными
оптимизационными подходами (например, квадратичный подход).
4) [Жесткое разделение нагрузки
Часто бывает, что есть подмножество входов (например,
размерности р), которое желательно выбрать исходя из требуемой
точности или по экономическим соображениям, но они ограничены по
амплитуде или влиянию на характеристики системы. В этом случае
в помощь им можно использовать другие входы. Наглядный пример
этой ситуации — когда желательно точно управлять материальным
потоком в широком диапазоне. В этом случае можно предложить
24.11. Неквадратные системы 797
стратегию, которая состоит в том, чтобы использовать большой
клапан, чтобы регулировать поток при больших ошибках и затем
с помощью маленького клапана корректировать поток до желаемой
величины. Это — переключающая стратегия управления.
Дополнительно об этом будет сказано в следующей главе.
Избыток выходов
Здесь мы предполагаем, что р > т. В этом случае мы не можем
надеяться управлять в любое время каждым из измеряемых выходов
независимо. Исследуем три альтернативных стратегии.
1) Квадрирование за счет выходов
Хотя все измеренные величины и должны использоваться для
получения восстановленного состояния, только т из них могут
независимо управляться. Таким образом, любая часть регулятора,
которая зависит от обратной связи по восстановленному состоянию,
должна использовать полный набор измеренных величин; однако
задание уставок должно быть выполнено только для подмножества т
переменных (независимо от того, являются ли они восстановленными
или измеренными).
2) Мягкое разделение управления
Если желательно управлять ббльшим количеством переменных,
чем существует входов, то можно определить их относительную
важность, используя подходящий показатель эффективности.
Например, можно было использовать квадратичный показатель качества с
различными весами для различных выходов. Заметим, что, конечно,
нулевая ошибка в установившемся состоянии не может, вообще
говоря, быть обеспечена во всех контурах. Таким образом, воздействие
интегратора (если это желательно) не может применяться больше
чем к т выходам.
3) Переключающие стратегии
Можно также воздействовать на переменные в любой момент
времени с помощью того или иного закона переключения. Этот закон
мог бы включать мультиплексирование с разделением времени или
несколько более сложную структуру решения. Пример этого был
приведен в разд. 11.4, где используется единственное управление,
чтобы обеспечить и ограничения состояния и отслеживание на
выходе, переключаясь между двумя линейными регуляторами, каждый
из которых предназначен для соответствующей цели.
798 Глава 24. Фундаментальные ограничения в MIMO-управлении
Дополнительные входы или выходы могут быть также очень полезны,
чтобы получить удовлетворительный проект в случае фундаментальных
ограничений характеристик. Проиллюстрируем это примером.
Пример 24.3 (Перевернутый маятник). Вспомним задачу
перевернутого маятника, рассмотренную в примере 9.4. Мы видели, что
эта система, когда она рассматривается как задача с единственным
входом (сила, прикладываемая к тележке) и единственным выходом
(положение тележки), имеет вещественный полюс в ППП, который
обладает большим модулем, чем вещественный нуль в ППП. Хотя эта
система формально управляема, было выяснено, что этой установкой,
рассматриваемой в свете фундаментальных ограничений
характеристик, фактически невозможно управлять из-за серьезных и
неизбежных пиков чувствительности.
Однако ситуация кардинально изменяется, если мы также
измеряем угол маятника. Это приводит к единственному входу и двум
выходам (положение тележки y(i) и угол 0(t)). Эта система может
быть представлена в виде структуры, приведенной на рис. 24.8.
Заметим, что эта неквадратная система имеет полюсы в точках
(О, 0, а, —а) но никаких конечных нулей (в MIMO-случае). Таким
образом, разумно было бы ожидать, что очень серьезные ограничения,
которые существовали в SISO-системе, теперь не имеют места в
этой неквадратной системе.
Мы используем те же самые числовые величины, что и в
примере 9.4: К — 2, а = л/20 и Ъ — л/10. Тогда подходящий неквадратный
регулятор будет иметь вид
U(a)=[Cy(s) Ce(s)]
R(s)-Y(s)
-ew
(24.11.1)
где R(s) =C[r(t)] —эталонный сигнал для положения тележки и
С„(з) = -
4(s + 0.2)
Ce(s) = -
150(s + 4)
(24.11.2)
s + 5 ' . s + 30
Рисунок 24.9 показывает реакцию замкнутой системы при r(t) =
fi{t — 1), т. е. при единичном ступенчатом эталонном воздействии,
приложенном в момент t — 1.
fit)
-к
(s-a)(s + d)
-(5"6)(5+6)
52
/
y(t)
0(t)t
Рис. 24.8. Модель перевернутого маятника с одним входом и двумя выходами
24.11. Неквадратные системы 799
9 ю
0.15
к
S o.i
3
S
о 0.05 Ь
К
я
g о
§
С-0.05
-т г
п 1 1 1 1 г-
I I
4 5 6
Время [с]
10
Рис. 24.9. Реакция на ступеньку при неквадратном управлении для
перевернутого маятника
Интересное наблюдение заключается в том, что
неминимально-фазовый нуль находится между входом и y(t). Таким образом, независимо
от того, какой вход выбран, ограничения характеристики из-за этого
нуля остаются. Например, для единичного ступенчатого эталонного
сигнала
f° [r(t) - m\ e-btdt = i (24.11.3)
Легко проверить, что это справедливо для верхнего графика на
рис. 24.9. В частности, наличие неминимально-фазового нуля задает
верхний предел полосы пропускания замкнутого контура независимо от
возможности измерения величины угла.
Ключевой момент, который объясняет преимущество
использования в этом случае неквадратного управления — это то, что
второй регулятор эффективно сдвигает неустойчивый полюс в область
устойчивости. Таким образом, больше нет конфликта между
маленьким неминимально-фазовым нулем и большим неустойчивым полюсом
и единственное, на что мы должны обратить внимание — это на
ограничения полосы пропускания, определяемые неминимально-фазовым
нулем. QQQ
800 Глава 24. Фундаментальные ограничения в MIMO-управлении
24.12. Дискретные системы
Результаты, представленные в предыдущих разделах, применимы с
соответствующими изменениями также и к дискретным системам.
Главные различия связаны со следующими проблемами:
1) различная область устойчивости и
2) при дискретном времени чистые задержки задаются просто как
полюсы в начале координат (на z-плоскости), в то время как.при
непрерывном времени они приводят к трансцендентным функциям
от 5.
Пункт 2) особенно важен, потому что позволяет применять
технологию систем с ограниченной размерностью к системам с запаздыванием.
24.13. Резюме
• Так же, как и в SISO-случае, эксплуатационные характеристики для
MIMO-систем не могут в общем случае рассматриваться независимо
друг от друга, потому что они связаны сетью компромиссов.
• Ряд фундаментальных алгебраических законов компромисса SISO-
случая довольно просто переносится на МШО-случай:
о равенство SQ(s) = I —TQ(s) создает компромисс между скоростью
реакции на изменение эталонного сигнала или подавлением
возмущений (S0(s) должна быть малой) и необходимой величиной
сигнала управления, чувствительностью к шуму измерения или
ошибкам моделирования (T0(s) должна быть малой);
о Ym(s) = —T0(s)Dm(s) подразумевает компромисс между полосой
пропускания дополнительной чувствительности и
чувствительностью к шуму измерения;
° Suo(s) = [G0 (s)]-1 Т0 (s) подразумевает, что дополнительная
чувствительность с полосой пропускания значительно выше, чем у
разомкнутого контура, приведет к большим сигналам управления;
° Sio(s) = S0(s)G0(s) подразумевает компромисс между входным и
выходным возмущениями и
о S(s) = S0(s)Sa(s), где Sa(s) = [I + Gai(5)T0(5)]~1, подразумевает
компромисс между дополнительной чувствительностью и робаст-
ностью по отношению к ошибкам моделирования.
• Существуют также компромиссы в частотной и временной области
для неустойчивых полюсов и нулей.
о Качественно они эквивалентны SISO-случаю и приводят к тому,
что (в терминах MIMO-систем) низкая полоса пропускания в со-
24.13. Резюме 801
четании с неустойчивыми полюсами дает увеличение
перерегулирования, в то время как широкая полоса пропускания в сочетании
с неустойчивыми нулями дает увеличение недорегулирования.
о Количественно мера, в которой проявляется вышеупомянутое,
более сложна, чем в SISO-случае: проявление недо- и
перерегулирования, а также ограничения, связанные с интегрированием,
определяются линейной комбинацией МШО-каналов.
• В MIMO-системах возникает дополнительное техническое требование
желательной развязки каналов.
• Развязка определяется временными и частотными ограничениями с
учетом направленности.
о Ограничения, связанные с неминимально-фазовыми нулями
разомкнутого контура, которые имеют неканонические направления,
могут быть изолированы для подмножества выходов с помощью
использования треугольной развязки.
о С другой стороны, если выполнена динамическая развязка,
ограничение распределяется на несколько каналов.
• Преимущества и недостатки полностью децентрализованного
управления, вариантов динамической и треугольной развязки были
проиллюстрированы на промышленном учебном примере.
Учебный пример сахарной отжимной линии
Вид проекта
Децентрализованный
Динамическое
разделение
Треугольное
разделение
Преимущества
Можно использовать
более простую теорию
SISO-систем
Выходы могут
управляться
независимо
Отделяется наиболее
важный выход и на
него не действуют
ограничения
неминимально-
фазового нуля
Недостатки
Взаимодействие
не учитывается;
получаются неважные
характеристики
Оба выхода должны
иметь более низкую
полосу пропускания
из-за одного
неминимально-
фазового нуля
На второй (хотя и
менее важный) выход
воздействуют первый
выход и ограничение
неминимально-
фазового нуля
802 Глава 24. Фундаментальные ограничения в MIMO-управлении
24.14. Литература для последующего чтения
Частотные ограничения MIMO-систем
1. Chen, J. (1995). Sensitivity integral relation and design trade-offs in linear
multivariable feedback systems. IEEE Transactions on Automatic Control,
40(10):1700-1716.
2. Chen, J. and Nett, С (1995). Sensitivity integrals for multivariable discrete-
time systems. Automatica, 31(8):113-124.
3. Preudenberg, J.S. and Looze, D.P. (1988). Frequency-Domain Properties of
Scalar and Multivariable Feedback Systems. Springer-Verlag, New York.
4. G6mez, G. and Goodwin, G.C. (1995). Vectorial sensitivity constraints for
linear multivariable systems. Proceedings of the 34th CDC, New Orleans, LA,
4:4097-4102.
5. G6mez, G. and Goodwin, G.C. (1996). Integral constraints on sensitivity
vectors for multivariable linear systems. Automatica, 32(4):499-518.
6. Skogestad, S. and Postlethwaite, I. (1996). Multivariable Feedback Control:
Analysis and Design. Wiley, New York.
7. Sule, V. and Athani, V. (1991). Directional sensitivity trade-offs in
multivariable feedback systems. Automatica, 27(5):869-872.
Сахарная отжимная линия
1. West, M. (1997). Modelling and control of a sugar crushing station. ME
Thesis, Department of Electrical and Computer Engineering, The University
of Newcastle, Australia.
Проблемы чувствительности
1. Boyd, S.P. and Barratt, C.H. (1991). Linear Controller Design-Limits of
Performance. Prentice-Hall, Englewood Cliffs, N.J.
2. Doyle, J.C. and Stein, G. (1981). Multivariable feedback design: Concepts for a
classic/modern synthesis. IEEE Transactions on Automatic Control, 26(1):4-
16.
3. Postlethwaite, I., Edwards, W.J., and MacFarlane, A. (1981). Principal gains
and principal phases in the analysis of linear multivariable feedback systems.
IEEE Transactions on Automatic Control, 26(l):32-46.
4. Postlethwaite, I. and MacFarlane, A. (1979). A Complex Variable Approach to
the analysis of linear Multivariable Feedback Systems. Lecture notes in control
and information sciences, Vol. 12, Springer-Verlag.
Проблемы робастности
1. Dahleh, M. and Diaz-Bobillo, I. (1995). Control of Uncertain Systems. Prentice-
Hall, Englewood Cliffs, N.J.
2. Stoorvogel, A. (1992). The Hqq Control Problem: a state space approach.
Prentice-Hall, Englewood Cliffs, N.J.
3. Zhou, K., Doyle, J.C, and Glover, K. (1996). Robust and Optimal Control.
Prentice-Hall, Upper Saddle River, N.J.
24.15. Задачи для читателя 803
24.15. Задачи для читателя
Задача 24.1. Рассмотрим MIMO-объект размерности 2x2, имеющий
передаточную функцию
G0(s) =
20
(5+ 2) (5 + 5)2
5-2 -5-1
5-2 -5
(24.15.1)
24.1.1. Вычислите неминимально-фазовые нули системы и связанные с
ними левые и правые направления.
24.1.2. Определите ограничения чувствительности, связанные с этими
нулями.
Задача 24.2. Рассмотрим MIMO-объект размерности 2x2, имеющий
номинальную модель
G0(s) =
1
5-2
(5 + I)2 I.-2 -2
(24.15.2)
24.2.1. Покажите, что эта система имеет неминимально-фазовый
взаимный нуль и вычислите связанные с ним левые направления.
24.2.2. Аналогичен ли этот случай случаю четырех резервуаров,
рассмотренному в примере 24.1? Обсудите результаты.
Задача 24.3. Рассмотрим тот же объект, что и в задаче 24.2. Нужно
спроектировать контур управления с обратной связью, который
обеспечивает нулевую установившуюся ошибку для постоянных эталонных
сигналов и полосу пропускания в обоих каналах, равную 0.5 рад/с.
24.3.1. Спроектируйте регулятор с диагональной дополнительной
чувствительностью.
24.3.2. Спроектируйте регулятор с нижней треугольной
дополнительной чувствительностью.
24.3.3. Сравните реализацию этих двух проектов.
Задача 24.4. Рассмотрим MIMO-объект с номинальной моделью
G0(s) = G0n(s)[God(s)]
-1
где GoD(3) =
2 0
-1 0
(24.15.3)
24.4.1. Определите направления, связанные с неустойчивым полюсом.
24.4.2. Определите ограничения, воздействующие на выход регулятора
u(t) для ступенчатого выходного возмущения в г-м канале (г = 1,2).
804 Глава 24. Фундаментальные ограничения в MIMO-управлении
Задача 24.5. Выведите ограничения во временной области для
дискретных систем, имеющих неминимально-фазовые нули и неустойчивые
полюсы.
Задача 24.6. Рассмотрим MIMO-объект размерности 2x2, имеющий
передаточную функцию
Go W =
20
(s -2) (5 + 5)2
1 0.2(5 + 5)
-0.125(5+ 5)2 2
(24.15.4)
Этим объектом нужно управлять с помощью цифрового регулятора
с периодом квантования Д = 0.1 си экстраполятором нулевого порядка.
24.6.1. Вычислите модель [GhoG0L(2) для дискретной системы.
24.6.2. Определите ограничения во временной области, определяемые
неустойчивыми полюсами и неминимально-фазовыми нулями (если
они есть).
Задача 24.7. Рассмотрим контур управления с обратной связью для
MIMO-объекта размерности 2x2, имеющего неминимально-фазовый
нуль в точке s = 2 и единственное связанное с ним левое направление
hT = [1 — 1]; из уравнения (24.6.3) видно, что для ступенчатого входа
в любом из каналов мы имеем
/•ОО /»00
/ hTy{t)e-Zotdt^ {yi(t)-y2(t))e-2tdt = 0 (24.15.5)
Jo Jo
где y\(t) и y2(t) — выходы объекта в каналах 1 и 2 соответственно.
Уравнение (24.15.5) может навести на мысль, что мы можем избежать
недорегулирования, если спроектировать регулятор, обеспечивающий
дополнительную чувствительность, где Tn(s) =T2i(s) и Tuis) =^22(5),
потому что в этом случае yi{t) — 2/2М = 0 Для всех t. Почему эта идея
не имеет смысла?
Задача 24.8. Рассмотрим MIMO-систему, имеющую модель
G0(s)
(s + l)2(s + 2)
2(-s + 3) 0.5(-a + 3) (s + a)'
0.5(я + 1) -/3 -(в+ 2)
-1 0.5 2.5
(24.15.6)
Если а = 3 и /3 = 1, найдите все ограничения во временной области
для управления с обратной связью для этой системы. (Напомним
читателю, что может быть больше одного левого направления, связанного с
неминимально-фазовым нулем.)
ЧАСТЬ VIII
ПРОДВИНУТОЕ
MIMO-УПРАВЛЕНИЕ
Введение
Эта заключительная часть книги охватывает некоторые
продвинутые идеи MIMO-управления. Мы начнем в гл. 25 с расширения на
MIMO-системы параметризации регулятора, описанной в гл. 15 для
SISO-случая. Наконец, в гл. 26 мы объединим многие идеи книги. Наша
цель здесь состоит в том, чтобы описать некоторые продвинутые идеи
проектирования. Наряду с этим мы также хотим показать читателю,
что, достигнув этого пункта, он может понимать весьма сложные
проблемы проектирования. В частности, мы покажем, как полная
динамическая и частичная развязка может быть достигнута с помощью
регуляторов, обладающих одной или двумя степенями свободы. Мы
также покажем, как динамическая развязка может быть сохранена при
наличии ограничений на амплитуду и скорость нарастания сигнала
исполнительного механизма.
Глава 25
Параметризация
MIMO-регуляторов
25.1. Введение
В этой главе мы расширим методы проектирования SISO-систем гл. 15
на MIMO-случай. Мы найдем, что многие проблемы являются общими
для SISO- и MIMO-случаев. Однако имеются и специфические
проблемы в MIMO-случае, что объясняет отдельное рассмотрение этих
систем. Ключевым фактором, ведущим к этим различиям, опять-таки
является то, что MIMO-системы имеют пространственную связь, т. е.
каждый вход может воздействовать более чем на один выход и на
каждый выход можно воздействовать более чем одним входом.
Последствия этого факта далеко идущие. Примеры трудностей, которые
являются результатом этих взаимодействий, включают устойчивость,
неминимально-фазовые нули с их свойствами направленности и
характеристики отслеживания.
Несмотря на эти различия, центральной проблемой в проектировании
MIMO-системы управления все еще остается формирование
(приблизительной) инверсии. Снова из-за взаимодействий инверсия более
сложная, чем в SISO-случае и мы поэтому должны будем разработать более
сложные средства для достижения этой цели.
25.2. Аффинная параметризация:
устойчивые MIMO-объекты
Отсылаем читателя к гл. 15 и, в особенности, к разд. 15.3, где мы
представили параметризацию всех стабилизирующих регуляторов для
устойчивой линейной системы. Обобщение на мультипеременный случай
непосредственное. Действительно, все регуляторы, которые
обеспечивают устойчивый замкнутый контур для данного устойчивого объекта в
808 Глава 25. Параметризация MIMO-регуляторов
разомкнутом состоянии, имеющего номинальную передаточную
функцию G0(s), могут быть выражены в виде
С(5) = [I - Q^GoWPQW = Q(s)[l - G0(5)Q(5)]-1 (25.2.1)
где Q(s) —любая матрица устойчивых собственных передаточных
функций.
Результирующие номинальные функции чувствительности равны
T0(5) = G0(S)Q(5)
So(e) = I-Go(«)Q(«)
S,o(e) = (I-G0(e)Q(e))Go(e)
Suo(s) = Q(e)
(25.2.2)
(25.2.3)
(25.2.4)
(25.2.5)
Эти матрицы передаточных функций одновременно устойчивы тогда
и только тогда, когда Q(s) устойчива. Основное свойство выражений
(25.2.2)-(25.2.5) —то, что они являются аффинными относительно
матрицы Q(s). Мы используем это свойство ниже, когда будем обсуждать
различные задачи проектирования.
Замечание 25.1. Заметим, что следующие выражения являются-
ЯМ ДО и ПМДО для номинального объекта и регулятора.
CD(s) = I - Q(s)GG(s) CN(s) = Q(s) (25.2.6)
CD(s) = I - GG(s)Q(s) CN(s) = Q(s) (25.2.7)
GoD(5) = I Gon(s) = Go(s) (25.2.8)
GoD(5) = I GoN(5) = G0(s) (25.2.9)
Фактически, такой выбор говорит о том, что (22.12.22)
удовлетворяется и, следовательно, что устойчивость замкнутого контура
гарантируется при устойчивой Q(s). Отсюда можно сделать
вывод, что (25.2.6) и (25.2.7) — подходящее матричное дробное описание
(МДО) для регулятора, которое облегчит последующие процедуры
проектирования. DDD
Идеализированная целевая функция чувствительности — T(s) = I.
Тогда мы видим из (25.2.2) и (25.2.3), что проектирование Q(s)
сводится к задаче нахождения (приблизительной) правильной инверсии
для G0(s), такой, что компромиссы приблизительно обеспечиваются в
различных частотных областях.
Отсылаем читателя к разд. 15.3.2, где рассмотрены следующие
проблемы в SISO-задаче определения приблизительных инверсий:
25.4. Относительная степень модели 809
• неминимально-фазовые нули;
• относительная степень модели;
• компромиссы возмущения;
• величина управления;
• робастность;
• неуправляемые компоненты.
Те же самые проблемы возникают и в MIMO-случае, но они
дополнены проблемами направленности. Далее мы исследуем для MIMO-
случая проблемы относительной степени, робастности и неминимально-
фазовых нулей.
25.3. Достигнутые чувствительности
Как и в SISO-случае, мы должны различать номинальные
чувствительности и достигнутые чувствительности. Результаты разд. 20.8 здесь
также используются. Например, достигнутая чувствительность, как и в
(20.8.3), имеет вид
S(e) = S0(e)[I + GAi(e)To(e)]-1 (25.3.1)
= [I - G0(5)Q(5)][I + GeWQC*)]-1 (25.3.2)
где G€(s) — аддитивная ошибка модели, определенная аналогично
(4.12.1):
G(s) = G0(s) + G€(s) (25.3.3)
25.4. Относительная степень модели
Напомним из гл. 15, что в SISO-случае, когда мы имели дело с
проблемами относительной степени модели, то просто добавляли
дополнительное фильтрование, чтобы получить соответствующую бисобствен-
ную передаточную функцию. Тот же самый принцип используется и в
MIMO-случае, за исключением того, что в качестве фильтра необходимо
взять бисобственную матричную передаточную функцию, что намного
более интересно, чем в SISO-случае. Чтобы понять это, сделаем паузу,
чтобы рассмотреть проблему относительной степени в MIMO-случае.
25.4.1. Относительная степень в MIMO-случае
Проблема степени MIMO-модели является более тонкой, чем в SISO-
случае. В следующих разделах мы определим относительную степень в
MIMO-случае и исследуем некоторые из ее свойств.
810 Глава 25. Параметризация Ml МО-регуляторов
а) Матрицы взаимодействия
Вспомним, что относительная степень SISO-модели, среди всего прочего,
устанавливает нижнюю границу относительной степени
дополнительной чувствительности. В SISO-случае мы говорим, что относительная
степень (скалярной) передаточной функции G(s) является степенью
полинома p(s), такого, что
lim p(s)G(s) =К где 0 < IК\ < оо (25.4.1)
S->00
Это означает, что функция p(s)G(s) бисобственная, т. е. (p(s)G(s))~1
также собственная. Мы можем фактически сделать этот полином p(s)
уникальным, если потребуем, чтобы он принадлежал классу полиномов
V = {sk\k e N}.
В MIMO-случае каждый элемент матрицы передаточных функций
G(s) может иметь различную относительную степень. Таким образом,
чтобы сформировать мультипеременную версию скалярного полинома
p(s) в (25.4.1), нам нужно рассмотреть отдельные элементы и их
взаимодействия. Чтобы понять, как это можно сделать, рассмотрим матрицу
G(s) размерности т х т.
Покажем, что существуют матрицы £l(5) и £r(5)> такие, что
выполняются следующие свойства (которые являются мультипеременными
аналогами (25.4.1)):
lim £L(s)G(s) = KL 0 < Idet(KL)| < оо
s-юо '
limG(«)*R(a) = KR
0<|det(KR)|<oo
(25.4.2)
(25.4.3)
Этот результат устанавливается следующей теоремой.
Теорема 25.1. Рассмотрим квадратную матрицу G(s) передаточных
функций размерности тхт, невырожденную почти всюду в 5. Тогда
существуют уникальные передаточные матрицы £l(5) u £r(5) (U3~
вестные как левая и правая матрицы взаимодействия
соответственно), при которых выполняются условия (25.4.2) и (25.4.3) и такие, что
справедливы равенства
£L(5)=HL(5)DL(s) (25.4.4)
DL(s)=diag(sJ\...,sp'") (25.4.5)
HL(«) =
■ 1 0
/&(*) 1
(25.4.6)
25.4. Относительная степень модели 811
£R(5) = DR(5)HR(5)
DR(5) = diag(5^,...,5^)
1 h*(s) h*(s) ... h*m(s)
0 1 h*(s) ... Л*»
HR(5) = '
(25.4.7)
(25.4.8)
(25.4.9)
[0 0 1
где hfj(s) и h^(s) — полиномы относительно s, удовлетворяющие
условиям Л§(0) = 0 и к%{0) = 0.
Доказательство
(От противного)
Сначала напомним, что функция G(s) может быть всегда
представлена с помощью ПМДО таким образом, что Gqn(s) и Gqd(s) —
правые взаимно простые матрицы полиномов и что G0j}(s) —
собственная по столбцам матрица. Пусть rid — сумма степеней
столбцов Gqd(s) и пусть пп —степень det(GQN(s)); тогда относительная
степень G(s) равна п^,—пп и G(s) является собственной, когда пп < n<j.
Докажем теорему для левой матрицы взаимодействия. Случай
правой матрицы взаимодействия может быть доказан зеркальным
отображением аргументов относительно строк и столбцов.
Рассмотрим сначала %-ю строку G(s), т. е. [G(s)]j*. В этом случае
существует минимальное неотрицательное целое число щ, такое, что
\imsni[G{s))i*=ff (25.4.10)
s-юо
где ff — вектор-строка, не равный тооюдественно нулю и имеющий
конечные компоненты.
Тогда можно продолжить формирование £l(5) следующим образом:
1) Выберем первую строку £l(5)> Kl(5)]i>m в ви^е
[Ы*)Ь* = [*П10 0...0] (25.4.11)
Тогда
[KL]b = lim KL(e)]i*G(e) = rf (25.4.12)
где rj
вектор-строка, такая, что rj = f^.
2) Рассмотрим вектор второй строки /£ . Если f£ линейно независим
от г[, то выбираем вторую строку £l(5)> [£ь(5)Ь*> в виде
[tL(s)h* = [0sn>0 0...0]
(25.4.13)
812 Глава 25. Параметризация Ml МО-регуляторов
Это даст
[KL]2. = lim KL(e)]2.G(e) = r\ (25.4.14)
3) Если J2 линейно зависит от r\, т. е. если существует отличный от
нуля параметр fi\, такой, что f£ = $\т\> то мы не можем выбрать
Кь(5)Ь* как в (25.4.13), потому что тогда матрица Kl в (25.4.2)
была бы вырооюденной. Вместо этого мы формируем вектор-строку
в виде
[ti(8)]l=sH0*'»00...0]-fi[tL(s)]u) (25-4.15)
где п\ — уникальное целое число, такое, что
lhnfcL(s)]LG(5) = (ri)T (25.4.16)
и т\— вектор, не равный тождественно нулю и с конечными
компонентами.
Если г\ линейно независим от г\, то выбираем вторую строку
£l(s); [£ь(5)Ь*, в виде
Кь(*)]2* = [Ы*)]1 (25.4.17)
Если же т\ линейно зависит от г\, то существует параметр 0$,
отличный от нуля, такой, что r<i = /3|г\. Тогда формируем вектор-
строку в виде
KlWIIL = (**Ш»)]Ъ -&Ы»)]ь) (25-4.18)
где п^ — уникальное целое число, такое, что
Ит KlW12.GW = (4)Т (25.4.19)
S—tOQ
где r\ — вектор, не равный тождественно нулю и с конечными
компонентами.
Если г2 линейно независим от г\, то выбираем вторую строку
£l(5); [£ь(5)Ь*, в виде
Кь(*)Ь* = Кь(А (25-4-20)
Если г\ линейно зависит от г\, то процесс повторяется, пока
не будет достигнута линейная независимость или k-я попытка
не даст п\ + п* = n<j — пп — в этом случае берем р2 = 0 и
соответствующие недиагональные элементы /&2i,--« >^2(m-i) равны
нулю. Заметим, что п\ + п* никогда не может быть больше, чем
пё, — Пп, потому что последняя величина — относительная степень
матрицы.
4) Продолэюаем операции с другими строками подобным образом. DDD
25.4. Относительная степень модели 813
Проиллюстрируем процедуру на следующем примере.
Пример 25.1. Рассмотрим матрицу передаточных функций G(s),
имеющую вид
|> + 1)2 (в+ 1)1
|2(в + 1) 1
G(S) =
[(« + 1ГЧ
Зт1"1
(25.4.21)
Тогда rid = 6 и пп = 2. Мы такэюе имеем, что щ = 1 с f\ = [1 0]т и
п2 = 2с/2 = [20]т.
1) Сначала формируем
[$b(s)]u = [sni0 0...0] = [s0]
Тогда
lim[tL(s)]u[G(s)]u=ri =[10]
s-юо
(25.4.22)
(25.4.23)
2) Рассмотрим вектор-строку /J. Поскольку /2 линейно зависит от
7*i с /32 = 2, т. е. /2 = 2ri, выберем вторую строку £l(5)> [£ь(5)Ь*>
в виде
Кь(*)Й. = «*([о *2] - /eJKbWh.) = [-2^1+I *2+I]
где х находим из условия
lim[*L(s)]LG(S) = (ri)T=lim
s-юо
-2s1+I -s2+x - 2s1+a;
(s + 1)2
(в + 1)3
(25.4.24)
(25.4.25)
откуда получаем х = 1. Это дает
г\ = [-2 - 1]Т (25.4.26)
которое линейно независимо от ff. Таким образом, выбор (25.4.24)
при х = 1 мооюно взять в качестве второй строки матрицы
взаимодействия. Таким образом,
€ь W
s 0
-2s2 53
(25.4.27)
□□□
Замечание 25.2. Очевидно, что матрицы взаимодействия мооюно
определить, используя диагональные матрицы Dl(s) и Dr(s) в (25.4.4)
и (25.4.7) с произвольными диагональными элементами в виде
полиномов степеней р11р21..чРт> которые являются инвариантными для
представления матрицы взаимодействия для данной матрицы G(s).
Эта гибкость важна, потому что мы можем всегда выбирать
устойчивые полиномы, подразумевая, что инверсии £l(5) u £r(5) также
устойчивы.
814 Глава 25. Параметризация Ml МО-регуляторов
б) Интерпретация
Матрицы взаимодействия играют центральную роль в управлении,
потому что они определяют (мультипеременную) относительную степень.
Например, они определяют минимальную достижимую относительную
степень любой дополнительной чувствительности, которую можно
получить, используя собственный регулятор.
Левую матрицу взаимодействия можно интерпретировать так, что
^l(5)^(5) является конкретной комбинацией предсказанных выходов,
обладающих тем свойством, что передаточная функция, соединяющая
€l(5)^(5) c U{s), имеет усиление на высокой частоте, отличное от нуля.
Это свойство можно использовать, чтобы получить прообраз закона
управления, задав предсказанному выходу £i,{s)Y(s) значение
некоторой желаемой величины. Эту интерпретацию можно лучше видеть на
простом дискретном примере.
Пример 25.2. Рассмотрим следующую передаточную функцию,
выраженную в терминах переменной Z-преобразования:
GQ4(z) = ^2
В соответствии с данными выше определениями левая матрица
взаимодействия £i,{z) оказывается равной
(25.4.29)
Используя £i,(z), мы можем определить новую переменную Yqb(z)
следующим образом:
YqL(z) = ^L(z)Yq(z) = tL{z)G04(z)Uq(z)
_ Г zYq(z)M
~~ [-3z2Yq(z)W+z2Yq(z)W
где Yq(z)W и Yq(z)W обозначают первый и второй элементы вектора
выхода Yq(z) соответственно.
Из самого правого выражения в (25.4.30) видно, что мы построили
предсказатель для комбинации будущих выходов, который зависит от
текущего и предыдущего значений входов. Кроме того, зависимость
от текущих входов определяется через обратимую матрицу. Таким
образом, существует выбор для текущих входов, который дает уьЩ =
Z~l [^l(^)] для любой желаемой величины y*L[k].
z
3z
(25.4.28)
€lM =
z
-3z2
2z-1
-2
ВД
(2t>A.6V)
25.4. Относительная степень модели 815
Обозначим через Y*L(z) величину £jj{l)Y*(z). Тогда определим закон
управления, задав значение Yql{z) равным Y*L(z). Это дает
соответствующий закон управления в виде
1 2z~l
О -2
Uq(z) = Yq*L(z)
(25.4.31)
или
u[k]W = -2u[k-1]<2> + y*qL[k]^ u u[k]W = -0.5yJL[*](2) (25.4.32)
Это приводит к следующему результату:
YqL(z) = tL(z)Yg(z) = Y*L(z) = £L(1) W (25-4-33)
Наконец,
nw=KbW]"1€L(i)ir;w
V1 0 '
3Z-1 z~\
" 1 0]
-3 lj
z~x 0 1
Zz~l(\-z-
-1
) z-2\
TO
to
(25.4.34)
Мы можем оценить результирующую реакцию системы во времени
следующим образом.
Единичная ступенька у\[к] {первый компонент у*[к]) формирует
следующие выходные последовательности:
{yi[*]} = [0111...]
ЫЛ]} = [0 3 3 0---]
(25.4.35)
(25.4.36)
Точно так же единичная ступенька у^Щ (второй компонент у*[к])
формирует
{Vi[*]} = [0000---] (25.4.37)
Ы*:]} = И II"-] (25.4.38)
Заметим, что yW появляется в одной квантованной величине, но
оказывает существенное влияние на у(2\ Мы можем удалить эту
связь, взяв более длинную задержку в предсказании. Например, вместо
(25.4.33) мы могли бы использовать
Yq*L(z)=tL(z)
0
о
*-2
П'Ю
(25.4.39)
816 Глава 25. Параметризация Ml МО-регуляторов
Если мы затем зададим Yqi,(z) = Y*L(z), то получим связанный с
этим закон управления
€ь(«)
который дает
у-2
О
,-2
ад =
Y*(z) =
"l 2Z-1]
0 -2 J
Ua{z)
О
y-2
то
(25.4.40)
(25.4.41)
Таким образом, мы видим, что теперь имеем динамически
развязанную систему, но для этого была введена дополнительная задероюка
(т. е. нуль при z = оо) в реакцию на единичную ступеньку в канале 1.
В итоге мы видим следующее:
1) Матрица взаимодействия содержит структуру системы с
минимальной задержкой, т. е. структуру нулей в бесконечности.
2) Использование этой структуры с минимальной задержкой в
проекте управления моэюет привести к динамической связи.
3) Мы можем получить динамическую развязку, но для этого моэюет
потребоваться дополнительная задероюка, т. е. дополнительные
нули в бесконечности.
Фактически этот вид свойств будет отражен в более общих
проектах MIMO-систем, которые мы рассмотрим ниже. DDD
Мы можем разработать аналогичную интерпретацию для правой
матрицы взаимодействия. Действительно, если мы запишем
Go(e) = Go(e)€R(e)KR(e)]-1 (25.4.42)
то мы видим, что [^R(5)]_1C/(5)— конкретная комбинация предыдущих
значений входов, которая обладает свойством, что усиление на
высокой частоте передаточной функции от [^r(5)]"1C/(5) к выходу Y(s)
невырождено. Это также можно использовать для получения прообраза
закона управления, пытаясь найти конкретную комбинацию
предыдущих управляющих действий, которая дает текущий выход, равный
некоторой желаемой величине. Снова проиллюстрируем это простым
дискретным примером.
Пример 25.3. Рассмотрим снова передаточную функцию, данную в
(25.4.28). Для этого примера правая матрица взаимодействия равна
Ы*) =
о
U Goq{z)tR(z) =
(25.4.43)
25.4. Относительная степень модели 817
Мы можем использовать ее, чтобы построить предсказатель для
текущего выхода в терминах комбинаций прошлых значений входов. В
частности, мы имеем
Yq(z) = G04(z)Uq(z) = (Goq(z)£R(*))(foi(2)r4(2))
1 2
3 4
r2u?\z\
(25.4.44)
tW .. тт(2)
где Щ ' ищ — первый и второй компоненты вектора входа
соответственно.
Мы можем теперь попытаться определить конкретную
комбинацию прошлых значений входов, которая дает текущий выход для
соответствующих прошлых величин у*[к].
Определим Uq(z), задав
Это приводит к
Uq{z) = i^{z)[G04{z)iK{z)}-1
z~ni О
у — П.1
о
У-П2
у—П2
то
то
(25.4.45)
(25.4.46)
где щ и пг выбраны так, чтобы регулятор обеспечивал необходимые
связи. Для нашего примера мы завершаем с
UQ(Z)=
Это приводит к
z О
О z2
1 2
3 4
-1 г -2
rZ г
ВД =
v-2
О Z
О
ад
ад
(25.4.47)
(25.4.48)
□□□
25.4.2. Приближенные инверсии
Далее мы покажем, как матрицы взаимодействия могут быть
использованы для построения приближенных инверсий, учитывая
относительную степень.
Ключевое свойство £l(5) и £r(5) заключается в том, что
Ar(s) = G0(S)£r(S) и AL(s)=tL(s)G0(s) (25.4.49)
818 Глава 25. Параметризация MIMO-регуляторов
являются бисобственными передаточными функциями, имеющими
невырожденное высокочастотное усиление. Это упрощает проблему
инверсии. Заметим, что и Ar(s) и Al(s) имеют следующее представление
в пространстве состояний:
x(t) = Ax(t) + Bu{t) (25.4.50)
y{t) = Cx{t)+Bu{t) (25.4.51)
где det D Ф 0. Заметим также, что А и С — те же самые, что и в описании
объекта (22.2.1)-(22.2.2).
Ключевой момент относительно (25.4.50) и (25.4.51) заключается в
том, что точную инверсию A(s) можно получить, просто меняя ролями
вход и выход, что приводит к следующей реализации [A(s)]"1 в
пространстве состояний:
x(t) = Ax(t) + ВD -1 (y(t) - Cx(t)) (25.4.52)
= Axx{t)+Bxu(t) (25.4.53)
u{t) = D -1 (y(t) - Cx{t)) (25.4.54)
= Cxx(t) + Dxu{t) (25.4.55)
где u(t) обозначает вход инверсии: u(t) = y(t)y a u(t) обозначает выход •
инверсии. Также, в (25.4.52)-(25.4.54)
Ал = А - В D-1 С Вл = В D-1 (25.4.56)
Сл = -D гС DA = D-1 (25.4.57)
Мы можем использовать [Al(s)]"1 или [Ar(s)]"1 для построения
различных приближений инверсии от GQ(s). Например,
GJTW = Kb WGo Wr^bW (25.4.58)
— приближенная правая инверсия со свойством, что
G0(5)Gi?v(S) = Кь(в)]_1€ь(0) (25.4.59)
является нижней треугольной матрицей, равной единичной матрице на
нулевой частоте.
Аналогично
GLnv(*) = €r(0)[Go(S)^r(S)]-1 (25.4.60)
— приближенная левая инверсия со свойством, что
GLnv(s)G0(S) =^R(0)[^R(S)]-1 (25.4.61)
также является нижней треугольной матрицей и равной единичной
матрице на нулевой частоте.
25.5. Неминимально-фазовые нули 819
Вооруженные вышеупомянутыми средствами, мы возвращаемся к
первоначальной задаче построения Q(s) в виде (приближенной)
инверсии для G0(s). Например, мы могли бы выбрать Q(s) как
Q(«) = [Al(s)]-4l(0) = [£l(s)Go(s)]-4l(0) (25.4.62)
При этом выборе мы получаем, что
То(я) = G0(s)Q(s)
= Go(s)[AL(S)]-^L(0) (25.4.63)
Таким образом, выбором корректирующих относительную степень
сомножителей (s + а) мы можем сделать матрицу TQ(s) равной I на
нулевой частоте и треугольной на других частотах, с полосой
пропускания, определяемой сомножителями (s + а), используемыми при
формировании £l(5)-
25.5. Неминимально-фазовые нули
25.5.1. Z-матрицы взаимодействия
Мы видели в разд. 25.4.1, что матрицы взаимодействия — удобный
способ описания относительной степени нулей объекта, расположенных на
бесконечности. Также мы видели, что матрица взаимодействия может
использоваться для предварительной компенсации объекта так, чтобы
изолировать нули на бесконечности, что позволяет, в конце концов,
получить собственную инверсию. Та же самая основная идея может
использоваться, чтобы описать структуру конечных нулей.
Соответствующие преобразования известны как z-матрицы взаимодействия. Они
позволяют определить предварительную компенсацию, которая
изолирует конкретные конечные нули. В частности, когда такая компенсация
применяется для изоляции неминимально-фазовых нулей и она
объединяется с матрицами взаимодействия для изоляции нулей на
бесконечности, z-матрицы взаимодействия позволяют вычислить устойчивую и
собственную инверсию.
Расширение теоремы 25.1 на конечные нули следующее.
Лемма 25.1. Рассмотрим невырожденную матрицу G(s)
размерности т х т. Предположим, что эта матрица имеет вещественный
неминимально-фазовый нуль, расположенный в точке s = z0. Тогда
820 Глава 25. Параметризация MIMO-регуляторов
существуют верхняя и ниэюняя треугольные матрицы ^n(s) и ^i,(s)
соответственно такие, что
]imi/>L(s)G{s)=KLa
s-tz,
lim G(s)V>r(s) = Krz
0<|det(KLz)|<oo (25.5.1)
0<|det(KRz)|<oo (25.5.2)
^L(e) = Hb(«)Db(u)
DjJ{v) = diag{vPl,...,vPm)
HL(u) =
1 0
hhiiv) 1
^r(s) = DR(v)HR(i;)
Г1 /»*(«) h&(v)
0 1 /4(v)
Hr(u)= :
10 0
(25.5.3)
(25.5.4)
(25.5.5)
(25.5.6)
(25.5.7)
(25.5.8)
где hfj(v) и hfAv) — полиномы от v, удовлетворяющие условиям
Л§(0)=0 ti/ig(0) = 0u2<fe
szn
v = — -
s-zn
(25.5.9)
Доказательство
Мы видим, что отображение (25.5.9) преобразовывает нуль в точке s =
z0 в нуль при v — оо. Тогда мы можем применить теорему 25.1. □□□
Замечание 25.3. Как и в теореме 25.1, z-матрицы взаимодействия
могут быть также определены с помощью диагональных матриц
Dl(u) и Dr(u) с произвольными диагональными полиномами
степеней Pi,P2,-- ,Pm, которые являются инвариантными по отношению к
представлениям матрицы взаимодействия для данной матрицы G(s).
25.5. Неминимально-фазовые нули 821
В частности, мы моэюем заменить v на (v + а), где «ЕК+. Тогда
(25.5.9) соответственно преобразуется в
v = __s(a + z0)
s — z0
Тогда hfAv) и h!^(v) станут полиномами от (v + a), удовлетворяя
условиям hfj(-a) = 0 и h^(—a) = 0.
Замечание 25.4. Заметим, что эти матрицы взаимодействия
удаляют неминимально-фазовый нуль в том смысле, что произведения
t/>l(s)G(s) и G(s)iJ>n(s) невырождены при s = z0. Это также
означает, что [^lC5)]"1 и [^rC5)]"1 вырождены при s = z0.
Проиллюстрируем эти идеи следующим примером.
Пример 25.4. Рассмотрим объект, имеющий номинальную модель
Go(«) = *
(в + 1)(в + 2)
'я + 1 1
2 1
(25.5.11)
Мы видим, что эта система имеет неминимально-фазовый нуль
при s = z0 = l. Определим преобразование (25.5.9), которое дает
v = -т^— = 8— 4=>s = -^- (25.5.12)
(S-Z0) 5-1 V+l
Применение этого преобразования к GQ(s) приводит к
1
V0(v) = G0(s)
(v + l)(2v + l) (u + 1)2]
з=^ " (2v + l)(3v + 2) [ 2{v +1)2 (v + 1)2J
(25.5.13)
Далее вычислим левую матрицу взаимодействия (для
относительной степени) для этого преобразованного объекта. Заметим, что хотя
каждый элемент в V0(t>) бисобственный, сама матрица строго
собственная, потому что ее детерминант обращается в нуль при v = оо.
Мы применим процедуру формирования, используемую в
доказательстве теоремы 25.1.
Заметим, что п\ = 0 с Д = -[2 1] и П2 = 0 с fa = -[2 1].
6 6
1) Сначала сформируем
КьЬ*(") = [^ni 00...0] = [1 0] (25.5.14)
Затем
lim KL]i.(t>)V0(u) = rf = [1 0] (25.5.15)
v—>oo
822 Глава 25. Параметризация MIMO-регуляторов
2) Рассмотрим вектор-строку f£. /2 — линейно зависит от r\c(i\ = \,
т- е. /2 = г\. Тогда мы выбираем вторую строку £ъ{у), [£l(^)]2*> в
filluP
fo»]L = vx([01] - /35[€l(«)]i.) = I-"* «1
где ж удовлетворяет условию
vx{v + l)
г>—>оо г>—>оо
о
(25.5.16)
(25.5.17)
(25.5.18)
.(Зи + 2)(2и + 1)
Отсюда получаем х = 1. Это дает
rl = [10f
который линейно независим от ff. Таким образом, выбор (25.5.16)
с х = 1 подходит для второй строки матрицы взаимодействия.
Таким образом,
' 1 01
£т» =
—V V
(25.5.19)
3) Нам нужно, чтобы [£i,{v)]~l была устойчивой без потери
существенного характера матрицы взаимодействия, так что мы
можем заменить v на v + a, например, при а = 1, что дает
£i» =
1 О
-(v + 1) (v + 1)
(25.5.20)
Мы теперь можем обратно преобразовать матрицу
взаимодействия £i,(v), чтобы получить V>l(s) в ви^е
iM*) =
1
s + 1
О
s + 1
s-1 s-1.
« [ФФ)Г =
о
s-1
S + 1J
(25.5.21)
Заметим, что det(,i/>L(s)) = —f^y. Это гарантирует, что
det(t/>L(s)G0(s)) невырожден для s = z0 — \.
25.5.2. Q-синтез с использованием
матриц взаимодействия и z-матриц взаимодействия
Далее мы покажем, как г-матрицы взаимодействия могут
использоваться при проектировании регулятора в Q-параметризованной структуре
для неминимально-фазовых объектов.
Для иллюстрации пусть G0 — матрица устойчивых передаточных
функций, имеющая один неминимально-фазовый нуль, расположенный
в точке s = z0. Напомним из разд. 25.5.1, что если V'lXs) является
25.5. Неминимально-фазовые нули 823
левой ^-матрицей взаимодействия и если <0r(5) —правая ^-матрица
взаимодействия, то
• limt/>L(5)G0(s) = KLz 0<|det(KLz)|<oo (25.5.22)
s—*z0
limG0(s)VR(s) = KRz 0<|det(KRz)|<oo (25.5.23)
s—*z0
Напомним также, что по своей сути матрицы я/>ь(5) и ipn{s) обладают
среди прочих следующими свойствами:
• V*l(5) и iPr(s) являются неустойчивыми матрицами;
• <0l(5) и iJ>r(s) являются нижней и верхней треугольными матрицами
соответственно, у которых компонент имеют вид
к
где keN и c*eR+ (25.5.24)
• [^lC5)]"1 и ['0r(5)]~1 —устойчивые треугольные матрицы, у которых
диагональные элементы имеют вид
Г s-z0
[ z0(a + s)
• lims_>oo'0L(5) = Zl и lims_>oo'0R(5) = Zr —матрицы с конечным,
отличным от нуля детерминантом.
• det(^L(0)) =det('0R(O)) = 1. (Это свойство — следствие (25.5.24).)
Рассмотрим следующий вариант для Q(s):
Q(«) = Ki»Ho(s)]-4l(*)Dq(s) = [HoCs^-^qCs) (25.5.26)
где Н0 (s) — объект, предварительно скомпенсированный левой z-
матрицей взаимодействия ij>i,{s):
Ko(s)=tPL(s)G0(s) (25.5.27)
и £l(5)- левая матрица взаимодействия для нуля, находящегося в
бесконечности. Dq(s) в (25.5.26)—устойчивая матрица со свойствами,
которые будут определены ниже.
Заметим, что благодаря предварительной компенсации HQ(s) —
устойчивая и минимально-фазовая матрица.
Используя (25.2.2), (25.5.26) и (25.5.27), мы видим, что
дополнительная чувствительность определяется выражением
T0(s) = G0(s)Q(s) = ^L(s)]-1H0(S)Q(S) = ЬЫвГЪдф (25.5.28)
Мы видим, что Dq(s) может использоваться для формирования
структуры и частотной характеристики MIMO-контура (ограниченных
z0(a + s)
s-z0
(25.5.25)
824 Глава 25. Параметризация MIMO-регуляторов
неизбежным наличием неминимально-фазового нуля объекта). Таким
образом, Dq(s) следует выбрать так, чтобы получить желаемую
динамику в различных каналах. Например, мы всегда можем получить
треугольную связь, выбрав Dq(s) в виде нижней треугольной матрицы.
Относительная степень элементов в Dq(s) должна быть выбрана так,
чтобы сделать Q(s) собственной (обычно, бисобственной).
Заметим, что наличие [^lC5)]"1 b (25.5.28) гарантирует внутреннюю
устойчивость, оставляя неминимально-фазовый нуль GQ в T0(s). Кроме
того, [ipi,{s)]~l вносит вклад в динамику контура полюсами,
расположенными в точке s = —а (см. (25.5.25)), которые обычно выбираются
намного больше, чем требуемая полоса пропускания.
Проиллюстрируем это простым примером.
Пример 25.5. Рассмотрим объект, имеющий номинальную модель
G0(s) =
1
5 + 1
2
(25.5.29)
(s + l)(s + 3)
Нужно спроектировать MIMO-контур управления с полосой
пропускания приблизительно 0.5 рад/с в каждом канале.
Решение
Это устойчивый и строго собственный объект. Однако он имеет
неминимально-фазовый нуль при s = z0 — 1. Таким образом, мы можем
использовать z-матрицу взаимодействия, чтобы синтезировать Q(s)
(см. разд. 25.5.1 и 25.5.2).
Мы сначала должны найти левую z-матрицу взаимодействия ipi,(s)
для матрицы GQ(s) и матрицу HQ(s).
Чтобы вычислить ij>i,(s), заметим, что объект в этом примере
подобен объекту в примере 25.4, где выбрано а = 1. Тогда просто
доказать, что
-фф) =
1
S + 1
s-1
0
S+1
8-1.
и [^ь(в)]_1 =
"1
1
0 1
в-1
~JTlJ
(25.5.30)
Далее вычислим Hc(s), которая определяется выражением
Ho(s) = Vi»Go(*) =
1
s + 1 1
(25.5.31)
(e + l)(e + 3) [s + 1 0J
Нам также нужно вычислить точную инверсию модели [G0(s)]_1.
Она имеет вид
[Go(s)}-1 =
_! _ (£+1)(£+3^
(5-1)
1 -1
-2 s + 1
(25.5.32)
25.5. Неминимально-фазовые нули 825
Из (25.5.28) и предыдущих выражений мы имеем
Г1
Т0(з) = ['фф)}-1Вф) =
1 -
О
8-1
S + 1
Dq(«)
(25.5.33)
Сначала рассмотрим вариант Dq(s), делающий матрицу T0(s)
диагональной. Это можно получить с помощью нижней треугольной
матрицы Dq(s):
\Dn(s) О
LD21(s) D22(s)\
DQ(e) =
(25.5.34)
Тогда
To(e) =
1
1 -
О
£-1
S + 1J
Du(s)
D2l(s)
О
i?22(e)
Dn
Du(s)
8-1
0
e+1
D2i(s) -^—D22{s)
8 + 1
(25.5.35)
и
Q(s) = [H0(5)]-1Dq(5) = (s + l)(a + 3)
(s + 3)D2i{s)
i8 + l)(8 + 3){Dn(8)-D2l(8))
■i1
AiW о
#21 (s) D22{s)
(5+3)1)22(5)
-(e + l)(e + 3)022W.
(25.5.36)
Мы сразу эюе видим из (25.5.35), что для того, чтобы сделать
T0(s) диагональной, необходимо, чтобы (s + l)Dn(s) = (s — l)D2i{s).
Это означает, что неминимально-фазовый нуль появится в канале
1 так эюе как в канале 2 замкнутого контура. Как мы увидим в
гл. 26, явление, что развязка заставляет размещать неминимально-
фазовые нули во многие каналы, не является специфическим для
данного примера, а является более общим компромиссом, связанным с полной
динамической развязкой.
Если вместо этого мы решим получить только треугольную
развязку, то мооюно избежать наличия неминимально-фазового нуля в
канале 1. Прежде чем мы выберем Dq(s), необходимо из (25.5.36)
определить требуемые ограничения на степени Dn(s), D2i(s) и D22(s),
чтобы получить бисобственную Q(s).
Из (25.5.36) мы видим, что Q(s) бисобственная, если одновременно
выполняются следующие условия:
1) относительная степень Дг2($) равна 2;
2) относительная степень D2i{s) равна 1;
3) относительная степень Dn(s) — Z?2i(s) равна 2.
826 Глава 25. Параметризация Ml МО-регуляторов
Условия 2) и 3) одновременно удовлетворяются, если Dn(s) имеет
относительную степень 1, в то время как Dn(s) и D2i(s) имеют
одинаковое высокочастотное усиление.
Кроме того, мы предполагаем, что требуется, чтобы MIMO-
контур управления был развязан на низких частотах. (Иначе
появляются ошибки в установившемся состоянии для постоянных
эталонных сигналов и возмущений.) Из уравнения (25.5.35) мы видим, что
эта цель достигается, если Dn(s) и D2i(s) имеют усиления на низких
частотах равные по величине, но противоположных знаков.
Подходящий выбор, который одновременно обеспечивает бисоб-
.ственность Q(s) и развязку на низких частотах, имеет вид
D2i(s) = ^Dn(s) (25.5.37)
s + р
где /3 Е R+ —намного больше, чем желаемая полоса пропускания,
скажем, /3 = 5.
Теперь можно продолжить выбор Dq(s) таким образом, чтобы
удовлетворить (25.5.37) с учетом ограничений полосы пропускания.
Возможный выбор следующий:
DqW =
0.5(5 + 0.5)
52 +0.755+ 0.25
0.5(5 + 0.5)(5-5) 0.25
L(52 + 0.755 + 0.25)(5 + 5) 52 + 0.755 + 0.25
(25.5.38)
Характеристика этого проекта может быть оценена
моделированием с помощью файла mimoS.mdl пакета SIMULINK. Обратите
внимание, что вы должны сначала запустить программу из файла
pmimo3.m пакета MATLAB. DDD
Замечание 25.5. Если GQ(s) имеет nz>l (различных)
неминимально-фазовых нулей, например, z0\,..., z0Tlx, тогда
вышеупомянутый подход все еще можно применить, если выберем
Q(s) = Kl(*)H0(5)]-4l(*)Dq(s) (25.5.39)
где Н0 (s) теперь определяется следующим образом:
Ho(5) = n^L(5)WG0(5) (25.5.40)
и где ^ь(*)(к) -
z-матрица взаимодействия для полюса,
расположенного в точке s = z0k.
25.5. Неминимально-фазовые нули 827
25.5.3. Q-синтез как проблема подбора модели
Хотя использование матриц взаимодействия и ^-матриц взаимодействия
дает понимание основных возможностей и фундаментальной
структуры Q-синтеза для MIMO-проекта, процедура, описанная в разд. 25.5.2,
обычно не соответствует выполнению синтеза в цифровой форме. В
дополнение к трудности автоматизировать численный алгоритм процедура
требовала бы аналитического исключения компенсации неустойчивых
полюсов и нулей, что выглядит странным. Трудность полностью связана
с вычислениями ^-матриц взаимодействия; робастные методы
пространства состояний полностью пригодны для вычисления обычной матрицы
взаимодействия.
В этом разделе мы поэтому исследуем альтернативный метод для
вычисления устойчивой приближенной инверсии, используя
соответствующие процедуры подбора модели разд. 22.6. Это обходит потребность в
использовании ^-матриц взаимодействия.
Преобразуем сначала объект в бисобственную форму, используя
обычную матрицу взаимодействия £l(5)-
Предположим, что целевая дополнительная чувствительность —
T*(s). Из (25.2.2) мы знаем, что при аффинной параметризации
регулятора для MIMO-объекта номинальная чувствительность
равна G0(s)Q(s). Следовательно, мы можем преобразовывать задачу Q-
синтеза в соответствующую задачу подбора модели, выбрав Q(s),
минимизирующую
• J = ^/00|lM(^)-N(iW)r(^)|lF^ (25-5-41)
где М, N и Г замещают Т*, £ь^о и Q соответственно. Тогда мы можем,
по крайней мере, в принципе применить методы разд. 25.5.4, чтобы
синтезировать Q.
Начнем с исследования Q каждый раз по одному столбцу. Для г-го
столбца мы имеем
Ji = -tf" \\[M(MU--N(M[r(joj))42F<^ (25.5.42)
Как и в подразд. 25.5.4, перейдем к временной области и используем
±i(*) = Ai*i(*); zi(0)=Bi (25.5.43)
Vi(t) = Ci*i(<) (25.5.44)
чтобы представить систему с передаточной функцией [M(s)]„j и
используем
х2 (t) = А2х2 (t) + B2u(t) (25.5.45)
z2(t) = C2x2(t) + i)u{t) (25.5.46)
828 Глава 25. Параметризация Ml МО-регуляторов
чтобы представить систему с бисобственной передаточной функцией
£l(5)C?o(s). Кроме того, для квадратных объектов мы знаем из свойств
£L(s), что det{D} ф 0.
Кажется, что это приспосабливает теорию, приведенную в разд. 22.6,
для подбора модели. Однако важное отличие заключается в том, что
здесь мы не имеем никаких весов величины управления u(t). Это
ранее явно не допускалось. По этой причине мы сделаем паузу, чтобы
расширить ранее полученные результаты и охватить случай, когда не
используются никакие веса для управления.
25.5.4. Подбор модели при решении без использования весов
Здесь мы рассмотрим специальный случай общей задачи подбора
модели. В частности, в основной задаче подбора модели, как описано
в (22.6.4), мы ищем ответ для задачи, в которой величина 0 нас не
интересует. В этом случае мы берем R = 0 и Г = I.
Однако трудность состоит в том, что эти условия приводят к
эквивалентной задаче линейного квадратичного регулятора, где вес,
штрафующий величину управления, нулевой. Это может быть недопустимо
для исходных условий линейного квадратичного регулятора. Такую
ситуацию можно исправить рядом способов. Покажем, как можно обойти
проблему, используя левую матрицу взаимодействия £l(5) (cm- раздел
25.4.1). Выберем элементы матрицы взаимодействия в виде (rs+l)n (при
малом г), чтобы так изменить модель пространства состояний для j/2,
чтобы в Z2(s) = £l(5)^2(s) был прямой путь от и к Z2. В этом случае
Z2(t) удовлетворяет модели пространства состояний вида
i2{t) = A2X2{t) + B2u{t)
Z2(t) = C2X2(t)+bu(t)
(25.5.47)
(25.5.48)
где DTD — невырожденная матрица.
Вид оптимального управления в задаче подбора модели тогда
изменится следующим образом:
/»00 /»00
J= \\yi{t)-z2{t)f2dt= [xT(t) uT(t)}
Jo Jo
где
dx(t)
dt
= Ax(t) + Bu(t); 5(0) =
Bi
0
S Ф
dt
хЩ
(25.5.49)
(25.5.50)
25.5. Неминимально-фазовые нули 829
Ф = 6Т6 C=[Ci -С2] Ф = СТС
Sr = -CrD A =
Ai
0
0 '
А2.
В =
0
ж
в2
(25.5.51)
(25.5.52)
Функция стоимости имеет взаимную связь между x(t) и u(t), но ее
можно устранить, переопределив закон управления следующим образом:
(25.5.53)
(25.5.54)
(25.5.55)
и(<)=й(<)-Ф-18ж(*)
Это преобразует задачу в
^Р = А5(*)+ВП(*)
at
/»оо
Jt= {x(t)T4>x(t)+u(t)T$u(t)}dt
Jo
где
(25.5.56)
(25.5.57)
(25.5.58)
(25.5.59)
А = А-ВФ_18
В = В
Ф = СТ[1-6Ф16Т]С
Ф = Ф = Т)тй
Теперь из разд. 22.5 мы видим, что стабилизирующее решение задачи
существует при условии, что (А, Ф 5) не имеет никаких ненаблюдаемых
нулей на мнимой оси. При этих условиях мы можем выразить
оптимальное значение u(t) в виде
U(t) = -Ksx(t) = -[K] K*]x(t)
или, используя (25.5.53),
u(t) = -Kx(t) = - [Ki K2] x(t)
где
k2 = k2+d-1c2
Как и в разд. 22.6.3, мы ищем ту конкретную обратную связь по
состоянию для исходной системы, которая решает задачу оптимизации.
Таким образом, значение u(t) может быть получено из условий
(25.5.60)
(25.5.61)
dx(t)
= A5(t) + Bu(<); 5(0) =
dt
u{t) = -Kx(t)
Bi
0
(25.5.62)
(25.5.63)
830 Глава 25. Параметризация Ml МО-регуляторов
Взяв преобразование Лапласа, получим окончательную реализацию
оптимального значения &{s) в виде
0(5) = [-1 + К2 (si - А2 + В2К2) 1В2] Кг {si - Аг)~1 Вг
(25.5.64)
Замечание 25.6. Вышеупомянутая процедура подбора модели обладала
тем ограничением, что &{s) долэюна быть устойчивой. Однако как
мы аргументировали в гл. 7 и 15, обычно необходимо {например, в
присутствии входных возмущений) в замкнутом контуре различать
устойчивые полюсы и полюсы с желаемым расположением. Метод,
описанный выше, может быть изменен так, чтобы ®{s) была
ограничена таким образом, чтобы иметь полюсы в различных желаемых
областях, как рассмотрено в разд. 22.8.
Замечание 25.7. В случае, когда D квадратная и невырожденная, то
из (25.5.58) мы видим, что Ф будет тождественно равняться нулю.
Это будет ситуация, когда мы используем данный алгоритм для Q-
синтеза — см. ниже.
25.5.5. Применение Q-синтеза
для неминимально-фазовых нулей
Теперь мы можем применить результаты разд. 25.5.4 к задаче Q-синтеза.
Использование (25.5.64) в задаче, описанной уравнениями (25.5.45) и
(25.5.46), дает в результате
[®(s)U = [-1+К2 (si - А2 + В2К2) _1 B2] Ki {si - Ах)"1 Вх (25.5.65)
Ki = K\{s) - D^Ci (25.5.66)
K2 = K|(5) - t>-lC2 (25.5.67)
Фактически, связанная с этим задача ЛКР имеет некоторые
специфические особенности, потому что, как было указано в замечании 25.7,
Ф = 0, т. е. нет никаких весовых коэффициентов у состояний в функции
стоимости.
Поэтому мы должны применить результаты приложения D
осторожно, понимая особенности решения. Обращаем ваше внимание на
преобразованную задачу, приведенную в (25.5.54)-(25.5.59). Для этих
условий мы имеем следующее:
25.5. Неминимально-фазовые нули 831
1)
Когда система минимально-фазовая, матрица Ад устойчива. Тогда из
приложения D следует, что единственное положительное
полуопределенное решение уравнения Риккати (22.5.1) — Роо = 0, дающее оптимальное
усиление обратной связи в виде K*(s) = 0, K|(s) = 0. Заметим, что
Р(£) сходится к Pqo для любых положительно определенных начальных
условий. Подставляя эти результаты в (25.5.65), (25.5.66), (25.5.67),
получим
[©(^^[-I+D^Cz^
(25.5.68)
= [D-1-D-1C2(^-A2+B2D-1C2)"1B2D-1][C1(5l-A1)~1Bi]
(25.5.69)
Предлагаем читателю проверить, что это в точности равно
[Л(5)]"1[Т*]^(5), где [A(s)]-1 имеет в пространстве состояний вид
{(25.4.56), (25.4.57)}. Таким образом, в минимально-фазовом случае
алгоритм подбора модели по существу приводит к точной инверсии
£l(5)(»o(s), умноженной на целевую дополнительную чувствительность
T*(s). Это эвристически понятно.
2)
Когда система неминимально-фазовая, K*(s) и K|(s) будут, в общем
случае^ отличны от нуля, гарантируя, чтобы собственные значения
А2 — В2К2 лежали в области устойчивости. Действительно, можно
показать, что собственные значения А2 — В2К2 соответствуют
устойчивым собственным значениям матрицы А2 вместе с неустойчивыми
собственными значениями матрицы А2, отраженными через границу
устойчивости. Кроме того, К| удовлетворяет следующему уравнению
Риккати (22.5.1):
О = Р22В2Ф '1ЩР22 + РггА2 + А2ГР22 (25.5.70)
К^Ф^ВзРзз (25.5.71)
Окончательно решение имеет вид
[Q(e)],i(e) = L(e)[T(e)].i (25.5.72)
где
L(s) = -I + К2 (si - А2 + В2К2) _1 В2 (25.5.73)
832 Глава 25. Параметризация Ml МО-регуляторов
и
[r(s)]*i = K1(sI-A1)-1Bi (25.5.74)
Кроме того, помещая столбцы Q(s) рядом, мы получим
Q(«) = ВДГ(«); Г(а) = [[T(s)U, [T(s)U ■ ■ ■ [T(s)U] (25.5.75)
где T(s) является аффинной в T*(s).
Замечание 25.8. Вышеупомянутый проект (хотя и оптимальный в
смысле £2) we гарантирует, что Q(0) = [Gq(O)]"1, т. е. нет никакой
гарантии интегрирующих свойств регулятора. Чтобы получить
интегрирующие свойства, мы можем сделать одну из двух вещей:
а) Умножить Q(s) слева на постоянную матрицу М, что дает
MQ(0) = [Go(O)]-1.
б) Следовать процедуре, описанной в разд. 16.3.4, т. е. выразить
Q(5) = [Go(O)]-1 + sQ{s) (25.5.76)
и оптимизировать Q(s).
Мы также изменяем функцию стоимости, чтобы включить
весовую функцию W(s) = I/s.
Замечание 25.9. Вышеупомянутая процедура находит точную
инверсию для минимально-фазовых устойчивых систем и приближенную
инверсию для неминимально-фазовых систем. Для
неминимально-фазового случая неустойчивые нули объекта отображаются на границу
устойчивости, так что они появляются как полюсы Q(s).
Дополнительные полюсы Q(s) дает матрица [£ь(5)]-1' которая является
частью инверсной системы.
Три интересных вопроса возникают относительно этой процедуры
проектирования.
а) Как задать полюсы Q(s) в некоторой области, а не просто
гарантировать устойчивость Q{s)? Это можно получить с помощью
преобразований, приведенных в разд. 22.8.
б) Как выбрать сомножители (s+a) в матрице взаимодействия? Это
связано, помимо всего прочего, с наличием неминимально-фазовых
нулей. Как мы видели в гл. 24, неминимально-фазовые нули
определяют верхнюю границу желаемой полосы пропускания. Другие
факторы, которые определяют (s + a) — допустимый диапазон входного
сигналя и присутствие шума измерения.
в) Как мы накладываем дополнительные ограничения типа
диагональной развязки? Эта тема требует дополнительной работы и
рассмотрена в гл. 26.
25.5. Неминимально-фазовые нули 833
Пример 25.6. Рассмотрим MIMO-объект размерности 2x2, имеющий
номинальную модель
-1 2
Go (в) =
5+2 5+1
2 7(-5 + 1)
5 + 2 (5 + l)(5 + 2)J
(25.5.77)
Это — устойчивая, но неминимально-фазовая система, с полюсами
в точках —1, —2 и —2 и нулем в точке 5 = 5.
Целевая функция чувствительности выбрана в виде
■ T*(s) =
s2 + 4s + 9
1 О'
О 1
(25.5.78)
Чтобы поместить ее в формулировку задачи, приведенную выше,
повторно параметризуем Q(s), чтобы обеспечить интегрирование в
контуре обратной связи. Таким образом, мы используем
Q(5) = Go(0)-1+sQ(S) = -
-14 8
4 2
+ sQ(s)
(25.5.79)
и введем весовую функцию Ws(s) = I/s. Тогда, учитывая (22.6.3), мы
имеем
M(s)=W8(s)(T*(s)-Go(s)Go(0)-1) и N(s) = G0(s) (25.5.80)
Таким образом,
-1.46s2 + 1.13s + 5.8 0.267
M(s) =
(s2 + 4s + 9)(s + l)(s + 2) (s + l)(s + 2)
3.73 -0.13s2 + 6.466s+ 17.8
(s + l)(s + 2) (s2 + 4s + 9)(s + l)(s + 2)J
(25.5.81)
Чтобы решить задачу, следуя предложенному выше подходу, мы
должны сформировать левую матрицу взаимодействия £l(s) для N(s).
Такая матрица взаимодействия имеет вид £l(5) = s^-> что дает
ЫаГЧ1.0> + а)Г*(5) =
TS + 1
(s + l)(s + 2)
-(s + 1) 2(s + 2)
2(s + l) 7(-s + l)J
(25.5.82)
где т = а г = 0.1
834 Глава 25. Параметризация Ml МО-регуляторов
1.5
8а
g£ 0.5
\о о
ом о
«а
К -1.5
nW
-
г— I
/tfiW
I/
"I г i
Ы*)
1
J
\Ш \
\-**^
10
15
Время [с]
20
25
30
Рис. 25.1. Отслеживание ступенчатых воздействий оптимальной
квадратичной системой
После решения задачи ЛКР мы получим
\Qn(s) Q12(s)
Q(*) =
Q2l(s) Q22(s)
s4 + 19s3 + 119s2 + 335s + 450
Qn (s) = 7.11s3 + 83.11s2 + 337.11s + 328.67
Q12(s) = 3.55s3 + 31.56s2 + 123.56s +189.33
Q21 (s) = 2.22s3 + 24.00s2 + 100.44s +142.67
Q22(s) = 1.11s3 + 12.0s2 + 50.22s + 71.33
Наконец, используя (25.5.79), мы возвращаемся к Q(s):
Qn(s) Qn(s)]
Q(s) =
.Q21 (a) Q22(s).
(25.5.83)
(25.5.84)
s4 + 19s3 + 119s2 + 335s + 450
Qn(s) = 6.18s4 + 65.38s3 + 226.04s2 + 16.00s - 420.00
Qi2(s) = 4.09s4 + 41.69s3 + 187.02s2 + 368.00s + 240.00
Q21 (a) = 2.49s4 + 29.07s3 +132.18s2 + 232.00s +120.00
Q22(s) = 1.24s4 + 14.53s3 + 66.09s2 + 116.00s + 60
Проект испытан с единичными ступенчатыми эталонными
воздействиями. Результаты показаны на рис. 25.1.
25.5.6. Q-синтез децентрализованных регуляторов
Как потенциальное приложение Q-параметризации к МШО-объекту,
рассмотрим проектирование децентрализованного регулятора для объ-
25.5. Неминимально-фазовые нули 835
екта GQ. Пусть мы имеем полное мультипеременное решение с
дополнительной чувствительностью Н0. Выберем конкретное соединение входов
и выходов, в качестве которого без потери общности возьмем следующее
(ui,yi)...(um,ym).
Определим тогда следующую диагональную номинальную модель с
соответствующей аддитивной ошибкой Ge(s)
G<(«) = diag[tf!(e),... ,g°mm(s)}, Ge(s) = G0(s) - G*(a) (25.5.85)
Пусть этот объект устойчив, тогда мы можем использовать
устойчивую Q-параметризацию всех децентрализованных регуляторов, которые
стабилизируют Gq(s):
С* (*) = Q^[I - G2WQ2W]-1 (25.5.86)
где Qo(s) и Cq (з)— диагональные.
Достигнутая чувствительность всего объекта (исходя из (25.3.1))
SA(s) = [I - G«(e)Q*(«)][I + Ge(e)Q^(e)]-1 (25.5.87)
Тогда мы можем спроектировать Qo(s), минимизируя величину
взвешенной ошибки чувствительности
[I-H0(a)-SA(e))W(a)||J.dw (25.5.88)
-/
Jo
где W(s) = [1 + Ge(s)Qo(s)] и || ||F означает норму Фробениуса.
Мы видим, что J можно представить следующим образом:
J= F\\M-NQ*\\2Fdu) (25.5.89)
Jo
где M(s) = Но и N(s) = (-HQG€(s) + GG(s)).
Однако это точно соответствует задаче подбора модели,
рассмотренной в разделе 22.6. Следовательно, мы можем спроектировать Qo(s),
чтобы получить достигнутую чувствительность Sa(s), близкую к
целевой чувствительности St(s)—HQ(s), где близость измеряется с помощью
(25.5.88).
Нормализованная мера стоимости использования
децентрализованного управления была бы тогда
v = ^Г^ — ^ (25.5.90)
f~\\ST(s)W(s)\\2F<L>
где 3° — минимальное значение (25.5.88).
Замечание 25.10. В вышеупомянутом примере мы неявно считали,
что «устойчивый» означает «желаемый». Если желательно
ограничить область, в которой находятся полюсы замкнутого контура, то
потребуется ограничить Q, как было сделано в SISO-случае.
836 Глава 25. Параметризация Ml МО-регуляторов
Далее мы рассмотрим задачу Q-синтеза для системы, неустойчивой в
разомкнутом состоянии. Заметим, что как и в гл. 15, мы будем в понятие
неустойчивых полюсов разомкнутого контура включать и
нежелательные полюсы разомкнутого контура, типа резонансных компонентов.
25.6. Аффинная параметризация:
неустойчивые MIMO-объекты
Рассмотрим ЛМДО и ПМДО для объекта вида
G0(«) = [GoD(e)]_1SoN(e) = Gon^HGodCs)]-1 (25.6.1)
Заметим, что такое представление может быть получено так же, как
в разделе 20.3.4. В этом случае мы имеем, что G0n(s),God(s),G0n(s)
и Gqd(s) определяются выражениями (22.12.16)2(22.12.19).
Учтем также, что если GQ(s) неустойчива, то Gqd(s) и Gqd(s) будут
неминимально-фазовыми. Точно так же, если GQ(s) неминимально-
фазовая, то такими же являются Gqn(s) и Gqn(s).
Следующий результат является MIMO-вариантом результата,
описанного в разделе 15.7.
Лемма 25.2 (Аффинная параметризация для неустойчивых
MIMO-объектов). Рассмотрим объект, заданный матричным
дробным описанием, как в (25.6.1), где G0n(s), G0d(s), Gqn(s) и Gqd(s) —
взаимно простое разложение на множители, как в лемме 20.1, га. е.
удовлетворяется условие
|"CD(5) CN(s)
[-Gn(s) Gd(s)
Тогда класс стабилизирующих регуляторов для номинального
объекта может быть выражен в виде
C(S) = CNn(5)[CDn(s)]-1 = [CDn(S)]-1[CNn(s)] (25.6.3)
где
CDn(s) = CD(s) - n(s)GoN(s)
CNn(s) = CN(s) + n(s)GoD(s)
CDn(s) = CD(«) - GoN(s)n(s)
CNn(s) = CN(e) + GoD(s)n(s)
(25.6.4)
(25.6.5)
(25.6.6)
(25.6.7)
[Gd(«)
|Gn(s)
-Cn(s)'
CdOO
= 1
(25.6.2)
25.6. Аффинная параметризация: неустойчивые MIMO-объекты 837
где fl(s) —любая устойчивая собственная передаточная матрица
размерности га х га.
Доказательство
1) Достаточность
Четыре результирующие функции чувствительности в этом
случае равны
So(«) = (CD(e) - GoN(s)n(s))GoD(s)
То(я) = GoN(s)(CN(s) + fi(s)GoD(s))
Sio(e) = (CD(e) - GoN(s)ft(s))GoN(s)
Su(s) = GoD(s)(CN(s) + n(s)GoD(s))
(25.6.8)
(25.6.9)
(25.6.10)
(25.6.11)
Ясно, что эти передаточные функции устойчивы, если
устойчива Q(s).
2) Необходимость
Так же, как и в гл. 15, этот результат следует из
алгебраической структуры задачи {детали см. в ссылках). DDD
Регулятор, описанный выше, изображен на рис. 25.2.
Стабилизирующая
структура
CnW
cWddM-1
Т+ '
Объект
дм
YW Х+
|Я
-1&
GoN(5)
Н*0*-
GoD(5)
nw
Рис. 25.2. Q-параметризация неустойчивых MIMO-объектов
Если в структуре на рис. 25.2 мы специальным образом выберем
n(s) = CD(s)fi(s) (25.6.12)
то сможем иначе представить систему так, как показано на рис. 25.3.
838 Глава 25. Параметризация Ml МО-регуляторов
Стабилизирующая
структура
Uf(s)
0-
CdW-'CnIs)
U(s)
♦ +
оценщик
возмущения
GoN(s)
Ue(s)
прогнозирующая
оценка
Объект
\R(s)
£МА+
GoD(5)
.___ — — j
S(«)
ОД
Рис. 25.3. Альтернативная Q-параметризация для неустойчивых
MIMO-объектов с ограниченной il(s)
В этом случае мы имеем
S0(s) = (CD(s) - GoN(S)CD(S)n(S))GoD(S)
= (I - [CD(S)]-1GoN(5)CD(S)n(S))CD(5)GoD(5)
= (I- [CD(S)]-1(CD(S)GoN(s))n(S))CD(S)GoD(5)
= (I-G0n(sMs))Cd(s)G„d(s)
= Sn(s)Sc(s) (25.6.13)
где Sc(s) — чувствительность, полученная с помощью регулятора
предварительной стабилизации (как на рис. 25.3), a Sq{s) — функция
чувствительности
SHW=I(e)-GoNWn(*)
(25.6.14)
Мы рассматриваем Sjq(s) как форму (25.2.3) для устойчивого
эквивалентного объекта Gqn(s). Таким образом, методы, разработанные
ранее в этой главе для Q-проектирования в случае устойчивого
разомкнутого контура, могут использоваться для проектирования Ct(s).
Заметим однако, что желательно гарантировать высокую
чувствительность Sc(s), иначе это отрицательно воздействует на выбор S^(s).
Например, если Sq{s) — не диагональная, то даже сделав Sjy(s)
диагональной, мы не получим динамическую развязку. Эту задачу мы
рассмотрим в следующей главе.
25.7. Реализация в пространстве состояний 839
25.7. Реализация в пространстве состояний
В гл. 15 мы видели, что существует красивая интерпретация в
пространстве состояний класса всех стабилизирующих регуляторов для
случая неустойчивого разомкнутого контура. Подобная интерпретация
применяется и в MIMO-случае. Эта интерпретация особенно полезна
в MIMO-случае, где формат пространства состояний очень облегчает
проектирование и реализацию.
Начнем с формы передаточной функции регулятора, показанного на
рис. 25.3. Дадим форму пространства состояния для каждого из блоков
регулятора следующим образом.
1) Стабилизирующая структура
Она легко обеспечивается обратной связью по восстановленному
состоянию. Все, что требуется — наблюдатель (возможно,
разработанный с помощью теории фильтра Калмана) и стабилизирующая
обратная связь по восстановленному состоянию (возможно,
разработанная с помощью теории ЛКР). Таким образом, мы можем записать
e(t) = y{t)-r(t) (25.7.1)
*i (t) = Ахг (*) + Bu{t) + Ji (e(t) - Схг (*)) - Bue(t) (25.7.2)
u(t) = -Kxi{t) + ue{t) (25.7.3)
В этих выражениях ue(t) соответствует обратному
преобразованию Лапласа величины Ue(s) на рис. 25.3. Мы ввели Ueft) в уравнения
для того, чтобы обеспечить правильное положение Cd(s)"1 в
контуре. Это можно проверить с помощью уравнения (25.7.2), которое
легко представить, используя передаточные функции:
Хг(з) = Тг{з)и{а) + Т2(з)Е(з) - Тг(з)ие(з) (25.7.4)
где
Ti(з) = (si - А + JiC)"1 В (25.7.5)
Т2(5) = (si - А + JiC)"1 Ji (25.7.6)
Тогда уравнение (25.7.3) будет выглядеть следующим образом:
U(s) = -КТг{з)и{з) - КТ2(з)Е{з) + КТф)ие(з) + Ue{s) (25.7.7)
Это уравнение имеет вид
Щз) = -C^{s)'1C^{s)E{s) + Cu{s)-1Cu{s)Ue{s) (25.7.8)
= -CD(5)-1CN(5)S(5) + Ue{s) (25.7.9)
где __ _
CD(s) = I + KTi(s) и CN(s)=KT2(s) (25.7.10)
Мы видим, что (25.7.9) соответствует рис. 25.2.
840 Глава 25. Параметризация MIMO-регуляторов
2) Оценщик возмущения
Мы также знаем из гл. 20, что ЛМДО в блоке возмущения может
быть реализовано с помощью наблюдателя:
&2{t) = Ax2(t) + Bu(t) + 32(e(t) - Cx2{t)) (25.7.11)
Z(t) = -(e(t)-Cx2(t)) (25.7.12)
Эти уравнения сразу же имеют форму г
E{s) = -Gor>(s)E(s) + GoN(s)U(s) (25.7.13)
где _
God(s) = I - С (si - A + J2C)-! J2 (25.7.14)
Gon(s) = С (si - A + J2C)-1 В (25.7.15)
Мы видим, что (25.7.13) соответствует блоку прогнозирующей
оценки на рис. 25.3.
3) Проектирование блока прогнозирующей оценки
Блок fl(s) может быть спроектирован инвертированием Gqn(s),
где из (25.7.15) мы видим, что Gqn(s) имеет модель пространства
состояний
£'(*) = Ax'(t) + Bu(t) - 32Cx\t) (25.7.16)
£'{t) = Cx'(t) (25.7.17)
Введя левую матрицу взаимодействия, эту модель можно
преобразовать в бисобственную форму:
£"(*) = Ax"(t) + Bu(t) - JC2x"{t) (25.7.18)
f(t) = C"x"{t) + B"u(t) (25.7.19)
где матрица D" — квадратная и невырожденная. При условии, что
система минимально-фазовая, мы можем сразу же инвертировать эту
систему, полностью меняя ролями входы и выходы.
Заметим, что регулятор будет бисобственным, если ft(s) является
бисобственной. Это следует из того, что Gqd(s) бисобственна.
25.8. Резюме
• Обобщение аффинной параметризации для устойчивой мультипере-
менной модели GQ(s) дается следующим представлением регулятора
1 Заметим, что E(s) = £[£(£)]•
25.8. Резюме 841
C(s) = [I-Q(5)G0(5)]-1Q(5) = Q(s)[I-G0(s)Q(5)]-\
обеспечивающего номинальные чувствительности
То(я) = G0(e)Q(e) (25.8.1)
So(e) = I-Gc(e)Q(e) (25.8.2)
Sto(a) = [I - Go(«)Q(a)]G0(«) (25.8.3)
Suo(s) = Q(«) (25.8.4)
• Связанная с ними достигнутая чувствительность, когда регулятор
применяется к G(s), имеет вид
S(s) = S0(s)[l + G€(s)Q(s)]-1
где G€(s) = G(s) — G0(s) — аддитивная ошибка моделирования.
• По аналогии с SISO-случаем, основные преимущества аффинной
параметризации включают следующее:
о явная устойчивость номинального замкнутого контура тогда и
только тогда, когда Q(s) устойчива;
о выдвижение на первый план фундаментальной важности
обратимости, т. е. достигаемых и достигнутых свойств G0(s)Q(s) и
G(s)Q(s) и
о чувствительности, которые являются аффинными в Q(s); это
облегчает синтез, основанный на критерии, который является
особенно привлекательным для МШО-систем.
• Снова по аналогии с SISO-случаем инверсия устойчивых МШО-
систем включает два основных вопроса:
о относительная степень —т. е. структура нулей в бесконечности и
о инверсная устойчивость — т. е. структура неминимально-фазовых
нулей.
• Из-за направленности оба из этих признаков обладают
дополнительной сложностью в МШО-случае.
• Структура нулей в бесконечности может быть нейтрализована левой
или правой матрицей взаимодействия (£l(5) или £r(5)
соответственно).
• Таким образом, матрица £l(5)G0(s) бисобственная, т. е. ее
детерминант—ограниченная, отличная от нуля величина при s —> оо.
• Структура неминимально-фазовых нулей может быть
нейтрализована левой или правой ^-матрицей взаимодействия (*0ь(5) или ij>n{s)
соответственно).
• Таким образом, аналитически ^\J{s)G0{s) — реализация инверсно-
устойчивой части модели — т. е. является эквивалентом минимально-
фазовых сомножителей в SISO-случае.
842 Глава 25. Параметризация MIMO-регуляторов
• Однако реализация ipi,(s)Go(s)
о неминимальна и
о обычно включает компенсацию динамики неустойчивых полюсов
и нулей (динамику неминимально-фазовых нулей матрицы GQ(s)).
• Таким образом, реализация ipi,{s)G0(s)
о полезна для анализа принципиально достижимых свойств
основных параметров G0(s)Q(s), относящихся к устойчивости Q(s) и
о вообще-то не подходит для реализации или инверсной реализации,
потому что она включает компенсацию неустойчивых полюсов и
нулей.
• Устойчивая инверсия, подходящая для реализации, формируется
подбором модели, который приводит к специфической задаче
линейного квадратичного регулятора (ЛКР), разрешимой через уравнения
Риккати.
• Если модель объекта неустойчива, проектирование регулятора может
быть выполнено в два этапа:
а) предварительная стабилизация, например, через ЛКР и затем
б) детальное проектирование с применением теории для устойчивых
моделей к предварительно стабилизированной системе.
• Все перечисленные результаты могут быть эквивалентно
интерпретированы или с помощью структуры передаточных функций, или
с помощью структуры пространства состояний; для МШО-систем
структура пространства состояний особенно привлекательна в случае
численной реализации.
25.9. Литература для последующего чтения
Аффинная параметризация и синтез
1. Desoer, С, Liu, R., Murray, J., and Saeks, R. (1980). Feedback systems
design: The fractional representation approach to analysis and synthesis. IEEE
Transactions on Automatic Control, 25(3):399-412.
2. Morari, M. and Zafiriou, E. (1989). Robust Process Control Prentice-Hall,
Englewood Cliffs, N.J.
3. Zhou, K., Doyle, J.C., and Glover, K. (1996). Robust and Optimal Control.
Prentice-Hall, Upper Saddle River, N.J.
Матрицы взаимодействия
1. Wolowich, W. and Falb, P. (1976). Invariants and canonical forms under
dynamic compensation. SI AM Journal on Control and Optimization, 14(6) :996-
1008.
25.10. Задачи для читателя 843
Относительная степень MIMO-системы и матрицы взаимодействия
1. Goodwin, G.C., Feuer, A., and G6mez, G. (1997). A state space tehcnique
for the evaluation of diagonalizing compensator. Systems and Control Letters,
32(3):173-177.
Z-матрицы взаимодействия
1. Weller, S.R. and Goodwin, G.C. (1995). Partial decoupling of unstable linear
multivariable systems. In Proceedings of the 3rd European Control Conference,
Rome, Italy, pages 2539-2544.
2. Weller, S.R. and Goodwin, G.C. (1996). Controller design for partial decoupling
of linear multivariable systems. International Journal of Control, 63(3):535-556.
Децентрализованное управление
1. Goodwin, G.C, Seron, M.M., and Salgado, M.E. (1998). H2 design of
decentralized controllers. In Proceedings of the 1999 American Control
Conference.
2. Gtiglti, A. and Ozgtiler, B. (1986). Diagonal stabilization of linear multivariable
systems. International Journal of Control, 43(3):965-980.
3. Hovd, M. and Skogestad, S. (1994). Sequential design of decentralized
controllers. Automatica, 30(10):1601-1607.
4. Wang, S.H. and Davison, E.J. (1973). On the stabilization of decentralized
control systems. IEEE Transactions on Automatic Control, 18(5):473-478.
25.10. Задачи для читателя
Задача 25.1. Рассмотрим устойчивый MIMO-объект, имеющий модель
пространства состояний (Ао,Во,Со,0). Предположим, что обратная
связь по восстановленному состоянию используется для проектирования
регулятора с одной степенью свободы в форме управления на основе
внутренней модели.
Покажите, что регулятор Q(s) имеет реализацию в пространстве
состояний, определяемую четырьмя матрицами (Aq,Bq,Cq,0), где
Cq= [К 0] (25.10.1)
где J и К — усиление наблюдателя и усиление обратной связи по
состоянию соответственно (Подсказка: используйте лемму 22.3, чтобы
получить модель пространства состояний для Q(s) = C(s)[I + Gq^C^s)]"1.
Далее выполните подходящее преобразование подобия состояния.)
AQ =
— В0К —J С0
О A0-JCo
; bq =
844 Глава 25. Параметризация Ml МО-регуляторов
Задача 25.2. Рассмотрим линейный объект, имеющий модель
1
Go (*) =
(s + 1)3
(5 + 1)2 (5 + 1)'
-2(5 + 1) 1
(25.10.2)
25.2.1. Найдите левую матрицу взаимодействия £l(5)> предполагая,
что полоса пропускания контура должна быть по крайней мере равна
3 рад/с.
25.2.2. Получите Al(s) = £l(5)Go(s) и ее представление в пространстве
состояний.
25.2.3. Получите Q(s) в структуре управления на основе
внутренней модели, как определяется в (25.4.62). (Используйте программу
minv.m пакета MATLAB.)
25.2.4. Оцените ваш проект, используя эталонные входы в полосе
частот [0,3] рад/с.
Задача 25.3. Дискретная система сформирована из следующей
непрерывной передаточной функции путем использования экстраполятора
нулевого порядка и периода квантования 0.1 с.
G0(e) =
(а + 1)(в + 2)
1 3
-2 1
(25.10.3)
25.3.1. Найдите простой регулятор, который стабилизирует эту
систему.
25.3.2. Параметризуйте все стабилизирующие регуляторы.
Задача 25.4. Рассмотрим непрерывную систему, имеющую
номинальную модель
Гв + 4 31
G0(«) =
1
(25.10.4)
(я + 1)(в + 2)
Найдите две матрицы V(s) и W(s), такие, что V(s)G0(s)W(s)
устойчива, бисобственна и минимально-фазовая.
Задача 25.5. Рассмотрим ту же модель объекта, как в предыдущем
примере и определим A(s) следующим образом:
А(-) =
(s + 1)3
'(cO-^e + o'Ke + l)2 (s + 1)
-2(s + l) (a')-3(s + a')3
(25.10.5)
где a' выбран равным значению а, определенному при создании левой
матрицы взаимодействия. Заметим, что A(s) — бисобственная матрица,
потому что det(A(oo)) имеет ограниченное ненулевое значение.
25.10. Задачи для читателя 845
25.5.1. Получите для A(s) реализацию в пространстве состояний.
25.5.2. Сравните A(s) и Al(s), используемую в задаче 25.2
(используйте единичные значения).
25.5.3. Постройте контур управления со структурой, использующей
внутреннюю модель, выбрав Q(s) = [A(s)]"1. Оцените его при тех
же условиях, что и в задаче 25.2. Сравните и объясните результаты.
Задача 25.6. Рассмотрим неустойчивый MIMO-объект, имеющий
модель
G0(s) =
(s + l)(s + 2)(s-l)
4(e + l)(s + 2) (5 + 1)
(s + 2)(s-l) 2(5-1)
(25.10.6)
25.6.1. Найдите для этого объекта модель в пространстве состояний и
определите матрицы усилений К и J для реализации схемы обратной
связи по восстановленному состоянию. Контур должен обладать
нулевыми ошибками в установившемся состоянии для постоянных
эталонных сигналов и возмущений. Переходный процесс замкнутой
системы должен иметь, по крайней мере, ту же самую скорость
затухания, что и е~4*. Оцените ваш проект.
25.6.2. Используя результаты, представленные в разд. 25.6,
синтезируйте Q(s), чтобы реализовать контур управления с одной степенью
свободы, с характеристикой, подобной той, что получена в проекте
выше.
Задача 25.7. Покажите, как вы включили бы интегрирование в
решение для децентрализованного управления, предложенное в разд. 25.5.6.
Глава 26
Развязка
26.1. Введение
Идеализированным требованием к проектированию МШО-систем
управления является требование развязки. Как было обсуждено в
разд. 21.6, развязка может принимать различные формы, начиная со
статической (где развязка требуется только для постоянных эталонных
сигналов) и кончая полной динамической (где развязка требуется на
всех частотах). Ясно, что полная динамическая развязка — строгое
требование. Поэтому практически обычно проще искать динамическую
развязку в некоторой желаемой полосе пропускания. Если объект
динамически развязан, то изменения в уставке одной переменной
процесса ведут к реакции только этой переменной процесса, а все другие
переменные процесса остаются постоянными. Преимущества такого
проекта интуитивно ясны; например, может потребоваться изменение
температуры, но при этом может быть нежелательно получить связанный с
этим переходный процесс для других переменных, например, давления.
Эта глава описывает процедуры проектирования, необходимые для
достижения динамической развязки. В частности мы обсудим
• динамическую развязку для устойчивых минимально-фазовых
систем;
• динамическую развязку для устойчивых неминимально-фазовых
систем;
• динамическую развязку для неустойчивых систем в разомкнутом
состоянии.
Как можно было бы ожидать, полная динамическая развязка — сильное
требование и, в общем, дается не бесплатно. Поэтому мы также будем
определять характеристики стоимости развязки, используя процедуры в
частотной области. Они позволят проектировщику оценивать априори,
является ли стоимость, связанная с развязкой, приемлемой в данном
приложении.
26.2. Устойчивые системы 847
Конечно, некоторая форма развязки — очень общее требование.
Например, статическая развязка почти всегда желательна. Тогда возникает
вопрос, для какой полосы пропускания (приблизительной) ее
следует обеспечить? Оказывается, что дополнительная стоимость развязки
является функцией полюсов и нулей разомкнутого контура, лежащих
в ППП. Таким образом, если ограничить развязку некоторой полосой
пропускания, то следует сосредоточить внимание на тех полюсах и
нулях разомкнутого контура, которые попадают в пределы этой полосы
пропускания и можно получить оценку стоимости развязки в этой
полосе пропускания. В этом смысле результаты, представленные в данной
главе, применимы почти ко всем задачам MIMO-проектирования,
потому что некоторая форма развязки в ограниченной полосе пропускания
(обычно около нулевой частоты) почти всегда требуется.
Мы также исследуем влияние на развязку насыщения
исполнительного механизма. В случае статической развязки необходимо избежать
накопления интегратора. Этого можно достигнуть, используя методы,
которые являются аналогичными SISO-случаю, рассмотренному в гл. 11.
В случае полной динамической развязки необходимо предпринять
специальные меры предосторожности для обеспечения развязки в
условиях ограничений исполнительного механизма. Мы покажем, что это
действительно возможно с помощью соответствующего использования
механизма противонакопления для МШО-случая.
26.2. Устойчивые системы
Сначала рассмотрим ситуацию, когда полюсы объекта в разомкнутом
состоянии расположены в желаемой области. Мы используем
технологию аффинной параметризации, описанной в гл. 25, чтобы
спроектировать регулятор, который обеспечивает полную динамическую развязку.
26.2.1. Минимально-фазовый случай
Обращаем ваше внимание на общую процедуру Q-проектирования,
отраженную в гл. 25.
Чтобы достичь динамической развязки, выберем Q(s) следующим
образом:
Q(s) =
Аа(в) =
DQ(a) =
= *ц(*)[Ац(в)]-
= G0(s)£r(s)
_1DqM
= diagl ——,—т-г,-" »
VPl(s) P2(S)
-AJ)
Pm(s)J
(26.5
(26.5
(26.5
>.l)
1.2) |
>.3)
848 Глава 26. Развязка
4
)иШ
) ■"
~
DqW
ч%
[AR(s)]-1
Щ1
€r(«)
«(«2
^
Объект
GoW
y(t)
4+
Рис. 26.1. Развязанная система управления, построенная на основе принципа
внутренней модели, для устойчивых МШО-объектов
где £r(s)— правая матрица взаимодействия, определенная в (25.4.3), а
Pi(s),P2(s),... ,рт(s) — устойчивые полиномы, выбранные таким
образом, чтобы сделать Q(s) собственной. Можно показать, что фактически
эти полиномы имеют степени столбцов, соответствующие левой
матрице взаимодействия для GQ(s). Полиномы Pi(s),p2(s),... >Pm(s) следует
выбрать так, чтобы иметь единичное усиление на нулевой частоте.
Мы видим, что при этом выборе мы получим следующую
номинальную дополнительную чувствительность:
T0(S) = G0(S)Q(s)
= Go(S)*R(*)[AR(S)]-1DQ(S)
= G0(S)^R(5)[G0(SKR(s)]-1DQ(5)
(26.2.4)
(26.2.5)
(26.2.6)
= Шав(Г-4т>-^т,-.,-4т) (26.2.7)
\Pl(s) p2{s) Pm{s)J
Мы видим, что она диагональна, как и требовалось. Тогда связанная с
этим структура системы управления могла бы выглядеть, как показано
на рис. 26.1.
Фактически, этот проект не единственен. Например, альтернативным
выбором Q(s) был бы
Q(a) = [AL(S)]-^L(S)DQ(S) (26.2.8)
где Dq(s) определяется выражением (26.2.3).
Заметим также, что Dq(s) может иметь более общую структуру
DQ(s)=diag(*i(s),*2 (*),-•• ,tm(s)) (26.2.9)
где £i(s),£2(s),...,£m(s) — собственные устойчивые передаточные
функции, имеющие относительные степени, равные соответствующим
степеням столбцов левой матрицы взаимодействия для GQ(s). Передаточные
функции £i(s),£2(s),...,£m(s) должны быть выбраны так, чтобы иметь
единичное усиление на нулевой частоте. Проиллюстрируем это простым
примером.
26.2. Устойчивые системы 849
Пример 26.1. Рассмотрим устойчивую MIMO-систему размерности
2 х 2, имеющую номинальную модель
(5 + 1)2(5 + 2) [(5 +l)2 (s + l)(s + 2)\
G0(s) =
(26.2.10)
Нужно выбрать подходящую матрицу Q(s), используя аффинную
параметризацию, чтобы управлять этим объектом таким образом,
чтобы MIMO-контур управления мог отслеживать эталонные
сигналы в полосах пропускания меньше или равных 2 рад/с и 4 рад/с в
каналах 1 и 2 соответственно.
Решение
Попытаемся получить развязанный проект, т. е. получить
дополнительную матрицу чувствительности, имеющую вид
Т0(я) =diag(T11(5),T22(5)) (26.2.11)
где Tn(s) и T22(s) будут выбраны так, чтобы иметь полосы
пропускания 2 рад/с и 4 рад/с в каналах 1 и 2 соответственно.
Тогда Q(s) должна в идеале удовлетворять условию
Q(5) = [G0(5)]-1T0(5). (26.2.12)
Заметим также, что матрица GQ(s) устойчива и имеет нули
строго внутри ЛПП. Тогда единственной трудностью в получении
инверсии G0(s) является необходимость получения собственной (би-
собственной) матрицы Q. Это довольно просто обеспечить] для этого
моэюно было бы добавить большое количество быстрых, устойчивых
полюсов в Tn(s) и T22(s). Однако имея относительные степени больше,
чем это необходимо, моэюно получить нежелательное запаздывание на
высоких частотах. Нас могло бы также заинтересовать получение би-
собственной Q(s) для реализации структуры противонакопления (см.
позже в этой главе). Это тот случай, где матрицы взаимодействия
играют полезную роль. Выберем структуру (26.2.8), из которой видим,
что T0(s) = Dq(s). Следовательно, относительные степени Tn(s) и
T22(s) будут выбраны равными степеням первого и второго столбца
левой матрицы взаимодействия для GQ(s) соответственно.
Тогда, следуя разд. 25.4.1, вычислим левую матрицу взаимодействия
£l(5)- Это дает
£L(s) = diag((s + a)2, (s + a)); а 6 М+ (26.2.13)
Тогда (26.2.12) моэюно также записать в виде
Q(«) = KL(s)Go(e)]-^L(e)T0(e). (26.2.14)
850 Глава 26. Развязка
Следовательно, матрица Q(s) собственная тогда и только тогда,
когда TQ(s) выбрана так, чтобы сделать £l(5)T0(s) собственной.
Таким образом, возможный выбор Tn(s) и T22(s) может быть
Tn(s) =
s2 + 3s + 4
и T22(s) =
4(s + 4)
s2 + 6s + 16
(26.2.15)
Предлагаем читателю проверить, что эти передаточные функции
имеют требуемые полосы пропускания.
Чтобы получить окончательное выражение для Q(s), мы далее
должны вычислить [G0(s)]_1, которая имеет вид
[Go(s)}-1 =
5 + 2
25 + 5
откуда мы окончательно получаем
(5 + 1)(5 + 2) 1
-(5 + 1)2 2(5 + 1).
(26.2.16)
Q(s) = [G0(s)]-lT0(s) =
5 + 2
25 + 5
4(5 + 1)(5 + 2) 4(5 + 4)
52 + 35 + 4
-4(5+1)2
52 + б5 + 16
8(5 + 4)(5 + 1)
52 + 35 + 4 52 + б5 + 16 J
(26.2.17)
Полученный проект можно проверить, используя файл mimo4.mdl
пакета SIMULINK. DDD
Вышеупомянутая процедура проектирования ограничена
минимально-фазовыми системами. В частности, ясно, что Q(s),
выбранная с помощью (26.2.1) или (26.2.8), устойчива тогда и
только тогда, когда GQ(5) является минимально-фазовой, потому что
[Ar(5)]_1 и [Al(5)]"1 включают инверсию GQ(5). Мы поэтому должны
скорректировать Q(s) так, чтобы гарантировать устойчивость, когда
G0 (s) является неминимально-фазовой. Путь, как это сделать, описан
в следующем разделе.
26.2.2. Неминимально-фазовый случай
Начнем с описания в пространстве состояний [Ar(5)]_1, определяемой
четырьмя матрицами (AajBa^AjDa)1. Обозначим через u(t) вход
этой системы. Наша цель состоит в том, чтобы так модифицировать
[Ar(5)]_1, чтобы достичь двух целей: а) обеспечить устойчивую
передаточную функцию и при этом б) сохранить ее диагональные свойства.
1 Заметим, что неминимально-фазовые нули G0(s) являются собственными значениями
Ах, т. е. Ах здесь неустойчива.
26.2. Устойчивые системы 851
С этими целями мы определим следующую подсистему, которая
управляется г-м компонентом u(t):
±i{t) = AiXi{t) + Biui{t) (26.2.18)
Vi(t) = C{Xi(t) + Diui(t) (26.2.19)
где Vi(t) E Mm, ui(t) E К и (Ai,B|,Ci,Di) — минимальная реализация
передаточной функции от г-го компонента u(t) к окончательному вектору
выхода u(t). Таким образом, (Ai,Bi,Ci,D|)— минимальная реализация
(Ал,Вдег,Сл,Влег), где е» —t-й столбец единичной матрицы
размерности т х т.
Далее применим стабилизирующую обратную связь по состоянию для
каждой из этих подсистем — т. е. сформируем
ui(t) = -Kixi(t) + ri(t)i г = 1,2,... ,m (26.2.20)
где ¥i(t) E R Проектирование К| может быть выполнено любым
удобным способом — например, линейной квадратичной оптимизацией.
Наконец, объединим вместе т векторов vi(t),V2{t),...,vm(t)) чтобы
получить выход, который может быть теперь обозначен через u(t):
га
u(t) = ^Vi(t) (26.2.21)
г=1
С приведенными определениями мы в состоянии установить
следующий результат.
Лемма 26.1.
а) Передаточная функция от r(t) = [fi(t) Г2СО •••^га(0]Т К **(<) имеет
вид
W{s) = [AR(5)]-1DZ(5) (26.2.22)
где
[Ar(s)}-1 = (Cx[sl - AaJ-^a + DA) (26.2.23)
Dz(5) =diag{[l + Ki[5I-Aij-^i]"1} (26.2.24)
б) Ar(s)W(s) является диагональной матрицей.
в) W(s) имеет представление в пространстве состояний, задаваемое
выражениями (26.2.18)-(26.2.21).
Доказательство
а) Из уравнений (26.2.18)-(26.2.20) передаточная функция от f{(t) к
V{(t) имеет вид
Wi(s) = (Q - DiKOfsI - A| + BiK^Bi + Di (26.2.25)
852 Глава 26. Развязка
Используя лемму об инверсии матрицы (лемма 18.2) и (26.2.18)-
(26.2.20), мы получим
Wi(e) = (CA[sI - AaI^Ba + DA)e,-[l + К,[Л - Ai]"^]"1 (26.2.26)
Тогда передаточная функция от r(t) к u(t), определенная в
(26.2.22), будет выглядеть следующим образом:
т
W(S) = X>i(5)ef (26.2.27)
= (СА[Л - AaJ-^a + DA) diag{[l + К{[з1 - Ai]-^]"1}
(26.2.28)
б) Следует непосредственно из определения [Ar(s)]_1.
в) По способу формирования. DDD
Возвращаясь теперь к задаче определения Q(s), выберем
Q(s)=£r(s)W(s)Dq(s) (26.2.29)
Это эквивалентно выражению
Q(e) = €r(5)Kr(s)]-1[G0(S)]-1Dz(5)Dq(s) (26.2.30)
где Dq(s) — то же, что и в (26.2.9) (или в (26.2.3)), и Dz(s) —такая же,
как в (26.2.24) и мы использовали (26.2.20). Тогда
Q(s) = [G0(s)]-1Bz(s)dmg{t1(s)Ms)r-,tm(s)} (26.2.31)
где ti(s),t2(s),...,tm(s) —такие же, как в (26.2.9). Наконец, мы видим,
что окончательно номинальная дополнительная чувствительность равна
То (5) = diag {[1 + Ki[sl - Aij^Bi]"1^*)} (26.2.32)
Заметим, что все неминимально-фазовые нули объекта сохранены в
T0(s), что является необходимым для внутренней устойчивости.
Читатель может заметить (это неявно проявляется в (26.2.32)), что
некоторые из неминимально-фазовых нулей продублированы и
появляются во многих диагональных элементах. В худшем случае, каждый
неминимально-фазовый нуль будет появляться в каждом диагональном
элементе. Точное значение, сколько нулей появится в каждом канале,
зависит от степени каждой минимальной реализации, включенной в
определение моделей (26.2.18)-(26.2.20). Мы не будем здесь это
доказывать, но неминимально-фазовые нули, появляющиеся в (26.2.32),—
26.2. Устойчивые системы 853
u(t)
diag{U{s)}
П/ T-
f / f2
fm \:
*
Si
Ш\т lXl
»iW
W \
\uli' "2(t), Ущ?
'■
i3
u(0
Рис. 26.2. Диагональная развязка МШО-регулятора (Q(s))
диагонально инвариантны и появляются во всех возможных диаго-
нализированных замкнутых контурах. Таким образом,
распространение неминимально-фазовой динамики на другие каналы — компромисс,
неотъемлемо связанный с развязкой.
Окончательная реализация Q(s) показана на рис. 26.2.
На рис. 26.2 S\ обозначает систему, описанную в форме
пространства состояний четырьмя матрицами (Ai,Bi,Ci,Di), как в (26.2.18)
и (26.2.19). Векторные сигналы изображены толстыми линиями.
Предыдущий анализ имел целью нахождение устойчивой инверсии,
которая гарантирует динамическую развязку. Конечно, возможны и
другие структуры.
Пример 26.2. Рассмотрим объект, имеющий номинальную модель
GQ(s) =
1
s + 2 -3
-2 1
(26.2.33)
(s + 1)2
Эта модель имеет неминимально-фазовый нуль в точке 5 = 4.
Чтобы синтезировать регулятор на основе идей, приведенных выше,
мы сначала вычислим правую матрицу взаимодействия, которая,
оказывается, имеет общую форму £r(s) = diag{s + a, (s + ее)2}. Для
упрощения вычислений выберем а = 1. Тогда
[ARWrMGoWfeWr1-
1
я-4
я + 1 3(я + 1)'
2 s + 2
и реализация в пространстве состояний для [Ar(s)] будет
АА =
4 О
0 4
I; сА =
15
б
DA
(26.2.34)
(26.2.35)
Далее вычисляем (Ai,Bi,Ci,Dj) кок минимальную реализацию
(AA,BAej,CA,DAei) для г = 1 и i = 2. Эти вычисления дают
Ах=4 В1 = 1 Сх = [5 2]т Di = [l 0]T (26.2.36)
А2=4 В2 = 1 С2 = [15 6]т D2 = [3 1]T (26.2.37)
854 Глава 26. Развязка
Эти подсистемы могут быть стабилизированы обратной связью
по состоянию с усилениями Ki и Кг соответственно. Для этого
случая каждое усиление выбрано так, чтобы переместить
неустойчивый полюс в точке s = 4 к устойчивому местоположению, например,
s = —10, что дает Ki = К2 = 14. Таким образом, Dz(s) в (26.2.24) —
диагональная матрица размерности 2x2, имеющая вид
DZ(*) = ^I (26.2.38)
Наконец, выбираем Dq(s) в (26.2.29) так, чтобы обеспечить полосу
пропускания приблизительно равной 3 рад/с, например,
Заметим, что элементы ti(s) и ^(s) в Dq(s) были выбраны с
относительными степенями, равными соответствующим степеням
столбцов матрицы взаимодействия £r(s). Также и их усиления на
нулевой частоте были выбраны так, чтобы обеспечить единичное
усиление на нулевой частоте в дополнительной чувствительности
TQ(s), что дает
T°«=d4j(ira> ч*+тУ+1+9)} <26-2'40»
26.3. Пред- и пост-диагонализация
Матрица передаточных функций Q(s), определяемая выражением
(26.2.29), фактически является правым диагональным компенсатором
для устойчивого (но не обязательно минимально-фазового) объекта. Это
можно видеть (как в (26.2.32)) из
G0(s)nR(5) = diag {[1 + Ki[el - Ail^Bi]-1^)} (26.3.1)
где
Пц(я) = Q(e)
= €r(s)W(s)Dq(s) (26.3.2)
Позже мы увидим, что иногда также желательно иметь левый
диагональный компенсатор. Мы могли бы получить такой компенсатор на
основе предыдущих принципов. Однако более простой путь —сначала
сформировать
G0(5) = Gj(5) (26.3.3)
26.3. Пред- и пост-диагонализация 855
Найдем правый диагональный компенсатор IIr(s) для Gq(s),
используя метод, предложенный выше. Пусть далее IIl(s) = IIj^(s),
обладающий свойством, что
nL(s)G0(S) = n^(S)Gj(s) = [G0(s)nR(S)]T (26.3.4)
что является диагональной матрицей по построению.
Пример 26.3. Рассмотрим тот оке объект, что и в примере 26.2.
Тогда
IlR(s) = tR(S)W(s)BQ(s) =
-9(s + l)2
4(s2 + 4s + 9)(s + 10)
s +10 120
s + 10 40(s + 2)J
(26.3.5)
Если мы повторим процедуру примера 26.2, ко на сей раз для G J(s),
то получим, что
-1
[ArW]-1 = [g0j W&W1"1 =
1
s-4
s + 1 2(s + l)'
3 s + 2
(26.3.6)
В этом случае реализация в пространстве состояний для [Ar(s)] *
будет
АА =
4 0
0 4
ВА =
2 0] _ Г2.5 2.5] „ _ [1 2]
0 4J ' ^А ~ [l.5 1.5J ' А ~ [О lj
(26.3.7)
Тогда минимальные реализации (Ai,Bi,Ci,Di) для (AA,B,\ej,C.\,D,\et
при г = 1 и г = 2 будут
Ai=4 Bi = 2 Ci = [2.5 1.5]г Dx = [1 0]т (26.3.8)
А2 = 4 В2 = 4 С2 = [2.5 1.5]г D2 = [2 1]т (26.3.9)
Эти подсистемы могут быть стабилизированы обратной связью
по состоянию с усилениями Ki и К2 соответственно. Сделаем тот
оке выбор, что и в примере 26.2: переместим неустойчивый полюс
при s = 4 в устойчивое местоположение, например, s = —10, что
обеспечивается с помощью Ki = 7 и К2 = 3.5. Таким образом, Dz(s)
есть диагональная матрица размерности 2x2, имеющая вид
4 .
Dz(s) =
(26.3.10)
s + 10
Dq(s) выбрана как и в (26.2.39), чтобы обеспечить ту оке самую
полосу пропускания 3 рад/с. Окончательно это дает
тт t \ пТм -9(s + l)2
UL(s) = n^{s) =
4(s2 + 4s + 9)(s + 10)
s + 10 2(s + 10)
30 10(s + 2)
(26.3.11)
856 Глава 26. Развязка
26.4. Неустойчивые системы
Далее мы займемся задачей проектирования развязанного регулятора
для неустойчивого МШО-объекта. Здесь мы имеем дополнительную
сложность: нужна некоторая минимальная обратная связь, чтобы
обеспечить устойчивость. Чтобы вникнуть в эту задачу, мы представим
четыре альтернативных варианта проекта:
1) проект с двумя степенями свободы, основанный на предварительной
фильтрации эталонного сигнала;
2) проект с двумя степенями свободы, использующий аффинную
параметризацию;
3) проект, основанный на обратной связи по состоянию, с одной
степенью свободы и
4) проект, объединяющий и обратную связь по состоянию и аффинную
параметризацию.
26.4.1. Проект с двумя степенями свободы, основанный
на предварительной фильтрации эталонного сигнала
Если требуется полная динамическая развязка только для изменений
эталонного сигнала, то это может быть легко получено сначала
стабилизацией системы, используя некоторый подходящий регулятор C(s)
и затем используя предварительную фильтрацию эталонного сигнала.
Основная идея иллюстрируется рис. 26.3.
Пусть этот объект имеет передаточную функцию GQ(s); тогда
передаточная функция замкнутого контура, связывающая R(s) с Y(s) на
рис. 26.3
Gci(s) = [I + G0(s)C(s)] "1G0(5)C(5)H(5) (26.4.1)
Чтобы обеспечить развязку, нужно лишь выбрать H(s) как правый
диагональный пред-компенсатор для устойчивой передаточной функции
[l + G0(s)C(s)]~ G0(s)C(s). Проиллюстрируем это примером.
r(t)
Предварительный
фильтр
Я(.)
±п -
1
J m
1 _
C(s)
Объект
У(«)
Рис. 26.3. Проект с предварительной фильтрацией для полного
динамического разделения
26.4. Неустойчивые системы 857
Пример 26.4. Рассмотрим объект
Go(5)=GoN(5)[GoD(5)]-1
где
Gqn(s)
-5 s2
1 -0.0023
GoD(s) =
255 + 1 0
0 s(s + 1)2
(26.4.2)
(26.4.3)
1). Преобразовать модель в форму пространства состояний и оценить
нули.
2). Спроектировать предварительный стабилизирующий регулятор,
чтобы обеспечить статическую развязку для эталонных сигналов.
3). Спроектировать предварительный фильтр, чтобы обеспечить
динамическую развязку для эталонных сигналов.
Решение
1)
Если мы вычислим det(G0N(s)), то увидим, что это — неминимально-
фазовая система, имеющая нули при s = ±0.1072. Нужно
спроектировать регулятор, который обеспечивает динамическую развязку.
Выполним это в несколько тагов.
Модель пространства состояний
Модель пространства состояний для системы имеет вид
xp(t) = AQxp(t) + BQu(t)
у{г) = с0хр{г) + в0и{г)
где
Ап =
Г-0.04 0
0 -2
0 1
[ 0 0
Г—0.2 1 0
[о.04 0 0
0 0
-1 0
0 0
1 0
0 1
—0.0023J
В0 =
Do = 0
г1
1°
0
[о
о]
1
0
oJ
(26.4.4)
(26.4.5)
(26.4.6)
(26.4.7)
2)
Будем проектировать стабилизирующий регулятор со структурой,
показанной на рис. 26.4.
Сначала спроектируем наблюдатель для состояния xp(t), используя
выход y(t). Этот проект использует теорию фильтра Калмана с Q =
В0В0Г i/R = 0.05I2x2.
858 Глава 26. Развязка
Jd9(t)
«(*)
—^■
Объект
Наблюдатель
Si
?*
\
|хр(
Ki
*)
\
y(t) __ /
r(t)
к+ J
-^ ф)
li
s
к2
Рис. 26.4. Оптимальный квадратичный проект с интегрирующими
свойствами
Оптимальные усиления наблюдателя оказываются следующими
Г-3.9272 1.3644
2.6120 0.1221
-0.6379 0.1368
-2.7266 -4.6461
J =
(26.4.8)
Мы хотим иметь нулевую ошибку в установившемся состоянии
при ступенчатых входных возмущениях. Поэтому воспользуемся
процедурой из разд. 22.13 и введем интегратор с передаточной функцией
I/s на выходе системы (после элемента сравнения). То есть, мы
добавляем1
z(t) = -y(t) = -CoXp(t) (26.4.9)
Мы можем теперь определить составной вектор состояния x(t) =
[xj(t) zT(t)]T, приводящий к составной модели
W(t) = Ax(t) + Bu(t) (26.4.10)
где
А =
А0
"Со
В =
(26.4.11)
Далее рассмотрим составную систему и спроектируем регулятор
состояния с помощью теории линейных квадратичных регуляторов.
Выберем
Ф =
С0 С0
0
0
0
0.005
0
0
0
0.1
Ф = 212Х2
(26.4.12)
Для простоты мы рассмотрим здесь случай, когда эталонный сигнал r(t) равен нулю.
26.4. Неустойчивые системы 859
03
о В;
Ю О
О «
§з
§£
з°
«S
«(*)
CoCsI-Ao + BoKiJ-iBo
-к2
II
S
Рис. 26.5. Эквивалентный замкнутый контур
(динамика наблюдателя игнорируется)
1 1— 1 1 1 II 1 1
[ f\yi(t)
' f~ n(t)
1 1 1 1
\у»(«)
Г2(«)
1 1 1 1
0 100 200 300 400 500 600 700 800 900 1000
Время [с]
Рис. 26.6. Статически развязанное управление
что приводит к усилению обратной связи К = [Ki K2], где
Кг =
0.1807 -0.0177 0.1011 -0.0016
-0.0177 0.1496 0.0877 0.0294
К2 =
Г0.0412 -0.1264
|о.0283 0.1844
(26.4.13)
Это дает эквивалентный замкнутый контур, показанный на
рис. 26.5 (где мы игнорировали динамику наблюдателя, потому что она
исчезает в установившемся состоянии).
Окончательные реакции замкнутого контура на единичные
ступенчатые эталонные воздействия показаны на рис. 26.6, где ri(t) = /i(£—1).
Заметим, что, как и ооюидалось, система «статически развязана»,
однако проявляется существенная связь в течение переходных процессов,
особенно после ступеньки во втором эталонном сигнале.
3)
Замкнутый контур имеет передаточную функцию
T0(5) = (I + G(s))-1G(s)
(26.4.14)
860 Глава 26. Развязка
где
1
G(e) = С0(Л - А0 + ВоКО^ВоКг- (26.4.15)
S
Это устойчивая собственная передаточная функция. Заметим
однако, что она неминимально-фазовая, потому что первоначальный
объект был неминимально-фазовым.
Используем методы разд. 26.2.2, чтобы спроектировать инверсию,
которая сохраняет динамическую развязку при наличии неминимально-
фазовых нулей. Чтобы использовать эти методы, учтем, что
эквивалентным объектом является замкнутая система с передаточной
функцией (26.4.14) и с моделью пространства состояний, определяемой
четырьмя матрицами (Ае,Ве,Се,0); где
Ае =
А0 — BQKi
-с„
В0Кг
Ве=[0 1]Т; Се=[С0 0] (26.4.16)
&(') =
Матрица взаимодействия для этой замкнутой системы равна
[(S+na)2 , 2 *Ъ « = 0-03
Это ведет к расширенной системе, имеющей модель пространства
состояний (A^B^C^D^) с
Ае = Ае
в; = ве
С; = а2Се + 2аСе Ае + СеАе2
d; = сеАеве
Тогда точная инверсия имеет модель пространства состояний
(AA,BA,CA,DA), где
aa=a;-b;[d;]-1c;
ba=b;[d;]-1
ca = -[d;]-1c;
da = [d;]-1
Теперь можно сформировать две подсистемы, как
рассматривалось в разд. 26.2.2. Сформируем минимальные реализации этих двух
систем, которые обозначим через (Ai,Bi,Ci,Di) и (A2,B2>C2,D2).
Определим стабилизирующую обратную связь для этих систем,
используя теорию линейного квадратичного регулятора с
*i = CiTCi Фх = 106
Ф2 = С2ГС2 Ф2 = Ю7
26.4. Неустойчивые системы 861
К
«
со о
Н«
«о
о сг
fi со
vo о
О «
Я 2
§я
О" SS
X В
«а
1
0.5
0
-0.5 h
-1
n(t)
I 1
»iW
, 1 1
T2{t)
•
\и(*) I
1 1 1 1 1
100
200
300
400 500 600 700 800 900
Время [с]
1000
Рис. 26.7. Динамически развязанное управление
Затем сформируем пред-компенсатор, как на рис, 26.2, где выберем
al-KilAj^Bi
<i(s)=or
t2(s)
а
{s + a)2
(e + a)2
где Ki, K2 теперь представляют стабилизирующие усиления для
этих двух подсистем, как сказано в разд. 26.2.2.
Результирующие реакции замкнутого контура для ступенчатых
эталонных воздействий показаны на рис. 26.7, где ri(t) = n(t — 1) и
r2{t) = —/х(* — 501). Заметим, что, как и ожидалось, система теперь
«полностью развязана» от эталонного сигнала до выходной реакции.
Предлагаем читателю смоделировать и изучить зависимость
меэюду входом и выходом предварительного фильтра H(s). Обратите
внимание на тонко скоординированное взаимодействие в эталонных
сигналах, которые поступают на объект (выход H(s)). Это было бы
поистине невозможно для человека-оператора, управляющего
эталонными сигналами, вручную так, чтобы один выход объекта изменялся
без того, чтобы вызвать переходный процесс на другом выходе. ППП
26.4.2. Проект с двумя степенями свободы,
использующий аффинную параметризацию
Здесь мы представим альтернативный проект развязки с двумя
степенями свободы, используя идеи гл. 25.
Сначала вспомним аффинную параметризацию всех
стабилизирующих регуляторов для не обязательно устойчивых систем, данную в
лемме 25.2. Это представление повторно приведено на рис. 26.8.
862 Глава 26. Развязка
Стабилизирующая
структура
CnW
*+
Сн-Н6^)"1
Объект
Gon(s)
+ г\+
НО*-
God(s)
п(«)
Рис. 26.8. Q-параметризация для неустойчивых МШО-объектов
CD(s)-1CN(s)
О
о-
«•(«)
GoD(s)r(S)LiO
Объект
GoN(5)r(5)
г(*)
* +
f
GoD(5;
y(t)
Рис. 26.9. Q-параметризация с двумя степенями свободы для неустойчивых
МШО-объектов
Далее рассмотрим схему на рис. 26.9, которая включает две степени
свободы.
Можно легко показать, что номинальная передаточная функция от
r(t) к y(t) имеет вид
Нс1(я) = GoN(s)r(5) (26.4.17)
Следовательно, нам просто нужно выбрать T(s) в виде устойчивого
правого диагонального компенсатора для специального устойчивого
объекта Gqn(s). Это можно сделать так, как сказано в разд. 26.2
и в разд. 26.3. Заметим, что это даст проектирование передаточной
функции от эталонного сигнала до выхода (определенной матрицей
r(s)), независимое от чувствительностей к возмущению (определенных
матрицей fl(s)).
26.4. Неустойчивые системы 863
26.4.3. Проект, основанный на обратной связи по состоянию,
с одной степенью свободы
Методы проектирования, представленные в разд. 26.4.1 и 26.4.2,
достигают диагональной развязки для эталонных сигналов только потому, что
они основаны на структурах с двумя степенями свободы.
В этом разделе мы покажем, как можно разработать
предварительный стабилизирующий контур (когда это возможно!), чтобы получить
диагональную номинальную чувствительность. Будем стремиться
получить динамическую развязку и для эталонных сигналов, и для выходных
возмущений.
Сначала представим объект с помощью ЛМДО и ПМДО следующим
образом:
G(a) = [G0d(5)]_1GoN(S) = GonCsHGodOO]-1 (26.4.18)
Затем используем следующие шаги.
Шаг 1. Сначала используем методы разд. 26.3, чтобы найти
устойчивые пред- и пост-компенсаторы IIl(s) и IIr,(s), такие, что
GoN(5)nR(5)=D1(5) и nL(5)GoD(5)=D2(5) (26.4.19)
где Di(s) и D2(s)— диагональные.
В соответствии с проектом Gqn(s) и Gqd(s) устойчивые, но не
обязательно минимально-фазовые. Таким образом, мы
рассматриваем эту подзадачу как задачу определения устойчивых диагональных
пред- и пост-компенсаторов для устойчивых передаточных матриц.
Это точно такая же задача, что и решенная в разд. 26.3.
Теперь, если можно выбрать
CN(s)=nR(5) и nL(s) = CD(s) (26.4.20)
и если истинна лемма 20.1, то можно получить диагональные TQ(s)
и S0(s), как и требуется. Трудность состоит в том, что решения
(26.4.19) в общем случае не будут удовлетворять лемме 20.1. Тогда
мы не можем непосредственно использовать (26.4.20), а вместо этого
переходим на следующий шаг.
Шаг 2. Мы решаем следующее уравнение (если возможно) для
устойчивых диагональных Di(s) и 62(5), таких, что
Di(s)Di(s)+D2(s)D2(s)=I (26.4.21)
где Di(s) и D2(s)— такие же, как и в (26.4.19).
864 Глава 26. Развязка
Заметим, что (26.4.21)—набор т независимых скалярных
тождеств Безу. Мы знаем, что это разрешимо тогда и только тогда,
когда числители соответствующих диагональных элементов в Di(s)
и T>2(s) не имеют никаких общих неустойчивых сомножителей.
Было показано (см. ссылки в конце главы), что это фактически
необходимое и достаточное условие для существования
диагонального регулятора с одной степенью свободы. Следовательно, если нет
никакого устойчивого диагонального решения (26.4.21), то развязка
в структуре с одной степенью свободы невозможна никаким
методом! Фактически, Di(s) и T>2{s) обычно называются_диагональными
структурами для числителя Gqn(s) и знаменателя Gqd(s)
соответственно. Наличие неустойчивых общих элементов в этих структурах
подразумевает, что развязка с одной степенью свободы обязательно
привела бы к компенсации неустойчивых полюсов и нулей, что
недопустимо. Таким образом, мы принимаем противоположное и
переходим к шагу 3.
Шаг 3. Построим регулятор C(s) в виде ПМДО следующим образом:
C(s) = CN(s)[CD(S)]-1
где
CN(s) = GoD(s)CN(s)[GoD(s)]-1
CD(s)=D2(s)nL(s)
вместе с
CN(e)=nR(e)Di(e) (26.4.22)
В этом случае мы имеем следующий результат.
Лемма 26.2. Вышеупомянутый регулятор (если он моэюет быть
построен) гарантирует следующее:
1) Контур обратной связи устойчив, т. е.
God(5)Cd(5) + GoN(5)Cn(5)=I
2) Номинальная чувствительность диагональна, т. е.
S0(s) = Cd(s)G0d(s) является диагональной.
3) Альтернативное JIM ДО для C(s) имеет вид
C(5) = [Cd(5)]-1Cn(5)
где Cn(s) такая же, как в (26.4.22) и
CD(s) = [I - CN(s)GoN(S)][GoD(s)]-1
26.5. Нули развязанных и частично развязанных систем 865
Доказательство
1) GoD(5)Cd(5) + Gon(5)Cn(5) = GoD(5)D2(5)nL(5) (26.4.23)
+ GoN(5)God(5)CN(5)[G0d(5)]-1 = (GoU(s)I)2{s)UL(s)GoIy{s)
(26.4.24)
+ G0N(5)GoD(5)nR(5)D1(5))[GoD(5)]-1 (26.4.25)
= (GoD(5)D2(5)D2(5) + GoD(5)GoN(5)nR(5)D1(5))[GoD(5)]-1
(26.4.26)
= (GoD(5)D2(5)D2(5) + GoD(5)D1(5)D1(5))[GoD(5)]"1 (26.4.27)
= GoD(5)(D2(5)D2(5)+D1(5)D1(5))[God(5)]-1=I (26.4.28)
2) S0(S) = Cd(5)[GoD(5)Cd(5) + Gon(5)CN(5)]-1God(5)
= Cd(s)G0d(s) [используя часть 1]
= D2(5)nL(s)GoD(s) = D2(5)D2(5) (26.4.29)
которая является диагональной. DDD
Предупреждаем читателя, что хотя вышеупомянутая процедура
аналитически корректна, она не подходит для реализации, потому что
(26.4.29)—не минимальная реализация и содержит неявные
компенсации неустойчивых полюсов и нулей, которые должны быть выполнены
алгебраически до реализации.
26.5. Нули развязанных
и частично развязанных систем
Мы выше видели, что неминимально-фазовые нули и неустойчивые
полюсы существенно затрагивают свободу получения развязки.
Действительно, проведенный выше анализ говорит, что единственный нуль или
полюс в ППП может потребовать обращаться ко многим контурам, если
развязка — требование проекта. Мы проиллюстрируем это ниже
различными аргументами. Рассмотрим объект, имеющий номинальную модель
G0(s). Предположим, что эта модель имеет неминимально-фазовый
нуль в точке s — z0 с направлением hT = [h\h2 ... hm]y т. е.
hTGo(zo) = 0 ' (26.5.1)
Предположим также, что регулятор C(s) спроектирован так, чтобы
получить динамическую развязку, т. е. обладает диагональной матрицей
чувствительности. Это означает, что матрица передаточных функций
866 Глава 26. Развязка
разомкнутого контура M(s) = G0(s)C(s) должна также быть
диагональной — т. е.
M(5)=diag(Mn(5),M22(5),...,Mmm(5)) (26.5.2)
тогда
hTM(z0) = [hiMn{z0) h2M22{z0) ... hmMmm{zo)}=0 (26.5.3)
Таким образом, мы должны иметь, что hiMu(z0) = О, для г =
1,2,...,т. Это подразумевает, что Mu(z0) = 0 для всех г, таких, что
соответствующий компонент hi не равен нулю.
Подобная ситуация возникает и с неустойчивыми полюсами. В этом
случае мы рассматриваем направление р, связанное с неустойчивым
полюсом rj0. Напомним, что rj0 является неустойчивым полюсом, если
существует вектор, отличный от нуля, д = \д\ д2 • ••9m]Ti такой, что
когда G0(s) представлен в ЛМДО, GQ(s) = [G0d(5)]"1G0n(5), тогда
СопЫр = 0 =* [ОоШГ'д = 0 (26.5.4)
Динамическая развязка подразумевает, что [M(s)]"1 также должна
быть диагональной. Таким образом
[M(s)}-1g = [(M11(z0))-1gi (M22(z0))-1g2 ... {Mmm{z0))-1 gm]T = 0
(26.5.5)
Следовательно, мы должны иметь, что {Mu(z0))~~1gi = 0 для i =
l,2,...,m. Это подразумевает, что Mu(z0) = 0 для каждого г такого,
что соответствующий компонент gi не равен нулю.
Чтобы получить более полное понимание этого явления, возьмем
следующий пример, где для простоты рассмотрим только задачу
неминимально-фазовых нулей.
Пример 26.5. Рассмотрим объект, имеющий поминальную модель
Go{s)=(s + l)(s + 2)
Это объект имеет нуль при s = z0 = 1 с геометрической
кратностью цг = 1 и соответствующее левое направление hT = [1 — 2].
Предположим, что мы хотим получить развязанный МШО-контур
управления, т. е. обладающий диагональной матрицей дополнительной
чувствительности. Тогда матрица передаточных функций
разомкнутого контура M(s) = G0(s)C(s) также должна быть диагональной
т. е.
G0(«)C(e) =
s + 1 2
1 1
(26.5.6)
Mn(s) 0
0 M22{s)
(26.5.7)
что дает
26.5. Нули развязанных и частично развязанных систем 867
Мц(в)
То(«) =
1 + Mn(s)
О
О
М22(а)
(26.5.8)
1 + М22(а)_
Из (26.5.7) регулятор должен удовлетворять условию
C(s) = [G0(s)}-1
Инверсия модели объекта дает
Mn(s) О
О M22(s)
[GOW]-I=fillip
1 -2
-1 я + 1
(26.5.9)
(26.5.10)
Это подтверждает присутствие неминимально-фазового нуля,
расположенного в точке s = l. Тогда, используя (26.5.10) в (26.5.9), мы
получаем
(а + 1)(а + 2) Г Afn(a) -2M22(s)
(а-1) [~Мц (a) (a + l)M22(a)J
Используя (20.4.8), легко показать, что матрица чувствителъно-
стей по управлению Suo(a) имеет вид
С(а) =
(26.5.11)
Suo(s) = [Go (a)]
-1
Мц (а)
1 + Мп(а)
0
0
М22(а)
(26.5.12)
l + M22(a)J
откуда следует, что контур не будет внутренне устойчив, если
одновременно Mu(s) и M22(s) не обращаются в нуль при а = z0.
Следовательно, неминимально-фазовый нуль должен появиться в
обоих каналах, чтобы избежать неустойчивости. Рассмотрим далее
измененную модель, имеющую вид
G0(s) = Х
-5 + 1 -5 + 1
(5 + 1)(5 + 2) [ 2 1
(26.5.13)
Заметим, что этот объект также имеет неминимально-фазовый
нуль, расположенный в точке s = z0 = 1. Чтобы получить ту же
самую передаточную функцию разомкнутого контура, как в (26.5.7),
регулятор теперь нужно выбрать таким:
С(а) =
(а + 1)(а + 2)
(а-1)
Мп(з) (-а + 1)М22(а)
2Мц(а) (-а + 1)М22(а)
(26.5.14)
868 Глава 26. Развязка
Тогда устойчивость контура может быть обеспечена без
требования, что M22{s) обращается в нуль при s = z0. Однако необходимо,
чтобы функция Mu(s) все-таки обращалась в нуль при s = z0.
Мы видим, что направление, связанное с неминимально-фазовым
нулем, в этом случае hT = [10].
Далее исследуем, что произойдет, если не нужно получать
полную динамическую развязку. Рассмотрим исходный объект, имеющий
модель, данную выраэюением (26.5.6). Выберем верхнюю треугольную
матрицу чувствительности — т. е. потребуем, чтобы матрица
передаточных функций разомкнутого контура имела вид
G0(a)C(e) =
Mn(s)
0
М12(з)
M22(s)J
(26.5.15)
ад =
Mu(s)
1 + Mu(a)
M12(s)
О
(1 + Mn(s))(l + M22(5))
M22(s)
1 + M22(s)
Тогда требуемый регулятор имеет форму
(26.5.16)
С(*) =
(а + 1)(а + 2)
и
SUo(s) =
(а+1)(я+2)
я-1
' Mu(s)
-Mn(s)
Mn(s)
1+Mn(s)
Mn(s)
M12(s)-2M22(s)
-M12(s) + (s + l)M22(s)
(26.5.17)
M12(s)-2M22(s)(l+Mn(s))
(1+Mn(s))(l+M22(s))
-M12(s) + (s+l)M22(s)(l+M11(s))
L 1+Afii(e) (1+Mn(s))(l+M22(s))
(26.5.18)
Отсюда мы делаем вывод, что для обеспечения устойчивости
замкнутого контура нам необходимо, чтобы Mn(s) обращалась в нуль
при s = 1 —т. е. неминимально-фазовый нуль должен появиться в
канале 1. Нам также нужно, чтобы
[M12(5)-2M22(5)]S=1 = 0
[-M12(5) + (5 + l)M22(5)]s=1 = 0
(26.5.19)
(26.5.20)
т. е. не нужно, чтобы неминимально-фазовый нуль появился и в
канале 2. Вместо этого мы можем выбрать элемент связи Mi2(s)
таким образом, чтобы удовлетворить условиям (26.5.19) и (26.5.20).
Предлагаем читателю исследовать, почему оба этих условия всегда
одновременно удовлетворяются.
26.6. Ограничения в частотной области для динамически развязанных систем 869
Очевидно, что если выбрать нижнюю треугольную структуру
связи, то неминимально-фазовый нуль появится в канале 2, но не
обязательно в канале 1.
Этот пример подтверждает, что единственный неминимально-
фазовый нуль может появиться более чем в одном канале, когда
обеспечивается полная динамическая развязка. Конкретная ситуация
здесь зависит от связанного с этим нулем направления.
Эта ситуация, которая может также происходить и с
неустойчивыми полюсами, дает дополнительные ограничения на
характеристики, учитывая неизбежные компромиссы, которые являются
результатом присутствия неминимально-фазовых нулей и неустойчивых
полюсов.
Пример также подтверждает вывод, что треугольная развязка
может улучшить основные компромиссы проекта по сравнению с теми,
которые имеются при полной динамической развязке. DQD
26.6. Ограничения в частотной области
для динамически развязанных систем
Дальнейшее понимание мультипеременного характера ограничений в
частотной области может быть получено путем исследования влияния
развязки на компромиссы чувствительности, как это было сделано в
гл. 24. В частности мы советуем читателю повторно рассмотреть
теорему 24.2.
Рассмотрим MIMO-контур управления, где SQ(s) и, следовательно,
Т0(«) —диагональные устойчивые матрицы.
Лемма 26.3. Рассмотрим MIMO-объект с неминимально-фазовым
нулем в точке 5 = z0 = j+j8 со связанными направлениями hj^ h^..., К^х.
Предположим также, что SQ(s) является диагональной; тогда для
любого значения т, такого, что h{r Ф 0; выполняется условие
/оо
]n\[So(ju>)]rr\dfl(z0,u)) = 0; для reV{ (26.6.1)
■оо
Доказательство
Контур развязан, так что выполняется условие [SQ(s)]kr = 0 для всех
кЕ {1,2,...,т}; кроме случая, когда к = г. Это подразумевает, что
hJ[S0{ju)]*r = hir[S0{ju))]rr (26.6.2)
870 Глава 26. Развязка
Используя это свойство в выражении (24.8.6) теоремы 24.2, мы
получаем
- Г ]n\hir[SoUu>)]rr\dn(z0,u>) = MIM Г dSl(ZoiU>)
К J-oo К У-оо
1 Г°°
+ - / ]n\[So(ju>)]rr\dn{z0,«>) > H\hir\) (26.6.3)
Тогда требуемый результат следует из использования
(24.8.7). □□□
Вывод 26.1. Согласно той же гипотезе леммы 26.3, если MIM0-
контур развязан (диагональная матрица чувствительности) и
технические требования таковы, что |[S0(jcc;)]rr| < err <S 1 для и Е [0,o;r],
тогда
У>(<*>Г
1 \ ir-V(u»r
errJ
\\[So(ju>)]rr\\oo> — (26.6.4)
Доказательство
Лпалогг/чпо выраоюению (24.9.2) г/з разд. 24.9 г/ используя (26.6.1), где
ф(шг) такая же, как в (24.9.3). QQQ
Мы также имеем следующий соответствующий результат для
функции дополнительной чувствительности.
Лемма 26.4. Рассмотрим МШО-систему с неустойчивым полюсом,
расположенным в точке s = rj0 = a + j(3, имеющей связанные с
ней направления gi,... ,gMp. Предположим также, что TQ(s) является
диагональной] тогда для любого значения г, такого, что gir ф О,
выполняется условие
Г
J -с
ln|[T0tfw)]rr \dSl{r)0,u) = 0; для reVt (26.6.5)
Доказательство
Контур развязанный, так что выполняется условие [TQ(s)]rk = 0 для
всех к Е {1,2,..., т} кроме случая, когда k = r. Это подразумевает, что
[ToU«>)]r*9i = 9ir[To(ju>)]rr (26.6.6)
26.7. Стоимость развязки 871
Используя это свойство в выражении (24.7.6) теоремы 24.1, мы
получаем
" 1пЫТо(У")]гг|^(%,") = ^9*$. Г <К1(г,0,и)
оо Я J—оо
+ - f° ln|[To(iw)]rr|rfn(4o,w) > \n{\gir\) (26.6.7)
ТТУ-оо
Тогда искомый результат следует после использования
(24.7.7). DDD
26.7. Стоимость развязки
Мы можем теперь исследовать стоимость динамической развязки,
сравнивая результаты в гл. 24 (а именно, лемму 24.4) с выводом 26.1. Чтобы
сделать анализ более прозрачным, мы предположим, что
геометрическая кратность нуля \xz равна единице — т. е. имеется только одно левое
направление hi, связанное с конкретным нулем.
Сначала предположим, что hi имеет больше чем один элемент,
отличный от нуля,— т. е. что кардинальное число V^ больше единицы. Тогда
сравним выражение (24.8.8) (применимое к контуру с взаимодействием)
и (26.6.1) (применимое к динамически развязанному MIMO-контуру). В
первом выражении мы видим, что правая часть неравенства может быть
отрицательной для некоторых комбинаций ненулевых недиагональных
чувствительностей. Таким образом, можно использовать
недиагональные чувствительности, чтобы уменьшить нижнюю границу пика
диагональных чувствительностей. Это можно интерпретировать как
двумерный компромисс чувствительности, потому что он включает наряду с
частотным и пространственное измерение.
Подобный анализ может быть выполнен и в отношении
выражений (24.9.2) и (26.6.4). Тогда мы видим, что в (24.9.2) нижняя граница
IKSoO'cjJJrrlloo может быть сделана меньше, чем с помощью
соответствующего выбора характеристик недиагональных чувствительностей.
Таким образом ограничение чувствительности, являющееся результатом
(24.9.2), может быть сделано более мягким, чем в (26.6.4), которое
соответствует развязанному случаю.
Выводом из этого анализа является то, что с точки зрения
компромиссов и ограничений проектирования лучше иметь связанный MIMO-
контур управления по сравнению с динамически развязанным. Однако
существенный факт, что выводя эти заключения, мы считали, что hi
имеет более одного элемента, отличного от нуля. Если это не так,
\.
872 Глава 26. Развязка
т. е. если только h\r Ф О (соответствующее направление является
каноническим), то не возникает никакого дополнительного компромисса,
накладываемого требованиями развязанного замкнутого контура.
Когда h\ имеет только один ненулевой элемент h\T ф 0, это означает,
что r-й столбец чувствительности нулевой, т. е. [S0]*r(^o) = 0 и что
остальные столбцы So(z0) линейно независимы. Нуль тогда связан
только с r-м входом ur(t). Напротив, если hi имеет более одного ненулевого
элемента, то нуль связан с комбинацией входов.
Другое упрощение в вышеупомянутом анализе было связано с тем,
что G0(s) является матрицей размерности тхт и максимального ранга,
a Go(z0) имеет ранг т— 1—т. е. нулевое пространство, связанное с
нулем при s = z0, имеет размерность (j,z — 1. Когда это ограничение
снято, мы могли бы иметь благоприятную ситуацию, что направления
/i^,^,... ,/i^r могут быть выбраны таким способом, что каждое из
них имеет только один ненулевой элемент. Это предполагает, что не
потребовалось бы никаких затрат на динамическую развязку.
Проиллюстрируем вышеупомянутый анализ на следующем примере.
Пример 26.6. Рассмотрим следующую МШО-систему:
1-5 5 + 3
G0(s) =
(5 + 1)2
1-5
(5 + 1)(5 + 2)
5+4
где
L(5 + l)(5 + 2) (5 + 2)2
(1-5)(5 + 2)2
= GoN(5)[GoD(5)]-1I (26.7.1)
Gon(s) =
GoD(s) =
(1-5)(5 + 2)(5 + 1)
(5 + 1)2(5 + 2)2
(5 + 1)(5 + 2)(5 + 3)
(5 + 1)2(5 + 4)
(26.7.2)
(26.7.3)
1) Определить расположение нулей в ППП и их направления.
2) Оценить интегральные ограничения на чувствительность, кото-
рые будут без организации динамической развязки и получить
границы пика чувствительности.
3) Оценить интегральные ограничения на чувствительность, кото-
рые будут, если требуется динамическая развязка и получить
границы пика чувствительности.
4) Сравнить границы, полученные в пунктах 2) и 3).
Решение
1) Нули объекта являются корнями det(G0N(s)) —тп. е. корнями
полинома -2s6 - 1455 - 3254 - I853 + 2б52 + 325 + 8. Только один из
26.7. Стоимость развязки 873
этих корней, а именно тот, который расположен в точке 5 = 1,
находится в ППП. Таким образом, z0 = 1 и
dCl(z0,u)) =
1
Далее вычислим G0(l):
G0(l).=
1+и<
О ?'
и 3
О *,
" 9J
:du)
(26.7.4)
(26.7.5)
откуда можно заметить, что размерность нулевого пространства
fj,z = 1 и (только) связана с (левым) направлением hT = [5 —6].
Ясно, что этот вектор имеет два ненулевых элемента, так что
мы могли бы ожидать, что будут дополнительные компромиссы
проектирования, являющиеся результатом развязки.
2) Применяя часть 2) теоремы 24.2 для г — 1 и г = 2, мы получаем
соответственно
- Г ln|5[S0(ia>)]ii - 6[S0(ja>)]2i| ттГТ*" ^ 1п(5) (26'7-6)
ТГУ-оо 1+СхГ
1 Г°° 1
- / ln|5[S0(iw)]l2 - 6[S0(iw)]22| 7Т-^^ ^ 1П(6) (26'7-7)
Если мы наложим на проект требования в соответствии с
леммой 24.4, то для связанного MIMO-контура будем иметь
IKSo]ll||eo + |||[Sobl||oo>(—XI—
||[So]22||oo + |[[[SoIl2||co> f \
6 V 622 + §621
V>(«*>c)
w-V(«*»c)
(26.7.8)
(26.7.9)
3) Если мы требуем динамическую развязку, выраоюения (26.7.6)
и (26.7.7) упрощаются и будут, соответственно,
1 г°° 1
-/ ^IPoO'wblY^jdw^O (26.7.10)
1 Г°° 1
- / ln\[So(ju)]22\-—^du>0 (26.7.11)
тгУ-оо 1+аг
874 Глава 26. Развязка
С динамической развязкой (26.7.8) и (26.7.9) упрощаются до
—J (26.7.12)
ll[So]22||oo>
(V>(«*>c)
€22/
(26.7.13)
4) Чтобы определить количественно отношения между величиной
границ в связанном и развязанном случаях, используем показатель
«id, определяемый как частное правых частей неравенств (26.7.8) и
(26.7.12):
(У>(«*>е)
6 \ *-*(«*с) Л €91
l + -AleJ где А^ = ^ (26.7.14)
Таким образом, А_€ — относительная мера взаимодействия в
направлении от канала 1 к каналу 2.
Проблемы, рассмотренные выше, отражены в графической форме на
рис. 26.10.
1.2
•в
£ 0.8
а»
к
s °-6
g
8 0.4
н
° о.2
_ , j ,,
I 1 .. 1 1
I —Г" ■"I" Г— F " 1
- ис — 0.3
— . ис = 0.5
шс = 1.0
1 i i i i i
J
~
-
01 23456789 10
Отношение Aie =e\/e2
Рис. 26.10. Стоимость развязки с точки зрения нижних границ пика
чувствительности
На рис. 26.10 показано семейство кривых, соответствующих раз-
личным полосам пропускания ис. Каэюдая кривая представляет для
указанной полосы пропускания отношение меоюду границами пиков
чувствительности как функцию показателя развязки А_€. Мы можем
сделать следующие основные выводы.
а) Когда показатель А_€ очень маленький, фактически нет никакого
влияния канала 1 на канал 2 (по крайней мере, в диапазоне частот
[0,с<;с]); тогда границы очень близки (n\d « 1).
26.8. Насыщение на входе 875
б) Когда Ai€ увеличивается, недиагональные чувствительности
становятся больше, чем диагональные чувствительности в полосе
частот [0,сс?с]. Эффект этого проявляется при к^ < 1, т. е. когда
граница для пика чувствительности связанного случая меньше чем
для развязанного случая.
в) Если Ai€ остается постоянным и мы увеличиваем полосу
пропускания, то преимущества использования связанной системы также
растут.
Заметим также, что левые части (26.7.8) и (26.7.12) различны. В
частности, (26.7.8) можно записать так:
1 \ w-V(u>c) £
бп + 5621/ ~5
ll[So]ll||co>[ , ,6 ) -ДОсЫИс
ч ^ (26-7.15)
пап
Мы видим из рассмотренного примера, что развязка может быть
относительно свободна от затрат в зависимости от полосы пропускания,
в которой работает замкнутая система. Это согласуется с интуицией,
потому что нули станут существенными только тогда, когда полоса
пропускания охватывает их положение.
26.8. Насыщение на входе
Наконец, исследуем воздействие входного насыщения на линейные
регуляторы, для которых используется развязка. Мы также разработаем
механизмы противонакопления, которые сохраняют развязку в случае
насыщения, используя методы, которые являются MIMO-зквивалентами
SISO-методам противонакопления из гл. 11.
Предположим, что наш объект смоделирован как квадратная система
со входом u(t) Е Km и выходом y(t) Е Km. Предположим также, что
вход объекта подвержен насыщению.1 Тогда, если u^(t) соответствует
Подобный анализ можно выполнить и для входных ограничений по скорости.
876 Глава 26. Развязка
входу объекта в г-м канале, г = 1,2,...,т, насыщение можно описать
следующим образом:
(О
итах
если
U(i)(*)>ti£L,
uM(t) = Sat(uU(t)) = { fiW(t) еслии«.п<^)(^)<и«йх, (26.8.1)
u«n еслий«(*)<г^-
Для упрощения обозначения, мы далее предполагаем, что линейная
область симметрична по отношению к началу координат, т. е. \u^in\ =
\Щпах\ — ^sat Для * = 1,2,...,т. Насыщение мы опишем параметром
uSat e Km, где
—-[•2 «2 - «£?]* <2в-8-2>
Существенная проблема с ограничениями на входе, как и в гл. 11,
состоит в том, что сигнал управления может накапливаться в течение
периодов насыщения.
26.9. Механизм противонакопления
в MIMO-случае
В гл. 11 с проблемами противонакопления мы справлялись,-используя
специальную конструкцию регулятора. Эта идея может быть легко
расширена на МШО-случай следующим образом.
Предположим, что матрица передаточных функций регулятора C(s)
является бисобственной — т. е.
lim C(s) = Сс
s->oo
(26.9.1)
где Cqo невырождена. Мультипеременная версия схемы
противонакопления, изображенной на рис. 11.6, приведена на рис. 26.11.
В скалярном случае мы выяснили, что нелинейный элемент на
рис. 26.11 можно было бы рассматривать по-разному, например, как
e(t), г
+ I
v(t)
[
Соо
rrv-м-
l^v°;j
u(t)
Нелинейный
элемент
-1 Гр 1-1
IVooJ
и
w
Рис. 26.11. Реализация регулятора с противонакоплением в МШО-случае
26.9. Механизм противонакопления в Ml МО-случае 877
простое насыщение или как клапан эталонного сигнала. Однако для
SISO-задач все эти процедуры, оказывается, эквивалентны. В MIMO-
случае оказывается, возникают тонкие проблемы в зависимости от того,
каким способом желаемое управление u(t) проектируется на допустимую
область. Мы исследуем три возможности:
1) простое насыщение;
2) ограничение входного сигнала;
3) ограничение сигнала ошибки.
1) Простое насыщение. Насыщение на входе исполнительного
механизма—прямой аналог скалярного случая и просто требует, чтобы
выражение (26.8.1) было использовано как нелинейный элемент на
рис. 26.11.
2) Ограничение входного сигнала. Здесь компенсация
обеспечивается сокращением вектора выхода регулятора u(t) до нового
вектора fiu(t) каждый раз, когда один (или больше) компонентов u(t)
превышает соответствующий уровень насыщений. Сомножитель /3
выбирается таким образом, чтобы u(t) = /3u(t)— т. е. регулятор
должен вернуться в линейную область функционирования. Эта идея
схематично показана на рис. 26.12.
Usat
"Л ш
1
Coo [
h(o)
01
abs(o)
i
I
u(t) """ Pu{t)
J ггт-м-1 rr! i-i L
Л IV \
°л
l*s~>a
°j
| Sat(o)
u(t)
Рис. 26.12. Схема реализации ограничения выходов регулятора
3) Ограничение сигнала ошибки. Третья схема построена для
ограничения вектора ошибки, так, чтобы контур работал только в
линейной области. Этот случай показан на рис. 26.13.
Заметим, что й может быть изменен только мгновенно,
посредством изменения W2, потому что wi(t) формируется строго
собственной передаточной функцией. Следовательно, ограничение сигнала
ошибки эквивалентно обеспечению W2 такой величины, что й
находится только внутри линейной области.
878 Глава 26. Развязка
\Usat
(Л
e(t)
ж По) \~-
W2(t) =ae(t)
+1
-о-
+"9:
«л (О
abs(o)L
u(t)
Sat(o)
u(t)
[ОД]"1 -[Coo]"1
Рис. 26.13. Реализация противонакопления с помощью ограничения сигнала
ошибки
На рис. 26.13 блок /(о) обозначает функцию, которая формирует
множитель 0 < а < 1. Мы видим, что блок с матрицей
передаточных функций [C(s)]_1 — [Coo]-1 строго собственный, так что любое
изменение в векторе ошибки e(t) будет немедленно приводить к
изменению вектора u(t). Вместо задания резких изменений в e(t) (и,
следовательно, й(£)), может использоваться более гибкая стратегия.
Примером такой стратегии является формирование а как выхода
динамической системы первого порядка с единичным усилением на
нулевой частоте, постоянной времени г и начальным условием а(0) =
1. Вход v(t) к этому элементу формируется следующим образом:
1) В момент времени, когда один (или более) компонентов u(t)
достигает предела насыщения, задать v(t) = 0, в то время как a(t)
уменьшается до нуля со скоростью, определяемой параметром т.
2) Как только все компоненты u(t) попадут в линейную область,
задать v(t) = 1. Тогда a(t) растет до 1 со скоростью, также
определяемой значением г.
Три метода, обсужденные выше, могут быть изображены
одновременно на следующем графике (рис. 26.14), который иллюстрирует
случай т = 2.
На рис 26.14 изображены
и: чистый сигнал управления;
us: сигнал управления, который получается непосредственно из-за
насыщения и^\
сигнал управления, полученный с помощью технологии ограничения
сигнала управления (как на рис. 26.12);
сигнал управления, полученный с помощью технологии ограничения
сигнала ошибки (как на рис. 26.13).
Замечание 26.1. Из рис. 26.14 очевидно, что если w\ леэюит вне
линейной области, то не может быть никакого ограничения сигнала
и.
ut
26.9. Механизм противонакопления в Ml МО-случае 879
♦ и<2)
Рис. 26.14. Влияние различных методов в случае насыщения
в MIMO-системах
ошибки, которое возвращает управление в линейную область и в то
же самое время сохраняет направленность. В этом случае можно
возвратиться к одной из других стратегий — например, к простому
насыщению.
Замечание 26.2. Заметим, что ограничение сигнала ошибки
эквивалентно введению нелинейного усиления регулятора и что ни одна из
вышеупомянутых схем не гарантирует, что контур управления будет
устойчив. В частности, когда объект неустойчив в разомкнутом
состоянии, насыщение на входе объекта мооюет привести к таким
его состояниям, из которых будет невозможно возвратиться при
ограниченной величине сигнала управления.
Проиллюстрируем вышеупомянутые идеи простым примером.
Пример 26.7. Рассмотрим MIMO-объект, имеющий номинальную
модель
GQ(s) =
(s2 + 2s + 4)
-5 + 2 25 + 1
-3 -5 + 2
с det(GQ(s)) =
Для этого объекта нужно выполнить следующее:
52 + 25 + 7
(52+25 + 4)2
(26.9.2)
а) Спроектировать динамически развязанный регулятор,
обеспечивающий полосу пропускания замкнутого контура приблизительно в
3 рад/с.
б) Исследовать, что произойдет, если выход регулятора в первом
канале насыщается при ±2.5.
в) Исследовать эффективность трех процедур противонакопления,
упомянутых выше.
880 Глава 26. Развязка
Решение
а)
Заметим, что эта модель устойчива и минимально-фазовая. Поэтому
динамическая развязка возможна без особых трудностей.
Нам требуется спроектировать регулятор, чтобы обеспечить
полосу пропускания замкнутого контура примерно в 3 рад/с. Обозначим
через M(s) {диагональную) передаточную функцию разомкнутого
контура, G0 (5)0(5) = М(5). Мы долоюны выбрать M(s) минимальной
относительной степени таким образом, чтобы регулятор был бисоб-
ственным. Выберем
ОД = КьWGoWr^LWM(e) = KlWGoW]-1^W [Mlo(s) m2%J
(26.9.3)
где £l(s) — левая матрица взаимодействия для G0(s) — см. разд. 25.4.1.
Затем учтем, что M(s) должна быть выбрана таким образом, что
lim £L(s)M(s) = Км (26.9.4)
s—>оо
где Км — ограниченная невырожденная матрица.
Используя процедуру, рассмотренную в разд. 25.4.1, мы находим,
что
\s (Л
€ь W =
о
(26.9.5)
Таким образом, относительная степень Mi(s) и M2(s) должна
быть равна 1, чтобы получить бисобственный регулятор для
удовлетворения (26.9.1). Мы также требуем наличия интегрирования в
обоих каналах, чтобы гарантировать нулевую ошибку в
установившемся состоянии для постоянных эталонных сигналов и возмущений.
Предположим, что мы выберем
M(s)
2(в + 2).
5(5 + 1)
Это дает следующий регулятор:
c{s) = 2(s + 2)(s2 + 2s + 4)
То(«)
2(* + 2) j
s2 + 3s + 4
-s + 2
3
-2s-1
-s + 2
(26.9.6)
(26.9.7)
s(s + l)(s2 + 2s + 7)
Проект оценен при условии, что ступенчатые эталонные
воздействия приложены к обоим каналам, но в разное время. Выберем
r(t)=[[i{t-l) 1.5/i(t —10)]'
(26.9.8)
Мы сначала запускаем моделирование, которое предполагает, что
нет никакого насыщения на входе. Результаты показаны на рис. 26.15.
U 1-5
\о о
о « 1
31 о-5
26.9. Механизм противонакопления в MIMO-случае 881
-
—г ■ г- 1 1
2/1W
i i i i
1 Г I '™ ■ 1
/
1 1 1 1 1
8 10 12
Время [с]
14
16
18
20
Рис. 26.15. Развязанный проект при отсутствии насыщения
8 10 12
Время [с]
Рис. 26.16. Насыщение в канале 1 линейного развязанного проекта
на уровне ±2.5
20
Заметим, что полная динамическая развязка действительно была
достигнута.
б)
Запустим второе моделирование, включающее насыщение на выходе
регулятора в первом канале на симметричном уровне ±2.5. Результаты
показаны на рис. 26.16.
Ясно, что результаты очень плохи. Происходит это благодаря
эффектам противонакопления в регуляторе, которые не были
скомпенсированы. По этой причине далее исследуем процедуры
противонакопления.
в)
Мы исследуем три процедуры противонакопления, описанные выше.
1). Простое насыщение. Результаты для случая, когда нелинейный
элемент на рис. 26.11 представляет собой простое насыщение,
882 Глава 26. Развязка
1.5
\о о
о а
£§ 0-5
II
Л
к -0.5
1111
1 ..... 1 1 J
/ -
I/ J
(\ yi{t) J
^ i i i i
8 10 12
Время [с]
14 16 18 20
Рис. 26.17. Развязанный линейный проект с насыщением в канале 1 и схемой
противонакопления (1)
3 1
Св
а
8 о
Р,
а»
-1
1-2
Я
PQ
i ■- 1 - 1 1 "1 ■ г-— 1 ■ ■ I г |
-
\
—' 1 \
1 1 1 1
8 10 12
Время [с]
14
16
18
20
Рис. 26.18. Выход регулятора (канал 1) при использовании ограничения
управляющего сигнала
показаны на рис. 26.17. Можно заметить, что это
неудовлетворительный вариант, — действительно, результаты подобны тем,
которые были в части б), где не использовался механизм
противонакопления.
2). Ограничение входного сигнала. Когда идея, изобраэюенная на
рис. 26.12, применяется к нашему примеру, управляемый выход
ui(t) автоматически регулируется так, как показано на рис. 26.18.
На этом рисунке изображены u\(t) и (3(t). Заметим, что 0 < /3 < 1
в том интервале времени, когда сигнал управления u\(t) находится
в области насыщения (в этом примере 2.5).
Однако наблюдается довольно неутешительный результат
относительно выходов объекта. Они показаны на рис. 26.19. Схему
для пакета SIMULINK можно найти в файле mmawu.mdl.
26.9. Механизм противонакопления в Ml МО-случае 883
8 10 12
Время [с]
18 20
Рис. 26.19. Выходы объекта, когда используется ограничение управляющего
сигнала
S
«1
33
2 2 0.5
«а
s
-
1 1 1 1 1
и (0
'
i i i i
i i i i
ю(0
lilt
8 Г. 10 Г I 12
Время [с]
14
16
18
20
Рис. 26.20. Выходы объекта, когда используется ограничение сигналов
ошибки
Результаты на рис. 26.19 показывают небольшое улучшение по
сравнению с полученными, когда используется чистый механизм
противонакопления 1).
3). Ограничение сигналов ошибки. Когда стратегия ограничения
сигналов ошибки применяется к нашему примеру, мы получаем
результаты, показанные на рис. 26.20.
В случае, показанном на рис. 26.20, для г выбрано значение
0.1. Результаты значительно лучше, чем в предыдущих случаях.
Схемное решение для пакета SIMULINK можно найти в
файле mmawe.mdl. Фактически, полная динамическая развязка по
существу здесь сохранена —на рис. 26.20 видна лишь маленькая
связь из-за реализации ограничения сигналов ошибки с помощью
(быстрой) динамической системы. QQD
884 Глава 26. Развязка
В этом примере мы видим, что механизм противонакопления,
включающий ограничение сигналов ошибки, оказывается наиболее
эффективным. Конечно, как было показано, это сохраняет полную
динамическую развязку для изменений эталонных сигналов. Мы проверили
идею на многих других задачах и нашли, что это дает превосходные
результаты почти во всех случаях.
Дальнейшие идеи относительно MIMO-насыщения исполнительных
механизмов исследованы в ссылках, приведенных в конце главы.
26.10. Резюме
• Напомним ключевые характеристики замкнутого контура, общие для
SISO и MIMO-проектов:
о непрерывная компенсация возмущений;
о непрерывная компенсация неопределенности модели;
о стабилизация систем, неустойчивых в разомкнутом состоянии,
в то время как системы
о становятся слишком чувствительными к шуму измерения;
о формируют чрезмерные сигналы управления
и обладают присущими им ограничениями из-за
о неустойчивых нулей;
о неустойчивых полюсов;
о ошибок моделирования;
о частотных и временных интегральных ограничений.
• В общем случае MIMO-системы обладают также дополнительными
сложностями из-за
о направленности (несколько входов, действующих на один выход);
о рассеивания (один вход, действующий на несколько выходов)
о и появляющегося с этим явления связи.
• Проектирование регулятора для замкнутого контура этих MIMO-
систем с явлением связи называется развязкой.
• Напомним, что имеются различные степени развязки, включая
следующие:
о статическая (т. е. матрица То(0) диагональная);
о треугольная (т. е. матрица TQ(s) треугольная) и
о динамическая (т. е. TQ(s) диагональная).
• Из-за фундаментального закона, что SQ(s) + T0(s) = I, если TQ
обладает любым из этих свойств развязки, им обладает и SQ.
26.10. Резюме 885
• Серьезность и типы компромиссов, связанных с развязкой, зависят
от:
о того, является ли система минимально-фазовой;
о направленности и количества неминимально-фазовых нулей;
о наличия неустойчивых полюсов.
• Если все неустойчивые нули системы канонические (их
направленность воздействует только на один выход), то их неблагоприятные
эффекты не распространяются на другие каналы при развязке,
при условии, что направление развязки соответствует направлению
неустойчивых нулей.
• Цена динамической развязки системы, имеющей неканонические
неминимально-фазовые нули, является простым сочетанием того,
что
о влияние неминимально-фазовых нулей потенциально
распространяется на несколько контуров управления и
о следовательно, хотя контуры и развязаны, для каждого из них
нужно рассматривать ограничения полосы пропускания и чувстви-
. тельности, накладываемые динамикой неустойчивых нулей.
• Если принять менее строгую треугольную развязку, влияние
распространяющихся ограничений из-за неминимально-фазовых нулей
может быть минимизировано.
• В зависимости от случая, большее количество неминимально-
фазовых нулей может или увеличить, или смягчить неблагоприятные
эффекты.
• Если система также и неустойчива в разомкнутом состоянии, вообще
не может быть какой-либо полной динамической развязки с
регулятором, имеющим одну степень свободы, хотя это всегда можно
сделать со структурой, имеющей две степени свободы для изменений
эталонных сигналов.
• Если система по существу линейна, но обладает такими нелинейно-
стями исполнительного механизма, как насыщение входного сигнала
или скорости его нарастания, то проект регулятора соответственно
должен это отразить.
• Другими словами, должно быть MIMO-обобщение явления
накопления SISO-случая.
• Проявление накопления в MIMO-случае определяется в двух
аспектах деградации характеристик:
о переходные процессы из-за увеличивающихся переменных
состояния регулятора и
о переходные процессы из-за нелинейностей, влияющих на
направленности.
886 Глава 26. Развязка
• Первое из этих двух явлений ...
... возникает по аналогии с SISO-случаем.
... возникает из-за сигналов управления, попавших в зону
насыщения и которые не могут устранить ошибки управления
существенно быстрее, чем динамика регулятора; поэтому переменные
состояния управления продолжают расти в ответ на
неуменьшающийся сигнал управления. Эти накопленные переменные
состояния формируют переходные процессы, когда контур выходит из
насыщения.
... может быть скомпенсировано прямым обобщением SISO-
реализации противонакопления.
• Второе явление ...
... оказывается специфичным для МШО-систем.
... возникает из-за некомпенсированных взаимодействий,
являющихся результатом потери вектором входа своего
первоначального направления.
• По аналогии с SISO-случаем, могут иметься области в пространстве
состояний, откуда неустойчивая разомкнутая MIMO-система с
насыщением входа не может быть стабилизирована никаким управлением.
• Более строго, чем в SISO-случае, МШО-системами трудно управлять
в присутствии насыщения на входе, даже если линейный контур
устойчив и регулятор осуществлен с противонакоплением.
Происходит это из-за насыщения, изменяющего направленность вектора
входа.
• Эта проблема сохранения развязки в присутствии насыщения на
входе может быть решена схемами противонакопления, которые
ограничивают ошибку управления, нежели сам сигнал управления.
26.11. Литература для последующего чтения
Динамическая развязка
1. Desoer, С. and Gundes, A. (1986). Decoupling linear multi-input multi-output
plants by dynamic output feedback. An algebraic theory. IEEE Transactions
on Automatic Control, 31(8):744-750.
2. Falb, P. and Wolowich, W. (1967). Decoupling in the design and synthesis of
multivariable control system. Automatica, 12:651-669.
3. Gilbert, E.G. (1969). The decoupling of multivariable systems by state
feedback. SIAM Journal of Control and Optimization, 7(l):5Q-63.
4. Goodwin, G.C., Feuer, A., and G6mez, G. (1997). A state space technique
for the evaluation of diagonalizing compensator. Systems and Control Letters,
32(3):173-177.
5. Hammer, J. and Khargonekar, P.P. (1984). Decoupling of linear delay
equations. Journal Mathematical System Theory, pages 135-137.
26.12. Задачи для читателя 887
6. Hautus, M. and Heymann, M. (1983). Linear feedback decoupling-transfer
function analysis. IEEE Transactions on Automatic Control, 28(8):823-
832.
7. Lin, C-A. and Hsie, T.F. (1991). Decoupling controller design for linear
multivariable plants. Automatica, 36:485-489.
8. Morse, A. and Wonham, W. (1973). Status of noninteracting control. IEEE
Transactions on Automatic Control, 16:568-581.
9. Williams, T. and Antsaklis, P. (1986). A unifying approach to the decoupling
of linear multivariable systems. International Journal of Control, 44(1):181-
201.
10. Wonham, W. (1985). Linear Multivariable Control: A Geometric Approach.
Springer-Verlag, 3rd edition.
Инварианты развязки
1. Commault, С, Descusse, J., Dion, J.M., Lafay, J., and Malabre, M. (1986). New
decoupling invariants: the essential orders. International Journal of Control,
44(3):689-700.
2. Dion, J. M. and Commault, С (1988). The minimal delay decoupling
problem: feedback implementation with stability. SIAM Journal of Control
and Optimization, 26(1):66-81.
3. Gundes, A. (1990). Parameterization of all decoupling compensators and all
achievable diagonal maps for the unity-feedback system. In Proceedings of the
29th CDC, Hawaii, pages 2492-2493.
4. Lin, C-A. (1995). Necessary and sufficient conditions for existence of decoupling
controllers. IEEE Transactions on Automatic Control, 42(8):1157-1161.
Стоимость развязки
1. G6mez^ G. and Goodwin, G.C. (1996). Integral constraints on sensitivity
vectors for multivariable linear systems. Automatica, 32(4):499-518.
26.12. Задачи для читателя
Задача 26.1. Дискретная MIMO-система имеет номинальную модель с
передаточной функцией Gq(z), где
GqW= l
(z-0.7)(г-0.9) L 0.5 z
z — a —0.5'
(26.12.1)
26.1.1. Для а = 1 постройте развязанный контур так, чтобы его полюсы
находились внутри окружности радиуса 0.4.
26.1.2. Повторите то же самое для а = 2.
888 Глава 26. Развязка
Задача 26.2. Рассмотрим устойчивый MIMO-объект, имеющий
номинальную передаточную функцию G0(s).
26.2.1. Если G0(s) минимально-фазовая, обсудите реализуемость
проектирования регулятора такого, что чувствительность по входу SiQ(s)
является диагональной.
26.2.2. Повторите ваш. анализ для случая, когда GQ(s) является
неминимально-фазовой.
Задача 26.3. Рассмотрим MIMO-систему, имеющую модель
2
G0(s) =
2(-5 + 3) 0.5(-5 + 3) (s + a)
0.5(5 + 1) -/3 -(5 + 2)
-1 0.5 2.5
(26.12.2)
(5 + 1)2(5 + 2)
са = -2и/3 = 1. Желательно получить динамическую развязку.
26.3.1. Возможно ли это без распространения неминимально-фазовых
нулей на все три канала?
27.3.2. Если а = 3 и /3 = —1, остается ли ваше заключение в силе?
Задача 26.4. Рассмотрим снова объект из задачи 26.3.
26.4.1. Повторите задачу 26.3, но используя треугольный (нижний и
верхний) проект.
26.4.2. Обсудите задачу стоимости динамической развязки, когда /3 =
—1, а а имеет некоторое неопределенное значение в окрестности
точки а = 3. (Это сложная задача.)
Задача 26.5. Рассмотрим процесс с номинальной моделью
1
G0(5) =
2 -1
[0.$ 5 + 2J
(26.12.3)
(5 + 1)(5 + 2)
Спроектируйте Q-регулятор, чтобы получить динамическую
развязку и нулевую установившуюся ошибку для постоянных эталонных
сигналов и ступенчатых возмущений.
Задача 26.6. Обсудите трудности динамической развязки для входных
возмущений у устойчивых (хотя и не обязательно минимально-фазовых)
объектов.
Задача 26.7. Рассмотрим объект с той же номинальной моделью, что
и в задаче 26.5. Спроектируйте цифровой регулятор, предполагая, что
период квантования равен А = 0.1 с.
Именной указатель
Ahlen, A. 609
Anderson, В. 396, 734, 735
Antsaklis, P. 887
Araki, M. 411
Astrom, К. 63, 197, 212, 361, 396, 465
Athani, V. 802
Athans, M. 734
Badgwell, T. 765
Balakrishnan, V. 496
Barratt, C.H. 496, 802
Bastiani, A. 650
Bellman, R. 734, 765
Bensoussan, D. 674
Bernstein, D. 325
Bittanti, S. 735
Black, H.W. 42
Blanke, M. 766
Bode, H. 42, 278
Bohlin, T. 85, 496
Bongiorno, J. 465, 495
Boyd, S.P. 496, 802
Braslavsky, J.H. 280, 411, 412, 496,
497, 560, 610
Bristol, E. 674
Brockett, R. 176, 528
Brown, J.W. 280
Bryant, G. 255
Bryson, A. 734
Bucy, R. 735
Cadzow, J. 361
Callier, F. 649
Campbell, D.P. 84
Campo, P. 325
Cannon, R. 84
Chan, S. 735
Chen, C-T. 527, 560
Chen, C.C. 765
Chen, J. 802
Chen, T. 411
Christensen, A. 766
Churchill, R.V. 280
Clark, M. 255
Commault, C. 887
Crisafulli, S. 197, 610
Cutler, C. 765
D'Azzo, J. 63
Dahleh, M. 802
Daoutidis, P. 325
Davison, E.J. 497, 843
De Dona, J.A. 325, 765
De Souza, С 735
Dendle, D. 255
Descusse, J. 887
Desoer, C. 465, 610, 649, 842, 886
Diaz-Bobillo, I. 802
Dion, J.M 887
Dion, J.M. 887
Distefano, J. 135
Doeblin, E.O. 63
Doetsch, G. 134
Dorato, P.E. 495, 496
Dorf, R. 63
Doyle, J.C. 254, 280, 464, 495, 496, 560,
649, 734, 735, 802, 842
Edwards, W.J. 255, 802
Elsley, G. 63
Emami-Naeini, A. 63
Evans, W. 176
Falb, P. 734, 842, 886
Feuer, A. 325, 361, 396, 411, 735, 843,
886
Fortmann, T. 560
Fossen, T. 766
Francis, B.A. 254, 280, 307, 411, 464,
495, 496, 560
Franklin, G.F. 63, 396
Freudenberg, J.S. 278, 411, 412, 802
Froisy, B. 765
Fuller, A. 42
Garcia, C.E. 325, 765
Gevers, M. 496, 735
Gilbert, E.G. 325, 528, 765,
766, 886
890 Именной указатель
Glover, К. 464, 495, 496, 649, 734, 735,
802, 842
Gdmez, G. 255, 802, 843, 886
Goodwin, G.C. 63, 85, 212, 255, 280,
325, 361, 396, 411, 464, 496, 560, 609,
610, 735, 765, 766, 802, 843, 886,
887
Graebe, S.F. 63, 85, 134, 212, 254,
464, 496, 609
Green, M. 649
Grosdidier, P. 765
Guglu, A. 843
Gundes, A. 886, 887
Hagander, P. 396
Hagglund, T. 197, 212
Hagiwara, T. 411
Hamid, N.S. 134, 361
Hammann, M. 765
Hammer, J. 886
Harms, R. 325
Hauser, J. 766
Hautus, M. 887
Henrotle, J. 325
Heymann, M. 887
Hitz, K. 560
Ho, Y.C. 528, 734
Horowitz, I. 212, 280
Houpis, (J. 63
Hovd, M. 674, 843
Hsie, T.F. 887
Hung, Y. 649
Isaksson. A.J. 212, 464
Isidori, A. 609
Ito, Y. 411
Jabr, H. 465, 495
Jadbabaie, A. 766
James, H.M. 42
Jankovi6, M. 609
Joseph, P. 735
Jury, E. 396
Kailath, T. 527, 528, 649, 735
Kalman, R.E. 528, 734, 735, 765
Kanellakopoulos, I. 610
Kapoor, N. 325
Keerthi, S.S. 325, 765, 766
Keller, J. 396
Khalil, H.K. 609
Khargonekar, P.P. 495, 886
Khraishi, N. 496
King, W. 255
Kinnaert, M. 325
Kleinman, B. 766
Kokotovi6, P. 609, 610
Kondo, K. 255
Kothare, M. 325
Krstic, M. 610
Krzyz, J.G. 280
Kucera, V. 735
Kuo, B.C. 63, 396
Kwakernaak, H. 361, 528, 560, 734
Lafay, J. 887
Lancaster, P. 735
Landau, I.D. 197
Lathi, B. 134
Laub, A.J. 735
Lee, E. 765
Levine, W.S. 63
Levinson, N. 280
Li, X. 496
Limebeer, D. 649
Lin, C-A. 887
Liu, R. 465, 842
Ljung, L. 85, 496
Lo, C-P. 396
Longman, R.W. 396
Looze, D.P. 278, 802
Luenberger, D. 528
Lyapunov 591
MacFarlane, A. 649, 802
Maciejowski, J.M. 649
MacLeod, I.M. 197
Maddock, R. 176
Malabre, M. 887
Manousiouthakis, V. 674
Markus, L. 765
Martin Jr, R. 610
Matsumori, Y. 255
Maxwell, T. 42
Mayne, D.Q. 325, 649, 765, 766
Mayr, O. 42
McFarlane, D. 649 .
Meinsma, G. 412
Mellquist, M. 197
Melsa, J. 528
Meyer, D. 496
Michalska, H. 325, 765
Michel, A. 325
Middleton, R.H. 134, 254, 255, 361,
396, 411, 412, 497
Miller, D.E. 496
Misaka, Y. 255
Miyagi, T. 255
Moheimani, S.O.R. 735
Moore, J. 734, 735
Moran, W. 396
Morari, M. 197, 212, 325, 464, 496, 649,
842
Morse, A. 887
Morshedi, A. 765
Mu, Z. 255
Murray, J. 465, 842
Muscato, G.M. 496
Именной указатель 891
Muske, K.R. 325, 766
Narendra, K.S. 528
Nett, С 325, 802
Nichols, N.B. 42, 197
Ninness, B.M. 396, 496
Norman, S.A. 496
Nyquist, H. 176
Ogata, K. 63, 84, 396, 527
Okamato, M. 255
Oppenheim, A.V. 134, 361
Ozguler, B. 843
Papon, J. 765
Papoulis, A. 135
Payne, R.L. 85, 496
Perez, T. 766
Person, P. 464
Petersen, I.R. 735
Phillips, R.S. 42
Polalc, E. 766
Pollington, A. 396
Poor, H.V. 361
Postlethwaite, I. 254, 280, 649,
674, 802
Pota, H.R. 735
Powell, J.D. 63, 396
Prett, D.M. 325
Qin, S. 765
Qui, L. 497
Ramaker, B. 765
Rao, C.V. 765, 766
Rault, A. 765
Rawlings, J.B. 325, 765, 766
Redheffer, R.M. 280
Riccati 687
Richalet, J. 765
Rivera, D. 197, 212, 464
Rodman, L. 735
Rodriguez, J.A. 610
Romagnoli, J.A. 610
Rosenbrock, H. 528, 649
Ryu, Y.S. 396
Saberi, A. 497
Saeks, R. 465, 842
Salgado, M.E. 411, 843
Sandberg, J. 610
Sannuti, P. 497
Sastry, S. 610
Schultz, D. 528
Scokaert, P. 765
Scokaert, P.O.M. 766
Sepulchre, R. 609
Seron, M.M. 280, 325, 496, 560, 609,
610, 843
Shaked, U. 280
Shamma, J. 610
Shaw, L. 765
Shim, J. 255
Shinskey, F. 307
Simon, H. 735
Sin, K. 735
Sivan, R. 361, 528, 560, 734
Skogestad, S. 197, 212, 254, 280, 464,
649, 674, 802, 843
Smith, O. 212, 465
Soderstrom, T. 85
Sourlas, D. 674
Stein, G. 802
Stephanopoulos, G. 84, 212,
307, 674
Sternby, J. 396
Stoorvogel, A. 802
Stubberud, A. 135
Sule, V. 802
Тал, К.Т. 766
Tannenbaum, A.R. 254, 280, 464, 496,
560
Teel, A.R. 325
Tempo, R. 496
Testud, J. 765
Thomas, P. 255
Thomas, Y. 765
Truxal, J.G. 63
Tzeng, C-Y. 766
Vidyasagar, M. 464, 609, 610, 649
Villanueva, H. 610
Voda, A. 197
Wang, L. 496
Wang, S.H. 843
Weller, S.R. 396, 843
West, M. 802
Whittle, P. 649
Wiberg, D. 528
Willems, J.C. 135, 176, 735
Williams, I. 135
Williams, T. 887
Wilsky, A.S. 134, 361
Wimmer, H.K. 735
Wittenmark, B. 63, 361, 396
Wolowich, W. 842, 886
Wonham, W. 307, 887
Woodyatt, A. 255
Workman, M. 396
Youla, D. 465, 495
Yu, J. 766
Zafiriou, E. 212, 464, 496, 649, 842
Zanies, G. 280, 496, 610, 674
Zhou, K. 464, 495, 496, 649, 734, 735,
802, 842
Ziegler, J. 197
Пред
Абстрактный регулятор 53
алгоритм Рауса 152
аммиачный завод 26, 615
антилюфтовые приводы 247
апериодическое управление 381
аппарат с четырьмя резервуарами
625, 660, 776
аффинная параметризация 419
неминимально-фазовые нули
423
устойчивые системы 421
Безу тождество см. тождество
Безу
Боде интеграл см. интеграл Боде
Вероятностная система 700
взаимно простые полиномы 202
взаимодействие
МШО-система 615
вибрация
вход 249
внутренне-внешнее разложение
472
внутренняя устойчивость
номинальная 150
возмущение 222
модели 284
обобщенное 284
формирующий полином 283
возмущения
выход 144
восстановление 335
восстановленное состояние 536
нелинейное 575
оптимальное 556
ошибка 542
й указатель
вырожденные значения 635
максимальное 636
свойства 636
Гибкие структуры 729
гибридные системы 69
главное направление 637
главные усиления 634, 636
граница устойчивости 98
граничная частота 116
Гурвиц 152
Датчика характеристика
см. характеристика
датчика
датчики 218
ограничения 218
двигатель постоянного тока 72
двойственная система 518
дельта-преобразований таблица
см. таблица
дельта-преобразований
дельта-преобразования свойства
см. свойства
дельта-преобразования
дельта-преобразования 346
децентрализованное управление
654
диагонально доминирующая
развязка 668
динамическая развязка 667
стоимость 871
динамическое программирование
682, 683
диофантово уравнение 211
Дирихле ядро см. ядро Дирихле
Предметный указатель 893
дискретное дельта-преобразование
345
дискретные системы
оптимальный регулятор 695
оптимальный фильтр 709
дистилляционная колонна 193
достижимое подпространство
513
достижимость 508
каноническое разложение 511
тест 509
дуальная система см. двойственная
система
дуальность 699
Единичная обратная связь 61
Задача подбора модели 692
закон управления 53
замкнутого контура
характеристическая
матрица
см. характеристическая
матрица замкнутого
контура
запаздывание 54
всечастотное приближение
126
запас устойчивости 166
запас устойчивости по фазе 166
Зиглера—Никольса настройка
см. настройка
Зиглера—Никольса
зона нечувствительности 588
Избыточные системы
МШО 796
измерение 59
быстрота реагирования 61
требования 61
шумы 61
импульсная передаточная функция
353
импульсные сигналы 98
инверсия 52, 420
ограниченная 56
приближенная 56
инновационный процесс 537
интеграл Боде 259
интегральная формула Коши
259
интегральный оператор 575
интегрирующие свойства 424
интерполяционные ограничения
444
исполнительного механизма
насыщение 588
исполнительный механизм 69
ограничения 219
Йола параметризация
см. параметризация
Йола
Калмана фильтр см. фильтр
Калмана
Калмана—Якубовича лемма
см. лемма
Калмана—Якубовича
каноническая форма
наблюдатель 520
регулятор 514
управляемость 514
каскадное управление 246, 300
вторичный регулятор 301
первичный регулятор 301
колебательные системы
ПИД-управление 435
компенсации возмущения
интегральное управление 229
компенсации полюсов и нулей
205
неустойчивые 150, 204, 530
компенсация возмущения
установившееся состояние 284
через каскадное управление
300
компенсация эксцентриситета валков
287, 725
конечное время установления
342
контур управления
номинальный 149
корневой годограф 157
Коши интегральная формула
см. интегральная формула
Коши
коэффициент демпфирования
102
кривая отклика процесса 188
круговой критерий 592
Кэли—Гамильтона теорема
см. теорема
Кэли—Гамильтона
894 Предметный указатель
Лапласа преобразования
см. преобразования
Лапласа
Лапласа свойства преобразования
см. свойства преобразования
Лапласа
Лапласа таблица преобразований
см. таблица преобразований
Лапласа
Лейбница правило см. правило
Лейбница
лемма Калмана—Якубовича 593
лемма об обратной матрице 534
линеаризация 77
линейный квадратичный регулятор
(ЛКР) 685
линейный квадратичный фильтр
699
Ляпунов 749
по Ляпунову устойчивость
см. устойчивость по
Ляпунову
Максимум номинальной
чувствительности 167,
269
массив относительных усилений
(МОУ) 658
матрица Сильвестра 202
матрица переходов 74
матрицы взаимодействия
левая 810
правая 810
матричная передаточная функция
619
матричное дробное описание 620
межтактовая реакция 367
межтактовое поведение 405
методы функционального
пространства 597
минимально-фазовый 101
минимальной модели регулятор
376
моделирование
феноменологический подход
68
черный ящик 68
моделирования ошибки см. ошибки
моделирования
модель 53, 65
входа—выхода 74
для малых сигналов 79
линеаризованная 77
номинальная 66
основные принципы 68
ошибка 66
пространства состояний 70
структуры 69'
эталонная 66
модельное прогнозирующее
управление 323
интегрирующие свойства 758
устойчивость 748
модельное прогнозирующее
управление (МПУ) 739
моменты квантования 336
Наблюдаемое подпространство
520
наблюдаемость 517
каноническая форма 520
наблюдатель 536
в МШО-системах 698
возмущенное состояние 551
нелинейный 586
несмещенный 544
назначение полюсов 199
обратная связь по состоянию
534
подбор полинома 200
Найквист
в MIMO-контуре управления
632
диаграмма 163
контур 163
модифицированный 164
теорема об устойчивости 164
накопление 182, 247
в МШО-системах 876
направление
каноническое 872
настройка Зиглера—Никольса
кривой отклика метод 189
метод колебаний 184
насыщение 54, 246, 383, 875
в МШО-системах 876
вход 588
насыщение входное 220
насыщение исполнительного
механизма
см. исполнительного
механизма насыщение
насыщение переменных состояния
314
начальные условия 148
недорегулирование 232
и неминимально-фазовые нули
107
Предметный указатель 895
недостижимое подпространство
513
нейтрализация значения рН 577
нейтрализация уровня рН 582
нелинейность
вход 572
гладкая 585
динамическая 573
негладкая 588
нелинейные системы
инверсия 573
наблюдатель 586
устойчивость 590
неминимально-фазовые нули
см. неустойчивые нули
в МШО-системах 773
связь с чувствительностью
267
ненаблюдаемое подпространство
520
непрерывное литье 222, 249
непрерывные линии гальванизации
722
неустойчивость 59
неустойчивые МШО-объекты
проектирование регулятора
856
неустойчивые нули 272
неустойчивые полюсы
в МШО-системах 773
связь с чувствительностью
272
норма Фробениуса 692
норма матрицы
индуцированная спектральная
635
нули 105
быстрые 105
медленные 105
неминимально-фазовый 101
нули квантования 368, 380
Обратная реакция 239
обратная связь 48
обратная связь по состоянию 532
оптимальная 555
обратное преобразование 48
объект 52
вход 52
выход 52
динамика 69
ограничение скорости нарастания
221, 248, 314
однородность проекта 251
оператор 53
идентичность 598
инвертируемый 598
опережения-задержки 191
определение устойчивости от входа к
выходу 597
определяемость 520
оптимальный регулятор
дискретный 695
оптимизация
квадратичная 683
основная частота 110
отслеживание геостационарного
спутника 719
оценка массы цинкового покрытия
722
оценка уровня жидкости в
резервуаре 538
ошибка слежения
интегральное управление 228
ошибки в установившемся состоянии
424
гармонические входные сигналы
425
постоянные входные сигналы
424
ошибки моделирования 75, 125,
223
аддитивная 75
запаздывание 128
мультипликативная 75
неустойчивые полюсы 127
неучет эффекта резонанса
128
пропущенный полюс 127
ошибки установившегося состояния
284
ошибкоустойчивость
см. робастность
Параметризация Йола 421
Парсеваля теорема см. теорема
Парсеваля
перевернутый маятник 80, 96, 274,
798
передаточная функция 95
бисобственная 96
дельта-форма 349
минимально-фазовая 101
несобственная 96
нули 96
относительная степень 96, 101
полюсы 96
896 Предметный указатель
кратность 96
строго собственная 96
форма оператора сдвига 341
переменные состояния 70
переменные состояния
наблюдателя
неуправляемые 546
перерегулирование 232
и медленные нули 109
периодическое управление 387
ПИД-настройки Коэна—Куна
190
ПИД-управление 180, 199
время восстановления 181
время дифференцирования
181
диапазон пропорциональности
182
дифференциальный режим
181
интегральный режим 181
классическое 180
модели первого порядка 431
назначения полюсов 207
настройка
Зиглера—Никольса настройка
184
последовательная форма 181
пропорциональный режим
181
режимы 180
стандартная форма 181
эмпирическая настройка 184
пик дополнительной
чувствительности 273
пик чувствительности 273
подавление возмущений 424
подбора модели задача см. задача
подбора модели
полином
номинальный характеристический
147
полином замкнутого контура 534,
542
полином замкнутой системы 200
минимальные требования 202
полиномы взаимно простые
см. взаимно простые
полиномы
полоса пропускания замкнутого
контура
и возмущения 223
и ограничения датчика 218
и ограничения исполнительного
механизма 221
полюсов и нулей компенсации
см. компенсации полюсов и
нулей
полюсы
быстрые 104
доминирующие 104
медленные 104
расположение 202
полюсы замкнутого контура
нежелательные 443
пост-диагонализация 854
постоянная времени 102
постоянная времени
дифференцирования 183
поток воды 67
правило Лейбница 73
пред-диагонализация 854
преобразование
билинейное 371
ступенчато-инвариантное 371
преобразование Фурье 118
преобразования Лапласа 90 •
область сходимости 91
примеры систем управления
BISRA-измеритель 245
аммиачный завод 26, 615
аппарат с четырьмя резервуарами
625, 660, 776
гибкие структуры 729
двигатель постоянного тока
• 72
дистилляционная колонна 193
компенсация эксцентриситета
валков 287, 725
нейтрализация значения рН
577
нейтрализация уровня рН 582
непрерывное литье 222, 249
непрерывные линии
гальванизации 722
отслеживание геостационарного
спутника 719
оценка массы цинкового
покрытия 722
оценка уровня жидкости в
резервуаре 538
перевернутый маятник 80, 96, 274,
798
поток воды 67
прокатный стан 665
промышленная печь 67
расходомер массы 246
Предметный указатель 897
реверсивный прокатный стан
240
сахарный отжимной пресс 785
система нагревания 97
система управления поверхностью
668
система управления толщиной
полосы 34
стабилизация с помощью
перекладки руля 80, 758
теплообменник 54
управление вибрацией 729
управление прокатным станом
225, 240, 245, 287, 297, 443,
668, 725
управление толщиной 225, 245,
443
флотация 54
центробежный регулятор Уатта
24
эффект затягивания 242, 297,
665
принцип внутренней модели
MIMO 772
подход к пространству состояний
550
принцип внутренней модели (ПВМ)
284, 285
принцип оптимальности 683
проекта однородность
см. однородность
проекта
проектирование в моменты
квантования 375
прокатный стан 665
промышленная печь 67
пространство состояний 501
каноническая форма
наблюдаемости 520
каноническая форма
управляемости 514
преобразование подобия 502
противонакопление 247, 740
насыщение переменных состояния
318,
Пуассона—Йенсена формула
см. формула
Пуассона—Йенсена
пульсации 342
пульсация 380
Рабочая точка 77
развязка 846
разделение нагрузки 797
расположение полюсов 202
расходомер массы 246
расширенный фильтр Калмана
586
Рауса алгоритм см. алгоритм
Рауса
реверсивный прокатный стан
240
регулятор
бисобственный 203
интегрирующие свойства 204
робастный 67
с большим усилением 56
с двойным диапазоном 249
строго собственный 203
регулятор Смита 441
регулятор минимальной модели
см. минимальной модели
регулятор
регулятор с двойным диапазоном
249
Риккати уравнение см. уравнение
Риккати
робастность 67, 223
и управление на основе
внутренней модели 466
характеристика 172
Сахарный отжимной пресс 785
свойства Z-преобразования 339
свойства дельта-преобразования
347
свойства преобразований Фурье
121
свойства преобразования Лапласа
93
связанность см. взаимодействие
сглаживающий фильтр 335
Сильвестра матрица см. матрица
Сильвестра
Сильвестра теорема см. теорема
Сильвестра
система нагревания 97
система управления поверхностью
668
система управления толщиной
полосы 34
системные нули 368
системы с запаздыванием
и Q-синтез 440
и ПИД-управление 439
и цифровое управление 466
системы с интегрированием
ПИД-управление 449
898 Предметный указатель
скорости нарастания ограничение
см. ограничение скорости
нарастания
Смита регулятор см. регулятор
Смита
Смита упредитель см. упредитель
Смита
собственная частота
демпфированная 102
недемпфированная 102
собственные частоты 505
составляющая
вынужденная 111
собственная 111
состояние
наблюдатель 536
стабилизация с помощью перекладки
руля 80, 758
стабилизируемый объект 513
статически развязанные системы
667
степени свободы
вторая 145, 288
две 145
МШО-проект 861
одна 145
МШО-проект 863
первая 145
третья 297
ступенчатые сигналы 98
Таблица Z-преобразований 338
таблица дельта-преобразований
346
таблица преобразований Лапласа
92
таблица преобразований Фурье
120
теорема Кэли—Гамильтона 508
теорема Парсеваля 122
теорема Сильвестра 201
теория разделения 541
теплообменник 54
тождество Безу 864
треугольное соединение 667
Управление
автоматическое 52
с обратной связью 58
управление вибрацией 729
управление настройкой 249
управление прокатным станом 225,
240, 245, 287, 297, 443, 668,
725
управление разомкнутой системой
57
управление толщиной 225, 245,
443
управляемость
каноническая форма 513
тест 518
упредитель Смита 209
упреждение 48, 292, 664
упреждение эталонного сигнала
288
уравнение Риккати 689
дискретное динамическое 696
непрерывное алгебраическое 687,
689
непрерывное динамическое 687,
688
стабилизирующее решение
689
уравнение выхода 502
уравнение состояния 502
устойчивое преобразование 54
устойчивость см. робастность, 98,
590
Ляпунов 609
внутренняя 150, 450
критическая 164
относительная 166
робастная 169
устойчивость по Ляпунову 591
Фильтр Калмана 699
вероятностный подход 699
расширенный 586
фильтры
всечастотный 116
высоких частот 116
низких частот 116
полосовой 116
полосовой режекторный 116
ширина полосы пропускания
116
флотация 54
формирующий фильтр 424
формула Пуассона—Йенсена 259
формула суммирования Пуассона
409
Фробениуса норма см. норма
Фробениуса
фундаментальная частота 110
фундаментальные законы
компромиссов
MIMO 800
Предметный указатель 899
SISO 253
частотная область 278
Фурье преобразование
см. преобразование
Фурье
Фурье свойства преобразований
см. свойства преобразований
Фурье
Фурье таблица преобразований
см. таблица преобразований
Фурье
Характеристика датчика 219
характеристическая матрица
замкнутого контура 630
характеристические компоненты
632
характеристические траектории
653
Центробежный регулятор Уатта
24
Частота граничная см. граничная
частота
чувствительность
алгебраические ограничения
227
вход 147
дополнительная 147
интерполяционные ограничения
227
управление 147
функции 147
чувствительность ошибки 172
Ширина полосы пропускания
116
шумы 218
шумы измерения 61
Экстраполятор нулевого порядка
352
эталонный сигнал 52
упреждение 288
формирующий полином 283
эталонный фильтр 145
эффект затягивания 242, 297,
665
эффект интегрирования 227
Ядро Дирихле 409
BISRA-измеритель 245
MIMO-контур управления
Найквиста теория 632
компенсация возмущений 638
насыщение
ограничение сигнала ошибки
877
нули и развязка 865
ограничения во временной
области 774
отслеживание 637
противонакопление 876
робастная устойчивость 645
робастность 644
треугольное соединение 824
установившееся состояние 633,
772
устойчивость 629
МШО-система
геометрическая кратность нуля
624
достигнутые чувствительности
809
направленность 639
неминимально-фазовые нули
819
нулевое правостороннее
направление 624
нули передачи 624
основной контур управления
626
относительная степень 809
приближенная инверсия 817
свойство в 809
РВН-тест 523
Q-синтез 419
И.2 оптимальный 469
z-матрицы взаимодействия 819,
822
%2 оптимизация 470
Оглавление
Предисловие к русскому переводу 5
Благодарности 7
Условные обозначения 9
Предисловие 12
Введение в проектирование систем управления 12
Цели 14
Краткий обзор книги 15
Использование этой книги 17
Web-сайт 18
Часть I. Элементы 21
Введение 22
Глава 1. Причины создания систем управления 24
1.1. Введение 24
1.2. Причины разработки систем управления 24
1.2.1. Проблемы рыночной глобализации 27
1.2.2. Экологические проблемы 27
1.3. Исторические периоды развития теории управления 29
1.4. Виды проектирования систем управления 30
1.4.1. Начальное проектирование «с чистого листа» 31
1.4.2. Ввод в действие и настройка 31
1.4.3. Улучшение и модернизация 31
1.4.4. Экспертные исследования 32
1.5. Организация систем управления 32
1.5.1. Объект 32
1.5.2. Цели управления 33
1.5.3. Датчики 33
1.5.4. Исполнительные механизмы 33
1.5.5. Линии связи 34
1.5.6. Вычисления 35
1.5.7. Структура и интерфейс 35
1.5.8. Алгоритмы 38
1.5.9. Возмущения и неточности 38
Оглавление
901
1.5.10. Однородность 39
1.5.11. Стоимостной анализ 39
1.6. Резюме 40
1.7. Литература для последующего чтения 42
Глава 2. Введение в принципы обратной связи 43
2.1. Введение 43
2.2. Основная цель управления 43
2.3. Поясняющий технический пример 45
2.3.1. Эксплуатационные характеристики 46
2.3.2. Моделирование 47
2.3.3. Обратная связь и упреждение 48
2.3.4. Первый пример компромисса 50
2.4. Формулировка задачи 50
2.5. Решение задач управления через инверсию 52
2.6. Глубокая обратная связь и инверсия 56
2.7. От разомкнутой структуры к структуре с замкнутым
контуром 57
2.8. Компромиссы, учитываемые при выборе усиления обратной
связи 59
2.9. Измеряемые величины 60
2.10. Резюме 61
2.11. Литература для последующего чтения 63
Глава 3. Моделирование 64
3.1. Введение 64
3.2. Разумное обоснование для моделей 64
3.3. Сложность модели 65
3.4. Создание моделей 68
3.5. Структуры моделей 69
3.6. Модели пространства состояний 70
3.6.1. Общий случай 70
3.6.2. Линейные модели пространства состояний 70
3.7. Решение непрерывных моделей пространства состояний 73
3.8. Модели с дифференциальными и разностными уравнениями
произвольного порядка 74
3.9. Ошибки моделирования 75
3.10. Линеаризация 77
3.11. Изучаемые задачи 82
3.12. Резюме 83
3.13. Литература для последующего чтения 84
3.14. Задачи для читателя 85
Глава 4. Непрерывные сигналы и системы 89
4.1. Введение 89
4.2. Линейные непрерывные модели 89
4.3. Преобразования Лапласа 90
Определение преобразования Лапласа 91
4.4. Преобразование Лапласа. Свойства и примеры 91
4.5. Передаточные функции 94
4.5.1. Модели в виде дифференциальных уравнений
произвольного порядка 94
902 Оглавление
4.5.2. Передаточные функции для непрерывных моделей в
пространстве состояний 95
4.6. Устойчивость передаточных функций 98
4.7. Реакция линейных систем на импульсные и ступенчатые
сигналы 98
4.8. Полюсы, нули и временные характеристики 100
4.8.1. Полюсы 101
4.8.2. Нули 105
4.9. Частотная характеристика 110
4.9.1. Диаграммы Боде 112
4.9.2. Фильтрация 115
4.9.3. Искажения и точность воспроизведения 117
4.10. Преобразование Фурье 118
4.10.1. Определение преобразования Фурье 118
4.10.2. Применения преобразований Фурье 119
4.11. Часто встречающиеся модели 123
4.12. Ошибки моделирования линейных систем 125
4.13. Границы ошибок моделирования 129
4.14. Резюме 129
4.15. Литература для последующего чтения 134
4.16. Задачи для читателя 135
Часть II. Основы SISO-систем управления 141
Введение 142
Глава 5. Анализ замкнутых SISO-систем управления 143
5.1. Введение 143
5.2. Структуры систем с обратной связью 143
5.3. Функции номинальной чувствительности 147
5.4. Устойчивость замкнутой системы в зависимости от
характеристического полинома 149
5.5. Устойчивость и анализ полиномов 151
5.5.1. Определение задачи 151
5.5.2. Некоторые интересные свойства полиномов 151
5.5.3. Алгоритм Рауса 152
5.6. Корневой годограф 157
5.7. Определение номинальной устойчивости с помощью частотной
характеристики 160
5.8. Относительная устойчивость: запасы устойчивости и
максимальная чувствительность 166
5.9. Робастность 168
5.9.1. Реальные чувствительности 168
5.9.2. Робастная устойчивость 169
5.9.3. Линейное управление нелинейными объектами 173
5.10. Резюме 173
5.11. Литература для последующего чтения 176
5.12. Задачи для читателя ( 176
Глава 6. Классическое ПИД-управление 180
6.1. Введение 180
6.2. ПИД-структура 180
6.3. Эмпирическая настройка 184
6.4. Метод колебаний Зиглера—Никольса (3—Н) 184
Оглавление
903
6.5. Методы, основанные на использовании кривой отклика
процесса 188
6.6. Компенсаторы опережения-задержки 191
6.7. Дистилляционная колонна 193
6.8. Резюме 196
6.9. Литература для последующего чтения 197
6.10. Задачи для читателя 197
Глава 7. Синтез SISO-регуляторов 199
7.1. Введение 199
7.2. Подбор полинома 200
7.2.1. Основная формулировка 200
7.2.2. Ограничение решения 204
7.3. ПИ- и ПИД-синтез; повторное рассмотрение с позиций
назначения полюсов 207
7.4. Упредитель Смита 209
7.5. Резюме 211
7.6. Литература для последующего чтения 212
7.7. Задачи для читателя 212
Часть III. Проектирование SISO-систем управления 215
Введение 216
Глава 8. Фундаментальные ограничения SIS О-управления 217
8.1. Введение 217
8.2. Датчики 218
8.2.1. Шумы 218
8.2.2. Динамика датчика 219
8.3. Исполнительные механизмы 219
8.3.1. Максимальное перемещение исполнительного
механизма 220
8.3.2. Минимальное перемещение исполнительного
механизма 222
8.4. Возмущения 222
8.5. Ограничения, связанные с неточностью модели 223
8.6. Структурные ограничения 224
8.6.1. Общие соображения 224
8.6.2. Запаздывания 224
8.6.3. Интерполяционные ограничения 226
8.6.4. Влияние интеграторов разомкнутой системы 228
8.6*5. Более общие влияния полюсов и нулей разомкнутой
системы 230
8.6.6. Влияние полюсов и нулей, находящихся на мнимой оси 237
8.7. Промышленный пример (эффект затягивания на реверсивном
прокатном стане) 240
8.8. Технические средства 244
8.8.1. Альтернативные датчики 245
8.8.2. Исполнительные механизмы 246
8.8.3. Механизмы противонакопления 247
8.8.4. Средства для минимальных перемещений
исполнительного механизма 249
8.8.5. Изменения структуры 249
8.9. Однородность проекта; повторное рассмотрение 251
904 Оглавление
8.10. Резюме 252
8.11. Литература для последующего чтения 254
8.12. Задачи для читателя 255
Глава 9. Ограничения проекта в частотной области 258
9.1. Введение 258
9.2. Интегральные ограничения Воде, накладываемые на
чувствительность 259
9.3. Интегральные ограничения на дополнительную
чувствительность 263
9.4. Ограничение на чувствительность, определяемое интегралом
Пуассона 266
9.5. Ограничение на дополнительную чувствительность,
определяемое интегралом Пуассона 272
9.6. Пример компромиссов проекта 274
9.7. Резюме 277
9.8. Литература для последующего чтения 278
9.9. Задачи для читателя 280
Глава 10. Структурные проблемы SISO-систем управления 282
10.1. Введение 282
10.2. Модели для детерминированных возмущений и эталонных
воздействий 282
10.3. Принцип внутренней модели применительно к возмущениям 284
10.3.1. Входные точки возмущений 284
10.3.2. Компенсация возмущения в установившемся
состоянии 284
10.3.3. Назначение полюсов 286
10.3.4. Промышленный пример: компенсация
эксцентриситета валков прокатного стана 287
10.4. Принцип внутренней модели для отслеживания эталонного
воздействия 288
10.5. Упреждение 289
10.5.1. Упреждение эталонного воздействия 290
10.5.2. Упреждение возмущения 292
10.6. Промышленные примеры управления с упреждением 297
10.6.1. Эффект затягивания у реверсивного прокатного
стана; повторное рассмотрение 297
10.7. Каскадное управление 300
10.8. Резюме 304
10.9. Литература для последующего чтения 307
10.10. Задачи для читателя 307
Глава 11. Работа при наличии ограничений 310
11.1. Введение 310
11.2. Накопление 311
11.3. Схема противонакопления 312
11.3.1. Интерпретация в терминах обеспечения условий — 317
11.4. Насыщение переменных состояния 318
11.4.1. Переключение замещением с гистерезисом 320
11.4.2. Взвешенное переключение 321
11.5. Введение в модельное прогнозирующее управление 323
11.6. Резюме 324
Оглавление
905
11.7. Литература для последующего чтения 325
11.8. Задачи для читателя 326
Часть IV. Цифровое управление 331
Введение 332
Глава 12. Модели дискретных систем 333
12.1. Введение 333
12.2. Квантование 333
12.3. Восстановление сигнала 335
12.4. Линейные дискретные модели 336
12.5. Оператор сдвига 337
12.6. Z-преобразование 337
12.7. Дискретные передаточные функции 340
12.8. Дискретные модели в дельта-области 343
12.9. Дискретное дельта-преобразование 345
12.10. Дискретные передаточные функции (форма дельта-
преобразования) : 349
12.11. Передаточные функции и импульсные характеристики 349
12.12. Устойчивость дискретных систем 350
12.12.1. Связь с полюсами 350
12.12.2. Устойчивость в дельта-области 350
12.13. Дискретные модели для квантованных непрерывных систем 351
12.13.1. Использование моделей непрерывных передаточных
функций 352
12.14. Использование непрерывной модели пространства состояний 353
12.14.1. Результат в форме оператора сдвига 354
12.14.2. Результат в форме дельта-оператора 355
12.14.3. Некоторые сравнения формы оператора сдвига и
дельта-оператора 355
12.15. Частотные характеристики импульсных систем 356
12.16. Резюме 359
12.17. Литература для последующего чтения 361
12.18. Задачи для читателя 362
Глава 13. Цифровое управление 365
13.1. Введение 365
13.2. Дискретные функции чувствительности 365
13.3. Нули импульсных систем 367
13.4. Является ли специальная теория цифровых систем
действительно необходимой? 370
13.5. Приближенные непрерывные проекты 370
13.6. Цифровое проектирование в моменты квантования 375
13.6.1. Проектирование во временной области 375
13.6.2. Минимальная модель 376
13.6.3. Оптимальное по времени апериодическое управление 381
13.6.4. Проектирование цифровых систем с помощью
назначения полюсов 383
13.7. Принцип внутренней модели для цифрового управления — 386
13.7.1. Периодическое управление 387
13.8. Фундаментальные ограничения характеристик 390
13.9. Резюме 394
13.10. Литература для последующего чтения 396
906 Оглавление
13.11. Задачи для читателя 397
Глава 14. Гибридное управление 401
14.1. Введение 401
14.2. Гибридный анализ 401
14.3. Модели для гибридных систем управления 401
14.4. Анализ межтактового поведения 405
14.5. Периодическое управление; повторное рассмотрение 407
14.6. Формула суммирования Пуассона 408
14.7. Резюме 410
14.8. Литература для последующего чтения 411
14.9. Задачи для читателя 412
Часть V. Продвинутое SISO-управление 417
Введение 418
Глава 15. Параметризация SISO-регуляторов 419
15.1. Введение 419
15.2. Инверсия разомкнутого контура; повторное рассмотрение ... 420
15.3. Аффинная параметризация: случай устойчивого объекта ... 421
15.3.1. Параметризация 421
15.3.2. Соображения насчет проекта 422
15.3.3. Неминимально-фазовые нули 423
15.3.4. Относительная степень модели 424
15.3.5. Подавление возмущений 424
15.3.6. Управляющее воздействие 429
15.3.7. Робастность 429
15.3.8. Выбор передаточной функции Q. Выводы для случая
устойчивых полюсов разомкнутого контура 430
15.4. Синтез ПИД-регулятора с помощью аффинной
параметризации 431
15.4.1. Модели объектов для ПИД-управления 431
15.4.2. Модели первого порядка 431
15.4.3. Модели второго порядка со средним демпфированием 433
15.4.4. Слабо демпфированные модели 435
15.4.5. Модели с запаздыванием, использующие
аппроксимацию Паде 439
15.5. Аффинная параметризация для систем, содержащих
запаздывание 440
15.6. Нежелательные полюсы замкнутого контура 443
15.6.1. Интерполяционные ограничения 443
15.6.2. Проектирование ПИД-регулятора; повторное
рассмотрение 446
15.6.3. Модели с интегрированием 449
15.7. Аффинная параметризация: случай неустойчивого
разомкнутого контура 452
15.8. Дискретные системы 459
15.9. Резюме 460
15.10. Литература для последующего чтения 464
15.11. Задачи для читателя 465
Глава 16. Проектирование систем управления на основе оптимизации . 468
16.1. Введение 468
Оглавление
907
16.2. Оптимальный Q-синтез (аффинный) 469
16.2.1. Общие идеи 469
16.2.2. Квадратичный оптимальный Q-синтез 470
16.3. Проектирование робастной системы управления с
доверительными границами 475
16.3.1. Статистические доверительные границы 475
16.3.2. Проектирование робастных систем управления 476
16.3.3. Частотные взвешенные ошибки 478
16.3.4. Добавление интегрирующих свойств 482
16.3.5. Простой пример 483
а) Случай без ограничения, связанного с интегрирующими
свойствами 484
б) Случай при наличии ограничения, связанного с
интегрирующими свойствами 485
в) Результаты моделирования замкнутых систем 485
16.3.6. Неустойчивый объект 488
16.4. Фундаментальные ограничения управления с минимальными
затратами 490
16.5. Ограничения в частотной области; повторное рассмотрение . 493
16.6. Резюме 495
16.7. Литература для последующего чтения 495
16.8. Задачи для читателя 497
Глава 17. Линейные модели пространства состояний 501
17.1. Введение 501
17.2. Линейные непрерывные модели пространства состояний 502
17.3. Преобразование подобия 502
17.4. Передаточные функции; повторное рассмотрение 504
17.5. Переход от передаточной функции к представлению в
пространстве состояний 505
17.6. Управляемость и стабилизируемость 507
17.7. Наблюдаемость и определяемость 516
17.8. Каноническое разложение 521
17.9. Компенсация нулей и полюсов и свойства системы 523
17.10. Резюме 526
17.11. Литература для последующего чтения 527
17.12. Задачи для читателя 528
Глава 18. Синтез с помощью методов пространства состояний 532
18.1. Введение 532
18.2. Назначение полюсов системы с обратной связью по состоянию 532
18.3. Наблюдатели 536
18.4. Объединение обратной связи по переменным состояния с
наблюдателем 541
18.5. Интерпретации передаточной функции 543
18.5.1. Передаточная функция наблюдателя 543
18.5.2. Передаточная функция обратной связи по оценкам
переменных состояния 545
18.5.3. Передаточная функция для инновационного процесса 548
18.6. Иное толкование аффинной параметризации всех
стабилизирующих регуляторов 549
18.7. Интерпретация принципа внутренней модели в пространстве
состояний 550
908 Оглавление
18.8. Компромиссы обратной связи по состоянию и наблюдателей 555
18.9. Ограничения на входе в контексте обратной связи по
восстановленному состоянию 557
18.10. Резюме 557
18.11. Литература для последующего чтения 560
18.12. Задачи для читателя •... 560
Глава 19. Введение в нелинейное управление 563
19.1. Введение 563
19.2. Линейное управление нелинейным объектом 563
19.2.1. Влияние ошибок моделирования 564
19.3. Переключаемые линейные регуляторы 569
19.4. Управление системами с гладкими нелинейностями 571
19.5. Статические нелинейности на входе 572
19.6. Гладкие динамические нелинейности для устойчивых и
инверсно устойчивых моделей 573
19.7. Проблемы возмущений при нелинейном управлении 580
19.8. Более общие объекты с гладкими нелинейностями 585
19.8.1. Нелинейный наблюдатель 586
19.8.2. Проектирование нелинейной обратной связи 587
19.9. Негладкие нелинейности 588
19.10. Устойчивость нелинейных систем 590
19.10.1. Устойчивость по Ляпунову 591
19.10.2. Круговой критерий 592
19.10.3. Определение устойчивости от входа к выходу с
помощью методов функционального пространства 597
19.11. Обобщенная линеаризация обратной связи для инверсно-
неустойчивых объектов 600
19.12. Резюме 608
19.13. Литература для последующего чтения 609
19.14. Задачи для читателя 611
Часть VI. Основы МШО-управления 613
Введение 614
Глава 20. Анализ MIMO-контуров управления 615
20.1. Введение 615
20.2. Поясняющие примеры 615
20.3. Модели для мультипеременных систем 618
20.3.1. Модели пространства состояний; повторное
рассмотрение 618
20.3.2. Модели в виде передаточных функций; повторное
рассмотрение 619
20.3.3. Матричное дробное описание 620
20.3.4. Связь между моделями пространства состояний и
матричными дробными описаниями 621
20.3.5. Полюсы и нули МШО-систем 624
20.3.6. Формы Смита—МакМиллана 626
20.4. Основной MIMO-контур управления 626
20.5. Устойчивость замкнутого контура 629
20.5.1. Устойчивость МДО-формы 629
20.5.2. Устойчивость и частотные характеристики 631
Оглавление
909
20.6. Реакция в установившемся состоянии для ступенчатых
входных сигналов 633
20.7. Анализ в частотной области 634
20.7.1. Главные усиления и главные направления 634
20.7.2. Отслеживание 637
20.7.3. Компенсация возмущений 638
20.7.4. Подавление шума измерения 639
20.7.5. Направленность в анализе чувствительности 639
20.7.6. Направленность в связи с компенсацией полюсов и
нулей 642
20.8. Проблемы робастности 644
20.9. Резюме 647
20.10. Литература для последующего чтения 649
20.11. Задачи для читателя 650
Глава 21. Использование SIS О-технологий в MIMO-управлении 654
21.1. Введение 654
21.2. Полностью децентрализованное управление 654
21.3. Объединение в пары входов и выходов 658
21.4. Проблемы робастности при децентрализованном управлении 662
21.5. Упреждающее воздействие в децентрализованном управлении 664
21.6. Преобразование MIMO-задач в SISO-задачи 666
21.7. Изучение промышленной установки (управление
поверхностью полосы) 668
21.8. Резюме 673
21.9. Литература для последующего чтения 674
21.10. Задачи для читателя 674
Часть VII. Проектирование MIMO-систем управления 677
Введение 678
Глава 22. Проектирование через методы оптимального управления 679
22.1. Введение 679
22.2. Обратная связь по оценке состояний 680
22.3. Динамическое программирование и оптимальное управление 682
22.4. Линейный квадратичный регулятор (ЛКР) 685
22.5. Свойства линейного квадратичного оптимального регулятора 688
22.5.1. Краткий обзор свойств 688
22.5.2. Более детальный обзор свойств 688
22.6. Подбор модели, основанный на линейных квадратичных
оптимальных регуляторах 692
22.6.1. Формулировка проблемы 692
22.6.2. Преобразование к временной области 693
22.6.3. Решение - 694
22.7. Дискретные оптимальные регуляторы 695
22.8. Связь с технологией назначения полюсов 696
22.9. Проектирование наблюдателя 698
22.10. Линейные оптимальные фильтры 699
22.10.1. Подход, основанный на вероятностной модели шума 699
22.10.2. Фильтр установившегося состояния как
детерминированная задача подбора модели 705
22.10.3. Дискретный оптимальный квадратичный фильтр ... 709
22.10.4. Вероятностные модели шумов 711
910 Оглавление
22.10.5. Оптимальное упреждение 711
22.10.6. Оценка состояния с непрерывными моделями и
квантованными наблюдениями 712
22.11. Обратная связь по оценке состояния 713
22.12. Интерпретация с помощью передаточной функции 714
22.13. Получение интегрирующих свойств при синтезе линейного
квадратичного регулятора ; 716
22.14. Промышленные приложения 718
22.14.1. Отслеживание геостационарного спутника 719
22.14.2. Оценка массы цинкового покрытия на непрерывных
линиях гальванизации 722
22.14.3. Компенсация эксцентриситета валков прокатного
стана 725
22.14.4. Управление вибрацией в гибких структурах 729
22.15. Резюме 731
22.16. Литература для последующего чтения 734
22.17. Задачи для читателя 736
Глава 23. Модельное прогнозирующее управление 739
23.1. Введение 739
23.2. Противонакопление; повторное рассмотрение 740
23.3. Что такое модельное прогнозирующее управление? 745
23.4. Устойчивость 748
23.5. Линейные модели с квадратичной функцией стоимости 751
23.6. Восстановление состояния и предсказание возмущения 757
23.6.1. Регулятор с одной степенью свободы 757
23.6.2. Интегрирующие свойства 758
23.7. Стабилизация качки судна с помощью перекладки руля 758
23.8. Резюме 763
23.9. Литература для последующего чтения 765
23.10. Задачи для читателя 766
Глава 24. Фундаментальные ограничения в МШО-управлении 770
24.1. Введение '. 770
24.2. Передаточная функция замкнутого контура 771
24.3. Принцип внутренней модели для МШО-случая 772
24.4. Стоимость принципа внутренней модели 773
24.5. Полюсы и нули в ППП 773
24.6. Ограничения во временной области 774
24.7. Ограничения интеграла Пуассона на МШО-дополнительную
чувствительность 779
24.8. Ограничения интеграла Пуассона на МШО-чувствительность 781
24.9. Интерпретация 783
24.10. Промышленное приложение: сахарный отжимной пресс 785
24.10.1. Описание модели 785
24.10.2. SISO-проект 788
24.10.3. MIMO-проект. Предварительные соображения 789
24.10.4. MIMO-проект. Динамическая развязка 790
24.10.5. MIMO-проект. Треугольная развязка 792
24.11. Неквадратные системы 795
24.12. Дискретные системы 800
24.13. Резюме 800
24.14. Литература для последующего чтения 802
Оглавление
911
24.15. Задачи для читателя 803
Часть VIII. Продвинутое МШО-управление 805
Введение 806
Глава 25. Параметризация MIMO-регуляторов 807
25.1. Введение 807
25.2. Аффинная параметризация: устойчивые МШО-объекты 807
25.3. Достигнутые чувствительности 809
25.4. Относительная степень модели 809
25.4.1. Относительная степень в МШО-случае 809
25.4.2. Приближенные инверсии 817
25.5. Неминимально-фазовые нули 819
25.5.1. Z-матрицы взаимодействия 819
25.5.2. Q-синтез с использованием матриц взаимодействия и
z-матриц взаимодействия 822
25.5.3. Q-синтез как проблема подбора модели 827
25.5.4. Подбор модели при решении без использования весов 828
25.5.5. Применение Q-синтеза для неминимально-фазовых
нулей .' 830
25.5.6. Q-синтез децентрализованных регуляторов 834
25.6. Аффинная параметризация: неустойчивые МШО-объекты .. 836
25.7. Реализация в пространстве состояний 839
25.8. Резюме 840
25.9. Литература для последующего чтения 842
25.10. Задачи для читателя 843
Глава 26. Развязка 846
26.1. Введение 846
26.2. Устойчивые системы 847
26.2.1. Минимально-фазовый случай 847
26.2.2. Неминимально-фазовый случай 850
26.3. Пред- и пост-диагонализация 854
26.4. Неустойчивые системы 856
26.4.1. Проект с двумя степенями свободы, основанный на
предварительной фильтрации эталонного сигнала ... 856
26.4.2. Проект с двумя степенями свободы, использующий
аффинную параметризацию 861
26.4.3. Проект, основанный на обратной связи по состоянию,
с одной степенью свободы 863
26.5. Нули развязанных и частично развязанных систем 865
26.6. Ограничения в частотной области для динамически
развязанных систем 869
26.7. Стоимость развязки „ 871
26.8. Насыщение на входе 875
26.9. Механизм противонакопления в МШО-случае 876
26.10. Резюме 884
26.11. Литература для последующего чтения 886
26.12. Задачи для читателя 887
Именной указатель 889
Предметный указатель 892
Учебное издание
Грэм К. Гудвин Стефан Ф. Гребе Марио Э. Сальгадо
Проектирование систем управления
Ведущий редактор Копылов Б. И.
Художник Лозинская Н. А.
Технический редактор Блёнцева Т. Н.
Компьютерная верстка в пакете 1А'1ЁХ2е
с использованием кириллических шрифтов семейства LH Лапко О. Г.
Подписано в печать 25.03.04 г. Формат 70 х 100/16
Гарнитура Computer Modern. Бумага офсетная. Печать офсетная.
Усл. печ. л. 74,1. Тираж 3000 экз. Заказ 1782
Издательство «БИНОМ. Лаборатория знаний»
Телефон (095)955-0398, e-mail:lbz@aha.ru
Отпечатано с готовых диапозитивов
в полиграфической фирме «Полиграфист»
160001, г. Вологда, ул. Челюскинцев, 3
Прилагаемый к книге CD-'
• Подробные сведения об авторах
• Введения и резюме ко всем главам и р
• Интерактивные учебные примеры, ил.
применение рассмотренных в книге N..
к реальным промышленным системам («виртуальная
лаборатория»)
• Приложения, содержащие математический аппарат,
использованный при разработке изложенных методов
проектирования
• Слайды лекции памяти X. Боде, прочитанной Г. Гудвином на
38-й Конференции по принятию решений и управлению в
1999 г. (с комментариями)
Об авторах
Грэм Гудвин более 30 лет работает в области систем
управления в учебных и исследовательских институтах и в
промышленности. Он автор семи книг, 500 статей и обладатель
четырех патентов. В настоящее время Грэм является директором
специального исследовательского центра по системам
управления.
Карьера Стефана Гребе охватывает и академические, и
промышленные виды деятельности. Он был координатором
исследований в Центре промышленного управления в
Университете Ньюкасла, а в настоящее время является
руководителем отделения оптимизации и автоматизации завода
очистки топлива аэропорта Швехат фирмы OMV, Австрия.
Марио Сальгадо получил степень магистра по системам
управления Имперского колледжа и доктора философии
Университета Ньюкасла. В настоящее время он является
научным сотрудником кафедры электроники в Техническом
университете Федерико Сайта Марии, Вальпараисо, Чили. Его
интересы включают обработку сигналов и проектирование
систем управления.
ISBN 5-94774-128-8