/
















Author: Гальперин М.И. Поликовский В.И.
Tags: авиация двигатели авиационное оборудование авиатехника
Year: 1949




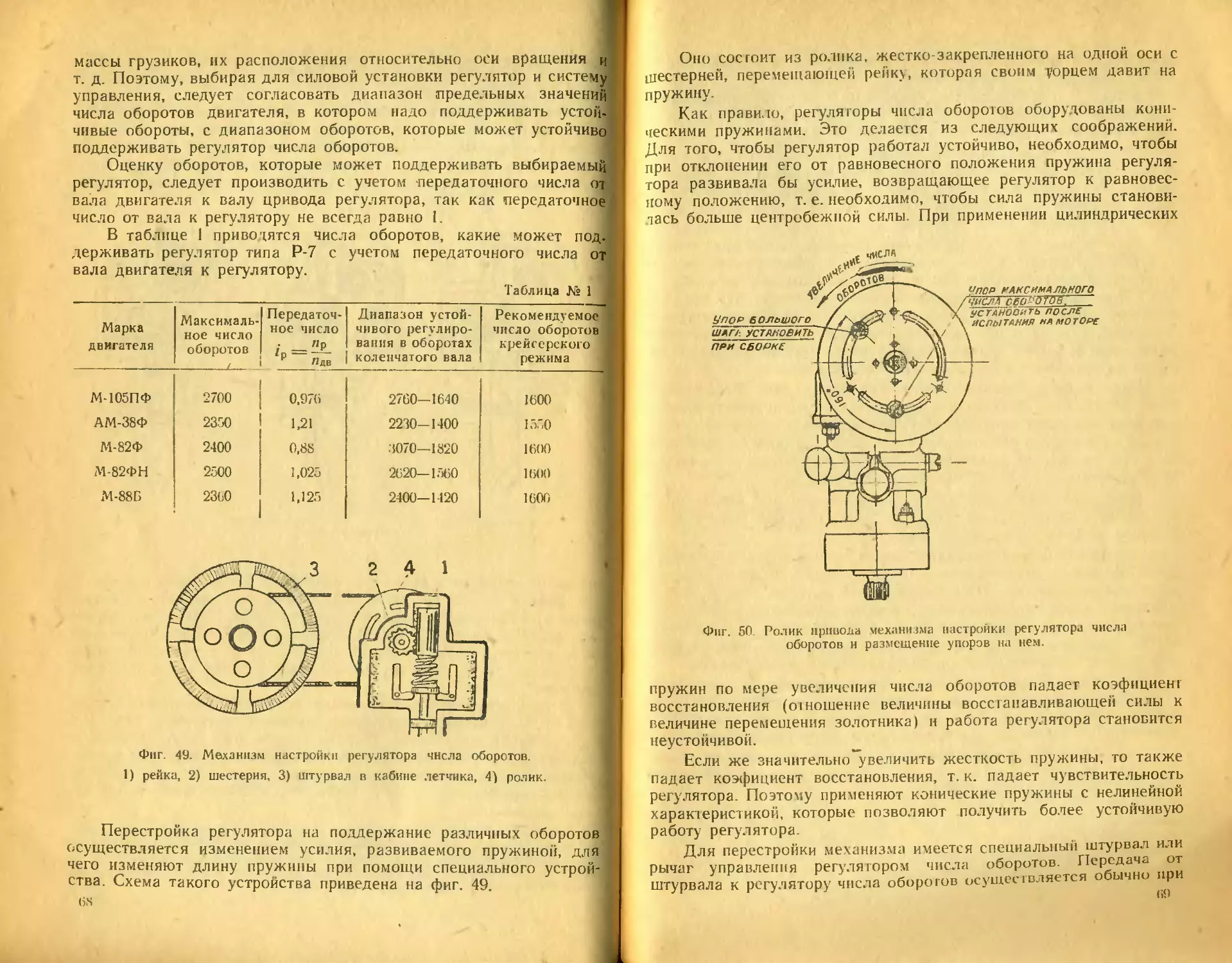
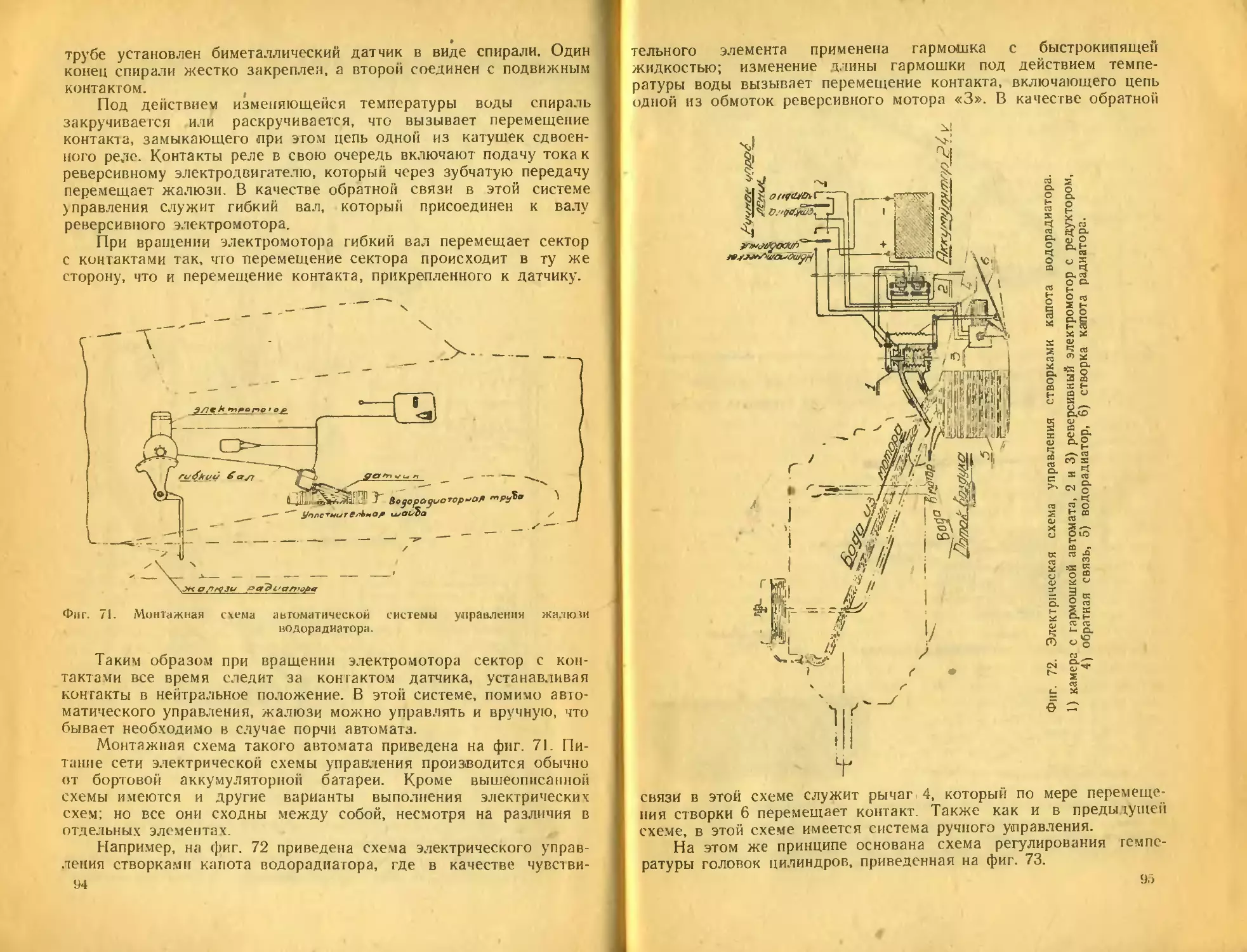
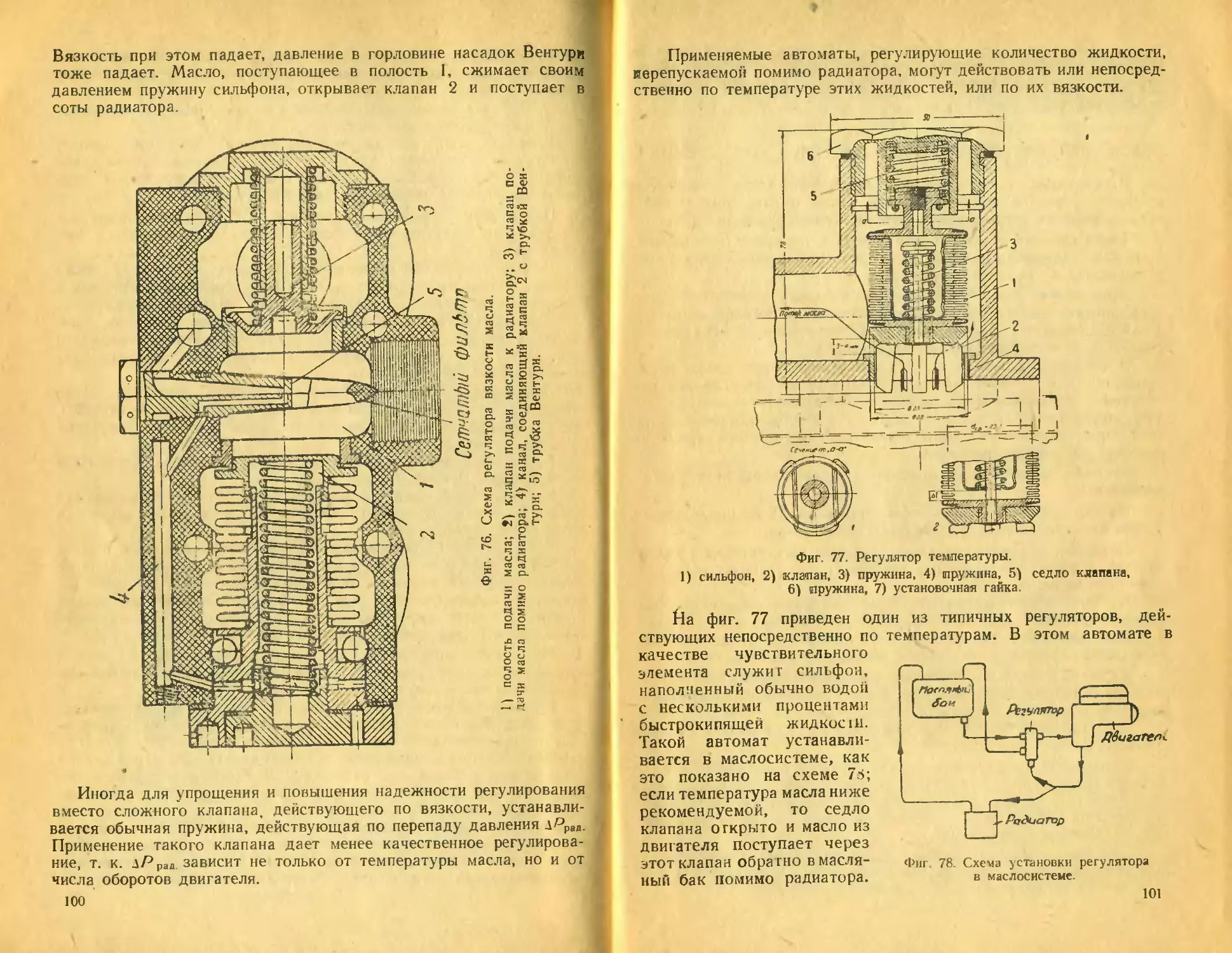
Text
! Ottl.S'O5*
7
и. голиковский г и. и. ГАЛььТРиа
СИСТЕМЫ УПРАВЛЕНИЯ
АВИАЦИОННЫХ ПОРШНЕВЫХ
ДВИГАТЕЛЕЙ
м д и
1 » 4 9
1981 г.*
Читальный зал |
МИНИСТЕРСТВО ВЫСШЕГО ОБРАЗОВАНИЯ СССР
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА АВИАЦИОННЫЙ ИНСТИТУТ
имени СЕРГО ОРДЖОНИКИДЗЕ
О УЛ 5 'ОУ
В. И. ПОЛИКОВСКИЙ и М. И. ГАЛЬПЕРИН
СИСТЕМЫ УПРАВЛЕНИЯ
АВИАЦИОННЫХ ПОРШНЕВЫХ
ДВИГАТЕЛЕЙ
Раздел курса .СИЛОВЫЕ УСТАНОВКИ-
кафедры
конструкции авиационных двигателей МАИ
М А И
19 4 9
6
Настоящее издание представляет собой одну из глав
курса .Силовые установки”, подготовленного к печати
коллективом сотрудников кафедры при участии н под руко-
водством заслуженного деятеля науки профессора
В И. Поликовского.
Ввиду отсутствия материала, руководство МАИ сочло
целесообразным выпустить ограниченным тиражем отдель-
ные главы курса не дожидаясь окончания работы по курсу
в целом и его издания в законченном виде.
Л-80740 Принято в произв. 14/V-48r. Редактор Пратусевич Г. М.
Объем кн. 73/4 п л. Подп. к печ. 8/11-49 г.
Зак. 361, Типография МАИ. Тираж 500.
*
I. ПРЕДИСЛОВИЕ
Возрастание мощности и высотности современных поршневых
авиационных двигателей, значительное усложнение систем управле-
ния, необходимость одновременного регулирования многих парамет-
ров, взаимно связанных между собой и зависящих от целого ряда
переменных величин (скорость, высота, режим эксплуатации и т. д.)
привели к тому, что вопрос о регулировании двигателя и системе
его управления становится одним из основных вопросов проектиро-
вания как самого двигателя, так и силовом установки в целом.
В современной авиационной силовой установке с поршневыми
двигателями приходится регулировать давление наддува, число
оборотов, опережение зажигания, состав смеси, температуру голо-
вок цилинтров, масла и воды, управлять целым рядом противо-
пожарных устройств и т. д.
Исследование процессов регулирования как отдельных пара-
метров, так и двигателя в целом, охватывает большой круг воп-
росов теории регулирования и теории самого двигателя, превра-
щаясь в отдельную науку —теорию регулирования и управления
силовой установки.
Аппаратура, необходимая для регулирования и управления,
настолько разнообразна и сложна, что производство этой аппа-
ратуры выросло в отдельную отрасль авиационной техники.
Вопросы регулирования и управления силовой установкой
являются сравнительно новым разделом в общей проблематике
силовых установок. Но уже теперь можно перечислить ряд работ
советских ученых и конструкторов, положивших начало теории
регулирования и управления авиационных двигателей.
Достаточно назвать работы об объединенных системах управле-
ния регулирования кандидата технических наук Дубравского 11. Г.
и работы профессора Кирсанова В. И. по автоматике и регули-
рованию систем питания. Работы этих авторов не ограничиваются
узко практическими целями, а раскрывают сложные физические
3
явления, происходящие при процессах регулирования поршневых
двигателей, анализируют эти явления на широкой теоретической
основе. Эти работы указывают практическое направление конструк
торам в создании новых систем регулирования и управления авиа-
ционных двигателей. Советские конструкторы Тарасов П. Н., Ясин-
ский С. Я., Коротков Ф. А., Ильин И. И., Наваркин В.А., Родио-
нов П. В., Столяров С. И. создали целый ряд оригинальных агрега-
тов регулирования и управления авиационной силовой установки.
Советские ученые и конструкторы в области систем управления
и автоматики шли своим путем; разрабатывая системы управления
отдельными параметрами и блокируя работу при помощи кинемати
ческих цепей, создали простые и надежные системы управления,
превосходящие заграничные образцы.
В настоящей работе рассмотрены только системы управления
и регулирования поршневых двигателей; вопросы, относящиеся к
реактивным двигателям, выделены в отдельную работу.
При чтении этого раздела курса, а также при составлении этой
работы, широко использован опыт отечественных институтов и
О. К- Б. заводов.
П. ОБЩИЕ ТРЕБОВАНИЯ К СИСТЕМАМ УПРАВЛЕНИЯ
ВИНТОМОТОРНОЙ УСТАНОВКИ
Система управления винтомоторной установки должна обес-
печить летчику возможность изменения мощности, развиваемой
двигателем, возможность эксплоатации двигателя на оптимальных
режимах (по числу оборотов, по температурам головок цилиндров,
воды, масла и т. д.) и кроме того возможность управления всеми
устройствами, обеспечивающими надежную и безотказную работу
двигателя и всей винтомоторной установки. Летчика в конечном
итоге интересуют тяга и экономичность двигателя, т. к.
они собственно, и определяют режим полета, выбираемый летчиком.
Основными параметрами (характеристиками) винтомоторной уста-
новки, влияющими на тягу и экономичность, являются мощность и
обороты двигателя. Эти параметры и устанавливаются в соответ-
ствии с необходимой тягой двигателя.
Мощность двигателя, в свою очередь, зависит от целого ряда
параметров, как например число оборотов, наполнение двигателя,
величина наддува и температура воздуха, подаваемого в цилиндры,
состав смеси, опережение зажигания, охлаждение двигателя и т. д.
Все эти параметры могут иметь различные значения в зависи-
мости от условий полета (высоты и скорости), даже для достиже-
ния одной и той же мощности. Это значительно усложняет систему
управления и регулирования двигателя.
Кроме того система управления должна обеспечить устойчивую
и стабильную работу двигателя, т. с. она должна предохранять
двигатель от опасных и неустойчивых режимов, как например
детонация, iряска, помпаж и т. д. Возникновение этих режимов
может иметь место- детонация при забеднении смеси, тряска при
забогащении смеси, помпаж — при неправильном регулировании
давления наддува и т. д.
Управление и автоматика должны быть такими, чтобы не
только предохранять двигатель от аварии в случае грубых ошибок
при управлении, но также обеспечивать установление таких пара-
метров, при которых срок службы двигателя был бы максималь-
ным.
Управление винтомоторной установкой требует одновремен-
ного регулирования нескольких параметров, взаимно-связанных
между собой.
Для уменьшения числа ручек управления органы управле
имя отдельными параметрами связывают между собой, <
также вводят в систему управления автоматические устройства,
устанавливающие необходимые параметры управления в зависи-
мости от условий полета.
В последнее время применяются механизмы, объединяющие
управление всеми или почти всеми параметрами двигателя в одш
рычаг. Такие механизмы, представляющие собой как бы централь,
ные посты управления, включают в себя конструкцию ряда автома
тов, либо кинематически связывают их между собой.
При выборе автоматов и систем связи и блокировки управле
ния отдельными параметрами следует считаться с (присущими
всем автоматам недостатками: инертностью, некоторой нечувстви-
тельностью и неустойчивостью, невозможностью точного варьи-
рования режимов работы двигателя применительно к сложным
условиям полета.
Поэтому выбор системы управления определяется тем, для
какого типа самолета она проектируется.
Например для многомоторных бомбардировщиков оптималь-
ные режимы двигателя могут быть подобраны бортмехаником зна-
чительно более точно, чем это могли бы сделать автоматы или
агрегаты совместного управления винтом, газом и регулятором
смеси. Поэтому на таких самолетах выгодней всего регулировать
основные параметры в безопасных пределах при помощи автомати-
ческих устройств с одновременной подкорректировкой их вручную
бортмехаником.
Иначе ставится задача при проектировании системы управле-
ния для самолетов типа истребителей, где простота управления и
быстрота перехода двигателя от одного режима к другому входят
в число основных требований, предъявляемых к системе управления.
В этом случае предпочтение отдается такой системе управле-
ния, где регулирование всех параметров осуществляется автомати-
ческими устройствами, управление которыми сведено в один рычаг.
Время перестройки двигателя от одного режима к тругому при
помощи одновременно действующих автоматических устройств
получается значительно меньше, чем при последовательном ручном
изменении каждого параметра в отдельности.
При выборе системы управления следует считаться со слож-
ностью аппаратуры автоматизации управления, а также с весом
этой аппаратуры и размещением ее на самолете и двигателе.
Проще всего решать эту задачу, если разработка системы
управления ведется одновременно с разработкой двигателя. Это
позволяет разместить ряд автоматов на двигателе, в качестве
органической его части. Несмотря на явную целесообразность
такого подхода к проектированию агрегатов и автоматов управле-
ния двигателем, во многих случаях чисто моторные автоматы уста-
навливают на самолете при сборке В. М. Г. (винтомоторной груп-
пы); при этом неизбежны повышение сложности и веса и одно-
временно снижение надежности сис1емы управления двигателем.
Основные требования к.системе управления двигателя сле-
дующие:
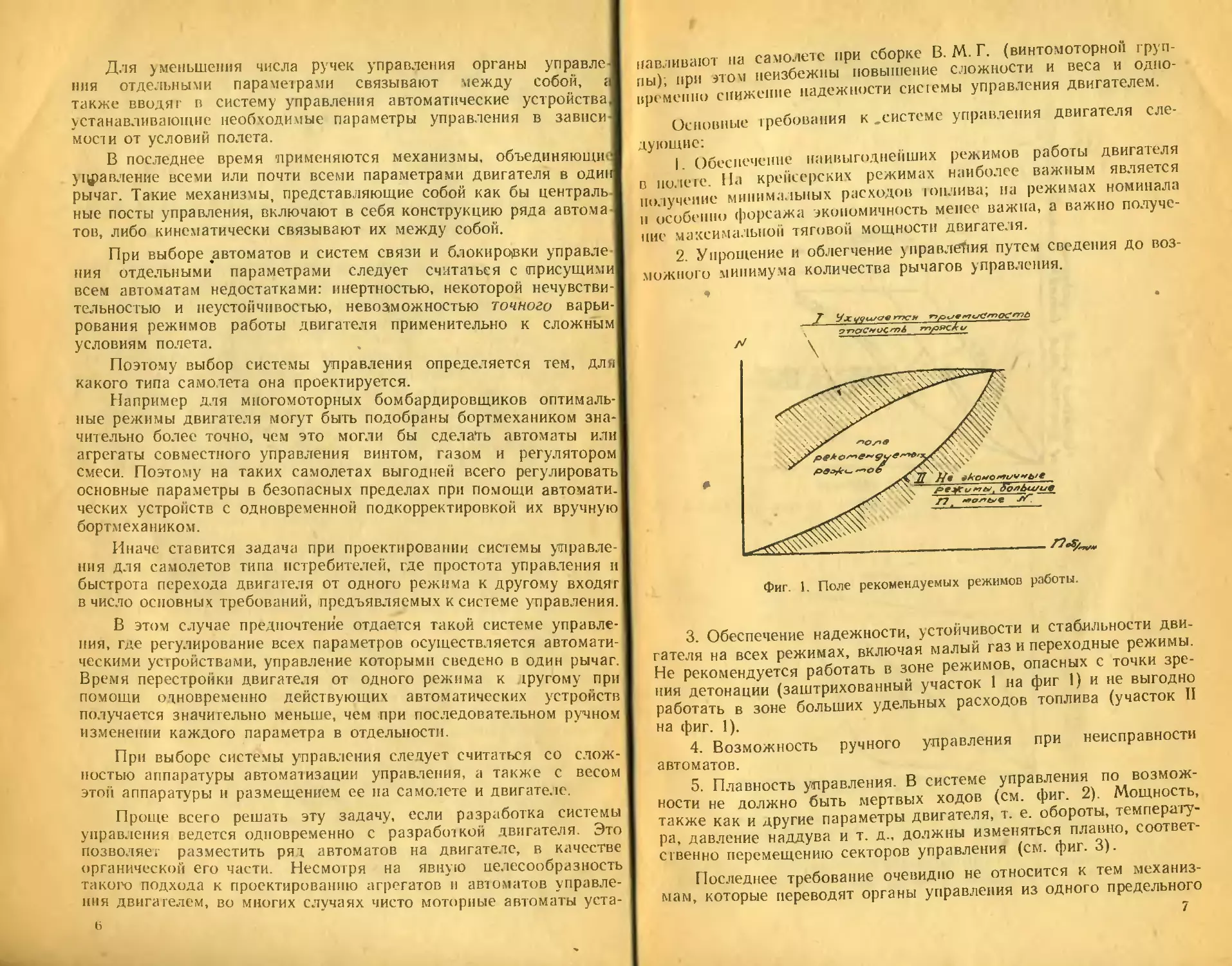
I. Обеспечение паивыгоднейших режимов работы двигателя
в нолеге. На крейсерских режимах наиболее важным является
получение минимальных расходов топлива; на режимах номинала
п особенно форсажа экономичность менее важна, а важно получе-
ние максимальной тяговой мощности двигателя.
2. Упрощение и облегчение у правления путем сведения до воз-
можного минимума количества рычагов управления.
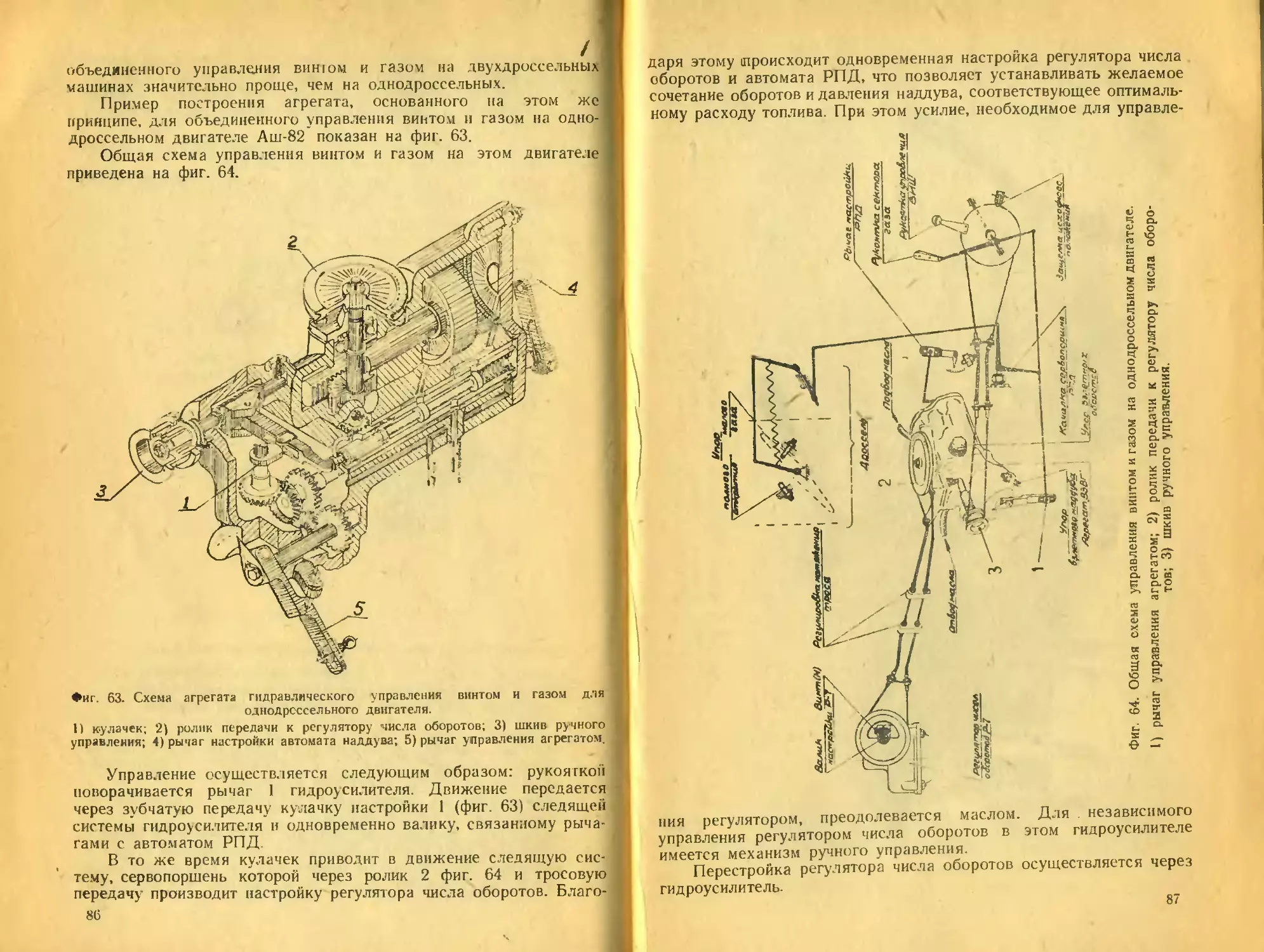
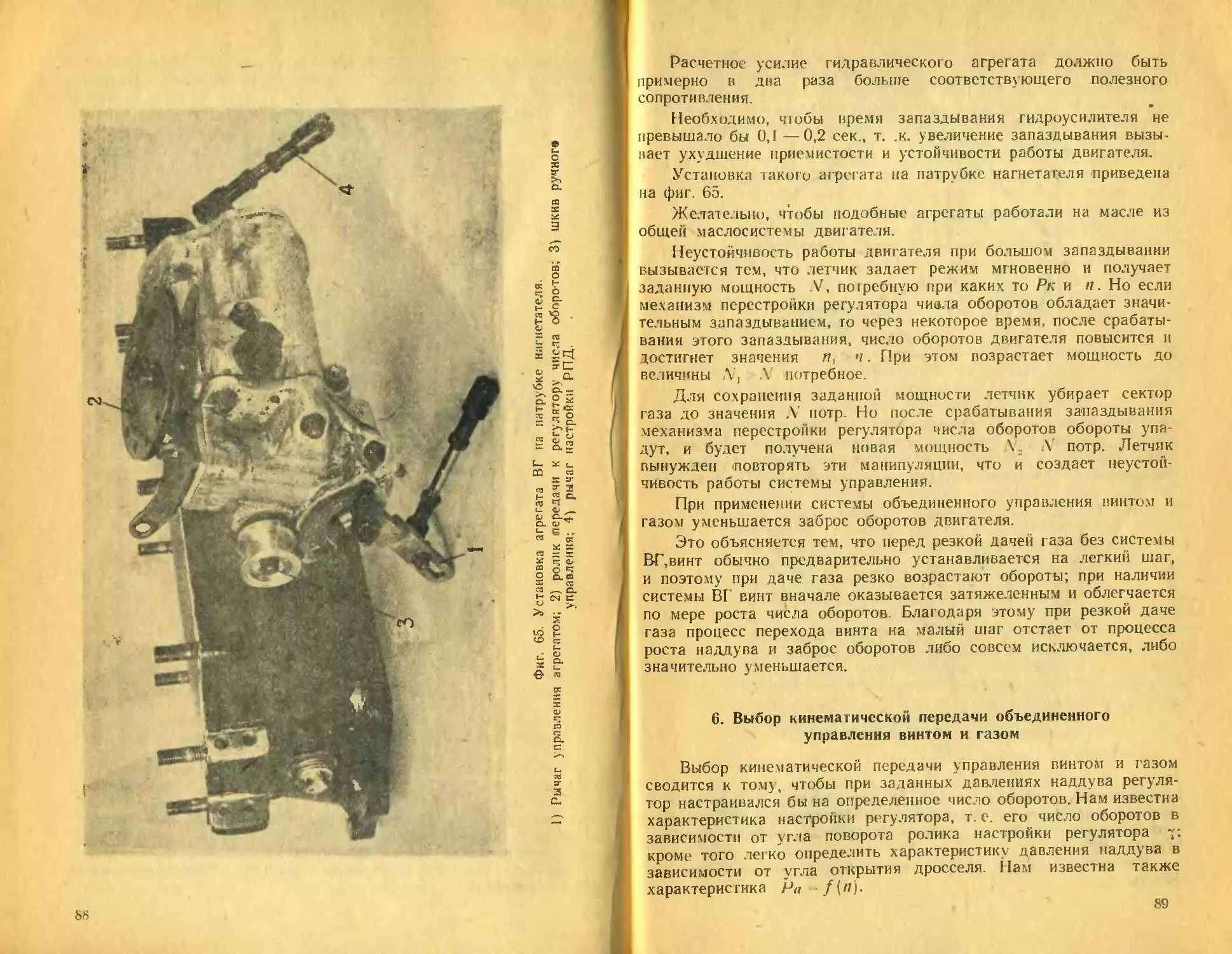
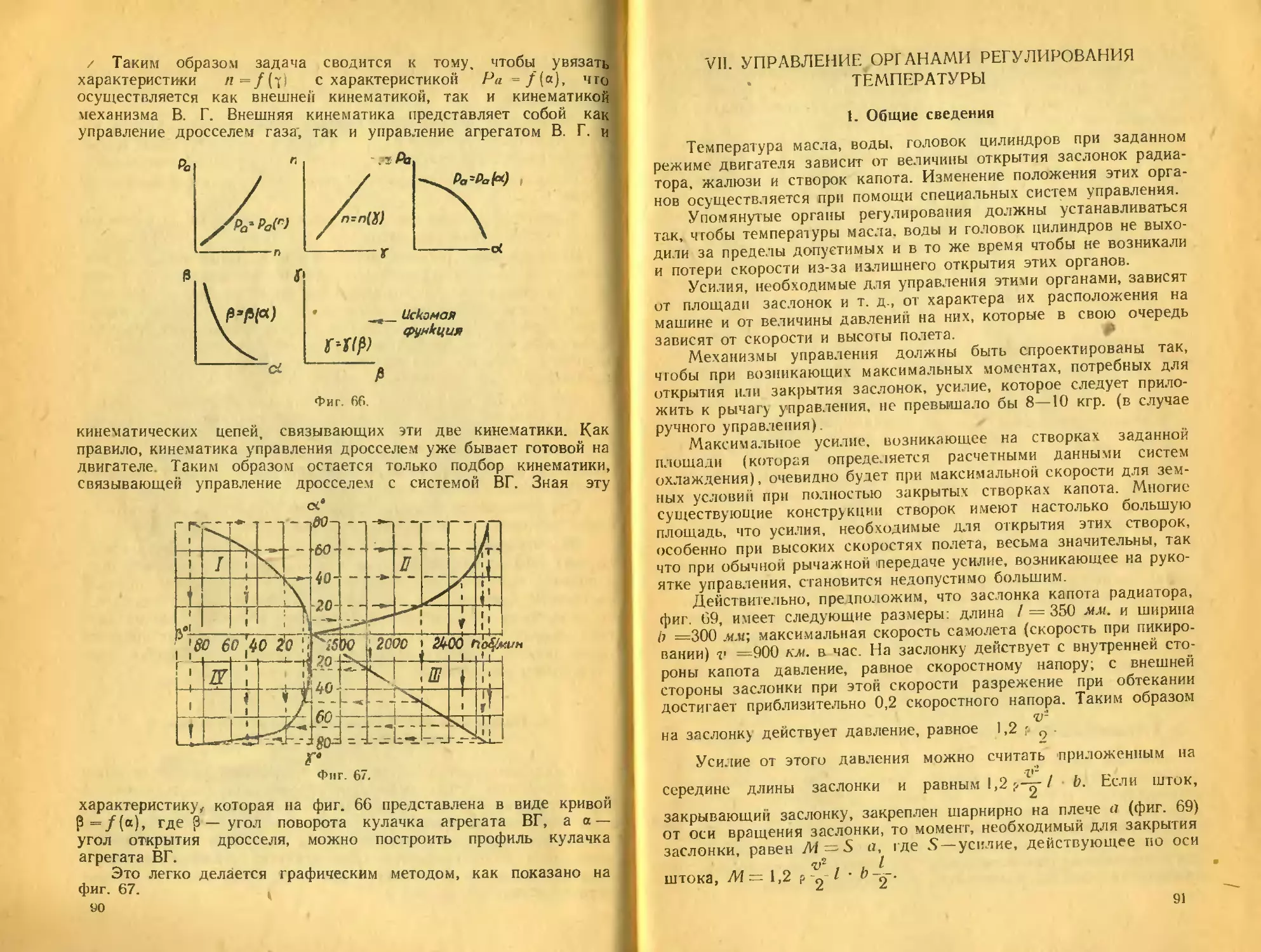
Фиг. 1. Поле рекомендуемых режимов работы.
3. Обеспечение надежности, устойчивости и стабильности дви-
гателя на всех режимах, включая малый газ и переходные режимы.
Не рекомендуется работать в зоне режимов, опасных с точки зре-
ния детонации (заштрихованный участок 1 на фиг 1) и не выгодно
работать в зоне больших удельных расходов топлива (участок II
на фиг. 1).
4. Возможность ручного управления при неисправности
автоматов.
5. Плавность управления. В системе управления по возмож-
ности не должно быть мертвых ходов (см. фиг. 2). Мощность,
также как и другие параметры двигателя, т. е. обороты, температу-
ра, давление наддува и т. д., должны изменяться плавно, соответ-
ственно перемещению секторов управления (см. фиг. 3).
Последнее требование очевидно не относится к тем механиз-
мам, которые переводят органы управления из одного предельного
7
положения
дренажных
теля и др.
в другое, как например краны бензосистемы, краны
систем, автоматы переключения скоростей нагнета-
Фиг. 2. Характер изменения -положения органов управления
в зависимости от перемещения сектора газа.
Фиг. 3. Характер изменения регулируемого параметра в зависимости
от перемещения сектора газа: 1) не должно быть; 2) правильно.
Эти механизмы должны срабатывать возможно быстро, четко
и должны быть снабжены фиксаторами предельных (рабочих)
положений.
III. РЕГУЛЯТОРЫ И АВТОМАТЫ
При установившихся оборотах двигателя
Мд *= Мпс + Мес
где Мд — момент движущих сил (развиваемый двигателем)
Мпс — момент полезных сопротивлений
Мес — момент вредных сопротивлений.
При соблюдении этого равенства двигатель работает на уста-
новившейся угловой скорости.
Предположим, что режим работы двигателя изменился за счет
уменьшения нагрузки, т. е. Мне. Тогда угловая скорость вала
двигателя начнет увеличиваться. Для того, чтобы угловая скорость
не изменялась произвольно, т. е. не стала бы слишком большой
(или слишком малой), двигатель снабжен специальными устрой-
ствами,— регуляторами, возвращающими двигатель к прежней
угловой скорости или изменяющими ее по заданному закону.
Рассмотрим один из случаев изменения условий работы двига-
теля. Если нагрузка на вал двигателя изменилась — самолет идет
на снижение или пикирует, — то число оборотов вала двигателя
стремится к увеличению, регулятор устанавливает лопасти винта
в такое положение, что нагрузка на вал двигателя увеличивается,
и двигатель приходит к новому установившемуся режиму*.
Таким образом мы видим, что процесс регулирования заклю-
чается в воздействии двигателя на регулятор и обратном воздей-
ствии регулятора на двигатель. Такая система регулирования назы-
вается замкнутой системой регулирования. При регулировании
поршневых авиационных двигателей приходится иметь дело как с
замкнутыми, так и с разомкнутыми системами регулирования.
Применяющиеся регуляторы и с^емы регулирования бывают
следующие.
Схема прямого регулирования. В этом случае чувствительные
элементы и регулирующие органы непосредственно связаны между
собой.
Конструкция регуляторов прямого действия наиболее проста,
но применение прямых схем регулирования не всегда возможно;
во первых, усилие, развиваемое чувствительным элементом (анерои-
дами, центробежными грузиками и т. д.) может оказаться недоста-
* При изменении числа оборотов не только регулятор числа оборотов
стремится вернуть двигатель к заданному установившемуся режиму, но и
Другие регуляторы, от которых зависит режим работы двигателя, стремятся
вернуть двигатель к тому же режиму (например автомат наддува — с увеличе-
нием числа оборотов давления наддува увеличивается и автомат прикрывает
дроссель).
9
точным для перемещения рабочего органа -дроссельных заслонок
лопастей внша и т. и. Во вторых при схеме прямого регулирована
колебания, возникающие в процессе регулирования, не всегда за
гухают. Поэтому чаще применяются схемы непрямого регулирова
ния, В лом случае перестановка регулирующих органов (дроссель
пых заслонок, лопастей винта и т. т.) осу ществляется дополниiель
ними механизмами, ги трав, шческимп или электрическими серво
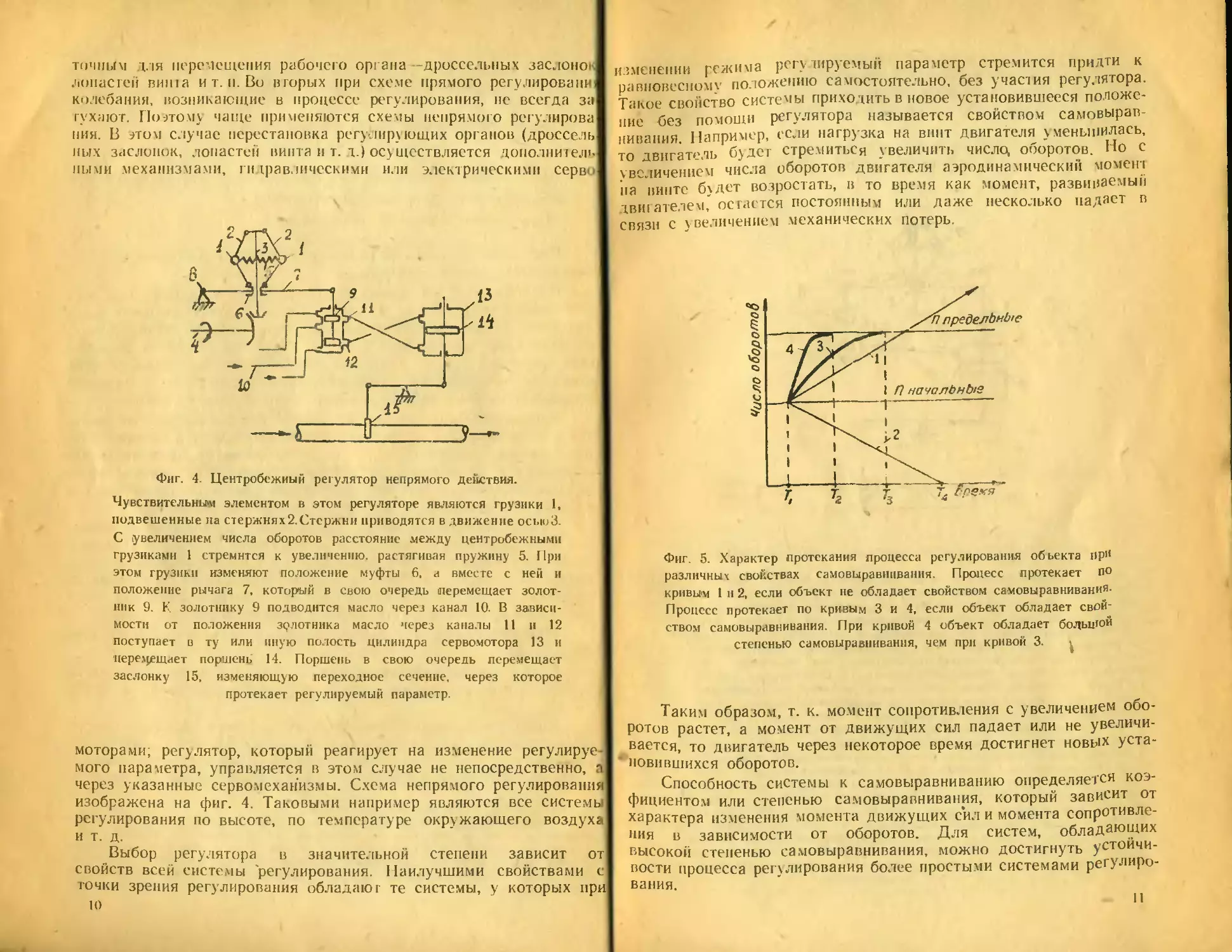
Фиг. 4 Центробежный регулятор непрямого действия.
Чувствительным элементом в этом регуляторе являются грузики 1,
подвешенные на стержнях2.Стержни приводятся в движение осыоЗ.
С увеличением числа оборотов расстояние между центробежными
грузиками 1 стремится к увеличению, растягивая пружину 5. При
этом грузики изменяют положение муфты 6, а вместе с ней и
положение рычага 7, который в свою очередь перемещает золот-
ник 9. К золотнику 9 подводится масло через канал 10. В зависи-
мости от положения зулотника масло через каналы 11 и 12
поступает в ту или иную полость цилиндра сервомотора 13 и
перез^щает поршень 14. Поршень в свою очередь перемещает
заслонку 15, изменяющую переходное сечение, через которое
протекает регулируемый параметр.
моторами; регулятор, который реагирует на изменение регулируе-
мого параметра, управляется в этом случае не непосредственно, а
через указанные сервомеханизмы. Схема непрямого регулирования
изображена на фиг. 4. Таковыми например являются все системы
регулирования по высоте, по температуре окружающего воздуха
и т. д.
Выбор регулятора в значительной степени зависит от
свойств всей системы регулирования. Наилучшими свойствами с
точки зрения регулирования обладают те системы, у которых при
10
изменении режима рогу тируемый параметр стремится придти к
равновесному положению самостоятельно, без участия регулятора.
Такое свойство системы приходить в новое установившееся положе-
ние без помощи регулятора называется свойством самовырав-
нивания. Например, если нагрузка на винт двигателя уменьшилась,
то двигатель будет стремиться увеличить числц оборотов. Но с
увеличением числа оборотов двигателя аэродинамический момент
па винте будет возростать, в то время как момент, развиваемый
двигателем, остается постоянным или даже несколько падает в
связи с увеличением механических потерь.
Фиг. 5. Характер протекания процесса регулирования обьекта пр11
различных свойствах самовыравиивания. Процесс протекает по
кривым 1 п 2, если объект не обладает свойством самовыравиивания.
Процесс протекает по кривым 3 и 4, если объект обладает свой-
ством самовыравиивания. При кривой 4 объект обладает большой
степенью самовыравиивания, чем при кривой 3.
Таким образом, т. к. момент сопротивления с увеличением обо-
ротов растет, а момент от движущих сил падает или не увеличи-
вается, то двигатель через некоторое время достигнет новых уста-
новившихся оборотов.
Способность системы к самовыравниванию определяется коэ-
ффициентом или степенью са.мовыравнивания, который зависит от
характера изменения момента движущих сил и момента сопротивле-
ния в зависимости от оборотов. Для систем, обладающих
высокой степенью самовыравиивания, можно достигнуть устойчи-
вости процесса регулирования более простыми системами регулиро-
вания.
11
Этим, в частности, можно объяснить, что регулирование числа
оборотов ВИШ осуществляется регуляторами без обратной связи
Выбирая систему регулирования как объекта в целом, так и отделы
ных параметров его, необходимо знать их степень само-
выравнивания.
Протекание процессов для регулируемого объекта при различ
ных свойствах его к самовыравниванию показано на фиг. 5.
Фиг. 6. Центробежный регулятор с жесткой обратной связью.
В качестве обратной связи в этом регуляторе служит стержень 3, который,
перемещаясь вместе с сервопоршне.м 2, перемещает точку опоры муфты регул я-
тора. Таким образом одновременно с перемещением поршня сервомотора произ-
водится воздействие на маслораопределительный золотник сервомотора 6
Кинематическая передача от сервомотора к золотнику, то есть стержни ЗиЛ
расположена таким образом, что если перемещение сервопоршня таково, чтс
заслонка 9 должна открываться, то стержни 3 и 4 настраивают золотиик таким
образом, что масло начинает поступать к сервомотору, стремясь закрыта
заслонку 9. Предположим, что рассматриваемый центробежный регулятор
служит для регулирования количества подаваемого топлива. Тогда, если дви-
гатель при изменении нагрузки увеличивает обороты, то грузики 7 стремятсц
разойтись, преодолевая усилие пружины 8. перемещают муфту 5, а вместе с не 8
и золотник 6. При этом золотник 6 поднимется и откроет доступ масла
нижнюю -полость сервомотора, и одновременно откроет слив масла с верхш*
полости сервомотора. Заслонка 9 будет прикрывать подачу топлива. Если нс
препятствовать этому процессу, то заслонка будет прикрывать доступ топлива
даже и тогда, когда надо будет сохранить определенное количество подаваемогс
топлива для сохранения нужных оборотов двигателя. Обратная связь и пре-
пятствует такому протеканию процесса, т. е. при перемещении сервопоршна
вверх стержень 3 перемещает точку опоры рычага 4; вместе с рычагом 4 пере-
мещается золотник 6 вниз, прикрывает отверстие доступа масла к нижнс-Я
полости сервомотора, благодаря чему прекращается перемещение серво-
поршня вверх
12
Если объект регулирования не обладает достаточной степенью
самовыравнинания, то регулятор, включивший сервомотор, не выклю-
чит его в дальнейшем, если не ввести какое нибудь вмешательство
Фиг. 7. Центробежный регулятор непрямого действия с изодромной
обратной связью.
В отличне от регулятора с жесткой обратной связью, где перемещение золот-
ника осуществляется при помощи жесткого стержня, в этом регуляторе воздей-
ствие на золотник происходит следующим образом: прн перемещении серво-
поршня основного сервомотора вместе с ним перемещается дополнительный
цилиндр изодрома 3, жестко связанный стержнем 1 с сервопоршнем. В цилиндре
3 помещен поршень изодрома 4, связанный с рычагом 2 и пружиной 6. Верхняя
н нижняя полости цилиндра 3 сообщаются между собой катарактом 5, который
состоит из специально подобранных калиброванных втулок. При перемещении
основного сервопоршня вместе с ним перемещается цилиндр 3 и масло пере-
текает из одной полости цилиндра 3 в другую. Отверстие катаракта подбирается
таким образом, чтобы при перемещении цилиндра 3 масло перетекало бы из
одной полости цилиндра 3 в другую так. чтобы вместе с цилиндром 3 пере-
мещался бы поршень изодрома 4. Скорость перемещения поршня 4 зависит от
размеров отверстия катаракта. Предположим, что изменилось число оборотов
двигатели, тогда, также как и в предыдущем регуляторе (см. фиг. 6) поршень
основного сервомотора будет перемещаться в цилиндре 3 с такой же скоростью.
С меньшей скоростью будет перемещаться поршень нзодрома 4. Так как поршень
пзодрома 4 связан со стержнем 2. то по мере перемещения основного сервопоршня
стержень 2 будет перемешать золотник 8 и прикрывать доступ масла к основ-
ному сервомотору. Таким образом перемещение основного сервопоршня и регули-
рующих заслонок происходит плавно. Кроме того, при перемещении сервопоршня
4 происходит сжатие пружины 6. После того, как установились новые равновес-
ные обороты, пружина 6, стремясь занять исходное или первоначальное положе-
ние, перемещает сервопоршень 4, а следовательно и стержень 2 и золотник 8.
это перемещение происходит до тех пор, пока пружина 6, стержень 2 и золот-
ник 8 не займут своего исходного положения, при котором для данного регуля-
тора достигаются вполне определенные установившиеся обороты, что не имеет
места при регуляторах с жесткой обратной связью.
13
в работу системы. Для этой цели в регуляторы вводят дополиитель
ные приспособления, называемые обратной связью
Назначение таких приспособлении заключается в том, чтобы п<
мере перемещения поршня сервомотора производить обратное воз
действие обычно на золотник сервомотора, от которого собственнс
и зависит перемещение поршня сервомотора.
Схема непрямого регулирования с жесткой обратной связью
приведена на фиг. 6.
Схема с жесткой обратной связью хотя и исключает ря,а
недостатков указанных выше схем, но в свою очередь обладает те\
недостатком, что после окончания процесса регулирования регули
руемый параметр не возвращается к своей прежней величине, а
получает некоторое новое значение, т. е. схема регулирования о
жесткой обратной связью обладает некоторой неравномерностью.
Для устранения неравномерности процесса регулирования
обратную связь делают не жесткой. Такая схема показана на
фиг. 7 и называется схемой изодромного регулирования.
IV. УПРАВЛЕНИЕ НАДДУВОМ
I. Требования к системам управления наддувом
Мощность двигателя зависит в первую очередь от давления
наддува. Давление наддува в авиационных двигателях регули-
руется дросселированием и кроме того изменением передаточного
числа от вала мотора к нагнетателю, т. е. изменением скорости
П. Ц. Н. (приводного центробежного нагнетателя), а у двигателей,
где П.Ц-Н. оборудованы турбомуфтами — плавным изменением
числа оборотов нагнетателя. Этим же способом, т. е. изменением
числа оборотов, регулируется давление наддува также и у двига-
гелей, оборудованных турбокомпрессорами. Одним только измене-
нием числа оборотов крыльчатки нельзя ограничить регулирование
наддува, а приходится параллельно с механизмами, изменяющими
число оборотов крыльчатки, ставить дросселирующие устройства.
Это объясняется тем, что повышение наддува за счет увеличения
оборотов агрегатов наддува происходит слишком медленно с точки
зрения приемистости двигателя. Разгон крыльчатки начинается с
некоторым запаздыванием из-за запаздывания устройства, воздей-
ствующего на гидравлический механизм привода или на число обо-
ротов турбокомпрессора, а также в связи с запаздыванием самого
механизма турбомуфты; кроме того момент инерции крыльчатки
также не позволяет сообщить крыльчатке значительную угловую
скорость в малое время. Поэтому у всех нагнетателей, в
астности у нагнетателей с турбомуфтой, также как и у
. агнетателей системы комбинированного наддува напорная способ-
ность на дроссельных режимах должна быть избыточна, а необхо-
димое снижение давления наддува должно хотя бы частично
достигаться дросселированием. Это и позволяет получить малое
время приемистости за счет открытия дросселя. Очевидно, что чем
больше напорная способность нагнетателя по сравнению с факти-
чески используемой, тем время приемистости будет меньше; при
том однако потери на дросселирование увеличиваются и соответ-
твенно снижается экономичность.
Установка дросселя нужна также и для номинальных режи-
мов, потому что точность регулирования наддува оборотами значи-
1елыю ниже, чем регулирование дросселем. Поэтому обычно изме-
нением числа оборотов крыльчатки производится грубое регулиро-
вание наддува, а более точно оно производится дросселированием.
Наличие дросселя в системе наддува необходимо еще и
потому, что число оборотов турбомуфты и турбокомпрессора не
однозначно зависит от изменения высоты полета; рекомендуется,
чтобы турбомуфта или турбокомпрессор делали несколько большие
обороты, чем это необходимо для нормального наддува.
До расчетной высоты напорная способность нагнетателя, с
постоянным передаточным числом от вала двигателя (с механичес-
ким приводом) по может быть полностью использована. Поэтому
15
Фиг. 8. Давление наддува и мощность в зависимости от величины открытия
дросселя
16
ппоссель до расчетной высоты прикрыт. Приоткрывая дроссель па
Личину большую, чем это необходимо для номинального режима,
В ‘ ик до предела высотности может получить форсированный
Лжим За пределом высотности возможно только дросселирова-
ние если только режимы форсажа по наддуву не являются одно-
временно и режимами форсажа по оборотам.
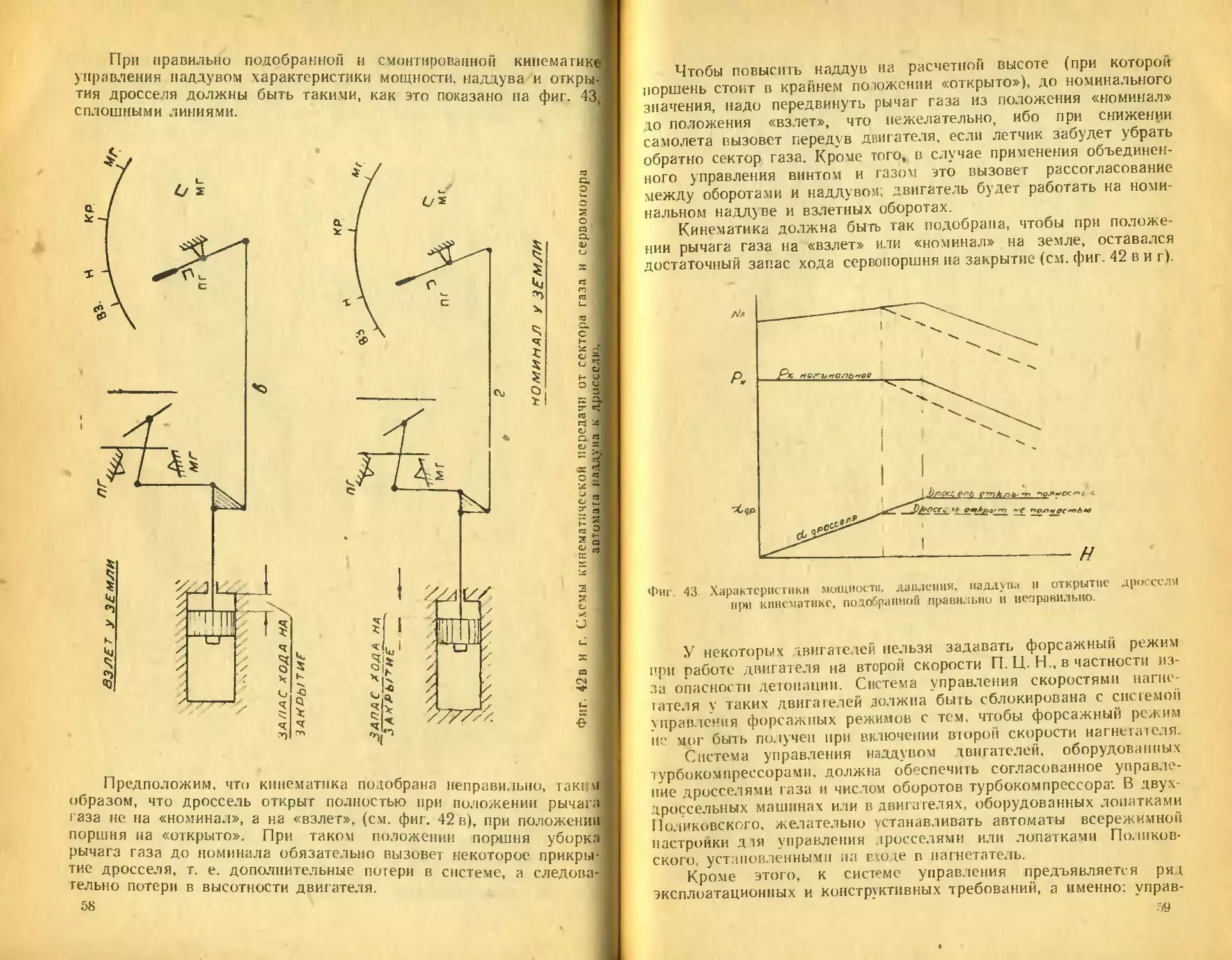
Н На фиг. 8 вверху сплошными линиями изображено семейство
высотных характеристик двигателя для различных постоянных
по тожений дросселя при неизменных оборотах. Внизу пунктиром
показаны несколько положений дросселя, необходимых для под-
держания постоянного наддува до расчетных высот*.
Регулирование давления наддува должно производиться
непрерывно в зависимости от изменения высоты полета для сохра-
нения постоянным режима работы двигателя, заданного летчиком.
С подъемом на высоту шадает барометрическое давление, а с ним
и давление за нагнетателем**. Поэтому следует для сохранения
одного и того же давления наддува дроссель газа непрерывно от-
крывать по мере подъема на высоту; наоборот, при снижении
высоты во избежание передува дроссель следует непрерывно
прикрывать.
Для того, чтобы освободить летчика от непрерывного наблю-
дения за регулированием наддува в зависимости от высоты полета,
поддержание режима по высоте осуществляется при помощи авто-
матических регуляторов***.
Изменение режима работы двигателя производится вручную из
кабины летчика посредством рычага газа, воздействующего на
дроссель через систему рычагов либо непосредственно, либо путем
перестройки автомата наддува.
Так как управление дросселями производится и автоматически
и вручную, то работа автоматического и ручного управления
должна быть согласована, что осуществляется на различных дви-
гателях по различным схемам.
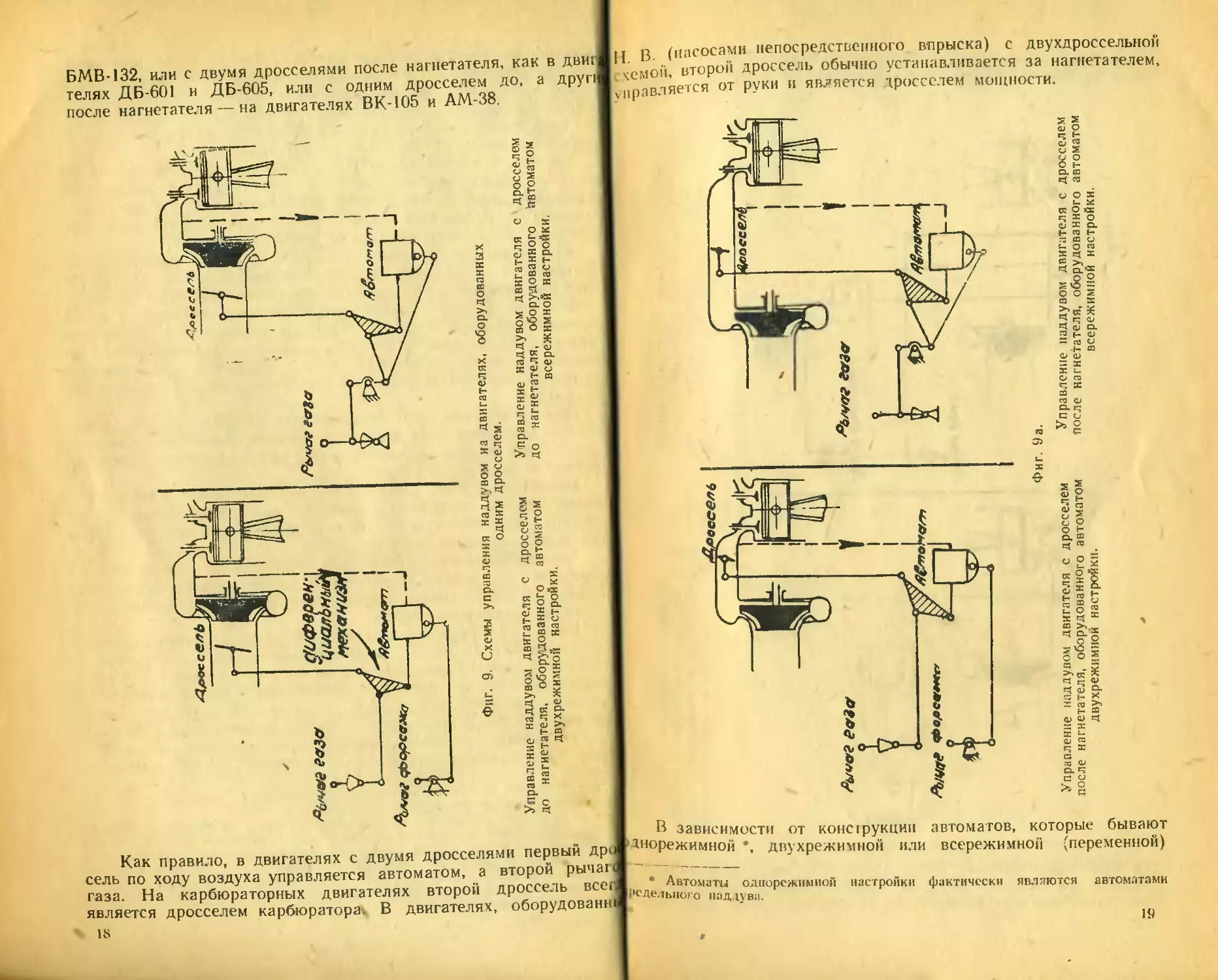
На фиг. 9 и 10 приведены наиболее часто применяемые схемы
управления наддувом как с одним, так и с двумя дросселями. В
системах с одним дросселем встречаются установки дросселя
нагнетателя — он же дроссель карбюратора — как до нагнетателя
(например, в двигателях АШ-82, Мерлин XX, БМВ-801, Брамо
Фафнир 323), так и после него, например, в двигателях ЮЛЮ-211.
В системах с двумя дросселями встречаются двигатели с
двумя дросселями до нагнетателя, например, в старом двигателе
Нагнетател'ь служит не только для повышения высотности, но и для
‘ овышения мощности при данном литраже.
В связи с понижением температуры на входе в нагнетатель с подъемом
на высоту, напорная способность его несколько повышается; однако при нзче-
1 Н*»кдавления и температуры по М. С. А. давление Рк все же падает.
* Следует отметить, что американские самолеты с двигателями Аллисон не
’мели автоматов наддува на двигателях, и только после того, как американцы
переняли наш опыт регулирования давления наддувом, они оборудовали свои
Двигатели подобными автоматами,
о
Поликовский В. и. в Гальперин М. И. 17
п
сл с
3
Фиг. 9. Схемы управления наддувом на двигателях, оборудованных
одним дросселем.
Управление наддувом двигателя с дросселем
до нагнетателя, оборудованного автоматом
двухрежимной настройки.
Управление наддувом двигателя с дросселем
до нагнетателя, оборудованного Автоматом
«сережнмной настройки.
Фиг. 9а.
Управление наддувом двигателя с дросселем Управление наддувом двигателя с дросселем
после нагнетателя, оборудованного автоматом после нагнетателя, оборудованного автоматом
двухрежимной настройки. всережимной настройки.
|П В (насосами непосредственного впрыска) с двухдросселыю!
•смой второй дроссель обычно устанавливается за нагнетателем
' шивтяется от руки и является дросселем мощности.
V
я с
О —
я
к
п
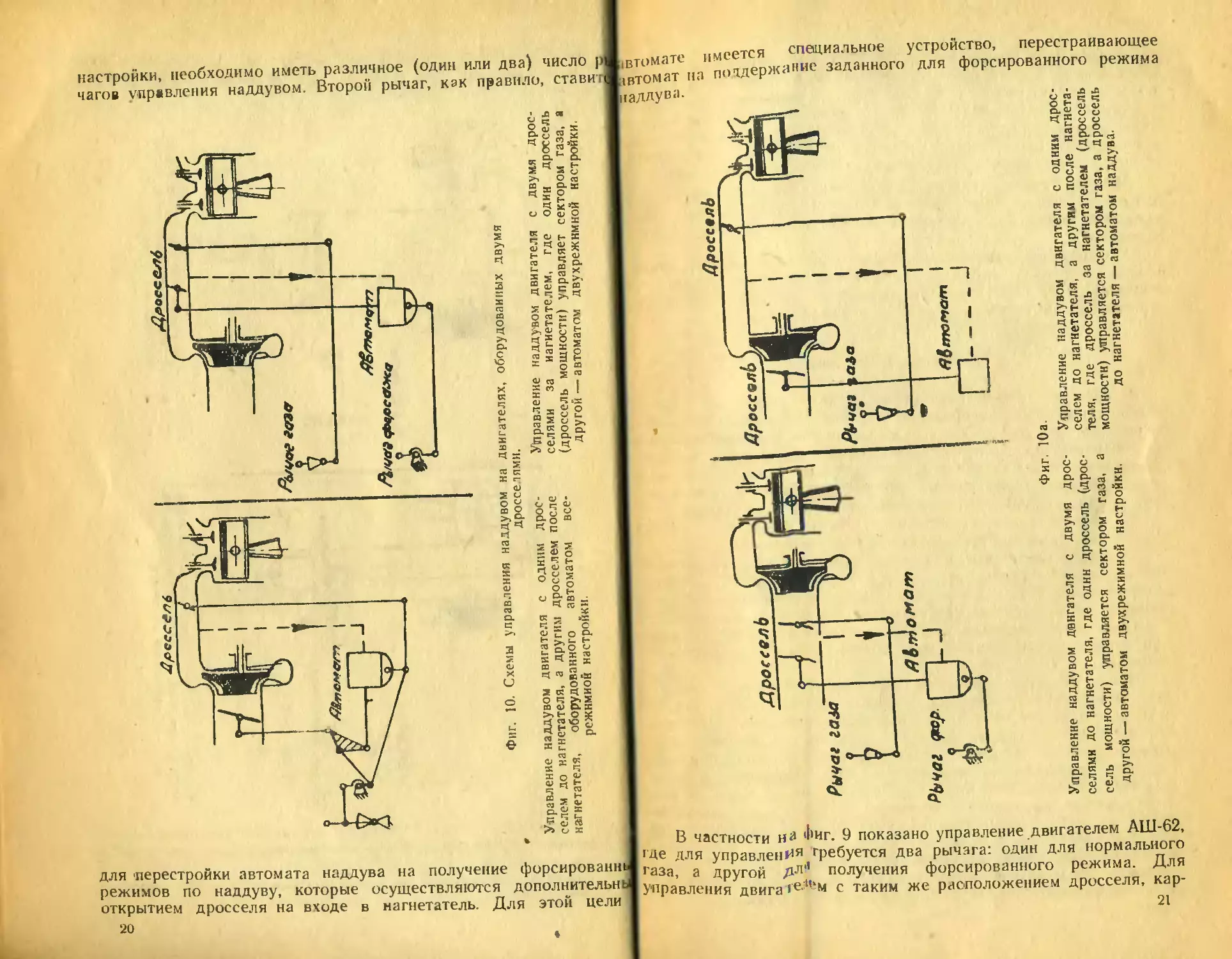
оборудованных двумя
Фиг. 10. Схемы управления
о
га
Управление наддувом двигателя с одним дрос-
селем до нагнетателя, а другим дросселем
нагнетателя, оборудованного автоматом
режимной настройки.
наддувом на двигателях,
дроссе тями.
Управление
селями за
(дроссель мощности) управляет сектором газа, а
другой — автоматом двухрежнмной настройки.
после
все-
наддувом двигателя
нагнетателем, где
с
один
двумя дрос-
дроссель
тз "2 50 ч Управление наддувом двигателя с двумя дрос- Управление наддувом двигателя с одним дрос-
2 S О 2 селями до нагнетателя, где одни дроссель (дрос- селем до нагнетателя, а ДРУГИ” ._HAr“eoTfu
2 52 л , теля, где дроссель за нагнетателем (дроссель
s з 3 сель мощности) управляется сектором газа, а мощности) управляется сектором газа, а дроссель
§ “ g > другой — автоматом двухрежнмной настройки. до нагнетателя — автоматом наддува.
га о
я
Я S3
2 5
бюратора и нагнетателя, как у АШ-62, можно ограничиться одни
рычагом, что может быть достигнуто установкой на двигате.'
автомата всережимной настройки. При этом вместе с изменение
положения дросселя автомат наддува перестраивается на поддс|
жание форсированного режима На этой же фигуре видна разниц
в управлении двигателями ЮМ0-211В и IOMO-211 F, у первог
из которых два рычага управления, а у второго только один.
На фиг. 11 приведена схема управления одним и тем же дел
гателем, но при установке на нем в одном случае автомата двуз
режимной настройки, а в другом случае автомата всережимщ!
настройки.
У двигателей с малой высотностью для получения взлетног
режима на первой скорости нагнетателя дроссель приходите
открывать полностью или почти полностью. В этих случаях пр
перестройке автомата он практически выключается.
2. Автоматы наддува
В качестве чувствительного элемента в автоматах наддув
обычно применяются анероидные коробки (гармошки) или набо
анероидных мембран Усилие, развиваемое чувствительным элеме!
том, недостаточно для перестановки органов управления давление
дроссельной заслонки или поворотных лопаток на входе в напк
татель. Поэтому применяемые для регулирования автоматы hhj
дува обычно являются регуляторами не прямого действия. >
В существующих конструкциях применяются два cnocot
воздействия давления на чувствительный элемент.
В первом случае имеется только один анероид, из которог
откачен воздух; анероид помещается в герметической камере,
которой подводится давление наддува из регулируемого участи
(обычно это давление за нагнетателем} при помощи трубопровод;
Один торец анероида жестко прикреплен к корпусу анероид;
а ко второму торцу анероида прикреплен маслораспределительны
золотник.
В другом случае анероидов два; один из анероидов, из коти
рого откачен воздух, является эталоном давления. Откачка воз
духа делается для того, чтобы исключить влияние температурь
Внутрь второго анероида, жестко связанного своим основанием
первым, подводится давление наддува (регулируемое давление;
Наружные торцы обоих анероидов жестко скреплены с корпусеi
анероидов, а торцы анероидов, соединенные между собой, связан;
с маслораспределительным золотником. В этом случае камера ане
роидов не требует герметизации; кроме того, маслораспределитель
ныи золотннк может помещаться не на одной оси с «анероидом,
в стороне что предотвращает просачивание масла в камер
нероида. То и другое является преимуществом данного способа
хотя конструкция получается несколько более сложной
22
Фиг. И. Схемы управления давлением наддува на однодроссельных двигателях
при установке автомата двухрежнмной и автомата всережимной настройки
Г) Автомат двухрежнмной настройки, 11) Автомат всережимной настройки.
23
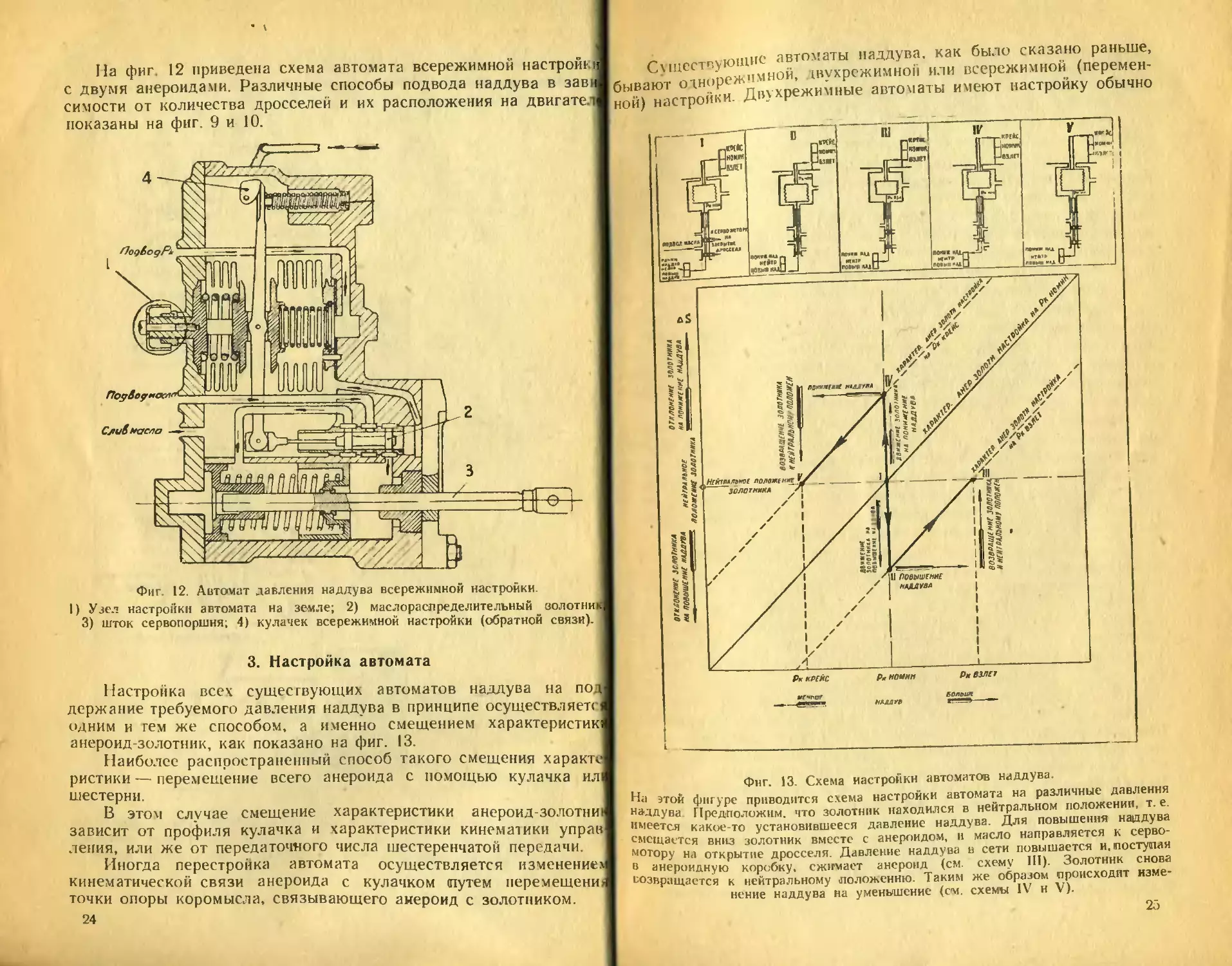
На фиг. 12 приведена схема автомата всережимной настрой^
с двумя анероидами. Различные способы подвода наддува в зав>
симости от количества дросселей и их расположения на двигатед
показаны на фиг. 9 и 10.
Фиг. 12. Автомат давления наддува всережимной настройки
1) Узел настройки автомата на земле; 2) маслораспределительный золотни,
3) шток сервопоршня; 4) кулачек всережимной настройки (обратной связи).
3. Настройка автомата
Настройка всех существующих автоматов наддува на по/
держание требуемого давления наддува в принципе осуществляете
одним и гем же способом, а и пенно смещением характеристик
анероид-золотник, как показано на фиг. 13.
Наиболее распространенный способ такого смещения характс
ристики — перемещение всего анероида с помощью кулачка ил
шестерни.
В этом случае смещение характеристики анероид-золотнш
зависит от профиля кулачка и характеристики кинематики управ
ления, или же от передаточного числа шестеренчатой передачи.
Иногда перестройка автомата осуществляется изменение!
кинематической связи анероида с кулачком (путем перемещени»
точки опоры коромысла, связывающего анероид с золотником.
24
Существующие автоматы наддува, как было сказано раньше,
бывают отнорежчмной, шухрежимноп или всережимной (перемен-
ной) настройки. Двухрежимные автоматы имеют настройку обычно
Р„ НОЫМП Рк 81ЛСТ
Фиг. 13. Схема настройки автоматов наддува.
На этой фигуре приводится схема настройки автомата на различные давления
наддува Предположим, что золотник находился в нейтральном положении, т. е.
имеется какое-то установившееся давление наддува. Для повышения наддува
смещается вниз золотник вместе с анероидом, и масло направляется к серво-
мотору на открытие дросселя. Давление наддува в сети повышается и, поступая
в анероидную коробку, сжимает анероид (см. схему III). Золотник снова
возвращается к нейтральному положению. Таким же образом происходит изме-
нение наддува на уменьшение (ом. схемы IV н V).
25
на режимы взлетный и номинальный. Автоматы однорежимной
двухрежимной настройки могут поддерживать постоянным тольк
одно или два значения давления наддува. Поэтому на крейсерскг
режимах при изменении высоты полета для сохранения заданно!
Рк (крейсерского) приходится все время поддерживать требуемс
давление наддува, изменяя положение сектора газа.
В автоматах переменной настройки, или всережимны
настройка автомата производится непрерывно по мере изм
нения положения сектора газа. В этом случае элеме!
настройки автомата (например кулачек) кинематически связь
вается с рычагом управления газом. Автомат наддува при это
поддерживает давление наддува не только на номинальных, но
на крейсерских режимах работы мотора.
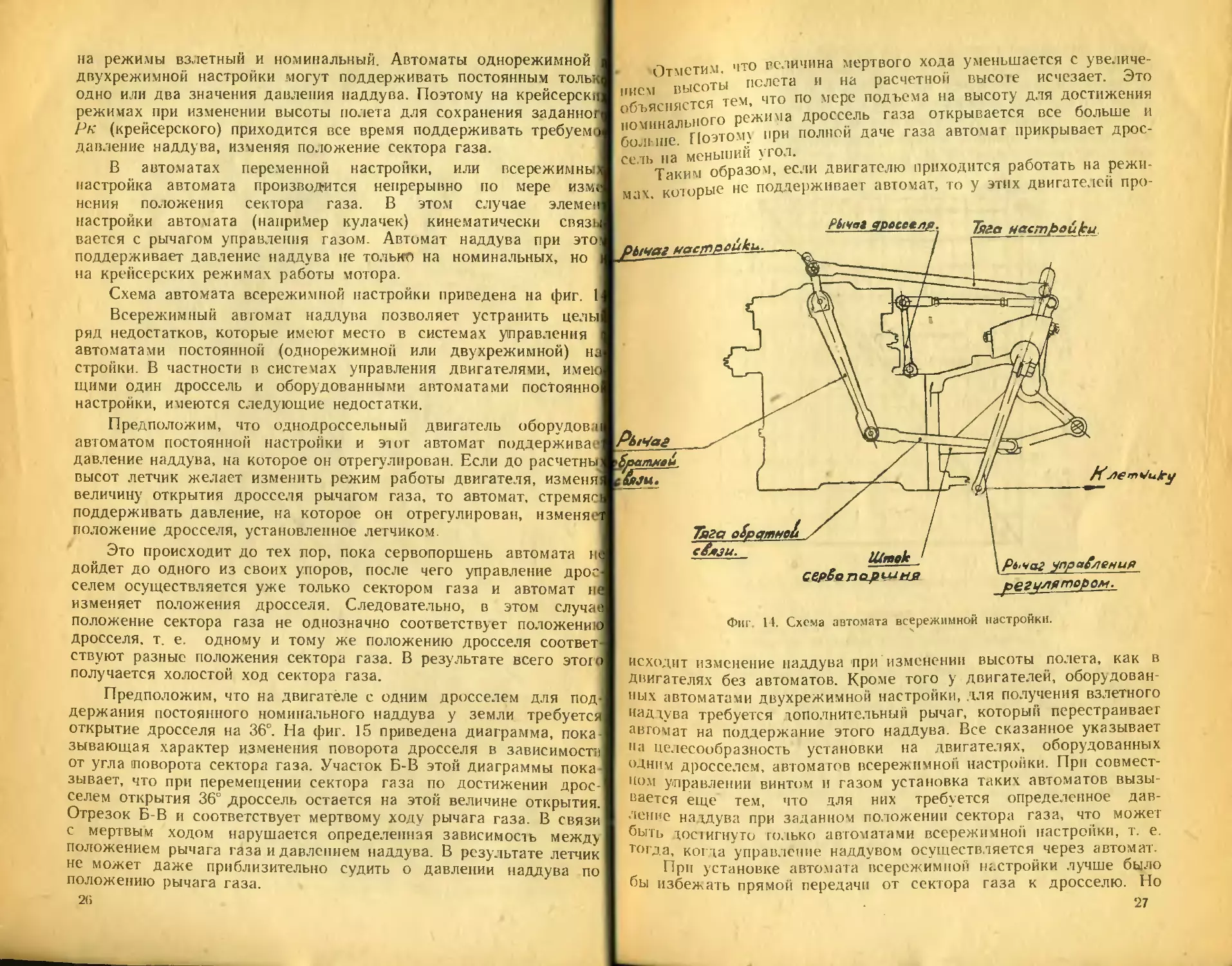
Схема автомата всережимной настройки приведена на фиг. 1
Всережимный автомат наддува позволяет устранить целы
ряд недостатков, которые имеют место в системах управления
автоматами постоянной (однорежимной или двухрежимной) н;
стройки. В частности в системах управления двигателями, имен
щими один дроссель и оборудованными автоматами постоянно
настройки, имеются следующие недостатки.
Предположим, что однодроссельный двигатель оборудова
автоматом постоянной настройки и этот автомат поддерживав
давление наддува, на которое он отрегулирован. Если до расчетны
высот летчик желает изменить режим работы двигателя, измени
величину открытия дросселя рычагом газа, то автомат, стремяс
поддерживать давление, на которое он отрегулирован, изменяв
положение дросселя, установленное летчиком.
Это происходит до тех пор, пока сервопоршень автомата н
дойдет до одного из своих упоров, после чего управление дрос
селем осуществляется уже только сектором газа и автомат н<
изменяет положения дросселя. Следовательно, в этом случа»
положение сектора газа не однозначно соответствует положении
дросселя, т. е. одному и тому же положению дросселя соответ
ствуют разные положения сектора газа. В результате всего этой
получается холостой ход сектора газа.
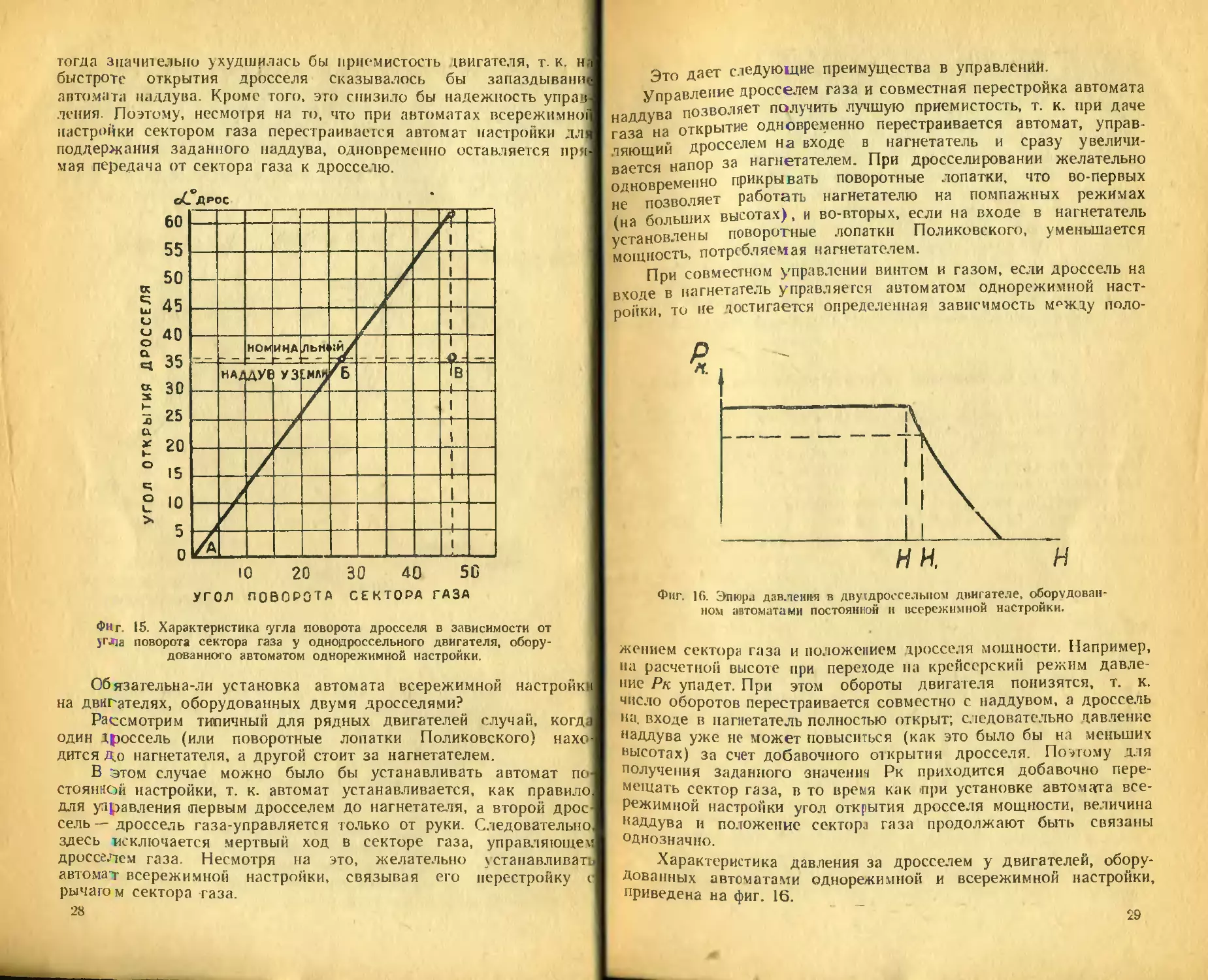
Предположим, что на двигателе с одним дросселем для под
держания постоянного номинального наддува у земли требуется
открытие дросселя на 36°. На фиг. 15 приведена диаграмма, пока-
зывающая характер изменения поворота дросселя в зависимости
от угла поворота сектора газа. Участок Б-В этой диаграммы пока
зывает, что при перемещении сектора газа по достижении дрос-
селем открытия 36° дроссель остается на этой величине открытия.
Отрезок Б-В и соответствует мертвому ходу рычага газа. В связи
с мертвым ходом нарушается определенная зависимость между
положением рычага газа и давлением наддува. В результате летчик
не может даже приблизительно судить о давлении наддува по
положению рычага газа.
26
Отмстим, что реличина мертвого хода уменьшается с увеличе-
11см высоты полета и на расчетной Bbicoie исчезает. Это
объясняется тем, что по мере подъема на высоту для достижения
номинального режима дроссель газа открывается все больше и
бо пше Поэтом) при полной даче газа автомат прикрывает дрос-
сель на меньший \ гол.
Таким образом, если двигателю приходится работать на режи-
мах которые нс поддерживает автомат, то у этих двигателей про-
исходит изменение наддува при изменении высоты полета, как в
двигателях без автоматов. Кроме того у двигателей, оборудован-
ных автоматами двухрежимной настройки, для получения взлетного
наддува требуется тополнитсльный рычаг, который перестраивает
автомат на поддержание этого наддува. Все сказанное указывает
на целесообразность установки на двигателях, оборудованных
одним дросселем, автоматов всережимной настройки. При совмест-
ном управлении винтом и газом установка таких автоматов вызы-
нается еще тем, что для них требуется определенное дав-
ление наддува при заданном положении сектора газа, что может
быть достигнуто только автоматами всережимной настройки, т. е.
тогда, когда управление наддувом осуществляется через автомат.
При установке автомата всережимной настройки лучше было
бы избежать прямой передачи от сектора газа к дросселю. Но
27
тогда Значительно ухудшилась бы приемистость гвигателя, т. к. н
быстроте открытия дросселя сказывалось бы запаздывай»
автомата наддува. Кроме того, эго снизило бы надежность управ
тения Поэтому, несмотря на то, что при автоматах всережпмно!
настройки сектором газа перестраивается автомат настройки дл
поддержания заданного наддува, одновременно оставляется при
мая передача от сектора газа к дросселю.
Фи г 15. Характеристика <угла поворота дросселя в зависимости от
)гэта поворота сектора газа у однодроссельного двигателя, обору-
дованного автоматом однорежимной настройки.
Обязательна-ли установка автомата всережимной настроим
на двигателях, оборудованных двумя дросселями?
Рассмотрим типичный для рядных двигателей случай, когд;
один Цэоссель (или поворотные лопатки Поликовского) нахо
дится До нагнетателя, а другой стоит за нагнетателем.
В этом случае можно было бы устанавливать автомат по
стоянной настройки, т. к. автомат устанавливается, как правило
для управления первым дросселем до нагнетателя, а второй дрос
сель — дроссель газа-управляется только от руки. Следовательно
здесь исключается мертвый ход в секторе газа, управляющем
дросселем газа. Несмотря на это, желательно тсганавливап
автомат всережимной настройки, связывая его перестройку <
рычагом сектора газа.
28
Это дает следующие преимущества в управлений.
Управление дросселем газа и совместная перестройка автомата
наддува позволяет получить лучшую приемистость, т. к. при даче
газа на открытие одновременно перестраивается автомат, управ-
ляющий дросселем на входе в нагнетатель и сразу увеличи-
вается напор за нагнетателем. При дросселировании желательно
одновременно прикрывать поворотные лопатки, что во-первых
не позволяет работать нагнетателю на помпажных режимах
(на больших высотах), и во-вторых, если на входе в нагнетатель
установлены поворотные лопатки Поликовского, уменьшается
мощность, потребляемая нагнетателем.
При совместном управлении винтом и газом, если дроссель на
входе в нагнетатель управляется автоматом однорежимной наст-
ройки, то не достигается определенная зависимость м^жду поло-
Фиг. 16. Эпюра давления в двуtдроссельном двигателе, оборудован
ном автоматами постоянной и всережимной настройки.
жением сектора газа и положением дросселя мощности. Например,
на расчетной высоте при переходе па крейсерский режим давле-
ние Рк упадет. При этом обороты двигателя понизятся, т. к.
число оборотов перестраивается совместно с наддувом, а дроссель
на. входе в нагнетатель полностью открыт; следовательно давление
наддува уже не может повыситься (как это было бы на меньших
высотах) за счет добавочного открытия дросселя. Поэтому для
получения заданного значения Рк приходится добавочно пере-
мещать сектор газа, в то время как при установке автомата все-
режимной настройки угол открытия дросселя мощности, величина
наддува и положение секторз газа продолжают быть связаны
однозначно.
Характеристика давления за дросселем у двигателей, обору-
дованных автоматами однорежимной и всережимной настройки,
приведена на фиг. 16.
Сплошными линиями показана характеристика при устаноя
автоматов однорежимной настройки; пунктирными линиями изобр
жена характеристика при установке автомата всережимн)
настройки. Предположим, чго на расчетной высоте или за расч<
ной высотой мы переходим на дросселированный режим, т. 1
прикрываем дроссель мощности на какую нибудь величш
Соответственно этому закрытию упадет давление наддува Г
Так как дроссель ПЦН уже полностью открыт, то Рк* буд
меняться с изменением высоты полета. Если же на расчета!
высоте или за ней вместе с закрытием дросселя мощности автом«
наддува прикроет дроссель ПЦН, то с увеличением высоты полет)
дроссель ПЦН будет снова открываться и сохранит земные услс
вия работы дросселя мощности до больших высот; это сохранив
условия работы карбюратора, а также В. Г. (объединенного упрщ
ления винтом и газом) до высоты Hi за расчетной высотой
что весьма положительно сказывается на характеристиках двиг!
теля в полете.
4. Усилие, возникающее на рычаге управления наддувом
Желательно, чтобы усилие, необходимое для перемещения сен
тора газа, было Р<5 кг. Однако на больших закрытиях дроссел
у мощных двигателей это условие не всегда удается выполнит!
Поэтому лтриходится допускать для интервалов от малого газа д
крейсерского большие усилия, но во всяком случае, не свыше 10 к.1
Момент, необходимый для перемещения сектора, слагается
основном из момента от сил трения и из аэродинамическое
момента, возникающего на дросселе. Аэродинамический момент н
Фиг. 17. Характер протекания
воз i\ ха до и за дросселем.
оО
дросселе возникает в результат
того, что перед дросселем обра
зуется неравномерное поле давле-
ний, в то время как за дросселел
получается почти постоянное раз
режение за счет срыва у входно!
кромки.
Характер протекания воздуха
до и за дросселем приведен на
фиг. 17. Б результате воздушного
потока на дроссель действует мо-
мент, стремящийся все время закры-
вать дроссель. Этот момент дости-
гает особенно значительной вели-]
чаны на однотроссельных двига-
телях по сравнению с двигателями,
обор\ дованными несколькими парал-’
дельными дросселями, если даже
расход воздуха через эти двигатели
одинаков. Например, усилие, необ-
аИмое для управления одним дросселем двигателей типа АШ-.82
Х несколько раз больше, чем усилие, необходимое для управления
° естью дросселями двигателей типа ВК-105 при приблизительно
одинаковых расходах воздуха.
' Рассмотрим, как действует аэродинамический момент на дрос-
•с1Ь- Этот момент существенно зависит от геометрических разме-
пов тросселя и от угла поворота. Приближенно он может быть
определен по формуле: ,
М = PS = Км (Рк-Ра ) ы-
Р = Кр(Рк-Ра}Ы; S = Ksl
где Р— усилие, действующее на дроссель
S — плечо от оси дросселя до силы Р
b — ширина дросселя
/ — длина дросселя
/И — момент, действующий на дроссель
Ks = / (а) и Кр «• /(а), а Км — Ks Кр.
Заменим теперь один дроссель шестью геометрическими подоб-
ными и параллельно включенными дросселями с такой же общей
площадью, площадь каждого из шести дросселей будет равна
</( • /,, где />, —ширина дросселя; /, - длина ею.
Выразим bt и /, через b и I
^=| -Lb-U,4l); |
Тогда, при этой же степени дросселирования Рк — Ра, т. е. при
том же угле а, а следовательно и том же значении Км, мы
получим момент Mi действующий на все дросселя и равный:
/И, = Км (Рк - Ра ) 0,4я • 6 Ь • I- - 0,4 Км (Рк -Ра . Ы1.
Таким образом момент, а следовательно и усилие, необходимое
Для управления шестью дросселями, в два с половиной раза
меньше, чем усилие, необходимое для управления одним дросселем
при одной и той же кинематической передаче от сектора газа к
Дросселям.
Для уменьшения усилий, возникающих при управлении одно-
Дроссельным двигателем, ось дросселя располагается несимметрич-
но. Смещение оси делается в сторону, уменьшающую момент на
закрытие дросселя, т. е. ось дросселя перемещается в сторону
Действующей силы Р Устанавливаются иногда и компенсирующие
кулачковые устройства, подобные тем, которые показаны на фиг. 18.
В этом случае профиль кулачка подбирается таким образом, чтобы
мо,мент трения, создаваемый кулачком, компенсировал бы момент,
возникающий на дросселе.
На фиг. 19 приведены кривые моментов, возникающих на дрос-
селе с кулачковым устройством и без него. Недостатком кулачко-
31
I
I
I
1
I
I
I
1
I-
f
вого механизма является то, что аэродинамический момент
дросселе при постоянном его положении меняется с изменения
высоты полета, в то время как момент трения кулачка от высот!
не зависит. Для уменьшения момента, необходимого 'д
I
I
I'
I
г
I
I
I
I
I
I
L
управления дросселем, делаются также попытки применит!
пружинное устройство, располагая пружину так, чтобы она па
мере открытия дросселя создавала бы момент, равный и противо
положили по знаку моменту, возникающему на дросселе. Но
пружинное устройство имеет тот же недостаток, что и кулачковое
32
е. оно может быть подобрано только для одной определенной
вь1соты; кроме того, сама система значительно менее надежна,
почему она и не может быть рекомендована для применения в
качестве компенсатора. На фиг. 20 показаны кривые усилий,
возникающих на дросселе в зависимости от положения оси дрос-
селя. Достаточно незначительного смещения оси дросселя, чтобы
резко изменить момент, действующий на дроссель.
При проектировании системы управления следует принять меры
к уменьшению сил трения, для чего все тяги управления следует
монтировать на шариковых или роликовых подшипниках, которые
Должны устанавливаться в местах соединений рычажной системы;
ось дросселя также следует устанавливать на таких подшипниках.
Наибольшее значение моментов возникает на дросселе на
Участке от 0 до 30°—40°. Одновременно на этом участке открытия
Дросселя очень резко изменяется перепад давлений на каждый
гРадус открытия дросселя Поэтому следует выбирать кинематичес-
кую цепь передачи от рычага газа к дросселю таким образом, что-
бы участку от 0 до 30° соответствовала бы большая часть хода
сектора газа, т. е. для открытия дросселя на 30° сектор газа
Г|Рремещался бы па 60' — 70°, а для открытия дросселя на осталь-
ные 50° — 60’ сектор газа перемещался бы на 30°.
Этим самым достигается, во-первых, меньшая чувствитель-
ность в управлении наддувом на участке от 0° до 30°, а во-вторых,
ПоликовскиЛ В. И. и Гальперин М. И. 33
на этом участке в связи с большим передаточным числом от ci
юра газа к дросселю усилие получается значительно меньшим.
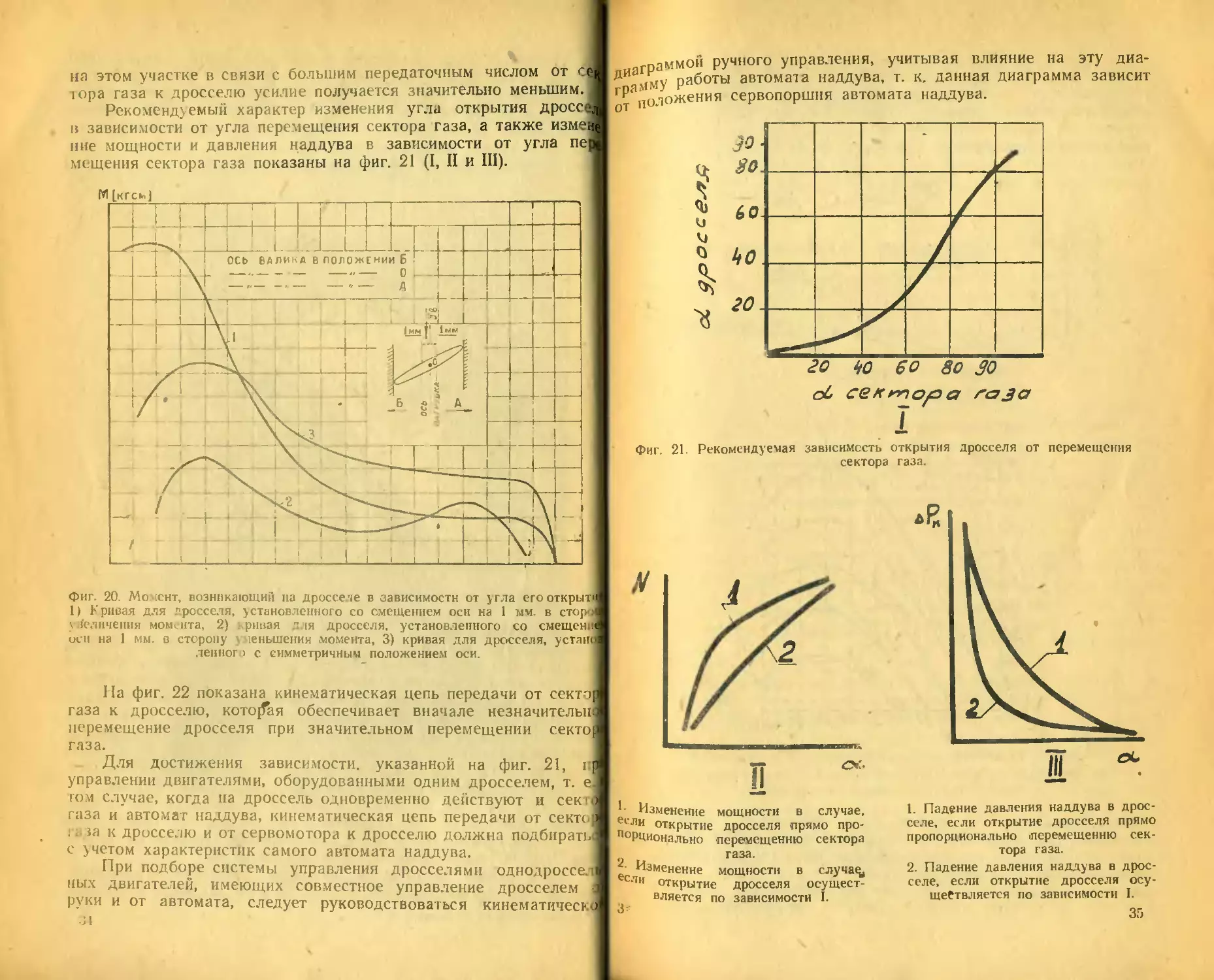
Рекомендуемый характер изменения угла открытия дроссе
в зависимости от угла перемещения сектора газа, а также изме:
пне мощности и давления наддува в зависимости от угла пе|
мощения сектора газа показаны на фиг. 21 (I, II и III).
установленного со смещением оси на 1 мм. в стор<
ля дросселя, установленного со смещсн|
мм. в сторону ченьшения момента, 31 кривая для дросселя, устав
ленного с симметричным положением оси.
1) 1 ривая для просселя1
\ {сличения момента, 2) кривая
оси на 1
фиг. 22 показана кинематическая цепь передачи от сект?
дросселю, которая обеспечивает вначале незначительн
На
газа к
перемещение дросселя при значительном перемещении секто
газа.
Для достижения зависимости, указанной на фиг. 21, и
управлении двигателями, оборудованными одним дросселем, т. е
гом случае, когда на дроссель одновременно действуют и сек
газа и автомат наддува, кинематическая цепь передачи от секте,
та к дросселю и от сервомотора к дросселю должна подбирать
с учетом характеристик самого автомата наддува.
При подборе системы управления дросселями однодроссес
пых двигателей, имеющих совместное управление дросселем
руки и от автомата, следует руководствоваться кинематическ
31
□аммой ручного управления, учитывая влияние на эту диа-
ДИаГ1МУ работы автомата наддува, т. к, данная диа1рамма зависит
-------------- cepBonoDiiiHH автомата наддува.
^положения
Фиг. 21. Рекомендуемая зависимость открытия дросселя от перемещения
сектора газа.
Изменение мощности в случае,
е< ли открытие дросселя прямо про-
порционально -перемещению сектора
газа.
• Изменение мощности в случа^
с.ти открытие дро< селя осущест-
вляется по зависимости I.
3'
1. Падение давления наддува в дрос-
селе, если открытие дросселя прямо
пропорционально перемещению сек-
тора газа.
2. Падение давления надд) ва в дрос-
селе, если открытие дросселя осу-
ществляется по зависимости I.
35
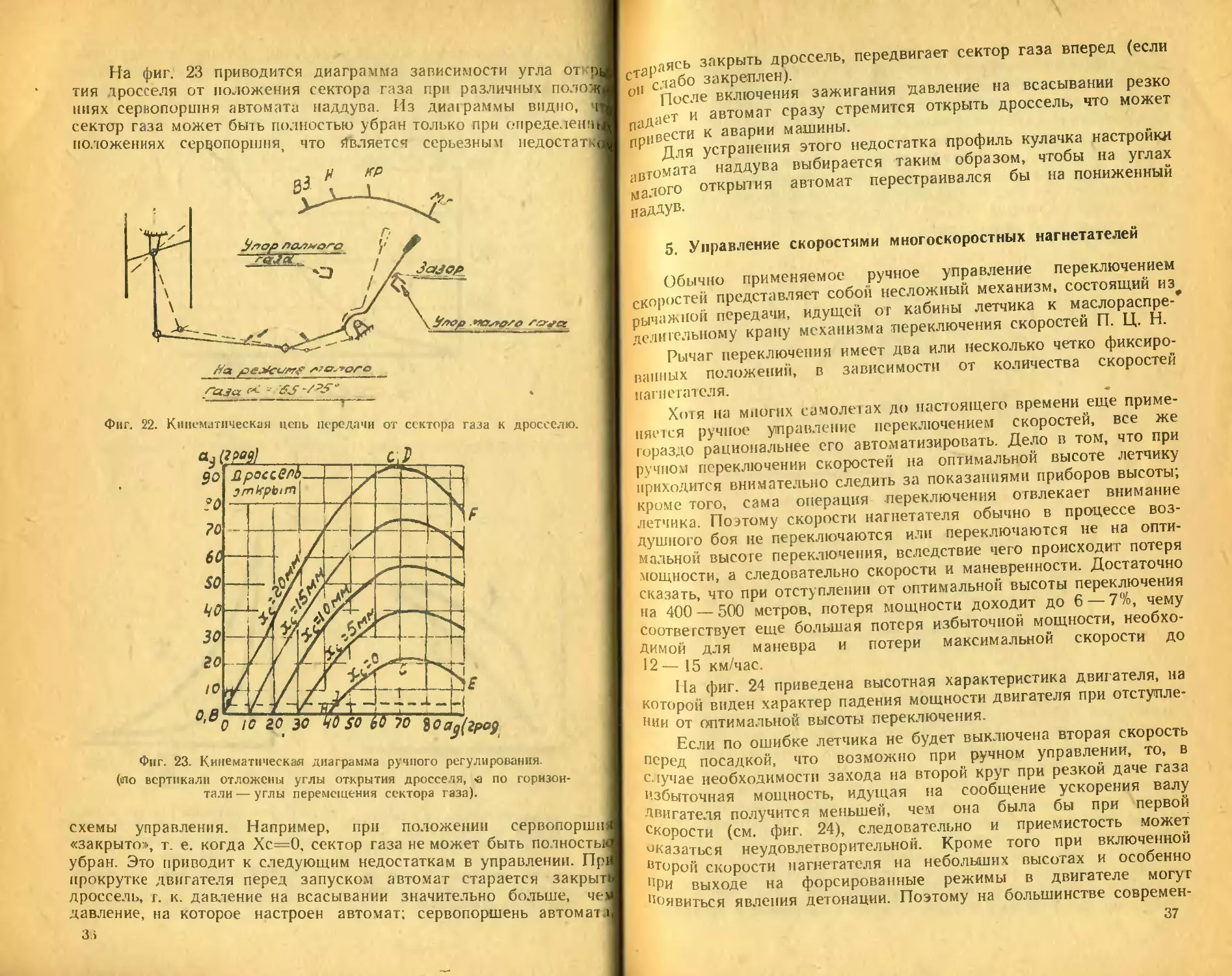
На фиг. 23 приводится диаграмма зависимости угла откй
тия дросселя от положения сектора газа при различных полой
ниях сервопоршня автомата наддува. Из диа!раммы видно, Ф
сектор газа может быть полностью убран только при определен!!
положениях серчопоршня, что Является серьезным недостатк
Фиг. 22. Кинематическая цепь передачи от сектора газа к дросселю.
Фиг. 23. Кинематическая диаграмма ручного регулирования.
(ото вертикали отложены углы открытия дросселя, « по горизон-
тали — углы перемещения сектора газа).
схемы управления. Например, при положении сервопоршн
«закрыто», т. е. когда Хс=0, сектор газа не может быть по-мосты
убран. Это приводит к следующим недостаткам в управлении. Пр!
прокрутке двигателя перед запуском автомат старается закрыт
дроссель, г. к. давление на всасывании значительно больше, че
давление, на которое настроен автомат; сервопоршень автомат.
3i
„аЯсь закрыть дроссель, передвигает сектор газа вперед (если
,с‘лабо закреплен).
0 После включения зажигания давление на всасывании резко
адает и автомат сразу стремится открыть дроссель, что может
привести к аварии машины.
Для устранения этого недостатка профиль кулачка настройки
чвгомата наддува выбирается таким образом, чтобы на углах
ма1°г0 открытия автомат перестраивался бы на пониженный
наддув-
s. Управление скоростями многоскоростных нагнетателей
Обычно применяемое ручное управление переключением
скоростей представляет собой несложный механизм, состоящий из
рычажной передачи, идущей от кабины летчика к маслораспре-
делигелыюму крану механизма переключения скоростей П. Ц. Н.
Рычаг переключения имеет два или несколько четко фиксиро-
ванных положений, в зависимости от количества скоростей
нагнетателя.
Хотя па многих самолетах до настоящего времени еще приме-
няйся ручное управление переключением скоростей, все же
гораздо рациональнее его автоматизировать. Дело в том, что при
ручном переключении скоростей на оптимальной высоте летчику
приходится внимательно следить за показаниями приборов высоты;
кроме того, сама операция переключения отвлекает внимание
летчика. Поэтому скорости нагнетателя обычно в процессе воз-
душного боя не переключаются или переключаются не на опти-
мальной высоте переключения, вследствие чего происходит потеря
мощности, а следовательно скорости и маневренности. Достаточно
сказать, что при отступлении от оптимальной высоты переключения
на 400 — 500 метров, потеря мощности доходит до 6 — 7%, чему
соответствует еще большая потеря избыточной мощности, необхо-
димой для маневра и потери максимальной скорости до
12 — 15 км/час.
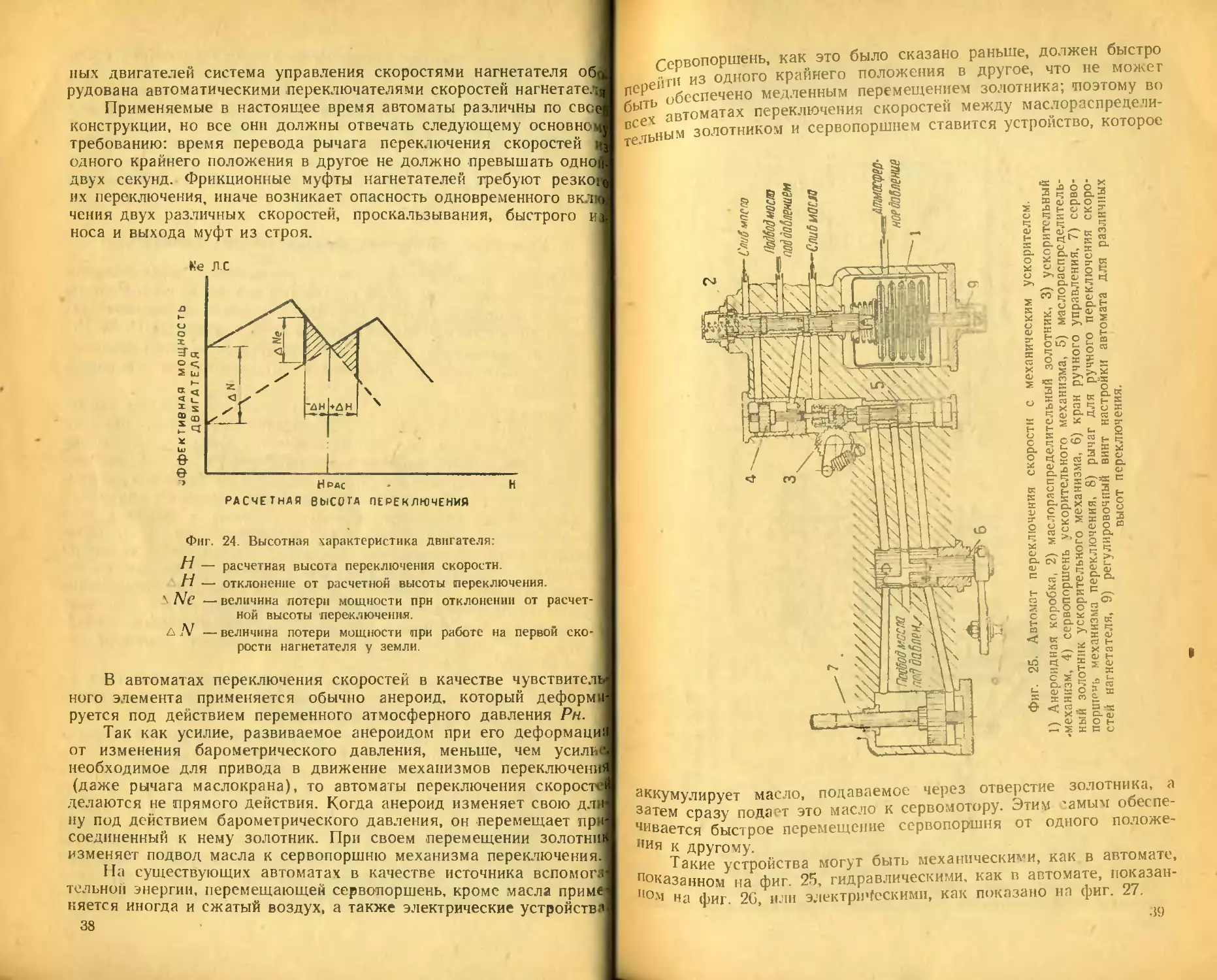
На фиг. 24 приведена высотная характеристика двигателя, на
которой виден характер падения мощности двигателя при отступле-
нии от оптимальной высоты переключения.
Если по ошибке летчика не будет выключена вторая скорость
псред посадкой, что возможно при ручном управлении, то, в
случае необходимости захода на второй круг при резкой даче газа
Избыточная мощность, идущая на сообщение ускорения валу
Двигателя получится меньшей, чем она была бы при первой
скорости (см. фиг. 24), следовательно и приемистость может
оказаться неудовлетворительной. Кроме того при включенной
второй скорости нагнетателя на небольших высотах и особенно
пРи выходе на форсированные режимы в двигателе могуг
появиться явления детонации. Поэтому на большинстве современ-
37
пых двигателей система управления скоростями нагнетателя об ,1
рудована автоматическими переключателями скоростей нагнетатедЯ
Применяемые в настоящее время автоматы различны по свсЛ
конструкции, но все они должны отвечать следующему основноЛ
требованию: время перевода рычага переключения скоростей Л
одного крайнего положения в другое не должно превышать ощоц.|
двух секунд. Фрикционные муфты нагнетателей требуют резкогЛ
их переключения, иначе возникает опасность одновременного вк.тЛ
чения двух различных скоростей, проскальзывания, быстрого ия
носа и выхода муфт из строя.
РАСЧЕТНАЯ ВЫСОТА ПЕРЕКЛЮЧЕНИЯ
Фиг. 24. Высотная характеристика двигателя:
Н — расчетная высота переключения скорости.
Н — отклонение от расчетной высоты переключения.
\ Ne — величина потери мощности при отклонении от расчет-
ной высоты переключения.
Д N — величина потери мощности при работе на первой ско-
рости нагнетателя у земли.
В автоматах переключения скоростей в качестве чувствитель-
ного элемента применяется обычно анероид, который деформи-
руется под действием переменного атмосферного давления Рн.
Так как усилие, развиваемое анероидом при его деформации
от изменения барометрического давления, меньше, чем усилив
необходимое для привода в движение механизмов переключенШ
(даже рычага маслокрана), то автоматы переключения скоросте!
делаются не прямого действия. Когда анероид изменяет свою для
ну под действием барометрического давления, он перемещает прй|
соединенный к нему золотник. При своем .перемещении золотнии
изменяет подвод масла к сервопоршню механизма переключения.]
Па существующих автоматах в качестве источника вспомог»
тельной энергии, перемещающей серволоршень, кроме масла приме
няется иногда и сжатый воздух, а также электрические устройств»
38
Сервопоршень, как это было сказано раньше, должен быстро
pneiirn из одного крайнего положения в другое, что не можег
5 1ть обеспечено медленным перемещением золотника; 'поэтому во
рСек автоматах переключения скоростей между маслораспредепи-
течьным золотником и сервопоршнем ставится устройство, которое
аккумулирует масло, подаваемое через отверстие золотника, а
затем сразу подает это масло к сервомотору. Этим 'амым обеспе-
чивается быстрое перемещение сервопоршня от одного положе-
,,ия к другому.
Такие устройства могут быть механическими, как в автомате,
доказанном на фиг. 25, гидравлическими, как в автомате, показан-
°м на фиг. 26, или электрическими, как показано на фиг. 27.
39
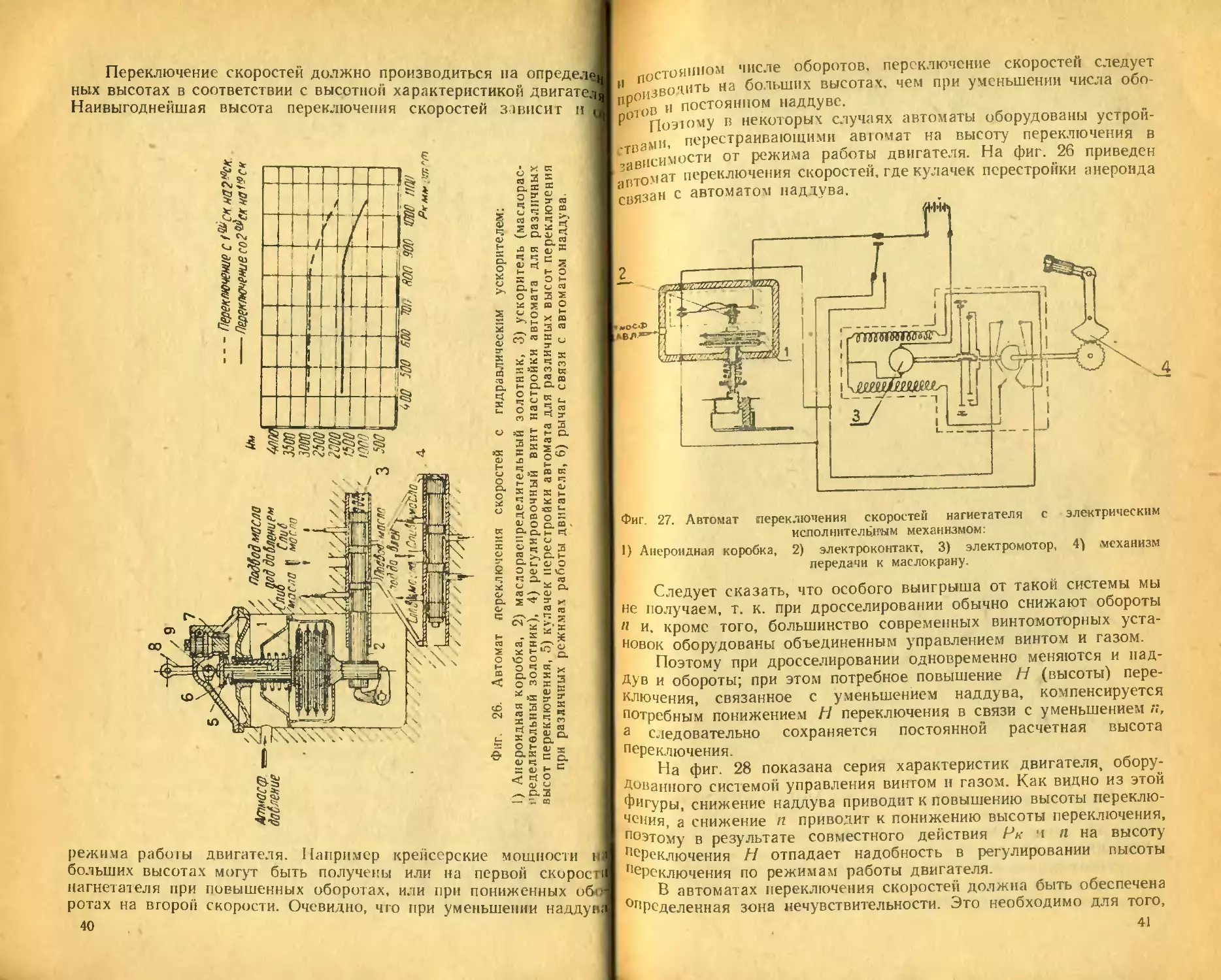
Переключение скоростей должно производиться на определи
ных высотах в соответствии с высотной характеристикой двигате.тч
Наивыгоднейшая высота переключения скоростей зависит и <
режима работы двигателя. Например крейсерские мощности
больших высотах могут быть получены или на первой скорое
нагнетателя при
ротах на второй
повышенных оборотах,
скорости. Очевидно, чг
или при
пониженных об>
о при уменьшении наддув
40
Стоя»ном числе оборотов, переключение скоростей следует
11 ' чвотчть на больших высотах, чем при уменьшении числа обо-
,1ртов И постоянном наддуве.
Р1' Поэтому в некоторых случаях автоматы оборудованы устрой-
вами, перестраивающими авюмат на высоту переключения в
Зависимости от режима работы двигателя. На фиг. 26 приведен
•Помат переключения скоростей, где кулачек перестройки анероида
связан с автоматом наддува.
Фиг. 27. Автомат переключения скоростей нагнетателя с электрическим
исполнительным механизмом:
1) Анероидная коробка, 2) электроконтакт, 3) электромотор, 4) механизм
передачи к маслокрану.
Следует сказать, что особого выигрыша от такой системы мы
не получаем, т. к. при дросселировании обычно снижают обороты
н и, кроме того, большинство современных винтомоторных уста-
новок оборудованы объединенным управлением винтом и газом.
Поэтому при дросселировании одновременно меняются и над-
ДУв и обороты; при этом потребное повышение Н (высоты) пере-
ключения, связанное с уменьшением наддува, компенсируется
потребным понижением Н переключения в связи с уменьшением а,
а следовательно сохраняется постоянной расчетная высота
переключения.
На фиг. 28 показана серия характеристик двигателя, обору-
дованного системой управления винтом и газом. Как видно из этой
Фигуры, снижение наддува приводит к повышению высоты переклю-
чения, а снижение п приводит к понижению высоты переключения,
поэтому в результате совместного действия Рк ч п на высоту
Переключения Н отпадает надобность в регулировании высоты
Переключения по режимам работы двигателя.
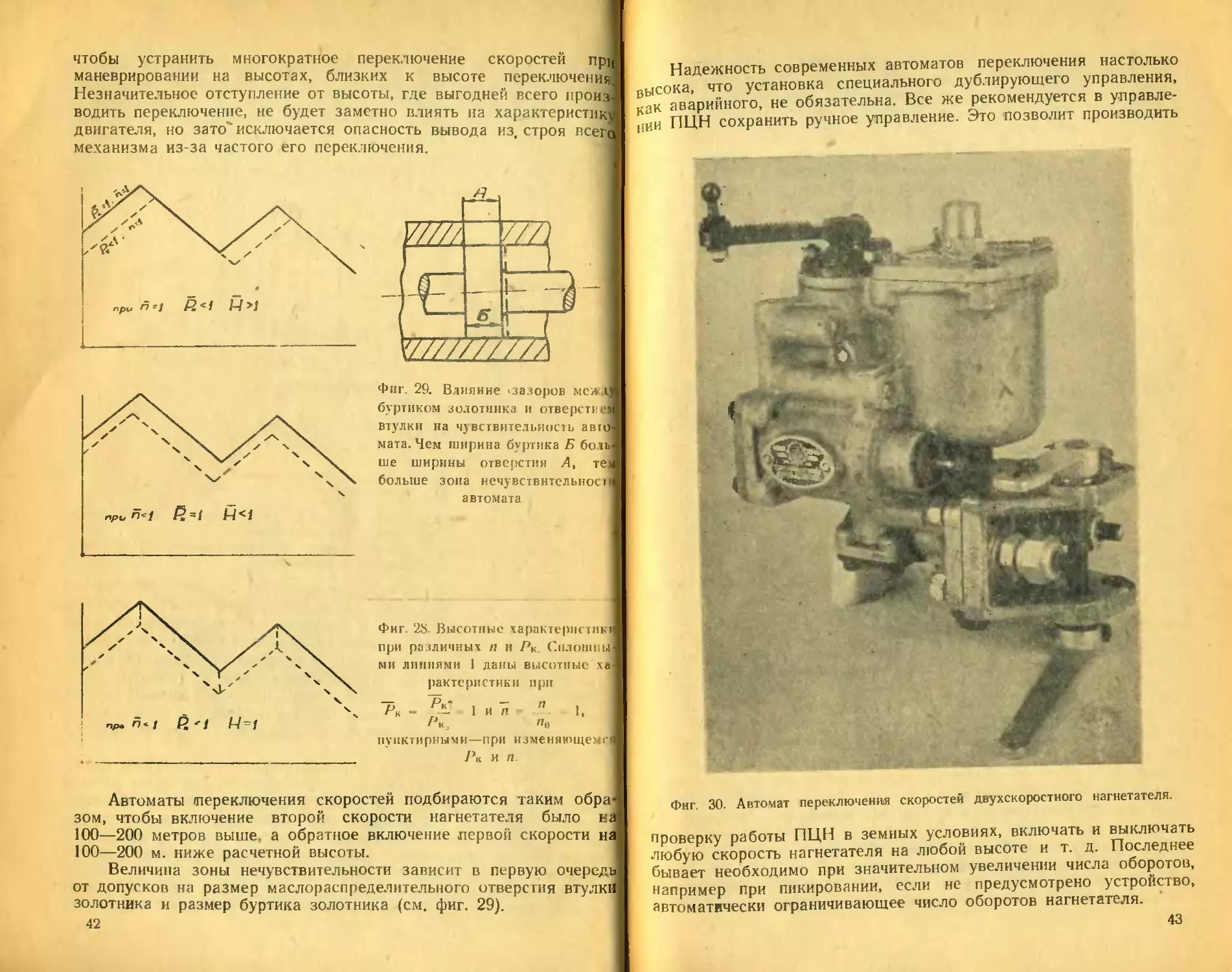
В автоматах переключения скоростей должна быть обеспечена
определенная зона нечувствительности. Это необходимо для того,
41
чтобы устранить многократное переключение скоростей
маневрировании на высотах, близких к
высоте переключения
Незначительное отступление от высоты, где выгодней всего произ
водить переключение, не будет заметно влиять на характеристик
двигателя, но зато исключается опасность вывода из, строя веет
механизма из-за частого его переключения.
Фиг. 29. Влияние ‘зазоров мса д
буртиком золотника и отверсти
мата. Чем
втулки на чувствительность авт
ширина
буртика
Б боль
ше ширины отверстия А, те,
больше зона нечувствительное!
автомата
ми линиями
Фиг. 28. Высотные характеристик
при различных п и /V
('.11.1011111
1 даны высотные
рактеристики при
1,
ха
пунктирными—при изменяющем г
/’к и п.
Автоматы /переключения скоростей подбираются таким обра
зом, чтобы включение второй скорости нагнетателя было н
100—200 метров выше, а обратное включение первой скорости на
100—200 м. ниже расчетной высоты.
Величина зоны нечувствительности зависит в первую очереди
от допусков на размер маслораспределительного отверстия втулю
золотника и размер буртика золотника (см. фиг. 29).
42
Надежность современных автоматов переключения настолько
высока, что установка специального дублирующего управления,
как аварийного, не обязательна. Все же рекомендуется в управле-
нии ПЦН сохранить ручное управление. Это позволит производить
Фиг. 30. Автомат переключения скоростей двухскоростиого нагнетателя.
проверку работы ПЦН в земных условиях, включать и выключать
любую скорость нагнетателя на любой высоте и т. д. Последнее
бывает необходимо при значительном увеличении числа оборотов,
например при пикировании, если не предусмотрено устройство,
автоматически ограничивающее число оборотов нагнетателя.
43
Хотя автомат может быть установлен как на самолете,
на самом двигателе, но желательно, чтобы он был установи
двигателе рядом с рычагом переключения
* г §
как на самолете, так ц
-лрн 1ц
скоростей нагнегате.1Ч
упрощает подвод масла к
I
. ..идоид масла к автомату, а также упрощает рыча Л
систему от автомата к рычагу переключения. При установив
мата на самолете, а не ня —
Эго
ную г___7 „,^Нч\.ичнения. при установку
автомата на самолете, а не на двигателе, необходимо, чтобы диа4
метр маслопроводов был не меньше 4x6 мм.; кроме того обяза-
тельно отепление трубопровода. \ 1
При монтаже рычагов or автомата к рычагу переключений
скоростей нагнетателя, ограничение хода рычага переключение
44
Lokho происходить на автомате, а не на двигателе. Автомат
Гр1Я<ен устанавливаться в таком месте, чтобы был свободный дос-
г п к нему и особенно к регулировочным устройствам, при по-
го1ди которых устанавливается высота срабатывания автомата;
Громе того автомат должен быть установлен так, чтобы он
Еатежно работал при различных вибрационных нагрузках и при
Еазличных положениях самолета. Желательно устанавливать
11Втомат в таком месте, чтобы он был в зоне небольших вибраций,
I как они увеличивают чувствительность автомата. Подвод и
L-jiiib масла лучше всего производить через полость крепления
Автомата к фланцу двигателя.
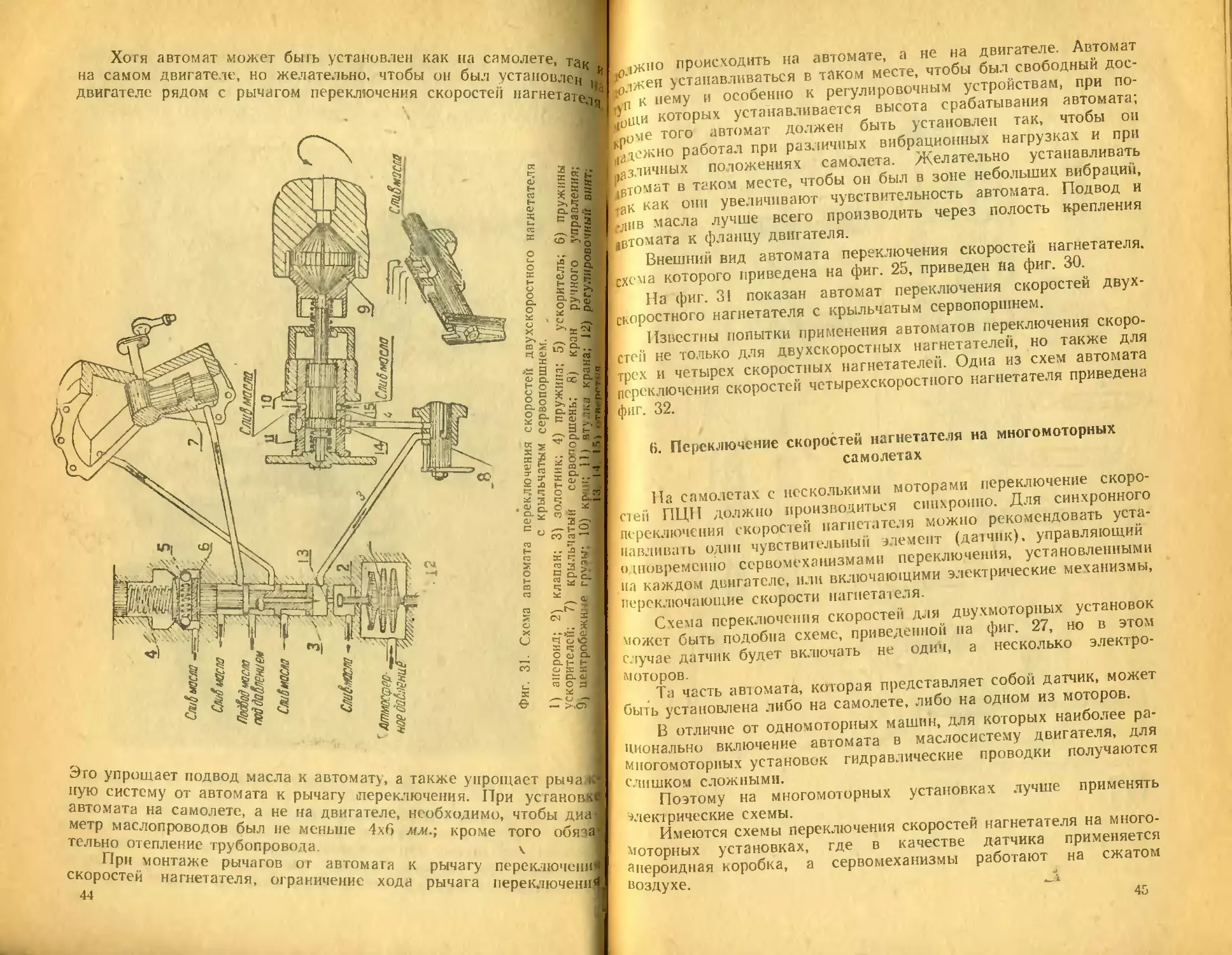
Внешний вид автомата переключения скоростей нагнетателя,
(схема которого приведена на фиг. 25, приведен на фиг. 30.
На фиг. 31 показан автомат переключения скоростей двух-
скоростного нагнетателя с крыльчатым сервопоршнем.
Известны попытки применения автоматов переключения скоро-
стей не только для двухскоростных нагнетателей, но также для
трех и четырех скоростных нагнетателей. Одна из схем автомата
переключения скоростей четырехскоростного нагнетателя приведена
фиг. 32.
6. Переключение скоростей нагнетателя на многомоторных
самолетах
Па самолетах с несколькими моторами переключение скоро-
стей ПЦИ должно производиться синхронно. Для синхронного
переключения скоростей нагнетателя можно рекомендовать уста-
навливать один чувствительный элемент (датчик), управляющий
о (повременно сервомеханизмами переключения, установленными
на каждом двигателе, или включающими электрические механизмы,
переключающие скорости нагнетателя.
Схема переключения скоростей для двухмоторных установок
может быть подобна схеме, приведенной на фиг. 27, но в этом
случае датчик будет включать не один, а несколько электро-
моторов.
Та часть автомата, которая представляет собой датчик, может
быть установлена либо на самолете, либо на одном из моторов.
В отличие от одномоторных машин, для которых наиболее ра-
ционально включение автомата в маслосистему двигателя, для
Многомоторных установок гидравлические проводки получаются
слишком сложными.
Поэтому на многомоторных установках лучше применять
электрические схемы.
Имеются схемы переключения скоростей нагнетателя на много-
моторных установках, где в качестве датчика применяется
анероидная коробка, а сервомеханизмы работают на сжатом
воздухе.
45
сбудем . ______________позвабпение»
АиГ~
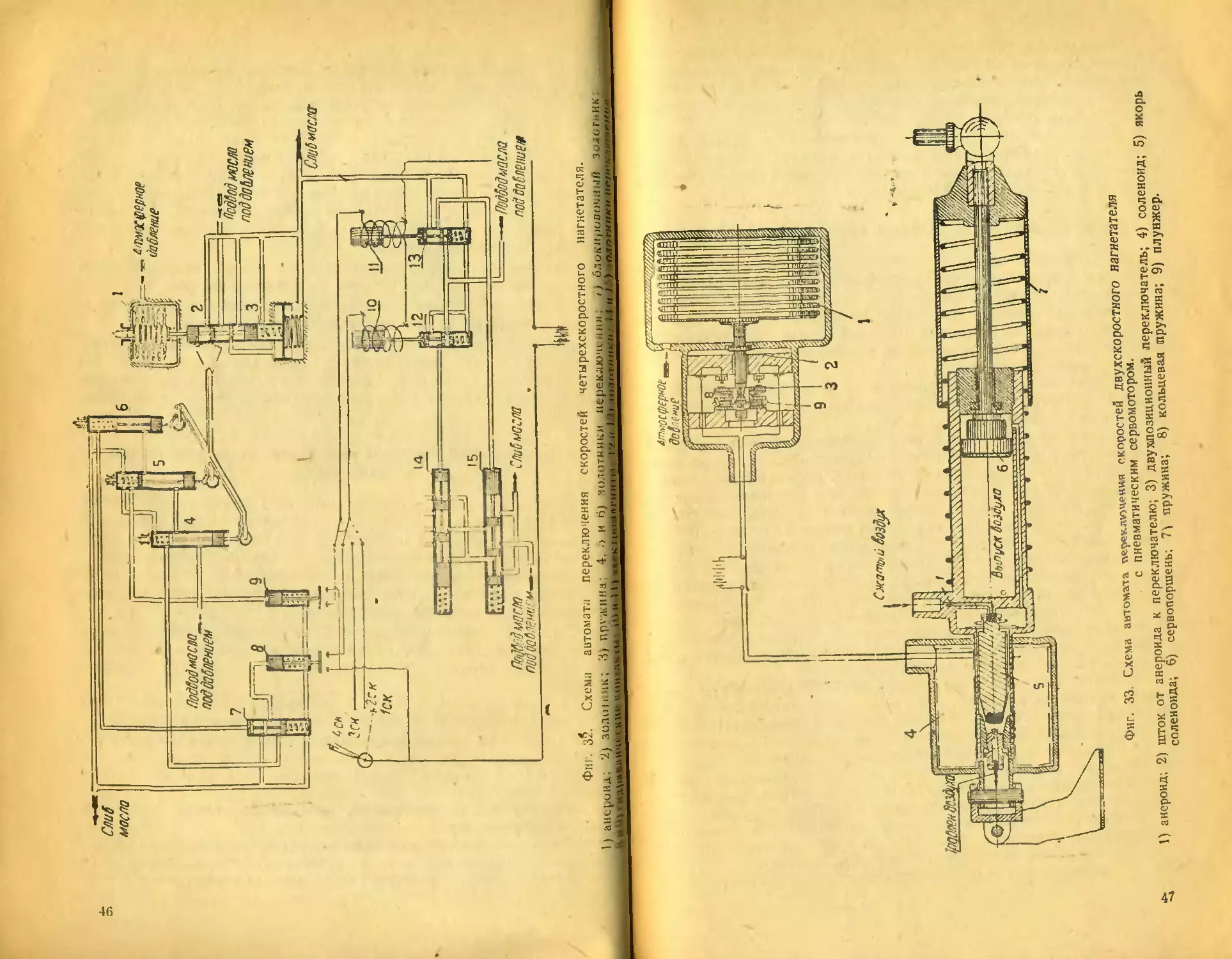
Фш. з5. Схема автомата переключения скоростей четырехскоростного нагнетателя.
1) анероид. '>-) золим ia, 3, пружина; 4, > и б) золотники переключения, /> блокировочный э^-огик
Фиг 33 Схема автомата м^млюцеикя скоростей двухскоростного нагнетателя
фиг. зз. схема пневматическим сервомотором.
Схема такого регулятора приведена на фиг. 33. Датчик в этОх
автомате построен на том же принципе, что и в электрическог
схеме (фиг. 27), но в' этом случае включается в работу не электри.
ческий, а пневматический сервомотор, сжатый воздух к котором}
подается через отверстие, открываемый соленоидом.
Так же как при применении гидравлических сервомоторов, i
этой схеме приходится делать воздухопроводы к сервомоторам
кроме того всегда надо иметь на самолете запас сжатого воздуха
что еще более усложняет систему.
7. Регулирование числа оборотов нагнетателя с гидромуфтой
Регулирование скорости нагнетателя осуществляется соответ
ствующим перепуском в турбомуфту масла, от количества которого
зависит число оборотов турбомуфты. Давление /-Ф подается в ка
меру анероида, изменяя его длину; анероид перемещает золотник
который, открывая и закрывая отверстие подвода или слива масла
к турбомуфте, изменяет количество подаваемого масла, а следова
телыю и число оборотов.
На фиг. 34 приведена одна из схем регулирования подач!
масла к турбомуфте. Следует сказать, что такие схемы обладаю!
большой нечувств’ительностыо.
На фиг. 35 приведены кривые изменения давления масла на
входе в турбомуфту в зависимости от разрежения в камере анеро-
ида, полученные при испытании автомата, работающего по выше-
приведенной схеме. Из кривых видно, что давление масла при
входе в турбомуфту резко увеличивается с 1800 метров прь
наборе высо1ы, а при снижении падает только начиная с 1000 мет
ров. Такая нечувствительность регулятора объясняется тем, чт<
золотник, выполняющий функцию крана, изменяющего расхол
масла согласно заданному закону, недостаточно уравновешен по;
действием на него усилия в процессе работы. Это получается
потому, что давление масла, подаваемого к золотнику, создае!
радиальное усилие, увеличивающее силы трения и прогиводей
ствие чувствительному элементу. Это усилие увеличивается с уве-
личением расхода масла и диаметра золотника.
Влияние этих усилий на работу автомата турбомуфты сказы-
вается значительно сильнее, чем в обычных автоматах наддува.
Это объясняется тем, что если регулирование производится по Рн (
то на анероидную коробку влияет только давление Pi,, и совершен
но не сказывается характер изменения регулируемого параметра]
когда же регулирование происходит по Ph , то инертность работ»!
автомата сказывается не только на регулируемый параметр, н •
сам этот параметр оказывает влияние на работу анероида.
Если- автомат срабатывает после некоторого запаздывания, ти
регулируемый параметр сразу же влияет на чувствительный
элемент, что увеличивает чувствительность автомата.
Это не имеет места, когда регулирование осуществляется по Рн
18
Иоликовскмй В- И. и Гальперин М. II.
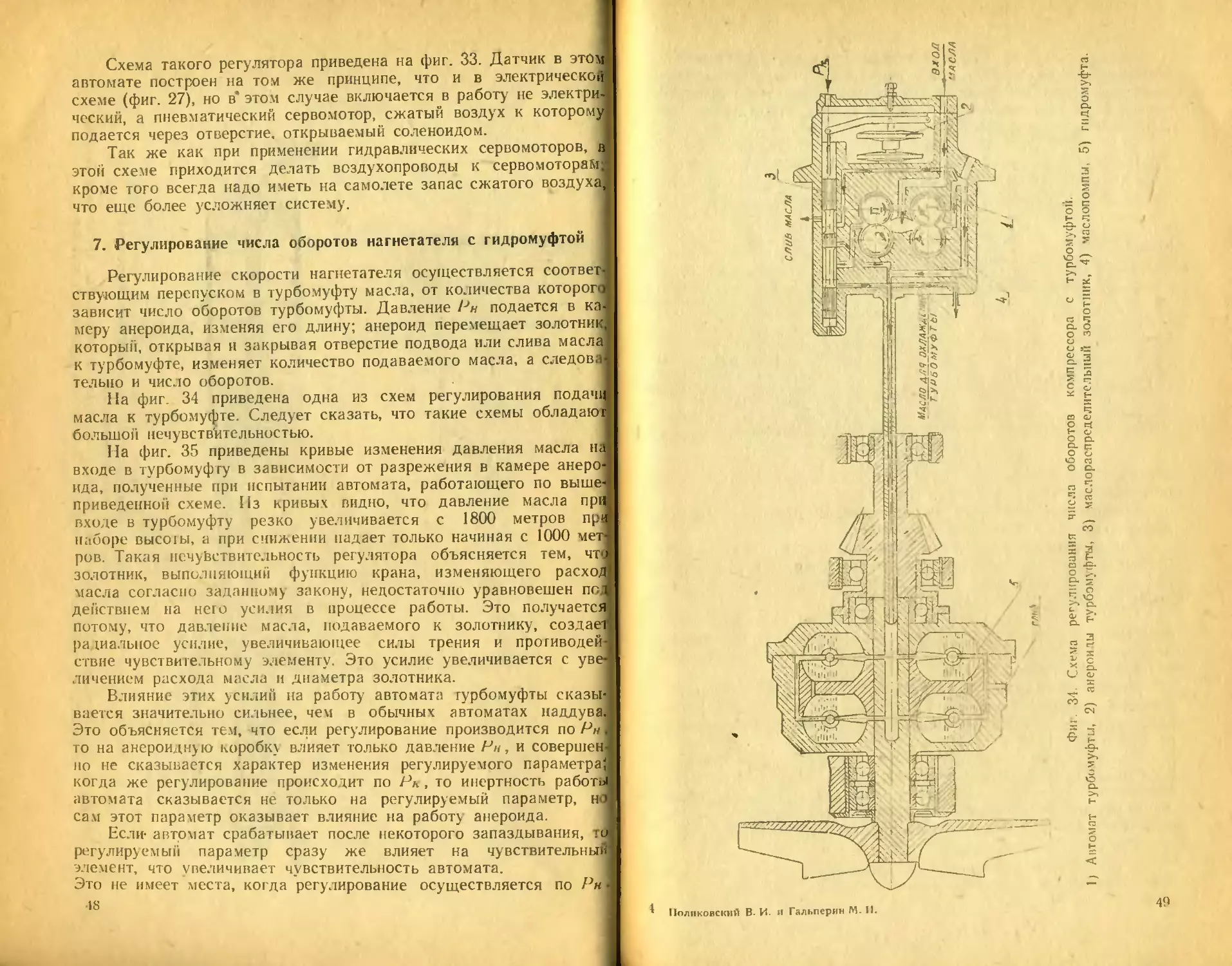
Фиг. 34. Схема регулирования числа оборотов компрессора с турбомуфтой.
lj Автомат турбомуфты, 2) анероиды турбомуфты, 3) маслораспределительный золотник, 4) маслопомпы, 5) гидромуфта.
1
49
Для улучшения работы распределительного устройства дела-
лось следующее: 1) уменьшался диаметр золотника, что создавало
меньшее радиальное усилие от давления масла; 2) изменялась
конструкция маслораопределительных втулок, чтобы подвод масла
был диаметрально двухсторонним.
Изменение давления масла вызывает изменение числа оборотов
ПЦН при изменении оборотов двигателя, что нежелательно.
Поэтому устанавливался редукционный клапан на линии подач!
масла в регулятор турбомуфты; этим самым поддерживалось
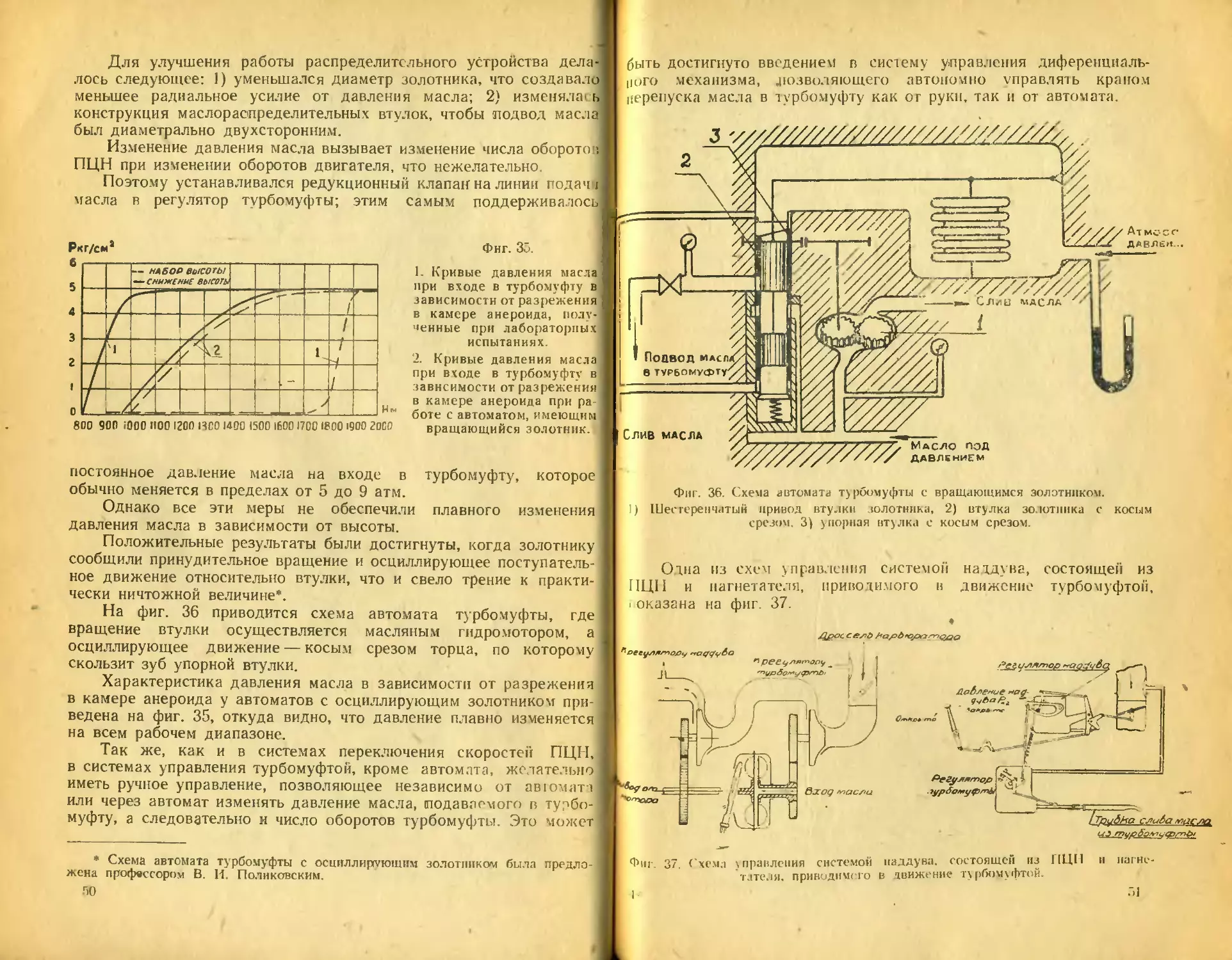
Фиг. 35.
1. Кривые давления масла
при входе в турбомуфту в
зависимости от разрежения
в камере анероида, полу-
ченные при лабораторных
испытаниях.
2. Кривые давления масла
при входе в турбомуфту в
зависимости от разрежения
в камере анероида при ра-
боте с автоматом, имеющим
вращающийся золотник.
постоянное давление масла на входе в турбомуфту, которое
обычно меняется в пределах от 5 до 9 атм.
Однако все эти меры не обеспечили плавного изменения
давления масла в зависимости от высоты.
Положительные результаты были достигнуты, когда золотнику
сообщили принудительное вращение и осциллирующее поступатель-
ное движение относительно втулки, что и свело трение к практи-
чески ничтожной величине*.
На фиг. 36 приводится схема автомата турбомуфты, где
вращение втулки осуществляется масляным гидромотором, а
осциллирующее движение — косым срезом торца, по которому
скользит зуб упорной втулки.
Характеристика давления масла в зависимости от разрежения
в камере анероида у автоматов с осциллирующим золотником при-
ведена на фиг. 35, откуда видно, что давление плавно изменяется
на всем рабочем диапазоне.
Так же, как и в системах переключения скоростей ПЦН,,
в системах управления турбомуфтой, кроме автомата, желательно
иметь ручное управление, позволяющее независимо от автомата!
или через автомат изменять давление масла, подаваемого в туэбо-
МУФТУ> а следовательно и число оборотов турбомуфты. Это может
* Схема автомата турбомуфты с осциллирующим золотником была предло-
жена профессором В. И. Поликовским.
быть достигнуто введением в систему управления диференцналь-
пого механизма, .дозволяющего автономно управлять краном
перепуска масла в турбомуфту как ог руки, так и от автомата.
Фиг. 36. Схема автомата турбомуфты с вращающимся золотником.
I) Шестеренчатый привод втулки юлотника, *2) втулка золотника с косым
срезом, 3) упорная втулка с косым срезом.
Одна из схем управления системой наддува, состоящей из
ПЦН и нагнетателя, приводимого в движение турбомуфтой,
оказана на фиг. 37.
Фиг. 37 Схема управления системой наддува, состоящей из ПЦН и нагне-
тателя. приводимого в движение ту рбомуфтой.
8. Управление турбокомпрессорами
В винтомоторных установках, где в системах наддува имеют
турбокомпрессоры, управление турбокомпрессором должно прог
Водиться согласованно с общей системой управления наддуве
Достижение необходимого давления наддува в системах с турб
к, Агрессорами регулируется перепуском выхлопных газов помш
турбины и соответственно изменением числа оборотов турб
компрессора; при этом, однако, сохраняется и дросселирован
воздуха на входе в нагнетатель.
Изменение числа оборотов турбокомпрессоров достигает
менением числа оборотов турбины. Последнее осуществляем
посредством отвода части выхлопных газов в атмосферу, для ча
в сети выхлопных газов до турбины устанавливается специалыл
перепускной дроссель.
Система управления должна отвечать следующим основан
(ребоваииям: 1) Чтобы потери на дросселирование и чи до < боа
тов турбокомпрессора были бы минимальными, для того, что]
। с а> п и 1ть большую часть энергии выхлопа для прямой реакцц
2) Кроме того, система управления должна быть так подо
р чтобы обеспечить хорошую приемистость двигателя. Э
южтг быть достигнуто, как было указано раньше, только при зи
। н-льн м перепаде давления на дросселе на режимах мала
га и и <енвнин наддува именно этим дросселем, а не одна
го [ь..о изменением числа оборотов турбокомпрессора.
Для достижения основных первого и второго условий cii
.......рдвленпя може; С 1ть подобрана таким образом, чтобы 1
п аш фор ажа др< г, ель газа б । i полностью открыт от земл
В ‘ дроссель перепу-ка газа Т. К. (турбокомпрессор!
npi :рьн зться то " с земли. Мюжно также подобрать с i
’......(| ’я ••. чтобы дроссель газа постепенно открыва й
ПЦН, а дроссель перепуска газа Т. К. б|
до irteTiioH высоты ПЦН и начинал бы пост
на т раечт тной высоте, увеличивая оборе i
ра и тим । амым поддерживая постоянное давлеш
I P I 1СОГЫ Т. К.
И । •, второй вариант управления обеспечивают в случ;
тмостн хорошую приемистость и почти равноценна
!О' ЛЧНОСТЬ.
Ei I трос 1ь газа открыт полностью, начиная с земли, (т.
>"v’M । выбрг по первому варианту), то очевидно потери на дро*
iBpi ^anr - отсутствуют. На земле приемистость получается |
дчи г;. , а в полете приемистость может понадобиться, ес!
п; 13 ится на режиме малого газа. В последнем случ!
гь г<133 прикрыт и приемистость получается за счет Н
'Ь. ГИЯ
Если выбирается схема по второму варианту, то имеЮ1<
' ткоюрые потери в дросселе ПЦН, но зато имеется и некотор^
iKO
-рыт в .получении тяги за счет прямой реакции выхлопа, так
J"1К троссель перепуска газа Т. К. более открыт, чем это имеет
ю при работе " первому варианту.
Следует сказать, что во втором случае система управления
несколько более усложнена, т. к. требуется отдельный автомат
। |я хправления дросселем газа в зависимости от высоты полет;.
Регулирование дросселя перепуска газа Т. К. может осу-
,и сгвлятьея по дщиению наддува перед нагнетателем, по давле-
। да на вых топе т д.
Гел регулирование производится по давлению на выхлопе,
1,, коммуникация от параметра, по которому производится регули-
1ие. к 4\iiCTi in пятому «лемешу • ачительно короч•, ч^м ес ш
црованйе пр тодится по ’явлению наддува Практически
, iKu, в большинстве случаев рогу; лрование осуществляется
: 11В тению за Т. К . т. к. регулирование по давлению на выхлопе
vc усложпетшой аппаратуры для регулирования.
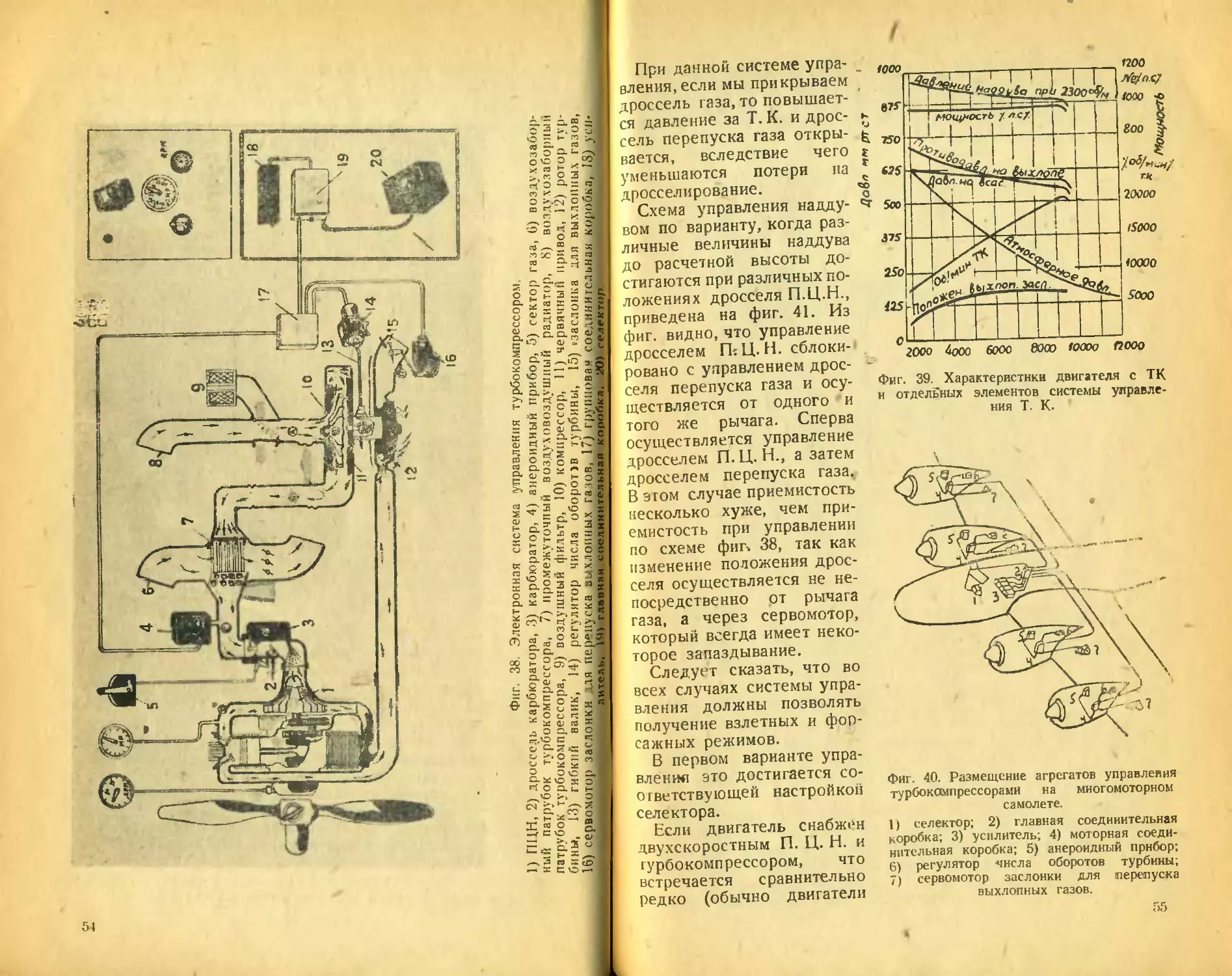
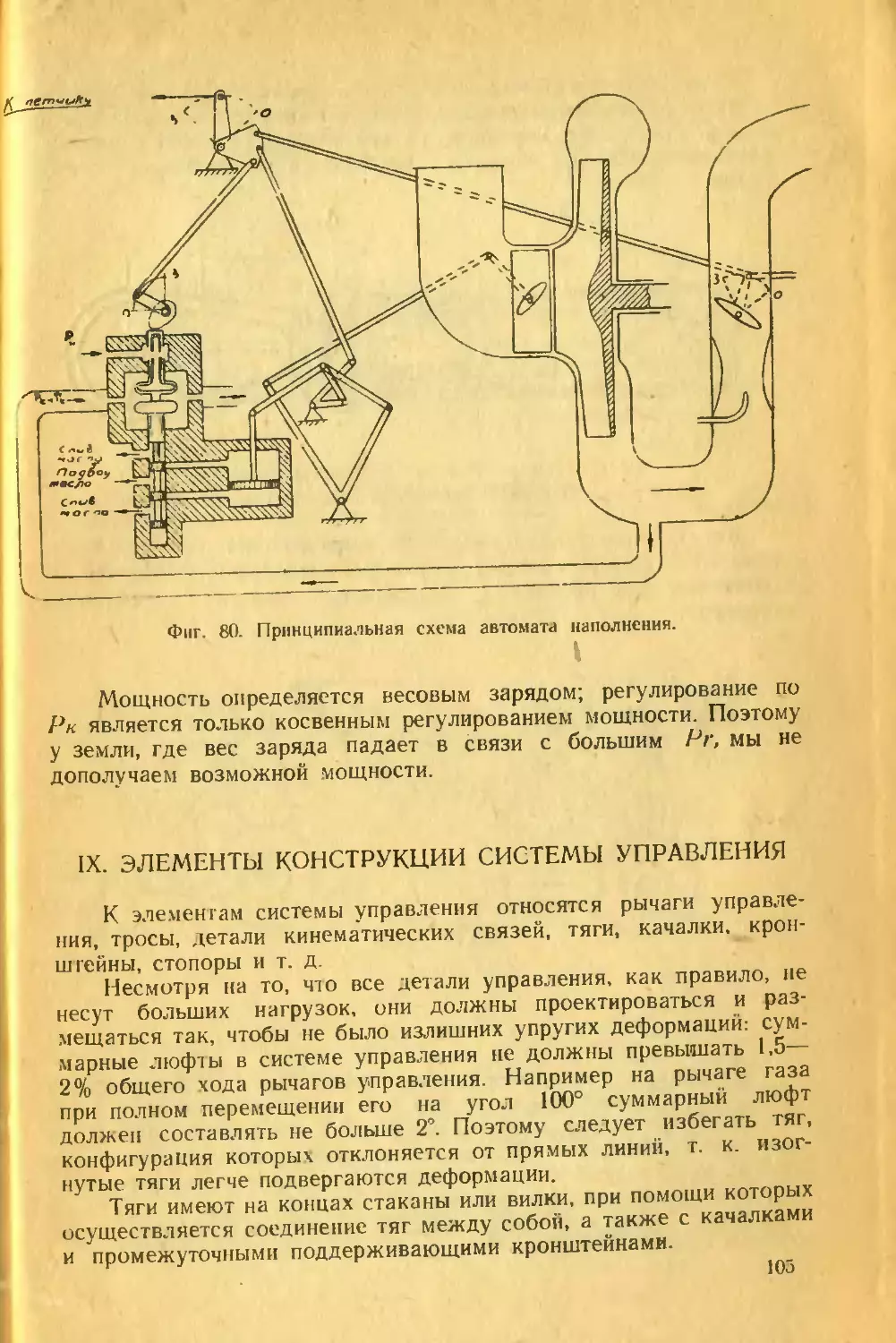
Одна из схем управления двигателей с турбокомпрессора тн
дена на фиг. 38. В этой схеме регулирование дросселя Т. К.
лщес1вляетса по давлению наддува за турбокомпрессором
ред П. Ц. II.,1.
Давление то нагнетателя передастся анероидной коробке 4
потенциометрическим датчиком. Анероиды, изменяя свою (лину
। т действием переменного давления, перемещают движок
'кненциоМегра.
Импульс от потенциометра передается через групповую короб-
17 к электрическому сервомотору 16, который собственно и
in мацает дроссель Т. К. На электро-сервомоторе имеется так - .
генцио.мстр обратной связи. Настройка анероидной коробки для
1 улирования заданного давления наддува, т. е. того давления,
трое поддерживается соответствующим перекрытием дросселя
К., ос и- сгвляется на данной схеме при помощи селектора 20,
оящего из нескольких потенциометров, через ламповый трех-
ст тдный усилитель. Между селектором и усилителем устанавли-
тся соединитель-,ая коробка.
В системе управления имеется также регулятор числа обо-
ротов турбины 11, цель которого — предохранять турбину от рас-
' рутки. Этот регхлятор центробежного типа соединен с валом
турбины при помощи гибкого вала. Когда обороты турбины превь
'ют доп^с ую величину, под действием центробежной части
регулятора (грузиков) перемещается движок шотенциометра,
который перед? - соответствующий импульс на эдектрпческий
рвот гор, прикрывающий дроссель Т. К.
X фактернстики, иллюстрирующие поведение параметров дви-
г< V. и отельных элементов системы приведены на фиг. 39.
Приведенная на фиг. 38схема регулирования наддува применена
(я много моторной установки. Размещение отдельных агрегатов
1 -истемы управления на такой установке приведено на фиг. 40.
54
При данной системе упра-
вления, если мы прикрываем
дроссель газа, то повышает-
ся давление за Т. К. и дрос-
сель перепуска газа откры-
вается, вследствие чего
уменьшаются потери па
дросселирование.
Схема управления надду-
вом по варианту, когда раз-
личные величины наддува
до расчетной высоты до-
стигаются при различных по-
ложениях дросселя П.Ц.Н.,
приведена на фиг. 41. Из
фиг. видно, что управление
дросселем Гк Ц. Н. сблоки-
ровано с управлением дрос-
селя перепуска газа и осу-
ществляется от одного и
того же рычага. Сперва
осуществляется управление
дросселем П. Ц. Н., а затем
дросселем перепуска газа.
В этом случае приемистость
несколько хуже, чем при-
емистость при управлении
по схеме фиг-. 38, так как
изменение положения дрос-
селя осуществляется не не-
посредственно от рычага
газа, а через сервомотор,
который всегда имеет неко-
торое запаздывание.
Следует сказать, что во
всех случаях системы упра-
вления должны позволять
получение взлетных и фор-
сажных режимов.
В первом варианте упра-
вления это достигается со-
ответствующей настройкой
селектора.
Если двигатель снабжен
двухскоростным П. Ц. Н. и
турбокомпрессором, что
встречается сравнительно
редко (обычно двигатели
Фиг. 39. Характеристики двигателя с ТК
и отдельных элементов системы управле-
ния Т. К.
Фиг. 40. Размещение агрегатов управления
турбокомпрессорами на многомоторном
самолете.
1) селектор; 2) главная соединительная
коробка; 3) усилитель; 4) моторная соеди-
нительная коробка; 5) анероидный прибор;
6) регулятор числа оборотов турбины;
7) сервомотор заслонки для перепуска
выхлопных газов.
55
с Г. К. имеют односкэростноi П. Ц. Н 1, то также как и
двигателях с отпоскоростным П Ц П.
дроссель перепуска
газа
Т. К. может прикрываться с земли или с расчетной высоты
скорости П. Ц. Н. При этом достигается значительно
первой
высотная характеристика.
лучшая
Фиг. 41. Система управления турбокомпрессором.
Эта система состоит нз анероидной коробки, к которой подается
давление наддува Рк; маслораспределителыюго золотника двух
сервомоторов; дросселя ПЦН и дросселя перепуска выхлопных
газов; регулятора числа оборотов турбокомпрессора, ограничиваю-
щего предельные числа оборотов Т. К.; отдельного маслораспреде-
лительного золотника регулятора числа оборотов Т. К.
9. Основные требования к системам управления наддувом
В системах управления наддувом с одним дросселем кинема-
тика передачи от автомата наддува к дросселю и от рычага газа
к дросселю должна быть подобрана таким образом, чтобы дрос-
сель мог доходить до своих упоров при любом положении серво-
поршня.
Кроме того, когда дроссель стоит на упоре малого газа, а
поршень автомата находится в крайнем положении «открыто»,
(смотри фиг. 42 а), между рычагом газа и упором малого газа па
секторе должен оставаться зазор, достаточный для выбирания всех
люфтов в системе управления.
Это значит, что при уборке газа остановка механизма должна
56
быть на упорах дросселя газа и сервопоршня, а не рычага газа
или управления, иначе не будет достигнут режим малого газа.
Дроссель на упоре малого газа не закрывается полностью.
Остановка двигателя производится выключением зажигания, а на
двигателях с II. В. (насосами непосредственного впрыска) и
выключением стоп-крана.
Если поршень автомата находится на упоре «открыто», что
соответствует отсутствию запаса то Рк, то при положении рычага
газа на номинале (но не позже), дроссель должен открываться
полностью, смотри фиг. 42 б. Это необходимо для того, чтобы
на номинальной расчетной высоте получить номинальный нужный
наддув, а выше полностью использовать нагнетатель.
57
При правильно подобранной и смонтированной кинематике
управления наддувом характеристики мощности, наддува и огкры
тия дросселя должны быть такими, как это показано на фиг. 4,'
сплошными линиями.
Предположим, что кинематика подобрана неправильно, гакт \1
образом, что дроссель открыт полностью при положении рычага
газа не на «номинал», а на «взлет», (см. фиг. 42 в), при положении
поршня па «открыто». При таком положении поршня уборка
рычага газа до номинала обязательно вызовет некоторое прикры
тие дросселя, т. е. дополнительные потеря в системе, а следовсе
гельно потери в высотности двигателя.
58
Чтобы повысить наддув на расчетной высоте (при которой
поршень стоит в крайнем потожении «открыто»), до номинального
значения, надо передвинуть рычаг газа из положения «номинал»
до положения «взлет», что нежелательно, ибо при снижении
самолета вызовет передув двигателя, если летчик забудет убрать
обратно сектор газа. Кроме того, в случае применения объединен-
ного управления винтом и газом это вызовет рассогласование
между оборотами и наддувом; двигатель будет работать на номи-
нальном наддуве и взлетных оборотах.
Кинематика должна быть так подобрана, чтобы при положе-
нии рычага газа на «взлет» или «номинал» на земле, оставался
достаточный запас хода сервопоршня на закрытие (см. фиг. 42 в и г).
Фиг 43. Характеристики мощности, давления, наддува и открытие дросселя
при кинематике, подобранной правильно и неправильно.
У некоторых двигателей нельзя задавать форсажный режим
при работе двигателя на второй скорости П. Ц. Н., в частности из-
за опасности детонации. Система управления скоростями нагие-
гателя у таких двигателей должна быть сблокирована с системой
управления форсажных режимов с тем. чтобы форсажный режим
не мог быть получен при включении второй скорости нагнетателя.
Система управления наддувом двигателей, оборудованных
турбокомпрессорами, должна обеспечить согласованное управле-
ние дросселями газа и числом оборотов турбокомпрессора: В дву.х-
дроссельных машинах или в двигателях, оборудованных лопатками
Поликовского, желательно устанавливать автоматы всережимной
настройки д 1я управления дросселями или лопатками Поликов-
ского, установленными на входе в нагнетатель.
Кроме этого, к системе управления предъявляется ря т
эксплоатационных и конструктивных требований, а именно: управ-
39
ление дросселем осуществляется из кабины летчика; рычаг управ-
ления, спроектированный на специальном кронштейне, должен
заметно выделяться из всех рычагов управления, так как он
является одним из основных рычагов, которым летчику приходится
все время манипулировать; в одном № ных кабинах рычаг управ-
ления газом устанавливается на левом борту кабины. Рычаги уп-
равления дросселями на многомоторных самолетах должны
находиться рядом и в одинаковом положении для одного и того
же открытия дросселя на всех двигателях. Рычаги управления
должны быть расположены так, чтобы пилот при подьзовании ими
не менял своего положения. Кинематика от рычагов управления
фосселями (от сектора газа) должна быть так подобрана, чтобы
при движении рычага от себя дроссель открывался. Управление
дросселем как на открытие, так и на закрытие, должно произво-
диться принудительно. Иногда применяется установка пружин в
системе управления дросселем, но только для открытия дросселя
двигателя в случае порчи управления.
Разрешается также установка пружины для компенсации
усилия на части хода рычага дросселя.
Кинематика системы управления должна быть такой, чтобы
основная часть хода рычага управления использовалась для регу-
лировки режима работы двигателя в диапазоне крейсерской
мощности. Это нужно для того, чтобы нс было слишком большой
чувствительности в управлении, при которой незначительное пере-
мещение сектора т аза резко меняло бы режим работы двигателя,
что нарушило бы нормальный полет в группе самолетов.
Фактическая зависимость Рк от угла открытия дросселя
показана на ранее приведенной характеристике (фиг. 21), откчда
видно, что большие изменения наддува при одинаковом изменении
угла получаются при тйалых открытиях дросселя, а малые измене-
ния наддува — при больших открытиях.
Это противоречит потребной зависимости Рк от угла хода сек-
тора газа, где требуется обратное — малые изменения Рк по
углу хода сектора газа в начале хода сектора газа и большие
изменения Рк в конце хода сектора, как это показано на фиг. 21.
При выполнении кинематической связи углов поворота сектора
газа и дросселя так, как это показано на фиг. 22, максималь-
ное усилие необходимое в соответствии с фиг. 19 дтя управления
сектором газа, получается значительно меньшим, т. к. большим
углам перемещения сектора газа соответствуют малые изменения
угла открытия дросселя, а сл довательно по.туч гея 1рч иное
передаточное число, уменьшаю : усилие . op'* i . i. У ’сли-
чение пер, „точного числа мс ' лом ?pt пи сектора
газа и yr io 1 открытия дрог ( п на i : • iр.:кв - режм ттх
является существенным пото? что га талых уг "х открытия
гросееля па о нс! bv< г наибольший аэро динамил .ш момент,
а следоале ’..то необходимо и наибольшее усилие тля поворота
дросселя.
GO
10. Измерение давления наддува
Измерение давления наддува производится при помощи при-
бора, называемого манозакууметрЬм. Этот прибор измеряет абсо-
лютное давлен ie наддува, поэтому его устройство подобно устрой-
ству барометра. Его название объясняется тем, что на некоторых
режимах пониженной мощности давление наддува ниже атмосфер-
ного, т. е. создается некоторый вакуум. Давление наддува подается
в герметически закрытую коробку, внутри которой помещен ане-
роид, из которого выкачан воздух.
Мановакуу метр, как основной прибор, по которому про-
веряется работа силовой установки, должен быть смонтирован на
центральном месте приборной доски прямо перед глазами летчика.
V. РЕГУЛИРОВАНИЕ СОСТАВА СМЕСИ
В зависимости от режима и условий полета следует регули-
ро 1ть состав смеси:
1) Тля получения минимальных допустимых расходов топлива,
например на крейсерских режимах и вообще в диапазоне средних
мощностей, когда стремятся предельно забеднять смесь, и для
сохранения рациональных значений коэфициента избытка воздуха
с увеличепи' > высоты полета.
2) На режимах форсажа и на взлетных режимах, которые дос-
тигаются повышением наддува, желательно увеличить количество
подаваемого топлива.
Кроме лого, богатую смесь рекомендуется иметь на режимах
малого газа и при запуске двигателя.
Регх. ирование состава смеси в карбюраторных двигателях
осхществлчстся высотными корректорами, действие которых осно-
вано на из 'нении давления воздуха над уровнем топлива в
топливной кг мере, вследствие чего изменяется истечение топлива
из жиклеро" В двигателях с насосами непосредственного впрыска
автоматы состава смеси перестраивают насос на изменение коли-
чества подаваемого топлива.
Высотные корректоры могут быть выполнены ввиде автомати-
ческих устройств, в которых управление жиклером осуществляется
анероидом, изменение длины которого происходит под действием
ашосферного давления. Этим самым достигается изменение рас-
хода топлива' в зависимости от высоты полета. Для форсажных
режимов перестройка автомата производится одновременно с
перестройкой давления наддува.
Автоматический высотный корректор должен иметь также
ручное управление, которое может служить одновременно и стоп-
краном. Следует сказать, что даже при установке автоматического
корректора не устраняется необходимость в ручной корректировке,
гак как при сильном забеднении смеси очень трудно достигнуть
61
хорошей приемистости двигателя. Поэтому, если полет осуще-
ствляется в таких условиях, что может возникнуть необходимость
в быстром переходе на номинальный или форсированный режим, то
нельзя сильно забеднять смесь: в то же время длительные полеты
на богатой крейсерской смети невыгодны. Для удовлетворения
обоих, отмеченных выше противоречивых требований в топливной
системе устанавливаются специальные механизмы, позволяющие
получать по желанию пилота крейсерскою богатую и крейсерскую
бедную смесь. Для осуществления этих двух режимов, даже при
автоматическом высотном корректоре, и предусматривается ручное
управление.
Для синхронной работы высотного корректора с системой
наддува, управление высотным корректором блокируется с автома-
том наддува. Например на двухдроссельных машинах, где номи-
нальный и взлетный режим достигается одним и тем же откры-
тием дросселя мощности, повышение наддува осуществляется
дополнительным открытием дросселя, для чего необходимо пере-
строить автомат наддува, управляющий дросселем на входе и
нагнетатель. При этом одновременно высотный корректор настраи-
вается на увеличение количества подаваемого топлива.
Если на двигателе установлен автоматический высотный кор-
ректор, то ручное управление этим корректором блокируется с
системой наддува и таким же образом, как и раньше, достигается
обогащение на режимах большой мощности.
VI. УПРАВЛЕНИЕ ВИНТОМ
1 Общие сведения о системах управления ВИШ
Одним из основных параметров, характеризующих работу
двигателя, являются его обороты.
В современных мощных винтомоторных установках применя-
ются исключительно винты изменяемого шага, у которых задан-
ные обороты поддерживаются автоматически регуляторам^ числа
оборотов, независимо от режима и условий полета. Но поддержа-
ние постоянных оборотов на всех режимах полета и режимах ра-
боты двигателя нерационально, так как для каждого режима
существуют свои наивыгоднейшие обороты. Например, номиналь-
ные обороты следует задавать только на режимах номинальной
мощности и на взлете; на некоторых двигателях разрешается
даже повышение оборотов выше номинальных для получения
взлетной и форсированной боевой мощности.
Для крейсерских режимов невыгодно, чтобы двигатель рабо-
тал на номинальных оборотах, т. к. при этом получается излишний
расход топлива и уменьшение моторесурса двигателя.
62
Поэтому, а также и в связи с применением реверсивных вин-
тов и винтов, позволяющих устанвливать лопасти во флюгерное
положение, приходится перестраивать регулятор числа оборотов на
поддержание постоянных, но различных оборотов в зависимости
от режима работы двигателя, а также устанавливать лопасти в
реверсное или во флюгерное положение.
Фиг. 44. Гидравлический винт двухсторонней схемы. Неподвижный цилиндр и
подвижный поршень.
1) неподвижный цилиндр, 2) подвижный поршень, 3 и 4) каналы подвода и
слива масла. 5) поводок 6) шатун, 7) палец.
Для перестройки регулятора на поддержание различных обо-
ротов двигателя применяется отдельная система управления регу-
лятором числа оборотов, и кроме того отдельные системы для
Установки винтов во флюгерное и реверсное положение.
Применяемые для поддержания постоянных оборотов регуля-
торы зависят от системы управления винтом и конструкции меха-
низмов, управляющих винтом.
Для управления винтом применяются: гидравлические схемы,
электромеханические, электрические и электрогидравлические.
Наиболее широкое применение получили гидравлические схе-
мы, где поворот лопастей винтов осуществляется сервомоторами,
Перемещаемыми маслом. Существует несколько типов гидравли-
ческих схем управления лопастями.
63
1. Двухсторонняя схема.
В этой схеме лопасти поворачиваются на малый и большой
шаг сервомотором втулки винта. Схема такой втулки показана hj,
фиг. 44. Эти схемы выполняются в двух вариантах конструкции: с
неподвижным цилиндром и подвижным поршнем, как показано н|
этой фигуре, и наоборот.
2. Обратная схема.
В этой схеме используется центробежный момент, возникаю-
щий на лопастях, для установки лопасти на малый шаг.
Фиг. 45. Гидравлический ринт обратной схемы.
а) Масло поступает в полость цилиндра Л и перемещает поршень, который
поворачивает лопасти на большой шаг, б) центробежные силы поворачивают
лопасть на малый шаг, поршень двигается вправо и выжимает масло и
полости А.
Установка же лопасти на большой шаг осуществляется серво-
мотором втулки винта (смотри фиг. 45).
3. Прямая схема.
В этом случае при помощи центробежных сил специальны1!
противовесов, смонтированных на лопастях винта, винт устанавли-
вается на большой шаг. Установка на малый шаг (производится
при помощи сервомотора под действием давления масла (сМ-
фиг. 46).
Если в маслосисгеме управления винтом по каким нибу Щ
причинам начинает падать давление масла, то в винтах обратной
64
схемы лопает поворачиваются па облегчение винта и возникает
опасность раскрутки двигателя. В вишах прямой схемы происходит
обратное явление, т. е. лопасти идут на затяжеление и обороты
будут падать.
В перечисленных схемах регулирование осуществляется, как
правило, центробежным маятниковым регулятором. Разрез такого
регулятора приведен на фиг. 47. Муфта с центробежными грузами
приводится во вращение от специального привода двигателя.
Фиг. 46. Гидравлический винт прямой схемы.
|) под давлением поступающего масла подвижный цилиндр двигается вправо и
поворачивает лопасть на малый шаг, б) противовес под действием центробеж-
ной силы поворачивает лопасть на большой шаг; цилиндр двигается влево н
выжимает масло из своей 'полости.
Усилия, развиваемые цеш робежнымн грузами и пружиной регуля-
тора, передаются маслораспределительному золотнику. Таким
образом в зависимости от того, что больше — усилие, развиваемое
Центробежными грузиками, или усилие, развиваемое пружиной.
Достигается перемещение золотника в ту или другую сторону
или же, в случае равенства этих усилий, его равновесное положе-
ние. К маслораспределительному золотнику подается масло и в
зависимости от положения -золотника эго масло поступает в
Цилиндры сервомоторов, поворачивающих лопасти в ту или другую
сторону, меняя соответственно шаг винта и корректируя число обо-
ротов двигателя до заданного значения
Полнковский ВИ и Гальперин М И.
65
на
Работа регулятора при различных схемах винтов приведет
фиг.
48. Масло в сервомотор втулки винта
подается из общей
маслосистемы двигателя, но так как давление масла в маслосис
Фиг. 47. Регулятор числа оборотов.
1) Центробежные грузики, 2) пружина регулятора, 3) маслораспределительный
золотник, 4) втулка золотника, 5) муфта привода втулки и центробежных
грузов. 6) шестерня маслопомпы регулятора, 7) гайка редукционного клапана
8) ролик настройки регулятора.
теме двигателя не превышает 6—9 атм
развивать сервомотор, должно быть
., а усилие.
которое
должен
значительно
больше,
чем
усилие, которое может быть получено при таком давлении масла
то масло во втулку винта подастся отдельной масляной помпой
обычно вмонтированной в регулятор числа оборотов. В современ-
ник системах управления виигом подобные помпы развивают дав-
ление порядка 20 — 30 атм.
Величина рабочего давления определяется регулировкой
редакционного клапана регулятора. При увеличении размеров
лопастей на одной и той-же втулке винта (т. е. при одном и том
же диаметре сервомотора) приходится увеличивать давление соот-
ветствующей регулировкой редукционного клапана, иначе серве-
Фиг. 48.
механизм может не справиться с поворотом лопасти или перемеще-
ние лопасти происходит очень медленно, вследствие чего не дости-
гается устойчивое регулирование числа оборотов. Повышение давле-
ния масла отрицательно отражается на работе маслосистемы дви-
гателя; поэтому, если регулятор работает не на автономной масло-
системе, не следует без особой надобности значительно повышать
давление*.
Регуляторы могут поддерживать устойчиво равновесные обо-
роты в определенном диапазоне; например регулятор типа Р-7
поддерживает равновесные обороты в пределах 1400—2700 об7мин.
Величина диапазона устойчивого регулирования чисел оборотов,
который может поддерживать регулятор, зависит от его конструк-
тивных параметров: от жесткости (характеристики) пружины.
* Вообще давление, поддерживаемое редукционным клапаном, не постояино,
так как в процессе работы редакционного клапана его пружина сжимается по
мере открытия клапана. Характеристика редукционного клапана зависит не
только от характеристики пружины, но также от размеров перепускных
отверстий п диаметра перепускного золотника.
67
массы грузиков, их расположения относительно оси вращения и
т. д. Поэтому, выбирая для силовой установки регулятор и систему
управления, следует согласовать диапазон предельных значений
числа оборотов двигателя, в котором надо поддерживать устой-
чивые обороты, с диапазоном оборотов, которые может устойчиво
поддерживать регулятор числа оборотов.
Оценку оборотов, которые может поддерживать выбираемый
регулятор, следует производить с учетом передаточного числа щ
вала двигателя к валу привода регулятора, так как передаточное
число от вала к регулятору не всегда равно 1.
В таблице 1 приводятся числа оборотов, какие может под.
держивать регулятор типа Р-7 с учетом передаточного числа от
вала двигателя к регулятору.
Таблица № 1
Марка двигателя Максималь- ное число оборотов 4— Передаточ- ное число / = "р- ₽ Пав Диапазон устой- чивого регулиро- вания в оборотах коленчатого вала Рекомендуемое число оборотов крейсерского режима
М-105ПФ 2700 0,976 2760-1640 1600
АМ-38Ф 2350 1,21 2230-1400 13.-,0
М-82Ф 2400 0,88 3070—1820 1600
М-82ФН 2500 1,023 2620—1.560 16О0
М-88Б 2360 1,125 2400—1420 1606
Фиг. 49. Механизм настройки регулятора числа оборотов.
1) рейка, 2) шестерня, 3) штурвал в кабине летчика, 4) ролик.
Перестройка регулятора на поддержание различных оборотов
осуществляется изменением усилия, развиваемого пружиной, для
чего изменяют длину пружины при помощи специального устрой-
ства. Схема такого устройства приведена на фиг. 49.
6S
Оно состоит из ролика, жестко-закрепленного на одной оси с
шестерней, переметающей рейку, которая своим торцем давит на
пружину.
Как правило, регуляторы числа оборотов оборудованы кони-
ческими пружинами. Это делается из следующих соображений.
Для того, чтобы регулятор работал устойчиво, необходимо, чтобы
при отклонении его от равновесного положения пружина регуля-
тора развивала бы усилие, возвращающее регулятор к равновес-
ному положению, т. е. необходимо, чтобы сила пружины станови-
зась больше центробежной силы. При применении цилиндрических
Фиг. 50. Ролик привода механизма настройки регулятора числа
оборотов и размещение упоров на нем.
пружин по мере увеличения числа оборотов падаег коэфицненг
восстановления (oiношение величины восстанавливающей силы к
величине перемещения золотника) и работа регулятора становится
неустойчивой.
Если же значительно увеличить жесткость пружины, то также
падает коэфициент восстановления, т. к. падает чувствительность
регулятора. Поэтому применяют конические пружины с нелинейной
характеристикой, которые позволяют получить более устойчивую
работу регулятора.
Для перестройки механизма имеется специальный штурвал или
рычаг управления регулятором числа оборотов. Передача от
штурвала к регулятору числа оборотов осуществляется обычно при
с>9
помощи двухстороннего тросового управления, но может приме-
няться также и жесткая передача.
Штурвал рекомендуется применять в случаях повышенных
требований к точности регулировки, хотя более удобна и компактна
получается конструкция при управлении рычагом.
Также как и в управлении сектором газа, система управления
ВИШ должна быть устроена таким образом, чтобы при движении
рычага или вращении штурвала от себя происходило увеличение
числа оборотов двигателя (облегчение винта), а при движении на
себя — уменьшение числа оборотов.
Если управление осуществляется рычагом из кабины летчика,
то ход рычага должен быть не меньше 100°, обеспечивая при этом
угол ^поворота ролика регулятора (см. фиг. 50) не менее чем на
160°. При управлении штурвалом из кабины летчика тот же угол
поворота ролика должен быть достигнут -при повороте штурвала
не более, чем на один оборот, т. е. 360. Рычаг или штурвал
управления в Кабине летчика должен иметь тормозное приспособ-
ление во избежание самопроизвольного смещения.
Возможность изменения числа оборотов должна быть ограни-
чена в известных пределах. Нельзя допустить возможность получе-
ния оборотов выше максимально положенных для данного дви-
гателя; обычно это обороты режима взлета или боевого номинала.
Для этого на ролике механизма настройки регулятора чиста оборо-
тов устанавливается упор максимальных оборотов.
Благодаря этому летчик имеет возможность дать рычаг управ-
ления ВИШ полностью от себя перед взлетом или маневром не
обращая внимания на счетчик оборотов.
Для некоторых конструкций винтов, в частности для вицтов
обратной схемы, рекомендуется ставить также ограничитель или
упор малых оборотов. Это следует делать потому, что в винтах
обратной схемы винт переходит на малый шаг благодаря центро-
бежному моменту, возникающему на лопастях винта. При слишком
малых оборотах эти силы могут уменьшаться в недопустимой
степени и облегчение винта будет происходить слишком вяло.
На многомоторных самолетах не рекомендуется устанавливать
упор малых оборотов, г. к. он препятствует 'Переводу винта на
максимально большой шаг, что бывает необходимо >при выходе
двигателя из строя и отсутствии у винта флюгерного положения.
Ограничители и упоры, как было сказано, должны устанавли-
ваться на ролике регулятора, а не на элементах системы управле-
ния, Например на рычагах, тросах и т. и.
70
2. Управление флюгерными винтами
Возможность установки винта по потоку (во флюгерное поло-
жение) имеет особое значение для многомоторных самолетов.
Если в связи с обнаруженным дефектом требуется в полете
ыключить один или несколько двига-
телей, то при обычной установке лопа-
стей винт выключенного двигателя
будет работать как ветрянка, что зна-
чительно затрудняет полет на остав-
шихся двигателях, а иногда делает его
даже невозможным. Кроме того про-
должающееся вращение двигателя
усугубляет появившийся дефект.
Если же установить лопасти во
флюгерное положение, то вцнт, а сле-
ювательно и двигатель, прекратит
вращение. Остановленный винт будет
создавать значительно меньше сопро-
тивления потоку, чем облегчаются
условия полета.
На фиг. 51 показано флюгерное
положение лопасти винта. Из этой Фнг 51 • флюгеРное положение
фигуры видно, что лопасть должна лопасти винта.
быть повернута на угол около 90', в то
время, как при работающем двигателе угол поворота лопасти для
различных винтов колеблется в пределах от 17 до 50°.
Для того, чтобы иметь возможность устанавливать лопасти во
флюгерное положение и выводить лопасть из него, требуются
значительно большие усилия на сервопоршень, чем для поддержа-
ния числа оборотов в нормальном диапазоне. Для получения боль-
шего усилия к сервопоршню подается масло при значительно
большем давлении, чем обычно. Для этой цели устанавливается
автономная маслопомпа, подающая масло под давлением 60—70
атм. и приводимая в движение отдельным электромотором.
Отдельный привод к маслопомпам ну жен еще и потому, что
во флюгерное положение винт устанавливается тогда, когда дви-
гатель выходит из строя, а в это время маслопомпы регулятора и
двигателя могут не работать.
В жидкостных двигателях желательно иметь аварийный слив
воды, что позволяет с установкой винта во флюгерное положение
сохрайить двигатель.
Масло во втулку винта во всех существующих схемах
подается через регулятор числа оборотов. Втулки флюгерных
витов делаются такими, чтобы обеспечить возможность дополни-
тельного хода сервопоршня.
На фиг. 52 приводится схема винта со всеми дополнительными
устройствами для ввода и выгода винта из флюгерного положения.
71
Фиг. 52. Схема управления винтом с во^южиостью установки его во флюгерное положение
В силовых установках, гд? установлены флюгерные винты,
следует блокировать систем)' запуска с системой, устанавливаю-
щей винт во флюгерное 'положение. Это нужно для того, чтобы
не делать попыток запуска тогда, когда винт находится во флюгер-
ном положении.
3. Управление реверсивными винтами
В последнее время начинают также применяться реверсивные
винты. У этих винтов можно поворачивать лопасть не только на
положительный угол установки, но и
на отрицательный, вследствие чего
винт создает отрицательную тягу.
Благодаря такому винту может быть
сокращен пробег самолета после его
посадки, а также уменьшена ско-
рость пикирования. Кроме того, значи-
тельно может быть облегчен разворот
многомоторных самолетов при рулежке,
особенно гидросамолетов.
Как видно из фиг. 53, для установ-
ки лопасти в реверсное положение
необходимо повернуть лопасть за пре-
делы упора малого шага. Поэтому в
системах управления с реверсными
винтами имеется дополнительное
у стройство, позволяющее убирать упор
малого шага на втулке винта. Система
управления переходом на реверсное
положение должна быть так подобрана, чтобы переход от
положения малого шага к реверсному положению происходил
в минимальное время. Скорость поворота лопасти должна быть не
меньше 50° в секунду, в то время как обычно при повороте
лопасти, например при резкой даче газа, при изменении режима
полета, эта скорость не превышает 3° — 6° в секунду.
Большая скорость поворота лопастей при повороте в реверс-
ное положение нужна во избежание нетопустимой раскрутки
винта и мотора, которая может возникнуть при прохождении ло-
пасти через малые углы установки.
>
Фиг. 53. Реверсное
положение лопасти.
4. Управление винтами на многомоторных самолетах
На многомоторных самолетах система управления ВИШ
должна позволять производить управление каждым винтом в от-
дельности. Кроме того, должна быть предусмотрена возможность
одновременного управления всеми винтами вместе. На многомотор-
ных самолетах чаще всего применяется дистанционное управле-
ние оборотами двигателей. в
73
В этом случае к механизмам настройки числа оборотов при-
строены электромоторчики небольшой мощности, управление кото-
рыми производится из кабины летчика.
Для синхронизации числа оборотов всех двигателей у много-
моторных самолетов применяются специальные автоматические
синхронизаторы. Они выполняются по различным схемам, которые
сводятся в основном к следующему.
Один из двигателей выбирается в качестве главного или веду-
щего, и его число оборотов устанавливается соответствующей
г>» nrf.
'П,~ПгГМ.~П*6г
Qа- г>оло>Кчте/1Ьно-У<лг>1> с^оротоб ^оёЬ/Luaerncfl
Пд^ОтрицотелЬи^ чиеРО оЪоротоёпонижается
Г!Л1 e />о oScpomoS
Фиг. 54. Схема синхронизации числа оборотов двухмоторной установки.
I Главный (ведущий) двигатель; II ведомый (следящий) двигатель;
1) датчик (генератор трехфазного переменного тока), 2) регулятор чисел
оборотов ВИШ. 3) диференциальный электромотор, включенный как асинхрон-
ный, 4) диференциальный электромотор для автоматического изменения установ-
ки чисел оборотов, 5) ручной переключатель для изменения установки чисел
оборотов.
настройкой регулятора числа оборотов. На этом двигателе устанав-
ливается, во-первых, генератор трехфазного 'переменного тока,
служащий датчиком, число оборотов которого равно числу оборо-
тов двигателя; во-вторых, на механизме настройки регулятора
числа оборотов устанавливается дифференциальный асинхронный
электромоторчик. Этот моторчик представляет собой трехфазный
индукционный двигатель двойного питания с обмотками на статоре
и роторе. На каждом из остальных двигателей (ведомых) устанав-
ливается также по датчику, т. е. генератору трехфазного перемен-
74 ’
кого тока, и по диференциальному электромоторчику, устанавли-
ваемому на механизме настройки регулятора числа оборотов и
изменяющему настройку регулятора на поддержание оборотов,
соответствующих оборотам ведущего двигателя.
На фиг. 54 приведена схема синхронизации чисел оборотов
двухмоторной установки. Предположим, что число оборотов на
ведомом двигателе (II) изменилось. Тогда возникает разность в
частотах тока в обмотках статора и ротора диференциального
электромотора 4, и якорь мотора начинает вращаться в ту или
иную сторону в зависимости от того, к какой обмотке — статору
или ротору подводится ток большей частоты.
Этим самым якорь диференциального электромотора пере-
щраивает регулятор числа оборотов ветомого двигателя так, что
лопасти винfa изменяют угол установки до тех пор, пока обороты
ведомого и ведущего двигателя не совпадут.
Для того, чтобы в случае выхода из строя ведущего двигателя
не упали бы обороты на всех остальных двигателях, необходимо в
системе синхронизации предусмотреть предохранительное устрой-
ство, сохраняющее обороты ведомых двигателей такими же,
какими они были до момента аварии ведущего двигателя.
Особое внимание следует обратить на работу синхронизирую-
щего устройства при взлете и заходе на посадку, когда выход из
строя ведущего двигателя и падение оборотов всех остальных
двигателей может привести к катастрофе.
В некоторых системах, оборудованных синхронизирующим
устройством, эти устройства выключаются на взлете и перед
посадкой.
Обороты в этом случае поддерживаются на каждом двигателе
своим автономным регулятором.
5. Объединенное управление винтом и газом
Расход топлива при заданной скорости полета зависит от дав-
ления наддува и от оборотов двигателя, которые для получения
экономических расходов следует корректировать по режиму работы
мотора, а также по скорости и по высоте полета. Расход топлива
зависит также от скорости нагнетателя и состава смеси; километ-
ровые расходы, кроме этих факторов, зависят еще и от к. п. д.
винта и аэродинамических данных самолета. Экономичные рас-
ходы достигаются при определенном соотношении всех этих пара-
метров; однако объединенное управление, обеспечивающее опти-
мальное регулирование всех вышеперечисленных параметров, пред-
ставляется недопустимо сложным для практического применения.
Поэтому для получения экономичных расходов связывают
наиболее существенные параметры, влияющие на экономичность
двигателя, а именно—обороты двигателя и давление наддува.
Экономичность горизонтального полета определяется километ-
1 G ,.
ровым расходом, топлива </ — 7
75
где Ci—полетный вес самолета (кг)
. Су
k —качество самолета
Сл-
Сх—коэфициенг лобового сопротивления самолета
Су —коэфициент подъемной силы
7,в—коэфициент полезного действия винта
Се —удельный расход топлива ( л~КГч.и. )•
Часовой расход топлива при горизонтальном полете с постоян.
ной скоростью'равен:
G час — q, где v — скорость км/час.
В пределах практического изменения веса самолета
можно считать k ~ Const. Обозначая через А отношение
tG „ .Се
ЭТО*' получи» О.„ = Л—.
Таким образом мы видим, что экономичность полета при
постоянной скорости и высоте определяется коэфициентом полез-
ного действия винта и удельным расходом топлива.
Винты, как правило, проектируются таким образом, что мак-
симальный к. и. д. достигается на режиме максимальной скорости.
Поэтому, если счита1ь правильным допущение, что при сохранении
отношения — —----- —Const, к. п. д. винта остается приоли-
п п „ом
зительно постоянным и равным его максимальному значению,
то следовало бы для получения максимального к. п. д.
винта на всех режимах подбирать обороты так, чтобы было
Const, что и делали в течение продолжительного времени при
экспдоатации самолетов, рекомендуя этот режим, как наиболее
экономичный. По, как видно из уравнения G4ac -= А—— часовой
7fe
расход топлива зависит не только от к. п. д. винта, но и удель-
ного расхода топлива Се.
При постоянной регулировке карбюратора Се для данной
мощности и высоты почета зависит лишь от числа оборотов дви-
гателя (см. фиг. 50). Из этого следует, что для выбора экономич-
ных режимов работы двигателя обороты следует выбирать, учиты-
вая нс только к. и. т. винта, но и удельные расходы двигателя.
При этом оказывается, что наивыгоднейшие режимы опреде-
ляются в первую очередь именно характеристиками двигателя,
которые гораздо больше влияют на расход топлива, чем xapaKie-
ристики винта. Это объясняется тем, что к. и. д. винта v обычно
меняется в пределах 3—5"», что дает изменение расходов топлива
7(>
также на 3 — 5%, в то время как работа двигателя при постоянной
крейсерской мощности, но на значительно пониженных оборотах и
повышенном наддуве может у меньшить расходы топлива до 20%.
Испытания двигателей и самолетов показали, что если за-
1авать режимы, соответствующие наивыгодчейшпм режимам дви-
гателя, то достигается .понижение расходов топлива на 10—15%
по сравнению с расходами, какие имеются, если выбирать режим
у „
по — — Const,
п
Поэтому можно экономичным режимом для полета самолета
считать такой режим работы двигателя, при котором сочетание
наддува и числа оборотов обеспечивает для заданной мощности
минимальные удельные расходы топлива на лошадиную силу, не
учитывая при этом изменения к. п.д. винта но оборотам, как второ-
степенного фактора.
Достижение одной и той же мощности при различном сочета-
нии числа оборотов и наддува стало возможным после того, как
начали применяться винты изменяемого в полете шага.
На фиг. 55 приводятся характеристики мощности по обо-
ротам, а также кривые зависимости открытия дросселя и удель-
ных расходов топлива от оборотов для различных постоянных
углов установки лопастей винта, снятые при стендовых испытаниях.
Из кривых расходов топлива видно, что при одной и той же
мощности двигателя, снимаемой на различных числах оборотов,
расходы топлива оказываются существенно различными.
Таким образом, чтобы определить наивыгоднейшую характе-
ристику двигателя, т. е. такую, при которой получаются минималь-
ные расходы топлива', находят на основе полученных кривых
стендовых испытаний такое сочетание оборотов и наддува, при
которых эти минимальные расходы топлива достигаются.
При окончательном выборе связи мощности (наддува) и оборо-
тов следует, конечно считаться не только с расходом топлива,но и
с целым рядом эксплоатационных особенностей, в первую очередь
с приемистостью.
Минимальные расходы топлива на крейсерских режимах дости-
гаются при работе двигателя на значительно пониженных оборотах
и угол установки лопасти в этом случае значительно больше, чем
при обычных условиях; это ухудшает приемистость двигателя.
Предположим, что потребную пониженную мощность V дви-
гатель развивает при его работе на оборотах и, (смотри фиг. 56)и
при полностью открытом дросселе, т. е. тогда, когда двигатель
работает по внешней характеристике. В этом случае приемистость
может быть достигнута только за счет облегчения винта, и избы-
точный момент, который развивает двигатель в этом случае может
быть получен только после облегчения винта, т. е. не сразу. Кроме
того, изменение оборотов в процессе приемистости должно
произойти на всем диапазоне, от ;it до номинального числа
оборотов Яном-
77
Фиг. 55. Порядок построения характеристики, обеспечивающей иаивыгодпеншие
расходы по характеристикам, полученным стендовыми испытаниями.
78
Поэтому при выборе характеристики работы двигателя
несколько повышают обороты крейсерских мощностей по сравне-
нию с оптимальными; этим самым снижают экономичность двига-
теля, но зато приемистость остается в допустимых пределах.
Предположим, что мы выбрали характеристику по кривой II. В этом
случае та же мощность .V будет получена на оборотах п.,. При
т.аче газа сразу же появляется избыточная мощность (т. к. имеется
запас по Рк, что не имеет места при работе по внешней характе-
ристике), равная отрезку d-e и идущая на сообщение ускорения.
Кроме того увеличение оборотов, которое должно быть получено
в процессе приемистости, равное отрезку n,—nuov, значительно
меньше, чем пг — пном.
Кроме того характеристику следует выбирать так, чтобы дви-
гатель не работал в зоне детонационных режимов и в зоне тряски.
На фиг. 55 приведен порядок построения характеристики,
обеспечивающей наивыгоднейшие расходы. Предположим, что для
выбранного режима полета требуется мощность 1600 л. с. Эта
мощность может быть достигнута при работе на винтах 3, 4 и 5 и
т. д. Наибольшая экономичность будет, если мы будем работать
на винте 5. Но при этом характеристика будет очень близка к
внешней и близка к зоне детонационных режимов. Поэтому выби-
рают режим с более легким винтом и с несколько меньшей эконо-
мичностью, а именно винт 4. При этом удельный расход равен
222 гр/л. с. ч. вместо 238 гр/л. с. ч., которые были бы при работе
на винте (1), т. е. по так называемой дроссельной характеристике.
Таким образом на мощности 1600 л. с. следует работать па
79
оборотах п—2800 об/мин., угол открытия дросселя при эюм
должен быть 65’, что видно также из фиг. 55.
Э|Им методом последовательно для различных мощностей
определяются обороты и величины скрытия дросселя.
Режим работы двигателя по заданной характеристике соответ
ствует определенной настройке регулятора числа оборотов и опре-
деленному наддуву. Раздельное управление этими элементами,
особенно на истребителе, где режим полета меняется довольно
часто, недопустимо усложняет работу летчика. Поэтому естественн0
возникло требование объединить управление винтом и наддувом,
что должно значительно упростить управление двигателем. Эта
система управления зависит от системы управления винтом (гид-
равлическая или электрическая) и от системы управления над-
дувом. В двухдроссельных двигателях типа ВК-105, АМ-38 и т.п.,
где изменение положения дросселя газа однозначно изменяет
давление наддува Ра (во всяком случае до границы высотности),
юстаточно объединить управление этим дросселем с регулятором
числа оборотов. В однодроссельных двигателях типа Аш-82 сис-
тема объединенного управления не может быть осуществлена так.
чтобы настройка регулятора числа оборотов была связана с углом
открытия дросселя «др, так как изменение Рк не однозначно с
изменением угла 5!лр и зависит от высоты полета. В этих случаях
система должна осуществляться так, чтобы при изменении наддува
перестраивался бы автомат наддува на поддержание т|К
согласно выбранной характеристики и одновременно производилась
бы перестройка регулятора числа оборотов.
Очевидно, как было сказано раньше, это может быть достиг-
нуто только при установке автоматов всережимной настройки.
Управление осуществляется так, что вместе с изменением положе-
ния дросселя перестраиваются автомат всережимной настройки и
регулятор числа оборотов.
Кроме того при выборе системы В. Г. (винт-газ) следует учиты-
вать протекание характеристик по высотам. Так как с изменением
высоты полета падает давление наддува, летчику приходится
приоткрывать дроссель газа, а вместе с ним перестраивается регуля-
тор числа оборотов, т.е. увеличивать обороты двигателя. Сле-
довательно двигатель работает не на выбранных режимах, а
удаляется от выбранного оптимума Поэтому стедует выбрать
какую го среднюю высоту полета и для этой высоты подобрать
характеристику системы винт-газ.
В однодроссельных двигателях, где величина открытия грос-
селя зависит, как это было сказано раньше, от кинематической
характеристики настройки системы управления, стедует обратить
внимание на подбор этой характеристики таким образом, чтобы
можно было получить необходимое открытие дросселя
Первые системы объединенного управления винтом и газом
были применены на самолетах Яковлева. Они представляли
собой простые кинематические связи настройки отдельно регуля-
80
lopa числа оборотов и отдельно дросселя газа; рыча!и управ-
ления были смонтированы рядом и перемещались одновременно,
как один рычаг (см. фиг. 57).
Кинематические же цепи к регулятору винта и дросселю газа
были подобраны таким образом, что при одинаковых перемещениях
сектора газа и сектора, управляющего регулятором числа оборо-
тов, достигается настройка числа оборотов и наддува, обеспечива-
ющих характеристику, оптимальную с точки зрения экономичных
расходов.
Подобная схема может быть объединена и в одном рычаге,
например как показано на фиг. 58.
В этом случае, перемещая рычаг сектора газа, на котором
имеется кулачковый паз, см. фиг. 58, перемещают тягу, управля-
ющую настройкой числа оборотов.
По известным характери-
стикам кинематической цени
управления регулятором числа
оборотов, а также по извест-
ным характеристикам самое >
Фиг. 58. Рычаг, объединяющий
управление винтом и газом.
I) рычаг объединенного управле-
ния (ВГ); 2) тяга к дросселю
карбюратора; 31 тяга к регулятору
оборотов; 4) кулиса; 5) регули-
ровочная гребенка.
Фиг. 57. Рычаги объединенного
управления винтом и газом при
автономных кинематических пере-
дачах к регулятору числа оборо-
тов и дросселю газа.
регулятора числа оборотов и изменения наддува по открытию
еросселя строится профиль кулачка на секторе газа. Строится он
таким образом, чтобы при перемещении сектора газа обеспе-
чивалось давление надду ва и обороты согласно выбранной ха-
рактеристике экономичных режимов.
Агрегаты совместного управления юлжны позволять независи-
мое ручное управление винтом, которое требуется для опробования
б ПпликонскшУ В. И. и Гальперин М. И.
системы ВИШ, для проверки зажигания, которое осуществляется
поочередно выключением магнето и предельным облегчением винта
до положения фиксированного малого шага. Особенно существенно
наличие автономного управления винтом для самолетов бом-
бардировщиков, у которых в зависимости от режима полета,
высоты и т. д. может быть сделана более точная настройка числа
оборотов винта, особенно в условиях дальних перелетов.
Фиксированный шаг при проверке зажигания - необходим
потому, что если проверять магнето при винте-автомате, то падение
мощности из-за неисправности магнето не отразится на
4
Фиг. 59. Схема объединенного управления винтом и газом.
1) Червячная передача ручного управления, 2) планетарная лере
дача, 3) кулиса; 4) рычаг настройки регулятора; 5) тяга к сектору
газа.
•
числе оборотов, т. к. винт будет облегчаться и обороты будут
оставаться неизменными, в то время как при неисправном
магнето обороты должны упасть и именно по этому7 судят о
неисправности магнето.
Ручное управление может также иногда требоваться в усло-
виях зимней эксплоатацин для удаления масла из втулки винта
перед остановкой двигателя.
Для этого в винтах прямой схемы винт переводится на пре-
дельно-большой шаг, а в винтах обратной схемы — на предельно
малый шаг.
«2
Если по конструктивным соображениям нежелательно или
трудно сделать ручное управление, то необходимо в системе иметь
звено, позволяющее разъединить связи винта и газа и производить
раз тельную проверку агрегатов на земле*.
Один из ва риантов механического агрегата, объединяющего
хправление винтом и давлением
Этот агреиг сосгош из
планетарной и червячной
передач Перестройка ре-
1улятора числа оборотов
осуществляется через ку-
лачек, приводимый в дви-
жение центральной ше-
стерней планетарной пе-
редачи. Этот агрегатпред-
ложен кандида том техни-
ческих наук Н. Г. Дуб-
равским.
Работает эта система
следующим образом: к
тяге управления дроссе-
лями присоединена ше-
стерня с внутренним за-
цеплениемЛ которая при
перемещении тяги пово-
рачивается и передает
движение сателитам и
через них центральной
шестерне, поворачиваю-
щей кулачек. Таким обра-
зом, задав определенные
наддува, приведен на фиг. 59.
Фиг. (50. Схема объединенного управления
винтом и газом с независимом управлением
от отдельного рычага.
1) рычаг объединенного 1правления винтом
и газом; 2) кулиса; 3) пружина регулятора
числа оборотов; 4) грузиги регуля10ра; 5)
рычаг независимого управления регулятором
числа оборотов; 6) валик настройки регуля-
тора числа оборотов; 7) дроссель.
закон кулачку, при опре-
деленных перемещениях
тяги (а следовательно и
дросселя)доститают опре-
деленной настройки peiy
лятора числа оборотов.
При передаче движения
от тяги управления дрос-
селем редуктор работает
как обычная зубчатая передача; оси сателиюв неподвижны и
удерживаются червячной передачей.
* Независимое управление винтом может быть также достигнуто, ес 1и
характеристика связи винта и газа построена таким образом, чтобы иметь
Участок, совпадающий с винтовой характеристикой предельно облегченного
винта. В этом случае при изменении положения сектора соответственно дан-
ному участку характеристики будет изменяться наддув, а винт останется на
предельно легком шаге.
1Г: S3
Червячная передача служит для ручной настройки регулятора
числа оборотов. При помощи тросовой передачи /поворачиваются
червяк и червячная шестерня, к оси которой прикреплен поводок
с осями сателитов. Шестерня с внутренним зацеплением неподвиж.
на и удерживается тягой управления дросселями. Сателиты
поворачивают центральную шестерню, а вместе с ней и кулачек
настройки регулятора.
Усилие, необходимое для одновременного управления винтом
и газом, получается значительно больше суммы усилий, необходи-
мых для раздельного управления этими агрегатами. Это объясняет^
ся возникновением добавочных сил трения в кулачковом механиз-
ме, через который производится настройка регулятора числа
оборотов.
Сероугсрш?мь
Спив vacno
Мослоросгредели-
телрный дую/ттнс*
тегьноо втдлко
Фиг. 61. Схема гидравлической следящей системы.
Поэтому для облегчения усилий часто устанавливаются спе-
циальные агрегаты, гидравлические и электрические.
Более широкое применение получили гидравлические агрегаты,
так называемые «гидроусилители», построенные на принципе так
называемых «следящих» гидравлических систем*. Принцип дей-
ствия их заключается в следующем: при перемещении маслораспре-
делительного золотника, как это показано на фиг. 61, масло
поступает в цилиндр сервомотора и перемещает его; при этом шток
сервопоршня передвигает втулку золотника, втулка прикрывает
отверстие подвода и слива масла к сервомотору, вследствие чего
сервопоршень может перемещаться только тогда, когда переме-
щается золотник, т. е. сервопоршень следит за перемещением
золотника.
Подобные бустерным системам управления самолетами
84
г
Схема применения агрегата объединенного управления винтом
л газом с гидравлическом следящей системой показана на фиг. 62
Ось дросселя через систему рычагов поворачивает кулачек,
который перемещает золотник, открывающий доступ масла к
сервомотору.
Сервомотор, перемещаясь, через зубчатую передачу и систему
рычагов перестраивает регулятор числа оборотов.
Таким образом при перемещении дросселя одновременно
перестраивается и регулятор числа оборотов.
Фиг. 62. Система объединенного управления винтом и газом.
1) рычаг к сектору газа; 2) механизм передачи от дросселя к
агрегату ВГ; 4) край ручного управления; 5) механизм настройки
регулятора числа оборотов; 6) упоры; 7) кулачек настройки.
Получение заданной характеристики достигается соответству-
ющей профилировкой кулачка, т. к. перемещение сервопоршня
осущесгвляется по закону, заданному кулачком.
Следовательно, и перестройка регулятора происходит по
закону, заданному тем же кулачком.
Для ручного управления регулятором числа оборотов установ-
лен специальный крап ручного управления, позволяющий перестра-
ивать регулятор числа оборотов независимо от положения дрос-
селя. Эга схема довольно проста, г. к. вообще осуществление
85
на двухдроссельных
объединенного управления винтом и газом
машинах значительно проще, чем на однодроссельных.
Пример построения агрегата, основанного на этом же
принципе, для объединенного управления винтом и газом на одно-
дроссельном двигателе Аш-82 показан на фиг. 63.
Общая схема управления винтом и газом на этом двигателе
приведена на фиг. 61.
♦иг. 63. Схема агрегата гидравлического управления
однодрсссельного двигателя.
винтом и газом
1) кулачек, 2) ролик передачи к регулятору числа
управления; 4) рычаг настройки автомата наддува; 5)
оборотов.
3)
шкив
для
рычаг управления
ручного
агрегатом
Управление осуществляется следующим образом:
поворачивается рычаг 1 гидроусилителя. Движение
через зубчатую передачу кулачку настройки 1 (фиг 63)
рукояткой
передается
следящей
системы гидроусилителя и одновременно валику, связанному рыча
сами с автоматом РПД.
В то же время кулачек приводит в движение следящую сис
тему, сервопоршень которой через ролик
2 фиг. 64 и
тросовую
передачу производит настройку регулятора числа оборотов. Благо
86
даря этому (происходит одновременная настройка регулятора числа
оборотов и автомата РПД, что позволяет устанавливать желаемое
сочетание оборотов и давления наддува, соответствующее оптималь-
ному расходу топлива. При этом усилие, необходимое для управле-
ния регулятором, преодолевается маслом. Для независимого
управления регулятором числа оборотов в этом гидроусилителе
имеется механизм ручного управления.
Перестройка регулятора числа оборотов осуществляется через
гидроусилитель.
87
Фиг. 65. Установка агрегата ВГ на патрубке нагнетателя.
1) Рычаг управления агрегатом; 2) ролик передачи к регулятору числа оборотов; 3) шкив ручногв
управления; 4) рычаг настройки РПД
88
Расчетное усилие гидравлического агрегата должно быть
примерно в два раза больше соответствх ющего полезного
сопротивления.
Необходимо, чтобы время запаздывания гидроусилителя не
превышало бы 0,1 —0,2 сек., т. .к. увеличение запаздывания вызы-
вает ухудшение приемистости и устойчивости работы двигателя.
Установка такого агрегата на патрубке нагнетателя приведена
на фиг. 65.
Желательно, чтобы подобные агрегаты работали на масле из
общей маслосистемы двигателя.
Неустойчивость работы двигателя при большом запаздывании
вызывается тем, что летчик задает режим мгновенно и получает
заданную мощность .V, потребную при каких то Рк и п. Но если
механизм перестройки регулятора чивла оборотов обладает значи-
тельным запаздыванием, го через некоторое время, после срабаты-
вания этого запаздывания, число оборотов двигателя повысится и
достигнет значения д, ч. При этом возрастает мощность до
величины \) Л' потребное.
Для сохранения заданной мощности летчик убирает сектор
газа до значения .V нотр. Но после срабатывания запаздывания
механизма перестройки регулятора числа оборотов обороты упа-
дут. и будет получена новая мощность V, Л потр. Летчик
вынужден повторять эти манипуляции, что и создает неустой-
чивость работы системы управления.
При применении системы объединенного управления винтом и
газом уменьшается заброс оборотов двигателя.
Это объясняется тем, что перед резкой дачей газа без системы
ВГ.винт обычно предварительно устанавливается на легкий шаг,
и поэтому при даче газа резко возрастают обороты; при наличии
системы ВГ винт вначале оказывается затяжеленным и облегчается
по мере роста числа оборотов. Благодаря этому при резкой даче
газа процесс перехода винта на малый шаг отстает от процесса
роста наддува и заброс оборотов либо совсем исключается, либо
значительно уменьшается.
6. Выбор кинематической передачи объединенного
управления винтом и газом
Выбор кинематической передачи управления винтом и газом
сводится к тому, чтобы при заданных давлениях наддува регуля-
тор настраивался бы на определенное число оборотов. Нам известна
характеристика настройки регулятора, т. е. его число оборотов в
зависимости от угла поворота ролика настройки регулятора 7:
кроме того легко определить характеристику давления наддува в
зависимости от угла открытия дросселя. Нам известна также
характеристика Ра f(nj.
89
/ Таким образом задача сводится к тому,
характеристики п =f(7) с характеристикой
осуществляется как внешней кинематикой, так
чтобы увязать
= /(а), что
и кинематикой
механизма В. Г. Внешняя кинематика представляет собой
управление дросселем газа; так и управление агрегатом В.
как
Г. и
кинематических цепей.
связывающих эти две кинематики. Как
правило, кинематика управления дросселем
уже бывает
готовой
на
двигателе. Таким образом остается только подбор кинематики
связывающей управление дросселем с системой ВГ. Зная
эту
ос*
характеристику, которая па фиг. 66 представлена в виде
₽=/(«), где ? — угол поворота кулачка агрегата ВГ,
кривой
а а
угол открытия дросселя, можно построить
агрегата ВГ.
Это легко делается графическим методом,
фиг. 67.
профиль
кулачка
как показано на
90
VII. УПРАВЛЕНИЕ ОРГАНАМИ РЕГУЛИРОВАНИЯ
ТЕМПЕРАТУРЫ
1. Общие сведения
Температура масла, воды, головок цилиндров при заданном
режиме двигателя зависит от величины открытия заслонок радиа-
тора, жалюзи и створок капота. Изменение положения этих орга-
нов осуществляется при помощи специальных систем управления.
Упомянутые органы регулирования должны устанавливаться
так, чтобы температуры масла, воды и головок цилиндров не выхо-
дили за пределы допустимых и в то же время чтобы не возникали
и потери скорости из-за излишнего открытия этих органов.
Усилия, необходимые для управления этими органами, зависят
от площади заслонок и т. д., от характера их расположения на
машине и от величины давлений на них, которые в свою очередь
зависят от скорости и высоты полета.
Механизмы управления должны быть спроектированы так,
чтобы при возникающих максимальных моментах, потребных для
открытия или закрытия заслонок, усилие, которое следует прило-
жить к рычагу управления, не превышало бы 8—10 кгр. (в случае
ручного управления).
Максимальное усилие, возникающее на створках заданной
площади (которая определяется расчетными данными систем
охлаждения), очевидно будет при максимальной скорости для зем-
ных условий при полностью закрытых створках капота. Многие
существующие конструкции створок имеют настолько большую
площадь, что усилия, необходимые для открытия этих створок,
особенно при высоких скоростях полета, весьма значительны, так
что при обычной рычажной передаче усилие, возникающее на руко-
ятке управления, становится недопустимо большим.
Действительно, предположим, что заслонка капота радиатора,
фиг. 69, имеет следующие размеры: длина / = 350 мм. и ширина
=300 .м.я; максимальная скорость самолета (скорость при пикиро-
вании) v =900 км. в час. На заслонку действует с внутренней сто-
роны капота давление, равное скоростному напору; с внешней
стороны заслонки при этой скорости разрежение при обтекании
достигает приблизительно 0,2 скоростного напора. Таким образом
v-
на заслонку действует давление, равное 1,2 .
Усилие от этого давления можно считать приложенным на
-р*~
середине длины заслонки и равным 1,2 / Ь. Если шгок,
закрывающий заслонку, закреплен шарнирно на плече а (фиг. 69)
от оси вращения заслонки, то момент, необходимый для закрытия
заслонки, равен М S а, где S—усилие, действующее по оси
/
штока, 1,2 р g ‘
91
Для наших данных М по этой формуле 'Получается равным 180 кгм.
Этот момент необходим только при положении полного закрытия
заслонки. В промежуточных положениях этот момент может быть
значительно меньшим, но рассчитывать устройство следует на
максимальный момент, притом даже увеличенный вдвое.
Для обычных створок мощность применяемых электромоторов
равна 100—250 ватт, а число оборотов их достигает нескольких
тысяч. Несмотря на незначительную .мощность, благодаря большому
передаточному числу достигается достаточная величина момента.
Такой момент не может быть передан обычной рычажной
передачей. Поэтому в системе управления этими устройствами
приходится в случае рычажного управления устанавливать меха-
Фиг 69. Заслонка капота радиатора.
нцзмы, уменьшающие пере-
даваемый момен г(червячная
передача), или устанавли-
вать сервопривод—гидравли-
ческий или электрический.
Для того, чтобы усилие,
передаваемое на управление
створками, не передавалось
через всю систему управле-
ния (тросы, рычаги и т. д.),
идущую из кабины летчика,
сервомеханизмы следует
устанавливать непосред-
ственно около управляемых
створок.
Благодаря этому тросы не вытягиваются под действием усилий
и на систему управления не влияют люфты в местах соединения.
В кабине летчика следует устанавливать только механизмы,
управляющие гидравлическими и электрическими сервомоторами,
непосредственно установленными у створок капота и радиатора.
Для разгрузки летчика от регулирования температурного
режима двигателя, а также во избежание потери скорости из-за
того, что во время сложных эволюций летчик не управляет створ-
ками капота, жалюзи и т. д., желательно применять автоматичес-
кие устройства, изменяющие величину открытия створок в зависи-
мости от режима полета двигателя.
2. Автоматические устройства для регулирования температуры
Обычно, хотя и не всегда, эти автоматические устройства
являются устройствами непрямого действия. Для lord, чтобы при
регулировании температуры отклонение регулируемой величины
от заданного значения было бы минимальным и продолжалось бы
минимальное время, необходимо, чтобы створки приоткрывались,
непрерывно следя за изменением температуры, а не закрывались
или открывались полностью при изменении температуры. Это
достигается установкой автоматов с обратной связью.
92
Последняя оказывает на механизм, перемещающий створки,
воздействие, противоположное воздействию чувствительного
элемента. Этим самым замедляется перестановка створок и г. д. и
исключается ‘перерегулировка.
На фиг. 70 приводится принципиальная схема электричес-
кого управления жалюзи водорадиатора. В водорадиаторной
93
трубе установлен биметаллический датчик в виде спирали. Один
конец спирали жестко закреплен, а второй соединен с подвижным
контактом. ,
Под действием изменяющейся температуры воды спираль
закручивается или раскручивается, что вызывает перемещение
контакта, замыкающего лри этом цепь одной из катушек сдвоен-
ного реле. Контакты реле в свою очередь включают подачу тока к
реверсивному электродвигателю, который через зубчатую передачу
перемещает жалюзи. В качестве обратной связи в этой системе
управления служит гибкий вал, который присоединен к валу
реверсивного электромотора.
При вращении электромотора гибкий вал перемещает сектор
с контактами так, что перемещение сектора происходит в ту же
сторону, что и перемещение контакта, прикрепленного к датчику.
Фиг. 71. Монтажная схема автоматической системы управления жалюш
водорадиатора.
Таким образом при вращении электромотора сектор с кон-
тактами все время следит за контактом датчика, устанавливая
контакты в нейтральное положение. В этой системе, помимо авто-
матического управления, жалюзи можно управлять и вручную, что
бывает необходимо в случае порчи автомата.
Монтажная схема такого автомата приведена на фиг. 71. Пи-
тание сети электрической схемы управления производится обычно
от бортовой аккумуляторной батареи. Кроме вышеописанной
схемы имеются и другие варианты выполнения электрических
схем; но все они сходны между собой, несмотря на различия в
отдельных элементах.
Например, на фиг. 72 приведена схема электрического управ-
ления створками капота водорадиатора, где в качестве чувстви-
94
тельного элемента применена гармошка с быстрокипящей
жидкостью; изменение длины гармошки под действием темпе-
ратуры воды вызывает перемещение контакта, включающего цепь
одной из обмоток реверсивного мотора «3». В качестве обратной
связи в этой схеме служит рычаг 4, который по мере перемеще-
ния створки 6 перемещает контакт. Также как и в предыдущей
схеме, в этой схеме имеется система ручного управления.
На этом же принципе основана схема регулирования темпе-
ратуры головок цилиндров, приведенная на фиг. 73.
95
Фиг. 73. Схема регулирования текбгературы головок цилиндров.
1,2иЗ) створки; 4) электромотор, управляющий движением створок.
Фиг. 74. Гидравлическая схема управления створками капота маслорадиатора;
1) камера с чувствительным элементом; 2) рычаг •передачи движения золотнику
следящей системы; 3). корпус сервомотора; 4, 6) поршень сервомотора; 5) золот-
ник следящей системы; 7) пружина; 8) направление охлаждающего воздуха;
9. 10) радиатор; 11) створка радиатора.
96
Схема гидравлического автомата для управления створками
маслорадиатора показана на фиг. 74. Масло поступает в камеру,
в которой помещен патрон с жидкостью, имеющей низкую темпе-
ратуру кипения.
При изменении температуры масла объем жидкости в патроне
меняется, в результате чего изменяется длина гармошки, помещен-
ной в этом же патроне. >
К одному из торцев гармошки прикреплен рычаг, перемещаю-
щий маслораспределительный золотник сервомотора. Золотник
помещен в штоке сервопоршня сервомотора, благодаря чему
перемещение сервопоршня строго соответствует перемещению
золотника. Приведенная на этой фигуре схема в одну сторону
(на закрытие) работает под действием масла, а в другую сторону
(на открытие) под действием пружины. Эта же схема может быть
выполнена в виде двухсторонней, так, чтобы она работала в обе
стороны под действием масла.
В последнее время применяется гидравлический регулятор,
приведенный на фиг. 75.
В качестве датчика этого автомата служит термопатрон, пред-
ставляющий собой спиральную трубку, заполненную жидкостью с
низкой температурой кипения. Спиральная трубка соединена с
мембранами регулятора при помощи капиллярной трубки. Таким
образом всякое изменение состояния быстро-кипящей жидкости
изменяет длину мембраны. Мембрана в свою очередь перемещает
золотник регулятора; при изменении регулируемой температуры
золотник перемещается, открывая доступ масла в одну из поло-
стей сервомотора и перемещая сервопоршень вместе со штоком.
Сервопоршень сидит на стержне, имеющем винтовую нарезку.
При перемещении поршня стержень поворачивается пальцем
сервопоршня и при этом перемещает втулку золотника, в направ-
лении, обратном перемещению золотника. Таким образом втулка
золотника прикрывает отверстие подвода или слива масла, которое
открывалось золотником, а следовательно поршень следит за пере-
мещением золотника, т. е. здесь налицо такая же следящая сис-
тема, как и в предыдущей схеме. Следует сказать, что для управ-
ления створками капота и радиатора требуется, чтобы сервомеха-
низм развивал значительное усилие; это может быть достигнуто
пли большим давлением масла, или значительным диаметром
сервопоршня. Так как из конструктивных соображений невыгодно
делать сервопоршень большого диаметра, то стремятся увеличить
давление масла, для чего к сервоприводу подводится масло из
маслосистемы ВИШ, где давление достигает 20 — 25 кг/см2.
Описанные автоматы должны иметь механизм настройки
автомата на поддержание определенной заданной температуры,
что в частности достигается в последней описанной схеме измене-
нием характеристики мембранного устройства.
Если управление заслонками и т. д. осуществляется автомати-
ческими устройствами, то желательно параллельно устанавливать
7 По.шкон, кин В. И и Гальперин М. И. 97
систему ручного управления, которая действует или через эти
автоматические устройства, или непосредственно на управляемые
органы.
Ручное управление рекомендуется по возможности выполнять
при помощи простых механизмов.
Гидравлическое и электрическое ручное управление следует
применять в тех случаях, когда трудно осуществить механическое
управление, например на многомоторных самолетах, или если
требуется очень большое перестановочное усилие.
При ручном управлении заслонки и т. д. должны открываться
при движении рычагов управления от себя, а закрываться при
движении на себя.
Рычаги управления должны всегда иметь запас хода таким
образом, чтобы заслонки и т. д. не только полностью прилегали к
обшивкам самолета в положении закрытия, но и были прижаты.
Помимо автоматов, изменяющих положение заслонок, при-
меняются автоматы, регулирующие поток охлаждаемой жидкости
через радиатор таким образом, что часть жидкости проходит
мимо радиатора или мимо его сот.
Это, например, бывает необходимо при запуске двигателя, когда
вязкость масла еще настолько велика (т. к. двигатель не прогрет),
что повышение давления масла от сопротивления радиатора
становится выше допустимого.
Кроме того, перепуском масла помимо радиатора достигается
более быстрый прогрев масла.
Иногда регулирование охлаждения перепуском охлаждающей
жидкости помимо радиатора применяется и в радиаторах для
охлаждения антифриза.
Такие системы применяются в комбинации с обычным регули-
рованием выходными заслонками радиатора и включаются после
полного закрытия заслонок. Благодаря этому мотор на режимах
длительного планирования или пикирования с убранным газом
дольше сохраняет достаточно высокую температуру охлаждающей
жидкости, что существенно влияет на его приемистость.
Регуляторы, действующие по вязкости масла, так же как и
регуляторы температуры перепускают масло помимо радиатора или
по обичайке его в обход сот.
Схема регулятора, реагирующего на вязкость масла, приведе-
на на фиг. 76. Масло поступает в центральную полость регуля^
тора и одновременно давит на два клапана 2 и 3.
Через клапан 2 масло идет в соты радиатора, а через клапан
3 масло идет в обход сот радиатора. В полости регулятора по-
мещена трубка Вентури, каналы которой сообщаются с полостью
сильфона клапана 2. Когда из двигателя поступает холодное мас-
ло, оно через трубку Вентури и через канал 4 попадает в сильфон
клапана 2, создавая добавочное усилие, препятствующее открытию
этого клапана. Тогда открывается клапан 3 и масло идет помимо
сот радиатора то тех пор, пока температура масла не повышается.
7* 99
Вязкость при этом падает, давление в горловине насадок Вентури
тоже падает. Масло, поступающее в полость I, сжимает своим
давлением пружину сильфона, открывает клапан 2 и поступает в
соты радиатора.
Иногда для упрощения и повышения надежности регулирования
вместо сложного клапана, действующего по вязкости, устанавли-
вается обычная пружина, действующая по перепаду давления д^рад.
Применение такого клапана дает менее качественное регулирова-
ние, т. к. дРрад зависит не только от температуры масла, но и от
числа оборотов двигателя.
100
Применяемые автоматы, регулирующие количество жидкости,
перепускаемой помимо радиатора, могут действовать или непосред-
ственно по температуре этих жидкостей, или по их вязкости.
Фиг. 77. Регулятор температуры.
1) сильфон, 2) клапан, 3) пружина, 4) пружина, 5) седло клапана,
6) пружина, 7) установочная гайка.
Йа фиг. 77 приведен один из типичных регуляторов, дей-
ствующих непосредственно по температурам. В этом автомате в
качестве чувствительного
элемента служит сильфом,
наполненный обычно водой
с несколькими процентами
быстрокипящей жидкости.
Такой автомат устанавли-
вается в маслосистеме, как
это показано на схеме 75;
если температура масла ниже
рекомендуемой, то седло
клапана открыто и масло из
двигателя поступает через
этот клапан обратно в масля-
ный бак помимо радиатора.
Фиг 78. Схема установки регулятора
в маслосистеме.
101
По мере повышения температуры масла длина сильфона увели-
чивается, седло клапана опускается и масло начинает поступать
в маслобак через радиатор.
VIII. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
В некоторых случаях все автоматы и регуляторы объединены
в одном агрегате, представ тяющем собой центральный пост с
единым рычагом управления основными параметрами двигателя.
Такая система повышает надежность и упрощает монтаж дви-
га1еля и системы управления, но зато приводит к заметному
усложнению и утяжелению конструкции.
Другой путь для получения единою рычага управления — это
блокирование между собой работы автоматов, регулирующих от-
дельные параметры. Тогда система облачает большей гибкостью и
позволяет решать ряд специфических задач.
В частности, для тяжелых самолетов желательно иметь, кроме
автоматического устройства, возможность ручной регулировки для
получения наивыгоднейших режимов. Устанавливая центральный
пост управления, уже нельзя вводить ручную корректировку в сис-
тему управления тем или иным параметром; при блокированных-же
системах это вполне возможно.
Рассмотрим некоторые примеры автоматизированных систем
управления.
На фиг. 78 приведена схема управления 12-ти цилиндровым
V-образным. двигателем жидкостного охлаждения.
Двигатель оборудован одноступенчатым нагнетателем с гидро-
муфтой. В качестве топливной системы служит насос непосред-
ственного впрыска.
На этом двигателе сблокированы следующие элементы управ-
ления: положение дросселя мощности и всережнмного автомата
наддува; настройка регулятора числа оборотов; установка опе-
режения ‘зажигания и управления топ швным насосом.
Установка лопастей в разные положения осуществляется при
помощи электромотора, который через планетарную и червячную
передачу поворачивает лопасти.
Регулирование числа оборотов производится центробежным
электрическим регулятором.
Управление регулятором может быть осуществлено как от
единого рычага управления, так и отдельно. Для этой цели имеется
переключатель на ручное управление, при помощи которого можно
производить затяжеление и облегчение винта, а также установку
его во флюгерное положение.
Для того, чтобы на рычаге мощности усилие, необходимое
для его управления, было бы незначительным, в систему управле-
ния введен гидроусилитель со следящей системой.
102
Управление осуществляется следующим образом. При пере-
мещении рычага мощности перемещается золотник гидроусили-
теля, а вместе с ним и сервопоршень, поворачивающий распредели-
тельный валик системы управления. От распределительного валика
идут рычаги управления ко всем вышеперечисленным органам.
Таким образом при повороте распределительного валика произво-
дится одновременно настройка согласно требуемых характеристик
всех органов управления.
Фиг. 78. Автоматизированная система управления двигателем при помощи
блокировки работы отдельных автоматов.
Например, при изменении положения дросселя газа одно-
временно перестраивается автомат наддува и через кулачек, за-
крепленный на распределительном валике, перестраивается
автомат смеси топливного насоса.
Одновременно с этим рычаг, прикрепленный к распределитель-
ному валику, 'перестраивает регулятор числа оборотов и автомат
опережения зажигания.
Таким образом подбором соответствующих кинематических
передач от распределительного валика к каждому из органов
управления осуществляется регулирование параметров по задан-
ным характеристикам.
Помимо автоматов, объединенных в единый рычаг управления,
в системе имеются устройства, корректирующие отдельные пара-
метры двигателя, но не включенные в объединенную систему управ-
103
I
ления К ним относится терморегулятор, корректирующий коли-
чество подаваемого топлива в зависимости от температуры вс
всасывающей системе, и автомат турбомуфты.
В системе управления предусмотрено также раздельное
управление зажиганием, так что можно устанавливать потребное
опережение зажигания независимо от 'положения рычага управле-
ния. Например позднее зажигание нужно бывает для самоочистки
свечей.
Кроме того предусмотрено раздельное управление регуля-
тором числа оборотов; оно нужно для той же цели, как описы-
валось в разделе «объединенное управление винтом и газом».
Таким образом бчагодаря довольно незначительным измене-
ниям в системе управления, которые заключаются в блокировке
работы отдельных Автоматов и установке дополнительного гидро-
усилителя, достигается возможность управления двигателем одной
рукояткой. Кроме того, преимущество такой системы заключается
в том что любой двигатель, не имеющий единого рычага управле-
ния, может быть переоборудован по этому принципу.
По качеству управления наши самолеты не уступают самоле-
там, оборудованным двигателями со сложными постами управле-
ния, один из которых показан на фиг. 79.
В отличие от существующих схем управления двигателем, где
для поддержания постоянства мощности, установленной летчиком,
применяются обычно автоматы давления наддува и автоматы сос-
тава смеси, в последнее время начали применяться автоматы
наполнения, одновременно регулирующие и давление наддува, и
качество состава смеси.
Применение таких автоматов устраняет ряд недостатков, име-
ющихся у типовых схем регулирования, а именно: в обычных схе-
мах не учитываются изменения противодавления на выхлопе и
температура весового заряда. Кроме того, объединение системы
регулирования наддува и состава смеси увеличивает надежность
и устойчивость регулирования.
Принципиальная схема автомата наполнения приведена на
фиг. 80. Количество воздуха, подаваемого в цилиндр при такой
схеме, зависит: 1) от противодавления на выхлопе, что достигается
подачей давления Рн к чувствительному элементу автомата; 2) от
температуры воздуха, подаваемого нагнетателем, для чего через
коробку чувствительного элемента производится беспрерывное про-
текание воздуха и чувствительный элемент реагирует на темпе-
ратуру воздуха.
В обычной системе регулирования, в которой поддерживается
Рк т Const от земли до расчетной высоты, весовой заряд не-
постоянен и меняется с изменением высоты полета. Это объясняется
тем, что противодавление на выхлопе Pr Const; у земли оно
больше, а с подъемом на высоту падает.
104
РаикциотЬи клапан
Атмосферное
давление
малого газа
Фиг 70. Центральный пост управления авиационным твигатслем.
Регулятор
наддува
Фильтр
Автомат переключения
Скорое пей
Атмарер ор
додление
'1Ш
Гидравлический усилитель
Нагнетающая ступень
насоса
РЬ1наг упра вления
подачей топлива
Регулятор
смеси
гереключатело
обогащения смеси
тщЮрмалвно
^скорости нагнетателя перекрести
Лроссело нагнетал
'томат пуска и
Дроссель
малого
газа
Всасывающая
ступень насоса
Отсос масла
из топа
управления
Рк’^К
Сливизрегуля- В корпус поста
тора смеси управления(с‘ *
(К странице 104—105).
Фиг 80. Принципиальная схема автомата наполнения.
Мощность определяется весовым зарядом; регулирование по
Рк является только косвенным регулированием мощности. Поэтому
у земли, где вес заряда падает в связи с большим Рг, мы не
дополучаем возможной мощности.
IX. ЭЛЕМЕНТЫ КОНСТРУКЦИИ СИСТЕМЫ УПРАВЛЕНИЯ
К элементам системы управления относятся рычаги управле-
ния, тросы, детали кинематических связей, тяги, качалки, крон-
штейны, стопоры и т. д.
Несмотря на то, чю все детали управления, как правило, не
несут больших нагрузок, они должны проектироваться и раз-
мещаться так, чтобы не было излишних упругих деформаций: сум-
марные люфты в системе управления не должны превышать 1,5—
2% общего хода рычагов управления. Например на рычаге газа
при полном перемещении его на угол 100° суммарный люфт
должен составлять не больше 2°. Поэтому следует избегать тяг,
конфигурация которых отклоняется от прямых линий, т. к. изог-
нутые тяги легче подвергаются деформации.
Тяги имеют на концах стаканы или вилки, при помощи которых
осуществляется соединение тяг между собой, а также с качалками
и промежуточными поддерживающими кронштейнами.
105
Тяги делаются обычно из стальных трубок диаметром 5—бльм.
Если по условиям монтажа требуется регулировка длины тяги,
го на концах тяг устанавливаются при помощи резьбовых соедине-
ний специальные наконечники с падежными контрующими устрой-
ствами.
Фиг. 81. Наконечники тяг управления двигателем.
1) Серьга; 2) тяга; 3) переходная втулка; 4) контр гайка.
Конструкция таких соединений приведена на фиг. 81. Места
соединений рычагов между собой рекомендуется выполнять на
шариковых или роликовых подшипниках или на специальных
шарнирах.
Фиг. 82
Шарнирные соединения нужны потому, что при перемещении
двух соединенных между собой тяг они располагаются под
большим углом друг к другу, см. фиг. 82 и в местах соединения
при перемещении тяг происходит-сильное трение. Кроме того,
иногда расположение тяг относительно друг друга и их перемеще-
ние происходит в разных плоскостях.
Конструкции и детали подобных шарнирных соединений при-
ведены на фиг. 83 и 84.
106
Фиг, 83. Шарнирное соединение.
I) Шарнирный пален; 2) корпус; 3) шарнирная пята; 4) винт со сферическим
концом
Фиг. 84. Шарнирное соединение.
1) Шарнирный палец; 2) винт; 3) винт со сферическим концом; 4) корпус.
107
Следует особое внимание обратить на точность изготовления
и термическую обработку этих шарнирных соединений, а также на
правильный их монтаж, т. к. несоблюдение этих условий быстро
Фиг. 85. Изношенное шарнирное соединение.
1) Шарнирный палец; 2) корпус.
выводит из строя такие соединения, даже если они кажутся мало
нагруженными. На фиг. 85 показано шарнирное соединение под-
вергшееся износу.
Фиг. 86. Заделка троса на ролике.
Широкое распространение в системах управления имеет
тросовая передача. Она обычно состоит из двух тросов, работаю-
щих на растяжение; тросы монтируются на роликах, обоймы
которых расположены в местах изгибов тросов.
108
Для управления применяются многожильные тросы диаметром
1,5 — 3 мм. На конечных участках трос заделывается с одной сто-
роны в ролик, который является ведомым элементом; с другого
Фиг. 87. Трос с наконечником.
конца трос закрепляется на барабане, приводимом в движение
штурвало*м, Трос может быть также закреплен на ведущем
ролике, как показано на фиг. 86, но в этом случае к ролику
эксцентрично прикреплена тяга, поворачивающая ролик. Тросовое
Фиг. 88. Сектор ручного управления, действующего при помощи
тросов.
1) панель; 2 и 3) рычаги управления; 4 и 10) оси рычагов управле-
ния; 6 н 11) ролики; 9) кронштейны; 5) подшипники; 7) болт
крепления троса; 8) трос.
управление применяется главным образом для регулирования числа
оборотов и для управления створками капота. Для меньшего из-
носа тросов рекомендуется устанавливать текстолитовые ролики. Во
109
избежание провисания троса он должен иметь достаточное число
опор, которые к тому же обеспечили бы предохранение троса от
соскакивания.
Все гибкие тросы, применяемые для управления, должны перед
монтажом подвергаться предварительной вытяжке. Кроме того, на
случай ослабления тросов, вызываемого как колебаниями дви-
гателя, гак и
ство, которое
пружиной.
амортизацией, предусматривается натяжное устрой-
представляет собой натяжной ролик, нагруженный
Фиг. 89 Сектор ручного управления действующего при помощи тросов.
1, 4 и 5) сектора, 2) втулка; 3) ролик, 6) пружина; 7J ось.
В системах управления применяется также так назыв.
«мягкая» система управления. При этой системе тросы -помещаются
не на жестких опорах, а в стальных или медных трубках. Концы
троса впаиваются в специальные наконечники с резьбой, при
помощи которой и производится регулировка длины грсса,
как показано на фиг. 87. Применение тросового управления или
«мягкой» системы управления очень удобно в тех случаях, когда
нет места для жесткой системы и когда необходимо делать ряд
поворотов и изгибов. Особенно удобна с точки зрения расположе-
ния на машине «мягкая» система управления, которая может быть
применена почти во всех условиях. 11о при «мягкой» системе
управления требуется значительно большее усилие, т. к. возникают
силы трения между тросом и оболочкой.
Натяжение такого троса осуществляется обычно при помощи
наконечников с резьбой, ввертываемых в корпус шарового соеди-
нения. ,
ПО
Значительное место среди элементов системы управления
занимают сектора управления. Так как правая рука пилота обычно
занята штурвалом, то рычаги управления мотором, которыми прихо-
дится часто пользоваться в полете, располагают на левом борту
кабины. К рычагам управления относятся: рукоятка нормального
газа, рукоятка высотного корректора, рукоятка (штурвал) управле-
<Ьиг 90. Сектор ручного упразления.
1) рычаг высотного корректора; 2) рычаг сектора газа: 3) рычаг управления
винтом; 4 и 5) зажимы секторов; 6) пружина; 7) фрикционн-ыс диски; 8) втулка;
9) ролик для крепления троса. Зажимы 4 — 5 служат для затяжки фрикционов,
препятствующих сползанию секторов после их установки. Затяжка должна быть
такой, чтобы летчик в случае надобности мог переместить’ сектора, не
отпуская зажимы. Сектор управления закрывается коробкой и прикрепляется
к фюзеляжу.
ния винтом, рукоятка управления жалюзи радиатора и т. д. Эти
рукоятки сводятся в сектор управления, которые могут объединять
две, три и больше рукояток. Различные конструкции секторов
управления приведены на фиг. 88, 89 и 90. В некоторых случаях
применяются рукоятки, позволяющие устанавливать механизм в
несколько фиксированных положений. Одна из таких рукояток
показана на фиг. 91.
111
Фиг. 91 Рукоятка выключения насоса непосредственного впрыска.
1) рукоятка; 2) пружина; 3) корпус.
X. РАСПОЛОЖЕНИЕ ПРИБОРОВ И РУКОЯТОК
УПРАВЛЕНИЯ В КАБИНЕ
На современном самолете в кабине летчика расположено от
25 до 30 приборов и до 30 различных рукояток и кнопок управле-
ния. Наблюдение за таким количеством приборов и управление
столькими рукоятками очень сложно. Поэтому необходимо наиболее
важные приборы располагать так, чтобы они были всегда в поле
зрения летчика, а наиболее часто употребляемые рычаги чтобы
были ближе к летчику.
При этом расположение ручек должно быть таково, чтобы при
пользовании ими летчику не приходилось менять своего положения;
112
последнее особенно трудно в тесных кабинах одномоторных
самолетов.
Для унификации расположения приборов на различных само-
летах стремятся к стандартизации оборудования кабины и к одно-
типности расположения рукояток управления и приборов. Это
значительно облегчает работу летчика при переходе от одного
самолета на другой.
Непосредственно перед пилотами располагаются наиболее
важные приборы, контролирующие те параметры, изменение
которых может вызвать резкое изменение работы силовой установ-
ки или даже выход ее из строя.
К таким приборам относятся: приборы, показывающие число
оборотов двигателя — тахометр; давление наддува — мановакуу-
метр; давление масла—манометр; температуру масла—термометр;
и давление топлива — манометр; последние три прибора обычно
бывают объединены в один прибор, который называется трехстре-
лочным индикатором. Кроме этих важнейших приборов, летчику
приходится наблюдать за следующими приборами: термометр воды;
гемометр, показывающий температуру головок цилиндров (часто
он делается с механизмом переключения, позволяющим последова.
тельно проверять температуру разных головок); термометр воздуха
на входе в карбюратор, по которому судят о возможности обледе-
нения; манометр нейтрального газа, который устанавливается на
самолетах, оборудованных системой нейтрального газа; тахометр
турбокомпрессора — на самолетах, оборудованных силовыми уста-
новками с турбокомпрессорами.
Кроме этих, и так довольно многочисленных приборов, на
отдельных самолетах устанавливаются еще указатели динамо-
метрических втулок, позволяющие судить о мощности, развиваемой
мотором; флюометры, оценивающие расход горючего; альфометры,
и т. д.
На самолетах, где силовые установки оборудованы насосами
подкачки (бустерными помпами),приходится контролировать работу
этих помп по сигнальным электрическим лампам.
Так же в кабине устанавливаются указатели количества горю-
чего в баках, а иногда указатели положения боковых и лобовых
жалюзи.
В последнее время на многих силовых установках имеются
указатели момента на винте.
Наиболее правильное расположение приборов на доске при-
ведено на фиг. 92. Менее важные приборы располагаются так,
чтобы они не отвлекали внимание летчиков, хотя и они должны
быть расположены удобно для обзора.
Как было сказано выше, наиболее важные рычаги должны
располагаться ближе к летчику; к ним относятся: сектор газа;
сектор управления винтом (регулятором числа оборотов); управле-
ние форсажными режимами; управление высотным корректором;
при автоматическом высотном корректоре обычно все же
8 ПолiiKoiiCKiiii В. II. и Гальперин М. И. 113
ЛИТЕРАТУРА
1. В. И. Поликобский. — О влиянии степени скоростного наддува на работу
авиационных двигателей Т. В Ф. № 6 1946 г.
2. В. И. Поликовский, В. С. Фролов и П. П. Королев. — Высотные характери-
стики авиационных моторов в условиях полета (труды ЦАГИ вып. 347).
3. М. М. Масленников. — Теория авиационных двигателей. 1945 г-
4. Г. С. Скубачевский и Д В. Хронин. — Винтомоторные установки самолетов.
Оборонгиз 1946 г
5 В. Г. Волков. — Силовые установки самолетов. Издание 1947 г.
6. С. Н. Столяров. — Синхронизация чисел оборот! в винтомоторных установок.
Обзорный бюллетень Ц11АМ № 2 1948 г.
В статье приводится большинство существующих схем синхронизации
числа оборотов и дается их анализ.
7. Н. Г. Дубравскнй.— а) Автоматизированные системы управления авиа-
двигателей. Т. В. Ф. Ns 2. В статье приводится анализ существующих
схем управления авиадвигателями и сформулированы основные технические
требования к системам управления поршневыми авиационными двигателями.
б) Автоматы наддува (издание МАИ) под редакцией Г С. Скубачевского.
Одна из первых работ по автоматам наддува, проведен анализ работы
автомата наддува
в) Объединенное управление винтом и газом авиационных двигателей.
Труды ЦИАМ № 88. Приводится аналитическое исследование по опреде-
лению параметров, которые лежат в основе выбора объединенной сис-
темы управления. Приводится опыт экспериментального исследования
режимов двигателя, обеспечивающих минимальные расходы топлива;
даются рекомендации по выбору систем обьединенного управления
винтом и газом, учитывая требования эксплоатации, удобства конструктив-
ной компановки, надежности работы системы и т. д.
8. П. В. Родионов и В. В. Борисов. — Автоматы переключения скоростей
нагнетателя. Обзорный бюллетень ЦИАМ Ns 3 1948 года.
В статье приводится описание различных автоматов переключения скоро-
стей нагнетателя и анализ выбора системы переключения скоростей
нагнетателя для одномоторных и многомоторных установок.
9 М. И. Гальперин и И. И Ильин.— Применение осциллирующего движения
золотника для повышения чувствительности регулятора. Информация
ЦИАМ Ns 5 1947 г. В статье изложены результаты экспериментальной
проверки автомата с осциллирующим золотником и сравнивается работа
такого автомата с автоматом без осциллирующего золотника.
10. М. И. Гальперин. — Гидравлические системы обьединенного управления
винтом и газом. Информация ЦИАМ Ns 16 1946 г. В этой статье приво-
дится принцип работы и конструкция гидравлических агрегатов объединен,
ного управления винтом и газом для однодроссельных и двухдроссельиых
двигателей,
116
11. Криволуцкий—Исследование регулирования наддува. (Кандидатская
диссертация).
12. П. Д. Самсонов. — Кабины самолетов. Т. В. Ф. № 6 1943 г.
13. Л ооновский В. А. — Автоматические регуляторы. 1944 г.
В книге имеется большой раздел, посвященный конструкциям авиацион-
ных регуляторов.
14. В. А. Бодиер. — Авиационные контрольно-измерительные приборы. В. В. И. А
имени Н. Е. Жуковского. 1948 г.
15. 3. М. Блох. — Регулирование н устойчивость машин Конспект Московского
Механического института.
ОГЛАВЛЕНИЕ
Стр
I. Предисловие..........................................
II, Общие требования к системам управления винтомоторное установки
III. Регуляторы и автоматы ................................®
IV. Управление наддувом...................................
1. Требования к системам управления наддувом 15 $2
2. Автоматы наддува 22 24
3. Настройка автомата ...... 24 30
4. Усилия возникающие на рычаге управления наддувом - 30—37
5. Управление скоростями многоскоростиых нагнетателей 37—4->
6. Переключение скоростей нагнетателя на многомоторных
самолетах . . . . - 45 48
7. Регулирование числа оборотов нагнетателя с гидромуфтой 48 о
8. Управление турбокомпрессорами 52-56
9. Основные требования к системам управления наддувом 56—60
10 Измерение давления наддува . .61
V. Регулирование состава смеси . . ... ...............61—62
VI. Управление винтом.................................. • 82
1. Общие сведения о системах управления ВИШ 62 70
2. Управление флюгерными винтами 71—/3
3. Управление реверсивными винтами 73
4 Управление винтами на многомоторных самолетах 73—/>
5. Объединенное управление винтом и газом . 75—89
6. Выбор кинематической передачи объединенного управления
винтом и газом . - 89 90
VII. Управление органами регулирования температуры
1 . Общие сведения . .... • • Ю 92
2 Автоматические устройства для регулирования температуры 92—101
VIII. Автоматизированные системы управлеия.......................102—105
IX. Элементы конструкции системы управления................ ,105—112
X. Расположение приборов и рукояток управления в кабине . . . .112—По
Литература ... , . ... .116—117
•2
118