/






















































































































































































Author: Денда В.
Tags: электротехника кибернетика электроника радиоэлектроника
ISBN: 5-03-002019-5
Year: 1993




Text
В.ДЕНДА
ШУМ
КАК ИСТОЧНИК
ИНФОРМАЦИИ
Перевод с немецкого
канд. техн, наук М.М. Гельмана
Москва «Мир» 1993
ББК 32.811.1
ДЗЗ
УДК 621.391.822
Федеральная целевая программа книгоиздания России
Денда В. Шум как источник информации: Пер. с
ДЗЗ нем.-М.: Мир, 1993.-192 с.: ил.
ISBN 5-03-002019-5
Книга немецкого специалиста, содержащая систематизированное краткое изло-
жение вопросов фильтрации и статистической обработки сигналов. Представлены
практические методы создания устройств для воспроизведения случайных процессов
известными функциями распределения, а также методы испытаний целого ряда
устройств, в частности усилителе!!, \Ц и ЦА преобразователей с использованием
белого шума.
Для специалистов по методам и средствам обработки сигналов, а также сту-
дентов и аспирантов, специализирующихся и областях радиоэлектроники и техники
связи.
2303040500 035
041(01) 93
КБ 46 35 92
ББК 32.811.1
Редакци и lu^iepamypbi по новой технике
1N 5-03-002019-5 (русск.)
1N 3-341-00507-2 (нем.)
© VEB Verlag Technik, Berlin, 1988
© перевод на русский язык, Гель-
ман М.М., 1993
Предисловие переводчика
Решение проблемы выделения слабых сигналов, воспринимаемых на
фоне шума, путем повышения энергетической чувствительности при-
емников имеет определенные пределы, связанные в основном с допу-
скаемым отношением сигнал/шум.
Качественно новые результаты в повышении достоверности воспри-
нимаемой информации в системах радиосвязи, радиолокации и нави-
гации, телевидения, а также в информационно-измерительных и управ-
ляющих системах были достигнуты на пути создания и использования
различных методов фильтрации и статистической обработки сигналов
Следует подчеркнуть, что шумоподобные сигналы с известными ста-
тистическими функциями распределения используются в настоящее вре-
мя для повышения точности измерений характеристик процессов, а так-
же для решения задачи идентификации различных систем.
Все эти вопросы в той или иной мере освещены в различной
литературе. Представляется, что их систематизированное изложение,
исходя из общей концепции «шум как источник информации», дается
впервые. Одно из достоинств этой работы практическая направлен-
ность, что делает ее доступной для широких кругов специалистов
в различных областях радиоэлектроники, информатик % передачи дан-
ных, автоматического управления, метрологии и измерительной тех-
ники, контроля и испытаний.
Книга состоит из семи глав. В первой главе (введении) показана
актуальность разработки и использования различных методов и средств,
предназначенных для выделения сигналов из шума.
Во второй главе рассмотрены представления случайных процессов
(сигналов) в частотной и временной областях, описаны статистические
характеристики сигналов и их параметры, изложены особенности белого
шума, помех, импульсных шумоподобных сигналов и низкочастотного
шума, порожденного фликкер-эффектом
Третья глава посвящена принципам построения технических средств,
воспроизводящие различные виды случайных процессов с различными
заданными функциями распределения. Подобные генераторы представ-
ляют собой, по существу, источники «образцовых» шумов, используе-
мых для испытаний различных радиоэлектронных устройств и иных
объектов и определения их полных и частных динамических характе-
ристик. Методы тестовых испытаний некоторых аналоговых и аналого-
6
Предисловие переводчика
цифровых устройств описаны в последующих разделах. Такие источники
в качестве опорных используют также и в средствах измерений, рабо-
тающих на принципе статистических испытаний (методы Монте-Карло).
В четвертой главе изложены основы методов и построения средств
измерений характеристик и параметров шумов, аналоговой и цифровой
фильтрации шумов с целью выделения полезных сигналов, а также
методы и средства измерений шумов транзисторов, операционных
усилителей, интеграторов, аналого-цифровых и цифро-аналоговых пре-
образователей, используемые для контроля их годности.
Пятая глава посвящена вопросам уменьшения влияния шума на
точность измерений и’ передачи сигналов путем их статистической
обработки (усреднения) и ограничения полосы пропускания, а также
использования методов сжатия и цифровой передачи данных.
В шестой главе рассмотрены методы метрологических испытаний
линейных систем с использованием белого шума, характеризуемого
постоянной спектральной плотностью. Такие испытания требуют су-
щественно меньше времени по сравнению с использованием набора
моногармоничсских сигналов, так как в белом шуме содержится широ-
кий 'пекф частотных составляющих с одинаковой амплитудой. В ка-
честв! примеров приведены результаты испытаний элемента задержки
(знсн.1 третьего порядка) и одноконтурной системы регулирования,
в процессе которых определялись АЧХ и ФЧХ, аналогового фильтра
(определялась его полоса пропускания) и закрытого помещения с целью
определения его акустических характеристик.
Последняя, седьмая глава посвящена методам анализа различных
шумоподобных сигналов, направленного на определение их функций
распределения, спектральной мощности, автокорреляционной функции
и др.
В приложении описаны алгоритмы для ЭВМ, предназначенные для
воспроизведения (генерирования) случайных сигналов с нормальной
и экспоненциальной функциями распределения, а также имитационная
модель измерения характеристик шума в аналого-цифровом преобра-
зователе, реализуемая на ЭВМ.
Актуальность рассмотренных вопросов не вызывает сомнений. Ма-
териал книги широко иллюстрирован примерами и результатами прак-
тических исследований с использованием минимально необходимых
математических соотношений. Поэтому, с учетом всего вышеизложен-
ного, представляется, что книга должна быть с интересом воспринята
читателем.
М. Гельман
От автора
В общем случае под шумом понимают помехи, вызывающие нередко,
особенно в информационных системах, достаточно серьезные проблемы.
Поэтому для борьбы с ними необходимо изучать их свойства. В этой
связи следует говорить и об информационном аспекте рассмотрения
шумов, основанном на определении их характеристик и параметров.
Наиболее информативным является низкочастотный шум.
В предлагаемой читателю книге основное внимание уделено рас-
смотрению низкочастотных шумов, характерных, в частности, для полу-
проводниковых активных элементов (транзисторов, интегральных ми-
кросхем). Наряду с описанием шума и шумоподобных сигналов изло-1
жены некоторые принципы искусственного их воспроизведения. Отдель-
ный раздел посвящен обнаружению и обработке сигналов, воспринимае-
мых на фоне шума. Рассмотрены вопросы паразитного воздействия
шума, использования шумоподобных сигналов в качестве испытатель-
ных и анализа шума с целью извлечения содержащейся в нем полезной
информации.
Книга предназначена для оказания практической помощи инженерам,
занимающимся разработкой и применением полупроводниковых ус-
тройств и анализом шумоподобных сигналов, а также для ознакомления
с уровнем достижений в области извлечения информации и* шума.
Схемотехнические вопросы изложены лишь в той мере, в какой эго
необходимо для освещения основной темы книги, с указанием соот-
ветствующей литературы для желающих более подробно ознакоми гься
с этими вопросами.
Материал изложен с привлечением несложных математических со-
отношений, в основном необходимых для практического применения.
Некоторые математические выводы приведены для того, чтобы читатель
получил навыки самостоятельного решения подобных проблем. В книге
содержится также обширный иллюстративный материал, что должно
способствовать лучшему восприятию обсуждаемой проблемы.
Особую благодарность хочу выразить профессору Е. Столярскому из
Института электроники и технологии в Варшаве, который во время
нашего многолетнего плодотворного сотрудничества во многом повли-
ял на появление идеи написать настоящую книгу. Вместе с тем выражаю
свою признательность коллегам за их понимание и поддержку при моей
работе над рукописью, а также редактору О Орлику за весьма полезную
совместную работу при подготовке рукописи к изданию.
В. Денда
Обозначения
В ширина частотной полосы пропускания
Е[Х] математическое ожидание случайной величины X
F шум-фактор
F(jco) частотная характеристика
F(p)- передаточная функция непрерывной системы
f -частота
fK частота перехода фликкер-шума (сопрягающая частота)
fm средняя частота полосы пропускания фильтра
/i,/2 -соответственно нижняя и верхняя граничные частоты полосы
пропускания фильтра
H(z) передаточная функция цифровой системы
kf форм-фактор
Р вероятность
R, Rg внутреннее сопротивление источника теплового шума
Ts шаг дискретизации сигнала
t - время
UR напряжение теплового шума
Us амплитуда напряжения импульсного шума
v коэффициент усиления
vSr отношение сигнал/шум
W спектральная плотность мощности
WB оценка величины W
Ww спектральная плотность мощности белого шума
w плотность вероятности
\|/ху - авто- и взаимнокорреляционные функции
р среднее значение функции распределения
ст среднеквадра гичное отклонение
т0. т1- время паузы и длительности импульсов шума
со-круговая частота
1. Введение
Под «шумом» в узком смысле этого слова часто понимают так назы-
ваемый белый шум, характеризующийся тем, чго его амплитудный
спектр распределен по нормальному закону, а спектральная плотность
мощности постоянна для всех частот1}. Примером белого шума явля-
ется тепловой шум резистора. Следует подчеркнуть, что при усреднении
напряжения белого шума на достаточно большом интервале времени
наблюдения полученное значение окажется нулевым.
В более широком смысле под шумом (шумами) по ассоциации
с акустикой понимают помехи, представляющие собой смесь случайных
и кратковременно детерминированных процессов. Детерминированные
(периодические) сигналы с незначительной случайной составляющей,
например слегка зашумленный гармонический процесс или наводки от
сети переменного тока, под приведенное понятие помех не подпадают.
В общем случае шум содержит ту или иную информацию, которую
можно выделить определением (измерением) соответствующих его ха-
рактеристик и параметров, используя определенные методы анализа.
Основное внимание в книге уделено рассмотрению шумов полупро-
водниковых устройств. Эти шумы порождены случайными процессами,
связанными с движением носителей зарядов в полупроводниках Раз-
личие в механизмах генерации обусловливает возникновение различных
видов шумов со своими специфическими характеристиками. В зави-
симости от формы различают белый, фликкер- и импульсный шумы.
С точки зрения извлечения информации из шума (измерения его харак-
теристик) классификация шумов по характеру источника их возникно-
вения представляется нецелесообразной. Примером может служи ть
шум, возникающий при генерации и рекомбинации носителей Он имеет
ярко выраженные характерные признаки, однако при правильно задан-
ном режиме эксплуатации полупроводникового элемента мощность
этого шума оказывается весьма малой и несоизмеримой с общей
мощностью всех иных шумов, подлежащих анализу в их смеси. Фликкер-
и импульсный шумы проявляются в области частот ниже 20 кГц. На
более высоких частотах наблюдается, как правило, белый шум, анализ
которого может ограничиваться низкочастотной областью с нижней
граничной частотой 1 Гц. Однако и на более низких частотах (примерно
до 10 4 Гц) возникают весьма интересные эффекты. Для их исследо-
вания используют принципы трансформирования (переноса) частот
п Белый шум следует рассматривать как математическую идеализирован-
ную модель, так как все реальные процессы характеризуются спектральной
плотностью мощности, убывающей при очень высоких частотах. Прим, перев.
10
Глава 1
(изменения масштаба времени) сигналов и цифровые методы обработки.
Целью анализа шумоподобных сигналов является определение ха-
рактеристик и параметров шума, последующая интерпретация которых
может быть направлена в том числе и на обоснование отбора и при-
менения полупроводниковых элементов для технических средств сбора
и обработки данных. Именно эти вопросы, основанные на физических,
технологических и прикладных методах исследований, нашли отражение
в данной книге.
В процессе изготовления полупроводниковых элементов шум явля-
ется весьма чувствительным индикатором при контроле их качества.
Так, годным считается элемент, генерирующий низкочастотный белый
шум с квазистабильным уровнем с незначительной примесью фликкер-
шума. Соотношения их параметров обусловлены технологическими
факторами. Возрастание фликкер-шума и наличие импульсного шума
свидетельствуют о превышении допустимого количества «грязных»
примесей в материале полупроводника, наличии дефектов в пластинах
и монтажных соединениях.
Об извлечении максимальной информации из шумов необходимо
позаботиться на этапе разработки этих элементов. Эта информация
интересует и потребителя, так как позволяет ему оценивать надежность
и ресурс работы аппаратуры, содержащей полупроводниковые приборы.
Полупроводниковые элементы, генерирующие фликкер- и импульс-
ный шумы повышенного уровня, в среднем характеризуются большей
интенсивностью отказов, нежели элементы, генерирующие в основном
тепловой белый шум. Поэтому, осуществляя входной контроль и отбра-
ковку полупроводниковых приборов по виду шумов и их уровням,
можно повысить надежность соответствующих технических средств,
изготовляемых на их основе. Массовое внедрение контроля при произ-
водстве и применении полупроводниковых приборов, основанного на
анализе шумов, может привести к значительному экономическому эф-
фекту. Однако это достижимо лишь при определенной подготовке
промышленного производства, расширении исследований в указанной
области контроля и достаточных инвестициях.
В предлагаемой читателю книге основное внимание уделено рас-
смотрению вопросов измерения и обработки шумоподобных сигналов
низкочастотного диапазона с целью их анализа. Математический аппа-
рат и физические принципы рассмотрены в той мере, в какой это
необходимо для уяснения механизмов возникновения различных видов
шумов [1.1 1.7]. Рассмотрены принципы построения генераторов шу-
мов с определенными свойствами и характеристиками, представляющих
собой важные средства для моделирования методов анализа и прове-
дения испытаний объектов. Наряду с измерением характеристик шумов
рассмотрены принципы улучшения отношения сигнал/шум в каналах
передачи информации и методы идентификации объектов с использо-
ванием (в качестве тестовых) шумоподобных сигналов, базирующиеся на
тех же методах анализа шумов.
2. Описание шумов и
шумоподобных сигналов
2.1. Статистические характеристики
случайных процессов
На рис. 2.1 2.3 представлены осциллограммы отдельных реализаций
двух разновидностей шумов. Характерным для них, в отличие от
детерминированных сигналов (процессов), является невозможность
предсказания точного мгновенного значения, которое появится в тот или
иной определенный момент времени. Можно лишь на основе длитель-
ного наблюдения оценить вероятность появления мгновенного значения
функции внутри заданного интервала. И если для белого шума (рис. 2.1
и 2.2) сказанное не требует дальнейших пояснений, то для импульсного
шума (рис. 2.3) необходимо помнить, что, несмотря на наличие лишь
двух значений сигналов шума, случайность процесса проявляется в том,
что переход от одного значения к другому может происходить в любой
момент времени. Для описания распределения амплитуд обычно исполь-
зуют функцию плотности вероятности и(х). Если вероятность попада-
ния амплитудного значения в интервал (х0, х0 -I- АХ) составляет
P[_XQ < х < (х0 + Ах)], то плотность вероятности в точке х0 можно
определить как
, . г <*<(л0 + Дх)]
w(*0)= hm -------------------. (2.1)
Дх-оо
Для некоторых характерных распределений плотность вероятности мож-
но представить в виде элементарных математических функций. Веро-
ятность того, что амплитудное (мгновенное, возможное) значение ока-
жется меньше значения х0, можно записать в виде
хо
Р(х < х0) = J vv(x) dx. (2.2)
— 00
Если х0 — оо, то из условия нормировки имеем
f w(x)dx=l. (2.3)
-
Приведенные выражения пригодны лишь для непрерывной случайной
величины с непрерывной функцией распределения. Для дискретного
распределения амплитуд (см. рис. 2.3) возможные амплитудные зна-
чения хк характеризуются отдельными значениями вероятности рк.
Соответственно условие нормировки (2.3) для дискретного распреде-
12
Глава 2
Рис. 2.1. Осциллограмма широкополосного белого шума.
Ч I j
Рис. 2.2. Осциллограмма узкополосного белого шума.
ления амплитуд можно записать в виде
Еа =1 •
к
(2.4)
По известной функции амплитудного распределения можно вычислить
моменты случайного процесса.
Момент первого порядка есть математическое ожидание Е [JV]
случайного процесса X. Математическое ожидание шума физически
представляет собой постоянную составляющую. Математическое ожи-
дание непрерывной случайной величины представляет собой интеграл
Описание шумов и шумоподобных сигналов
13
Рис. 2.3. Осциллограмма двухуровневого импульсного шума
вида
Л/Д Е[Х]= f xw(x)dx, (2.5)
— со
а математическое ожидание дискретной случайной величины опреде-
ляется суммой
Ml-Y.x*pk- (2.6)
к
Математическое ожидание центрированной случайной величины равно
нулю. При анализе шума часто представляет интерес математическое
ожидание Е [| X |] абсолютного значения амплитуды X. Этой величине
соответствует математическое ожидание переменного сигнала после его
двустороннего выпрямления Для центрированного сигнала (при
Е [X] = 0) при его непрерывности можно записать, что
Е[|Х|] = 2 f xw(x)dx = 2 J xw(x)dx, (2.7)
0 — oo
а в случае его дискретного представления
Е[|Х|] = Х|хк|Л. (2.8)
к
Центральный момент М2 второго порядка случайного процесса X назы-
вают дисперсией D2[X] Корень квадратный из дисперсии именуют
среднеквадратичным отклонением (СКО), или стандартным отклоне-
нием а случайной величины. СКО шума равно эффективному значению
14
Глава 2
его переменной составляющей. Для вычисления дисперсии непрерывных
и дискретных величин используют соответствующие формулы:
M2 = D2[X]= J (х- Е[Х])2 w(x)dx, — 00 (2.9)
M2 = D2[X]=£(xk-E[X])2A. к (2.10)
В практике вычислений используют также выражение
D2[X] = Е [X2] — (Е [X])2, (2.П)
или в развернутой форме оо Г оо 12
D2[X] = f x2w(x)dx — j xw(x)dx , (2.12)
— co co / \ 2 О2 [X] = YxkPk - ( YxkPk) • к X к / (2.13)
Математическое ожидание и дисперсия обладают следующими свой-
ствами:
Е[аХ + Ь] = аЕ[Х]+Ь, (2.14)
D2 [аХ + 6] = л2Р2[Х] . (2.15)
Если случайный процесс представлен, например, в виде стохастического
напряжения, то в предыдущих выражениях величина а соответствует
коэффициенту усиления, а величина b уровню постоянной составляю-
щей. Следует подчеркнуть, что дисперсия не зависит от постоянной
составляющей процесса.
До сих пор мы ограничивались рассмотрением случайной величины
X как возможного значения случайного процесса (функции) X (t) в опре-
деленный момент времени t. Если рассматривать стационарные случай-
ные величины в моменты времени и t2, отстоящие друг от друга на
интервал времени т, то можно их охарактеризовать условной плот-
ностью распределения w(x1? х2) = w(x, т), где зависимость именно от
т = t2 — связана со стационарностью случайного процесса.
Для дальнейшего обобщения рассмотрим два различных стационар-
ных случайных процесса X и Y Закон условной плотности распределения
для них можно записать в виде
, ч Р(х0< х <х0 +Лх; у0< у <у0 +&у)
w(x0,y0, т)= lim -------------—------------------, (2.16)
Дх “* О AW
Ах -* О
показывающем, с какой вероятностью в момент времени значение
х случайной величины X попадает в интервал (х0, х0 + Ах), а в момент
времени t2 значение у случайной величины Y попадет в интервал
(Уо, Уо + Ду)-
Описание шумов и шумоподобных сигналов
15
Особую роль играет второй смешанный центральный момент (ма-
тематическое ожидание произведения центрированных величин X и У):
00 00
J f xyw(x, y,x)dxdy. (2 17)
— оо - оо
Эта характеристика называется корреляционной функцией случайных
процессов X и Y и представляет собой условную плотность распре-
деления, зависящую от интервала т между рассматриваемыми мо-
ментами времени.
Корреляционная функция случайного процесса x(t) определяется
выражением
оо оо
VxxCO = f f xlx2w(xi9 x2, i)dx1dx2 . (2 18)
— oo — oo
Она характеризует степень связи значений случайной величины для двух
разных моментов времени, зависящую от интервала т.
2.2. Представление случайных процессов
во временной области
Детерминированный сигнал описывается функцией времени x(Z),
а также характеризуется средним по времени значением. Совершенно
очевидно, что стохастический сигнал (процесс) не может быть пред-
ставлен подобной функцией времени. В лучшем случае подобная функ-
ция может быть определена эмпирически для отдельной выборки сто-
хастического процесса. Если зарегистрированная выборка достаточно
представительна (так что в ней могут проявиться статистические зако-
номерности, реализующиеся в бесконечном множестве выборок) на всем
интервале времени наблюдения, то, как и в случае детерминированного
процесса, на этом интервале можно оценить среднее значение стохасти-
ческого процесса по его выборке.
Из требования о необходимости представительности регистрируемой
выборки вытекают определенные ограничения на понятие стационар-
ности случайного процесса. Стационарный случайный процесс характе-
ризуется постоянством математического ожидания независимо о г мо-
мента времени наблюдения. Однако этого условия стационарности
недостаточно.
Так как обычно случайный процесс может быть представлен только
одной-единственной своей реализацией, то приведенные в предыдущем
разделе выражения для определения моментов оказываются непригод-
ными для оценки стационарности этого процесса. На практике стацио-
нарность процесса определяют по постоянству во времени его диспер-
сии. Случайный процесс полагают стационарным при неизменности его
дисперсии для любых произвольно выбранных равных интервалов
времени наблюдения. Это условие требует бесконечного временного
16
Глава 2
интервала наблюдения, что практически недостижимо. Поэтому обычно
задают определенный интервал времени наблюдения и соответствую-
щий допуск отклонений дисперсий.
Процедуры нахождения средних по времени значений для случайных
и детерминированных процессов весьма похожи. Различие лишь в пре-
делах интегрирования: для детерминированного периодического про-
цесса оно может быть ограничено одним его периодом, а для случайного
процесса требуется интегрирование по бесконечному интервалу времени.
Однако на практике, как и для дисперсии, предел интегрирования по
времени ограничивают.
Математическое ожидание стационарного случайного процесса, опи-
сываемого функцией времени x(t), определяется выражением
--- 1 т
x(t)= lim — f x(f)dt. (2.19)
т-»oo 21 _т
Математическое ожидание шума представляет собой его постоянную
составляющую, а математическое ожидание центрированного случайно-
го процесса равно нулю. Иногда при измерении шума его среднеариф-
метическое значение сравнивают с эффективным, которое определяют
как усредненное выпрямленное напряжение шума:
= lim J |х(г)|Л. (2.20)
Г —♦ оо 21 _р
Выражение квадрата среднего значения центрированного стационарного
случайного процесса
____ 1 т
х2(/)= lim — f x2(t)dt (2.21)
Т-оо 21 _т
представляет собой дисперсию этого процесса. Обычно же эффективное
значение напряжения шума X (его среднеквадратичное отклонение)
определяют как
X = . (2.22)
При совместном воздействии множества независимых случайных сиг-
налов квадраты их эффективных значений суммируются. Это правило
распространяется также на среднеквадратичные отклонения постоянной
и переменной составляющих сигнала.
Выражение (2.21) можно представить как произведение двух слу-
чайных величин (сечений случайной функции), относящихся к двум
близким моментам времени, разделенных интервалом времени т, и по-
лучить тем самым выражение автокорреляционной (корреляционной)
функции (АКФ):
Vxx(t)= lim — f x(t)x(t + z)dt.
т <x> 21 _T
(2.23)
Описание шумов и шумоподобных сигналов 17
Автокорреляционная функция характеризует степень связи (корреля-
цию) между сечениями случайной функции, отстоящими друг от друга
на интервал времени т. АКФ играет важную роль как основная харак-
теристика случайного процесса, содержащая информацию об изменении
этого процесса во времени.
Аналогичным образом можно описать взаимосвязь двух различных
случайных функций (сигналов) x(z) и y(t), представленную взаимной
корреляционной функцией
1 т
\|/хДт)= lim — j x(t)y(t+ i)dt. (2.24)
T -» oo 2 1
Следует указать на ряд важнейших свойств автокорреляционной функ-
ции.
Эта функция является четной, т. е. не изменяется при изменении знака
аргумента т1}. Указанное свойство можно продемонстрировать, ис-
пользуя выражение (2.23) и поменяв в нем местами моменты времени.
При т = О корреляционная функция (2.23) обращается в квадрат
эффективного значения случайной функции'(2.21):
Vxx(0) = X2. (2.25)
В этот момент времени автокорреляционная функция достигает мак-
симума:
Ухх(О) > Ухх(т). (2.26)
Данное свойство отражает тот факт, что определенное значение слу-
чайной функции в наибольшей степени коррелировано с самим собой
Смесь периодического процесса с шумом (стохастическим процессом)
наглядно отображается соответствующей корреляционной функцией.
При больших значениях т, т.е. для сечений случайной функции, рас-
положенных далеко друг от друга, соответствующая автокорреляцион-
ная (взаимнокорреляционная) функция указывает на минимальную ста-
тистическую связь либо на ее отсутствие.
Если автокорреляционная функция процесса равна нулю при любом
т / 0, то это характеризует стохастичность данного процесса, в част-
ности, речь может идти, например, о широкополосном белом шуме.
Автокорреляционная функция не содержит информации о фазовом
спектре процесса, что не позволяет восстановить процесс в виде функции
времени. Если математические ожидания случайного процесса при его
статистическом и временном представлениях равны, то данный процесс
называют эргодическим* 2). Очевидно, что свойство эргодичности при-
п Это свойство непосредственно следует из условия симметрии \|/ху(т) =
— Vvx(-t)- Прим, перев.
2) Строго говоря, среднее по множеству наблюдений должно быть при-
ближенно равно среднему по времени на достаточно большом участке наблю-
дения. Об эргодичности процесса говорит и стремление корреляционной функции
к нулю при т -► оо. Прим, перев.
2-23
18
Глава 2
суще только стационарным случайным процессам Встречающиеся на
практике стационарные случайные процессы, в частности шумы, с боль-
шой достоверностью можно считать эргодическими. Оценка эргодич-
ности процесса оказывается затрудненной или вовсе невозможной при
небольшом числе его реализаций.
2.3. Представление случайных процессов
в частотной области
Частотный спектр сигналов играет важную практическую роль в оце-
нивании свойств, а также качественных и количественных характеристик
исследуемых процессов Ч
Периодические сигналы могут быть представлены амплитудным
спектром в форме ряда Фурье, причем спектр в этом случае является
дискретным, т. е. содержит дискретное множество частот. При переходе
к непериодическим детерминированным колебаниям x(t) дискретный
спектр становится непрерывным (сплошным) и процесс x(i) характе-
ризуется спектральной плотностью амплитуд (или спектральной плот-
ностью), вычисляемой по выражению прямого преобразования Фурье
(интегралу Фурье):
Х(/и) = f x(t)e~jMdt = F{x(t)} (2.27)
Обратное преобразование Фурье позволяет восстановить процесс x(t):
X(t) = f X(jco)e+^J(D = F-1 {£(»}. (2.28)
Спектральная плотность является комплексной функцией и помимо
информации о гармоническом составе процесса содержит информацию
и о фазах этих гармоник.
Для случайного процесса существует понятие спектральной плот-
ности мощности 5 (со), определяемое через его эффективное значение по
выражению
Х2= f S(co)cfa). (2.29)
— 00
Спектральная плотность и спектральная плотность мощности связаны
11 Спектром процесса называют функцию, описывающую распределение
амплитуд по частотам различных гармоник. Для случайного процесса эти
амплитуды являются случайными величинами, поэтому спектр такого процесса
характеризует распределение дисперсий по различным частотам. Прим, перев.
Описание шумов и шумоподобных сигналов
19
зависимостью
$(<•>) = lim -Д=|£(>) |2, (2.30)
Т-*оо47ГТ —
т. е. спектральная плотность мощности пропорциональна квадрату мо-
дуля спектральной плотности Ч Последнее выражение представляет
собой вещественную функцию, не содержащую фазовых соотношений,
и не может быть решено относительно его правой части. Оно не
позволяет определить функцию x(t) случайного процесса, но дает
представление о характере его спектральной плотности мощности.
Вычислить спектральную плотность мощности случайного процесса
можно, используя теорему Винера Хинчина, располагая при этом
корреляционной функцией процесса Так как корреляционная функция
может быть определена и с использованием статистических характе-
ристик сигнала, и при представлении последнего во временной области,
то упомянутый подход к расчету спектральной плотности мощности
пригоден в равной степени как для стохастических, так и для детерми-
нированных процессов.
Согласно теореме Винера Хинчина, зависимость между корреля-
ционной функцией у(т) и спектральной плотностью мощности 5 (со)
случайного процесса может быть представлена следующим образом:
1 00 1
S(<o) = —- J Т(г)е->’Л = —(2.31)
2л_00 2л
у(т) = f S(co)e^T<*j = F-1{5(<o)}. (2.32)
— 00
Спектральная плотность мощности может быть представлена рядом
выражений, позволяющих соответствующим образом преобразовать
выражение (2.29), в частности к виду
Х2= ] S(ay)da> = f S(f)df, (2.33)
- 00 - 00
п Выражение (2.30) неудовлетворительно, поскольку оно следует лишь из
усреднения по времени произведения величин (2 28) и возникновения отношения
IX (jay) 12/Т, в котором формально числитель не зависит от периода усреднения Т
Корректное определение функции S (со) имеет вид
X (jay) X* (jay') = S (со) 6 (со — со'),
где звездочка означает комплексное сопряжение, а черта сверху усреднение по
ансамблю реализаций. Поскольку в левой части приведенного выражения содер-
жится усреднение, оказывается невозможным и определение комплексной функ-
ции X(jay) через 5 (со). Прим, перев.
2*
20
Глава 2
или
£2 = f Ш)(/(й) = J W(f)df. (2.34)
- оо О
Следует отметить, что, в то время как плотности мощности РУ(со) и W(f)
определены для положительных частот, спектральные плотности мощ-
ности 5 (со) и S(f) определены в соответствии с двусторонним преоб-
разованием Фурье для амплитуд для положительных и отрицательных
частот, причем 5(/) = 5(—/). Это приводит к следующим соотноше-
ниям:
JV(co) = 2S(co), (2.35)
W(f) = 2тгРГ(со) = 4тг5 (со). (2.36)
При анализе процессов во временной и частотной областях широко
используют цифровую обработку сигналов. Причем одни и те же
алгоритмы оказываются пригодными для обработки как детермини-
рованных, так и стохастических сигналов, если можно пренебречь
условиями их различия или удовлетворить им.
2.4. Белый шум
Белый шум представляет собой одну из разновидностей случайных
процессов и характеризуется распределением амплитуд по нормальному
закону, а также постоянством спектральной плотности мощности при
всех частотах Г). Модуль спектральной плотности мощности является
единственным информативным параметром белого шума.
На практике постоянство спектральной плотности мощности можно
полагать лишь условно, так как реальные технические системы обла-
дают ограниченной частотной полосой пропускания. Ее обычно считают
постоянной в интересующих пределах амплитудно-частотной характе-
ристики системы.
Нормальное (точнее, близкое к нему) амплитудное распределение
белого шума в электронных приборах обусловлено хаотическим дви-
жением множества носителей зарядов. Среднее значение случайных
независимых перемещений этих зарядов равно нулю, что не приводит
к появлению остаточных смещенных зарядов. Тем самым допускается
представлять амплитудное распределение белого шума нормальным,
или гауссовым, законом с нулевым математическим ожиданием. Плот-
ность вероятности напряжения белого шума описывается выражением
[1-4]
1 (и2
где о-среднеквадратичное отклонение.
п Название дано по аналогии с белым светом, имеющим в видимой части
равномерный сплошной спектр. - Прим, перев.
(2.37)
Описание шумов и шумоподобных сигналов
21
Рис. 2.4 Гистограмма широкополосного белого шума аппроксимированная нор-
мальной функцией распределения.
На рис. 2.4 приведена гистограмма белого шума, осциллограмма
которого показана на рис. 2.1, при его передаче по каналу с верхней
граничной частотой полосы пропускания 3,2 кГц. Эта гистограмма,
аппроксимируемая нормальной функцией распределения и с хорошим
приближением, соответствует функции плотности вероятности. Линей-
ная цепь передачи сигнала, например фильтр, не деформирует функцию
амплитудного распределения. Сказанное иллюстрирует гистограмма
того же шума (рис. 2.5), гистограмма которого приведена на рис. 2.4, но
переданного через дополнительно подключенный к упомянутому выше
каналу передачи узкополосный фильтр (с полосой пропускания В =
= 160 Гц). Осциллограмма шума, полученного после узкополосной
фильтрации, показана на рис. 2.2.
Эффективное значение напряжения белого шума, как и в случае
эргодического стационарного процесса, можно вычислить по выраже-
ниям (2.9) и (2.37). При бесконечно малом среднем значении, согласно
(2.9), можно записать, что
U2 = f u2w(u)du.
— 00
22
Глава 2
Рис. 2.5. Гистограмма узкополосного белого шума аппроксимированная нормаль-
ной функцией распределения.
Подставляя в это соотношение выражение (2.37) для w(w), получим
Так как функция w(u) является симметричной, можно записать, что
После вычисления интеграла получим
т. е. эффективное значение напряжения белого шума представляет собой
среднеквадратичное отклонение амплитудного распределения и равно
корню квадратному из дисперсии. Равенство эффективного значения
напряжения шума его среднеквадратичному отклонению сохраняется
Описание шумов и шумоподобных сигналов
23
для любого закона распределения при условиях нулевого математи-
ческого ожидания и эргодичности процесса.
Интерес при исследованиях белого шума представляет его коэффи-
циент формы (форм-фактор), определяемый как отношение эффектив-
ного значения напряжения шума к математическому ожиданию его
модуля. Математическое ожидание модуля напряжения в соответствии
с выражением (2.7) запишем в виде
— ? 2 7 ( w2 \
| и | = 2 J ию (и) du = -==- J и ехр ( — —I du,
о у/2тиз о \ 2о /
или, после вычисления интеграла,
(2.39)
Вычисляя этот интеграл, получим для коэффициента формы белого
шума выражение
Эффективное значение напряжения белого шума можно также вычис-
лить по выражению (2.34) при известной спектральной плотности
мощности W(f). Теоретически при W(f) = Ww, равном постоянному,
отличному от нуля значению для всех частот, эффективное значение
напряжения белого шума становится бесконечно большим. Это служит
еще одним доказательством того, что требование обеспечения постоян-
ства плотности мощности при всех частотах практически не может быть
выполнено При ограничении спектра, согласно выражению (2.34), эф-
фективное значение напряжения белого шума является конечным. В
частности, при прохождении белого шума через идеальный фильтр
с прямоугольной передаточной характеристикой и граничными часто-
тами j\ и f2 эффективное значение его напряжения равно
*2
О2 = f Ж(Л#= Ww(f2 -fx). (2.41)
fl '
Далее в разд. 4.1.3 показано, как выбрать граничные частоты реального
фильтра, чтобы выражение (2.41) можно было использовать для рас-
четов.
Характер изменения автокорреляционной функции идеального бе-
лого шума можно оценить, исходя из следующих соображений. Значение
шума u(t0) не коррелировано с соседним значением u(t0 4- т), так как
вследствие неограниченности спектра идеального белого шума послед-
нее может принять любое произвольно большое значение. Это означает,
что для всех т / 0 автокорреляционная функция становится исчезающе
малой. И лишь для т = 0 она равна квадрату эффективного значения
24
Глава 2
напряжения белого шума, причем, как показано ниже, принимая бес-
конечно большое значение. Функция такого вида представляет собой
дельта-функцию Дирака.
Реальный белый шум имеет ограниченный частотный спектр 1}, что
обусловливает ограничение скорости изменения его значений и, следо-
вательно, ограничение изменений этих значений в определенном интер-
вале времени т. Это приводит к корреляции значений процесса w(/0)
и м(г0 + т). С уменьшением верхней граничной частоты спектра процесса
уменьшается максимальная скорость его изменения и расширяется
область коррелированных амплитудных значений этого процесса. С уве-
личением интервала т корреляция, естественно, ослабевает.
На рис. 2.6. приведены равномасштабные во времени кривые авто-
корреляционных функций широкополосного квазибелого шума с верх-
ними граничными частотами 5 и 1 кГц. Эти кривые подтверждают
рассмотренные выше зависимости. Важно подчеркнуть, что с увели-
чением граничной частоты спектра импульсный скачок автокорреля-
ционной функции вблизи т = О сужается. Автокорреляционная функция
белого шума, переданного через узкополосный фильтр, представляет
собой косинусоидальную функцию, убывающую по амплитуде.
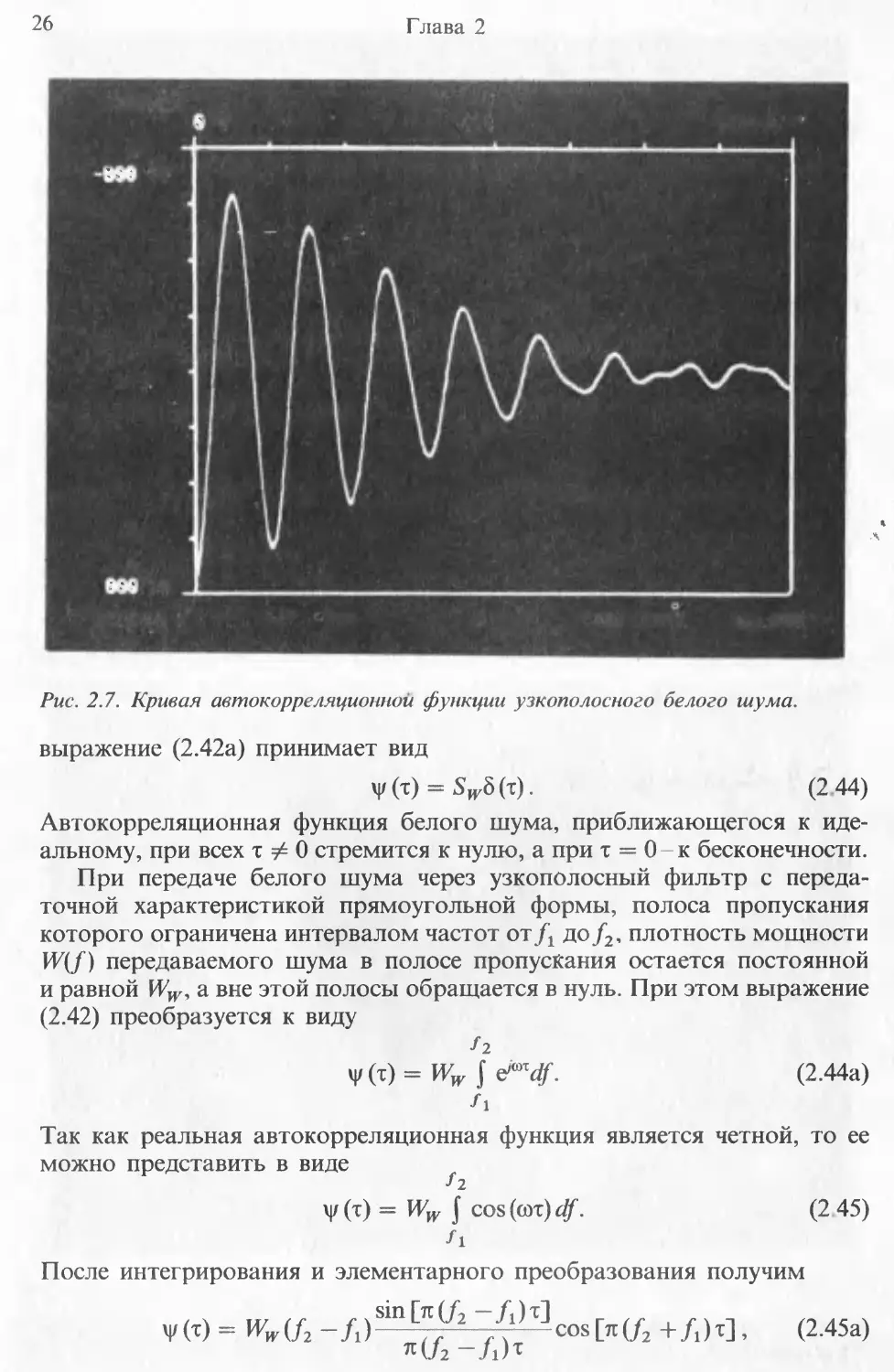
На рис. 2.7 в качестве примера показана автокорреляционная функ-
ция узкополосного отфильтрованного белого шума, осциллограмма
которого изображена на рис. 2.2 (полоса частот В = 160 Гц, средняя
частота /0 = 1 кГц). Огибающая подобной косинусной функции описы-
вается аналогично огибающей автокорреляционной функции белого
шума с ограниченным спектром, верхняя граничная частота которого
равна частоте среза характеристики узкополосного фильтра.
Для математического представления автокорреляционной функции
белого шума используют видоизмененное выражение (2.32)
00 00
у(т)= f S(f)e/andf= f W(f)^df. (2.42)
— oo О
Для идеального белого шума 5 (/) = т. е. спектральная плотность
мощности остается постоянной для всех частот. Поэтому последнее
выражение для рассматриваемого случая можно записать в виде
00
у(т) = 5ж f dmdf. (2 42а)
- 00
Поскольку интеграл в правой части этого равенства выражается через
функцию Дирака
8(т) = J dmdf, (2 43)
- оо
п Речь идет о замене идеализированного белого шума квазибелым, который
далее и рассматривается. Прим, перев.
a
5
Рис. 2.6. Кривые автокорреляционных функций белого шума: a-f2 = 5 кГц;
б f2 = l кГц.
26
Глава 2
Рис. 2.7. Кривая автокорреляционной функции узкополосного белого шума.
выражение (2.42а) принимает вид
у(т) = У(т). (2 44)
Автокорреляционная функция белого шума, приближающегося к иде-
альному, при всех т / О стремится к нулю, а при т = О к бесконечности.
При передаче белого шума через узкополосный фильтр с переда-
точной характеристикой прямоугольной формы, полоса пропускания
которого ограничена интервалом частот от/^ до /2, плотность мощности
передаваемого шума в полосе пропускания остается постоянной
и равной И^-, а вне этой полосы обращается в нуль. При этом выражение
(2.42) преобразуется к виду
/2
Y(t) = M (2.44а)
/1
Так как реальная автокорреляционная функция является четной, то ее
можно представить в виде
Л
V (т) = Ww J cos (сот) df. (2 45)
/i
После интегрирования и элементарного преобразования получим
V(0 = ww(f2 -Л)81П[У2 ~{1)Т]cosIX/, +Л)т], (2.45а)
71 С/2 ~ J1)T
Описание шумов и шумоподобных сигналов
27
или, после замены величины f2 — J\ = В (полоса пропускания) и
(Л + /1)/2 = Л (средняя частота), для у(т) имеем
sin (яВт)
\|/(т)=И^5— -cos(27t/0t). (2.456)
нВт
При этом характер изменения косинусоидальной автокорреляционной
функции и ее огибающей соответствует поведению так называемой
щелевой функции Ч Огибающая функции на рис. 2.7 отражает харак-
теристики реального фильтра.
При Л = 0 автокорреляционная функция широкополосного белого
шума в соответствии с выражением (2.45а) принимает вид
V (Т) = wwf2 slnj^T cos (я/2т) . (2.46)
^Л1
После элементарных преобразований из этого выражения получим
(2 «а)
2л/2т
Это выражение отражает изменение автокорреляционной функции, гра-
фик которой представлен на рис. 2.6, и, в частности, ее переходы через
нуль при т = 1/(2/2) и кратных ему значениях.
2.5. Фликкер-шум
В электронных приборах спектральная плотность мощности шума
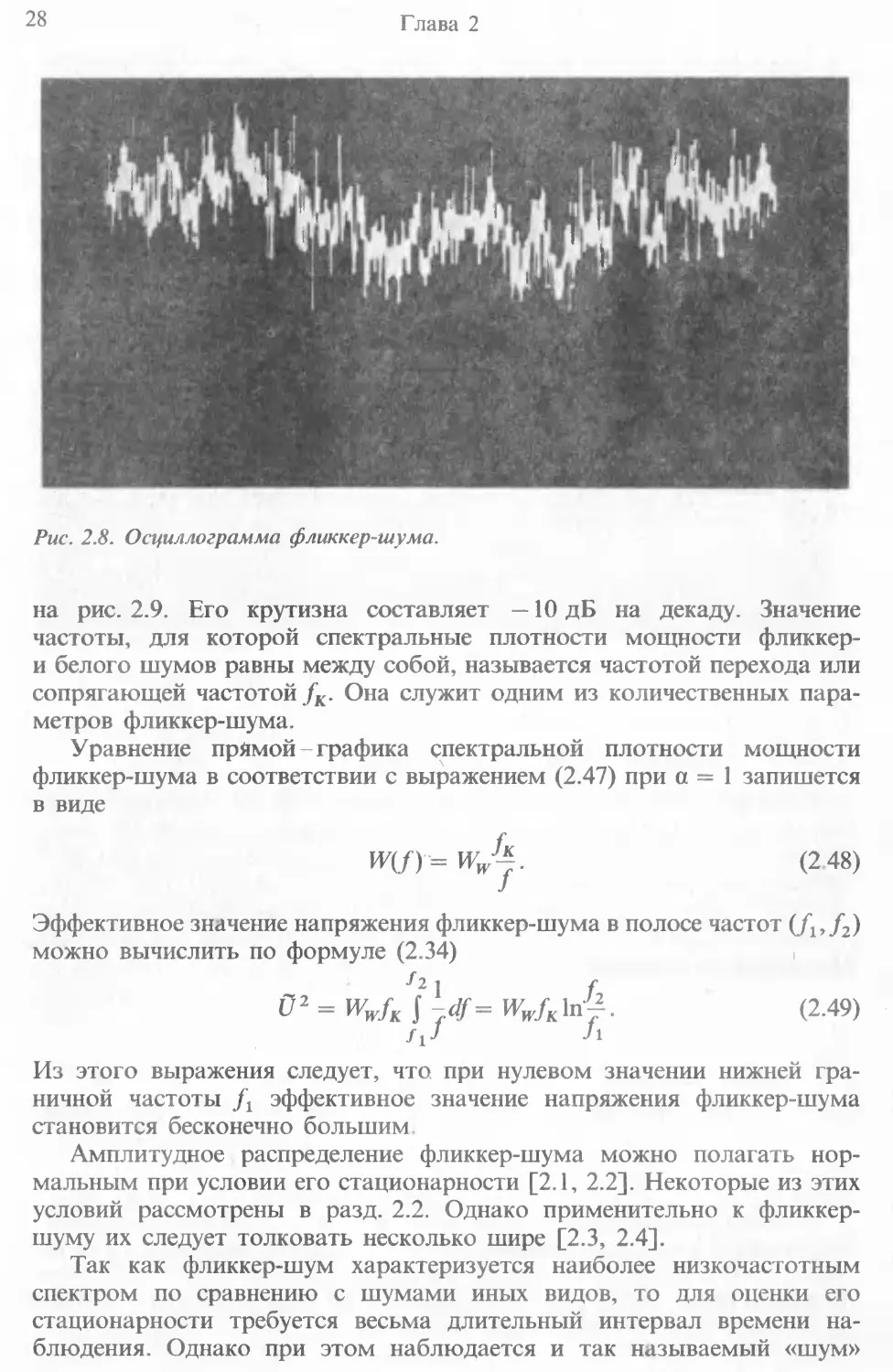
возрастает с уменьшением частоты. Осциллограмма такого шума, по-
рожденного так называемым фликкер-эффектом, приведена на рис. 2.8 * 2).
Эксперименты показали, что в полосе частот от примерно 10 4 Гц до
частоты, после которой фликкер-шум начинает перекрываться белым
шумом, изменение спектральной плотности мощности фликкер-шума
описывается выражением
где а принимает значения от 0,8 до 1,2. Обычно задают среднее значение
а = 1. График этой функции в логарифмическом масштабе представлен
11 Характеризующей системы записи-воспроизведения звука. Прим, перев.
2) Фликкер-эффект это низкочастотные флуктуации электрических токов и
напряжений, порождаемые испарением атомов вещества, диффузией их из глу-
бинных слоев к поверхности, бомбардировкой электрода положительными иона-
ми, приводящей к образованию примесных атомов на его поверхности а также
структурными изменениями. Прим, перев.
28
Глава 2
Рис. 2.8. Осциллограмма фликкер-шума.
на рис. 2.9. Его крутизна составляет —10 дБ на декаду. Значение
частоты, для которой спектральные плотности мощности фликкер-
и белого шумов равны между собой, называется частотой перехода или
сопрягающей частотой fK. Она служит одним из количественных пара-
метров фликкер-шума.
Уравнение прямой-графика спектральной плотности мощности
фликкер-шума в соответствии с выражением (2.47) при а = 1 запишется
в виде
W(fY~Wwfj. (2 48)
Эффективное значение напряжения фликкер-шума в полосе частот
можно вычислить по формуле (2.34)
О2 = WwfK f -df= WwfK\vk. (2.49)
Из этого выражения следует, что. при нулевом значении нижней гра-
ничной частоты эффективное значение напряжения фликкер-шума
становится бесконечно большим
Амплитудное распределение фликкер-шума можно полагать нор-
мальным при условии его стационарности [2.1, 2.2]. Некоторые из этих
условий рассмотрены в разд. 2.2. Однако применительно к фликкер-
шуму их следует толковать несколько шире [2.3, 2.4].
Так как фликкер-шум характеризуется наиболее низкочастотным
спектром по сравнению с шумами иных видов, то для оценки его
стационарности требуется весьма длительный интервал времени на-
блюдения. Однако при этом наблюдается и так называемый «шум»
Описание шумов и шумоподобных сигналов
29
Рис. 2.9. Кривая спектральной плотности мощности фликкер-шума.
дисперсии, который может значительно превышать статистические из-
менения самого шума [2.5-2.8].
Под «шумом» дисперсии понимают дисперсию дисперсии амплитуд-
ного распределения шума. Для центрированного шума (т.е. шума без
постоянной составляющей) его дисперсия, согласно выражению (2.22),
соответствует квадрату эффективного значения напряжения шума.
«Шум» дисперсии определяют по п измеренным эффективным значениям
напряжения шума при неизменных условиях измерений, в частности при
одном и том же времени интегрирования, по выражению
.v2= —Ц-f (Ul-uly. (2.50)
Л ~ 1f = 1
Отношение шума дисперсии к квадрату среднего эффективного значения
шума является мерой (г2) «шума» дисперсии:
v2 = s2/(Uf)2, (2.51)
а величина v называется коэффициентом вариации.
В ряде публикаций [2.4 2.6] приведены численные значения ве-
личины, обратной V2. При задании численного значения «шума» дис-
персии необходимо одновременно указывать условия измерений: час-
тотный диапазон, временные пределы интегрирования, количество вы-
борок и интервалы между ними
«Шум» дисперсии может быть использован и при оценке стацио-
нарности случайного процесса, поскольку он является мерой нестацио-
нарное™.
Практическое определение «шума» дисперсии должно выполняться
с высокой точностью, требующей существенных затрат технических
и Программных средств для измерений и обработки данных
30
Глава 2
2.6. Импульсный шум
Импульсный шум - специфический случайный процесс, характерный
для некоторых видов полупроводниковых приборов и порождаемый
обычно дефектами кристаллических структур полупроводников. Зачас-
тую к импульсному шуму относят также случайные импульсные помехи
и прерывистые колебания процессов. В качестве примера на рис. 2.10
показана осциллограмма импульсного по форме двухуровневого шума.
Наложенный на него белый шум, всегда присутствующий в полупро-
водниковых приборах, при дальнейшем рассмотрении не учитывается.
Импульсный шум характеризуется амплитудой, средней продолжи-
тельностью импульса и ее распределением, а также средним временем
паузы между импульсами и его распределением, которые являются
информативными параметрами и характеристиками шума этого вида.
Амплитудное распределение двухуровневого импульсного шума
(рис. 2.11) не отражает других его статистических свойств. Подобные
свойства шума определяются временными распределениями длитель-
ностей импульсов и пауз между ними.
Допустим, что амплитудные значения двухуровневого импульсного
шума принимают значения 0 или 1. Если в этом случае средняя
продолжительность нулевого значения шума (время паузы) составляет
т0, а средняя продолжительность импульса (единичное значение ампли-
туды) равна т1? то вероятности Р(0)иР(1) появления соответствующих
амплитудных значений 0 или 1 можно оценить как
/>(0) = Т° Р(1) = —--1—. (2.52, 2.53)
*о + *1 то +
Как показывает анализ, упомянутые временные параметры импульсного
шума независимы друг от друга и распределены по экспоненциальному
закону (см. разд. 4.6.7). Зная т0 и т1? можно оценить плотности ве-
роятностей пауз и продолжительностей импульсов такого шума:
1 ( т \
w0 (т) = — ехР I-Ь (2.54)
т0 V т0/
1 / т \
w1(x) =—expl-----I. (2.55)
Ti \
В работе [2.9] приведена оценка вероятности Рц(т) того, что амплитуда
импульсного шума к моменту времени т > 0 имеет единичное значение
при условии, что в момент т = 0 амплитуда также была равна 1, причем
в указанном интервале допускаются неоднократные изменения ампли-
туды импульса от 1 к 0 и обратно:
( т0 + Т1 \
т0 + т^ехр!-------т I
Pi! W =----------....—— (2.56)
To + Tj
Описание шумов и шумоподобных сигналов
31
W* I ' й й
О
Рис. 2.10. Осциллограмма двухуровневого импульсного шума.
Рис. 2.11. Гистограмма двухуровневого импульсного шума.
32
Глава 2
и соответственно
( т0 + Tj
То + Т1 ехР(----------1
Л>о(?) = V T°T1 '
(2.57)
*0 + И
Последние два выражения позволяют оценить вероятности соответ-
ствующих изменений амплитудных значений:
Р10(т)=1-Р1Х(т), (2.58)
Ро1(т)=1-Роо(т). (2.59)
Необходимо отметить, что при т —► оо выражение (2.52) характеризует
предельное значение вероятностей, определяемых формулами (2.57)
и (2.58). То же в равной степени относится к выражениям (2.53) и (2.56),
(2.59). Это объясняется тем, что продолжительность существования того
или иного амплитудного значения шума определяется только средними
значениями т0 и тх и не зависит от значения амплитуды в момент
времени т = 0.
Автокорреляционная функция импульсного шума может быть
вычислена согласно выражению (2.18). Однако, учитывая, что ампли-
тудные значения xt и х2 оказываются равными только 0 или 1,
интегральное выражение (2.18) можно преобразовать в сумму четырех
слагаемых, три из которых при х{ = 0 или х2 = 0 оказываются равными
нулю [2.9]. В общем случае хг и х2 одновременно принимают единичное
значение.
При дискретном распределении плотность условной вероятности
w(x1, х2, т) заменяют условной вероятностью P(xlf х2, т). В общем
случае с учетом формул (2.53) и (2.56) можно записать, что
= />(1)^(1). (2.60)
При этом выражение автокорреляционной функции преобразуется к
виду
у(т) = Р(1)Л1(т)
или, после подстановки выражений (2.53) и (2.56),
Y(t) =
-——tj + тоехр!----------------
(t0 + Ti)zL \ t0Ti
(2.61)
(2.62)
Предельные значения автокорреляционной функции определяются вы-
ражениями
v(0) = ~) =---------------------------->
(То + и) \т0 + Tj/ то +
/ т \2
lim v (т) — I----------
c-*oo \T0 +
(2.63а)
(2.636)
Описание шумов и шумоподобных сигналов
33
Среднее значение (математическое ожидание) импульсного шума рас-
смотренной формы определяется из выражений (2.6), (2.52) и (2.53):
Е[Х] =
(2 64)
Наличие постоянной составляющей обусловлено двухуровневым (ну-
левым и единичным) представлением процесса. Ее влияние на значение
автокорреляционной функции проявляется, как это видно из выражений
(2.63), в виде квадрата константы- второго слагаемого в выражении
(2.63а). Это согласуется с тем, что квадрат эффективного значения
напряжения процесса равен сумме квадратов эффективного значения его
переменной и постоянной составляющих
Выражение для автокорреляционной функции (2.62) после некоторой
корректировки можно представить без постоянной составляющей
To + Tj
¥1
(2.65)
При т = О это выражение представляет собой квадрат эффективного
значения переменной составляющей импульсного шума, а при увели-
чении т автокорреляционная функция стремится к нулю.
Вышесказанное иллюстрируется кривыми (рис. 2.12) автокорреля-
ционных функций импульсного шума, генерируемого реальным тран-
зистором, с постоянной составляющей и в ее отсутствие. Напряжение
амплитуды Us = 4 В, т0 = 8 мс, Ч = 1,8 мс. Кривая на рис. 2.12, а со-
ответствует выражению (2.62), т. е. процессу с постоянной составляю-
щей, а кривая на рис. 2.12, б "Выражению (2.65), т. е. центрированному
процессу. Кривая на рис. 2.12, в представляет собой часть кривой на
рис. 2.12,6, но с малым интервалом т. При т = 0 автокорреляционная
функция равна квадрату эффективного значения переменной состав-
ляющей шума. Касательная к кривой в точке т = 0 пересекается с осью
времени в точке
Ts 2k/s
Wi
Т0 + Т1
1,5 мс,
где fs верхняя граничная частота спектра импульсного шума. Эта
«постоянная времени» обусловливает характер изменения экспоненци-
альной функции в выражении (2.65), а также спектральной плотности
мощности S'(со) импульсного шума, определяемой фурье-преобразова-
нием его автокорреляционной функции.
Выполняя преобразование (2.31) над функцией (т) (2.65), получим
S (со) = 3- ( ехр ( - — — -1 т 11 e-Jm dx. (2.66а)
-оос^о "г ^1* ' ¥1 '
3—23
34 Глава 2
а.
б
Описание шумов и шумоподобных сигналов
35
в
Рис. 2.12. Автокорреляционные функции импульсного шума транзистора: а со-
держащего постоянную составляющую- б без постоянной составляющей;
в часть кривой рис. 2.12,6, но при меньшем значении т.
Для упрощения интегрирования произведем замену функции ехр (—усот)
на соответствующую косинусоидальную функцию, а интегрирование
будем осуществлять только для положительных значений т, заменяя
отрицательные значения ее модулем. После указанных подстановок
формула (2.66а) преобразуется к виду
5 = , 5.911 | еХр । _ т° + Т1т ) cos (сот) dx, (2.666)
^(To + Ti) о V ToTi /
и после интегрирования получим
S((o) = -—1
ят0 + Т1Ло + И
1
2
+ со2
(2.66в)
Для удобства использования это выражение для спектральной плот-
ности мощности в соответствии с формулами (2.35) и (2.36) преобразуют
в другую форму с использованием верхней граничной частоты спектра fs
3*
36
Глава 2
Рис. 2.13. Кривая спектральной плотности мощности импульсного шума.
(частота, при которой максимальное значение S'(со) уменьшается на
3 дБ):
1- .2-1 Z2
Л Ч + Tjs +/
(2.67)
у 1 то + Ь 1
где /о =------------=-------.
2л TqT! 2tcts
(2.68)
На рис. 2.13 приведена кривая спектральной плотности мощности
импульсного шума с параметрами т0 = 5 мс и Tj = 1 мс Логарифми-
ческий масштаб изображения диаграммы позволяет четко выделить
граничную частоту fs и переход к белому шуму.
Все сказанное в разд. 2.2 о свойствах стационарности случайных
процессов в полной мере относится и к импульсному шуму. Однако при
этом следует иметь в виду, что вследствие статистического характера
временных параметров импульсного шума необходимо существенно
увеличить время наблюдения, особенно при больших длительностях
импульсов и паузах между ними.
В некоторых полупроводниковых приборах наблюдается нестацио-
нарный импульсный шум, амплитуда и временные параметры которого
резко изменяются в случайные моменты времени. Эти изменившиеся
значения могут сохраняться от нескольких миллисекунд до нескольких
дней [2.10].
Вышеприведенные рассуждения относились к частному случаю двух-
уровневого импульсного шума. Однако реально импульсный шум яв-
ляется, вообще говоря, многоуровневым (рис. 2.14). Если рассматривать
Описание шумов и шумоподобных сигналов
37
его как результат наложения соответствующих двухуровневых шумов,
то все вышеизложенное в данном разделе может быть распространено
и на общий случай.
2.7. Помехи
Рассмотренные в разд. 2.4 2.6 шумы представляют собой лишь
небольшую группу низкочастотных стохастических процессов Обычно
их трудно четко выделить и поэтому относят к помехам, которые
а
у
Рис. 2.14. Осциллограммы многоуровневого импульсного шума различной формы.
38
Глава 2
№ *
Продолжение рис. 2.14.
в
г
о
характеризуются наличием совокупности случайной и детерминирован-
ной составляющих, причем часть случайной составляющей нельзя оха-
рактеризовать однозначно
На практике число различного вида помех весьма велико. Осцил-
лограммы некоторых из них приведены на рис. 2.15. Математическое
Описание шумов и шумоподобных сигналов
39
а
Рис. 2.15. Осциллограммы помех различного вида.
описание помех как правило оказывается невозможным. Что же касается
оценки их стационарности, то в этом случае можно руководствоваться
соображениями, изложенными в разд. 2.2.
Информативные параметры помех определяют посредством их ана-
лиза. Хорошим анализатором акустических помех является человеческое
ухо Методы электронного анализа помех и шумов рассмотрены в гл. 7.
40
Глава 2
в
г
Продолжение рис. 2.15.
3. Генерирование шума
3.1. Области применения искусственно
генерируемых шумоподобных сигналов
Во многих исследованиях используют методы измерения и контроля,
требующие шумоподобных сигналов с искусственно воспроизводимыми
определенными свойствами и характеристиками. Целесообразность по-
добных методов иллюстрируют следующие три примера.
1. Для определения эффективных значений напряжений, изменяю-
щихся по различным законам, используют нелинейные устройства,
реализующие алгоритм измерений в соответствии с выражением (2.21).
Метрологическая аттестация и поверка подобных устройств с приме-
нением детерминированных испытательных сигналов оказываются не-
достаточно точными, так как подобные испытательные сигналы не
обеспечивают требуемые амплитудное и частотное распределения. Так,
синусоидальный сигнал позволяет проконтролировать только одну ор-
динату амплитудно-частотной характеристики (АЧХ) и лишь часть
передаточной характеристики устройства, так как часть значений сиг-
нала оказывается недостаточной для испытаний. Более приемлемым для
определения АЧХ является короткий прямоугольный импульс. Однако
и он не обеспечивает достаточно больших амплитуд гармоник в высоко-
частотной области спектра.
Сказанное в той или иной степени характерно и для испытательных
сигналов иных форм, часть из которых, кроме того, трудновоспроизво-
дима. Наиболее удобным для испытаний рассматриваемых устройств
является широкополосный белый шум, для которого характерна рав-
номерная спектральная плотность (см. разд. 2.4).
2. Амплитудно-частотные характеристики линейных цепей обычно
определяют поточечно, используя наборы испытательных синусоидаль-
ных сигналов соответствующих частот. Вместо таких совокупностей
сигналов можно использовать белый шум и определять АЧХ посред-
ством частотного анализа выходных сигналов испытуемых линейных
цепей.
3. Важную роль в промышленном производстве играют контроль
и анализ различных шумов, например контроль шума электронных
элементов для оценки их годности, шумовая диагностика неисправности
машин и механизмов и др. Соответствующие электронные устройства
являются достаточно сложными и, как правило, не могут быть аттесто-
ваны и проградуированы с применением детерминированных испыта-
тельных сигналов. Поэтому для их испытаний формируют шумопо-
42
Глава 3
добные тестовые сигналы с требуемыми характеристиками, с которыми
сравнивают соответствующие характеристики выходных сигналов этих
устройств.
В последующих разделах данной главы рассмотрены методы гене-
рирования ряда шумоподобных сигналов, характеристики которых опре-
деленным образом соотносятся с видом доминирующего шума.
3.2. Генерирование белого шума
Самым простым методом получения белого шума является исполь-
зование шумящих электронных элементов (ламп, транзисторов, различ-
ных диодов) с усилением напряжения шума. Для этой цели выпускают
специальные шумящие диоды. На рис. 3.1 представлена схема генера-
тора шума с подобным вакуумным диодом типа GA560. Необходимый
анодный ток устанавливают заданием соответствующего тока нити
накала (катода). Шумовая составляющая i анодного тока 1а с полосой
частот В равна
? = 2eIaF2B, (3.1)
где е= 1,602-10“19 А с, а коэффициент F отражает связь между тем-
пературой катода Тк, анодным напряжением Ua и минимальной раз-
ностью потенциалов Смин вблизи катода [2.5]:
9(1 -п/4)кТк
Здесь к = 1,38 -10“ 23 Вт с/К. При эффективном напряжении теплового
шума резистора с сопротивлением R при температуре Т, определяемом
соотношением
и2 = 4kTRB,
(3.3)
напряжение шума на выходе схемы составит
4 == 2eIaF2BR2 + 4kTRB. (3.4)
II—
Рис. 3.1. Схема генератора бело-
го шума на основе специаль-
ного вакуумного диода.
Генерирование шума
43
Рис. 3.2. Схема генерирования белого шума с преобразованием частотного спект-
ра.
Существенным недостатком описанной схемы является наличие в
выходном напряжении значительной доли шума, обусловленного флик-
кер-эффектом, что сильно ограничивает возможность получения «чисто-
го» белого шума в этой схеме на низких частотах
Указанный недостаток можно устранить выбором рабочего участка
частотного спектра с гарантированным белым шумом либо элемента,
генерирующего подобный спектр, и трансформацией этого участка
спектра в область низких частот. Реализация такого принципа ил-
люстрирована схемой устройства, приведенной на рис. 3.2. В качестве
источника белого шума используют транзистор с незначительным флик-
кер-шумом, что обеспечивает достаточную надежность устройства и ма-
лые постоянные времени. Напряжение шума усиливается до единиц
милливольт в широкой полосе частот, после чего ограничивается поло-
совым фильтром в полосе от 100 до 300 кГц. Трансформацию спектра
этого шума в область низких частот осуществляют его смешиванием
с сигналом синусоидальной или прямоугольной формы с частотой
примерно 200 кГц. Разность частот свыше 30 кГц отсекается фильтром
нижних частот, обеспечивающим выделение шума с равномерной спект-
ральной плотностью мощности вплоть до частоты 1 Гц.
Белый шум может быть получен и при помощи цифровой схемы
приведенной на рис. 3.3 [3.1 3.3]. Псевдослучайные коды формирует
регистр сдвига (РГ) с включенной на его входе комбинаторной логи-
ческой микросхемой (КЛМ), преобразующей выходной код регистра
сдвига. Коды в регистр сдвига могут поступать либо в последовательной
форме (вход IS), либо в параллельной (входы IO ... 1п). Регистр управ-
ляется тактовыми сигналами, поступающими на тактовый вход С или на
вход записи L. Благодаря комбинаторной обратной связи коды на
выходе регистра сдвига появляются с определенной периодичностью.
Длительность периода зависит от разрядности регистра и программного
задания (командного слова) логической микросхемы, определяющего
комбинаторику преобразования кодов. Для увеличения степени случай-
ности последовательности выходных сигналов устройства при которой
периодичность их повторения стремится к бесконечности, можно ис-
44
Глава 3
Рис. 3.3. Цифровая схема формирования белого шума: КЛМ комбинаторная
логическая микросхема; РГ регистр сдвига' ТПЗУ табличное постоянное
ЗУ; ЦАПФ цифро-аналоговый преобразователь с выходным сглаживающим
фильтром.
пользовать внешний датчик командных слов, изменяющих правила
преобразования выходных кодов регистра сдвига. Тот же эффект может
быть достигнут и с применением внешнего генератора шума с дискри-
минатором знака изменения напряжения шума (см. схему на рис. 3.3).
Последовательность «-разрядных слов на выходе регистра сдвига
воспринимается как случайный процесс, для которого плотность ве-
роятности амплитудного распределения постоянна на всем массиве слов.
Для получения белого шума равномерное распределение «-разрядных
слов преобразуется в нормальное распределение т /7-разрядных слов
при помощи табличного постоянного ЗУ. Алгоритм указанного преоб-
разования описан в приложении П.1 [3.4]. Полученные ш-разрядные
коды преобразуются цифро-аналоговым преобразователем (ЦАП) в
непрерывный процесс. Для подавления «выбросов», обусловленных
конечным временем тактирования (тактовой частотой), на выходе ЦАП
включен сглаживающий фильтр нижних частот. При переменной такто-
вой частоте смещается частотный спектр генерируемого белого шума,
и поэтому необходимо изменять и частоту среза характеристики выход-
ного фильтра.
Шумоподобные сигналы, генерируемые описанными аналоговым
и цифровым устройствами в одном и том же ограниченном частотном
диапазоне, характеризуются идентичными свойствами. Нижняя гранич-
ная частота их частотного спектра определяется длительностью периода
последовательности, а верхняя-тактовой частотой. Так, цифровое
Генерирование шума
45
Рис. 3.4. Осциллограмма шума, генерируемого цифровым устройством без фильт-
рации после ЦАП.
устройство, выполненное по схеме на рис. 3.3, при т = п = 7 и тактовой
частоте 100 кГц генерирует шум, спектральная плотность мощности
которого постоянна в диапазоне частот от 1 Гц до 25 кГц. Осцил-
лограмма этого шума до фильтрации приведена на рис. 3.4.
Цифровой генератор шума, представленный схемой на рис. 3.3,
может быть реализован программными средствами ЭВМ в виде датчика
случайных чисел, распределяемых по нормальному закону соответ-
ствующей таблицей (см. приложение П.1). При необходимости к каналу
вывода данных ЭВМ может быть подключен ЦАП.
3.3. Генерирование фликкер-шума
Статистические характеристики фликкер-шума и белого шума раз-
личаются только зависимостью спектральной плотности мощности от
частоты. У фликкер-шума эта величина, согласно выражению (2.48),
обратно пропорциональна частоте. Поэтому генерируемый фликкер-
шум имеет ограниченный спектр, на что дополнительно влияют дина-
мические характеристики используемых технических средств.
Проблема генерации фликкер-шума связана с его выделением из
смеси с белым шумом путем фильтрации. Однако простейшие цепи не
обладают пригодной для этой цели амплитудно-частотной характе-
ристикой.
В работе [3.5] описаны два подхода к решению указанной проблемы.
Первый из них основан на использовании бесконечно длинной линии
с распределенными ЛС-параметрами, реализующей характеристику
спектральной мощности вида \/f. Однако практическое получение такой
46
Глава 3
Рис. 3.5. RC-звено.
характеристики затруднено в том случае, когда она должна распро-
страняться на совокупность декад фильтров.
Второй подход основан на использовании множества АС-звеньев,
обладающих характеристикой спектральной мощности шума вида!//12.
Выбором их постоянных времени и комбинацией включения достигают
реализации совокупной характеристики спектральной мощности вида
1//.
Простейший способ получения указанной характеристики с умень-
шением мощности в 10 дБ на декаду описан в работе [3.6]. Для этой
цели используют АС-звено, схема которого приведена на рис. 3.5.
Модуль комплексного сопротивления этого звена равен
|Z| = *i
1 + со2С2/^
1 + о)2С2(Л+/У2'
(3.5)
Частотная характеристика этого звена, определенная по соответствую-
щим диаграммам Боде, представлена на рис. 3.6, причем частоты
в точках перегиба характеристики равны
= l/[C(At + А2)], со2 = 1/СА2 . (3.6, 3.7)
Последовательное включение подобных звеньев с одной и той же (в
логарифмическом масштабе) разницей между частотами ац и со2 позво-
ляет получить частотную характеристику каскадной схемы со средней
крутизной уменьшения мощности 10 дБ на декаду. Характеристика
каскада приближается к идеальной (вида 1/f) с уменьшением разницы
Рис. 3.6. Частотная харак-
теристика RC- звена
(схема на рис. 3.5).
Генерирование шума
47
Рис. 3.7. Схема фильтра, реализующего частотную характеристику вида 1/f.
частот (Dt и со2 каждого из звеньев. Зачастую их соотношение выбирают
из условия
со2/со1 = ^/10, (3.8)
что позволяет приведенным на рис. 3.5 звеном перекрывать одну декаду.
Схема фильтра, реализующего частотную характеристику вида 1//,
приведена на рис. 3.7. Функции резисторов элементарных звеньев, схема
которых приведена на рис. 3.5, выполняют потенциально связанные
транзисторы. Попеременное включение транзисторов разного вида про-
водимости обеспечивает связи между пятью каскадами по постоянному
току. Шестой каскад служит для развязки внешней цепи. Каждый из
каскадов перекрывает одну декаду, что достигается выбором соответ-
ствующих соотношений емкостей и сопротивлений:
сп/сп+1 = 10, (^ + R2)/R2 .= yio. (3.9, 3.10)
При R3 = Ri/3 получают частотную характеристику, представленную на
рис. 3.8, которая весьма хорошо аппроксимирует зависимость 1//, при-
чем частота первой точки перегиба характеристики выбрана равной
1 Гц:
А = 1/[2тсС1 (Rt + Я2)] = 1 Гц. (3.11)
Для иллюстрации отклонения полученной характеристики от тре-
буемого вида на рис. 3.9 изображена в увеличенном масштабе часть этой
характеристики, относящаяся к средней декаде. Обычно добиваются
такого соотношения параметров схемы, чтобы отклонение реальной
характеристики от требуемой не превышало ±0,25 дБ.
На инфранизких частотах аналоговые устройства для указанной цели
48
Глава 3
Рис. 3.8. Кривая частотной характеристики фильтра, схема которого пред-
ставлена на рис. 3.7.
Рис. 3.9. Часть частотной характеристики фильтра, схема которого представ-
лена на рис. 3.7, относящаяся к средней декаде.
Генерирование шума
49
обычно оказываются непригодными, так как возрастание постоянных
времени цепей приводит к увеличению дрейфа нулевого уровня и воз-
никновению иных паразитных процессов. На этих частотах оказывается
необходимым использовать цифровые устройства, лишенные указанных
недостатков, хотя это и приводит к резкому увеличению их стоимости.
Вполне оправданным в этом случае является применение микропроцес-
соров. Одна из возможностей формирования инфранизкочастотного
квазиподобного фликкер-шума при помощи процессора описана в [3.7].
Речь идет о случайных импульсах прямоугольной формы, амплитуды
которых распределены по нормальному закону, а длительности (их
ширина) tt по экспоненциальному закону. Используя равномерно рас-
пределенную последовательность случайных чисел Rh можно найти
значения амплитуд и длительностей этих импульсов из выражений
щ = cos (2л Я J 2 In ——, (3.12)
V Ri+5
(3.13)
Постоянные и т2 представляют собой границы интервала изменений
Для получения частотной характеристики вида 1/f эти постоянные
должны существенно различаться между собой. Так, например, следует
выбирать т2/т1 = Ю6. Выбор значения предопределяет среднее зна-
чение т ширины импульсов и тем самым частотный спектр форми-
руемого фликкер-шума:
T^/Eln^/Tj]. (3.14)
Так, например, при = 13,52-10”6 достигается значение т = 1.
3.4. Генерирование импульсного шума
Как отмечалось в разд. 2.6, продолжительности единичного и нуле-
вого значений двухуровневого импульсного шума независимо друг от
друга распределены по экспоненциальному закону. Генерировать по-
добный шум может устройство, схема которого представлена на
рис. 3.10. Счетчик СТ1 с генератором G импульсов высокой частоты
следования, модулируемой напряжением генератора шума, образуют
датчик случайных чисел. С поступлением сигнала записи на вход
L микросхемы памяти (ЗУ) содержимое счетчика переписывается в эту
память В предположении, что частота следования импульсов записи
существенно меньше значения /1/2и+1, последовательность случайных
чисел zt на выходе памяти оказывается распределенной равномерно. Это
распределение преобразуется в табличном ПЗУ в последовательность
случайных чисел z2, распределенных по экспоненциальному закону. При
этом числа zt служат в качестве адресов, по которым в ПЗУ выбираются
числа z2. Эти числа при поступлении импульса записи на вход L ре-
версивного счетчика СТ2 записываются в этот счетчик, работающий на
4—23
50
Глава 3
Рис. 3.10. Схема устройства для генерирования импульсного шума: G генератор
импульсов; СТ1 счетчик; СТ2 реверсивный счетчик; ТПЗУ табличное
ПЗУ; S одновибратор; Г генератор частоты.
вычитание при поступлении тактовых сигналов на его вход синхрони-
зации С с частотой f2 или /3. При обнулении счетчика СТ2 на его выходе
ZC образуется сигнал, из которого соответствующим одновибратором
S формируется импульс записи для этого же счетчика СТ2, с малой
задержкой во времени поступающий также на вход записи ЗУ. Одно-
временно выходным сигналом реверсивного счетчика переключается
D-триггер, управляющий генераторами Г частот f2 и /3. Они включаются
попеременно. На выходе триггера при этом формируются сигналы
импульсного шума. Частоты f2 и /3 можно ступенчато изменять, вы-
бирая тем самым среднюю продолжительность импульса ?! и среднюю
продолжительность паузы т0 между импульсами:
Т!=22//2, x0 = z2//3. (3.15,3.16)
Осциллограмма шума, генерируемого описанным устройством с числом
разрядов последовательности равным п = 3, и числом разрядов
последовательности z2, равным т = 8, изображена на рис. 3.11, а на
рис. 3.12 приведена диаграмма спектральной плотности мощности этого
Генерирование шума
51
Рис. 3.11. Осциллограмма импульсного шума, генерируемого устройством схема
которого представлена на рис. 3.10.
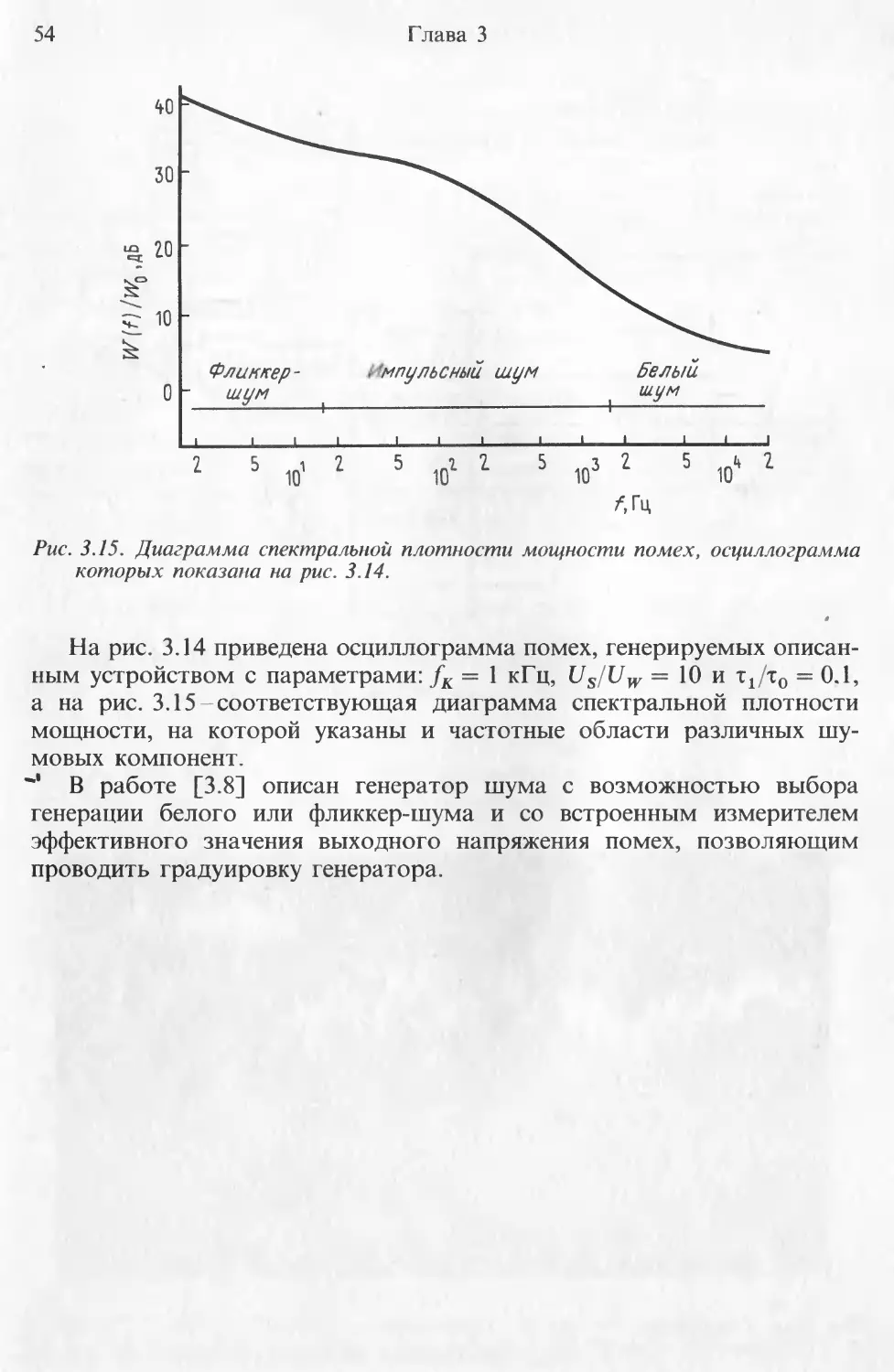
Рис. 3.12. Диаграмма спектральной плотности мощности импульсного шума
генерируемого устройством, схема которого представлена на рис. 3.10.
4*
52
Глава 3
шума, определенная в результате весьма длительного времени наблю-
дения. Наблюдавшиеся «выбросы» экспериментальных данных обуслов-
лены конечной емкостью счетчика СТ1, ограниченной в рассматривае-
мом случае 16 числами При увеличении количества чисел zt,
записываемых в счетчик СТ1 большей емкости, необходимо соблюдать
вышеприведенное условие о том, чтобы частота формируемых импуль-
сов записи (входы L ЗУ и счетчика СТ2) оставалась существенно
меньшей значения /i/2"^1.
3.5. Генерирование помех
Помехи представляют собой смесь шумов рассмотренных выше
видов с неким детерминированным процессом. Генерирование помех
можно осуществлять устройством, схема которого приведена на
рис. 3.13. Она содержит четыре независимых канала возбуждения упо-
мянутых составляющих помех. Так как они не коррелированы между
собой, то это позволяет сравнительно просто суммировать их на входе
операционного усилителя.
Генерацию трех шумовых компонент осуществляют аналогично
описанному ранее в соответствующих разделах данной главы. Но так
как для получения фликкер-шума и белого шума используют иден-
тичные по характеристикам источники высокочастотного шума, то-с
целью уменьшения взаимной корреляции между ними при их транс-
формации в область нижних частот в соответствующих смесителях
обеспечивают относительное смещение спектров этих шумов на 20 кГц.
Важным аспектом является градуировка всех каналов формирования
составляющих помех.
Белый шум характеризуют спектральной плотностью мощности или
эффективным значением напряжения в наиболее часто используемом
диапазоне частот, например до 20 кГц. Градуировку канала его фор-
мирования целесообразно проводить с применением спектр-анализа-
тора. Постоянную составляющую белого шума используют для обра-
зования других шумовых компонент.
Фликкер-шум может изменяться по амплитуде. Переход от него
к белому шуму определяется сопрягающей частотой fK в соответствии
с выражением (2.48). Амплитуда Us импульсного шума также изме-
няется, и градуировку канала формирования этого шума можно осу-
ществить с использованием осциллографа. Переход в этом случае
к белому шуму можно осуществить нормированием амплитуды им-
пульсного шума эффективным значением белого шума Uw. Градуировку
канала формирования импульсного шума по временным параметрам
и т0 осуществляют установлением частот соответствующих генераторов
согласно выражениям (3.15) и (3.16). Соотношение между и т0 и их
значения необходимо задать такими, чтобы получить требуемый рав-
номерный участок энергетического спектра (см. частотную характе-
ристику на рис. 2.13) согласно выражению (2.68).
Генерирование шума
53
Рис. 3.13 Схема комбинированного устройства для генерирования различных
шумов и помех.
Рис. 3.14. Осциллограмма помех генерируемых устройством схема которого
представлена на рис 3.13.
54
Глава 3
Рис. 3.15. Диаграмма спектральной плотности мощности помех, осциллограмма
которых показана на рис. 3.14.
На рис. 3.14 приведена осциллограмма помех, генерируемых описан-
ным устройством с параметрами: fK = 1 кГц, Us/Uw = 10 и = 0.1,
а на рис. 3.15 соответствующая диаграмма спектральной плотности
мощности, на которой указаны и частотные области различных шу-
мовых компонент.
*’ В работе [3.8] описан генератор шума с возможностью выбора
генерации белого или фликкер-шума и со встроенным измерителем
эффективного значения выходного напряжения помех, позволяющим
проводить градуировку генератора.
4. Измерение
характеристик шума
4.1. Техника измерений
4.1.1. Особенности измерений
Средства для измерений характеристик различных видов шума в силу
ряда специфических особенностей случайных процессов образуют спе-
циальное направление измерительной техники.
Характерной особенностью шума являются весьма малый ток или
малое напряжение, возбуждаемые в соответствующей электрической
измерительной цепи. Так, например, тепловой шум в резисторе с со-
противлением 1 кОм создает эффективное напряжение около 403 нВ
с частотным спектром до 10 кГц. Малошумящий транзистор харак-
теризуется коэффициентом шума, не превышающим 1 дБ, т.е. генери-
руемое им напряжение шума лишь незначительно превышает напря-
жение теплового шума резистора. Поэтому существуют серьезные труд-
ности в дистанционном измерении столь слабых сигналов, образующих
самые разные формы. В частности, собственные шумы используемых
для этих целей средств измерений не должны вносить искажений
в результаты измерений.
Шум нельзя описать определенной функцией времени. Поэтому
возникает необходимость в измерениях эффективного значения его
напряжения, определяемого выражением (2.22). При наличии достовер-
ного нормального амплитудного распределения в соответствии с вы-
ражением (2.40) может быть определен коэффициент формы шума,
однако обычно такое распределение оказывается неизвестным, так как
белый шум может маскироваться импульсным шумом и детермини-
рованным процессом.
При нормальном амплитудном распределении шума его ампли-
тудные значения могут быть выделены при многократных измерениях
эффективных значений. Отношение пикового значения шума к эффек-
тивному называют амплитудным коэффициентом. Значение этого коэф-
фициента, особенно при значительной доле фликкер-шума, достигает
5...7. Иначе говоря, эффективное значение шума составляет всего
15...20° о от верхнего предела рабочего диапазона используемых для
определения характеристик и параметров шума средств измерений.
Указанное обстоятельство при ярко выраженной нелинейности переда-
точной характеристики измерительного устройства и наличии пределов
измерений приводит к существенной погрешности получаемых резуль-
татов измерений.
Как показано в гл. 2, стационарность всех видов шума является
56
Глава 4
Рис. 4.1. Блок-схема устройства для измерения эффективного значения напря-
жения шума.
условной. Эта условность в сравнении с детерминированными про-
цессами приводит к значительной случайной составляющей погреш-
ности при измерениях характеристик и параметров шумов. Ее можно
уменьшить усреднением результатов, что связано, однако, с существен-
ным увеличением времени измерений. Помимо неэкономного использо-
вания самих средств сбора и обработки данных увеличение времени
измерений приводит нередко к дополнительной погрешности, обуслов-
ленной временным и температурным дрейфами измерительной аппара-
туры.
Шум представляет собой неустановившийся процесс, предсказать
изменения которого во времени можно лишь с весьма и весьма малой
вероятностью, что и обусловливает существенные трудности его анали-
за. Для получения результатов в реальном масштабе времени требуется
применять либо очень быстродействующую измерительную систему,
либо ряд параллельно действующих измерительных систем. Промежу-
точное запоминание сигналов или необходимость предварительного
преобразования их частотного спектра с последующей обработкой
данных также связано с решением ряда технических проблем.
Анализ шума можно выполнять и его фильтрацией, выделяя пред-
ставляющие интерес участки частотного спектра. Это требует при-
менения относительно сложных фильтров. Подобный подход исполь-
зуют при анализе звуковых уровней акустического шума [4.1].
Многие перечисленные проблемы существенно проще и точнее ре-
шают при помощи цифровых средств, нежели аналоговых.
В качестве примера на рис. 4.1 приведена блок-схема устройства для
определения эффективного значения напряжения шума в выделенном
участке частотного спектра и его усреднения. Ниже описываются ис-
пользуемые для подобных измерений типовые функциональные эле-
менты.
4.1.2. Входной усилитель средств измерений
Для измерения весьма малых напряжений шума входной (предва-
рительный) усилитель должен обладать как можно меньшим уровнем
собственного шума, с тем чтобы минимально искажать входной сигнал.
Измерение характеристик шума
57
Рис. 4.2. Схема замещения внутренних источников шума усилителя.
Шумовые свойства усилителя характеризуются приведенными ко входу
шумовым напряжением или током, либо шум-фактором [4.2, 4.3].
Внутренний шум, независимо от места его возникновения, в уси-
лителе накладывается на входной измеряемый процесс и поддается
оценке лишь на выходе усилителя. Поэтому для упрощения расчетов
усилитель полагают нешумящим, а соотношение сигнал/шум приводят
ко входу усилителя. Схема замещения реального усилителя таким
усилителем с вынесенными на его вход внутренними источниками шума
показана на рис. 4.2. Эти источники являются условными (теорети-
ческими). Моделью источника измеряемого шума является генератор
теплового шума (шумящий резистор), напряжение которого равно
UR = 'fikTRB, (4.1)
к выходу которого подключен резистор сопротивлением R, представ-
ляющий внутреннее сопротивление генератора теплового шума. Шум-
фактор F определяют как отношение реальной и идеальной мощностей
шума на выходе устройства, которое не генерирует дополнительного
шума. Применительно к схеме на рис. 4.2 его можно записать в виде
выражения
+ 1/^ 4- I^R2)v2 _ Ur + Un + InR2
U2rv2 ~ U2r
где v2 коэффициент усиления мощности. Усилитель в рассматриваемой
схеме замещения не влияет на шум-фактор. Иногда используется ло-
гарифмический шум-фактор Fig, определяемый выражением
F18=101g
UR + U2n + InR2
u2r
(4.3)
и измеряемый в децибелах.
Другое определение шум-фактора связано с наличием на входе схемы
замещения усилителя дополнительного (шумового) источника сигнала.
В этом случае шум-фактор определяют как отношение соотношений
шум-сигнал на выходе и входе, и выражение (4.2) будет отличаться
наличием в числителе и знаменателе множителя - квадрата напряжения
шумового сигнала.
58
Глава 4
Рис. 4.3. Графики зависимостей
отношений сигнал/шум от
внутреннего сопротивления
источника шума.
Как следует из выражения (4.2), в которое подставлено вместо
Ur выражение (4.1), шум-фактор зависит от значения внутреннего
сопротивления R источника шума. Минимального значения шум-фактор
достигает при
^мин=^/^. (4 4)
Для выбора значения Амин, обеспечивающего получение максимально
возможного отношения сигнал/шум, в схему замещения усилителя
(рис. 4.2) вводится источник дополнительного сигнала Us При этом
исследуют три возможных случая:
1) напряжение дополнительного сигнала остается постоянным при
изменении R;
2) напряжение дополнительного сигнала изменяется пропорциональ-
но изменению R;
3) напряжение дополнительного сигнала оказывается пропорцио-
нальным y/R.
Графики зависимостей отношений сигнал/шум от сопротивления
R для всех трех перечисленных выше случаев приведены на рис. 4.3.
В первом случае (кривая /) выбор R меньше RMm не создает до-
полнительного эффекта, так как остается воздействие постоянного
напряжения шума UN. Во втором случае (кривая 2) основным фактором,
ограничивающим рост отношения сигнал/шум, является ток IN, так как
цепь представляет собой делитель напряжения. В третьем случае (кривая
3) используется согласующий трансформатор.
Влияние сопротивления источника R на уровень суммарного шума
при использовании шумящего операционного усилителя рассмотрено
в работах [4.4-4.6]. Графики зависимостей нормированного на
UQ = 1 мкВ напряжения суммарного шума [/ges от сопротивления R в
полосе частот 10 кГц для трех разных типов шумящих усилителей
приведены на рис. 4.4. Усилитель ОРИ содержит на входе биполярные
Измерение характеристик шума
59
транзисторы с относительно большим коллекторным током, что обус-
ловливает и сравнительно большой шумовой ток IN. Как видно из
графика, шумовое напряжение UN с ростом R увеличивается именно
вследствие возрастания тока IN. Входные каскады других усилителей
(рис. 4.4) ОРЛ101 и В087 выполнены на полевых транзисторах, шумовой
ток которых существенно меньше, чем у усилителя ОР27, вследствие
чего увеличение сказывается на росте шумового напряжения в значи-
тельно меньшей степени. Как видно из графиков на рис 4.4, усилители на
биполярных транзисторах целесообразно использовать при сопротив-
лениях источника теплового шума R примерно до 30 кОм, а свыше этого
значения (с точки зрения минимизации шумового напряжения) следует
использовать усилители на полевых транзисторах. Подчеркнем, что
сказанное относится к усилителям, выполненным на дискретных компо-
нентах [4.7 4.9]. Интегральные усилители характеризуются существенно
меньшими дополнительными шумовыми напряжениями и током.
Шумовые характеристики усилителя определяются в основном его
входным каскадом. С учетом шум-факторов первого и второго каскадов
(соответственно Г1 и F2) и коэффициента усиления мощности vj первого
каскада шум-фактор двухкаскадного усилителя определяется как
F — 1
F = F1+^-2-. (4 5)
Из данного выражения следует, что усиление мощности первого каскада
необходимо выбирать возможно большим. Это достигается, в част-
ности, использованием обратной связи, что расширяет пределы изме-
нения сопротивления первого каскада Эффективное снижение шума при
Рис. 4.4. Графики зависимостей нормированного напряжения суммарного шума
усилителя от внутреннего сопротивления источника измеряемого шума
60
Глава 4
увеличении усиления обеспечивает параллельное включение нескольких
транзисторов [4.10]. При этом увеличивается крутизна передаточной
характеристики, и тем самым линейно возрастает усиление с ростом
числа транзисторов N, в то время как некоррелированный шум увели-
чивается в y/N раз. Увеличение усиления дополнительно улучшает
отношение сигнал/шум. Полоса пропускания усилителя должна соот-
ветствовать частотному спектру обрабатываемого сигнала. Если ши-
рина спектра такого сигнала превышает полосу пропускания усилителя,
то это может привести к ухудшению отношения сигнал/шум.
В заключение следует обратить внимание на необходимость тща-
тельной экранировки первого каскада усилителя и выполнения про-
думанного монтажа общей шины усилителя в целом Рекомендуется
также с целью уменьшения влияния внешних помех, возможно про-
никающих через цепи питания, дополнительно стабилизировать на-
пряжение питания первого каскада усилителя.
4.1.3. Фильтры
Рассматриваемые в настоящем разделе фильтры предназначены для
селекции частей исследуемого процесса в определенных областях час-
тотного спектра. Каждая из выделяемых областей спектра характери-
зуется верхней и нижней граничными частотами, поэтому для их
селекции используют либо полосовые фильтры, либо комбинации из
фильтров нижних и верхних частот с соответствующими частотами
среза амплитудно-частотных характеристик (АЧХ). При широком час-
тотном спектре процесса в качестве фильтров обычно используют
RC-цепи, так как низкие частоты составляют пренебрежимо малую часть
всего энергетического спектра. В отличие от каналов связи, допускаю-
щих применение фильтров с ослаблением амплитуды сигнала на 3 дБ
при приближении к граничной частоте, в технике измерения шумов
используют полосовые фильтры с определенной эффективной частотной
полосой пропускания. Условия эффективности пропускания упрощают,
когда не требуется четкого разделения частот соседних областей. Под
эффективной частотной полосой пропускания будем понимать область
частот (в рассматриваемом случае шума), где спектральная плотность
мощности Wo постоянна и эффективное значение напряжения для об-
ласти между граничными частотами и f2 равно U. При использовании
идеального фильтра с прямоугольной характеристикой и частотно-
независимым усилением vm в полосе пропускания эффективное значение
напряжения шума в выделенной области с граничными частотами и /2
составит
/2
#пол = f wov2mdf= Wov2m(f2 -f2). (4.6)
Усиление v(f) реального фильтра зависит от частотных составляющих
Измерение характеристик шума
61
спектра сигнала, вследствие чего эффективное значение шума на выходе
фильтра определяется выражением
00 00
и2 = f W0v2(f)df= Жоу v2(f)df. (4.7)
О о
По определению эффективной частотной полосой пропускания Beff
является такая область частот (/2>/i)> которая характеризует идеальный
фильтр с прямоугольной характеристикой, обладающий постоянным
для этой области частот коэффициентом усиления vm при постоянстве
эффективного значения выходного напряжения Спол, причем Спол = U.
Из выражений (4.6) и (4.7) следует, что
1 00
=/2.-/1=-2 У (/и- (4.8)
vm О
Последнее выражение позволяет вычислять эффективную полосу про-
пускания простейших фильтров. Так, в случае простейшего АС-фильтра
нижних частот с уменьшением усиления 20 дБ на декаду имеем
/2=Ь57/3дБ, (4.9)
а для фильтра верхних частот
/1 = 1^7/здБ- (410)
Для фильтров, АЧХ которых точно не определены либо описаны
сложными математическими зависимостями, эти характеристики могут
быть оценены эмпирически, а полоса пропускания определена при-
ближенной формулой, полученной при замене интеграла (4.8) суммой:
(4.11)
i
При графическом изображении последнее выражение можно предста-
вить в виде суммы площадей прямоугольников с основанием, равным
A/J, высоты которых соответствуют значениям функции v2(j). При
постоянном значении А/. = А/ выражение (4.11) можно представить
в виде
А/_ „
Berra-fL»?- (412)
i
Оптимальное приближение к площаи v2(f) достигается уменьшением А/
и выбором этого шага в соответствии с частотной характеристикой
фильтра.
Существуют разнообразные возможности построения фильтров с
требуемыми характеристиками [4.10]. Ниже кратко рассмотрены важ-
нейшие свойства некоторых из них: LC-, активных АС- и импульсных
62
Глава 4
Рис. 4.5. Схемы полузвеньев
фильтров с пологими фрон-
тами АЧХ: а фильтр НЧ;
б фильтр ВЧ.
фильтров, преимущественно используемых в технике измерений шумов.
LC-фильтры используются в сетях электрической проводной связи
[4.11]. Это чисто реактивные цепи Они состоят из катушек индук-
тивности и конденсаторов и требуют обязательного включения на входе
и выходе нагрузочных резисторов с определенным сопротивлением.
Слабым элементом этих фильтров является катушка индуктивности,
требуемые характеристики которой бывает затруднительно обеспечить
и которая является хорошим приемником электромагнитных помех.
Однако, несмотря на указанные недостатки, LC-фильтры благодаря
хорошим селективным свойствам применяют довольно часто.
На рис. 4.5 представлены схемы фильтрующих LC-цепочек, каскад-
ным соединением которых реализуют схемы фильтров нижних и верхних
частот Т- и П-образных форм (соответственно рис. 4.5, а и 4.5,6). Их
АЧХ имеют относительно пологие фронты и соответственно нечетко
выраженную частотную селективность. Более крутые фронты характе-
ристик и лучшую частотную селективность имеют полузвенья, схемы
которых приведены на рис. 4.6. На спаде (фильтр нижних частот) или
нарастании (фильтр верхних частот) их АЧХ наблюдается выброс на
частоте cos (несколько сдвинутый) по отношению к частоте сод среза
характеристики, соответствующей граничной частоте полосы пропуска-
ния фильтра), как это показано на частотной характеристике фильтра
частот на рис. 4.9.
Ниже приводятся расчетные соотношения для параметров элементов
этих фильтров с учетом значений волнового сопротивления и коэффи-
циента т:
Z = 1,25/? для Т-звена,
Z = 0,87? для П-звена,
L= Z/Og, С = i/wgZ,
If ®sV
m = /1 — — 1 для фильтра НЧ,
V W
CDS //соД2
m = — / — — 1 для фильтра ВЧ.
% V \cos/
(4.13)
(4.14, 4.15)
(4 16а)
(4.166)
Рассмотренные полузвенья последовательно включают в схему фильтра
по мере надобности с целью достижения постоянства волнового сопро-
Измерение характеристик шума
63
Рис. 4.6. Схемы полузвеньев
фильтров с крутыми
фронтами А ЧХ: а
фильтры НЧ; б фильт-
ры ВЧ.
тивления. Цепочечный (каскадный) фильтр может быть образован сово-
купностью параллельных и последовательных схем с отдельными их
ответвлениями. Нагрузочное сопротивление R полузвеньев определяется
соотношениями (4.13). Если полузвенья с крутыми спадами АЧХ вклю-
чают в качестве внешних фильтров, то при больших значениях т коэф-
фициент отношения Z и R стремится к единице.
Полосовой фильтр может быть реализован каскадным соединением
полузвеньев, схема которых представлена на рис. 4.7. Расчеты индуктив-
ностей и емкостей могут быть выполнены по следующим соотношениям:
(4.17, 4.18)
(4.19, 4.20)
причем Z определяется согласно (4.13). Соединение звеньев и полу-
звеньев в схему полосового фильтра осуществляют аналогично це-
Рис. 4.7. Схема полу звена по-
лосового фильтра.
64
Глава 4
Рис. 4.8. АЧХ фильтра нижних частот состоящего из двух полных звеньев.
почечным фильтрам нижних и верхних частот, а для увеличения кру-
тизны нарастания и спада АЧХ требуются дополнительные элементы
[4.11].
Свойства некоторых LC-фильтров иллюстрируют диаграммы их
АЧХ, приведенные на рис. 4.8-4.10 в логарифмическом масштабе по
обеим осям. Характеристика на рис. 4.8 принадлежит фильтру нижних
частот, образованному двумя полными звеньями с пологим спадом
АЧХ. Характеристикой на рис. 4.9 обладает фильтр нижних частот,
образованный одним полным звеном с пологим спадом АЧХ, и двумя
полузвеньями с крутым спадом частотной характеристики (cos/co0 = 1,1).
Скачок и пологость спада характеристики после этого скачка обуслов-
лены АЧХ полного звена. На рис. 4.10 показана АЧХ полосового
фильтра, образованного одним полным звеном (полузвеньями нижних
и верхних частот).
Другой разновидностью являются активные ЯС-фильтры, состоящие
из операционного усилителя с ЯС-цепью [4.12]1}. В таком фильтре
п Активные фильтры имеют огромное преимущество перед их пассивными
аналогами на частотах ниже 10 кГц, когда катушки индуктивности и конден-
саторы становятся громоздкими и дорогостоящими, а характеристики далекими
от идеальных. Прим, перев.
Рис. 4.9. АЧХ фильтра нижних частот образованного одним полным звеном
и двумя полузвеньями.
Рис. 4.10. АЧХ однозвенного полосового фильтра.
5-23
66
Глава 4
Рис. 4.11. Схемы активных RC-филътров: а фильтр НЧ; б фильтр ВЧ.
используют различные обратные связи: простую или сложную отри-
цательную, а также положительную.
На рис. 4.11 приведены принципиальные схемы простейших актив-
ных фильтров нижних и верхних частот с положительной обратной
сязью. Усиление в полосе пропускания этих фильтров составляет 40 дБ
на декаду, а вне ее весьма близко к нулю. Соотношения номиналов
элементов в зависимости от типа фильтра (Бесселя, Баттерворта или
Чебышева) и частот среза АЧХ различаются между собой. Для изме-
рения шумов наиболее приемлемой характеристикой обладает фильтр
Баттерворта, схемы которого приведены на рис. 4.11 и имеют следую-
щие соотношения номиналов элементов [4.12], причем для фильтра
нижних частот (граничная частота /2)
1,414 с 1
1 — 4л/27?’ 2 ~ 1,414л/2/?’
а для фильтра верхних частот (граничная частота fr)
СГ = С2 = с9
1 _ 1,414
1 “ Х^Х^С R1 ~ 4ЛЛС’
(4.21а)
(4.216, 4.21в)
(4.22а)
(4.226, 4.22в)
Фильтры с указанными соотношениями номиналов элементов вблизи
граничных частот характеризуются ослаблением усиления примерно
— 3 дБ на декаду. Для достижения большей крутизны спада или нараста-
ния АЧХ вблизи граничных частот используют каскад из двух соот-
ветствующих фильтров. Расчетные соотношения номиналов их эле-
ментов несколько изменятся (индексом «а» обозначены элементы пер-
вого фильтра, индексом «в» второго), причем для фильтра нижних
частот
К1а ~ &2а — Rib — &2Ъ — К,
1,848 1
4л/2/?’ Сга ~ 1,848л/2/?’
(4-23)
Измерение характеристик шума
67
С _ °’756 г 1
ib 4nf2R’ 2Ь 0,756л/27?'
а для фильтра верхних частот
^la = С 2а — Clb = Clb ~ С•>
1 __ 1,848
Rla ~ l,8487t/iC’ R2a ~ 4nf\C”
1 _ 0,756
Rib ~ 0,156nf^C’ Rlb ~ Anj\C'
(4.24)
На рис. 4.12 изображена кривая АЧХ (в логарифмическом масштабе
по обеим осям здесь и ниже) фильтра Баттерворта нижних частот 4-го
порядка, представляющего собой каскад из двух фильтров по схеме на
рис. 4.11,6/, с граничной частотой f2 = 1 кГц. АЧХ фильтра Баттерворта
верхних частот также 4-го порядка с/2 = 1 кГц, образованного каскадом
из двух фильтров по схеме на рис. 4.11,6, представлена на рис. 4.13. Обе
характеристики взаимно зеркальны относительно ординаты в точке
1 кГц, что обусловлено их схемами и расчетными соотношениями
номиналов элементов.
На основе активных ЯС-фильтров могут быть реализованы и поло-
совые фильтры. Для получения АЧХ с достаточно продолжительной
Рис. 4.12. АЧХ фильтра Баттерворта нижних частот 4-го порядка
68
Глава 4
Рис. 4.13. АЧХ фильтра Баттерворта верхних частот 4-го порядка.
горизонтальной частью в полосе пропускания и крутыми фронтами
вблизи граничных частот используют каскадное включение активных
фильтров нижних и верхних частот. При использовании звеньев, АЧХ
которых показаны на рис. 4.12 и 4.13, результирующая АЧХ имеет вид,
показанный на рис. 4.14, а. Расширенной полосой пропускания обладает
фильтр, АЧХ которого представлена на рис. 4.14, б, с граничной час-
тотой звена нижних частот f2 = 2 кГц и граничной частотой звена
верхних частот /! = 500 Гц Из сравнения АЧХ на рис. 4.10 и 4.14 видно,
что полосовой LC-фильтр имеет более качественную характеристику.
АЧХ, близкую к характеристике АС-фильтров, имеют импульсные
интегральные фильтры, изготовленные по МОП-технологии, содержа-
щие интегрирующий конденсатор, зарядом которого управляет быстро-
действующий ключ, и усилитель. Ключ работает под воздействием
внешних тактовых сигналов высокой частоты следования. Вид фильтра
(нижних или верхних частот либо полосовой) и форма его характе-
ристики определяются соответствующей схемой. Рабочий частотный
диапазон фильтра связан пропорциональной зависимостью с частотой
тактовых сигналов, что позволяет сравнительно просто задавать раз-
личные полосы пропускания, особенно в области нижних частот.
Подробно указанные импульсные фильтры рассмотрены в работе
[4.10]. Их преимуществами являются интегральное исполнение, простое
задание граничных частот и сравнительно большая крутизна фронтов
Измерение характеристик шума
69
Рис. 4.14. АЧХ каскадных фильтров 4-го порядка.
70
Глава 4
Рис. 4.15. АЧХ импульсного интегрального фильтра нижних частот типа R 5609.
АЧХ. Недостатком является искажение характеристики для гармони-
ческих составляющих входного сигнала, частоты которых превосходят
половину тактовой частоты, из-за эффекта наложения (мимикрии) час-
тот, что требует применения дополнительного входного фильтра Ч
На рис. 4.15-4.17 показаны АЧХ (кривые в логарифмическом мас-
штабе по обеим осям) интегральных импульсных фильтров, изготов-
ляемых фирмой RETICON.
Микросхема Я5609 представляет собой фильтр нижних частот с не-
равномерностью характеристики в полосе пропускания менее 0,2 дБ
и подавлением частот 75 дБ и более вне этой полосы. Микросхема R5611
содержит чебышевский фильтр верхних частот с крутизной фронта
характеристики 30 дБ на октаву и ее неравномерностью в полосе
пропускания менее 0,6 дБ. Микросхема Я5604 включает в себя три
чебышевских третьоктавных полосовых фильтра, подключенных парал-
лельно входу и выходу октавного полосового фильтра [4.13].
Характеристики поставляемых микросхем импульсных фильтров
определяет заказчик. Потребитель должен позаботиться о генераторе
тактовых сигналов и фильтрах для исключения мимикрии частот и по-
давления паразитных выходных сигналов, вызванных тактированием.
п Необходимость ограничения частотного спектра дискретизируемого сиг-
нала отражает условие применимости теоремы Котельникова. Прим, перев.
Измерение характеристик шума
Рис. 4.16. АЧХ импульсного интегрального фильтра верхних частот типа R 5611.
Рис. 4.17. АЧХ полосового импульсного интегрального фильтра R 5604.
72
Глава 4
4.1.4. Измерители эффективного значения
напряжения шума
Сравнение различных видов сигналов и шума в общем случае
возможно только по эффективным значениям их напряжений, так как
определение соответствующих форм-факторов чаще всего затруднено.
Так, форм-фактор, вычисляемый по выражению (2.40), характеризует
только белый шум. Однако обычно шум содержит различные по форме
составляющие, что не позволяет воспользоваться упомянутым выра-
жением (2.40).
Эффективное значение Ua сигнала ue(t) произвольной формы опре-
деляют по выражению
-J u2e(t)dt
.1 л
(4.25)
L1 О
т. е. квадратичные мгновенные значения напряжения сигнала усредняют
по времени, интегрируют в течение достаточно продолжительного
интервала времени Т, после чего извлекают из него квадратный корень.
Блок-схема устройства, реализующего указанный алгоритм, приведена
на рис. 4.18.
Операцию извлечения корня можно заменить делением подынтег-
рального выражения на значение Ua, принимаемое в качестве константы:
(4-26)
Блок-схема устройства, моделирующего последнее выражение, приве-
дена на рис. 4.19 1}.
Рис. 4.18. Блок-схема измерения эффективного значения напряжения шума.
Первое из устройств (рис. 4.18) реализуют сравнительно просто при
использовании аналоговых множительных микросхем [4.2]. Квадриро-
вание осуществляют объединением обоих входов микросхемы умно-
жителя, а извлечение корня реализуют включением квадратора в цепь
обратной связи инвертирующего усилителя.
Устройство, представленное схемой на рис. 4.19. реализуют при-
менением множительно-делительной микросхемы, имеющей три входа
для соответствующих сигналов [4.2].
Квадрирование сигналов выполняют и диодно-резистивные схемы,
п В таком виде процедура некорректна. Прим, перев.
Измерение характеристик шума
73
Рис. 4.19. Преобразован-
ная блок-схема изме-
рения эффективного
значения напряжения
шума.
например приведенная на рис. 4.20, я, вольтамперная характеристика
которой аппроксимируется параболой (рис. 4.20,6). Последовательно
отпираемые диоды осуществляют параллельное подключение резисто-
ров, каждый из которых формирует соответствующий участок вольт-
амперной характеристики устройства. Проекции точек пересечения от-
резков прямых, образующих характеристику, на ось абсцисс (напря-
жений) равно отстоят друг от друга, вследствие чего погрешность
аппроксимации для всех сечений характеристики постоянна. Из-за не-
линейности диодных характеристик результирующая вольт-амперная
характеристика устройства существенно сглаживается, а погрешность
аппроксимации оказывается весьма малой.
Точные расчеты сопротивлений резисторов с учетом реальных ха-
рактеристик диодов оказываются довольно трудоемкими и требуют
применения ЭВМ.
Так как параболическая вольт-амперная характеристика реализуема
лишь в первом квадранте системы координат, то обрабатываемый
описанной диодно-резистивной схемой несимметричный сигнал должен
предварительно подвергаться двухполупериодному выпрямлению.
Рис. 4.20. Схема (а) и вольт-амперная характеристика (б) диодно-резистивного
квадратора.
74
Глава 4
Рис. 4.21. Схема диодно-резистивной
матрицы.
Простая диодно-резистивная схема, реализующая соотношение (4.25)
в несколько ином виде
Ua = const у/ We (/) , (4.27)
описана в работе [4.14]. Диодно-резистивная матрица этой схемы
(рис. 4.21) имеет параболическую характеристику преобразования.
Среднее значение сигнала (шума) определяют с помощью ЯС-цепи
или интегратора, реализуемых с использованием операционного усили-
теля. В случае А С-цеп и с целью уменьшения длительности переходного
процесса первоначально задают (выбором Л) небольшую постоянную
времени этой цепи, после чего постоянную времени увеличивают под-
ключением резистора с большим сопротивлением.
Рассмотренным выше схемам устройств для определения эффектив-
ного значения напряжения шума свойственны небольшие пределы из-
мерений. Если требуется измерять эффективные значения, характери-
зуемые отношением пиковых значений к эффективному значению на-
Рис. 4.22. Блок-схема измерения эффективного значения напряжения шума ме-
тодом логарифмирования и антилогарифмирования
Измерение характеристик шума
75
Рис. 4.23. Упрощенная принципиальная схема устройства блок-схема которого
показана на рис. 4.22.
пряжения (коэффициентом пиковости), достигающим ~ 10, то диапазон
устройства должен достигать 50...60 дБ. Поэтому применяют более
сложные схемы, позволяющие расширить пределы измерений. Одна из
таких схем, осуществляющая «сжатие» входного сигнала его логариф-
мированием с последующим восстановлением обработанного сигнала
путем его антилогарифмирования, приведена на рис. 4.22 [4.15]. Схема
реализует алгоритм определения эффективного значения напряжения
шума согласно выражению (4.26), но после его логарифмирования,
с пределами измерений в диапазоне до 60 дБ. Упрощенная принципи-
альная схема такого устройства приведена на рис. 4.23. Усилитель
работает в режиме двухполупериодного выпрямления входного сигнала,
а усилитель N2 осуществляет логарифмирование выпрямленного на-
пряжения, причем транзисторы Тг и Т2 удваивают значение логарифма
этого напряжения. Усилитель N3 с транзистором Т4 работает в режиме
логарифмирования выходного напряжения Ua. Выходные сигналы ло-
гарифмических усилителей N2 и N3 вычитаются в цепи база эмиттер
транзистора Т3, осуществляющего антилогарифмирование выделяемой
разности сигналов. Коллекторный ток этого транзистора преобразуется
интегрирующим усилителем N4 в пропорциональное напряжение, пред-
ставляющее собой среднее значение входного сигнала устройства (шу-
ма). Подробное описание этого устройства содержится в работе [4.16].
76
Глава 4
В виде монолитной и гибридной микросхем оно производится несколь-
кими фирмами п.
Эффективное значение напряжения шума помимо среднего значения
содержит случайную составляющую, амплитудное распределение ко-
торой при достаточно длительном наблюдении можно полагать нор-
мальным. Количественно эта случайная составляющая зависит от спект-
ра шума и качества цепи определяющей среднее значение напряжения
шума. При идеальном интеграторе и входном белом шуме с эффек-
тивной шириной спектра Beff коэффициент вариации (см. выражение
(2.51)) мощности U2 эффективного значения напряжения на выходе
устройства, выполненного по схеме на рис. 4.18, составит [1.5, 4.14]
_£i_ =____1 * * * *
Vl и2
(4.28)
где среднеквадратичное отклонение мощности а также предпола-
гается, что Т» 1/Z?eff. При использовании для усреднения ЯС-цепи
и условии RC » 1/Ве{( имеем
(У, 1
"i=771 = -7—• (4.29)
Коэффициент вариации г2 эффективного значения напряжения Ua при
гх « 1 определяется выражением
Со 1
V2 = U=2Vl' (430)
Это означает, что измеренное значение U* с вероятностью 68° о лежит
в пределах интервала значений U (1 ± и2), где Ua-значение выходной
величины, «измеренное» за бесконечно большое время. Необходимо
подчеркнуть, что коэффициент v2 ни в коем случае не является пределом
относительной погрешности. Подобного предела не существует. Причем
вероятность появления весьма большой относительной погрешности
существенно снижается. Так, например, вероятность относительной
погрешности, в 3 раза превышающей v2, составляет всего 27°о.
Для индикации эффективного значения напряжения шума Ua ис-
пользуют стрелочные приборы или приборы с цифровым отсчетом на
основе аналого-цифровых преобразователей (АЦП) Так, например, для
этой цели предназначена специализированная микросхема трехразрядно-
1) При наличии устойчивого к температурным влияниям устройства ло-
гарифмирования более просто технически реализуется логарифм выражения
(4.25), так как при этом исключаются операции logx и вычитания логарифмов,
заменяемые простой операцией масштабирования делением на 2 логарифма
х. Прим. переа.
Измерение характеристик шума
77
012345 6 7 8 9 10 дБ
।--1--1--г1-1 1- 1 4—И-1-Н--*1- -h-1
0 10 20 30 40 50 60 70 80 90 100 %
а
0 1 2 3 4 5 6 7 8 9 10 дБ
।----г1------------1-----1---г-—।------1.---1----1
О 10 20 30 40 50 60 70 80 90 100 %
б
Рис. 4.24. Логарифмические шкалы индикаторов: а для квадратов средних зна-
чений напряжения шума; б для эффективных значений напряжения шума.
го (в десятичном коде) АЦП С52О с погрешностью измерений, в общем
случае не превышающей 1°о. Время высвечивания результатов пре-
вышает время интегрирования Т, что исключает мерцание индикатора
вследствие изменений выходного напряжения интегратора.
Для отсчета в децибелах в стрелочных приборах применяют ло-
гарифмические шкалы, для градуировки которых используют операцию
извлечения квадратного корня (рис. 4.24, а) или обходятся без нее
(рис. 4.24, б). В первой из шкал приходится мириться с относительно
большой погрешностью отсчета в ее начале
В приборах с цифровым отсчетом в децибелах используют операцию
логарифмирования. При этом необходимо учитывать существенное
влияние изменений температуры окружающей среды на схему лога-
рифмирования. В устройстве, выполненном по схеме на рис. 4.23, бла-
годаря используемому принципу логарифмирования-антилогарифмиро-
вания это влияние существенно снижено благодаря использованию
микросборки транзисторов 7j..., Т4, размещенных в одном корпусе
(измененйя соответствующих токов взаимно компенсируются).
В отдельных устройствах логарифмирования" предусмотрены спе-
циальные цепи коррекции погрешностей, вызываемых температурными
влияниями [4.2, 4.15]. По возможности они должны входить в состав
соответствующих микросхем, для которых поставщик гарантирует пре-
делы изменения как основной погрешности преобразования так и до-
полнительных погрешностей.
4.2. Цифровые методы измерений
4.2.1. Общие принципы
Успехи в развитии микроэлектроники, в том числе появление микро-
процессоров и микро-ЭВМ, создали необходимые предпосылки для
внедрения методов цифровой обработки сигналов. Достоинствами си-
стем цифровой обработки данных являются высокая гибкость и боль-
78
Глава 4
шой коэффициент передачи. К недостаткам можно было бы отнести
ограниченность (сверху) частотного спектра обрабатываемых сигналов
и большие аппаратурные затраты, однако их значимость уменьшается
по мере совершенствования характеристик элементной базы (ее быстро-
действия, точности) и увеличения степени интеграции элементов и функ-
ций в микросхемах.
В настоящее время широко применяют цифровую обработку сигна-
лов, характеризующихся спектром низких и инфранизких частот. В слу-
чае инфранизких частот наилучший результат дают методы цифровой
обработки, так как фильтрация сигналов аналоговыми средствами на
частотах порядка единиц или долей герца требует использования гро-
моздких катушек индуктивности и конденсаторов.
Важнейшее отличие цифровой обработки от аналоговой заключается
в дискретизации входных сигналов, т. е. во взятии их отсчетов (счи-
тывании мгновенных значений) в определенные моменты времени. Шаг
считывания по времени определяется необходимым временем аналого-
цифрового преобразования сигналов и их последующей обработки.
Между требуемой частотой дискретизации сигнала и максимальной
частотной составляющей его спектра существует определенная зави-
симость, которую необходимо соблюдать. Речь идет о теореме отсчетов,
в соответствии с которой частота дискретизации сигнала по меньшей
мере в два раза должна превышать частоту максимальной гармони-
ческой составляющей спектра сигнала [1.3] и. Несоблюдение этого
условия при аналого-цифровом преобразовании приводит к появлению
ложных частот, т.е. частотные составляющие сигнала, превышающие
половину частоты дискретизации, воспринимаются как низкие частоты,
зеркальные по отношению к половине частоты дискретизации. Иначе
говоря, речь идет о возникновении мимикрии частот [4.17]. Как отме-
чалось выше при рассмотрении фильтров, для устранения этого эффекта
на входе АЦП необходимо включать фильтр нижних частот с верхней
граничной частотой, соответствующей анализируемому спектру изме-
ряемого сигнала.
Теорема отсчетов должна соблюдаться и при многоканальной обра-
ботке данных с последовательной во времени дискретизацией сигналов
в отдельных каналах.
Цифровая обработка дискретизованных сигналов может выполнять-
ся в реальном времени либо с промежуточным их запоминанием
(обработка в измененном масштабе времени). В первом случае обра-
ботка текущего дискретного значения сигнала должна завершиться до
момента следующего отсчета. Этот режим применяют для обработки
высокочастотных сигналов при высокой частоте дискретизации, причем
В отечественной литературе известна также как теорема Котельникова.
Прим, перев.
Измерение характеристик шума
79
его реализация возможна только при использовании ЭВМ с соответ-
ствующим быстродействием. Обработка сигналов в реальном масштабе
времени характерна, например, для систем передачи аналоговой ин-
формации. В измерительной технике такую обработку сигналов при-
меняют в общем случае редко. С одной стороны, в этом зачастую нет
необходимости, а с другой, вследствие малого времени, отводимого на
обработку дискретного значения, могут возрастать погрешности из-
мерений. Поэтому при измерениях дискретизируемые значения сигнала
обычно запоминают в цифровом виде и обрабатывают их с задержкой
во времени относительно момента восприятия При этом данные из-
мерений могут многократно накапливаться и обрабатываться с целью
достижения минимальной погрешности результата.
При цифровой обработке используют специальные методы, неко-
торые из них кратко рассмотрены ниже. В цифровой системе обработки
сигналов, предназначенной для измерений (информационно-измеритель-
ная система), можно выделить (условно) четыре основные процедуры.
Первая из них преобразование сигналов из аналоговой формы пред-
ставления в цифровую с целью подготовки их для последующей цифро-
вой обработки. Вторая процедура состоит в обработке цифрового
сигнала и подготовке результата измерений. Третья процедура обра-
ботка полученных результатов путем усреднения данных с целью умень-
шения случайной составляющей погрешности, обусловленной ограни-
ченным временем наблюдения. Четвертая процедура- выдача оконча-
тельного результата измерений. Часто для вывода результатов в гра-
фической и цифровой формах представления одновременно используют
элек гронно-лучевой дисплей.
4.2.2. Аналого-цифровое преобразование сигналов
В измерительных системах аналоговые сигналы чаще всего пред-
ставляют двоичным кодом. Если напряжение в пределах от 0 до
1/макс представляют «-разрядным числом, то произвольное значение
напряжения в этих пределах можно представить в виде следующего
выражения:
U = U^4a„-l2"-1 + а„_22"-2 + ... + а02°). (4.31)
Коэффициенты ап_^ ..., а0 принимают значения 0 или 1, и их после-
довательность представляет собой двоичное число цифровой эквива-
лент напряжения U. Выражение в скобках в правой части формулы (4 41)
представляет собой масштаб шкалы преобразования.
Время аналого-цифрового преобразования предопределяет возмож-
ную частоту дискретизации сигнала и тем самым допускаемую при
анализе верхнюю граничную частоту его спектра.
Наиболее широко применяют в настоящее время АЦП, работающие
80
Глава 4
п . а 1. 2. 3. 4. 5. 6.
Подготовка । ... । Запоминание
(cfyoc) I “ '(выдача результата)
Рис. 4.25. Диаграмма, иллюстрирующая принцип двоичного поразрядного урав-
новешивания измеряемой величины.
по принципу последовательных* приближений1}. Реализацию этого прин-
ципа иллюстрирует диаграмма на рис. 4.25. Допустим (это показано на
диаграмме) пределы преобразования напряжений от 0 до 6,4 В, а зна-
чения напряжения представляются 6-разрядными двоичными числами,
вследствие чего масштаб преобразования составляет 0,1 В/бит. До-
пустим, текущее значение входного измеряемого сигнала оказывается
равным 4,65 В. Преобразование происходит в соответствии с выра-
жением (4.31), в котором последовательно определяются коэффициенты
ап. 1, ..., я0, начиная с коэффициента (значения) an-i старшего разряда.
Для этого используют набор напряжений от С7макс/2 до (7Макс/25, кото-
рым соответствуют значения двоичных разрядов от а5 до я0. Вначале
устанавливается единичное значение я5, т.е. напряжение уравновешива-
ния, равное 17макс (рис. 4.25). Если измеряемая величина превышает
установленное значение уравновешивающего напряжения, то значение
последнего сохраняется и соответствующее значение двоичного разряда
оказывается равным 1. В противном случае установленное значение
п Речь идет о принципе двоичного поразрядного уравновешивания. Про-
изводство интегральных АЦП такого принципа действия достигает в настоящее
время примерно 80°о общего объема выпуска микросхем АЦП. Прим, перев.
Измерение характеристик шума
81
уравновешивающего напряжения «выключается» и соответствующее
значение двоичного разряда оказывается равным 0.
Как видно из диаграммы уравновешивания на рис. 4.25, на первом
шаге процесса произошла недокомпенсация а5 — 1, на втором шаге-
перекомпенсация я4 = 0 и т. Д. Разрешение рассмотренного АЦП таково,
что он не может более точно (в данном случае это 4,6 В) преобразовать
входное напряжение, которое менее чем на 0,1 В (см. рис. 4.25) пре-
вышает 4,6 В. Для достижения лучшего разрешения необходимо допол-
нительно увеличить число ступеней уравновешивающего напряжения,
уменьшая их значения, и соответственно увеличится число шагов урав-
новешивания. Время преобразования пропорционально числу шагов
уравновешивания, т. е. числу двоичных разрядов (без учета времени
подготовки АЦП к началу уравновешивания). При необходимости
обеспечения требуемой частоты дискретизации число двоичных разря-
дов АЦП должно ограничиваться в соответствии с допускаемой по-
грешностью преобразования.
Из диаграммы уравновешивания следует, что входной сигнал не
должен изменяться во время цикла преобразования, так как иначе
возникает динамическая погрешность кодирования. Для выполнения
этого условия на входе АЦП включают блок выборки/хранения мгно-
венного значения сигнала, управляемый тактовым сигналом той же
частоты, что используется и для запуска АЦП. Задержка, вносимая этим
блоком, несколько увеличивает общее время аналого-цифрового пре-
образования и снижает частоту дискретизации сигнала.
На рис. 4.26 приведена блок-схема системы сбора данных, содержа-
щей АЦП с блоком выборки/хранения (БВХ) и аналоговый мульти-
плексор измерительных каналов (МИК) с выходным согласующим
операционным усилителем. Выбор каналов осуществляется адресным
регистром РгАдр (40...42- двоичный код адреса), управляемым адрес-
ным счетчиком Сч (LD вход сигнала записи). Конец цикла аналого-
цифрового преобразования фиксируется сигналом на его выходе ЕОС.
Выходной код АЦП группами через соответствующие логические (клю-
чевые) элементы (группы ключей Кл) по сигналам ENB передается на
шины входной магистрали ЭВМ.
Выход ЕОС может быть подключен непосредственно ко входу управ-
ления Trig блока-формирователя Ф стробирующего импульса БВХ,
а также ко входу управления адресного счетчика, что позволяет после-
довательно опрашивать 8 каналов без дополнительного адресного об-
ращения.
Рассмотренную систему сбора данных выпускают в виде модулей
различных модификаций. Время преобразования 12-разрядного АЦП
составляет примерно 20 мкс, что обеспечивает частоту дискретизации
сигналов до 50 кГц.
6-23
82
Глава 4
Рис. 4.26. Блок-схема системы сбора данных' МИК мультиплексор измеритель-
ных каналов; РгАдр адресный регистр; Сч счетчик; БВХ блок выборки/хра-
нения; Кл группы ключей.
4.2.3 Цифровая фильтрация
Основу цифровых фильтров составляют ЦВМ, и ведут они обра-
ботку, в отличие от аналоговых фильтров, дискретных (прерывистых во
времени) сигналов. Тем не менее между аналоговыми и цифровыми
фильтрами существует тесная взаимосвязь [4.18]. Аналоговые фильтры
характеризуются передаточной функцией F(p), определяемой из соот-
ветствующего дифференциального уравнения путем преобразования
Лапласа. Для описания цифрового фильтра исходным также является
дифференциальное уравнение, однако вследствие дискретности сигналов
его передаточную функцию H(z) определяют при помощи z-преобразо-
вания.
В качестве примера рассмотрим определение передаточной функции
системы цифровой фильтрации 2-го порядка [4.19]. Входной дискретный
сигнал можно представить в виде функции x(nTs), где п = О, 1, 2, ...,
a Ts интервал дискретизации, т. е. этот сигнал определен в дискретные
моменты времени nTs. Аналогично можно представить и выходной
сигнал фильтра функцией y(nTs). Тогда дифференциальное уравнение
Измерение характеристик шума
83
цифрового фильтра запишется в виде
y(nTs) = Aox(nTs) + Atx(nTs - Ts) + A2x(nTs - 2TS) +
+ Biy(nTs - Ts) + - 2TS). (4.32)
После z-преобразования этого уравнения получим [4.18]
Y(z) = A0X(z) + AiX(z)z~l + A2X(z)z~2 +
+ BlY(z)z~t + B2Y(z)z~2, (4.33)
z = exp(/>Ts), (4.34)
т. e. умножение на z~l соответствует временному сдвигу на период
дискретизации Ts.
Соотношение (4.33) может быть упрощено и преобразовано в выра-
жение описывающее передаточную функцию цифрового фильтра:
Y(z) Ао + A2z 1 + A2z 2
{Z) X(z) 1- B.z-1 — B2z~2
(4.35)
Такую передаточную функцию реализует рекурсивная система, модель
которой изображена на рис. 4.27. Символические операторы, исполь-
зуемые в этой модели, и реализуемые ими действия поясняются на
рис. 4.28. Временной сдвиг на интервал (шаг) дискретизации Ts осу-
ществляют при помощи цифрового ЗУ.
Реализация того или иного вида фильтра (нижних или верхних
частот, полосового, заграждающего) обусловлена выбором значений
коэффициентов Ло, Лх, Л2, В2, а их соотношение предопределяет
характеристику фильтра (например, фильтр Чебышева, Бесселя или
Баттерворта). Необходимо подчеркнуть, что частотная характеристика
системы определена относительно опорной частоты
/о = const/Ts. (4 36)
Это является существенным преимуществом цифровых фильтров, так
как посредством подбора их коэффициентов и изменения частоты
дискретизации можно задавать требуемый частотный диапазон фильт-
Рис. 4.27. Блок-схема мо-
дели рекурсивной си-
стемы 2-го порядка с
дискретным време-
нем.
6
84
Глава 4
рации. Так же как и аналоговые, цифровые фильтры можно включать по
каскадной схеме для достижения крутых фронтов АЧХ вблизи гра-
ничных частот. Практически такая схема образуется одним фильтром
с выходным ЗУ, причем сигнал циркулирует между выходом и входом
фильтра требуемое число раз.
Временная задержка рассматриваемого цифрового фильтра (см.
рис. 4.27) моделируется звеном задержки 1-го порядка (АС-фильтр
нижних частот) и выделена в виде соответствующей части фильтра на
рис. 4.29. Передаточная характеристика фильтра описывается выраже-
нием вида
д
(437)
Если коэффициенты А и В принимают значения А = 0,1 и В = 0,9, то
достигается единичное усиление. В качестве входного сигнала рассмат-
ривается единичный скачок, на который наложено синусоидальное коле-
бание х частотой f = 83,3 Гц, с тем чтобы можно было определить
переходную характеристику и процесс установления колебаний (пере-
ходный процесс). На рис. 4.30 изображены диаграммы упомянутого
синусоидального сигнала х и отклика у на единичный скачок. На
рис. 4.30, а отклик yY представляет собой переходную характеристику
звена задержки 1-го порядка, на которую наложено ослабленное си-
нусоидальное колебание. Отклик у2 получен в результате повторного
прохождения выходного сигнала уг через фильтр, что соответствует
звену задержки 2-го порядка На диаграммах отчетливо видны фазовые
сдвиги между входными и выходными синусоидальными сигналами.
Сигналы на рис. 4.30, а получены при частоте дискретизации 1 кГц
(Ts = 1 мс). Диаграммы сигналов на рис. 4.30, б иллюстрируют частот-
ные искажения выходного сигнала того же фильтра при аналогичном
входном сигнале с уменьшением частоты дискретизации в два раза по
сравнению с предыдущим случаем. При этом возрастает примерно вдвое
время установления и вдвое уменьшаются амплитуды пульсаций.
Xz(z)
Y(z) = Xy(z] + X2(z)
Y(z}=A>X(z)
Y(z)^X(z)-z'‘>
Puc. 4.28. Символические изображения
операторов модели рекурсивной си-
стемы с дискретным временем.
Измерение характеристик шума
85
X(z)
Y(z)
Рис. 4.29. Блок-схема звена
задержки 1-го порядка.
Цифровые фильтры имеют большие преимущества по сравнению
с аналоговыми при частотном анализе в многодекадном диапазоне
например при анализе низкочастотного шума на частотах от 1 Гц до
20 кГц. В этом случае можно использовать один фильтр, «перестраи-
ваемый» на требуемую частоту изменением частоты дискретизации
входного сигнала. Узкополосная фильтрация достигается многократной
передачей выходного сигнала фильтра на его вход, например при
использовании фильтра 2-го порядка Вследствие их принципа действия
цифровые фильтры позволяют проводить обработку и анализ сигналов
в реальном масштабе времени. Временная задержка фильтра (сдвиг
между выходным и входным сигналами) обусловлена только временем
вычислений, что и иллюстрируют диаграммы на рис. 4.30 Х). При соот-
ветствующем задании последовательности частот дискретизации и весь-
ма малом времени вычислений выполняется частотный анализ в реаль-
ном масштабе времени в диапазоне от 1,6 Гц до 20 кГц с третьоктавным
интервалом между каналами.
Недостатки цифровых фильтров проявляются при определении
спектральной мощности, так как при смещениях частоты фильтра
изменением частоты дискретизации входного сигнала относительные
значения его параметров, в частности относительная ширина полосы
пропускания, сохраняются постоянными. Это, например, означает, что
полоса пропускания фильтра изменяется пропорционально частоте диск-
ретизации. Данное свойство приводит, например, к искажению резуль-
татов анализа белого шума, что проявляется в виде неравномерности
спектра, достигающей для отдельных компонентов 10 дБ на декаду.
Для узкополосного анализа цифровые фильтры обычно не при-
меняют, так как относительную ширину их полосы пропускания нельзя
сузить до произвольно малого значения. В этом случае наиболее
пригодными оказываются фильтры, реализующие алгоритм дискрет-
ного преобразования Фурье.
11 В это время задержки должно, очевидно, входить и время аналогово-
цифрового преобразования. Прим, перев.
86
Глава 4
Рис. 4.30. Диаграммы входного и выходного сигналов цифрового фильтра, схема
которого представлена на рис. 4.27, при частоте дискретизации 1 кГц (а)
и 500 Гц (б).
Измерение характеристик шума
87
4.2.4. Дискретное преобразование Фурье
Как известно, преобразование Фурье позволяет функцию х(г), опре-
деленную во временной области, представить соответствующей функ-
цией X (/) в частотной области (прямое преобразование Фурье):
X(f)= J (4.38)
— 00
При этом обратное преобразование Фурье имеет вид
х(0 = f X(f)e’™df. (4.39)
— а
Важным в анализе сигналов является случай функции х(/), повторяю-
щейся с периодом Т. Спектр такого сигнала содержит основную гармо-
нику с частотой fY = 1/Т и множество гармонических составляющих
с частотами, кратными основной частоте, которые образуют набор
эквидистантных линий в диаграмме спектра. В точке f= 0 спектра
размещается ордината, соответствующая постоянной составляющей
Обычно непрерывное множество частотных составляющих спектра огра-
ничивают рассмотрением произвольного целого числа к дискретных
частот (к положительное число) fk = kfl9 что позволяет соотношения
(4.38) и (4.39) представить соответственно в несколько ином виде:
1 Т/2
X(fk) = - f x«e ™>ldt, (4.40)
1 -т/2
00
х«)= X X(fk)^‘. (4.41)
к — — оо
Если функция л(0, представленная в виде дискретного сигнала
x(rn) = x(nTs), где Ts интервал дискретизации, а «-произвольное целое
число, заключенное между 0 и +оо, является периодической, то и ее
частотное представление будет периодической функцией. Причем период
повторения ограничивается интервалом частот от f — 0 до f=fs = 1/7^,
а функция X(fk) является зеркальной относительно частоты J=0,5/s.
Число N эквидистантных линий спектра fk между f = 0 и fs равно числу
дискретных отсчетов сигнала за его период Т, т. е.
f Т
N = = (4.42)
Ji
С учетом последних выражений соотношения (4.38) и (4.39) для перио-
дических дискретных сигналов принимают следующий вид:
1 N~1 / '2.тгик\
*(Л) = 7УJox(,”)exp("7' nJ’ (4’43)
88
Глава 4
*('„) = X X (fk) eXP (y-^- ) • (4 44)
k = 0 \ A /
Эти соотношения именуют дискретным преобразованием Фурье (ДПФ).
Это преобразование позволяет вычислять амплитудный спектр перио-
дического сигнала при его представлении последовательностью соот-
ветствующих дискретных значений.
При вычислении N значений функции X по N дискретным
значениям функции X (t) в соответствии с выражением (4.43) необходимо
выполнить N2 умножений комплексных чисел. Метод так называемого
быстрого преобразования Фурье (БПФ) позволяет сократить число
умножений до NlogTV. Так, для типичного случая N = 210 = 1024 число
операций умножений сокращается примерно в 100 раз Ч Алгоритм БПФ
применяют не только для вычисления амплитудного спектра. Он ока-
зывается весьма эффективным и при определении авто- и взаимнокор-
реляционной функций, а также передаточной функции [4.22, 4.23].
При использовании алгоритма БПФ безусловно необходимо соблю-
дать условия теоремы отсчетов, в том числе и ограниченность спектра
анализируемого сигнала верхним значением частоты, которое не должно
превышать половины частоты дискретизации сигнала. В противном
случае возникает эффект мимикрии частот. Для ее исключения на входе
дискретизатора (АЦП) включают фильтр нижних частот с соответ-
ствующей частотой среза характеристики. На практике зачастую оцени-
ваемый спектр (вследствие неидеальности частотной характеристики
фильтра) оказывается несколько большим. При числе дискретных отсче-
тов N = 1024 можно определить около 400 гармонических составляю-
щих спектра, соответствующих плоской области характеристики фильт-
ра.
Фильтр, реализующий алгоритм БПФ, позволяет оценить спект-
ральный состав сигнала лишь в пределах двух декад, причем при
обязательном эквидистантном расположении гармоник и начальной
нулевой составляющей. Это является недостатком подобных фильтров
по сравнению с цифровыми. В ряде случаев требования, предъявляемые
к фильтру, оказываются противоречивыми. Так, может потребоваться
анализ узкой части спектра, причем начиная с его верхней половины
относительно нулевой гармоники. Для такого анализа в работах [4.24,
4.25] предлагается использовать стробоскопическое преобразование сиг-
нала с целью сжатия его частотного спектра (коэффициент сжатия
примерно равен 10), выделение требуемого участка спектра и смещение
его к нулевой гармонике с последующим анализом по алгоритму БПФ.
Естественно, что стробоскопическое преобразование возможно лишь
п Следует подчеркнуть, что применение алгоритма БПФ в отличие от ДПФ
требует предварительного накопления всех дискретных значений сигнала, что
в ряде случаев снижает скорость анализа. Прим, перев.
Измерение характеристик шума
89
для периодических сигналов. Поэтому при анализе шума для возмож-
ности использования описанной совокупности процедур преобразования
выделяют часть процесса, запоминают и искусственно ее периодически
повторяют.
Для уменьшения случайных погрешностей используют усреднение
данных. В современных анализаторах на основе БПФ осуществляют
усреднение до 104 выборок
4.2.5. Определение среднего значения напряжения шума
Выделяемые при цифровом анализе частотные составляющие слу-
чайного процесса характеризуются существенной временной нестабиль-
ностью. В случае использования аналоговых фильтров для достижения
стабильности получаемых результатов напряжение шума квадрируют,
т.е. определяют его эффективное значение и затем его усредняют (см.
разд. 4.1.4). Усреднение осуществляют интегрированием сигнала за
определенный интервал времени (линейное усреднение) либо передачей
этого сигнала через звено задержки (7?С-цепь), обычно 1-го порядка
(нелинейное усреднение).
При цифровой обработке сигнала аналоговое интегрирование за-
меняют эквивалентным цифровым суммированием N дискретных зна-
чений этого сигнала входной величины X и нормированием суммы на
N. Результат цифрового интегрирования составляет
1 N
(4.45)
Для удобства вычислений деление совмещают с суммированием, и для
л-й выборки имеем
Y„ = "£ + XNn = ^in 1, « = 1JV • (4.46)
Зависимость среднего значения быстро флуктуирующего процесса X от
числа выборок УНп i = /(л), т. е. времени наблюдения (интегрирования),
представлена соответствующей диаграммой на рис. 4.31. После накоп-
ленных отсчетов вычисленное среднее значение запоминают в качестве
квазистабильного.
При анализе инфранизкочастотных процессов с большим интервалом
дискретизации появление среднего значения отслеживают в соответ-
ствии с алгоритмом
Ул = —У„-1+ —= Ун„2, (4.47)
п п
по результатам обработки предыдущих п отсчетов (см. рис. 4.31). При
n = N имеем УнП1 = 1нП2- Характерным для обеих зависимостей яв-
ляется уменьшение их нестабильности с ростом числа отсчетов п. При
90
Глава 4
Рис. 4.31. Диаграммы зависимостей среднего значения процесса от числа выборок.
использовании для усреднения звена задержки 1-го порядка, имеющего
экспоненциальную передаточную характеристику, большее приближение
к установившемуся среднему наблюдается при четных номерах отсчетов.
Среднее значение вычисляют согласно алгоритму
у„ = V1 + Уп ~ Ул1 = Уехр, и = 1, 2, 3,.... (4.48)
К
Постоянную К следует воспринимать как постоянную времени звена.
Чем большим выбрано К, тем длительнее влияет на установление
среднего значения спад входного сигнала.
Алгоритм (4.48) реализует цифровой фильтр со звеном задержки 1-го
порядка (см. рис. 4.27 и 4.29), рассмотренный в разд. 4.2.3. При А = 1/К
и В ~ \ — А выражение (4.37) преобразуется в выражение (4.48). Кривая
Уехр = f(n) на рис. 4.31 изображена для случая К = 5, причем характе-
ристика самого звена на этой кривой проявляется слабо из-за сущест-
венных колебаний входного сигнала. Лишь при больших п значения
функции Уехр становятся равными отдельным мгновенным средним
значениям случайной величины X.
Измерение характеристик шума
91
В отличие от линейного усреднения экспоненциальное усреднение,
как это следует из выражения (4.48), временем не ограничено.
4.3. Измерение характеристик и параметров шума
4.3.1. Эффективное значение напряжения
Простейшей, сугубо количественной характеристикой шума является
эффективное значение его напряжения. Однако, являясь в соответствии
с выражениями (2.9), (2.22) и (2.29) интегральной характеристикой,
эффективное значение напряжения не содержит информации об ампли-
тудном распределении, временном изменении и частотных свойствах
и характеристиках шума. Для его измерения используют устройство,
выполненное по схеме на рис. 4.1. Такое устройство должно иметь
достаточно широкую полосу пропускания, а частотный спектр измеряе-
мого процесса в этом случае искусственно не ограничивают. Информа-
тивность эффективного значения напряжения шума невелика. Его при-
менение для задания и оценки характеристики шума целесообразно
лишь при одновременном знании частотного спектра этого шума.
Обычно эффективное значение напряжения используют для количествен-
ного сравнения шумовых свойств тех или иных технических средств,
например для сравнения низкочастотных усилителей по приведенному
ко входу напряжению шума.
Следует подчеркнуть, что все вольтметры переменного тока изме-
ряют именно эффективное значение напряжения. Однако большей
частью их шкалы отградуированы с учетом форм-фактора синусоидаль-
ного напряжения и показывают среднее арифметическое. Для точного
измерения эффективного значения напряжения шума необходимо ис-
пользовать вольтметры, построенные по блок-схеме, приведенной на
рис. 4.18, т. е. с извлечением квадратного корня из среднего значения
напряжения.
4.3.2. Шум, приведенный ко входу средства измерения
Как отмечалось в разд. 4.1.2, для определения шумовых характе-
ристик усилителя необходимо знать приведенные к его входу ток IN
и напряжение UN шума, которые могут быть измерены по схеме,
представленной на рис. 4.2. Напряжение UN определяют при замкнутых
входных зажимах, когда UR = 0 и R = 0, а ток IN, благодаря короткому
замыканию его источника, не воздействует на входную цель усилителя.
По измеренному выходному напряжению шума Va и известному коэф-
фициенту усиления напряжения v приведенное по входу напряжение
шума UN вычисляют по формуле
UN=Ua/v. (4 49)
92
Глава 4
Рис. 4.32. Кривые зависимостей
от внутреннего сопротивле-
ния генератора теплового
шума для различных состав-
ляющих квадрата напряже-
ния шума на выходе усили-
теля.
Измерение тока IN оказывается более сложным. При R ф 0 выходное
напряжение шума Ua определяют из выражения
и 2 = (4kTBR + и % + I2NR2) v2. (4.50)
Зависимости отдельных членов последнего выражения от внутреннего
сопротивления R генератора теплового шума представлены графически
на рис. 4.32. Для определения IN необходимо использовать генератор
теплового шума с возможно большим внутренним сопротивлением R,
при котором вклад от флуктуаций тока (JnR2) в значение Ua в выра-
жении (4.50) превосходит вклад тепловых шумов 4kTBR. Измерив Ua,
можно вычислить IN согласно выражению
_ 1/2-(4/с77?/?+^)г2
In~ ~^r2 (451)
Существенные трудности возникают при измерении весьма слабого
шумового тока, например действующего в операционном усилителе на
биполярных и полевых транзисторах. Необходимое в этом случае
сопротивление R оказывается столь велико, что может привести к не-
стабильности работы усилителя.
Приведенные ко входу ток и напряжение шума оказываются час-
тотнозависимыми. Поэтому для полноты оценок необходимо проводить
их селективные измерения на различных частотах с вычислением соот-
ветствующих их спектральных плотностей
Dun = Vn/Jb, DIn = I„/'/в, (4.52)
где В полоса частот.
Кривые зависимости этих плотностей от различных частот для
специально отобранного малошумящего операционного усилителя типа
Измерение характеристик шума
93
J_____I_____II
10 100 U 10/(
4 Гц
Рис. 4.33. Кривые зависимостей спектральных плотностей напряжения и тока
шума, приведенных ко входу операционного усилителя \jlK739.
представлены на рис. 4.33. Типовые значения спектральных плот-
ностей, гарантируемые изготовителем этого усилителя, оказываются
несколько большими.
4.3.3. Шум-фактор
Шум-фактор определяют как отношение реальной и идеальной (из-
лучение черного тела) мощностей шума, переданного через нешумящий
усилитель (внутренний шум приведен к его входу). Это отношение
обычно измеряют в децибелах. С учетом параметров схемы замещения
усилителя и модели источника измеряемого шума, представленных на
рис. 4.2, выражение (4.3) для шум-фактора может быть преобразовано
к виду
4kTBR + U2n + I2nR2
F = 101g----------------, дБ.
Б 4kTBR
(4.53)
Учитывая частотную зависимость тока IN и напряжения UN шума,
приведенных ко входу усилителя, при задании шум-фактора указывают
соответствующий ему частотный диапазон.
Измерение шум-фактора осуществляют в соответствии с его опре-
делением, данным выше, с учетом коэффициента усиления усилителя v.
При этом измеряют действительное значение напряжения шума на
выходе усилителя, пересчитывают его ко входу и сравнивают с напря-
жением теплового шума (шумящего резистора R):
F = 201g—, ДБ. (4.54)
vx/4kTBR
94
Глава 4
Рис. 4.34. Схема для измерения шум-фактора.
При использовании в измерителе шум-фактора стрелочного указываю-
щего прибора логарифмирование учитывают соответствующей градуи-
ровкой шкалы. Для градуировки измерителя (усилителя), согласно
выражению (4.1), вычисляют нулевое напряжение шума в децибелах и,
увеличив его в 103 раз, подают на вход усилителя. Испытательное
напряжение для упрощения градуировки может быть и синусоидальной
формы при условии соответствия его частоты эффективной полосе
пропускания устройства и использования в этом устройстве точного
измерителя эффективного значения напряжения. После подачи тысяче-
кратно увеличенного напряжения нулевого уровня на вход усилителя
коэффициент усиления последнего уменьшают в 103 раз и тем самым
фиксируют на шкале нулевую точку отсчета (в дБ). Столь высокий
уровень испытательного сигнала необходим для подавления влияния
собственных шумов усилителя на результаты градуировки.
Измерение шум-фактора в соответствии с выражением (4.54) пред-
полагает предварительное определение коэффициента усиления напря-
жения измерительного устройства. Обычно этот коэффициент задают
жестко выбором соответствующих значений номиналов элементов в
цепи обратной связи испытуемого усилителя (они установлены в из-
мерительной схеме) и при необходимости корректируют их.
Традиционная схема измерения шум-фактора, используемая в лабо-
раторных исследованиях, изображена на рис. 4.34. Измерения основаны
на сравнении напряжения собственного шума испытуемого объекта
(усилителя) с напряжением испытательного генератора шума. Сначала
измеряют напряжение шума усилителя при указанных на схеме поло-
жениях ключа и переключателей и далее регулировкой коэффициента
усиления добиваются установления определенного показания индикан
тора. Затем ключ и переключатель устанавливают в другое положение,
причем коэффициент усиления (передачи) уменьшается до 3 дБ или на
половину предыдущего значения коэффициента усиления мощности.
Регулированием напряжения генератора шума (шум предполагается
белым) добиваются того же показания индикатора, что и на предыду-
щем этапе,-при изменении коэффициента усиления испытуемого усили-
теля. В этом случае мощность выходного сигнала генератора шума
Измерение характеристик шума
95
оказывается равной собственной выходной мощности шума усилителя.
Уровень шума генератора оценивается спектральной плотностью его
напряжения Dv. С учетом измеренных и известных данных шум-фактор
вычисляют по выражению
£)2 Д
Г=101ё4^(Л^ДБ’ <455)
где Rv сопротивление ограничивающего резистора.
Описанный способ измерений хотя и сравнительно сложен, но в ряде
случаев безусловно предпочтителен, так как при его применении не
требуется знания не только коэффициента усиления, но и полосы
пропускания всего измерительного канала.
На рис. 4.35 изображены зависимости шум-фактора операционного
усилителя цЛ739 от сопротивления генератора теплового шума для
различных частот, вычисленные, согласно выражению (4.53), по резуль-
татам измерений спектральных плотностей напряжения Dv и тока
шума, приведенных ко входу усилителя. При расчетах использованы
зависимости, графически представленные на рис. 4.33. На частотах выше
1 кГц спектральные плотности тока и напряжения шума (см. рис. 4.33)
изменяются незначительно, поэтому все зависимости шум-фактора от
сопротивления генератора R для частот, превышающих 1 кГц, вплоть до
верхней граничной частоты полосы пропускания усилителя, оказывают-
ся почти идентичными зависимости для частоты 1 кГц (рис. 4.35).
Рис. 4.35. Графические зависимости шум-фактора операционного усилителя уА739
от внутреннего сопротивления источника теплового шума для различных
частот входного сигнала
96
Глава 4
4.3.4. Спектральная плотность мощности
Спектральная плотность мощности W(f), согласно выражению
(2.34), определена как мощность, приходящаяся на единичную частот-
ную ширину спектра сигнала, и имеет размерность В2/Гцп. При ее
измерении определяют значение мощности (квадрат эффективного зна-
чения напряжения) в достаточно узкой полосе частот сигнала, которое
делят на ширину этой полосы. «Достаточно узкую» полосу частот
выбирают, исходя из условной стабильности плотности мощности на
этом участке спектра. На практике для измерения спектральной плот-
ности мощности стараются использовать фильтры с возможно узкой
полосой пропускания, причем выбор верхней граничной частоты фильт-
ра должен обеспечивать передачу основной части мощности сигнала
в средней части спектра пропускания. Фильтры с узкой резонансной
характеристикой (непрямоугольной формы) непригодны для этой цели,
так как основная часть мощности сигнала приходится на фронты этой
характеристики и требуемая эффективная полоса пропускания достижи-
ма в подобных фильтрах лишь теоретически.
Измерение спектра мощности осуществляют поточечно Одна из
схем такого измерительного устройства (анализатора спектра) пред-
ставлена на рис. 4.36. Шум после предварительного усиления пропуска-
Рис. 4.36. Схема устройства для поточечного измерения спектра мощности
процесса.
Корректнее говорить о средней мощности процесса, приходящейся на
единицу полосы частот. А распределение средней мощности процесса по частотам
называют спектром мощности или энергетическим спектром. Прим, перев.
Измерение характеристик шума
97
Рис. 4.37. Схема анализатора энергетического спектра шума последовательного
действия.
ют через последовательно переключаемые узкополосные фильтры и из-
меряют эффективные значения их выходных напряжений. По данным
измерений U2 (/) и средней частоте эффективной полосы пропускания
B(f) каждого из фильтров вычисляют значения спектральных плот-
ностей на разных частотах:
(4.56)
Анализаторы параллельного действия обычно используют в узких диа-
пазонах частот, так как иначе существенно возрастают затраты на их
изготовление. Эффективными с этой точки зрения являются анализа-
торы последовательного действия с одним перестраиваемым по частоте
фильтром. Причем предпочтительными оказываются фильтры с узкой
резонансной характеристикой, близкой по форме к прямоугольной.
Однако подобные анализаторы имеют недостатки, один из которых
связан с необходимостью настройки фильтра на требуемую эффектив-
ную полосу пропускания. Теоретически эта полоса пропорциональна
анализируемой частоте, т. е. должно сохраняться постоянство относи-
тельной полосы пропускания. Однако на практике эта пропорциональ-
ность нарушается, особенно на границах соседних перестраиваемых
участков спектра, что приводит к существенным погрешностям анализа.
Уменьшить влияние этого фактора позволяет метод измерений, принцип
которого поясняется схемой на рис. 4.37. Метод реализуется двумя
процедурами. Сначала на вход анализатора подают белый шум с из-
вестной спектральной плотностью мощности Wo и измеряют квадрат
эффективного значения напряжения этого шума. Затем на вход устройст-
ва подают исследуемый шум, измеряют квадрат эффективного значения
его напряжения и по измеренным данным определяют его спектральную
плотность мощности как
W=W0U2/Ul. (4.57)
При этом существенно уменьшается влияние различия полос пропуска-
ния фильтра при его перестройках, однако требование достаточной
узости полосы сохраняется.
Схема анализатора с гетеродинным преобразованием частоты и по-
стоянной относительной полосой пропускания фильтра приведена на
98
Глава 4
Рис. 4.38. Схема анализатора энергетического спектра шума с гетеродинным
преобразованием частоты.
рис. 4.38. Шум (после достаточного предварительного усиления) посту-
пает в смеситель-преобразователь частоты, на второй вход которого
поступает изменяемое в диапазоне низких частот синусоидальное на-
пряжение от генератора (гетеродина). Преобразованный сигнал после
усиления поступает в фильтр нижних частот с полосой пропускания до
1...2 Гц с крутым срезом характеристики. Это позволяет выделить
весьма узкий участок частот преобразованного сигнала, лежащих по обе
стороны относительно установленной частоты синусоидального сигнала
гетеродина. Изменяя частоту последнего, определяют энергетический
спектр шума при постоянной узкой относительной полосе пропускания
устройства, равной удвоенной полосе пропускания фильтра нижних
частот. Анализ в области более низких частот ограничен возможностями
задания произвольно узкой полосы пропускания фильтра нижних час-
тот Х).
Одним из общих недостатков аналоговых анализаторов спектра
является наличие собственного шума, что становится особенно замет-
ным при измерениях характеристик случайных процессов. При после-
довательном анализе спектра точность выделения каждой из частотных
составляющих обусловлена временными характеристиками соседних
«частей» исследуемого процесса. В силу этого обстоятельства восста-
новление исходного процесса по его спектральным компонентам обус-
ловлено высокими требованиями к стационарности этого процесса. Они
могут быть удовлетворены выбором относительно продолжительного
времени анализа, однако надо иметь в виду, что источники шума
генерируют и кратковременно стабильные процессы, как, например,
прерывающийся импульсный шум.
При определении спектральной мощности большими преимущества-
ми обладают цифровые методы и алгоритмы анализа быстрое преоб-
разование Фурье (БПФ) и цифровая фильтрация (см. разд. 4.2). Алго-
ритм БПФ наиболее целесообразно использовать при анализе сравни-
п Сужение полосы согласно принципу неопределенности Т = const, где
Т время интегрирования) требует соответствующего увеличения времени изме-
рения, иначе сужение полосы приводит к существенной погрешности. Прим,
перев.
Измерение характеристик шума
99
тельно узкополосных процессов, а методы цифровой фильтрации при
анализе широкополосных порядка 4-5 декад. Эти методы позволяют все
спектральные составляющие определять одновременно, причем дискрет-
ные компоненты спектра могут располагаться достаточно плотно (на-
пример, 400 линий при БПФ либо 10 линий на декаду при цифровой
фильтрации) Ч
Для определения спектральной , мощности используют анализаторы
с ручным управлением или автоматизированные устройства с ЭВМ
и выводом информации на устройства отображения. Одна из схем
подобных автоматизированных систем была приведена на рис. 4.26.
Правда, при разработке систем необходимо исходить из приемлемых
затрат на программное обеспечение. Пригодные для этих целей алго-
ритмы вычислений описаны в работе [3.4].
Так как рассмотренные анализаторы предназначены не только для
определения спектральной мощности случайных процессов, но и для
селективных по частотам измерений иных сигналов, то в этом случае
фиксируют общую мощность, приходящуюся на канал.
Как уже пояснялось в разд. 4.2.3, при постоянстве относительной
полосы пропускания цифрового фильтра (одного канала) его абсолют-
ная полоса увеличивается пропорционально средней (резонансной) час-
тоте fm. Например, для третьоктавного фильтра имеем
В = 0,232£. (4 58)
При анализе белого шума, характеризуемого постоянной спектральной
плотностью мощности, в каждом канале анализатора будет фиксиро-
ваться часть общей мощности, причем каждая из частей будет воз-
растать пропорционально резонансной частоте, а крутизна нарастания
соответствующей кривой спектра мощности будет составлять 10 дБ на
декаду. Вследствие умножения мощности в каждом канале на частотно-
зависимый коэффициент определяемый при этом спектр используют
в качестве оценки спектра, а плотность мощности также в качестве ее
оценки WB(f). Для третьоктавного фильтра, согласно выражению (4.58),
соотношение между плотностью мощности и ее оценкой составляет
Жв(/)= W)-0,232/. (4.59)
При резонансной частоте fm = 4,31 Гц третьоктавного фильтра его
относительная полоса пропускания составляет В = 1, так что при этих
параметрах спектральная плотность мощности и ее оценка оказываются
равными.
Различия между вычисленными энергетическими спектрами неко-
торых видов шума и полученными их оценками наглядно иллюстрируют
соответствующие кривые на рис. 4.39 и 4.40.
п Одновременность определения спектральных составляющих возможна
лишь при параллельной цифровой фильтрации. Прим, перев.
7*
4.39. Диаграммы энергетических спектров различных видов шума.
W(f)/W0,R5 ?
Рис.4.40. Диаграммы оценок энергетических спектров различных видов шума.
Измерение характеристик шума
101
Для определения энергетического спектра используют и цифровую
фильтрацию, и метод дискретного преобразования Фурье, в том числе
и алгоритм БПФ. При этом необходимо согласовывать полосу про-
пускания фильтра, время измерения (интегрирования, усреднения) и
дисперсию данных измерений, например, согласно выражению (4.28).
Для достижения требуемого значения дисперсии можно уменьшить
полосу пропускания фильтра, увеличив соответственно при этом время
измерения.
4.3.5. Корреляционные функции
В разд. 2.4-2.6 рассматривались автокорреляционные функции от-
дельных видов шума. При т = 0 значение автокорреляционной функции
шума равно квадрату эффективного значения его напряжения. С воз-
растанием т автокорреляционная функция с той или иной крутизной
спадания стремится либо к нулю, либо к какому-то иному постоянному
значению при наличии в шуме постоянной составляющей. Характер
изменения этой функции в общем случае не позволяет выделить инфор-
мацию о взаимосвязи отдельных шумовых компонент в их смеси,
и поэтому автокорреляционная функция оказывается непригодной для
анализа шума.
Пригодными (с точки зрения информативности) авто- и взаимно-
корреляционные функции оказываются при анализе детерминированных
процессов в смеси с шумом с целью выделения каждого из этих
процессов.
Вопросы аппаратурного определения (измерения) корреляционных
функций достаточно широко рассмотрены в литературе (см., например,
работы [4.26, 4.27]). В принципе подобные измерения реализуют, со-
гласно выражениям (2.23) и (2.24), по общей схеме, представленной на
рис. 4.41. Ординаты функций определяют последовательно (непрерывно
либо дискретно по точкам) по мере изменения продолжительности
задержки сигнала т.
Сравнительно просто корреляционные функции измеряют цифро-
выми устройствами, например с использованием ЭВМ и системы сбора
Рис. 4.41. Общая схема измерения корреляционных функций ' А КФ автокорреля-
ционная функция; ВКФ взаимная корреляционная функция.
102
Глава 4
Счетчик 1
Счетчик 2
(zz)
Рис. 4.42. Схема устройства для определения амплитудного распределения про-
цесса.
данных, схема которой представлена на рис. 4.26. В подобной системе
данные измерений (дискретные значения сигналов) попеременно опра-
шиваемых каналов x(t) и y(t) накапливают в течение определенного
интервала времени Т в памяти ЭВМ, после чего ЭВМ по программе
осуществляет поточечное вычисление ординат функции (авто- или вза-
имно-корреляционной). Временной сдвиг (задержку) отсчетов имити-
руют соответствующим относительным сдвигом адресов ячеек памяти,
куда записывают «задержанные» дискретные значения одного из от-
счетов каждой пары отсчетов. Время задержки т образуется множеством
двойных временных интервалов дискретизации входных сигналов.
Увеличивая время наблюдения при накоплении данных и их усред-
нении, можно определять функции с хорошей повторяемостью ре-
зультатов.
4.3.6. Амплитудное распределение
Схема устройства для определения амплитудного распределения
процесса представлена на рис. 4.42. Это устройство позволяет также
определять функцию вероятности и функцию плотности вероятности
При замкнутом ключе 5 операционные усилители с транзисторами
Измерение характеристик шума
103
образуют схему интервального дискриминатора уровней с шириной
анализа AL7 = IR. Смещение интервала дискриминации регулируют при
помощи потенциометра. Верхняя граница интервала определяется
опорным напряжением U. Если напряжение «(/) исследуемого процесса
попадает в интервал дискриминации, то деблокируется соответству-
ющий вход элемента И (DJ и прямоугольные импульсы, передаваемые
через предварительно открытый элемент D2, начинают поступать на
вход счетчика 1. Счетчик 2 подсчитывает число импульсов z2 в течение
интервала времени Тоткрытого состояния элемента D2. Этот интервал
ограничен числом N периодов следования прямоугольных импульсов,
частота которых fG намного превышает частоту изменений анализи-
руемого процесса. С появлением TV-го импульса триггер D3 переклю-
чается и блокирует элемент D2. За время наблюдения Т счетчик 1 фикси-
рует число zx импульсов, пропорциональное времени, в течение кото-
рого анализируемое напряжение и (t) находилось в пределах выбранного
интервала дискриминации AU. Вероятность того, что напряжение u(t)
попадает в интервал АС, определяется выражением
P[_(U - АС7) u(t) С] = z1/z2 = Л (С). (4.60)
Последовательно изменяя абсолютные значения нижней границы ин-
тервала дискриминации, определяют функцию плотности вероятностей
w(iz) при соблюдении условия
(4.61)
и
которое хорошо выполняется при достаточно точных измерениях и до-
статочно длительном времени наблюдения:
T=N/fG. (4.62)
Вероятность того, что исследуемое напряжение u(t) окажется меньше
верхней границы интервала дискриминации, т. е. опорного напряжения
U, определяется выражением
P[W(0^C]=z1/z2 = P2(C). (4.63)
Изменением опорного напряжения U можно определить функцию ве-
роятности Р2(С) согласно соотношению
и
P2(U)= f w(u)du. (4.64)
— 00
Иной, чисто цифровой метод определения амплитудного распреде-
ления основан на аналого-цифровом преобразовании дискретных зна-
чений анализируемого сигнала с равномерным шагом его дискретиза-
ции. Получаемые и-разрядные двоичные числа образуют 2” классов
одинаковых относительных интервалов значений сигнала, причем само
104
Глава 4
«-разрядное слово (число) является и номером соответствующего интер-
вала. Выделив для каждого интервала ячейки памяти с определенными
(в соответствии с номерами интервалов) адресами, цифровые данные,
получаемые в результате кодирования, заносят по мере их появления
в эти ячейки. После регистрации N выборок получают распределение
частостей мгновенных значений анализируемого сигнала, соответствую-
щее его искомому амплитудному распределению.
При использовании для реализации описанного цифрового метода
микропроцессора необходимо иметь в виду следующие обстоятельства.
1. При частоте дискретизации сигналов около 50 кГц обработка
в реальном масштабе времени одного дискретного значения не должна
превышать 20 мкс.
2. При использовании 8-разрядного микропроцессора и разрядности
слов п > 8 возникает необходимость загрузки данных в пары 8-разряд-
ных регистров, т. е. выделения для каждого числа 16-разрядной ячейки.
При времени наблюдения около 20 с и частоте дискретизации 50 кГц
количество зарегистрированных событий может превышать 105. Про-
граммное обслуживание столь большого массива 16-разрядных слов
будет связано с выполнением большого числа операций и потребует
много времени.
3. При частоте дискретизации, превышающей 50 кГц, возникают
серьезные трудности синхронизации работы АЦП с микропроцессором
из-за ограниченного резерва времени.
Альтернативой программной обработке является аппаратурная реа-
лизация алгоритма анализа и сортировки дискретных значений процесса
по классам. Упрощенная блок-схема такого специализированного уст-
ройства представлена на рис. 4.43. В ней не обозначены цепи управления
запуском устройства и вывода данных. Результаты измерений с целью
их непосредственной индикации цифровым указателем представляют
двоично-десятичным кодом. Блок памяти содержит 32 запоминающих
24-разрядных устройства (ЗУ) для записи 6 тетрад кода1}. Аналогичную
разрядность имеет и счетчик. Буферное ЗУ (БЗУ) по выходным кодам
АЦП формирует соответствующие адреса для блока памяти. А-разряд-
ный счетчик фиксирует количество отсчетов и по достижении числа
N формирует сигнал завершения работы устройства (цепи передачи
сигнала и соответствующие элементы управления на схеме не отра-
жены).
Перед началом измерений счетчики и ЗУ обнуляются. По сигналу
датчика тактов происходит запись в буферную память текущего ре-
Каждое из ЗУ блока памяти соответствует определенному интервалу
значений анализируемого процесса. При этом в ЗУ записывается не само значение
этого процесса, а число событий-попаданий значений анализируемого процесса
в соответствующий интервал за время наблюдения, т. е. частость. Под частостью
«f (абсолютной) понимают число амплитудных значений процесса, размеща-
ющихся в границах классов i и i + \-Прим. перев.
Измерение характеристик шума
105
Рис. 4.43. Схема специализированного устройства с цифровым определением ам-
плитудного распределения процесса.
зультата аналого-цифрового преобразования, осуществляется очередной
запуск АЦП, содержимое счетчика отсчетов увеличивается на 1 и запус-
кается блок управления. Последний формирует последовательность
сигналов, по которым из ЗУ блока памяти, выбранного по адресу,
сформированному БЗУ по соответствующему значению анализируемого
процесса, переписывается в счетчик содержимое этого ЗУ. Далее к числу
в счетчике прибавляется единица (передается из БУ на счетный вход
счетчика) и дополненное число вновь переносится в то ЗУ, из которого
производилось считывание.
Временной цикл формирования сигналов БУ размещается внутри
интервала дискретизации анализируемого процесса, заданного интерва-
лом между тактовыми сигналами.
Описанный выше цикл работы устройства повторяется А раз (что
соответствует времени наблюдения), после чего содержимое всех ЗУ
последовательно выводится в устройство обработки и индикации ре-
зультатов. Для получения функции плотности вероятности w(w) нор-
мируют частости отдельных значений анализируемого процесса на
общее число выборок А.
На рис. 4.44 приведено распределение частостей, измеренное опи-
санным устройством при N = 106. Строго говоря, кривая распределения
действительна лишь в отдельных измеренных точках, а на рисунке
следовало бы изобразить гистограмму. Кривая, аппроксимирующая эту
гистограмму, понадобилась для того, чтобы отразить характер измене-
ния соответствующей функции плотности вероятностей.
106
Глава 4
Рис. 4.44. Распределение
частостей, измерен-
ное устройством,
схема которого пока-
зана на рис. 4.43, при
N = 106.
4.3.7. Распределения значений временных параметров
импульсного шума
Распределения длительностей импульсов и пауз между ними в им-
пульсном шуме могут быть измерены не только непосредственно, но
и косвенным образом. Так, например, при анализе двухуровневого
импульсного шума с достаточно большой амплитудой его количествен-
ные характеристики могут быть получены на основе измерения характе-
ристик других видов шума. Упрощенная схема устройства для подобных
измерений представлена на рис. 4.45. Усиленное и ограниченное по
частотному спектру напряжение импульсного шума u(f) поступает на
компаратор двухуровневый дискриминатор. Уровни дискриминации
задают опорными напряжениями Urefi и Uref2. Компаратор преобразует
входной шум в последовательность прямоугольных импульсов с уров-
нями ТТЛ. Допустим, что продолжительность нулевого значения вы-
ходного сигнала компаратора соответствует длительности паузы между
импульсами шума, а продолжительность единичного значения выход-
ного сигнала компаратора соответствует продолжительности импульса
шума. Для измерения продолжительностей импульсов шума переклю-
чатель устанавливают в положение, указанное на схеме. По единич-
ному сигналу, переданному через предварительно деблокированный
элемент И, запускается генератор счетных импульсов (ГСП). Эти им-
пульсы, следующие с периодом tg, подсчитывает двоичный «-разрядный
счетчик цифрового дискриминатора. Емкость счетчика соответствует
заданному пределу продолжительности импульса шума. Выходной па-
раллельный код счетчика преобразуется в позиционный десятичный код
Измерение характеристик шума
107
Опрос/СБрос
Компаратор
ГСП
Сч
N
Рис. 4.45. Схема цифрового устройства, измеряющего распределения значений
временных параметров импульсного шума: ГСИ генератор счетных им-
пульсов; Сч N, Сч nG, Сч щ- счетчики.
«1 из п». Значения (позиции) последнего соответствуют интервалам
значений искомого распределения. С появлением нулевого сигнала
компаратора (окончание текущего импульса шума) полученное значение
единичного кода переписывается через коммутатор S2 в соответствую-
щий счетчик числа иДСч и,) импульсов соответствующего интервала,
т. е. уровня импульса. После записи кода счетчик дискриминатора
сбрасывается в нуль. Далее работа устройства повторяется с появлением
очередного импульса шума аналогично описанному. Одновременно
счетчик Сч N подсчитывает требуемое для анализа число N событий
и с появлением N-го импульса шума своим выходным нулевым сигна-
лом блокирует элемент И, а тем самым нулевым сигналом последнего
блокируется и счетный вход ГСИ. Счетчик Сч„с подсчитывает число
счетных импульсов за все время наблюдения. Для анализа пауз между
импульсами шума переключатель 5! устанавливают в положение, про-
тивоположное указанному на схеме.
Вероятность того, что продолжительность т импульса шума (или
паузы между импульсами) заключена между периодами (z — 1)tg и ztg,
составляет
P(z, tg) = n./N, i = 1, 2,.... (4.65)
По этим вероятностям можно построить гистограмму и определить
соответствующую функцию плотности вероятностей w(t). Средние зна-
чения т определяют по формуле
f = iGnG/N. (4.66)
Знание среднего значения необходимо для контроля достаточности
числа наблюдений N и проверки тем самым стационарности анализи-
108
Глава 4
руемого процесса. Результаты контроля являются достаточно досто-
верными, если средние значения при измерениях нескольких реализаций
шума не выходят за определенные границы поля допуска.
Кривые распределений т импульсного шума транзистора, измерен-
ные описанным устройством для i — 12, представлены на рис. 4.46.
Число фиксировавшихся событий превышало 104. Период следования
счетных импульсов при измерениях длительностей импульсов составлял
= 0,45 мс, а при измерениях пауз между ними tgo = 2 мс. Для лучшей
обозримости кривых использован логарифический масштаб щ. Прямо-
линейный вид характеристик, представленных в логарифмическом мас-
штабе, говорит об экспоненциальном законе изменения функции плот-
ности вероятностей w(t). Приведенные выше выражения для этой
функции в случае длительностей импульсов шума (2.55) и пауз между
ними (2.54) можно записать в несколько ином, обобщенном виде:
w (0 = -ехр ( — -), (4.67)
а \ а/
где а-математическое ожидание (среднее значение) числа i различных
уровней импульсов шума.
Если щ представить как п (0 и предположить, что i принимает только
Рис. 4.46. Кривые распределе-
ний импульсного шума
транзистора.
Измерение характеристик шума
109
целые значения, то предыдущее выражение для w(i) можно представить
в виде
w (/) = - ехр ( - -} = . (4.68)
а \ а/ N
В соответствии с логарифмическим масштабом кривых, представленных
на рис. 4.46, последнее выражение можно преобразовать к виду
/ 1\ N
In п (z) = ( — ) i + In . (4.69)
\ а/ а
Из выражений (4.68) и (4.69) можно вычислить математические ожида-
ния 04 и а2, причем а2 соответствует случаю логарифмического преобра-
зования функции Wf.
I/04 =w(0)/N, (470)
1 = _ 1пи(/ + AZ) - In и (0 71)
а2 Az
При численных значениях функций, графически представленных на
рис. 4.46, получим следующие значения а:
среднее число импульсов равно
аг =0,181, а2 = 0,176;
среднее количество пауз между импульсами составляет
04 = 0,278, а2 = 0,277.
Хорошее совпадение 04 и а2 свидетельствует о том, что распределение
количеств уровней шума действительно подчиняется экспоненциальному
закону (4.67).
Средние значения длительностей импульсов (tJ и пауз (т0) можно
вычислить умножением соответствующих значений а на период tg
счетных импульсов.
4.4. Измерение параметров шума полупроводниковых
устройств
4.4.1. Транзисторы
Измерение параметров внутреннего (собственного) шума транзисто-
ра направлено на выбор рабочего участка его вольт-амперной характе-
ристики в статическом режиме и определение границ постоянства
коэффициента усиления переменного напряжения при заданной гранич-
по
Глава 4
ной частоте сигнала при требуемом входном согласовании сопротивле-
ний база эмиттер и источника сигнала. Соответствующие средства
измерений (испытаний) должны обладать весьма низким уровнем соб-
ственных шумов и быть защищены от внешнего шума, с тем чтобы
избежать дополнительных погрешностей.
Одна из схем для подобных измерений приведена на рис. 4.47.
Испытуемый транзистор включен в цепь обратной связи малошумящего
операционного усилителя с большим коэффициентом передачи Цепь
обратной связи по постоянному току (резисторы R3, R4) предназначена
для регулирования коллекторного напряжения транзистора соответ-
ственно смещению, задаваемому резистивным делителем Я6, Я7. Кол-
лекторный ток устанавливают подбором сопротивления резистора при
данном напряжении питания 1/сс.
Коэффициент усиления напряжения переменного тока определяется
сопротивлениями резисторов R2. Rr в цепи обратной связи по пере-
менному току. Его обычно задают равным примерно 103, с тем чтобы
измеренное напряжение шума на выходе устройства существенно пре-
вышало уровень внешних помех. Конденсатор С разделяет цепи обрат-
ных связей по переменному току и постоянному току, а его емкость (в
сочетании с сопротивлениями резисторов Я15 Я4) предопределяет ниж-
нюю граничную частоту полосы пропускания устройства.
Генератор испытательного напряжения UG с внутренним сопротив-
лением Rv предназначен для измерения передаточной характеристики
устройства. Ток испытательного сигнала, протекающий через точку
М мнимой массы, вызывает появление на выходе устройства напряже-
ния, превышающего шумовое напряжение испытуемого транзистора
благодаря большому коэффициенту усиления (около 103). Это необхо-
димо для снижения погрешности измерений.
Измерение характеристик шума
111
Для исключения влияния генератора на погрешность измерений
шума его отключают от измерительного устройства, в том числе и от
источника питания. Номиналы сопротивлений в схеме обеспечивают
испытания транзисторов при нормированных значениях коллекторного
напряжения UCe = 5 В и тока Jc = 0,2 мА.
Амплитудно-частотная характеристика устройства описывается вы-
ражением
=
УсоСЛ2/?з
1 + jcoCRi (R2 + 7?з)
(4.72)
из которого можно определить нижнюю граничную частоту полосы
пропускания устройства:
и коэффициент усиления в средней части полосы
R R
v = T7TTT\ = (R2 + R3)/R2- (474)
С уменьшением требуемой нижней граничной частоты спектра устройст-
ва существенно возрастает емкость конденсатора С. Так, для частоты
1 Гц требуется емкость 158 мкФ. В этом случае возникают серьезные
трудности применения подобных устройств с переключением испытуе-
мых транзисторов п-р-п- и р-и-р-типов, так как необходимо использовать
неполярный конденсатор. Поэтому схему устройства видоизменяют.
Конденсатор С при этом закорачивают и задают соотношение сопро-
тивлений /^//^ (резистор 7?з отключают) таким, чтобы коэффициент
усиления по постоянному и переменному току не превышал 20, исходя из
того, что напряжение эмиттер-база испытуемого транзистора должно
быть около 0,6 В, в то время как максимальное значение выходного
сигнала усилителя достигает 12 В. Для обеспечения требуемого усиления
(> 103) к выходу усилителя подключают второй малошумящий усили-
тель через конденсатор для развязки по постоянному току. Раздели-
тельный конденсатор может иметь небольшую емкость, если второй
усилитель имеет высокоомный вход. Однако в этом случае необходимо
иметь в виду, что высокоомные цепи генерируют относительно большое
напряжение теплового шума, влияющее на точность измерений. Для
градуировки устройства в режиме измерения параметров шума исполь-
зуют выражение для напряжения теплового шума (4.1), генерируемого
соответствующим источником. Умножая это напряжение на коэффи-
циент усиления устройства, определяют выходное напряжение шума,
т. е. соответствующую точку на передаточной характеристике устройст-
ва, в предположении об отсутствии дополнительного шума, генерируе-
мого самим транзистором, и паразитных шумов элементов схемы.
Измеренное напряжение шума транзистора позволяет вычислить его
112
Глава 4
+ 17
Рис. 4.48. Схема измерения параметров собственного шума транзисторов с
регулированием режимов.
шум-фактор в соответствии с выражением (4.54).
Описанное устройство целесообразно использовать при стабильном
режиме измерений. Однако при необходимости измерять параметры
шума транзистора при различных значениях коллекторных напряжений
и токов, а также сопротивления RG источника шума рассмотренные
выше методы нуждаются в некоторой модификации. С этой целью
рассмотрим схему устройства, представленную на рис. 4.48, которая
отличается от схемы на рис. 4.47 отсутствием конденсатора С и вслед-
ствие этого характеризуется небольшим коэффициентом усиления. Ре-
зисторы Rg, имитирующие сопротивление источника шума, и нагру-
зочные резисторы Rl коммутируются малошумящими экранированны-
ми реле.
Наличие источника тока позволяет почти независимо друг от друга
регулировать коллекторные ток и напряжение. Транзисторы и Т2
образуют преобразователь импеданса. Фильтрующие цепочки позво-
ляют уменьшить влияние внутренних и внешних паразитных шумов на
точность измерений. Усилители Nt и N2 предназначены для развязки
внешних измерителей коллекторных токов и напряжений от основной
измерительной схемы. Значения этих токов и напряжений определяются
выражениями
Измерение характеристик шума
ИЗ
l/i - U.
Ic = *1 р > иСЕ = к2и2, (4.75, 4.76)
где kt и к2 - соответственно коэффициенты усиления усилителей и N2.
4.4.2. Операционные усилители
Схема измерения параметров внутреннего шума операционного уси-
лителя (ОУ) сосредоточена в основном в нем самом. При этом отпадает
надобность оценивать рабочие участки характеристик его транзисторов
и использовать дополнительный усилитель. В общем случае ОУ обла-
дают достаточным потенциальным диапазоном усиления сигналов,
позволяющим при помощи обратной связи удерживать стабильным
коэффициент усиления, примерно равный 100. А имитировать изменение
внутреннего сопротивления RG источника шума без особых трудностей
возможно в пределах нескольких десятичных порядков.
На рис. 4.49 представлена обычно используемая схема для измерения
параметров шума ОУ. Тестируемый ОУ включен по прямой схеме,
причем усиление сигнала и шума совмещено [4.2]. Коэффициент уси-
ления ОУ задают относительно низкоомным делителем R2, R3 в цепи
обратной связи, с тем чтобы уменьшить нежелательное влияние со-
противления Rg через резистор R3. Резистор Rr предусмотрен на случай
включения внешнего источника испытательных сигналов.
Наряду с шум-фактором для ОУ часто нормируют приведенные ко
входу ток и напряжение шума, определяемые согласно методикам,
описанным в разд. 4.3.2 и 4.3.3.
В работе [4.28] описано устройство, предназначенное для измерений
параметров шума ОУ, используемого в интегральных блоках выбор-
ки/хранения дискретных значений сигналов. В этом случае усиление
шума должно превышать усиление схем для испытания обычных ОУ,
с тем чтобы выходное напряжение шума испытуемого ОУ не зависело от
иных воздействий. Подобное устройство необходимо и для испытаний
8-23
Рис. 4.49. Схема измерения
параметров внутреннего
шума операционного уси-
лителя.
114
Глава 4
ОУ с входными полевыми транзисторами, так как другие средства
измерений являются неточными.
В работе [4.29] описано устройство, позволяющее, помимо упомя-
нутых выше параметров, определять также пиковые значения напря-
жения импульсного и мощного фликкер-шума. Подобные устройства
предназначены для специальных случаев, например для аппаратного
контроля характеристик шума, генерируемого испытуемым объектом
Может фиксироваться число превышений выбросов сверх заданного
уровня, фиксируемых дискриминатором и подсчитываемых счетчиком за
определенное время. Увеличение этого числа сверх допустимого может
служить оценкой дефектности испытуемого объекта.
В работе [4.30] описано цифровое устройство для измерения па-
раметров шума с использованием тестера с микропроцессорным управ-
лением. В этом устройстве сигналы шума представляются в дискретной
форме.
Определенной спецификой отличаются измерения параметров шума
интегральных низкочастотных (НЧ) усилителей. Обычно для этого
требуется знание эффективного значения выходного напряжения шума
в широкой полосе частот. Вместе с тем[ определению подлежат также все
те параметры воспроизводимых и воспринимаемых речевых процессов
(при использовании НЧ усилителя для этих целей), которые могут
подвергаться искажениям шумом. Пересчитывать (приводить) выходное
напряжение шума ко входу НЧ усилителей (используемых в звуковой
аппаратуре) оказывается нецелесообразным, так как обычно требуемый
коэффициент усиления задают на десь тракт усиления и передачи
звуковых сигналов, включая и устройства, подключаемые к выходу НЧ
усилителя. При этом для потенциометрических цепей, предназначенных
для регулирования громкости звука,, его верхних и нижних частот,
а также балансировки, как правило, Нормируют отношение выходного
напряжения этих цепей к напряжению их шума во всей полосе частот (в
децибелах), соответствующее обычно используемому понятию отноше-
ние сигнал/шум. При этом необходимо также знать нормируемые для
указанных потенциометрических регуляторов входные и выходные на-
пряжения сигналов. Естественно, что измерение шумов подобных регу-
ляторов должно происходить в отсутствие входных сигналов. Коэффи-
циент передачи регуляторов вычисляют как отношение выходного и
входного напряжений, а после измерения напряжения шума определяют
отношение сигнал/шум для определенного значения выходного напря-
жения регулятора.
Прочие характеристики шумов НЧ усилителей определяют в сово-
купности со всей аппаратурой тракта усиления, передачи и воспроизве-
дения звуковых сигналов. В их числе «отметим спектральную плотность
напряжения шума и зависимость характеристик шума от внутреннего
сопротивления его источника
Измерение характеристик шума
115
4.4.3. Цифро-аналоговые и аналого-
цифровые преобразователи
Разрешение цифро-аналоговых ц аналого-цифровых преобразовате-
лей (ЦАП и АЦП), выражаемое «весом» единицы младшего разряда
кода (ЕМР), во многом зависит от их внутреннего шума. Измерение
параметров и характеристик шума ЦАП не составляет особых труд-
ностей по сравнению с аналоговыми устройствами, так как его выходное
напряжение постоянного тока, превышающее напряжение шума, можно
отсечь от шума (конденсатором или трансформатором) и, усилив шум,
выполнить необходимую его обработку.
В АЦП выходной сигнал представлен кодом. Источниками его
внутреннего шума являются источник опорного напряжения, компара-
тор и некоторые другие элементы и блоки. Этот шум приводит к тому,
что если значение входной измеряемой величины находится вблизи
границы, соответствующей соседнему значению выходного кода, то при
большом числе циклов преобразования каждое из кодовых значений
появляется в случайной последовательности друг за другом. Появление
определенного значения кода является случайным событием, оценить
которое можно только по законам теории вероятностей.
Допустим, измеряемая величина Ue находится вблизи значения Us,
которому соответствует граница соседних кодовых значений А (нижнее
значение) и А + 1 (верхнее значение). Предположим также, что ампли-
туда внутреннего шума АЦП распределена по нормальному закону
и эффективное значение напряжения этого шума равно UR (соответ-
ствует дисперсии амплитудного распределения). Ча рис. 4.50 приведена
кривая зависимости вероятности Рок появления одного из двух соседних
значений кода от входного сигнала. Если в отсутствие шума входная
величина лежит ниже значения Us, представляющего собой порог
Рис. 4.50. Кривая распределения вероятностей появления одного из двух соседних
значений кода АЦП
8*
116
Глава 4
Uj Тактовый
От опорного ЦАП сигнал
Рис 4.51. Схема измерения параметров внутреннего шума АЦП
компарирования (смены кодов), то вероятность Рок = 0, если же
Ue > Us, то Рок=1- Наличие шума приводит к неопределенности
срабатывания компаратора и соответствующей вероятности появления
того или иного значения кода, характеризуемой кривой на рис. 4.50. При
значении Ue, равном половине интервала шума вблизи порогового
значения Us(Ue< Us), появление верхнего значения кода практически
маловероятно и существует большая вероятность появления нижнего
значения кода. Изменение кривой вероятностей подчиняется нормаль-
ному закону, что обусловлено нормальным амплитудным распределе-
нием собственного шума АЦП.
Используя указанные свойства, можно измерить эффективное зна-
чение напряжения шума АЦП. Эти измерения проводят следующим
образом Сначала подбирают такое входное напряжение Uel, при
котором вероятность появления верхнего значения кода POki составляла
бы 20 ...30°о. Затем подбирают другое значение входного напряжения
U 2, при котором вероятность Р0КЛ достигала бы от 70 до 80°о. Для
повышения достоверности определения указанных вероятностей вы-
полняют примерно по 103 отсчетов. По измеренным данным вычисляют
эффективное значение напряжения шума АЦП и его порог компари-
рования.
Реализация описанного метода связана с необходимостью доста-
точно длительного по времени подбора входных напряжений и обес-
печения их стабильности на весь период измерений. Эти недостатки
устранены в методе измерений и соответствующем устройстве, схема
которого представлена на рис. 4.51. На вход испытуемого АЦП по-
ступает опорное напряжение Uj от ЦАП, которому соответствует
Измерение характеристик шума
117
выходной код А АЦП. Кроме того, на вход АЦП через делитель R2, R3
подается выходное напряжение интегратора Nt. Выходной код АЦП (А)
сравнивается в цифровом компараторе с кодом опорного напряжения
(В). При А > В по соответствующему выходному сигналу цифрового
компаратора переключатель 5 подключает ко входу интегратора
опорное напряжение + U2, вследствие чего напряжение на входе АЦП
начинает уменьшаться. При достижении значения А В ко входу ин-
тегратора подключается источник — l/j и напряжение на входе АЦП
начинает возрастать. Переключение источников напряжений на входе
интегратора Nt циклически повторяется соответственно циклическому
изменению состояния цифрового компаратора вследствие изменений
кода ЛотЛ^Вдо^^В+1. Операционный усилитель N2 предназна-
чен для измерения среднего значения выходного напряжения и интегра-
тора Nr.
В соответствии с изложенным на схеме рис. 4.51 обозначено: N -чис-
ло циклов измерений; z- число переключений источников напряжений на
входе интегратора; й среднее значение и измеренное за N циклов,
следовавших с периодом Т; /с = Я3Л5/[СК2 + Я3)Т?4]-вероятность пе-
реключения цифрового компаратора.
Увеличение напряжения за время Т составляет
Л £11
а уменьшение за то же время составляет
Л W
и2 Л2 + Л3
В схеме соблюдены следующие соотношения:
(Я2 + *з)/*з » ЮО, C2R5 « 100Т.
Для определения эффективного значения напряжения шума UR изме-
ряют вероятность Р переключения цифрового компаратора при Awt =
= Aw2 при числе циклов N ж 104.
В случае идеального, свободного от шума АЦП порог изменения
соседних значений кода В и В 4- 1 является постоянным, и при со-
ответствующем входном напряжении цифровой компаратор будет пе-
реключаться в каждом цикле, т.е. Р= 1. В реальном АЦП этот порог
«шумит» и компаратор переключается далеко не в каждом цикле, т.е.
его вероятность переключения оказывается меньше 1.
В работе [4.31] описана взаимосвязь между эффективными значе-
ниями напряжения шума UR и соответствующими им вероятностями
Р смены кодов, полученная на основе теории дискретных цепей Маркова
в предположении о нормальном амплитудном распределении шума
и идентичности приращений напряжения и интегратора (Awt = Aw2 =
= Aw). Указанная зависимость представлена графиком на рис. 4.52.
118
Глава 4
Рис. 4.52. Кривая взаимозависимостей
эффективных значений напряже-
ния шума АЦП и соответствую-
щих вероятностей смены соседних
значений кода.
В пределах значений UR/&u от 0,4
аппроксимирована выражением
до 8 эта зависимость может быть
UR __ 0,6Р - 0,7
АЙ “ 1 - 2Р
(4.77)
с максимальной погрешностью 1%. При Awj / Aw2 погрешность аппро-
ксимации существенно возрастает.
В приложении П.З рассмотрена модель, имитирующая работу схемы,
приведенной на рис. 4.51, и позволяющая анализировать соотношение
между Р и UR при вариациях Дм2.
Схема на рис. 4.51 позволяет проводить измерения параметров шума
и в отсутствие опорного напряжения ЦАП (Uj = 0) [4.32]. При этом
порог смены соседних значений выходного кода АЦП лежит вблизи 0.
В этом случае выходное напряжение интегратора в процессе измерений
колеблется также вблизи нулевого значения, и при Awt = Aw2 имеем
й = 0, что не зависит от эффективного значения напряжения шума UR.
В случае изменения соотношения приращений напряжения интегратора,
например при Awt — 3Aw2, среднее значение й возрастает пропорцио-
нально UR. Этот случай также отражен в приложении П.З, причем
приведенная в нем модель позволяет анализировать взаимосвязь между
и и UR при изменениях Aw2. Если изменить направление асимметрии
приращений и, полагая, например, что Ам2 = 3Ai/1? то абсолютное
среднее значение й сохранится прежним, но изменится его знак на
отрицательный. Интервал между обоими средними значениями воз-
растает вдвое по сравнению с каждым из них, определяемым порознь.
Это свойство используют для исключения влияния на точность из-
Измерение характеристик шума 119
мерений неопределенности порога смены соседних кодов при данном
опорном напряжении Ur Указанный интервал между средними зна-
чениями напряжения интегратора оказывается примерно пропорцио-
нальным эффективному значению напряжения шума UR.
Метод определения UR, основанный на нахождении вероятности
смены кодов, обеспечивает лучшее разрешение в тех случаях, когда
значения UR близки к приращениям Аиг При больших значениях
отношения UjJ&Uy погрешность данного метода возрастает (см.
рис. П.3.2). В методе, базирующемся на использовании среднего зна-
чения напряжения интегратора для измерения UR, последнее соотно-
шение имеет обратное значение (см. рис. П.3.3). Нижний предел изме-
ряемых значений UR определяется выбором достаточно малых значений
Awp Приемлемая пропорциональность между UR и й достигается в этом
методе при несимметричном приращении = ЗДм2.
5. Помехи
5.1. Обработка сигналов, зашумленных
помехами
Сигналы при их передаче и обработке обычно подвержены воздействию
множества помех различного вида. Влияние помех, описываемых де-
терминированными функциями времени, можно минимизировать из-
вестными методами: экранировкой технических средств, фильтрацией
сигналов, развязкой цепей передачи сигналов, применением специальных
конструкций линий передачи. Помехи, представляющие собой случайные
процессы, т.е. шум, обусловленный внутренними свойствами функцио-
нальных элементов и устройств и внешними воздействиями, в той или
иной степени всегда присутствуют в сигналах. Степень зашумленности
сигналов может быть различной-от частичного до полного преобла-
дания над сигналом, что делает его в таком виде непригодным для
последующей обработки. Для возможности дальнейшей обработки за-
шумленных сигналов разработаны различные методы их восстановления
(выделения из шума), целью которых является повышение отношения
сигнал/шум. Это отношение vSr равно результату деления эффективных
значений соответствующих напряжений, причем его обычно выражают
в децибелах.
Простейшим методом выделения сигнала из шума является выделе-
ние некоторой полосы частот в спектре их смеси. Однако такой подход
возможен лишь в том случае, когда информативная часть сигнала
сосредоточена в относительно узкой части его частотного спектра,
а шум характеризуется постоянством спектральной плотности. Эти
условия нередко соблюдаются. И так как эффективное значение напря-
жения шума пропорционально корню квадратному из ширины его
спектра, то при сужении этого спектра в п раз отношение сигнал/шум
возрастает в у/п раз.
На рис. 5.1, а изображена осциллограмма синусоидального сигнала
с частотой f = 300 Гц, смешанного с белым шумом. Спектр последнего
локализован в полосе от 0 до 12,5 кГц, отношение сигнал/шум vSr = 1.
На рис. 5.1,6 и в показаны осциллограммы этой же смеси, но спектр
шума ограничен сверху соответственно частотами 5 и 1 кГц. Ограни-
чение спектра не повлияло на синусоидальный сигнал, но отношение
сигнал/шум увеличилось. Однако и в случае ограничения спектра шума
частотой 1 кГц влиянием последнего на синусоидальный сигнал пре-
небрегать нельзя (vSR = 3,5). Для придания наглядности осциллограммы
5
Рис. 5.1. Иллюстрация возможности увеличения отношения сигнал/шум сужением
полосы частот: а осциллограмма смеси сигнала с шумом с полосой частот
^...12,5 кГц; б осциллограмма той же смеси, но ограниченная частотой
5 кГц; в-осциллограмма той же смеси, но ограниченная частотой 1 кГц.
122
Глава 5
Продолжение рис. 5.1.
процессов представлены на рис. 5.1 в существенно идеализированном
виде.
В реальных условиях исследуемые процессы не являются моно-
гармоническими и представляют собой смесь сигналов множества час-
тот, как, например, речевые сигналы. Поэтому ограничение спектра
подобных сигналов, смешанных с шумом, неизбежно ведет к той или
иной потере информации, заключенной в высокочастотной части спектра.
Из сказанного следует, что подобный подход к улучшению отношения
сигнал/шум оказывается малоэффективным, когда шум порожден флик-
кер-эффектом или является импульсным и его спектральная плотность
мощности существенно возрастает в области низких частот (см. рис. 4.39).
Для достижения оптимального отношения сигнал/шум частотный спектр
необходимо ограничивать в той степени, которая необходима для
сохранения информации, содержащейся в сигнале. Естественно, возмож-
ность такой оптимизации зависит от самого сигнала и характера шума.
Для уменьшения влияния шума широко используют также усред-
нение множества ограниченных по времени реализаций исследуемого
процесса. Среднее значение процесса вычисляют делением суммы от-
дельных его реализаций на их количество. Для исключения фазовых
сдвигов отсчет при повторении реализаций начинают в определенный
Помехи
123
момент времени. При наличии шума (без постоянной составляющей) его
среднее значение (после усреднения достаточных по времени реализаций)
оказывается равным нулю. Усреднение бесконечно большого числа
реализаций сигнала в смеси с шумом позволяет выделить сигнал
в чистом виде. Однако реальное число реализаций п выбирают конеч-
ным и по возможности небольшим. В связи с этим интерес представляет
влияние числа реализаций сигнала, т. е. числа эффективных значений его
напряжения USi (/ = 1, п) на расчетное отношение сигнал/шум:
us (и) = 1 (Usl + US2 + ... + USn) = ~(nUs) = Us. (5.1)
n n
Из этого выражения следует, что собственно сигнал при его пред-
ставлении средним значением не изменяется благодаря исключению
фазовых сдвигов суммируемых реализаций. Что касается шума, со-
держащегося в этих реализациях, то эффективное значение напряжения
суммы реализаций шума определяется выражением
Ur W — ~ \/Uri 4- Ur2 + — + Rn •
(5.2а)
В случае стационарного шума усредненные мощности отдельных его
реализаций оказываются приблизительно равными между собой и эф-
фективное значение напряжения их совокупности определится выраже-
нием
1/к(л)= -^ul = -^=uR.
п х/п
(5 26)
Тогда отношение сигнал/шум в результате усреднения по ансамблю из
п реализаций процесса составит
. ч Us(n) Г-
VsrW = — . = Vй vsr > (5-3)
UR(n)
т. е. это отношение при усреднении возрастает пропорционально ^/л.
Так, для увеличения vSR в 10 раз необходимо усреднение по 100
реализациям, а для увеличения в 100 раз необходимо усреднение уже по
104 реализациям.
Методом усреднения можно распознать полезный сигнал, даже
полностью скрытый шумом. На рис. 5.2, а представлена осциллограмма
смеси синусоидального сигнала (/ = 300 Гц) с белым шумом. Отношение
сигнал/шум составляет 0,2. На рис. 5.2,6-г представлены осциллограм-
мы той же смеси, но после усреднения по различному числу релизаций.
Этот метод дает хорошие результаты не только при белом, но и при
других видах шума (помех).
На рис. 5.3 и 5.4 приведены результаты усреднения смеси синусои-
дального сигнала (/ = 300 Гц) соответственно с фликкер- и импульсным
a
Рис. 5.2. Иллюстрация выделения сигнала из под шума методом усреднения числа
п реализаций: а осциллограмма смеси сигнала с белым шумом; б осцилло-
ГА
' .*• 1
9 I
- "Г f м F <' » *r -
0 «
гм
в
• , < . k’*rt * f*> J'> j j J ‘L ' '•’ ' **'*'* ’’л*
\VyV/AW7\A
- i‘ > ’’?
О
-гм
a
г
грамма той же смеси, но усредненная по пяти реализация м (п — 5); в то же,
но при п = 20; г- то же, но при п = 100.
CL
б
Рис. 5.3. То же, что и на рис. 5.2, но для смеси с фликкер-шумом (а) и после 100
усреднений (б).
a.
tj
Рис. 5.4. То же, что и на рис. 5.2, но для смеси с импульсным шумом (а) и после
100 усреднений (б).
128
Глава 5
шумами при исходном отношении сигнал/шум, также равном 0,2. Как
видно из всех осциллограмм, вид шума несущественно влияет на
результаты усреднения. Необходимым условием при этом является его
стационарность. Однако и в случае импульсных помех, когда паразит-
ные импульсы появляются достаточно редко, чтобы можно было пола-
гать этот процесс стационарным, их влияние на полезный сигнал при
усреднении также устраняется
Усреднение по ансамблю реализаций исследуемого процесса осу-
ществляют обычно цифровыми средствами с дискретным представле-
нием и кодированием дискретных значений этих реализаций. Методы
цифрового усреднения рассмотрены в разд. 4.2.5.
Улучшение отношения сигнал/шум играет важную роль в решении
многих прикладных задач измерений, в частности в области медицин-
ских исследований [5.1]. Так, например, при измерениях биотоков мозга
чувствительные электроды воспринимают сигнал не непосредственно
с мозга, а с кожи человека, что приводит к восприятию и регистрации
сильных стохастических помех, перекрывающих полезные сигналы. Для
подобных измерений используют элекгроэнцефалографы. На рис. 5.5
показаны диаграммы одного и того же регистрируемого процесса
электрической активности мозга, но с различным числом усредняемых
реализаций. При этом необходимо использовать также фильтр нижних
частот для усреднения сигналов за малый интервал времени, с тем чтобы
подавлять высокочастотные помехи.
Как уже отмечалось выше, улучшение отношения сигнал/шум ме-
тодом усреднения по ансамблю реализаций возможно лишь при сохра-
нении фазовых соотношений суммируемых реализаций. Для этого необ-
ходимо знать повторяющиеся частоты сигналов. Если процесс неперио-
дический, то эти частоты определяют искусственной периодизацией
зарегистрированных реализаций и определением их автокорреляцион-
ных функций. Повторяющиеся частоты находят по соответствующим
автокорреляционным функциям, имеющим одинаковые периоды повто-
рения. Автокорреляционную функцию зашумленного процесса также
можно определить только усреднением по большому числу его реали-
заций. Однако в этом случае не требуется согласования их фазовых
соотношений, так как автокорреляционная функция зависит от разности
двух моментов времени, что является существенным преимуществом
такого подхода к улучшению отношения сигнал/шум.
На рис. 5.6 в качестве примера показана автокорреляционная функ-
ция процесса (осциллограмма которого представлена на рис. 5.2), полу-
ченная по усреднению различного числа реализаций.
Помехи
129
Рис. 5.5. Энцефалограммы с различным числом усредняемых реализаций.
9—23
Рис. 5.6. Графические изображения автокорреляционной функции для смеси сигнала
с шумом осциллограмма которого изображена на рис. 5.2: а без усреднения;
-we
vvwwwww
б после усреднения 5 реализаций; в ноле усреднения 20 реализации; г после
усреднения 100 реализаций.
9*
132
Глава 5
5.2. Увеличение помехозащищенности каналов
и цепей передачи информации
Канал передачи информации в общем случае представляет собой
систему взаимосвязанных активных и пассивных цепей. Одним из его
важных параметров является так называемый динамический диапазон,
определяемый как отношение максимально и минимально допустимых
значений (пределов) сигналов в децибелах Верхний предел зависит,
в частности, от напряжения питания активных элементов и нелинейности
их характеристик. Что касается нижнего предела, то он ограничивается
уровнем помех (шумов), чаще всего обусловленных свойствами исполь-
зуемых элементов и устройств. В качестве примеров можно указать:
шум корректирующего усилителя для адаптера-звукоснимателя; ши-
рокополосный шум при магнитной записи звука; перекрестные помехи
в телефонных сетях и др.
При передаче сигнала пределы его изменений должны быть согла-
сованы с допустимым динамическим диапазоном канала. При этом
следует иметь в виду, что отношение сигнал/шум существенно ухуд-
шается с приближением к нижнему пределу значений сигнала. Поэтому
для согласования сигнал «сжимают» по амплитуде с последующим
восстановлением ее исходного значения после передачи и приема сиг-
нала.
Ряд методов подобного сжатия и восстановления сигналов разра-
ботан специально для систем передачи и воспроизведения музыки [5.2,
5.3]. В одной из таких систем, предназначенных для студий зукозаписи,
низкочастотный диапазон разбит на 4 поддиапазона. Звуковые сигналы
каждого из них согласованно сжимаются по уровню специальными
усилителями и далее смешиваются. Восстановление сжатых сигналов
происходит в обратном порядке. Улучшение отношения сигнал/шум
достигает при этом 10... 15 дБ. В некоторых кассетных магнитофонах
также применяют сжатие сигналов, но только на частотах выше 3 кГц
либо на двух частотных поддиапазонах с границей на 4,8 кГц. В первом
случае улучшение отношения сигнал/шум составляет 8 дБ, во втором-
определяется степенью сжатия. Число частотных поддиапазонов с неза-
висимым по уровню сжатием сигналов может достигать четырех с
улучшением отношения сигнал/шум до 25 дБ. Улучшение в 20 дБ
достигается без деления на частотные поддиапазоны в аудиосистеме
High-Com, выполненной на интегральных схемах.
Существенное увеличение динамического диапазона достигается в
каналах с цифровой передачей данных, но это связано с необходимостью
обеспечения достаточно широкой полосы пропускания этих каналов.
Вместе с тем передача только двух амплитудных значений сигналов
обеспечивает высокую помехоустойчивость.
На рис. 5.7 приведена структурная схема канала передачи и приема
цифровых данных с импульсно-кодовой модуляцией (ИКМ). На пере-
Помехи
133
Передающая Линия Принимающая
сторона связи сторона
Рис. 5.7. Структурная схема канала связи с цифровой передачей данных.' ФНЧ
фильтр нижних частот; Рг-сдвиговый регистр; П-передатчик; Пр при-
емник.
дающей стороне дискретные значения аналогового сигнала преобра-
зуются посредством АЦП в последовательность эквивалентных циф-
ровых кодов. Дискретизация аналогового сигнала должна выполняться
в соответствии с условием теоремы Котельникова, поэтому на входе
АЦП включен фильтр нижних частот (ФНЧ). Для преобразования
выходного кода АЦП из параллельной в последовательную форму
используют сдвиговый регистр (Рг). В передатчике (П) последователь-
ный код дополняется синхронизирующими импульсами. Кроме того,
в передатчике, согласованном с линией связи, происходит усиление
передаваемых сигналов. В приемнике (Пр) цифровые сигналы вновь
усиливаются и от них отделяют импульсы синхронизации. Далее про-
исходит восстановление исходного аналогового сигнала. Выходной
ФНЧ подавляет паразитные компоненты, вызванные дискретизацией
аналогового сигнала.
Требуемую минимальную полосу пропускания Вмин цифрового ка-
нала определяют, исходя из максимальной частоты/макс передаваемого
сигнала и разрядности кода АЦП согласно выражению
^МИН = 2д/^акс . (5 4)
Для параллельной (многоканальной) передачи сигналов необходимо
использовать линии с соответственно увеличенной полосой пропускания
(например, коаксиальный или оптико-волоконный кабели).
5.3. Шум как критерий качества
электронных компонентов
Критерием применимости электронных компонентов может являться
допустимый уровень их внутреннего шума. Этот критерий особенно
важен при оценке годности элементов предназначенных для обработки
слабых сигналов. Для них регламентируют допускаемый интервал зна-
чений напряжения шума, и изготовитель обязан его контролировать
у всех поставляемых им элементов. Условия измерений параметров
шума и границы их допусков зависят от конкретных применений
элементов. В особых случаях потребитель осуществляет повторный
(входной) контроль и отбор элементов по более жестким требованиям.
Характеристики и (или) вид шума могут свидетельствовать и о ра-
ботоспособности электронных компонентов вообще, в том числе пред-
134
Глава 5
назначенных для преобразования (обработки) относительно мощных
сигналов, таких, как усилители мощности, ключевые транзисторы,
цифровые микросхемы. Так, например, появление высокочастотного или
иного аномального шума может служить индикатором технологических
отклонений при производстве того или иного изделия, что в итоге
сказывается на его надежности. Критерии допусков параметров шума
в случае жестких требований к надежности элементов могут указываться
заказчиком. Некоторые методы исследования характеристик и пара-
метров шума рассмотрены в гл. 7.
В заключение необходимо обратить внимание на еще одно обстоя-
тельство, связанное с контролем шума у малошумящих элементов.
Достижение приемлемых характеристик шума возможно лишь при
использовании так называемых чистых технологий. Причинами возник-
новения нехарактерного шума в электронном полупроводниковом эле-
менте или интегральной микросхеме могут являться случайные ло-
кальные дефекты кристаллической решетки либо повреждения корпуса
при его изготовлении и монтаже. Причем дефектными могут оказаться
единичные образцы в партии изделий, которые не всегда удается
выявить при выборочном контроле на этапе сдачи продукции. При
необходимости используемая элементная база подвергается 100°о-ному
контролю на наличие аномального шума.
6. Шум как испытательный
сигнал
6.1. Некоторые общие положения
Благодаря своим специфическим свойствам шум находит разнообразное
полезное применение в технике [6.1]. Одно из них-использование шума
в качестве испытательного сигнала для исследования передаточных
свойств электронных устройств и систем. Традиционные методы подоб-
ных исследований основаны на применении детерминированных испы-
тательных сигналов гармонических, в форме единичной (ступенчатой)
функции и единичного импульса, описываемых известными функциями
времени. Эти сигналы сравнительно легко воспроизводимы техническими
средствами, и их можно измерять с достаточной точностью. Однако при
использовании подобных сигналов для полного описания исследуемого
объекта необходимо выполнить множество измерений при различных
значениях времени и частоты, так как информация, получаемая в резуль-
тате одного измерения, оказывается недостаточной. Это является недо-
статком метода детерминированных воздействий, поскольку при боль-
ших уровнях помех он приводит к значительным погрешностям резуль-
татов. Указанный недостаток устраняется при использовании для испы-
таний в качестве тестового сигнала псевдослучайных сигналов типа
«белый шум». Белый шум внутри заданного интервала частот содержит
все гармонические составляющие одинаковой амплитуды, т. е. он харак-
теризуется постоянством спектральной плотности. Это означает, что
при испытаниях объект подвергается одновременному воздействию
сигналов всех частот (в рамках заданного интервала). При подобном
воздействии на вход линейной системы вследствие характерного для нее
принципа суперпозиции на выходе системы действует сумма всех вход-
ных сигналов без какого-либо взаимного их влияния друг на друга.
Важным преимуществом подобного метода испытаний является
возможность идентификации динамических систем благодаря миними-
зации времени измерений. Его внедрению способствовало применение
цифровых методов измерений и обработки (анализа) выходных сигналов
испытуемых объектов. Некоторые из этих методов анализа рассмотрены
ниже.
Свойства передачи сигналов аналоговых систем характеризуют пе-
реходной функцией h(t) или весовой функцией g(t) при представлении
сигналов во временной области и передаточной функцией F(p) или
136
Глава 6
комплексным коэффициентом передачи F(yco) при частотном представ-
лении сигналов. Временное и частотное представления сигналов равно-
значны, и переход от одного представления к другому осуществляют при
помощи преобразования Лапласа [1.3, 6.2]. В рассматриваемом случае
преобразование Лапласа оказывается предпочтительнее преобразования
Фурье, так как позволяет уменьшить трудности достижения требуемой
сходимости функций [1.3].
Ниже рассмотрены методы определения частотных характеристик
некоторых линейных систем. Амплитудно-частотную характеристику
(АЧХ), т. е. модуль комплексного коэффициента передачи F(yco), фор-
мально можно вычислить, исходя из знания передаточной функции F(p)
при соблюдении определенных требований к стационарности системы.
Следует подчеркнуть, что в практике измерений предпочтительнее поль-
зоваться круговой частотой со, нежели комплексной переменной р.
6.2. Определение частотных характеристик
разомкнутых аналоговых систем
Комплексный коэффициент передачи F(Jco) можно определить как
отношение вектора Y выходной величины аналоговой системы к вектору
X входной величины синусоидальной формы при заданном значении ее
частоты со. Выходной вектор Y можно вычислить умножением входного
вектора X на F(Jco), если комплексный коэффициент передачи априори
известен. При дискретных значениях частоты речь идет о спектральных
плотностях амплитуд X (усо) на выходе системы и Y (/со) на ее входе, как
показано на рис. 6.1, причем
Y(jco) = F(jco)X(jco). (6.1)
Выражение (2.30) устанавливает взаимосвязь между спектральными
плотностями амплитуд и мощности процесса. Поэтому, согласно вы-
ражениям (2.30) и (6.1), можно установить зависимость между спект-
ральными плотностями мощности Sx(co) на входе системы и Sv(co) на ее
выходе:
(со) = | F (jco) 12SX (со). (6.2)
Спектральная плотность мощности, определяемая модулем спектраль-
ной плотности амплитуд, не отражает фазовых соотношений состав-
ляющих сигнала, поэтому взаимосвязь между спектральными плот-
ностями мощности входного и выходного сигналов линейной системы
(6 2) также определяется только АЧХ
Выражение (6.2) характеризует возможность измерения АЧХ ли-
ХЦш) F(ju) У (jb>)
Sx(w) s м '
Рис. 6.1. Обобщенная модель ра-
зомкнутой аналоговой си-
стемы.
Шум как испытательный сигнал
137
Рис. 6.2. Схема аналогового звена
задержки 3-го порядка.
нейной системы путем воздействия на ее вход шумоподобным испы-
тательным сигналом. При этом измеряют спектральные плотности
мощности выходного и входного сигналов и вычисляют квадратный
корень из их отношения. Измерения упрощаются при постоянстве
спектральной плотности мощности So испытательного сигнала и вы-
числении логарифма АЧХ:
F (,/со) = 101g —7—^ дБ. (6.3)
^0
В этом случае отпадает надобность в измерении входного сигнала
и операции извлечения квадратного корня.
В качестве примера можно рассмотреть определение АЧХ звена
задержки 3-го порядка, схема которого представлена на рис. 6.2, а АЧХ
описывается выражением
U ' (1+>TJ(1+>TJ(1+>T3)-
При = 3,3 кОм, R2 = 10 кОм, Сх = С2 = 47 пФ, согласно последнему
выражению, имеем: k = 1; 7] = 0,052 мс; Т2 = 0,155 мс; Т3 = 0,47 мс.
На входе звена действует белый шум со спектральной плотностью
мощности, равной 20 10 6 В2/Гц. Кривые спектральных плотностей
мощности сигналов на входе и выходе рассматриваемого звена задержки
представлены на рис. 6.3. Соответствующая разность этих плотностей
равна АЧХ в децибелах.
Для определения частотных характеристик широко используют циф-
ровые методы обработки данных. В рассматриваемом случае испытаний
с использованием шума входной и выходной сигналы испытуемого
объекта дискретизируют на протяжении времени наблюдения Т, полу-
ченные дискретные значения сигналов кодируют и запоминают. Число
отсчетов обусловлено требуемым объемом выборки, а шаг временной
дискретизации Ts выбирают согласно условиям теоремы отсчетов (Ко-
тельникова). Спектральные плотности сигналов вычисляют по алго-
ритму дискретного преобразования Фурье (4.43). Однако условием
допустимости использования этого алгоритма является периодичность
сигнала. Это условие полагают выполнимым в предположении о том,
что ограниченные по времени Т реализации входного и выходного
5
Рис.. 6.3. Кривые спектральных плотностей мощности сигналов на входе (а)
и выходе (б) звена задержки 3-го порядка (в логарифмическом масштабе по
обеим осям координат).
Шум как испытательный сигнал
139
случайных процессов повторяются с периодичностью Т интервала на-
блюдения И определяемый амплитудный спектр, естественно, должен
характеризовать весь процесс, образуемый последовательностью мно-
жества его реализаций. Поскольку каждый из участков процесса не
воспроизводит этот процесс полностью, осуществляют наблюдение за
рядом реализаций процесса, для каждой из которых вычисляют ампли-
тудный спектр по алгоритму дискретного преобразования Фурье, и по
совокупности вычисленных амплитудных спектров определяют усред-
ненный спектр, характеризующий процесс в целом0. Вычисленные
подобным образом амплитудные спектры входного X(jco) и выходного
Y (усо) случайных процессов помимо модуля содержат информацию
о фазовых соотношениях гармонических составляющих.
АЧХ и фазочастотную характеристику (ФЧХ) испытуемого объекта
можно определить, используя выражение (6.1). Современные анализа-
торы, реализующие описанный метод, позволяют строить кривые АЧХ,
ФЧХ и годограф вектора (амплитудно-фазовую характеристику) иссле-
дуемого объекта. Кривые перечисленных характеристик рассмотренного
звена задержки 3-го порядка приведены на рис. 6.4. Соответствие АЧХ
звена и спектральной плотности мощности шума на его выходе наглядно
отражают соответствующие кривые на рис. 6.4, а и 6.3,6. Однако раз-
брос значений АЧХ оказывается существенно меньшим. Это объясня-
ется тем, что спектральную плотность мощности на выходе звена
измеряли независимо во времени от входного сигнала, а АЧХ опре-
делена по коррелированным выборкам входного и выходного сигналов.
6.3. Определение частотных характеристик
замкнутых систем автоматического регулирования
Частотные характеристики систем автоматического регулирования
(САР) являются важнейшими показателями их качества. И если для
простейших САР достаточными оказываются математический анализ
и расчет этих характеристик, то при проектировании сложных САР
единственно возможным нередко оказывается только эксперименталь-
ное определение их частотных характеристик. И в этих случаях в ка-
честве испытательного сигнала можно использовать белый шум. Ниже
для примера и лучшей наглядности рассмотрено определение частотных
характеристик простейшей замкнутой САР, блок-схема модели которой
представлена на рис. 6.5. В ней использовано звено задержки 3-го
° При этом необходимо знать характер нестационарности. а также рас-
положение и длительности участков квазистационарности процесса Если от-
сутствуют продолжительные участки квазистационарности, то применение опи-
санного метода приводит к существенной погрешности в оценке спектра. Прим,
перев.
140
Глава 6
а
б
Шум как испытательный сигнал
141
в
Рис. 6.4. Кривые частотных характеристик звена задержки 3-го порядка: а А ЧХ;
б ФЧХ; в амплитудно-фазовой характеристики
порядка, частотные характеристики которого приведены в предыдущем
разделе.
Заданный коэффициент усиления (передачи) регулятора равен
v = FK(>). (6.5)
Регулируемая величина х определяется задающим воздействием w и за-
висит от мешающих воздействий помех zY и z2. Комплексные коэф-
фициенты передачи для каждого из указанных воздействий можно
Рис. 6.5. Модель простейшей замкнутой САР.
142
Глава 6
записать в виде следующих выражений: Fw(» = при z2 = 0; z2 = 0; (6.6) Fzi (7®) = а ,. . при w = 0, z2 = 0; (6.7) Zi (у®) Fz2(7®) = a ' , при w = 0, Zj = 0. (6.8) Z2(7®)
После подстановки выражений (6.4) и (6.5) в выражения (6 6) (6.8)
получим
kv Fw(jV>) " (1 + 7®Tt) (1 +7®T2) (1 +7®T3) + kv’ (6’9) k Fh (7®) - (1 +>Ti) (1 +>7i) (1 +>7;) + kv> (6.10) F _ (1 +>Т2)(1 +7®T2)(1 +7®T3) z2°* (1 +7®T1)(1 +7®T2)(1 +jaT3) + kv'
В стат ическом режиме (при со = 0) последние выражения преобразуются
к виду
ки к 1
FJ0) = т—Г- Fzi (0) = —Гг2(0) = —(6.12, 6.13, 6.14)
1 4- kv 1 4- kv 1 4- kv
Комплексные коэффициенты передачи для каждого из воздействий
определяют аналогично изложенному в разд. 6.2. К каждому из входов
САР последовательно подключают генератор испытательного сигнала-
шума при двух остальных входах, замкнутых на массу, действующий
вход и выход соединяют с анализатором сигналов, определяющим АЧХ,
ФЧХ и годограф вектора. Кривые указанных характеристик, которые
получены экспериментально, представлены на рис. 6.6 6.8. Коэффици-
ент усиления составлял v = 8,1 при регулировании х в пределах до 6 дБ
[6.3]. Полученные результаты подтверждены теоретическими расчетами.
Начальные значения АЧХ (статический режим) при каждом отдельном
воздействии равны
Fw (0) = — 1 дБ (рис. 6.6, а),
Fzi(0)= —19дБ (рис. 6.7,о),
Fz2 (0) = — 19 дБ (рис. 6.8, а).
a
S'
Рис. 6.6. Кривые частотных характеристик простейшей замкнутой САР (для
модели на рис. 6.5): а-АЧХ; б-ФЧХ; в амплитудно-фазовой характерис-
тики.
Рис. 6.7. Кривые частотных характеристик САР (модель на рис. 6.5) при воз-
действии помех z1: а- АЧХ; б ФЧХ; в амплитудно-фазовой характеристи-
ки.
6
в
10-23
a
&
Рис. 6.8. Кривые частотных характеристик САР (для модели на рис. 6.5) при
воздействии помех z2: а-АЧХ; б-ФЧХ; в - амплитудно-фазовой характе-
ристики.
Шум как испытательный сигнал
147
в
6.4. Определение эффективной полосы
пропускания фильтра
Описанный в разд. 4.13 метод определения эффективной полосы
пропускания В фильтра, основанный на реализации выражения (4.11),
требует относительно больших затрат времени и средств. Так, при
заданной погрешности измерений, не превышающей 3%, требуется
обработать 50 дискретных значений коэффициента усиления (АЧХ)
фильтра для соответствующих частот спектра, причем АЧХ необходимо
определить предварительно.
Использование для этой цели в качестве испытательного сигнала
белогр шума с постоянной спектральной плотностью мощности Wo
позволяет упростить измерения. Соответствующая схема приведена на
рис. 6.9. По измеренному эффективному значению напряжения шума
U на выходе фильтра и известному его коэффициенту передачи vm
определяют эффективную полосу пропускания по формуле
B=U2/(v2W0). (6.15)
При неизвестной спектральной плотности мощности испытательного
сигнала ее можно определить, используя фильтр с известными эф-
148
Глава 6
Рис. 6.9. Схема измерения эффектив-
ной полосы пропускания фильтра.
фективной полосой пропускания BQ и коэффициентом передачи vmQ по
формуле
W0 = U2/(v20B0). (6.16)
Описанный метод является также основой измерений параметров и ха-
рактеристик шума. В качестве примера его реализации в этом качестве
можно указать схему, приведенную на рис. 6.10, предназначенную для
измерения шум-фактора. Эта схема в деталях соответствует схеме для
измерений характеристик шума транзисторов, изображенной на
рис. 4.47. Резистор R имитирует внутреннее! сопротивление испытуемого
объекта (как источника шума), а цепи подключения генератора шума
G для наглядности упрощены. Шум-фактор объекта определяют со-
гласно формуле
F=U22/(v24kTBR), (6.17)
полученной преобразованием выражения (4.54) согласно используемой
схеме измерения. В данном случае общий коэффициент передачи равен
Vm = Vl'V2- (618)
В этом режиме переключатели схемы находятся в положении 2. Для
определения полосы пропускания фильтра переключатели устанавли-
вают в положение 1 и ко входу испытуемого объекта подключают
генератор белого шума с постоянной спектральной плотностью мощ-
ности
Wo — 4kTRl06. (6.19)
Шум как испытательный сигнал
149
При этом приложенное к резистору R напряжение шума в 103 раз
превышает его собственный тепловой шум и тем существенно снижает
влияние последнего на результаты измерений. Для согласования предела
напряжения испытательного шума с пределом входного напряжения
фильтра на его входе включен резистивный делитель 103:1. Абсо-
лютную полосу пропускания фильтра вычисляют, согласно выражению
(6.15), по формуле
В=1061/Ш%). (6.20)
Шум/фактор может быть определен также согласно преобразованной
формуле (6.17), при подстановке в нее выражений (6.19) и (6.20):
F^Uj/Uj, (6.21)
F = 201g^i дБ. (6.22)
В этом случае не требуется знания ни коэффициента передачи, ни полосы
пропускания фильтра.
Рассмотренный метод особенно важен при определении параметров
перестраиваемых фильтров, значения которых оказываются зависимы-
ми от частоты.
6.5. Определение акустических
характеристик помещений
Помещения с точки зрения их акустических свойств можно рас-
сматривать как звенья передачи сигналов. При этом на «входе» рас-
полагается источник звука (оркестр, громкоговоритель, человеческая
гортань), а на «выходе» приемник звука (ухо, микрофон и т. п.).
Передаточные свойства помещений оценивают при импульсном звуко-
вом воздействии, создаваемом электрическим разрядом или взрывом
пистонов [6.4]. Таким способом может быть измерена весовая функция,
Рис. 6.11. Схема установки для оптимизации качества звучания помещения.
150
Глава 6
по которой, используя преобразование Лапласа, вычисляют передаточ-
ную функцию.
Комплексный коэффициент передачи помещения можно определить
с помощью излучения акустического «белого» шума. Воспринимаемый
измерительным микрофоном «выходной» сигнал подают на спектр-ана-
лизатор, посредством которого определяют также АЧХ и ФЧХ по-
мещения, как изложено в разд. 6.2.
Схема подобной установки, позволяющей оптимизировать качество
звучания помещения, например дискотеки, приведена на рис. 6.11. В по-
мещении располагают группы динамиков, АЧХ и ФЧХ которых могут
корректироваться эквалайзером. На вход эквалайзера через микшерский
пульт поступает «белый» шум. Перемещением измерительного микро-
фона отыскивают в помещении наилучшие точки в смысле требуемого
звучания. Регулировкой эквалайзеров каждой из групп (каналов) дина-
миков добиваются одного и того же амплитудного спектра в каждой из
точек акустического пространства, т. е. примерно однородной спектраль-
ной плотности мощности [6.5].
7. Анализ шума и
шумоподобных сигналов
7.1. Цели анализа
Процессы, протекающие в технических системах (устройствах), нередко
характеризуются одновременно и детерминированностью, и стохастич-
ностью. Отклонения характеристик таких шумоподобных процессов
в тех или иных системах от принятых норм отражают внутренние
изменения, происходящие в этих системах. Эти отклонения и фиксируют
при проведении соответствующего анализа.
Так, контроль шума, производимого движущимися частями машины
или механизма, позволяет оценивать степень их износа и тем самым
прогнозировать их выход из строя. Диагностика по шуму основана на
том, что все механические разрушения вызываются предварительно
возникшими нежелательными процессами, причем каждый из этих
процессов отражается соответствующей компонентой в шумоподобном
сигнале, анализируемом при диагностике состояния объекта [7.1, 7.2].
При анализе шумоподобных сигналов и помех в каналах передачи
информации исходят из совершенно других предпосылок [7.3]. Влияние
паразитных воздействий может исследоваться, исходя из рассмотрения
их источников.
Весьма информативен внутренний шум полупроводниковых элемен-
тов. Годный к применению элемент генерирует смесь шумов, большую
часть которой составляет белый шум и незначительную часть фликкер-
шум. Если последний преобладает и наблюдается появление импульсно-
го шума, то это свидетельствует о внутренних дефектах элемента,
вызванных отклонениями от норм операций технологического процесса
производства этих элементов. Так, при некачественных контактных
площадках и наличии дефектов в оксидном слое резко возрастает
фликкер-шум. Вкрапления тяжелых металлов, дефекты кристаллической
решетки подложки микросхемы, а также механические напряжения
кристалла, возникшие при неправильном монтаже, вызывают появление
импульсного шума. Идентификация указанных видов шума позволяет
устранять соответствующие ошибки в технологии.
Анализ шума полупроводниковых элементов позволяет также оцени-
вать показатели надежности, в том числе наработку на отказ этих
элементов. Их взаимосвязь с шумом исследована, например, в работах
[7.4-7.6]. Причем некоторые отклонения характеристик шума от нор-
мированных значений могут служить критериями отбора элементов
с требуемыми показателями надежности.
152
Глава 7
Приведенные примеры не исчерпывают всего многообразия инфор-
мационной значимости шумов в промышленном производстве и экс-
плуатации технических средств. В некоторых случаях контроль за
состоянием объекта возможен на основе оценок характера изменения
шума этого объекта во времени.
Наблюдать изменение стохастического сигнала во времени можно
при помощи осциллографа в том случае, когда такому сигналу присущи
определенные статистические закономерности. Несмотря на неустано-
вившийся характер временного изменения такого сигнала, опыт и неко-
торые навыки позволяют наблюдателю распознавать его важнейшие
статистические свойства. Естественно, что время наблюдения должно
быть при этом достаточно продолжительным. Для широкополосного,
но достаточно низкочастотного сигнала это время должно составлять
единицы секунд, а с понижением нижней граничной частоты спектра
сигнала время наблюдения возрастает до нескольких минут.
Белый шум распознается благодаря тому, что разброс его ампли-
тудных значений не выходит за границы узкого интервала и составляет
половину среднего значения шума, причем само среднее значение не
подвержено существенным колебаниям.
Если в смеси белого и фликкер-шума последний преобладает, то
среднее значение этой смеси изменяется. Причем частота колебаний
с возрастанием среднего значения уменьшается, что отражено диаграм-
мой на рис. 2.9. Если колебания среднего наблюдаются лишь в области
инфранизких частот с интервалом от 0,1 до 1 Гц без наличия каких-либо
более высокочастотных составляющих, то это свидетельствует не о
фликкер-шуме, а о флуктуациях рабочих параметров контролируемого
объекта (полупроводникового элемента) около заданных значений. По-
добный характер изменений параметров свидетельствует о темпера-
турных влияниях окружающей среды, которые не могут быть полностью
устранены схемотехническими средствами. В подобных случаях необхо-
димо не только экранировать элемент от электрических и магнитных
полей, но и обеспечить его термостатирование.
Импульсный шум может проявляться в широком частотном диапа-
зоне в виде скачкообразных изменений его амплитудных значений на
фоне другого шума, например на фоне белого шума с квазипостоянным
средним. Эти скачки могут происходить в пределах двух или более
уровней. Ширина импульсов и интервалы между ними независимо друг
от друга распределены по экспоненциальному закону и характеризуются
квазипостоянством средних значений. Последние трудно оценить из
распределений временных параметров, так как узкие импульсы появ-
ляются намного чаще широких, о чем свидетельствует экспоненциаль-
ный закон указанных распределений. При преобладании других видов
шума над импульсным (с малой амплитудой) идентифицировать по-
следний почти не удается.
Приведенные выше рассуждения справедливы в основном для лабо-
раторных исследований и непригодны для контроля изделий в условиях
Анализ шума и шумоподобных сигналов
153
их массового производства. Только совместное рассмотрение ампли-
тудных распределений и временных зависимостей позволяет судить
о статистических закономерностях стохастических процессов в целом
и составляющих их компонентов в частности. При этом весьма важную
роль играет первоначальное сжатие данных измерений, что ведет к воз-
можности определения «сжатых» характеристических величин и функ-
ций: эффективного значения напряжения, амплитудного распределения,
спектральной плотности мощности, корреляционных функций.
Простейшей сжатой формой представления данных измерений яв-
ляется среднее значение процесса (сигнала). Однако в случае «чистого»
шума, в котором отсутствует постоянная составляющая, его среднее
арифметическое значение малоинформативно, так как близко к нулю.
Интегральным параметром шума является эффективное значение его
напряжения, определяемое из квадрата среднего значения шума. Однако
и эффективное значение служит лишь для предварительной оценки
шума, причем оно обычно отсутствует в задаваемом перечне его
основных характеристик. Но если речь идет об эффективном значении
напряжения теплового шума, выделяемом в шумящем резисторе, то,
согласно выражению (4.54), в этом случае возможно определение шум-
фактора испытуемого объекта.
Целесообразное сжатие данных позволяет получать оценки основных
параметров и характеристик шума, рассмотренных в разд. 4.3.
Далее описаны некоторые методы оценивания параметров и харак-
теристик шума и шумоподобных сигналов, важных для исследования
состояний испытуемых объектов. Применительно к конкретным объек-
там эти методы в деталях могут несколько различаться, сохраняя свою
общность вследствие общности проявлений того или иного вида шума.
Так, например, импульсный шум в полупроводнике имеет тот же
характер, что и импульсные помехи в канале передачи информации,
а низкочастотный шум во многом идентичен случайным низкочастот-
ным процессам, протекающим в окружающем нас технизированном
мире.
7.2. Оценивание амплитудных распределений
Внутренний шум полупроводниковых элементов представляет собой
смесь трех видов шума: белого, импульсного и обусловленного фликкер-
эффектом. Они различаются между собой видом амплитудного распре-
деления: нормальным у белого и фликкер-шума и двухточечным у им-
пульсного. Примеры кривых амплитудных распределений подобной
смеси шумов и отдельных ее компонентов представлены на рис. 7.1.
Величины -абсолютные частости (количества значений в классах
(интервалах), где z-номер класса). Распределение этих частостей яв-
ляется дискретным. При достаточно малом шаге между соседними
классами распределение частостей аппроксимируется кривой, соответ-
154
Глава 7
Рис. 7.1. Кривые амплитудных распределений смеси шумов и отдельных ее со-
ставляющих.
ствующей функции плотности вероятностей. Для определения этой
функции частости необходимо разделить на число опытов N, равное
сумме всех частостей. Напоминание о взаимосвязи между дискретным
распределением частостей и соответствующей ему функцией плотности
вероятностей необходимо для дальнейшего изложения.
Как видно из рис. 7.1, амплитудное распределение смеси шумов nt
представляет собой сумму двух нормальных распределений с различ-
ными средними значениями щ и ц2, но равными среднеквадратичными
отклонениями Qi и ст2, причем сдвиг между средними значениями
соответствует амплитуде двухуровневого импульсного шума:
= (7.1)
Равенство среднеквадратичных отклонений обусловлено постоянством
эффективных значений напряжений обоих видов шума с нормальным
амплитудным распределением и не зависит от произвольных уровней
импульсного шума. Различная крутизна функций распределений яв-
ляется следствием различия вероятностей появления каждого из двух
уровней импульсного шума. Крутизна каждой функции распределения
пропорциональна соответствующей вероятности, а вследствие равенства
среднеквадратичных отклонений этих функций крутизна каждой из них
пропорциональна соответствующей максимальной частости. Из выра-
жений (2.52) и (2.53) следует, что
max ni2 = P(l) = Tj
шах щ! Р(0) т0‘
Анализ шума и шумоподобных сигналов
155
Как видно из рис. 7.1, результирующая кривая качественно отличается
от кривой функции нормального распределения, что вызвано наличием
импульсного шума. Это отклонение служит индикатором наличия им-
пульсного шума, а его значение является количественной оценкой уровня
этого шума (соответствующая математическая зависимость приведена
ниже).
Обозначим Pi относительные частости событий (амплитудных зна-
чений) в классах (/ = 0, к — 1):
Pi^nJN, (7.3)
т. е. Pi - нормированная частость, где А общее количество амплитудных
значений. Обозначим рт соответствующие им вероятности нормальной
функции амплитудного распределения, аппроксимирующей дискретное
распределение относительных частостей, причем оба распределения
характеризуются равными средними значениями и средними квадрати-
ческими отклонениями и. В этом случае отклонение Y амплитудного
распределения смеси шумов от нормального закона определяется вы-
ражением
у-Г/»)’. (7.4)
i = 0 PNi
Деление (нормирование) на pNi позволяет оценить отклонение Y при
малых значениях функции распределения и сделать оценку отклонения
независимой от числа классов (естественно, в разумно выбранных
границах).
На рис. 7.2 сплошной линией представлена кривая нормированного
Рис. 7.2. Кривые нормированной функции амплитудного распределения (pj и нор-
мального распределения (pNi).
156
Глава 7
амплитудного распределения, полученная из амплитудного распреде-
ления nh приведенного на рис. 7.1; пунктирной линией показана соот-
ветствующая кривая нормального распределения с указанными выше
равными значениями параметров ц и и.
Исходными данными для практических расчетов отклонения У ам-
плитудного распределения от нормального закона является совокуп-
ность N всех амплитудных значений, распределенных по к классам
с одинаковым единичным интервалом значений. Так, например, может
быть задан интервал напряжения в 0,1 мкВ либо интервал, равный
единице младшего разряда кода АЦП (см. функцию амплитудного
распределения на рис. 4.44). При единичном интервале значений отно-
сительная частость Pi представляет собой значение функции плотности
вероятностей, так как в этом случае при нормировании на N выпол-
няется условие (2.4). Однако число классов должно быть при этом
достаточно велико, с тем чтобы соответствующее середине интервала
значение было как можно ближе к площади элементарного прямо-
угольника, ограниченного пределами классов i и i + 1, а также эле-
ментарным участком кривой функции плотности вероятностей. При
указанных условиях допустимо сравнивать относительную частость д-
с вычисленным значением pNi для середины класса функции плотности
вероятностей ю(и) соответствующего нормального распределения. Ре-
альное амплитудное распределение и соответствующее ему вычисленное
нормальное распределение должны иметь одинаковые среднеквадра-
тичные отклонения о и средние значения ц:
к-1
Н = Е (' + °’5)Pi,
i = 0
н2 = Е Ч + °’5)2а- - и2
i —О
(7.5)
(7.6)
Исходя из этих значений, могут быть вычислены значения pNi соот-
ветствующей функции нормального распределения:
w(i 4- 0,5) = —-Дг—exp
х /2л (У
(* 4- 0,5 - ц)2
2су2
При недостаточном числе классов вычисленные, согласно этому
выражению, значения функции окажутся неточными, причем соответ-
ственно возрастет погрешность расчетов отклонения амплитудного
распределения от нормального закона, выполненных по выражению
(7.4). В этом случае потребуются более точные вычисления pNi для
каждого из классов по следующим зависимостям:
Pni = Pn Ч + 1) - Pn (0, Р-8)
Анализ шума и шумоподобных сигналов
157
(и-и)2
2о2 _
du,
(и - и)2
2а2
(7.8а)
(7.86)
du.
Для решения интегральных выражений приближенным методом вы-
числяют значения pN (х) нормального распределения с нулевым средним
и среднеквадратичным отклонением, равным 1 (распределение N (0,1)).
Затем вычисляют границы классов i в соответствующих границах
классов х распределения N (0,1) по формуле
Xi = (/ - р)/с (7.9)
и далее определяют
PNi = Pn(*/+1) ~ Pn(*/)> (7.10)
что позволяет вновь воспользоваться выражением (7.4) для вычисления
отклонения У. Численный приближенный метод вычисления значений
pN(x) распределения N (0,1) описан в разд. П.1.
Теоретически отклонение У зависит только от амплитуды Us им-
пульсного шума (по отношению к эффективному значению напряжения
UN нормально распределенной импульсной составляющей смеси шумов)
и от соотношения временных параметров импульсного шума tJtq
(средней продолжительности импульсов к паузе). Количественно эти
зависимости, вычисленные на ЭВМ, показаны в виде соответствующих
диаграмм на рис. 7.3. Однако достоверную информацию отражает
только средняя часть этих кривых. Нижняя часть кривых отражает
неизбежные погрешности округления, обусловленные используемыми
численными методами и ограниченностью разрядной сетки ЭВМ, про-
суммированные по всем классам. Кроме того, свой вклад вносит
и характер зависимости (7.4). При больших амплитудах импульсов шума
с ростом значений существенно уменьшаются соответствующие им
значения pNh что при вычислениях приводит к неправдоподобным
отклонениям У Поэтому вычисление разностей в выражении (7.4)
ограничивают областью значений (ц + За) нормального распределения.
В случае приведенных кривых это условие нарушено и реально выбран-
ные границы искажают их нижнюю и верхнюю части. Тем не менее
кривые (в средней своей части) хорошо отражают упомянутые зависи-
мости отклонения функции амплитудного распределения от нормаль-
ного закона. Так, отношение в пределах от 0,05 до 20 незначительно
влияет на форму кривой распределения, но вне этих пределов влияние
этого отношения существенно возрастает. Естественно, что обратного
влияния на соотношения US/UN и т1/т0 отклонение У не оказывает.
158
Глава 7
Рис. 7.3. Кривые зависи-
мостей отклонения Y
от параметров шума.
Однако это отклонение указывает на наличие в шуме импульсной
составляющей того или иного уровня.
Отклонение У в электронных элементах для белого шума составляет
примерно 10 4, что хорошо согласуется с вычисленными зависимостя-
ми, представленными на рис. 7.3. На погрешность определения У су-
щественно влияет также значение младшего разряда АЦП, так как шаг
квантования предопределяет ширину классов. Кроме того, непостоян-
ство ширины интервалов (классов), которое выражается в локальных
отклонениях значений pt от истинных, дополнительно влияет на рост
погрешности определения отклонения У Поэтому АЦП должен быть
высокоточным и его погрешность должна быть меньше ширины класса.
При разработке устройств для определения амплитудных распреде-
лений процессов важную роль играет учет влияния выбора ширины
и числа классов на отклонение этих распределений от нормального
закона. Как показали расчеты на ЭВМ, это влияние становится не-
существенным при достаточно большом числе классов: от 24 до 80 из
100 возможных. Естественно, что классы не должны перекрывать друг
друга, и следует анализировать все амплитудные значения, сколь бы
велики они не были.
При преобладании в электронных элементах белого шума отклоне-
ние У оказывается меньше 2-10 4 [3.6]. При высоком уровне им-
пульсного шума вследствие нарушения условий стационарности слу-
Анализ шума и шумоподобных сигналов 159
чайного процесса Y возрастает до 2-10~3. При У>210-3 с весьма
большой вероятностью можно утверждать о наличии в шуме им-
пульсной составляющей. Однако при значениях Уот 2-10“4 до 2 -10~3
однозначно судить об этом нельзя. При малых значениях отношения
U$/UN и экстремальных значениях Tx/Tq по отклонению У невозможно
распознать наличие импульсного шума.
7.3. Оценивание параметров импульсного шума
Как следует из рис. 7.1, сдвиг между максимальными значениями
функций амплитудных распределений nit и ni2 соответствующих шу-
мовых компонент смеси (их средними значениями щ и ц2) равен
амплитуде Us двухуровневого импульсного шума. А отношению этих
максимумов, согласно выражению (7.2), соответствует отношение Тх/т0
Однако, для того чтобы воспользоваться этим выражением, необходимо
проанализировать, включает ли результирующее амплитудное распре-
деление смеси указанные максимумы. С тем чтобы исключить воз-
можные ошибки из-за наличия паразитных или ложных пиков в экспе-
риментально полученной функции распределения, ее перед анализом на
наличие двух истинных максимумов предварительно сглаживают. Это
сглаживание сводится к замене частостей частостями mh каждая из f-x
классов которых является среднеарифметической от щ (частостей со-
седних классов) согласно формуле
='(«i-i + «,• + «< + 1), (7.Н)
что отражают соответствующие кривые на рис. 7.4.
В качестве максимального значения функции принимают значение
если выполняется следующее условие:
mi-2 < mi-i < > mi+l > mi+2 • П-12)
Сглаживание оказывается эффективным и в случае определения при
помощи АЦП функции распределения, ширина классов которой изме-
няется случайным образом (из-за шумов АЦП), что приводит к ло-
кальным искажениям функции и соответствующей погрешности опре-
деления отклонения У.
Если результирующая функция амплитудного распределения харак-
теризуется только одним максимумом, то в определении параметров
импульсной составляющей шума возникают существенные трудности.
Левая часть кривой результирующей функции распределения, пред-
ставленной на рис. 7.1, определяется характером функции ип, а правая
часть характером функции ni2, но крутизна ее изменения уменьшается.
Очевидно, что из нарастающих значений результирующей функции
распределения могут быть вычислены параметры щ и функции
нормального распределения nir, а также сама эта функция, а разность
обеих функций представляет собой вторую составляющую результи-
160
Глава 7
Рис. 7.4. Пример сглаживания экспериментально полученной функции распреде-
ления.
рующей функции функцию ni2. Однако возможность вычислений толь-
ко приближенных значений параметров функции ип, а значит, и самой
функции приводит к погрешностям в вычислениях значений функции
ni2, проявляющимся в том, что с большой вероятностью значения
функции ni2 оказываются отрицательными. Однако в этом случае можно
вычислить абсолютный максимум при вычитании функций щ и пц и
определить с достаточным приближением амплитуду Us импульсной
составляющей шума. Но из-за упомянутых погрешностей определение
временных параметров шума оказывается нецелесообразным.
В соответствии с изложенным разработана методика вычислений
параметров импульсного шума, рассматриваемая ниже. Эту методику
иллюстрируют кривые вычисленных амплитудных распределений со-
ставляющих шума, приведенные на рис. 7.5.
На результирующей кривой выбирают три уровня: 10°о (z\), 90% (z2)
на фронте нарастания функции и тахиР
Нормальная функция распределения N (ц, о) с параметрами ц и о
описывается выражением
1
w(i) = ...- exp
О'-нЛ
2о2
(7-13)
Максимума эта функция достигает при z — ц = 0:
max w =
1
(7-14)
Анализ шума и шумоподобных сигналов
161
Подставляя в выражение (7.13) значения it и г2, после элементарных
преобразований получим
ч - ц = о ,/2 In (1/0,1) х 2,146а,
i2 - и = <7^/2 In (1/0,9) х 0,459о,
(7.15а)
(7.156)
а разность двух последних выражений позволяет определить средне-
квадратичное отклонение:
п = 0,593 |г\ — г2|. (7.16)
После подстановки (7.16) в выражение (7.156) получим
р = г2 ± 0,272 l/’i —i2|, (7.17)
знак в котором определяется тем, находятся значения г; и г2 выше (—)
или ниже (4-) среднего значения ц.
Кривая функции распределения проходит через целые значения г и
аппроксимирована прямой линией. Значения г\ и г2 могут быть заданы не
только целыми, но и дробными числами. Если, к примеру, значение
(см. рис. 7.5) лежит между значениями n(i) и п(г 4- 1), то
. _ . , иО1)-«(О
г 1 — г 4-----------.
n(i 4- 1) — и(г)
(7.18)
Признаком пары значений г\ и г2, принадлежащей фронту нарастания
функции, из двух таких пар (вторая пара принадлежит фронту спада)
является наименьшая разность этих значений. После вычисления и щ
по выражениям (7.16) и (7.17) соответственно определяют искомую
Рис. 7.5. Иллюстрация методики расчетов функций амплитудных распределений
отдельных составляющих смеси шумов.
11-23
1о2
Глава 7
Рис. 7.6. Кривые зависимостей относительных погрешностей амплитуд импульс-
ного шума.
нормальную функцию распределения
Пц = шах д/ехр
(*- Hi)2
2О1
1 = 0, 1, 2,....
(7.19)
Функцию распределения ni2 вычисляют как разность между щ и пц.
Кривые вычисленных функций приведены на рис. 7.5. Максимум функ-
ции ni2 достигается при /макс2. По известному значению zMaKC1 = Pi
и вычисленному /макс2 приближенно определяют амплитуду импульсной
составляющей шума:
U $ ~ I ^макс1 4лакс2 I • (7.20)
Для того чтобы оценить, в каких пределах отношений US/UN и Ti/x0
целесообразно использовать описанный метод определения Us, были
проведены расчеты на ЭВМ с генерированием различных амплитудных
распределений составляющих шума. Кривые (несколько идеализирован-
ные) вычисленных зависимостей относительных погрешностей Us от
US/UN при различных т0/т1 приведены на рис. 7.6.
Так как /макс2 в отличие от /макс1 может принимать только цело-
численные значения, то возникают случайные погрешности, искажающие
функцию распределения niq. Поэтому прибегают к некоторой идеализа-
ции последней. С ростом значений Ug/UN кривые спадают и наступают
разрывы в точках, соответствующих каждому из двух максимумов
Анализ шума и шумоподобных сигналов
163
амплитудных распределений, аналогичных приведенным на рис. 7.1.
В этих случаях для определения амплитудного значения импульсной
составляющей шума необходимо воспользоваться более простым ме-
тодом, описанным ранее. Исследования показали, что последний метод
применим лишь для амплитудных распределений с одним максимумом.
На рис. 7.7 представлена блок-схема алгоритма реализации опи-
санных методов. Вначале определяют результирующую функцию амп-
литудного распределения и вычисляют ее отклонение от нормального
закона. Если это отклонение меньше порогового значения Уо, то иссле-
дуемый шум или шумоподобный сигнал не содержат импульсной
компоненты и дальнейшие вычисления прерываются В противном
случае (если Y> Уо) выполняется следующий шаг определение макси-
мума результирующей функции распределения. Если эта функция харак-
Рис. 7.7. Блок-схема алгоритма вычислений оценок амплитудного распределения
и параметров шума.
11
164
Глава 7
1еризуе1ся цзумя максимумами, ю вычисления параметров импульсной
составляющей упрощаются При наличии одною максимума вычисле-
ния параметров осуществляют по последнему методу. Если функция
распределения, несмотря на сглаживание, не располагает выраженным
максимумом, то ею вводят искусственно (этот путь на блок-схеме
а поритма на рис. 7.7 не отражен).
Гели функция характеризуется более чем двумя максимумами, то это
свидетельствует о наличии mhoi оуровневого импульсного шума, пара-
мет ры которого не могут быть определены описанными выше метода-
ми. Оценки параметров, вычисляемые по приведенной блок-схеме, moi ут
быть достаточно грубыми и даже неправдоподобными. Поэтому на
практике программу вычислений дополняют рядом условных переходов,
прерывающих ее дальнейшее выполнение, если обнаруживаются про-
тиворечия с заданными в этих переходах критериями (условиями).
Такими критериями могут быть те или иные граничные значения
параметров, шриори известные для исследуемых процессов, либо дан-
ные зависимостей погрешностей, приведенных на рис. 7.6, либо оценки
спектральной плотности мощности. Выбирается тот критерий, который
обеспечт получение правильной оценки (на данном этапе вычислений)
с наибольшей вероятностью. Естественно, что лучше прервагь вычисле-
ния и отбросить полученный ошибочный результат, нежели продолжать
вычисления, наращивая ошибки.
7.4. Определение оценки спектральной
плотности мощности
Различия между вычисленными энергетическими спектрами различ-
ных видов шума и полученными их оценками наглядно иллюстрируют
соответствующие диаграммы на рис. 4.39 и 4.40, а их взаимосвязь
определена выражением (4.59). Причем вычисленная спектральная плот-
ность мощности WB(f) измеряется в В2/Гц, а ее оценки приводятся в В2,
г.е. это не спектральная плотность мощности, а просто мощность,
отнесенная к относительно узкой полосе частотного спектра рассматри-
ваемого частотного диапазона. Поэтому изменение этой мощности
в зависимости от частоты точно так же, как и спектральная плотность
мощности, характеризует распределение мощности в анализируемом
частотном диапазоне.
Дальнейшее изложение настоящего раздела ведется применительно
к шуму, ограниченному частотным спектром от 2 Гц до 20 кГц (4
декады). Оценку энергетического спектра в столь широком диапазоне
частот можно получать лишь при помощи цифровых фильтров (см.
разд. 4.3.4). Если частотный спектр превышает указанное выше ограни-
чение, то для получения оценки соответствующего энергетического
спектра шума используют выражение (4.59).
Как известно, белый шум характеризуется постоянством спектраль-
ной плотности мощности, т.е. Ww(f) = Ww, и поэтому, согласно выра-
Анализ шума и шумоподобных сигналов
165
жепию (4.59), се оценка определяется как
Wlin</) = 0,232 Ww-J = kwh
где
kw = 0,232 Ww.
(7.21)
(7.22)
То1да эффективное значение напряжения белою шума в интервале
часто! со!ласно формуле (2.41), можно представить в виде
Ой = I kw- <//= kw (7.23)
/0,232 0,232 2 1
J 1
Спек тральная плотность мощности фликкер-шума определяется выра-
жением (2.48), а его оценку можно получить согласно соотношению
(4.59):
^И./) = 0,232Ии./А =А„.. (7.24)
Тогда, аналогично выражению (7.23), эффективное значение напряжения
фликкер-шума в интервале частот fl9J2 определился выражением
f2 к к /
0?.= f ' df= 1 \nh-. (7.25)
Д 0,232/ 0,232 ./,
Частота /к, характеризующая уровень фликкер-шума, определяется из
выражений (7.22) и (7.24):
,/к = Г <726>
Оценку спектральной плотности мощности импульсного шума полу-
чают согласно выражениям (2.67) и (4.59):
0,232(7; f
BS Л2(то + Tj/i +f2'
(7.27)
Однако в противоположность формуле (2.67) в последнем выражении
принята во внимание реальная амплитуда Us импульсного шума, в то
время как выражение (2.67) для упрощения отражает частный случай
Us = 1. Обозначая ks следующую комбинацию величин:
0,2321/j
s ^(To+tJ’
выражение (7.27) можно представить в виде
WBS(f) = ЬзТТТТг-
J s + J
(7.28)
(7.29)
Для эффективного значения напряжения импульсного шума по аналогии
166
Глава 7
с (7.23) получим
°’-dsH-а" ' •*’301
Так как мощность каждого из видов шума в смеси независима от
мощностей друт их составляющих, то мощность смеси определится
суммой соответствующих значений, вычисляемых по выражениям (7.21),
(7.24) и (7.29):
= kwf+kF + ks-^—2, (7.31)
JS-rj
причем максимальная мощность будет наблюдаться при
L 1 _________
/Lee = -fs - ,7 (7.32)
Значение /макс лежит в области действительных чисел лишь при условии
/cs %kwfs. В противном случае /макс является комплексным числом,
причем четко выраженный максимум мощности отсутствует и на соот-
ветствующей кривой при ее нарастании наблюдается «горб». Граничное
значение равно /макс = yj 3fs и на 2 декады превышает характеристи-
ческую частоту fs импульсного шума. Чем лучше выполняется условие
достижения максимума мощности (при действительном значении /макс),
тем меньше разность частот /макс и fs.
Оценку функции спектральной плотности мощности WB(f) получают
аппроксимацией совокупности измеренных дискретных значений WBn
(ц = 1, 2, ..., N), принимаемых в качестве опорных значений этой
оценочной функции. Пересчет этих п значений в реальные частоты
зависит от используемого анализатора. Для частотного диапазона от
2 Гц до 20 кГц при третьоактавном шаге между каналами анализатора
реальные частоты определяют по эмпирической формуле
/’= Юп/1° Гц, и = 3, 4, ..., 43. (7.33)
Дискретные (опорные) значения оценки спектральной плотности
мощности определяют в логарифмическом масштабе (децибелах), и их
количеству N должно соответствовать такое же число третьоктавных
канальных полосовых фильтров используемого анализатора. Для ука-
занного выше ограниченного частотного диапазона (2...2-104 Гц), со-
гласно формуле (7.33), число каналов равно N = 41.
Измеряемые анализатором опорные значения ап оценки спектраль-
ной плотности мощности вследствие статистических изменений при-
водят к существенной погрешности самой оценки, вычисляемой по
выражению (7.31), и ее отклонению от идеальной. Эта погрешность
особенно проявляется на нижних частотах. Ее можно уменьшить увели-
чением времени наблюдений Т Но так как такой подход не всегда
целесообразен, то прибегают к сглаживанию результатов измерений
нализ шума и шумоподобных сигналов
167
Рис. 7.8. Иллюстрация сглаживания оценок спектральной плотности мощности.
путем их усреднения. При этом исходят из того, что упомянутые
отклонения оценки носят случайный характер и по частям компенси-
руются в соседних каналах. При таком сглаживании для каждого и-го
канала по результатам измерений в этом и соседних каналах (и + 1)
и (п — 1) вычисляется среднее значение Ьп по формуле
= + 1 + ап + an+i + ^и+2) • (7.34)
Пример подобного сглаживания приведен на рис. 7.8. Для демонстрации
эффекта сглаживания приведены кривые двух оценок шума, генерируе-
мого одним и тем же источником. У первой (сглаживаемой) кривой
выбрано время наблюдения Т~ 4 с, а для второй кривой Т=128с,
причем уровень мощности во втором случае уменьшен на 10 дБ. Как
видно из приведенных кривых, сглаженная оценка имеет более выражен-
ную монотонность, но недостатком сглаживания является потеря перво-
го и последнего опорных значений. Для низкочастотного шума эти
значения могут быть опущены, но в случае высокочастотного шума
невычисляемые значения Ьп (первое и последнее) заменяют в сглаженной
функции соответствующими значениями ап.
Наличие импульсной компоненты в шуме обусловливает появление
максимума в его оценке спектральной плотности мощности на частоте,
определяемой выражением (7.32), как это иллюстрируют соответствую-
168
Глава 7
щие диаграммы на рис. 4.40. Установление критерия идентификации
этого максимума в определенной мере может быть затруднено при
наличии нерегулярностей в оценке функции. Применительно к выраже-
нию (7 31) критерий идентификации записывают в виде условия
bn-2<bn-i <bn^bn+1 ^bn+2. (7.35)
Следует подчеркнуть, что поиску максимума обязательно должно пред-
шествовать сглаживание оценки функции, так как вследствие даже
малых ее нерегулярностей идентификация максимума оказывается да-
леко не всегда возможной.
Сглаживание и поиск максимума целесообразнее выполнять с ло-
гарифмическими значениями данных, так как логарифмическое пред-
ставление функции является монотонным. Для логарифмического пре-
образования и представления мощности по выражению (7.31) исполь-
зуют формулу пересчета
WBn = 10ь"/1О-Жво, (7.36)
где HZBO константа, характерная для используемого анализатора; она
измеряется в В2 и может составлять, к примеру, 10"12 В2.
В выражении (7.31) содержатся четыре неизвестные константы: kw, kF,
ks,fs. Первую из них (kw), характеризующую белый шум, сравнительно
просто вычислить по данным Ьп9 определяемым в каналах анализа
высоких частот, так как в этой части спектра влияние фликкер- и им-
пульсной составляющих шума оказывается сравнительно слабым. При
массовом контроле годности полупроводниковых элементов того или
иного типа по их шумовым характеристикам рекомендуют отобрать
элемент с минимальными уровнями фликкер- и импульсной составляю-
щих шума и измеренное его значение kw принять в качестве типового для
данной номенклатуры элементов.
Частоту fs с приемлемой погрешностью можно определить с ис-
пользованием выражения (7.32), учитывая соответствующие условия,
изложенные выше.
Зная kw и fS9 можно вычислить ks и kF методом последовательных
приближений. Блок-схема алгоритма их вычислений представлена на
рис. 7.9. Вначале полагают kF = 0 и при этом значении вычисляют ks для
/макс подстановкой в (7.31) вместо переменной/его значения/макс = fs,
т. е.
ks = 2/макс [WB(/макс) - ^/макс - kF3 . (7.37)
Далее по выражению (7.31) вычисляют значения 1УВи для всех частот
анализируемого спектра и эти значения сравнивают с измеренными
значениями WBn. Сумма S квадратов полученных отклонений служит
мерой приближения к измеренным значениям WBn. В зависимости от
знака отклонения текущее вычисленное значение kF увеличивают или
уменьшают и повторяют цикл вычислений до тех пор, пока разность
текущей и предыдущей сумм не станет меньше d. Описанный алгоритм
Анализ шума и шумоподобных сигналов
169
Рис. 7.9. Блок-схема алгоритма вычислений постоянных ks и kF. Число каналов
анализа в диапазоне частот 2...2-104 Гц равно п = 43.
требует априорного знания /макс. Если мощность WB(f) не характе-
ризуется четко выраженным максимумом, то описанный алгоритм
(точнее, соответствующая часть всего алгоритма) оказывается непри-
годным и переходят к расчетам kF и ks с последовательным прибли-
жением к частоте fs, которой заменяют частоту /макс в выражении (7.37).
Блок-схема алгоритма (точнее, продолжения предыдущей части) этих
расчетов представлена на рис. 7.10. В качестве одной из процедур
последовательного приближения к искомым значениям kF и ks в данном
алгоритме используют предыдущий алгоритм. При каждом текущем
значении частоты анализируемого спектра определяют минимальное
значение текущей суммы S. Это значение становится все меньше по мере
приближения к fs. Абсолютный минимум определяют перебором всех
п частот спектра и тем самым автоматически выделяют частоту и об-
ласть спектра, не относящуюся к импульсной составляющей шума.
Вероятность достоверного определения константы, характеризую-
щей ту или иную составляющую шума, вычисляют как отношение
мощности этой составляющей к общей мощности всей смеси.
170
Глава 7
На рис. 7.11 приведены кривые мощностей (оценок спектральной
плотности мощности) в зависимости от частот спектра (и номера
каналов анализатора), вычисленные, согласно выражению (7.31) при
следующих значениях констант.
кп = 2-10 8 В2/Гц, 14^0 = 10 12 В2,
kF = 2,2-10' 6 В2, ,/к = НО Гц,
kSi = 1,1 10 3 В2Гц, fst =20 Гц,
1<52 = 55-10 3 В2 Гц, /52 = 2кГц.
Для точного определения kF мощность фликкер-шума не должна пре-
вышать 5°о моДщосги всей смеси, чему соответствует частота среза
характеристики fK = НО Гц (см кривую 2 на рис. 7.11). Для точного
Рис. 7.10. Блок-схема алгоритма вычисления постоянных kF и ks (продолжение
алгоритма, представленного на рис. 7.10).
Анализ шума и шумоподобных сигналов
171
Рис. 7.11. Примеры оценок спектральных плотностей мощности: 1 только белый
шум; 2 белый шум в смеси с 5% ф шккер-шума (fK— 1 К) Гц); 3 в смеси
с 20% импульсного шума (fs — 20 Гц); 4 в смеси с 10° о импульсного шума
(/8 = 2кГц).
определения ks необходимо, чтобы мощность импульсной составляю-
щей шума распределялась следующим образом: по меньшей мере 20° о
должно приходиться на нижние частоты анализируемого спектра и 10%
на его высокочастотную область (см. кривую 3 на рис. 7.11). Последние
условия сохраняются также и в случае существенно большей 5° о доли
мощности фликкер-шума, распределенной вплоть до fK = 10 кГц.
7.5. Вычисление оценки автокорреляционной
функции
Как отмечалось выше (см. разд. 4.3.5 и 5.1), автокорреляционная
функция шумоподобного процесса позволяет распознать наличие в нем
детерминированной части, но для описания самого процесса она непри-
годна. Таким образом, может создаться впечатление, что автокорреля-
ционная функция не позволяет судить и о характеристиках и параметрах
шума.
На рис. 7.12 представлена кривая автокорреляционной функции \|/ (т)
смеси белого и импульсного шумов. Так как эти шумы не коррели-
172
Глава 7
Рис 7.12. Кривая автокорреляционной функции смеси белого шума с импульсным.
ровапы между собой, ц/(т) является суммой автокорреляционных функ-
ций этих шумов. Эт01 факт очевиден из сравнения кривых указанных
функций, изображенных соответственно на рис. 2.6,а и 2.12, в, с авто-
корреляционной функцией смеси этих шумов, кривая которой изобра-
жена на рис. 7.12. Продолжение автокорреляционной функции импульс-
ною шума до пересечения с осью ординат позволяет определить,
согласно выражению (2.55), эффект ивное значение напряжения этого
шума. Точно так же можно определить эффективное значение напря-
жения Сц белою шума и смеси в целом как сумму этих напряжений.
Точка пересечения с осью абсцисс касательной к автокорреляционной
функции импульсного шума, проведенной из точки U$ на оси ординат,
позволяет определить значение т5, которое связано с характеристической
частот ой fs зависимостью (2.68).
Следует подчеркнуть, что вычисление автокорреляционной функции
шума связано с большими трудностями, особенно в обласш переходных
колебаний. Наличие фликкер-шума и ограничение частотного спектра
белого шума мо1ут привести к существенному расширению значений
автокорреляционной функции по сравнению с изображенной на
рис. 7.12. Причем область переходных колебаний этой функции при-
обретает большую неопределенность, и возникающие случайные откло-
нения от теоретической функции невозможно полностью устранить даже
при большом числе усреднений.
Анализ шума и шумоподобных сигналов
173
Если сравнительный анализ показывает, что эффективные значения
напряжений шумовых компонент и характеристическую частот) им-
пульсного шума целесообразнее определять из оценки спектральной
плотности мощности шума, го от вычисления его автокорреляционной
функции лучше отказаться.
7.6. Комплексный анализ
При анализе шума и шумоподобных сигналов на основании изме-
ренных их характерис1ических параметров и функций (эффективно!о
значения напряжения или шум-фактора, амплитудного распределения
и энергетического cncKipa) вычисляют все параметры шумовых компо-
нент, в том числе эффективнее значения их напряжений, амплитуду
импульсного шума и его временные параметры.
Исходя из оценки энергетического спектра, можно определить кон-
станты kw, кг и kS' а также характеристическую частоту /х. Зная
указанные константы, можно вычисли 1ь эффективные значения напря-
жений составляющих шума по выражениям (7.23), (7.25) и (7.30), а также
частоту среза fK по соотношению (7.26). Амтитуду импульсною шума
можно определить из амплитудною распределения.
Отношение тг/т0 из амплитудного распределения можно найти лишь
в одном случае при наличии в нем двух максимумов. Обычно для
определения Tj и т0 используют другой подход.
Эффективное значение напряжения импульсною шума можно вы-
числить по выражению (2.65) при т = 0 и l/s # 1, т.е.
u2s = u2s- T°T1 2.
(То + Ь)2
(7.38)
Последнее соотношение может быть также получено на основании
выражений (7.30) и (7.28) для бесконечного спектра частот, начинаю-
щегося с нулевой частоты:
Us = _V1_
(Tq + tJ2'
(7.39)
Из выражения (2.67) следует, что
7vf _ то + Ti
Т0Т1
(7-40)
и, решая его относительно т0, имеем
г =______ь____
° 2nJsxt - 1
(7-41)
После подстановки выражения (7.41) в формулу (7.39) и некоторых
174
Глава 7
преобразований получим квадратное уравнение
т2 - Т1 + 1 = ()
1 2nfs-a 4n2fla
(7.42)
решение которого имеет вид
т4-(1 ±/1 -4«).
(7.43)
Двузначность последнего решения имеет глубокий смысл. Выражения
(7.39) и (7.40) симметричны, т.е. т0 и могут быть без отрицательных
последствий заменены друг на друга. Поэтому если уравнение (7.40)
разрешить относительно то получим выражение, аналогичное (7 43),
но разрешенное относительно т0. Следовательно, решения выражения
(7.43) представляют собой значения т0 и в виде
г0 = -1-(1 +v/l -4«), (7.44)
4k/s«
^ = -^-(1-7'1-40). (7.45)
4лЛа
Следует отметить, что комплексные значения т0 и не имеют физи-
ческого смысла.
Максимума выражение (7.39) достигает при — т0, и отношение
а (7.39) равно при этом 0,25. Причем в этом случае подкоренное
выражение в соотношениях (7.44) и (7.45) является также неотрица-
тельным числом.
После тою как значения параметров шума определены, возникает
вопрос об их единственности.
Первая, причем весьма простая возможность такой проверки заклю-
чается в контроле равенства суммы эффективных значений напряжений
отдельных шумовых составляющих измеренному эффективному значе-
нию шума:
С2 = С^+ С?+ 1?|. (7.46)
Однако такая проверка нецелесообразна при малом значении напря-
жения хотя бы одной из составляющих, так как если она определена
с noiрешностью, то в общей сумме эта погрешность проявится несу-
щественно.
Другая возможность проверки однозначности полученных результа-
тов измерений заключается в определении отклонения У от действи-
тельной функции амплитудного распределения функции, полученной по
результатам измерения дискретных значений шума при определении его
параметров. Определение функции амплитудного распределения рас-
смотрено в разд. 7.2. Эффективное значение напряжения шума, ампли-
Анализ шума и шумоподобных сигналов
175
тудно распределенного по нормальному закону, определяют как
= (7.47)
Распределение каждой из составляющих можно вычислить из соот-
ветствующей нормальной функции плотности вероятностей N (ц, а):
1
' 2U2n _
Т1 1
Hi2 =--7=—ехр
xOy/2nUN
2U2n
(7.48)
(7.49)
где числовая переменная i представляет класс. Если значения обоих
распределений ограничены областью ц + За, то i изменяется от 0 до
i = 6UN + Us. Целесообразно ограничить UN восемью классами и со-
ответственно пересчитать Us. Результирующая функция распределения
(смеси шумов) равна сумме распределений составляющих
= Пц + ni2 .
(7 50)
Рассмотренные методы требуют больших затрат времени на их
реализацию. Поэтому их целесообразно использовать для исследований
других методов анализа стохастических процессов, а также в случаях
измерений, не регламентированных жесткими временными рамками.
Измеренные (вычисленные) значения того или иного параметра
можно полагать достоверными в том случае, если от 50 до 200° о этих
значений являются истинными. Столь большое число требуемых совпа-
дений необходимо для четкого выделения основной тенденции развития
процесса при его анализе, причем погрешность отдельных результатов
измерений слабо влияет на результаты анализа в целом. Вследствие
существенной нестационарности низкочастотного шума и использования
аппроксимации (приближения) данных измерений рассмотренные мето-
ды анализа получаемых результатов некритичны с точки зрения до-
пускаемой погрешности.
Следует отметить, что рассмотренные методы определения пара-
метров шума не позволяют обнаруживать редко появляющиеся им-
пульсы с аномальными пиковыми значениями. Для этой цели исполь-
зуют интервальный дискриминатор уровней со счетчиком числа по-
добных импульсов. Если за. время наблюдения, например при контроле
полупроводникового элемента, счетчик фиксирует один-два таких им-
пульса, то их появление можно объяснить внешними помехами. Большее
число таких импульсов свидетельствует о каких-то дефектах в испы-
туемом элементе.
На рис. 7.13 представлена блок-схема системы, реализующая опи-
санные выше методы анализа шума и определения его параметров.
Входной нормирующий усилитель обеспечивает необходимый уровень
сигналов на входах соответствующих элементов системы Коэффициент
176
Глава 7
Рис. 7.13. Блок-схема системы для измерения параметров и анализа шумов:
ШФ широкополосный фильтр; ИД интервальный дискриминатор уровня;
ИЭЗ измеритель эффективных значений напряжения; БОАР блок опреде-
ления амплитудного распределения; С А - спектроанализатор; Вв/В -групповые
устройства ввода/вывода данных; МС-модуль сопряжения; ПИ приборный
интерфейс; ДМ3 детектор максимальных значений.
усиления нормирующего усилителя ступенчато, по 2...5 дБ на ступень,
регулируется процессором по данным детектора максимальных значе-
ний (ДМ3). Тем самым обеспечивается оптимальное согласование ана-
лизируемого процесса с динамическими диапазонами функциональных
элементов и, следовательно, минимизируются погрешности преобразо-
вания сигналов.
Интервальный дискриминатор (ИД) предназначен для выделения
импульсов аномального уровня, превосходящего характерный для ис-
следуемого шума. Причем сигнал на вход ИД поступает, минуя широко-
полосный фильтр (ШФ), с тем чтобы не исключались из наблюдения
короткие импульсы. Число аномальных импульсов запоминает счетчик
дискриминатора уровня, и после завершения всего анализа это число
считывается из него процессором. Измерителем эффективного значения
напряжения шума (ИЭЗ) служит соответствующий детектор. Постоян-
ная времени сглаживающей /?С-цепи этого детектора должна быть
Анализ шума и шумоподобных сигналов 177
выбрана такой, чтобы выпрямленное выходное напряжение повторяло
изменения эффективных значений напряжения шума. Значения выпрям-
ленного напряжения циклически считываются процессором через интер-
валы времени, превосходящие постоянную времени ЛС-цепи, и после
накопления усредняются. В необходимых случаях процессор вычисляет
и шум-фактор.
Амплитудное распределение измеряют обычно по схеме, представ-
ленной на рис. 4.43 (блок БОАР на рис. 7.13). После накопления в ЗУ
выборки объемом N промежуточное ЗУ используется в качестве счет-
чика адресов, и по программе в память процессора последовательно
вводятся зафиксированные числа значений каждого из классов. Для
спектрального анализа в системе может быть использовано любое
автономно действующее устройство - специализированное или универ-
сальное с программным управлением и цифровым выходом, с возмож-
ностью внешнего управления запуском и обменом данными с про-
цессором системы через общую магистраль. Взаимосвязь с системой
может осуществляться через приборный стандартный интерфейс (ПИ на
рис. 7.13; примером может служить интерфейс IEC-625). Спектральный
анализ может осуществлять и непосредственно процессор системы,
однако следует помнить, что для этого понадобится использовать
процессор с существенно большим быстродействием. Даже и при вы-
полнении этого условия быстродействие и скорость обработки данных
автономного специализированного анализатора многократно превосхо-
дят аналогичные характеристики универсального процессора. Некото-
рые методы измерения спектральной плотности мощности и принципы
построения соответствующих анализаторов спектра рассмотрены в
разд. 4.3.4 и 7.4.
Центральный процессор системы осуществляет управление обменом
данными со всеми функциональными элементами через соответствующие
групповые устройства ввода/вывода (Вв/В), присоединенные к общей
стандартной магистрали. Общая магистраль позволяет наращивать
систему, а также связывать между собой несколько систем (подсистем)
сбора и обработки данных. Групповые устройства ввода/вывода, вы-
полненные в соответствии со стандартом магистрали, осуществляют
распознавание адресов, формирование управляющих сигналов и про-
межуточное запоминание данных и сигналов управления. Периферийное
оборудование процессора системы может включать в себя монитор
с клавишным пультом оператора, печатающее устройство, плоттер для
выдачи графической информации, а также внешние ЗУ (магнитофон, ЗУ
на гибком или жестком магнитных дисках).
Выбор процессора с теми или иными характеристиками определяется
кругом решаемых системой задач, используемыми методами измерений
и требуемыми критериями оптимизации системы.
12-23
Приложение
П.1. Воспроизведение нормальной
функции распределения
I
Функцию распределения, подчиненную нормальному закону, с матема-
гическим ожиданием, равным 0, и средним квадратическим отклонением
случайной величины, равным 1, обозначают символом Л/ (0 1) Такая
функция характеризуется плотностью вероятности
1 /
и’(л) = —7= ехр
х/2л
2
(П.1.1)
и вероятностью
Р(Л) = — х
л/2я
(П.1.2)
Кривая нормального распределения N (0,1) изображена на рис. П.1.1.
Вероятность того, что значение х попадает в интервал значений (хр х2),
определяется соотношением
P(Xi < Л- < х2) = Р(х2) Р(Х1). (П.1.3)
Значение указанной вероятности численно равно площади, oi раниченной
кривой и’(х), осью х и двумя штриховыми прямыми со значениями
Выражение (П.1.2) не может быть представлено численно, так как
входящий в него интеграл нельзя выразить через элементарные функции,
Рис. П.1.1. Кривая нормальной
функции распреде. гения
N (0,1).
Приложение
179
ошако он допускает представление в виде
(П.1.4)
где функцию erf (г) с большой численной точностью можно аппрокси-
мировать выражением [3.4]
erf(-) ~ 1 - 7----------т------\Тб’
( 1 + z )
(П.1.5)
причем константы at имеют следующие значения:
а. = 0,0705230784, а. = 0,0422820123, а3 = 0,0092705272, =
= 0,0001520143, а5 = 0,0002765672, аь = 0,0000430638.
Предполагается, что площадь под кривой и(х) разделена на ряд
элементарных площадок (квазипрямоугольников) равной площади, об-
разованных парами ординат, число которых равно а. Если каждой из
ординат приписать соответствующее ее положению натуральное число,
то координаты центров тяжести элементарных площадок окажутся
распределенными по нормальному закону в зависимости от номера
площадки.
Для вычисления упомянутых координат поверхность, ограниченная
кривой и’(а), симметрично (относительно ординаты математического
ожидания) разбивают (каждую из симметричных половин) на а эле-
ментарных площадок, площади которых равны 1 !2а Расчеты начинают
со значения хо(хо = 0 на рис. П.1.1) при Р(х0) = 0,5. Далее методом
последовательных приближений с использованием выражений (П.1.4)
и (П.1.5) вычисляют значение л19 которому соответствует вероятность
7’Схо)--1 . (П.1.6)
2а
Хналогично вычисляют все последующие значения: х2, х3..Значения
с нечетными порядковыми номерами i (по обе стороны ординаты
симметрии) представляют собой искомые координаты центров тяжестей
гпементарных площадок. Для вычисления упомянутых координат мож-
но использовать таблицу элементарных площадок, аппроксимирован-
ных распределением N (0,1). Таблица может быть представлена в таб-
личном ЗУ, содержащем а ячеек, адресуемых последовательностью
равномерно распределенных чисел.
12*
ISO
Приложение
П.2. Воспроизведение экспоненциальной функции
распределения
Экспоненциальная функция распределения характеризуется плот-
ностью вероятности вида
и’(л') = не а\ х 0. (П.2.1)
Вероятность того, что произвольное значение случайной величины
окажется меньше заданного значения (порога) л\, равна
P(.v1) = f w(x)dx = 1 — е av. (П.2.2)
О
Величина, обратная а, представляет собой математическое ожидание
этого распределения.
Так как конкретная функция распределения размещается в памяти
в виде совокупное! и зависящих от а значений, целесообразно перейти
к «безразмерной» функции с математическим ожиданием, равным 1,
с тем ч тобы упростить связанные с ней вычисления и уменьши и»
требуемый объем ЗУ. Приведенные выше выражения в этом случае
преобразуются к виду
и (л) = е \ (П.2.3)
Р(лд) = 1 -e"xi, (П.2.4)
а кривая экспоненциального распределения изображена на рис. П.2.1.
Расчеты функции экспоненциально! о распределения, как и в пре-
дыдущем разделе приложения, можно упростить. Допустим, что вход-
ной исследуемый сигнал представлен набором равномерно распределен-
ных дискретных значений, число которых равно /?. В этом случае
площадь под кривой функции >г(\) можно заменить набором из 2Ь
Рис. П.2.1. Кривая экспо-
ненциа. iwioii функции
распределения.
Приложение
181
элементарных равных площадок, т. е. разбить на 2Ь равных значений
вероятности. Из этого следует, что
Р(хг < х < х2) - Р(х2) — P(.Vj) = e-xi — е“х2. (П.2.5)
Вероятность того, что произвольное значение случайной величины
попадет в элементарную площадку, равна 1/2Л. Тогда последнее выра-
жение можно записать в виде
или
е хи — е х« +1
1
2Ь
(П.2.6)
-In е
JA
2b)
Из 2b вычисленных значений х координаты центров тяжести элемен-
тарных площадок составляют значения с нечетными индексами п,
которые при их отборе в соответствии с равномерно распределенной
последовательностью чисел образую! экспоненциальное распреде-
ление (см. разд. 3.4).
Для случая генерирования импульсного шума, рассмотренного в
разд. 3.4. по схеме, изображенной на рис. 3.10, при b = 16 и 8-разрядном
двоичном предс Iавлении чисеп в табличном ПЗУ получены следующие
данные:
:1 X Z2 zi X Z2
0 0,0317 2 8 0,7577 56
1 0,0984 7 9 0,9008 66
2 0,1699 12 10 1,0678 79
3 0,2469 18 11 1,2685 93
4 0,3302 24 12 1,5198 112
5 0,4212 31 13 1,8563 137
6 0,52.13 38 14 2,3671 174
7 0,6325 47 15 3,4657 255
П.З. Моделирование процесса измерений
параметров внутреннего шума АЦП
На рис. П.3.1 представлена блок-схема модели (программы) про-
цесса измерений параметров внутреннего шума АЦП по схеме, изобра-
женной на рис. 4.51. Символы переменных указаны в разд. 4.4.3 при
описании этой схемы. Признак М характеризует положение переключа-
теля S. Для упрощения описания модели напряжение Uj опорного ЦАП
принято равным 0. Напряжение шума АЦП является при этом порогом
182
Приложение
Рис. П.3.1. Блок-схема програм-
мы измерений параметров
внутреннего шума АЦП.
переключения смены соседних значений кода. Генерирование мгновен-
ных значений напряжения шума UR осуществляют по методу, описан-
ному в приложении П.1. Действие интегратора имитируют изменением
входного напряжения и на ступень Лмх или Дм2 после завершения
каждого цикла преобразования и установки переключателя S. Среднее
значение и вычисляют последовательным суммированием частных от
деления входных значений и на N. Приведенная модель позволяет
определять зависимости между вероятностью Р переключения опорных
напряжений (т.е. вероятностью смены соседних значений кода) и соот-
ветствующим эффективным значением напряжения шума АЦП UR
(рис. П.3.2), а также между UR и соответствующим ему средним зна-
Приложение
183
10
9
8
7
6
5
3
1
I
Рис. П.3.2. Кривые взаимозави-
симостей между вероятно-
стями смены соседних зна-
чении кода и соответству-
ющими им эффективными
значениями напряжения шу-
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 ма АЦП.
чением входного испытательного напряжения АЦП и (рис. П.3.3) при
различных соотношениях приращений Az/2 Az/j. Получаемые результаты
позволяют оптимизировать соотношения номиналов элементов схемы
измерения.
Рис. П.3.3. Кривые зависи-
мостей между эф-
фективными значе-
ниями напряжения
шума АЦП и соот-
ветствующими им
средни ми значениями
и сп ытатеяьного
входного напряжения.
Литература
К главе 1
1.1. Lange F. Н., Si^nale und Systeme, Verlag Technik, Berlin, 1971.
1.2. Wunsch G., Schreiber H., Stochastische Systeme, Verlag Technik, Berlin, 1984
1.3. Woschni E. G., Informationstechnik, Verlag Technik, Berlin, 1973.
1.4. Maibaum G., Wahrscheinlichkeitstheorie und mathematische Statistik. Deutscher
Verlag der Wissenschaften, Berlin, 1976.
1.5. Ambrozy A., Electronic Noise, Akademiai Kiado, Budapest, 1982.
1.6. Miller R., Rauschen, Springer, Berlin, 1979.
1.7. Hasse L., Spiralski L., Szumy elementow i ukladow elektronicznych (Rauschen der
elektronischen Bauelemente und Schaltkreise), Wydawnictwa Naukowo-Technicz-
ne, Warszawa, 1981.
К главе 2
2.1. Hooge F. N., Hoppenbrouwers A. M. H., Amplitude Distribution of 1/f Noise,
Physica 42 (1969) S. 331 339.
2.2. Handel P. H., Wolf D., Amplitude Distribution of 1/f Noise, in: Noise in Physical
Systems, Springer, Berlin, 1978
2.3. Hasse L., Ocena wlasciwosci statystycznych szumow przyrzadow polprzewodni-
kowych w zakresie bardzo malych czestotliwosci (Einschatzung der statistischen
Eigenschaften des Rauschens von Halbeiter-Bauelementen im Bereich sehr niedri-
ger Frequenzen). Diss. Tech. Hochsch. Gdansk, 1979.
2.4. Dell R. A., Epstein M., Kannewurf C. R., Experimental study of 1/f noise statio-
narity by digital techniques, J. Appl. Phys., 44 (1973) 1, S. 472 476.
2.5. Brophy J. J., Low Frequency Variance Noise, J. Appl. Phys., 41 (1970) 6, S.
2913 2916.
2.6. Purcell W. E., Variance Noise Spectra of 1/f Noise, J. Appl. Phys., 43 (1972) 6, S.
2890 2895.
2.7. Ambrozy A., Variance Noise, Electronic Letters, 13 (1977) 5, S. 137-138.
2.8. Strasilla U.J., Various Types of Noise in Monolithic Integrated Operational
Amplifiers. Diss. Elek. Tech. Hochsch. Zurich, 1973.
2.9. Machlup S., Noise in Semiconductors: Spectrum of a Two-Parameter Random
Signal, J. Appl. Phys., 25 (1954) 3, S. 341-343.
2.10. Knott K. F., Characteristics of Burst Noise Intermittency, Solid state Electronics,
21 (1978) 8; S. 1039 1043.
Литература
185
К главе 3
3.1. Malvar Н. S., Maximum-length Shift Register generates white Noise, Electronics, 52
(1979) 18, S. 141.
3.2. Wulfken W., Schoening B., Ein trinarer Rauschgenerator, Electronik, 31 (1982) 15,
S. 31 34.
3.3. Neuvo Y., Ku W. H., Analysis and Digital Realization of a Pseudorandom Gaus-
sian and Impulsive Noise Source, IEEE Trans., Vol. COM-23 (1975) 9, S. 849 858.
3.4. Otnes R. K., Enochson L., Digital Time Series Analysis John Wiley, New York,
1972.
3.5. Radeka V., 1/f Noise in Physical Measurements, IEEE Trans, on nuclear science, 16
(1969) 5, S. 17 35.
3.6. Denda W., Beitrag zur meBtechnischen Analyse von niederfrequenten Rauschsig-
nalen. Diss. Tech. Univ. Dresden, 1982.
3.7. Ambrozy A., Veriance of simulated 1/f Noise, Electronics Letters, 13 (1977) 8, S.
224 225.
3.8. Corinth G., Rauschen nach MaB. Funkschau 55 (1983) 7, 109-111.
К главе 4
4.1. Kraak W., WeiBing H., SchallpegelmeBtechnik, Verlag Technik,Berlin, 1970.
4.2. Негру M., Analoge integrierte Schaltungen Akademiai Kiado, Budapest, 1976.
4.3. Letzter S., Webster N., Noise in amplifiers, IEEE spectrum (1979) Aug.
4.4. Reimer F., Rauscharme Operationsverstarker erschlie en neue Anwendungen,
Elektronik, 30 (1981) 21, S. 71-78.
4.5. Bernardi T. S., Designing low noise op-amp systems, Electronic Engin., 54 (1982)
667, S. 43ff., und 668, S.33ff.
4.6. Grenze des Moglichen- Rauschen, Markt & Technik (1983) 16, S. 52-55.
4.7. Metzger H. J., Rauscheigenschaften von modernen FET-Operationsverstarkern,
Elektronik, 31 (1982) 13, S. 125-129.
4.8. Netzer Y., The Design of Low-Noise Amplifiers, Proc. IEEE, 69 (1981) 6,
S.728-741.
4.9. Ramm G., Rauscharme Wechselspannungsverstarker fiir den nV-Bereich, Elektro-
nik, 32 (1983) 5, S.82 86.
4.10. Rienecker W., Elektrische Filtertechnik, Oldenbourg, Munchen, 1981.
4.11. Schroder H., Elektrische Nachrichtentechnik, Bd. 1, Verlag f. Radio-Foto-Kino-
technik, Berlin, 1959.
4.12. Schenk C., Tietze U., Aktive Filter, Elektronik, 19 (1970) 10, S. 329 bis 334, und 11,
S.379-392, und 12, S. 421 424.
4.13. Datenblatter der Firma RETICON.
4.14. Wahrmann C. G., Broch J.T., On the Averaging Time of RMS Measurements,
В & К Technical Review (1975) 2, S. 3-21, und 3, S. 3-35.
4.15. Nonlinear circuit handbook, Analog Devices, 1976.
4.16. Kiihne H., MeBschaltung zur Ermittlung des echten Effektivwertes, Radio fern-
sehen elektronik, 29 (1980) 1, S. 39-42.
4.17. Randall R. B., Application of В & К Equipment to Frequency Analysis, Nearum:
Bruel & Kjaer, 1977.
4.18. Fritsche G., Zeitdiskrete und digitale Systeme, Akademie-Verlag, Berlin, 1981.
4.19. Roth O., Digital Filters in Acoustic Analysis Systems. В & К Technical Review
(1977) 1, S. 3 17.
Литература
х
4.20. Geratcbeschrcibung Тур 2131 Brucl & Kjaer.
4.21. Cooley J. W., Tukey J. W., An Algorithm for the Machine Calculation of Complex
Fourier Scries, Math, of Comput. 19 (1965) 90, S. 297 301.
4.22. Bcrgland G. D., A guided tour of the fast Fourier transform, IEEE spectrum (1969)
July, S. 41 52.
4.23. Roth P. R., Effective measurements using digital signal analysis, IEEE spectrum
(1971) April, S. 62 70.
4.24. Thranc N. ZOOM-FFT, В & К Technical Review (1980) 2, S. 3 41.
4.25. McKinney H. W., Band-Selectable Fourier Analysis, Hewlett-Packard Journal, 26
(1975) 8, S. 20 24.
4.26. Lange F. IL, Korrclationsclcktronik Vcrlag, Tcchnik, Berlin, 1962.
4.27. Ball G. A., KorrclationsmcBgerate, Vcrlag Technik, Berlin, 1972.
4.28. Bernhardt U., Zur Mcssung des Rauschcns von Operationsvcrstarkern messen
slcuern rcgeln, 28 (1985) 6, S. 271 273.
4.29. Rates L, Rauschmcssung an Operationsvcrstarkern, Electronik, 33 (1984) 4, S.
87 88.
4.30. Ryan A., Scranton T., DC-Amplifier Noise Revisited, Analog Dialogue, 18 (1984)
1, S. 3 10.
4.31. Souders T. M., Lechner J. A., A Technique for Measuring the Equivalent RMS
Input Noise of A/D Converters, IEEE Trans, on Instrum, and Meas., 29 (1980) 4, S.
251 256.
4.32. Firmenschrift LTX Corporation.
К главе 5
5.1. Tictze G., Die objeklive F unktionsprilfung des Fl drorgans, Nachrichtentech.
Elcktron., 26 (1976) 5, S. 179 181.
5.2. Haase H. J., Kampf dem Rauschen, Funktechnik, 35 (1980) 8, S. W 293 300.
5.3. Mahrun F., Magnellontechnik, in: Taschcnbuch Akustik Teil 2, Vcrlag Technik,
Berlin, 1984.
К главе 6
6.1. Gupta M. S., Applications of Electrical Noise, Proc. IEEE, 63 (1975) 7, S. 996 1010.
6.2. Oppcll W., Kleines Handbuch technischer Regclvorgange, Verlag Tcchnik, Berlin,
1967.
6.3. Ziegler J. G., Nichols N. B., Optimum sellings for automatic controller, Trans.
ASME, 64 (1942) S. 759.
6.4. Tennhardt II P., Reichardt W., Spezicllc raumakustische MeBverfahrcn, in
Taschcnbuch Akustik. Teil 2, Verlag Technik, Berlin, 1984.
6.5. Schmidt A., Computer-Equalizer, Funktechnik 40 (1985) 10 S. 417 41).
К главе 7
7.1. Grabncr A., Liewcrs P., Schumann P., Rauschdiagnostik zur Schadensfriihcrken-
nung, Die Technik, 34 (1979) 6, 323 325.
7.2. Licwers P., Rauschdiagnostik, Akadcmie-Verlag, Berlin, 1985.
7.3. Dietz E„ Beitrag zur statistischcn Analyse impulsformiger Storspannungcn auf
Signallcitungen in MeBwerlerfassungs- und ProzeBrechcnanlagcn. Diss. Lech. Univ.
Dresden, 1976.
Литература
187
7.4. Kursawc К. Н., Ein Verfahren zur Fehlerdiagnose und Fehlerfruhdiagnose an
elektronischen Bauelementen und Baugruppcn mittels Analyse des elektronischen
Eigcnrauschcns durch lernende Zuordner, Diss. Ing. Hochsch. Mittweida, 1978.
7.5. Domagala J.. Voraussage der Lebensdaucr von Bauelementen und elektronischen
Schaltkreisen auf der Grundlage der Darstellung ihres Rauschverhaltens, Nachrich-
tcntcch. Elektron., 30 (1980) 11, S. 473 477.
7.6. Tanncbcrger K., Rauschen und Zuverliissigkeit, in: Zuverlassigkeit elektronischer
Bauclcmentc, Deutscher Verlag fiir Grundstoffindustrie, Leipzig, 1974.
Предметный указатель
Анализатор спектра 96
Аналого-цифровой преобразователь 79
Блок выборки/хранения 81
Вероятность 11
Время наблюдения 166
Выборочный контроль 134
Генератор шума 42
— теплового 57
Градуировка 94
Динамический диапазон 132
Дискриминатор уровня интервальный
176
Дисперсия 13
Звено задержки 137
Ипульсно-кодовая модуляция 113
Квадратор 73
Коэффициент амплитудный (пиково-
сти) 55
вариации 23
передачи комплексный 141
- формы 23
Математическое ожидание 11
Мимикрия частот 70, 78
Момент центральный 13
смешанный второй 15
Надежность 151
Обработка в реальном времени 78
измененном масштабе времени 78
Отношение сигнал/шум 114, 120
Плотность всрятности 11
Погрешность отсчета 77
Полоса пропускания 60
относительная 85
эффективная 61
Полузвено фильтра 62
Помехи 37
Преобразование Фурье 18, 87
быстрое 98
дискретное 18, 87
Сглаживание 159
Система автоматического регулирова-
ния 139
аналоговая 136
рекурсивная 83
- сбора данных 80
Спектральная плотность 18
мощности 18, 96
Среднеквадратичное отклонение 13
Стационарность 15
Теорема Винера - Хинина 19
- Котельникова 78
- отсчетов 78
Усилитель операционный 58, 113
У среднение данных 79
Предметный указатель
189
Фильтр 60
активный 61
Баттерворта 66
Бе свела 66
верхних частот 62
импульсный 62
интегральный 71
нижних частот 43
полосовой 63
Г- и П-образпый 62
цепочечный 63
цифровой 82
Чебышева 66
Фильтрация 56
цифровая 82
Фликкер-шум 27
квазиподобный 49
Функция автокорреляционная 16
взаимная корреляционная 17
Дирака 24
корреляционная 16
передаточная 82
Характеристика амплитудно-частотная
ill
частотная 46
Частота переходе! 28
сопрягающая 28
Шум белый 20
дисперсии 29
импульсный 30
временные параметры 30
многоуровневый 36
тепловой 55
собственный 55
Шум-фактор 57
Шумящий диод 42
резистор 57
Эргодичность 18
Эффективное значение напряжения 13,
16. 56
^-преобразование 83
Оглавление
Предисловие переводчика . 5
От автора . 7
Обозначения 8
Глава 1. Введение 9
Глава 2. Описание шумов и шумоподобных сигналов...... 11
2.1. Статистические характеристики случайных процессов . ... 11
2.2. Представление случайных процессов во временной области 15
2.3. Представление случайных процессов в частотной области . . 18
2.4. Белый шум............................................... 20
2.5. Фликкер-шум ... . . . . . . 27
2.6. Импульсный шум . ... 30
2.7. Помехи.............................. ... 37
Глава 3. Генерирование шума....................................... 41
3.1. Области применения искусственно генерируемых шумоподоб-
ных сигналов.............................................. . 41
3.2. Генерирование белого шума . . . . 42
3.3. Генерирование фликкер-шума .... 45
3.4. Генерирование импульсного шума ... 49
3.5. Генерирование помех...................................... 52
Глава 4. Измерение характеристик шума . .55
4.1. Техника измерений....................................... .55
4.1.1. Особенности измерений.............................. .55
4.1.2. Входной усилитель средств измерений . . . 56
4.1.3. Фильтры............................................. 60
4.1.4. Измерители эффективного значения напряжения шума 72
4.2. Цифровые методы измерений.............................
4.2.1. Общие принципы ... . . 77
4.2.2. Аналого-цифровое преобразование сигналов . . 79
4.2.3. Цифровая фильтрация........................... . . 82
4.2.4. Дискретное преобразование Фурье..................... 87
4.2.5. Определение среднего значения напряжения шума . 89
4.3. Измерение характеристик и параметров шума .... 91
4.3.1. Эффективное значение напряжения..................... 91
4.3.2. Шум, приведенный ко входу средства измерения . ... 91
Оглавление
191
4.3.3. Шум-фактор . . .............. . . 93
4.3.4. Спектральная плотность мощности . . 96
4,3.5. Корреляционные функции................. . . . 101
4.3.6. Амплитудное распределение.......................... 102
4.3.7. Распределения значений временных параметров импульс-
ного шума................................................. 106
4.4 Измерение параметров шума полупроводниковых устройств 109
4.4.1. Транзисторы........................................ 109
4.4.2. Операционные усилители............................. 113
4.4.3. Цифро-аналоговые и аналого-цифровые преобразователи 115
Глава 5. Помехи.................................. .... 120
5.1. Обработка сигналов, зашумленных помехами................ 120
5.2. Увеличение помехозащищенности каналов и цепей передачи
информации ................................................ 132
5.3. Шум как критерий качества электронных компонентов . 133
Глава 6. Шум как испытательный сигнал ... 135
6.1. Некоторые общие положения............................... 135
6.2. Определение частотных характеристик разомкнутых аналого-
вых систем................................................. 136
6.3. Определение частотных характеристик замкнутых систем авто-
матического регулирования.................................. 139
6.4. Определение эффективной полосы пропускания фильтра . . 147
6.5. Определение акустических характеристик помещений . . 149
Глава 7. Анализ шума и шумоподобных сигналов . . . . 151
7.1 Цели анализа........................... . 151
7.2 Оценивание амплитудных распределений .... 153
7.3. Оценивание параметров импульсного шума......... 159
7.4 Определение оценки спектральной плотности мощности . 164
7.5. Вычисление оценки авюкорреляционной функции . . 171
7.6 Комплексный анализ . . .. 173
Приложения ... .........t................................. 178
П.1. Воспроизведение нормальной функции распределения ... 178
П.2. Воспроизведение экспоненциальной функции распределения 180
П.З. Моделирование процесса измерений параметров внутреннего
шума АЦП .... . . . ............. 181
Литература 184
Предметный указатель 188
УВАЖАЕМЫЙ ЧИТАТЕЛЬ!
Ваши замечания о содержании книги, ее оформлении,
качестве перевода и другие просим присылать по адресу:
129820, Москва. И-110, ГСП, 1-й Рижский пер., д. 2, изд-во «Мир»
Научное издание
Вольфганг Денда
ШУМ КАК ИСТОЧНИК ИНФОРМАЦИИ
Заведующий редакцией В. И. Пропой
Ведущий редактор А. Ю. Кирий
Редактор Л. В. Тарасова
Художн и к Е. А. Дроздов
Художественные редакторы | Н. М. Иванов I, Е. А. Дроздов
Технические редакторы 3. И. Резник, М. А. Страшнова
Корректор В. И. Киселева
ИБ № 7621
Лицензия Л. Р. № 010174 от 22.01.92 г.
Сдано в набор.24.05.91. Подписано к печати 24.08.93.
Формат 60 х 88/16. Бумага офсетная. Печать офсетная. Гарнитура тайме.
Объем 6,00 бум. л. Усл. печ. л. 11,76. Усл. кр.-отт. 12,01.
Уч.-изд. л. 11,92. Изд. № 7/8/7967. Тираж 1000 экз.
Зак. 23. С 035.
Издательство «Мир»
Министерства печати и информации Российской Федерации
129820, ГСП, Москва, И-110,1-й Рижский пер., 2
Отпечатано с готовых диапозитивов в Московской типографии № 11
Министерства печати и информации РФ.
113105 Москва, ул. Нагатинская, дом 1.