/


































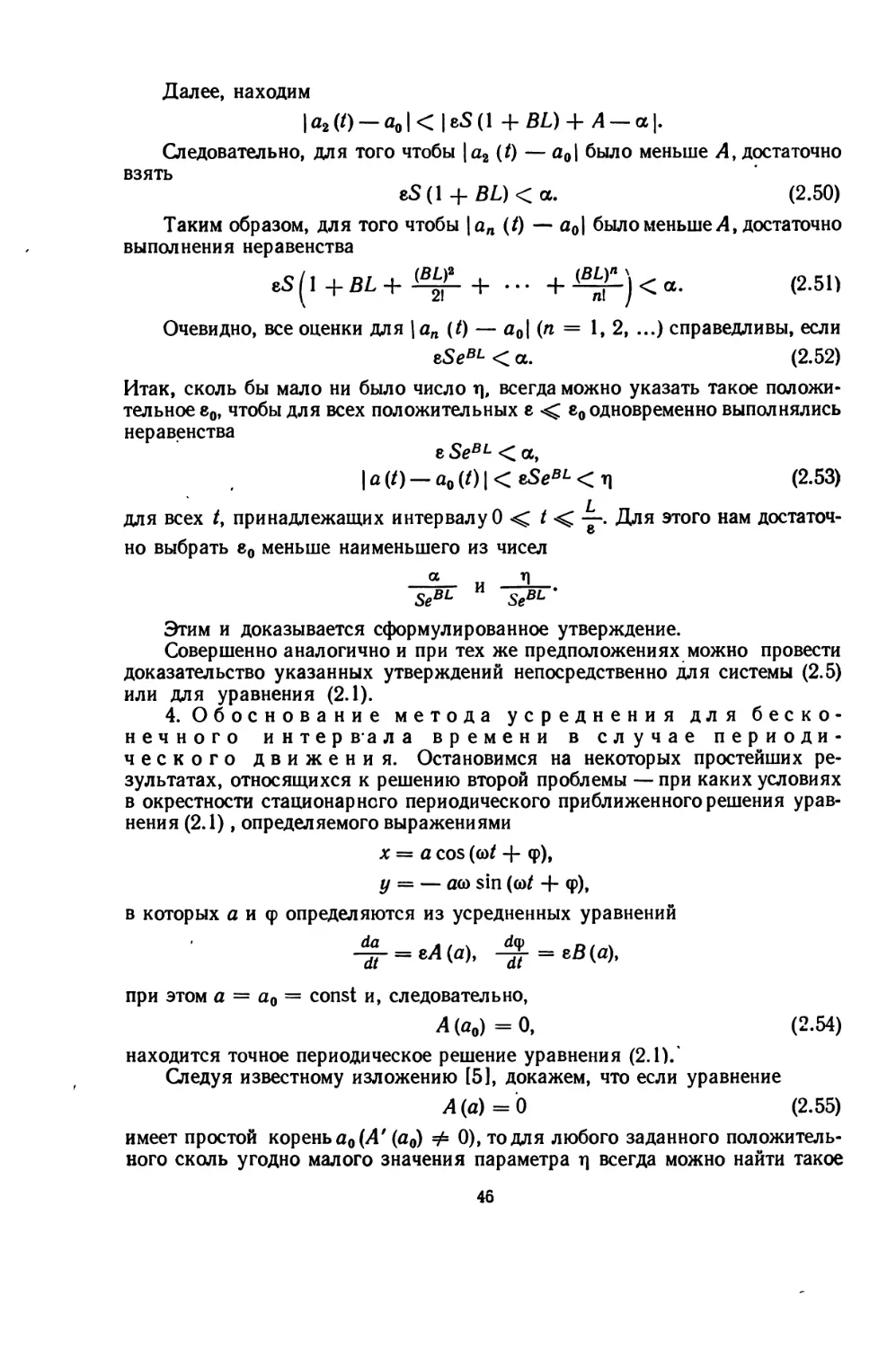
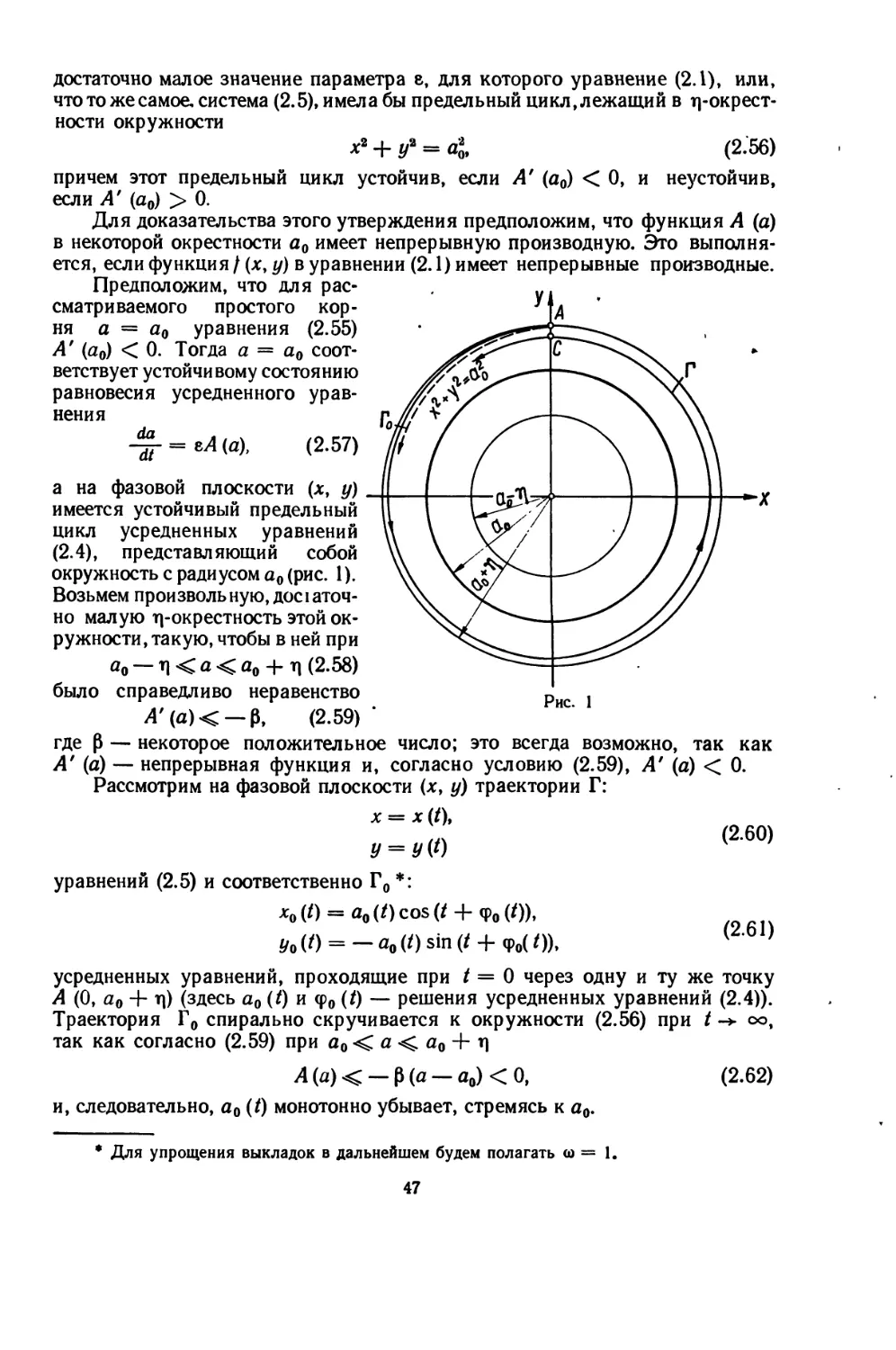




















































































































































































































Text
Ю. А. МИТРОПОЛЬСКИЙ
МЕТОД
УСРЕДНЕНИЯ
В Н ЕЛИ Н ЕЙ НОЙ
МЕХАНИКЕ
АКАДЕМИЯ НАУК УКРАИНСКОЙ ССР
ОРДЕНА ТРУДОВОГО
КРАСНОГО ЗНАМЕНИ
ИНСТИТУТ
МАТЕМАТИКИ
«НАУКОВА ДУМКА»
КИЕВ - 1971
Ю. А. МИТРОПОЛЬСКИИ
МЕТОД
УСРЕДНЕНИЯ
В НЕЛИНЕЙНОЙ
МЕХАНИКЕ
*ДК 517.9
531
М67
Редакция физико-математической литературы
Зав. редакцией И. В. Евееенко-Миаоренко
МИТРОПОЛЬСКИЙ ЮРИЙ АЛЕКСЕЕВИЧ
Метод усреднения в нелинейной механике
Печатается по постановлению ученого совета
Института математики АН УССР
Редактор И. Г. Козубовская. Художественный редактор К. Г. Л ичак
овский- Оформление художника Б. И. БроОского. Технический редактор
Н. П. Рохлина. Корректор Э. Я- Белокопытова.
Сдано в набор 27/Х1 1970 г. Подписано к печати 10/v 1971 г. БФ 05407
Зак. № 246. Изд. № 292. Тираж 4400. Бумага № I, 70xl00Vie Печ
физ. листов 27,5- Условн. печ. листов 35,75. Учетно-издательских
листов 34,92. Цена 3 руб. 90 коп.
2—2—3 Издательство сНауковз думка», Киев. Репина, 3.
ИЗ—71М* Напечатано с матриц Киевского полиграфического комбината на
книжной ф ке «Октябрь» Комитета по печати при Совете Министров УССР,
КиТв, Артема, 23-а
ОГЛАВЛЕНИЕ
Предисловие 9
Введение 13
§ 1. Метод усреднения в задачах небесной механики 25
1. Предварительные замечания (25). 2. Уравнения плоской задачи трех тел (25).
3. Схема усреднения Гаусса (27). 4. Схема усреднения Фату (28). 3. Схема
усреднения Делоне — ХилЛа (32).
§ 2. Метод Ван-дер-Поля 35
1. Метод усреднения Ван-дер-Поля (35). 2. Обоснование метода усреднения
Фату (38). 3. Обоснование метода Ван-дер-Поля Л. И. Мандельштамом и Н. Д. Па-
палекси (42). 4. Обоснование метода усреднения для бесконечного интервала
времени в случае периодического движения (46). 5. Решение уравнения
Ван-дер-Поля (49).
§ 3. Приведение нелинейных дифференциальных уравнений, содержащих «малый» и
«большой» параметры, к стандартной форме 52
1. Предварительные замечания (52). 2. Приведение к стандартной форме системы
уравнений второго порядка (52). 3. Приведение к стандартной форме системы
уравнений с гироскопическими членами (53). 4. Приведение к стандартной
форме канонических уравнений (55). 5. Приведение к стандартной форме уравнений
/я-го порядка, разрешенных относительно старшей производной (57).
§ 4. Метод усреднения Н. Н. Боголюбова 60
1. Постановка задачи. Принятые обозначения (60). 2. Первое приближение (61).
3. Второе приближение (64). 4. Построение высших приближений (69).
5. Анализ усредненных уравнений (70). 6. Решение уравнения Ван-дер-Поля
(72). 7. Об условиях, обеспечивающих однозначность в методе усреднения (73).
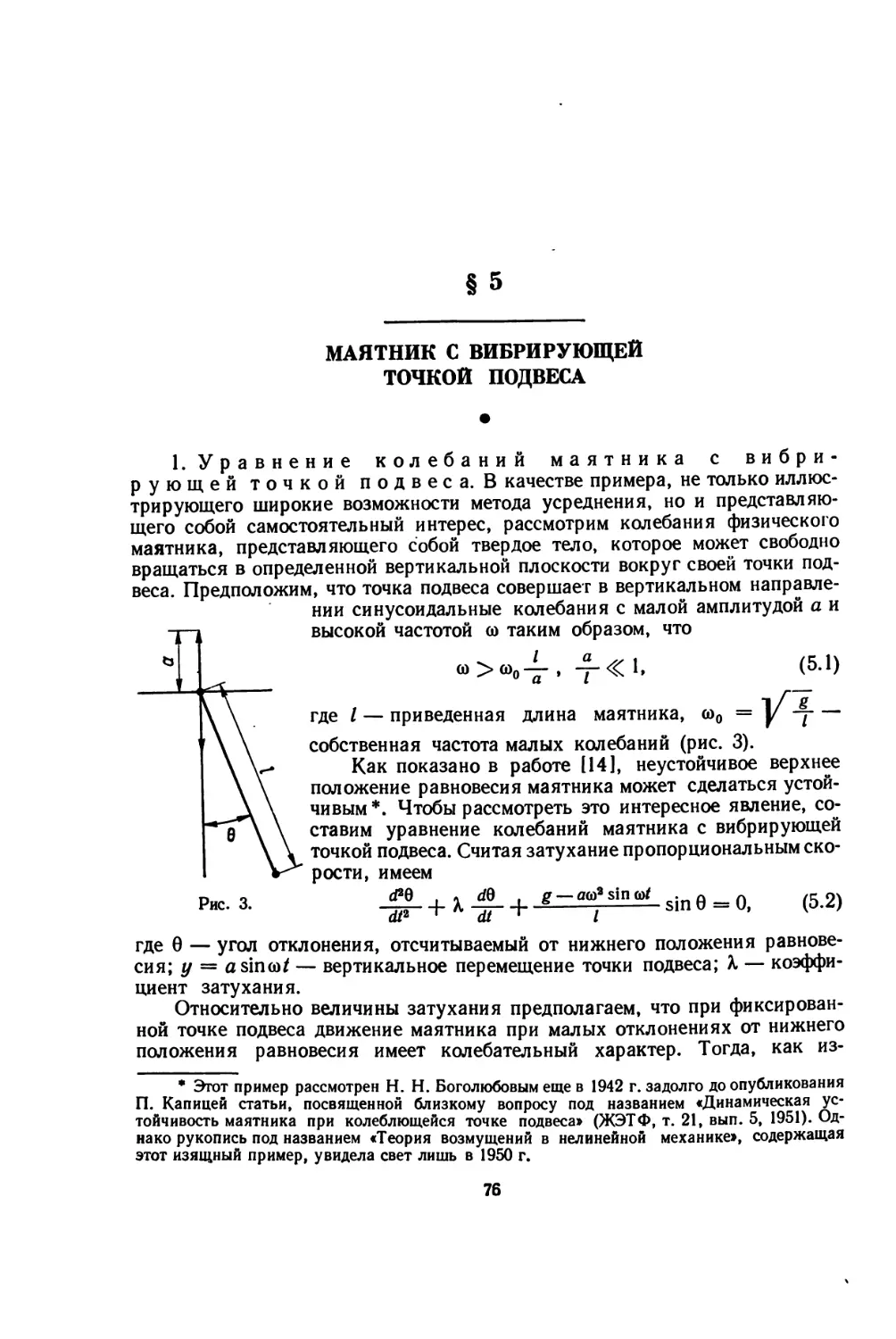
§ 5. Маятник с вибрирующей точкой подвеса 76
1. Уравнение колебаний маятника с вибрирующей точкой подвеса (76). 2.
Приведение уравнения колебаний маятника к стандартной форме (77). 3.
Построение первого приближения (78). 4. Второе приближение (79).
§ 6. Математическое обоснование метода усреднения Н. Н. Боголюбова 84
1. Задача математического обоснования (84). 2. Первая основная теорема
Н. Н. Боголюбова (85).
§ 7. Обоснование метода усреднения Н. Н. Боголюбова на бесконечном интервале
времени 90
1. Постановка задачи и некоторые предположения (90). 2. Преобразование
уравнений в стандартной форме (91). 3. Построение решений системы уравнений (7.41)
(95). 4. Устойчивость полученных решений (99). 5. Вторая основная теорема
Н. Н. Боголюбова (103). 6. Пример существования периодического решения в
нелинейных системах (104). 7. Некоторые замечания относительно высших
приближений (107).
§ 8. Дальнейшее развитие и обобщение первой основной теоремы метода усреднении 110
1. Зависимость решений от параметра ( 110). 2. Связь между теоремой о зависимо-
5
сти решений от параметра и первой теоремой метода усреднения (НО). 3.
Обобщение первой теоремы метода усреднения (111). 4. Обобщение теорем о непрерывной
зависимости решений от параметра (112). 5. Обобщение первой теоремы метода
усреднения на случай счетных систем дифференциальных уравнений (118).
6. Обоснование метода усреднения для уравнений с нерегулярной правой частью
(120). 7. Пример уравнения с нерегулярной правой частью (122). 8. Воздействие
мгновенных импульсов (122). 9. Усреднение при наличии в системе особых точек
(124). 10. Оценки высших приближений(126)
§ 9. Усреднение в системах дифференциальных уравнений, находящихся под
воздействием сил с высокой частотой 131
1. Дифференциальные уравнения с быстро вращающейся фазой (131). 2.
Построение преобразования, разделяющего переменные ( 132). 3. Построение
усредненной системы первого приближения (133). 4. Замечание о точности получаемых
приближений (136).
§ 10. Усреднение в дифференциальных уравнениях с медленно меняющимися
параметрами 137
1. Уравнение с медленно меняющимися параметрами (137). 2. Приведение к
стандартной форме (138). 3. Построение усредненных уравнений в первом
приближении (139). 4. Частные случаи системы (10.1) — (10.3) (139). 5. Системы
уравнений с медленно меняющимися параметрами (142). 6. Теорема об оценке
погрешности m-го приближения (142). 7. Маятник с медленно меняющейся
длиной (143). 8. Колебания системы, возбуждаемые силами инерции
неуравновешенной массы (145). 9. Адиабатический инвариант (146). 10. Об одном частном виде
систем с медленно меняющимися параметрами (148). 11. Пример: колебания
маятника с вибрирующей точкой подвеса (151).
§11. Усреднение в системах, близких к точно интегрирующимся 153
1. Постановка задачи ( 153 ). 2. Приведение уравнения (11.1) к стандартной форме
(154). 3. Построение усредненных уравнений (156). 4. Уравнения первого
приближения. Порядок погрешности (158). 5. Построение огибающих для амплитуд
колебаний, описываемых уравнением (11.1) ( 161 ). 6. Пример уравнения, близкого
к точно интегрирующемуся (162). 7. Воздействие внешних периодических сил
на сильно нелинейные системы (164). 8. Интеграл действия (165).
§ 12. Усреднение в системах уравнений с малыми параметрами при высших производных 169
1. Постановка задачи ( 169). 2. Основной подход к изучению системы (12.1)
(170). 3. Теорема об усреднении (171). 4. Усреднение при наличии быстроколе-
блющихся внешних сил ( 1741
§ 13. Усреднение в системах, содержащих медленные и быстрые движения 176
1. Общая постановка задачи (176). 2. Преобразование, разделяющее переменные
( 178). 3. Теорема об усреднении для системы (13.1) (183). 4. Зависимость
средних значений от траекторий (185). 5. Системы, близкие к гамильтоновым с
медленными переменными 1188). 6. Маятник с переменной длиной (190). 7.
Резонансные режимы в нелинейных системах (192).
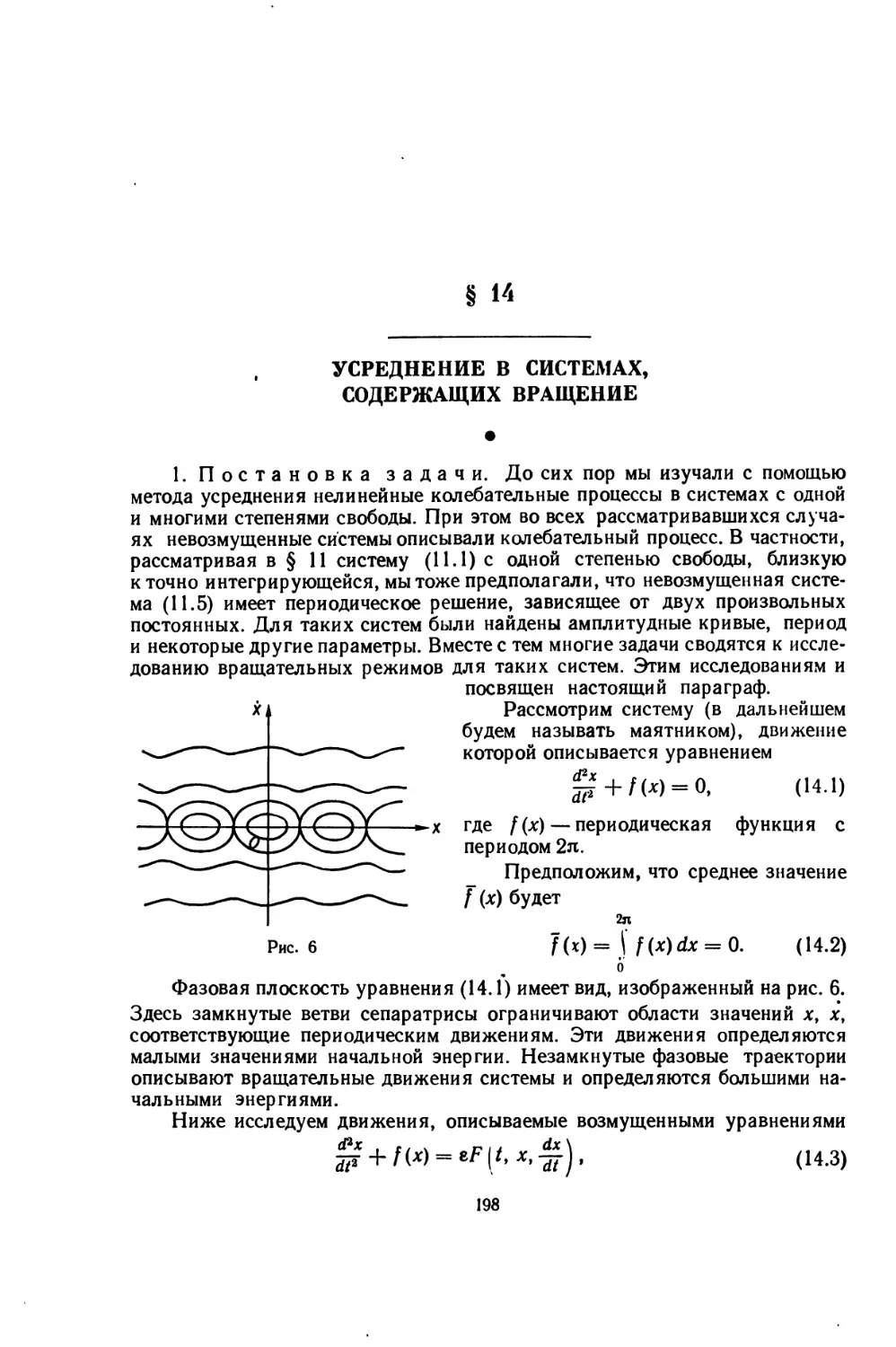
§ 14. Усреднение в системах, содержащих вращение 198
1. Постановка задачи (198). 2. Случай быстрого вращения (199). 3. Возмущение
быстрых вращений (203). 4. Случай малой угловой скорости вращения (204).
5. Пример: маятник Эйнштейна во вращательном режиме (207). 6. Резонансные
явления во вращательных системах (208). 7. Пример: движение спутника
относительно центра масс (211).
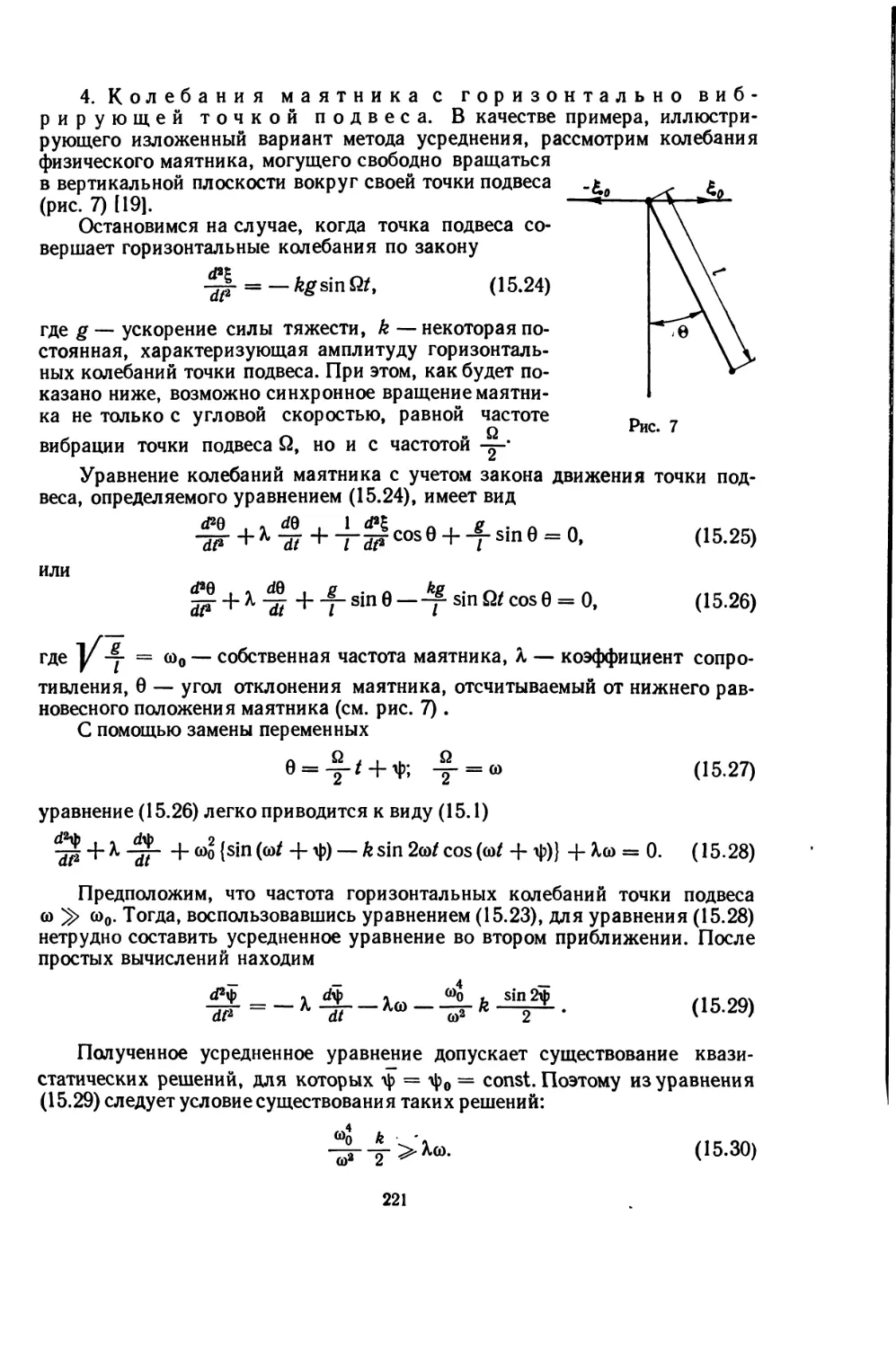
§ 15. Метод усреднения для уравнений высшего порядка 217
1. Приведение систем высшего порядка к стандартному виду (217). 2.
Построение усредненной системы (217). 3. Уравнение второго порядка (220). 4.
Колебания маятника с горизонтально вибрирующей точкой подвеса (221).
§ 16. Метод усреднения для конечно-разноггных уравнений 223
1. Построение усредненных уравнений для конечно-разностной системы в
стандартной форме (223). 2. Основная теорема об усреднении (225).
§ 17. Усреднение в системах с недифференцируемыми правыми частями 231
б
У
I. Теорема о существовании периодического решения (231).
§ 18. Усреднение в системах, возбуждаемых мгновенными силами 243
1. Воздействие мгновенных сил на систему с одной степенью свободы (243).
2. Уравнения первого приближения. Улучшенное первое приближение (245).
3. Стационарные режимы (246). 4. Примеры: часовой маятник; ламповый
генератор (247). 5. Усреднение в системах с мгновенными силами в общем случае (249).
6. Теоремы о соответствии решений точных и усредненных уравнений (251).
§ 19. Применение метода усреднения к исследованию дифференциальных уравнений с
«периодическими» коэффициентами, 253
1. Общие замечания ( 253 ). 2. Дифференциальное уравнение второго
порядка ( 253 ). 3. Построение усредненной системы ( 254 ). 4. Линейное
уравнение с периодическими коэффициентами (257).
§ 20. Усреднение в канонических и близких к каноническим системах 260
1. Усреднение в системах с периодическим гамильтонианом (260). 2.
Сферический маятник с вибрирующей точкой подвеса (262). 3. Второй метод построения
гамильтониана усредненного движения (263). 4. Пример: движение гироскопа с
вибрирующей точкой подвеса (268).
§21. Применение метода усреднения для построения приближенных решений,
соответствующих одночастотным колебаниям 270
1. Основные предположения и ограничения (270).2.Преобразованиесистемы к двум
уравнениям в стандартной форме (271). 3. Энергетическая интерпретация
уравнений (21.20) (273). 4. Пример построения решения, соответствующего одно-
частотному режиму в системе с распределенными параметрами (275). 5.
Усреднение в системах высокого порядка при наличии одной нелинейности (277).
§ 22. Усреднение в системах дифференциальных уравнений с запаздывающим
аргументом и малым параметром 279
1. Предварительные замечания и постановка задачи (279). 2. Обобщение первой
основной теоремы метода усреднения (280). 3. Теорема о непрерывной
зависимости решения от параметра (285). 4. Обобщение второй основной теоремы метода
усреднения (287). 5. Сингулярно возмущенные уравнения с запаздыванием (289).
6. Усреднение в дифференциально-разностных уравнениях нейтрального типа
(291). 7. Системы с запаздыванием и медленными переменными (292). 8. Примеры
(293).
§ 23. Усреднение в стохастических системах 296
1. Постановка задачи (296). 2. Уравнение Колмогорова—Фоккера—Планка (297).
3. Дифференциальные уравнения со случайными функциями (299). 4.
Воздействие стационарного «белого шума» на автономную систему (300). 5. Воздействие
стационарного «белого шума» на неавтономную систему (302). 6. Теоремы об
оценках на конечном интервале времени (304). 7. Дальнейшее развитие принципа
усреднения для стохастических уравнений (309). 8. Усреднение непосредственно
в уравнениях Колмогорова—Фоккера — Планка (313). 9. Стохастические
колебательные системы с медленно меняющимися параметрами (316). 10. Пример:
параметрическое случайное возбуждение колебательной системы (317). 11. Пример:
воздействие «белого шума» на автоколебательную систему (318). 12.
Квазилинейные системы со случайным запаздыванием (319).
§ 24. Метод усреднения с точки зрения точечных преобразований 320
1. Основные определения (320). 2. Точечные отображения для точных и
усредненных уравнений (321). 3. Соответствие между состояниями равновесия и
периодическими решениями (322). 4. Применение метода усреднения к разрывным
системам (323).
§ 25. Стробоскопический метод Н. Минорского и его связь с методом усреднения . . .325
1. Стробоскопический метод (325). 2. Стробоскопические дифференциальные
уравнения (326). 3. Примеры составления стробоскопических уравнений (328).
§ 26. Связь метода усреднения с другими приближенными методами 330
1. Метод эквивалентной линеаризации и связь его с методом усреднения (330).
2. Метод разложения по двум переменным (331). 3. Связь между методом
усреднения и методом разложения по двум переменным (334). 4. Пример (337).
7
5. Связь между методом усреднения и принципом гармонического баланса (338).
§ 27. Усреднение в уравнениях с частными производными 340
1. Уравнение, близкое к гиперболическому; приведение его к бесконечной системе
(340) . 2. Построение усредненных уравнений (342). 3. Пример:
распространение электромагнитных колебаний по кабелю (342). 4. Уравнение колебаний
океанских волн (343). 5. Пример: нерезонансный случай (345). 6. Пример:
кажущиеся резонансы (346). 7. Усреднение в уравнениях, близких к
гиперболическим с запаздыванием (347). 8. Уравнения, близкие к гиперболическим
при наличии случайных сил (350). 9. Случайные колебания, описываемые
нелинейным дифференциальным уравнением четвертого порядка (352). 10.
Поперечные колебания балки под воздействием случайных сил (355). 11.
Уравнения в частных производных при наличии случайного запаздывания (356).
§ 28. Применение метода усреднения к уравнениям в частных производных, не
сводящимся к бесконечномерным системам 358
1. Предварительные замечания (358). 2. Система дифференциальных уравнений
первого порядка (358). 3. Непрерывная зависимость решения от параметра (360).
4. Принцип усреднения для задачи Коши (361). 5. Задача Коши для
гиперболического уравнения с запаздыванием (363). 6. Теорема об усреднении для
гиперболического уравнения с запаздыванием (364). 7. Распространение метода
усреднения на квазилинейные гиперболические уравнения высшего порядка
(368) 8. Смешанная задача для квазилинейных гиперболических уравнений (369).
9. Усреднение в параболических и эллиптических дифференциальных
уравнениях (369).
§ 29. Обоснование метода усреднения для дифференциальных уравнений в
функциональных пространствах ... 375
1. Общие'замечания (375). 2 Обобщение первой основной теоремы метода
усреднения на случай гильбертова пространства (375). 3. Обобщение второй
основной теоремы метода усреднения; предварительные замечания и обозначения
(379). 4. Преобразование основной системы и вспомогательные утверждения
(380) 5. Вторая основная теорема в случае гильбертова пространства (384).
6. Другие обобщения второй теоремы (385).
§ 30. Усреднение и «укорочение» счетной системы дифференциальных уравнений в
стандартной форме .... 387
§31. Усреднение в системах интегро-дифференциальных и интегральных уравнений 393
1. Предварительные замечания (393). 2. Интегро-дифференциальное уравнение в
стандартной форме (393). 3. Частный случай системы (31.1) (395). 4. Ин-
тегро-дифференциальные уравнения, содержащие медленные и быстрые
переменные (397). 5. Интегро-дифференциальные уравнения типа Фредгольма (398).
6. Пример: колебания маятника с полостью, заполненной вязкой жидкостью (398).
7. Усреднение в системах интегральных уравнений (400). 8. Дальнейшее развитие
метода усреднения применительно к различным классам
интегро-дифференциальных уравнений (402).
§ 32. Усреднение в многочастотных системах 406
1 Постановка задачи. Основные особенности усреднения при резонансе (406).
2v Теорема об усреднении при наличии резонанса в начальный момент (409).
§ 33. Усреднение в некоторых гироскопических системах 412
1. Случай колебательной системы со многими степенями свободы при наличии
гироскопических членов (412). 2. Усреднение в некоторых специальных системах
теории гироскопов (416). 3. Пример: движение астатического гироскопа в кар-
дановом подвесе на подвижном основании (418).
§ 34. Метод усреднения и задача о разделении движений 421
§ 35. Применение метода усреднения для исследования устойчивости движения . .425
Литература 431
ПРЕДИСЛОВИЕ
Монография написана на основе лекций, читаемых автором
на механико-математическом факультете Киевского
государственного университета им. Т. Г. Шевченко.
Стандартные курсы теории дифференциальных уравнений
и теории колебаний не включают многих специальных методов и
только знакомят слушателей с основными положениями. Вместе
с тем в дальнейшей практической деятельности математикам и
механикам требуется знание вопросов, выходящих далеко за
рамки программы.
При составлении программы спецкурсов я считал, что выбор
материала не должен быть случайным и не должен следовать
сложившимся традициям, а должен включать наиболее новые
результаты, имеющие широкую перспективу применения. Ввиду
того что в настоящее время теория колебаний играет очень
важную роль в развитии всей современной материальной
культуры, естественно выбор материала для лекций был мною сделан
в одной из наиболее важных областей теории нелинейных
колебаний.
Кроме студентов, лекции посещают аспиранты университета,
Института математики АН УССР и многих других институтов.
Тематика лекций вызвала живой интерес у слушателей, в результате
чего возникли темы не только для курсовых работ, но и для
многих кандидатских диссертаций. Лекции были изданы в 1965 г.
малым тиражом, однако они заинтересовали многих специалистов
и после выхода их в свет (а также обзорных статей автора с
постановкой проблем) появилось много статей у нас и за рубежом,
посвященных дальнейшему развитию и обобщению метода
усреднения.
Как известно, методы нелинейной механики излагаются в
ряде широко известных монографий. Однако в них методу
усреднения уделяется недостаточно внимания и совершенно
отсутствуют результаты как чисто математического, так и алгоритмического
характера, полученные в области развития метода усреднения
за последние годы.
Настоящая монография посвящена изложению метода
усреднения в нелинейной механике, строгое математическое
обоснование которого заложено в трудах Н. Н; Боголюбова. В нее
включены многочисленные результаты дальнейшего развития и
обобщения основополагающих идей Н. Н. Боголюбова, полученные
9
автором книги и его аспирантами и сотрудниками в области
строгой математической трактовки метода усреднения и в направлении
создания алгоритмов усреднения для других классов уравнений.
В монографию также включены некоторые первоначальные
идеи усреднения и результаты многочисленных работ,
вышедших у нас и за рубежом (США, ЧССР, РНР) и содержащих
наиболее существенные результаты в области дальнейшего
развития и обобщения основных идей Н. Н. Боголюбова об усреднении.
Разделы книги неоднократно обсуждались на семинаре по
математической физике и теории нелинейных колебаний
Института математики АН УССР, а также излагались во многих
обзорных и специальных докладах на международных и
всесоюзных съездах, конференциях, совещаниях и различных других
семинарах.
Все содержание монографии имеет определенную напрайлен-
ность и концентрируется вокруг основной идеи метода
усреднения, связанной с особой заменой переменных и двумя
фундаментальными теоремами. Эта идея за последние годы получила
чрезвычайно широкое развитие и распространение и положила
начало новому направлению в теории асимптотических методов
нелинейной механики. Методы эти проникли в самые различные
области теоретической физики, электроники, прикладной
астрономии, динамики космических аппаратов, гидродинамики,
теории строения кристаллов, нелинейной оптики, теории плазмы,
теории ускорительных устройств, нелинейной акустики, теории
реактивных двигателей и др.
В книге изложены различные алгоритмы, схемы и правила
построения приближенных решений уравнений с шалым» и
«большим» параметрами, приведены примеры, на которых во
многих случаях удается наглядно проиллюстрировать
эффективность метода усреднения и широту применения его к самым
разнообразным, на первый взгляд далеким друг от друга,
проблемам. Разделы, посвященные алгоритмам, правилам и
примерам, представляют несомненный интерес в первую очередь для
инженеров и математиков, занимающихся фактическим расчетом
конкретных колебательных систем.
Приведенные в книге теоремы (многие из них снабжены
подробным доказательством, для некоторых дана только
формулировка и идея доказательства со ссылкой на первоисточник)
раскрывают глубину и математическую строгость метода
усреднения. Разделы, посвященные строгому математическому
обоснованию изложенных в монографии методов, заинтересуют
математиков, занимающихся вопросами теории дифференциальных
уравнений с малым параметром.
Вместе с тем изложенный в книге материал и приведенный
> список литературы ни в коем случае не претендуют на
исчерпывающую полноту. В монографии изложены основные
принципиальные направления в развитии метода усреднения и в качестве
их иллюстрации приведены характерные примеры нелинейных
колебательных систем, раскрывающие эффективность
изложенного метода.
10
Объем настоящего издания не позволил подробно
рассмотреть задачи, связанные с расчетом гироскопических устройств,
динамикой летательных аппаратов, регулируемых систем и т. п.,
в которых также находит широкое применение метод усреднения,
и остановиться на многочисленных важных аспектах применения
этого метода в задачах ядерной физики, микроэлектроники,
радио- и электротехники.
Кроме того, в книге не затрагивается вопрос об установлении
соответствия между решениями точных уравнений и усредненных
с помощью рассмотрения интегральных многообразий,
получивший в настоящее время существенное развитие.
Ю. Митропольский
ВВЕДЕНИЕ
Как известно, метод усреднения первоначально возник в небесной
механике и на первом этапе развитие его связано, в основном, с задачами
небесной механики, для решения которых применялись различные схемы
усреднения (например, схема Гаусса, Фату, Делоне — Хилла и др.). При
этом основной прием метода усреднения заключался в том, что правые части
сложных дифференциальных уравнений, описывающих колебания или
вращение, заменялись «сглаженными», усредненными функциями, не
содержащими явно времени t и быстро изменяющихся параметров системы.
Получающиеся в результате усредненные уравнения либо точно интегрировались,
либо в какой-то мере упрощались, что позволило получить важные
выводы относительно изучаемого движения как качественного, так и
количественного характера.
Однако в теории нелинейных колебаний метод усреднения долгое время
оставался неизвестным, хотя в отдельных случаях в неявном виде
использовался уже давно Так, например, еще в 1835 г. М. В. Остроградский [2471,
рассматривая нелинейное уравнение второго порядка
-^ + со2* « ах3, (1)
получал в первом приближении решение, совпадающее с тем, которое
получается с помощью метода усреднения.
А еще ранее, в 1682 г. Исаак Ньютон (см. «Математические начала
натуральной философии», кн. V), исследуя движение маятника при наличии
сопротивления, нашел формулу, определяющую величину затухания малых
колебаний маятника при любом законе сопротивления среды. Эта формула
всецело совпадает с первым приближением, получаемым с помощью метода
усреднения.
В основу систематического применения метода усреднения для
исследования нелинейных колебательных процессов в радио- и электротехнике,
механике легли известные работы голландского ученого Ван-дер-Поля [23,
2501, разработавшего достаточно эффективный способ решения нелинейных
дифференциальных уравнений, описывающих колебательный процесс в
системе с одной степенью свободы. Благодаря своей простоте и наглядности,
а также широкой популяризации Л. И. Мендельштамом и Н. Д. Папалекси
[1071 метод Ван-дер-Поля начал применяться инженерами для исследования
колебательных процессов. Вместе с тем следует отметить, что в
формулировке метода усреднения, данной Ван-дер-Полем, усредненные уравнения
выводились с помощью далеко не строгих с математической точки зрения
13
рассуждений. Хотя этот метод и оказался плодотворным на первом этапе
развития нелинейной механики, однако он не мог полностью удовлетворить
ни запросам практики, ни минимальным требованиям относительно
убедительности и общности выводов, которые следует предъявлять к подлинному
приближенному методу для того, чтобы иметь хотя бы некоторое представление
о его степени точности и пределах применимости. Правда, для частного
случая дифференциальных уравнений с периодическими правыми частями
некоторые шаги в области математического обоснования метода усреднения
сделаны еще в 1928 г. П. Фату [225] и в 1934 г. Л. И. Мендельштамом и
Н. Д. Папалекси [1061.
Значительные результаты в развитии метода усреднения получены
Н. М. Крыловым и Н. Н. Боголюбовым [92], доказавшими в 1937 г.
применимость метода усреднения и в том случае, когда правые части усредняемых
дифференциальных уравнений являются квазипериодическими функциями
времени.
Кроме того, Н. М. Крылов и Н. Н. Боголюбов [91] предложили
некоторый общий подход для исследования уравнений типа
-^- = со + еМа, в).
Содержание этого метода сводится к построению замены переменных,
позволяющей отделять «медленные» переменные а от «быстрых» переменных 9.
Такая замена позволяет представлять решение систем (2) в виде
асимптотического ряда, первый член которого совпадает с решением, получаемым по
методу Ван-дер-Поля.
Создание же строгой теории метода усреднения принадлежит Н. Н.
Боголюбову [13, 14]. Н. Н. Боголюбов показал, что метод усреднения
органически связан с существованием некоторой замены переменных, позволяющей
исключить время / из правых частей уравнений с произвольной степенью
точности относительно малого параметра е. При этом, исходя из тонких
физических соображений, указал, как строить не только систему первого
приближения (усредненную систему), но и усредненные системы высших
приближений, решения которых аппроксимируют решения исходной
(точной) системы с произвольной наперед заданной точностью.
Рассмотрим дифференциальное уравнение в векторной форме
ТГ = еХ (*.*), (3)
где е — малый положительный параметр, / — время, х — точки
n-мерного евклидова пространства Еп.
Уравнения, правая часть которых пропорциональна малому параметру
е, согласно терминологии, введенной Н. Н. Боголюбовым, будем называть
уравнениями в стандартной форме.
При определенных ограничениях, налагаемых на правые части
уравнения (3), заменой переменных согласно формуле
* = 6 + еЛ (*, S) + e2F2 (f, g) + ... + e»*Fm (/, В (4)
уравнение (3) приводим к эквивалентному уравнению
-§- = еХ0 (6) + е2Р2 ©+••• + *тРт (£) + *m+lR V. 6). (5)
14
Пренебрегая в уравнении (5) слагаемым em+lR (/, |), получаем
«усредненное» уравнение m-го приближения
-%- = гХ0 (I) + е2Р2 (6) + • • • + e-Pw (g). (6)
При этом функции Т7! (/, |), F2 (/, |), ... , FM (/, |), входящие в правую часть
замены (4), находятся элементарно; функции Х0 (£), Р2 (|), ... , Рт (|)
определяются в результате усреднения правой части уравнения (3) после
подстановки в нее выражения (4).
Сформулированный и развитый Н. Н. Боголюбовым метод усреднения
применительно к уравнениям в стандартной форме получил в его работах
строгое математическое обоснование (см., например, 1131). Это обоснование,
в основном, сводится к решению следующих двух проблем:
1) определение условий, при выполнении которых разность между
решением точной системы уравнений
-ЗГ«еХ(/. *) (7)
и решением соответствующей ей усредненной системы
-§- = е*о(£) (8)
для достаточно малых значений параметра е становится сколь угодно малой
на сколь угодно большом, но конечном, интервале времени;
2) установление соответствия между различными свойствами решений
точных уравнений (7) и усредненных уравнений (8), зависящими от их
поведения на бесконечном интервале времени, в частности установление
соответствия между периодическими решениями точной и усредненной систем
и установление свойств притяжения ими близких решений.
В решении первой проблемы для достаточно широкого класса
дифференциальных уравнений в стандартной форме фундаментальное значение имеет
классическая теорема Н. Н. Боголюбова, устанавливающая оценку разности
| х (t) — | (01 на сколь угодно большом, однако конечном, интервале времени
при достаточно общих условиях, налагаемых на правые части системы (7).
При этом для правых частей системы (7) должно существовать только среднее
т
Um±\x(t9 ЙЛ-Х0(6). (9)
Эта теорема дала возможность существенно расширить область применения
метода усреднения и в дальнейшем получила большое развитие и обобщение
в работах многих авторов.
Решению второй проблемы Н. Н. Боголюбов посвятил несколько теорем.
В этих теоремах рассматривается соответствие между периодическими
решениями, вопрос о существовании и соответствии между почти периодическими
решениями, а также выдвинута идея рассмотрения интегральных
многообразий для нелинейных дифференциальных уравнений в стандартной форме
и в простейших случаях для уравнений в стандартной форме устанавливается
соответствие между интегральным многообразием для точной системы и
соответствующей ей усредненной системы. Эта идея рассмотрения
интегральных многообразий вместо конкретных решений получила в дальнейшем
15
существенное развитие и широкое применение для практических расчетов
в работах автора монографии [120, 17, 139], а также в работах [102,
189, 2231.
В монографии излагаются метод усреднения в форме, предложенной
Н. Н. Боголюбовым, и основные результаты, полученные автором книги и
рядом других ученых, в дальнейшем развивавших и обобщавших метод
усреднения. Однако для более полного уяснения всех особенностей этого
метода, его широты и гибкости, мы считаем уместным включение в книгу
первоначальных идей об усреднении.
В § 1 в общих чертах приведен метод усреднения, применявшийся
астрономами в небесной механике. Здесь на примере уравнений плоской задачи
трех тел иллюстрируются схемы усреднения, предложенные Гауссом [2281,
Фату [225, 2261 и Делоне — Хиллом [219].
§ 2 посвящен изложению метода Ван-дер-Поля [249J для уравнения
второго порядка с малой нелинейностью
-£+*■*-«/(*.-£).' <10>
где е — малый положительный параметр. Уравнения типа (10) обычно и
рассматривал в своих исследованиях Ван-дер-Поль.
В этом же параграфе приведено математическое обоснование метода
усреднения Ван-дер-Поля, предложенное в 1928 г. П. Фату [225] и в 1934 г.
Л. И. Мандельштамом и Н. Д. Папалекси [106].
§ 3 носит вспомогательный характер. В нем изложена методика
.приведения к стандартному виду ряда характерных типов нелинейных
дифференциальных уравнений и систем нелинейных дифференциальных уравнений,
содержащих «малый» или «большой» параметр.
Следующие четыре параграфа посвящены подробному изложению метода
усреднения для уравнений в стандартной форме типа (3). Приводится
алгоритм построения усредненных уравнений в первом и высших приближениях,
а также приведены с подробным доказательством две основные теоремы
Н. Н. Боголюбова, устанавливающие соответствие между решением точной
системы и усредненной на конечном и на бесконечном интервалах времени.
В § 8 изложены основные результаты, посвященные обобщению и
развитию первой основной теоремы Н. Н. Боголюбова, принадлежащие
отечественным и зарубежным авторам.
§ 9 посвящен изложению основополагающего результата,
полученного Н. Н. Боголюбовым совместно с Н. Д. Зубаревым [15] для системы
дифференциальных уравнений с быстро вращающейся фазой
~^- = Xk (ос, хь ..., хп) (k = 1, 2, ..., л),
da (И)
-jjL = К(о(хъ ..., кп) + А (а, хъ ..., хп),
где X — большой параметр. Для этой системы Н. Н. Боголюбов и Н. Д.
Зубарев разработали методику построения усредненных решений,
базирующуюся на основной идее метода усреднения о разделении движений. Эти
результаты, наряду с общим методом, разработанным для уравнений в
стандартной форме, получили в дальнейшем широкое развитие и применение.
§ 10 и § 11 содержат результаты, полученные автором монографии в
направлении развития метода усреднения применительно к дифференциальным
16
уравнениям с медленно меняющимися параметрами, близким к линейным
[113, 111], вида
4t [т w 4г} +с <т) х =гр (т> е> х> -ж) • <12>
где т = е/, е — малый положительный параметр, -гг = v (т), и к
уравнениям с медленно меняющимися параметрами, близким к нелинейным точно
интегрирующимся уравнениям [1091, вида
4г {т <х> -аг) +' <т- ж) =е^(х'е- *- -ж) • (,3>
для которых известно периодическое решение невозмущенного уравнения
(уравнения (13) при е = 0, т = const).
Как известно, дифференциальные уравнения с медленно меняющимися
параметрами играют большую роль в самых разнообразных разделах
механики и физики, поэтому распространение метода усреднения на такие
уравнения представило существенное развитие метода. Результаты, полученные
в этом направлении автором в конце 40-х и начале 50-х годов, явились
стимулом и послужили основой появления многих работ, посвященных
дальнейшему развитию и обобщению метода усреднения (работы В. М. Волосова,
Н. Н. Моисеева, К. В. Задираки, П. Сетны и др.). Результаты, полученные в
работах [113, 1111, сразу же нашли применение для расчетов
нестационарных колебаний при прохождении через резонанс, в исследованиях колебаний
маятника с переменной длиной [661, в исследовании синхротронных
колебаний в синхрофазотроне на 10 Бэв 1261, в исследованиях движения зарядов в
пространственно-периодических магнитных полях неадиабатических
магнитных ловушек [72] и во многих других важных задачах.
В § 12 приведены результаты, относящиеся к распространению метода
усреднения на системы уравнений с малым параметром при производных.
Рассматривается система дифференциальных уравнений
где х = (хь х2 xk),y = (уь f/2, ..., yi) — k-и /-мерные векторы,/ (*, у),
ё(х> У) — **и /-мерные вектор-функции, обладающие рядом необходимых
свойств. Как известно, система (14) может быть приведена к системе
уравнений с медленно меняющимися параметрами. Однако во многих задачах
электротехники удобна запись уравнений в форме (14). В § 12 излагается основной
подход к изучению систем вида (14), предложенный Л. С. Понтрягиным
[156]; приводится теорема [157] о распространении метода усреднения на
системы такого вида.
§ 13 посвящен достаточно подрадному изложению метода усреднения
для систем, содержащих медленные и быстрые движения. Здесь приведены
основные результаты, полученные В. М. Волосовым [28, 29] и его учениками
по исследованию систем дифференциальных уравнений, содержащих
многомерные медленные и быстрые движения, типа
■4т- = * V, х9 у, е),
(15)
-3L = еК(/, у, е),
2 246
17
где х, у — соответственно k- и /-мерные векторы л-мерного евклидова
пространства Еп (к + т = п)> X (/, х, у, е) и Y (tt x, у, е)—соответственно к- и
m-мерные вектор-функции, е — малый положительный параметр.
Медленными переменными здесь являются у, а быстрыми х. Базируясь на идеях
Н. Н. Боголюбова об усреднении уравнений в стандартной форме (см. § 4),
а также на развитии этих идей для уравнений с медленно меняющимися
параметрами (§ 10, § 11) и уравнений с быстро вращающейся фазой (§9),
В. М. Волосов разработал общую схему усреднения, доказал теоремы,
дающие строгое обоснование усреднения для систем вида (15), рассмотрел
многочисленные частные случаи. Полученные при этом результаты нашли
широкое практическое применение (см., например, [242, 206, 48] и дрО и
дальнейшее теоретическое развитие.
В § 14 метод усреднения распространяется на системы, содержащие
вращение. Такие системы представляют большой интерес при исследованиях
гироскопических систем, в различных задачах небесной механики, теории
ускорителей и т. п. Рассматривается система уравнений
(16)
где / (у, х) — периодическая функция х с периодом 2я, у = (yl9 y2t ..., уп),
J/(у, x)dx=0. (17)
о
Функции Fly, t, х, -gjf], У [У у х, -£А периодические по у.
Для исследования системы (16) в колебательном режиме применимы
результаты, изложенные в § И.
Во вращательном же режиме весьма эффективными являются метод,
предложенный Н. Н. Моисеевым (для быстрого вращения), и метод,
развитый В. М. Волосовым и Б. И. Моргуновым (для малой угловой скорости
вращения).
Для быстрого вращения (случай больших начальных энергий системы)
в работе [142] развит оригинальный метод отыскания решения
невозмущенного уравнения
igr+ftir. *) = 0 (у = const) (18)
в виде ряда, расположенного по отрицательным степеням корня из энергии.
Предложенный метод базируется на общей схеме усреднения В. М. Волосова.
После определения решения невозмущенного уравнения для исследования
влияния возмущения на быстрое вращение Н. Н. Моисеев использовал
методику автора [125].
Для рассмотрения небольших угловых скоростей вращения использован
метод построения явного выражения для периодического решения
невозмущенной системы через первые интегралы (см. [29, 32, 150]).
В § 15 рассматривается система уравнений высокого порядка
dmx J 4 dx dm-]x \
in*r = f[(»t>x>-w> ••••-5*=rJ' (,9)
18
где со — большой параметр, / — периодическая функция т с периодом 2я,
т = со/.
Для уравнения (19) изложен вариант метода усреднения (являющийся
обобщением результатов Н. Н. Боголюбова и Н. Д. Зубарева, изложенных в
§9), дающий возможность получить для этого уравнения непосредственно
соответствующее усредненное уравнение (минуя промежуточный переход
от уравнения (19) к системе уравнений) [191.
В § 16 изложены результаты, относящиеся к распространению метода
усреднения на системы конечно-разностных уравнений с малым параметром
(в стандартной форме)
Ахп = еХ(хП9 п) (д=1, 2, ...), (20)
где Дхп = х(п + 1) — x(n)t xn = x(п).
В § 17 приведены результаты, полученные автором по обоснованию
применимости метода усреднения к системам уравнений в стандартной форме,
правые части которых недифференцируемы [127]. Сформулирована и
доказана теорема о существовании периодического решения в окрестности
статического решения усредненной системы, рассмотрен вопрос о
единственности решения и его устойчивости.
§ 18 посвящен усреднению в системах дифференциальных уравнений,
описывающих колебания, возбуждаемые мгновенными силами.
Как известно, еще Н. М. Крылов и Н. Н. Боголюбов в монографии [92]
показали эффективность применения метода усреднения для исследования
колебаний маятника часов, представляющего собой автоколебательную
систему, возбуждаемую мгновенными импульсами.
Рассматривается уравнение
*± + tfx = e^f(x, J*L)e(x-*0)-f/^*, 4")]. (21)
где б (х) — «несобственная» функция, определяемая соотношениями
о
J8(jc)dx= 1, (22)
—о
б(х)=0 при хфО. (23)
Для уравнения (21) развивается общая методика усреднения, составляются
уравнения первого приближения и улучшенное первое приближение.
Приведена теорема, обобщающая первую основную теорему метода усреднения об
оценке решений на конечном интервале времени [166].
В § 19 приведены результаты, полученные автором в области
распространения метода усреднения на системы дифференциальных уравнений с
«периодическими» коэффициентами при наличии малых возмущающих сил
4г + S Рш (е> *) *ы = *П С*, в, хи ..., *Л), (24)
где х = е/, -JJ- = v (т), р1к (в + 2я, т) = pik (0, т). Такие системы имеют
большое значение в решении проблем, связанных с конструированием
ускорительных устройств.
2*
19
§ 20 посвящен усреднению в канонических и близких к каноническим
системам. Здесь рассматривается вопрос об усреднении в системах с
периодическим гамильтонианом. Как известно, для исследования периодических
движений в небесной механике давно разработан метод возмущения, широко
использующий принцип усреднения. Однако, применяя принцип усреднения
к системе уравнений в кононической форме Гамильтона, мы получаем
усредненные уравнения, вообще говоря, не в канонической форме. В связи с этим
в этом параграфе приведены результаты по модернизации принципа
усреднения для канонических систем, полученные А. М. Федорченко [178] и
Э. Л. Бурштейном и Л. С. Соловьевым [22]. Эти результаты позволяют так
производить усреднение в уравнениях Гамильтона, что получаемые
усредненные уравнения также представляются в канонической гамильтоновой
форме. Это дает возможность сразу получить их первый интеграл.
В § 21 излагаются результаты, полученные автором [112], эффективные
при построении приближенных решений (в первом приближении),
соответствующих одночастотному колебательному процессу в системах со многими
степенями свободы, описываемых уравнениями
N
2(^rs?s+^s?s) = 8Qr(?i» Яъ •••> qN> Яъ Яъ ••-, Яы) (25)
(г=1, 2, ..., N).
Здесь же приведен оригинальный метод построения усредненных
уравнений непосредственно из рассмотрения усредненной работы (или
усредненной энергии), производимой возмущающими силами [113]. Этот метод
позволяет перенести результаты, полученные для системы обыкновенных
дифференциальных уравнений, на уравнения в частных производных и построить
для них усредненные уравнения, соответствующие одночастотному
колебательному процессу. Он представляет особый интерес в тех случаях, когда
краевые условия не дают возможности произвести разделение переменных и
свести задачу к исследованию бесконечной системы обыкновенных
дифференциальных уравнений. Изложен также метод усреднения для систем высокого
порядка, при наличии одной нелинейности [ПО]. В этом случае удобно
рассматривать символическое уравнение
Z(p)* = eF(e, х), (26)
где P = -^fy F(Q> *) —некоторый функционал,-^- =v(t), т = е/,
Z(p)=^ahpn. (27)
§ 22 посвящен изложению наиболее весомых результатов по
дальнейшему развитию метода усреднения применительно к исследованию различных
классов дифференциальных уравнений с запаздывающим аргументом и
малым параметром. Обычно наличие запаздывания в колебательных системах
обуславливается тем, что скорость протекания процесса не всегда является
мгновенной и во многих случаях необходимо учитывать зависимость скорости
от предистории системы. Явление последействия в системе может
существенно влиять на весь ход колебательного процесса.
В настоящее время для исследования колебательных процессов в
системах с последействием с успехом применяется метод усреднения,
распространение которого на системы с запаздыванием связано, в первую очередь, с
20
работами А. Халаная [2301, В. П. Рубаника [160], Дж. К. Хейла [232],
В. И. Фодчука [1881. В книге приводятся результаты, полученные
указанными авторами в области построения соответствующих алгоритмов, и
некоторые теоремы, являющиеся обобщениями первой и второй основных
теорем метода усреднения, теоремы о непрерывной зависимости от параметра,
а также результаты по распространению метода усреднения на
сингулярно возмущенные уравнения с запаздыванием [190] и относящиеся к
рассмотрению систем, содержащих медленные и быстрые движения и
запаздывание [34].
В § 23 рассматривается проблема усреднения в стохастических
системах. Многие актуальные задачи радиотехники, акустики, измерительной
техники, гидро-аэроупругости и др. приводят к необходимости изучения
влияния случайных сил на колебательную систему.
Известно, что задача о поведении линейной (а также близкой к
линейной) колебательной системы, находящейся под воздействием случайных сил,
в пределе превращающихся в «белый шум», описывается марковским
процессом, переходные вероятности которого удовлетворяют уравнению
Колмогорова и Фоккера — Планка (КФП). Однако в большинстве случаев
получаемые уравнения КФП трудно поддаются аналитическому решению.
Применение же принципа усреднения позволяет получить во многих
случаях интересные результаты, в особенности тогда, когда рассматриваемые
исходные уравнения, описывающие случайный колебательный процесс,
могут быть приведены к стандартному виду. Основные результаты по
применению и обоснованию принципа усреднения для стохастических систем
принадлежат И. И. Гихману [431. Дальнейшее развитие по применению принципа
усреднения для стохастических систем связано с работами Р. Л. Стратоно-
вича [1721, Р. 3. Хасьминского [1971, В. Г. Коломийца [1351, И. Врко-
ча [251 ].
В § 24 метод усреднения рассматривается с точки зрения точечных
преобразований. Как известно, метод точечных преобразований был развит и
впервые применен к решению многих задач теории регулирования А. А.
Андроновым. В последнее время Ю. И. Неймарк [1531 систематизировал этот
метод и применил его ко многим проблемам теории нелинейных колебаний,
установив, в частности, соответствие между точечными отображениями для
точных и усредненных уравнений и обосновав возможность применения
метода усреднения к разрывным системам с точки зрения точечных
преобразований.
§25 посвящен изложению стробоскопического метода Н. Минорского
[2391; показана связь его с методом усреднения.
В § 26 устанавливается связь метода усреднения с другими широко
известными приближенными методами, например, с методом эквивалентной
линеаризации, принципом гармонического баланса, методом разложения по
двум переменным.
В § 27 и § 28 метод усреднения распространяется на уравнения в
частных производных. Заметим, что применение метода усреднения проще всего
осуществляется в том случае, когда можно, применяя метод Фурье, в
соответствующих уравнениях с частными производными произвести разделение
переменных, после чего полученные счетные системы обыкновенных
дифференциальных уравнений можно привести к стандартной форме.
Некоторые конкретные задачи такого типа рассматривали еще Н. М. Крылов и
Н. Н. Боголюбов в работе [92]. Однако общая методика решения, применимая
21
для широкого класса дифференциальных уравнений в частных
производных, близкого к уравнению гиперболического типа, сформулирована в
работах автора (см., например, [120, 128, 240]). Здесь рассматривается в
общем виде уравнение
ЛЖ + »-&■ + «£ + »-5г + *■£- + Л »
—F(т. <,,.«, -£.-£•). (28)
для которого выполняется неравенство
В2 — АС>0 (29)
и заданы начальные и граничные условия.
Применяя метод Фурье, уравнение (28) можно свести к бесконечной
системе обыкновенных дифференциальных уравнений.
Если граничные условия не дают возможности произвести разделение
переменных, то весьма эффективным является предложенный автором
метод энергетической интерпретации [113], дающий возможность построить
усредненные уравнения в одночастотном режиме, исходя непосредственно
из выражений для работы, совершаемой возмущающими силами.
Рассмотрены также уравнения, близкие к гиперболическим, при
наличии случайных сил, при наличии запаздывания и др.
Значительное внимание уделяется рассмотрению систем
дифференциальных уравнений первого порядка. Здесь приводятся результаты
исследований непрерывной зависимости решения от параметра [202], а также
рассматриваются вопросы, связанные с перенесением первой основной
теоремы метода усреднения на уравнения в частных производных [87, 138,
140] и др.
В конце § 28 излагается обоснование метода усреднения для
параболических и эллиптических дифференциальных уравнений 1197, 210].
§ 29 посвящен результатам, связанным с обоснованием метода
усреднения для дифференциальных уравнений в функциональных пространствах.
Как известно, в последнее время успешно развивается теория обыкновенных
дифференциальных уравнений в функциональных пространствах. Этот
раздел анализа возник в результате объединения методов обыкновенных
дифференциальных уравнений, функционального анализа и математической
физики. Методы теории дифференциальных уравнений в функциональных
пространствах находят широкое применение в теории колебаний систем с
бесконечным числом степеней свободы, в гидродинамике, в теории
вероятностей и т. п. В связи с этим представляют интерес приведенные в этом
параграфе обобщения первой и второй основных теорем метода усреднения на
случай гильбертова пространства [100, 169] и др.
В § 30 изложены результаты, связанные с усреднением и
«укорочением» счетной системы дифференциальных уравнений в стандартной форме
[154,59]
^Г = eXkV> *■ х*> • • •> (* - 1. 2, ...). (30)
§ 31 содержит интересные результаты по применению метода усреднения
к исследованию систем интегро-дифференциальных и интегральных уравне-
22
ний, содержащих малый параметр. Рассматриваются интегро-дифференци-
альные уравнения в стандартной форме
-$- = «/('. *. 1фС s> x(s))ds)9 (31)
системы интегро-дифференциальных уравнений, содержащие быстрые и
медленные переменные
-~- = 8/Л/, х, у, |ф,(/, s, x(s), y(s))ds)f
-ДГ = /iU *> I/» {«М*. s, *(s), #(s))ds),
(32)
и другие типы интегро-дифференциальных уравнений. Для этих уравнений,
исходя из ряда основополагающих результатов метода усреднения, А. Н.
Филатов [1821 предложил схему усреднения и доказал несколько теорем об
оценках на конечном интервале времени.
В § 32 затрагивается важный, но еще не решенный во всей своей полноте,
вопрос об усреднении в многочастотных системах, содержащих малый
параметр. Здесь приведена теорема В. И. Арнольда [81, впервые обратившего
внимание на то, что несуществование равномерных средних от правых частей
уравнений существенно влияет на оценку разности между решением точной
системы и усредненной. Приведена теорема Е. А. Гребеникова об усреднении
в системах вида
da <33)
-5-в<о(Р) + еК(р, q)
(puq— m- и я-мерные векторы) при наличии резонанса в начальный
момент [49].
§ 33 посвящен применению принципа усреднения к некоторым
гироскопическим системам. В этот параграф включены результаты, полученные
автором [117] в направлении формального построения усредненных
уравнений для гироскопических систем, характеризующихся функцией Лагранжа
\ ( N N N )
L==T\ 2 ail(x)qlqi+2 2 ft/(x)^/— 2 MT) ?/?/[• (34)
где
т = e/, au (t) = ан (т)Г bti (t) = bn(x), gu (т) Ф £У4 (т),
и внешним возмущением
«Q* (т> е» <7i» • • •. <?*• Яи • • • > О» (35)
при этом
_ = v (т) + evx (т, 6, ql9 ... , qN, qLt ..., qN).
23
Изложена методика усреднения применительно к системам
2 [<№ COS(Ont + Ь(п} Sin tont] + bfx (<x)ntt X, y, X, y, X, y)f
(36)
2 \<№ cos (ont + b(? sin a>nt] + e/2 (o)n/, x, y% x, yf x, "y).
n
Системы такого типа встречаются во многих задачах динамики
гироскопических устройств [71].
В последних двух параграфах рассматриваются проблемы, связанные с
ролью метода усреднения в общей задаче о разделении движения, при этом
затронуты соображения о разделении движения, высказанные А. (4.
Молчановым [145]; обращается внимание на асимптотическое разделение
движения и точное при наличии ускоренной сходимости рядов, входящих в
состав соответствующих замен. Приведены также соображения о роли метода
усреднения при решении проблем теории устойчивости и в задачах
оптимального управления.
Следует особо обратить внимание на то, что метод усреднения получил
широкое применение в качественной теории дифференциальных уравнений
и, в частности, при исследовании дифференциальных уравнений с
периодическими и почти периодическими коэффициентами. Здесь с помощью метода
усреднения удается привести систему с периодическими или почти
периодическими коэффициентами к системе линейных дифференциальных уравнений
с постоянными коэффициентами и в результате получить условия
устойчивости или неустойчивости (как правило, достаточные условия
неустойчивости).
В заключение заметим, что возможности применения метода усреднения
в разнообразных областях физики, механики и математики очень широки.
Так, например, весьма важной и интересной областью качественной теории
дифференциальных уравнений, где метод усреднения находит эффективное
применение, является метод интегральных многообразий [17, 139]. Во
многих случаях усредненные уравнения обладают устойчивыми инвариантными
многообразиями тороидального типа, тогда удается исследовать
интегральные многообразия исходной точной системы и установить соответствие между
их свойствами и свойствами многообразия для усредненной системы.
Интересным является применение метода усреднения в эргодической
теории сильно неустойчивых динамических систем, развиваемой С. Смей-
лом, Д. В. Аносовым и др. Оказывается, что сильно неустойчивые
динамические системы обладают некоторыми инвариантами, получаемыми с помощью
усреднения по времени.
Однако на всех этих важных и интересных результатах мы не имеем
возможности остановиться и отсылаем читателя к цитированной литературе.
** | v2 dy
dt* Т" Ч dt
d?y
dt
2 dx
§1
МЕТОД УСРЕДНЕНИЯ
В ЗАДАЧАХ НЕБЕСНОЙ МЕХАНИКИ
•
1. Предварительные замечания. Как известно,
многие проблемы небесной механики, благодаря своей сложности при строгой
математической постановке, еще в прошлом веке обусловили появление
тенденции к созданию упрощенных вариантов этих проблем, допускающих более
полную и всестороннюю математическую трактовку. Среди многочисленных
упрощенных вариантов значительная роль принадлежит тем, которые
получаются в результате применения усреднения. Так, большое распространение
получил метод усреднения при решении ограниченной проблемы трех тел, в
особенности при решении вопросов, связанных с вековыми возмущениями
и соизмеримостью средних движений. При помощи рассмотрения
усредненных схем проводилось много исследований, давших ценные результаты как
количественного, так и качественного характера.
Заметим, однако, что получение усредненных схем в задачах небесной
механики, в частности в ограниченной круговой проблеме трех тел,
проводилось, исходя из чисто интуитивных соображений и совершенно не
рассматривалось ни физическое содержание усредненной схемы, ни математическое
обоснование самого метода или вопрос о получении хотя бы оценки
погрешности, допускаемой при замене схемы, взятой в строгой математической
постановке, усредненной схемой.
Ниже остановимся на нескольких классических схемах усреднения в
небесной механике, а именно на схемах усреднения, предложенных Гауссом
[228], Фату [226], и на так называемой схеме Делоне — Хилла [219] (см.
также [144]). При этом рассмотрим простейший случай ограниченной
плоской круговой проблемы трех тел, для которой построение усредненной схемы
позволяет решить проблему до конца.
2. Уравнения плоской задачи трех тел. Приведем основные
уравнения движения ограниченной плоской круговой задачи трех тел.
Как известно, ограниченная задача трех тел, являясь частным случаем
общей неограниченной задачи трех тел, состоит в определении и изучении
движения весьма малого тела под действием притяжения двух других массивных
тел. К таким задачам относится, например задача о движении малой планеты
под действием притяжения Солнца и Юпитера.
Обозначим через г и / гелиоцентрические радиус-вектор и долготу малой
планеты Р, массой которой в связи с ее малостью по сравнению с массой
25
Юпитера и массой Солнца будем пренебрегать. Массу Солнца обозначим т$>
массу Юпитера — ту. Рассматривая движения планеты Р, как движение
материальной точки с массой, равной нулю, под действием ньютоновского
притяжения двух других материальных точек с конечными массами,
приходим к системе уравнений
d?r /dl\* , dW
df* r[dt) ^ dr >
_d_
dt
\r dt)~ dl *
(1.1)
где W — силовая функция, определяемая согласно формуле
W = Ws + Wh (1.2)
в которой Ws — солнечная часть силовой функции
И75=-*^-, (1.3)
k2 — постоянная тяготения; Wj — возмущающая функция, определяемая
формулой
^ = *ч[-^-^1; . (1.4)
здесь г/ — расстояние между планетой Р и Юпитером:
Гу = у a2j + r2 — 2a/rcosfl, (1.5)
aj — радиус круговой орбиты движения Юпитера вокруг Солнца; Ф —
разность долгот планеты Р и Юпитера:
0=Z — /,. (1.6)
Поскольку, согласно предположению, задача круговая, то
/, = V> (1-7)
где/i/ — угловая скорость вращения Юпитера вокруг Солнца, определяемая
выражением '
*/ = * з • (1.8)
«/
Учитывая выражение (1.7), формулу (1.6) можем представить в виде
Ъ = 1 — п{, (1.9)
и, следовательно, возмущающая функция W,- оказывается зависящей явно
от времени t.
Для системы уравнений (1.1), как известно, может быть найден интеграл
ra + r2(^-n/)2==2[r+4-^2] + 2A, (1.10)
называемый интегралом Якоби.
Для получения усредненной системы уравнений (1.1) целесообразно
перейти от переменных г, / к системе кеплеровых оскулирующих элементов
26
dM
dt
dt
dp
dt
_ A
da)
kVms
kVms '
a*', k
= _ 2J^p
ам »
aiF/
/5
au7y
au7/
"5a"»
(a, p, M, со), определяемых через фазовые координаты (г, /, rf /) формулами
-г - -г -ткг«^+'*>• ^ = Т7^ *
Л1 = £ — ]Л — -£-sin£, cos£ = *Г~Г (1.11)
V а
(0 = 1 — 8, sm0 = -^:—.
Тогда вместо системы уравнений (1.1) получим систему
дифференциальных уравнений
da 2/5 dwf
(1.12)
в которой возмущающая функция U7/ выражена через кеплеровы фазовые
координаты (а, р, Л1, со). Функция U?/ может быть представлена двойным
рядом Фурье вида
оо оо
^/ = 2 2 <V («. Р) cos (<?M + гш), (1.13)
где коэффициенты Cqr (a, р) — известные функции я, р, а со = со — /у.
Интеграл Якоби (1.10) в переменных Кеплера имеет вид
-^- + кУъп,}ГЦ + Wf ~ Я. (1.14)
Перейдем к упрощению системы уравнений (1.12).
3. Схема усреднения Гаусса. Самым первым методом
введения в рассмотрение, вместо строгой системы уравнений (1.12), некоторой
упрощенной системы является метод Гаусса, основанный на двукратном
усреднении возмущающей функции Wf. Согласно этому методу -вместо
истинной возмущающей функции Wjt определяемой выражением (1.4), берется
среднее значение этой функции, вычисленной при помощи формулы
Г> = тМ \WidMdlj. (1.15)
о <Г
При этом, проводя двукратное усреднение по аномалии Л! и по долготе
Юпитера //, считаем, что элементы a, p и со остаются неизменными
параметрами и, кроме того, средняя аномалия М и долгота Юпитера // являются
независимыми друг от друга переменными.
Принимая во внимание разложение для W,- (1.13), из (1.15) находим:
^/ = Q0(a, р). (Ыб)
27
Подставляя теперь в систему уравнений (1.12) вместо истинного
значения возмущающей функции Wj двукратно усредненное значение (1.16),
получаем усредненную систему уравнений
dt u'
J*L.e0
_* ' (1.17)
dM ъУщ %Уа дСрр(а, р)
dt 3 ky- * да f
а *
da 2Vp дСт (а, р)
Эта система уравнений легко интегрируется. Так, из первых двух
уравнений находим
а = а0 = const,
Р = Ро = const;
(1.18)
из двух других —
Г 6|Ля
Л/f Л/f - Г k ^m* 2/gQ ^оо К. Po) 1 ,/ м
Лв — Af о — | s ^y=-. й (*-«.
2/Ро . дС00(о0, р0)
(1.19)
Согласно полученным решениям (1.18) и (1.19) усредненных уравнений
(1.17) движение происходит вдоль эллипсов с фокусом в Солнце и с
неизменными полуосью а и параметром р, линии апсид которых вращаются с
постоянной угловой скоростью, зависящей только от а и р.
Рассмотренное выше двукратное усреднение возмущающей функции
по долготе (о возмущающей точки и по средней аномалии М возмущаемой
точки согласно Гауссу не подкреплено никаким строгим математическим
обоснованием. Оправданием такого двукратного усреднения является лишь
то, что в результате получается некоторая средняя вековая
характеристика движения.
4. Схема усреднения Фату. Перейдем к изложению схемы
метода усреднения Фату, предполагающего только однократное усреднение
по долготе возмущающей точки /,, либо по средней аномалии М возмущаемой
точки на примере тех же уравнений (1.12) ограниченной круговой задачи
трех тел. Очевидно, если положить в основу суждения о степени близости
усредненной схемы к исходной точной схеме критерий близости усредненной
возмущающей функции к неусредненной, то усредненная схема Фату
оказывается более близкой к истинной ограниченной круговой задаче трех тел,
чем схема Гаусса. И, следовательно, движение, получаемое в результате
применения схемы усреднения Фату, ближе к истинному, причем не только в
смысле количественных характеристик, но и в смысле более точного
отражения качественных особенностей.
При применении метода усреднения, предложенного Фату, возможны,
как указывалось выше, два варианта. В первом варианте возмущающая
функция усредняется по долготе возмущающей точки (Юпитера), при этом
28
в процессе усреднения координаты возмущаемой точки (планеты Р)
считаются постоянными. Такое усреднение естественно, когда скорость движения
планеты Р значительно меньше скорости движения Юпитера по его орбите.
Этот вариант обычно называется «наружным».
Второй вариант, называемый «внутренним», предполагает усреднение
возмущающей функции по средней аномалии возмущаемой планеты Р, при
этом в процессе усреднения долгота Юпитера предполагается постоянной.
Этот вариант, естественно, применяется в случае, когда скорость
движения планеты Р по своей орбите намного превосходит скорость движения
Юпитера.
Перейдем к разбору этих вариантов. В первом варианте рассмотрим
среднее значение возмущающей функции
2д
о
Очевидно, что Wj зависит от а, р и М и не зависит от ю, так как о) =*
= со + //.
Принимая во внимание разложение (1.13) и выражение (1.20),
получаем
оо
Wi= 2 С,, (я. p)cosqM. (1.21)
Подставляя в уравнения (1.12) вместо истинных значений возмущающей
функции Wj ее среднее значение W, согласно формуле (1.21), получаем
систему уравнений __
da 2Va dw1
(1.22)
dM
dt
dt
к
dco
dt
-^-=0
dt u'
iVms 2Va Щ
a*
2\Tp dWj
Полученная усредненная система (1.22) может быть проинтегрирована
до конца. Действительно, для нее имеем интеграл Якоби
igs- + k Ущщ iTp + W^F^ const (1.23)
Из второго уравнения системы (1.22) находим интеграл площадей
р = Р2 = const. (1.24)
Комбинируя интегралы (1.23) и (1.24), получаем
I^ + Wj^Fl- (1.25)
Из соотношения (1.25) находим
a = a(Mt F'u F2). (1.26)
29
0 I kVms 2Va dWj *
1 Д. kVrru ' да
Подставляя значение а согласно (1.26) в третье уравнение системы (1.22),
находим зависимость между средней аномалией М и временем t при помощи
квадратуры
(1.27)
Далее, из первого уравнения системы (1.22) находим зависимость а от
/ и из последнего зависимость со от /.
Перейдем к рассмотрению «внутреннего» варианта усреднения метода
Фату. В этом случае усредненное значение возмущающей функции
определяется выражением
2л
wi = -hclwtdM- О-28)
О
Согласно изложенному выше, усредненная функция (1.28) зависит лишь
от полуоси а, параметра р и от комбинации со долготы Юпитера // и долготы
перигелия со, а не зависит от средней аномалии М. Принимая во внимание
разложение (1.13), имеем
оо
Fy= 2 Cor (a, p)cosm. (1.29)
Подставляя значения усредненной возмущающей функции в систему
уравнений (1.12) вместо истинных значений, получаем систему усредненных
уравнений
dp __ 2l/p dWf
(1.30)
dM
dt
dt
dco
da
dt
kVms
3
2
a
= —
Yms to »
= o,
2Va
k]fms
2 Vp dWj
kVriu ' ^P
dWj
da
.
Эта система так же, как и предыдущие, допускает интеграл Якоби'
-ngb- + kVinMVp + W, = Л = const. (1.31)
Кроме того, из первого уравнения системы (1.30) следует
а = J2 = const. (1.32)
Комбинируя соотношения (1.31) и (1.32), получаем
k Yms щ \Г£ + Щ = /1 = const. (1.33)
Далее, из (1.33) можем найти
р = р(а, Уь Л). (1-34)
30
Подставляя значение р из (1.34) в последнее уравнение системы (1.30),
находим зависимость между о) и t при помощи квадратуры
'-*.- Р г-л -—• о-35)
2Ур dWj У '
kYm% ' dp Щ
Интегрирование системы (1.30) завершается еще одной квадратурой:
"-«•-|р^-т&-£]* «'•«►
определяющей зависимость средней аномалии М от времени /.
Остановимся на оценке близости «внутренней» и «внешней» схем
усреднения Фату к истинной задаче.
Допустим, что рассматривается строгая неусредненная круговая
ограниченная плоская задача. Эта задача описывается системой уравнений (1.12),
в которой возмущающая функция имеет вид (1.13). Предположим, что
отыскиваются возмущения первого порядка, вызываемые возмущающей функцией,
предполагая при этом, что кеплеровы элементы в правых частях системы
(1.12) остаются неизменными.
Тогда каждый член возмущающей функции вида
Cqr(a> p)cos(qM + ra>) (1.37)
после интегрирования по времени в решении даст член
jj^g sin [(9п - rn,) t + const]. (1.38)
При этом слагаемое (1.38) имеет тем большую амплитуду и тем больший
период, чем меньше делитель
(qn — гщ). (1.39)
В случае «внутренней» задачи среднее движение возмущаемой
планеты (п) значительно больше среднего движения возмущающего Юпитера (nj).
Поэтому совершенно естественно, что во «внутренней» задаче усреднение
производится таким образом, чтобы сохранились слагаемые вида
Cor (я, p) cos га, (1-40)
вызывающие появление слагаемых с большей амплитудой и большим
периодом, чем у обусловленных членами вида
CQo(at p) cosqM. (1.41)
В случае «наружного» варианта получаем противоположный вывод.
Таким образом, выбирая «внешний» или «внутренний» вариант
усреднения Фату, задаемся целью: упрощая путем усреднения систему, все же
оставить именно те слагаемые в возмущающей функции, влияние которых
наиболее существенно.
Однако оба рассмотренные варианта являются, вообще говоря,
предельными.
31
5. Схема усреднения Делоне — Хилла. Рассмотрим
случай, когда величина (1.39) мала. Он включает в себя в виде частных
случаев оба варианта однократного усреднения Фату и называется схемой
усреднения Делоне — Хилла.
Из всей совокупности делителей (1.39) выделим все те делители
•/(<7*л-г*Л/), (1.42)
(j — любое целое число), которые либо равны нулю, либо малы, и займемся
конструированием такой схемы усреднения, которая бы оставила в составе
усредненной возмущающей функции члены вида
С,'д\,'г* (я, р) cos (jq*M + /г*о))
(ю = со — lh 1,- = п{). (1.43)
Для этого рассмотрим величину угла ft, входящего в выражение
возмущающей функции Wj. Этот угол можно представить в виде
О = / — /у = Э + ю = 6 — £-M + ±r(q*M + r*w),
или
0 = е_^^+-L д (1.44)
где через D обозначена величина
D = q*M + г*й (со = со — /,), (1.45)
называемая «аномалией Делоне».
Подставляя значение для Ф из (1.44) в выражение возмущающей
функции W/(1.4) и раскладывая полученное в двойной ряд Фурье, для Wf вместо
(1.13) находим
оо оо
Г/ = 2 2 Cqr(a, p)cos(^j^M + -^D). (1.46)
<7=0 г=-^оо
Далее, согласно схеме усреднения Делоне — Хилла в уравнениях (1.12)
возмущающая функция Wf заменяется ее средним значением, вычисленным
по формуле
2пг*
Wi=^\w>dM' О-47)
О
при этом усреднение по средней аномалии М ведется в предположении, что
элементы невозмущенной орбиты а и р, а также аномалия Делоне D
сохраняют неизменные значения.
Подставляя вместо истинных значений возмущающей функции
найденное усредненное значение Wf в правые части уравнений (1.12), получим
систему дифференциальных уравнений
(1.48)
dM
dt
da
dt
= -
__ 2/a
k\r7ns
kVrns
3
„2
4 dD
2Va
kVms '"
dp
"' dt
dWf
da »
=
do»
dt
2Vp
k\fms
= —
dD
2V~p
kVms '
>
dWf
dp
32
Приступим к интегрированию зтой системы.
Прежде всего заметим, что усредненное значение возмущающей функции
согласно формуле (1.47) зависит только от трех величин: от полуоси а,
параметра р и аномалии Делоне. В связи с этим составим дифференциальное
уравнение для D. Дифференцируя выражение (1.45), находим
■£-«•-£- + '•-$--^«i. О-*»
Подставляя в (1.49) значения для -^— и -jg-f взятые из системы (1.48),
получаем дифференциальное уравнение
—it = —Ч-2" Я — r nt т=- Я —г1- т=- г -ir1- • (1.50)
d* 2- ' kV щ ** kVms dp x >
a
Теперь вместо системы четырех уравнений (1.48) можем рассматривать
систему трех уравнений — два первых уравнения системы (1.48) и уравнение
(1.50). Найдем два интеграла этой системы. Разделив первое уравнение
системы (1.48) на второе, получим
-5--^Yf <■•»■>
Отсюда имеем
УЪ = -%гУ~Р + Нъ (1.52)
где Н1 — произвольная постоянная.
Для получения второго интеграла составим полную производную
от ИГ/: _ _
JW^^JWj^ da dWj dp . dWj dD (} „.
dt ~~ da ' di + dp # dt ~*~ dD ' di ' (i'06'
Подставляя в выражение (1.53) значения для -^-, -~- и -^т~» получаем
* а '
или, принимая во внимание первое уравнение системы (1.48),
Из уравнения (1.55) находим второй интеграл
tfm,
Ь- + * щк V^s V* + Wf = H2. (1.56)
2a ' ?*
Комбинируя соотношения (1.56) и (1.52), получаем интеграл Якоби для
проблемы Делоне — Хилла
k2m«
2а
+ k Ущ Щ Vp + Wf = H2. (1.57)
Теперь не представляет затруднений завершить интегрирование системы
(1.48). Действительно, при помощи интегралов (1.52) и (1.56) можем выразить
аир через аномалию Делоне D и постоянные Нъ Я2.
3 246 33
Подставляя эти значения а и р в правую часть уравнения (1.50) после
интегрирования получаем зависимость между Ои/в виде
D
t — t0= Р- т= г -^ = 7= ^-. (1.58)
± J kVms &* kVms dp
Do
После этого из последнего уравнения системы (1.48) без затруднений
находим
а из уравнения (1.45) находим среднее значение аномалии М.
В заключение заметим, что из формул схемы усреднения Делоне — Хил-
ла можно получить как частные случаи соответственно «внутренний»
(полагая q* =5 0) и «внешний» (полагая г* = 0) варианты усреднения Фату.
§2
МЕТОД ВАН-ДЕР-ПОЛЯ
•
1. Метод усреднения Ван-дер- П.о л я. Несмотря на
достаточно широкое распространение в небесной механике, в теории
нелинейных колебаний метод усреднения долгое время оставался неизвестным, и
только известными работами Ван-дер-Поля, благодаря широкой их
популяризации Л. И. Мандельштамом и Н. Д. Папалекси, было положено начало
систематическому применению метода усреднения при исследовании
нелинейных колебательных систем.
Метод Ван-дер-Поля возник в 1920—1923 гг. в связи с быстрым
развитием радиотехники после появления электронной лампы, оказавшейся
чрезвычайно гибким и удобным средством для создания в колебательной
системе соответствующего нелинейного элемента.
В своих исследованиях Ван-дер-Поль рассматривал, главным образом,
уравнения с малым положительным параметром е вида
-£+«*-*(*.-£); (2.1)
при этом обычно полагалось
f(x, i) = (l—x2)x (2.2)
(так называемое уравнение Ван-дер-Поля).
Для получения приближенного решения уравнения (2.1) при достаточно
малых значениях параметра е Ван-дер-Поль предложил особый прием,
названный им методом «медленно меняющихся» коэффициентов, аналогичный
одному из методов, применявшихся еще Лагранжем в небесной механике.
Он представил истинное решение уравнения (2.1) в виде функции,
выражающей гармонические колебания
х = a cos (со/ + ф) (2.3)
с медленно меняющимися амплитудой а и фазой ср, которые должны
находиться из системы дифференциальных уравнений с разделяющимися
переменными
(2.4)
3* 35
составленными по определенному правилу. Уравнения (2.4), так называемые
«укороченные уравнения» Ван-дер-Поля, позволяют сравнительно просто
получить приближенное решение исходного уравнения (2.1). В частности,
задача отыскания периодического решения уравнения (2.1) сводится к
значительно более простой задаче нахождения состояния равновесия
«укороченных уравнений» (2.4).
Перейдем к составлению «укороченных уравнений» для
рассматриваемого уравнения (2.1), или эквивалентной ему системы двух уравнений первого
порядка
dx
(2.5)
JjL = -<*x+ef(X9 у).
Прежде всего заметим, что при е = О уравнение (2.1) превращается в
дифференциальное уравнение обычного гармонического осциллятора и его
решение, как известно, имеет вид
х = a cos (со/ + ф), 2ф
у = -^- = — асо sin (со/ + q>),
где а и ф — постоянные интегрирования.
Будем отыскивать решение уравнения (2.5) при достаточно малых
значениях параметра е в виде выражений (2.6), но уже считая а и ф не
постоянными, а некоторыми функциями времени. Для этого будем рассматривать
выражения (2.6) не как решения уравнения (2.5) при е = 0, а как формулы
замены старых переменных х, у на новые переменные а и ф.
Продифференцировав выражения (2.6) по /, подставим значения
производных в уравнениях (2.1). Принимая во внимание формулы (2.6), получаем
систему уравнений относительно производных новых переменных а и ф:
-^- cos (со/ + ф) — а -^- sin (со/ + ф) = О,
— со —£- sin (со/ + ф) — а -£- со cos (со/ + ф) = (2.7)
= е/ [a cos (со/ + ф), — асо sin (со/ + <р)];
разрешая систему (2.7) относительно —гг и -^-, находим систему уравнений
-J- = j- / [a cos (со/ + ф), — асо sin (со/ + ф)] sin (со/ + ф),
-^f- = — — / [a cos (со/ + ф), — асо sin (со/ + ф)] cos (со/ + ф).
Система дифференциальных уравнений (2.8) эквивалентна
рассматриваемой исходной системе (2.5) или, что то же самое, уравнению (2.1) *.
Из системы (2.8) видно, что новые переменные а и ф являются медленно
меняющимися, так как правые части системы (2.8) пропорциональны малому
* Вопрос о приведении уравнения (2.1) или системы (2.5) к системе вида (2.8), в
котором правые части пропорциональны малому параметру е, в дальнейшем будет
рассмотрен подробно в самом общем виде.
36
параметру е. Кроме того, заметим, что новая система уравнений (2.8)
является неавтономной, в то время как исходная система (2.5) была автономной.
Рассматривая правые части уравнений (2.8) как функции трех перемен-
ных я, ф и /, замечая при этом, что они периодические по г с периодом — и
раскладывая их в ряды Фурье по /, можем написать
-3" = - в Ц № (a) cos п (со/ + Ф) + /<!> (a) sin п (со/ + Ф)],
п (2 9)
-$- = -*l>[f{? (a) cos n (cot + Ф) + /? (a) sin я И + Ф)Ь
Отбросив в правых частях уравнений (2.9) все «осциллирующие» члены, или
(что равноценно) произведя усреднение правых частей уравнений (2.9) по
явно входящему в них времени /, т. е. по\|э = со/ + ф (так как время / входит
в правые части уравнений (2.9) только в комбинации со/ + ф), от системы (2.9)
для медленно меняющихся переменных а и ф перейдем к приближенным
«укороченным уравнениям»
-£--вЛ<а),
где принято обозначение А (а) = —/о1} (я)э В (а) = — ffi (а).
Таким образом, «укороченными уравнениями» для системы (2.8)
являются уравнения (2.4), где
А (а) = g~" ) / (а cos ♦» — асо s'n ♦) s*n Ф^Ф»
2л
о
(2.10)
2д
В (а) — 2^ J / (a cos -ф, асо sin -ф) cos \|>di|).
о
Если бы мы рассматривали вместо автономной системы уравнений (2.5)
и автономного уравнения (2.1) неавтономное уравнение
*jL + «>*x = ef{t, *, 4г). <2Л1>
где функция /I/, х, —^-) периодическая по /, то «укороченные уравнения»
получили бы тем же способом, т. е. в результате перехода к медленно
меняющимся переменным с последующим усреднением правых частей по явно
входящему в них времени. Однако, так как в этом случае время / не всюду
входит в комбинации со/ + ф, то «укороченные уравнения» хотя и получаются
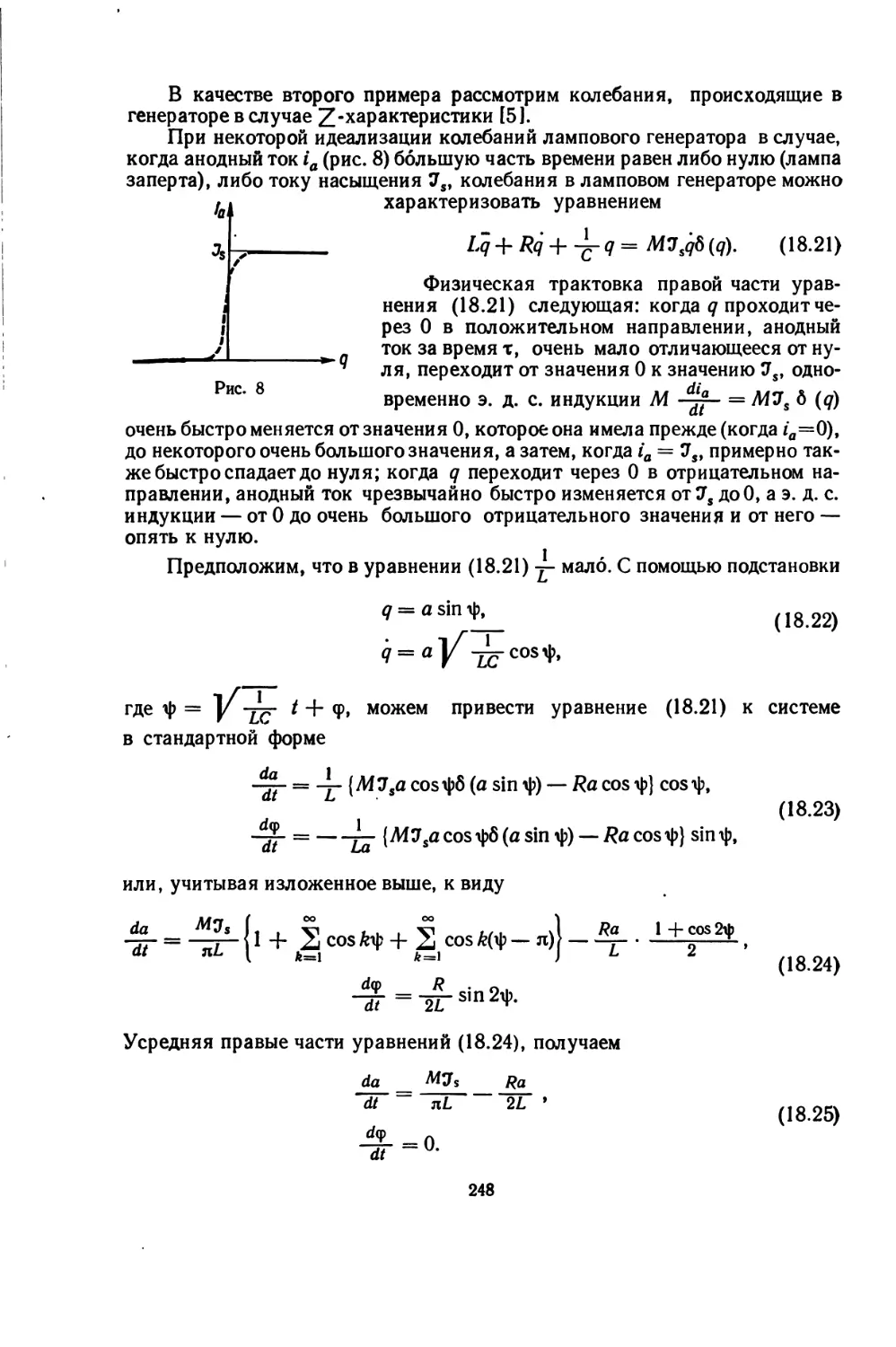
тоже автономными, но уже не с разделяющимися переменными. В общем
случае они имеют вид
-^- = еЛ{а, ф),
«Ф „, , (2Л2)
-2- = гВ(а% Ф).
Как видно, замена исходной точной системы уравнений (2.5)
«укороченными уравнениями» (2.4), полученными вследствие усреднения правых
частей уравнений (2.9), что эквивалентно отбрасыванию «осциллирующих»
членов в правых частях уравнений (2.9), является совершенно необоснованной
37
процедурой в связи с отбрасыванием слагаемых того же порядка, что и
оставшиеся члены.
Получая соответствующие «укороченные уравнения» для уравнения
(2.1), Ван-дер-Поль предполагал, что решение уравнений (2.1) имеет вид
х = и sin at — v cos (ot. (2.13)
При e = 0 и и и будут постоянными, но при малом е и и v — медленно
меняющиеся функции времени. В связи с этим Ван-дер-Поль вводил медленно
меняющиеся переменные и и и в уравнение (2.1) с помощью подстановки (2.13) и
отбрасывал в левой части члены, содержащие и и v, а в правой — члены,
содержащие и и и, умножаемые на е. Затем он приравнивал нулю
коэффициенты при sin о)/ и cos cot. В результате получались два дифференциальных
уравнения первого порядка относительно и и v точно таких же, как если бы
проводилась замена переменных с последующим усреднением правых частей
по явно содержащемуся времени.
Основанный на чисто интуитивных соображениях и совершенно
лишенный математической строгости метод Ван-дер-Поля все же сыграл
существенную роль в изучении нелинейных колебательных процессов и оказался
весьма плодотворным в первый период исследований нелинейной механики.
Сего помощью Ван-дер-Поль получил ряд новых результатов, так например,
исследовал процессы установления колебаний, стационарные режимы,
колебательный гистерезис и т. п. во многих актуальных задачах, связанных
с проблемами радиотехники.
Однако отсутствие строгости и убедительности метода, а также общности
его выводов долгое время являлось преградой для широкого применения
метода к разнообразным задачам нелинейной механики. Для более
широкой применимости этого метода требовалось иметь хотя бы некоторое
представление о степени его точности и пределах применимости. Эти трудности
впервые были преодолены при довольно жестких условиях, налагаемых на
правые части рассматриваемых уравнений (2.1) и (2.5), в 1928 г. П. Фату
12251 и Л. И. Мандельштамом и Н. Д. Папалекси [1061 в 1934 г.
2. Обоснование метода усреднения Фату.
Остановимся на самом раннем результате в области математического обоснования
метода усреднения, данном П. Фату [225] для движения системы, находящейся
под воздействием периодических сил с малым периодом. Для этого, следуя
•Фату, рассмотрим систему дифференциальных уравнений
их ti t \
правые части которой—периодические функции-— с периодом 2я;е — малый
8
положительный параметр.
Очевидно, вводя в системе (2.14) новую независимую переменную т по
формуле т = —, вместо системы (2.14) получим систему
dx с, ч
-^- = е/(*. У, х, е),
dy , , <2Л5>
-^ = eg(*> у, т, е),
38
в которой правые части периодические по т с периодом 2я. Заметим, что
полученная система (2.15), так же, как и рассматривавшаяся выше система (2.8),
определяет медленно меняющиеся переменные х и у.
Предположим, что правые части уравнений (2.14) разлагаются в ряды
Фурье
/(*. У* -f' 8)= 2H"cosT"+5"sin"F'
Г (2Л6)
п=0
где Лл, Bn, Cn, Dn (п = 0, 1, 2,...) — функции ху у, е, допускающие
непрерывные первые производные по jc, у и изменяющиеся в области
*в — а<х<Сх0+а>
Уо~Ь<у<Уо+Ь (2.17)
(0<е<1).
В этой же области равномерно сходятся ряды
2{|Л.| + 1Д.|Ь 5{|C„| + |D„|} (2.18)
и их суммы не превосходят фиксированного числа М, а также ряды
я=0
л=0
и их суммы соответственно не превосходят фиксированного числа Я.
Если в дополнение ко всем этим условиям правые части системы (2.14)
удовлетворяют условиям Липшица, то, как известно, эти уравнения имеют
единственную систему решений х = х (0, У = У (0> принимающую значения
Хо> Уо ПРИ ' ^ *о- Эти решения определены, по крайней мере, на интервале
lt0 — -^-, t0 + -£A, где с — наименьшее из двух чисел а и 6, и могут быть
получены с помощью метода последовательных приближений.
Одновременно с системой (2.14) будем рассматривать систему
дифференциальных уравнений
4г = 4>(*. У, е),
d (2.20)
-gr =C0(x, у, е),
получающуюся после усреднения правых частей системы (2.14) по / в
интервале (/о, /0 + 2яе).
Пусть х = хх (/), у = уг (0 — решения системы уравнений (2.20),
принимающие при / = t0 значения x0t y0. При выполнении приведенных выше
условий эти решения определены,по крайней мере, в интервале lt0 ^р»
t0 + -щ), содержащем интервал //0 — -^ , t0 + ^), так как М0 < М.
Возвращаясь к системе (2.14), для отыскания решений х (/), у (0
методом последовательных приближений, в качестве первого приближения примем
не х0, у0, а решения хх (О, У\ (0 системы (2.20). Заметим, что хх (f), yx (/) для
/, принадлежащих интервалу Ко — -^-» *о+"Ж~)' удовлетворяют
неравенствам (2.17).
Итак, согласно системе (2.14), имеем
*2 — *о = 1/(*ь Уъ Т9 8)Л'
% — Уо = §ё(хи Унт* 8)Л'
** — *о — J / (*я-ь ffn-u 4"» 8)Л»
Уп — Уо = J 8 \Xn-i, Уп-и 4" • е) Л.
Совершенно очевидно, что когда / изменяется в интервале(t0—£т-,
(2.21)
to + -jfjf то (*2. Уг)» (*з» Уз)» •••» (*я> У*)» .- остаются внутри области (2.17).
Оценивая разность х2 — xlf имеем
*2"
так как
*i = f 2М«(*ь ft. e)cos-f+ Bn(*i» ft, e)sin-^U, (2.22)
*
*i — ^0 = J A>(*ii ft» е)Л.
Интегрируя правую часть выражения (2.22) по частям, получаем
-J-M3-*+4£-*}«~fl*
(2.23)
Учитывая условия, которым удовлетворяют ряды (2.18) и (2.19) и
неравенства
йхл
dyi
<M,
40
после мажорирования правой части выражения (2.23) окончательно
находим
\х2-хх\<2е(М + Н)
и, аналогично,
|Л-л1<2е(Л!+Я).
Далее, находим
*з — *2 = J |/(*2> #2>4"' 8) — f[x*9 УьТ,8)]Л-
После некоторых выкладок получим
t
\x3-x2\<\H[\x2-x1\ + \y2-y1\]dt<4eH(M + H)(t-t0)
to
и последовательно
\х<-х3\<2г(М+Н)12Н«-'<>)]г
2!
\yt-y,\<2*(M + H)[2H(t-'°)]\
|хп+2- хп+г \<2г(М + Н)[2Н{t~ад1",
| уп+2 - уп+11< 2в (М + Н) ШШ=Ш
откуда следует, что ряды с общими членами
| Хп+2 — Хп+\ | , | Уп+2 — Уп+\ |
сходятся равномерно, когда / изменяется в интервале
(** — ж> *° + ж)> а °<8<1-
Отсюда заключаем, что xnt yn сходятся к предельным непрерывным
функциям соответственно х (О, У (0, являющимся решениями системы (2.14) при
начальных условиях x0t у0, и получаем оценки
\х—х1\<2г(М + Н) #hv-**9
\y-yi\<2e(M+H) **«-*, (2,24)
правые части которых — произведения е на ограниченную функцию на
интервале ^0 — -J--, ^о + ^г)-
Таким образом, следует, что при выполнении всех указанных выше
условий для любого заданного положительного г\ (сколь угодно малого)
всегда можно найти такое положительное е0, что для любых положительных
е <[ е0 будут выполняться неравенства
1*<0—*1<01<ч. ,2_
|у(0-л(0Кл. ( '
где х (/), у (/) — решения системы уравнений (2.14), хх (/), У\ (0 — решения
системы усредненных уравнений (2.20), удовлетворяющие одним и тем же
41
\
начальным значениям х (t0) = хг (t0) = х0, у (t0) = уг (/0) = у0- При этом
е0 удовлетворяет неравенству
3. Обоснование метода Ван-дер-Поля Л. И.
Мандельштамом и Н. Д. П а п а л е к с и. Как уже отмечалось, в
математическом обосновании метода усреднения важную роль играет решение
следующих двух проблем:
1) при каких условиях решение «укороченных уравнений» (2.4)
является приближением решения исходного уравнения (2.1)?
2) при каких условиях находится точное периодическое решение
уравнения (2.1) в окрестности стационарного периодического приближенного
решения этого уравнения, определяемого выражениями (2.6), в которых а и
Ф определяются из уравнений (2.4), причем а = а0 = const, А (д0) = О?
Остановимся теперь на результатах, полученных Л. И. Мандельштамом
и Н. Д. Папалекси [106]. Приведем их рассуждения и результаты в
несколько модернизированном виде [51.
Пусть а = а(<)иф = ф(/) — решения точной системы уравнений
-Щт = — 82 lfnl) (a)cosпМ + Ф) + fn}(a)sinn(cot + Ф)1,
*L . _ е 2 tf? (a)cos n(at + <р) + ?f (a) sin п(Ш + <р)|,
(2.27)
и а = а0 (t), ф = ф0 (0 — решения системы усредненных уравнений
— _ —е/0 (а),
удовлетворяющие одним и тем же начальным условиям: при / = t0 a (t0) =
= flo(W. ф('о) = Фо('о).
Тогда, для заданных положительных г\ (сколь угодно малого) и L (сколь
угодно большого) всегда можно найти такое достаточно малое положительное
е0, что для всех положительных е <; е0 будут выполняться неравенства
|а(0-в.(*)1<4,
|ф(')-Фо(')1<Л (' '
на интервале /0 << t <; t0 -\
Для упрощения выкладок докажем сформулированное утверждение для
одного уравнения первого порядка *
-%-=tF(a,t), (2.29)
для которого усредненное уравнение имеет вид
4- = в/ (а). (2.30)
* Совершенно очевидно, что доказательство сформулированного выше утверждения
для системы (2. 26) принципиально не изменится.
42
Предположим, что F (а, /) — функция, периодическая по t с периодом
2л. Тогда
2д
f(a) = 4rJF(a, О Л. (2.31)
о
Очевидно, можем написать
F(a, t) = f(a) + v(a9 t), (2.32)
где ф (а, /) — периодическая функция / с периодом 2л, среднее значение
которой равно нулю
j Ф(в, 6) « — О (2.33)
}
при любых а и /.
Положим /0 = 0 и рассмотрим решения уравнения (2.29) а = a (f) и,
усредненного уравнения (2.30) а = a0(t), удовлетворяющие одному и тому
же начальному условию
а(0) = ао(0) = ао. (2.34)
Предположим, что на некотором интервале [я, а0]
\а — а0\<А (2.35)
и при любых /функции f (а) и ф (а, /) непрерывны и ограничены:
|/(а)|<Л«, |<р(а, /)|<Л (2.36)
и, кроме того, удовлетворяют условиям Липшица
|<р(а\ /)-Ф(а', OKQK'-a'l, /9Ч7.
|F(a", t)-F(a', /)|<Д|а"-а'|. (Zm6i)
где Af, P, Q, В — положительные постоянные.
Покажем, что при выполнении указанных условий для любых заданных
положительных чисел х\ (сколь угодно малого) и L (сколь угодно большого)
всегда можно подобрать такое достаточно малое положительное е0, что для
всех положительных е <; е0и при всех /, принадлежащих интервалу 0< / <С
«< —, будет выполняться неравенство
\a(t)-a0(()\<r\. (2.38)
На число L налагается лишь одно ограничение: оно должно быть таким,
чтобы решение а0 (0 при любых е <; е0 и при всех значениях / £ 0, — не
выходило за пределы выбранного ранее интервала (2.35).
Для доказательства сформулированного утверждения будем отыскивать
решение уравнения (2.29) методом последовательных приближений, взяв
за нулевое приближение решение усредненного уравнения (2.30) а = а0(0.
Подставляя a0(t) в правую часть уравнения (2.29) и интегрируя, находим
первое приближение в виде
t
al(t) = a0 + e^F(a0(t)t t)dt. (2.39)
6
Точно так же находим второе приближение
я2 (0 = Д0 + 8 .( F fci (0. t) dt, (2.40)
6
43
и, следовательно, п-е:
МО = «о + в}/7 («<*-!> (О, t)dt.
(2.41)
Как известно, при выполнении условий (2.36) и (2.37) существует
lim an (/) и единственным решением уравнения (2.29), удовлетворяющим на-
Л-*оо
чальному условию (2.34) является a (t) = lim an (f).
Оценим последовательно разности
«i.(0-e.<0 (л=1, 2, ...).
Для первого приближения имеем
' К *
a1(t) = a0 + eiJF(a,(t)9 t)dt = а0+ \ f(a0(t))dt + ej <р(М0. О Л.
О 0 0
Но, согласно уравнению (2.30), можем написать
поэтому
«o + eJ/(MO><«—МО.
о
МО — M0=eJq>(M0, *)dt.
(2.42)
Покажем, что интеграл, стоящий в правой части выражения (2.42),
ограничен. Обозначим буквой N целую часть отношения -g—, т. е. число
периодов подынтегральной функции (по явно входящему /)» целиком
укладывающееся на интервале [0, /1. Тогда, учитывая тождество (2.33), получим
vU(M0, 0Л= 2 J <p(0o(0. t)dt + j Ф(а0(/), /)Я =
0 *=° 2nk 2nN
Л^_1 2я<*+1> t
= 2 ! {<р(М0, 0-<Р(М2я£), 0}Л+ J q>(M0. 0Л.
Согласно условиям (2.36), (2.37) и теореме Лагранжа о конечных
приращениях функций, имеем
IФ К (0. 0 — Ф К (2я£), 0 К Q | Д0 (0 - До (2я£) |< eMQ | / - 2nk |,
следовательно,
2я<*-Н) I 2я(М-1)
J {ф(М0. 0-ф(Д0(2я&), t))dt \<eMQ j [/ — 2nk\dt = 2n2eMQ
2я*
2я*
так как eN-^L и
J<P(M0. 0*
J ф(М0. t)dt
< 2n2MQL + 2nP,
< 2яР.
2jiJV
44
Таким образом, получаем
IMfl-MOK6*' (2.43)
где принято обозначение
S = 2n2MQL + 2лР.
Перейдем к оценке разности а2 (0 — а0 (/). Заметим, что
|ei(0-ao(/)|<|fl,(0-fli(OI + |fli(0-OD(Ol.
Но, согласно соотношениям (2.39) и (2.40),
t
<h (0 - ах (/) = е J |F (ax (/), t)-F (a0 (Q, /)] Л.
о
Воспользовавшись вторым из условий Липшица (2.37), имеем
t
IД2 (0 — ах (/) |< еВ 11 at (/) — а0 (/) | dt < e2BS/ < eBSL.
о
Следовательно, окончательно находим
Ia2(t)-а0(/)|< eS(1 + fiL). (2.44)
Аналогично получаем
\(h(t)-a0(1)\< tS^l + BL + ^-]. (2.45)
Продолжая итерационный процесс, получаем
l«i.(0-fle(0|<eS[l + BL + -^+ .•• + i*^]<eSe» (2.46)
Так как lim an (/) = a (t) — решение уравнения (2.29), то
П-+оо
\a(t)-a0(t)\<eSeB^ (2.47)
Оценки (2.43) — (2.46) основаны на использовании неравенств (2.37),
справедливых до тех пор, пока все функции а/ (/) находятся внутри
интервала (2.35), т. е. пока
\щ(1)-а,\<А (/=1, 2, ...) (2.48)
для 0<*<-~.
Проверим выполнение неравенства (2.48) для всех этапов итерационного
процесса / = 1, 2, 3, ..., п, ... .
Очевидно, в силу неравенства (2.35), существует такое число а (а > i),
что
1М0 —«в|<Л—а (2.49)
при любых /, принадлежащих интервалу 0 <; / <; —.
Переходя к аг (/), на основании (2.43), для тех же значений / имеем
|ei(0-flel<|ei(0-ae(OI + |fle(0-flol<|eS + 4 —а|.
Отсюда следует, что для выполнения неравенства (2.48) для ах (f) достаточно,
чтобы eS < a.
45
Далее, находим
IMO —Oel<|eS(l +BL) + A — a\.
Следовательно, для того чтобы \а2 (t) — а0\ было меньше А, достаточно
взять
eS(l + BL)<a. (2.50)
Таким образом, для того чтобы \ап (t) — a0\ было меньше А, достаточно
выполнения неравенства
eS(H-BL+i^i+ .- + ££-)<«. (2.51)
Очевидно, все оценки для \ап (t) — а0\ (п = 1, 2, ...) справедливы, если
eSeBL < a. (2.52)
Итак, сколь бы мало ни было число г\, всегда можно указать такое
положительное е0, чтобы для всех положительных е<е0 одновременно выполнялись
неравенства
е SeBL < a,
H0-M')|<eS^<T| (2.53)
для всех /, принадлежащих интервалу 0 < t < —. Для этого нам достаточ-
но выбрать е0 меньше наименьшего из чисел
а х\
SeBL И Ц5*"
Этим и доказывается сформулированное утверждение.
Совершенно аналогично и при тех же предположениях можно провести
доказательство указанных утверждений непосредственно для системы (2.5)
или для уравнения (2.1).
4. Обоснование метода усреднения для
бесконечного интервала времени в случае
периодического движения. Остановимся на некоторых простейших
результатах, относящихся к решению второй проблемы — при каких условиях
в окрестности стационарного периодического приближенного решения
уравнения (2.1), определяемого выражениями
х = a cos (со/ + ф),
у = — асо sin (со/ + q>),
в которых а и ф определяются из усредненных уравнений
-%- = еА(а), -^=еВ(а),
при этом а = а0 = const и, следовательно,
А(ао)=0, (2.54)
находится точное периодическое решение уравнения (2.1).'
Следуя известному изложению [5], докажем, что если уравнение
А(а) = 0 (2.55)
имеет простой корень а0 (А' (а0) ф 0), то для любого заданного
положительного сколь угодно малого значения параметра х\ всегда можно найти такое
46
достаточно малое значение параметра е, для которого уравнение (2.1), или,
чтотожесамое, система (2.5), имела бы предельный цикл,лежащий в т|-окрест-
ности окружности
x2 + y* = di (2.56)
причем этот предельный цикл устойчив, если А' (а0) < 0, и неустойчив,
если А' (а0) > 0.
Для доказательства этого утверждения предположим, что функция А (а)
в некоторой окрестности а0 имеет непрерывную производную. Это
выполняется, если функция / (х, у) в уравнении (2.1) имеет непрерывные производные.
Предположим, что для
рассматриваемого простого
корня а = а0 уравнения (2.55)
А' (а0) < 0. Тогда а = а0
соответствует устойчивому состоянию
равновесия усредненного
уравнения
-%-~гА(а), (2.57)
а на фазовой плоскости (*, у)
имеется устойчивый предельный
цикл усредненных уравнений
(2.4), представляющий собой
окружность с радиусом а0 (рис. 1).
Возьмем произвольную,
дос^точно малую ^-окрестность этой
окружности, такую, чтобы в ней при
а0~ т|<а<а0 + т|(2.58)
было справедливо неравенство
Л'(а)< —р, (2.59)
где р — некоторое положительное число; это всегда возможно, так как
А' (а) — непрерывная функция и, согласно условию (2.59), А' (а) < 0.
Рассмотрим на фазовой плоскости (х, у) траектории Г:
x = x(t),
' (2.60)
y = y(t)
уравнений (2.5) и соответственно Г0
^о (0 = а0 (0 cos (/+ ф0 (/)),
&e(0 = -Oe(Osin(* + q>o(0).
(2.61)
усредненных уравнений, проходящие при / = 0 через одну и ту же точку
А (0, а0 + ц) (здесь а0 (t) и ср0 (/) — решения усредненных уравнений (2.4)).
Траектория Г0 спирально скручивается к окружности (2.56) при / -* оо,
так как согласно (2.59) при а0< а <> ао + Л
Л(я)<-Р(а-а0)<0,
и, следовательно, а0 (t) монотонно убывает, стремясь к а0.
(2.62)
* Для упрощения выкладок в дальнейшем будем полагать ш = 1.
47
Выберем такой промежуток D медленного времени т, чтобы при т = D It =
= —J Д0(/) — Д0<-7Г и за промежуток времени — траектория Г0 делала
более одного оборота вокруг начала координат. Это всегда возможно, так
как при а0< я < До + Л> согласно неравенству (2.62) и уравнению (2.57),
имеем
-%Г<-ф(а-ао), (2.63)
и, следовательно,
0<а0(/) — a0<£r\e~*V.
Поэтому за рассматриваемый промежуток медленного времени можно взять
D = -р-1п 2. Число оборотов спирали Г0 за этот промежуток времени можно
сделать любым за счет выбора достаточно малого е.
Согласно сформулированному утверждению (см. неравенство (2.38))
существует такое е = е (т|, D), при котором изображающая точка (х (/), у (t))
не выходит за пределы-9 -окрестности точки (х0 (/), у0 (/)) на всем промежутке
времени 0 <; t <; —. Возьмем это значение параметра е в системе уравнений
(2.5). При этом значение е точка (*(—), У (—)) траектории Г будет
находиться внутри заданной т|-окрестности окружности (2.56), а сама траектория
сделает более одного оборота вокруг начала координат за промежуток
времени / = —. Так как Г — фазовая
траектория автономной системы (2.5) и, как известно,
не может самопересекаться, то первая точка
ее пересечения с осью у (при t > 0), точка С,
имеет координату
Ус < ао + Л-
Поэтому через замкнутую кривую АВСА
(рис. 2), составленную из дуги ЛВС траектории
Г и отрезка СА оси у, фазовые траектории
системы (2.5) могут только входить при
возрастании / в область, заключенную внутри
этой кривой.
Совершенно аналогично можно построить другую замкнутую кривую
^i^i^Hi» состоящую из дуги А1В1С1 траектории системы (2.5), проходящей
через точку Ах (0 + а0 — Л). и из отрезка С1А1 оси у; через эту кривую
фазовые траектории системы (2.5) могут только выходить при возрастании t в
область, лежащую вне ее.
Таким образом, мы построили на фазовой плоскости (х, у)
кольцеобразную область G, ограниченную кривыми АВСА и А1В1С1А1 (см. рис. 2), из
которой траектории системы (2.5) не могут выходить (при увеличении /)•
Так как в этой области нет состояния равновесия системы (2.5) *, то, согласно
Рис.
* Всегда можно выбрать столь малое е, чтобы состояние равновесия системы (2. 5),
определяемое из уравнений — х + е/ (х, 0) = 0, у = 0, не находилось в области G.
48
известным теоремам качественной теории дифференциальных уравнений, в
ней, т. е. в т)-окрестности окружности (2.56), имеется устойчивый предельный
цикл системы (2.5) с выбранным выше значением малого параметра е.
Доказательство существования неустойчивого предельного цикла
системы (2.5) при достаточно малом е, лежащего в окрестности окружности (2.56),
где а0 — корень уравнения (2.55), причем А' (а0) > 0, сводится к только
что проведенному заменой / на —/. Следовательно, сформулированное выше
утверждение, дающее ответ на второй вопрос о законности метода усреднения,
доказано.
Нетрудно показать, что при достаточно малых е система уравнений (2.5)
не имеет предельных циклов, лежащих вне малых окрестностей окружностей
х2 + у2 = а?, (2.64)
гдеа( — простые корни уравнения (2.55). Другими словами, если мы найдем
все корни уравнения (2.55) и они будут простыми (система (2.5) грубая),
то тем самым найдем местоположение (с точностью до г\) всех предельных
циклов системы (2.5) при достаточно малых значениях параметра е.
5. Решение уравнения Ван-дер-Поля. Заканчивая
настоящий параграф, проиллюстрируем метод усреднения Ван-дер-Поля на
классическом уравнении, описывающем колебания лампового генератора и
носящем название уравнения Ван-дер-Поля:
d2x ,, 2Ч dx
4f-e(l-*2>-Sr + * = 0, (2.65)
где е — малый положительный параметр.
Перейдя в этом уравнении к новым переменным а и ср согласно формулам
х = a cos (/ + ф),
J^-asintf+cp),
(2.66)
dt
получим систему уравнений
da_
Л ..... -
-3- = е{-±- (1--^)5ш2(/ + Ф)--|-5т4(/ + ф)}.
Соответствующая ей усредненная система имеет вид
da
= 4^(1-4)-t-cos2(/ + ^ + t"cos4(< + (p))'
da __ га /1 ал \
-^- = 0
(2.68)
Решая «укороченные» (согласно терминологии Ван-дер-Поля) уравнения
(2.68), приближенно получаем для уравнения (2.65) гармоническое
колебание, обладающее постоянной частотой со = 1, амплитуда которого
изменяется в соответствии с первым уравнением системы (2.68). Чтобы найти в
явном виде закон изменения амплитуды в зависимости от времени,
необходимо решить это уравнение. УмнЬжая обе части его на 2а, имеем:
^ = в(1-4)а2. (2-69)
4 246
49
Отсюда
С-т)*
или
-^+*?-.«». (2.70)
Интегрируя уравнение (2.70) при начальном значении а (0) = а0, получаем
In -х^-г = In—^ + е/. (2.71)
Из выражения (2.71) окончательно находим
а = * . (2.72)
■j/l+^-a0V-l)
Подставив значение а из (2.72) в формулу (2.66), найдем выражение
для приближенного значения х в явном виде:
х = — м cos (t + ф). (2.73)
}Л+-1-^(*е'-1)
Как видно из выражения (2.73), если начальное значение амплитуды а0
равно нулю, амплитуда останется равной нулю для любого /, и,
следовательно, получим х = 0, т. е. тривиальное решение уравнения Ван-дер-Поля.
Это тривиальное решение, очевидно, соответствует статическому режиму,
т. е. отсутствию колебаний в системе.
Однако, исходя из формулы (2.73), нетрудно заключить, что этот
статический режим неустойчив. Действительно, как бы ни было мало
начальное значение амплитуды, оно все равно будет монотонно возрастать,
приближаясь к предельному значению, равному 2. Таким образом,
поскольку случайные малые толчки практически неизбежны, в рассматриваемой
колебательной системе, находящейся в состоянии покоя, автоматически
возбуждаются колебания с нарастающей амплитудой, т. е. система
самовозбуждается.
Из выражения (2.73) следует, что если а0 = 2, то а = 2 для любых
/ > 0. Это решение соответствует стационарному (установившемуся)
динамическому режиму:
Jt = 2cos(/+q>). (2.74)
В отличие от статического (а = 0) динамический режим обладает
сильной устойчивостью, заключающейся в том, что каково бы ни было значение
Оо ф 0, малое или большое, все равно а (/) -+ 2 при / -*• оэ. Иначе говоря,
любое колебание при увеличении / приближается к стационарному
колебанию (2.74).
Эти же самые выводы можно получить, рассматривая корни уравнения
Л(я) = 4-(1-т-)=0 <2J5>
50
и составляя для них соответствующее уравнение в вариациях
^- = еЛ'(я<)6а (/=1,2), (2.76)
где 6я = а — ае.
Действительно, из уравнения (2.75) находим для корней следующие
значения: ах = 0 и а2 = 2; при этом А' (0) = j- > 0 и А' (2) = — 1 < 0.
Таким образом, а = 0 соответствует неустойчивому состоянию равновесия,
а а = 2 — устойчивому предельному циклу.
Здесь не будем останавливаться на рассмотрении многочисленных
примеров (связанных преимущественно с задачами радиотехники), решаемых с
помощью метода Ван-дер-Поля, отсылая интересующихся этим вопросом к
специальной литературе (см., например, [5]), где имеется подробная
библиография.
В заключение заметим, что хотя метод Ван-дер-Поля и позволил
исследовать достаточно широкий круг задач нелинейной механики (с одной
степенью свободы), в основном радио- и электротехники, обладает
наглядностью и удобен для проведения расчетов, однако он имеет существенные
недостатки. Прежде всего, приближение в данной Ван-дер-Полем
формулировке выводилось с помощью чисто интуитивных рассуждений, весьма
сомнительных с математической точки зрения. Хотя оно и оказалось
плодотворным в первоначальный период исследований по нелинейной механике,
все же не могло полностью удовлетворить ни запросам практики, ни
минимальным требованиям в отношении убедительности и общности выводов,
предъявляемым к подлинному приближенному методу для получения хотя
бы некоторого представления о его степени точности и пределах
применимости. Кроме того, в рамках теории Ван-дер-Поля нельзя уточнить
полученные решения.
Существенным недостатком метода Ван-дер-Поля является также и
то, что он приспособлен для исследования только одномерных задач и не
допускает непосредственного обобщения На многомерные задачи, на
системы уравнений, уравнения в частных производных, стохастические
уравнения, интегро-дифференциальные уравнения и т. п.
4*
ч
§3
ПРИВЕДЕНИЕ НЕЛИНЕЙНЫХ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ,
СОДЕРЖАЩИХ «МАЛЫЙ» И «БОЛЬШОЙ»
ПАРАМЕТРЫ, К СТАНДАРТНОЙ ФОРМЕ
•
1. Предварительные замечания. Как известно, вид
нелинейных дифференциальных уравнений, содержащих малый параметр,
а также самый характер вхождения в них малого параметра может быть
чрезвычайно разнообразным.
Выше, при выводе «укороченных» уравнений Ван-дер-Поля, показано,
что для удобства применения метода усреднения целесообразно
преобразовать исследуемое нелинейное уравнение, содержащее малый параметр, к
специальному виду, в котором правые части уравнения пропорциональны
малому параметру. Уравнения, приведенные к такому виду, согласно
терминологии, введенной Н. Н. Боголюбовым, называются уравнениями в
стандартной форме.
В предыдущем параграфе мы проиллюстрировали приведение
простейшего нелинейного уравнения второго порядка к стандартной форме. Однако
к стандартной форме во многих случаях с помощью замен переменных могут
быть приведены и достаточно сложные системы дифференциальных
уравнений, описывающих колебательные процессы.
Рассмотрим несколько характерных случаев приведения уравнений
к стандартной форме.
2. Приведение к стандартной форме
системы уравнений второго порядка. Пусть, например,
нелинейная колебательная система с N степенями свободы характеризуется
следующими выражениями кинетической и потенциальной энергий:
Г=-2- 2 ЪМ,, V=-2~ 2 bkiqkqh (3.1)
где qlf q2, ..., qs — обобщенные координаты, я*/, bkl- (kt j = 1, 2, ..., N) —
постоянные и, кроме того, квадратичные формы Т и V — определенно
положительны. Как известно, посредством линейного преобразования
Ч\ = 2 ФМ* (3.2)
Л=1
52
можно ввести нормальные координаты хх, хг Хы, для которых
Г = 4-2^2. V=-L^<otxl (3.3)
Уравнения Лагранжа для невозмущенного движения принимают вид
*£- + <o2kxk = О (k = 1, 2, ..., ЛО- (3.4)
Допустим, что на систему действует малое возмущение
eQ* - е {(?Г (qkt qk) + 2 [QiV (gk9 qk) cos Q*t +
a
+ QkV (qk, qk) sin Йа*1} (k = 1, 2, ..., Л0, (3.5)
где Qa — частоты возмущающих сил, е — малый положительный параметр.
Переходя в выражении (3.5) к нормальным координатам, получим
систему нелинейных дифференциальных уравнений
ф- + colxk = eXk (/, xk, xk) (k = 1, 2, ..., ЛО, (3.6)
где eXk (/, xk, xk) (k = 1, 2, ..., ЛО определяются из условия
эквивалентности работ согласно формулам
Xk (U xk, xk) = g Q/V*, (k = 1, 2, ..., N). (3.7)
Заменой переменных
xk = zkei<0k' +z_ke-l<»k\ (3.8)
xk = Ца/"*' — i(*kz-ke-i(°ktt (3.9)
в которых г* и Z-k (k = 1, 2,..., ЛО — комплексно сопряженные
неизвестные функции времени, уравнения (3.6) могут быть приведены к стандартной
форме. Действительно, дифференцируя выражение (3.8) и сравнивая с
(3.9), имеем
гк4** + aL*-"* =0 (k = 1, 2, ..., ЛО- (3.10)
Дифференцируя выражение (3.9) и подставляя результат в уравнение
(3.6), получим
mkzke **' — *ovU*-*V = еХЛ. (3.11)
Полагая для упрощения записи
-ю_* = со,, X-k = Xk (k = 1, 2, ..., ЛО (3.12)
и разрешая систему уравнений (3.10)— (3.11), окончательно получаем
систему уравнений для zg в стандартной форме
-§■ = eZe(t, zg) (g=±l±2,...,±N), (3.13)
где принято обозначение
Z« <'• *t> = ^Ь~ **(/> **'"* + *-**~/<V■ ' W*' - ivkt-ke-^1) еш&<. (3.14)
3. Приведение к стандартной форме
системы уравнений с гироскопическими членами.
53
Рассмотрим более сложную колебательную систему с N степенями свободы,
для которой функция Лагранжа может быть представлена в виде
| Af N N \
L = -о- 2 аим, + 2 S Bifitqi — 2 b,/W/|. (3.15)
где, как и выше, qlt q2, ..., qn — обобщенные координаты, е — малый
положительный параметр, ац = ajit Ъц = biit ga ф gn (if /=1,2, ..., N).
Предположим, что полная энергия рассматриваемой колебательной
системы
N
н -Ь-5—L <ЗЛ6>
является определенно-положительной квадратичной формой и сама система
находится под воздействием малого возмущения, определяемого
обобщенными силами
eQ, (/, qv .... qN, <7i, • • •, qN) (/=1,2,..., АО, (3.17)
периодическими по / с периодом 2я.
Тогда придем к рассмотрению следующей системы N дифференциальных
уравнений второго порядка:
"^Нг] — ~^Г e eQi V' 4lt q* '" • qNi qi'q29'"'' 'Qn) (' = U 2, ..., N).
(3.18)
В системе (3.18) введем новые переменные qu+t согласно формулам
<7„+, = -^- «— 1, 2 (3.19)
Теперь система (3.18) примет вид
dt ~
дН
d4N+i
dqN+,
дН
(3.20)
+ eQ„
dt dqt
где Ни Qt (i — 1, 2, ..., N) —союзные выражения функций Н и Q{ (i =
= 1,2, ...» Л0, получающиеся после замены в них скоростей qt (i =
= 1, 2, ..., Л0 значениями, определенными из уравнений (3.19). Подставляя
эти же значения q( (i = 1, 2, ..., N) в выражение (3.16), получим
. n n n
Я=Т 2 ^nQtQi+ 2 qflN+i + ^s- 2 btiqN+iqN+i. (3.21)
Систему уравнений (3.20) нетрудно привести к нормальным
координатам. Для этого составляем функциональную матрицу
/(G)) =
<хи • • • otuv
&N\ • ф • &NN
Yn —о) • • • уы\
Уш • • • Ум -
— (D
54
Yu + w
Yam
Ри
Рлл
•• • Yia/
• • • Ум + 0)
• • • Pw
• • • (W
(3.22)
Эта матрица квазиэрмитова, так как / (—со) совпадает с транспонированной
матрицей. Отсюда следует, что
D^co) = DX(—со), (3.23)
т. е. характеристический определитель Dx (со) содержит только четные
степени со. Так как Н — определенно-положительная квадратичная форма,
то все корни уравнения Dt (со) = 0 имеют вид со = ± /соЛ. Предположим,
что уравнение Dx (со) = 0 не имеет кратных корней. Тогда для любого к
среди диагональных элементов присоединенной матрицы
/ЧН) HI Л/04) II (3.24)
найдется по крайней мере один, отличный от нуля; обозначим его/7/ ^ t (Л) (коЛ).
Заметим, что
и Fi(h)i(h) (i(&h) — величины действительные, при этом Дд(/а>д) так же, как
Fiih)i(h) (*<">л), не обращаются в нуль.
С помощью перехода от переменных ql9 qu+\ (i = 1, 2, ..., N) к новым
переменным *у, у} (/ = 1, 2, ..., W) согласно формулам
ы " ' (3-26)
йы+i = 2 \Х%хк + YW+iyh] (J = 1,2 N),
в которых X(k\ Yih) (k = 1,2, ..., 2Л0 определяются из выражения
Хр + iY[h) = , Fkl(i(*h) (*=1.2 2*0, (3.27)
приводим систему уравнений (3.20) к виду
*%- + соЛ = EQVit, х, у) (А = 1, 2 АО-
Система уравнений (3.28) всегда может быть представлена в виде
системы уравнений второго порядка
-g^ + <*lxh = еВД х, х, е) (h = 1, 2, ..., АО. (3.29)
приведение которой к уравнениям в стандартной форме было сделано выше.
4. Приведение к стандартной форме
канонических уравнений. Рассмотрим механическую систему с N
степенями свободы, описываемую каноническими уравнениями
dqt = дН
" dPt ' (3.30)
55
(3.28)
где функция Гамильтона Н имеет вид
H = T2-T0-U; (3.31)
при этом U = U (ql9 q2, ..., qu) — силовая функция.
Особый интерес представляет случай, встречающийся во многих
технических задачах и задачах небесной механики, когда в выражение гамиль-
тоновой функции Н можно ввести малый параметр е так, что при е = О
она перейдет в функцию Гамильтона Я0, допускающую точное решение
соответствующей системы канонических уравнений.
Итак, предположим, что Н — периодическая функция / с периодом 2я
и может быть представлена рядом
Н = Н0 + гН1 + г*Н2+ ... , (3.32)
сходящимся для достаточно большого интервала изменения координат и
импульсов.
Одновременно с системой (3.30) рассмотрим вспомогательную
каноническую систему
dgi _ дН0
Pi (3.33)
dPj дн° (i-\ 2 №
получающуюся из системы (3.30) при е = 0.
Предположим, что функция Гамильтона Н0 в системе уравнений (3.33)
выбрана так, что соответствующее ей уравнение Гамильтона —
Остроградского
dV , и I. av W \
— + H0^qvq2f...9qNtJ^9...9^=o (3.34)
может быть проинтегрировано методом разделения переменных.
Пусть
V = V (/, ql9 q2, ..., qNt alf аъ ..., aN+x) (3.35)
— полный интеграл уравнения (3.34), в котором а, (* = 1, 2, ..., N + I) —
произвольные постоянные.
Согласно известной теореме Якоби — Остроградского, общее решение
канонической системы (3.33) определяется уравнениями
dV
(3.36)
•^г=^
-g--ft, ««1,2...., АО,
где Ъ{ (г = 1, 2, ..., N) — новые произвольные постоянные.
Заметим, что, так как уравнение (3.34) не содержит явно
неизвестной функции V, одна из постоянных щ входит в полный интеграл (3.35)
аддитивно.
Отыскание полного интеграла уравнения Гамильтона —
Остроградского во многих случаях упрощается, например, при наличии в системе
циклических координат, при независимости функции Гамильтона Н явно от
времени и т. п.
56
Предполагая, что якобиан отличен от нуля:
, дУ дУ дУ , / дУ дУ дУ \
\ддх ' дд2* '''' dqN) _ U[dal ' da2 ' '"' daN I
D (alf a2, aN) ~ D (qlt 4* • •, QN)
0,
можем разрешить систему уравнений (3.36) относительно qt и p{(i = 1, 2, ...
..., N)t выразив их как функции / и 2N произвольных постоянных at, bt
(i = 1, 2, ..., N). Тогда получим общее решение канонической системы
(З.сЗ) в виде
Л=Л('-*|Л>. п —
fc=?4('.«i.*i> 0=1,2, ..., N). {°° }
Рассмотрим соотношение (3.37) как замену переменных, где ал, bt (i =
= 1, 2, ..., N) — новые переменные, вводимые в уравнениях (3.30) вместо
Ро 4i U• = 1» 2,..., N). После некоторых выкладок, согласно теоремеШарлье,
вместо системы (3.30) для новых переменных ait bt (i = 1, 2, ..., N) получим
систему уравнений
da{ _ OR
dt ~~ dbi '
1 (3.38)
-^- - — -^- « = 1 2 M
где /? — новая функция Гамильтона, определяемая выражением
# = Я+4£-, (3.39)
дУ
в котором Я и -0f при помощи формул (3.37) должны быть выражены через
Др bc (i = 1, 2, ..., W). Согласно разложению (3.32) и уравнениям (3.34)
функцию R можно представить в виде ряда
/? = еЯ1+е2Я2+ ... (3.40)
и систему (3.38) записать в стандартной форме
^=е^г+ег^г+---=^^^^е).
(3.41)
-ж—'^г-^'ж----- -«Ф('.«,Л.в).
5. Приведение к стандартной форме
уравнений m-го порядка, разрешенных относительно
старшей производной. При решении многих задач теории
нелинейных колебаний, в которых имеется внешнее периодическое
возбуждение с достаточно высокой частотой (большой по сравнению с возможными
собственными частотами), приходится рассматривать дифференциальное
уравнение m-го порядка
*-/(-.*.* -£f). <"»
(dx dm~lx \
со/, х, --у-, ..., —^ц-I —периодическая функция ш/ = тс
периодом 2л, со — «большой» параметр.
57
С помощью замены переменных
-2Г = *i- • • • • d/m-f = х«-ь со/ = т (3.43)
и введения малого параметра е = — эта система приводится к системе
уравнений первого порядка
dx
dT =8*i'
dxx
"ST = 8*2' (3.44)
tf*m-l
^ — 8/1 (T, Xlf X2, • • . , #m—1)>
которая является системой уравнений в стандартной форме.
К системе уравнений в стандартной форме вида (3.44) может быть
приведено также уравнение m-го порядка
dmx J. dx dm-xx\ /Q,~
• dtm
где [i — малый положительный параметр.
j_
Полагая в уравнении (3.45) \im = е, можем представить его в виде
системы
dx
dxx
(3.46)
dt
— 8Xm—1»
m != e/(/, jclf e*2, ..., em !xm_i).
Заметим, что при применении асимптотических формул к системе (3.46)
степень приближения ухудшается по сравнению с формулами разложения
непосредственно по степеням малого параметра [i (так как е = \f\i). Как
известно [119], то же самое получается при исследовании колебательных
систем при наличии внутреннего резонанса. Так, например, решая систему
четвертого порядка, описываемую уравнением
\р2 + со2)2 х = eF (jc, x'f х\ x"\ (3.47)
гдер = -7т, можно убедиться, что найденное асимптотическое решение
представляет собой ряд, расположенный не по степеням малого параметра е,
а по его дробным степеням (для уравнения (3.47) — по степеням е1/«).
58
В последующих параграфах по ходу изложения разнообразных
вариантов и модификаций метода усреднения мы приведем еще некоторые сложные
системы нелинейных дифференциальных уравнений, содержащих малый,
параметр, и остановимся на приведении их либо к стандартному виду, либо
к специальному, удофному для применения метода усреднения.
В дальнейшем будем рассматривать нелинейные уравнения,
предполагая, что они уже приведены к стандартной форме
^ = гХк (t, xltx2, ..., хп) (k = 1, 2, ..., л), (3.48)
где е — малый положительный параметр, / — время, а функции
Xk (/, xv x2f ..., хп) (k = 1, 2, ..., п) могут быть представлены в виде
Хь (*> xlt x2t ..., хп) = 2j в Xy(xlt х2, .. •, хп)
{k= 1, 2 п).
(3.49)
§4
МЕТОД УСРЕДНЕНИЯ
Н. Н. БОГОЛЮБОВА
1. Постановка задачи. Принятые обозначения.
Перейдем к изложению фундаментальных результатов, полученных
Н. Н. Боголюбовым [141 в направлении создания строгой теории метода
усреднения, включающей алгоритм построения усредненных уравнений с
любой точностью и математическое обоснование. Н. Н. Боголюбов показал,
что метод усреднения органически связан с существованием некоторой
замены переменных, позволяющей исключать время t из правых частей
уравнений с любой степенью точности относительно малого параметра е. Кроме
того, указал, как строить не только систему первого приближения
(усредненную систему), но и усредненную систему уравнений высших
приближений, решения которых аппроксимируют решения исходной точной системы
с точностью до величин, пропорциональных высшим степеням малого
параметра е.
Введем некоторые сокращенные обозначения, значительно
упрощающие выкладки при усреднении системы уравнений в стандартной форме
(3.48). При этом в настоящем параграфе и двух следующих будем
придерживаться в основном оригинального изложения Н. Н. Боголюбова
[14], [161.
В дальнейшем условимся обозначать совокупность п величин хъ jc^...
..., хп одной буквой х. Тогда уравнение (3.48) запишется в векторной форме:
-§- = *X(t,x). (4.1)
Здесь jc, X можно рассматривать как точки я-мерного евклидова
пространства Еп. При этом выражение (3.49) примет вид
X(U) = 2^V%W. (4.2)
Формулы дифференцирования сложных функций
п
'i> - - > *n) __ dFk , V< dFk dxq fA с*.
60
в принятых обозначениях можно записать следующим образом:
dF
где -j- трактуется как матрица
dFk
II дХд || »
приложенная к вектору -~т, и !-£- • у) — как операторное скалярное
произведение
Очевидно, применение указанной матрично-вектор ной системы
обозначений не требует особых пояснений и представляет значительное
преимущество в отношении сокращения записи.
Пусть, далее, F (/, х) — сумма вида
F(t9x) = 2elytFv(x). (4.6)
Вводя обозначения
M{F{t,x)\ = FQ(x),
t
~F(t,x) = ^-C-FAx), (4.7)
и т. д., получим тождественно
v*0
1L = f
**--F-M[F). (4.8)
Оператор ~ будем называть интегрирующим оператором, М — опера-
тором усреднения при постоянных х или оператором усреднения по явно
содержащемуся времени.
2. Первое приближение. Перейдем к физической
предпосылке метода усреднения и строгой его формулировке.
Рассмотрим систему дифференциальных уравнений (4.1), где е — малый
положительный параметр и выражения X (/, х) как функции времени t
представляются суммами (4.2).
Форма приближенного решения системы уравнений (4.1) может быть
найдена, или, лучше сказать, угадана, с помощью совершенно интуитивных
соображении, а именно: так как первые производные -^ пропорциональны
малому параметру, естественно считать х медленно изменяющимися
величинами. Поэтому представим х как супперпозицию плавно изменяющегося
члена £ и суммы малых вибрационных членов и, ввиду малости последних,
61
в правой части уравнения (4.1) в первом приближении положим х = |.
Учитывая выражение (4.2), получим
-^ = е|Лу(£), (4.9)
или
-%- = еХ0 (I) + е 2 *'V'XV (£)• (4.10)
Сумма, стоящая в правой части уравнений (4.10), состоит из малых
синусоидальных колебательных слагаемых. Считая, что эти синусоидальные
• колебательные члены вызывают лишь малые вибрации х около £ и не
оказывают влияния на систематическое изменение х (отсутствует резонанс !),
пренебрегая ими, приходим к уравнениям первого приближения
-^ = гХ,(Ъ) = гМ{Х«Л))- (4.11)
Для получения второго приближения в выражении х необходимо
принять во внимание также и вибрационные члены; учитывая в уравнении (4.10)
слагаемое z&vtXv (£), как вызывающее в решении х колебания вида
Fpi»t
Xv(£),
= S + 82 4r*v(&) = Б + «*С Б). (4.12)
приходим к приближенному выражению
V4*0
Подставляй выражение (4.12) в уравнения (4.1), имеем
^ = еХ(<.6+еХ(/.В), (4.13)
т. е.
—- = гМ {X(tt £ -f eX(tf £))} -f- малые синусоидальные колебательные
члены.
Отсюда, пренебрегая влиянием синусоидальных колебательных членов на
систематическое изменение £, получаем уравнение второго приближения
JL = *M[X(t9b+BX(t9Q)}9
dt t
или, с точностью до величин второго порядка малости включительно
относительно е,
-§- = гМ {* (/Л) + е (X (/. Б) -£-) X (t. g)} . (4.14)
и т. д.
Приведенные рассуждения, очевидно, не могут претендовать на какую-
либо убедительность: против них, в первую очередь, может быть выдвинуто
хотя бы то возражение, что при составлении усредненных уравнений (4.11)
в уравнениях (4.1) отбрасывались члены того же порядка малости, что и
оставленный член гХ0 (£). Однако всем этим рассуждениям нетрудно
придать вполне обоснованную форму и показать, что в действительности,
применяя усреднение, в преобразованных уравнениях пренебрегаем величинами
высшего порядка малости.
62
>
Для этого в уравнениях (4.1) совершим замену переменных с помощью
формул
* = E+eX(ffg). <415)
где £ будем рассматривать как новые неизвестные.
Выражения (4.15) рассматриваются здесь не как приближенное решение
системы (4.1), а как формулы замены переменных.
Дифференцируя выражения (4.15), имеем
dx <% , дХ <% . в дХ (л -
Учитывая тождественные соотношения (4.8) интегрирующего оператора,
имеем
-^- = Х(*,|)--*„(!)•
Подставляя выражения (4.15) и (4.16) в уравнение (4.1), получаем
-§- + вЖ ' -^+ «*<'. 8-«ХоЮ-еХ {<.& + «*(*. 6)}
или
{£ + 8^-}4- = 8Xo(S) + e{X(/,g + eX(/,g))--X(/,g)}, (4.17)
где £ — единичная матрица.
Умножая соотношение (4.17) слева на выражение
{я + е^гр1 (4.18)
для новых неизвестных £ получаем уравнение
+ eJ£ + e-^-J {X(t,l + *X(t,t))-X{t,l)}. (4.19)
Далее, разлагая выражение (4.18) в ряд по степеням параметра е,
имеем
1£ + 8ж} =£-е^- + е2...,
(4.20)
где символ ет обозначает величины порядка малости не ниже ет.
Принимая во внимание разложение (4.20), уравнение (4.19) можем
представить в виде
-§- = еХо(5) + е2..., (4.21)
или, более подробно,
4|- = 8Х0(1)-е^Х0(|) + е^Х(/Д)^)х(/,|) + еЗ ... . (4.22)
63
Пренебрегая в системе уравнений (4.21) величинами второго порядка
малости, получим так называемые уравнения первого приближения
-§-=«*•©• (4.23)
Итак, если | удовлетворяют уравнениям (4.21) (точным уравнениям),
правая часть которых отличается от правой части уравнений первого
приближения (4.23) на величины второго порядка малости, то выражение
x = t + eX(t,t) (4.24)
представляет точное решение рассматриваемой системы уравнений (4.1).
Поэтому в качестве первого приближения можем принять
* = 6, (4.25)
взяв за | решение уравнения первого приближения (4.23).
Выражение (4.24), в котором £ удовлетворяет уравнениям (4.23), будем
называть улучшенным первым приближением.
Подставляя улучшенное первое приближение (4.24) в точные
уравнения (4.1), нетрудно убедиться, что это приближение удовлетворяет им с
точностью до величин второго порядка малости.
Возвращаясь к уравнениям (4.23), заметим, что, согласно определению
оператора усреднения,
X0(t) = M{X(t,t)},
и, следовательно, уравнения первого приближения могут быть
представлены в виде
Л- = Ш{Х (/,£)}. (4.26)
t
Таким образом, уравнения первого приближения (4.26) получаются из
точных уравнений (4.1) путем усреднения последние по явно содержащемуся
времени /. При выполнении усреднения £ трактуются как постоянные.
3. Второе приближение. Перейдем к изложению метода
построения решений уравнений (4.1) во втором приближении, основанного
также на применении принципа усреднения.
Прежде всего заметим, что при построении первого приближения путем
замены переменных (4.24) уравнения (4.1) были преобразованы к
уравнениям (4.21)
4- = 8*о(£) + е2...,
отличающимся от уравнений, получаемых после усреднения правых частей
точных уравнений (4.1) на величины второго порядка малости относительно
параметра е. Таким образом, точные уравнения (4.21) отличаются от
усредненных уравнений на величины второго порядка малости относительно
параметра е.
Для получения второго приближения найдем замену переменных,
аналогичную замене (4.24), преобразующую переменную х к переменной
£, удовлетворяющей уравнению (точному)
-§- = еХ0(|) + е*Р(|) + ез.... (4.27)
64
Чтобы прийти к этой замене переменных наиболее естественным путем,
найдем выражение
* = Ф(*,£,е), (4.28)
которое для g, удовлетворяющей уравнению
-§- = еХ„(|)+е2/>(|), (4.29)
удовлетворяло бы уравнению (4.1) с точностью до величин порядка
малости е3.
Так как при £, определяемой из уравнения первого приближения
-§- = е*о(£),
выражение
*- &+8 2 тг *»© - &+8*('' £)
V+0
удовлетворяет уравнению (4.1) с точностью до величин порядка малости
е2, то решение (4.28) будем отыскивать в форме
x = t+eX(t,t) + s*F(t,i)t (4.30)
где F (/, £) представляется суммами
/ЧЛЭ-И^МЭ- (4-31)
и
Подставляя значения * согласно выражениям (4.30) в правую часть
системы (4.1), имеем
еХ 0, х) = гХ (/, | + «X (/,£) + е»Р (f, 1)) =
= гХ (t, I) + е* (х(/, |)-^) X (/, |) + е» ... . (4.32)
С другой стороны, дифференцируя выражение (4.30) и принимая при
этом во внимание уравнения (4.29), находим
*L - Ж. + г™- • Л. j-e»-^ • Л. _!_ 8i*_ j. е2-^- -
л~л+8а| л +e ag л+8а<+ед<~
= еХ0(|) + 8^(|) + бг^-Х0(1) + 8-§- + 82-^- + 8»...,
т. е.
-^ = eX(M) + e2P(g)+e2-^-Xo(g)+ea-^-+e» ... , (4.33)
так как
™=X(t,t)-x0®.
Для того чтобы правые части выражений (4.32) и (4.33) были равны с
точностью до величин порядка малости е3, необходимо подобрать
находящиеся в нашем распоряжении функции Р (£) и F (/, £) так, чтобы выполнялось
5 246 65
соотношение
dF
W = (x (/, I) |-) X(/, I) - ^ X0 (I) - P(|). (4.34)
Ввиду того что
W£) = 2-£r*v(i); X(/,&) = 2e,v%(!), (4-35)
можем написать
b V, V(V^O)
x (*,-(*, l)^) Xv.(t, g)-2 -£ • Xх'®. (436>
где в сумме у суммирование распространено по всем парам (v', v")
v'.v" (vVO)
частот v, фигурирующих в суммах (4.35).
Следовательно, выражение (4.36) можем представить в виде суммы
(xv, i)-^)x(t, г)-Щ-хл)= 2 «*Ч©
(H^v.v'+v")
и соотношение (4.34) будет выполняться, если
p(i) = ф0(1) = м^ха, ®-щ)ха, ю- -f-ад) =
= м{р(М)-|-)х(М)} (4.37)
Ц-fO Р
к, резюмируя, можем утверждать, что при £, определяемой уравнением
-|- - еМ {X (*, 0} + е2М {(х (/, I) ^-) X (/, |)j , (4.38)
выражение
*= £ + еХ(/, $) + е2 (*(/, £) -J-)x(f, £)- e2^-X0(g) (4.39)
удовлетворяет уравнению (4.1) с точностью до величин порядка е3.
Покажем, что если рассматривать полученное выражение (4.39) не как
приближенное решение уравнения (4.1), а как формулу замены переменных,
преобразующую неизвестную jc, определяемую точным уравнением (4.1),
к новой неизвестной £, то она будет удовлетворять уравнению вида
-J- = гМ {Х(/, %)} + г*М ((X(/, 1)-щ)Х«, £)) + е3 ... , (4.40)
которое отличается от уравнения (4.38) величинами, пропорциональными е3.
66
Для этого продифференцируем выражение (4.39). Принимая во внимание
обозначение (4.37), получаем
dt -"ЧГ~т~г dl dt +е ag Л+в"ЗГ"|"в"ЗГ""
Но, согласно определению интегрирующего оператора,
+ в*(х(/. а-|-)х(/, £)-е2 ^-X.(6)-e»Al{(A:(/, 6)-^-)х(/, «} ,
и поэтому из соотношения (4.41) вытекает
- е* -^" *о (I) - **„ (5) ~ #М {(* (t, I) -£■) X (/, g)} .
В силу уравнения (4.1) это выражение должно быть равным
следующему:
е(Х(/, х) = sX(t91 + eX(t91) + e2F(/, В) =
= еХ(Л g) + е2(*(/, g) -|-) Х(М) + е3....
Таким образом, переменная g удовлетворяет уравнению
-1-(1+в4+в1-1-Г[вх'®+^тгл-®+
+ е2Л1 {(л: (/, |) -|-) X(/, 6)} + в» ... ] . (4.42)
Но очевидно, что
и поэтому уравнение (4.42) может быть представлено в форме
-§- = еХ0(Б) + <AW {(*(/, £) -gg-) Xtf. Б)} + *3 • • • .
совпадающей с (4.40).
Итак, если £ удовлетворяет уравнению (4.40), правая часть которого
отличается от правой части уравнения (4.38) на величины порядка малости
е3, то выражение (4.39) представляет точное решение уравнения (4.1).
В качестве второго приближения примем выражение
x = Z + eX(tt®, (4.43)
б* 67
где | определяется уравнением (4.38). Иначе говоря, за второе приближение
принимаем форму улучшенного первого приближения, в которой £
удовлетворяет уравнению уже не первого, а второго приближения.
Выражение (4.39), в котором £ определено из уравнений (4.38), назовем
улучшенным вторым приближением.
Таким образом, улучшенное второе приближение удовлетворяет
точному уравнению (4.1) с погрешностью порядка малости е3.
Все сказанное непосредственно обобщается и на уравнения типа
*L = eX(ttx)+e*Y(ttx)t (4.44)
в которые входят члены второго порядка малости.
В этом случае уравнения второго приближения примут вид
-§- = гМ {X(t, £)} + е'М {Y(t, £)} + е'М {(X(t, |)-|-)Х(/, Щ, (4.45)
и выражением второго приближения будет
x = l + eX(t,D- (4-46)
Для улучшенного второго приближения находим
ж = | + вХ(М)Ч-в2К(М) + в2(х(/, t)-kjx(t, 1)-г***-Х0(1).(4Л7)
Заметим, что
М {eX(t, I + еХ(/, g)) + е'К (t, | + еХ (*, £))} =
= М {еХ(/, I + sX(t, D) + е*К (/, I)} + е3 ... =
= М {еХ (/, I) + е* (х (/, 6) -|-] X (t, £) + г*¥ (/, g)} + в» ... . (4.48)
и поэтому уравнение (4.45) можно записать безразлично в какой форме:
либо в виде
-§- = M[zX(t, g +eX(/, !)) + e?Y(t, £)}. (4.49)
либо t
4- = М {еХ(/, I + еХ(/. Э) + t*Y(t, I + eX(t, $))}, (4.50)
см t
так как в уравнениях второго приближения члены порядка малости е3 не
учитываются.
Таким образом, уравнения второго приближения могут быть получены
непосредственно из точных уравнений (4.44), если в их правые части
подставить вместо х форму улучшенного первого приближения (или, что то же
самое, форму второго приближения) и усреднить по явно содержащемуся
времени t, считая в процессе усреднения переменные £ как бы постоянными,
причем величины третьего порядка малости могут отбрасываться.
Этот принцип усреднения может быть также сформулирован
следующим образом: уравнения второго приближения получаются усреднением
точных уравнений (4.44), в обе части которых подставлено улучшенное пер-
68
вое приближение, по явно содержащемуся времени. В самом деле,
уравнения второго приближения вытекают из соотношения
м{-^|=Л!{еХ(/, х)+е2Г(/, д)}, (4.51)
где в обеих частях вместо х стоит Б + еХ (/, Б), при этом в процессе
усреднения -jj- и Б трактуются как постоянные и величины порядка малости е3
могут не приниматься во внимание. При указанном истолковании операции
М очевидно
~ л + , 1 аБ J л + 871 л J ~~ dt •
и, следовательно, соотношение (4.51) переходит в (4.50).
4. Построение высших приближений. Сделаем
некоторые замечания относительно образования высших приближений.
Пусть общее уравнение в стандартной форме имеет вид
-|L = еХ(/, х) + e%(f, х) + • • • + г"Хп*-х (/, *), (4.52)
где Xfe (/, х) — некоторые тригонометрические суммы того же типа, что и
X (t, х).
Для получения m-приближения рассмотрим выражение
x = l + BFt(t9 |) + e2F2(/, l)+ ... + e»*Fm(t9 6), (4.53)
в котором Fk (t9 I) — суммы вида
и**/7* (Б)
НФО
и переменная £ — решение уравнения
-§- = *Рг®+*Р%® + ... +e«Pm®. (4.54)
Подставляя выражение (4.53) в'уравнение (4.52) и приравнивая
коэффициенты при одинаковых степенях е до т-го порядка включительно, подберем
Л (t, 6),..., Fm (t9 Б) и Рх (Б), ..., Рт (Б) так, чтобы выражение (4.53)
удовлетворяло уравнению (4.52) с точностью до величин порядка малости ew+!.
В результате получим
P1(t) = M{X(t, Б)},
p%(D = M[{x(t, D-fcjxit, d+xm Б)),
Ft(t9 t) = X(t9 Б),
F*(t, l) = [X(t, l)-%)x(tt ®--Щ-М{Ху91) + Хгу9 Б)}.
Если теперь, определив^ (/, Б), ...,fm (t9Q и Рх (Б),..., Рт(Э, рассматривать
выражение (4.53) как некоторую формулу замены переменных, преобразующую»
69
неизвестную х к новой неизвестной |, то для этой новой переменной
получим уравнение (точное!)
-§- = еРх (g) + е2Р2 (|) + • • • + г*»Рт (I) + е™+'/? (/, Б, е), (4.55)
правая часть которого состоит из «интегрируемой» части и возмущения
em+1 R (/, £, е), являющегося величиной порядка гт+х. При этом, если
переменная £ удовлетворяет уравнению (4.55) (отличающемуся от уравнения
(4.54) на величины порядка малости ет+1), то выражение (4.53)
представляет собой точное решение уравнения (4.52).
Поэтому в качестве т-го приближения решения уравнения (4.52) может
быть принято выражение
x = l + *Fx(U Ъ)+ ••• +е—'Fm_,(/, Ъ\ (4.56)
в котором £ определяется уравнением m-го приближения (4.54). Для такого
| формула (4.53) представляет улучшенное m-приближение,
удовлетворяющее точному уравнению (4.52) с погрешностью порядка гт+\
Заметим, что если известна формула улучшенного т-приближения,
то уравнения m-приближения могут быть непосредственно получены из
точных уравнений (4.52) при подстановке в них этой формулы и последующем
усреднении с помощью оператора М.
t
В приложениях в основном используется первое и иногда второе
приближение. Высшие приближения применяются обычно при общетеорети- >
ческих рассуждениях и анализе качественных свойств, для фактического же
построения решений они применяются редко ввиду быстрого возрастания
сложности их фактического построения.
5. Анализ усредненных уравнений. Прежде чем
переходить к иллюстрации изложенного общего метода усреднения на
конкретных примерах, сделаем некоторые замечания общего характера
относительно полученных усредненных уравнений первого, второго и высших
приближений.
Как уже указывалось, получаемые после усреднения приближенные
уравнения имеют то основное преимущество перед точными, что не
содержат в правых частях явно времени и являются автономными. Вместе с тем
они все же являются дифференциальными (так же, как и точные), что
налагает определенное ограничение на возможности изложенного метода.
Однако следует подчеркнуть, что для весьма большого числа
практически интересных задач усредненные уравнения оказываются гораздо
более простыми и поддающимися исследованию. При этом во многих случаях,
в которых общее решение усредненной системы не удается получить, можно
найти, по крайней мере, частные решения, например соответствующие
установившимся стационарным процессам. Так, при п — 1 уравнения первого
приближения интегрируются в квадратурах, при п = 2 для их исследования
может быть использована известная теория Пуанкаре.
При любом я, если Х0 (£) обращается в нуль в некоторой точке £ = g0,
можем рассматривать «квазистатическое» решение
* = £о
уравнений первого приближения. Для исследования устойчивости этого
решения можно поступать обычным образом, составив для малых отклонений
70
уравнения в вариациях
J§_=e^L6i. (4.57)
Если все вещественные части корней характеристического уравнения
Det
Ер-гдХо{1о)
dl
= 0 (4.58)
отрицательны, то рассматриваемое квазистатическое решение оказывается
устойчивым. Всякое решение усредненных уравнений (уравнений первого
приближения), исходящее из начальных значений, достаточно близких к
£0, при t -+ оо экспоненциально приближается к «квазистатическому»
решению. Если хотя бы для одного из корней характеристического уравнения
(4.58) вещественная часть положительна, имеем случай неустойчивости.
Может представиться также критический случай, когда некоторые или все
вещественные части равны нулю. Этот случай иногда можно свести к одному
из предыдущих с помощью рассмотрения высших' приближений.
Улучшенное первое приближение для рассматриваемого
«квазистатического» решения
* = Бо+ ?*(<> Бо) (4.59)
представляется в виде суммы постоянного членами малых
синусоидальных колебаний с амплитудами гХу, (£0) и «внешними» частотами v.
Высшие приближения выявили бы также наличие членов с комбинационными
частотами, составленными из v.
Сделаем еще одно существенное замечание относительно построения
высших приближений. С помощью замены переменных (4.53) уравнение (4.52)
сводится к уравнению (4.55), состоящему из «интегрируемой» части и
возмущения em+lR (/, £, е), являющегося величиной порядка ет+1. При этом если
переменная £ удовлетворяет уравнению (4.55), то выражение (4.53)
представляет собой точное решение уравнения (4.52).
Естественный путь дальнейшего развития изложенного метода —
рассмотреть его в пределе, т. е. в выражении (4.53) и уравнении (4.55) устремить
т к бесконечности. Если ряды (4.53) окажутся сходящимися, то система
уравнений (4.52) сведется к «интегрируемой» системе
-§- = е/>(£, е). (4.60)
Однако такое развитие изложенного метода оказывается невозможным:
уже для систем с квази пер и одически ми по / функциями X (/, х, е) в
формулах (4.53), как правило, появляются малые делители, и ряды,
определяющие функции Fx (/, £), ...,Fm (/, Б)» расходятся. Поэтому практическая
применимость метода должна определяться их асимптотическими свойствами для
данного фиксированного т при е -+ 0. В общем случае от них требуется,
чтобы при малом е и фиксированном т выражение (4.53) давало бы
достаточно точное представление решения уравнения (4.52) для достаточно
длительного интервала времени. В связи с возникновением указанных затруднений
далеко не всегда можно использовать выражения (4.53) и уравнение (4.55)
для исследования качественных свойств системы (4.52) на бесконечном
интервале времени. Однако, как покажем далее, эти трудности могут быть
устранены с помощью некоторой модернизации метода, в результате которой
71
получается настолько быстрая сходимость соответствующих рядов, что
малые делители подавляются.
6. Решение уравнения Ван-дер-Поля. В качестве
простейшего примера, иллюстрирующего применение изложенного метода
опять рассмотрим классическое уравнение Ван-дер-Поля
^L_e(l_x2)^+JC==0f (4e61)
которое путем введения новых переменных а, ср посредством формул замены
переменных
* = acos(/ + <p), (4б2)
-£- = — a sin (t + ф)
легко приводится к системе уравнений в стандартной форме
-w- = e{-r(1-x)-^-cos2(' + <P)+xcos4^ + 4))}
-^ = e}-F(i:-T-)sin2^ + ,»,)-T-sin4^ + (P))-
Остановимся сразу на построении улучшенного первого приближения
и второго приближения.
Согласно изложенному, для улучшенного первого приближения
получаем
(4.63)
до eat
а = а, -+- sin 2 (t + фх) + -^- sin 4 (t + фх),
р ( а? \ ecii
Ф= <Pi Г [1 ~ "Г J C0S2(/ + Ъ) + -32-С05*(* + <Pi).
(4.64)
rfleat и фх должны определяться из уравнений первого приближения,
получаемых обычным способом, в результате усреднения правых частей системы
(4.63)
dt — 2 у 4 )*
(4.65)
dt u#
Для стационарного режима, как и выше, имеем
a(t) -*2 при / -*оо,
и, следовательно, для установившегося колебательного режима при ах = 2
из формул улучшенного первого приближения (4.64) следует
а = 2 - ±- sin 2 (/ + ф1) + -J- sin 4 (/ + Ф1),
Ф = Ф1 + -|-cos2^ + ф1) + Т" cos4 (' + Ф1>-
Подставляя эти значения в первую формулу (4.62), имеем
х = [2 |-sin2(/ + ф1) + -f sin4(/+ 9!)]cos(/ + ф1) +
(4.66)
81П2(/ + ф1)+-|-81п4(/+ф1)
J
+ -J-cos2(/ + q>1) + -|-cos4(/+q>1), (4.67)
72
или, пренебрегая членами второго порядка малости, после элементарных
преобразований получаем улучшенное приближение для стационарного
решения в виде
х = 2 cos (/ + (Pi) J- sin 3 (/ + фх) (ф2 = const). (4.68)
Во втором приближении а и q> будут определяться выражениями (4.64),
где ах и фх должны быть найдены уже из уравнений второго приближения
/ Л2
dax
dt _ ,
(4.69)
-■*(•-4-).
Л ~ e \^ 8 8 ^ 256 j
Для стационарного решения во втором приближении получим
х = 2 cos (/ + Ф1) 7- sin 3 (t — фх),
е2
где фх = jg- + const.
7.0 6 условиях, обеспечивающих
однозначность в методе усреднения. В п. 4 приведены соображения
по поводу построения с помощью метода усреднения высших приближений.
Остановимся на этом вопросе несколько подробнее.
Пусть имеем общее уравнение в стандартной форме
-J- = вХ(/, х) + е*Хгу, х) + • • • + e"Xm-i(/, х), (4.70)
где Х{ (/, х) (i = 0, ..., т — 1) — периодические функции с периодом 2л,
е > 0 — малый параметр.
Чтобы образовать пг-е приближение, рассмотрим выражение
* = 6 + в/ч(/, gJ + eV.p. 6)+ ••• +*mFm(t, I), (4.71)
в котором £ — решения «усредненного» уравнения
-у- = ePi (I) + e»Pt (g)+...+ e*Pm (£), (4.72)
а функции P< (/, £) (i; = 1, ..., m) — периодические по / с периодом 2я.
В п. 4 для определения функций Ft (/, £) и Р< (£) (1 = 1, 2,..., т)
налагались ограничения, заключающиеся в том, что функции Ft (/, £)
представлялись суммами вида
и, следовательно, имели нулевое среднее значение. Ниже эти функции
будем определять иначе.
Подставим выражение (4.71) в уравнение (4.70), учитывая при этом
уравнение (4.72). Получим
•(/,i(B-^} + e»{pi(6)+-^- + -^p1(B)}+ ••• =«*<<. *> +
+ e2{*i('> 6) + Xetf. Б)ЛС В}+ •••• <4J4>
73
Приравнивая коэффициенты при одинаковых степенях е, имеем
^(6)+^ + ^Pi(6)-*i(*. 6)+*е«. б)/ч«. Б), (4.76)
Так как функция /ч (/, В периодическая по *с периодом 2я, из
уравнения (4.75) следует
Pi <6> = 4г j *('' 6) * - *о (6>- (4-77)
О
Предположим, что функция их (/, В определяется из уравнения
-^- = X (/, |) - Рх (|), J Bl (*, |) dt = 0. (4.78)
о
Тогда из уравнения (4.75) и условия (4.77) находим
FAU В = М*. В + *(Б). (479)
гДе <7i (I) — произвольная функция £.
Далее, из уравнения (4.76) следует
р* © - -sr J [*i (Л В + *е (/. 6) Л С I) - -ip Pi ©] *• (4-80)
5
Обозначим
2я
"5Г J[*i«. 6) + *8</. £)«i«. t)]dt =Xl0(l). (4.81)
0
Очевидно, что Xl0 (Q однозначно определяется через Х0 (/, В и
Хг (/, В-
Согласно выражениям (4.77) и (4.80), имеем
Р. (В - *ю (Б) + ^® 9i (6) - *о (|)-^ . (4.82)
Из уравнения (4.76) теперь можем определить F2 (/, В с точностью до
произвольной функции q2 (В-
Ранее при формулировке метода усреднения для уравнения (4.52)
требовалось, чтобы в выражениях (4.59) функции/^ (/, В имели нулевое среднее
значение по t и, следовательно, чтобы qx (В = 0, ....
СогласноМоррисону [2461, уравнения (4.72), в которых PL (В, Р<ь (В» —
определяются выражениями (4.77), (4.82), ..., аХ10(В, ... определяется
при помощи (4.78) и (4.81), qx (В — произвольная функция В будем
называть модифицированными усредненными уравнениями.
На неоднозначность получения усредненных уравнений уже
указывалось в [16] (см. стр. 38, соображения о получении разложения (1.7)).
Согласно сделанному там указанию модифицированные усредненные уравнения
могут быть получены следующим образом.
Предположим, что для уравнений в стандартной форме (4.70) с помощью
метода, изложенного в п. 4, построено решение
х = Л + в/ч (/, Л) + *2F2 V. Ц) + • • •, (4.83)
74
где функции Ft (t, r\), F2 (t, r\), ... имеют нулевое среднее по t и г\
определяются из усредненных уравнений типа уравнений (4.54)
•§- = e^i (Ч) + «2Рг (л) + •' • • (4-84)
Введем замену переменных
Л = & + е<7х(1) + «а<7*(1)+ •••• (4-85)
Обращая ее, получаем
1 = Л-«?1(Л)+ •••• (4.86)
В новых переменных % уравнения (4.84) примут следующий вид:
-§- = еРх (г,) + е'Р2 (г,) + е' -^ Р, (т,) + О (е») =
= в/>1Ш + е2[Р2(|)+^-<7хШ + Л(1)-^| + 0(е«). (4.87)
Таким образом, получили уравнения, совпадающие с уравнением (1.7)
(см. [16], стр. 38). Правая часть этих уравнений совпадает с выражениями
(4.77) и. (4-82).
Для устранения получаемой неоднозначности при построении
усредненных уравнений, как известно, нужно налагать некоторые дополнительные
условия. Таким условием может быть, например, условие нулевого среднего
в функциях Ft (/, £) и др. Вместе с тем неоднозначность построения
усредненных уравнений во многих случаях позволяет придать им вид, удобный для
последующего анализа, путем соответствующего подбора функций qx (£),
Цч (£)» ••• • Как будет показано ниже, соответствующий подбор произвольных
функций q1 (|), q2 (£), ... позволяет, усредняя систему уравнений в
канонической форме, добиться того, чтобы усредненные уравнения были тоже
каноническими.
§5
МАЯТНИК С ВИБРИРУЮЩЕЙ
ТОЧКОЙ ПОДВЕСА
1. Уравнение колебаний маятника с
вибрирующей точкой подвеса. В качестве примера, не только
иллюстрирующего широкие возможности метода усреднения, но и
представляющего собой самостоятельный интерес, рассмотрим колебания физического
маятника, представляющего собой твердое тело, которое может свободно
вращаться в определенной вертикальной плоскости вокруг своей точки
подвеса. Предположим, что точка подвеса совершает в вертикальном
направлении синусоидальные колебания с малой амплитудой а и
высокой частотой (о таким образом, что
/
0) >0)0-^- , -^-< 1,
(5.1)
где I — приведенная длина маятника, со0 = |/ "f
собственная частота малых колебаний (рис. 3).
Как показано в работе [14], неустойчивое верхнее
положение равновесия маятника может сделаться
устойчивым*. Чтобы рассмотреть это интересное явление,
составим уравнение колебаний маятника с вибрирующей
точкой подвеса. Считая затухание пропорциональным
скорости, имеем
Рис. 3.
^6
d&
g —- ар)2 sin Ы
sin 6 = 0,
(5.2)
где 0 — угол отклонения, отсчитываемый от нижнего положения
равновесия; у = asino)/ — вертикальное перемещение точки подвеса; А, —
коэффициент затухания.
Относительно величины затухания предполагаем, что при
фиксированной точке подвеса движение маятника при малых отклонениях от нижнего
положения равновесия имеет колебательный характер. Тогда, как из-
* Этот пример рассмотрен Н. Н. Боголюбовым еще в 1942 г. задолго до опубликования
П. Капицей статьи, посвященной близкому вопросу под названием «Динамическая
устойчивость маятника при колеблющейся точке подвеса» (ЖЭТФ, т. 21, вып. 5, 1951).
Однако рукопись под названием «Теория возмущений в нелинейной механике», содержащая
этот изящный пример, увидела свет лишь в 1950 г.
76
вестно,
-? < «А (5.3)
Прежде всего необходимо выявить в уравнении (5.2) малый параметр
и привести его к стандартному виду. Для этого целесообразно привести это
уравнение к «безразмерному» времени. Вместо времени t, измеряемого в
секундах, введем время т, для которого единицей измерения будет отнесенный
к 2л период колебаний точки подвеса, т. е. — . Имеем
Т —Ш ' dx ~~ to # dt • dx2 ~ о2 * Л2 #
Потому из уравнения (5.2) следует:
■^-+-^Г--Зх- + {Ъ2"^ — sinxjsine = 0. (5.4)
Для упрощения положим
k=J*L.±f a=±-k. (5.5)
Тогда
_g / в>о \2_ £,а /_Ма А — -А_ ^о _ * *, JL — 9rf а
/О)2 ~ \ Ю ) ~~ * \ / ) • CD "" О)0 О) " "оЗГ / " / *
и уравнение (5.4) может быть записано в виде
J^ + 2a-J-.-g-+{*(7-)2--Нпт)8|пе = 0. (5-6)
Принимая в качестве малого параметра е отношение амплитуды
колебаний точки подвеса к приведенной длине маятника, т. е. е = -у-,
окончательно имеем
-gji- + 2ea -^- + Ike2 — е sin т) sin 6=0, ' (5.7)
где, согласно соотношениям (5.1), (5.3) и (5.5), постоянные а и & меньше
единицы.
2. Приведение уравнения колебаний
маятника к стандартной форм е. Для применения метода усреднения
уравнение (5.7) необходимо привести к двум уравнениям в стандартной
форме. Это удается сделать, если ввести новые неизвестные <р и Q с помощью
формул замены переменных
0 = Ф — е sin х sin ф, (5.8)
—т- = eQ — е cos x sin ф. (5.9)
Дифференцируя выражение (5.8) и сравнивая с (5.9), получаем
d8 dcp d(p • гл
-j— = -р- 8 Sin X С05ф -р- 8 COS X Sin ф = Bll — 8 COS X Sin ф.
Отсюда имеем
/ 1 о ein т ллс т\ .
dx
77
(1 — е sin х cos ф) —jr- = eQ. (5.10)
Дифференцируя соотношение (5.9) и подставляя в уравнение (5.7),
получаем
-j-g- = e -j e cos x cos ф -^- + e sin x sin ф = (e sin x — я V) sin 6 —
и поэтому
8 -j— = 8cos xcos ф —r- + esinx {sin^— e sin x sin ф)— 5Шф) —
— &2e2 sin (ф — 8 sin x sin ф) — 2ae (eQ — e cos x sin ф).
Отсюда, сокращая на е и принимая во внимание соотношение (5.10),
получаем
-J— == {sin (ф — 8 sin х sin ф) — sin ф} sin x — k2e sin (ф — 8 sin x sin ф) +
. eQcosx cos ф n /ГЛ ч /cii\
+ ! : -—2ae(Q — cos x sin ф). (5.11)
1 1 — 8 Sin X COS ф V T/ V '
Раскладывая правые части уравнений (5.10) и (5.11) по степеням
параметра е, для новых переменных ф и Q получим следующую систему
дифференциальных уравнений в стандартной форме
~~~j— ^= 8L& ~j~ 8 • • • у
-^- = 8 {— sin2 х sin ф cos ф — k2 sin ф + Q cosx cos ф — 2aQ + (5.12)
+ 2a cos x sin ф} + e2 ... .
3. Построение первого приближения. Применяя к
полученным уравнениям принцип усреднения и учитывая тождественные
соотношения
М {cosх} = 0, М {sin2 х} = 4- »
X X 1
получаем уравнения первого приближения в виде
dx ~*1*'
(5.13)
-jj- = — e |-y sin ф cos ф + k2 sin ф + 2aQl.
Иногда вместо двух уравнений первого порядка нагляднее
рассматривать одно уравнение второго порядка. В данном случае система двух
уравнений (5.13), очевидно, эквивалентна уравнению второго порядка
-0- + 2ea-^ + 82 [k2 + ± cos <pj sin q> = 0. (5.14)
Полученное уравнение первого приближения (5.14) гораздо проще
точного уравнения (5.7) хотя бы потому, что не содержит явно времени. Оно
представляет, собой уравнение колебаний системы, подобной маятнику с
неподвижной точкой подвеса, у которой «восстанавливающая сила»
пропорциональна не sin ф, а Ik2 + -«- cos ф) s*n Ф-
78
При отсутствии затухания (а = 0) уравнение (5.14) полностью
решается в эллиптических функциях. Однако для рассмотрения интересующего нас
вопроса об устойчивости верхнего положения равновесия не требуется иметь
выражение общего решения.
Анализируя уравнение (5.14), заключаем, что оно допускает
квазистатическое решение ср = я, соответствующее верхнему положению равновесия
маятника.
Для исследования устойчивости рассмотрим малые отклонения бср =
= ф — я от этого положения.
Составим уравнения в вариациях для этих отклонений. Имеем
4£ + 2еа -$- + в' (-1- - А») бФ = 0. (5.15)
Так как еа > 0, то условием устойчивости будет
т. е., согласно определению &,
о)>К2о)04-. (5.16)
Итак, если частота вибраций точки подвеса достаточно велика, чтобы
удовлетворить неравенство (5.16), то верхнее положение маятника
становится устойчивым.
Пусть, например, / = 40 см, а = 2 см. В этом случае из условия (5.16)
следует
о)>/2 j/Jjg-20» 140 сек-К
Следовательно, верхнее положение маятника устойчиво, если число
циклов колебаний точки подвеса больше -д—, т. е. больше 22,3 колебаний в
секунду.
Рассматривая аналогичное квазистатическое решение q> = 0,
соответствующее нижнему положению равновесия, убеждаемся, что оно остается
устойчивым при любых k и частота колебаний при малых отклонениях без
Vi + *
учета затухания равна е I/ -^- + k' для времени т и соответственно
80)
1/Г-г + *-/х(тг),+ -«
для времени /.
Таким образом, для рассмотренного выше конкретного примера при
числе колебаний точки подвеса, равном 60 в секунду (со = 377 секгх), частота
малых колебаний маятника соц = 14,2 сек~1, тогда как в случае
покоящейся точки подвеса эта частота a>v = 4,94 сект1.
Эффективная восстанавливающая сила увеличивается в
(*;-«
раза. Эта сила при малых отклонениях будет, следовательно, такой же, как
у соответствующего обычного маятника, в 8,2 раза более тяжелого.
4. Второе приближение. Перейдем к исследованию
колебаний маятника во втором приближении. Нетрудно убедиться, что для
79
уравнений (5.12) уравнения второго приближения совпадают с уравнениями
первого приближения. Поэтому для иллюстрации процесса построения и
исследования второго приближения займемся исследованием иного возможного
типа движения маятника. Оказывается, что маятник может синхронно
вращаться с угловой скоростью со, затрачивая работу на преодоление
сопротивлений, если только они не превзойдут известной величины. В этом
случае возможны колебания оси маятника около оси/вращающейся равномерно
с угловой скоростью, точно равной со.
Чтобы несколько упростить выкладки, исключим действие силы
тяжести, предполагая, что движение маятника совершается в горизонтальной
плоскости. Тогда, положив в уравнении (5.7) k = 0, получим
Jg|- + 2е<х-^- — е sinx sin 6 = 0. (5.17)
Угол 9 измеряет отклонение оси маятника от некоторой неподвижной
оси, и, так как предполагается исследование колебания маятника вокруг оси,
вращающейся с постоянной угловой скоростью о), целесообразно ввести
вместо него угол г|>
ф = 0 _ со/,
или для безразмерного времени
г|)=9 —т.
Очевидно, для угла г|э уравнением колебаний будет
-Q- + 2еа -^- — е sin x sin (i|? + x) + 2еа = 0. (5.18)
Для приведения этого уравнения к стандартной форме положим
^=K«v. (5.19)
В результате получим два уравнения первого порядка относительно
неизвестных г|э и v:
-%L = у е sin х sin (г|> + х) — 2 V « а — 2 (V* ? <*v>
(5.20)
dx
в которых за малый параметр можно принять У е.
Так как
sin х sin (г|) + х) = "2~ cos гр ^- cos (\\> + 2х),
то улучшенное первое приближение можно представить в виде
гр = гр, v = Q— J^-cos(\|> + 2х) = Q — -^- sin(г|э + 2х). (5.21)
Подставляя выражения (5.21) в правые части уравнений (5.20) и
выполняя усреднение по х, считая при этом г|э и Q постоянными, приходим к
уравнениям второго приближения
d\j> __
(5.22)
-S--VTQ.
-^ = Jy- cos\|> —2^8 a — 2e<xQ,
80
или
^ + 2e«-£-lfi*- + 2e« = 0. (5.23)
Возвращаясь к времени t, измеряемому в секундах (/ =-~)»
полученное уравнение второго приближения (5.23) можем представить в виде
Заметим, что в принятых обозначениях уравнением первого
приближения будет
|£~5г cost|) + Xo = 0. (5.25)
Оно отличается от уравнения второго приближения (5.24) отсутствием
члена ^-тг-, вызывающего затухание колебаний.
Из уравнения второго приближения (5.24) следует, что оно допускает
квазистатические решения
\|э = %, где -^- cos гр0 = Хо), (5.26)
соответствующие вращению маятника (0 = Ы + %) с постоянной угловой
скоростью о), если
*<ТГ- (5-27)
При
*>ТГ ♦ (5.28)
такие квазистатические решения невозможны.
Для исследования устойчивости квазистатических решений (5.26) в
случае (5.27) рассмотрим малые отклонения г|> от г|)0:
* = % + fit-
Для этих отклонений 6г|> из уравнения (5.24) получаем
4^ + *T + -1rsin^ = 0. (5.29)
Исследуя соответствующее характеристическое уравнение
P2+^ + -^-sinto=0,
убеждаемся, что ввиду положительности коэффициента X при —^- sin i|?0 > 0
аса2 . . .
вещественные части корней этого уравнения отрицательны; при —57- sinif0 <
< 0 это уравнение имеет корень с положительной вещественной частью.
Итак, решение (5.26) устойчиво при sin ip0 > 0 и неустойчиво при
sin % < 0. Следовательно, имеем одно устойчивое квазистатическое
решение 0 < ур0 < я и одно неустойчивое я < i|>0 < 2л.
6 246 81
Заметим, что если ограничиваться уравнением первого приближения
(5.25), то в уравнении (5.29) будет отсутствовать член ^—зр и
характеристическое уравнение примет вид
Следовательно, при sin if0 > 0 его корни оказываются чисто мнимыми и
нельзя решить вопрос об устойчивости. О возможности таких случаев
упоминалось выше.
Как видим, во втором приближении вещественные части корней
характеристического уравнения отличны от нуля, и поэтому возможно выяснить
вопрос об устойчивости.
В заключение скажем несколько слов об условиях существования
квазистатических решений (5.26).
Заметим, что если 7 обозначает момент инерции маятника, то 7Ха>
представит, очевидно, момент сил сопротивления для маятника, вращающегося
с угловой скоростью со. Умножая на со момент сил сопротивления, получаем
мощность N, расходуемую на преодоление этих сил,
N = 7Х<о2.
Согласно условию (5.27) следует, что для возможности установившегося
вращения маятника с угловой скоростью со необходимо, чтобы мощность,
расходуемая на преодоление*сил сопротивления, не достигала некоторого
предельного значения, а именно:
N<~T "Т^ (530)
Так, например, если момент инерции мятника 7 = 0,5кг-см-сек2,
приведенная длина / = 40 см и точка подвеса совершает в секунду 60 колебаний
(© = 377сект1) с амплитудой а = 2см, то
-~. -у- со3 = 8q кг • см • сект1 s 6698 кг • м • сект1.
Следовательно, в данном случае для возможности вращения маятника с
угловой скоростью со (60 оборотов в секунду) согласно условию (5.30)
необходимо, чтобы мощность, расходуемая на преодоление сопротивлений, не
превосходила 6698 кг • м • сект1.
Приведенный выше пример маятника с вибрирующей точкой подвеса
и вывод об устойчивости верхнего положения равновесия при достаточно
большой частоте вибрации точки подвеса явились стимулом появления
многих интересных исследований. Среди них в первую очередь следует обратить
внимание на работу В. Н. Челомея [204], в которой показано, что те же
по природе динамические силы, которые рассматривались в примере с
маятником, приводят статически неустойчивую систему (в частности, стержень)
к динамически устойчивой, в результате чего показана принципиальная
возможность повышения устойчивости упругих систем при помощи
вибраций.
Эти же идеи были в дальнейшем использованы при рассмотрении
задачи о повышении устойчивости цилиндрических оболочек под действием
осевой вибрационной нагрузки, о динамической устойчивости пологой
цилиндрической панели, находящейся под совместным воздействием продольной
равномерно распределенной периодической нагрузки и сверхзвукового
потока газа [209J.
82
По существу этот же принцип повышения устойчивости положен в
основу расчета ускорителя с жесткой фокусировкой для повышения
стабильности орбитального движения заряженных частиц [180], а также для
повышения устойчивости быстровращающегося гироскопа [181].
Что касается исследований, посвященных различным маятниковым
системам с вибрирующими точками подвеса, то таких в последнее время
появилось много. Например, в работе [252] рассмотрено влияние вертикально
колеблющейся точки подвеса на движение гироскопического маятника в
широком диапазоне частот; в [178] исследована задача о колебаниях
гироскопического маятника с вертикально колеблющейся точкой подвеса; в [174]
рассмотрена задача о плоских колебательно-вращательных движениях
двойного маятника с вибрирующей по вертикали точкой подвеса и др.; в статье
[40] рассмотрены резонансные колебания и вращения маятника с
вибрирующей точкой подвеса. Интересные результаты получены также в работах
[36, 151, 9, 238 и др.].
6*
\
§6
МАТЕМАТИЧЕСКОЕ ОБОСНОВАНИЕ
МЕТОДА УСРЕДНЕНИЯ
Н. Н. БОГОЛЮБОВА
•
1. Задач.а математического обоснования.
Сформулированный и развитый Н. Н. Боголюбовым метод усреднения в
применении к уравнениям в стандартной форме получил в классических
работах [13, 16J строгое математическое обоснование.
Это обоснование, как и обоснование метода Ван-дер-Поля, в основном
сводится к решению следующих двух проблем:
1) отысканию условий, при которых разность между решениями точной
и соответствующей ей усредненной систем для достаточно малых значений
параметра $ становится сколь угодно малой на сколь угодно большом, но
все же конечном интервале времени;
2) установлению соответствий между различными свойствами решений,
зависящих от их поведения на бесконечном интервале времени, точных и
усредненных уравнений.
Остановимся на первой проблеме, как более простой.
Рассмотрим систему уравнений в стандартной форме
-§- = еХ (/,*), (6-1)
где х, X — точки n-мерного евклидова пространства, е — малый
положительный параметр, / — время.
Построим для системы (6.1) соответствующую усредненную систему
-#- = вХ0ф, (6.2)
где
X0(t)=M{X(t, g)}. (6.3)
Как указывалось, первая проблема заключается в доказательстве
теоремы, устанавливающей, что при весьма общих условиях разность \х (t) —
— £ (/) | может быть сделана сколь угодно малой для достаточно малого е >
> 0 на сколь угодно большом интервале 0 < / < Т. При этом, так как | (/)
зависит от t посредством et, то для того чтобы в течение указанного интер-
84
вала времени £ (/) могло успеть значительно отойти от своего начального
значения, т. е. чтобы этот интервал оказался достаточно длительным с
точки зрения изменения | (/), за Т следует брать величину порядка —, где
L может быть сделано сколь угодно большим при достаточно малом е.
2. Первая основная теорема Н. Н. Боголюбова.
Сформулируем и приведем доказательство основной теоремы о малости
ошибки разности х (t) — £ (0 в первом приближении.
Теорема [16]. Пусть функция X (/, х) удовлетворяет условиям:
а) для некоторой области D можно указать такие положительные
постоянные М и X, что для всех вещественных значений < > 0 ы для любых
точек ху х\ х" из этой области выполняются неравенства
\ху, *)|<Л1 \X(tt x')-X(u *")|<Ч*'-*"|; (6.4)
б) в этой области равномерно относительно х существует предел
т
lim ±г f X (t, x) dt =X0 (jc). (6.5)
Г-*оо ' J
О
Тогда любым сколь угодно малым положительным р, х\ и сколь угодно
большому L можно сопоставить такое положительное е0, что если £ = | (t) —
решение уравнения
-§-=еХ0(£),
определенное на интервале О < / < со и лежащее в области D вместе со
всей своей р-окрестностью *, то для О < е < е0 в интервале 0 < / < —
справедливо неравенство
ИО-бОКч, (6-б)
в котором х = х (0 — решение уравнения
совпадающее с £ (/) при t = 0.
Доказательство. Фиксируем некоторое положительное число
а и строим функцию
\Аа[\-Цр[, \х\<а,
= I I (6.7)
( 0, \х\>а;
положительная постоянная Аа определяется из соотношения
§ba(x)dx = 1,
в котором интегрирование выполняется по всему рассматриваемому
пространству Еп; dx обозначает бесконечно малый элемент обычного л-мерного
евклидова объема.
Л„(*) =
* р-окрестностью некоторого множества А будем называть множество всех точек,
расстояние которых до А меньше р.
85
Очевидно, введенная функция Ла (х) ограничена вместе со своими
частными производными до второго порядка включительно.
Так как эта функция и ее производные тождественно равны нулю для
| jc | >а, нетрудно убедиться, что интеграл
dx
(6.8)
оказывается конечным для всякого положительного а.
Заметив это, рассмотрим функцию
u(t,x)=[Aa(x-x')H\X(t, x')-X0(x')\dAdx'. (6.9)
Согласно условию б) можно построить такую монотонно убывающую
функцию / (/), стремящуюся к нулю при / -»■ оо, что во всей области D
\dt
</(<)•
(6.10)
-j-j|X(/, x)-X0(x)\<
I 0
Поэтому имеем
И*. x)\<tf(t)\/±a(<-x')dx'<tf(t) ^a(x-x')dx' = if(i)^Q(x')dx\
т. е.
Далее,
\u(U x)\<£tt(t).
(6.11)
ди (t, x)
дх
<
**>я
дЬа(х-х')
дх
dx'<tf(t)^
дЬа(х)
дх
dx,
или, согласно выражению (6.8),
| ди (t, х)
дх
:tf(t)ia
(6.12)
С другой стороны, благодаря условию а),
1*в(х)|<Л«; \Хо(х')-Хо(х")К>Ах'-х"Ъ х,х\хГеО,(6ЛЗ)
и поэтому
\X(t, x')-X0(x')-X(t, *)+Xe(*)|<2b|*'-*|, x, jc', jc"6D. (6.14)
Из выражения (6.9) следует
D
Отсюда, на основании (6.14), убеждаемся, что в области D справедливо
неравенство
ди (tt х)
!^il _ {X(t, х)-Х0(х)} ГAfl(*-x')dx' |< 2U. (6.15)
86
Но, согласно определению функции Да (jc), для любой точки х, а-окрестность
которой принадлежит D, имеем
$Д«(х — x')dx' = J Да(* — x')dx' = l,
Ъ \х—х'\<а
и, таким образом, из соотношения (6.15) для таких точек следует
l^i) X(tt x) + Х0(х) I < 2Ха. (6.16)
Зафиксируем теперь число а так, чтобы
я < Р. а< -^^ , где л* = min ft, р), (6.17)
и введем функции
t
F(8)=isup|x/^)|, Ф(/)= ±-\tf(t)di. (6.18)
О
Очевидно имеем
F(e)-*0, е-*0, Ф(0-*0, f^co.
Поэтому можем найти столь малое положительное е0, чтобы для всякого
положительного е, не превосходящего е0, выполнялись неравенства
F <,)«., ^(в,<(^,Ф(4.)<-;й1^__. (6.,9)
Произведя такой выбор величин е0и а, рассмотрим выражение
x = x(t) = t(t) + Eu(t, £(/)), (6.20)
где £ (f) — решение уравнения (6.2), принадлежащее со своей р-окрест-
ностью области D.
Благодаря неравенствам (6.11) и (6.17)—(6.19), в интервале
0</<4" (6.21)
имеем
Iги(/, I)|<е//(/)<F(е)< а< р. (6.22)
Следовательно, в интервале (6.21) x(f)£D.
Далее,
dx
где
-£--еХ(^) = /?, (6-23)
= e[|--X(U)+^)| + 8^X0g) + e(X(U)-X(U+e4
Вследствие неравенств (6.11) — (6.13) и (6.16), получаем
| R | < 2Яае + VaMe*tf (/) + be2// (/).
87
Таким образом, в рассматриваемом интервале (6.22)
8
Г eeut-t) | £ (Т) | dz < <?"• J | R (t) | dt < (2XaL + (7eM + A,) L*(D 1-Ц\ e*L,
0 0
или, согласно неравенствам (6.17) и (6.19),
так что
j>«->|*(x)|dT<-f + Т = Т'
о
Г eew-т) | ^ (Т) | dx < -3-, Г e*W-* \R(t)\ dx <-£-. (6.24)
о о
Пусть, далее,* = х (t) — решение уравнения (6.1), для которого х (0) =
= I (0). Тогда в интервале
0<t<t*t <*<4"> (6.25)
в котором х (/) £ Z), получим
\X(t, x)-X(t, x)\^X\x-x\.
Отсюда, благодаря соотношению (6.23), имеем
|ii^L|<^|x-x| + |/?(/)|.
Так кйк разность х — х анулируется при t = 0,
\x-x\<j^-^\R(x)\dx.
О
Поэтому на основании (6.24) заключаем, что в интервале (6.25)
выполняются неравенства
\х-1с\< ^-, -\х — х\<-%-9
из которых, вследствие неравенства (6.20) и (6.21), получаем
|x-6|<-jL + F(e)<4f \x-l\<±- + F{B)<p. (6.26)
Покажем теперь, что число /* может быть взято равным — .
В самом деле, если этого сделать нельзя, то неравенство
|*-Б|<Р (6.27)
не может выполняться во всем интервале (0, —), так как в последнем случае
имели бы х (0 £ D для всякого / из интервала [0, — ]. Но так как
неравенство (6.27) заведомо выполняется для достаточно малых /, то из соображений
непрерывности ясно, что существует такое tl9 для которого в интервале
(0, У это неравенство выполняется и, кроме того,
|*<<i)-6(<i)l>P-e. (6.28)
88
где за б может быть взято любое сколь угодно малое число. Возьмем
Ь=-у[%—Р(*)} (6-29)
и положим /* = /ь что возможно, так как на сегменте [0, tx] точка х (f)
принадлежит области D. Но тогда согласно неравенству (6.26) получим
\x(t1)-t(t1)\<i- + F(*) = p-2S<p-6,
что противоречит неравенству (6.28).
Итак, можем положить /* = —, и неравенства (6.26) оказываются
справедливыми в интервале 0 < /< —, что и завершает доказательство
теоремы.
Если область D ограничена (лежит в ограниченной части
рассматриваемого евклидова пространства), то из условия теоремы б) можно исключить
требование равномерности и сформулировать его как условие
существования предела (6.5) в каждой точке этой области.
В самом деле, ввиду условия а), функции
т
Fr(*)=-Mx(/, x)dt (6.30)
о
удовлетворяют неравенству
\FT(x,)-FT(xn)\<'k\xt -х"\ (6.31)
и, таким образом, последовательность их при Т -> со равностепенно
непрерывна. Но так как область D, будучи ограниченной, компактна, то всякая
равностепенно непрерывная последовательность, сходящаяся в каждой
точке D, оказывается вместе с тем и равномерно сходящейся.
Так как для всякой почти периодической функции / (/) существует предел
т
llm-Jpf/Wtf, (6.32)
о
то в случае ограниченности области D условие б) удовлетворяется, если для
каждого х из D выражение X (t, x) оказывается почти периодической
функцией переменной /.
В заключение заметим, что оценка (6.27) во многих случаях может быть
значительно улучшена. Так, например, В. В. Ларичевой [97] получены
удобные для практического применения оценки, позволяющие значительно
расширить интервал пригодности решений усредненной системы, для
случая стандартных систем с периодической по времени правой частью.
§ 7
ОБОСНОВАНИЕ МЕТОДА УСРЕДНЕНИЯ
Н. Н. БОГОЛЮБОВА НА БЕСКОНЕЧНОМ
ИНТЕРВАЛЕ ВРЕМЕНИ
1. Постановка задачи и некоторые
предположения. Остановимся на рассмотрении одной из задач, относящихся к
указанной в предыдущем параграфе проблеме второго вида — установлении
соответствия между свойствами решений точных и усредненных уравнений,
которые зависят от их поведения на бесконечном интервале времени.
Условия, при которых существует периодическое решение исходной
системы уравнений в стандартной форме в окрестности устойчивого
изолированного статического решения усредненной системы, устанавливаются
второй основной теоремой Н. Н. Боголюбова [13, 161. Она, как и теорема
предыдущего параграфа, явилась основной для многих исследований и
обобщений.
Итак, рассмотрим систему уравнений в стандартной форме
-§--«Х (/.*). (7.1)
где х, X — точки /г-мерного евклидова пространства Еп% t — время, е —
малый положительный параметр.
Одновременно с системой (7.1) будем рассматривать усредненную
систему
-§- = е*о(!)> (7-2>
где
Хв(6)-А*{Х(/. В), (7.3)
и подробно исследуем случай, когда система (7.2) имеет «квазистатическое»
решение, соответствующее точке равновесия
Б-Ьн *о(1о) = 0. (7.4)
Для решений системы уравнений (7.2), бесконечно близких к |0, имеем
уравнения в вариациях
-g-явь М^Ц* T==e*' (7-5)
90
являющиеся однородными линейными дифференциальными уравнениями с
постоянными коэффициентами.
Рассмотрим характеристическое уравнение, соответствующее
уравнениям (7.5),
Det | р/ — //1 = 0. (7.6)
В дальнейшем будем рассматривать случай, когда все корни
характеристического уравнения (7.6) имеют отрицательные вещественные части, и,
следовательно, все 6£ экспоненциально стремятся к нулю.
Для доказательства теоремы о позедении точных решений системы
(7.1) в окрестности £0, кроме указанного выше условия неравенства нулю
вещественных частей корней характеристического уравнения (7.6),
понадобятся еще некоторые предположения.
Предположим, что правые части системы (7.1) удовлетворяют
следующим условиям:
а) функции X (/, х) и ее частные производные первого порядка
ограничены и равномерно непрерывны по отношению к х в области
— оо</<оо, x£Dp, (7.7)
где Dp — некоторая р-окрестность точки £0»
б) в каждой точке этой области
т
-j- Г X (/, х) dt -* Х0 (х) при Т -^ оо (7.8)
6
равномерно по отношению к / из интервала (—со, со).
2. Преобразование уравнений в стандартной
форме. Для упрощения преобразуем уравнение (7.1) к некоторому
специальному виду.
Положим в уравнении (7.1)
x = to + b, (7.9)
где |0 — квазистатическое решение уравнения (7.2), Ъ — новые переменные.
Учитывая уравнения (7.5), основное уравнение (7.1) можно представить
в виде
-§- = eHb + sB(t, Ь), (7.10)
где введены обозначения
В(/, b) = Z(t, Ъ + Ь)+Х0(и + Ь)-(Щр) Ь, (7.11)
Z(t, to + b) = X(t, lo+b)-X0(l0 + b). (7.12)
При этом,согласно условиям а) и б), в р-окрестности точки &= 0 функции
В (t, 6), Z (/, £0 + Ь) и их частные производные первого порядка по Ь
ограничены и равномерно непрерывны в области
-со</<оо, |6|<р. (7.13)
Кроме того, в каждой точке рассматриваемой окрестности \Ь\ < р,
согласно условию (7.4) и обозначению (7.12),
t+T
■jr[z(t, U + b)dt-+0 при T-+oo ,(7.14)
91
равномерно по /. Отсюда, очевидно следует
t+T
-Y§B(t, b)dt -+ В(Ь) = Xoito + ty-Xt&o) - X'oi(to)b,
t
t+т
(7.15)
-H
dB (ttb) A4 дВф)
db
dX0(*0 + b)
db
Хо*(|0)при Г-оо
равномерно по / в области (7.13).
Поскольку В (b) обращается в нуль при ft = 0 со своими частными
производными первого порядка, из условия, которому удовлетворяет функция
В(Ь),
\В(Ь')-В(Ь")\ =
I дВ (Ь)
db
„\b'-bH\ (&'<&<&"), (7.16)
ь=ь
следует, что при | V | < а, | Ь" \ < а (о < р) справедливо неравенство
\В(Ъ')-В(Ь")\<х\(о)\Ь' -Ь'\9 (7.17)
где г] (а) -+ О при а -+ 0.
Для дальнейшего исследования удобно преобразовать уравнение (7.10)
к виду
(7.18)
dh
^- = Hh + Q(U ft, в),
в котором Q (/, ft, e) была бы достаточно малой величиной при малых Л и
е. Для этого, прежде всего, сделаем ряд замечаний относительно характера
функций В (/, Ь).
Рассмотрим функции
В, (U 6) = B(/, b)-B(b)f
дД, (/, Ь) dB(t, b) дВ(Ь)
db ~~ db db
Согласно условиям (7.14) и (7.15), имеем
t+T
(7.19)
■jr f B^it, b)dt -»-0 при Т
t
t+т
->- oo
равномерно по / и Ь в области (7.12).
Следовательно, можно построить такие функции гх (Т) и е2 (Т), стремя
щиеся к нулю при Т -► оо, что будут выполняться неравенства
I ^+т
UrJBi(/, b) dt
i t
i '+r
_1_ С дВх (t, b) dt
\T J *
<е2(Г).
(7.20)
(7.21)
92
Построим функции
t
BlT| (/, Ь) = j *-*<-*> В2 (т, &) dr,
(7.22)
(7.23)
где т]—пока произвольный положительный параметр.
Согласно условиям а) и б), функции Вг (ttb)a * / ' в области |&| <р
— оо < / < оо ограничены:
ИМ/, 6)KM,, I^A*L
дб
<м„
поэтому для функций (7.22) и (7.23) получаем неравенства
|Bi4(/. Ь)
\dB^(t,b)\
|Bi4(/. ЬЦК-^^+М.Т,
дЬ
7е(Г)
MJ,
(7.24)
(7.25)
где е(Г) = е1(Г) + 8г(Т).
Возьмем Г как функцию х\, определяемую уравнением
1 — е~*т = в(Т).
Так как е (7") -»- 0 при Т -+• оо, то для 7\, должно выполняться
соотношение
т)7\, ->- 0 при г\-уО.
Введем обозначения
(Мг+ 1)л7\,«С,(л),
{Мг+\)г)Тп = Ъ(г\);
теперь неравенства (7.24) и (7.25) можем представить в виде
Ci (Л)
(7.26)
(7.27)
(7.28)
|В,Л(/. Ь)\ =
Се-т-^в1(х, b)d%
—ОО
t
<
дЬ
J^^SigA*
л ■
Ь(ч)
(7.29)
(7.30)
где &(л)-^°> ^2(л)^-0 при tj-»-0 в области (7.13).
Произведем в уравнениях (7.10) замену переменных согласно формуле
& = A + et)(/, А), (7.31)
где
v(t, h) = Bi„(/, A) = J e-"fii(T, h)di.
(7.32)
Для определения области изменения h в качестве величины х\ возьмем
некоторую функцию от параметра е г\е таким образом, чтобы
tie-*- 0, — -»• const при е -»■ 0.
(7.33)
93
Принимая во внимание обозначение (7.27), получаем
eiiM^O при е-0. (7.34)
Выберем столь малое положительное е1э чтобы для е > 0, не превосходящего
в!, выполнялось неравенство
8-^Г < Р - Рь где ° < Pi < Р- (7-35>
Для 0 < е < е1э согласно неравенству (7.29) и выражению (7.31), Ь£
£ Dp при h £ Dp.
Дифференцируя выражение (7.31) и подставляя полученный результат
и значение Ъ в уравнение (7.10), получаем
^ + *^~ = -*-^ + *Hh + e*Hv + eB(tth + Ev). (7.36)
Далее, из выражения (7.32) находим
t
-J- = - ц J е-ч»-^ (т, ft) dx + Bx (t, h) = - vp (t, h) + B(t, h) - В (А).
(7.37)
Подставляя значение -^- в уравнение (7.36), имеем
f + 8^. J = e#ft + er\v(tth) + E2Hv(t,h)+eB(tth + Ev)—eB(t,h) + *B(h).
(7.38)
Вводя обозначение
L(t, ft, e) = T)t;(/, h) + eHv(tt h)+B(t, ft + eu) — B(/, ft),
находим
(7 + 8"Ж") 1Г = eHh + eL(/> Л' 8) + 8fl(ll); (739)
выражение L (/, Л, е) и его частные производные первого порядка по А
в области —©о < t < оо, Л£ DPl ограничены некоторой функцией от
е, стремящейся к нулю при е -+ 0, а / обозначает единичную /г-мерную
матрицу.
Согласно неравенству (7.30), выражению (7.32) и условию (7.33),
U -gj-1 - 0 при е -* 0,
и можно найти такое положительное е0 < е1э что для любого г «< е0 будет
выполняться условие
При этом условии существует обратная матрица (/ + e-^-j , и можем раз-
Ah
решить систему (7.39) относительно -^-:
dh t9 , _ dv \-i
-S-=(7+8-S-) 1«#A+ «*■('■ Л. e) + efl(*)]f
94
или
dh
-^- = е//Л + еГ(/, ft, е).
(7.40)
(7.42)
(7.43)
Совершая в уравнении (7.40) переход к «медленному» времени т = е/
и в найденных выражениях вновь заменяя х на /, получаем окончательно
систему уравнений
-%- = Hh+Q(t, Л, е), (7.41)
где Q(/, ft, e) = Г( — , ft, ej . Нетрудно убедиться, что функции Q (/, ft, е)
удовлетворяют условиям:
а) функции Q (t, ft, e) определены в области
-оо</<оо, ft£DPl, 0<8<80;
б) для —со</< оо и 0 < е<;ес выполняется неравенство
\Q(t9 0, е)|< М(8),
где М(е)-*0 при е-*0;
в) для любого положительного о < pt в области
-оо</<оо, A'£Da, ft"£Da, 0<8<80
справедливо неравенство
IQ(/, Л'. *)-Q(t, h\ e)|<X(e, a)|A'-ft"|,
где А, (8, a) -* 0 при е -* 0, a -* 0;
г) все вещественные части корней ръ р2, ..., рп уравнения
Det | р/ — Я | = 0
отличны от нуля.
3. Построение решений системы уравнений (7.41)
Рассмотрим матрицу //, входящую в систему (7.41). Представим ее в виде
\Н+ 0
0 Я_|
н = и
и~\
(7.44)
(7.45)
(7.46)
где U — произвольная матрица, имеющая обратную U~~l;Q —
нуль-матрица; //+, Я-— матрицы, для которых корнями характеристических
уравнений являются корни уравнения (7.45) соответственно с положительными
вещественными частями для #+ и отрицательными вещественными частями для
#_. Таким образом, если уравнение (7.45) имеет s корней с
отрицательными вещественными частями и п — s с положительными веществеными
частями, матрица //_ будет s-ro порядка, а матрица #+ — (п — s)-ro порядка.
Введем матрицу 7 (f) при помощи соотношений
7(0 = -(/
7(0=6/1°
10
е-н+* 01
0
0
95
СГ{ для / > 0,
0|
IT1 для * < 0.
(7.47)
Определенная таким образом матрица 7 (f) удвлетворяет
дифференциальному уравнению
Ю = _ HI = — 7Н для 1Ф 0 (7.4g)
ш
и условию разрыва при / = О
7(—0) — 7(+0) = Е. (7.49)
Так как общее решение уравнения (7.48) имеет вид
где 7/ (0 = eV — для простого корня уравнения (7.45) и 7,- (/) = F, (/) Л' —
для кратного корня уравнения (7.45) (/•/ (0 — некоторый полином,
степень которого не превосходит Порядка кратности pj), то, следовательно,
в общем случае имеем
* (0 = ijc/F, (/) е'/' = е-^. (7.50)
Отсюда очевидно, что элементами матриц е~н+\ ё~и~г соответственно
будут
2 c/F/ (/) в <!*/+*/>* при |i7 < 0 (7.51)
и
2 */*/ (0 е№№ при цу > 0. (7.52)
/=1
Ввиду того что экспонента растет быстрее полинома, всегда можно
найти такие положительные постоянные а и /С, для которых справедливо
неравенство
|ЗГ(0 К **-««'« (7.53)
на всей вещественной оси /.
Зафиксируем некоторое положительное число D < рх и рассмотрим
класс ограниченных непрерывных функций F (/), определенных на интер:
вале —оо < t < со, со значениями из Еп и удовлетворяющих неравенству
\F(t)\<D (7.54)
для любых /£ (—оо, оо); здесь обозначено ||/|| = sup |/(0I-
—оо<*<оо
Обозначим этот класс функций С (D) и рассмотрим преобразование S,
переводящее функцию F (/), принадлежащую классу С (D), в функцию
оо
St (F) = J 7 (г) Q[t+z,F(t+ г), в] dz, (7.55)
—со
где 7 (г) определяется выражением (7.50) и обладает свойствами (7.48)
и (7.49).
Согласно неравенствам (7.43) и (7.44), для 0 < е •< е0 имеем
\Q[t + z, F(t + z), e]\ = \Q(t + z, 0,B)+Q[t+z, F(t + z), e]-Q(/ +
+ 2, 0, e)|<|Q(< + «, 0, *)\ + \Q[t+z. F(t + z),e\-
— Q(t + z, 0, e)|<M(e)+A.(e, D)D. (7.56)
96
Следовательно, учитывая неравенство (7.53), находим
оо
\St(F)\<{M(z) + k(t, D)D) J/Ce-«w<fe=-^-{Af(e) + ».(e, D)D). (7.57)
—оо
Для двух функций F (t) и F (0» принадлежащих классу С (D),
аналогично получаем
\S,(F)-St(F)\ =
<\j7(z){Q\t+z,F(t + z),E\-Q\t + z,F(t + z),e]}dz
<
оо
<Kb(B,D)^e-«\»\F(t + z)-F(t + z)\dz<2KK£-D)tF(t + z)-F(t + z)l.
(7.58)
Подберем теперь D как функцию параметра е таким образом, чтобы
D (е) -»- 0 при е -»- 0 и чтобы для всех е, не превосходящих некоторого ех <
< е0, выполнялись неравенства
-?£-{M(t) + \(z,D)D}<D, (7.59)
4Ме,£>) /с<1> (7б0)
а
Такой подбор D = D (г) возможен, поскольку М (е) -+ О, К (е, D) ->- О
при е -*- О, D -^ 0.
Тогда для е <: е1э согласно неравенствам (7.57) и (7.58), получим
\St(F)\<D(e), (7.61)
|St(F)-S,(F)|<4-I^-f«- <762)
Отсюда следует, что S — оператор сжатия, отображающий полное
нормированное пространство С (D) самого в себя. Следовательно, согласно
теореме Банаха, уравнение
F = S(F) (7.63)
имеет единственное решение.
Обозначим это решение через F = f (/)•
Покажем, что А = / (/) — решение рассматриваемого нами уравнения
(7.41).
Согласно принятому обозначению, а также уравнению (7.63) и
обозначению (7.55), имеем
t
/ (0 = J* ЗГ (z) Q \t + г, f (t + г), el dz. (7.64)
—оо
Произведя замену переменной г+/ = ти обозначая ft = hu находим
оо *
/*,= J 7(% — t)Q(T, Лт, e)dx= J ЗГ(т —0QC*,*i,e)A +
—оо —оо
оо
+ J 7 (т — /) Q (т, Лх, 8) Л. (7.65)
t
7 246 97
Дифференцируя последнее равенство по / и принимая во внимание
уравнение (7.48) и условие (7.49), получаем
df?- = Hht + Q(t,htte)f
dt
т. е. функция А/ = / (0 действительно представляет собой решение
уравнения (7.41), сводящееся при t = t0 к / (t0).
Пусть, в дополнение к условиям а) — г), функции Q (t, ft, е) почти
периодические по U т. е. существует последовательность вещественных чисел
{тт}, такая, что для любого положительного е <; гг функции Q (/, А, е)
в области —<х>< *<оо, A£DP равномерно удовлетворяют соотношению
|Q(' + Tm, A, e) — Q(*,A,e)|-*.0 при т -+ оо. (7.66)
Покажем, что в этом случае решения уравнений (7.41) также почти
периодические, т. е. для е < гг равномерно по отношению к t
1/С + О-/СЖ0 при т-*оо. (7.67)
Для этого снова рассмотрим некоторую функцию F (t) из класса С (D),
где, как и выше, D = D (a), D (е) -*- 0 при е -► 0.
Имеем
оо
S(+I(F)-S((F)= J V(z){Q[t + T + z,F(t + t + z),t\-
—оо
— Q\t + z,F(t + z), 8|) dz. (7.68)
Мажорируя правую часть этого равенства и принимая при этом во
внимание неравенства (7.44) и (7.53), получаем
\St+AF)-St{F)\<{\Q,-Q\ + l^,D)\Fi-F\)^, (7.б9)
где принято обозначение
1Qt-Q||= sup \Q(t+T,h,s)-Q(t,h,e)\,
—oo<f<oo
iaisp. (7.70)
IFX-Ft= sup \F(t + x)-F(t)\.
—oo</<oo
Предположим, что D и К (e, D) выбраны согласно соотношениям (7.59)
и (7.60). Тогда из неравенства (7.69) окончательно получим
\St+x(F)-St(F)\<±lFx-FI+^lQx-Ql (7.71)
Уравнение (7.63), как отмечалось выше, согласно теореме Банаха,
имеет единственное решение F = / (/), которое может быть фактически
получено, например, методом последовательных приближений. Возьмем
последовательно:
F0 = 0, Fx = SF0, ..., /vj-i = SFn, ....
Благодаря неравенству (7.62)
1^+1-^1 = II SFn- SF-гК ±\\Fn-Fn^ fl,
так что
\n— I
1^(И*-^к(4-)я Vj.
93
и, следовательно, последовательность {/•"„} равномерно сходится к функции
/ (0:
1^«-/|<(-гГ 'Н^Л^ 0 при ЛГ-*оо. (7.72)
Введя обозначения
Ox = ^||Qx-Q[, (7.73)
из неравенства (7.71), полагая последовательное = F0,F = Flt F = F2
получим
|(ЛЬ-Л1<о„
1(/гг)т-/гг1<(и-4-)стг.
l(/r8)x-f3i<(l+4-+T-)CT^
в общем случае
\(FNh-FN{<2o%. (7.74)
Отсюда, переходя к пределу при N -»■ оо, на основании неравенства (7.72)
убеждаемся, что
i(/)x-/||<2ax,
или, согласно обозначениям (7.73), что всюду на интервале(—со, оо) для
любого х справедливо неравенство
|/(/ + x)-/(0|<-^-|Qx-Q|. (7.75)
Пусть {тш} — последовательность из интервала (— со, со), такая, что
для любого положительного е <; ех в области /£ (—со, со), | Л| <^Г рг
равномерно выполняется соотношение (7.66). Тогда
II Qxm — Q\\ -* 0 при т -+ со,
и, следовательно, согласно неравенству (7.75), на интервале (— со, оо)
равномерно выполняется соотношение
l/(' + 4j-/<0|-*0 при т-^оо.
4. Устойчивость полученных решений. Перейдем!
к рассмотрению вопроса об устойчивости полученного решения h = / (t) —
о свойствах притяжения (или отталкивания) этим решением любых близких,
к нему решений системы уравнений (7.41).
Для этого рассмотрим интегральное уравнение
оо
Л, =J7(T-0Q(T,/i*,e)dT+:7(/0-/M, /0< U (7.76>
где А — некоторый произвольный фиксированный вектор из Еп.
Используя для исследования уравнения (7.76) полученные выше оценки,
нетрудно установить следующий результат: можно указать такие
положительные ех, а0, ах, подчиненные условиям
еА < е0, D(ex) < а0, а0 < ах < р, (7.77>
7* 99
что для любого значения параметра е и любого вектора А из £„,
удовлетворяющих неравенствам
0<е<81, |4|<а„,
а) уравнение (7.76) при всех / > t0 будет иметь одно единственное
решение ht£D0l;
б) для этого решения
ht = f(t0,t,A), (7.78)
где/ (/0, /, А) — непрерывная функция своих аргументов, удовлетворяющая
неравенствам Липшица вида
I / (*•. <i. А') - f (t0, t9Am)\<K (в, D) е~а (/"/в) | А' - Л" |; (7.79)
здесь К (е, D) -+ К при е -* О, D -^ 0.
Представим уравнение (7.76) в виде
; оо
ht = J7(x —/)Q(x, ftx, e)dx+ f 7(T —/)Q(t,/ix, e)dx. (7.80)
*• i
Дифференцируя обе части этого равенства по t как по параметру и
принимая во внимание соотношения (7.48) и (7.49), убеждаемся, что решения
интегрального уравнения (7.76) являются в то же время решениями
дифференциального уравнения (7.41).
Назовем решением типа S любое решение уравнения (7.41), для
которого
Л06 Ат0, ht £ Dat для всех t > /0. (7.81)
Нетрудно показать, что всякое решение Л = А/ системы (7.41) типа S
является также решением интегрального уравнения (7.76) при А = h (h0 =
= Л,0).
Действительно, умножая обе части уравнения (7.41) на 7 (т — /) и
интегрируя, имеем
оо оо оо
f:7(T_/)_I-dT=: Г7(т— t)Hhxdx+ Гзг(х — /) Q К Лт, e)dx, (7.82)
/ } /
* dh * *
f7(T_/)_I-dT= Гзг(т — t)Hhxdi+ h(% — t)Q(x,hXt e)dx. (7.83)
5. <• '•
Далее, принимая во внимание соотношение (7.48), получаем
7 dhv Г (П(т— 0 , J
\1(*-t)-1tdT = -7(+0)ht-\ 5Г-Мт =
У Г
оо
= _ j(+ 0) ht + f 7 (т — О ЯАЖ (7.84)
}
t t
Г7(т-0-^г^ = ЗГ(-0)Л/-7(/0-/)Л0+ far(x-/)//ft,£h.
и '•
100
\
Складывая выражения (7.82) и (7.83) и используя соотношение (7.84)
и условие (7.49), убеждаемся, что
оо
А/ = $ У (х -1) Q (х, Лт, е) dx + 7 (/e -1) h0. (7.85)
К
Следовательно, всякое решение типа S является решением интегро-
дифференциальной системы (7.76) при А = Л0, и поэтому
ht = f(t0,t,A), \A\<o0. (7.86)
Согласно изложенному выше, решение системы (7.41) Лг = f (t)
удовлетворяет условию
|/(0l<D(e)<a0, (7.87)
и, следовательно, принадлежит типу S и является одновременно решением
интегрального уравнения (7.76) для некоторого А = А'. Представим это
решение в виде
h = f(t) = f(t0,t,A'). (7.88)
Подставляя в неравенства (7.79) вместо одного решения решение (7.88),
а вместо другого — произвольное типа S, получаем неравенство,
справедливое для любого решения ht типа S:
|/(/)-ht |<Щг, D)е~а<'-'•>|/(/„)-Л,1. (7.89)
Рассмотрим множество точек {А} из области Dao, для которых
h = f(t0,t,A), \A\<a0t
соответствующее данным фиксированным /0, и обозначим его ЭК (/0). Так как
для всякого решения типа S выполняется соотношение (7.86), то, положив
в нем / = /0, получим
Ae=/('o.'oM). \А\<о0. (7.90)
Следовательно, для всякого решения типа S h должно принадлежать
Ж (t0).
Отсюда следует, что если для t = t0
**ед* htem(t0),
то соответствующее этим начальным условиям решение ht не может
принадлежать типу S (так как согласно сказанному выше для решения h типа S
при t = t0 Ы t 9Л (t0)) и, следовательно, согласно определению решений
типа S, ht не будет оставаться в области Dai, для / >- /0.
Как уже отмечалось, решение интегрального уравнения (7.76),
обладающее свойствами а) и б), существование которого установлено выше,
является в то же время решением дифференциального уравнения (7.41).
Благодаря свойству б), имеем
Ао = /(/0.М). И |< а0, (7.91)
а так как решение дифференциального уравнения (7.41) всецело
определяется начальными условиями, очевидно, если ht —какое-либо решение
дифференциального уравнения (7.41), для которого справедливо (7.91), то оно
является также решением интегрального уравнения (7.76) и обладает
свойствами а) и б).
Таким образом, если для некоторого решения уравнения (7.41) при
/= to
л, е эк Со),
101
то оно принадлежит типу S. и поэтому для него выполняется неравенство
(7.89).
Предположим, что s = 0. Согласно определению (7.47) матрицы 7(0,
имеем
7(0 = -*"
—Ht
/>0,
7(0 = 0, *<0,
вследствие чего интегральное уравнение (7.76) можно представить в виде
(7.92)
ht = — \ ен U~X)Q (т, йх, е) Л, t > /0
(7.93)
(в силу (7.92) для t0— t < 0 7 (/0— 0 = 0), в котором отсутствует
произвольный вектор А. Отсюда следует, что Oil (t0), состоящее из начальных
значений ht (7.93), вырождается в точку, и, так как всегда / (/0) £ ЭК (/0),
то OR (t0) состоит из одной точки Л0 = / (/0).
Пусть теперь s = п. Тогда, согласно определению (7.47) матрицы 7 (/),
имеем
"""t '>«■ (794)
и, следовательно, интегральное уравнение (7.76) принимает следующий вид:
t
ht = ^eH (t-x)Q (т, Лт, е) di + ен ('"'в)Л, t > t0. (7 95)
tn
Отсюда, в частности, имеем А = Л0.
Интегральное уравнение (7.95) является тождеством для любого
решения дифференциального уравнения (7.41) при любом Л0.
Таким образом,
Л1(/о) = Д,..
Пусть, наконец, s =£ 0 и л — s =£ 0. В этом случае член 7 (/ — /0) Л,
посредством которого вектор Л входит в уравнение (7.76), может быть
представлен в виде
U
0 0
"- <'--'•>
(/"'Л = U
0 0
где
a = U
0 0
0 1,
0 е
LTlA
-tf_ ('-*о>
U'{a,
(7.96)
(7.97)
и ls — s -мерная единичная матрица.
Отсюда можно заключить, что тождественно
f(t0,t.A) = f(t0,t,a). (7.98)
С другой стороны, при произвольном А вектор я, определяемый
равенством (7.97), имеет всего s независимых компонент: av a2, ..., as, вследствие
чего уравнение
h = f(t0,t0,A), (7.99)
характеризующее многообразие Ж (^0), может быть записано в виде
h = h(alta2t as),
102
где h (аъ а2, •••» ^s) —функции s параметров, зависящие от / и
удовлетворяющие, согласно (7.79), условиям Липшица.
Таким образом, ЯК (/0) — s-мерное многообразие.
Итак, если вещественная часть хотя бы одного из корней
характеристического уравнения (7.45) положительна, то рассматриваемое решение ht =
= / (/) обладает свойством отталкивания всех близких к нему решений, за
исключением решений, начальные значения которых лежат на особом
точечном многообразии ЯК (/0), при этом размерность ЯК (/0) меньше размерности
всего фазового пространства. Следовательно, любое решение ht = f{t)
оказывается неустойчивым.
Если вещественные части всех корней уравнения (7.45) отрицательны,
то найденное решение, наоборот, обладает свойством притяжения близких
решений по закону
|ft, - /(t)|<с|К - f Со)Ie~y('-Ч (7.100)
5. Вторая основная теорема Н. Н. Боголюбова.
Резюмируя изложенное выше и возвращаясь к переменной х, приходим ко
второй основной теореме метода усреднения.
Теорема [161. Пусть функция X (/, х), входящая в уравнение
-§- = eX(t,x)f (7.101)
удовлетворяет следующим условиям:
а) усредненные уравнения
-§- = еХ0(£), (7.102)
где
т
X0(l)=\\m^r[x(ttl)dtt (7.103)
имеют квазистатическое решение £ = £0;
б) вещественные части всех п корней характеристического уравнения
Det|/7/-X;s(lo)l = 0, (7.104)
составленного для уравнений в вариациях
dt
= еХо*(£о)б|, (7.105)
соответствующих квазистатическому решению | = £0, отличны от нуля;
в) можно указать такую ^-окрестность DQ точки £0, в которой X (t, x) —
почти периодические функции t равномерно относительно х £ Dp;
г) функция X (ty х) и ее частные производные первого порядка по х
ограничены и равномерно непрерывны относительно х в области — оо < t < оо,
Тогда можно указать такие положительные постоянные е', а0, ах
(причем o0<C^i < р), что для всякого положительного е < е' будут справедливы
следующие утверждения:
1. Уравнение (7.101) имеет единственное решение х = х* (t),
определенное навеем интервале (— оо, оо), для которого
|**(0-&оК*о> -оо</<оо. (7.106)
103
2. Это решение х* (t) почти периодическое с частотным базисом
функции X (/, х).
3. Можно найти такую функцию б (е), стремящуюся к нулю вместе с г,
что будет выполняться неравенство
|**(0-6о1<в(в). -оо</<оо. (7.107)
4. Пусть х (0 — любое решение уравнения (7.101), отличное от х* (t),
при некотором t = t0t удовлетворяющее неравенству
\x(t)-to\<°o> (7.108)
то, если вещественные части всех корней характеристического
уравнения (7.104) отрицательны, разность \х (f) —x* (t)\ стремится к нулю при
t-+ со, причем
| х (0 — х* (t) | < Се~уг ('-'0), (7.109)
где Сиу — положительные постоянные.
Если вещественные части всех корней характеристического уравнения
(7.104) положительны, можно найти такое tx > t0, для которого
l*('i)-5ol>°i- (7.H0)
Если s вещественных частей рассматриваемых корней отрицательны, а
остальные п — s положительны, то в а0-окрестности точки £0 существует
s-мерное точечное многообразие JRto, такое, что из соотношения х (t0) £ ЭП<0
вытекает экспоненциальное стремление к нулю (при /-> со) разности
\х (/) — х* (t)\t а из соотношения х (t0)£ 9Н/о следует справедливость
неравенства (7.110).
Примечание 1. Очевидно, согласно свойству 4), решение х* (t)
устойчиво, и притом асимптотически, когда вещественные части всех корней
рассматриваемого характеристического уравнения (7.104) отрицательны.
Если вещественная часть хотя бы одного из корней характеристического
уравнения (7.104) положительна, решение х* (t) оказывается
неустойчивым.
Примечание 2. Предположим, что в дополнение к условиям
приведенной теоремы X (/, х) является периодической функцией t с
некоторым периодом т, не зависящим от х. Тогда
Т х
Hmlf X(/, X)dt =^r[X(t,x)dt, (7.111)
о о
и поэтому
*о© = 4" JX0.B*- (7П2)
о
Поскольку частотный базис функции X (/, х) состоит в рассматривае-
мом случае из одного числа —, на основании свойства 2 сформулированной
теоремы следует, что решение х* (t) периодическое с периодом т.
6. Пример существования периодического
решения в нелинейных системах. Остановимся на
иллюстрации приведенной теоремы примером нелинейного дифференциального
уравнения второго порядка, описывающего движение нелинейного осциллятора
и рассмотренного в § 2.
104
Рассмотрим свободные колебания, описываемые уравнением вида
**+«о«, = в/(х,-^), (7.113)
где е — малый положительный параметр.
Совершая в уравнении (7.113) замену переменных согласно формулам
х = acosty,
dx . , (7.114)
получаем
-£- = — f (a cos г|>, — aco sin i|?) sin if,
—$- = аз ~ f (a cos г|>, — aw sin г|э) cos г|э.
(7.115)
Отсюда, исключая /, находим дифференциальное уравнение в стандартной
форме типа (7.1)
da е / (a cos ф, — ска sin ф) sin ф /711^
I — / (a cos ф, — до sin ф) cos ф
Соответствующее усредненное уравнение (уравнение первого
приближения)
-£ = -£-*»<«>. (7П7)
где
1 *я
Лх (а) = s— I / (я cos г|>, — aco cos г|>) sin г|ий|э. (7.118)
6
Предположим, что уравнение
А1(а) = 0 (7.119)
имеет нетривиальное решение
а = a0, a0 =£ О,
для которого
А[(а0)фО,
и что функция / (х, jc') на плоскости (х, х') непрерывна вместе со своими
частными производными первого порядка в окрестности эллипса
х«+-£=а8. (7.120)
Тогда, согласно приведенной теореме, можем утверждать, что при
достаточно малых значениях параметра е точное уравнение (7.116) имеет
периодическое решение а = a 0J?) с периодом 2л, близкое к а0. Это решение
устойчиво, если
4(a0)<0, (7.121)
и обладает свойством притяжения близких решений.
Если
Л1(а0)>0, (7.122)
оно неустойчиво и обладает свойством отталкивания.
105
Таким образом, уравнение (7.113) при достаточно малых е имеет
предельный цикл, соответствующий периодическому решению, близкий к
эллипсу (7.120). При условии (7.121) этот предельный цикл устойчив и все близкие
к нему решения уравнения (7.113) притягиваются им, а при условии
(7.122) — неустойчив и все решения уравнения (7.113) отталкиваются от
него.
Рассмотрим еще колебательную систему, описываемую более общим
уравнением
J£ + upx = Bf{vtfXfj£.)f (7.123)
в котором / ( vt, jc, -£-) — периодическая функция с периодом -^-.
Ограничимся резонансным случаем, когда
о)2 = I— v) + еД,
где р и q — взаимно простые числа.
Приведем уравнение (7.123) к стандартной форме. Для этого совершим
в нем замену переменных согласно формулам
х = I cos — vt + ц sin — v/,
Я Я (7.124)
-^- = _!-P-sinJLv* + T, — vcos-^v/.
dt * q q q q
Подставляя выражение (7.124) в уравнение (7.123), после некоторых
выкладок получим
-g.=eX(/,£,r,),
-JL-eKfrbn);
(7.125)
здесь введены обозначения
qF (/, tr\) sin JLvt
*<<.Б.п> = pv я
ПЦ,Ч) =
qF (U £, r\) cos —vt
Я_
F(t> E> Л) = f[ < £cos-^- vt + x] sin -£- vt. — g -£- v sin -£- v/ +
\ */ 4 4 4
+ Л — vcos — v/J — Л (£ cos — vt + x] sin — vt).
Очевидно, правые части полученных уравнений в стандартной форме
(7.125) —периодические функции /с периодом —^-.
106
Усредненные уравнения, соответствующие системе (7.125),
.*.
dt
*L
dt
dl -еХв(6,Л).
-5- = 8Ko (6, Л)>
(7.126)
где принято обозначение
2л<7 2л<у
V V
xo(S. л) = -^- 1 Х('.Б.ч)Я, П(£.л) = ^]'П',£.л)<«•
Предположим, что уравнения
Хо(Б.Л) = 0, Г0(|,Г1) = 0 (7.127)
имеют постоянное отличное от тривиального решение
6 = бе. Ч = Чо (7.128)
и что в окрестности эллипса
х* = х'' = 4, (7.129)
("Н
где al = go + Ло, функция / (v/, x, *') непрерывна по х, jc' вместе со своими
частными производными первого порядка.
Пусть, кроме того, выполняются условия
*as (Бо. Ло) + У'<*\ (Бо> Ло) < О,
^ (Бо. Ло) ^оп (Бо> Ло) — Ко (Бо> Ло) *Ч (Бо> Ло) > О,
обеспечивающие отрицательность вещественных частей обоих корней
соответствующего уравнения в вариациях для решений (7.128).
Тогда, на основании приведенной теоремы, можем утверждать, что в
рассматриваемом случае, при достаточно малых е, уравнение (7.123) имеет
периодическое решение с периодом -22, близкое к гармоническому
х = 0ocos(— vt + ф0Ь (7.131)
где
*о = 1/Бо + Ло, Ф = - arctg-3j- •
Любое решение уравнения (7.123), проходящее через точку некоторой
окрестности эллипса (7.129), при t -* ©о асимптотически приближается к
периодическому решению (7.131). •
7. Некоторые замечания относительно
высших приближений. Выше получены оценки разности между
решениями точной и усредненной систем, а также рассмотрены свойства точных
решений в окрестности «квазистатического», соответствующего точке
равновесия усредненной системы. При этом не устанавливалось соответствие в
свойствах устойчивости приближенных и точных решений лишь в случае,
когда вещественные части всех характеристических чисел матрицы Н
(см. формулу (7.5)) равны нулю.
107
Этот весьма важный и математически интересный случай может быть
иногда исследован с помощью перехода к уравнениям высших
приближений.
Напомним об основных моментах построения таких приближений
(см. § 4, п. 4).
Пусть для уравнения в стандартной форме
4-= «*«.*) (7132>
правая часть представляется рядом
*(/,*) = 2 «"%(*). (7.133)
V
Для получения m-го приближения рассмотрим выражение
х = Б + bFx (/, I) + e2F2 (/, I) + • • • + *mFm (t, I), (7.134)
в котором Fk (/, £) представляются рядами
/^/.a-Se^F*© (7135)
и переменная £ — решение уравнения
^- = eP1(E)+---+emPm(g). (7.136)
Подставляя выражение (7.134) в уравнение (7.132) и приравнивая
коэффициенты при одинаковых степенях е до m-го порядка включительно,
подбираем Ft (/, £), ..., Fm (/, |), Рх (£), ..., Рт (I) так, чтобы выражение (7.134)
удовлетворило уравнению (7.132) с точностью до величин порядка малости
Em+i при этом получаем
(7.137)
Fiit.Q = X(t9Q9
F%(t. I) = (X (t9 1)-^)X«91) ^jp-X0(g),
Если теперь, определив Fx (t9 g) Fm (t9 £), Pt (£), ..., Pm (g), будем
рассматривать формулу (7.134) как формулу замены переменных,
преобразующую неизвестную х к новой неизвестной |, то £ будет определяться
уравнением
-§- « е/\ © + ... + е Рт (|) + ew+'/? (/, |, в). (7.138)
в котором em+* R (/, g, e) — члены т + 1-го порядка малости и выше.
Отбрасывая в уравнении (7.138) (в точном преобразованном уравнении)
слагаемое em+' R (/, £, е), получаем уравнения m-го приближения (7.136).
И вот здесь следует обратить внимание на то, что приведенный способ
преобразования уравнения (7.132) к виду (7.138) чисто формальный. Для
установления фактической применимости этого способа в каждом отдельном
случае необходимо исследовать равномерную сходимость формальных ря-
108
дов, представляющих функции Fx (/, £) Fm(tt £), и установить для них
существование и ограниченность частных производных.
В некоторых случаях этот вопрос решается сравнительно просто.
Например, если ряд (7.133) представляет собой конечную сумму, а входящие в
него функции Xv (х) — полиномы относительно jc, to формальные ряды
(7.134) также будут конечными суммами, а их коэффициенты Fk^ (£) и
выражения Pk (£) представятся в виде полиномов.
В общем же случае вопрос этот чрезвычайно сложный и решается
только при некоторых ограничениях.
Если законность преобразования системы (7.132) с помощью замены
(7.134) установлена, то в приведенных выше рассуждениях о соответствии
между точными решениями и усредненными можем заменить уравнения 1-го
приближения (усредненные уравнения) уравнениями m-го приближения
(уравнениями (7.136)).
При таком подходе к исследованию «квазистатнческого» решения
уравнений (7.136)
fe— So ,
вместо матрицы еН = гХ'01 (£0) = *Р'\1 (Ъо) следует рассматривать матрицу
т
2 e^GP). (7.139)
И вот, если все характеристические значения матрицы гН имеют нулевые
действительные значения, то характеристические значения матрицы (7.139)
могут оказаться с неравными нулю вещественными частями.
Кроме того, можно улучшить оценку, установленную в основной
теореме § 6, например, можно установить оценку вида
l**(0-6o-*6i(0 e^U-iWKC/, (7.140)
где х* (0 — почти периодическое решение уравнения (7.132), £0—
«квазистатическое» решение уравнения первого приближения, \х (/), ..., Ьп—\ (t) —
почти периодические функции /, Ст — постоянная.
Теорему об оценке m-го приближения с подробным доказательством
можно найти в работе автора [113], где при ряде ограничений, налагаемых
на правые части системы
£$- + <D* (4)Xk = ^jj-X (X, 6, Х19 . . . , XN% Х19 . . • , XNf 8) (7.141)
(Л=1, 2, ... , ЛО,
установлена справедливость неравенств
\^ru(t)-xk(t)\<KmBm9
Гх5Г"п(0—**(0KKmem (о</<4-),
в которых хТ~Х) (t) — m-ые приближения частных решений системы (7.141),
a Xk (/) — частные решения системы (7.141), удовлетворяющие начальным
условиям
I №(0)-хк(0)|<Sem, |хГ (0)|<М.
\х(Р(0)- Ч (0) |< Sem, \х{Г(0)\<М (k==l,2, ..., N),
где хТ] — m-ые улучшенные приближения, Km, S, М — постоянные.
109
m ' (7.142)
§8
ДАЛЬНЕЙШЕЕ РАЗВИТИЕ
И ОБОБЩЕНИЕ ПЕРВОЙ ОСНОВНОЙ
ТЕОРЕМЫ МЕТОДА УСРЕДНЕНИЯ
•
1. Зависимость решений от параметра. Теорема
Н. Н. Боголюбова, посвященная обоснованию принципа усреднения на
конечном временном интервале (первая основная теорема), в дальнейшем была
обобщена многими авторами *. Остановимся на некоторых результатах,
посвященных обобщению и развитию этой теоремы, заметив, что вопрос
обобщения и расширения ее для более широкого класса уравнений
существенно связан с классическими теоремами анализа о непрерывной зависимости
решений дифференциальных уравнений от параметра.
Приведем формулировку одной из этих теорем.
Теорема. Пусть для дифференциального уравнения
-§- = Х(/,хД) (8.1)
х, X — точки n-мерного евклидова пространства Еп, функция X (/, х> К)
непрерывна по совокупности своих аргументов /, jc, К в замкнутой области
*£А /GKWL |Х|<С (С>0), (8.2)
где D £ Еп, и удовлетворяет условию Липшица по х:
\X(ttx\X)-X(ttx\X)\<k\xf-x"\ (*', хпео) (8.3)
с константой k, не зависящей от t, x, А,.
Тогда для заданных начальных условий х (0) = х0 £ D можно указать
такой замкнутый интервал [0, т], на котором решение дифференциального
уравнения (8.1) х = х (/, К) будет непрерывной функцией параметра К.
2. Связь между теоремой о зависимости
решений от параметра и первой теоремой метода
усреднения. И. И. Гихман [451 доказал более общую теорему о
непрерывной зависимости решения дифференциального уравнения вида
(8.1) от параметра, из которой можно вывести как сформулированную выше
теорему о непрерывной зависимости решения от параметра, так и первую
* См., например, работы [45, 54, 59, 88, 212, 235] и др.
110
основную теорему Н. Н. Боголюбова об усреднении на конечном интервале
времени.
Приведем здесь только формулировку этой теоремы.
Теорема [45]. Допустим, что функция X (/, х, X), принимающая
значения в Еп, определена для значений своих аргументов в области
*6(0, Л, xfD, Х£А, (8.4)
где А — некоторое множество значений параметра X, для которого Х0
является предельной точкой, и D — ограниченная область.
Пусть выполнены следующие условия:
а) функция X (/, х, X) равномерно ограничена, непрерывна по t и х (/£
£ [О, Т\У х £ D) и удовлетворяет условию Липшица по переменной х с
константой С, не зависящей от t и X:
|Х(*,*Д)|<Л1,
\X(!,x't\)-X(ttx\X)\<C\x'-x"\;
б) существует предел
t+T t+T
lim j X(6, x,X)dQ = J X(6, *Д0)Л; .(8.6)
(8.5)
в) решение уравнения
-% = X(t,y,\) (8.7)
лежит вместе с некоторой ^-окрестностью в области D.
Тогда решение х = х (t) уравнения
-§- = Х(/,*Д), (8.8)
совпадающее с у (t) при t = 0, х (0) = у (0), непрерывно по X в точке X =
= X те
max\x(t)-y(t)\-+0 (8.9)
при X -+ Х0.
Доказательство этой теоремы не будем приводить, так как ниже еще
остановимся подробно на более общей теореме о непрерывной зависимости
решения от параметра.
3. Обобщение первой теоремы метода
усреднения. Близкий результат к теореме И. И. Гихмана получил Б. П. Де-
мидович [54J, обобщивший теорему Н. Н. Боголюбова для системы вида
-^- = Х(/,*,е), (8.10)
которая, как уже указывалось во втором параграфе, рассматривалась Фату.
Для системы (8.10) доказана следующая теорема.
Теорема [541. Пусть функция X (/, х, е), стоящая в правой части
системы уравнений (8.10), удовлетворяет условиям:
1) X (/, х, е) комплекснозначна, определена и непрерывна по совокупности
переменных t, х иге области 0«</<°о,*Е^'С)<е< е0, где D — не-
которая область n-мерного евклидова пространства Еп, е0 — положительное
число;
111
2) в каждой компактной части о области изменения переменных tux
равномерно по е имеет место неравенство
|Х(/,х,е)|<Л*(а); (8.11)
3) выполняется условие Липшица
\X(tfx'fe)-X(t,x\e)\<£L(o)\x'-x''\; (8.12)
4) существует предельное среднее значение
т
X0(jc) = lim4- \x(t, х, в) Л, (8.13)
.-о ' $
не зависящее от выбора Т (О < Т < оо), равномерно по х на любом
компактном множестве D0a D.
Тогда для всякого решения х = х (/, г) системы (8.10), такого что
lim*(0, в) = *вед (8.14)
справедливо предельное соотношение
limx(/te) = g(0, (8.15)
где I = 1(f) —решение усредненной системы
-§-=-Xo(Z)> (8.16)
удовлетворяющее условию £ (0) = jc0, причем соотношение (8.15) выполнено
равномерно на каждом конечном интервале 0 <; / <: I, целиком
принадлежащем интервалу определения предельного решения £ = £ (/).
Доказательство этой теоремы может быть проведено методом
последовательных приближений.
Полагая в этой теореме
X0,*,e) = x(-f .*) (8.17)
и совершая замену т = —, приходим к системе вида
-£- = еХ(т,*), (8.18)
для которой доказана основная теорема о принципе усреднения Н. Н.
Боголюбовым, причем
Х0 (х) = lim -}г ( xU-.x)dt. (8.19)
4. Обобщение теорем о непрерывной
зависимости решений от параметра. Обе приведенные выше
теоремы существенно используют тот факт, что правые части
рассматриваемых дифференциальных уравнений (8.1) и (8.10) удовлетворяют условию
Липшица.
В связи с этим представляет интерес дальнейшее обобщение указанных
теорем о непрерывной зависимости решения от параметра, предложенное
М. А. Красносельским и С. Г. Крейном [88], при менее ограничительных
112
условиях, что позволяет получить обоснование принципа усреднения для
более широкого класса дифференциальных уравнений.
Имеет место следующая теорема о непрерывной зависимости решения
от параметра.
Теорема [88]. Пусть для дифференциального уравнения
^-=Х(/,*Д), (8.20)
где функция X (t, х, А,), принимающая значения в Еп, определена при 0 <; t <:
T,x£D, Х£ Л, D — ограниченная область вЕПУ Л — некоторое множество
значений параметра X, имеющее Х0 предельной точкой, выполнены следующие
условия:
а) функция X (/, х, X) равномерно ограничена и непрерывна по х
равномерно относительно /, х, X;
б) функция X (/, х, X) интегрально непрерывна поХв точке Х0, т. е. при
всех /£ [0, Т\ выполняется условие
t t
lim J X (т, хД) dx = J X (x, x, X0) dx; (8.21)
*•"**•« 0 0
в) при X = X0 уравнение (8.20) имеет единственное решение х (/, X),
определенное при 0 < t <[ Г, лежащее в D и удовлетворяющее начальному
условию
*(0До) = *о (лг0£О). (8.22)
Тогда каждому г\ > 0 соответствует такая окрестность U (Х0) точки
Х0у что при X £ U (Х0) для всех решений х (/, X) уравнения (8.20),
определенных при 0< /<Гм удовлетворяющих начальному условию (7.22),
справедливо неравенство
|х(/Д)-х(/Д0)|<т| (0</<Г). (8.23)
Доказательство. Из условия теоремы б) (соотношение (8.21))
следует, что
lim \ X (х, х, X) dx = J X (х, х, Х0) dx (xlf х2£ [0, Г], х£ D), (8.24)
или в более общем виде
п )( п Ь
lim 2 Х(х, *,,*.) dx= 2 \ Х(х, *,, >.0)dx (8.25)
(t,G|0, Г], Аг,еД<=1,2 п).
Если интервалы (x<_i, t<) при различных i не пересекаются, равенство
(8.25) можно переписать в виде
t t
lim j" X (т, х (х), Я) dx = f X (т, * (х), Х0) dx, (8.26)
где 0 <: /<: Т и, кроме того, кусочно-постоянная функция х (f) при xt_i <
< / < т/ равна xi и нулю вне этих интервалов.
Согласно условию а) можем задать семейство функций х (/, X) (X £ Л),
удовлетворяющее условию
lim max | x (ttX) — х (tf Х0) \ = 0, (8.27)
8 246 П3
и по каждому е > О выбрать такое б > 0, что при \хг — х21 < 8
IX(/, xl9 X)-X(/, г,Д) |< JL.. (8.28)
Обозначим х (f) такую кусочно-постоянную функцию, для которой
max | x(t) — x(t, X0)|< 8, (8.29)
а через U (к0) — такую окрестность точки А,0, для которой при А,£ U (к0)
max | х (/, X) — х (/, K0) |< 8 (8.30)
и
<т-
(8.31)
ЭГ3 = К Х(х, х(х)Д)4х-|х(х, х(х)Д0)4х
1о о I
Возможность выбора окрестности U (А,0) обеспечивается равенством
(8.26) и условием (8.27).
При X£U(k0), согласно неравенствам (8.30) и (8.28),
ЗГ1== ||Х(т,х(тД)Д)-Х(т,л:(тД0)Д)Ит<^г/<-|-, (8.32)
о
а также, согласно (8.29) и (8.28),
72 = J|X(x, х(х, Я0), М-^(т, *(х), X)|dx<-^r/ <-|-, (8.33)
о
и
74 = J|X(t, х(х), Х0)-Х(х9 *(х, Я0), X0)|dx<-^r/ <-|-. (8.34)
о
Поэтому, учитывая полученные неравенства (8.31) — (8.34), можем написать
I j X(x, х(х, Я), X)dx — JX(x, х(х, Х0), Я0)dx|< 7Х + зг, + 7, + зг4 < е.
(8.35)
о о
Таким образом, мы показали, что
t t
lim j X(x, jc(x, X), X) dx = j X(x, jc(x, X0), X0)dx.
(8.36)
Очевидно, решения х = x (/, X) уравнения (8.20) дри начальных
условиях (8.22) удовлетворяют интегральному уравнению
*('Л) = *о+ |Х(т,х(тД)Д)А. (8.37)
о
Вследствие ограниченности функции X (/, х, А,), эти решения образуют
равномерно ограниченное и равностепенно непрерывное, следовательно,
компактное в смысле равномерной сходимости, семейство функций. Поэтому
114
для завершения доказательства теоремы достаточно показать, что любая
равномерно сходящаяся при кп -+ Х0 последовательность функций х (t, Kn)
имеет своим пределом функцию х (t, X0).
Пусть
lim x(t,Xn) = y(t)-
Согласно равенству (8.36) в выражениях
t
x(t,K) = *o+ )х (т> х (т, Я„), Кп) dx
о
можно перейти к пределу. В результате получим
y(t) = x0+ \X{T,y(%Xjdi,
6
т. е. функция у (/) является решением уравнения
-^-= *(*,* Д0) (8 38)
при начальном условии (8.22). Так как, согласно условию в) теоремы,
решение единственно, то у (t) = x (/, А,0), что и доказывает теорему.
Из этой теоремы непосредственно следует теорема о принципе
усреднения.
Теорема [88]. Пусть для уравнения
*L = eX(t, х) ' (8.39)
выполняются следующие условия:
а) функция X (/, х) равномерно ограничена и непрерывна по х равномерно
относительно О <; / < оо, х £ D;
б) при каждом х £ D существует предел
ton -у- X (t, x) dt = X0 (x)\ t (8.40)
в) при е = 1 уравнение
-§- = eX0(I) (8.41)
имеет единственное решение £ = £(/), удовлетворяющее начальному условию
£ (0) = х (0) = х0, определенное при 0< /<Гм лежащее в D.
Тогда для любого х\ > 0 существует такое е0 > 0, что при 0 < е < е0
решения х (t) уравнения (8.39), удовлетворяющие условию х (0) = х0, на
интервале 0, — отличаются от\ (t) меньше, чем на г\:
\х(0-6(0К n (°<'<v)- (8'42)
В справедливости этой теоремы легко убеждаемся, если в уравнениях
(8.39) произведем замену е/ = tv е = X.
Вместо (8.39) имеем уравнение
-£-=X(tvx9k)9 (8.43)
8* 115
где принято обозначение
х(А, x) = X(ll9x,k)- (8.44)
Существование среднего
т
lim 4" f X (/, jc) d/ = Х0 (а:) (8.45)
эквивалентно интегральной непрерывности по X в точке X = 0 правой части
уравнения (8.43), т. е. эквивалентно соотношению
limjx (4"» х)лг = J*o(*)#i- (8.46)
Действительно, полагая в левой части соотношения (8.46) -j- = *,
имеем
lirnjx(^, хЦ-^ф^, *)*(-£-) =
х*-б ■ — о
'•
= lim ( X(t, x)dt = /, lim-^— f X(/, *)<# =
a»
T t,
Приведенная выше теорема о непрерывной зависимости решений
системы дифференциальных уравнений (8.20) от параметра обобщена в
дальнейшем Я. Курцвейлем и З.Ворелем [235].
Приведем здесь только формулировку полученной ими основной
теоремы.
Предположим, что для системы уравнений
-§-=Х(/,хД), (8.47)
где, как и ранее, jc, X — точки я-мерного евклидова пространства,
выполняются следующие условия:
а) функция X (/, jc, X) определена для х£ D, гдеО — открытое
подмножество пространства £„, t£ [0, Т1, А,£Л, Л — множество чисел,
содержащих предельную точку А,0. Для х£ D и Х£ Л функция X (tt xt X)
измерима по / и, кроме того, существует интегрируемая по Лебегу на
интервале [0, Т] функция m (/, X), для которой | X (/, х, X) | < m (/, X) в области
/£ [0, 74, x£D, А,£А. Для t£ [0, Г], Х£ А функция X (/, л;Д)
непрерывна по л:. При постоянном X все эти условия гарантируют
существование решения уравнения (8.47);
б) существуют неубывающая функция г|> (б), определенная для 0 < б <;
<; d, d > 0, lim г|э (б) = 0, и интегрируемая по Лебегу функция х (0 > 1;
6-*0
116
т
X (f)dt-+ 00, такие, что
\X(t9xltX)-X(ttXt9X)\<M\Xi-Xtbx(f)
ДЛЯ
*!,*,£ A ki —x,|<d, /£[0, Л, ^£Л;
в) существует решение х (/, А,0) уравнения (8.47) при А, = А,0,
определенное для t£ [0, П, и справедливо утверждение: если функция v (f) —
решение уравнения (8.47) для к = Х0 на интервале [0, 7\], 0 < 7\ <: Г,
»(0) = х (0, Я0), то о (0 = х (/, Х0) для /£ Ю, 7\].
При этих предположениях справедлива следующая теорема.
Теорема [235]. Пусть правые части уравнения (8.47) удовлетворяют
условиям а), б) и в) и, кроме того, пусть выполняется условие
t t
lim ( X (х, .*, k) dx = J X(x, x, X0) dx (8.48)
я,-*х0 о о
равномерно относительно t, x.
Тогда для любого х\ > 0 найдется такое б > 0, что для каждого решения
х (t, k) уравнения (8.47), определенного на интервале t£ [0, Т\ и
удовлетворяющего условиям | к — к0\ < б, | х (0, ку — х (0, к0) | < к, справедливо
неравенство | х (/, к) — х (/, к0) | < т) для / £ [0, Г].
По сравнению с теоремой М. А. Красносельского и С. Г. Крейна здесь
предполагается, что сходимость в условии (8.48) равномерна, но не
предполагается, что функции X (/, х, к) для t£ [0, Т], к£ Л, являются
системой равностепенно непрерывных и равномерно ограниченных функций
переменного х и что открытое множество D ограничено.
Во всех предыдущих теоремах о непрерывной зависимости решений
системы уравнений типа (8.47) от параметра предполагалась интегральная
непрерывность правых частей уравнений (8.47) по отношению к параметру к
в точке к0 при всех / £ [0, Т]:
t t
lim J X(t, x, k)dt = \x(t, x, k0)dt. (8.49)
Г. А. Антосевич [2121 доказал непрерывную зависимость решений
уравнения (8.47) в предположениях, не требующих обязательного выполнения
условия (8.48).
Рассматривая уравнение (8.47), Г. А. Антосевич предполагает, что
значения функций X (t, х, к) принадлежат действительному банаховому
пространству (не обязательно конечномерному, как в предыдущих теоремах),
вводит условия, отличающиеся от рассматриваемых предыдущими авторами
в двух существенных моментах. Во-первых, его предположения
относительно свойств функций X (/, jc, к) более тесно связаны с желательным
поведением решений системы (8.47). Во-вторых, они позволяют более полно провести
аналогию с классическими теоремами о зависимости решений от параметра,
которые могут быть доказаны аналогичным образом. Метод доказанной им
теоремы связан с модификацией общего принципа сравнения для решений
уравнений типа (8.47), и основным моментом в нем является рассмотрение
некоторой положительно определенной непрерывной функции V(t, х),
удовлетворяющей условию Липшица.
117
5. Обобщение первой теоремы метода
усреднения на случай счетных систем
дифференциальных уравнений. Остановимся кратко на некоторых* результатах,
полученных О. А. Жаутыковым [59] в направлении обобщения
основной теоремы принципа усреднения для счетных систем дифференциальных
уравнений.
Как и выше, эти результаты получены из теоремы о непрерывной
зависимости от параметра решений счетной системы дифференциальных
уравнений в пространстве С°°, представляющей собой обобщение приведенной
выше теоремы (см. [45]) на счетную систему.
Рассмотрим счетную систему дифференциальных уравнений,
содержащую параметр А,,
ТГ = Х*У> *i> **•••.*> (Л— 1.2. ...). (8.50)
где функции Xk (/, хъ х2, ..., X) (k = 1, 2, ...) заданы в области
ХиЬ, ..., GDisupllXxl, |х2|, ...]</?, 0</<7\ Х£А, (8.51)
D — некоторая область пространства С°°, точкой которого является
счетная совокупность непрерывных функций, равномерно ограниченных
некоторым числом, и Л — некоторое множество значений параметра X, для
которого Х0 — предельная точка.
Пусть для правых частей системы уравнений (8.50) в области (8.51)
выполняются следующие условия:
1) функции Xk (/, хи х2, •••» *•) (* = 1» 2, ...) равномерно
непрерывны по каждому аргументу t и х = (xlt х2, ...) (t£ [0, Г], х £ D) и
удовлетворяют для всех точек области (8.51) неравенствам
\Xk(t, хъ х29 ...Д)1<а», (8.52)
где ak -* 0 при k -* со;
2) функции Xk (tt хъ x2t ..., X) (k = 1, 2, ...) удовлетворяют
усиленному условию Коши — Липшица, заключающемуся в том, что для
всяких двух точек
/ t mm
(t9 Xi, X2f • • • » Xm—U Xm* -Vm-fl,« • • , Л») И (t, X\9 X2t • • . , Xm— U *m, Xm-\-lf *tX)
области (8.51) выполняются неравенства
I Afc(£, X^ X2t • • • » Xtn—U Хщу Xm-\-\t • • • > **) ~~~*
— Хл(/, jclt jc2, ..., Хш-i, xm, *m+i, . •., ^)|< emA/i, (8.53)
где em -* 0 при т->оои
Art = SUP [| Xm — Xm |,| *m+l — *m+l |, . . •]•
Тогда справедлива теорема, которую приводим здесь без
доказательства.
Теорема [59]. Пусть правые части системы уравнений (8.50)
удовлетворяют условиям I) и 2) и, кроме того, для них выполняются следующие
условия:
а) функции Xk(t, xlt x2t ..., X) (k = 1, 2, ...) имеютв области (8.51)
непрерывные частные производные —т-*- по переменным хъ х2, ...;
118
б) существует равномерно относительно х = (хъ х2, ...) предел
lim j Xk(t, хъ x2t ...; X)dt = )' Xk(t, xv x2t ...; X0)dt (8.54)
(0</<^ + /1<Г, ft=l,2, ...);
в) счетная система дифференциальных уравнений
-Цг = Х*(*> У* У* • • - Х«) (* = 1, 2, ...) (8.55)
имеет единственную систему решений
yk = yk(t) (ft=l,2, ...),
определенную при 0 <; t <; Г, лежащую вместе с некоторой р-окрестностью
в D и удовлетворяющую начальным условиям
xk(0) = yk(0) = xl (ft =1,2, ...) (sup(|x?|,|*S|f ...)<*)• (8.56)
Тогда решения системы уравнений (8.50) xk(t) (ft = 1,2,...),
удовлетворяющие начальным условиям (8.56), непрерывны по X в точке X = Х0, т. е.
sup max | xk (f) — yk (t) | -+ 0 при X -+ X0.
k 0<t<T
Рассмотрим счетную систему дифференциальных уравнений в
стандартной форме
^ = eXk (/, х1% хШ9 ...) (ft = 1, 2, ...), (8.57)
*
где е — малый положительный параметр, Xk (t, xlt х2, ...) — функции
счетного числа переменных, определенные для всех /(0 <: t < со) и для
значений х = (xv хъ ...) из области D: sup 1\хг\, \х2\, ...] < R.
Предположим, что для всех значений х £ D существуют средние
значения
г
lim 4" 1 Xk(*> *ь х» • • •)* = Х(*Чх» x2t • • •) (ft = 1, 2, ...), (8.58)
Г-оо 0
и одновременно с системой (8.57) будем рассматривать усредненную систему
-ТЕГ = е*к0)(!ъ Ь. • • •) № = 1, 2, ...) (8.59)
при одних и тех же начальных условиях
xk (0) = Ik (0) = хТ (ft = 1, 2, .. .)• (8.60)
Если в уравнениях (8.57) и (8.59) произвести замену -^- = t> г = X,
а затем положить
**(4 • *1> х* ' • -)1«-ов *P<*i. ** .. •) (ft = 1, 2, ... ), • (8.61)
то из предыдущей теоремы непосредственно следует основная теорема о
принципе усреднения Н. Н. Боголюбова применительно к бесконечным
системам уравнений (8.57) в следующей формулировке.
119
Теорема [59]. Пусть правые части бесконечной системы
уравнений (8.57) в области 0 < / < со, х£ D удовлетворяют условиям I) и 2)
(см. стр. 118) и, кроме того, условиям:
а) для всех х £ D существует предел (8.58);
б) при е = 1 система уравнений (8.59) имеет единственное решение
£*(0 (ft = 1, 2, ...), удовлетворяющее начальным условиям (8.60), определен-
ное при 0< /< Ги лежащее вместе с некоторой своей окрестностью в
области D. *
Тогда &Ая любого х\ > 0 можно указать такое е0 > 0, что при 0 < е < е0
решения системы уравнений (8.57) xk (/) (k = 1, 2, ...),удовлетворяющие
начальным условиям (8.60), отличаются от решений %k (/) (& = 1, 2, ...)
меньше, чем на х\, на достаточно большом, но все же конечном интервсме
[О, X]. т. е.
1**(0-Ьк(01<П (* =1.2, ...). (8.62)
6. Обоснование метода усреднения для
уравнений с нерегулярной правой частью. Приведем
некоторые соображения и результаты, относящиеся к проблеме обоснования
метода усреднения для дифференциальных уравнений с нерегулярной
правой частью, например для уравнений с разрывной правой частью, с недиф-
ференцируемой правой частью и т. п.
Многие задачи радиотехники, автоматического регулирования
приводятся к уравнениям с разрывной правой частью. Изложенные выше теоремы
метода усреднения не охватывают такие случаи. В связи с этим заслуживают
упоминания результаты, полученные А. М. Самойленко [1631,
относящиеся к рассмотрению вопроса о непрерывной зависимости решений от
параметра для уравнений с разрывной по входящим аргументам и интегрально
непрерывной правой частью.
Приведем лишь постановку задачи и полученные теоремы.
Рассмотрим систему дифференциальных уравнений
-§-=Х(/,*Д), (8.63)
где jc, X — точки я-мерного евклидова пространства £„, / — время, X —
некоторый параметр.
Допустим, что функции X (/, jc, X) определены, вещественны и измеримы
в области / £ [0, Г], х £ D при любом X £ Л, где Л — некоторое множество
значений параметра А,, содержащее предельную точку А,0, D — некоторая
область евклидова пространства Еп.
Справедлива теорема.
Теорема [1631. Пусть для системы уравнений (8.63) выполняются
следующие условия: функции X (*, х, X) почти для всех t£ [0, Г], jc£ D,
X £ Л ограничены суммируемой на [0, Т\ функцией /п (/); существует предел
t t
lim J X(t, x,X) dt = f X(t, xt X0) dt (8.64)
k-*-k©o о
равномерно относительно х £ D, t £ [0, T\\ функции X (/, xf Xq)
удовлетворяют условию Липшица по х с постоянной k; интегралы
t x
\\z(t, jc, X)dxdt, Z(t, x, X) = X(t, xt X) — X(t, x, X0) (8.65)
0 с
120
непрерывно дифференцируемы по х, t при t£ [О, Л, х£ D и
фиксированных К £ Л, с £ D. Существует убывающая последовательность чисел
гт (гт -*■ О при т -+ оо), такая, что
t
* Z (t, xv 1.., Xj + rm% ..., xnt V) — Z (/, x, A,)
Л
r
m
T
<0(t,X) (i=l,2, ...,n)
(8.66)
почта для ecejc / £ [О, Л a jc + rm £ D, где j" О (/, X) m (f) dt-+ OnpuX-*
о
-* Я0; решением (/, X) (jc (0, X) = x (О, А,0)) уравнения (8.63) единственно и при
X = Х0 лежит в области D вместе с некоторой р-окрестностью.
Тогда
lim x(ttX)==x(ttXo) (8.67)
равномерно относительно t£ [О, Г].
Как и обычно, переходя в этой теореме к новой переменной т = е/
и полагая е-1 = X, получаем следующую теорему.
Теорема [163]. Пусть для системы уравнений в стандартной форме
4г=еХ(/,х) (8.68)
правые части X (/, х) равномерно ограничены, а интегралы
t X
l\x{t,x)dxdt
0 с
непрерывно дифференцируемы для 0</<©o,x£Da фиксированного c£D\
равномерно относительно х £ D существует предел
т
]im±\X(t,x)dt=X0(xy9 (8.69)
Г-*оо ' 0
равномерно относительно х, гт
т
lim -L Г Z(t.xv...9Xi + rm....s,d-Z(t.x) dt=(j (8 70)
для х + rm £ D, где rm — убывающая последовательность чисел, тт -+ 0 при
т-+ оо, a Z (/, х\ = X (/, х) — Х0 (jc); X0 (х) удовлетворяет условию
Липшица с постоянной-k; решение g (f) усредненного уравнения
4=еХ»(1) (8-71)
я/ш ecejc / аз интервала 0 <С * < со лежит в области D вместе со своей
р-окрестностью, решение х (f) уравнения (8.68), удовлетворяющее начальному
условию х (0) = I (0), единственно.
Тогда для любого т]>0а сколь угодно большого Т существует такое е0 >
> 0, что при 0 < е < е0 для решения х (/) уравнения (8.68) будет вк/юл-
няться неравенство
И(0-6(0К Л (872>
на отрезке 0, — .
121
7. Пример уравнения с нерегулярной правой
частью. Применим приведенную выше теорему к уравнению
■у+Л« ев (х - х0) + *f (v/, jc, -J-) , (8.73
где
е(*-*0) = (1прИХ>*°' (8.74)
10 при х < х0,
/ | v/, jc, --р] — периодическая nov/c периодом 2я функция,
удовлетворяющая всем необходимым условиям регулярности.
С помощью замены переменных
х = a cos г|э, -^- = — асо sin г|э, -ф = со/ + ф (8.75)
уравнение (8.73) сведем к системе
da __ _е_
dt ~~ о
а = —{/(v/, acosip, —аю sin if)+ 0 (a cos if —jc0)} sin \|),
соа
/о y^?\
-^jr = ^{/(v/, acos\|), — ao)sin\|5) + 6(acosi|) —jc0)}cosi|),
правая часть которой удовлетворяет всем условиям приведенной выше
теоремы.
Усредняя правые части системы (8.76), получаем систему усредненных
уравнений
т
-£г = — -j- lim ~y \ f Ы, cl cos (со/ + ф), — асо sin (со/ + ф)) х
X sin (со/ + ф)Л,
J[9 8 1 / 1 х*
dt - жо2д У а1
т
lim -Tfr \ f (v/, a cos (со/ + ф), — асо sin (со/ + ф)) cos (со/ + ф) <#• (8.77)
Г-оо ' J
8. Воздействие мгновенных импульсов.
Применим к некоторым специфическим колебательным системам, находящимся
под воздействием мгновенных импульсов, принцип усреднения.
Рассмотрим систему дифференциальных уравнений, содержащую
параметр А,,
-§- = Y(tty,X); (8.78)
здесь /—время, у, Y — m-мерные векторы евклидова пространства £т.
Согласно упомянутым выше теоремам И. И. Гихмана, М. А.
Красносельского и С. Г. Крейна, Я. Курцвейля и др., при некоторых
предположениях относительно правых частей уравнения (8.78), в частности при
выполнении условия
/ t
Um§Y(t,y,X)dt = $Y0(t,y)dt (8.79)
122
равномерно по t, у для /£ [О, Г], y£D, Da Emt решения уравнения
(8.78) равномерно сходятся к функции у (tt Х0), являющейся решением
уравнения
-f- = K0 (/,*/). (8.80)
При некоторых дополнительных условиях наличие условия (8.79) все же
может допускать сходимость у (f, X) к функции, не являющейся решением
уравнения (8.80).
Для многих задач представляет интерес установление критериев,
позволяющих судить о равномерной сходимости у (/, X) к у (/, А,0), где у (/, Х0)
определяется не из уравнения (8.80), а из некоторого другого уравнения.
В связи с этим приведем теорему, доказанную в работе [164], не
останавливаясь на ее доказательстве.
Рассмотрим уравнение
t
x(t, X) = х(0, X) + Ф(/, x(ty X), X) + J X(t, x(t, X), X)dt, (8.81)
о
где, как и ранее, X — параметр, / — время, jc, Ф, X — m-мерные векторы
пространства Ет, х (0, X) — произвольная постоянная, Ф (0, х, X) = 0.
Предположим, что Ф (/, х, X) и X (/, х, X) удовлетворяют следующим
условиям:
1) существуют область D, D с ЕтУ и интервал [А,0, Хг], такие, что X (/,
xt X) измерима по / при фиксированных (х, X) £ D х [Х0, А*], непрерывна
по х при фиксированных (/, X) £ [0, Т] х lX0t A,J, Ф (/, Xf x) — равномерно
непрерывная функция переменных (/, jc, X) £ 10, Т] х D X [Х0, Хг]\
2) существуют постоянная М и интегрируемая по Лебегу на интервале
т
10, Т] функция m (t, X), Г m (/, X) dt < М, такие, что
о
||Х(/,*Л)Л<т(*Д),
|Ф(*.*,Х)|<А1
для (/, х, X) £ [0, Г] х D X [Х0, AJ;
3) существуют неубывающая функция ф2 (б), lim г^ (б) = 0, интегри-
t
руемая по Лебегу функция X (0 > 0, J % (f) dt < 0, и положительное число
о
а < 1, такие что
\\0(t,x'fX)-0(t1x\X)\\<;*lx'-x,'\\
ДЛЯ
*',/ед /ею.л. ье^дл
4) существует решение х (/, А,0) уравнения (8.81) при X = Х0,
определенное для t£ [0, Г], такое, что если v (f) удовлетворяет уравнению (8.81)
при X = Х0 на интервале [0, 7\J, 0 < 7\ < Г, и и (0) = х (0, А,0), то v (t) =
= x(t, Х0)для t£ [0, rj.
При этих предположениях справедлива следующая теорема.
123
Теорема 1164]. Пусть для уравнения (8.81) выполняются условия
1)—4) и, кроме того,
t t
lim f X (/, jc, X) Л = J X (t, x, ^o) Л (8.82)
равномерно по t и х.
Тогда для любого малого е > О найдется б > 0, такое, что если х (/Д) —
решение уравнения (8.81), определенное на интервале [О, Г], то справедливо
неравенство
|*(/Д)-*(/Д«)|<в,
асшс толь/со |А, — А,0| < б, ||jc (О, X) — jc (0, Jt0)|| < fi для всех /£ [О, Т].
Приведенная теорема дает возможность распространить метод
усреднения на изучение автоколебаний в системах, находящихся под воздействием
мгновенных импульсов, воздействующих на нее при прохождении через
фиксированное положение; для изучения колебательных систем, находящихся
под воздействием высокочастотных периодических возмущений
специального вида, и др.
9. Усреднение при наличии в системе особых
точек. Среди теорем, посвященных дальнейшему развитию и
обобщению первой основной теоремы, заслуживает внимания теорема М. М. Ха-
паева [1931. Приведем здесь лишь формулировку этой теоремы.
Теорема [193]. Пусть правые части системы уравнений в
стандартной форме
-ljL=eX(t, x) (8.83)
определены для t> 0 и х£ D, гдей — область евклидова пространства ЕПУ
и выполняются следующие условия:
а) X (t, x) удовлетворяют условиям Каратеодори, обеспечивающим суще-
ствование непрерывных решений х (/);
б) существует такая суммируемая функция N (f) и постоянная N0,
что для t > 0 и х £ D, | X (t, x) | «< N (t) и для любого конечного отрезка
Ui, *,]
[N(t)dt<NQ(t2-t& (8.84)
в) существует суммируемая функция Н (f) и постоянная Н0, а также
неубывающая функция г|э (a), lim -ф (а) = 0, такие, что для t > 0 и х£ D
\Х«,х')-Г(1х'')\<у(\х'-х''\)Н«)9
и
на любом конечном отрезке [tlf t2];
г) равномерно относительно х £ D существует предел
lim -f fx(/, x)dt=X0(x);
д) Х0 (х) в области D удовлетворяет условию Липшица
|Х0(*')-х0(дОКМ*'-*").
124
Тогда любому сколь угодно малому г\ > 0 и сколь угодно большому L
можно поставить в соответствие такие е0, что если £ = £ (/) — решение
усредненной системы
-7JT-«*e®. (8-86>
определенное на интервале О < / < со и лежащее в области D вместе со
своей г\-окрестностью, то для О < е < е0 в интервале 0 < / < — спра-
ведливо неравенство
1*(0-6(0|<Ч.
в котором х (0 — решение системы (8.83), совпадающее с 1(f) при t = 0.
Приведенная теорема дает возможность ослабить требования,
предъявляемые к правым частям многих классов уравнений, в том числе и
уравнений, описывающих быстрые и медленные движения, приводящихся к
уравнениям в стандартной форме. В частности, появляется возможность
усреднять системы, содержащие особые точки.
В качестве примера приведем систему уравнений, описывающую
движение быстрой заряженной частицы вблизи оси аксиально-симметричного
периодического поля
-~ = — f (p) sin t sin (a — ср) — ew2 cos (а —- ф),
w-%- = — / (р) sin / cos (а — ф) — 2ew(s0 — J0cost),
* (8.87)
-J- = epw cos (а — ф),
-J- = ewsin (a — ф).
Здесь е — малый параметр, р и ф — полярные координаты, являющиеся
медленными переменными, w — скорость, a — угол, образованный
вектором скорости с некоторым фиксированным направлением; шиа — быстрые
переменные, / (р) — целая функция, f (0) = 1, J0 = J0 (p) —бесселева
функция мнимого аргумента; s0— параметр.
Соответствующая системе (8.87) вырожденная система имеет интеграл
р = w cos (a — ф), q = w sin (a — ф) — f (p) cos t. (8.88)
Эти интегралы существенно облегчают приведение системы (8.87) к
стандартному виду.
Дифференцируя (8.88), имеем
(8.89)
Подставляя в правые части выражений (8.89) значения производных
согласно уравнениям (8.87), после ряда упрощений получим систему в
dp
dt ~
dq
dt ~
dw
= -*-.
dw
dw dp
~ЧГ + ~da~
dw dq
"5Г + ~da~ '
da dp
dt + dq>
da . dq
4ф
&p
dt "Г"
dq
dp
dt
125
стандартной форме
-§- = е[-р* + 2(<? + f (p) cos t)(s0-J0(p) cost) -f (/(р) cos / + <7)2],
-^- = e [— 2p (/ (p) cos f + q) — 2p (s0 - J0 (p) cos 0 — /' (p) pp cos /],
Система (8.87) при до = 0 имеет особенность, однако введенная замена
переменных с помощью формул (8.88) приводит систему (8.87) к системе в
стандартной форме с регулярными правыми частями. Усредняя систему
(8.90), получаем
dp = e[2<7S0- Др)/0(р) + 4-,"/Л л-"г- "2|
dq
f- = е [2<7S0 - f (р) /0 (р) + -£-/»(р) + </* - р2],
■g- = -e[2p^ + 2ps0],
dtp -
10. Оценки высших приближений. Оценкам высших
приближений, получаемых с помощью метода усреднения, посвящены
работы [113, 130, 60]. Приведем кратко лишь результаты, полученные П. П. За-
брейко и И. Б. Ледовской [60]. Они базируются на идеях теоремы,
приведенной в п. 4 настоящего параграфа, и поэтому позволяют несколько
смягчить условия, налагаемые на правые части рассматриваемых уравнений.
Итак, по аналогии с рассуждениями о построении высших
приближений, приведенными в § 4, п. 4, рассмотрим общее уравнение в стандартной
форме
-§- = гХ (/, х) + 82XX (/, х) + • • • + *»+"Xm (/, х, е), (8.92)
гдеХ (/, х), Xt (/, х) (0< t < со,х£ D, / = 1, 2,..., т — 1) — измеримые
по / и гладкие по х операторы, а Хт (/, х, е) (0 <; / < со, х £ D, 0 <; е <;
<; е0) — измеримый по / и гладкий по х и е оператор. £„ — n-мерное
евклидово пространство, D — область в Еп.
Для получения m-го приближения в уравнении (8.92) совершим замену
переменных
* - 6 + е/\ (/. I) + e2F2 (/,©+...+ e»fm (/, Q. (8.93)
Новое уравнение для £ имеет вид
-§- = еЯ0 О + e2pi ©+•••+ *трт-х (6) + *"+i/>m (/. fc e). (8.94)
Здесь Fx (/, |), F2 (/, Ъ),..., Fm (/, |) — действующие в Еп гладкие операторы,
подлежащие определению;
126
Подставляя выражение (8.93) в уравнение (8.92), получаем
['+«^+-+«™^
т
dt ^ dt dt
+ eX(tft + eFl+ ... + e«Fj + ... + em+lXm(t, £ + eF,+
+ • • • + 8mFm, 8).
Отсюда для новой переменной I в предположении, что при малых е норма
оператора е-^- + ... + 8т~^" меньше единицы, получаем уравнение
^1 Г t , dFi , , т <^т I-1 ( ЯЛ « <^т ,
+ еХ(/,£ + е/^ + ... +е^т)+ ... + e<*+*Xm(t,t+ *FX +
+ ... + e^Fw, e)J. (8.95)
В дальнейшем будем следовать предположениям и выкладкам работы
160].
Предположим, что каждый из операторов Xt (/, х) (i = 0, 1, 2, ...
..., т — 1; Хщ = X) имеет т — i непрерывных производных по х (тот факт,
что оператор Z (/, х) имеет г непрерывных по jc и измеримых по t
производных по хь будем записывать в виде включения Z (t, x)£ Сп).
Имеем
m—i
Xi (t, x + п) - Xt (t, x) + 2 4- X? (t, x) {uin} + <ot (t, x, u), (8.96)
где
XP (/, jc) {um} = Xlh (/, jc) {ult ... , u,}9 (8.97)
aXf(U) {wj, ...,W/}—линейный и симметрический попеременным^,...
..., ujt непрерывный по совокупности переменных /, х, иъ ..., щ оператор,
o)j (/, xt п) — непрерывный по совокупности переменных оператор,
удовлетворяющий условию
Введем обозначения
2 1=а^
lim "«*<'■*»>" =0.
||u||-*0 ИИ1Г
Qe(U)=s,
а#Л
' * j
(8.98)
(8.99)
(8.100)
(t =1,2, ...),
где через {J\rt\ .... e^m1} обозначена деленная на 7l ... г \ сумма
всевозможных произведений вида щ. ... а. ,в которых aj встречает-
ся гг раз, .... От — гт раз;
у и (/.в = 2 тпЬз x<s,+*' *+w <'• &> ^ F-m1}(8Л01)
127
(i = 0, 1, ... , m — 1; / = 0, ... , m — i),
iM/,S,e) = co,(/,S + eF1+ ... +e'»Fm) +
20S|+2st+ . .. +msm
st+ ... +msm>k_i
(8.102)
здесь X\0) (/, |) = X, (*, |), a *?'+ *' * +s<*> (/, Q {F[s'] F^]} - деленная
на s i ... s I сумма всевозможных слагаемых вида X[Sl+ ' *' +$m){Fitt ... ,
FSl+ ... +sm}, в которых аргумент F± встречается st раз аргумент
гт — sm раз j
Фа(Л 6) = 2 QFu - 2 <?«-* "Т" (« = 0, 1 га - 1),
(8.103)
ф«(М)= 2 №/+*«(<.»- 2 <з—*т- (8104)
и, наконец,
L(t,l.e) = Xm(t,l+EF1+ ... +e-Fm)-Xw(/.E) +
+ 2 QfiiXn{t9l + BFl+ ••• +e-Fm)+ ^ W +
+ «< 2 QlYil^+'-m- 2 Q«TtL«*K~"'- (8.Ю5)
i+l+l>m k+l>m
Воспользовавшись введенными обозначениями (8.99)—(8.105),
уравнение (8.95) представим в виде
+ em+,{<Dm(/,t) + Z,(*,&,e)}. (8.106)
Приравнивая, как обычно, в правых частях уравнений (8.95) и (8.106)
коэффициенты при одинаковых степенях е, получаем равенство
Р,0 = Фа(/,Э-^(Л& (« = 0,1 т-\). (8.107)
Из этой системы нужно последовательно определить операторы Fx (tf
9. •-., Fm (t, Б): P0 (Б), ..., Pm-\ (Б) и вместе с ними — операторы Ф0 (t, Б),
<I>i(/, Б). .... Фт(/, 6)и L(/, Б, е).
Пусть а — одно из чисел 0,..., т — 1. Предположим, что для
некоторого а операторы Ф0(/, Б), ...,Ф<х(*, Б); ^i ('» Б)» ••> ^« ('» Б); ^о(Б), ...»
Ра-1 (I) определены. При а=0Фо(Ц) = Х (/, Б). Допустим, далее, что
128
при каждом^ £ D оператор Фа (/, В обладает средним:
г
Фа (I) = Ит ^г J Фа (*, Ю di. (8 108)
Согласно общей методике, изложенной в § 4, операторы Ра (В и
Ра-н (*, В определяются выражениями
Лх©=Фа(|)> (8.109)
t
F*+\ (t. В = J (Фа(Л В-Р«®} Л. (8.110)
С помощью формулы (8.103) можем найти Фа+1 (*> В-
Таким образом, могут быть определены все операторы, необходимые для
приведения исходного уравнения (8.92) к автономному уравнению с
(точностью до величин порядка е"1*1)
-§- = еР0 (В + в2/5! © + ... + в-Р^г © + e-HPJB- (8.111)
Прежде чем переходить к формулировке теоремы об оценке разности
между решениями системы (8.92) и системы (8.111), введем некоторые
обозначения и предположения.
Будем говорить, что оператор Z (х) является усреднением оператора
Z (/, х) в СГ9 если при / -+ со операторы
Z{t9x) = -j-$Z(tfx)i
для каждого х £ D равномерно сходятся к оператору Z (х) вместе с
производными до порядка г в некоторой окрестности точки х.
Предположим, что при некотором фиксированном а (а = 0, ..., т — 1)
выполняются условия:
a) Xt(/, х), Ф,(/,x)eCm-t (i = 0, 1, ..., а),
Xa+l(/, *)£
6)РЛ1)еСт-1 (t = 0, ..., а-1);
в) Ftit.QZCn-i (i=lf ...,a)
и, кроме того, оператор Ра (В является усреднением в Cm_a оператора
Фа (*, В- В этом случае будем говорить, что для системы (8.92) выполнено
уСЛОВИе Gam.
Предположим также, что при е -> 0 в уравнении (8.94) оператор
Pm(t, £> е) «усредненно» стремится к оператору Рт (В, т. е.
8
Kmj-U' Рт(<,6,е)Л-Рж(|)| = 0. (8.112)
Будем, далее, говорить, что условие (Ym) выполнено, если при всех
a = 0,..., т — 1 выполнены условия о^т и, кроме того, оператор Рт {t, £ ,е)
9 246 12д
удовлетворяет неравенствам
|Рж(/,6.в)|<?(/,е).
\РЯ{*> Ь. е)-Рш(/, S» e)i<(7(/, в)*(|Ь-Ы).
где <7(—, в) <; (/0(0. <7о(0 — суммируемая функция на каждом конечном
промежутке, г|> (и) -+ О при а -*- 0, а при е -► 0 «усредненно» стремится к
оператору Рт (I), при этом оператор Рт (0 удовлетворяет условию
l^mttl)—Pm(Ei)l<V(0.
где £ь £2 G D» z G ^n» <7 (0 — суммируемая на [О, Т] функция,
удовлетворяющая условию
limq>(tt) = 0.
Назовем область D правильной, если существует такая постоянная с,
что любые две точки х, у £D могут быть соединены спрямляемой кривой
длиной меньше с\\х — у\\.
Пусть £е (0 и |е (/) — решения соответственно уравнений (8.94) и (8.111),
удовлетворяющие одному и тому же начальному условию £е (0) = 1е (0) =
== Xq»
Подставляя значения | (f) и \ (t) в выражение (8.93), получим
*W = 6(0 + eF1(<.6(0) + ••• + е"»Л,0,Е(О). (8.113)
х (0 = g (0 + е/ч (*, |(0) + • • • + e-Fm (/, |(/)). (8.114)
Очевидно, х (/), определяемое выражением (8.113), является решением
уравнения (8.92), удовлетворяющим начальному условию х (0) = jc0.
Функция х (0 «близка» к решению х (t) и называется асимптотическим
приближением порядка т+ 1 к точному решению х (/).
После всех этих предположений и замечаний можем перейти к
формулировке теоремы об оценке разности между точным решением системы (8.92)
х (/) и его асимптотическим приближением (т + 1)-го порядка. На
доказательстве теоремы останавливаться не будем.
Теорема (60]. Пусть для уравнения (8.92) выполнены условия (Ym)
и область D правильная.
Тогда для любого Т > 0 выполняется равенство
lim sup max »*<0-*<01 = о, (8.115)
где 91 (е, Т) — множество всех определенных на [0, Т] решений уравнения
(8.92), удовлетворяющих начальному условию х (0) = х0> a 3tm (в, Т) — мно-
жеспгво всех асимптотических приближений (т + 1)-го порядка к
решению х (/).
►
§9
УСРЕДНЕНИЕ В СИСТЕМАХ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ,
НАХОДЯЩИХСЯ ПОД ВОЗДЕЙСТВИЕМ СИЛ
С ВЫСОКОЙ ЧАСТОТОЙ
•
1. Дифференциальные уравнения с быстро
вращающейся фазой. Как уже указывалось выше, основным
моментом развития метода усреднения Н. Н. Боголюбовым явилось
установление связи между методом усреднения и существованием некоторой замены
переменных, позволяющей исключать время t из правых частей уравнений с
любой степенью точности относительно малого параметра е. Это дает
возможность строить не только систему уравнений первого приближения
(получаемую при непосредственном усреднении правых частей уравнений в
стандартной форме по явно содержащемуся времени), но и найти усредненные
системы высших приближений.
Одним из основополагающих результатов в дальнейшем развитии этих
идей о разделении переменных является обобщение метода усреднения
Н. Н. Боголюбовым и Н. Д. Зубаревым [15] на системы дифференциальных
уравнений с быстро вращающейся фазой.
Следуя авторам [151, рассмотрим колебательную систему, состояние
которой характеризуется угловой переменной а и п переменными xlf x2f ..., хп
и описывается системой дифференциальных уравнений
-^- = Хк (a, xl9 x2t ..., хп) (6=1,2,..., /г),
da (9Л)
_ = Хю (xl9 x2t ..., хп) + А (а, х19 х2, ... , хп),
где А, — большой параметр, Ха> — соответствует частоте вращения a, Xk (а,
xlt х2,..., хп), А (а, хъ х2У ..., хп) — периодические функции угловой
переменной а с периодом 2л.
В частном случае, когда со = const и А (а, хъ jc2, ..., хп) = 0, система
(9.1) может быть непосредственно приведена к стандартной форме. В самом
деле, при этих предположениях второе уравнение системы (9.1)
интегрируется.
9*
131
Подставив а = Ясо/ + q>, где ф = const, в первые п уравнений системы
(9.1), получим
-^- = Xk{Xcot + ф, tlf х2, ... , хп),
после чего, вводя новую независимую переменную х = А,ео/, найдем
<# = влЛ(х, хх, х2, ... , хп),
где е - тег-
Воспользовавшись основной идеей метода усреднения, можно
исключить переменную а из правых частей уравнений (9.1) с любой степенью
точности в разложении по степеням е = -г-
Для упрощения выкладок, как и ранее, совокупность величин хг%
ха,..., хп и Xlt Х2,..., Хп соответственно обозначим буквой х и X. Тогда
систему уравнений (9.1) можно записать в виде
-^- = Х(а, х),
da (92)
-ЗГ = Ы(х) + А(а, х).
Задачу об усреднении для системы (9.2) сформулируем следующим
образом: требуется заменить систему уравнений (9.2) более простой усредненной
системой, в которой переменная а отделена от переменных х, более того,
быстрая фаза а исключена из правых частей усредненных уравнений.
2. Построение преобразования, разделяющего
переменные. Аналогично § 4, будем искать замену переменных вида
оо
"Г (9.3)
а = а+2-рг^(т)(а,л:),
с помощью которой систему уравнений (9.2) можно привести к
усредненной системе
т=° те (9-4)
= *«(*)+2 тег^Ю.
da
т=0
где ы<т> (a, x) — n-мерные вектор-функции, tfm> (a, x) — скалярная
функция. При этом ряды в формулах (9.3) и правых частях систем (9.4),
необходимые для построения усредненной системы m-го приближения, считаем
формальными, т. е. не будем касаться вопроса об их сходимости.
Усредненная система (9.4) существенно проще первоначальной системы
(9.1), поскольку уравнения для х интегрируются независимо от а.
Физический смысл преобразования (9.3) заключается в разложении
действительного движения, описываемого переменными х, а, на усредненное
132
движение с координатами * и «дрожание», описываемое углом а и
функциями и<т> (а, х) и i^m> (а, х).
Определение функций, стоящих в правых частях выражений (9.3),
вообще говоря, неоднозначно ввиду произвола, с которым можно относить
различные члены разложения либо к основному, либо к высшим членам
рядов (9.3).
Если имеется какое-либо конкретное разложение (9.3), всегда можно
совершить замену переменных вида
х = х+е/(х)-^е2
в результате которой получим другую возможную форму разложений,
поскольку х с тем же правом может быть принята за новую переменную х.
Как известно, для получения определенных однозначных выражений
членов рядов (9.3) необходимы какие-либо дополнительные условия,
например, н(т) (а, л;) и а<т> (а, х) не должны содержать нулевых гармоник по а
что эквивалентно включению в хк и а всех усредненных движений.
Можно налагать и другие дополнительные условия. Так, например,
если система (9.2) каноническая, можно потребовать, чтобы уравнения
усредненного движения (9.4) также были бы каноническими. На последнем
вопросе подробнее остановимся ниже, при рассмотрении задачи применения
метода усреднения к каноническим системам.
3. Построение усредненной системы первого
приближения. Перейдем к построению усредненной системы (9.4),
для чего определим функции
и(т) (а, *), vm (а, х) (т = 1, 2, ...), (9.5)
а также _
Хт (х) и А{т)(х) (т = 0, 1, 2, ...). (9.6)
Для этого продифференцируем соотношения (9.3) и, принимая во
внимание систему (9.4), подставим результат в исходную систему
дифференциальных уравнений (9.2), выразим все величины через новые переменные jT, a.
После этого, приравнивая коэффициенты при одинаковых степенях X, Х° и
X""1, получим систему четырех уравнений для определения шести функций
A<fl> (х), А«> (х), Х<0) (*), Х<» (х), «<'> (а, х), 0(,) (а, *): Х<°> + -^- «, = X;
да
X« + i£« + J^«+(-*£-, ^\ «,<•> + («., ««>); (9.7)
да да \ дх J да \ дх )
да да \ дх J
да у дх
В системе (9.7) число неизвестных больше числа уравнений, что вполне
согласуется со сделанным выше замечанием о неоднозначности.
+ А«\
133
Недостающие два уравнения получим из условия отсутствия нулевых
гармоник по а в функциях u(m) (а, х) и tKm» (а, х):
ит(а,х) = 0,
"ТЯГ— (98)
v{m)(a, х) = О,
где черта означает усреднение по а.
Разложим функции А (а, х), X (а, х) в ряды Фурье:
А&,х)-2Ая(х)е!»*,
- - * - - (9.9)
Х(од) = 2Хт(х)Л
Подставляя выражения (9.9) в уравнения (9.7), согласно условиям (9.8),
усредняя результат по а, находим
Х{0)(х) = Х0&); (9.10)
1 жт* — Jfna
uili(a,x) = -L 2 XJx)^-; (9.11)
{т+0)
Ат(х) = А9; (9.12)
■"М-2 ^- 2 -at (-£*-*"} *•»*
(m^O) (m*0) \ а* /
Л^Й—й-»1"+(■*£•«'"). (9.15)
С помощью выражений (9.11) и (9.12) соотношения (9.14) и (9.15)
приводятся к виду
im+Q) (т+0)
- 2 ^АтА.т- 2 -i- ijf **- (9-i6)
О)
(m*0)
^w = - 2 i^_m- 2 т!г- -fr**-<» +
(m*0) m,<7
(m*0)
thty
+ 2-%£-• i ад. - (9-i7)
(m*0)
&C„ «^m
Произведения векторов записаны здесь не в матричной форме, а в виде
обычных сумм.
Выражения (9.10) — (9.13), (9.16), (9.17) и являются необходимыми для
составления усредненной системы (9.4) и формул замены переменных (9.3)
с точностью до величин порядка малости -т- включительно.
134
Перейдем от комплексных рядов Фурье (9.9) к действительным
оо
А (а, х) = А0 (х) + 2 {fm (x) cos та + gm (x) sin та},
m=l
--__ _ _ (9.18)
Х(а, х) = Х0(х)+ 2 {Fm(x)cosma + Gm(x)sinma}.
/71=1
Формулы замены переменных (9.3) с помощью соотношений (9.11), (9.13),
и (9.18) можно представить в виде
X = X
/71=1
+ х2 i{-GmWcosma + Fm(*)sinma}~f ОШ, (9.19)
/71=1 V '
ОО
a = «+r2i(- gm(x)cosma + fm(x)sinma} —
m=l
~ "Г 2 ^itr У* (*>• (*) cos m* + G«"» (*) sin "*«} + О (4*j •
После подстановки найденных коэффициентов из уравнений (9.10) —
9.13), (9.16) и (9.17) в систему уравнений (9.4), получим
_ оо
-*L-X,(J)-4- 2-Н-{^т(*)/ж^) + См(5)«Гт(х)}-
(mi-0)
+ X 2 -зли"^Г"<F«(J)<*•"»(*>~G"»(*>F'-«<*>> +°Ш> <920>
<7.m U*Q
(m+0)
<m*0)
+ G„.m(x)Gq,m(x)}-± 2 w^!^W^W-/,»WC,».W} +
(m+0)
+ — У —~ l**"® F (r\ *fm$Ln (r\\
(тФО)
—г24г ^W + sUx)} + 0(l?-). (9-21)
Система уравнений (9.20) — (9.21) дает решение задачи, поставленной
в начале настоящего параграфа, с точностью до величин первого порядка
милости включительно относительно параметра -г-* Первая группа этих
уравнений (9.20) выражает систематическое движение. Уравнение (9.21)
для а выражает «дрожание». Таким образом, систематическое движение
отделено от «дрожания» с точностью до членов порядка -ту.
135
4. Замечание о точности получаемых
приближений. Сделаем некоторые замечания относительно точности
получаемых из уравнений (9.20), (9.21) решений х и а.
Обозначая т = еи делая в этих уравнениях замену независимой пере-
л»
менной t на т по формуле т = М9 получаем уравнения типа
-*L = гХт (х) + е2Х(1) (х) + О (е8), (9.22)
-JL = о (х) + еЛ(0) (JO + еМ(,) (х) + О (е8). (9.23)
Переменные х — медленно изменяющиеся функции, поскольку -^- ^ е,
— -* da
а фаза а изменяется сравнительно быстро, так как -^- пропорциональна
конечной величине. Систему уравнений (9.22)—(9.23) рассматриваем на
конечном, однако большом интервале времени порядка т <^ —. За время
х ~ — быстрая фаза может получить, вообще говоря, большое приращение
порядка —. Медленные переменные х за время / ~ —f как и в случае
стандартных систем, получают некоторое ограниченное приращение.
Отбрасывая в уравнениях (9.22) члены порядка е3 и интегрируя на
промежутке / ^ —, очевидно, получим х — лФ ~ еа. После определения j?2*
его нужно подставить в уравнение (9.23). Однако, поскольку х — лс^^е2, в
уравнении (9.23) нет смысла сохранять члены порядка выше е, так как
© (х) — © (лФ) "ч* х — З?2) ~ е2. Поэтому а надо определять из уравнения
-^- = со(х) + 8Л(0)(х). (9.24)
Аналогично, зная/г-е приближение для jc, для а Получаем, вообще
говоря, лишь (п — 1)-е приближение, т. е. а вычисляется с точностью на один
порядок ниже, чем х.
В общем случае медленные движения всегда вычисляются с каждым
приближением на один порядок выше, чем быстрые.
Заметим также, что, исключая ty систему (9.2) можно записать в виде
_dx_ _ Х(а х)
da ~ Ы(х) + А(а,х) 9 ™-'0'
или, обозначая -^ = е, в виде
-g- = eX(a,*,e). (9.26)
Полученная система уравнений — система в стандартной форме по
отношению к независимому аргументу а. Применяя к ней обычный метод
усреднения, можем определить х как функции а с любой степенью точности, после
чего можем выразить jc и а как функции /.
Изложенный выше метод находит множество приложений. Обобщению и
развитию его посвящено много работ (см., напр., [28, 142, 115,205]), наиболее
интересные результаты которых будут приведены ниже.
§ ю
УСРЕДНЕНИЕ В ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЯХ С МЕДЛЕННО
МЕНЯЮЩИМИСЯ ПАРАМЕТРАМИ
1. Уравнение с медленно меняющимися
параметрами. Как известно, исследование нестационарных
колебательных процессов во многих случаях приводит к рассмотрению
дифференциальных уравнений, в которых некоторые параметры — масса системы,
жесткость, частоты и амплитуды внешних воздействующих сил и т. п.—
изменяются со временем. Если эти параметры изменяются медленно (по сравнению
с так называемой «естественной» единицей времени — периодом собственных
колебаний), для получения приближенных решений с успехом можно
воспользоваться методом усреднения. Не будем останавливаться на подробном
анализе уравнений с медленно меняющимися коэффициентами и на
полученных для них многочисленных результатах, отсылая интересующихся к
специальной литературе [130]. Заметим лишь, что в некоторых работах
автора [120, ИЗ, 112, 1091 метод усреднения получил широкое развитие и
применен для исследования таких систем, как в направлении построения
алгоритмов и расчетных схем, так и в направлении строгого математического
обоснования.
Рассмотрим нелинейное дифференциальное уравнение с медленно
меняющимися параметрами
4г\тмЩ+смх=гр[у>*>х>-^)> <101>
где е -— малый положительный параметр, -^ = v (у) > 0, т (у) и с (у) —
функции, положительные при любых у; функция F\yt 6, х, -£-)
периодическая по 6 с периодом 2я и может быть представлена в виде суммы
F [у, в, к, 4-) = 2 eMF. (у, х. -£-) , (10.2)
при этом коэффициенты Fn ly, x, -—Ч — некоторые полиномы х и -g-.
137
Предположим, что в уравнении (ЮЛ) параметр у медленно изменяется
со временем, причем характер его изменения зависит от движения самой
системы, описываемой уравнением (10.1).
Пусть медленно изменяющаяся величина у определяется уравнением
-§- = вф,е,*,4г). (Го-з)
где f[yt 0, jc, -gj-j — периодическая функция по8 с периодом 2я, которая
также может быть представлена суммой типа (10.2).
2. Приведение к стандартной форме. Для
применения принципа усреднения к системе уравнений (10.1) — (Ю.З), прежде
всего, целесообразно привести ее к стандартному виду. Для этого предположим,
что в рассматриваемой системе отсутствует резонанс, т. е. при любых у
*{у)ф»{у). ™*(y)=Vl$T-
Тогда, переходя в уравнениях (ЮЛ), (10.3) к новым переменным а,
Ф и у согласно формулам
х = acos\|j,
_=_a(D(#)sin\|), (10.4)
У = У> Ф = 1®(»)Л+ф,
вместо системы уравнений (ЮЛ) — (10.3) получим систему уравнений в
стандартной форме
+ F(y, в, acos-ф, — а& (у) sin \|)) sin гМ, (10.5)
-W—l^w{d[mT(y)]fi!f' 6' aC0S*' -«fe)siiH)sln*c«1> +
Ч F(yt 0, acos\|j, —аы(у)sinг|>)cosгМ,
-5Г = вД^9. acosif, — a(d(y)smip) (г|> = $<*(y)dt + ф).
Если мы рассматриваем поведение системы в резонансной зоне: го (у) »
да v (у) (для определенности, в зоне основного резонанса), следует ввести
новые переменные а, г|> и у согласно формулам
х = a cos (0 + \|))
-§- = -aoQ/)sin(6 + t|))> (10.6)
У = У*
После некоторых, простых преобразований придем к системе уравнений в
стандартной форме
138
+1» sin2 (9 + ф) + F (y, 6, a cos (6 + ф), — а<л (у) sin (в + Щ sin (в + ф)},
— асо (г/) sin (в + г|э)) sin (в + г|э) cos (в + г|э) + -~F(t/, 6, acos(0 + ♦), (10.7)
— аа) (у) sin (6 + ♦)) cos (9 + ф)j,
-% = tf ((/, 9, а cos (9 + *), — асо (*/) sin (9 + Ф)) (еД (у) = со (у) ~ v (у)).
3. Построение усредненных уравнений в
первом приближении. После приведения системы уравнений (10.1) —
(10.3) к стандартной форме для получения усредненных уравнений в первом,
во втором и т. д. приближениях можем применить схему усреднения,
подробно изложенную в § 4. Так, например, для получения усредненных уравнений
в первом приближении в резонансном случае, усредняя правые части системы
(10.7) по 0, приходим к системе дифференциальных уравнений
-§" = еЛх (у, а, г|>), ^- = со (у) —v(y) + гВх (у, а, ф),
-%-=гОг{у9а,1>)9 (10.8)
где со(у) =у ш\' 1T = V^ и' кРоме того» ввеДены обозначения:
2л
Аг(У> *> ♦) = 2ппГ(у)<»(у) ([" р1У> 6' acos<* + 9>' -в©(У)«п(в + г|>)) X
о
Xsin(9 + i|))d9 4-
2л
+d[my(y)iaj/(y> 6( acos(9 + ^ _a(0(^)sin(e + ф))5ш*(е + *)<»},
О
2л
Вг(у, я, +) = - 2ят(^)0)(у) {| j F(0f 9, acos(9 + ifl, -о® (у) sin (в + Щ X
о
Xcos(9+t)d9 + (10.9)
2я
+ dln(%*m$f(y, в, acos(6 + +), -a<o(t/)sin(e + ^))cos(e +
о
+ t|>)sin(0+4>)d8J,
2я
D, (#, c, i|>) = -gL J / (#, в, a cos (0 + *), — a© (y) sin (6 + i|>)) dQ.
0
4. Частные случаи системы (10.1) — (10.3). Рассмотрим
некоторые частные случаи системы (10.1) — (10.3), для которых интегриро-
139
вание усредненной системы значительно упрощается и даже может быть
сведено к квадратурам.
Прежде всего исследуем случай, когда в правой части уравнения (10.3)
имеем константу, для определенности положим f [у, 6, х, -jA = 1. Тогда
уравнение (10.1) примет вид
4-[т^-1г]+с^х==8/?(^е'х'-^)» (10Л0)
где х = е/ — «медленное» время.
Вводя новые переменные а и г|> с помощью формул (для основного
резонанса © (х) » v (х))
х = a cos (0 + гЬ),
dx (10Л1>
-5Г = — ao)(x)sin(6 + t|)),
получаем уравнения в стандартной форме
тг —^fcw {« '-Щг®sin*<e + +) + рье< acos(0 + ♦>•
-г аи (х) sin (Э +ф)) sin (6 + t)j,
^-«--^{ач^****»^** <10■12,
+ -jj-F (x, 0, a cos (6 + ф), — fl® (*) sin (6 + г|>)) cos (6 + \|))|,
где еД (т) = о) (т) — v (т).
Усредняя правые части по 0, находим
-^ = еЛ1(т,а, ф),
«, (10-13>
-др = вД(т) + вД1(т,.а,1|>),
где Лх (т, a, if) и Вг (т, а, г|>) определяются согласно формулам (10.9).
Если в уравнении (10.10) правая часть удовлетворяет условию
/?(t,0,^-^-)=F(t,jc), . (10.14)
усредненные уравнения (10.13) принимают вид
da ее d \m (т) со (т)]
dt "" 2/п(т)ш(х) dx »
2„ (Ю.15)
ТГ = Ю (Т) 2дт(т)о)(т)а j f <Х' a C0S +>C0S W
6
Система уравнений (10.15) может быть проинтегрирована до конца.
Действительно, из первого уравнения находим
140
где а0 — начальное значение амплитуды при I = 0. Подставляя найденное
значение амплитуды во второе уравнение системы (10.15), получаем
♦ =U,[a(x)fTltff (10.17)
где принято обозначение
ю,И*), т1=»
_„W """"-""'T f^^Vlgggc»»)».*» 00.18,
2я [т (х) со (т)] 2 a0 °
Таким образом, колебания, описываемые уравнением (10.10) при условии
(10.14), в первом приближении «синусоидальные» с амплитудой, медленно
изменяющейся обратно пропорционально величине Ym (т) ® (т) » и фазой,
изменяющейся согласно формуле (10.17).
Второй частный случай. Пусть
'(*. °. *.-£)-'(*•-$-)• 0019)
Усредненные уравнения имеют вид
da eg fl* \m (т) о (т)]
Л ~~ 2m(x)(o(x) " dx
2я
- 2ят(т)о>(т) J f (Т' ~ аШ (Т) Sin *> Stn **' (10'20)
dib
Из второго уравнения сразу находим закон изменения полной фазы
колебания
t
= Гю(т)Л. (10.21)
-j
Очевидно, частота колебаний, описываемых уравнением (10.10) при
условии (10.19), в первом приближении не зависит от амплитуды колебания, а
зависит лишь от характера медленного изменения массы и жесткости
системы. Если бы масса и жесткость были постоянны, то, как известно, мы
получили бы колебания, называемые квазиизохронными, частота которых в
первом приближении постоянна и не зависит от амплитуды, как в большинстве
нелинейных колебательных систем.
Рассмотрим еще один частный случай, когда правая часть уравнения
(10.3) не зависит от выбора траектории (10.4) (решения невозмущенной
системы), вдоль которой производится усреднение. Тогда третье уравнение
системы (10.8) будет иметь вид
4- = е7(*). (10.22)
dt
где
2я
~2п
hy) = ^if(y,Q)dQ. (Ю.23)
о
141
Из уравнения (10.22) находим у = у (т), после чего приходим опять к
уравнению (10.10).
5. Системы уравнений с медленно
меняющимися параметрами. Для упрощения будем рассматривать случай,
когда медленно изменяющиеся параметры в системе не зависят от выбора
траектории невозмущенной системы.
Пусть колебательная система с N степенями свободы характеризуется
следующими выражениями для кинетической и потенциальной энергий:
т = 4 2 *'/<т>wi> ^ = т2 *</Wм/. <10-24)
где в;/ (т) = ац(%), bif (т) = Ьц (т), т = е*и обобщенными силами
е(?у(х, 6, (7ь ... , qN, ft, ... , qN> e) (/=1.2,..., tf), (10.25)
тогда для изучения колебательного процесса получим систему
дифференциальных уравнений
d iN - 1 N • •
"2Г 2 a'/0H + 2 M*)ft = «Q/(*. в, (7Ь ... , qN, ql9 ... , (/*, е) (10.26)
u=i J »=i
(/=1,2;..., АО,
которая путем введения новых квазинормальных переменных хъ х2, ..., xn
согласно формулам
4i = S 4f}М** (' = 1.2 ЛО, (10.27)
где ф{Л) (т) (/, ft = 1,2, ..., ЛО — нормальные функции, зависящие от
параметра т и удовлетворяющие условию ортогональности, может быть приведена
к системе дифференциальных уравнений с медленно меняющимися
параметрами
^ + со|(х)^ = ^Х,(х,6,х1, ..., xN/xx, ..., %,е) (10.28)
(ft =1.2. .... ЛО.
Система уравнений (10.28), как было показано в § 3, с помощью замены
переменных может быть приведена к системе уравнений в стандартной форме
-^ = еХ(т,6,х), (10.29)
где х, X — точки л-мерного евклидова пространства, п = 2N.
Применяя метод усреднения, можем построить усредненные системы
первого, второго и высших приближений для системы уравнений (10.29).
6. Теорема об оценке погрешности т-го
приближения. Приведем формулировку одной из теорем об оценке т-го
приближения на конечном интервале времени, являющуюся аналогом первой
основной теоремы Н. Н. Боголюбова для систем с медленно меняющимися
параметрами. Подробное доказательство этой теоремы можно найти в работах
автора [ИЗ, 130].
142
Итак, пусть для системы (10.29) построена усредненная система т-го
приближения
^p- = eX(m)(x,x(m)). (Ю.ЗО)
Тогда справедлива следующая теорема.
Теорема [1131. Пусть выполняются следующие условия:
1) квадратичные формы (10.24) определенно-положительны на любом
конечном интервале 0 <: т <; L;
2) функции ati (т), Ьц (х), v (т), Xk (т, 6, хъ ..., xN, хъ ..., xN, e)
(i, /, k = 1, 2,..., N) неограниченно дифференцируемы при всех конечных зна*
нениях своих аргументов и достаточно малых е;
3) выражения —^- являются конечными тригонометрическими
полиномами угла 6;
4) на всем интервале 0 < т <: L имеет место неравенство
Аг{т9а9^ХСа + С19 (10.31)
где С иСх — некоторые постоянные и
/Мт, а> t) = м {Х(*> в, a cos (6 + Щ. (10.32)
в
Тогда любому сколь угодно большому L и постоянным М, S, можно
сопоставить такие положительные постоянные е0, Кт, что для всех е (0 <; е <
< е0) на интервале 0 <: / <; — будет выполняться неравенство
\xm)(t)-x(t)\<Km*m, (10.33)
в котором xSm) (0 — решение усредненной системы (10.30), а х (f) — решение
системы (10.29), удовлетворяющее начальным условиям
х{т)(0)^х(0), |*(0)|<Л1.
На доказательстве этой теоремы здесь не останавливаемся. Заметим, что
она может быть значительно улучшена и обобщена на более общие системы с
медленно меняющимися параметрами.
7. Маятник с медленно меняющейся длиной.
В качестве примера рассмотрим колебания математического маятника
постоянной массы (в случае переменной массы дополнительные затруднения не
возникают) при наличии малого затухания, пропорционального первой
степени скорости, и медленного изменения длины 1111]. Обозначая х угол
отклонения маятника qt вертикального положения, g — ускорение силы
тяжести, т — массу маятника, / = I (т) — медленно изменяющуюся длину,
2п — коэффициент трения, получаем дифференциальное уравнение
4г [mP № -w] + 2nW I' W x] + mSl W sin * = °- <10-34)
Для небольших отклонений sin x можем заменить первыми двумя
членами разложения в степенной ряд, после чего уравнение (10.34) можно
записать в виде
4-[т/»(т)-§-] +mgl(x)x = eF(r, x, Щ, (10.35)
143
где формально
eF(T,x,-J-) = ^-^-2«/(x)-g--2e"4r-^ О0'36)
Для того чтобы при составлении уравнений первого и второго
приближений легче было учитывать члены малого порядка, введем обозначения
х = Vlxl9 n = гпк, (10.37)
характеризующие малость амплитуды колебания и трения.
Теперь уравнение (10.35) можно записать в виде
4 [m/2 W Q] + m8l W * = 8/?1 (Т> **> ЧГ • е) • (10-38>
где
^(t.^.^-.e)=^lL^-2n1/(x)^._2en1^Lx1. (10.39)
Приводя уравнение (10.38) к стандартной форме с помощью замены
переменных
Ху = acosib,
dx * , (1(Ш)
—l = — асо (т) sin \|)
и усредняя полученную систему, находим усредненные уравнения
Л "" е т/ (т) ^ 4/ (х) а'
здесь <а(т) = Ут^-
Интегрируя первое уравнение системы (10.41) при начальных значениях
/ = 0, а = а0» получаем выражение для а:
а = аое-»1^Щ\ (,0.42)
Подставляя это значение а во второе уравнение системы (10.41), находим
ф = j(D(T) 1-
t ~
■»М"Ч-%Т
16
Л. (10.43)
Формулы (10.42) и (10.43) дают возможность провести полный анализ
колебаний маятника при медленном изменении длины. Подставляя в них
заданное значение I (т), т = е/, и вычисляя интегралы, можно получить
простые формулы для амплитуды и фазы, которые легко проанализировать.
На анализе их, также как и на построении усредненных уравнений во
втором приближении, останавливаться не будем, отсылая интересующихся к
специальной литературе [130].
144
8. Колебания системы, возбуждаемые силами
инерции неуравновешенной массы. Исследование
таких колебаний приводит к рассмотрению системы уравнений [85]
**- + co2.v = е[-A -$--/i(*) + ?2e2cos6 + ?2esinel,
г , (Ю.44)
-ar = e[Af1(e) + ^-arsine + 94smeji
где со, А, <72, <7з, <74 — постоянные, Мх (6) и /t (x) — известные функции.
Вводя в системе (10.44) новые переменные а, гр, v с помощью формул
х = acosfO-J-il)),
dx
— = —ao)sin(6 + t)»
(10.45)
4T = V>
получаем систему уравнений в стандартной форме (со — v = ea)
da е
dt оГ
da = - {aAo)sin(6 + i|)) —/x [acos(6 + гр)] +
+ <72v2cos6} sin (6 + ♦) + e2 ...,
"7?" = ea--^- {aAo)sin(6 + ф) - fA [a cos (9 + ф)] + (10.46)
+ ^2v2cos 6} cos(9 + yp) + e2 ...,
-^ = e [Afx (v) + <73* sin 6 + <?4 sin 6].
Усредняя правые части в первом приближении, имеем систему
2л
О
-%Г = е [Mi (v) + 4" Wva sin ^J •
Полученная система (10.47) представляет собой систему трех взаимно
связанных уравнений. Исследования, а также численное интегрирование
этой системы проще исходной системы (10.46). Так, например, с помощью
системы (10.47) без затруднений можно исследовать стационарный
резонансный режим рассматриваемого нелинейного вибратора.
Приравнивая правые части системы (10.47) нулю, получаем систему
уравнений для определения стационарных значений а, я|> и v:
h(da + q2v2 sin г|э = 0,
(a) _ v) + F {a) - -§£- cos * = 0, (10.48)
M (v) + ~2~ (?30)va s'n ^ = 0,
10 246 145
где
F(a> = "555"J Macos<e + *))cos(6 + 4)4(6 + +). (10.49)
о
из которой находим уравнение для определения стационарной частоты v:
M(v) — -£-а)2яа = 0, (10.50)
а также выражение для амплитуды стационарных колебаний:
а = , (10.51)
/
4ооа(й)<, — v)2 +
где
(D<, = co + F(a), (10.52)
m, m§, р, г — постоянные параметры вибратора.
9. Адиабатический инвариант. В системах с медленно
меняющимися параметрами рассматриваются величины, называемые
адиабатическими инвариантами. Это величины, которые по законам
классической механики остаются инвариантными при медленных изменениях
параметров. Для истолкования понятия адиабатического инварианта рассмотрим,
согласно М. Борну [20], пример математического маятника с массой /л,
длиной нити /, которая медленно изменяется (укорачивается или удлиняется).
Это изменение нити обуславливает изменение энергии системы W и частоты
со колебаний маятника. Однако можно показать, что для малых колебаний
W
величина — остается постоянной. Сила, натягивающая нить, состоит при
отклонении ср из части силы тяжести mg cos ф и из центробежной силы т/ср2.
Работа, произведенная вследствие одного укорочения нити (или
удлинения, тогда необходимо взять противоположный знак), равна
А = — J mg cos q>dl — J ml'tfdl. (10.53)
Если это укорочение происходит медленно, так, что продолжительность
его процесса не находится ни в какой зависимости от продолжительности
колебания, т. е. чтобы можно было говорить о возможной амплитуде (здесь
вводится такое же предположение о медленной изменяемости параметров
как и обычно вводимые нами ограничения), то можно написать
dA = — mg cos ф dl — mlqfidl, (10.54)
где черта сверху означает усреднение за один период.
Для малых колебаний в формуле (10.54) можем положить cos ф = 1 —
— -^-, после чего dA распадется на части: —mgdl, представляющую собой
работу подъема маятника, и
Ш = [2JL ф2 _ т/ф2) dU (Ю.55)
представляющую собой приобретенную энергию колебания. Средние
значения кинетической и потенциальной энергий колебания маятника равны
146
друг другу и равны половине общей энергии, т. е.
-*--«./У «-"яф. • (10.56)
Сопоставляя правые части выражений (10.55) и (10.56), можем написать
w
2/
dW = — -^dl. (Ю.57)
Но так как частота колебаний со = у -у, имеем
-$—4- (Ю.58)
Сопоставляя уравнения (10.57) и (10.58), находим
Отсюда окончательно получаем
-^ = const. (10.60)
Возвратимся к рассмотренному выше примеру о маятнике с переменной
длиной и покажем, что для него, при отсутствии трения, в первом
приближении сохраняется адиабатический инвариант (10.60).
Действительно, в случае отсутствия трения имеем уравнение
^[m/2(T)^j + mg/(T)sinx== 0, (10.61)
где / (г) — медленно изменяющаяся длина. Решение этого уравнения в
первом приближении —
х = a cost, (10.62)
где а и г|> определяются из усредненной системы
здесь
da 31' (т)
"ЗГ-— 8 4/(х) а*
««-/т^г
(10.63)
Интегрируя первое уравнение системы (10.63), находим
з
—Ш'
(10.64)
Найдем теперь значение общей энергии согласно формуле (10.56), в
которую вместо ф следует подставить значение х согласно формуле (10.62) и
значение а согласно формуле (10.64):
W = mgl (т) ф2 = mgl (т) а2 Е^> = mgl (т) а* Г{Ш * -±- . (Ю.65)
10* 147
Подставляя найденное значение W и значение со (т) в выражение (10.60),
окончательно получаем
з
^_-^ш:_^,т(„)=мм1,
что и требовалось показать.
10. Об одном частном виде систем с медленно
меняющимися параметрами. В рассмотренных выше
системах с медленно меняющимися параметрами мы производили усреднение по
времени /, а медленное время т считали в первом приближении постоянным
(или медленную переменную у полагали постоянной). Учитывая эту
специфику, мы рассматривали приближенные решения на конечном интервале
времени, в течение которого медленно изменяющиеся параметры изменялись
не намного (по сравнению с быстрыми переменными). Так, например, для
системы уравнений в стандартной форме с медленно меняющимися
параметрами вида
-J- = eF(/, б/, х, е) (10.66)
при выполнении некоторых условий, налагаемых на функцию F (/, е/, jc, e),
мы строили усредненное уравнение
-^- = eF(/,e/,|, 0), (10.67)
где
. т
F (/, е/, Ь 0) = lim у- J F (6, в/, g, 0) d9. (10.68)
Усредняя правую часть системы (10.66), полагаем et константой и в
дальнейшем решение рассматриваем на конечном интервале времени /£
е ["• Н
Однако можно указать задачи, для которых интервал времени t£
£ 0, — недостаточно продолжительный для того, чтобы можно было бы
достаточно полно изучить рассматриваемый процесс. С таким явлением
можем встретиться, например, при изучении системы, описываемой уравнением
-|L = G«arf, х), . (10.69)
где функция G (v/, со/, х) периодична по vt и со/ с периодом 2я, v = е-1, а
<о < v. Полагая в уравнении (10.69) vt = г~Ч = tx («быстрое время»),
получаем уравнение типа (10.66)
-|L = eG(/1,co8/1,x). (10.70)
Рассмотрим частный случай системы (10.66) с быстрым и медленным
временем и приведем полученную П. Сетна [2531 теорему, устанавливающую
оценку разности между решением точной системы и частично усредненной на
бесконечном интервале времени.
148
Предположим, что быстрое и медленное время так разделены, что
система уравнений (10.66) может быть представлена в виде
-2Р = ef(t, x) + eg(Btt x), (10.71)
где х — я-мерный вектор, f (/, х) и g (/, х) — непрерывные /г-мерные
вектор-функции, имеющие частные производные по х. Предположим, что
/(/, х) — почти периодическая функция по t равномерно по х в области
х£ G, где G — некоторая область евклидова пространства £п, а функция
g (/, х) — периодическая по е/с периодом 2л.
Основной результат, полученный П. Сетна, состоит в установлении
связи между почти периодическими решениями системы (10.71) и
периодическими решениями соответствующей ей усредненной системы, в которой
усредняется только f (/, х).
Таким образом, рассматриваем частично усредненную систему
-§- = «/в© + «*(^ I) = вФ(в/, Q, (10.72)
где
1 т
MS)-Hm-f \f(t9$dt. (10.73)
Согласно приведенной ниже теореме, существование и свойства
устойчивости периодических решений уравнения (10.72) определяют
существование и свойства устойчивости почти периодических решений системы
уравнений (10.71) и, более того, почти периодические решения системы
уравнений (10.71) приближаются к периодическим решениям системы (10.72)
при е -> 0.
Теорема [253]. Пусть для системы уравнений (10.71) выполняются
приведенные выше условия и £* (et)—периодическое решение уравнения
(10.72) с периодом 2л по т = е/, которое вместе со своей ^-окрестностью
лежит в G, — оо < / < со.
Пусть, далее, уравнение в вариациях, составленное для системы (10.72)
и решения £* (т), /п. е. уравнение
-1ЙГ = Фб(т,6*<т))66, (10.74)
не имеет чисто мнимых характеристических показателей.
Тогда найдутся такие положительные постоянные е1э о (0 < а <; р),
что для каждого 0 < е <; ех существует единственное почти периодическое
решение х* (/, е) системы уравнений (10.71), удовлетворяющее неравенству
|**(Лв)-6*(в0|<а (10.75)
для — со < t < со. Это решение непрерывно по г и для него имеем:
a) lim|jc*(/, 8) — g*(e/)| = 0.
е-*0
б) Свойства устойчивости х* (/, е) по Ляпунову такие же, как и
свойства устойчивости нулевого решения уравнения (10.74).
Доказательство. Справедливость этой теоремы
непосредственно следует из теоремы Дж. Хейла [234] (теорема 13.1, в которой
необходимо сделать незначительное обобщение, положив в уравнении (13.1)
149
A = A (t) — периодической матрице). Для этого нужно показать, что
систему (10.71) можно привести к виду
-^- = A(t)x + q(ttxte)9 (10.76)
где A (f) — непрерывная периодическая п X я-матрица, q (/, jc, e) — почти
периодическая по / равномерно по х функция. Для этого совершим в системе
(10.71) замену
x = y + ew(t9y, е), (10.77)
где w (/, у, е) определяется соотношением'
ТГ-/С *> + Ш - -АС Л е>- (Ю.78)
Нетрудно показать, что всегда можно подобрать такие функции
w(tf у, е) и h(t, у, е) (зная функции /(/, у), удовлетворяющие всем
сформулированным выше условиям), для которых при в -► 0
I Ь /4 4 1 Л I дЛ (/, (/, 8) I Л
|Л(/,0,в)|-*О, ^/ К0>
|»('.У. в) | -*- 0,
dw(t,y,s) I 0
Ф
равномерно по /и г/.
Подставляя значение jc (10.77) в уравнение (10.71), имеем
(/+e^)4- + e^ = eM*H-el/(<,*)-M*/)l +
+ «If (/, # + ew) — f(t, у)) +z\g(et, у + ew)-g(e<, */)|,
(10.79)
или, принимая во внимание соотношение (10.78),
^- = e[/+ew^,e)][/,(y) + A(/.y,e) + g(rf,y) +
+ .^Й.в(|.Л + в4^юЛЛ], (10.80)
где (/х и у2 — точки на линии, соединяющей у и у + ею.
Система (10.80) может быть представлена в виде
-J- = в|/0(у) +g(et, у)] + eh(t9 у, е) + e2F(e/, f, у, е),
или
-^f- - еФ(е/, у) + еА(/, у, е) + e2F(et, t, yt е), (10.81)
где
W*lf.s)-(^ + £). + r(/. + , + A+e^ + .-£).
Пусть |* (ef) — периодическое решение с периодом 2л по е/ уравнения
(10.72).
Подставив в уравнение (10.81)
0«£*(вО + * (10.82)
150
получим
-^- = eA(et)z + е[Ф(е/, g* + z)- Ф(е/, £*) — A(et)z] +
+ еЛ(/, t* + z, е) + e2F(e/, f, £* + z, e), (10.83)
где принято обозначение
A(el) = Q>i(d9l*(*t)).
Система уравнений (10.83) удовлетворяет всем требованиям указанной
теоремы Дж. Хейла, и, применяя к ней упомянутую теорему, можно
убедиться в справедливости доказываемой теоремы.
11. Пример: колебания маятника с
вибрирующей точкой подвеса. Рассмотрим маятник, точка подвеса которого
совершает вертикальные колебания, а на маятник воздействует внешняя
синусоидальная сила и трение [253]. Колебания такого маятника описываются
уравнением
^ + (l + J^bin«7-Fcosarf--=-D^-, (10.84)
где q — угловая координата, отсчитываемая от нижнего положения
равновесия, h (vt) — непрерывная периодическая функция vt с периодом 2я,
характеризующая вертикальные колебания точки подвеса, v = е-1, 0 < е < < 1,
D, F и со — положительные параметры.
Прежде всего следует преобразовать уравнение (10.84) к «стандартному»
виду, т. е. к виду (10.66). Для этого проще всего преобразовать его сначала
к двум уравнениям первого порядка. Для этого рассмотрим гамильтониан
левой части
Н{р, q, t) = 4" [Р2 — 2Р ~2Г sin q ~ hsrf cos2 q
+ (1— cos?)-
— qF cos Ы, (10.85)
где p — обобщенный импульс, соответствующий угловой координате q.
Исходя из гамильтониана (10.85) и правой части уравнения (10.84),
получим систему уравнений, эквивалентную уравнению (10.84),
dq dh .
-2Г = Р ЗГ*'П<7,
-др = — Г— ^"dTCOS(7 + ~2"("5r) sin20 + sin<f —Fcosarfj— (10.86)
— D[p—-drsin?)-
Предположим, что h (vt) = e/ (v/) — величина порядка е и что vt =
= т — быстрое время, т. е. точка подвеса маятника, как и в рассмотренном
ранее случае, совершает колебания с малой амплитудой и высокой
частотой.
Вводя новую независимую переменную т = v/, v = е-1, систему (10.86)
приводим к виду
dq Г dl . Л
lk = E\P-lHsmcl\>
^ = e\pJ^Cosq + ±(ffl^ (10.87)
-Ь eF cos есот.
151
Положим I (т) = A sin хт, где х не зависит от е. В этом случае
система уравнений (10.87)—система типа (10.71). Выражения в
квадратных скобках являются периодическими по быстрому времени,
слагаемое zF cosecox — по медленному времени.
Усредненные уравнения (по быстрому времени), соответствующие
системе (10.87), имеют вид
dq
-^- = — ef-^- sin? cos ? + s\nq+ D/?] + eFcoscoet.
(10.88)
Исключая из системы уравнений (10.88) р и возвращаясь обратно к
переменной /, получаем усредненное уравнение второго порядка
"S" + °-Щ-+(1 + "Г" cos ч) sin ? = F cos «*• (Ю.89)
Согласно теореме, доказанной в предыдущем пункте, почти периодические
решения точного уравнения (10.84) с течением времени приближаются к
периодическим решениям усредненного уравнения (10.89) при е достаточно
малом, т. е. при условии высокой частоты вибрации точки подвеса и малой
амплитуды.
Если в уравнении (10.84) и соответствующем ему усредненном уравнении
(10.89) положить F = 0, то придем к подробно рассмотренной в § 5 задаче
о маятнике с вибрирующей точкой подвеса.
Если F Ф 0, предполагая, что F — величина порядка |ы, где \л — малый
параметр, a D — величина нулевого порядка по |ы, можно показать, что
уравнение (10.89) в окрестности q = 0 и q = я имеет устойчивые периодические
решения с периодом —-.
Таким образом, рассматриваемый маятник имеет устойчивые
квазипериодические движения с частотным базисом о) и vx в окрестности нижнего и
верхнего положений равновесия.
§ 11
УСРЕДНЕНИЕ В СИСТЕМАХ,
БЛИЗКИХ К ТОЧНО
ИНТЕГРИРУЮЩИМСЯ
•
1. Постановка задачи. Многие практические задачи теории
колебаний приводят к необходимости рассмотрения нелинейных
дифференциальных уравнений с медленно меняющимися параметрами,
существенно отличающихся от линейных дифференциальных уравнений. Для таких
уравнений в общем случае не существует сколько-нибудь общих эффективных
методов для построения приближенных решений даже в случае колебаний
системы с одной степенью свободы.
Однако во многих случаях мы встречаемся с нелинейными
дифференциальными уравнениями, содержащими медленно меняющиеся параметры и
зависящими от малого параметра е таким образом, что при нулевом значении
последнего они обращаются в дифференциальные уравнения, хотя и
нелинейные, но обладающие рядом свойств, облегчающих разработку специальных
методов построения приближенных решений для исходного уравнения при
е Ф 0 и х = е/. Из таких методов, в первую очередь, следует обратиться к
методу усреднения. В связи с этим приведем результаты, полученные в
работах автора [109, 125].
Рассмотрим нелинейное дифференциальное уравнение с медленно
меняющимися параметрами, существенно отличающееся от линейного, но
содержащее малый параметр е таким образом, что при е = 0 и т = const оно
может быть точно проинтегрировано. Пусть это уравнение имеет вид
^ + /(t,x) = 8F(x,x,-^-,e), (11.1)
где, как обычно, е — малый положительный параметр, т = е/ — медленное
время, a F (т, jc, -£, г) — аналитическая функция е, разлагающаяся при
малых значениях параметра е в степенной ряд
Fix, х, -%-, е) = 2 e«Fn (т, х, -§-) , (11.2)
\ ' /1=0 * '
153
коэффициенты которого имеют достаточное число ограниченных
производных для всех конечных значений своих аргументов т, х, -^-.
(Рх
Равенство единице коэффициента перед второй производной -^ в
уравнении (11.1) ни в коем случае не нарушает общности рассмотрения.
Действительно, вместо уравнения (11.1) мы могли бы рассматривать
уравнение
-4r[m^-w\ + fi <*• *) = efi(*> х> -чг> eJ- (1L3)
Предполагая, что для любых т т (т) Ф О, и положив
_1
т
wFl(*'x'^'*)-iir' -тг-в/7(т^-4-'8)- (,М)
это уравнение можно привести к уравнению вида (11.1).
2. Приведение уравнения (11.1) к стандартной
форме. Одновременно с уравнением (11.1) рассмотрим «невозмущенное»
уравнение
-Sr+/(*.*)-О (И.5)
и предположим, что для любых т, принадлежащих интервалу 0 <; т < L,
известно периодическое решение
х = г(т, г|>, а) (г(т, г|> + 2я, а) = г(т, г|>, а)), (11.6)
где
ф = о>(т, а)/ + Ф,
а и ф — две произвольные постоянные, физический смысл которых
совершенно ясен. Параметр а определяет форму и амплитуду колебаний, q> —
начальную фазу колебаний.
Преобразуем уравнение (11.1) к стандартному виду. Для этого введем
новые переменные а и г|э согласно формулам
d;=z(T'*'fl); (.и)
—^- =со(т, а)г^,(т, t|>, а),
гдет = еЛ
Дифференцируя выражения (11.7) и подставляя результат в уравнение
(11.1), учитывая при этом тождество
о)2(т, a)z'v + f(T,z) = 09 (11.8)
получаем систему
, da . ' d\b . v '
(о)2ф)а -^- + coztpt -gp = — со2 (т, а) *р + е {F (т, г, сог^, е) — (сог^т}.
154
Решая систему уравнений (11.9) относительно-^- и -^J-, получаем
систему дифференциальных уравнений, эквивалентную уравнению (11.1):
da в {—F (т, 2, 0)2^, в) ц + (в>4)^, — <ауг^}
dtb , ч , е {F (х, 2, шг' е) га - (юг!)^ + (юг' )^} * • '
Л «2^ — 2^(0)2^
Нетрудно показать, что знаменатель в правых частях полученных
уравнений не зависит от г|э. Действительно, дифференцируя тождество (11.8) по
\|? и по а, находим
g>2z^' + ^(x, z)z,|> = 0, П1 Jn
2(uO)aZ^t + G)%pa + /2 (Т, Z) ta — 0.
Умножая первое тождество (11.11) на га, а второе — на z^> и вычитая
второе из первого, получаем
0)2Z^Za — (02Z^aZ^ — 2(0(daZ^Z^ s= 0, (11.12)
т. е.
■gjr- [(OZaZv — Z^ (d>Z^)a] = 0. (11.13)
Следовательно, выражение таър — z$ (coz^)fl не зависит от г|э, а
зависит только от т и а. Обозначим это выражение через D0 (г, а):
coZflZ^i — z'$ (o)z^)a = D0 (т, a). (11.14)
Введя обозначения
-1- {— F (х, г, cozi, e) z^> + (coz^)izi — (ozi«Zx} = Q>i (т, ф, a, e),
(П.15)
-yr- {F(x, Z, 0)Z^, e)Za—((dZ$)TZa + (0)Z^)aZT} = Ф2 (X, \|), a, 8),
систему уравнений (11.10) представим в стандартной форме
(11.16)
^_ = еФ1(х, ф, а, е),
-^ = о)(т, а) + еФ2(т, гр, а, е).
Согласно разложениям (11.2) и периодичности функции (11.6) по г|>
получаем разложения
оо
Ф, (т, я|>, а, е) = 2 г*Ф)т> (x, i|>, я). (11.17)
го=0
Ф^(т,^,а)= 2 ФГЛх.а)^ О'=1,2), (П.18)
П=—со
где
2я
ФГЛх, а) = 4г$ ФГ»(Т> *» <*)e~'n**l>- (»-19)
155
(11.20)
3. Построение усредненных уравнений. Изложим
метод построения «усредненных» уравнений для системы (11.16). Этог метод
основан на введении замены переменных, в результате которой разделяются
переменные и получаются более простые уравнения вследствие
отбрасывания членов более высокого порядка малости. По своему содержанию он,
как будет видно из дальнейших выкладок, эквивалентен методу усреднения.
Произведем в системе уравнений (11.16) замену переменных по
формулам
а = а1 + ги1(ч, г|)„ ях),
i|> = i|>i + еи2 (х, г^, а,),
где иг (т, г|э, а) и иг (х, а, г|э) определяются следующими выражениями:
«t (т, *, а) - 2 ТЯТГЗГ «"** + ""(Т'а)' (J' 2,)
fi(t, *, а) - 2 \Т5ЙГ5) „vim e + и^> а)-
Функции ы10 (т, а) и и10 (т, а) пока что неизвестны, и выражения для них
в дальнейшем будут определены в зависимости от вида решения (11.6) и от
некоторых дополнительных условий, налагаемых на величину а.
Нетрудно убедиться, что функции (11.21) удовлетворяют соотношениям
°> <т> а> -т5г = ф('0> (т> +• а> - ф'•« <т>а)>
Ш<Т' а)1^= Ф20> <Т' * fl> - Ф^<Т> *> + (1 L22>
+ о>а (т, а) \их (х, \|э, а) — и10 (х, я)|.
Подставляя выражения (11.20) в уравнения (11.16), разрешая получен-
ную систему относительно -rj- и -£4 учитывая при этом соотношения
(11.22), после ряда выкладок находим
-^ = еФ^х, ах) + е2/?1 (х, фь fllf 8),
dib, - ,о> 01.23)
-^ = со (х, я^ + е [соа (х, ах) и10 (х, ях) + Ф\Ь (х, ах)1 + е/?2 (х, гр1э alf e).
Не будем выписывать явные выражения для функций /?х (х, г|э, я, г) и
/?2 (т> i|>, а, е), заметив, что они обладают теми же свойствами, что и
функции (11.17).
Прежде чем переходить к построению и анализу усредненных уравнений,
остановимся на вопросе определения функций и10 (х, я), vl0 (x, а), входящих
в формулы (11.21), которые, ввиду произвольности этих функций, пока что
неоднозначно определяют функции иг (х, г|\ а) и vt (x, г|э, а). Для
однозначности этих функций необходимы некоторые дополнительные условия,
позволяющие определить функции и10 (х, а) и v10 (x, а). Такие условия могут быть
различными, и выбор их существенно зависит от вида решений (11.6)
невозмущенного уравнения и от того, что подразумевается под величиной а.
Рассмотрим конкретный пример введения таких дополнительных
условий и метод определения выражений для функций и10 (х, а) и и10 (х, а).
156
Предположим, что для «невозмущенного» уравнения (11.6) любое
значение решения
z(t) = z[t, o)(x, a)t + ф, а]
(х = const), лежащее между его минимальным значением гт\п и
максимальным 2тах, в течение половины периода колебаний достигается дважды — в
2я
момент времени /ив момент Т — /, где Т = —.——-. Имеем соотношение
z(t) = z(T-t),
выявляющее симметрию колебаний относительно половины периода.
Разложение z (t) в ряд Фурье будет содержать лишь гармоники с
косинусами.
Если, кроме того, максимальное и минимальное отклонения по
абсолютной величине равны между собой, т. е.
то, в дополнение к симметрии по отношению к половине периода, колебания
будут обладать также симметрией по отношению к четверти периода, и в
разложении Фурье для z (t) будут лишь нечетные гармоники косинусов.
Предположим, что а — полная амплитуда основной гармоники
колебания. Тогда разложение Фурье для решения «невозмущенного» уравнения
будет иметь вид
г(т, г|), a) = acos^+ 2 гп(т, а)*"1*, (11.25)
я=±3,±5,...
где
2л
zn(T,a) = -±r$z(x,y,a)e-'n*dq.
О
Введем, далее, некоторые дополнительные условия, дающие возможность
однозначно выбрать функции и10 (х, а) и v10 (х, а). Потребуем, чтобы
полученная после замены (11.20) новая переменная ах тоже была полной
амплитудой основной гармоники колебания с точностью до величин первого
порядка малости включительно. Это условие и даст возможность определить
однозначно неизвестные функции и10 (х, а) и v10 (т, а). Действительно,
подставляя значения а и г|э согласно формулам (11.20) в выражение (11.25),
имеем
г (х, г|>, а) = (а, + гих) cos (^ + е^) + 2 zn (х, ах + гиг) eln (*1+et,° =
я=±3.±б....
= ах cos ^ -f 2 zn (х, ax) ein^ + е I uL cos ^ — сцрх sin ^ +
л==±3,±5,... I
+ 2 \z'na(Ty av)u,+zn(i, al)invl\ein*;\ +г* .... (11.26)
л=±3,±5,... J
Второе слагаемое в правой части выражения (11.26) не содержит первой
гармоники. Поэтому для того, чтобы ах представляло собой полную
амплитуду первой гармоники угла \|), с точностью до величин первого порядка
малости включительно, достаточно отсутствия первой гармоники в выражении
иг cos \|)i — арг sin \|)x 4- 2 \zna (x, ax )ux + zn (x, ax) invj ein*\
rt=±3,±5t...
157
Это условие эквивалентно выполнению равенств
I | иг cos ih — axvL sin ^ + 2 l*™ (x, ^i)a, -f
0 I *-±3.±5....
+ *n (x, <>i) invx\ einHC0S *l d^ = 0. (11.27)
Jsin oh
Подставляя в выражения (11.27) значения ах (т, г|эь ах) и ^ (т, г|5х, а^
согласно формулам (11.21) и производя элементарные преобразования,
находим значения и10 (х, ctj) и и10 (т, dj). Приведем явное выражение лишь для
"ю<*. ei) = - ^d {4 1фи2(^ «d - <-2(*> 0i)l -
—?-1Ф(20)2(х, aj- Ф^2(т, «Д + ^l^L[Oi?L2(x, о,)-Ф»(т. al}] +
оо
+ 2 2 fi ф'°" (т. <*i> (?;_«.„ (т. ax) + zl,_.„ (т, aj) +
/2=—оо L
Я*±1
+ 4" Ф<2°>Л^ ai)((J - «)21-и(х, ad — (1 + л)г_1_я(т, ad) —
,ДХ) «* -я)*|-(х. aj- (1 + *)z-i-»(x, аЦ. (11.
28)
Для построения второго приближения в системе уравнений (11.23) опять
совершаем замену переменных типа (11.20), вводим новые переменные а2,
ty2 согласно формулам
ах = а2 + г2и2 (т, г|э2, ad, п 2Q)
♦i = ♦■ + A>i(*. Ц2> <*2)>
где а2(х, г|52, а^ и 02 (т, г|>2, ad определяются выражениями (11.21), в
которых вместо Фх (х, гр, а, е) и Ф2 (т, г|>, а, е) должны быть подставлены
функции Rx (т, г|э, а, е) и /?2 (т, гр, а, е) и значения неизвестных функций
а20 (т, а) и и20 (т, а). При этом для однозначности замены переменных (11.29)
опять прибегаем к приведенным выше рассуждениям, дающим возможность
определить ц20 (т, а) и v20 (т, а).
4. Уравнения первого приближения. Порядок
погрешности. Остановимся на интегрировании системы уравнений
(11.23) и порядке погрешности, получаемой в результате отбрасывания
некоторых слагаемых в правой части этой системы.
Пренебрегая в уравнениях (11.23) слагаемыми второго порядка малости,
получаем систему уравнений
■£-e<D»(T.ad.
-^- = (о (т, ad + е [(да (т, ах) иго (т, аг) + Ф£о(х, aj].
Система (11.30), как и полученные ранее уравнения первого (или
второго) приближения, в общем случае не интегрируется в замкнутом виде, и
поэтому ее приходится интегрировать численно.
158
Интегрируя первое уравнение системы (11.30) на интервале 0 <С / <: —
(можем рассматривать данную систему в общем случае лишь на конечном
интервале, так как х £ [0, L1), получаем значение ах с погрешностью
порядка е. Подставляя найденное значение аг во второе уравнение системы (11.30)
и интегрируя ее на интервале 0 <; /<;—, благодаря тому, что в правую
часть этого уравнения входит слагаемое со (т, ах), не являющееся малой
величиной, получим конечную погрешность для фазы колебания г|э. Подставляя
найденные таким образом значения а = ах (г|э) и гр = я|>х (/) в выражение
(11.6), получаем выражение
*i = *(e*.iM0. МО),
вообще говоря, отличающееся от истинного значения х на величины
конечного порядка.
Однако в большинстве практически важных случаев достаточно
определить величину ах и частоту колебания со (т, ях), фаза же колебания часто
нас не интересует (фаза колебания играет существенную роль при наличии
внешних периодических сил, при резонансе, на чем подробно остановимся
ниже). Поэтому при решении многих практических задач вполне достаточно
ограничиться численным интегрированием системы (11.30).
Если же мы хотим вычислить, с точностью до величин порядка е
включительно, не только величину aY и частоту колебаний о) (т, aj, но и сами
значения jc, to необходимо рассматривать систему уравнений
^ = еФ(10^т,а1) + 8^10|)(т,а1),
-^ = со (т, ах) + е \(да (х, aj ul0 (х, аг) + <1>2?о (х, а^\%
получающуюся в результате сохранения в первом уравнении усредненных
слагаемых второго порядка малости.
Для составления усредненных уравнений предполагалось, что уравнение
«невозмущенного» движения (11.5) имеет периодическое решение (11.6),
содержащее две произвольные постоянные а и \|э. Зная это периодическое
решение, уравнения (11.1) преобразовывали к «стандартной» форме (11.16).
В дальнейшем для получения усредненных уравнений предполагалось, что
а представляет собой амплитуду и, кроме того, что колебания симметричны.
Ниже покажем, что многими из указанных выше ограничений
можно пренебрегать и составлять уравнения типа (11.30) не для амплитуды
основной гармоники, а для максимального и минимального отклонений
колеблющейся величины, исходя непосредственно из вида функций / (х, х) и
F\xy х, -jg-f ej, характеризующих уравнение (11.1).
Прежде всего, следуя работе автора [125], рассмотрим случай, когда
величина а характеризует максимальное отклонение а = хтах и, кроме того,
колебания, определяемые «невозмущенным» уравнением, симметричны, т. е.
Покажем, что уравнения первого приближения (11.30) могут быть
приведены к такому виду, когда правая часть совершенно не зависит от решения
«невозмущенного» уравнения (11.5) и выражается непосредственно через
функции /(х, х) и F (х, jc, -£9 е), характеризующие уравнение (11.1).
159
Действительно, первое уравнение системы (11.30) согласно
обозначению (11.15) можно записать в виде
2я
~7*Г = глВок a) J {— F (т'' z' ***** 0) z* + (шг*)**Ф — G>4'2i} <ty, (11.32)
где
Рассмотрим уравнение «невозмущенного» движения (11.5)
-3^ + /(х,х) = 0.
где т — постоянный параметр.
Обозначим V (х, jc) потенциальную энергию «невозмущенной» системы
<П.5),
х
V(T,*) = j'/(T, x)dx. (11.33)
Уравнение живых сил можем написать в виде
-Т(-ЗГ)2+ У^> X) = V(*> *»*) = *. (П.34)
где£ — полная энергия, являющаяся произвольной постоянной интеграции.
Из соотношения (11.34) имеем
("75"/ = 2 W(T> х™*> - V <т' *И- (J135)
Отсюда находим
J*- = сог; = К2 [К (т, хтах) — V (х, х)]. (11.36)
Согласно выражению (11.34),
0)2 4-(-^)2+^ *)=v^*—)• eL3?)
Дифференцируя пох выражение (11.37), находим
со^о) (z^)2 + со2г^4 + vz (Т> г) zx + V'x (х, г) = */х' (т, *тах).
Согласно равенству
К (х, г) = / (х, г) = — со%2,
окончательно получаем
(о)гф)тгф - югфЛт = т ^ ^—-. (11.38)
На основании соотношений (11.36) и (11.38) для интеграла, стоящего в
правой части уравнения (11.32), имеем
2* /
\ {— F (х, z, сог^9 0) г* + ((oz^)xz^ — (oz^z%) d\|) =
о
160
*тах
= j [F(%, z, V2[V(x,xmaK)-V(x,z)\, e) —
~"**max
-f (x,«, -i/2i.(r, ^-^ „,, о,+v^';:,t J-^iH-
(11.39)
Перейдем к преобразованию выражения для D0 (х, а). Предположим,
что х достигает максимального значения при яр = 0. Это предположение
не нарушает общности, так как если бы х достигало максимального
значения при некотором значении г|э = г|э, то выражение для D0 (т, а) мы
вычислили бы при значении г|? = -ф.
Итак, пусть
г(т, 0, а) = хтах = а. (11.40)
Принимая во внимание соотношения (11.5), (11.39) и (11.36), имеем
2ф« |ф=0 = — ^2" Vz (t» *max)> Z$ |ф=0 = 0, Za |ф=0 = 1»
и, следовательно,
D0{Tt *max) = — Кг(Т, Лтах). (П.41)
Подставляя значения (11.41) и (11.39) в правую часть уравнения (11.32),
получаем преобразованное уравнение в виде
а
ТГ = 1^-Г I К * " K2lV(x,a)-^,*)l. 0)-
2 —а
-F(TtztV2\V(x9a)-V(Ttz)lO)-2 J^\a)^^^}dz. (11.42)
V2[V(t, a) — V(x, г)] J
Очевидно, правая часть полученного уравнения (11.42) содержит только
известные функции / (х, *), F (х, ,, *, о) и для составления этого уравнения
не надо, как в ранее рассмотренном случае, предполагать известным
решение «невозмущенного» уравнения (11.5).
Проведя аналогичные, однако несколько более сложные выкладки,
таким же образом можем преобразовать и второе уравнение системы (11.30),
определяющее фазу колебаний, а также уравнения высших приближений.
5. Построение огибающих для амплитуд
колебаний, описываемых уравнением (11.1). Приведем, минуя
выкладки, имеющиеся в работах [28, 29), некоторые результаты,
полученные В. М. Волосовым, с помощью которых можно строить огибающие
амплитуд колебаний, описываемых дифференциальным уравнением типа (11.1),
исходя непосредственно из выражений для функций f (т, х) и F (т, jc, -^-, е)
и нетребуя явного выражения для периодического решения «невозмущенного»
уравнения (11.5).
Сущность метода заключается в том, что находятся так называемые
амплитудные кривые Fx (т) > 0 и F2 (т) > 0, на которые опираются
максимумы и минимумы колеблющегося решения.
11 246 1б1
Эти амплитудные кривые, согласно [28], связаны соотношением
J /(т, x)dx = 0 (11.43)
и определяются с точностью до величин, дающих погрешность порядка е,
дифференциальным уравнением
4~ / 1т, Рг (х), F2 (х)] = еЛ [т, Ft (x), F2 (х)], (11.44)
где введены обозначения
Si Г Л 1 i Р,Г F, 1 ]
2J/(T,*)d* <fc-U2j/(T,x)d* d*j
2 F" Г ,/ ^
Л(х, Flf F2) = - Д (- 1)*+' f F x, x, (- 1/12 J /(x, x)
dx ,0
(11.45)
d*.
При этом, если для решения уравнения (11.1) заданы начальные
значения х (0) = *0, х (0) = jc0, то начальные значения Fx (0) и F2 (0)
определяются формулами
2 I /(0, x)dx= хо,
*. (11.46)
sign Fk (0) = sign(- l)ft+1 {k = 1, 2).
Для определения периода колебаний Т (времени между двумя соседними
максимумами или минимумами) с точностью до величин, дающих
погрешность порядка е, получаем формулу
2 fk«f Fk<-° I '
7\(t) = 2 2i(-1)*+I j 2 J /(x,x)d* d.v, (11.47)
справедливую на интервале 0 <: x <; L.
6. Пример уравнения, близкого к точно
интегрирующемуся. В качестве конкретного примера рассмотрим
крутильные колебания вала, несущего
на концах изменяющиеся со
временем массы (рис. 4). Предположим, что
момент инерции вала мал по
сравнению с моментами инерции вращаю-
М
М(х)к
#
tg<x=K
—х
Рис. 4
Рис. 5
162
щихся масс. В этом случае при составлении уравнений можем пренебречь
массой самого вала.
Обозначим ?х (т) и 72 (т) моменты инерции вращающихся масс, а фх и
ф2 — соответственно углы поворота этих масс. Пусть М (х), где х = ф2 —
— ф2 — крутящий момент упругой связи (например, упругой муфты),
зависящий от угла скручивания. Для определенности предположим, что
функция М (х) — ломаная, имеющая вид приведенной на рис. 5, т. е.
М (х) = А + kx, если х > 0, ... «.
М (х) = — Л + kx9 если х < 0;
здесь h и k — постоянные.
Тогда можно написать уравнения
71М-^+Л*(Ф1~ф2) = 0,
^(х)-^- + Л1(ф1-ф2) = 0,
из которых непосредственно находим уравнение крутильных колебаний
*i (х) 72 (т) ■££ + р! (т) + 72 (т)] М (х) = 0. (11.50)
Предположим, что на рассматриваемую колебательную систему также
действует некоторая сила трения, пропорциональная скорости скручивания,
с коэффициентом пропорциональности 2к (х), медленно изменяющимся со
временем. Вводя обозначения
v(x)= У + ^ГС . v(T)Ai(x) = /(T,*)f (11.51)
•Ч (T) J2 (X)
приходим к рассмотрению дифференциального уравнения типа (11.1)
При этом имеем
^ + 2Мт)-£-+/(т,*) = 0. (П.52)
eF /х, х, -^-, е) = — 2Х (х) -^-.
В рассматриваемом случае для уравнения «невозмущенного» движения
(11.53)
(Рх
-щ- + v (т) (ft + kx) = 0, если jc > 0,
^2^ + v (x) (— h + kx) = 0, если х < 0 (х = const),
легко может быть найдено периодическое решение
,_,(,.1,ffl)-aeint+-£- ^ ,«к?«Г Г' (И'-54)
п-8.5.7.... д L!li!Ln»_ft
I V (Т) ]
где
* = (о(х, a)t + ф, (о8(т, с) = v(х)*|l + ^J. (11.55)
11* 163
Воспользовавшись выведенными выше формулами, для а и \|>, с
точностью до величин первого порядка включительно, получаем уравнения (
4Л |f v' (т)
dax
*-**«*
zax
nkax
|V(T)-
2v(t)
]
nka* J*A
I
nkax
n=3.5.7,.
И1+=г)-]
(■+*)'
2е/ш
'-'h"^l
(11.56)
.1 JL
a*2v2
(т) 1 +
Ah
лба*
где ul0(%, аг) должно определяться из условия, чтобы ах являлось полной
амплитудой первой гармоники угла iflf т. е. с помощью формулы (11.28).
Полученные для ах и -фх уравнения (11.56) могут быть сравнительно легко
проинтегрированы. Так, например, полагая для упрощения, что моменты
инерции 7Х и 72 не зависят от т и, следовательно, v = const, X = const,
находим зависимость между ах и /
Ah
\ л£а0/ /1=3.5,7,... \ nkai)
Оо
1
л2
= в
-М
(11.57)
л£а0 / /1=3.5,7,.,
где приняты начальные значения: при / = 0, а = а0.
При Л = 0, т. е. когда уравнение (11.52) вырождается в линейное, из
формулы (11.57), как и следовало ожидать, для амплитуды колебаний
следует известное выражение
ах = а0е
Если моменты инерции, изменяясь со временем, удовлетворяют условию
71(т) = С72(т),
то из первого уравнения системы (11.56) находим:
-и
Ax(ax)
= Г 7*(т)
l^i (0)
Л
где А (ах) обозначает левую часть выражения (11.57).
7. Воздействие внешних -периодических сил
насильно нелинейные системы. Как известно,
исследование резонансных явлений в существенно нелинейных колебательных
системах является трудной и, несмотря на свою важность, недостаточно
изученной проблемой даже в случае колебательной системы с одной степенью
свободы. Приведем лишь некоторые соображения о построении
усредненных уравнений для уравнения типа (11.1), находящегося под воздействием
внешних периодических сил.
Итак, пусть колебательная система описывается дифференциальным
уравнением
7§г + /(т, х) =sf(%, 6, *,-§ , в), (11.58)
164
\
где, как и обычно, е — малый положительный параметр, т = е/ -—
«медленное» время, ^ = v (т), функция F (х, 0, х, -^, ej периодическая по 0 с
периодом 2я и аналитическая по е.
Предположим, что для «невозмущенной» системы
-gL + /(x,x) = 0, (11.59)
т = const, известно периодическое решение
х = z (т, г|5, а),
г(х, г|> + 2я, а) = г(х, г|>, а), (11.60)
в котором г|э = (о (т, а) £ + ср, а и ф — произвольные постоянные, х —
некоторый постоянный параметр.
При исследовании уравнения (11.58) могут представиться два случая:
1) «нерезонансный», когда ни при каких значениях х и а не выполняются
соотношения вида
v(t)«-J-cd(t, а), (11.61)
гдер и q — целые взаимно простые числа;
2) «резонансный», когда соотношение (11.61) выполняется при
некоторых значениях т и а.
В «нерезонансном» случае с помощью замены переменных согласно
формулам
x = z(it \|?, а),
dx x > (11.62)
^-=со(т, a)z^(xy \|э, а)
уравнение (11.58) приводим к системе в «стандартной» форме
^ = еФ1(т,0,г|5,а,8), (И63)
^ = со (т, а) + еФ2 (т, 0, г|>, а, е),
где функции Фх (х, 0, г|>, я, е) и Ф2 (т, 0, г|э, а, е) периодические по 0 и
г|э и обладают некоторыми свойствами, аналогичными свойствам функций
(11.17).
С помощью преобразования
а = ах + But (х, 0, ф1э ах), j
'ф = \|?1 + 8и1(т, 0, ф1э ах),
где функции f/x (т, 0, i|>lt я^) и их (х, 0, yfplt ax) строятся по известным функциям
Фх (т, 0, гр, а, е) и Ф2 (х, 0, г|>, а, е), преобразуем систему уравнений (11.63)
к системе
-Jr = еФ(^,о(т, ах) + e2/?2 (т, 0, г^, ах, е), (11.65)
-^- = а>(х, ах) + г {Ф(2°|).о(т, ах) + Мх, аг) и10(х, а^) + е2/?2(х, 0, г^, ах, е).
Пренебрегая в уравнениях (11.65) слагаемыми, пропорциональными
е2, получаем систему типа (11.30). Продолжая процесс введения
последовательных замен вида (11.64), можем построить следующие приближения.
165
(11.68)
В «резонансном» случае (для упрощения в случае главного резонанса
р = q = 1) в уравнении (11.58) вводим новые переменные а и О с помощью
формул
х = г(т, 9 + 0, а),
dx * О1-66)
-g- = о)(т, а)гф(т, О + О, а) (г|> = 6 + О),
получаемых в результате подстановки в формулы (11.62) вместо г|э суммы
9 + 0.
Произведя преобразования, получаем систему в «стандартной» форме
■^- = еФ1(т, 9, 9 + 0, а, е),
^ = ю(т,а)-г(т) + еФ2(т, 9, 9+0, а, е). (1L67)
Эта система с помощью замены переменных согласно формулам
а = аг + гих (т, 9, 9 + Ог, ах),
0 = 01 + 8i;1(x, 9, 9 + Оь ах),
приводится к виду
^ - еФ{0)(т, 0lf аО + е2/?!(т, 9, 9 + Оь аь в), {ХХщ
5*- = © (т, аЛ - v (т) + еф£0) (т, Ох, ах) + е2£2 (т, 9, 9 + 0lf а„ е).
8. Интеграл действия. Рассмотрим вопрос о существовании
адиабатического инварианта для колебательной системы с медленно
меняющимися параметрами, описываемой невозмущенным >равнением (11. 5).
Нетрудно показать, что адиабатическим инвариантом для этого уравнения
является функция
7 (т, а) = -^- J со (т, а) г'ъ (т, г|), a) dap, (11.70)
о
где г (т, гр, а) — периодические решения невозмущенного уравнения (11.5)
с периодом 2л.
Функция (11.70) называется интегралом действия.
При т = const а — постоянная величина, и, следовательно, 7 (т, а) —
также постоянная величина.
Покажем, что при т и а, медленно изменяющихся, 7 (т, а) будет
оставаться величиной постоянной.
Для этого найдем полную производную по времени от 7 (т, а):
ЛЪ4_ = 7'q(t a)a + ejx{Xi a). (11.71)
dt
Вычисляя частные производные 7„ (т, а), 7Х (т, я) и подставляя их
значения в выражение (11.71), получаем
Л%а) = -5Г j" К** + 2ю*Ц«> *|> + -£- j (а*£ + 2а>г^) rf*. (11.72)
о о
166
Преобразуем второе слагаемое в первом интеграле выражения (11.72),
Интегрируя по частям, находим
2л 2я
О О
Однако, согласно выражению (11.6), z^zj^o1 = 0, следовательно,
2я 2я
j Z^Za^d^ = — J Z^Zadfy
О О
и первый интеграл, входящий в правую часть выражения (11.72), можем
представить в виде
2я
?i (т> я) = -^- J (aw + 2(ог^гаф) d* =
о
2я
= -^- j {o)a2^2 — о) (г^га — г^аф)} dip.
6
Принимая во внимание обозначения (11.14), находим
^(х, а) = ^ J D0(x, а)Л|э = — aD(x, a). (11.73)
о
Аналогично проводим вычисление второго интеграла в выражении
(11.72). Имеем
2я
72 (т, а) = -^- \ (&'xzv + 2(dZ^a) dty =
о
2я
= -gj- I (coxZ^t — (dzwz'x + сог^г^х) А|>. (11.74)
о
Сопоставляя правую часть выражения (11.74) с первым уравнением
системы (11.10), получаем
2л
72 (х, а) = dD (т, а) + 2л/^т> д) ] F (т, г, coz^, е) г^г|). (11.75)
о
Подставляя значения 7Х (х, а) и 72 (х, а) согласно формулам (11.73) и
(11.75) в правую часть выражения (11.72) и учитывая, что в
рассматриваемом случае F (х, z, юг^,, е) = 0, получаем
Отсюда
7 (т, а) = const, (11.76)
что и требовалось показать.
В качестве простого примера,* иллюстрирующего применимость
адиабатического инварианта, рассмотрим уравнение колебаний системы с одной
167
степенью свободы с медленно меняющейся жесткостью:
&Ч
-^r + c(x)jc=0, (11.77)
гдет = е/, е > 0 — малый параметр.
Имеем (о (т) = Ус (т), г (т, г|э, а) = асоэгр, г^ (т, г|э, а) = -— asin\|>.
Подставляя эти значения в правую часть выражения (11.70), находим
2я 2я
•3 (т, а) = 4т j «*♦** = iSr j" ^^Й) a2 sin2 ф*|> = ^М^ .(11.78)
о о
На основании изложенного выше, 7 (т, а) = const, следовательно,
const
аяжТтш' <1179>
Формула (11.79) характеризует закон изменения амплитуды колебаний а
в зависимости от закона медленного изменения жесткости системы.
Амплитуда медленно изменяется обратно пропорционально корню четвертой
степени из с (е/).
Этот же результат мы получили, рассматривая уравнение (10.10),
полагая в нем т (т) = 1 и Fx (т, х) = 0 (см. выражение (10.16)):
/й) (8/)
где со(е<) = Ус(г1).
!
§ 12
УСРЕДНЕНИЕ В СИСТЕМАХ
УРАВНЕНИИ С МАЛЫМИ ПАРАМЕТРАМИ
ПРИ ВЫСШИХ ПРОИЗВОДНЫХ
1. Постановка задачи. Остановимся на некоторых наиболее
важных результатах, относящихся к распространению метода усреднения на
системы обыкновенных дифференциальных уравнений с малым параметром
при высших производных.
Рассмотрим систему дифференциальных уравнений
z-jT = f(x>y)>
d (12Л)
rff-= £(*>#)>
где х = (х1у х2, ..», xk), у = (ylt y2t..., yt) — k- и /-мерные векторы k + I = я-мер-
ного евклидова пространства £n, e — малый положительный параметр,
/ (*» У) и g (x, у) — к- и /-мерные вектор-функции, обладающие некоторыми
необходимыми свойствами.
Переменные х и у в системе уравнений (12.1) не равноправны: вектор v
фазовой скорости в пространстве Еп распадается на два вектора:
v = (-^f(x,y),g(x>y))> (12.2)
причем второй из них — g (xf у) — не зависит от е, а первый —- f(x, у) —
стремится к бесконечности при е -> 0, если только/ (х, у) Ф 0. Поэтому
переменные х естественно называть быстро меняющимися, а переменные у —
медленно меняющимися.
Такая классификация совершенно очевидно следует из терминологии,
принятой в § 10. Действительно, совершим в системе уравнений (12.1)
замену переменной t на т согласно формуле / = ет. Получим систему
d (I23)
169
совпадающую с ранее рассмотренными системами с медленно меняющимися
параметрами (медленно меняющийся параметр здесь у).
Таким образом, система уравнений (12.1) с малым параметром при
высших производных может быть сведена к уравнениям .(12.3) с медленно
меняющимися параметрами, и для решения последних можно воспользоваться
методами, изложенными в § 10.
Однако системы дифференциальных уравнений (12.1) играют большую
роль именно в форме записи с малыми параметрами при высших
производных, что отражает физическую сущность многих актуальных задач,
связанных, в основном, с проблемами радиотехники и наличием так называемых
паразитных параметров. Поэтому целесообразно рассматривать систему
уравнений в приведенной записи (12.1), тем более что для такой записи
получены интересные и важные результаты.
2. Основной подход к изучению системы (12.1).
Основной подход к изучению системы (12.1), как и в § 10, заключается в том,
что мы начинаем с рассмотрения быстро меняющихся переменных (быстрых
движений) при постоянных значениях медленно меняющихся.
Предположим, что при любом у£ G, где G — область изменения у,
система уравнений
■ЯГ = /(*.*). If-const, (12.4)
описывающих быстрые движения, имеет устойчивое изолированное
периодическое решение
x = x°(t,y) (12.5)
с периодом Т (у) . В этом случае система уравнений в вариациях,
составленная для решения (12.5)
^ = Ы*°(т,#)]6* (12.6)
для любых у £ G обладает k — 1 характеристическими показателями с
отрицательной действительной частью (один характеристический показатель
равен нулю вследствие периодичности решения системы уравнений (12.4)
х° (т, у)).
Предположим, что при любых y£G функция Т (у) > 0 и ограничена
и что функции / (*, у) и g (jc, у), стоящие в правых частях системы уравнений
(12.1), дважды непрерывно дифференцируемы по jc, у в некоторой открытой
области Г £ Еп (проекция области Г на пространство переменных у и есть
G). При выполнении всех этих условий функция Т (у) оказывается гладкой.
Введем в рассмотрение усредненную систему
& = Ш, (12.7)
где
Т(у) J
и при интегрировании предполагается, что у = const.
Обозначим через х (/, е) и у (/, е) решения системы (12.1) при
начальных значениях х (0, е) = jc0, у (0, е) = у0, х0, у0£ Г, через х (т ) — решение
системы (12.4) с начальным значением х (0) = х0 и параметром у0, а через
170
у (f) — решение усредненной системы (12.7) с начальным значением # (0) =
= у0. Предположим, что у (t)£G при 0<;/<;L< °°, а у (t) £ D строго
внутри D при 0 < t < L, где D — компактная подобласть области G.
При этих предположениях Л. С. Понтрягин и Л. В. Родыгин [157]
сформулировали и доказали теорему, устанавливающую оценки для разностей
между решениями точной системы (12.1) х (/, е), у (/, е) и усредненной
системы (12.7) х (т, у), у (t) на конечном интервале времени.
3. Теорема об усреднении. Приведем формулировку и
доказательство теоремы, устанавливающей указанную оценку, согласно ее
авторам.
Теорема [1571. Существует гладко зависящая от t функция ср (t, e)
(«фаза»), такая, что если б > 0, то при б <; t <; L справедливы равномерно
по t соотношения
г^--тш = 0{е)* <12-9)
|x(/,e)-x(cp(/, e), y(t))\ = 0(e), (12.10)
\y(t,e)-y(t)\ = 0(e)t (12.11)
где _
*(Ф(*. *),y(t)) = x°(T(y(t))<p(t, 8),у(/)).
Таким образом, согласно этой теореме на интервале б <; /<: L y(t)
близко к усредненному решению у (/), ах (t, г) остается вблизи циклов
х = х? (Т (у (/)) ф (/, е), у (/)), совершая при этом быстрые колебания вдоль
них с периодом, близким к гТ (у (/)).
Доказательства Преобразуем систему уравнений (12.1).
Для этого, как обычно, воспользуемся выражением
8х=жио+А(ш'у)и' (1212)
где и0 — скаляр, и — вектор с k — 1 компонентами, А (ф, у) — матрица с
k строками и k — 1 столбцами, имеющая по ф период 1.
Таким преобразованием систему уравнений в вариациях (12.6) приведем
к виду
dx u'
d ( \ (12ЛЗ)
T? = H\TW'y)u'
где Н (ф, у) = Н (ф + 1, у) — квадратная матрица k — 1-го порядка,
причем характеристические показатели системы
£ = Ни (12.14)
совпадают с характеристическими показателями системы уравнений в
вариациях (12.6). Поэтому существует функция Ляпунова W [fry* u> У],
квадратичная поиис периодом по —^г-равным 1, полная производная которой по
171
т, на основании системы уравнений (12.13),
*L<_aU7 (a>0). (12.15)
Функцию W всегда можно подобрать так, чтобы ее коэффициенты были
гладкими функциями своих аргументов и выполнялись неравенства
д<р
&VW<\u\<hVW (р3>0).
Заметим, что pf (i = 1, 2, 3, 4) и а в неравенстве (12.15) можно выбрать
одними и теми же для всех y£D.
Произведем в системе (12.1) замену переменных согласно формулам
х = х(ч,у) + А(у,у)и. (12.17)
Вместо уравнений (12.1) получим эквивалентную систему
fi<w
£|<p.v*. (12Л6)
8J^ = ^+ 0<8+ !"!>•
Т(у)
г^- = Н(<р,у)и + 0(г+\и2\), (12.18)
е§- = £[*(Ф,#),#] + 0(е+М).
Вычислим полную производную функции Ляпунова W (<р, и, у) по / на
основании системы уравнений (12.18). Можно показать, что всегда имеются
такие г19 Съ С2 > 0, что при е < еь Схе2 < W <: С2 справедливо
неравенство
е-^<-а1В7 (а1>0). (12.19)
Согласно неравенству (12.19), очевидно, что поверхность W = С (Cte2 <:
<; С <С Сд) является поверхностью без контакта для системы уравнений
(12.18) и, следовательно, если решение этой системы попадает в момент / =
= t\B на поверхность W = С2, то пока оно лежит в области Схг2 <; W <: С2,
справедливо неравенство
№(ф(', 8), U(t, 8), (/(/, 8))<^(ф(/1в, 8), u(tle, 8), */(/,е, 8)) в * <
a
<С2е е . (12.20)
Согласно неравенству (12.20), через время fee = О (elne) ^обратится в
Сгг2, и решение, таким образом, попадет внутрь поверхности W = Qe2
и уже не сможет выйти из нее до тех пор, пока у £ D.
Если решение системы (12.4) попадает за время tx внутрь поверхности
W = -2>С2, то при достаточно малых е решение системы (12.3) заведомо
попадет внутрь поверхности W = С2 за время /, так как txz < e/1#
Анализируя неравенства (12.16), видим, что при е/х < / < t2e будет |ы|<
yt
< С3 ехр (— ^(t — etx) )< С4е e (Y > 0), а при / > fae I и| < СБе до тех
пор, пока у (/, е) £ D, а j/ (0, е) лежит строго внутри области D и скорость
172
изменения у (/, е) конечна, так что у (/, е) может выйти из D лишь за
время te = О (1). Положим С = min (tBt L), тогда, согласно изложенному,
при е/х <: / < /g получим
|Ы(/,е)|<С/^+С5е. ^-21>
Оценим разность \у (/, е) — #(/)| на интервале е^ < *< £.
Удобнее оценить на этом же интервале величину х\ (/, е) = у (/, е) — у (/) —
— 7 (t, e), где
Ф (/.8)
l(t,z) = sT(y(t,e)) j" {г[*(ф,]/(О),0(О]-£Ы<))}<*ф. (12.22)
О
Итак, если покажем, что на интервале е/х <; t < £ равномерно
по *|л(*» 8)| = О (е) и 7 (/, е) = О (е), то тем самым докажем
справедливость соотношения (12.11). Равенство J (/, е) = О (е) очевидно, так как
5 С* (ф» J/ (0)» У (0) периодична по ф с периодом 1 и средним значением,
равным g (#(/)). Следовательно, интеграл в правой части формулы (12.22)
порядка О (1). Докажем теперь, что \г\ (/, е) | = О (е).
Дифференцируя г\ (/, е) и принимая во внимание соотношения (12.22) и
третье уравнение системы (12.18), имеем
40, е) = #|*(Ф(/, е), £/(/, е)), */(/, 8)] + 0(| и| + 8) —
- g [У (01 - еГ (У (Л в)) Ф (*, е) {£ [х (Ф (t, е), у (0), у (01 -
Ф (*.8) Ф (/,8)
-g[ym-eT(y(t,t)) J {g-^dcp-efQ/tf.eflJ {г-£}<*р. (12.23)
о о
Два последних слагаемых в правой части выражения (12.23), очевидно,
порядка О (8).
Далее, произведение
8Г (*/(/, 8» ф(/, 8)= 1+0(8 + |и|),
согласно первому уравнению системы (12.18).
Следовательно,
Mt9B)^g\x{4>(ttE)ty(tiB))ty(tte))-g[x^(t9B)ty(t))t'y(t)] + 0(E +\и\).
Поскольку g [x (ф, у), у\ гладко зависит от у и, как показано выше, у (/, е) —
— ~У (0 = Л ('» е) + О (е) (так как7 (t, e) = О (&)), то при &tx ^ t < £
имеем \ц (/, е) | < В \г\ (/, ej | + О (е + |и\), или, воспользовавшись
неравенством (12.21),
|Л(/, 8)|<А|л(Л е)| + Свее + С78. (12.24)
При этом, очевидно, In (e/lt e) | = О (е).
Как известно, из неравенства (12.24) на интервале е/х <; / < /е следует
оценка
1п('.е)|<6(/,е), (12.25)
при этом £(*, е) = B%(t, г) + Cffi e + С7е, £(е^, е) = т|(е/1э е).
Определяя I (/, е), находим £ (/, е) = О (г) на интервале е^ < t < /р.
173
Согласно неравенствам (12.11), (12.21) и системе (12.18), очевидна
справедливость соотношений (12.9) и (12.10) на интервале е/ <; / < t\. Остается
показать, что te = L, но это очевидно. Если при /£ [0, L] у (t) отстоит от
границы области D не менее, чем на d (d> 0), и если бы было С = tB < L,
то для достаточно малых е при t£ Ыъ te] было бы | у (/, е) — у (t) \ < -у'
т. е. мы получили, что у (te, e) лежит в D и отстоит от границы области D не
менее, чем на -у, а следовательно, у (/, е) еще не выходит из D за время te.
4. Усреднение при наличии быстроколеблю-
щихся внешних сил. Рассмотрим систему нелинейных
дифференциальных уравнений с малым параметром при некоторых производных
$f = g(x,y, t,t),
где ет = /, х и / — fe-мерные векторы, у и g — /-мерные векторы k + I =
= n-мерного евклидова пространства £п, вектор-функция g (jc, i/, /, т)
обладает средним по переменной т:
т
lim ±г \g(x, у, t, x)d% = g0(x, у, t). (12.27)
Производя в системе (12.26) замену независимой переменной / на т,
получим
dx
^ = *g(x,y, ет,-т).
(12.28)
Системе (12.28) можем сопоставить частично усредненную по быстроко-
леблющейся переменной т систему *
#-'<**«* (12.29)
•^Г = е£о(*> у, ет).
Системы подобного вида будут нами подробно рассмотрены в следующем
параграфе.
Может быть и иной подход к исследованию системы (12.26).
Предполагая, что выполняется условие (12.27), системе (12.26) сопоставляем
вырожденную и усредненную по аргументу т систему
dy
(12.30)
х = <?(У, t),
-£ = go(x, У, t)
* Здесь, как и в § 10, п. 10 (стр. 148), производим частичное усреднение, в результате
чего получаем систему, содержащую только медленно меняющееся время ет.
174
где вектор-функция <р (у9 i) — корень системы
/<*. y,t)=0. (12.31)
Обозначим буквой А матрицу l-jr) и предположим, что все корни
характеристического уравнения
Det||pi4—£|| = 0 (12.32)
удовлетворяют условию Re [pt (jc, /)} < — а < 0.
При некоторых обычных условиях, налагаемых на правые части системы
(12.26), можно доказать, что при е -* 0 решением/ = у (/, е) этой системы
равномерно по /стремится к решению у = у {t) системы (12.30) [63].
В заключение рассмотрим систему дифференциальных уравнений
s£-f(x9y) + BX(x9y9*)9 (i233)
-jf = Y(x9 y9 е),
где х = (х19 ..., хп)9 у = (у19 ..., ут)— векторы. Для такой системы можно
ввести усредненные уравнения, приближенно описывающие изменение
медленно изменяющихся переменных у9 и показать, что при е -* 0 у (t9 e),
определенные из системы (12.33), сходятся к решениям усредненной системы.
Эта сходимость характеризуется как «сходимость по мере начальных
значений». Подробное доказательство этого результата читатель может найти
в работе Д. В. Аносова [6].
§ 13
УСРЕДНЕНИЕ В СИСТЕМАХ,
СОДЕРЖАЩИХ МЕДЛЕННЫЕ
И БЫСТРЫЕ ДВИЖЕНИЯ
1. Общая постановка задачи. В предыдущих параграфах
подробно изложены основанные на усреднении методы построения
приближенных решений для уравнений в стандартной форме, уравнений с
медленно меняющимися параметрами, уравнений с быстровращающейся фазой.
Однако при решении многих задач, связанных с исследованием
колебательных процессов, мы приходим к необходимости рассматривать системы,
в которых лишь часть уравнений может быть приведена к стандартной
форме. Так, например, к таким системам приходим в случае, когда в
рассматриваемой колебательной системе некоторые элементы совершают
быстрые движения, а иные — медленные.
И вот, базируясь на идеях Н. Н. Боголюбова об усреднении уравнений в
стандартной форме и на развитии этих идей для уравнений с медленно
меняющимися параметрами, а также уравнений с быстро вращающейся фазой,
В. М. Волосов [28, 29] разработал общую схему усреднения для систем
дифференциальных уравнений, содержащих многомерные медленные и
быстрые движения, вида
-£ =X(t, ху */, е),
ш (13.1)
-£ =-еУ(*, *, у, е),
где jc, у — соответственно /с-и m-мерные векторы я-мерного евклидова
пространства En(k + т = я), X (/, х, у, е) и Y (/, jc, у, е) —соответственно
£- и m-мерные вектор-функции, е — малый положительный параметр; у —
медленные переменные, ах — быстрые.
Разлагая правые части системы (13.1) в ряд по степеням малого
параметра е, запишем ее в виде
-J- = X0(t, х, у) + еХх(/, х, у) + е2. ..,
(13.2)
-g- = вУг (/, х, у) + 82К2 (/, х, у) + 8»...
176
и одновременно с системой (13.2) будем рассматривать соответствующую
вырожденную, или так называемую невозмущенную, систему
-£- = X0(t, х, у),
й (13.3)
-gjr = 0, у = const,
которую получаем, полагая в уравнениях (13.2) е = 0.
В системе (13.2) переменные у изменяются с малой скоростью еУ\
Влияние быстрых движений х на характер изменения у сводится к тому, что на
малую скорость изменения переменных у еУ накладываются быстрые
воздействия х, поскольку У = Y (t, х, у, е). Допустим, что это влияние
быстрых движений на скорость медленных движений может быть усреднено в
течение длительного промежутка времени, т. е. что вдоль интегральных
кривых быстрых движений существуют средние значения скоростей еУ.
Тогда естественно возникает вопрос о близости решений системы (13.2) к
решениям усредненной системы.
Итак, допустим, что вдоль всякой интегральной кривой х = х (/, у)
(у = const) системы (13.3) существует предел
т
Yx(у) = lim -i- f Y[t,x(t,у), 01 dt. (13.4)
Заметим, что обычно усреднением вдоль интегральной кривой является
просто усреднение по явно входящему времени, а, рассматривая в § 10
систему (10.1) — (10.3), мы усредняли второе уравнение этой системы (10.3) вдоль
интегральной кривой уравнения (10.1), т. е. вдоль х = a cos (0 + -ф).
К решению задачи об усреднении для системы (12.2) существует два
подхода.
Первый подход: так как в системе (12.2) переменные у изменяются
медленно, а переменные х — быстро, влияние переменных х на переменные у
сводится к тому, что на медленные скорости еУ переменных у накладывается
быстрое воздействие переменных jc, поскольку, как уже указывалось, Y =
= У (/, х, у, е). Усредняя это воздействие быстрых движений в течение
длительного промежутка времени, приходим к рассмотрению, вместо второго
уравнения системы (12.1), усредненного уравнения
#-dV . (13.5)
Если правые части уравнения (13.5) зависят только от у и,
следовательно, не зависят от выбора траектории х = х (/, у) невозмущенной системы
(13.3), то такое усреднение дает существенное упрощение задачи, так как
система (13.2) распадается на две независимые системы — £-го и т-го
порядков.
Вопрос об асимптотической аппроксимации решения системы (13.2)
сводится к задаче об аппроксимации с помощью решений усредненной
системы (13.5). При этом решения усредненной системы (13.5) представляют собой
первые приближения для решений (для у) исходной системы (13.2).
В этом подходе существенным ограничением является условие
независимости правой части уравнения (13.5) от выбора траектории
невозмущенной системы (13.3). Однако заметим, что могут быть разработаны методы,
12 246 177
состоящие в специальной замене переменных, с помощью которой общий
случай, при котором среднее (13.4) зависит от траектории невозмущенной
системы (13.3), сводится к приведенному выше.
Этот первый подход более прост и основан на применении к системе
уравнений (13.2) обычных идей метода усреднения.
Второй подход, более общий, заключается в построении высших
приближений для у и для быстрых движений х. Он всецело базируется на идеях
Н. Н. Боголюбова, изложенных в § 4 и § 9, и сводится к построению для всей
системы уравнений (13.2) усредненной системы
-£- = X0(t, х, у) + гАх(у) + г2А2(у) + ...,
- _ (13.6)
%- = *Y1(y)+*2B2(y) + ...,
решения которой должны аппроксимировать ее решения с любой степенью
точности на интервале времени порядка —, а неизвестные пока функции
Аг(у), А2 (у), ..., В2(у), ... должны быть найдены с помощью усреднения
вдоль траектории невозмущенной системы (13.3); Yx (у), как и выше,
определяется выражением (13.4).
Система уравнений (13.6), если ограничиться конечным числом
слагаемых в правых частях, интегрируется проще исходной системы (13.2),
поскольку в ней быстрые и медленные переменные х и у разделяются.
2. Преобразование, разделяющее переменные.
Перейдем к изложению основных результатов В. М. Волосова,
связанных с построением преобразования, переводящего исходную систему (13.2)
к «усредненной» системе с уже разделенными переменными.
Поскольку основным моментом является усреднение вдоль
интегральных кривых х = х (/, у) невозмущенной системы (13.3), в дальнейшем будем
предполагать, что в рассматриваемой области (которая будет в дальнейшем
регламентирована в связи с доказательством теоремы об оценке) существует
и известно общее решение невозмущенной системы (13.3)
* = ф(*. У, *оЛ), О3-7)
где х0 — постоянный ^-мерный вектор, причем q> (/0, у, х0, t0) = x0.
Предположим, что вектор-функция (13.7) имеет достаточное число производных и
что через каждую точку рассматриваемой области переменных х, у, t
проходит единственная интегральная кривая (13.7). Так как функция <р (/, у, х0, t0)
в рассматриваемой области представляет собой общее решение системы
(13.2), то, очевидно, ранг матрицы I-gSL , -^U равен k—числу переменных х
Кроме того, допустим, что для функций (13.7) и функций, стоящих в правых
частях уравнений (13.2), выполняются все необходимые для дальнейших
выкладок условия.
При этих предположениях будем отыскивать замену переменных в виде
х = х + гих (/, х9 ~у) + e2u2(t, х, 'у) + ..., I3 g.
у = #-f ev1(tt x, */) + *2v2(t, *,#) + ...,
где иг (t, jc, у), и2 (<, х, ~у) — ft-мерные вектор-функции, vx (t, x, y)f
v2 (t, xf у) — m-мерные вектор-функции, подлежащие определению таким
образом, чтобы замена (13.8) сводила систему (13.2) к системе усредненных
178
уравнений (13.6). Очевидно, что при е = 0 системы (13.2) и (13.6)
вырождаются в невозмущенную систему (13.3) и одновременно из замены (13.8) еле-
дует, что х = jc, у = у, т. е. решения системы (13.2) и системы (13.6)
совпадают при одинаковых начальных условиях.
Для решения поставленной задачи необходимо найти вектор-функции
ux{t, х, */), u2(t, 7, у), ...; vx(t9 x, у), v2(t, x, у), ...; (13.9)
AiG), А2СУ), ...; В.г(У)>
Перейдем к их определению. Для этого продифференцируем разложения
(13.8) и подставим найденные выражения в систему (13.2), выразив при этом
все величины через новые переменные jc, у согласно формулам (13.8).
В полученных выражениях приравняем коэффициенты при одинаковых
степенях е. В результате составим бесконечную систему соотношений:
^L + ^.X0(t,x,y)^Xl(t,x,-y)+d-§-ul + ^v1-AlCy), (13.10)
-At(y), (13.11)
.£. + -£х.0. I. y) = Yl{t, x, y)-Yl(y), ' (13-12)
%- + 1йГЛо(<. х, у) - Yt(t, х, у) - ВАУ) +
+ %* + %"»-%■ b®-%-7M (1313)
из которых должны быть определены неизвестные функции (13.9).
Очевидно, из структуры полученных уравнений (13.10) — (13.13) при
некоторых дополнительных условиях вытекает возможность
последовательного определения функций (13.9).
Действительно, допустим, что некоторое количество функций
щ (/, х, у), v( (t, х, у), А( (*/), В( (у) (i: = 1, 2, ...,J — 1) найдено; тогда
уравнение для следующей функции, например vs (/, jc, у), примет вид
ж + жх° ('• *• я - s ('• *• & (1314)
где для упрощения индекс s опущен, а в правой части стоит уже известная
функциях (/, jc, у) (после того, как найдены функции (13.9) до s — 1-х
включительно).
Векторное уравнение (13.14) можем записать в виде системы
—^ г ^ ло (*, xlt ..., xn> j/lf ..., уп) qx —
s=l
— 5(/)(jcj jc*, yv .... ym, t), у = const 0=1» • • •» *). (1315)
12* 179
где и(/> — компоненты вектора v = (у(,), и(2> и(т>), Хо/} — компоненты
вектора Х0 = (Xq\ Хо2), ..., ХоЛ)), S(/) — компоненты _ вектора S =
= (S(1), S(2>, ...,S(/5)), становящегося известной функцией /, jc, у после того,
как будут найдены функции (13.9) до s — 1-х включительно.
Характеристическая система обыкновенных дифференциальных
уравнений, соответствующая системе (13.15), имеет вид
dxx __ dx2 _ __ dxk __ dv(l) __ dyM dv(m) dt
X(q\) X{2) X(k) 5(d 5(2> sm
у = const
= нг» (13Л6)
и переменные у входят в эту систему как параметры.
Для системы (13.16) k интегралов известны, так как по предположению
известно общее решение х = ср (/, yf x0, t0) системы невозмущенных
уравнений (13.3), зависящее от k произвольных постоянных х#\ xff\ ..., *<*>. Эти
интегралы относятся к уравнениям
dxx dx2 dxb dt ,
W) = W)= '" ==#=_r' * = const'
которые эквивалентны системе (13.3).
Остальные т интегралов системы (13.6) можем найти при помощи
обычных квадратур:
v(I) = v{l)\t=t, + f S(/)(<p(/, у, x0t g, у, t)dt (/=1,2,..., m), (13.17)
\
причем интегралы здесь берутся вдоль известных траекторий х = q> (/, у
хОУ t0) системы (13.3).
Таким образом, нашли k + т = п интегралов системы (13.16) и,
следовательно, можем построить общее решение системы (13.15), после
чего, задав начальные значения, можем выбрать конкретно функцию и =
= и (/, х, у).
Остановимся теперь на определении функций us (/, jc, у).
Для определения этих функций в общем случае из системы (13.10), ...,
опуская индексы внизу и сразу расписывая векторное уравнение, получаем
систему
~-§^ г ^ Ло (* > *i> • • • » xk, уъ ... , у,„) -^
-2^-3?" = ^ С*. ..чХьй, .. - . *U) (I3.18)
s=l **
(/=1,2, ..., k),
где и<П — компоненты вектора и = (и{1\ и(2\ ..., а(Л)), /?(/) (/, д:1э ...,
*fc> */i> • ••» */m) — известные функции (после определения функций (13.9) до
(s — 1)-х включительно).
180
Для решения системы (13.18) необходимо найти 2k интегралов
соответствующей характеристической системы
dxx dx2 dxk dtt])
(13.19)
Как и в предыдущем случае, общее решение системы (13.3) дает k
интегралов х = ф (/, у, jc0, /0), а остальные k интегралов получим, найдя общее
решение неоднородной линейной системы уравнений
0
х<2> ~
— ...
/?<*>
У
du{k> dt
= const.
s=l
у = const (/ = 1, 2, ... , k).
В системе (13.20) все коэффициенты и правые части — известные функции
времени /, так как в них подставлены решения системы невозмущенных
уравнений (13.3) х = ф (/, у, jc0, /0), у = const.
Для того чтобы найти общее решение системы неоднородных уравнений
(13.20), надо знать фундаментальную систему решений для однородных
уравнений
T=2#"(S) C/-1.2. ....*). (13.21)
5=1 *$
За матрицу фундаментальных решений системы (13.21) можем принять
матрицу минора &-го порядка матрицы
д<р дф
дх0 ' dt0
ранг которой, согласно предположению, равен k.
После этого с помощью метода вариации произвольных постоянных
найдем общее решение системы неоднородных уравнений (13.20) и, таким
образом,-получим 2k интегралов системы (13.19). Задав начальные условия,
без труда найдем все искомые функции и = (ы(1>, а(2), ..., u{k)).
На основании систем (13.20) и (13.21) для us имеем
t
us = us\t=to + L J {L~lRs(t, xl9 ... , xk9 yv .... ym)} dt, (13.22)
и
где х = ф (/, у, х0, t0), у = const, L — матрица фундаментальных решений
системы (13.21). Интегрирование в выражении (13.22) совершается, как и
выше, вдоль известных траекторий х = ф (/, у, х0> t0) невозмущенной системы
(13.3).
Определим функции As (у) и Bs (у). Для этого необходимы еще некоторые
дополнительные условия, в качестве которых совершенно естественно
181
наложить условия конечности функций us (/, *, y)ji_vs (/, x, у). Иначе говоря,
функции As (у) и В$ (у) выберем так, чтобы us (/, x, у) и и, (/, х, у) были
ограниченными на рассматриваемом интервале, и, следовательно, выражения
(13.8) давали соответствующее приближение для решений исходной системы
уравнений (13.2) х и у.
Анализируя уравнения (13.12), (13.13), ..., можно заметить, что правые
части уравнений (13.15) должны иметь следующую структуру:
S,(t> *> У) = QsV* х* У> и\> • • • » и*-и vlt ... t vs-u Alt ... f
Л5—i, Въ ... , Bs— i) — BSf
где Qs — некоторые известные функции /, x, у и ранее найденных функций
(13.9) до (s — 1)-х включительно.
Согласно выражениям (13.17), функции vs вдоль характеристик
выражаются в виде
t
v$ = vs\t=t9 + J [Qs - Bs]x=»{tMo) <U. (13.23)
и
Поэтому для ограниченности функций vs естественно положить
В5(У) = Ш> (13.24)
где
Q.W-lim-i- $ Qsdt\ (13.25)
при этом, разумеется, среднее значение (13.25) существует и не зависит от
выбора траектории х = ср (/, у, x0t t0) усредненной системы (13.3). В
формулах (13.24) s = 2, 3, 4, ..., а для s= 1 мы уже в самом разложении (13.6)
положили Вг (у) = У\ (у).
Аналогично, анализируя уравнения (13.10), (13.11), замечаем, что
правые части уравнений (13.18) имеют структуру
Л,(/, х* У)-Рз(^ х, у, uv ... 9 щ-и vlt ... , i>s-i, Av ... , As-u
Въ ..., Bs^)-Ast (13.26)
где ps — известные функции t% x, у и ранее найденных функций (13.9) до
(s — 1)-х включительно.
Согласно формулам (13.22), us выражаются в виде
t
us - и,\Ыш + L J {L-1 \PS - As)} \x=»{ttytXo,,e) dt. (13.27)
Поэтому для того чтобы us были ограниченными, естественно полагать
Л5(у) = Н(у)-1Ф,(у), (13.28)
где приняты обозначения
_ _ t0+r
Os(yl=L->ps; 1-х-Н(у)-Ш± J [^Ц^^, (13.29)
и, как и в предыдущем случае, предполагаем, что среднее (13.29) не зависит
от траектории х = q> (/, у, x0t t0) усредненной системы (13.3).
182
Приведенный процесс определения функций (13.9) дает возможность
найти эти функции вполне однозначно, после чего можем построить замену
переменных (13.8), приводящую исходную систему уравнений (13.2) к
усредненной системе (13.6) с наперед заданной точностью
Принимая во внимание сделанные выше замечания о точности
определения из системы типа (13.6) медленных и быстрых переменных, в общем
случае получаем уравнения л-го приближения
-J- = Х0(/, х, у) + вАг(у) + еМ2(у)+ ... + г^Ап^(у),
(13.30)
-^Г = сУ1(~У) + *2В2(У)+ ••• +*ПВП(У).
Как уже указывалось, полученная система усредненных уравнений
(13.30) значительно проще исходной системы (13.2). Хотя здесь и не
достигается в общем случае полное исключение быстрых движений или полное
разделение переменных, но, во всяком случае, вторая группа уравнений для
медленных движений у не зависит от быстрых переменных £ и ее можно
интегрировать независимо. Определяя из уравнений (13.30) уп = уп (f) и
подставляя их_в уравнения для быстрых переменных х% интегрируя, можем
найти х = хп-\ (t). Далее с помощью введенной замены переменных (13.8)
находим приближения для решений исходной системы уравнений (13.2)
х = х + euL(t, Хп-\, уп) + е2и2(/, хп-и #„)+••• + .
+ en-2un-2(t, Хп-иуп), (13.31)
y = y + evl(tt Хп-и уп) + еЧС **-ь Уп) + • • • +
+ вЛ""|иЛ__1 (/, Хп-и Уп\
где, как и ранее, медленные движения у с каждым приближением
рассчитываются на один порядок точнее быстрых.
3. Теорема об усреднении для системы (13.1).
Приведем формулировку теоремы, устанавливающей оценку на конечном
интервале между решением системы уравнений (13.1) и решением
усредненной системы (13.5) [28].
Предположим, что правые части системы уравнений (13.1)
ТГ = *(*.*. if. е),
-^- = еУ(/,х,*/,е)
удовлетворяют следующим условиям:
1. Вектор-функции X (/, xf yy e), Y (/, х, у, е) существуют в области
x,y,teG> 0<8<e0, (13.32)
где G — область k + т + 1-мерного пространства переменных х, yt tf е0—
положительное число, и непрерывны в этой области по е равномерно
относительно jc, у, /, е.
2. Вектор-функции Yx (t, jc, у) = Y (/, jc, у, 0) в области (13.32)
непрерывны по jc, у, /, удовлетворяют по х, t условию Липшица с общей для всей
области G постоянной и имеют по переменным х частные производные,
непрерывные по совокупности jc, у, t.
183
3. Вектор-функции Х0 (t, х, у) = X (/, х, у, 0) непрерывны по
совокупности х9 (/, /и удовлетворяют пох, у, t условию Липшица.
4. Вырожденная система уравнений
-£- = X0(t, х, у), у = const,
имеет общее решение
гдех0— постоянный fe-мерный вектор, ф (/в, у, x0t t0) == jc0, определенное в
области (13.32), причем через каждую точку области (13.32) проходит
единственная кривая (13.7), и, кроме того, это решение определено для всех
значений t0 < t < оо и при этих значениях целиком лежит в G, а для
значений t *C t0 интегральная кривая может быть продолжена до границы G
или целиком лежит в G при — оо < t < /0. Предположим также, что
функции ф (/, у, хв, /0) непрерывны по совокупности всех переменных, а по
переменным х0, /0 имеют непрерывные равномерно ограниченные частные
производные.
Ранг матрицы
равен k при всех значениях /, у, x0t t0 для которых определены функции
(13.7) и, кроме того,
2Z3?>a>0, (13.34)
i=\
гдеО, (i = 1, 2,..., ft) — миноры &-го порядка матрицы©, представляющие
собой определители, получающиеся из (13.33) вычеркиванием i-й строки,
a > 0 — некоторая постоянная.
5. В области G лежит некоторое гладкое k + т = /i-мерное
многообразием, заданное параметрически в виде
х = а(Х), у = b(X), t = с(Х), (13.35)
где
a = (al9 ..., a*), £ = (£>!, ..., bj, K=(Kl9 ..., Я,п)
— совокупность п независимых параметров, принимающих значения из
некоторой открытой области Л. Функции (12.35) непрерывны, имеют
непрерывные равномерно ограниченные частные производные по X £ Л. При всех
значениях X £ Л ранг матрицы
<• II да db дс
(13.36)
равен п и, более того, при всех А, £ Л
2 Л > const > 0, (13.37)
где At — всевозможные миноры /г-го порядка матрицы Л, получающиеся
из матрицы А вычеркиванием i-го столбца. Допустим также, что М не
является характеристическим многообразием и всякая интегральная кривая
(13.7), лежащая в области G, непременно пересекает многообразие Л4.
184
6. Равномерно относительно всех значений у, дг0, t0£ G существует
предел
t.+T _
lim-f J ад».ф(<.и.«)* = ^(й. (13.38)
не зависящий от х0, /0.
Кроме того, во всей области
IS(t, х,у)\<const < оо, (13.39)
где __
S(t9x9y) = Y1(t,x9y)-Y1(y).
7. Для всех уу jc0, t0 £ G существуют такие постоянные Т0 > О, С > О,
то при Г >- Г0 выполняется неравенство
k
1-1
где
Ь+т
N = N(y, xot t„ T) = -jr[ S(/, Ф(/, у, jc0, /0), y)dt. (13.41)
При выполнении всех этих условий справедлива следующая теорема.
Теорема [28]. Пусть для системы дифференциальных уравнений
(13.1) выполняются приведенные выше условия 1—7.
Тогда для любого сколь угодно большого L > 0 и любого значения х\ > О
можно указать такое положительное еь (ех < е0), что при всех значениях
О < е < ех «а интервале Г /0, —1
а) решение усредненного уравнения (13.5) у = у (f), удовлетворяющее
начальным условиям у (t0) = у 0t существует и однозначно определено, и
интегральная кривая системы (13.5) яа э/шш интервале не выходит из
области Gy, где Gy — проекция области G в подпространство переменных; _
б) если х (/, е), у (/, е) — решения системы уравнений (13.2), а у =
= 1/(0 — решение усредненной системы (13.5), причем
х (t0, е) = х0, у (/0, 8) = */ (/0) = 0О, (13.42)
то «а интервале /0, — I выполняется неравенство
\y(t,*)-y(t)\<4 (13.43)
Ha доказательстве этой теоремы, ввиду ее громоздкости,
останавливаться не будем, отсылая интересующихся к специальной литературе [28].
4. Зависимость средних значений от
траекторий. Как мы видели выше, при усреднении системы (13.2) существенно
использовалось условие независимости средних значений (13.4) от начальных
значений х0> /0 траектории (13.7), вдоль которой производится усреднение.
Рассмотрим общий случай, когда это условие не выполняется и средние
значения зависят некоторым образом от выбора траектории (13.7). Покажем,
что при некоторых ограничениях он сводится к рассмотренному выше, когда
средние значения функций (13.4) не зависят от х0, /0.
185
dN
*4°
+
dt0
(13.40)
Предположим, что решение невозмущенной системы (13.3) можно
представить в виде
лг = х(с1э ..., ст, у, t), (13.44)
гдесх ст — независимые произвольные постоянные. Допустим, что
средние значения функций (13.4) зависят от некоторого числа произвольных
постоянных, например отсъ ..., ck (k <; m), a otc*+i, ..., ст не зависят:
lim 4г [ Y [tf у9 x(cl9 ..., ст, у, /)] dt = Yx(x9 clt ..., ck, t0). (13.45)
Г-*оо ' V
•0 v
При этом в формуле (13.45) t0 — такой начальный момент, для которого
х (cl9 ..., ст9 у, t0) = х0.
Предположим, далее, что постоянным с19..., ск соответствует система
независимых интегралов уравнения (13.3) вида
с = Ф(х, у, 0 = const, (13.46)
где с = (clf..., ск), Ф = (Фь ..., Фй), а также, что интегральные поверхности
(13.46) в пространстве переменных jc, у, t допускают параметрическое
представление вида
* = ¥((/, с, г, 0, (13.47)
где V = (Tlf ..., Ym), с = (clf ...,cft), а г = (г^ ..., 2m_fe) — совокупность
(т — k) независимых параметров, изменяющихся в некоторой области.
В качестве параметров гъ ..., гт_*, в частности, можно принять постоянные
Ck+u ..•» ст> от которых не зависят средние (13.45).
Кроме того, пусть
л= д^ ^ .... Уш)— ^0 (13 48)
D (С!, с2, ..., ck, гъ ..., гт__к) ^ l '
В этом случае соотношения (13.47) можно разрешить. В результате
найдем следующие тождества:
с = Ф(#, 4(y9c9z9t)9t)9
z = e(y,V(y9c9ztt)9t)t (13.49)
x=VU/90(x9y9f)9 B(x9y9f)9i).
Система уравнений (13.3) и представление (13.47) порождают на
поверхностях (13.46) систему дифференциальных уравнений
^ 'U-* <**«■* (I350)
х = const, с = const.
Будем считать, что общее решение системы (13.50) известно и что оно
представимо в виде г = г{у, с, г0, /0, /). где z (у9 с9 г0, t0, t0) = г0.
При этих условиях общее решение вырожденной системы (13.3) можно
записать в виде
* = ¥(*/, с9 г (у9 с9 г, t0, t)9t).
Это общее решение зависит от т произвольных постоянных cl9 c2t ..., ск и
компонент г0 2*!\ ..., 2*0т-кК
Совершим в системе (13.2) замену переменных согласно формулам
c(t9 е) = Q>\y(t9 e), x(t9 e), /],
г(/,8) = в[0(/,е),л:(/,8),/],
186
гдес (/, е), г (t, в) — новые неизвестные функции, а х (t, e), у (/, е) —
решения первоначальной системы (13.2).
После соответствующих операций получим систему уравнений
-%- = eY\y,V(y,c,z,t),t,t\,
dc
£-(х1 + щх,+...,+ » г
(13.52)
\x=V (y,c.z.t)
Для сокращения записи введем вектор г = (гх, ..., r„+*) = (jc1? ..., xnt
clt ..., cfe) в п + ^-мерном пространстве переменных у, с. Систему (13.52)
можно записать в виде
-^-=.е/?(г, z, /, 8),
d2 (13.53)
-^-=Y(r, Z, /, 8).
Система (13.53) принадлежит к типу (13.2). Вырожденной системой для
(13.53) являются уравнения (13.50). Отличие уравнений (13.53) от
первоначальной системы (13.2) заключается в том, что для нее, как нетрудно
показать, средние значения вдоль траекторий вырожденной системы г = z (у, с,
*о» *о» 0 Уже не зависят от начальных значений г0 = (г<1>, ..., 2™+*, /0).
Действительно, если F (jc, у, t) — некоторая интересующая нас вектор-
функция, для которой среднее значение (13.45) зависит от х0, /0 посредством
постоянных съ с2,..., ck, то в новых переменных при усреднении вдоль
траектории z = z (yt с, z0, /0, /) быстрых движений
-£-=Х0(ху у, t),
у = const
подобного рода зависимость отсутствует, так как в системе (13.52) переменные
съ с2, ---,ck включены в систему медленных движений вместе со старыми
медленными переменными ylf y2> ..., ут:
F(x, y,t) = F [У (у, с, z, t), у, t]=f(y9 с, z, t),
t9+T
F^J=\im^r j f{y, с, z(y, c,z0, /0), t]dt =
'~ ,0+r'° (13.54)
= lim -~- f F [q>(*/, у0, /0, О» У у t\ dt =
Г-*оо ' У
= F(yi,y2, ..-t Ут>С1>С2> •••» СкУ
Следовательно, к системе (13.53) можно применить способ усреднения,
описанный ранее для уравнений (13.2), и тем самым рассматриваемый общий
случай редуцируется к первоначально рассмотренному.
Применяя к уравнениям (13.53) описанный выше способ усреднения,
получаем уравнения первого приближения
-^ = etf(r,z,*,e). (13.55)
187
Принимая во внимание систему (13.52), уравнения (13.55) можем
представить в виде
*У _ о17 /7 7ч
-к = еУ1 СУ. с) = е Hm j Yx (/, Y (у, х0, /0, /), у) Л,
ж-^ + тг1'"}- (,356)
где # = (ух, ..., уп) — первое приближение для у, с= (с1э ..., с*) — первое
приближение для с, а усреднение производится согласно выражениям (13.54).
5. Системы, близкие к гамильтоновым с
медленными переменными. Остановимся на некоторых
результатах, полученных в направлении развития изложенных выше идей
применительно к исследованию «канонических» систем с медленно меняющимися
параметрами [281.
Эти результаты заслуживают внимания в связи с тем, что они, как будет
показано ниже, получили непосредственное практическое применение во
многих интересных задачах, связанных не только с колебательными
явлениями, но и с задачами о переходе от колебаний к вращению.
Предположим, что невозмущенная система описывается каноническими
уравнениями
dq _ дН(р,д,у)
dt ~ др
dp dH(p,qty) . (13-57)
гдер = (рх, р2, ..., р,), q = (qlt q2, ..., qt) (21 = n)f H (p, qt у) — скалярная
функция Гамильтона, зависящая от параметров у = [ylt y2, ..., ут) и не
содержащая /.
Возмущенную систему типа (13.2), соответствующую системе (13.57),
представим в виде
-ir = - дНТУ) +е^<"•*у>в>- С1358)
-^- = еГ(р, ?, у, е),.
где/("> (р, q, у, е), /<*> (р, q, у, е), К (р, q, у, е) — соответственно /-мерные и
m-мерная функции.
Предположим, что невозмущенная каноническая система (13.57)
такова, что переменные в ней могут быть разделены на колеблющиеся и
вращающиеся. Тогда можно применить формулы (13.55) и получить уравнения
первого приближения.
Система (13.57) имеет первый интеграл энергии
Е = Н (р, qf у) = const. (13.59)
188
Допустим, что интеграл (13.59) входит в систему интегралов (13.46),
т. е. энергия Е введена в качестве одной из произвольных постоянных в
общее решение невозмущенной системы (13.57). Применяя к интегралу (13.59)
формулы первого приближения (13.56), получаем уравнение
dE _ (дН у дН f(q) дН {р)\
где усреднение происходит по траекториям системы (13.57). Но вдоль этих
. dp дН dq дН
траекторий -~- = ^—, -^ = -^--, а поэтому окончательное уравнение
энергии имеет вид
JL-oljm-L Г [дН у | flP dp fig) dq ) ,
-(%-Гг+1Рр + 1Р'Я)9 (13.60)
где интегралы берутся вдоль траекторий системы (13.57), соответствующих
уровню энергии Е = Е.
Если решения системы (13.57) чисто периодические с периодом Г0, то
в первом приближении имеем
d- оо (1361)
Формулы (13.61) позволяют вычислить изменение энергии, вызванное
возмущениями. Слагаемое
о
представляет собой среднее приращение энергии системы за один период,
вызванное изменением медленно меняющихся параметров со скоростью
у = zYv Слагаемое
т.
-^ilfo'dp + f^dq]
т° о
описывает в первом приближении работу возмущающих сил efoP) и г$ф за
период Г0, деленную на Т0.
Таким образом, формула (13.61) характеризует быстроту изменения
энергии, равную средней за период мощности возмущающих сил и сил,
изменяющих параметры системы.
Допустим, что решения системы (13.57) р, q допускают разбиение на
две группы
•Р(1) =(Pi Ps)>q{l) = (<7i> ...> <7s)
и Р(2) = (Ps_,, .... Pi), q{2) = {qs+v • • • , <7/);
189
в группе р(1>, фЪ все координаты р(,) колеблющиеся, фХ) — произвольные
(в том числе могут быть и вращающиеся), в группе р(2), ф2) все координаты
ф2) колеблющиеся, а р(2> — произвольные.
При этих предположениях подсчитаем интеграл действия, рассмотрение
которого представляет интерес для канонических систем.
Имеем
7 = ] (р<> у ■> _ р< v>) Л = f <,<«># _ tfft ^ (13.62)
о б
взятый по произвольной траектории невозмущенной системы (13.57).
В выражении (13.62) 7 зависит от параметров yl9 ..., уп и
постоянных съ ..., сш-ь поэтому его можно рассматривать как один из интегралов
невозмущенной системы (12.57) и представить в виде
• 7 = 7 (с19 ... , ст_ь у19 ... , уп) = 7 (р, (/, у). (13.63)
Введем 7 в качестве одной из произвольных постоянных в общее решение
системы (13.57). Тогда, применяя формулы (13.56), в первом приближении
получим следующее уравнение действия
т. т.
^Г = в I [fTdp + f{0q)dq] + в J -^ (У - Fj Л, (13.64)
о о
где
Пб) = т-]>1#, -ж = ^Лу)
То 6
и интегрирование проводится по траектории системы (13.57).
Если решения системы (13.57) чисто периодические, интеграл (13.62)
принимает вид
7 = ф pdq,
а уравнение (13.64) —
■b-^tfytirdp + fPdql + tjt^Lff-Yjdt (13.65)
(интегрирование производится по одному обходу замкнутой траектории).
6. Маятник с переменной длиной. Приведем пример,
иллюстрирующий свойства интеграла 7 [28]. Этот пример представляет собой
видоизменение известной задачи о маятнике Эйнштейна.
Маятником Эйнштейна обычно называют математический маятник с
медленно и плавно меняющейся длиной. Уравнение колебаний такого
маятника имеет вид
ТГ^ W-J-] + Sy^smq = 0, (13.66)
где q — угловое отклонение от вертикали, g — ускорение свободного
падения, у (т) — медленно изменяющаяся длина нити, т = е/.
Уравнение (13.66) можно представить в виде системы типа (13.58):
dg _ р
Ш ту* »
d (13.67)
-£-= — mgysinqt
190
где
H = -£jr-mgycosq, (13.68)
т — масса маятника, е/ = 0, у = у (е/).
В этом случае интеграл действия является адиабатическим инвариантом,
т. е. 7 ^ const.
Рассмотрим теперь маятник, сходный с маятником, описываемым
уравнением (13.66), нос некоторыми видоизменениями.
Предположим, что длина маятника меняется не внешними силами, а
за счет собственной энергии системы, т. е. пусть скорость изменения длины
нити у зависит от q, q, у. Практически это возможно, например, е&ш нить
маятника растягивается под действием его веса и центробежной силы.
Допустим, что скорость «пластической» деформации нити мала и
пропорциональна ее натяжению, т. е. у = еА,р, гдер — сила натяжения, а гК — малый
коэффициент деформации. Установившиеся колебания такой системы
описываются уравнениями
-1г\у2-чг\ + ёУ^я-о9
(13.69)
-J- = eA, (mg cos q + myq%
или системой
-$- = — mgysinq,
-^ = ek (mg cos q + myq\
Считая qи (/малыми и пренебрегая слагаемыми, содержащими
квадраты этих величин, вместо уравнений (13.69) рассмотрим систему
1 ,J (13.71)
dp __ p
dt ~~~ my* '
-*3- = -mgyq, (13.72)
at
(mg-^+ту'ф).
или систему
■*--*(«
Обозначим через а амплитуду колебаний маятника и найдем выражение
для интеграла действия 7 через амплитуду.
Невозмущенная система, соответствующая уравнению (13.72), имеет вид
dP _ Р
dt ~~ ту* »
J±- = —mgyqt у = const. ^ * *
191
Решением этой системы будет
q = a cos (g)/ + с),
q = _ ао) sin (ю/ + с), ю = 1/ -£-.
у
Согласно формуле (13.62), для 7 находим выражение
о) J. JL
7 = ^ p^d/ = my2 J a2©2 sin2 (w/ + c)dt = mg2 na*y2.
о
После некоторых вычислений для правой части уравнений (13.65) получаем:
JL JL
j^eknm2g2a*y2.
Аналогично находим
Таким образом, уравнения первого приближения после сокращения на
константы принимают вид
3 1
-—[aty^^-B-^Xmga4 у2,
(13.74)
JL -
dt
= &mg(l+^-),
где а и у — первые усредненные приближений для угловой амплитуды и
длины маятника. Решая систему (13.74), находим
~Т±
~а*W (! + х а* (т)) ^2 (т) = const' т = еЛ (13'75)
Формула (13.75) описывает зависимость амплитуды колебания от длины
в первом приближении.
Для маятника Эйнштейна вследствие адиабатической инвариантности
7 s const, следовательно, имеем
J_ ±
7 = a2mg2 лу 2 (т) = const, т = е/. (13.76)
Сравнивая между собой формулы (13.76) и (13.75), видим существенное
различие законов колебаний маятников. Это происходит потому, что для
одного уравнения адиабатический инвариант сохраняется в первом
приближении, а для другого не сохраняется. С механической точки зрения этот
эффект является результатом того, что у маятника Эйнштейна длина нити
изменяется за счет работы внешних сил, а у маятника на пластической
нити — за счет энергии самой системы.
7. Резонансные режимы в нелинейных
система х. Рассмотрим нелинейную систему, содержащую медленные и быстрые
192
движения, вида
dx
-5Г = о)(у) + еХ(у, х, е),
du <13-77)
-J- = eK(f/,x, e),
где х и у — соответственно k- и m-мерные векторы (k + т) = я, X (t/, jc, e) и
У (У> х> с) — соответственно k- и m-мерные вектор-функции, о) = {со1э ...,
сол}, 8 -— малый положительный параметр. Предположим, что векторные
функции X (у, х, е) и К (у, jc, e) достаточно гладкие по jc и у и периодичны
по jc с периодом 2л.
Будем говорить, что в системе (13.77) наступает резонанс, если для
некоторого у0 найдется отличный от нуля целочисленный вектор S =
= {5Ь ...,5Л}, такой, что скалярное произведение
Sco(*/o) = 0, <о(у0)ФО. (13.78)
Произведем преобразование системы (13.77) [33]. Для этого рассмотрим
совокупность всех отличных от нуля целочисленных векторов {S}, для
которых выполняется условие (13.78), и выберем из нее произвольную конечную
систему {S/| e {S} (I = 1, ..., q). Тогда ранг |S,(/)|I< k— I, S\h (j = 1,
..., <7, / = 1, ..., k) — i-я целочисленная компонента у-го вектора, Sf £ {Sy}.
Пусть {St} пробегает все конечные подсистемы такого вида, и обозначим
через г наибольшее из чисел rang \S{^\ = г«< k— 1. Тогда найдется хотя бы
одна система г отличных от нуля целочисленных векторов5ь ..., Sn
наибольший общий делитель целочисленных компонент каждого из которых
равен 1, такая, что для каждого вектора этой системы выполняется
равенство (13.78).
Произведем замену переменных в системе (13.77) согласно формулам
ф/ = Sf = S\hXl + • • • + йЧ (/ = 1, 2, ... , г). (13.79)
Так как ранг матрицы \\пФ\\ равен г, из формул (13.79) можно
определить только г переменных xttl, JCttl, ...,*<хг. Поэтому необходимо дополнить
замену (13.79). Остальные переменные jcpt, *pIf ...ч, x$k_r (fy Ф <xf, / = 1, ...,
k — г, i=l, ..., г) заменим согласно формулам
jcP/ = Щ (/ = 1, ... , k — г), (13.80)
где Л Ф 0 — соответствующий минор г-го порядка матрицы |Sj^|.
С помощью замен (13.79), (13.80), приведем систему (13.77) к виду
-^ = еГ(£л<р,0,8),
*jL = X{y) + ea>(y, Ф,0,8), (13.81)
J*L = Q(y) + eB(y, Ф,0,8),
где у {у19 ... , ут}, ф -= {<plf ... , фг|, О = {«„ ... , ф«}, У = [Yv ....
Ут}, Ф={ФХ, ..., Фг|, В={в, Щ, ? = £-г.
Кроме того, здесь введены обозначения Л,- (jc) = S/oo (jc), следовательно,
согласно (13.78), \; (х0) = 0, / = 1, ..., г; Фу = S,X, Й,(*) = (-5-) ©fy (*).
13 246
193
Bf = (-д-)^Р/ (J = U •••» Я)- В точке х0, очевидно, все X, (х0) = 0 и при этом
йу (*0) =#= 0, так как соотношение 1^ (х0) + • • • + 'А (*о) = 0» гДе h (* =
= 1,..., q) — целые числа, может выполняться лишь при lt = 0, i = 1,..., q.
Из сравнения системы (13.77) с преобразованной системой (13.81)
следует, что «быстрым» переменным xlt ..., xk системы (13.77) в системе (13.81)
соответствуют переменные <plf ..., срг, Ф1э ..., fy (г + q = k)y причем
переменные ф( в окрестности точки резонанса х0 изменяются медленно, так как
h (*о) = 0, а переменные Оу — быстро (Qy (х0) Ф 0).
В окрестности резонанса (х = х0) система (1§.81) представляет собой
систему с быстро вращающейся фазой, и для исследования ее могут быть
применены методы, изложенные выше, в частности метод § 9.
В общем случае правые части системы (13.81) следует усреднять по
быстрой переменной О и систему (13.81) заменять усредненной системой
-ljf = еГ(7/, ф),
где
2л 2я
о о
Стационарные резонансные значения у = у0, ф = ф0 определяются
как значения, обращающие в нуль правые частц системы (13.82). Для
исследования устойчивости следует составить уравнения в вариациях и
исследовать корни соответствующего характеристического уравнения.
Эта простейшая схема обладает некоторыми недостатками, связанными
с возможностью появления при усреднении малых знаменателей. Во
избежание этого следует обратиться к схеме усреднения, предложенной В. М. Во-
лосовым и Б. И. Моргуновым [30]. Эта схема, на изложении которой не будем
останавливаться, позволяет перейти от исходных уравнений (13.81) к
усредненным и исследовать стационарные режимы на устойчивость как на
конечном промежутке времени, так и на асимптотически больших, но конечных
промежутках времени.
Приведем еще некоторые результаты, относящиеся к исследованию
системы
^ = еГ (у, 6, *,-§-), (13.83)
-df, = V(#) + 80 [у, 9, X, -gpj ,
где х — одномерная координата, т (у) — медленно изменяющаяся масса,
у = (ylt..., ут) — совокупность медленно меняющихся параметров. Функции
F\и, 6, х, -£А , Y ly, 6, х, -£-\ и 01у9 б, *, -£-\ периодичны по в с
периодом 2я.
Система (13.83) является более общей по сравнению с системами,
рассмотренными в § 11 (см. системы (11.1) и (11.58)).
194
Одновременно с системой (13.83) рассмотрим соответствующую ей
невозмущенную систему
т(У)-а£ +f(y,x)= О,
(13.84)
у = const.
Общее решение невозмущенной системы может быть записано в виде
х = г(у, ib, а),
dx , (13.85)
-^- =со (у, a) z*(y,yt>,a).
Производя замену переменных с помощью формул (13.85), приводим
систему (13.83) к виду
-^- = еЛ(£/, а, г|>, 9),
-J- ^еУ^у.а,*. 9),
' *ь (138б)
-^- = со (£/, а) + е¥ ((/, а, г|>, в),
-5T = v(t/) + eei(f/, а, г|>, 9),
где обозначено
^i (У, а, г|), 6) = Y (у, 9, г(#, г|>, а), со (#, а)г^ (у, ф, а)),
©i(*/, «, г|>, 9) = в (у, 9, г(£/, яр, а), ©(*,, а)гф(#, г|>, а)).
Предположим, что при некоторых значениях aw у выполняются
равенства
/7(o(y,a)=(7v((/), (13.87)
гдер и <7 — целые взаимно простые числа.
В этом случае в системе наступает резонанс. Вводя в системе (13.86)
вместо переменных я|? и в новые переменные фи О согласно формулам
и обозначая переменные а и у одной буквой г, получаем систему
-^-=eZ(2, ф, «),
^=Я(г) + е^(г, Ф, О), (13.89)
-^ = Й(г) + ев(г,Ф,0),
где X(z) = v(z)--£-v(z)
Система (13.89) — система типа (13.81). Применяя к ней указанную выше
схему усреднения, можем построить усредненную систему с помощью замены,
коэффициенты которой зависят лишь от фиксированных значений z0,
соответствующих точке резонанса и определяемых из условия обращения в нуль
13* 195
средних скоростей изменения величин г и ср:
Z(z0, Ф0) = 0, Х(г0) = 0. (13.90)
Составим уравнение
det(A — iiE) = 0t (13.91)
где
/ Р dZ (г0, ф0) dZ (г0, ф0)
[ ь дг дф
А\ дК£] ' с^(2о> Фо) ' с *КЛ°] Ч е^а°,фо)
£ — единичная матрица, 8г — поправка первого порядка к координатам
резонансной точки.
Если все корни уравнения (13.91) имеют отрицательные действительные
части (и выполняются еще некоторые условия, налагаемые на правые части
системы (13.89)), то для сколь угодно большого Т > 0 и сколь угодно малого
т) найдется такое е0 > 0, что для любого е < е0 существует б (е), такое, что
из условий | г (/0) — jc0l < б, | ф (/0) — ф0| < б для всех /0 < / < Т следуют
неравенства
|*(0 —*о1<П.
1ф(0-ФоКп, (13,92)
где z (/), Ф (0 — решения системы (13.89).
В заключение заметим, что идеи В. М. Волосова получили дальнейшее
развитие в работах его учеников и сотрудников. Так, например, в работе
[214] рассматривается система типа
-^ = еХ(х,у, t, е),
(13 93)
%- = Y(x9y9t9B)
с начальными условиями
x(to) = *o> У(*о) = Уо-
Для уравнений (13.93) находятся условия, при которых можно вычислить
среднее значение
т
lim 4- f Х(х, Ф(х, /), t, 0)Я = Х(х). (13.94)
Так, для системы
% = A(x,l)y + B(x9f),
(13.95)
dl
%r = e[A(xtt)y+B(xtt)],
где A (jc, f) — квадратная матрица с m2 элементами, A (xy f) — (n X m)-
матрица, В (jc, /) и В (jc, f) — матрицы-столбцы, х — л-мерный вектор,
у — m-мерный вектор, / = ет, х £ [ 0, — 1, показано, что при некоторых
196
условиях для средних значений (13.94) правых частей системы (13.95)
имеет место формула
lim4- \{Ay(x) + B)(h = B--AA-lB9 . (13.96)
Г-оо * $
где у (х) — общее решение системы
% = A{x9t)~y + B{x9t) (13.97)
(х = const, t = const).
Полученный результат дает возможность найти первое приближение для
медленных движений х в случае, когда некоторые из собственных значений
матрицы А чисто мнимые.
В работе [31 рассматривается система (13.93) и для нее доказывается
теорема В. М. Волосова при некотором ослаблении ее условий. Показано,
что при достаточно широких предположениях можно вычислить длину
интервала Г^е), на котором решение х (/, е) отличается от вырожденной
траектории с теми же начальными условиями не более чем на б, не прибегая
к интегрированию системы (13.93).
Так, в предположении, что функции Y (х9 у9 t9 0) удовлетворяют
условию
\Y(x'9y'9t90)-Y(x9y9t90)\<L(\x'-x\ + \y'-y\)t
\Y(x9y9t9e)\<M,
где L и М — постоянные, для Т& {е) получена формула
т«'> = У-т--т+т>-тг- <13">
§ 14
УСРЕДНЕНИЕ В СИСТЕМАХ,
СОДЕРЖАЩИХ ВРАЩЕНИЕ
1. Постановка задачи. До сих пор мы изучали с помощью
метода усреднения нелинейные колебательные процессы в системах с одной
и многими степенями свободы. При этом во всех рассматривавшихся
случаях невозмущенные системы описывали колебательный процесс. В частности,
рассматривая в § И систему (11.1) с одной степенью свободы, близкую
к точно интегрирующейся, мы тоже предполагали, что невозмущенная
система (11.5) имеет периодическое решение, зависящее от двух произвольных
постоянных. Для таких систем были найдены амплитудные кривые, период
и некоторые другие параметры. Вместе с тем многие задачи сводятся к
исследованию вращательных режимов для таких систем. Этим исследованиям и
посвящен настоящий параграф.
Рассмотрим систему (в дальнейшем
будем называть маятником), движение
которой описывается уравнением
£+/(*)=<),
(14.1)
функция с
где f (х) — периодическая
периодом 2я.
Предположим, что среднее значение
J{x) будет
2я
Рис. 6
7(*) = \ f(x)dx = 0.
(14.2)
Фазовая плоскость уравнения (14.1) имеет вид, изображенный на рис. 6.
Здесь замкнутые ветви сепаратрисы ограничивают области значений х, х,
соответствующие периодическим движениям. Эти движения определяются
малыми значениями начальной энергии. Незамкнутые фазовые траектории
описывают вращательные движения системы и определяются большими
начальными энергиями.
Ниже исследуем движения, описываемые возмущенными уравнениями
g? + /(*) = eF (/,*,-£), (14.3)
198
где е>0 — малый положительный параметр, и для которых
соответствующим невозмущенным уравнением является уравнение (14.1), а также
уравнениями с медленно меняющимися параметрами
d \m(y)§\ + f(y,x) = tF(y,t,x,£),
dt
w = tY(y-x'w)-
(14.4)
где / (x, у) — периодическая функция х с периодом 2я, у = (yv ..., уп),
2я
\f{y,x)dx = 0, (14.5)
6
F [у, t, ху -£-\ и Y (у, х, -^\ периодичны по х.
Уравнения (14.3) и (14.4) в колебательном режиме с успехом
исследуются с помощью метода, изложенного в § 11. Однако следует заметить, что с
увеличением амплитуды, т. е. по мере приближения к полосе, примыкающей
к сепаратрисе, точность результатов, получаемых с помощью обычных
методов, уменьшается.
Для исследования систем (14.3) и (14.4) во вращательном режиме
эффективными являются методы, предложенные Н. Н. Моисеевым [142],
В. М. Волосовым [36, 31], В. И. Моргуновым [148, 150].
2. Случай быстрого вращения. Рассмотрим сначала
случай больших начальных энергий системы (14.1), когда движение
изображается незамкнутыми фазовыми траекториями. Для исследования быстрого
вращения Н. Н. Моисеев [142] предложил метод представления решений
невозмущенного уравнения (14.1) в виде ряда, расположенного по
отрицательным степеням корня из энергии. Остановимся на этом методе.
Рассмотрим какую-либо из кривых, описывающих вращательное движение.
Она пересекает ось Ох в точке х = Q, и фазовая траектория,
соответствующая этому уровню энергии, представляет собой волнообразную кривую,
лежащую в окрестности прямой х = Q. Поэтому в уравнении (14.1)
естественно ввести замену
§- = а+у. (14.6)
Полагая t = е/1э где е = -~-, получаем
dx , .
ж=1+гУ>
! = -е/(ж). С"-7)
Система уравнений (14.7) принадлежит к типу систем, рассмотренных в
предыдущем параграфе, и поэтому для нее может быть построено решение с
помощью изложенного там метода.
Следуя общей схеме, решение порождающей («невозмущенной») системы
(14.7) будем отыскивать в виде
х =- х + Eut (yy х) + е2и2 (у, х) +
y^'y + ev! (у, х) + e2v2 (у, х) +
2.^- , (14-8>
199
где функции у, х удовлетворяют уравнениям
dx
dt
%-=1+еВ1(у) + г*В2Су)+ ..,
jf-~*41(y) + e41fc) +
(14.9)
Потребуем, чтобы функции щ (*/, х) и vt (у, х) были ограничены и
удовлетворяли условию
М</>0) = М<Л 0) = 0. (14.10)
Подставляя ряды (14.8) в уравнения (14.7) и учитывая при этом
уравнения (14.9), после приравнивания коэффициентов при одинаковых степенях
е получим
^=fCx)-AM dfx=y-Bx{y),
£ —£-.-$4i-%*©-*.tft (14.11)
Рассмотрим первое из уравнений системы (14.11). Для ограниченности
функции Vi (y> х) необходимо и достаточно, чтобы
Л(У) = -№ (14.12)
Но/ (х) = 0, согласно условию (14.2), следовательно,
Аг(у) = 0. (14.13)
Далее, находим
X
МУ, x)= — \f(x)dx + CCy),
О
где С (у) — произвольная функция у и, согласно условию (14.10), С (у) = 0.
Введем обозначение
X X
jf(x)dx = V(x), |ч,(х)Лс = Ф(х). (14.14)
о о
Имеем
Vl(l) = — W(x). (14.15)
Из следующих двух уравнений системы (14.11) находим
ВЛУ)='У, иг(у,х) = 0, (14.16)
А2(У) = 0, v2(y,x) = yY(x), (H.17)
В*(У) = -У (х), Щ(у, ~х) = -Ф(х) + Y(х) х. (14.18)
200
С точностью до величин порядка в2 включительно разложения (14.8) и
уравнения (14.9) можем представить в виде
х = х — е2 [Ф (х) — Y (х) х],
|l = l+ey-e»Y(x),
# = 0.
(14.19)
(14.20)
Принимая во внимание начальные значения
/ = 0, «/ = 0, * = 0, (14.21)
из второго уравнения системы (14.20) находим
У = 0.
Выражения (14.19) и первое уравнение системы (14.20) можем
представить в виде
х = х + е2 (хУ (х) — Ф (*)),
(14.22)
у = *У(х),
*L=l_e2¥(*). (14.23)
Интегрируя уравнение (14.23), подставляя полученное значение, х =
= x(t) в выражения (14.22) и возвращаясь к переменному tt = et, e.= -g- ,
получаем
(14.24)
Введем вместо Q новую постоянную X по формуле
X = fi —-1-Y. (14.25)
Тогда асимптотическое представление общего интеграла уравнения
(14.1) для случая больших энергий будет иметь вид
х = м* + '•) + -хг {*м< + д- ф(^(< + дм + ° (т?) • <14-26)
Это решение содержит две произвольные постоянные к и /0.
Для иллюстрации рассмотрим вращательное движение математического
маятника
(14.27)
ф(х) = х — sinjc.
Имеем
, следовательно,
¥(*) =
1
— COSJC,
jgr+sinx-.O.
/(*) = sin*,
T=l,
201
Согласно формуле (14.26), находим
х = U + -jp- sin U +0Щ . (14.28)
Изложенная методика отыскания решения порождающей системы в
случае больших начальных энергий может быть с успехом распространена и на
более общие уравнения. Так, например, как показано в работе [1431,
уравнение
■5г+К*.В~0. (14.29)
где | — вектор, изменение которого описывается системой
дифференциальных уравнений
§-=*(*. Б). (И.ЗО)
в предположении, что функция / (*, |) периодическая по х с периодом
2л для любых |, заменой (14.6) может быть приведено к системе
dx , ,
1ГЛ = 1 +*У>
|f = -e/(*,£), (14.31)
f = «/?(*,£).
Для системы (14.31) согласно изложенной методике строим
асимптотическое решение.
Системы, описываемые уравнениями (14.29) и (14.30), называются
системами с вращающимся звеном и часто встречаются в приложениях,
например в задаче исследования совместного движения центра инерции спутника и
его движения относительно центра инерции и др. [1431.
Рассмотрим уравнение колебаний маятника при условии большой
начальной энергий
$ + /<*. 0 = 0. (14.32)
Это уравнение сводится к системе (14.29) — (14.30) заменой
t = t, f- = l. (14.33)
Для уравнения (14.32) можем составить систему типа (14.31)
dx , ,
3f. = _ef(x, g). (14.34)
После этого без затруднений найдем асимптотическое представление для
общего решения уравнения (14.32)
х(/) = М+-ЗВг{¥(/)М-Ф(/Д0Ь (14.35)
202
dt*
где введено обозначение А, = Q ^- ¥ (/0).
3. Возмущение быстрых вращений. Полагая в
системе уравнений (14.4) для упрощения выкладок т(у) = 1, У = 1, */ = е/ = т
(медленное время), получаем уравнение
+ /(t,A) = 8F(T,/,Ar,^, (14.36)
где е > 0 — малый параметр. Предположим, что энергия этой системы
достаточно велика, т. е. при е = 0 порождающее уравнение
%£ + f (т, х) = 0 (т = const) (14.37)
имеет вращательное движение.
Для исследования уравнения (14.36), как показано в [1431, опираясь на
асимптотическое решение уравнения (14.1), построенное выше, можно
построить теорию, аналогичную развитой в § 11 для уравнения (11.1).
Пусть, далее,
2л
~fW = ^-$f(*>x)dx = 09 (14.38)
о
и решение порождающего уравнения (14.37) имеет вид
* = г(т, г[\я), (14.39)
где
г(т, ф, а) = ф + aZ<x, <ф, а); (14.40)
здесь а — произвольная постоянная, а
1|) = со(т,а)(/ + д. (14.41)
Сопоставляя выражение (14.40) с асимптотическим решением (14.26),
получаем
а Л 1 1
г(т, 4, а) = ¥(т)г|>- Ф (г|>, т) + оЩ = Z(x, г|>) + о(±) . (14.42)
Таким образом, с точностью до О (-j-g) функция Z не зависит от а.
Совершим в системе (14.36), как и в § 11, замену переменных с помощью
формул
х = г(т, гЬ, я),
-5Г=о)(т, а)г;-(т,гМ).
После некоторых выкладок в общем случае получим систему (см. § 11,
система (11.63))
do 8 ' ' ' ' ' * ' 1
1Г = о^Г *~ F (/* г' ^ г"* + (<02*)xZ* ~" ^ч*2* ^ =
= 8Ф1(т,/, г|5, а), (14.44)
203
^ = G> (x, a) + ^-^j- IF (Л z, coz*) г'а — (сог^л + (сог'ф)^} =
= о)(т, а) + еФ2(т,/, гр, а),
где
DQ (a) = (О (Z^t — z'^aZ'b) — toaZ$>- ( 14'45)
Таким образом, уравнение (14.36) приведено к4 стандартной форме и
D0 (а) не зависит от г|э.
Принимая во внимание выражения (14.40) и (14.42), получаем
г (т, ^, а) = гр + aZ (т, гр), г* = 1 + 2^ + a2z£
z^, = 1 -f* aZyt z аф = Z^, o)x = 0,
гт = aZT,
и, следовательно, уравнения (14.44) можно представить в виде
где
o0=4<o3+i-(zz;.- 4-z;2),
а гф и га определяются из формулы (14.40).
Далее система уравнений (14.46) может быть исследована согласно
методу, изложенному в § 11.
4. Случай малой угловой скорости вращения.
Существенным моментом во всех изложенных рассуждениях являлось
предположение о больших значениях начальной энергии, что давало возможность
построить асимптотические решения невозмущенной системы и после этого
привести исследуемую систему к стандартному виду.
Рассмотрим случай, когда исследованию подлежит вращательное
движение системы, у которой угловая скорость вращения еще не настолько
велика, чтобы можно было бы построить асимптотическое решение
невозмущенного уравнения. Здесь с успехом можно воспользоваться методом,
предложенным в работе [281 и в дальнейшем развитым в работах [149, 2 и др1.
Этот метод разработан [1251 применительно к изучению существенно
нелинейных колебательных систем типа (14.3), (14.4) и позволяет находить
характеристики исследуемой системы, не зная явного выражения для
периодического решения невозмущенной системы (аналогично тому, как это
сделано, например, в п. 4 § 11).
Для упрощения выкладок рассмотрим уравнение
-g+/(*)= е^(х,§), (14.48)
где е > 0 — малый параметр, / (х) — периодическая функция х с
периодом 2л.
(14.46)
(14.47)
204
При 8 = 0 уравнение (14.48) допускает два интеграла
TJlf + ^W^. О4-49)
где
V{x) = ]f(x)dx, (14.50)
Е — полная энергия, являющаяся произвольной постоянной
интегрирования и
^■Е^тж\тт=т-*- <14л|>
где период вращения
2л
Г(£)=[-7= dx (14.52)
В качестве новых переменных примем величины £ и р. Тогда, вместо
системы (14.48), после некоторых выкладок получим систему уравнений в
стандартной форме
7JT - «F (*• V2(E-V(x))\ V E-V(x),
„ft . т ■ (14-53)
Ж = тщ + *Р(х,У2(Е-У(х)))£УЕ-У(х).
Правые части системы (14.53) — периодические функции / с периодом
Т (£), а следовательно, и по переменной р. Поэтому для получения
уравнений первого приближения, усредняя правые части системы (14.53), имеем
_ т
^ = t^\f(x,V2(E-V{x))) УЁ-У(х)ф,
0 т (14.54)
Дифференциалы dx и dp связаны соотношением
dx=± VE — V(x) ф, (14 55)
где «+» соответствует движению в верхней полуплоскости, «—» — в нижней
полуплоскости. Поэтому систему (14.54) можем представить в виде
# -±7^J F(xy*W^)))dxt
0 2Я {И-56)
JJL = ^±^]™F(xy2(E-V(x)))dx,
& Т(Е) Т(Е) J дЕ V '
где интегрирование производится вдоль фазовой траектории, ордината
которой — периодическая функция переменной х с периодом 2я (поэтому
пределы в интегралах взяты от 0 до 2я).
205
Рассмотрим теперь уравнения (14.4) при F(у, t> х,-£) = Fly, х,-£\ :
ay у i *v <14-57>
где F (у, х, -£Л и Y (у, х, -£А периодичны по у с периодом 2л.
Пользуясь формулами (13.60) и (13.65), составляем усредненные
уравнения для медленно изменяющихся энергий, действия и параметра у для
системы (14.57) в первом приближении:
2я
+^И-Ож)!><У^г<£-^<»)*
X ** (14.58)
]/2m(y)(E-V(y. x))
2Я 2я
0 х ' О
*l = JL l
* г° J
2Як(У,*."|/-^Г(£-К(«/.х)))
Х /IV
dx; (14.60)
здесь Т0= \/ ^Ж \ dx — период вращения, 7 =
* 2 J / Е — V (у, х)
» г m (у)
2л
0
2л
= ] ]/ 2т (у) (£ — К (у, jc)) djc — интеграл действия,
о
Заметим, что так как 7 выражается через энергию £, то уравнения (14.58)
и (14.59) эквивалентны.
206
В частном случае, когда уравнение (14.57) зависит от одного медленно
изменяющегося параметра — «медленного» времени т = е/, уравнения
энергии (14.58) и действия (14.59) могут быть записаны в виде
2д
О '
2я
+*f(-BS+*)7ws£ros- «'«■>
2я
-£- -ej" ^(мУ^(Я-У(т, *)))*. (14.62)
Уравнений второго приближения для энергии вращения, действия и
параметров у приводить здесь не будем. Эти уравнения, а также асимптотиче-
Иг
ские формулы для координаты х и скорости -jg- можно найти в работах [147„
149, 150).
5. Пример: маятник Эйнштейна во
вращательном режиме. Рассмотрим маятник Эйнштейна во вращательном
режиме. Уравнение такого маятника имеет вид (см. уравнение (13.66))
ir\y2W
at * *•' at
+ g(/(x)sinx = 0, (14.63>
где т = e/, x — угловое отклонение, у (т) — длина нити, g — ускорение
свободного падения. Для энергии вращательного движения маятника из-
уравнения (14.61) получаем выражение
у (х) VEG ( УЩг~) = const' (14-64>
где G обозначает полный эллиптический интеграл второго рода.
Согласно изложенной выше методике, для больших энергий в работе
[1421 с точностью до величин порядка -^ найдена зависимость между
энергией и длиной маятника:
Е-71Е' + %&-М+8&<*-*> + 0Ш- (14-65>
где у0, Е0 — соответственно длина и энергия маятника в начальный момент
времени.
Рассмотрим видоизмененный маятник Эйнштейна (см. стр. 191,
уравнение (13.69)), описываемый системой уравнений
-^2-f]+^sin* = 0'
(14.66»
■§■ = гХ (mgcos х + my^j ) ,
гдееА, — малый коэффициент «пластической» деформации нити.
Для энергии колебаний маятника, описываемых системой (14.66) (слуг
207
чай больших энергий), воспользовавшись уравнением (14.58), с точностью до
1
членов порядка -g^- получаем выражение
E=i\E> + i^-^]- -ф]Г^-»Ь + 0(±). (14.67)
6. Резонансные явления во вращательных
системах. Резонансные явления в системах с вращающимися элементами
обладают некоторыми особенностями и еще далеко не полно изучены.
Рассмотрим частный случай уравнения (14.4),
^- + f(x) = BF(vt,x,£y (14.68)
где F Ivt, х, -^Л — функция, периодическая по t с периодом -^-.
Предположим, что невозмущенное уравнение
АР
^+/(*) = ° (Н.69)
имеет решение
х = г(^а) № = (*(a)(t-t0))t (14.70)
где
г(г|? + 2я, а) = г(г|), а) (14.71)
в случае колебательного режима и
г СФ + 2я, а) = z(i|>, а) + 2я (14.72)
в случае вращательного режима.
Предположим, что частота собственных колебаний о) (а) близка к — v,
где р и q — взаимно простые натуральные числа. Вместо t|) введем новую
переменную Ф (сдвиг фаз) согласно формуле
^=-£-v/ + u (14.73)
и в уравнении (14.68) — новые переменные а и О (как и в § 11) с помощью
формул
х = г(^-в + О, а) , £в аф^Ц-^-е + О, а) . (14.74)
Для новых переменных а, О получим систему в стандартной форме
£ = щИ0>г(те + М' <*(a)4(fe + »,a))z;(f е + *,а).
(14.75)
со (а) г; (-М + О, а)) г; (-J- 0 + О, а),
где W = в, ф = -£ в + О.
208
Обозначим через а0 решение уравнения
o)(a) = -^-v (14.76)
и будем рассматривать резонансные решения системы (14.75), т. е.
предположим, что
В этом случае
а — а0 = О (е)
и мы можем написать
co(a)__£_v = 0(e). (14.77)
(o(a)--Z-v = (o'(a0)(a-a0) + O(ek)t k>\. (14.78)
Принимая во внимание соотношение (14.78), после усреднения правых
частей системы (14.75) получаем
2яр
da e
^(е,-£-е + а,а)г;<ю,
dt 2npD (a0)
(14.79)
^ = ffl'(a0)(a-ao)-^{F(e(|9 + 0,e)2>
о
Для случая быстрых вращений, согласно выражению (14.40) и
асимптотическим решениям (14.26), имеем
z(xM) = i|> + aZ(4), я). (14.80)
где
1 1
(14.81)
Ztt,a) = Z№ + 0(l),
Поэтому усредненная система (14.79) может быть представлена в виде
2яр
da 8
~аТ ~~ ~ 2npD (aj
0
[ F (в, -f в + О, а) (1 Ч- az; (*)) d6,
(14.82)
2яр
4-^co'(flo)(a-ao) + 2l^J f F(e.f e + *,a)Z(t)«,
где\|) = -^- 0 + О, а, согласно формуле (14.47),
О К) = 4" ^о + V4 (^ - 4" 42) • (И.83)
14 246 209
С той же степенью точности можем представить систему (14.82) в виде
ТГ" 2ЩГ J F 6,f e+*,a)(l + ^)de,
О '
(14.84)
dt
*Val 2Г
Приравнивая правые части системы (14.84) нулю, получаем систему
уравнений, определяющую стационарные значения а и #, для которых
совершается равномерное вращение. Для исследования устойчивости этого
равномерного вращения, как и обычно, составляем и исследуем уравнения в
вариациях. (
Рассмотрим частный случай уравнения (14.68), приведенный в работе
[145],
$- + /W=e[/(v/)-2/i-^], (14.85)
де Л > 0 — постоянная / (yf) = 0.
Ограничиваясь основным резонансом (р = q = 1), уравнения (14.84)
запишем в виде
(14.86)
Стационарные режимы определяются из системы
/7ё)4=-^, 2ef№ = a-=^. (И.87)
У аI 2ао
Из первого уравнения находим О = О0, а из второго — а = а0. Для
определения устойчивости найденного решения а0, О0 составляем уравнение
в вариациях
ТГ = -2e]^/(6)Z>>, (14.88)
^ = -^+2е^д^6». (14.89)
Уравнение (14.89) можно упростить, воспользовавшись для этого
первым уравнением системы (14.87). Имеем
^ = %г + 4еЛ80. (14.90)
dt 2Уа30
Составляем характеристическое уравнение для системы (14.88), (14.90).
Имеем
X* _ 4е/& — га J (9) Z^ = 0.
210
При е > О, Л > 0 это уравнение всегда имеет корень с положительной
вещественной частью. Таким образом, любой резонансный режим в системе,
описываемой уравнением (14.85) при быстром вращении неустойчив, если
в системе имеется затухание.
С помощью изложенных выше методов могут быть рассмотрены
вращательные движения в резонансном случае, описываемые более сложными
системами, чем система (14.4). Так, в работах 130 и 321 на основании метода
усреднения некоторых вращательных движений в резонансном случае
излагается асимптотический расчет для системы вида
-dt\m(y)-^-\+f{ytx) = eFl у, в, х, -дг.в),
U -еУ^.в,*, £,в), (14.91)
д- = v(y) + ев [у, 6, х, -£ , в) ,
где* — одномерная координата, у = {уи ..., уп\ — совокупность медленно
меняющихся параметров, F lyy 6, x, -jj , е), Y I yf 6, jc, -^- , г\, 6 (#, 0, дг,
-^-,8 — нелинейные возмущающие функции, периодически зависящие от
в, G — фаза внешней возмущающей силы. Для системы (14.91) рассмотрен
также вопрос о стационарных вращательных движениях в резонансном
случае, найдены критерии устойчивости таких режимов.
7. Пример: движение спутника
относительно центра масс. В качестве изящного примера,
иллюстрирующего изложенную методику исследования резонансных явлений при
наличии вращения, приведем сокращенно задачу о движении спутника
относительно центра масс, подробно рассмотренную Ф. Л. ЧерноуСько 1206].
Рассмотрим плоское движение спутника относительно центра инерции,
движущегося по эллиптической орбите в центральном гравитационном поле.
Предположим, что главная центральная ось инерции спутника, момент
инерции относительно которой равен fl, все время перпендикулярна
плоскости орбиты. Моменты инерции относительно двух других главных
центральных осей инерции обозначим через Л, С (А > С).
Тогда, как показано В. В. Белецким [11 ], с точностью до величин
порядка отношения размера спутника к размерам орбиты, уравнение
относительно движения имеет вид
(l+ecos6)^- — 2esin6-^ + 3a2sin6 = 4esine, (14.92)
где б = 2v — удвоенный угол между радиусом-вектором центра масс и осью
инерции, момент инерции относительно которой равен С, аг = —g—L, e —
эксцентриситет орбиты, 0 — угловое расстояние радиуса-вектора от перигея
орбиты. Заметим, что, согласно неравенству А <; В + е, следует а <; 1.
Уравнение (14.92) — нелинейное дифференциальное уравнение второго
порядка с периодическими коэффициентами, содержащее два числовых
параметра а и е. При е = 0 (круговая орбита) уравнение (14.92) сводится к
уравнению маятника.
14*
211
При а = 0 уравнение (14.92) интегрируется в элементарных функциях.
Рассмотрим три случая:
1) е <£ 1 — орбита близка к круговой;
2) а << 1 —спутник близок к телу динамической симметрии;
3) -jg"!^ 1 —угловая скорость вращения спутника много больше
угловой скорости радиуса-вектора его центра инерции.
1) В случае е < 1 уравнение (14.92) можно представить в виде
•^ + 3a2sin8 = e(4sin6 + 2sine-^ + За2cos6 sin б ) + О (е2).
(14.93)
При е = 0 получаем невозмущенное уравнение
-g| + 3a2sin8 = 0, (14.94)
общее решение которого описывает колебательные, вращательные или
апериодические движения и зависит от двух произвольных постоянных а и 0О.
Исключим из рассмотрения апериодические движения. Тогда общее решение
уравнения (14.94) примет вид
б = г(г|>, а), (14.95)
где
г|) = о)(а)(е —60). (14.96)
При любом а г(г|э, а) удовлетворяет условию
г(г|> + 2я, а) = г(г|>, а) + у, (14.97)
где у = 0 (для колебаний), у = 2я (для вращений).
Напомним, что для уравнения (14.94), согласно формуле (11.70),
интеграл действия имеет вид
2л
7(а) = ^| 4 (Ъ a) dip, (14.98)
О
а согласно выражениям (11.71) и (11.73),
7'a(a) = D(a). (14.99)
Совершая в уравнении (14.93) замену переменных с помощью формул
8 = z(\|), a),
(14.100)
^g-= ©(*)*♦(♦• a),
после некоторых выкладок относительно новых переменных а и г|э получим
систему уравнений в стандартной форме
(14.101)
-^- = ю(а)+ щ^(е, ф, ^(тр, a),
где/7 (0, ф, а) обозначает множитель при е в правой части уравнения (14.93),
а членами порядка О (е2) пренебрегаем.
212
Правые части системы (14.101) периодичны пог|э и 6 с периодом 2я.
Как легко видеть в нерезонансном ел учае( со (а) = —, гдер и q — целые
взаимно простые числа) усреднение системы уравнений (14.101) по 6
приводит к системе
— =0
dQ и'
dtp _
(14.102)
ж=со(а).
Отсюда находим а = const, г|э = со (а) (9 + 60), и, следовательно,
возмущающий момент, вызванный эллиптичностью орбиты, в первом приближении
не меняет амплитуды а и частоты со (а).
В резонансном случае, предполагая, что со (а) близко к —,
со(а) = ^-Ч-0(е), (14.103)
вводим новую переменную О — сдвиг фаз — с помощью соотношения
г|)=-£-(9 + в). (14.104)
Тогда, обозначая через а0 значение а, при котором происходит точный
резонанс
®<<0--J-. (14-105)
с точностью до величин первого порядка малости включительно
усредненную систему (14.101) можно представить в виде
da e
W j F (-7 + - *» +» а°)z* <+• «„) <%
гЮ 2ярО(
° (14.106)
Определяя явно с помощью эллиптических функций все функции,
стоящие в правой части системы (14.106), можно найти стационарные
резонансные режимы колебаний и вращений спутника и исследовать их
устойчивость. На подробном анализе полученных решений и зыцодах здесь
не будем останавливаться, отсылая интересующихся к специальной
литературе [2061.
2) Рассмотрим второй случай а < 1 (спутник близок к телу
динамической симметрии). В уравнение (14.92) удобно ввести новую независимую
переменную т согласно формуле
T-ZArcig у 1 + еЩ 2 i+*cos9 '
(14.107)
т(6+ 2я) = т(6) + 2я,
213
а в качестве новой искомой функции — угол х между главной центральной
осью инерции и радиусом-вектором перигея
г = е + 0 = е + -|-. (14.108)
После некоторых выкладок уравнение движения можно записать в виде
dlx , За2 (1 +еcosЭ)3 . n/ e\\ n t\* \nn\
-Ы+Т (1-«у sin2U —6) = 0, (14.109)
где 0 = 6 (т) определяется из формулы (14.107).
Согласно уравнению (14.109), очевидно, что при а = 0 спутник
совершает равномерное вращение вокруг центра инерции: х = схх + с2. При малом
а движение близко к равномерному вращению.
Уравнение (14.109) заменим системой
dx _„ йУ — За2 0 — gcos9)3^0/„ ft. - nm
~Л =У> "57 Т (1—^)3 $^2(х — 0). (14.110)
Решение этой системы ищем в виде
х = От+ф. £/ = Q + az, (14.111)
где Q — постоянная, а ср и г — новые искомые функции, для определения ко-
* торых получаем систему уравнений в стандартной форме
d(P ~ dz За* (1 + е cos 0)3 .
~*Г=аг' ^a"7 (i^)> 5|п2(От + Ф-е), (14.112)
где а — малый параметр.
Если 2Q — не целое число, то, усредняя правые части системы (14.112),
получим
(14.113)
£=*
Отсюда находим z = const, ср = сх + с0, и, следовательно, как и в
случае отсутствия возмущения (а = 0), х = сх т+ с2; гравитационный
возмущающий момент не оказывает влияния на равномерное вращение спутника
(в первом приближении!).
Пусть 2Q = т, где т — целое число (при т = 2 имеем главный
резонанс — период вращения спутника близок к периоду обращения его по
орбите). Усредняя систему (14.112), получаем
|f-az. *.-_^фж(в)51п2ф, (14.114)
где введено обозначение
тс
ф"»<в>~5Г I {±0S^cos(mT-2e)dx. (14.115)
—Я
Заменяя систему (14.114) одним уравнением (как это мы уже делали в
§ 5), получаем усредненное уравнение второго порядка
^ + 3a*<I>m(e)sin2q> = 0, (14.116)
совпадающее с уравнением движения маятника.
214
Согласно первой из формул (14.111), в которую необходимо подставить
Q = у и ф, определенное из уравнения (14.116), очевидно, что х описывает
вращение с угловой скоростью Q, на которое накладываются медленные
вращения или колебания.
Положения равновесия уравнения (14.116)ф = -g- (п = 0, ±1, ±2,...)
соответствуют равномерному вращению с постоянной угловой скоростью.
Устойчивость равномерного вращения зависит от знака Фт (ё).
3) Исследуем быстрое вращение спутника в плоскости орбиты: период
вращения много меньше периода обращения спутника по орбите. В этом
случае уравнение (14.109) можно записать в виде
-Sr+ *(*.■■) = 0, (14.117)
где функция g (jc, т) периодична по х с периодом я и имеет среднее значение,
равное 0 при любом т.
Согласно методу, изложенному в п. 2 настоящего параграфа, для
больших^ > 1 находим асимптотическое представление общего решения в виде
х = Q (х + т0) + З^щ^-У8 (sin 2 [fl (x + х0) - 6] - sin 26} + О (^) .
(14.118)
Асимптотическое решение (14.118) состоит из быстрого вращения с
угловой частотой Q, на которое накладывается быстропериодическое колебание
с частотой 2Q и медленные колебания частоты 2, амплитуда и фаза которых
медленно изменяются.
Заметим, что с помощью метода усреднения, и в частности идей,
изложенных в настоящем параграфе, с успехом могут быть решены многие
важные задачи динамики космических орбитальных аппаратов. При этом в
некоторых работах метод разделения движений используется для построения
рациональных вычислительных схем, на чем мы здесь не останавливаемся.
К числу интересных задач, рассмотренных в последнее время с помощью
привлечения метода усреднения, следует отнести задачу о возмущении кепле-
ровских орбит, задачу о движении космического аппарата малой тяги
(задача о трансверсальнои тяге), задачу о движении спутника на последних
оборотах, в частности в конце последнего оборота, многие интересные
резонансные задачи, возникающие при исследовании систем с двумя
вращающимися фазами (например, задачи о возмущении орбит высоких спутников
Луной) и др. (см., например, [56, 57,93, 206,242, И, 171,99, 221,222,213,391).
Интересные результаты, относящиеся к теории резонансных явлений во
вращательных системах, могут быть получены разложением решений в ряды
по степеням малого параметра или с помощью метода последовательных
приближений (см., например, П)).
В заключение отметим, что резонансные явления общего вида в системе,
содержащей линейную вращательную координату и я-мерный
квазистатический вектор, описываются уравнениями
Л , Л/ v Л dx dz л \
-SF + Q(x) = Eqtt,x,4i , *>ж,в),
(14.119)
^г _ pli dx dz \
-jp - Et \t, x, dt , г, dt , ej,
215
здесь функция Q (х) периодична по х с периодом 2л,/7 и q— периодичны по /
с периодом соответственно 7> и Тя и по х с периодом 2я, а также
удовлетворяют некоторым необходимым условиям.
Для системы (14.119) в [1] найдены условия существования
единственного стационарного вращательно-колебательного решения с периодом Т
(при котором между периодами выполняется соотношение Т = пТ0 =
= шТд = ITf, где Т — период возмущенного вращательно-колебательного
движения, Т0 — период невозмущенной вращающейся координаты, я, m, I —
взаимно простые целые числа) и обращающегося при е^Ов порождающее
решение.
Вращательное движение во втором приближении рассмотрено в работах
[149, 151]. В них рассмотрен случай движения с большой энергией;
найдено выражение, во втором приближении, для медленно изменяющейся
функции, описывающей медленное изменение энергии возмущенного движения,
описываемого уравнениями
d ( dx\ (14.120)
-i = eY(y> x>w •
вычислены фаза и период вращения во втором приближении.
§ 15
МЕТОД УСРЕДНЕНИЯ
ДЛЯ УРАВНЕНИИ
ВЫСШЕГО ПОРЯДКА
1. Приведение систем высшего порядка к
стандартному виду. Как уже указывалось в § 3, многие задачи
нелинейной механики сводятся к исследованию дифференциального
уравнения т-го порядка, разрешенного относительно старшей производной, вида
dmx J . dx dm~lx \ ,, _ ,.
-Лй- = /р.*.-2Г« ••" "а=гЬ (15Л)
(dx dm~*x \
со/, jc,-^-, . . . , —jszr) — периодическая функциях =со/
с периодом 2я, о) — «большой» параметр.
С помощью замены переменных
dx cPx dm-xx . /ir оч
уравнение (15.1) может быть приведено к системе уравнений в стандартной
форме
dxa 1 \
-т- = еха+\ (а = 0, 1, 2, . . . , т — 2; х = х0, е = — I,
йТ " 7 (15.3)
dxm_x
2х == 8' (Т' *0» хи • v« » Хт—\> в).
2. Построение усредненной систем *ы., Применяя к
системе (15.3) метод усреднения, посредством замены переменных
п
*а=£а + 2 в*Иа*Сс,£в,Ь , .... |m-l) (а = 0, 1, . . . , Ш -*- 1), (15.4)
гдеиа*(х, |0, £ъ . . . , |т_,) (а= 0, 1, . .. , т — 1; Л= 1, 2, . . .) —
периодические функции т с периодом 2я, можем привести систему (15.3) к
усредненной системе уравнений первого порядка
^2- = еФ^0, Ь. . . . , 6^0 + . . . + елФ^0> Ei, ... . Ь-i) +
+ ел+| Ф(ал+,)(|0, Ъ19 . . . , &,_,, х, е) (а = 0, 1, 2, .... т- 1). (15.5)
217
При решении многих задач нелинейной механики, в особенности задач,
связанных с качественным анализом дифференциальных уравнений
(исследование точек равновесия, устойчивости и др.) целесообразно рассматривать
не систему усредненных уравнений первого порядка (систему (15.5)), а одно
усредненное уравнение m-го порядка (аналогично рассмотренному частному
случаю колебаний маятника с вибрирующей точкой подвеса, где вместо
системы двух усредненных уравнений переходили к анализу одного усредненного
уравнения второго порядка).
В связи с этим Н. Н. Боголюбов (мл.) и Б. И. Садовников [19]
разработали вариант метода усреднения, дающий возможность получать для
системы (15.3) соответствующую усредненную систему л-го приближения в виде
(15.6)
dx
= в£т-1 ,
^т-1
^Г" = еФх^о, Ь. .... bi-i) + ... + еяФя(Бв.Е1 Sm-i).
Переходя к переменной /, систему (15.6) можно привести к одному
уравнению m-го порядка
dml
dm
1 l б' dt » * • • » dtm-\ I ^
+ .. . + е"-'Фя (l,§ £1) (| --у. (15.7)
Идея разработанного варианта метода усреднения для уравнений (15.3,
сводится, как обычно, к определению функций uak (т, £0, glf ..., Em-i) ( а =
= 0, 1, 2, ..., т — I; k = 1,2, ..., л) и функций Фд (q = 1, 2, ..., л) таких,
чтобы ряды (15.4), в которых Еа определяются из системы усредненных
уравнений (15.6), удовлетворяли системе уравнений (15.3) с точностью до
величин порядка малости гп. При этом потребуем, чтобы выполнялись
дополнительные условия (как обычно, вводимые для однозначности определения
искомых функций uka (т, g0, ..., Em-i) (а = 0f 1, ..., т — 1; k = 1,2, ..., п);
они должны быть периодическими по т с периодом 2я и среднее значение от
2л
них по т должно равняться нулю: J uakdx = 0).
о
Кроме того, предположим, что правые части системы (15.3) непрерывны
и имеют частные производные надлежащего порядка.
Будем рассматривать формальные разложения (15.4) только как
источник получения приближенных формул, не останавливаясь на вопросе
сходимости.
. Перейдем к отысканию выражений для
"о* (Т. g„, Еь ... , Em-l). <Dk (|o, Ei , • • • , Em-i)
{a - 0. 1 m— 1; k = 1, 2, . . . , n). (15.8)
218
Дифференцируя ряды (15.4), находим
dxa _ d^a , ^ ok dU*k (T> g°' 6l* ' ' ' ' *m-\) ,
+ 2d 2d Ж- 17 (a = 0, 1, ...» m—l). (15.9)
Подставляя выражения (15.9) и (15.6) в уравнения (15.3) и приравнивая
коэффициенты при одинаковых степенях е, получаем соотношения для
определения искомых функций (15.8)
"5Г = "^ *-' — 2|—аб~ b+l ~
- 2 ЛГ^-фЛ^ Si, ... , Sm-i) (15.10)
(а = 0, 1, . . . , т —- 2; ft = 1, 2, . . . , л);
п т—2
™m-l,fe п /г, V V dum-ltk-\ t
-я-в|?*-ф*-2| 2—чг"ь+|™
- 2 %z!l-r^(Ee.6i. ••• > Sm-i) (ft = 2,3, . ... п). (15.11)
Г^ 1.0^1
Здесь Ffe выражаются через заданные функции / (т, £0» Si, •••, Sm-i) и
Kar(*.fco.fci. —,tm-i) (a = 0, 1, ...,m — U r = 1,2 fe — 1).
Следовательно, из систем (15.10) и (15.11) можем найти ыа*(т, £0> Si» •••» Sm-i) и
Ф* (So. Si,..., Sm-i) (а = 0, 1,..., m—l; ft = 1, 2,..., п).
При ft = 1 из системы (15.10) следует, что
^ = 0 (а = 0, 1, ..., т-2), (15.12)
а из соотношения (15.11) —
ди | *
fr^^/C*' So» Si» • • » Sm-l) —<J>i(So> Si» • • • » Sm-l). (15.13)
Согласно дополнительному условию отсутствия нулевой гармоники в
функциях Uak (х, So» Si» •••» Sm-i), из соотношений (15.12) находим
«ад (х, S0, Si, ...» Sm-i) = 0 (a = 0, 1, ...» m — 1), (15.14)
а из соотношения (15.13) —
<MSo, Si, .... Sm-i) = ^ j/(T> So» Si, ..., Sm-i)dx. Q5.iа
0
Интегрируя уравнение (15.13), получаем
Ит-1,1 (X, So, Si, ...» Sm-l) = / (X, lo, Si , •• • , Sm-l), (15.16)
где знак ^ обозначает интегрирование по явно входящему времени.
219
Нетрудно показать, что процесс определения функций (15.8) может быть
продолжен до сколь угодно большого k и что получаемое таким образом
/г-е приближение удовлетворяет исходной системе уравнений с точностью до
величин п + 1-го порядка малости.
3. Уравнение второго порядка. Рассмотрим частный
случай — уравнение второго порядка
где функция м cot, x, -£-) может быть представлена в виде
f{x, х, *) = /(*, x) + 21(a0cosoT +b0sin<л). (15.18)
a
Для этого уравнения расчеты значительно упрощаются.
'Воспользовавшись приведенными рекуррентными уравнениями (15.10),
(15.11), можем выписать явные выражения для усредненных уравнений
первого и второго приближений (с точностью до величин порядка е2
включительно, уже в переменных f).
После некоторых выкладок, находим
Ф, (5. li) =^ 4г 1 F'(х' *• Si) dT (i==1' 2> 3>'
о
f I (х, 6, £i) = f (x, 1,10, F2 (x, I, £x) = -щ uUt (15.19)
F*&, 1,ti) - I; "12 + -§ "02 + -5"^- ("n)2,
где a<xft(T, |, 10(a = 0, 1; k — 1, 2) определяются выражениями
"n (x, 6, li) - /(x, I, Ы, ы02(х, 1, |x) = f(x, I, b),
. "i2 (x, 6, h) = F, (x, 6, li) - Ф2 (x, 6. Si) —%-Si —^- <&i. (15.20)
Усредненное уравнение первого приближения (в переменных 0 —
2-<*(«.#)+.* (tf). (««ч
второго приближения —
-3- = *г (Б. 1) + еФ2 (6, §) + е'Ф, (l, f) . (15.22)
Если в уравнении (15.17)
/L<, х, -pl = rn-£ + f(nt, *),
выражения (15.19) существенно упрощаются и уравнение второго
приближения (15.22) в переменных / примет вид
** р пл ™ * о2 у <ц(Вдд(6) + ^(6)*д(Е) (15.23)
а>\
220
4. Колебания маятника с горизонтально
вибрирующей точкой подвеса. В качестве примера,
иллюстрирующего изложенный вариант метода усреднения, рассмотрим колебания
физического маятника, могущего свободно вращаться
в вертикальной плоскости вокруг своей точки подвеса
(рис. 7) [19].
Остановимся на случае, когда точка подвеса
совершает горизонтальные колебания по закону
-р- = — kgsinQt,
(15.24)
гДе g — ускорение силы тяжести, k — некоторая
постоянная, характеризующая амплитуду
горизонтальных колебаний точки подвеса. При этом, как будет
показано ниже, возможно синхронное вращение
маятника не только с угловой скоростью, равной частоте
вибрации точки подвеса Q, но и с частотой -^-*
Уравнение колебаний маятника с учетом закона движения точки
подвеса, определяемого уравнением (15.24), имеет вид
Рис. 7
<Р0
49
1 #1
-dF+K!it+— 5?cose + -rsine = 0.
или
d*e
ае
g
kg
jjr + b-fi +-f-sine—f- sin Qt cose = 0,
(15.25)
(15.26)
где у -у = o)0 — собственная частота маятника, X — коэффициент
сопротивления, 0 — угол отклонения маятника, отсчитываемый от нижнего
равновесного положения маятника (см. рис. 7).
С помощью замены переменных
9 = -|-/ + г|г, -%- = <* 05.27)
уравнение (15.26) легко приводится к виду (15.1)
W + К 1и~ + ^ (sin № + *)— * sin 2(dt cos M + Ф)} + А-со = 0. (15.28)
Предположим, что частота горизонтальных колебаний точки подвеса
со > со0. Тогда, воспользовавшись уравнением (15.23), для уравнения (15.28)
нетрудно составить усредненное уравнение во втором приближении. После
простых вычислений находим
аСг at со2
<4
sin 2ф
(15.29)
Полученное усредненное уравнение допускает существование
квазистатических решений, для которых ^ = \|)0 = const. Поэтому из уравнения
(15.29) следует условие существования таких решений:
(15.30)
221
Для исследования устойчивости этих решений составим уравнение в
вариациях.
Обозначая малые отклонения г|э от г|э0 через бг|> = г|э — г|э0, находим
уравнение в вариациях
■Ф- + * Т + -F 4- cos 2*«2S* " °- (I53I>
Анализируя соответствующее характеристическое уравнение
Р2 + Ьр + 26 cos 2г|)0 = 0, (15.32)
где
U k 2 1
ь<4
убеждаемся, что решение г|> = г|?0, где 2о)2 >Ясо, устойчиво, как только
выполняется условие
К2(о2 < 4Ыо cos 2г|?0. (15.33)
Таким образом, в рассматриваемой системе, кроме вращения маятника с
частотой Q, может оказаться устойчивым и вращательное движение с дроб-
ной частотой -g-.
§ 16
МЕТОД УСРЕДНЕНИЯ
ДЛЯ КОНЕЧНО-РАЗНОСТНЫХ
УРАВНЕНИЙ*
1. Построение усредненных уравнений для
конечно-разностной системы в стандартной форме.
Рассмотрим систему конечно-разностных уравнений в стандартной форме
LxXn == бА] (Хп » А'п , • . . 9 Хп у tl)f
AJ2) _ «V /y<D J2) y<m> „\
(16.1)
Д*Г = гХт (хУ\ £\ ..., хТ\ п) (п = 1, 2, ...),
записываемую в дальнейшем в виде векторного уравнения
Дхп = гХп(хп, п) (п = 1, 2, ...), (16.2)
где *л G ^m> 8 — малый положительный параметр, Д*„ = х (п + 1) — jc (n).
Покажем, что для системы (16.2) очень просто может быть перенесен
изложенный в § 4 метод построения усредненных систем и доказан аналог
первой теоремы об оценке разности между решением точной и усредненной
систем на конечном интервале времени.
Предположим, что правые части системы (16.2) можно представить в
виде разложений
X(xn9n)=^eivnXv(xn) (16.3)
v=0
и для п > 0 в некоторой области D £ Ет существует и ограничена
производная ХХп (xnt п).
Обозначим
v*0
М{Х(хп,п)} = Х0(хп), (16.4)
Xv(xa) = X(xn,n). (16.5)
еш
* Этот параграф написан в соавторстве с Е. П. Беланом.
223
Очевидно, что функция X* (jc„), определяемая равенством
ЬХ(хп) = Х*(хп)Ахп,
существует и единственна при Ахп Ф 0.
Введем обозначения:
2 ешК(хп) = Х*(хп,п)} (16.6)
v=0
V • Xv(xn) = X(xn,n). (16.7)
v+0 e l
Воспользовавшись обычными правилами отыскания конечной разности
от произведения двух функций, получаем равенство
ДХ(хп, п) = Х*(хп, п+ 1)Ьхп + Х(хп, n)-M{X(xnt n)}. (16.8)
п
Совершим в уравнении (16.2) замену переменных с помощью формулы
хп = 1п + гХ&п,п). (16.9)
Эту формулу, на основании равенства (16.8), представим в виде
A*n = A^ + eX*(!n, /i,+ l)A^ + eX(|n, n)-eX0(ln). (16.10)
В результате преобразования система (16.2) в новых переменных примет
вид
АЬ, = гХ0 © - е'Х0 (1п) X* (£Л, п + 1) + е*Х (£п, п) Х1п (£„, п) + е3 ... .
(16.11)
Таким образом, если |п удовлетворяет уравнению (16.11), правая часть
которого отличается от правой части уравнения
Д£п = еХ0(*Л) (16.12)
на величины второго порядча малости относительно е, то выражение (16.9)
представляет собой точное решение уравнения (16.2).
Как и обычно, выражение
Xn = tn, (16.13)
в котором £Л удовлетворяет уравнению (16.12), будем называть первым
приближением решения уравнения (16.2), а выражение (16.9), в котором £п
удовлетворяет уравнению (16.12), улучшенным первым приближением.
Согласно обозначению (16.4), уравнение (16.12) можно представить в виде
А1п = еМ{Х&п,п)}. (16.14)
п
Итак, уравнения первого приближения получаются из уравнения (16.2)
усреднением по п. Нетрудно показать, что с помощью подстановки
ха = 1п + е£(Ь,. п) + е2Х(|„, n)X'ln($nt n)-
-e2X0&n)X*(tn,n+l)t (16Л5>
а также принимая во внимание, что
224
Ддс„ = АЬ, + еХ(|„, п + 1)АЬ, + ёХ(£„, я)- еХ0&.) +
+ е2 {X &,, я + 1) Х'1п(1„, п + 1)}* Д|я +
+ etffc,, п)Х;п(Ь,, я)-егМ {*(&,. п)Х'1а(1п, я)} -
- е2 (X,(UX* (£., п + 1)}* ЛЬ, - е'Х0 (ЫХ~* &,, я + 1) -
-e*yW{X0(i„)X*(i„,n+l)}
уравнение (16.2) можно привести к виду
Л&п = еХ0 (у + е2М (Х^ <&,, /г) X &. п)} + в» ... . (16.16)
Таким образом, в качестве второго приближения решения уравнения
(16.2) принимаем выражение
Xn-ln + tXi^n), (16.17)
в котором £„ должны быть определены из уравнений второго приближения
Д£п = гМ [X(U. n)) + е2М {Xlnaa9 n)X(lnt n)}. (16.18)
п п
Совершенно очевидно, что, как и в случае обыкновенных
дифференциальных уравнений в стандартной форме, рассмотренных в § 4, исследование
приближенных уравнений (16.14) или (16.18) гораздо проще
непосредственного исследования системы (16.2).
2. Основная теорема об усреднении. Остановимся
на формулировке и доказательстве первой основной теоремы, дающей оценку
разности между решениями точной и усредненной систем.
Пусть хп — решение уравнения (16.2), а %п — решение усредненной
системы (16.14). Тогда справедлива следующая теорема о малости разности
|*« — 1п\ на конечном интервале времени.
Теорема [101. Пусть функция X (хп, п) в области D удовлетворяет
условиям:
1) для всех п > 0 и для любых точек xnt хп, хп £ D существуют такие
положительные числа М и К что
а) |Х(*Л,я)|<Л1, б) \Х(Хп,п)—Х(х'п, п)\<К\хп—Хп\; (16.19)
2) существует такое Х0 (хп), что равномерно по хп в области D
«т 4г\ 2 {Х(хП9п)-Х0(хп)}\
Тогда, если ^ — решение уравнения
Ab.-eXefc,). (16.21)
определенное для всех п >• 0 и принадлежащее вместе со своей р-окрестностью
области D, а хп — решение уравнения
Ахп = гХ(хп,п), (16.22)
15 246 225
0. (1620)
имеющее с &, одни и те же начальные значения, то для любых г\ > 0, р > О и
L > О можно указать такое е0 > О, что для О < е < е0 при 0< п < Е (—)
будет выполняться неравенство
1*.-Ы<Ч- (16.23)
Доказательство этой теоремы проведем аналогично доказательству
соответствующей теоремы для дифференциальных уравнений в гильбертовом
пространстве.
Доказательство. Из условия (16.20) вытекает существование
такой монотонно убывающей функции / (п) -* 0 при п -* оо, для которой
справедливо неравенство
Обозначим
2 1Х(хп,у)-Х0(хп)]
7«0
<nf(n).
F(e)= sup \nf(±)
mi«tl Vе/
Очевидно F (e) -»- 0 при е -»- 0 и либо
(16.24)
либо
1) -Чг-< А дляв>с,
^(е)
2)Нт-Ш_ = 00. (16.25)
е-0 8
Для каждого из этих случаев существует свое е0.
В соответствии с условиями (16.25) можем написать неравенства
2) MF(e)+тИг+^^+F{B)+Шг < ik>
(16.26)
VF(e)>2t, 6 = min(p,ri).
Рассмотрим функцию
_ n+Eia) л-1
^-6« + TT2-.S Il{X(h,v)-X0(ll)) (16.27)
« + 2 ь1
i=n— 1 t>=0
(а > 0 — постоянная, пока еще неопределенная, величина), которая имеет
с \п одно и то же начальное значение и принадлежит ее р-окрестности.
Действительно, имеем неравенство
п+Е(а) /1—1
2 2
/=л—1 »=0
а т" z /==л—1 в=Г
<4r£Lf(e)<F(8><P- (16.28)
Пользуясь правилом определения конечной разности от произведения двух
функций, нетрудно показать, что хп удовлетворяет уравнению
ten = eX(xntn) + R(n), (16.29)
226
где
п+\+Е (а)
+ -т4го" 2 {* (Ъп+1+Е (a),V) — ХЬ (Ьн-1+* (в))) —
-тЬ 2 {*<&..*)-х.(Ы}-
£* + ТТТ 2 2 {*&. о) - *о <Ь)}. я 1 + «X(Ь., я) - е*0ft,, п).
a"t"z /=л—1 о=0 /
Имеем
|Я(«)1<
п+\+Е (а)
ex„(b,)-ex(b„ n)+ ^ 2 {*&. »)-хв(6,)}
+
д + 2 2 {* №я+'+£ <">' °) — -^0 (&»+!+£ (а))}
+
+
"T"z 0=0 |
+ еХ(ь. + тЬ- 2 2 {*&.*)-Хо(Ь)Ы -*Х(Ь..*:
. (16.30)
Далее находим следующее неравенство
| /i+1+Я (а)
л+1+£ (а)
а + 2
S {X(1„ п)-Х(£„, л) + Х„(|„) + Х0 (|,)}
/=л
<
+
e£_*M{xe(S„)-Xe&,(n)}
л+1+£ (а)
<7Т2- 2 |{Х(1„я)-Х&,,л)}| +
а -г ^ <=л
*Н-1+£ (а)
а + 2 |п 1^#(Е-)-^в(Ь)1 +
а + 2
{*о(Ь)-*&..*)}
. (16.31)
Воспользовавшись условием (16.19), находим
п+\+Е (а) . п+\+Е (а)
_е — —
а
^2 2 |{Х(ь,я)-Х(ь.,л)}|<^1 2 1Ь-Ы.
• Л t=/I U~* |=5Я
л+1+£ (а) . л+1+Е (а)
^j 2 \x0(U-x0(tM<^2 2 |ь-ы.
15*
227
Так как £л — решение уравнения (16.21), то
*-i
1Ь-Ь,1<в 2 1*о(У1<« 2 M = tM\i-ni
o=n—1 zf=n— 1
Теперь нетрудно получить оценку
п+\+Е (а) п+\+Е (а)
-^ 2 |{^(Ь.л)-х(ь1.я)}| + ^т 2 1*о(У-*о&)1<
я+1+£ (а)
28A> 2 eM|t-n| =
1=Л
Я (а) +1
а + 2
2е2КМ у
* + 2 fit
Ш =
= УШ (Е (а) + 1Н£ (а) + 2) < ^ (а + 2).
Очевидно, имеем
8 {X0(^)-X(^,n)}|<-2eM
Сумма оценок второго и третьего выражений в неравенстве (16.30), со-
2F (&\
гласно определению F (е), не превышает fl , 2 ■ Норма последнего
слагаемого в неравенстве (16.30), по условию (16.19) и определению F (е), не
превышает eXF (e). Таким образом, окончательно получаем неравенство
| R (л) |< е'Ш (а + 2) + -^_ + -^§- + df(e),
позволяющее найти оценку
о=0
< 2 ^(^КИ-еХГ0-^
0=0
<И»+2> + та||х + т£$рг + 'Ч
.IA
Определяя произвольную величину а для случаев 1), 2) (16.26)
соответственно равенствами
1)« + 2-£-.
2)a + 2 = ffl,
получаем неравенство для п < £ (—)
|2Я(р)(1 + Л)»-*-'|<-5--
Согласно определению б, имеем
S/?(t»)(H-exr*"'
0=0
^ 2 '
о=0
<-§-. (16.32)
228
о=0
Пусть хп — решение уравнения (16.22), причем х0 = £0. В интервале
0<л<л*, л*<£(А|, (16.33)
для которого хп £ Z), согласно неравенствам (16.19), имеем
\Х(хп, п) — Х(х, п)\<сЬ\хп — хп\.
Отсюда, принимая во внимание уравнение (16.29), получаем
\^(xn-xn)\<Xe\xn-Jn\ + \R(n)\.
Таким образом,
\ХП — Хп\<\
т. е. для всех п, удовлетворяющих условию (16.33), выполняются
неравенства
N-b.K-J- + /7(e)<n. ki.-b.K-f+ f(e)<p. (16.34)
Покажем, что п* можно взять равным Е (—). Допустим, что xn£D. Из
уравнений (16.22) и (16.21) получаем
хп+\— хп = еХ(хп, п),
Отсюда находим
|хп+\ — хп|<|гХ(хт п)[<еМ,
\tn+i-tn\<\*X0(tn)\<eM.
Согласно этим неравенствам, имеем
]хп+1—Ъп+\\<\хп+\—хп\ + \хп~1п\ + \Ъп — Ъп+1\<£2гМ + \хп — Ъп\.
(16.35)
Предположим, что равенством* = Е ( —) не выполняется. Тогда неравенство
\хя-1я\<9 06.36)
не может выполняться для п, принадлежащих интервалу [0, Е[— 1 ], так
как мы имели бы, что хп£ D для всех п из интервала 0 <: п <; Е (—).
Итак, существует такое я, что
1*;н-|--Ьн1>Р. <16-37>
в то время, как для всех 0 •< п <: п выполняется неравенство (16.36). В
частности,
l^-feKp- <16-38)
Так как х- £ D, то, на основании условия (16.35), имеем неравенство
229
Принимая во внимание неравенство (16.37), получаем *
\хп — fe|>p —2вМ. (16.39)
Согласно условию (16.26), имеем
F(e)< А_2Ме<-|--Ме. (16.40)
Положим теперь п* = п% что возможно, так как х- Q D. Тогда, согласно
неравенствам (16.34) и (16.40), получим*
l^-^|<-|- + F(e)<p-2iWe,
что противоречит неравенству (16.39).
Итак, можем положить п* = Е (—L и неравенства (16.34) будут
справедливы на интервале 0 «< п «< Еу —). Это завершает доказательство
теоремы.
§ 17
УСРЕДНЕНИЕ В СИСТЕМАХ
С НЕДИФФЕРЕНЦИРУЕМЫМИ
ПРАВЫМИ ЧАСТЯМИ
•
1. Теорема о существовании периодического
решения. Остановимся на теореме, устанавливающей законность
применения принципа усреднения к уравнениям в стандартной форме, правые
части которых не дифференцируемы [126]. Эта теорема, в частности,
позволяет построить периодическое решение усредненной системы и дает его
оценку. Она относится к проблемам второго типа, так как устанавливает
соответствие между свойствами точных и усредненных уравнений на бесконечном
интервале времени.
Рассмотрим систему дифференциальных уравнений в стандартной форме
ТГ = «*('.*>. 07.1)
где х, X — точки л-мерного евклидова пространства Ent t — время, е —
малый положительный параметр.
Предположим, что для системы (17.1) выполняются условия:
а) функции X (/, х) непрерывны, периодические по / с периодом 2я;
б) система усредненных уравнений
-2Г = «*о®. (17.2)
где
X.(9=-srJx(/.S)tf, <17-3)
6
обладает свойствами: 1) функции Х0 (|) допускают существование
ограниченных частных производных по !• до третьего порядка включительно; 2)
среди решений уравнения (17.2) £ = £ (/) имеется изолированное статическое
решение | = |в, для которого
*•<*•>- О'ИжЧ-ь^ (17,4)
231
в) существует некоторая выпуклая окрестность Up (UQ £ Еп) решения
I = £ (0» в которой функции X (tt l) удовлетворяют неравенствам
\X(t9x)\<M, (17.5)
\X(ttx')-X(t,x")\<4\x'-xn\ (17.6)
для jc, x't x" £ Up и всех вещественных /, где М и г\ — некоторые постоянные.
Покажем, что при указанных предположениях система уравнений (17.1)
обладает периодическим решением х = х (t) с периодом 2л, лежащим в сколь
угодно малой окрестности статического решения £ = £о усредненной
системы (17.2).
Для дальнейшего исследования исходную систему дифференциальных
уравнений (17.1) необходимо преобразовать к некоторому специальному
виду. Для этого, прежде всего, введем в рассмотрение вспомогательную
сглаживающую функцию
kjl-i^lf, \х\<а,
1 а } (17.7)
I 0 ,|*|>а,
где а — фиксированное положительное число из области £/р, а
положительная постоянная Аа определяется из соотношения
f Afl(*)d*=l, (17.8)
К
в котором интегрирование выполняется по всему рассматриваемому
пространству Еп. Функция Afl (jc) ограничена вместе со своими частными
производными до второго порядка включительно и, кроме того, как уже
указывалось, интеграл
'.-Л^гЧ* (17-9)
Еп
конечный для всякого положительного а.
Введем в рассмотрение функцию
Д«(*) =
и(/,х)= [ K(*-xj\$lX(t,xJ — XM]dt\dxl9 (17.
0о [о I
Ю)
периодическую во /с периодом 2я. Согласно условию (17.3), можно
построить такую монотонно убывающую функцию / (t), стремящуюся к нулю при
/ -* 2л, что во всей области UQ будет
-j-$\X(t, к)-Х0(х)]Ш
7(0.
(17.11)
Мажорируя правую часть выражения (17.10) и учитывая неравенство
(17.11), получаем
\u(t, x)|<//(0 J Aa(x-x1)dx1<tf(f) [ Ae(Jf-^)^!<
<tf(t)\ (S.a(xjdxb (17.12)
232
или, согласно соотношению (17.8),
\u(t,x)\<tf(t). (17.13)
Из выражения (17.10), принимая во внимание неравенство (17.11), имеем
I ди (/, х)
<tf«)$ laAaVXl)l^<//(/)i lJ^K
Г дх
а на основании обозначения (17.9)
|^|<*Л(0.
С другой стороны, согласно условиям (17.3), (17.5) и (17.6),
|Х0(х)|<М, \Х0(х')-Х0(х')\<ч]х'-х"\
(х,хУеир),
и поэтому
|Х(/, л:') — Х0(х')-X(t, х) + Х0(х)|<2л|х'-х|.
Дифференцируя выражение (17.10) по t, находим
-^^- = J {X(t, Xl) - ХМ) Ьа(х - Xl) d*.
(17.14)
(17.15)
(17.16)
(17.17)
Согласно определению функции Дв (х), для любой точки х, а-окрест-
ность которой принадлежит области Up, имеем
f Ла(д: — x1)dxl= j Aa(x-Xl)dXl=l. (17.18)
Up I x-xi | <а
Поэтому из выражения (17.17), используя неравенство (17.16),
непосредственно получаем
-Щр- -\X(t,x)- Х0 (х)} j Да (х - хг) dx, I
<2ria, (17.19)
т. е. для любых точек х, принадлежащих со своей a-окрестностью области Up,
\*!£±-Х«,х) + Х0(х)\<2г]а. (17.20)
После этих предварительных замечаний относительно функции и (/, х)
и ее свойств перейдем к преобразованию системы уравнений (17.1).
Совершим в системе (17.1) замену переменных согласно формулам
x = t + eu(t,Z), (17.21)
где I — новая переменная, р-окрестностью которой является введенная
область Up.
Благодари неравенству (17.13) и свойству функции и (/, £), всегда можем
подобрать такое положительное е0, чтобы для всех 0 <; е < е0 выполнялось
условие
|еи(/,£)|<е//(/)<а<р (17.22)
и, следовательно, х оставался в области UQ.
233
Подставляя значение х согласно формуле (17.21) в уравнение (17.1),
получаем
^ + ejapL + Eeu^^ = eX(ttl + zu{t>l))t (1723)
ИЛИ
(/+в^№В.)4—{х(/.6 + ««.В)—^}. (17.24,
где / — единичная матрица я-го порядка.
Добавляя и вычитая в правой части (17.24) выражение еХ0(£ +
+ еХ (/, £) и затем умножая полученное выражение слева на
получаем, что £ удовлетворяет системе уравнений
-|- = 8Х0(|)-е{-^^--Х(М) + Х0(|)} + е{Х(/,| + еи«,5))-
-X(t, Ш _e»i^{x(/, l + Bu(t, i)) _ *Ц|1Ц + ез .... (17.25)
Уравнение (17.25) может быть представлено в виде
-§-=*X0® + eF(t,ltt)f (17.26)
где/7 (t, £, е) — периодическая функция /с периодом 2я, удовлетворяющая
неравенству
|/?(М,е)|<2т,а + л(е)е. (17.27)
Действительно, согласно условию (17.3) и неравенствам (17.5), (17.6),
(17.13), (17.14) и (17.20), для слагаемых, находящихся в правых частях
уравнений (17.25), имеем
|-^^ X(t,$ + X0&)\<2w, (17.28)
|Х(/, £ + m(t, Q)-X(t, Z)\<T)ttf(t), (17.29)
|8 ди%® xV>t+e"«> D)|<eMV/(0«, (17.30)
l^-^W^ • J*&2-\<*to* + W.№n. (17.31)
Поэтому, мажорируя правые части уравнения (17.25), принимая при
этом во внимание неравенства (17.28) — (17.31), а также свойства функции
f (/), получаем неравенство (17.27), в котором постоянная х\ (е) имеет
следующее значение: _
т, (е) = R [г] + 2х\а7ап + 37аМп\ + е ... , (17.32)
R= sup tf(t).
Рассмотрим систему уравнений в вариациях, соответствующую
статическому решению £ = £0системы уравнений (17.2),
ТГ = «**(Ы«. (17.33)
234
Общее решение этой системы, как известно, имеет вид
8| = Ш, (17.34)
где D — постоянная квадратная матрица порядка п; h — вообще говоря,
линейная комбинация из произведений полиномов на экспоненты,
содержащая п произвольных постоянных.
Произведем теперь замену переменных уже в системе (17.26), введя
новые переменные Л согласно формулам
l = lo + Dh. (17.35;
Потребуем, чтобы Dh находились в такой малой выпуклой окрестности
Ub точки |0, чтобы х, определяемое формулой (17.21), находилось в
области Up.
Подставляя значения для £ из (17.35) в уравнения (17.26), получим
D -g- = гХ0 (go + Dh) + eF(ttt0 + Dh, e). (17.36)
Учитывая свойства правой части уравнения (17.2), систему (17.36) можем
записать в виде
DTT = гХ'°1&о)Dh + tO(h)(Dh? + eF(t, l0 + Dh, г), (17.37)
где принято обозначение
О (А) = 4- Х'оя (|0 + 6DA) (0 < в < 1). (17.38)
Введем в рассмотрение квадратную матрицу л-го порядка
H = D-lXoi(l0)D, (17.39)
определитель которой |#| отличен от нуля согласно условию (17.4) и
выражению (17.34).
Согласно свойствам функций Х0 (|) и D, матрицы Я и Я""1 ограничены
по модулю некоторыми положительными постоянными Мг и М2.
Теперь систему (17.37) можем представить,в виде
D[w- eHh) = *°(h)(Dh)2 + zF{i, go + Dh, e). (17,40)
Рассматривая уравнение (17.40) как систему алгебраических уравнений
относительно неизвестных
-§—еЯЛ, (17.41)
замечаем, что определитель ее отличен от нуля. Разрешая эту систему в
области 0ь относительно неизвестных (17.41), получаем
^==еЯЛ + е/?(*,Л,е), (17.42)
где/7 (/, Л, е) удовлетворяет неравенству
\F(t, Л, e)|<fc2 [fe^2 + 2х\а + ч(в)е1, (17.43)
в котором постоянные kx и k2 определяются следующим образом
10(ft)|<ft* IZr'lK^, I DA|<б. (17.44)
235
Перейдем к доказательству существования периодических решений
системы уравнений (17.42). Для этого воспользуемся теоремой Шаудера о
неподвижной точке.
Уравнение (17.42) при начальном значении: / = О А = Л (0) может быть
представлено в виде
* t
h(t) = Л(0) + гН f Л(х)dx + г f F(x, A(x), e)dx. (17.45)
6 6
Подставляя значения Л (0 из (17.45) во второе слагаемое правой части
выражения (17.45), имеем
* и
h (t) = Л (0) + zHh (0) / + e2//2 J j А (x) dxd^ +
о о
+ e2# J j F(x, A(x), e)d/d^ + elf(T, A(x), e)dx. (17.46)
0 0 0
Отсюда, воспользовавшись условием периодичности Л (t) no / с периодом
2я,
А(2я) = А(0), (17.47)
находим
2я *? 2я ft
е#А(0)2я + е2#2 j JAfxJdxd^ + е2# f J F(x, A(x), z)dxdt1 +
0 0 0 0
2я
+ e J F(x, A(x), e)dx = 0. (17.48)
. 0
Исключим из системы (17.45) и выражения (17.48) начальные значения
Л (0). Определяя из соотношения (17.48) А(0) и подставляя в уравнение
(17.45), получаем систему уравнений для определения Л (/),
удовлетворяющую условию (17.47),
h(t) = гН J A(x)dx + 8 J F(x, A(x), e)dx —
о о
(2я*! 2я tt
e#J jA(x)dxd^ + eJ j F (х, Л (х), е) didix +
0 0 0 0
2я \
+ /Г1 f F(x, Л(т), е)Л. (17.49)
6 J
Обозначим правую часть выражения (17.49) через St (Л). Тогда,
очевидно, уравнение (17.49) можно представить в виде
A = S,(A). (17.50)
Будем рассматривать правую часть соотношения (17.50) как оператор,
преобразующий Л bS, (A).
Согласно условию (17.47), оператор St (Л) обладает периодом 2я по
переменной t.
Нетрудно проверить, что Л и St (Л) удовлетворяют условиям теоремы
Шаудера. Действительно, из линейности, полноты и нормированности п-
236
мерного евклидова пространства следует линейность, полнота и нормиро-
ванность множества {Л}. Далее, функции А (к которым применяется оператор
St) образуют выпуклое множество, так как они принадлежат области Ut-
Не представляет затруднений показать, 4toS, переводит выпуклое
множество {Л} в его компактную часть.
Чтобы множество, лежащее в полном метрическом пространстве, было
компактным, необходимо, чтобы оно было вполне ограниченным, но в
подмножестве /г-мерного евклидова пространства полная ограниченность
совпадает с просто ограниченностью, следовательно, достаточно показать
ограниченность St (Л) величиной б.
Составим оценку для
|S,(A)|. (17.51)
Принимая во внимание, что \Dh\ < б, \Н\ < Mlt jH~ll < M2f a
также неравенство (17.43), имеем
I St (Л) \<Эы1\Мг6 + k2 (М2 + 2ла + л (е) е)] +
+ M,k2 |М2 + 2т]а + л (е) е]. (17.52)
Выберем такие малые положительные а0 < р* 8о. бо, чтобы для любых
положительных е < е0, б < б0выполнялось неравенство
Зея\Mfi + k2(M2 + 2пя + Л(<0е)| + M2k2 [/^б + 2х\а + х\(г)е] < б.(17.53)
Тогда получим
|S,(A)|<6. (17.54)
Таким образом, все условия теоремы Шаудера выполняются, и,
следовательно, уравнение (17.49) в области (Л0 имеет решение
h = h(t), (17.55)
периодическое по t с периодом 2я.
Остановимся теперь на вопросе единственности периодического решения
А = h (t) системы уравнений (17.42). Допустим, что, кроме решения А = Л (t),
существует другое решение Л = Л, (/), и рассмотрим разность
МО — Л(/) = г. (17.56)
Покажем, что при некоторых дополнительных ограничениях,
налагаемых на правые части уравнений (17.1), г в некоторой малой окрестности
решения h (t) асимптотически стремится к нулю, и, следовательно, в этой
окрестности Л (/) — единственное периодическое решение системы уравнений
(17.42).
Подставляя значение hx (t),
hl(t) = h(t) + zf (17.57)
в уравнение (17.42), получаем
-§- = гНг + г {F(t, h(t) + z, e)-F(t, h(t), e)}. (17.58)
Допустим, что для системы уравнений (17.1) выполняются еще
следующие условия: 1) статическое решение £ = £0 усредненной системы (17.2)
асимптотически устойчиво, и, следовательно, для уравнений (17.33)
характеристическое уравнение
|/Лр —еЯ| = 0 (17.59)
237
имеет все корни с отрицательными действительными частями; 2) правые
части уравнений (17.1), кроме неравенств (17.5) и (17.6) (стр. 232), в области
Up удовлетворяют также неравенству
\X(tt x')-X(t, x")\< cp(/)|*'-jc% (17.60)
при этом
2л
-l-J<p(f)rf/<x, (17 61)
о
гдех — достаточно малая положительная постоянная.
Покажем, что при налагаемых ограничениях на правые части системы
(17.1) всегда можем выбрать в полученных оценках для F (t, Л, е) такие
а, е и 8, для которых нулевое решение системы (17.58) асимптотически
устойчиво.
Для этого необходимо произвести некоторые оценки функций,
входящих в правые части уравнений (17.58).
Из выражения (17.10), (17.17), принимая во внимание неравенство
(17.60) и ограниченность частных производных по х для Afl(x), находим
dt
(t,U + Dh) +X(ttlo+Dh)-X0(U + Dh)\<^(t) + x)y\z\t (17.62)
где у — положительная постоянная, <р (Q и к определяются соотношениями
(17.61).
Имеем, далее,
\u(t,x')-u(t, OK*i|*'—*Ч (17.63)
[i^^-i^l |<^|^-^|, (17.65)
гдеЯх, Я,2, Х3 — некоторые положительные постоянные.
Принимая во внимание неравенства (17.63) — (17.65), а также (17.6) и
(17.60), можем написать
-X(t, l0 + Dh'(t) + eu(t, |0 + Dh(t)))\< <?(t)dn(l + еЛ.01z|, (17.66)
\X(t,to + Dfi(t) + Dz)-X(t,l0 + Dh(t))\<<p(t)dn\z\, (17.67)
|*«'fa + gft(0 + a»> Х(1,1о + Dh(t) + Dz + eu(t,U + Dh(t) + Dz))-
-du«'t° + M(t))X(t> |o + Dh(/) + su(t> lo+Dhm I<
< dn2 [MX, + 7Jf (t) (r\ + Л»)] | z |, (17.68)
t,l, + Dh(t) + Dz) du(t,b, + Dh(t)+Dz) du (t, fa + Dh (Q)
Щ, dt dl
X du«-b> + Dh(t)) \<dn2[7Jf{t)ka+ rfikiHzl, (17.69)
238
где d = max | йц\, <1ц (i, j = 1, ..., n) — элементы определителя | D |.
Кроме этих неравенств, имеем
|Р(Л(0 + г)|2О(А(/) + г)-фЛ(/))2О(Л(/))|<Х4(б)|г|, (17.70)
где Х4 (б) -+ 0 при б -* 0.
Исходя из полученных неравенств (17.62) — (17.70), видим, что правые
части уравнений (17.58) удовлетворяют неравенству
\F(t,h(t) + 2,e)-F(t,h(t)9e)\<<p1(t)\z\ + o(x,e,6)\z\, (17.71)
где а (х, е, б) -+ 0 при х -»- 0, е -»- 0, 6 -»- 0,
2л
-^Л «МО Ж*, (17.72)
хх — достаточно малая положительная постоянная.
Перейдем непосредственно к определению характера устойчивости
тривиального решения системы уравнений
-^-=е#г + е#(/,г,е), (17.73)
для которой характеристическое уравнение, соответствующее системе
уравнений первого приближения
-|-=еЯ2, (17.74)
имеет все корни с отрицательными действительными частями, а функции
R (/, 2, е) в области | z\ < б, 0 <С / < оо удовлетворяют условиям
\R(t, 2, е)|< «МОИ + <т(х, е, 6)|z|. (17.75)
При выполнении указанных выше условий тривиальное решение уравнений
(17.73) асимптотически устойчиво 1104, 41).
Действительно, для системы уравнений (17.74) всегда можно построить
определенно-положительную квадратичную форму
п
W(zuz2 г„)= 2 Л.0г,г„, (17.76)
полная производная которой по времени, взятая с учетом системы уравнений
(17.74), определенно-отрицательная:
^Г<-'^ (17.77)
где г = sup {\zl\i |22|,..., \zn\) в области z£ (Уб.
Очевидно, всегда можно указать такие положительные постоянные
сх и с2, для которых квадратичная форма W (z) будет удовлетворять
неравенству
^Ч^^Х^. (17.78)
Рассмотрим функцию Ляпунова для уравнения (17.73)
V(tt zlt 22, ..., 2П) = е* {t)W(zlt 22, ..., 2П). (17.79)
239
Найдем полную производную от функции V (/, г), составленную на
основании дифференциальных уравнений (17.73). Имеем
<eli">{p-(0»?-5*+91(');|-f-|z| + <'(».«.«>2f-lJ{ О7-*»
Замечая, что
2 ^ dzs Z*- Wf
согласно неравенству (17.78), имеем
*,г|
<2пс&. (17.81)
Поэтому неравенство (17.80) можем представить в виде
4т < *Р (° №' (0 ^ - *2 + 2^г2ф1 (0 + 2псга (х. е, б) ?}.
Мажорируя правую часть этого неравенства, с учетом неравенства (17.78)
получаем
ТГ<{Р'Ю Ь + ^Г" Ф1(0}^ + 2пс1а(н,е(б)еР(^. (17.82)
Положим '
P(0 = -L^*--?rLf<Pi(0<*-f«(0<*, 0<<?<1, (17.83)
с> с« о о
где ю (0 — неотрицательная функция, удовлетворяющая условию
2я ч 2л
j «в(/)Я =i=5-2n ^S-J ф1(0Л, (17.84)
о 1 о
что выполняется, если
*i<-^r~- <17-85)
Далее, согласно соотношениям (17.83) и (17.84), имеем
р (2*я) = 0 (ft = 0, 1, 2, ...). О7-86)
Мажорируя выражение (17.83) с учетом неравенства (17.72), находим
|Р(')1<-^2я. (17.87)
Дифференцируя выражение (17.83), имеем
240
Теперь неравенство (17.82) можно представить в виде
4r<—tv+-ir **(*.е- б> к« <17-89>
при этом V, согласно условию (17.87),— определенно-положительная
функция, допускающая бесконечно малый высший предел.
Вследствие того, что о (х, е, б) -* 0 при х -* 0, е -* 0, б -* 0, для
достаточно малых х всегда можно найти такие а*, е*, б* (а* <д0, е* < е0, б* < б0),
что при любых положительных е < е*, б < б* для уравнения (17.73) будет
существовать определенно-положи-кельная функция V (17.79), допускающая
бесконечно малый высший предел, полная производная которой,
составленная на основании уравнений (17.73), является определенно-отрицательной.
Следовательно, согласно теореме Ляпунова об асимптотической
устойчивости, тривиальное решение системы (17.73) асимптотически устойчиво.
Заметим, что полученные оценки, например оценка (17.85) для х1э не
являются окончательными и всегда могут быть улучшены за счет более
подходящего выбора функции Ляпунова. Таким образом, всегда можно
подобрать такие достаточно малые постоянные е*, я*, б*, для которых в области
Оь* система (17.42) будет иметь единственное периодическое решение А =
Резюмируя изложенное, приходим к теореме.
Теорема [1261. Пусть для системы дифференциальных уравнений
-J--eX (/.*), (17.90)
где xf X — точки n-мерного евклидова пространства ЕП9 t — время, е —
малый положительный параметр, выполняются следующие условия:
1) функции X (/, х непрерывны, периодические по t с периодом 2я;
2) уравнения
-§- = 8*о(£), (17.91)
где
2я
о
обладают свойствами:
а) функции Х0 (g) допускают существование ограниченных частных
производных по g до третьего порядка включительно;
б) среди решений уравнений (17.91) g = g (f) имеется изолированное
статическое решение g = g0, для которого
Х,(Ь)=0, Ц^^-Ц^О; '(17.93)
3) существует выпуклая окрестность Up (Up£ Е„) решения \ = \ (f),
в которой функции X (/, х) удовлетворяют неравенствам
\X(t,x)\<My (17.94)
\X(t,x')-X{t,xn)\<r\\x'-x"\ (17.95)
для х, х',х?£ Up и всех вещественных t, где М и т) — некоторые постоянные.
Тогда для любого сколь угодно малого о можно найти такие достаточно
малые положительные е0, б0 и малое положительное а0, что для любого
16 246 241
положительного е < г0в р-окрестности статического решения £ = £0 системы
усредненных уравнений (17.91) (р < р0, х££/Рв, когда Л££/<0 система
(17.90) будет иметь периодическое решение х = х (t) с периодом 2л, для
которого справедливо неравенство
M0-6el<°. (17.96)
Пусть в дополнение к сформулированным выше условиям правые части
системы (17.90) удовлетворяют неравенству
\X{ttx')-X(t,x")\<v(t)\x'-xn\, (17.97)
где
-^.{фЮЖх, (17.98)
о
х — достаточно малая положительная постоянная, и, кроме того,
характеристическое уравнение, соответствующее уравнениям в вариациях,
составленным для статического решения | = £0, имеет все корни с отрицательными
действительными частями.
Тогда всегда найдутся такие достаточно малые положительные
постоянные а* < а0 (характеризующие структуру функций и (/, £)), е* < t0 и
6* < 60, что для любых 0 < е < е* в р-окрестности (х £ (7pv когда h £ £V)
статического решения £ = |0 система уравнений (17.90) будет иметь
единственное периодическое решение с периодом 2я.
§ 18
УСРЕДНЕНИЕ В СИСТЕМАХ,
ВОЗБУЖДАЕМЫХ
МГНОВЕННЫМИ СИЛАМИ
1. Воздействие мгновенных сил на систему
с одной степенью свободы. Метод усреднения применим не
только для систем, находящихся под воздействием сил, описываемых
достаточно гладкими функциями. Еще в известной монографии «Введение в
нелинейную механику» Н. М. Крылов и Н. Н. Боголюбов показали эффективность
применения метода усреднения для исследования колебаний маятника часов,
представляющего собой автоколебательную систему, возбуждаемую
мгновенными импульсами Эти идеи могут быть развиты в применении к более
широкому классу систем, возбуждаемых мгновенными силами.
Рассмотрим уравнение
**- + at*x = t\f(x,-%-)6(x-xJ + h(x, 4r)l П81>
где е — малый положительный параметр, б (х) — «несобственная» функция,
определяемая соотношениями
о
f 8(jc)dx=l, (18.2)
—о
б (х) = 0 при х Ф 0.
Приведем уравнение (18.1) к стандартному виду. Для этого введем новые
переменные аифс помощью формул
к = a sin г|э,
—j- _ асо cos\|) (г|> = (ot + ф). (18.3)
После обычных преобразований получим систему уравнений в
стандартной форме
—^ = — /(a sin г|э, acocos\|))cosi|)6(asin\|) — x^j +
+ -jj- fi (a sin г|>, аю cos г|?) cosф, (18.4)
16*
243
—-jy- = — f (a sin if, aco cos -ф) sin t|>6 (a sin i|> — *0) —
— fx (a sin гр, aco cos i|>) sin гр.
Как известно, для «несобственной» функции имеем следующие
соотношения
f(x)8(x — *о) = /Wfi(* — х0),
где / (xf) = 0.
Принимая во внимание соотношения (18.5), преобразуем систему
уравнений (18.4).
Находим
da
г
Va2-$
-W = ±-L-^ f(x0,±a>Va* - х* )6(asiny-x0) +
+ — fi (a sin ty, aco cos a|)) cos if>, (18.6)
"S- = —£?"/(*•» ±«>К^ГГ~^ )8(asint|>-*0)-
— fx (a sin i|>, aco cos \|>) sin гр,
где из двух знаков «±» знак «-—» берется для гр, изменяющегося в интервалах
/jL JL W ± L ) (5я 7я \
V 2 » 2 Я/' \ 2 ' 2 Я/' \ 2 ' 2 j
Для определенности в дальнейшем будем полагать х0 > 0. Так как
б (a sin if — х0) отлична от нуля только при а > х0, исследование системы
(18.6) представляет интерес лишь в этом случае.
Для дальнейшего преобразования системы (18.6) необходимо найти
корни уравнения
asin\|? = x0. (18.7)
Допустим, что т$\ г|5(а2) — корни уравнения (18.7), лежащие соответ
ственно в интервалах (о, -у] и (4р я) Очевидно,что корнями этого же
уравнения будут также величины
г|£> = 2£я, г|£2) + 2kn (k = ± 1, ± 2, ...).
Учитывая это, согласно (18.5), можем написать
8(asint|> —х0) = 2- лГ-% 2 ' (18'8>
—oo<fe<oo уа—х
После этого система (18.6) может быть представлена в виде
^=^{^^со/^-^)|б(г|)-.^,>-2И- (189)
—/ (*о> — <° V<? — •*<>) 2 s № — ^ — 2&л)| + — h (а sin *» асо cos Wcos *»
244
+ / (x0, © У a2 — xl) ^ б 0|> — ^2> — 2Лл)[ _
/x (a sin ■$, a© cos г|>) sin i|>.
Используя известное равенство
2 6(x + 2kn)=-Ll^- + flcoskx],
систему (18.9) можем преобразовать к виду
-/(*„, -to У*-xl) Г-l- + 2 cos*(i|>-Ч>Ы) +
(18.9)
Н /i (a sin \|э, aco cos i|?) cos г|э,
яюа2
^°__|/(х0, eo/fl2-4)[4- + icosfe(^-Vo))1 +
+ /(*о> -со]/а2-4) [4" + 2 «»*(*- ^2>)1 -
— ^fasinty, aco cos if) sin -ф. (18.10)
2. Уравнения первого приближения.
Улучшенное первое приближение. Составим уравнения первого
приближения. Усредняя правые части системы (18.10) по / или, что то же
самое (так какг|э = cot + q>) по\|>, получаем усредненную систему
dcp
dt
2яа2(о ]A2 - xl
—-ST **(*).
где введены обозначения
2л
001 (л) = ~2— J /i (a sln 'Ф» a(0 cos Ф) cos Ф*Р»
(18-12)
a02 (a) = -s— J /x (a sin if, a© cos \|>) sin \|)dt|).
2jlo
245
После элементарных выкладок для улучшенного первого приближения
аолучим выражения
V Ь I
Sin/2(tl> —Ч>^2>)
fe=l
l/1 2Ч^ зтМФ~ф(а2)) | ,
— /(V — <о V <>2 — хо) 2, { +
fe=i
, _е_ V flfelsinfo|)-6felcosfoj?
едс0
яа2©2 |/ а2 — Jcg
(18.13)
r/ l/1 24Vi sin*(4> —¥«) .
X Ш*0, о) У а2 — л0)2 1 +
I k=\
_!_*/ 1/1 2ч^ sIn*M>-l42)>
*=1
<a2a 2d k f
где ciku bku a>ki> bk2 (k = 1,2,...) — коэффициенты Фурье функций fx (a sin \|),
aocos t|>) cos t|>, fx (a sin i|>, acocos i|>) sin гр, а и ф — решения системы
уравнений (18.11).
оо
Так как сумма \ sinr* ряд Фурье для функции л7~^ , 0 <
< *ф < 2я, формулы (18.13) определяют выражения улучшенных первых
приближений для а и г|) с помощью разрывных функций с разрывами в
точках г|> — Va0 = 2fcrc, г|5 — г|42) = 2fcrc, А = 0, 1, 2
Таким образом, в колебаниях, описываемых уравнением (18.1), в
которых амплитуда и фаза определяются улучшенными первыми
приближениями, действие мгновенного импульса проявляется в скачкообразном
изменении как амплитуды, так и фазы колебаний.
3. Стационарные режимы. Для отыскания стационарных
режимов необходимо приравнять правые части системы уравнений (18.11)
нулю (ввиду того, что правые части зависят только от а, приравнять нулю
следует лишь правую часть первого уравнения).
Имеем
-255- I/(*e. °> Va2 — xl)-f(x0y - со j/a2-*2o)| + a0l\a) = 0. (18.14)
Предположим, что а0 — стационарная амплитуда (корень уравнения
(18.14)), гр = [со + еВ (До)1 * + Фо — соответствующая ей полная фаза.
Тогда выражение улучшенного значения амплитуды alt определяемого
согласно первой формуле (18.13), будет периодической разрывной функцией
246
с периодом
1 т(*о)= а+2:вы. (18.15)
Здесь через гВ (а0) обозначена правая часть второго уравнения системы
(18.11).
Функции
х = ах sin г|эь -^- = ахсо cos г|51э (18.16)
где ах и ярх определяются согласно выражениям (18.13), в которых вместо а
подставлено стационарное значение а0, будут периодическими с периодом
Т (а0)у причем -£— периодическая разрывная функция с точками разрыва,
совпадающими с корнями уравнения
а0 sin {[со + гВ (а0)] t + q>0} = х0. (18.17)
4. Примеры: часовой маятник; ламповый
генератор. Рассмотрим уравнение, описывающее колебания часового
маятника, возбуждаемого импульсами [921,
— I 1
Л±8(к — х0)\ + кх = 09 (18.18)
dx ,
^"W + r^df—1 2
гдех0 — значение угла отклонения маятника, при котором на маятник
посылается импульс /, б (х) — «несобственная» функция.
Чтобы привести уравнение к виду (18.1), полагаем
dx I dx I
г/ dx \ \ dx , I dt ~П А с, v ,,o mv
Bf\x> ~ЗГ) = — Т"5Г + Т 5 -Их — *). (18.19)
После некоторых выкладок согласно изложенной схеме получим
усредненное уравнение для амплитуды
-2Г = — "2JTa' если а<хо> (18.20)
2"
1_-§-,еслиа>лг0;
для полной фазы
где
если а <: х0,
со
Г'
Из уравнения (18.20), очевидно, следует, что при достаточно малом
начальном значении амплитуды я0, например при а •< х0, амплитуда а (/)
убывает:
a(t) -*o ПРИ '-* °°»
и колебания с течением времени затухают.
247
В качестве второго примера рассмотрим колебания, происходящие в
генераторе в случае Z-характеристики [5J.
При некоторой идеализации колебаний лампового генератора в случае,
когда анодный ток ia (рис. 8) большую часть времени равен либо нулю (лампа
заперта), либо току насыщения 7S, колебания в ламповом генераторе можно
характеризовать уравнением
1
Рис. 8
_ Lq+Rq + ^q= M7sq8(q). (18.21)
Физическая трактовка правой части
уравнения (18.21) следующая: когда q проходит
через 0 в положительном направлении, анодный
ток за время т, очень мало отличающееся от ну-
~*~ ' ля, переходит от значения 0 к значению 7S,
одновременно э. д. с. индукции М ~-jj- = M7S б (q)
очень быстро меняется от значения 0, которое она имела прежде (когда /fl=0),
до некоторого очень большого значения, а затем, когда ia = 7S, примерно
также быстро спадает до нуля; когда q переходит через 0 в отрицательном
направлении, анодный ток чрезвычайно быстро изменяется otUs до 0, а э. д. с.
индукции — от 0 до очень большого отрицательного значения и от него —
опять к нулю.
Предположим, что в уравнении (18.21) -j- мало. С помощью подстановки
(18.22)
q = a sin г|э,
q = ay ^-cost|>,
где if = у -Tjr t + ф, можем привести уравнение (18.21) к системе
в стандартной форме
-JL _ [Mlsa cos\|)6 (a sin -ф) — Ra cosг|э} cos\|>,
ф = /- {M3sa cos yfp& (a sin i|>) — Ra cos if} sin ф,
(18.23)
dt
La
или, учитывая изложенное выше, к виду
da
Mvs
Ra 1 + cos 2ф
Усредняя правые части уравнений (18.24), получаем
Ml* Ra
(18.24)
da
dt
dq>
~W
nL
2L
(18.25)
= 0.
248
Решение уравнения (18.21) в первом приближении выразится формулой
д = кГ* ' sin(-^ t + Фо) + ^£- sin (-^t + Фо), (18.26)
где k и ф0 — постоянные.
Исследуемая система имеет единственный стационарный режим
Id, a0) =i^Lsin(^-^4- Фо)- (18.27)
Для улучшенного первого приближения получаем выражение
Ф1 = Фо—4" KT"C0S^ (* = уЁБ l + Фо);
здесь а — решение первого уравнения системы (18.25).
5. Усреднение в системах с мгновенными
силами в общем случае. Исследуем периодические решения систем,
описываемых уравнениями в стандартной форме при наличии малых
мгновенных сил, выражающихся в виде толчков, приводящих к разрывам
траектории. Как известно, движение такой системы может описываться
уравнениями
-J- = eX(/, v),
ш (18.29)
Ах|/(^)=0 = еЗГ(/,х)|м^)=0,
где е>0 — малый параметр, Ajc—величина скачка в моменты, когда
/(/,*) = 0.
Для применения метода усреднения к системе (18.29) целесообразно
предварительно преобразовать ее к виду (18.4) путем введения дельта-
функции Дирака б (/).
Предположим, что ср (0 — кусочно непрерывная функция, f (f) —
кусочно дифференцируемая функция. Обозначим tlt t2, ..., tly ... простые нули
функции / (0 и предположим, что их не более счетного числа. Для б (/),
по аналогии с (18.5), получим
ф(о6(о=ф(0)6(о, еу(/))■= 21 6!1~и » (18-30>
/ I /1 VI) I
где / (td = 0,
2 « (< - kT) = -J- [4- + s cos H' <18-31)
(«(0 = (1при/>0, (18.32)
_l \0 при/<0.
где v = -=-, T — период.
249
Пусть функция / (/, х) кусочно дифференцируемая в окрестности
поверхности / (/, х) = 0. Тогда, принимая во внимание соотношения (18.30),
систему (18.29) можем представить в виде
^ = еХ^х) + е7(^*)|^^^ (18.33)
Предположим, что при любых х £ D уравнение /(/,*) = 0 на конечном
отрезке 0 << / << Т имеет m = m (Г) решений
М*КМ*)< ... <tm(x). (18.34)
Систему уравнений (18.33) теперь можно представить в виде
f'x (h (х), х)
dx
^ = гХа,х) + г%7(и(х),х)
*=i
1+8
U(им x)
X(t((x), x)
Предположим, что для любых х £ D
К (U (х), х) „ й
М,
(18.35)
(18.36)
где М = const. С точностью до величин порядка е2 система уравнений (18.35)
будет эквивалентна системе
-g- = гХ (t9 х) + е ^ 7 (t( (х), x)8(t- tt (x)). (18.37)
Предположим, для упрощения последующих выкладок, что правые
части системы (18.37) периодичны с периодом 7\ т. е.
X(t + Т,х) = Х (/, х), f(t + Ткх) = /(*, х),
1(t + T9x) = Ht9x).
В этом случае, очевидно,
Ь+т(Т)(х) = Ш + Т (/=1, 2, ...)
и систему (18.37) можно записать в виде
*L=RX(t,x) + em£v{(x)2l8(t-tt-kT),
где принято обозначение
ад = зг(м*), *)•
Введем еще следующие обозначения
М
И{X(/, х)} = Х0(х), М("2' 7,(х) 2«(<-/,-kT)\ = 7<0>(х),
* ' I i=l ft=0 )
*<'• *> - 2 МьГ- созЫ -*Г- со&ы •
(18.38)
(18.39)
(18.40)
(18.41)
(18.42)
т(Г)
т(Г)
2 ar,(x)«(/-/,W) = -i- 2 7<<*)2
Й=1
sin fev (t — fr (jc))
250
fc=i
Для системы (18.40) в качестве первого приближения примем
*(0 = 6(0. (18.43)
где | (/) -— решение усредненной системы
4- = еХ0(£) + е7(0)(£). (18.44) .
В качестве улучшенного первого приближения принимаем выражение
т (Т) оо
x-I + bX&Q + b-L^®'! si"*v(<~''(£)) (OMB), (18.45)
1=1 k=\
где g — решение усредненной системы (18.44).
При построении второго приближения поступаем согласно общей
методике, изложенной в § 4, однако необходимо принять во внимание
отброшенные слагаемые, пропорциональные е2.
6. Теоремы о соответствии решений точных и
усредненных уравнений. Для систем, находящихся под
воздействием мгновенных сил, могут быть доказаны теоремы, обобщающие
первую и вторую основные теоремы метода усреднения. Ниже приведем без
доказательства результаты, полученные А. М. Самойленко по обобщению этих
теорем на конечном и на бесконечном интервалах времени.
Теорема [1661. Пусть для правой части системы уравнений (18.40)
выполняются следующие условия:
а) функции X (U х), 7t(x) (i = 1, 2, ...), -^jM- (/ = l, 2, ..., n; i =
= 1,2,...) ограничены и удовлетворяют условию Липшица для t £ (0, со) и
x£D;
б) равномерно по / :> 0 и х£ D существуют средние значения
{т (Т) оо \
2 зг«(л)21«(/ —*i —«1>; (18.46)
в) усредненная система (18.44) имеет решение £ = | (е, tt х0), g (0, х0) =
= х0 при г = 1, принадлежащее вместе с некоторой ^-окрестностью
области D для всех t £ D [0, L] и удовлетворяющее неравенствам
ди(Ш,х„)) J<(6(e<i ^))<р < 0 (t't<t< t\), (18.47)
• * L
где U = inf tt (х), t = sup*,(*), i= 1,2,..., m{T)ytm < — < tm+i, ила
толсто *€0
Тогда для любого r\ > 0 можно указать такое е0 > 0, <//яо для всех 0 <
< е < ^система уравнений (18.40) будет иметь решение х (/, х0), х (0, х0) =
= x0t определенное для всех t£ [0, — \и удовлетворяющее неравенству
I *('.*«)-£ К *о)|<Ч. (18'48>
Теорема [166]. Яусть правые тети системы (18.40) периодические
по / > 0 с периодом Т и выполняется условие а) предыдущей теоремы;
усредненная система (18.44) имеет изолированную особую точку | = £°:
Х0(|в) + 7(<,)(10) = 0) (1849>
251
принадлежащую области D вместе с некоторой своей ^-окрестностью^ ее
индекс при отображении
1-+Х0® + 7{0)(%) (18.50)
отличен от нуля и
-^Г"^Й°)<Р<0 (*=1, 2, ..., т). (18.51)
Тогда можно указать такое е0 > 0, что для всех 0 < е < е0 система
(18.40) имеет периодическое решение с периодом Т
х = х(/, е), />/,,
для которого
limx(/, e) = x°.
Более того, если функции Х0(х), 7(0> (х) непрерывно дифференцируемы
в р-окрестности положения равновесия £ = |° и вещественные части
собственных значений матрицы
д[Х9 <&)+№(&))
дх
отрицательны, то решение х = х (/, е) асимптотически устойчиво.
!
§ 19
ПРИМЕНЕНИЕ МЕТОДА УСРЕДНЕНИЯ
К ИССЛЕДОВАНИЮ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИИ
С «ПЕРИОДИЧЕСКИМИ» КОЭФФИЦИЕНТАМИ
1. Общие замечания. При решении многих задач приходим к
рассмотрению систем дифференциальных уравнений типа
ТГ + S PM*)*k = «/*С *!.••• >*п) <* - 1, 2.... f л), (19.1)
где Pi* (/) (i, k= 1, 2, ..., n) — периодические функции времени с общим
периодом Т. Будем предполагать, что эти функции непрерывны, а функции
// (t, хъ ..., хп) периодичны по /с тем же периодом Т.
Невозмущенную систему, соответствующую системе (19.1), при
некоторых ограничениях с помощью замены переменных можем привести к системе
уравнений с постоянными коэффициентами и с помощью той же замены
переменных возмущенную систему (19.1) — к системе, близкой к линейной с
постоянными коэффициентами.
Приведя полученную систему к стандартной форме, можем применить
метод усреднения.
Целый ряд важных физических проблем приводит нас к необходимости
отыскания приближенного решения более сложных систем с
«периодическими» коэффициентами вида
-%- + 2S Pik(*. в)** = вМт, в. хъ ... , ха) ,(i = 1, 2, ... , я), (19.2)
где т = е/, -^- = v(x), р**(т, в)(*\ £= 1, 2, ... , я)—периодические
функции 9.
Система (19.2) путем введения новых переменных также может быть
приведена к стандартному виду, после чего для построения приближенного
решения следует воспользоваться методом, изложенным в § 10.
2. Дифференциальное уравнение второго
поря д к а. Остановимся подробнее на рассмотрении дифференциального
уравнения второго порядка
£Цг + р (т, в)х = zF (т, е,х, -£), (19.3)
253
где функции р (х, 6), F [х, 0, х, -£-) периодические по 6 с периодом 2я; -гг- =
= v (х); р (х, в), v (х) и F (х, в, х, -£-) неограниченно дифференцируемы по
т для любых конечных т, т = е/. Кроме того, функции F (т, 0, я.-дт-) могут
быть представлены в виде конечных сумм Фурье по 6 с коэффициентами,
являющимися полиномами относительно ху —тт-.
На примере уравнения (19.3) покажем, что с помощью специальной
замены переменных дифференциальное уравнение (19.3) удобно привести к
стандартному виду и далее применять метод усреднения.
Как показано в работах автора [123, 129, 1301, применение метода
усреднения к уравнению (19.3) особенно удобно при построении первого
приближения.
Рассмотрим дифференциальное уравнение второго порядка
Jj!*- + p(t)x = 09 (19.4)
где р (0 — периодическая функция t с периодом 2я.
Допустим, что для уравнения (19.4) известны два линейно независимых
частных решения хх (/), х2 (I), удовлетворяющие начальным условиям
*i(0)=l, x1(0) = 0,
*2(0) = 0, л?2(0)=1.
Характер общего решения уравнения (19.4) целиком определяется
характером корней уравнения
а2 — \хх (2л) + х2 (2я)] а + 1 = 0. (19.5)
В частности, если выполняется условие
Л = |*1(2я) + ха(2я)|<2, (19.6)
то корни уравнения (19.5) будут комплексными и сопряженными:
ах = е , а2 = е ,
и общее решение уравнения (19.4) может быть представлено в виде
tesr -<*4г <19-7>
xW^de 2Я М0 + С2е 2я и2(0,
где Их (0 и «2 (0 — периодические функции t с периодом 2я, определяемые
выражениями
мо-{*т+-й=#*-*(о}.-~*. (198)
«,(0-^(0+ *-у> *.«>}«
а Сх и С2 — произвольные постоянные.
3. Построение усредненной системы. Полагая в
уравнении (19.3) е = 0 и т = const, получаем
-^ + p[x,v(T)/]x = 0, (19.9)
254
которое, как обычно, будем называть невозмущенным уравнением. Здесь
р It, v (т) /] — периодическая функция /с периодом
v(x)-
Допустим, что для уравнения (19,9) известны два линейно независимых
частных решениядсг (т, /)> *2 (т> 0» зависящие отт как от параметра,
удовлетворяющие начальным условиям
*i(t,0)=1, ^(т,0)=0,
*2(т,0) = 0, х2(х, 0)=1. (19Л0)
Уравнение (19.5) в рассматриваемом случае будет иметь вид
o2-Hx'w)+4T'^r)]o+1==0- (19Л,)
В дальнейшем будем рассматривать случай, когда выполняется условие,
аналогичное условию (19.4),
А w -1 *• (т- w)+ «• (т> -vw) | <2 <19-12>
для любых хна интервале 0 < т < L. Корнями уравнения (19.11) будут
0i = oi(t) = ^u>, 0f = o2(T) = e-'art\
и, следовательно, общее решение уравнения (19.9) будет иметь вид
«it»-^2-г -ta№^
х(0 = Схе *" аа(т, 0 + Сге ** ы2(т, /), (19.13)
2я
где ых (т, 0 и и2 (х, 0 — периодические функции / с периодом ^у-р 0ПРеде"
ляемые выражениями
^(х.0-
и2(%, 0 =
*1<Т'<>+ / 2л MM)g
*i(*. 0+ : 2Г\ **(т' /} Iе
(19.14)
Заметим, что выражение (19.13) при х = const удовлетворяет уравнению
(19.4). Если же в уравнении (19.9), а также в выражении (19.13) положить
х = е/, то выражение (19.13) будет удовлетворять уравнению (19.9) на
интервале 0 <: t < — приближенно, с точностью до величин порядка е.
После этих предварительных соображений относительно решения
невозмущенного уравнения (19.9) перейдем к преобразованию и построению
методом усреднения приближенного решения уравнения (19.3).
Предположим, что в интервале времени 0<: / <: — выполняется условие
(19.12), следовательно, рассмотрим вопрос о построении приближенного
решения уравнения (19.3) в области устойчивых решений невозмущенного
уравнения (19.9). Кроме того, обозначим a (x) ^р^ = ах (х).
255
Исследуем случай резонанса, когда на интервале времени 0 <^. т < L
ах (х) может приблизиться к величине — v(x), где р и q — целые взаимно
простые числа, или совпасть с ней.
При этих предположениях приведем уравнение (19.3) к стандартному
виду.
Для этого введем в уравнении (19.3) новые переменные а и гр с помощью
формул
x = ae\q )ux(xyt) + ae \q >и2(т, 0, (19.15)
dx 'ffwi
—rr- = ae \4 »\
dt
ae^q j [iaL (x) ux (x, /) + ux (x, /)] —
-t (л е+ъ)
— ae \q '[to^WM*. t) — u%(x9t)]9 (19.16)
где и{ (x, f) (i = 1,2) обозначает производную по явно входящему времени
/. Структура формул принимаемой замены переменных (19.15) — (19.16)
совершенно естественно следует из формулы (19.13).
Продифференцируем правую часть выражения (19.13), учитывая при
этом, что а = а (0, г|> = г|э (/), т = е/, и полученный результат приравняем
правой части соотношения (19.16).
Продифференцируем выражения (19.16) и результат, а также значение
х согласно формуле (19.15), подставим в уравнение (19.3). Учитывая, что
(19.13) — решение невозмущенного уравнения (19.9), после ряда
преобразований получим систему уравнений
-J-=eF1(x, 6, a, tf),
-§- = «Л*)- -J-v(x) + eF2(x, 6, а, *),
(19.17)
где Fx (х, 9, а, г|э) и F2 (х, 0, а, г|э) — известные функции, периодические по
в и гр с периодом 2я.
Для резонансного случая, когда <хх (х) — v (x) на всем интервале
изменения х, 0<х< L,— величина порядка е, усредняя правые части
системы (19.17) по /, считая при этом х, а, г|э постоянными параметрами, а
в = £ v (x) dt, получаем усредненную систему первого приближения
с
-f-=eM{F1(Tfefa,*)}i
wT ' - - (19Л8)
-5- = «iW- -f-v(x) + eAf {Fa(x, 9, a, i|>)}.
Определяя из системы (19.18) a = a (/) и г|э = \j) (/) и подставляя
результат в правую часть выражения (19.13), получаем решение уравнения (19.3)
в первом приближении
Ч (0 = а (0 в'("ф+* (/)) ^ (х, 0 + a (/) в"' ("ф+*('» а, (х, /), (19.19)
1 а
где ф = — 9.
256
Если мы хотим исследовать не только резонансную область, но и
подходы к ней из нерезонансной области, разностьа^т) — v (т) может быть
и не малой величиной. В этом случае уравнения (19.17) принимают вид
уравнений (19.3) и для исследования их может быть применен вариант метода
усреднения, изложенный в § 12.
4. Линейное уравнение с периодическими
коэффициентами. В качестве простейшего примера рассмотрим
колебательную систему, движение которой описывается дифференциальным
уравнением второго порядка
-5т + 2*(т)-2г + P(t)x = 0, (19.20)
где п (т) — медленно меняющийся коэффициент трения, являющийся малой
величиной, т = е/, р (f) — периодическая функция / с периодом 2я,
изменяющаяся по закону
p{t) = k\ 2ля<*<(2л+1)я,
p(t) = 0, (2п+ 1)я<*<(2л+2)я (/1 = 0,1,2,...).
где k — постоянная.
Невозмущенное уравнение, соответствующее возмущенному (19.20),
имеет вид
-$- + р(')* = 0. . 09.22)
Для уравнения (19.22) находим' частные решения, удовлетворяющие
начальным условиям (19.10). Имеем
x1(0 = cos*/, 0</<я, (19.23)
хг (t) = cos fet + (я — t) k sin fet, я <: / <; 2я;
/</ч sin kt л _ . _
*2 (0 = 1 » 0 < / < Я,
(19.24)
x2(t) = smk n + (t — n)coskn, я<t<2я.
Уравнение (19.11), определяющее характер общего решения уравнения
(19.22), в рассматриваемом случае будет иметь вид
a2 — (2cosfei — ksi sin kn)a+ l =0, (19.25)
a условие комплексности корней этого уравнения (условие (19.12))
|2cos*n —fee sin fei| <2. (19.26)
Условие (19.26) будет выполняться, в частности, при k = -о-. В этом
случае уравнение (19.25) запишется следующим образом:
a2 + -Ja+1=0. (19.27)
Отсюда находим
Л2.475/ „ -2,475* /iq ооч
а1=е , а2 = е • (ly.Jo)
17 246 257
Решения (19.23) и (19.24) для случая k = -у будут иметь вид
хх(/) =cos-2-, x2(t) = 2sin-j , 0</<я,
Xx{t) = -^-(n — t) x2(t) = 2, я</<2л.
Найдем теперь общее решение уравнения (19.22). Согласно
соотношениям (19.13) и (19.28), имеем
2*475' -^Г -2,475/ 4г
х(0 = С^ 2rt их (/) + С2е 2Я и2 (/), (19.30)
где Сг и С2 — произвольные постоянные, ах (0 и и2 (/) — функции,
периодические по t с периодом 2я, определяющиеся согласно формулам (19.14)
выражениями
"1 (0 = {*i (0 + (х + 'О'309) ** (О) в
«2 (0 = {*i (0 + ("Г- ю»309) *• (')} ^
_* 2'475'
(19.31)
2.475/ v '
2я
Подставляя значения их (/) и и2 (t) согласно формулам (19.31) в выражение
(19.30), получаем ч
х (о = сг {* (0 + (-£- + ю^309) ** (0) +
+ Q {* (0 + (-f - Ю,309) *2 (/)}. (19.32)
где хх (t) и х2 (/) определяются согласно формулам (19.23) и (19.24).
Задаваясь начальными значениями
*(0) = лг0> х(0) = 0, (19.33)
для постоянных Сх и С2 находим:
Сг = -^(1 + 1,2710, C2=-f-(1-1,271*),
после чего решение невозмущенного уравнения (19.22), удовлетворяющего
начальным условиям (19.33) для /, изменяющегося от 0 до 2я, будет иметь вид
а для последующих моментов времени —
x(t + 2лп) = х0 [хх (t) [cos 2,475л — 1,271 sin 2,47Ъп\ —
— x2(t) 0,808 sin 2,475/t}, (19.34)
где п = 1, 2, 3, ... .
Рассмотрим возмущенное уравнение (19.20). Для приведения его к
стандартному виду введем новые переменные цх и т|2 согласно формулам
х = ц1е2п МО + Ч* 2Я % (0.
258
-4,-g-e 2Я «,(<)+л* ** «,(/), (19.35)
где а = 2,475, ux (0 и и2 (t) определяются согласно формулам (19.31).
После некоторых выкладок получим систему уравнений в стандартной
форме
т - тййг"а(/) {"ёг^ w f чл(0 ~ "£■ ЛАС) + п*"2(<)},
■5— —W- МО {-£ ла (О + ча « -
-^ЪМО + ПЛР)}. (19.36)
гдеО (0) имеет вид
D(0)« И[^(0)^,(0)-i,(0)M0) + -^ tti(0)a,(0)]. (19.37)
Усредняя правые части системы (19.36), получаем систему
-4г « 4i I* <*> (* + ЫМ + 421* (т) <с + '^Ь
(19.38)
^f- = % I * W (с - id) + т,2 |л (т) (a - /&)],
при этом
а = —1, 6 = 0,1929, с = —0,3125, d = 0,04537.
Полученная усредненная система (19.38) линейная и может быть
элементарно проинтегрирована. После ее интегрирования легко можем
проанализировать влияние малого медленно меняющегося трения на процесс
колебаний, возникающих в системе (19.22).
17*
§20
УСРЕДНЕНИЕ В КАНОНИЧЕСКИХ
И БЛИЗКИХ К КАНОНИЧЕСКИМ СИСТЕМАХ
1. Усреднение в системах с периодическим
гамильтонианом. Как известно, в небесной механике и боровской
квантовой теории (см., например, М. Борн [20]) для исследования
периодических движений давно был разработан метод возмущения, в котором
широко использовался принцип усреднения.
Заметим, что если исходные уравнения в стандартной форме можно
записать в гамильтоновой форме
4£- = e-^L, 4г=-е4?-. (20.1)
dt dpk * dt dqk x '
то усредненные уравнения, вообще говоря, не имеют формы канонических
уравнений Гамильтона. В связи с этим усреднение целесообразно проводить
таким образом, чтобы получаемые усредненные уравнения также
представлялись в канонической гамильтоновой форме, что позволяло бы сразу же
получить их первый интеграл.
Остановимся на результате, полученном А. М. Федорченко [178], в
котором несколько модернизирован метод канонического усреднения
применительно к задачам нелинейной механики, в результате чего получены более
простые формулы, чем в боровской квантовой теории. Будем рассматривать
системы, гамильтониан которых периодически зависит от времени.
Применяя метод усреднения для исследования таких систем, будем
исходить не из уравнений в стандартной форме (20.1), а непосредственно из
соответствующего им гамильтониана
е#(р„<?„0, (20.2)
при этом предположим, что он — периодическая функция времени /с
периодом 2я, е — малый положительный параметр.
Предлагаемый метод состоит в том, что дается рецептура отыскания
производящей функции S (P{t qlt f)t дающей такое преобразование
канонических переменных pt9 qt к новым переменным Ри Qt согласно
общеизвестным формулам
*--£. ъ-ж' (20-3)
-§- + еЯ (pf, qt, t) = гН' (Р(, (?,). (20.4)
260
в результате которого преобразованный гамильтониан гН' (Pit Qt) уже не
содержит явно времени. Как будет показано далее, в общем случае функВДЮ
S, обладающую указанным свойством, найти нельзя. Будем искать ее, а
также выражение для преобразованного гамильтониана в виде рядов.
Поэтому и в рассматриваемом случае мы также придем к основной особенности
метода усреднения — время t переводится в'слагаемые более высокого
порядка малости.
Будем отыскивать производящую функцию S в виде ряда,
расположенного по степеням е,
S = S0 + eS1 (Qi, Pitt) + e2S2 (qit Pit /)+..., (20.5)
где S0 = 2 qiPt — тождественное преобразование, Sx (qit Pit /), S2 (qlt
i
Рц 0 — функции, подлежащие определению.
Выражение для преобразованного гамильтониана Н' (Pit Q,)
отыскиваем также в виде ряда
И' <Р„ Qt) = Н, (Pit Qt) + гН2(Р,, Qt) + • •. . (20.6)
Подставляя значениях и Я' согласно формулам (20.5) и (20.6) в
уравнение (20.4), учитывая при этом формулы замены переменных (20.3), получаем
jjg. 4- g2 dS* О- g3 . . . Xow/Axc^l
е-зг + е2т + 83-" +*н
+ е2Я2(Р„ ^- + 8^-+ ...)+еЗ .... (20.7)
Разлагая теперь функции Я, #ь Я2, ... в ряды по степеням е и
приравнивая коэффициенты при одинаковых степенях е, получаем уравнения для
определения искомых функций Slt S2, ..., Hl9 Я2, ...
-§-+// (Р„ qi9 t) = H, (Pit qt)9 (20.8)
Так как, согласно предположению, Н (pit qit t) — периодическая
функция времени, ее можно представить в виде ряда Фурье (формулы
преобразования (20.3) при е = 0 дают тождественное преобразование pt = Р1У q( =
H(Pi,qi,t)= f H{:)(Pi,qi)e"u. (20.10)
П=—©о
Предполагая производящую функцию S периодической, наложим
условие отсутствия нулевой гармоники в функциях Slt S2, ... .
Поэтому, усредняя соотношение (20.8) по времени и учитывая что
2л
j -0Р dt = 0,получаем
о
нлр* Qd = -sr] H(Pi>Qt. О* (20.il)
о
261
или, учитывая разложение (20.10),
HtiPoQd^HtfHPfQt). (20.12
Из этого же уравнения (20.8) для Si получаем выражение
S1(Pl,qt,t) 'J "*'(Рь'* *""• (2°ЛЗ)
/1=—оо
п+0
Принимая во внимание разложение
I я=—оо
из уравнения (20.9) без затруднений находим
H2(Pi,Qi) = H?(Pi,Qt), (20.15)
S2(P^t,t) J Щ^-ем. (20.16)
/1=—оо
Продолжая этот процесс, для любого приближения можем построить
преобразованный гамильтониан Н' (P(t Qt), дающий возможность получить
усредненные канонические уравнения.
2. Сферический маятник с вибрирующей
точкой подвеса. В качестве примера, иллюстрирующего изложенный
метод, рассмотрим движение сферического маятника с вибрирующей
точкой подвеса [178].
Гамильтониан такой системы имеет вид
п2
# =
"5ДГ [Я + -Аг) -т1(е- а°>2 sin «0cos е> (20- 1Т>
где m — масса маятника, I — его длина, 0 — угол отклонения от
вертикального направления, g — постоянная ускорения силы тяжести, со —
частота вибрации точки подвеса, а — амплитуда колебаний точки подвеса, со0 =
Введем безразмерное время т = со/ и безразмерный параметр fc2 =
1 \coJ
Тогда выражение для гамильтониана (20.17) можно записать в виде
H = *[-^(PI+1^ (20Л8)
где е = — малый параметр.
Применяя изложенный метод, после ряда выкладок получаем:
Н'= '
2/жо/2
.(|*+-5г-)-^-(».«-й-Н-<«,-ю'
s = рфф + р0е + —^— cos e cos т + -jL- р0 sm e sm т +
262
+ -£-[(-£л«.-«л*р«п..+ф*«Й-)«.х-
Y~ sin2 9 sin 2t . (20.20)
Так как Q= -gp— = 0+0 f—J, величина Q с точностью до малых
вибраций равна 6.
Уравнение для Q имеет вид
■3-+(-?-),['-(-?-),T~e]*"»-p&-.-S|-eK«"')
из которого находим
Полагая в уравнении (20.21) /г = 0, получаем уравнение сферического
маятника с закрепленным подвесом. Если Рф = 0, то имеем плоский
маятник (см. § 5, формула (5.14)).
Таким образом, приведенный пример наглядно иллюстрирует основную
особенность приведенного варианта метода усреднения для уравнений в кз*
ионической форме. Эта особенность заключается в том, что уравнения,
получаемые для усредненного гамильтониана, являются также каноническими.
Такое усреднение является весьма эффективным, потому что в случае, когда
усредненные уравнения представляются в канонической гамильтоновои
форме, можем сразу же получить для них первый интеграл.
3. Второй метод построения гамильтониана
усредненного движения. Приведем еще один вариант
построения гамильтониана усредненного движения, принадлежащий Э. Л. Бур-
штейну и Л. С. Соловьеву [22] и развитый ими, по-видимому, независимо от
результатов, полученных А. М. Федорченко.
Напомним, что согласно результатам, приведенным в § 4, уравнение в
стандартной форме
-JjL-eX (*.*), (20.23)
где е — малый положительный параметр, X (t, x) — периодические вектор-
функции с периодом 2я по ty с помощью замены переменных
х = I + е/ч (t, I) + e2F2 (*, g) + ... (20.24)
может быть приведено к системе
-§- = *Р, (В + е2Р2 (!)+•-., (20.25)
не содержащей явно аргумента /.
Предполагая, что функции Ft (/, g), F2 (t, £), ... периодические по t с
периодом 2я, после некоторых выкладок для определения функций
^i (t, g), F2 (t, I), P± (£), P2 (l) получим соотношения
Рш С В - Xftfi - F'mPi (6) + F 2» (20-26)
263
Рв (1) - X'iF2 + -J- Хн^Л - Fi6Pa (|) - FkPi (£).
где введены обозначения
X = X(t,$ = M{X(t,t)}=X0a),
X= X (t, I) - X0 (1) = j |X(*, g) - X0 (D! Л.
После этого выражения (20.24) могут быть представлены в виде
(20.27)
/\
х»-Ь + в1Х» + Л*1 + в!
/\
ахА
/\
2 Г ^* V
+
ах -р
*
Л*-
Pw
df
lft
Pu + Л* +
(ft = 1, 2, .... n), (20.28)
где ради сокращения опущены знаки сумм, т. е. предполагается, что
<&
xi= 2d ag, *<•
(20.29)
/=i
Аналогично и систему (20.25) с точностью до величин третьего порядка
малости можем представить в виде
dt
- pY 4- р»[ дХ* У 4- дХ" ?. ^ Y
+
+ е»
axft дх( q -р дх„ (
+
Ф аь
аь
аь
" "То
+
(ft=l, 2 n).
№" x,} +
(20.30)
В выражениях (20.26) и, следовательно, в формулах (20.28) и уравнениях
(20.30) функции Fh■= Fu (£),/а = F2i (Q неопределенные. Как
указывалось в конце § 4, если система уравнений (20.23) каноническая, то путем
соответствующего подбора этих функций можно добиться, чтобы усредненные
уравнения (20.30) также были каноническими.
Итак, предположим, что исходные уравнения в стандартной форме
(20.23) можно записать в гамильтоновой форме (полагаем, что имеется 2л
переменных xv x2, ..., Х2п)
dxk
dt
= 8
дН _ у dxn+k __ дН
^,
= еХ,
n+fe.
(20.31)
Выберем функции Ft9 F2 так, чтобы усредненные уравнения,
соответствующие системе (20.31), были также каноническими в гамильтоновой фор-
264
ме. Для этого вместо преобразования (20.24) произведем, как и выше,
каноническое преобразование от xk, xn+k к новым переменным |fe, £я+* согласно
формулам
**=£• ь-теЬ-. (20-32)
где опять представим производящую функцию S в виде ряда
S = 2 *£,+* + eS, (хк% tn+k , t) + e2S2(*fc, Zn+kt t) + • • • . (20.33)
Замену переменных (20.24) для системы уравнений (20.31) запишем в вид
Ч = lk + в/7!.*(Л Ь Ы + e2F2,*(f, Ь. • • • . Ы + • • • .
xn+k = Sn+л + efi.n+fe (t, li, .... Ья) + в2^2.л+* (Л Si> • • •» бгя) Ч- * • •
(Л=1, 2, ... , п). (20.34)
Сопоставляя разложения (20.34) с формулами замены переменных (20.32)
и учитывая при этом выражение (20.33), после приравнивания
коэффициентов при одинаковых степенях е, получим
F dsi
*»fl '
F dSi
dlk •
*■*= - "al^T + -ЩЖ' ТБ5Г' (2a35)
^«+* ~ dik ада ' ae^ •
где Sk = Sk (&, 5я+/, /)• Преобразование (20.32) остается каноническим
при произвольных функциях Sk. Введем дополнительное требование, чтобы
Забыли периодическими функциями, причем такими, чтобыSk = 0.
Тогда, приравнивая постоянные и переменные части в соотношениях
(20.35) и подставляя вместо Fitk, Fitn+k их выражения из соотношений
(20.26), получим искомые выражения для ?,,*, Fitn+k (i = l, 2):
F\,k = F\,n+k = 0, F2,k = ^ dl '• ^2-п+к — 2 —W-— (20.36)
Для F2,fe и /^.л+л вместо выражений (20.36) можно взять выражения,
отличающиеся от них заменой £„+* -»- £*, £* -> Ьи-*:
f».*=2 -#- **+" f*-***=2 4^- **+<• (20-37)
С целью симметризации по канонически сопряженным переменным
Ii, ёп-н» ^2fe и F2n+ft выберем равными полусумме выражений (20.26) и
(20.37): ' *
^-4-2тР» ^--ri-%-*" (20-38)
265
После этого уравнения Гамильтона (20.31), согласно формулам (20.26)
и (20.38), можем заменить приближенными уравнениями в канонической
форме
n+k
+ 8J
дН
д*Н
дН
4-*<% dln+l dln+kd\n+i <%,
+
+ 85
д*Н
дН
&Н
dlsdtn+i dln+s dln+sdln+l dgj
дН \ _
д*Н
(
д*Н
дН
д*Н
дН
dtn+kdtn+l \ аьаь ' din+s din+sdit dis
■)
+
+-f
д*Н
а2я
ая
д2Н
дН
2 [ din+kdit ' аел^ ' абя+§ Яя+Л ' а^д,^. * ags
дН
д*Н
#»Я
#»#
ая
«я+Льн ' авл ' a&n+s + абя+*«п+# # a^i, • db
+
+ diddle ' д1Лп+1 ' dln+s д1п+кд1( • dl
-Лп
>n+subn+i
дН
dls
д*Н
дН
+
д2Н
/ч
дН
Ъп+kofn+t ' «Л/ ' ««+. + «я-H^+i ' <^dWs д£>
+
^3Я дН дН &Н
"*" dln+kd*<dls dln+l dln+s
ЪЛп
дН
Ъп
>+i
дН
dls
д*Н
дН дН
д*Н
дН дН__
dtn+kdin+idls ' д'ц din+s + din+kdln+idin+s ' dli dl
дН
д*Н
дН
• +
&H
«Ь.+Лаь ' din+s ' din+l ч- a^+^g,^+s
ая
ая
ая
дЬ д%
9/I-H
Ч-
д*н
д*Н дН дН д*Н дН дН ]\
dtn+kdln+idls ' dln+s • dlt dln+,dln+ldln+s * dls ' % J} +
(20.39)
ая
а2я
dl
»n+/
«Ля.
I+/
OH \
8 { д1кдЬ [ dlMn+i ' din+s
&H
n+s dln+sdln+i
дН \
dis )
266
д*Н I д*Н дН д*Н дН \
+
2 [ аде,
а2я ая д2// азя ая
<^я+, <^+s дШ< dln+sdln+t db
__ __a^L_ а*я _<?#_ _i_ _£!#_ &>н дн
дШп+1 ' Ъ№ ' ain+s + a&fca&„+, * as„+sag, * a|s
+
а2я а*я ая а*я а*я ая
«,- dbdW, * a|n+s д|*аь ' ^,4^,-w *•
&Н д*Н дН д*Н &Н дН
<>тп+1 • аь*Ь ' agn+s + ajnagn+f а£,аёге+5 ' ags +
а»я ая ая
азя дн
dh^ls d$n+i
д*н ая4
<^п+д$ аь
/ч
дН
*„+.
/ч
дН
<^+s
аб*аЬа£»+« <%„+, <%■
/ч /ч
азя ая ая
/ч /ч __ /ч /ч —
__аз_я_ дн зн азя ая _<?#__ ,
с^аьаь ' <%n+s * <>tn+l + аь^аьа^,, ' ags ' agn+t. +
, ^Я дН дН &Н дН дНТу .
+ «ЛнЛ e agn+s ' а& ЗДн-Лн-. ' * ' * \Г '" f
где по индексам £ и s суммирование ведется в пределах от 1 до п.
Для усредненных уравнений в канонической форме (20.39) усредненный
гамильтониан с точностью до членов порядка е3 имеет вид
pw PD, & \ дН дН дН дН -I
, _£( a*J
+ 2 I ag,
а^я ая ая а*я ая ая
Я. din+i din+s dbdin+s din+( аь
а*я ая ая д*н дн он
аб^аь аь "ail+s "*" asn+<a5n+s аь «.
, дН &Н дН дН д*Н дН
"*" * ' 35я+<аь ' dtn+s дь ' а?я+^п+$ * ags
_ ая а2// дн д/Г д*н ен \ r20 4m
При выводе выражения для гамильтониана (20.40) следует иметь в виду
равенство аЬ = —аб.
267
Принимая во внимание скобки Пуассона
df # j)g_ _ dg df
n+i ' db dln+i
выражение для гамильтониана (20.40) можем записать в виде
»л-*г-*--&-*• <2041>
(On
(О
4. Пример: движение гироскопа с вибрирующей
точкой опоры. Рассмотрим движение гироскопа при неточном
совпадении центра тяжести с неподвижной точкой, неидеальной симметрией и
вибрацией точки опоры [179). Движение такого гироскопа характеризуется
гамильтонианом
И = 4"^ + 7*& + 7з<*з) + U (6, 0, (20.43)
где
<»з = -~-, (20.44)
-4-1 p*-plc°SQ созф-резшф), (20.45)
"2 \ Sin О /
i= "т7 ( sine sin » + Р»cos ч>) (20-46>
— проекции угловой частоты вращения гироскопа на главные оси инерции.
Потенциальная энергия U (0, 0 Для тяжелого гироскопа с
вибрирующей опорой имеет вид
U (6, /) = МI(g — аа>2 sin Ы)cos6, (20.47)
где М — масса гироскопа, I — расстояние центра тяжести от неподвижной
точки (предполагаем, что центр тяжести лежит на оси инерции), а, о) —
амплитуда и частота колебаний точки опоры.
Подставляя выражения (20.44) — (20.47) в правую часть уравнения
(20.43) и произведя перегруппировку членов, получаем
+ A»! (g — асо2 sin о)/) cos б) , (20.48)
где принято обозначение
1 1 / 1 , 1 \
Ц-к-тУ"» '-^ (2049)
Согласно формуле (20.40), найдем выражение для гамильтониана ej#.
Имеем
Лг-.^ + ^-ДГ" +*] +
268
*<*И sin'6 jcos2y + 2g8 * 8|пфе ре51п2ф + М/1Йгсо5 9]
(20.50)
(сохраняем те же обозначения для углов и импульсов в усредненном
гамильтониане).
Далее, находим
Нг = М1г аса2 cos 0 cos w/, (20.51)
^ •Ч >Ч
-^Г=0' -^Г130' -1JT =-Л«1 <и»2 sine cos <
(20.52)
_™L=0 -^-=0 -*£--<)
Таким образом, в правой части выражения (20.40) отличными от нуля
могут быть только суммы
дН дН &Н дН дН
(20.53)
д\пМ дЬ - dln+l<%n+s <Ъ dls •
Для определения их находим
-§^- = 2с2рв + 2сзРвcos2Ф + 2с8 "*~J£™* sin26; (20.54)
Имеем
■^^- = 2сг + 2с8со5 2Ф.
дН дН _ dH^ дНг "
аёя+г4+5 ' ~%Г ' Ж" = (с*+ Сз cos 2ф) А1Ч,Л*sin e-
(20.55)
(20.56)
Подставляя найденные выражения (20.50), (20.55) и (20.56) в правую
часть выражения (20.40), получаем усреднённый гамильтониан с точностью
до членов порядка е3
+ сз[Ре Т?6 |cos2cp + 2с3 » sine рвsin2Ф +
+ Mlxg cos el + e3 (c2 + c3 cos 2cp) M2Z?a2co4 sin2 6. (20.57)
В заключение заметим, что если функция Гамильтона Н периодическая
по одной из координат (например ^), то, аналогично предыдущему, можно
произвести усреднение и по этой координате. В этом случае все выкладки
проводим согласно изложенному выше, строим замены переменных, которые
приводили бы к новым уравнениям для £„ не содержащим переменной |fe,
при этом операция усреднения и интегрирования производятся по lk
вместо /.
§21
ПРИМЕНЕНИЕ МЕТОДА УСРЕДНЕНИЯ
ДЛЯ ПОСТРОЕНИЯ ПРИБЛИЖЕННЫХ РЕШЕНИЙ,
СООТВЕТСТВУЮЩИХ ОДНОЧАСТОТНЫМ КОЛЕБАНИЯМ
1. Основные предположения и ограничения.
Остановимся на применении метода усреднения для построения
приближенных решений, соответствующих одночастотному колебательному режиму
в системе со многими степенями свободы. Рассмотрим колебательную систему
с N степенями свободы, для которой невозмущенная система соответствует
обычной схеме теории малых колебаний и, как известно, полностью
характеризуется кинетической энергией
Г-Т 2 a^rks (2Ы)
и потенциальной
V=-T £ спЯЛ> (21.2)
где qs (s = 1, 2,..., АО — обобщенные координаты и ars, сп (г, s = 1, 2, ...
..., ЛО — соответственно инерционные и квазиупругие коэффициенты,
причем ars = asr, crs = csr-
Подставляя значения кинетической и потенциальной энергий (21.1) и
^21.2) в уравнения Лагранжа, получаем дифференциальные уравнения
невозмущенного движения
2 (<М, + crsqs) = 0 (г = 1, 2, ... , АО. (21.3)
s=l
Предполагая, что возмущение определяется малыми обобщенными
силами
ФЛЯъ Яъ • • • , Ям> Яъ Яг> • • • . Яы) (г = 1, 2, ... , N), (21.4)
приходим к исследованию системы дифференциальных уравнений второго
порядка
л ...
2 (а"Я* + сг*Яз) = 8Qr(<7i> Я2> • • • > <7", <7i> • • • » Ы (21-5)
(r=l, 2f .... АО.
при 8 = 0 вырождающуюся в уравнения (21.3).
270
Введем теперь некоторые предположения, необходимые для
существования устойчивого одночастотного колебательного процесса в системе,
описываемой уравнением (21.5), [113, 117, 130].
Допустим, что для рассматриваемой системы выполняются следующие
условия.
1. В невозмущенной системе возможны незатухающие гармонические
колебания с частотой ©1э зависящие только от двух произвольных
постоянных.
2. Единственным решением, соответствующим равновесию в
невозмущенной системе, является тривиальное решение
<7i = <?2 = • • • = Qn = 0.
3. Ни частота о)1т ни один из ее обертонов 2ю1э 3%,..., Ao)lt... не равны
какой-либо собственной частоте со2, ..., со# невозмущенной системы.
2. Преобразование системы к двум
уравнениям в стандартной форме. При указанных выше предположениях
преобразуем систему уравнений (21.5) к стандартному виду, для которого
без затруднений применим метод усреднения.
Напомним некоторые известные факты из теории линейных
дифференциальных уравнений.
Как известно, частные решения системы уравнений (21.3), соответствую-,
щие нормальным колебаниям, представляются выражениями
qs=(pli)acos((oit + e) (s,/=l, 2,..., N), (21.6)
где coy — собственные частоты, определяемые характеристическим
уравнением
D||arsG)2 +сг,|| = 0, (21.7)
ф($/}—нормальные функции, являющиеся нетривиальными решениями
системы однородных алгебраических уравнений
2 {- a,so)? + Crs} Ф<(/) =0 (г, / = 1, 2 N), (21.8)
обладающие свойством ортогональности:
2 <WV> = 6,
ы (21.9)
2 c»v<n<tp = о а ф о.
а а и 0 — вещественные произвольные постоянные.
Введем обозначения
2 вг.Ф»>Ф<» = Щ. (21.10)
r,s=l
На основании соотношения (21.9) очевидно, что
2 Crs^Wv-mtf. (21.11)
Выделим из частных решений (21.6) решение невозмущенной системы
(21.3), соответствующее первому нормальному колебанию с частотой o)lf
qs = ф^лсобК/ + 6) (s = 1, 2, ... , N). (21.12)
271
Это частное решение удовлетворяет системе уравнений (21.3).
Обозначим
acos(o)1/+6) = jc. (21.13)
Тогда
fc = <PSl}*. 4, = 4il)x> 4s = 4>{sl)x. (21.14)
Подставляя в уравнения (21.3) значения (21.12), учитывая при этом
обозначения (21.13) и (21.14), умножая каждое из уравнений полученной
системы соответственно на q>i(I>, ф2!), ..., Фл}* и суммируя их, получаем
N d*x
2 «««PJV.11 "Ж" + CntfWx = О,
шл
или, согласно обозначениям (21.10) и (21.11),— уравнение второго порядка с
одной неизвестной х
(-SL+°)^)=°- <2,Л5>
Таким образом, частное решение системы (21.3), соответствующее одно-
частотному колебательному режиму с частотой ю1э может быть получено в
результате умножения решения уравнения (21.15) х = a cos (%/ + 6)
соответственно на фундаментальные функции q>\l\ фг1*, ..., фл}*.
Исходя из эквивалентности при одночастотном режиме системы
уравнений (21.3) одному уравнению второго порядка (21.15) с массой т1 и
упругостью тха?и преобразуем систему уравнения (21.5) к новым переменным
а и 6 с помощью замены
qs = ф<!>а cos (ю^ + 6), (21.16)
qs = — ф^Чя sin (gV + 6) (s = 1, 2, ... , N). (21.17)
Как и обычно, дифференцируя соотношение (21.16) и сравнивая с
выражением (21.17), находим
cos^t + 6)-g- — a sin К/ + 9) -J- = 0. (21.18)
Подставляя выражения (21.16) и (21.17) в уравнения (21.5), получаем
2 - (an¥gl)*i sin К* + 6) -%- + anV^a cos (co.t + в) -J-) =
= eQ^^acos^t + 0), ... , — y^^as'in^t + 6), ...)
(r=l,2 АО.
Умножая эти уравнения соответственно на ф(г!> и суммируя по г, находим
- 2 *«Ч* V,!) к sin (о)^ + 6) -g- +
r.s=l *
//А Ч ы
+ ош, cos К/ + 6) -g- U e 2 Q,^.
272
т. е., принимая во внимание обозначение (21.10),
(o1m1[sin((o1/ + e)-^ + acos((o1/ + e)-^-] = -e2 Q^1». (21.19)
Разрешая относительно -£- и -^- систему двух уравнений (21.18) и
(21.19), получаем систему двух уравнений в стандартной форме
da e ^
~1Г = ~ ~*ПГ ^ WQ' Wа cos *» •••• — ф}'Ча sin я|), ...)sin4|),
1 1 г=\
(21.20)
d0 e N
~dTz=~-7^r1i<fr)Qr((f\l)acos^1 — cpjocojasiinl), ..Ocos^,
где гр = cojt + 6.
Применяя к системе (21.20) принцип усреднения, в первом приближении
получаем усредненную систему уравнений
"5Г = ~ 2пщщ ( 2 Ч>{г)С1г(Ч>\1)асо$Ц, ..., — у^щаьту, ...) sin г|>%
6 г=х
(21.21)
1Г = 2пщща I Ё^^Ф^СОЗ*, ..., — «pj^asintfc ...)C0Sl|)dl|).
о Г=1
Далее нетрудно построить усредненную систему во втором приближении
и т. д.
Заметим, что полученная усредненная система (21.21) такая же, как и
усредненная система для амплитуды и фазы колебаний, описываемых
уравнением (21.15) с обобщенной массой тх (21.10) и обобщенной жесткостью
N
т^х (21.11) и происходящих под воздействием силы 2 Qr^-
3. Энергетическая интерпретация уравнений
(21.20). Остановимся на простой энергетической интерпретации уравнений
(21.20), полученных для случая одночастотного колебательного режима в
системе с N степенями свободы.
Для этого рассмотрим выражение виртуальной работы W, которую
совершили бы возмущающие обобщенные силы (21.4)
eQr (<7i, q* ... , <7n, <7i, <Ь • • • » Qn) (r = 1, 2, ... , N)
в режиме синусоидальных колебаний
qs = ф<!>а cos if, qs = — о^ф^а sin if,
на виртуальных перемещениях
8qs = ф^> cos г|?ба — ф$(|>а sin г|>8г|),
соответствующих вариациям амплитуды и полной фазы первого нормального
колебания. С точностью до величин первого порядка малости включительно
18 246 273
имеем
N
б И? = е v Qf (фП) a cos i|), ... ,— ф^асох sin -ф, ...) (ф*1) cos г|>бд —
— ф^>а sin г|>бф). (21.22)
Обозначим символами
тег и тт <2,-23>
коэффициенты при вариациях ба и бг|> в выражении для б IF.
Сопоставляя полученные выше уравнения в стандартной форме для
амплитуды а и фазы 0 с выражением (21.22) и принимая во внимание
обозначения (21.23), уравнения (21.20) можно представить в виде
da =_l_ Ш
dt тх(йха 6ф '
dt ~" m1co1a 6j
Итак, чтобы составить уравнения в стандартной форме для амплитуды
и фазы нормального колебания, к изучению которого сводится исследование
одночастотного колебательного процесса в системе с N степенями свободы,
необходимо определить величину виртуальной работы за цикл колебания,
которую совершили бы возмущающие силы в режиме синусоидальных
колебаний на виртуальных перемещениях, соответствующих вариации их
амплитуды а и полной фазы гр. После этого остается лишь подставить в уравнения
(21.24) значения соответствующих коэффициентов при вариациях Ьа и бг|>.
Возьмем среднее значение рассматриваемой виртуальной работы б UP за
полный цикл колебания
бГ=-~- f &Wdyp (21.25)
о
и обозначим символами
W 6W
6а ' 6ф
коэффициенты при вариациях ба и б\|э в выражении для б UP.
Усредненные уравнения (21.21) можно представить в виде
da 1 Ш
dt тхща бф ' (21.26)
аЪ \ W
dt Шхща Ьа
Итак, для получения усредненных уравнений в первом приближении
достаточно определить лишь среднюю величину виртуальной работы за цикл
колебаний, которую совершили бы возмущающие силы в режиме
синусоидальных колебаний на виртуальных перемещениях, соответствующих
вариации их амплитуды а и полной фазы \|э.
Нетрудно дать энергетическую интерпретацию и высшим приближениям,
а также различным резонансным случаям, когда воздействующие на систему
возмущающие обобщенные силы зависят явно от времени. Кроме того,
энергетическая интерпретация может быть распространена и на случаи, когда
в системе имеются медленно меняющиеся параметры.
274
На всех этих вопросах не будем останавливаться, отсылая
интересующихся к специальной литературе [130, 112]. Заметим, что при составлении
усредненных уравнений с помощью рассмотрения выражения виртуальной
работы выкладки существенно упрощаются, если исследуемая
колебательная система находится под воздействием только потенциальных сил.
В этом случае
(21.27)
потенциальной энергии, возникшая в результате наличия
№
где V — часть
возмущения.
Существенным преимуществом изложенного энергетического метода,
как отмечено еще в работе автора [120], является то, что он дает
возможность получать приближенные решения без
предварительного составления точных
дифференциальных уравнений задачи. Согласно этому методу, для
получения приближенного решения надо
составить линейную систему, описывающую
невозмущенное движение, найти частоту
рассматриваемого одночастотного процесса, его форму и после
этого составить уравнения, определяющие амплитуду
и фазу исследуемого одночастотного колебания.
При этом составляем уравнения (21.24) или (21.26),
пользуясь непосредственно выражением работы
(или потенциальной и кинетической энергии). Это
наталкивает на мысль формального применения
метода усреднения для построения приближенных
решений, 'соответствующих одночастотному
колебательному процессу в системах с распределенными
параметрами, описываемых уравнениями в частных
производных.
Действительно, как и в системах с конечным
числом степеней свободы, в колебательных
системах с распределенными параметрами (описываемых нелинейными
дифференциальными уравнениями в частных производных, близкими к
линейным уравнениям гиперболического типа) при определенных условиях
могут осуществляться одночастотные колебательные режимы, и
исследование этих режимов в случае их устойчивости представляет
физический интерес. Поэтому вполне естественна попытка распространения
изложенного метода на колебательные системы с распределенными
параметрами. Это эффективно в особенности в тех случаях, когда краевые условия
не позволяют произвести разделение переменных в точном уравнении и свести
задачу к бесконечной системе обыкновенных уравнений.
4. Пример построения решения,
соответствующего одночастотному режиму в системе с
распределенными параметрами [112]. В качестве иллюстрации
рассмотрим задачу о поперечных колебаниях стержня длиной /, на
свободный конец которого действует осевая сила
S = S0 + «F(/), (21.28)
где F(t) = A + Bsinat (21.29)
/М/М//МЛ/////////////№
Рис. 9
18*
275
(рис. 9). Пусть EU обозначает жесткость стержня, у — удельный вес, g —
ускорение силы тяжести, Q — площадь поперечного сечения. Для
потенциальной энергии изгиба, пренебрегая инерцией вращения и перерезывающей
силой, находим выражение
'=i(*-4)'.f(-№-isi№- <21-*»
О О
Обозначим
V = V0 + eVv (21.31)
где
*'-M*~z-)*i(&r<—T°.iw* <21-з2>
о о
— потенциальная энергия «невозмущенной» системы, а
•".--4---!!2H(*),*-4''»f№ <21»>
6 О
— «возмущенная» потенциальная энергия, возникающая в результате
наличия силы eF(t).
Для кинетической энергии имеем выражение
T-r-f №)'<*■ <2134>
о
Дифференциальное уравнение «невозмущенного» движения имеет вид
-^^- + So-g- + ^--^ = 0, (21.35)
при этом
y(t, 0) = 0, -|-| =0 (21.36)
— граничные условия для закрепленного конца, а для свободного —
(*-*)
~дх* \хЫ - °» (Е — ~ff") 7 ~дх*
= — °0 "IT,
Согласно обычным методам, для «невозмущенного» уравнения (21.35)
с граничными условиями (21.36) находим частоты о>Л и нормальные
функции q>(*> (х):
ф(*> (х) = (J* sin Ы + XjXt sh X2l) (cos \xx — Ch Jt2\;) —
— (>-?cos V + AjchA,,/) (sinKvx— ^- sh^)> (21-37)
где i^x и Л2 — корни уравнения
/fi — j^bx' + SoX1— _^ =0.
Для иных граничных условий (например, в случае шарнирно опертых
концов) мы могли бы составить непосредственно уравнение «возмущенного»
движения (уравнение (21.35), в котором вместо S0 необходимо подставить S)
276
и с помощью обычной замены свести его к уравнению' в обыкновенных
производных.
В данном случае граничные условия (21.36) не дают возможности сделать
такую замену и поэтому решить задачу обычным методом нельзя.
На основании же приведенного выше метода составления уравнений для
амплитуды и фазы одночастотного колебания, исходя непосредственно из
выражения энергии, можно решить рассматриваемую задачу.
Как известно, под воздействием периодической осевой силы с частотой,
приблизительно в два раза большей основной собственной частоты, в стержне
могут возникнуть интенсивные колебания. Приступая к исследованию этих
колебаний, будем отыскивать решение для «возмущенного» движения в виде
у = ф(,) (л) a cos U- О + г|>) , (21.38)
где а и -ф должны быть определены из усредненных уравнений. При этом
at = О, т. е. рассматриваем резонансный случай.
Имеем
«■*.-- "{х- т/(-3-),*+/(*),*)'«>-
I О 0 '
X [cosZ-i-* + г|))8а — asin (-L* + $\ бф] a cos /-i-ф + ^V (21.39)
Составим уравнения в стандартной форме для амплитуды а и полной
фазы г]э
" ^ = -^®(V + Ssinfl)asin(4<H*)cos(4* + *)>
где приняты обозначения
о о
(21.40)
о
Усредняя правые части системы (21.40), окончательно находим
da еФ0)аВ 0 .
—- = cos 2\b,
5. Усреднение в системах высокого порядка
при наличии одной нелинейности. При исследовании
колебательных процессов в нелинейных системах со многими степенями
свободы часто встречаемся с системами, обладающими нелинейностью
такого типа, что в соответствующей системе дифференциальных уравнений лишь
277
в одном уравнении будет присутствовать нелинейная функция, зависящая
только от одной обобщенной координаты.
Для таких систем в некоторых случаях целесообразно воспользоваться
символическим методом, приводящим к существенным упрощениям как при
выкладках общего характера, так и при конкретных числовых расчетах.
Рассмотрим символическое уравнение [110]
Z(p)x = 8F(e, jc), (21.42)
где принято обозначение р = -^-, F (0, х) — некоторый функционал*,
периодический по 6 с периодом 2я, -тг = v, a
Z(p)=%anpn. (21.43)
Допустим, для простоты, что оператор Z (р) можно представить в виде суммы
Z(p) = Q(p) + *R(p), (21.44)
где R (/со) Ф 0, a Q (р) имеет пару сопряженных мнимых корней ± ш, т. е.
Q (р) = (Р2 + со2) Q^p), (21.45)
причем Qi (io)) Ф 0.
Согласно сделанным предположениям, исследуемая колебательная
система при е = 0 совершает собственные колебания с частотой со.
Обозначим q-t\ = Р (Р)- Тогда уравнение (21.42) можно представить
в виде
(р* + со2)* = гР(р) i-R(p)x+F(Q, х)}. (21.46)
Как и обычно, совершим в уравнении (21.46) замену переменных с
помощью формул
х = a cos (со/ + ф),
(21.47)
рх = — асо sin (со/ + Ф)-
После обычных выкладок получим систему уравнений в стандартной
форме
pa = — eP(p){—R (p) a cos (со/ + q>) + F (в, a cos (со/ + cp))} sin (со* + cp),
(21.48)
РФ = — -j- Я(р){— /?(р)асо8(со/ + ф) + ^(0, a cos (со/ + ф))}соз(со/ + ф).
Правые части системы (21.48) можно усреднить. Получим
J = — еЛ1 (Я (р) [— R (p) a cos (со/ + ф) + F (6, a cos (со/ + ф))] sin (со/ + <р)},
(21.49)
-I?- = - ±-М {Р(р)[- Я (р) a cos (со/ + Ф) +
+ Z7 (0, a cos (со/ + ф))] cos (со/ + ф)},
где -зр-v.
* F (Э, х) — некоторый функционал, следовательно, в правой части уравнения (21.42)
могут быть производные от *, различные интегралы. Таким образом, уравнение (21.42)
, включает различные интегро-дифференциальные уравнения, уравнения с запаздыванием и т.п.
§ 22
УСРЕДНЕНИЕ В СИСТЕМАХ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
С ЗАПАЗДЫВАЮЩИМ АРГУМЕНТОМ
И МАЛЫМ ПАРАМЕТРОМ
•
1. Предварительные замечания и постановка
задачи. В последнее время возрос интерес к задачам исследования
колебательных процессов в системах с последействием, обычно описываемых
дифференциальными уравнениями с запаздывающим аргументом.
Наличие запаздывания в колебательной системе обусловливается тем,
что скорость (или ускорение) протекания процесса в такой системе не всегда
можно считать мгновенной и во многих случаях необходимо учитывать
зависимость скорости от предыстории системы. Явление последействия в
системе может существенно влиять на весь ход колебательного процесса, в
частности на устойчивость колебаний, а в ряде случаев может служить причиной
возникновения самовозбуждающихся колебаний. Последнее обстоятельство
широко используется в электро- и радиотехнике.
В настоящее время для исследования колебательных процессов в
системах с последействием, наряду с общими асимптотическими методами
нелинейной механики (см. [131]), с успехом стал применяться метод усреднения.
Распространение метода усреднения на дифференциальные
уравнения с запаздыванием, в основном, связано с работами А. Халаная [230],
В. П. Рубаника [160, 158, 159], Дж. К. Хейла [232, 233], В. И. Фодчука
1187, 188]» др.
Перейдем к изложению основных результатов, относящихся к
применению метода усреднения к уравнениям с запаздыванием.
Рассмотрим систему уравнений в стандартной форме с запаздывающим
аргументом
*$L = zX\t9x(t)% x(t-x% (22.1)
где е — малый положительный параметр, t — время, х, X — точки
n-мерного евклидова пространства Еп, т — постоянная, характеризующая
запаздывание.
279
Допустим, что для правых частей системы (22.1) существует предел
т
lim 4" J'X (/, х, у) dt = Х0 (х, у). (22.2)
Тогда будем называть усредненной (соответствующей системе (22.1))
систему
*£1=гХ0[у«), y(t)]. (22.3)
Замена системы (22.1) усредненной системой (22.3) обосновывается
теоремами, являющимися обобщением первой и второй основных теорем метода
усреднения.
2. Обобщение первой основной теоремы
метода усреднения. Обобщением первой теоремы Н. Н. Боголюбова
является следующая теорема.
Теорема [2301. Пусть для системы уравнений (22.1) выполняются
следующие условия:
а) в области t £ [0, оо), х, у £ D (D d fj функции X(tt x, у)
ограничены:
\X(t, х, у)\<М,
где М — постоянная;
б) для всех х, у £D существует предел
т
lim4- ( X(t9 x, y)dt = X0(x, у);
в) для любого г\ > 0 существует такое б (г\) > 0, что если \х' — х" | <
<*(П). 1У'-/К Мл).""
\X(Lx\ y')-X(t, ЛЛКЧ,
|Х0(*\ У')-хв(дЛ /) К л; ( '
г) усредненная система (22.3) имеет единственное решение у = у (/)
удовлетворяющее условию у (0) = х0.
Тогда, если х (/) —решение системы (22.1), для которого х (0) = jc0,
mo для любых Т > 0 ы т) > 0 существует такое е0 > 0, что для всех е £
£ Ю> в<>1 будет выполняться неравенство
1*(0-*(01<Ч (22.5)
г т ^
на интервале /МО, — .
Приведем доказательство этой теоремы, следуя изложению ее автора.
Но прежде докажем несколько лемм.
Лемма 1. Если для любых х, у £ D выполняется условие (22.2), то
для любой пары кусочно-постоянных функций х (t), у (f) имеет место
соотношение
t t
lim J X [-J-, x (tj i(to] dtx = f X0 [x (/,), ~y (tj) div
8^°o
280
Доказательство. Имеем
lim I X Г-^-, x, у] dtx = lim I X [a, x, y] du =
о
8
= /lim-y— \ X\uy x, y]du = tX0(x, y) = lX0(x, y)dtv
Отсюда следует:
x, т,
e- -
lim
что и доказывает лемму.
Лемма 2. Если функция X (/, jc, у) ограничена при /£ [0, оо),
*» # 6 ^ w ** (О — решение системы уравнений
-%^ = е„Х f/, х (/), * (/ - т)], (22.6)
то из соотношения lime,, = 0 и limxn(—) = y(t) следует:
\шхпЦ т) = «,(*). (22.7)
Доказательство. При ы > т имеем
*« (" — т) = *„ (и) — ххп (и — 9т),
хп(и — 9т) = епХ[и — 9т, ;cn(a — 9т), хп(и— 9т-т)1, ( '
гдеО < 9 < 1.
Отсюда находим
*я(±._9т-т)], *>те„. (22.9)
Пусть |Х (/, *, у)\ < М при /£ [0, оо), х, i/GD.
Согласно соотношению (22.9), можем записать
_*.*.(£-*), *.(£-*-г)].
Отсюда находим неравенство -
\x"(i;-*)-yW\<\xn(i;)-y(i)\ + ™nM, t>xta. (22.10)
281
Теперь для любого t > 0 и х\ > 0 выберем такое N(r), t), чтобы при п >
> N(r\, t) выполнялись неравенства
e„<min{4-. -g^r}.
\х*0;)-№\<1"
Учитывая неравенство (22.10), окончательно получаем
Wi-т)— *(')!< Л при n>N(x], t),
что и доказывает лемму.
Лемма 3. Если гп < .Л. и lim jc„ (—) = у (t) равномерно по
отношению Kte интервале t £ [0, 74, то
*\ tl
SlX[^'^(^)>Xnfe"T)]^1=IXo[y(/)' y(t)]dt' (22П)
казательство. Очевидно
N^M£)'*«(£- -)\^-^o\y(t),y(t)]dt
о
!'*[*• *&)-«.±-')i*.-
0
0 I I V
*l I
- J *e[y('i). y('i)l*i . (22.12)
J Xdt, — j Xo*! <2УИеят. (22.13)
о о I
Пусть б (r\) такое, что при \х' — х"\ < б (п) выполняются неравенства
\X(t9 х\ y')-X(t, х\ /)|<-jL,
(22.14)
\Х0(х', у')-Хй{хГ9 ЛК-дЬ
а у (f) — кусочно-постоянная функция, такая, что
Ы0-У(01<в(ч) при *£[0, 7]. (22.15)
Выберем теперь таким W (г\), чтобы при /г > N (т)) выполнялись
неравенства
8" "^ТбМт »
282
*. (-£)-*(*>
<б(Т1),
(22.16)
ха(-±- — т\ — y(t)\ <fi(t|) для е„т</<7\
Для этого достаточно взять N(r\) такое, чтобы при п >- N(r\) было бы
*»<т™{шт'4тг}> \хпШ-у(^\<-тШ.
Кроме того, N(r\) выберем таким образом, чтобы при п > N(r\)
выполнялось также неравенство
j X [-£-, ~у (tj, 'у (/!>] dtt - j X0 [yit,), 'у (tt)] dt,
<-J- (22.17)
Для ±2W<tl<T.
Согласно неравенствам (22.14), (22.15) и (22.16), при те„<: tx < Т,
получаем
\x[£'x»(-t)'x-{-k-x)}-x[-k< "<'■>• ^)!<тй- <2218>
|*[-£. УМ, УЫ]-Х[£> УМ» *«i)|| <-Й". (22-19)
I *о l</ (*i). 0 ('i)l - *о U/ (*i), 0 (<i)l К -й- (22.20)
На основании неравенств (22.17) — (22.20), имеем
i *[£• *■(£)• ч£-хЖ-1 *[£• ^ н*1
+
+
+
J *o [y (/,), у (f _»] £tft - J X, [У (<i), У ('i)l Л
d^
+
+
<
<r_IL4.JQ_4.JLj._a 3_
4 19 T 19 T < T
12 ^ 12 "•" 4
283
12
(22.21)
Кроме того, согласно неравенству (22.13) и условию е < 1J* , следует что
16Мт
J Xdt,- J* X0d/X
^ 2
(22.22)
При л > N(r\) окончательно получаем
Я £ • * (*) 'Хп{£-х)]Лх-1 *°l*('х)- *W1 Л]
что и доказывает лемму.
Перейдем к доказательству сформулированной теоремы.
Согласно уравнению (22.1), имеем
t
х (t) = х0 + е ] X [и, х (и), х(и — т)| du.
о
Полагая в уравнении (22.23) / = -i, находим
<П.
(22.23)
x(^fj = x0 + e J X[u, x(u), x(u—x)]du,
(22.24)
или, совершая замену v = еа,
Согласно условию а) теоремы, следует, что при 0 <; / <; Т семейство
функций |jc ( —)} равномерно ограничено и имеет равномерно
ограниченные производные, следовательно, равностепенно непрерывно. Поэтому оно
компактно, и для любой последовательности {е„}, такой, что lim еа = 0, мож-
п-+оо
но найти подпоследовательность {е„ }, такую, что lim xnk(—L-\ = */(*i),
Й^(ч-)
причем сходимость будет равномерной на интервале / £ [О, 71. Тогда у (0) =
= х0 и из равенства
на основании леммы 3, получаем
У (<i) = *о + J *о №(v), У (v)\ dv. (22.25)
о
Отсюда следует, что у (/х) — решение системы
284
Так как это решение, согласно предположению, единственно, приходим
к выводу, что для любой последовательности ел -* 0 существует
подпоследовательность гп , такая, что lim хп. / —*—\ = у (tx). Но это означает, что
е-° [ Ч /
limx/—) = у^) и, следовательно, для любого х\ > 0 существует е0 > О,
такое, что если 0 < е < е0, то
\х [т)-у1ы\<ч
для /, £ 10, Т\.
Пусть t = -*. Тогда
\x(t)-y(et)\<r).
Обозначая у (et) = у (/), получаем
4т У О = 4 * <8'> = 8 Ж" * (8/) = еХ° [У («0. У (*01 = еХ0 [у (0. У (01.
т. е. у (/) — решение системы (22.3) и у (0) = *0.
Теорема доказана.
3. Теорема о непрерывной зависимости
решения от параметра. Теорема о непрерывной зависимости решения
от параметра обобщена также на системы дифференциальных уравнений с
запаздывающим аргументом.
Остановимся на некоторых наиболее общих результатах, полученных
В. И. Фодчуком 11871.
Рассмотрим дифференциальное уравнение с запаздывающим
аргументом и правой частью, зависящей от некоторого параметра А,,
^Р- = f(t, х (/), x(t- А), X) (22.26)
с начальными условиями
x(t, Я) = ф(/, X) для t£[— Д, 01, (22.27)
где х и / — точки я-мерного евклидова пространства ЕПУ ср (t, X) —
некоторая начальная функция, ср (/, X) £ Еп. Решение системы (22.26) будем
отыскивать вправо от начальной точки /0 = 0.
Допустим, что для системы (22.26) выполняются следующие условия,
а) Функция / (/, jc, уу X) определена в области
t£l0, П х, y£DczEn, Х£А, (22.28)
где D — открытое множество пространства £п, Л — некоторое множество
значений параметра А,, содержащее предельную точку Х0. Для *, y£D9
X£D функция / (/, jc, у, X) измерима по / и, кроме того, существует
интегрируемая по Лебегу на интервале [0, Т) функция m (/), такая, что
II/С х, у, Х)|<т(0 (22.29)
в области (22.28). Для /£ [0, 71, Х£ А функция / (/, х, у, X)
непрерывна по х, у.
б) Функция ф (/, X) определена для / £ I—Д, 01, X £ Л, непрерывна по
/, ||ср (/, Я) || <: £, где k — постоянная, ф (/, X) £ D и lim ф (/, X) =
= Ф(/, Xq) равномерно относительно t.
285
в) Существует неубывающая функция Т (б, y), определенная для 0 <
< б <; d, 0 < y-<^» Hm ЧГ (б, y) = О, и интегрируемая по Лебегу на
интервале [О, Т] функция X (/),
т
jX(Od/<oo, (22.30).
о
такие, что
\\f(t> xl9 уъ X)-f(t, i%9 y2, Щ<Ч(\хг-х%1 \\yl-y2\\)%(t) (22.31)
для /£l0, Л. xv х2, уъ y2£D, \\x1 — *2||<d, \\yl— y2\\<dt Х£А.
г) Решение уравнения (22.26) при условии (22.27) и X = Х0 определено
на интервале [0, Г], единственно и лежит в области D вместе с некоторой
своей р-окрестностью.
При этих условиях справедлива следующая теорема.
Теорема [187]. Пусть для системеуравнений (22.26) выполняются
условия а) — г) и, кроме того,
t t t
Hm J/(/, x, y,X)dt = $f(t, x, y, X0)dt (22.32)
Я,-+Хо о 0
равномерно относительно t, jc, у.
Тогда для каждого г\ > 0 найдется такое б > 0, для которого при | X —
— Я0| < б решение х (/, X) уравнения (22.26), удовлетворяющее условию
fljc (0, X) — х (0, А,0)|| < б, определено на интервале и удовлетворяет
неравенству
tx(t,X)-x(ttX0)\\<r) для /610, Л- (22.33)
Заметим, что эта теорема справедлива также и в случае, когда
запаздывание Л — непрерывная и неотрицательная функция параметра X £ Л.
Из этой теоремы непосредственно следует теорема о принципе усреднения.
Теорема [1871. Пусть в уравнении
4г" = **['> *(*). x(t-b(e))\ (22.34)
функции X (/, jc, у) в области t £ [0, со), х, у £D удовлетворяют
следующим условиям.
1. X (/, х, у) определена, измерима по t и, кроме того, существует
интегрируемая по Лебегу на каждом конечном промежутке функция т (/),
такая, что
IIX (/, х, y)\\<m(t)
при t, х, у, принадлежащих области t £ [0, со), jc, у £ D. Для t £ [0, Т]
функция X (/, jc, у) непрерывна по jc, у.
2. Существуют неубывающая функция W (б, y), определенная для 0<!
<; б <: d, 0 < y < d, Hm *Р (б, y) = 0, и интегрируемая по Лебегу на
каждом конечном промежутке функция X (t), такие, что
\X(t. xl9 yd—X(t9 jc2, 0,)|<Y(|*i-*,||. \yi-yi\mt)
для
t£[0, со), xl9 x2, ylt y2£Dy Ж — x2||<d, \\yi — y2\\<d.
"** 286
3. При фиксированных * £ D, у £D существует предел
Пт
-jrjxp. *• #)Л = Хо(*> У) (22.35)
равномерно относительно х, у £ D.
4. Уравнение
-45r = *olS(<i). 6('i)l (22.36)
имеет единственное решение £ = £ (/х), удовлетворяющее начальному
условию I (0) = £0, определенное для t£ I— Д0, оо) и лежащее в области D вместе
с некоторой своей ^-окрестностью (Д0 = ьир Д (е)).
Тогда для каждого г\ > 0, Г > Q можно найти такое е0, для которого
при 0 <; е <; е0 решения х (t) уравнения (22.34), удовлетворяющие условию
х (t) = | е/) для /£ 1—Д0, 01, существуют на интервале 0, — и
удовлетворяют «а $/жш интервале неравенству
1*<*>-Б(в/)|<П-
4. Обобщение второй основной теоремы метода
усреднения. Остановимся на некоторых результатах, относящихся
к распространению второй теоремы Н. Н. Боголюбова на системы
уравнений с запаздывающим аргументом. Эти результаты получены, в основном,
для систем уравнений с малым запаздыванием (см., например, [230, 158, 188,
232, 2331).
Приведем результаты, полученные А. Халанаем [2301. Рассмотрим
систему дифференциальных уравнений
ЦР- = гХ (/, х (0, х(/ - Д)), (22.37)
где х — л-мерный вектор евклидова пространства £„, X (/, х (/), х (t —
— еД)) — /г-мерная вектор-функция, периодическая по /с периодом 2я, еД —
малое запаздывание.
Одновременно с системой (22.37) рассмотрим соответствующую ей
усредненную систему
-2Г = е*§& Э. (22.38)
где
2я
*о(Б. 6) -Т5Г J*». Б. Б)*- (22-39)
Предположим, что усредненная система (22.38) имеет статическое
решение I = £0, Х0 (^, £0) = 0.
Для системы (22.37) в работе [2301 устанавливается следующая теорема.
Теорема [2301. Пусть правые части системы имеют непрерывные
частные производные по х первого порядка и являются периодическими
функциями по t с периодом 2я. Пусть \ = ^ — статическое решение
усредненного уравнения.
Тогда, если характеристические числа матрицы
\\дХ0(и, v)
ди
1
, <**о(и.р)
287
имеют отрицательные действительные части, то существует е0 > 0, такое,
"то при О < е < е0 система (22.37) имеет периодическое решение периода
2я, стремящееся при е -*. О к £0.
На доказательстве этой теоремы не будем останавливаться. Заметим
лишь, что доказывается она согласно такой же схемы, как и вторая основная
теорема Н. Н. Боголюбова (см. § 7). Однако при применении этой схемы
возникает затруднение в связи с тем, что для систем с запаздывающим
аргументом нельзя заменить систему интегральным уравнением при помощи
метода вариации постоянных. Поэтому для того, чтобы доказать существование
периодического решения для вспомогательного уравнения с малым
параметром, приходится строить функционал Ляпунова, что вызывает ряд
громоздких выкладок при проведении всех оценок.
Приведенная выше теорема может быть распространена и на системы
более общего вида.
Рассмотрим систему уравнений, содержащую малое запаздывание,
-^- = X(t,x (/)) + еХ* (*, х (0, x(t- еД)), (22.40)
где X (/, х (/)) и X* (/, х (f), х (t — еД)) периодические по / с
периодом 2я.
Предположим, что для невозмущенной системы, соответствующей
системе (22.40),
*$L = X(t9 *(*)). (22.41)
известно общее периодическое решение х = х0 (t, h) с периодом 2л, h =
Вводя в системе (22.40) новые переменные г согласно формулам
*= x0(tf z),
находим
д*о(*.г) , дхо С» г) & _ у ы Y (t -Л1 4-
+ еХ* [t9 x0 (/, г (/)), х0 (t - еД, г (/ - еД))1. (22.42)
dz
Разрешая систему (22.42) относительно -z-, для г окончательно
получаем систему уравнений в стандартной форме с запаздывающим аргументом
типа (22.37)
-£& = eZ (/, z (/), г (/ - еД), е), (22.43)
где
Z(/, 2(/), z(f —еД), е) =
= [ dx°«>zzMyx*[tt Xo{t9 z(i))t *о(/-8Д, ztf-eA))].
Воспользовавшись результатами, полученными для системы (22.37), для
системы (22.40) можем сформулировать следующий результат: пусть | =
= £о — статическое решение усредненной системы
-§-«eZe(gf gf 0), (22.44)
288
где
и матрица
2я
Ze(gf I 0) = ^ Jz(/, Е. £, 0)dt,
dZ0 (и, vt 0)
ди
+
dZ0 (и, у, 0)
do
имеет характеристические числа с отрицательными действительными
частями. Тогда система (22.40) имеет периодическое решение периода 2я, при
&-+ 0 стремящееся к периодическому решению х = x0(t, £0) невозмущенной
системы (22.41).
Заметим, что условие периодичности функций, стоящих в правых
частях уравнений (22.37) и (22.40), как показано в работе [2311, может быть
заменено условием почти периодичности.
Случай, когда запаздывание в уравнениях (22.40), не мало, рассмотрен
в работах [232, 233 и 2071.
Рассмотрим систему дифференциальных уравнений в стандратной
форме с запаздывающим аргументом
dx
-jr = ef(t, xf xt)t
(22.45)
где е — малый положительный параметр, / (/, х, xt) — непрерывный
функционал, определенный для / £ [0, со), xt £ С [— г, 0], где СI— г, 0] —
пространство функций, непрерывных на I—г, 01. Допустим, что функционал
f (/, х, xt) почти периодический по / равномерно относительно xt и имеет
непрерывные производные Фреше второго порядка по xt. Пусть, далее,
/0 (Ф) = 1^-^-1 f(t, ф, <р)Д;
(22.46)
усредненная система уравнений для (22.45) определяется как система
обыкновенных дифференциальных уравнений
-§-=8Ы&).
(22.47)
Для системы (22.45) справедлива следующая теорема.
Теорема [233]. Если усредненное уравнение (22.47) имеет точку
равновесия £ = So, такую, что матрица коэффициентов линейной системы
в вариациях не имеет собственных значений на мнимой оси, тогда для
достаточно малых положительных г система уравнений (22.45) имеет
единственное почти периодическое решение х = х (/, е), лежащее в
окрестности £ = £0, х (/, 0) = £0, и обладающее свойствами устойчивости
такими же, как и свойства устойчивости решения £<>.
Заметим, что в то время как А. Халанаем при доказательстве теорем
предполагается, что запаздывание имеет порядок е, в работах [232], [233],
[207] доказательство проводится без этого ограничения.
5. Сингулярно возмущенные уравнения с
запаздыванием. Вопрос применения метода усреднения к
сингулярно возмущенным уравнениям с запаздыванием еще сравнительно мало
изучен. Однако некоторые результаты уже получены (см., например, [190]).
19 246
289
Рассмотрим систему сингулярно возмущенных уравнений с малым
запаздыванием
«Тр-= /(*('). *('-«Д>. У (0. 0.
Л (22.48)
■^ = *(*(<). У(0. У('-еД). /).
где х и /—6-мерные векторы, уу g — /-мерные векторы, е — малый
положительный параметр, Д — положительная постоянная.
Наряду с системой (22.48) рассмотрим вырожденную систему
4г = £(*> У, У, 0.
(22.49)
и предположим, что для нее выполняются следующие условия:
а) система
f(x. х, у, /) = 0 (22.50)
имеет в области 0 <; * < оо, у £ D изолированное решение х = v {у, t),
где D — ограниченная замкнутая область евклидова пространства £,;
б) при каждом фиксированном у £D существует предел
т
Пт-МгИУ* 0. У, У> t)dt = g0(y). (22.51)
Введем усредненную систему, соответствующую системе (22.48),
x = v(y, f). (22.52)
Пусть х = х (/, е), у = у (t, г) — решения системы (22. 48),а х = v (у (/), /),
У = У (0 — решения системы (22.52).
Оценку разности между решениями точной системы (22.48) и
решениями соответствующей ей усредненной системы (22.52) при одинаковых
начальных условиях устанавливает следующая теорема.
Теорема [190]. Предположим, что для системы уравнений (22.48)
в области
0</<оо, у, y£D9 \x — v(y% 0|<Ро. /оои.
\Ч-НУ, 01<Р. (^Ы)
где принято обозначение х±= х (t — еД), уА = у (t — еД), выполняются
условия:
1) функция f (jc, jca, у, /) непрерывна и ограничена вместе со своими
производными по х, *д до второго порядка включительно;
2) функция g (jc, у, #д, /) непрерывна и ограничена вместе со своими пер-
выми производными по х и удовлетворяет условию Липшица по у, #д;
3) решение системы (22.50) непрерывно и обладает ограниченными
первыми производными по у, t;
4) корни pL = pt (у, f) (i = 1, 2, ...) уравнения
det | A — Be-»* — pE | = 0, (22.54)
290
где
л-is.) , в-(-!!*-)
Е — единичная матрица, расположены в полуплоскости Rep <; — 2|л, [л > 0;
5) решение у = у (/), у (0) = у0 системы (22.52) лежит в области D
вместе с некоторой своей 8-окрестностью
Тогда для любых г\ > 0, L > 0 можно найти такое е0 > 0, для которого
при всех 0 < е < е0 решение у (/, е), у (О, е) = y0i системы (22.48)
удовлетворяет неравенству
\y(t, e)-y(0|<4 (22.55)
для всех t £ 10, LI, а для решения х (/, е) выполняется условие
limxtf, e) = v(yt t) (22.56)
равномерно по t для tx < / <; L, /, > 0.
На доказательстве этой теоремы останавливаться не будем. Оно
проводится путем соответствующего распространения на системы с
запаздыванием методов, изложенных в § 12.
6. Усреднение в дифференциально-разностных
уравнениях нейтрального тип а. Для уравнений
нейтрального типа метод усреднения тоже находит применение и позволяет здесь
получить усредненные уравнения значительно более простые.
Рассмотрим систему в стандартной форме с запаздыванием
^р- = гХ (t, х (/), х (t - Л), х (/), х it — А)), (22.57)
где х, X — я-мерные векторы, / — время, е > 0 — малый параметр,
Д > 0 — постоянная.
Допустим, что существует предел
т
lim-^г \X(t9 x, у, и, v)dt = X0(x, у. и, v)t (22.58)
и сопоставим системе (22.57) усредненную систему
4г = еХ° <*W. S W- Б(0. ё (0). (22.59)
Для системы (22.57) справедлива теорема об оценке разности между
решением системы (22.57) и решением соответствующей ей усредненной
системы (22.59) на конечном интервале времени.
Теорема |1911. Пусть для системы (22.57) выполняются следующие
условия:
1) функция X (/, х, у, и, v) определена, непрерывна для /£ (0, со),
*, У> и> у££*> где D — некоторая область евклидова пространства £„,
ограничена:
\X(t, х, у, и, 0)|<Л«, (22.60)
и удовлетворяет условию Липшица
|Х(/, х, £/, и, v) — X(t, х\ у\ и\ и') К
<\{\x-x'\ + \y-yr\ + \u-u'\ + \v-ur\) (22.61)
при /£(0, оо), л, у, и, v£Df x\ y\ u\ v'£D;
19* 291
2) равномерно по отношению к х, у, и, v£D существует предел (22.58);
3) функция Х0 (х, у, и, v) имеет в области D ограниченные частные
производные;
4) усредненная система (22.59) имеет решение £ = £ (/), £ (0) = |0,
определенное для /£ [Д, со), для которого множество точек {£(/)»&(')»£ (0»
|(/)} лежит в D вместе со своей ^-окрестностью.
Пусть далее, х = х (/) — решение системы (22.57), удовлетворяющее
начальному условию
*(0 = Ф(0 Аля '61—А. 01, Ф(0) = |0, (22.62)
где ф (0 — непрерывно дифференцируемая начальная функция, причем для
t £ [0, Д] множество точек \х (/), ф (/ — Д), х (/)» ф (t — Д)} лежит в D.
Тогда для любого сколь угодно малого г\ > 0 и сколь угодно большого L >0
существует такое е* > 0, что для всех 0<е<е*,0</< —
справедливо неравенство
\x(t)-Ut)\<i\.
Доказательство этой теоремы проводится путем обобщения метода,
предложенного Н. Н. Боголюбовым (см. § 6).
7. Системы с запаздыванием и медленными
переменными. Метод усреднения может быть применен к уравнениям с
медленно меняющимися параметрами, а также к системам, описывающим
медленные и быстрые движения при наличии в них запаздывания как
постоянного, так и переменного, к уравнениям
±[m(x)*^\ + c(T)x(t) = *f(yt, т, *(0. *(/-Д), i(/). i(*-A», (22.63)
и к более общим системам
w [т {у) ТГ-] +с (у) х {t) = Ef (< y <*>• y(t~ Л)> х (/)> х (/ - Л)>
*(/), x(t — А)), (22.64)
-М- = еГ(/, */('), »(<-А). *(/), *(*-Д), i(0. i(/- A)),
m(y) --^j + Q(#, x) = ef(vt, y(t), у (/-А), *(/), *('-A), i(0,i(/-A)),
(22.65)
■M- = eK(*, */(/), у (/ — A), x(t)t *(/-A), x(t), i(/-A»,
к системам с медленно меняющимися параметрами и запаздыванием
нейтрального типа, к системам с быстро вращающейся фазой, аналогичным
рассмотренным в §9 и с наличием запаздывания как постоянного, так и
переменного и т. п.
Так, например, в работах [34, 37, 1081 рассматривается
система уравнений
dx(t)
или
dt
dt
= eX(x(t), х(/-Д), y(t), у (/-А)),
(22.66)
&P- = о (x (/)) + zY (x (0, x(f- A), y(t), y{t- A), e),
292
(22.67)
где X— n-мерная векторная функция, у — скалярная функция, е > 0 —
малый параметр, Д = А (х, у) — переменное запаздывание, являющееся
ограниченной неотрицательной функцией /, х, у.
Для системы (22.66) строится замена переменных
х = 1 + еи1(1, г\, г] (/х)) -(- e2Uj (£, г\, т)(*,), п(/2))+е3 •.
y = r\ + evl (|, ч, r\ (tj) + еЧ (£> Л> Л (*i). Л ('г)) + е8 .
'(/i = /-A(S. Л). /, = *-Д(&, л)-Д(1, Л(<-А(Ь Л)))),
приводящая ее к виду
-§- = еХ,(Э + вЧ,© + ••• ,
*. (22-68)
-9- = о)(|) + е51(|)+ ... ,
где
Xe© = lim-jr J *1Б, I. «(6)('-<•>+ Й,. ®(6)('-'t-
- A (g, о)(1) (t - g + */0)) + £/0| Л. (22.69)
Остальные коэффициенты системы (22.68) также представляют собой
средние значения типа (22.69) от известных функций, стоящих в правой
части системы (22.66).
8. Примеры. Рассмотрим простейшую автоколебательную систему
1159], описываемую уравнением
£$- + ««* 0 - еД) = ев 11 - ах' (/)! *^р>, (22.70)
где а, Р, Л, т, ю0 — положительные постоянные, е— положительный
малый параметр.
Для приведения уравнения (22.70) к стандартной форме совершим
замену переменных согласно формулам
x = acos(o)0/ + (p),
-JL = _ а0)0 sin (о)0/ + Ф)-
После некоторых выкладок вместо уравнения (22.70) получим систему
уравнений в стандартной форме для новых переменных а и ф
da
(22.72)
_^- = е(Р[1 — aa2cos(co0/ -f q>)] a sin ((o0t — co0t -f- ф) +
+ Дсо2 sin (G)0/ + ф) + e2 ...} sin (&0t + ф),
-§- = -f {Pll -aa2cos(co0/ + Ф)] a sin (co0/— со0т + Ф) +
+ Дсо2 sin (co0/ + ф) + e2 ...} cos(co0f + ф).
Усредняя правые части уравнений (22.72), получаем систему уравнений
в стандартной форме
4 = 4h* + Pcos<o0T(l-i-aH>)],
-5- = - 4" «п со0т (l - -|-a^).
293
(22.73)
Анализируя уравнения (22.73), видим, что малое запаздывание
восстанавливающей силы играет роль отрицательного трения — оно вызывает
нарастание амплитуды колебаний и не оказывает влияния (в первом
приближении) на частоту колебаний.
Исследуем стационарные решения. Приравнивая правые части системы
(22.73) нулю, получаем уравнение для определения стационарных амплитуд
а Гсо^Л + р cos о)0т /1 — -^- шА I = 0. (22.74)
Отсюда находим два решения:
«х = 0, 4=2/^(1 +IJy; (22.75)
02 существует, если Pcos g>0t > 0, т. е. при
2ял — -£- < о)0т < 2ял + -?г (я — ^лое), (22.76)
2 а ^О^
а также в случае щА < р при cos ю0т < »—, т. е. если
(2/1 + 1) я — arccos -^— < о)0т < (2л + 1) я + arccos-^j-. (22.77)
Исследуя устойчивость решений (22.75), получаем, что при выполнении
условия (22.75) амплитуда а^ устойчива, а ах — неустойчива, а при
выполнении условия (22.77), наоборот, решение а^ неустойчиво, а а± устойчиво.
В качестве следующего примера рассмотрим уравнение
-^ + ю» (т) х 2<Л (т) ^=^>, (22.78)
где Д = const, т = et.
Вводя новые переменные а и <р с помощью замены (22.71), вместо
уравнения (22.78) получаем систему уравнений в стандартной форме
-^- = -е{2Я(т)а(/-Д) "(eff~A)) sint(f - A)sint|>(0 +
ш(т) т ' (22.79)
^ = -e{2Mx)^^-^|^))sini|,(,_A)cosip(0_
~W-^sin *(<)«« *(')}.
т = е/.
Усредненная система в первом приближении —
4 = -e{Mx)acoSlAco(x)] + i-^.^L},
-J=0, (22-80)
294
Интегрируя систему (22.80), находим первое приближение для
амплитуды и фазы:
X
5и=°оУШе° * (2281)
ф =- ф0, X = 8/,
где а (0) = а0, ф (0) = ф0.
Полагая в формуле (22.81) Д = 0, для а (т) получаем формулу
X
5w = ^Vwe* • (22-82)
совпадающую с результатом, получаемым согласно интегрированию
уравнения (10.20) после подстановки в него т (т) = 1, F (т, —асо (т) sin i|j) ==
= — 2Л (т) аю (т) sin -ф.
§ 23
УСРЕДНЕНИЕ
В СТОХАСТИЧЕСКИХ СИСТЕМАХ *
•
1. Постановка задачи. Исключительно важной проблемой
является изучение влияния случайных сил на колебательные системы.
Задачи подобного рода имеют большое значение в радиотехнике, акустике,
измерительной технике, гидро- аэроупругости и других разделах физики и
техники, связанных в большинстве случаев с повышением чувствительности
и помехоустойчивости радиоприемных и измерительных устройств и т. п.
Исследуя вопрос о предельном поведении линейной колебательной
системы, находящейся под воздействием случайных сил,в пределе
превращающихся в «белый шум», Н. Н. Боголюбов показал, что движение такой
системы описывается марковским процессом, переходные вероятности которого
удовлетворяют уравнению Колмогорова — Фоккера — Планка (КФП).
Связь между поведением частицы, участвующей в броуновском
движении, и дифференциальным уравнением в частных производных впервые была
установлена Эйнштейном, затем получила дальнейшее развитие в работах
Смолуховского, Фоккера и Планка [211]. Более общие уравнения для
марковских процессов получены А. Н. Колмогоровым [821 и применены для
изучения динамических систем А. А. Андроновым, Л. С. Понтрягиным и
А. А. Виттом [1551. Однако предельный переход в уравнениях динамики
не был строго обоснован.
Развивая идеи Н. Н. Боголюбова, И. И. Гихман [42, 431 дал общее
определение динамической системы, находящейся под влиянием
случайного процесса с независимыми приращениями, показал, что такая система
описывается марковским процессом и вывел для переходных вероятностей
широкого класса систем уравнения КФП.
В средине сороковых и начале пятидесятых годов К. Ито [641 и
независимо от него И. И. Гихман [441 провели прямое построение траекторий
диффузионных марковских процессов с помощью стохастических интегральных
уравнений. Появление стохастических интегральных уравнений открыло
новые возможности для применения вероятностных методов в теории
дифференциальных уравнений. Здесь впервые введено понятие стохастического
дифференциала, найдены условия существования и единственности решения
* Этот параграф написан в соавторстве с В. Г. Коломийцем.
296
стохастического дифференциального уравнения, доказана дифференциру-
емость решений по начальным данным и выведены уравнения КФП для
переходных вероятностей. Новые теоремы существования и единственности
решений стохастических уравнений, полученные А. В. Скороходом [170]>
дали возможность построить многомерный диффузионный процесс. В
работе [47| построено самое общее стохастическое дифференциальное
уравнение, основанное на понятии криволинейного интеграла от случайного поля
вдоль случайной кривой.
Возросший интерес к теории дифференциальных уравнений со
случайными параметрами и функциями стимулировал не только математические
работы, но и исследования прикладного характера. Здесь следует указать
на работы И. Л. Берштейна [12], С. М. Рытова [1611, Р. Л. Стратоновича
[1721, В. И. Тихонова [1771 и др.
Эффективным методом исследования случайных процессов в нелинейных
колебательных системах является метод уравнений КФП, хотя они в
большинстве случаев трудно поддаются аналитическому решению, за
исключением частного случая линейных систем. В первых исследованиях
броуновского движения рассматривались только линейные задачи.
Применение принципа усреднения позволяет получить интересные
результаты и для квазилинейных систем, содержащих малый параметр. Метод
уравнений КФП дает в этом случае приемлемые и обозримые результаты, если
рассматриваемые исходные уравнения, описывающие случайный колебатель
ный процесс, могут быть приведены к стандартному виду. Усреднение можно
провести либо в самих стандартных уравнениях, которые затем с помощью
уравнений КФП легко анализируются, либо в составленном для них
уравнении КФП, которое в этом случае также имеет стандартный вид. Первые
результаты по применению и обоснованию принципа усреднения к уравнениям,
содержащим случайные функции, принадлежат И. И. Гихману [431;
дальнейшее развитие затем они получили в работах [172, 197, 46, 254, 135 и др.).
2. Уравнение Колмогорова — Фоккера — Планка.
Переходя к анализу колебательных стохастических систем, кратко
остановимся на сущности метода уравнений КФП и основных положениях
теории дифференциальных уравнений со случайными функциями.
Допустим, что марковский процесс Z (/) представляет собой
совокупность п процессов zt (t) (i = 1, ..., ri), тогда уравнение КФП для плотности
распределения вероятности W (zlt..., z„, t\ 0 о „Л можно записать в виде
I Pi *п>t)
п п
■тг+2-srM* *. W=-r 2 -zkfato' ■■•>*»• OWL
<=1 i\*=l ' * (23.1)
где
А = lim—Af {£/, —Z,} =
оо со
= \\m-\- \ \ (Щ — ?с) Р (*i> • • • > 2/1» *'> ии ..., un,t + т) dult..., dun>
Bik = \\т±М [Ui-ZWb -ZJ} =
СО ОО
=.-lim4- \ J ("< — 2*М"* — zk)P(zi> ...,гп,/;% un,t+i)x
297
X duL ... .dun,
Ut =Z,(/ + x) (*=1 /г),
p(zlt ..., z„, /, f£lv ..., un, t + x)—плотность вероятности перехода, М —
математическое ожидание.
Если марковский процесс z (t) = [zt(t)9 ..., zn (t)} является решением
некоторой системы стохастических дифференциальных уравнений, то А( и
Bik легко определяются из системы этих уравнений. Пусть, например,
уравнение движения автономной системы, находящейся под воздействием
стационарных гауссовских шумов, записано в каноническом виде
■$-/W+*W6<0. (23.2)
«г
где вектор z = {zlf ..., zn) описывает состояние системы, | (/) = {Si (О» — »
—» Sn (0} — векторный процесс «белого шума», / = [fx /„} —
вектор-функция, g (z) — квадратная матрица п-го порядка.
В этом случае Л, = /if Blk = glmgkm.
Уравнение КФП, соответствующее системе уравнений (23.2), может
быть записано в форме
УУ +2£<м»)*(»./и»-
п
= 4" 2 -ШГ(Вьп(*)8ьпЮ*(*. 'к'Л- (23-3)
Метод уравнений КФП применим также и для неавтономных систем с
той лишь разницей, что коэффициенты переноса At и коэффициенты
диффузии Blk будут зависеть от времени t. При этом функция W должна
удовлетворять условиям
а) W ;> 0при всех ей/;
б) W -> 0 при г -* ±со и всех *;
оо со
в) J ... J Wdzx ... dzn= I при всех /.
—оо —оо
В исследованиях нелинейных систем особый интерес представляет
случай таких систем, для которых W со временем стремится к стационарной
плотности распределения вероятности, не зависящей от времени и
начальных условий. В этом случае
тМ—о,
limW(zv .... zn, П. ,A = WCT(zlt ..., zj
*-*оо I 2, Zn*oJ
и уравнение (23.1) переходит в стационарное уравнение
п а
2 -ш (Л< (zi zj w„) = 4- 2 тагiBik (z* z«> ^ct)- (23-4>
Если исходное уравнение первого порядка, то уравнение (23.4) всегда
можно легко проинтегрировать. Для нелинейных же систем более высокого
порядка в некоторых случаях можно проинтегрировать методом разделения
переменных, а в остальных случаях может быть применен численный анализ.
298
3. Дифференциальные уравнения со
случайными функциями. Сделаем некоторые замечания, относящиеся к
основным положениям теории дифференциальных уравнений со случайными
функциями. Основные результаты здесь принадлежат И. И. Гихману и
А. В. Скороходу [47].
Рассматривая стохастические дифференциальные уравнения, следует,
прежде всего, условиться, что будем понимать под решением этого
уравнения. Если, например, задано обыкновенное дифференциальное уравнение
-it = /('.*). <23-5)
где х — /i-мерный вектор, принадлежащий n-мерному евклидову
пространству £„, / — время, то оно описывает в пространстве Еп движение,
обладающее скоростью. Вместе с тем, даже самые простые и интересные
случайные процессы (броуновское движение, диффузионные процессы) не
обладают скоростью. Поэтому определение дифференциального уравнения для
случайного процесса должно быть дано в такой форме, чтобыоно охватывало
также и возможность существования недифференцируемых решений. Это
можно достичь различными способами—либо заменой дифференциального
уравнения интегральным, либо введением некоторого другого определения.
Остановимся на определении, данном в работе [461.
Допустим, что {U, у, Р) —некоторое вероятностное пространство;
а (/, х) = а (/, jc, и) и и £ U — случайное векторное поле со значениями
в пространстве £„, определенное для всех /£ 1/0, Т], х£ Еп. Обозначим
через К = {/0, tl9 ..., tn = Т) разбиение отрезка [/0, 71, и пусть \Х\ =
= max A/fe, ktk = tk — 4-i- Для каждого х0 и к построим случайную
\<k<n
функцию Б (/) (t0 <: / <: Т) с помощью соотношений
МО = Б*(W + «C М'*-.))-«('*-,. Бх ('*_,))• (23*6)
Если при |А,| -* 0 существует предел lim Бх (/) = Б (/) при каждом /Р
£ Uo> Т\% т0 этот предел называется решением дифференциального
стохастического уравнения
« = «(*, Б. Л), Ш = *о (23.7)
на интервале U0, 71.
При этом всюду под пределом понимается предел в смысле средней
квадратичной сходимости случайных величин.
Сформулируем теорему, обеспечивающую существование решения
дифференциального стохастического уравнения (23.7). .
Теорема [461. Пусть для стохастического дифференциального
уравнения (23.7) выполняются следующие условия:
1) |Л!{Да(/, x)\,t}\<(X + C\x\)U9
Л1{|Да(/, *)|»y<(X + C|*|»)A/,
2) lM{Aa(t9 x)-Aa(t, y)\ft}\<C\x-y\M9
\M[\ba(t, дг)-Да(/, y)\*\h) <C|x-y\*M,
299
где X — случайная величина, не зависящая от t их и такая, что
М%2 < оо,
С — постоянная,
Да(/, лг) = а(/ + Д/, x) — a(t, *),
\х\ — норма вектора xf M {z\)f) обозначает условное математическое
ожидание z относительно монотонно неубывающего семейства а-алгебр {ft, tP
е Ue. п.
Тогда уравнение (23.7) имеет решение в смысле средней квадратичной
сходимости.
В приложениях проще рассматривать уравнение
dl = a (f, I) dt + b (/, I) da, (23.8)
понимая его как уравнение, определяющее неизвестную случайную
функцию 5 (0> обладающую свойствами:
А) £ (/) при каждом / /^-измерима,
t t
Б) l(t)-I(t0) = $ *(т, g(х))Л + J 6(т, 6(х))da(т).
Второй интеграл в условии Б) стохастический по винеровскому
процессу или мартингалу [46].
Когда а (/, х) и Ь (/, х) ограничены и удовлетворяют условиям Липшица,
существует единственный случайный процесс g (/), являющийся решением
интегрального уравнения Б). Существование и единственность решения
уравнения (23.8), когда a (/) — мартингал, доказывается аналогично случаю,
когда a (0— винеровский процесс.
4. Воздействие стационарного «белого шума»
на автономную систему. Рассмотрим колебательную систему
с одной степенью свободы, находящуюся под воздействием стационарного
гауссового «белого шума» и описываемую дифференциальным уравнением
второго порядка [135, 78].
р- + со2* = е/, (х, -§-) + ]Гга[2 (х9 -£-) i(0, (23.9)
где е — малый положительный параметр, со, a — некоторые постоянные
величины, /х и f2 — нелинейные функции, удовлетворяющие всем
необходимым условиям, £(/) — процесс «белого шума» *.
Используя фазовую плоскость /х, у = -Д-), уравнение (23.9) можно
записать в виде
dx = ydt,
dy = [- со2* + efx (x, y)\ dt + V~*of2 (*, у) с% (/). (23"10)
Под решением системы (23.10) понимаем решение системы интегральных
уравнений
* — хо+ J y(s)ds,
о
t
У = Уо+$1- «>2х (*) + *h (х (s), у (s))] ds + V** ] Ш (s). У 00) d\ (s).
о о
(23.11)
* Здесь «белым шумом» называется обобщенная производная от процесса Винера или
процесса броуновского движения £ (t) (M£ (t) = 0, М£2 (0 = t).
300
Уравнения (23.10) представляют собой квазилинейные стохастические
дифференциальные уравнения.
Прежде всего приведем систему уравнений (23.10) к системе уравнений
в стандартной форме. Для этого произведем в уравнениях (23.10) замену
переменных согласно формулам
х = a cos ib, у = — аю sin гЬ
(♦-J + e,. ,2312)
Тогда для новых переменных а и 8 — амплитуды и фазы — получим
систему стохастических дифференциальных уравнений в стандартной форме
для двумерного диффузионного марковского процесса
da = —fx (a cos -ф, — аа> sin \|?) sin г|)Л —
— ХЛ. f2 (д COs yjpt —ao)sini|))sini|5d£(/),
dQ = — fi (a cos г|>, — дсо sin г|э) cos tydt —
Ea /2 (д cos ^» — ш sm 'Ф)cos №1 (0-
(23.13)
am
Заметим, что эти уравнения являются точными и в общем случае
достаточно сложными.
Остановимся теперь на вопросе, как следует обобщать принцип
усреднения на дифференциальные стохастические уравнения. Рассмотрим в
качестве простейшего примера уравнение
dx(t) = sin tdt(t). (23.14)
Если к уравнению (23.14) обычным образом применить принцип усреднения,
то для усредненного уравнения мы получили бы
dxJF) = 0.
В действительности же правильное усреднение уравнения (23.14) должно
привести к уравнению
d^=--L-d£(/). (23.15)
В ряде работ [12, 75,1731 усреднение в системах типа (23.13) проводилось
в два приема. Сначала в системе типа (23.13) проводилось частичное
усреднение — усреднялись только функции в правых частях системы, не
содержащие флюктуационных членов; функции же, содержащие флюктуацион-
ные члены, усреднялись в составленном потом уравнении КФП.
Эти частичные усреднения в два приема можно объединить в одно
усреднение, если под усредненной системой стохастических
дифференциальных уравнений, соответствующей системе (23.13), понимать систему
— _ — (23.16)
de = /!2)(a)^+/f(5)^(0,
где
/1° = М J ~/1 (^cosг|>, — аыsin\|))sinгМ ,
301
f:
fil) = l/ M {ea2/2 (a cos if, — aco sin г|>) sin2 -ф},
/}* = Af I =Д- /x (a cos \j\ — aw sin гр) cos гр\,
M a© J
F = |/^^{-|J-/22(acos^ -acosin«)cos2г|>},
здесь, как.обычно, М —оператор усреднения.
t
В дальнейшем покажем, что при некоторых предположениях
марковский процесс {а (/), 0 (/)} слабо сходится на отрезке0 < /<; —к
марковскому процессу (а (/), 0 (/)}.
5. Воздействие стационарного «белого шума»
на неавтономную систему. Рассмотрим случайные колебания
неавтономной системы, описываемой нелинейным стохастическим
дифференциальным уравнением второго порядка
-^ + o)2* = e/(v/, х, -%-) + yiog (vt, х, -J-)|(a (23.17)
где / (v/, x, -^~) и g (vt, x, --jjA — нелинейные функции, являющиеся
целыми полиномами относительно sin v/, cosv/, x, -тг и представимые в
виде сумм
/-2 «-*.(*.-£-).
л=—Л/ V /
"7" (23.18)
dx
*=2 **•*. (*.-£-)•
В исследовании системы (23.17) следует различать нерезонансный и
резонансный случаи [161.
В нерезонансном случае, совершая в уравнении (23.17) замену
переменных согласно формулам (23.12), после некоторых выкладок для амплитуды
и фазы получим систему в стандартной форме
--£- = —/(vf, acosi|), —ao) sin -ф) sin ф —
Yea
g(vt, acosi|), —acosin^sinifi^),
-gr- = —f(vt, acosi|), — ao) sin г|?) cos if—
(23.19)
g(v/, acos\|), —a© sin г|э) cos г|э| (/).
Уравнениям (23.19) будет соответствовать усредненная система
стохастических дифференциальных уравнений
-|- = Г'(а) + ^(а)|(0,
-S-=/(2,(a) + i(2)(a)i(0,
302
где
2л 2я
/(|) (а) = -j^— j j / (ф, a cos \|э, — аю sin if) sin tydydty
о о
/2л 2л
4S&-J jVto» acos^, — a(osint)sin2^d^,
2л 2Л
/^ (a) = 1=— f ] / (ф, a cos if, — ao) sin г|э) cos ^ф^,
5® /7Л « l/
О О
2л 2л
гт2
ёт (а) = у д-2 2 j J g2 (ф, a cos г|э, — aco sin г|э) cos2 фйр<Ц>
4яРАй«0 о
(ф = со/ + 6).
В резонансном случае для приведения уравнения (23.17) к стандартному
виду поступаем согласно общим правилам.
Предполагая, что в системе выполняется соотношение
0)2 ^(tv)2* (2321)
где г и s — целые взаимно простые числа/введем новые переменные айв
с помощью замены
x = acos(— vt + в),
\s I (23.22)
Тогда, после некоторых выкладок получим систему стохастических
дифференциальных уравнений в стандартной форме
- --£/(< acos(-J-v*+e), -af vsin(f v/+ в)) х
Xsin(-J-v/ + e)-J^ff(v/, acos(^-v/+e),-af vsin(f v/+e))x v
xsin(-i-v/+e]i(0,
vs / (23.23)
-S—a.«rf(fw + e)-^/(w..«»(fw + e).
— a-^vsinU-W + 6))cos(-L v<+e\ —
-*£- £ (< a cos (f v/ + в),_ a -J- v sin (f vt+в)) X
X cos ( xv'+e ) 1 (/) (со2 = (jj v*±6a) •
303
Усредненная система будет иметь вид
# = Г(а,в)+?'>(а,В)|(0, (2324)
4=7(2)(Н. ё)+^>(я, ёН('),
где
/<»=Al(-|-^v/, acos(-^v/ + e), _a-^-vsin(fv/+e))x
X sin(-fv/ + e)),
v s It (23.25)
I0> = Y^M {g*(vt, acos(-^v/ + 6), -~aL v sin(f v/ + 5) X
xsin2(-j-v/ + e)},
^ = ^+^{--S-^(<«C0S'f^+e>-«7vsin(T^ + 6))><
XCOs(-£-v/+6)},
y s Л (23.26)
xcos2 I-v/ + e)}-
Применение метода уравнений КФП для усредненных уравнений
упрощается особенно в стационарном случае.
6. Теоремы об оценках на конечном интервале
времени. Изложенному выше методу усреднения в стохастических
дифференциальных уравнениях в стандартной форме можно придать
математическую строгость. Здесь может быть тоже доказана теорема об оценке
разности между решением точной и усредненной систем на конечном временном
интервале.
Расомэтрим систему стохастических дифференциальных уравнений в
стандартной форме
-^ = eX(U) + e-J, (23.27)
где х, X — я-мерные векторы евклидова пространства Еп, Y (/) — /г-мер-
ный винеровский процесс.
Допустим, что вектор-функция X (t, х) удовлетворяет следующим
условиям:
а) существуют такие положительные постоянные К и X, что при всех
t > О для любых ху х\ х" £ D czEn выполняются неравенства
\X(U x)\<K,
\X(t, x')-X((, *")|<Ч*'-*Т.
304
б) равномерно по х £ D существует предел
т
lim-4r \x(t, x)dt = Х0(х). (23.28)
При этих условиях справедливо следующее утверждение.
Теорема [751. Пусть для системы (23.27) выполняются условия
а) и б).
Тогда для любых наперед заданных сколь угодно малых чисел р > 0, г\ > О
и сколь угодно большого L можно указать такое е0, что если х (/) — решение
системы
-^=еВД, (23.29)
определенные при О <; t < оо и лежащие в области D вместе со своей р-ок-
рестностыо, то для О < е < е0 в интервале О <; / <; — х (/) сходится по
вероятности к х (/), т. в.
Р{|х(/)-*(0|<п}^0, (23.30)
где х (/) — решение системы (23.27), совпадающее с решением х (t) при / = 0.
Эта теорема справедлива и для системы
-J- = eX(/, X) + Vla^9 (23.31)
но в качестве усредненной следует взять систему
^L = tX0(x) + V~*>-%" (23.32)
Принцип усреднения распространен также и на стохастические
дифференциальные уравнения более общего вида
dt = a(t, g, |i)#+ i>C Б. V)d*s, (23.33)
где as = as (/) (s = 1, 2, ..., n) — винеровский процесс, а векторные функции
а (/, jc, |л), bs (/, jc, |л) (s=l,2,..., я) удовлетворяют соответствующим
условиям регулярности.
Большое значение имеет обоснование принципа усреднения для
дифференциальных стохастических уравнений, не предполагающее, что
стохастическая часть этого уравнения выражается через винеровские процессы,
хотя последний случай и является очень важным. Зачастую можно считать,
что винеровские процессы появляются только в пределе при \i-+ 0, а до
предельного перехода случайные возмущения имеют более общую
стохастическую природу. В соответствии с этим рассмотрим два случая. В первом
допустим, что только а (/, jc, ц) может быть интегрально непрерывно при
|л = 0, а функции fts (/, jc, ц) непрерывны при \i = 0 в более сильном
смысле. Во втором случае предположим, что возмущающий случайный процесс
as (t) зависит от параметра \i и сформулируем теорему, соответствующую
принципу усреднения.
Для уравнения (23.33) принцип усреднения вытекает из свойств
непрерывной зависимости решений дифференциальных стохастических уравнений
20 246 305
от параметра, если a (tt xf \i) и bs (t, jc, \i) интегрально непрерывны по
параметру (А и удовлетворяют условию Липшица.
Итак, пусть при всех
*, у£Еп, />0, ц£[0, ц0] (23.34)
для уравнения (23.34) выполняются условия
а(/, х, (i)-a(/, у, |i)|+ 2 | **('.*.!*)~И<. У, v)\<C\x — y\9 (23.35)
\ [а(х, xt \x) — а0(т, *)]dx
<Ш)0+М)> (23.36)
С \b*(t, x, |i)-«(/. x)|a
J l+|*l2 * <ЖН<) (s = 1, 2, . .., п), (23.37)
о
где а0 (t, х) = а (/, jc, 0), 6о (Л *) = bs (/, jc, 0), С не зависит от х, */, ja,
ф (ц) -* 0 при |л -*- 0, as (/) — векторный мартингал
(ЖЛа5(0 = 0, Ж|Да$|2 = ДМ0)>
функции Xs (/) абсолютно непрерывны и
KVXK (23.38)
При этих условиях справедлива следующая теорема.
Теорема [46]. Пусть для уравнения (23.33) выполняются условия
(23.35) — (23.37), тогда его решение £** (t) непрерывно в среднем квад ратине-
ском при |л ->- 0, т. е.
Af |Б"(0—PWIf-*0. (23.39)
Приведем подробное доказательство этой теоремы. Пусть Т > 0 —
любое число. Разобьем отрезок [0, Т] на частичные отрезки точками деления
tk (k = 1, 2, ..., л); 0 = /0 < 'i < ••< *п = Г и положим ££ = £ц (/*).
Рассмотрим разность
E2+i-6t-62-6f + I №>«. Бв(0>-«('. 1ц(а |*]Л +
Эту разность можно представить в виде
U+i - 6£н = SS ~ 6* + J К + a)2 + a), + co4) = go _ |jf + j ^ (23.40)
'* 'ft
где приняты обозначения
«>i = [Oo С i° (0) - «о (Л 12)1 Л + £ [*5 (Л i" W - bb (t, 12)1 das)
<■>* = [«о С 8) - «о С. Sf)l dt + S [65 (Л Й) - fto (/, Sf)l das,
S=l
306
S=l
«0 = ©1 + <°2 + <°3 + 0)4-
Положим
efc = Af |g-дм1- (23-41)
Из соотношения (23.40) находим
6fe+1 = 6, + 2iWU,-^; J aJ + Л
V.
0),
(23.42)
•* 1 К I
Заменив w0 на <ьх + щ + w3 + w4, оценим различные слагаемые в
правой части формулы (23.42). Воспользовавшись неравенствами Коши — Бу-
няковского (23.35) — (23.38) и
(ах+ ... +ап)2<2п(а21+ ... + <&
получим
*(s-«; I *i)<V^cVuAj At|Ee(0 —Б21тл}2 • (23.43)
где С — символ некоторой абсолютной постоянной, так что
12С = С, С* = С.
Используя свойства стохастического интеграла по мартингалу,
нетрудно показать, что моменты второго порядка от £ (/) решения
дифференциального стохастического уравнения при некоторых предположениях
равномерно ограничены на отрезке времени 1/0, Т\ и, более того,
Af|6(/ + A0 —6(0Г<С!Д/, (23.44)
где С, зависит только от Г и от константы С, входящей в условие Липшица.
Учитывая неравенство (23.44), можем написать
Aflg-tt; f с^ <cKVU* .
*+1 \
8-6Г. I *>i)
Аналогично оценивается слагаемое, соответствующее ю4:
мЫ-%; f <o4\<CVSkMk .
Далее, находим
И, наконец, получаем
<Y(|i)AI||2-6f|(l + |6tl). (23.45)
20* 307
Воспользовавшись снова равномерной ограниченностью величин
•М | V1 (t) I2 (относительно \i; неравенство (23.44)), получим
Jf$-tf; j о)3)<^(ц)[С + бЛ].
Аналогично оценивается третье слагаемое в формуле (23.42). Новой является
лишь оценка вида
М
J [bo(t,&)-b>(t,$, n))das
2 '*+i
= J M\b&(t,&)-
- 6* (/, tf. Ц) |» Л, < Ж (1 + | tf |2). (23.46)
Таким образом, из соотношения (23.42) получаем неравенство
8*+1 < [1 + С{ЫШ + ЧГ(ц)] 6ft + С [Л/*2 + V(|i)],
где ЧГ (ц) -»- О при ц -»- 0.
Согласно б0 = 0, получаем
5„ < ec<T+N4r*»C \T max |/"ЦГ+ АГЧГ(|*)1.
k
Разбив отрезок [0, 71 таким образом, чтобы
тахД^<(2гс;(Г+|))2,
а затем выбрав р, настолько малым, чтобы
*»>< цс^ч-о' *<!*>< тег.
получим
8Л<е. (23.47)
Отсюда без затруднений можно получить условие (23.39), что и требовалось
доказать.
Рассмотрим, далее, дифференциальное стохастическое уравнение, в
котором от параметра ц зависит случайный процесс <xs (/) = <х£ (/), так что
вместо уравнения (23.33) имеем уравнение
d£» = а (/, Ъ») dt + 2 bs (/, ?) da».
Как известно [461, из слабой сходимости процесса о£ (/) к процессу <х°
вытекает слабая сходимость процесса Iм" (/) к £° (/).
Объединяя последний результат с предыдущей теоремой, приходим к
теореме об усреднении для дифференциальных стохастических уравнений.
Теорема [46]. Пусть коэффициенты уравнения
<& = а (/, 6«\ ц) dt + 2 bs (t9 I», |A) dttf (23.48)
s=l
удовлетворяют условиям (23.35) — (23.38) с постоянными, независящими от
4*; при у -> 0 процесс а£ (/) слабо сходится /cas(s= 1 я).
308
Тогда процесс £ц (f) слабо сходится к процессу £° (/).
Таким образом принцип усреднения может быть легко распространен
на стохастические системы в стандартной форме вида
dx = eX(t,x)dt + УгоХ*(/, х)dg(/), (23.49)
где X, X* —функции, удовлетворяющие условиям существования и
единственности решения, £ (/) — я-мерный винеровский процесс.
7. Дальнейшее развитие принципа усреднения
для стохастических уравнений. В последнее время
принцип усреднения получил дальнейшее развитие и обоснование
непосредственно для стохастических уравнений. Так, Р. 3. Хасьминский [199, 201J
при е -*0 на отрезке времени порядка О I —) рассмотрел поведение
траектории случайного процесса, определяемого дифференциальным уравнением
-%Г = *Р(хъ U со) (23.50)
и начальным условием
*(0) = .*о
(Q = {со}, U, P) — вероятностное пространство.
Предположим, что функция F (х, /, со) (х £ £„, t > 0, со £ Q)
удовлетворяет условию
\F(x2t t, (o) — F(xv /, co)|<L|jc2 — Xl\ (23.51)
и при каждом фиксированном х F (х, /, со) — измеримый случайный процесс.
При этих условиях уравнение (23.50) имеет единственное решение,
являющееся непрерывным с вероятностью 1 случайным процессом.
В уравнении (23.50) совершим замену т = е/:
; (23.52)
*е(0) = *0
и будем рассматривать поведение решения этого уравнения на отрезке
времени 10, х0], т0 — любое положительное число.
Тогда справедлива следующая теорема.
Теорема [199]. Пусть задача (23.52) имеет единственное решение,
а для процессов F (xt t, со) выполнен закон больших чисел в следующей форме:
-jr j F(x,t9 (*)dt-F(x)\
Тогда решение хе (х, со) задачи (23.52) при е -* 0 сходится в среднем к
решению х° (т) задачи
*±=Р(*)9 x°(0) = x0 (23.54)
равномерно для 0 <; т < т0, т. е. при е -+ 0
sup M | хг(х, со) — х° (т) | -* 0. (23.55)
Доказательство этой теоремы мало отличается от доказательства
принципа усреднения в детерминированном случае и поэтому на нем
останавливаться не будем.
309
sup Л!
0 (Т - оо). (23.53)
Приведем некоторые результаты, полученные И. Вркочем [254].
Допустим, что выполняются следующие предположения:
1) вектор а (/, х) и квадратная матрица В (*, х) непрерывны по /, х и
удовлетворяют условию Липшица по х;
2) \a(t, 0)|</(, |В(/, 0)|</(, где|В| = КЩ и
^—составляющие матрицы В;
3) задано семейство процессов w8 (/) с независимыми приращениями,
для которых
М | WE (t2) - Ше (/х) | = 0, Ж | W8 (t2) - WR (tj |2 - Fe (t2) - F8 (h)
и функции Fe (/) непрерывны;
4) существует функция ф (е), ф (е) > 0 для е > 0, так что
lim (we (tt) — we (tt)) - w0 (t2) — w0 (tt)
равномерно на каждом компактном множестве значений tt и U, где we (t) =
5) We (/) = we (/) — w0 (/) — процессы с независимыми приращениями;
6) существует монотонно неубывающее семейство а-алгебр F (/);
7) существует вектор a (jc), такой, что
Нт-=-Гя(/, x)dt = a(x)
равномерно по х;
8) существует матрица В (jc), такая, что
lim f \B(t, x) — B(x)\2dF^\ = 0
равномерно по х при всех а, р, 0 < а <; L, 0 < р < L, где L — заданное
положительное число;
9) случайная величина х0 (ю) независима от всех приращений we (*2) —
— we(/i) и М |jc0(co)|2 < оо. При этих предположениях справедлива
следующая теорема.
Теорема 1254]. Пусть выполнены условия 1) — 9) их (/), у (t) —
решения уравнений
t *
*(0 = *0 + е|а(т, х(ч))с1т + Уч>(г)§В(1, *(x))dwe(T), (23.56)
о о
t t _
У(*) = х0 + $а(у (х)) dx+^B(y (x)) dw0 (x). (23.57)
о о
Тогда для заданных r\ > 0, L > 0 существует е0 > 0, такое, что для
Af(sup [*(/)-0(d)РКП- (23.58)
°«'«Т
310
Заметим, что если w0 (t) — винеровский процесс, то условие 7)
перейдет в условие
lim-±ri\B{t9 x)-B(x)\2dt = 0
Г-оо / J
равномерно по х.
В дальнейшем принцип усреднения был обоснован непосредственно для
стохастических уравнений более общего вида; изучались условия, при
которых решение сходится к пределу в среднем квадратическом (см. [46, 254]).
Допустим, что Х{г) (0, Y{e) (t) — семейство марковских случайных
процессов в я-мерном евклидовом пространстве £„, описываемое системой
стохастических дифференциальных уравнений Ито
dXf} (О = At (Х(8\ Ym) dt + 2 оГ (Xw. Yw) d\r (/),
dY)e) (t) = — Bj (X(e\ Y(e)) d( + 4=y Ф/П (Х(е)> Y{e)) d\r (t) (23.59)
e V* r=i
(i = 1, . .., k\ j = 1, ..., m; k + m = n)
и начальным условием
X(8>(0) = *0, У(е)(0) = Уо, (23.60)
где li (t), ..., ln (t) — независимые винеровские процессы (Afgr (/) = 0,
Ml£ (f) = /). Процесс X{e) (/) называется «медленной», а процесс Yie) (t) —
«быстрой» компонентой рассматриваемого движения.
Предположим, что выполняются следующие условия.
1. Векторы Л, а(г), В, ф(г) удовлетворяют условию Липшица по х, у
и справедливо неравенство
IА(д, у)|2 + 21а(г)(*,*/)|2< С(1 + М2).
Ито
2. Для процесса Y ,у) (/), описываемого стохастическим уравнением
и начальным условием
существуют функции А (х) и alf (х), такие, что для некоторой функции а (т),
стремящейся к нулю при т -+ со, выполняются неравенства
м
м
1 '+х
-^ \ А(х, YUy)(s)ds—A(x)
t
<а(т)(1
4-7 s «^ <*• y<*,w(s»ds -°« **> 1
«*-> 1
При этих предположениях доказана теорема.
311
<а(т)(1+|*|2).
L.
Теорема [201]. Пусть для процесса (Х(е) (/), У(в) (0), определяемо-
го системой (23.59) и условиями (23.60), выполняются условия 1 и 2. Тогда
процесс Xie) (t) при е -* 0 слабо сходится на отрезке [О, Т] к марковскому
случайному процессу Х(0> (/), являющемуся решением задачи
dXi0) (t) = А (Х(0)) dt + £o(x) (X{0)) dlr (/), (23.61)
г=\
Х(0)(0) = *о,
где а (х) — квадратный корень из симметричной матрицы (aLi (x)).
В этой теореме наложено менее ограничительное условие 2, чем
соответствующее условие, используемое в работах [46, 254].
В последнее время возрос интерес к задачам исследования случайных
процессов в стохастических системах, описываемых дифференциальными
уравнениями с запаздывающим аргументом и случайными параметрами
и функциями. Речь идет о поведении при е ->- 0 на отрезке времени 0, —
решения системы в стандартной форме
^Р- = гХ (/, *(/), x(t -Л), со), (23.62)
где Д — постоянная, характеризующая запаздывание, / — время (0 <; t <
< °°)> х, у = х (t — Д), X — точки я-мерного евклидова
пространства £„, со — элементарное событие некоторого вероятностного
пространства Q.
Справедлива теорема.
Теорема [81]. Пусть для системы уравнений (23.62) выполняются
условия:
1) вектор-функции X (t, x, у, со) ограничены в области t£ [0, со),
jc, у G D (D а £), со £ Й, т. е.
\X(t, х, у, со)|</С, (23.63)
К — некоторая положительная постоянная;
2) для всех вещественных значений t >- 0, со £ Q и для любых точек
х\ у', х'\ у" из области D функции X (t, x, у, со) удовлетворяют условию
Липшица
\X(t, x\ у\ со)-Х(/, х\ у\ <»)\<%{\х'-'х"\ + \у'-уп\1 (23.64)
X — некоторая положительная постоянная;
3) при любых фиксированных х, у X (t, x, у, со) является измеримым
векторным случайным процессом;
4) для процессов X (t, х, у, со) выполнен усиленный закон больших чисел
в следующей форме
\у\ X(t, x, у, (d)dt — X0(x, y)\
UmM
Т-ьоо
о
при фиксированных х, у£ D9 m. e
1 г
= 0 (23.65)
6
с вероятностью 1.
312
Тогда если х (t, со, e) — решение системы (23.62), для которого
х (О, е) = х0, a £ (t, e) — решение усредненной системы
4г = 8*о(КО> 1(0), (23.66)
определенное в интервале О <; / < со, для которого £ (t, е) = х0, для всех
t£ [—А, 0] х (t, со, г) = 1 (е/) = £ (t, е), то для любых L > 0 и х\ > О
существует е0 = е0 (х\), такое, что для всех О <; е < е0 в интервале
О <; / < — справедливо неравенство
M\x(t, со, е) — %(tt г)\<г). (23.67)
Иначе говоря, решение х (/, со, е) системы (23.62) при е -* О сходится в
среднем к решению I (/, е) системы (23.66), т. е.
Ж |х(/, со, е)-£(/, 8)|^0 (е^О). (23.68)
Если случайный процесс X как функция / удовлетворяет усиленному
закону больших чисел (23.65), то для X существует предел
Х0(х, y) = \im±[MX(tt х, у, со)Л,
О
не зависящий от со. Поэтому решение системы (23.62) может быть с
вероятностью 1 приближено детерминированным решением системы (23.63).
Если для процессов X выполнен закон больших чисел и Х0 (jc, у) =
= Х0 (jc, у, со), то принцип усреднения также справедлив, однако в этом
случае решение | (/, е) = £ (/, со, е) случайное.
т
Если -=■ J Xdt-+ X0 (T-+oo) по вероятности, тогда решение системы
о
(23.62) сходится по вероятности к решению системы (23.66). Эти результаты
легко обобщаются на уравнения нейтрального типа.
8. Усреднение непосредственно в уравнениях
Колмогорова — Фоккера — Планка. Как уже отмечалось,
для дифференциальных стохастических уравнений в стандартной форме
принцип усреднения может быть применен в составленном для них
уравнении КФП.
Системе уравнений (23.11) можно сопоставить уравнение КФП
= т {-&■ 1°.*> +2 -ш> iD^ + ж [D*W]}> (23-69>
где W = W (a, G, *|а0.евл)— плотность совместного распределения
амплитуды и фазы, Ка> Кв — коэффициенты переноса (сноса) амплитуды
и фазы, Dat Dq — коэффициенты соответственно диффузии амплитуды и
фазы, Dae — смешанный коэффициент диффузии амплитуды и фазы, при
этом
Ка = Нт да = —^~fi(acos^» — ао)sin♦)s'n♦»
/Се = Нт Л, = —/i(acos\b, — cm sin t|>) cosfy
313
Da = lim ^- = ^-f2(a cos г|>, — асо sin г|>) sin2 \|), (23.70)
Dae = lim —^— = -^fl (a cos \|>, — асо sin г|э) sin yfp cos г|>,
n i. Л1Д92 eo2 t2, . . 14 « ,
De = hm —rr— = -3-=- /2 (a cos \|>, — aw sin t|?) cos2 \|>.
Уравнение (23.69) — параболическое уравнение в стандартной форме.
Как будет подробно показано ниже (см. §28, п. 9), для
дифференциального уравнения
-J- = eL(*, t, в) и, (23.71)
где L—дифференциальный оператор второго порядка параболического
типа, исходя из теоремы о непрерывной зависимости решения уравнения
в частных производных параболического типа от параметра (здесь ц = е,
|л0 = 0), Р. 3. Хасьминский [197] установил принцип усреднения,
согласно которому решение задачи Коши для этого уравнения при е -+ 0 можно
приблизить равномерно на отрезке времени 0, — решением задачи Коши
для уравнения
-*L = eL0(x, e)u, (23.72)
где L0 — дифференциальный оператор параболического типа,
коэффициенты которого — средние значения коэффициентов оператора L по явно
содержащемуся времени.
Для уравнений (23.11) уравнение (23.72) имеет вид
4г =8 {- ж i*« <e> *J ~ ж[К» <a) *J| +
где
/Ce (a) = — "2^ f/i (a cos if, — aco sin -ф) sin \f d\|>,
о
2я
tf e (a) = — -§^ I /i (я cos г|5, — ao) sin \|>) cos\|>d\|\
о
2Я
Д, (a) = 2^2" f/2 (^ cos г|э, — aco sin г|э) sin2 \|?da|\
0
2rt
~~ <J2 P 2
Dae (a) = 2 2 I /2 (a cos \|>, — aw sin \f) sin ф cos \|>di|\
0
2л
A> (a) = 2^-а Г/2 (a cos \f, — ao) sin \|)) cos2 \|>dt|).
314
Для проведения анализа колебательных систем со случайными
воздействиями большую роль играет стационарная плотность распределения
амплитуды. Стационарные точки этой плотности (если они существуют)
соответствуют устойчивым и неустойчивым состояниям исходной системы в
зависимости от того, достигается в этой точке соответственно максимум
или минимум.
Для неавтономной колебательной системы (23.17) в нерезонансном
случае усредненное уравнение КФП имеет вид (23.73) с коэффициентами
переноса и диффузии
2я2я
Ка(а) = — -j^j- [ (7(ср, a cost, — аю sin г|>) sin 4|»d<pd$,
(Г 6
2л 2л
/Св(а) = 4~2^7 \ \Дф» acos^» — ш sm 4s)cos *МфА|>1
о о
2л 2л
^а № = 4я^*~ \ [S* (ф> а C0S *' _ Ш Sifl ^ Sin% ^d(Pd^»
о о
2я2я
DaQ (а) = 4 ^ ( I g2 (ф, а cos *ф, — дсо sin -ф) sin \p cos \|5*/фЛ|\
о о
2я2я
^в ^а) = 4nW [ fa* (ф' а C0S * ~ а0> Sin ^ C°S2 Ф*^-
о о
Анализ уравнения КФП в нерезонансном случае проводится
таким же путем, как и для автономной колебательной системы.
В резонансном случае усредненные коэффициенты переноса и диффузии
зависят не только от амплитуды а, но и от фазы 0. Их следует находить из
уравнений (23.20) согласно формулам
Ка(а. 6) = -Al-i-/(v<iacos(-j-v/+e)f _a-^-vsin^v< + б)) х
х sin(-yv/ + e)f
ffe(a, Q) = -M-±-f(vt, acos(-J-v/+e), - a-j v sin ^ vt + 9Jj x
xcos^v/ + e) + -|^,
DQ(a> e) = >M^-g2(v/, acos^v/ + e), -a-J- vsin^v + в)) X
X sin2 /-j- v/ + в) ,
A*(a, e) = ^-^g2(v/, acos(^v/+e),-a-J.vsin(f v* + в)) х
X sin /-j v/ + в) cos l-^-vt + в) ,
315
DQ(at e)-^^^(<acos^v/+e)f-a-^vsIn(-J-v/ + e))x
X cos2 /-J- vt + 6J ,
где М—оператор усреднения по явно содержащемуся времени. Для
решения уравнения КФП в этом случае может быть использован
численный анализ.
9. Стохастические колебательные системы с
медленно меняющимися параметрами. Рассмотрим
стохастическую колебательную систему, описываемую системой нелинейных
дифференциальных стохастических уравнений
-Я-[тЦг)-$г\ + с(у)х = гР(у, в, х, Jfj + yZog(y, 8, х, -§-)Ш
(23.74)
-f- = e/(y, в, х, -§-),
Hft
где -g- = v(y) > 0, функции т (*/), с (у) положительные при любых у,
определяющихся из системы (23.74) с вероятностью 1, F (у, 0, х, -^-),
g (у, 6, х, -£—)> f(y> 6» *» -J-)— нелинейные периодические по 0 с
периодом 2л функции, £ (0 — процесс «белого шума».
Вместо хи-| в системе уравнений (23.74) введем новые
переменные а и ур согласно формулам
jc = acosf— 0 + г|А ,
. / ч (23-75)
-^--»(y)sin(^e + +).
В результате получим систему стохастических дифференциальных
уравнений в переменных a, if, у:
-S- = -^ar,^[^0'acos(f * + *).-«><*> ein(f 9+^)]x
X8ln»(fe+t)-s^jW^[if,e.eC0s(f в+t).
_eBS|n(fe+t)]^(ie + t)-jj|i2_ff[i,ie.aco.(f в+t).
_ a(01.£_ e+^ j sin(-£- e + s>)e (0, (23.76)
-a»sin(-2-e++)]sin(-J-e + 4»)cos(-|-e+i|))-
И^(»)«^У-В' ecos(-|-e + i|,),-ac»sin(-5-e+t)Jx
Xcoe(fe+1,)-_g^rff[|rf 6. acos(f 6+t).
Л
316
dt
-«DSin(-|-e++)jcOs(-J-e+^6(0.
= e/L, 9, acosf-J-e+ip), — aco(y) sin (-~9 + ф)|
В резонансной зоне со (у) — v (у) = еД (у) система (23.77) является
системой уравнений в стандартной форме. Решением ее, как известно,
будет трехмерный марковский диффузионный процесс [а (/), г|> (t)% y(t)},
исследование которого можно провести при помощи уравнений КФП
аналогично изложенному выше. Подобные результаты могут быть получены и
для стохастических уравнений более высоких порядков (для одночастотного
режима колебаний), а также в случае нелинейных систем с медленно
изменяющимися случайными параметрами 168, 69|.
10. Пример: параметрическое случайное
возбуждение колебательной системы. Рассмотрим задачу
о параметрическом случайном возбуждении линейной колебательной
системы. Исследование влияния параметрических флюктуации играет важную
роль в связи с тем, что это влияние может привести систему, находящуюся
в покое, к неустойчивому состоянию и, наоборот, привести к срыву
имеющихся в системе колебаний.
Итак, рассмотрим линейную колебательную систему, описываемую
дифференциальным уравнением второго порядка
-g- + 28 11 + VEO& (01 -§- + о)211 + уТай (/)] х = 0, (23.77)
где аг, а2, б, со — постоянные коэффициенты, 8 > 0 и б < о).
Введем в уравнение (23.77) новые переменные а и 0 согласно формулам
(23.12). Получим систему стохастических дифференциальных уравнений
da=— 26a sin2 ^dt + У га 1 -^l s\n 2^ — 2баг sin2 \fl d\ (t)9
1 ] (23.78)
dQ = — б sin 2\|) dt + VT\g>o2 cos21|? — бах sin 2г|Я d| (/).
Второе уравнение в этой системе не зависит от амплитуды. Поэтому
решением его будет одномерный процесс Маркова.
Усредняя уравнения (23.78), получаем систему стохастических
дифференциальных уравнений
г- - , / соао2 Зо?6а
da~— badt + V*aV -о1 s—4(0>
v 8 2 (23.79)
-/el/"
л-viv "* + *1«со.
8^2
Первое уравнение системы (23.79) с помощью формулы замены
переменных Ито и = In а преобразуется к виду *
Г 1 /©2а? За?6а\1 л/ /<оааН За?б2\
* Смысл формулы Ито заключается в следующем: если имеем стохастическое
уравнение da = ydt + tfdg и положим и = /(а), то du = (/' (а) ф •+- ^- /" (а) ф2) Л + /' (a)^d|.
317
Согласно этому уравнению, для изменяющейся во времени плотности
распределения логарифма амплитуды W (и, t) уравнение КФП имеет вид
0W „ dW Du &W /9ЧЯП
— + к~дй rssr* (23-81)
где
М Зо?6*'
Решением уравнения (23.81) при начальном условии W (а, 0) = 8 (и)
будет
Г|»'"-7Шм'(-^)- (23'82)
Стационарные амплитуды в системе (23.79) отсутствуют.
Согласно второму уравнению системы (23.79), дифференциальное
уравнение для плотности распределения фазы имеет вид
-щ- - — ' -эв»- • (23-83)
где
Решение этого уравнения при начальном условии W (6, 0) = б (8) -—
Таким образом, в случае параметрического случайного воздействия
имеет место диффузионное расплывание фазы.
11. Пример: воздействие «белого шума» на
автоколебательную систему. Рассмотрим воздействие малых
случайных сил типа «белого шума» и малых периодических сил на простейшую
нелинейную систему, описываемую общеизвестным уравнением Ван-дер-Поля
d2x , ,, , , г, . ,ч9, dx
dt*
а: = е 11 — (x+Esin vt)2\ -%- + yi ох\ (/). (23.85)
В нерезонансном случае усредненное стационарное уравнение КФП
для стационарной плотности распределения амплитуды принимает вид
+ -Тё--^1а2^ст(^)1=0. (23.86)
da \ 2 \1 4 2 )wct\a>
Принимая во внимание граничные условия WCT -*» 0, ^ -+0 при
а -> оо, интегрируя уравнение (23.86), получаем
8 — 4Е» — 2а» _<£
Wct(a) = Ca a% e °\ (23.87)
318
где постоянная С находится из условия нормирования
оо
^WCT(a)da=L
6
Из анализа формулы (23.87) следует, что она имеет единственный
максимум при
а=|/4 — 2£2 — а2. (23.88)
При а -* О амплитуда случайных колебаний совпадает с амплитудой
детерминированных колебаний системы, в которой отсутствует случайное
возмущение.
При а2 = 4 — 2£2 колебания в системе отсутствуют; если а2 < 4 —
— 2£2, стационарные случайные колебания устойчивы и совершаются с
амплитудой (23.88). В противоположном случае, а2 > 4 — 2£2, никакой
устойчивый режим колебаний невозможен.
12. Квазилинейные системы со случайным
запаздыванием. При рассмотрении многих динамических систем,
запаздывание часто носит случайный характер.
В самом общем случае движение таких систем описывается системой
дифференциально-разностных уравнений
*Lp- = Ах (t) + Bx(t — &) + eF [x (0, х (t — Д), е], (23.89)
где Л = Д (t) — запаздывание, представляющее собой случайную
функцию времени, х — вектор фазовых координат, характеризующий
траекторию динамической системы в фазовом евклидовом пространстве £„, Л, В —
квадратные я-мерные матрицы с постоянными или переменными
коэффициентами, F — л-мерная вектор-функция, в которую также может входить
явно время /. Предполагается, что с вероятностью единица х (t — Д (/)) =
= 0 при / — Д (/) < 0. Будем рассматривать случай малых флюктуации
запаздывания, т. е.
Д(/) = До + г<т|(*, ц), (23.90)
где Д0 = УИД (t) > 0, а > 0, £ (/, \л) — стационарный случайный процесс,
превращающийся при \i -* 0 в «белый шум» £ (/). Для исследования
системы (23.89), как обычно, вначале следует привести ее к стандартному виду, а
затем применить аналитический метод уравнений КФП.
Для системы (23.89) нетрудно рассмотреть одночастотные случайные
колебания, а также многочастотные.
Аналогичное исследование может быть проведено и для автономных
квазилинейных систем с несколькими статистически независимыми
случайными запаздываниями, например для системы
4р-=2^(/-Д/(/)) + е£[х(/), *(<-M0). ....*(*-А, (0). е],
(23.91)
а также в случае, когда в этой системе Ах и F зависят от «медленного
времени» т = е/ и кроме того F = F(tf х (t), х (t — Дх (/)), ...» х (t — Дг (/)), е) —
периодическая функция времени.
§ 24
МЕТОД УСРЕДНЕНИЯ
С ТОЧКИ ЗРЕНИЯ
ТОЧЕЧНЫХ ПРЕОБРАЗОВАНИЙ
1. Основные определения. Как известно, метод точечных
преобразований был развит и впервые применен к решению задач теории
регулирования А. А. Андроновым [4].
Систематическому изложению этого метода применительно к теории
нелинейных колебаний посвящены работы Ю. И. Неймарка [152, 153].
Отсылая интересующихся к цитированной литературе, кратко остановимся
лишь на трактовке метода усреднения с точки зрения метода точечных
отображений.
Приведем некоторые известные определения метода точечных
преобразований.
Допустим, что с помощью формул
хх — fi (xlf х2, ..., хп),
Х% — /2 (*1> *2» • • • » Хп)>
(24.1)
Хп == In \Х1> Х2> • • • » Хп)
каждая точка М fa, jc2, ..., хЛ) некоторого геометрического образа ЯП
однозначно преобразуется в другую его точку М (хъхг, ...,*„). В этом случае
формулы (24.1) определяют точечное преобразование геометрического
образа ЯП в себя.
Обозначим это преобразование буквой Т и запишем формулы (24.1) в
виде
М = ТМ, _ (24.2)
обозначающим, что преобразование Т переводит точку М в точку М.
Повторяя это преобразование, можем написать
М = ТМ = Т (ТМ) = Т2М
и т. д.
Точка М* называется неподвижной точкой преобразования Г, если
преобразование Т переводит точку М* в себя, т. е. если
77W* = М*. (24.3)
320
Будем называть р-окрестностью точки М* (jci, *2> ..., хп) совокупность
точек М (xlt x2, ...» хп), для которых
_^
l(*i - х\? + (х2 - х\? + ... +(хп- Хп)2] 2 < р. (24.4)
Левую часть неравенства (24.4) будем записывать в виде р(М, М*) и
называть расстоянием между точками М и М*.
Неподвижную точку М* будем называть асимптотически устойчивой,
если можно указать некоторую малую окрестность а > О, которая
стягивается к М* при последовательном многократном применении
преобразования Ту т. е. выполняется неравенство
р(ТтМ, М*)<°т, (24.5)
где ат -> 0 при m -* со и max ат -► 0 при а -+ 0.
2. Точечные отображения для точных и
усредненных уравнений. Не останавливаясь на всех разнообразных
и специфических особенностях отображений (24.2), сразу же перейдем к
установлению точечных отображений, соответствующих точному и усредненному
уравнениям, и анализу связи между этими отображениями. При этом будем
придерживаться изложения, принятого в работе [153].
Рассмотрим систему уравнений в стандартной форме
-2Г = еХ (/,*), (24.6)
где x(xlt х2, ..., хп), X (Xlt Х2, ..., Хп) — точки я-мерного евклидова
пространства, t — время, е — малый положительный параметр.
Предположим, что правые части уравнения (24.6) дважды непрерывно
дифференцируемы по х и являются непрерывными и периодическими
функциями / с периодом 2л,
Одновременно с системой точных уравнений (24.6) будем рассматривать
усредненную систему
-§- = в*0(£), (24.7)
где
*oO = -5rjx(<. l)dt- (24*8)
Перейдем к геометрической интерпретации решения системы (24.6)
и (24.7) в пространстве переменных xlt x2t ..., хП9 /.
Каждой системе значений xlt x2, ..., хПУ t поставим в соответствие
точку М с координатами хь х2, ..., xnt t— -^—[2я, где -^—обозначает
целую часть числа -^—. Через каждую точку выбранного таким образом
фазового пространства проходит единственная фазовая траектория, и каждая из
фазовых траекторий через промежутки времени, равные 2я, вновь и вновь
пересекает гиперплоскость t = 0.
Допустим, что М — некоторая точка гиперплоскости / = 0; выходящая
из точки М фазовая траектория через время, равное 2я, вновь пересечет
гиперплоскость / = 0 в точке /И. Обозначим через Ггя точечное отображение,
21 246
321
переводящее точку М в М. Для отыскания этого точечного отображения
необходимо найти решение уравнения (24.6) на промежутке времени, равном
2я. Это решение может быть найдено, например, с помощью итерационного
процесса согласно соотношению
t
х(т) (t) = х0 + е j X(/, х{т-[) (0) dt. (24.9)
о
Ограничиваясь первым приближением, имеем
t
x(t) = x(0) + e^X(t, x(0))dt + eQ(x(0), e), (24.10)
о
где в любой ограниченной области фазового пространства согласно условиям,
наложенным на функции X (/, х), при е -* 0
Q(x, е)^0, Q^jc, e)- 0 (24.11)
равномерно по х.
Согласно соотношению (24.10), точечное отображение Ты,
переводящее точку х гиперплоскости / = 0 в точку х той же гиперплоскости, будет
иметь вид
"х = х + г2пХ0(х) + еЙ(лг, e). (24.12)
Для усредненного уравнения (24.7) точечное отображение Ты будет
иметь следующий вид:
| = | + е2яХ0 (I) + ей (g, e), (24.13)
где Q (|, е) удовлетворяет условиям, аналогичным условиям (24.11).
Таким образом, с точки зрения метода точечных отображений переход
от точного уравнения (24.6) к усредненному уравнению (24.7) соответствует
рассмотрению вместо преобразования (24.12) преобразования (24.13),
отличающегося от (24.12) величинами второго порядка малости относительно е.
Поэтому все утверждения, справедливые для точечного отображения (24.13),
справедливы и для точечного отображения (24.12), т. е. они общи для точной
системы (24.6) и соответствующей ей усредненной системы (24.7).
Разумеется, что тождественность структуры фазового пространства для
системы (24.6) и (24.7) будет лишь в том случае, если усредненная система
груба в смысле Андронова — Понтрягина и е достаточно мало.
3. С о о т в е тс т в и е между состояниями
равновесия и периодическими решениями. Нетрудно
установить связь между состояниями равновесия усредненного уравнения и
периодическими решениями исходного точного уравнения.
Так, неподвижным точкам точечного отображения Ты соответствуют
периодические движения периода 2я системы уравнений (24.6). При этом
неподвижные точки х* отображения Ггя» согласно соотношению (24.12),
находятся из уравнения
2яХ0 (х*) + Й (**, е) = 0. (24.14)
Неподвижные точки отображения Тгя определяются из уравнения
2яХв(6*) + 0(6*, е) = 0. (24.15)
322
Исходя из аналитичности отображений Т^ и Тгя по е, нетрудно
показать, что х* и £* отличаются друг от друга на величину порядка е.
Далее, легко показать, что устойчивому состоянию равновесия
усредненной системы, у которой все корни характеристического уравнения имеют
отрицательные действительные части, соответствует асимптотически
устойчивое периодическое решение исходной точной системы.
Рассмотрим подробнее вопрос о близости решений усредненного и
точного уравнений на конечном интервале времени.
Пусть ^ и Т2 — точечные отображения, удовлетворяющие условиям:
|Тгхг- Т2хх||< ц, ||Т2х, - Т2х2\<qix1-x%|, (24.16)
где [I и q — постоянные.
Как нетрудно показать, выполняется неравенство
\Пк1-ТиЛ<*Т^[+\х1-Хг\Яп- (24.17)
В качестве 7\ и Т2 рассмотрим отображения Ггя и Ггя и положим ц =
= Ле2, |<7| = 1 + Be.
т
Для п = — получим
\\Т&гх-Т&%\\<^г(е"- 1). (24.18)
Отсюда при х (0) = I (0) находим
МО - Б (0 К 48 ^LT - J> + Аг* <24Л9)
т
на интервале 0 <; / <; —.
4. П р и м е н е н и е метода усреднения к
разрывным системам. Метод точечных преобразований позволяет
наглядно проиллюстрировать возможность применение метода усреднения к
разрывным, системам.
Допустим, что правые части системы уравнений (24.6) допускают
разрывы непрерывности на некоторыхповерхностяхЯ/ (х, t) = 0 (/ = 1,2,.... m),
где Sj (x, t) — дважды непрерывно дифференцируемые функции х и /,
периодические по / с периодом 2л, и что фазовые кривые непрерывно
продолжаются через поверхности разрыва и прямые, параллельные оси /, не имеют
касаний с поверхностями S/ (х, /) = 0.
При этих предположениях точечное отображение Тчя можно записать
в виде
X(t) = x + E^ J X(t,x(t))dt9 (24.20)
/ tj(X)
где x (t) — решение исходной системы (24.6), обращающееся в х при / = 0;
tj (х) — моменты пересечения фазовой кривой х (t) (0 <; / <; 2я) с
поверхностями Sj (/, х) = 0. С точностью до величин порядка е2 точечное
отображение (24.20) можно записать в виде
х = л: + е ^ j X(ttx)dt (0</(*)<2я). (24.21)
/ tyx)
21* 323
Введем обозначение
*о (х) = 2 * j* * С *)<*/= j X (/, jc) Л. (24.22)
i *,(*) о
Тогда точечное отображение Тчл (24.20) с точностью до величин порядка е2
совпадает с точечным отображением Ггл для усредненного уравнения (24.7).
В заключение заметим, что с помощью метода точечных отображений
легко устанавливается соответствие областей притяжений устойчивого
состояния равновесия усредненной системы и соответствующего устойчивого
периодического движения исходной системы; соответствие устойчивому
периодическому движению усредненной системы устойчивой тороидальной
интегральной поверхности исходной системы.
Рассматривая неавтономные системы второго порядка, с помощью
метода точечных отображений можно установить не только соответствие
между некоторыми типами движений и их областями притяжения, но и
соответствие в целом. Так, например, доказана следующая теорема.
Теорема [1531. Если усредненная система груба (в смысле
Андронова — Понтрягина), то в любой конечной no x части фазового прострой-
ства х, t каждой ячейке усредненной автономной системы,
интерпретируемой в пространстве х, t, соответствует (с точностью до величин,
стремящихся к нулю вместе с г) такая же ячейка исходной неавтономной системы.
На доказательстве этой теоремы, а также на более подробном
обсуждении высказанных выше положений о соответствии между свойствами
точных и усредненных уравнений и на роли метода точечных отображений в
установлении таких соответствий здесь останавливаться не будем, отсылая
интересующихся к специальной литературе, посвященной этому вопросу
[152, 1531.
§25
СТРОБОСКОПИЧЕСКИЙ МЕТОД
Н. МИНОРСКОГО И ЕГО СВЯЗЬ
С МЕТОДОМ УСРЕДНЕНИЯ
•
1. Стробоскопический метод. Основная идея
стробоскопического метода Н. Ми норско го 1239] заключается в следующем: пусть
некоторый процесс обладает медленно меняющимся периодом, мало
отличающимся от Т. Будем этот процесс изучать только в моменты 7\ 27,
37\ ..., тогда мы увидим этот процесс медленно меняющимся, что позволит
изучить его более подробно. Для иллюстрации этой идеи рассмотрим одну
из траекторий гармонического осциллятора, определенную некоторыми
начальными условиями х (0), у (0), которые определяют начальные
координаты представляющей точки R = R0 на фазовой плоскости (х, у). Допустим,
что движение рассматриваемого гармонического осциллятора,
действующего в течение времени 2л, описывается дифференциальным уравнением х + х=0.
Ввиду того, что 2я — период, /?, будучи при / = 0 в точке /?0, через
время, равное 2л, вернется в ту же самую точку R0. Это можно записать
в форме тождественного преобразования
^(#о) = Яо- (25.1)
Траектория гармонического осциллятора представляет собой окружность
(с радиусом, определяемым начальными условиями), описываемую точкой
R с равномерной угловой скоростью, равной 1. Это можно представить в
виде колеса, вращающегося равномерно с угловой скоростью, равной 1,
на котором нанесена метка в точке Я- Это метка дает изображение
непрерывного углового движения с периодом 2л.
Предположим, далее, что колесо освещается стробоскопическими
вспышками, возникающими через период 2л. Тогда вместо непрерывного
движения будем видеть только фиксированную точку /?0, т. е. лишь результат
преобразования (25.1).
Если рассмотрим осциллятор,описываемый уравнением Ван-дер-Поля,
в первом приближении характеризующийся устойчивым предельным
циклом с радиусом, равным 2, то точка R на равномерно вращающемся (в
первом приближении) колесе будет описывать спираль, приближающуюся к
циклу, и при стробоскопических вспышках получим последовательность
точек Av A2i ..., постепенно приближающихся к предельной точке А0 = 2,
325
«Медленное» движение этих стробоскопических точек возникает вдоль
радиуса, поскольку в первом приближении угловая скорость вращения
постоянна. Если принять во внимание второе приближение, то это медленное
движение стробоскопических точек будет происходить вдоль некоторой
линии С, отличной от радиуса.
Стробоскопические точки Аи Л2> ... образуют некоторую дискретную
последовательность, но в данной оптической аналогии эта
последовательность возникает как почти непрерывная последовательность «медленного»
движения.
Предлагаемый метод, как будет ясно из дальнейшего, особенно
полезен для исследования неавтономных систем, ввиду того что получаемые
стробоскопические аналоги всегда автономны. В связи с этим трудная задача
исследования устойчивости периодических движений с помощью
стробоскопического метода сводится к более простой задаче об устойчивости
сингулярных точек.
Заметим, что стробоскопический метод эффективно применим лишь в
случае медленного движения стробоскопических точек, а это, в свою
очередь, связано с уравнениями, близкими к линейным.
2. Стробоскопические дифференциальные
уравнения. Рассмотрим близкую к линейной неавтономную систему
-£- = X (tt х, у, е),
. (25.2)
-3J- = K(/f Д. у, 8),
где е > 0 — малый параметр, характеризующий близость системы к
линейной, х, у — скалярные переменные.
Во многих случаях удобно ввести новые переменные риф,
определяемые формулами
р = а2 = х2 + х2 = х2 + у2,
i|) = arctg-|-.
(25.3)
Заметим, что во многих задачах введение вместо а новой
переменной р = а2 удобно в связи с тем, что р — мера энергии. Однако введение
переменной р не всегда возможно и зависит от вида правых частей
системы (25.2). Допустим, что введение переменных р и г|э возможно. В новых
переменных система (25.2) примет вид
-^- = F{t, p, г|), е),
4Ф (25-4)
-£- =G(/, p, ф, е),
где F (t, р, ф, й) и G (/, р, ф, е) — периодические функции с периодом 2я.
Так как мы предполагаем, что система (25.2) близка к линейной, то и
дифференциальные уравнения (25.4) должны быть близки к уравнениям
гармонического осциллятора, в переменных риф имеющим вид
dt u'
(25-5
<*Ф _ 1
dt ~ 1#
326
Таким образом, уравнения (25.4) при указанных предположениях
могут быть представлены в виде
-J-= efC P» ♦).
*, (256)
-а=_1+чг(/, р, +)f
где функции / (/, р, г|э) и g (/, р, i|>) периодические по / с периодом 2л и знак
«—» перед 1 во втором уравнении означает, что вращение угла -ф
предполагается по часовой стрелке.
Правые части системы (25.6) содержат малый параметр е и при е = О
вырождаются в уравнения (25.5). Поэтому решение системы (25.6)
естественно искать в виде рядов
P(0 = Po + ePi(0 + •••.
в которых р0 и г|50 (/) —решения системы (25.5).
В первом приближении получим
p(0=Po + epi(0.
*W = +o-' + e«l(/),
где рА (/) и \|)! (/) определяются согласно формулам
Pi(0 = J/C Ро. *■-*)*.
о
t
*i(0 = Jff(Л Ро» *в — О Л-
(25.7)
(25.8)
(25.9)
Выражения (25.8) используем для оценки р (/) и г|э (t) в моменты / =
= 2л, 4л, 6л,... . Для этого вычислим вариации рх (2л) и ^ (2л) в течение
интервала 2л. На следующем интервале (от 2я до 4л) в качестве начальных
значений / уже будем принимать не t = 0, а / = 2л и т. д.
Из выражений (25.9) находим
Р!(2л) = /С(р0, %), (25.10)
^i(2n) = L(p0,^0),
где
2л
*(Pe. +o) = Jf(<. Ро. *■-<)*.
о
(25.11)
2л v
Мро. %) = \g(*> Po. to—')*•
6
Для определения р (2л) и -ф (2л), согласно выражениям (25.8) и (25.11),
получаем
Р (2я) = р0 + е/С (р0, г|)0), 25Л^
ур (2л) = г|50 — / + eL (p0, ф0).
327
Обозначая через Ар = р — р', Д-ф = *ф — г|/ приращения,
получаемые р и я|) за промежуток времени 2л, имеем
Др = 2я8/С(Ро, W, (2513)
Дг|> = 2яе!(р0, \|э0).
Вводя элемент стробоскопического времени Лт =-- 2яе, выражениям
(25.13) можно придать вид
-&-*<*, *■).
(25.14)
Дф г / и ч
Уравнения (25.14) можно рассматривать как разностные уравнения,
при помощи которых, начиная от значений р0, *ф0, вычисляем приращения
-д~-, -^-, прибавленные к р0 и г|>0 для того, чтобы получить начальные
значения ро и i|)o для следующего момента времени, равного 2я, и т. д.
В физической интерпретации этот процесс соответствует вычислению
последовательных стробоскопических точек. При этом для достаточно
малых е благодаря инерции зрительного восприятия получаем впечатление
замедленного квазинепрерывного движения вдоль траектории вместо
множества отдельных точек. Иначе говоря, ломаная линия, образованная
соединением отрезков прямых, соединяющих стробоскопические точки,
заменяется непрерывной гладкой кривой.
Заменяя в уравнениях (25.14) Лр, Лгр и Лт на dp, dip и dx (это можем
сделать в том случае, если продолжительность процесса много больше периода 2л
и, кроме того, если Лт достаточно мало, так как аппроксимация тем лучше,
чем меньше е), получаем стробоскопические дифференциальные уравнения
-£-К(Р.*>.
(25.15)
Эти дифференциальные уравнения автономны, что позволяет найти
для них постоянные решения, соответствующие периодическому решению
исходной системы (25.6). При этом вопрос об устойчивости периодического
решения уравнений (25.6) сводится к исследованию устойчивости
особой точки уравнений (25.15), представляющему собой сравнительно простую
задачу.
Нетрудно видеть, что уравнения (25.15) с учетом обозначений (25.11)
с точностью до постоянного множителя совпадают с уравнениями,
получаемыми при усреднении.
Кроме того, согласно изложенному ранее (см. § 24) очевидно, что
исследование точек, отстоящих на время, равное 2л, по существу означает
рассмотрение точечного отображения Ггя.
3. Примеры составления стробоскопических
уравнений. В качестве примера рассмотрим общеизвестное уравнение
Матье
-Sr + 0 + а cos 2t) х = 0, (25.16)
где а — малая величина.
328
Совершая замену переменных согласно формулам
р = х2 + х2,
ф = arctg ^- f
получаем систему
-^- = — ар sin 2t|>cos 2/,
-^- = — 1 — а cos2 г|) cos 2/.
После этого, согласно формулам (25.11), находим
tf(p, г|>) = — J psin2(t — t)cos2tdtf
о
L (р, г|>) = — j cos2 (г|> — /) cos 2*Л.
о
И, окончательно, получаем стробоскопические уравнения
-ЗГ = — ~~Psin2*'
-5Г = --ГС052^
(25.17)
(25.18)
(25.19)
(25.20)
с точностью до множителя а совпадающие с уравнениями, получаемыми с
помощью метода усреднения.
В качестве следующего примера составим стробоскопические
уравнения для автономной системы (уравнения Ван-дер-Поля)
+ е(*»-1)-2-+х = 0. (25.21)
Произведя в уравнении (25.21) замену переменных согласно формулам
(25.17), получаем систему
—£- = ер (1 — cos 2-ф) j- ер2 (1 — cos 4t|>),
(25.22)
-Jr = —' + -у8Sin 2^—8р (4"sin2,)'+"т sin4*J •
Вычисляя, далее, функции К (р, tp) и L (р, гр) согласно формулам (25.19),
получаем стробоскопические уравнения
•Д- = р(1-4-р)'
*L_0 (25,23)
§26
СВЯЗЬ МЕТОДА УСРЕДНЕНИЯ
С ДРУГИМИ ПРИБЛИЖЕННЫМИ МЕТОДАМИ
1. Метод эквивалентной линеаризации и связь
его с методом усреднения. Остановимся на связи между
методами эквивалентной линеаризации и усреднения на самом простом
примере колебательной системы с одной степенью свободы, описываемой
уравнением
m^+** = e/(x,-J-), (26.1)
где т и k — положительные постоянные, е > 0 — малый параметр.
Как известно [92, 16], согласно методу эквивалентной линеаризации,
с точностью до величин первого порядка малости вместо уравнения (26.1)
можем рассматривать эквивалентное ему (с точностью до величин
указанного порядка малости) линейное уравнение с «постоянными» (вообще
говоря, с медленно меняющимися) коэффициентами
т4р+Ыа)11Г + к' (а) х = О, (26.2)
где коэффициенты К (а) и ke (a) — функции медленно меняющейся
величины а, определяемые выражениями
2л
*•(а) = ~~Ш \^а cos *• ~~ ш sin ♦* sin ^'
О
2л
(26.3)
ke (а) = k ^- \ f (a cos яр, — аса sin -ф) cos \|>d\|).
о
Таким образом, в точном уравнении (26.1) мы заменили нелинейное
слагаемое
«линейным»
Fe = - [kx (а) х-К (a) -g-| , (26.5)
где kx (a) = ke (a) — k.
330
Функции амплитуды К (а) и ke (а) называются соответственно
эквивалентным коэффициентом затухания и эквивалентным коэффициентом упругости.
Введем декремент затухания эквивалентной линейной системы (26.2)
и собственную частоту этой системы
о,(я) ="-]/-
о) ,„i_ ./ Мд)
Воспользовавшись обычной линейной теорией для решения
эквивалентной линейной системы (26.2) (с принятой точностью), имеем
jc = acost|>, (26.6)
где а и \f должны быть определены из уравнений
da __ Хе (а)
dt ~~~~'2m~'
выражающими общеизвестный факт о том, что декремент затухания —
логарифмическая производная амплитуды, взятая с обратным знаком, а
частота — угловая скорость вращения полной фазы колебания.
Определяя а и г|э из системы (26.7) и подставляя их значения в решение
(26.6), получаем решение эквивалентного «линейного» уравнения (26.2)
с медленно меняющимися коэффициентами Хе (а) и ke (a).
Если в уравнении (26.1) произвести замену переменных согласно
формулам
х = a cos ib,
dx (268)
—jj- = — асо sin \|э,
то, как известно, вместо уравнения (26.1) получим эквивалентную ему
систему
-jjt — — tf (a cos г|), — асо sin i|>) sin г|>,
<N> e (26-9)
-~- = 0) f (a cos \|), — аы sin г|>) cos г|>.
Подставляя решение уравнений (26.9) а = а (/), г|> = -ф (f) в формулы
(26.8), можно получить точное решение уравнения (26.1).
Правые части системы (26.9) можно интерпретировать как точные
«декремент» затухания и «собственную» частоту колебаний, описываемых
уравнением (26.1). Уравнения (26.7) представляют собой усредненные уравнения
(26.9). Поэтому совершенно очевидно, что замена уравнения (26.1)
эквивалентным линеаризованным уравнением (26.2) соответствует усреднению
точных «декремента» затухания и «собственной» частоты колебаний.
2. Метод разложения по двум переменным.
Остановимся на установлении связи между усредненными уравнениями высшего
приближения и методом разложения по двумя переменным, предложенным
в работе [218].
331
+ x = e/(*,-§-), (26.10)
Рассмотрим общие положения метода разложения по двум переменным
применительно к уравнению второго порядка
где е — малый положительный параметр.
Решение его будем отыскивать в виде ряда
х = x0(t*tx) + eXl(t*,t)+ ****«*, ч)+ ... , (26.11)
зависящего от быстрого времени /и медленного т. Время t* и т тоже
представим в виде рядов
**-(1+еЧ + «Ч+-Х.
х = (е + е2^ + е8Й3 + •••)'• * '
Постоянные юп, Q„ будем определять из условия ограниченности
решений.
Подставляя значения /*ит (26.12) в правую часть разложения (26.11),
имеем
-g- = (1+еЧ) -£«- + <е + в«ад-gL + e^- +
+ e2-§-4-8a-^- + 0(e«), (26.13)
+e-gf+2еа та+*а -S-+° и- (26-14>
Далее, имеем
+ «?*(*• ■&)(■& + ■&) +«М- (26-15)
Подставляя выражения (25.11), (26.14) и (26.15) в уравнение (26.10)
и приравнивая коэффициенты при одинаковых степенях е, получаем
-|sr + * = Qi (26.16)
-& + * 24*k + f(x>>4F)> <2617>
+ *^] + /-' (-o. &) * + /-' (-o. £) ($" + -&). (26-18)
Вводя медленно меняющиеся амплитуду а = а (т) и фазу ср = ср (т)»
из уравнения (26.16) находим
х0 = а (т) cos (/* + ф (т)). (26.19)
332
Далее, подставляя это значение в правую часть уравнения (26.17),
получим
Т&-+х1 = 2-3TsinC* + »<х» +2а ЧГС0*«* + Ф<т» +
+ f(acos(f* + q>), —asm(t* + q>)). (26.20)
Во избежание появления секулярных членов, необходимо положить
da
dx
g— I / (a cos г|э, — a sin г|э) sin ifd\|? = Ях (а),
о
a -g- = ^- j / (a cos г|), - a sin г|>) cos i|rt|> = Qx (a), (26.21)
о
где
ф = /* + Ф(т). (26.22)
Переходя в уравнении (26.20) к переменной г|э, получаем
^ + хх = 2 [Рх (a) sin ф + Ql (a) cos ф| + f (a cos г|>, — a sin г|>). (26.23)
Определяя функции а(1) (а, г|э) и 0(1) (а, г|э) при помощи соотношений
^- = — Да cos \|), — a sin г|>) sin г|> — Рг (а), (26.24)
д0(,)
а -^г- = — / (a cos г|>, — a sin г|>) cos ф — Qi (a) (26.25)
и условий
j а(1)(Ф, я)*|>==0,
£ (26.26)
fe(,)(^,a)di|) = 0,
о
из уравнения (26.23), методом вариации параметров, найдем
Xl = [DA(т) + a(1) (i|\ a)\ cos г|) + [^i (*) — a6(l) (г|>, a)] sin г|), (26.27)
где медленно меняющиеся функции Dx (т) и Ех (т) должны быть подобраны
из условия отсутствия секулярных членов в выражениях для х2. В
результате некоторых выкладок для определения Dx (т) и Ех (т) получаем уравнения
где 2я
Ъ1а) = -к$[<*1}1Ъ *>-&■ +0(>' e)-^"]slnt*|», (26.29)
о
2п
'«•<*>- -5Г j" к" <+' ")-£•+ 0<1) <*' a> "S"]cos ***• (26-30)
333
Если Рг (а) = 0, то из первого уравнения системы (26.21) следует а = а0 =
= const. В этом случае необходимо, чтобы и Р2 (а) = 0, так как иначе Dt
будет линейной функцией /, и мы не получим разложения, свободного от
секулярных членов. Поэтому предположим, что Рх (а) ф 0, и представим
систему (26.28) в виде
Pi(°)^-1EirLDi = P>(<i)-Wi(a), (2631)
Далее, согласно разложениям (26.11), (26.13) формуле (26.19),
обозначению (26.22) и выражению (26.27), имеем
^ = acos\|) + 8[(Dl(T) + a1(\|5, я)) cos \|> + (£х (т) — аб^-ф, a))sin\f] + ••• .
(26.33)
-£- = — a sin t + е [(Et (т) — аВг (г|>, a)) cos ф — (Dx (т) +
+ fli(*,fl))sin*]+ ••• . (26.34)
или
x=[a+e(D1(T) +
+ fli(*e))+ •••]cos[* + e(el(+ffl) *lGL)+...]+ ... , (26.35)
-^- = -И + в(01(т) +
+ fl1№,a)+ ...]sin|t + e(el»,a) ^-)+ •••] + ••• •
3. Связь между методом усреднения и
методом разложения по двум переменным. Установим связь
между методом разложения по двум переменным и модифицированным
методом усреднения [246]. «
Приведем уравнение (26.10) к стандартному виду. Для этого произведем
преобразование переменных с помощью формул
jc = acos(/ + ф),
dx (2636)
-&• = — asin(/ + q>).
После некоторых выкладок получим систему, эквивалентную уравнению
(25.10),
-~- = е/ [a cos (t + ф), — a sin (/ + ф)] sin (t + ф),
(26.37)
-дг = -J-f la cos if + Ф)э — а sin (' + Ф)1 cos С + Ф)-
Согласно общему методу, изложенному в п. 7 § 4 (см. стр. 73—75),
удерживая произвольные медленно меняющиеся функции а, на основании
формул (4.71), (4.77), (4.79), (4.80) и (4.82), имеем
а = а + 8Л1(^ф,а)+..., ^ щ
Ф = Ф + 8f12(/ + ф, а)+ ... ,
334
(26.39)
где
Fn(t + ф, а) = ип (t + Ф, а) + qn (a),
F\2 (t + ф, а) = wi2 (/ + ф, а) + ql2 (а),
а, Ф определяются из системы уравнений (с точностью до величин
порядка еа)
da
[я22(а) + ^(а)^[^]-^Я1(а)];
^Iffr)
(26.40)
= 8 " 'Г~7 + 82
здесь приняты обозначения
(26.41)
Р"(а) = ~i~ j f (♦■ а) sin *d^
о
2л
6
Р«® —5Г J {"/(Ф'|$'ПФ1 "п<*. а) + *"уп*1 «h,(* 5)}<*,
(26:
f (a cos if, — a sin i|>) = / (\|), a), / + ф = г|э.
Далее, _согласно уравнению (4.78) (стр. 74) для определения
функций ии (ур, а) и и12 0ф, а) имеем уравнения
(2б!42)
и условия
2л
J "и (*. л) d\|) = 0,
о
2л
J и12(г|>, a)d\|) = 0,
(26.43)
(26.44)
согласно которым можем написать
2л 2я
j мц(*. <0/(♦.<*) cos гр^ = J и12(г|>, a) [a -^- + Plt(a)](ty = 0, (26.45)
о
2л
J 1"и Ok ^) cos ф +~аи12 (г|), a) sin 41 / (4, a) dty =
335
2л
= j {"п (+, а) [а -^ + Р18 (а)] + а«12 (i|>, а) [^- + Рц (5)]) dt|> = 0.
(26.46)
Сопоставляя выражения (26.42) с формулами (26.29) и (26.30) (в которых
полагаем а(,) (г|>, а) = ии (i|>, а), 60) (i|>, а) = и12 (ф, а) и принимая во
внимание соотношения (26.45) и (26.46), получаем
Рп (а) = Рг (а), Р22 (а) = -Ш- . (26.47)
а
Уравнения (26.40) с учетом соотношений (26.31) и (26.32), а также (26.47),
(26.41) и (26.21) можем представить в виде
-g-=eP1(a) + e2Q2P1(a),
- г п 1 (26-48)
-$--e-fiya-+e-[«F+-^-Q1(a)J.
Система (26.48) эквивалентна двум системам (26.21) и (26.28),
обеспечивающим в методе разложения по двум переменным отсутствие секулярных
членов.
Следовательно, из системы уравнений (26.40) и равенств (26.47)
очевидно, что qn (а) и q22 (а) должны удовлетворять соотношениям
Рг Са) + <7п (а) ^Я - ^ujfL Pl (H) = Q2PX (a),
"* "* (26.49)
da \_ a \ da a
0)2
Подставляя в формулы (26.36) значение а и ср согласно разложениям
(26.38), получаем
х = acos(* + ф) + е[(un(t + ф, a) + (7u(a))cos(/ + q>) —
- a (u12(t + Ф, a) + (/12(a)) sin (/ + ф)] + e2 .... (26.50)
— — E
Отождествляя qlx (a) с Dx и q12 (а) с =-, можно получить полное соответ-
а
ствие (с точностью до величин второго порядка малости) между разложением
(26.50) и разложением (26.33).
Мы могли бы также провести параллельное рассмотрение разложений,
получаемых с помощью метода усреднения и с помощью известной ы-методи-
ки, применяемой обычно к дифференциальным уравнениям с малым
параметром, но не сведенных к стандартному виду. В результате получили бы
аналогичное соответствие.
Изложенный метод разложения по двум переменным и его связь с
методом усреднения, в его общей форме, представляют определенный интерес.
Так умелым подбором произвольных функций от амплитуды можно свести
усредненные уравнения к достаточно простому виду (26.48).
Однако, следует заметить, что допускаемое разложение по двум
переменным t* и т (26.12) не всегда справедливо. Например, не всегда воз-
336
можно подобрать функции qn (а) и q12 (а) так, чтобы удовлетворить уравнениям
(26.49) при подходящих постоянных со2 и Q2.
4. П р и м е р. В качестве простейшего примера, иллюстрирующего
приведенные формулы и показывающего, как следует подбирать
постоянные со2, Q2, рассмотрим уравнение Ван-дер-Поля
—г + х==г(1 — х2)чг. (26.51)
Вводя новые переменные а и ср с помощью замены
jc = a cos (/ + ф),
& . „ , ч (26.52)
-#- = — asin(/ + <p),
уравнение (26.51) приводим, к стандартному виду
= е [1 — a2 cos2 (/ + q>)] a sin2 (/ + ф),
-gj- = e[l — a2COS2(* + ф)1 Sin(f + ф)С05(* + ф).
(26.53)
Далее, согласно формулам (26.41), имеем
Pi(a) = P11H=-y(1--f")'
i-Q1(a) = P12(a) = 0. (26.54)
Воспользовавшись уравнениями (24.43) и условиями (26.44), находим
"и (t> л) = — -^ sin 2г|) + -Ig- siR 4<Ф*
i / 2 \ 2 <26-55)
Ми (*,«) = r(l —-V)cos2* + -gg-cos4# (+ = ' + <P).
С помощью формул (26.42), принимая во внимание соотношения (26.47),
получаем
ЯЛя) = Я21(я) = 0,
Р /~i- QiW - / * Зд2 . "«М (26*56)
^22 W — 1"8 16" + ~25б~/ •
После этого можем составить усредненные уравнения (26.48) во втором
приближении
4-(.+л^4(1--т-)-
(26.57)
А система (26.49) запишется в виде
„1Й(4—*)_^.^(,_^)_o.-f (■-?•).
5 Л ЗМ «to. l/i з? , цв-г\ . 1 (26-58)
22 «о 337
Из системы (26.57) находим
*- 17 2 ^ 2 > x = (e + e2Q2)/. (26.59)
При т -> оо ^-* 2 (а0 > 0).
Из системы (26.58) определим со2 и Q2. Налагая на qn (а) условие
аналитичности в окрестности а = 0, получаем Q2 = 0. Из условия конечности
<7i2 (я) ПРИ я = 2 следует, что со2 = —j^-.
5. Связь между методом усреднения и
принципом гармонического баланса. Как известно, принцип
гармонического баланса широко используется для отыскания
периодических решений нелинейных дифференциальных уравнений. Этот принцип
имеет непосредственную связь с методом усреднения. Рассмотрим уравнение
m-^+kx = Bf(Xl -£-) (26.60)
и составим для него выражение эквивалентной линейной силы
Р< = -[кЛ<*)х + К(а)-%г]> (26.61)
заменяющей нелинейную
F = zf(x,-%r). (26.62)
Предположим, что колебания системы, описываемой уравнением (26.60),
близки к гармоническим:
х — a cos (со/ -f ф),
dx (26-63)
-^- = — до) sin (со/ + ф).
Подставим значения х и -j£- согласно формулам (26.63) в выражения
(26.61) и (26.62).
Для гармонического колебания (26.63) линейная эквивалентная сила
(26.61) — гармоническая функция времени с частотой со. Обозначая
амплитуду и фазу Fe соответственно через Яе и ф*, имеем
^ = ^со5И + ф,). (26.64)
Нелинейная сила (26.62), после подстановки в нее значений х, -^-
согласно формулам (26.63), вообще говоря, станет периодической функцией
времени, состоящей из различных гармоник с частотами вида ясо, где п =
= 1,2,....
Допустим, что
7 cos (со/ + ф) (26.65)
— ее основная гармоника. Приравнивая между собой амплитуды и фазы
эквивалентной силы (26.61) и основной гармоники нелинейной силы (26.62)
7. = ЗГ. Ф* = Ф,
получаем два уравнения, дающие для параметров kx (а) и Хе (а) усредненные
значения декремента затухания и собственной частоты колебаний.
338
В самом деле, в раскрытом виде при гармоническом колебании
эквивалентная линейная сила (26.61) имеет вид
— kk (a) a cos (со/ + q>) + (oXe (a) a sin (со/ + q>), (26-66)
а основная гармоника нелинейной силы (26.62) —
| \ / (a cos г|), — асо sin г|э) cos ypchp) cos (со/ -f ф) +
+ |— ] HacoSTk — «cosin\|))sini|?dij)|sin(co/+ ф). (26.67)
Приравнивая друг другу обе гармоники (26.66) и (26.67)
(соответственно коэффициенты при синусах и косинусах в выражениях первых гармоник),
получаем
2Я
акк (а) = \ / (a cos г|э, — а со sin г|э) cos ipdi|),
£ (26.68)
(оХе (а) = I / {a cos гр, — асо sin г|э) sin \|)di|).
о
Этот прием и называется, как известно, принципом гармонического
баланса.
Выражения (26.68) совпадают с выражениями (26.3), связь которых с
методом усреднения была установлена выше.
22*
§ 27
УСРЕДНЕНИЕ В УРАВНЕНИЯХ
С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
1. Уравнение, близкое к гиперболическому;
приведение его к бесконечной системе. Метод
усреднения с успехом может быть применен для построения приближенных
решений дифференциальных уравнений в частных производных, близких к
уравнениям гиперболического типа. Следует заметить, что применение
метода усреднения проще всего осуществляется в тех случаях, когда, применяя
метод Фурье, в соответствующих уравнениях в частных производных можем
произвести разделение переменных, после чего полученные счетные системы
обыкновенных дифференциальных уравнений привести к стандартной форме.
Изложение единой методики такого приведения, применимой для самого
общего вида уравнений в частных производных, близких к уравнениям
гиперболического типа, по-видимому, вызвало бы ряд трудностей и громоздкие
выкладки, поэтому мы ее проиллюстрируем на нескольких частных видах
уравнений.
Прежде всего рассмотрим уравнение в частных производных с
постоянными коэффициентами
dp ^"" dtdx ^^ a*2 ^ dt ^ дх
= 1>(*.х. и,-%-.-£■), (27.1)
/, xt и, -gj-, -g£-) — нелинейная
функция, а постоянные коэффициенты А, В, С удовлетворяют условию
В2 — ЛС>0. (27.2)
С помощью известных замен зависимых и независимых переменных
уравнение (27.1) при соблюдении условия (27.2) может быть приведено к виду
(в новых переменных сохраняем те же обозначения ы, х и /)
.rf£-X«+«F(/,x.«.-!..-£)- (27-3)
340
Допустим, что требуется найти решение уравнения (27.3) при
следующих граничных и начальных условиях
u(t,0) = u (/,/) = О, (27.4)
и (0, а) = /(*),
ди (/, х)
dt
t=o
= F(A),
(27.5)
где / (х) и F (х) — непрерывные функции, удовлетворяющие всем
необходимым условиям.
Прежде, чем переходить к преобразованию уравнения (27.3), рассмотрим
невозмущенное уравнение, получающееся, если в уравнении (27.3) положить
при тех же граничных и начальных условиях (условиях (27.4) и (27.5)).
Предполагая, что 1-^уЧ — X > 0, п = 1, 2, 3, ..., с помощью метода
Фурье отыскиваем решение уравнения (27.6) в виде ряда
оо
и (/, v) = 2 {Ап cos cont + Bn sin (ont) sin -^- jc, (27.7)
n=\
где <дп = Л/ (-^п-j — ^— частоты нормальных колебаний, Ап и Вп —
постоянные, определяемые начальными условиями (27.5), п = 1, 2, 3 ....
Принимая во внимание решения (27.7) невозмущенного уравнения (27.6)
и предполагая, что в связи с малостью параметра е формы колебаний
нормальных тонов при наличии возмущения с достаточной точностью
определяются теми же функциями sin —т- а, будем отыскивать решение
возмущенного уравнения (27.3) в виде ряда
оо
и (/, jc, e) = 2 zn (t) sin -^-jc, (27.8)
где zn (/)—функции, подлежащие определению.
Подставляя ряд (27.8) в уравнение (27.3), умножая последовательно на
sin -^р- х (т = 1, 2, 3, ...) и интегрируя результат в пределах от 0 до /,
получаем для определения гп (t) бесконечную систему уравнений
dp
с начальными условиями
+ (OnZn = tFn (/, zlt z2, ..., *lt г2, ...) (n = 1, 2, 3, ...) (27.9)
*„(<)) = /„,
dzn (t)
(27.10)
dt |f«o"" "'
где fn и Fn — коэффициенты в разложениях функций f (jc) и F (jc) в ряды
по фундаментальным функциям sin -^т-*, я = 1, 2, 3,
341
Приведем систему уравнений (27.9) к стандартной форме. Для этого,
аналогично замене, приведенной в § 3, введем новые медленно меняющиеся
переменные хп и х_„ (п = 1, 2, 3, ...) с помощью формул
** -ЧЛ-^-Ч^е-^. (27П)
dt
Произведя такую замену переменных и введя обозначения: о)т = —со_т,
Гт == «"—т
-^- Fm (/, хх е**< + *_, е-"*', ...) = Хт (/, *. .... *_„ ...), (27.12)
в результате получим бесконечную систему обыкновенных уравнений в
стандартной форме
dx
-jf-= eX„(t, xl9 хъ ..., х_ь *-2, . • .) (л = ± 1, ± 2, ± 3, ...).
(27.13)
2. Построение усредненных уравнений. К
уравнениям (27.12) при некоторых обычных предположениях уже можем
применить принцип усреднения, в результате чего получим усредненные
уравнения, в первом приближении, соответствующие системе (27.12),
-%- = гМ {Хп (/, Ь, Ь. • • • . 6-ь 6-2, ...)} (п = ± 1, ± 2, ± 3,...). (27.14)
Решение этой системы хотя в некоторых случаях и проще решения
системы (27.12), все же оно требует, в общем случае, совместного решения
бесконечной системы уравнений с бесконечным числом неизвестных. Однако
могут представиться случаи, когда структура этой системы позволяет
определять неизвестные последовательно, или искомые функции 6Л (/) убывают
столь быстро, что бесконечную систему можем заменить некоторой
конечной.
Приведем несколько примеров, в которых усредненные уравнения
позволяют определить последовательно все неизвестные £„(/) (п = 1, 2, ...).
3. Пример: распространение
электромагнитных колебаний по кабелю. В качестве примера рассмотрим
уравнение, получаемое при изучении закона распространения
электромагнитных колебаний по кабелю,
-S— *-£--Ли+ *4<*,/)«-£- (27.15)
граничными и начальными условиями
u(t, 0) = и(/,/) = 0,
u{0,x) = f(x)9
duikxL\ =р{х)
(27.16)
dt |*=o
Предположим, что в уравнении (27.15) А, Ф 0; тогда k^ Ф щ, где
<оЛ = 1 / (-^у-)2 — К т. е. в системе отсутствует внутренний резонанс.
342
Допустим, что функция A (jc, f) имеет вид
А (х, /) = cos -pjccosco^, (27.17)
т. е. частота внешней силы равна частоте первого нормального колебания
невозмущенной системы.
Поступая согласно изложенному методу, получаем в результате
усредненную систему
^ = ew(2^-i+^
dt
т - -е w(2^-1+£•>. (27Л8)
•^--•-та-(ь+6->ь (* = ±2,±з,±4,...).
Определив из первых двух уравнений этой системы £х и |_i, без
затруднений можем определить все \k (k = ±2, ±3, ...).
Рассмотрим еще случай, когда в уравнении (27.15) при тех же
начальных и граничных условиях (27.16) и отсутствии внутреннего резонанса
функция Л (х, f) имеет вид
А (х, t) = sin-у- kcosgV. (27.19)
После некоторых выкладок, получим усредненную систему
dt ~"81б"ё1'
&> I 3 9
Т^ТГ^ь (27.20)
' -ЧГ = eJrl(e>l + ®*)b-(»i-®*)E-ilbk (* = ± 2, ± 3, ...).
Интегрируя систему (27.20), получаем
6i(0 = Цг-. 5-1(0 =
5 (/) S <2721>
где С*, С-* (&= 1, 2, 3, ...) — комплексно-сопряженные постоянные,
определяемые из начальных условий.
4. Уравнение колебаний океанских волн.
Рассмотрим еще один класс дифференциальных уравнений в частных
производных, встречающийся в теории океанских волн [248] и гидродинамической
устойчивости [251]. Исследуя эти уравнения с помощью метода усреднения,
Д. Дж. Бенни и А. М. Нилл [215] смогли дать подробный анализ обмена
* энергии и возникающего в связи с этим кажущегося резонанса слабо
нелинейных стоячих волн. Приведем кратко их результаты.
343
Рассмотрим уравнение
-^\a(x)^]-B(x)u-C{x)^^zF(u) (27.22)
в области 0 •< х •< /, 0 <: /•< со при начальных условиях
u(0,x) = f(x),
du(t,X) I (27.23)
di \t=o~ti(x)
и граничных условиях
а*
= o,
*=0
vu(M) + 6^§iL|x=/ = 0.
(27.24)
Предположим, что Л (x)t В (х), С (х) — функции только одного х и,
кроме того, В (х) и С (х) не отрицательны на интервале 0 <; х < I и
достаточно гладкие.
Тогда, как известно, к уравнению (27.22) при условии е = 0 можно
применить регулярную теорию Штурма — Лиувилля и найти решение вида
Ф„ (х) ё~Шп\ где числа соп действительные и положительные, а система
функций {ц>п (х)) полная на интервале 0 <: х <; /.
Решение невозмущенного уравнения (уравнения (27.22) при е = 0)
при тех же начальных и граничных условиях (соответственно (27.23) и (27.24))
имеет вид
и (/, х) = 2 [апе*** + а*пе-1<*п'} фл (jc), (27.25)
где постоянные ап определяются выражениями
а„ = J! s , , (27.26)
[C<*)q>*<*)<fc
{<
а постоянные ап комплексно-сопряженные по отношению к постоянным ап.
Рассматривая уравнение (27.22) при е Ф 0 и поступая так же, как и
выше, сведем это уравнение к бесконечной системе обыкновенных
дифференциальных уравнений. Для этого представим искомую функцию и (/, х) в
виде ряда, расположенного по фундаментальным функциям срп (х),
u(t,x)= 2 гя(0 <&.(*>• (27.27)
п=1
Подставляя выражение (27.27) в уравнение (27.22) и используя свойство
ортогональности функций q>„ (jc), получаем уравнения бесконечной системы
слабо связанных (е <g 1) осцилляторов
-^-+<o^ = eFn(z1>zi, -..) (п= 1,2,3,...) (27.28)
где
F„ (zlf z2, ...) = Jf I2 г4ф, (*)L (*) dx; (27.29)
о !
344
при этом начальные условия для функций г„ (t) (л = 1, 2, 3, ...) принимают
вид
]c(x)fl(x)<pn(x)dx
(C(x)y2n(x)dx
, (27.30)
§C(x)F(x)<pn(x)dx
^Ц=^-1 <»-1,2,3,...).
\C(x)<f2n(x)dx
о
Для приведения уравнений (27.28) к стандартной форме сделаем замену
переменных согласно формулам
^--ьч-^-бХ*"^. (27'31)
где In и ?£ — взаимно сопряженные медленно меняющиеся величины, п =
= 1, 2, 3, ....
В результате получим систему уравнений в стандартной форме
Ь = -^-%Ь 6i.& ..О*"**.
_ . . (27'32)
для которой начальные значения будут определяться согласно условиям
(27.30), т. е.
t /m _ /0)П2П (0) + г„ (0)
л . (27.33)
t* /лч _ 'Ч^п (0) — Zn (0)
где zn (0) и zrt(0) определяются выражениями (27.30), п = 1, 2, 3, ... .*
Для получения уравнений первого приближения остается лишь
усреднить правые части уравнений (27.32) по явно входящему времени /, считая
при этом, как обычно, £„, & (п = 1, 2, 3, ...) постоянными.
5. Пример: нерезонансный случай. Рассмотрим
случай (см. [215]), когда F (и) = и3, т. е. нелинейность консервативного типа
в том смысле, что при малом е каждая нормальная форма колебаний будет
сохранять свою амплитуду, однако ее частота будет изменяться и, кроме fo-
го, появятся различные комбинационные тоны.
Рассмотрим сначала нерезонэнсный случай. После усреднения
получим уравнения первого приближения.
dl — 2iu) ^n — Упппп\п\п + 2 2d yUnn&t& t
d\n 3e • Г * xi •!
~dT = ШГ t» I — УмппЪпЪп + 2 Syunnt&l (« = 1, 2, 3,...),
345
где 1
Y<iki = J 4>i (x) Ф/ (x) q>* (а) ф, (x) dx. (27.35)
о
Умножая первое уравнение системы (27.34) на 6л» а второе — на 6л
и складывая, убеждаемся в том, что
6n(06*(0 = 6*(0)6*(0), (27.36)
и, следовательно, интегрируя систему (27.34), легко можем найти
6.(0 = 6.(0)*** ' (27.37)
где
ЬЛ - УжкмБя (0)Б»(0) - 2S у««Ь (0) б! (0), (27.38)
п= 1, 2
Таким образом, каждое колебание первого порядка претерпевает
изменение частоты, зависящее от амплитуды всех других гармоник.
6. Пример: кажущиеся резонансы. Перейдем к
рассмотрению резонансных случаев. Здесь сможем обнаружить так называемые
кажущиеся резонансы.
Предположим, что
0)2 = 3©!,
и другие резонансы отсутствуют. Тогда после подстановки в уравнения
(27.22) F (и) = ы3, приведения их к стандартному виду (27.32) и усреднения
получим систему уравнении первого приближения
"§- = ^Г{^i [~ ТииЬЙ + 2 Jl VU2&&] + Yinrfffe*} ,
Г = — -2^7 Ы — Yim6i6i + 2.2 Y"22Ei6,J + Yi 1126162} •
J621 — Y22226262 + 2 S Y«226*6, J + 4" V111261J,
^ (62! — Y22226262 + 2 2 yimhl] I + -J Yin26l3J
(27.39)
dt
d\2 = 3e
dt 2ico2
^62 3e_
dt "" 2iu)2
и остальные уравнения для я = 3, 4, 5, ..., совпадающие с
соответствующими уравнениями системы (27.34).
Из первых четырех уравнений системы (27.39) легко найдем
соотношение
Ь (/) 6i (0 + 962 (0h (0 = 6i (0) 61 (0) + 962 (0) 62 (0), (27.40)
представляющее собой связь между амплитудами двух форм колебаний.
Таким образом, в то время как эти амплитуды, вообще говоря, являются
медленно меняющимися функциями времени, в течение всего изменения они
остаются связанными соотношением (27.40).
Таким образом, анализируя уравнения (27.39), получаем, что первая
форма колебаний может возбудить вторую, а вторая не может возбудить
первую форму колебаний.
346
Рассмотрим другой случай внутреннего резонанса, аналогичный
интересному случаю из теории нелинейных взаимодействий гравитационных волн.
Предположим, что
со3 = 2о)х — о)2,
причем других резонансов нет.
При F (и) = и3 после аналогичных преобразований системы (27.22)
и усреднения получим систему уравнений первого приближения
dt
dt
dl2
= — -^ у* [— YimEiEr + 2 2 Y«ii6i6«J + 2Yii23gil2g3J ,
= "2^71^2 — Y2222I2I2 + 2 2 yu22&tl] + У\тЪЩ »
"2Г = i" (^1— ТииБабг + 2 2 Y«22b6?J + YiiaSigibJ »
lis — Узззз£з1з + 2 2 Y«33g/b" I + Ynagfej ,
{& — Y3333£eb + 2 2 Y/03E<6/ + Yii23iil2|i|
(27.41)
<*6» _ 2e
dt 2io)3
d^ 2e
dt 2(й)з
и остальные уравнения для п = 4, 5, 6,..., совпадающие с
соответствующими уравнениями системы (27.34).
Из первых шести уравнений системы (27.41) без затруднений находим
соотношения
о)^! (/) Ei (t) + 2о)212 (О Ь (0 = const, (27.42)
©1Б1W б! (О + 2о)3^з (0 £з (0 = const, (27.43)
которым будут всегда удовлетворять медленно меняющиеся амплитуды
трех первых гармоник.
Из первых шести уравнений системы (27.41) следует, что колебания
формы 1 и 2 могут возбуждать колебания формы 3 и, аналогично, колебания
формы 1 и 3 могут возбуждать колебания формы 2. Вместе с тем колебания
формы 2 и 3 не могут возбудить колебания формы 1.
7. Усреднение в уравнениях, близких к
гиперболическим с запаздыванием. Остановимся на некоторых
результатах [227], относящихся к применению метода усреднения для
построения приближенного решения уравнения в частных производных с
запаздывающим аргументом, близкого к уравнению гиперболического типа,
Ж""а2"0 =e^('.*. u(ttxl (/(/ — Л, г),
miU х), М/-Д, *), u'x(t,x), М/ —Д,к),е), (27.44)
V
где F — нелинейная функция, периодическая по t с периодом 2я и
имеющая достаточное число непрерывных частных производных по всем своим
аргументам, начиная со второго.
347
Пусть начальные и граничные условия имеют вид
u(t,x) = q>(t,x)
<P(t,x) J
Ф('.*)1
щ (/> х)._ л* /, .л , для /0 - А < / < /0, (27.45)
и (/, *) |*=о = и (t, х) U-rf = 0, (27.46)
где функции ф (t, x) и Ф (/, jc) непрерывны по / и достаточное число раз
дифференцируемы по х.
Рассмотрим сначала невозмущенное уравнение
45—*-£--• с™)
при тех же начальных и граничных условиях. Решая задачу (27.47), (27.45),
(27.46) методом Фурье, находим
оо
и (U х) = 2(ЛЛ cos ^ + вп sin °>/i0 sin -^- x, (27.48)
где юя = —у а — частоты нормальных колебаний, Лп, Вп — постоянные,
определяемые начальными условиями, а Ха (х) = sin ^у- х — ортонорми-
рованная система собственных функций задачи
(27.49)
Xn(0) = Xn(D = 0,
п=1,2
Принимая во внимание вид решения (27.48) невозмущенного уравнения
(27.47) и предполагая, что в связи с малостью возмущения форма колебаний
возмущенной системы определяется с достаточной точностью теми же
собственными функциями, что и форма колебаний невозмущенной системы,
будем отыскивать решение уравнения (27.37) в виде ряда
оо
и (/, *, е) = 2 Тп V, е) sin -S- jc, (27.50)
где функции Тп (/, е) (п = 1, 2,...) подлежат определению.
Подставляя выражение (27.50) в уравнение (27.44), умножая обе части
полученного равенства на sin —у- х (пг = 1, 2, ...) и интегрируя результат
в пределах от 0 до /, получаем для определения функций Тт (/, е)
бесконечную систему дифференциальных уравнений с запаздывающим аргументом
- eFm(t, Tk(t, e), Tk(t- Д,е), «*£Д , "Г»<'-Д'е) , г) (27.51)
(m,k=\, 2, ...)
с начальными условиями
dr<" ('■ е> = ф /л
для i0 — А </</„, (27.52)
348
где cpm (/), Фт (0 — коэффициенты при sin ^j-x в разложении начальных
функций ф (tt х) и Ф (f, х) в ряд Фурье по собственным функциям sin ^—х.
Для построения приближенного решения системы (27.51) следует,
прежде всего, привести ее к стандартному виду, после чего применить метод
усреднения.
Для этого введем новые комплексно-сопряженные переменные гт и г__т
(т = 1, 2, ...) согласно формулам
dTm _ #v% „ Ja>mt ;M „ Л-*от/
= t(omzme " — mmz-me "w
Система (27.51) примет вид
-4T-^^Pn(t9zk(t)tzk(t-^te) (n,k=±L±2, ...),
где (о_п = (оя, FLn = /v
Вводя обозначение —тр Fn = Z„, получаем систему
_^_ = eZ„(/, МО. zk(t-A), е) (л, ft - ± 1, ± 2. ...) (27.53)
с начальными условиями
%(0 = х«.(0«"^' + "2^7 «UO*"** =4.(0 (я = ± 1, ± 2, . ..)
(27.54)
для /0 — Д < t < /0-
Итак, задача свелась к отысканию решения бесконечной системы
дифференциальных уравнений первого порядка с запаздывающим аргументом
(27.53) и с начальными условиями (27.54), причем правые части системы
(27.53) имеют множителем малый параметр е, т. е. система имеет
стандартный вид.
Применение метода усреднения к системе (27.53) заключается в том,
что решение системы (27.53) с начальными условиями (27.54) может быть
с достаточной точностью аппроксимировано решением более простой
системы
-%- = *Z{?\tk(t),Zk(t-A)fE) (л, £=±1, ±2, ...), (27.55)
где
1 Т
Я? (*. у, е) = lim 4* [ Zn V, *> У< «) Л.
с теми же начальными условиями.
При этом задача существенно упрощается, когда запаздывание Л =
= eAj = т мало. В этом случае вместо системы (27.55) приходим к
усредненной системе
-£*- = eZ^ (lk (0, lk (t), e) (л, k = ± 1, ± 2, ...). (27.56)
349
Что касается распространения первой теоремы Н. Н. Боголюбова на
бесконечные системы вида (27.53), то здесь могут быть высказаны следующие
соображения.
Вместо системы (27.56) (при Л = eAJ будем рассматривать
дифференциальное уравнение
-^р- = гХ [/, * (/), x(t- eA)l (27.57)
в гильбертовом пространстве^, элементами которого являются
последовательности функций {xt (/)}, удовлетворяющие в любой момент времени /
условию
21*,(')1'<~.
Норма элемента х пространства Ж вычисляется по формуле
KI
Допустим, что в некоторой области DczM функция X (t,x, у)
равномерно ограничена, удовлетворяет условию Липшица и, кроме того, существует
такое Л0 (jc, у), что равномерно по jc, у в этой области
lira l-y-JX(t, x, y)dt~-X0(x, J = 0.
Тогда имеет место теорема.
Теорема [188]. Если £ = £ (t) — решение уравнения
6(0 = «*#«(<). 6(0). (27.58)
определенное для всех значений t и принадлежащее вместе со своей
^-окрестностью области D, а х = х (t) — решение уравнения (27.57), совпадающее на
начальном отрезке [—Л, 0] с £(/), то для любых сколь угодно малых г\ > 0
и р > 0 и сколь угодно большого L > 0 можно указать такое е0 > 0, что для
0 < е < е0 в интервале 0 < t < — будет выполняться неравенство
1*(0-6(0Кл.
8. Уравнения, близкие к гиперболическим при
наличии случайных сил. Многие задачи о колебаниях упругих
тел (исследование крутильных колебаний упругих валов, продольных и
поперечных колебаний стержней, колебания струны, балок и т. п.) приводят
нас к нелинейным дифференциальным уравнениям в частных производных
со случайными параметрами и функциями.
В самом общем случае движение таких систем описывается
стохастическим уравнением
£2» = в/^Л х, и, -Jj^ , е) + V!og[t, xf и, -J^jjp-, ej|(0, (27.59)
где Я?" (и) — линейный однородный дифференциальный оператор с
частными производными относительно и\ fit, jc, и, —аГТ» 8) и
350
g\t> х, и,—-^—йг* 81 — нелинейные функции, обладающие необходимыми
у дх дхр J
свойствами гладкости, 2п > k = а + Р-
Рассмотрим одночастотные случайные колебания упругих систем при
случайном возбуждении, описываемых нелинейными стохастическими
дифференциальными уравнениями в частных производных второго порядка,
близкими к линейным дифференциальным уравнениям в частных
производных гиперболического типа,
д2и .о д2и с i ди ди д2и \ • I ди ди д2и х \. ...
_ (27.60)
где е, (1 — малые положительные параметры (p. ~ V^e). 0 •< х <: I, b — по-
с I $и ди д*и \ I ди ди д*и \
стоянная, /(х, и, -^, -^-, -^\ и g \х, и, -^-, -^ , -^j — некоторые не-
ди ди д2и
линейные целые рациональные функции относительно а, -^-, -^-э -^ ,
удовлетворяющие всем необходимым условиям.
Применяя изложенные ранее методы, исследуем задачу с линейными
краевыми условиями вида
-J-+ аи = 0 при х = 0,_|L + рц = о при х = / (27.61)
в случае, когда в детерминированной системе (ц = 0) устанавливается одно-
частотный колебательный режим [24].
В первом приближении решение задачи (27.60), (27.61), соответствующее
£-му одночастотному режиму, отыскиваем в виде
и (х, /) = аХк (x) cos (cokt + 9), (27.62)
где Xk (jc), a>k — k-я фундаментальная функция и k-я собственная частота
колебаний невозмущенной краевой задачи (е = р, = 0), а и 0 — искомые
случайные функции времени определяются из системы стохастических
дифференциальных уравнений
-^ = еМ/,я) + цЫ/,аШ0,
dt
dQ
dt
*L = efz(tta) + iift(t,a)i(t)t
(27.63)
f fkXk sin ^dx J gkXk sin ^dx
fi = } » / 2 = Г
Vk$Xl(x)dx <x>k\X'i(x)dx
о о
J fkXk cos ydx J* gkXk cos tydx
f _ __2 f __ J>
/3— i » /4 — / »
ащ (X2k{x)dx au>k С Х\ (jc) dx
о ' о
fk = / f*. aXk cos гр, — aa>kXk sin -ф, a -^- cos \|), a -^£- cos yp\ ,
gfe = g /*, яХЛ cos г|\ — ae>*X* sin г|), a -^- cos ф, a -^- cos г|>) .
351
(27.64)
Уравнения (27.64) по виду такие же, как и уравнения (23.19). Поэтому
метод усреднения позволяет и в данном случае решение соответствующего
уравнения КФП при е -+ О равномерно приблизить на достаточно большом
конечном интервале времени решением усредненного уравнения по виду
такому же, только в качестве коэффициентов переноса и диффузии следует
взять их средние по времени значения.
Аналогично можно провести исследование одночастотных случайных
* е(4 ди ди д2и\ ,
колебании в неавтономных системах, когда fit, х, и, -^ , -^-, ~^\ и
(ди ди д*и \ , r-i
/,х, н»-лг> -J-»-лт) — периодические функции времени. При этом
различают нерезонансный и резонансный случаи. Нерезонансный случай ничем не
, t /. ди ди д*и \
отличается от рассмотренного выше, если функции / (г, х, ы, —^ > -gj-» -g^r]
(ди ди д2и\
t, х, и, -0j-, -gj-, -j-?) предварительно усреднить по явно
содержащемуся в них времени.
В резонансном случае коэффициенты переноса и диффузии зависят от
фазы 8, что, как указывалось, существенно затрудняет решение уравнений
КФП.
9. Случайные колебания, описываемые
нелинейным дифференциальным уравнением
четвертого порядка. Рассмотрим краевую задачу [79]
с», д*и , д2и , , - / ди ди д2и \ ,
EJl*+m-dF + ku = ef(x'u'-W>-dr>-M) +
+ Угаё[Х,и,^,^,ЩШ, ' (27.65)
Ы(0,/) = Ы(и) = -^^Ц=^А[с=г0, ' (27.66)
где £, У, m, k, а, / — некоторые положительные постоянные, е — малый
положительный параметр, / — время, 0 < х < /, / 1х, и, -J-, -gj-, -^\
(ди ди д*и \
х> и> ~дГ » ~дГ * "Зх*") — некоторые нелинейные целые рациональные
функции своих аргументов, | (/) — процесс броуновского движения, £ (/) —
процесс «белого шума», интенсивность которого характеризуется функ-
— къ«(*-.-5-.-£-■■&)•
Предположим, что краевая задача (27.65) — (27.66) описывает колебания
балки на упругом основании, свободно опертой на концах и подверженной
воздействию малых регулярных и случайных распределенных сил.
Краевая задача (27.65) — (27.66) без случайного члена Veogl(f)
достаточно хорошо изучена. Наличие случайного члена вызывает необходимость
дополнить эту детерминированную теорию некоторыми статистическими
представлениями.
Рассмотрим колебания, близкие к колебаниям «невозмущенной»
краевой задачи
352
EJ^ + m-?£ + ku = 0; (27.67)
и(0.Л-«(1,0-А&4| -^frS-J =0. (27.68)
Очевидно, линейная краевая задача (27.67) — (27.68) допускает
применение метода разделения переменных. Решение ее согласно методу Фурье
отыскиваем в виде
и(х, t) = X(x)T(t). (27.69)
Находим систему попарно ортогональных на отрезке [0, /1 фундаментальных
функций
Хп (х) = sin 22L , Тп (t) = ап cos (©я/ + 6П), (2у
чде
™п b V /« ^ ^ ' ° — EJ f ^ ~~ EJ '
Дп и 6/1 — произвольные постоянные.
Таким образом, в невозмущенной системе возможны незатухающие
нормальные колебания, определяемые двупараметрическими решениями
ип (х, 0 = апХп (х) cos (<ont + 6n). (27.71)
Для того чтобы исследовать одночастотные колебания, близкие к одному
из нормальных колебаний (27.71), совершим, согласно общей методике, в
системе (27.67) замену переменных с помощью формул
и (jc, t) = аХк (х) cos ty, ^ =* — a>kaXk (x) sin г|>. (27.72)
где г|> = cokt + 9, а и 0— искомые случайные функции времени. Для
определения этих функций в результате замены получим систему уравнений в
стандартной форме
ТГ = --fcif\x' a**<*)costt>, -a*>kXk(x)sin4, a-^£L cosiJ>,
л I
0
а ^У} cos ф] Xfc (*) sin ijjdje —
J^- Jjt f x, aXk (x) cos ф, - a«>fcXft (x) sin i|>, a -^H
a —5^2— cos г|? ХЛ (x) sin грrfxg (/),
/07 7*^^
-g- = -T55- J/[*. aXk(x)cosq, -^a<okXk(x)siny, a-*££L cos *,l
а ^У1 cos ф] Xft (ж) cos qdx —
~ "St/ф «**<*> «*Ч>, -ав)4Х4(х)мп*, а -£*£!-cos+,
a -£&£*- cos J Хй (*) cos «tbg (0,
где приняты обозначения Мк = /m»ft f X* (дс) dx.
23 246 353
где
Для исследования колебательного процесса, амплитуда и фаза которого
описываются системой уравнений (27.73), необходимо составить уравнение
КФП. Определяя коэффициенты переноса /Св, /Се, коэффициенты
диффузии Da, De и Dae — смешанный коэффициент диффузии амплитуды и фазы,
имеем
*• - - -Щ j /*X* sin ***' *e = —Щ; 1 f"X" cos №, (27.74)
О О
D-e^ff **x*sln*d*)1' ^^-^ff**^008^*)1' (2775)
2 l l
А* = -^- J #Л sin ДО J gkXk cos ДО,
* о о
fk = f\x> aXk (x) cos tf, — a<£>kXk (x) sin -ф, a ^ cos ^ я —^a cos ф 1,
(27.76)
£* = £ [*> a** (jc) cos ф, — ao>*Xfe (x) sin -ф, a ^W cos ф, a —^^- cos \|)1.
Уравнениям в стандартной форме (27.73) соответствует уравнение КФП
+ 4" {"5- lD«*l + 2 -Шё lD"eri +Ж 'DeW1} • <27-77>
где Н7 = Н7 (а, в, /) — плотность совместного распределения амплитуды
и фазы. Но чтобы W(af 8, t) была плотностью распределения вероятности,
должны выполняться следующие условия: 1) W (а, 0, t) > 0 для всех а, 0, /;
оо 2Я
2) №(а, 0, f)-+0 при а-* оо, О<0<2я и всех /; 3) j* jV(a, 0, f)dadQ^
= 1 при всех /. ° °
Второе условие можно принять в качестве одного из краевых условий.
В качестве начального распределения очень часто принимают дираковское
распределение
W (я> в, t0 \а..е0.0 = б (а - а0) б (0 - 0О),
означающее, что а = а0 и 0 = 0О при / = /0.
Согласно изложенному в § 23, вместо уравнения (27.77), решение кото-
рогб можем найти лишь в редких случаях, будем рассматривать
усредненное уравнение
где
+ т {-щ- № +2 -таг Р°т+-яг w) • <27-78>
- Is" _ i **
О О
354
2я . 2я
Da = ЗГ \ Dad^De = "УгJ Derf+' (2779)
о о
i ^
О
Предположим, что при больших / процесс становится стационарным
\-qt~ = 0) и не зависит "от начальных условий. Тогда функция плотности
распределения вероятности будет зависеть только от амплитуды и фазы и
удовлетворять стационарному уравнению в частных производных
4- &*1 + Ж № + -J" {-£r \DaW\ ^
+ 2 W f0"eiri + -Ж Ф№}} = 0. (27.80)
Заметим, что аналитически решение уравнения (27.80) можно найти
лишь в частных случаях, когда его удается расщепить на два одномерных
уравнения плотности распределения соответственно для амплитуды и фазы.
10. Поперечные колебания балки под
воздействием случайных сил. В качестве примера рассмотрим
уравнение, описывающее поперечные колебания балки на упругом основании,
находящейся под воздействием случайных распределенных сил,
EJ -*£- + т -§£- + ku = е(1 - «*)(-|-)3 + Vlo«|<0 (27.81)
с краевыми условиями
«<0.0-«(/.0-£^| =^-1 =0. (27.82)
В этом случае после простых выкладок для выражений(27.79) получим
значения
_ 5со|а5 9ю£а3 _ _ а2д2
Аа = ToqZT Н оо^Г" » #6 = 0, Da =
128m ■ 32m ' JXO - v' -a~ snfal
и стационарное уравнение КФП (27.80) запишем в виде
<*\ д Г/ 5а6 n-*\iwl . a3 f д1 .,«*,. о д2^
(27.83)
32т
.«.[( --9*)*) + * {-g^l + 34J.)-a (27.84,
Уравнение (27.84) допускает разделение переменных, после чего для
определения стационарной плотности распределения амплитуды Wx (а)
Получим уравнение
-к- т [(-г- 9<")».] + -щ -£- 1^.1 - о- <»*>
dWP (a)
Поскольку Wt (а) и —^-^ на бесконечности исчезают одновременно,
решением уравнения (27.85) будет функция
23* 355
\
Wl(a) - Ca-2exp{- -^i(Jf—¥-)} , (27.86)
где постоянная С должна быть определена из условия нормирования
функции Wx (a).
Функция Wx (а) достигает максимума при
2 18 , 18 /"~\ 20a2 /CV7 074
я = —е- + -е- 1 / 1 г • (27.87)
При а -* 0 амплитуда случайных колебаний приближается к амплитуде
81 mot
детерминированных колебаний. При а2 < —^— стационарные случай-
8\таА
ные колебания устойчивы. При а2 > —^п— устойчивый колебательный
режим не возможен.
Изложенная методика исследования одночастотных колебаний в
системах, описываемых уравнениями в частных производных, при наличии
случайных возмущений легко обобщается на уравнения
д*(тд*и \ m„m-2 д2и ./ ди ди д2и \ /07 оо\
-ЯГ\Х -d^j + ^x -5Г = 4(1>и.-$Г*-дг>-яг) (27.88)
со случайными краевыми условиями
г I ди д*и I ди ди \ , „ / ди ди \ „• ...
v \ / \ / (2789)
L2i [U> -g^" 1 = вV/(*, И) + 8ЦХ/ (X, £1) £ (/),
где Я4 = -gr~, е, (i — малые параметры, /х < х < /, g (/) —
стационарный случайный процесс в пределе при р, -* 0 превращающийся в «белый
шум» [27]. К уравнению (27.&8), как известно, сводится задача о колебаниях
стержней переменного сечения.
Уравнение (27.88) в одночастотном режиме также сводим к системе в
стандартной форме, после чего составляем «усредненное» уравнение КФП.
11. Уравнения в частных производных при
наличии случайного запаздывания. Рассмотренный в
настоящем параграфе подход к исследованию уравнений в частных
производных, содержащих случайные возмущения, может быть применен к
изучению влияния случайных сил на одночастотный колебательный режим
нелинейной системы, описываемой дифференциально-разностным уравнением
**# Х) ~Ь* ^а$ Х) +cu(t- еД, х) = е/[х. u(t9 x), u(t-x. x),
ди (U х) ди (t — т, х) ди (U х) ди (t — т, х) д2и (t, x) dh
dt ' dt ' дх • дх дх2
, ,/— Г а \ a v dulttX) du(t—T,X)
+ Veog\x9 u(t, x)% и (/ — т, х), —fr-L , —^ '-,
du(t — T,x) d2u(t,x) d2u(t — x, *)U (f.
дх ' дх2 ' дх2 \iV,t
U(t — T, X)
дх2
ди (t, x)
дх
(27.90)
356
где 6, с, а, Л, т — постоянные, причем с > О, А > 0, т > 0, е — малый
положительный параметр, 0 < х < /, / и g— нелинейные функции,
достаточное число раз дифференцируемые по х, | (/) — процесс «белого шума»,
спектральная плотность которого характеризуется функцией g.
При исследовании уравнения (27.90) задаются некоторые граничные
условия. После этого рассматривается невозмущенное уравнение, в режиме
одночастотного колебательного процесса уравнение (27.90) приводится к
системе уравнений в стандартной форме типа (27.73) и применяется метод
КФП.
В качестве примера рассмотрим краевую задачу
(27.91)
= 8[1 -««(/, х)\ ди{(~Т,Х) + V~*ou(I -т, х)%(/),
u(t, 0) = 0, u(t, я) = 0.
Имеем
Xk (x) = sin kx, col = k*b2 + c,
K. = -f- [cA - (-^- a» - I J] cos ©fcT, Д, = ^- (2 - cos 2ш,т),
£>e = -IV (2 + cos 2(0ftt), /Ce = 0, A,e = 0.
о(0ь
80^
•2
Стационарная плотность распределения амплитуды Wx (а) будет
решением уравнения
■£г [а (-W а* - ' - сА) Г*] + -^" {(2 - cos о^-Щг \a*WA = ° <27-92)
при условии исчезновения на бесконечности Wx (а) и l£a' .
Интегрируя при этом условии уравнение (27.92), находим
8о>£(1+'Д) Зю£
Wx (а) = Са °*(2 - cos 2ш*т) в ^(2" cos e*T) , (27.93)
где С — постоянная интегрирования.
Из анализа функции (27.93) следует, что она имеет единственный
максимум при
а2 = -£-(1 + сД) - -^(2-cos2g),t). (27.94)
а2 1 4- сД
При —5~ < о—^5— стационарные колебания устойчивы и совершают-
ся с амплитудой, определяемой формулой (27.94).
§28
ПРИМЕНЕНИЕ МЕТОДА УСРЕДНЕНИЯ
К УРАВНЕНИЯМ В ЧАСТНЫХ ПРОИЗВОДНЫХ,
НЕ СВОДЯЩИМСЯ К БЕСКОНЕЧНОМЕРНЫМ СИСТЕМАМ
•
1. Предварительные замечания. Как известно,
задачи математической физики для одного дифференциального уравнения с
частными производными высшего порядка (скалярного или векторного)
всегда сводятся к задачам для системы уравнений с. частными
производными первого порядка со специальным образом согласованными краевыми
условиями, а интегрирование системы уравнений с частными производными
первого порядка можно свести к интегрированию эквивалентной
характеристической системы обыкновенных дифференциальных уравнений. Часть
задач математической физики можно непосредственно свести к бесконечной
системе обыкновенных дифференциальных уравнений, как это делалось в
§ 27. Следовательно, теоремы об усреднении для систем обыкновенных
дифференциальных уравнений в сущности будут решать вопрос об усреднении и
в исходном уравнении с частными производными первого или высшего
порядка.
Во многих практических задачах метод усреднения удобнее применять
непосредственно к уравнениям с частными производными. Поэтому
вкратце остановимся на некоторых результатах, полученных в последнее время
и относящихся к усреднению уравнений в частных производных
гиперболического типа, не сводя последние к системе обыкновенных уравнений.
Сначала изложим первую основную теорему метода усреднения
применительно к задаче Коши для гиперболической системы уравнений в частных
производных первого порядка, затем — для гиперболического уравнения в
частных производных второго порядка с запаздыванием. Далее рассмотрим
задачу Коши для уравнений с частными производными более высокого
порядка.
/ 2. Система дифференциальных уравнений
первого порядка. Рассмотрим систему т дифференциальных уравнений
первого порядка
4-+A^L + B = 0, (28.1)
358
где и (/, х) — вектор-функция с компонентами иъ и2, ..., ит, А (/, х) —
т X m-матрица —и m-мерный вектор В (/, jc, и) имеют непрерывные первые
производные.
Предположим, что для уравнения (28.1) заданы начальные условия
и(09х) = чр(х)9 (28.2)
в которых функции гр (jc) имеют непрерывную первую производную, и что
система (28.1) гиперболическая. Это будет тогда, когда матрица A (t, x)
имеет т действительных собственных значений Xlf A,2, ..., Хт и т линейно
независимых левых собственных векторов llf /2, ..., /т, образующих матрицу
с определителем, равным 1. Предположим, что векторы / имеют
непрерывные производные по /, jc и первые производные коэффициентов
удовлетворяют условию Липшица.
Тогда, согласно соотношению ltA = кс119 умножая систему (28.1) на
собственный вектор /,, получим систему уравнений в характеристической
форме
/,0,11+/^= 0, (28.3)
или
IDu + IB = 0, (28.4)
где Dt — дифференциальный оператор,
При этом оператор Dt можно рассматривать как дифференцирование
-^ вдоль кривой xt = jc,(/, £, т), где xt(t, £, т) — характеристические
кривые, определяемые дифференциальными уравнениями
-7ЕГ-М*,*) (28.6)
и выходящие из точки Р с координатами (£, т).
Преобразуем систему (28.4). Введем новую переменную v = lu. Так как
lD(u) = D(lu) — uD([)t
то система (28.4) примет вид
D(lu)= — lB + uD(l).
Выражая и через v, и = Г"1 и, окончательно получаем уравнение
Dv = F{tfx,v), (28.7)
в котором правая часть — непрерывная вектор-функция переменных /, х, и,
обладающая непрерывными производными по v; D — диагональная
матрица с компонентами Dt. Начальные значения (28.2) переходят в начальные
значения для системы (28./)
и (0, jc)= Y(jc), (28.8)
где Y (jc) = Л (0, jc) гр (jc).
Для системы (28.7) на плоскости (/, jc) рассмотрим замкнутую
область Gr, такую, что все характеристики jc, (/, £, т), проведенные из
точки Р в область Gt в направлении / = 0, пересекают отрезок [а, Ь] оси х
в точках Pi с координатами jc = xt (О, £, т).
359
При изложенных предположениях справедлива теорема Р. Куранта,
согласно которой задача Коши для системы (28.1) или (28.7) с начальными
значениями (28.2) или (28.8) (на отрезке [а, 61) имеет единственное решение.
Решение это определяется однозначно и при гладких коэффициентах
распространяется на всю область Gt. Это непрерывное решение называется
«непрерывным обобщенным решением» задачи Коши для системы (28.7).
3. Непрерывная зависимость решения от
параметра. Для системы типа (28.7) с начальными условиями (28.8) может
быть доказана теорема о непрерывной зависимости решения от параметра,
являющаяся обобщением приведенной ранее теоремы (см. § 8). Эта теорема
дает возможность получить первую теорему метода усреднения
гиперболической системы.
Итак, рассмотрим систему т дифференциальных уравнений
гиперболического типа для вектор-функции и (/, xf у) с компонентами иъ и2, ..., ит
Du=F(t,x, и, у), (28.9)
где D — диагональная матрица с компонентами (28.5), F (/, х, и, у) — вектор,
который мсжет зависеть от переменных и нелинейно, у — параметр. Пусть
Gt — замкнутая область в полуплоскости (—со < х < оо, t :> 1), Г —
множество значений параметра у, для которого у0 — предельная точка.
Пусть для системы (28.9) заданы начальные условия
u(0,xty) = g(x). (28.10)
Тогда справедлива следующая теорема о непрерывной зависимости
решения от параметра.
Теорема 1202]. Пусть для системы (28.9) с начальными условиями
(28.10) выполняются следующие условия:
1) вектор-функция F (/, ху и, у) определена для всех значений аргументов
(t, х) £ Gt, u£ D, у £ Г, где В — ограниченная область
пространства Ет, и удовлетворяет условиям:
а) функция F (t, х, и, у) равномерно ограничена, непрерывна по t, x,
удовлетворяет условию Липшица по ult u2, ..., ит с константой, не
зависящей от /, х, у;
б) функция F (/, х, и, у) интегрально непрерывна по параметру у в
точке сгущения у0 £ Г, т. е.
t t
lim f F(x, x, u, y)di = f f(x, x, u, y0)dx (28.11)
равномерно no (/, x) £ Gt, u£D;
2) функция g (x) непрерывна по х, функции A,,(/, x) (i = 1, 2, ..., m)
непрерывны в области Gt и обеспечивают единственность в сторону
убывания t решения начальной задачи (х (t0) = x0) для уравнения
характеристик (28.6) в этой области;
3) для системы
Du = F(t,x, и, у,,) (28.12)
существует единственное решение, определенное в области Gt и
удовлетворяющее условию (28.10). '
Тогда для каждого т] > 0 существует такая окрестность r\ (y0t t)
точки Yo» что при yG Л (Yo> 0 для решения задачи Коши (28.9), (28.10),
определенного в области Gt, справедливо неравенство
|a(/.*.Y)-«('.*.Y«)l<Tb (28.13)
360
где (/, х) £ Gt, у £ tj (y0, 0» и {U х, и, у0) — решение задачи Коши (28.12),
(28.10).
Доказательство. Согласно предположениям, при любом у
существует такая область Gh, что при t < Л система (28.9) имеет решение,
удовлетворяющее условию (28.10). Далее будет показано, что при у,
достаточно близких к Yo» можно положить h = Т.
Вследствие единственности решения задачи Коши, u(ty xy и, у) и u(t,
х, и, Yo) удовлетворяют интегральным уравнениям
t
Щ V, х, у) = g{ (х( (/, х, 0)) + j Ft (х, xt (/, х, х), и (х, х{ (/, х, х), y)> y) d%f (28.14)
о
i
ut (/, *, Yo) = gi (Xi (t, x, 0)) + j* F, (x, *, (f, x, x), и (x, *, (/, x, x), y0), y0) di
(i= 1, 2, ..., m) (28.15)
для (/, x) £ Gr.
Зафиксируем / и проведем оценку функции
U(t) = max \Uf(Tt x, y)-Mt> *■ Yo)l- (28.16)
Согласно условию а) теоремы, имеем
|F(/, x, и', Y)-/7^ x, и", Y)l<*2 \*'t(t* *> y) — ui(t9 x, y)\. (28.17)
Обозначим через tj (y0> t) такую окрестность точки Yo» что пРи Y 6 Л (Yo»
0, согласно условию (28.11), будем иметь
j max | У7 (х, х, и (т, х, y), y) — F (х, х, и (х, х, у0), у0)\ di < б (| y — Yo |). (28.18)
о х
где б (|y — Yol) — сколь угодно малая величина.
Согласно уравнениям (28.14; и (28.15), учитывая при этом обозначение
(28.16) и неравенства (28.17) и (28.18), имеем
U(t)<6<\y-y0\)+ Km$U(i)dt.
о
Отсюда, на основании леммы Гронуолла — Беллмана, получим
(/(0<6(|Y-Yol)^<8(lY-Yol)^r.
Итак, U (t) < т), если б (| Y — Yo I )< Л*"*^» y 6 Л (Yo» 0-
Следовательно,
\a(t, x, y) — u(t, xt Yo)l< Л
для любых (/, x) £ GA, y G Л (Yo» ')•
Далее, исходя из возможности продолжения решения во всей области
Gt, можно установить справедливость оценки (28.13). Это и требовалось
доказать.
4. Принцип усреднения для задачи Коши.
Перейдем к распространению принципа усреднения применительно к задаче
Коши для гиперболической системы с малым параметром.
361
Рассмотрим систему дифференциальных уравнений для вектор-функции
и (/, х9 е) с компонентами иъ u2f ..., ит:
Du = eF(t9x9u), (28.19)
где D — диагональная матрица (28.5), Ft (t9 х, и) — вектор, т = е/, е >
> 0 — малый параметр.
Допустим, что Gt обозначает замкнутую область в полуплоскос-
Т"
ти (—оо < х < оо, t > 0) и что заданы начальные условия
и(0, х, e) = g(x). (28.20)
Теорема об усреднении для задачи Коши (28.19), (28.20), как и в § 8,
является непосредственным следствием доказанной выше теоремы о
непрерывной зависимости, когда собственные значения матрицы D Xl9 А,2, ...,
кт — действительные функции переменного х и «медленного времени» т.
Теорема [2021. Пусть для гиперболической системы (28.19) с
начальным условием (28.20) выполняются требования:
1) вектор-функция F (/, х9 и) определена для всех значений аргументов
— оо<*<оо, 0<;/<со, и£ D и удовлетворяет условиям
а) функция F (t, х, и) равномерно ограничена, непрерывнаьпо /, х и
удовлетворяет условию Липшица по и с постоянной, не зависящей от t9 x\
б) равномерно по х, и существует предел
lim 4" f F(t9 *> u)dt = F0(x9 и); (28.21)
2) для усредненной системы
Dv = eF0(x9v) # (28.22)
существует единственное решение, определенное в области Gt и удовлетво-
ряющее условию (28.20);
3) функции g{x)t Kt (т, х) непрерывны, причем Xt (т, х) обеспечивают
единственность решения в сторону убывания t начальной задачи (х (t0) = х0)
для уравнения характеристик
-£- = Xt (т, х) (1=1, 2, ..., т). (28.23)
Тогда для любого х\ > 0 существует такое е0, что решения задачи Коши
(28.19), (28.20) и задачи Коши (28.22), (28.20) удовлетворяют неравенству
\u(t,x9B)—v(t9x9s)\<4\ (28.24)
при (/, х) £ Gt для всех 0 < е < е0.
Т
Доказательство. Справедливость этой теоремы вытекает
непосредственно из предыдущей теоремы о непрерывной зависимости. Полагая
в системах (28.19) и (28.22) х = е/, соответственно получаем
Dlu = Ffe9x9u)=OlT,x9u9*)9 (2g25)
Dxv= F0(x9v).
Положим
Ф(т, х, и, 0) = F0(x9u)9
362
тогда функция Ф (т, х, и, е) в рассматриваемой области будет
интегрально непрерывна по параметру е при е = 0.
Действительно, на основании условия (28.21) при 0 <: / < оо, —<х><
< х < со, и£ D имеем
t t 8
lim Гф(т, х, и, e)dx = lim fW— , x9 u)dx = lim e Г F(6, x, 0)dQ = •
e-*+0j e-*+0J \ 8 / e-*+0 J
0 0 0
e t t
= Mim -J- Г F(6, *, u)dQ = tF0(x, u) = f F(jc, a)dx = f Ф (т, jc, a, 0) dx.
~ 0 0 0
Итак, условия теоремы о непрерывной зависимости от параметра
выполнены и мы приходим к неравенству
\и(х, х, е) — и(х, *)|< г] при (т, x)£GT, 0<е<г0.
Возвращаясь к прежней переменной /, окончательно получаем
неравенство
| U(t, X, 8) — V(t9 X, 8)| < Т| При (t, X)£ GTj 0 < 8 < 80,
8
что и требовалось доказать.
5. Задача Коши для гиперболического
уравнения с запаздыванием. Рассмотрим задачу Коши для
гиперболического уравнения с запаздыванием
w = *(<• *• «'с*>. -Чг-•"«-*•*>• ди('7хх,х)) (282б>
и начальными условиями
и (*. x)\t£Et = -^^-1 = -^LI , . (28.27)
v n^^U dt \t£Eto dx \t£Eu * • \ /
где
X = x(/, X, U% Ux) > 0, X(tf X, U, Ux)t==t9 = X (t, X, U, Ux)x=x0 = 0,
£/e — начальное множество на плоскости (/, jc), не совпадающее^
характеристиками уравнения (28.26).
Предположим, что для правой части уравнения (28.26) выполняется
условие
. и+т
lim — Г /(/, *, zl9 г2, 23, zA)dt = М*> zit г2, z3, z4) (28.28)
Г-*оо ' J
и одновременно с задачей Коши (28.26), (28.27) будем рассматривать задачу
Коши
J^=e/o(x,„(^ (28.29)
«*.*>|i^--^
= ^(/,дс) I . (28.30)
Уравнение (28.29), как обычно, будем называть усредненным по
отношению к уравнению (28.26). При этом заметим, что можно было бы принять
и другую схему усреднения, в которой уравнению (28.26) будетсопоставлять-
363
ся усредненное уравнение
-%* = е/о (х. v </. .), ■*£* . о (/ - х), *2^) . (28.31)
Однако, для упрощения дальнейших выкладок, остановимся на
усредненном уравнении (28.29).
6. Теорема об усреднении для
гиперболического уравнения с запаздыванием. Приведем
формулировку и доказательство теоремы, устанавливающей близость между
решениями задач Коши (28.26) — (28.27) и (28.29) — (28.30).
Символ S (г1; г2, 23, ..., zk) £ (С, Lip(/)) здесь обозначает, что всюду в
области своего определения функция непрерывна по. всем аргументам
(принадлежит пространству S) и удовлетворяет условию Липшица по
аргументам, начиная с /-го.
Теорема [87]. Пусть в уравнении (28.26) функции f (t, jc, zlt г2,
z3, z4) и х = т (/, jc, zlt г2) определены для t > t0 и jc, zl9 ..., г4 £ D, где
D — ограниченная область евклидова пространства £Б» и удовлетворяют
следующим требованиям:
1) f (/, jc, zlt ..., z4) и x = т (/, jc, гь Zg) удовлетворяют всем условиям,
обеспечивающим существование классического решения и (/, jc) задачи Коши
(28.26), (28.27), т. е. /£ (С, Lip<3>) с постоянной Липшица Lh x£ (С, Lip<3>)
с постоянной Липшица Lx, \f (t, x, zv ..., z4) | < В = const;
2) для каждого jc, гь ..., z4£ D существует предел (28.28);
3) функция /0£ (С, Lip(2)) с постоянной Липшица Lfof \f0(x, гъ ...,
24) < В0 = const;
4) задача Коши (28.29) — (28.30) имеет решение v{t, jc), для которого
точка ( jc, v (/, х), —jf~"~> о (*> *)» — *х ) евкли^ова пространства Еь
лежит в области D вместе со своей окрестностью.
Тогда любому сколь угодно малому 8>0 и сколь угодно большому L
можно сопоставить такое е0, что если v = v (/, х) — решение усредненной
системы (28.29), определенное в интервале /0< /< оо, —оо< —jcx<;jc<;
<; jcx < с» (хх > 0) ы лежащее в области D вместе со своей окрестностью,
то для всех 0 < е < е0 в интервале 0 < / < — (х £ D) выполняется нера-
венств0 \u(t%x) — v (/, jc) |< б, (28.32)
в котором и (t, х) — решение системы (28.26), совпадающее с v (t, x) при
t=t0.
Доказательство. Заменим исходную и усредненную системы
интегральными уравнениями
[0 для /££*„ x£D,
v(t,x) =
(28.33)
0 для t£Et„ x£D
• J |/о (Л, V(t, л), ***- , ,<$. л), -SfA) 4*. ^
364
Вычитая из уравнения (28.33) уравнение (28.34), принимая во внимание
третье условие теоремы, получаем
t X
| и (t, х) - v (/, х) |< zLu j j | и (1, т,) - v (I, r\)\ dldri +
t0 X9
t X
+ • I J j[/(g. ч. u(t л), *%*-. «(Б-х. л). ди(1^ч)) -/.(л. *«. л).
da (I. Л)
(28.35)
Введем в рассмотрение функцию
y(t,x,u(l,x),*^,u(t-x,x),du(t-x'x)) =
= f{t, x, u(t, x), ±%<L: «<*-,. x), du(tJxx'x)) -
- /, [x, a (t, x), -*£*- ,u(t, x), *Щ (28.36)
и оценим на интервале 0 < / < — выражение
е| ^{t,x,u(t,x),-^L,u(t-x,x), gHVX)H- <28-37>
Для этого распространим интегрирование по / на весь интервал —
— /в, разбивая его на k равных частей и считая при этом, что функция ¥
справа от / равна 0. Имеем
- е |Т [*(*• * «<Ь Л), -&£* . ««-т. Л). ^^)-
-у(|, л. «,. ■%, „«,-,«„...), r»), »<*--'# -">)]d£ +
Л—1 rW
4-е V f *(Ы|. «,.*-. Ц«,-т«„...),Л). ^^-^-^)^.
'-» Г. V
(28.38)
В выражении (28.38) мы добавили и вычли У (|, т), «i( -^-, ... j, / =
= 0, 1 k-l.
365
Согласно первому условию теоремы, имеем неравенства, справедливые
на каждом отрезке времени [tl9 ti+\\,
\u(t,x)—ut\<2e J jfirf/dx<2e-^-mes£> = -^-mesD,
\u(t — x(t,x, ...),x) — u(ti—T(tl, ...),jc)|<
<[2 + fiIt(l +mes£>)]e-^-fl mes D = [2 +- LXB(\ + mes£>)] -^-mesD,
| du (/. x) '_ а«^| ^2g _L_ B = 2LB^
| dx dx \^ ek "— k '
-^uit — %(t,x, ...),x) — -wu(ti—i(tlt ...),x) <
<[2 + LxB(l + mesD)]-^-,
где символ «mes D» означает диаметр области D.
Учитывая эти неравенства, можем оценить первую сумму в правой
части выражения (28.38). Имеем
'ж
|.J ^6.Л,«(6,1|).-2^-.«(6-т.Л).3^5Л)_
-*(Ьч.«*-§-.«№-*</,. ...).л), ан(<<"т^-)'п))]^|< -
<|е^ f -M.(l+mesD)[4 + 5Lt(l+mesD)]dd +
+ leL,„ j i^L(i + mesD)^|<
'о
<e-^.(l +mes/3){1,-^-[4+ BLx(l 4- mesD)] + L/e i^L.}.
Так как первая сумма в правой части выражения (28.38) содержит &
таких интегралов, то для любого сколь угодно малого б > 0 можно указать
такое число k, для которого равномерно относительно е (0 < е < е0) при
х £ D получим
k— 1 ' *
-У(1>п,а<,^-,Ц(^-х(^ ...),ti), ац(<'-^->^у]^1)|<
<-|"е_£^те8£> • <28'39)
366
Зафиксируем k и, принимая во внимание существование нулевого
среднего для функции V |/, х% ы, -—-, ...V оценим вторую сумму в правой части
неравенства (28.38).
Согласно второму условию теоремы, всегда можно построить такую
монотонно убывающую функцию х (/), стремящуюся к нулю при / -+ оо, что
во всей области [/, оо) х D будет выполняться неравенство
I ГТ<Б,1Ы1(Ьп). ...)dg|<<x(0.
V '
Очевидно, если /лежит на каком-либо отрезке ltif 6+1 ], кроме первого,
то для каждого tt можно написать
tt
Для первого отрезка имеем
|e J 4(l>i\9uv ...)dg|<e/x(/)<x2(e),
'о
где Me) = sup|8/(-2-J| . a==bXe
Следовательно, справедливо неравенство
k-\ '<+»
£ « f ^(^ Л. «I. ... )^Б I < 2ftx!<e) + x2(e).
'« /J '
При фиксированном * функции хх (е) и х2 (е) стремятся к нулю при
е -* 0. Поэтому для любого б > 0 можно указать такое е0, что для всех
0<е<е0их£О будет выполняться неравенство
|Vef fV&ibii,. ...)d&n\<4-e-Ll'f'amD. (28.40)
Сопоставляя неравенства (28.39) и (28.40), на интервале /0 < / < —
получаем оценку
У { JW Л. «. ...)-МЛ. ". •••)] dgdT,|<6e-"-'.mesD . (28.41)
Неравенство $8.35) теперь можем представить в виде
\u(t,x)-v(t,x)\<eLu j ||w(E,r,)-t;(|,T0|rf|^ + 8e-^mesD. (28.42)
Из неравенства (28.42) и неравенства Вендорфа легко находим
\u(t,x)-v(t, *)|<6,
что и требовалось показать.
367
В заключение сделаем два замечания. Во-первых, приведенные
результаты имеют место и в случае задачи Коши для уравнения (28.26) с
начальными данными на характеристиках х = а = const, / = а = const (задача
Гурса):
и (а, х) = фх (х), и (/, а) = ф2 (/), фх (а) = ф2 (а).
Доказательство осуществляется аналогичным образом.
Во-вторых, из изложенного автоматически следует первая теорема об
усреднении для нехарактеристической задачи Коши и задачи Коши с
данными на характеристиках при т = 0, т. е. для уравнений без запаздывания.
7. Распространение метода усреднения на
квазилинейные гиперболические уравнения
высшего порядка. Результаты о непрерывной зависимости решения от
параметра и принцип усреднения легко переносятся и на задачу Коши для
квазилинейного гиперболического уравнения m-го порядка
(k0 + k1 = k<cm— l),
где щ (/, х) (/ = 1, 2, ..., т) — известные коэффициенты, / — нелинейная
функция переменных и, ..., —^—^-, ..., у— параметр.
Задавая для уравнения (28.43) начальные условия
■4SH =g/W <P</<m-l), (28.44)
dt k=o
предполагая существование равномерно по (/, х) в некоторой области От
предела
о х
= Jf(/,*.a. .... -дас-. ..- Ye)Л.
о ч
и выполненными условия, аналогичные сформулированным в п. 2, можем
получить теорему [202], устанавливающую оценку
\u(t,x,y)-u(t,x,y0)\<r\, (28.45)
где и (/, jc, Yo) — решение уравнения
2МЛ*)^£^ = /('.*." -5S5E-'•"•*)• (28'46)
удовлетворяющее начальному условию (28.44).
Установленная теорема позволяет сразу же распространить принцип
усреднения на систему вида
2C/-*)ial(t,x)-^7 = zf(t,x,u -^-, ...). (28.47)
368
При этом следует, конечно, иметь в виду порядок е и полагать в
уравнении (28.43) у= V4 т = у Tt.
8. Смешанная задача для квазилинейных
гиперболических уравнений. Все рассуждения и доказательства
теорем выше проводились для задачи Коши. Однако это делалось ради
сокращения выкладок и в связи с тем, что смешанная задача для
гиперболических уравнений, близких к линейным, рассматривалась достаточно
подробно в предыдущем параграфе.
Нетрудно получить аналогичным путем соответствующие результаты
и для смешанной задачи.
В результате могут быть сформулированы теоремы о непрерывной
зависимости решения от параметра, как для систем описываемых уравнением
(28.9) при наличии заданных начальных и краевых условиях, так и для
систем, описываемых уравнениями типа (28.43). На основании этих теорем
нетрудно сформулировать теоремы об усреднении, подобные приведенным
в п. 3 для системы (28.19).
9. Усреднение в параболических и
эллиптических дифференциальных уравнениях. Приведем в
заключение настоящего параграфа без подробного доказательства
результаты, полученные Р. 3. Хасьминским [197], относящиеся к распространению
принципа усреднения на дифференциальные уравнения параболического и
эллиптического типов.
Допустим, что ux(t, х)— ограниченные решения дифференциального
уравнения
-ЗГ+2 au(t9xA)-^+ybdt9xA)^ + c(tfxtk)u^-d(ttxtX)
(28.48)
в области
x£G, *G(0,oo), Х£Л, (28.49)
где G — конечносвязная область я-мерного евклидова пространства Fa
с дифференцируемой границей Ге, удовлетворяющие условию
lim M*. *) = /(*), (28.50)
t e (o.oo)
где f (z) — непрерывная ограниченная функция в области Еп.
Допустим, что коэффициенты уравнения (28.48) удовлетворяют
следующим условиям.
1) Матрица (ац) неотрицательно определена при всех (/, jc, X) в области
(28.49), все коэффициенты непрерывны по (/, х) при каждом X £ Л,
ограничены равномерно по Х£ Л некоторой постоянной С. Кроме того,
выполнены условия, гарантирующие существование решения уравнения (28.48)
в области (28.49) (для этого, как известно, достаточно положительной
определенности (аи) и существования трех производных по / и х{ у
коэффициентов ail% b{, с).
2) Коэффициенты уравнения (28.48) непрерывны по х равномерно
относительно /, jc, X и интегрально непрерывны по X при X = Х0 равномерно
в области (28.49).
3) Выполняются также условия
а) с (/, х, Х)< 0 в области (28.49),
24 246
369
б) найдется такое число / (1 < / < п), что ап (/, х, X) > а0 > 0 в
области (28.49),
в) G cz {гх < Xj < г2} для некоторых rlt г2 (—со < гх < г2 < со).
При выполнении этих условий справедлива следующая тедрема о
непрерывной зависимости.
Теорема [197]. Пусть для уравнения (28.48) в области (28.49)
выполняются условия 1)—3).
Тогда решение этого уравнения и% (/, jc), удовлетворяющее условию (28.50),
при X -* Х0 сходится к решению уравнения
= — <*(*, *Л«), (28.51)
удовлетворяющему условию (28.48). Эта сходимость равномерна в области
(28.48).
Доказательство приводить не будем, отсылая интересующихся к
указанной выше литературе.
Эта теорема позволяет сформулировать аналог первой основной
теоремы принципа усреднения применительно к решению задачи Коши,
смешанной задачи и задачи без начальных условий для параболического уравнения.
Приведем формулировку соответствующей теоремы для решения задачи
Коши.
Рассмотрим в области jc£ £„, /£ (0, со) уравнение
ЧГ + ^У, ^i(^ х) -^ + ^bt(tt х)-^ + c(tt х)и + d(tt х)]==0.
U/=i * ' i=i J
(28.52)
Допустим, что коэффициенты этого уравнения удовлетворяют условиям:
I. Матрица (а*/) неотрицательно * определена при х £ £„, / £ (0, со),
все коэффициенты непрерывны по (/, jc), ограничены при / > 0 и достаточно
гладки для существования задачи Коши для уравнения (28.52), е > 0.
II. Все коэффициенты непрерывны по jc равномерно относительно
хеЕп, <е<о. оо).
III. Равномерно по х£ En существуют пределы средних значений по t
при / ->• со для всех коэффициентов:
1 Т 1 т
lim -=- [ an (/, х) dt = аи (х), lim -=r \ bt (t, x)di = bc (x),
0 0
T T
lim 4" \c(t, x)dt = c(x), lim -^ f d(t, x)dt = d(x).
IV. Существует решение задачи Коши для усредненного уравнения
^-+1 a<<wiS^+2b'{x)£+c(x)u+dM=0- (28-53)
При этих предположениях справедлива теорема, представляющая
собой перенесение на параболические уравнения первой основной
370
теоремы Н. Н. Боголюбова об усреднении на конечном интервале
времени.
Теорема [197]. Пусть для уравнения (28.52) выполнены условия
I—IV и ue(t, х) — решение этого уравнения в области х £ ЕПУ t £ 1О, —)
удовлетворяющее условию
lim M*,jc) =./(*), (28.54)
8
a v (/, х) — решение уравнения (28.53) в области х £ £„, / £ (О, Г),
удовлетворяющее условию v (7\ х) = / (х).
Тогда выполняется соотношение
lim sup \иг (4- , х) — v (/, х) I = 0. (28.55)
e-0 xG£n IV8/ |
t£(0,T)
Справедливость этой теоремы вытекает из предыдущей теоремы о
непрерывной зависимости решения от параметра. Действительно, заменой е/ = т
уравнение (28.52) можно привести к уравнению
T+|^7-.')w + 2Mt- .*)» + «(-Ь*Н. (28-56)
а условие (28.54) — к условию lim ие (/, х) = f (х). Положив е = Л,
t-*T
к0 = 0, нетрудно убедиться, что все условия предыдущей теоремы
выполняются.
Исходя из приведенной выше теоремы о непрерывной зависимости
решения от параметра, нетрудно сформулировать и доказать принцип
усреднения для смешанной задачи и для задачи без начальных условий. Остановимся
подробнее на задаче без начальных условий. Для упрощения ограничимся
случаем, когда граничные условия не зависят от /. Предположим, что
условия I-— IV в области х £ G, /£(0, оо) выполнены и, кроме того, при всех
x£G, /£ (0, оо) и некоторых гг > —со, г2 < со и / имеем: 1) с (*, х) <: 0,
2)бс(г1<х/<г2)и ац (t, х) > а0 > 0. Пусть, далее, ф (х) —
непрерывная функция, заданная на Г0.
Тогда справедлива теорема.
Теорема [1971. Пусть ие (/, х) — решения уравнения (28.52) в
области х £ G, t £ (0, со) удовлетворяющее условию
Hm ue (t, х) = ц> (х0) (х0 £ Г6), (28.57)
(*.f)-*Uo,f©)
a v(x)* — решение уравнения
2 йц(Х) ^" + 2 bi {х) 1ВГ. + с{х)v + d{х) = °' (28*58)
удовлетворяющее условию lim v (х) = <р (х0).
* v (х) — решение уравнения (28.53) в области х £ G, / £ (0, оо), удовлетворяющее не
зависящим от / краевым условиям, не зависит от /.
24* 371
Тогда
lim sup I u£ (tf x) — v(x) | = 0. (28.59)
e-+0 x£G '
t£ (O.oo)
Проиллюстрируем применение сформулированной теоремы для
исследования поведения решения эллиптического уравнения с малым параметром
е при старших производных [197].
Пусть область G с Е3 — полоса {гх < х3 < г2}, а ие (хъ х2, х3) —
решение уравнения
(28.60)
в области G0 удовлетворяющее условиям
lim u£ (xlt x2t х3) = с, (/ = 1. 2)- (28.61)
Здесь сх и с2 — постоянные, у — иррациональное число.
Предположим, что все коэффициенты уравнения (28.60) периодические
по хг и х2 с периодом 1, а с (х) < 0. Введем новую функцию
0еС x) = ue(xl — -^-t *2 — -^ > *з). (28.62)
Очевидно, функция ve (/, х) будет удовлетворять уравнению
+ 26,(*1 — "Г* **"~ T~* Х»)"Л^" + С(Х1— 4"' хг—"Т", *зК +
/—1 * '
+ d(v1--L, x2-^-, х3), (28.63)
и для нее выполняется условие
limM/, *) = c, (/ = 1,2). (28.64)
Применяя теорему о непрерывной зависимости решения от параметра к
уравнению (28.63) — (28.64), легко установить, что ve (xlt x2t x3) -+ v0 (*g)
равномерно по jc£ G0, t£ (0, oo), где v0(x3) — решение уравнения
Язз (*з) -?Т- + b* <*•> -5т- + с (*> "о + <* (*3) = 0, (28.65)
djo -г-t.™ <ц
*3
удовлетворяющее условию (28.64).
В уравнении (28.65) приняты обозначения
it it
Язз (*з) = J J азз (*i> *2> *з) dxxdx2, Ь3 (х3) = § [ b3 (xv x2, xj dxtdx2t
0 0 0 0
11 11
с(*3) = J J* с (xv x2, x3) dxtdx2t d(x3) = j* J d(xit x2t x3) dxxdx2.
0 0 0 0
372
Принимая во внимание связь между ve и иг можем получить
окончательно, что при е -+ 0 иг (xlt x2, х3) ->• v0 (x3) равномерно в области G0.
Рассматривая параболическую систему второго порядка
•5— 2 ^W-aSr + 2B'W-^+^.x.«.X) (28.66)
и предполагая все входящие в уравнение (28.66) функции вещественными,
а фундаментальную матрицу решений Z (/, х9 |) системы
Т=2>М^- + 2В,<*>£ (28.67)
— неотрицательной, С. Д. Эйдельман доказал следующую теорему [210]*.
Теорема [210]. Пусть для системы (28.66) выполняются следующие
условия:
1) коэффициенты Ац (х), В{ (х) ограничены и удовлетворяют условию
Гельдера по хи ..., хп при —оо < xs < оо (s = 1,2, ..., п);
2) функция F (/, jc, и> X) определена для всех значений аргументов t£
[0, Т], —со < xs < со (s = 1, 2, ..., п), и £ D, X £ Л, где Л —
некоторое множество значений параметра Х9 для которого Х0 — предельная точка,
a D —ограниченная область пространства EN\ кроме того, функция F (t,
х, и, X) равномерно ограничена, непрерывна по t9 удовлетворяет условию
Гельдера по хъ ..., хпи условию Липшица по и1$ и2, ..., un с константами, не
зависящими от t9 X и U К х соответственно;
3) существует предел
t t
lim f F(x x, ut X)di = [F(t. x, u9X0)dx (28.68)
равномерно по xl9 ..., xn и t в области
— °o<*s<oo, /£[0,Л;
4) решение v (x, t) уравнения
■f— 2 Mx) ag- + J Д, (*)-£■ +F(t9 x9 v9 U (28.69)
имеющее две непрерывные в смысле Гельдера, по х ограниченные производные
в полосе Х1Х {0 < /<: Т — со < jcs < оо (s = 1, 2, ..., п)) по хъ х2, ...,
хп (т. е. входит в класс Съ), лежит вместе со своей р-окрестностью в D.
Тогда решение и (х9 t) системы (28.66), принадлежащее классу С*щ,
совпадающее с v (x9 t) при t = 0, непрерывно по Хв точке X = Х0, т. е.
N
max | и(х9 f) — v(x9 t) \ = max у. sup | щ(х91) — v{ (x9 t) \ -+ 0 (28.70)
при X -* Х0.
* Работа [197] выполнена, по-видимому, совершенно независимой сдана в печать до
выхода в свет работы [2101*
373
Непосредственным следствием этой теоремы является теорема об
усреднении для уравнения
«./-1 ' *=1
удовлетворяющего условиям приведенной выше теоремы, а также условию
существования равномерно по хъ ..., хп (— со < jcg < со) предела
1 т
lim -jr J F(t9 x, u)dt = F0(x, u). (28.72)
В заключение заметим, что метод усреднения может быть
распространен на абстрактные параболические уравнения.
Рассматривая абстрактное параболическое уравнение
•£- = Ax + f(x,cot)t (28.73)
где Л — линейный, вообще говоря, неограниченный оператор, порождающий
аналитическую полугруппу; f(x\ (о/)— подчиненное оператору Л нелинейное
отображение, обладающее средним
1 т
lim 4- f / (*» t) dt = Fx, (28.74)
можно установить связь задачи с начальными данными для уравнения (28.73)
при (о -* со и для усредненного уравнения
-4L=Ay + Fy. (28.75)
Кроме того, в случае периодической зависимости отображения / (х, со/
от времени может быть установлена связь между устойчивостью
стационарных решений уравнения (28.75) и устойчивостью соответствующих
периодических решений уравнения (28.73) при достаточно больших значениях
со [167].
t
§ 29
ОБОСНОВАНИЕ МЕТОДА УСРЕДНЕНИЯ
ДЛЯ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
В ФУНКЦИОНАЛЬНЫХ ПРОСТРАНСТВАХ
•
1. Общие.замечания. В последнее время успешно
развивается теория обыкновенных дифференциальных уравнений в функциональных
пространствах. Этот раздел анализа возник в результате объединения
методов обыкновенных дифференциальных уравнений, методов функционального
анализа и методов математической физики.
В настоящее время методы теории дифференциальных уравнений в
функциональных пространствах нашли широкие приложения в теории
колебаний систем с бесконечным числом степеней свободы, в гидродинамике, в
теории вероятностей, в теории устойчивости и т. д.
В связи с этим остановимся на некоторых теоремах, являющихся
обобщением приведенных выше основных теорем Н. Н. Боголюбова на
дифференциальные уравнения, рассматриваемые в функциональном пространстве.
Эти обобщения получаются наиболее просто, когда уравнения в
стандартном виде рассматриваются в линейном нормированном пространстве,
где можно воспользоваться без сравнительно существенных изменений
некоторыми приемами, использованными в приведенных выше доказательствах
(см., например, § 6 и § 7).
2. Обобщение первой основной теоремы
метода усреднения на случай гильбертова
пространства. Обобщение теоремы Н. Н. Боголюбова об оценке разности между
решением точной системы и усредненной на системы, рассматриваемые в
бесконечно-мерном координатном гильбертовом пространстве, получено в
работе [100]. Остановимся ниже на этих результатах.
Рассмотрим дифференциальное уравнение в стандартной форме
-J- = eX (*.*), (29.1)
где х (/), X (t, х) — вектор-функция со значениями в координатном
гильбертовом пространстве $, элементами которого являются совокупности
функций
*- {*1 (*).*! (0. •••> Xn(t)> •••}»
375
удовлетворяющие в любой момент времени I = tx условию
2 *?(<i)< const. Г29.2)
Уравнение (29.1) при условии, что функция X (/, х) равномерно
ограничена в некоторой области Dc% для xl9 x2czD удовлетворяет условию
Липшица
]X(*, xt)-X(t, х2)\<\\хг-х21 (29.3)
с константой Х>0и суммируема по / в некотором интервале 10, /), имеет
единственное непрерывное решение х = х (/), удовлетворяющее
начальному условию х (0) = х°.
Справедлива следующая теорема.
Теорема [100]. Пусть в координатном гильбертовом пространстве
Ж задана вектор-функция X (/, х) = (Хх (/, jc), X2 (ty x), ..., Хп (/, jc), ...),
для которой в области D cz j# существуют такие положительные постоянные
X, М, что для всех значений t > 0 и для любых точек xyxx,x2aD выполняют-
ся условия
|X(/,jc)|<M, \X(t,xl)-X{t,x2)\<fk\xl-x2\ (29.4)
и, кроме того, существует такое Х0(х), что равномерно по х в области D
= 0. (29.5)
lim
Г-юо
i T
jr\X(x,x)dx-X0(x)
о
Тогда, если 5 = 1(0 — решение уравнения
-§- = еХ0(|), (29.6)
определенное для всех значений t и принадлежащее вместе со своей
^окрестностью области D, х = х (/) — решение уравнения
-J-=eX (*.*). (29.7)
совпадающие в начальный момент времени, х (0) = £ (0), то для любых
сколь угодно малых г\>0ир>0и сколь угодно большого L > 0 можно
указать такое е0 > 0, что для 0 < е < е0 в интервале 0 < t < — будет
выполняться неравенство
1*(0-Б(0Кп. (29.8)
Доказательство. Согласно условию (29.5), всегда можно
построить такую монотонно убывающую функцию / (/), стремящуюся к нулю
при неограниченном возрастании /, для которой справедливо неравенство
f [X(т, х) -Х0(х)\ dx\<tf (/). (29.9)
о |
Определим функцию F (е) следующим образом:
F(e)= sup k/(-f)|. (29.10)
376
Так как F (в) стремится к нулю вместе с е, то можно указать такое
положительное е0, что для 0 < е < е0 будет выполняться неравенство
VF(e)<
^(^+-г+1)
(29.11)
где v равно меньшему из чисел г\ и р.
Построим функцию х (/), совпадающую с решением уравнения (29.6)
£ (f) при t = 0 и в интервале 0 < / < —- принадлежащую р-окрестности
этого решения.
Такая функция определяется выражением *
__ t+a t
* (0 = 6 (0 + "Г J М J & (т* 5 СО) - *о ffi (О)} Л. (29.12)
/ о
где а — постоянная, пока что еще неопределенная величина.
Подставляя выражение (29.12) в уравнение (29.7), находим
■£--еХ (/.*)« Я (0.
(29.13)
где R (/) определяется выражением
* W = "f- + "f J <* «• 6 (О) - *<> (Б (О)} ^ +
+ -J- J {*(*,£ (/ + а))-Х0(1-« + a))} dx -
—£- J {X (х, | (0) - Х„ (| (/))} dx -
о
t, 6(0 +-J- J Л'j (X(x,5(x'))-X0 (£(x'))} dx . (29.14)
Отсюда, на основании уравнения (29.6), после мажорирования получим
t+a
1Ж01-
еХ0 (6 (0) -«*(*, 6 (0) + -J- f {* (/.6 К)) - *о (I (х'))} dx'
+
+
-J- J {X(x, 6(/ + а))-Х0(1(/ + а))} dx
+
+
-i-j{X(x,£(/))-X0(£(/))}dx
+
еХ0,6(/))-еХ /,Б(*) +
* Функция х в выражении (29.12) берется в таком виде (вместо *= 6 + за) во
избежание трудностей, связанных с введением меры объема в функциональном пространстве.
На целесообразность такого выбора х указано в монографии [13] , стр. 16.
377
. t+a t )
4-JL J d*'\{X(<ztt(i'))-X0(t(V))}dT\
t 6 J
(29.15)
0
<
Воспользовавшись для оценки величин, стоящих в правой части
неравенства (29.15), соотношениями (29.4), (29.9) и (29.10), после некоторых
выкладок получим оценку
\R(t)\<-j-MMa + 2-^-+BXF(e),
с помощью которой найдем оценку
J б* ('-г> | R (т)|Л < \ ееХ ('-%) | R (т) | dx <
0
JH.L (4- еМа + х -^" + F(e>) •
Выберем до сих пор произвольную величину а следующим образом:
8
Согласно неравенству (29.11), находим
о
где А — некоторое положительное число.
Таким образом, для t < — всегда выполняется неравенство
t
' егХ {t~x) | R (т)|Л < 4- + ^ (е)- (29.16)
о
Проанализируем решение уравнения (29.7), удовлетворяющего
условиям теоремы.
В некотором интервале 0 < / < tx x (t) принадлежит области D, и,
следовательно, будет выполняться условие
\X(t,x) — X(t,x)\<.X\x—x\. (29.17)
Из уравнения (29.13) получаем
1 *(ХШХ) \<&\*-x\ + \R(t)\- (29.18)
Так как х (0) = х (0), то из неравенства (29.18) следует, что
|*-J|<jVX(^|#(T)|dT (0<*<«.
Поэтому, воспользовавшись неравенством (29.16), получаем
\x-x\<^-+AF(e)t \x-x\<± + AF(t)t
378
и, следовательно,
l*-SK-J- + We)<4, \x-l\<-§- + BF(E)<p9 (29.19)
где В — некоторое положительное число.
Проводя рассуждения, аналогичные проведенным при доказательстве
основной теоремы в § 6 (см. стр. 88 —89), нетрудно показать, что неравенства
(29.19) справедливы на всем интервале 0 < t < — , и, следовательно, на этом
интервале имеет место неравенство (29.8), что и требовалось показать.
3. Обобщение второй основной теоремы
усреднения; предварительные замечания и
обозначения. Перейдем к рассмотрению более сложного случая — перенесение
второй теоремы Н. Н. Боголюбова на случай системы (29.1), рассматриваемой
в координатном гильбертовом пространстве.
Введем некоторые необходимые понятия.
Пусть имеем уравнение
-J- = eX(f, jc), (29:20)
где х (/), X (/, х) — вектор-функции со значениями в координатном
гильбертовом пространстве Ж* е — малый положительный параметр. Допустим,
что функция X (/, х) такова, что матрица i-g^) (i> k = 1, 2, ...) порож-
х=х0
дает некоторый оператор, действующий в пространстве^. Этот оператор
назовем частной производной функции X (/, х) по х в точке (/0, х0) и обозначим
/ дХ (/, х) \
х=х0
Под полной производной —^ *' в дальнейшем будем понимать
вектор-функцию
-^ = Т- + Т-БГ- (292D
Для упрощения выкладок норму элемента х в пространстве 3t будем
обозначать |х\у а норму оператора А — \А\.
Предполагая, что существует такое Х0 (£), для которого равномерно по
|4-jxe.9*-Xo(S)
о I
lim
T-*OQ
= 0, (29.22)
одновременно с уравнением (29.20) будем рассматривать усредненное
уравнение
-|- = еХ0(£). (29.23)
Предположим, что выполняются следующие условия.
1. Уравнение (29.23) имеет статическое решение
6 = Ь. Хо(Ы-0.
соответствующее4 точке равновесия.
379
2. Оператор Н = (—JipM ограниченный в пространстве St,
удовлетворяющий условию, согласно которому абсолютные значения
вещественных частей всех точек спектра имеют нижнюю грань, отличную от нуля.
3. В области — оо< /<oo,jccz Dp, где Dp — некоторая р-окрестность
точки £0, выполняются условия:
а) функции X (/, х) и —§^^ непрерывны как функции переменных /, х
и непрерывны по х равномерно относительно t, x;
б) функции X (t, х) и —j' *' ограничены;
в) X (/, х) — почти периодическая функция / равномерно по
отношению к х.
При этих условиях может быть обобщена вторая основная теорема
метода усреднения — доказано существование и единственность некоторого
частного почти периодического решения уравнения (29.20), лежащего в
окрестности положения равновесия усредненного уравнения (29.23).
4. Преобразование основной системы и
вспомогательные утверждения. Прежде чем переходить к
формулировке второй основной теоремы для гильбертова пространства, остановимся
на доказательстве некоторых вспомогательных утверждений и на
преобразованиях уравнения (29.20), аналогичных проведенным в § 7.
Нетрудно показать, что при выполнении указанных выше условий
уравнение (29.20) последовательными заменами переменных
х = 1о + Ь, Ь£Ж, (29.24)
b = h + ev(tfh), h£ft (29.25)
может быть приведено к уравнению
•§- = Hh + Q(t9h9e)i (29.26)
при этом
v(t, h)= J е-,|(|-т)Д1(т,й)А,
—оо
B1{t,b) = B{t,b)-B(b), (29.27)
B(t, b) = z(t. ь> + ь) + x0(i„ + b) - (™*&^ь,
*(*) = *o(Io + *)-(^)s=|^ (29.28)
Z(t, lo + b) = X(t, |0 + b)-X0(lo + b),
где т) = tj8 — некоторый положительный параметр, зависящий от е и
удовлетворяющий условию
т) -»- 0, — -»- const при е -»- 0.
Для функции Q(t,h, e) можно указать такие положительные в0 и р, что:
а) она будет определена в области
— оо<*<со, Л 6 С/р„ 0<е<е0,
где UPi — Pi-окрестность точки А = 0;
380
б) для —оо</<сх5и0<8<е0 выполняется неравенство
|Q(/,0,e)|<M(e), (29.29)
где М (е) -+ О при е -* 0;
в) для любого положительного о < рх в области
— оо</<со, h'h"(=Uo, 0<e<e0
справедливо неравенство
| Q (/, Л', е) - Q (/, Ы е) | < X (8, а) | Л' - Л" |, (29.30)
где А, (е, о) -^ 0 при е ->- 0, а -»- 0.
Для уравнения (29.26) может быть доказана следующая
вспомогательная теорема.
Теорема [1691. Если оператор Я удовлетворяет условиям 2)
(см, стр. 380)у а функция Q (/, Л, е) — условиям а) — в), то можно
указать такое положительное е, что для каждого положительного е <; е
уравнение (29.26) будет иметь решение
Л = /(Ле), (29.31)
где | / (/, е) | < D (е) < р1э причем D (е) -+ 0 яры 8-^0.
Прежде чем переходить к доказательству сформулированной теоремы,
напомним некоторые общеизвестные сведения из спектральной теории
общих линейных ограниченных операторов в банаховом пространстве *.
Обозначим а+ и а_ части спектра а (Я) оператора соответственно с
положительными и отрицательными вещественными частями. Известно, что
резольвентный оператор
/?Х = (Я-Х/Г1 (29.32)
на резольвентном множестве р (Я) — аналитическая функция.
Обозначим через Г+ и Г_ произвольные гладкие замкнутые контуры,
окружающие соответственно а+иа.и не имеющие общих точек с мнимой
осью.
Рассмотрим проекционные операторы
Ро_ = --^г j) Rr.dk, (29.34)
г_
где /?х определяется выражением (29.32). Нетрудно показать, что для
проекционных операторов Ра+ и Ра_ выполняются соотношения
Pl+ = Po+, Ро_ = Ро_, Яа+ + Ра_ = Д (29.35)
где / — единичный оператор.
Операторы Ра+ и Ра_ проектируют пространство Ж на инвариантные
подпространства jf^ и Ж~ оператора Я, такие, что спектр оператора Я в этих
подпространствах совпадает соответственно с а+ и а_. Обозначим «части»
* См., например, [90].
381
оператора Н в JUt* и Ж~ соответственно через Н+ и //_. Таким образом,
спектры операторов Н+ и #_ совпадают соответственно с множествами a-j.
и о_. •
Определим функцию 7 (f) при помощи следующих соотношений:
(— е~н+'Ро+ при / > О,
7(/)= н iD (29.36)
w | е-и-'Ро_ при /<0.
Функция е-** аналитична во всей комплексной плоскости,
следовательно, для построения функций е~н+1 и ё~и~* можем воспользоваться формулой
Коши, согласно которой
2да
je^RbdK (29.37)
в-Я^:
г §e-uRkdX. (29.38)
2ni
г
Согласно соотношениям (29.36), имеем
^ (- 0) - 7 (+ 0) = Ра+ + Ра_ = /. (29.39)
Используя известное соотношение
/?xKv= \zl> . (29-4°)
нетрудно доказать справедливость равенств
е-н^Ра+ = е-тРа+9 t>0, (29.41)
е-н-'Р0_ = е-шР0_, t<0. (29.42)
Таким образом, функция 7 (/), определяемая соотношениями (29.36), при
t Ф 0 удовлетворяет дифференциальному уравнению
-^- = — 7(t)H = —H7 (t). (29.43)
Далее, вследствие ограниченности в пространстве JC оператора Я, для
которого абсолютные значения вещественных частей всех точек спектра
имеют нижнюю грань, отличную от нуля, нетрудно убедиться, что всегда можно
найти такие положительные постоянные k и а, для которых будет
выполняться неравенство
\7{t)\<ke~a{t) (29.44)
на всей вещественной оси.
Доказательство упомянутой вспомогательной теоремы проводим
обычным путем. Фиксируем некоторое положительное число D < рх и
рассматриваем класс ограниченных непрерывных функций F (0, определенных на
интервале — со < / < со, со значениями в пространстве j#, таких, что
\F(t)\<D<Pl (29.45)
для любого —со</ < со. Обозначим этот класс функций С^ (D). Введем в
классе С4*1 (D) норму:
|F(0|= sup \F(t)\. (29.46)
—oo<f<oo
382
Пространство С^ (D), как и пространство jft, полное нормированное,
причем, согласно условию (29.45) и обозначению (29.46), имеем
\F(m<D<h. (29.47)
Рассмотрим преобразование S, переводящее функцию F (f) из
пространства С^ (D) в функцию
оо
S, (F)= J 7 (z) Q [* - z, F (' + г), в] dz, (29.48)
—оо
где 7 (г) определяется выражением (29.36).
Воспользовавшись соотношениями (29.29), (29.30) и (29.44), получаем
неравенства
| St (F) - St (F) | < 2M°'P) «| /?(< + z) - F (t + z)|, (29.49)
IS,(F)|<-£- {Л1 (e) + X(e, D)D}. (29.50)
Ob ;
Подберем теперь D как функцию параметра е таким образом, чтобы при
е -* 0 О(е)-)-0и чтобы для всех е, не превосходящих некоторого е < е0,
выполнялись неравенства
2k
а
{M(b) + X(*,D)D}<D, (29.51)
4Ме,Р) fe< { (2952)
Тогда для этих е, согласно неравенствам (29.49) и (29.50), получим
IS^n-S^FUK-^lF'-Fl (29.53)
||S,(F)||<D(e). (29.54)
Отсюда следует, 4toS — оператор сжатия, отображающий полное нормиро-
ванное пространство С^ (D) самого в себя.
Следовательно, согласно теореме Банаха, уравнение
F = S(F) (29.55)
имеет единственное решение. Обозначая его/7 = / (/, е) видим, что, согласно
самому определению пространства С4*1 (D), функция / (/, е) удовлетворяет
требованиям теоремы, т. е.
|/(/, e)|<D(8)<Pl.
Подставляя значение F = f (/, е) в выражение (29.48), совершая в нем
замену переменной г + / = ти обозначая / (/, е) = Л,, после
дифференцирования," принимая при этом во внимание соотношения (29.39) и (29.43)^
убеждаемся, что функция Л = / (/, е) действительно представляет собой
решение уравнения (29.26), при t = /„сводящееся к / (/0, е).
Нетрудно показать также, что если функция Q (/, Л, е) в уравнении
(29.26) — почти периодическая функция / равномерно по отношению к Л в
области UPi, то и полученное решение этого уравнения h = / (/, е) будет
также почти периодическим.
383
Переходя к исследованию устойчивости решения Л = / (/, е) уравнения
(29.26), заметим, что при выполнении всех условий предыдущей теоремы с
помощью рассуждений, совершенно аналогичных приводимым при
доказательстве второй основной теоремы (см. § 7), может быть сформулирована и
доказана следующая теорема.
Теорема [1691. Пусть среди точек спектра оператора Н имеются
точки как с положительными, так и с отрицательными вещественными
частями.
Тогда можно указать такие положительные е*, а, с, о0, ох (причем о0 <
< ох < рх, е* < е), что для каждого е <; е*, любого вещественного t0 в некоторой
окрестности Ua9 будет существовать особое многообразие OR (t0t е) точек
{Л} со свойствами:
1) если для t= t0 ht£ Uo9, но ht£0R (t0, e), то для некоторого Г> /
hiGUat; (29.56)
2) если для t= t0 ht£0R (t0, e), то для всех t > t0 ht £ Uat и
|ht -f (/, e)|<ce~a(/-'e)|h0- f (t0t 8)|, (29.57)
где
К = ft*.;
3) если все точки спектра оператора Н имеют положительные
вещественные части, то многообразие OR (/0, е) вырождается в точку h = / (t0, е);
4) если, наоборот, все точки спектра оператора Н с отрицательными
вещественными частями, то многообразие OR (/0, е) совпадает со всей
окрестностью Uo0.
Используя неравенство (29.57), нетрудно показать, что в окрестности Uao
может находиться лишь одно единственное решение уравнения (29.26) Л =
= f V, 8).
5. Вторая основная теорема в случае
гильбертова пространства. Резюмируя все изложенные рассуждения и
приведенные две теоремы, приходим к следующей основной теореме,
характеризующей поведение решения уравнения (29.20) в окрестности решения
усредненного уравнения (29.23).
Теорема [1691. Пусть функция X (t, х) в уравнении (29.20)
удовлетворяет условиям 1—3 (см. стр. 379 — 380).
Можно указать такие положительные постоянные 8*, о'0, а[ (причем
°о < ai < Р)> что для всякого положительного е <; е* будут выполняться
следующие утверждения.
1. Уравнение (29.20) имеет единственное решение х = х* (t)f
определенное на всем интервале —оо < t < оо, для которого
|**(0-1о !<<*>• (29.58)
2. Это решение в общем случае почти периодическое.
3. Можно найти такую функцию б (е), причем б (е) -+ 0 при е -+ 0,
что будет выполняться неравенство
|**(0-Ы<*(в). (29.59)
4. Пусть х (/) — любое решение уравнения (29.20), отличное от х* (/),
при некотором t = t0 удовлетворяющее неравенству
\x(t)-t0\<°'o. (29.60)
384
Тогда
а) если все точки спектра оператора Н имеют отрицательные
вещественные части, то для всех t > t0\x (t) — |01 < о\ и
\x(t)— х* (t) | < се"™ ('"Ч (29.61)
где с и а — некоторые положительные постоянные;
б) если все точки спектра оператора Н с положительными
вещественными частями, то можно найти такое tx > t0t что
l*('i) —6ol>*i; (29.62)
в) если спектральное множество оператора Н содержит точки как с
положительными, так и с отрицательными вещественными частями, то
в о ^окрестности точки ^существует особое точечное многообразие ЯП (t0t е),
такое, что из соотношения
вытекает справедливость неравенства (29.61), а из соотношения
*('о)ёЭЛ('о. *)
следует справедливость неравенства (29.62).
6. Другие обобщения второй теоремы. Остановимся
еще на некоторых теоремах, дающих обобщение второй основной теоремы
метода усреднения в различных направлениях.
Прежде всего остановимся на интересном результате, полученном в
области обоснования метода усреднения для уравнения в стандартной форме,
рассматриваемого в пространстве Банаха. Приведем здесь лишь
формулировку теоремы [2361.
Рассмотрим пространство Банаха $ и обозначим через G открытую часть
$. Допустим, что функции fk (x, t)y k = 1, 2, ..., определены и непрерывны
для х£ G, ^ ^ 10, 74, Т -* 0, и принимают значения, принадлежащие
пространству $, || х || — норма вектора х. Справедлива теорема.
Теорема 12361. Пусть функции fk (jc, t) удовлетворяют условиям
IM*.0i<m. \\fk(x'>t)-fk(x\t)\<m\x'-x"\ (ft = 0. I, 2, ...),
m — положительная постоянная; уравнение
ТГ=/о<*.0 (29.63)
имеет решение х0 (/) для t £ [0, Т], х0 (0) = х0; х( = х0 и
^fi(x,t)dt-+^f0(x9t)dt, /=1, 2, 3, ... . (29.64)
Тогда для всех достаточно больших j существуют решения Xj(t)
уравнения
-J- = №0, */(°) = */> (29.65)
x,(t)-+x0(t)9 (29.66)
равномерно на интервале [0, Т].
25 246 385
Если обозначить
Р/(х) = max\\\fi(xf t)—f0(x, t)]di\
dMx£G, tlt t2£ (0, T],mo
lxi(t)-x0(t)l<ekt[lxi-.x0\\ +
+ min 12 p, U (q -f) + 2Г2 4), (29.67)
k2 = (ekt—l—kT)T-2.
На доказательстве этой теоремы останавливаться не будем. Оно
достаточно просто и проводится по схеме доказательства теоремы о непрерывной
зависимости решения от параметра (см. §8).
Заметим, что не все теоремы метода усреднения могут быть легко
перенесены на бесконечномерные пространства (см., например, [88, 61]).
Теорема о непрерывной зависимости решения от параметра [88]
справедлива в банаховых пространствах для дифференциальных уравнений
специального вида — когда оператор F (/, jc, X) допускает представление
F(ttx9K)^F1(ttxyX) + F2(tt гД),
где операторы Fx (/, jc, К) и F2 (/, jc, X) измеримы (по Бохнеру), причем Fx (/,
jc, X) удовлетворяет условию Липшица с постоянной q (/), суммируемой на
[0, Г], а оператор F2 (tt х, К) непрерывен по jc и его значения лежат в
компактном множестве.
Заканчивая настоящий параграф, посвященный, в основном, развитию
и обобщению первой основной теоремы Н. Н. Боголюбова, заметим, что эта
классическая теорема об усреднении на бесконечном промежутке времени
(вторая основная теорема) носит характер теоремы о неявных функциях,
однако из стандартных теорем о неявных функциях она не вытекает ввиду
имеющихся в них существенных ограничений о гладкости соответствующих
операторов. В связи с этим представляет интерес полученная недавно
теорема, в которой предложено новое обобщение теоремы о неявных функциях
[62]. Из этой теоремы немедленно вытекает теорема Н. Н. Боголюбова об
усреднении на бесконечном интервале при более общих условиях, чем
приведенные в § 7.
§30
УСРЕДНЕНИЕ И «УКОРОЧЕНИЕ»
СЧЕТНОЙ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЙ В СТАНДАРТНОЙ ФОРМЕ
Остановимся на одном из методов построения приближенных решений
счетной системы обыкновенных дифференциальных уравнений типа (27.12),
в основу которого положено не только усреднение правых частей по явно
входящему времени, но и так называемое «укорочение» системы,
заключающееся в том, что вместо бесконечной системы рассматривается некоторая
конечная система с п неизвестными.
Рассмотрим одновременно со счетной системой в стандартной форме
%- = еХ.(<. *и *».•.> (* = 1. 2, ...) (30.1)
так называемую «укороченную» систему
^ = %Xk(U *!, *„ ... , *„, 0, 0, ... , 0) (к = 1, 2, ... , /г), (30.2)
получающуюся из исходной системы (30.1), если положить в ней равными
нулю все искомые функции, начиная с (п + 1)-й [154, 591.
Предположим, что правые части системы дифференциальных уравнений
(30.1) в некоторой области
0</<7, \xk\<R (£=1,2,...) * (30.3)
удовлетворяют следующим условиям.
1. Функции Хк (/, xlt jc2, ...) (k = 1, 2, ...) непрерывны по совокупности
своих переменных t, xlt х2, ... .
2. Функции Xk (/, xl9 x2, ...) удовлетворяют усиленному условию
Коти — Липшица
*Xk(tt *i> x2* • • • » хт— Ь Xm, *m-fl» . . .) —
— Xk(t, xv х2, ... 9 xm-i, x'm, x"m+u ...) | < emAf/, (30.4)
где (tt xlt х2, . •. , хт— 1, хт, xm+i,...) и (tt xit х2У •.. , #т—ь Хщ* хт+\,...) —
какие-либо две точки, принадлежащие области (30.3), ает->-0 при т -+ оо и
Ml = SUp[\x'm — Xml \ Xm+\ — Хм+\ |, . . .].
25* 387
Заметим, что выполнение условия 2 влечет за собой выполнение
обычного условия Коши — Липшица
\Xk(t, xlxi ...) — Xk(t, x'uxl ...)|<4(/)At>,
где A (f) — некоторая непрерывная функция на интервале 0 < / < 7\
точки (/, xv xv ...) и (/, х\у xv ...) принадлежат области (30.3), а
Ли = sup[|*i' — x\\, |*2— xl\f ...].
3. При любом /£ [0, Т] и при хх — х2 = ... = 0 выполняются
неравенства
|Xfe(;,0,0, ...)|<А(0,
где В (f) — некоторая непрерывная на интервале 10,Т] функция.
Покажем, что при этих предположениях решения усредненной
«укороченной» системы со сколь угодно большой точностью будут
аппроксимировать решения исходной системы уравнений (30.1) на достаточно большом, но
все же конечном интервале времени.
Найдем оценку разности между решением исходной системы (30.1) и
«укороченной» системы (30.2).
Рассмотрим последовательность функций
XX(t, 8), Х2(/, 8),
при 0 <: 8 <: 80 равностепенно непрерывных на интервале t£ [0, Т] и
удовлетворяющих условиям
\xk(t9*)\<R (Л =1.2, ...)•
Очевидно, что функции
**('.*i(M).*i('.e). •••) (Л=1,2, ...)
будут непрерывны на интервале / £ [0, Т\ [154].
Допустим, далее, что хк (*, е)— решение системы (30.1), проходящее
через точку (/0, х°, х%, ...), принадлежащую области (30.3).
Положим
*o = sup[|*i|, |*2|, ...1. (30.5)
X(t, 8) = SUp[|x1(/, 8)1, \xt(t, 8)|, ...].
Обозначим о произвольно взятый отрезок длины б, удовлетворяющий
условию / £ а, а £ [0, Т].
Согласно условиям 2—3, в любой точке области (30.3) выполняются
неравенства
|Х*С *i.*i. ^^\<A(t)supl\xx(t)l\x2(t)l ..-] + Д(0. (30.6)
Поэтому
х(/, е)<х0 + е \ [А(/)х (/, в) + Д(01 dt. (30.7)
Отсюда, полагая / >• /0, находим
Х(«,8)<У(/,8), (30.8)
где v (/, е) — решение уравнения
v (/, е) = х0 + е \ [Л (/) о (/, е) + В (t)] dt. (30.9)
Пусть А = max A (f) и В = max В (f) на отрезке а. Из (30.8) и (30.9)
находим неравенство
x(t. *)<х0еш + 4 (ееЛ6- 1), (30.10)
справедливое при любом значении / £ а.
Допустим, что usn = usn (t, e) (s = 1, 2, ..., /г) — решения «укороченной»
системы (30.2), удовлетворяющие начальному условию usn (t0) = х°, при этом
и^ = 0 при s = п + 1, п + 2,... .
Нетрудно убедиться, что функции usn (/, е) удовлетворяют неравенствам
Iи5п(/, е)|< V46 + А(*8Лб- 1) = Y (30.11)
при любых s, л и любом / £ а и что выполняется неравенство
|usn(t + Д/, е) — usn(/, е)|<(Лу + В)|М|. (30.12)
Рассмотрим последовательность чисел л1э п2, ... -* оо.
Соответствующие этим числам последовательности функций
usni (/, е), usnt (/, 8), ... , и5Лр (/,е) (s = 1, 2, ...) (30.13)
удовлетворяют неравенствам (30.11); следовательно, они равномерно
ограничены и равностепенно непрерывны на отрезке а, и, согласно теореме
Арцела, из этих последовательностей можно выделить
подпоследовательность
ttlai(*.8), U]a,(t,e), ..., Hiart(/, 8), . ..,
равномерно сходящуюся на отрезке а.
Из последовательности
U2at (<, 8), U2*2 (/, 8), ... 9 U2an(tt 8), ...
можно выделить подпоследовательность
"20, (/, 8), И232 (*, 8), . . . , U2fin(t, 8),
также равномерно сходящуюся на отрезке о.
Из последовательности
Изе, (<> 8), и3р2(/, е), ... , tt3pn(/, е), ...
можно выделить подпоследовательность
U3yi(t> 8)> U3yt(t, 8), . . . , И3-л(/, 8),
которая также равномерно сходится на отрезке а, и т. д.
Продолжая этот процесс, получаем счетное множество бесконечных
последовательностей
UiaA** e)> U\at(ty 8), . . . , U\an(t, 8) . . . ,
W2pt (t, 8), И2р, (/, 8), . . . , W2pn(/, 8) . . . , (30.14)
"3Vi (<» 8). ИЗу, (*, 8), . . . , W3V/i(/, 8)
389
каждая из которых равномерно сходится на отрезке а. С помощью (30.14)
составим последовательности
u\at(t, e), Uib(t, е), uiyt(t> е), •.. , ti\6n(t, е), .. . ,
"2аЛ^, б), U2b(t9 8), U2y9(t, 6), .... U26n(t, 8), . . . ,
ИЗаД*, е). "ЗЭ,(<» 6), Uzyt(t, 8), . . . , W3ftn(/, 8), .... (30.15)
us*t (t, 8), uS£t(tt 8), aSYa(/, 8), ... , as6n(/, e)
Каждая бесконечная последовательность
Usa.it, 8), HS3,(<» 8), Usyt(tt 8) Ws6/I (/, 8), . . . (S = 1, 2, . . .) (30.16)
равномерно сходится на отрезке а, так как если в (30.16) отбросить некоторое
конечное число членов, то получим подпоследовательность, содержащуюся
в равномерно сходящейся последовательности (30.14).
Обозначим пределы последовательностей (30.16) us (/, е):
us (t, e) = 6J™ usbn it, 8) («=1,2....). (30.17)
Очевидно, что функции us it, е) (s = 1, 2, ...) удовлетворяют
неравенствам (30.11) и (30.12) и, следовательно, являются равностепенно
непрерывными на отрезке а.
Обозначим последовательности (30.16)
<Psi (*. е), ф$2(/, е), ... , ф$я(/, е), ... (s = 1, 2, ...)
и при фиксированных s рассмотрим тождества
ХкЦ, ф1„(/, 8), q>2nit, 8), . . .) — ХкЦ, игЦ, 8), U2it, 8), . . .) =
= ХкЦ, ф1„(/, 8), ф2л(Л 8), . . .) — ХЛ(/, Ut(t9 8), И2(/, 8), . . . ,
Ut(t, 8), ф|+1.я(<, 8), ф/+2,/,(/, 8), . . .) +
+ Xk{t9 U±itf 8), U2it, 8), .... Wz(/, 8), ф/+1.я(^ 8), ф/+2./,(^ 8), . . .) —
-Xkittulit9B)tu2it>e)t ...). (30.18)
Зафиксируем теперь I; на основании условий (30.4) получим
\ХкЦ, ф1*(<>е), Ф2/,(Л 8), . ..) —
—Х*('. я, (/, е), a2(/, e), ... , ut(t% e), Ф/+1,Л(/, 8), ф/+2.«(/, е), .. .)|<
<y4sup[|W!(/, 8) — ф,л(/, 8)|, |И2(Л е) —ф2«(^, 8)|, ...
.... |^(/,е)-Ф/п(/,8)|, ...]. (30.19)
Пусть т) >0—сколь угодно малое наперед заданное число. Тогда, согласно
выражению (30.17), всегда найдется такое Л/, что для п > N будет выполняться
неравенство
supHM/, е) — Фь(Л е)|, \и2(*, 8)— ф2п(/, 8)|, ...
.... 1М<,в)-ф|я(/,в)|, ...]< JL, (30.20)
390
и, следовательно, неравенство (30.19) можно записать в виде
\Xk(t> 4>m(t, <*), ф2п(/, е), ...) — Xk(t, ux(t, e), u2(tf г), ...
...9ut(t9 е), ф/+1,п(/, 8), ф/+2рЯ(/, 8),...)|< -£•. (30.21)
На основании условий (30.4) и (30.Д2) имеем
\Xk(t, Ux(t, 8), U2(t, 8), .... Ut(tt 8), ф/+1,Л(/, 8), ф/+2,/,(/, 8), .. .) —
-Xk(/, их(/, 8), и2(/, e), ...)|<fe, (30.22)
при любом t £ а, где А — некоторая положительная постоянная.
Так как при / -+ со е, -* 0, то для любого т) -► 0 можно найти такое
#i = Л^1 (Л)> что
8* < -ЗГ при ' > Nl>
и, следовательно, неравенство (30.22) примет вид
\Xk(ty Ux(t, 8), U2(tt 8), . . . , a,(<, 8), ф|+1.я(*; 8), ф/+2.„(*, 8), . . .) —
- X* (/, ttl (/, 8), ut (/, 8), ...) |< -J- . (30.23)
Принимая во внимание неравенства (30.21) и (30.23) и мажорируя
выражения (30.18), получаем неравенство
I Xk (t, ф|я (t, 8), Ф2л (/, е), ...) - Xk (/, их (t, е), и2 (/, е), ...) |< л (30.24)
при п > N и любом / £ а, из которого следует, что при любом / £ а
выполняется соотношение
- *
lim \ Xk(t, ф1«(/, е), ф2/1(*. е), .. .)dt =
= \ ** (*. "i V. в), и2 (/, е), ...) dt (k = 1, 2, ...). (30.25)
Следовательно, функция us (/, e) удовлетворяет уравнениям
t
U5 (/, 8) = X? + 8 J X$ (/, Hx (/, 8), И2 (/, 8), . . .) dt (S = 1, 2, . . .). (30.26)
Следовательно,
us(t, e) = xs(*. e),
т. е. при любом фиксированном / для любого заданного сколь угодно малого
т| > 0 найдется такое достаточно большое число N2 = N2 (т|), что при п > N2
max [ | хх (/, е) — ищ (/, 8) |, | х2 (t, е) — и2п (*, е) |, ...
..., \xl(t,B) — uin(t,B)\]<r\. (30.27)
Очевидно, что выбор числа N2 не зависит от е и при п -* оо usn (t, e)
(s = 1, 2, ...) стремятся к пределу xs (/, е) равномерно относительно е.
Таким образом, при выполнении условий 1—3 решение «укороченной»
системы (30.2) удовлетворяет соотношениям
Mmusn(t, 8) = xs(*, e), (30.28)
Л-*оо
391
где xs (/, е) (s = 1, 2, ...) — решения исходной счетной системы (30.1), при
этом выполняется условие (30.27).
Предположим, далее, что для правых частей «укороченных» уравнений
(30.2) равномерно в области (30.3) выполняется условие
т
lim -=■ \ Xk(t, xlt x2, ..., xnf 0, 0, ...) dt = X°k (xlt x2t ... 9 хПУ 0, 0, ...),
T-+CO ' g
(30.29)
и рассмотрим усредненную «укороченную» систему, соответствующую
системе (30.2),
-%- = еХ2(!1э|2, .... ЬрО.О, ...) (6=1,2, ..., п). (30.30)
Согласно основной теореме Н. Н. Боголюбова, если £Л = lk (/, е) (k =
= 1, 2, ..., п) — решение усредненной системы уравнений (30.30), лежащее
со своей р-окрестностью в области (30.3), то при выполнении определенных
условий (которые в данном случае выполнены) любым сколь угодно малым
р и т) и сколь угодно большому L можно сопоставить такое положительное
е0, что для 0 <: е <; е0 в интервале 0< / <; — будут выполняться нера-
венства
\uSn(t, e)-U'. е)1<П (s=l,2, ... , л), (30.31)
где Usn (ty e) — решения «укороченной» системы (30.2).
Рассматривая точные решения счетной системы (30.1) xs = xs (/, е)
(s = 1,2, ...), имеем
х* С 8) — Is (f> 8) = *s С. 8) — и*п (t, e) + usn (/, 8) — ls (tt e).
Отсюда находим
1*.С e)~U'. e)|<|x$(/, e)-usn(t, e)| + \usn(tf в) —Ь(Л е)|,
или, согласно неравенствам (30.27) и (30.31), получим
\xs(t,*)-h(t,*)\<2r\. (30.32)
Таким образом, решения исходной точной системы (30.1) на конечном
временном интервале можем с успехом аппроксимировать не решениями
укороченной системы вида (30.2), а решениями усредненной «укороченной»
системы (30.30). Этот прием существенно облегчает рассмотрение и
фактическое построение приближенных решений для уравнений в частных
производных, рассматривавшихся в § 27.
§31
УСРЕДНЕНИЕ В СИСТЕМАХ ИНТЕГРО-
ДИФФЕРЕНЦИАЛЬНЫХ
И ИНТЕГРАЛЬНЫХ УРАВНЕНИИ
•
1. Предварительные замечания. При решении многих
задач часто приходим к рассмотрению интегральных и
интегро-дифференциальных уравнений, содержащих малый параметр.
Для таких систем возможны различные варианты усреднения в
зависимости от того, по каким переменным ведется усреднение. Поэтому в общем
случае, как будет показано ниже, одной системе интегро-дифференциальных
уравнений можно сопоставить несколько различных систем усредненных
уравнений.
Исходя из основополагающих результатов метода усреднения, можно
разработать схему усреднения для интегро-дифференциальных и
интегральных уравнений и доказать теоремы об оценках на конечном интервале
времени. Это во многих случаях позволяет значительно упростить
рассматриваемую задачу. Ниже остановимся на некоторых предпосылках и схеме
усреднения для указанных уравнений, предложенной А. Н. Филатовым
[1821.
2. Интегро-дифференциальное уравнение в
стандартной форме. Рассмотрим нелинейное
интегро-дифференциальное уравнение в стандартной форме
-$- = в/(/, х, J Ф(/, s, x(s))ds) , (31.1)
где е > 0 — малый параметр, х — n-мерный вектор, f (/, jc, у) и q> (/, s, x) —
соответственно я-мерная и m-мерная вектор-функции, определенные и
непрерывные для всех / и s из интервала [0, со ) и всех х £ £„, у £ Ет, где
Еп и Ет — евклидовы пространства размерностей пит.
Уравнению (31.1) сопоставим усредненное уравнение, которое получим
следующим образом. Допустим, что
J <p(/,st *)&=♦(/,*), (31.2)
о
393
где интеграл вычисляется по явно входящей переменной s (/ и х
рассматриваются при этом как параметры). Тогда получим
fit, х, j Ф(/, s, x)ds) =/(/, х, $V, x)) = F{t, x).
Усредним функцию F (tf x) по переменной /:
lim ±]F(t, x)(U = \\т^±\fU (31.3)
Систему дифференциальных уравнений
-§- = «/•©. (3i.4)
где /0(g) определяется выражением (31.3), будем называть усредненной по
отношению к интегро-дифференциальной системе (31.1).
Как видим, процедура усреднения в интегро-дифференциальной системе
такова, что получаемое усредненное уравнение уже дифференциальное
(притом с правой частью, не зависящей от времени t), исследование
которого значительно проще исследования исходной интегро-дифференциальной
системы.
Однако могут представиться и другие случаи.
Пусть для системы (31.1) существуют пределы
т
lim 4" J / {t, x, y)dt = f0(x, у),
T-юо l jjf
T (31.5)
lim -i- f Ф С s9x)dt*= <#> (s, л).
Г-оо ' g
Тогда системе (31.1) можно сопоставить усредненную систему
ТГ = efoU J Ч*0^ EW)*J • <31-6>
которая, вообще говоря, проще системы (31.1), но также интегро-дифферен-
циальная.
Допустим, что для системы (31.1) существуют пределы
т
(31.7)
Г-оо / j(
' s
lim ^ J ф(М,д&* = ф^(<,*).
8-оо * QJ
Тогда системе (31.1) можно сопоставить усредненную систему
-§" = е'° (б. 1 4>W 6 (s)) & J • (31.8)
которая тоже интегро-дифференциальная.
394
Для всех трех случаев доказывается основная теорема об оценке
разности между решением точной системы (31.1) и решением одного из
вариантов усредненной системы (31.4), (31.6) или (31.8).
Приведем формулировку теоремы о близости решений точных (31.1) и
усредненных (31.4) уравнений.
Теорема [183]. Пусть функции f (/, х, у) и <р (/, s, x) удовлетворяют
следующим условиям:
1) для некоторой области D можно иказать такие постоянные М, N,
А,, |л, что для всех t > 0, s > 0 и для любых почек jc, jc', jc" из этой области
и любых у, у', у" из Ет будут выполняться неравенства
\f(ttx,y)\<M, |/(/,jc',^>-/(/,jcw,(/")I<^I^-^I + (a|^-^|,
t
|ф(*, s, *)|<#Фо(0. — j4(s)ds-*0, t-+oo, ^3I 9j
^(t) = t%(t)\
2) равномерно по отношению к х в области D существует предел (31.3),
для которого
\fo(xf)-f0(x")\<a\x'-xn\9 а = const. (31.10)
Тогда любому сколь угодно малому т) > 0 и сколь угодно большому L > 0
можно сопоставить такое е0 > 0, что при 0 < е < г0в интервале 0 < t < —
будет выполняться неравенство
1*(0-Е(0|<П. (31.11)
где 1(f) — решение уравнения (31.4), определенное в интервале 0 < / < со и
лежащее в области D вместе со своей р-окрестностью; х (f) — решение
уравнения (31.1), совпадающее с I (f) при t = 0.
Сформулированная теорема доказывается аналогично первой основной
теореме метода усреднения. Заметим, что как показано в [1851, эта теорема
может быть доказана и при некоторых условиях, отличных от неравенства
(31.9).
3. Частный случай системы (31.1). Рассмотрим интегро-
дифференциальное уравнение
-^- = еХ(/, jc) + e j*Z(tt s, x(s))ds, (31.12)
6
где е > 0 — малый параметр, jc — л-мерный вектор, X (/, х), Z (t, s, x (s)) —
вещественные вектор-функции, определенные и непрерывные для всех U
s£l0, оо)ихе£„.
Предположим, что для вектор-функций, входящих в правую часть
системы (31.12), существуют пределы
т
lim-±r\x(t,x)dt = X0(x)9
Т-ьсо ' А
(31.13)
lim _L J Z (/, s,x)ds = Z0 (t, x).
s-»°» s о
395
Тогда в качестве усредненной системы, соответствующей системе (31.12),
можем рассмотреть интегро-дифференциальную систему
-^Г = *Х0® + г$г0У,т)<18. (31.14)
о
Допустим, далее, что для вектор-функции Z (/, jc, s) существует среднее
значение не по s, как в условии (31.13), а по /, т. е. выполняется условие
г
lim -^г f Z(t, jc, s)dt =Z0,(jc, s). (31.15)
T-+oo g
Тогда вместо усредненного уравнения (31.14) получим усредненное ин-
тегро-дифференциальное уравнение
-§- = eX,© + eJz0i(6(s).s)ds, (31.16)
о
сводящееся к системе дифференциальных уравнений
dt =4.
(31.17)
или к уравнению
Ц- = е^Г-4 + е2<"&<>, (31-18)
простой заменой переменных приводящееся к системе уравнений в
стандартной форме
^ -п/7 № а , и **о(Й g) (31Л9)
где |л = е1/*.
Если для системы (31.12) в каждой точке области D существует предел
Нт -у j Х(/, х) + J Z(/, s, x)ds \dt = F0(x), (31.20)
то этой системе можем сопоставить усредненную систему обыкновенных
автономных дифференциальных уравнений f
4-=8fo(D- (31.21)
Для иллюстрации последней процедуры приведем простенький пример.
Рассмотрим уравнение
л t
-£- = 8— -^8^(1 + X) + 8 [ e"^(s)dS,
6 (31.22)
х(0)= 1.
396
Так как для уравнения (31.22) существует предел (31.20), равный е, то
усредненное уравнение будет иметь вид
Л ' (31.23)
6(0) = 1.
Интегрируя уравнение (31.23), находим решение
1(0=1+8/, (31.24)
совпадающее с точным решением исходного уравнения х (f) = 1 + е/.
4. Интегро-дифференциальные уравнения,
содержащие медленные и быстрые переменные.
Рассмотрим систему интегро-дифференциальных уравнений, содержащую
медленные и быстрые переменные,
~W = Eh \Ux,y, Jcpxtf, s,x(s), у(s))ds\,
\ ° ' (31.25)
-J- = Ы *> *. У> f <PtC s, *(s), y(s))& J ,
где e — малый положительный параметр, х и у — соответственно п-и т-
мерные векторы, /х (/, х, у, и), /2 (/, х, у, и), фх (f, s, х, у), q>2 (/, s, jc, у) —
вещественные вектор-функции, определенные и непрерывные для всех t,
s £ Ю, со) и всех х£Еп,у£Ет,и£ Еп v £ Eq.
Для исследования системы (31.25) с успехом может быть применен
вариант метода усреднения, развитый в работе 128].
При е = 0 система (31.25) вырождается и, следовательно, имеем
х = const,
/ t v (31.26)
-§-= /Л'.*.», .(ф2(<>«. xfy(s))ds\.
Предположим, что решение системы (31.26) известно и имеет вид
х = const,
У = УУ,х,с), (31.27)
г|> (0, х, с) = с,
где с £ Еп — произвольная постоянная.
Тогда, следуя изложенному в § 12, рассмотрим функцию / на траектории
(31.27): / t ч
/I/, х, г|>(/, х, с), j ф(/, s, х, t(5, х, c))dsl. (31.28)
При усреднении функции (31.28) вдоль траектории (31.27), так же, как
и в предыдущем случае, возможны три варианта. Приведем здесь лишь один
из них. Пусть существуют пределы
т
Urn 4" [ fi (t, xt ф (t, х, с), u)dt = f0 (x, и),
Т-+СО ft
т
lim -7jr \ фх(/, s, x, \|)(s, x, c))dt = q>0(s, x).
°T (31.29)
397
Системе (31.25) можем сопоставить усредненное уравнение
ТГ = 8/о(^ j <М*. l(s))ds) . (31.30)
Для двух других вариантов мы можем сопоставить системе (31.25) еще
два вида усредненных уравнений и доказать теоремы об оценках разности,
являющиеся обобщением соответствующей теоремы В. М. Волосова. Однако
на этом вопросе останавливаться не будем, отсылая интересующихся к
специальной литературе.
5. Интегро-дифференциальные уравнения
типа Фредгольма. Перейдем к вопросу о распространении метода
усреднения на интегро-дифференциальные уравнения типа Фредгольма.
Рассмотрим уравнение
^=еИ/,х, $<p(t,s9x(s))ds)9 (31.31)
где* — я-мерный вектор, f (/, jc, у) — n-мерная вещественная вектор-функция,
Ф (/, s, х) — m-мерная вещественная вектор-функция, определенные для
всех t > 0, s > 0, х £ Е„, у £ Ет.
Для уравнения (31.31) также возможны три варианта усреднения.
Остановимся лишь на одном. Допустим, что существуют пределы
т
Ит 4- f/С х> y)dt=f0(x, у), (31.32)
Т-юо ' J
Т
lim 4" \ Ф (<> s,x)dt = Фо (s, х). (31.33)
Т-+оо 0
Системе (31.31) можно сопоставить усредненную систему
-§-=в/в(б.|ф(в.6М)л). (31.34)
Для системы интегро-дифференциальных уравнений (31.31), как и для
рассмотренных выше уравнений типа Вольтерра, могут быть легко доказаны
различные теоремы, обобщающие первую основную теорему Н. Н.
Боголюбова, в зависимости от условий, налагаемых на функции, находящиеся в
правой части уравнения (31.31).
6. Пример: колебания маятника с полостью,
заполненной вязкой жидкостью. В качестве иллюстрации
приведем пример колебания физического маятника, ось подвеса которого
совершает вертикальные гармонические колебания с малой амплитудой а
и частотой со. Предположим, что в маятнике содержится осесимметричная
полость с вязкой жидкостью.
Колебания такого маятника описываются интегро-дифференциальным
уравнением [89]
t
•ж + я>^1-т^^ + ^(1"6со8<о0е = 0* (3135)
где введены обозначения
э' ' (31.36)
б=—•
Af — масса жидкости, Мг — масса тела без жидкости^/ — момент инерции
маятника без жидкости, I и 1Х — соответственно расстояния от оси подвеса
до центра масс полости и до центра масс тела, g— ускорение силы тяжести,
р — плотность жидкости, Pi и р2 — координаты полюсов полости.
Произведя замену переменных
ъ Г О) (О
уравнение (31.35) приведем к виду
SW-
*е(1-х) dJL + 6* (1 - 8cos2%)6=0. (31.37)
и
При v = 0, т. е. в случае идеальной жидкости, е = 0 и мы получаем
уравнение Матье, для которого, как известно, при определенных
соотношениях между параметрами k2 и б нижнее положение равновесия маятника
может оказаться неустойчивым. В плоскости параметров k2, б существуют
зоны неустойчивости. Наличие вязкости приводит к деформации и сдвигу
этих зон. Для исследования поведения системы в окрестности первой зоны,
соответствующей основному параметрическому резонансу и расположенной
в окрестности значений параметра k2 = 1, совершим замену k2 = 1 + Y»
где у — некоторая малая величина.
Тогда с точностью до величин второго порядка малости получим
уравнение
-g- + 2e| ^ГТ) -^ + (l + Y-6cos21)e=0. (31.38)
О
в котором е, y и б — величины малые. Перенося малые члены в правую часть,
уравнение (31.38) можно записать в виде
-^+e = (6cos2|-Y)6-2e|j!^L-^. (31.39)
О
Для приведения уравнения (31.39) к стандартному виду введем новые
переменные а и Ъ согласно формулам
0 = acos£+ Ъ sin E,
dB • * Л * (31-4°)
"ЗГ =—asmfc+ftcosg.
Тогда с точностью до величин первого порядка малости относительно
малых параметров е, б, у получим систему уравнений относительно новых
399
переменных а и b
da
-дг = — (6cos2£ — v)(flcosg+ 6 sing) sing —
I
_2esingf[acos(g —x)+ftsin(g —x)]-^,
о V пт
db
-щ- = (6 cos 2£ — у) (я cos I + b si n £) cos g +
(31.41)
+ 2ecos£l [acos(£-^x) + 6sin(£ — t)]-|L-.
о V лт
Усредняя правые части системы (31.41) по £, получаем систему
уравнений первого приближения
da е - , Г/ v в \ , б
-зг = --" + [Нг- -) + -?
4--[(+-*)-4]-—н
Характеристическое уравнение этой системы
1а + -г; -(-f—f)-
ft.
т)-т- а+т-
= 0.
Отсюда находим
Ol,2 =
-e-fc j/^-ft-e)*
(31.42)
(31.43)
и, следовательно, для границ области неустойчивости получаем соотношение
(2е)2
(у-в)2
= 1.
(31.44)
Это — уравнение гиперболы в плоскости параметров у, 8 с асимптотами
б = 2 |y — е|. Оно и характеризует смещение границы области
неустойчивости и величину смещения в зависимости от вязкости жидкости.
7. Усреднение в системах интегральных
уравнений. Остановимся на некоторых соображениях об усреднении в
системах интегральных уравнений.
Рассмотрим систему нелинейных интегральных уравнений
*(/) = ef(0 + e{r(/fs,*(s))&f
(31.45)
где е — малый положительный параметр, х — я-мерный вектор, / (/) и
Г (/, s, х) — я-мерные вещественные вектор-функции, определенные и
непрерывные для всех / > 0, s > 0 и х £ Еп.
400
Дифференцируя систему (31.45) по /, находим
-Ту- = 8 4" + 8Г('' '■ *> + 8 \ WTV> s' *<5»&' <ЗМ6)
о
л;(0) = е/(0). (31.47)
Решение уравнения (31.46), удовлетворяющее начальному условию
(31.47), очевидно, будет решением и уравнения (31.45).
Для сокращения выкладок введем обозначения:
F(t,x)=-^- + T(ttt,x),
Ф(Лв,х) = -|-.Г(<.в,х).
(31.48)
(31.49)
Уравнение (31.45) примет вид
t
-§- = zF(t, х) + ef Ф(/, s, *(s))ds,
о
х(0) = е/(0).
К уравнению (31.49) можно применить различные варианты усреднения.
Пусть, например, существуют пределы
г
lirni-i- lF(t,x)dt = F0(x),
°r (31.50)
\im ^r\0(t,s,x)dt = 09(s,x).
г-°° о
Тогда уравнению (31.41) можно сопоставить усредненное
интегро-дифференциальное уравнение
-§- = eF0(!) + efa>0(s,S(s))ds,
t(0)=e/(0), ° (31'51)
сводящееся к дифференциальному уравнению
Ж _ е —^| аГ + ефо^> w»
* I <зь52>
|(0) = е/(0), -f- =eF0(e/(0)).
Для уравнений типа (31.45) также можно доказать различные теоремы,
обобщающие теоремы Н. Н. Боголюбова. Так, например, для интегрального
уравнения (31.45) с начальным условием (31.47) при f (f) = 0 справедлива
следующая теорема.
Теорема [1831. Пусть в уравнении (31.45) функция Г (/, s, х) та-
кова, что функции Г (/, /, х) = F (/, х) и дГ (^ *' х) = Ф (/, s, x)
удовлетворяют следующим условиям:
26 246 401
1
1) для некоторой ограниченной области D можно указать такие
постоянные Mf N, к, ц и такую положительную функцию О (/, s), что для всех
t > 0, s > 0 и для любых точек х9 x\ x" £D будут выполняться
неравенства
\F(t9x)\<M9 \F(t,x')-F(t9xn)\^\x'-x"\t
\<b(t9s9x') — <l>(t9s9x')\<b(t9s)\x' — x'\9
t t
J0(/,s)ds = *0(/), -f foo(0#-*0, Uoo, Фв(0<ЛГ;
о о
2) решение (31.45) ограничено;
3) в каждой точкеx£D существует предел
lim-i-I
F(t,x)+[0(t,s,^ds
dt = F0(x) + <D0(x).
Тогда, если |(/) —решение усредненного уравнения
-§—e[F0© + O.(E)l, (31.53)
определенное в интервале 0 < К °°" лежащее в области D вместе со своей
^-окрестностью, то для любого сколь угодно малого х\ > 0 и сколь угодью
большого L > 0 можно указать такое е0 > 0, что при О < е < е0 на
интервале 0 < / < — будет выполняться неравенство
1*(0-6(0|.
где х (f) — решение интегрального уравнения (31.45).
В заключение заметим, что нетрудно распространить метод усреднения
и на интегральные уравнения Фредгольма.
8. Дальнейшее развитие метода усреднения
применительно к различным классам интегро-
дифференциальных уравнений. В последнее время метод
усреднения распространен также на более сложные нелинейные интегро-
дифференциальные и интегральные уравнения, содержащие малый параметр:
рассмотрены уравнения, не разрешенные относительно производных,
различные типы интегро-дифференциальных уравнений с запаздыванием и др.,
для которых обобщена теорема Н. Н. Боголюбова (см., например, [186, 175,
176, 941).
Так, рассмотрена нелинейная система
t
*L = ef(t9x (0, х (/), f Ф (/, s, х (s), х (s)) &), (31.54)
6
где х, /, ф — /г-мерные векторы евклидова пространства ЕП9 е>0 — малый
параметр.
Предполагая существование среднего значения
lim ^\f[t9x9y9^(t9s9x9y)ds)dt^f0(x9y)9 (31.55)
г-°° о \ о /
системе (31.54), можно сопоставить усредненную систему
-§- = */<>& I). (ЗЬ56)
402
Рассмотрим систему
dx
%r = е/(/, х, у, х, у) + е) <р(/, s, х, у, х, y)ds,
at Q
§- = g(', х, у, х, y)+jjty(t, s, х, у, х, y)ds
(31.57)
и предположим, что существуют пределы
т
(31.58)
Ит-Jr j/(f, *, р(<, jc, x, #0), .v, -^|^)d/ = /0(^ x),
"*°° о
г
&т !»('• s> x>p{s' x> *•%)' *• ap(s^;^o))^ = ф0(5, x, x),
0
гдер (t, x, x, y0) — общее решение вырожденной системы
х = const, x = const,
t
-^r= *('■ *• #' *• У) + J♦('. s» *. #» *• У)ds-
0
Системе уравнений (31.57) можно сопоставить усредненное интегро-
дифференциальное уравнение
t
-$" = 8/о& В + 8 J Фо(*> 6(e). 6(s»Л. (31.59)
о
Рассмотрены также случаи, когда правые части уравнений (31.54) или
(31.57) содержат запаздывание. Так, например, в статье [1751 усредняется
интегро-дифференциальное уравнение с запаздыванием
^- = e/(f, x(t), x(t), x(t-a)t J Ф(/, s, x(s), x(s)t x(s — a))ds) (31.60)
о
с начальными условиями
*(<) = +(0 при /£[-0,01,
*(0) = г|>(0) = *о>
где а = О — постоянное запаздывание, г|э (/) — заданная непрерывная
вектор-функция.
Остановимся еще на процедуре усреднения для уравнения вида
t
^Р~ = eX(t, ж(Q, i(0, *(/-A), *(/- А), {ф(/, s,
О
*(s), at(s), x(s —A), x(s— A)W (31.61)
Обозначим, как и обычно, через М оператор усреднения по явно входя-
t
щему времени /.
26* 403
или
или
Пусть для системы (31.61) выполняются условия:
М {X(tt х, у, и, и, w)) = Х0(х, у, и, vt w),
М {ф(/, S, X, у, U, V)} = ф01 (S, X, (/, U, U),
М {Х(/, х, #, a, v, w)} = Х0(*, у, и, v, w),
t
М {q>(/, s, х, |/, и, v)} = ф02(«, х, #, и, v),
t
М {X(t, х, у, и, и, ty(tt л, £/, и, i;))} = Х01(х, у, и, и),
' ♦ (<, х, у, и, v) = j ф(/, s, х, (/, и, y)ds.
(31.62)
(31.63)
(31.64)
о
Тогда системе (31.61) можно сопоставить следующие усредненные
уравнения:
для условия (31.62) —
4т- = е*о (Б (0. Б (0.5 С - А). Б С - А), (Фо1 (*. Б (s). Б W.
6
g(s-A)fg(s-A)) <fe), (31.65)
при выполнении условия (31.63) —
4г = еХ0 (| (/), Ё (0. 6 (' ~ Д). I (< - A), f Фог (е. I (s), 6 (s).
6
g(s-A),6(s-A))&) (31.66)
и в случае условия (31.64) —
4г = eXoi (Б (О, Б (О, Б (< - А). Б « - А))- (31.67)
При этом показано, что точность сопоставляемых усредненных
уравнений не нарушается, если в них положить А = 0, | = 0.
Во многих задачах прикладного характера ядра интегро-дифференци-
альных уравнений таковы ,что интеграл, стоящий в правой части системы
(31.61), может быть вычислен в элементарных или специальных функциях:
t
J ф(/, s, х, у, и, v)ds = ty(t, х, у, u,v). (31.68)
о
Вводя обозначение
М [X(t, х, у, и, v, ♦(*, х, у, и, v))} = Х(х, у, и, v), (31.69)
системе (31.61) можем сопоставить усредненную систему [176]
4г - ^«Ю' 6(0. Б С-А), Б С-А)). (31.70)
404
Аналогичный прием применен также и для системы интегро-дифферен-
циальных уравнений с запаздыванием, описывающих медленные и
быстрые движения [1761.
Остановимся еще на одном варианте усреднения в интегро-дифферен-
циальных уравнениях, принадлежащем А. Н. Филатову и Л. И. Талипо-
вой (см. «Дифференциальные уравнения», V, № 5, 1969, стр. 958—961).
Возвратимся к рассмотрению интегро-дифференциального уравнения
в стандартной форме (30.1)
iji = KfU x, jq>(/, stx(s))ds) (30.71)
при условиях, приведенных на стр. 393. Рассмотренная в п. 2 настоящего
параграфа процедура усреднения связана с необходимостью вычисления
интеграла (30.2). Однако в прикладных задачах часто встречаются случаи,
когда в элементарных или специальных функциях вычисляется интеграл вида
J ф (/, stx)ds = фх (/, х). (30.72)
о
В этом случае целесообразно пользоваться следующей схемой
усреднения. После вычисления интеграла (30.72) находим среднее функции
/ (*, х, ф (/, х)) по t:
т
lim i f / (/, jc, ф1 (/, х)) dt = fx (x) (30.73)
и ставим в соответствие интегро-дифференциальному уравнению (30.71)
усредненное уравнение вида
# = в/х(|). (30.74)
Для указанной схемы усреднения при определенных условиях,
налагаемых на функции / (/, х, у) и ф (/, s, x)f также доказывается теорема о
малости разности между решениями системы (30.71) и соответствующей ей
усредненной системы (30.74) на конечном интервале времени 0< / < Lz~K
§32
УСРЕДНЕНИЕ
В МНОГОЧАСТОТНЫХ СИСТЕМАХ
1. Постановка задачи. Основные особенности
усреднения при резонансе. Приведенные выше теоремы
обоснования метода усреднения предполагали существование у правых частей
рассматривавшихся дифференциальных уравнений равномерных средних
значений. Однако многие задачи небесной механики, аналитической
механики и др. приводят к необходимости исследования дифференциальных
уравнений, для которых условие существования равномерных средних не
выполняется. Поэтому этот случай заслуживает особого внимания.
Рассмотрим систему дифференциальных уравнений с малым параметром
-|-=еХ(р,<7),
dn (32Л)
-5- = »(р)+еУ(р,0.
гдер = (ръ ..., рт) — m-мерный вектор медленных движений, q = (qv ...
qn) —n-мерный вектор быстрых движений, ю (р) = (g^ (р), ..., ып (р)), а
вектор-функции X (р, q) и Y (p, q) могут быть представлены в виде сумм
Х(р,<7)= 2 **(/>) *'(М\
Y(p,g)= S Yk(p)e^\ (322)
где k = (ifex &„) — вектор с целочисленными положительными и
отрицательными компонентами, норма которого вычисляется по формуле
i*i-£i*ii.
символ (k, q)% как обычно, обозначает скалярное произведение векторов k и
q, т. е.
п
(k, q) = 2 ktqt.
406
Пусть функции X (р, q) и Y (р, q) интегрируемы в некоторой открытой
т + я-мерной области евклидова пространства £т+*, представляющей
собой произведение Рт X Q„, гдер £ Рт, q£ Qn
При п > 2 к системе уравнений (32.1) сводятся задачи многочастотных
колебательных процессов. Если при некотором р = р0 выполняется
соотношение
(£,<о(ро)) = 0, (32.3)
для некоторых ft с ненулевой нормой (| ft| Ф 0), то, как уже об этом
говорилось в § 13, в системе имеет место резонанс.
Покажем, что при п > 2 для функций X (р, q), Y (p, q) не имеют места
так называемые эргодические теоремы, т. е. среднее по времени не равно
среднему по фазовому подпространству переменных q.
Для этого рассмотрим порождающую систему (систему (32.1) при е = 0
dt u'
4, (32-4)
и возьмем произвольную точку р0, q0£ £т+п, которой соответствует
решение системы (32.4)
Р « Р* Я = *У + ?о> («о = ® (Ро))- (32.5)
Подставляя значения ри ? (32.5) в функции (32.2), получаем
(выписываем только выражение для X (р, q))
Х(р0,оУ+?о)= 2 Xk(p0)el{kMt+i(k^\ (32.6)
Среднее значение для X (р, q) по / существенно зависит от
арифметических свойств вектора со0. Если вектор ю0 имеет несоизмеримые компоненты
(o>w —рационально независимы: (ft, co0) =£ 0 для любого ft (\к\Ф 0)), то
среднее значение функции X (р, #) по времени равно среднему значению по
фазовому пространству быстрых переменных q, т. е.
Х(р,ф=Пт-\г\ 2 Xk(p)JikM*i+iihM*-
Т-ооо ' jjf | k |^0
2л 2л
—^1 •■• 1 S ^(Л^(*^1-- dqn^X0(p). (32.7)
Пусть теперь вектор со0 такой, что выполняется условие (32.3), т. е. в
системе имеет место резонанс, тогда
Х(р,</) = 2' Xk(p)ei{k«\ (32.8)
|*1>о
где верхний индекс у суммы означает, что суммирование ведется по тем ft,
для которых (ft, со0) = 0.
При условии |ft|>0 точки со0 = (о)01, ..., а>од) n-мерного пространства,
удовлетворяющие условию (ft, юв) =£ 0, а также точки, удовлетворяющие
условию (ft, (о) = 0, образуют всюду плотное множество. Следовательно, в
пространстве Фт существуют сколь угодно близкие друг к другу точки р'0 и
407
pj, такие, что (k, о$ = 0 и (£, о$ Ф 0. Отсюда следует, что
| X(ро) - X(pi) 1 = | S' X, (ро) е' (М) | > т,, (32.9)
|*1>о
где т) — некоторое положительное число.
Таким образом, нельзя для любого е > 0 указать такое б = б (е) > О,
чтобы выполнялось неравенство
\Х(р'о)-Х(ро)\<г
в случае, если
\р'о — Ро|<8,
wp;p;G9>m.
Следовательно, хотя средние значения от функций X (р, q) (и
соответственно Y (р, (7)) по / при л>2и существуют в любой точке (р, (7) £ Ет+п,
оанако они не являются непрерывными функциями своих аргументов в
области Ет+п и, следовательно, не выполняется условие существования
равномерных средних.
На указанные особенности при усреднении функций в случае п > 2 еще
в 1956 г. указывал С. Дилиберто [2241, в связи с этим предложивший иную
процедуру усреднения, позволившую проанализировать более тонкие
явления в исследуемых системах.
В. И. Арнольд [8] впервые обратил внимание на то, что несуществование
равномерных средних значений приводит к тому, что решения системы
дифференциальных уравнений типа (32.1) и соответствующей усредненной по
пространству переменных q системы
^Г = *Х(р), (32.10)
где
2я 2л
*®=lbrl ••• f X<P'<i№i •■■ dqn, (32.11)
полученные при одинаковых начальных значениях, отличаются на
конечную величину, если t —.
Это может быть проиллюстрировано на следующем примере [81.
Рассмотрим систему уравнений четвертого порядка
"5Г""8'
-^- = eacos(<7,— q^
dt ~Pl>
dq.
-df=P*
(32.12)
Усредненная система имеет вид
dpx
— е.,
(32.13)
-ж-е>
408
Пусть Pl (0) = р2 (0) = рг (0) = р2 (0) = 1, qx (0) = 0, q2 (0) =
= arccos (—j. Точное решение рх (f) = р2 (/) = 1 + W через время * = —
теряет всякую связь с усредненным
Pi (0=1+ в/, р,(0=1.
В связи с этим для /г = 2 установлена теорема, обеспечивающая близость
решений точных и усредненных уравнений на интервале изменения / по-
1
рядка —.
Теорема [81. Пусть для системы (32.1) при п = 2 функции ю (р),
X (р, (7), У (р, q) аполитичны в области р £ ^т, 11т^| < р, где ^т — /аш-
пактная т-мерная область.
Тогда, если выражение
А(Р><» = [^-Х(Р' *>)"»- И?" Х(р, <7))% (32.14)
не обращается в нуль ни при каких значениях q и р £Фт, то справедлива
оценка на интервале 0 <; / <; —, е <: е0 < < 1,
|P(0-p(0l<CKeln2(4), (32.15)
где р (/) — решение усредненной системы (32.10), р (0) = р (0).
Введенное здесь условие (32.14) обеспечивает исключение «застревания»
системы в резонансной зоне и играет существенную роль при
доказательстве теоремы, на котором мы останавливаться не будем.
В приведенном выше примере условие (32.14) нарушено. Действительно,
для уравнений (32.12) имеем
А (р, q) = р2 — p1acos(ql — q2). (32.16)
При pi = Ра и а > 0 выражение (32.16) меняет знак.
2. Теорема об усреднении при наличии
резонанса в начальный момент. Остановимся на результатах,
полученных Е. А. Гребениковым [48, 491 по обоснованию метода усреднения
применительно к системе уравнений (32.1) в том случае, когда в начальный момент
в системе имеет место резонанс и, следовательно, когда средние значения
функций, стоящих в правых частях уравнений (32.1) по времени и по
пространству быстрых переменных q не совпадают.
Для удобства дальнейших выкладок совершим в системе (32.1) замену
переменных. Вместо переменных р и q введем новые переменные х, у с
помощью формул
х = р — Ро, (32л7)
y = q — ((o0t+q0),
гдер0и со0/+ <7о — решение (32.5) соответствующей порождающей
системы (32.4).
В результате получим эквивалентную систему
-^- = еХ(х + р0, y + aj+qj,
(32.18)
^ = <о(х + рв) — ©о + еУ(х + р0, у + а>о/ + q0),
где ю0 = со (р).
409
Согласно общему методу (см., например, § 9 или § 13), ищем такую
замену переменных
ос
х = х+ 2iebus(xfy,t),
^ __ (32.19)
У = У+2.ь\(х, у, /),
s=l
благодаря которой система уравнений (32.18) преобразуется в систему
.- _ °о
-£-= гХ(х + р0,у + q0) + ^ eMs(x, y\
« (32.20)
■Л- = <й(х + р0) + &Y(х + р0, у + q0) + 2 г%(х, у),
где X и Y — средние значения функций X и К, вычисленные с учетом
резонанса начальных частот (Л, ю (р0)) = 0, | k \ Ф 0, т. е.
X (х + р0, у + q0) - Ц' Xft (I + />0) s< <*.*+«•>,
(32 21)
г (* + *.* + *)- 2' у* G + *)* <*■*-*.
Функции us {х, у, /), vs (jc, у, 0, As (jc, у) и Bs (x, у) определяются
согласно общим правилам из уравнений в частных производных. На определении
их останавливаться не будем.
Усредненные уравнения, соответствующие системе (32.18), будут иметь
вид
^ = *X(x + p0,y + q0),
d - - - (32'22)
-$£ = о) (х + р0) — (о0 + еГ (дг + р0, у + <70).
Учитывая специфику систем, содержащих медленные и быстрые
движения, усредненные уравнения в первом приближении представим в виде
dx - - -
-^ = еХ(х + р0, у + q0) + еМа(л\ у),
d - - - (32'23)
-^- = со(х + р0) — ю0 + еК (х + Ро. 0 + ?о)-
Этими уравнениями часто пользуются в задачах небесной механики при
наличии соизмеримости средних движений.
Не останавливаясь на доказательстве тейремы, устанавливающей оценку
разности между решениями точной системы (32.18) и усредненной (32.23),
приведем здесь лишь ее формулировку для случая, когда правые части
системы (32.18) — конечные тригонометрические суммы относительно угловых
переменных:
°**кЫ" /32 24)
У(Р.Ф- 2 Yk(P)e«k«. (32-24)
410
Теорема [49]. Пусть для системы уравнений (32.1) выполняются
следующие условия:
1) вектор-функции X (р, q), Y (p, q) определены, дважды непрерывно
дифференцируемы в открытой области Ет+п, ограничены в этой области,
\X(p.q)\<M. \Y(p9q)\<M,
и представляются суммами вида (32.24);
2) в LyHMax (32.24) N— конечное положительное число, Rn — число
членов в этой сумме;
3) вектор-функция со (р) дважды дифференцируема в открытой'
области 9>т;
4) вектор начальных частот со0 = со (р0) = (сох (р0), со2 (р0), ..., со„ (р))
имеет рациональные компоненты и, следовательно, для некоторых k (| k\ Ф 0)
выполняется условие (32.3);
5) 0<а>л/ = inf \(кч <о0)|,
где I2n — множество целых положительных чисел не больше 2N, за вычетом
тех, для которых (k, co0) = 0;
6) в области Ет+п имеют место неравенства
da>s
дрг
<
*2N
2MN„
dPrdPi
<с
дхр
dpt
(/, г = 1, 2,
<С,
&Хр
dpidplt
s = 1, 2 п)\
dYf
(l9ll9 г =1,2, .
m;
dpi
s=l,2, .
(32.25)
<C (32.26)
С — постоянная.
Тогда для любого е > 0 существует такое щ (е) > 0, что при всех 0 <
< I1 < Но справедливы неравенства
или
|*(0-*<0|<в. \y(t)-y(t)\<zy
|р(0-Р(0|<е, |?(0-?(0|<е
(32.27)
(32.28)
на интервале 0< / < —, где х (0, у (f) — решения системы (32.18), х (/),
__ Г* _
у (0 — решения системы (32.22^, р (0 = * (0 + Ро. Р (0 = * (0 + Ро»
q(t)=y (t) + co0/ + <7о> 9(0 = У (0 + со0/ + <7о-
На доказательстве этой теоремы останавливаться не будем. Заметим, что
теорема справедлива также и в случае аналитических правых частей
системы (32.18) с единственным изменением, заключающимся в том, что оценки
(32.27) и (32.28) будут справедливы уже на меньшем интервале 0 < /< —=.
Для этого случая идея доказательства сводится к доказательству
сформулированной теоремы с разницей лишь в том, что аналитические правые части
дифференциальных уравнений (32.18) заменяются тригонометрическими
полиномами с таким большим числом членов, что отброшенная часть будет
иметь порядок |л2 а влияние этих ошенных членов оценивается отдельно.
§33
УСРЕДНЕНИЕ В НЕКОТОРЫХ
ГИРОСКОПИЧЕСКИХ СИСТЕМАХ
1. Случай колебательной системы со многими
степенями свободы при наличии
гироскопических членов. Рассмотрим случай достаточно сложной колебательной
системы с N степенями свободы, для которой функция Лагранжа может быть
представлена в виде (см. работу автора [1301, стр. 269, или [1201)
f N /V N \
L = -к- 2 аи (т) дм + 2 £ ft/ W ЧА\ - 2 Ьи (т) дйдЛ , (33.1)
1 U./-1 «./=1 £./=1 J
где
т = ef, а„ (т) = аи (х), ft„ (х) = Ъи (х), ft, (х) Ф gH (x),
а полная энергия рассматриваемой системы — определенно-положительная
квадратичная форма, т. е. при любых х дискриминант
A-|fli/W|5«-0. (33.2)
При этих предположениях систему дифференциальных уравнений
dQ • (33.3)
у = v(x) + evx(x, 6, ft, .... qNf qlt ..., (7W) ({ = 1, 2, ..., N)%
где x = et, eQt (x, 0, ql9 ..., ^, ft, ..., q^) — малые возмущающие силы,
удовлетворяющие, как и обычно, ряду необходимых условий, можно
привести к системе 2N уравнений первого порядка.
Действительно, вводя, как и в работе [1201, новые переменные
Л--21 (*-1.2....,Л0, (32.4)
заменяя в выражении
«-21*Л-1. (33.5)
412
скорости qt их значениями, определенными из системы (33.4), и обозначая
результате, вместо системы (31.3) получим систему уравнений
dqt _ дН
dt ~~ др< '
(33.6)
— = v (т) + е v, (т, 9, qlf ... , qN> pu ..., pN) (/ = 1,2,..., N),
где Q( — представляет собой Qit в которых также qi заменены их
значениями, определенными из системы (33.4).
Явное выражение для Н получаем, подставляя в правую часть
выражения (33.5) значения q( (i = 1, 2, ..., ЛО:
Г N N N \
# = i- [2 «,/ (х) <7,<7/ + 2 ^ Y</ W <7<Р/ + Д Pi/ (х) p,P/J , (33.7)
где
аи (х) = а„ (х), р„ (х) = р„ (х), уи (т) ^ Y// М-
Принимая во внимание выражение для //, уравнения (33.6) можем
написать в развернутом виде
N N
/=1 /-1L J
2[V/i Wft—$•] + 2Pn WP/ =0, (33.8)
d9 —
-#- = v(t) + evx(t, 0, qu .... qN, plt .... p*) (i = 1, 2 JV).
Следуя работе автора [120], совершим «квазиканоническое»
преобразование переменных qj}t согласно формулам
V (33.9)
л = 2 ia#h (х) *ь + rtfV, (х) й1,
гдеХ1Л) (х), y£h) (t) (k = 1, 2, ..., ЛО определяются выражениями
*Р (х) - iYf> (т) = ,/*{('?j ,. „ (Л-1. 2 2Л0, (33.10)
М^-тпГТ- (33.11)
*2+ <■>;;
Т7*/ — элементы присоединенной матрицы, соответствующей
функциональной матрице / (А,) для невозмущенной системы. (33.8), Хь (т) = ± шЛ (х) —
корни характеристического уравнения невозмущенной системы (33.8)
D(X(t))=0. (33.12)
413
При этом предполагается, что кратных корней нет на всем интервале
изменения т.
После некоторых выкладок система (33.8) в новых «квазинормальных»
координатах xht yh примет вид
fc-*M*-.||[ww+j^^£<i»'*,«-
/ Л1=1 \
Л**0 (х) \ 1)
^^-^Wlif*, JJ = eFfc(T,e,x1, .... xN, ylt .... yN)9
^^^-.Jl^^W + lfi^A^w- (ЗЗЛЗ)
^W),A,+|(^ZL^,X)_
MfrLd)
N+i*
dx
di
1Л)(х))^]) =
XI 4T) h/fti = еОл(т, 9, xlf ..., xN, yu ..., */*),
_ = v (x) + ev2(x, 6, xv ..., xN, yi9 .. ., yN) (Л = 1, 2, ..., N).
Предположим, что правые части системы (33.13) не зависят от 0. Тогда
получим систему
-ЭГ — ®*(Т)Л = е/гл (т> -^ж» — . **. Л. • • •» Ы>
d (33.14)
-$- + °>л(т) *л = e^(x, xlf ..., xN, уъ ..., yN).
При е = 0 и т = const система (33.14) имеет решение
xh = ah sin г|?Л, */л = ah cos г|>л, (33.15)
Где г|5л = о)А (т) t + yh, ал, фА — произвольные постоянные.
Рассматривая выражения (33.15) как замену переменных xh, yh на новые
медленно меняющиеся переменные аА, фЛ, вместо системы (33.14) получим
систему в стандартной форме
^- = e(Fhsm%+Ghcos^t
(33.16)
-J- = —J Л cos г|>„ - Gh sin thJ.
Предположим, что для любых х£ [О, L] выполняется условие
несоизмеримости частот (fc, со (т)) Ф О, где ft = (klt ..., kN) — вектор с
целочисленными положительными и отрицательными компонентами. Тогда, как об этом
говорилось выше, среднее значение от правых частей уравнений (33.16) по
времени будет равно среднему значению по фазовому пространству переменных
414
% и усредненная система, соответствующая системе (33.16), примет вид
Т = ~^лг] "• 1(^/1sinth+Олcos^Jd^ ... d^N,
l^v 0 О
ы ы (33-17)
№> о о
При этом правые части усредненной системы (33.17) зависят только от
ah (Л = 1, 2, ..., ЛО и отт и не зависят от фл (Л = 1, 2, ..., N).
Если для т = т0 вектор со (т0) такой, что для некоторых k с ненулевой
нормой (|*| Ф 0) выполняется условие (&,а> (т)) = 0, то в системе (33.16)
имеет место резонанс. Усреднять ее нужно уже по времени, а не по угловым
переменным \|?Л, и в правых частях усредненной системы будут
присутствовать компоненты с ёт* с теми Л, для которых (k, со (т0)) = 0.
Предположим, что правые части системы (33.13) зависят от 0.
Тогда мы получим систему
-^ coh(T)yh = *Fh(i. 0, xv ..., xNf yv ..., yN),
-^- + G)„ (x) xh = eGh(x, в, xlt . .., **, (/lf ..., yN)f (33.18)
-jg- = v(x) + ev2(x, 6, xu ..., *N, ylt . .., #*).
Системы типа (33.18) часто встречаются при исследовании роторов
гироскопов,- центрифуг, турбин и т п.
Допустим, что частота внешней силы v (х) при некотором значении х =
= х0 близка к i -й собственной частоте ы( (x0), и введем расстройку
eA,<T0) = co(x0)-v(x0). (3.19)
Кроме того, как и выше, предположим, что для остальных частот
% (х), ..., со£_| (х), cot+i (х), ., coyv (x), v (х) на интервале х£ [0, L]
выполняется условие несоизмеримости.
Тогда система уравнений (33.18) с помощью замены переменных
xh=ahs\nyh, yh =ahcos^h (h = 1, 2, ..., i— 1, i+ 1, ..., N),
xt = a, sin (9 +- fy), yt = at cos (6 + fy), (33.20)
где1|)Л = o>h/ + q>h, 0 + Ф| = i|^, может быть сведена к следующей системе
в стандартной форме:
-^- = е (Fh sin г|?А + бЛ cos %),
^ = --^(Fh™s%-Ghsinybh)
(Л=1, 2, ..., I- 1, t+1 Л0,
-^- = e (F, sin (6 + O,) + Gt cos (6 + O,)),
dat
(33.21)
(33.22)
-^- = со, (x) - v (x) - -i- (f. cos (6 + bt) - G( sin (6 + 0()),
-Щ- = v (x) + ev, (x, 6, fll cos ^ a, cos (9 + fl,), ...). (33.23)
415
При малой расстройке а>( (т) — v (т) в системе (33.21) — (33.23)
переменные аЛ, фл (А = 1, 2,...,/ — 1, i + 1,..., ЛО, ait fy — медленные переменные,
а 9 — быстрая переменная. Усредняя правые части системы (33.21) — (33.22)
по 0 и по tyh (при выполнении указанной выше несоизмеримости частот
сох (т), ..., G>f__i (x), G)t+t (т), ..., o)yv (x), v (т)) для медленных переменных
ал» Фа» я*> vi получим усредненную систему, правые части 'Которой будут
зависеть от ah (h = 1, 2, ..., N) и fy.
2. Усреднение в некоторых специальных
системах теории гироскопов. Многие задачи динамики
гироскопических устройств приводят к рассмотрению систем дифференциальных
уравнений вида
-з)г + vi "йГ = 2 Wn cos (ont + b(n} sin <dnt] + e/x (v, yt x, #, дг, у, e),
rf2 Л (33.24)
-^| v\ J± = S [aj,2) cos con/ + 6? sin щД + e/2 (x, t/, x, у ,v, у, е),
H = const,
или
-g£- + v? -^- = 2J [fl£I} cos con/ + б^0 sin соЛ/] + eft (x9 у, i, у, а> ^, е),
~1& V2 "^" = ^ I**? COS(Ont + Ь(п} Sin (Ont] + 8/2 (X, */, X, y, (dkt, 8)
Я = const,
где x, у — обобщенные координаты, Н — кинетический момент ротора, е —
малый положительный параметр, fx и /2 — рациональные функции своих
аргументов.
Для приведения систем (33.24), (33.25) к уравнениям в стандартной
форме, введем новые медленно меняющиеся переменные Mi9 Nlt N2, 0 согласно
формулам
х = Nt + Mt 4- cos ф + S И^ cos (ont + B^ sin con/),
^ = tf2 + Mx sin г|> + 2 [4i2> cos con/ + B{n] sin со,Д (33.26)
= — ML^ sint + S [— (oaA{n}sinсоЛ/ + ©„fl*1*coscon/],
Vg /I
if. _
dt "*' v2
-^- = /M^cos гр + 2 [— o),X2) sin о)„/ + о)пВ^2) cos o)n/],
где приняты обозначения
v = Vi • v2, -ф = v/ + 8,
Лл - *(*-•2> ' B" ~ *<*-.& ' (3327)
,2, = ^2'-^" (2) vR" + Q)^2'
416
Структура формул замены переменных (33.26) выбирается согласно
общему решению невозмущенной системы (системы (33.24) при е = 0).
После обычных выкладок для новых переменных Мъ Nl9 N2, 8
получаем систему уравнений в стандартной форме
^-eri-^coet-^eta*!,
dNx
dt
dN2
dt ~~
dt ~~
= -
8
— e
— F
Fu
M^TF
(33.28)
F2 sin г|> -\ •„ Fx cos ф
Мг4
I
где f! и F2 - выражаются через функции ft и /2, в которых произведена
замена переменных согласно формулам (33.26), и, следовательно, они
периодические по vt и (ont с периодом 2я.
Усредняя по t правые части системы (33.28), в первом приближении
получаем систему усредненных уравнений
^ = e[-i-no,cosM3-^F(I°>sin^],
-#- = -4F<2°>, (33.29)
v5
d~Nj _ e ~ЛЩ
dt ~ v? ' *
где верхний индекс (0> означает, что в функциях Fx и F2 e = 0. Далее, можем
построить улучшенное первое приближение, второе приближение и т. д.
Если некоторые параметры, характеризующие гироскопическую
систему, изменяются со временем, то, в случае медленного изменения этих
параметров, приходим к системе дифференциальных уравнений
d?x 2/ v dy e . . v
4F + Vl W ЧГ = 8^(т» ы* х> У> х> У*х* У* 8)'
-^г — vf(x) ^ = е/2(т, о/, х, у, х, у, х, у, е), (33.30)
Н = const,
где т = et — «медленное» время, характеризующее «медленное»
изменение некоторых параметров системы.
Для приведения системы уравнений (33.30) к стандартному виду
вводим новые переменные Ml9 Nv N2, 0 согласно формулам
х = Nl + M1 -^-cos^,
У = N2 + Mi sin ф,
27 246 417
ТГ = Miv(t)cos^,
где приняты обозначения
v(t) = v1(x)v2(t), * = Jv(x)dt+ в.
После обычных выкладок получим систему уравнений в стандартной
форме, эквивалентную системе (33.30),
dMi Г 1 г . 1 г • , 1
_Ё^_ „г 1 * , ,т>1 (3332)
—[;55'-+*}
dt ~ 8|Allv(T)'^"^^Aflv2(T)
где введены обозначения
= ~ 81ШГТ^ ^ sin ф + -^^ Ft cos VI
F1 = /1 + M1[v?(x)i;sin1|3,
F2-=f2 — yMjvi(T)cosi|),
(33.33)
J*
/i и /а — функции, стоящие в правой части системы (33.30).
К системе (33.32) можем применить изложенный в § 11 метод усреднения,
при этом в первом приближении считаем т постоянным параметром и
усреднение ведем только по /, явно входящему в правую часть системы (33.32).
3. Пример: движение астатического
гироскопа в кардановом подвесе на подвижном
основании. В качестве иллюстрации изложенного приема, приведем пример
влияния малого периодического момента относительно оси внутреннего
кольца карданова подвеса на уходы гироскопа, установленного на колеблющемся
вокруг двух взаимно перпендикулярных осей основании [701.
В случае взаимной перпендикулярности колец и ряда упрощений
задача сводится к следующей системе уравнений возмущенного движения
~3F + v*it = — v*a2°>2 cos o)2/ + e/i (alf <ii, Pi, ft, со^, ©2/)f
&Ъ da (3334)
"Ж — v2 ~W = а*щ sin ^ + т cos ®* + г?21*1' ait P1» &' 0)l^ ^^
Я = const,
где приняты обозначения
/i (ai. «ъ Pi, Pi. <М, o)20 = — l2ax + [(Lt + ^2) Pi — v?axl ali^l cosoV —
— ^lPi^i00? sin ^i* + ai^Vh0^cos °V cos ^ — (33.35)
— 0)2^1^2 s'n °M sin ©i* + Ь8а1а8©1©2 cos %/ cos o)2/,
418
h(«i» <*ъ Pi» Pi» *V. °>20 = — 'iPi + hbPi — (1 + Ц aj ax©!cos o)^ -f
+ а^о)! sin o)^ + \\аха2щ cos coj/ sin g)2/; (33.35)
здесь vlt v2, m, /lt L, Lb L2, L3 — постоянные.
Невозмущенная система (система (33.34) при е = 0) имеет общее
решение
v \\т
«1 = Ni + A*i -т cos ф ——г—г sin (о/,
V2 CD(V О); (3336)
Pi = Л^2 + Mi sin if — a2 sin g)2* + ^^^ cos <d/,
где ф = v/ + 9, v = vxv2 — собственная частота нутационных колебаний,
Mlt Nlt N2, 9 — произвольные постоянные.
Для приведения системы (33.34) к стандартному виду производим
замену переменных согласно формулам
v \\т
a1 = Nl + M1 -^cos^ — д^,,.^ sin ©f,
Pi = N2 + Л^1 sin г|э — a2 sin co2/ + va_^2 cos <*>*»
2 V Ш (33.37)
v2 vfm
«i = — Afx -2- sin ф — у2_ш2 cos со/,
v2
Pi = Mxv cos 'Ф — л2(о2 cos o)2/ — v2__ 2 sin со/.
Усредняя полученную систему уравнений в стандартной форме,
получаем систему усредненных уравнений
dt — 8/Wl 2 '
f 0, если со =£ o)lf
-e^S"(l + ^^-). если g> = g)i; (33.38)
Mi
dt
y2'
О, если ©! Ф co2,
v2
e -xV (L3 — L2) a^co i, если o^ = w2;
2v2
Отсюда, находим
Mloe
Nl0, если со Ф olf
A*i = Мю*
Л^ =
-•^(l + L^)t + ЛДО, если co = o)i;
v2
27* 419
(33.39)
[ N20t если coj Ф ©2,
N2 =J v2 С33-39)
I e ^ (L8 — L2) a^co?/ + л4о, если а>г = coa;
6 = 90,
где M10t N10t #io\ N20, MJ\ в0 — постоянные интегрирования.
Из анализа формул (33.39) можно сделать некоторые выводы о движении
гироскопа, описываемого системой уравнений (33.34).
Так, например, действие «малого» трения вызывает затухание
нутационных колебаний: Л4, -+ 0 при / -* оо. При совпадении частот сох = со2
гироскоп теряет устойчивость: имеет место систематический уход по углу
Р со средней угловой скоростью
- v2
р = ерх = е2 2^2 (Ls - Ъ) аха^1 (33.40)
При совпадении частоты возмущающего момента с частотой колебаний
основания вокруг одной из осей (со = со^ возникает систематический уход по
углу а со средней угловой скоростью
S-e£--e«^(l + L^.). (33-41)
причем эта скорость резко возрастает, если частота нутационных колебаний
v близка к частоте возмущающего момента со.
Воспользовавшись результатами, приведенными для системы вида
(33.30), мы могли бы подробно исследовать задачу о движении гироскопа
на подвижном основании в случае медленного изменения моментов инерции
ротора гироскопа, внутреннего и внешнего колец карданового подвеса.
Однако на этом не будем останавливаться, отсылая читателя к специальной
литературе [71].
§ 34
МЕТОД УСРЕДНЕНИЯ
И ЗАДАЧА О РАЗДЕЛЕНИИ
ДВИЖЕНИЙ
•
Изложенные многочисленные варианты и модификации метода
усреднения обладают общей характерной чертой, являющейся основным
содержанием метода усреднения — в результате усреднения мы получаем
сглаживание правых частей соответствующих уравнений и разделение переменных
(полное или частичное).
Как говорилось во введении, уже простейшее усреднение по Ван-дер-
Полю, дающее лишь первое приближение для соответствующиху равнений,
приводит к разделению переменных а и гр (гр = &t + ср). Разделение здесь
проводится путем усреднения правых частей по быстрому переменному /,
что равносильно отбрасыванию всех гармоник в разложении в ряд Фурье
правых частей, за исключением нулевой гармоники.
Впервые четко идея разделения движений при строгой формулировке
и развитии метода усреднения для уравнений в стандартной форме была
высказана Н. Н. Боголюбовым, в дальнейшем она получила развитие в
наших работах, посвященным исследованию систем с медленно меняющимися
параметрами, систем близких к интегрируемым. Далее она получила
развитие в работе Н. Н. Боголюбова и Н. Д. Зубарева, посвященной
исследованию системы с быстро вращающейся фазой и наконец в ряде работ
В. М. Волосова.
Рассмотрим, как и в § И, систему уравнений в стандартной форме
i£ = еФ1(г|>, а, е),
л (341)
-jf = со(а) + еФ2(г|>, а, е),
где а и г|э — соответственно п- и m-мерные векторы, Фх (Ф, а, е) и
Ф2 (ф, а, е) — я-мерные вектор-функции, периодические по г|э с периодом
2я и обладающие некоторыми необходимыми свойствами.
Система (34.1) отличается от рассмотрение в § 11 системы (11.16) тем,
что в ней отсутствует «медленное» время т и а, г|> являются векторами.
Производя в системе (34.1) последовательные замены переменных типа
(11.20), можно показать, при некоторых ограничениях, налагаемых на пра-
421
вые части системы (34.1), что существует замена переменных
а = а + вР(Ц, а, е), (34.2)
такая, что система уравнений для а не будет содержать угловых
переменных гр:
■£-вЛ(а.в). (34-3)
Здесь А (а, 0) определяется формулой
Л (а, 0) = Фх^.а, 0) = -^\ . • • J®iM>, а, 0)<% .. . rffe (34.4)
при этом следует помнить, что обычно рассматриваемое среднее по траектории
совпадает со средним по пространству лишь в случае, если частоты со (а)
несоизмеримы. Поэтому и замена (34.2), производящая разделение движений,
существует в случае несоизмеримости частот: (£,со (а)) Ф 0 для любых а.
Если некоторые из частот со (а) соизмеримы, то, как уже упоминалось в § 32,
разделение движений может быть только частичным.
Для определения функций F (г|>, а, е), входящих в формулу замены
переменных (34.2), необходимо решить уравнение
^- [со(а + sF) + еФ2(г|>, а, е)] + е |J-Л(а, е) =
= Фх W, а + eF, е) — А (а, е). (34.5)
Если в уравнении (34.5) отбросим члены порядка е, то получим
уравнение первого приближения
решение которого
в случае, если со (а)—скаляр, совпадает с решением (11.21).
В выражении первого приближения (34.7) без дополнительных условий
могут появиться малые знаменатели. Рассматривая же точное уравнение
(34.5), можно избежать появления малых знаменателей.
Не вдаваясь далее во все тонкости анализа решений уравнений (34.5),
заметим, что в большинстве рассмотренных случаев мы получали разделение
движений в асимптотическом смысле. Это вытекало из того, что все замены,
вводимые для построения усредненных уравнений (в любом приближении),
представляли собой асимптотические разложения по степеням малого
параметра е, а не сходящиеся ряды.
Вместе с тем иногда, применяя, например, метод последовательных
замен, приведенный в §11, с соответствующими видоизменениями (см. [181),
можно построить точные замены переменных, выражающиеся уже
сходящимися рядами и приводящие к разделению переменных.
Остановимся еще на соображениях о разделении движений,
высказанных в работе [145] применительно к уравнению
£ = Х(х) + гХ*(х,г), (34.8)
422
где X, X*, х — точки я-мерного евклидова пространства Еп> е — малый
положительный параметр, и X* (jc, e) допускает асимптотическое
разложение: X* (*, е) = Х\ (х) + eXl (х) + ... .
Одновременно с системой (34.8) рассмотрим невозмущенную систему
# = *(£) (34.9)
и предположим, что
6 = Е(«М) (34.10)
— решение системы (34.9), удовлетворяющее начальному условию 11*=0 =
= I (w, 0) = w.
Нетрудно показать, что решение уравнения (34.8) также можно записать
в виде (34.10), но w уже не будет постоянной, а будет содержать явно время t.
Если уравнение для w не содержит явно времени, то исследование его
значительно упрощается. В этом случае уравнение описывает медленные
движения системы, не зависящие от ее основного быстрого движения и
естественно говорить, что система (34.8) допускает разделение движений.
Найдем сначала условия, при выполнении которых система (34.8)
допускает разделение движений, после чего докажем существование замены
переменных, приводящей уравнение (34.8) к форме, допускающей разделение
движений.
Подставляя выражение (34.10) в уравнение (34.8), имеем
Учитывая, что при w = const £ (wf f) — решение уравнения (34.9),
и умножая (34.11) слева на (-^Н , получаем
-^ = £Г(гМ), (34.12)
где введено обозначение
w={%)~ix*' t34-13)
Для того чтобы система (34.8) допускала разделение движений, правая
часть в уравнении (34.12) не должна содержать явно времени. После
некоторых выкладок найдем
г-(йПт*-$*-]- (3414>
Поэтому необходимым и достаточным условием разделения движений
является равенство
Щ-Х-д-щХ* = 0. (34.15)
Если это равенство выполняется, то решением уравнения (34.9) будет
|(ш, 0» где w = w (t) — решение уравнения (34.12), которое в данном
случае принимает вид
^ = еХ*(ю,е), (34.16)
согласно (34.13), так как при t = 0 -g~ = E.
423
Покажем, что при помощи некоторой замены переменных систему (34.8)
можно привести к форме, допускающей разделение движений.
Совершим в уравнении (34.8) замену переменных согласно формулам
у = х + eQ, (х) + e2Q2(x) + . . . , (34.17)
где Qx (jc), Qa (*). ••• в дальнейшем будут определены.
Подставляя ряд (34.17) в уравнение (34.8), после некоторых выкладок
найдем уравнение
■J = Х(у) + г¥г(у) + е2У2 &)+.... (34.18)
для которого справедливо соотношение
Yn=Yn + ^X-d£Qa, (34.19)
где Ynf кроме заданных функций Х\9 ..., Х«, зависит только от предыдущих
членов Qlt ..., Qn-i, в частности Yx = X\ (у).
Коэффициенты ряда (34.17) мы должны подобрать так, чтобы уравнение
(34.18) допускало разделение движений, а это будет в том случае, если для
уравнения (34.18) будет выполняться условие (34.15).
Введем обозначение
LAY) = d^X-d±Y, (34.20)
тогда задача определения Qn сведется к задаче разложения известной
функции Yn на сумму двух слагаемых, одно из которых принадлежит области
значений линейного оператора LXf а другое аннулируется этим оператором:
Yn = ~LX (Qn) + Yn9 Lx (У J = 0 (34.21)
§35
ПРИМЕНЕНИЕ МЕТОДА
УСРЕДНЕНИЯ ДЛЯ ИССЛЕДОВАНИЯ
УСТОЙЧИВОСТИ ДВИЖЕНИЯ
ф
В теории колебаний нелинейных систем существенную роль играет
определение устойчивости стационарных режимов относительно постоянно
действующих на систему возмущений.
В предыдущих параграфах (например, § 4, § 5, § 15) мы уже обращали
внимание на исследование стационарных режимов и проблему их
устойчивости. Для стационарного режима обычно составлялись уравнения в
вариациях и, анализируя корни характеристического уравнения, в зависимости
от знака действительных частей мы приходили к заключению об
устойчивости или неустойчивости рассматриваемого режима. Разумеется, что
получаемый результат об устойчивости имел смысл только для конечного промежутка
времени, так как рассматривались не точные уравнения, а суредненные,
решения которых в общем случае аппроксимируют решения точных на
конечном промежутке времени порядка —.
Однако во многих случаях для нелинейных уравнений, описывающих
колебательный процесс и содержащих малый параметр, вопрос об
устойчивости полностью может быть решен исходя из рассмотрения усредненных
уравнений. При этом следует особо заметить, что задача об устойчивости,
трудно решаемая*для неусредненных уравнений, решается гораздо проще
для усредненных, так как в последнем случае исследуется устойчивость
сингулярной точки.
В основной теореме § 7 сформулированы условия существования и
устойчивости решений уравнения в стандартной форме
%=вХ«9х). (35.1)
Приведем основные формулировки теорем, устанавливающих
устойчивость точных решений уравнений в стандартной форме (35.1) исходя из
рассмотрения свойств решений соответствующих им усредненных уравнений
(см. §7 или работу автора [16])
-§ = еХ0й), (35.2)
28 246 425
где
т
X0(t) = \im±-$X(t,t)d< (35.3)
равномерно по отношению к /.
Теорема [161. Пусть уравнения (35.1) обладают следующими
свойствами:
а) уравнение первого приближения (усредненное уравнение) (35.2) имеет
квазистатическое решение £ = £0;
б) вещественные части всех п корней характеристического уравнения
Det|/p —Хох(1о)^о1 = ° (35.4)
отличны от нуля;
в) функциях (/, х) обладает всеми необходимыми условиями
существования решения системы (35.1) и почти периодическая по (равномерно
относительно х.
Тогда можно указать такие положительные постоянные а0, е0, что для
всякого положительного г < е0 уравнения (35.1) будут иметь единственное
почти периодическое решение х* (/), для которого
1**(0 —ЕоК°о (-оо</< + оо).
Если все действительные части корней характеристического уравнения
(35.4) отрицательны, то любое решение х (t) системы (35.1) стремится к
jc* (t) no закону
|x(0-**(')l<Ce~ve('~'e> (35.5)
(где Сиу — положительные постоянные), и, следовательно, решение х* (t)
асимптотически устойчиво.
Если вещественная часть хотя бы одного корня уравнения (35.4)
положительна, то решение х* (t) будет неустойчивым.
Предположим теперь, что усредненная система (35.2) имеет
периодическое решение
1 = 1(о0, 1(ф + 2я) = |(ф). # (35 6)
Тогда может быть сформулирована следующая теорема.
Теорема [161. Пусть для дифференциальных уравнений в
стандартной форме (35.1) выполнены следующие условия:
а) уравнения первого приближения (усредненные уравнения) (35.2) имеют
периодическое решение (35.6);
б) вещественные части всех (п — 1) характеристических показателей для
уравнений в вариациях
^ = е«И№ (35.7)
соответствующих периодическому решению (35.6), отличны от нуля (один
характеристический показатель в данном случае равен нулю).
Кроме того, в некоторой окрестности орбиты периодического решения
(35.6) функции X (/, х) обладают необходимыми условиями существования
почти периодического решения, зависящего от одной постоянной (фазы).
Тогда можно указать такие положительные постоянные е0, а0, что при
любом положительном е < е0 уравнение (35.1) будет обладать единственным
426
почти периодическим решением
x*(t) = f(t,e(t))t (35.8)
зависящим от произвольной постоянной (фазы).
Если все действительные части характеристических показателей
системы уравнений в вариациях отрицательны, то любое решение системы (35.1)
х (t), исходящее из достаточно малой окрестности орбиты (35.8), со временем
будет стремиться к решению (35.8) по закону
\x(t)-f (/, в (/)) | < С^'-Ч (35.9)
и, следовательно, решение (35.8) будет обладать орбитальной
асимптотической устойчивостью и притягивать к себе все лежащие вблизи решения
системы (35.1).
Если вещественная часть хотя бы одного характеристического показа-
тем уравнения (35.7) положительна, орбита (35.8) неустойчива.
В случае наличия нулевых характеристических показателей (больше
одного) или нулевых действительных частей характеристических показателей
получаем критический случай, для рассмотрения которого вместо
усредненной системы в первом приближении (системы (35.2)) следует рассматривать
усредненную систему высшего приближения.
Приведенные теоремы являются только одним из примеров того, как
метод усреднения может быть использован при решении многочисленных
задач исследования устойчивости колебательных систем.
Важные результаты, связанные с вопросом устойчивости решений
различных классов нелинейных дифференциальных уравнений с малым
параметром и соответствием между устойчивостью решений для точных и
усредненных уравнений могут быть получены при исследовании интегральных
многообразий для таких систем [139]. Интересные результаты для нелинейных
гамильтоновых систем с аналитической функцией Гамильтона, получены в
работе В. И. Арнольда [7j.
Алгоритм усреднения Н. Н. Боголюбова, как это показано в работе
И. 3. Штокало [2081, может быть с успехом применен для сведения линейного
дифференциального уравнения с почти периодическими коэффициентами
к уравнению с постоянными коэффициентами с последующим применением
известного критерия Гурвица для вывода условий устойчивости и
неустойчивости.
Идея усреднения может быть применена для исследования
устойчивости и в несколько ином аспекте, по сравнению с изложенным выше. Как
показано [1941, предположение о существовании отрицательного среднего от
скалярного произведения grad V (где V — функция Ляпунова) на
возмущающую вектор-функцию X* (/, х) вдоль интегральных кривых невозмущенной
системы (35.10) дает возможность доказать теоремы об устойчивости или
неустойчивости типа классических теорем Ляпунова. Приведем
формулировку одной из таких теорем.
Рассмотрим систему невозмущенных уравнений
£ = X(t,x) (35.10)
и предположим, что вектор-функцйи X (/, jc), стоящие в правых частях, в
некоторой области
|*<КА t>0 (1 = 1,2, .... л) (35.11)
28* 427
непрерывны и удовлетворяют условию Липшица с постоянной А, по
переменным jc, X (/, 0) = 0.
Одновременно с системой (35.10) рассмотрим систему с постоянно
действующими возмущениями
$T=X(t9x) + eX*(t9x)9 (35.12)
где е — положительный малый параметр, а возмущающая вектор-функция
X* (/, х) определена в области (35.11) и удовлетворяет условиям,
обеспечивающим существование непрерывного решения.
Для системы (35.12) справедлива следующая теорема.
Теорема [1941. Пусть для системы дифференциальных уравнений
(35.12) выполняются следующие условия:
а) существует определенно-положительная функция Ляпунова V (t,
xi> •••> хп)> допускающая бесконечно малый высший предел [103];
б) полная производная V (/, хъ ..., хп), составленная на основании
невозмущенных уравнений (35.10), неположительна в области (35.11):
тг--у- + 25гл''</'*' •••.*.><°; <35-13)
в) частные производные -^— непрерывны по xi равномерно относительно
t в области (35.11);
г) возмущения Xi (/, xlt ..., хп) непрерывны по xt равномерно
относительно t в области (35.11) и ограничены;
д) равномерно относительно t0 и xi0 существует среднее значение
1 /o~tr п dv
Фо(*ю xn0) = Y\m ~y Г 2"a^ГXt(/, Xl% " • • • Xn)dt' (35Л4)
J M
где интеграл вычисляется вдоль решения xi (t) невозмущенной системы (35.10)
с начальными значениями jc,o, при этом вне сколь угодно малой окрестности
точки покоя среднее q>0 (x10, ..., хпо) строго меньше 0:
Фо(*ю> ...,*„«)<-8f<0. (35.15)
Тогда для любого х\ > 0 можно указать такие положительные v (ц) и
е0(т)), что любое решение возмущенной системы (35.12) хс (/) с начальными
значениямиxt0, удовлетворяющими неравенствам |х,01< v (r\) при е < е0 (rj),
для всех t > 0 будет удовлетворять неравенствам \ xt (t) | < г\.
Эта теорема дает критерий устойчивости при постоянно действующих
возмущениях тривиального решения невозмущенной системы (35.10) в
предположении, что выполняются лишь условия теоремы Ляпунова об
устойчивости, т. е. в так называемом «нейтральном» случае.
Применение приведенной теоремы к уравнениям в стандартной форме
(35.1) дает те же результаты, что и теоремы, сформулированные в начале
настоящего параграфа (см. стр. 426—427). Действительно, в теореме на стр. 426
предполагалось, что если усредненная система (35.2) имеет
квазистатическое решение £ = |0 и действительные части всех корней
характеристического уравнения системы в вариациях (35.4) отрицательны, тогда все решения,
близкие к £0 в начальный момент / = 0, остаются близкими к нему для всех
/>0.
428
Предположим, для упрощения, что все корни характеристического
уравнения (35.4) Xt различны и отрицательны, а в исходной и усредненной
системах произведена замена с тем, чтобы матрица системы в вариациях (35.4)
была диагональна. Возьмем функцию Ляпунова
V = (U - *i)2 + (U - *2)2 + . . . + (U - *«)2- (35.16)
Поскольку в рассматриваемом случае все X (/, х) = 0, условие б)
теоремы выполнено.
Далее, имеем
у <'• *) = 2 ~£гXi {t> х) = 22 (|<» ~**> ** (/> х)- (35-17)
Фо = 2 £ &0 - *,) Х„ (х,.) = 2 £ (6,, - xtf К < 0, (35-!8)
1=1 1 = 1
откуда и следует устойчивость Х; = £;о.
Аналогично можно получить и утверждения следующей теоремы (см.
стр. 426), относящиеся к случаю, когда усредненная система имеет
периодическое решение.
Заканчивая настоящую монографию, мне хочется заметить, что метод
усреднения, при всем своем чрезвычайно широком диапазоне применения, не
является все же единственным и абсолютно универсальным методом
исследования проблем нелинейных колебаний. Его следует рассматривать как
часть общей теории асимптотических методов, в создание которых
фундаментальный вклад внесли Н. М. Крылов и Н. Н. Боголюбов. Вместе с тем в
своем настоящем развитии, подкрепленном всесторонним и глубоким
математическим обоснованием, метод усреднения чрезвычайно эффективен,
он дает возможность решать очень широкий круг разнообразных задач
нелинейной механики. При этом с полной уверенностью можно утверждать,
что возможности этого метода в дальнейшем еще более расширятся.
И вот в связи с этим мне хочется остановиться на некоторых
аспектах дальнейшего развития метода усреднения как в теоретическом
отношении, так и применительно к решению новых актуальных задач физики и
техники.
Такими задачами являются дальнейшее развитие метода усреднения
применительно к исследованию нелинейных уравнений в частных производных,
математическое обоснование полученных здесь результатов и применение их
к исследованию новых задач гидродинамики, магнитодинамики, нелинейной
оптики, термоупругости, термовязкоупругости.
Широкие возможности для применения метода усреднения открываются
при рассмотрении многочисленных новых задач теории управления и теории
регулирования.
Важные проблемы возникают в связи с изучением систем с
распределенными параметрами, колеблющихся в потоке жидкости или газе,
двигающемся с большой скоростью. Здесь метод усреднения, несомненно, найдет свое
применение и дальнейшее развитие.
Безусловно метод усреднения окажется полезным при решении сложных
проблем, связанных с изучением динамических процессов в биологии (био-
429
логическая кибернетика), при изучении многих вопросов экономики и
планирования (экономическая кибернетика). Здесь многие проблемы в общих
чертах сводятся к исследованию чрезвычайно сложных автоколебательных
систем с обратной связью, для решения которых метод усреднения окажется
достаточно эффективным.
Интересным является дальнейшее обобщение метода усреднения.
Усреднение функций, находящихся в правых частях уравнений в стандартной
форме, представляет собой наиболее простой случай «сглаживания» этих
функций. В связи с этим для многих задач может оказаться эффективным
введение в рассмотрение более сложных сглаживающих операторов и
доказательство теорем, устанавливающих соответствие между решениями точных
уравнений и решениями уравнений со сглаженными правыми частями, а
также разработка соответствующих алгоритмов.
Чрезвычайно важной областью исследования является изучение
интегральных многообразий для точных уравнений и соответствующих им
усредненных уравнений. При этом представляет интерес более подробное
рассмотрение многообразий при наличии различного вида запаздываний,
воздействия случайных возмущений, наличия быстрых и медленных переменных
и т. п. Усреднение весьма эффективно может быть использовано при
решении многих задач теории устойчивости и качественной теории
дифференциальных уравнений.
Заслуживает внимания дальнейшее развитие исследований различных
классов интегральных и интегро-дифференциальных уравнений, содержащих
малый параметр, а также нелинейных уравнений в частных производных
(близких к уравнениям гиперболического типа), правая часть которых
содержит интегралы. Для указанных уравнений прежде всего следовало бы
разработать алгоритмы построения высших приближений, как в общем
случае проиллюстрировано в § 4 и в некоторых других параграфах для
обыкновенных дифференциальных уравнений в стандартной форме, для
уравнений с медленно меняющимися параметрами, для уравнений с быстрыми и
медленными переменными и др.
Идея такого алгоритма высказана, как указывалось выше (см. сноска
на стр. 278), уже давно в связи с рассмотрением уравнения в символическом
виде, правая часть которого — некоторый функционал [1101.
Представляет также интерес подробное рассмотрение вопроса о
соответствии точных решений и решений усредненных уравнений на бесконечном
интервале времени для различных классов интегральных и
интегро-дифференциальных уравнений и перенесение многочисленных результатов,
полученных в последнее время в области исследования интегральных
многообразий, на интегро-дифференциальные уравнения.
Заслуживает внимания рассмотрение случаев, когда правые части
интегро-дифференциальных и интегральных уравнений зависят от случайных
возмущений, а также рассмотрение этих уравнений со значениями в
различных функциональных пространствах.
ЛИТЕРАТУРА
1. Акуленко Л. Д., Волосов В. М. О резонансе во вращательной
системе.— Вестник МГУ, сер. I, матем., мех., 1967, 1, с. 12—16.
2. Акуленко Л. Д. О резонансных колебаниях и вращениях в некоторых
механических системах.— Вестник МГУ, сер. III, физика, астрономия, 1967, 1, с. 90—97.
3. А л е ш и н Б. В. По поводу одной схемы усреднения.— Вестник МГУ, сер. I,
матем., мех., 1969, 4, с. 35—38.
4. Андронов А. А. Собрание трудов. Изд-во АН СССР, М., 1956.
5. А н д р о н о в А. А., В и т т А. А., X а и к и н С. Э. Теория колебаний.
Изд. 2-е. Физматгиз, М., 1959.
6. Аносов Д. В. Осреднение в системах обыкновенных дифференциальных
уравнений с быстроколеблющимися решениями.— Изв. АН СССР, сер. матем., 1960, 24, 5,
с. 721—742.
7. А р н о л ь д В. И. Малые знаменатели и проблемы устойчивости движения в
классической и небесной механике.— УМН, 1963, 18, 6, с. 91 —192.
8. А р н о л ь д В. И. Условия применимости и оценка погрешности метода
усреднения для систем, которые в процессе эволюции проходят через резонансы.— ДАН СССР,
1965, 161, с. 9—12.
9. Арутюнов С. С. О демпфированном маятнике с вибрирующей точкой
подвеса. Тр. Казанск. авиацион. ин-та., Казань, 1959, вып. 45, с. 93—102.
10. Б е л а н Е. П. О методе усреднения в теории конечно-разностных уравнений.
Укр. матем. журн., 1967, 19, 3. с. 85—90.
П.Белецкий В. В. О либрации спутника.— В сб.: «Искусственные спутники
Земли», 1959, вып. 3. Изд-во, АН СССР, М., с. 13—31.
12. Б е р ш т е й н И. Л. Флуктуация амплитуды и фазы лампового генератора.—
Изв. АН СССР, сер. физ., 1950, 14, 2, с. 145—173.
13. Боголюбов Н. Н. О некоторых статистических методах в математической
физике. Изд-во АН УССР, К., 1945.
14. Боголюбов Н. Н. Теория возмущений в нелинейной механике. — Сб. Ин-та
строит, механики АН УССР, 1950, 14, с. 9—34.
15. Боголюбов Н. Н., Зубарев Д. Н. Метод асимптотического
приближения для систем с вращающейся фазой и его применение к движению заряженных частиц
в магнитном поле.— Укр. мат. журн., 1955, 7, 1, с. 5—17.
16. Б о г о л ю б о в Н. Н., Митропольский Ю. А. Асимптотические
методы в теории нелинейных колебаний. Изд. 3-е. Физматгиз, М., 1963.
17. Боголюбов Н. Н., Митропольский Ю. А. Метод интегральных
многообразий в нелинейной механике.— В кн.: Международн. симпозиум по нелин.
колебаниям, т. 1. Изд-во АН УССР, К., 1963, с. 93—154.
18. Боголюбов Н. Н., Митропольский Ю. А., Самойлен-
к о А. М. Метод ускоренной сходимости в нелинейной механике. «Наукова думка»,
К., 1969.
19. Б о г о л ю б о в Н. Н. (мл.), Садовников Б. И. Об одном варианте
метода усреднения.— Вестник МГУ, сер. III, физика, астрономия, 1961, 3, с. 24—34.
20. Б о р н М. Лекции по атомной механике, т. 1, ОНТИ, К., 1934.
21. Бородина Р. М. Решение уравнений движения уравновешенного ги-
'роскопа методом усреднения.— Укр. матем. журн., 1961, 13, 3, с. 97—100.
22. Б у р ш т е й н Э. Л., Соловьев Л. С. Гамильтониан усредненного
движения.— ДАН СССР, 1961, 139, 4, с. 855—858.
431
23. Ван-дер-Поль Б. Нелинейная теория электрических колебаний. Связь-
издат, М., 1935.
24. В а с и л и ш и н С. А., К о л о м и е ц В. Г. Исследование колебаний
нелинейных систем с распределенными параметрами при случайных возмущениях.— Укр.
мат. журн., 1967, 19, 3, с. 3—10.
25. Василишин С. А., Коломиец В. Г. Исследование одночастотных
колебаний нелинейных систем с распределенными параметрами и запаздываниями по
времени при случайных воздействиях.— В кн.: Математическая физика. Вып. 6, «Наукова
думка», К., 1969, с. 60—66.
26. В е к с л е р В. И., Коломенский А. А., Петухов В. А.,
Рабинович М. С. Физические основы сооружения синхрофазотрона на 10 Бэв.— В кн.:
Ускорители элементарных частиц. Атомиздат, М., 1957, с. 5—14.
27. В о з н ю к А. В., Коломиец В. Г. Применение асимптотических
методов нелинейной механики для исследования одночастотных колебаний стержней
переменного сечения при случайных возмущениях.—В кн.: Математическая физика. Вып. 6,
«Наукова думка», К., 1969, с. 66—72.
28. В о л о с о в В. М. Усреднение в системах обыкновенных дифференциальных
уравнений.— УМН, 1962, 17, 6, с. 3—126.
29. Волосов В. М. Некоторые виды расчетов в теории нелинейных колебаний,
связанные с усреднением.— Журн. вычисл. матем. и мат. физики, 1963, 3, 1, с. 3—53.
30. Волосов В. М., Моргунов Б. И. К расчету стационарных
резонансных режимов некоторых нелинейных колебательных систем.— ДАН СССР, 1963, 153, 3,
с. 559—561.
31. Волосов В. М., Моргунов Б. И. Асимптотический расчет
некоторых вращательных движений в резонансном случае.— ДАН СССР, 1965, 161, 6, с. 1303—
1305.
32. Волосов В. М., Моргунов Б. И. Асимптотика некоторых
вращательных движений.—ДАН СССР, 1963, 151, 6, с. 1260—1263.
33. В о л о с о в В. М., Моргунов Б. И. К расчету стационарных
резонансных колебательных режимов некоторых негамильтоновых систем.— Вестник МГУ, сер. 111,
физика, астрономия, 1965, 4, с. 86—39.
34. В о л о с о в В. М., Медведев Г. Н., Моргунов Б. И.
Применение метода усреднения к расчету некоторых систем дифференциальных уравнений с
отклоняющимся аргументом.— Вестник МГУ, сер. III, физика, астрономия, 1965, 6, с. 89—91.
35. В о л о с о в В. М., Моисеев Н. Н., Моргунов Б. И.,
Черноус ь к о Ф. Л. Асимптотические методы нелинейной механики, связанные с осреднением.—
В кн.: Тр. II Всесоюзн. съезда по теорет. и приклад, механике. Колебания, гироскопия.
«Наука», М., 1965, с. 35—50.
36. Волосов В. М., Моргунов Б. И. Методы расчета стационарных
резонансных колебательных и вращательных движений некоторых нелинейных систем.—
Журн. вычисл. матем. и мат. физики, 1968, 8, 2, с. 251—294.
37. В о л о с о в В. М., Медведев Г. Н., Моргунов Б. И. О применении
метода усреднения к некоторым системам дифференциальных уравнений с отклоняющимся
аргументом.— Вестник МГУ, сер. III, физика, астрономия, 1968, 2, с. 129—131.
38. В ч е р а ш н ю к П. П. К вопросу об интегрировании канонических
уравнений с помощью принципа усреднения.— В кн.: Тр. научн. конференции инженеров,
аспирантов и мл. научн. сотрудн. Ин-та матем. АН УССР. Изд-во АН УССР, К., 1963, с. 20—24.
39. Вчерашнюк П. П. О движении искусственного спутника Земли
относительно центра масс.— Укр. мат. журн., 1963, 15, 3, с. 305—309.
40. Гадионенко А. Я. Резонансные колебания и вращения маятника с
вибрирующей точкой подвеса. — Укр. мат. журн., 1966, 18, 2, с. 102—106.
41. Гермаидзе В. Е. Об асимптотической устойчивости по первому
приближению.— ПММ, 1957, 21, 1, с. 133—135.
42. Г i х м а н I. I. Про вплив випадкового процесу на динам1чну систему.— Нау-
Koei записки мех. мат. фак-ту КДУ, т. 5, 1941, с. 119—132.
43. Г и х м а н И. И. О некоторых дифференциальных уравнениях со случайными
функциями.— Укр. мат. журн., 1950, 2, 3, с. 45—69.
44. Г и х м а н И. И. К теории дифференциальных уравнений случайных
процессов.— Укр. мат. журн., 1950, 2, 4, с. 37—63.
45. Г и х м а н И. И. По поводу одной теоремы Н. Н. Боголюбова.— Укр. мат.
журн., 1952, 4, 2, с. 215—219.
46. Г и х м а н И. И. Дифференциальные уравнения со случайными функциями.—
В кн.: Зимняя школа по теории вероятностей и мат. статистике в г. Ужгороде. «Наукова
думка», К., 1964, с. 41—85.
432
47. Г и х м а н И. И., Скороход А. В. Стохастические дифференциальные
уравнения. «Наукова думка», К., 1968.
48. Г р е б е н и к о в Е. А. Об обосновании метода осреднения уравнений
небесной механики.— Астрономический журнал, 1965, 12, 1, с. 190—195.
49. Г р е б е н и к о в Е. А. Некоторые вопросы обоснования схем осреднения в
задачах небесной механики.— Бюллетень Института теоретической астрономии АН СССР,
1968, 11, 5(128), с. 293—313.
50. Гребеников Е. А. Некоторые оценки метода осреднения для
многочастотных систем обыкновенных дифференциальных уравнений.— Дифференциальные уравнения,
1968, 4, 3, с. 459—473.
51. Гробов В. А. Метод усреднения канонических уравнений, содержащих
«квазициклическую» угловую координату.— ДАН СССР, 1958, 119," № 5, с. 858—860.
52. Г р о б о в В. А. О построении асимптотических приближений, описывающих
нестационарные процессы в нелинейных гироскопических системах, с помощью принципа
усреднения.— Укр. мат. журн., 1959, 11, 2, с. 213—216.
53. Демидович Б. П. О некоторых теоремах осреднения для обыкновенных
дифференциальных уравнений.— Матем. сб., 1954, 35, (77), с. 73—92.
54. Демидович Б. П. Об одном обобщении принципа усреднения Н. Н.
Боголюбова.— ДАН СССР, 1954, 96, 4, с. 693—694.
55. Д у б Д ж. Вероятностные процессы. ИЛ, 1956.
56. Евтушенко Ю. Г. Асимптотический расчет влияния относительного
движения спутника на движение его центра масс.— Журн. вычисл. матем. и мат. физики,
1965, 5, 2, с. 262—273.
57. Евтушенко Ю. Г. Асимптотические методы интегрирования уравнений
движения искусственных спутников Земли при наличии аэродинамических воздействий.—
ПММ, 1965, 29, 3, с. 408—417.
58. Жаутыков О. А. О применении метода усреднения к решению одного
уравнения в частных производных, встречающегося в теории колебаний. — В сб.:
Приближенные методы решения дифференциальных уравнений, вып. 2. «Наукова думка», К., 1964,
с. 52-61.
59. Ж а у т ы к о в О. А. Принцип усреднения в нелинейной механике
применительно к счетным системам уравнений.— Укр. мат. журн., 1965, 17, 1, с. 39—46.
60. 3 а б р е и к о П. П., Ледовская И. Б. О старших приближениях
метода усреднения Н. Н. Боголюбова — Н. М. Крылова.—ДАН СССР, 1966, 171, 2,
с. 262—265.
61. Забрейко П. П., Ледовская И. Б. К обоснованию метода Н. Н.
Боголюбова — Н. М. Крылова для обыкновенных дифференциальных
уравнений.—Дифференциальные уравнения, 1969, 5, 2, с. 240—253.
62. Забрейко П. П., Колесо в Ю. С, Красносельский М. А.
Неявные функции и принцип усреднения Н. Н. Боголюбова — Н. М. Крылова.— ДАН
СССР, 1969, 184, 3, с. 526-529.
63. 3 а д и р а к а К. В. Исследование решения системы нелинейных
дифференциальных уравнений с малыми параметрами при некоторых производных.— Укр. мат. журн.,
1958, 10, 2, с. 121—127.
64. И т о К. О стохастических дифференциальных уравнениях.— Математика (сб.
переводов), 1957, 1, 1, с. 78—116.
65. И т о К. Об одной формуле, касающейся стохастических дифференциалов. —
Математика (сб. переводов), 1959, 3, 5, с. 131—141.
66. К а з а к С. А. Колебания груза при гибком его подвесе.— В кн.: Вопросы
теории и работы подъемно-транспортных машин. Уральский политехнический институт. 47.
Машгиз, 1953, с. 49—60.
67. К а п и ц а Л. П. Динамическая устойчивость маятника при колеблющейся
точке подвеса.— Журн. эксп. и теор. физики, 1951, 21, 5, с. 588—598.
68. К е р з ю к В. И., Коломиец В. Г. Об исследовании некоторых
колебательных систем с медленно меняющимися случайными параметрами.— В кн.: Тр. семинара
по мат. физике и теории нелин. колеб., вып. 3. «Наукова думка», К., 1969, с. 162—168.
69. К е р з ю к В. I., Колом1ець В. Г. Дослиження деяких нелшшних
стохастичних коливних систем з повьльно змшними параметрами.— В кн.: П'ята наукова
конференщ'я молодих математике Укра'ши. Тези доповщей. 1н-т матем. АН УРСР, К., 1970,
с. 109—110.
70. К л и м ч у к В. И. К вопросу о движении астатического гироскопа в кардано-
вом подвесе на подвижном основании. — Прикладная механика, 1966, 2, 2, с. 76—80.
71. Климчук В. И. Гироскоп с переменными моментами инерции в кардановом
% подвесе на подвижном основании.— Укр. мат. журн., 1966, 18, 2, с. 118—122.
433
72. К о в т у н Р. И. Движение зарядов в пространственно-периодических
магнитных полях.— В сб.: Физика плазмы и проблемы управляемого термоядерного синтеза.
« Наукова думка», К., 1965, 45—71.
73. К о л о м и е ц В. Г. Параметрическое воздействие случайной силы на
нелинейную колебательную систему.— Укр. мат. журн., 1962, 14, 2, с. 211—214.
74. К о л о м и е ц В. Г. О воздействии случайных сил на нелинейные
колебательные системы.— В сб.: Приближенные методы решения дифференциальных уравнений. Изд-
во АН УССР, К., 1963, с. 40—46.
75. Коломиец В. Г. Воздействие случайных сил на нелинейные
колебательные системы. Автореф. диссертации на соиск. уч. степ. канд. физ.-матем. наук. Изд-во
АН УССР, К., 1963.
76. Коломиец В. Г. О параметрическом случайном воздействии на линейные
и нелинейные колебательные системы.— Укр. мат., журн., 1963, 15, 2, с. 199—205.
77. Коломиец В. Г. Параметрические случайные колебания в линейных и
нелинейных системах.— В кн.: Вторая Всесоюзн. межвузовск. конференция по теории и
методам расчета нелинейн. электрич. цепей. Ташкент, 1964, 6, с. 49—59.
78. К о л о м и е ц В. Г. Случайные колебания квазилинейных систем. В кн.: III
Konferenz tiber Nichtlineare Schwingungen (Berlin vom 25 bis 30 Mai 1964), t. I, Berlin, Aka-
demie-Verlag, 1965, с 61—66.
79 Коломиец В. Г., П о р х у н Л. М. Случайные колебания упругих
нелинейных систем с распределенными параметрами.— В сб.: Математическая физика, вып. 5,
«Наукова думка», К., 1968, с. 103—108.
80. Коломиец В. Г. Случайные колебания неавтономных квазилинейных
стохастических систем. — Укр. мат. журн., 1968, 20, 3, с. 388—395.
81. Коломиец В. Г. О принципе усреднения для стохастических систем с
последействием.— В кн.: Тр. V Международн. конференции по нелин. колебаниям. Ин-тматем.
АН УССР, 1970.
82. Колмогоров А. Н. Об аналитических методах в теории вероятностей.—
УМН, 1938, вып. 5, с. 6—41.
83. К о л м о г о р о в А. Н. Общая теория динамических систем и классическая
механика. Международн. матем. конгресс в Амстердаме. Физматгиз, М., 1961, с. 187—208.
84. Колмогоров А. Н. О сохранении условно периодических движений при
малом изменении функции Гамильтона.—ДАН СССР, 1954 98, 4, с. 527—530.
85. К о н о н е н к о В. О. Некоторые автономные задачи теории нелинейных
колебаний — В кн.: Тр. Международн. симпозиума по нелин. колебаниям, т. 3. Изд-во
АН УССР, К., 1963, с. 151—179.
86. Кореневский Д. Г., Коломиец В. Г. Некоторые вопросы теории
нелинейных колебаний квазилинейных систем со случайными запаздываниями.— В сб.:
Математическая физика, вып. 3. «Наукова думка», К., 1967, с. 91 — 113.
87. Кореневский Д. Г. О принципе усреднения для гиперболических
уравнений второго порядка с функционально возмущенным аргументом.— Укр. мат. журн.,
1971,23, 4.
88. Красносельский М. А., Крейн С. Г. О принципе усреднения в
нелинейной механике.— УМН, 1955, 10, 3 (65), с. 147—152.
89. Краснощекое П. С. Малые колебания твердого тела, имеющего полости,
заполненные вязкой жидкостью.— В кн.: Численные методы решения задач
математической физики. Сб. статей. «Наука», М., 1966, с. 258—266.
90. К р е й н М. Г. Лекции по теории устойчивости решений дифференциальных
уравнений в банаховом пространстве. «Наукова думка», К., 1964.
91. Крылов Н. М., Боголюбов Н. Н. Приложение методов нелинейной
механики к теории стационарных колебаний. Изд-во АН УССР, К., 1934.
92. Крылов Н. М., Боголюбов Н. Н. Введение в нелинейную механику.
Изд-во АН ЬССР, К., 1937.
93. К у з м а к Г. Е., К о п н и н Ю. М. Новая форма уравнений движения
спутника и приложения ее к исследованию движений, близких к -кеплеровым.— Журн.
вычисл. матем. и мат. физики, 1963, 3, 4, с 730—741.
94. Ларионов Г. С. О трех вариантах усреднения в
интегро-дифференциальных уравнениях.— Дифференциальные уравнения, 1970, 6, 6, с. 1125—1126.
95 Ларичева В. В., Шилов А. А. Аналитический метод определения
аналога сепаратрис при движении тела около центра масс в атмосфере. — Космические
исследования, 1969, 7, 1, с. 61—67.
96. Л а р и ч е в а В. В., Рейн М. В. Асимптотика уравнений небесной
механики, пригодная при широком диапазоне изменения эксцентриситета.— Космические
исследования, 1965, 3, 1, с. 27—41.
434
97. Л а р и ч е в а В. В. Об осреднении одного класса систем нелинейных
дифференциальных уравнений.— Дифференциальные уравнения, 1966, 2, 3, с. 345—352.
98. Ларичева В. В., Рейн М. В. Об осреднении в смысле среднего на
конечном интервале времени.—ДАН СССР, 1967, 174, 1, с. 21—23.
99. Л е б е д е в В. Н. Расчет движения космического аппарата с малой тягой. Изд.
ВЦ АН СССР, 1968.
100. Л о с ь Ф. С. О принципе усреднения для дифференциальных уравнений в
гильбертовом пространстве.— Укр. мат. журн., 1950, 2, 3, с. 87—93.
101. Л у р ь е А. И., Ч е к м а р е в А. И. Вынужденные колебания в
нелинейной системе с характеристикой, составленной из двух прямолинейных отрезков.— ПММ,
1938, 1, 3, с. 307—324.
102. Л ы к о в а О. Б. О поведении решений системы дифференциальных
уравнений в окрестности изолированного статического решения.—ДАН СССР, 1957, 115, 3,
с. 447—449.
103. Л я п у н о в А. М. Общая задача об устойчивости движения. Харьков, 1892.
104. М а л к и н И. Г. Die Stabilitatsfrage bei DifferentiaIgleichunger. Сб. трудов
Казанского авиационного ин-та, 1934, 2.
105. М а л к и н И. Г. Некоторые задачи теории нелинейных колебаний. Гостех-
издат, М., 1956.
106. Мандельштам Л. И., Папалекси Н. Д. Об обосновании одного
метода приближенного решения дифференциальных уравнений.— Журн. эксп. и теорет.
физики, 1934, 4, 2, с. 117—122.
107. Мандельштам Л. И. Полное собрание трудов, т. II. Изд-во АН СССР.М., 1947.
108. Медведев Г. Н., Моргунов Б. И. Об асимптотическом решении
методом усреднения некоторых систем дифференциальных уравнений с запаздыванием.—
Вестник МГУ, сер. III, физика, астрономия, 1968, 2, с. 109—111.
109. Митропольский Ю. А. Исследование собственных колебаний
нелинейной системы, близкой к точно интегрирующейся, при наличии медленно меняющихся
параметров.— Сб . трудов Ин-та строит, механики АН УССР, 1949, И, с. 99—106.
ПО. Митропольский Ю. А. Применение символических методов к
исследованию нелинейных систем с медленно меняющимися параметрами. — Сб. трудов Ин-та
строит, механики АН УССР, 1949, 13, с. 99—111.
111. Митропольский Ю. А. Собственные колебания нелинейной системы с
медленно меняющимися параметрами.— Сб. трудов Ин-та строит, механики АН УССР, 1949,
И, с. 107—114.
112. Митропольский Ю. А. Исследование колебаний в нелинейных
системах со многими степенями свободы и медленно меняющимися параметрами.— Укр. мат.
журн., 1949, 1, 2, с. 85—98.
113. Митропольский Ю. А. Медленные процессы в нелинейных
колебательных системах со многими степенями свободы. — ПММ, 1950, 14, 2,
с. 139—170.
114. Митропольский Ю. А. Исследование колебаний нелинейной системы
с медленно меняющимися параметрами.— Сб. трудов Ин-та строит, механики АН УССР,
1950, 14, с. 134—144.
115. Митропольский Ю. А. Медленные процессы в нелинейных
колебательных системах со многими степенями свободы. Автореферат дисс. на соискание уч. степ, д-ра
техн. наук, К., 1950.
116. Митропольский Ю. А. О стационарных колебаниях в нелинейных
системах со многими степенями свободы.— Сб. трудов Ин-та строит, механики АН УССР,
1950, 12, с. 228—233.
117. Митропольский Ю. А. О нестационарных колебаниях в системах со
многими степенями свободы.— Укр. мат. журн., 1954, 6, 2, с. 176—189.
118. Митропольский Ю. А. О воздействии на нелинейный вибратор «сину-
соидиальной» силы с модулированной частотой.— Укр. мат. журн., 1954, 6, 4, с. 442—447.
119. Митропольский Ю. А. К вопросу о внутреннем резонансе в
нелинейных колебательных системах.— Наук, записки КиТвськ. ун-ту, 1957, т. 16, вип. 2. Матем.
сб., №9, с. 53—61.
120. Митропольский Ю. А. Нестационарные процессы в нелинейных
колебательных системах. Изд-во АН УССР, К., 1955.
121. Митропольский Ю. А. О колебаниях в гироскопических системах при
прохождении через резонанс.— Укр. мат. журн., 1953, 5, 3, с. 333—349.
122. Митропольський Ю. О. До питания про порядок norpiuiHocTi при
асимптотичному штегруванш р1внянь, близьких до точно штегровних.— Вкник Ки'шськ.
ун-ту, 1, сер. астроном., матем. та мех., вип. 2, 1958, с. 3—6.
435
123. Митропольський Ю. О., Ликова О. Б. До питания про нел!*-
HiftHi piвняння з перюдичними коефМентами.— ЕПсник КиТвськ. ун-ту, 2, сер. астроном.,
матем., та мех., вип. 2, 1959, с. 3—12.
124. Митропольский Ю. А. Асимптотические методы в теории нелинейных
колебаний.— В кн.: Труды Третьего Всесоюзного математического съезда. Т. 3, Изд-во
АН СССР, М., 1958, с. 531—542.
125. Митропольский Ю. А. О некоторых уравнениях, близких к точно
интегрирующимся.— В кн.: Автоматическое управление и вычислительная техника, вып. 2.
Машгиз, М., 1959, с. 221—248.
126. Митропольский Ю. А. О периодических решениях систем нелинейных
дифференциальных уравнений, правые части которых не дифференцируемы. Укр. мат. журн.,
1959, 11, 4, с. 366—379.
127. Митропольский Ю. А. О периодических решениях системы
нелинейных дифференциальных уравнений с недифференцируемыми правыми частями.—
ДАН СССР, 1959, 128, 6, с. 1118—1121.
128. Митропольський Ю. О., Мосеенков Б. I. Дослщження коливань
в системах з розподьленими параметрами (Асимптотичш методи). Вид-во КДУ,К., 1961.
129. Митропольський Ю. О., Ликова О. Б. Про нелшшш диферен-
шалып р1вняння з перюдичними коеф!*шентами та повкльно змшними параметрами.—
Вкник КиТвськ. ун-ту, 3. сер!я матем. та механши, вип. 2, 1961, с. 3—10.
130. Митропольский Ю. А. Проблемы асимптотической теории
нестационарных колебаний. «Наука», М., 1964.
131. Митропольский Ю. А., Фодчук В. И. Асимптотические методы
нелинейной механики применительно к нелинейным дифференциальным уравнениям с
запаздывающим аргументом. — Укр. мат. журн., 1966, 18, 3, с. 65—84.
132. Митропольский Ю. А. Лекции по методу усреднения в нелинейной
механике. «Наукова думка», К., 1966.
133. Митропольський Ю. О. Метод усереднення в нелМйнш механщк
(Оглядова допоешь).— В кн.: Друга наукова конференшя молодих математике Украши.
«Наукова думка», К., 1966, с. 5—34.
134. Митропольский Ю. -А., Лыкова О. Б. Об исследовании одного
класса нелинейных дифференциальных уравнений в гильбертовом пространстве.— В кн.:
Международный конгресс математиков, Москва, 1966. Секция 6. Обыкновенные
дифференциальные уравнения. Тезисы кратких научных сообщений, М., 1966, с. 38—39.
135 Митропольский Ю. А., Коломиец В. Г. Применение принципа
усреднения к исследованию влияния случайных воздействий на колебательные системы.—
В сб.: Математическая физика, «Наукова думка», К., 1967, 3, с. 146—168.
136. Митропольский Ю. А., Самойленко А. М., СтрижакТ. Г.
О приведении к стандартному виду ... В кн.: Тр. семинара по мат. физике и теории нелин.
колебаний, т. 1, вып. 2, «Наукова думка», К., 1968, с. 4—20.
137. Митропольский Ю. А., Мосеенков Б. И. Лекции по
применению асимптотических методов к решению уравнений в частных производных, Ин-т матем.
АН УССР, К., 1968.
138. Митропольский Ю. А., Кореневский Д. Г. Исследование
нелинейных колебаний в системах с распределенными параметрами и запаздыванием. — В сб.:
Математическая физика, вып. 4. «Наукова думка», К., 1968, с. 93—145.
139. Митропольский Ю. А., Лыкова О. Б. Лекции по методу
интегральных многообразий, Ин-т математики АН УССР, К., 1968.
140. Митропольский Ю. А., Хома Г. П. О принципе усреднения для
гиперболических уравнений вдоль характеристик.— Укр. мат. журн., 1970, 21, 5,
с. 600—610
141. Митропольский Ю. А. Метод усреднения в нелинейной механике.—
В кн.: Тр. V Международ, конференции по нелин. колебаниям, Ин-т матем. АН УССР, 1970.
142. Моисеев Н. Н. Асимптотика быстрых вращений.— Журн. вычисл.
матем. и мат. физика, 1963, 3, 1, с. 145—158.
143. Моисеев Н. Н. Асимптотические методы нелинейной механики. «Наука»,
М., 1969.
144. М о и с е е в Н. Д. О некоторых основных упрощенных схемах небесной
механики, получаемых при помощи осреднения ограниченной круговой проблемы трех точек.
1.06 осредненных вариантах ограниченной круговой плоской проблемы трех точек.—
Ученые записки МГУ, вып. 96; Тр. гос. астрономическ. ин-та им. П. К. Штернберга, т. XV,
кн. 1, с. 75—100.
145. Молчанов А. М., Разделение движений и асимптотические методы в
теории нелинейных колебаний.—ДАН СССР, 1961, 136, 5, с. 1030—1033.
436
146. Молчанов А. М. Об эволюции планетных систем.— В сб.: Проблемы
движения искусственных небесных тел. Изд-во АН СССР, М., 1963, с. 42—49.
147. Моргунов Б. И. Высшие приближения при расчете некоторых
вращательных движений.— Вестник МГУ, сер. III, физика, астрономия, 1963, 6, с. 35—42.
148. Моргунов Б. И. Стационарные резонансные режимы некоторых
вращательных движений.— ДАН СССР, 1964, 155, 2, с. 277—280.
149. Моргунов Б. И. Полный расчет второго приближения для вращательного
движения.— Вестник МГУ, сер. III, физика, астрономия, 1964, 1, с. 23—28.
150. Моргунов Б. И. Асимптотический анализ некоторых вращательных
движений.— Вестник МГУ, сер. III, физика, астрономия, 1965, 4, с. 56—65.
151. Моргунов Б. И. Расчет вращательных режимов некоторых негамильто-
новых систем.— Вестник МГУ, сер. III, физика, астрономия, 1965, 4, с. 83—86.
152. Н е и м а р к Ю. И. Метод точечных преобразований в теории нелинейных
колебаний. I —Изв. высш. уч. зав. Радиофизика, 1958, 1, 1, с. 41—66; II — 1, 2, 1958,
с. 95—117; III — 1, 5—6, 1958, с. 146—165.
153. Н е й м а р к Ю. И. Метод усреднения с точки зрения метода точечных
отображений. — Изв. высш. уч. зав. Радиофизика, 1963, 6, 5, с. 1021—1032.
154. П е р с и д с к и й К. П. Счетные системы дифференциальных уравнений и
устойчивость их решения. — Изв. АН КазССР, сер. матем. и мех., 1959, 7 (11),
с. 52—71.
155. Понтрягин Л. С, Андронов А. А., Витт А. А. О
статистическом рассмотрении динамических систем.— Журн. эксп. и теорет. физики, 1933, 3, 3, с.
165—180; см. также: Андронов А. А. Собрание трудов. Изд-во АН СССР, М., 1956, 142—160.
156. Понтрягин Л. С. Системы обыкновенных дифференциальных уравнений
с малыми параметрами при высших производных.— В кн.: Тр. III ЕГсесоюзн.матем. съезда,
т. 2, М., 1956, с. 93—94; т. 3. М., 1958, с. 570—577.
157. Понтрягин Л. С, Родыгин Л. В. Приближенное решение одной
системы обыкновенных дифференциальных уравнений с малым параметром при
производных.— ДАН СССР, 1960, 131, 2, с. 255—258.
158. Рубаник В. П. Обоснование применимости принципа усреднения к
системам дифференциально-разностных уравнений.— Научн. ежегодн. Черновицк. гос.ун-та,
1959. Изд-во Черновицк. гос. ун-та, I960.
159. Р у б а н и к В. П. Применение асимптотического метода Н. М. Крылова и
Н. Н. Боголюбова к квазилинейным дифференциально-разностным уравнениям.— Укр.
мат. журн., 1959. 11, 4, с. 446—450.
160. Рубаник В. П. О зависимости решений дифференциально-разностных
уравнений от параметра.— Сибирск. мат. журн., 1961, 2, 6, с. 904—912.
161 Р ы т о в С. М. Введение в статистическую радиотехнику. «Наука», М., 1966.
162. Самойленко А. М. Применение метода усреднения для исследования
колебаний, возбуждаемых мгновенными импульсами в автоколебательных системах второго
порядка с малым параметром.— Укр. мат. журн. 1961, 13, 3, с. 103—109.
163. Самойленко А. М. Об одном случае непрерывной зависимости
решений дифференциальных уравнений от параметра.— Укр. матем. журн., 1962, 14, 3,
с. 289—298.
164. Самойленко А. М. Обоснование принципа усреднения для
дифференциальных уравнений с разрывной правой частью. — В кн.: Приближенные методы решения
дифференциальных уравнений. Изд-во АН УССР, К., 1963, с. 90—95.
165. Самойленко А. М. К вопросу о периодических решениях
дифференциальных уравнений с недифференцируемыми правыми частями.— Укр. мат. журн., 1963,
15, 3, с. 328—332.
166. С а м о й л е н к о А. М. Метод усреднения в системах с толчками. — В кн.:
Математическая физика. «Наукова думка», 1971, вып. 9.
167. Симоненко И. Б. Обоснование метода осреднения для. абстрактных
параболических уравнений.— Матем. сб., 1970, 81 (123), 1, с. 53—61.
168. Сирченко 3. Ф. Применение метода усреднения к решению уравнений в
частных производных. — Укр. мат. журн., 1962, 14, 2, с. 222—227.
169. Сирченко 3. Ф. Обобщение одной теоремы Н. Н. Боголюбова на случай
гильбертова пространства. — Укр. мат. журн., 1964, 16, 3, с. 339—350.
170. Скороход А. В. Исследования по теории случайных процессов. Изд-во
КГУ, К., 1961.
171. Страбл А. Точная теория движения спутника.— Механика (периодический
сборник переводов иностранных статей), 1961, 4, 68, с. 5—25.
172. С т р а т о н о в и ч Р. Л. Избранные вопросы теории флюктуации в
радиотехнике. «Советское радио», М., 1961.
437
173. Стратонович Р. Л. Новая форма записи стохастических интегралов и
уравнений.— Вестник МГУ, сер. 1, математика, механика, 1964, 1, с. 3—12.
174. Стрижак Т. Г. Применение асимптотических методов для исследования
движений сложных маятников. Автореф. дис. на соиск. уч. степ. канд. физ.-матем. наук,
Ин-т математики АН УССР, К., 1969.
175. Тазабеков Р. Метод усреднения в теории нелинейных интегро-диффе-
ренциальных уравнений типа Вольтерра. — Изв. АН КиргССР, 1967, 4.
176. Тазабеков Р. Метод усреднения в системах нелинейных интегро-диффе-
ренциальных уравнений, содержащих быстрые и медленные переменные. — В сб.:
Исследования по интегро-дифференциальным уравнениям в Киргизии, вып. 6, «ИЛИМ», Фрунзе,
1969, с. 244—265.
177. Тихонов В. И. Статистическая радиотехника, «Советское радио», М., 1966.
178. Ф е д о р ч е н к о А. М. Метод канонического усреднения в теории нелинейных
колебаний.— Укр. мат. журн., 1957, 9, 2, с. 220—224.
179. Ф е д о р ч е н к о А. М. О движении тяжелого несимметричного гироскопа с
вибрирующей точкой опоры.— Укр. мат. журн., 1958, 10, 2, с. 209—218.
180. ФедорченкоА. М. Радиальные и вертикальные колебания в ускорителях
с сильной фокусировкой. — Укр. мат. журн., 1959, 11, 2, с. 192—198.
481. ФедорченкоА. М. Об одном динамическом методе повышения
устойчивости быстроеращающегося симметричного гироскопа.— ПММ, 1961, 25, 5, с.
938—940.
182. Филатов А. Н. О методе усреднения в системах интегро-дифференциаль-
ных уравнений.— ДАН СССР, 1965, 165, 3, с. 490—492.
183. Филатов А. Н. Усреднение в системах интегральных и интегро-диффе-
ренциальных уравнений. — В сб.: Исследование по аналитической механике, Изд.
«Наука», УзССР, Ташкент, 1965, с. 135—179.
184. Филатов А. Н. Усреднение в дифференциальных и интегро-дифференциаль-
ных уравнениях. Изд-во «Фан», УзССР, Ташкент, 1967.
185. Филатов А. Н., Умаров А. Г. К методу усреднения в системах ин-
тегро-дифференциальных уравнений.— Докл. АН УзССР, 1965, 6.
186. Ф и л а т о в А. Н. Усреднение в системах дифференциальных уравнений
не разрешенных относительно производной. — ДАН СССР, 1967, 172, 4, с. 795—797.
187. Фодчук В. И. О непрерывной зависимости решений дифференциальных
уравнений с запаздывающим аргументом от параметра.— Укр. мат. журн., 1964, 16, 2,
с. 273—279.
188. Фодчук В. И. К вопросу обоснования принципа усреднения для
дифференциальных уравнений с запаздывающим аргументом.— III Konferenz iiber nichtlineare
schwingungen. (Berlin vom 25 bis 30 May 1964), t. I, Berlin, Akademie-Verlag, 1965,c. 45—50.
189. Фодчук В. И. Исследование интегральных многообразий для систем
нелинейных дифференциальных уравнений с запаздывающим аргументом, Укр. мат. журн.,
1965, 17, 4, с. 94—102.
190. Фодчук В. И. Обоснование метода усреднения для одного класса
сингулярно возмущенных систем с запаздыванием.— В кн.. Тр. семинара по теории
дифференциальных уравнений с отклоняющимся аргументом, 1967, 4, с. 163—172.
191. Фодчук В. И. Метод усреднения для дифференциально-разностных
уравнений нейтрального типа.— Укр. мат. журн., 1968, 20, 2, с. 203—209.
192. Халанай А. Системы с запаздыванием. Результаты и проблемы
математики. Математика. Период, сб. переводов иностр. статей, 1966, 10, 5, с. 85—102.
193. ХапаевМ. М. О методе усреднения и некоторых задачах, связанных с
усреднением.— Дифференциальные уравнения, 1966, 2, 5, с. 600—608.
194. X а п а е в М. М. Об одной теореме типа Ляпунова.— ДАН СССР, 1967, 176,
6, с. 1262—1265.
195. X а п а е в М. М. Об исследовании на устойчивость в теории нелинейных
колебаний.— Математические заметки, 1968, 3, 3, с. 307—318.
196. Хапаев М. М. Об устойчивости положения равновесия систем
дифференциальных уравнений. —Дифферендиальные уравнения, 1969, 5, 5, с. 848—855.
197. Хасьминский Р. 3. О принципе усреднения для параболических и
эллиптических дифференциальных уравнений и марковских процессов с малой диффузией.—
Теория вероятн. и ее применение, 1963, 8, 1, с. 3—25.
198. Хасьминский Р. 3. О работе автоколебательной системы при
воздействии на нее малого шума. — ПММ, 1963, 27, 4, с. 683—688.
199. Хасьминский Р. 3. О случайных процессах, определяемых
дифференциальными уравнениями с малым параметром. — Теория вероятн. и ее применение, 1966,
11, 2, с. 240—259.
438
200 Хасьминский Р. 3. Предельная теорема для решений
дифференциальных уравнений со случайной правой частью.— Теория вероятн. и ее применение, 1966, 11,
3, с. 444—462.
201. Хасьминский Р. 3. О принципе усреднения для стохастических
дифференциальных уравнений Ито.— Kybeinetika, 1968, 3, 4 (ЧССР).-
202. X о м а Г. П. Теорема об усреднении для гиперболических систем первого
порядка.— Укр. мат. журн., 1970, 22, 5.
203. X о м а Г. П. Про неперервну залежшсть розв'язку ппербол1чно1 системи в'щ
параметра.— ДоповЫ АН УРСР, 1970, сер. А 7, с. 615—617.
204. Челомей В. Н. О возможности повышения устойчивости упругих систем
при помощи вибраций.—ДАН СССР, 1956, 110, 3, с. 345—347.
205. Черноусько Ф. Л. О резонансе в существенно нелинейной системе.—
Журн. вычисл. матем. и мат. физики, 1963, 3, 1, с. 131 —144.
206. Черноусько Ф. Л. Резонансные явления при движении спутника
относительно центра масс.— Журн. вычисл. матем. и мат. физики, 1963, 3, 3, с. 528—538.
207 Ш и м а н о в С. Н. К теории линейных дифференциальных уравнений с
последействием. Дифференциальные уравнения, 1965, 1, 1, с. 102—116.
208. Штокало И. 3. Линейные дифференциальные уравнения с переменными
коэффициентами. Изд-во АН УССР, К., 1960.
209 Шулежко Л. Ф. ГПдвищення спйкосп гнучких пластин i цилшдричних
панелей за допомогою Bi6pauii.— Доповш АН УРСР, 1964, 1, с. 10—13.
210. Эйдельмаи С. Д. О применении принципа усреднения к
квазилинейным параболическим системам второго, порядка.— Сибирск. матем. журн., 1962, 3, 2.
211. Эйнштейн А., Смолуховский М. Броуновское движение. Сб.
статей (перевод с немецкого), ОНТИ, 1936.
212. Antosiewicz H. A. Continuous Parameter Dependence and the Method of
Averaging, Труды Международного симпозиума по нелинейным колебаниям, Аналитические
методы. Изд-во АН УССР, I, 1963, 51—58.
213. Arenstorf Richard F. A New Method of Perturbation Theory and
its Application to the Satellite Problem of Celestial Mechanics, J. reine und angew. Math.,
' 1966, 221, 113—144.
214 Байнов Д.,Д. Об усреднении в некоторых системах обыкновенных
дифференциальных уравнений, Математички весник, 5(20), св. 1, 1968, 53—62.
215. В е п п е у D. J., N i е 1 1 A. M Apparent Resonances of Weakly Nonlinear
Standing Waves, J. Mathematics and Physics , 41, 4, 1962, 254—263.
216. Bogoliubov N. N., Mitropolsky Y u. A. The Method of Integral
Manifolds in Nonlinear Mechanics, В кн.: Contribs. Differential Equations, New York, J.
Wiley £c Sons Inc., 2, 1963, 123—196.
217. BrennerJ. L. Motion of an Equatorial Satellite of an Oblate Planet, Ballistic
Missile and Space Technology, New York, III, 1960, 259—289.
218 Cole J. D. and Kevorkian J. Uniformly Valid Approximations
for Certain Nonlinear Differential Equations, Proc. 1961 Internat. Sympos. Nonlinear
Differential Equations and Nonlinear Mechanics, Academic Press, New York, 1963, 113—120.
219. Delanhay M. Theorie du mouvement de la Lune, 1, 1860; 2, 1867. Memoires
de PAcademie des Sciences de la France 28, 29.
220 D i 1 i b e г t о S. P. New Results on Periodic Surfaces and the Averaging
Principle. Proceedings United States—Japan Seminar on Differenzial and Functional Equations.
1967.
221. D i I i berto S. P., К у пег W. Т., Freund R. В. The
Application of Periodic Surface Theory to the Study of Satellite Orbits, Astron. J., 66, 3, 1961,
118—128.
222. D i 1 i b e г t о S. P. Periodic Surfaces and Satellite Orbits, NAVORD Report
6445, May 1959.
223. D i 1 i b e г t о S. P. Perturbation Theorems for Periodic Surfaces I, II. Rend.
Circolo Mat. Palermo, Ser. 2, 9, 1960, 265—299; 10, 1961, 111 — 161.
224. D i 1 i b e г t о S. P. An App.ication of Periodic Surfaces, Contribs. to the
Theory of Nonlinear Oscillations, Princeton University Press, Princeton, 3, 1956, 257—261.
225. F a t о u P. Sur le mouvement d'un systeme soumis a des forces a courte periode,
Bull. Soc. math. France, 56, 1—2, 1928, 98—139.
226. F a t о u P. Sur le mouvement d'un point material dans un champ de gravitat on
fixe, Acta astron., a, 2, 1931, 101.
227. Fodchuk V. I. Application of the Averaging Method to the Differential —
Difference Equations of the Neutral Type, Proc. Fourth Conf. Nonlinear Oscillations, Prague,
1968, 161—165.
439
228. Gauss С. F. Determinativ attractions quam in punctum quodwis data exer-
cerat planeta, si ejus massa per totam orditam ratione temporis quo singulae partes describun-
fur esset dispertita, Werke, 3, 331 (Gottingen, 1867).
229. H a 1 a n а у A. Solutions periodiques et presque-periodiques des systemes
d'equations aux differences finies, Arch. Rational. Mech. and Analys., XII, 2, 1963, 134—149.
230. Халанай А. Метод усреднения для систем дифференциальных уравнений
с запаздывающим аргументом, Rev. math, pures et appl. Acad. RPR, 4, 3, 1959, 467—483.
231. Халанай А. Почти-периодические решения систем дифференциальных
уравнений с запаздывающим аргументом с малым параметром, Rev. de math, pures et appl. Acad.
RPR, 5, 1, 1960, 75—79.
232. Hale J. K. Averaging Methods for Differential Equations with Retarded
Arguments and a Small Parameter, Brown University, Technical Report, 1964,64—1.
233. Hale J. K. Averaging Methods for Differential Equations with Retarded
Arguments and a Small Parameter, J. Differential Equations, 2, 1, 1966, 57—73.
234. Hale J. K. Oscillations in Nonlinear Systems, McGraw — Hill Book Company,
INC., New York, 1963.
(Русский перевод: Дж. Хейл, Колебания в нелинейных системах, «Мир», М. 1966.)
235. Курцвейль Я., ВорелЗ. О непрерывной зависимости решений
дифференциальных уравнений от параметра.— Чехосл. матем. ж., 7, 4, 1957, 568—580.
236. Курцвейль Я. О принципе усреднения в некоторых специальных случаях
краевых задач для уравнений в частных производных, Casopis pestovani mat., 4, 88, 1963,
444—455.
237. К У п е г W. Т. A Mathematical Theory of the Orbits about an Oblate Planet,
J. Soc. Industr. Appl. Math., 13, 1965, 136—170.
238. Miles J. W. Stability of Forced Oscillations of a Spherical Pendulum, Quart.
Appl. Math., 20, 1, 1962, 21—32.
239. Minorsky N. Nonlinear Oscillations. D. Van Nostrand Company, Ing., New
York, 1962.
240. M i t г о р о 1 s k i i Y u. A., Moseenkov B. I. The Monofrequency
Method in the Dynamic Analysis of Structures, Consultants Bureau, New York, 1967, 104.
241. Mitropolsky Yu. A. Averaging xMethod in Nonlinear Mechanics, Int. J.
Nonlinear Mechanics, Pergamon Press Ltd, 1967, 2, 69—96.
242. Moiseyev N. N. Methods of Nonlinear Mechanics in the Problems of
Dynamics of Satellites, Reports of the XIII Internat. Congress of Astronautics, Varna, 1962.
243. Morrison J. A. An Application of a Generalized Method of Averaging. ICM,
тезисы кратких научн. сообщений. Секция 12. М. «Наука», 1966, 14.
244. Morrison J. A. A Generalized Method of Averaging with Applications to
Slightly Damped Nonlinear Oscillations, J. Math. Analysis and Applic, 15,1966, 213—227.
245. Morrison J. A. Application of the Method of Averaging to Planar Orbit
Problems, J. Soc. Industr. Appl. Math., 13, 1965 96—117.
246. Morrison J. A. Comparison of the Modified Method of Averaging and the
Two Variable Expansion Procedure, SIAM Rev. 8, 1966, 66—85.
247. Ostrogradsky M. V. Note sur la methode des approximations successi-
ves, Mem. be l'Acad. des Sciences be St.—Pbg., 1, 1, 1836, 233—238; Bull. Scient. publ.
par l'Acad. des Sciences de St.— Pbg., 1,1, 1836, 1—2.
См. также Остроградский М. В. Полное собрание трудов, Изд. АН УССР, К. 1961
III, 71—75.
248. Philips О. М. On the Dynamics of Unsteady Gravity Waves of Finite
Amplitude, Part I, J. Fluid Mech., 9, 1960, 193—217.
249. Pol B. van der. A Theory of the Amplitude of Free and Forced Triode
Vibrations, Radio Review, 1, 1920, 701,754.
250. Pol B. van der. Nonlinear Theory of Electric Oscillations, Proc. IRE, 22,
1934, 1051—1086.
251. R a e t z G. S. A New Theory of the Cause of Transition in Fluid Flows, Norair
Report, Nor—59—383, 1959.
252. Sethna P. R., 4emp GeneW. Nonlinear Oscillations of a Gyroscopic
Feidulum with an Oscillating Point of Suspension, Les vibrations forcees dans les systemes
non-lineaires, Paris, 1965,375—391.
253. Sethna P. R. An Extension of the Method of Averaging, Quart. Appl. Math.,
25, 1967, 205—211.
254. Vrkoc I. Extension of the Averaging Method to Stochastic Equations, Czechosl.
Math. J., 16(91), 4, 1966, 518—544.