/

















































































































































































































































Text
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное
автономное образовательное учреждение
высшего образования
«Южный федеральный университет»
Инженерно-технологическая академия
Н.К. Полуянович
М.Н. Дубяго
СИСТЕМЫ ЭЛЕКТРОНИКИ
И АВТОМАТИКИ АВТОМОБИЛЕЙ
И ТРАКТОРОВ
Учебное пособие
Ростов-на-Дону-Т аганрог
Издательство Южного федерального университета
2017
УДК 62-83 (075.8)
Рецензенты:
доктор физико-математических наук, профессор, зав. кафедрой элек¬
тротехники ДГТУ, Лаврентьев А.А.;
доктор технических наук, профессор Донского государственного
технического университета, Бурлакова В.Э.
Полуянович Н.К., Дубяго М.Н. Системы электроники и автоматики
автомобилей и тракторов: учебное пособие. - Таганрог: Изд-во ЮФУ,
2017.-240 с.
Рассмотрен принцип действия, характеристики, структурные и электриче¬
ские схемы управления основных систем электроники и автоматики автомоби¬
лей тракторов.
Учебное пособие предназначено для изучения принципов работы, построе¬
ния структурных и электрических схем управления системами электроники и
автоматики автомобилей тракторов. Рассмотрены методы диагностирования
основных систем автоматики автомобилей, а именно электроснабжения автомо¬
биля, электростартерного пуска, электронные системы зажигания, электронное
управление автомобильным двигателем, антиблокировочная система тормозов
и ABS, вопросы автоматизации рабочих процессов автомобилей и тракторов.
Основная цель работы состоит в том, чтобы научить студентов практиче¬
скому приложению знаний и навыков по отдельным разделам курса «Системы
электроники и автоматики автомобилей тракторов», приобретению самостоя¬
тельности при решении конкретных технических задач в области проектирова¬
ния электропривода.
Пособие может быть использовано для курсового и дипломного проекти¬
ровании по направлению подготовки 13.03.02 «Электроэнергетика и электро¬
техника» профиля «Электрооборудование предприятий, организаций и учре¬
ждений, электрического транспорта, автомобилей и тракторов».
Для студентов направления 13.03.02 «Электроэнергетика и электротехни¬
ка» по профилю «Электрооборудование предприятий, организаций и учрежде¬
ний, электрического транспорта, автомобилей и тракторов»
Учебное пособие написано при поддержке гранта ЮФУ №ВнГр-
07/2017-15 «Разработка теоретических основ и методов построения интеллекту¬
альных многосвязных систем управления процессами производства, транспор¬
тировки, распределения и потребления энергии»".
УДК 62-83 (075.8)
© Южный федеральный университет, 2017г
© Полуянович Н.К., 2017
© Дубяго М.Н., 2017
2
5
5
6
10
15
24
29
35
40
42
48
54
55
56
58
63
65
70
94
101
108
112
113
119
125
128
132
132
135
136
137
СОДЕРЖАНИЕ
ВВЕДЕНИЕ В КУРС СИСТЕМЫ ЭЛЕКТРОНИКИ И
АВТОМАТИКИ АВТОМОБИЛЕЙ И ТРАКТОРОВ
Тенденции развития бортового электрического и электрон¬
ного оборудования
Еироскопическая система VDC
ДАТЧИКИ АВТОМОБИЛЬНЫХ ЭЛЕКТРОННЫХ СИСТЕМ
Датчики давления
Датчики температуры и влажности
Датчики расхода жидкостей и газов
Датчики состава выхлопных газов
Датчики угловых и линейных перемещений и положений...
Бесконтактные датчики
Радарные и другие специальные датчики
Степени интеграции
ЭЛЕКТРОННОЕ УПРАВЛЕНИЕ АВТОМОБИЛЬНЫМ
ДВИЕ АТЕЛЕМ
Уменьшение загрязнения окружающей среды выхлопными га¬
зами
Функции электронных систем управления бензиновым дви¬
гателем
Режимы работы системы управления двигателем
Системы подачи топлива
Электронное управление двигателем
Датчики электронных систем управления двигателем
Исполнительные устройства систем впрыска
Диагностика системы топливоподачи
ЭЛЕКТРОСНАБЖЕНИЕ АВТОМОБИЛЯ
Автомобильные генераторы
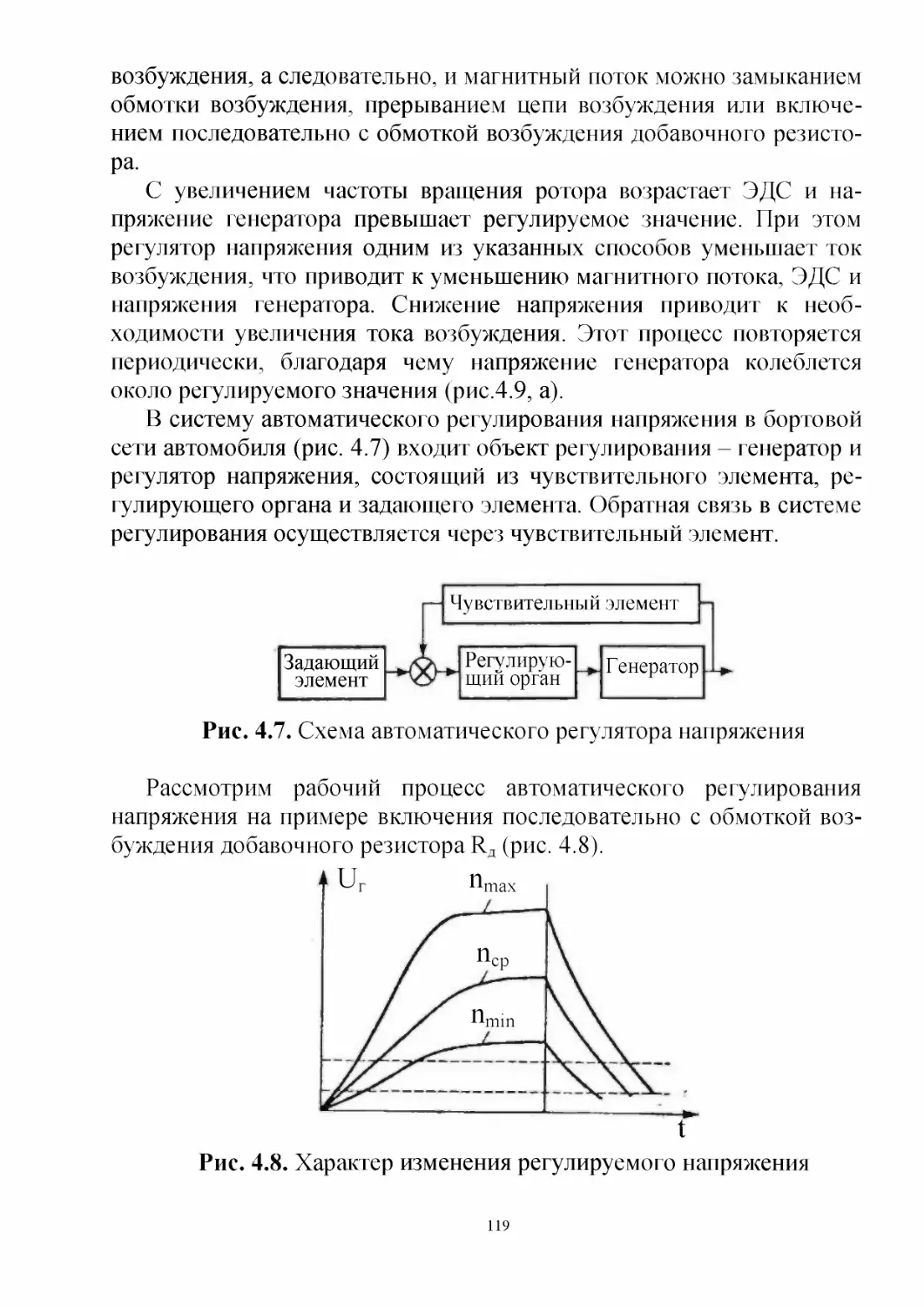
Автоматическое регулирование напряжения в сети автомобиля
Аккумуляторные батареи
Методы диагностирования системы электроснабжения
ЭЛЕКТРОПРИВОДНЫЕ СИСТЕМЫ
Двигатели постоянного тока
Электродвигатели предпусковых подогревателей
Электродвигатели для привода вентиляционных и отопи¬
тельных установок
Электродвигатели для привода стеклоочистительных уста¬
новок „
141
143
143
149
153
156
157
165
167
177
178
182
187
189
194
196
201
206
209
211
217
219
220
221
225
227
229
230
231
234
236
238
.239
Стеклоочистители, омыватели и фароочистители
АВТОМАТИЗАЦИЯ РАБОЧИХ ПРОЦЕССОВ АВТОМО¬
БИЛЕЙ И ТРАКТОРОВ
Информационно-диагностическая система
Бортовые средства отображения информации
Приборные панели
Отображение информации на лобовом стекле
Навигационные системы автомобиля
Спутниковая позиционирующая система GPS
Системы охранной сигнализации и противоугонные устрой¬
ства
СИСЕМА ЭЛЕКТРОСТАРТЕРНОГО ПУСКА
Характеристики аккумуляторной батареи в режиме пуска
Особенности стартерных электродвигателей
Электрические схемы управления стартером
Анализ работы системы электростартерного пуска
Техническое обслуживание и методы диагностирования си¬
стемы пуска
ЭЛЕКТРОННЫЕ СИСТЕМЫ ЗАЖИГАНИЯ
Классическая система зажигания
Контактная система зажигания
Построение бесконтактных систем зажигания автомобиль¬
ных ДВС
Электронная система зажигания
Датчики, входящие в систему зажигания
Диагностика системы зажигания
АНТИБЛОКИРОВОЧНАЯ СИСТЕМА ТОРМОЗОВ
Антиблокировочная система тормозов автомобиля
Разновидности систем ABS
Теоретические предпосылки полезного функционирования
системы ABS
Функциональная модель системы ABS для одного переднего
колеса
Место установки
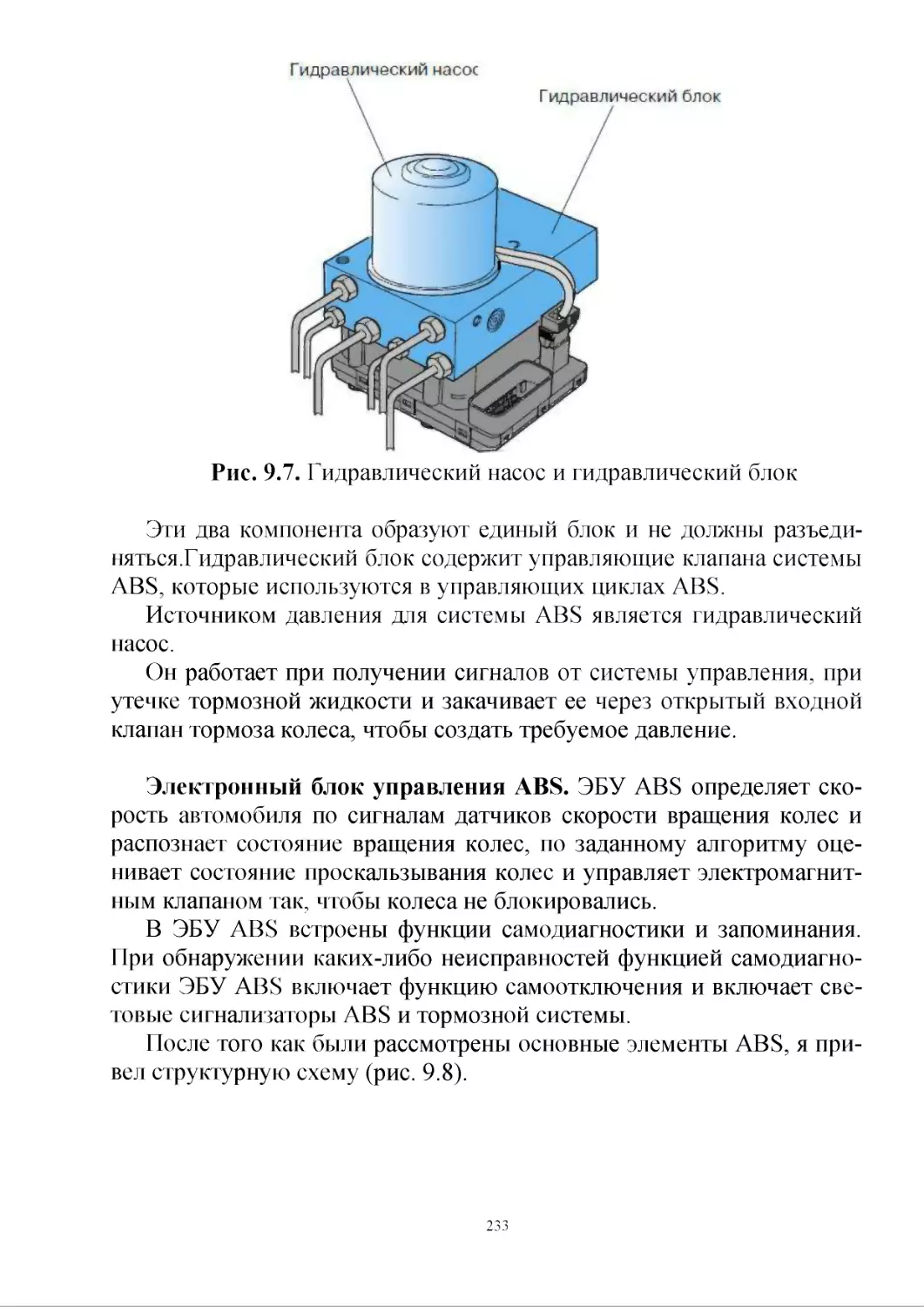
Основные элементы и их функции
Управление гидравлическим давлением ABS
Диагностика системы ABS
Заключение
Литература
4
1. ВВЕДЕНИЕ В КУРС СИСТЕМЫ ЭЛЕКТРОНИКИ И
АВТОМАТИКИ АВТОМОБИЛЕЙ И ТРАКТОРОВ
Успешное развитие автомобильной бортовой электроники каждые
8-10 лет значительно повышает качественные показатели вновь вы¬
пускаемых автомобилей. Интерес к автомобильным электронным си¬
стемам постоянно растет.
В работе изложены основные принципы построения и функцио¬
нальные особенности новейших электронных систем автоматического
контроля, управления и регулирования, которые в последние годы
находят все более широкое распространение в бортовом оборудова¬
нии концептуальных автомобилей.
Это системы автоматического управления механическими узлами
и агрегатами, в которых ранее средства электронной автоматики не
применялись (газораспределительный механизм ДВС, гидравлические
тормоза, коробка переключения передач, рулевое и педальное управ¬
ление, ходовая часть, подвеска).
Это и системы с нетрадиционными для автомобиля функциями, с
помощью которых реализуются: круиз-контроль, спутниковая нави¬
гация, автопоиск, защита автомобиля от соударений, а пассажиров от
увечий, стабилизация устойчивости движения, защита экологии
окружающей среды, мультиплексная электропроводка, компьютери¬
зация контрольно-измерительных приборов, управление электромо¬
билем и другие новации.
Рассмотрены также входные преобразователи (датчики) и некото¬
рые выходные исполнительные устройства нетрадиционного назначе¬
ния.
1.1. Тенденции развития бортового электрического и
электронного оборудования
Автомобиль состоит из четырех основных агрегатов: двигателя
внутреннего сгорания (ДВС); кузова; шасси; - ходовой части.
Классические системы ЭСАУ: системы управления топливоподачей;
электронные системы управления гидравлическими тормозами; си¬
стемы управления зажиганием клапанами цилиндров; рециркуляцией
отработавших газов гибкое управление углом опережения зажигания
и энергией искрообразования; бортовая самодиагностика.
5
Системы управления клапанами применяются для отключения
группы цилиндров с целью экономии топлива и для регулирования
фаз газораспределения.
Системы управления рециркуляцией отработавших газов обеспе¬
чивают возврат во впускной трубопровод потребного количества от¬
работавших газов для смешивания их со свежей горючей смесью.
ЭСАУ обеспечивает пуск холодного двигателя, уменьшение вре¬
мени его нагрева перед началом движения.
Электронные антиблокировочные системы позволяют уменьшить
практически в 2 раза тормозной путь автомобиля на скользкой дороге,
исключая возможность возникновения заноса, и управлять автомоби¬
лем в сложных дорожных условиях.
Нетрадиционные бортовые автоматические системы; информаци¬
онная система водителя с микропроцессорным обеспечением; спутни¬
ковая навигационно-поисковая система; радарные и ультразвуковые
системы защиты автомобиля от столкновений и угона; системы по¬
вышения безопасности, комфорта людей в салоне; система круиз-
контроля; система «электронная карта»; мультиплексная электропро¬
водка.
Лингвистические функциональные преобразователи используют
компьютерные технологии обработки информации в ЭСАУ, работа¬
ющие с нечеткими подмножествами лингвистических переменных,
выраженных словами или предложениями на естественном (англий¬
ском) или искусственном (компьютерном) языке: повышается точ¬
ность и скорость обработки сигналов; усложнился интерфейс; необ¬
ходимо введение CAN-протокола в мультиплексную систему.
1.2. Гироскопическая система VDC
Г ироскопическая система VDC повышает курсовую устойчивость
автомобиля в сложных условиях движения, разработана на базе ЭС¬
АУ-Д (двигателем) и ЭСАУ-Т (тормозами).
YDC работает по принципу запрограммированного под нештатные
условия движения совместного воздействия на крутящий момент ДВС
посредством: системы ASR; антиблокировочной системы тормозов
АВ, чем исключается боковой снос автомобиля при поворотах и на
скользкой дороге. Водитель выполняет роль активного наблюдателя,
контролирующего и корректирующего поведение автомобиля.
6
Исследуются и применяются электромагнитные клапаны с элек¬
тронным управлением в газораспределительном механизме (ГРМ)
поршневого ДВС.
Создаются экологически чистые силовые установки для электро¬
мобилей. Городской автомобиль - гибридный электромобиль.
Совершенствуются международные стандарты OBD-1I (США) и
EOBD-1I (EU) к автомобильным электрическим и электронным си¬
стемам.
Автотронные системы, основные компоненты: электрические и
электронные узлы и блоки; механические, гидравлические, светооп¬
тические, ультразвуковые устройства, имеющие неэлектрическую
природу функционирования.
Эти комплексы управления не относятся ни к механическим, ни к
электрическим (электронным).
Автотронная система, управляя неэлектрическими процессами че¬
рез неэлектрическую периферию на выходе, сама управляется от сиг¬
налов, имеющих неэлектрическую природу, которые формируются
неэлектрической входной периферией.
Например, автотронная система VDCT-управления курсовой
устойчивостью движения автомобиля, функциональные взаимосвязи
которой с водителем и дорогой (рис.ЕІ), использует входную инфор¬
мацию: скорость движения; углы наклонения кузова; разность частот
вращения колес; угол поворота руля; атмосферные условия; давление
в шинах; состояние дорожного покрытия.
Неэлектрические проявления условий движения автомобиля с по¬
мощью входных неэлектрических преобразователей перерабатывают¬
ся в неэлектрические информационные сигналы:
• скорость движения - в круговую частоту вращения колес;
• углы вертикального наклонения - в механические переме¬
щения инерционных элементов в гироскопическом устройстве;
• угол поворота руля - в движение (поворот) светомодули¬
рующего (кодирующего) диска;
• давление в шинах - в прогиб упругой мембраны и т. д.
Полученные неэлектрические информационные сигналы посредством
входных датчиков (рис.ЕІ, поз. А, С, D) преобразуются в электрические
сигналы поворот кодирующего диска на руле - в цифровой электрический
код; круговая частота вращения колес - в последовательность электриче¬
ских импульсов с изменяющейся частотой следования; перемещение
инерционных элементов гироскопа, упругой мембраны датчика давления
- в аналоговые электрические сигналы, которые далее с помощью АЦП
7
перерабатываются в цифровые сигналы, пригодные для подачи на вход
МП. Микропроцессор - центральный орган управления автотронной
системы. Его функция заключается в преобразовании электрических
информационных сигналов об условиях движения, полученных с пе¬
риферии, в электрические сигналы управления, несущие информацию
об интенсивности и последовательности неэлектрических воздей¬
ствий на неэлектрические органы управления. Информация формиру¬
ется в МП в виде кодовых последовательностей электрических им¬
пульсов для непосредственного управления неэлектрическими орга¬
нами.
Рис.1.1. Система VDC
Составные части системы: I. Географические условия: извили¬
стость дороги, спуски, подъемы, повороты, перекрестки дорог, пере¬
езды. II. Дорожные условия: тип дорожного покрытия (гравий, бетон,
асфальт); асфальт сухой, мокрый, обледенелый; освещение дороги;
плотность транспортного потока. III. Климатические условия: атмо¬
сферные - температура, влажность, давление; температура асфальта.
IV. Техногенные условия: сцепление колес с дорогой по состоянию
протекторов шин; скорость вращения колес; скорость рыскания; бо¬
ковой увод автомобиля, боковой увод колес, боковое ускорение.
А - блок датчиков: угла поворота руля; угла поворота кузова ав¬
томобиля вокруг вертикальной оси (гироскоп); бокового ускорения.
8
В - УВР - управляющие реакции водителя, являющиеся откликом
субъективного мышления на дорожные условия движения; проявля¬
ются в зависимости от физического и психического состояния чело¬
века. С - блок датчиков: температуры, давления, влажности, темпера¬
туры асфальта (по давлению в шинах). D - блок колесных датчиков
(ДК) ABS и вычисляемых в ЭБУ системы YDC неэлектрических
входных параметров - ц, {n,q>,a,p,s,v\ Е - центральный боковой ком¬
пьютер (микропроцессор МП), в который интегрированы все логиче¬
ские и вычислительные функции четырех автоматических систем
управления YDC, ADS, ASR, ABS. Содержит оперативную (ОЗУ) и
постоянную (ПЗУ) память, а также входные аналогово-цифровые
(АЦП) и выходные цифроаналоговые (ЦАП) преобразователи.
F - блок оконечных преобразователей электрических сигналов в не¬
электрические воздействия:
а) ДИС/ВП - драйверы информационной системы водителя (ДИС)
и визуальный преобразователь (ВП) электрического сигнала в оптиче¬
ское изображение;
б) ЭДД/КД - электродвигатель (ЭДД) и клапан (КД) демпфирова¬
ния активной подвески (системы ADS);
в) ЭДН/НД - электродвигатель (ЭДН) и нагнетатель (НД) высоко¬
го давления в системе VDC;
г) ЭДТ/ГК - электродвигатель (ЭДТ) и гидроклапаны (ГХ) системы
ABS;
д) ШЭД/ДР - шаговый электродвигатель (ШЭД) и дроссельная за¬
слонка (ДР) системы ASR.
G - блок водительских органов управления: ВИ - визуальные индика¬
торы (стрелочные, электронные, дисплей и пр.); РК - рулевое колесо;
ПТ - педаль тормоза; ПГ - педаль акселератора (газа).
ЦАП - согласует энергетические уровни на выходе микропроцес¬
сора, преобразовывает сигнал из цифровой в аналоговую форму, уси¬
ливает по мощности сигнал.
Чтобы выполнить управляемое неэлектрическое воздействие на
неэлектрические органы управления, вслед за ЦАПами устанавлива¬
ются оконечные преобразователи электрических сигналов в механи¬
ческие или любые другие неэлектрические воздействия. Оконечные
преобразователи (блок F на рис. 1.1) являются выходными исполни¬
тельными устройствами автотронной системы, но не являются ее ин¬
формационным окончанием. В отличие от электронной системы авто¬
тронная система включает в свой состав и неэлектрические объекты
управления, которые и являются оконечными потребителями инфор-
9
мации: система подачи топлива в двигатель, тормозная система авто¬
мобиля, информационная система водителя с визуальными индикато¬
рами (ВИ), оптическим (зрительным) каналом управления (ОКУ).
Эти системы представляют собой выходную исполнительную пе¬
риферию автотронной системы, которая (периферия) под автоматиче¬
ским управлением микропроцессора, при крайне ограниченном (по¬
средством коррекции положения руля) участии водителя, обеспечива¬
ет наиболее оптимальный режим движения автомобиля в сложных
дорожных условиях или в аварийной ситуации.
2. ДАТЧИКИ АВТОМОБИЛЬНЫХ ЭЛЕКТРОННЫХ СИСТЕМ
Датчики преобразуют информацию неэлектрических параметров в
электрический сигнал - напряжение, ток, частоту, фазу и т. д. Эти
сигналы преобразуются в цифровой код и поступают в микро¬
контроллер. МК на основании значений этих сигналов и в соответ¬
ствии с заложенным ПО принимает решения, управляет через испол¬
нительные механизмы (реле, соленоиды, электродвигатели) объектом.
Классификация датчиков по видам систем автомобиля. Датчи¬
ки, входящие в систему топливоподачи: температуры охлаждающей
жидкости двигателя; положения дроссельной заслонки; массового
расхода воздуха; лямбда-зонд; детонации; положения коленчатого ва¬
ла; положения распределительного вала; температуры поступающего
воздуха; давления топлива в рампе форсунок; положения педали ак¬
селератора; давления топлива в баке; уровня топлива; пропусков вос¬
пламенения; положения клапана рециркуляции выхлопных газов; аб¬
солютного давления во впускном коллекторе; холостого хода; крутя¬
щего момента двигателя.
Датчики, входящие в систему зажигания: положения распредели¬
тельного вала; детонации; кислорода; температуры охлаждающей
жидкости двигателя; массового расхода воздуха; положения дрос¬
сельной заслонки; скорости автомобиля; положения коленчатого вала;
пропусков воспламенения; положения педали акселератора; темпера¬
туры поступающего воздуха; холостого хода; крутящего момента
двигателя.
Датчики, входящие в систему тормозов и АВС: скорости автомо¬
биля; скорости вращения ведущего вала коробки передач; выбранной
передачи КПП; скорости вращения руля; положения педали тормоза;
ю
скорости вращения автомобиля относительно вертикальной оси; вы¬
соты кузова по отношению к шасси; угла поворота руля; скорости
вращения колес; уровня тормозной жидкости; давления тормозной
жидкости; управления двигателем.
Датчики, входящие в систему безопасности: радарный датчик си¬
стемы торможения; радарный датчик системы предотвращения
столкновения; скорости автомобиля; ускорения при фронтальном
столкновении; ускорения при боковом столкновении; наличия пасса¬
жира на сидении; веса пассажира; подушки безопасности; ремня без¬
опасности; алкометр; усталости водителя; положения автомобиля на
дороге.
Датчики, входящие в систему комфорта: атмосферного давления;
температуры окружающей среды; температуры воздуха в салоне;
влажности; дождя и тумана; угла поворота руля; открытой/закрытой
двери, багажника; капота; давления в шинах; азимута; света; положе¬
ния сидений.
Датчики, входящие в систему оповещения водителя: аварийного
уровня топлива; аварийного уровня масла двигателя; аварийного
уровня охлаждающей жидкости; аварийного уровня тормозной жид¬
кости; аварийного уровня жидкости в бачке омывателя; аварийного
уровня масла в КПП; давления в шинах; ремня безопасности; спидо¬
метра; тахометра; давления масла; уровня топлива; стояночного тор¬
моза; парковки; состояния электрических цепей; износа тормозных
колодок.
Датчики, входящие в систему курсовой устойчивости (YDC): ско¬
рости колеса; давления в тормозной системе; угла поворота руля; ско¬
рости рыскания; бокового ускорения.
Датчики, входящие в систему сигнализации: датчик удара (шок-
сенсор); звуковой (акустический) датчик; датчик качания; датчик из¬
менения напряжения; ультразвуковой датчик; микроволновый датчик
(радар); емкостной датчик; инфракрасный датчик.
Классификация автомобильных датчиков приведена на рис. 2.1.
п
Класификация автомобильных датчиков
Датчики, входящие в
систему топливоподачи
Датчики, входящие в
систему зажигания
Датчики, входящие в
тормозну систему
Датчики, входящие в
систему безопасности
Датчик,и входящие в
систему комфорта
Датчики, входящие в
систему оповещения
водителя
▼
'
’ '
’
- температуры
- положение
- скорости автомобиля;
- радарный датчик
- атмосферного
- аварийного уровня
распределительного
- скорости вращения
системы торможения;
давления;
топлива;
- положение дроссельной
вала;
ведущего вала коробки
- радарный датчик
- температуры
- аварийного уровня
заслонки;
- детонации;
передач;
системы
окружающей среды;
масла двигателя;
- массового расхода
- кислорода;
- выбранной передачи
предотвращения
- температура воздуха
- аварийного уровня
воздуха;
- температуры
КПП;
столкновения;
в салоне;
охлаждающей жидкости;
- лямбда-зонд;
охлаждающей жидкости
- скорость вращения
- скорости автомобиля;
- влажность;
- аварийного уровня
- детонации;
двигателя;
руля;
- ускорения при
- противоугонной
тормозной жидкости;
- положение коленчатого
- массового расхода
- положения педали
фронтальном
системы;
- аварийного уровня
вала;
воздуха;
тормоза;
столкновении;
- дождя и тумана;
жидкости в бачке
- положение
- положения
- скорости вращения
- ускорение при
- угла поворота руля;
омывателя;
распределительного вала;
дроссельной заслонки;
автомобиля
боковом столкновении;
- открытой/закрытой
- аварийного уровня
- температуры
поступающего воздуха;
- скорости автомобиля;
относительно
- наличия пассажира в
двери, багажника,
масла в КПП;
- давления топлива в
- положения
вертикальной оси;
сидение;
капота;
- давления в шинах;
рампе форсунок;
коленчатого вала;
- высота кузова по
- веса пассажира;
- давления в шинах;
- ремня безопасности;
- положение педали
- пропусков
отношению к шасси;
- подушки
- азимута;
- спидометра;
акселератора;
воспламенения;
- угла поворота руля;
безопасности;
- света;
- тахометра;
- давления топлива в баке;
- положение педали
- скорости вращения
- ремня безопасности;
- положения сидений;
- давления масла;
- уровня топлива;
акселератора;
колес;
- алкометр;
- уровня топлива;
- пропусков
- температуры
- уровня тормозной
- усталости водителя;
- стояночного тормоза;
воспламенения;
поступающего воздуха;
жидкости;
- положения автомобиля
- датчика парковки;
-холостого хода;
- давления тормозной
на дороге;
- СОСТОЯНИЯ
рециркуляции выхлопных
газов;
- крутящего момента
жидкости;
электрических цепей;
- абсолютного давление
двигателя;
- управления
- износа тормозных
во впускном коллекторе;
двигателем;
колодок;
- холостого хода;
- открытой/закрытой
- крутящего момента
двери;
двигателя;
Рис. 2.
1. Классификация автомобильных датчиков
12
По принципу действия датчики подразделяют на электрокон¬
тактные, потенциометрические, оптические, оптоэлектронные, элек¬
тромагнитные, индуктивные, магниторезистивные, магнитострикци-
онные, фото- и пьезоэлектрические, датчики на эффектах Холла, До¬
плера, Кармана, Зеебека, Вигонда.
В зависимости от энергетического преобразования (рис.2.2,а), дат¬
чики (Д) бывают активными (поз. 2 на рис. 2.2, б), в которых выход¬
ной электрический сигнал (ЭС) возникает как следствие входного не¬
электрического воздействия (НВ) без приложения сторонней электри¬
ческой энергии за счет внутреннего физического эффекта (например,
фотоэффекта), и пассивными (поз.З, рис. 2.2, б), в которых электриче¬
ский сигнал (ЭС) есть следствие модуляции внешней электрической
энергии (ВЭ) управляющим неэлектрическим воздействием (НВ).
Например, потенциометрический датчик (рис. 2.2,6, поз. 5) является
пассивным преобразователем угла поворота оси потенциометра (чув¬
ствительного элемента ЧЭ) в электрический сигнал. Электрический
сигнал (ЭС) появится на выходе потенциометра только после того,
как на резистивную дорожку (П) будет подано внешнее напряжение
(ВЭ).
Рис. 2.2,а. Расположение датчиков на автомобиле:
1 - датчик конфигурации впускного коллектора с управляемой гео¬
метрией, 2 - датчик тахометра, 3 - датчик положения распредели¬
тельного вала, 4 - датчик нагрузки двигателя, 5 - датчик положения
коленчатого вала, 6 - датчик крутящего момента двигателя, 7 - датчик
количества масла, 8 - датчик температуры охлаждающей жидкости,
9 - датчик скорости автомобиля, 10 - датчик давления масла, 11 -
13
датчик уровня охлаждающей жидкости, 12 - радарный датчик систе¬
мы торможения, 13 - датчик атмосферного давления, 14 - радарный
датчик системы предотвращения столкновений, 15 - датчик скорости
вращения ведущего вала коробки передач, 16 - датчик выбранной пе¬
редачи в коробке передач, 17 - датчик давления топлива в рампе фор¬
сунок, 18 - датчик скорости вращения руля, 19 - датчик положения
педали, 20 - датчик скорости вращения автомобиля относительно
вертикальной оси, 21 - датчик противоугонной системы, 22 - датчик
положения сиденья, 23 - датчик ускорения при фронтальном столкно¬
вении, 24 - датчик ускорения при боковом столкновении, 25 - датчик
давления топлива в баке, 26 - датчик уровня топлива в баке, 27 - дат¬
чик высоты кузова по отношению к шасси, 28 - датчик угла поворота
руля, 29 - датчик дождя или тумана, 30 - датчик температуры заборт¬
ного воздуха, 31 - датчик веса пассажира, 32 - датчик кислорода, 33 -
датчик наличия пассажира на сидении, 34 - датчик положения дрос¬
сельной заслонки, 35 - датчик пропусков воспламенения, 36 - датчик
положения клапана рециркуляции выхлопных газов, 37 - датчик аб¬
солютного давления в впускном коллекторе, 38 - датчик азимута, 39 -
датчик скорости вращения колес, 40 - датчик давления в шинах.
Линейная характеристика преобразования (рис. 2.2,6, поз. 6) легко
изменяется на квадратичную, ступенчатую и любую нелинейную с за¬
данной крутизной, что достигается подбором конструктивных разме¬
ров (длины, ширины, толщины) резистивной дорожки.
эе = ЦНВ) ■ (R^/R^ )ВЭ; ВЭ ■ cons*
Рис. 2.2,6. Модели датчиков ЭСАУ
Любой датчик состоит из чувствительного элемента (ЧЭ), способ¬
ного воспринимать входное неэлектрическое воздействие (НВ), и
14
преобразователя (П) промежуточного неэлектрического сигнала (НС)
от чувствительного элемента в выходной электрический сигнал (ЭС).
По назначению датчики классифицируются так: датчики краевых
положений, датчики угловых и линейных перемещений, датчики ча¬
стоты вращения и числа оборотов, датчики относительного или фик¬
сированного положения, датчики механического воздействия, датчи¬
ки давления, датчики температуры, датчики влажности, датчики кон¬
центрации кислорода, датчики радиации и др. Если к датчику под¬
ключено 5-6 проводов, то на датчике размещают микросхему обра¬
ботки сигнала, и данные к контроллеру передают через последова¬
тельный интерфейс.
Шасси (масса) автомобиля не используется в качестве измеритель¬
ной земли. Между точкой подключения ЭБУ к массе и датчиком
напряжение может падать до 1 В за счет токов силовых элементов по
массе, что недопустимо как при штатной работе датчика, так и при
его диагностике.
2.1. Датчики давления
Используются датчики (от давления масла, разрежения во впускном
коллекторе, до дифференциального давления воздуха по разные сторо¬
ны кузова). На рис. 2.3,а изображены датчики давления, предназна¬
ченные для измерения величины абсолютного давления жидких и га¬
зообразных сред. Параметры датчиков давления представлены в табл.
2.1.
Рис. 2.3. Датчик давления
Водителю выдается информация: о давлении масла в двигателе,
уровне топлива, уровне масла, давлении охлаждающей жидкости,
уровне охлаждающей жидкости, уровне жидкости в омывателе,
уровне жидкости в коробке переключения передач, давлении в шинах.
15
Параметры датчиков давления. Таблица 2.1
Единицы
измерения
Па
Бар
кгс/см2
Кгс/см2
(мм
вод.ст.)
Мм рт.ст.
1 Па
1
10°
1,0197*10'5
0,10197
7,5006* ІО'3
1 Бар
ІО5
1
1,0197
1,0197* 104
50,06
1 кгс/см2
9,8066* ІО4
0,98066
1
104
735,56
1 Кгс/см2
(мм вод.ст.)
9,8066
0,98066* ІО'4
10'4
1
7,3556* ІО'2
1 Мм рт.ст.
133,32
133,32* ІО'3
1,3595* ІО'3
13,595
1
Примечание 1 Па = 1 Н/м2 = 1 Дж/м3 = 1 кг/м (с2).
Системы, в которых используются датчики давления. Таблица 2.2
Система
Параметр
Диапазон
Управление
двигателем
Абсолютное давление во
впускном коллекторе [кПа]
100
Абсолютное давление во
впускном коллекторе
двигателя с наддувом [кПа]
200
Барометрическое давление [кПаІ
100
Давление в системе рециркуляции
выхлопных газов [кПа]
51,7
Давление топлива[кПа]
450
Коробка
переключения
передач
Давление масла [кПа]
550
Антиблокировочная
система тормозов
Давление масла [кПа]
3447
Воздушные мешки
безопасности
Давление газа [кПа]
1,7
Подвеска
Давление в пневматическом
амортизаторе [мПа]
1,0
Датчики барометрического давления и абсолютного давления
во впускном коллекторе. Датчики барометрического (атмосферного)
давления нужны для адаптации ЭБУ к перепадам высоты и изменени¬
ям погоды. Они применяются совместно с расходомером воздуха по
іб
объему. Выпускаются и сдвоенные датчики (рис. 2.4, а), где 1 - ваку¬
умный шланг; 2 - шланг в атмосферу. Вход барометрического датчи¬
ка остается открытым и на него подается атмосферное давление, вход
датчика разрежения соединяется вакуумным шлангом с впускным
коллектором.
а б
Рис. 2.4. Датчики барометрического (атмосферного) давления
Барометрические датчики и датчики давления, применяемые для
измерения разрежения во впускном трубопроводе, могут быть раз¬
личных конструкций. Датчики давления дискретного действия пред¬
ставляют собой устройство, где замыкание и размыкание контактов
происходят под действием упругой мембраны, испытывающей изме¬
ряемое давление. Датчики давления непрерывного действия пред¬
ставляют собой либо потенциометр, ползунок которого связан с мем¬
браной, либо катушку индуктивности, в которую мембрана под дей¬
ствием давления вдвигает магнитный сердечник. Современный инте¬
гральный датчик давления в защитном корпусе (рис. 2.5) подключает¬
ся к микропроцессору ЭБУ через коммутатор и АЦП. Для 8-раз-
рядного контроллера шаг дискретизации может составлять до 4 мс,
для 16-разрядного - до 2 мс.
Рис. 2.5. Интегральный датчик давления
Погрешность датчика абсолютного давления во впускном коллек¬
торе обычно около 1 %. Датчик барометрического давления работает
17
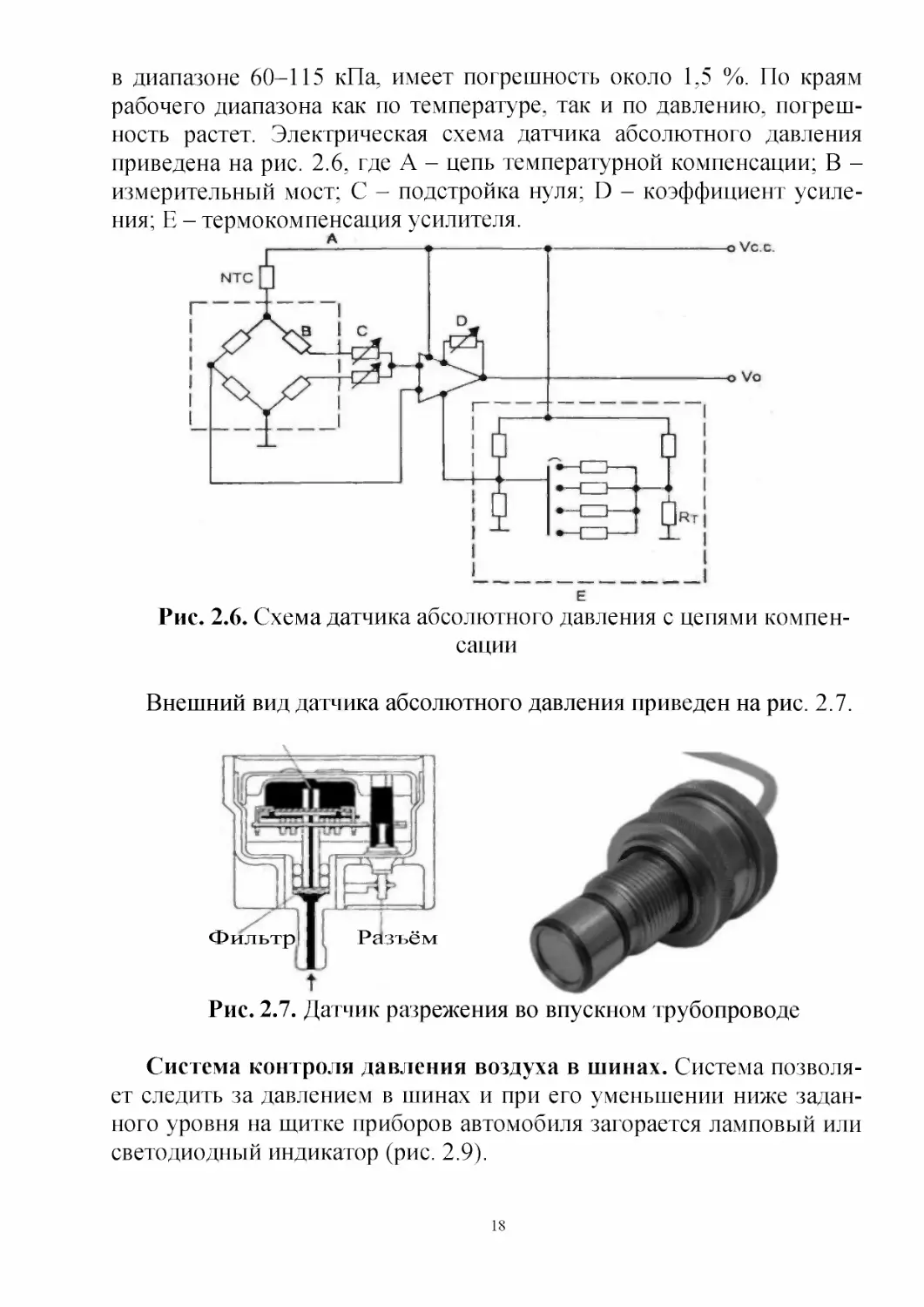
в диапазоне 60-115 кПа, имеет погрешность около 1,5 %. По краям
рабочего диапазона как по температуре, так и по давлению, погреш¬
ность растет. Электрическая схема датчика абсолютного давления
приведена на рис. 2.6, где А - цепь температурной компенсации; В -
измерительный мост; С - подстройка нуля; D - коэффициент усиле¬
ния; Е - термокомпенсация усилителя.
Рис. 2.6. Схема датчика абсолютного давления с цепями компен¬
сации
Внешний вид датчика абсолютного давления приведен на рис. 2.7.
Рис. 2.7. Датчик разрежения во впускном трубопроводе
Система контроля давления воздуха в шинах. Система позволя¬
ет следить за давлением в шинах и при его уменьшении ниже задан¬
ного уровня на щитке приборов автомобиля загорается ламповый или
светодиодный индикатор (рис. 2.9).
18
Каждому колесу соответствует отдельный индикатор. Пониженное
давление в шинах повышает их износ, а также расход топлива, может
привести к потере управления автомобилем, повышенное - ведет к
вибрациям. На рис. 2.8 показаны: а - размещение датчика в колесе ав¬
томобиля и б - блок-схема системы контроля давления в шинах.
Система состоит из трех основных элементов. На ободе колеса
установлен мембранный миниатюрный датчик давления (первый эле¬
мент), замыкающий контакты при снижении давления в шине и тем
самым создающий вторичную цепь для высокочастотного излучателя
(второй элемент), который размещен на узле крепления тормозных
колодок (на супорте). Датчик давления постоянно проходит в не¬
посредственной близости от излучателя при вращении колеса. Факт
появления вторичной цепи для излучателя фиксируется ЭБУ. На при¬
борном щитке загорается контрольный индикатор (третий элемент),
соответствующий колесу со сниженным давлением в шине. Система
измеряет давление с точностью до ±50 миллибар. При нагреве на 10
°С давление в шине повышается на 1,5 psi (10,33 кПа).
КЭБУ
Датчик
давления
Излучатель
- Б Суппорт
Тормозной
диск
Задающий
диск
Датчик
скорости
а б
Рис. 2.8. Система контроля давления в шинах
В другом варианте система контроля давления воздуха в шинах
содержит аналоговые датчики давления и температуры. Эти датчики
размещаются в шинах и передают бесконтактным способом информа¬
цию в ЭБУ о давлении и температуре, даже если автомобиль непо¬
движен. Учитываются скорость и загрузка автомобиля.
19
Рис. 2.9. Системой контроля давления воздуха в шинах (RDK)
Давление в системе рециркуляции выхлопных газов. Система
рециркуляции выхлопных газов (exhaust gas recirculation - EGR)
предназначена для уменьшения содержания окислов азота (NOx) в
выхлопных газах. В присутствии солнечного света NOx вступает в ре¬
акцию с углеводородом, образуя канцерогенный фотохимический
смог.
Когда не производится отбор полной -мощности, при равномерном
движении по шоссе, можно снизить температуру сгорания рабочей
смеси, т.е. пойти на уменьшение мощности. Это достигается введени¬
ем небольшого количества (6-10 %) выхлопных газов из выпускного
во впускной коллектор. Так как выхлопные газы инертны, то они раз¬
бавляют ТВ-смесь, не изменяя соотношения воздух/топливо.
Давление паров топлива в баке. Автомобиль производит ток¬
сичные отходы, поступающие в окружающую среду:
- 60 % в виде выхлопных газов во время движения;
- 20 % в виде картерных газов;
- 20 % за счет испарений топлива;
Испарения топлива из бака поступают в адсорбер с акти¬
вированным углем, где накапливаются и сжигаются в двигателе в
подходящее время.
Система улавливания паров бензина из топливного бака (рис. 2.10), в
которой для управления продувкой адсорбера используется клапан с
20
дифференциальным датчиком давления, между давлением в задрос-
сельной зоне впускного коллектора и давлением паров топлива в баке.
Воздух
Рис. 2.10. Система улавливания паров бензина
Мембранные потенциометрические датчики. Чувствительным
элементом является гибкая диафрагма или мембрана. При изменении
давления ее перемещение преобразуется в положение движка потен¬
циометра, (рис. 2.11). На рис. 2.11,а 1 - потенциометр; 2 - щетка;
3 - вилка; 4 - щеткодержатель; 5 - ось поводка; 6 - поводок;
7 - возвратная пружина; 8 - качалка; 9 - шток; 10,13 - основания;
11 - мембрана; 12 - штуцер.
а б
Рис. 2.11. Потенциометрический датчик давления и его внешний
вид
Для потенциометрических датчиков характерны повышенный уро¬
вень шума, износ. Статическое трение затрудняет регулирование в
диапазоне менее 0,5 % от номинала.
Резистивный проволочный потенциометр со скользящим контак¬
том - один из наиболее простых и эффективных преобразователей пе¬
21
ремещения. Для его использования нужно лишь соединить скользя¬
щий контакт (движок) с движущимся объектом, а остальную часть
потенциометра закрепить неподвижно. Разрешение этого преобразо¬
вателя зависит от диаметра намоточного провода. Сегодня в потен¬
циометрических датчиках используется пленочное покрытие рези¬
стивной дорожки.
Датчики давления на основе линейных дифференциальных
трансформаторов (ЛДТ). Линейный дифференциальный трансфор¬
матор - это электромеханическое устройство, вырабатывающее вы¬
ходной электрический сигнал, пропорциональный перемещению фер¬
ромагнитного сердечника (рис. 2.12, б). ЛДТ состоит из первичной и
двух вторичных обмоток, симметрично расположенных на цилиндри¬
ческом каркасе. Движущийся внутри обмоток ферромагнитный
стержневой сердечник обеспечивает связь этих обмоток через маг¬
нитный поток (рис. 2.12, а.).
Магнитный экран
Т'ГѴГУГТГГ77ТТТГТГГ7Ш?Ш* f f ГУ i
Вторичная
обмотка 2
Первичная
обмотка
Вторичная
обмотка 1
Г72ТГГГ77Г77ТГГ77ТГ7-777Т71_
Ферритовый сердечник
Вторичная
Первичная
Вторичная
обмотка 2
»' 7 Г .9 ' ? ? *"?
r-r-r
обмотка
777 ТГ77Г77У77:
обмотка 1
а б
Рис. 2.12. Линейный дифференциальный трансформатор и его прин¬
ципиальная схема
При возбуждении первичной обмотки с помощью внешнего ис¬
точника переменного напряжения в двух вторичных обмотках наво¬
дятся ЭДС взаимоиндукции. Вторичные обмотки включены последо¬
вательно и встречно, поэтому результирующий сигнал ЛДТ представ¬
ляет собой разность этих напряжений и равен нулю, когда сердечник
находится в центральной (нулевой) позиции. При уходе сердечника из
этой позиции напряжение, индуцируемое в той вторичной обмотке, к
которой движется сердечник, возрастает, а в другой обмотке умень¬
шается. Вырабатывается дифференциальный выходной сигнал, вели¬
чина которого линейно зависит от положения сердечника. Фаза вы¬
ходного напряжения изменяется скачком на 180° при переходе через
нулевую позицию. Преобразуется информация о перемещении (ам¬
22
плитуда и фаза) фазочувствительным демодулятором, исполненные
интегрально.
Применяются ЛДТ в датчиках абсолютного давления впускного
коллектора, преобразуя перемещение мембраны в электрический сиг¬
нал с погрешностью напряжения 0,25 %. Первичная обмотка запиты¬
вается синусоидальным напряжением 3 - 15 В с частотой 2-5 кГц.
Коэффициент трансформации ЛДТ ЮЛ - 2Л. ЛДТ характеризуется
отсутствием трения, стабильностью нуля, гальванической развязкой
входа и выхода, может работать в агрессивных средах.
Емкостные датчики давления. Одна из обкладок датчика-
конденсатора является диафрагмой, которая прогибается при измене¬
нии давления. Номинальная емкость конденсатора определяется зави¬
симостью С = A*k*Ad, где А - площадь обкладки; S— диэлект¬
рическая постоянная; d - расстояние между обкладками; к - кон¬
структивный коэффициент. Чувствительным элементом датчика яв¬
ляются кремниевые или керамические диафрагмы (рис. 2.13).
Рис. 2ЛЗ. Емкостной датчик с кремниевым чувствительным эле¬
ментом для измерения разрежения
Кремниевая диафрагма емкостного датчика разрежения (рис.
2.13,а), закреплена на корпусе из стекла Ругех, поверхность стекла
металлизирована для создания обкладки конденсатора методом фото¬
литографии. После закрепления кремниевой диафрагмы на стеклян¬
ной основе специальным герметиком в полости создается вакуум, от¬
верстия запаиваются припоем, который образует выводы конденсато¬
ра для монтажа на печатную плату или керамическую подложку. Ем¬
кость конденсатора меняется линейно примерно от 32 до 39 пФ при
изменении давления от 17 до 105 кПа. Размеры датчика - 6,7 х 6,7 мм,
коэффициент ТКЕ - (30/80) ІО'6
Металлизированный
а
б
23
на °С, нелинейность - 0 менее 1,4 %, время установления показаний -
менее 1 мс. Выходной сигнал датчика для подключения к ЭБУ преоб¬
разуют в частоту.
Стекловолоконный датчик давления. Датчик используется для
непосредственного измерения давления в камере сгорания, для изме¬
рений больших давлений или при высоких температурах, что необхо¬
димо для управления двигателем и контроля процесса воспламенения
рабочей смеси.
Стекловолоконный (волоконно-оптический) датчик (рис. 2.14) вы¬
держивает температуры до 550 °С, рабочий диапазон давлений
0 - 1000 psi (7000 кПа) с перегрузками до 3000 psi.
Источник
излучения
Фото¬
детектор
Диафрагма
В-°Д—_ Стекловолокно
\
Выход
•DJ
Давление
Рис. 2.14. Стекловолоконный датчик давления
Работа. Световое излучение от источника проходит через оптиче¬
ское волокно и попадает на диафрагму расходящимся пучком. Отра¬
женное от диафрагмы излучение проходит по другому каналу кабеля.
Интенсивность обратного светового излучения зависит от зазора D и
положения диафрагмы.
Датчики, вмонтированные в свечу зажигания имели погрешность
до 5 %. Датчики аварийного давления для выполнения несложных
функций используют простейшие контактные датчики.
2.2. Датчики температуры и влажности
Автомобили эксплуатируются в различных климатических зонах
(-60 ~ +57 °С), под капотом температура может меняться в диапазоне
-40 ~ +125 °С; в салоне -40 ~ +85 °С.
Температура и влажность в различных местах автомобиля могут
иметь значения, величины которых сведены в табл. 2.3.
24
Температура и влажность в автомобиле. Таблица 2.3
Узел
Температура,°С
Влажность
(относительная)
Иней
Выпускной коллек-
- 40 - + 649
95 % при 38 °С
+
Впускной коллектор
-40-+ 121
95 % при 38 °С
+
Приборная панель
-40-+ 141
95 % при 38 °С
—
Шасси, корпус
-40-+ 177
98 % при 38 °С
+
Влажность влияет на комфортабельность салона и работоспособ¬
ность некоторых узлов автомобиля.
Источники тепла в автомобиле. Таблица 2.4
Источник тепла
Примечание
Максмалтная
температура, °С
Двигатель
Процесс сгорания
> 1000
Каталитический
нейтрализатор
Химические реакции
> 1000
Шины
Трение о дорогу, удары
< 100
Тормоза
Колодки
<250
Лампы освещения
Обычные
< 125
Лампы в фарах
Г алогеновые
<750
Силовые транзисторы
В электронных схемах
<200
Узлы автомобиля, в которых производится измерение температу¬
ры, приведены в табл. 2.5.
Методы и средства измерения температуры:
Температура жидкостных сред. Это охлаждающая жидкость
(охладитель ДВС), масло двигателя в коробке передач, топливо, тор¬
мозная жидкость, электролит в аккумуляторе. Температура указанных
жидкостей измеряется в пределах -40 ~ +200 °С.
Температура электролита в аккумуляторах должна учитываться
для установки оптимального зарядного напряжения на генераторе.
Это делается на этапе испытаний. Используются стеклянные термо¬
метры или остекленные термопары.
25
Системы, в которых измеряется температура. Таблица 2.5
Узел/система
Параметр
Система управления
двигателем
Температура воздуха во впускном кол¬
лекторе
Температура охлаждающей жидкости
в двигателе
Система управления
климатом в салоне
Влажность воздуха в салоне
Температура воздуха в салоне
Температура забортного воздуха
Информационная
система водителя
Температура охлаждающей жидкости в
двигателе
Температура тормозной жидкости в
колесных тормозных цилиндрах
Температура забортного воздуха
Температура воздуха в салоне
Температура воздуха в шинах
Температура электролита:
-наличие дождя (осадков);
-интенсивность солнечной радиации
На электромобилях используются аккумуляторы с температурой
электролита 300 - 350 °С или твердые топливные элементы с темпе¬
ратурой до 1000 °С, при этом система управления и диагностики
должна постоянно контролировать эту температуру.
Температура воздуха автомобиля контролируется на входе в дви¬
гатель, за бортом, в салоне. Вблизи электронных компонентов верх¬
ний предел 85 - 125 °С.
Температура в каталитическом нейтрализаторе составляет >350
°С. Сегодня есть необходимость ускоренного разогрева нейтрализато¬
ра при пуске двигателя для скорейшего его приведения в рабочее со¬
стояние и уменьшения токсичности выхлопа. Разогрев производят
или бензиновой горелкой, или электрически, при этом осуществляется
контроль за температурой нейтрализатора.
Температура датчика кислорода >350 °С контролируется на этапе
испытаний автомобиля и двигателя.
Температура воздуха в шинах измеряется на опытных и гоночных
моделях автомобилей. Например, система Michelin для гоночных ав¬
томобилей Peugot Proxima сигналы датчиков передает на радиочасто¬
те приемнику и затем в информационную систему водителя. При t>85
26
°С система рекомендует снизить скорость до 240 км/ч, при t > 100 °С
- остановиться.
Температура в силовых электронных и интегральных схемах кон¬
тролируется автоматически, что сохраняет дорогостоящие компонен¬
ты в аварийных режимах, например, при КЗ. Датчики температуры
разнятся по назначению и температурным диапазонам (табл.2.6, тип Р
- серийные модели; тип D - опытные при их испытаниях; тип F - ис¬
пользование в будущем).
Назначение и температурный диапазон. Таблица 2.6
Тип датчика
Диапазон температур, °С
Использование
Термистор
0-500
Р
Термопара
-200 - +3000
0
Биметалличе ская
пластина
-50 - +450
Р
Потенциометрический
^10-+125
Р
Резистор
(платиновый)
-200 - +850
Р
р-п-переход
-40 - +200
Р
Термостат
-50 - +500
Р
Волоконная оптика
0 - +1800
D/F
Т ермоиндикаторы
-40-+1350
D
Инфракрасный
тешометц
-200-+1000
D
Термисторы. Используются для измерения температуры, при ее
изменении меняется электрическое сопротивление термистора и вы¬
ходной сигнал датчика (ток или напряжение).
Термисторы имеют отрицательный температурный коэффициент
сопротивления, которое изменяется от нескольких килоом при 0 до
сотен Ом при 100 °С. Термисторы изготавливаются из полупроводни¬
ков, напимер, окиси никеля или окиси кобальта.
Работа. При увеличении температуры в полупроводнике растет
количество свободных электронов и уменьшается электрическое со¬
противление. Система измерения температуры на основе термистора
имеет высокую чувствительность, так как относительно небольшие
изменения температуры приводят к значительным изменениям сопро¬
тивления.
27
Применение термисторов, например - датчик температуры ОЖ
(рис. 2.15, а).
При низкой температуре охлаждающей жидкости датчик имеет
высокое сопротивление (100 кОм при -40 °С), а при высокой темпера¬
туре - низкое (70 Ом при 130 °С).
ЭБУ подает к датчику через сопротивление определенной величи¬
ны напряжение 5 В и измеряет падение напряжения на датчике. По
падению напряжения БУ определяет температуру ОЖ.
Термисторный датчик температуры воздуха имеет аналогичную
конструкцию. Размещен в системе подачи и очистки воздуха. Рабочий
диапазон температур -40-120 °С.
Термопары. Термопара - устройство, состоящее из двух провод¬
ников из разнородных металлов или сплавов со сварным контактом на
одном из концов. На другом конце два проводника соединяют друг с
другом, так что образуется замкнутая цепь.
Работа. Если температуры, при которых находятся два противопо¬
ложных контакта, различны, то в замкнутой цепи протекает ток.
Электродвижущая сила, вызывающая ток, называется термоЭДС Зее-
бека. Если замкнутую цепь разорвать посередине, то напряжение
между ее разомкнутыми свободными концами будет функцией разно¬
сти между температурой сварного контакта и температурой свобод¬
ных концов. Термопары измеряют высокие температуры. Термопара,
выполненная из сплава 70 % платины и 30 % родия или 94 % платины
и 6 % родия, работает в диапазоне 0-1500 °С. Такой датчик уста¬
навливается в выпускном трубопроводе.
Разновидности датчиков температуры:
На основе биметаллического чувствительного элемента - исполь¬
зуется свойство различных металлов по-разному изменять свои ли¬
нейные размеры в зависимости от температуры.
а
б
Рис. 2.15. Датчик температуры охлаждающей жидкости
28
Работа. Изгиб (перемещение) пластины используется для замыка¬
ния или размыкания контактов или перемещения движка потенцио¬
метра. В первом случае получается дискретный, а во втором - анало¬
говый датчик температуры.
Реализованные на р-п-р переходе - используют свойство перехода
изменять падение напряжения в зависимости от температуры при по¬
стоянном токе. Например, используется переход база-эмиттер
кремниевого транзистора с малым током коллектора (около 0,1 мА)
для предотвращения саморазогрева. В диапазоне температур -40 ~
+150 °С напряжение на переходе изменяется от 730 до 300 мВ с нели¬
нейностью ±3 мВ. Датчики размещаются в микросхемах силовых пре¬
образователей и стабилизаторов.
Термостат - это механический датчик температуры. Расширяю¬
щийся элемент приводит в действие клапан, перенаправляющий поток
охлаждающей жидкости в радиаторе.
Термоиндикаторы - материалы, температура плавления которых
калибруется с точностью до ±1 °С, при этом меняется цвет. Исполь¬
зуются в виде краски или аппликаций, которые наносятся на поверяе¬
мую поверхность во время испытаний автомобиля.
Инфракрасные термометры (пирометры) определяют температуру
тел по их тепловому излучению. Метод бесконтактный.
Датчики влажности.
Датчики относительной влажности: резистивные, емкостные:
В емкостных влажность изменяет диэлектрические свойства изо¬
лятора (полимерной пленки). Датчики стабильны, работают до 180 °С.
В резистивных датчиках меняется сопротивление объемного по¬
лимера в зависимости от относительной влажности. Напимер, при из¬
менении относительной влажности в пределах 10 ~ 100 % сопротив¬
ление датчика меняется в диапазоне 2*107~2*103 Ом.
2.3. Датчики расхода жидкостей и газов
Датчики расхода (рис. 2.16) необходимы для оптимальной реали¬
зации основных функций управления ДВС. Напимер, в СУ впрыском
количество подаваемого в двигатель топлива рассчитывается по массе
воздуха, подаваемого в цилиндры.
Масса воздуха мА измеряется по объемному расходу:
29
Мд = NVriP RaTa,
где N - число оборотов; Y - объем двигателя; 77 - коэффициент ис¬
пользования объема двигателя (77 = f(N)); Р - разрежение во впускном
коллекторе; R - конструктивная постоянная; тА - температура возду¬
ха во впускном коллекторе.
При косвенном измерении массы Мд воздуха следует учитывать
зависимость объема V от коксования, а также запаздывание измене¬
ний Р по отношению к изменениям мА. Такой способ получается бо¬
лее дешевым по отношению к непосредственному измерению массы
воздуха, но менее точным.
Рис. 2.16. Датчики расхода жидкостей и газов
Современные автомобили оснащаются датчиками для непосредст¬
венного измерения массы мА всасываемого в цилиндры воздуха. Вы¬
ходной сигнал таких датчиков аналоговый (0...4 В) или частотный.
Датчики расхода также применяются:
- при определении расхода топлива (рис. 2.17) для информацион¬
ной системы водителя. Расход определяется по разности между коли¬
чеством топлива, поступившим в рампу форсунок и возвращенным в
бак;
- при определении расхода газа через клапан рециркуляции вы¬
хлопных газов (EGR). При определенных условиях выхлопные газы
30
через клапан EGR охлаждают камеру сгорания, что понижает содер¬
жание NOx в выхлопе. Контроль за расходом газа через клапан - один
из способов проверки правильности его функционирования. В соот¬
ветствии с требованиями OBD-II, ЭБУ должен осуществлять постоян¬
ный мониторинг систем, неисправность которых приведет к увеличе¬
нию загрязнения окружающей среды;
- при определении расхода дополнительного воздуха в каталити¬
ческом нейтрализаторе. В некоторых типах нейтрализаторов для ми¬
нимизации токсичных веществ СО и СН применяется подача допол¬
нительного воздуха при прогреве двигателя, когда рабочая смесь бо¬
гатая. Исправность насоса контролируется по расходу воздуха. Непо¬
средственный контроль за составом выхлопных газов не применяется
из-за высокой стоимости измерительного оборудования.
Рис. 2.17. Датчики уровня топлива в баке
Параметры датчиков расхода жидкостей и газов. Таблица 2.7
Назначение
Измеряемая
величина
Диапазон,
кг/ч
Допустимая
погрешность,
%
Воздух, посту¬
пающий в дви¬
гатель
Масса
10-1000
±4
Расход топлива
Масса / объем
1-66
±4
Выхлопные газы
Масса
30-100
± 10
Доп. воздух в
нейтрализаторе
Объем
50 м3/ч
±20
Принцип действия датчиков расхода основан на измерении пара¬
метра:
31
• угла отклонения парусной заслонки или скорости вращения тур¬
бины, находящихся в потоке среды (жидкости или газа);
• частоты вращения вихревых потоков за рассекателем;
• падения давления среды после прохождения ею препятствия
(дросселя);
• изменения температуры находящегося в потоке среды нагретого
тела.
Расходомеры и массметры. Датчики расхода жидкостей (газов)
разделяются на расходомеры и массметры. Датчик называется объем¬
ным расходомером, если расход жидкости или газа (нр., воздуха)
определяется по объему пропущенной среды.
Расходомеры воздуха подразделяются:
• на механические - с круглым плавающим ротаметром;
• на потенциометрические - с парусной измерительной заслонкой;
• на вихревые (датчики Кармана) - с рассекателем воздушного по¬
тока, выполняющего функцию генератора воздушных завихрений, ча¬
стота или вариации давления в которых несут информацию об объеме
пропущенного воздуха.
При измерении расхода жидкости (нр., бензина) применяются про¬
стые расходомеры с вращающейся турбиной в подвижном потоке - по
частоте вращения турбины определяется объем пропущенной жидко¬
сти.
Массметром называется датчик, если расход текучей среды (жид¬
кости, газа) определяется непосредственно по массе.
Массметры выдают более качественную метрологическую инфор¬
мацию. Особенно воздушные массметры, так как объем газообразных
сред, в отличие от жидкостей, в значительной степени зависит от тем¬
пературы и давления. Массметры в системах впрыска работают без
вспомогательных датчиков.
Принцип действия воздушных массметров (термоанемометриче-
ский).основан на применении платиновой нити, разогретой электри¬
ческим током, в качестве датчика информации о массе проходящего
воздушного потока, охлаждающего разогретую нить.
Датчик Кармана. Датчики Кармана относятся к вихревым расхо¬
домерам воздуха.
Принцип работы датчика Кармана основан на измерении частоты
вращения вихревых потоков, которые образуются за поперечным
стержнем в потоке всасываемого воздуха. Скорость Y потока воздуха
определяется по формуле
32
v = fx(d + St),
где d - константа, зависящая от геометрии стержня; St - критерий по¬
добия неустановившихся движений текучих сред (число Струхаля)
для конструкций автомобильных датчиков расхода воздуха St = 0,23);
f- частота вращения вихревых потоков (генерации вихрей).
По частоте f определяют скорость V, затем по известному попе¬
речному сечению входного канала датчика - объем воздуха.
Частоту генерации вихрей определяют ультразвуковым методом
или по вариациям давления. В ультразвуковых датчиках (рис. 2.18)
частоту генерации вихрей определяют по доплеровскому сдвигу ча¬
стоты ультразвуковой волны (обычно 50 кГц) при ее рассеянии дви¬
жущейся средой (потоком воздуха).
„ _ Передатчик
Стабилизатор i L
Ламинатор ^ 1
L Т енератор
вихрей
гНІІІІІІІІІ Сигнал на выходе
передатчика
X І /в>-
<000, ^
Г
К дроссельному
патрубку
Вихри ,
I Сигнал на выходе приёмника
II Mill—,
“ Усилитель
Байпас К ЭБУ-- IJlAJLTI
Рие. 2.18. Ультразвуковой датчик Кармана
Датчики Кармана на основе подсчета числа вихрей по вариациям
давления, дешевле, в них п-п, чувствительный к изменениям дав¬
ления элемент, расположен за вихреобразующим стержнем (рас¬
секателем). Вихрь, появляющийся за стержнем, вызывает изменение
давления, которое преобразуется в электрический сигнал, поступаю¬
щий в ЭБУ двигателя. Конструкция датчика Кармана с измерением
вариаций давления показана на рис. 2.19,6. Он состоит из формиро¬
вателя ламинарного потока (ламинатора) на входе, треугольного по¬
перечного стержня (рассекателя) - генератора вихрей и емкостного
датчика давления. В корпусе также размещены датчики температуры
и барометрического давления (на рис. 2.19,6 не показаны) для опреде¬
ления массы поступающего воздуха по его объему. На холостом ходу
датчик выдает сигнал с частотой около 100 Гц при полной загрузке
двигателя - около 2000 Гц.
33
Выходной сигнал ДМРВ представляет собой напряжение постоян¬
ного тока, изменяющееся в диапазоне от 1 до 5 В, величина которого
зависит от массы воздуха, проходящего через датчик. При нулевом
расходе исправный датчик должен иметь выходное напряжение около
1 В. Эталоном считается значение 0,996 В. По осциллограмме на
рис 2.19,в, можно отследить 2 важных момента:
1. Скорость реакции ДМРВ можно оценить по времени переходно¬
го процесса выходного сигнала при подаче питания на датчик.
2. Выходное напряжение датчика при нулевом расходе воздуха
(двигатель остановлен).
Ламинарные Датмик
каналы
а
f - _ у,
\кі—А:. |]
1
( 0,996 В)
^ *—
/
/
[/
0 5 мс ноома
Время
В
Рис. 2.19. Массметр
2.4. Датчики состава выхлопных газов
Процесс сжигания топлива описывается уравнением
CmHn + (т + п/4) 02 = тС02 + (п/2)Н2 О.
34
- ТВ-смесь - стехиометрическая (л =1), при сжигании 1 кг (1 л)
топлива и 14,7 кг (10 м ) воздуха образуются вода и двуокись углеро¬
да. Эти вещества нетоксичны. Но даже при стехиометрическом соста¬
ве ТВ-смеси ее сгорание осуществляется не полностью и образуются
токсичные вещества;
- сгорание богатой смеси (л<1) приводит к появлению избыточно¬
го количества СО, Н2 и СН;
- бедные смеси (д>1) приводят к образованию NOx, 02.
Вредные компоненты выхлопных газов нейтрализуются. Система
нейтрализации содержит датчик (или два) концентрации кислорода,
называемый лямбда-зондом ( л -зонд).
Циркониевые и титановые датчики концентрации кислорода
в выхлопных газах. Каталитические нейтрализаторы точно контро¬
лируют состав ТВ-смеси и поддерживают коэффициент избытка воз¬
духа близким к единице. Датчики кислорода устанавливаются в си¬
стеме отвода выхлопных газов и вырабатывают сигнал, зависящий от
концентрации кислорода в выхлопе. Этот сигнал используется в ЭБУ
двигателя для коррекции длительности открывания форсунок, чем
обеспечивается стехиометрический состав ТВ-смеси. Используются
циркониевые и титановые датчики кислорода. Бортовые диагностиче¬
ские системы OBD-II осуществляют мониторинг узлов, выход из
строя которых приведет к увеличению выбросов токсичных веществ.
Прямое измерение СО, СН и NOx экономически нецелесообразно.
Применяется система нейтрализации с двумя датчиками кислорода.
Второй датчик кислорода устанавливается на выходе нейтрализатора
и контролирует его исправность (рис. 2.20).
СУ подачи топлива является релейным стабилизатором состава
ТВ-смеси, который колеблется около стехиометрического значения с
частотой 4 - 10 Гц. Колебания отслеживаются первым, входным по
отношению к каталитическому нейтрализатору, датчиком кислорода.
Сигнал с первого датчика изменяется между значениями 0,1 - 0,9 В с
частотой 4 - 10 Гц (в соответствии с изменениями концентрации кис¬
лорода в выхлопных газах). В исправном нейтрализаторе избыточный
кислород участвует в химических реакциях, его концентрация в вы¬
хлопных газах уменьшается и в выходном сигнале второго датчика
кислорода на выходе нет колебаний (рис. 2.20). Чем более засорен или
отравлен нейтрализатор, тем более похожи сигналы входного и вы¬
ходного датчиков (рис. 2.21).
35
Напряжение Ог датчика до катализатора
Катали¬
затор
Напряжение СЬ датчика после катализатора
WW
Неисп¬
равный
WW
Л А Л Л (
Исправный
\
V У V и
Вшік 1 sensor 1 ц Катализатор
(Ш М) ___
4 Bank 1 sensor 2
(B1 S2)
Выхлопные
і*і jijiji*
# A
Рис. 2.20. Датчики кислорода на входе (1) и выходе (2) каталити¬
ческого нейтрализатора с соответствующими выходными сигналами
Богатая
Выходной
сигнал
датчика
кислорода i
Оценка
смеси ЭБУ
Эталонное
нацряжение f
Увеличения
количества
Коэффициент
коррекции по
обратной связи1
ѳ
Богатая смесь
ѵ
{
Л_ГЫ І_
©
л_п
Коррекция
увеличения Г і
количества -
Коррекция ®
уменьшения
количества
Бедная смесь
Рис. 2.21. Выходной сигнал датчиков кислорода
Датчики кислорода для двигателей, работающих на обеднен¬
ных смесях (рис. 2.22,а). Использование рабочих смесей с соотноше¬
нием воздух/топливо 16:1 - 25:1, с активным выгоранием избыточно¬
го кислорода, экономит топливо более чем на 10 % и уменьшает со¬
держание NOx и СО в выхлопных газах.
В двигателе, работающем на обедненной ТВ-смеси, требуется точ¬
ное регулирование ее состава и мощная искра зажигания (например,
Honda YTEC-E и Toyota Carina-Е с соотношениями воздух/топливо
22:1 и экономией топлива до 25 %). Необходимым элементом САУ с
таким двигателем является аналоговый датчик кислорода с выходным
сигналом, меняющимся не скачкообразно, а плавно в пропорции с со¬
держанием кислорода в выхлопных газах от очень обогащенного
(10;1) до очень обедненного (35:1) (рис. 2.22,6)
36
4,0 — 4
3,5-i 2 -
2,0-L- -4
2,5- -2
3,0- o-
Отношение воздух/топливо
б
—i 1 1 1 1 1
10 20 30 40
a
Рис. 2.22. Датчик кислорода
Им является модернизированный циркониевый датчик, обнаружи¬
вающий точки стехиометрического состава ТВ-смеси (рис. 2.23). Он
состоит из двух ячеек для перемещения ионов кислорода: ячейки Ір,
куда закачиваются ионы кислорода, и ячейки Vs для обнаружения
ионов кислорода.
Через ячейку Vs проходит небольшой стабилизированный ток Іср,
переносящий ионы кислорода вправо и тем самым поддерживающий
камеру О2 заполненной кислородом.
Содержание кислорода в этой камере является эталонным количе¬
ством для датчика. Выхлопные газы поступают в измерительную ка¬
меру, и на электродах ячейки Vs образуется падение напряжения, про¬
порциональное концентрации кислорода в выхлопе.
Электронная схема формирует ток Ір через электроды ячейки, вы¬
зывая генерацию и перемещение ионов кислорода из атмосферного
воздуха, поддерживая напряжение Vs на одном и том же уровне -0,45
Таким образом, ток Ір становится мерилом соотношения воз¬
дух/топливо для рабочей смеси и формирует выходной аналоговый
сигнал датчика в виде напряжения UBbIx.
В.
37
Влияние различных факторов на характеристики датчиков
кислорода. При появлении некоторых веществ в выпускном коллек¬
торе происходит изменение статических характеристик датчика кис¬
лорода (отравление) и преждевременный выход его из строя. Это сви¬
нец (РЬ) из этилированного бензина или кремний (Si) из силиконовых
герметиков (рис. 2.24).
0.98 0.99 1.00 1.01 1.02 1.03
Коэффициент избытка воздуха
Рис. 2.24. Влияние различных факторов на характеристики датчи¬
ка кислорода
38
На динамические характеристики СУ двигателем влияет кон¬
струкция датчика кислорода, его расположение, техническое состоя¬
ние.
Датчик кислорода размещается на расстоянии 0,2 - 2 м (обычно
1 м) от выпускных клапанов, чтобы газы из всех цилиндров равно¬
мерно перемешивались, а транспортное запаздывание не было слиш¬
ком большим. Запаздывание составляет от 500 мс на холостом ходу
до 20 мс под нагрузкой.
Газоанализаторы. Газоанализаторы предназначены для опреде¬
ления параметров выхлопных газов в стационарных условиях на ис¬
пытательном стенде.
Определяют содержание следующих газов в выхлопе автомобиля:
окиси углерода СО, двуокиси углерода С02, углеводорода СН, кисло¬
рода 02, а также могут определять коэффициент избытка воздуха и
соотношение воздух/топливо. Газоанализатор выполняется отдель¬
ным модулем с дисплеем, подключается через последовательный порт
к компьютерному мотор-тестеру.
Значения, полученные с помощью газоанализатора Таблица 2.8
СО, %
НС,
млн-1
02, %
С02, %
X
Возд./
топл.
До нейтрализатора
0,6
120
0,7
14,7
1,0
14,7
После нейтрализа¬
тора
0,2
12
од
15,9-
1,0.
14,7
СО, С02 определяется инфракрасными методами, с использовани¬
ем свойств различных газов по-разному поглощать инфракрасное из¬
лучение. Содержание 02 определяется электрохимическими метода¬
ми, используется устройство, аналогичное датчику кислорода.
Инфракрасный излучатель, (рис. 2.25) нагревается до 900 °С, его
лучи направляются рефлектором через вращающийся диск с отвер¬
стиями и далее через измерительную камеру в приемную камеру. В
приемной камере, состоящей из двух герметичных полостей 1,2, кото¬
рые сообщаются между собой по соединительному каналу, содержит¬
ся определенная концентрация газа СО. Газ в приемной полости 1 по¬
глощает инфракрасное излучение, его температура увеличивается, и
часть газа переходит в полость 2, что фиксируется расходомером.
Вращение диска с отверстиями модулирует поток инфракрасного из¬
лучения, в результате газ в приемной камере периодически нагревает-
39
ся и охлаждается. Показания расходомера, фиксирующие переход газа
СО из полости 1 в полость 2 и обратно, представляют собой периоди¬
ческий разнополярный сигнал в виде напряжения. При введении в из¬
мерительную камеру выхлопных газов, содержащих СО, часть излу¬
чения в диапазоне, характерном для окиси углерода, будет поглощена
и выходное напряжение расходомера изменится пропорционально со¬
держанию СО в выхлопе.
По такой же методике определяют содержание СН и С02, окислов
азота N02.
Вход Выход
Инфракрасный
излучатель
Измерительная
камера
Расходомер
Рис. 2.25. Измерение концентрации СО
2.5. Датчики угловых и линейных перемещений и положений
Используются датчики угловых и линейных перемещений от простых
- типа микровыключателя на двери (рис. 2.26,а), до сложных - типа
ЛДП в активной подвеске. Датчики выполняются контактными или
бесконтактными. Чаще всего используются те или иные магнитные
свойства чувствительных элементов.
Контакт
-Ои+
1 кОм
75 кОм
ЭБУ
Общий
-О
а б в
Рис. 2.26. Датчик угловых и линейных перемещений, а - микро¬
выключатель; б, в - датчик положения дроссельной заслонки
Контактные датчики. Простейшие контактные датчики для фик¬
сации краевого положения - при срабатывании микровыключателя в
40
ЭБУ подается сигнал, соответствующий напряжению питания. В этом
случае по изменению входного напряжения ЭБУ различает рабочее
или нерабочее состояние ключа и проводки. Недостатком микровы¬
ключателей является дребезг контактов. В ответственных схемах дре¬
безг подавляют схемотехнически или программно.
Потенциометрические датчики. Потенциометры применяются в
качестве датчиков положения (например, датчик положения дрос¬
сельной заслонки и т.п.), имеют наработку на отказ больше срока экс¬
плуатации автомобиля, выдерживают вращение движка со скоростью
до 1000 оборотов в минуту в течение более 1000 часов.
Проволочные потенциометры характеризуются числом витков
намотки на градус: от 1 до 8. Сопротивление потенциометров лежит в
пределах 10 - 10 000 Ом, с погрешностью 5 %. Достоинство прово¬
лочных потенциометров - возможность реализации низкоомных дат¬
чиков. Недостатки: нелинейность, дискретность, быстрый износ
(около 105 оборотов).
Чаще используются непроволочные потенциометры с напыленным
на пластике или керамике резистивным покрытием с сопротивлением
50-20 000 Ом, с погрешностью 10 - 20 %.
При измерении линейных перемещений движок перемещается в
пределах 10 мм - Эм, при измерении угловых - до 355 °.
Датчики, АЦП и компараторы запитываются напряжением 5 В от
ЭБУ, что делает систему «датчик - АЦП» нечувствительной к вариа¬
циям питающего и опорного напряжений. Ток через щетки движка
ограничивается до порядка 0,1 мкА.
Датчик положения дроссельной заслонки - ДПДЗ (рис. 2.26, б)
установлен на оси дроссельной заслонки. Данные о положении дрос¬
сельной заслонки необходимы для расчета длительности импульсов
управления форсунками. При повороте дроссельной заслонки (движе¬
нием педали акселератора) изменяется напряжение на подвижном
контакте ДПДЗ. При закрытом положении дроссельной заслонки вы¬
ходной сигнал ДПДЗ ниже 0,7 В. Открытой заслонке соответствует
напряжение не менее 4 В. Пример осциллограммы двух датчиков по¬
ложения дроссельной заслонки VW Passat с двигателем RP показана
на рис. 2.27.
Первый датчик работает в диапазоне от 0 до 25 % открытия дрос¬
сельной заслонки, а второй - от 25 до 100 %.
41
4'
о *
А.
1 Л п г
45 46 46.5 47 47.5 48 48.5 49 49.5 50 50.5 51 51.5 52 52.5 53 53.5 54
Время
Рис. 2.27. Выходной сигнал с ДПДЗ
Датчики высоты кузова вы¬
полняются на основе обычных
потенциометров, выходное
напряжение датчика пропорцио¬
нально высоте кузова по отно¬
шению к шасси (рис. 2.28), они
необходимы для работы СУ ак¬
тивной подвеской.
Рис. 2.28. Датчик высоты кузова
2.6. Бесконтактные датчики
В автоматизированных системах информация об угловой скорости
или угловом положении вращающегося вала вырабатывается бескон¬
тактными датчиками частоты вращения (магнитоэлектрические, на
эффекте Холла, высокочастотные, оптоэлектронные, токовихревые,
на эффекте Виганда, фотоэлектрические).
Оптические датчики. Оптические датчики углового положения -
используются светомодулирующие (кодирующие) диски с симмет¬
ричными прозрачными и непрозрачными секторами. Для прецизион¬
ных датчиков диски стеклянные, для обычных - металлические, кото¬
рые стоят дешевле. Кодирующий диск освещается с одной стороны, с
другой располагают фотоприемники. Кодирующий диск может иметь
от 16 до 6000 позиций на оборот. Сектора располагают на двух радиу¬
сах, смещая их на половину длины отверстия, что в 4 раза увеличива¬
ет разрешающую способность. Третья дорожка используется для раз¬
мещения маркера. Оптический датчик углового положения рулевого
колеса (рис. 2.28) содержит вращающийся диск с прорезями и три не-
42
подвижных оптоэлектронных пары. Диск вместе с рулем вращается
между светодиодами и фототранзисторами. При повороте руля на фо¬
тотранзисторах вырабатываются последовательности электрических
импульсов, по которым ЭБУ определяет угол и скорость поворота.
Для определения направления поворота используется два фотопреры¬
вателя ST-1 и ST-2. Третий прерыватель ST-N фиксирует центральное
положение рулевого колеса.
а б в
Рис. 2.29. Датчик положения рулевого колеса
Оптический датчик углового положения коленчатого вала и ВМТ
помещался в распределителе (рис.2.29). Кодирующий диск датчика с
прорезями на двух радиусах и выходные сигналы датчика показаны
на рис. 2.30, где 1 - диск, 2 - прорези внешнего радиуса, 3 - прорези
внутреннего радиуса, 4 - сигнал с внутреннего радиуса, 5 - сигнал с
внешнего радиуса. С внешнего радиуса диска снимается информация
об угловом положении коленчатого вала шестицилиндрового ДВС, с
внутреннего - о ВМТ. Светодиоды и фототранзисторы приходится
периодически очищать от загрязнения.
ВМТ1 ВМТ2 ВМТЗ ВМТ4 ВМТ5 ВМТ6 ВМТ1
4 Ч Ч Ч п Ч Ч Ч
синхроимпульс синхроимпульс
5
Рис. 2.30. Задающий диск оптического датчика в распределителе
43
Выпускаются серийные микросхемы для подключения к оптиче¬
ским датчикам. Дешифруется относительное угловое положение и
направление вращения. При вращении кодирующего диска возникает
погрешность из-за крутизны фронтов сигналов. Частотный диапазон
для светодиода не более 100 кГц. Датчики абсолютного углового по¬
ложения применяются там, где информация нужна сразу же после по¬
дачи питания. Оптические кодирующие диски таких датчиков (рис.
2.31) имеют разрешение от 26 до 216, формат данных - двоичный, дво¬
ично-десятичный, код Г рея. На диске имеется N концентрических до¬
рожек с секторами, где N - разрядность слова. Считывающее устрой¬
ство может воспринять часть разрядов из соседнего сектора, тогда
возникает ошибка считывания. Для уменьшения ошибок считывания,
как правило, используется код Грея. В этом коде при изменении лю¬
бого числа на единицу меняется только один двоичный разряд.
Считывающие устройства
ѵтл
а) б)
Рис. 2.31. Кодирующие диски: а - двоичный код; б - код Г рея
Датчики относительного линейного положения, например, для
регулятора XX с шаговым двигателем выполняются в виде модулей,
количество отсчетов - до 8-ми на миллиметр, что дает разрешение до
30 микрон.
Исходя из стоимости производства, требований к точности,
надежности помехозащищенности, стойкости к внешним воздействи¬
ям, датчики магнитоэлектрические и на эффекте Холла получили
наибольшее применение и производятся у нас в стране и за рубежом
крупными сериями.
Магнитоэлектрические датчики. Магнитоэлектрическим датчи¬
ком является генераторный датчик коммутаторного типа с пульсиру¬
ющим магнитным потоком. Принцип его действия заключается в из¬
менении магнитного сопротивления магнитной цепи и магнитного
44
потока в ней, при изменении зазора с помощью ферромагнитного зуб¬
чатого ротора (коммутатора).
При вращении зубчатого ротора в обмотке статора (рис.2.32) в со¬
ответствии с законом электромагнитной индукции возникает пере¬
менное напряжение с частотой, соответствующей частоте вращения
зубчатого ротора.
Рис. 2.32. Схема коммутаторного датчика и осциллограмма выходно¬
го сигнала
Напряжение определяется по формуле
Uout = к • w • n(d<J> н- da),
где к - коэффициент, зависящий от характеристик магнитной цепи; w -
количество витков обмотки; п - частота вращения зубчатого ротора;
dO/dcr - изменение потока Ф в зависимости от угла поворота а.
Когда зубцы ротора 4 приближаются к полюсам 5 статора, в об¬
мотках 2, включенных последовательно и согласованно, нарастает
напряжение Uout. При совпадении фронтов зубцов ротора с полюсами
статора (со средней их линией) напряжение Uout достигает максимума,
затем быстро меняет знак и при удалении зубцов увеличивается в
противоположном направлении снова до максимума. Число зубцов
зависит от числа цилиндров двигателя. Необходимое магнитное поле
создают постоянные магниты 1.
Датчики на эффекте Холла. Принцип работы датчика на исполь¬
зовании эффекта Холла изображен на рис. 2.33,а, где 1 - стальной
экран с прорезями; 2 - магниты; 3 - датчик Холла; 4 - воздушный за¬
зор; b - ширина лепестка стального экрана.
Эффект Холла возникает в плоской полупроводниковой пла¬
стине, внесенной в магнитное поле, при пропускании через нее элек¬
трического тока. Если поместить пластинчатый элемент толщиной h в
45
магнитном поле таким образом, чтобы направление индукции В маг¬
нитного поля было перпендикулярно плоскости пластины, и пропу¬
стить ток через пластину в продольном направлении, то в поперечном
направлении между противоположными гранями пластины возникнет
ЭДС Холла:
EX = k I B/h, где k - постоянная Холла м /А.
б
Рис. 2.33. Датчики на эффекте Холла
Чувствительность элемента Холла зависит от соотношения между
длиной и шириной пластины и повышается при уменьшении ее тол¬
щины. Для изготовления элементов Холла используются германий,
кремний, арсенид галлия (GaAs), арсенид индия (InAs), антимонид
индия (InSb).
Элемент Холла и преобразовательная схема, содержащая усили¬
тель, пороговый элемент, выходной каскад и стабилизатор напряже¬
ния, выполняются в виде - магнитоуправляемой интегральной схемы,
и выпускаются дискретными и аналоговыми.
Дискретные ИС применяются в датчиках относительного положе¬
ния и скорости. Имеют погрешность менее 0,5 % и используются в
качестве датчиков положения коленчатого или распределительного
валов. в системах зажигания.
Аналоговые - в датчиках абсолютного положения вместо контак¬
тных потенциометрических. Выходное напряжение пропорционально
магнитной индукции поля и напряжению питания, что упрощает их
сопряжение с АЦП. Для определения углового положения применяет¬
ся аналоговый датчик Холла, рис. 2.34, где а - устройство датчика аб¬
солютного углового положения с чувствительным элементом Холла, б
- диаграмма выходного сигнала. При повороте кольцевого магнита
относительно статоров, между которыми размещен датчик Холла, вы¬
ходное напряжение датчика меняется. В диапазоне 150° характери-
а
46
стика линейна, погрешность преобразования менее 1 %. В датчиках
нет трущихся частей, кроме подшипников, они безынерционны и
имеют высокую надежность.
Рис. 2.34. Датчик абсолютного углового положения
Стоимость аналоговых датчиков высокая, на их чувствительность
влияет температура, поэтому применяются магнитные материалы с
низкой температурной стабильностью: ферриты и сплавы AINiCo
(0,002 - 0,02/°С). Вводят внешние компенсирующие элементы, про¬
граммируют характеристики датчика через интерфейс.
Сельсины и дифференциальные трансформаторы. В качестве
датчиков абсолютного углового положения применяют:
• вращающиеся трансформаторы (сельсины), которые характери¬
зуются высокой разрешающей способностью, работают в тяжелых
внешних условиях. Обмотки возбуждения запитываются напряжени¬
ем с частотой 400 - 20000 Гц, (обычно 2 - 5 кГц). Угловое положение
ротора декодируется по сигналам с синусной и косинусной обмотка¬
ми специальной микросхемой в цифровой код (R-D - converter);
• линейные дифференциальные трансформаторы. Выходной сиг¬
нал может быть декодирован специализированной ИС.
Магниторезисгивные датчики. Используется способность мате¬
риалов, нр, сплава FeNi менять свое сопротивление под воздействием
изменения напряженности магнитного поля. Датчики безынерционны,
могут работать на нулевой частоте. В рабочем диапазоне магниторе¬
зистора его сопротивление меняется в пределах 2,5 % по квадратич¬
ному закону функции косинуса. Магниторезисторы встраивают в ин¬
тегральную схему, где размещают и цепи обработки сигнала. Магни¬
торезисторы имеют чувствительность: 4 - 15 %.
47
2.7. Радарные и другие специальные датчики
Радарные и ультразвуковые датчики. Автомобильные радарные
датчики работают на сверхвысоких радиочастотах в диапазоне 20 - 100
ГГц. Для определения скорости сближения автомобиля с фронтальным
препятствием на дороге используется эффект Доплера. Акселерометры
используются в системах безопасности, ABS, навигационных системах,
активной подвеске. Еще в 1969 г. фирма Lukas устанавливала экспери¬
ментальный доплеровский радиорадар с несущей частотой 24 ГГц на ав¬
томобиле Ford Zodiak для получения информации о скорости сближения
и расстоянии до объекта перед автомобилем. На поворотах такой радар
часто давал ложные сигналы тревоги, когда деревья и дорожные знаки
отражали сигнал излучателя. В современных радиорадарных системах
эта проблема решается за счет сложной цифровой обработки сигнала и
значительного повышения частоты излучения (в Европе - это 77 ГГц),
что дает более высокое разрешение и повышает помехоустойчивость. В
радиоизлучателе используется сканирующая антенна или три неподвиж¬
ных антенны, смонтированные под передним пластиковым бампером.
Такие антенны посылают вперед радиолуч с размером растра 3x9° (рис.
2.35, где а - внешний вид датчиков и блока управления; б - угол охвата и
дальность действия).
а б
Рис. 2.35. Радарный датчик парковки
Радиосигналы отражаются от других автомобилей, неподвижных
препятствий и обрабатываются в ЭБУ примерно 20 раз в секунду, с
учетом собственной скорости автомобиля и положения руля. Радар
дает информацию о фронтальных препятствиях перед автомобилем,
объекты на обочине (деревья и дорожные знаки) не вызывают ложных
срабатываний.
Современные радарные системы обнаруживают препятствия на
расстоянии до 150 метров, определяют расстояние до объекта с точ¬
48
ностью до 1 метра и скорость сближения с точностью до 1 км/ч. Ин¬
формация о препятствии поступает в ЭБУ, который через исполни¬
тельный механизм управляет специальной дроссельной заслонкой, не
связанной с педалью водителя, поддерживается безопасная скорость
сближения. В случае возможного столкновения ЭБУ использует сред¬
ства звукового и визуального предупреждения.
На рис. 2.36 представлен радарный датчик АСС для адаптивного
круиз-контроля фирмы BOSCH. В блоке размещены приемо¬
передающая антенна диаметром 75 мм, радиорадар с модуляцией ча¬
стоты, контроллер.
Помимо радиоарадарных датчиков разработаны и уже применяют¬
ся ультразвуковые датчики сближения.
Ультразвуковые датчики излучают узконаправленные звуковые
волны на частоте 40 кГц. Для определения скорости сближения и рас¬
стояния до обнаруженных по отраженному сигналу объектов здесь,
как и в радиорадаре, используется эффект Доплера. Скорость рас¬
пространения звуковой волны (340 м/с при 15 °С) зависит от свойств
атмосферы.
а б
Рис. 2.36. Радарный датчик
Датчики ускорения (акселерометры). Некоторые твердотельные
материалы обладают электрической чувствительностью к механиче¬
ским воздействиям. Такие материалы часто используются для преоб¬
разования механических величин в электрические.
На их основе создаются пьезоэлектрические и тензорезистивные
акселерометры, которые в автомобильных электронных системах ча¬
ще всего используются как датчики ускорения.
Пьезоэлектрические акселерометры. Этот тип датчиков ускоре¬
ния широко используется для вибрационных измерений, так как это
точные, надежные и простые устройства. На рис. 2.37, а показана ба¬
зовая конструкция акселерометра, работающая в компрессионном ре¬
49
жиме. Чувствительность автомобильных акселерометров составляет
около 20 мВ/g.
При деформации (сжатии) пьезокристалла на его гранях появляет¬
ся электрический сигнал, пропорциональный в данном случае ускоре¬
нию. Рабочий диапазон частоты - 5 - 100 000 Гц. Для обработки сиг¬
нала от пьезоэлектрического датчика используется электронный уси¬
литель-формирователь, собранный по схеме рис. 2.38.
Пьезоэлектрические акселерометры имеют малые размеры и вы¬
пускаются в интегральном исполнении. После принятия мер по тер¬
мокомпенсации эти датчики ускорения имеют погрешность не хуже
0,5 % в температурном диапазоне -40 - +110 °С.
Пьезоэлемент Сейсмическая
а б
Рис. 2.37. Пьезоэлектрический акселерометр
+U
Рис. 2.38. Схема усилителя сигнала пьезоэлектрического акселерометра
Акселерометры для воздушных мешков безопасности. Эти ак¬
селерометры являются механическими датчиками инерционного типа.
Такие датчики должны располагаться не далее 40 см от места удара.
Используются обычно 3-5 датчиков.
50
Конкретное исполнение инерционных датчиков выбирается произ¬
водителем системы безопасности, но все они работают по одному и
тому же принципу. В обычных условиях движения автомобиля вы¬
ходные контакты акселерометра разомкнуты, они замыкаются, когда
датчик испытывает отрицательное ускорение в диапазоне 15 - 20 g,
что соответствует наезду автомобиля на твердое препятствие со ско¬
ростью 12-20 миль в час. Существует несколько конструкций аксе¬
лерометров, применяемых в системах безопасности. Рассмотрим не¬
которые из них.
Самыми распространенными механическими акселерометрами яв¬
ляются акселерометры с постоянным магнитом. Эта механическая
конструкция (рис. 2.39) состоит из чувствительной массы (металличе¬
ского шара), которая прочно удерживается в задней части небольшого
цилиндра мощным постоянным магнитом. Во время обычной езды
выходные электрические контакты датчика разомкнуты. При столк¬
новении сила инерции металлического шара преодолевает притяже¬
ние магнита, шар катится по цилиндру вперед и замыкает контакты,
сигнал поступает в ЭБУ.
Электрические
контакты
Направление движения
Магнит
Сила
смещения
Чувствительная масса
До столкновения контакты разомкнуты
Рис. 2.39. Акселерометр с постоянным магнитом
Динамические характеристики механических акселерометров опи¬
сываются дифференциальным уравнением 2-го порядка. Такие пара¬
метры, как жесткость пружины, масса шарика, сила притяжения маг¬
нита, демпфирование и т. д., должны быть увязаны с динамикой авто¬
мобиля при ударе. Эти параметры подбирают под конкретную модель
автомобиля с учетом его веса, конструкции корпуса, места располо¬
жения датчика.
Специальные акселерометры. В последнее время начали приме¬
няться интегральные акселерометры на основе полупроводниковых
или пьезоэлектрических тензорезисторов. Они малогабаритны, более
надежны, программируются, их характеристики воспроизводимы с
более высокой точностью. Интегральные датчики располагаются
примерно в центре салона. Их чувствительность к ударному ускоре¬
51
нию выше, чем у механических из-за амортизации корпуса. Использу¬
ется один датчик для фронтального удара с диапазоном ±50 g. Могут
применяться датчики боковых ударов, пьезорестивные или емкост¬
ные. Погрешность - менее 5 %, частотный диапазон - 0 - 750 Гц.
Акселерометры используются также в активной подвеске для
определения изменения нагрузки на колеса. Рабочий диапазон ±2 g,
погрешность - менее 5 %, диапазон частот - 0 - 10 Гц.
В некоторых недорогих системах ABS используются акселеромет¬
ры для определения предельных значений ускорения, при которых
возможно проскальзывание колес. Рабочий диапазон ±lg, погреш¬
ность - менее 5 %, диапазон частот - 0,5 - 50 Гц.
Датчик детонации. Датчики детонации используются для обна¬
ружения явления детонации при сгорании рабочей смеси в цилиндрах
[1] и [2] Контроль за детонацией особенно актуален в современных
двигателях с высокой компрессией, так как для их эффективной рабо¬
ты угол опережения зажигания близок к предельному, за которым
начинается детонация.
Обнаружение детонации можно производить различными спосо¬
бами: измерением давления непосредственно в цилиндре, измерением
ионизационного тока через электроды свечи после воспламенения и
т. д. На практике используется метод измерения вибрации цилиндров
с помощью пьезоэлектрического датчика детонации. На рис. 2.40,а
показано устройство датчика детонации, где 1 - пьезоэлемент; 2-
шунтирующий резистор. Датчик выполнен таким образом, что его ре¬
зонансная частота совпадает с частотой детонации двигателя (обычно
в диапазоне 6 - 12 кГц). Датчик закрепляется на блоке цилиндров и
реагирует даже на слабую детонацию. При появлении детонации виб¬
рация двигателя приводит к генерации сигнала на выходе датчика
(рис. 2.40, г). ЭБУ двигателя фильтрует сигнал с датчика детонации,
производит аналого-цифровое преобразование. После момента зажи¬
гания (вероятное время появления детонации) производится сравне¬
ние сигнала с датчика детонации с заданным уровнем (рис. 2.40, д).
При обнаружении детонации ЭБУ уменьшает угол опережения зажи¬
гания во всех цилиндрах или только в одном. При выходе датчика де¬
тонации из строя ЭБУ устанавливает несколько уменьшенное без¬
опасное значение угла опережения зажигания. При исчезновении де¬
тонации ЭБУ начинает постепенно увеличивать угол опережения за¬
жигания до появления детонации вновь и т. д. Таким образом, ЭБУ с
помощью датчика детонации удерживает двигатель в эффективном
52
режиме работы на грани детонации, но без опасности поломок и вы¬
хода из строя.
Рис. 2.40. Датчик детонации
Датчик содержания метанола в топливе. Для уменьшения со¬
держания токсичных веществ в выхлопных газах автомобиля возмож¬
но использование смешанных топлив. Предполагается, что положи¬
тельный эффект может дать добавление метанола (метилового спирта)
к бензину. Проблема состоит в том, что для поддержания стехиомет¬
рического состава бензиновой и составной (метаноловой) ТВ-смеси
требуется разное количество воздуха.
ЭБУ двигателя должен работать с обеими этими смесями и их
комбинацией в различных пропорциях. В этом случае необходим дат¬
чик, способный определить процентное содержание метанола в топ¬
ливе.
Один из вариантов реализации датчика метанола показан на рис.
2.41,а. Содержание метанола в топливе здесь определяется по элек¬
трической емкости, при этом учитывается температура топлива и его
электрическое сопротивление. В соответствии с полученным сигна¬
53
лом программное обеспечение ЭБУ выбирает стратегию управления
подачей топлива под конкретный состав ТВ-смеси.
Предполагается, что такие датчики в будущем найдут широкое
применение в двигателях, а также с другими альтернативными видами
топлива.
Рис. 2.41. Датчик метанола
Датчики состояния электрических цепей. Состояние электриче¬
ских цепей современного автомобиля постоянно контролируется ЭБУ.
Датчиками состояния служат, как правило, резистивные шунты и де¬
лители напряжения, обмотки токовых реле.
Например, для того что¬
бы можно было различить
закрытое и открытое состоя¬
ние ключа от неисправно¬
стей в проводке, в его цепь
введены дополнительные ре¬
зисторы (рис. 2.42).На схеме
исправной проводке соответ¬
ствует сопротивление R1 = 1
кОм при разомкнутом ключе
и R2 = 39 Ом при замкнутом. состояния электрической цепи
Любые иные значения ЭБУ воспримет как признак неисправности
датчика и занесет в память соответствующий код ошибки.
2.8. Степени интеграции
По степени интеграции (рис. 2.43, где АОС - аналоговая обра¬
ботка сигнала; МП - микропроцессор; АТЩ - аналого-цифровой)
датчики разделяются на уровни:
54
• Обычный нулевой уровень. Аналоговый сигнал с датчика пере¬
дается по линии связи (проводам) в ЭБУ, где и производится вся не¬
обходимая обработка. Такой метод наименее помехозащитен.
• Уровень интеграции 1. В датчик включены цепи предваритель¬
ной аналоговой обработки сигнала, улучшена помехозащищенность.
• Уровень интеграции 2. В датчик помимо аналоговой обработки
сигнала встроен аналого-цифровой преобразователь. Датчик может
быть подключен к цифровой коммуникационной шине, например
CAN, улучшена помехозащищенность, сигнал датчика становится до¬
ступным локальной сети контроллеров.
Рис. 2.43. Интеграция датчиков
• Уровень интеграции 3. Датчики получают интеллектуальные
возможности за счет установки в них микропроцессоров. Цифровой
сигнал хорошо помехозащищен, имеются возможности программной
установки параметров датчиков под конкретную модель автомобиля,
расширены диагностические возможности. Например, датчик поло¬
жения дроссельной заслонки соответствует обычному уровню, инте¬
гральный датчик разрежения во впускном коллекторе соответствует
первому уровню интеграции, а радарный датчик скорости и расстоя¬
ния для целей адаптивного круиз-контроля соответствует третьему
уровню.
3. ЭЛЕКТРОННОЕ УПРАВЛЕНИЕ АВТОМОБИЛЬНЫМ
ДВИГАТЕЛЕМ
Электронная система автоматического управления двигателем
(ЭСАУ-Д) состоит из датчиков для постоянного контроля за его пара¬
метрами и параметрами окружающей среды, электронного блока
55
управления (ЭБУ) на основе микропроцессора и исполнительных
устройств, с помощью которых ЭБУ управляет двигателем по зало¬
женной в его память программе и в соответствии с информацией от
датчиков.
Электронное управление необходимо:
- для удовлетворения высоких требований по экологичности,
- топливной экономичности,
- эксплуатационным характеристикам,
- удобства обслуживания и диагностики, предъявляемым к двига¬
телям законодательно и потребителями.
3.1. Уменьшение загрязнения окружающей среды выхлопными
газами
В выхлопных газах содержатся:
- остатки углеводородного топлива (СН),
- окись углерода (СО),
- двуокись углерода (С02),
- окислы азота NOx, азот(К) и кислород (02).
Содержание углеводородов измеряется в частях на миллион по
объему (PPM или млн). Нормально работающий двигатель сжигает в
цилиндрах практически все топливо. Допустимое содержание СН
должно быть менее 50 PPM. Бензин является канцерогеном.
Окись углерода - неустойчивое химическое соединение, вступа¬
ющее в реакцию с кислородом, в результате образуется двуокись уг¬
лерода С02. СО - ядовитый газ, вызывает сильное отравление. Уро¬
вень СО измеряется в процентах и не должен превышать 0,5 %.
Двуокись углерода С02 - результат соединения углерода с кисло¬
родом. Допустимое содержание - 12 - 15 %. Высокие значения свиде¬
тельствуют о хорошей работе двигателя. Низкий уровень С02 говорит
о том, что топливно-воздушная смесь (ТВ-смесь) богатая или бедная.
Повышение концентрации С02 в атмосфере способствует развитию
парникового эффекта.
Кислород - содержание в воздухе 21 % и большая часть вступает
в реакцию с топливом. Уровень кислорода в выхлопных газах должен
быть низким, менее 0,5 %.
Группа окислов азота, NOx
• Окись азота NO - бесцветный газ без вкуса и запаха. При соеди¬
нении окислов азота с углеводородом СН в атмосфере под воздей¬
ствием солнечных лучей образуется фотохимический смог, вредный
для органов дыхания человека;
56
• Двуокись азота NOx - рыжеватый газ с кислым едким запахом,
слабо токсичен.
Экология бензиновых двигателей. При полном сжигании I кг
о
(1л) бензина в14,7кг(10м) воздуха образуются нетоксичные веще¬
ства: вода и двуокись углерода.
Стехиометрическим называется соотношение между массой воз¬
духа и топлива, равное 14,7:1.
Коэффициентом избытка воздуха X называется отношение фак¬
тического состава ТВ-смеси к ее стехиометрическому составу.
Полное сгорание топлива имеет место при Л = 1.
Сгорание богатой ТВ-смеси (л<1) приводит к появлению избы¬
точного количества СО, Н2 и СН.
Бедные ТВ-смеси (л> 1) сгорают с образованием N02 и приводят к
пропускам воспламенения.
Каталитический газонейтрализатор. В каталитическом газоней-
трализаторе происходят химические реакции, уменьшающие концен¬
трацию токсичных веществ в выхлопных газах:
2СО + 02 2С02
2С2Н6 + Ю2 4С<92 + 6Н20
2NO + 2 СО -^N2+ 2 С02
Катализаторы химических реакций - это благородные металлы,
нр., платина.
Для нормальной эксплуатации газонейтрализатора требуется под¬
держание стехиометрического состава ТВ-смеси с высокой точностью
- менее 1%, иначе нейтрализатор деградирует (точность дозирования
без ЭБУ недостижима). Нейтрализатор перерабатывает до 90 % ток¬
сичных веществ в нетоксичные.
Угол опережения зажигания. Неоптимальные значения угла опе¬
режения зажигания приводят к увеличению концентрации СН и N0.
Точное задание угла опережения зажигания для всех режимов работы
двигателя возможно только с помощью электронной СУ.
Экология дизельных двигателей. В дизелях топливо впрыскива¬
ется непосредственно в цилиндры и воспламеняется за счет разогрева
сжимаемого воздуха. В дизелях Я всегда больше единицы. При опти¬
мальных значениях я = 1,1-1,2 в выхлопных газах содержится ми¬
нимальное количество сажи, СН и СО. На дизелях работают двухком¬
понентные окислительные каталитические нейтрализаторы, преобра¬
зующие СН и СО в С02 и Н20. Применение трехкомпонентного ката¬
литического нейтрализатора невозможно из-за избытка воздуха. На
57
процесс сгорания топлива сильно влияет точность синхронизации его
впрыска. Нр, погрешность начала впрыска в 1° оборота коленчатого
вала ведет к увеличению содержания в выхлопных газах N02 на 5 % и
СН на 15 %.
Для уменьшения концентрации N02 применяется система рецирку¬
ляции выхлопных газов.
Уменьшение потребления топлива. Экономия топлива в двигате¬
лях с электронным управлением достигается за счет:
- его точного дозирования во всех режимах работы;
- отключения подачи топлива, когда это допустимо, нр, при тор¬
можении двигателем.
Обеднение ТВ-смеси с целью экономии топлива приводит к необ¬
ходимости увеличивать угол опережения зажигания, так как бедная
смесь горит медленно, но при этом возрастает токсичность выхлоп¬
ных газов.
Диагностика. ЭБУ в фоновом режиме контролирует исправность:
- датчиков и исполнительных механизмов,
- систем, выход из строя которых ведет к увеличению загрязнения
окружающей среды (каталитический газонейтрализатор, система по¬
дачи топлива и т. д.).
3.2. Функции электронных систем управления бензиновым
двигателем
Электронные системы управления топливоподачей бензиновых
двигателей
Применение ЭСАУ топливоподачей бензиновых двигателей обу¬
словлено необходимостью снижения токсичности отработавших газов
и повышения экономичности ДВС. ЭСАУ позволяют оптимизировать
процесс смесеобразования; применять трехкомпонентные нейтрализа¬
торы, работающие при коэффициенте избытка воздуха а, близком к 1.
Повысить приемистость автомобиля, надежность холодного пуска,
ускорить прогрев и увеличить мощность двигателя.
ЭСАУ топливоподачей (рис. 3.1) разделяют на системы впрыска
(во впускной трубопровод или непосредственно в камеру сгорания) и
карбюраторные системы с электронным управлением.
Принцип действия системы электронного управления карбюра¬
тором заключается в согласованном управлении воздушной и дрос¬
сельной заслонками.
58
Рис. 3.1. Схема ЭСАУ топливоподачей
Определение необходимого количества топлива. Масса подава¬
емого в двигатель топлива FM связана с массой воздуха Ам и тре¬
буемым значением коэффициента избытка воздуха я соотношением
г Ам
М Ах 14,7'
Масса воздуха может быть выражена через его объем Аѵ и плот¬
ность
Ам = Аѵ х Ad .
Плотность воздуха А0 определяется по его давлению и температу¬
ре во впускном коллекторе с помощью соответствующих датчиков.
Объем воздуха рассчитывается по числу оборотов ДВС в ми¬
нуту N:
Л W D т.
Avrpm — ^ х 7 Х
где D - объем двигателя; ѵЕ - коэффициент использования объема, за¬
висящий от оборотов.
Если в двигателе применяется рециркуляция выхлопных газов, их
объем Атрм также учитывается:
Аѵ = Avrpm — Avegr .
Объем Avecr зависит от положения клапана системы рециркуляции
выхлопных газов.
В датчиках расхода воздуха с измерительной заслонкой по откло¬
нениям заслонки определяют непосредственно объем воздуха Ѵу.
Для определения плотности воздуха во впускном коллекторе уста¬
навливаются датчики температуры и давления.
В ЭСАУ-Д устанавливаются датчики массового расхода воздуха.
Определив необходимую массу топлива Fm, контроллер по известной
производительности форсунок вычисляет для них базовые значения
времени включения.
59
Чтобы масса подаваемого через форсунки топлива зависела только
от длительности их включения, в рампе форсунок относительно
впускного коллектора специальным регулятором поддерживается по¬
стоянное давление топлива.
В двигателях с распределенным впрыском подача топлива произ¬
водится следующим образом:
- все форсунки включаются одновременно один раз за один обо¬
рот коленчатого вала;
- форсунки включаются группами, нр., парами для 4-
цилиндрового двигателя, один раз за 4 такта. Группы управляются
раздельно;
- форсунки управляются независимо, т.е. подача топлива на соот¬
ветствующем такте впуска ТВ-смеси в каждый цилиндр регулируется
индивидуально.
Управление по сигналу датчика кислорода. Сигнал с датчика
кислорода поступает в ЭБУ двигателя, где сравнивается с опорным
напряжением Vs = 0 > 45 В. Это напряжение находится примерно по¬
середине между уровнями сигналов для обедненной и обогащенной
ТВ-смеси для циркониевого датчика.
Когда сигнал с датчика кислорода превышает опорный уровень,
программное обеспечение ЭБУ двигателя определяет рабочую ТВ-
смесь как обогащенную и ЭБУ начинает постепенно уменьшать дли¬
тельность импульса отпирания форсунки. Датчик реагирует на изме¬
нение состава топливовоздушной смеси с некоторой задержкой. Чем
дольше датчик кислорода индицирует обогащенный состав ТВ-смеси,
тем больше уменьшается длительность импульса отпирания форсунок
и тем беднее становится ТВ-смесь. В результате таких действий вы¬
ходной сигнал датчика кислорода перейдет на уровень ниже опорного
и ЭБУ зафиксирует обедненный состав смеси. Далее начнется посте¬
пенное увеличение длительности импульса отпирания форсунок и
обогащение ТВ-смеси будет продолжаться до тех пор, пока датчик
кислорода вновь не переключится.
Таким образом, состав ТВ-смеси постоянно колеблется между
обедненным и обогащенным состояниями при постоянной нагрузке
двигателя (рис.3.2). Имеет место релейная стабилизация при колеба¬
ниях по предельному циклу.
Частота переключений сигналов датчика (обедненный состав сме¬
си - обогащенный состав смеси) определяется по формуле
F = 1/4^
60
где tL - время, за которое топливо проходит путь от форсунки впрыска,
через впускной коллектор, цилиндр и выпускной коллектор до датчика
кислорода. Для большинства двигателей при работе на холостом ходу
частота лежит в диапазоне 0,5 - 2,0 Гц. У новейших ДВС - до 10 Гц.
Обогащ.
1.0
Обеднен.
Коэффициент избытка воздуха
Время —1—►
1.0
Сигнал на выходе с датчика кислорода, В
•
Г i
Уровень Vs
/
/
L... J
Время —
—►
0.5
Корректирующий коэффициент
Рис. 3.2. Сигналы в системе стабилизации стехиометрического
состава ТВ-смеси
Данная релейная система стабилизации поддерживает стехиомет¬
рический состав ТВ-смеси на уровне 1 - 5%. Каталитический газоней-
трализатор имеет рабочий объем для выхлопных газов, выполняющий
функцию ресивера, демпфирующего колебания в составе отработан¬
бі
ных газов. Таким образом, в ресивере катализатора продукты сгора¬
ния перемешиваются и усредненный их состав становится близким к
составу продуктов сгорания стехиометрической ТВ-смеси. Это спо¬
собствует более эффективной работе газонейтрализатора, и количе¬
ство токсичных веществ на его выходе становится минимальным.
Из-за задержки срабатывания СУ составом ТВ-смеси по сигналу
датчика кислорода не имеет необходимого быстродействия. След¬
ствием инерционности может быть увеличение выброса токсичных
веществ на переходных режимах. Контроллер для управления подачей
топлива использует не только сигнал с датчика кислорода, но и ка¬
либровочные диаграммы в осях «обороты - нагрузка двигателя», хра¬
нящиеся в памяти ЭБУ.
Управление углом опережения зажигания. Правильная установ¬
ка текущего значения угла опережения зажигания:
- оптимизирует крутящий момент на валу двигателя;
- минимизирует содержание токсичных веществ в выхлопных га¬
зах;
- уменьшает расход топлива;
- улучшает ездовые характеристики;
- исключает детонацию.
Базовые значения для определения угла опережения зажигания в
зависимости от нагрузки и оборотов двигателя заложены в по¬
стоянной памяти контроллера. Их получают во время эксперимен¬
тальных исследований вновь разрабатываемого двигателя на стендо¬
вом динамометре.
Базовые значения корректируются в зависимости от режима рабо¬
ты ДВС:
- перегрев;
- ускорение;
- включение системы рециркуляции выхлопных газов и т. д.
В системах зажигания первичный ток катушки зажигания регули¬
руется временем ее подключения к напряжению питания. ЭБУ опре¬
деляет длительность временного интервала подключения по калибро¬
вочным диаграммам, хранящимся в ПЗУ, и в зависимости от оборотов
двигателя и напряжения бортовой сети выполняет корректировку. Ра¬
бота ключа (коммутатора зажигания) синхронизируется так, чтобы
необходимое значение тока первичной обмотки катушки зажигания
достигалось непосредственно перед моментом новообразования.
Значения угла опережения зажигания, обеспечивающие наиболее
эффективную работу двигателя, близки к предельным, на которых
62
возникает детонация. При обнаружении детонации угол опережения
зажигания соответственно уменьшается. В современных СУ угол опе¬
режения зажигания регулируется раздельно по цилиндрам.
3.3. Режимы работы системы управления двигателем
Запуск двигателя. Двигатель при прокрутке стартером должен
быстро запускаться при любой температуре охладителя и внешней
среды. При пуске топливо подается с избытком (богатая ТВ-смесь),
так как оно плохо испаряется в холодном двигателе и конденсируется
на стенках впускного коллектора. Но свечи зажигания заливаться не
должны, иначе искрообразование ухудшится. Во время запуска ЭБУ
управляет подачей топлива по калибровочным диаграммам, храня¬
щимся в ПЗУ, и корректируют состав ТВ-смеси по температуре ОЖ.
Датчик кислорода в это время еще не работает, так как не прогрет, а
ТВ-смесь переобогащена. Количество подаваемого топлива начинает
уменьшаться, после того как скорость вращения коленчатого вала
превысит пороговое значение для данного типа двигателя. В некото¬
рых СУ при прокрутке ДВС все форсунки открываются одновременно
и только после запуска начинают работать синхронно с тактами впус¬
ка своих цилиндров.
Угол опережения зажигания при прокрутке определяется ЭБУ по
оборотам и температуре двигателя. Для холодного двигателя и низкой
скорости прокрутки угол опережения зажигания почти равен нулю. В
любом случае при прокрутке ДВС значение угла опережения зажига¬
ния ограничивается, так как вспышка в камере сгорания до верхней
мертвой точки может провернуть коленчатый вал в обратном направ¬
лении и повредить стартер.
Прогрев двигателя. После запуска ДВС во время его прогрева СУ
ДВС обеспечивает:
- устойчивую работу двигателя;
- быстрый нагрев датчика кислорода и каталитического нейтрали¬
затора для введения их в рабочее состояние;
- минимальное потребление топлива и загрязнение окружающей
среды.
Для устойчивой работы холодного ДВС в него подается обога¬
щенная ТВ-смесь. Во время прогрева степень обогащения зависит от
температуры ДВС и всасываемого воздуха:
63
1) . в каталитический газонейтрализатор подается дополнительный
воздух. Образовавшиеся в цилиндрах излишки СО и СН (из-за обога¬
щенной ТВ-смеси) доокисляются в каталитическом нейтрализаторе.
Химическая реакция окисления ускоряет разогрев нейтрализатора;
2) . увеличивают обороты XX и уменьшают угол опережения зажи¬
гания, что повышает температуру выхлопных газов и ускоряет разо¬
грев каталитического газонейтрализатора и датчика кислорода;
3) . применяется и электрический разогрев датчика кислорода и
нейтрализатора.
Работа в переходных режимах. В переходных режимах (при
быстром увеличении, уменьшении нагрузки или оборотов ДВС) СУ
должна обеспечивать плавную, устойчивую работу ДВС.
При ускорении автомобиля дроссельная заслонка резко открывает¬
ся, во впускной коллектор поступает больше воздуха. СУ должна
быстро отреагировать, чтобы успеть обогатить ее так. При этом не
должно увеличиваться загрязнение окружающей среды выхлопными
газами. Для обеспечения максимального крутящего момента на валу
угол опережения зажигания устанавливается на грани детонации.
При торможении, езде под гору, торможении двигателем подача
топлива резко ограничивается или полностью отключается до тех пор,
пока обороты двигателя остаются выше заданного значения (чуть
больше оборотов XX). СУ двигателем следит, чтобы при отключении
подачи топлива не остыли и не перешли в нерабочее состояние датчик
кислорода и каталитический нейтрализатор. Это реализуется допол¬
нительным электроподогревом.
Полная нагрузка. При езде автомобиля под полной нагрузкой,
например, в гору, двигатель должен развивать максимальную мощ¬
ность. ЭБУ управляет составом ТВ-смеси и углом опережения зажи¬
гания по калибровочным таблицам. Двигатель имеет наилучшие тяго¬
вые характеристики при 1=0,9 - 0,95, в этом диапазоне датчик кисло¬
рода не работает. Угол опережения зажигания имеет значение, обес¬
печивающее максимальный крутящий момент на валу, при необходи¬
мости производится коррекция по детонации. Экологические показа¬
тели двигателя несколько ухудшаются.
Работа на холостых оборотах. В режиме XX СУ двигателем в це¬
лях экономии топлива поддерживает минимальные устойчивые обо¬
роты. В городском цикле движения на XX автомобиль потребляет
около 30 % топлива. Система регулирования холостых оборотов
должна отрабатывать как скачкообразно, так и плавно меняющиеся
нагрузки. Обороты двигателя в режиме XX автоматически регулиру-
64
ются изменением количества подаваемого воздуха или угла опереже¬
ния зажигания.
Воздух в режиме XX обычно подается через байпасный канал, се¬
чение которого регулируется шаговым двигателем, по командам ЭБУ.
Есть варианты, когда количество подаваемого воздуха регулируется
автоматически управляемым ЭП дроссельной заслонки. Недостатком
СУ оборотами XX путем изменения пропускного сечения воздушного
канала является ее инерционность, особенно при скачкообразных из¬
менениях нагрузки. Более высокое быстродействие имеет система,
работающая с изменением угла опережения зажигания в заданных
пределах. В современных ЭБУ для управления оборотами XX исполь¬
зуются оба эти варианта управления.
Чтобы двигатель, работающий в режиме XX, не останавливался
при подключении мощной нагрузки (нр, компрессора кондиционера),
сначала от выключателя нагрузки на ЭБУ поступает сигнал о пред¬
стоящем увеличении нагрузки, по которому ЭБУ увеличивает оборо¬
ты двигателя, и затем включается нагрузка.
3.4. Системы подачи топлива
Работа системы подачи топлива в цилиндры двигателя заключается:
- в формировании состава ТВ-смеси;
- ее дозировании;
- транспортировке;
- распределении по цилиндрам.
Водитель управляет оборотами двигателя посредством дроссель¬
ной заслонки, которая дозирует количество поступающего в цилин¬
дры воздуха. СУ измеряет объем или массу всасываемого воздуха и
формирует оптимальный состав ТВ-смеси.
Карбюратор с электронным управлением. В поплавковом карбюра¬
торе чем больше воздуха засасывается в цилиндры, тем больше топ¬
лива поступает для образования ТВ-смеси. Основной недостаток та¬
кой системы смесеобразования - нелинейная связь между массой по¬
ступающего в двигатель воздуха и количеством распыленного топли¬
ва, т.е. не выдерживается стехиометрический состав ТВ-смеси при
различных оборотах двигателя. Для компенсации этого недостатка
вводят электронное управление. Электронный карбюратор позволяет
реализовать следующие функции:
65
- стабилизация оборотов XX. Обороты ДВС на XX поддерживают¬
ся постоянными на низком уровне с целью экономии топлива и умень¬
шения токсичности выхлопных газов. Регулирование производится ша¬
говым двигателем. Обороты XX могут быть изменены по сигналу от ав¬
томатической коробки переключения передач, от реле включения муфты
кондиционера и другим сигналом об увеличении нагрузки;
- прогрев двигателя. При прогреве двигателя обороты XX под¬
держиваются увеличенными до тех пор, пока соответствующий сиг¬
нал не поступит от датчика температуры ОЖ;
- обогащение ТВ-смеси при прогреве. Используется вращающа¬
яся воздушная заслонка или иной тип клапана для обогащения смеси,
в зависимости от режима работы двигателя и температуры ОС;
- отключение подачи топлива при больших оборотах двигателя.
Для отключения подачи топлива используется запирающий электро¬
клапан, который срабатывает, когда температура двигателя выше
установленного предела или обороты двигателя выше допустимого
значения при отпущенной педали акселератора (случай - торможение
двигателем).
На рис. 3.3 показаны основные компоненты карбюратора с элек¬
тронным управлением, используемые на некоторых ранних моделях ав¬
томобилей фирмы Rover. Блок-схема СУ карбюратором (рис.3.4) со¬
держит набор датчиков, устройство обработки информации, исполни¬
тельные механизмы.
температуры датчик положения
двигателя дроссельной заслонки
Рис. 3.3. Основные компоненты карбюратора с электронным
управлением
66
Рис. 3.4. Блок-схема системы управления электронным
карбратором
В такой системе обороты двигателя определяются по частоте им¬
пульсного сигнала, поступающего с отрицательного зажима первич¬
ной обмотки катушки зажигания, как и во многих других системах.
Датчик температуры охлаждающей жидкости (термистор) размещен
в рубашке водяного охлаждения двигателя, этот же датчик используется
в СУ зажиганием. Температура окружающего воздуха определяется
термистором, расположенным под передним бампером или за фарой. В
более поздних системах температура всасываемого воздуха измеряется
датчиком, установленным во впускном коллекторе.
Датчик закрытого положения дроссельной заслонки помещен под
педалью акселератора и срабатывает, когда педаль отпущена, т.е.
дроссельная заслонка закрыта.
Основным исполнительным механизмом в электронном карбюра¬
торе является шаговый электродвигатель. Шаговый двигатель изме¬
няет положение дроссельной заслонки в соответствии с командами,
которые формируются в ЭБУ с учетом режима работы двигателя,
температуры охлаждающей жидкости и всасываемого воздуха.
Когда обороты двигателя превышают допустимое значение, ЭБУ с
помощью электроклапана уравнивает давление в поплавковой и сме¬
сительной камерах и подача топлива прекращается.
ЭБУ выдает также сигнал на указатель температуры двигателя, ко¬
торый установлен на щитке приборов для водителя.
Системы с центральным впрыском топлива. Используются одна
или две форсунки, устанавливаемые перед дроссельной заслонкой (рис.
3.5). Электробензонасос постоянно прокачивает топливо через форсунку
2. Регулятор давления топлива I поддерживает давление топлива посто¬
янным на уровне 0,71 бар. Топливо подается через ввод 7 и сливается об¬
ратно в бак по возвратной линии 3. По команде ЭБУ форсунка включает¬
67
ся один раз за два оборота КВ. Сопло сконструировано так, чтобы топли¬
во проходило между стенками трубопровода и краями дроссельной за¬
слонки. На XX ТВ-смесь подается во впускной коллектор через байпас¬
ный канал 5, сечение которого регулируется шаговым двигателем 4.
Рис. 3.5. Форсунка центрального впрыска
Системы с распределенным впрыском топлива. Топливо пода¬
ется вблизи впускных клапанов каждого цилиндра с помощью меха¬
нических или электромеханических форсунок. Преимущества распре¬
деленного впрыска по сравнению с центральным:
- экономия топлива за счет его более равномерного распределения
по цилиндрам. В системах с центральным впрыском подача топлива
регулируется под цилиндр, получающий наиболее бедную смесь, в
результате суммарное потребление топлива возрастает;
- в системах с распределенным впрыском есть возможность опти¬
мизировать конструкцию впускного коллектора под подачу макси¬
мального количества воздуха, в результате с двигателя снимается
большая мощность;
- за счет подачи топлива непосредственно в зону впускных клапа¬
нов уменьшается транспортное запаздывание, двигатель быстрее реа¬
гирует на изменение положения дроссельной заслонки;
- за счет сокращения транспортного запаздывания в системе стабили¬
зации стехиометрического состава топливовоздушной смеси по сигналу с
датчика кислорода повышена частота переключений «бедная смесь - бо¬
гатая смесь». Это улучшает работу каталитического нейтрализатора,
уменьшается содержание токсичных веществ в выхлопных газах.
В системах распределенного постоянного впрыска, например,
K-Jetronic фирмы BOSCH, количество подводимого воздуха непре¬
рывно измеряется расходомером, а масса впрыскиваемого топлива
68
пропорциональна объему поступающего воздуха. Система поддержи¬
вает стехиометрическое соотношение 1:14,7 в ТВ-смеси, кроме пере¬
ходных режимов и работы двигателя с полной нагрузкой. Топливо
впрыскивается постоянно, его количество регулируется дозатором-
распределителем, управляемым расходомером воздуха и регулятором
управляющего давления. В свою очередь, воздействие регулятора
управляющего давления определяется величиной подводимого к нему
разрежения во впускном коллекторе и температурой ОЖ. В этой чи¬
сто механической системе используются датчики температуры на ос¬
нове биметаллических пластин. Датчики управляют работой дозатора-
распределителя через систему диафрагм и патрубков.
В системах распределенного постоянного впрыска с электронным
управлением, например, в KE-Jetronic, используется больше датчиков,
информация с которых обрабатывается в микропроцессорном ЭБУ.
Управляющее давление в дозаторе-распределителе меняется электро-
гидравлическим регулятором по командам ЭБУ. За счет электронного
управления лучше оптимизировано дозирование топлива.
Наиболее совершенными являются системы прерывистого распре¬
деленного впрыска топлива. В них давление подводимого к форсун¬
кам топлива поддерживается постоянным по отношению к впускному
коллектору. Количество подаваемого топлива регулируется временем
включения электромагнитных форсунок, управляемых непосред¬
ственно от ЭБУ, чем достигается высокое быстродействие и точность
дозирования. Неотъемлемыми частями современных систем подачи
топлива с прерывистым впрыском являются:
• датчик массового расхода воздуха (массметр), обычно термо¬
анемометрический;
• система дозирования топлива: электробензонасос, топливный
фильтр, рампа форсунок, электромагнитные форсунки, регулятор дав¬
ления топлива. Бензонасос подает топливо в рампу под давлением 250
- 350 кПа. Регулятор давления поддерживает постоянный перепад
давления между впускной трубой и нагнетающей магистралью рампы,
излишки топлива возвращаются в бензобак по линии слива. Соленои¬
ды форсунок управляются силовыми транзисторами эбу. В некоторых
системах имеется дополнительная пусковая форсунка, которая уста¬
навливается за дроссельной заслонкой и включается при холодном
пуске двигателя;
• датчик кислорода, сигнал которого используется ЭБУ для работы
в замкнутом режиме стабилизации стехиометрического состава топ¬
ливовоздушной смеси.
69
3.5. Электронное управление двигателем
Электронные СУ топливоподачей бензиновых двигателей.
Применение ЭСАУ топливоподачей бензиновых двигателей обуслов¬
лено необходимостью снижения токсичности отработавших газов и
повышения экономичности ДВС. ЭСАУ позволяют оптимизировать
процесс смесеобразования; применять трехкомпонентные нейтрали¬
заторы, работающие при коэффициенте избытка воздуха а, близком к
1; повысить приемистость автомобиля, надежность холодного пуска,
ускорить прогрев и увеличить мощность двигателя.
ЭСАУ топливоподачей разделяют на системы впрыска (во впускной
трубопровод или непосредственно в камеру сгорания) и карбюраторные
системы с электронным управлением. Принцип действия системы элек¬
тронного управления карбюратором заключается в согласованном
управлении воздушной и дроссельной заслонками. Так как система Есо-
tronic фирмы Bosch поддерживает стехиометрический состав рабочей
смеси, обеспечивает необходимое обогащение смеси на режимах пуска и
прогрева двигателя, в системе предусмотрены функции отключения по¬
дачи топлива на принудительном холостом ходу и поддержания на за¬
данном уровне частоты вращения коленчатого вала на холостом ходу.
Классификация систем впрыска приведена на рис. 3.6.
Наибольшее распространение получили системы впрыска во впускной
трубопровод. Они разделяются на системы с впрыском в зону впускных
клапанов и с центральным впрыском (рис. 3.7, где а - центральный
впрыск; б - распределенный впрыск в зону впускных клапанов; в - непо¬
средственный впрыск в цилиндры двигателя; 1 - подача топлива; 2 - по¬
дача воздуха; 3 - дроссельная заслонка; 4 - впускной трубопровод; 5 -
форсунки; 6 - двигатель).
Система с впрыском в зону впускных клапанов (другое название -
распределенный или многоточечный впрыск) включает в себя количество
форсунок, равное числу цилиндров, система с центральным впрыском -
одну или две форсунки на весь двигатель. Форсунки в системах с цен¬
тральным впрыском - устанавливаются в специальной смесительной ка¬
мере, откуда полученная смесь распределяется по цилиндрам. Подача
топлива форсунками в системе распределенного впрыска может быть со¬
гласована с процессом впуска в каждый цилиндр (фазированный впрыск)
и несогласована - форсунки работают одновременно или группой (нефа¬
зированный впрыск). Системы с непосредственным впрыском из-за слож¬
ности конструкции долгое время не применялись на бензиновых
70
Рис.3.6. Классификация систем впрыска
Отличительные особенности систем
Используется система зажигания с низковольтным распределением
и индивидуальные катушки зажигания на каждый цилиндр;2
датчика кислорода.Отсутствие механической связи педали и
дроссельной заслонки, CAN
Улучшен пуск холодного двигателя, поддерживаются обороты на
холостом ходу
Оборудована системой улавливания паров бензина
Снижено выделение углеводородов с выхлопными газами
Устанавлены: регулятор давления, датчик температуры; впервые
установлен ЭБУ
м
i
i
О
Й
Благодаря внедрению ЭБУ повысились экономичность и
о
р
экологичностью Минус - низкий КПД
о
Впервые был применен датчик расхода воздуха, регулятор
давления топлива
1
о
й
Благодаря применению датчика расхода воздуха улучшилась
дозирование топлива, всвязи с чем уменьшился расход топлива и
содержание вредных веществ в выхлопных газах
Изменена схема управления холодным пуском(реле бензонасоса и
Г
реле пуска заменены электронной схемой управления)
i
i
о
3"
Обогащение смеси при холодном пуске осуществляется через
о
ЕЗ
осоновные форсунки(а не через клапан холодного пуска)
О
Впервые применен датчик массового расхода воздуха
термоанемометрического типа (массметр)
І-Н
I
Применение массметра позволило избавится от дополнительных
—ч
О
корректировок по плотности, температуре и влажности воздуха,
О
р
что снизило погрешность в измерениях и повысило точности
о
дозирования топлива
Типы
систем
гРазделение по |
способу
впрыска
ЭСАУ топливоподачей
двигателях. Однако ужесточение экологических требований к двигателям
делает необходимым развитие этих систем.
Рис. 3.7. Системы впрыска
Современные ЭСАУ двигателем объединяют в себе функции управле¬
ния впрыском топлива и работой системы зажигания, поскольку принцип
управления и входные сигналы (частота вращения, нагрузка, температура
двигателя) для этих систем являются общими. В ЭСАУ двигателем ис¬
пользуется программно-адаптивное управление. Для реализации про¬
граммного управления в ПЗУ блока управления (БУ) записывается зави¬
симость длительности впрыска (количества подаваемого топлива) от
нагрузки и частоты вращения коленчатого вала двигателя. На рис. 3.8
представлена обобщенная регулировочная характеристика бензинового
двигателя по составу смеси. Зависимость задается в виде таблицы (харак¬
теристической карты), разработанной на основании всесторонних испы¬
таний двигателя. Данные в таблице представлены с определенным шагом,
например, 5 мин'1, промежуточные значения БУ получает интерполяцией.
Аналогичные таблицы используются и для определения угла опережения
зажигания. Выбор данных из готовых таблиц является более быстрым
Рис. 3.8. Регулировочная характеристика
72
Непосредственное измерение крутящего момента двигателя на ав¬
томобиле связано с большими техническими трудностями, поэтому
основным датчиком нагрузки являются датчики расхода воздуха и
(или) датчик давления во впускном трубопроводе. Для определения
частоты вращения коленчатого вала двигателя обычно используется
счетчик импульсов от датчика положения коленчатого вала индукци¬
онного типа или от датчика-распределителя системы зажигания.
Полученные по таблицам значения корректируются в зависимости
от сигналов датчиков температуры охлаждающей жидкости, по¬
ложения дроссельной заслонки, температуры воздуха, а также на¬
пряжения бортовой сети и других параметров.
Адаптивное управление (управление по обратной связи) исполь¬
зуется в системах с датчиком кислорода (X-зондом). Наличие ин¬
формации о содержании кислорода в отработавших газах позволяет
поддерживать коэффициент избытка воздуха а (в мировой практике
принято обозначение X) близким к 1. При управлении топливоподачей
по обратной связи БУ первоначально определяет длительность им¬
пульсов по данным датчиков нагрузки и частоты вращения коленча¬
того вала двигателя, а сигнал от датчика кислорода используется для
точной корректировки. Управление впрыском топлива по обратной
связи осуществляется только на прогретом двигателе и в определен¬
ном диапазоне нагрузки.
Принцип адаптивного управления применяется также для ста¬
билизации частоты вращения коленчатого вала в режиме холостого
хода и для управления углом опережения зажигания по пределу дето¬
нации.
Современные ЭСАУ топливоподачей бензиновых двигателей
имеют функцию самодиагностики. БУ проверяет работу датчиков и
исполнительных устройств и может идентифицировать определенный
перечень неисправностей. При обнаружении неисправности БУ зано¬
сит в память соответствующий код и включает аварийную лампу
CHECK ENGINE на панели приборов. Для получения информации от
БУ используется диагностический прибор, подключаемый к отдель¬
ному разъему. Через разъем для диагностики кроме считывания кодов
неисправностей возможно определение текущих значений параметров
двигателя и активизация исполнительных механизмов, однако функ¬
ции диагностического прибора ограничены возможностями БУ.
Применение ЭСАУ повышает надежность работы двигателя за
счет обеспечения возможности его работы в «усеченном» режиме. В
случае возникновения неисправности в одном или нескольких датчи¬
73
ках, БУ определяет, что их показания не соответствуют действитель¬
ности и отключает эти датчики. В «усеченном» режиме работы ин¬
формация от неисправных датчиков замещается эталонным значением
или косвенно рассчитывается по данным от других датчиков. Напри¬
мер, при неисправности датчика положения дроссельной заслонки его
показания можно имитировать расчетом по частоте вращения колен¬
чатого вала и расходу воздуха. При выходе из строя одного из испол¬
нительных механизмов используется индивидуальный алгоритм об¬
хода неисправности. При дефекте в цепи зажигания, например, от¬
ключается впрыск в соответствующий цилиндр, с целью предотвра¬
щения повреждения каталитического нейтрализатора.
При работе двигателя в «усеченном» режиме возможно снижение
мощности, ухудшение приемистости, затрудненный пуск холодного
двигателя, увеличение расхода топлива и др.
Для компенсации технологического разброса в характеристиках
элементов ЭСАУ и двигателя, учета их изменения при эксплуатации в
программе БУ предусмотрен алгоритм самообучения. Как упомина¬
лось выше, сигнал от датчика кислорода используется для корректи¬
ровки значения длительности впрыска, полученного по таблице из
ПЗУ БУ. Однако при значительных расхождениях такой процесс за¬
нимает много времени.
Самообучение заключается в сохранении в памяти БУ значений
коэффициента корректировки. Весь диапазон работы двигателя раз¬
бивается, как правило, на 4 характерные зоны обучения: 1) холостой
ход, 2) высокая частота вращения при малой нагрузке, 3) частичная
нагрузка, 4) высокая нагрузка.
При работе двигателя в любой из зон происходит корректировка
длительности импульсов впрыска до тех пор, пока реальный состав
смеси не достигнет оптимального значения. Полученные таким об¬
разом коэффициенты корректировки характеризуют конкретный дви¬
гатель и участвуют в формировании длительности импульса впрыска
на всех режимах его работы. Процесс самообучения применяется
также для управления углом опережения зажигания при наличии об¬
ратной связи по детонации. Основная проблема функционирования
алгоритма самообучения заключается в том, что иногда неправильный
сигнал датчика может быть воспринят системой как изменение пара¬
метра двигателя. Если ошибка сигнала датчика недостаточно велика,
чтобы был зарегистрирован код неисправности, повреждение может
остаться необнаруженным. В большинстве систем корректирующие
коэффициенты не сохраняются при отключении питания БУ.
74
Ведущим производителем систем впрыска бензиновых двигателей
является фирма Bosch, начавшая разработку таких систем в 1912 г.
L-Jetronic. Система распределенного нефазированного впрыска
топлива L-Jetroniс появилась в 1973 г. (рис.3.9, где 1 - топливный бак;
2 - топливный насос с электрическим приводом; 3 - топливный
фильтр; 4 - распределительный трубопровод; 5 - регулятор давления;
6 - пусковая форсунка; 7 - регулировочный винт количества смеси; 8
- датчик положения дроссельной заслонки; 9 - дроссельная заслонка;
10 - датчик температуры воздуха; 11 - реле включения топливного
насоса; 12 - расходомер воздуха; 13 - замок зажигания; 14 - аккуму¬
ляторная батарея; 15 - клапан подачи дополнительного воздуха; 16 -
прерыватель-распределитель; 17 - термореле; 18 - датчик температу¬
ры охлаждающей жидкости; 19 - лямбда-зонд; 20 - электронный блок
управления; 21 - регулировочный винт качества смеси; 22 - клапан¬
ная форсунка).
18 17 13
Рис. 3.9. Система впрыска топлива L-Jetronic
Топливо из бензобака 1 электрическим топливным насосом 2 через
топливный фильтр 3 подается под давлением 250 кПа в топливную
рампу и распределяется по форсункам 22. На конце топливной рампы
75
расположен регулятор давления топлива, который поддерживает раз¬
ность давления в топливной рампе и впускном коллекторе на посто¬
янном уровне 0,5 атм. Таким образом, количество подаваемого топли¬
ва однозначно определяется длительностью открытия форсунки.
Остатки топлива возвращаются в бак по сливной магистрали. В БУ 20
поступают сигналы от датчика расхода воздуха 12, датчика положе¬
ния дроссельной заслонки 9, по которым определяется нагрузка дви¬
гателя. Датчик положения дроссельной заслонки позволяет различать
режим холостого хода и полной нагрузки. Информация о частоте
вращения коленчатого вала двигателя поступает от датчика-
распределителя системы зажигания. Для обогащения смеси при пуске
холодного двигателя используется клапан холодного пуска 6, который
управляется термореле 17. Термореле обеспечивает работу клапана
при температуре -20 °С. Датчик температуры двигателя 13, подклю¬
ченный к БУ, позволяет обогащать смесь на режиме прогрева двига¬
теля.
Управление частотой вращения на режиме холостого хода осу¬
ществляется регулятором добавочного воздуха 15с заслонкой, управ¬
ляемой биметаллической пластиной. При комплектовании системы
каталитическим нейтрализатором для корректировки качества рабо¬
чей смеси используется датчик кислорода 11.
L3-Jetronic. Система L3-Jetronic (рис. 3.10, где 1 - топливный бак;
2 - электрический топливный насос; 3 - топливный фильтр; 4 - фор¬
сунка; 5 - топливная рампа; 6 - регулятор давления топлива;
7- впускной трубопровод; 8 - датчик положения дроссельной за¬
слонки; 9- датчик расхода воздуха; 10 - электронный блок управле¬
ния; 11 - датчик кислорода (X - зонд); 12 - датчик температуры двига¬
теля; 13 - датчик-распределитель системы зажигания; 14 - регулятор
добавочного воздуха (регулятор холостого хода); 15 - аккумуляторная
батарея; 16- выключатель зажигания) является модификацией пред¬
ставленной системы. Основное отличие от L-Jetronic - БУ, выпол¬
ненный в одном корпусе с датчиком расхода воздуха и располо¬
женный в моторном отсеке.
76
Направление воздуха
• Направление остаточного топлива
-Направление топлива 15
-Направление тв-смеси
Рис. 3.10. Система впрыска топлива L3-Jetronic
rtv —
BOSCH
—
'J
Г
ШІ
н>
В системе используются алгоритмы диагностики датчиков и «усе¬
ченного» режима работы, отсутствует клапан холодного пуска. Обо¬
гащение смеси при пуске холодного двигателя осуществляется увели¬
чением подачи топлива через основные форсунки.
LH-Jetronic. В системе LH-Jetronic (рис. 3.11, где 1 - топливный
бак; 2 - электрический топливный насос; 3 - топливный фильтр;
4 - электронный блок управления; 5 - форсунка; 6 - топливная рампа;
7 - регулятор давления топлива; 8 - впускной трубопровод; 9 - датчик
положения дроссельной заслонки; 10 - датчик массового расхода воз¬
духа; 11 - датчик кислорода (X - зонд); 12 - датчик температуры двига¬
теля; 13 - датчик-распределитель системы зажигания; 14 - поворотный
регулятор холостого хода; 15 - аккумуляторная батарея; 16 - выключа¬
тель зажигания ) для определения нагрузки двигателя используется дат¬
чик массового расхода воздуха термоанемометрического типа. В отли¬
чие от датчика системы L-Jetronic, определяющего объем проходящего
воздуха, этот датчик определяет непосредственно массу воздуха и не
требует дополнительной корректировки по его плотности.
77
Рис. 3.11. Система впрыска топлива LH-Jetronic
Для регулировки частоты вращения коленчатого вала на холостом
ходу в системе LH-Jetronic используется поворотный клапан с приво¬
дом от реверсивного электродвигателя (трехпроводной). БУ периоди¬
чески переключает направление вращения электродвигателя, что
предотвращает заброс клапана в любую из крайних позиций. Требуе¬
мое положение клапана регулируется изменением соотношения вре¬
мени включения электродвигателя в различных направлениях.
KE-Jetronic. В 1982 г. фирмой Bosch была предложена система
KE-Jetronic (рис. 3.12, где 1 - топливный бак; 2 - топливный насос с
электрическим приводом; 3 - накопитель топлива; 4 - топливный
фильтр; 5 - регулятор давления топлива в системе; 6 - впускной тру¬
бопровод; 7 - пусковая форсунка; 8 - дроссельная заслонка;
9 - напорный диск расходомера воздуха; 10 - клапанная форсунка;
11 - верхняя камера дифференциального клапана; 12 - распредели¬
тель; 13 - отсечная кромка распределителя; 14 - электрогидравличе¬
ский регулятор управляющего давления; 15 - нижняя камера диф¬
ференциального клапана; 16 - датчик положения напорного диска
78
расходомера воздуха; 17 - расходомер воздуха; 18 - датчик положе¬
ния дроссельной заслонки; 19 - клапан подачи дополнительного воз¬
духа; 20 - прерыватель-распределитель; 21 - термореле; 22 - датчик
температуры охлаждающей жидкости; 23 - реле включения топливно¬
го насоса; 24 - электронный блок управления; 25 - замок зажигания;
26 - аккумуляторная батарея; 27 - дозатор топлива; 28 - датчик кис¬
лорода в отработавших газах), прототипом которой явилась гидроме¬
ханическая система K-Jetronic, дополненная электронным блоком
управления и датчиком кислорода.
Рис. 3.12. Система впрыска топлива KE-Jetronic
В БУ поступают сигналы о положении паруса расходомера, край¬
них положениях дроссельной заслонки, частоте вращения двигателя,
температуре охлаждающей жидкости и содержании кислорода в отра¬
ботавших газах. Воздействие БУ на состав рабочей смеси осуществ¬
ляется с помощью электрогидравлического управляющего устрой¬
ства, закрепленного на дозаторе-распределителе топлива (рис. 3.13,
где 1 - парус расходомера; 2 - дозатор-распределитель топлива;
79
3 - поступление топлива от регулятора начального давления; 4 - по¬
дача топлива к форсункам; 5 - возврат топлива в регулятор начально¬
го давления; 6 - жиклер; 7 - верхняя камера дифференциального кла¬
пана; 8 - нижняя камера дифференциального клапана; 9 - диафрагма;
10 - регулятор давления; 11 - управляющая пластина; 12 - выпускной
канал; 13 - электромагнит; 14 - воздушный зазор). Так, для обогаще¬
ния смеси по сигналу от БУ управляющая пластина 11 закрывает вы¬
пускной канал 12, тем самым снижая давление в нижних камерах
дифференциального клапана 8. Мембраны 9 прогибаются вниз, и ко¬
личество топлива, поступающего к форсункам 4, увеличивается.
Управляющее устройство сконструировано таким образом, что при
выходе из строя цепи электромагнита будет обеспечиваться стехио¬
метрический состав смеси и двигатель сохранит работоспособность.
3 4 4 5
'О' ft ft ft
Рис. 3.13. Электрогидравлическое управляющее устройство
Mono-Jetronic. Появившаяся в 1983 г. недорогая система цен¬
трального впрыска Mono-Jetronic получила широкое распространение,
в том числе н на компактных автомобилях. Эта система имеет всего
одну топливную форсунку, расположенную перед дроссельной за¬
слонкой (рис. 3.14). Она содержит: 1 - топливный бак; 2 - топливный
насос с электрическим приводом; 3 - трубопровод, подающий топли¬
во; 4 - топливозаборник; 5 - сливной трубопровод; 6 - воздушный
фильтр; 7 - регулятор давления топлива; 8 - форсунка; 9 - датчик
температуры всасываемого воздуха; 10 - резервуар с угольным абсор¬
бентом для сбора паров топлива; 11 - электронный блок управления;
12 - разъем для подключения диагностического оборудования;
so
13 - продувочный клапан резервуара с угольным абсорбентом; 14 -
блок центрального впрыска; 15 - датчик положения дроссельной за¬
слонки; 16 - жидкостный подогреватель впускного трубопровода; 17
- регулятор положения дроссельной заслонки; 18 - впускной трубо¬
провод; 19 - топливный фильтр; 20 - лямбда-зонд; 21 - каталитиче¬
ский нейтрализатор; 22 - датчик температуры охлаждающей жидко¬
сти; 23 - распределитель зажигания; 24 - прерыватель зажигания; 25 -
аккумуляторная батарея; 26 - выключатель зажигания; 27 - реле топ¬
ливного насоса. Качество смеси задается длительностью импульса от¬
крытия форсунки. Топливо в системе Mono-Jetronic подается под бо¬
лее низким давлением, нежели в описанных выше системах - около
ОД МПа.
Измерения расхода воздуха система Mono-Jetronic не производит.
Необходимое количество топлива вычисляется по положению дрос¬
сельной заслонки и частоте вращения коленчатого вала. Электронный
блок управления обрабатывает информацию от потенциометрическо¬
го датчика положения дроссельной заслонки, датчика-распределителя
системы зажигания, датчиков температуры воздуха и охлаждающей
жидкости, а также датчика кислорода.
Топливно-воздушная смесь обогащается при холодном пуске и
прогреве двигателя увеличением длительности цикла топливоподачи.
Минимальная частота вращения в режиме холостого хода поддержи¬
вается путем изменения положения дроссельной заслонки с помощью
шагового электродвигателя.
При средних нагрузках и прогретом двигателе подача топлива
корректируется обратной связью по датчику кислорода.
Полное открытие дроссельной заслонки переводит БУ в режим
обогащения рабочей смеси. Для обеспечения приемистости авто¬
мобиля БУ определяет ускорение перемещения педали управления
дроссельной заслонкой и адекватно изменяет подачу топлива.
В режиме принудительного холостого хода система Mono-Jetronic
работает по общепринятой схеме. Для ограничения выделения угле¬
водородов (СН) из топливного бака в Mono-Jetronic используется си¬
стема улавливания паров бензина, к которой относятся емкость с ак¬
тивированным углем - адсорбер 10 и электромагнитный клапан про¬
дувки адсорбера 13. Пары бензина из топливного бака поступают в
адсорбер. При работе двигателя БУ открывает клапан продувки ад¬
сорбера и накопившиеся пары топлива удаляются во впускной трубо¬
провод. БУ регулирует степень продувки адсорбера в зависимости от
режима работы двигателя.
81
Рис. 3.14. Система впрыска Mono-Jetronic
К комплексным системам управления двигателем, применяю¬
щимся на большинстве современных автомобилей, относятся системы
семейства Motronic. Основная функция всех систем Motronic - согла¬
сованное управление зажиганием и впрыском топлива. Принятие за¬
конодательных требований к снижению вредных эмиссий и расхода
топлива расширяет базовые функции системы Motronic и делает не¬
обходимым контроль всех компонентов, влияющих на состав отрабо¬
тавших газов. Система Motronic обеспечивает:
- регулировку частоты вращения холостого хода;
- поддержание стехиометрического состава смеси по сигналу дат¬
чика кислорода;
- управление системой улавливания паров топлива;
- регулирование угла опережения зажигания по сигналу датчика
детонации;
- рециркуляцию отработавших газов для снижения эмиссии ок¬
сидов азота (NOx);
- управление системой подачи вторичного воздуха для снижения
эмиссии углеводородов (СН);
- поддержание заданной скорости движения (круиз-контроль).
При более высоких требованиях система может дополняться функци¬
ями:
82
- управление турбонагнетателем, а также изменением конфигу¬
рации впускного тракта для повышения мощности двигателя;
- управление фазами газораспределения для снижения токсич¬
ности отработавших газов, расхода топлива и повышения мощности
двигателя;
- детонационное регулирование, ограничение частоты вращения и
скорости для защиты двигателя и автомобиля.
Система Motronic поддерживает работу блоков управления других
систем автомобиля. Так, совместно с БУ автоматической коробкой
передач посредством снижения крутящего момента двигателя при из¬
менении передачи обеспечивается предохранение коробки передач.
Взаимодействуя с антиблокировочной (АБС) и противобуксовочной
(ПБС) системами, Motronic создает повышенную безопасность при
езде. Современные требования к противоугонным автомобильным си¬
стемам делают необходимым интеграцию БУ двигателем и иммоби¬
лайзера.
ME-Motronic. Одной из последних разработок фирмы Bosch явля¬
ется система ME-Motronic (рис. 3.15, где 1 - угольный адсорбер; 2 -
отключающий клапан; 3 - клапан продувки адсорбера; 4 - датчик дав¬
ления во впускном коллекторе; 5 - топливная рампа с форсунками; 6 -
свеча зажигания с индивидуальной катушкой; 7 - фазовый дискрими¬
натор; 8 - насос вторичного воздуха; 9 - клапан вторичного воздуха;
10 - пленочный датчик массового расхода воздуха; 11 - модуль дрос¬
сельной заслонки; 12 - клапан рециркуляции; 13 - датчик детонации;
14 - датчик положения коленчатого вала; 15 - датчик температуры
двигателя; 16 - датчик кислорода (X - зонд); 17- электронный блок
управления; 18 - диагностический интерфейс; 19 - аварийная лампа;
20 - иммобилайзер; 21 - датчик давления в бензобаке; 22 - погружной
электрический топливный насос; 23 - модуль педали управления дрос¬
сельной заслонкой; 24 - аккумулятор). ME-Motronic сочетает в себе
систему распределенного фазированного впрыска топлива в зону
впускных клапанов и систему зажигания с низковольтным распределе¬
нием и индивидуальными катушками. Определение частоты вращения
коленчатого вала и синхронизация системы осуществляется по сигналу
индукционного датчика положения коленчатого вала 14. Для опреде¬
ления такта впуска в каждом цилиндре, что необходимо при организа¬
ции фазированного впрыска топлива и зажигания, используется датчик
положения распределительного вала - фазовый дискриминатор 7.
83
4заі_ is2ip—щ
TboscWt ^
Направление воздуха
Направление топлива
•Направление паров топлива
Направление остаточного топлива
■Направление тв-смеси
Направление отработавших газов
Рис. 3.15. Система впрыска ME-Motronic
Для расчета нагрузки двигателя используется пленочный датчик
массового расхода воздуха 10, датчик давления во впускной трубе 4 и
датчик положения дроссельной заслонки. Основным отличием систе¬
мы является отсутствие жесткой механической связи между дрос¬
сельной заслонкой и педалью, ею управляющей. Положение педали
управления дроссельной заслонкой определяется с помощью двух за¬
крепленных на ней потенциометров 23. БУ устанавливает дроссель¬
ную заслонку 11 в оптимальное положение, в зависимости от нагруз¬
ки и других параметров двигателя.
В системе используется два датчика кислорода 16. Установка до¬
полнительного датчика после каталитического нейтрализатора повы¬
шает надежность работы обратной связи по содержанию кислорода,
так как этот датчик лучше защищен от загрязнения отработавшими
газами. Кроме того, наличие второго датчика позволяет системе про¬
водить самодиагностику основного датчика, стоящего перед нейтра¬
лизатором.
БУ ME-Motronic имеет интерфейс последовательной передачи
данных (CAN) для взаимодействия с БУ других систем автомобиля.
84
MED-Motronic. На базе системы ME-Motronic фирма Bosch разрабо¬
тала систему непосредственного впрыска топлива в цилиндры двигателя
MED-Motronic (рис. 3.16, где 1 - топливо под высоким давлением; 2 -
топливная рейка (аккумулятору давления); 3 - форсунка; 4 - свеча зажи¬
гания с индивидуальной катушкой; 5 - фазовый дискриминатор; 6 - дат¬
чик давления топлива; 7 - датчик детонации; 8 - датчик положения ко¬
ленчатого вала; 9 - датчик температуры двигателя; 10 - датчик кислоро¬
да (перед катализатором); 11 - трехкомпонентный каталитический
нейтрализатор; 12 - датчик температуры выхлопных газов; 13 - NOx ка¬
талитический нейтрализатор; 14 - датчик кислорода (после нейтрализа¬
тора)). В сравнении с традиционными системами впрыска бензиновых
двигателей, системы непосредственного впрыска позволяют снизить
расход топлива до 20 % и уменьшить выбросы оксидов углерода.
Рис. 3.16. Система впрыска MED-Jetronic
85
Как и впрыск во впускной коллектор, непосредственный впрыск
под высоким давлением спроектирован как система с топливной рам¬
пой - аккумулятором давления. В подобных системах топливо может
быть непосредственно впрыснуто в цилиндр в любой момент времени
с помощью электромагнитных форсунок. Масса поступающего возду¬
ха может свободно регулироваться с помощью электронного модуля
дроссельной заслонки. Точное измерение массы всасываемого возду¬
ха выполняется с помощью пленочного датчика расхода воздуха. Со¬
став топливо-воздушной смеси контролируется датчиками кислорода
в выпускной системе, расположенными перед и после ка¬
талитического нейтрализатора. Электрический топливоподкачиваю¬
щий насос и регулятор давления, расположенные в бензобаке, обеспе¬
чивают подачу топлива под давлением 0,35 МПа к топливному насосу
высокого давления. Задача насоса высокого давления состоит в уве¬
личении давления топлива с исходных 0,35 до 12 МПа, после чего
топливо поступает в топливную рампу. На топливной рампе располо¬
жен регулятор давления, который поддерживает давление в системе
во всем диапазоне работы двигателя независимо от количества впры¬
скиваемого топлива и производительности насоса.
Для измерения давления топлива используется датчик, предо¬
ставляющий собой сварную диафрагму из высококачественной стали
с тензорезисторами.
Важным компонентом системы непосредственного впрыска топ¬
лива являются форсунки высокого давления, которые подсоединя¬
ются непосредственно к рампе. Время начала впрыска и количество
топлива определяются сигналами от блока управления.
Низкое потребление топлива и высокая мощность двигателя, при¬
сущие системе непосредственного впрыска, достигаются путем раз¬
личной организации двух основных режимов работы: режима малой
нагрузки и режима высокой нагрузки.
При малой нагрузке двигатель работает с неоднородной смесью и
большим избытком воздуха. Поздний впрыск, прямо перед подачей
искры, позволяет создать в зоне свечи область богатой топливо¬
воздушной смеси, в то время как остальной объем цилиндра запол¬
няет смесь воздуха и оставшихся отработавших газов. Благодаря это¬
му расслоению заряда достигается работа двигателя на очень бедной
смеси, кроме того, даже при малых нагрузках дроссельная заслонка
остается открытой, что уменьшает потери на газообмен.
При повышении нагрузки увеличивается и количество впрыски¬
ваемого топлива, неоднородное облако смеси становится все более
86
богатым. Это может вызвать увеличение содержания вредных ве¬
ществ в отработавших газах, особенно выбросов сажи. Поэтому на
высоких нагрузках двигатель переводится на работу на гомогенной
смеси.
Во время перехода между этими режимами для стабилизации мо¬
мента необходимо контролировать количество впрыскиваемого топ¬
лива, поступающего воздуха и угол опережения зажигания. Такое
управление моментом возможно благодаря использованию электро¬
управляемой дроссельной заслонки, как и в системе ME-Motronic.
Дроссельная заслонка должна быть закрыта вплоть до фактического
переключения режима работы с неоднородной на гомогенную смесь.
Особенностью системы непосредственного впрыска является об¬
разование оксидов азота (NOx), содержание которых в условиях из¬
бытка кислорода не может быть уменьшено с использованием тра¬
диционного трехкомпонентного каталитического нейтрализатора. Для
уменьшения содержания NOx в выхлопе используется специальный
каталитический нейтрализатор аккумулирующего действия.
Экономайзер принудительного холостого хода с электронным
управлением. В процессе движения автомобиля значительное время
занимает режим принудительного холостого хода, когда коленчатый
вал двигателя вращается за счет кинетической энергии автомобиля.
Этот режим наблюдается, например, при движении автомобиля с вы¬
сокой скоростью при включенной передаче и отпущенной педали
управления подачей топлива, т. е. когда двигатель работает в тормоз¬
ном режиме.
Экономайзер предназначен для прекращения подачи топлива в
двигатель на режиме принудительного холостого хода.
Достоинства:
- уменьшение эксплуатационного расхода топлива на 2 - 3 %;
- снижение выброса токсичных веществ на 15 - 30 %.
Режим принудительного холостого хода в ЭПХХ определяют сле¬
дующие условия:
- частота вращения коленчатого вала двигателя должна быть
больше частоты, соответствующей холостому ходу;
- дроссельная заслонка должна быть закрыта.
Прекращение подачи топлива обеспечивается электромагнитными
клапанами. На основе информации о частоте вращения коленчатого
вала, получаемой от первичной цепи системы зажигания КЗ (рис.
3.17), и о положении дроссельной заслонки, получаемой от датчика
положения дроссельной заслонки Д, электронный блок управления
87
вырабатывает сигнал, управляющий электромагнитным клапаном
ЭМК, который, в свою очередь, открывает и закрывает подачу топ¬
лива в систему холостого хода карбюратора.
Рис. 3.17. Структурная схема экономайзера
Датчик положения дроссельной заслонки представляет собой мик¬
ровыключатель, механически связанный с приводом дроссельной за¬
слонки, замыкающийся при полностью отпущенной педали управле¬
ния подачей топлива (режим холостого хода).
Электронные системы управления, топливоподачей дизелей.
ЭСАУ дизельными двигателями позволяют:
- снизить токсичность отработавших газов;
- уменьшить дымность;
- шум;
- стабилизировать работу двигателя на холостом ходу.
ЭСАУ выполняют:
- функции управления количеством впрыскиваемого топлива;
- моментом начала впрыска;
- частотой вращения коленчатого вала на холостом ходу;
- работой свечей накаливания.
ЭСАУ делятся:
- на аналоговые системы, состоящие в основном из операционных
усилителей;
- цифровые регуляторы, построенные на элементах средней степе¬
ни интеграции;
- микропроцессорные системы.
Электронные системы управления автомобильными дизелями.
Электронное управление дизелем необходимо ддя уменьшения количе¬
ства токсичных веществ, в отработавших газах, уменьшения дымности,
вибрации, уровня шума, оптимизации и стабилизации частоты, вращения
на холостом ходу и т.д. Это обеспечивается электронным блоком управ¬
ления, который после обработки информации о состоянии двигателя от
88
различных датчиков выдает управляющие сигналы, обеспечивающие оп¬
тимизацию количества подаваемого топлива и момента его впрыскивания.
Система управления дизелем (“Toyota”) приведена на рис. 3,18. где 1 -
специальный клапан управления; 2 - датчик угла поворота коленчатого
вала; 3 - вход топлива; 4 - корректирующие сопротивление; 5 - выход
топлива; 6 - электромагнитный перепускной клапан; 7 - электромагнит¬
ный клапан; 8 - датчик температуры поступающего в двигатель воздуха; 9
- воздушные заслонки; 10 - клапан; 11 - электронный блок управления;
12 - сигнал открытия педали акселератора; 13 - датчик давления посту¬
пающего в двигатель воздуха; 14 - система турбонаддува; 15 - клапан;
16 - датчик воспламенения; 17 - датчик температуры охлаждающей жид¬
кости; 18 - датчик частоты вращения коленчатого вала.
Рис. 3.18. Система управления дизелем («Тойота»)
Система обеспечивает управление количеством подаваемого топ¬
лива, моментом начала подачи топлива, воздушной заслонкой, часто¬
той вращения холостого хода и свечой накаливания.
Управление количеством подаваемого топлива осуществляется
электронным блоком управления на основании данных о частоте вра¬
щения коленчатого бала и положении педали акселератора с учетом
поправок на температуру и давление воздуха на впуске, температуру
окружающей жидкости и т.д.
89
Момент подачи топлива выбирается блоком управления по сигна¬
лам датчиков угла поворота педали акселератора, давления воздуха на
впуске. Используя сигналы датчика воспламенения, установленного в
камере сгорания, блок управления обеспечивает совпадение зареги¬
стрированного момента воспламенения с расчетным.
Управляя воздушной заслонкой в полости впускного трубопрово¬
да, можно уменьшить вибрацию двигателя на холостом ходу и устра¬
нить вибрации при остановке двигателя. При отказах системы управ¬
ления воздушная заслонка автоматически наполовину открывается,
что предотвращает чрезмерный разгон двигателя.
Получая информацию от различных датчиков, блок управления
обеспечивает подачу такого количества топлива, чтобы частота вра¬
щения в режиме холостого хода не отличалась от расчетной. Сила то¬
ка свечей накаливания в системе предпускового подогрева дизеля ре¬
гулируется блоком управления в зависимости от температуры охла¬
ждающей жидкости и ряда других параметров.
Микропроцессорная система управления. Структурная схема
микропроцессорной системы управления дизельного двигателя (рис.
3.18) включает:
- микропроцессор (МП), осуществляющий все арифметические
операции и общее управление устройствами;
- оперативное запоминающее устройство (ОЗУ) для хранения
промежуточных результатов вычислений;
- постоянное запоминающее устройство (ПЗУ) для хранения про¬
грамм управления всей системы в целом.
Предусмотрены три типа датчиков: а) режимных параметров;
б) коррекции; в) защиты.
Особо важной задачей топливоподачи дизельного двигателя яв¬
ляется качественное обеспечение переходных процессов, так как это
непосредственно связано с технико-экономическими показателями
работы двигателя.
Микропроцессорная система управления (рис. 3.20) состоит из
программного задатчика положений рейки ПЗ, вычисляемых по зна¬
чениям частоты вращения коленчатого вала двигателя п, положению
педали управления подачей топлива \|/педали и информации от датчиков
коррекции ДК; регулятора Р. вычисляющего рассогласование между
расчетным значением положения рейки 1ірасч и действительным Ьд; ис¬
полнительного механизма ИМ, включенного в контур регулятора и
формирующего интегральную составляющую топливного насоса вы¬
сокого давления ТНВД и двигателя Д.
90
Ьрейки
W’
^педали ^
Ттоплива
Твоздуха
W
Р
А атм.
W
о
н
о
тз
ЛЦП й=
п
им
Генератор
опорной частоты
н
р
Sc
— et>
——►
*
Контроллер
перывании
МП
£
£
<3=!> озу
Рис. 3.19. Структурная схема микропроцессорной системы
управления дизельного двигателя
Рис. 3.20. Схема микропроцессорной системы управления дизелем
Микропроцессорная система управления дизелем изменяет угол
опережения впрыска топлива по оптимальному закону в зависимости
от нагрузки и частоты вращения коленчатого вала.
Примером ЭСАУ топливоподачей дизельного двигателя с рампой-
аккумулятором может служить система Common Rail фирмы Bosch
(рис. 3.21, где 1 - топливный насос высокого давления; 2 - перепуск¬
ной клапан; 3 - электромагнитный клапан - регулятор давления; 4 -
топливный фильтр; 5 - топливный бак с топливоподкачивающим
91
насосом и предварительным фильтром; 6- электронный блок управ¬
ления; 7 - реле включения свечей накаливания; 8 - аккумуляторная
батарея; 9 - топливная рампа-аккумулятор; 10 - датчик давления топ¬
лива в рампе; 11 - топливный жиклер; 12 - предохранительный кла¬
пан; 13 - датчик температуры топлива; 14 - электромагнитная фор¬
сунка; 15 - свеча накаливания; 16 - датчик температуры охлаждаю¬
щей жидкости; 17 - датчик положения коленчатого вала; 18 - фазо¬
вый дискриминатор; 19 - датчик температуры воздуха на впуске;
20 - датчик давления наддува; 21 - пленочный датчик массового рас¬
хода воздуха; 22 - турбокомпрессор; 23 - пневматический клапан
управления рециркуляцией; 24 - пневматический клапан управления
наддувом; 25 - вакуумный насос; 26 - приборная панель; 27 - датчик
положения педали управления топливо подачей; 28 - датчик нажатия
педали тормоза; 29 - датчик выключения сцепления; 30 - датчик ско¬
рости автомобиля; 31 - пульт управления круиз-контроля; 32 - ком¬
прессор кондиционера; 33 - переключатель кондиционера; 34 - ава¬
рийная лампа и диагностический разъем).
27 28 29 30 31 32 33 34
Рис. 3.21. Система топливоподачи Common Rail
Топливо из бака 5 топливоподкачивающим насосом подается через
фильтр 4 в ТНВД 1. Из насоса топливо поступает в рампу-
аккумулятор 9 и распределяется по форсункам 14. Давление топлива в
92
рампе-аккумуляторе поддерживается на постоянном уровне 135 МПа,
что обеспечивается датчиком 10 и электромагнитным клапаном 3.
Для защиты двигателя используется ограничительный клапан 12,
открывающийся при давлении свыше 150 МПа. Количество впры¬
скиваемого топлива определяется длительностью открытия элек¬
тромагнитной форсунки. Для снижения потерь энергии на сжатие
топлива в режиме холостого хода и частичных нагрузок производи¬
тельность ТНВД может уменьшаться путем открытия перепускного
клапана 2.
По своей структуре ЭСАУ Common Rail во многом аналогична
рассмотренным ранее системам впрыска бензиновых двигателей.
Датчик положения коленчатого вала 17 индукционного типа ис¬
пользуется для определения частоты вращения и положения ко¬
ленчатого вала. Информации от этого датчика недостаточно, чтобы
различить конец такта сжатия, поэтому используется датчик поло¬
жения распределительного вала 18 - фазовый дискриминатор. В осно¬
ву работы датчика положен эффект Холла.
ЭСАУ получает информацию о температуре охлаждающей жид¬
кости и воздуха на впуске. В некоторых модификациях системы ис¬
пользуются датчики температуры масла и топлива.
Для обеспечения точного определения состава рабочей смеси и
снижения вредных выбросов, особенно на переходных режимах, ис¬
пользуется пленочный датчик массового расхода воздуха, уста¬
навливаемый до турбокомпрессора.
Положение педали управления режимом работы двигателя оп¬
ределяется потенциометрическим датчиком, при этом какая-либо ме¬
ханическая связь педали с системой топливоподачи отсутствует. Для
определения давления наддува используется датчик абсолютного дав¬
ления с пьезорезистивными чувствительными элементами.
В процессе управления двигателем можно выделить следующие
функции и режимы: режим пуска двигателя, рабочий режим, режим
холостого хода, функция обеспечения равномерности работы дви¬
гателя и снижения колебаний при переходных процессах, режим ав¬
томатического поддержания заданной скорости автомобиля, ог¬
раничение топливоподачи, остановка двигателя.
При пуске двигателя количество впрыскиваемого топлива является
постоянной величиной. В рабочем режиме для определения количе¬
ства топлива используется сигнал датчика положения педали управ¬
ления топливоподачей и датчика положения коленчатого вала двига¬
теля. БУ обрабатывает информацию от датчиков и, используя харак¬
93
теристические карты, вычисляет значение угла опережения впрыска
(момент подачи топлива) и длительность открытия форсунки.
Для снижения расхода топлива частота вращения коленчатого вала
в режиме холостого хода поддерживается на минимальном устойчи¬
вом уровне, при этом учитывается температура двигателя и сигналы о
включении кондиционера и других устройств, создающих нагрузку.
3.6. Датчики электронных систем управления двигателем
Датчики, входящие в систему топливоподачи: температуры
охлаждающей жидкости двигателя; положения дроссельной заслонки;
массового расхода воздуха; лямбда-зонд; детонации; положения ко¬
ленчатого вала; положения распределительного вала; температуры
поступающего воздуха; давления топлива в рампе форсунок; положе¬
ния педали акселератора; давления топлива в баке; уровня топлива;
пропусков воспламенения; положения клапана рециркуляции вы¬
хлопных газов; абсолютного давления во впускном коллекторе; холо¬
стого хода; крутящего момента двигателя.
Измерители расхода воздуха. В измерителе расхода воздуха (рис.
3.22, где 1 - корпус; 2 - датчик температуры воздуха; 3 - стабилизирую¬
щая решетка; 4 - внутренний измерительный контакт; 5 - чувствитель¬
ный элемент; 6 - электронная схема) воздушный поток воздействует на
заслонку 2, закрепленную на оси в специальном канале. Поворот заслон¬
ки потенциометром преобразуется в напряжение, пропорциональное
расходу воздуха.
Рис. 3.22. Термоанемометрический расходомер с пленочным
чувствительным элементом
94
Воздействие воздушного потока на заслонку 2 уравновешивается
пружиной. Демпфер 3 с пластиной 4, выполненной как одно целое с
измерительной заслонкой 2, служит для гашения колебаний, вызван¬
ных пульсациями воздушного потока и динамическими воздействия¬
ми, характерными для движущегося автомобиля. На входе в измери¬
тель расхода воздуха встроен датчик 7 температуры поступающего в
двигатель воздуха. Недостатком измерителя расхода является наличие
подвижных деталей и скользящего контакта. Подвижные детали не
имеют измерителей расхода воздуха ионизационного, ультразвуково¬
го, вихревого и термоанемометрического типов. Термоанемометриче¬
ский измеритель расхода воздуха для системы впрыскивания топлива
“LH-Jetronic” представляет собой автономный блок, устанавливаемый
во впускной тракт двигателя. Наиболее ответственной частью термо¬
анемометра является внутренний измерительный канал 6 (рис. 3.23, а
где 1 - байпасный канал; 2 - измерительная заслонка; 3 - демферная
камера; 4 - пластина демфера; 5 - потенциометр; 6 - винт качества
смеси в режиме холостого хода; 7 - датчик температуры; 8 - контакт
топливного насоса), состоящий из пластмассовых обойм, которые
окружают несущие кольца нагреваемой платиновой нити 2 диаметром
100 мкм и термокомпенсационного пленочного резистора 3. Корпус
5 имеет камеру для размещения электронного блока, который под¬
держивает постоянным перегрев нити относительно потока на уровне
150 °С путем регулирования силы тока измерительного моста. Вы¬
ходным параметром измерителя расхода воздуха служит падение
напряжения на прецизионном резисторе 1. На входе и выходе основ¬
ного канала измерителя расхода воздуха установлены защитные сет¬
ки, которые одновременно выполняют функции стабилизирующих
элементов. На рис. 3.23,6, где 1 - прецизионный резистор; 2 - изме¬
рительный элемент; 3 - термокомпенсационный элемент; 4 - стабили¬
зирующие решетки; 5 - пластмассовый корпус; 6 - внутренний изме¬
рительный канал, показан автомобильный термоанемометрический
измеритель расхода воздуха с пленочным чувствительным элементом
на твердых керамических подложках.
Основой конструкции является чувствительный элемент, включа¬
ющий измерительный и термокомпенсационный резисторы. Пласт¬
массовая рамка с чувствительным элементом размещается в измери¬
тельном патрубке измерителя расхода воздуха. Температура перегре¬
ва измерительного терморезистора равна-70 °С. Она поддерживается
с помощью электронной схемы управления.
95
а
б
Рис. 3.23. Термоанемомертрический измеритель расхода воздуха
Измерители расхода топлива. Информация о расходе топлива на
автомобиле необходима как для бортовых систем контроля, так и для
адаптивных систем управления двигателем. В электромеханических
измерителях расхода топлива турбинного типа (тахометрических)
считывающим элементом при определении частоты вращения турбин
является светодиод инфракрасного излучения и фоторезистор. В рас¬
ходомере предусмотрены демпфирующее устройство для гашения
пульсации потока, системы для удаления воздушных пробок из пото¬
ка топлива, а также система термокомпенсации.
В одном из вариантов теплового измерителя расхода топлива дат¬
чик представляет собой четыре терморезистора, соединенных в мо¬
стовую схему и размещенных по периферии на тонкой квадратной
подложке. Поток жидкости омывает терморезисторы и в большей
степени охлаждает те из них, которые расположены перпендикулярно
потоку. В диагонали моста возникает разностный сигнал, филирую¬
щий расход топлива.
В системах впрыскивания следует учитывать количество топлива,
поступающего от форсунок или стабилизатора давления обратно в
бак, и компенсировать влияние пульсации потока топлива и вибрации
двигателя на показания измерителей расхода топлива.
Датчики давления. Датчикам давления с мембранным чувстви¬
тельным элементом 3 (рис. 3.24,а, где 1 - потенциометр; 2 - корпус
мембранного механизма; 3 - мембрана; 4 - калиброванная пружина;
96
5 - шток) присущи существенные недостатки: наличие механических
элементов и сравнительно большое число звеньев в цепи передачи
информации, что отрицательно сказывается на точности и надежности
измерительной системы. В бесконтактных индуктивных датчиках при
перемещении чувствительного элемента - мембранной камеры 9
(рис. 3.24,6, где 6 - амортизатор; 7 - стальной сердечник; 8 - первич¬
ная обмотка; 9 - мембранная камера; 10 - корпус; 11 - вторичная об¬
мотка; 12 - электрические контакты) изменяется воздушный зазор в
магнитопроводе, магнитное сопротивление магнитопровода и индук¬
тивность катушки. Катушка включена в измерительный мост. При
разбалансировке моста появляется электрический сигнал, поступаю¬
щий в блок управления. Применение микроэлектронной технологии
позволило перейти к полностью статическим конструкциям датчиков.
На рис. 3.24,в, где 2 - корпус мембранного механизма; 4 - калибро¬
ванная пружина; 12 - электрические контакты; 13 - полупроводнико¬
вый тензорезистор; 14 - контактная площадка, показан интегральный
датчик давления с полупроводниковыми тензоэлементами.
Рис 3.24. Датчик давления
97
Датчики температуры. В автомобильных системах контроля в
качестве датчиков температуры широко используются полупроводни¬
ковые терморезисторы, размещаемые в металлическом корпусе, име¬
ющем разъем для включения датчика в измерительную цепь. В систе¬
мах управления находят применение более совершенные типы датчи¬
ков температуры, обладающих высокой стабильностью и малым тех¬
нологическим разбросом номинального сопротивления, высокой тех¬
нологичностью, малой инерционностью и простотой конструкции.
Это интегральные датчики температуры. Они представляют собой
однокристальные термочувствительные полупроводниковые элемен¬
ты с периферийными схемами (усилители и т.д.). Выходным сигналом
датчика является напряжение. Это также датчики на основе термочув¬
ствительных ферритов и конденсаторов, в которых используются за¬
висимости магнитной и диэлектрической проницаемости от темпера¬
туры. Однако из-за сложности конструкции они нетехнологичны.
По разным причинам (нетехнологичность, сложность конструк¬
ции, высокая стоимость и т.д.) на автомобилях пока не находят при¬
менения термоэлектрические датчики, датчики на основе кварцевых
резонаторов и многие другие.
Датчики положения и перемещения. Для определения положе¬
ний дроссельной заслонки и угловой скорости перемещения (частоты
вращения) коленчатого вала применяют датчики контактного типа.
Основой потенциометрического датчика является пленочный ре¬
зистор с несколькими контактными дорожками, с которыми контак¬
тируют упругие токосъемные элементы. Последние связаны с осью
датчика и перемещаются вместе с ней. Токосъемные элементы обес¬
печивают получение сигналов ускорения при резком открытии дрос¬
сельной заслонки, о холостом ходе двигателя, информацию о положе¬
нии дроссельной заслонки и полном или близком к нему открытии
дроссельной заслонки.
Основные требования к датчику положения дроссельной заслонки:
высокая долговечность и стабильность работы при отсутствии дре¬
безжания контактов. Эти требования выполняются за счет подбора
износостойких материалов дорожек и контактных площадок токо¬
съемных элементов.
Недостатки электромеханических датчиков контактного типа от¬
сутствуют в бесконтактных датчиках, в частности, оптоэлектронных
датчиках с кодирующим диском. Разрешающая способность датчика
может быть меньше 1° за счет применения прецизионных кодирую-
98
тттих дисков и оптических или фотоэлектрических устройств. Коди¬
рующий диск имеет прорези или прозрачные площадки. По разным
сторонам диска установлены источники света и фоточувствительные
элементы (обычно фотодиоды). При вращении диска свет попадает на
определенную комбинацию фотодиодов (фотоэлементов), что позво¬
ляет однозначно определять угол поворота диска.
Индуктивные датчики перемещения в электронных системах
управления двигателем используются в основном для измерения ча¬
стоты вращения коленчатого или распределительного вала двигателя.
Они предназначены также для определения ВМТ первого цилиндра
или другой специальной метки, служащей началом отсчета для систе¬
мы управления, чем обеспечивается синхронизация функционирова¬
ния системы управления с рабочим процессом двигателя.
Индукционная катушка датчика размещена вокруг постоянного маг¬
нита, полюс которого со стороны, обращенной к объекту вращения,
например, к зубчатому венцу маховика, имеет магнитопровод из магни¬
томягкого материала. Магнитопровод установлен с небольшим зазором
относительно зубьев вращающегося зубчатого венца маховика.
При перемещении зубьев относительно магнитопровода величина
зазора между ними меняется. Это вызывает изменение магнитной ин¬
дукции и появление двухполярного электрического импульса в ин¬
дукционной катушке. Две пикообразные полуволны импульса распо¬
ложены симметрично относительно оси, проходящей через нулевую
точку, а нулевая точка соответствует центру каждого зуба, что позво¬
ляет с большой точностью определить их положение.
99
Амплитуда выходного сигнала датчика зависит от длины воздуш¬
ного зазора между магнитопроводом и маркерным зубом и от скоро¬
сти изменения магнитной индукции, зависящей от скорости переме¬
щения зуба. Индуктивные датчики относятся к числу наиболее
надежных датчиков в электронных системах управления автомобиль¬
ными двигателями. Конструкция индуктивного датчика показана
нарис. 3.25 где а - конструкция, б - внешний вид: 1 - корпус; 2 - ин¬
дукционная катушка; 3 - магнитопровод; 4 - магнит из феррита ба¬
рия; 5 - пружинное кольцо; 6 - крышка со штекерами; 7 - фланец.
Датчики детонации Датчики дето¬
нации (рис. 3.26, где 1 - основание;
2 - пьезоэлемент; 3 - инерционная
масса; 4 - латунная фольга; 5 - крыш¬
ка; 6 - кабель) отличаются боль¬
шим разнообразием по конструкции и
физическим принципам работы, так
как имеет место большое количество
признаков проявления детонации. Соответственно, датчики могут
размещаться на двигателе в различных местах.
Наиболее распространен способ установления детонации с помо¬
щью пьезокварцевого вибродатчика, все элементы которого крепятся
к основанию 1, выполненному из титанового сплава. Пьезоэлектриче¬
ский преобразователь состоит из двух включенных параллельно квар¬
цевых пьезоэлементов. При возникновении детонации (вибрации)
инерционная масса 3 воздействует на пьезоэлементы 2 с соответству¬
ющей частотой и усилием. В результате пьезоэффекта появляется пе¬
ременный сигнал, который снимается с кварцевых пластин с помо¬
щью выводов из латунной фольги 4.
Датчики кислорода (Z-зонды). Известны два типа датчиков кис¬
лорода. В одном из них чувствительным элементом является диоксид
циркония Zr02, во втором - диоксид титана Ті02. Оба типа датчиков
реагируют на парциальное давление кислорода.
Циркониевый датчик имеет два электрода - внешний 4 и внутренний
5. Оба электрода выполнены из пористой платины или ее сплава и раз¬
делены слоем твердого электролита. Электролитом является диоксид
циркония Zr2 с добавлением оксида иттрия Y203 для повышения ион¬
ной проводимости электролита. Среда, окружающая внутренний элек¬
трод, имеет постоянное парциальное давление кислорода. Внешний
электрод омывается потоком отработавших газов в выпускной системе
100
Рис. 3.26. Пьезоэлектри¬
ческий вибродатчик
двигателя с переменным парциальным давлением кислорода. Ионная
проводимость твердого электролита, возникающая вследствие разности
парциальных давлений кислорода на внешнем и внутреннем электро¬
дах, обусловливает появление разности потенциалов между ними.
U них. М В
800
600
400
200
При низком уровне парциального давления
кислорода в отработавших газах, когда двига¬
тель работает на обогащенной смеси (Х<1),
датчик, как гальванический элемент, генери¬
рует высокое напряжение (700 - 1000 мВ).
При переходе на обедненную смесь (Х>1)
парциальное давление кислорода в отрабо¬
тавших газах заметно увеличивается, что
приводит к резкому падению напряжения на
выходе датчика до 50 - 100 мВ.
0.7 0.9 1.1 л.
Рис. 3.27. Характери¬
стика циркониевого
датчика кислорода
Такое резкое падение напряжения датчика (рис. 3.27) при переходе от
обогащенных к обедненных смесям позволяет определить стехиометри¬
ческий состав смеси с погрешностью не более ±0,5 %. Конструкция дат¬
чика кислорода на основе диоксида циркония показана на рис. 3.28,а где:
1 - металлический корпус; 2 - уплотнение; 3 - соединительный кабель; 4
- кожух; 5 - контактный стержень; 6 - активный элемент из двуокиси
циркония;7 - защитный колпачок с прорезями. Принцип работы датчика
кислорода на базе диоксида титана Ті02 (рис. 3.28,6) основан на измене¬
нии электропроводности ТіСЬ при изменении парциального давления
кислорода в выпускной системе. Конструкция датчика представлена на
рис. 3.29,6 где 1 - чувствительный элемент; 2 - металлический корпус; 3
- изолятор; 4 - входные контакты; 5 - уплотнение; 6 - защитный кожух.
Параллельно к чувствительному элементу 1 датчика подключен терми¬
стор для компенсации влияния температуры на сопротивление соедине¬
ния ТіСЬ.
3.7. Исполнительные устройства систем впрыска
Форсунки бывают двух основных типов - механические и элек¬
тромагнитные
Электромагнитные форсунки. Работа электромагнитной фор¬
сунки связана с протекающими одновременно гидравлическими, ме¬
ханическими, электромагнитными и электрическими процессами, по¬
этому она является одним из наиболее ответственных элементов в си¬
101
стеме впрыскивания топлива. Форсунки открываются автоматически
и осуществляют дозирование и распыливание топлива. Обычно
1 2
*і - • • •' : • <- * т . ‘ — -. 111 1 ■ ■ ~ ** ’-Т"-"- - - -- ■.
'Г 4 ..У ~
Рис. 3.28. Конструкция датчика кислорода
форсунки разрабатываются для каждой модели автомобиля и двигате¬
ля, они постоянно совершенствуется, поэтому можно отметить боль¬
шое разнообразие их конструкций.
Форсунки работают в импульсной режиме при частоте срабатыва¬
ния от 10 до 200 Гц в условиях вибрации двигателя, повышенных
температур и при этом должны обеспечивать линейность характери¬
стики дозирования топлива в пределах 2 - 5 % на протяжении всего
срока службы (около 600 млн циклов срабатывания). Сигнал на нача¬
ло впрыскивания топлива подается на обмотку 1 (рис. 3.29, где
1 - обмотка электромагнита; 2 - якорь; 3 - запирающий элемент;
4 - упор; 5 - пружина; 6 - магнитопровод; 7 - выходные контакты;
8 - штуцер для топлива) электромагнита, размещенную в металличе¬
ском корпусе.
102
В корпусе расположен также запирающий
элемент 3 клапана, прижимаемый к седлу
пружиной 5. Когда на обмотку электромагнита
от электронного блока управления подается
электрический импульс прямоугольной формы
определенной длительности, запирающий эле¬
мент перемещается, преодолевая сопротивле¬
ние пружины, и открывает отверстие распыли¬
теля. Топливо поступает в двигатель. После
прекращения электрического сигнала запира¬
ющий элемент под действием пружины воз¬
вращается в седло. Количество впрыскиваемо¬
го топлива за цикл при постоянстве давления
Рис. 3.29. Схема элек- на входе в форсунку зависит только от дли-
тромагнитной фор- тельности управляющего импульса,
сунки
В реальной форсунке время открытого состояния клапана не сов¬
падает с длительностью управляющего импульса. После подачи
управляющего электрического импульса на форсунку в обмотке элек¬
тромагнита возникает ток самоиндукций, препятствующий нараста¬
нию магнитного потока в системе. Открытие клапана происходит с
задержкой по времени. При прекращении подачи управляющего им¬
пульса в результате самоиндукций сохраняющийся магнитный поток
будет препятствовать быстрому отпусканию запирающего элемента.
Повысить быстродействие электромагнитном форсунки можно за
счет уменьшения числа витков обмотки электромагнита и ее индук¬
тивности. Однако при этом уменьшается сопротивление обмотки и
увеличивается сила потребляемого ею тока. Для ограничения силы
тока последовательно с обмоткой включают резистор.
В электромагнитных форсунках используются три вида запираю¬
щих элементов клапана (рис. 3.30, где 1 - корпус; 2 - обмотка элек¬
тромагнита; 3 - жиклер клапана; 4 - пружина; 5 - запирающий эле¬
мент; 6 - топливный фильтр; 7 - сердечник электромагнита; 8 - топ¬
ливные каналы; 9 - регулировочный винт; 10 - электрические контак¬
ты; 11 - магнитная вставка; б - рабочий ход запирающего элемен¬
та): плоский (дисковый), конусный (штифтовый), сферический (ша¬
риковый). Плоский запирающий элемент 3 форсунки, представленнбй
на рис. 3.30, а, изготовлен из магнитомягкой стали и в центральной
части имеет стальную вставку, которая предотвращает появление
кольцевой выработки в месте его посадки на седло клапана. Рабочий
103
ход запирающего элемента составляет ОД 5 мм и ограничивается спе¬
циальным дистанционным кольцом.
В форсунке применена поляризованная электромагнитная система,
которая кроме обмотки электромагнита включает кольцевую вставку
из магнитотвердого сплава, создающего поляризующий магнитный
поток.
При этом появилась возможность увеличить усилие пружины 4,
что повысило герметичность клапана. Усилие пружины может регу¬
лироваться специальным винтом 9, закрытым пробкой. Внутри фор¬
сунки размещен топливный фильтр 6 в виде кольца из порошкового
материала, так как при попаданий загрязнении (частиц размером бо¬
лее 30 - 40 мкм) клапан форсунки может потерять герметичность.
Форсунки с конусным запирающим элементом (рис. 3.30, б) получили
наибольшее распространение.
Форсунка имеет нижний подвод топлива, обеспечивающий его по¬
стоянную циркуляцию через форсунку, лучшее охлаждение электро¬
магнитной системы и лучшие условия для отвода пузырьков газа.
Рис. 3.30. Электромагнитные форсунки
Преимущество сферического запирающего элемента в форсунке,
представленной на рис. 3.30, в, состоит в том, что сферические эле¬
менты обладают хорошими герметизирующими свойствами и способ¬
ностью к центрированию в седле клапана.
Форсунки для распределенного и центрального впрыскивания от¬
личаются по размерам, способу крепления на двигателе, способу под¬
вода топлива и по сопротивлению обмоток электромагнита.
104
Дополнительная пусковая форсунка отличается по конструкции от рабо¬
чих. Обычно она состоит из корпуса с фланцем крепления 4 (рис. 3.31, где 1
- пластмассовый каркас; 2 - обмотка электромагнита; 3 - фланец крепления
форсунки; 4 - распылитель; 5 - пружина; 6 - запирающий элемент), в кото¬
рый завальцован пластмассовый каркас 1 обмотки 2 электромагнита. Запи¬
рающий элемент клапана является якорем электромагнита. В нижней части
корпуса расположен центробежный распылитель. При подаче топлива пуско¬
вая форсунка постоянно находится в открытом состоянии. При подаче топли¬
ва пусковая форсунка постоянно находится в открытом состоянии.
Механические форсунки открываются автоматически под давлением и не
осуществляют дозирование топлива (рис. 3.32, где 1 - штуцер подключения к
впускному тракту; 2 - пружина; 3 - корпус клапана; 4 - мембрана; 5 - кла¬
пан; 6 - подвод топлива; 7 - отвод топлива). Они обеспечивают эффективное
распыление путем открытия и закрытия своего распылительного отверстия.
Механические форсунки устанавливаются на системах впрыска К, КЕ-
jetronic. У форсунок данных систем существует давление начала впрыска,
которое составляет от 2,7 до 5 кгс/см , а также рабочее давление, минималь¬
ное значение которого в этих системах впрыска 4,5 кгс/см2, а максимальное
6,2 кгс/смл2. Количество впрыскиваемого топлива должно зависеть только от
длительности впрыска - времени открытого состояния форсунки.
Рис. 331. Пусковая форсунка. Рис. 3.32. Механическая форсунка
Поэтому разница между давлением топлива в топливной рампе и давлением
во впускной трубе (перепад давления на форсунках) должна оставаться по¬
стоянной. Для этого служит регулятор давления топлива
Он пропускает обратно в бак излишки топлива. Конструкция регулятора вид¬
на на рисунке 3.32. Резинотканевая мембрана делит регулятор
105
на топливную и пружинную камеры. Когда сила давления топлива
превысит силу пружины, клапан откроется и пропустит такое количе¬
ство топлива, которое необходимо для восстановления равновесия на
мембране. Пружинная камера пневматически связана с впускным
коллектором двигателя за дроссельной заслонкой. Поэтому разреже¬
ние в коллекторе действует и в пружинной камере, а соотношение
давлений на мембране остается таким же, как и на форсунках. Оно за¬
висит только от силы пружины и площади мембраны и, следователь¬
но, остается постоянным.
Электромагнитные клапаны. Переключающие устройства.
Электромагнитный клапан системы автоматического управления,
ЭПХХ (рис. 3.33, где 1 - запорное кольцо; 2 - стопорное кольцо;
3 - пружина; 4 - корпус; 5 - якорь; 6 - втулка; 7 - катушка электро¬
магнита; 8 - кожух; 9 - крышка; 10 - штекер; 11 - упор) герметично
закрыт, что препятствует попаданию влаги в его внутреннюю по¬
лость. При подаче напряжения на обмотку электромагнита якорь при¬
тягивается к стопу (упору) и запорное кольцо перекрывает доступ
топлива по каналу системы холостого хода карбюратора. Обратный
ход якоря обеспечивает возвратная пружина. Электромагнитный кла¬
пан ЭПХХ имеет неразборную конструкцию, отличается простотой,
надежностью и малой стоимостью.
Рис. 3.33. Электромагнитный клапан
Примером переключающего устройства систем управления двига¬
телем является пневмоэлектрический клапан системы управления
турбонаддувом. Специфика работы в среде с высокой температурой
требует предусмотреть меры для охлаждения клапана. Для подачи
топлива к форсункам в системах впрыскивания топлива используются
электрические топливные насосы. В основном используются насосы
роторного (роликового) типа (рис. 3.34,а, где 1 - корпус насоса;
2 - предохранительный клапан; 3 - роликовый насос; 4 - электродви¬
106
гатель; 5 - обратный клапан). Насосы могут устанавливаться как вне
топливного бака (магистральный), так и внутри (погружной).
12 3 4
Рис. 3.34. Электрический топливный насос
Топливо
При внешней установке насос представляет собой автономный аг¬
регат, объединяющий насос и электродвигатель в одном корпусе . Во
избежание перегрева при применении магистральных насосов, в топ¬
ливный бак может быть встроен насос подкачки, который подает топ¬
ливо к главному насосу под малым давлением. При размещении в ба¬
ке насос представляет собой единый агрегат, включающий собственно
насос, топливопроводы, датчик уровня топлива, демпфирующее
устройство, фильтр, провода электропитания и т.д. Пример системы
топливоподачи с таким насосным агрегатом приведен на рис. 3.35, где
1 - бак; 2 - топливный насос с электроприводом; 3 - топливный
фильтр; 4 - нагнетательная магистраль высокого давления; 5 - регу¬
лятор давления топлива; 6 - форсунки; 7 - топливо провод с форсун¬
ками; 8 - возвратная топливная магистраль.
На рис. 3.36, где 1 - дросселирующий
элемент; 2,3 - обмотки шагового дви¬
гателя; 4 - ротор шагового электро¬
двигателя; 5 - пружина представлен
регулятор холостого хода с приводным
шаговым электродвигателем. Шаговый
электродвигатель имеет четыре обмот¬
ки управления, которые размещены на
статоре.
В продольных пазах ротора установлены постоянные магниты с
чередующимся расположением полюсов.Управление двигателем ве¬
дется с помощью электрических импульсов различной полярности,
подаваемых на обмотки в определенной последовательности. Малога¬
баритные электродвигатели постоянного тока используются для регу¬
лирования расхода воздуха на холостом ходу путем перемещения
Рис. 3.35. Схема топливопода¬
чи с топливным насосом
107
дроссельной заслонки. Вал электродвигателя через редуктор связан с
цилиндрическим толкателем, который непосредственно воздействует
на подпружиненный рычаг заслонки.
Рис 3.36. Регулятор холостого хода с шаговым электродвигателем
3.8. Диагностика системы топливоподачи
Диагностика форсунок. Состояние форсунок существенно влияет
на работу двигателя. Наиболее распространенной неисправностью
форсунок является их загрязнение, что приводит:
- к затрудненному пуску двигателя;
- неустойчивой работе на холостом ходу;
- повышенному расходу топлива;
- потере мощности;
- появлению детонации и т.д.
Считается, что отечественный бензин практически не уступает по
своим физико-химическим свойствам иностранным аналогам. Однако
в процессе производства, транспортировки и хранения в него попада¬
ет значительное количество смолистых соединений, различные за¬
грязнения и механические примеси. Если предположить, что автомо¬
биль потребляет порядка 10 л топлива на 100 км пробега, то легко
можно посчитать, какое количество топлива проходит через его топ¬
ливную систему за 1 год, за 2 года и т. д.
С таким количеством топлива в систему попадает значительное
количество загрязнений, которые осаждаются на деталях топливной
системы. Но своевременно заменяя топливные фильтры, которые сто¬
ят на пути движения топлива к форсункам, можно предотвратить за¬
грязнение механическими частицами. Наиболее интенсивно накопле¬
на
ние отложений происходит сразу после остановки двигателя. В это
время температура корпуса форсунки возрастает за счет нагрева от
горячего двигателя, а охлаждающее действие бензина отсутствует.
Легкие фракции бензина в рабочей зоне форсунки испаряются, а тя¬
желые накапливаются в виде лаковых отложений, уменьшающих се¬
чение калиброванного канала, что сильно уменьшает пропускную
способность, если вовремя не принять меры.
Своевременная очистка форсунок способствует их нормальной ра¬
боте и продлевает им жизнь. На автомобиль отечественного произ¬
водства ВАЗ или Г АЗ устанавливаются форсунки типа Bosch или GM,
стоимость которых 500- 650 руб. за шт. А на автомобиль иностран¬
ного производства стоимость одной форсунки может колебаться от 70
до 200 у.е. за штуку.
И тут возникает вопрос, как выявить, что неудовлетворительная
работа двигателя связана с загрязнением форсунок и на каком обору¬
довании провести диагностику, чтобы быть в полной мере уверенным.
Диагностика и очистка форсунок. Рассмотрим для начала не¬
сколько видов очистки форсунок. На сегодняшний день существует
два способа очистки - химический и ультразвуковой.
Химический способ реализуется либо добавлением специальных
присадок (жидкостей) в топливный бак автомобиля, либо специаль¬
ными установками, которые подключаются к топливной системе ав¬
томобиля, и автомобиль работает на специальном очистителе. Ис¬
пользование специальной присадки необходимо делать с нулевого
пробега автомобиля, использование с пробегом просто бессмысленно,
так как за счет сильнодействующих компонентов идет смывание
накопившихся отложений, которые, в свою очередь, засоряют топ¬
ливный фильтр, форсунки и топливную систему; использование спе¬
циальных установок позволяет избежать нюансы от использования
присадок, но, в свою очередь, сольвент - это обычно токсичная и
агрессивная среда.
Самое важное - перед тем как "сваливать" неустойчивую работу
двигателя на загрязненные форсунки, необходимо провести полную
диагностику форсунки в тех же условиях, в которых она работает.
Точную диагностику состояния форсунок может дать специально
предназначенная для этих целей установка, которая может полностью
сымитировать работу двигателя на различных режимах и создать ра¬
бочее давление для данного типа форсунок.
1. Пульсация (анализ работоспособности форсунок при подаче то¬
ка на форсунку - проверяется открытие электромагнитного канала).
109
2. Утечка (анализ герметичности форсунок - устанавливается дав¬
ление на 30 % выше рабочего, допустимое пропускание топлива 1
капля в мин).
3. Распыление (анализ угла факела распыления топлива).
4. Расход (равномерность расхода топлива через форсунки).
Как отмечалось выше, существуют различные типы форсунок с верх¬
ним и боковым подводом топлива. Обычно такие приборы имеют
максимально возможную комплектацию, данный прибор имеет в сво¬
ем составе 9 видов адаптеров для проверки форсунок с верхней пода¬
чей топлива и 3 типа адаптеров для проверки форсунок с боковой по¬
дачей топлива. Еще немаловажная деталь, при диагностике форсунок
необходимо одновременно проверять все форсунки, снятые с двигате¬
ля, а их количество бывает разным. На ДД-2200 одновременно можно
провести диагностику 8-ми форсунок.
Необходимо отметить, что при диагностике механических и элек¬
тромагнитных форсунок есть определенное отличие. Не стоит забы¬
вать тот факт, что для механических форсунок немаловажна проверка
давления начала впрыска У электромагнитных форсунок нет необхо¬
димости.
Итак, можно подвести определенный итог, что специалисту, кото¬
рый оценивает состояние форсунок, необходимо провести следующие
операции.
1. Снять форсунки с топливной рампы автомобиля .
2. Подобрать соответствующие типы адаптеров для установки
форсунок на топливной рампе стенда .
3. Провести полную диагностику форсунок.
Механические форсунки:
1) герметичность,
2) давление начала открытия,
3) факел распыления,
4) равномерность расхода топлива.
Электромагнитные форсунки:
1) пульсация,
2) герметичность,
3) факел распыления,
4) равномерность расхода топлива.
После проведения диагностики соответственно делается вывод о со¬
стоянии форсунок, можно ли восстановить технические свойства фор¬
сунок или они подлежат только замене.
по
Рис. 3.37. Стенд для очистки форсунок
Типичные стенды
оснащены ультразвуковой
камерой (УЗК) (рис. 3.37),
и очистка форсунок про¬
исходит под действием
ультразвука. Очистка уль¬
тразвуком - это более ра¬
дикальный метод по срав¬
нению с химическим ме¬
тодом. Ультразвуковые
колебания - это упругие
механические колебания с
частотой выше порога
слышимости человеческо¬
го уха.
Получение механических колебаний ультразвуковой частоты осу¬
ществляется с помощью специальных преобразователей, составляю¬
щих основу ультразвуковых колебательных систем.
Если ультразвуковые колебания имеют интенсивность более 1-2
Вт/кв см, то в жидкости наблюдается эффект, называемый ультразву¬
ковой кавитацией.
При прохождении фазы ультразвуковой волны в жидкости образу¬
ется большое количество разрывов. Кавитационные пузырьки при
этом совершают пульсирующие колебания и вокруг них образуются
сильные микропотоки жидкости. Во время схлопывания пузырьков
идет отслаивание отложений внутри форсунки. Форсунки устанавли¬
ваются на специальный держатель и размещаются в УЗК.
Любая очистка должна заканчиваться контролем качества. Иногда
не всегда с первого раза удается достичь желаемого результата. По¬
этому повторная диагностика не повредит.
Если данные операции прошли успешно и технические характери¬
стики форсунок восстановлены, остается только установить их на
штатное место в двигателе. Но предварительно нужно заменить рези¬
новые уплотнения (для сохранения прежней герметичности) и капро¬
новый фильтр, который расположен внутри форсунки.
іи
Коды неисправностей
№ кода
Неисправность
142
Неисправность форсунки 4-го цилиндра (обрыв.)
143
Неисправность форсунки 4-го цилиндра (короткое замыка¬
ние на корпус)
161
Неисправность первой обмотки регулятора дополнительно¬
го воздуха (междувитковое замыкание)
162
Неисправность первой обмотки регулятора дополнительно¬
го воздуха (обрыв)
163
Неисправность первой обмотки регулятора дополнительно¬
го воздуха (короткое замыкание на корпус)
164
Неисправность второй обмотки регулятора дополнительно¬
го воздуха (междувитковое замыкание)
165
Неисправность второй обмотки регулятора дополнительно¬
го воздуха (обрыв)
166
Неисправность второй обмотки регулятора дополнительно¬
го воздуха (короткое замыкание на корпус)
4. ЭЛЕКТРОСНАБЖЕНИЕ АВТОМОБИЛЯ
Система электроснабжения предназначена для питания элек¬
трической энергией всех потребителей, в нее входят генератор и ак¬
кумуляторная батарея, включенные параллельно. При работающем
двигателе генератор является источником электроэнергии и обеспе¬
чивает электроснабжение потребителей и заряд аккумуляторной бата¬
реи. При неработающем двигателе источником электроэнергии стано¬
вится аккумуляторная батарея, обеспечивающая и надежный пуск
двигателя. Для автоматического поддержания напряжения генератора
на заданном уровне при изменении частоты вращения и нагрузки
предназначен регулятор напряжения.
Для структурной схемы (рис. 4.1
где Ів - ток возбуждения) имеем:
Іг Ібз С при Ur > Еб,
Ір Ін при Up Еб,
С Ібр Ін при Up ^ Еб,
т _ тт _ Рис. 4Л. Структурная схема элек-
І6р = Ін при и, = 0, троснабжения
где С - ток генератора; Ібз - ток, потребляемый батареей при заряде; Ін
- ток, потребляемый потребителями; Ur - напряжение генератора; Еб-
112
ЭДС аккумуляторной батареи; Ібр - ток, отдаваемый батареей при раз¬
ряде.
4.1. Автомобильные генераторы
Преимуществом генераторов переменного тока перед генератора¬
ми постоянного тока являются: уменьшение в 1,8 - 2,5 раза массы ге¬
нератора при той же мощности и примерно в 3 раза расхода меди;
большая максимальная мощность при равных габаритах; меньшее
значение начальных частот вращения и обеспечение более высокой
степени заряженности аккумуляторных батарей; значительное упро¬
щение схемы и конструкции регулирующего устройства вследствие
исключения из него элемента ограничения тока и реле обратного тока;
уменьшение стоимости эксплуатационных затрат в связи с большей
надежностью работы и повышенным сроком службы.
Генераторной установкой называется встроенный в генератор ре¬
гулятор и выпрямительный блок.
Для генераторов надежность и срок службы определяются каче¬
ством электрической изоляции и подшипниковых узлов, надежностью
щеточно-контактных устройств.
Принцип действия генераторов переменного тока. Упрощенная
схема устройства автомобильного генератора переменного тока с
клювообразным ротором представлена на рис. 4.2.
Принцип действия гене¬
ратора заключается в сле¬
дующем. При включении
замка зажигания на обмот¬
ку возбуждения 2 подается
напряжение аккумулятор¬
ной батареи, которое вызы¬
вает появление тока воз¬
буждения. Ток возбужде¬
ния, проходя по обмотке
возбуждения, создает маг¬
нитный поток, рабочая
часть которого распределя¬
ется по клювообразным полюсам одной полярности. Выходя из по¬
люсов, магнитный поток пересекает воздушный зазор, проходит по
зубцам и спинке статора 10, еще раз пересекает воздушный зазор,
входит в клювообразные полюсы другой полярности и замыкается че¬
рез втулку и вал. При вращении ротора 3 под каждым зубцом статора
Рис. 4.2. Конструкция генератора пере¬
менного тока
из
10 проходит попеременно то положительный, то отрицательный по¬
люс, т. е. магнитный поток, пересекающий обмотку статора 11, изме¬
няется по величине и направлению (рис. 4.3). При этом в обмотках
фазы будет индуцироваться переменная по величине и направлению
ЭДС, действующее значение которой равно
Еф = 4,4 * f * w * коб * Ф, (4.1)
где f - частота; w - число витков обмотки одной фазы; Ф - магнитный
поток,
f = р * и -г 60,
где р - число пар полюсов; п - частота вращения,
q = z = (2*p* ш),
где z - число пазов; m - число фаз.
Рис. 4.3. Значение магнитного потока
Для отечественных генераторов характерны следующие пара¬
метры:
Z
18
36
72
І^об
0,866
1
0,966
q
0,5
1,0
2
В фазах обмотки статора синхронного генератора индуцируется
ЭДС, описываемая зависимостью (4.1), которую можно переписать в
более простом виде:
Е = Се * и * Ф, (4.2)
где Сс = 4,44 pwko6 /60 - постоянный коэффициент.
В генераторах применяются трехфазные мостовые двухполупери-
одные схемы выпрямления (рис. 4.4, б), имеющие благоприятные со¬
отношения между выпрямленной мощностью Рс1 и мощностью генера¬
тора Рг (Рг =1,045 Pd). Выпрямитель обеспечивает небольшие пульса¬
ции выпрямленного напряжения, что является важным требованием к
генераторам в связи с широким применением электроники на автомо¬
биле.
114
Рис. 4.4. Двухполупериодный выпрямитель
Обмотка возбуждения питается от отдельного выпрямителя из трех
маломощных диодов (Д 223 А с током 2 А). В последних генераторах
используются стабилитроны, что позволяет ограничить пики напряже¬
ния генератора. Для соединения фазных обмоток по схеме «звезда»
справедливы следующие соотношения:
ип = ѴЗ*иф; Іп = Іф,
где ил и Иф - соответственно линейное и фазное напряжение; Іл, Іф -
линейная и фазная сила тока.
К выпрямителю подается линейное напряжение генератора. Вы¬
прямленное напряжение Ud пульсирует с частотой fn, в 6 раз большей
частоты переменного напряжения генератора, т. е.
fn = 6*f=6*p*n4-60 = 0,lp*n.
Минимальное значение выпрямленного напряжения равно
1,5 ифтах, а максимальное 1,73 ифтах. Пульсация выпрямленного
напряжения при соединении обмоток генератора по схеме «звезда»
равна
AUd = (1ДЗ - 1,5) * иф тах = 0,23 * иф тах,
где ифтах- амплитудное значение фазного напряжения (рис. 4.4,6).
Среднее значение выпрямленного напряжения (период пульсации
Т/6) равно
6 'у1— ^ 2
— ^ Х—Х-НТ2 max * cotdt — 1,651Іф тах ,
где Т - период времени; со - угловая частота.
Следовательно, пульсация выпрямленного напряжения:
AUd=^Ud = 0,139Ud.
115
При выпрямленном напряжении 14 В пульсация равна 1,95 В. При
этом максимальное значение выпрямленного напряжения - 14,65 В, а
минимальное - 12,7 В. Ток при подключении к выпрямителю актив¬
ной нагрузки равен
Id — Uсі -г- RH,
где RH - сопротивление нагрузки.
Форма выпрямленного тока имеет такой же вид, как и выпрямлен¬
ного напряжения, т. е. выпрямленный ток будет пульсирующим с ам¬
плитудой, равной
Id max max — Rjj.
Среднее значение выпрямленного тока:
Id — ^ /_т-ні2 max * COS G)tdt — 0,955 1^ max .
Действующее значение фазного тока:
4 ГТ/3 о
Іф = Ь і_т/з Id max Sin2COtdt = 0,775 Id max,
ИЛИ
Іф = 0,815 I(j.
Характеристики генераторов переменного тока. Внешняя ха¬
рактеристика генератора переменного тока (рис.4.5, а - с самовозбуж¬
дением; б - с независимым возбуждением), т. е. зависимость напря¬
жения генератора от тока Ur (Іг) при п = const, определяется при само¬
возбуждении и независимом возбуждении:
U = 4,4 fwk06O - Z0I,
где z0 - полное сопротивление генератора.
Из семейства внешних характеристик определяется максимальный
ток, который обеспечивается при заданном или регулируемом значе¬
нии напряжения.
Скоростная регулировочная характеристика Ів(п) (рис. 4.5,в) поз¬
воляет определить диапазон изменения тока возбуждения с изменени¬
ем нагрузки при U=const. Токоскоростная характеристика Іг(п) (рис.
4.5,г) имеет важное значение при разработке и выборе генератора.
Генераторы обладают свойством самоограничения максимального
тока. С увеличением частоты вращения ток генератора увеличивается
медленнее, асимптотически стремясь к некоторому предельному зна¬
чению. При замыкании внешней цепи на сопротивление нагрузки ин¬
дуцированная в обмотке статора электродвижущая сила вызывает ток
не
Рис. 4.5. Характеристики генератора переменного тока
J(Ra+RH)2+Xt
где Ra, и XL - соответственно активное и индуктивное сопротивление
обмотки статора.
Выразив индуктивное сопротивление обмотки статора через ча¬
стоту и индуктивность, а затем через частоту вращения и индук¬
тивность
XL = 2nfL = 2тт — L = Схп.
где L - индуктивность обмотки статора; Сх - постоянный коэффициент;
сх = 7^-ь, и, учитывая (3.2), получим выражение для тока генератора:
60
j _ СепФ
V(Ra+RH)2+(cxn)2
При малой частоте вращения индуктивная составляющая сопро¬
тивления {Cnf мала по сравнению с активной составляющей
Г\
(Ra + RH) и ею можно пренебречь. При этом ток будет возрастать
пропорционально частоте вращения (начальная часть характеристики
на рис. 4.5,г):
117
Т СеФ Срф
I = , = П—2—.
7(Ra+RH)2 Ra+RH
С увеличением частоты вращения индуктивная составляющая воз¬
растает и становится значительно больше активной составляющей,
следовательно, последней можно пренебречь. Ток не будет зависеть
от частоты вращения, а будет определяться параметрами обмоток ге¬
нератора и магнитным потоком:
СепФ СепФ СеФ
1 = ' г = "7 1 ~Г~ = const-
V(Cxn)2 Cxn Сх
Электрическая схема генератора показана на рис. 4.6,а.
Максимальная мощность генератора переменного тока равна
max Uj-[Irmax,
где UH - номинальное выпрямленное напряжение (14 или 28 В);
Iг max — максимальный ток нагрузки генератора.
Масса электрических машин зависит не от их мощности, а от мо¬
мента (т.е. мощности, деленной на частоту вращения). Диоды соеди¬
нены между собой и образуют трехфазную полупериодную схему вы¬
прямления (рис. 4.6,6). В местах соединения разнополярных диодов
имеются клеммы для присоединения фазных обмоток генератора.
Рис 4.6. Генератора 37.3701
4.2. Автоматическое регулирование напряжения в сети автомобиля
Независимо от типа генератора в системе электроснабжения необ¬
ходим регулирующий элемент. Поддержание постоянного на¬
пряжения при увеличении частоты вращения ротора генератора воз¬
можно лишь при уменьшении магнитного потока. Уменьшить ток
118
возбуждения, а следовательно, и магнитный поток можно замыканием
обмотки возбуждения, прерыванием цепи возбуждения или включе¬
нием последовательно с обмоткой возбуждения добавочного резисто¬
ра.
С увеличением частоты вращения ротора возрастает ЭДС и на¬
пряжение генератора превышает регулируемое значение. При этом
регулятор напряжения одним из указанных способов уменьшает ток
возбуждения, что приводит к уменьшению магнитного потока, ЭДС и
напряжения генератора. Снижение напряжения приводит к необ¬
ходимости увеличения тока возбуждения. Этот процесс повторяется
периодически, благодаря чему напряжение генератора колеблется
около регулируемого значения (рис.4.9, а).
В систему автоматического регулирования напряжения в бортовой
сети автомобиля (рис. 4.7) входит объект регулирования - генератор и
регулятор напряжения, состоящий из чувствительного элемента, ре¬
гулирующего органа и задающего элемента. Обратная связь в системе
регулирования осуществляется через чувствительный элемент.
Рис. 4.7. Схема автоматического регулятора напряжения
Рассмотрим рабочий процесс автоматического регулирования
напряжения на примере включения последовательно с обмоткой воз¬
буждения добавочного резистора Яд (рис. 4.8).
Рис. 4.8. Характер изменения регулируемого напряжения
119
Скорость нарастания напряжения при отсутствии в цепи возбуж¬
дения добавочного резистора, а также скорость убывания напряжения
при подключении добавочного резистора зависят от частоты враще¬
ния ротора генератора:
п RBto + (RB+Rfl)tB Г^в^о+Г^в^в+Г^д^в RB(to"l"tB)+R^tB п i _ п
Кэф- ^ - ж - - Ж -RB+TB Ra>
где т B — tB/ (t с +13) - относительная продолжительность включения
резистора.
Тогда ток возбуждения I B — U / R э ф — U / ( R B + т BRд) .
Рассмотрим скоростную характеристику генератора при работе с
регулятором напряжения (рис. 4.9, б) при увеличении частоты враще¬
ния от 0 до ns, т. е. пока регулятор напряжения не работает (тв = 0), ток
возбуждения IB =U/RB возрастает до максимального значения.
Рис. 4.9. Скоростная характеристика и процесс регулирования
напряжения генератора
При дальнейшем возрастании частоты вращения регулятор на¬
пряжения начинает работать, поддерживая заданное напряжение. При
этом Тв возрастает от 0 до 1, а ток возбуждения уменьшается до зна¬
чения, соответствующего постоянно включенному резистору:
I b — U / (Rb + Ra) .
При дальнейшем увеличении частоты вращения напряжение и ток
возбуждения начнут возрастать. Таким образом, сопротивление доба¬
вочного резистора определяет максимальную частоту вращения рото -
ра генератора, при которой возможно регулирование напряжения.
Регуляторы напряжения. Применяются регуляторы напряжения
электромагнитного, электронного и смешанного типов. С переходом
на системы электроснабжения с генератором переменного тока регу¬
120
ляторы электронного и смешанного типов практически вытеснили
электромагнитные регуляторы, которые применялись с генераторами
постоянного тока, так как:
- ток возбуждения генераторов переменного тока в 1,5 - 2, раза
выше, чем генераторов постоянного тока. Контакты электромагнит¬
ного регулятора напряжения при таких токах имеют низкую надеж¬
ность;
- электронный регулятор имеет ресурс до 200 - 250 тыс. км пробе¬
га, в то время как средний срок службы электромагнитного регуля¬
тора 120- 150 тыс. км пробега;
- электронный регулятор не содержит подвижных частей, поэтому
не подвержен разрегулировкам в процессе эксплуатации.
Регулятор напряжения генератора с электромагнитным регулято¬
ром представлен на рис. 4.10. При неработающем генераторе под дей¬
ствием пружины 4 контакты замкнуты, тем самым добавочный рези¬
стор выключается из цепи возбуждения. Обмотка электромагнита 5
включена параллельно генератору 1. Сила притяжения электромагни¬
та зависит от тока
Іэ = Ur/Ro,
где R0 - сопротивление обмотки электромагнита.
Притяжению электромагнита противодействует усилие пружины.
С увеличением частоты вращения возрастает ЭДС, и напряжение
генератора превышает регулируемое значение. При этом ток в обмот¬
ке электромагнита возрастает, усилие притяжения увеличивается и
контакты размыкаются. В цепь возбуждения включается сопротивле¬
ние добавочного резистора, что приводит к уменьшению тока воз¬
буждения, магнитного потока, ЭДС и напряжения генератора. Сниже¬
ние напряжения приводит к ослаблению усилия притяжения электро¬
магнита и пружина замыкает контакты. Добавочный резистор выклю¬
чается и напряжение опять возрастает, пока контакты вновь не разо¬
мкнутся.
Рис. 4.10. Регулятор напряжения генератора
Разрывная мощность равна
121
РК = Ів/Рд-
Для надежной работы контактов разрывная мощность должна
находиться в пределах 150 - 200 В-А.
Двухступенчатый регулятор напряжения электромагнитного
типа. (рис. 4.11, а). До достижения регулируемого напряжения кон¬
такты РН1 замкнуты, и ток возбуждения определяется напряжением
генератора и сопротивлением ОВ. При достижении регулируемого
напряжения электромагнитное усилие, созданное обмоткой PH, пре¬
одолевает усилие пружины и контакты размыкаются. При этом ток
возбуждения пройдет по добавочному резистору, сила его уменьшит¬
ся, следовательно, уменьшится и напряжение. Параллельно контактам
РН1 включается резистор, сопротивление которого в 10 - 15 раз
меньше, чем у одноступенчатых регуляторов.
Сопротивление добавочного резистора рассчитано таким образом,
чтобы при частоте вращения, равной половине максимальной, контак¬
ты первой ступени перестали замыкаться, т. е. регулирование на¬
пряжения прекратилось. При этом ток возбуждения уменьшается до
1,2 - 1,3 А. При дальнейшем увеличении частоты вращения генерато¬
ра напряжение будет возрастать до того момента, пока не замкнутся
контакты РН2. При их замыкании ОВ шунтируется (т. е. замыкается
накоротко). Токи возбуждения и напряжения упадут, при этом кон¬
такты РН2 снова разомкнутся. Процесс будет повторяться. Регулиро¬
вочная характеристика регулятора напряжения РР380 представлена на
рис. 4.11, б.
Рис. 4.11. Двухступенчатый регулятор напряжения
В регуляторах смешанного типа (рис. 4.12) основной ток - ток воз¬
буждения - проходит через силовой транзистор, а роль контактов сво¬
дится к коммутированию небольшого тока управления транзистором.
При напряжении генератора, меньшем регулируемого, транзистор
122
Рис. 4.12. Регуляторы смешанного
типа
VT1 открыт, так как имеется его ток базы. Сопротивление цепи воз¬
буждения определяется сопротивлением обмотки. При напряжении
генератора выше регулируемого усилие электромагнита преодолевает
сопротивление пружины и контакты замыкаются. В результате шун¬
тируется переход «эмиттер-база», транзистор закрывается и сопро¬
тивление цепи возбуждения увеличивается, так как ток возбуждения
проходит по добавочному резистору Яд.
Уменьшение тока возбужде¬
ния вызывает уменьшение маг¬
нитного потока, ЭДС напряже¬
ния, что в свою очередь при¬
водит к ослаблению усилия
электромагнита, и контакты
разомкнутся. Этот процесс по¬
вторяется.
Регулятор напряжения смешанного типа (рис. 4.13). После вклю¬
чения замка зажигания ВЗ до достижения генератором регулируемого
напряжения, ток проходит по следующим цепям:
цепь базы: клемма «ВЗ» —> диод VD2-> «эмиттер-база» VT1 -> резистор
ДЗ-> клемма «М» —> «масса»; цепь тока возбуждения: клемма «ВЗ» ->
диод VD2 -> «эмитгер-коллектор» VT1 —> клемма «Ш» -> обмотка воз¬
буждения -> «масса». Сопротивления VD2 и эмитгерно-коллекгорного пе¬
рехода VT1 невелики, поэтому ток возбуждения определяется со¬
противлением ОВ. Помимо указанных цепей, ток идет по обмотке PH:
клемма «ВЗ» —> диод VD2 —> ускоряющий резистор R1 —> обмотка HP
-> термокомпенсационный резистор R-, -> клемма <<М>2_"Ді<масса>>-
При достижении регулируемого
напряжения контакты РН2 замкнутся.
При этом на базу транзистора будет
подан потенциал батареи (положи¬
тельный). Потенциал эмиттера стано¬
вится несколько ниже потенциала ба¬
зы за счет падения напряжения на ди¬
оде VD2. Транзистор закрывается. В
этом случае ток возбуждения, проте¬
кая по последовательно соединенным
резисторам R1 и уменьшается, что
приводит к уменьшению магнитного
потока ОВ и напряжения
PH
РР362
Рис. 4.13. Регулятор напря¬
жения смешанного типа
генератора. При этом контакты РН2 размыкаются, транзистор
123
открывается и описанный процесс повторяется, обеспечивая по¬
стоянство регулируемого напряжения.
Недостатком регулятора является нестабильность регулируемого
напряжения, так как вследствие старения изменяются характеристики
возвратной пружины регулятора.
Электронный регулятор напряжения (рис. 4.14).
При напряжении генерато¬
ра ниже регулируемого стаби¬
литрон VD3 закрыт, закрыт
транзистор ѴТ2, а транзистор
ѴТ1 открыт. Сопротивление
цегш Рис. 4.14. Электронный регулятор
возбуждения минимально. При напряжении генератора выше регули¬
руемого стабилитрон пробивается, транзистор ѴТ2 открывается, что
приводит к закрытию транзистора ѴТ1, так как на его базу подается
положительный потенциал. В цепь возбуждения включается до¬
бавочный резистор и напряжение генератора падает. Уменьшение
напряжения вызывает закрывание стабилитрона, закрытие транзисто¬
ра YT2 и открытие транзистора ѴТ1. Этот процесс повторяется.
Электронные регуляторы обладают высокой надежностью и ста¬
бильностью регулируемого напряжения. Недостатком является слож¬
ность изменения регулируемого напряжения в условиях эксплуата¬
ции.
Интегральные регуляторы напряжения (рис. 4.15).
При напряжении в бортовой сети ниже регулируемого транзисто¬
ры ѴТ5 и ѴТ4 открыты, так как имеется ток их баз, протекающий по
следующей цепи: клемма «В» —> резистор R5 —> диод VD3 —> ба¬
за-эмиттер транзистора ѴТ4 —> база-эмиттер транзистора ѴТ5 —>
клемма «-» —> «масса». При этом ток возбуждения приходит по сле¬
дующей цепи: клемма «В» —> клемма «В'» —> обмотка возбуждения
генератора —> клемма «Ш» —> коллекторно-эмиттерный переход
транзистора ѴТ5—> клемма «-» —> «масса».
124
Как только напряжение дости¬
гает заданного уровня, стабили¬
трон YD1 пробивается и транзи¬
стор YT2 открывается. Сопротив¬
ление этого транзистора стано¬
вится минимальным и шунтирует
эмиттерно-базовый переход тран¬
зисторов VT5 и YT4, что приво¬
дит к их закрыванию. Схема ре¬
гулятора напряжения переключа¬
ется в состояние, при котором
транзистор VT2 открыт, а VT5 и
VT4 заперты. Ток возбуждения
генератора и выпрямленное
напряжение начинают падать.
При этом стабилитрон и транзи¬
стор VT2 закрываются, транзи¬
сторы VT5 и VT4
открываются и процесс повторяется. Диод ѴШ служит для улуч¬
шения закрывания основного транзистора при открытом транзисторе
ѴТ2 благодаря дополнительному падению напряжения на этом дио¬
де. Диод VD6 служит для гашения ЭДС самоиндукции обмотки воз¬
буждения генератора и защиты транзистора от перенапряжения в мо¬
мент его закрывания.
4.3. Аккумуляторные батареи
Аккумуляторные батареи являются источниками электрической
энергии, обеспечивающими питание потребителей при неработающем
ДВС или при недостаточной мощности, развиваемой генератором.
Тип и конструкция аккумуляторной батареи определяются условиями
ее разряда в стартерном режиме при пуске двигателя. Поскольку эти
режимы наиболее тяжелые (максимальный ток и мощность), автомо¬
бильные аккумуляторные батареи называются стартерными.
Стартерный аккумулятор представляет собой химический источ¬
ник тока (рис. 4.16,а), где 1 - корпус, 2 - крышка, 3 - положительный
вывод, 4 - межэлементное соединение, 5 - отрицательный вывод, 6 -
пробка заливной горловины, 7 - заливная горловина, 8 - сепаратор,
9,10 - «+»«-» пластины. После разряда производится его повторный
заряд путем пропускания тока от внешней зарядной цепи в обратном
Рис. 4.15. Интегральные ре¬
гуляторы
125
направлении. К стартерным аккумуляторам предъявляются сле¬
дующие требования:
- максимальное рабочее напряжение, которое определяется ЭДС
одного аккумулятора батареи и их количеством в последовательном
соединении;
- минимальная общая масса;
- минимальное внутреннее сопротивление (особенно при пони¬
женных температурах);
- малое изменение напряжения в процессе разряда;
- максимальное количество энергии, отдаваемой с единицы массы;
- быстрое восстановление емкости в процессе заряда;
- малые габаритные размеры и большая механическая прочность;
- надежность и простота обслуживания в эксплуатации;
- малая стоимость при массовом производстве.
Перечисленным требованиям удовлетворяют свинцово-кислотные
аккумуляторы. Помимо них применяются щелочные аккумуляторы:
никель-кадмиевые, никель-железные, никель-цинковые, серебряно¬
цинковые и т.д.
Щелочные аккумуляторы имеют на 20 - 25 % меньшую ЭДС по
сравнению со свинцово-кислотными и немного меньший КПД.
В свинцово-кислотном аккумуляторе плотность электролита свя¬
зана со степенью его заряженности, что используется для контроля
степени заряженности с помощью денсиметров. При разряде, напри¬
мер, батареи номинальным током 3,75 А при температуре 25 °С ем¬
кость составляет 75 А-ч, а при разряде током 250 А емкость резко па¬
дает и составляет всего 25 А-ч. Зависимость емкости от наминала и
температуры приведена на рис. 4.16, б.
2 3 4 5 6
Рис. 4.16. Внешний вид и диаграмма стартерного аккумулятора
126
Аккумуляторные батареи можно заряжать от любого источника
постоянного тока при условии, что его напряжение больше, чем на¬
пряжение заряжаемой батареи.
т ЦиСТ~Цб
~~ R
где иисх - напряжение источника тока, В; U6 - напряжение батареи в
данный момент заряда, В; R - общее сопротивление зарядной цепи,
Ом. Рекомендуемые значения регулируемого напряжения приведены
в табл. 4.1.
Рекомендуемые значения регулируемого напряжения Таблица 4.1
Климатическая
зона
Время года
Рекомендуемые значения
регулируемого напряжения,
В, при установке батареи
наружной
подкапотной
Холодная
Зима
Лето
14.5.. .15.5
13.8.. .14.8
14.2.. .15.0
13.2.. . 14,2
Умеренная
Круглый год
13,8...14,8
13,2... 14,2
Жаркая и теплая влажная
То же
13,2...14,0
13,0...14,0
При равенстве напряжений зарядного устройства и батареи заряд¬
ный ток равен нулю. С ростом напряжения аккумулятора при заряде
ток заряда уменьшается, поэтому зарядные устройства снабжены си¬
стемами, позволяющими регулировать и поддерживать постоянным
один из электрических параметров - напряжение или ток заряда.
4.4. Методы диагностирования системы электроснабжения
Интерес к вопросу о качестве напряжения в последние годы воз¬
рос. Связано это в первую очередь с широким применением на авто¬
мобиле электроники, требующей строгого соблюдения реко¬
мендуемых режимов эксплуатации и имеющей незначительную пе¬
регрузочную способность. Повышенная пульсация создает значи¬
тельную разницу между средним и действующим напряжениями и,
следовательно, разные условия работы для потребителей, реаги¬
рующих на то или другое значение напряжения. При этом также воз¬
растает статическая ошибка регулирования и ухудшаются условия ра¬
боты потребителей и аккумуляторной батареи. Так, например, при
уменьшении напряжения на 5 % световой поток ламп уменьшается на
127
20 %, а при таком же увеличении напряжения срок службы ламп све¬
тосигнальной аппаратуры уменьшается в 2 раза. Повышение регули¬
руемого напряжения на 10 - 12 % приводит к снижению срока служ¬
бы аккумуляторной батареи в 2 - 2,5 раза. На автомобилях для кон¬
троля за уровнем регулируемого напряжения и зарядом батареи при¬
меняются стрелочные приборы - амперметры, вольтметры, а также
ламповые индикаторы, устанавливаемые на панели приборов. Ампер¬
метр подключают последовательно с батареей таким образом, чтобы
через него проходил только зарядный или разрядный ток батареи (за
исключением тока мощных потребителей электроэнергии кратковре¬
менного действия - стартера, звукового сигнала, прикуривателя и т.
д.). Вольтметр непосредственно измеряет напряжение в бортовой сети
автомобиля. Для контроля исправности генераторных установок
включают контрольную лампу между «плюсом» основного силового
выпрямителя и «плюсом» дополнительного. Однако необходимо от¬
метить, что по показаниям этих приборов и индикаторов невозможно
в полной мере оценить работу системы электроснабжения. Например,
применение лампового индикатора, управляемого реле контроля за¬
ряда, не позволяет обнаружить повышение напряжения. При включе¬
нии контрольной лампы между «плюсом» основного и дополнитель¬
ного выпрямителей обеспечивается обнаружение неисправностей,
связанное только с невозбуждением генератора, - обрыв цепи обмот¬
ки возбуждения, проскальзывание или обрыв приводного ремня.
Полную информацию о работоспособности и возникших неис¬
правностях получают при диагностировании системы электроснаб¬
жения. При этом используется специальная диагностическая аппара¬
тура (напимер, Элкон С-300, Э240, Э242 и др.). Для контроля техни¬
ческого состояния аккумуляторных батарей используется пробник
(рис. 4.17, а, где 1 - вольтметр; 2 - нагрузочный резистор; 3 и 5 - кон¬
такты; 4 - выключатель резистора), позволяющий измерять напряже¬
ние батареи под нагрузкой. Срок службы батарей определяется про¬
должительностью, когда ее емкость снизится до 40 % номинального
значения. Реально аккумулятор имеет срок службы 2-4 года. Основ¬
ными причинами выхода батарей из строя являются:
- необратимая сульфитация электродов в результате частого раз¬
ряда током стартерного режима, длительного хранения при поло¬
жительной температуре без подзаряда и высокой плотности элек¬
тролита;
128
- коррозия решеток вследствие содержания в электролите посто¬
ронних примесей, оголения электродов (низкий уровень электролита),
длительного перезаряда и длительного хранения сухозаряженных ба¬
тарей (более 3 лет);
- коробление электродов из-за неравномерности реакции по по¬
верхности электродов вследствие большого разрядного тока, а также
при большом зарядном токе;
- выпадание активной массы положительных электродов, про¬
исходящее при перезаряде, а также при заряде, когда температура
электролита больше 40 °С; от сильной вибрации; после замерзания
электролита;
- короткое замыкание электродов осыпающейся активной массой.
Важнейшим параметром, определяющим срок службы батарей,
является ток перезаряда, при повышенном регулируемом напряжении
генератора. Зависимость тока перезаряда от регулируемого напря¬
жения при различной температуре электролита представлена на рис.
4.17, б. В результате перезаряда происходит обильное газовыделение
(«кипение»), что приводит к интенсивному разрушению активной
массы электродов. Стартерные аккумуляторные батареи эксплуати¬
руются при температурах от -40 до +60 °С и на высоте над уровнем
моря до 3000 м. Повышенная температура электролита способствует
быстрому разрушению электродов, ускоряет сульфатацию и сокраща¬
ет срок службы батареи. Для уменьшения химической активности
электролита и электродов при высоких температурах в жаркой и теп¬
лой влажной климатических зонах в батареи заливают электролит по¬
ниженной плотности. Холодные батареи заряжаются медленнее и ча¬
сто остаются недозаряженными. Причиной снижения срока службы
батарей может быть повышенный саморазряд, который зависит от чи¬
стота электролита и его температуры. Иногда саморазрядом называют
быструю потерю емкости вследствие коротких замыканий внутри ак¬
кумулятора. Хранить батареи рекомендуется при пониженных тем¬
пературах. Подготовка к работе аккумуляторных батарей сводится к
составлению электролита, последующей проверке его плотности и за¬
ряду батарей. Электролит приготовляют из аккумуляторной серной
кислоты и дистиллированной воды. Плотность электролита зависит от
района эксплуатации, времени года и должна соответствовать данным
табл. 4.2.
129
а
Рис. 4.17. Внешний вид прибора и диаграмма тока перезаряда
от регулируемого напряжения
При эксплуатации батарей в первую очередь обращают внимание
на контроль зарядного тока, чтобы не допустить излишнего пе¬
резаряда или не дозаряда, сокращающих срок их службы. Для этого
необходимо постоянно следить за техническим состоянием регулято¬
ра напряжения.
Зависимость плотности электролита от времени года. Таблица 4.2
Климатическая
зона
Время
года
Плотность электролита, г/см',
приведенная к температуре 25°С
запиваемого
заряженной бата¬
реи
Очень холодная
Зима Лето
1,29/1,25
1,31/1,27
Холодная
Круглый год
1,27
1,29
Умеренная
Тоже
1,25
1,27
Жаркая
-
1,23
1,25
Теплая влажная
-
1,21
1,23
Основными операциями технического обслуживания акку¬
муляторных батарей являются:
- постоянная проверка чистоты батарей и их вентиляционных от¬
верстий;
- проверка уровня электролита и при необходимости корректиров¬
ка его;
- проверка заряженности батареи по замеру плотности электролита
с учетом температуры.
Для проверки технического состояния батареи и оценки способ¬
ности ее к холодному пуску двигателя разработан специальный ди¬
агностический режим разряд током «холодной прокрутки» при
130
t = -18°C. Диагностическими параметрами при этом являются на¬
пряжение на 30-й и 150-й секундах разряда. Они должны быть соот¬
ветственно не менее 9 и 6 В у полностью заряженной батареи. Также
используется такая характеристика, как сила тока, вызывающего па¬
дение напряжения до 1,2 В на аккумуляторе в течение 30 с. Суще¬
ствуют методы диагностирования, основанные на контроле внутрен¬
него сопротивления батареи и определении параметров ее эквива¬
лентной электрической схемы. Неисправности, возникающие в бата¬
рее, по-разному влияют на диагностические параметры. Наибольшей
чувствительностью к неисправностям обладает скорость падения
напряжения на линейном участке разрядной кривой Ue(t) в стартер¬
ном режиме разряда dlVdt. Этот параметр позволяет с достаточной
для практических целей точностью оценить степень разряженности
батареи в процессе электростартерного пуска двигателя. При появле¬
нии коррозии решеток положительных электродов изменяется как по¬
казатель dlVdt, так и внутреннее омическое сопротивление R0, при
оплывании активной массы - dlVdt и поляризационное сопротивле¬
ние Rn. Диагностический режим активной массы для проверки техни¬
ческого со и поляризационное сопротивление стояния аккумулятор¬
ной батареи при пуске двигателя. Диагностирование батареи может
производиться также в процессе заряда или путем организации специ¬
альных тестовых воздействий (разряд ступенчатым, импульсным то¬
ком и т. д.).
Вопросы для самоконтроля
1. Какие конструкции генераторов переменного тока применяются
на современных автомобилях?
2. Из каких основных элементов состоит генератор переменного
тока с клювообразным ротором?
3. За счет чего в современных автомобильных генераторах проис¬
ходит ограничение максимального тока?
4. Каким образом происходит процесс регулирования напряжения
генератора?
5. Какие бывают типы регуляторов напряжения, в чем их преиму¬
щества и недостатки?
6. Какие физико-химические процессы происходят в свинцово¬
кислотной аккумуляторной батарее при заряде и разряде?
7. Как осуществляется маркировка аккумуляторных батарей?
8. Что такое емкость аккумуляторной батареи в 20-часовом режи¬
ме разряда?
131
9. Какие существуют способы заряда аккумуляторных батарей?
10. Чем отличаются «необслуживаемые» аккумуляторные батареи?
11. Методы диагностирования аккумуляторных батарей.
5. ЭЛЕКТРОПРИВОДНЫЕ СИСТЕМЫ
5Л. Двигатели постоянного тока
Тенденции развития различных систем автомобиля, связанные с
повышением экономичности, надежности, комфорта и безопасности
движения, приводят к тому, что роль электроприводных систем,
неуклонно возрастает. Если 25 - 30 лет назад на серийных автомоби¬
лях практически не встречалось механизмов с электроприводом, то в
настоящее время даже на грузовых автомобилях устанавливается ми¬
нимум 3-4 электродвигателя, а на легковых - 5 - 8 и более, в зави¬
симости от класса.
Электроприводом (ЭП) называется электромеханическая система,
состоящая из электродвигателя (или нескольких электродвигателей),
передаточного механизма к рабочей машине и всей аппаратуры для
управления электродвигателем. Основными устройствами автомоби¬
ля, где находит применение электропривод, являются отопители и
вентиляторы салона, предпусковые подогреватели, стекло- и фаро¬
очистители, механизмы подъема стекал, антенн, перемещения сиде¬
ний и др.
Длительность работы и ее характер определяют рабочий режим
привода. Для ЭП принято различать три основных режима работы:
продолжительный, кратковременный и повторно-кратковременный.
Продолжительный режим характеризуется такой длительностью,
при которой за время работы электродвигателя его температура до¬
стигает установившегося значения. В качестве примера механизмов с
длительным режимом работы можно назвать отопители и вентилято¬
ры салона автомобиля.
Кратковременный режим имеет относительно краткий рабочий пе¬
риод и температура двигателя не успевает достигнуть устано¬
вившегося значения. Перерыв же в работе исполнительного меха¬
низма достаточен для того, чтобы двигатель успевал охладиться до
температуры окружающей среды. Такой режим работы характерен на
132
самых различных устройств кратковременного действия: подъема
стекол, привода антенн, перемещения сидений и др.
Повторно-кратковременный режим характеризуется рабочим пе¬
риодом, который чередуется с паузами (остановка или холостой ход),
причем ни в один из периодов работы температура двигателя не до¬
стигает установившегося значения, а во время снятия нагрузки двига¬
тель не успевает охладиться до температуры окружающей среды.
Примером устройств автомобиля, работающих в таком режиме, могут
служить стеклоочистители (на соответствующих режимах), стекло¬
омыватели и др.
Характерной чертой для повторно-кратковременного режима яв¬
ляется отношение рабочей части периода T' к всему периоду Т. Этот
показатель именуется относительной продолжительностью работы ПР
или относительной продолжительностью включения ПВ, измеряемы¬
ми в процентах.
Требования, предъявляемые к электродвигателям, устанавли¬
ваемым в том или ином узле автомобиля, отличаются особой спе¬
цификой и обусловлены режимами работы этого узла. При выборе
типа двигателя необходимо сопоставить условия работы привода с
особенностями механических характеристик различных видов элек¬
тродвигателей. Принято различать естественную и искусственную
механические характеристики двигателя. Первая соответствует номи¬
нальным условиям его включения, нормальной схеме соединений и
отсутствию каких-либо добавочных элементов в цепях двигателя. Ис¬
кусственные характеристики получаются при изменении напряжения
на двигателе, включении добавочных элементов в цепи двигателя и
соединении этих цепей по специальным схемам.
Одним из наиболее перспективных направлений в развитии элек¬
тропривода вспомогательных систем автомобиля является создание
электродвигателей мощностью до 100 Вт с возбуждением от посто¬
янных магнитов.
Применение постоянных магнитов позволяет в значительной мере
повысить технико-экономические показатели электродвигателей:
уменьшить массу, габаритные размеры, повысить КПД. К пре¬
имуществам следует отнести отсутствие обмоток возбуждения, что
упрощает внутренние соединения, повышает надежность электро¬
двигателей. Кроме того, благодаря независимому возбуждению все
электродвигатели с постоянными магнитами могут быть реверсив¬
ными. Типичная конструкция электродвигателя с постоянными маг¬
нитами, применяемого в отопителях, показана на рис. 5.4, где 1 - кол¬
133
лектор; 2 - графитные щетки; 3 - корпус; 4 - постоянные магниты; 5 -
подшипник; 6 - плоская пружина; 7 - якорь.
3 4
Рис. 5.4. Конструкция электродвигателя с постоянными магнитами
Постоянные магниты 4 закреплены в корпусе 3 с помощью двух
стальных плоских пружин 6, прикрепленных к корпусу. Якорь 7 элек¬
тродвигателя вращается в двух самоустанавливающихся подшипни¬
ках скольжения 5. Графитные щетки 2 прижимаются пружинами к
коллектору 1, выполненному из полосы меди и профрезерованному на
отдельные ламели.
Принцип действия электрических машин с постоянными магни¬
тами аналогичен общеизвестному принципу действия машин с элек¬
тромагнитным возбуждением - в электродвигателе взаимодействие
полей якоря и статора создает вращающий момент. Источник магнит¬
ного потока в таких электродвигателях - постоянный магнит. Харак¬
теристикой магнита является кривая его размагничивания. Свойства
материала определяются значениями остаточной индукции Вг и коэр¬
цитивной силы Нс. Полезный поток, отдаваемый магнитом во внеш¬
нюю цепь, не является постоянным, а зависит от суммарного воздей¬
ствия внешних размагничивающих факторов.
Рабочая точка магнита вне системы электродвигателя N, рабочая
точка в сборе с корпусом М и рабочая точка магнита в электродвига¬
теле в сборе К различны. Причем для большинства магнитных мате¬
риалов процесс размагничивания магнита необратим, так как возврат
из точки с меньшей индукцией в точку с большей индукцией (напри¬
мер, при разборке и сборке электродвигателя) происходит по кривым
возврата, не совпадающим с кривой размагничивания.
В связи с этим важным преимуществом используемых в автотрак¬
торной промышленности оксидно-бариевых магнитов является не
только их относительная дешевизна, но и совпадение в определенных
134
пределах (до точки перегиба) кривых возврата и размагничивания.
Если воздействие внешних размагничивающих факторов таково, что
рабочая точка магнита перемещается за колено, то возврат в точку К
уже невозможен и рабочей точкой в собранной системе будет уже
точка Кі с меньшей индукцией. Поэтому при расчете электродвигате¬
лей с постоянными магнитами очень важен правильный выбор объема
магнита, обеспечивающий не только рабочий режим работы электро¬
двигателя, но и стабильность рабочей точки при воздействии макси¬
мально возможных размагничивающих факторов.
5.2. Электродвигатели предпусковых подогревателей
Предпусковые нагреватели используются для обеспечения надеж¬
ного пуска ДВС при низких температурах. Назначение электродвига¬
телей этого типа - подача воздуха для поддержания горения в бензи¬
новых подогревателях, подача воздуха, топлива и обеспечение цирку¬
ляции жидкости в дизелях.
Особенностью режима работы является то, что при таких темпера¬
турах необходимо развивать большой пусковой момент и функциони¬
ровать непродолжительное время. Для обеспечения этих требований
электродвигатели предпусковых подогревателей выполняются с по¬
следовательной обмоткой и работают в кратковременном и повторно¬
кратковременном режимах. В зависимости от температурных условий
электродвигатели имеют различную продолжительность включения:
-5 —10 °С не более 20 мин; -10 —25 °С не более 30 мин; -25 —50
°С не более 50 мин.
Нашедшие широкое применение в предпусковых подогревателях
электродвигатели МЭ252 (24В) и 32.3730 (12В) имеют номинальную
мощность 180 Вт и частоту вращения 6500 мин'1.
5.3. Электродвигатели для привода вентиляционных
отопительных установок
Вентиляционные и отопительные установки предназначены для
обогрева и вентиляции салонов легковых автомобилей, автобусов, ка¬
бин грузовых автомобилей и тракторов. Действие их основано на ис¬
пользовании тепла двигателя внутреннего сгорания, а производитель¬
ность в значительной степени зависит от характеристик электропри¬
вода. Все электродвигатели такого назначения представляют собой
135
двигатели длительного режима работы, эксплуатируемые при темпе¬
ратуре окружающей среды -40 - +70 °С. В зависимости от компо¬
новки на автомобиле отопительной и вентиляционной установки
электродвигатели имеют разное направление вращения. Эти электро¬
двигатели одно- или двухскоростные в основном с возбуждением от
постоянных магнитов. Двухскоростные электродвигатели обеспечи¬
вают два режима работы отопительной установки. Частичный режим
работы (режим низшей скорости, а следовательно, и низшей произво¬
дительности) обеспечивается за счет дополнительной обмотки воз¬
буждения.
На рис. 5.5 показано устройство электродвигателя с возбуждением
от постоянных магнитов для отопителей. Он состоит: 1 и 5 - подшип¬
ник скольжения; 2 - постоянный магнит; 3 - щеткодержатель;
4 - щетка; 6 - коллектор; 7 - траверса; 8 - крышка; 9 - крепежная
пластина; 10 - пружина; 11 - якорь; 12 - корпус.
Рис.5.5. Устройство электродвигателя
Постоянные магниты 2 закреплены на корпусе 12 пружинами 10.
Крышка 8 прикреплена к корпусу винтами, которые вворачиваются в
крепежные пластины 9, расположенные в пазах корпуса. В корпусе и
крышке установлены подшипники 7 и 5, в которых вращается вал
якоря 11. Все щеткодержатели 3 находятся на траверсе 7 из изоля¬
ционного материала.
Траверса закреплена на крышке 8. Щетки 4, по которым ток под¬
водится к коллектору 6, размещены в щеткодержателях 3 коробчатого
типа. Коллекторы так же, как и в электродвигателях с электромагнит¬
ным возбуждением штампуются из медной ленты с последующей
опрессовкой пластмассой или из трубы с продольными пазами на
внутренней поверхности.
136
Крышки и корпус изготовлены из листовой стали. У электро¬
двигателей стеклоомывателей крышка и корпус могут быть выпол¬
нены из пластмассы.
Кроме отопительных установок, использующих тепло ДВС, на¬
ходят применение отопительные установки независимого действия. В
этих установках электродвигатель, имеющий два выхода вала, приво¬
дит во вращение два вентилятора, один направляет холодный воздух в
теплообменник, а затем в отапливаемое помещение, другой подает
воздух в камеру горения.
Применяемые на целом ряде моделей легковых и грузовых авто¬
мобилей электродвигатели отопителей имеют номинальную мощность
25 - 35 Вт и номинальную частоту вращения 2500 - 3000 мин'1.
5.4. Электродвигатели для привода стеклоочистительных
установок
К электродвигателям, используемым для привода стеклоочи¬
стителей, предъявляются требования обеспечения жесткой меха¬
нической характеристики, возможности регулирования частоты вра¬
щения при различных нагрузках, повышенного пускового момента.
Это связано со спецификой работы стеклоочистителей - надежной и
качественной очистки поверхности ветрового стекла в различных
климатических условиях.
Для обеспечения необходимой жесткости механической харак¬
теристики используются двигатели с возбуждением от постоянных
магнитов, с параллельным и смешанным возбуждением, а для уве¬
личения момента и снижения частоты вращения используется спе¬
циальный редуктор. В некоторых электродвигателях редуктор вы¬
полнен как составная часть электродвигателя. В этом случае элек¬
тродвигатель называют моторедуктором. Изменение скорости элек¬
тродвигателей с электромагнитным возбуждением достигается из¬
менением тока возбуждения в параллельной обмотке. В электро¬
двигателях с возбуждением от постоянных магнитов изменение ча¬
стоты вращения якоря достигается установкой дополнительной щетки
и организацией прерывистого режима работы. На рис. 5 приведена
принципиальная схема электропривода стеклоочистителя СЛ136 с
электродвигателем на постоянных магнитах.
137
10
3 4 5
7 8
Рис. 5.6. Принципиальная схема электропривода стеклоочистителя
Режим прерывистой работы стеклоочистителя осуществляется
включением переключателя 1 в положение III. В этом случае в цепь
якоря 4 электродвигателя включается реле 7. Реле имеет нагреватель¬
ную спираль 8, которая нагревает биметаллическую пластину 9. По
мере нагрева биметаллическая пластина изгибается и контакты 10
размыкаются, отключая питание реле 11, контакты 12 которого пре¬
рывают питание якорной цепи электродвигателя. После того, как пла¬
стина 9 остынет и замкнутся контакты 10, реле 11 сработает и на
электродвигатель вновь будет подаваться питание. Цикл работы стек¬
лоочистителя повторяется 7-19 раз в минуту.
Режим малой скорости осуществляется путем включения пере¬
ключателя 1 в положение II. При этом питание на якорь 4 электро¬
двигателя подается через дополнительную щетку 3, установленную
под углом к основным щеткам. В этом режиме ток проходит только
по части обмотки якоря 4, что является причиной уменьшения час¬
тоты вращения якоря и вращающего момента. Режим большой ско¬
рости стеклоочистителя происходит при установке переключателя 1 в
положение I. При этом питание электродвигателя осуществляется че¬
рез основные щетки и ток проходит по всей обмотке якоря. При уста¬
новке переключателя 1 в положение IV питание подается на якоря 4 и
2 электродвигателей стеклоочистителя и омывателя ветрового стекла
и происходит их одновременная работа. После выключения стекло¬
очистителя (положение переключателя 0) электродвигатель остается
включенным под напряжение до момента подхода кулачка б к по¬
138
движному контакту 5. В этот момент кулачок разомкнет цепь и двига¬
тель остановится. Выключение электродвигателя в строго определен¬
ный момент необходимо для укладки щеток стеклоочистителя в пер¬
воначальное положение. В цепь якоря 4 электродвигателя включен
термобиметаллический предохранитель 13, который предназначен для
ограничения силы тока в цепи при перегрузке.
Работа стеклоочистителя при моросящем дожде или слабом снеге
осложняется тем, что на ветровое стекло попадает мало влаги. По
этой причине увеличиваются трение и износ щеток, а также расход
энергии на очистку стекла, что может вызвать перегрев приводного
двигателя. Периодичность включения на один-два такта и выключе¬
ние, осуществляемое водителем вручную, неудобно, да и небезопасно,
так как внимание водителя на короткое время отвлекается от управ¬
ления автомобилем.
Для организации кратковременного включения стеклоочистителя
система управления электродвигателем может дополняться элек¬
тронным регулятором тактов, который через определенные проме¬
жутки времени автоматически выключает электродвигатель стекло¬
очистителя на один-два такта. Интервал между остановками стек¬
лоочистителя изменяется 2 -30 с. Номинальная мощность электро¬
двигателей 12 - 15 Вт и частоту вращения 2000 - 3000 мин"1.
В автомобилях получили распространение стеклоомыватели пе¬
реднего стекла и фароочистители с электрическим приводом. Элек¬
тродвигатели работают в повторно-кратковременном режиме и вы¬
полняются с возбуждением от постоянных магнитов, имеют мощ¬
ность (2,5-10 Вт).
Помимо перечисленных назначений, электродвигатели исполь¬
зуются для привода различных механизмов: подъема стекол дверей и
перегородок, перемещения сидений, привода антенн и др. Для обес¬
печения большого пускового момента эти электродвигатели имеют
последовательное возбуждение, используются в кратковременном и
повторно-кратковременном режимах работы.
В процессе работы электродвигатели должны обеспечивать из¬
менение направления вращения, т. е. быть реверсивными. Для этого в
них имеются две обмотки возбуждения, попеременное включение ко¬
торых обеспечивает разные направления вращения. Конструктивно
электродвигатели этого назначения выполнены в одной геометриче¬
ской базе и по магнитной системе унифицированы с электродвигате¬
лями отопителей мощностью 25 Вт.
139
Требования к электродвигателям постоянно возрастают, и это свя¬
зано с повышением качества различных систем автомобиля, безопас¬
ности движения, снижением уровня радиопомех, токсичности, повы¬
шением технологичности изготовления. Выполнение этих требований
обусловило переход от электродвигателей с электромагнитным воз¬
буждением к электродвигателям с возбуждением от постоянных маг¬
нитов. При этом масса электродвигателей снизилась, а КПД увели¬
чился примерно в 1,5 раза. Их срок службы достигает 250 - 300 тыс.
км пробега.
Электродвигатели отопительных, вентиляционных и стеклоочи¬
стительных устройств разрабатываются на базе четырех типоразмеров
анизотропных магнитов. Это позволяет сократить число выпускаемых
типов электродвигателей и провести их унификацию.
Другим направлением является применение в конструкциях элек¬
тродвигателей эффективных фильтров радиопомех. Для элек¬
тродвигателей мощностью до 100 Вт фильтры будут унифицироваться
применительно к каждой базе электродвигателя и выполняться встро¬
енными. Для перспективных электродвигателей мощностью
100 - 300 Вт разрабатываются фильтры с применением конденсаторов
- проходных или блокировочных больших емкостей. В случае невоз¬
можности обеспечения требований по уровню радиопомех за счет
встроенных фильтров намечаются применение выносных фильтров и
экранирование электродвигателей.
В более отдаленной перспективе предполагается использовать
бесконтактные двигатели постоянного тока. Эти двигатели снабжа¬
ются статическими полупроводниковыми коммутаторами, заме¬
щающими механический коммутатор-коллектор, и встроенными дат¬
чиками положения ротора. Отсутствие щеточно-коллекторного узла
позволяет увеличить ресурс электродвигателя до 5 тыс. часов и более,
значительно повысить его надежность и снизить уровень радиопомех.
Проводятся работы по созданию электродвигателей с ограни¬
ченными осевыми размерами, что необходимо, например, для привода
вентилятора охлаждения ДВС. В этом направлении поиск ведется по
пути создания двигателей с торцовым коллектором, который распола¬
гают совместно со щетками внутри полого якоря, или с дисковыми
якорями, выполненными со штампованной или печатной обмоткой.
Имеют свое продолжение разработки специальных электродви¬
гателей, в частности, герметизированных электродвигателей предпус¬
ковых подогревателей, что необходимо для повышения надежности и
применения на специальных автомобилях.
140
5.5. Стеклоочистители, омыватели и фароочистители
Стеклоочиститель предназначен для механической очистки ло¬
бового стекла (в некоторых моделях легковых автомобилей, например
ВАЗ-2108, и заднего стекла) от атмосферных осадков и грязи. По типу
привода различают вакуумные, пневматические и электрические
стеклоочистители. Последние получили наибольшее распространение.
Электрический стеклоочиститель состоит из электродвигателя,
червячного редуктора (обычно выполненного в одном корпусе с элек¬
тродвигателем), кривошипного механизма, системы рычагов и щеток.
Электродвигатель стеклоочистителя через червячный редуктор при¬
водит во вращение кривошип, который через систему приводных ры¬
чагов и тяг сообщает рычагам щеток качательное движение. Щетки
должны перемещаться по стеклу плавно, без толчков, с определенны¬
ми углом размаха и усилием прижатия к стеклу. Применение на со¬
временных автомобилях гнутых передних стекол усложняет работу
стеклоочистителя, так как становится трудно обеспечить плотное
прилегание щеток к поверхности стекол.
Различные климатические условия и скоростные режимы дви¬
жения автомобиля обусловливают необходимость изменения про¬
изводительности стеклоочистителя. Поэтому современные стекло¬
очистители имеют две или три скорости. Конструкция стеклоочисти¬
теля представлена на рис. 5.7, где 1 - гайка крепления рычага; 2 - по¬
водок рычага; 3 - защитная гайка; 4, 30 - подшипник; 5 - гайка креп¬
ления штуцера; 6, 12 - тяги; 7 - штуцер; 8 - вал рычага; 9 - электро¬
двигатель; 10 - резистор; 11 - биметаллический предохранитель; 13 -
кронштейн крепления; 14 - контактный диск; 15 - червячная шестер¬
ня; 16 - заглушка; 17 - упорный шарик; 18 - корпус редуктора; 19
- червяк; 20 - соединительная муфта; 21, 24 - крышки электродвига¬
теля; 22 - якорь; 23 - обмотка возбуждения; 25 - коллектор; 26 -
стяжной винт; 27 - панель щеткодержателей; 28 - фетровая шайба с
запасом смазочного материала; 29 - вал электродвигателя; 31 -
щетка электродвигателя; 32, 37 - пружины; 33 - вал редуктора; 34 -
контакт концевого выключателя; 35 - рычаг щетки; 36 - щетка стек¬
лоочистителя.
141
Рис. 5.7. Конструкция стеклоочистителя
Вращение вала 29 электродвигателя 9 через соединительную муф¬
ту 20 передается червяку 19 и далее червячной шестерне 15 понижа¬
ющего редуктора. На валу червячной шестерни 15 жестко закреплен
кривошип. Вращение кривошипа посредством рычажной системы
преобразуется в качание рычагов 35, на которых установлены щетки
36.
Биметаллический предохранитель разрывает цепь электроснаб¬
жения электродвигателя при появлении недопустимых перегрузок,
когда, например, щетки примерзают к стеклу или по каким-либо при¬
чинам резко возрастает сопротивление вращения якоря электродви¬
гателя. Включение электродвигателя после остывания биметалличе¬
ской пластины предохранителя происходит автоматически. В случае
неоднократного срабатывания предохранителя следует выключить
стеклоочиститель, найти причину неисправности и устранить ее.
В дополнение к стеклоочистителям часто устанавливают омывате¬
ли переднего стекла. При движении по сырой грязной дороге даже
при отсутствии дождя стекло водителя забрызгивается грязью от
встречных автомобилей. Щетки стеклоочистителя не очищают стекло,
а лишь размазывают по нему подсыхающую грязь. Омыватели стекла
состоят из небольшого бачка с чистой водой и насоса, приводимого в
142
движение электродвигателем. При работе омывателя переднее стекло
автомобиля смачивается струйками воды из форсунок, установленных
около стеклоочистителей. Увлажненная грязь затем легко очищается
щетками стеклоочистителя.
С целью повышения безопасности движения на легковых авто¬
мобилях последних выпусков устанавливают фароочистители, ко¬
торые предназначены для чистки стекол фар от грязи, нарушающей
нормальное светораспределение при движении автомобиля в темное
время суток и неблагоприятных климатических условиях. Су¬
ществуют два способа очистки фар: щеточный и струйный. Принцип
действия и устройство щеточного фароочистителя аналогичны прин¬
ципу действия и устройству стеклоочистителя ветрового стекла.
Принцип действия струйного фароочистителя заключается в том, что
частицы грязи на стекле фары отбиваются и смываются водой, кото¬
рая подается от специального электрического насоса через форсунку
под большим давлением - до 0,3 МПа.
Преимуществами такой очистки являются высокая надежность и
эффективность в работе, возможность очистки фар любой формы,
кратковременное вмешательство в светораспределение. К недостат¬
кам можно отнести необходимость использования мощного электро¬
насоса высокого давления и сравнительно большой расход воды.
6. АВТОМАТИЗАЦИЯ РАБОЧИХ ПРОЦЕССОВ
АВТОМОБИЛЕЙ И ТРАКТОРОВ
6Л. Информационно-диагностическая система
Данная система является составной частью автомобиля и предна¬
значена для сбора, обработки, хранения и отображения информации о
режиме движения и техническом состоянии автомобиля и окружаю¬
щих его внешних факторах.
Система «водитель - автомобиль - дорога - среда» улучшает дви¬
жение на перегруженных автомагистралях, если водитель имеет ин¬
формацию о состоянии дороги, транспортных потоках и о состоянии
автомобиля.
Telematic - предполагает, что информация, необходимая для
функционирования ITS, будет поступать с самих автомобилей, осна¬
щенных телематическими системами. На рис. 6.1 приведена блок-
схема информационной системы водителя, для конкретного автомо¬
143
биля реализация может быть иной. В информационную систему вхо¬
дят несколько подсистем, включая навигационную систему, дистан¬
ционное управление дверными замками, систему связи «автомобиль -
дорога», цифровой аудио- и видеокомплекс, систему передачи сроч¬
ной информации водителю по радио. На бортовой компьютер посту¬
пают также сигналы от компаса, датчика скорости вращения колес,
датчика положения руля и других.
Современные информационные системы водителя с их широкими
возможностями сейчас все чаще называют телематическими (образо¬
вано от слов телекоммуникации и информатика). Телематические си¬
стемы - это устройства обмена информацией между системами авто¬
мобиля, водителем и окружающим миром: бортовой компьютер,
навигационная система, средства связи и т. д.
Рис. 6.1. Блок-схема информационной системы водителя
Электронные блоки управления агрегатами автомобиля (двигатель,
тормоза с ABS и т. д.) выдают информацию системам телематики по
шине данных. Ожидается, что к 2010 г. практически все автомобили бу¬
дут иметь минимальный пакет телематики.
Система дистанционного управления дверными замками автомобиля
широко используется уже сегодня. Портативный передатчик, инфра¬
красный или радио, умещающийся в руке («брелок»), посылает цифро¬
вой код приемному устройству на автомобиле. Если код правильный,
срабатывает исполнительный механизм и замок открывается. Если си¬
стема опознает две кодовые посылки как ложные, дистанционное
управление замками блокируется, их можно открыть теперь только
144
ключом, при этом блокировка сбрасывается. Такое решение исключает
подбор кодов каким-либо электронным устройством с целью угона.
Система связи «автомобиль - дорога» обеспечивает передачу сооб¬
щений от дорожных информационных служб автомобилю по радио.
Система представляет собой инфраструктуру из приемопередатчиков
небольшой мощности на дорогах и средств для генерации сообщений.
Локальный приемопередатчик имеет ограниченный набор фиксирован¬
ных сообщений. Различные сообщения может генерировать стационар¬
ный компьютер и передавать их локальным точкам (например, о проб¬
ках на данном маршруте). Приемопередатчики информационной систе¬
мы могут также автоматически получать от проходящих мимо автомо¬
билей сведения с помощью установленных на них транспондеров.
Транспондер - это специальный автоматический приемопередатчик,
устанавливаемый на подвижных объектах. В ответ на кодовую посылку
транспондер передает требуемую информацию об объекте, на котором
он установлен. В авиации транспондеры используются для автоматиче¬
ской передачи параметров движения самолета наземным службам.
В автомобилях транспондеры используются для дистанционного
взимания платы за проезд по шоссе, получения информации о загрузке
проходящих грузовиков и т. п. Имеется возможность дистанционно по¬
лучать и передавать информацию от бортовой диагностической систе¬
мы сервисным предприятиям. В случае обнаружения отклонений, води¬
тель предупреждается соответствующим текстом на дисплее или про¬
чтением этого текста компьютером.
Система передачи сообщений по радио использует дополнительный
канал в УКВ-диапазоне, что требует специального приемника. По ра¬
диоканалу передается различная предупредительная информация
(оползни, гололед). Имеется возможность передачи корректирующей
информации для данной местности к сигналам от спутниковой глобаль¬
ной позиционирующей системы. Это позволяет увеличить точность
определения координат автомобиля с ±100 метров до ±5 метров.
Системы распознавания голоса и преобразования текста в речь.
Во время движения автомобиля пользоваться сотовым телефоном или
компьютером затруднительно и опасно, так как это отвлекает внимание
водителя от дороги, особенно при напряженном движении в черте горо¬
да.
Существует программное обеспечение, позволяющее распознавать
речь человека. Водитель говорит в микрофон, а компьютер выполняет
несложные команды, например, программы распознавания голоса и
чтения текста ѴіаѴоісе фирмы IBM. Программа хорошо понимает голо¬
145
са различных людей. ѴіаѴоісе позволяет водителю давать голосом ко¬
манды многим автомобильным системам и получать ответ в виде синте¬
зированной речи. Допустимы, например, такие команды: запереть две¬
ри, включить CD-проигрыватель, настроиться на такую-то радиостан¬
цию, запросить направление движения или сведения о дорогах от Web-
сервера или иных источников, зачитать поступившую электронную по¬
чту, запросить спортивные или биржевые новости и прочесть их, свя¬
заться по телефону с таким-то номером и т. д.
В концептуальном автомобиле Buick Bengal (General Motors) ис¬
пользуется программное обеспечение фирмы Visteon. Программа распо¬
знает 118 команд на шести языках, включая местные акценты, в услови¬
ях открытого или закрытого салона. Водитель, не выпуская из рук руля
и не отрывая глаз от дороги, голосом может подать различные команды,
начиная от управления режимом CD-проигрывателя или кондиционера
и кончая изменением скорости движения автомобиля. Технология
управления голосом позволит отказаться от многих кнопок и индикато¬
ров на приборной панели.
Бортовой компьютер. Бортовой компьютер (маршрутный или пу¬
тевой процессор) выдает водителю различную информацию, необходи¬
мую на маршруте, о состоянии автомобиля, управляет средствами связи
автомобиля с внешним миром, навигационной системой и т. д. Обычно
бортовой компьютер выдает информацию на цифровой дисплей, управ¬
ляется с пульта управления на приборном щитке автомобиля. На рис.
6.2 показан пульт управления с жидкокристаллическим дисплеем для
одного из типов бортовых компьютеров (рис. 6.3). Портативные комму¬
никаторы и органайзеры можно подключать к шине данных автомоби¬
ля. Программное обеспечение делает их частью автомобильной инфор¬
мационной системы. Все услуги связи, реализуемые в стационарном
офисе, сегодня доступны и для автомобилей: факсимильная связь, авто¬
ответчик, модем для компьютера и т. д.
7.5
Расход
л/іев
535
Прогн.Пр
км
5Z
Скор/Л
км/час
43
Бак
литры
146
Рис. 6.2. Пульт управления бортового компьютера
Рис. 6.3. Сенсорный дисплей
Компьютер в автомобиле может быть подключен к сети Internet.
Электронная почта (e-mail) становится доступной для водителя. При
подключении через спутниковую антенну (direct PC) обеспечивается
высокая скорость передачи данных. Автомобиль превращается в офис
на колесах.
Бортовой компьютер определяет точное время и дату, расход топ¬
лива по сумме длительностей открытого состояния форсунок, ско¬
рость и пройденное расстояние.
На дисплей обычно выводится следующая информация:
• время, день недели и дата;
• средняя скорость на маршруте;
• время в пути;
• средний расход топлива на маршруте;
• мгновенный расход топлива;
• расход топлива на маршруте;
• расстояние, которое можно пройти на оставшемся запасе топли¬
ва. Если при выезде на маршрут водитель с клавиатуры ввел расстоя¬
ние до пункта назначения, бортовой компьютер будет выдавать ин¬
формацию об ожидаемом времени прибытия в пункт назначения и
расстоянии, оставшемся до пункта назначения.
Информация о состоянии бортовых систем автомобиля. Бор¬
товой компьютер автоматически осуществляет контроль за состояни¬
ем систем автомобиля и выдает полученную информацию на жидко¬
кристаллический дисплей, (см. рис. 6.2). Информация представляется
в удобном графическом виде, при необходимости привлечь внимание
водителя издается звуковой сигнал или включается синтезатор речи.
147
Контролируемые функции бортового компьютера:
• индикация неисправности сигналов торможения;
• индикация неисправности осветительных приборов;
• индикация открытого состояния двери или крышки багажника;
• индикация низкой температуры окружающего воздуха;
• индикация низкого уровня охлаждающей жидкости в двигателе;
• индикация низкого уровня масла в картере;
• индикация низкого уровня омывающей жидкости в бачке омыва¬
теля стекла;
• индикация чрезмерного износа тормозных накладок.
Дисплей на рис. 6.2 показывает, что в автомобиле открыты четыре
двери, включены фары, температура забортного воздуха низкая (сим¬
вол «снежинка» на крыше).
Контроль за состоянием электрических цепей осветительных при¬
боров осуществляется, например, путем измерения электрического
тока в проводах, подключенных к соответствующим лампам. Ток из¬
меряется обычно двумя методами:
• в цепь питания лампы последовательно включается низкоомный
резистор, сигнал с которого усиливается и подается на компаратор.
При обрыве цепи ток исчезает, что приводит к низкому уровню сиг¬
нала на выходе компаратора и появлению соответствующей преду¬
предительной информации на индикаторе или дисплее;
• в цепи питания лампы последовательно включается обмотка гер¬
кона или иного токового реле;
• температура окружающего (забортного) воздуха измеряется тер¬
мистором с отрицательным температурным коэффициентом. Он раз¬
мещается в закрытых местах, вдали от источников тепла, обычно за
передним бампером. При уменьшении температуры сопротивление
термистора увеличивается и после прохождения уровня +4 °С на дис¬
плее появляется предупреждение о возможном оледенении дороги;
• контроль за уровнем эксплуатационных жидкостей (масла, тор¬
мозной, охлаждающей и омывающей жидкостей) осуществляется с
помощью датчиков на основе геркона и плавающего кольцевого маг¬
нита. Геркон помещают в герметичный цилиндр, по которому пере¬
мещается пластиковый поплавок с кольцевым постоянным магнитом;
• при нормальном уровне эксплуатационной жидкости поплавок
фиксируется в верхнем положении стопором, магнит замыкает кон¬
такты геркона. При понижении уровня жидкости ниже критического
поплавок опускается, контакты геркона размыкаются, на дисплее по¬
является соответствующее предупреждение;
148
• уровень масла в двигателе компьютер измеряет за несколько се¬
кунд до пуска двигателя, так как уровень масла в картере работающе¬
го двигателя ниже контрольной метки и колеблется на поворотах и
при торможении, что может приводить к генерации ложных сообще¬
ний компьютером;
• датчики износа тормозных Состояние электрических цепей ав¬
томобиля постоянно контролируется ЭБУ. Для того чтобы можно бы¬
ло различить закрытое и открытое состояние геркона от неисправно¬
стей в цепи датчика, в его цепь вводятся дополнительные резисторы;
• накладок бывают двух типов: размыкающие и замыкающие кон¬
тролируемую цепь. В размыкающем датчике провод, заложенный в
накладку на заданную глубину, соответствующую максимально допу¬
стимому износу, при наступлении последнего перетирается и размы¬
кает контролируемую цепь. Замыкающий датчик при наступлении
предельного износа замыкает контролируемую цепь через тормозной
диск или барабан на массу. Недостатком замыкающего датчика явля¬
ется ненадежность контакта, который образуется только в момент
применения тормозов.
6.2. Бортовые средства отображения информации
Задачей индикатора является представление информации с задан¬
ной точностью и в удобном для водителя виде. Индикаторы должны
оперативно выдавать информацию, требования к точности при этом
относительно невысокие. Аналоговые индикаторы представляют ин¬
формацию в форме, более удобной для быстрого считывания водите¬
лем. Например, если стрелка указателя температуры охлаждающей
жидкости находится в районе середины шкалы, водителю достаточно
одного взгляда на указатель, чтобы понять, что температура двигателя
находится в пределах нормы. Точность в данном случае не важна. От¬
счет 98 °С на цифровом указателе температуры не так просто интер¬
претировать, нужно еще успеть сообразить, много это или мало. Это
показывает почему несмотря на наличие контроллеров и цифровой
обработки информации для управления различными системами, ин¬
формация водителю чаще представляется в аналоговой форме. На рис.
6.4 показаны аналоговый и цифровой индикаторы одной и той же ин¬
формации (скорости движения автомобиля). Дисплеи (цифровые и
графические индикаторы) используются на автомобиле для решения за¬
дач: выдача картографической информации в навигационных системах;
дисплей бортового компьютера; часы; дисплей магнитолы и т. д.
149
Для управления отдельными сегментами и частями дисплеев при¬
меняется мультиплексная система передачи информации.
Стрелочные индикаторы. Неэлектрический параметр на борту
автомобиля (скорость, температура, давление и т. д.) преобразуется
соответствующим датчиком в электрический сигнал.
Этот сигнал фильтруется, подвергается необходимым преобразовани¬
ям и подается в виде электрического тока или напряжения на анало¬
говый (стрелочный) индикатор с измеряемым значением параметра
электромагнитной системы. Амперметр электромагнитной системы
(рис. 6.5) состоит из основания 4, постоянного магнита 3, латунной
шины 1, якоря 5 и стрелки 2. При разомкнутой цепи якорь со стрелкой
под действием магнитного поля постоянного магнита удерживается в
среднем положении на нулевом делении.
Rover reading 60 mph 96.5
km/h. ±4 mph - ±6.5km/h
MPH Km/h
8. Maestro. Montego reading
81 mph 130 km/h t5 mph -
±8 km/h
Рис. 6.4. Аналоговый и цифровой индикаторы. Рис. 6.5. Стрелочный ин¬
дикатор
Цифровые индикаторы (дисплеи). Цифровая система индикации
работает во многом так же, как описанная выше аналоговая. Сигналы
с датчиков поступают на ЭБУ панели приборов в аналоговой или
цифровой форме. В ЭБУ производится необходимая обработка полу¬
ченной информации, затем она передается на индикаторы, в качестве
которых могут быть использованы: светодиоды, жидкокристалличе¬
ские дисплеи, электронно-лучевые трубки.
Индикаторы на светодиодах. Диод, выполненный из фосфида
арсенида галлия (GaAsP), при протекании электрического тока в пря¬
мом направлении создает электромагнитное излучение в световом
диапазоне.
Это так называемые светодиоды, излучающие зеленый, желтый
или красный свет в зависимости от технологического процес-
150
са при производстве. Светодиоды широко используются как индика¬
торы в электронном оборудовании и в цифровых дисплеях. Они без¬
отказно работают длительное время (более 50000 часов) и потребляют
маленький ток.
В настоящее время имеется тенденция замены автомобильных све¬
тодиодных индикаторов на жидкокристаллические, которые подсве¬
чиваются для облегчения чтения. Индикатор (дисплей) автомобиля
обычно состоит из группы светодиодов (матрицы), которая организо¬
вана для выдачи информации в определенной форме. Могут исполь¬
зоваться отдельные светодиоды, семисегментные индикаторы или
сложные шкалы спидометров (рис. 6.6).
ѳ ♦
Рис. 6.6. Светодиодные индикаторы
Жидкокристаллические дисплеи. Молекулярная структура жид¬
ких кристаллов и их оптические свойства могут быть изменены при¬
ложением механического усилия, электрического или магнитного по¬
ля, давления, температуры. Жидкие кристаллы рассеивают свет, па¬
дающий на них. Жидкие кристаллы применяются в индикаторах каль¬
куляторов, часов, автомобильных дисплеях, дисплеях портативных
компьютеров, телеэкранах, мультимедиа проекторах и т. д.
Принцип действия индикатора на жидких кристаллах (рис. 6.7).
Пусть кристалл не возбужден, дисплей пропускает только поляризо¬
ванный свет, который, проходя через первый поляризатор, попадает в
кристалл и поворачивается им на угол 90°. На выходе кристалла уста¬
новлен второй поляризатор под углом 90° к первому. Свет проходит
через второй поляризатор, отражается зеркалом и возвращается через
второй поляризатор, кристалл, первый поляризатор. В не¬
возбужденном жидком кристалле свет просто отражается.
151
Зеркало
Поляризатор
Жидкий кристалл
Поляр и зо ванный
свет
Поляризованный
свет
Поляризатор
Свет
Рис. 6.7. Принцип работы жидкого кристалла
Если на жидкий кристалл подано напряжение порядка 10 В с ча¬
стотой 50 Гц, его молекулы становятся неупорядоченными и свет,
проходя через жидкий кристалл, не будет поворачиваться на 90°. Это
значит, что свет, пройдя первый поляризатор, не пройдет второй и не
отразится. На дисплее при этом будет виден темный сегмент. Размеры
сегментов определяются назначением дисплея, например, для дисплея
компьютера или телеэкрана сегмент принимает форму и размеры пик¬
селя. Жидкокристаллические дисплеи потребляют небольшую мощ¬
ность, но нуждаются во внешних источниках освещения. Иногда вме¬
сто зеркала в жидкокристаллических дисплеях используется фоновый
источник света.
Вакуумные флуоресцентные индикаторы. Схематически
устройство таких индикаторов показано на рис. 6.8. Катод нагревается
до температуры нескольких сотен градусов и излучает электроны, по¬
ток которых к аноду управляется сеткой. Анод образован сегментами,
которые покрыты флуоресцентным материалом и на которые подают¬
ся управляющие электрические сигналы. При подаче сигнала на сег¬
мент он начинает светиться.
Стеклянная
пластина
Сегменты Ускоряющая
]
]
]
]
]
анода
-Ѳ
О
о
сетка Электроны Катод
/
тро]
Л
-Ѳ
-ѳ
-о
\
Рис. 6.8. Вакуумный флуоресцентный индикатор
152
Вся конструкция собрана в стеклянной колбе, из которой откачан
воздух для создания вакуума. Потенциометром в цепи сетки меняют
яркость свечения индикатора. Индикатор в зависимости от применяе¬
мого флуоресцентного вещества светится желто-зеленым или сине-
зеленым светом. Достоинством вакуумных флуоресцентных индика¬
торов является высокая яркость свечения, недостаток - хрупкость
стеклянной колбы.
6.3. Приборные панели
Водитель получает информацию о режиме движения и техническом
состоянии автомобиля с помощью контрольно-измерительных приборов
и индикаторов, размещенных на панели приборов. Панель приборов со¬
держит 3-6 стрелочных приборов и 5 - 7 световых индикаторов, разме¬
щение которых основывается на следующих принципах:
• в центре панели группируются средства отображения информа¬
ции, связанные с обеспечением безопасности дорожного движения;
• размещение приборов и индикаторов тем ближе к центру панели,
чем выше частота обращения к ним водителя;
• группировка в единые блоки функционально связанных приборов
и индикаторов.
Электронные индикаторы способны:
• предоставлять водителю информацию в цифровой, графической
и текстовой формах;
• могут информировать о значениях не одного, а нескольких па¬
раметров, передавать разнообразные сообщения и поэтому позволяют
резко увеличить информативность приборной панели при тех же га¬
баритах;
• предоставляют водителю более достоверные данные.
Проблема оптимальной компоновки приборов на панели в автомоби¬
ле заключается во времени затрачиваемом водителем на то, чтобы отве¬
сти взгляд от дороги, найти на панели нужный прибор и получить от не¬
го информацию. Типичная панель приборов на рис. 6.9. Она компактна,
все находится в поле зрения водителя. Качество дизайна приборной па¬
нели учитывается потребителем при покупке автомобиля. Информация с
цифровых дисплеев плохо усваивается во-дителями, используются
электронные аналоговые дисплеи, но они увеличивают цену автомо¬
биля на 200...400 долларов. Типовая блок-схема цифровой автомо¬
бильной системы отображения информации представлена на рис.
6.10. Обработка сигнала и логические функции возложены на ЭБУ.
153
Рис. 6.9. Приборная панель современного автомобиля
Стандартные датчики подключены к ЭБУ, который управляет
необходимыми устройствами отображения информации и дисплеем.
Рис. 6.10. Блок-схема цифровой системы отображения информации
Рассмотрим некоторые из выполняемых функций.
1. Когда сопротивление резистивного датчика уровня топлива в
баке примет определенное значение, загорится индикатор низкого
уровня топлива.
2. При заданном значении сопротивления термистора загорится
индикатор перегрева двигателя.
3. Нет необходимости информировать водителя о каждом градусе
изменения температуры в системах автомобиля. ЭБУ разбивает диа¬
пазон изменения входного сигнала термодатчика на 4-6 поддиапазо¬
нов. Например, если сопротивление термистора меняется в пределах
240 - 200 Ом, ЭБУ выдает на дисплей одно стабильное значение тем¬
пературы (нормальное), если сопротивление термистора вышло из
этого диапазона, ЭБУ выводит на отсчетное устройство следующее
154
значение температуры из соответствующего поддиапазона изменения
сопротивлений.
Предупреждающие индикаторы (такие как индикатор давления
масла) делаются мигающими для привлечения внимания водителя.
Предупреждающие индикаторы предупреждают о необходимости
техобслуживания и техосмотра (автомобили BMW). Индикаторы за¬
гораются после определенного пробега или через определенное вре¬
мя, которое сокращается, если двигатель работал на высоких оборотах
и с перегревом.
Индикатор нештатной работы генератора. ЭБУ обнаруживает несо¬
ответствие уровня вырабатываемого напряжения или проскальзывание
приводного ремня. Проскальзывание определяется путем сравнения ча¬
стот сигнала зажигания и напряжения с одной из фаз генератора.
Например, при поступлении сигналов о высокой температуре охлажда¬
ющей жидкости и низком уровне топлива в бензобаке. Блок-схема си¬
стемы для этого случая представлена на рис. 6.11. АЦП подключается
через мультиплексный коммутатор поочередно к датчикам температуры
и уровня топлива. Сигнал подвергается аналого-цифровому преобразо¬
ванию и поступает в ЭБУ. Допустим, эти сигналы имеют значения 180
Ом (температура охладителя около 105 °С) и 200 Ом (осталось 10 лит¬
ров топлива в баке). Эти значения присваиваются соответствующим пе¬
ременным «temp inpub и «fuel input» и сравниваются с константами
«temphigh» и «fuel low», хранящимися в памяти ЭБУ. Сравнение реа¬
лизуется по следующему упрощенному алгоритму:
IF tempinput temphigh THEN temphighlamp = ON IF
fuel inputfuel low THEN fuellowlamp = ON При выполнении условия
загорается соответствующий индикатор.
Рис. 6.11. Блок-схема цифровой системы отображения информации
155
6.4. Отображение информации на лобовом стекле
Отображение информации на лобовом стекле (head up display или
HUD). Принцип отображения информации на лобовом стекле проил¬
люстрирован на рис. 6.12,6. Изображение с проектора (электронно¬
лучевая трубка, жидкокристаллическая матрица) проецируется на
ветровое стекло, являющееся после специальной обработки полупро¬
зрачным зеркалом. Водитель видит дорогу через это «стекло-зеркало»
при включенном или выключенном проекторе. Яркость проецируемо¬
го изображения автоматически подстраивается под наружное освеще¬
ние. На рис. 6.12,а показана система HUD в работе, требуется индиви¬
дуальная подборка передних стекол, иначе возникает двоение и изоб¬
ражение на ветровом стекле получается нечетким. Какую информа¬
цию и когда выводить на лобовое стекло, решает бортовой компьютер
в зависимости от ситуации. Например, спидометр имеет смысл про¬
ецировать постоянно, а индикатор низкого давления топлива, только
если это событие произойдет.
Системы HUD выводят информацию прямо перед водителем. В
качестве дисплеев предупреждающей информации можно также ис¬
пользовать жидкокристаллические зеркала заднего вида, автоматиче¬
ски меняющие коэффициент отражения при освещении их в темное
время фарами идущего сзади автомобиля.
General Motors выпустила систему, облегчающую водителю ори¬
ентирование на местности на основе HDD и синтезатора речи. Синте¬
затор голосом выдает подсказку типа «повернуть налево на следую¬
щем перекрестке», а на ветровом стекле схематично представляется
156
эта часть пути с указывающей стрелкой. Система может также выда¬
вать предупреждения типа «до поворота 0,3 мили» или «впереди до¬
рожные работы», она не отличается от аналогичных разработок дру¬
гих фирм, но применение HUD делает ее более удобной.
Разрабатываются методы, позволяющие определять, куда именно
направлен взгляд водителя и проецировать необходимую инфор¬
мацию с помощью HUD именно в эту точку на ветровом стекле. Ис¬
пользуется видеокамера и лазер, луч которого отражается от роговой
оболочки глаза водителя. Вероятно, детектор движения взгляда води¬
теля будет использован для определения самочувствия водителя, не
дремлет ли он.
6.5. Навигационные системы автомобиля
Первые навигационные системы применялись для индикации расчет¬
ного времени прибытия в пункт назначения и расстояния до него и ис¬
пользовали датчики азимута и скорости вращения колес. Позднее ис¬
пользовались базы данных с картографической информацией, появилась
возможность определять текущие координаты автомобиля на карте
местности.
Функции, структура и составные компоненты навигационной
системы. Навигационная система (рис. 6.13) определяет положение ав¬
томобиля на карте местности по конфигурации пройденного пути, опре¬
делять абсолютные координаты с помощью спутниковой системы GPS
(глобальная позиционирующая система или GPS - Global Positioning Sys¬
tem). С помощью навигационного счисления определяют относительное
положение автомобиля и направление движения по информации, полу¬
ченной с датчиков скорости вращения колес и азимута. Конфигурация
участка пройденного пути, полученная с помощью навигационного
счисления, сравнивается с конфигурацией дорог, нанесенных на карту.
Определив дорогу, по которой движется автомобиль, система находит и
его текущие координаты. Более точное определение координат автомо¬
биля на карте производится с помощью GPS по широте и долготе. Для
практических целей достаточно знать координаты автомобиля с точно¬
стью до размера половины квартала, т. е. ±100 метров.
Навигационная система должна иметь датчики пройденного пути и
направления движения.
Датчик пройденного пути - электронный одометр, информация в ко¬
торый поступает с датчиков скорости вращения колес ABS. Одометрам
157
присущ ряд систематических погрешностей. К ним относятся следую¬
щие.
1. Разница в диаметрах новой и изношенной покрышки дает погреш¬
ность в определении пройденной дистанции до 3 %.
2. За счет увеличения диаметра покрышки от центробежной силы на
каждые 40 км/час скорости автомобиля погрешность в определении
пройденной дистанции увеличивается на ОД - 0,7 %.
CD
Рис. 6.13. Структура навигационной системы
3. Изменение давления в шинах на 689 кПа (10 psi) увеличивает
погрешность на 0,25 - 1,1 %.
Для определения направления движения - используются датчик
азимута, датчики скорости вращения колес, гироскопы.
Датчик азимута (компас). Датчик азимута использует магнитное
поле Земли и представляет кольцевой сердечник из ферромагнетика,
на который намотаны обмотка возбуждения (ОВ) и перпендикулярно
друг другу две выходные обмотки (рис. 6.14, б).
К ОВ приложено синусоидальное напряжение. При отсутствии
внешнего магнитного поля в выходных обмотках наводится ЭДС вза¬
имоиндукции, также синусоидальная, с нулевым средним значением.
При наличии постоянного внешнего магнитного поля напря¬
женностью Н (магнитное поле Земли) происходит искажение синусо¬
идальной формы магнитного потока в сердечнике за счет наложения
постоянной составляющей и напряжений выходных обмоток. Элек¬
L58
тромагнитные процессы в геомагнитном датчике азимута в присут¬
ствии внешнего магнитного поля Н (рис. 6.14, а).
а б
Рис. 6.14. Геомагнитный датчик азимута
Если внешнее магнитное поле направлено под углом Ѳ к обмотке
X, то средние значения напряжений в выходных обмотках определят¬
ся как:
Vx=kHcos0,
где к - коэффициент пропорциональности. Отсюда Ѳ = arctg(Vy/Vx),
т. е. направление движения автомобиля определено.
Современные датчики азимута выпускаются в интегральном ис¬
полнении.
Датчик скорости вращения колес. Используются датчики скоро¬
сти вращения передних колес, применяемые и для ABS. Угол поворо¬
та автомобиля определяется по разности путей, проходимых при по¬
вороте левым и правым колесом. Когда автомобиль поворачивается
на угол 9 радиан с радиусом поворота R, пути, пройденные левым и
правым колесами, описывают дуги с общим центром (рис. 6.15).
Рис. 6.15. Пути, проходимые правым и левым колесом при повороте
159
Пути, пройденные левым и правым передними колесами, различ¬
ны и составляют: Іл=В1Ѳи L0= . Радиусы этих дуг имеют общий
центр и определяются как:
Rl=ylR1+L2 - Ц, = Л/(й + Kf +1} ,
где L - колесная база, а К - ширина колеи.
Введем Р - отношение между протяженностями путей колес на
повороте:
Rq — L0 / Zj
^(R + Kf+L2
*Jr2+l2
Преобразуем это уравнение:
К + у/К2 + (Р2 + 1)[(Р2 -1)1} - К2]
Р2-1
Колесная база L и ширина колеи К известны для данного автомо¬
биля, пути правого и левого колес замеряют с помощью датчиков
скорости вращения колес. Тогда угол поворота 9 вычисляется по
формуле
6) = /1/д,=І1/л/й2 + І2 .
Сложив все поворотные углы, можно определить и угол поворота
п
автомобиля для заданного пути от стартовой точки: - 2^ •
і=\
Гироскоп. При использовании гироскопа определяется угловая
скорость автомобиля на повороте и интегрируется для определения
угла поворота. Газовый гироскоп. Насос создает поток гелия с задан¬
ной скоростью истечения и направляет его через сопло на две нагре¬
тые проволочки датчика. Угловая скорость определяется по измене¬
нию сопротивлений проволочек датчика. Когда поток гелия выходит
из сопла насоса, он постепенно расширяется. Распределение скоро¬
стей в потоке газа по сечению возле проволочек показано на рис. 6.16,
а. Когда автомобиль движется прямо, распределение скоростей сим¬
метрично относительно проволочек, они охлаждаются одинаково и на
выходе мостовой схемы, частью которой являются проволочки, нуле¬
вое напряжение (рис. 6.16, б). При повороте возникает сила Кориоли¬
са, смещающая газовый поток, проволочки охлаждаются неравномер¬
но, их сопротивления электрическому току различны, на выходе мо-
160
стовой схемы появляется напряжение, пропорциональное угловой
скорости автомобиля на повороте.
Координаты проволочек
а б
Рис. 6.16. Газовый ©гироскоп
Навигационное счисление. Навигационное счисление - это метод
определения координат движущегося объекта (автомобиля, самолета,
судна и т. д.) по отношению к стартовой точке. Используется сумма век¬
торов пройденных расстояний, информация о направлениях поступает с
датчика азимута или датчика скорости вращения колес (рис. 6.17).
Рис. 6.17. Определение координат автомобиля
Расстояние от стартовой точки (Хц, Yy) определяется по следую¬
щей системе уравнений:
Х„=Х0 + ^АИІпѲ: ; l^o + XA/sinfl,,
i=1 7=1
где ось X обозначает направление «восток - запад», а У - «север - юг».
Таким образом, текущие координаты могут быть определены, если
известно положение стартовой точки на карте.
Направление движения автомобиля обычно определяется по гео¬
магнитному датчику азимута (компасу). Корпус автомобиля выполнен
161
из металла возникает систематическая погрешность в определении
направления движения автомобиля. Паразитное магнитное поле ком¬
пенсируется дополнительными магнитами вблизи компаса.
Магнитное поле также искажается в тоннелях, на металлических
мостах, при движении вдоль автопоездов, поэтому часто применяются
датчики скорости вращения колес наряду с компасом. Навигационное
счисление дает низкую точность определения текущих координат
объекта.
Электронные карты. Картографическая информация или элек¬
тронные карты существуют в двух основных форматах: матричном и
векторном.
В матричном формате каждому элементу карты (пикселю) соот¬
ветствуют свои значения декартовых координат X-Y. Матричные
карты требуют много места в памяти компьютера или на носителе
информации и неудобны для математических операций при прокладке
и слежении за маршрутом.
В векторном формате дороги, улицы представляются последова¬
тельностями отрезков прямых, описанных аналитически, пересечения
- узлами (рис. 6.18). Узлы идентифицируют координатами - долготой
и широтой. Если дорога (улица) не прямая, в точке излома также по¬
мещается узел. Таким образом, дороги (улицы) любой конфигурации
аппроксимируются набором векторов и узлов.
Рис. 6.18. Улицы и узлы на векторной карте
162
Имеющиеся карты или изображения местности, полученные с са¬
молетов и спутников, сканируются. Затем специальное программное
обеспечение трансформирует изображение сначала в матричный, а за¬
тем в векторный формат. Электронная карта несет такую информа¬
цию, как номера дорог, названия улиц, номера домов между пере¬
крестками, одностороннее или двухстороннее движение на улице,
названия отелей, ресторанов и т. д.
Ориентирование на карте местности по конфигурации прой¬
денного пути. Этот метод позволяет определить или уточнить теку¬
щие координаты автомобиля сравнением конфигурации пройденного
пути (его участка), полученного навигационным счислением с конфи¬
гурацией дороги, по которой движется автомобиль. На рис. 6.19,а по¬
казано как сравниваются и корректируются пути, полученные навига¬
ционным счислением с картой.
Навигационная система определяет, какие из близлежащих дорог
могут соответствовать координатам автомобиля, определенным нави¬
гационным счислением и делается сравнение (рис. 6.19,а). Выбирает¬
ся наиболее подходящая дорога и корректируются координаты авто¬
мобиля по карте. Когда автомобиль достигает перекрестка, выбор до¬
роги определяется направлением движения.
Рис. 6.19. Корректировка пути
Если дороги на перекрестке выглядят примерно одинаково, как на
рис. 6.19,6, навигационный компьютер прослеживает их по карте впе¬
ред и определяет коэффициент корреляции для каждой из дорог по
отношению к требуемому маршруту. Выбирается дорога с наиболь¬
шим коэффициентом корреляции.
Выбор оптимального маршрута. Для этого навигационный ком¬
пьютер рассматривает дорожную сеть между исходным пунктом и
163
пунктом назначения и выбирает кратчайший маршрут алгоритм
Дейкстра (Dijkstra algorithm). В алгоритме производится определение
всех пересечений дорог от стартовой точки и вычисляются кратчай¬
шие пути до каждой точки пересечения. Например, если имеется до¬
рожная сеть (рис. 6.20,а), поиск пересечений начнется от начальной
точки А, как показано на рис. 6.20,6. Сначала будут рассмотрены пе¬
ресечения В и С. Расстояния от точки А до каждого из пересечений
указаны внутри кружочков. Затем рассматриваются пересечения Е и
F, соединяющиеся с точкой С, для этих пересечений указано расстоя¬
ние от стартовой точки А (рис. 6.20,6 (2)). В-третьих, рассматривают¬
ся пересечения D и Е, соединенные с точкой В, на рис. 6.20,6 (3) ука¬
заны расстояния от стартовой точки А до D и Е. При этом расстояние
до точки Е указано через точку С, так как оно меньше, чем через D
(было бы 8). Точка D связана с точкой Е, и маршрут через Е оказыва¬
ется короче, это отражено на рис. 6.20,6 (4). Кратчайшим путем до D
оказывается маршрут A-C-E-D. Таким образом, можно определить
кратчайший маршрут до любого из пересечений (жирные линии на
рис. 6.20, 6(6)). Располагая современной навигационной системой, во¬
дитель может не опасаться сбиться с пути.
Рис. 6.20. Алгоритм Дейкстра
Информация сообщается водителю различными способами: от
указания символом положения на карте до команд голосом через син¬
тезатор речи о необходимости повернуть налево или направо.
6.6. Спутниковая позиционирующая система GPS
Система GPS (рис. 6.21) может использоваться для определения
абсолютных координат автомобиля. Она состоит из 18 основных и 3
запасных спутников на околоземных орбитах (радиус 20183 км, пери¬
164
од обращения 12 часов), (программа NA-VSTAR), и предназначена
поставлять информацию об абсолютных координатах различным объ¬
ектам: морским судам, самолетам, ракетам, воинским подразделе¬
ниям, автомобилям и т. д. На спутниках установлены атомные часы,
периодически на Землю посылаются сигналы с информацией о си¬
стемном времени и параметрах орбиты на частоте 1,57542 ГГц. Поль¬
зователи обслуживаются системой GPS по двум категориям: точное
определение координат (Precise Position Service - PPS) - для военных
и стандартная точность определения координат (Standard Position Ser¬
vice - SPS) - для остальных категорий пользователей, в том числе и
для автомобильной навигации. Теоретически точность определения
координат до 100 м, на практике - до 30 метров. Координаты прием¬
ника (X, Y, Z) и спутника (ІЛ, Vi, Wi) связаны соотношением
/>=A/(X-t/,.)2+(F-^)2+(Z-^)2+«.
Здесь Pi - расстояние между спутником и приемником; R - вре¬
менная ошибка, возникающая из-за невозможности точно синхрони¬
зировать атомные часы спутника и кварцевый генератор приемника.
Рис. 6.21. Спутниковая система NAVSTAR
Таким образом при известных координатах (Ui,Vl,Wi) четырех спут¬
ников (рис. 6.22) и расстоянии от спутников до приемника Рі из реше¬
ния четырехмерного нелинейного уравнения определяются координа¬
ты приемника (X, Y, Z).
165
Рис. 6.22. Определение координат с помощью GPS
Координаты спутника определяются по решению уравнения
Кеплера, для чего и передается информация о системном времени.
Расстояние Рі между спутником и приемником определяется по
времени задержки f, прихода синхронизирующего сигнала со спутни¬
ка (скорость распространения радиоволн - постоянная величина).
Полагают, что навигация с помощью GPS является наиболее пер¬
спективной, но есть и следующие недостатки.
1. При первом обращении начальные координаты определяются
долго - 2 - 3 минуты. В дальнейшем информация обновляется в тече¬
ние нескольких секунд.
2. Система работает в условиях прямой видимости с 4 спутниками.
Горы и высокие здания могут служить препятствием.
6.7. Системы охранной сигнализации и противоугонные
устройства
Автомобили время от времени угоняют, треть из них не находят.
Таким образом, системы охранной сигнализации и противоугонные
устройства, предотвращающие несанкционированный доступ в салон
автомобиля, нужны не только для борьбы с воровством, но и для
обеспечения дорожной безопасности. Эффективным оказывается
166
применение скрытых радиомаяков, по которым полиция обнаружива¬
ет угнанный автомобиль в 93 % случаях.
Электронные противоугонные системы. Противоугонные си¬
стемы реализуют защиту автомобиля условно на трех уровнях.
1. Защита по периметру. Система периметрической защиты ис¬
пользует микровыключатели для контроля за открывающимися пане¬
лями автомобиля (двери, капот, багажник). При попытке несанкцио¬
нированного открытия панели включаются звуковой и световой сиг¬
налы. Система дополняется датчиками обнаружения движущихся тел.
2. Защита по объему. Система с помощью инфракрасных, ультра¬
звуковых или микроволновых датчиков обнаруживает несанкциони¬
рованное движение в салоне автомобиля. Ультразвуковые датчики
используют эффект Доплера, когда любое движение в салоне изменя¬
ет частоту сигнала ультразвукового излучателя (40 кГц), принимаемо¬
го приемником. Микроволновая радиосистема работает на том же
принципе, но радиосигнал излучается на частоте 10 ГГц. Микровол¬
новые датчики реже ложно реагируют на движение воздуха и часто
устанавливаются в кабриолетах. Инфракрасные датчики представля¬
ют собой сборку «приемник - излучатель» и монтируются на потолке
салона. Они создают невидимую инфракрасную завесу до пола сало¬
на. Приемник постоянно контролирует отраженный сигнал и при его
изменении (кто-то появился в салоне) включается сигнал тревоги.
Иммобилизация двигателя. Иммобилизация осуществляется
специальным ЭБУ, запрещающим запуск двигателя при получении
сигнала тревоги. Это может быть выполнено двумя способами:
а) аппаратной иммобилизацией, при которой некоторые электри¬
ческие цепи системы пуска двигателя разрываются специальными ре¬
ле или полупроводниковыми переключателями. Эффективность аппа¬
ратных систем иммобилизации сильно зависит от скрытности разме¬
щения разрывающих реле и немаркированных проводов в жгуте;
б) программной иммобилизацией, когда по команде противо¬
угонной системы ЭБУ двигателя запрещает его запуск, например, де¬
лает недоступными калибровочные диаграммы подачи топлива и за¬
жигания. После этого двигатель хотя и будет проворачиваться старте¬
ром, но не запустится. Системы эффективны, нужно только исклю¬
чить возможность запуска путем замены ЭБУ двигателя на другой ра¬
ботоспособный блок.
Состав противоугонных устройств, входящих в стандартную ком¬
плектацию, зависит от модели автомобиля. Во всех случаях автомо¬
биль комплектуется средствами периметрической защиты, многие
167
противоугонные системы включают иммобилизатор и защиту по объ¬
ему. Обычно противоугонная система включается и выключается
ключом замка двери или с дистанционного пульта, управляющего
также и центральным замком. Запарковав автомобиль, водитель запи¬
рает двери и включает противоугонное устройство нажатием кнопки
на дистанционном пульте управления (брелоке). Светодиодный инди¬
катор включения противоугонной системы начинает вспыхивать: сна¬
чала часто, информируя водителя о включении системы, затем редко,
отпугивая потенциальных угонщиков.
При попытке несанкционированного проникновения в автомобиль
противоугонная система включает звуковой сигнал, периодически за¬
жигает и гасит фары, иммобилизатор блокирует работу двигателя.
Примерно через 30 секунд звуковые и световые сигналы прекращают¬
ся, чтобы не разрядить чрезмерно аккумулятор, иммобилизатор оста¬
ется включенным до тех пор, пока владелец автомобиля не выключит
его дверным ключом или с дистанционного пульта управления.
Дистанционное управление противоугонными устройствами.
Она состоит из портативного передатчика, носимого водителем, и
приемника, подключенного к ЭБУ противоугонного устройства и
центральному замку. Передатчик размещается в брелоке или самом
ключе.
Передатчики выполняются на базе микросхем HCS200 (Microchip),
или 8-разрядных микроконтроллеров МС68НС05КЗ (Motorola).
Противоугонная система включается (выкл.) передатчиком посыл¬
кой цифрового кода. Код передается последовательно, используется
инфракрасное излучение или радиосигнал в УКВ-диапазоне. Систе¬
мы, использующие инфракрасное излучение, имеют малый радиус
действия, требуют точного наведения луча передатчика, но не созда¬
ют электромагнитных помех. УКВ-системы имеют больший радиус
действия, но сигнал может быть перехвачен и декодирован угонщи¬
ками с помощью электронной аппаратуры. УКВ-излучатели могут
быть источниками электромагнитных помех, поэтому их параметры
регламентируются соответствующими законодательствами (33,9-418
МГц).
Двунаправленная передача кодовой информации усложняет взлом
противоугонных систем.
Для повышения секретности линий связи системы используют
набор кодов, т. е. при каждом нажатии кнопки передатчика посылает¬
ся свой код из набора. Программное обеспечение приемника синхро¬
низирует его работу с передатчиком, т. е. приемник ожидает смену
168
кода. Осуществляется циклический перебор кодов из заданного набо¬
ра (например, 25 различных кодов). Если приемник и передатчик
вышли из синхронизации (например, водитель нажал кнопку передат¬
чика вдали от автомобиля), дистанционное управление работать не
будет, но система автоматически синхронизируется при отпирании
двери ключом.
Характеристики противоугонных систем с дистанционным
управлением
1. Электропитание. Литиевая батарейка (например, CR2032 емко¬
стью 210 мА-час), на 5 лет при 50 передачах в сутки. Ток в режиме
ожидания не превышает 100 нА. В активном режиме контроллер по¬
требляет 2-3 мА и 10 - 12 мА с работающим передатчиком. Прием¬
ник в режиме ожидания потребляет менее 1 мА.
2. Быстродействие. Время от нажатия кнопки на брелоке до распо¬
знавания кода в приемнике около 300 мс, с учетом выполнения коман¬
ды - 1 с.
3. Размеры и стоимость. Замена утерянного брелока стоит не дорого.
Работа противоугонной системы с дистанционным
управлением
При нажатии кнопки брелока (рис. 6.23, а и 6.23, б, передатчик)
его микросхема из режима ожидания переходит в рабочий режим. За¬
пускается 16-разрядный синхронизирующий счетчик. Генератор ди¬
намического кода вырабатывает по определенному алгоритму дина¬
мический код (28-32 бит) в функции от значения секретного ключа
(статический код) и состояния синхронизирующего счетчика. Дина¬
мический код, заводской номер брелока и код нажатой клавиши обра¬
зуют управляющее слово длиною 60-70 бит, которое передается при¬
емнику по радиоканалу или иным способом. Если брелок зарегистри¬
рован в данном приемнике, т. е. его идентификационный номер, сек¬
ретный код, состояние синхронизирующего счетчика помещены в
ППЗУ приемника, принятая информация идентифицируется по номе¬
ру брелока и обрабатывается. Запускается синхронизирующий счет¬
чик приемника и вырабатывается динамический код в генераторе
приемника. Если динамические коды приемника и передатчика сов¬
падают, производится выполнение переданной команды
169
ППЗУ
ППЗУ
а б
Рис. 6.23. Алгоритм работы передатчика
Заводской номер передатчика и секретный ключ - статические ко¬
ды. Генератор динамического кода, тактируемый от 16-разрядного
синхронизирующего счетчика, вырабатывает 65535 различных значе¬
ний кода, меняющихся в каждой посылке, повторяющихся цикличе¬
ски. Если пользоваться брелоком по 50 раз в день, повторение кода
произойдет через 1310 суток.
Системы дистанционного управления на основе динамического
кода являются криптографическими. Защита зависит от кодовой дли¬
ны секретного ключа, т.е. от числа его возможных состояний. Счита¬
ется удовлетворительным, если время Г, взлома системы методом
сканирования (перебора возможных комбинаций), превышает 32 су¬
ток. В таком случае
г5=1с(7;+гд
где D - число зарегистрированных брелоков; С - число значений сек¬
ретного ключа; Т1 - время активации системы; Т2 - время, на которое
отключается система, получив неверный динамический код и распо¬
знав попытку взлома.
Виды взлома и защита от них. Возможные варианты взлома си¬
стемы дистанционного управления следующие.
1. Воспроизведение ранее записанного кода.
2. Воспроизведение ранее записанного кода с использованием ска¬
неров или грабберов.
3. Криптоанализ.
4. Взлом во время обслуживания.
Ранние системы дистанционного управления передавали фиксиро¬
ванный код или меняющийся код из небольшого фиксированного
набора. Угонщик с портативным компьютером и приемопередатчиком
(граббер) записывал сигнал с брелока автовладельца, затем воспроиз¬
водил его в нужный момент, отключая сигнализацию. При сканирова¬
но
нии передатчик угонщика периодически посылает кодовые комбина¬
ции из небольшого набора, пока противоугонная система не будет от¬
ключена совпавшим кодом.
Применение динамического кода, т. е. увеличение числа возмож¬
ных кодовых комбинаций в посылке сделало использование сканиро¬
вания невозможным.
Появились интеллектуальные грабберы, взламывающие проти¬
воугонные системы с динамическим кодом и односторонней переда¬
чей информации, работающие так:
• первая посылка с брелока записывается граббером с одновре¬
менной генерацией помехи, блокирующей приемник;
• не получив подтверждения о включении противоугонной систе¬
мы, владелец вторично нажимает кнопку брелока;
• граббер записывает вторую посылку, блокирует ее прием прием¬
ником, затем посылает первую посылку;
• противоугонная система включается;
• в нужное время угонщик ее отключит записанной граббером
второй посылкой.
Борьба против этого алгоритма граббера является использование
двунаправленной передачи информации в системе дистанционного
управления. Криптоаналитик по записям нескольких реализаций ди¬
намического кода, полученных граббером, может определить алго¬
ритм работы генератора и секретный ключ, чтобы потом по М-й по¬
сылке вычислить (N + 1)-ю.
В современных противоугонных системах часто применяют спе¬
циализированные микросхемы фирмы Microchip, реализующие алго¬
ритм генерации псевдослучайной последовательности (динамическо¬
го кода) Keeloq с длиной ключа 64 бита. Имеются оценки среднего
времени для аппаратного вскрытия грубой силой (перебором комби¬
наций) в зависимости от затрат на взламывающее оборудование и
длины ключа (табл. 6.1).
Зависимость затрат на взламывающее оборудование. Таблица 6.1
Стоимость
оборудования
Длина ключа в битах
56
64
80
100 000$
35 часов
1ГОД
70 000
1 000 000$
3,5 часа
37 дней
7 000 лет
10 000 000$
21 минута
4 дня
700 лет
171
Для взлома противоугонной системы нужно иметь специализиро¬
ванное оборудование или суперЭВМ типа Cray, так как операционные
системы обычных компьютеров не приспособлены для обработки
длинных кодовых слов. Криптоанализ обойдется неразумно дорого.
В автосервисе угонщики могут попытаться зарегистрировать свой
брелок в приемнике автомобиля. Далее можно записать с помощью
граббера команду ресинхронизации с зарегистрированного брелока,
чтобы воспроизвести ее позднее при угоне.
z'"’Следовательно, ПО приемника
/ \n Рабочее окноДОлжио информировать владель-
ца о подключении еще одного пе¬
редатчика. Для нормальной рабо¬
ты системы ДУ содержимое 16-
разрядных синхронизирующих
счетчиков приемника и передат¬
чика должны совпадать и инкре¬
ментироваться с каждым нажати¬
ем кнопки брелока.
На практике возможны случайные нажатия кнопок брелока (ребе¬
нок поиграл), ведущие к рассинхронизации, что должно корректиро¬
ваться. Рисунок 6.24 поясняет алгоритм синхронизации в противо¬
угонных системах.
Код в синхронизирующем счетчике циклически изменяется с каж¬
дым нажатием кнопки брелока, пробегая последовательно значения О,
1, ...N, N+1, ...,216-1,0, 1,.... Пусть текущее состояние счетчика при¬
емника N приемник воспримет как разрешенные динамические коды,
соответствующие состояниям синхронизирующего счетчика от N до
(N + Д), где А - ширина рабочего окна, обычно Д = 16. В пределах ра¬
бочего окна ресинхронизация производится одной посылкой неза¬
метно для владельца. 32 К состояний счетчика до N являются запре¬
щенными, 32 К состояний счетчика после N являются разрешенными.
Рабочее окно и обе зоны циклически перемещаются при инкремента¬
ции счетчика.
Если с брелока поступает динамический код, соответствующий
состоянию синхронизирующего счетчика М вне рабочей зоны, но в
разрешенной зоне, приемник запоминает М и ждет следующей по¬
сылки. Если в следующей посылке передается код, соответствующий
(М+1), производится ресинхронизация счетчика приемника, рабочее
окно смещается в новое положение, посланная команда выполняется.
Рис. 6.24. Алгоритм синхро¬
низации
172
Получив код из запрещенной зоны, приемник на какое-то время
отключается, чтобы воспрепятствовать сканированию. После записи
двойной посылки для ресинхронизации угонщик должен 32 К раз
нажать кнопку брелока, чтобы посланный с граббера код оказался
опять в разрешенной зоне. Кроме того, приемник запоминает не¬
сколько последних попыток ресинхронизации (обычно 4) и не позво¬
ляет использовать записанные кодовые комбинации повторно.
Большинство противоугонных систем поддерживают режим Valet,
когда для обслуживания автомобиля система отключается и нет необ¬
ходимости передавать брелоки посторонним лицам.
Иммобилизатор с транспондером. Электронный иммобилизатор
с микротранспондером в ключе зажигания. Замок зажигания срабаты¬
вает, если код, полученный специальным приемником от транспонде¬
ра, совпадает с заданным. Транспондер потребляет электромагнитную
энергию, излучаемую приемником на частоте 60 - 150 кГц, и не тре¬
бует дополнительного источника питания.
Транспондер (рис. 6.25) состоит из микросхемы, называемой про¬
граммируемым идентификатором (Programmable Identification Tag -
PIT), которая подключена к источнику питания, состоящему из при¬
нимающей катушки и конденсатора. Когда ключ зажигания оказыва¬
ется на расстоянии примерно 5 см от замка, возникает электромагнит¬
ная связь между катушкой транспондера и приемником. Получаемой
энергии оказывается достаточно для работы микросхемы PIT, которая
передает кодовое слово на приемник, модулируя ток, проходящий че¬
рез катушку на ключе. Если код, полученный от транспондера, соот¬
ветствует коду, хранящемуся в памяти приемника, ЭБУ двигателя по¬
лучает разрешение выполнить запуск двигателя. После успешного за¬
пуска двигателя приемник посылает в транспондер новую кодовую
комбинацию, именно она будет использоваться при следующем за¬
пуске двигателя. Таким образом достигается высокий уровень защи¬
щенности противоугонной системы.
173
Рис. 6.25. Иммобилизатор с транспондером
Транспондер может работать на 1 - 1,5 м от приемника, размеща¬
ясь в одежде водителя. Если приемник утрачивает связь с транспон¬
дером (водителя выбросили из салона), через некоторое время двига¬
тель останавливается.
Интеллектуальные грабберы засекают наличие такого транспонде¬
ра и способны имитировать его сигнал.
Конфигурация противоугонной системы. Конфигурация проти¬
воугонной системы с периметрической и объемной защитой и с им-
мобилизатором (рис. 6.26), включает микропроцессорный ЭБУ,
управляющий также центральным замком и приводящийся в рабочее
состояние сигналом с радиочастотного дистанционного пульта управ¬
ления после запирания дверей автомобиля.
174
Рис. 6.26. Блок-схема базовой противоугонной системы
Как только противоугонная система включена, она может реагиро¬
вать на следующие действия: открывание капота, дверей или багажни¬
ка; попытка отпереть дверной замок; попытка включить замок зажига¬
ния; попытка включить стартер; перемещение, движение в салоне ав¬
томобиля (объемная защита).
Когда противоугонная система зафиксирует попытку несанкциони¬
рованного доступа к автомобилю, на 30 секунд включается звуковой
сигнал и подсветка фарами, иммобилизатор вносит разрывы в цепи
управления запуском и запрещает пользование калибровочными диа¬
граммами электронного зажигания и впрыска топлива, после чего рабо¬
та двигателя становится невозможной. Для выключения системы и от¬
пирания дверей с дистанционного пульта должен быть послан соответ¬
ствующий код.
Дополнительные датчики. Многие противоугонные системы име¬
ют дополнительные датчики и больше возможностей.
1. Радиоприемник и ящик для перчаток. Здесь могут быть установ¬
лены микропереключатели, включающие охранную сигнализацию при
открывании ящика для перчаток, включении, демонтаже радиоприем¬
ника.
2. Датчики, фиксирующие разбивание стекла. Эти датчики включа¬
ют охранную сигнализацию, если угонщик попытается проникнуть в
салон автомобиля, разбив заднее или боковые стекла. Переднее ветро¬
вое стекло (триплексное) обычно не оснащается датчиками, так как счи¬
175
тается достаточно прочным. В основном используются два типа датчи¬
ков:
а) проволочная петля. На стекле размещается петля из тонкого про¬
вода. Постоянно контролируется целостность этой электрической цепи.
При разбивании стекла электрическая цепь нарушается и включается
охранная сигнализация. Этот способ хорош для неподвижных стекол,
например, для заднего стекла, где уже имеется электрический контур
обогревателя;
б) магнитные датчики используются для подвижных боковых сте¬
кол. На нижнем крае стекла (в корпусе двери) закрепляют небольшой
постоянный магнит. Когда стекло поднято, магнит находится близко от
геркона размещенного в корпусе двери, и своим магнитным полем за¬
мыкает контакты геркона, образуя замкнутый сигнальный контур. Если
стекло разбито, его фрагменты проваливаются вместе с магнитом на
дно корпуса двери, геркон размыкает контакты, включается охранная
сигнализация.
3. Датчик наклона. Включает охранную сигнализацию, если наклон
автомобиля будет отличаться от того, при котором он был запаркован.
Это может произойти при попытке поднять автомобиль подъемным
краном или буксировать. Один из типов датчиков предусматривает кон¬
троль за величиной электрической емкости конденсатора, образованно¬
го двумя металлическими пластинами, разделенными жидким диэлек¬
триком.
Если датчик наклонен, пластины по-иному омываются жидкостью и
емкость меняется. ЭБУ противоугонного устройства замеряет емкость
конденсатора и запоминает ее при включении, затем постоянно ее кон¬
тролирует. При изменении емкости конденсатора (машину подняли
краном) включается сигнал тревоги. По специальной команде ЭБУ про¬
тивоугонного устройства сигнал с датчика наклона можно заблокиро¬
вать, что позволяет перевозить автомобиль на пароме, по железной до¬
роге без ложного срабатывания противоугонной системы.
4. Датчик, положения автомобиля. Передвижение автомобиля впе¬
ред или назад фиксируется, что вызывает срабатывание противоугонной
системы (например, при попытке толкать или буксировать автомобиль).
Несанкционированное перемещение автомобиля обычно определяется
подсчетом импульсов от датчика спидометра.
Если за заданное время получено число импульсов больше опреде¬
ленного, автомобиль считается движущимся и включается сигнализа¬
ция.
176
7. СИСЕМА ЭЛЕКТРОСТАРТЕРНОГО ПУСКА
Система пуска представляет собой комплекс устройств, обеспе¬
чивающих принудительное вращение вала ДВС. Тип системы пуска
определяется видом используемой энергии и конструкцией основного
пускового устройства (стартера). Эта система компактна и надежна в
работе, обеспечивает возможность автоматизации процесса пуска с по¬
мощью несложных электротехнических устройств. Она состоит из ак¬
кумуляторной батареи, стартерной цепи (провода, коммутационная ап¬
паратура управления), стартера и средств облегчения пуска. Структур¬
ная схема электростартерной системы пуска изображена на рис. 7.1.
Рис. 7.1. Структурная схема электростартерной системы пуска
Общим элементом для систем пуска и электроснабжения является
аккумуляторная батарея. Она работает в режиме циклического разря¬
да и заряда, причем токи не превышают номинальной емкости (0,5 -
0,7)С20. В системе пуска батарея разряжается в прерывистых режимах
при силе тока (2 - 5)С20.
Развиваемая батареей мощность соизмерима с мощностью стар¬
тера. Поэтому ее характеристики зависят от режима стартерного раз¬
ряда (силы тока, температуры, продолжительности пуска) и влияют на
характеристики самого стартера и тем самым на процесс пуска двига¬
теля.
Наиболее важными параметрами батареи, влияющими на процесс
пуска двигателя, являются ее емкость и число электродов в ак¬
кумуляторе (так называемый счет сборки п+ / п_), температура элек¬
тролита t3 и степень разряженности батареи АСР.
Батарея в процессе пуска двигателя должна дать определенный ток
без уменьшения напряжения ниже минимального 6,0 - 8,0 В для си¬
стемы на 12 В. Это значение определяется, с одной стороны, характе¬
ристиками стартера, который должен обеспечить прокручивание дви¬
гателя с частотой не ниже минимальной пусковой, а с другой - требо¬
ваниями системы зажигания к минимальному напряжению в первич¬
ной цепи катушки зажигания (для бензиновых двигателей) и мини¬
177
мальным напряжением на тяговом реле стартера при пуске (для дизе¬
лей).
Применяют стартерный электродвигатель постоянного тока после¬
довательного или смешанного возбуждения. Его основными парамет¬
рами являются: номинальное напряжение UH (12, 24 В); номинальная
мощность Рсн; номинальная частота вращения якоря псн и момент Мсн;
ток при максимуме мощности Існ. Стартер характеризуется ком¬
плексом электромеханических характеристик - зависимостями мо¬
мента, частоты вращения якоря, мощности, КПД и напряжения на за¬
жимах от потребляемого тока Іс.
Стартер во время эксплуатации автомобиля работает со значи¬
тельной нагрузкой. Так, средняя частота его включений на 100 км
пробега составляет в условиях города для легковых автомобилей 28, а
для грузовых - 22.
7.1. Характеристики аккумуляторной батареи в режиме пуска
Электростартер является основным потребителем энергии ак¬
кумуляторной батареи. Сила тока стартерного разряда составляет 100
- 1500 А. Основные параметры батареи оцениваются по вольтампер-
ной и временной характеристикам. Вольт-амперная характеристика
(ВАХ) представляет собой зависимость напряжения батареи Ue от то¬
ка разряда Іб. Временная характеристика - это зависимость напряже¬
ния от времени разряда при постоянной силе разрядного тока. Произ¬
водными от ВАХ и временной характеристик являются мощностные
характеристики - зависимости мощности, отдаваемой батареей в
нагрузку, от тока или времени разряда. ВАХ батареи выражается кри¬
вой (рис. 7.2), имеющей квазилинейный участок в зоне от Іб = С2о до
Иб = 0,4UHOM (кривая 1). Нелинейность характеристики объясняется
нелинейностью внутреннего сопротивления батареи, в основном его
поляризационной составляющей. Точки пересечения отсекают на осях
координат отрезки, пропорциональные начальному разрядному
напряжению U^, и условному току короткого замыкания Ібк. Прямая,
проведенная через эти две точки, называется расчетной вольт-
амперной характеристикой аккумуляторной батареи.
178
Рис. 7.2. ВАХ батареи
Внутреннее сопротивление батареи по такой характеристике
— ^нр/^бк
и пропорционально тангенсу угла наклона ср расчетной вольт-
амперной характеристики от оси тока. В процессе разряда на нагрузку
RH батарея развивает активную мощность Рб = U6 Іб = Іб RH (кривая
2), так как для расчетной вольт-амперной характеристики
и6 = иир - I6R6 = I6R„ то Р6 = .
При R6 = RH мощность будет достигать своего максимального значения
Рб max UHV/4R6 UBpI^K/4.
При этом Іб = 0,5Ібк и U6 = 0,51Інр (см. рис. 7.2). С уменьшением
температуры батареи увеличивается ее внутреннее сопротивление и
соответственно уменьшается максимальная мощность Р1пах.
Для оси абсцисс вольт-амперной характеристики используются
различные масштабы: сила тока разряда батареи Іб(А), ток разряда на
один положительный электрод аккумулятора Іб+ = Іб/п+ (А/п+) ток раз¬
ряда на 1 А ч номинальной емкости батареи J = Iб / С2о [А/(А ч)].
Удельные параметры дают возможность сравнивать вольт-амперные
характеристики батарей различной емкости.
Учитывая, что максимум мощности батареи при ее разряде на¬
ходится при значениях напряжения, близких к половине номиналь¬
ного (6 В для батареи на 12 В), рабочий участок характеристики в ре¬
жиме пуска находится слева от тока разряда, равного 0,5Ібк.
179
В виду линейного характера вольт-амперной характеристики ее
расчет сводится к определению начального разрядного напряжения
Uhp (Іб = 0) и условного тока короткого замыкания Ібк(иб = 0).
Начальное разрядное напряжение определяется следующей эмпи¬
рической зависимостью:
UHр = т(2,02 - 0,00136 t3 - ОДШДСД
где т - число аккумуляторов в батарее; t3 - температура электролита;
ДСр - разряженность батареи, %.
Очевидно, что ток короткого замыкания Ібк невозможно опреде¬
лить экспериментально. Однако его можно рассчитать, имея коор¬
динаты какой-либо рабочей точки а (Іб, U6 ) (рис. 7.3):
^бк — I+TI+
Uup-Ue’
где 1+ - условный ток короткого замыкания, приходящийся на один
положительный электрод; п+ - число положительных электродов в ак¬
кумуляторе. Тогда
J _ Ібк _ Unph
п+ (иНр-иб)п+
Вольт-амперная характеристика может быть представлена в виде
уравнения прямой в отрезках.
1 120 240 360 480 600 720 840 * '
4 ' 160 320 480 640 800 960 1 120
200 400 600 800 ЮОО 1200 1400
6 240 480 720 960 1200 1440 1680
Рис. 7.3. Характеристики аккумуляторной батареи
іб ! и б
І+п+ UH р
= 1.
Тогда получим
180
иб = т{2,02 + 0,0013613 - 0,001ДСР)(1 - —).
Уравнение дает возможность рассчитывать вольтамперную харак¬
теристику для батарей любой емкости (п+) и напряжения (т). Вольт-
амперная характеристика для случая, когда т = 1 и п+ = 1, является
единой для батарей всех типов, собранных из одних и тех же электро¬
дов и сепараторов. Переход к конкретному типу батареи осуществля¬
ется за счет изменения масштаба координатных осей. На рис. 7.3 по¬
казаны единые расчетные вольт-амперные характеристики аккумуля¬
торной батареи с 1+ = const. АСР = 0 и t, = +40 —40°С. Ось абсцисс
соответствует п+ = 1. Ниже показано преобразование масштаба для
п+ = 2 - 6 (соответственно изменяется и номинальная емкость бата¬
реи). По оси ординат показано преобразование масштаба напряжения
при переходе от т = 1 (один аккумулятор с номинальным напряжени¬
ем 2 В) к т = 6 (батарея 12 В).
По существующим нормативам продолжительность попытки пус¬
ка бензинового двигателя составляет 10 с, дизеля - 15 с, интервал
между попытками - 60 с. После трех попыток интервал - 3 мин.
Если пуск двигателя производится при температуре -30 °С, необ¬
ходимо уменьшить ток разряда. Это может быть достигнуто подогре¬
вом двигателя перед пуском или применением маловязких зимних ма¬
сел. При разрядном токе больше ЗС2о напряжение и время разряда бу¬
дут меньше, чем указано на рис. 7.4. Чтобы улучшить пусковые каче¬
ства батареи при ее разряде стартерными токами, необходимо при
температурах ниже -25 °С подогревать батарею или уменьшать
силу разрядного тока (подогревать двигатель).
Рис. 7.4. Напряжение и время разряда
181
7.2. Особенности стартерных электродвигателей
В стартерах применяются электродвигатели постоянного тока. Для
анализа особенностей их работы в системе пуска рассмотрим основ¬
ные характеристики электродвигателей постоянного тока, которые
подразделяются на двигатели последовательного, параллельного,
смешанного и независимого возбуждения. Тип возбуждения опреде¬
ляется схемой включения обмоток возбуждения по отношению к
якорной цепи. Характеристики:
и = Е + /ЯД я-
(7.1)
Е = СеФ п.
(7.2)
М = СМФІЯ,
(7.3)
где U - напряжение, подводимое к электродвигателю от источника
питания; Е - противоЭДС якоря; Ія - ток якоря; Яя - активное со¬
противление цепи якоря; Се, См - конструктивные постоянные; Ф -
магнитный поток; п - частота вращения якоря; М - момент электро¬
двигателя. Постоянные:
С
С
м
pN
ахбО
pN
2тта5
(7.4)
(7.5)
где р - число пар полюсов; N - число проводников обмотки якоря; а -
число пар параллельных ветвей обмотки якоря.
Из выражений (7.1) - (7.3) можно получить формулы для опреде¬
ления частоты вращения якоря:
п
п
Се Ф
и
С3Ф
MR„
СеСм &
(7.6)
(7.7)
В электродвигателе с параллельным возбуждением обмотка воз¬
буждения подключена параллельно с обмоткой якоря к источнику
напряжения U (рис. 7.5,а).
Особенностью этого двигателя является то, что ток возбуждения Ів
не зависит от тока якоря Ія (нагрузки на валу). Поэтому, пренебрегая
размагничивающим действием реакции якоря, можно приближенно
считать, что и поток Ф не зависит от нагрузки.
182
в
Рис. 7.5. Электромеханические характеристики электродвигателя с
параллельным возбуждением
С учетом этого выражения (7.3) - (7.7) примут вид
М = СгІя, (7.8)
п = и/С2 - ІА/С2 = По - Ап ; (7.9)
п = U/С2 — М/С3, (7.10)
где Сі - С3 - постоянные; Сг = СМФ, С2 = СеФ,С3 = Се См <E?/Ra ;
Ап - падение частоты вращения.
Электромеханические характеристики электродвигателя с па¬
раллельным возбуждением, построенные по формулам (7.8) и (7.9),
изображены на рис. 7.5,6, а механическая характеристика (7.10) - на
рис. 7.5,в. Таким образом, обе они имеют линейный характер. Показа¬
тель п0 = и/СеФ называется частотой вращения идеального холостого
хода. Он имеет конечное значение при М = 0 (Ія = 0) и уменьшается с
ростом потока Ф. Падение частоты вращения при увеличении нагруз¬
ки на двигатель (Ія) определяется сопротивлением Яя якорной цепи. В
случае если обмотка якоря электродвигателя и обмотка возбуждения
подключены к различным источникам питания, его называют двига¬
телем с независимым возбуждением. Механические и электромехани¬
ческие характеристики такого двигателя аналогичны характеристикам
двигателя с параллельным возбуждением, так как у него ток возбуж¬
дения Ів также не зависит от тока якоря Ія. В электродвигателях с по¬
следовательным возбуждением обмотка возбуждения включается по¬
следовательно с обмоткой якоря и поэтому Ія = Ів (рис. 7.6,а).
183
Рис. 7.6. Электромеханические характеристики электродвигателя с
последовательным возбуждением
Следовательно, магнитный поток двигателя Ф является некоторой
функцией тока якоря Ія. Характер этой функции изменяется в зависи¬
мости от нагрузки двигателя. При токе якоря Ія < (0,8 - 0,9) Іном (Сом -
номинальный ток якоря), когда магнитная система машины не насы¬
щена, можно считать, что поток линейно зависит от Ія:
Ф кфІя,
(7.11)
где кф - коэффициент пропорциональности, имеющий размерность
индуктивности, Гн. остается практически постоянным в значительном
диапазоне нагрузок.
Подставляя формулу (7.11) в уравнения (7.3) и (7.6), получим ско¬
ростную и моментную характеристики n = f (Ія), М = / (Ія) в этом диа¬
пазоне Ія в следующем виде:
U № _ U
П — - - - - — Ь2,
С е к Ф Г
С е к-фія
СгІя
(7.12)
М = СМФІЯ = См кф II = с;II (7.13)
Где Сг , Сі, С2 - постоянные, т. е. в диапазоне 0 - Ія зависимость
n = f (Ія) имеет гиперболический характер (при Ія = 0, п^оо), а зависи¬
мость М = f (Ія) - параболический (рис. 7.6,6).
При дальнейшем возрастании тока якоря поток Ф растет мед¬
леннее, чем Ія, и при больших нагрузках (Ія > Іном) можно считать Ф =
= const.
184
В этом случае скоростная и моментная характеристики становятся
линейными аналогично характеристикам двигателя с независимым
возбуждением.
Механическая характеристика и = f(M) (рис. 7.6,в) может быть по¬
строена на основании уравнений (7.12) и (7.13). При токе якоря,
меньшем (0,8 - 0,9)ІНОМ5 частота вращения изменяется по закону
п =
и
Rа
U
Се кф^М/(См кф ) Се к
Ф
С2-
(7.14)
При токе якоря, большем Іном зависимость и = f(M) становится ли¬
нейной вида (7.10).
Из рис. (7.6,в) следует, что механическая характеристика двига¬
теля с последовательным возбуждением является «мягкой». При ма¬
лых нагрузках частота вращения и резко возрастает и может превы¬
сить максимально допустимое значение (двигатель идет «вразнос»).
Несмотря на этот недостаток, такие двигатели широко применяются в
различных электрических приводах, где происходит изменение нагру¬
зочного момента в широких пределах и тяжелые условия пуска. В
частности, большинство стартерных электродвигателей имеют после¬
довательное возбуждение. Объясняется это тем, что «мягкая» харак¬
теристика рассматриваемого двигателя более благоприятна для ука¬
занных условий работы, чем «жесткая» характеристика двигателя с
параллельным возбуждением. При жесткой характеристике частота
вращения почти не зависит от момента (см. рис. 7.5, в), поэтому меха¬
ническая мощность стартера
Рс = Ма> = ^М = С4, (7.15)
где С4, - постоянная.
При «мягкой» характеристике двигателя с последовательным воз¬
буждением частота вращения п обратно пропорциональна Ѵм (7.14),
вследствие чего
Рс = Мш = С4л/М, (7.16)
где С4 - постоянная.
Поэтому при изменении нагрузочного момента в широких преде¬
лах, что характерно для пуска ДВС, мощность Рс, а следовательно,
электрическая мощность Рэп /я ия и ток Ія у двигателей с последова¬
тельным возбуждением изменяются в меньших пределах, чем у двига¬
телей с параллельным возбуждением. Кроме того, они лучше перено-
185
сят перегрузки. Например, при заданной кратности перегрузки по мо¬
менту Км = М/Мном ток 1я в двигателе с параллельным возбуждением
увеличивается в Км раз, а в двигателе с последовательным возбужде¬
нием - только в у[К^ раз. По этой же причине двигатель с последова¬
тельным возбуждением развивает больший пусковой момент, так как
при заданной кратности пускового тока bQ = Іп /Іном пусковой момент
его, в то время как у двигателя с параллельным возбуждением
М =К2М
іѵ±П АѴі 1VAHOM-
В электродвигателе со смешанным возбуждением магнитный по¬
ток Ф создается в результате совместного действия двух обмоток воз¬
буждения (рис. 7.7,а): параллельной (ОВ1) и последовательной (ОВ2).
Поэтому его механическая характеристика (рис. 7.7,в, кривые 3, 4)
располагается между характеристиками двигателей с параллельным
(прямая 1) и последовательным (кривая 2) возбуждением. В зависи¬
мости от соотношения магнитодвижущей силы (МДС) F = wIB (w -
число витков обмотки) параллельной (w,IB,) и последовательной
(ѵѵ2Ів2) обмоток при номинальном режиме можно приблизить характе¬
ристику двигателя со смешанным возбуждением к характеристике 1
(при w,IB, > w2Ib2) или к характеристике 2 (лѵ,Iв, < w2Ib2). Одним из до¬
стоинств двигателя со смешанным возбуждением, которые использу¬
ются в некоторых конструкциях стартеров, является то, что он, обла¬
дая «мягкой» механической характеристикой, может работать на хо¬
лостом ходу, так как частота вращения холостого хода имеет конеч¬
ное значение.
Рис. 7.7. Электромеханические характеристики электродвигателя
со смешанным возбуждением
Конструктивно электростартер объединяет в себе электродвига¬
тель и механизм привода с электромагнитным тяговым реле, муфтой
свободного хода и шестерней понижающего редуктора. Стартер
186
CT130-A3 (рис. 7.8) состоит: из 1 - обмотка якоря; 2- обмотка воз¬
буждения; 3 - полюс; 4 - контакты тяго^вого реле; 5 - контакт замы¬
кания добавочного резистора; 6 - обмотки тягового реле; 7 - якорь тя¬
гового реле; 8 - регулировочный винт-тяга; 9- защитный кожух;
10 -рычаг; 11 - винт регулировки хода шестерни; 12- крышка со сто¬
роны привода; 13 - упорное кольцо; 14 - шестерня; 15 - муфта сво¬
бодного хода; 16 - пружина; 17 - поводковая муфта; 18 - корпус;
19 - якорь; 20 - защитная лента; 21 - коллектор; 22- крышка со сто¬
роны коллектора.
/ щтнцаа 7 / III
22 21 20 19 18 17 16 15
Рис. 7.8. Стартер CT130-A3
7.3. Электрические схемы управления стартером
Системы электро стартер но го пуска имеют дистанционное управ¬
ление стартером, т.е. стартерный электродвигатель соединен с акку¬
муляторной батареей с помощью тягового реле стартера. На автомо¬
билях с дизельными двигателями это делается при помощи выключа¬
теля стартера, контакты которого рассчитаны на ток, потребляемый
тяговым реле. На автомобилях с бензиновыми двигателями, у кото¬
рых мощность стартера значительно ниже, тяговое реле включается
через выключатель зажигания. Однако контакты последнего не рас¬
считаны на силу тока, потребляемую реле (30 - 40 А) в момент вклю¬
чения. Поэтому дополнительно устанавливается промежуточное реле
стартера, контакты которого подключают обмотки тягового реле к ба¬
187
тарее. Обмотка этого реле стартера включается через выключатель
зажигания.
Наиболее просты схемы управления стартеров малой мощности с
однообмоточном тяговым реле. Электрическая схема управления
стартером показана на рис. 7.9. Стартер смешанного возбуждения
включается однообмоточным тяговым реле К1, питание на обмотку
которого поступает непосредственно через контакты S1 выключателя
зажигания при повороте ключа в положение «Стартер».
Якорь реле втягивается в электромагнит, че¬
рез рычажный механизм вводит шестерню в
зацепление с венцом маховика и в конце хода
замыкает силовые контакты К1.1 цепи пита¬
ния электродвигателя М. Последний начина¬
ет вращаться и проворачивать коленчатый
вал двигателя. После пуска ДВС шестерня от
вала отсоединяется обгонной муфтой, при
переводе ключа в положение
«Зажигание» якорь тягового реле и приводной механизм под дей¬
ствием пружины возвращаются в сходное положение. В стартерах в
основном применяются двухобмоточные тяговые реле, имеющие втя¬
гивающую (ВО) и удерживающую (УО) обмотки. Такие реле позво¬
ляют снизить расход энергии батареи в процессе пуска двигателя.
Принцип работы двухобмоточного тягового реле стартера проиллю¬
стрирован на рис. 7.10. После замыкания контактов КРС. 1 реле стар¬
тера (или выключателя стартера на дизельных двигателях) ток от ак¬
кумуляторной батареи проходит по двум обмоткам: УО и ВО (рис.
7.10,а). Под действием намагничивающей силы этих двух обмоток
якорь тягового реле втягивается в электромагнит (см. рис. 7.8), при
помощи рычажного механизма вводит шестерню привода в зацепле¬
ние с венцом маховика и в конце хода, замыкая силовые контакты тя¬
гового реле КТР. 1, включает цепь питания стартерного электродвига¬
теля. Одновременно этими же контактами втягивающая обмотка ВО
замыкается накоротко (рис. 7.10,6).
si
К1
Рис. 7.9. Однообмо¬
точное тяговое реле
188
Рис. 7.10. Двухобмоточного тягового реле
После пуска двигателя контакты КРС.1 размыкаются и ток про¬
ходит последовательно через силовые контакты КТР.1, обмотки 60 и
УО параллельно стартерному электродвигателю (рис. 7.10,в). Причем
направление тока в витках обмотки УО сохраняется прежним, а в вит¬
ках втягивающей обмотки ВО изменяется. Так как число витков в об¬
мотках одинаково и по ним протекает ток одной и той же силы, сум¬
марная магнитодвижущая сила будет равна нулю. Сердечник элек¬
тромагнита размагничивается, возвратная пружина, выдвигая якорь из
сердечника тягового реле, размыкает силовые контакты КТР.1 и, воз¬
действуя на рычаг включения привода, выводит шестерню из зацеп¬
ления с венцом маховика.
В схеме управления стартером СТ230-Б при замыкании контактов
выключателя зажигания S1.1 срабатывает реле стартера К2, контакты
К2.1 которого соединяют с аккумуляторной батареей GB обмотки тя¬
гового реле К1. Контакты одновременно шунтируют добавочный ре¬
зистор Я в первичной цепи катушки зажигания. После пуска двигате¬
ля и возвращения ключа выключателя зажигания в положение «Зажи¬
гание» остаются замкнутыми контакты S1.2 в цепи зажигания и раз¬
мыкаются контакты S1.1, снимающие напряжение с обмотки реле К2.
7.4. Анализ работы системы электростартерного пуска
Исходными данными для анализа являются характеристики пус¬
ковых качеств двигателя, а также электромеханические характери¬
стики стартера, полученные экспериментальным и расчетным путями.
Пусковые качества ДВС определяются средним давлением трения
Рхср и минимальной пусковой частотой вращения nmin. После установ¬
ки двигателя на автомобиль его пусковые качества оцениваются так¬
же предельной температурой надежного пуска и временем подготовки
189
двигателя к принятию нагрузки, которое складывается из времени на
приведение в действие и работу устройств облегчения пуска холодно¬
го двигателя, пуска двигателя и его работы на холостом ходу до мо¬
мента, когда возможно начало движения автомобиля.
Среднее давление трения является удельным показателем и харак¬
теризует момент сопротивления двигателя при его пуске. Оно опреде¬
ляется аналогично условному среднему давлению внутренних потерь
двигателя
Ртс„ = 1,256 хЮ4^,
тхр іѴн
где Мсд - момент сопротивления двигателя при прокручивании, Н м;
t о
i - число цилиндров; Vh - рабочий объем двигателя, м .
Момент сопротивления двигателя при прокручивании можно
представить как сумму моментов от сил трения в кинематических па¬
рах двигателя (Мх) и момента от компрессии (Мг):
Мс д = мт + мг.
Момент трения и момент от компрессии зависят от угла поворота
коленчатого вала, причем Мг на такте расширения в цилиндрах меня¬
ет знак.
Так как стартеры имеют «мягкую» механическую характеристику,
то при изменении момента сопротивления угловая частота также пе¬
риодически изменяется, вызывая появление динамического (инерци¬
онного) момента. Коэффициент неравномерности вращения при пус¬
ке, определяемый как отношение разности максимальной и мини¬
мальной частот вращения к средней частоте в течение одного перио¬
да, находится в пределах 0,1 - 0,2. У бензиновых двигателей по срав¬
нению с дизелями степень сжатия и неравномерность вращения ко¬
ленчатого вала меньше. Неравномерность вращения зависит также от
числа цилиндров двигателя.
Выделяют три стадии электростартерного пуска поршневого дви¬
гателя (рис. 7.11). На 1-й стадии частота вращения коленчатого вала
увеличивается до средней частоты вращения в установившемся ре¬
жиме. После подключения электростартера к аккумуляторной батарее
его якорь и коленчатый вал двигателя остаются неподвижными, пока
вращающий момент электродвигателя не превысит момент трогания
системы стартер-двигатель (t = 0). Продолжительность 1-й стадии
пуска зависит от вязкости моторного масла, мощности электростарте¬
ра, момента инерции системы стартер-двигатель автомобиля и обыч¬
но не превышает десятых долей секунды.
190
Отличительной чертой 2-й стадии пуска является равенство сред¬
них значений вращающего момента (Мср) электродвигателя и момента
сопротивления при постоянной средней частоте вращения коленчато¬
го вала пср. Возможное увеличение средней частоты на 2-й стадии свя¬
зано с интенсивным снижением вязкости масла в узлах трения вслед¬
ствие его нагрева теплотой, выделяемой при трении и сжатии воздуха
или топливовоздушной смеси в цилиндрах двигателя. Воспламенение
топлива в цилиндрах при низкотемпературном пуске ДВС начинается
на 2-й стадии.
п, МИН'1 ГУ,
400
200
О
Рис. 7.11. Стадии электростартерного пуска
Процесс пуска переходит в 3-ю стадию, когда двигатель начинает
развивать мощность за счет теплоты сгорания топлива. Если топливо
воспламеняется и сгорает во всех цилиндрах, то 3-я стадия характери¬
зуется непрерывным нарастанием частоты вращения коленчатого вала
благодаря совместному действию вращающих моментов электростар¬
тера и двигателя.
Уравнение равновесия моментов при пуске имеет вид
м' = мсд - ; —,
с СД J dt'
где М’с - момент стартера, приведенный к двигателю с учетом пе¬
редаточного числа ідс до и КПД зубчатой передачи от стартера к дви¬
гателю щ; М’с = М'сідс r|z.
Момент инерции вращающихся и возвратно-поступательно дви¬
жущихся масс системы стартер-двигатель, приведенных к колен¬
чатому валу:
J /дв 3” /«Уде?
где Ідв - приведенный момент инерции двигателя; Jc - момент инер¬
ции стартера.
191
Момент трения зависит от вязкости моторного масла, которая с
понижением температуры возрастает по экспоненциальному закону.
За последние годы освоен выпуск новых моторных масел с более по¬
логой вязкостно-температурной характеристикой (рис. 7.12, где 1 -
М-8В; 2 - М-10Г3; 3 - М-6В3).
На составляющую сопротивления, обусловленную компрессией,
температура влияет незначительно. У бензиновых двигателей это со¬
противление сравнительно невелико, у дизелей больше.
При расчете электропусковых систем пользуются формулами для
расчета среднего момента сопротивления и средней частоты раскру¬
чивания. Существует большое количество эмпирических формул, вы¬
ражающих зависимость момента сопротивления от вязкости масла и
частоты прокручивания. Зависимость момента сопротивления двига¬
теля от частоты вращения приведена на рис. 7.12,6.
Рис. 7.12, а - зависимость момента трения от вязкости моторного
масла; б-зависимость момента сопротивления двигателя от частоты
вращения
В общем виде эту зависимость можно представить выражением
Мсд = kAvxnl,
где к - постоянный коэффициент; А - коэффициент, характеризую¬
щий площадь поверхности трения; ѵ - вязкость масла; п - частота
прокручивания коленчатого вала двигателя; х, у - показатели степени;
х = 0,33 -0,53; у = 0,25 -0,35.
В зависимости от вязкости масла и его количества, динамики про¬
кручивания коленчатого вала, качества трущихся поверхностей, а
также нагрузки на них трение в отдельных узлах двигателя может
быть граничным, жидкостным или смешанным.
192
Время подготовки двигателя к принятию нагрузки зависит от тем¬
пературы пуска двигателя и при температурах +40, -20, -25 °С не
должно превышать соответственно 4, 8 и 9 мин. С применением
устройств для облегчения пуска это время составляет 10 мин при
-30 °С и 20 - 30 мин при -40°С.
Анализ работы системы электростартерного пуска обеспечивается
совмещением мощностных и механических характеристик стартера и
двигателя. Поскольку напряжение аккумуляторной батареи определя¬
ет в значительной степени режим пуска, ее вольт-амперная характе¬
ристика также должна быть задана в исходных данных для такого
анализа.
Совмещение механических характеристик стартера и двигателя
дает возможность определить частоту вращения коленчатого вала и
момент при пуске двигателя. Процесс совмещения можно разбить на
следующие этапы (рис. 7.13):
- расчет вольтамперной характеристики батареи для заданных
условий пуска;
- пересчет номинальных характеристик стартера на новую вольт-
амперную характеристику;
- расчет механических характеристик стартера;
- совмещение характеристик стартера и двигателя.
На рис. 7.13 цифрой 1 обозначена частота прокручивания ко¬
ленчатого вала двигателя при различных температурах пуска.
Расчет вольт-амперных характеристик батареи и пересчет ха¬
рактеристик стартера на новую вольт-амперную характеристику рас¬
смотрен ранее.
Механические характеристики стартера рассчитывают следующим
образом. Интервал тока разбивают на 8 - 10 значений. Для каждого
значения тока момент и частота вращения стартера приводятся к валу
двигателя по формулам:
Мс Мс Ідс T]z )
где ідс - передаточное число от двигателя к стартеру; rjz - КПД зуб¬
чатой передачи шестерня стартера - венец маховика обычно
pz = 0,8 - 0,9).
Точка пересечения механической характеристики стартера и мо¬
мента сопротивления двигателя характеризует частоту, с которой
стартер вращает коленчатый вал двигателя. Выполнив указанные рас¬
четы и построения для различных температур и соединив рассчитан¬
ные точки, получим рабочую кривую (рис. 7.13,а), показывающую,
193
как изменяются координаты рабочей точки при прокручивании двига¬
теля в различных температурных условиях.
Совмещение характеристик пд(Т) и nmm(T) (рис. 7.13,6) позволяет
определить минимальную температуру пуска двигателя, при которой
обеспечивается минимальная пусковая частота вращения вала двига¬
теля (Тга111П).
а б
Рис. 7.14. Совмещенные механические характеристики
7.5. Техническое обслуживание и методы диагностирования
системы пуска
Стартеры обладают достаточно высокой эксплуатационной на¬
дежностью и поэтому не требуют частых технического обслужива¬
ния и регулировок. Рекомендуется при проведении ТО-2 проверять
состояние силовых контактов стартерной цепи (крепление нако¬
нечников проводов к выводам тягового реле, реле включения, кон¬
такты аккумуляторной батареи). Техническое обслуживание стар¬
тера рекомендуется производить перед зимней эксплуатацией
примерно через 40 тыс. км при снятии его с автомобиля. При этом
осуществляют следующие операции: внешний осмотр; проверку
осевого зазора вала якоря и подвижность щеток в щеткодержате¬
лях; контроль высоты щеток (если она меньше допустимой, то их
заменяют); контроль динамометром давления щеточных пружин;
проверку работы механизма привода.
Неисправности в самом стартере определяют после его разбор¬
ки. Проверяют состояние обмоток возбуждения и якоря, коллекто¬
ра, подшипников, а также исправность тягового реле.
194
После ремонта стартера с его разборкой регулируют тяговое реле
и проверяют работу стартера в режимах холостого хода и полного
торможения на специальных стендах. При проверках стартеров на
специальных стендах используют провода, размеры которых соответ¬
ствуют размерам проводов, применяемых в эксплуатации для данного
типа стартера. Аккумуляторная батарея должна быть исправна и за¬
ряжена не менее чем на 75 %.
При проверке на холостом ходу замеряют частоту вращения якоря
ПсХ (тахометром) и потребляемый им ток Ісх. Эти параметры дают воз¬
можность определить качество сборки стартера.
В режиме полного торможения измеряют момент МсХ полного
торможения (динамометром) и силу тока Ісх. Эти параметры опре¬
деляют состояние электрических и магнитных цепей стартера. В этом
режиме определяют также внутреннее сопротивление стартера Rc =
UCT/ICT. Последовательность поиска дефектов в системе пуска зависит
от характерных признаков неисправностей. Если при включении стар¬
тера тяговое реле не срабатывает (нет характерного щелчка), то про¬
веряют состояние аккумуляторной батареи, электрические цепи про¬
межуточного и тягового репе, состояние наконечников проводов и
исправность выключателя стартера.
Если после срабатывания тягового реле коленчатый вал двигателя
не проворачивается, то также необходимо вначале проверить аккуму¬
ляторную батарею и состояние клемм силовых проводов, а затем по¬
следовательно состояние контактов включения стартера тягового ре¬
ле, качество соединения корпуса стартера с «массой» (корпусом)
ДВС, состояние коллектора, щеток и обмоток электродвигателя. Вра¬
щение электродвигателя стартера при замыкании контактных болтов
на корпусе тягового реле проводом большого сечения указывает на
его исправность. Для проверки исправности тягового реле необходи¬
мо общий вывод его обмоток соединить с положительной клеммой
аккумуляторной батареи, минуя контакты реле включения и замка за¬
жигания. Исправность выключателя зажигания и целостность его це¬
пей управления проверяют путем подключения обмотки реле включе¬
ния непосредственно к аккумуляторной батарее.
Вопросы для самоконтроля
1. Из каких основных элементов состоит система пуска?
195
2. Какие функции выполняет приводной механизм стартера?
3. Как изменяются электромеханические характеристики
стартера при изменении вольтамперной характеристики
аккумуляторной батареи?
4. Чем определяется момент сопротивления двигателя прокру¬
чиванию?
5. От каких факторов зависит минимальная пусковая частота
вращения двигателя?
6. Как выбирается мощность электропусковой системы?
7. В чем заключаются операции по техническому обслужива¬
нию системы пуска?
8. Каковы перспективы в развитии конструкции и характери¬
стик элементов системы пуска?
8. ЭЛЕКТРОННЫЕ СИСТЕМЫ ЗАЖИГАНИЯ
Назначение системы зажигания - воспламенение ТВ-смеси в каме¬
ре сгорания двигателя в нужный момент времени. Искровой разряд
должен обладать энергией, достаточной для воспламенения смеси во
всех рабочих режимах, в противном случае происходит пропуск вос¬
пламенения, несгоревшее топливо может повредить датчик кислорода
и каталитический нейтрализатор, возрастет токсичность выхлопных
газов и расход топлива.
Процесс горения рабочей смеси в цилиндре длится около 2 мс и
заканчивается образованием сильно разогретого газообразного рабо¬
чего тела. Необходимо, чтобы максимум давления разогретых газов в
цилиндре имел место непосредственно за верхней мертвой точкой
поршня. Двигатель работает на разных оборотах, следовательно, при¬
ходится устанавливать угол опережения зажигания в зависимости от
оборотов, чтобы пик давления в цилиндрах имел место при требуе¬
мом угловом положении коленчатого вала. Величина угла опережения
зажигания влияет на экономичность двигателя, токсичность выхлоп¬
ных газов, развиваемую мощность.
Система зажигания. Система зажигания предназначена для вос¬
пламенения топливно-воздушной смеси бензинового двигателя.
В настоящее время на автомобилях применяются следующие типы
систем зажигания:
196
• контактная система зажигания;
• бесконтактная (транзисторная) система зажигания;
. электронная (микропроцессорная) система зажигания.
В контактной системе зажигания управление накоплением и рас¬
пределение электрической энергии по цилиндрам осуществляется ме¬
ханическим устройством - прерывателем-распределителем. Дальней¬
шим развитием контактной системы зажигания является контактная
транзисторная система зажигания.
В отличие от контактной в бесконтактной системе зажигания для
управления накоплением энергии используется транзисторный ком¬
мутатор с бесконтактным датчиком импульсов.
В микропроцессорной системе зажигания используется электронный
блок управления. Ранее на некоторых моделях автомобилей электронный
блок одновременно управлял системой зажигания и системой впрыска
топлива (так называемая объединенная система впрыска и зажигания). В
настоящее время применяется система управления двигателем, которая
осуществляет управление многими системами двигателя, в том числе си¬
стемой зажигания. Система зажигания имеет следующее общее устрой¬
ство (рис. 8.1), где 1 - источник питания (генератор и аккумуляторная ба¬
тарея); 2 - выключатель зажигания; 3 - устройство управления накопле¬
нием энергии (прерыватель, транзисторный коммутатор, электронный
блок управления); 4 - накопитель энергии (катушка зажигания, конден¬
сатор); 5 - устройство распределения энергии (механический распредели¬
тель, статический распределитель); 6 - высоковольтные провода; 7 - све¬
чи зажигания. Принцип работы системы зажигания заключается в накоп¬
лении и преобразовании катушкой зажигания низкого напряжения (12 В)
электрической сети автомобиля в высокое напряжение (до 30 000 В), рас¬
пределении и передаче высокого напряжения к соответствующей свече
зажигания и образовании в нужный момент искры на свече зажигания.
197
Рис. 8.1. Принципиальная схема системы зажигания
Классификация систем зажигания
Электронная система зажигания содержит следующие компонен¬
ты:
- накопитель энергии (чаще всего индуктивный);
- устройство синхронизации момента зажигания (электронный
микроконтроллер);
- распределитель, свечи зажигания и высоковольтные провода.
В электронных системах зажигания напряжение на свечах превы¬
шает 30 кВ. Энергия для осуществления искрового разряда накапли¬
вается в магнитном поле катушки зажигания. Ее первичная обмотка
периодически подключается под напряжение бортовой сети автомо¬
биля, и, когда ток достигает определенной величины, обмотка отклю¬
чается, а накопленная энергия трансформируется во вторичную по¬
вышающую обмотку катушки зажигания, в цепь которой через высо¬
ковольтный распределитель включены электроискровые свечи зажи¬
гания. Высоковольтный разряд в искровом промежутке свечи являет¬
ся интенсивным источником тепловой энергии, которая затрачивается
на воспламенение ТВ-смеси, сжатой в камере сгорания. Разряд нако¬
пителя производится контактным (механический прерыватель) или
бесконтактным (транзисторный коммутатор) способом. Чередование
искр по свечам синхронизируется с тактами работы двигателя при
198
помощи распределителя. В качестве датчиков углового положения
вала механического распределителя используются индукционные
датчики или датчики на эффекте Холла. В ранних электронных си¬
стемах зажигания регулирование угла опережения зажигания по
нагрузке и оборотам двигателя осуществлялось с помощью вакуумно¬
го и центробежного автоматов зажигания. На рис. 8.2 приведена клас¬
сификация систем зажигания.
Разработаны системы, в которых синхронизация искрообразования
и распределение высоковольтных импульсов производится в распре¬
делителе, а коррекция угла опережения зажигания по оборотам и
нагрузке двигателя выполняется программно в ЭБУ по сигналам с
датчиков разряжения во впускном коллекторе, положения дроссель¬
ной заслонки, температуры охлаждающей жидкости.
В многоканальных электронных системах зажигания распредели¬
тель отсутствует. Синхронизация и генерация искры производится
электронными цепями под управлением программы в ЭБУ. Например,
в системе зажигания с холостой искрой двухвыводная вторичная об¬
мотка катушки зажигания подключена к свечам двух цилиндров, ра¬
бочие процессы в которых сдвинуты по фазе на 360°.
Тогда в 4-цилиндровом двигателе можно использовать блок из
двух двухвыводных катушек, в 6-цилиндровом - блок из трех таких
же катушек, при этом потребность в высоковольтном распределителе
отпадает.
Электронная система управления углом опережения зажигания
(УОЗ) значительно точнее механической. Для управления УОЗ при¬
меняется калибровочная диаграмма (трехмерная характеристика за¬
жигания - ТХЗ), которая хранится в памяти ЭБУ. Коррекция значений
угла опережения зажигания реализуется автоматически при измене¬
нии оборотов и нагрузки двигателя. Совершенные многоканальные
системы зажигания с отдельными катушками для каждого цилиндра.
Имеются системы зажигания с накоплением энергии в электрическом
поле конденсатора, который затем разряжается через повышающий
трансформатор на искровой промежуток свечи зажигания. Применя¬
ются они на высокооборотных ДВС.
К системам зажигания предъявляют следующие требования:
- должна развивать напряжения, достаточные для пробоя искрово¬
го промежутка свечи, обеспечивая при этом бесперебойное новооб¬
разование на всех режимах работы двигателя;
199
Системы
зажигания
, 1
I
H Контактные
I Бесконтактные
^Батарейная I
- Уменьшение
вторичного напряжения
при увеличении
оборотов ДВС.
- Образование дугового
разряда между
контактами
прерывателя.
- Снижение вторичного
напряжении при
увеличении емкости
вторичной цепи, при
уменьшении
шунтирующего
сопротивления.
->| Транзисторная ]
~Н Интегрированная
+ Вместо
контактов
прерывателя
установлен
датчик,
связанный с
коленвалом.
+ Малый износ.
Параметрическая
+ Оптимальная
мощность.
+ Малый расход
топлива.
+ Ненадобность
регулировок.
+ Уверенное
искрообразование,
с холостых
оборотов до
максимальных.
+ Большая скорость
нарастания
вторичного
напряжения.
+ Не надо
регулировать
искровой зазор.
+ Работа с
большими токами.
- Потребляет
большую мощность
от источников
питания.
- Склонна к
перегреву.
- Зависит от
шунтирующих
нагрузок.
С нерегулированным
временем накопления
энергии
С регулированным
временем накопления
энергии
Электронные
(микропроцессорные)
I С электронным
1 прерывателем
^Конденсаторная |
+ Экономичность.
+ Высокое
напряжение и
энергия искры.
+ Легкий холодный
пуск.
+ Малое
потребление.
- Малая
длительность
заряда.
- Сложность
конструкции.
- Дороговизна.
I
+ Универсальность
применения.
+ Большой срок
службы.
+ Полное сгорание
топлива(экономия).
+ Простая
профилактика и
регулировка.
- Дороговизна
деталей.
- Техническая
сложность.
Индуктивные |
С постоянным
углом замкнутого
контура
С постоянной
энергией
С цифровым
управлением
Рис. 8.2. Классификация систем зажигания
- искра, образующаяся между электродами свечи, должна обла¬
дать достаточной энергией и продолжительностью для воспламенения
рабочей смеси при всех возможных режимах работы двигателя;
- момент зажигания должен быть строго определенным и соот¬
ветствовать условиям работы двигателя;
200
- все элементы СЖ должны быть надежными при высоких темпе¬
ратурах и механических нагрузках;
- эрозия электродов свечи должна находиться в пределах допуска.
Система зажигания характеризуется следующими параметрами:
- развиваемым вторичным напряжением в пусковом и рабочем
режимах работы U2m;
- коэффициентом запаса по вторичному напряжению К3;
- скоростью нарастания вторичного напряжения dU2m/dt;
- энергией Wp и длительностью индуктивной составляющей ис¬
крового разряда тр;
- зазором между электродами свечей 5;
- углом опережения зажигания Ѳ.
8.1. Классическая система зажигания
Классическая система батарейного зажигания (рис. 8.3) с одной
катушкой и многоискровым механическим распределителем до сих
пор применяется на автомобилях. Главным достоинством этой систе¬
мы является ее простота, обеспечиваемая двойной функцией меха¬
низма распределителя: прерывание цепи постоянного тока для гене¬
рирования высокого напряжения и синхронное распределение высо¬
кого напряжения по цилиндрам двигателя.
Рис. 8.3. Классическая система зажигания
201
Классическая система зажигания состоит:
- из источника тока (аккумуляторной батареи) 1; катушки зажига¬
ния 5, преобразующей низкое напряжение в высокое;
- прерывателя 17, содержащего рычажок 6 с подушечкой 7 из тек¬
столита, поворачивающийся около оси, контакты прерывателя 8, ку¬
лачок, имеющий число граней, равное числу цилиндров. Непод¬
вижный контакт прерывателя присоединен к «массе»; контакт укреп¬
лен на конце рычажка. Если подушечка не касается кулачка, контакты
замкнуты под действием пружины. Когда подушечка находит на
грань кулачка, контакты размыкаются. Прерыватель управляет размы¬
канием и замыканием контактов и моментом подачи искры;
- конденсатора первичной цепи 18, подключенного параллельно
контактам 8, который является составным элементом колебательного
контура в первичной цепи после размыкания контактов;
- распределителя 14, включающего в себя бегунок 12, крышку 10,
на которой расположены неподвижные боковые электроды 11 (число
которых равно числу цилиндров двигателя) и неподвижный цен¬
тральный электрод, который подключается через высоковольтный
провод к катушке зажигания. Боковые электроды через высоко¬
вольтные провода соединяются с соответствующими свечами за¬
жигания. Высокое напряжение к бегунку 12 подается через цен¬
тральный электрод с помощью скользящего угольного контакта.
Электрод бегунка 13 отделен воздушным зазором от боковых элек¬
тродов 11. Бегунок 12 распределителя и кулачок 16 прерывателя
находятся на одном валу, который приводится во вращение зубчатой
передачей от распределительного вала двигателя с частотой, вдвое
меньшей частоты вращения коленчатого вала. Прерыватель и распре¬
делитель расположены в одном аппарате, называемом распределите¬
лем зажигания;
- свечей зажигания 15, число которых равно числу цилиндров дви¬
гателя;
- выключателя зажигания 2;
- добавочного резистора 3 (Rao6), который уменьшает тепловые
потери в катушке зажигания, дает возможность усилить зажигание.
(При пуске двигателя Rflo6 шунтируется выключателем 4 одновремен¬
но с включением стартера.) Добавочный резистор изготовляют из ни¬
хрома или константана и наматывают на керамический изолятор.
Работа системы зажигания. При вращении кулачка 16 контакты
8 попеременно замыкаются и размыкаются. После замыкания контак¬
202
тов (в случае замкнутого выключателя 2) через первичную обмотку
катушки зажигания 5 протекает ток, нарастая от нуля до определенно¬
го значения за данное время замкнутого состояния контактов. При
малых частотах вращения валика 9 распределителя 14 ток может
нарастать до установившегося значения, определенного напряжением
аккумуляторной батареи и омическим сопротивлением первичной це¬
пи (установившийся ток). Протекание первичного тока вызывает об¬
разование магнитного потока, сцепленного с витками первичной и
вторичной обмоток, и накопление электромагнитной энергии. Вто¬
ричное напряжение подводится к бегунку распределителя, а затем че¬
рез электроды в крышке и высоковольтные провода поступает к све¬
чам соответствующих цилиндров. Характеристики электрических
сигналов в первичной и вторичной цепях системы зажигания (рис. 8.4,
здесь: 1 - первичный ток; 2 - импульс первичного напряжения; 3 -
импульс вторичного напряжения).
Рис. 8.4. Характеристики электрических сигналов в первичной и
вторичной цепях системы зажигания
Особенности рабочего процесса транзисторной системы зажи¬
гания. Рабочий процесс транзисторной системы зажигания протекает
в два этапа.
1. Открывание транзистора. После подачи тока управления в базу
выходного транзистора последний открывается и через проводящий
участок коллектор-эмиттер подключает первичную обмотку катушки
зажигания к источнику постоянного тока. Начинается процесс нарас¬
тания первичного тока и запасания энергии в магнитном поле катуш¬
203
ки зажигания. Первичный ток нарастает по экспоненциальному зако¬
где икэ нас - падение напряжения на участке коллектор-эмиттер насы¬
щенного транзистора; UK3 нас = 0,5 - 0,7 В для германиевых транзисто¬
ров и 1 - 1,5 В для кремниевых транзисторов.
Ток разрыва Ір в момент выключения выходного транзистора за¬
висит от параметров первичной цепи катушки зажигания Rb и от
времени его включенного состояния
Для контактно-транзисторной и бесконтактной систем зажигания с
постоянным углом накопления энергии аналитическое выражение то¬
ка разрыва примет вид
Выражение (8.2) с учетом потерь в выходном транзисторе (UK3 нас).
В системах зажигания с нормированием времени накопления энергии
ток разрыва определяется амплитудой тока ограничения, если tH >
tH min, где tmin - время нарастания первичного тока до амплитудного
значения тока ограничения. При tH < tH min ток разрыва Ір может быть
определен из выражения (8.2)
2. Закрывание и отсечка транзистора. Характерной особенностью
переходных процессов в транзисторной системе зажигания является
их зависимость от электрических характеристик и инерционных
свойств транзистора. Процессы закрывания и отсечки (полное закры¬
вание) транзистора могут влиять на вторичное напряжение катушки
зажигания. В зависимости от характера нагрузки транзистора (актив¬
ная, емкостная, индуктивная или смешанная) движение его рабочей
точки в процессе закрывания имеет различный характер. Рабочая точ¬
ка характеризует изменение мгновенного значения тока коллектора ік
и напряжения икэ - транзистора.
После закрывания транзистор переходит в режим отсечки, начи¬
нается процесс обмена энергии между магнитным и электрическим
полями катушки зажигания, и в первичной обмотке возникают зату¬
хающие колебания с максимальной амплитудой Uim.
ну:
(8.1)
(8.2)
204
Потери энергии в транзисторе приводят к снижению рабочих и
пусковых показателей катушки зажигания и определяются из выра¬
жения
WTp = WTp3 + WTpK J0tc" ибэ(і) i6(u)dt + J^" икб(і)ік (u)dt »
/о40" UK3(i)i3 (u)dt,
где Wtp э и Wtp к - энергия, рассеиваемая соответственно наі эмитте¬
ром и коллекторном перехода транзистора в режиме закрывания; и, і -
мгновенные значения соответственно напряжения и тока в режиме за¬
крывания транзистора; - время, за которое соответствующий ток
(базы, коллектора или эмиттера) изменяется от I = Ір до I = 0.
Для ік и іэ время tcn характеризует длительность закрывания тран¬
зистора. Процессы, происходящие в первичной и вторичной цепях,
обычно рассматриваются в предположении, что за время закрывания
транзистора потери энергии в нем не превышают 2 - 6 % энергии, за¬
пасенной в магнитном поле катушки зажигания. Пренебрегая этими
потерями, транзистор можно считать идеальным коммутирующим
ключом. При таком условии и отсутствии цепи защиты транзистора
рабочие процессы в первичной и вторичной цепях протекают анало¬
гично процессам в классической батарейной системе.
8.2. Контактная система зажигания
Контактная система зажигания
меняется на некоторых моделях
называемой «классике»).
Создание высокого напря¬
жения и распределение его по
цилиндрам в данной системе
происходит с помощью контак¬
тов.
Контактная система зажига¬
ния имеет следующие устрой¬
ства:
(рис. 8.5) в настоящее время при-
отечественных автомобилей (так
Рис. 8.5. Контактная
система зажигания
• источник питания;
• выключатель зажигания;
• механический прерыватель тока низкого напряжения;
• катушка зажигания;
• механический распределитель тока высокого напряжения;
205
. центробежный регулятор опережения зажигания;
• вакуумный регулятор опережения зажигания;
• высоковольтные провода;
• свечи зажигания.
Механический прерыватель предназначен для размыкания цепи
низкого напряжения (цепи первичной обмотки катушки зажигания).
При размыкании контактов во вторичной цепи катушки зажигания
наводится высокое напряжение. Для защиты контактов от обгорания в
цепь параллельно контактам включен конденсатор.
Катушка зажигания служит для преобразования тока низкого
напряжения в ток высокого напряжения. Катушка имеет две обмотки
- низкого и высокого напряжения.
Механический распределитель обеспечивает распределение тока
высокого напряжения по свечам цилиндров двигателя. Распредели¬
тель состоит из ротора (обиходное название «бегунок») и крышки. В
крышке выполнены центральный и боковые контакты. На централь¬
ный контакт подается высокое напряжение от катушки зажигания.
Через боковые контакты высокое напряжение передается на соответ¬
ствующие свечи зажигания.
Прерыватель и распределитель конструктивно объединены в од¬
ном корпусе и приводятся в действие от коленчатого вала двигателя.
Данное устройство имеет общее название прерыватель-
распределитель (обиходное название - «трамблер»).
Центробежный регулятор опережения зажигания служит для
изменения угла опережения зажигания в зависимости от числа оборо¬
тов коленчатого вала двигателя. Конструктивно центробежный регу¬
лятор состоит из двух грузиков. Грузики воздействуют на подвижную
пластину, на которой расположены кулачки прерывателя.
Углом опережения зажигания называется угол поворота колен¬
чатого вала двигателя, при котором происходит подача тока высокого
напряжения на свечи зажигания. Для того чтобы топливно-воздушная
смесь полностью и эффективно сгорела, зажигание производится с
опережением, т.е. до достижения поршнем верхней мертвой точки.
Установка угла опережения зажигания производится регулировкой
положения прерывателя-распределителя в двигателе.
Вакуумный регулятор опережения зажигания обеспечивает из¬
менение угла опережения зажигания в зависимости от нагрузки на
двигатель. Нагрузка на двигатель определяется степенью открытия
дроссельной заслонки (положением педали газа). Вакуумный регуля¬
тор соединен с полостью за дроссельной заслонкой и, в зависимости
206
от степени разряжения в полости, изменяет угол опережения зажига¬
ния.
Высоковольтные провода служат для подачи тока высокого
напряжения от катушки зажигания к распределителю и от распреде¬
лителя на свечи зажигания.
Свеча зажигания предназначена для воспламенения топливно¬
воздушной смеси путем образования искрового разряда.
Принцип работы контактной системы зажигания
Рис. 8.6. Принцип работы контактной системы зажигания
При замкнутом контакте прерывателя ток низкого напряжения
протекает по первичной обмотке катушки зажигания. При размыка¬
нии контактов во вторичной обмотке катушки зажигания индуцирует¬
ся ток высокого напряжения. По высоковольтным проводам ток высо¬
кого напряжения подается на крышку распределителя, от которой
распределяется по соответствующим свечам зажигания с определен¬
ным углом опережения зажигания.
При увеличении оборотов коленчатого вала двигателя, увеличи¬
ваются обороты вала прерывателя распределителя. Грузики центро¬
бежного регулятора опережения зажигания под действием центро¬
бежной силы расходятся, перемещая подвижную платину с кулачками
прерывателя. Контакты прерывателя размыкаются раньше, тем самым
207
увеличивается угол опережения зажигания. При уменьшении оборо¬
тов коленчатого вала двигателя угол опережения зажигания уменьша¬
ется.
Дальнейшим развитием контактной системы зажигания является
контактно-транзисторная система зажигания. В цепи первичной
обмотки катушки зажигания применен транзисторный коммутатор,
управляемый контактами прерывателя. В данной системе за счет при¬
менения транзисторного коммутатора уменьшена сила тока в цепи
первичной обмотки, тем самым увеличен срок службы контактов пре¬
рывателя.
8.3. Построение бесконтактных систем зажигания автомобильных
Две
Бесконтактная система зажигания (рис. 8.7) является конструк¬
тивным продолжение контактно-транзисторной системы зажигания. В
данной системе зажигания контактный прерыватель заменен бескон¬
тактным датчиком. Бесконтактная система зажигания стандартно
устанавливается на ряде моделей отечественных автомобилей, а также
может устанавливаться самостоятельно вместо контактной системы
зажигания.
Применение бесконтактной
системы зажигания позволяет
повысить мощность двигателя,
снизить расход топлива и вы¬
бросы вредных веществ за счет
более высокого напряжения раз-
ряда (30 000 В) и соответственно Рис 8>7> Внешний вид беСконтакт-
более качественного сгорания
топливно-воздушной смеси.
ной системы зажигания
Бесконтактная система зажигания имеет следующие устройства:
• источник питания;
• выключатель зажигания;
• датчик импульсов;
• транзисторный коммутатор;
. катушка зажигания;
• распределитель;
• центробежный регулятор опережения зажигания;
• вакуумный регулятор опережения зажигания;
• провода высокого напряжения;
208
• свечи зажигания.
В целом устройство бесконтактной системы зажигания анало¬
гично контактной системе зажигания, за исключением следующих
устройств: датчика импульсов и транзисторного коммутатора.
Датчик импульсов предназначен для создания электрических им¬
пульсов низкого напряжения. Различают датчики импульсов следую¬
щих типов:
• датчик Холла;
• индуктивный датчик;
• оптический датчик.
Наибольшее применение в бесконтактной системе зажигания
нашел датчик импульсов, использующий эффект Холла (возникнове¬
ние поперечного напряжения в пластине проводника с током под дей¬
ствием магнитного поля). Датчик Холла состоит из постоянного
магнита, полупроводниковой пластины с микросхемой и стального
экрана с прорезями (обтюратора).
Прорезь в стальном экране пропускает магнитное поле и в полу¬
проводниковой пластине возникает напряжение. Стальной экран не
пропускает магнитное поле, и напряжение на полупроводниковой
пластине не возникает. Чередование прорезей в стальном экране со¬
здает импульсы низкого напряжения.
Датчик импульсов конструктивно объединен с распределителем и
образуют одно устройство - датчик-распределитель. Датчик-
распределитель внешне подобен прерывателю-распределителю и име¬
ет аналогичный привод от коленчатого вала двигателя.
Транзисторный коммутатор служит для прерывания тока в цепи
первичной обмотки катушки зажигания в соответствии с сигналами
датчика импульсов. Прерывание тока осуществляется за счет отпира¬
ния и запирания выходного транзистора.
Принцип работы бесконтактной системы зажигания показан на
рис. 8.8.
При вращении коленчатого вала двигателя датчик-распределитель
формирует импульсы напряжения и передает их на транзисторный
коммутатор. Коммутатор создает импульсы тока в цепи первичной
обмотки катушки зажигания. В момент прерывания тока индуцирует¬
ся ток высокого напряжения во вторичной обмотке катушки зажига¬
ния. Ток высокого напряжения подается на центральный контакт рас¬
пределителя. В соответствии с порядком работы цилиндров двигателя
ток высокого напряжения подается по проводам высокого напряже¬
209
ния на свечи зажигания. Свечи зажигания осуществляют воспламене¬
ние топливно-воздушной смеси.
При увеличении оборотов коленчатого вала регулирование угла
опережения зажигания осуществляется центробежным регулятором
опережения зажигания. При изменении нагрузки на двигатель регули¬
рование угла опережения зажигания производит вакуумный регулятор
опережения зажигания.
Рис. 8.8. Принцип работы бесконтактной системы зажигания
8.4. Электронная система зажигания
Электронной системой зажигания (рис. 8.9) называется система,
в которой создание и распределение тока высокого напряжения по
цилиндрам двигателя осуществляется с помощью электронных
устройств. Система имеет другое название - микропроцессорная си¬
стема зажигания. Необходимо отметить, что контактно¬
транзисторная система зажигания и бесконтактная система зажигания
также включают электронные компоненты, но данные системы уже
имеют свои устоявшиеся названия. С другой стороны электронная си¬
стема зажигания не имеет механических контактов, поэтому, по сути,
является бесконтактной системой зажигания.
210
Электронная система зажигания яв¬
ляется составной частью системы управ¬
ления двигателем. Данная система осу¬
ществляет управление объединенной си¬
стемой впрыска и зажигания, а на по¬
следних моделях автомобилей и рядом
других систем- впускной и выпускной
системами. Существует множество кон¬
струкций электронных систем зажигания
ш
Рис. 8.9. Вид электронной
системы зажигания
(Bosch Motronic, Simos, Magneti-Marelli и др.), отличающиеся от¬
дельными конструктивными элементами. Вместе с тем электронная
система зажигания имеет следующее общее устройство: источник
питания; выключатель зажигания; входные датчики; электронный
блок управления; катушка (катушки) зажигания; провода высокого
напряжения; свечи зажигания.
Входные датчики фиксируют текущие параметры работы двига¬
теля и преобразуют их в электрические сигналы. К входным датчикам
относятся:
датчик частоты вращения коленчатого вала двигателя;
датчик массового расхода воздуха;
датчик детонации;
датчик температуры воздуха;
датчик температуры охлаждающей жидкости;
датчик давления воздуха;
датчик Холла (положения распределительного вала);
датчик положения дроссельной заслонки;
датчик положения педали газа;
датчик давления топлива;
кислородный датчик;
и др.
Номенклатура датчиков на разных моделях автомобилей может
различаться.
Микропроцессорная система зажигания не имеет механического
распределителя. Функции создания импульсов напряжения и распре¬
деления тока высокого напряжения по цилиндрам двигателя осу¬
ществляет электронный блок управления. Работа блока основана на
обработке сигналов входных датчиков.
Система зажигания может иметь одну общую катушку зажига¬
ния или отдельные катушки зажигания на каждую свечу.
211
Общая катушка зажигания имеет четыре вывода по числу цилин¬
дров двигателя. Конструктивно она состоит из двух катушек: одна для
1 и 4 цилиндров, другая - для 2 и 3 цилиндров. Каждая из катушек со¬
здает ток высокого напряжения на обоих выводах, поэтому искра за¬
жигания всегда происходит одновременно в двух цилиндрах. В одном
из цилиндров она воспламеняет топливно-воздушную смесь, в другом
происходит вхолостую.
Отдельные катушки зажигания устанавливаются непосредственно
на свечу, поэтому необходимость в высоковольтных проводах отпада¬
ет. Катушки зажигания имеют электронное управление. Принцип ра¬
боты электронной системы зажигания приведен на рис. 8.10.
В соответствии с сигналами датчиков электронный блок управле¬
ния вычисляет оптимальные параметры работы системы, в соответ¬
ствии с которыми подается напряжение на катушку зажигания. В цепи
первичной обмотки катушки зажигания начинает протекать ток. При
прерывании напряжения, во вторичной обмотке катушки индуцирует¬
ся ток высокого напряжения. По высоковольтным проводам или
непосредственно с катушки ток высокого напряжения подается к со¬
ответствующей свече зажигания. Создающаяся искра в свече зажига¬
ния воспламеняет топливно-воздушную смесь.
При изменении скорости вращения коленчатого вала двигателя со¬
ответствующий датчик подает сигнал в электронный блок управле¬
ния, который в свою очередь осуществляет необходимое изменение
угла опережения зажигания.
При увеличении нагрузки на двигатель управление углом опере¬
жения зажигания осуществляется с помощью датчика массового рас¬
хода воздуха. Дополнительную информацию о процессе воспламене¬
ния и сгорания топливно-воздушной смеси дает датчик детонации.
Другие датчики представляют дополнительную информацию о
режимах работы двигателя.
212
Рис. 8.10. Принцип работы электронной системы зажигания
Описание и работа электронной системы зажигания
Свечи зажигания
Рис. 8.11. Описание и работа электронной системы зажигания
На рис. 8.12 представлена структурная схема контроллера. В зада¬
чу контроллера входит обработать информацию, поступающую от
213
датчиков, и в соответствии с ней, установив оптимальный для данного
режима угол опережения зажигания, дать команду через коммутатор
на образование искры зажигания. В режиме принудительного холо¬
стого хода контроллером выдается команда на прекращение топливо¬
подачи. Контроллер получает информацию от индукционных датчи¬
ков: начала отсчета НО, установленного на картере сцепления так, что
он генерирует импульс напряжения в момент прохождения в его маг¬
нитном поле стального штифта, укрепленного на маховике, при по¬
ложении в верхней мертвой точке поршней 1 и 4 цилиндров, и датчи¬
ка угловых импульсов УИ, реагирующего на прохождение зубьев
венца маховика и снабжающего контроллер информацией о частоте
вращения и угле поворота коленчатого вала двигателя, полупровод¬
никового датчика температуры охлаждающей жидкости t порогового
типа, информирующего о достижении температуры заданного уровня,
датчика разряжения во впускном коллекторе Р тензометрического ти¬
па, информирующего о нагрузке двигателя.
Для управления экономайзером принудительного холостого хода
(ЭПХХ) сигнал поступает с концевого выключателя КВ от дроссель¬
ной заслонки. Сигналы с датчиков НО и УИ преобразуются преобра¬
зователем сигналов в прямоугольные импульсы с логическими уров¬
нями интегральных микросхем, сигнал с датчика разряжения, величи¬
на которого по напряжению пропорциональна разряжению, также
преобразуется до временные импульсы.
Рис. 8.12. Структурная схема контроллера
214
Система работает следующим образом: в постоянно запоминаю¬
щем устройстве ПЗУ контроллера записана информация об оптималь¬
ном угле опережения зажигания в зависимости от частоты вращения
коленчатого вала и нагрузки двигателя. Информация записана в двух
вариантах - характеристики для холодного (температура охлаждаю¬
щей жидкости ниже 65 °С) и прогретого двигателя. Нужная характе¬
ристика выбирается по сигналу с датчика температуры, поступающе¬
го на 1.0-й разряд адреса ПЗУ А10. Процессор Р, выполненный на
микросхеме КМ1823ВУ1, формирует сигнал “старт АЦП”, по-
которому устройство ввода-вывода (УВВ) запускает преобразователь
“напряжение - время” и начинает изменение напряжения с датчика
загрузки двигателя в цифровой код. По сигналу "Конец преобразова¬
ния" устанавливается в сети адрес ПЗУ в разрядах А5-А9 с допуском
к необходимой информации. Начало измерения загрузки двигателя и
вычисления угла опережения зажигания синхронизировано с импуль¬
сом НО. Вычисление угла опережения зажигания реализуется процес¬
сором по жесткому алгоритму. Когда величина вычисленного угла
совпадает с углом поворота коленчатого вала по сигналу с процессора
через УВВ включается блок <W3 (формирователь импульсов зажига¬
ния) на микросхеме КМ1823АГ1, вырабатывающий импульсы зажи¬
гания постоянной скважности, подаваемые через ключ СЗ на выход
блока управления.
Каналы управления многоканального коммутатора выбираются по
сигналу ИЗ, через ключ выбора канала ВК.
Особенности устройства и принцип работы полностью элек¬
трической системы зажигания. На двигателях с впрыском топлива в
головке цилиндров между вторым и третьим цилиндрами установлен
датчик детонации, посредством которого осуществляется медленное
или ускоренное регулирование угла опережения зажигания.
При медленном регулировании угол опережения зажигания по¬
этапно каждый раз на 1° перемещается в сторону запаздывания зажи¬
гания (это происходит одновременно для всех цилиндров) до полного
исчезновения детонации. После этого через определенный промежу¬
ток времени угол опережения зажигания начинает увеличиваться на
1° каждые 16 с, пока не вернется к номинальному значению, заданно¬
му контроллером (блоком управления зажиганием).
При медленном регулировании угол опережения зажигания
уменьшается максимально на 5°.
Быстрое регулирование угла опережения зажигания является вы¬
борочным. Датчик детонации определяет цилиндр, в мотором проис¬
215
ходит детонация, и на основе поступающей от него информации кон¬
троллер (блок управления зажиганием) вводит задержку момента за¬
жигания на 2-4°. Если детонация продолжается, то немедленно
угол опережения зажигания уменьшается еще на 4°. После исчезнове¬
ния детонации угол опережения зажигания увеличивается на 1° каж¬
дые 0,5 с.
При быстрой регулировании угол опережения зажигания умень¬
шается максимум на 10°.
При отказе датчика детонации угол опережения зажигания немед¬
ленно уменьшается на Т для всех цилиндров.
Примечание: если температура масла ниже 15 °С и выше 70 °С, на
основе информации, поступающей от датчика температуры масла, ко¬
торый установлен в передней части блока цилиндров рядом с масля¬
ным фильтром, блок управления дополнительно увеличивает угол
опережения зажигания на 10°.
Проверка и регулировка системы зажигания. Положение дат¬
чиков и распределителя зажигания устанавливается на заводе и в про¬
цессе эксплуатации автомобиля не регулируется, т.е. момент зажига¬
ния не регулируется. Предусмотрена возможность только проверки
электрических характеристик системы впрыска.
Предупреждение.
На автомобиле применена полностью электронная система зажи¬
гания. Поэтому, чтобы не получить травм и не вывести из строя элек¬
тронные узлы, необходимо соблюдать следующие правила.
Не проверять работоспособность контроллера или электронного
блока управления "на искру".
Не соединять с массой первичную или вторичную обмотки катуш¬
ки зажигания.
При проверке работоспособности высоковольтной части системы
зажигания при включенном стартере отсоединить высоковольтный
провод от крышки распределителя зажигания и отвести его на 2 см от
блока двигателя.
Для проверки системы зажигания использовать вольтметр, омметр,
контрольную лампу, стробоскоп, диагностический стенд.
8.5. Датчики, входящие в систему зажигания
- положения распределительного вала; - детонации; - кислорода; -
температуры охлаждающей жидкости двигателя; - массового расхода
воздуха; - положения дроссельной заслонки; - скорости автомобиля;
- положения коленчатого вала; - пропусков воспламенения; - поло¬
216
жения педали акселератора; - температуры поступающего воздуха; -
холостого хода; - крутящего момента двигателя.
Датчики углового положения коленчатого вала двигателя
Известен ряд бесконтактных датчиков (положении КВ), в основу
работы которых положены различные физические явления: - магни¬
тоэлектрические; - на эффекте Холла; - высокочастотные; - опто¬
электронные; - токовихревые, на эффекте Виганда; - фотоэлектриче¬
ские.
Исходя из стоимости производства, требований к точности момен¬
та искрообразования, помехозащищенности, стойкости к внешним
воздействиям два первых типа датчиков получили наибольшее при¬
менение.
Магнитоэлектрические датчики. Принцип действия магнито¬
электрического датчика заключается в изменении магнитного сопро¬
тивления магнитной цепи, содержащей магнит и обмотку, при изме¬
нении зазора с помощью распределителя потока (коммутатора) (рис.
8.13, где 1 - магнитная цепь (статор); 2 - магнит; 3 - обмотка; 4 -
распределитель потока (коммутатор)). При вращении зубчатого рото¬
ра в обмотке статора в соответствии с законом индукции возникает
переменное напряжение
U Rhix — kwn^,
вых daJ
где к - коэффициент, зависящий от характеристик магнитной цепи; w
- число витков обмотки; и - частота вращения распределителя потока;
dO/da - изменение потока Ф в зависимости от угла поворота.
Рис. 8.13. Магнитоэлектрический датчик
Когда один из зубцов ротора 4 приближается к полюсу статора 7, в
обмотке 3 нарастает напряжение. При совпадении фронта зубца ротора с
полюсом статора (со средней линией обмотки) напряжение на обмотке
достигает максимума, затем быстро меняет знак и увеличивается в проти¬
воположном направлении до максимума при удалении зубца.
217
Датчик на эффекте Холла. Эффект Холла возникает в полупро¬
водниковой пластине, внесенной в магнитное поле, при пропускании
через нее электрического тока. Если поместить элемент толщиной h в
магнитном поле таким образом, чтобы направление индукции В маг¬
нитного поля было перпендикулярно плоскости пластины, и пропу¬
стить ток I через пластину, то между противоположными гранями
пластины возникает ЭДС Холла:
ех —
кІВ
где к - постоянная Холла; м /А; к = %р; % - подвижность носителей то-
ка м /В; р - удельное сопротивление материала пластины, Ом.
Чувствительность элемента Холла зависит от соотношения между
длиной и шириной пластины и повышается при уменьшении ее тол¬
щины. Для пленки толщина h достигает ІО'6 м, для пластины из полу¬
проводникового кристалла - ІО'4 м. Для изготовления элементов Хол¬
ла используются германий, кремний, арсенид галлия (GaAs), арсенид
индия (InAs), антнмонид индия (InSb).
Электродвижущая сила самоиндукции Холла очень мала и по¬
этому должна быть усилена вблизи кристалла для того, чтобы уст¬
ранить влияние радиоэлектрических помех. Поэтому конструктивно и
технологически элемент Холла и преобразовательная схема, со¬
держащая усилитель У, пороговый элемент St, выходной каскад ѴТ и
стабилизатор напряжения СТ, выполняются в виде интегральной мик¬
росхемы, которая называется магнитоуправляемой интегральной схе¬
мой. Её структурная схема представлена на рис. 8.14, где ЭХ - чув¬
ствительный элемент Холла; В - индукция поля (изменяется от 0 до
Вшах; У - усилитель; St - триггер Шмитта; ѴТ - транзистор выходного
каскада с открытым выходом; СТ - источник стабилизированного
напряжения; RH - нагрузка.
218
Изменяя магнитное поле от 0 до Втах с помощью магнитного экра¬
на на выходе магнитоуправляемой интегральной схемы получаем
дискретный сигнал. Объединив магнитоуправляемую схему с магнит¬
ной системой в корпус, получают микропереключатель на эффекте
Холла, который устанавливается в традиционный распределитель.
8.6. Диагностика системы зажигания
Описание процесса. Подключаем контакты мотор-тестера к высо¬
ковольтным цепям в зависимости от системы зажигания, которое
установлено на автомобиле. Затем анализируем структуру графика, по
которому виден процесс горения, вспышки и значение пробоя.
Предназначение. Для определения правильности работы системы
зажигания и выявления неисправностей в высоковольтных цепях.
Результат. Восстановление работы ДВС, улучшение качества
приёма при разгоне, определение неисправности свечей зажигания.
Применяемое оборудование. Выполняется при помощи мотор-
тестера Scan Doc.
9. АНТИБЛОКИРОВОЧНАЯ СИСТЕМА ТОРМОЗОВ
Актуальность темы заключается в том, что многие аварии проис¬
ходят именно из-за высокой эффективности тормозов. На скользких
дорогах - мокрых или покрытых ледяной коркой - экстренное задей¬
ствование тормозов с целью быстро остановить автомобиль либо рез¬
ко снизить его скорость приводит обычно к прямо противоположному
результату. Колеса блокируются и теряют сцепление с дорожным по¬
крытием, а автомобиль нисколько не уменьшает скорость и, более то¬
го, вовсе перестает слушаться руля. Опытный водитель в таких случа¬
ях будет тормозить прерывисто, регулируя усилие на педаль тормоза
таким образом, чтобы сохранить максимальное сцепление колес с до¬
рогой и не допустить срыва автомобиля в занос. Однако далеко не все
водители имеют достаточный опыт, чтобы точно оценить ситуацию, и
уж совсем немногие обладают выдержкой и необходимыми навыка¬
ми, чтобы отреагировать на изменение дорожной обстановки долж¬
ным образом. Отсюда аварии и законное желание инженеров приста¬
вить к тормозам "пастуха", абсолютно беспристрастного, способного
219
исправлять оплошности водителя и сохранять ему контроль над авто¬
мобилем в любых условиях движения.
Практическая значимость заключается в том, что безопасность
водителя и пассажиров является первостепенным, и поэтому ABS
сможет предотвратить управляемость автомобиля в процессе резкого
торможения и исключить вероятность его неконтролируемого сколь¬
жения.
Ведутся изменения в электронной и механической составляющей
АБС, создаются новые алгоритмы его работы, делавшую эту систему
практически интеллектуальной. Допустим, на дорогу неожиданно вы¬
бежал ребенок. Ваша нога инстинктивно жмет на педаль тормоза,
датчик моментально вычисляет реакцию и силу нажатия на педаль и
определяет степень опасности ситуации. Затем сенсор за доли секун¬
ды передает сигнал тормозам, а они далее - тормозным суппортам,
активизируется АБС, автомобиль замедляет ход.
9.1. Антиблокировочная система тормозов автомобиля
Антиблокировочная система (АБС, ABS) (рис. 9.1) - это система,
которая предотвращает блокировку колёс транспортного средства при
торможении. Основное предназначение системы состоит в том, чтобы
предотвратить потерю управляемости транспортного средства в про¬
цессе резкого торможения и исключить вероятность его неконтроли¬
руемого скольжения.
В настоящее время применяются более сложные электронные си¬
стемы торможения, которые могут включать в себя:
- электронное распределение тормозных усилий (EBD);
- электронный механизм блокировки дифференциала (EDL);
- управление торможением двигателем (EDC);
- антипробуксовочная система (TCS).
Тормозная система, как и раньше, выполнена по двухконтурной
схеме, известной как диагональное распределение. Каждый контур
тормозной системы воздействует на переднее колесо диагонально. В
каждом из контуров тормозной системы предусмотрено два клапана -
впускной, который открывает путь жидкости из аккумулятора давле¬
ния к рабочему цилиндру, когда надо увеличить тормозное усилие, и
выпускной, позволяющий жидкости уйти обратно в бачок, когда дав¬
ление надо ослабить.
220
Контур гидравлического Выходная информация
привода тормозов
■ I ■ Контур гидравлического Входная информация
привода тормозов
Рис. 9.1. Функциональная схема ABS
Эти клапаны при исправной АБС либо открываются поочередно,
либо закрыты, если давление в контуре должно сохраняться неизмен¬
ным. Наконец, важно знать, что в обесточенном состоянии впускные
клапаны открыты, а выпускные - закрыты. Это позволяет при отказе
АБС просто отключить ее (например, вынув предохранитель F54 или
сняв разъем с ЭБУ) и тормозить, как на обычном автомобиле.
В момент начала торможения антиблокировочная система начина¬
ет точное отслеживание скорости вращения каждого из колёс. Как
только обнаруживается, что скорость вращения одного из колёс зна¬
чительно ниже скорости вращения других (что говорит о возможной
блокировке), тормозное усилие ограничивается посредствам клапана,
расположенного в тормозной магистрали заблокированного колеса.
Как только скорость вращения колеса нормализуется, антиблокиро¬
вочная система восстанавливает тормозное усилие. Описанный про¬
цесс происходит несколько раз, при этом сопровождается пульсацией
педали тормоза. Именно это информирует водителя о работе АБС.
Преимущества электрогидравлических тормозов:
- во-первых, сокращается время срабатывания,
- во-вторых, происходит более точное распределение тормозных
сил между колесами,
221
- в-третьих, такая система более гибко коммутируется с АБС и
различными системами стабилизации движения,
- в-четвертых, на педали не чувствуется пульсации при срабаты¬
вании АБС, характерной для современных гидромеханических тор¬
мозных систем,
в-пятых, отпадает необходимость в вакуумном усилителе, что осо¬
бенно актуально для автомобилей с дизельными двигателями.
Недостатки.
К недостаткам можно отнести, то что на рыхлых поверхностях
будто гравий или снег, тормозной путь будет увеличен, но зато авто¬
мобиль не потеряет управление.
На рис. 9.2 приведена классификация тормозных систем.
Рис. 9.2. Классификация тормозных систем
Системы распределения тормозного усилия:
EBD, Electronic Brake Force Distribution
EBV, Elektronishe Bremskraftverteilung
Системы курсовой устойчивости:
ESP (Electronic Stability Programme) на большинстве автомобилей в
Европе и Америке;
ESC (Electronic Stability Control) на автомобилях Honda, Kia, Hyundai;
222
DSC (Dynamic Stability Control) на автомобилях BMW, Jaguar, Rover;
DTSC (Dynamic Stability Traction Control) на автомобилях Volvo;
VS A (Vehicle Stability Assist) на автомобилях Honda, Acura;
VSC (Vehicle Stability Control) на автомобилях Toyota;
VDC (Vehicle Dynamic Control) на автомобилях Infiniti, Nissan, Subaru;
VDIM (Vehicle Dynamics Integrated Management) на автомобилях Toyota.
Системы экстренного торможения:
BA (Brake Assist), BAS (Brake Assist System), EBA (Emergency Brake
Assist) на автомобилях Mercedes, Toyota и др.;
AFU на французских автомобилях Renault, Peugeot, Citroen.
HBA (Hydraulic Braking Assistance) на автомобилях Volkswagen, Audi;
HBB (Hydraulic Brake Booster) на автомобилях Volkswagen, Audi;
SBC (Sensotronic Brake Control) на автомобилях Mercedes;
DBC (Dynamic Brake Control) на автомобилях BMW.
Ераница срабатывания системы АБС изображена на рис. 9.3.
Антиблокировочная система делится на 3 типа:
• одноканальная АБС - тормозные усилия ограничиваются по всей
тормозной системе одновременно;
• двухканальная АБС - ограничиваются тормозные усилия на каж¬
дой из сторон автомобиля;
• многоканальная АБС - тормозные усилия ограничиваются на
каждом отдельно взятом колесе.
223
Одноканальные антиблокировочные системы обеспечивают
наилучшее торможение только в том случае, когда все колёса нахо¬
дятся на схожем покрытии. Многоканальные системы обеспечивают
наилучшее торможение на неоднородных участках дороги среди всех
перечисленных систем, однако они значительно сложнее и дороже.
В настоящий момент на автомобили устанавливаются электриче¬
ские антиблокировочные системы (АБС, ABS), которые независимо
от чего отслеживают вращение каждого колеса. При этом не суще¬
ствует обратной связи с педалью, противоположной заднему колесу.
От гидравлического блока к каждому колесу (4-х канальный вариант)
проложены отдельные трубопроводы.
9.2. Разновидности систем ABS
В настоящее время на легковых автомобилях применяется доста¬
точно большое количество самых разнообразных вариантов исполне¬
ния систем антиблокировки тормозов (ABS). Общим для всех ABS
является то, что они дополняют рабочие функции гидравлической
тормозной системы (ГТС) автомобиля принципиально новым каче¬
ством - способностью интенсивного торможения без блокировки ко¬
лес. Для достижения этой цели любая система ABS помимо основных
компонента ГТС включает в свой состав датчики частоты вращения
колес. Электронный блок управления гидротормозами (ЭБУ-Т) авто¬
мобиля и центральный гидравлический исполнительный механизм
(ЦИМ), который раздельно управляет колесными тормозными цилин¬
драми (КГЦ), а сам управляется от электрических сигналов ЭБУ-Т.
Разновидности систем ABS можно классифицировать на четыре
типа по четырем отличительным признакам:
а - конструктивным особенностям системы;
б - функциональным возможностям системы;
в - компонентному составу;
г - эксплуатационным свойствам (преимуществам и недостаткам).
1. Если система ABS выполнена с применением шариковых клапа¬
на (ШК), которые управляются поршневыми толкателями, а послед¬
ние в свою очередь приводятся в действие червячными передачами
(ШЧМ) от электродвигателя - ЭД, то такая система работает без гид¬
ронасоса с использованием давления от главного тормозного цилин¬
дра (ГТЦ) и классифицируется как вентильная ABS (ABS-Y), или как
ABS первого типа (ABS-T1).
224
Если система ABS реализована с применением шариковых клапа¬
нов, которые управляются от гидроусилителя руля (ГУР) посредством
поршневых толкателей, а переключение режимов торможения - с по¬
мощью двухпозиционного электрогидроклапана (ДПЭК), то система
может быть отнесена в отдельный (второй) тип. В состав ЦИМ такой
системы дополнительно входят три гидравлических клапана: предо¬
хранительный (ПХК), перепускной (ППК) и переключающий (ПКК).
2. Если в системе ABS давление в колесных тормозных цилиндрах
управляется посредством двух- или трехпозиционных гидроклапанов
(ТПЭК), которые в свою очередь управляются электрическими сигна¬
лами от ЭБУ-Т и в системе имеется электрогидронасос низкого дав¬
ления (ГННД), то такая система называется электроклапанной (ABS-
К) и относится к третьему типу (ABS-T3). Система дополняется регу¬
лятором-распределителем давления (РРД) и редукционным клапаном
(РК).
3. Если система ABS содержит в своем составе гидроаккумулятор
высокого давления - ГАВД (120 - 180 бар) с подпорным герметичным
пневморессивером - ПРВД (азот, гелий), то эта система содержит
гидронасос высокого давления (ГНВД) с автоматическим гидровы¬
ключателем насоса (ГВК) и классифицируется как ABS с гидроакку¬
мулятором (ABS-Г), или как ABS четвертого типа (ABS-T4). Давле¬
ние в КТЦ управляется посредством четырех клапаннопоршневых ре¬
гуляторов (КПР), которые в свою очередь управляются трехпозици¬
онными электрогидроклапанами, каждый из которых составлен из
двух двухпозиционных клапанов. Системы ABS-T4 более эффектив¬
ны в работе, обладают высоким быстродействием и могут применять¬
ся совместно с электронными системами EDS, ЕВѴ и ASR.
4. Если регулировке с помощью ABS подвергаются два передних
колеса в отдельности, а два задних колеса вместе по одному общему
гидроканалу регулирования (Select low), то система называется трех¬
канальной. Наиболее простой вариант такой системы реализован с
использованием давления от главного тормозного цилиндра.
5. Если регулировке с помощью ABS подвергаются только два
задних колеса, но по одному (общему) гидроканалу, то система назы¬
вается одноканальной. Такая система выполняет функцию регулятора
тормозов заднего моста и устанавливалась на японском автомобиле
"TOYOTA" еще в 1971 г. Это первое применение системы ABS на се¬
рийном автомобиле. В классификацию включена более поздняя одно¬
канальная система ABS (для японского автомобиля "TRUCK", 1989 г.
225
выпуска), в которой в качестве рабочего давления используется дав¬
ление гидроусилителя руля - ГУР.
6. Если с помощью ABS регулировке подвергается каждое из четы¬
рех колес в отдельности, то система называется четырехканальной.
Применяется на большинстве современных автомобилей высокого по¬
требительского класса.
7. Если ABS используется на полноприводном автомобиле, то в
системе устанавливается специальный инерционный датчик, а систе¬
ма называется ABS с датчиком (ДЗ) замедления (может быть одно-,
трех- или четырехканальный, в отдельный тип не выделяется).
8. Если давление в управляемом с помощью ABS колесном цилин¬
дре может удерживаться для трех случаев торможения (торможение с
повышением давления, торможение с удержанием давления, тормо¬
жение с понижением давления), то система ABS трехпозиционная.
Специфический компонент 3-позиционной ABS - трехпозиционный
гидроклапан с электромагнитным управлением от ЭБУ-Т.
9. Если давление в колесном цилиндре может удерживаться только
для двух случаев торможения (с увеличением и понижением давле¬
ния), то система ABS - двухпозиционная. Реализуется такая система с
применением двухпозиционных гидроклапанов. Однако с помощью
пары двухпозиционных клапанов можно создать один трехпозицион¬
ный электрогидроклапан (используется в системах ABS-T4).
9.3. Теоретические предпосылки полезного функционирования
системы ABS
При движении автомобиля с постоянной скоростью разницы в
скоростях вращения колес не возникает. При этом не возникает также
разницы между приведенной скоростью Ѵа движения автомобиля и
согласованной с ней усредненной скоростью Ѵк, вращения колес, т.е.
Ѵа = ѴК. При этом под усредненной скоростью вращения колес по¬
нимается величина
ѴК = (ѴК1 + ѴК2 + ѴКЗ + ѴК4)/4,
где ѴК1 + VK4 - скорости вращения каждого колеса в отдельности.
Но как только начинается процесс интенсивного торможения, при¬
веденная скорость кузова автомобиля Ѵа начинает превышать усред¬
ненную скорость ѴК вращения колес, так как кузов "обгоняет" колеса
под действием силы инерции массы автомобиля, т.е. Ѵа > ѴК.
226
В такой ситуации между колесами и дорогой возникает явление
равномерного умеренного скольжения. Это скольжение является ра¬
бочим параметром тормозной системы.
Физически рабочее скольжение в отличие от аварийного юза реа¬
лизуется за счет пригибания протектора колесных шин, сдвига мелких
фракций на поверхности дороги, и за счет амортизации автомобиль¬
ной подвески. Эти факторы удерживают автомобиль от юза и отобра¬
жают полезную суть рабочего скольжения колеса при его торможе¬
нии. Ясно, что при этом замедление вращения колеса происходит по¬
степенно и управляемо, а не мгновенно, как при блокировке. Величи¬
на S названа коэффициентом скольжения и измеряется в процентах.
S = * 100 %,
где Ѵа- скорость автомобиля; Ѵк- скорость колеса.
Если S = 0 %, то колеса вращаются свободно, без воздействия на
них дорожного сопротивления трению НК. Коэффициент скольжения
S = 100 % соответствует юзу колеса, когда оно переходит в заблоки¬
рованное состояние.
При появлении эффекте рабочего скольжения, при котором все
еще имеет место нормальное качение колес, между ними и дорогой
возникает равномерно возрастающее сопротивление трению RA, ко¬
торое является функцией от рабочего скольжения S и создает силу
торможения автомобиля FT = KRA(S). К - конструктивный коэффи¬
циент пропорциональности, зависящий от состояния протектора шин,
тормозных колодок, тормозных дисков и тормозных суппортов.
Важно заметить, что при малых S (от 0 % до 7 %) сила торможения
линейно зависит от скольжения, что обеспечивает наиболее эффек¬
тивное торможение. Это имеет место при плавном и медленном нажа¬
тии на педаль тормоза. При более интенсивном торможении скольже¬
ние S растет, а сила FT торможения начинает уменьшаться или, в
лучшем случае, остается постоянной. Для эффективного торможения
система ABS ограничивает давление тормозной жидкости, предот¬
вращая блокировку колес, удерживая коэффициент скольжения S в
оптимальных пределах 0,05 - 0,2 (рис. 9.4).
Коэффициент скольжения
V -V
S = ^ *
ѵ. ’
где Ѵа - скорость автомобиля; Ѵк - линейная скорость точки на ради¬
усе колеса.
227
Системы ABS большинства производителей настроены на ком¬
промиссное значение S=0,1. Но дорожные условия разные и на обле¬
денелой дороге S должно быть равно 0,05, а на сухом асфальте 0,2
(см. рис. 9.4). Датчики текущего состояния дорожного покрытия
слишком дороги. Переключатель, управляющий системой ABS, для
водителя устанавливать бессмысленно. С другой стороны, опытный
водитель по реакции автомобиля при нажатии педали тормоза спосо¬
бен идентифицировать состояние покрытия дороги. Это же делает и
ЭБУ-ABS по информации от имеющихся датчиков: скорости и уско¬
рения автомобиля, скорости и ускорения колес, давления тормозной
жидкости. Информация обрабатывается по алгоритмам нечеткой ло¬
гики. Эксперименты показали, что работа системы ABS существенно
улучшается уже при введении шести продукционных правил.
Из сказанного ясно, что основной задачей ABS является автомати¬
ческое (без участия водителя) поддержание коэффициента скольже¬
ния S в пределах от 10 % до 30 %, когда сила торможения автомобиля
максимальна. При некоторых состояниях дорожного покрытия,
например, на твердом и сухом бетоне, система ABS может привести к
некоторому увеличению тормозного пути автомобиля по сравнению с
этим показателем для случая интенсивного торможения с выключен¬
ной ABS.
Рис. 9.4. Зависимость силы трения от коэффициента скольжения S
Однако в последнем случае устойчивость движения автомобиля не
гарантирована, а износ колесной резины и тормозных колодок резко
взрастает. В большинстве же случаев тормозная система с ABS значи¬
тельно эффективнее классической тормозной системы.
228
9.4. Функциональная модель системы ABS для одного переднего
колеса
Схема в зависимости от режима торможения может находиться в
следующих пяти состояниях.
1. Режим "торможение без ABS". В этом случае: YK1 = YK2 =
ѴКЗ = YK4 = Ѵа, где Ѵа = (ѴК1 + VK2 + ѴКЗ + YK4)/4.
2. Режим "снижения давления" в КТЦ (ослабление силы торможе¬
ния колес). Этот режим возникает, когда от колесного датчика КД
данного колеса в ЭБУ поступает сигнал о замедлении вращения (со¬
стояние, близкое к блокировке колеса). При этом
Ѵа = (ѴК1 + ѴК2 + ѴКЗ + ѴК4)/4 > ѴК1, так как Ѵа < (ѴК2 + ѴКЗ +
ѴК4)/3.
3. Режим "удержания давления" в КТЦ. Этот режим возникает, ко¬
гда система ABS автоматически выходит из режима "снижение давле¬
ния". Это происходит по сигналу от колесного датчика, когда ѴК1
снова становится равной Ѵа.
4. Режим "увеличения давления" в КТЦ. Этот режим возникает, ко¬
гда от колесного датчика КД приходит сигнал повышенной скорости
вращения данного колеса, т.е. сигнал, при котором ѴК1 > Ѵа (колеса
со скоростью вращения ѴК2, ѴКЗ, Мни - тормозятся, а со скоростью
ѴК1 - вращается свободно).
5. Во всех четырех состояниях функциональная схема при обрат¬
ном ходе тормозной педали работает на возврат тормозной жидкости
обратно в ГГЦ через обратный клапан КЗ.
9.5. Место установки
Усилитель тормозов с главным тормозным цилиндром последова¬
тельного типа и блок ABS являются двумя независимыми компонен¬
тами. Во всех моделях тормозной усилитель работает по принципу
вакуумного усиления. Блок ABS - отдельный модуль, который кре¬
пится на передней стенке салона в моторном отсеке слева (рис. 9.5).
229
Это расположение одинаково для моделей с левосторонним и пра¬
восторонним рулем (на моделях с правосторонним рулем усилитель
тормозов размером 7’78” установлен отдельно в правой части мотор¬
ного отсека).
Главный тормозной цилиндр последовательного типа соединен с
блоком ABS гибкими тормозными шлангами.
Благодаря встраиванию ЭБУ ABS в гидравлический блок для пе¬
редачи управляющего сигнала электромагнитному клапану и электро¬
двигателю насоса нет необходимости в жгутах электропроводки, что
обеспечивает более высокую надежность.
Усилитель Главный тормозной БлокАВБ
тормозов цилиндр
последовательного типа /
Гибкие тормозные шланги
Рис. 9.5. Место расположения элементов ABS
230
9.6. Основные элементы и их функции
Основные элементы АБС и их функции. Таблица 9. 1
Название элемента
Описание выполняемых функций
Датчик
Датчик скорости
колеса
Передает в ЭБУ ABS сигнал с частотой, пропорциональной
скорости вращения каждого из колес
Исполни¬
тельный
механизм
Г идравли-ческий
блок
По сигналу из ЭБУ ABS приводит в действие электромагнит¬
ный клапан и управляет давлением тормозной жидкости в каж¬
дом из колес
Световой сигна¬
лизатор ABS
Свечением, миганием или отключением по сигналам из ЭБУ
ABS сообщает водителю о состоянии системы.
Сигнальный ин¬
дикатор ABS
Свечением, миганием или отключением по сигналам из ЭБУ
ABS сообщает водителю о состоянии системы.
Световой сигна¬
лизатор тормоз¬
ной системы
Используется в качестве светового сигнализатора для стояноч¬
ного тормоза, указателя уровня тормозной жидкости и управ¬
ления EBD. Свечением, миганием или отключением по сигна¬
лам из ЭБУ ABS, сообщает водителю о состоянии системы.
Сигнальный ин¬
дикатор тормоз¬
ной системы
Используется в качестве сигнального индикатора для указателя
уровня тормозной жидкости. Свечением, миганием или отклю¬
чением по сигналам из ЭБУ ABS сообщает водителю о состоя¬
нии системы.
Диагностический разъем
Служит для подключения к диагностическому оборудованию
Блок управления ABS (ЭБУ
ABS)
Управляет исполнительными устройствами по сигналам, по¬
ступающим со всех датчиков.
Управляет функциями самодиагностики и функциями самоот-
ключения. Управляет функцией диагностики
231
Датчик скорости (рис. 9.6) состоит из постоянного магнита и ка¬
тушки индуктивности. Он соединен с блоком управления. Датчик
скорости работает по принципу генератора, иными словами, когда
зубчатое колесо ротора вращается перед этим датчиком, в индукци¬
онной катушке генерируется синусоидальный ток.
Частота тока зависит от скорости вращения.
Блок управления анализирует синусоидальные колебания и рас¬
считывает мгновенную скорость колеса.
Зазор между зубчатым ротором и датчиком скорости чрезвычайно
важен для правильной работы системы ABS (от него зависит ампли¬
туда импульсов датчика).
Если во время езды подшипник колеса люфтит, то возникает не¬
значительное изменение зазора датчика скорости колеса. Величина
зазора меняется. Поэтому важно при проведении ремонтных и регу¬
лировочных работ проверять зазор так, как это указано в руководстве
по ремонту. Если зазор слишком велик, то блок управления отключа¬
ет управление этим колесом. Ерязь, которая может накопиться между
зубьями ротора, также может стать причиной отказа системы ABS.
'V/WW ІІ
вращающегося колеса датчике скорости
Рис. 9.6. Составные части датчика скорости
Еидравлический насос и гидравлический блок представлен на рис. 9.7
232
Гидравлический насос
\ Г идравлический блок
\ /
\ і
\ /
Рис. 9.7. Г идравлический насос и гидравлический блок
Эти два компонента образуют единый блок и не должны разъеди-
няться.Гидравлический блок содержит управляющие клапана системы
ABS, которые используются в управляющих циклах ABS.
Источником давления для системы ABS является гидравлический
насос.
Он работает при получении сигналов от системы управления, при
утечке тормозной жидкости и закачивает ее через открытый входной
клапан тормоза колеса, чтобы создать требуемое давление.
Электронный блок управления ABS. ЭБУ ABS определяет ско¬
рость автомобиля по сигналам датчиков скорости вращения колес и
распознает состояние вращения колес, по заданному алгоритму оце¬
нивает состояние проскальзывания колес и управляет электромагнит¬
ным клапаном так, чтобы колеса не блокировались.
В ЭБУ ABS встроены функции самодиагностики и запоминания.
При обнаружении каких-либо неисправностей функцией самодиагно¬
стики ЭБУ ABS включает функцию самоотключения и включает све¬
товые сигнализаторы ABS и тормозной системы.
После того как были рассмотрены основные элементы ABS, я при¬
вел структурную схему (рис. 9.8).
233
Датчик скорости колеса(переднего левого)
Датчик скорости колеса(заднего левого)
Датчик скорости колеса(переднего правого)
Датчик скорости колеса(заднего правого)
Выключатель стоп-сигнала
Питание ЭБУ
Регулирующий электромагнитный клапан
(передний правый) - входной сигнал
ЭБУ ABS
Регулирующий электромагнихный
(передний правый) - выходной сиг
Регулирующий электромапім іім.іГі
^ПС|ТСЩЙЙ^іеВЫЙ]^!ХОЩОЙ_СИГН£Щ
клапан
сигнал
■’егулирующии электромагнит і ими
передний левый) - выходной сиги;
клапан
сигнал
Регулирующий э
(задним правый)
электромагшт гныи клапан
' входной сигнал
Регул
(задни:
электромагнитиыи клапан
авый) - выходной сигнал
Регулирующий
(задний левый)
электромагнитный клапан
- входной сигнал
Регулирующий электромагнитным клапан
(задний левый) —
■выходноисштгал
Комбинированная панель и
многофункциональный дисплей
• Световой сигнал тормозной
системы
• Световой сигнализатор ABS
□ • Световой сигнал тормозной
системы
• Световой сигнализатор ABS
Диагностический разъём
Переднее правое колесо (1111)
Датчик
скорости
колеса
(переднего
правого)
Выключатель
\\ стоп-сигнала
Датчик
скорости
колеса
(заднего
правого)
Гидравлический блок
Датчик скорости колеса
(переднего левого)
Датчик скорости
(заднего левого)
Переднее левое колесо (ПЛ)
Заднее левое колесо (ЗЛ)
Рис. 9.8. Структурная схема ABS
9.7. Управление гидравлическим давлением ABS
Цикл управления АБС (рис. 9.9) следующий.
1. По сигналам четырех датчиков скорости вращения колес ЭБУ
ABS вычисляет скорость и замедление каждого колеса и оценивает
скорость автомобиля в данный момент.
2. При нажатии педали тормоза давление тормозной жидкости в
тормозном цилиндре увеличивается, и скорость вращения колеса
уменьшается. При увеличении разницы между скоростями вращения
234
колес и скоростью автомобиля и падении скорости автомобиля ниже
заданного значения (точка А) ЭБУ определяет, что колеса заблокиро¬
ваны. В этот момент ЭБУ понижает давление тормозной жидкости,
подавая на электромагнитные клапаны сигнал понижения давления
(ВХОДНОЙ, ВЫХОДНОЙ). (Между а и Ь).
3. Когда замедление автомобиля прекращается и скорость враще¬
ния колес начинает восстанавливаться, а скорость автомобиля дости¬
гает точки В, ЭБУ подает сигнал фиксации давления, чтобы обеспе¬
чить постоянное давление жидкости в тормозных цилиндрах колес.
(Между b и с).
4. Когда замедление автомобиля продолжает прекращаться и ско¬
рость достигает точки С, ЭБУ определяет, что вероятность блокиров¬
ки колес устранена и увеличивает давление тормозной жидкости, сно¬
ва выдавая сигнал увеличения давления. (Между с и d).
5. Управление давлением тормозной жидкостью осуществляется по¬
средством повторного увеличения и фиксации давления. (Между d и е).
6. Когда замедление колеса снова падает ниже порогового значе¬
ния, ЭБУ ABS выполняет управление давлением тормозной жидко¬
сти, повторяя цикл (шаги со 2 по 5).
235
9.8. Диагностика системы ABS
Сама по себе антиблокировочная система является довольно
сложным механизмом, который включает в себя и механическую, и
электронную часть. И как следствие они могут выходить из строя.
Ниже будет предложена система диагностирования как самому, так и
специальным прибором.
Самодиагностика. При появлении неисправности сигнальная
лампа в комбинации приборов не загорается. Следует определить, где
возникла неисправность:
- в системе тормозов;
- в ABS.
Для этого:
- включить реле питание ABS;
- проверить работу системы придвижения автомобиля.
Диагностика системы АБС по сигнальной лампе. Таблица 9.2
Операция проверки
Состояние сигнальной лампы
Исправна
Неисправна
Выключение зажи¬
гания
Не горит
Горит
Выключение зажи¬
гания без пуска
двигателя
Не горит
Загорается на 0,5 с и гаснет
Не горит
Пуск двигателя
Не горит
Загорается через 20 с
Горит
Мигает
Проверка на ходу
торможения, при¬
менив аварийное
торможение
Не горит
Горит
Мигает
Если неисправность сохраняется, то причина не связана с ABS, то¬
гда необходимо действовать в приведенной ниже следующей после¬
довательности.
1. Проверить состояние механических элементов конструкции ав¬
томобиля, относящихся к тормозной системе.
2. Уровень тормозной жидкости в бачке в норме.
3. Проверить визуально, не загрязнена ли жидкость в главном ци¬
линдре.
236
4. Проверить главный цилиндр и модулятор на утечки.
5. Проверить детали тормозов на всех колесах.
6. Убедиться, что не происходит прихватывание тормозов (регули¬
ровка выключателя контрольной лампы тормоза).
7. Проверить равенство тормозного усилия на всех колесах (отсут¬
ствие бокового увода).
8. Проверить на износ и повреждения тормозные колодки.
9. Проверить на износ и повреждения колесные подшипники.
10. Проверить датчики скорости колес и их провода.
11. Проверить на повреждения зубчатые кольца датчиков скоро¬
сти.
12. Проверить на износ шины и определить толщину протектора.
13. Чтобы убедиться в наличии неисправности, выполнить проб¬
ный выезд, если проблемы не устранились, значит надо выполнить
проверку цепи сканером и по коду ошибки найти не исправность.
Диагностирование с применением специальной аппаратуры
Диагностирование аппаратуры проводится обычным автоскане¬
ром, который подключается в диагностический разъем (рис. 9.10), ко¬
торая находится в районе коробки предохранителей, около рулевой
колонки.
Перечень кодов неисправностей АБС, отображаемых диагностиче¬
ским прибором, приведён в таблице.
Код
Описание кода
С0035
Отказ в цепи переднего левого ДСК или недостоверный
сигнал
С0040
Отказ в цепи переднего правого ДСК или недостовер¬
ный сигнал
С0045
Отказ в цепи заднего левого ДСК или недостоверный
237
сигнал
С0050
Отказ в цепи заднего правого ДСК или недостоверный
сигнал
С0060
Отказ в цепи выпускного переднего левого ЭМК
С0065
Отказ в цепи впускного переднего левого ЭМК
С0070
Отказ в цепи выпускного переднего правого ЭМК
С0075
Отказ в цепи впускного переднего правого ЭМК
С0080
Отказ в цепи выпускного заднего левого ЭМК
С0085
Отказ в цепи впускного заднего левого ЭМК
С0090
Отказ в цепи выпускного заднего правого ЭМК
С0095
Отказ в цепи впускного заднего правого ЭМК
С0110
Отказ в цепи ЭВН
С0121
Отказ в цепи реле включения напряжения питания ЭМК
С0161
Отказ в цепи выключателя сигнала торможения
С0245
Ошибка при измерении частоты ДСК
С0550
Внутренняя неисправность ЭБУ
С0800
Напряжение питания ниже или выше рабочего диапазо¬
на
Заключение
Рассмотрен принцип действия, характеристики, структурные и
электрические схемы управления основными системами электроники
и автоматики автомобилей.
Рассмотрены датчики автомобильных электронных систем.
Приведены разновидности электронных систем: управления авто¬
мобильным двигателем, электроснабжения автомобиля; электропри¬
водные системы; автоматизация рабочих процессов автомобилей и
тракторов; система электростартерного пуска; электронные системы
зажигания; антиблокировочная система тормозов.
Рассмотрены системы диагностики и самодиагностики. Освещено
диагностирование электронных систем с применением специальной
аппаратуры.
238
Литература
1. Соснин Д.А. Автотроника. Электрооборудование и системы борто¬
вой автоматики современных легковых автомобилей: Учебное посо-
бие.М: Солон-Р, 2005. 272 с.
2. Соснин Д.А., Яковлев В.Ф. Новейшие автомобильные электронные
системы, - М: Солон-Пресс, 2005.- 240 с.
3. ЮттВ.Е. Электрооборудование автомобилей. Учебник для вузов. -
4-ое изд. Перераб. И доп. - М: Горячая линия -Телеком, 2008. - 440с.:
ил.
4. Автомобильные двигатели. Системы управления и впрыска топли¬
ва. Руководство по обслуживанию и ремонту. 2000, «Альфамер»,
Хельсинки, Финляндия.
5. Автомобильный справочник Bosch. Перевод с англ. Первое русское
издание. - М: ЗАО «ЮКИ «За рулем», 2002. - 896 с.
6. Акимов С.В., Чижков Ю.П. Электрооборудование автомобилей.
Учебник для вузов. - М: ЗАО «ЮКИ «За рулем», 2004. - 384 с.: ил.
7. Резник А.М., Орлов В.М. Электрооборудование автомобилей. - М:
Транспорт, 1983. - 248 с.
8. Топливные насосы высокого давления распределительного типа.
Учебное пособие и ТНВД (Bosch), Издательство: Легион-Авто дата,
Число страниц: 132.
9. Полуянович Н.К. Монтаж, наладка, эксплуатация и ремонт
электро-оборудования и систем электроснабжения промышленных
предприятий. (№ 3787) Таганрог. Изд-во ТРТУ, 2005 - 232 с.
10. Полуянович Н.К. Силовая электроника. Таганрог. Изд-во
ТРТУ.2006-34с.
11. Полуянович Н.К. Дубяго М.Н. Электрический привод ISBN: 978-5-
9275-1811-1 Учебное пособие-Таганрог: Изд-во ЮФУ, 2015 - 164 с.
12. Полуянович Н.К. Тибейко И.А. Эксплуатация и ремонт эл. обору¬
дования промышленных предприятий Уч. пос. Таганрог: Изд-во ИТА
ЮФУ, 2014.-406 с.
239
Учебное издание
Полуянович Николай Константинович
Дубяго Марина Николаевна
Учебное пособие
по курсу
Системы электроники и автоматики автомобилей
тракторов
Редакторы: Проценко И.А., Селезнева Н.И.
Корректоры: Проценко И.А., Селезнева Н.И.
Подписано в печать 14.11.2017
Заказ № Тираж 40 экз.
Формат 60x84 1/16. Усл.п.л. - 14,9. Уч - изд.л. - 14,7.
Издательство Южного федерального университета
344091, г. Ростов-на-Дону, пр. Стачки, 200/1.
Тел. (863) 2478051.
Отпечатано в Отделении
полиграфической, корпоративной и сувенирной
продукции МПК КИБИ МЕДИА ЦЕНТРА ЮФУ.