










Author: Федосов Е.А.
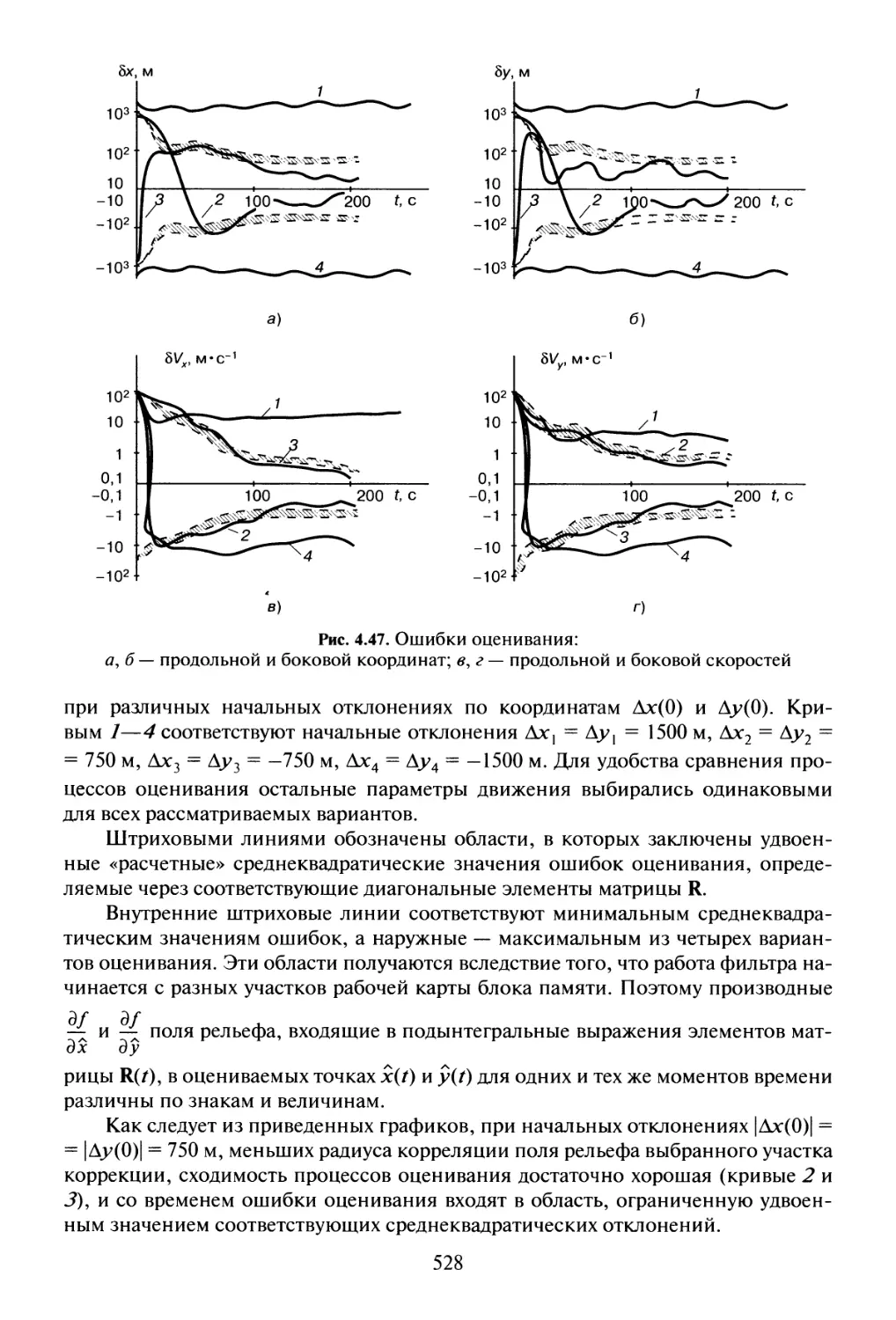
Tags: военная и военно-морская авиация маскировка военное дело военная наука издательство дрофа научно технический прогресс армия россии авиация и космонавтика военно вооруженные силы
ISBN: 5-7107-7070-1
Year: 2005




Библиотека сайта http://www.dogswar.ru
Dogswar.ru - Информационный портал о стрелковом оружии, военной технике, вооруженных силах
стран мира. Статьи и обзоры о армиях мира, оружии и военной технике, боеприпасах и амуниции.
Тактико-технические характеристики и фотографии вооружения. Электронные книги, справочники и
энциклопедии оружия, униформы, военной истории. Форум.
WrOJOO TCiCO'
ИНА'ОЛОИО К
(по>го1Л1И\’С1>:. crnwf!
Под редакцией академика
Е. А. Федосова
АВИАЦИЯ
ВВС РОССИИ
И НАУЧНО-ТЕХНИЧЕСКИЙ
ПРОГРЕСС
Боевые комплексы и системы
вчера, сегодня, завтра
d р о ф а
Москва 2005
УДК 623.7
ББК 68.53
А20
Серия «Авиация и космонавтика» основана в 2004 году
Рецензенты:
В. П. Кутахов, заместитель начальника Военного авиационного
университета им. проф. Н. Е. Жуковского;
А. А. Герасимов, начальник 30 ЦНИИ Минобороны РФ;
С. А. Колядин, председатель Научно-технического
комитета ВВС Минобороны РФ
Авторы:
Д. А. Антонов, |Р. М. Бабич|, Ю. П. Балыко, И. Н. Белоглазов, Е. Я. Бершадский,
Л. В. Борисов, С. М. Виноградов, В. И. Войтенко, А. А. Герасимов, Б. Н. Гузеев,
А. В. Доценко, А. М. Жеребин, А. В. Зайцев, |В. С. Зинйч], В. В. Инсаров,
В. А. Кислицын, Г. Г. Кичигин, К. М. Колпаков, В. Н. Корниенко, В. С. Кравченко,
М. Г. Кульчак, Е. А. Махов, И. В. Немыченков, В. А. Попов, А. Л. Пухов,
И. С. Селезнев, Ю. Н. Сорокин, Н. В. Топорков, Е. А. Федосов, В. И. Червин
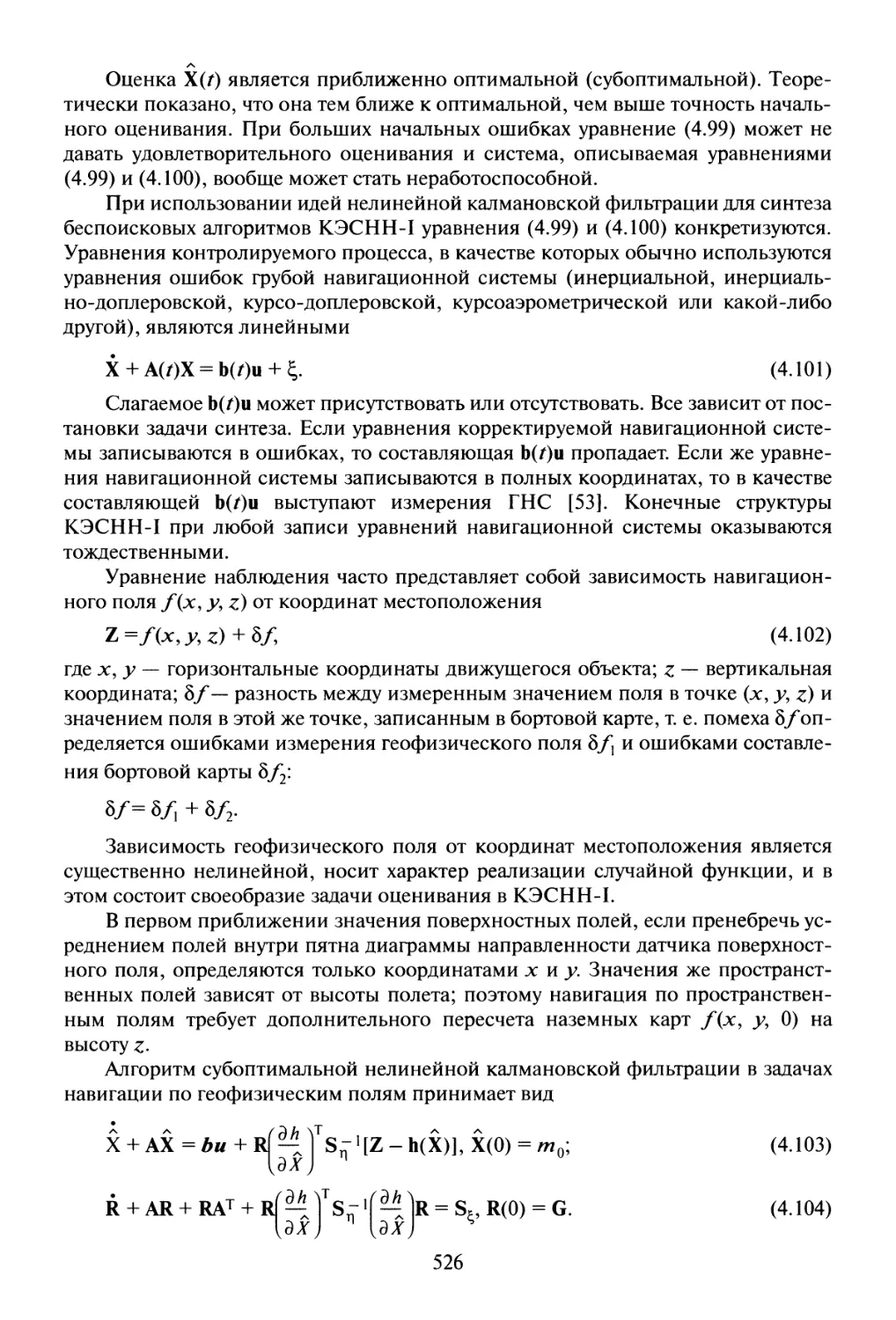
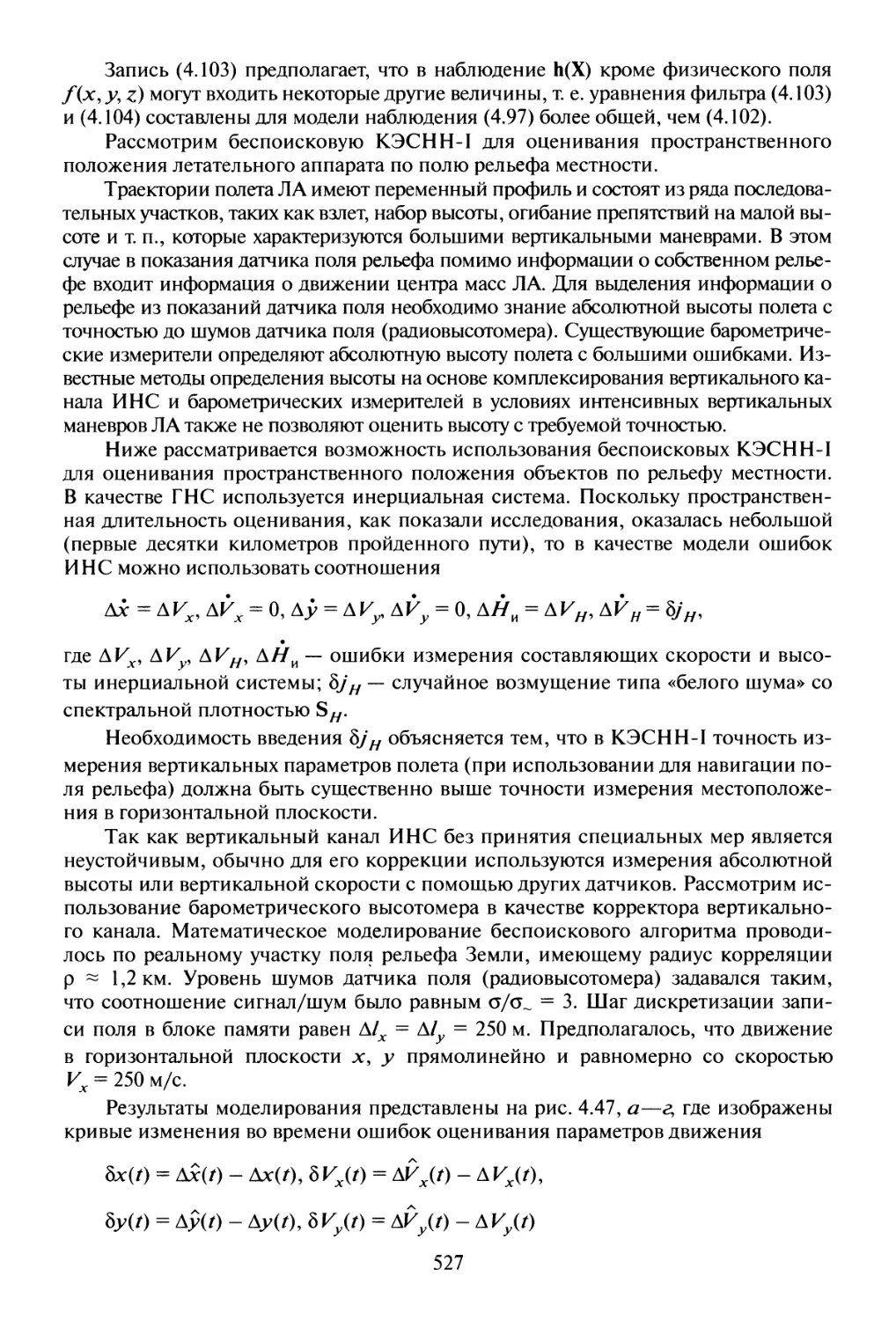
Авиация ВВС России и научно-технический прогресс. Боевые
А20 комплексы и системы вчера, сегодня, завтра / под ред. Е. А. Федосо-
ва. — М. : Дрофа, 2005.— 734, [2] с.: ил. — (Авиация и космонав-
тика).
ISBN 5-7107-7070-1
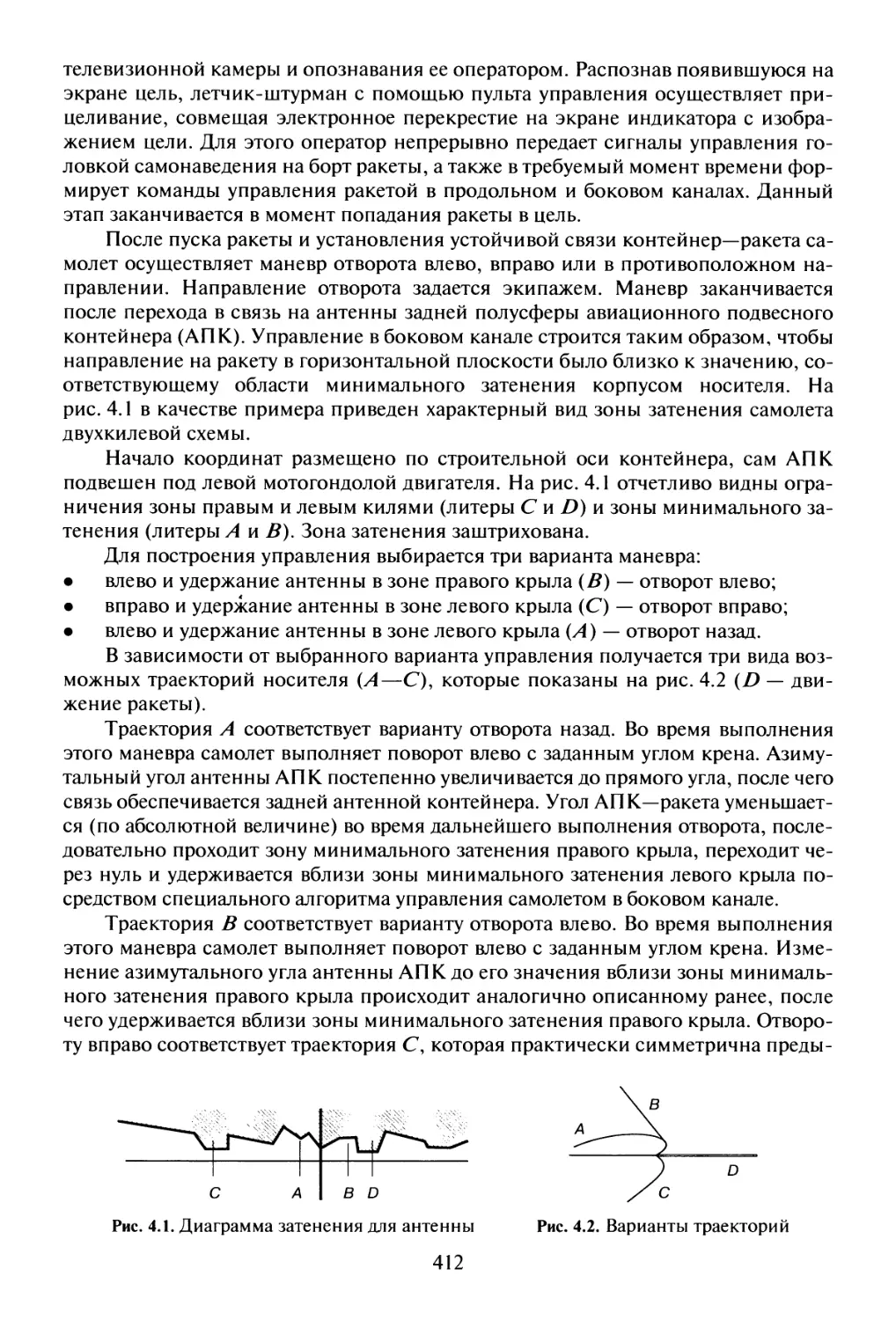
В книге освещаются вопросы применения ударной авиации России и научно-
технические достижения в разработке образцов авиационной техники, вооружения
и авиационных систем. Книга написана коллективом ведущих специалистов
научно-исследовательских институтов и ОКБ России.
Представленные материалы имеют прикладной характер: описаны конкрет-
ные достижения, реализованные в ударных комплексах армейской (вертолеты
«Ми» и «Ка»), фронтовой (самолеты «Су» и «Миг») и дальней (самолеты «Ту»)
авиации и касающиеся в первую очередь их боевого применения, боевых
возможностей и интеллектуального уровня борта самолета и ракет в решении
боевых задач. Рассматривается оружие, применяемое на указанных типах само-
летов, системы управления вооружением и системы наведения оружия на цель
с высокой точностью.
Для научной общественности, специалистов, студентов и преподавателей вузов,
военных, а также для всех, интересующихся отечественной военной авиацией.
УДК 623.7
ББК 68.53
ISBN 5-7107-7070-1
© ООО «Дрофа», 2005
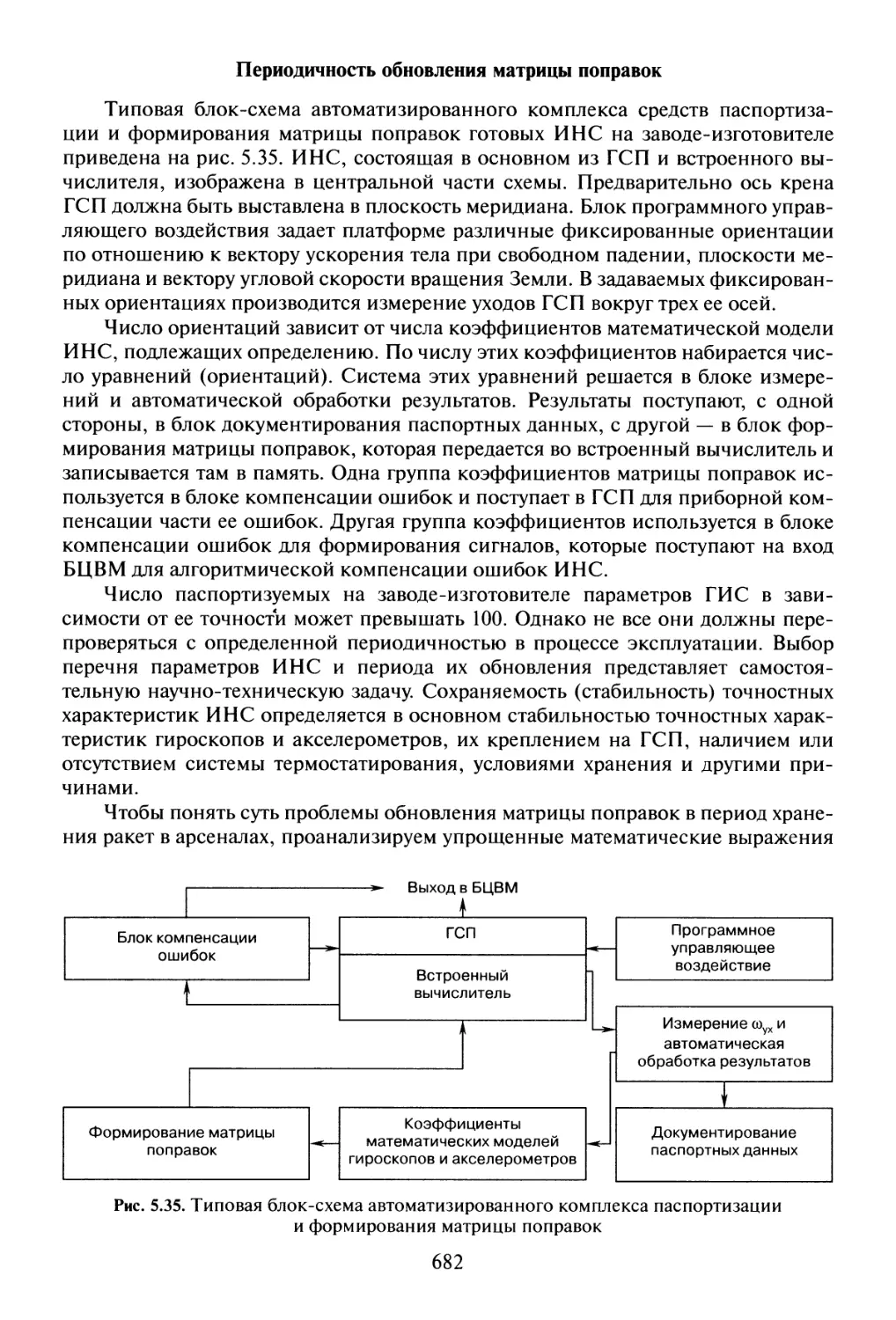
Предисловие
Военная авиация и в особенности ее ударная компонента ввиду ее непрев-
зойденной маневренности, дальности, боевой мощи и глубине боевого примене-
ния занимает особое место в системе вооруженной борьбы. Оснащенные совре-
менным оружием, в том числе и высокоточным, самолеты различных классов
могут успешно наносить удары по целям в тактической и оперативной глубине.
Применение авиацией крылатых ракет позволяет решать стратегические задачи.
Это оружие — сильнейший политический аргумент в руках высшего руководства
страны. Особая роль ударной авиации заключается также в высоких возможнос-
тях демонстрации военной мощи государства, его военного и научно-промыш-
ленного потенциала.
Военно-воздушные силы России оснащаются самыми современными само-
летами и оружием, и несмотря на трудности последних лет, их традиционное ли-
дерство неоспоримо. Это наглядно показывают выставки, авиасалоны, высокий
спрос на нашу авиационную технику со стороны зарубежных государств.
Ударная авиация постоянно совершенствуется: разрабатываются новые об-
разцы оружия, систем управления, бортового оборудования, реализуется про-
грамма глубокой модернизации авиационной техники.
Основы современного состояния мировой авиации заложены изначально
в русской научной школе Н. Е. Жуковского и его сподвижников. Лидерство ко-
валось с первых лет существования авиации: полеты Ефимова, петля Нестерова,
рекорды Громова и Чкалова, боевое крещение в небе Испании. Пройдя через
горнило Великой Отечественной войны, авиация нашей страны стала одной
из самых могущественных в мире. В послевоенной истории наша авиация
в конфликтах различного масштаба приобретала боевой опыт и совершенствова-
ла научно-технический облик. Мощный рывок в техническом оснащении ави-
ации произошел в 70—80-х годах прошлого века.
На протяжении всей истории отечественной авиации шел напряженный
совместный труд ученых-исследователей, разработчиков, испытателей, летного и
инженерно-технического состава ВВС. В результате появились оригинальные
технические решения. Фундаментальные научные идеи, сложные авиационные
комплексы, новые способы боевого применения в совокупности определяют об-
лик современной авиации.
В этой книге, созданной коллективом специалистов под руководством одно-
го из крупнейших ученых в области военной авиации академика РАН
Федосова Е. А., представлен обширный обобщенный материал по вопросам тех-
нического развития боевой авиации, концепций и способов боевого применения,
3
по новым принципам построения самолетных систем и оружия. Здесь же опреде-
лены перспективные пути развития авиационных комплексов и систем.
Этой книгой авторы не только подводят итоги определенного исторического
этапа развития авиации, но и смотрят вперед, вселяют в читателя уверенность в
завтрашнем дне нашей авиации.
Завершить предисловие хотел бы словами Президента Российской Федера-
ции В. В. Путина: «Россия — страна с давними авиационными традициями, нам
есть что вспомнить ... Нам есть чем гордиться».
Главнокомандующий Военно-
воздушными силами ВС РФ
генерал армии В. Михайлов
Введение
В недавно вышедшей книге «Авиация ПВО России и научно-технический
прогресс. Боевые комплексы и системы вчера, сегодня, завтра» (М.: «Дрофа»,
2004) был дан анализ развития авиационных оборонительных систем. Настоящая
книга является продолжением названного издания. В ней предпринята попытка
проведения с тех же системных позиций исторического анализа прогресса авиа-
ции ВВС России — в основном ударной составляющей с учетом того, что истре-
бительные системы ВВС хорошо представлены в упомянутой выше книге.
Ударные самолеты предназначены для решения двух основных боевых задач:
прорыва обороны противника и выхода на рубежи применения оружия; нанесе-
ния удара по различным наземным и надводным целям. Решение этих задач обес-
печивается как специальными системами самолета, так и информационно-управ-
ляющей инфраструктурой. Понятие и состав комплекса авиационного вооруже-
ния, комплекса обороны и их инфраструктуры зависят от принятых концепций и
возможностей техники и технологий на современном этапе развития. Естествен-
но, необходим компромисс между желаемыми концепциями применения авиаци-
онных комплексов и техническими возможностями, достигнутыми в настоящее
время. Самые передовые концепции останутся нереализованными при отсутствии
необходимых технических средств.
Прорыв противовоздушной обороны противника, выход на рубеж атаки и
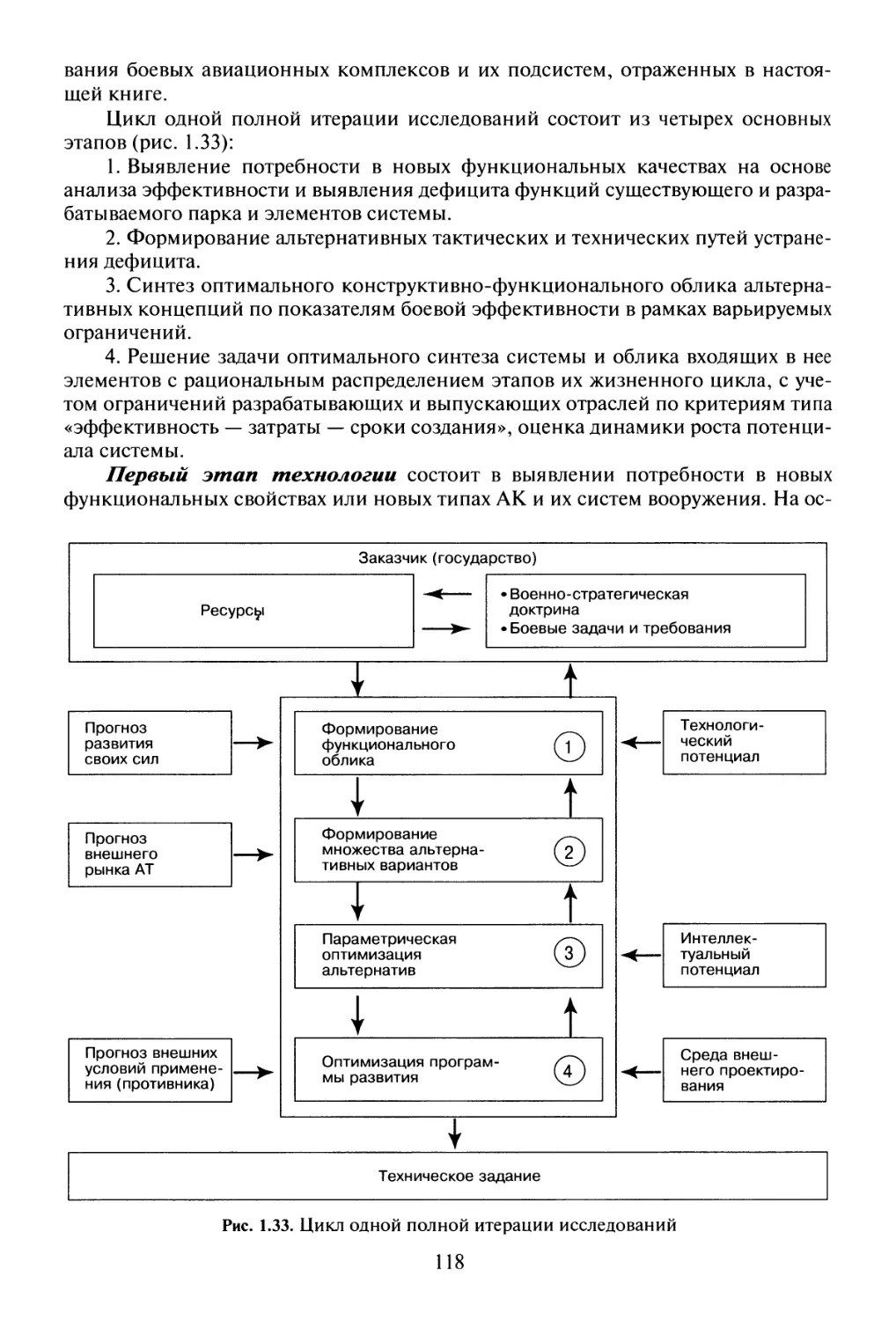
поражение цели можно обеспечить только при гармоничном развитии всех сис-
тем самолета: планера, двигателя, оборудования, вооружения и бортового
интеллекта. Усилить любой параметр (скорость, высотность, маневренность,
дальность стрельбы, незаметность) возможно, как правило, лишь в ущерб другим
параметрам, что приводит к потере боевой эффективности ударного самолета.
Такая жесткая соревновательность идет по всему спектру параметров самолета,
двигателя, оборудования, вооружения.
Ударный самолет — это флагман новейших конструкторских достижений и
передовых наукоемких технологий в авиации, это сгусток идей и технологиче-
ских прорывов. Все новейшие легкие сплавы, композиционные и жаропрочные
материалы в «горячих» зонах двигателя, последние достижения в аэродинамике и
газовой динамике, новейшие открытия в радиоэлектронике, оптоэлектронике,
информатике, теории управления и вычислительной технике, технологические
достижения в микроэлектронике и спецхимии энергонасыщенных материалов
быстро внедряются в конструкции ударного самолета, в его системы и подсисте-
мы. Ударный самолет — это двигатель научно-технического прогресса авиации и
в какой-то мере технических систем в целом.
5
К настоящему времени у нас выпущено немало книг, справочников, обзоров
и рекламных проспектов с описанием российской военной авиации. В большин-
стве из них приводятся выходные параметры авиационных комплексов, систем и
вооружения, относящиеся в основном к тактико-техническим и летным характе-
ристикам разных поколений нашей авиационной техники. В подобной литерату-
ре, написанной чаще всего журналистами или историками, отсутствуют ответы
на важные вопросы — как развивались и за счет чего получены те или иные пара-
метры авиационной техники, как практически используются передовые дости-
жения в боевых действиях. И, конечно, абсолютно не представлены перспективы
развития авиации и пути создания новых разработок.
Кроме того, в научно-технической литературе, посвященной боевой ави-
ации, представлены материалы по проектированию, разработке, испытаниям и
эксплуатации самолета, авиационных систем и ракетного вооружения, носящие
общетеоретический характер и не привязанные к конкретным авиационным
комплексам и их характеристикам.
В предлагаемой книге предпринята попытка дать четкое представление о
боевых возможностях как прошлых (с историей их развития), так и современных
ударных авиационных комплексов и, главное, показать, каким образом дости-
гаются эти возможности, какова роль внешних и бортовых систем в обеспечении
и совершенствовании боевых характеристик ударных авиационных комплексов.
Боевое применение ударной авиации рассматривается или упоминается во
многих источниках, в том числе зарубежных, но пока еще нет книги, дающей до-
статочно полное представление о бортовых системах современных ударных само-
летов, о новейших медодах и способах боевого применения и перспективных на-
правлениях совершенствования авиационных боевых комплексов, о путях даль-
нейшего развития науки и техники при новых разработках и модернизации
авиационных систем. В настоящей книге авторы постарались восполнить этот
пробел.
Представленные в книге историко-научные сведения о развитии ударной
авиации и ее применении органично сочетаются с научно-техническим материа-
лом по современным и перспективным авиационным комплексам. Большое вни-
мание уделяется описанию конкретных достижений, реализованных в этих комп-
лексах, касающихся в первую очередь их боевого применения, боевых возмож-
ностей и интеллектуального уровня борта в решении боевых задач.
Материалы книги написаны специалистами российских НИИ и ОКБ, непо-
средственно владеющими научно-техническими проблемами и участвующими в
создании и применении ударной авиации. Авторы выражают благодарность спе-
циалистам 30 ЦНИИ МО РФ за рецензирование данной монографии.
Обобщив отечественный и зарубежный опыт разработки авиационных
комплексов и бортовых систем, авторы пришли к выводу: боевые характеристики
перспективных и модернизируемых комплексов в основном будут определяться
степенью использования достижений научно-технического прогресса и уровнем
интеллекта, заложенного в бортовых системах. От этого зависят объем и качество
решения задач, совершенство авиационного комплекса и возможности его при-
менения в сложных условиях.
Книга рассчитана на широкую аудиторию читателей, включающую научную
и техническую общественность, инженеров, студентов и преподавателей вузов,
военных специалистов, а также людей, интересующихся техническими и научны-
ми вопросами авиации ВВС России. Авторы надеются на интерес читателей и бу-
дут рады обсудить с ними проблемы, затронутые в этой книге.
6
раздел
*1
УДАРНАЯ АВИАЦИЯ:
БОЕВЫЕ ЗАДАЧИ
И ИНФРАСТРУКТУРА
Рассмотрены общие вопросы состояния и при-
менения ударной авиации РФ. Выделены вопросы
боевого применения армейской, фронтовой и даль-
ней авиации. Приведены материалы по договорным
процессам в области стратегических наступатель-
ных вооружений и их влияние на развитие стратеги-
ческой авиации в РФ. Проанализированы концепции
ядерного и неядерного сдерживания относительно
авиационной составляющей. Представлены матери-
алы по*методам оценки эффективности ударной
авиационной группировки.
1.1. Армейская авиация
и ее боевое применение
Рождение армейской авиации (ДА) в современной трактовке данного поня-
тия связано с появлением в войсках вертолетов. Уникальные и присущие только
этим летательным аппаратам специфические летно-технические характеристики
позволили им выполнять широкий круг транспортно-десантных, специальных, а
в дальнейшем (с поступлением на вооружение вертолета Ми-24) и боевых задач.
Первоначально армейская авиация структурно состояла из вертолетных эс-
кадрилий, первая из которых была сформирована в г. Серпухове в начале 50-х го-
дов прошлого века. По мере выпуска достаточного числа вертолетов в городах
Торжке и Каунасе были развернуты две вертолетные дивизии. Вскоре армейская
авиация была передана в состав Сухопутных войск (СВ).
Вертолеты постепенно завоевывали всеобщее признание в войсках. С 1960-х
годов начался период бурного подъема армейской авиации. Поступили на воору-
жение новые турбореактивные вертолеты (Ми-6, Ми-2, Ми-8), значительно рас-
ширились боевые возможности авиационных частей и подразделений. Шел по-
иск более совершенных организационных форм. Создавались фронтовые, армей-
ские и дивизионные комплекты авиации с различной степенью подчиненности:
только командованию Сухопутных войск, только командованию ВВС, одновре-
менно обоим.
Дальнейшее развитие и боевая учеба армейской авиации, применение в ло-
кальных конфликтах показали, что основное ее предназначение — авиационное
обеспечение боевых действий Сухопутных войск.
В 1990 г. ДА преобразуется в авиацию Сухопутных войск (АСВ) и становится
самостоятельным родом Сухопутных войск. Для руководства ею созданы управ-
ления командующего АСВ и начальников авиации военных округов (групп
войск), а также отделы авиации общевойсковых (танковых) армий (корпусов).
Армейская авиация начинает использоваться в интересах частей и соедине-
ний Сухопутных войск для ведения разведки, корректирования огня артиллерии,
высадки тактических десантов, диверсионных групп и обеспечения их действий,
для переброски войск и грузов, обеспечения управления и связи, эвакуации боль-
ных и раненых.
Организационно армейская авиация сведена в отдельные подразделения,
входящие в состав механизированных и бронетанковых дивизий.
В настоящее время авиация Сухопутных войск переживает период структур-
ной реорганизации. В частности, осуществляется сокращение мелких частей и
подразделений, переход на типовые организационные структуры фронтовых, ар-
мейских и корпусных комплектов авиации с учетом решаемых войсками задач и
особенностей районов базирования. В дальнейшем предполагается усиление
9
комплектов авиации фронтов, армий и армейских корпусов. Намечен переход на
модульный принцип построения частей обеспечения.
В условиях резкого сокращения численности Сухопутных войск войсковая
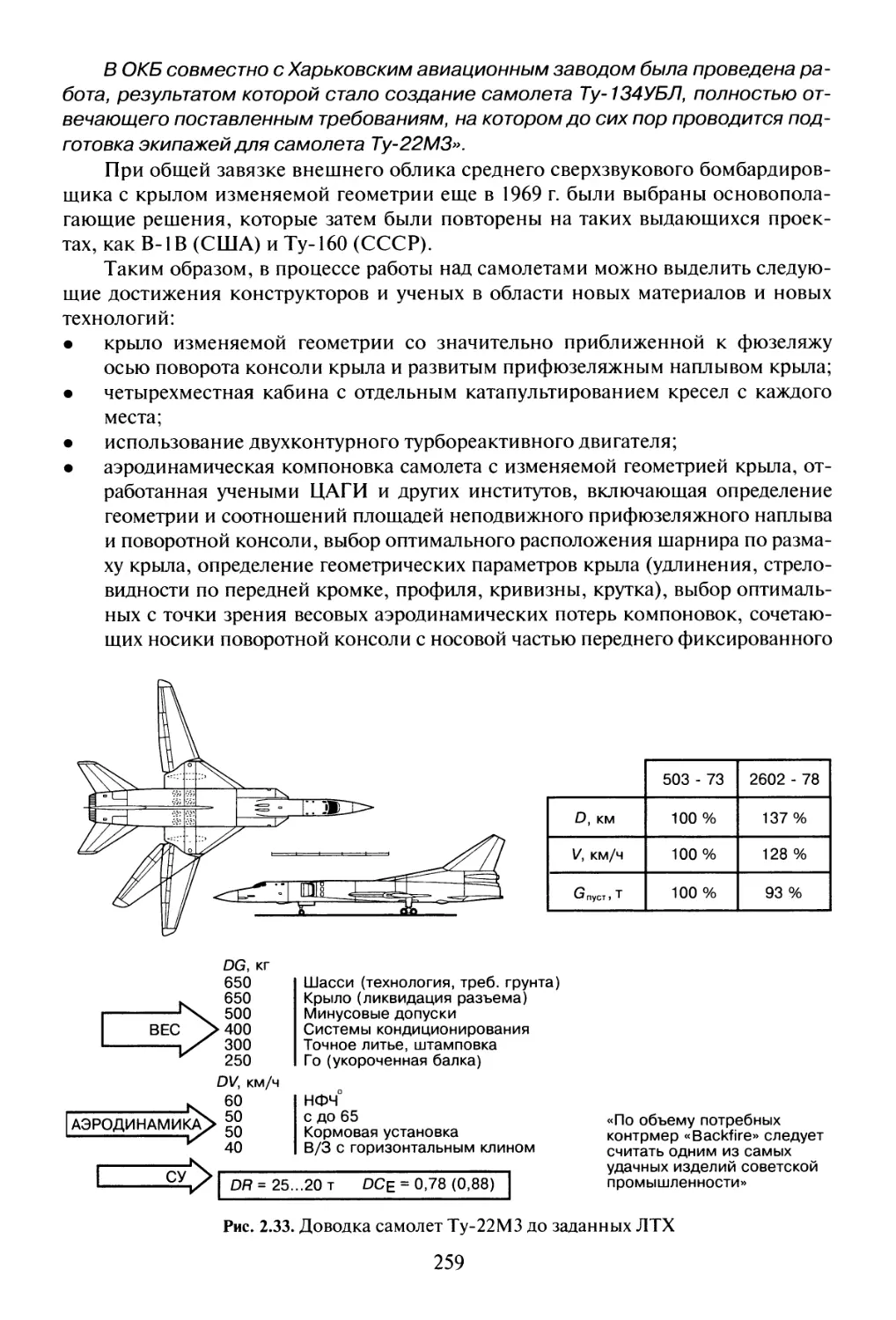
авиация, оснащенная летательными аппаратами различного назначения, высоко-
точным оружием, всепогодными и всесуточными средствами разведки и наблю-
дения, должна играть все большую роль в обеспечении национальной безопас-
ности России.
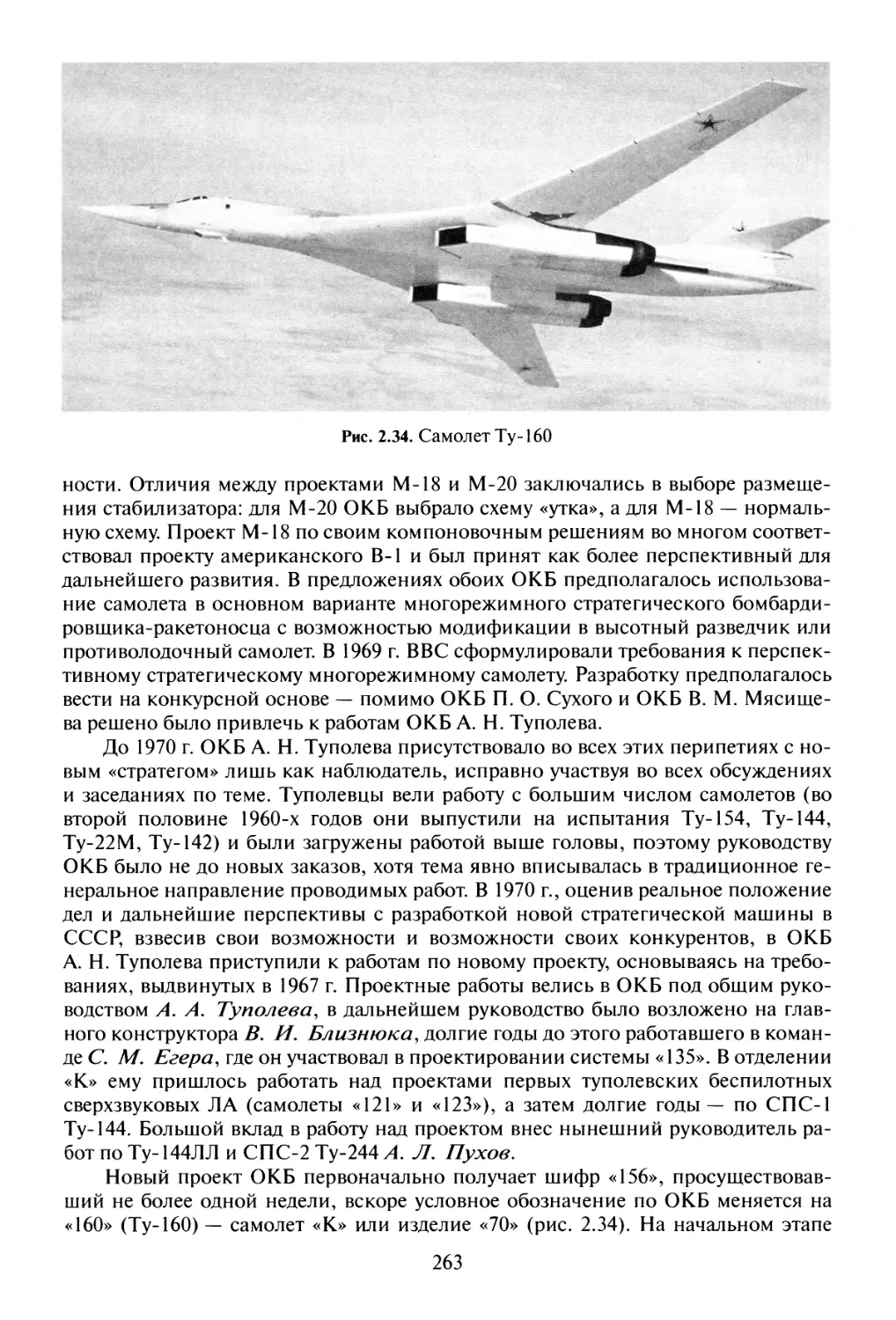
Российские вертолеты завоевали репутацию самых простых и надежных в
эксплуатации, а по вооружению и боевой живучести в настоящий момент им нет
равных. В различных регионах мира эксплуатируется несколько тысяч вертолетов
отечественного производства, и многие страны выражают желание их закупать и
обучать в России своих специалистов. Свою заинтересованность в приобретении
российских вертолетов подтвердили многие государства Азии, Африки и Латин-
ской Америки.
В соответствии с имеющейся концепцией развития авиация Сухопутных
войск вступила в новый этап своего строительства, в который предстоит решить
следующие вопросы:
• сокращение до минимума числа мелких частей и подразделений;
• переход на типовые организационные структуры фронтовых, армейских,
корпусных комплектов авиации с учетом решаемых войсками задач и осо-
бенностей районов базирования;
• оснащение авиационных частей новыми типами вертолетов;
• преобразование инженерно-авиационной службы в службу вооружения
АСВ;
• переход на модульный принцип построения частей обеспечения.
В ходе дальнейшего развития авиации Сухопутных войск предусматривается
совершенствование организационно-штатных структур органов управления,
строевых частей, частей и подразделений обеспечения.
1.1.1. БОЕВЫЕ ЗАДАЧИ
Круг задач, возлагаемых на вертолеты, достаточно велик и непрерывно рас-
ширяется. Учитывая, что вертолеты входят во все звенья современных армий и
флотов, удобнее рассмотреть их задачи по видам вооруженных сил.
Задачи, решаемые в интересах Сухопутных войск, можно разделить на три боль-
шие группы: специальные (разведывательно-связные), транспортные и ударные.
К группе специальных (разведывательно-связных) задач можно отнести
разведку и наблюдение; выбор переправ через водные преграды и артиллерий-
ских позиций; инженерную, химическую, радиационную и радиотехническую
разведку; управление огнем артиллерии и его корректировку; поддержание связи
между подразделениями и прокладку проводных связных линий в труднодоступ-
ной местности; управление частями на марше в условиях радиопомех; целеуказа-
ние штурмовикам-бомбардировщикам и наведение их на наземные цели; выпол-
нение функций летающего командного пункта и ретранслятора; несение погра-
ничной службы, особенно в горах.
В группу транспортных задач входят переброска войск в район боевых
действий; осуществление рокадного (вдоль линии фронта) маневра; доставка
предметов материально-технического снабжения с базовых складов и морских
10
портов на передовые склады; высадка тактических воздушных десантов и снаб-
жение их боеприпасами и другими видами довольствия; выброска (эвакуация)
групп глубинной разведки; эвакуация раненых и больных, а также войск после
выполнения задач в тылу противника; спасение экипажей сбитых самолетов и
вертолетов; высадка диверсионных групп; наведение переправ при форсирова-
нии водных преград и обеспечение захвата плацдармов.
Непрерывно повышается удельный вес группы ударных задач, решаемых
вертолетами. К ним относятся огневая поддержка своих передовых частей, все
более перерастающая в непосредственную авиационную поддержку сухопутных
войск; борьба с воздушными десантами противника путем уничтожения его вер-
толетов, боевой техники и войск; поражение пунктов управления, средств ПВО;
сопровождение и огневое прикрытие транспортных вертолетов при полете в тыл
противника, подавление огневых точек противника в районе десантирования,
прикрытие транспортных вертолетов во время высадки войск, огневая поддержка
десанта; береговая охрана и действия против мелких судов; минирование участ-
ков местности с воздуха; постановка дымовых завес; создание завалов и разруше-
ний на маршрутах отхода или продвижения войск противника.
В интересах Военно-морских сил вертолеты также способны выполнять мно-
гочисленные задачи. Основными из них являются выброска воздушных десантов
с кораблей в морских десантных операциях; поиск и уничтожение подводных ло-
док; высадка диверсионных групп на побережье противника; несение радиолока-
ционного дозора (для увеличения дальности действия корабельных средств обна-
ружения); прикрытие судов, патрулирующих в устьях рек и у побережья; поиск и
спасение людей на море; эвакуация с кораблей больных и раненых; траление
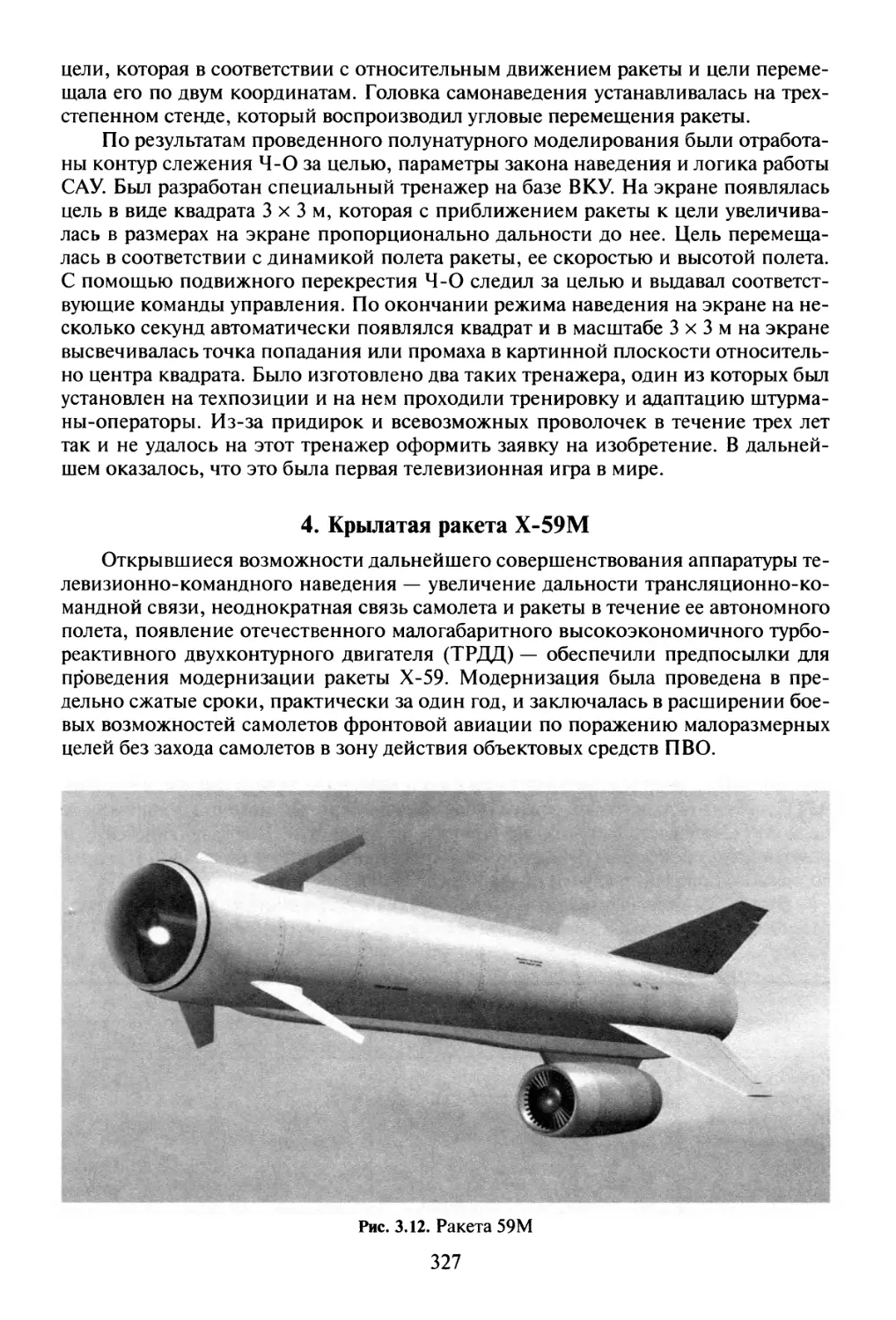
мин; буксировка небольших судов.
Даже из краткого перечисления задач, возлагаемых на вертолеты, видно, что
их круг действительно широк, а некоторые из них настолько специфичны, что
могут быть выполнены только вертолетами. В боевом применении вертолетов на-
ибольший интерес представляют высадка десантов, непосредственная авиацион-
ная поддержка сухопутных войск и борьба с подводными лодками. Если выпол-
нение последней задачи приняло более или менее четкие формы, то поиски ре-
шения первых двух будут продолжаться еще долгое время.
1.1.2. АРМЕЙСКАЯ АВИАЦИЯ В ОПЕРАЦИЯХ
В оборонительных операциях АА должна самостоятельно решать задачи по
прикрытию главных сил, вести сдерживающие действия, обороняться для эконо-
мии сил на второстепенных направлениях, обеспечивать безопасность тылового
района, наносить контратаки. Не исключается также ее участие в позиционной
обороне на труднопроходимой местности в составе первого эшелона. В этом ва-
рианте АА организует и ведет оборону, как и другие общевойсковые соединения.
В наступательной операции АА при действиях в первом эшелоне может на-
ступать на второстепенном направлении и на местности, наиболее подходящей
для реализации боевых качеств вертолетов, а также для достижения четкого взаи-
модействия с тактической авиацией.
В ходе преследования воздушные, тактические группы, рейдовые отряды и
аэромобильные десанты, совершая маневр по воздуху с использованием откры-
тых флангов и промежутков в построении противника, захватывают и удержива-
ют ключевые объекты на путях его отхода, разрушают мосты, перевалы, уничто-
жают охранение, пункты управления, выводят из строя личный состав и боевую
технику. В результате подобных активных действий у переправ, теснин, дефиле1
образуются скопления отходящих войск противника, пробки, являющиеся вы-
годными объектами для огневого поражения.
Основными формами маневра в наступательном бою являются ПРОРЫВ,
ФРОНТАЛЬНОЕ НАСТУПЛЕНИЕ И ОХВАТ.
Под прорывом понимается нарушение целостности обороны в результате
огневого воздействия по противнику и наступления войск в целях разобщения
обороняющихся частей противника и создания брешей для ввода в бой вторых
эшелонов (резервов). При таком виде маневра основной удар наносится на опре-
деленном участке фронта обороны противника в направлении объекта захвата.
Фронтальное наступление проводится по всему фронту; оно применяет-
ся для того, чтобы уничтожить или ослабить противника на занимаемых им пози-
циях или сковать силы противника с фронта и тем самым обеспечить проведение
других форм маневра.
Охват является такой формой маневра, когда основные усилия наступаю-
щих войск направлены на овладение объектом в тылу противника, в результате
чего отрезаются пути отхода его войск и создаются условия для их уничтожения
на занимаемых позициях.
Для повышения подвижности войск, осуществляющих охват, особое значе-
ние отводится транспортным вертолетам армейской авиации.
оборонительная армейская операция начинается с ведения тактической
воздушной разведки», в ходе которой устанавливаются силы и средства противни-
ка, изготовившегося к наступлению, уточняются районы сосредоточения сил и
состояние противовоздушной обороны. К решению данной задачи привлекается
тактическая авиация.
Добытые разведкой данные используются для планирования (и нанесения)
упреждающего удара по наиболее открытым и уязвимым местам скопления войск
противника. Транспортные вертолеты задействуются для обеспечения маневра
своих частей (подразделений) на ответственные участки обороны. Средства войс-
ковой ПВО участвуют в уничтожении беспилотных разведывательных аппаратов
противника (благодаря умелой организации «маловысотной» ПВО югославским
зенитчикам в Косово удалось сбить 20 БЛА союзных сил).
При отражении наступления противника сухопутные войска удерживают за-
данные рубежи, воспрещая прорыв танков в глубину, а боевые вертолеты ведут
«противотанковый» бой совместно с ракетно-артиллерийскими подразделения-
ми. После подхода резервов свои танковые части и армейская авиация изготавли-
ваются к нанесению контрудара.
КОНТРУДАР начинается с артиллерийско-воздушной атаки, где важнейшую
роль играет согласованность усилий вертолетов с наземными огневыми подразде-
лениями. Кратковременное и мощное воздействие по противнику превращается
в «огневой вал».
Используя последствия контрудара, сухопутные войска вклиниваются в бое-
вые порядки противника, общее наступление которого захлебывается. Боевые и
1 Дефиле (фр. defile — воен.) — узкий проход между препятствиями (горами, болота-
ми, озерами и т. п.), использующимися обычно для задержания противника обороняющи-
мися войсками.
12
разведывательные вертолеты участвуют в авиационном сопровождении танков.
Это наиболее сложный по организации этап операции. Поскольку прорыв осу-
ществляется на узком направлении, фланговое сопровождение опасно. Для вер-
толетов огневой поддержки, прокладывающих дорогу танкам вперед, крайне не-
обходимо целеуказание: наземная обстановка становится недоступной для рас-
познавания с воздуха, передний край своих войск подвижен и обозначается
нечетко. Последние конфликты низкой интенсивности показали, что проблема
взаимного опознавания на поле боя осталась и серьезных сдвигов в ее разреше-
нии со времен Второй мировой войны не было сделано.
В последнее время появилась разновидность маневра — ВЕРТИКАЛЬНЫЙ ОХ-
ВАТ, который обычно проводится с воздуха путем высадки тактического воздуш-
ного десанта, аэромобильных частей и подразделений в тылу основного объекта
противника. В качестве таких десантов планируется использовать воздушно-де-
сантные и мотопехотные подразделения в составе роты или батальона, которые
выбрасываются (высаживаются) как во время наступления, так и в ходе боя.
Вертолеты армейской авиации поддерживают десант, наводят войска на объ-
екты противника, устанавливают цели для нанесения ударов, корректируют
огонь артиллерии.
Под АЭРОМОБИЛЬНЫМИ ОПЕРАЦИЯМИ понимаются боевые действия, заклю-
чающиеся в скрытной и быстрой переброске армейской авиацией в районы рас-
положения противника аэромобильных частей и подразделений сухопутных
войск, а также в нанесении ими ударов с суши и воздуха для выполнения своих
боевых задач.
Аэромобильные операции (действия) проводятся на оперативно-тактиче-
ском уровне, как правило, в интересах корпусов (дивизий) во всех видах боевых
действий специально подготовленными частями и подразделениями сухопутных
войск во взаимодействии с тактической авиацией, подразделениями сил специ-
альных операций и средствами радиоэлектронной борьбы (РЭБ). Наиболее эф-
фективны аэромобильные войска в наступлении. На летательных аппаратах они
способны легко преодолевать любые препятствия, естественные преграды, нано-
сить по противнику внезапные удары с любых направлений (в том числе с тыла) и
на большую глубину.
Наиболее характерной чертой аэромобильных формирований является их
способность переносить усилия с одного объекта на другой, используя транспорт-
но-десантные (многоцелевые) вертолеты для маневра и ударные вертолеты для
мощных огневых ударов с воздуха. При ведении обороны высокая мобильность и
огневая мощь в сочетании с эффективной воздушной разведкой способствуют ус-
пешному проведению ими противодесантных и противоаэромобильных действий.
В ходе аэромобильных операций успешно решаются задачи овладения важ-
ными участками местности, плацдармами на крупных водных преградах, горны-
ми перевалами, дефиле и узлами дорог; содействия войскам, наступающим с
фронта, в развитии успеха и наращивании темпов наступления; дезорганизации
деятельности органов управления и учреждений тыла противника; усиления
войск в окружении, доставки разведгрупп и их эвакуации; воспрещения выдви-
жения и ввода в сражение вторых эшелонов (резервов) противника; отвлечения
его боевых формирований из зоны боевых действий для охраны тыловых объек-
тов и обеспечения безопасности тыловых районов.
Опыт показал, что аэромобильные операции содержат три взаимосвязанных
этапа: подготовительный, десантирование и боевые действия по выполнению
13
поставленной задачи. Управление силами, участвующими в аэромобильных опе-
рациях, на всех этапах осуществляет общевойсковой командир.
В ходе подготовительного этапа проводятся планирование аэромобиль-
ной операции, сосредоточение сил и средств в районе погрузки, уточнение воп-
росов боевого использования, а при наличии достаточного времени тренировоч-
ные занятия на местности, схожей (однотипной) с районом десантирования по
местным предметам и объектам действий.
Этап десантирования начинается с посадки личного состава и загрузки
боевой техники в вертолеты, заканчивается высадкой их в назначенных зонах.
Для переброски аэромобильного десанта в тыл противника назначаются район
погрузки, воздушный коридор и район высадки.
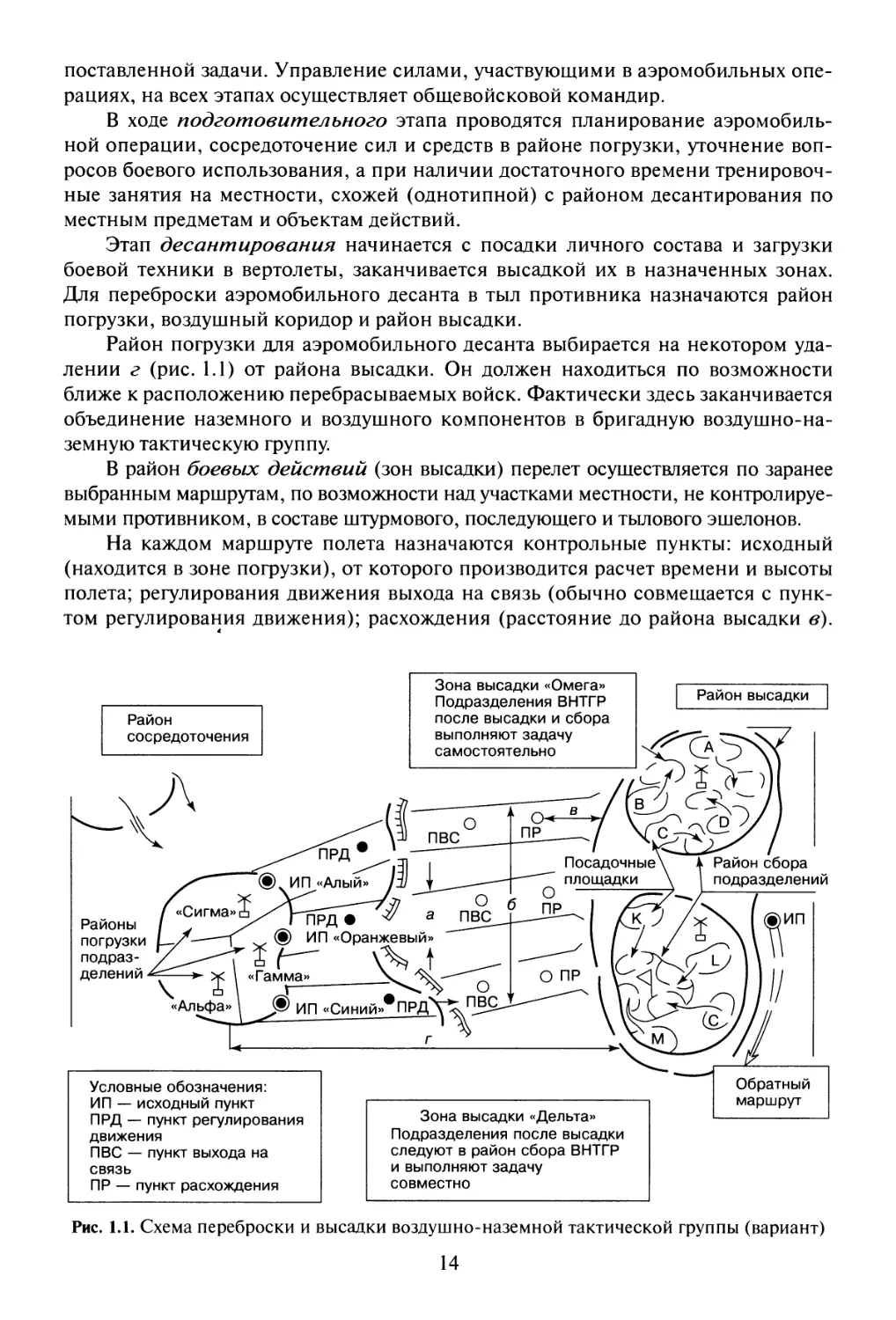
Район погрузки для аэромобильного десанта выбирается на некотором уда-
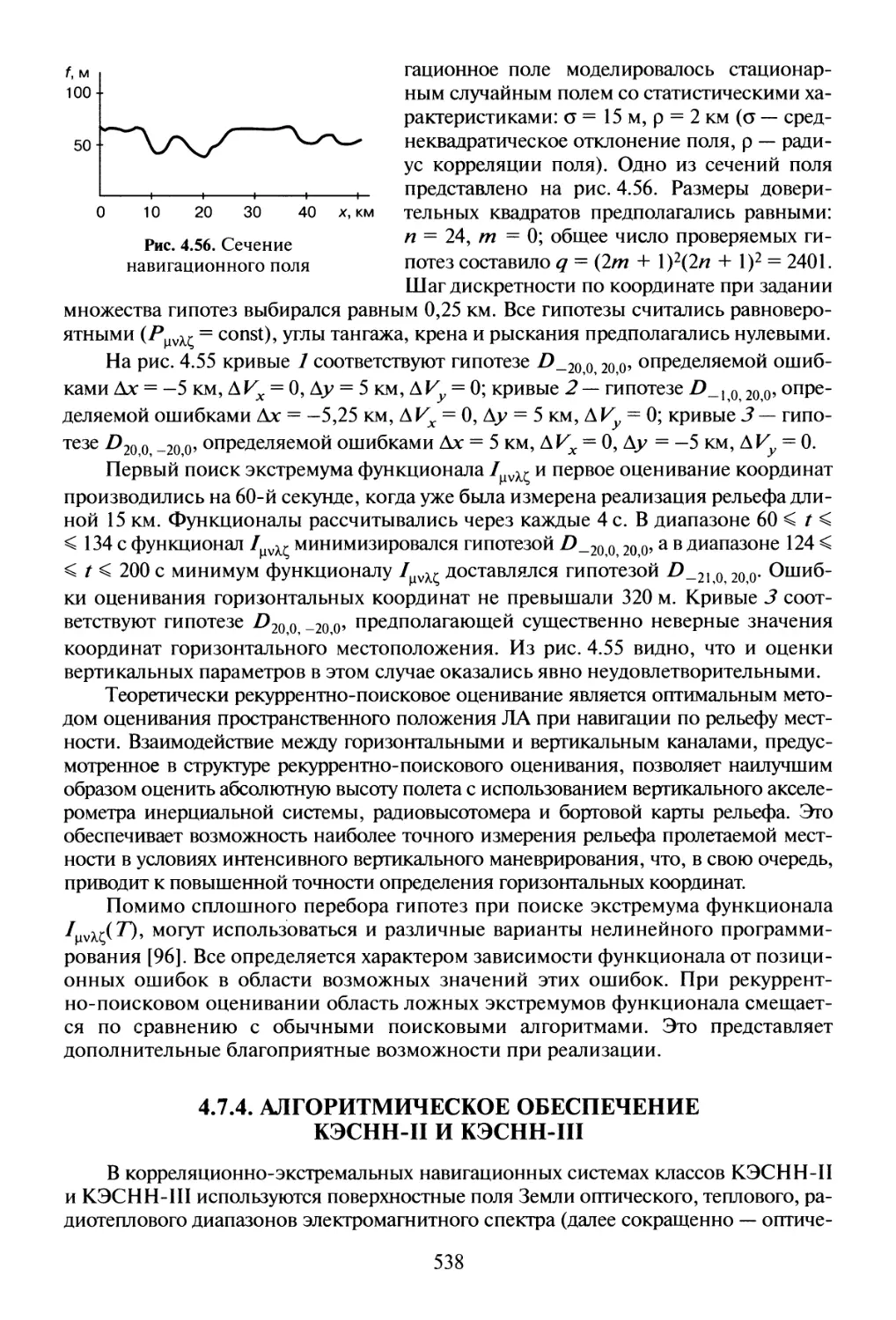
лении г (рис. 1.1) от района высадки. Он должен находиться по возможности
ближе к расположению перебрасываемых войск. Фактически здесь заканчивается
объединение наземного и воздушного компонентов в бригадную воздушно-на-
земную тактическую группу.
В район боевых действий (зон высадки) перелет осуществляется по заранее
выбранным маршрутам, по возможности над участками местности, не контролируе-
мыми противником, в составе штурмового, последующего и тылового эшелонов.
На каждом маршруте полета назначаются контрольные пункты: исходный
(находится в зоне погрузки), от которого производится расчет времени и высоты
полета; регулирования движения выхода на связь (обычно совмещается с пунк-
том регулирования движения); расхождения (расстояние до района высадки в).
Зона высадки «Омега»
Подразделения ВНТГР
после высадки и сбора
выполняют задачу
самостоятельно
| Район высадки |
Районы
погрузки
подраз-
делений
Район
сосредоточения
ИП
О ПР
«Гамма,
«Альфа,
Обратный
маршрут
Условные обозначения:
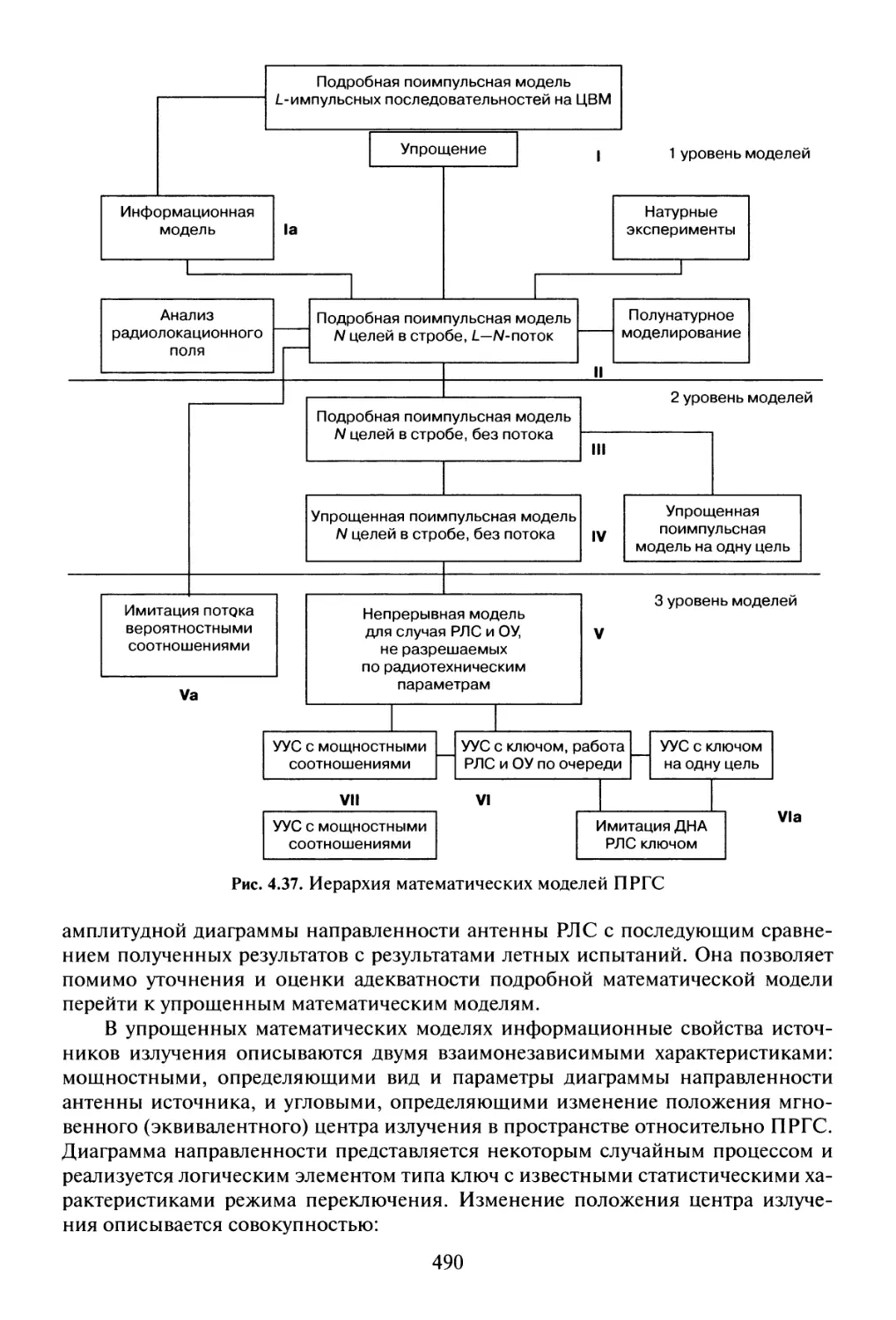
ИП — исходный пункт
ПРД — пункт регулирования
движения
ПВС — пункт выхода на
связь
ПР — пункт расхождения
Зона высадки «Дельта»
Подразделения после высадки
следуют в район сбора ВНТГР
и выполняют задачу
совместно
ИП «Синий»* ПРД^5^
ПРД •
(•) ИП «Оранжевый
сСигма»^
ПРД
ПВС
ИП «Алый
Посадочные
площадки
Район сбора
подразделений
О б
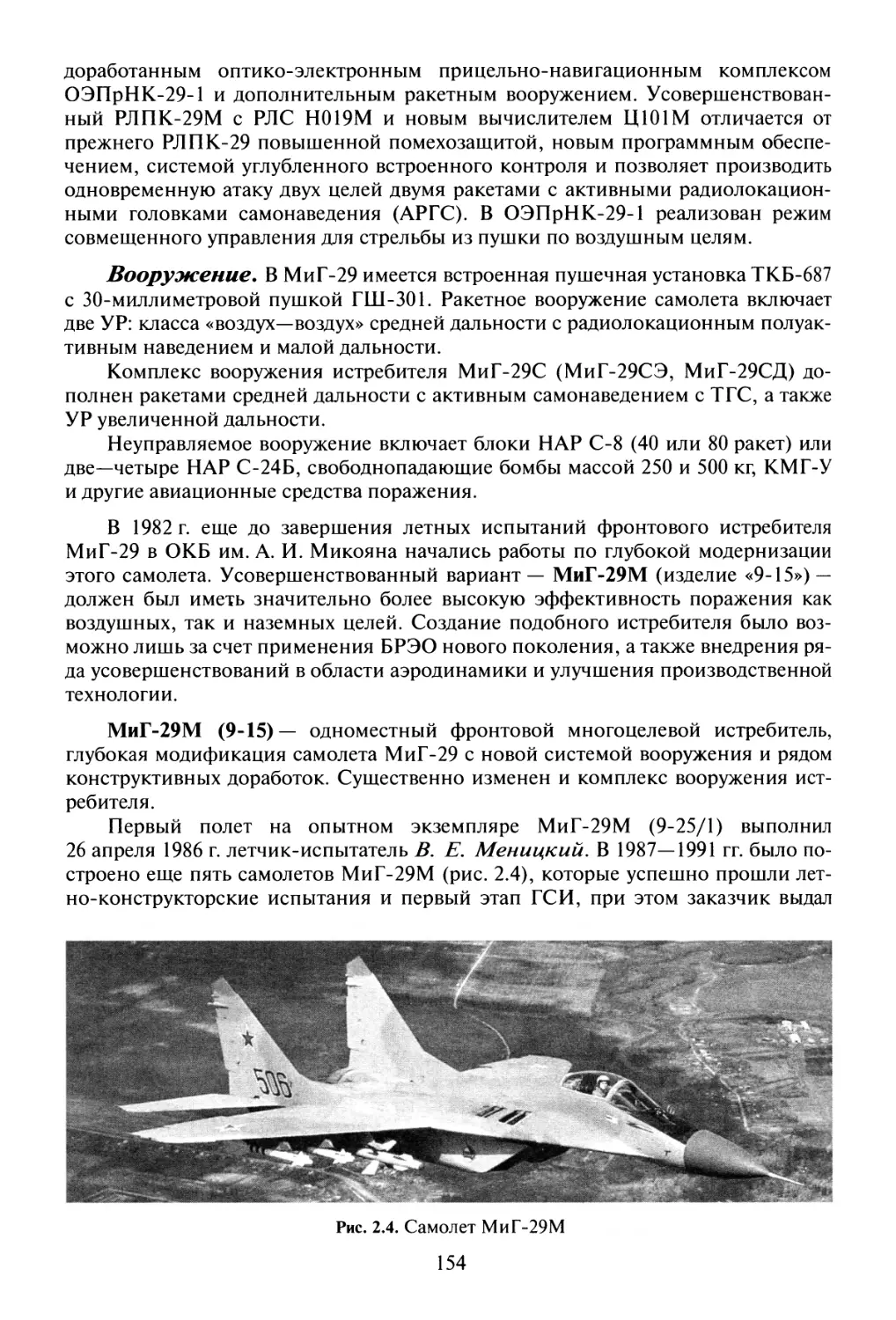
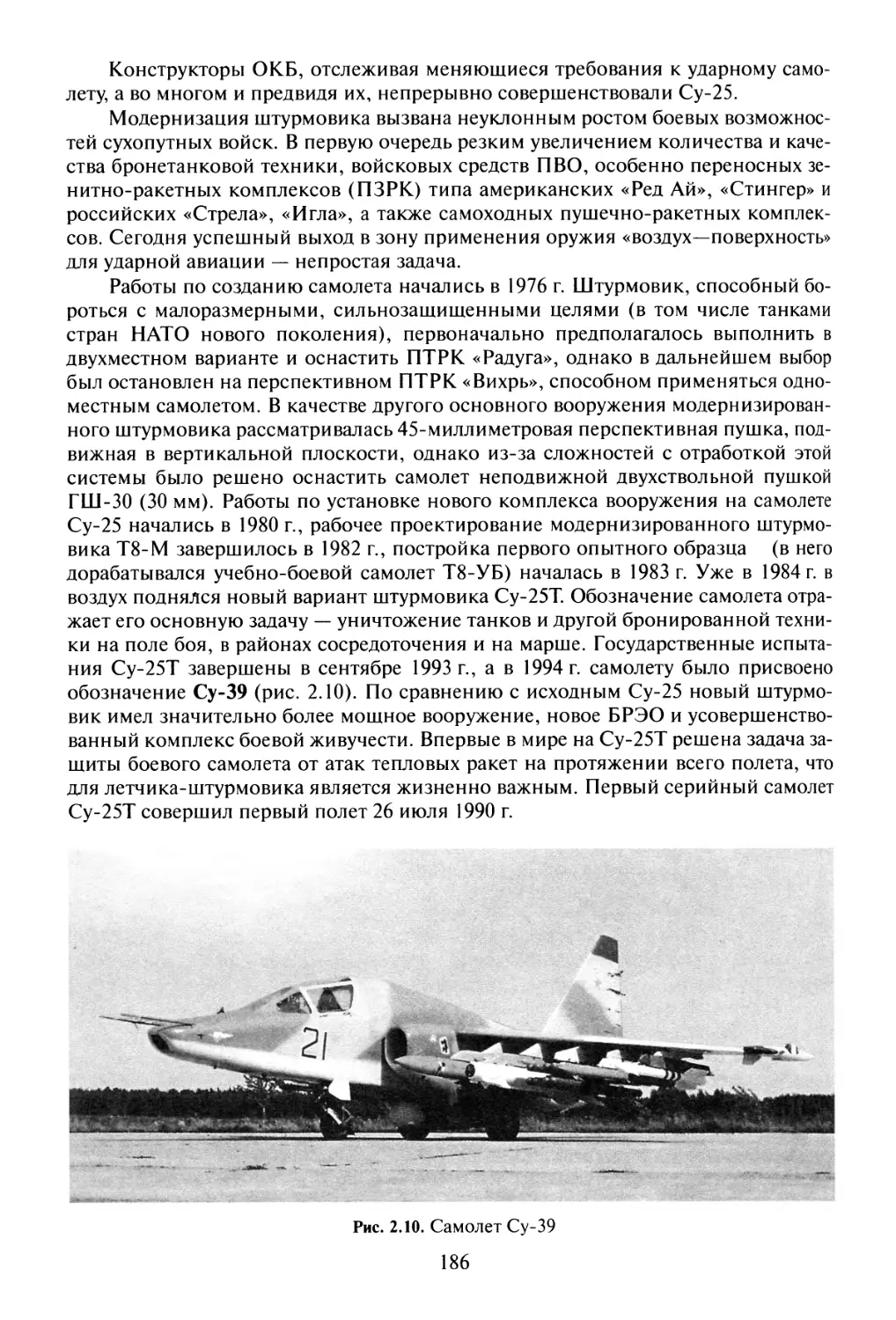
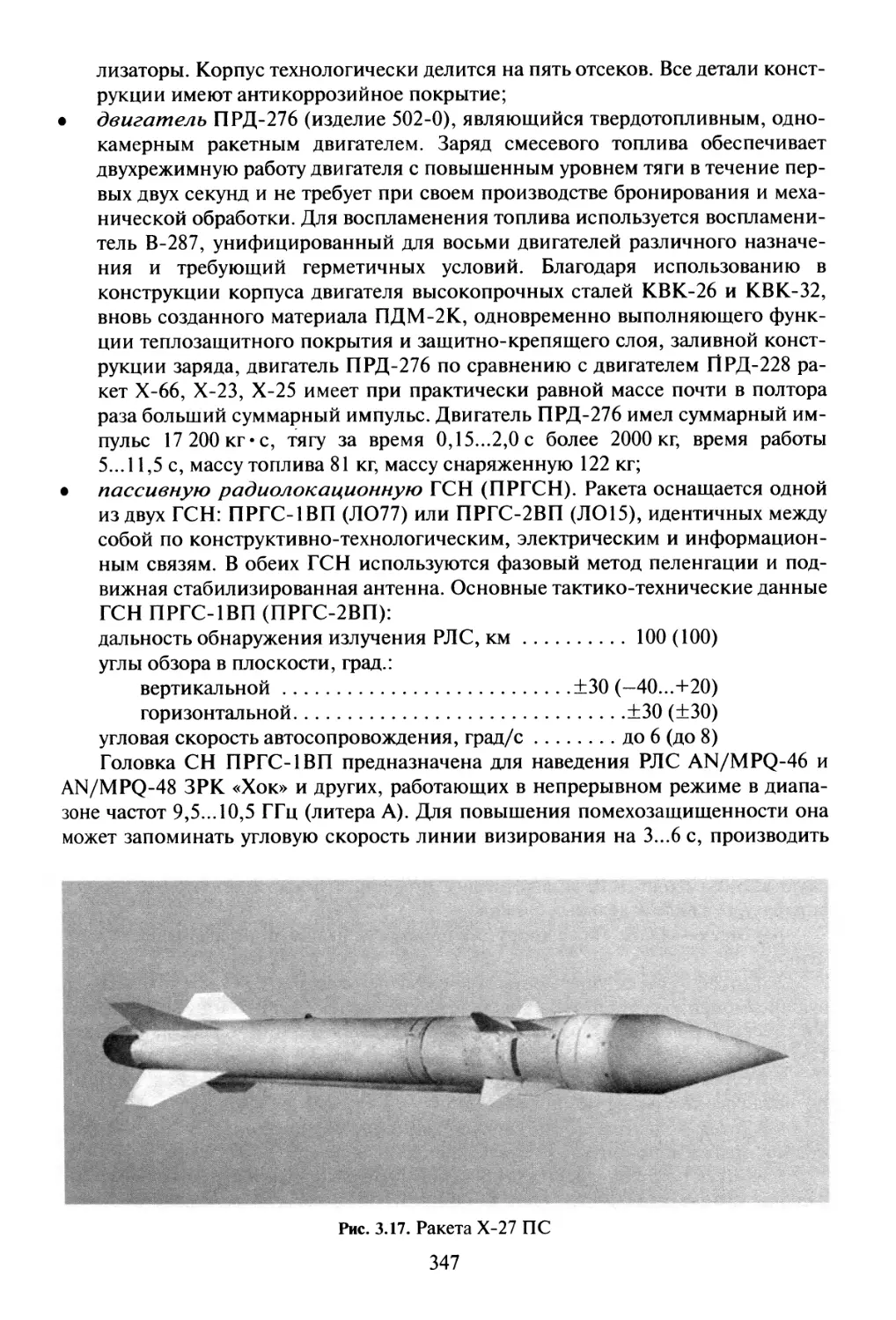
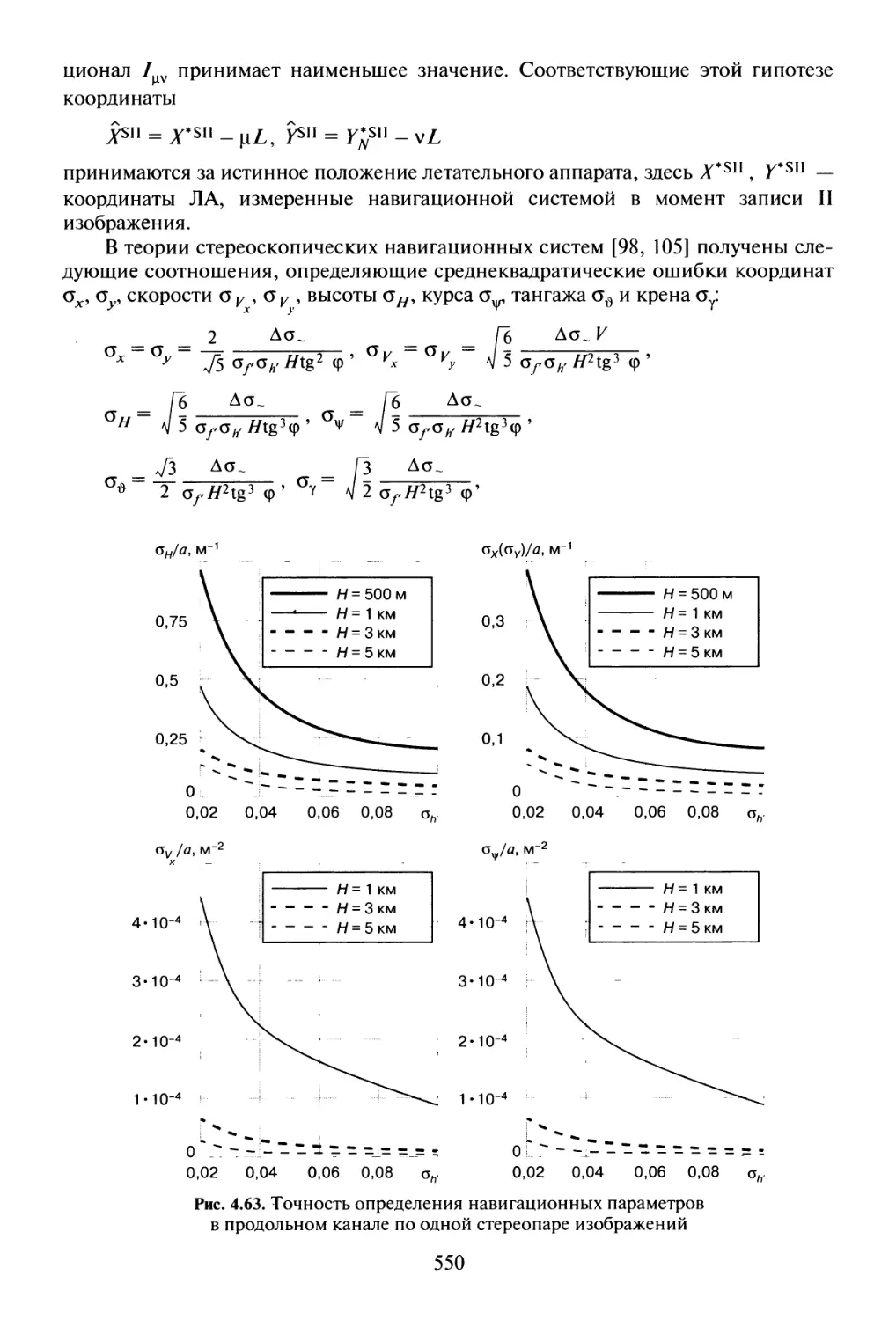
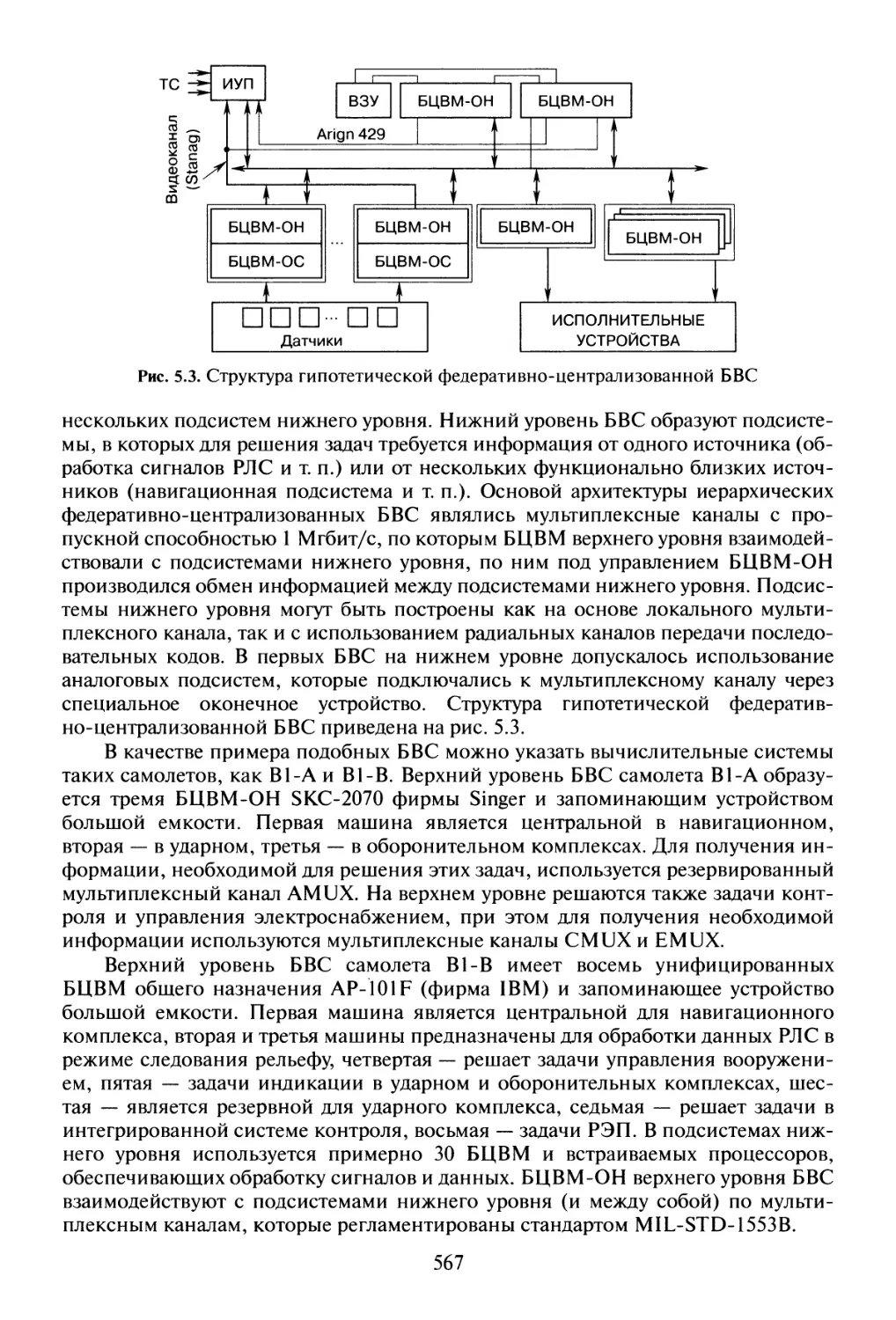
Рис. 1.1. Схема переброски и высадки воздушно-наземной тактической группы (вариант)
14
Два-три маршрута полета вертолетов шириной а каждый составляют воздушный
коридор б.
ШТУРМОВОЙ ЭШЕЛОН (в его состав входят боевые подразделения и мини-
мально необходимые силы и средства боевого обеспечения) осуществляет захват
и удержание назначенного района высадки. На рис. 1.1 показана схема перебро-
ски и высадки для воздушно-наземной тактической группы.
Последующий эшелон перебрасывается вслед за штурмовым и предназнача-
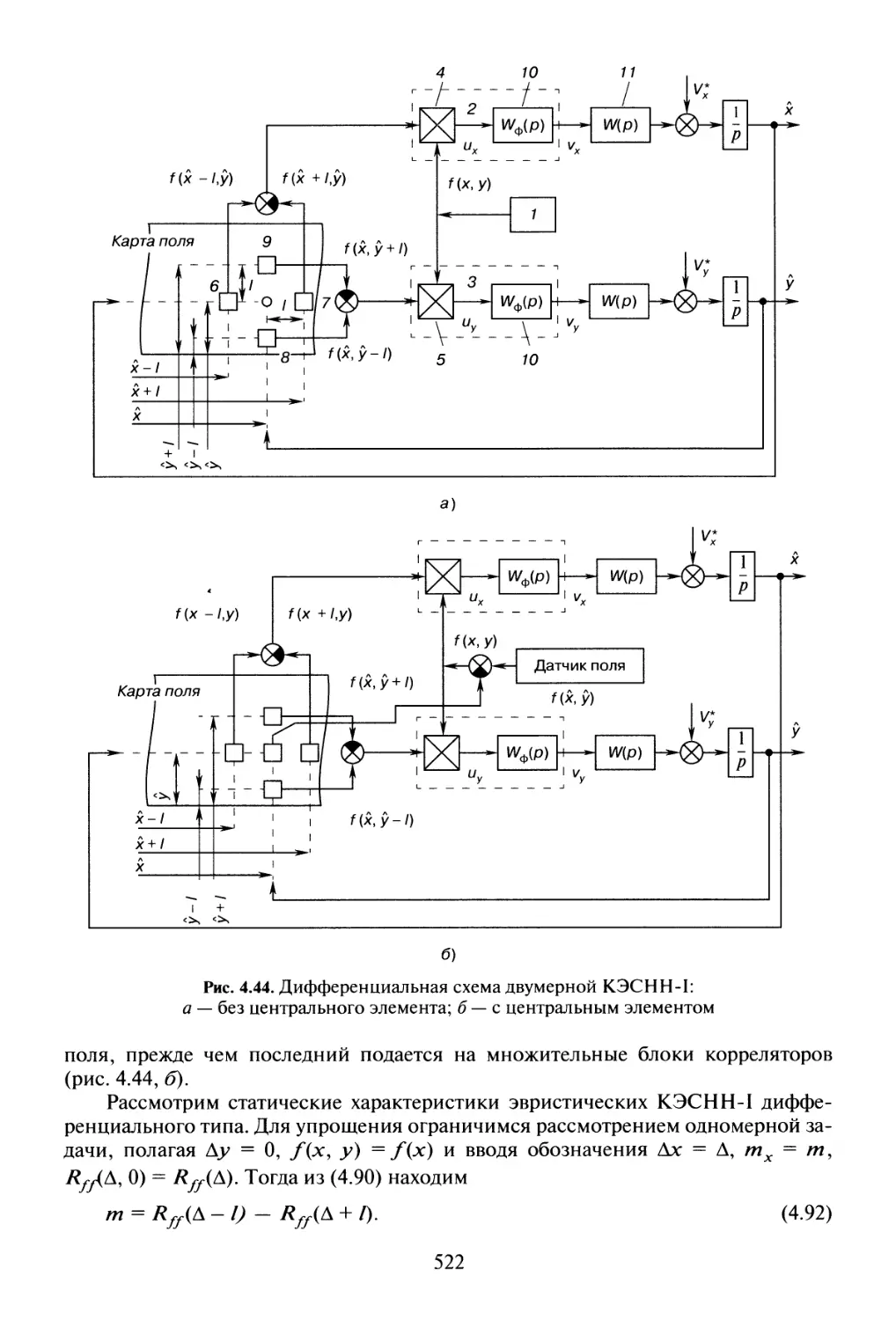
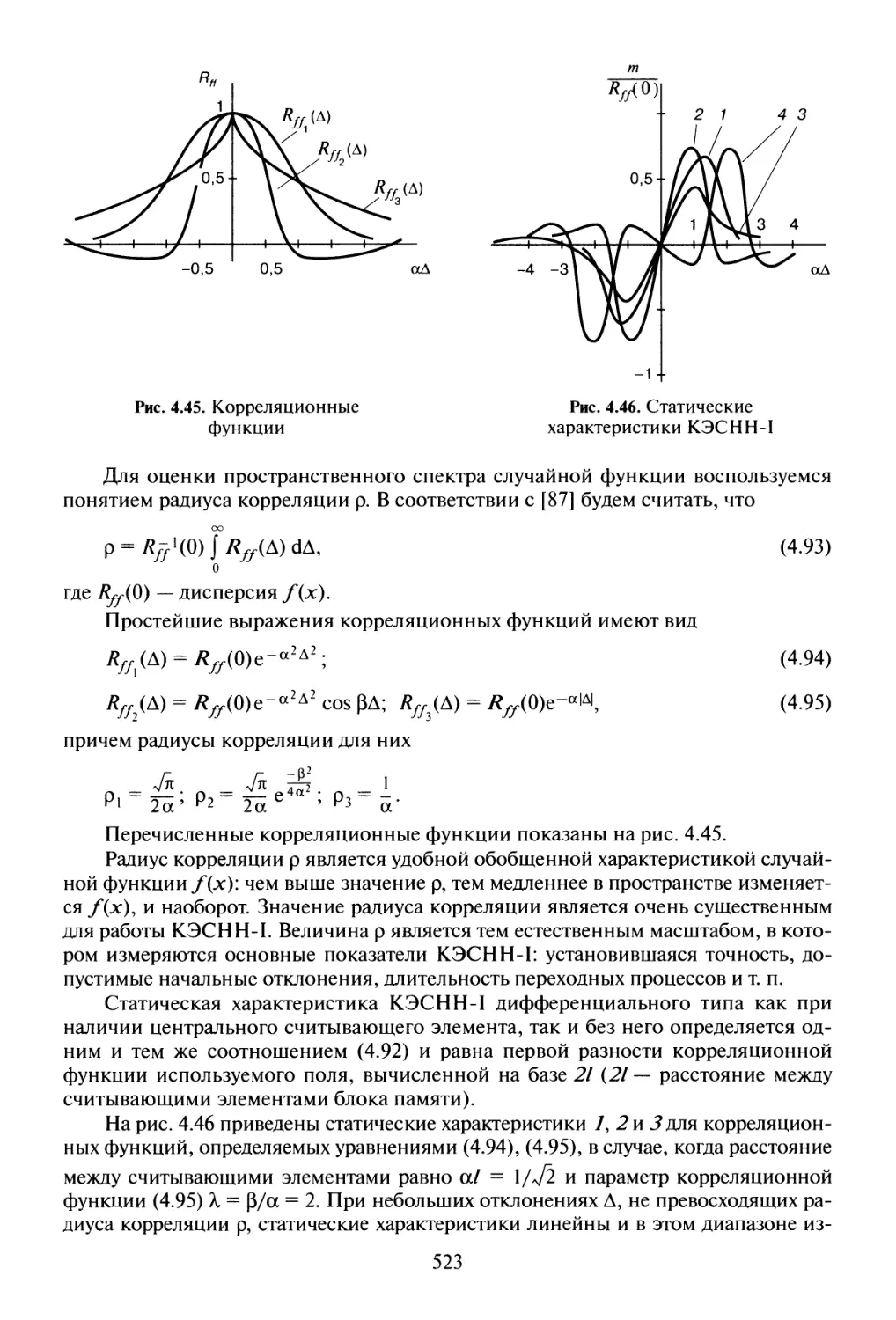
ется для наращивания его усилий. Он включает дополнительные подразделения
боевого и тылового обеспечения, необходимые для поддержки боевых действий
штурмового эшелона.
ТЫЛОВОЙ ЭШЕЛОН обеспечивает аэромобильный десант материально-техни-
ческими средствами. При незначительном удалении зон высадки он может не пе-
ребрасываться, а обеспечивать боевые действия десанта непосредственно из
района погрузки.
В ходе военных действий в процессе высадки десанта начинают действовать
вертолеты огневой поддержки, которые создают условия для его продвижения.
Эту задачу они решают по вызову воздушных (наземных) наводчиков вылетами
из положения дежурства в передовом районе. Нередко обстановка вынуждает
атаковать обнаруженные цели из положения «висения» над своими войсками.
Тогда вертолеты огневой поддержки освобождаются от эскортирования штурмо-
вого эшелона, также ведут предварительную огневую «обработку» района высад-
ки и сопровождают высадившихся десантников к исходному рубежу ввода в бой.
Для атаки обычно выбираются цели, находящиеся за пределами досягаемости по-
левой артиллерии.
В задачу вертолетов прикрытия входит подавление выявленных огневых то-
чек на маршруте следования и обеспечение безопасности штурмового эшелона
при посадке. Нередко создаются группы непосредственного и дальнего сопро-
вождения. В боевой порядок звена включается пятый вертолет без десантников
на борту, но с дополнительным вооружением. Увеличенный интервал от ведущего
звена предоставляет ему свободу перемещения по всей глубине боевого порядка и
расширяет сектор наблюдения экипажа. На наиболее уязвимом фланге, где веро-
ятен обстрел с земли, располагается обычно группа вертолетов охранения. В эту
группу дополнительно включаются вертолеты, экипажам которых вменяется в
обязанность вести разведку.
МОРСКАЯ ДЕСАНТНАЯ ОПЕРАЦИЯ начинается с погрузки сил десанта на транс-
портно-десантные вертолеты, которые привлекаются также к доставке боевой
техники и другого снаряжения на десантные корабли и суда, стоящие на рейде,
что значительно сокращает время их пребывания в пунктах погрузки.
Во время окончательной подготовки района высадки десанта вертолеты ис-
пользуются для доставки специальных групп разведчиков-диверсантов и водола-
зов-подрывников для проведения разведки противодесантных заграждений от-
дельных участков и всего плацдарма на побережье.
Одной из задач в ходе подготовки района высадки является траление фарва-
теров к пунктам высадки. Наиболее мобильными силами для ее выполнения яв-
ляются вертолеты-тральщики.
Непосредственно перед высадкой десанта для изоляции района стоянки де-
сантных кораблей и судов от сил противника специально оборудованные верто-
леты ставят минные заграждения. Они способны принять на борт небольшое
число мин (до восьми), однако их непосредственное базирование на кораблях де-
15
сантного соединения позволяет в короткие сроки осуществить постановку
минного заграждения.
Важной задачей вертолетов в морской десантной операции является огневая
поддержка сил десанта в ходе боя за высадку Наибольшее значение действия
вертолетов огневой поддержки приобретают в период от начала высадки до мо-
мента доставки на плацдарм и развертывания артиллерийских подразделений.
Они являются эффективным средством для захвата и удержания вертолетных по-
садочных площадок. Ведя огонь по путям подхода и отхода противника и райо-
нам наиболее вероятного сосредоточения его сил вокруг зоны высадки, они могут
успешнее обеспечивать действия транспортно-десантных вертолетов.
В ходе боя за высадку вертолеты огневой поддержки могут решать также за-
дачи ведения разведки и целеуказания другим ударным силам и средствам, уп-
равления действиями вертолетов в воздухе, корректировки огня и наведения ави-
ации на объекты удара в ходе авиационной поддержки десантных сил и т. д.
Анализ решаемых вертолетами задач и их боевые возможности свидетельст-
вуют о том, что в современных условиях они стали важным боевым средством при
проведении морской десантной операции. При их использовании сокращаются
сроки десантной операции, значительно повышается темп высадки, появляется
возможность осуществления «вертикального охвата» противника, а также созда-
ния превосходства в огневой мощи и мобильности.
1.1.3. СПОСОБЫ БОЕВЫХ ДЕЙСТВИЙ.
‘ ВЕРТОЛЕТЫ НА ПОЛЕ БОЯ
Вертолеты огневой поддержки предназначены прежде всего для поражения
танков противника на поле боя. В то же время они способны подавлять наземные
огневые средства, устанавливать минные заграждения на путях движения танков,
вести борьбу с вертолетами. Скорость, мобильность, гибкость управления и вы-
сокая огневая мощь вертолетов способствуют тому, что командование может бы-
стро реагировать на угрозу применения противником танковых группировок и
наносить по ним массированные удары.
Основными принципами боевого применения противотанковых вертолетов
являются умелое сочетание огня и маневра, гибкости и внезапности действий,
сосредоточение основных усилий на решающем участке и в критический момент,
максимальное использование местности для укрытия и маскировки своих дейст-
вий, четкое взаимодействие противотанковых вертолетов с разведывательными
вертолетами, самолетами тактической авиации, зенитными средствами, подраз-
делениями и частями других родов войск и служб.
Для подготовки нанесения ударов по танкам противника и для выхода в рай-
он целей подразделениям противотанковых вертолетов назначаются районы со-
средоточения, выжидательные районы и боевые позиции.
РАЙОН СОСРЕДОТОЧЕНИЯ — это место сбора вертолетов для подготовки к веде-
нию предстоящих боевых действий. Здесь оценивается обстановка, отдаются бое-
вые приказы, осуществляется техническое обслуживание и ремонт вертолетной
техники, пополнение некоторыми запасами предметов снабжения. В ВЫЖИДАТЕЛЬ-
НОМ районе, который рекомендуется выбирать между районами сосредоточения и
боевыми позициями вертолетов, подразделение обычно находится короткое время,
пока разведывательные вертолеты не завершат разведку маршрутов по перелету
16
противотанковых вертолетов на боевые позиции. БОЕВЫЕ ПОЗИЦИИ представляют
собой укрытия или замаскированные места (например, складки местности, про-
странство между вершинами деревьев и т. п.), занимаемые противотанковыми вер-
толетами для нанесения удара по бронированным целям противника. Они выбира-
ются с таким расчетом, чтобы обеспечить ведение эффективного огня с максималь-
ных дальностей стрельбы и скрытный перелет на другие боевые позиции (обычно
после второго пуска противотанковой управляемой ракеты — ПТУР).
Важная роль придается совместным действиям тактической авиации (осо-
бенно штурмовиков) и противотанковых и разведывательных вертолетов.
Разведывательные и ударные вертолеты входят в район цели на предельно
малых высотах с использованием рельефа местности и растительного покрова с
тем, чтобы до минимума сократить время обнаружения и вероятность их пораже-
ния зенитным оружием. Для навигации могут выполняться подскоки на большую
высоту с продолжительностью пребывания на ней не более нескольких секунд,
что затрудняет обнаружение вертолетов противником.
Получив информацию от разведывательного вертолета, ударные вертолеты
скрытно выходят на рубеж пуска ракет, энергично набирают расчетную высоту с
одновременным выполнением маневра, обеспечивающего операторам условия
для применения оружия. На выполнение маневра, прицеливание, пуск и наведе-
ние ракеты на максимальную дальность затрачивается около 15 с, затем вертоле-
ты уходят под прикрытие естественных масок, складок местности или строений.
Возможно применение противотанковых ракет и их наведение с помощью
выносного пульта управления. Такой способ наиболее целесообразен в условиях
пустыни, где вертолет может занять замаскированную огневую позицию на об-
ратном склоне бархана, а оператор с выносным пультом — удобную для наблюде-
ния позицию на переднем его склоне, с которого и осуществляется управление
огнем.
В современном бою наиболее вероятным может стать эшелонированное или
одновременное использование противотанковых вертолетов. Выбор того или
другого способа определяется командиром соединения, в интересах которого они
действуют, исходя из конкретно складывающейся обстановки.
При первом способе противотанковые вертолеты вводятся в бой звеньями
или парами друг за другом, т. е. одна их часть ведет бой, а другая в это время про-
изводит дозаправку топливом и пополнение боекомплектов. Такие действия по-
зволяют непрерывно атаковать противника и не терять его из виду.
Второй способ более целесообразен при массированном наступлении танков
противника на широком фронте, а также в том случае, когда он прорвал оборону
и развивает достигнутый успех. Однако его применение может быть затруднено,
если противник усилит войсковую ПВО и сосредоточит его действия на уничто-
жении вертолетов.
1.1.4. УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ
Под управлением армейской авиацией в операции подразумевается постоян-
ное и непрерывное руководство со стороны командования и штабов всей де-
ятельностью подчиненных частей для сосредоточения их усилий на выполнении
поставленных боевых задач. Управление охватывает весь комплекс мероприятий,
проводившихся в процессе подготовки, организации и ведения боевых действий.
17
а)) мд
[секция)
Г руппа v
управления'
Штурмовой
эшелон
ТреГнспортный
[эшелон
|Секция| |ЦКП|
УВД^У^/
[ГУП]
.phcz
б) \МО|
Условные обозначения: V AfrL—\
АА — армейская авиация "а^^мпб!
ТА — тактическая авиация -----ц]
ПУО - пост управления I _ /ГУП®^^ ПАН_________________1Д
и оповещения х^!/ - - - -_______О—---------у- j----
ПАН — передовой
авианаводчик
ГУП — группа управления
полетами
РНС — радионавигацион-
ная станция
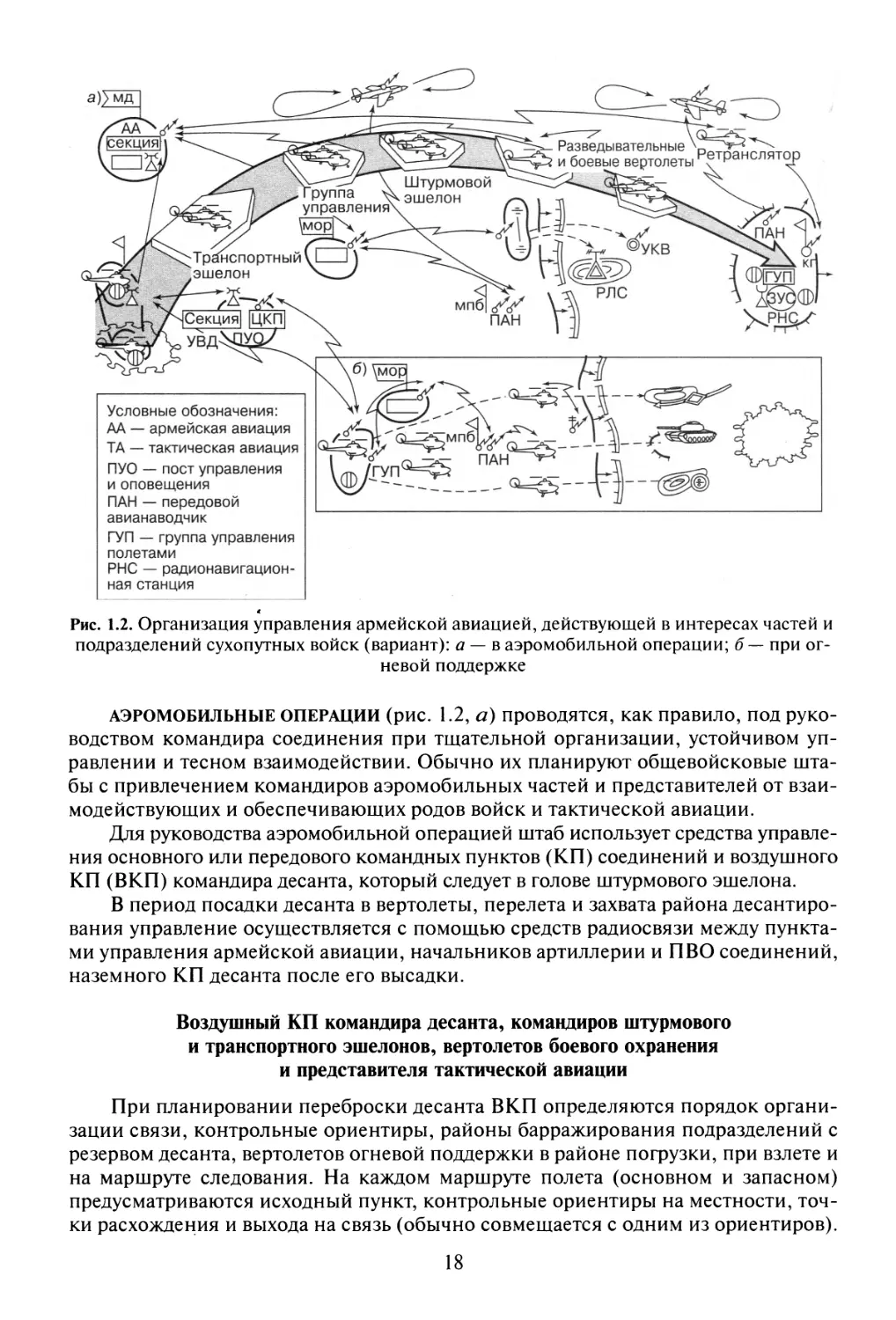
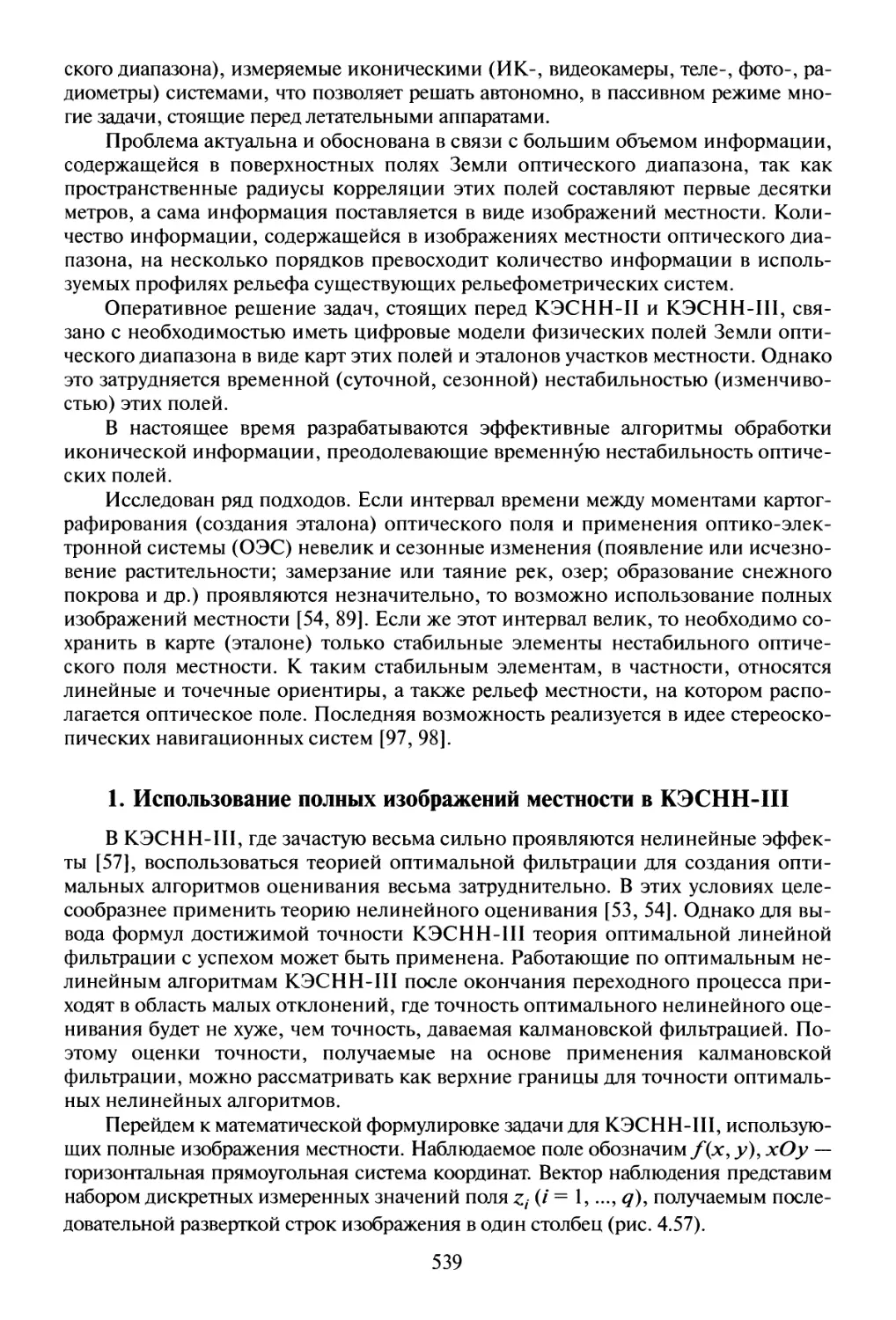
Рис. 1.2. Организация управления армейской авиацией, действующей в интересах частей и
подразделений сухопутных войск (вариант): а — в аэромобильной операции; б — при ог-
невой поддержке
АЭРОМОБИЛЬНЫЕ ОПЕРАЦИИ (рис. 1.2, а) проводятся, как правило, под руко-
водством командира соединения при тщательной организации, устойчивом уп-
равлении и тесном взаимодействии. Обычно их планируют общевойсковые шта-
бы с привлечением командиров аэромобильных частей и представителей от взаи-
модействующих и обеспечивающих родов войск и тактической авиации.
Для руководства аэромобильной операцией штаб использует средства управле-
ния основного или передового командных пунктов (КП) соединений и воздушного
КП (ВКП) командира десанта, который следует в голове штурмового эшелона.
В период посадки десанта в вертолеты, перелета и захвата района десантиро-
вания управление осуществляется с помощью средств радиосвязи между пункта-
ми управления армейской авиации, начальников артиллерии и ПВО соединений,
наземного КП десанта после его высадки.
Воздушный КП командира десанта, командиров штурмового
и транспортного эшелонов, вертолетов боевого охранения
и представителя тактической авиации
При планировании переброски десанта ВКП определяются порядок органи-
зации связи, контрольные ориентиры, районы барражирования подразделений с
резервом десанта, вертолетов огневой поддержки в районе погрузки, при взлете и
на маршруте следования. На каждом маршруте полета (основном и запасном)
предусматриваются исходный пункт, контрольные ориентиры на местности, точ-
ки расхождения и выхода на связь (обычно совмещается с одним из ориентиров).
18
Считается, что для достижения лучшей организованности высадки десанта и
обеспечения ее безопасности целесообразно с головной группой штурмового
эшелона перебросить в намеченный район высадки разведывательные подразде-
ления, команды по приему вертолетов, а также передовых авианаводчиков и кор-
ректировщиков огня наземных огневых средств.
Командир десанта, высадившись вместе со штурмовой группой, управляет
действиями десанта, используя при этом средства связи своего ВКП. Он лично
отдает указания экипажам разведывательных вертолетов и командирам подразде-
лений боевых вертолетов на действия по уничтожению наиболее важных целей и
захвату объектов, а через находящихся при нем офицеров — представителей от
артиллерии дивизии и тактической авиации — он организует взаимодействие с
поддерживающей десант артиллерией и самолетами тактической авиации.
Для обеспечения надежности управления в районе высадки развертываются
основной узел связи и запасный (ЗУС), а вблизи одного из них — наземный КП
командира десанта. Для повышения устойчивости связи с командованием ар-
мейского корпуса (дивизии) применяется один или несколько вертолетов-рет-
рансляторов.
В локальных войнах организация взаимодействия между тактической авиа-
цией, ствольной артиллерией, вертолетами поддержки и пехотой в ходе аэромо-
бильной операции включает новые, не отрабатывавшиеся ранее элементы. Обя-
зательным приложением к плану операции считается временной график под-
держки, который согласовывается между командирами, имеющими право
отдавать приказ на открытие огня и подъем самолетов (вертолетов). Весьма нео-
бычна и организация управления разнородными подразделениями. Командир
батальона (роты) десантников должен находиться на одном командном пункте
(или на вертолете) с командиром вертолетного подразделения. Для того чтобы
ход поддержки был плановый, выделяется специальный вертолет управления с
офицером связи на борту, который должен находиться в воздухе на наиболее от-
ветственном участке.
Управление и взаимодействие армейской авиации с частями и подразделе-
ниями сухопутных войск при их огневой поддержке (рис. 1.2, б) командир осу-
ществляет через командиров вертолетных частей и подразделений.
Взаимодействие аэромобильной части (подразделения) с ПВО своего со-
единения достигается установлением опознавательных знаков, а также назначе-
нием полосы и времени пролета десанта в тыл противника и другой полосы —
обратно.
Взаимодействие с артиллерией организуется для поражения средств ПВО
противника в полосе пролета, нанесения огневых ударов по противнику в районе
высадки десанта и огневой поддержки при ведении десантом боевых действий в
тылу. Оно достигается целеуказанием по радио с разведывательных вертолетов,
передачей командиром десанта данных целеуказания по радио и через офице-
ра-артиллериста, находящегося в составе десанта.
Для ведения разведки с целью выяснения мест нанесения бомбовых ударов
по противнику в районе предполагаемой высадки, прикрытия десанта с воздуха
при его перелете и высадке в тылу противника осуществляется взаимодействие с
тактической авиацией. Оно обеспечивается различными средствами, в том числе
и по радио через передового авианаводчика, находящегося при десанте.
19
Подразделения армейской авиации создают свои радиосети или радионап-
равления, их радиостанции также входят в радиосеть командиров соединений и
частей Сухопутных войск, которым они подчинены, приданы или с которыми
взаимодействуют во время боевых действий.
1.1.5. ОРУЖИЕ ПОДДЕРЖКИ
Неуправляемые авиационные ракеты
Неуправляемые авиационные ракеты (НАР) занимают важное место в систе-
ме вооружения боевых вертолетов. Они предназначаются для поражения назем-
ных, надводных и воздушных целей.
По сравнению с управляемыми ракетами и бомбами НАР имеют невысокую
точность и малую дальность стрельбы. Однако они отличаются высокой надеж-
ностью, относительной простотой конструкции и низкой стоимостью, возмож-
ностью развертывания массового серийного производства. Кроме того, в отличие
от управляемого оружия на вертолетах может подвешиваться большое количество
НАР. В связи с этим большое внимание уделяется созданию новых и совершенст-
вованию имеющихся НАР, причем основные усилия направляются на повыше-
ние точности и дальности стрельбы, а также мощности их боевых частей (БЧ).
Неуправляемая авиационная ракета обычно состоит из трех отсеков: носово-
го, в котором размещаются БЧ и взрыватель; цилиндрического корпуса двигате-
ля; хвостового, включающего сопловой блок с четырьмя соплами и механизм
раскрытия оперения. Для сборки отсеков применяются резьбовые соединения.
В качестве твердого топлива двигателя используется баллиститный порох, кото-
рый воспламеняется смесью черного пороха с магнием. Инициирование смеси
производится электрозапалами, питание к которым подводится от бортового ис-
точника через контактный диск фиксатора оперения. НАР имеет автоматически
раскрывающееся хвостовое оперение, перья которого расположены под некото-
рым углом, что заставляет ракету вращаться относительно продольной оси, тем
самым обеспечивая ее стабилизацию в полете.
Ракеты оснащаются боевыми частями фугасного и кумулятивного действий.
Кроме того, используются дымовые БЧ, снаряженные белым фосфором и пред-
назначенные для обозначения целей и постановки дымовых завес.
Прицельная стрельба НАР с летящего на малой высоте вертолета связана с
определенной трудностью, так как низкая начальная скорость и относительно
большая масса НАР влияет на их рассеивание. Наилучшие результаты получают-
ся при обстреле целей с пикирования. Неустойчивость НАР в полете приводит к
их большему рассеиванию по сравнению со снарядами, выпущенными из пушки.
Однако НАР, во-первых, обладают большей разрушающей силой по сравнению с
пушечными снарядами; во-вторых, установка ракетных пусковых установок (ПУ)
на вертолет менее трудоемка, чем установка авиационных пушек.
Системы минирования
Авиационные системы минирования являются составной частью систем дис-
танционного минирования и предназначаются для скоростной установки мин-
ных заграждений. Этот вид авиационного оружия весьма перспективен и должен
20
найти достаточно широкое применение в ходе боевых действий. Такое мнение
обусловливается следующими основными причинами:
• созданием принципиально новых боеприпасов — мин, характеризующихся
малым весом и габаритами, высокой эффективностью действия, надежно-
стью и сохранением боеспособности после весьма больших ударных нагрузок
(при падении на землю с высокой скоростью);
• возможностью одновременного применения значительного числа мин, что
позволяет в предельно сжатые сроки устанавливать заграждения на большой
площади;
• способностью вертолетов доставлять мины точно в заданный район их уста-
новки, даже если он находится на территории, контролируемой противни-
ком. Считается, что установка заграждений непосредственно перед боевыми
порядками противника будет способствовать повышению эффективности
заграждения как за счет внезапности его применения, так и благодаря распо-
ложению именно там, где имеется конкретный противник;
• разработкой универсальных бомбовых кассет, рассчитанных на снаряжение
различными малокалиберными боеприпасами и предназначаемых для ис-
пользования несколькими носителями. Оснащение такими боеприпасами
позволяет не только наносить удары по скоплениям живой силы и техники,
важным объектам, но и одновременно минировать окружающую местность,
что существенно ограничивает подвижность противника, препятствуя его
выходу из зоны, подвергшейся удару, и проведению работ по восстановле-
нию разрушенного объекта.
Системы минирования включают в себя одну или несколько универсальных
сбрасываемых либо несбрасываемых бомбовых кассет, авиационные мины (в од-
ной кассете может находиться несколько их типов, возможно также смешанное
снаряжение — малокалиберные бомбы и мины) и систему управления минирова-
нием. В настоящее время значительное внимание уделяется созданию систем, ос-
новную массу снаряжения которых должны составить противотанковые мины
высокой эффективности действия. Это вызвано стремлением успешно решать за-
дачу борьбы не с отдельными танками противника, а с его танковыми подразде-
лениями, движущимися на поле боя в рассредоточенных боевых порядках.
Противотанковые управляемые ракеты
В современных условиях основным и наиболее целесообразным оружием
считаются ПТУР большой дальности действия, резко снижающие вероятность
поражения вертолетов зенитными средствами противника. В этом направлении
совершенствуются существующие и разрабатываются новые ПТУР следующего
поколения.
Наведение ПТУР первого поколения производится командной системой по
проводам, при этом оператор следит за целью и ракетой в течение всего времени
ее полета, а изменение траектории осуществляется отклонением вектора тяги
двигателя. Для наведения ПТУР второго поколения используется полуавтомати-
ческая система наведения по проводам. В этом случае оператор с помощью ги-
ростабилизированного прицела непрерывно удерживает перекрестие на цели.
Отклонение ракеты от линии визирования фиксируется системой управления,
которая автоматически вырабатывает и посылает команды-коррекции на борт
ПТУР. Применение такой системы наведения повышает точность стрельбы. Од-
21
нако все ПТУР имеют существенный недостаток, заключающийся в том, что вер-
толет-носитель не может совершить противозенитный маневр сразу после их пу-
ска и вынужден в течение всего времени полета ракет к цели находиться под воз-
действием наземных активных средств ПВО противника. Кроме того, ПТУР
первого и второго поколения, обладая недостаточной дальностью стрельбы и
бронепробиваемостью, могут использоваться только в дневное время.
Оснащение вертолетов противотанковыми управляемыми ракетами с полу-
автоматической системой наведения потребовало установки перископических
визиров с гиростабилизированным полем зрения и встраивания в прицел тепло-
пеленгатора для автоматического сопровождения ракеты. Дальнейшее совершен-
ствование систем прицеливания шло по пути внедрения лазерных систем дально-
метрирования и целеуказания, а также низкоуровневых телевизионной и тепло-
визионной систем.
Пушечное вооружение
Артиллерийское вооружение боевых вертолетов предназначено для поражения
малоразмерных (точечных) и площадных целей, в первую очередь бронемашин.
Каждый из членов экипажа для управления пушечным огнем может пользо-
ваться нашлемным визиром. В этом режиме точные значения угловых скоростей
вращения линии визирования цели не используются, а дальность вычисляется
вручную, однако при решении уравнений управления стрельбой учитываются все
перечисленные параметры. Режим управления стрельбой с помощью нашлемно-
го визира является менее точным, чем режим управления с помощью телескопи-
ческого прицела. Однако особой точности не требуется, поскольку нашлемные
визиры используются для стрельбы «навскидку» при малых дальностях до цели.
Авиационный противотанковый ракетный комплекс «Штурм-В»
Этот комплекс создан на базе наземного самоходного противотанкового
комплекса. В составе обоих комплексов используются ракеты следующих моди-
фикаций: 9М114, 9М114П и 9М114Ф.
Авиационный ракетный противотанковый комплекс предназначен для по-
ражения современных танков, боевых машин пехоты, пусковых установок ПТУР
и ЗУР, долговременных огневых точек типа ДОТ и ДЗОТ, низколетящих малоско-
ростных воздушных целей, а также живой силы противника в укрытиях.
В состав комплекса входят боевые средства, состоящие из аппаратуры наве-
дения и управления, установленной на вертолете; управляемые ракеты в транс-
портно-пусковых контейнерах (ТПК) «Штурм»; средства технического обслужи-
вания для баз и арсеналов, состоящие из контрольно-проверочной аппаратуры
наведения и управления носителя и контрольно-проверочной аппаратуры для
регламентных проверок ракет; учебно-тренировочные средства, состоящие из
тренажера и учебных макетов ракет.
МНОГОЦЕЛЕВАЯ УПРАВЛЯЕМАЯ РАКЕТА 9М114 С МОНО6ЛОЧНОЙ Кумулятивной
боевой частью выполнена по аэродинамической схеме «утка» — со складными
передним оперением и полукруглым крылом, которое в нерабочем положении
прижимается к ее цилиндрическому корпусу. В ракете применен твердотоплив-
ный двухрежимный маршевый двигатель, обеспечивающий высокую скорость
полета (до 530 м/с). Она оснащена стартовым ускорителем, обеспечивающим ее
22
надежный выход из стеклопластикового транспортно-пускового контейнера.
Конструкция последнего такова, что при выходе из него ракета получает враща-
тельное движение. Кроме того, контейнер позволяет хранить ракету в нем сроком
до 10 лет.
«Штурм» может также комплектоваться управляемой ракетой 9М114Ф с фу-
гасной боевой частью. Это дает возможность уничтожать живую силу противника
и разрушать долговременные огневые точки и другие инженерные сооружения, в
том числе в горной местности. В связи с появлением танков с динамической за-
щитой в настоящее время конструкторами создана конкурентоспособная на ми-
ровом рынке новая ракета с тандемной боевой частью.
Модернизированная ракета обладает увеличенной дальностью полета и спо-
собна гарантированно поражать танки за динамической защитой. Система наве-
дения ракет — полуавтоматическая, радиокомандная, с инфракрасным сигналом
слежения. Она имеет высокую помехоустойчивость за счет использования при
наведении ракеты двух специальных кодов и пяти фиксированных частот. Следу-
ет также отметить и тот факт, что при сверхзвуковой скорости, с которой летит
ракета, ей невозможно поставить радиопомехи существующими в настоящее вре-
мя техническими средствами.
Для управления стрельбой разработаны специальные программы, которые
позволяют ракете на первоначальном этапе лететь по траектории выше линии ви-
зирования, а при подлете к танку на расстояние 500...700 м опускаться и поражать
цель. Это дает возможность оператору независимо от погодных условий и работы
двигателей ракеты всегда видеть поражаемый объект. При максимальной даль-
ности стрельбы точность системы управления ПТУР не превышает 0,6 угловой
минуты. Это позволяет обстреливать любые малоразмерные бронированные цели
и даже вертолеты в режиме зависания и подлета.
До настоящего времени комплекс «Штурм» сохраняет передовые позиции по
ряду технических характеристик среди аналогов.
Однако улучшение качества брони танков и оснащение их динамической за-
щитой потребовали дальнейшего совершенствования противотанкового управ-
ляемого вооружения и, в частности, комплексов «Штурм», создания для них но-
вой ракеты с тандемной боевой частью и увеличенной (с 5000 до 6000 м) дально-
стью стрельбы с авиационного носителя. При этом параллельно решалась задача
ее эксплуатации и боевого применения со всех ранее выпущенных носителей без
их доработки, с сохранением контрольно-проверочных средств.
Эти сложные и, казалось бы, противоречивые требования были успешно ре-
шены в ракете «Атака», которая обладает всеми достоинствами своей предшест-
венницы и превосходит ее по бронепробитию и дальности стрельбы.
Конструктивной особенностью ракеты является наличие тандемной кумуля-
тивной боевой части, которая содержит два соосно расположенных кумулятив-
ных заряда: первый заряд (лидер) ликвидирует динамическую защиту, а второй
(основной) пробивает бронепреграду.
Последовательное срабатывание лидирующего и основного зарядов проис-
ходит от предохранительно-исполнительного механизма через временную за-
держку.
Дальность управляемого полета ракеты на 6000 м достигается за счет высоко-
эффективной бортовой энергосистемы и оригинальной конструкции тонкопро-
фильных крыльев и высокопрочного материала.
23
Модульность конструкции ракеты «Атака» позволяет вести ее дальнейшую
модернизацию в части повышения дальности стрельбы. Так, например, при раз-
унификации ракеты «Атака» между вертолетными и самоходным комплексами
возможно дальнейшее увеличение дальности ее стрельбы до 8000 м.
Преимущества многоцелевых ракетных комплексов «Штурм» с ракетой
«Атака» следующие:
• сверхзвуковая скорость и малое время полета ракеты до цели, что означает
снижение вероятности нанесения ответного удара со стороны противника,
снижение вероятности срыва наведения от пыледымовых помех на поле боя,
уменьшение психологической нагрузки на оператора;
• высокая скорострельность (2—3 выстрела в минуту), что способствует пора-
жению большого числа целей в короткий промежуток времени, достижению
минимального времени пребывания носителей на линии огня;
• наличие двух типов боевых частей (мощной кумулятивной тандемной и фу-
гасной) обеспечивает возможность поражения современных и перспектив-
ных танков, любой другой бронированной и небронированной техники, по-
левых сооружений, низколетящих самолетов и вертолетов;
• высокая помехозащищенность обеспечивает эффективную стрельбу без сни-
жения вероятности попадания в цель в условиях естественных и организо-
ванных радио- и инфракрасных помех (ИК-помех);
• высокая точность стрельбы означает поражение целей, помех практически с
первого выстрела;
• большая дальность стрельбы до 6000 м способствует высокой выживаемости
носителей.
1.2. Фронтовая авиация
и ее боевое применение
1.2.1. ФОРМЫ ОПЕРАТИВНОГО ПРИМЕНЕНИЯ
И СПОСОБЫ РЕШЕНИЯ БОЕВЫХ ЗАДАЧ
Фронтовая авиация (ФА) — бомбардировочная (БА) и штурмовая (ША) —
в оргструктуре ВВС составляет пока примерно треть от общего числа авиацион-
ных полков, включая авиаполки истребительной авиации (ИА) Войск ПВО.
Основные задачи:
• завоевание и удержание господства в воздухе;
• изоляция поля боя — разрушение коммуникаций, средств ПВО в глубине
обороны противника, аэродромов, скопления войск и техники;
• поражение авиационных, противовоздушных группировок;
• поражение оперативных и тактических резервов;
• авиационная поддержка СВ и сил флота (на приморских направлениях);
• поражение воздушных десантов противника.
Основными формами оперативного применения ФА являются наступатель-
ные и оборонительные операции. ОПЕРАЦИЯ — это совокупность согласованных
и взаимосвязанных по цели, задачам, месту и времени сражений, боев и ударов,
проводимых по единому замыслу и плану. Фронтовая авиация участвует в опера-
ции на театре войны (военных действий) и проводит операции воздушных армий
(ВА) в рамках фронтовых операций.
Целью операции на театре войны является завоевание (удержание) господст-
ва в воздухе. Господство достигается разрушением государственного и военного
управления, поражением стратегических и оперативных резервов, уничтожением
самолетов противника на аэродромах и в воздухе.
Целью операции воздушной армии является поражение авиационных и про-
тивовоздушных группировок, разрушение объектов системы управления, пора-
жение тактических и оперативных резервов, подавление зональной ПВО, унич-
тожение самолетов и беспилотных средств противника.
Основа воздушных операций — авиационные удары: массированные, груп-
повые, одиночные.
Опыт проведения воздушных операций показал, что ни один вид вооружен-
ных сил не в состоянии так быстро менять направление и глубину своих ударов,
как ФА. И в обороне, и в наступлении высокая мобильность, дальнобойность и
поражающая мощь тактических боевых комплексов позволяют переносить уси-
лия с одного направления на другое, парировать угрозы противника в их зачатии,
оказывать экстренную помощь с воздуха тем общевойсковым армиям, где созда-
ется наиболее напряженная обстановка.
В основу боевых действий ФА в операциях заложены принципы тесного
взаимодействия с сухопутными войсками, экономии сил и средств — использо-
вании их на важнейших направлениях, непрерывности и твердости управления,
25
своевременности и точности ударов. Постоянное совершенствование самоле-
тов-штурмовиков и тактических бомбардировщиков, оснащение их высокоточ-
ным оружием и передовой авионикой должны превышать эффективность выпол-
нения ФА задач по завоеванию господства в воздухе, глубокой изоляции и непо-
средственной авиационной поддержке войск.
1.2.2. ПРИНЦИПЫ БОЕВОГО ПРИМЕНЕНИЯ.
ОПЫТ ЛОКАЛЬНЫХ ВОЙН
1. Завоевание превосходства в воздухе
Понятие «ПРЕВОСХОДСТВО в ВОЗДУХЕ» означает достижение такого положе-
ния в воздушном пространстве (в определенное время и в определенном районе),
при котором своим сухопутным войскам, военно-морским силам и авиации обес-
печивается успешное выполнение стоящих перед ними задач без организованно-
го и серьезного противодействия противника с воздуха. Важнейшим условием
этого — его первым этапом — считается достижение превосходства над авиацией
и ПВО противника.
Борьба за превосходство в воздухе начинается далеко за пределами района
боевых действий и задолго до вооруженного столкновения и продолжается
вплоть до окончания военных действий. Ее успех во многом зависит от своевре-
менного учета факторов, лежащих в основе процесса противоборства в воздуш-
ном пространстве.
Первый такой фактор — состояние ВВС и системы ПВО противника. Исходя
из этого особое значение придается своевременному вскрытию группировки его
ВВС и ПВО (как в качественном, так и в количественном отношении), возмож-
ным вариантам хода и характера боевых действий его вооруженных сил.
Получение такой информации позволяет в каждый конкретный период вре-
мени иметь представление о составе и дислокации сил противника, об уровне и
развитии тактики и программ их боевой подготовки, а также создает необходи-
мые предпосылки для разработки наиболее обоснованных тактико-технических
требований к новым самолетам и для правильного выбора численности и состава
своих сил и средств, способных обеспечить превосходство над противником. Эти
данные являются основой для составления долговременных прогнозов в области
развития вооружения и строительства военной авиации и ПВО.
Вторым фактором считается уровень развития собственной экономики, про-
мышленности, технологии и возможность их переориентации в том или ином на-
правлении в конкретных условиях обстановки. Опыт прошедших войн убеди-
тельно доказывает, что завоевания и удержания превосходства в воздухе можно
добиться, лишь опираясь на мощную военно-промышленную базу, способную
своевременно восполнить потери и создать необходимый перевес сил над про-
тивником.
Третий фактор связан с искусством использования имеющейся авиации в
ходе боевых действий.
Борьбу за превосходство в воздухе необходимо вести целеустремленно и ре-
шительно, поражать не только противостоящую авиационную группировку, но и
26
объекты авиационной промышленности, а также другие элементы инфраструк-
туры, оказывающие прямое или косвенное влияние на восполнение потерь и эф-
фективность боевых действий ВВС и ПВО противника.
В годы Второй мировой войны в интересах завоевания стратегического и
оперативного господства в воздухе проводились крупномасштабные воздушные
операции по уничтожению самолетов на земле и в воздухе, а также предприятий
авиационной промышленности, центров подготовки летного состава.
В локальных войнах в связи с особенностями военных действий, развитием
авиационной техники и средств ПВО изменилось содержание борьбы за господ-
ство в воздухе, расширился арсенал способов и тактических приемов решения
этой задачи. Так, наряду с уничтожением самолетов на земле весьма эффектив-
ными стали удары по взлетно-посадочным полосам (ВПП), поскольку сверхзву-
ковые реактивные самолеты могли эксплуатироваться только с аэродромов,
имеющих искусственную взлетно-посадочную полосу значительной длины. Осо-
бую значимость приобрели действия по дезорганизации систем управления авиа-
цией и ПВО противника.
Уничтожение самолетов на земле, вывод из строя аэродромов в локальных
войнах рассматривается как один из основных способов борьбы за господство в
воздухе. В корейской войне американская авиация нанесла удары по североко-
рейским аэродромам на четвертый день после начала боевых действий. Массиро-
ванные налеты, в результате которых ВВС Корейской народной армии (КНА) по-
несли серьезные потери, продолжались несколько дней подряд. Американское
военное руководство решило, что к концу первой недели войны превосходство в
воздухе завоевано окончательно. Однако КНА дала решительный отпор, получив
помощь в самолетах и зенитной артиллерии от СССР и других дружественных
стран. ВВС Корейской народной армии продолжали активно противодействовать
американской авиации. Истребительные авиационные подразделения МИ Г-15
были перебазированы на аэродромы в освобожденные районы и стали оказывать
своим войскам эффективную помощь с воздуха. Американское командование
вынуждено было спешно перебрасывать дополнительные силы бомбардировщи-
ков (В-29) и истребителей с континента. После их прибытия на театр военных
действий агрессор вновь начал «битву за аэродромы». Она продолжалась около
двух лет. Систематическим бомбардировкам подвергались полевые аэродромы и с
бетонированными ВПП. Воздушная разведка вела постоянное наблюдение за хо-
дом восстановительных работ, и, когда они подходили к концу, предпринимался
очередной воздушный удар. Лишь ценой больших потерь американцам удалось
серьезно затруднить использование аэродромов, расположенных на территории
Северной Кореи. С мая 1951 по январь 1952 г. более 50% самолетовылетов ави-
ация США совершила по плану «битвы за аэродромы».
Опыт корейской войны со всей определенностью свидетельствует, что самым
уязвимым местом ВВС являются аэродромы, на которых авиация беззащитна.
Разрушение ВПП затрудняло, а порой и исключало, возможность выполнения
взлета. Однако в армиях ряда стран не были извлечены должные уроки. Именно
этим просчетом и воспользовался израильский агрессор при нападении на араб-
ские страны. В «шестидневной войне» 1967 года на Ближнем Востоке израильтя-
не основную ставку сделали на внезапный удар авиации вначале по аэродромам и
средствам управления, а затем по войскам другой стороны. Этому способствова-
ли выбор времени нанесения удара, выполнение глубоких обходных маневров
27
для выхода на цель с наиболее неожиданных для противника и наименее прикры-
тых средствами ПВО направлений, использование малых и предельно малых вы-
сот для маскировки самолета.
Самолеты арабских стран к началу войны находились на открытых стоянках
аэродромов и были выстроены компактно в линию (представляли групповую
цель). Осуществляя заход на бомбометание вдоль стоянки, израильские летчики
получали возможность для точного прицеливания и эффективного применения
средств поражения.
В первом массированном ударе по аэродромам были задействованы все без
исключения самолеты ВВС агрессора. Ни один из них не был оставлен в резерве.
Расчет строился на достижении авиацией максимально возможного результата
непосредственно в начале войны. Большинство арабских аэродромов подверг-
лись ударам одновременно. Боевая зарядка на каждом самолете предназначалась
только для поражения авиационной техники на земле. Все группы были ударны-
ми, на подавление средств ПВО силы не отвлекались. Отчасти это вызывалось
тем, что применялось старое оружие (авиабомбы, неуправляемые ракеты) и наря-
да авиации хватало только для атак самолетов на земле.
Уроки арабо-израильской войны 1967 года были учтены во многих армиях.
В частности, в ряде стран, в том числе в арабских государствах, для авиации были
построены надежные укрытия на аэродромах, выдерживающие прямое попадание
1000-килограммовой фугасной бомбы. Это требовало иного подхода к решению
задач уничтожения ВВС в местах их базирования. Однако в войне 1973 года про-
счет был допущен уже израильским военным руководством. Не желая изменять
оправдавшей себя тактике, израильская авиация нанесла, как и в «шестидневной
войне», массированные удары по аэродромам арабских государств. Однако резуль-
тат был иным. Агрессор понес значительные потери в авиации, не достигнув долж-
ных результатов. В изменившихся условиях он был вынужден сделать упор уже не
на уничтожение самолетов на земле, а на блокирование аэродромов (воспрещение
с них взлета) путем разрушения бетонированных полос.
В настоящее время типовым вариантом считают парализацию действий зна-
чительной части авиации противника хотя бы на 1...2сут. Этого можно достичь
тремя основными способами: бомбардировкой запасных аэродромов, где самоле-
ты противника, находясь вне укрытий, готовятся к повторному вылету; согласо-
ванной по времени атакой основных авиабаз в момент, когда самолеты буксиру-
ются на стартовую позицию; нанесением ударов по самолетам в укрытиях на ос-
новных аэродромах базирования.
Первый способ считается наиболее предпочтительным и относительно легко
осуществимым с помощью бомбовых кассет, оснащенных малокалиберными бе-
тонобойными бомбами и противопехотными минами, которые должны быть
сброшены на техническую позицию, где происходят заправка самолетов топли-
вом и пополнение их боекомплекта перед вылетом. Перспектива внезапной атаки
буксируемых к месту старта машин считается весьма привлекательной, поскольку
они представляют собой легко уязвимые цели. Однако при этом большую роль
играет не выбор средств поражения, а организация глубокой разведки в реальном
масштабе времени.
И наконец, нанесение ударов непосредственно по самолетам в укрытиях
считается возможным только при определенных условиях, в частности при при-
менении так называемых боеприпасов двойного предназначения, оптимизиро-
28
ванных для повреждения ВПП, но дающих результат и при прямом попадании в
укрытие. Оружие для нанесения ударов по аэродромам условно подразделяют на
два вида: сбрасываемое при пролете самолета-носителя непосредственно над
целью (ВПП, рулежные дорожки, укрытия для самолетов и т. п.) и запускаемое
вне зоны действия ПВО объекта.
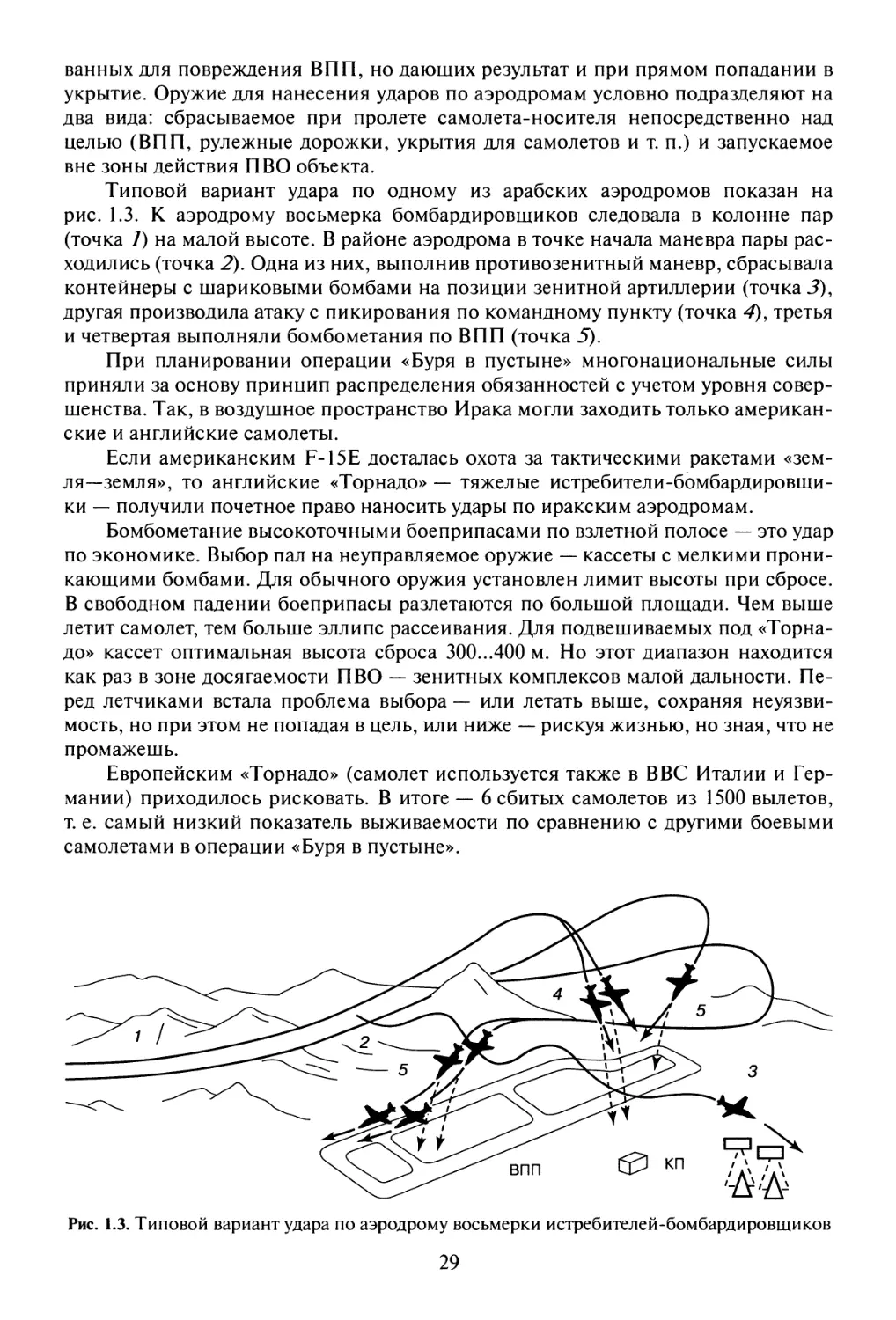
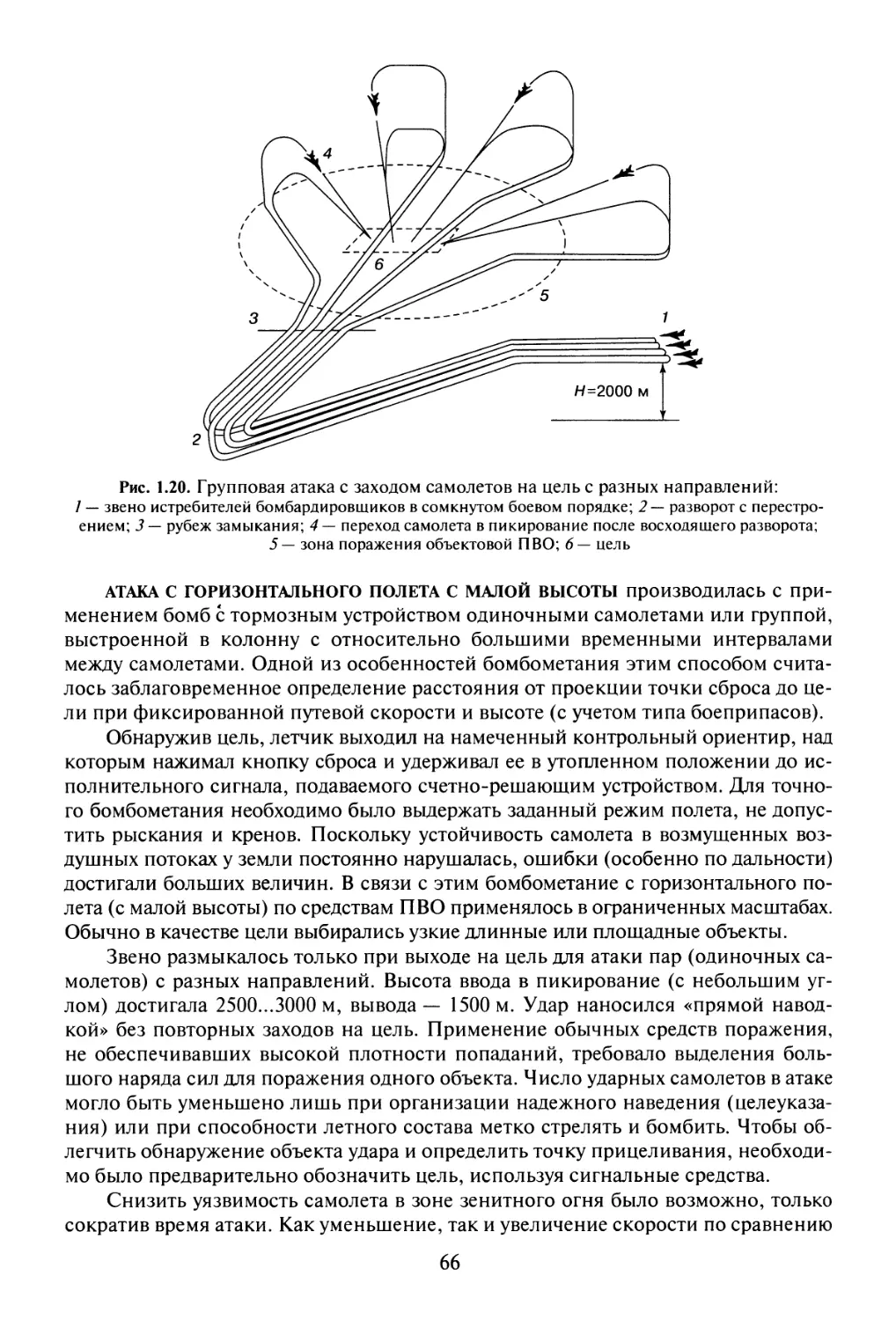
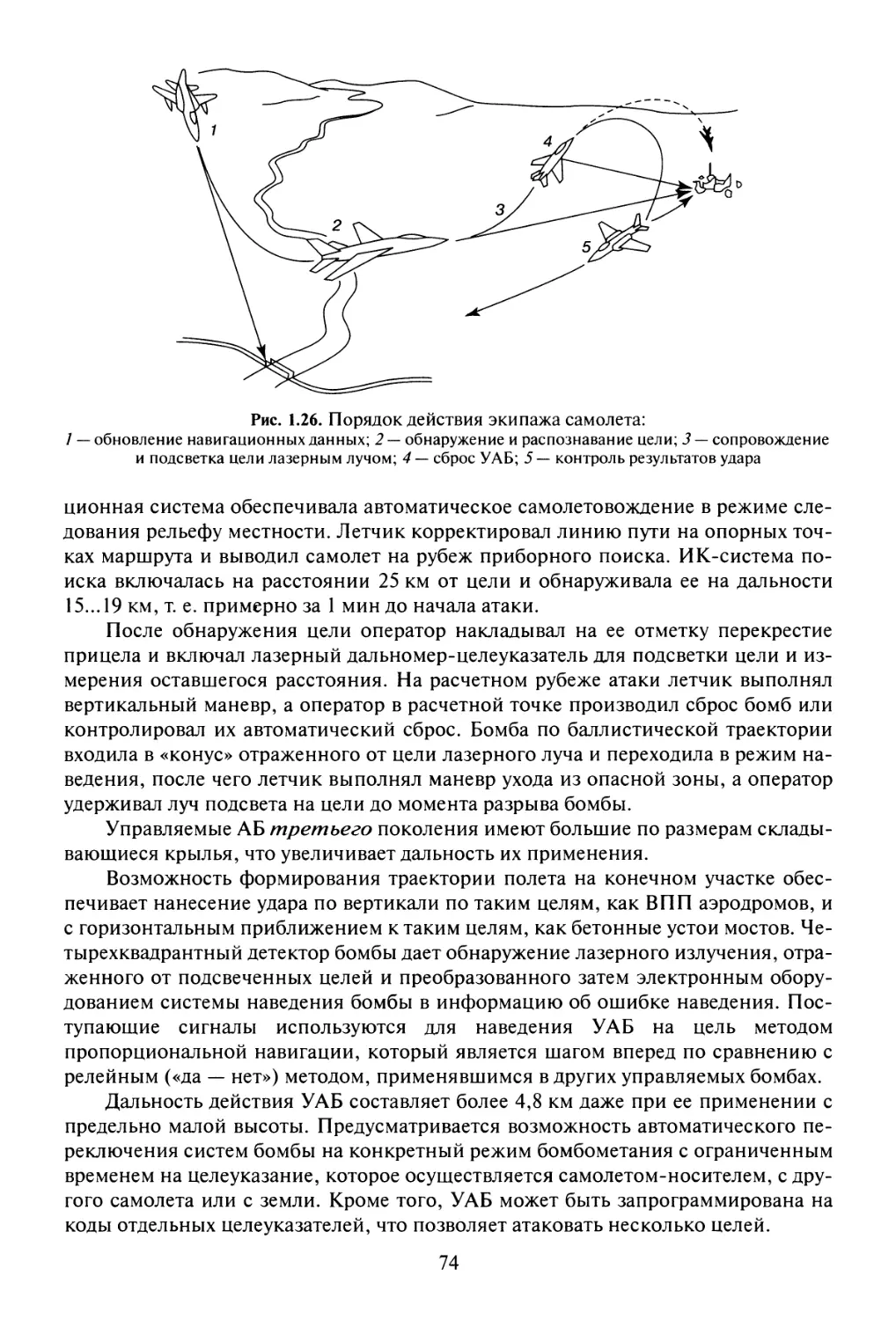
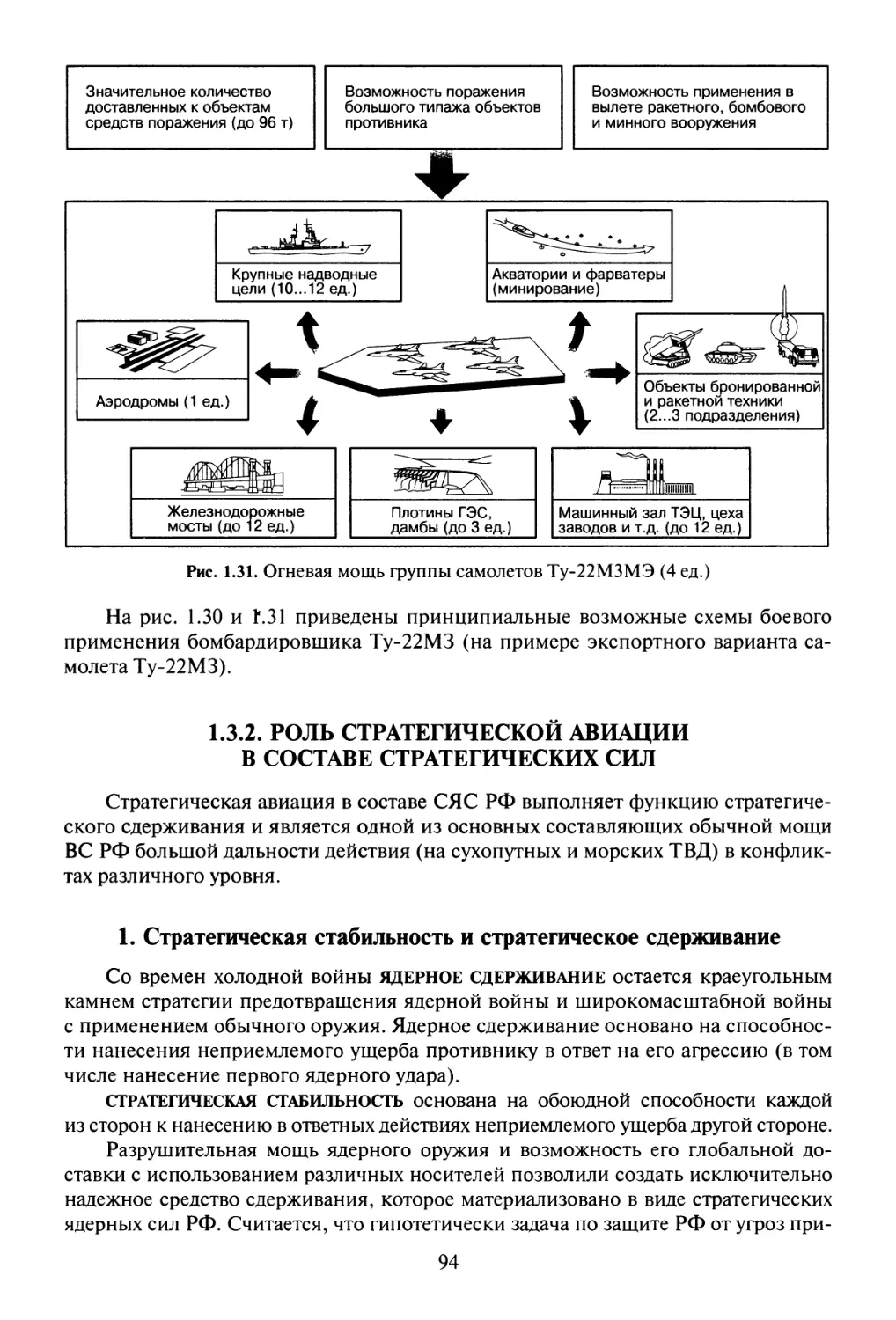
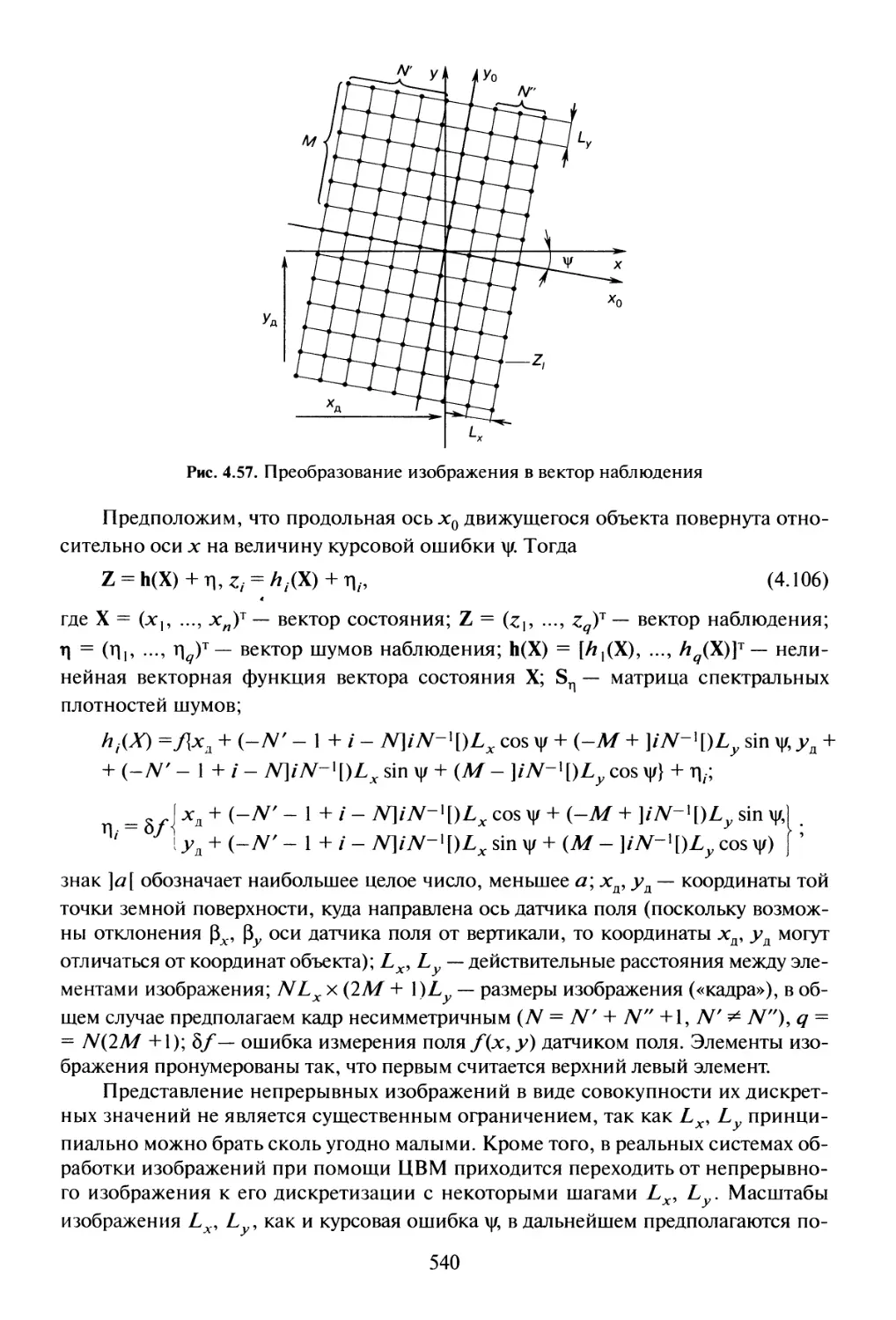
Типовой вариант удара по одному из арабских аэродромов показан на
рис. 1.3. К аэродрому восьмерка бомбардировщиков следовала в колонне пар
(точка 7) на малой высоте. В районе аэродрома в точке начала маневра пары рас-
ходились (точка 2). Одна из них, выполнив противозенитный маневр, сбрасывала
контейнеры с шариковыми бомбами на позиции зенитной артиллерии (точка 5),
другая производила атаку с пикирования по командному пункту (точка 4), третья
и четвертая выполняли бомбометания по ВПП (точка 5).
При планировании операции «Буря в пустыне» многонациональные силы
приняли за основу принцип распределения обязанностей с учетом уровня совер-
шенства. Так, в воздушное пространство Ирака могли заходить только американ-
ские и английские самолеты.
Если американским F-15E досталась охота за тактическими ракетами «зем-
ля-земля», то английские «Торнадо» — тяжелые истребители-бомбардировщи-
ки — получили почетное право наносить удары по иракским аэродромам.
Бомбометание высокоточными боеприпасами по взлетной полосе — это удар
по экономике. Выбор пал на неуправляемое оружие — кассеты с мелкими прони-
кающими бомбами. Для обычного оружия установлен лимит высоты при сбросе.
В свободном падении боеприпасы разлетаются по большой площади. Чем выше
летит самолет, тем больше эллипс рассеивания. Для подвешиваемых под «Торна-
до» кассет оптимальная высота сброса 300...400 м. Но этот диапазон находится
как раз в зоне досягаемости ПВО — зенитных комплексов малой дальности. Пе-
ред летчиками встала проблема выбора — или летать выше, сохраняя неуязви-
мость, но при этом не попадая в цель, или ниже — рискуя жизнью, но зная, что не
промажешь.
Европейским «Торнадо» (самолет используется также в ВВС Италии и Гер-
мании) приходилось рисковать. В итоге — 6 сбитых самолетов из 1500 вылетов,
т. е. самый низкий показатель выживаемости по сравнению с другими боевыми
самолетами в операции «Буря в пустыне».
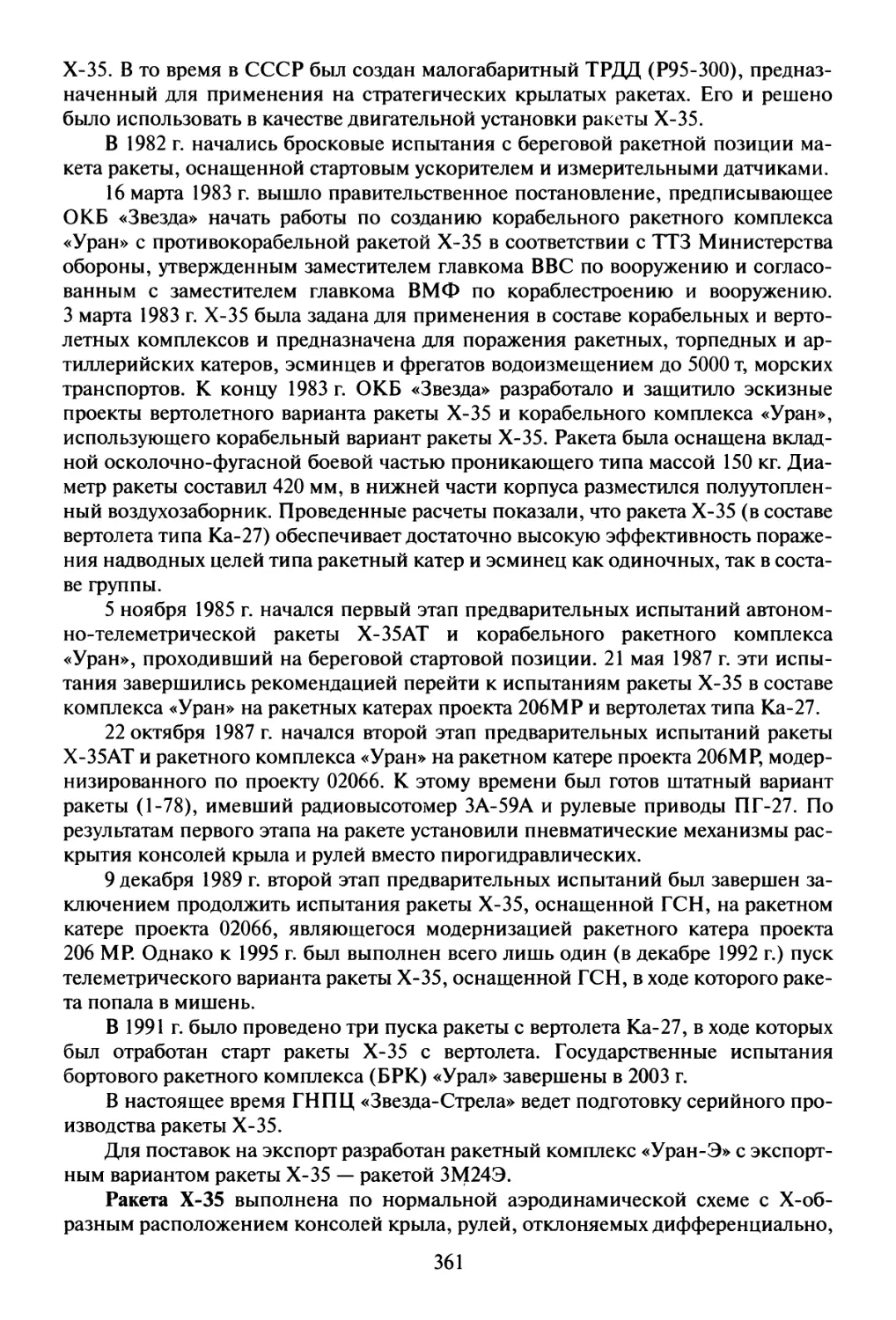
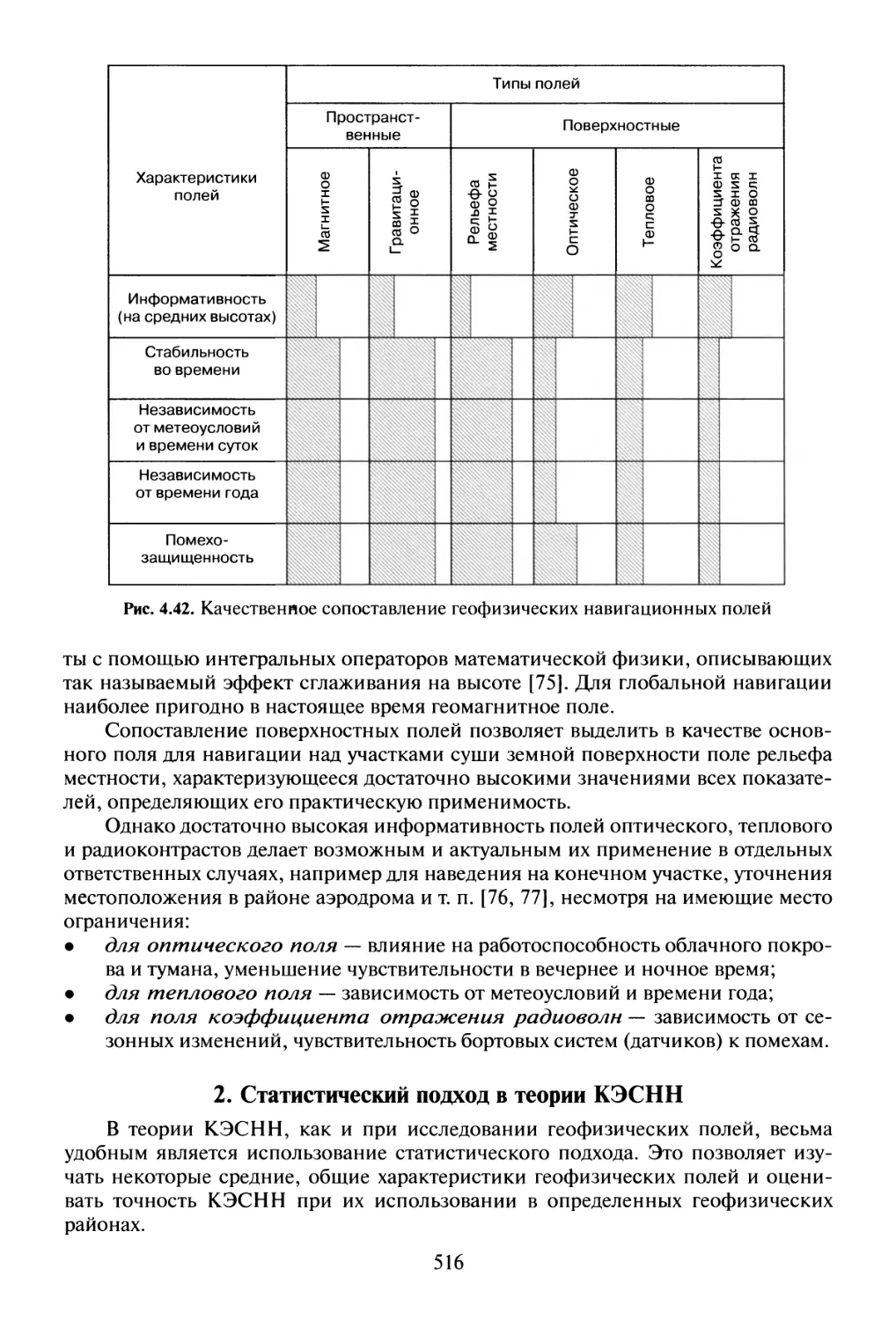
Рис. 1.3. Типовой вариант удара по аэродрому восьмерки истребителей-бомбардировщиков
29
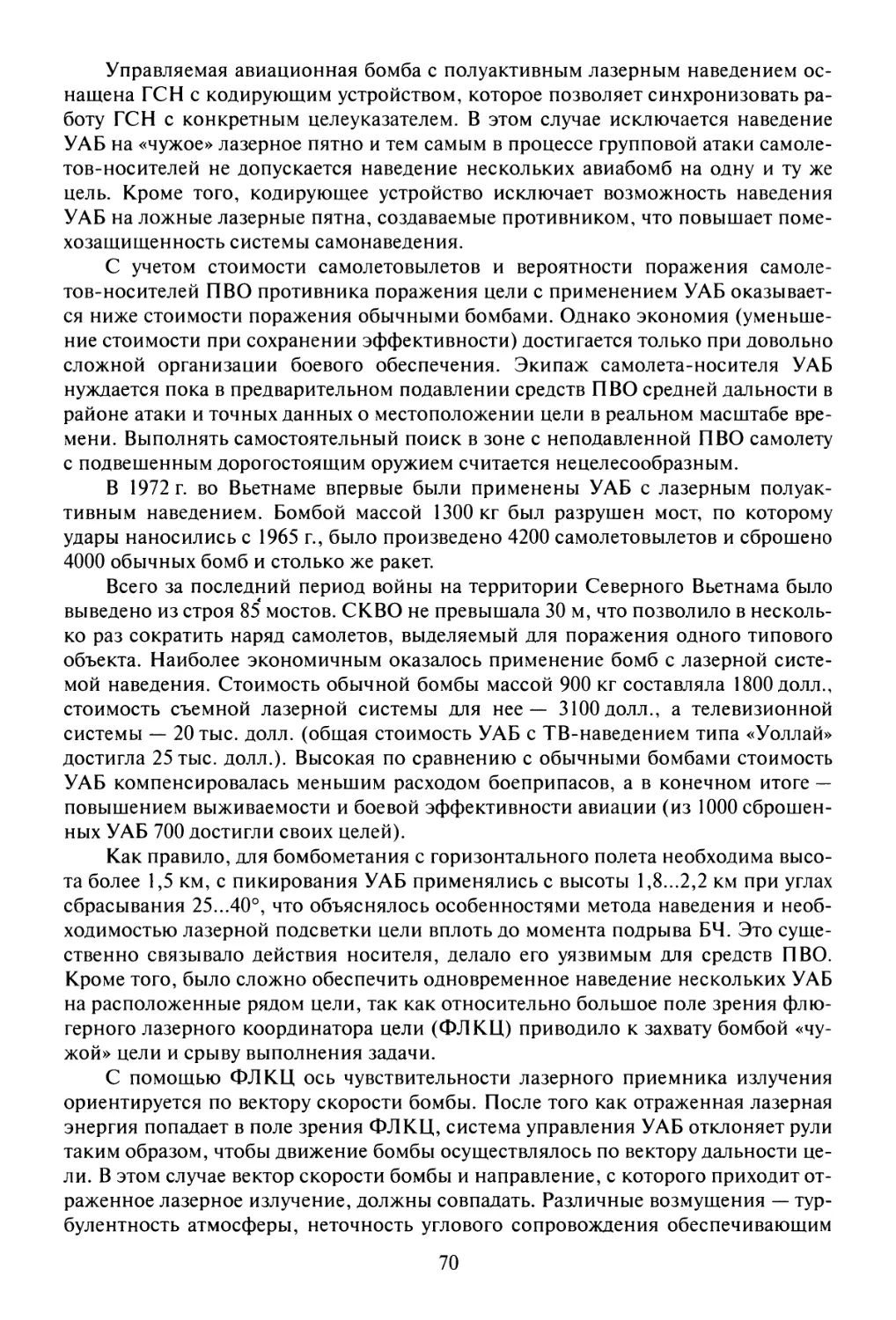
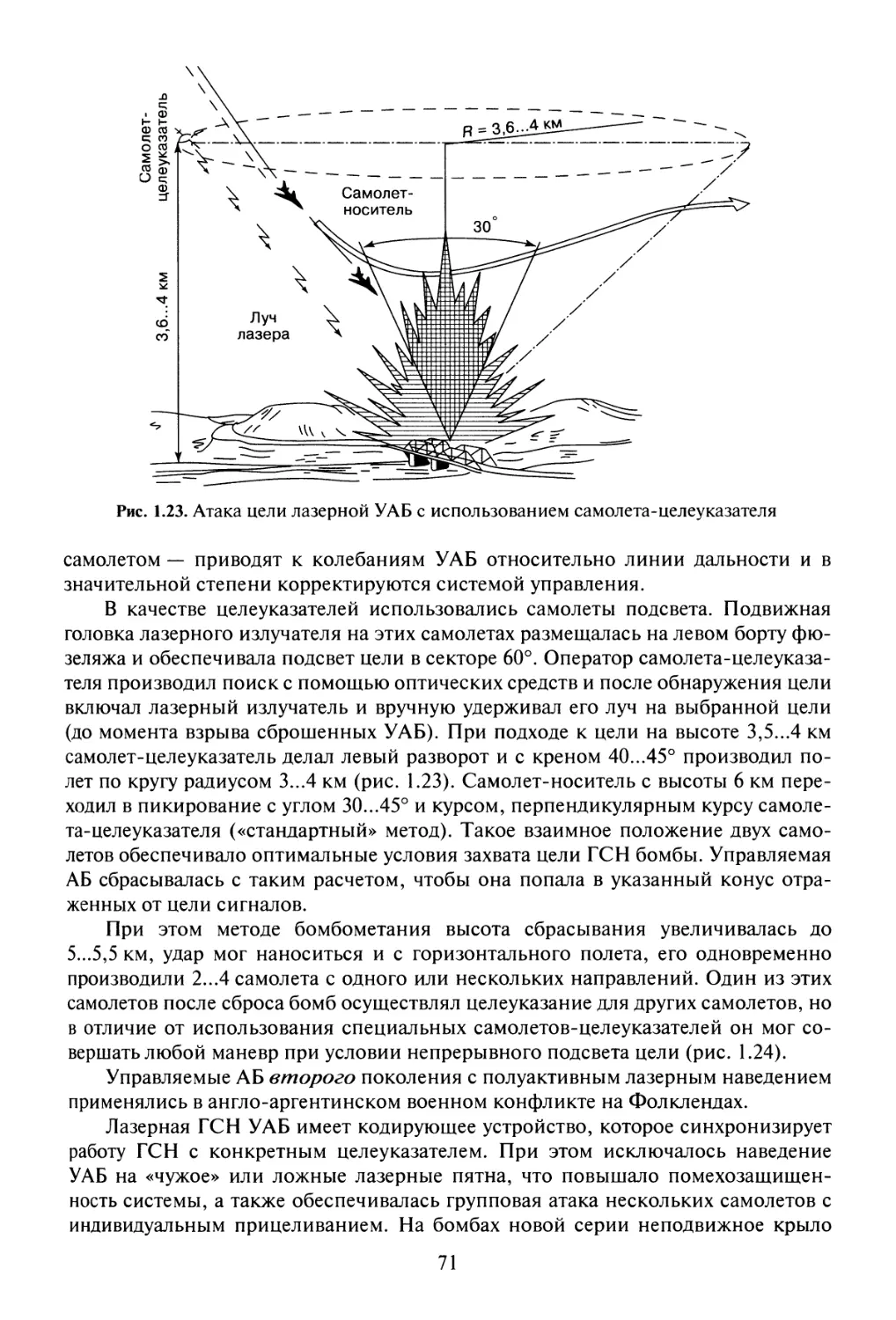
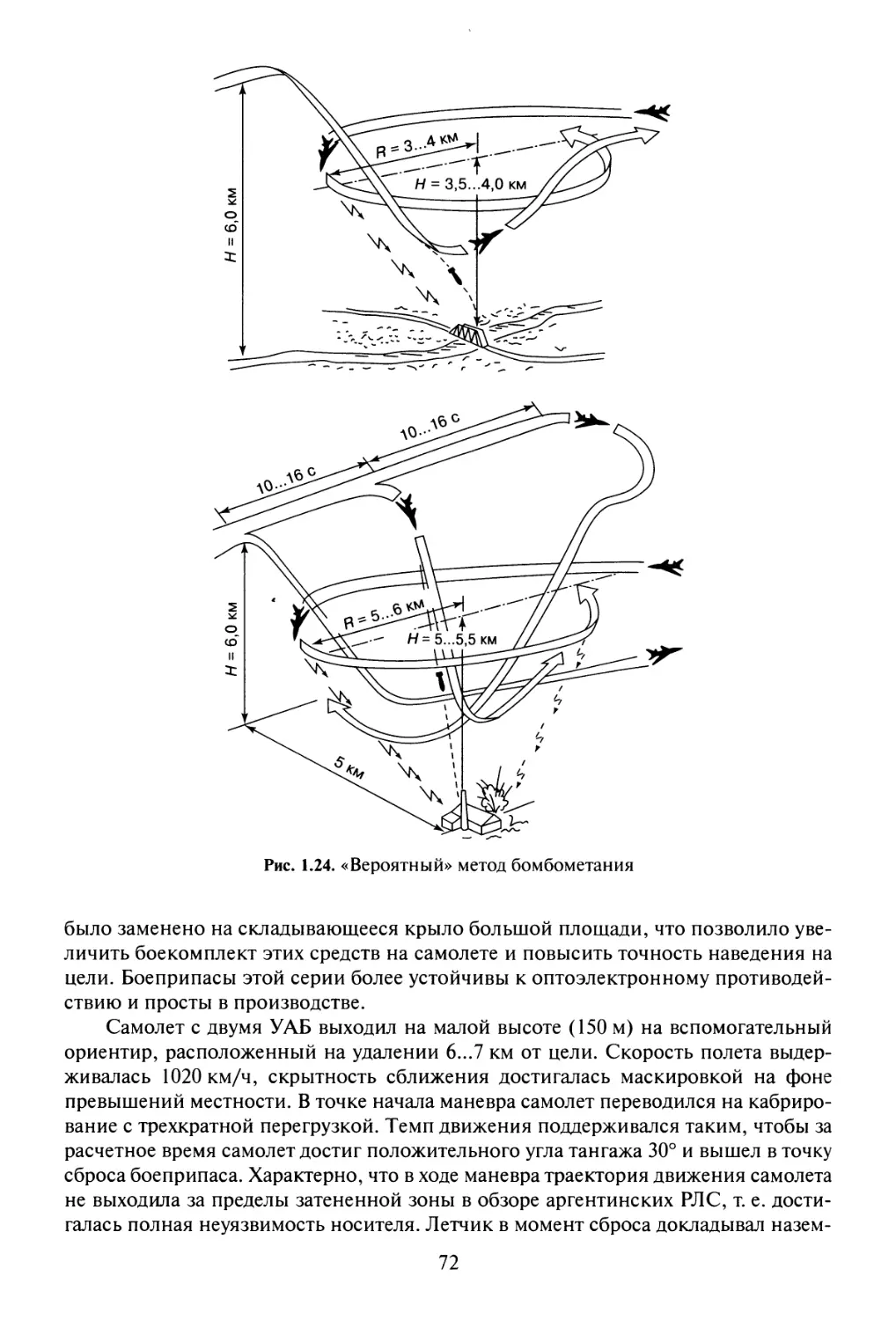
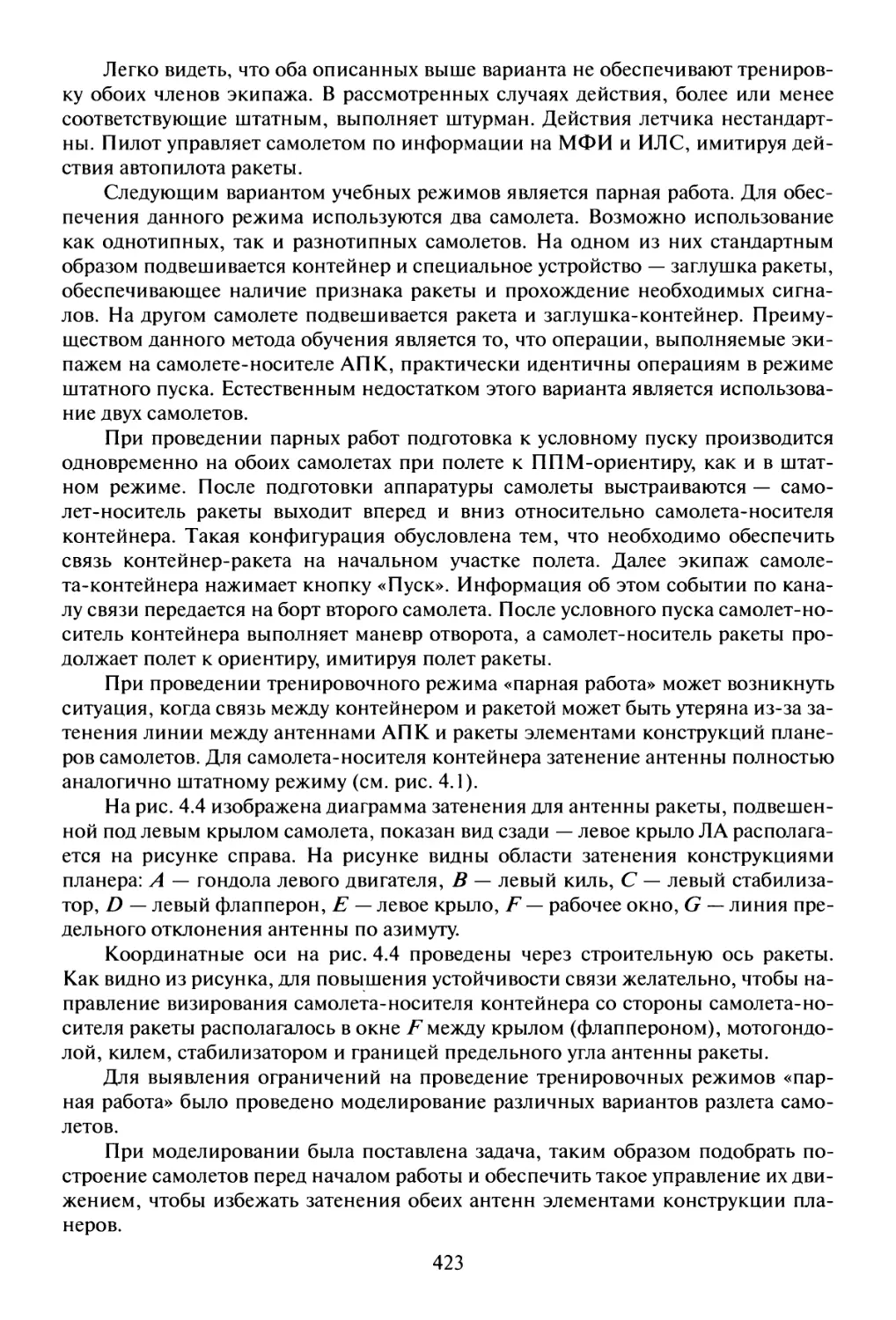
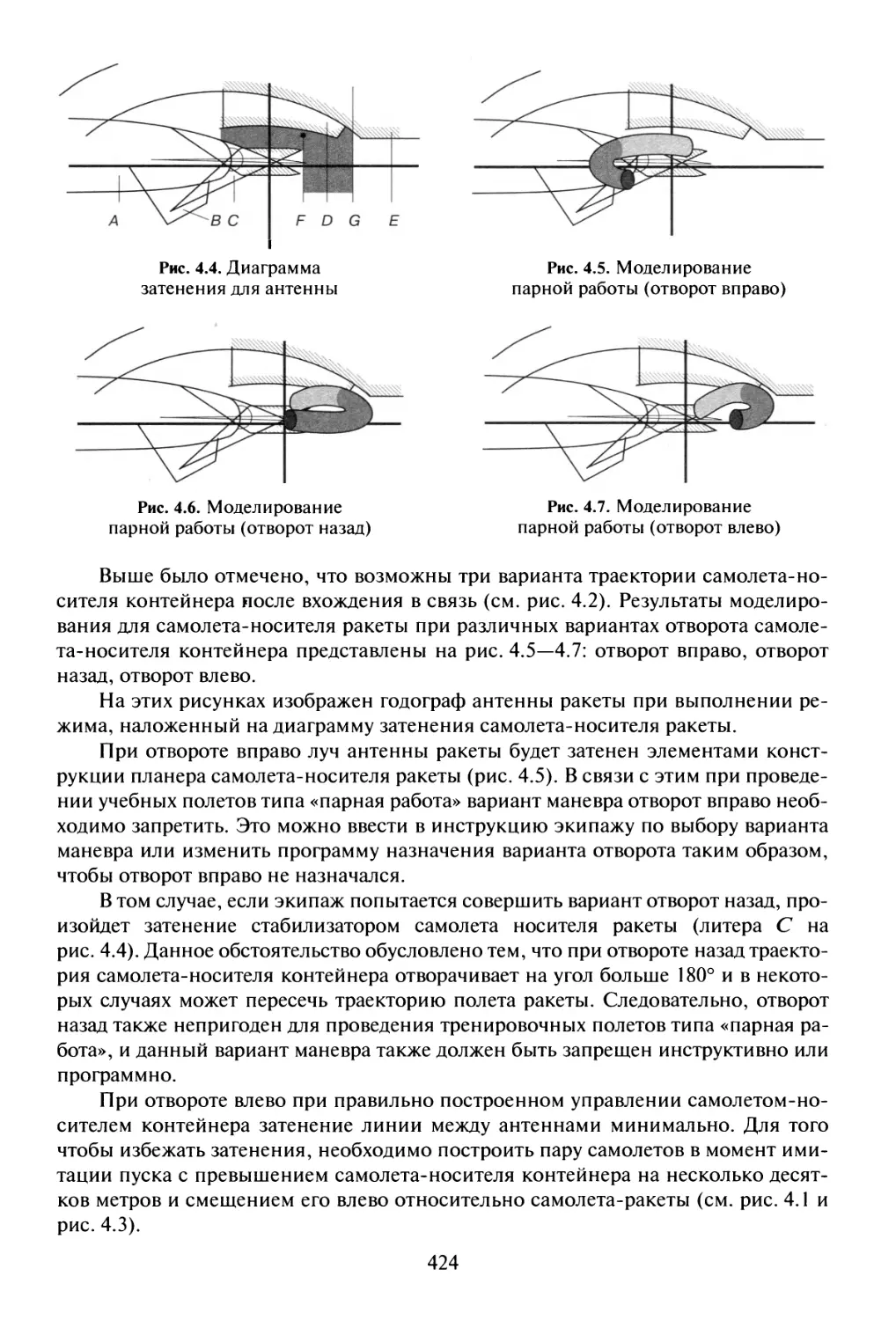
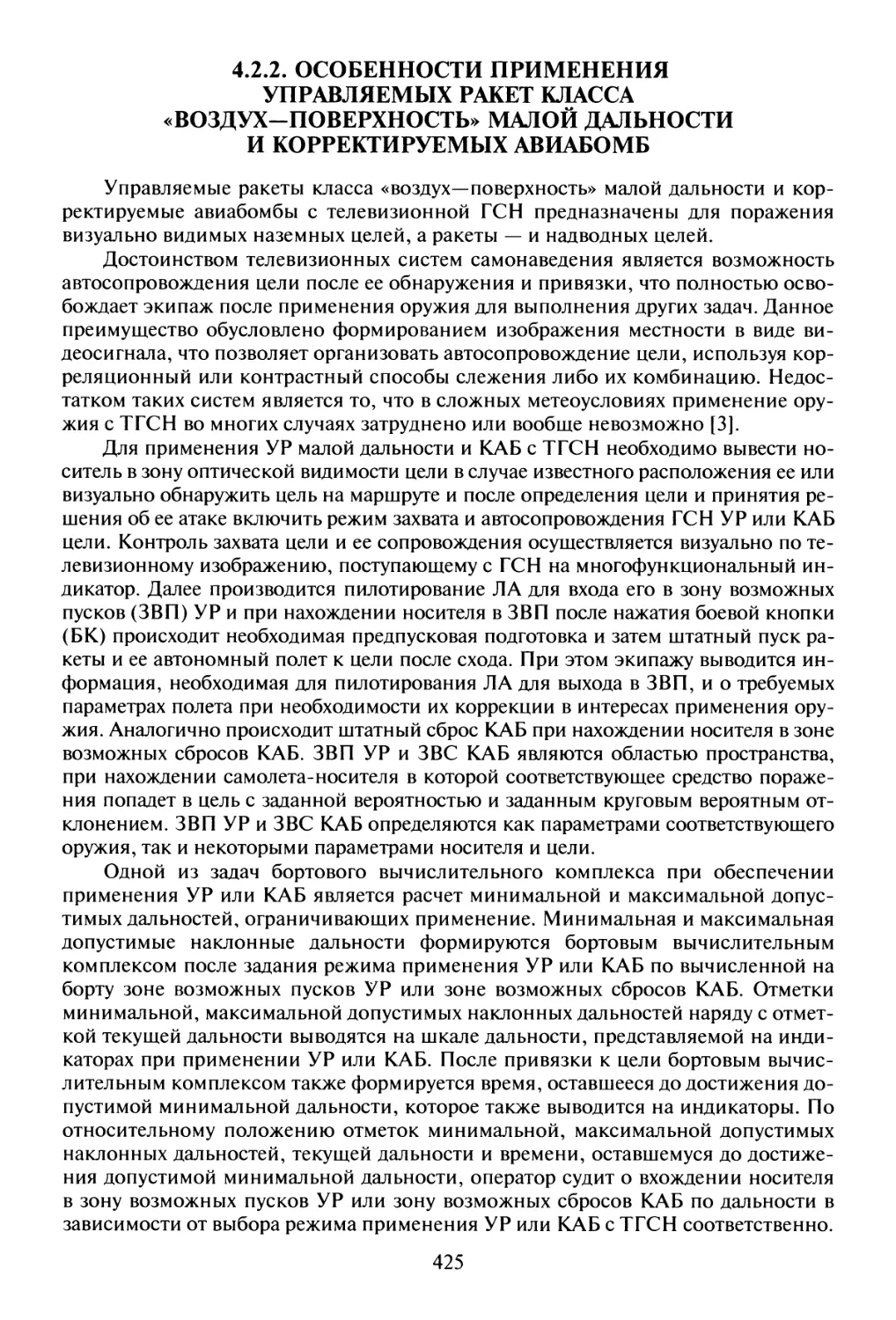
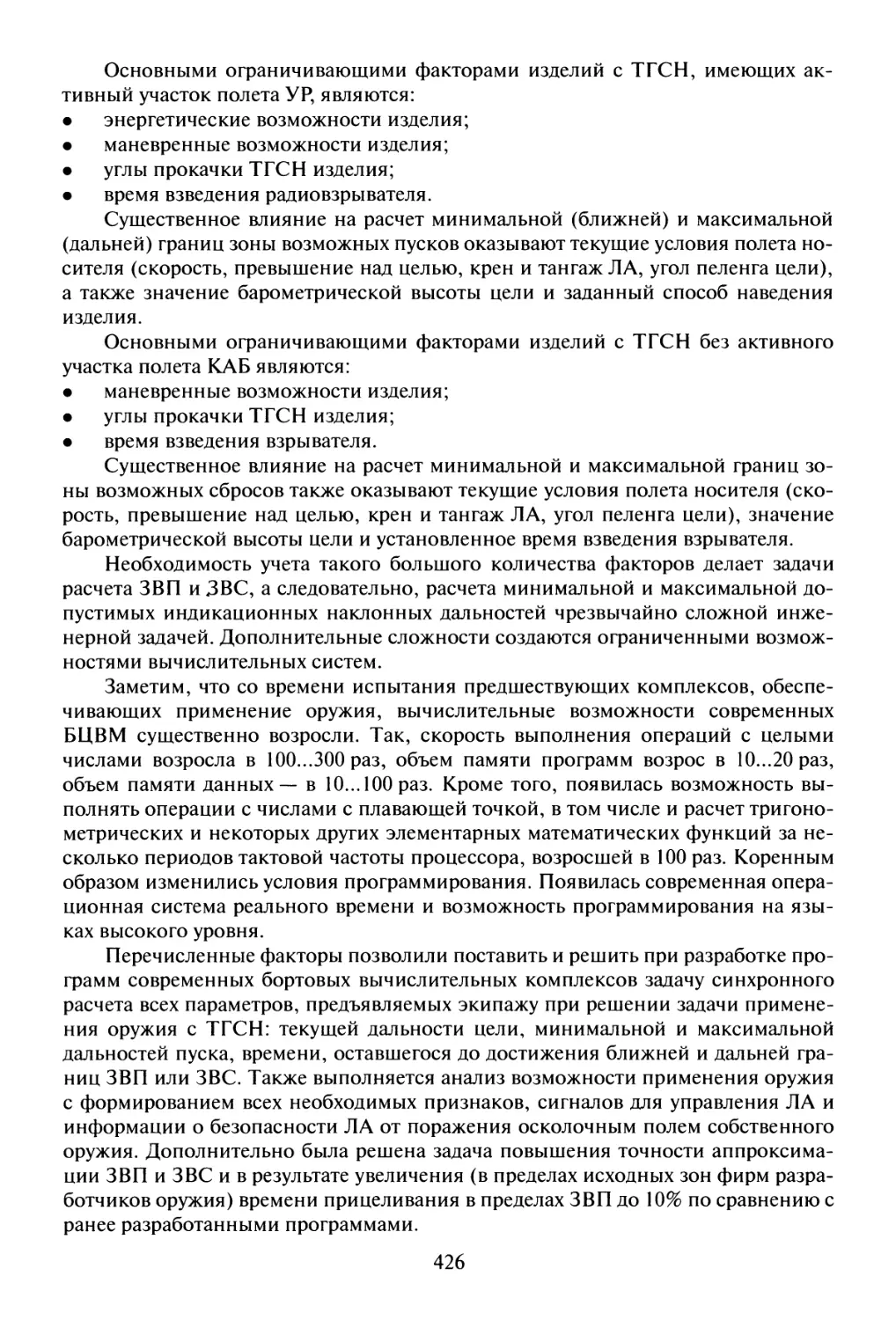
Огневое поражение средств ПВО
Способы огневого поражения сводились в две основные группы: воспреще-
ние ОГНЯ ЗЕНИТНОЙ АРТИЛЛЕРИИ (ЗА); ОГНЕВОЕ ПОРАЖЕНИЕ ЗЕНИТНЫХ РАКЕТНЫХ
КОМПЛЕКСОВ.
Воспрещение огня зенитной артиллерии оказалось сложной тактиче-
ской проблемой, о чем наглядно свидетельствуют такие показатели: американ-
ская авиация в Корее и во Вьетнаме потеряла от огня ЗА две трети от общего чис-
ла сбитых самолетов.
Зенитная артиллерия мало повысила свои возможности по сравнению с пери-
одом Второй мировой войны и считалась устаревшим оружием. Число подразделе-
ний ЗА в штатах Сухопутных войск заметно снизилось. Боевые качества самолетов
(скорость, потолок, огневая мощь), наоборот, резко росли. Кроме управляемых
ракет, на борту сверхзвуковых бомбардировщиков имелась аппаратура радио-
электронной борьбы. Но огонь зенитной артиллерии воспретить не удалось.
Во-первых, позиция зенитной артиллерии представляла собой объект, слож-
ный для отыскания и поражения. Самолетный радиолокатор не мог обнаружить
и тем более захватить малокалиберную пушку, чтобы обеспечить данными при-
цельную систему для применения управляемого оружия. Сама пушка не излучала
тепло, достаточное для наведения на него ракеты с тепловой головкой самонаве-
дения. Батарея малой зенитной артиллерии (МЗА) не имела в своем составе РЛС
разведки и целеуказания, которую можно было «забить» помехами.
Во-вторых, вследствие неэффективности электроники и автоматики в борь-
бе с МЗА способы* огневого поражения ее основывались на зрительном обнару-
жении, опознании и прицеливании. Это означало необходимость сближения са-
молета с объектом атаки на дальность 2...3 км на умеренной скорости и примене-
ния неуправляемых средств поражения. Все те достоинства, которые отличали
сверхзвуковой реактивный самолет-ракетоносец от поршневого самолета, не
могли быть использованы.
В-третьих, существенные ограничения в способах огневого поражения авиа-
цией ЗА означали, что их возможности в противоборстве выравнивались. И не
случайно во время войны во Вьетнаме число зенитных батарей в составе ПВО Се-
верного Вьетнама резко возросло. Обладая хорошей мобильностью, они быстро
перемещались на вероятные направления действий американской авиации, вели
интенсивный огонь из засад. Местоположения засад было трудно вскрыть развед-
кой, поэтому воздушный агрессор встречал отпор там, где меньше всего ожидал.
С зенитной артиллерией взаимодействовали ракетные комплексы, которые при-
жимали зоной своего поражения американские самолеты к земле под обстрел зе-
нитных пушек.
Таким образом, основной причиной поражения авиации в борьбе с ЗА в так-
тическом плане являлась необходимость входа самолетов в зону ее огня в процес-
се атаки. Это же обстоятельство сохранялось в силе при атаке маловысотных зе-
нитных комплексов, не имевших радиолокаторов (оснащенных оптическими
прицельными устройствами). Вследствие этого часто против таких объектов при-
менялись средства поражения, предназначенные для вывода из строя не техники,
а личного состава, шариковые или «ананасовые» бомбы в кассетах, разбрасывае-
мые по большой площади и не требующие точного прицеливания.
Огневое поражение зенитных ракетных комплексов по содержанию отлича-
лось от способов активной борьбы с ЗА, так как эти комплексы были оснащены
30
радиолокаторами или другими поисковыми средствами — излучателями энергии.
Против них уже можно было применять противорадиолокационные ракеты. Эф-
фект применения их возрастал при ведении радиотехнической разведки, обеспе-
чивавшей установление координат стартовых позиций.
Вместе с тем опыт показал, что из-за высокой мобильности ЗРК (особенно
входивших в состав войсковой ПВО) данные разведки необходимо иметь в реаль-
ном масштабе времени. Другими словами, временной разрыв между установле-
нием местоположения ЗРК и нанесением воздушного удара по нему должен быть
минимальным или вообще отсутствовать. Это требование обусловило появление
тактического принципа «обнаружил — уничтожил», который на практике нашел
отражение в способе «огневой разведки».
Самостоятельно обнаруживать и немедленно атаковать подвижные зенитные
комплексы должны были самолеты, которые оснащались аппаратурой радиотех-
нической разведки и активных помех, основным их вооружением являлись уп-
равляемые ракеты «воздух—РЛС».
Для прицельного пуска ракеты по РЛС, входящей в ПВО объекта, нужно бы-
ло заставить боевой расчет включить ее в работу, а затем затруднить ему обнару-
жение и идентификацию атакующего самолета. Это достигалось выполнением
демонстративных маневров специально выделенными самолетами, запуском
ложных целей, имитирующих полет в направлении объекта удара. Такие тактиче-
ские приемы вынуждали приводить средства ПВО в готовность к отражению на-
лета, создавали сложную радиолокационную обстановку, но не исключали необ-
ходимость входа самолета-носителя в зону поражения атакуемого ЗРК. Поэтому
пришлось изыскивать способы атак с учетом боевых свойств противорадиолока-
ционной ракеты. Часто самолет-носитель выполнял полет к объекту удара на ма-
лой высоте вне радиолокационной видимости, в расчетной точке или по данным
бортовой навигационной системы он резко набирал высоту и кратковременно
входил в зону облучения атакуемой РЛС. После захвата ее головкой самонаведе-
ния ракеты летчик производил пуск и немедленно снижался с одновременным
разворотом на обратный курс. Управляемая ракета (УР) самостоятельно наводи-
лась на источник излучения. Уязвимость атакующего самолета уменьшалась, но
значительно увеличивалась ошибка наведения ракеты на цель. Кроме того, воз-
можность выполнения такого маневра зависела от точности выхода самолета в
исходное положение для атаки.
2. Изоляция района боевых действий
(борьба с оперативными резервами)
изоляция района боевых действий — объемная задача, на решение кото-
рой ударными самолетами затрачивалось около трети летного ресурса.
Бомбардировщики (фронтовые) должны воспрещать подход резервов и су-
щественно ограничивать маневр сил и средств противника в рамках театра воен-
ных действий (ТВД) бомбардировками коммуникаций, складов, баз снабжения,
уничтожением живой силы и техники в местах сосредоточения.
Изоляция имеет историческое прошлое, базируется на достаточно солидном
боевом опыте. Война дала несколько ярких примеров, подтверждающих, что
фронтовая авиация может прервать подвоз горючего, боеприпасов и вооружения,
вследствие чего боевые действия наземных войск противника могут быть наполо-
вину обречены на провал еще до их начала.
31
Фронтовая авиация способна еще на дальних подступах оказывать действен-
ную поддержку войскам во всех периодах операции, быстро переносить свои уси-
лия по фронту и в глубину и сосредоточивать их на главных направлениях, на вы-
полнении важнейших задач.
В локальных войнах четко обозначились вопросы «изоляции», считавшиеся
наиболее острыми, но решение которых было оставлено на будущее:
1. Низкая эффективность поражения подвижных наземных целей на боль-
шой глубине. Специфика «изоляции» как боевой задачи заключалась в действиях
преимущественно по нестационарным объектам, а прицельно-навигационные
системы самолетов выводили их только на цели, не изменявшие своих координат.
Поэтому конечный участок маршрута превращался в этап поиска, который тех-
нически не обеспечивался.
2. Противоречие между требованием полного загружения самолетов боепри-
пасами для достижения заданной степени поражения цели и сохранением манев-
ренности, нужной для преодоления противодействия средств ПВО. В применяв-
шемся компромиссном варианте слабость огня компенсировалась увеличением
числа самолетов в группе. Это означало, что в единицу времени через зону пораже-
ния ПВО проходило больше самолетов, подвергавшихся обстрелу. Потери росли.
3. Ограничения, связанные с выполнением заданий в неблагоприятных по-
годных условиях, когда действия сухопутных войск продолжались. Несмотря на
то что все тактические истребители были всепогодными, ночью и в облаках вы-
нужденным являлся переход к одиночным ударам и действиям в составе мелких
групп. Сведение ударных самолетов, не имевших аппаратуры контроля за рас-
стоянием между ними, в единый боевой порядок исключалось. Это снижало по-
ражающие возможности тактической авиации до неприемлемого уровня.
4. Неэкономный расход сил, который не мог быть возмещен применением
высокоточного оружия. Управляемые бомбы и ракеты в связи с особенностями
своего наведения (лазерное, телевизионное, тепловизионное) не всегда подходи-
ли для поражения подвижных и малоконтрастных целей. Другим фактором, сни-
жающим их эффективность, являлись сложные метеоусловия.
5. Неудовлетворенная потребность в данных разведки и реальном масштабе
времени. Срочность доставки сведений об объектах удара определялась постоян-
ной сменой местоположения последними. Использование устаревшей информа-
ции срывало замысел: вышедшая на рубеж атаки группа самолетов заданной цели
на месте не заставала. По опыту локальных войн «изоляция» стала рассматри-
ваться как комплексная задача, обязательными составными элементами которой
являются разведка и немедленное огневое воздействие по вскрытым целям.
В этом имелось сходство с непосредственной авиационной поддержкой, только с
растянутым временем реакции. Некоторые специалисты рассматривают «изоля-
цию» как отодвинутую на 400 км от переднего края поддержку войск.
6. Недостаточная разработка способов изоляции воздушного пространства
над объектами нанесения удара. Для борьбы с истребителями противника не под-
ходили методы прорыва или уклонения, применявшиеся при преодолении на-
земных средств ПВО. В этом заставили убедиться северовьетнамские истребите-
ли. Уступая группам сопровождения по численности в несколько раз, они нано-
сили им внушительный урон.
7. Противоречивые требования к авиационной технике, применявшейся для
изоляции района боевых действий. Многоцелевой самолет не обладал ни доста-
точной поражающей мощью, ни качествами истребителя. Использование его
32
только в варианте бомбардировщика потребовало сложной организации боевого
обеспечения. Полученный опыт применения тактической авиации в локальных
войнах позволил сделать следующий вывод: изоляция района боевых действий —
удел бомбардировщика, но с улучшенными боевыми характеристиками, увели-
ченным радиусом действия и расширенными огневыми возможностями. Самолет
должен участвовать как в ударных действиях по наземным целям (до 70% ресур-
са), так и в завоевании превосходства в воздухе (30% ресурса). Приоритет отдает-
ся функциям всепогодного бомбардировщика при сохранении способности вести
оборонительный маневренный воздушный бой и бой на средних дистанциях с
применением всеракурсного оружия. Сдерживающим фактором считается дока-
занная в реальных боевых условиях невозможность успешного применения одно-
го самолета при решении двух разноплановых задач.
8. Непрочные связи взаимодействия. «Изоляция» — комплексная задача, в
решении которой участвуют разнородные силы тактической авиации — бомбар-
дировщики, истребители, разведчики, постановщики помех. Для достижения
требуемого результата они должны дополнять друг друга, устраняя слабости. Не-
согласованность действий, усугубленная тенденцией расчленения боевого по-
рядка, могла быть исключена лишь при налаженном боевом управлении, которое
страдало от нехватки квалифицированных командных кадров, технической недо-
оснащенности и острого информационного голода.
Вместе с совершенствованием средств «изоляции» возникают проблемы их
эффективного боевого использования. По-прежнему основным препятствием
считается уязвимость самолетов, совершающих групповой полет на значитель-
ную глубину в зоне противодействия современных средств ПВО. Поэтому перс-
пективы связываются с реализацией концепции «борьбы со вторыми эшелона-
ми», предусматривающей применение управляемого оружия большой дальности
со своей территории или за пределами зон досягаемости огня зенитных средств и
истребителей-перехватчиков противника.
«Автономность»
Опыт показал зависимость результатов боевого применения тактического
бомбардировщика, осуществляющего «изоляцию», от способностей выполнять
боевое задание самостоятельно. Бомбардировщики в локальных войнах во Вьет-
наме и на Ближнем Востоке вынуждены были действовать автономно. Экипажи
самолетов испытывали при этом значительные затруднения как в самолетовож-
дении и применении оружия, так и в реализации тактических замыслов.
Во-первых, не получая данных о воздушной обстановке от внешних источ-
ников, летчику приходилось добывать их самому, однако «собственное» инфор-
мационное поле, создаваемое бортовыми средствами обнаружения, было невели-
ко, что приводило к возникновению крайне нежелательных ситуаций: истребите-
ли противника занимали исходное положение для атаки еще до входа в зону
обнаружения бортовых поисковых средств самолета. Времени для ликвидации
угрозы уже не хватало.
Во-вторых, не только отсутствовала связь с командными пунктами, но и за-
труднялся обмен информацией между экипажами, входившими в ударную груп-
пу, и истребителями, составлявшими их прикрытие. Последние, стремясь устра-
нить угрозу нападения с дальних рубежей, выдвигались далеко навстречу истре-
бителям противника. При этом зрительный контакт и огневое взаимодействие
2 Авиация ВВС России и научно-технический прогресс
33
нарушались. В смешанном боевом порядке создавались бреши, которые умело
использовал противник для прорыва к ударной группе.
В-третьих, после того как полет становился автономным, управление пере-
ходило к командиру смешанной группы, выполнявшему, кроме того, обязаннос-
ти рядового летчика. Он должен был принимать обоснованные решения на каж-
дом последующем этапе полета: при вторжении на территорию противника, пре-
одолении ПВО, в районе расположения объектов удара, на обратном маршруте.
Выработка решений могла базироваться только на устойчивом наблюдении за
всем боевым порядком и контроле за исполнением команд. Но это обязательное
условие не выполнялось, так как командир «захватывал» в зону своего обзора
меньшую часть следовавших в группе экипажей. Таким образом, к ненадежному
взаимодействию добавлялись срывы в управлении, последствием которых стано-
вились хаотические перемещения отдельных групп, нарушавшие план полета и
систему круговой обороны.
В-четвертых, при отсутствии целеуказания от постов (пунктов) управления
летчики осуществляли поиск заданной цели и ее опознавание самостоятельно. Ре-
зультативность этого процесса резко снижалась в полете на малой высоте и на
большой скорости. В действие вступал так называемый тоннельный эффект, когда
внимание летчика, пытающегося выдерживать заданный режим полета, сосредо-
точивается в относительно узком секторе, направленном вперед и вниз на ограни-
ченную дальность. Если цель не попадала в пределы этого сектора, то предстояло
выполнять повторный заход, т. е. находиться под огнем объектовой ПВО более
продолжительное время. Вероятность выживания самолета резко снижалась.
В-пятых, отсутствие осведомительной и командной информации в полете
над территорией противника сказывалось на моральном состоянии летчика, по-
стоянно ждавшего воздушного нападения, но не получавшего оповещения о вре-
мени и направлении удара. Острота внимания и быстрота реакции, необходимые
при выполнении сложных элементов самолетовождения и боевого применения,
утрачивались.
Технические усовершенствования увеличивали зону самостоятельного поис-
ка, однако результат продолжал во многом зависеть от опыта и мастерства экипа-
жа самолета. С комбинированной поисковой системой требовались устойчивые
навыки работы, которые приобретаются в процессе длительной и упорной трени-
ровки. Кроме того, автоматизм должен был сочетаться с оценкой поступающей
информации, выбором целесообразного вида маневра и атаки.
3. Глубокое поражение в современной операции
Поступление в войска новых видов оружия и боевой техники, и прежде всего
высокоточного, повышение их мобильности, особенно за счет оснащения соеди-
нений и частей армейской авиацией, а также развития тактической авиации и
широкого применения тактических (оперативных) воздушных десантов приводят
к изменению характера боевых действий.
Фронтовая авиация получает возможности не только поражать соединения и
части первого эшелона противника, но и одновременно наносить удары по вто-
рым эшелонам и резервам, т. е. на всю глубину оперативного построения его
войск. В современных условиях любая операция (сражение) сухопутных войск
(наступательная или оборонительная) будет воздушно-наземной.
34
Основным компонентом «ВОЗДУШНО-НАЗЕМНОЙ ОПЕРАЦИИ» является «ГЛУ-
БОКОЕ ПОРАЖЕНИЕ» противника, представляющее собой неотъемлемую часть
единого плана боевых действий. В любой его операции (наступательной или обо-
ронительной) предусматривается проведение согласованных действий армейской
и тактической авиаций, сил и средств объединений, соединений и частей сухо-
путных войск по уничтожению, задержке и дезорганизации вторых эшелонов и
резервов противника.
Цель таких действий — ослабление противостоящей группировки, срыв мас-
сирования ее сил и средств для достижения необходимого преимущества, а в ко-
нечном итоге — разгрома противника. Это предполагается достичь за счет рассе-
чения и дезорганизации боевых порядков противника, прикрытия маневра свои-
ми силами, снижения эффективности огневых средств поражения, системы
управления и связи, осуществления глубокой изоляции района боевых действий
путем отсечения или недопущения подхода его вторых эшелонов и резервов.
«Глубокое поражение» лишает противника преимуществ, ограничивая пред-
полагаемые варианты его действий, срывая планы и сдерживая инициативу.
Можно, например, задержать подход очередного эшелона противника или отре-
зать его от поля боя или вынудить противника применить свои силы в невыгод-
ных условиях. Осуществляя «глубокое поражение», можно также нарушить сис-
тему управления войсками противоборствующей стороны нанесением ударов по
командным пунктам и узлам связи в решающие моменты операции (сражения)
или выводом из строя ключевых элементов группировки.
«Глубокое поражение» в зависимости от складывающейся боевой обстановки
и решаемых задач осуществляется следующими четырьмя основными способами.
Первый — заключается в уничтожении (подавлении) войск второго эшелона
противника главным образом путем нанесения ударов авиацией, разведыватель-
но-ударными комплексами и артиллерией. Кроме того, в целях изоляции района
боевых действий и недопущения наращивания усилий первых эшелонов против-
ника, ведущих боевые действия, предусматривается проведение мероприятий по
введению его в заблуждение и осуществлению активного радиоэлектронного по-
давления.
Второй — предусматривает огневое поражение с помощью нанесения ударов
разведывательно-ударными комплексами, смешанными (самолетно-вертолетны-
ми) воздушно-штурмовыми группами по той части вторых эшелонов, которая в
сложившихся условиях может оказать противодействие войскам, совершающим
маневр во фланг и в тыл ведущих боевые действия частей и соединений первого
эшелона противника для завершения его разгрома.
Третий — предполагает одновременное поражение вторых и первых эшело-
нов противника. Считается, что этот способ поражения является более сложным,
чем первые два, так как требует четкого взаимодействия и координации по одно-
временному использованию войск, ведущих фронтальные боевые действия,
аэромобильных сил, огня артиллерии, средств радиоэлектронной борьбы, армей-
ской и тактической авиаций.
Четвертый — имеет целью устранить или централизовать потенциальную уг-
розу со стороны противника за счет поражения в его тылу огневых средств, объ-
ектов ядерного оружия, авиации на аэродромах и т. д. Для этого предусматривает-
ся использовать огневые средства и авиацию.
Основными существующими и перспективными средствами «глубокого по-
ражения» являются разведывательно-ударные комплексы, тактическая авиация,
35
крылатые ракеты воздушного базирования, баллистические ракеты оператив-
но-тактического назначения, реактивные системы залпового огня, вертолеты ог-
невой поддержки и системы дистанционного минирования.
Оружие «изоляции»
Эффективность изоляции района боевых действий определяет в конечном
счете поражающая мощь тактических бомбардировщиков.
По опыту локальных войн следует отметить следующую особенность: разно-
образие объектов, назначавшихся для поражения. Эти объекты характеризова-
лись как малоразмерные и площадные, контрастные и неконтрастные, стаци-
онарные и подвижные; они располагались на поле боя, в тактической и оператив-
ной глубине, были сильно защищены средствами ПВО и реже открыты для
нападения с воздуха. Отсюда многообразие боекомплекта: включение в него
авиабомб, кассет, зажигательных баков, управляемых и неуправляемых ракет. По-
стоянно возникала необходимость варьирования боеприпасами в зависимости от
характера выполняемого задания.
Применение первых управляемых ракет с радиокомандной системой наведе-
ния не дало ожидаемого сокращения расхода сил авиации. Их несовершенство
выявилось при нанесении ударов по мостам. После пуска ракеты летчик должен
был дистанционно управлять ею до встречи с целью, ориентируясь по дымовому
шлейфу, оставляемому трассером. При этом самолет неизбежно входил в зону ог-
ня объектовой ПВО.
Прорыв к цели тактического истребителя с управляемыми ракетами обеспе-
чивали специально вЪяделенные самолеты, которые ложными вторжениями в зо-
Рис. 1.4. Типовой состав вооружения тактического бомбардировщика:
1 — встроенная пушка; 2, 5 — управляемые ракеты «воздух—поверхность»;
3 — управляемая ракета «воздух—воздух»; 4 — неуправляемые авиационные ракеты;
6 — противорадиолокационная ракета; 7— управляемая ракета «воздух—корабль»;
8, 9, 10— бомбы различного калибра; //— кассетные бомбы; 12— осветительная бомба;
13— подкрыльевой или подфюзеляжный сбрасываемый топливный бак
36
ну ПВО отвлекали огонь на себя. Этот довольно рискованный тактический прием
требовал не только высокой профессиональной и психологической подготовки
летчиков, но и выделения дополнительных сил авиации.
Эффект применения УР, имевших невысокие поражающие свойства и огра-
ниченную дальность пуска (12... 15 км) только при хорошей визуальной видимос-
ти, военные эксперты признали лишь «удовлетворительным по умеренно труд-
ным целям со слабой ПВО».
Более эффективными оказались управляемые авиационные бомбы (УАБ) с
лазерными и телевизионными системами наведения: из 1000 сброшенных в кон-
це войны во Вьетнаме управляемых бомб около 700 поразили цели. При этом ве-
роятное круговое отклонение составило 6... 16 м, т. е. в пять раз меньше, чем у
бомб свободного падения. Высокая точность УАБ позволила в десять раз сокра-
тить наряд самолетов, выделяемых для уничтожения одной цели. По сравнению с
применением УР с радиокомандной системой наведения нанесение ударов по
наземным объектам с использованием УАБ не представляло большой сложности
для экипажей, имеющих боевой опыт, так как бомбометание осуществлялось с
пикирования обычными бомбами.
Типовые составы вооружений тактического бомбардировщика и штурмови-
ка показаны на рис. 1.4 и 1.5.
Рис. 1.5. Типовой вариант вооружения штурмовика:
/ — типовое распределение полезной нагрузки на внешних подвесках (кг); 2— пушечная установка с
пушкой; 3 — два подвесных топливных бака и две напалмовые бомбы; 4 — шесть бомбовых кассет;
5 — два подвесных топливных бака и четыре бомбовых кассеты; 6 — четыре бомбовые кассеты; 7 —
шесть фугасных бомб; 8 — два подвесных топливных бака и четыре фугасные бомбы; 9 — четыре фу-
гасные бомбы; 10 — четыре пусковых установки неуправляемых авиационных ракет; 11 — два подвес-
ных топливных бака и две учебно-тренировочные подвески; 72 — два подвесных топливных бака и
контейнер с разведовательной аппаратурой; 13 — два подвесных топливных бака
37
4. Непосредственная авиационная поддержка
НЕПОСРЕДСТВЕННАЯ АВИАЦИОННАЯ ПОДДЕРЖКА (НАЛ) — ЭТО организованные
воздушные атаки по объектам противника, уничтожение или подавление которых
оказывает непосредственное влияние на ход общевойскового боя. Самолеты дей-
ствуют по целям, находящимся настолько близко от переднего края своих войск,
что возникает необходимость полной интеграции наземного и воздушного огня.
Авиация атакует обычно объекты, которые трудно поразить артиллерией или
тактическими ракетами «земля—земля».
В современных условиях непосредственная авиационная поддержка имеет много
общего с теорией и практикой прошлых войн. Вместе с тем в ней есть и существен-
ные особенности, вызванные в основном изменившимися условиями, качественны-
ми улучшениями в авиационной технике и вооружении, повышенной мобильностью
войск, а главное, намного возросшей мощью противовоздушной обороны.
Специфическими условиями выполнения этой задачи в локальных войнах
являлись быстрая смена наземной и воздушной обстановки, определявшая высо-
кую цену элемента времени, а также разнообразие последовательно применяв-
шихся средств и способов вооруженной борьбы, обусловливавшее необходимость
четкой организации боевого управления и взаимодействия.
Непосредственная авиационная поддержка слагалась из планирования, до-
ведения задания до исполнителей и его выполнения. Планирование осуществля-
лось на основе единого плана операции, в котором определялись общие задачи
поддержки и авиационный ресурс для их решения.
На основе обобщения опыта боевых действий определились основные прин-
ципы НАП. К ним относятся тесное взаимодействие между авиацией и сухопут-
ными войсками в тактическом звене, непрерывность оказания поддержки, стро-
гое согласование воздушных и наземных ударов на поле боя.
Совместные действия тактической и армейской авиаций стали необходимы
после появления в составе армии боевых вертолетов.
Попытки добиться одновременного использования двух систем оружия в
рамках решения одной общей задачи не были успешными. Огневая и непосред-
ственная авиационная поддержка, как правило, строго разграничивались по вре-
мени и рубежам. При этом боевые вертолеты обычно начинали действовать толь-
ко после окончания артиллерийской подготовки.
Главным препятствием на пути объединения усилий тактической и армейской
авиаций являлись необходимость сохранения мер безопасности и сложность орга-
низации управления. Тактика как боевых вертолетов, так и самолетов-штурмовиков
была основана на использовании малых и предельно малых высот. Чтобы исключить
возможные столкновения в воздухе, в районе действий вертолетов создавались ко-
ридоры, по которым самолеты следовали к целям. При слабом противодействии
средств ПВО производилось эшелонирование самолетов и вертолетов по высотам.
Экипажи боевых вертолетов действовали под контролем армейских коррек-
тировщиков огня, а самолетами руководил авианаводчик. Общего органа управле-
ния, который бы разрешал или запрещал ведение огня всеми летательными аппа-
ратами в одной зоне, не существовало. Контроль за полетом вертолетов, выпол-
нявшимся на предельно малой высоте, можно было осуществить только в
пределах визуальной видимости с другого вертолета. А радиолокаторы передовых
постов наведения имели крайне ограниченную дальность наблюдения даже за са-
38
молетами, летевшими на высоте более 100 м. Таким образом, полностью решить
проблему взаимодействия между тактической и армейской авиациями не удалось.
Требование непрерывности авиационной поддержки предполагало не только
решение проблемы повышения ее эффективности в ночном бою, но и обеспече-
ние всепогодности, что особенно актуально для туманных и дождливых условий
Западной Европы. Стало необходимым создание всепогодного штурмовика с ус-
тановкой на нем радиолокатора, низкоуровневой телевизионной камеры, инер-
циальной навигационной системы и поисковой ИК-аппаратуры.
Строгое согласование воздушных и наземных ударов на поле боя в ходе ло-
кальных войн проявлялось при распределении целей, установлении очередности
атак, назначении рубежей ответственности, а также при соблюдении мер без-
опасности, исключающих взаимное поражение. «Согласование» предопределя-
лось способностью тактической авиации перенацеливать самолеты после взлета,
организацией надежного контроля и централизованного управления всеми сила-
ми, привлекаемыми к поддержке.
Оружие поддержки
Опыт локальных войн показал, что самолет, оказывающий непосредствен-
ную поддержку войскам, должен не только нести максимально большую боевую
нагрузку, но, что не менее важно, иметь на борту различное по предназначению,
принципу действия и поражающим факторам оружие с таким расчетом, чтобы
летчик в зависимости от характера цели смог выбрать нужные боеприпасы.
На ПОЛе бОЯ ШТУРМОВИКИ ШИРОКО Применяли ШАРИКОВЫЕ И ПРОТИВОПЕХОТ-
НЫЕ мины.
Первая по форме напоминает ананас, в стенки которого вделаны 250 метал-
лических шариков диаметром 5...6 мм. Один штурмовик брал около 1000 таких
бомб (в цилиндрических кассетах), т. е. примерно 250 тысяч шариков, которые
разлетались по площади, равной почти четырем футбольным полям.
В полете после сброса на высоте 400...500 м кассета с уложенными в нее бом-
бами раскрывалась. Шарики поражали людей, находящихся на открытой мест-
ности и в не защищенных сверху укрытиях. Они проникали глубоко в тело, и их
трудно было извлечь.
Противопехотные мины подразделяются на два вида: поражающего и
сковывающего действия. При полной загрузке один самолет разбрасывал до
1500 мин при очень большой плотности их рассеивания. После падения на землю
мина сковывающего действия выпускала восемь жестких проволочных усов дли-
ной до 7,5 м. Прикосновение к любому из них вызывало взрыв мины, и ее мелкие
осколки или шарики разлетались на расстояние до 60 м. Вместе с минами сбра-
сывались акустические датчики, указывающие на попытки противника преодо-
леть минные поля. Когда от датчиков поступали сигналы о взрывах мин, в этот
район высылался дополнительный наряд штурмовиков с боеприпасами, предназ-
наченными для поражения как личного состава, так и техники.
Опыт локальных войн однозначно определил целесообразность наличия на
штурмовиках встроенных, а не размещенных в подвесных контейнерах авиаци-
онных пушек. Внутрифюзеляжная установка хотя и увеличивает вес основной
конструкции, но зато уменьшает лобовое сопротивление, повышает точность ог-
ня и освобождает внешние узлы для подвески другого оружия. Однако для борь-
бы с танками применение пушек калибром менее 30 мм малоэффективно.
39
Управляемые авиабомбы и ракеты с учетом своих особенностей, характерис-
тик систем наведения и способов атак более подходят для решения задач по изо-
ляции районов боевых действий. Исключение составляют некоторые образцы,
создаваемые специально для поражения бронированных целей на поле боя.
1.2.3. ТАКТИКА УДАРНОЙ АВИАЦИИ
ТАКТИКА — наиболее динамичная составная часть военного искусства. Она
весьма тесно связана с людьми и оружием — материальной основой боевых дей-
ствий и в силу этого очень чувствительна к изменениям в средствах ведения вой-
ны. В тактике особенно отчетливо проявляется закон зависимости хода и исхода
военных действий от экономических условий, определяющих качество вооруже-
ния и личного состава.
По мере развития военного искусства характер взаимосвязи и соотношения
между оружием и тактикой постоянно изменяется. Общая закономерность здесь
такова: чем совершеннее вооружение, поступающее в строй, чем больше отличает-
ся одно поколение оружия от предыдущего, тем глубже, разностороннее его влия-
ние на тактику. При этом чем оперативнее осуществляется приведение тактики в
полное соответствие с ее материальной основой и перспективой развития средств
борьбы, тем активнее теория способствует процессу обновления боевых средств,
выработке новых тактико-технических требований к ним и дальнейшему их со-
вершенствованию. Опыт локальных войн показывает, что теория часто отстает от
практики. Разрабатываемые в мирное время способы и тактические приемы зна-
чительно отличаются от тех, которые приходится применять в реальном бою.
Разрыв между теорией и практикой выявился во время войны в Корее, когда
в противоборство вступили первые боевые реактивные самолеты, скорость и вы-
сота полета которых увеличились в 1,5...2 раза. Теория предвещала тогда расчле-
нение строев, уменьшение количественного состава групп и смену их тактиче-
ского назначения, «выпрямление» траекторий скоростных маневров, увеличение
дистанции атак. Однако расширились лишь пространственные границы боя, «пе-
рестроились» боевые порядки, но способы решения авиацией основных боевых
задач обновились незначительно.
Причиной тому, что боевая практика не оправдала прогнозов теории, яви-
лось влияние старого оружия. На борту новых реактивных самолетов находились
пушки, неуправляемые снаряды и бомбы свободного падения, являющиеся сред-
ствами поражения времен Второй мировой войны. Чтобы применять их с требуе-
мой точностью, необходимо было сближаться с наземной или воздушной целью
на небольшое расстояние. Поэтому атака как решающий этап боевого полета
бомбардировщика или истребителя сохранила свой вид и параметры: и бой, и
удар остались «ближними».
После войны в Корее последовал очередной качественный скачок в развитии
авиационной техники и оружия. Самолеты стали сверхзвуковыми, их оборудова-
ние — электронным, а средства поражения — управляемыми. Появились концеп-
ции одноразовой ракетной атаки, высотного прорыва к цели и скоростного пере-
хвата. Был осуществлен переход от групповых к одиночным действиям, дуэльным
ситуациям в бою. Так как дальность поражающего воздействия оружия возросла,
то теория «отменила» ближний бой. С истребителей за ненадобностью были сня-
ты пушки — надежное оружие малой дальности. В жертву скорости была прине-
40
сена маневренность — способность самолета быстро изменять направление поле-
та в любой плоскости. Считалось, что сверхзвуковая скорость при прорыве к цели
гарантирует неуязвимость, поэтому бомбардировщики были лишены брони, за-
щищавшей их от зенитного огня противника. Первые же результаты боевого при-
менения новых авиационных комплексов во Вьетнаме опровергли теорию мир-
ного времени. Бомбардировщики полностью загружались обычными средствами
поражения и сводились в большие группы, чтобы достичь заданной степени по-
ражения объектов. Внешняя подвеска бомб увеличивала лобовое сопротивление
самолетов и ограничивала скорость. Появившиеся в составе ПВО зенитные ра-
кетные комплексы вынуждали бомбардировщики во время налетов переходить с
больших высот на малые, где они попадали под интенсивный огонь малокалибер-
ной зенитной артиллерии. Потери превысили во много раз ожидавшиеся, этому
также способствовало отсутствие защитной брони на самолетах. Избежать пора-
жения от огня маловысотных зенитных комплексов, подвижных и скрытных, ста-
новилось все труднее. Выход на средние высоты (куда надежный «щит» над вой-
сками не поднимался) вызвал необходимость повысить эффективность приемов
«нейтрализации» — постановку помех средствам обнаружения и наведения зенит-
ных комплексов средней дальности. Однако по мере увеличения высоты точность
попадания бомб в цель снижалась. В результате вторжение в воздушное простран-
ство противника связывалось с гораздо большим риском, чем в самом недавнем
прошлом.
Опыт локальных войн дал готовые для подражания приемы уклонения самоле-
тов от средств поражения ПВО противника, скрытного проникновения к объектам
ударов, помог выявить их преимущества и недостатки, выработать рекомендации
по наиболее рациональному применению. Но чтобы выполнить эти рекомендации
в изменившихся условиях, требуются уже более сложная авиационная техника, дру-
гие огневые средства и разнообразное радиоэлектронное оборудование.
1. Боевые порядки
Наиболее подвижным элементом тактики ударной авиации являются БОЕ-
ВЫЕ ПОРЯДКИ (рис. 1.6—1.10), под которыми понимается размещение самолетов
(групп самолетов) в воздухе для совместного выполнения боевой задачи.
Развитие боевых порядков, изменение их структуры тесно связаны с техни-
ческим прогрессом и постоянным усложнением условий ведения боевых дейст-
вий. Быстрый рост поражающих возможностей авиационного оружия при повы-
шении огневой мощи средств ПВО,
противодействие которых приходится
преодолевать в различных условиях
обстановки, вынуждает вести постоян-
ный поиск оптимальных вариантов
размещения самолетов в воздухе и оп-
ределения необходимого наряда сил
для выполнения боевой задачи.
Боевые порядки самолетов (групп)
в зависимости от дистанций и интерва-
лов, а также превышений (приниже-
Рис. 1.6. Боевой порядок звена «фронт пар»:
вверху — вид сзади, внизу — вид сверху
ний) между ними подразделяются на
сомкнутые, разомкнутые и рас-
41
Рис. 1.7. Боевой порядок «клин самолетов»:
2, 3, 4— зоны маневра второго,
третьего и четвертого самолетов
относительно ведущего
460 м 460 м 460 м
+ 150 м + 150 м + 150 м
Рис. 1.8. Зона безопасного маневрирования
ведомого самолета
а)
Рис. 1.9. Боевой порядок звена «клин»
при преодолении ПВО противника:
а — вид сверху, б — вид спереди
средоточенные, которые с учетом этапа полета и обстановки могут быть услов-
но названы предбоевыми и боевыми.
В СОМКНУТОМ БОЕВОМ ПОРЯДКЕ устанавливаются единый режим полета и
минимально допустимые интервалы, дистанции и превышения (принижения)
между самолетами (группами). Чаще всего он применяется при полетах над своей
территорией (в случае отсутствия воздействия противника).
В РАЗОМКНУТОМ БОЕВОМ ПОРЯДКЕ также сохраняется единый режим полета,
расстояние между самолетами (группами) увеличивается до пределов визуальной
или радиолокационной видимости. Обычно он используется при поиске назем-
ных, морских и воздушных целей, а также при необходимости последовательного
выхода на цель и нанесения ударов по ней с учетом информации о результатах
действий впереди идущих самолетов (групп).
В рассредоточенных боевых порядках устанавливаются различные режи-
мы полета самолетов (групп) и может отсутствовать визуальный контакт между
ними. Применяются они ночью и днем при полете в облаках самолетами-носите-
лями оружия большой дальности действия, наносящими удары с расстояния,
превышающего предел зрительного контакта с противником, а также при дейст-
виях в составе частей и соединений.
предбоевые И боевые построения применяются при сближении с целью и
нанесении удара по ней (в ходе воздушного боя). Они строятся с таким расчетом,
чтобы обеспечить максимально возможную свободу маневра, наилучшее взаимо-
42
Рис. 1.10. Боевой порядок истребителей
при сопровождении бомбардировщиков
действие и эффективное использование бортового оружия своих истребителей, а
также для сковывания маневра и снижения эффективности действий воздушного
противника или его наземных зенитных средств.
Типовыми формами боевого порядка являются: «фронт», «клин», «колонна»
и «пеленг» (рис. 1.6—1.9).
Выбор боевого порядка определяется в первую очередь характером выпол-
няемой задачи и конкретной обстановкой в районе боевых действий. Боевой по-
рядок в общем случае должен исключить возможность вклинивания в него групп
истребителей противника; позволить быстро сосредоточивать самолеты для со-
здания превосходства на определенном участке (направлении); уменьшить время
нанесения удара по противнику до минимума, чтобы не подвергаться длительно-
му воздействию огня противовоздушной обороны объекта; обеспечить свободу
маневра группам и самолетам при их перестроении и уклонении от огня средств
ПВО; обезопасить самолеты от столкновения при маневрировании.
Те общие требования, которые предъявляются к боевым порядкам групп са-
молетов любого рода авиации, противоречивы, а некоторые даже несовместимы.
На основном этапе полета — при атаке цели — боевой порядок должен обес-
печить главным образом наибольшую эффективность применения средств пора-
43
жения и прикрытие ударных самолетов от истребителей противника. На других
этапах на первый план выступают иные требования, при поиске цели главным
является обеспечение возможности обзора наибольшей части воздушного про-
странства, что позволит своевременно обнаруживать потенциальную цель или
атакующие истребители противника, а при преодолении противодействия его на-
земных средств противовоздушной обороны — исключить или максимально сни-
зить потери своих самолетов.
Когда тактические бомбардировщики действуют группами большого соста-
ва, то одновременную атаку наземной цели с одного направления может выпол-
нять группа в составе не более звена. В боевой обстановке четверки, выполняю-
щие роль ударных групп (или составляющие их часть), на маршруте к цели вы-
держивали боевой порядок «клин самолетов». За 5...6 км до рубежа атаки каждое
звено перестраивалось в «колонну пар», которые самостоятельно выполняли за-
ход на объект удара с разных направлений. Этот прием считается типовым.
В эволюции боевых порядков усматриваются следующие основные тенденции:
• появление групп нового тактического назначения;
• увеличение наряда вспомогательных сил;
• уменьшение количественного состава ударных групп;
• повышение требований к управлению.
Группы нового тактического назначения. В локальных войнах в
боевом порядке появился новый элемент — группа самолетов радиоэлектронной
борьбы (РЭБ). При нанесении авиационных ударов самолеты РЭБ занимали зону
дежурства в воздухе над своей территорией и осуществляли постановку активных
прицельных помех радиолокационным станциям ПВО противника. Их положе-
ние в общем построении сил во многом определяло результат воздушного налета.
Дальность обнаружения ударной группы РЛС противника зависела от совпадения
линии ее пути с направлением «подавляемая РЛС — постановщик помех». Если
имелось заметное рассогласование, то предпринимавшиеся меры по маскировке
сводились на нет, поскольку самолеты выходили из сектора помех и могли быть
обстреляны зенитными средствами.
Помощь в выходе ударной группы на линию «самолет РЭБ — цель» стал ока-
зывать воздушный командный пункт, оборудованный РЛС кругового обзора.
Оператор ВКП, наблюдая на экране общей обстановки отметки постановщика
помех и бомбардировщиков, регулировал их движение командами по радио.
Кроме того, он использовал информацию бортовой станции радиотехнической
разведки о местоположении подавляемой РЛС противника. Появился еще один
элемент — ВКП, совмещавший в себе функции управления и боевого обеспече-
ния. Оба новых элемента были отнесены к вспомогательным, потому что они не
принимали участия в огневом воздействии по заданному объекту, т. е. оказывали
косвенное влияние на достижение главной цели операции.
Постановка активных помех радиоэлектронным средствам обнаружения
противника позволила самолетам ударной группы использовать переменный
профиль полета. Четко проявилась также тенденция к смыканию небольших по
составу ударных групп на маршруте и рассредоточению их над целью, где уже не
удавалось обеспечить их эффективное прикрытие постановщиками помех из зон
и самолеты встречали противодействие зенитной артиллерии и других средств
ПВО, использовавших не только радиолокационный способ наведения средств
поражения на цель.
44
Как самостоятельный элемент в тактическое построение вошла группа огне-
вого подавления средств ПВО. Она заняла позицию впереди ударной группы.
Определились два основных варианта действий групп подавления ПВО.
Первый — одновременные атаки групп бомбардировщиков по нескольким це-
лям в одном ограниченном районе. Чаще всего такие атаки осуществлялись в об-
щем плане так называемого прямого прорыва круговой системы ПВО, когда проти-
водействие противника было достаточно эффективным. Обходный маневр ударной
группы в этих условиях исключался, а индивидуальные средства защиты не обеспе-
чивали надежной радиолокационной маскировки самолетов. Прямой прорыв к
объектам удара через зону противодействия зенитных ракет использовали стратеги-
ческие бомбардировщики, не обладавшие достаточной для уклонения маневренно-
стью и избегавшие заходов в зону огня зенитной артиллерии на малой высоте.
Второй вариант — эшелонированные (последовательные) действия бомбар-
дировщиков в нескольких районах в течение продолжительного времени. Груп-
пы самолетов в составе не более восьми выполняли самостоятельные задания по
уничтожению обнаруженных с воздуха объектов ПВО. Нередко в боевой порядок
бомбардировщиков включался самолет-разведчик. Его экипаж с помощью ра-
диотехнического оборудования определял направление на работавшую РЛС и да-
вал целеуказание ударной группе. Первый вариант огневого воздействия оцени-
вали как более сложный по исполнению, так как группы подавления ПВО, про-
кладывавшие огнем узкий коридор для пролета ударных самолетов к цели,
скапливались в ограниченном районе и стесняли один другого в маневре.
Группа истребителей прикрытия располагалась на флангах и сзади колонны
бомбардировщиков. При подлете к цели фланговые группы выдвигались вперед и
изолировали район нанесения удара (расчищали воздушное пространство). Ти-
пичным для налетов было выделение большого наряда истребителей обеспечения.
Увеличение наряда вспомогательных сил
Пункты управления, расположенные на своей территории, не были способ-
ны полностью контролировать полет самолетов и непрерывно информировать
летчиков о воздушной обстановке. Возможность внезапной атаки по прикрывае-
мым бомбардировщикам в этих условиях значительно возрастала. Поскольку
трудно было предугадать, с какого направления последует удар, кроме группы со-
провождения, замыкавшей боевой порядок, выставлялся еще и фланговый эс-
корт. На летчиков при этом возлагались дополнительные функции по обнаруже-
нию воздушного противника.
После увеличения потерь бомбардировщиков от огня перехватчиков против-
ника на подходах к району расположения объектов удара начали выставляться за-
слоны. Заслон рассматривался как один из способов прикрытия ударных групп и
создавался на базе нескольких зон барражирования. Зоны располагались на удале-
нии 15...20 км от объектов удара, т. е. примерно на рубеже размыкания бомбарди-
ровщиков. Заслон имел два преимущества: относительную самостоятельность дей-
ствий истребителей и свободный выбор маневра. Группы заслона не включались в
боевой порядок бомбардировщиков, хотя выделялись для их прикрытия. Зритель-
ный или радиолокационный контакт с ударными группами поддерживать не требо-
валось. Открывалась возможность для перемещения по высоте и улучшались усло-
вия ввода в бой. Угроза поражения истребителей заслона наземным огнем частично
устранялась выводом истребителей за пределы досягаемости средств ПВО.
45
Поскольку качественные изменения боевого порядка происходили медлен-
но, поставленные цели достигались увеличением числа его составных элементов.
Без доразведки цели снижалась точность удара, без подавления средств ПВО и
при отсутствии истребителей прикрытия увеличивались потери. Накопленный
опыт показал, что надежнее всего функционирует трехэлементная динамическая
система, управляющим органом которой является человек. Назрело альтернатив-
ное решение: или упрощать управляемые системы (боевые порядки) за счет сов-
мещения функций отдельных элементов, или оказывать действенную помощь
командиру путем передачи части возлагаемых на него обязанностей бортовым
экспертным системам. При этом надо было освободить его в первую очередь
от черновой работы в кабине самолета, дать больше свободы тактическому мыш-
лению, столь необходимому при принятии решений по
управлению боевым порядком.
Уменьшение количественного состава ударных групп объясняется
тремя причинами — стремлением действовать преимущественно на малых высотах;
необходимостью повышения маневренности групп; оснащением ударных самоле-
тов высокоточным оружием, обладающим большой поражающей способностью.
Стремление действовать на малых высотах четко обозначилось еще в войне
во Вьетнаме. Тогда американская авиация встретила сильное противодействие со
стороны нового средства ПВО — зенитных управляемых ракет. Попытки продол-
жать налеты на наиболее благоприятных для самолетовождения и бомбометания
средних высотах обернулись ростом боевых потерь. Назрело вынужденное реше-
ние: снизиться на малые высоты и, используя естественную маскировку, умень-
шить дальность обнаружения самолетов радиолокационными станциями против-
ника. Меры по уменьшению уязвимости воплотились в так называемой «тактике
уклонения», которую летный состав начал осваивать уже в ходе боевых действий.
Первые тренировочные полеты на малой высоте над горной местностью Та-
иланда показали неприспособленность самолетов и неподготовленность экипа-
жей к их выполнению. Самолеты не были оснащены оборудованием, обеспечи-
вающим автоматический полет на малых и предельно малых высотах с большой
скоростью, их экипажи при пилотировании испытывали непомерное физическое
напряжение. Радиовысотомеры давали искаженные показания при огибании
рельефа местности, летчики были вынуждены определять расстояние до земли на
глаз. Внимания на выдерживание места в строю не оставалось, а чрезмерное
сближение с соседним самолетом грозило катастрофой. За 20 мин полета на ма-
лой высоте «выдыхались» даже самые опытные пилоты. Следовало сделать выбор:
или сократить число связей, контролируемых летчиком в полете, или оставить
безопасность на угрожаемом уровне.
Предпочтение было отдано сохранению безопасности. Тактические бомбар-
дировщики стали летать парами, растянутыми в длинную колонну. Ведущий
контролировал высоту, а ведомый, державшийся с превышением, — интервал и
дистанцию. Временные интервалы между парами достигали 2 мин, поэтому рас-
тянулось время нанесения удара. Внезапности при выходе на цель удавалось до-
стичь только первым парам, остальные попадали под прицельный огонь зенит-
ной артиллерии, успевавшей изготовиться к стрельбе уже к подходу следующей
пары. Для снижения потерь необходимо было уменьшить число боевых самоле-
тов в ударной группе, причем поражающие возможности боевого порядка замет-
но снижались. Это могло быть компенсировано только повышением точности
применения средств поражения.
46
Теоретические расчеты показали, что при бомбометании уменьшение круго-
вого вероятного отклонения (КВО) на 25% сокращает наряд самолетов наполо-
вину. Сопоставляя такие данные, как стоимость оружия, расход боевого ресурса и
уровень подготовки летного состава, был сделан вывод: ориентиром на пути по-
вышения эффективности ударов может служить круговое вероятное отклонение,
равное 30 м. С помощью мер по повышению огневой выучки летного состава,
усовершенствованию способов прицеливания и атак КВО удалось уменьшить
лишь до 90 м. Дальнейшие попытки улучшить точность атак с применением бомб
свободного падения и неуправляемых ракет не увенчались успехом. Тормозом
становилось оружие, исчерпавшее свои возможности.
Эксперты, оценивавшие достигнутые результаты по критерию «стоимость/
эффективность», пришли к заключению, что ущерб, наносившийся одной типо-
вой цели, был намного меньше затрат на вылет (с учетом потерь самолетов от ог-
ня средств ПВО). Это послужило стимулом к разработке новых управляемых
средств поражения — бомб и ракет «воздух—поверхность» с лазерными, телеви-
зионными и тепловизионными системами наведения.
Бомбы уже не падали, а направлялись на цель, что позволило уменьшить
КВО до 6... 16 м, т. е. в 5 раз. Наряд тактических самолетов, назначавшийся для
поражения одного типового объекта, сократился в 6 раз.
Повышение требований к управлению. Процесс управления — это
целенаправленное воздействие управляющего объекта (командира) на управляе-
мые объекты (группы различного тактического назначения или отдельные само-
леты), сообразуемое с изменениями обстановки. Надежность системы, создавае-
мой на каждый вылет с учетом характера задания и обстановки, определяется
следующими факторами: количеством управляемых объектов; разнообразием
возлагаемых на них функций; числом действующих информационных связей;
способностью управляющего объекта бесперебойно руководить подчиненными.
Это означает, что существуют требования, без соблюдения которых боевой поря-
док теряет свою целостность и назначение. За разумным пределом «количества»
и «разнообразия» начинается состояние неопределенности, приводящее к разба-
лансированию созданной системы.
Как показывает опыт локальных войн, структура (тактическое построение)
групп при активном воздействии противника часто ломалась. Ударная группа ли-
шалась поддержки обеспечения или прикрытия, и цель боевого полета не дости-
галась.
Наиболее распространенными причинами этого были недостаточная информа-
ционная обеспеченность управляющего объекта, низкая пропускная способность
каналов связи и, как следствие, — растянутость по времени цикла управления.
Недостаточная информационная обеспеченность управляющего объ-
екта приводила к тому, что тактическое построение переставало отвечать услови-
ям, складывавшимся на различных этапах боевого полета. Только располагая
полными данными об обстановке, командир может предусматривать выполнение
группового маневра, перестроение боевого порядка, уточнение боевых задач эки-
пажам или группам и т. д. Однако поток сведений заметно убывал по мере удале-
ния самолетов от средств контроля за обстановкой (ВКП, самолетов дальнего ра-
диолокационного обнаружения (ДРЛО) и управления). Бортовые радиолокаци-
онные станции самолетов ударной группы осматривали ограниченное по объему
пространство.
47
Обнаружение воздушного противника на малой дальности оставляло коман-
диру слишком мало времени на принятие решения, постановку задач подчинен-
ным и контроль за их исполнением. По мере углубления на территорию против-
ника все большей становилась разница между числом возникающих угроз и
числом поступающих о них оповещений. Реакция на отражение замедлялась или
опаздывала, что влекло за собой крайне нежелательные последствия.
Не получая данных о воздушной обстановке от внешних источников, экипаж
вынужден был добывать их сам, однако его информационное поле было невели-
ко, что приводило к возникновению крайне нежелательных ситуаций. Истреби-
тели противника занимали исходное положение для атаки вне визуальной види-
мости экипажа и до входа в зону обнаружения бортовых поисковых средств его
самолета, поэтому времени для ликвидации угрозы не хватало. Например, амери-
канские истребители-бомбардировщики F-105 в начале агрессии против Демо-
кратической Республики Вьетнам понесли ощутимые потери от огня дозвуковых
вьетнамских истребителей, сближавшихся с ними скрытно на дистанцию стрель-
бы из пушки. Отсутствовала не только связь с командными пунктами, но и за-
труднялся обмен информацией между экипажами ударной группы и истребите-
лями прикрытия. Последние, стремясь устранить угрозу нападения с дальних ру-
бежей, выдвигались далеко навстречу истребителям противника. При этом
зрительный контакт и огневое взаимодействие нарушались. В смешанном боевом
порядке создавались бреши, которые вьетнамские летчики умело использовали
для прорыва к ударной группе.
Низкая пропускная способность каналов связи объяснялась их ненадежно-
стью. В локальных войнах 1980-х годов, где боевые действия вели реактивные са-
молеты третьего поколения, информация внутри боевого порядка, как и 40 лет
назад, передавалась по одному каналу — радио. Но во время войны в Корее сооб-
щения по радио дополнялись зрительным восприятием обстановки, развивав-
шейся в относительно небольшом по объему воздушном пространстве. В воору-
женных конфликтах последних лет составные части боевого порядка в бою выхо-
дили уже за пределы визуальной связи. Нити взаимодействия становились
слабыми и нередко обрывались. Отрицательно влияли на организацию взаимо-
действия и интенсивные радиопомехи, ставившиеся противником, которые за-
бивали единственный канал обмена информацией. Включение передатчиков шу-
мовых помех «привязывалось» обычно к самым ответственным моментам боя,
например к размыканию боевого порядка ударной группы на пары (звенья) или
отдельные самолеты для захода на цель. К преднамеренной утрате зрительного
контроля добавлялось непреднамеренное прекращение приема сведений по ра-
дио. Разведенные на большое расстояние (в интересах лучшего выполнения зада-
ния) группы разного тактического назначения оказывались изолированными.
Оперативное построение ударных сил. При нанесении массиро-
ванных ударов в ходе наступательной операции боевой порядок подразделения
являлся составным элементом построения сил вторжения.
Авиационные удары наносились по тактической схеме, в которой отчетливо
различались шесть основных эшелонов оперативного построения (рис. 1.11).
Первый эшелон — группа доразведки. В ее состав входят беспилотные и пи-
лотируемые тактические самолеты-разведчики. Главная цель — установить, ка-
кие изменения произошли в расположении объектов удара и позиций средств
ПВО. Пилотируемые средства не пересекали пограничную полосу и вели воздуш-
ное фотографирование с больших высот (12 000...22 000 м) в сочетании с радио-
технической разведкой.
48
вкл
ДРЛО
Рис. 1.11. Оперативное построение при нанесении авиационного удара
по наземным целям, включающее шесть эшелонов (вариант)
Второй эшелон — демонстративная группа. Действия этой группы преследо-
вали цель «разбудить» противостоящую группировку средств ПВО, заставить вхо-
дившие в ее состав РЛС включиться в работу. Вторжения в чужое воздушное про-
странство выполняли БЛА, на которых устанавливались уголковые отражатели,
увеличившие их эффективную отражающую поверхность, чтобы отметка на экра-
нах РЛС обнаружения не отличалась от отметки самолета.
Третий эшелон — группа огневого подавления средств ПВО. Огневому воз-
действию подвергались обнаружившие себя «выходом в эфир» радиолокацион-
ные станции. Основная нагрузка ложилась на самолеты, которые были оснащены
противорадиолокационными ракетами, пассивно наводящимися на источники
излучения. Атаки строились по типу «переката», т. е. сначала средства поражения
применялись по ближним целям, а следующие самолеты переносили усилия на
более удаленные, расположенные за ними.
49
Четвертый эшелон — группы самолетов РЭБ. Вынужденное включение в ра-
боту радиолокационных средств ПВО позволяло получить необходимые данные
для постановки прицельных помех самолетами РЭБ в нужный момент времени.
Как правило, постановщики помех включались в работу при подходе ударных са-
молетов к границе зоны обнаружения РЛС противника.
Пятый эшелон — ударная группа. Она делилась на два самостоятельных
эшелона. В первом действовали самолеты (группы самолетов), вооруженные уп-
равляемыми бомбами. Они выполняли атаки по важным выборочным целям, где
требовалась высокая точность попадания. Во втором проводился массированный
(групповой) налет тактических истребителей с применением обычных (неуправ-
ляемых) боеприпасов по площадным целям.
Шестой эшелон — группа контроля результатов удара. Самолеты-разведчики
устанавливали, какие из намечавшихся целей поражены, а также размеры нане-
сенного ущерба, что было необходимо для планирования последующих ударов.
При решении задачи непосредственной поддержки сухопутных войск в одном
из вариантов нестандартных боевых порядков объединялись усилия штурмовиков
и боевых вертолетов. Первый эшелон составляли разведывательные вертолеты,
второй — вертолеты огневой поддержки и третий — штурмовики. Разведыватель-
ные вертолеты устанавливали местоположение танковых колонн противника, по
их сигналу из засад в воздухе выходили вертолеты огневой поддержки и осуществ-
ляли атаку обнаруженных целей с применением противотанковых управляемых
ракет. Пункт управления, размещенный на специально оборудованном вертолете,
давал команду на ввод в бой штурмовиков, дежуривших в зонах ожидания. Ис-
пользуя места разрыва ПТУР как точки прицеливания, штурмовики наращивали
усилия вертолетов в нанесении удара.
2. Развитие способов преодоления ПВО
В локальных войнах проходили проверку как новые самолеты и авиационное
оружие различного назначения, так и средства противовоздушной обороны. При
этом велись постоянный поиск и отработка приемов и способов преодоления
авиацией современной системы ПВО (рис. 1.12—1.16), как, например, пролет зон
поражения средств ПВО на максимальных скоростях и минимальных высотах;
обход их по направлению и высоте, прорыв ПВО.
пролет зон поражения пво на минимальных высотах особое значение
приобрел после оснащения войск ПВО зенитными ракетными комплексами
(ЗРК) с радиолокационными системами наведения.
Полет на предельно малой высоте — ниже зоны поражения ЗРК — вообще
исключает возможность поражения им цели. При полете скоростной воздушной
цели на малых высотах снижается вероятность ее поражения огнем зенитной ар-
тиллерии вследствие увеличивающихся ошибок сопровождения цели. На малых
высотах существенно возрастают трудности использования истребительной ави-
ации для борьбы с воздушными целями.
Опыт выполнения маловысотных полетов на участках маршрутов различной
длины и сложности позволил определить вероятность выживания экипажей са-
молетов в зоне, где противодействие средств ПВО считалось сильным. Диапазон
высот от 60 до 90 м, в котором возможность остаться невредимым составляла бо-
лее 0,75, был назван «коридором выживания». На высотах 30...60 и 90...200 м рас-
полагались зоны «сомнительной вероятности» (ее количественный показатель —
50
Рис. 1.12. Вероятность преодоления самолетом системы ПВО
в зависимости от высоты полета:
а — на высоте 200...300 м; б — на высоте до 50 м; в — на высоте 50...90 м
0,5...0,75). И наконец, высоты менее 30 и более 200 м, где вероятность выживания
была менее 0,5, характеризовались как «зоны гибели».
Казалось, что после определения «коридора выживания» оставалось только
совершать полеты в его границах — и задача уклонения от огня ПВО была бы ре-
шена. Однако кроме опасности быть сбитым зенитными средствами, пришлось
учитывать и физические возможности летчиков по выполнению длительного по-
лета вблизи земли.
Летчики при определении способов преодоления ПВО широко использова-
ли выведенную экспериментально зависимость времени «засветки» самолета (об-
лучения его радиолокатором) от режима полета. Продолжительность «засветки»
влияла на выбор высоты, скорости подхода к объекту и вида маневра для атаки.
Ее сравнивали со временем, необходимым для подготовки средств ПВО к «отра-
жению» удара. Выявленный резерв времени (или его отсутствие) позволял судить
о возможности реализации главного тактического преимущества, предоставляе-
мого маловысотным полетом, — достижения внезапности и завершения атаки до
открытия огня зенитными средствами.
Эффект внезапности проникновения к цели на малой высоте одними бом-
бардировщиками (без прикрытия и обеспечения) иногда оказывал большее влия-
ние на результат налета, чем участие крупных вспомогательных сил. Многое при
этом зависело от правильной оценки обстановки и учета всех факторов, оказы-
вающих влияние на выбор способа нанесения авиационного удара. Так, одновре-
51
Скорость полета самолета, число М
Рис. 1.13. Зависимость времени облучения
самолета от высоты и скорости его полета
Скорость полета самолета, число М
Рис. 1.14. Зависимость безопасной высоты
полета самолета от его скорости
Скорость полета самолета, число М
Рис. 1.15. Зависимость вероятности поражения
самолета от скорости его полета
менный выход групп израильских са-
молетов на предельно малой высоте к
20 египетским аэродромам обеспечил
достижение полной внезапности уда-
ра, в результате которого было выве-
дено из строя 374 самолета, что пред-
решило исход «шестидневной» войны
1967 года на Ближнем Востоке. Одна-
ко такой тактический прием не дал
должного эффекта в войне во Вьетна-
ме. Там не удалось застать врасплох
ПВО ВНА, имевшую богатый боевой
опыт. Несмотря на такие преимущест-
ва, как снижение уязвимости от зе-
нитных ракет, скрытность подхода к
цели и сокращение наряда вспомога-
тельных сил, американское командо-
вание все же отказалось от полетов на
малой высоте как основного способа
преодоления ПВО.
Уровень потерь тактической ави-
ации при использовании малых высот
снизился, но эффективность ударов в
целом заметно упала.
ПОЛЕТ САМОЛЕТОВ НА МАЛЫХ ВЫ-
СОТАХ сопровождается значительным
увеличением (в 3...4 раза) расхода топ-
лива на 1 км по сравнению с оптималь-
ным расходом топлива, который обес-
печивается при полете на высоте около
10 км. Увеличение запасов топлива,
размещаемого на самолете в дополни-
тельных баках, приводит к ограниче-
нию их маневренных возможностей и
к уменьшению бомбовой нагрузки.
Наряду с преодолением ПВО на
малых высотах не утратил своего зна-
чения применявшийся еще во время
Второй мировой войны такой тактиче-
ский прием, как ПРОЛЕТ ЗОНЫ ПОРА-
ЖЕНИЯ ЗЕНИТНЫХ СРЕДСТВ НА МАКСИ-
МАЛЬНО возможной скорости. Уве-
личение скорости полета сокращает
время пребывания самолета в зоне по-
ражения зенитных средств, что приводит к уменьшению числа возможных
стрельб, проводимых зенитными комплексами по воздушным целям.
Однако полет на больших скоростях предъявляет повышенные требования
как клетно-техническим характеристикам самолета, так и к мастерству летчика.
Большая скорость полета приводит к уменьшению маневренных возможностей.
Разворот самолета связан с появлением огромных перегрузок от центробежных
52
Рубежи
радиолокационного
обнаружения
30 км
до 45 км
18 км
к
ИА
На флангах зенитных ракетных зон
или в промежутках между ними
ЗРК ДД
1-й линии
на Н-средних
ЗРКСД
ЗРК ДД
20 км
Условные обозначения:
Зона ЗРК БД и МЗА
25...40 км
Зона ЗРК СД
Зона ЗРК ДД
120... 150 км и более
Рис. 1.16. Примерная схема распределения по глубине зон действия средств ПВО
ЗРК СД
i 1 -Й ЛИНИИ1
ЗРК
3 км
сил, действующих на летчика и конструкцию самолета: чем меньше радиус раз-
ворота, тем больше эти перегрузки. Каким бы прочным ни был самолет, необхо-
димо учитывать возможности человека выдерживать эти перегрузки. Чтобы они
при маневрировании не превысили допустимых, необходимо увеличивать радиус
разворота или виража пропорционально квадрату скорости полета. Следователь-
но, если скорость увеличивается вдвое, то радиус разворота должен быть увели-
чен в 4 раза. Это весьма усложняет выполнение маневра при полете на большой
скорости, например при осуществлении разворота самолета для повторной атаки
объекта, так как в этом случае средствам ПВО предоставляется дополнительное
время для обстрела самолета и, кроме того, он может быть обстрелян соседними
комплексами.
На этой скорости росла и минимально безопасная высота, затруднялся полет
с огибанием рельефа местности по горизонтали и вертикали, что считалось боль-
шим недостатком в тактике преодоления ПВО.
Обобщение и анализ опыта локальных войн позволили сделать вывод о том,
что разумным пределом является околозвуковая скорость, при которой только
начинается интенсивное возрастание лобового сопротивления, в сочетании с
противозенитным маневром по направлению и высоте. Скорость, соответствую-
щая наилучшей маневренности, находится также именно в этой области, при
этом достигалось и оптимальное соотношение между количеством пораженных
целей и сбитых наземным огнем самолетов.
Обход зон поражения средств ПВО по направлению и высоте по опыту ло-
кальных войн считается тактическим приемом весьма условно. Обойти зону ПВО
и беспрепятственно продолжать полет к цели можно лишь в штабной игре на кар-
тах. Реально следует рассчитывать лишь на выбор маршрута, обеспечивающего
минимальное воздействие средств ПВО. Этот способ практиковался часто. Воз-
можность его применения зависела от наличия у экипажа данных о действитель-
53
ном местоположении ЗРК к моменту нанесения удара, получаемых от радиотех-
нической разведки в реальном масштабе времени, о характеристиках РЛС, обес-
печивающих обнаружение воздушных целей, о досягаемости комплекса по
дальности и высоте, о конфигурации радиолокационного поля противника по го-
ризонтали и вертикали, а также информации от самолетной аппаратуры предуп-
реждения о входе в зону облучения РЛС и их типе. Отсутствие этих сведений и
средств приводило к срыву попыток обхода зон ПВО.
Чтобы проникнуть к цели, на конечном этапе маршрута приходилось приме-
нять все известные приемы «тактики уклонения» и военной хитрости. Таким об-
разом, беспрепятственных обходов зон ПВО авиационными ударными группи-
ровками практически не было. В такой обстановке довольно широкое распрост-
ранение получили демонстративные действия и отвлекающие маневры.
Например, создавалась видимость атаки с одного направления сосредоточения
сил в зоне обзора радиолокаторов ПВО, а истинный заход на цель осуществлялся
с другой стороны с соблюдением необходимых мер маскировки. В воздушных на-
летах во Вьетнаме и на Ближнем Востоке в октябре 1973 г. боевые расчеты средств
ПВО вводились в заблуждение относительно направления удара запуском лож-
ных целей, которые создавали на экранах РЛС отметки, схожие с отметками са-
молета.
обход зон поражения средств пво по высоте («по вертикали») осуществ-
лялся только при преодолении зоны огня противодействия и войсковой ПВО.
Прорыв ПВО
По опыту локальных войн прорыв отнесен к самому активному способу пре-
одоления противовоздушной обороны авиацией. Вследствие плотной концентра-
ции обороны часто отсутствовала возможность выполнить обход или применить
обманный маневр.
Главным в организации прорыва считается выделение специальной группы
подавления ПВО. В ее задачу входит прокладывание огнем «коридора» для про-
лета ударных самолетов к цели. С этой группой обычно взаимодействуют истре-
бители, расчищающие воздушное пространство в районе нанесения удара. Атаки
ударной и обеспечивающих групп строго согласовываются по времени с тем, что-
бы лишить противника возможности восстановить боеспособность своей систе-
мы ПВО или ввести в бой резервные силы.
Самолеты, предназначенные для огневого подавления ЗРК и ЗА, действова-
ли обычно в облегченном варианте, не имели большой внешней подвески, за-
труднявшей выполнение маневров уклонения. Все средства поражения расходо-
вались в одной атаке, поэтому предъявлялись повышенные требования к точнос-
ти огневых ударов. В образовавшемся «коридоре» самолеты, загруженные
бомбами, следовали обычно в «колонне» звеньев, поскольку построение широ-
ким фронтом исключалось. Временные интервалы между звеньями сокращались
до предела.
Усилия по обеспечению прорыва ударным группам распределялись по трем
направлениям: «нейтрализация» средств обнаружения и наведения противника;
воздействие огнем по средствам его ПВО — зенитным ракетам и зенитной артил-
лерии; устранение угрозы со стороны перехватчиков. Для каждого из этих на-
правлений требовались свое оружие и способы его применения.
54
Прорыв считался процессом скоротечным. Растягивание его по времени да-
вало возможность противнику восстановить боеспособность и вновь встречать
самолеты огнем, поэтому активное воздействие на средства ПВО скорее было
комплексным, чем поэтапным. Однако для анализа и оценки эффективности
этапы условно выделялись в следующем порядке: «ослепление», «расчистка»,
«подавление», «бросок к цели».
«ОСЛЕПЛЕНИЕ» — это постановка активных помех самолетами РЭБ из зон де-
журства в воздухе, которые назначались на выбранном направлении прорыва за
рубежом досягаемости огня наземных средств ПВО.
«РАСЧИСТКА» — этап действий истребителей обеспечения по установлению
контроля за воздушным пространством над районом объекта удара. Чаще всего
выставлялся многоярусный заслон на вероятном направлении перехватчиков
противника.
«ПОДАВЛЕНИЕ» — огневое воздействие по средствам обнаружения и наведе-
ния противника. На этом этапе применялись самолеты, оснащенные противора-
диолокационными ракетами.
«БРОСОК К ЦЕЛИ» — это пролет бомбардировщика к объекту удара по коридо-
ру, «пробитому» в группировке ПВО средствами подавления. По количеству по-
терь бомбардировщиков на маршруте к цели оценивалась действенность меро-
приятий, проделанных на трех предыдущих этапах.
Следуя правилу «больше скорость — меньше снарядов в поражаемую пло-
щадь самолета», конструкторы много сил и средств затратили на реализацию
СВЕРХЗВУКОВОГО БРОСКА НА МАЛОЙ ВЫСОТЕ.
Это должно было обеспечить неуязвимость самолета при преодолении ПВО.
Планировалось, что бомбардировщик продемонстрирует преимущества данного
приема, выполняя полет на предельно малой высоте со скоростью, соответствую-
щей числу М = 1,2. Однако после первых же попыток «бросок» был снят с прак-
тического применения по следующим причинам.
Во-первых, осуществить огибание рельефа (полную маскировку полета) на
сверхзвуковой скорости оказалось невозможным из-за резкого увеличения ради-
усов маневрирования в вертикальной плоскости. Самолет вытеснялся скоростью
наверх — летел над рельефом и входил в зону обнаружения РЛС противника.
Во-вторых, вследствие повышенного аэродинамического нагрева на малой высо-
те самолет начинал излучать тепло во все стороны, в том числе и вперед. Появи-
лась реальная угроза применения по нему зенитных ракет с тепловой головкой
самонаведения не только с задней, но и с передней полусферы. В-третьих, из-за
повышенной турбулентности воздуха начиналась тряска, резко увеличивалась
нагрузка на экипаж самолета, быстро терявшего работоспособность. В-четвер-
тых, топливо при полете на сверхзвуковом режиме на малой высоте расходова-
лось быстрее, чем на большой высоте. И в-пятых, сама сверхзвуковая скорость,
как оказалось, давала в тактическом плане совсем немного преимуществ, кото-
рые многократно перекрывались возникшими недостатками. Увеличение ско-
рости полета у земли способствовало выживаемости самолета только до опреде-
ленных величин числа Л/, затем в силу вступали непреодолимые отрицательные
факторы.
Приемы уклонения на конечном этапе боевого полета значительно отлича-
лись по траектории, скорости, перегрузке и «перепаду высот» от приемов, приме-
нявшихся на маршруте при полете в район расположения цели. Самолет последо-
вательно пересекал рубежи обнаружения, сопровождения, огня и поражения зе-
55
нитных ракетных комплексов, прикрывавших объект удара. Летчик, вторгаясь в
зону обнаружения, стоял перед выбором: выполнять маневр с уменьшением ско-
рости сближения с целью и проигрывать во времени или преодолевать участок
сопровождения по типу прорыва — по прямой с увеличением скорости и выигры-
вать во времени. Решение во многом зависело от дальности обнаружения самоле-
та РЛС ЗРК, которое фиксировалось бортовой системой оповещения.
Перед входом группы в зону действия РЛС наведения истребительной ави-
ации и целеуказания ЗУР и ЗА самолеты смыкаются до минимально допустимых
интервалов и дистанций, чтобы звено наблюдалось на экране РЛС как одна от-
метка. Этот прием полностью заимствован из опыта локальных войн. Так делали
экипажи тактических бомбардировщиков, чтобы скрыть от противника числен-
ный состав группы и замысел дальнейших действий.
Для исключения захвата (перехода РЛС систем управления зенитным оружи-
ем на автоматическое сопровождение по азимуту и дальности) смыкание группы,
особенно при полете на средних высотах, сочетается с выполнением следующего
маневра — переменного обгона или змейки со сменой мест ведущего и ведомого.
Амплитуда змейки и частота обгона подбираются такими, чтобы сорвать процесс
наведения ракеты на цель. Практика показала, что маневр, рассчитанный против
одной системы наведения, может быть совершенно неэффективным против дру-
гой. Правильность выбора характера и параметров маневра зависит от полноты
имеющейся у экипажей информации и быстроты их реакции на нее. Такое ма-
неврирование, как правило, предпринимается независимо от того, включены
бортовые средства РЭБ или нет.
На этапе полета, который связан с вторжением самолетов в зону объектовой
ПВО, главными считаются выход на цель с наиболее безопасного направления и
атака в минимально возможное время. Направление захода определяется чаще
всего при подготовке к вылету в процессе изучения цели и системы ее обороны.
Атака ударной группы обычно строится с круга или веером с поочередным пере-
водом в пикирование одиночных самолетов. Нередко выполняются и обманные
маневры, например ложный проход цели на не вызывающем тревогу расстоянии,
затем внезапная атака ее с тыла.
При атаке для снижения эффективности зенитных ракет, наводящихся на
струю выхлопных газов двигателя, рекомендуется осуществлять маневр с сохра-
нением наибольшей угловой скорости перемещения самолета относительно по-
зиции ЗРК и в то же время уложиться в минимально допустимое время (40 с). Ва-
риант применения упомянутых выше тактических приемов показан на рис. 1.17.
На схеме обозначены действия только ударных самолетов, где 1 — группа в сомк-
нутом боевом порядке; 2— группа в разомкнутом почти до пределов визуальной
видимости боевом порядке; 3 — группа в сомкнутом боевом порядке, самолеты в
звеньях идут на минимально возможных интервалах и дистанциях; 4 — первое
звено выполняет обманный маневр — ложный проход цели на «не вызывающем
тревогу расстоянии»; 5— второе звено осуществляет атаку цели с круга (ради-
усом R) с поочередным переводом в пикирование одиночных самолетов, причем
первые две машины наносят удар по позициям ЗРК, прикрывающим объект уда-
ра; 6 — экипажи третьего звена атакуют цель веером с поочередным разворотом
с прямой и переводом самолетов в пикирование; 7— маршруты ухода самолетов
от цели.
Как уже упоминалось выше, выбор боевых порядков ударной группы и при-
нятие решения о применении того или иного тактического приема на различных
56
Н-г-Н
1 РЛС обнаружения и управления
@ ЗРК средней дальности стрельбы
(2) ЗРК малой дальности стрельбы
Зона эффективного огня ЗРК
Участок противоракетного маневра
Рис. 1.17. Схема действия ударной группы в составе трех звеньев
этапах полета и о способах атаки цели должны производиться с учетом конкрет-
ных условий обстановки и возможных вариантов ее изменения. Все это осу-
ществляется, как правило, в ходе подготовки к полету.
Определились следующие тактические приемы и другие мероприятия по
снижению вероятности обнаружения самолетов, преодолевающих ПВО, различ-
ными поисковыми средствами:
• визуально и оптическими приборами — полет на минимальной высоте на
скорости М = 0,8...0,9, выдерживание устойчивого режима работы двигателя
во избежание образования дымового следа, использование в маскировочных
покрытиях самолетов естественных цветов (под фон неба — снизу, земной
поверхности — сверху);
• посредством ИК-аппаратуры — полет на минимальной высоте и на дозвуко-
вой скорости, использование форсажа только в случае крайней необходи-
мости, сбрасывание ИК-ловушек, экранирование наиболее нагреваемых
частей двигателя, применение теплопоглощающих покрытий;
• с помощью РЛС — полет на минимальной высоте, постановка активных и
пассивных помех, разработка самолетов с расчетом получения наименьшей
площади эффективной отражающей поверхности, использование в конст-
рукции планера материалов, поглощающих электромагнитное излучение.
Разработано устойчивое правило «достаточности»:
а) избегать воздействия средств ПВО за счет обхода и уклонения;
б) если это сделать невозможно, то ослепить оборону противника средства-
ми радиоэлектронной борьбы;
в) когда этого окажется недостаточно, перейти к непосредственной атаке и
уничтожению объектов ПВО.
Установлена прямая зависимость успеха от наличия точных разведданных в ре-
альном масштабе времени и расположения противостоящей группировки ПВО.
57
3. Защита бомбардировщиков
В последних локальных войнах выявилась проблема защиты ударного само-
лета. На первых реактивных бомбардировщиках в составе экипажа имелись
стрелки, а также оружие, защищавшее заднюю полусферу. В войне во Вьетнаме
их сменили истребители-бомбардировщики с пушками и ракетами, направлен-
ными только вперед. При отражении атак перехватчиков противника они долж-
ны были действовать «по-истребительному», т. е. разворачиваться им навстречу.
Но тяжелый самолет не мог ввязываться в продолжительный оборонитель-
ный бой, прекратив полет к объекту удара, а сверхзвуковая скорость уже не по-
зволяла ему «оторваться» от преследующего его перехватчика.
После того как потери превысили допустимые пределы, ударные группы ста-
ли прикрываться на маршруте к цели и обратно усиленным нарядом истребите-
лей. Однако способ непосредственного сопровождения в ходе практического
применения выявил не только достоинства, но и очевидные недостатки.
Во-первых, ударные самолеты с полным комплектом боеприпасов выдержи-
вали на маршруте скорость примерно 800 км/ч. Истребители прикрытия, чтобы
не потерять визуального контакта с охраняемыми самолетами, вынуждены были
лететь на уравненных скоростях. Перехватчики противника вступали в бой, имея
преимущество в скорости, и прорывались к ударным самолетам.
Во-вторых, наличие ракет класса «воздух—воздух» позволяло перехватчикам
атаковать с больших дальностей, что давало дополнительные тактические пре-
имущества нападавшим.
В-третьих, попытки организовать надежную защиту ударных самолетов уве-
личением численности самолетов сопровождения положительных результатов не
дали. Ранее оптимальное соотношение числа самолетов прикрытия и ударной
группы составляло 2 : 3, т. е. эскадрилью бомбардировщиков должны были при-
крывать два звена истребителей. Оно изменилось и стало 3 : 3, т. е. число самоле-
тов сопровождения и ударной группы стало равным, но ожидаемого положитель-
ного результата количественный прирост истребителей не дал. Перехватчики,
свободные в выборе направления атаки, сближались со смешанной группой и
прорывались на рубеж огня сзади на повышенной скорости.
В-четвертых, не оправдал себя вариант усиления защиты ударных самолетов
еще одной группой — дальнего перехвата. Стремясь встретить противника на
дальних подступах к прикрываемым бомбардировщикам, истребители выходили
за пределы коридора, предварительно проделанного в группировке наземной
ПВО, и попадали под огонь зенитных средств.
В-пятых, сопровождение на большую глубину (радиус действия тактической
авиации достигал 800 км) было связано с необходимостью подвески на самолеты
прикрытия топливных баков, вследствие чего они теряли маневренные качества,
необходимые для ведения воздушного боя.
Сопровождение ударных групп становится все более бесперспективным, так как
эскорт даже при равенстве сил отражения несет большие потери, которые превраща-
ются в недопустимые при количественном превосходстве в районе нанесения ударов.
Проблемы выживаемости
По уровню потерь бомбардировщики в локальных войнах превзошли итого-
вые данные Второй мировой войны. Причин, влияющих на показатели выжива-
емости (выражается отношением числа сбитых самолетов к общему числу произ-
веденных самолетовылетов), имеется несколько.
58
1. Уязвимость конструкции самолетов. При разработке техники живу-
чести не придавалось прежнего внимания. Была дана неправильная оценка видов
возможной угрозы. Считалось, что даже защищенный самолет будет не в состоя-
нии выдержать попадание в него ракеты. Поэтому основное внимание уделялось
летным данным самолета, в особенности скорости и высоте полета. Любое уст-
ройство или система, не способствовавшие улучшению этих характеристик,
воспринимались с глубоким недоверием.
Особо ненадежными в условиях противодействия ПВО были признаны топ-
ливная и гидросистемы, а также система управления. Непосредственно на театре
военных действий на топливные баки устанавливались протекторы, бронирова-
лись наиболее открытые узлы соединений, однако тяги управления, идущие че-
рез весь фюзеляж к хвостовому оперению, защитить не удалось.
Живучесть самолета значительно проще было бы обеспечить в процессе его
разработки, чем при последующей модернизации в полевых условиях.
2. Слабая индивидуальная защита бомбардировщиков. Все более ши-
рокое использование против самолетов управляемых ракет с пассивными опти-
ко-электронными системами наведения поставило жесткие требования к защите
самолетов. Острота этой проблемы определялась тем, что экипажам трудно было
получить предупреждающую информацию об атаке, а системы активного подавле-
ния угрозы были очень дорогие и недостаточно надежны. Поэтому возникла необ-
ходимость комплексного подхода к ее решению с детальным рассмотрением тех-
нических и тактических вопросов. Но тактика в то время базировалась на весьма
ограниченном числе приемов, главным из которых был маневр высотой с выходом
самолета за пределы досягаемости ЗРК малой дальности стрельбы и с применени-
ем активных радиоэлектронных средств защиты против ЗРК большой дальности.
3. Необходимость выполнения полетов на малых и средних высо-
тах с дозвуковой скоростью. Бомбардировщики, принимавшие активное
участие в локальных войнах, располагали максимальной скоростью М > 1. Одна-
ко такой режим достигался при полете на большой высоте и с ограниченной на-
грузкой. В боевых условиях им приходилось летать на малых и средних высотах,
обеспечивающих приемлемую точность бомбометания. А система ПВО противо-
борствующей стороны была оснащена зенитными ракетными комплексами, зона
поражения которых перекрывала эти высоты.
4. Снижение работоспособности экипажа на наиболее сложных
этапах полета. Напряжение (физиологическое и психологическое) экипажа
самолета по мере усложнения условий полета растет. Как показал опыт, наиболее
ответственными и насыщенными этапами для ударного самолета являются пре-
одоление ПВО и атака наземной цели. До тех пор пока управление самолетом не
требовало постоянной корреляции информации от различных датчиков, данные
от системы управления и навигации достаточно эффективно обрабатывались са-
мим летчиком. В настоящее время такая схема работы неприемлема из-за резкого
увеличения объема поступающих разнородных сведений. Для улучшения взаимо-
действия летчика с самолетом при одновременном уменьшении рабочих нагрузок
необходимо комплексирование и обобщение потока информации и улучшение
форм ее подачи. Искажение данных об обстановке и расположении объектов
противника недопустимо, так как составленный по ним план будет неправиль-
ным, а применение оружия неэффективным.
В боевом полете летчик современного самолета постоянно обрабатывает по-
ток «приборной», осведомительной и командной информации. Кроме того, он
принимает сигналы предупреждения и оповещения об опасности, выполняет ко-
59
манды и распоряжения по радио. Обстоятельства нередко требуют немедленного,
одновременного и правильного реагирования на несколько видов поступающих
сведений. Число операций, выполняемых летчиком, неуклонно растет. Ему надо
быстро анализировать создающуюся ситуацию и мгновенно принимать решение,
отвечающее ее развитию.
Еще недавно большая часть времени тратилась на пилотирование и мень-
шая — на принятие решений, т. е. летчик выполнял «обязанности» центрального
процессора и связующего блока между функциональными подсистемами. В сов-
ременных условиях для самолетов со сложным вооружением и оборудованием
такая организация непригодна.
В локальных войнах наметился рост боевых потерь из-за принятия ошибоч-
ных решений, что было обусловлено в первую очередь неправильной оценкой об-
становки и запоздалой реакцией на ее изменения.
Поскольку зенитные комплексы малой и средней дальности стали достаточ-
но подвижными, экипажи ударных самолетов часто оказывались в трудном поло-
жении из-за отсутствия своевременной информации об их действительном месте
расположения к моменту вылета. Поэтому на этапе преодоления ПВО летчики
чаще всего пребывали в состоянии «неопределенности».
Недостаток столь необходимых исходных данных о противнике резко снижал
качество оценки обстановки и приводил к выбору отнюдь не лучшего варианта дей-
ствий: в большинстве случаев огонь противника настигал бомбардировщик там, где
экипаж меньше всего этого ожидал. Собственные же информационные возможнос-
ти ударного комплекса были ограниченными, что и поставило на повестку дня проб-
лему сочетания глубокой разведки воздушного пространства с нанесением удара.
4. Тактика радиоэлектронной борьбы («нейтрализация»)
НЕЙТРАЛИЗАЦИЯ — понятие, определившееся сравнительно недавно, означа-
ет воспрещение боевой работы зенитных ракетных комплексов без использова-
ния огневого воздействия по ним. Это, прежде всего, постановка активных и пас-
сивных помех, затрудняющая обнаружение и проводку воздушных целей, а также
выработку прицельных данных радиолокационными станциями наведения ЗУР.
На начальном этапе так называемой «радиоэлектронной войны» примене-
нию помех предшествовала разведка частот работы РЛС противника. Затем функ-
ции разведки и радиоэлектронного противодействия (РЭП) были совмещены.
Под прикрытием маскирующих помех на наземную цель скрытно выходил удар-
ный самолет, а постановщик помех оставался в зоне на безопасном удалении от
позиции ЗРК. Данный способ требовал точного согласования действий, ибо не-
преднамеренный выход атакующего из довольно узкого сектора «засветки» ста-
вил его под удар зенитных огневых средств.
Маскировка ударных самолетов заградительной помехой из зоны, удаленной
на большое расстояние от цели, не обеспечивала их надежной неуязвимости. Тог-
да средствами нейтрализации стали оснащаться и боевые самолеты. Первой была
применена на бомбардировщике система, выполнявшая следующие функции:
предупреждение экипажа об облучении самолета РЛС ПВО; автоматическое пе-
ленгование РЛС (с выдачей на миниатюрный экран ее азимута); предупреждение
экипажа о моменте пуска ЗУР. Система оповещала об угрозе обстрела самолета и
подавала летчику команду на включение передатчика помех, размещенного в
подвесном контейнере.
60
Средства РЭП на боевых самолетах относились к маломощным, поэтому поле
«нейтрализации» было ограниченным, обеспечивавшим лишь индивидуальную
защиту. Если контейнер устанавливался на одном самолете в звене (вместо средств
поражения), то другие «прижимались» к нему, лишая себя столь необходимой сво-
боды маневра. Поэтому обязательным дополнительным элементом «нейтрализа-
ции» во всех локальных войнах была постановка пассивных помех. Дипольные от-
ражатели экономичны («отдачи» на единицу затрат). Однако отстройка от них для
расчетов средств ПВО перестала быть проблемой. Тактика радиоэлектронной вой-
ны предполагала комплексное применение средств групповой защиты.
В боевых условиях применяют два способа использования дипольных отража-
телей: традиционный, предусматривающий постановку облака помех в полосе
пролета ударных самолетов к цели преимущественно на участках выхода на боевой
курс; выстреливание экипажами боевых самолетов противорадиолокационных ло-
вушек (ПРЛ) из встроенных контейнеров на участках атаки и выхода из нее. Сис-
темы выстреливания ПРЛ срабатывали либо автоматически по команде аппарату-
ры оповещения об облучении РЛС противника, либо по воле летчика, решившего
усилить защиту самолета при возникновении не замеченной «техникой» угрозы.
В арсенале нейтрализации РЛС противника остается актуальным такой спо-
соб, как постановка помех линиям связи в системах управления средствами
ПВО. Нарушение радиообмена мощным сигналом срывало боевое управление и
взаимодействие между отдельными элементами системы ПВО противника, в том
числе и между экипажами истребителей-перехватчиков в группе. В современном
бою успешная борьба с воздушным противником во многом зависит от четкости
и своевременности согласованных действий. Радиопомехи нарушают синхрон-
ность и тем самым ослабляют или воспрещают огонь.
Важным рубежом в эволюции РЭБ являлось решение проблемы индивидуаль-
ной защиты одно- и двухместных боевых самолетов. Выход был найден в оснаще-
нии их подвесной контейнерной аппаратурой РЭБ (внутри фюзеляжа находилась
лишь ее часть). Снаружи, в частности, размещался обнаружительный приемник,
первый вариант которого представлял собой широкополосное четырехканальное
(по направлению) приемное устройство прямого усиления со световой и звуковой
сигнализациями, а также указанием квадранта, откуда исходит угроза.
Обнаружительный приемник с мини-ЭВМ обеспечивал мгновенный перехват
и анализ сразу нескольких облучающих самолет сигналов посредством сравнения
их параметров с параметрами РЛС известных типов, записанными в памяти ЭВМ.
Результаты анализа тут же отображались в символической форме на экране круго-
вой развертки с указанием назначения и частотного диапазона обнаруженных
РЛС, примерного направления их расположения и дальности (по мощности при-
нятого сигнала) относительно самолета, а также режимов их работы (мигающая
буквенно-цифровая группа означала переход ЗРК на автосопровождение).
В результате полученного опыта были разработаны новые технологии, приме-
няемые при создании аппаратуры РЭБ. К ним относятся программируемое управ-
ление ресурсами радиоэлектронного подавления постановщиков помех групповой
и индивидуальной защиты (одновременное автоматическое подавление несколь-
ких выбираемых по приоритетности целей); высокоточное (разностно-временное/
разностно-доплеровское) определение местоположения РЛС, постановщиков по-
мех и радиостанций; малогабаритные передатчики помех одноразового использо-
вания, которые отстреливаются с помощью пиропатронов с борта ударных само-
летов или доставляются артиллерийскими средствами в район цели.
61
Таблица 1.1
Эффективность применения средств РЭП
Основные параметры Стоимость закупок систе- мы оружия, млн долл. Требуемое число самоле- товылетов Стоимость поражения одной цели, долл. Экономическая эффективность
1. Постоянная ЭОП без учета применения средств РЭП 937 6,4 11 800 5
2. Уменьшенная ЭОП без учета применения средств РЭП 937 4,0 2300 Уменьшение в 5 раз
3. Уменьшенная ЭОП с учетом применения средств РЭП 937 2,8 380 Уменьшение в 6 раз
В табл. 1.1 показано влияние величины ЭОП и эффективности применения
средств РЭП на размеры затрат по поражению воздушной цели.
Радиолокационная, тепловая и визуальная маскировки — категории разные.
В борьбе с зенитной артиллерией и в «пушечном» воздушном бою на коротких
дистанциях, где с воздушной целью постоянно сохраняется визуальный (оптиче-
ский) контакт, малозаметность в радиодиапазоне роли не играет.
Опыт показал, что средства снижения демаскирующих признаков не могут
сделать самолет полностью «невидимым», они лишь затрудняют его обнаруже-
ние. При уменьшении ЭОП на 30% дальность снижается всего на 16%, а при
уменьшении ЭОП на 75% — уже на 29%.
Создание самолета из материалов, не отражающих радиоволн и имеющих
низкий уровень теплового излучения, отбросило бы тактику к временам ближне-
го боя (удара). Практически возможным считается снижение ЭОП бомбардиров-
щика до ЭОП крылатой ракеты (0,1 м2), что уменьшает дальность его обнаруже-
ния существующими бортовыми РЛС до 20...25 км, а захват на сопровождение
может произойти на дальности 15 км. В этом случае атака в переднюю полусферу
(даже не маневрирующей цели) резко усложняется из-за острого дефицита вре-
мени, а в заднюю полусферу — исключается. Таким образом, реализованная на
практике малозаметность должна существенно изменить показатели выжива-
емости бомбардировщика.
5. Способы атак с применением обычных средств поражения
Из опыта боевого применения тактических бомбардировщиков в локаль-
ных войнах можно выделить несколько способов групповых атак по наземным
объектам.
атака с пикирования (с направления, обратного направлению захода на
цель), или метод «внезапного появления», применялась в период действий ави-
ации на малых высотах. Суть метода состояла в следующем. Группа в составе
6...8 самолетов сначала занимала на большой высоте зону ожидания за пределами
62
района боевых действий, затем пары самолетов поочередно выходили из общего
боевого порядка и выстраивались друг за другом на установленном временном
(до 2 мин) интервале в процессе снижения. Полет на последнем этапе маршрута
до контрольного пункта, расположенного в 15...20 км от цели, проходил на высо-
те 50... 100 м над рельефом местности. Затем летчик осуществлял корректировку
местоположения по дальности и боковому уклонению, отыскивал намеченный
линейный ориентир (дорогу, реку) и «привязывался» к нему. После визуального
обнаружения вспомогательного контрольного пункта увеличивалась скорость, и
по истечении расчетного времени самолет переводился в крутой набор по типу
полупетли. На высоте 2500...3000 м выполнялся поворот «через плечо» и ввод в
пикирование с углом до 45°. Бомбы сбрасывались залпом, после чего самолет
продолжал снижение и переводился в горизонтальный полет непосредственно у
земли. Расчет при этом строился на предположении, что вся траектория атаки
должна располагаться в непростреливаемом с земли пространстве (учитывая вы-
полнение вертикального маневра в пределах «мертвой воронки» над стартовой
позицией ракет).
Казалось бы, метод «внезапного появления» обеспечивал неуязвимость само-
лета, а эффективность атаки зависела лишь от способности летчика справиться
со сложным полетным заданием. Однако после оценки результатов первых нале-
тов выявились почти непреодолимые недостатки метода, которые в конечном
счете привели к ограниченному его использованию в реальных боевых условиях.
Во-первых, на малой высоте исключалось применение радиотехнических средств
для точного самолетовождения, во-вторых, резко сокращались возможности эки-
пажа по поиску и обнаружению цели и, в-третьих, появление над целью каждой
следующей после ведущей пары самолетов уже не являлось неожиданным для
противника, поскольку направление захода не изменялось. Но главное заключа-
лось в том, что позиции зенитных ракет стали прикрываться ствольной зенитной
артиллерией. Самолет во время набора высоты, пикирования и особенно в мо-
мент поворота «через плечо» резко уменьшал скорость перемещения относитель-
но зенитной точки и становился уязвимым (рис. 1.18).
Рис. 1.18. Метод «внезапного появления»
63
АТАКА С ПРЯМОЙ после выполнения горки отличалась от метода «внезапного
появления» тем, что самолет не выходил непосредственно на цель на малой высо-
те, а переводился в набор от ориентира, удаленного от цели на 8... 12 км. Ориен-
тир выбирался обычно не строго на линии пеленгования цели от конечного пово-
ротного пункта, а в стороне от нее на 4...5 км.
Таким образом, сектор поиска сужался, летчик заранее знал, с какой стороны
по ходу полета находится цель. По мере увеличения высоты облегчались условия
визуального обнаружения заданного объекта атаки. Величина угла набора выбира-
лась с таким расчетом, чтобы к достижению высоты 1400... 1600 м летчик не только
обнаруживал, но и опознавал бы цель. Затем самолет без фиксации горизонтально-
го положения доворачивался на боевой курс и переводился на снижение. После вы-
вода из разворота проекция линии пути проходила через цель. Поскольку время уп-
реждения сброса вводилось в самолетное решающее устройство заранее, а осталь-
ные данные пересчитывались по текущим значениям высоты, скорости и дальности
до цели, бомбометание производилось автоматически. Углы снижения могли быть
значительно меньшими, чем при методе «внезапного появления», поэтому предста-
вилась возможность пуска по цели неуправляемых реактивных снарядов.
Наряду с заметными преимуществами способа атаки с горки отмечались и
его существенные недостатки. Время нахождения самолета в процессе выполне-
ния горки в зоне поражения зенитным комплексом должно было исчисляться се-
кундами. Даже незначительная задержка, связанная с опознаванием экипажем
цели или уточнением захода, грозила поражением самолета средствами ПВО.
Прямая угроза эффективного противодействия заставила выделять самолеты
обеспечения, которые ложными маневрами на границе зоны пуска стремились
отвлечь на себя внимание боевого расчета зенитного ракетного комплекса и обес-
печить скрытный полет к цели бомбардировщиков.
Чаще всего отвлекающая группа осуществляла преднамеренные вторжения в
зону обзора РЛС с одного направления с ударной группой. Успех этого тактиче-
ского приема во многом зависел от согласованности маневров групп по месту и
времени. Нарушение взаимодействия приводило к тому, что отвлекающий ма-
невр лишь оповещал противника о появлении ударной группы и, по мнению лет-
чиков, облегчал ее обстрел.
Несмотря на вскрытые недостатки, атака с прямой после выполнения горки
применялась тактическими и палубными ударными самолетами на протяжении
всех локальных войн.
АТАКА С БОЕВОГО РАЗВОРОТА начиналась немедленно после пролета звеном
траверза обнаруженной цели, причем каждый последующий самолет перед вво-
дом в пикирование разворачивался на больший угол, чем предыдущий. Боковое
удаление точки начала маневра от цели обычно было соизмеримо с двумя ради-
усами разворота. Нередко летчики применяли ложный пролет траверза с тем,
чтобы усыпить бдительность расчетов средств ПВО, а затем внезапно выполнить
атаку с обратного направления. В этом случае точка начала маневра выносилась
за цель и каждый ведомый начинал разворот после пролета расчетного времени
по прямой. Продолжительность разворота каждого самолета до перевода его в пи-
кирование была также неодинаковой, в результате получалась поочередная атака
«веером» из сектора 180...270° по отношению к курсу выхода на цель (рис. 1.19).
бомбометание с большой высоты без захода самолетов в зону поражения
малокалиберной зенитной артиллерией нашло довольно широкое применение
после отказа от действий на малых высотах из-за потерь от огня МЗА. С началом
64
Рис. 1.19. Групповая атака с боевого разворота
интенсивного использования радиолокационных помех для маскировки полета
бомбардировщиков стали сводить в крупные группы, имевшие непосредственное
прикрытие. В таком случае при полете в сомкнутом боевом порядке выполнение
эффективного противозенитного маневра исключалось. А поскольку интенсив-
ность огня с земли не уменьшалась, было решено заканчивать атаку за пределами
его досягаемости по высоте.
Все самолеты звена с высоты полета по маршруту (5000...6000 м) одновре-
менно переводились на снижение и сбрасывали бомбы залпом. Если на каждом
из них было подвешено по 6 бомб массой 340 кг, то на цель одновременно падало
24 бомбы. Однако точность попадания обычных неуправляемых боеприпасов,
сбрасываемых с высоты 2500 м, оказалась низкой (для достижения более высокой
эффективности требовалась меньшая наклонная дальность).
АТАКА С КРУГА с разных направлений (рис. 1.20) до войны в процессе боевой
подготовки летным составом не отрабатывалась. Во Вьетнаме она применялась
бомбардировщиками в районах с очаговой ПВО, там, где зона прикрытия одного
объекта не перекрывалась другой, т. е. отсутствовало сплошное радиолокацион-
ное поле. Используя данные воздушной разведки и ориентируясь по показаниям
бортовых приборов предупреждения, группа в составе 4—8 самолетов выходила в
зону ожидания, а затем размыкалась поодиночно. Выдерживая примерно одина-
ковые дистанции, летчики образовывали замкнутый круг с большим радиусом, в
центре которого находилась цель.
Если в сторону одного из самолетов осуществлялся пуск ракеты, то летчик
предпринимал маневр для уклонения, а по цели следовала атака с противополож-
ной стороны. Чтобы иметь возможность сначала обнаружить старт ракеты с зем-
ли, а затем успеть уклониться от нее, полет по кругу совершался на высоте при-
мерно 6000 м. При атаке штурмовиками объектов, защищенных МЗА и стрелко-
вым оружием, высоту эту уменьшали до 2500...3000 м. На один из самолетов, как
правило, подвешивались бомбы или неуправляемые ракетные снаряды с сигналь-
ным дымовым зарядом. Этот экипаж выполнял атаку первым, осуществляя целе-
указание для остальных.
3 Авиация ВВС России и научно-технический прогресс
65
Рис. 1.20. Групповая атака с заходом самолетов на цель с разных направлений:
/ — звено истребителей бомбардировщиков в сомкнутом боевом порядке; 2— разворот с перестро-
ением; 3 — рубеж замыкания; 4 — переход самолета в пикирование после восходящего разворота;
5— зона поражения объектовой ПВО; 6— цель
атака с горизонтального полета с малой высоты производилась с при-
менением бомб с тормозным устройством одиночными самолетами или группой,
выстроенной в колонну с относительно большими временными интервалами
между самолетами. Одной из особенностей бомбометания этим способом счита-
лось заблаговременное определение расстояния от проекции точки сброса до це-
ли при фиксированной путевой скорости и высоте (с учетом типа боеприпасов).
Обнаружив цель, летчик выходил на намеченный контрольный ориентир, над
которым нажимал кнопку сброса и удерживал ее в утопленном положении до ис-
полнительного сигнала, подаваемого счетно-решающим устройством. Для точно-
го бомбометания необходимо было выдержать заданный режим полета, не допус-
тить рыскания и кренов. Поскольку устойчивость самолета в возмущенных воз-
душных потоках у земли постоянно нарушалась, ошибки (особенно по дальности)
достигали больших величин. В связи с этим бомбометание с горизонтального по-
лета (с малой высоты) по средствам ПВО применялось в ограниченных масштабах.
Обычно в качестве цели выбирались узкие длинные или площадные объекты.
Звено размыкалось только при выходе на цель для атаки пар (одиночных са-
молетов) с разных направлений. Высота ввода в пикирование (с небольшим уг-
лом) достигала 2500...3000 м, вывода — 1500 м. Удар наносился «прямой навод-
кой» без повторных заходов на цель. Применение обычных средств поражения,
не обеспечивавших высокой плотности попаданий, требовало выделения боль-
шого наряда сил для поражения одного объекта. Число ударных самолетов в атаке
могло быть уменьшено лишь при организации надежного наведения (целеуказа-
ния) или при способности летного состава метко стрелять и бомбить. Чтобы об-
легчить обнаружение объекта удара и определить точку прицеливания, необходи-
мо было предварительно обозначить цель, используя сигнальные средства.
Снизить уязвимость самолета в зоне зенитного огня было возможно, только
сократив время атаки. Как уменьшение, так и увеличение скорости по сравнению
66
с оптимальной для быстрого разворота (число Л/, близкое к 0,8) повышало воз-
можности средств ПВО по противодействию атакующему (выполняющему ма-
невр над целью) самолету.
Приведенные выше способы атак соответствовали утвердившейся в локаль-
ных войнах схеме налетов с использованием неуправляемых средств поражения,
когда невысокая точность попадания компенсировалась количеством сбрасывае-
мых на цель бомб свободного падения.
6. Влияние высокоточного оружия на тактику ударной авиации
Достигнутый к началу 1960-х годов прогресс в теории автоматического уп-
равления, аэродинамике, ракетных двигателях и особенно в радиоэлектронной
технике явился той базой, на которой начался современный этап разработки и
совершенствования высокоточного оружия. Были созданы УР класса «воздух—
земля», противорадиолокационная ракета (ПРР), управляемая авиабомба. В ло-
кальных войнах управляемое оружие показало достаточно высокую боевую эф-
фективность.
Определились следующие направления в развитии тактики:
• тщательная оценка объектов авиационных ударов и выбор средств пораже-
ния по критерию стоимость—эффективность;
• нанесение упреждающих ударов по наземным средствам ПВО с применени-
ем ПРР специальными подразделениями самолетов;
• одновременное согласованное примене-
ние самолетов и групп по большому коли-
честву целей и совместное использование
разнородных сил авиации — разведыва-
тельно-ударных комплексов, беспилот-
ных летательных аппаратов (БПЛА), са-
молетов с управляемым и обычным ору-
жием;
• ввод в оперативно-тактическое постро-
ение авиации при нанесении массирован-
ных ударов таких элементов, как ВКП, са-
молеты ДРЛО и разведывательно-ударные
комплексы, постановщики активных и
пассивных помех, самолеты с управляе-
мым оружием и группы самолетов с неуп-
равляемыми бомбами и ракетами;
• пересмотр оценки боевой эффективности.
Такие традиционные показатели, как ко-
личество самолетовылетов, вес сброшенных
бомб, число пораженных объектов, были объ-
единены в критерий «стоимость поражения
одной цели».
Из рис. 1.21 видно, что при СКВО = 100 м
и коэффициенте потерь 0,1 стоимость пора-
жения одной типовой цели для бомбардиров-
щика с учетом расхода ресурса превышала
1 млн долл, и являлась неприемлемой.
Процент потерь на один самолетовылет
Рис. 1.21. Зависимость стоимости по-
ражения цели при бомбометании с
самолета, вооруженного 8 бомбами
массой по 450 кг, от процента потерь
на один самолетовылет (числа у кри-
вых обозначают среднеквадратиче-
ское вероятное отклонение — СКВО)
67
Анализ показал, что единственный путь решения проблемы — уменьшение
КВО бомбометания, т. е. создание нового высокоточного оружия. Уменьшение
КВО с 90 до 30 м приводило к такому же снижению стоимости поражения цели.
Боевое применение управляемых авиационных бомб
При применении УАБ, имеющих телевизионную систему наведения (СН) с
предварительным захватом, летчик обнаруживает цель при помощи телевизион-
ной камеры головки самонаведения (ГСН), видеоизображение с которой переда-
ется на индикатор, расположенный в кабине самолета-носителя. После выбора и
уверенного захвата цели и перехода ГСН на режим ее сопровождения летчик про-
изводит пуск ракеты или сброс УАБ, которые наводятся на цель автоматически
(рис. 1.22, а).
Максимальная дальность применения оружия с телевизионной системой на-
ведения определяется дальностью обнаружения, которая в значительной степени
зависит от контраста, размеров и конфигурации цели, а также от высоты полета
самолета и разрешающей способности телевизионной камеры. Так, наклонная
дальность обнаружения танка составляет около 4 км, а железнодорожного
моста — 11...17 км.
Телевизионно-командная система наведения в отличие от телевизионной с
предварительным захватом позволяет применять УАБ на значительно большем
удалении от целей, а также поражать слабоконтрастные цели. Кроме того, после
пуска ракеты самолет-носитель может совершать противозенитный маневр или
уходить в обратном направлении от цели, но даже в этом случае управляемый
боеприпас будет оставаться в поле зрения приемной антенны аппаратуры связи и
наведения, находящейся на самолете-носителе.
Рис. 1.22. Схема бомбометания телевизионной (а) и лазерной (б) систем наведения:
1 — телевизионная головка наведения; 2 — цель; 3 — лазерная головка наведения; 4 — конус отраже-
ния лазерного луча; 5 — подсветка цели лазером
68
Благодаря участию оператора в процессе наведения телевизионная команд-
ная система может обеспечить более высокую точность по сравнению с автоном-
ным самонаведением. При проектировании оружия с телевизионными система-
ми наведения большое внимание уделяется полунатурному моделированию с ис-
пользованием различных макетов местности и заранее отснятых фильмов и с
непременным участием летчика (оператора). Одной из главных целей моделиро-
вания является исследование статистических характеристик человека как звена
контура управления полетом ракеты, в частности способности оператора обнару-
живать ориентиры на местности и саму цель по телевизионному изображению на
экране видеоконтрольного устройства, определять величину отклонения ракеты
от заданной траектории и осуществлять наведение ракеты на конечном участке
траектории.
Лазерные СН. Полуактивная лазерная головка самонаведения для УАБ
состоит из координатора цели и блока электронной аппаратуры. Координатор
включает приемное устройство с четырехквадрантным фотодетектором и кольце-
вой стабилизатор. В электронном блоке обрабатываются сигналы, поступающие
от четырех сегментов фотодетектора, и формируются сигналы управления, кото-
рые в виде команд подаются на рули бомбы.
Подсветка цели лазерным лучом может производиться с самолета-носителя
(рис. 1.22, 6), другого летательного аппарата или передовым авиационным навод-
чиком с земли. При установке аппаратуры подсветки на самолете-носителе обес-
печивается возможность атаки неподвижных и подвижных целей. Кроме того, в
этом случае отпадает необходимость обеспечения взаимодействия носителя и
средства, осуществляющего подсветку. Однако такое использование оружия воз-
можно только с самолетов, имеющих экипаж из двух человек и оснащенных спе-
циальными контейнерами, в которые входят устройства обнаружения и целе-
указания.
Управляемая авиационная бомба с лазерной СН применяется следующим
образом. После выхода самолета в район цели и ее обнаружения летчик-оператор
включает лазерный целеуказатель и при выполнении условий стрельбы произво-
дит бомбометание. Самолет совершает противозенитный маневр, но лазерный
луч продолжает непрерывно сопровождать и облучать цель. Отраженное лазерное
излучение воспринимается ГСН бомбы, и определяется направление на цель,
при этом измеряется ошибка между линией прицеливания и направлением поле-
та УАБ, пропорционально которой вырабатываются сигналы управления.
Управляемые бомбы с лазерным наведением могут применяться по целям с
малым оптическим контрастом. Полуактивная лазерная система наведения по-
зволяет экипажу более дифференцированно выбирать цели из состава близко
расположенных и поражать их. По конструктивному исполнению эта система
проще и дешевле телевизионной. Вместе с тем ей присущ и недостаток, заклю-
чающийся в том, что оператор должен сопровождать цель лазерным лучом во
время всего полета авиабомбы к цели, что сковывает действия экипажа и затруд-
няет выполнение противозенитных маневров. Впоследствии лазерные целеуказа-
тели были доработаны и стали автоматически сопровождать цель при эволюциях
самолета. Однако необходимость подсветки целей до попадания в нее авиабомб
осталась обязательной для всех последующих поколений полуактивных лазерных
систем, что является одним из их принципиальных недостатков.
69
Управляемая авиационная бомба с полуактивным лазерным наведением ос-
нащена ГСН с кодирующим устройством, которое позволяет синхронизовать ра-
боту ГСН с конкретным целеуказателем. В этом случае исключается наведение
УАБ на «чужое» лазерное пятно и тем самым в процессе групповой атаки самоле-
тов-носителей не допускается наведение нескольких авиабомб на одну и ту же
цель. Кроме того, кодирующее устройство исключает возможность наведения
УАБ на ложные лазерные пятна, создаваемые противником, что повышает поме-
хозащищенность системы самонаведения.
С учетом стоимости самолетовылетов и вероятности поражения самоле-
тов-носителей ПВО противника поражения цели с применением УАБ оказывает-
ся ниже стоимости поражения обычными бомбами. Однако экономия (уменьше-
ние стоимости при сохранении эффективности) достигается только при довольно
сложной организации боевого обеспечения. Экипаж самолета-носителя УАБ
нуждается пока в предварительном подавлении средств ПВО средней дальности в
районе атаки и точных данных о местоположении цели в реальном масштабе вре-
мени. Выполнять самостоятельный поиск в зоне с неподавленной ПВО самолету
с подвешенным дорогостоящим оружием считается нецелесообразным.
В 1972 г. во Вьетнаме впервые были применены УАБ с лазерным полуак-
тивным наведением. Бомбой массой 1300 кг был разрушен мост, по которому
удары наносились с 1965 г., было произведено 4200 самолетовылетов и сброшено
4000 обычных бомб и столько же ракет.
Всего за последний период войны на территории Северного Вьетнама было
выведено из строя 85 мостов. СКВО не превышала 30 м, что позволило в несколь-
ко раз сократить наряд самолетов, выделяемый для поражения одного типового
объекта. Наиболее экономичным оказалось применение бомб с лазерной систе-
мой наведения. Стоимость обычной бомбы массой 900 кг составляла 1800 долл.,
стоимость съемной лазерной системы для нее — 3100 долл., а телевизионной
системы — 20 тыс. долл, (общая стоимость УАБ с ТВ-наведением типа «Уоллай»
достигла 25 тыс. долл.). Высокая по сравнению с обычными бомбами стоимость
УАБ компенсировалась меньшим расходом боеприпасов, а в конечном итоге —
повышением выживаемости и боевой эффективности авиации (из 1000 сброшен-
ных УАБ 700 достигли своих целей).
Как правило, для бомбометания с горизонтального полета необходима высо-
та более 1,5 км, с пикирования УАБ применялись с высоты 1,8...2,2 км при углах
сбрасывания 25...40°, что объяснялось особенностями метода наведения и необ-
ходимостью лазерной подсветки цели вплоть до момента подрыва БЧ. Это суще-
ственно связывало действия носителя, делало его уязвимым для средств ПВО.
Кроме того, было сложно обеспечить одновременное наведение нескольких УАБ
на расположенные рядом цели, так как относительно большое поле зрения флю-
герного лазерного координатора цели (ФЛКЦ) приводило к захвату бомбой «чу-
жой» цели и срыву выполнения задачи.
С помощью ФЛКЦ ось чувствительности лазерного приемника излучения
ориентируется по вектору скорости бомбы. После того как отраженная лазерная
энергия попадает в поле зрения ФЛКЦ, система управления УАБ отклоняет рули
таким образом, чтобы движение бомбы осуществлялось по вектору дальности це-
ли. В этом случае вектор скорости бомбы и направление, с которого приходит от-
раженное лазерное излучение, должны совпадать. Различные возмущения — тур-
булентность атмосферы, неточность углового сопровождения обеспечивающим
70
Рис. 1.23. Атака цели лазерной УАБ с использованием самолета-целеуказателя
самолетом — приводят к колебаниям УАБ относительно линии дальности и в
значительной степени корректируются системой управления.
В качестве целеуказателей использовались самолеты подсвета. Подвижная
головка лазерного излучателя на этих самолетах размещалась на левом борту фю-
зеляжа и обеспечивала подсвет цели в секторе 60°. Оператор самолета-целеуказа-
теля производил поиск с помощью оптических средств и после обнаружения цели
включал лазерный излучатель и вручную удерживал его луч на выбранной цели
(до момента взрыва сброшенных УАБ). При подходе к цели на высоте 3,5...4 км
самолет-целеуказатель делал левый разворот и с креном 40...45° производил по-
лет по кругу радиусом 3...4 км (рис. 1.23). Самолет-носитель с высоты 6 км пере-
ходил в пикирование с углом 30...45° и курсом, перпендикулярным курсу самоле-
та-целеуказателя («стандартный» метод). Такое взаимное положение двух само-
летов обеспечивало оптимальные условия захвата цели ГСН бомбы. Управляемая
АБ сбрасывалась с таким расчетом, чтобы она попала в указанный конус отра-
женных от цели сигналов.
При этом методе бомбометания высота сбрасывания увеличивалась до
5...5,5 км, удар мог наноситься и с горизонтального полета, его одновременно
производили 2...4 самолета с одного или нескольких направлений. Один из этих
самолетов после сброса бомб осуществлял целеуказание для других самолетов, но
в отличие от использования специальных самолетов-целеуказателей он мог со-
вершать любой маневр при условии непрерывного подсвета цели (рис. 1.24).
Управляемые АБ второго поколения с полуактивным лазерным наведением
применялись в англо-аргентинском военном конфликте на Фолклендах.
Лазерная ГСН УАБ имеет кодирующее устройство, которое синхронизирует
работу ГСН с конкретным целеуказателем. При этом исключалось наведение
УАБ на «чужое» или ложные лазерные пятна, что повышало помехозащищен-
ность системы, а также обеспечивалась групповая атака нескольких самолетов с
индивидуальным прицеливанием. На бомбах новой серии неподвижное крыло
71
Рис. 1.24. «Вероятный» метод бомбометания
было заменено на складывающееся крыло большой площади, что позволило уве-
личить боекомплект этих средств на самолете и повысить точность наведения на
цели. Боеприпасы этой серии более устойчивы к оптоэлектронному противодей-
ствию и просты в производстве.
Самолет с двумя УАБ выходил на малой высоте (150 м) на вспомогательный
ориентир, расположенный на удалении 6...7 км от цели. Скорость полета выдер-
живалась 1020 км/ч, скрытность сближения достигалась маскировкой на фоне
превышений местности. В точке начала маневра самолет переводился на кабриро-
вание с трехкратной перегрузкой. Темп движения поддерживался таким, чтобы за
расчетное время самолет достиг положительного угла тангажа 30° и вышел в точку
сброса боеприпаса. Характерно, что в ходе маневра траектория движения самолета
не выходила за пределы затененной зоны в обзоре аргентинских РЛС, т. е. дости-
галась полная неуязвимость носителя. Летчик в момент сброса докладывал назем-
72
4
Рис. 1.25. Атака с применением управляемой бомбы:
7 — пролет контрольного ориентира и вход в кабрирование; 2 — достижение угла набора 30° и сброс
УАБ; 3 — доклад летчика передовому наземному посту и начало подсвета цели; 4 — вход УАБ в отра-
женный от цели «луч», самонаведение на цель; 5 — уход самолета-носителя от цели
ному авиационному наводчику по радио. Последний через 11 с включал свой ла-
зерный целеуказатель. Задержка по времени давала возможность бомбе выйти на
высоту 460 м, только там облучиться отраженным от цели сигналом (рис. 1.25).
Опыт конфликта показал, что использование дополнительного летательного
аппарата для лазерного подсвета цели в рамках задачи непосредственной авиаци-
онной поддержки связано с повышенным риском для него. Более предпочтитель-
ным является вариант «наземный наводчик — штурмовик (ударный самолет)».
Вероятность попадания в цель размером 18 м УАБ с лазерной системой наведе-
ния при атаке с пикирования составила 0,55; для обычных бомб она равнялась
0,2. При атаке с малой высоты с кабрирования (обеспечивающей неуязвимость
носителя) разница была более ощутимой и составляла 0,89 и 0,05 соответственно
(подсвет цели лазером в течение 8... 15 с).
В боевых условиях проверялся также способ применения УАБ с большой вы-
соты, гарантировавшей безопасность самолета при полете над позициями ЗРК
малой дальности «Роланд». Подсвет цели — ВПП аргентинского аэродрома —
осуществлялся не наземным наводчиком, а другим самолетом (лазерным дально-
мером, установленным в носовой части фюзеляжа). Ударный самолет был пере-
веден летчиком в пикирование с высоты 10 670 км. Бомба «Пейв Уэй» была сбро-
шена на высоте 7620 м. Самолет «подсвета» повторил маневр, чтобы обозначить
цель и направить на нее УАБ. Однако лазерному дальномеру, работавшему на
одинаковой с наземным целеуказателем частоте, не удалось устойчиво захватить
цель, атака сорвалась [1].
В воздушной операции против Ливии в 1986 г. лазерные «УАБ-2» применя-
лись с бомбардировщиков, оборудованных системой, которая обеспечивала на-
много лучшие условия обнаружения и сопровождения наземных целей (рис. 1.26).
Перед боевым вылетом в ЗУ ЭВМ контейнера вводились координаты цели и
опорных точек (поворотных пунктов маршрута, точек начала маневра). Навига-
73
Рис. 1.26. Порядок действия экипажа самолета:
/ — обновление навигационных данных; 2 — обнаружение и распознавание цели; 3 — сопровождение
и подсветка цели лазерным лучом; 4 — сброс УАБ; 5 — контроль результатов удара
ционная система обеспечивала автоматическое самолетовождение в режиме сле-
дования рельефу местности. Летчик корректировал линию пути на опорных точ-
ках маршрута и выводил самолет на рубеж приборного поиска. ИК-система по-
иска включалась на расстоянии 25 км от цели и обнаруживала ее на дальности
15... 19 км, т. е. примерно за 1 мин до начала атаки.
После обнаружения цели оператор накладывал на ее отметку перекрестие
прицела и включал лазерный дальномер-целеуказатель для подсветки цели и из-
мерения оставшегося расстояния. На расчетном рубеже атаки летчик выполнял
вертикальный маневр, а оператор в расчетной точке производил сброс бомб или
контролировал их автоматический сброс. Бомба по баллистической траектории
входила в «конус» отраженного от цели лазерного луча и переходила в режим на-
ведения, после чего летчик выполнял маневр ухода из опасной зоны, а оператор
удерживал луч подсвета на цели до момента разрыва бомбы.
Управляемые АБ третьего поколения имеют большие по размерам склады-
вающиеся крылья, что увеличивает дальность их применения.
Возможность формирования траектории полета на конечном участке обес-
печивает нанесение удара по вертикали по таким целям, как ВПП аэродромов, и
с горизонтальным приближением к таким целям, как бетонные устои мостов. Че-
тырехквадрантный детектор бомбы дает обнаружение лазерного излучения, отра-
женного от подсвеченных целей и преобразованного затем электронным обору-
дованием системы наведения бомбы в информацию об ошибке наведения. Пос-
тупающие сигналы используются для наведения УАБ на цель методом
пропорциональной навигации, который является шагом вперед по сравнению с
релейным («да — нет») методом, применявшимся в других управляемых бомбах.
Дальность действия УАБ составляет более 4,8 км даже при ее применении с
предельно малой высоты. Предусматривается возможность автоматического пе-
реключения систем бомбы на конкретный режим бомбометания с ограниченным
временем на целеуказание, которое осуществляется самолетом-носителем, с дру-
гого самолета или с земли. Кроме того, УАБ может быть запрограммирована на
коды отдельных целеуказателей, что позволяет атаковать несколько целей.
74
Бомба может применяться как в режиме прямой атаки цели, когда произво-
дится захват цели на автосопровождение до сбрасывания бомбы с самолета и
дальнейшее автоматическое самонаведение, так и в режиме непрямой атаки при
захвате цели в процессе полета бомбы.
В первом случае возможно использование самолетов, не имеющих системы
связи с ней и оборудованных только соответствующими оптико-электронными
прицельными устройствами. Во втором случае после сбрасывания бомбы с само-
лета она совершает запрограммированный набор высоты, оператор по передан-
ному с бомбы изображению местности обнаруживает цель и производит захват ее
на автосопровождение или же сопровождает цель при управлении вручную.
Передача телевизионных и тепловизионных изображений с бомбы, несом-
ненно, является полезной не только для разбора результатов нанесения удара
после выполнения задачи, но и для летчика или оператора системы оружия, по-
зволяя ему вносить поправки в ход атаки, пользуясь разведывательной информа-
цией в реальном времени. Это было продемонстрировано в ходе операции «Буря
в пустыне» видеозаписью во время полета, при котором три бомбы с телевизион-
ным самонаведением были запущены в быстрой последовательности против трех
зданий. Один снаряд не достиг цели, тогда другой снаряд из этого залпа немед-
ленно отвернул от здания меньшей приоритетности, чтобы атаковать первое.
Особое место занимала УАБ с лазерным наведением, которая предназначалась
для поражения особо прочных целей (заглубленных КП, узлов связи, складов, ук-
рытий подземного и полуподземного типов, железобетонных укрытий для самоле-
тов и т. д.). Бомба снаряжалась БЧ двойного действия, заключенной в особо проч-
ный корпус. При контакте сброшенной УАБ с поверхностью объекта сначала сра-
батывал головной кумулятивный заряд, который образовывал в преграде глубокий
канал. Затем в канал проникал заряд БЧ фугасного типа, подрыв которого происхо-
дил с установленным замедлением. Испытания показали, что УАБ нового типа спо-
собны без рикошетирования разрушать бетонные плиты толщиной до 4,5 м.
По опубликованным данным авиация многонациональных сил в течение
43 дней боевых действий в зоне Персидского залива сбросила на Ирак и оккупи-
рованный им Кувейт более 80 000 т боеприпасов, из них около 6000 т боеприпасов
с точным наведением. При этом около 25% неуправляемых и 80% управляемых
боеприпасов поразили свои цели. В операции было задействовано 25 различных
систем оружия с точным наведением.
Для УАБ третьего поколения одной из основных проблем является коорди-
нация действий самолета-носителя и оператора, осуществляющего подсветку це-
ли лазерным лучом, поскольку при бомбометании с малых высот нельзя прово-
дить подсветку с самолета-носителя. В настоящее время именно согласованность
действий обеспечивающего самолета и носителя ограничивает возможности при-
менения бомб с полуактивными лазерными системами самонаведения. Этих не-
достатков лишены УАБ с телевизионными и тепловизионными координаторами
цели пассивного типа, которые могут реализовать принцип выстрелил—забыл.
Управляемые ракеты большой дальности
Ракета SLAM (Standoff Land-Attack Missile) является первой тактической УР,
на которой применяется приемник GPS. На конечном участке траектории поле-
та, когда за 60 с до попадания в цель включается тепловизионная ГСН, летчик
выбирает точку прицеливания и выводит на нее ракету.
75
При подготовке удара с использованием ракет SLAM с помощью карт, схем и
ЭВМ разрабатывается специальная компьютерная программа. Полетные данные
вводятся в ЭВМ для обработки предпусковых данных, где вся информация транс-
формируется в сигналы, применительно к различным бортовым системам ракет.
Затем информация вводится в загрузчики запоминающего устройства, в которых
в течение 8 ч может храниться до 64 программ профиля полета ракеты, сгруппи-
рованных в пакеты по четыре программы в каждом.
После ввода информации в ЗУ ракеты подвешиваются на самолет и каждый
загрузчик последовательно подключается к соответствующей ракете. Программы
полета вводятся в БЦВМ ракеты и находятся в электронно-стираемом програм-
мируемом постоянном ЗУ. На отработку плана предстоящей боевой операции с
применением ракет SLAM потребуется от 30 мин до 2 ч, на ввод информации в
ЭВМ для обработки подготовки предпусковых данных — около 30 мин, а для за-
полнения загрузчика ЗУ — 5 мин. До взлета ударного самолета бортовая аппара-
тура ракет принимает данные системы GPS, которые хранятся в памяти до 18 ч.
После взлета самолет выходит в точку задания начальных условий полета,
где приемники ракет начинают принимать сигналы ИСЗ системы GPS. Чем бы-
стрее будет получена спутниковая информация до пуска ракет, тем меньше по-
требуется времени на повторный прием сигналов системы GPS после пуска, что
позволяет осуществить корректировку данных о местоположении ракеты. Нави-
гация УР SLAM на маршевом участке траектории полета к цели осуществляется с
помощью системы GPS. В случае нанесения заранее запланированного удара ли-
ния передачи данных и ГСН приводится в действие на конечном участке траек-
тории за 1 мин до подлета ракеты к цели. В это время видеоизображение района
цели передается на борт специально выделенного самолета наведения или непо-
средственно на самолет-носитель. Оператор наведения управление ракетой осу-
ществляет с помощью рукоятки, используя линию передачи данных для выбора
приоритетной цели и «запирания» ГСН на точку прицеливания. При нанесении
удара по внезапно обнаруженной цели пуск ракеты осуществляется по данным
пеленга, ГСН включается в заранее запрограммированный момент времени, осу-
ществляя сканирование со скоростью 4 град/с до того момента, пока оператор не
обнаружит и не захватит цель.
Ракеты SLAM в ходе операции «Буря в пустыне» впервые были применены
18 января 1991 г. для поражения ГЭС. В состав ударной группы входили два само-
лета-носителя А-6Е (на каждом из них на внешних узлах подвески было по одной
ракете) и два самолета наведения А-7Е. Все самолеты взлетели с авианосца
«Джон Кеннеди» из состава оперативного соединения ВМС США в Красном мо-
ре. До начала боевых пусков ракет SLAM шесть летчиков авиакрыла этого авиа-
носца прошли ускоренную подготовку по применению нового оружия. Всего до
первого боевого применения ракет SLAM было произведено 10 испытательных
пусков. Удар по цели наносился в полном соответствии с методом, продемонст-
рированным при испытаниях опытного образца УР. Высокая точность оружия
позволила летчикам разрушить энергоустановку без повреждения примыкающих
к ней строений. Первая ракета пробила отверстие в стене корпуса энергоустанов-
ки ГЭС, а вторая через 2 мин была наведена в то же отверстие и уничтожила внут-
реннее оборудование здания. В ходе еще одной атаки две ракеты были выпущены
по зданию штаба ВМС Ирака. Одна ракета поразила цель, а вторая отклонилась
на несколько метров. Промах объясняется чрезмерным переутомлением операто-
ра оружия (он же летчик) самолета F/A-18. Остальные ракеты были преднамерен-
76
но введены в режим падения на землю, поскольку не удалось установить контакт
с соответствующими ИСЗ системы GPS.
Система GPS представляет собой глобальную систему космического базиро-
вания военного назначения, служащую для определения местоположения, ско-
рости и времени. Система состоит из орбитальной группировки (24 ИСЗ, из них
3 резервных), наземного комплекса управления и контроля (одна главная управ-
ляющая станция и 6 станций контроля) и приемной навигационной аппаратуры
потребителей.
Особую важность представляют такие характеристики и возможности систе-
мы, как точность, непрерывный режим работы, всепогодность определения мес-
тоположения в общей координатной сетке, быстродействие и синхронизация по
времени. Кроме того, при ведении боевых действий система GPS способствует
улучшению характеристик систем оружия за счет повышения устойчивости к
уводящим помехам и уменьшению уязвимости от радиоэлектронных помех.
Каждый искусственный спутник передает свои данные. Они периодически
корректируются основной станцией управления на основе информации, полу-
чаемой от пяти широко разнесенных одна от другой станций управления. Прием-
ник системы GPS автоматически выбирает соответствующие сигналы от необхо-
димого числа искусственных спутников, наблюдаемых в данный момент и соот-
ветствующих оптимальной геометрии взаимоположения спутников. Затем
аппаратура приемника (процессор) вычисляет разницу во времени прибытия сиг-
налов для определения расстояния между пользователем и искусственными спут-
никами. На основе этой информации определяется положение пользователя по
отношению к системе искусственных спутников. Каждый искусственный спут-
ник непрерывно передает сложный широкополосный сигнал.
Оборудование пользователя измеряет четыре независимых псевдодальности
и скорости их изменения и преобразует их в трехмерные данные положения, ско-
рости и времени.
Много примеров использования системы GPS было продемонстрировано в
ходе операции «Буря в пустыне». В частности, была установлена целесообраз-
ность использования этой системы в ходе боевых действий для целеуказания, ко-
ординации и управления действиями войск, включая действия в особых условиях
(десантно-диверсионные), а также при внесении поправок в полетные карты в
соответствии с новыми данными. ВВС США планируют оснастить все самолеты
сил специального назначения приемниками системы GPS.
Один из способов применения приемников GPS в зоне Персидского залива
связан с предварительной геодезической привязкой и размещением переносных
радиолокационных отражателей в точках, координаты которых затем сообща-
лись экипажам самолетов. Пилот самолета, не оснащенного приемником систе-
мы GPS, мог осуществить поиск отражателя и внести поправки в соответствии с
уточненными данными в бортовую инерциальную навигационную систему перед
атакой, используя свою РЛ карту местности.
Самолеты F-16, оснащенные приемниками системы GPS, применялись как
посты передового воздушного наведения. При пролете над целями летчик само-
лета F-16 отмечал их координаты с помощью индикации на лобовом стекле
(ИЛС), используя бортовые вычислители, определял точные координаты целей и
передавал их экипажам бомбардировщиков, не оснащенных приемниками GPS.
В ходе боевых действий против Ирака с оборудованных приемниками систе-
мы GPS вертолетов ВВС США MH-53J «Пэйв Лоу» на не оснащенные такими
77
приемниками армейские вертолеты АН-64 «Апач» передавались данные, необхо-
димые для занятия ими исходного положения и нанесения первого удара по
иракским позициям РЛС дальнего обнаружения. С вертолета МН-53 сбрасыва-
лись пачки элементов «Кемлит», чтобы обеспечить для вертолетов «Апач» визу-
альную отметку, указывающую точные координаты цели, и возможность выпол-
нения боевого захода на малой высоте. Когда вертолет «Апач» внезапно появлял-
ся над целью (после подхода к ней на предельно малой высоте с последующим
быстрым набором высоты), его летчик находил цель точно в том месте, где он
ожидал ее обнаружить.
Приемники системы GPS обеспечили для смешанных десантно-диверсион-
ных групп ВМС (подразделений боевых кораблей, морской авиации и морской
пехоты) высокую точность навигации, которая ранее была невозможна. Эти груп-
пы использовали приемники системы GPS также для выполнения боевых задач в
пустыне с применением вездеходов, оснащенных 12,7-миллиметровым пулеме-
том и реактивными гранатометами. Приемники системы GPS использовались
для поиска передвигающихся фронтовых частей и подразделений, для доставки
им пищи и даже для поиска источников воды.
Орбитальная структура системы строится таким образом, чтобы минимум
пять искусственных спутников находились в поле зрения каждого пользователя в
любой точке земного шара. Каждый искусственный спутник передает данные в
двух диапазонах частот: Lx и £2. На частоте Lx передается точный сигнал Р и не-
точный сигнал захвата С/А (Coarce Acquisition). На частоте £2 передается только
сигнал Р. На эти сигналы накладываются навигационные данные и данные сис-
тем, включая параметры искусственного спутника, поправки на атмосферное
распространение радиосигналов и информация о систематических ошибках
синхронизации искусственного спутника.
На станциях управления используются приемники системы GPS для пассив-
ного отслеживания всех наблюдаемых в данный момент спутников. Информа-
ция, поступающая со станций управления, обрабатывается на основной станции
управления для определения параметров орбиты спутников и корректировки на-
вигационной информации, обеспечиваемой каждым спутником. Эта скорректи-
рованная информация передается на искусственные спутники через наземные
антенны, которые предполагается также использовать для передачи и приема ин-
формации при управлении искусственными спутниками. Аппаратура пользова-
теля включает антенну и процессор приемника, которые обеспечивают данными
о положении, скорости и точном времени.
Крылатые ракеты
Опыт боевых действий в зоне Персидского залива показал, что боевые воз-
можности крылатых ракет (КР) при прорыве ПВО противника благодаря запуску
их за тысячи километров до цели и полету на очень малой высоте при незначи-
тельной ЭПР (около 0,05 м2, что в 400...500 раз меньше, чем у самолетов В-52 и
В-1 соответственно) и слабом ИК-излучении превышают возможности пилоти-
руемых бомбардировщиков типа В-1. Обычно КР являются не дополнением к
прорывающимся бомбардировщикам, а основным элементом смешанных бом-
бардировочных сил.
За первую неделю операции «Буря в пустыне» в районе Персидского залива
американские войска запустили свыше 240 крылатых ракет BGM-109C «Тома-
78
гавк» морского базирования, что составляет примерно 25 % от общего числа ра-
кет этого типа, состоявших на вооружении ВМС США до начала военных дейст-
вий. Из 52 ракет, запущенных 17 января 1991 г. в первом ударном эшелоне одно-
временно с пилотируемыми самолетами, 51 ракета поразила свои цели.
Ракеты «Томагавк» впервые массированно применялись для подавления или
уничтожения приоритетных целей, имевших сильную систему ПВО: стационар-
ных ЗРК, центров командования и управления, заводов по производству воору-
жения, складов оружия, центров по производству ядерного, химического и бак-
териологического оружия и т. д. В Багдаде ими были разрушены здание минис-
терства обороны Ирака, президентский дворец и центр связи. Применение КР по
целям, обороняемым мощной системой ПВО, было одной из мер, предпринятых
американским командованием для сокращения потерь авиации.
Вероятность поражения целей КР превысила 80%, хотя до начала боевых
действий у американского командования не было полной уверенности в том, что
в случае применения ракет в сложных погодных условиях будет достигнута высо-
кая точность стрельбы. Следует учесть, что ракеты впервые применялись ночью,
а на начальном этапе разработки цифровая оптическая корреляционная система
наведения на конечном участке траектории DSMAC при испытаниях в ночных
условиях работала плохо. По этой причине боевое применение КР ночью вначале
не предусматривалось.
Особой проблемой являлась координация ударов, наносимых одновременно
КР и пилотируемыми самолетами. Анализ результатов ранее проведенных испы-
тательных пусков КР «Томагавк» показал, что время их выхода на цели рассчиты-
валось с большим разбросом. Однако в 1990 г. во время учений флота и проведе-
ния испытаний на авиабазе ВМС в Фаллоне (шт. Невада) были получены данные,
которые позволили штабу многонациональных сил добиться точной координа-
ции действий при нанесении первого удара авиации по Ираку. Учения проводи-
лись в целях приобретения опыта по координации нанесения воздушных ударов с
применением пилотируемых самолетов и КР. В ходе учений для расчета времени
выхода ракет на цели использовались настольные ЭВМ со специально разрабо-
танным программным обеспечением.
В августе 1990 г. было проведено специальное учение, в ходе которого отра-
батывалось координирование нанесения имитируемого удара по наземной цели
самолетами ВМС и КР «Томагавк», запускаемыми из акватории Тихого океана.
К началу боевых действий командование ВМС провело аналогичные учения с
участием личного состава эскадрилий палубных ударных самолетов.
В боевых действиях применялись только ракеты BGM-109C «Томагавк», ос-
нащенные обычными фугасными БЧ массой 454 кг, используемыми на ракетах
«Булпап», и предназначенные для нанесения ударов по наземным целям. Для
полного уничтожения атакуемой цели по ней обычно производится пуск
двух-трех КР. Дальность полета ракеты составляет около 1300 км. Ракеты запуска-
лись с палубных защищенных контейнерных ПУ или установок вертикального
пуска 11... 13 надводных кораблей из состава оперативных соединений ВМС
США, дислоцирующихся в Персидском заливе и Красном море. Первая ракета из
подводного положения была запущена 19 января 1991 г. с атомной ударной под-
водной лодки (ПЛ) «Луисвилл», находившейся в Красном море.
На вооружении американских боевых кораблей из состава оперативного со-
единения, расположенного в Средиземном море, также имелись КР, однако при-
менение их для нанесения ударов по целям, расположенным на территории Ира-
79
ка, зависело от разрешения Сирии на пролет своего воздушного пространства.
В связи с этим КР «Томагавк» запускались по Ираку с ПЛ, находившейся в вос-
точной части акватории Средиземного моря. Ракеты пролетали над территорией
Турции и наносили удары по целям в северной части Ирака. Кроме линкора
«Висконсин», на котором имелись 32 КР «Томагавк», стрельбу КР вели еще
4—5 крейсеров, расположенных в зоне Персидского залива, и 8 крейсеров, дис-
лоцирующихся в районе Красного моря.
В операциях с пуском КР из торпедных аппаратов участвовали также амери-
канские атомные ударные ПЛ.
Надводные корабли и ПЛ — носители КР — получили приказы о примене-
нии КР до выхода их с баз. Это связано с тем, что во время нахождения носителей
КР в море очень трудно изменять или уточнять программу маршрутов полета ра-
кет, вводимых в память бортовой ЭВМ, поскольку программное обеспечение го-
товится в основном на береговых базах. По планам ВМС США лишь некоторые
боевые корабли предполагалось обеспечить системой планирования боевых опе-
раций после выхода с баз. Имелись возможности, хотя и ограниченные, передачи
во время перехода по морю через спутники уточненных данных целеуказания на
корабли. Однако оперативная передача с помощью спутников данных целеуказа-
ния для загрузки в память примерно 100 КР после выхода кораблей в районы за-
данной дислокации была бы весьма затруднительной.
На второй день операции «Лиса в пустыне» (1998 г.) с бомбардировщиков
ВВС США «В-52Н» впервые были запущены КР AGM-86C CALCM.
В военном отношении эта операция стала развитием форм и способов при-
менения ВС, которые были впервые опробованы в ходе войны в Персидском за-
ливе в январе — марте 1991 г. и последующих операциях против Ирака, босний-
ских сербов, Судана и Афганистана в 1993—1998 гг. Вместе с тем ей присущи и
новые черты.
Важнейшая из них состоит в том, что первые удары были нанесены без пред-
варительного развертывания дополнительных сил вблизи Ирака. По состоянию
на 16 декабря ВМС и ВВС США и Великобритании имели в регионе относитель-
но небольшую ударную группировку: одну авианосную многоцелевую группу
(АМГ); восемь крупных боевых кораблей (БК); 200 самолетов. По своим возмож-
ностям она не превосходила силы, развернутые накануне ударов по Судану и Аф-
ганистану (одна АМГ, 10 БК, 167 самолетов), уступала группировке, сформиро-
ванной вокруг Ирака в январе 1998 г., когда ожидалось очередное нападение на
эту страну (два АМГ, 14 БК, 190 самолетов) и была на порядок слабее, чем много-
национальные силы в 1991 г. (шесть АМГ, около 100 БК, 2100 боевых самолетов).
Американцы отрабатывали одну из главных задач, которую политическое ру-
ководство США ставит перед своими ВС: немедленно воздействовать на против-
ника в любой точке Земли без длительного развертывания сил, дислоцированных
на континентальной части США.
По сравнению с прежними вариантами КР этого семейства КР CLCM осна-
щены усовершенствованной системой наведения, связанной со спутниковой гло-
бальной навигационной системой GPS, обладают вдвое более высокой точностью
и поражающей способностью. Эти ракеты имели самые мощные БЧ из всех, ис-
пользовавшихся в операции «Лиса в пустыне». Дальность действия, составляю-
щая примерно 1200 км, позволила бомбардировщикам В-52Н запускать их про-
тив целей в Багдаде, не заходя в опасную зону действия иракских средств ПВО.
80
В процессе воздушной операции было поражено 100 целей, в большинстве
своем находившихся в центральных и южных регионах Ирака. При выборе це-
лей внимание было сосредоточено на объектах, предположительно связанных с
иракским оружием массового поражения, на комплексах инфраструктуры ко-
мандования и управления, а также на местах сосредоточения подразделений рес-
публиканской гвардии, наиболее лояльно настроенных по отношению к Багдаду.
Американские и английские самолеты широко применяли оружие с лазерным
наведением. Английские «Торнадо» выполнили 28 боевых заданий по доставке к це-
лям управляемых бомб с лазерным наведением. Американцы, в свою очередь, вы-
пустили по целям более 425 КР: около 90 КР воздушного базирования CALCM
(Conventional AirLaunched Cruis Missil) были запущены с бомбардировщиков В-52Н,
базировавшихся в Диего-Гарсия (Индийский океан), и более 325 КР «Томагавк»
стартовали с кораблей ВМС США, находившихся в Персидском заливе. Это означа-
ет, что выпущенное по Ираку число КР превысило уровень в 323 КР (35 CALCM 288
«Томагавк»), зафиксированный во время войны в Персидском заливе в 1991 г.
Эти 323 КР и примерно 600 бомб поразили 85% запланированных для них
целей, а 74% нанесенных ударов определены как успешные.
Элементы нового в тактике
Опыт применения ударных сил авиации в локальных войнах позволил вы-
явить элементы нового в тактике, которые следует рассматривать как «заявку» на
будущее. Нестереотипность тактических приемов выразилась в том, что их пре-
валирующей формой явился не ближний и даже не глубокий бой, а «дистанцион-
ная борьба» сторон. Так, свои основные задачи по достижению разгрома ирак-
ской армии в операции «Буря в пустыне» коалиционные силы решали не теми
традиционными способами, которые были выработаны в ходе Второй мировой и
последующих локальных войнах, а по-иному. Наиболее мощные удары по про-
тивнику они наносили, главным образом, авиацией и ракетами в сочетании с
электронным подавлением, избегали осуществления прорыва подготовленной
обороны противника, не вступали в затяжные, изнурительные ближние бои, не
допускали длительного пассивного противостояния в непосредственной близос-
ти с обороняющимися войсками.
Видимо, в данных способах боевых действий проявляются черты новой перс-
пективной тактики в виде дальнего («дистанционного») боя. Резонно возразить,
что это отнюдь не «диковинка» в военном искусстве. Стремление наносить удары
по противнику «издалека» возникло уже тогда, когда вооруженная борьба велась с
применением холодного оружия, а также таких дальнедействующих по тому вре-
мени летательных средств, как стрелы, копья, дротики, арбалеты, катапульты и
др. Однако в тот период это имело не основную, а лишь вспомогательную цель —
создать более выгодные условия для ведения рукопашного боя, в ходе которого
достигался разгром противника.
С появлением и развитием огнестрельного оружия дистанционное противо-
борство обострилось и стало одним из важных побудительных мотивов для все
большего увеличения дальности стрельбы артиллерии и стрелкового оружия.
Боевой опыт свидетельствует о том, что сторона, которая раньше другой ос-
нащалась более совершенными дальнобойными средствами борьбы, приобретала
явное превосходство над противником, а следовательно, и имела больше шансов
на успех.
81
В современных условиях глубокое огневое поражение сочетается с внезап-
ным воздушно-наземным ударом, мощным электронным подавлением против-
ника и стремительным маневром войск. Этому благоприятствует повышение ка-
чества средств «дистанционного» управления войсками и оружием, достигнутое в
результате широкого внедрения автоматизированных систем сбора и обработки
информации, а также роботизированных средств.
Следует отметить, что все эти и другие преобразования не просто повышают
роль дальнего боя, а превращают его в самостоятельный акт вооруженной борь-
бы, выдвигают в ряде случаев на первый план. Если, например, дальнее огневое
нападение артиллерии и удары авиации по глубоким резервам в ходе минувших
войн, несмотря на их эффективность, были не более чем эпизодом в общем
комплексе боевых действий, то сейчас нанесение ударов дальнобойными средст-
вами поражения в сочетании с глубоким воздушно-наземным маневром явилось
доминирующим средством достижения целей операции.
Сейчас авиационные соединения в состоянии решать ряд задач (разгром ре-
зервов противника, уничтожение воздушных десантов, рейдовых отрядов, воз-
душно-наземных тактических групп, отрядов глубинной разведки, диверсион-
но-разведывательных формирований за счет применения дальнобойных средств
поражения в сочетании с использованием воздушно-наземного ударного эше-
лона и эшелона «глубинных» действий (воздушно-штурмовых, рейдовых, об-
ходящих отрядов и групп) без ведения в ряде случаев затяжного ближнего боя.
В перспективе объем подобных задач, решаемых в дальнем бою, видимо, будет
увеличиваться. Соответственно будет неуклонно повышаться и удельный вес
«дистанционного» противоборства сторон.
Авиация в состоянии маневрировать в широком диапазоне, наносить внезап-
ные массированные удары по войскам и объектам на большом удалении от линии
фронта. Для этого командир должен располагать исчерпывающими данными о на-
личии авиационной группировки противника не только в полосе действий своего
соединения, но и далеко за ее пределами. Это относится и к оценке радиоэлект-
ронной обстановки. Используя как наземные, так и самолетные (вертолетные)
средства РЭП, противник может воздействовать на РЭС пунктов управления всех
командных инстанций и широко применять радиодезинформацию.
Одной из характерных черт дальнего боя является применение разнообраз-
ных тактических приемов разгрома противника. В основе решения командира на
бой должна лежать идея быстрого завоевания «электронно-огневой инициати-
вы», нанесения по противнику упреждающих электронно-огневых ударов, чтобы
добиться незамедлительного уничтожения его первоочередных объектов —
средств разведки, РЭБ, ПВО, систем ВТО, дезорганизовать систему управления
оружием и войсками, создать условия для высадки в тыл противника воздуш-
но-наземного эшелона для изоляции поля боя от притока резервов из глубины и
разгрома его группировок по частям. Подчеркнем, что в этих условиях фактор
времени имеет особую значимость. Искусство правильно использовать каждую
минуту так же важно, как и умение рационально распорядиться материальными
средствами.
Необходимо отметить, что планирование дальнего боя и организация взаи-
модействия в нем не укладываются в тыловую схему. Поэтому их следует осу-
ществлять поэтапно. Первый этап — обнаружение противника при выдвижении
в районы сосредоточения средствами воздушной и космической разведки, опре-
деление точных координат целей (объектов) и одновременное проведение мероп-
82
риятий по противодействию разведке, срыву электронно-огневого удара против-
ника. Второй этап — развертывание ударно-огневой, «электронной» группиров-
ки в удаленном районе, осуществление мероприятий по достижению скрытности
и внезапности действий, уничтожение тактических воздушных десантов, аэромо-
бильных и диверсионно-разведывательных групп противника в случае их высад-
ки. Третий этап — нанесение последовательных и одновременных электрон-
но-огневых ударов по противнику, создание условий для высадки в тыл против-
ника воздушно-ударного эшелона. Четвертый этап — сближение главных сил
сторон, последовательный ввод в действие огневых средств частей и подразделе-
ний, перерастание (при необходимости) дальнего боя в ближний, противодейст-
вие воздушно-наземному маневру противника.
ДАЛЬНИЙ бой — атрибут маневренных, динамичных военных действий, кото-
рые для современных условий (судя по опыту последних локальных войн) стано-
вятся все более характерными. Так, после войны в Корее (1950—1953 гг.) практиче-
ски не было войны, в которой длительное время существовал позиционный фронт
противостояния сторон. Например, в ходе арабо-израильских войн (1967 г.,
1973 г.), военных действий в Ливане (1982 г.), а также англо-аргентинского военно-
го конфликта (1982 г.) вооруженная борьба выливалась в дуэльное противоборство
авиации против средств ПВО, танков против танков и ПТУР и т. п.
Анализируя современные условия военных действий, можно предположить,
что наиболее часто предпосылки для дальнего противоборства будут создаваться
при ведении встречного боя, причем силы сторон будут стремиться воздейство-
вать друг на друга как можно раньше, используя удары авиации и максимальную
досягаемость имеющихся в соединениях огневых средств. Качественный уровень
в развитии средств поражения, разведки, РЭБ, управления, наземного и воздуш-
ного маневра, достигнутый в последние десятилетия, поднимает тактику ударной
авиации на .. г ° ступень.
1.3. Дальняя (стратегическая) авиация.
Ядерное сдерживание
На протяжении всего послевоенного периода в системе вооружений СССР и
РФ стратегические и дальние бомбардировщики играли и продолжают играть до-
статочно важную роль.
С помощью авиационных комплексов дальней авиации (ДА), способных на-
носить удары на большой дальности, обладающих высокой ударной мощью в
ядерном и неядерном оснащении, можно решить целый спектр задач от стратеги-
ческих до оперативных и тактических.
В составе ДА авиационные боевые комплексы с учетом тактико-технических
характеристик (ТТХ) и специфики назначения подразделяются на СТРАТЕГИЧЕ-
СКИЕ АВИАЦИОННЫЕ КОМПЛЕКСЫ (стратегические бомбардировщики или тяже-
лые бомбардировщики) и дальние авиационные комплексы (дальние бомбар-
дировщики).
После Второй мировой войны в СССР (РФ) был разработан ряд стратегиче-
ских (тяжелых) бомбардировщиков, среди которых следует выделить следующие
типы:
• Ту-95 (ОКБ им. А. Н. Туполева);
• М-4 и ЗМ (ОКБ им. В. М. Мясищева);
• Ту-160 (ОКБ им. А. Н. Туполева);
• дальние бомбардировщики Ту-16, Ту-22 и Ту-22М (ОКБ им. А. Н. Туполева).
Бомбардировщики ОКБ В. М. Мясищева входили в состав ВВС относи-
тельно недолгое время. Первый полет самолета М-4 состоялся в 1953 г. В 1955 г.
был разработан стратегический бомбардировщик ЗМ (первый полет 1956 г.).
Всего было построено 93 самолета М-4, ЗМ всех модификаций, в том числе
9 самолетов ЗМД со штангой топливоприемника системы дозаправки в воздухе.
В 1963 г. на базе бомбардировщиков ЗМ были разработаны топливозаправщи-
ки ЗМС-2 и ЗМН-2, которые эксплуатировались в ВВС до истечения срока служ-
бы [2]. В послевоенный период на вооружение были взяты в основном самоле-
ты ОКБ Туполева, в том числе в классе тяжелых бомбардировщиков Ту-95МС
и Ту-160 и в классе дальних бомбардировщиков Ту-22М.
Следует отметить, что указанные самолеты по своей сути являются сложны-
ми комплексами, включающими самолет-носитель, системы вооружения, комп-
лексы бортового электронного оборудования, системы обеспечения наземной
эксплуатации, системы обеспечения боевого применения, включая системы ин-
формационного обеспечения, планирования и подготовки полетных заданий,
поэтому речь и пойдет об авиационных комплексах дальней авиации.
84
1.3.1. АВИАЦИОННЫЕ КОМПЛЕКСЫ ДАЛЬНЕЙ АВИАЦИИ
1. Стратегические комплексы
В ретроспективном плане значимость стратегических бомбардировщиков в
роли стратегических вооружений менялась и была обусловлена развитием систем
их вооружений, изменениями в характеристиках и потенциале систем противо-
воздушной обороны вероятных противников, а также развитием альтернативных
комплексов стратегических вооружений (в частности, баллистических ракет
большой дальности действия наземного и морского базирования).
Стратегическая авиация как стратегическое оружие прошла путь от моно-
польной роли в начальный послевоенный период (после создания ядерного ору-
жия), минимальной — в 1970—1980-е годы, увеличения значимости после созда-
ния авиационных ядерных крылатых ракет большой дальности в 1990-е годы, сов-
ременного положения «равноправной» компоненты стратегической ядерной
триады и в перспективе — универсального высокоточного ударного средства в
ядерном и неядерном оснащении для применения в конфликтах различного уров-
ня (особенно в условиях прогнозируемого развития систем противоракетной обо-
роны (ПРО), потенциально снижающих эффективность баллистических ракет).
В настоящий момент стратегическая авиация совместно с другими стратеги-
ческими средствами (МБР и БРПЛ) обеспечивает синергетические свойства
стратегической ядерной триады РФ, устойчивость в меняющихся внешних (и
внутренних) военно-стратегических условиях.
Наиболее наглядно эволюция авиационной компоненты СЯС в СССР и Рос-
сии может быть прослежена на примере тяжелых бомбардировщиков: дозвуково-
го Ту-95МС и многорежимного сверхзвукового Ту-160.
Стратегический бомбардировщик Ту-95МС
Работы по созданию межконтинентального стратегического авиационного
комплекса линии Ту-95 начались в 1950 г. [3], тогда же состоялся первый полет
бомбардировщика «95-1». Межконтинентальность определялась как способность
достижения территории североамериканского континента и возвращения обратно.
В 1955 г. началось серийное производство бомбардировщика Ту-95 (макси-
мальная взлетная масса этого самолета 172 000 кг, двигатели НК-12 мощностью
12 500 л. с., практическая дальность полета 12 100 км). В 1957 г. начат выпуск бом-
бардировщиков Ту-95М, оснащенных более мощными двигателями НК-12М (4 х
х 15 000 л. с.). Самолет имел взлетную массу 182 000 кг, скорость полета 920 км/ч,
практическую дальность 13 200 км.
На базе бомбардировщика Ту-95 был разработан самолет-носитель крылатых
ракет Ту-95К. В 1958 г. на Куйбышевском заводе началось серийное производство
самолетов-носителей Ту-95К с КР Х-20, которое продолжалось до 1962 г. (принят
на вооружение в 1960 г.). Сверхзвуковая крылатая ракета большой дальности Х-20
разрабатывалась в ОКБ А. И. Микояна, ракета размещалась под фюзеляжем са-
молета в полуутопленном положении и предназначалась для поражения назем-
ных и морских целей. Установка на самолет крупногабаритных ракет на внешней
подвеске уменьшила дальность полета, и в 1958 г. было принято решение об осна-
щении самолетов системой дозаправки топливом в полете типа «шланг—конус»,
отработанной к тому времени на стратегических бомбардировщиках М-4В
В. М. Мясищева [4]. В 1962 г. начался выпуск серийных самолетов Ту-95КД со
85
штангой топливоприемника в носовой части фюзеляжа. Часть самолетов Ту-95К
также была доработана до уровня Ту-95КД. Далее была произведена модерниза-
ция бортового радиоэлектронного оборудования (БРЭО) самолета Ту-95КМ. В
1987 г. был принят на вооружение комплекс Ту-95К-22 с новой КР Х-22, имею-
щей автономную систему наведения и предназначенной для поражения авианос-
ных ударных групп и стационарных наземных целей.
В начале 1970-х годов в МКБ «Радуга» начались работы по созданию страте-
гических малогабаритных дозвуковых крылатых ракет большой дальности авиа-
ционного базирования, получивших впоследствии обозначение Х-55.
Оснащение бомбардировщиков крылатыми ракетами большой дальности
позволило за счет обеспечения пусков без входа в систему ПВО противника ре-
шить проблему выживаемости бомбардировщиков, которая обострилась в тот пе-
риод. Смещение функций преодоления системы ПВО с самолетов-носителей на
крылатые ракеты, способные обеспечивать полет на сверхмалых высотах и обла-
дающие значительно меньшей заметностью, позволило создать новый эффектив-
ный тип стратегических авиационных вооружений, решающих тактические зада-
чи на отдаленных театрах военных действий с эффективностью, не уступающей
эффективности других компонент СЯС.
Носитель этих крылатых ракет был создан на базе противолодочного самоле-
та Ту-142М, который в дальнейшем получил обозначение Ту-95МС (рис. 1.27).
Противолодочный самолет Ту-142 также относится к семейству самолетов Ту-95
и отличается от исходного прототипа большим фюзеляжем.
Созданный стратегический авиационный комплекс по сути был авиацион-
ным комплексом нового типа, оснащенным принципиально новым комплексом
вооружения и бортового электронного оборудования, позволившим решить зада-
чи высокоточного наведения крылатых ракет на больших дальностях и эффек-
тивного поражения целей при базировании в глубине своей территории.
Серийное производство самолетов началось с 1981 г. на Таганрогском авиа-
ционном заводе и с 1983 г. — на Куйбышевском авиационном заводе, на послед-
нем оно продолжалось до 1992 г.
На вооружение ДА стратегический бомбардировщик Ту-95МС был принят
в 1981 г.
Рис. 1.27. Бомбардировщик Ту-95МС
86
Самолеты строились в двух модификациях: самолет Ту-95МС6 с боекомп-
лектом из 6 ракет Х-55 на барабане внутри отсека вооружения и самолет
Ту-95МС16 с боекомплектом из 16 ракет Х-55, из которых 6 ракет размеща-
лись на барабане внутри отсека вооружения и 10 ракет — на внешней подвеске
на 4 подкрылевых пилонах. Вторых было произведено в 2 раза больше. Такое ко-
личественное соотношение этих бомбардировщиков во многом было обусловле-
но внешней «конъюнктурой» военно-политического противостояния периода
«холодной войны», в настоящее время в составе группировки имеются
бомбардировщики Ту-95МС с боекомплектом как из 6, так и из 16 ракет.
Стратегический бомбардировщик Ту-160
Работы по сверхзвуковому стратегическому многорежимному бомбардиров-
щику с крылом изменяемой геометрии Ту-160 начались в ОКБ А. Н. Туполева в
конце 1970-х годов. В рамках конкурса по новому бомбардировщику, проведен-
ного в 1972 г., были разработаны также предложения ОКБ В. М. Мясищева по
сверхзвуковому многорежимному стратегическому бомбардировщику М-18 и
ОКБ П. О. Сухого на базе самолета Т-4. По результатам конкурса был выбран
проект ОКБ Туполева, в том числе по соображениям наличия производственной
базы и задела в области самолетов подобного класса.
Самолет Ту-160 разрабатывался как многорежимный бомбардировщик, спо-
собный решать боевые задачи при использовании сложных профилей полета, в
том числе на сверхзвуковых скоростях и на малых высотах полета (в интересах
повышения выживаемости самолета в системе ПВО противника). Большое вни-
мание было уделено проблемам надежности и боеготовности, обеспечению высо-
кой предстартовой выживаемости на земле (быстроте покидания аэродрома бази-
рования по сигналу тревоги).
В условиях «холодной войны» этот самолет многими аналитиками рассмат-
ривался как ответ или альтернатива американскому бомбардировщику В-1, ко-
торый создавался примерно в тот же период времени. С учетом националь-
ной специфики бомбардировщик Ту-160 превосходит американский самолет
по основным летно-техническим характеристикам (ЛТХ), в том числе по даль-
ности и скорости полета, грузоподъемности и, соответственно, по взлетной
массе (табл. 1.2). Самолет был оснащен совершенным бортовым электронным
оборудованием, обеспечивающим возможность многоцелевого применения и
решения различных боевых задач, хотя впоследствии не все функциональные
возможности комплекса были по тем или иным причинам реализованы в полной
мере.
В качестве основного вооружения самолета Ту-160 рассматривались страте-
гические крылатые ракеты большой дальности типа Х-55, которые размещались
внутри фюзеляжа на барабанах в двух больших отсеках вооружения.
Первый полет самолета Ту-160 (рис. 1.28) состоялся в декабре 1981 г. Серий-
ное производство ведется с 1984 г. на Казанском АПО. В конце 1999 г. был пере-
дан ВВС один самолет Ту-160 (из ранее заложенных самолетов, находившихся в
высокой степени производственной готовности).
Первый самолет поступил в 184-й бомбардировочный авиационный полк,
который базировался на Украине (г. Прилуки), к концу 1991 г. в Прилуках нахо-
дилось 19 самолетов Ту-160. После распада СССР все они остались на Украине.
87
Рис. 1.28. Бомбардировщик Ту-160
После этого начались долгие политические споры с Украиной о судьбе этих само-
летов, поскольку Украина объявила себя неядерной державой и не должна иметь
стратегические вооружения.
В 1992 г. было принято решение о достройке самолетов Ту-160, находящихся
в заделе на серийном заводе (КАПО им. Горбунова), и о формировании на терри-
тории РФ в г. Энгельсе бомбардировочного полка ВВС РФ, оснащенного самоле-
тами Ту-160. К концу 1999 г. в его составе было 6 самолетов Ту-160. В настоящее
время на авиабазе в Энгельсе базируется 15 самолетов Ту-160, включая самолеты,
возвращенные в 1999 г. с Украины.
Самолет Ту-160 имеет нормальную аэродинамическую схему с крылом изме-
няемой геометрии (стреловидность может меняться в диапазоне 20...65°), в само-
лете реализованы уникальные конструктивные и компоновочные решения. Са-
молет оснащен двумя большими отсеками вооружения, оборудован системой до-
заправки в воздухе типа «шланг—конус» (в нерабочем положении штанга
убирается в носовую часть фюзеляжа). Бомбардировщик оснащен прицельно-на-
вигационным комплексом, БРЛС, оптико-электронным прицелом и другим обо-
рудованием, обеспечивающим автоматический полет, подготовку и боевое при-
менение ракетного и другого оружия. В состав вооружения Ту-160 может входить
до 12 ядерных КРВБ, размещаемых на многопозиционных ПУ барабанного типа
в отсеках вооружения.
Высокие характеристики самолета Ту-160 подтверждены 44 мировыми ре-
кордами, например полет по замкнутому маршруту протяженностью 1000 км с
полезной нагрузкой был выполнен со средней скоростью 1720 км/ч.
В табл. 1.2 приведены сравнительные ТТХ отечественных стратегических
бомбардировщиков и США, которые на протяжении многих лет рассматрива-
лись в плане военно-технического соперничества. Анализ этих данных показыва-
ет, что по основным тактико-техническим характеристиками (ТТХ) отечествен-
ные и американские тяжелые бомбардировщики имели сравнимые характерис-
тики [3, 7].
После распада СССР значительная часть стратегических бомбардировщиков
осталась за пределами России — на Украине (43 ТБ Ту-160 и Ту-95МС) и в Ка-
88
Таблица 1.2
Основные ТГХ стратегических бомбардировщиков РФ и США
Основные характеристики B-52G В-52Н В-1В В-2А Ту-95МС Ту-160
Экипаж, чел. 6 6 4 2 7 4
Взлетная масса, т 226,8 226,8 216 138,4 (153) 185 275
Максимальная боевая нагрузка, т 23 28,6 39 (52) 14,5 более 30 45
Максимальная скорость, км/ч 1050 1050 1700 900 850...905 2230
Крейсерская скорость, км/ч 800 800 850 750...800 700...750 900
Количество отсеков вооружения 1 1 3/2 1 1 2
Количество узлов внешней подвески 2 2 8 4
Максимальная высота полета, м 15 000 15 000 15 000 14 000 До 15 000 17 000
Дальность полета без дозаправки с нормальной боевой нагрузкой, км 11 600 15 000 до 13 000 11 000 10 500 до 14 000
Силовая 8ТРД 8ТРД 4ТРД 4ТРД 4 ТВД по 4ТРД
установка тяга, кг по 6200 по 7700 по 13 600 по 8650 15 000 л. с. по 25 000
Размах, м 56,39 56,39 23,84... 52,4 50,5 35,5...
Длина, м 49,05 48,03 41,67 44,81 21 46,9 55,7 52,37
Высота, м 12,4 12,4 10,36 5,5 13,3 13,1
захстане (28 ТБ Ту-95МС). Казахстан передал России все боеспособные тяжелые
бомбардировщики. Украина все имеющиеся на момент распада СССР на ее тер-
ритории стратегические бомбардировщики объявила собственными. Всего на
Украине остались 19 ТБ Ту-160 (на авиабазе в г. Прилуки) и 24 ТБ Ту-95МС (на
авиабазе Узин). Впоследствии часть самолетов была возвращена в Россию в счет
долга Украины, остальные должны быть ликвидированы.
В настоящее время группировка стратегических авиационных комплексов
РФ в составе 37-й Воздушной армии Верховного главного командования (страте-
гического назначения) включает два типа комплексов: Ту-160 и Ту-95МС [5].
Бомбардировщики устаревших модификаций Ту-95К и Ту-95К-22 к настоя-
щему времени ликвидированы.
Самолеты Ту-160 и Ту-95МС имеют достаточно высокий потенциал разви-
тия и совершенствования, что находит отражение в планах ВВС по модерниза-
ции и продлению ресурса этих самолетов. На Казанском авиационном производ-
ственном объединении им. Горбунова предполагается проведение планового ре-
монта и модернизации стратегических бомбардировщиков Ту-160 ДА. После
проведения этих работ самолеты Ту-160 смогут эксплуатироваться примерно до
2030 г. [6].
89
2. Дальние бомбардировщики
Этот класс бомбардировщиков в ретроспективном плане представлен само-
летами типов Ту-16 [6], Ту-22 и Ту-22М.
Первый полет Ту-16 состоялся в 1952 г. Серийное производство началось
в 1953 г. на КАПО и в 1954 г. — на Куйбышевском авиазаводе, серийное производ-
ство было завершено в 1963 г. До 1993 г. этот самолет состоял на вооружении ВВС.
Первый полет прототипа Ту-22 состоялся в 1959 г., принят на вооружение
в 1962 г., а первый полет Ту-22М-0 — в 1969 г. Серийное производство Ту-22М2
началось в 1972 г. (официально принят на вооружение в 1976 г.).
В отличие от стратегических бомбардировщиков самолеты этого класса не
обладают межконтинентальной дальностью и не оснащаются стратегическими
ядерными крылатыми ракетами.
В настоящее время на вооружении ВВС РФ и авиации ВМФ РФ имеются
дальние бомбардировщики Ту-22МЗ.
Самолет Ту-22МЗ продолжает линию самолетов Ту-22М. Первый полет са-
молета Ту-22МЗ состоялся в 1977 г., в 1983 г. — принят на вооружение. Серийное
производство разведывательной модификации самолета Ту-22МР малой серией
продолжается до сих пор.
Самолет Ту-22МЗ выполнен по нормальной аэродинамической схеме с кры-
лом изменяемой геометрии. Самолет имеет один отсек вооружения и до 5 узлов
внешней подвески. Ракетное вооружение этого самолета по сравнению со своим
предшественником значительно усилено: к крылатым ракетам Х-22МА добавле-
ны аэробаллистические ракеты (АБР) малой дальности (шесть АБР размещены
на барабанной многопозиционной пусковой установке в фюзеляже и еще
четыре — на внешних узлах подвески) [3, 7].
В 1985 г. на базе Ту-22МЗ создан разведывательный самолет Ту-22МР, пере-
данный в серийное производство в 1989 г. Разведчик, предназначенный для дей-
ствий на сухопутных и морских ТВД, имеет комплекс аппаратуры, включающий
РЛС бокового обзора, размещенную в гондоле под фюзеляжем, систему радио-
электронной разведки, тепловизионную разведывательную систему, а также сред-
ства фоторазведки. Аналогичным образом с 1994 г. были модернизированы в са-
молеты-разведчики и часть бомбардировщиков Ту-22М2.
Для самолета типа Ту-22М была разработана система дозаправки в воздухе ти-
па «шланг—конус», однако в соответствии с договором СНВ-1 для гарантирован-
ного отделения самолета от класса стратегических бомбардировщиков система до-
заправки была демонтирована и существующие самолеты Ту-22МЗ ее не имеют.
Самолеты Ту-22М2 и Ту-22МЗ принимали участие в боевых действиях в ходе
Афганской войны [8—10]. Впервые в 1984 г. в боях приняли участие Ту-22М2.
Осенью 1988 г. эти самолеты обеспечивали вывод частей 40-й армии из Афганис-
тана. Благодаря применению бомбардировщиков ДА (Ту-16, Ту-22МЗ), наносив-
ших удары бомбами массой до 9 т (Ту-22МЗ — до 3 т), удалось обеспечить отно-
сительно безопасные условия вывода частей 40-й армии. За успешные боевые
действия в Афганистане многие летчики, участвовавшие в боевых вылетах, полу-
чили высокие правительственные награды.
Самолеты этого типа имеются в составе ВВС и авиации ВМФ РФ. В резуль-
тате сокращения российской авиации в строю сохранятся лишь бомбардировщи-
ки Ту-22МЗ (рис. 1.29) и их варианты. Украина имеет в составе своих ВВС
55 самолетов типа Ту-22М. В составе морской авиации ВМФ РФ самолеты
90
Рис. 1.29. Бомбардировщик Ту-22МЗ
Ту-22МЗ предназначены для борьбы с надводными кораблями в варианте осна-
щения противокорабельными ракетами типа Х-22.
Имеющиеся на вооружении самолеты имеют достаточный ресурс, поэтому
ОКБ им. А. Н. Туполева продолжает работы по их модернизации, в том числе в
соответствии с общей линией развития военной авиации в направлении оснаще-
ния высокоточным вооружением.
3. Основные боевые задачи и способы применения
самолетов дальней авиации
В составе СЯС РФ тяжелые бомбардировщики дальней авиации должны
обеспечить возможность гарантированного нанесения ответного ядерного удара
с неприемлемым для противника ущербом.
В мирное время основными задачами стратегической авиации являются под-
держание боеготовности и обеспечение высокой предстартовой выживаемости.
Способы и механизмы обеспечения последней различны. Они включают в себя
рассредоточенное базирование на ряде аэродромов, а период кризисов боевое де-
журство на аэродроме в повышенной степени готовности к вылету и боевое де-
журство в воздухе. В кризисных ситуациях взлет бомбардировщиков может про-
изводиться по первым сигналам системы предупреждения о ракетном нападении
(СПРН) без окончательного подтверждения их достоверности, учитывая, что при
необходимости начавшийся боевой вылет бомбардировщика может быть прекра-
щен. В этом состоит важное и уникальное свойство кризисной устойчивости
91
авиационной компоненты СЯС на фоне других компонент, не обладающих этим
свойством.
При нанесении ответного удара объекты поражения на территории
противника определяются в соответствии с понятиями неприемлемого ущерба.
Перечень объектов поражения включает критические и уязвимые объекты воен-
ной и промышленной инфраструктуры противника, составляющие основу его
стратегического потенциала, для авиации это, в первую очередь, объекты про-
мышленного потенциала. Основной формой ведения боевых действий, как пра-
вило, является нанесение массированных ударов. Использование в качестве
средства поражения в ответном ударе ядерных крылатых ракет воздушного бази-
рования (КРВБ) большой дальности обусловливают необходимость тщательного
планирования боевого вылета и формирование соответствующего информацион-
ного обеспечения, в том числе эталонной информации для бортовых систем уп-
равления крылатых ракет, включая системы корреляционно-экстремальной на-
вигации и системы конечного наведения. Планирование боевого применения
авиационных комплексов и подготовка полетных заданий осуществляются с ис-
пользованием специальных автоматизированных наземных комплексов, вклю-
чающих программные и компьютерные средства с развитой системой визуализа-
ции и интерактивным интерфейсом, коммуникационные и информационные
средства и др. Боевой вылет бомбардировщика включает в себя полет в заданный
район пуска крылатых ракет.
Вследствие специфики боевого применения предполагаются высокие требо-
вания по точности навигации и по дальности полета. В зависимости от потреб-
ной дальности до зон пуска ракет возможно осуществление дозаправки бомбар-
дировщиков в воздухе от самолетов-заправщиков Ил-78. Профиль полета бом-
бардировщиков с учетом конкретных условий боевого применения может быть
комбинированным и включать участки маловысотного или сверхзвукового (для
самолета Ту-160) полета. В зонах пуска обеспечивается координированный пуск
крылатых ракет, осуществляющих управляемый полет к целям в заданных боевых
порядках на сверхмалых высотах.
Боевое применение бомбардировщиков дальней авиации в локальных
и региональных конфликтах определяется их способностью решать разнооб-
разные боевые задачи на больших дальностях. Среди боевых задач на сухопутных
ТВД с применением дальней авиации могут быть выделены следующие задачи:
• снижение боеспособности вооруженных сил и военно-промышленного по-
тенциала противника путем поражения основных ключевых объектов управ-
ления ВС и страной, объектов военного и промышленного комплекса,
транспортных коммуникаций и средств связи;
• изоляция района боевых действий для воспрещения подхода резервов и ог-
раничения маневра сил и средств противника в рамках ТВД путем нанесения
ударов по базам, складам, коммуникациям, живой силе и технике в местах
сосредоточения и на марше.
Способы боевого применения бомбардировщиков зависят от типа используе-
мого вооружения, в том числе от типа системы наведения и дальности пуска. В за-
висимости от дальности полета используемого оружия применение бомбардиров-
щиков возможно как с входом в зону действия ПВО противника, так и без входа.
Способы применения высокоточных неядерных крылатых ракет большой
дальности во многом схожи с применением стратегических крылатых ракет. Дан-
ные о местонахождении цели и характере выполняемой задачи вводятся в ракету
перед пуском. После пуска ракета осуществляет автономный полет, в том числе с
92
использованием коррекции от спутниковой навигационной системы. Принци-
пиальным моментом в реализации высокой точности наведения управляемых ра-
кет класса «воздух—поверхность» является наличие высокоточного целеуказания
и достоверной идентификации целей. Это является главным условием успеха
ударов с использованием неядерных КР большой дальности. Применение не-
ядерных КР большой дальности планируется к применению на начальных этапах
конфликта для ударов по критически важным целям, расположенным на всей
глубине ТВД, в том числе по целям в наиболее обороняемых районах, при этом
пуски КР осуществляются, как правило, без входа носителей в зону ПВО против-
ника, в том числе без пересечения его границ.
В условиях систематических боевых действий и использования оружия
меньшей дальности боевое применение пилотируемой ударной авиации осу-
ществляется в рамках воздушных операций, предполагающих совместные дейст-
вия с различными комплексами: самолетами ДРЛО, авиационными и космиче-
скими средствами разведки, самолетами-заправщиками, истребителями прикры-
тия и самолетами радиоэлектронной борьбы. Планы подобных операций обычно
включают в себя реализацию скоординированных ударов по глубине и фронту,
первых ударов, направленных на подавление сил и средств ПВО и т. п.
Применение самолетов ДА на морских театрах при взаимодействии с силами
ВМФ связано с решением задач поражения надводных кораблей противника раз-
личных классов. Объектами воздействия являются надводные корабли, дейст-
вующие одиночно, в составе корабельных групп или авианосных соединений.
В условиях конфликта действия ударных комплексов ДА могут происходить в ус-
ловиях активного информационного и огневого противодействия противника.
Применение авиационного противокорабельного оружия связано, во-первых, с
обнаружением цели и осуществлением целеуказания, во-вторых, с выходом са-
молета в зону пусков и применением оружия. Этап обнаружения и целеуказания
может осуществляться как с помощью бортовых информационных средств удар-
ных самолетов ДА (бортовой РЛС и других бортовых информационных средств),
так и во взаимодействии с внешними источниками целеуказания, информация
которых передается на борт по каналам радиосвязи.
Рис. 1.30. Поражение наземных объектов самолетами Ту-22МЗЭ
93
Значительное количество
доставленных к объектам
средств поражения (до 96 т)
Возможность поражения
большого типажа объектов
противника
Возможность применения в
вылете ракетного, бомбового
и минного вооружения
Железнодорожные
мосты (до 12 ед.)
Машинный зал ТЭЦ, цеха
заводов и т.д. (до 12 ед.)
Плотины ГЭС,
дамбы (до 3 ед.)
Рис. 1.31. Огневая мощь группы самолетов Ту-22МЗМЭ (4 ед.)
На рис. 1.30 и К31 приведены принципиальные возможные схемы боевого
применения бомбардировщика Ту-22МЗ (на примере экспортного варианта са-
молета Ту-22МЗ).
1.3.2. РОЛЬ СТРАТЕГИЧЕСКОЙ АВИАЦИИ
В СОСТАВЕ СТРАТЕГИЧЕСКИХ СИЛ
Стратегическая авиация в составе СЯС РФ выполняет функцию стратегиче-
ского сдерживания и является одной из основных составляющих обычной мощи
ВС РФ большой дальности действия (на сухопутных и морских ТВД) в конфлик-
тах различного уровня.
1. Стратегическая стабильность и стратегическое сдерживание
Со времен холодной войны ядерное сдерживание остается краеугольным
камнем стратегии предотвращения ядерной войны и широкомасштабной войны
с применением обычного оружия. Ядерное сдерживание основано на способнос-
ти нанесения неприемлемого ущерба противнику в ответ на его агрессию (в том
числе нанесение первого ядерного удара).
СТРАТЕГИЧЕСКАЯ СТАБИЛЬНОСТЬ основана на обоюдной способности каждой
из сторон к нанесению в ответных действиях неприемлемого ущерба другой стороне.
Разрушительная мощь ядерного оружия и возможность его глобальной до-
ставки с использованием различных носителей позволили создать исключительно
надежное средство сдерживания, которое материализовано в виде стратегических
ядерных сил РФ. Считается, что гипотетически задача по защите РФ от угроз при-
94
менения против нее ядерного оружия в совокупности решается с меньшими затра-
тами при наличии ядерных сил сдерживания, нежели при их отсутствии.
В новых геополитических и военно-стратегических условиях согласно ут-
вержденной концепции национальной безопасности РФ продолжает политику
ядерного сдерживания, пока ядерное оружие имеется у других государств, могу-
щих рассматривать его использование против РФ. Более того, реалии последнего
периода, в том числе рост мощи обычных вооружений НАТО, вынудили РФ
включить в ядерную доктрину принцип «применения ядерного оружия первыми
в случае необходимости», чтобы сдержать крупномасштабные действия с приме-
нением неядерного оружия. Следует отметить, что НАТО всегда придерживалось
в своей доктрине последнего принципа, хотя в современных условиях он многи-
ми аналитиками считается явно излишним.
Ядерное сдерживание — сложная категория, обремененная массой дилемм и
опасностей. Сдерживание может быть эффективно только в том случае, когда
имеются реальные и убедительные схемы применения ядерного оружия, в том
числе при нештатных ситуациях. Построение таких схем чрезвычайно затрудни-
тельно, а попытка поднять степень угрозы ядерного возмездия может быть расце-
нена как стремление к ядерному преимуществу другой стороны. Все это чревато
опасностями усиления международной напряженности, стимулирования гонки
вооружений и увеличения угрозы ядерной войны в случае кризиса или аварии.
Договор по ПРО от 1972 г. на протяжении долгого периода играл важную
роль в сфере сокращения ядерных наступательных вооружений. Это обусловлено
тесной взаимосвязью стратегических наступательных и оборонительных воору-
жений.
До тех пор пока стороны придерживаются принципов ядерного сдержива-
ния, их даже уменьшенные (в соответствии с договорами по СНВ) по численнос-
ти ядерные наступательные вооружения должны продолжать обеспечивать обо-
юдную способность нанесения неприемлемого ущерба в ответных действиях. Од-
ностороннее наращивание системы ПРО одной из сторон снижает возможности
другой стороны в части нанесения неприемлемого ущерба и поэтому является
дестабилизирующим фактором, нарушающим достигнутый на пониженном
уровне баланс стратегических наступательных вооружений.
На Западе в настоящее время дискуссия о новой роли ядерного оружия ве-
дется в контексте расширения роли ядерного оружия сверх выполнения основ-
ной функции — сдерживания ядерного конфликта, при этом констатируется, что
в современных условиях международной обстановки угроза ядерного конфликта
не является актуальной. Более актуальной является проблема сдерживания
и участия в региональных конфликтах, где под угрозой могут находиться насущ-
ные интересы ядерных держав или интересы их союзников. В них на первое мес-
то выдвигаются обычные средства нового поколения — высокоточные неядер-
ные средства, в том числе размещаемые на стратегических авиационных носите-
лях. Наряду с этим на Западе активно прорабатываются концепции использо-
вания ядерного оружия сверхмалой мощности в качестве средства ведения
обычной войны, но перспективы создания такого ядерного оружия весьма
проблематичны.
Эти тенденции имеют место, однако неопределенности и противоречия в
мире не позволяют в настоящее время полностью отказаться от ядерного оружия,
которое продолжает оставаться гарантом безопасности и стратегической стабиль-
ности.
95
Важность ядерного оружия для России (в системе ее национальных средств)
в современный период не уменьшилась. Более того, после окончания холодной
войны Россия и НАТО в определенном смысле поменялись местами. Если во вре-
мена холодной войны недостаточная мощь обычных сил служила причиной опо-
ры блока НАТО на ядерное сдерживание, то сейчас Россия не является «лидером»
по обычным вооружениям как Европе, так и в мире, поэтому концепция ядерно-
го сдерживания (в том числе с возможностью применения ядерного оружия пер-
выми) является одним из инструментов обеспечения ее безопасности.
Учитывая, что в ближайшей перспективе полный отказ от ядерного оружия
нереален, договорный его контроль необходим и сам факт продолжения договор-
ного процесса является стабилизирующим фактором.
2. Договорный процесс в области стратегических наступательных
вооружений и его влияние на развитие стратегической авиации в РФ
В ретроспективном плане важную роль в обеспечении международной без-
опасности играет договорный процесс в области стратегических наступательных
и оборонительных вооружений, который находится в диалектической связи с раз-
витием этих вооружений.
Начало договорного процесса в области стратегических наступательных во-
оружений связано с Договором ОСВ-2 (1979 г.) и Договором по ограничению сис-
тем ПРО [11, 12].
Эти договоры разрабатывались в период «холодной войны» и заложили осно-
вы будущих договоров. Они стали результатом общего понимания, что дальней-
шее неограниченное наращивание ядерных вооружений чревато непоправимыми
для существования всего человечества последствиями.
Эти договоры ввели некоторые количественные и качественные ограниче-
ния на стратегические вооружения, при этом меры контроля базировались в ос-
новном на национальных средствах.
С окончанием «холодной войны» и произошедшими преобразованиями
международного политического ландшафта, изменениями внешнеполитических
проблем и возможностей начался новый этап американо-советского сотрудниче-
ства в области сокращения ядерных вооружений. Для России этот период был ос-
ложнен внутренними политическими и социально-экономическими трудностя-
ми и преобразованиями.
Договор СНВ-1
Договор по сокращению стратегических вооружений — СНВ-1 (START I)
был подписан в 1991 г.
Согласно договору США и Россия к концу срока реализации должны умень-
шить число стратегических ядерных боеголовок, развертываемых двумя страна-
ми, с 13 000 и 11 000 соответственно до 6000 зачетных единиц с каждой стороны.
Концептуальной основой договора стало установление количественного па-
ритета стратегических ядерных сил, измеряемого в терминах численности ядер-
ных боезарядов сторон. Общая численность ядерных боезарядов сторон ограни-
чена 6000 развернутых ядерных боезарядов, при этом также определен подуро-
вень в 4900 ядерных боезарядов, размещенных на баллистических носителях
(МБРи БРПЛ).
96
Для боезарядов, размещаемых на авиационных носителях, стороны смогли
договориться об использовании достаточно сложной непрямой схемы зачета.
В рамках Договора СНВ-1 устанавливается несколько категорий самолетов-
носителей — тяжелых бомбардировщиков, в том числе оснащенных:
• для ядерных ракет малой дальности (РМД) (дальность до 600 км);
• для ядерных крылатых ракет воздушного базирования;
• для неядерных вооружений.
Для каждой категории ТБ были установлены зачетные численности ядерных
боезарядов:
• ТБ, оснащенный для ядерных РМД, засчитывается как 1 ядерный боезаряд;
• ТБ, оснащенный для ядерных КРВБ, засчитывается для США как 10 ядер-
ных боезарядов, при этом фактически на ТБ не может быть размещено более
20 КРВБ, для РФ как 8 ядерных боезарядов, при этом фактически на ТБ не
может быть размещено более 16 КРВБ.
В результате с учетом того, что договорная квота для баллистических ракет
(наземных и подводных лодок) в составе СЯС РФ традиционно «выбирается»
полностью, Договор СНВ-1, исходя из численности боезарядов, ограничил чис-
ленность ТБ РФ 137 тяжелыми бомбардировщиками (1100 зарядов при зачетной
величине на каждом ТБ 8 единиц).
Кроме того, были определены прямые ограничения на численность ТБ для
США не более 150, для РФ не более 180, в рамках которых действует обозначен-
ная зачетная схема численности ядерных боезарядов. Сверх этих пределов учиты-
вается максимальный реальный боекомплект размещаемых на ТБ боезарядов.
В договоре был определен достаточно большой перечень ограничений и ус-
ловий для авиационной компоненты, введены:
• понятие тяжелого бомбардировщика и бомбардировщика каждого типа, по-
нятие крылатой ракеты того или иного типа (ядерной и неядерной);
• запрет на создание ТБ на базе широкофюзеляжного самолета (не созданного
с самого начала как бомбардировщик);
• реестр отличительных признаков для ТБ различных категорий и крылатых
ракет (если созданы на одной базе);
• численные ограничения на бывшие, в том числе неядерные, ТБ.
Договор СНВ-1 дает определенные преимущества США в части авиационной
компоненты, в первую очередь это касается льготной схемы зачета ТБ с ядерными
РМД. Эта «льгота» может быть реализована только США, учитывая наличие у них
группировки самолетов В-1В численностью до 95 самолетов, которые согласно до-
говоренности были отнесены к категории ТБ с РМД (хотя фактически этот тип са-
молета был испытан с ядерными КРВБ ALCM AGM-86B). При размещении на са-
молете В-1В РМД, например типа SRAM (боекомплект самолета 24 ракеты), с уче-
том наличия системы передового базирования и возможности выполнения задания
без возвращения на свою территорию, фактически в авиационной компоненте мо-
жет быть примерно на 2000 ядерных боезарядов больше, чем зачетное.
Отмеченное обстоятельство составляло одну из негативных проблем Догово-
ра СНВ-1, которая наряду с рядом других, связанных с резкими ограничениями
МБР, являлась причиной его острой критики.
В Договоре СНВ-1 были определены достаточно строгие и детальные схемы
взаимного контроля на уровне инспекций, постоянного наблюдения, показов
и т. п. При этом фактически контролировались и сокращались носители (БР, ТБ),
число которых определялось с использованием зачетных схем. Вопрос контроля
4 Авиация ВВС России и научно-технический прогресс
97
и уничтожения ядерных боеголовок прямо не ставился, каждая сторона решала
его самостоятельно.
Начало реализации и утверждения Договора СНВ-1 совпало с распадом
СССР. Ядерные вооружения СССР оказались на территории четырех стран, об-
разовавшихся на его территории (России, Украины, Белоруссии и Казахстана).
Правоприемницей СССР как ядерной державы стала Россия, тем не менее всеми
этими странами было подписано Лиссабонское соглашение об ответственности
за реализацию договора. Договор СНВ-1 имеет срок действия до 2009 г.
С учетом фактора распада СССР и фактической невозможности его выпол-
нения одной Россией, негативной позиции, занятой Украиной в отношении ос-
тавшихся на ее территории ядерных вооружений (в том числе ТБ), а также для
устранения неприемлемых для РФ проблемных вопросов были форсированы пе-
реговоры по Договору СНВ-2.
Договор СНВ-2
Договор СНВ-2 был подписан в 1993 г., ратифицирован США в начале 1996 г.
и Россией — в 2000 г. При этом условием ратификации Россия выставила требо-
вание дополнительной ратификации США подписанного в 1997 г. Протокола к
Договору СНВ-2 о продлении срока реализации договора до 2007 г. (вместо ранее
определенного 2003 г.) и сохранения Договора по ПРО от 1972 г. [12]. США отка-
зались ратифицировать этот Протокол и Договор СНВ-2 не вступил в силу.
В Протоколе к Договору СНВ-2 зафиксировано достигнутое на встрече в
верхах в Хельсинки соглашение о продлении срока достижения окончательного
уровня СНВ, установленного договором. Цель поправки — учет возражения Рос-
сии о том, что график выполнения договора нецелесообразен и нереален.
Договор СНВ-2 предполагал дальнейшее сокращение количества разверну-
тых стратегических ядерных боезарядов до уровня 3000...3500 у каждой стороны.
Помимо снижения уровней вооружений, в договоре запрещались все наземные
стратегические баллистические ракеты с разделяющимися головными частями
индивидуального наведения (РГЧ ИН), в наземной компоненте допускались
только моноблочные БР.
Достижением Договора в части авиационной компоненты был переход к схе-
ме реального зачета ядерных боезарядов (по фактическому боекомплекту), одна-
ко США добились в этой сфере сохранения односторонних преимуществ. В дого-
воре было определено, что ТБ, оснащенные для ядерных РМД, могут быть пере-
ориентированы на неядерные задачи без фактического их переоборудования. Это
положение позволяет вывести из ядерного зачета существующую группировку
бомбардировщиков В-1В (фактически способных принимать ядерное оружие,
включая ядерные КРВБ). При этом Договор СНВ-2 допускает их возвращение в
ядерный зачет, если соответствующая сторона посчитает это необходимым. Но-
вейшие малозаметные ТБ типа В-2А объявлены неядерными, в ядерном эшелоне
остаются ТБ В-52Н с КРВБ.
В РФ такой категории ТБ нет, имеющиеся ТБ с ядерными КРВБ могут быть
переведены в неядерные только после проведения переоборудования с после-
дующими процедурами показов и без возможности обратного переоборудования.
Это, а также проблема уменьшения числа боезарядов на БРПЛ без уничтожения
платформ боеголовок породили негативную для РФ проблему так называемого
«возвратного потенциала», которая явилась одной из причин долгой нератифи-
кации Договора СНВ-2 Госдумой РФ.
98
После Договора СНВ-2 руководители США и РФ неоднократно подтвержда-
ли свою приверженность дальнейшему договорному процессу в области СНВ.
В Хельсинки в марте 1997 г. Президенты США и РФ Б. Клинтон и Б. Н. Ельцин
пришли к соглашению о разработке и последующему подписанию Договора
СНВ-3, был определен уровень 2000...2500 развернутых стратегических ядерных
боеголовок, что считалось вполне реальным и достаточным. Следующие админи-
страции США и РФ определили уровень в 1700...2200 ядерных боезарядов.
Договор о сокращении стратегических наступательных потенциалов
России и США и дальнейший договорный процесс
Вплоть до 2002 г. велись консультации об основных параметрах Договора
СНВ-3. Стороны обменялись предварительными соображениями о содержании
договора. Для РФ было важно в ходе продолжения договорного процесса по СНВ
добиться снятия проблемных вопросов предыдущего договора, которые многими
политиками в РФ расцениваются как неравноправные и односторонние, в том
числе решение проблем «возвратного» потенциала и переориентирования ТБ на
неядерные задачи и др. Согласно имеющимся данным, США большое внимание
уделяли вопросам повышения транспарентности в ядерной области и обеспече-
ния контроля за ядерными боеголовками (в предыдущих договорах их контроль
осуществлялся непрямым способом, в отличие от контроля за средствами достав-
ки). Контроль числа неразвернутых и нестратегических ядерных боеголовок, в
частности, требует мер открытости и свободного доступа к получению информа-
ции по производству, хранению и демонтажу ядерных боеголовок, а также нали-
чия механизма для обмена и проверки информации относительно расположения
и состояния боеголовок. Более того, в начале переговорного процесса по СНВ-3
США и РФ находили общее понимание в этой части. На российско-американ-
ском саммите в Хельсинки в 1997 г. президенты США и России согласились, что
договор СНВ-3 будет включать «меры, относящиеся к инвентаризации ядерных
боеголовок и уничтожению стратегических ядерных боеголовок, и любые другие
согласованные технические и организационные меры, чтобы способствовать не-
обратимости существующих сокращений, включая недопущение быстрого увели-
чения количества боеголовок».
С приходом в США к власти администрации президента Дж. Буша (младше-
го) ситуация вокруг договорного процесса по Договору СНВ-3 изменилась. Пос-
ле террористических актов 11 сентября 2001 г., а также с учетом уменьшения
ядерного противостояния между нашими странами в США сменились воен-
но-стратегические приоритеты. В рамках пересмотра общей политики обеспече-
ния национальной безопасности США изменяется точка зрения на роль ядерного
оружия. Как следует из доклада по новой национальной стратегии США (страте-
гии Рамсфелда), в предстоящие 25 лет планируется структурная перестройка во-
оруженных сил США, в том числе создание новой стратегической триады. Если
классическая стратегическая триада состояла из МБР (наземного базирования),
БРПЛ (морского базирования) и ТБ (авиационной компоненты), то новая триада
наряду с «классической триадой» включает такие новые компоненты, как проти-
воракетная оборона и высокоточное оружие (средой для этих компонент должна
стать глобальная система управления, разведки, связи и планирования). При этом
было объявлено о планируемом до 2012 г. снижении стратегических ядерных во-
оружений до уровня 1700...2200 ядерных боезарядов. Россия ранее (в 2000 г.) заяв-
ляла о допустимом уровне снижения до 1500 ядерных боезарядов.
99
В 2002 г. был юридически подписан обязывающий Договор о сокращении
ядерных потенциалов США и РФ, предполагающий сокращение в течение 10 лет
их ядерных потенциалов до уровня 1700...2200 ядерных боезарядов у каждой из
сторон без наложения дополнительных ограничений или условий на стратегиче-
ские средства, при этом полагается, что этот договор будет существовать парал-
лельно с Договором СНВ-1 (действующим до 2009 г.). Вместе с этим новый дого-
вор носит противоречивый характер в отношении предмета договора, правил за-
чета вооружений, отсутствия взаимосвязи стратегических наступательных и
оборонительных вооружений, допускает складирование сокращаемых боезарядов
и др. В договоре по настоянию США в отличие от действующего Договора СН В-1
в качестве предмета договора рассматриваются оперативно развернутые стратеги-
ческие ядерные боезаряды, под которыми понимаются только ядерные боезаря-
ды, находящиеся на боеготовых стратегических носителях.
В 2002 г. США отказались от Договора СНВ-2 и Договора по ПРО от
1972 года.
Договор по ПРО от 1972 г. фактически запрещал создание системы ПРО как
дестабилизирующего фактора в деле поддержания стратегической стабильности,
который признавался всеми странами (в том числе формула о существовании
объективной взаимосвязи между оборонительными и наступательными стратеги-
ческими вооружениями). Вопрос модификации Договора по ПРО давно подни-
мался США. В поисках компромисса в 1997 г. была достигнута договоренность о
разграничении системы ПРО на тактическую и стратегическую. Однако нынеш-
няя администрация США, учитывая сложившуюся ситуацию, в том числе невоз-
можность РФ соперничать с США в военной области, и тенденции перехода к од-
нополярному миру, полностью отказалась от Договора по ПРО от 1972 г., имея в
виду долгосрочные планы создания полномасштабной системы ПРО. Выход
США из Договора по ПРО не привел к активному противодействию РФ и возвра-
щению к гонке стратегических вооружений. Это обусловлено причинами эконо-
мической слабости, а также технической проблемности создания системы ПРО,
способной существенно повлиять на эффективность российского ответного уда-
ра, в обозримой перспективе, что активно декларируется также американцами,
которые заявляют, что их система ПРО будет ограниченной и не будет представ-
лять угрозу российскому потенциалу сдерживания. На сегодняшний день адми-
нистрация США не связана никакими международно-правовыми ограничениями
в области создания систем ПРО.
В новых условиях в США отчетливо прослеживается тенденция отказа от ка-
кого-либо договорного режима в сфере стратегической стабильности. Перспек-
тивы дальнейшего обсуждения проблем ядерных вооружений на двусторонней
основе весьма туманны, действенных стимулов для продолжения переговорного
процесса нет.
Следует отметить, что после исчезновения биполярной системы не удалось
создать соответствующей структуры международной безопасности на глобальном
и региональных уровнях. Изменение баланса экономической мощи этих стран
начинает все более явно отражаться на соотношении сил в военной сфере.
Поддержание стабильности в многополярном мире, где вместо двух сверх-
держав активно защищает свои интересы десяток центров силы, является более
сложной задачей.
100
1.3.3. РОЛЬ СТРАТЕГИЧЕСКИХ
АВИАЦИОННЫХ КОМПЛЕКСОВ В БУДУЩЕМ
До сих пор при планировании развития отечественной стратегической ави-
ации приоритет отдается первой ее функции — функции ядерного сдерживания,
согласно которой в составе стратегических сил сдерживания авиация должна
обеспечивать гарантированное нанесение ответного ядерного удара с неприемле-
мым для противника ущербом (в составе СЯС). Для реализации этой функции
должны обеспечиваться высокая степень готовности к применению оружия, вы-
сокие уровни предстартовой выживаемости, выживаемости в системе ПВО и вы-
сокая эффективность поражения стратегических целей на территории вероятного
противника. Основной формой боевого применения в ответных действиях явля-
ется нанесение массированных ударов.
С позиций стратегической стабильности стратегическая авиация как средство
сдерживания обладает рядом уникальных свойств, в том числе невозможностью
нанесения упреждающих контрсиловых ударов, а также кризисной устойчивостью
(в частности, способностью прекращения выполнения начавшегося боевого зада-
ния). При ведении договорного процесса по СНВ-1 и СНВ-2 особое внимание
США в части сокращения или ограничения тех или иных видов вооружений уде-
ляли тем параметрам договора, которые оказывали наибольшее влияние на стра-
тегическую стабильность. В соответствии с этим критерием сокращению подверг-
лись наземные МБР с РГЧ и в значительно меньшей степени авиация и БРПЛ.
В военно-политических и академических кругах США сложилась единая точка
зрения о том, что вооруженные силы развитых стран уже вступают в эпоху новой ре-
волюции, в основе которой лежит массовое внедрение в военное дело научно-техни-
ческих достижений, обеспечивающих создание принципиально новых информаци-
онно-управляющих систем, разведывательно-ударных комплексов большой даль-
ности, боевых машин-роботов и других высокоэффективных средств борьбы. При
этом считается, что в перспективе в боевых возможностях вооруженных сил про-
изойдет скачок, сравнимый по значению с изменениями, которые произошли в
1950-х годах, в связи с поступлением на вооружение ракетно-ядерного оружия. Аме-
риканское военно-политическое руководство придает большое значение развитию
своих вооруженных сил в соответствии с современными требованиями, понимая,
что в складывающейся геостратегической обстановке потеря темпа в реализации
преимуществ, предоставляемых революцией в военном деле, неизбежно приведет к
потере передовых позиций или даже отставанию в острой конкурентной борьбе не
только в военной, но также в политической и экономической областях.
В этом плане перспективы стратегической авиации в будущем связываются с
развитием высокоточных неядерных вооружений. Стратегическая авиация рас-
сматривается как многофункциональное средство, которое наряду с традицион-
ной ядерной ролью предстает как высокоэффективный элемент обычной мощи
большой дальности в конфликтах различного уровня. На Западе о новой роли
авиации наиболее активно стали говорить после известных конфликтов на Ближ-
нем Востоке и в Югославии. При этом стратегическая авиация с высокоточным
оружием большой дальности стала рассматриваться как инструмент достижения
решающего военного успеха в самом начале конфликта (нанесением ударов и по-
ражением ключевых объектов противника на всей глубине его территории и па-
рализацией его способности вести дальнейшие боевые действия).
101
С учетом существующего опыта перспективные военные концепции XXI в.
предусматривают два уровня применения:
• нанесение первых избирательных высокоточных ударов (в условиях неподав-
ленной ПВО) по важнейшим объектам на всей глубине ТВД и (или) террито-
рии противника для достижения решающего успеха в самом начале конф-
ликта;
• высокоточное и избирательное поражение целей на всей глубине ТВД при
ведении систематических боевых действий в условиях подавленной системы
ПВО при обеспечении высоких показателей по критерию «стоимость—эф-
фективность».
Обеспечение высокой эффективности решения первой из этих задач позво-
ляет реализовать функции стратегического неядерного сдерживания противника
(от развязывания агрессии против РФ) угрозой нанесения высокоточных избира-
тельных ударов по важнейшим целям на территории противника. Таким обра-
зом, арсенал средств ядерного сдерживания дополняется средствами неядерного
сдерживания, что позволяет повысить эффективность сдерживания всего спект-
ра возможных угроз нападения с использованием как ядерного, так и неядерного
оружия.
Осуществление новой роли стратегической авиации концептуально связыва-
ется с решением ряда проблем (концептуальный документ МО США «Единая
перспектива-2010» — Joint Vision 2010). Главенствующее место отводится про-
блеме обеспечения информационного превосходства над противником и исполь-
зования научно-технических достижений для преобразования традиционных
способов боевых действий и значительного повышения их эффективности через
разработку новых оперативных концепций, организационных структур и систем
вооружения.
В упомянутом документе сформулированы четыре основные оперативные
концепции, комплексное применение которых должно обеспечить всеохваты-
вающее господство вооруженных сил США в любых возможных вооруженных
конфликтах следующего столетия: господствующий маневр, высокоточное сра-
жение (бой), всеобъемлющая защита и целенаправленное тыловое обеспечение.
1.3.4. НАУЧНО-ТЕХНИЧЕСКИЙ ПРОГРЕСС
И РАЗВИТИЕ СТРАТЕГИЧЕСКОЙ АВИАЦИИ
Функции авиационных комплексов как стратегического оружия в значитель-
ной степени связываются с межконтинентальной дальностью и большой ударной
мощью. Для авиации речь должна идти о досягаемости системы: самолет-носи-
тель — оружие. Одной из проблем разработки комплекса подобного назначения
является оптимизация системы самолет-носитель — оружие, в том числе оптими-
зация распределения функций, возлагаемых на самолет и ракету. Решение этой
задачи зависит от уровней научно-технических достижений, экономики страны и
развития средств противодействия противника. В ретроспективе влияние этих
факторов проявлялось по-разному и определяло оптимальность различных тех-
нических решений в тот или иной период времени.
В начальный период, когда вооружение самолетов составляли авиационные
бомбы или ракеты малой дальности (по терминологии договоров по СНВ — до
600 км), самолет-носитель играл ключевую роль в системе, обеспечивая как необ-
102
холимую дальность, так и боевую эффективность (например, при оснащении
бомбами самолет должен обеспечивать выживаемость в системе ПВО противника
в течение длительного полета к поражаемой цели). В этих условиях противник,
развивая систему ПВО над своей территорией, обладал преимуществами и обес-
печивал существенное снижение боевой эффективности бомбардировщиков с
бомбами.
Революционные изменения произошли после создания малогабаритных
ядерных крылатых ракет большой дальности (по терминологии договоров СНВ —
КРВБ). Высокая дальность полета КРВБ способствует обеспечению высокой ве-
роятности поражений целей за счет повышения выживаемости самолетов-носи-
телей в системе ПВО. Пуск КРВБ в большинстве случаев происходит без входа
самолетов-носителей в систему ПВО противника. Разработка КРВБ позволила
«заместить» ряд функциональных требований к бомбардировщику. Крылатые ра-
кеты обладают превосходством перед бомбардировщиками в эффективности пре-
одоления системы ПВО за счет обеспечения меньших уровней заметности, мень-
ших высот полета, усложняющих их перехват, наличия систем встречного подры-
ва. При этом реализация обозначенных технических достижений на ракетах по
опыту предыдущих разработок связана со значительно меньшими затратами, чем
на самолетах.
В последние десятилетия с учетом этих факторов как у нас, так и в США для
решения задачи нанесения ответного удара концепция бомбардировщиков с
КРВБ сохраняет приоритет. Эта концепция позволяет обеспечивать высокую эф-
фективность системы за счет кардинального совершенствования одной компо-
ненты системы — крылатых ракет при сохранении дорогостоящих самолетов-но-
сителей в течение длительного периода времени. Фактор стоимости даже в США
рассматривается в качестве определяющего при определении перспектив разви-
тия стратегической авиации. Так, стоящие на вооружении самолеты В-52Н,
имеющие на 2001 г. средний срок службы около 39 лет, согласно имеющимся пла-
нам предполагается эксплуатировать до 2025 г. Высокая боевая эффективность
обеспечивается за счет использования малозаметных КРВБ.
Наряду с этим в США предпринимались новые попытки создать ТБ прорыва
ПВО, т. е. самолета, оснащенного оружием малой дальности, обеспечивающего
полет вплоть до поражаемой цели. В США был создан бомбардировщик В-2,
имеющий нетрадиционную — «летающее крыло» — конфигурацию, позволяю-
щую обеспечить сверхнизкий уровень демаскирующих признаков и высокие лет-
ные характеристики (в первую очередь характеристики груз—дальность) самолета
и на этой основе — высокую выживаемость в системе ПВО и глобальную досяга-
емость. Однако стоимость самолета оказалась столь высокой, что даже эта страна
смогла построить только 21 самолет. Стоимость программы бомбардировщика
В-2 составила более 16 млрд долл., стоимость одного самолета — более 1 млрд
долл. Отметим, что реальные возможности бомбардировщика В-2 и его эффек-
тивность многими авторами ставятся под сомнение. В США после разработки до-
рогостоящего малозаметного бомбардировщика В-2 неоднократно высказывают-
ся сомнения в его эффективности при преодолении системы ПВО. Эксплуатация
самолета удорожается из-за нестойкости используемых покрытий для снижения
заметности и необходимости хранения самолетов в специальных ангарах после
полетов. Это и высокая стоимость самолета стали причиной его ограниченного
развертывания.
103
В настоящее время перспективы этого самолета в большей степени связыва-
ются с выполнением неядерных задач в различных районах мира. Успешность
боевого использования самолета в последних конфликтах стимулировала про-
граммы развития этого самолета (самолет непрерывно совершенствуется, разра-
ботано несколько программ модернизации) вплоть до разработки планов возоб-
новления его производства.
Значимость высокоточного неядерного оружия проявляется не только в фак-
те создания нового эффективного оружия. Данное оружие изменяет «филосо-
фию» будущих войн, в том числе способы и методы их ведения. Дозированное
реагирование и соответствующее ему высокоточное нанесение удара при мини-
мальном побочном эффекте — основная парадигма будущей войны. При этом
глобальные системы разведки и мониторинга земной поверхности обеспечивают
обнаружение, сопровождение и возможность атаки любой цели, перемещающей-
ся по земле, морю и в воздухе.
Прослеживается стратегическая роль высокоточных неядерных средств по-
ражения большой дальности (крылатых ракет воздушного и морского базирова-
ния), которые обладают возможностью поражения целей практически в любой
точке мира (при этом в большинстве случаев носители осуществляют пуски ракет
из нейтральных зон без пересечения границ других стран). Высокая степень урба-
низации и наличие большого числа энергонасыщенных производств делают вы-
сокоразвитые страны весьма уязвимыми от воздействия высокоточного оружия.
При поражении подобных целей высокоточные неядерные заряды приближают-
ся по эффективности к ядерному оружию без губительных факторов ядерного
взрыва. В этом смысле можно говорить о нанесении неприемлемого ущерба с ис-
пользованием неядерных средств большой дальности.
Исключительно важное значение США придают созданию высокоточного
оружия и перевооружению им своих вооруженных сил. Уже сейчас США облада-
ют неядерным высокоточным потенциалом, эффективность которого была ре-
ально подтверждена в конфликтах последнего периода. Неядерный потенциал
(военная сила) становится инструментом решения политических задач, как это
было продемонстрировано на примере Югославии.
В РФ имеются технологии и перспективные заделы в области разработки и
производства как стратегических самолетов, так и крылатых ракет. В настоящее
время и ближайшей перспективе стратегия развития должна учитывать факторы
развития военно-стратегических концепций (определяющих потребные функци-
ональные и обликовые характеристики), ограниченности ресурсов, сохранения и
развития научно-технического задела, поддержания ресурса и боеготовности
парка существующих комплексов и систем их вооружения, развития инфраст-
руктуры информационного обеспечения и планирования боевого применения.
1.4. Концепция неядерного сдерживания
Ядерное сдерживание не является достаточным
Ядерное противостояние между блоком НАТО и странами—участницами
Варшавского договора было основным содержанием гонки вооружений в период
холодной войны. Шло непрерывное наращивание и совершенствование ядерно-
го оружия и средств его доставки. В результате возникло понятие стратегического
паритета в составе объединенной «ядерной» триады из средств доставки — бал-
листических межконтинентальных ракет наземного и морского базирования и
стратегической авиации с крылатыми ракетами.
Этот паритет представляет собой неустойчивую динамическую систему, так
как всякое, даже небольшое, техническое превосходство в компонентах триады
или системах обороны от ядерного оружия рождало ответную реакцию противо-
положной стороны, вызывая процесс гонки вооружений. Бессмысленность этого
процесса стала достаточно очевидной после достижения определенного количе-
ственного уровня ядерных арсеналов. Этот факт был осмыслен политическим ру-
ководством противоборствующих сторон и сделал возможным переговорный
процесс по сокращению стратегических ядерных вооружений и ограничению
развертывания систем ПРО. Результатом переговоров явились Договоры ОСВ-1
и ОСВ-2 и Договор по ПРО 1972 г. Одновременно были прекращены и натурные
испытания ядерных зарядов.
В процессе ядерного противостояния сформировалось оборонное мышле-
ние, определившее новую доктрину стратегического равновесия, в которой кри-
терий равного количественного паритета заменен на показатель ядерного сдер-
живания, отражающий способность нанесения агрессору в ответном ударе непо-
правимого ущерба.
Это понятие, безусловно, является более мягкой формой, так как слово «не-
поправимый» не имеет четко выраженной количественной меры и поэтому со-
здает некоторую неопределенность в оценках эффективности ответного удара.
Окончание холодной войны, переговорные процессы и распад военного
союза стран—участниц Варшавского договора приостановили раскручивание
ядерной спирали, но не сняли с повестки дня аргументацию ядерного сдержива-
ния. Наоборот, фактическое состояние российских обычных видов вооружения
и разразившийся экономический кризис заставили политическое и военное ру-
ководство нашей страны усилить ядерный «тезис».
Но возникает вопрос, который особенно остро встал в связи с событиями
последнего периода: является ли ядерное сдерживание необходимым и достаточ-
ным условием для оборонной безопасности страны? К сожалению, можно дать
105
четкий ответ: необходимость не вызывает сомнения, а вот достаточность — явно
под большим вопросом.
В последнее десятилетие XX в. в ряде вооруженных конфликтов реализованы
принципиально новые формы вооруженной борьбы на основе качественно но-
вых средств вооружений, что особенно ярко проявилось в действиях стран НАТО
в зоне Персидского залива и конфликте в Боснии и Югославии.
Все это заставляет задуматься о путях развития систем вооружений в России.
Если проанализировать мировой опыт, то становится явным влияние развития
новейших высоких технологий на обеспечение глобальной информатизации и
автоматизации боевых операций с применением высокоточного оружия для до-
зированного и избирательного поражения широкого спектра целей, составляю-
щих экономическую и военную инфраструктуры. При этом доступными для по-
ражения оказываются объекты, находящиеся на всей территории страны, стира-
ются понятия линии боевого соприкосновения, тыла и фронта. Высокоточное
оружие большой дальности обеспечивает точное поражение, практически не за-
висящее от дальности стрельбы или времени полета, причем огневое поражение
происходит без вступления войск в непосредственное боевое соприкосновение.
Решающая роль при применении высокоточного оружия принадлежит в пер-
вую очередь военно-воздушным силам и силам флота с крылатыми ракетами
большой дальности. Для нападающей стороны это означает минимизацию потерь
личного состава (бескровная война). Высокоточное оружие при поражении тяже-
лых вооружений и избирательного поражения объектов инфраструктуры в урба-
низированной местности минимизирует и потери среди мирного населения.
В связи с этим вполне закономерно возникает вопрос: не может ли вероят-
ность такого способа воздействия на противника являться сдерживающим факто-
ром для его агрессивных намерений?
Видимо, простого ответа на этот вопрос не существует, так как при оценках
необходимо рассматривать очень много факторов (наличие у вероятного против-
ника эффективных средств противовоздушной обороны, степень защищенности
основных объектов управления от точного воздействия обычных зарядов и т. д.).
Поэтому необходимо более внимательно и подробно исследовать на всех
уровнях характер и особенности ведения военных операций с применением вы-
сокоточного дальнобойного оружия с обычным боезарядом.
Комплексная система разведки и мониторинга
Разведка должна носить непрерывный характер, быть построена на принци-
пах мониторинга и пространственно должна быть глобальной.
Значительную роль приобретают средства космической разведки. Во время
войны в зоне Персидского залива широко использовались американские разведы-
вательные спутники «Лакрос», передававшие из космоса радиолокационное изо-
бражение необходимых районов боевых воздействий. Их использование позволило
оценивать эффективность высокоточных ракетных ударов, разведывать с достаточ-
ной степенью точности оборону иракской армии до отдельной боевой машины или
зенитной артиллерийской пушки даже в условиях плохой видимости.
Наряду с этим в прогнозируемой перспективе особую важность приобретает
непрерывный информационный мониторинг приграничных территорий в кри-
зисных ситуациях. Он может осуществляться на основе воздушных разведыва-
тельных систем (самолеты, беспилотные летательные аппараты) с обеспечением
оперативного получения, обработки и передачи информации потребителям.
106
Среди требований, выдвигаемых к перспективным средствам разведки, мож-
но отметить следующие:
• всепогодность, круглосуточность получения информации, реализуемые на
основе расширения спектра физических принципов получения данных, ис-
пользуемых в бортовых информационных датчиках разведчиков;
• высокая точность местоопределения объектов разведки путем использова-
ния единого с потребителями развединформации высокоточного навигаци-
онного поля, обеспечиваемого в определяющей степени глобальной навига-
ционной спутниковой системой ГЛОНАСС;
• оперативность передачи информации потребителям.
Планирование операций и подготовка полетных заданий
Планирование операций и подготовка полетных заданий для ударных
средств занимают значительное место в рамках общей системы автоматизации
планирования операций и включают комплекс программных и компьютерных
средств с развитой системой визуализации и единой информационной базой.
Применение специальных систем навигации в современных системах ору-
жия класса «воздух—поверхность» связано с использованием цифровых карт
рельефа местности, подготовка которых составляет наиболее трудоемкую часть
разработки полетных заданий.
Новые информационные технологии и достижения в бортовой электронике
позволяют в значительной мере рационализировать эти процессы.
Объемы памяти современных и перспективных бортовых ЭВМ позволяют за-
писывать картографическую информацию о больших районах земной поверхности
и обеспечивать на этой основе высокоточную навигацию ракеты в пределах боль-
ших районов боевых действий. Этот процесс требует также внедрения технологии
получения трехмерных моделей цели и местности на основе данных дистанционно-
го зондирования (в том числе космического, авиационного, агентурного и т. п.).
Необходимая информация, как правило, должна быть подготовлена забла-
говременно. Координаты поражаемой цели вводятся оперативно перед полетом
или в процессе полета.
Для систем тактического назначения, особенно при локальных конфликтах,
характерна быстрота изменения оперативной обстановки, что определяет важ-
ность высокой оперативности системы управления, в том числе по передаче об-
разов цели, команд целеуказания и перенацеливания в процессе полета (особен-
но в условиях отсутствия точного начального целеуказания, применения по мо-
бильным целям и т. п.). Создание системы оперативного формирования и
передачи на борт подводной лодки, ударного самолета или ракеты с самоле-
та-разведчика (разведывательного спутника) эталонов атакуемой цели составляет
существенно важный элемент перспективной технологии.
На разрабатываемой в США перспективной ракете JASSM прорабатывается
техника общего синтезирования изображений (General Pattern Mathching) с ис-
пользованием электронно-оптических фотографий, получаемых в том числе от
беспилотных разведывательных летательных аппаратов или тактических самоле-
тов-разведчиков, исследуется возможность использования изображений, полу-
чаемых при помощи РЛС с синтезированной апертурой, а также тепловизионных
систем, формирующих изображение. Траектория полета ракеты отслеживается до
момента встречи ее с целью, давая возможность в случае необходимости принять
решение о нанесении повторного удара по заданной цели.
107
Система высокоточной доставки боевого снаряжения
Определяющим фактором новой формы вооруженной борьбы является вы-
сокоточная доставка боевого снаряжения с использованием последних достиже-
ний спутниковой навигации.
В США создана высокоточная система оружия CALCM на основе ядерной
авиационной CRR ALCM посредством оснащения ее обычной боевой частью и
приемником глобальной навигационной спутниковой системы GPS, который
входит в систему наведения на ракете.
Ракета CALCM применялась во всех операциях, проводимых США в пос-
леднее время, и расценивается ими как важный поворотный момент в военной
истории:
благодаря системе GPS вооруженные силы США
могут «присутствовать» в любой точке земного шара.
Крылатая ракета морского базирования «Томагавк» с инерциальной навига-
цией и системой наведения по рельефу местности принята на вооружение в стра-
нах НАТО в 1983 г. Известно несколько модификаций этой ракеты с обычной
(неядерной) боевой частью, предназначенных для поражения наземных стаци-
онарных целей. Последние модификации ракет «Томагавк» оснащены приемни-
ками спутниковой навигации GPS и оптической системой точного наведения на
конечном участке полета DSMAC.
Комплексирование системы космической навигации и бортовых навигаци-
онных систем (самолета, подводной лодки, ракеты) обеспечивает повышенную
точность и автономность навигации в условиях помех, в любых метеоусловиях, в
любое время суток и в периоды прекращения работы космической системы.
Адаптация системы управления оружием класса «воздух—поверхность» типа
JDAM со спутниковой навигационной системой GPS позволяет определить не-
посредственно перед пуском оружия координаты и обеспечить возможность ата-
ки целей, не исключает возможности в благоприятных условиях осуществлять
пуск оружия с использованием других высокоточных систем наведения, напри-
мер лазерной или телевизионной.
К наиболее важным функциональным качествам перспективных средств вы-
сокоточного поражения следует отнести:
• высокую эффективность выполнения боевой задачи;
• высокие показатели по соотношению эффективность—стоимость;
• сочетание высокоточное™ и избирательности поражения целей;
• пуск с носителей в большинстве тактических ситуаций вне зоны действия
системы объектовой ПВО противника;
• скрытность применения;
• поражение цели при неблагоприятных метеоусловиях и в условиях ограни-
ченной видимости.
Понятие поражение цели получает новую интерпретацию в случае примене-
ния высокоточного оружия, так как оно обеспечивает точечное поражение кри-
тических элементов ключевых компонентов и объектов, приводящее к прекраще-
нию функционирования цели полностью или на длительный срок.
Развитие высокоточных неядерных вооружений объективно повышает роль
носителей крылатых ракет большой дальности и как эффективного средства по-
ражения в локальных конфликтах, и как средства стратегического сдерживания.
108
Навигационное сообщение
Опорная сеть разнесенных
корректирующих станций
Полетное задание
в местной системе
координат
Рис. 1.32. Схема высокоточной доставки боевого снаряжения
Коррекция
целеуказания
Груз определяет свое точное
местоположение с помощью
спутниковых навигационных
систем ГЛОНАСС и GPS, в том
числе в дифференциальном
режиме
Г осударственная
граница _______
Поправки
ХЦель
Г осударственная
граница
Горизонтальная точность системы GPS
в дифференциальном режиме по
одной корректирующей станции
Функция неядерного стратегического сдерживания определяется объективной
уязвимостью высокоразвитых стран от воздействия высокоточного обычного оружия.
Общая схема высокоточной доставки боевого снаряжения представлена на
рис. 1.32.
Стратегическое сдерживание в современной оценке
В начале нового века однозначно проявились тенденции перехода к новой,
более расширенной концепции стратегического сдерживания, которая по своей
форме базируется на вероятности реализации ядерно-неядерного воздействия.
Концепция стратегического сдерживания в том виде, в котором она сущест-
вует сейчас, декларирует две цели:
• сдерживание ядерного нападения;
• сдерживание наиболее серьезной неядерной опасности, угрожающей
стране, — нападение превосходящих обычных сил (Россия в отличие от
НАТО и США стала декларировать последнее совсем недавно).
СДЕРЖИВАНИЕ — это сложная категория, которая определяется рядом факто-
ров, в том числе:
• эффективностью осуществления угрозы ответного удара;
• правдоподобностью выполнения такой угрозы;
• осознанием противником последствий ответного удара.
В контексте этих факторов ядерное оружие общепризнанно рассматривается
как главное средство сдерживания с учетом наиболее разрушительных физиче-
ских и долгосрочных последствий его применения.
109
Кроме того, в настоящее время требуется осмысление роли высокоточного
неядерного оружия как сдерживающего фактора, которое имеет возможность
прицельного поражения ключевых стратегических целей на территории вероят-
ного противника, приводящего к значительной деградации его военно-экономи-
ческого потенциала. Оценки показывают, что число таких целей в высокоразви-
тых странах может быть не столь большим, а наносимый ущерб носит критиче-
ский и даже неприемлемый характер.
Роль неядерного оружия как средства стратегического сдерживания еще в
недостаточной степени определена и признана в мире, однако на Западе выска-
зываются суждения, что в обычной (неядерной) области идея стратегического
превосходства была наглядно продемонстрирована и доказана в последних опе-
рациях типа «Буря в пустыне» и «Лиса в пустыне».
После операции «Буря в пустыне» аналитики США разрабатывают новые кон-
цепции стратегической роли неядерного оружия, создаваемого на основе новых тех-
нологий и обеспечивающего достижение стратегических целей при первом ударе.
При этом они имеют возможность не только декларировать устрашение противника,
основанное на неядерной мощи, но и достигли состояния правдоподобности выпол-
нения угрозы нанесения ущерба противнику критически неприемлемой величины.
Однако ограничиться исключительно опорой на угрозу обычным оружием с
целью сдерживания не представляется возможным, так как это связано с пробле-
мами действенности устрашающего эффекта на противника (он меньше, чем
ядерный) и зависимостью операции применения этого оружия от многих внеш-
них факторов (качество разведки, удаленное географическое расположение про-
тивника, что требует разрешенных воздушных коридоров для авиации и преодо-
ления систем ПВО и противолодочной обороны для подводных лодок и т. д.).
Необходимо иметь в виду, что высокоточные неядерные вооружения при их
асимметричном развитии в странах, образующих основу военно-стратегического
баланса в мире, становятся серьезным фактором нестабильности, особенно на фоне
прогресса и интенсификации работ в области их создания и развертывания на Запа-
де (где уже имеются соответствующие технологии и образцы вооружений авиаци-
онного и морского базирования при явном преимуществе в количестве носителей).
Однако ядерно-неядерное сдерживание потенциально дает новые возмож-
ности для страны, его реализующей, в контексте рассмотрения спектра сдержи-
ваемых угроз на основе ограниченного или широкого применения оружия массо-
вого поражения. В этих условиях сдерживание на основе обычного оружия будет
действовать в нижней части этого спектра, а ядерное — в верхней, чем будет до-
стигаться гибкая пропорциональность и достоверность угроз.
Следует отметить, что переход к политике ядерно-неядерного сдерживания
затрагивает ряд проблемных вопросов, таких как:
• негативное влияние на стратегический баланс, основанный в настоящее вре-
мя на ядерном оружии;
• введение в систему средств стратегического сдерживания нового вида ору-
жия (высокоточного неядерного), что неизбежно влияет на стратегический
баланс, особенно с учетом намечающегося превосходства США;
• существенное превосходство одной из сторон в неядерном стратегическом
потенциале не стимулирует процесс контроля и сокращения ядерного ору-
жия в других ядерных державах и, более того, создает стимулы к распростра-
нению ядерного оружия как более «дешевого» ответа на возникающие вызо-
вы (с учетом того, что высокоточное неядерное оружие базируется на новей-
ших информационных и общетехнических достижениях);
НО
• бесконтрольное развитие неядерных стратегических вооружений, что может
послужить толчком к гонке вооружений в этой области.
Обозначенные выше тенденции возрастания роли неядерного оружия в ка-
честве стратегического средства ставят на повестку дня проблему договорного
контроля над его развитием в контексте сохранения и поддержания существую-
щего стратегического баланса и системы обеспечения международной безопас-
ности, в том числе и на региональном уровне.
Блок НАТО, США и Россия руководствуются доктринами, в которых предус-
матривается возможность первого ядерного удара в ответ на превосходящую не-
ядерную агрессию (например, с захватом территории). По отношению к НАТО
сохранение этого положения, по существу, излишне, поскольку Варшавский до-
говор прекратил свое существование и угроза Западной Европе обычных сил ис-
чезла. Западные аналитики называют это анахронизмом для США и НАТО и ука-
зывают, что это имело бы смысл лишь в том случае, если бы на пороге Европы по-
явилась крупная военная угроза обычных сил.
Ситуация для России имеет обратный смысл: на пороге РФ имеется мощная
военная сила, угроза которой в любых условиях сохраняет потенциальный харак-
тер и не должна сниматься со счетов в долгосрочном аспекте (в том числе на фоне
расширения НАТО и приближения его инфраструктур к РФ). Наличие реальных
союзнических обязательств внутри НАТО и со стороны США в части корпора-
тивности совместных действий и объединения военных потенциалов в случае
конфликта (при высокой мобильности этих сил) и принижение роли России в ре-
шении проблем безопасности Европы ставят перед РФ проблему необходимости
иметь симметричные по потенциалу обычные вооружения.
В контексте сдерживания с помощью ядерного оружия крупной неядерной
агрессии (при наличии асимметрии обычных сил) порог применения ядерного
оружия определяется уровнем потенциала обычных сил в отношении потенциала
противника, поэтому высокая асимметрия обычных сил понижает декларируе-
мый порог применения ядерного оружия и повышает опасность применения
ядерного оружия даже в конфликтах невысокого уровня.
Следует отметить, что ситуация значительного мирового превосходства
США и НАТО в обычных силах оказывает дестабилизирующее влияние на про-
цесс нераспространения оружия массового поражения, а возможность их передо-
вого базирования придает даже тактическим ударным носителям возможность
поражения или создания реальной угрозы поражения важных целей на террито-
рии России, в том числе объектов стратегических ядерных сил, тем самым влияя
на имеющийся баланс и возможность выполнения ими функций ядерного сдер-
живания.
В целом можно констатировать:
• развитие новых технологий в области обычных вооружений, существенно
повышающих их потенциал, определенным образом в отдельных случаях мо-
жет демпфировать функции стратегического ядерного сдерживания при наи-
более серьезной опасности — нападении превосходящих обычных сил;
• существенная асимметрия обычных сил, в том числе США в мире и НАТО в
Европе, потенциально создает препятствия для РФ на пути глубокого сокра-
щения ядерного потенциала.
Обозначенное делает актуальной проблему увязки вопросов выравнивания
потенциалов обычных сил в Европе и других прилегающих к России регионов с
вопросами сокращений ее ядерных вооружений.
111
Перспективы развития высокоточных неядерных технологий в России
ВЫСОКОТОЧНЫЕ ВООРУЖЕНИЯ — это оружие развитых стран, требующее со-
здания и поддержания необходимого научно-технологического фундамента.
Имеющиеся в России образцы вооружения большой дальности соответству-
ют мировому уровню, однако существующий технологический задел устаревает
на фоне происходящей информационной и технологической революции, и уже
сейчас наша страна начинает утрачивать лидирующие позиции в мире в этой об-
ласти, что, безусловно, отразится на боевой эффективности авиации.
Причина одна — резкое сокращение затрат на НИОКР вооружений. В 1998 г.
затраты Министерства обороны РФ на НИОКР составили порядка 15 млрд руб.
против 32 млрд долл, в США. Серийное производство вооружений и военной
техники (ВВТ) в России прекратилось почти полностью, за исключением неболь-
ших партий на экспорт. Все это чревато потерей технологической базы, необхо-
димой для создания новых поколений ВВТ
Россия не может отказаться от разработки высокоточных конкурентоспособ-
ных комплексов вооружения. Здесь определяющим фактором является обеспече-
ние безопасности РФ, а также экономические мотивы, связанные с участием в
высокодоходном рынке вооружений.
В контексте безопасности для России функции высокоточного неядерного
оружия большой дальности важны как средства, способные при боевом воздейст-
вии предварить применение ядерного оружия и повысить действенность сдержи-
вания, а также к^к средства решения важнейших задач в локальных конфликтах.
По нашему мнению, при ограниченном бюджете основной приоритет дол-
жен быть отдан созданию систем по наиболее важным военным технологиям, без
которых на отечественной базе создать конкурентоспособные комплексы оружия
будет принципиально невозможно. Важной задачей становится получение объ-
ективной априорной информации о степени влияния различных перспективных
технологий на функциональные качества и эффективность комплексов вооруже-
ния, обеспечивающих его конкурентоспособность, а также оценки их реализу-
емости, стоимости и сроков внедрения.
Решение этих проблем должно происходить на фоне новой военно-стратеги-
ческой ситуации, сложившейся в последнее время, что потребует переосмысле-
ния в части количественных и качественных соотношений как обычных, так и
стратегических вооружений с оптимизацией организационных структур, типажа
и численных показателей.
Перспективы развития авиационных высокоточных неядерных вооружений
связываются с созданием интегрированной распределенной авиационно-косми-
ческой разведывательно-ударной системы. В такой системе исключительное зна-
чение принадлежит глобальным разведывательным системам с единой информа-
ционной средой разведки и распределения информации на основе современных
компьютерных и сетевых технологий, цифровых геоинформационных моделей
района боевых действий с обеспечением доступа к информации для всех звеньев
боевых сил, включая тактические звенья, а также со средой исполнительных бое-
вых средств с планированием боевой операции и выработкой полетных заданий
самолетам и оружию (типа современных систем С41).
Возросшая значимость авиации и авиационных средств поражения заключа-
ется в повышении ТТХ, позволяющих на практике решать стратегические задачи
112
достижения решающего успеха в конфликтах различного уровня при минималь-
ных собственных потерях.
Для новых видов авиационного оружия превалирующими являются качества
высокоточное™ и избирательности, а также низкой стоимости поражения. Высо-
коточное оружие большой дальности — это в первую очередь высокоточные не-
ядерные крылатые ракеты большой дальности воздушного и морского базирова-
ния. Требование низкой стоимости высокоточного оружия общего назначения
является ключевым, только на этой основе возможно его массовое применение (в
масштабах, достаточных для решения задач конфликта). В этом контексте в переч-
не высокоточного оружия общего назначения большое место уделяется разви-
тию управляемого бомбового вооружения типа JDAM. Следует отметить, что эф-
фективное применение оружия типа JDAM возможно лишь в рамках интегриро-
ванной боевой системы. JDAM — это не только собственно управляемая бомба,
это — высокоточная спутниковая навигационная система GPS (в перспективе с
использованием помехозащищенных каналов), эффективная система разведки и
высокоточного внешнего целеуказания, система планирования и подготовки по-
летного задания.
К настоящему времени в своем развитии высокоточные авиационные сред-
ства поражения прошли ряд этапов от первого поколения оружия, применяемого
по целеуказанию бортовых информационных систем (после обнаружения цели
летчиком) и использующего естественный оптический или радиолокационный
контраст целей, второго поколения (настоящее время), в котором оружие наво-
дится по внешнему целеуказанию в единой информационно-навигационной сре-
де, к высокоточному оружию следующего третьего поколения (перспектива), ос-
нащенного интеллектуальной системой самонаведения с автоматическим рас-
познаванием и наведением.
1.5. Методические основы
системного анализа
и обоснования облика
авиационного комплекса
Эволюция методологии обоснования развития вооружений и формирования
тактико-технических требований к новым образцам претерпела ряд этапов. В ус-
ловиях плановой экономики (и наличия стратегического противостояния двух
мировых систем) затраты на разработку в большинстве случаев играли второсте-
пенную роль, превалировал принцип «большее и самое лучшее». Возможность
повышения тактико-технических характеристик образцов вооружения рассмат-
ривалась как достаточное основание для начала новой разработки. В условиях
возрастания стоимости вооружений продолжение подобной политики стало не-
возможным. Одним из выходов явилось внедрение методологии системного ана-
лиза, указывающей на наличие объективной неразрывной связи характеристик
вооружений (их боевой эффективности) со стоимостью. В практику планирова-
ния разработок вооружений и обоснования их облика был внедрен эффективно-
стно-стоимостной принцип выбора. При этом исторически наибольшее внима-
ние вначале уделяли вопросам снижения стоимости разработки и производства,
поскольку они составляют начальные затраты и наиболее очевидны, а стоимость
эксплуатации обычно находится вне контроля разработчика. В настоящее время
показано, что многие проектные параметры вооружений непосредственно влия-
ют на стоимость эксплуатации и поэтому на начальных этапах должна учиты-
ваться полная стоимость жизненного цикла.
Фактор возрастания сложности авиационной техники с высокой степенью
начальной неопределенности, связанной с неясностью самой возможности тех-
нической реализации новых функциональных требований и уровня запрашивае-
мых заказчиком характеристик создаваемых авиационных комплексов (АК), стал
другой побудительной причиной совершенствования методологии. Заказчиком
боевой авиационной техники традиционно выступает государство в лице Минис-
терства обороны и ВВС, которые выдают ТЗ на разработку нового образца. В по-
следние годы многие разработки ведутся отечественными оборонными пред-
приятиями по иностранным заказам. Цена ошибок при реализации проектов но-
вых АК может быть слишком высокой. Это требует тщательной проработки на
начальных этапах проекта, в том числе экспертизы технического задания (ТЗ) в
промышленности для начального подтверждения его реализуемости.
Укрупненно в ТЗ на проектирование обычно указываются следующие данные:
• назначение объекта проектирования;
• основные функции;
• условия эксплуатации;
• требования к важнейшим характеристикам и параметрам (т. е. к величинам,
характеризующим свойства объекта, с позиций заказчика-потребителя).
114
Боевая эффективность ВВС определяется не только совершенством техниче-
ских характеристик образцов авиационных вооружений, но и совокупным их
действием при выполнении потребных боевых задач. Для обеспечения макси-
мальной боевой эффективности и адекватного учета ограничений системный
принцип обоснования ТТХ и облика проектируемого АК должен быть распрост-
ранен на все его аспекты и факторы, включая области боевого применения и тех-
нического построения (как технического объекта, предназначенного для реше-
ния заданных задач). Методической основой проведения подобных исследова-
ний стала методология внешнего проектирования.
внешнее проектирование рассматривается как этап жизненного цикла, в
рамках которого обосновываются функционально-технический замысел и кон-
цепция комплекса, исследуется эффективность АК и его интеграция в систему
вооружений ВС с учетом прогноза будущих условий боевого применения. Выхо-
дом этапа является тактико-техническое задание (ТТЗ) на разработку АК во
взаимосвязи с характеристиками стоимости, сроками создания и технической ре-
ализуемости. Основным инструментом внешнего проектирования является опе-
рационное математическое моделирование (имитация) технических систем и
их целевого функционирования во взаимосвязи с внешней средой, а также про-
блемами создания нового комплекса, и этот инструмент реализуется в рамках
систем автоматизированного проектирования и комплекса операционного моде-
лирования.
Жизненный цикл сложной технической системы включает следующие этапы:
• разработку требований к системе, концепции технического задания (внеш-
нее проектирование);
• проектирование (внутреннее проектирование);
• изготовление, испытания и доводка опытных образцов;
• серийное производство;
• продвижение продукции к потребителю;
• эксплуатацию (целевое применение);
• утилизацию.
Исследования на начальных этапах разработки, так же как и на последующих
этапах проектирования, призваны получить информацию о разрабатываемом из-
делии, чтобы минимизировать общие затраты и снизить риск потерь в связи с
ошибочными решениями. Ретроспективный анализ показывает, что размер потерь
пропорционален сроку действия ошибочного решения до его отмены или коррек-
тировки. Степень неопределенности и объем затрат на исследования и разработ-
ки, требуемые для их разрешения во временном разрезе по этапам разработки об-
разца, связаны обратно пропорциональной зависимостью. При этом затраты на
выявление принципиальной возможности использования новой идеи в изделии и
отсеивание заведомо нерациональных или нереализуемых на начальных этапах
невелики, учитывая, что эти исследования проводятся, как правило, относительно
небольшими научными коллективами. По мере перехода к конструкторским про-
работкам трудоемкость и стоимость работ возрастает, а темп разрешения неопре-
деленностей уменьшается. Такая связь неопределенностей и затрат на их разреше-
ние указывает на необходимость разрешения научно-технических трудностей со-
здания образца до начала основных проектно-конструкторских работ.
Современная ситуация в экономике страны и рыночные условия более остро
ставят проблемы финансово-экономического обеспечения новых разработок.
Сокращение бюджетного финансирования ориентирует на максимизацию полез-
115
ной отдачи по затратам ресурсов. По некоторым типам боевых комплексов при
планировании новых разработок ставится задача ориентации не только на внут-
ренние потребности, но и на потребности мирового рынка авиационной техники
с внедрением инновационных принципов разработки. Более остро стоят пробле-
мы технологического задела и уровня технологий, которыми обладает страна.
В связи с этим следует отметить, что воспроизводство новых поколений само-
летов возможно лишь на базе перманентного воссоздания научно-технического
потенциала в области критических технологий, что способствует созданию пе-
редовой авиационной техники и научно-техническому прогрессу в целом. Сти-
мулирование этого процесса в значительной степени должно быть функцией го-
сударства.
Возрастание значимости фактора ресурсных ограничений оказывает влия-
ние на методологию. Проблемы проектирования новых образцов авиационной
техники следует рассматривать в более широком контексте, в том числе включать
комплекс программ при постановке и решении задачи формирования облика
перспективного АК: развитие авиационной техники, создание научно-промыш-
ленной базы, международного научно-технического сотрудничества и финансо-
вого обеспечения.
Фактор ресурсных ограничений выделяет в качестве отдельного подэтапа
исследований — согласование допустимой стоимости и объема возлагаемых на
комплекс функций. Так, перед заданием ТЗ на разработку нового самолета JSF в
США был проведен большой объем подобных исследований, в результате кото-
рых было определено оптимальное соотношение стоимости и возлагаемых на са-
молет функций. При этом ограничения по стоимости были включены в ТЗ как
один из основных факторов проектирования.
Готовность научно-промышленной базы к реализации на заданном времен-
ном интервале совокупности критических технологий, определяющих потреб-
ный функционально-технический уровень проекта, создает некоторую техноло-
гическую неопределенность. Этот фактор проявляется на этапе внешнего проек-
тирования, в том числе в виде отсутствия или несвоевременности поступления от
организаций-соисполнителей достоверной информации о характеристиках ос-
новных подсистем самолета; непроработанности ключевых технологий, опреде-
ляющих облик перспективного АК и др.
Разработка нового боевого комплекса обычно инициируется МО в связи с
дефицитом функциональных свойств существующей группировки боевых комп-
лексов, который невозможно устранить за счет их модернизации или модифика-
ции или за счет количественного наращивания существующих комплексов.
В коммерческой сфере создание нового самолета связывается со стремлением по-
лучения прибыли от продаж новой авиационной продукции на рынке. Коммер-
ческая деятельность на рынке и возможные типы инновационных действий для
получения прибыли следующие:
• производство нового самолета, отличающегося повышенным качеством по
сравнению с имеющимися самолетами;
• освоение нового рынка или его нового сегмента;
• внедрение нового, более совершенного и более производительного производ-
ства (что, как правило, снижает собственные издержки производства и по-
зволяет снизить цену).
Следует отметить, что возрастание требований рынка в определении направ-
лений развития АТ и обоснования ТТХ определяет необходимость внедрения
116
элементов методологии маркетинга. Маркетинг — идеология управления функ-
ционированием предприятия в условиях рынка. В связи с этим должны активно
использоваться маркетинговые стратегические исследования, маркетинговая
проектная экспертиза, маркетинговая структура управления.
Содержание задачи внешнего проектирования
Традиционно проектирование технического объекта рассматривается как
процесс создания, преобразования и представления в принятой форме объекта,
предназначенного для выполнения определенного набора функций. Вначале об-
раз объекта выражен в виде некоторых потребностей в терминах набора функ-
циональных свойств и характеристик, которые в конечном счете должны быть
преобразованы в описание технического объекта в терминах структуры состава,
размерности и т. п. При этом процесс проектирования происходит итеративно
в виде последовательностей этапов, завершающихся созданием очередного про-
тотипа объекта проектирования с формированием соответствующих промежу-
точных описаний и подводящих итоги решения некоторых задач и используемых
для принятия очередных проектных решений.
Основным объектом исследования является авиационный комплекс как тех-
нический объект, который выполняет определенные функции, состоит из эле-
ментов, характеризуется показателями и параметрами, функционирует во внеш-
ней среде. При этом в процессе проектирования (при формализации) с объектом
разработки — АК — обычно связываются различные представления, отражаю-
щие его функциональные, структурные, параметрические и конструктивно-гра-
фические аспекты. В ходе проектирования реализуется последовательность пре-
образований: F => S => Р => G, где F — функциональное представление; S — струк-
турное представление; Р — параметрическое представление (отображение облика
проектируемого изделия в пространство параметров); G — конструктивное и гра-
фическое представление.
Следует отметить, что АК состоит из элементов, которые тем или иным об-
разом группируются в относительно самостоятельные составные части (подсис-
темы, агрегаты, блоки, узлы). В качестве признаков выделения элементов и их
группирования при формировании облика могут быть использованы различные
принципы. Наиболее естественным является функциональный принцип, когда
каждая составная часть выполняет одну или несколько функций или для каждой
функции можно выделить одну или несколько самостоятельных частей.
Обычно при описании АК используется декомпозиция, он представляется в
виде иерархической структуры, в том числе в отношении функций и физических
элементов, которые взаимосвязаны, но не повторяют один другого.
В соответствии с принятой методологической схемой внешнего проектиро-
вания процесс превращается в композицию итеративных процедур информаци-
онного обмена и принятия решений, с выделением специализированных объект-
но-ориентированных этапов, которые к тому же могут выполняться различными
коллективами или кооперациями.
На начальных этапах разработки важную роль играет кооперация исполни-
телей по линии заказчик—разработчик, реализуемая, как правило, на уровне го-
ловных исследовательских организаций и ОКБ (включая такие организации, как
30 ЦНИИ МО, ГосНИИАС, ЦАГИ, ОКБ). Следует особо отметить специалистов
30 ЦНИИ МО, которые принимали активное участие на всех этапах проектиро-
117
вания боевых авиационных комплексов и их подсистем, отраженных в настоя-
щей книге.
Цикл одной полной итерации исследований состоит из четырех основных
этапов (рис. 1.33):
1. Выявление потребности в новых функциональных качествах на основе
анализа эффективности и выявления дефицита функций существующего и разра-
батываемого парка и элементов системы.
2. Формирование альтернативных тактических и технических путей устране-
ния дефицита.
3. Синтез оптимального конструктивно-функционального облика альтерна-
тивных концепций по показателям боевой эффективности в рамках варьируемых
ограничений.
4. Решение задачи оптимального синтеза системы и облика входящих в нее
элементов с рациональным распределением этапов их жизненного цикла, с уче-
том ограничений разрабатывающих и выпускающих отраслей по критериям типа
«эффективность — затраты — сроки создания», оценка динамики роста потенци-
ала системы.
Первый этап технологии состоит в выявлении потребности в новых
функциональных свойствах или новых типах АК и их систем вооружения. На ос-
Рис. 1.33. Цикл одной полной итерации исследований
118
нове анализа прогнозируемых военно-политических ситуаций будущего, поли-
тики государства и его военной доктрины ставятся цели и боевые задачи на
заданный период. Одновременно формируется информация о собственных
силах, о состоянии, структуре (в том числе о «возрастной» структуре) парка су-
ществующих и разрабатываемых боевых комплексов и их вооружения с учетом
располагаемого срока службы, потерь техники в процессе эксплуатации и т. д.
Для выявления потребности в новых функциональных качествах необходимо:
• прогнозировать будущие военно-политические ситуации и вытекающие из них
цели и боевые задачи для авиационных комплексов и их систем вооружения;
• прогнозировать развитие техники противника;
• анализировать боевые возможности существующих и разрабатываемых авиа-
ционных комплексов в будущих операциях.
Характерным для внешнего проектирования является необходимость моде-
лирования боевого применения проектируемого авиационного комплекса в со-
ставе макросистемы — группировок ВВС. Обращение к глобальным оценкам эф-
фективности как при формировании рационального множества боевых задач в
перспективе, так и при синтезе облика обязательно, поскольку роль и место АК
могут быть определены только исходя из анализа его функционирования в систе-
ме высшего уровня.
Поэтому, например, для стратегических комплексов система моделирования
включает модели стратегической стабильности с оценкой потребного уров-
ня стратегических сил сдерживания. Моделирование стратегической стабиль-
ности наряду с моделированием стратегического конфликта (обмена ударами)
включает модель функционирования социально-экономических структур взаи-
модействующих государств в конфликтный и бесконфликтный периоды, в рам-
ках которых оцениваются уровни неприемлемого ущерба как фактора, опре-
деляющего границы соответствующих областей стабильности и уровни воору-
жений.
Результатом этого этапа является формирование функционального облика
проектируемого АК, а также оценки граничных значений его основных (связан-
ных с целевым эффектом) характеристик.
Второй этап технологии связан с формированием альтернативных техни-
ческих вариантов и тактических способов ликвидации дефицита свойств, опреде-
ленного на первом этапе. Формируются альтернативные концепции, т. е. набор
ведущих технических и тактических свойств и качеств системы, обеспечивающих
достижение заданных функций. Опираясь на одно из основных положений сис-
темного анализа, утверждающего, что решения должны приниматься на возмож-
но более полном множестве альтернатив, на данном этапе рассматривается как
можно большее множество возможных направлений решения исходной пробле-
мы устранения дефицита свойств как при создании нового комплекса, так и мо-
дернизации образцов существующей техники для большей их адаптации к изме-
нившимся задачам и условиям применения и модификации существующих или
разрабатываемых образцов и систем в целом для придания им нужных функци-
ональных качеств. Для проектируемого комплекса генерируется по возможности
большее число различных вариантов (технических и тактических), позволяющих
добиться изменения функциональных качеств по отдельным параметрам, группе
параметров или по всем параметрам. Формируется морфологическое множество
альтернативных решений по всем направлениям дефицита функциональных
свойств. Учитываются основные этапы жизненного цикла и вытекающие отсюда
119
требования, в том числе к системе эксплуатации, материально-технического
обеспечения, стандартизации, возможности использования образца совместно с
другими системами вооруженных сил, а также возможные сроки создания и не-
обходимые затраты.
Третий этап связан с синтезом облика альтернативных вариантов комп-
лексов различных концепций. Здесь же осуществляется их структурный и пара-
метрический синтез с учетом ограничений и имеющихся предложений предприя-
тий возможной кооперации.
Основной целью этого этапа является установление связи между потреб-
ными функциональными свойствами и техническими параметрами АК и его
элементов. В результате оптимизации параметров и рассмотрения альтернатив,
не улучшаемых по частным показателям, формируется оптимальное множество
обликов альтернатив. Они имеют привязку к ожидаемым срокам создания, кото-
рые могут присутствовать в модели в качестве параметра.
Практическая процедура исследований включает схему, в рамках которой
проводятся проектно-расчетные проработки опорных вариантов различных кон-
цепций основной подсистемы — самолета-носителя и важнейших подсистем.
Опорные варианты отличаются достаточно подробным уровнем проработки с
участием специализированных организаций, включая ОКБ промышленности, и с
демонстрацией их научно-технической реализуемости.
Опорные варианты являются основой для параметрического размножения
основных характеристик, особенно связующих с другими подсистемами, в инте-
ресах последующей оптимизации комплекса по показателям эффективности. Па-
раметрическое размножение осуществляется с использованием математичес-
ких моделей самолета или исследовательской САПР самолета и других компо-
нент АК.
На этом этапе решается задача распределения функций по подсистемам, а
также распределения располагаемых ресурсов (в том числе стоимостных, мас-
со-габаритных, энергетических и др.) по подсистемам в рамках единого комплек-
са по общим критериям и на общих ограничениях.
На уровне АК параметрическое множество строится в координатах «эффек-
тивность — затраты». Эффективность оценивается для расчетных вариантов сце-
нариев будущих конфликтов.
Третий этап завершается формированием совокупности альтернативных
концепций АК и их систем вооружения, оптимальных по критериям боевой эф-
фективности в зависимости от выделенного ресурса на их создание.
Четвертый этап (завершающий в одной итерации исследований) связан
с синтезом системы в целом в условиях ограничений на выделенные ресурсы.
Решаются задачи оптимизации программы развития средств и жизненного
цикла разрабатываемого комплекса с учетом качественного и количественного
составов существующего парка и задела, который может быть создан разрабаты-
вающей промышленностью с учетом предполагаемого объема финансирования,
т. е. отрабатываются модели, в которых отражается динамика развития парка в
рамках жизненного цикла.
Среди методических особенностей можно отметить трудности формулирова-
ния критерия эффективности. Здесь возможны варианты минимизации затрат на
создание и эксплуатацию группировки АК:
120
• обеспечивающей максимальную целевую эффективность в конце планируе-
мого периода;
• обеспечивающей минимальный дефицит эффективности за весь планируе-
мый период;
• позволяющей (с учетом уже имеющихся комплексов) за возможно короткий
срок выйти на потребный уровень эффективности и обеспечивающей мини-
мальный дефицит эффективности до конца планируемого периода.
Еще одна особенность связана с необходимостью адекватного описания жиз-
ненного цикла изделия — не только этапов разработки и производства, но модер-
низации и списания, что выражается во введении соответствующих ограничений.
При этом учитываются также другие системные требования, в частности тре-
бования пропорциональности и упорядоченности развития различных комплек-
сов и средств в рамках единой структуры ВС. В качестве удобного способа учета
этого могут быть введены расчетные тактические единицы вооружений (РТЕ),
определяющие соотношение различных типов самолетов и вооружений в группи-
ровке, и требования, вытекающие из международных договорных ограничений в
области вооружений.
Обозначенная итерация в зависимости от принятого критерия их прекраще-
ния может повторяться. При этом глубина итераций (уровень возвращения на-
верх для уточнения соответствующих проектных параметров АК, параметров
внешней среды, объема решаемых задач, точности модельного описания и т. п.)
может быть различной в зависимости от причин, их вызвавших. Так, одной из
причин возвращения могут быть потребности уточнения приоритетов верхнего
уровня. Последние в современных условиях во многом связаны с определением
приемлемого соотношения между выделяемыми ресурсами на реализацию соот-
ветствующих программ вооружения (т. е. с учетом ограниченности выделяемых
на военные нужды государственных ресурсов) и объемом возлагаемых на ВС за-
дач (в соответствии с установками доктрины).
Особенности задач внешнего проектирования
Среди типовых проектных процедур, реализуемых в рамках обозначенной тех-
нологии, следует выделить процедуры анализа для получения информации о харак-
тере функционирования и значениях выходных параметров при заданных структу-
ре и параметрах объекта, данных о внешних параметрах. В качестве оптимизируе-
мых параметров здесь выступают стратегии функционирования в рамках системы
верхнего уровня во взаимосвязи с другими объектами, образующими макросистему.
При этом большое место принадлежит прогнозным исследованиям, особен-
но при описании внешней среды функционирования и создания. Это связано как
с прикладной спецификой боевых комплексов или ориентацией на рынок, так и
длительными сроками реализации проектов.
Процедуры синтеза проектных решений, которые охватывают широкий круг
задач и процедур — от выбора вариантов в конечных и обозримых множествах до
задач творческого характера, не имеющих формальных способов решения. Соот-
ветственно применяют как методы формального синтеза проектных решений (в
том числе выполняемые в автоматическом режиме), так и методы синтеза про-
ектных решений в интерактивном режиме.
121
Задачи синтеза структур проектируемых объектов относятся к наиболее
трудно формализуемым. Структурный синтез заключается в преобразовании ис-
ходного описания объекта, содержащего информацию о требованиях к свойст-
вам объекта, об условиях его функционирования, ограничениях на элементный
состав и т. п., в результирующее описание, которое должно содержать сведения о
структуре, т. е. о составе элементов и способах их соединения и взаимодействия.
Постановки и методы решения задач структурного синтеза в связи с трудностями
формализации не достигли степени обобщения и детализации, свойственной ма-
тематическому обеспечению процедур анализа.
Задача принятия решений в процессе структурного синтеза может быть в
обобщенном виде представлена в виде Л* = МАХр{т4, К. М, Р}, где А — множе-
ство альтернатив проектного решения; К= (ЛГ1? К2, ..., Кт) — множество крите-
риев (характеристик), по которым оценивается соответствие альтернативы пос-
тавленным целям; Л/ : А К — модель, позволяющая для каждой альтернативы
рассчитать вектор критериев; Р — решающее правило для выбора наиболее под-
ходящей альтернативы в многокритериальной ситуации. В свою очередь, каждой
А[ альтернативе ставится в соответствие упорядоченный вектор множества пара-
метров X = (х1? х2, •••’ хпУ характеризующих свойства альтернативы.
Основными проблемами в задаче принятия решений являются следующие:
• компактное представление множества альтернатив;
• формулировка предпочтений в многокритериальных ситуациях;
• установление предпочтений между альтернативами в отсутствие количест-
венной оценки целевой функции;
• выбор метода поиска оптимального варианта (по крайней мере сокращения
перебора вариантов).
Присущие проектным задачам неопределенность и нечеткость исходных
данных, а иногда и моделей диктуют использование специальных методов коли-
чественной формулировки исходных неколичественных данных и отношений, в
том числе используются специальные методы построения измерительных шкал,
экспертные методы, методы теории нечетких множеств.
Задача параметрического синтеза (параметрической оптимизации) для слу-
чая одного критерия обычно решается как задача математического программиро-
вания вида extr {F(X)/Z)x}, где F(X) — целевая функция; X— вектор проектных
(варьируемых) параметров; множество Dx = {Х| ф(Х) < О, ф(Х) = 0} — допустимая
область; \|/(Х) — функции ограничения.
Следует отметить, что в качестве критериев оценки в зависимости от конк-
ретной постановки задачи проектирования могут выступать или учитываться те
или иные характеристики АК. Критерии в общем случае образуют свою иерар-
хию, отражающую систему приоритетов или предпочтений проектировщика
(оперирующей стороны).
В процессе решения задач внешнего проектирования, в том числе при со-
ставлении и преобразовании описаний объекта проектирования, используются
знания о рассматриваемой предметной области, информация об опыте проекти-
рования объектов аналогичного назначения и другая информация. При этом
большую роль играют исследователи, выступающие как принимающие решения
лица, генераторы новых решений, в том числе в рамках интерактивных режимов
работы.
122
Выходной информацией этапа внешнего проектирования является раци-
ональный облик авиационного комплекса, в том числе определение потребности
в новом самолете, формирование его общей концепции, формулирование перво-
начальных требований к тактико-техническим характеристикам и параметрам.
Конкретный перечень последних зависит от типа комплекса и может включать,
например, требования к транспортной эффективности (полезная нагрузка, даль-
ность полета, крейсерская скорость), целевой нагрузке (оборудованию, вооруже-
нию), к системе эксплуатации и базированию, послепродажному сервису и др.
Эти данные служат исходной информацией для начала внутреннего проекти-
рования и конструирования комплекса (в том числе самолета и его основных со-
ставляющих). Требования определяют в пространстве характеристик допустимую
область, соответствующую потребностям, а также прогнозируемому уровню тех-
нического совершенства на момент начала производства и представления о до-
пустимости или реализуемости АК.
Модельное обеспечение
Решение упомянутых выше задач осуществляется в рамках следующих пред-
метно-ориентированных исследований:
• целевого применения авиационных средств (операционного моделирова-
ния);
• анализа рынка и маркетинговых исследований;
• моделирования авиационного комплекса (исследовательского проектирова-
ния комплекса);
• моделирования авиационной системы (в том числе связанного с планирова-
нием жизненного цикла АК для внутреннего и внешнего рынка).
Этим предметным областям соответствует модельное обеспечение внешнего
проектирования. Учитывая, что основным инструментом исследования на этапе
внешнего проектирования является моделирование, а перечень решаемых задач
достаточно велик, структура и состав необходимого модельного обеспечения
весьма многообразны и во многом определяются типом и сложностью проекти-
руемого комплекса. Большое влияние на развитие моделирования как инстру-
мента исследований оказало развитие вычислительной техники.
На практике система моделей внешнего проектирования АК развернута по
нескольким иерархическим структурам, в том числе иерархии операций, иерархии
систем и т. п. Существует иерархия операционных моделей по уровням методиче-
ской сложности и уровням агрегирования параметров моделирования. На верхнем
уровне, использующем наиболее сложные в математическом отношении методы,
находятся игровые модели операций. Следующий уровень представляет опти-
мизационные модели, и на нижнем иерархическом уровне находятся имитаци-
онные математические модели операций, использующие сравнительно простые
формальные математические построения, но отличающиеся максимально подроб-
ным учетом характеристик АК и факторов, присущих реальной операции.
Сочетание имитационного, оптимизационного и игрового моделирований
является одним из основных принципов построения системы операционных мо-
делей внешнего проектирования АК. На игровом уровне обосновываются такти-
ческие решения (т. е. способы применения АК), для выбора которых необходимо
содержательно учитывать противодействие разумного противника. На оптимиза-
ционном уровне в основном выбираются рациональные технические решения, на
123
имитационном уровне осуществляется детальная оценка эффективности АК при
реализации выбранных на предыдущих уровнях решений.
При автоматизации вычислений развитие моделирования прошло путь от
этапа простых вычислительных программ с алфавитно-цифровым выводом к
компьютерным комплексам операционного моделирования с развитыми интер-
фейсом и графикой, интерактивным режимам моделирования и далее к системам
распределенного моделирования, к сетевым средам моделирования и имитации,
к системам виртуального проектирования и создания АК.
Система модельного обеспечения на фоне развития вычислительной техни-
ки и информационных технологий развилась в комплекс операционного модели-
рования (КОМ) ФГУП «ГосНИИАС» — среду моделирования, которая включает
совокупность взаимоувязанных моделей, описывающих различные аспекты ис-
следуемых комплексов.
В первую очередь — это модели, описывающие функционирование АК на
различных уровнях рассмотрения (от одиночных комплексов до группировок
разнородных комплексов). В рамках комплекса реализуются типизированные
прикладные модели, ориентированные на решение широкого круга задач как в
рамках технологического процесса внешнего проектирования, так и разнообраз-
ных задач, связанных с оценкой проектных решений и сопровождения разработ-
ки АК. Так, для решения задачи сравнительной оценки альтернативных вариан-
тов входной информацией является описание характеристик технических средств
и подсистем технических средств, элементов инфраструктуры, сценариев, внеш-
ней среды и условий выполнения целевых задач, принимаемых тактических ре-
шений. На выходе комплекса операционного моделирования формируются пред-
ставленные либо в стоимостном, либо в натуральном выражении данные о по-
требностях в ресурсах и потерях ресурсов группировкой АК, выполняющей
заданный объем задач. Эти данные используются для сравнения альтернативных
вариантов проектируемого АК и выбора наилучшего варианта в ходе итерацион-
ного процесса исследований и принятия решения по выбору рационального об-
лика перспективного самолета. Для определения рационального состава группи-
ровки АК, кроме перечисленных выше данных, используемых комплексом опе-
рационных моделей, входной информацией являются данные, характеризующие
существующие качественный и количественный составы группировки АК; дан-
ные о перспективных вариантах АК отечественной разработки; о возможных
предложениях по перспективным вариантам АК на внешнем рынке авиационной
техники; о прогнозируемых объемах ассигнований на содержание и развитие
группировки АК; об ограничениях (например, международных договорных обя-
зательствах) на выбор варианта развития качественного и количественного соста-
вов группировки АК и др. На выходе комплекса моделей определения рациональ-
ного состава формируются планы развития группировки АК, научно-промыш-
ленной базы, международного научно-технического сотрудничества.
При исследовании самолетов нового поколения в рамках обозначенной тех-
нологии внешнего проектирования возникла необходимость включения в систе-
му моделирования математической модели самолета. В этой модели реализованы
проектировочные методы весового, аэродинамического расчетов, расчетов сило-
вой установки, характеристик заметности, надежности, а также летно-техниче-
ских характеристик самолета. Это позволяет реализовать задачу параметрическо-
го синтеза формирования облика АК под заданный вариант вектора конструктив-
ных параметров самолета при условии, что схема самолета фиксирована.
124
В комплексе реализуется ряд технологий компьютерной поддержки проек-
тирования, среди которых следует выделить:
• широкое применение графических диалоговых интерфейсов (диаграммы
структур данных, иерархий функций, потоков данных и др.);
• использование баз данных;
• использование моделей и методов объектного моделирования.
Структурно система реализована как компьютерная система (рабочее место
пользователя), включающая:
• компьютер;
• операционную систему;
• систему управления базой данных;
• прикладные программы — пакетные и диалоговые для заданного набора
функций и процессов;
• интерфейс;
• систему визуализации;
• пользователь-оператор.
Важное место в комплексе операционного моделирования занимает подсис-
тема пользовательского интерфейса и система визуализации вводимой и отобра-
жаемой информации, в том числе картографической. Именно возможности, за-
ложенные в данные подсистемы, во многом определяют внешние свойства и эф-
фективность комплекса. При этом пользователю предоставляется возможность
управления процессом моделирования (просмотр и контроль текущих результа-
тов моделирования, замена параметров модели для поиска рациональных вари-
антов структур и архитектур исследуемых систем, отладки модели и загрузки в ба-
зу данных результатов моделирования), а также просмотр результатов моделиро-
вания.
Новые информационные технологии увеличили возможности классических
методов проектирования за счет новых способов их компьютерной поддержки, в
том числе кооперативных технологий, состоящих в компьютерной поддержке
совместной согласованной работы группы работников над одним проектом. Этот
феномен возник на основе суммы методов, обеспечивающих управление досту-
пом членов группы к разным частям проекта, управление версиями и редакциями
проектной документации и согласованным выполнением работ в последователь-
ной процедуре работ, управление параллельным проектированием и др. Внедре-
ние компьютерных коммуникаций позволяет резко увеличить возможности об-
мена любой информацией. Основой здесь должны стать стандартизованные про-
токолы обмена данными прикладного уровня в локальных и глобальных сетях.
Это исключает необходимость передачи бумажных документов для получения со-
гласия или содержательных замечаний, ненужные переезды для проведения сове-
щаний, обеспечить постоянную готовность исследователей получить и отослать
сообщение или информативные записи данных вне зависимости от места его гео-
графического расположения и др. Здесь следует отметить необходимость и важ-
ную роль формирования системы понятийных моделей предметной области.
Использование новых компьютерных и информационных технологий стано-
вится побудительным мотивом совершенствования и развития классических ме-
тодов и технологий внешнего проектирования боевых комплексов и сокращение
на этой основе времени разработки, повышение качества и конкурентности оте-
чественной авиационной техники.
125
Список литературы к разделу 1
1. Flight International, 1982, № 3838.
2. Техника воздушного флота, 1997, т. LXXI, № 5 (628).
3. Боевые самолеты ВВС России. — Авиация и космонавтика, 1999, № 8.
4. Федотов В. А. Самолеты В. М. Мясищева. — Техника воздушного флота, 1997,
т. LXXI, № 5 (628).
5. Arms control today, november 1999.
6. РИА «Новости». 14 января 2002, LENTA.RU, Москва.
7. Техническая информация ЦАГИ. 1999, № 2—3.
8. Авиация и космонавтика. 2000, № 2; 1999, № 8.
9. Ильин В. Е., Левин М. А. Бомбардировщики. — М.: Виктория, ACT, 1996.
10. Вестник воздушного флота. 1997, март—апрель.
11. Договор между СССР и США об ограничении стратегических наступательных во-
оружений (Договор ОСВ-2). Подписан 18 июня 1979.
12. Договор между СССР и США об ограничении системы противоракетной обороны
(Договор ПРО-72). Подписан 26 мая 1972.
13. Федосов Е. А., Спасский И. Д. Высокоточное оружие заняло место бога
войны. — Газета. Независимое обозрение, 1999, № 28.
14. Федосов Е. А. Полвека в авиации. Записки академика. — М.: Дрофа, 2004.
раздел
СОЗДАНИЕ, РАЗВИТИЕ
И ПРИМЕНЕНИЕ
УДАРНОЙ АВИАЦИИ
В ПОСЛЕВОЕННЫЙ
ПЕРИОД
С историко-научных позиций освещены разви-
тие и применение ударной авиации в послевоенный
период, использование научно-технических дости-
жений в конструкциях самолетов ударной авиации
2—4-го поколений. Приведены общие научные и ме-
тодические основы создания ударной авиации, в том
числе методы исследования эффективности удар-
ных комплексов. Показан рост боевых возможностей
ударной авиации, диапазонов высот и скоростей,
роль в этом научно-методической базы. При рас-
смотрении характеристик самолетов, состоявших на
вооружении ВВС страны в послевоенный период, в
первую очередь обращено внимание на их боевое
применение и анализ боевых показателей. Приведе-
ны летные, тактико-технические данные и характе-
ристики вооружения самолетов начального этапа и
специализированных ударных самолетов последую-
щих поколений. Рассмотрены реальные боевые дей-
ствия российских истребителей в локальных войнах.
2.1. Ударные самолеты
в историческом ракурсе
2.1.1. ФРОНТОВАЯ АВИАЦИЯ1
1. Обзор развития фронтовой ударной авиации России
Российская военная авиация зарождалась и развивалась, прежде всего, как
авиация фронтовая. Первые асы России А. Казаков, В. Федоров, Е. Крутенъ
и многие другие выдающиеся летчики сражались именно во фронтовой авиации.
На Халхин-Голе, в небе республиканской Испании и Китая, в советско-фин-
ляндской войне (1939—1940 гг.), в войне против фашистской Германии фронто-
вая авиация покрыла себя неувядаемой славой.
Фронтовая авиация — это самая многочисленная и мобильная часть Воен-
но-воздушных сил России. В ее составе — наиболее широкий спектр классов и
типов боевых и вспомогательных летательных аппаратов: от фронтовых бомбар-
дировщиков, штурмовиков, истребителей, разведчиков до самолетов авианаведе-
ния, вертолетов и легких транспортных самолетов.
В послевоенный период фронтовая авиация бурно и динамично развивалась.
Она достойно представляла ВВС в различных локальных конфликтах, на учени-
ях, маневрах и показах авиационной техники, выдвинула из своих рядов космо-
навтов, известных ученых и политических деятелей.
Переход ВВС на реактивную технику начался с фронтовой авиации. Летчики
ФА первыми освоили истребители МиГ-9, Як-15 и Як-17. Именно здесь наиболее
быстро происходил и продолжает идти процесс обновления самолетного парка:
если в состав дальней и морской авиации еще в 1993 г. входили самолеты Ту-16,
Ту-22 и ЗМ, построенные в 1950—1960-х годах, то их ровесники — истребители
МиГ-15, МиГ-17 и МиГ-19, бомбардировщики и разведчики Ил-28, Як-25РВ и
Як-27 покинули боевой строй еще в начале 1970-х. Несколько позже из состава
ВВС исключили и самолеты Як-28 всех модификаций. Даже машины третьего
поколения реактивной авиации— Су-17М2, Су-17МЗ, Су-17М4, МиГ-23 и
МиГ-27 — можно встретить лишь в авиационных музеях и на базах резервных са-
молетов, где их поддерживают в боеготовом состоянии на особый период [1].
В начале 1980-х годов в составе ВВС страны была вновь, спустя четверть века
после ликвидации, создана штурмовая авиация, на вооружение которой поступи-
ли реактивные дозвуковые самолеты-штурмовики Су-25.
1 В написании подраздела принимали участие Ю. Ф. Полушкин, О. С. Титков.
5 Авиация ВВС России и научно-технический прогресс 1 29
Можно выделить несколько поколений боевой авиации, каждое из которых
характеризуется новой качественной ступенью развития летательного аппарата,
систем вооружения или боевого комплекса.
Первое послевоенное поколение боевой авиации (1950—1957 гг. — фронто-
вые истребители МиГ-15бис, МиГ-17Ф, фронтовой ударный самолет Ил-28) ос-
нащалось стрелково-пушечным, бомбардировочным вооружением, неуправляе-
мыми реактивными снарядами, а бортовые системы содержали простейшие ме-
ханические и оптические коллиматорные прицельные визиры для обеспечения
стрельбы и бомбометания [2].
Второе поколение авиации (1958—1966 гг. — фронтовой истребитель
МиГ-21Ф, истребители-бомбардировщики Су-7Б, Су-17, фронтовой бомбарди-
ровщик Як-28) приняло на вооружение первые авиационные управляемые раке-
ты классов «воздух—воздух» и «воздух—поверхность». В бортовые системы во-
шли первые импульсные РЛС, осуществлявшие целеуказание или наведение уп-
равляемых ракет; сложные прицелы стрельбы — авиационные стрелковые
прицелы (АСП) и оптические прицелы бомбометания (ОПБ); аналоговые вычис-
лители; навигационные гироскопические системы; автопилоты. Началась эра уп-
равляемого авиационного оружия, что обусловило развитие автоматизированных
бортовых систем управления оружием.
Третье поколение авиации (1967—1976 гг. — фронтовой истребитель-бом-
бардировщик МиГ-23Б, перехватчик МиГ-25, истребители-бомбардировщики
МиГ-27М, МиГ-27К, Су-17М, Су-17М2, Су-17МЗ, Су-17М4, фронтовой удар-
ный самолет Су-24) получило богатый арсенал управляемых ракет класса «воз-
дух—воздух» — от ракет ближнего воздушного боя до ракет большой дальности с
различными системами наведения — и еще более разнообразный набор ракет
классов «воздух—поверхность», противорадиолокационных «воздух—корабль»,
ПТУР, а также корректируемых бомб различных калибров и с разными система-
ми наведения. В бортовые системы управления новым составом вооружения во-
шли импульсно-доплеровские РЛС, РЛС для маловысотного полета, пассивные
радиопеленгаторы, оптико-электронные обзорно-прицельные системы с телеви-
зионными и лазерными каналами, электронная прицельно-пилотажная индика-
ция, нашлемные системы целеуказания, унифицированные системы управления
оружием, первые бортовые цифровые вычислительные машины, инерциальные
навигационные системы.
Внедрение бортовой цифровой вычислительной машины (БЦВМ) обуслов-
ливало объединение систем управления вооружением и навигационных систем в
единый прицельно-навигационный комплекс.
Новые средства бортового комплекса ознаменовали собой рождение
авионики — направления, связанного с созданием высокоэффективных радио-
электронных, оптико-электронных, индикационных, навигационных и вычис-
лительных систем.
Четвертое поколение авиации (1977—1990 гг. — фронтовые истребители
Су-27, МиГ-29, штурмовик Су-25, фронтовой ударный самолет Су-24М) вобрало в
себя все стремительно развивающиеся системы вооружения от ракет ближнего ра-
диуса действия до крылатых стратегических ракет, качественно новые бортовые
комплексы, полностью основанные на вычислительной технике и кодовом обмене
информацией, что позволило объединить в единый комплекс все системы управ-
ления самолетом (вертолетом), вооружением, средствами радиоэлектронного про-
тиводействия, групповыми действиями, информационные, радиоэлектронные,
130
оптико-электронные, пилотажно-навигационные системы, системы электронной
индикации и органы ручного управления. Повысились точность навигационных
систем, точность применения вооружения, автоматизация систем управления.
Эффективность и надежность возросли, расширился диапазон применения бое-
вой авиации на сухопутном и морском театрах военных действий. Локальные во-
енные конфликты в горячих точках земного шара с участием нашей авиации под-
твердили высокий уровень отечественной авиации, не уступающий уровню ави-
ации крупнейших мировых держав, а в ряде случаев — превосходящий его.
В настоящее время основу парка фронтовой авиации российских ВВС со-
ставляют машины четвертого поколения — МиГ-29, Су-27, Су-24М, Су-25, а
также разведчики МиГ-25РБ. Для уничтожения и «ослепления» РЛС, средств уп-
равления войсками и высокоточного оружия противника используются ударные
самолеты МиГ-25БМ, вооруженные противорадиолокационными ракетами, и
специализированные самолеты и вертолеты, оснащенные современными средст-
вами РЭБ.
Как свидетельствует новейшая история, роль военно-воздушных сил в совре-
менной войне постоянно возрастает. Развитие фронтовой авиации, составляю-
щей основу воздушной мощи нашей страны, в значительной степени определяет
и общее состояние оборонного потенциала России. Поэтому особое внимание
уделяется реорганизации прежде всего фронтовой авиации, оснащению ее мно-
гофункциональными боевыми самолетами (поколение 4+) — Су-39, Су-27М,
Су-34 и МиГ-29М, имеющими новейшие бортовые системы обнаружения, вы-
числительную технику с элементами искусственного интеллекта, наиболее совер-
шенное вооружение и системы обмена информацией.
Современный парк самолетов фронтовой авиации (Су-27М, Су-34, МиГ-29М,
Су-39) формируется в условиях принятия ограничений стратегических вооруже-
ний и формирования доктрины оборонной достаточности. Поэтому дальнейший
рост боевой эффективности авиации связывается с техническими решениями,
обоснованными экономической целесообразностью, с повышением информиро-
ванности бортовых комплексов о внешней тактической обстановке, с примене-
нием универсальных бортовых средств, пригодных для различных авиационных
комплексов, с интеллектуализацией бортового комплекса, позволяющей экипа-
жу принимать тактически правильные решения в сложной боевой обстановке,
поднять уровень автоматизации процессов управления системами авиационного
боевого комплекса (АБК). В этих направлениях устремлены помыслы специалис-
тов при проведении исследований и отработке перспективных бортовых комп-
лексов нового поколения боевой авиации XXI в. Практически боевая авиация
разных поколений на разных этапах создания прошла исследования по частным
или комплексным проблемам.
Эти самолеты способны в одном вылете с высокой эффективностью пора-
жать как воздушные, так и наземные (морские) цели, успешно вести РЭБ, а также
самостоятельно, при помощи бортовых средств, вскрывать различные по харак-
теру объекты противника. Применение многофункциональных боевых самолетов
позволит сохранить высокий боевой потенциал российских ВВС в условиях чис-
ленного сокращения авиации.
Непрерывность управления боевыми действиями и организацию перегруп-
пировки войск обеспечивают воздушные командные пункты, оборудованные на
базе современных транспортных самолетов и вертолетов различных типов, а так-
же автоматические ретрансляторы.
131
Новым классом машин ФА должны стать самолеты наблюдения и целеуказа-
ния М-55, а также самолеты и вертолеты передового авианаведения.
В настоящее время ведутся работы по созданию самолета пятого поколения.
Ударный многоцелевой самолет пятого поколения сверхмногофункционален и
должен иметь бортовое радиоэлектронное оборудование с весьма высокой сте-
пенью интеллектуальности, которое и определяет его боевую эффективность.
При этом самолет 5-го поколения должен не только получать и использовать ин-
формацию от своих информационных каналов, но иметь возможность получать и
передавать информацию от других сил и средств практически в реальном масшта-
бе времени.
Фронтовой самолет 5-го поколения должен иметь возможность в качестве ис-
полнительного, активно-информационного и управляющего элемента включаться
в единую авиационно-космическую и наземную сеть системы управления, что, в
свою очередь, выдвигает совершенно новые по сравнению с предыдущим поколе-
нием требования к БРЭО самолета (обеспечение качественно нового уровня опе-
ративности получения информации на любом этапе ведения боевых действий —
практически «мгновенная» реакция на изменение внешней обстановки, функци-
онирование в сложной сигнальной и помеховой обстановке с качественно новым
уровнем помехоустойчивости, способность эффективно функционировать в ходе
групповых действий, целеуказание и целераспределение при применении оружия,
высокая скрытность функционирования и минимальное влияние на характерис-
тики заметности самолета, реализация совмещенных режимов работы, совместная
обработка информации от различных информационных каналов, интеллектуаль-
ная поддержка и автоматизация работы экипажа и т. п.).
При создании самолета 5-го поколения необходима реализация новых сис-
темных архитектур, технологий комплексирования БРЭО, автоматизации пред-
ставления, обработки и контроля информации, выдаваемой экипажу, обеспече-
ния взаимосвязи и интеграции систем, позволяющих реализовать ключевые
принципы построения нового поколения БРЭО:
• функциональную и аппаратурную интеграцию аппаратуры;
• модульность, многоуровневость и открытость архитектуры;
• внутривидовую и межвидовую унификацию и стандартизацию систем, эле-
ментов радиоэлектронных комплексов (РЭК) и программно-математическо-
го обеспечения и т. д.
Реализация этих ключевых принципов определяет облик перспективного
комплекса бортового оборудования.
2. Самолеты первого послевоенного десятилетия
Сложившаяся к началу 1950-х годов организационная структура отечествен-
ных Военно-воздушных сил разделяла три вида авиации: фронтовую, дальнюю
и военно-транспортную. Наиболее массовая по общему числу и количеству
типов имеющихся на вооружении самолетов фронтовая авиация в свое время
включала в себя несколько родов авиации: бомбардировочную, истребитель-
ную, штурмовую, разведывательную и специальную.
Задачи поражения наземных целей на поле боя возлагались на самоле-
ты-штурмовики, главным образом поршневые самолеты типа Ил-10 и Ил-ЮМ,
прототипом которых был прославленный штурмовик времен Второй мировой
132
войны Ил-2. Выпуск этих самолетов продолжался до 1954 г., когда стало ясно, что
повсеместное внедрение в военную авиацию реактивных двигателей и прогрес-
сивных аэродинамических схем не оставляет места самолетам со скоростью поле-
та не более 500...550 км/ч. Для повышения эффективности действий штурмовой
авиации в середине 1950-х годов на ее вооружение был передан ряд частей, осна-
щенных реактивными истребителями первого поколения МиГ-15бис. Располагая
значительно более высокими летными данными (так, скорость МиГ-15бис у земли
составляла 1076 км/ч против 476 км/ч у Ил-ЮМ), реактивные машины уступали
специализированным самолетам поля боя как по боевой живучести и степени за-
щищенности экипажа, так и по вооружению: в то время как Ил-ЮМ мог поднимать
до 600 кг бомб и 8 реактивных снарядов и имел 5 пушек, МиГ-15бис принимал на
борт всего две авиабомбы массой 50 или 100 кг и оснащался двумя 23-миллиметро-
выми и одной 37-миллиметровой пушками. Отсутствие эффективного самоле-
та-штурмовика (разработка в ОКБ С. В. Ильюшина реактивного бронированного
самолета поля боя Ил-40 в 1953 г. не была поддержана) и изменение взглядов у ру-
ководства СССР на тактику ведения вооруженной борьбы привели к тому, что в
1956 г. штурмовая авиация как род авиации советских ВВС была ликвидирована.
Вместо нее спустя год в составе фронтовой авиации начала создаваться истреби-
тельно-бомбардировочная авиация.
Фронтовым бомбардировщикам ставились задачи поражения целей в опера-
тивной и тактической глубине обычным и ядерным оружием. Первым реактив-
ным самолетом этого класса, принятым на вооружение отечественных ВВС в
1949 г., стал трехместный дозвуковой самолет Ил-28. Разработанный коллекти-
вом ОКБ-240 под руководством главного конструктора С. В. Ильюшина этот
бомбардировщик отправился в первый полет 8 июля 1948 г. Первые машины ос-
нащались английскими турбореактивными двигателями Роллс-Ройс «Чин» и их
отечественными вариантами РД-45 и РД-45Ф тягой 2270 кгс (22,3 кН). В августе
1949 г. на бомбардировщик установили отечественные двигатели ВК-1 тягой
2700 кгс (26,5 кН), созданные на базе РД-45Ф под руководством главного конст-
руктора В. Я. Климова. С новой силовой установкой Ил-28 в сентябре 1949 г.
был запущен в массовое производство [1].
Построенный по схеме цельнометаллического высокоплана с тонким прямым
крылом и стреловидным оперением Ил-28 достигал скорости полета 906 км/ч на
средней высоте и имел практический поток 12 500 м. При максимальной взлет-
ной массе около 23 т он принимал на борт до 3 т бомб массой от 100 до 3000 кг, с
расчетной боевой нагрузкой в одну тонну дальность полета составляла 2400 км.
Он имел мощное оборонительное пушечное вооружение (четыре 23-миллиметро-
вые пушки, в том числе две — на поворотной кормовой установке) и совершен-
ное оборудование, включавшее панорамный радиолокатор ПСБН-М8, систему
слепой посадки и другую радионавигационную аппаратуру. Прицельное бомбо-
метание осуществлялось по оптическому и радиолокационному прицелам. Эки-
паж самолета состоял из трех человек — летчика, штурмана и кормового стрел-
ка-радиста.
Самолет Ил-28 выпускался в больших количествах и исправно нес службу в
частях в течение более четверти века. На его базе был создан ряд модификаций,
наибольшее распространение из которых получили самолет-разведчик Ил-28Р с
увеличенной дальностью полета и учебно-тренировочный самолет Ил-28У, став-
ший «летающей партой» для большинства летчиков-бомбардировщиков 1950—
1970-х годов. Были и другие варианты: торпедоносец Ил-28Т, штурмовик
133
Ил-28Ш; немало послужили самолеты Ил-28 в качестве летающих лабораторий
для испытаний новой авиационной техники, а в конце своей «карьеры» — в каче-
стве летающих мишеней для отработки систем ПВО. Бомбардировщики Ил-28
широко поставлялись на экспорт: помимо стран социалистического лагеря (Бол-
гарии, Венгрии, Вьетнама, ГДР, Китая, КНДР, Польши, Румынии и Чехослова-
кии), он состоял на вооружении ВВС ряда государств Африки и Ближнего Восто-
ка (Алжира, Египта, Ирака, Йемена, Марокко, Нигерии, Сомали), а также Индо-
незии и Финляндии. Кроме того, самолеты этого типа строились по лицензии в
Чехословакии, а с 1967 г. — в Китае, где они имели обозначение Н-5 («Хар-
бин-5»).
Бомбардировщики Ил-28 применялись в ходе вооруженных конфликтов на
Ближнем Востоке 1967 и 1973 годов, войны во Вьетнаме; в 1962 г. советская груп-
пировка самолетов-носителей ядерного оружия Ил-28А была на время Карибско-
го кризиса развернута на Кубе; в начале 1970-х годов самолет Ил-28Ш применял-
ся во время инцидента на советско-китайской границе; Ил-28 ВВС ДРА исполь-
зовались в ходе войны в Афганистане.
Первый серийный советский реактивный фронтовой бомбардировщик
Ил-28 стал в 1950—1960-е годы одним из наиболее массовых самолетов первого
послевоенного поколения в советских ВВС, с ним в отечественную бомбардиро-
вочную авиацию пришли новые скорости и высоты полета, именно на нем впер-
вые были внедрены радиолокационная аппаратура и тактическое ядерное ору-
жие, придавшие отечественным Военно-воздушным силам в трудные годы «хо-
лодной войны» новые боевые возможности.
<
3. Быстрее звука
Как уже отмечалось, в середине 1950-х годов в структуре отечественных Во-
енно-воздушных сил произошли некоторые изменения: была расформирована
штурмовая авиация, а в мае 1957 г. началось формирование нового рода
авиации — истребительно-бомбардировочной. Поначалу ее основу составляли
части, вооруженные самолетами МиГ-15бис, до этого выполнявшими роль штур-
мовиков. Несколько позднее в ее состав из истребительной авиации был передан
ряд полков самолетов МиГ-17. Эти машины, находившиеся в серийном произ-
водстве с 1951 г., в ударном варианте мало отличались по боевым возможностям
от МиГ-15бис. Несколько большей эффективностью располагали самолеты
МиГ-17Ф с форсированным двигателем ВК-1Ф тягой 3380 кгс (33,2 кН), строив-
шиеся в 1952—1958 гг. При взлетной массе 5350 кг МиГ-17Ф разгонялся до ско-
рости 1145 км/ч на средней высоте, достигал практического потолка 16 600 м,
дальность полета превышала 1000 км. Было усилено вооружение: к трем пушкам
добавились неуправляемые реактивные снаряды, подвешиваемые под крылом.
МиГ-17Ф мог брать на борт 2 снаряда ТРС-190 калибра 190 мм или АРС-212 ка-
либра 212 мм, а также малокалиберные снаряды АРС-57 (С-5) калибром 57 мм,
устанавливавшиеся в блоки по 6, 12 или 16 снарядов. Кроме того, на два под-
крыльевых пилона на балочных держателях могли подвешиваться авиабомбы
массой 50, 100 и 250 кг (по две на самолет). Тем не менее МиГ-17 и МиГ-17Ф,
не будучи специально созданными для выполнения задач истребителя-бомбарди-
ровщика, к началу 1960-х годов уже не могли удовлетворять требованиям, предъ-
являвшимся к самолетам этого класса. Необходима была разработка новой спе-
циализированной боевой машины, изначально предназначенной для решения
подобных задач. Таким самолетом стал одноместный сверхзвуковой истреби-
тель-бомбардировщик Су-7Б, спроектированный в 1958 г. в ОКБ-51 главного
конструктора П. О. Сухого.
Необходимо отметить, что истребители-бомбардировщики как новый тип
боевых самолетов появились в СССР в результате разделения в конце 1950-х го-
дов прежде многообразного, но единого класса самолетов-истребителей на три
большие группы: истребители-перехватчики, фронтовые истребители и
истребители-бомбардировщики. Первые, оснащенные мощными бортовы-
ми радиолокационными станциями и исключительно управляемым ракетным
оружием, стали решать задачи перехвата воздушных целей. Вторые были более
универсальными и предназначались в первую очередь для ведения воздушного
боя, но могли и совершать атаки на наземные цели. Третьи в качестве приоритет-
ной задачи имели поражение объектов противника на земле и на море в тактиче-
ской и ближайшей оперативной глубине, но располагали и определенными воз-
можностями по ведению воздушного боя. Истребители-бомбардировщики отли-
чались от фронтовых истребителей большей массой бомбовой нагрузки и
широкой номенклатурой неуправляемого ракетного оружия, отсутствием радио-
локационных прицелов и управляемых ракет класса «воздух—воздух» (воздушные
цели поражались пушками).
Первый специализированный истребитель-бомбардировщик отечественных
ВВС Су-7Б наряду с фронтовым истребителем МиГ-21Ф-13 и истребителем-пе-
рехватчиком Су-9 представлял второе поколение отечественных сверхзвуковых
реактивных боевых самолетов, характеризовавшееся значительно более высоки-
ми летно-техническими данными (скорость полета свыше 2000 км/ч, практиче-
ский потолок более 18 км), мощным ракетно-пушечным вооружением, совре-
менным прицельно-навигационным оборудованием. На самолетах второго поко-
ления нашли применение мощные турбореактивные двигатели с форсажными
камерами и осевыми компрессорами, изменилась аэродинамика.
Одноместный сверхзвуковой истребитель-бомбардировщик Су-7Б с двигате-
лем АЛ-7Ф-1 тягой 9600 кгс (94,2 кН) достигал максимальной скорости полета
2120 км/ч и при взлетной массе 13 600 кг мог принимать на борт до 2 т различно-
го вооружения. Помимо двух 30-миллиметровых пушек НР-30, оно включало
авиабомбы от 50 до 500 кг различного назначения, неуправляемые ракеты калиб-
ра от 57 до 240 мм. В состав оборудования входили автоматический стрелковый
прицел АСП-5НД и прицел бомбометания ПБК-2, радиодальномер СРД-5М,
современный комплект радионавигационной и радиосвязной аппаратуры. Го-
ловной серийный самолет Су-7Б совершил первый полет 24 апреля 1959 г.,
и после прохождения испытаний в 1961 г. истребитель-бомбардировщик был
принят на вооружение советских ВВС. Уже в декабре 1961 г. серийный завод
перешел на производство улучшенного варианта Су-7БМ с увеличенным запа-
сом топлива и модернизированным оборудованием. Выпуск его продолжался
до 1965 г., когда он был сменен еще более совершенной модификацией Су-7БКЛ
с улучшенным прицельно-навигационным оборудованием и увеличенной до 3 т
массой боевой нагрузки. На самолете были установлены колесно-лыжное шасси,
новый тормозной парашют и стартовые пороховые ракетные двигатели, что по-
зволило обеспечить базирование на грунтовых аэродромах и улучшить взлет-
но-посадочные характеристики. В производстве находились также варианты
Су-7Б: учебно-боевой Су-7У; экспортные Су-7БМК и Су-7УМК.
135
В период с 1956 по 1971 г. строились 7 основных модификаций Су-7, послед-
ние из которых эксплуатировались в отечественных ВВС до 1989 г. Кроме того,
самолеты Су-7Б различных модификаций поставлялись на экспорт в ряд друже-
ственных Советскому Союзу государств: Алжир, Афганистан, Египет, Индию,
Ирак, Северную Корею, Польшу, Сирию, Чехословакию. Самолеты этого типа
применялись в ряде вооруженных конфликтов на Ближнем Востоке, индо-пакис-
танском конфликте 1971 г., во время войны в Афганистане.
Развитием концепции истребителя-бомбардировщика Су-7 Б стал одномест-
ный сверхзвуковой самолет Су-17 с крылом изменяемой геометрии, за которым
последовало целое семейство боевых реактивных машин третьего поколения,
принявших у Су-7Б эстафету наиболее массового и популярного самолета истре-
бительно-бомбардировочной авиации.
В начале 1960-х годов сверхзвуковые скорости пришли и во фронтовую бом-
бардировочную авиацию. Первым сверхзвуковым бомбардировщиком, поступив-
шим на вооружение частей фронтовой авиации, стал двухместный самолет Як-28,
разработанный в ОКБ-115 главного конструктора А. С, Яковлева. Первый по-
лет новой машины состоялся 5 марта 1958 г., и уже в 1959 г. фронтовой бомбарди-
ровщик Як-28Б был запущен в серийное производство. Построенный по схеме
высокоплана со стреловидными крылом и оперением и двумя двигателями
Pl 1АФ-300 тягой по 5750 кгс (56,4 кН) в мотогондолах под крылом, этот самолет
со взлетной массой 16 800 кг развивал скорость до 1900 км/ч, имел потолок
16 200 м и дальность полета без подвесных баков почти 2000 км. Вооружение
включало авиабомбы различных типов, в том числе ядерные, общей массой до
3000 кг, размещаемые во внутрифюзеляжном отсеке, а также встроенную пушку
калибром 23 мм. Экипаж самолета состоял из летчика и штурмана, в распоряже-
нии которых было прицельно-навигационное оборудование с радиолокационным
бомбардировочным прицелом РБП-3 и оптическим прицелом ОПБ-16. В 1960 г.
на испытания вышли два новых варианта бомбардировщика с более совершен-
ным оборудованием и двигателями Р11АФ2-300 тягой 6200 кгс (60,8 кН).
Самолеты Як-28Л с разностно-дальномерной бомбардировочной системой
«Лотос» и Як-28И с радиолокационным прицелом «Инициатива-2» выпускались
серийно, однако наибольшее распространение получила последняя, по ее типу
позднее переоборудовались и другие ранее выпущенные бомбардировщики
Як-28. При той же, что у Як-28Б и Як-28Л, боевой нагрузке взлетная масса
Як-28И увеличилась до 18 100 кг, а дальность превысила 2000 км. В строевых час-
тях ВВС Советского Союза находилось около 350 фронтовых бомбардировщиков
Як-28.
Интересной особенностью самолета явилось создание на его базе ряда мо-
дификаций различного назначения: в частях ПВО страны до второй половины
1980-х годов широко эксплуатировались двухместные самолеты-перехватчики
Як-28П с мощной радиолокационной станцией и ракетным вооружением, на во-
оружение разведывательной авиации ВВС были приняты самолеты-разведчики
Як-28Р, до начала 1990-х годов в строю находились самолеты радиоэлектронного
противодействия — постановщики помех Як-28ПП. Имелся и двухместный учеб-
но-тренировочный вариант самолета Як-28У с двумя отдельными кабинами, так-
же выпускавшийся серийно. Як-28, таким образом, в истории мирового самолето-
строения представляет собой редкий пример самолета, который достаточно
успешно выступал в столь разных ролях. Всего было построено около
1000 самолетов Як-28 разных модификаций.
136
4. Самолеты третьего поколения
Состоявшийся после долгого перерыва 9 июля 1967 г. на подмосковном
аэродроме Домодедово парад по случаю Дня Воздушного Флота СССР убеди-
тельно продемонстрировал всему миру совершенство и мощь советской военной
авиационной техники. Особый интерес для специалистов представил показ наря-
ду с серийными боевыми самолетами прототипов новейших летательных аппара-
тов, которые спустя несколько лет составили основу отечественных Военно-воз-
душных сил.
Один из них — одноместный сверхзвуковой истребитель-бомбардировщик
Су-17. Прототип машины совершил первый полет 2 августа 1966 г. Он был создан
на базе серийного самолета Су-7БМ, но отличался от него применением крыла
изменяемой геометрии, подвижные части консолей которого могли поворачи-
ваться, занимая углы стреловидности от 60 до 30°. Несмотря на некоторое увели-
чение массы крыла и уменьшение запаса топлива, дальность крейсерского полета
нового самолета возросла на 20...25%, значительно улучшились взлетно-посадоч-
ные данные. В 1969 г. под обозначением Су-17 он был запущен в серийное произ-
водство, а уже в 1972 г. на смену ему пришла более совершенная модификация
Су-17М. На самолет установили более экономичный двигатель АЛ-21Ф-3 тягой
11 200 кгс (НО кН), современное пилотажно-навигационное оборудование, уве-
личили запас топлива. Максимальная масса боевой нагрузки была доведена до
4000 кг, в ее номенклатуре кроме бомб массой от 100 до 500 кг и неуправляемых
реактивных снарядов калибром 57, 80 и 240 мм появились управляемые ракеты
класса «воздух—поверхность» Х-23 с радиокомандным наведением и Х-28 с пас-
сивным радиолокационным самонаведением. Взлетная масса самолета увеличи-
лась до 18 400 кг, скорость полета у земли составила 1350 км/ч, на большой высо-
те — 2200 км/ч, дальность полета с подвесными баками у земли достигла 1400 км,
а на большой высоте — 2450 км. Произведенные доработки позволили отнести
Су-17М уже к третьему поколению реактивных боевых самолетов.
К началу 1970-х годов требования к самолетам истребительно-бомбардиро-
вочной авиации несколько изменились: определяющее значение придавалось
уже не высотно-скоростным данным самолета, а радиусу действия, возможности
базирования на коротких малоподготовленных аэродромах, боевой эффектив-
ности при выполнении основной боевой задачи, которой для истребителя-бом-
бардировщика стало поражение наземных целей. Самолеты этого класса стано-
вились все более «бомбардировщиками» и даже «штурмовиками», постепенно ут-
рачивая функции истребителя. Такой подход можно наглядно проследить и на
развитии семейства самолетов Су-7 и Су-17 [4].
В конце 1973 г. выходит на испытания одноместный сверхзвуковой истреби-
тель-бомбардировщик Су-17М2. Пилотажно-навигационное оборудование на
нем сведено в комплекс навигации КН-23 с аналоговым вычислителем, для точ-
ного определения расстояния до атакуемых целей установлен лазерный дально-
мер «Фон», расширена номенклатура вооружения класса «воздух—поверхность».
При установке подвесной станции подсвета цели «Прожектор» с Су-17М2 стало
возможным применять управляемые ракеты с полуактивной лазерной системой
наведения. Появились на борту и современные самонаводящиеся ракеты класса
«воздух—воздух» типа Р-60. Вскоре после запуска Су-17М2 в серийное производ-
ство в ОКБ создается его улучшенный вариант Су-17МЗ с увеличенным запасом
топлива и более эффективным прицельным оборудованием (установлен лазер-
137
ный дальномер-целеуказатель «Клен-ПС»), выпуск его начался в 1977 г. С 1976 г.
строился двухместный учебно-боевой самолет Су-17УМ, с 1978 года — Су-17УМЗ
с более совершенным оборудованием и вооружением.
Требованиям дальнейшего увеличения боевой эффективности отвечал само-
лет Су-17М4, переданный в производство в 1981 г. На новую модификацию уста-
новили современный прицельно-навигационный комплекс с цифровой вычис-
лительной машиной, а некоторое снижение максимальной скорости полета на
большой высоте (до 1900 км/ч) позволило облегчить конструкцию и увеличить
дальность полета. Взлетная масса самолета возросла до 19 500 кг. В состав воору-
жения были включены управляемые ракеты класса «воздух—поверхность» с теле-
визионным самонаведением, корректируемые ракеты, противорадиолокацион-
ные ракеты, корректируемые бомбы КАБ-Л. Стрелковое вооружение из двух
встроенных пушек НР-30 могло дополняться подвесными подвижными установ-
ками СППУ-22. При подвеске сменных контейнеров с разведывательным обору-
дованием Су-17М4 превращался в Су-17М4Р, который, как и аналогичный вари-
ант Су-ПМЗР, широко использовался в разведывательных частях и подразделе-
ниях фронтовой авиации.
Последней основной боевой модификацией этого семейства самолетов стал
Су-17М4, выпускавшийся в течение двух десятков лет вплоть до 1990 г. в больших
количествах (по некоторым оценкам, было построено около 1200 самолетов
Су-17 почти полутора десятков модификаций). Самолеты этого типа получили
широкое распространение в частях истребительно-бомбардировочной авиации
отечественных ВВС. Немало самолетов сегодня продолжает нести службу и в во-
оруженных силах зарубежных государств. С 1972 г. строился истребитель-бомбар-
дировщик Су-20 (вариант Су-17М), поставлявшийся в Польшу, Египет и Ирак; с
1976 г. выпускались самолеты Су-22 (вариант Су-17М2 с двигателем Р29БС-300),
с 1978 г. — самолеты Су-22М и Су-22УМ (модификации Су-17МЗ и Су-17УМ с
таким же двигателем), с 1982 г. — Су-22МЗ и Су-22УМЗ (с Р29БС-300 и более со-
вершенным оборудованием и вооружением), а с 1983 г. — Су-22М4 и Су-22УМЗК
(с АЛ-21Ф-3). Эти машины поставлялись в страны—участницы Варшавского до-
говора (ГДР, Венгрию, Польшу, Чехословакию), Афганистан, Вьетнам, КНДР, ряд
стран Африки и Ближнего Востока (Анголу, Йемен, Ливию, Сирию), а также Пе-
ру. Самолеты Су-20 и Су-22М участвовали в сирийско-израильском конфликте
1973 г., в боях в долине реки Бекаа в Ливане. Советские и афганские Су-17МЗ,
Су-17М4 и Су-22М широко применялись в ходе боевых действий в Афганистане.
Другой представитель третьего поколения реактивных боевых самолетов —
фронтовой истребитель-бомбардировщик МиГ-27. Работы по его созданию на-
чались в ОКБ А. И. Микояна в конце 1960-х годов одновременно с внедрением в
серийное производство фронтового истребителя МиГ-23 с крылом изменяемой
геометрии. Первый ударный вариант этого истребителя, получивший обозначе-
ние МиГ-23Б, оснащался двигателем АЛ-21Ф-3 тягой 11 200 кгс (ПО кН), при-
цельно-навигационным комплексом «Сокол-23С» с лазерным дальномером
«Фон» и имел увеличенную до 3000 кг боевую нагрузку. В отличие от МиГ-23 на
МиГ-23Б не устанавливался бортовой радиолокатор, что позволило изменить
форму носовой части фюзеляжа, значительно улучшив обзор из кабины пилота
вниз-вперед. На самолете появилось бронирование, возрос запас топлива, что
привело к увеличению максимальной взлетной массы до 20 т. Опытный образец
МиГ-23Б совершил первый полет 20 августа 1970 г., а в 1971 г. была выпущена
небольшая серия. В 1973 г. на самолет установили двигатель Р29Б-300 тягой
138
11 500 кгс (112,8 кН), доработанный ПрНК «Сокол-23Н». В таком виде самолет
под обозначением МиГ-23БН был запущен в серийное производство и постав-
лялся в основном на экспорт в страны Восточной Европы (Болгарию, ГДР, Поль-
шу, Чехословакию), Африки и Ближнего Востока (Алжир, Египет, Ирак, Йемен,
Ливию, Сирию, Эфиопию), а также во Вьетнам, в Индию и на Кубу. Вооружение
истребителей-бомбардировщиков МиГ-23Б и МиГ-23БН включало встроенную
пушку ГШ-23Л, различные образцы неуправляемого ракетно-бомбового оружия,
а также управляемые ракеты класса «воздух—поверхность» с радиокомандным
наведением. Для обороны от истребителей могли использоваться самонаводя-
щиеся ракеты.
В это же время в ОКБ был разработан вариант истребителя-бомбардировщи-
ка для советских ВВС с повышенной боевой эффективностью. Такой самолет по-
лучил первоначально обозначение МиГ-23БМ, а позднее был переименован в
МиГ-27. На него установили новый прицельно-навигационный комплекс
ПрНК-23 с цифровым вычислителем, пушка калибром 23 мм уступила место бо-
лее мощной шестиствольной ГШ-6-30, изменилось расположение и увеличилась
грузоподъемность узлов подвески вооружения, максимальная масса которого
была доведена до 4000 кг. В 1973 г. МиГ-27 был запущен в крупносерийное про-
изводство и начал поступать в части истребительно-бомбардировочной авиации.
Этот самолет взлетной массой 20 500 кг с двигателем Р29Б-300 тягой 11 500 кгс
(112,8 кН) развивал скорость 1350 км/ч у земли и 1800 км/ч на большой высоте,
дальность полета с подвесными баками составляла 2500 км.
В 1974 г. на испытания передали истребитель-бомбардировщик МиГ-23БК.
На него установили прицельно-навигационный комплекс ПрНК-23К, в состав
которого была включена лазерно-телевизионная прицельная система «Кайра»,
позволявшая производить обнаружение целей на значительно больших расстоя-
ниях. Кроме того, система обеспечивала применение с самолета широкой но-
менклатуры управляемых ракет класса «воздух—поверхность» с полуактивной
лазерной системой наведения и с телевизионным самонаведением. В арсена-
ле истребителя-бомбардировщика появились противорадиолокационные ракеты,
корректируемые авиабомбы, современные ракеты класса «воздух—воздух». Пред-
принятые меры наряду с установкой на самолет оборудования радиоэлектронного
противодействия позволили значительно увеличить его боевые возможности. Ис-
пытания показали, что потребный наряд самолетов для решения одинаковой бое-
вой задачи снизился по сравнению с МиГ-23БН и МиГ-27 в 2...2,5 раза, а уровень
потерь в боевом вылете — в 1,5...3 раза. Под обозначением МиГ-27К в 1977 г. эта
машина была запущена в серийное производство и по праву считалась наиболее
эффективной из всего семейства истребителей-бомбардировщиков МиГ-27.
Несколько более скромными возможностями располагал созданный в 1976 г.
вариант МиГ-27М. Не имея дорогостоящей оптико-электронной системы (вместо
нее на борт установили лазерный дальномер-целеуказатель «Клен-ПМ»), прицель-
но-навигационный комплекс ПрНК-23М самолета МиГ-27М тем не менее обеспе-
чивал применение почти полной номенклатуры вооружения МиГ-27К (за исклю-
чением корректируемых авиабомб КАБ-Л). На МиГ-27М установили модернизи-
рованный комплект пилотажно-навигационного оборудования. В 1978 г. был начат
серийный выпуск этой модификации, а с 1986 г. производство ее лицензионного
варианта МиГ-27Л было налажено в Индии, где самолет получил название «Баха-
дур». С 1982 г. была начата доработка ранее выпущенных истребителей-бомбарди-
ровщиков МиГ-27 под ПрНК-23М; такие самолеты имели обозначение МиГ-27Д и
139
располагали боевыми возможностями самолета МиГ-27М. Всего с 1971 по 1986 г. в
серийном производстве находилось 7 модификаций истребителя-бомбардировщи-
ка МиГ-23Б/МиГ-27, было выпущено почти 1000 машин, которые широко исполь-
зовались в частях истребительно-бомбардировочной авиации отечественных Воен-
но-воздушных сил.
5. Работы ОКБ имени А. И. Микояна
в области ударной авиации
В декабре 2004 г. ОКБ им. А. И. Микояна отметило свое 65-летие. За эти годы
созданы 14 семейств массовых летательных аппаратов, более 100 типов запущены
в серийное производство, разработано свыше 450 проектов. Хотя основной про-
дукцией фирмы являлись всемирно известные истребители семейств МиГ-1, -2, -3,
МиГ-9, МиГ-15, МиГ-17, МиГ-19, МиГ-21, МиГ-23, МиГ-25, МиГ-29 и МиГ-31,
значительное место уделялось:
• обеспечению многофункциональности применения самолетов как по воз-
душным, так и по наземным и надводным целям;
• созданию на базе истребителей их специализированных ударных модифи-
каций;
• проведению модернизаций ранее выпущенных самолетов, в том числе с из-
менением их назначения;
• разработке новых проектов либо ударных самолетов, либо с преобладающей
ролью ударных задач.
Многолетний опыт показал, что успех обеспечивается, прежде всего, за счет:
• внедрения новейших научно-технических достижений в создании авиацион-
ной техники;
• тесного взаимодействия с институтами промышленности, прежде всего с
ФГУП «ГосНИИАС» и Министерством обороны, и устоявшейся кооперации
с организациями-разработчиками:
♦ прицельно-навигационных комплексов — С.-Петербургским ОКБ «Элек-
троавтоматика», Раменским ПКБ;
♦ оптико-электронных систем — ЦКБ «Геофизика», Уральским опти-
ко-механическим заводом, ЦКБ завода «Арсенал»;
♦ систем управления оружием — Курским ОКБ «Прибор»;
♦ управляемого, корректируемого и неуправляемого оружия и пусковых
устройств — ОКБ «Стрела», МКБ «Радуга», МКБ «Вымпел», НПО «Ре-
гион», ПО «Базальт», НИИПФ, Тульским ПКБ и др.
Многофункциональные истребители
Все истребители ВВС, начиная с первенца ОКБ МиГ-1, должны были обес-
печивать поражение наземных целей неуправляемым оружием в условиях визу-
альной видимости целей. Исключением стал реактивный самолет первенец ОКБ
«МиГ-9», который имел очень мощное артвооружение: 1 пушку калибром 37 мм
и 2 — по 23 мм, но стрельба по наземным целям не рекомендовалась, так как при
возможном заглохании двигателей при стрельбе из пушек ситуация могла стать
достаточно опасной. Следующим исключением в силу особенностей ЛТХ был
перехватчик МиГ-25П.
140
С течением времени от типа к типу на истребителях устанавливались все бо-
лее и более совершенные прицелы: ПБП на МиГ-1, АСП-1Н на МиГ-15,
АСП-ЗН на МиГ-17, АСП-5Н на МиГ-19, 21, АСП-17 на МиГ-23, индикаторы на
лобовом стекле, позволяющие решать ударные задачи.
Параллельно росла и масса бомбовой нагрузки, которая на последних вари-
антах самолета МиГ-29 достигла 4 т.
Мощное артвооружение (1 пушка калибром 37 мм и 2 — по 23 мм), неуправ-
ляемые ракетные снаряды (НРС), бомбы, хороший обзор, маневренные характе-
ристики позволили успешно эксплуатировать Ми Г-15 и Миг-17 в частях штурмо-
вой и истребительно-бомбардировочной авиации.
Следующим шагом в создании универсального самолета (впервые в России)
стало его оснащение одним-двумя видами управляемого оружия, действующего
по наземным целям.
Таким оружием являлись:
• ракета с наведением в луче БРЛС на самолетах МиГ-21 с РЛС РП-21М;
• ракета с радиокомандным наведением с самолетной аппаратуры «Дельта-Н»,
которая размещалась на многих вариантах самолетов МиГ-23;
• корректируемая бомба с телевизионно-корреляционным наведением
КАБ-КР на самолетах МиГ-21-93 и МиГ-29СМ, имеющих телевизионный
индикатор;
• ракета с телевизионно-корреляционным наведением на самолетах
МиГ-29СМ.
Первой разработкой многоцелевого самолета в ОКБ стал поднятый в дале-
ком 1941 г. ДИС-200, который использовался в качестве дальнего истребителя со-
провождения, легкого бомбардировщика, торпедоносца, разведчика.
Смена варианта назначения осуществлялась заменой контейнера под фюзе-
ляжем. Самолет имел великолепный обзор вперед—вниз за счет специального ос-
текления. К сожалению, во время войны шансов на серию у самолета не было.
Появление прицельных комплексов и управляемого оружия, позволяющих
уничтожать цели вне зоны объектовой ПВО, с одной стороны, и возросшие стои-
мости закупок самолетов и их эксплуатации, с другой стороны, заставили отка-
заться от доктрины специализированного самолета и выявили целесообразность
создания многоцелевых универсальных самолетов. Не случайно с 1980-х годов
производство чисто ударных фронтовых самолетов практически прекратилось.
Руководство ОКБ своевременно поняло перспективность создания многоце-
левых самолетов. Однако требовалось решение большого числа сложных научно-
технических задач [10, 11]:
• создания многофункциональных РЛС, обладающих как лучшими возмож-
ностями по обнаружению воздушных целей, так и возможностями обзора
земной поверхности в режимах низкого, среднего и высшего разрешения,
селекции движущихся целей, режимами обзора и выделения морских целей
(при желательном наличии вспомогательных режимов — облета и обхода
препятствий, измерения дальности и пеленга заданного ориентира и т. д.);
• комплексных систем оптикоэлектроники;
• новых типов управляемого, корректируемого и неуправляемого оружия;
• создания новой открытой архитектуры бортового комплекса с использовани-
ем ЦВМ более высокой мощности, современных каналов связи, в том числе
мультиплексных по стандарту MIL STD 1553В и более совершенного мат-
обеспечения, в том числе с задачами искусственного интеллекта;
141
• нового подхода к эргономике кабины с реализацией концепций «гласе—кок-
пит» (стеклянная кабина) с выводом основной части информации на элек-
тронные дисплеи и обеспечение одновременного, без переноса рук, управле-
ния самолетом, двигателями и вооружением за счет расположения специаль-
ных органов управления вооружением на ручках управления самолетом и
двигателем (принцип HOTAS);
• создания комплексов радиоэлектронного противодействия с одновремен-
ным внедрением мер по повышению боевой живучести (два разнесенных
двигателя, изоляция топливных баков от каналов воздухозаборника, пенопо-
лиуретан в баках для исключения его разрушения от гидроудара, заполнение
надбакового пространства нейтральным газом, разнос каналов управления
самолетом, проводка электропитания);
• новых систем связи с обеспечением приема—передачи телекодовой, команд-
ной и аудиоинформации;
• более совершенной системы регистрации, обработки и контроля полетной
информации.
Впервые в нашей стране эта идеология стала основополагающей в проекте
МиГ-29М — глубокой модификации истребителя МиГ-29К с полностью унифи-
цированным вооружением и оборудованием (за исключением некоторых особен-
ностей в системах навигации).
Для самолетов МиГ-29М и МиГ-29К созданы:
• первый в стране многофункциональный радиолокатор «Жук»;
• новая оптико-локационная станция с лазерным и ИК-каналами (предусмат-
ривалось внедрение низкоуровневого телевизионного канала);
• комплексы связи, навигации, обороны на базе типовых базовых комплексов;
• более мощные ЦВМ Ц-101;
• новая система матобеспечения;
• комплексы полунатурного моделирования;
• модернизированные двигатели с более высокой максимальной тягой, а для
МиГ-29К — с режимом «чрезвычайной тяги»;
• более объемные баки для внутреннего топлива, система дозаправки в воз-
духе;
• система дистанционного управления;
• в кабине два многофункциональных дисплея на монохромных электрон-
но-лучевых трубках (ЭЛТ), индикатор на лобовом стекле и резервные элек-
тромеханические приборы уменьшенного размера;
• увеличенная масса бомбовой нагрузки при 9 точках подвески.
В состав управляемого оружия для действий по наземным целям были вклю-
чены ракеты:
• с телевизионными головками самонаведения и корректируемые бомбы
КАБ-КР;
• «воздух—РЛС»;
• « воздух—корабл ь».
Внедрение новых конструкционных материалов, в том числе сварных алю-
миниево-литиевых сплавов, позволило снизить вес конструкции, а за счет широ-
кого внедрения автоматизированной сварки уменьшилась трудоемкость построй-
ки самолета. Кроме того, введен комплекс мер по улучшению эксплуатационных
характеристик.
142
Работа по созданию этих самолетов считалась наиболее приоритетной. Не-
смотря на все трудности первых лет перестройки, удалось построить опытную
партию самолетов МиГ-29М и МиГ-29К, подготовить серийное производство.
В перспективе предполагалось:
• дооснащение самолета оптико-электронным прицельным контейнером.
В этом случае самолет мог быть легко довооружен оружием с лазерными го-
ловками самонаведения и корректируемыми бомбами КАБ-КР;
• создание последовательности самолетов МиГ-29М1, М2, М3, М4 с поэтап-
ным наращиванием характеристик по дальности полета, маневренных харак-
теристик, предусматривался переход на схему «триплан»;
• создание двухместных учебно-боевых самолетов.
К сожалению, экономические возможности страны не позволили оснастить
ВВС России этими самолетами. Тем не менее полученный задел был использован
в разработках:
• самолетов МиГ-29СМТ и экспортного варианта МиГ-29К;
• дальнейших проектов развития МиГ-29;
• многофункционального истребителя;
• самолетов семейства МиГ-АТ;
• при модернизации самолетов МиГ-21.
Истребитель МиГ-15
Долгое время слово «МИГ» на Западе являлось синонимом всех советских
истребителей. Начало этому было положено в конце 1950 г., когда американцы
впервые столкнулись в Корее с реактивным истребителем МиГ-15 (рис. 2.1).
Работы по созданию этой машины начались в 1946 г. Относительно тяжелый
для своего времени истребитель, предназначенный в первую очередь для борьбы
с дальними бомбардировщиками типа В-29, В-36 и В-50, разрабатывался под дви-
гатель РД-45 — лицензионный вариант английского ТРД «НИН 1». Первоначаль-
но в ОКБ А. И. Микояна был создан аванпроект И-320 самолета с прямым кры-
лом, представляющего собой дальнейшее развитие концепции МиГ-9. Однако в
марте 1947 г., основываясь на результатах исследований ученых ЦАГИ, было ре-
шено радикально пересмотреть аэродинамическую компоновку, перейдя к стре-
ловидному крылу (35° по 1/4 линии хорд) и оперению.
Рис. 2.1. Самолет МиГ-15
143
Постройка нового самолета, получившего индекс И-310 (С), была завершена
27 ноября 1947 г., а 30 декабря того же года опытный истребитель выполнил свой
первый испытательный полет. Третья опытная машина 17 июня 1948 г. достигла
рекордной скорости, соответствующей М = 0,943, вплотную приблизившись к
звуковому барьеру Истребитель нес мощное вооружение (две пушки калибром
23 мм и одну — 37 мм), оптимизированное в первую очередь для уничтожения
бомбардировщиков противника. Первый этап государственных испытаний ново-
го истребителя завершился осенью 1948 г. решением Совета Министров СССР о
запуске самолета в серийное производство под обозначением МиГ-15 (практиче-
ски одновременно было принято решение о развертывании выпуска более легких
истребителей Ла-15 и Як-23, оснащенных лицензионными двигателями «Дер-
вент»).
Первый серийный МиГ-15 поднялся в воздух 30 декабря 1948 г., а поступле-
ние истребителей в строевые части ВВС, ПВО и морской авиации началось зи-
мой 1948/1949 г. Вскоре они полностью вытеснили самолеты Ла-15 и Як-23.
Серийное производство МиГ-15 было организовано в СССР на девяти заво-
дах (в том числе и в г. Комсомольске-на-Амуре). Несколько позже лицензии на
выпуск этого самолета были переданы Чехословакии и Польше (где он соответ-
ственно получил наименование S101 и 1-1М-1). Серийные самолеты имели дви-
гатель РД-45Ф. Был изменен и состав вооружения: вместо пушек НС-23 калиб-
ром 23 мм истребитель получил более совершенные НР-23 того же калибра.
В начале 1950 г. приступили к выпуску новой модификации МиГ-15бис,
имеющей усовершенствованный двигатель ВК-1, а также ряд изменений в конст-
рукции планера и бортового оборудования. МиГ-15бис «СД» — одноместный
фронтовой истребитель. Он отличался от серийного МиГ-15 более мощным дви-
гателем ВК-1 тягой 2700 кгс, что потребовало изменения внутренних обводов
шпангоутов хвостовой части фюзеляжа. Одновременно была изменена конструк-
ция тормозных щитков — для уменьшения «валежки» приклепаны «ножи» к за-
дней кромке крыла и элеронов. Максимальная скорость, скороподъемность, по-
толок и дальность самолета увеличились, а длина разбега, несмотря на увеличе-
ние взлетной массы, сократилась, поскольку для уменьшения длины пробега
после испытания ряда вариантов на МиГ-15бис был введен тормозной парашют.
Некоторые доработки были выполнены в процессе серийного производства, та-
кие, например, как модернизация остекления фонаря, усовершенствование тор-
мозных щитков, применение противоперегрузочного костюма летчика, замена
связного KB-приемопередатчика РСИ-6 на УКВ-радиостанцию РСИУ-3.
Серийное производство МиГ-15бис началось в 1950 г. на авиазаводах в горо-
дах Куйбышеве, Новосибирске, Горьком, Комсомольске-на-Амуре и Саратове,
где он сменил МиГ-15; в 1951 г. к сборке МиГ-15бис приступил завод в
г. Тбилиси. МиГ-15бис вытеснил МиГ-15 и с конвейеров лицензионного произ-
водства. Выпуск этой модификации в СССР продолжался до 1953 г., затем заводы
полностью перешли на производство более совершенных истребителей МиГ-17.
По заказу Вьетнама прорабатывался вариант МиГ-15бис с дополнительной
установкой самонаводящихся ракет Р-ЗС и теплопеленгатора вместо 37-милли-
метровой пушки.
Строились также фоторазведчик МиГ-15Рбис и учебно-тренировочный са-
молет МиГ-15УТИ. Всего в СССР было выпущено 10 073 МиГ-15 различных мо-
дификаций, а с учетом лицензионного производства в Польше и Чехословакии
суммарный объем выпуска этих машин составил 15 560 единиц.
144
Истребитель МиГ-17
Безусловно удачная конструкция истребителя МиГ-15 была положена в ос-
нову последующих модификаций самолета. Повышение летных характеристик
самолета стало возможным, благодаря применению нового крыла с углом стрело-
видности 45° по линии 1/4 хорд. Такое крыло, разработанное ОКБ совместно с
учеными ЦАГИ, имело двойную стреловидность по передней кромке: 45° в корне
и 42° на концах. Было увеличено с двух до трех число аэродинамических гребней
на верхней поверхности каждой консоли.
Опытный самолет «СИ» с крылом увеличенной стреловидности был пере-
оборудован в ОКБ-155 из серийного МиГ-15бис в июле 1949 г. Помимо нового
крыла, в конструкцию машины были внесены и другие изменения: применено
горизонтальное оперение со стреловидностью по передней кромке 45°, установ-
лен небольшой подфюзеляжный гребень, на 900 мм увеличена длина хвостовой
части фюзеляжа, введены более эффективные тормозные щитки увеличенной
площади. При этом объем топливных баков пришлось уменьшить до 1412 л.
Первый полет модернизированного самолета состоялся 14 января 1950 г., ист-
ребитель пилотировал летчик-испытатель Герой Советского Союза И. Т. Иващен-
ко. В ходе испытаний была достигнута максимальная скорость 1114 км/ч (на вы-
соте 2000 м). На высоте 10 200 м самолет удалось разогнать до 1077 км/ч, что со-
ответствовало М = 1. Однако 17 марта 1950 г. во время одного из испытательных
полетов произошла катастрофа — летчик-испытатель И. Т. Иващенко погиб, а
опытный истребитель потерян.
Испытания продолжились на второй опытной машине СИ-2, поднявшейся в
воздух в марте 1950 г. В дальнейшем к ней присоединились и другие истребители.
В соответствии с приказом Министерства авиационной промышленности от
1 сентября 1951 г. серийное производство нового самолета, получившего назва-
ние МиГ-17 (рис. 2.2), должно было развернуться на основных «истребительных»
заводах страны: в городах Комсомольске-на-Амуре, Куйбышеве, Горьком, Тби-
лиси, Саратове и Новосибирске.
Летные испытания усовершенствованного варианта истребителя Ми Г-17 с
двигателем ВК-1Ф, снабженным форсажной камерой, начались 29 сентября
1951 г. По сравнению с ТРД ВК-1 тяга нового двигателя возросла с 2700 до
3380 кгс. В результате удалось значительно повысить потолок, скороподъемность
и разгонные характеристики истребителя, несколько возросла и максимальная
Рис. 2.2. Самолет МиГ-17
145
скорость горизонтального полета. Серийное производство этой, наиболее массо-
вой, модификации началось в конце 1952 г.
В следующем году в г. Горьком и г. Тбилиси началось производство истре-
бителя МиГ-17П — первого в нашей стране серийного всепогодного легкого пе-
рехватчика, оснащенного радиолокационным прицелом (РП-1 «Изумруд»). Поз-
же были созданы варианты МиГ-17ПФ (с двигателем ВК-1Ф): МиГ-17ПФУ (с
управляемыми ракетами РС-1У), фронтовой разведчик МиГ-17Р и ряд других
модификаций (как серийных, так и опытных). Всего в СССР было выпущено
7999 самолетов МиГ-17 различных вариантов. При этом наибольшее число ист-
ребителей этого типа было построено в г. Горьком (2424) и в г. Комсомольске-
на-Амуре (2180).
Кроме того, лицензия на серийный выпуск МиГ-17 была передана Польше
(где было произведено 540 истребителей) и Китаю.
Освоение производства МиГ-17 на новом китайском авиазаводе в г. Шеньяне
началось в 1955 г. При этом активную помощь китайским коллегам оказывали со-
ветские специалисты (в том числе и авиастроители из г. Комсомольска-на-Амуре —
ближайшего к КНР советского авиационного завода, производящего МиГ-17).
Первый МиГ-17Ф китайской сборки, получивший обозначение J-5, вышел
на летные испытания в июле 1956 г. До 1969 г. в КНР было выпущено
767 истребителей этого типа. В дальнейшем строились истребители-перехватчи-
ки J-5A (аналог советского МиГ-17ПФ) и учебно-тренировочные J-7 (выпуск
этой модификации продолжался до конца 1986 г.). В общей сложности на китай-
ских авиастроительных предприятиях было построено 1828 МиГ-17 (J-5) всех мо-
дификаций.
Самолеты МиГ-17 несли службу в советских ВВС, ПВО и авиации ВМФ до
начала 1980-х годов. В 1957 г. часть самолетов этого типа (вместе с более старыми
МиГ-15) была переведена в состав истребительно-бомбардировочной авиации.
Вооружение самолетов было усилено двумя бомбами по 250 кг (ранее истребите-
ли несли лишь 50- и 100-килограммовые боеприпасы) и неуправляемыми авиа-
ционными ракетами (НАР).
Фронтовой истребитель МиГ-23
МиГ-23 — основной истребитель советских ВВС 1970—1980-х годов
(рис. 2.3). Работе по его созданию предшествовал большой объем исследований, в
которых принимали участие Г. С. Бюшгенс, Г. В. Александров, С. М, Бело-
церковский, Г. И. Загайнов и другие ведущие ученые-аэродинамики ЦАГИ.
Было доказано, что за счет применения крыла изменяемой стреловидности обес-
печивалось создание многорежимного боевого самолета, способного решать за-
дачи фронтового истребителя, истребителя-перехватчика и маловысотного ист-
ребителя-бомбардировщика.
В 1964 г. были начаты работы по проектированию самолета МиГ-23, а первый
опытный самолет «23-11/1», пилотируемый летчиком-испытателем А. В. Федо-
товым, впервые поднялся в воздух 9 июля 1967 г.
Выпуск первой серийной модификации МиГ-23С с ТРДФ Р-27 начался в
1969 г. на ММ3 «Знамя труда». В 1972 г. был создан МиГ-23М, имеющий более
мощный двигатель Р-29, крыло с увеличенной хордой подвижных частей, хвосто-
вое оперение, смещенное назад, усовершенствованное БРЭО и ракетное воору-
жение класса «воздух—воздух» средней дальности.
146
Рис. 2.3. Самолет МиГ-23
МиГ-23С («23-11С») — первая серийная модификация фронтового истреби-
теля с двигателем Р27Ф-300 и системой управления вооружением С-21М (перво-
начально С-21) с РЛС «Сапфир-21М» (РП-22СМ) и прицелом АСП-ПФ. Воору-
жение включало четыре ракеты «воздух—воздух» малой дальности Р-ЗС или Р-ЗР
с тепловыми или радиолокационными головками самонаведения. Для поражения
наземных целей могли использоваться две управляемые ракеты Х-23 с радиоко-
мандной системой наведения, а также неуправляемое ракетно-бомбовое воору-
жение общей массой до 2000 кг. Истребитель строился серийно в 1969—1970 гг.
Вариантом фронтового истребителя со штатной системой управления воору-
жением С-23 в составе РЛС «Сапфир-23Л», теплопеленгатором ТП-23 и прице-
лом АСП-23Д являлся МиГ-23 образца 1971 г. Его вооружение состояло из двух
ракет средней дальности Р-23Р или Р-23Т и двух ракет малой дальности Р-ЗС
(позднее Р-60). Важными конструктивными отличиями от МиГ-23С стали мо-
дернизированное крыло так называемой «второй редакции» с увеличенной пло-
щадью консолей и немеханизированной передней кромкой и увеличенное плечо
оперения (киль и стабилизатор были смещены назад на 860 мм). На самолет уста-
навливался модифицированный двигатель Р27Ф2М-300 тягой 10 000 кгс. Запас
топлива увеличился на 70 л за счет установки дополнительного четвертого бака
в хвостовой части фюзеляжа. Самолет строился серийно в 1970—1971 гг.
Первая массовая модификация фронтового истребителя Миг-23 — МиГ-23М
(«23-11М») — создана в 1972 г. Основными отличиями этого самолета стали дви-
гатель Р29-300 тягой 12 500 кгс; доработанная система управления вооружением
С-23Д-Ш, состоящая из РЛС «Сапфир-23Д-Ш», теплопеленгатора ТП-23 и при-
цела АСП-23Д (на первых МиГ-23М использовалась система управления воору-
жением С-23Л самолета МиГ-23); крыло «третьей редакции» с отклоняемым
4-секционным носком (первые МиГ-23М имели еще крыло «второй редакции»);
узлы подвески под поворотными консолями двух дополнительных подвесных
топливных баков (ПТБ) емкостью 800 л каждый (для случая, когда крыло нахо-
дится только в положении минимальной стреловидности).
147
Основной вариант вооружения включал две ракеты Р-23Р или Р-23Т и
2...4 ракеты Р-60, могли также использоваться ракеты малой дальности Р-ЗС и
Р-13М, ракеты «воздух—поверхность» и неуправляемое оружие по типу приме-
няемого на МиГ-23.
Эта модификация оснащалась системой автоматического управления
САУ-23А и навигационно-пилотажным комплексом «Полет-1 И».
Серийное производство МиГ-23М осуществлялось в 1971 — 1978 гг., было по-
строено свыше 1300 самолетов.
Глубокой модернизацией МиГ-23М является МиГ-23МЛ («23-12») с двига-
телем Р-35 тягой 13 000 кгс, усовершенствованной системой управления воору-
жением С-23МЛ и облегченной конструкцией. Комплекс работ по облегчению
самолета и его оборудования (был снят фюзеляжный топливный бак № 4, приме-
нены 3-секционные закрылки, уменьшена площадь форкиля, изменено шасси)
поднял уровень летно-технических характеристик истребителя, что позволило
ему практически на равных вести воздушные бои с истребителями США F-16
следующего поколения. Система управления вооружением С-23МЛ включала
РЛС «Сапфир-23МЛ» (Н003), теплопеленгатор ТП-23М и унифицированный
прицел С-17МЛ (первоначально АСП-23МЛ). Облет прототипа МиГ-23МЛ вы-
полнил 21 января 1975 г. А. Г. Фаетовец, серийное производство продолжалось с
1976 по 1983 г., построено более 1000 самолетов.
Первой экспортной модификацией стал самолет МиГ-23МС, созданный
в 1973 г. и имеющий более простое оборудование и вооружение. Другой экспорт-
ный вариант МиГ-23МФ, созданный в 1977 г., мало отличался от самолета
МиГ-23М.
На заводе в г. Иркутске был освоен выпуск учебно-боевых вариантов
МиГ-23.
Появление на Западе истребителей четвертого поколения заставило ОКБ
им. А. И. Микояна провести работы по улучшению маневренных характеристик
МиГ-23. В 1976 г. был создан облегченный самолет МиГ-23МЛ, оснащенный усо-
вершенствованным двигателем Р-35. Его дальнейшим развитием стали создан-
ный в 1977 г. фронтовой истребитель МиГ-23МЛА и истребитель-перехватчик
ПВОМиГ-23П.
Эволюцию самолетов семейства МиГ-23 завершил фронтовой истребитель
МиГ-23МЛД, созданный в 1984 г. и способный совершать полет на больших уг-
лах атаки, что увеличивало маневренные характеристики. На самолете был умень-
шен «боевой» угол стреловидности (технология изготовления отъемных частей
крыла была полностью отработана, было выяснено, что консоли даже на умень-
шенном угле стреловидности могут «держать» эксплуатационную перегрузку
8,5 g), в корневой части крыла был сделан вихреобразующий «запил», а на прием-
нике воздушного давления (ПВД) появились вихреобразующие пластины. В ва-
риант МиГ-23МЛД до 1985 г. было переоборудовано большое число самолетов
МиГ-23 других модификаций.
Серийное производство истребителей МиГ-23 прекращено в 1985 г. На ММ3
«Знамя труда» выпущено 4278 самолетов (включая и истребительно-бомбардиро-
вочные модификации), в г. Иркутске построено 769 учебно-тренировочных са-
молетов (УТС) МиГ-23УБ (с учетом переоборудования в вариант МиГ-23УМ —
1020 самолетов).
В настоящее время истребители МиГ-23 последних модификаций ВВС Рос-
сии выведены в резерв и находятся на базах хранения. Кроме ВВС и Войск ПВО
148
СССР, самолеты МиГ-23 различных модификаций поставлялись ВВС Афгани-
стана, Алжира, Анголы, Болгарии, Кубы, Чехословакии, Германии, Египта, Ли-
вии, Венгрии, Ирака, Индии, КНДР, Эфиопии, Южного Йемена, Польши, Си-
рии, Вьетнама.
Вооружение. Имеются пушка ГШ-23Л (23 мм, 200 патронов), УР средней
дальности Р-23Р и Р-24Р (МиГ-23МЛА и МиГ-23МЛД) с радиолокационной по-
луактивной системой наведения, Р-23Т и Р-24Т (МиГ-23МЛА и МиГ-23МЛД) с
ТГС; 2...4 УР малой дальности Р-13М, Р-ЗР или Р-ЗС с радиолокационной полу-
активной системой наведения или ТГС; 4...5 УР ближнего боя Р-60 и Р-60М.
В ходе модернизации возможна установка ракет Р-73 с целеуказанием от на-
шлемного визира.
Для поражения наземных целей самолет может оснащаться двумя УР, НАР
различных типов, свободнопадающими бомбами до 500 кг, общей массой до
20 00 кг. В перегрузочном варианте самолета МиГ-23МЛД масса боевой нагрузки
может достигать 4500 кг.
Фронтовой истребитель МиГ-29
МиГ-29 — один из наиболее распространенных в мире истребителей четвер-
того поколения и основной легкий истребитель российских ВВС. Исследование
его облика началось в 1969 г. с привлечением ОКБ им. А. Микояна, П. О. Сухого
и А. С. Яковлева. В 1971 г. с учетом опыта боевого применения истребительной
авиации во Вьетнаме и на Ближнем Востоке были сформулированы тактико-тех-
нические требования к перспективному фронтовому истребителю (ПФИ), спо-
собному бороться с новейшими истребителями потенциального противника чет-
вертого поколения. Основными отличиями ПФИ от его предшественников —
истребителей МиГ-21, МиГ-23 и Су-15 — должны были стать повышенная ма-
невренность, обеспечиваемая новыми аэродинамическими и компоновочными
решениями, применение принципиально нового БРЭО (в частности, цифровой
СУ В) и перспективных авиационных средств поражения [14—18].
В начале 1970-х годов командование ВВС обосновало целесообразность по-
строения перспективного парка истребительной авиации страны на основе двух
типов самолетов: тяжелых и легких (в отношении 1 : 3). Легкий истребитель дол-
жен был обладать превосходством в воздушных боях над американским истреби-
телем 4-го поколения F-16 и любым истребителем предшествующего поколения
и вести бой на равных с тяжелым истребителем 4-го поколения F-15A, перехва-
тывать широкий круг воздушных целей, в том числе крылатые ракеты, а также
поражать наземные цели неуправляемым оружием.
Работы по формированию облика перспективного истребителя, почти сразу
получившего название МиГ-29, начались в 1970 г. под непосредственным руко-
водством Генерального конструктора Р. А. Белякова и его заместителя по про-
ектированию А, А. Чумаченко. Первоначально рассматривалась традиционная
аэродинамическая схема самолета по типу МиГ-25 и система вооружения, являв-
шаяся развитием системы вооружения истребителя МиГ-23, которая могла вклю-
чать модернизированную РЛС «Сапфир-23», ракеты средней дальности К-23 или
К-25 (отечественный аналог американской ракеты AIM-7 «Спэрроу») и ракеты
малой дальности К-13М и К-60. Предложение было представлено заказчику в
первой половине 1972 г.
149
Одновременно в ОКБ началась проработка принципиально нового варианта
истребителя — среднеплана интегральной схемы с трапециевидным крылом со
значительным наплывом, двумя килями и двумя двигателями в гондолах под
крылом. В августе 1972 г. заказчику была представлена вторая редакция аванпро-
екта МиГ-29, на основе которой в следующем году было уточнено тактико-техни-
ческое задание ВВС. На самолете предусматривалось применение ракет «воздух—
воздух» нового поколения — УР средней дальности и УР ближнего боя, обеспечи-
вающих поражение воздушных целей, маневрирующих с максимальной пере-
грузкой, на значительно больших дальностях по сравнению с ракетами типа
К-23, К-13М и К-60. Совершенно новой должна была стать и система управления
вооружением истребителя, в которую предлагалось включить многофункци-
ональный радиолокатор, оптико-электронную прицельную систему, систему
электронной индикации и более современные средства навигации.
В силовую установку входили два новых двухконтурных турбореактивных
двигателя с форсажной камерой РД-33 тягой 8300 кгс, разрабатывавшихся в ОКБ
Генерального конструктора С. П. Изотова. Несмотря на применение на истре-
бителе двух двигателей, взлетная масса его оценивалась всего в 12 т.
Чтобы ускорить процесс создания самолета при условии длительной разра-
ботки перспективной системы управления вооружением (СУВ), было предложе-
но вести его в два этапа. На первом этапе предстояло построить и испытать вари-
ант истребителя МиГ-29А с СУВ на базе радиолокационной станции «Янтарь»
(развитие РЛС «Сапфир-23МЛ» самолета МиГ-23МЛ) и оптико-электронного
прицельно-навигационного комплекса ОЭПрНК-29А с квантовой оптико-лока-
ционной станцией (КОЛС) и ракетами К-24 (К-23М) и К-60М (К-60). На втором
этапе самолет МиГ-29 планировалось оснастить перспективной СУВ, в состав
которой входили новая РЛС «Рубин» (Н019) и оптико-электронный прицель-
но-навигационный комплекс ОЭПрНК-29, а также ракетным вооружением но-
вого поколения — УР К-27 и К-73 (или К-14). Компоновка, конструкция и со-
став остального оборудования самолетов МиГ-29А и МиГ-29 были практически
идентичными. На оба варианта предполагалось устанавливать систему навигации
СН-29, включающую инерциальную навигационную систему и приемник радио-
технической системы ближней навигации, бортовую аппаратуру командной ра-
диолинии управления, станцию оповещения об облучении, связную радиостан-
цию. Помимо управляемого ракетного вооружения, на обоих самолетах преду-
сматривалось применение встроенной двухствольной пушки АО-17А калибром
30 мм, а для действий по наземным целям — неуправляемых ракет и авиабомб
общей массой 2000 кг.
В соответствии с ТТЗ, откорректированным по результатам аванпроектных
проработок, допускалось увеличение взлетной массы истребителя до 13,5 т.
В 1974 г. была утверждена интегральная схема истребителя. На стадии эскизного
проектирования изменили тип пушки (от двухствольной перешли к более легкой
новой одноствольной пушке ГШ-301) и приняли решение об установке унифи-
цированного катапультного кресла К-36ДМ. На этом этапе сформировался опти-
ко-электронный прицельно-навигационный комплекс, в состав которого поми-
мо квантовой оптико-локационной станции КОЛС, представляющей собой ком-
бинацию обзорно-следящего теплопеленгатора и лазерного дальномера, вошла
нашлемная система целеуказания «Щель». Окончательно определилась архитек-
тура системы управления вооружением, состоящей из двух комплексов — радио-
локационного и оптико-электронного. В состав обоих входили цифровые вычис-
150
лительные машины Ц-100, объединенные между собой цифровой линией связи.
Основная, наиболее важная информация выводилась на индикатор на лобовом
стекле и электронный индикатор прямого видения (ИПВ).
Успехи в создании нового радиолокатора «Рубин», для испытаний которого
были подготовлены летающие лаборатории, и тщательная стендовая отработка
систем позволили в 1976 г. отказаться от создания «переходного» варианта
МиГ-29А с упрощенной системой управления вооружением и сосредоточить ос-
новные усилия на варианте МиГ-29 с перспективной СУВ и ракетным оружием
нового поколения. Этот вариант истребителя, получивший заводской шифр 9-12,
был построен, испытан, а затем запущен в массовое производство. Оценки пока-
зывали, что по боевой эффективности новый истребитель, вооруженный ракета-
ми Р-73, в ближнем маневренном воздушном бою должен превзойти самолет
F-15 в 1,4 раза и F-16 в 1,5 раза, а во встречном дальнем ракетном бою с исполь-
зованием УР К-27 МиГ-29 будет обладать некоторым превосходством над F-15 во
всем диапазоне высот и скоростей.
К постройке опытных экземпляров МиГ-29 приступили в 1975 г. В следую-
щем году состоялась защита эскизного проекта и был предъявлен макет самолета.
Сборка первого опытного экземпляра МиГ-29 (самолета №901) закончилась в
августе 1977 г., а 6 октября 1977 г. летчик-испытатель А, В. Федотов совершил
на нем первый вылет. Большой вклад в создание истребителя на стадии проекти-
рования и постройки опытных самолетов внесли А. А. Чумаченко, назначен-
ный главным конструктором самолета, и заместители главного конструктора
В. А. Лавров и В. А. Микоян [11].
В летных испытаниях МиГ-29 приняли участие 14 опытных экземпляров и
самолетов установочной партии, построенных в период с 1977 по 1982 г. на опыт-
ном производстве ММ3 им. А. И. Микояна и в МАПО им. П. В. Дементьева.
Государственные совместные испытания (ГСИ) МиГ-29 начались в 1979 г. и
успешно завершились в октябре 1983 г. после выполнения 2330 полетов. В 1987 г.
самолет был принят на вооружение ВВС.
С конца 1983 г. первые МиГ-29 начали поступать в строевые части ВВС Со-
ветского Союза, в том числе расположенные на территории стран—участниц
Варшавского договора. Затем МиГ-29 стали получать ВВС стран Варшавского
договора и традиционные союзники из стран третьего мира.
Наличие на МиГ-29 эффективных ракет «воздух—воздух» средней и малой
дальности, уникальной системы управления вооружением на основе РЛС, КОЛС
и нашлемной системы целеуказания, его отличные маневренные характеристи-
ки, большая максимальная скорость обеспечили самолету абсолютное превос-
ходство над американским истребителем F-16A, на котором отсутствовали раке-
ты средней дальности, а комплекс «прицел—ракета малой дальности» значитель-
но уступал по своим возможностям российскому, а также определенное
превосходство над F-15A, хотя и не столь яркое. Проведенные несколько позднее
(в начале 1990-х годов) учебные бои подтвердили это на практике.
Вместе с тем появление в США ракет «воздух—воздух» средней дальности с
активной радиолокационной головкой самонаведения AMRAAM и вооружение
этими ракетами самолетов F-15 и F-16 значительно уменьшило перевес МиГ-29 в
дальних ракетных боях. Кроме того, летчиков и авиационных специалистов
вполне справедливо не удовлетворяли дальность полета МиГ-29 первых серий и
величина бомбовой нагрузки, они критиковали его за отсутствие аппаратуры ак-
тивных помех и высокоточного оружия для действий по наземным целям. Все это
151
определило основные направления дальнейшего развития МиГ-29: «малую мо-
дернизацию» МиГ-29 (9-13), а затем МиГ-29С (9-13С), модификацию с управ-
ляемым оружием «воздух—поверхность» МиГ-29 (9-14) и глубокую модерниза-
цию МиГ-29М (9-15) для ВВС и МиГ-29К (9-31) для ВМФ. В 1990-е годы идея
модернизации выпущенных ранее истребителей привела к созданию самолетов
МиГ-29СМ и МиГ-29СМТ (9-17). Глубокой модификацией учебно-боевого са-
молета МиГ-29 УБ (9-51) должен был стать двухместный многофункциональный
самолет МиГ-29УБТ (9-52).
МиГ-29 (9-13) — одноместный фронтовой истребитель с двумя двигателями
РД-33, радиолокационным прицельным комплексом РЛПК-29 и оптико-элек-
тронным прицельно-навигационным комплексом ОЭПрНК-29, модификация
серийного МиГ-29 (9-12). Максимальная масса бомбовой нагрузки возросла до
3000 кг (обеспечена подвеска 6 бомб массой 500 кг (по две бомбы) на тандемных
балочных держателях).
Истребитель МиГ-29 (9-13), имеющий гаргрот увеличенных размеров для
размещения встроенной станции постановки активных радиолокационных по-
мех, поднялся в воздух 4 мая 1984 г. Боевая нагрузка самолета (9-13) возросла по
сравнению с (9-12) с 2000 до 3000 кг, в состав вооружения включили контейнеры
малогабаритных грузов КМГ-У, число одновременно подвешиваемых бомб мас-
сой 500 кг возросло с 4 до 6. В серийное производство истребитель (9-13) был за-
пущен в 1986 г. (самолеты этого типа строились лишь для советских ВВС).
Для поставок на экспорт в середине 1980-х годов было разработано два вари-
анта истребителя МиГ-29 (9-12), отличающихся составом оборудования и во-
оружения. МиГ-29 (9-12А) предназначался для стран Варшавского договора, а
(9-12Б) — для остальных государств. 20 января 1989 г. совершил первый полет са-
молет МиГ-29С (9-13С), получивший усовершенствованную СУВ, включающую
модернизированную БРЛС повышенной помехозащищенности, обеспечивающую
возможность одновременной атаки двух целей, и новый цифровой вычислитель.
Были оптимизированы возможности стрельбы из пушки по воздушной цели
(«совмещенное» управление). В состав вооружения включили ракеты класса «воз-
дух—воздух» РВВ-АЕ, Р-27Т, Р-27РЭ и Р-27ТЭ. Масса бомбового вооружения уве-
личена до 4000 кг (восемь боеприпасов по 500 кг). До 1992 г. ВВС было поставле-
но 16 самолетов МиГ-29С (официальное принятие на вооружение — 1994 г.). Эф-
фективность истребителя МиГ-29С по сравнению с МиГ-29 при ведении
воздушного боя возросла в 2,5...3 раза, по данному параметру он превзошел само-
леты F-16C и «Рафаль» на 10%, а «Мираж»2000 — на 5% и JAS39 «Грипен» — на
25%. Невыкупленные ВВС 30 самолетов МиГ-29С были переоборудованы в экс-
портный вариант МиГ-29СЭ.
МиГ-29 (9-14) — опытный многоцелевой фронтовой истребитель, модифика-
ция МиГ-29 (9-12). От предыдущих вариантов самолет отличался новой системой
управления вооружением, в которую была включена лазерно-телевизионная при-
цельная система (ЛТПС) «Рябина» в подвесном контейнере. Состав вооружения
МиГ-29 (9-14) был дополнен управляемыми средствами поражения наземных це-
лей: ракетами Х-25МЛ, Х-25МП, Х-29Л, Х-29Т и Х-31П, корректируемыми бом-
бами КАБ-500Кр и КАБ-500Л, а максимальная бомбовая нагрузка самолета воз-
росла до 4500 кг (были введены две дополнительные точки подвески вооружения
под крылом и одна под фюзеляжем, на которых одновременно размещалось до
9 бомб ФАБ-500). Первый вылет на прототипе МиГ-29 (9-14) (самолете №407)
выполнил 13 февраля 1985 г. летчик-испытатель Т. О. Аубакиров. Летом 1985 г.
152
истребитель совершил несколько полетов с 9 бомбами ФАБ-500 и массогабарит-
ным макетом контейнера ЛТПС «Рябина». Однако до испытаний на боевое при-
менение дело не дошло, поскольку с середины 1980-х годов ОКБ уже интенсивно
работало над созданием модернизированного истребителя МиГ-29М.
Бортовые системы и оборудование. Система управления — меха-
ническая, с гидравлическими рулевыми приводами. Имитация усилий на ручке
управления и педалях создается загрузочными механизмами, включенными во
все три канала проводки управления; для уменьшения усилий на ручке управле-
ния используются механизмы триммерного эффекта. Управление самолетом осу-
ществляется в ручном и автоматическом режимах. В автоматическом режиме уп-
равление производится по сигналам из системы автоматического управления
САУ-451. Для предотвращения выхода самолета на режим сваливания и обеспе-
чения летчика информацией о текущих и предельно допустимых углах атаки и
вертикальных перегрузках, а также для расширения эксплуатационного диапа-
зона углов атаки за счет автоматического управления носками крыла на самолете
имеется система ограничительных сигналов, настроенная на срабатывание при
достижении углов атаки 26° (на МиГ-29С, МиГ-29СЭ и МиГ-29СД — 28°).
Самолет МиГ-29 оснащен комплексной системой управления вооружением
СУВ-29, включающей импульсно-доплеровский радиолокационный прицель-
ный комплекс РЛПК-29 (Н-019 «Сапфир-29») с цифровым вычислителем серии
Ц100, а также оптико-электронный прицельно-навигационный комплекс
ОЭПрНК-29 (С-31). Бортовая РЛС массой 350 кг с параболической антенной,
имеющей механическое сканирование по азимуту и углу места, способна обнару-
живать цели типа «истребитель» (ЭПР порядка 3 м2) в передней полусфере (в том
числе и на фоне земли) на дальности 60 км и в задней полусфере — на дальности
35 км. Диапазон углов обзора по азимуту ±70°, по углу места +60...—40°. Станция
способна одновременно сопровождать до 10 целей.
На истребителе МиГ-29С установлена СУВ-29М с усовершенствованным
РЛПК-29М (Н-019М), оснащенная цифровым вычислителем серии ЦЮШ. Воз-
можен одновременный пуск ракет по двум воздушным целям.
Навигационный комплекс ОЭПрНК-29 включает оптико-электронную при-
цельную систему ОЭПС-29, которая, в свою очередь, состоит из лазерной опти-
ко-локационной станции КОЛС (ИК-датчик и коллимированный с ним лазер-
ный дальномер) и автономной нашлемной системы целеуказания «Щель-ЗУМ»;
систему навигации СН-29; систему управления оружием СУО-29М; цифровой
вычислитель серии Ц100; систему единой индикации и фотоконтрольный при-
бор. Имеется аппаратура командной радиолинии управления (КРУ), обеспечи-
вающая взаимодействие с наземными автоматизированными системами наведе-
ния и система автоматического управления САУ-454.
Самолет МиГ-29 оснащен станцией предупреждения о радиолокационном
облучении, имеющей круговой обзор. Для создания активных радиолокационных
помех истребители МиГ-29 (9-13) и МиГ-29С оборудованы встроенной станцией,
обеспечивающей защиту самолета в задней полусфере.
Для защиты от ракет с тепловой головкой самонаведения (ТГС) имеется сис-
тема выброса ложных целей ППИ-26 (в двух блоках выброса помех размещается
60 патронов).
Одноместный фронтовой истребитель МиГ-29С — модернизированный ва-
риант МиГ-29 (9-13) с радиолокационным прицельным комплексом РЛПК-29М,
153
доработанным оптико-электронным прицельно-навигационным комплексом
ОЭПрНК-29-1 и дополнительным ракетным вооружением. Усовершенствован-
ный РЛПК-29М с РЛС Н019М и новым вычислителем Ц101М отличается от
прежнего РЛПК-29 повышенной помехозащитой, новым программным обеспе-
чением, системой углубленного встроенного контроля и позволяет производить
одновременную атаку двух целей двумя ракетами с активными радиолокацион-
ными головками самонаведения (АРГС). В ОЭПрНК-29-1 реализован режим
совмещенного управления для стрельбы из пушки по воздушным целям.
Вооружение. В МиГ-29 имеется встроенная пушечная установка ТКБ-687
с 30-миллиметровой пушкой ГШ-301. Ракетное вооружение самолета включает
две УР: класса «воздух—воздух» средней дальности с радиолокационным полуак-
тивным наведением и малой дальности.
Комплекс вооружения истребителя МиГ-29С (МиГ-29СЭ, МиГ-29СД) до-
полнен ракетами средней дальности с активным самонаведением с ТГС, а также
УР увеличенной дальности.
Неуправляемое вооружение включает блоки НАР С-8 (40 или 80 ракет) или
две—четыре НАР С-24Б, свободнопадающие бомбы массой 250 и 500 кг, КМГ-У
и другие авиационные средства поражения.
В 1982 г. еще до завершения летных испытаний фронтового истребителя
МиГ-29 в ОКБ им. А. И. Микояна начались работы по глубокой модернизации
этого самолета. Усовершенствованный вариант — МиГ-29М (изделие «9-15») —
должен был иметь значительно более высокую эффективность поражения как
воздушных, так и наземных целей. Создание подобного истребителя было воз-
можно лишь за счет применения БРЭО нового поколения, а также внедрения ря-
да усовершенствований в области аэродинамики и улучшения производственной
технологии.
МиГ-29М (9-15)- одноместный фронтовой многоцелевой истребитель,
глубокая модификация самолета МиГ-29 с новой системой вооружения и рядом
конструктивных доработок. Существенно изменен и комплекс вооружения ист-
ребителя.
Первый полет на опытном экземпляре МиГ-29М (9-25/1) выполнил
26 апреля 1986 г. летчик-испытатель В. Е. Меницкий. В 1987—1991 гг. было по-
строено еще пять самолетов МиГ-29М (рис. 2.4), которые успешно прошли лет-
но-конструкторские испытания и первый этап ГСИ, при этом заказчик выдал
Рис. 2.4. Самолет МиГ-29М
154
предварительное заключение на запуск его в серийное производство. Однако в
1992 г. прекращаются закупки МиГ-29 для ВВС России, а объемы ассигнова-
ний для ОКБ по тематике фронтовых истребителей значительно уменьшаются.
В 1992—1993 гг. полеты на самолетах МиГ-29М были фактически прекращены.
Всего в период с 1986 по 1994 г. на шести опытных МиГ-29М было совершено
почти 1200 полетов, в ходе которых удалось опробовать и довести большинство
систем самолета и его оборудования, отладить несколько версий программного
обеспечения СУВ и системы индикации, исследовать вопросы электромагнит-
ной совместимости БРЭО, отработать ряд элементов боевого применения, про-
вести реальные пуски ракет и боевые стрельбы по наземным и морским целям.
По оценкам специалистов, совокупный боевой потенциал самолета
МиГ-29М при решении задач завоевания господства в воздухе в 1,5 раза превзо-
шел соответствующий показатель истребителя МиГ-29. При решении ударных
задач МиГ-29М превзошел МиГ-29 в 3,4 раза. По боевым качествам новая моди-
фикация Мига не уступала европейским истребителям нового поколения — Ев-
рофайтер EF-2000 и Дассо «Рафаль», а по ряду параметров превосходила эти ма-
шины. Все это давало основание отнести МиГ-29М к поколению «4+».
Летно-конструкторские испытания и первый этап госиспытаний истребите-
ля завершились в 1991 г., после чего ВВС выдали предварительное заключение о
запуске машины в серию. Однако в том же году было принято решение прекра-
тить закупки самолетов типа МиГ-29, сосредоточив все усилия на программе тя-
желого истребителя Су-27. Госиспытания МиГ-29М к 1993 г. были свернуты.
На рубеже 1980—1990-х гг. в АНПК «МиГ» была подготовлена программа
поэтапной модернизации МиГ-29М (МиГ-29М1, МиГ-29М2, МиГ-29МЗ и т. д.),
в процессе которой предполагалось увеличить внутренний запас топлива, вне-
дрить систему дозаправки топливом в полете, ввести переднее горизонтальное
оперение и новые консоли крыла, внедрить более совершенную систему воору-
жения, более мощные двигатели и т. д. Кроме того, на базе МиГ-29М был разра-
ботан аванпроект истребителя-бомбардировщика (штурмовика) МиГ-29Ш, от-
личавшийся повышенной боевой живучестью, модифицированным комплексом
оборудования, увеличенной до 5000 кг массой боевой нагрузки, более мощными
двигателями. Кроме того, рассматривался и двухместный учебно-боевой вариант
МиГ-29УБМ.
В дальнейшем интерес российских ВВС к легкому истребителю, имеющему
значительно меньшую стоимость жизненного цикла и более высокий экспорт-
ный потенциал, чем тяжелые истребители, возник вновь. Это обусловило возоб-
новление летных испытаний самолета МиГ-29М. Однако в конце 1990-х годов
работы по программе МиГ-29М вновь были заморожены. Но задел, полученный
при создании этого самолета, был использован при создании модернизированно-
го истребителя МиГ-29СМТ.
Бортовые системы и оборудование. Основу системы вооружения
составляет импульсно-доплеровская РЛС с щелевой антенной решеткой с улуч-
шенной помехозащищенностью, возможностью одновременного сопровождения
10 и обстрела 4 воздушных целей, режимами обзора земной поверхности и кар-
тографирования. Модифицированный оптико-электронный прицельно-навига-
ционный комплекс ОЭПрНК-29М состоит из новой оптико-локационной стан-
ции ОЛС-М и нашлемной системы целеуказания. ОЛС-М включает тепловой,
лазерный и телевизионный каналы, имеет повышенную дальность действия и
155
обеспечивает не только обнаружение и измерение координат воздушных целей,
но и лазерный подсвет наземных целей для определения дальности до них и при-
менения управляемого оружия класса «воздух—поверхность», а также слежение
за наземными целями в корреляционном режиме [20—25].
Пилотажно-навигационное оборудование МиГ-29М также модернизирова-
но: установлены новые инерциально-навигационная система (ИНС), радиотех-
ническая система ближней навигации. Самолет оборудован защищенной линией
передачи данных для взаимодействия с наземными автоматизированными систе-
мами управления и воздушными командными пунктами, а также новыми средст-
вами радиосвязи и госопознавания. Бортовой комплекс обороны МиГ-29М
включает новую станцию предупреждения об облучении, которая имеет возмож-
ность выдавать целеуказание головкам самонаведения противорадиолокацион-
ных ракет, станцию активных помех и блоки выброса помех БВП-60-26 с общим
боекомплектом 120 патронов, размещенные под обшивкой на верхней поверхно-
сти корпуса самолета.
Значительным доработкам подверглась система индикации: в кабине
МиГ-29М были установлены два многофункциональных монохромных индика-
тора на ЭЛТ (с перспективой замены на цветные), на которые выводилась при-
цельная и навигационная информация. Основным прицельно-пилотажным при-
бором стал улучшенный индикатор на лобовом стекле (ИЛС), а малогабаритные
электромеханические пилотажные приборы с круглыми циферблатами, располо-
женные в центре приборной доски, стали резервными на случай отказа электрон-
ной индикации. Кроме того, управление основными системами самолета и выбор
оружия пилот МиГ-29М мог теперь осуществлять, не снимая рук с рычагов уп-
равления двигателями и ручки управления (концепция HOTAS).
Вооружение. Максимальная масса боевой нагрузки увеличилась, а число
точек подвески возросло до 9 (4 под каждой консолью крыла и одна под фюзеля-
жем). В состав управляемого вооружения класса «воздух—воздух» была включена
новая ракета средней дальности с активной радиолокационной головкой самона-
ведения. В номенклатуре ракет средней дальности, применение которых обеспе-
чивается системой управления вооружением МиГ-29М, остались ракеты Р-27Р и
добавились УР с ТГС, а также ракеты увеличенной дальности. Для эффективного
поражения наземных целей в состав вооружения МиГ-29М было включено уп-
равляемое оружие класса «воздух—поверхность»: тактические ракеты общего на-
значения с лазерной полуактивной системой наведения, с телевизионной ГСН,
противокорабельные ракеты с АРГС, противорадиолокационные ракеты с ПРГС,
корректируемые авиабомбы КАБ-КР с телевизионно-корреляционной ГСН. Но-
менклатура неуправляемого вооружения осталась практически без изменений, но
была дополнена неуправляемыми ракетами С-8 калибром 80 мм (в 4 блоках
Б-8М1) и С-13 калибром 122 мм (в 4 блоках Б-13Л), число подвешиваемых бомб
ФАБ-500 возросло до девяти.
Развитие истребителя МиГ-29 шло в направлении расширения областей его
боевого применения, придания самолету способности поражать высокоточным
оружием не только воздушные, но и наземные цели. Это соответствовало общей
тенденции мирового военного авиастроения: снижение в 1990-х годах оборонных
расходов в большинстве развитых стран и вызванное этим сокращение самолет-
ного парка обусловили повышение интереса к универсальным боевым машинам,
способным решать широкий круг боевых задач.
156
МиГ-29С (9-13С) — одноместный фронтовой истребитель, модернизирован-
ный вариант МиГ-29 (9-13) с радиолокационным прицельным комплексом
РЛПК-29М, доработанным оптико-электронным прицельно-навигационным
комплексом ОЭПрНК-29-1 и дополнительным ракетным вооружением. Усовер-
шенствованный РЛПК-29М с РЛС Н019М и новым вычислителем ЦЮШ отли-
чается от прежнего РЛПК-29 повышенной помехозащитой, новым программным
обеспечением, системой углубленного встроенного контроля и позволяет произ-
водить одновременную атаку двух целей двумя ракетами с АРГС или ТГС.
МиГ-29С оснащается доработанной системой автоматического управления,
обеспечивающей улучшение характеристик устойчивости и управляемости ист-
ребителя на больших углах атаки [11, 23—25].
Хотя ВВС объявили о прекращении закупок истребителей типа МиГ-29, в
рамках инициативных работ по модернизации этого самолета, ставшего самым
массовым истребителем российских Военно-воздушных сил, в середине 1990-х
годов началась разработка многоцелевого МиГ-29СМ, являющегося дальнейшим
развитием истребителя МиГ-29С. В состав вооружения модернизированной ма-
шины были включены управляемые ракеты Х-29Т и корректируемые бомбы
КАБ-500КР с телевизионными головками самонаведения. Для отображения ви-
довой информации от ГСН бомб и ракет в систему управления вооружением был
включен телевизионный канал с автономным вычислителем.
МиГ-29СМ — одноместный многоцелевой истребитель, модификация
МиГ-29С, доработанная для применения самонаводящегося управляемого во-
оружения класса «воздух—поверхность» — двух ракет Х-29Т (ТД) или четырех
корректируемых бомб КАБ-500КР с телевизионными головками самонаведения.
На основании результатов испытаний были даны рекомендации о начале ра-
бот по доработке истребителей МиГ-29 в вариант МиГ-29СМ. Отсутствие у ВВС
необходимых средств не позволило начать работу. Однако совершенствование
истребителя МиГ-29 продолжалось: по инициативе ОКБ и АО «Русская авиони-
ка» в начале 1997 г. работы продолжились, была создана модификация «9-17», по-
лучившая в дальнейшем обозначение МиГ-29СМТ. Главным конструктором са-
молета был назначен В, В, Новиков.
«Идеология» нового истребителя заключалась в придании МиГ-29 принци-
пиально новых боевых качеств и значительном увеличении его боевого радиуса
действия при минимальных затратах, доступных в то время российским ВВС.
МиГ-29СМТ (9-17)— модернизированный вариант истребителя МиГ-29С
(СМ) с принципиально новым комплексом бортового оборудования, расширен-
ной номенклатурой вооружения и увеличенной дальностью полета. Вооружение
модернизованного истребителя усилено противорадиолокационными ракетами
Х-31П и противокорабельными ракетами Х-31А с АРГС (обеспечена подвеска
двух УР) данного типа. Разработка начата в 1997 г.
Целью программы разработки самолета МиГ-29СМТ являлось значительное
улучшение характеристик самолетов семейства МиГ-29, в том числе и модерни-
зация ранее построенных самолетов до уровня, соответствующего поколению 4+.
При проведении работ использовались опыт создания самолетов МиГ-29М,
МиГ-29СМ, последние достижения в областях вычислительной техники, средст-
вах электронной индикации, бортовой авионики на основе применения новой
элементной базы и новых подходов к построению комплекса БРЭО, а также мно-
голетний опыт эксплуатации, работ по увеличению летного ресурса и календар-
ных сроков службы.
157
По комплексу оборудования самолеты МиГ-29СМТ имеют:
• более совершенную архитектуру построения с использованием центрального
вычислителя, мультиплексных каналов связи, с формированием системы
верхнего уровня, в состав которой помимо мощной вычислительной маши-
ны, блоков связи и преобразования информации входят полноцветные жид-
кокристаллические дисплеи, ИЛС, НСЦ, система видеорегистрации;
• модернизированную многофункциональную БРЛС «Жук-М» с более высо-
кими характеристиками;
• новый навигационный комплекс на базе бесплатформенной инерциальной
системы на лазерных гироскопах, корректируемой от космической навига-
ционной системы GPS (ГЛОНАСС), по желанию заказчика дополнительно
устанавливаются приемники зональных навигационных радионавигацион-
ных систем ILS, VOR, DME, TACAN;
• более совершенные средства связи;
• новую систему бортового контроля с защищенным твердотельным накопи-
телем;
• систему подготовки и ввода полетного задания.
Самолет адаптирован к современным системам логистики. По желанию за-
казчика может быть установлена аппаратура национального либо иностранного
производства, уточнен и расширен состав вооружения.
У новых самолетов предусматривается увеличение числа точек подвески,
внедрение системы дистанционного управления. Для обеспечения межпроект-
ной унификации у» самолетов МиГ-29 корабельного базирования и МиГ-29М2
(MRCA) предлагаются близкие по функциям и составу оборудования комплекс
оборудования и вооружения.
Самолет МиГ-29М2 создан в 2001 г. и демонстрировался на МАКС-2001, а
в октябре того же года уже принимал участие на выставке L1 МА-2001 г. в Малай-
зии с выполнением фигур высшего пилотажа. Наличие второго члена экипажа на
этом самолете значительно расширяет возможности по поиску и атаке малораз-
мерных наземных и надводных целей, особенно при подвеске контейнера с длин-
нофокусной оптроникой в ночных условиях.
Аналогичная идеология заложена для модернизированных самолетов
МиГ-21-93, а также для семейства учебно-боевых самолетов МиГ-АТ.
Для летной отработки технических решений, которые будут реализованы на
МиГ-29СМТ, АНПК «МИГ» подготовило три опытных самолета, два из которых
ранее использовались в рамках программы создания истребителя МиГ-29С. Пер-
вый из них— МиГ-29 №405 — вначале был переоборудован для испытаний
нового информационно-управляющего поля кабины летчика. Первый полет на
нем был выполнен 29 ноября 1997 г. летчиком-испытателем АНПК «МИГ»
М. Р. Алыковым. В начале 1998 г. опытное производство ОКБ произвело дора-
ботку конструкции фюзеляжа этого истребителя в соответствии с чертежами
МиГ-29СМТ, и он вновь вышел на испытания. Облет переоборудованной маши-
ны выполнил 22 апреля 1998 г. шеф-пилот АНПК «МИГ» В. М. Горбунов. В мае
того же года истребитель стал участником международной авиационной выстав-
ки в Берлине.
На другом опытном самолете — МиГ-29 № 404 — с сентября 1997 г. прово-
дилась отработка новой РЛС. И наконец, третья опытная машина (еще один до-
работанный серийный МиГ-29) предназначалась для летных испытаний новой
топливной системы, а затем всего комплекса усовершенствований МиГ-29СМТ
158
Первый полет этой машины, получившей индекс «9-17», состоялся 14 июля
1998 г. Программа испытаний была в целом завершена к концу 1998 г., когда на-
чалось переоборудование первого из заказанных ВВС России строевых самоле-
тов МиГ-29. Приведенный к стандарту МиГ-29СМТ совершил первый полет в
начале 1999 г.
Авиационным научно-производственным комплексом «МИГ» разработана
долгосрочная программа дальнейшего развития и модернизации семейства лег-
ких фронтовых истребителей МиГ-29, рассчитанная на сохранение их высокой
боевой эффективности и эксплуатационной надежности в течение 10...20 лет те-
кущего века в условиях появления истребителей 5-го поколения. Основными на-
правлениями такой программы являются:
• увеличение дальности полета за счет дальнейшего увеличения внутреннего
запаса топлива в фюзеляжных и крыльевых баках;
• улучшение маневренных характеристик при переходе от традиционной ме-
ханической системы управления к цифровой трехкратно резервированной
элекродистанционной системе управления и двигателям с отклоняемым век-
тором тяги (ОВТ);
• модернизация силовой установки за счет оснащения самолета модификаци-
ей двигателей РД-33 с управляемым с вектором тяги, а в дальнейшем с двига-
телями нового поколения с повышенной тягой;
• использование бортового радиоэлектронного оборудования нового поколе-
ния, в первую очередь многофункционального радиолокатора нового поколе-
ния, выполненного на новой элементной базе и имеющего качественно но-
вые возможности, комбинированной оптико-электронной прицельной сис-
темы с лазерным, телевизионными и тепловизионным каналами в подвесном
контейнере для обнаружения наземных целей и применения высокоточного
оружия класса воздух—поверхность, бесплатформенной инерциальной нави-
гационной системы на лазерных гироскопах со спутниковой коррекцией
(плата GPS), работающей в системе глобальной навигации ГЛОНАС/
НАВСТАР для обеспечения точного выхода самолета в район цели;
• повышение выживаемости истребителя в условиях реальных боевых дейст-
вий за счет оснащения его перспективным комплексом РЭП и использова-
ния специальных покрытий планера, снижающих радиолокационную замет-
ность;
• применение высокоэффективных авиационных средств поражения нового
поколения и увеличение максимальной массы боевой нагрузки до 5500 кг;
• увеличение ресурса самолета: в рамках программы совершенствования само-
летов МиГ-29 уже проведены мероприятия по увеличению назначенного ре-
сурса планера с 2500 до 4000 ч, что продлевает срок службы истребителей до
2010—2015 гг., аналогичные работы осуществляются и в отношении двигате-
ля РД-33 (в настоящее время ресурс двигателя РД-33 3-й серии до первого
ремонта составляет 1000 ч., назначенный — 2000 ч);
• улучшение эксплуатационной технологичности за счет перевода МиГ-29 с
планово-предупредительной системы эксплуатаций на эксплуатацию по тех-
ническому состоянию с периодическим контролем уровня надежности и
проверочно-профилактическими работами через каждые 1000 ч налета.
В дальнейшем самолет должен получить бесплатформенную инерциальную
навигационную систему на лазерных гироскопах со спутниковой коррекцией, а
также перспективный комплекс РЭБ.
159
В ходе дальнейшей модернизации истребитель должен получить новую отъ-
емную часть крыла, заимствованную у истребителя МиГ-29М и имеющую четы-
ре, а не три, точки внешней подвески. Это позволит довести максимальную бое-
вую нагрузку до 5500 кг.
Бортовые системы и оборудование. Основой комплекса бортового
радиоэлектронного оборудования является трехкратно резервированная борто-
вая цифровая вычислительная система верхнего уровня, построенная по принци-
пу открытой архитектуры на основе мультиплексных каналов информационного
обмена, соответствующих международному стандарту MIL-STD-1553В. Это по-
зволяет комплектовать самолет тем или иным оборудованием в соответствии
с желанием и финансовыми возможностями конкретного заказчика. В то же вре-
мя архитектура кабинного приборного оборудования едина для всех вариантов
самолета.
В состав БРЭО входит модернизированный радиолокационный прицельный
комплекс с РЛС Н019МП, в которой реализован режим картографирования
местности, оптико-электронная прицельная система (КОЛС и нашлемная систе-
ма целеуказания), комплекс навигации, новый помехоустойчивый комплекс свя-
зи и наведения (две радиостанции Р-833, каналы телекодового обмена и команд-
ной радиолинии управления), комплекс РЭП, комплекс контроля и регистрации
«Карат-Б» с малогабаритной системой видеорегистрации, система учета ресурса
самолета и диагностики его состояния «Регата», система управления оружием и
другое оборудование.
Модернизированная импульсно-доплеровская БРЛС сантиметрового диапа-
зона Н019МП получила способность «работать» по наземным целям в режиме
синтезирования апертуры. Возможно сопровождение малоразмерных целей, дви-
жущихся со скоростью до 15 км/ч. В режиме ведения воздушного боя станция
способна одновременно сопровождать до 10 целей и производить пуск ракет по
двум из них.
Вычислители серии Ц100 заменены на МВК и «Багет» (последний выполняет
роль сигнального процессора).
В перспективе на модернизированном МиГ-29СМТ может быть установлена
новая БРЛС, снабженная фазированной антенной решеткой и имеющая значи-
тельно более высокие боевые возможности.
Навигационный комплекс дополнен приемником спутниковой навигации.
Информационно-управляющее поле кабины включает два цветных много-
функциональных жидкокристаллических индикатора с кнопочным обрамлени-
ем, индикатор на лобовом стекле, многофункциональный пульт управления с мо-
нохромным жидкокристаллическим дисплеем, резервные приборы и пульты, ор-
ганы управления на ручке управления самолетом и рычагах управления
двигателями.
В кабине самолета МиГ-29СМТ на приборной доске установлено два много-
функциональных цветных индикатора на жидких кристаллах с кнопочным об-
рамлением, имеющие формат 6x8 дюймов (152 х 203 мм). МФИ предназначены
для вывода прицельно-пилотажной и навигационной информации, а также ин-
формации о работе бортовых систем. При этом допускается наложение одной ин-
формационной «маски» на другую (например, на цветную цифровую карту мест-
ности может быть наложена информация о радиолокационных полях, зонах дей-
ствия средств ПВО противника и т. п.).
160
На боковых панелях размещено два цветных многофункциональных пульта
управления, также выполненные на жидких кристаллах. Левый МФПУ использу-
ется для решения задач боевого применения, а правый, снабженный буквен-
но-цифровой клавиатурой, служит для управления средствами связи. МФПУ мо-
гут частично дублировать МФИ.
Число различных индикаторов сокращено по сравнению с серийным
МиГ-29 вдвое (с 30 до 16), сигнализаторов — в 2,5 раза (с 82 до 34), органов
управления — на 40% (со 193 до 136). Число традиционных электромеханических
приборов на приборной доске уменьшено до восьми (командно-пилотажный и
навигационно-плановый приборы, указатели приборной и вертикальной скорос-
ти, барометрический высотомер, тахометр, вольтметр и панель ИСТР).
В дальнейшем предполагается установить в центре приборной доски
МиГ-29СМТ и третий МФИ. Однако, по мнению специалистов из «Русской ави-
оники», сегодня это преждевременно, поскольку сохранение блока аналоговых
приборов в центре приборной доски обеспечивает определенное резервирование
и позволяет осуществить плавную адаптацию летчиков к экранной индикации.
Реализована концепция HOTAS (Hands On Throttle And Stick), в соответствии с
которой летчик может осуществлять большинство операций по самолетовождению,
прицеливанию и пуску ракет, не снимая рук с ручки управления самолетом и РУД.
В перспективе предполагается использование более совершенной бортовой ап-
паратуры наведения и информационного обмена, обеспечивающей целераспределе-
ние при групповых действиях, исключающей излишнее дублирование при решении
боевой задачи несколькими истребителями и облегчающей взаимодействие с други-
ми самолетами (в том числе типа Су-27), а также наземными средствами ПВО.
МиГ-29СМТ предполагается оснастить также подвесным контейнером с теп-
ловизионным, телевизионным и лазерным оборудованием, что обеспечит возмож-
ность применения управляемых боеприпасов с лазерной полуактивной системой
наведения, а также расширит возможности по обнаружению наземных целей.
Возможна установка на МиГ-29 перспективного комплекса РЭБ, включающе-
го станцию радиотехнической разведки, станцию активных помех с возможностью
перепрограммирования библиотеки угроз и изменения программы создания помех
в процессе предполетной подготовки, а также устройства выброса ложных целей.
Вооружение. В состав вооружения класса «воздух—воздух» входят УР уве-
личенной дальности, средней дальности, а также ракеты ближнего боя с ТГС.
Для поражения наземных целей истребитель может нести управляемые средства
поражения — с телевизионным и лазерным самонаведением, корректируемые
авиабомбы КАБ-КР и КАБ-Л, высокоскоростные противокорабельные ракеты и
противорадиолокационные ракеты.
В состав вооружения входят и неуправляемые средства поражения, аналогич-
ные применяемым на самолете МиГ-29С.
Имеется встроенная пушка ГШ-301 с боекомплектом 150 патронов. В даль-
нейшем самолет предполагается оснастить перспективными УР класса «воздух—
воздух», в том числе ракетами «обратного старта», высокоточными ракетами
класса «воздух—поверхность» с большой дальностью пуска (вне зоны ПВО про-
тивника), а также перспективными УР класса «воздух—корабль».
К настоящему времени построено около 1500 самолетов МиГ-29 различных
модификаций: более 1200 одноместных истребителей (все они выпущены Москов-
ским авиационным производственным объединением) и более 200 учебно-боевых
6 Авиация ВВС России и научно-технический прогресс
161
МиГ-29УБ (изготовлены Нижегородским государственным авиазаводом «Со-
кол»). Согласно сообщениям в печати, к 1998 г. на вооружении ВВС Россий-
ской Федерации имелось около 340 истребителей МиГ-29, с учетом учебно-боевых
МиГ-29УБ — около 400. После распада СССР Россия унаследовала все самолеты
этого типа, находившиеся на ее территории и в Грузии и входившие в Группу со-
ветских войск в Германии. Истребители, базировавшиеся в Белоруссии, на Укра-
ине, в Молдавии, Узбекистане и Туркменистане, остались в ВВС этих ныне суве-
ренных государств. Кроме того, самолетами МиГ-29 с 1995 г. располагают воору-
женные силы Казахстана. К началу 1999 г. почти 400 истребителей данного типа
эксплуатировались в 18 государствах дальнего зарубежья: Болгарии, Венгрии, Гер-
мании, Индии, Ираке, Иране, Йемене, КНДР, на Кубе, в Малайзии, Перу, Польше,
Румынии, Сирии, Словакии, США (самолеты, проданные Молдовой), Эритрее
и Югославии.
Серийное производство самолета продолжается, разрабатываются новые мо-
дификации, ведутся работы по модернизации, так что МиГ-29 еще сможет по-
бить рекорды самолетов-долгожителей МиГ-15 и МиГ-21 и эффективно эксплу-
атироваться как минимум в первой трети XXI века.
Многофункциональный фронтовой истребитель (МФИ)
Работы над концепцией истребителя пятого поколения начались еще в нача-
ле 80-х годов прошлого века. Основные ее положения формулировались так:
• достижение сверхманевренности (т. е. установившегося полета при углах ата-
ки не менее*60°), а также сверхзвуковой скорости полета на бесфорсажном
режиме работы двигателя;
• использование технологии «стеле» (т. е. малой заметности в радиолокацион-
ном и инфракрасном диапазонах).
Кроме того, при разработке истребителя значительное внимание уделялось
применению качественно нового оружия и оборудования, созданию новой архи-
тектуры построения бортового комплекса, наращиванию бортового интеллекта,
улучшению взлетно-посадочных и эксплуатационных характеристик.
Концепция предусматривала целесообразность постройки двух типов само-
летов: тяжелого двухдвигательного истребителя с большой дальностью полета,
боекомплектом расширенного состава, РЛС с высокой дальностью обнаружения
целей и легкого однодвигательного истребителя с максимально возможной сте-
пенью унификации конструкции и оборудования.
На концепции отразились и проводимые в США работы по программе АТЕ
Утвержденная программа создания многофункционального фронтового ист-
ребителя предусматривала целевую организацию работ институтов Министерства
обороны и организаций оборонных отраслей промышленности. Программа
включала работы не только по истребителю, но и по двигателю, ракетам класса
«воздух—воздух», комплексу бортового оборудования и т. д. Она должна была
обеспечить базу для создания других классов военных и гражданских самолетов
5-го поколения и модернизации самолетов предшествующих поколений.
Аванпроект перспективного истребителя был выполнен специалистами ОКБ
им. А. И. Микояна в 1985 г. Он выполнялся в двух частях — по многофункци-
ональному фронтовому истребителю и истребителю ПВО, получившему название
МФИ, и по легкому фронтовому истребителю ЛФИ. При этом предполагалась
высокая степень унификации между обоими самолетами. На этапе аванпроекта с
учетом результатов продувок в аэродинамических трубах ЦАГИ, предварительных
162
данных по характеристикам двигателя, оборудования, исследований по снижению
радиолокационной заметности были определены рациональные размерности
МФИ и Л ФИ, выбрана аэродинамическая схема самолетов, приняты основные
конструктивно-компоновочные решения, такие, как компоновка фюзеляжа, фор-
ма и размещение воздухозаборников, схема хвостового оперения, а также опреде-
лены параметры основных систем истребителей. Вскоре ММ3 им. А. И. Микояна
совместно с другими участниками работ успешно защитил аванпроект по самоле-
там МФИ и ЛФИ и приступил к разработке эскизного проекта МФИ (рис. 2.5).
В середине 1980-х годов были согласованы тактико-технические требования, ус-
пешно защищены технические предложения и эскизный проект.
В конце 1980-х годов АНПК «МИГ» начал разработку конструкторской докумен-
тации и постройку первого экземпляра самолета «1.44», а также изготовление элемен-
тов конструкции для прочностных испытаний и для следующих опытных образцов.
Результатами проведенных работ стали:
• создание конструкции с низким уровнем заметности и широким использо-
ванием композиционных материалов, в том числе крупногабаритных;
• разработка комплексной системы управления, обеспечивающей координи-
рованное управление большим числом подвижных аэродинамических по-
верхностей и вектором тяги двигателей;
• построение архитектуры комплекса с использованием мультиплексных кана-
лов связи, нового информационно-управляющего поля, мощной стандарт-
ной вычислительной техники нового поколения;
• создание интегрированных комплексов бортового оборудования;
• разработки нового типа бортовой РЛС и новых видов управляемых ракет.
Рис. 2.5. Самолет МФИ
163
При разработке истребителя была использована автоматизированная систе-
ма проектирования.
В 1989 г. был выпущен полный комплект рабочих чертежей МФИ, что поз-
волило начать постройку первой опытной (летно-демонстрационной) маши-
ны «1.44».
В 1991 г. эскизный проект МФИ был успешно защищен. Первоначально ра-
боты по программе шли быстрыми темпами, не уступая или даже опережая по
срокам работы над американскими аналогами — Локхид YF-22 и Нортроп YF-23,
создававшимися в рамках программы ATF. Однако экономическая и политиче-
ская ситуация в стране, сложившаяся в начале 1990-х годов, привела к резкому
замедлению хода реализации программы. Тем не менее в начале 1994 г. летно-де-
монстрационный самолет «1.44» был доставлен в ЛИИ им. Громова (г. Жуков-
ский) для проведения летных испытаний. В декабре того же года машина, управ-
ляемая летчиком-испытателем Романом Таскаевым, совершила первую ско-
ростную рулежку с отрывом передней опоры шасси. Но в дальнейшем из-за
отсутствия финансирования работы по программе были практически замороже-
ны. Лишь в 1998 г. удалось найти средства для возобновления испытаний.
Однако из-за резкого сокращения бюджетных ассигнований по теме МФИ в
связи с экономическими трудностями в стране довести истребитель до стадии
летных испытаний тогда не удалось. В 1995 г. финансирование программы было
практически прекращено.
Истребитель МФИ создавался как противовес самолетам Локхид-Мартин
F-22A «Рэптор» (ATF), Еврофайтер EF-2000 «Тайфун» и Дассо «Рафаль». По ос-
новным тактико-техническим характеристикам он не уступает, а по ряду из них
превосходит лучший зарубежный аналог F-22A «Рэптор». В частности, широкое
применение средств снижения радиолокационной заметности позволило умень-
шить ЭПР самолета до уровня, меньшего, чем у «Рэптора». При этом российская
машина обладает более высокими скоростными, высотными, разгонными и ма-
невренными характеристиками, что обеспечивается, в частности, уникально вы-
сокой тяговооруженностью самолета (1,4 по сравнению с 1,15 у «Рэптора»).
По словам бывшего главнокомандующего ВВС Анатолия Корнукова, истре-
битель МФИ, несмотря на финансовые трудности, все же «найдет свое место в
Военно-воздушных силах России». Однако это «самолет даже не завтрашнего, а
послезавтрашнего дня». По утверждению главкома, поступление МФИ в строе-
вые части может начаться лишь в 2008—2010 гг., т. е. на пять—семь лет позже,
чем ВВС США получат его ближайший аналог — F-22A «Рэптор». В то же время
следует иметь в виду, что американская машина идет на смену самолетам F-15C
«Игл», уже исчерпавшим свой модернизационный потенциал, тогда как МФИ
призван заменить более совершенные Су-27, которые в начале 2000-х годов
должны пройти модернизацию, приближающую их боевые возможности к уров-
ню истребителей 5-го поколения.
Однако высокая стоимость (по некоторым оценкам, приведенным в
печати, порядка 70 млн «условных единиц») в сочетании с ограниченностью обо-
ронного бюджета России, очевидно, не позволят заказать истребитель МФИ в
количестве, соизмеримом с объемом выпуска истребителей предыдущего поколе-
ния (эта тенденция характерна и для США, где с 2001 по 2011 г. Пентагон намерен
профинансировать закупку лишь 339 серийных F-22A, тогда как приблизительно
за такой же временной интервал американские ВВС закупили 1103 истребителя
164
типа F-15). По причине высокой стоимости будет ограничен и экспортный по-
тенциал МФИ.
Однако МАПО «МИГ» и ВВС рассматривают самолет «1.44» в значительной
степени и как своего рода «летающий стенд», предназначенный для исследования
и летной проверки передовых технологий.
В конце 1998 г. руководителям фирмы было разрешено продемонстрировать
истребитель общественности. Такая демонстрация была призвана привлечь вни-
мание к проекту и привести к выделению правительством дополнительных
средств, необходимых для начала испытаний. Кроме того, показ новейшего само-
лета мог позволить «ОКБ Микояна» найти потенциальных зарубежных партне-
ров, заинтересованных в совместной с фирмой «МИГ» разработке перспектив-
ных истребителей.
Публичная презентация самолета МФИ состоялась 12 января 1999 г., когда
перспективный истребитель среди других самолетов АНПК «МИГ» был офици-
ально представлен российскому военному командованию, военным атташе ряда
зарубежных стран и представителям средств массовой информации. Самолет
прибыл на место показа своим ходом, запустив двигатели и прорулив по взлет-
но-посадочной полосе Летно-исследовательского института. Шеф-пилот Герой
России В. М. Горбунов 29 февраля 2000 г. совершил на этом самолете первый
вылет.
Доводка, внедрение в производство и принятие на вооружение многофунк-
ционального истребителя МФИ могли бы не только способствовать укреплению
обороноспособности страны, но и увеличить ее экспортный потенциал, создав
условия для выгодного международного сотрудничества в XXI в. в области авиа-
строения.
Вооружение. На боевом варианте истребителя МФИ будет обеспечено
применение всей номенклатуры имеющихся сегодня на вооружении российской
авиации управляемых и неуправляемых средств поражения, а также перспектив-
ных образцов высокоточного оружия малой, средней и большой дальности класса
«воздух—воздух» и «воздух—поверхность», реализующих принцип «пустил—за-
был». Основной вариант вооружения самолета МФИ будет включать управляе-
мые ракеты средней дальности с активными радиолокационными головками са-
монаведения и ракеты ближнего воздушного боя с тепловыми головками самона-
ведения, а также их дальнейшие модификации. Не исключается возможность
применения ракет «воздух—воздух» большой и сверхбольшой дальности, которые
могут быть созданы на базе ракет, используемых на истребителях-перехватчиках,
а также перспективных ракет малой дальности. Под крылом могут устанавливать-
ся неуправляемые средства поражения наземных целей — блоки НАР и авиабом-
бы. Сохранится на самолете и стрелково-пушечное вооружение (встроенная пуш-
ка калибром 30 мм).
Ударные модификации
Первым самолетом ОКБ А. И. Микояна было создание истребителя-штур-
мовика на базе МиГ-15бис — МиГ-ИШ для штурмовой авиации (построена се-
рия самолетов). В дополнение к мощному артиллерийскому вооружению
(1 пушка калибра 37 мм и 2 по 23 мм) самолет имел увеличенную бомбовую на-
грузку (авиабомбы, блоки НРС) на 4 крыльевых точках подвески.
165
Истребитель-штурмовик МиГ-15бис-ИШ
Возможность применения МиГ-15 с мощным пушечным вооружением, с од-
ной стороны, и неудачи в создании штурмовиков в конце 1940-х — начале 1950-х
годов, с другой стороны, привели к тому, что на вооружение штурмовой авиации
стали поступать истребители МиГ-15. Для усиления ударных возможностей са-
молета была подготовлена модификация МиГ-15бис-ИШ («истребитель-штур-
мовик») с более мощным бомбовым и ракетным вооружением (четыре точки
подвески под крылом). Помимо обычных авиабомб, такие самолеты могли ос-
нащаться двумя неуправляемыми ракетами С-21 или 12... 14 ракетами АРС-57.
Было переоборудовано несколько МиГ-15бис-ИШ. Вооружение этих самолетов
составляли две пушки НР-23 (23 мм, 2 х 80 патронов) и одна Н-37 (37 мм,
40 патронов), две авиабомбы массой 50 или 100 кг.
Семейство МиГ-23Б, МиГ-27
Создание данного семейства представляет собой наиболее важный вклад
ОКБ А. И. Микояна в развитие ударной авиации. Было создано 7 серийных мо-
дификаций, построено 1250 самолетов, в том числе 165 по лицензии в Индии. Са-
молеты эксплуатируются в ВВС 12 стран мира, хорошо зарекомендовали себя
в конфликтах на Ближнем Востоке, Северной Африке, а также в боевых операци-
ях ВВС Индии против Пакистана и Шри-Ланка против повстанческих группиро-
вок [И, 27]. *
В середине 1960-х годов ВВС перестали удовлетворять характеристики ист-
ребителя-бомбардировщика 1-го поколения Су-7Б по таким параметрам, как:
• максимальная скорость полета у земли;
• недостаточный обзор вперед-вниз;
• низкая точность бомбометания;
• дальность полета;
• условия базирования (потребная длина ВПП, базирование с грунтовых по-
лос, размеры ЖБУ).
Опытно-конструкторскому бюро было поручено проработать предложения
по созданию нового самолета или по созданию новой модификации. В качестве
исходного базового варианта в ОКБ рассматривались варианты на базе МиГ-21,
как в классическом варианте, так и бесхвостки с крылом овальной формы (на ба-
зе самолета-аналога Ту-144), опытного самолета Е-8 и только что созданного ист-
ребителя МиГ-23. Остановились на последнем варианте по следующим основ-
ным причинам:
• возможности унификации и выпуска на одном конвейере совместно с истре-
бителями;
• возможности использования крыла изменяемой геометрии, которое обеспе-
чивало бы высокую дальность полета и получение высокой сверхзвуковой
скорости полета у земли. Надежды на значительное снижение посадочной
скорости не оправдались, но уменьшение перегрузок от турбулентности ат-
мосферы и высокая точность прицеливания на больших приборных скорос-
тях были получены. В конфигурации с максимальным углом стреловидности
самолет размещался в укрытиях минимального размера, упрощался процесс
рулежки по земле.
166
При проектировании самолета был принят ряд новых для того времени тех-
нических решений:
• несимметричная в вертикальной плоскости форма носовой части с обеспече-
нием хорошего обзора летчику вперед-вниз, что повысило вероятность обнару-
жения малоразмерных целей и увеличило время для выбора ошибки прицели-
вания и точность бомбометания, так как для большинства режимов цель в мо-
мент бомбометания (основного оружия самолета) находилась в поле прицела;
• установка прицельно-навигационного комплекса «Сокол-23», обеспечиваю-
щего резкий рост точностных характеристик навигации и бомбометания.
В состав комплекса входили:
• мощный аналоговый вычислитель;
• лазерный дальномер-целеуказатель «Фон» (впервые в нашей стране);
• визирная головка прицела АСП-17;
• дополнительный прицел для бомбометания с кабрирования;
• доплеровский измеритель путевой скорости и угла сноса (впервые);
• инерциальная курсовертикаль (впервые);
• бортовая часть радиотехнической системы ближней навигации РСБН-6С;
• барометрическая система воздушных сигналов;
• датчики угла атаки и скольжения, а также кинофотопулемет, автоматический
радиокомпас, радиовысотомер, маркерный радиоприемник и органы управ-
ления комплексом;
• станция предупреждения о непрерывном облучении самолета РЛС (в том
числе стрельбовыми комплексами «Хок» — впервые), затем установлена но-
вая станция, обеспечивающая обнаружение излучения РЛС как импульсно-
го, так и непрерывного излучения;
• станция активных помех;
• ракеты Р-ЗС в основном для самообороны от истребителей;
• для повышения боевой живучести установка брони по бокам кабины пилота
(спереди, сзади и снизу защита обеспечивалась за счет экранирования отсека-
ми оборудования) и заполнение надбакового пространства нейтральным газом.
В дальнейшем самолеты оснастили системой выброса пассивных помех. От базо-
вого самолета-истребителя помимо вышеизложенного ударный самолет отличался:
• ограничением по числу М полета на высоте;
• увеличением массы бомбовой нагрузки до 3 т за счет введения дополнитель-
ных точек подвески на фюзеляже;
• увеличением количества внутреннего топлива;
• усилением шасси для расширения возможностей базирования на грунте и
обеспечения взлетов с большей массой.
В состав вооружения вошли ракеты «воздух—воздух», «воздух—поверх-
ность», НРС С-24, С-5, авиабомбы, зажигательные баки и т. д. (контейнеры мел-
ких грузов, пушечные контейнеры).
Первый вылет состоялся летом 1972 г. Серийное производство продолжалось
до 1985 г.
Самолеты МиГ-23БН поставлялись в основном на экспорт в страны—участ-
ницы Варшавского договора (Болгарию, ГДР, Чехословакию), а также в Алжир,
Египет, Индию, Ирак, на Кубу, в Ливию, Сирию, Эфиопию. В результате реэкс-
порта самолеты оказались в Судане, США, Великобритании и Китае.
В конфликтах между Сирией и Израилем, Индией и Пакистаном, при дейст-
виях в Северной Африке самолеты показали себя отлично.
167
МиГ-23БМ (МиГ-27) — следующий шаг в направлении развития ударных
самолетов.
Основные отличия от МиГ-23БН состояли:
• в переходе с аналогового вычислителя на цифровую вычислительную маши-
ну «Орбита-10» (впервые для истребителей-бомбардировщиков);
• в переходе от двуствольной пушки ГШ-23 калибром 23 мм к существенно бо-
лее мощной шестиствольной встроенной пушке калибром 30 мм ГШ-6-30;
• в увеличении максимальной бомбовой нагрузки до 4 т за счет схемы тандем-
ной подвески;
• в увеличении взлетной массы и использования колес большого размера.
Первый вылет самолета состоялся 20 августа 1970 г.; в 1973 г. начался серий-
ный выпуск на Иркутском авиазаводе, где до 1977 г. было выпущено 360 самолетов.
К серийному производству был подключен и завод в Улан-Удэ, но реально там в се-
рии производилась уже следующая модификация МиГ-27М.
МиГ-27М (« изделие 32-29») отличался от МиГ-27 прицельно-навигационным
комплексом, в состав которого вошел телевизионный индикатор ИТ-23М, заменой
лазерного дальномера «Фон» на лазерный дальномер-целеуказатель «Клен», новым
ДИСС, а также системой управления вооружением, возможностью подвески кон-
тейнера с аппаратурой управления противорадиолокационными ракетами «Вьюга»,
новыми пусковыми устройствами и переходными балками, значительно доработан-
ным матобеспечением. Наличие в прицельно-навигационном комплексе режима
программно-корректируемого слежения обеспечило автоматический (режим руч-
ной коррекции) подсвет цели лазерным лучом, что позволило поражать цели раке-
тами с лазерными головками самонаведения. Наличие телевизионного индикатора
и кнюппеля (органа управления на ручке управления самолетом), с помощью кото-
рого можно совместить ось головки самонаведения с целью и обеспечить примене-
ние управляемых ракет и корректируемых бомб КАБ-КР с телевизионными голов-
ками самонаведения с захватом цели головкой самонаведения под крылом, и при-
менением по принципу «пустил—забыл», т. е. без наличия связи на траектории
полета в режиме после отделения от самолета. С помощью аппаратуры «Вьюга»
обеспечивался пуск ракет по радиоизлучающим объектам.
За счет широкого применения управляемого оружия резко увеличился боевой
потенциал самолета, так как к моменту создания комплекса выяснилось, что в
боевых условиях эффективность ракет с радиокомандным наведением значитель-
но ниже, чем в полигонных условиях. Аналогичные результаты получили и США
во Вьетнаме при применении ракет «Булпап». В условиях противодействия ПВО
противника самолет начинал маневрировать, снижалась точность работы летчика
и как результат значительно ухудшались точностные характеристики. Так как бое-
вые возможности самолетов МиГ-27М существенно выше, чем у МиГ-27, было
принято решение о переоборудовании самолетов МиГ-27 по типу МиГ-27М. Пе-
реоборудованные самолеты получили индекс МиГ-27Д (изделие 32-29Д).
Первый вылет самолета МиГ-27М состоялся 5 мая 1976 г. В 1978—1983 гг.
в г. Улан-Удэ построено около 160 самолетов. Самолет МиГ-27М производился в
Индии по лицензии (МиГ-27Л, изделие 32-29Л). Серийное производство в ко-
операции с Иркутским авиазаводом шло до 1996 г.; выпущено 165 самолетов.
Самолеты МиГ-27Л приняли активное участие в индо-пакистанском конф-
ликте.
Несколько самолетов МиГ-27М были поставлены Украиной в Шри-Ланку где
активно участвовали в боях с тамильскими сепаратистами. Советские МиГ-27М
168
поддерживали наши войска в Афганистане. По результатам боевого применения
самолеты получили систему отстрела ложных целей с патронами 50 мм.
Наиболее совершенным в семействе был самолет МиГ-27К (МиГ-23БК, «из-
делие 32-26»), который отличался от МиГ-27М более совершенным прицельно-
навигационным комплексом с лазерно-телевизионной системой «Кайра» и более
мощной БЦВМ «Орбита-20». В отличие от «Клена» наличие телевизионного кана-
ла и блоков обработки телевизионного сигнала обеспечило, особенно в условиях
дымки, легкого тумана, увеличение, по сравнению с визуальной, дальности обна-
ружения малоразмерных целей, а возможность ввода телевизионного изображения
как эталона в головки самонаведения — рост реальных дальностей пуска ракет, а
также залповое применение ракет и КАБ-КР, увеличенные углы прокачки. При
более высоких угловых скоростях линии визирования стало возможным примене-
ние корректируемых бомб КАБ-Л. В системе появилось два канала слежения за
целью: корреляционный и с автоматическим переходом на программно-корректи-
руемый, что позволило повысить точность применения вооружения и снизить на-
грузку пилота. Впервые реализовано прицельное применение оружия с простран-
ственного маневра. Математическое обеспечение практически новое.
Первый вылет состоялся 29 декабря 1974 г. В 1976—1982 гг. в г. Иркутске
построено более 200 самолетов. Значительное число самолетов приняло участие в
боевых действиях в Афганистане.
Истребитель-бомбардировщик МиГ-23Б
Этот истребитель-бомбардировщик создан на базе фронтового истребителя
МиГ-23 и предназначен для нанесения ударов по неподвижным наземным целям
в тылу противника в светлое время суток, а также штурмовых действий с исполь-
зованием пушек, УР, НАР и свободнопадающих бомб.
Учитывая широкие перспективы применения крыла изменяемой геометрии
на самолетах фронтовой авиации в 1969 г., ОКБ А. И. Микояна начало разработку
на базе истребителя МиГ-23 модификаций, предназначенных для нанесения уда-
ров по наземным целям. В том же году были выпущены аванпроекты истребите-
ля-бомбардировщика Ми Г-23 Б (рис. 2.6), отличавшегося от базового истребителя
Рис. 2.6. Самолет Ми Г-23 Б
169
только применением специального оборудования и вооружения, и штурмовика
МиГ-23Ш, отличавшегося от базового видоизмененной носовой частью фюзеляжа
для улучшения обзора, бронированием и существенным увеличением боевой на-
грузки. Последний был взят за основу для разработки истребителя-бомбардиров-
щика МиГ-23Б (32-24), создание которого было задано приказом МАП в 1970 г.
Основные отличия самолета МиГ-23Б от истребителя МиГ-23 следующие:
• существенное улучшение обзора из кабины летчика, обеспечивающее хоро-
шую видимость цели при бомбометании за счет изменения формы носовой
части фюзеляжа (угол обзора вперед-вниз увеличен до 17°);
• установка новой прицельной системы «Сокол-23» в составе аналоговой вы-
числительной машины, лазерного дальномера «Фон», стрелкового прицела
АСП-17, прицела бомбометания с кабрирования ПБК-3, а также комплекса
навигации КН-23 и модифицированной системы автоматического управле-
ния САУ-23Б, что обеспечило большую точность применения оружия и на-
вигации;
• упразднение бортовой РЛС;
• бронирование боковых стенок кабины, установка встроенной станции ак-
тивных радиопомех и новой станции оповещения об облучении, защита топ-
ливных баков от взрыва инертным газом;
• применение нового двигателя с лучшей экономичностью АЛ-21Ф-3 с фор-
сажной тягой 11 500 кгс;
• увеличение максимальной массы подвешиваемого вооружения до 3000 кг
(6 бом§ массой 500 кг), введение дополнительных точек подвески авиабомб
под фюзеляжем, увеличение числа одновременно подвешиваемых авиабомб;
• применение в составе вооружения, помимо бомб, управляемых ракет «воз-
дух—поверхность» с радиокомандной системой наведения, блоков неуправ-
ляемых ракет калибром 57 мм, неуправляемых ракет крупного калибра, пу-
щенных контейнеров УПК-23-250, а также ракет «воздух—воздух» малой
дальности для атаки воздушных целей и самообороны;
• усиление передней опоры шасси, введение дополнительного топливного ба-
ка на 225 л за кабиной летчика.
Постройка первого опытного экземпляра истребителя-бомбардировщика
МиГ-23Б (32-24/1, бортовой номер 321) завершилась в январе 1971 г. Первый вы-
лет опытного самолета МиГ-23Б «32-24» с двигателем АЛ-21Ф-3 состоялся
18 февраля 1971 г., а в следующем году на ММ3 «Знамя труда» начали серийное
производство истребителей-бомбардировщиков такого типа. Однако выпуск их не
стал массовым, было построено всего несколько десятков машин. Вариант
МиГ-23Б с доработанной прицельно-навигационной системой «Сокол-23Н» полу-
чил название МиГ-23БН «33-24БН». Его создали в 1973 г. и вскоре запустили в мас-
совое производство на МАЛО, продолжавшееся до 1985 г. Самолеты МиГ-23БН
широко экспортировались во многие страны. Было построено более 500 машин
данного типа. МиГ-23БН поставлялись ВВС Афганистана, Алжира, Анголы, Болга-
рии, Венгрии, Египта, Германии, Ирака, Индии, Кубы, Ливии, Нигерии, Чехосло-
вакии, КНДР, Эфиопии, Южного Йемена, Сирии, Судана.
В конце 1990-х годов АНПК «МИГ» вернулось к идее модернизации истре-
бителей МиГ-23. Сейчас рассматриваются два варианта модернизации, извест-
ных под условным названием МиГ-23-98. Один из них (малая модернизация)
обеспечивает лишь применение на самолетах МиГ-23 ракет Р-73. Второй
(МиГ-23-98-2) предусматривает глубокую доработку истребителей с введением
170
дополнительного цифрового вычислителя и канала радиокоррекции для приме-
нения современных ракет средней дальности, внедрением новых систем диалога
с экипажем, вычислительной техники, современных средств радиопротиводейст-
вия, навигации и связи. Кроме того, прорабатывался вариант полной замены
бортового оборудования истребителя на БРЭО нового поколения (например,
РЛС «Сапфир-23» может уступить место современным РЛС с щелевой или фази-
рованной антенной решеткой). Демонстрационный образец самолета МиГ-23МЛ
с новым вооружением был показан на презентации АНПК «МИГ» 12 января
1999 г.
Существуют также предложения АНПК «МИГ» по модернизации эксплуати-
руемых в зарубежных странах самолетов МиГ-23БН. В соответствии с програм-
мой МиГ-23Б-98 такие машины могут оснащаться РЛС в подфюзеляжном кон-
тейнере, новым оборудованием кабины и новой навигационной системой, рас-
ширенной номенклатурой их вооружения.
Оборудование. МиГ-23БН оснащен лазерным дальномером «Фон», при-
цельной системой «Сокол-23С», навигационной системой КН-23, станцией на-
ведения УР класса «воздух—поверхность» «Дельта-Н» или «Дельта-НГ», опти-
ческим прицелом АСП-17Б, бомбардировочным прицелом РБК-3. МиГ-23БМ
оборудован прицельно-навигационным комплексом ПрНК-23 и лазерным даль-
номером «Клен».
Вооружение. Для самолета МиГ-23Б оно включает пушку ГШ-23Л
(23 мм, 200 патронов), НАР, а также две УР. Для самообороны применяются раке-
ты малой дальности с ТГС.
Существует возможность оснащения самолетов МиГ-23Б противорадиоло-
кационными ракетами (для управления их пуском под фюзеляжем устанавлива-
ется контейнер с системой «Вьюга»). Бомбовая нагрузка МиГ-23Б— 3000 кг.
Он может брать на борт до 18 бомб массой 50, 100 кг или четыре — 500 кг. Допус-
кается подвеска под крылом двух пушечных контейнеров УПК-23-250 с пушкой
ГШ-23.
Истребители-бомбардировщики МиГ-27
Поскольку эффективность боевого применения МиГ-23Б при использова-
нии бортовой аналоговой вычислительной техники была недостаточно высокой,
а ОКБ А. И. Микояна в начале 1970-х годов уже был получен положительный
опыт работ с бортовыми цифровыми вычислительными машинами на самоле-
тах-разведчиках МиГ-25Р, на следующей модификации истребителя-бомбарди-
ровщика для советских ВВС решено было использовать новый прицельно-нави-
гационный комплекс на основе БЦВМ.
Такая модификация получила первоначально название МиГ-23БМ (32-25).
Ее основными отличиями от самолетов МиГ-23Б и МиГ-23БН стали:
• внедрение прицельно-навигационного комплекса ПрНК-23 на базе БЦВМ
«Орбита-10», включавшего лазерный дальномер «Фон» и визирную головку
С-17ВГ; навигационного комплекса КН-23, системы автоматического управ-
ления САУ-23Б-1;
• установка двигателя Р29Б-300 тягой 11 500 кгс и нерегулируемых воздухоза-
борников;
171
• применение кардинально нового типа встроенной пушки — шестиствольной
ГШ-6-30 калибром 30 мм, обеспечивающей высокую скорострельность и
большой секундный залп; на внешних точках подвески могли закрепляться
два контейнера СППУ-22 с подвижными в вертикальной плоскости ствола-
ми пушек ГШ-23 калибром 23 мм;
• увеличение до 4 т максимальной бомбовой нагрузки;
• возможность использования трех ПТБ.
Опытный экземпляр самолета МиГ-23БМ (32-25/1, бортовой номер 351) был
поднят в первый полет 17 ноября 1972 г. После завершения всей программы ис-
пытаний в феврале 1975 г. самолет был принят на вооружение под названием
МиГ-27. Модификациями самолета МиГ-27 стали истребители-бомбардировщи-
ки МиГ-27К (МиГ-23БК), МиГ-27М и МиГ-27Д. В 1973-1977 гг. в г. Иркутске
было построено 360 истребителей-бомбардировщиков МиГ-27.
Вслед за созданием первого варианта истребителя-бомбардировщика
МиГ-23БМ с цифровым ПрНК ОКБ А. И. Микояна приступило к разработке его
варианта со значительно расширенными боевыми возможностями. Основными
отличиями самолета МиГ-23БК (32-26), опытный образец которого был в 1974 г.
переоборудован из одного из серийных МиГ-23БМ, стали:
• применение нового прицельно-навигационного комплекса ПрНК-23К на
базе БЦВМ нового поколения «Орбита-20» с оптико-электронной прицель-
ной системой «Кайра», имеющей лазерный и телевизионный каналы;
• существенное расширение номенклатуры управляемого вооружения класса
«воздух—поверхность» за счет применения ракет с полуактивной лазерной и
телевизионной системами наведения, а также корректируемых бомб КАБ-Л
и КАБ-КР, противорадиолокационных ракет, а для обороны от самолетов
противника — самонаводящихся ракет «воздух—воздух».
Новая ЦВМ «Орбита-20» обеспечивала ряд новых режимов, например корре-
ляционное слежение за целью с автоматическим переходом на программно-кор-
ректируемое слежение. Телевизионный канал системы «Кайра» имел систему
подчеркивания контраста, что обеспечивало рост дальности обнаружения целей
за пределами визуальной видимости в условиях дымки, тумана и т. д. Большие уг-
лы визирования телевизионного канала (до 140°) обеспечивало применение кор-
ректируемых бомб КАБ-Л с лазерными головками самонаведения с горизонталь-
ного полета.
Первый вылет на опытном образце МиГ-23БК был выполнен 30 декабря
1974 г., и в 1976 г. самолет был запущен в серийное производство на авиационном
заводе в г. Иркутске. До 1982 г. здесь было выпущено более 200 таких машин, по-
лучивших в 1980 г. новое наименование МиГ-27К. Истребители-бомбардировщи-
ки данной модификации по праву считались наиболее эффективными среди всех
самолетов семейства МиГ-27.
Вариант МиГ-27М (32-29) с несколько упрощенным по сравнению с
МиГ-27К прицельно-навигационным комплексом ПрНК-23М, не имевшим
телевизионного канала. ПрНК-23М, строившийся на базе БЦВМ «Орби-
та-10-15-23М», включал лазерный дальномер-целеуказатель «Клен-ПМ» и ви-
зирную головку С-17ВГ-1 и обеспечивал применение практически всей но-
менклатуры вооружения «воздух—поверхность», использовавшегося на самоле-
тах МиГ-27К (за исключением корректируемых бомб КАБ-Л). Применение ракет
с лазерными головками самонаведения обеспечивалось лазерным дальноме-
ром-цел еуказателем «Клен-ПМ», противорадиолокационных ракет — аппарату-
172
рой «Вьюга» в подвесном контейнере, ракет с радиокомандным наведением —
аппаратурой «Дельта-НГ». Применение корректируемых бомб КАБ-КР обеспе-
чивалось их телевизионными головками самонаведения, с отображением инфор-
мации на телевизионном индикаторе ИТ-23М в кабине самолета.
Опытный экземпляр самолета МиГ-27М (32-29/1, бортовой номер 91) по-
строен на базе серийного МиГ-27 в апреле 1976 г. и успешно прошел испытания.
В 1977 г. МиГ-27М был запущен в серийное производство на авиационном заво-
де в г. Улан-Удэ. По его образцу начиная с 1983 г. на заводе в г. Иркутске и авиа-
ремонтных предприятиях дорабатывались ранее выпущенные самолеты МиГ-27
(32-25), которые после модернизации обозначались МиГ-27Д (32-27). До 1984 г.
здесь было изготовлено около 150 таких машин. МиГ-27М стал разумным комп-
ромиссом между МиГ-27 с наиболее простым комплексом оборудования и во-
оружения и МиГ-27К, являвшимся достаточно дорогим в производстве и эксплу-
атации.
В 1986 г. производство самолетов МиГ-27М по советской лицензии было ос-
воено в Индии. Эти самолеты, имевшие название МиГ-27МЛ (32-29Л), получили
в Индии имя собственное «Бахадур». Первые комплекты для индийских
МиГ-27МЛ изготовлялись в г. Иркутске. Производство МиГ-27МЛ в Индии было
завершено в 1995 г. после выпуска 150 самолетов.
Самолеты МиГ-27 были первыми в стране истребителями-бомбардировщи-
ками, на которых ввели режимы бомбометания с пространственного маневра, а
также режимы навигационного бомбометания. На них впервые устанавливалась
аппаратура видеозаписи. В плане проектных работ рассматривалось достаточно
большое число вариантов модернизации, связанной с установкой новых опти-
ко-электронных систем, в том числе более совершенной системы «Рябина» (взаи-
мозаменяемой с системой «Клен», но имеющей телевизионный канал, работаю-
щий при низких уровнях освещенности), и оптико-электронной аппаратуры в
контейнерном исполнении, малогабаритных РЛС миллиметрового или сантимет-
рового диапазонов, имеющих режимы повышенного разрешения или режимы ра-
боты по морским целям.
На выставке «Аэро-Индия-96» в г. Бангалоре демонстрировалась кабина мо-
дернизированного самолета МиГ-27М с новой системой индикации, современ-
ной архитектурой построения бортового комплекса на базе мультиплексных ка-
налов связи и цифровой техники, отличающейся на порядок более высоким вы-
числительным потенциалом. Самолет получил навигационную систему нового
поколения, в состав которой вошла ИНС, совмещенная с приемником спутнико-
вой навигации NAVSTAR/EJ1OHACC. На многофункциональном жидкокристал-
лическом индикаторе, установленном в кабине, может проецироваться цифровая
карта местности. В комплекс вооружения включены новые образцы высокоточ-
ного оружия класса «воздух—поверхность». Под фюзеляжем может подвешивать-
ся контейнер с БРЛС типа «Копье», что обеспечивает самолету МиГ-27 возмож-
ность вести ракетный бой на средних дальностях в любых погодных условиях, в
том числе и с использованием новейших ракет класса «воздух—воздух». Усовер-
шенствованный вариант самолета МиГ-27М ориентирован на экспорт. В част-
ности, по его образцу возможна модернизация истребителей-бомбардировщиков
ВВС Индии МиГ-23БН и МиГ-27МЛ.
Варианты применения новых видов вооружения, средств радиопротиводей-
ствия и навигации составляют значительную часть предложений по модерниза-
ции истребителя-бомбардировщика.
173
Оборудование. МиГ-23БМ оборудован прицельно-навигационным комп-
лексом ПрНК-23 и лазерным дальномером «Клен». На МиГ-23БК установлен
ПрНК-23М с цифровым вычислителем, обеспечивающим более широкие воз-
можности при атаке со сложных видов маневра.
На МиГ-27, МиГ-27М, МиГ-27МЛ и МиГ-27Д установлен прицельно-нави-
гационный комплекс ПрНК-23 или ПрНК-23М, включающий автоматическую
систему управления САУ-1 или САУ-23Б и лазерный дальномер-целеуказатель
«Клен». Для управления УР класса «воздух—земля» имеется станция наведения
«Дельта-2НГ» (установлена на крыле) или «Дельта-НЗГ» (размещена в носовой
части, над оптическим окном лазерного дальномера).
МиГ-27К оснащен ПРнК-23К с оптоэлектронной системой «Кайра-1»,
включающей лазерный дальномер-целеуказатель и телекамеру, БЦВМ «Орби-
та-20-23К», аппаратурой РСБН «Радикал», ДИСС-7, автоматической системой
управления САУ-23Б и радиовысотомером АО-31. В кабине установлен ИЛ С (на
МиГ-27 других модификаций не устанавливается). Система управления оружием
обеспечивает пуск УР со сложных видов маневров, а также применение управляе-
мого оружия в режиме программно-корректируемого слежения, без визуального
наблюдения цели.
Средства РЭБ позволяют обнаруживать РЛС наземного базирования и про-
изводить постановку активных и пассивных помех. На крыле самолетов, прошед-
ших доработку, размещены контейнеры с ИК-ловушками.
Вооружение. Самолет МиГ-27 оснащен пушкой ГШ-6-23 (30 мм, 260 пат-
ронов).
На МиГ-27К, МиГ-27М, МиГ-27Л и МиГ-27Д могут устанавливаться УР с
лазерным или телевизионным наведением. Для самообороны они вооружаются
четырьмя УР ближнего боя.
На МиГ-27К могут применяться корректируемые бомбы КАБ-500Л с лазер-
ной системой наведения.
Часть самолетов МиГ-23Б и МиГ-27 может оснащаться противорадиолока-
ционными ракетами, для управления их пуском под фюзеляжем устанавливается
контейнер с системой «Вьюга».
Самолеты МиГ-25РБ, МиГ-25-БМ
История создания этих самолетов несколько сложнее. Первоначально высот-
ный, скоростной самолет Е-155, будущий МиГ-25, был задан в трех вариантах:
перехватчика (основной вариант), разведчика и носителя обычного бомбардиро-
вочного вооружения. Были построены, испытаны и в конце 1960-х годов запуще-
ны в серию МиГ-25П и МиГ-25Р в трех комплектациях разведывательной аппа-
ратуры, одна из которых ночной и сумеречной фоторазведки предусматривала
применение фотоосветительных бомб ФОТАБ-100/140 для подсвета местности
при ночной фотосъемке. Число М полета из-за недостаточной термостойкости
фотобомб и пиропатронов для их отделения было ограничено М = 2,2 [30, 31].
В это время дружественное тогда СССР правительство Объединенной Араб-
ской Республики Египет в качестве ответного шага на бомбардировки военных и
экономических объектов в центре страны обратилось с просьбой о введении в
страну военной техники, обеспечивающей адекватный ответ. Было принято ре-
шение срочно оснастить самолеты МиГ-25Р более термостойкими фугасными
174
авиабомбами, а по ходу работы — и держателями авиабомб с более термостойки-
ми пиропатронами, а также обеспечить автоматическое бомбометание по цели с
известными координатами с больших высот и скоростей полета.
Для самолета была создана система автоматизированного управления
САУ-155Р, а также комплексная навигационная цифровая система «Пеленг».
Для увеличения точности ввели дополнительный канал связи между инерци-
ально-доплеровской системой «Пеленг» и бортовой частью системы ближней ра-
дионавигации, а также доработали математическое обеспечение ЦВМ «Орбита»,
входящей в состав системы «Пеленг». Потребовалась доработка системы управле-
ния сбросом авиабомб, а также установка соответствующих пультов в кабине пи-
лота. Таким образом обеспечивалось одновременное выполнение задач разведки
и бомбометания. Отработанное бомбометание с приемлемой точностью с высоты
20 км на скорости 2500 км/ч не имело аналогов в мировой практике и обеспечи-
вало неуязвимость самолетов от средств ПВО того времени.
В 1969 г. на основе опыта боевого применения авиации на Ближнем Востоке
было принято решение о расширении функций самолета оснащением его бом-
бардировочным вооружением: низкая уязвимость и наличие высокоточной нави-
гационной системы позволили МиГ-25 с высокой точностью поражать наземные
цели бомбами с больших высот и на скоростях, приближающихся к М = 2. Боль-
шая скорость самолета уменьшала время реакции при действиях по целям, выяв-
ленным в ходе разведывательных полетов.
На модификации МиГ-25РБ, выпуск которой начался в 1970 г., в дополне-
ние к фоторазведывательному оборудованию установили станцию радиотехниче-
ской разведки, а также станцию активных помех. Бомбовое вооружение массой
до 2000 кг размещалось под крылом и фюзеляжем. В дальнейшем масса боевой
нагрузки была увеличена до 4000 кг. В процессе испытаний было отработано не-
сколько вариантов авиабомб с увеличением общей массы бомбовой нагрузки до
5 т и снижением аэродинамического сопротивления.
Был создан новый вариант навигационной системы «Пеленг-2» с более совер-
шенной инерциальной системой ИНС-72 на поплавковых гироскопах с коррекцией
от гиперболических импульсно-фазовых радионавигационных систем типа «Тро-
пик» либо коррекцией от двух радиосистем ближней радионавигации; алгоритм
бомбометания стал учитывать вертикальную составляющую скорости в момент
сброса бомб, были проведены экспериментальные работы с другими типами авиа-
бомб, в процессе которых опытная бомба была сброшена со скоростью 3000 км/ч.
В дальнейшем все самолеты-разведчики МиГ-25РБ, МиГ-25РБВ, МиГ-25РБТ,
МиГ-25РБС, МиГ-25РБШ, МиГ-25РБК и МиГ-25РБФ выпускались в качестве
разведчиков-бомбардировщиков, а ранее выпущенные МиГ-25Р были модифи-
цированы в МиГ-25РБ [32].
Большие значения высоты и скорости полета обеспечивали неуязвимость са-
молета от основных ЗРК средней дальности того времени, с одной стороны, а с
другой — обеспечивали для противолокационных ракет большие зоны пораже-
ния, значительные дальности прямой видимости головок самонаведения, что
явилось предпосылкой создания специализированной модификации — самолета
прорыва ПВО МиГ-25БМ, вооруженного противолокационными ракетами. При
этом сохранялись бомбардировочное вооружение и возможность применения в
одном полете как ракет, так и авиабомб. Для обеспечения выживаемости самоле-
та были установлены сразу две станции активных радиопомех, одна из которых
имела большую мощность излучения. Размещение станций помех и аппаратуры
175
управления ракетами в носовой части потребовало небольшого удлинения носо-
вой части, что практически не отразилось на аэродинамике самолета.
Самолеты МиГ-25БМ могли обеспечить прорыв ПВО западных стран 1980-х
годов в интересах обеспечения полетов с малым уровнем потерь самолетов
МиГ-25РБ или самолетов других типов.
Предпринимались попытки создания и чисто бомбардировочных вариантов
самолета МиГ-25. В начале 1970-х годов прорабатывался проект Е-155Б, оснащен-
ный ударным вооружением. Несколько позже был предложен проект бомбарди-
ровщика Е-155МФ, отличающегося расширенным фюзеляжем с поперечным раз-
мещением кресел, экипажем, состоящим из двух человек, а также усиленным
вооружением «воздух—поверхность», включающим, в частности, до 12 свободно-
падающих авиабомб массой 500 кг, подвешенных на конформных узлах в три ряда
под фюзеляжем, а также четыре УР на подкрыльевых узлах подвески. Е-155МФ
рассматривался в качестве альтернативы фронтовому бомбардировщику Су-24.
Разведчики-бомбардировщики типа МиГ-25 состоят на вооружении ВВС
России, а также ряда стран СНГ. Они имеются также в ВВС Алжира (поставлено
более 30 самолетов), Индии (6), Сирии (8), Ирака (8) и Ливии (5). Кроме того, че-
тыре самолета этого типа некоторое время находились на вооружении ВВС Бол-
гарии, но в дальнейшем были возвращены в СССР.
В конце 1980-х годов ОКБ были проработаны варианты модернизации самолета
МиГ-25, обеспечивающие рост его боевой эффективности за счет введения дозап-
равки в воздухе, нового управляемого вооружения, а также перспективного БРЭО и
систем РЭБ. Однако4распад СССР и резкое сокращение оборонных расходов России
привели к прекращению работ по дальнейшему совершенствованию самолета.
В настоящее время несколько десятков самолетов типа МиГ-25РБ и МиГ-РМ
продолжают нести службу в российских ВВС. Однако моральное старение самоле-
тов, высокая стоимость их эксплуатации, а также отсутствие на территории Рос-
сии ремонтных предприятий ВВС, обслуживающих эти самолеты (в СССР ремонт
МиГ-25 осуществлялся на ремзаводах в Азербайджане и на Украине), должны
привести в ближайшее время к снятию этих самолетов с вооружения. Практически
весь парк самолетов МиГ-25БМ после распада СССР оказался на территории Бе-
лоруссии, которой эксплуатация самолетов данного типа была не нужна.
Оборудование. Самолет оснащен системой автоматического управления
САУ-155Р, а также цифровым прицельно-навигационным комплексом «Пе-
ленг-Д», «Пеленг-ДА» или «Пеленг-ДМ», включающим ИНС с коррекцией от
доплеровского измерителя ДИСС-3 (на поздних модификациях — ДИСС-7) и
цифровую ЭВМ ЦВМ-10-155 «Орбита-155».
Имеется различное взаимозаменяемое разведывательное оборудование,
обеспечивающее ведение фоторадиотехнической и радиолокационной разведки.
На самолете МиГ-25РБ аппаратура РЭБ размещена в более длинной, чем у
остальных разведчиков-бомбардировщиков, носовой части фюзеляжа.
Вооружение. На четырех держателях (двух под крылом и двух под фюзеля-
жем) самолет может нести четыре ФО-ТАБ-100—80 (под крылом); восемь
ФОТАБ-100—80 (под крылом и фюзеляжем); 8—10 бомб ФАБ-500М62 (в том чис-
ле и ФАБ-500М62Т со специальным термостойким покрытием, обеспечивающим
возможность полета в течение 45 мин на скорости 2500 км/ч на высоте 18 000 м).
Самолеты МиГ-25РБМ несут две противорадиолокационные УР с дально-
стью пуска до 40 км.
176
Самолеты — летающие лаборатории
Еще одним направлением работ ОКБ было создание на базе серийных
самолетов — летающих лабораторий для отработки ударного вооружения. Первая
работа была начата еще до Великой Отечественной войны, когда два самолета
(МиГ-1 и МиГ-3) были вооружены пушками конструкции Таубина.
Для отработки НРС созданы самолеты:
• на базе МиГ-15 - СД-21, СД-57, СД-5, СД-59;
• на базе МиГ-17 - СП-9, СИ-7, СИ-15, СИ-16, СИ-19, СИ-21, СИ-21М;
• на базе МиГ-19 - СМ-2А, СМ-2Б, СМ-2В, СМ-2Г, СМ-2Д.
Для отработки систем авиамин «Мга», «Вилюй», «Алдан» создан специаль-
ный вариант самолета МиГ-21;
для отработки ракет «воздух—поверхность» Х-29 — пара самолетов МиГ-27 —
носитель, МиГ-21 («кролик»)— имитатор ракеты, ракет Х-31П — самолет
МиГ-27.
Самолеты МиГ-21, МиГ-27, МиГ-25, оборудованные специальной конт-
рол ьно-записывающей аппаратурой (КЗА) и аппаратурой видеофоторегистра-
ции, широко используются для отработки вопросов безопасности при сбросе но-
вых типов авиабомб, контейнеров, зажигательных баков, НРС, пушечных патро-
нов и т. д. и контрольных испытаний. В ряде случаев в подобных испытаниях
участвуют учебно-боевые самолеты, чаще всего МиГ-21 для киновидеосъемки.
Проекты ударных самолетов
Здесь рассмотрены проекты либо чисто ударных самолетов, либо с преиму-
щественно ударным применением. Первыми работами с разработкой эскизных
проектов, заказом брони и ряда комплектующих были разработанные в 1940—
1941 гг. проекты пушечных бронированных штурмовиков: моноплан ПБШ-1 и
биплан оригинальной схемы ПБШ-2 (обычно верхнее крыло больше либо равно
нижнему, а в данном проекте верхнее крыло было значительно меньше нижнего
и имело стреловидность для улучшения обзора).
В последней четверти XX в. разрабатывался еще ряд проектов, среди которых
МиГ-101 — легко воспроизводимый легкий штурмовик с двумя турбовинтовыми
двигателями ТВД-7-117 с высокой степенью боевой живучести и возможностью
автономного базирования. Мощные турбовинтовые двигатели, прямое крыло до-
статочно большого удлинения с хорошей механизацией и низкой удельной на-
грузкой конструкции шасси обеспечивали базирование на грунтовых аэродромах
ограниченных размеров с низкой плотностью грунта. В нем предусматривалось
наличие грузопассажирского отсека, в котором на новую точку базирования мог
перебрасываться технический состав и средства технического обслуживания са-
молета. Двигатели допускали применение топлива, используемого в сухопутных
войсках. Повышенная емкость баков, наличие специальных средств заправки по-
зволяли за счет использования части самолетов для перевозки топлива обеспе-
чить заправку боевых самолетов и танков. Для большей автономности патроны к
30-миллиметровой пушке и НРС были унифицированы с соответствующей тех-
никой сухопутных войск. Тщательно был проработан комплекс мер по индикат-
риссе теплового излучения для снижения вероятности захвата самолета головкой
самонаведения ПЗКР и комплекс мер по обеспечению боевой живучести.
177
Проект был представлен на конкурс ВВС, разделил 1—2-е места, но начались
90-е годы прошлого столетия...
По той же причине не получили дальнейшего развития два проекта гипер-
звукового самолета: с использованием углеводородного топлива и с комбинацией
углеводородного топлива, используемого до М ~ 3, и водорода на больших чис-
лах Л/, а также ударного варианта сверхзвукового административного самолета с
большой дальностью полета.
Есть надежда, что более удачной будет судьба самолета семейства МиГ-АТ
Построены и успешно завершают сертификацию две его модификации:
• МиГ-АТ — учебно-тренировочный самолет, используемый для обучения лет-
чиков, а при необходимости для сброса авиабомб, стрельбы НРС и из пушки,
размещаемой в подвесной гондоле, а также пуска ракет «воздух—воздух» с
И К головкой самонаведения;
• МиГ-АТС — учебно-боевой самолет, отличающийся от МиГ-АТ большими
массой подвешиваемого вооружения, числом точек подвески и, соответ-
ственно, большей допустимой взлетной массой, а также возможностью при-
менения управляемого оружия с телевизионными головками самонаведения,
подвеской оптико-электронного контейнера с соответствующим арсеналом
вооружения.
Проводятся работы по вариантам самолетов с чисто российским оборудова-
нием и двигателем, комплектациям по требованиям потенциального заказчика, а
также вариантам МиГ-АТС корабельного базирования и МиГ-АС — одноместно-
му боевому самолету.
4
6. Фронтовые ударные самолеты «Су»1
Истребитель-бомбардировщик Су-7Б
Самолеты Су-7Б (рис. 2.7) в течение длительного времени составляли основу
отечественной истребительно-бомбардировочной авиации, являясь одними из
самых эффективных боевых машин в своем классе.
Рис. 2.7. Самолет Су-7Б
1 В написании подраздела принимал участие В. Н. Коровин.
178
Воссозданное в 1954 г. (после его расформирования в 1949 г.) ОКБ
П. О. Сухого в том же году приступило к работам по созданию семейства сверх-
звуковых боевых самолетов нового поколения — фронтовых истребителей со
стреловидным (С1) и треугольным (Т1) крылом, а также перехватчиков СЗ и ТЗ.
В конструкции самолетов предполагалось воплотить последние достижения оте-
чественного авиастроения, а также американский опыт, который стал доступен
советским конструкторам после изучения трофейных истребителей Норт Амери-
кен F-86 «Сейбр». При формировании облика машин учитывался опыт воздуш-
ных боев в Корее (1951 — 1953 гг.).
Летом 1954 г. завершилось рабочее проектирование, и в том же году был из-
готовлен натурный макет истребителя С1. Внешне новый самолет напоминал со-
зданный в 1949 г. опытный сверхзвуковой истребитель «Р» (Су-17), однако имел
более крупные размеры и крыло иной формы. Как и на Су-17, на С1 был приме-
нен двигатель, разработанный под руководством А. М. Люльки. По расчетам
скорость самолета должна была достигать 1800 км/ч. Для истребителя разрабаты-
валась одна из первых в нашей стране система необратимого бустерного управле-
ния с созданием «искусственного чувства управления» на ручке летчика.
В 1954 г. началась постройка трех опытных истребителей С1. Первый полет
самолета состоялся 8 сентября 1955 г. Самолет С1 был оснащен тремя новейшими
пушками НР-30 с боекомплектом 70 снарядов на ствол. Вооружение на внешних
узлах подвески отсутствовало, хотя и предполагалось в дальнейшем оснащение
истребителя двумя блоками по восемь НАР С-5 (57 мм). Осенью 1956 г. вышел на
испытания второй экземпляр нового истребителя С2, отличающийся от исходно-
го самолета уменьшенным пушечным вооружением (две НР-30 вместо трех) и
увеличенным объемом топливных баков. Самолет предназначался для завоевания
господства в воздухе и атаки наземных целей, т. е. являлся многоцелевым истре-
бителем, призванным заменить во фронтовой авиации самолеты МиГ-15 и
МиГ-17.
Во время конкурсных испытаний с истребителем Е-370 ОКБ А. И. Микояна,
имевшим аналогичное назначение и близкие параметры, С1 и С2 показали более
высокие характеристики. Машина была рекомендована в серийное производст-
во, получив войсковое обозначение Су-7.
Главной причиной прекращения выпуска Су-7 явилась острая потребность в
истребителе-бомбардировщике, способном нести тактическое ядерное оружие и
осуществлять атаки с малых высот.
В 1956 г. в СССР была ликвидирована штурмовая авиация, признанная «не-
перспективной» в условиях быстрого развития ракетно-ядерного оружия. Однако
уже в следующем году было решено создать истребительно-бомбардировочную
авиацию (ИБА), призванную решать задачи в тактической и оперативной глуби-
не противника. Первоначально парк истребительно-бомбардировочной авиации
составили самолеты МиГ-15 и МиГ-17, переклассифицированные из фронтовых
истребителей в истребители-бомбардировщики. Однако командованию ВВС бы-
ло очевидно, что ИБА требуется новая машина специальной разработки, более
полно удовлетворяющая требованиям времени по летным характеристикам, во-
оружению и оборудованию.
В качестве базы для создания такого самолета наилучшим образом подходил
Су-7 — тяжелая, достаточно живучая машина с мощным двигателем, имеющая
значительные резервы для увеличения боевой нагрузки и установки нового бор-
тового оборудования.
179
Задание на истребитель-бомбардировщик было дано ОКБ весной 1958 г.,
а в апреле 1959 г. опытная машина С22 — доработанный Су-7 — уже поднялась
в воздух.
На самолете, получившем в серии обозначение Су-7Б, была удлинена носо-
вая часть фюзеляжа, снабженная противопомпажными створками, автоматиче-
ски открывающимися на сверхзвуковых скоростях. В крыле установили допол-
нительные топливные баки, значительно расширился комплекс вооружения, со-
стоявший помимо двух пушек НР-30 из бомб и НАР на четырех узлах внешней
подвески. Истребитель-бомбардировщик имел ТРДФ АЛ-7Ф1 с 40%-м форсиро-
ванием (1 х 9650 кгс). За счет применения более крупной форсажной камеры
хвостовая часть самолета получила характерное «раздутие», что отличало этот
Су-7 Б от истребителя Су-7.
В апреле 1959 г. начались летные испытания первого С22-1, построенного на
серийном заводе в г. Комсомольске-на-Амуре. Зимой 1960 г. Су-7Б был передан
на государственные испытания, а 24 января 1961 г. самолет был принят на воору-
жение советских ВВС.
В 1962 г. был создан самолет Су-7БМ (С22-2), имеющий усовершенствован-
ное БРЭО (в частности, на борту появилась гировертикаль).
Серийный выпуск Су-7БМ начался в 1963 г., сразу же после прекращения
производства Су-7 Б, и продолжался до 1965 г.
В 1964 г. была выпущена экспортная модификация Су-7БМ, получив-
шая обозначение Су-7БМК и имеющая несколько измененное бортовое оборудо-
вание.
1965 г. стал годом рождения самолетов Су-7БКЛ и Су-7У.
Истребитель-бомбардировщик Су-7БКЛ — наиболее распространенный из
семейства «Су-7» (выпускался до 1971 г.). Он был оснащен прицелом для бомбо-
метания с кабрирования ПБК-2, который решал задачи прицеливания по даль-
ности (по направлению прицеливание осуществлял летчик за счет точного вы-
держивания плоскости полупетли).
Серийное производство самолетов типа Су-7 продолжалось в г. Комсомоль-
ске-на-Амуре до 1971 г. Всего было выпущено 1950 машин этого типа.
Истребители-бомбардировщики Су-7Б различных модификаций состояли
на вооружении советских ВВС до конца 1980-х годов. Они поставлялись также
ВВС Алжира, Афганистана, Чехословакии, Египта, Индии, Ирака, Северной Ко-
реи, Польши и Сирии.
Вооружение. Две пушки НР-30 (30 мм, 2 х 70 патронов), НАР, бомбы мас-
сой до 500 кг. Максимальная масса бомбовой нагрузки 2000 кг.
Истребитель-бомбардировщик Су-17
Истребители-бомбардировщики типа Су-17 (рис. 2.8), в 1970—1980-х годах
составлявшие основу фронтовой ударной авиации России, продолжают нести
службу в ВВС Сирии, Ливии, Ирака, Вьетнама, Перу, Польши, Чехии и других
зарубежных государств, а также в ряде стран СНГ. Сегодня можно со значитель-
ной долей уверенности утверждать, что боевая карьера этих надежных, живучих и
мощных боевых машин, несмотря на их солидный возраст, будет продолжаться и
в ближайшие десятилетия [20, 23, 24].
180
Рис. 2.8. Самолет Су-17
Су-17 — редкий пример в истории военного авиастроения, когда на базе ист-
ребителя 2-го поколения, созданного в середине 1950-х годов, удалось создать
удачный боевой самолет нового поколения, сохранившийся на вооружении до
1990-х годов. Разработка проекта глубокой модернизации истребителя-бомбар-
дировщика Су-7Б, заключающейся в первую очередь в применении крыла изме-
няемой стреловидности, значительно улучшающего взлетно-посадочные харак-
теристики, началась в 1964 г., а 2 августа 1966 г. модернизированный самолет
С-22И, переоборудованный из Су-7Б, совершил первый полет (летчик-испыта-
тель — В. С. Ильюшин). В 1970 г. серийное производство истребителей-бом-
бардировщиков, получивших обозначение Су-17, развернули на заводе в г. Ком-
сомольске-на-Амуре, где раньше строили самолеты Су-7Б. В том же году первые
10 новых истребителей-бомбардировщиков поступили в Центр боевого примене-
ния ВВС в г. Липецке.
Следующая модификация Су-17М (С-32М, 1971 г.) была оснащена двигате-
лем АЛ-21ФЗ, имеющим увеличенную тягу, меньшую массу и габариты, чем
АЛ-7. Кроме того, истребитель-бомбардировщик получил топливные баки увели-
ченной емкости. Был создан экспортный вариант этого самолета — Су-20.
В декабре 1973 г. налетные испытания вышел истребитель-бомбардировщик
Су-17М2 (С-42) с навигационным комплексом КН-23, лазерным дальномером
«Фон» и другим усовершенствованным БРЭО. Это потребовало удлинения на
200 мм носовой части фюзеляжа. Несколько позже на С-42 установили доплеров-
ский измеритель скорости и сноса ДИСС-7, расположенный в обтекателе под
воздухозаборником (этот вариант получил обозначение Су-17М2-Д). Серийный
выпуск Су-17М2 осуществлялся в 1975—1977 гг.
Истребитель-бомбардировщик Су-17МЗ (С-52) имел конструкцию, унифи-
цированную с Су-17УМ. В состав оборудования включили лазерную станцию
181
«Клен-ПС», выполняющую задачи дальномера и системы подсвета целей. Пер-
вый полет Су-17МЗ состоялся в 1976 г., в том же году началось и серийное произ-
водство, продолжавшееся до конца 1981 г.
Последней серийной модификацией стал истребитель-бомбардировщик
Су-17М4 (С54). Его разработка началась в марте 1977 г. На самолете отказались
от регулируемого воздухозаборника, что упростило конструкцию, но привело к
снижению скоростных характеристик. В отличие от самолетов прежних модифи-
каций перед этой машиной не ставилась задача ведения воздушного боя: факти-
чески из истребителя-бомбардировщика он превратился в легкий бомбардиров-
щик. С54 получил цифровой прицельно-навигационный комплекс ПрНК-54, в
состав которого вошел лазерный дальномер-целеуказатель «Клен», инерциальная
навигационная система, ЦВМ, телевизионный кабинный индикатор, система об-
наружения радиолокационного облучения «Сирена-3» (обеспечивает обзор на
360°) и другое оборудование.
Для решения разведывательных задач под фюзеляжем может подвешиваться
контейнер комплексной разведки. Для борьбы с РЛС противника там же может
размещаться контейнере системой «Вьюга», обеспечивающей целеуказание про-
тиворадиолокационным ракетам.
Производство самолетов Су-17М4 было прекращено в 1990 г. За двадцать лет
было выпущено более 1000 истребителей-бомбардировщиков различных моди-
фикаций.
Для экспортных поставок был создан Су-20, его модификация Су-22. Даль-
нейшим продолжением экспортного направления стали истребители-бомбарди-
ровщики Су-22М, Су-22МЗ и Су-22М4. Эти машины поставлялись ВВС Сирии,
Ливии, Ирака, Египта, Вьетнама, Перу, Польши, Германии, большинство из ко-
торых в настоящее время продолжает находиться на вооружении. Экспортный
вариант самолета — Су-22М4 (С54К) серийно выпускался с 1984 г.
Производство самолетов семейства Су-17 было прекращено в 1990 г., за двад-
цать лет выпущено более 1200 истребителей-бомбардировщиков всех модифи-
каций.
В настоящее время летные характеристики самолетов семейства Су-17 в це-
лом вполне соответствуют требованиям времени. Однако комплекс бортового ра-
диоэлектронного оборудования даже на последних, наиболее современных моди-
фикациях (Су-17М4 и Су-22М) уже устарел. Не в полной мере удовлетворяет сов-
ременным требованиям и комплекс вооружения истребителя-бомбардировщика.
В конце 1990-х годов ОКБ П. О. Сухого совместно со смежниками, в част-
ности с Раменским ПКБ, разработало комплекс мероприятий, направленных на
повышение боевого потенциала самолетов типа Су-17. БРЭО модернизирован-
ного истребителя-бомбардировщика должно обладать способностью:
• автономного обнаружения наземных целей вне визуальной видимости, как в
дневных, так и в ночных условиях;
• обнаружения и сопровождения наземных целей в ночных условиях с повы-
шенной точностью, в том числе с использованием лазерной подсветки целей
ночью и в сложных метеоусловиях;
• обеспечения применения высокоточного оружия по малоразмерным и силь-
нозащищенным наземным целям;
• применения как российских, так и зарубежных авиационных средств пора-
жения.
182
Комплекс модернизационных мероприятий применительно к самолетам
Су-17М4 и Су-22М включает оснащение истребителя-бомбардировщика следую-
щим оборудованием:
• приемником глобальной навигационной системы;
• аппаратурой радионавигационной системы VOR/ILS;
• усовершенствованной (или полностью новой) радиосвязной аппаратурой;
• дополнительными средствами РЭБ (в том числе контейнерами постановки
активных помех, размещенными на двух внешних узлах подвески).
Самолет предполагается оснастить контейнером с тепловизионным навига-
ционно-прицельным оборудованием, обеспечивающим возможность применения
в темное время суток ракет с лазерной полуактивной системой самонаведения.
Кроме того, комплекс вооружения самолета должен быть дополнен ракетами
класса «воздух—воздух», а также корректируемыми авиабомбами с телевизион-
ным самонаведением КАБ-КР.
Планируется существенное усовершенствование информационно-управ-
ляющего поля кабины, в частности внедрение крупноформатных многофункци-
ональных цветных индикаторов на жидких кристаллах.
Предложенный комплекс мероприятий может быть реализован и на самоле-
тах типа Су-17 более ранних модификаций (Су-17МЗ, Су-22). В результате бое-
вой потенциал истребителей-бомбардировщиков приблизится к соответствую-
щему показателю самолетов четвертого поколения.
Бортовое оборудование и системы. Наиболее современные самоле-
ты типа Су-17 — истребители-бомбардировщики Су-17М4 и Су-22М — оснаще-
ны прицельно-навигационным комплексом ПрНК-54, в состав которого входит
ЦВМ. Для решения разведывательных задач самолет может комплектоваться
контейнером комплексной разведки ККР, в котором размещаются АФА плано-
вой, панорамной и перспективной съемки, РЛС БО, ИК-система, а также освети-
тельные патроны для фотографирования в ночных условиях.
Вооружение. Су-17М4 имеет десять узлов подвески, на которых может раз-
мещаться боевая нагрузка общей массой до 4000 кг, в том числе УР класса «воздух—
земля» с телевизионной ГСН, ракеты с лазерным полуактивным наведением, проти-
ворадиолокационные ракеты, корректируемые бомбы с лазерным наведением
КАБ-Л, свободнопадающие бомбы массой до 500 кг, контейнеры малогабаритных
грузов, подвесные пушечные установки СППУ-22, НАР различных типов. В корне-
вой части крыла размещены две пушки НР-30 (30 мм). Для ведения воздушного боя
самолет может оснащаться двумя УР класса «воздух—воздух» с ТГС. Для поражения
наземных РЛС на Су-17МЗ и Су-17М4 может подвешиваться контейнер с системой
«Вьюга», обеспечивающей целеуказание для противорадиолокационных ракет.
Фронтовой бомбардировщик Су-24
Су-24 — один из наиболее массовых боевых самолетов современных россий-
ских ВВС.
Историю создания этой машины следует начать с 1963 г., когда в ОКБ
П. О. Сухого приступили к проектированию ударного самолета С6, предназна-
ченного для нанесения высокоточных бомбово-ракетных ударов по наземным
целям в любых погодных условиях с использованием маловысотного режима по-
лета. Одновременно ОКБ приступило к проработке нового проекта ударного са-
молета Тб с укороченными взлетом и посадкой [34].
183
Су-24 (рис. 2.9) стал вторым отечественным тактическим самолетом, осна-
щенным цифровым прицельно-навигационным комплексом (ПрНК). Основным
вооружением Су-24 для борьбы с наземными РЛС стала ракета Х-28, созданная в
МКБ «Радуга» в 1973 г. Для поражения малоразмерных целей самолет оснащался
четырьмя УР класса «воздух—поверхность» с радиокомандной системой наведе-
ния. Для ведения воздушного боя бомбардировщик мог нести две—четыре раке-
ты. Серийное производство самолетов Су-24 продолжалось Новосибирским
авиационным производственным объединением до 1983 г. Почти сразу же после
принятия Су-24 на вооружение начались работы по его модернизации, что было
обусловлено как созданием новых средств ПВО в США и странах НАТО, так и
появлением в СССР нового бортового оборудования и вооружения. В апреле
1975 г. было принято решение о разработке фронтового бомбардировщика
Су-24М. Опытный образец этой машины, самолет Т6-8М, переоборудованный из
опытного Т6-8, совершил первый полет 24 июня 1977 г., а серийное производство
новой модификации развернулось в Новосибирске уже в 1979 г. Основное отли-
чие Су-24М от Су-24 заключалось в переходе на более совершенный и надежный
ПрНК, значительно повысивший точность бомбометания и стрельбы, а также
обеспечивший применение новых высокоточных боеприпасов.
Су-24М — первый отечественный тактический самолет, оснащенный систе-
мой дозаправки топливом в полете. Убирающийся топливоприемник был разме-
щен перед фонарем кабины летчиков. В качестве заправщиков применяются са-
молеты Су-24М с подвешенными агрегатами УПАЗ или специализированные са-
молеты Ил-78 и ^1л-78М.
В сентябре 1980 г. начались летные испытания самолета Т6МР — прототипа
фронтового разведчика Су-24МР, принятого на вооружение в 1984 г. Первые са-
молеты этого типа начали поступать в строевые части зимой 1985 г.
В декабре 1979 г. совершил первый полет самолет радиоэлектронного проти-
водействия Т6МП (Су-24МП), предназначенный для замены самолетов РЭП
Як-28ПП.
На базе бомбардировщика Су-24М был создан экспортный вариант —
Су-24МК, имеющий несколько упрощенное БРЭО и вооружение. Серийное про-
изводство самолетов Су-24 всех модификаций завершено в 1993 г. (более подроб-
но о самолете Су-24 и его модификациях см. выше).
Рис. 2.9. Самолет Су-24
184
Планируется, что самолеты Су-24М в составе ВВС и ВМС России сохранят-
ся и в следующем десятилетии. Им на смену должны прийти бомбардировщики
нового поколения. Однако недостаточное финансирование может привести к за-
держке поступления на вооружение новых самолетов. Зарубежные страны, рас-
полагающие парком бомбардировщиков Су-24МК, также вряд ли смогут найти
им замену до конца следующего десятилетия. В этих условиях особое значение
приобретают работы по модернизации самолетов, направленные в первую оче-
редь на расширение возможностей его БРЭО и комплекса вооружения. ОКБ про-
работано несколько вариантов модернизации самолета — от простейшего, пред-
усматривающего установку приемника спутниковой системы навигации, до наи-
более радикального, в соответствии с которым истребитель-бомбардировщик
должен получить новое БРЭО.
Одноместный бронированный штурмовик Су-25
Он предназначен для непосредственной поддержки войск, уничтожения
групповых и одиночных малоразмерных наземных объектов, минирования с воз-
духа и уничтожения малоскоростных воздушных целей в условиях визуальной ви-
димости днем и ночью при сильном огневом противодействии противника.
Су-25 отличается высоким уровнем боевой живучести, которая обеспечива-
ется конструкцией цельносварной кабины из титановой брони с лобовым опти-
ческим бронеблоком для защиты летчика, протектированием и заполнением пе-
нополиуретаном топливных баков, противопожарной защитой мотоотсеков,
стойкими к повреждениям основными силовыми элементами, бронезащитой
жизненно важных агрегатов и систем, применением огнестойкой проводки уп-
равления с усиленными тягами, способными выдержать попадание пули калибра
12,7 мм [4,9, 20, 23-25].
Для эксплуатации на необорудованных аэродромах разработана автономная
система технического обслуживания, размещаемая в 4 перевозимых на внешних
узлах подвески контейнерах.
Высокая маневренность позволяет самолету Су-25 поражать цели с первого
захода, эффективно использовать рельеф местности для выхода из атаки.
В настоящее время разработана программа и начата подготовка к модерниза-
ции Су-25: предусматривается установка новой системы управления оружием,
многофункционального радиолокационного прицельного комплекса, опти-
ко-электронного комплекса, информационной системы комплекса РЭБ со стан-
цией радиотехнической разведки. На модернизированном Су-25 будет обеспече-
на всепогодность боевого применения с использованием современного высоко-
точного оружия для действий по наземным (надводным) и воздушным целям.
Таким образом, модернизированный Су-25 становится многоцелевым боевым
самолетом (более подробно о штурмовике Су-25 см. выше).
На базе штурмовика Су-25 разработаны двухместный учебно-боевой вариант
Су-25УБ, противотанковый Су-25Т и многоцелевой Су 39 (Су-25ТМ).
Штурмовик Су-39 (Су-25Т)
Глубокой модернизацией самолета Су-25 стал «противотанковый» штурмо-
вик Су-39, предназначенный для применения в любое время суток и оснащенный
новым высокоточным оружием — ракетным комплексом «Вихрь» с лазерно-луче-
вой системой наведения [20, 25].
185
Конструкторы ОКБ, отслеживая меняющиеся требования к ударному само-
лету, а во многом и предвидя их, непрерывно совершенствовали Су-25.
Модернизация штурмовика вызвана неуклонным ростом боевых возможнос-
тей сухопутных войск. В первую очередь резким увеличением количества и каче-
ства бронетанковой техники, войсковых средств ПВО, особенно переносных зе-
нитно-ракетных комплексов (ПЗРК) типа американских «Ред Ай», «Стингер» и
российских «Стрела», «Игла», а также самоходных пушечно-ракетных комплек-
сов. Сегодня успешный выход в зону применения оружия «воздух—поверхность»
для ударной авиации — непростая задача.
Работы по созданию самолета начались в 1976 г. Штурмовик, способный бо-
роться с малоразмерными, сильнозащищенными целями (в том числе танками
стран НАТО нового поколения), первоначально предполагалось выполнить в
двухместном варианте и оснастить ПТРК «Радуга», однако в дальнейшем выбор
был остановлен на перспективном ПТРК «Вихрь», способном применяться одно-
местным самолетом. В качестве другого основного вооружения модернизирован-
ного штурмовика рассматривалась 45-миллиметровая перспективная пушка, под-
вижная в вертикальной плоскости, однако из-за сложностей с отработкой этой
системы было решено оснастить самолет неподвижной двухствольной пушкой
ГШ-30 (30 мм). Работы по установке нового комплекса вооружения на самолете
Су-25 начались в 1980 г., рабочее проектирование модернизированного штурмо-
вика Т8-М завершилось в 1982 г., постройка первого опытного образца (в него
дорабатывался учебно-боевой самолет Т8-УБ) началась в 1983 г. Уже в 1984 г. в
воздух поднялся новый вариант штурмовика Су-25Т. Обозначение самолета отра-
жает его основную задачу — уничтожение танков и другой бронированной техни-
ки на поле боя, в районах сосредоточения и на марше. Государственные испыта-
ния Су-25Т завершены в сентябре 1993 г., а в 1994 г. самолету было присвоено
обозначение Су-39 (рис. 2.10). По сравнению с исходным Су-25 новый штурмо-
вик имел значительно более мощное вооружение, новое БРЭО и усовершенство-
ванный комплекс боевой живучести. Впервые в мире на Су-25Т решена задача за-
щиты боевого самолета от атак тепловых ракет на протяжении всего полета, что
для летчика-штурмовика является жизненно важным. Первый серийный самолет
Су-25Т совершил первый полет 26 июля 1990 г.
Рис. 2.10. Самолет Су-39
186
Развитием штурмовика Су-25Т стал усовершенствованный самолет Су-25ТМ,
первый полет которого состоялся в 1996 г. Серийное производство этого самолета
освоено на заводе в г. Улан-Удэ. Су-25ТМ весьма значительно превосходит по сво-
им возможностям серийный Су-25. Его многофункциональность определяется кар-
динально расширившимися возможностями по поражению воздушных целей, что
обеспечивается применением ракет с полуактивными радиолокационными ГСН, с
инерциально активным наведением и с тепловыми ГСН. Локатор обнаруживает
воздушные цели типа «истребитель» в передней полусфере на дальности 57 км, а в
задней — на дальности 25 км. Группа самолетов Су-39, часть из которых вооружена
ракетами класса «воздух—воздух» средней дальности, может успешно противосто-
ять во встречном ракетном бою любым современным истребителям, в особенности
если используются новые ракеты с инерциально активным наведением, не требую-
щие сопровождения для подсвета воздушной цели после пуска. Это может обеспе-
чить решающее преимущество в дуэльной ситуации.
Существующий парк ударных самолетов фронтовой авиации ВВС России стре-
мительно устаревает, да и физически подходит к концу срок жизни машин Су-17,
Су-25, МиГ-27. Через три-пять лет проблема обновления парка будет особенно ост-
рой, так что Су-39, к тому же оснащенный и круглосуточной прицельной теплови-
зионной системой, поспеет весьма кстати. Неизвестно только, будут ли ВВС России
располагать к тому времени необходимыми финансовыми средствами для заказа се-
рии таких самолетов. У Су-39 есть и немалый экспортный потенциал: больше сот-
ни штурмовиков Су-25 были проданы в Чехословакию, Ирак (до введения эмбарго
ООН), Северную Корею и Болгарию. По сообщениям зарубежной печати, интерес
к последней модификации проявляют страны Азии, Латинской Америки. Сто-
имость такого штурмовика на международном рынке составит не менее 15 млн
долларов, однако надо иметь в виду, что страны третьего мира не желают покупать
боевые самолеты, если их типы не состоят на вооружении страны-экспортера.
Оборудование. Усовершенствовано бортовое оборудование самолета. Са-
молет Су-25Т оснащен системой управления вооружением СУВ-25Т, предназна-
ченной для распознавания и автоматического сопровождения малоразмерных
подвижных целей (танков, автомобилей, катеров и т. д.), целеуказания и автома-
тического наведения УР, а также для обеспечения стрельбы НАР и пушки. В со-
став комплекса входит круглосуточный автоматический прицельный комплекс
«Шквал» (размещен в носовой части самолета и включает телевизионную аппа-
ратуру, сопряженную с блоком автоматического слежения за целью, а также ла-
зерный дальномер-целеуказатель), система отображения информации (СОИ),
центральная цифровая вычислительная машина, информационный комплекс
вертикали и курса, доплеровский измеритель скорости и сноса, радиовысотомер,
радиосистемы ближней и дальней навигации.
Основой системы управления вооружением является оптико-электронная
прицельная система «Шквал», телевизионное изображение с которой поступает
на установленный в правой верхней части приборной доски телевизионный ин-
дикатор. «Шквал» имеет поле зрения 10° и обеспечивает 23-кратное увеличение
изображения цели. Обзор пространства ведется в режиме сканирования визир-
ной головки. Система «Шквал» позволяет распознавать цели на дальностях, су-
щественно превосходящих визуальные. Обнаруженную летчиком цель телевизи-
онный автомат из состава «Шквала» берет на автоматическое сопровождение с
запоминанием ее образа. Несмотря на все маневры цели, в том числе беспорядоч-
187
ное пространственное перемещение, система цепко держит ее как на фоне земли
или моря, так и на фоне неба, точно измеряя дальность лазерным дальномером.
Это обеспечивает прямое попадание управляемыми ракетами, а точность приме-
нения неуправляемого вооружения повышается в 2...3 раза. «Шквал» может обна-
руживать цели и по пятну внешнего лазерного подсвета, которое создает авиана-
водчик, находящийся в передовых боевых порядках сухопутных сил. Процедура
такой атаки автоматизирована и обеспечивает взаимодействие с наземными час-
тями, что особенно необходимо на линии боевого соприкосновения как для по-
вышения точности применения оружия, так и для исключения возможности на-
несения удара по своим войскам.
Самолет может атаковать цели не только днем, но и ночью, при низком уров-
не освещенности, с помощью низкоуровневой телевизионной прицельной систе-
мы, размещаемой в контейнере под фюзеляжем. Она обеспечивает обнаружение
и распознавание целей типа танк ночью, при свете Луны в ее первой четверти —
на дальности до 3 км. Этого достаточно для применения управляемого и неуправ-
ляемого оружия. Система имеет переключаемое поле зрения. Принцип ее дейст-
вия состоит в электронной обработке ТВ-изображения с увеличением контраст-
ности и яркости так, что неясные серые контуры обретают на экране узнаваемые
очертания реальных предметов и становится возможным распознать, например,
танк, стоящий между стогами сена.
В навигационный комплекс самолета помимо системы воздушных сигналов,
сдвоенной инерциальной курсовертикали, радиотехнической системы ближней
навигации и посадки (РСБН), доплеровского измерителя путевой скорости и уг-
ла сноса (ДИСС) и радиовысотомера включена также аппаратура радиотехниче-
ской системы дальней навигации (РСДН). Принцип действия основан на приеме
модулированных сигналов наземных отечественных станций системы «Чайка» и
международных станций «ЛОРАН-С», развернутых по всей планете и обеспечи-
вающих глобальную навигацию. Точность определения координат с использова-
нием РСДН существенно улучшается.
Система автоматического управления серьезно снижает загрузку летчика,
поддерживая заданную высоту, полет по запрограммированному маршруту через
заданные промежуточные точки, выход в район обнаружения цели, повторный
заход на атакуемую цель, заход на посадку.
Су-25ТМ имеет усовершенствованный оптико-телевизионный прицельный
комплекс «Шквал-М», осуществляющий поиск и корреляционное опознавание
цели в режиме сканирования. Имеется режим автоматического полета к цели с
точным выходом по времени: между отдельными самолетами выдерживается
строго определенный временной интервал, что позволяет проводить четко ско-
ординированную групповую атаку с различных направлений. На Су-25Т предпо-
лагалось установить РЛС миллиметрового диапазона. Из-за нарушения сложив-
шейся кооперации было принято решение установить в контейнер РЛПК
«Копье-25». РЛС позволяет применять самолет по широкому кругу воздушных,
наземных и морских целей. Информация от подвесной РЛС выводится на инди-
катор телевизионного типа, расположенный в правом верхнем углу приборной
доски, а от телевизионной системы или подвесного тепловизора — на ИЛС. РЛС
способна одновременно обнаруживать 10—12 целей и обеспечивать применение
УР класса «воздух—воздух» по двум из них.
Еще одним вариантом подвески является контейнер с тепловизионным обо-
рудованием.
188
Усовершенствованный навигационный комплекс самолета Су-25ТМ допол-
нен блоком спутниковой навигации А-735. Выход на цель осуществляется в авто-
матическом режиме с высокой точностью вне зависимости от дальности полета.
Бортовой информационный комплекс обеспечивает возможность длительного
полета на сверхмалых высотах.
Комплекс РЭБ обеспечивает Су-25Т высокую вероятность преодоления мощ-
ной ПВО противника. Основной информационной системой комплекса является
станция радиотехнической разведки (СРТР), обеспечивающая обнаружение и пе-
ленгацию наземных, бортовых и корабельных РЛС. Диапазон СРТР позволяет вы-
являть практически все существующие РЛС обнаружения и управления огнем.
Цифровой вычислитель СРТР определяет типы и режимы работы облучающих ра-
диолокаторов, их степень опасности. Наличие противорадиолокационных ракет
существенно повышает выживаемость Су-25Т и делает возможным его использо-
вание в качестве специализированного самолета подавления ПВО в боевых поряд-
ках с другими типами ударных самолетов тактической авиации.
Уничтожение средств ПВО может производиться и при взаимодействии стан-
ции радиотехнической разведки с оптико-телевизионной системой «Шквал», ког-
да последняя получает целеуказание от СРТР, выставляет визирную головку в на-
правлении облучающей РЛС, а после ее обнаружения и взятия на сопровождение
обеспечивает применение управляемого оружия «воздух—поверхность», в том
числе ПТУР «Вихрь».
Для преодоления полосы средств ПВО может использоваться станция поста-
новки активных помех, предназначенная для противодействия современным и
перспективным радиоэлектронным системам управления оружием с импульс-
ным, непрерывным и квазинепрерывным излучением. Станция устанавливается
в контейнерах, подвешиваемых на внешних подкрыльевых точках подвески. Воз-
можно создание уводящих, шумовых, мерцающих и перенацеливающих на под-
стилающую поверхность помех. Для защиты от ракет с инфракрасными (тепло-
выми) ГСН на Су-25Т в хвостовой части самолета, в основании киля, установле-
на станция оптико-электронных помех.
Усовершенствованный комплекс РЭБ, примененный на Су-25ТМ, включает
встроенное и подвесное оборудование в контейнерном исполнении. В его состав
входят:
• станция радиотехнической разведки, служащая для пеленгации РЛС против-
ника, а также определения наиболее опасной цели, ее координат и дальности
до нее;
• малогабаритная станция активных радиотехнических помех, создающая уво-
дящие, шумовые, мерцающие и перенацеливающие на подстилающую по-
верхность помехи;
• станция оптико-электронных помех;
• устройство выброса ложных целей с комплектом 192 помеховых патрона;
• авиационные ложные цели для вскрытия и дезориентации комплексов ПВО
противника, БРЛС самолетов и ракет с ГСН всех типов.
Вооружение штурмовика Су-39 размещается на 10 подкрыльевых узлах внеш-
ней подвески и включает 16 сверхзвуковых противотанковых ракет, имеющих воз-
можность поражать и воздушные цели, летящие со скоростью до 800 м/с. Самоле-
ты могут нести УР класса «воздух—поверхность» с телевизионным самонаведением
или с лазерным наведением, а также КАБ-КР или КАБ-Л. В комплекс вооружения
входят также противорадиолокационные УР. Самолет Су-25Т может оснащаться
189
ракетами класса «воздух—воздух» тепловой ГСН. Кроме того, Су-25ТМ может нес-
ти ракеты класса «воздух—воздух» средней дальности с радиолокационным наведе-
нием, а также противокорабельные ракеты. Пушечное вооружение состоит
из встроенной неподвижной установки НППУ-8 с пушкой ГШ-30, а также двух-
четырех подвесных пушечных установок СППУ-687 с пушкой ГШ-301. Самолет
может брать на борт до восьми блоков НАР С-8 (160 ракет) или С-13 (40 ракет),
до восьми НАР С-24 или С-25. Неуправляемое бомбовое вооружение — до 32 бое-
припасов массой 100 кг или до восьми — 250 или 500 кг. Для поражения площад-
ных целей возможна подвеска восьми КМ ГУ.
2.1.2. РЕАЛИЗАЦИЯ ПРИНЦИПИАЛЬНЫХ
НАУЧНО-ТЕХНИЧЕСКИХ ДОСТИЖЕНИЙ СВОЕГО ВРЕМЕНИ
ПРИ СОЗДАНИИ БОМБАРДИРОВЩИКОВ СЕМЕЙСТВА «Ту»
В ПОСЛЕВОЕННЫЙ ПЕРИОД
1. Самолет Ту-4 — перестройка всей авиапромышленности СССР
и смежных отраслей через создание абсолютной копии В-29.
Идея Иосифа Сталина по факту сброса атомной бомбы
Агрессивные планы, угрозы бывших союзников, владеющих атомной бомбой,
заставили в конце войны принять решение: в быстрые сроки создать тяжелый
стратегический бомбардировщик, способный нести и сбросить атомную бомбу.
Андрей Николаевич Туполев уже имел проект и построил макет такого
бомбардировщика — АНТ-64, по характеристикам даже превосходящий амери-
канский В-29. По сравнению с другими конкурентами (С. В. Ильюшиным и
В. М. Мясищевым) у А. Н. Туполева, по его словам, были такие аргументы:
«Думаю, что времени потребуется не так уж много, но это только потому,
что мы исподволь уже ведем прикидочные работы над четырехмоторной маши-
ной (проект «64»). А если бы не это, то, вероятно, и трех лет бы не хватило. Всю
войну мы пристально следили за действиями авиации и постепенно пришли к
убеждению, что надобность в тяжелом бомбардировщике останется в силе. Вот
мы и вели предварительные расчеты и наметки. Кое-что у нас в загашнике есть.
Сказать по секрету, мы даже и моторы к нему подобрали. Был у меня недавно
Аркадий Дмитриевич Швецов и рассказал, что его работа над новым 1800-силь-
ным двигателем с воздушным охлаждением и турбокомпрессорами (АШ-73ТК)
продвинулась достаточно далеко, и он надеется уже осенью приступить к их на-
земной отработке» [35].
Но тут происходит счастливая случайность для всей советской авиапромыш-
ленности. 7 июля 1944 г. бомбардировщик США «сверхкрепость» В-29, отбомбив
Японию и получив повреждения, совершает вынужденную посадку в Восточной
Сибири СССР. Летчиков радушно приняли и отправили в США, а самолет кон-
фисковали, так как СССР в тот момент еще не находился в состоянии войны с
Японией. В том же районе 8 августа разбивается другой В-29. Оставшиеся в жи-
вых летчики отправляются в США, а сохранившиеся агрегаты конфискуются.
11 и 21 ноября благополучно приземляются еще 2 самолета В-29.
Получив три экземпляра самого современного американского самолета
практически в полной комплектации, И. В. Сталин принимает поистине истори-
ческое решение.
190
Руководство страны понимало, что, несмотря на наши успехи на отдельных
участках, в целом авиапромышленность Запада, особенно США, ушла далеко
вперед. Сталин решил, что случай посылает возможность: имея 3 самых послед-
них (летали В-29 к этому времени меньше 3-х лет), совершенных американских
бомбардировщика, создать абсолютную советскую копию. Обеспечивая мощное
серийное производство самолета, модернизировать, подтянуть при этом к амери-
канской всю авиапромышленность СССР и смежные с ней отрасли.
Эту работу И. В. Сталин поручает А. Н. Туполеву, приказывает, чтобы первые
образцы приняли участие в воздушном параде вДень Воздушного Флота в августе
1947 г., т. е. через два с небольшим года!
В принятии решения И. В. Сталина о создании копии В-29 не меньшую роль
играло то обстоятельство, что СССР должен был очень оперативно доказать ми-
ру, что он обладает атомным оружием, т. е. имеет атомную бомбу и необходимый
для ее доставки бомбардировщик. «Но поскольку американцы уже доказали, что
с В-29 можно сбрасывать атомные бомбы, Сталин дал указание строить точную
копию В-29. Сроки решения этой ответственной задачи были строго ограниче-
ны и определялись основным условием: самолет должен быть готов ко времени
создания атомной бомбы» [36].
Вместе с Д. М. Марковым, которому он поручил конструкторскую работу,
А. Н. Туполев, используя свои выдающиеся организаторские способности, в те-
чение этих лет не только построил, обеспечил серийное производство копии В-29
и дал советской авиации современный стратегический бомбардировщик, но и
провел коренную модернизацию авиапромышленности СССР.
Для многих ветеранов нашей авиапромышленности годы работы по Ту-4 (так
решили назвать копию американского В-29) запомнились на всю жизнь, они на-
зывают это сагой, эпопеей, замечательной историей в авиастроении СССР.
Туполев А. Н. получает от Сталина полномочия на принятие любых необхо-
димых мер, вплоть до выдачи ТТЗ на получение новых материалов и комплек-
тующих в другие министерства и ведомства напрямую, без согласования с выше-
стоящими инстанциями.
Все 3 самолета В-29 перегоняются в Москву. Один самолет полностью разби-
рается для разработки детальных конструктивных чертежей всех узлов и агрега-
тов, второй используется для проведения летных испытаний, третий остается в
запасе для сравнительного анализа. Началась энергичная работа. Один из авторов
этой героической эпопеи Л. Л. Кербер так описывает работы по Ту-4 [35]:
«Следовало заказать промышленности новые радиолокаторы и радиостан-
ции, дистанционно управляемые пушечные установки, более точные бомбарди-
ровочные и стрелковые прицелы, универсальные приборы и автопилоты, коле-
са из более стойкой резины и разнообразные электромеханизмы, резиновые
противообледенители и неискажающий плексиглас, термосы для пищи и спаса-
тельные надувные лодки, стойкие краски и негорючие ткани, новые, более проч-
ные сплавы и пластики. Одно тянет за собой другое. Нужны более производи-
тельные станки, более мощные прессы и молоты. Самолет должен отвечать са-
мым передовым техническим параметрам, быть гораздо легче старых,
довоенных образцов и, конечно же, во много раз надежнее их».
Руководителем проекта был А. Н. Туполев, главным конструктором —
Д. С. Марков, начальниками подразделений были назначены ответственные ис-
полнители по каждому специальному вопросу с определенным кругом обязан-
ностей и полномочий.
191
Вот перечень только самых ведущих туполевских специалистов: А. А. Ар-
хангельский, К. В. Минкнер, А. М. Черемухин, Г. С. Френкель, Д. С. Мар-
ков, С. М. Егер, Н. И. Базенков, Н. А. Соколов, Л. Л. Кербер, А. В. На-
дашкевич, И. Ф. Незваль, С. А. Вигдорчик, Н. С. Некрасов, А. В. Ме-
щеряков, И. Л. Головин и др.
За два с половиной года было принято много неординарных решений и под-
ходов:
• «по мере разборки В-29 каждый агрегат тщательно изучали, взвешивали и
составляли на него техническое описание. Затем производилась разборка
агрегата с составлением детального чертежа, и чертежи отправляли на
промышленные предприятия с заданием в первоочередном порядке обес-
печить создание дубликата. Ответственность за определение того, какой
изготовленный дубликат годится, а какой — нет, была возложена персо-
нально на Туполева. Решения необходимо было принимать по каждому ком-
поненту конструкции: трубопроводам, кабелям, обшивке фюзеляжа, плане-
ру, лонжерону. Туполев регулярно собирает своих сотрудников на совеща-
ния, где сравниваются оригиналы и копии. Американский оригинал ставили
рядом с аналогами, которые создавались на разных отечественных пред-
приятиях и конструкторских бюро. Сравнивали отчеты об испытаниях, выве-
ряли веса и, прежде чем принять окончательное решение, выслушивали
мнение присутствующих специалистов» [37];
• «требовалось создание огромного числа новых материалов, приборов, сис-
тем, всего того, чего наша промышленность до этого времени не выпуска-
ла. Так как* уровень нашей промышленности значительно отставал от аме-
риканского, потребовалась перестройка на уровне технической революции
не только авиационной, но и целого ряда других отраслей техники и про-
мышленности, таких, как металлургия, химия, электро- и радиотехника,
станко- и приборостроение и т. д.» [36];
• «одним из эффективных организационных приемов было создание на тер-
ритории ОКБ и завода выставки готовых деталей и изделий, предназна-
ченных для самолета Ту-4, по всем отраслям промышленности. Пустые
стенды наглядно демонстрировали отставание отрасли, завода, института,
КБ» [36];
• для ускорения производства самолетов был предусмотрен выпуск партии в
20 самолетов без традиционной опытной машины, было принято решение
для контроля рабочих чертежей построить реальный опытный самолет из де-
рева. Не макет, а самолет, так как собирался он не по эскизам, а по рабочим
чертежам, передаваемым в г. Казань. И если при сборке появлялись несты-
ковки, неувязки, то конструктор оформлял необходимое изменение чертежа
и направлял уточнение на серийный завод;
• поскольку множество новых изделий, агрегатов задерживалось, а иногда да-
же были не известны их размеры и условия крепления, было принято реше-
ние: каркасные чертежи выпускаются в 2 слоя: сначала сам каркас (без внут-
ренней начинки), а затем доработки каркаса под оборудование, агрегаты, тя-
ги, провода, трубки и т. д.;
• одна из крупных проблем создалась с системой единиц измерений. В работе
[37] так описывается решение вопроса: «В Советском Союзе принята метри-
ческая система мер, в американской индустрии оперировали футами и
дюймами британской системы. И когда дело доходило до замера, скажем,
толщины сечения проводов и кабелей электроцепей, возникал вопрос: ка-
192
Рис. 2.11. Самолет Ту-4
кую использовать систему мер? Если подбирать ближайший метрический
размер, неизбежно увеличится или уменьшится вес, и ведь при этом изме-
нятся электропроводящие свойства. А обшивка? Малейшее изменение тол-
щины может привести к огромному изменению веса и прочности, хотя в
этом случае просчитать все последствия легче. Не располагая запасом вре-
мени, Туполев решает сохранить систему мер, принятую в Соединенных
Штатах. В целом ряде случаев советским авиастроителям пришлось при-
спосабливаться к непривычным для них неметрическим единицам, и еще
лет двадцать после этого во многих отраслях советской промышленности
продолжали пользоваться британской системой мер».
В результате успешной работы по вышеотмеченным и по сотням других воп-
росов и проблем 19 мая 1947 г. в г. Казани поднялся в воздух первый Ту-4, а
3 августа 1947 года первые 3 серийных Ту-4 (рис. 2.11) и их пассажирский вариант
Ту-70 приняли участие в авиационном параде в Тушино. В поставленные Стали-
ным сроки А. Н. Туполев уложился и успешно решил возложенную на него за-
дачу. По сравнению с В-29 ЛТХ Ту-4 чуть хуже: максимальная скорость ме-
нее 570 км/ч (у В-29 — 576 км/ч), дальность полета (вес бомб — 5т) — 4900 км
(у В-29 — 5000 км) при взлетном весе 47,5 т. Именно Ту-4 стал первым советским
самолетом, с которого была сброшена атомная бомба. Самолет строился серийно
в г. Казани (завод № 22), г. Куйбышеве (завод № 18) и Москве (завод № 23). Все-
го было построено 847 самолетов.
2. Самолет Ту-85 — вершина стратегической авиации
с поршневыми двигателями
Дальность полета Ту-4 не вполне удовлетворяла командование ВВС СССР,
жизнь, политическая обстановка требовали создания самолета с дальностью по-
лета 12...13 тысяч километров. Работа по новому самолету Ту-85 была поручена
А. Н. Туполеву.
В результате министерского конкурса между конструкторскими бюро
В. А. Добрынина и А. Д. Швецова на создание мощного и экономичного дви-
гателя для самолета Ту-85 была выбрана конструкция В. А. Добрынина, к момен-
ту выпуска создан двигатель ВД-4К небывалой мощности — до 4300 л. с. Таких
моторов никто в мире до этого не выпускал.
Размеры самолета тоже впечатляли: размах крыла 55,94 м, длина фюзеляжа
39,31 м. Для обеспечения полета большой дальности самолет мог брать на борт до
7 Авиация ВВС России и научно-технический прогресс
193
Рис. 2.12. Самолет Ту-85
50 т топлива. Максимальный взлетный вес был 107 т. Число членов экипажа мог-
ло составлять 16 чел. (2 экипажа). Полет на полную дальность занимал более су-
ток! В первый полет — эту «лебединую песню» дальних самолетов — поднимал
9 января 1951 г. выдающийся туполевский летчик А. Д. Перелет. Тяжелая ма-
шина, оторвавшись от земли, стала энергично набирать высоту, возникла опас-
ность потерять скорость и сорваться. Алексей Дмитриевич среагировал правиль-
но — воспользовался триммером! Но что это?! Многотонный самолет стал еще
энергичнее набирать высоту! В считанные секунды Алексей Дмитриевич сообра-
зил (!!!), что при сборке электрическое управление триммером, вероятно, перепу-
тано и включив триммер наоборот! Самолет среагировал, перешел в нормальный
набор высоты. Так А. Д. Перелет спас самолет и экипаж.
Здесь важно отметить выдающийся вклад летчиков-испытателей в создание
ударных самолетов туполевского ОКБ. Некоторые из них отдали жизнь при испы-
таниях новых самолетов. Тот же А. Д. Перелет героически погиб, испытывая прото-
тип самолета Ту-114. Л. Л. Кербер [35] так описывает подвиг Алексея Дмитриевича:
«Я прослушал магнитофонную запись последнего разговора Перелета А. Д.
с КДП, когда он погиб, надеясь спасти прототип Ту-114 при возвращении из ис-
пытательного полета на базу. Сдержанный, может быть, излишне спокойный го-
лос: «Пожар двигателя № 3, освободите посадочную полосу, буду садиться пря-
мо с маршрута». Немного спустя: «С пожаром справиться не удалось, он раз-
растается, до вас осталось километров сорок». Еще пару минут: «Двигатель
оторвался, горит крыло и гондола шасси, дал команду экипажу покинуть само-
лет, следите». Больше сообщений не поступало. Вместе с бортинженером Чер-
новым, пытаясь спасти самолет, он не выпрыгнул из него и погиб».
Самолет Ту-85 успешно прошел все летные испытания, показал заданную
скорость, высоту и дальность (рис. 2.12).
При его создании туполевцы продолжили традицию использования нетради-
ционных подходов для решения возникающих проблем. Так, ранее для создания
запаса кислорода на борту использовались стальные баллоны с газообразным
кислородом. Поскольку многочисленный экипаж Ту-85 использует кислород по-
стоянно, иногда более суток, то применение батарей тяжелых стальных баллонов
приводило к большим весовым потерям. Возникла идея применения жидкого
кислорода — всего четыре легких сосуда Дюаре, что позволило сэкономить не-
сколько сот килограммов веса.
Также на Ту-85 впервые в самолетных электросетях были заменены медные
провода на алюминиевые.
194
3. Начальный этап создания реактивных бомбардировщиков —
опытный Ту-12, Ту-14, Ту-82
Андрей Николаевич Туполев сразу оценил реактивные двигатели. Тесно по-
работав с ЦИАМ, конструкторскими бюро А М. Люльки и В, Я. Климова, он
понял, что реактивный самолет — это не только самолет с новым реактивным
двигателем, а самолет с новой аэродинамической компоновкой под существенно
большие скорости с новыми системами, новым топливом (бензин заменяется на
керосин), новыми проблемами компоновки воздухозаборника (устойчивость ра-
боты, эффективность забора воздуха) и реактивного сопла (тепловое и акустиче-
ское нагружение конструкции, воздействие на горизонтальное оперение).
Он предлагает проверить новые двигатели, освоить специфику их эксплуата-
ции на создании опытного самолета Ту-12 — модификации надежного, хорошо
проверенного в эксплуатации самолета Ту-2. На Ту-2 заменяются только двига-
тели и носовая часть фюзеляжа. Так, под руководством Туполева С. М. Егерем
была реализована программа по созданию первого советского реактивного
бомбардировщика — Ту-12 (рис. 2.13). Из-за более высоких скоростей в конст-
рукцию были внесены некоторые изменения — применено трехколесное шасси
с носовым колесом. На самолете устанавливались двигатели «НИН» фирмы
«Роллс-Ройс» с тягой 2270 кг. Всего было построено 3 самолета, которые исполь-
зовались как учебно-тренировочные и как летающие лаборатории.
Поскольку С. М. Егер также руководил созданием реактивных бомбарди-
ровщиков для ВМФ (Ту-72, Ту-73, Ту-74, Ту-78, Ту-79) и были достигнуты зна-
чительные успехи, то разработка серийного реактивного бомбардировщика Ту-14
была поручена ему. Для получения минимального веса самолет имел простую
конструкцию с максимальным использованием наработок по самолетам Ту-72,
Ту-73 и Ту-74. Первоначально проект предусматривал создание фронтового, за-
тем среднего бомбардировщика и разведчика для ВВС. После появления Ил-28 и
отказа ВВС от Ту-14 машина была «пристроена» в ВМС. По данным Иркутского
авиазавода, было выпущено 150 серийных Ту-14.
При этом следует отметить, что параллельно ОКБ А. Н. Туполева при работе
над самолетом Ту-73 решило проблему жизнеобеспечения экипажа на больших
высотах без скафандров — была создана герметичная кабина с наддувом ее от
Рис. 2.13. Самолет Ту-12
195
ТРД. В ходе работ над Ту-12, Ту-73, Ту-14 решались многие проблемы, связан-
ные с переходом на керосин: потребовались новые конструктивные и технологи-
ческие решения для существенного повышения герметичности топливной систе-
мы из-за большей проникающей способности керосина в сравнении с бензином.
На Ту-73 были использованы все новейшие наработки ЦАГИ по скоростным
крыльевым профилям. На Ту-73 было применено стреловидное горизонтальное
оперение. Как сказал Андрей Николаевич: «Переходить на стреловидное крыло
для скоростей Ту-14 еще рано, но оставлять оперение прямым уже нельзя».
Сначала из-за недостатков тяги двух двигателей использовалась компоновка с
дополнительным хвостовым третьим двигателем, что затем повторили на Ту-154.
Однако установка более мощных двигателей позволила снять третий двигатель, и
так появился самолет Ту-14 (рис. 2.14). Поскольку заказ на скоростной фронтовой
реактивный бомбардировщик правительство дало одновременно А. Н. Туполеву
(Ту-14) и С. В. Ильюшину (Ил-28), то эти два проекта шли одновременно, но затем
по объективным причинам в крупную серию запустили не Ту-14, а Ил-28, посколь-
ку он был легче, неприхотливее в эксплуатации и проще в производстве. Андрей
Николаевич поначалу хотел видеть в Ту-14 такого же родоначальника целого се-
мейства реактивных машин, каким был в свое время ТБ-1 для самолетов с поршне-
выми двигателями, и поэтому переживал проигрыш в таком соревновании.
А. Н. Туполев продолжает освоение техники проектирования и производства
реактивных бомбардировщиков. Очередная разработка представляла собой лег-
кий двухдвигательный самолет Ту-82 — первый в СССР бомбардировщик со
стреловидным крылом.
Под руководством возглавившего проект Сергея Егера было разработано
крыло со стреловидностью 35°. Стреловидное горизонтальное хвостовое опере-
ние к тому времени уже применялось на самолете Ту-14, однако в конструкции
Ту-82 стреловидный контур с углом 40° имел еще и киль. На Ту-82 устанавлива-
лись два двигателя ВК-1 тягой 2740 кгс, разработанные на базе двигателя «НИН»
фирмы «Роллс-Ройс» [37].
Самолет показал хорошие летно-технические характеристики. Максималь-
ная скорость полета достигала 934 км/ч, весьма впечатляющим был рабочий по-
толок — 14 км, дальность полета составляла 2750 км [37].
Самолет Ту-82 был выпущен в 1949 г. и долго всесторонне испытывался, по-
скольку цель постройки опытного экземпляра была экспериментальная — отра-
ботка конструкции и исследование прочности стреловидного крыла при скорос-
тях порядка 1000 км/ч.
Рис. 2.14. Самолет Ту-14
196
В общем тип стреловидного бомбардировщика у нас сложился и развился го-
раздо скорее и легче, чем тип стреловидного истребителя без «детских болезней»
устойчивости [38].
Под руководством А. Н. Туполева конструкторами и учеными ОКБ и ЦАГИ,
производственниками, летными экипажами последовательно были освоены си-
ловые установки с ТРД, их системы, герметизированные кабины с наддувом от
ТРД для реализации высотных полетов; конструкция и аэродинамика стреловид-
ного крыла и оперения, необходимые для полета с околозвуковыми скоростями;
системы и методы управления полетом на больших высотах и скоростях. «Был от-
крыт путь для создания дальнего бомбардировщика с учетом выявленных прак-
тикой особенностей его конструкции и эксплуатации» [36].
4. Научно-технические проблемы, возникавшие
при создании самолета Ту-16, и их решение
на основе достижений науки и техники того времени
История создания самолета Ту-16
На праздновании шестидесятилетия Андрея Николаевича Туполева в январе
1949 г. двигателист Александр Микулин подарил эффектную модель нового перс-
пективного самолета с турбореактивным двигателем на расчетную тягу около
8000 кгс. Многие присутствующие на торжестве восприняли этот презент как сти-
мул к разработке уникального реактивного бомбардировщика. И не ошиблись.
Опыт, приобретенный ОКБ Туполева в послевоенный период, когда разра-
ботка различных конструкций самолетов шла с небывалым размахом, воплотился
в идее создания серийного бомбардировщика на реактивной тяге.
Самолет Ту-4 лег в основу таких конструкций, как Ту-70, Ту-75, Ту-80 и
Ту-85. Результатом развития конструкции Ту-2 стали самолеты Ту-72, Ту-73,
Ту-74, Ту-78, Ту-79 и Ту-81. Первое семейство самолетов позволило накопить
опыт разработки больших самолетов дальнего действия, второе — меньших по
габаритам реактивных бомбардировщиков. И вот пришло время соединить обе
разработки. Туполев и Марков приступают к работе над 88-м проектом, которому
предстоит войти в историю под военным обозначением Ту-16 (рис. 2.15).
Рис. 2.15. Самолет Ту-16
197
К началу разработки этой новой конструкции призвало созданное Алек-
сандром Микулиным новое поколение мощных турбореактивных двигателей.
Пять лет, отданные Микулиным разработке нового двигателя, не прошли даром.
Был создан замечательный АМ-3, развивавший расчетную тягу 8750 кгс, —
в 1951 г. это был самый большой двигатель в мире [37].
Известно, что стреловидное крыло уменьшает влияние сжимаемости воздуха и
снижает волновые потери на скоростях, близких к скорости звука. К стреловидной
форме крыла и оперения в ОКБ подходили постепенно, изучая все плюсы и минусы
новой конструкции. На самолете Ту-14 сделали стреловидным только горизонталь-
ное оперение, которое позволило улучшить устойчивость на больших скоростях
полета — устранило «затягивание» самолета в пикирование. Оно также успешно вы-
держало статиспытания и позволило проверить методику расчета стреловидного кес-
сона. На Ту-82 стреловидным сделали уже крыло и оперение при угле стреловиднос-
ти 35°, что в основном позволило достичь указанной выше большой скорости [39].
Предварительные изыскания по разработке Ту-16 были впечатляющими.
Главный аэродинамик фирмы Г. А. Черемухин в одной из бесед с соратниками
вспоминает:
«В начале 1948 г. в бригаде Проектов, руководимой Борисом Михайлови-
чем Кондорским, приступили к расчетным исследованиям по выбору оптималь-
ных параметров тяжелого дальнего реактивного бомбардировщика, что отвеча-
ло теме моего дипломного проекта, который я делал при научном руководстве
профессора Ивана Васильевича Остославского. Гпавным выводом этой работы
было то, что реактивный дальний самолет должен иметь низкую нагрузку на
квадратный метр крыла.
Первый же этап ответственных исследований 1948 г. подсказал, что нагруз-
ку на крыло надо увеличивать с ограничениями по объему топлива и взлетно-по-
садочным характеристикам. Кстати, по поводу ответственности моей работы
Андрей Николаевич сказал, перейдя на «Вы», примерно так: «Вы должны пони-
мать, что мы, опираясь на Ваши работы, принимаем решения, от которых зави-
сит эффективность работы всей авиационной промышленности».
В процессе этой работы было найдено наглядное представление возможной
области осуществления самолета с заданными характеристиками путем нанесе-
ния в координатах взлетный вес — площадь крыла при фиксированной тяге дви-
гателей или в координатах тяга двигателей — взлетный вес и т. п. кривых посто-
янных значений дальности, длины разбега и других заданных характеристик. На
этих графиках всегда можно было выделить область, где реализуются заданные
данные. Иногда это делалось в пространстве с помощью металлических стер-
женьков, вырисовывающих постоянное значение интересующей характеристики
уже в координатах всех трех главных размеров.
К середине 1949 г. после кропотливого расчета большого числа вариантов
была определена область оптимальных основных характеристик самолета
(взлетного веса, площади крыла, тяги двигателей) и началась работа по поиску
наилучшей компоновки самолета в пределах минимальных значений этих пара-
метров, проводимого группой конструкторов-компоновщиков под руководст-
вом Игоря Борисовича Бабина.
Главной проблемой этой задачи было размещение 2—4 двигателей с сум-
марной статической тягой (Н = 0; v = 0) порядка 16 т. Конечно, начальной точкой
была привычная компоновка с поршневыми двигателями, но к тому времени уже
все поняли, что для уменьшения потерь тяги лучше иметь длинный воздухоза-
борник, чем длинную выхлопную трубу.
198
Двигатели гуляли по всей поверхности планера в самых различных комби-
нациях, в том числе и близких к осуществленной на Боинге В-47. И несмотря на
веские возражения ЦАГИ, была предложена и проработана компоновка с двумя
двигателями Александра Александровича Микулина под крылом на пилонах.
По моему мнению, одним из крупнейших достижений компоновки было
предложенное талантливейшим компоновщиком Андреем Аполлоновичем
Юдиным размещение шасси в гондоле за максимальной толщиной крыла, что
по испытаниям в трубах ЦАГИ не давало сопротивления. Другой особенностью
было предложение делать самолет с отрицательным поперечным V для исклю-
чения динамических колебаний, прозванных «голландским» шагом.
За полгода или чуть больше до завершения этих работ к нам в бригаду Кон-
дорского после окончания института пришел Алексей Андреевич Туполев и стал
заниматься разработкой этого же самолета, но меньших размеров по всем пара-
метрам, доказывая расчетами, что его вариант выполняет все заданные характе-
ристики. Он приходил утром и говорил Борису Михайловичу: «Мы решили делать
так...», тот вскидывал плечи и отходил к другому компоновщику.
В компоновке Алексея Андреевича было две главных особенности:
• размещение двигателя Архипа Михайловича Люльки за крылом у фюзе-
ляжа и воздухозаборником, проходящим через толщу крыла (как потом на
Ту-16);
• одностоечное главное шасси, убирающееся в фюзеляж.
По результатам заседания всего руководства ОКБ по докладам Г. А. Чере-
мухина, И. Б. Бабина и А. А. Туполева к дальнейшей проработке был принят ва-
риант последнего, что вызвало серию насмешек над Бабиным.
В дальнейшем по результатам компоновок в отделе технических проектов
Сергея Михайловича Егера и аэродинамических расчетов (на базе продувок мо-
делей) в отделе Александра Эммануиловича Стерлина были приняты для выпу-
ска рабочих чертежей основные размеры, полученные нами, шасси по схеме
Юдина и силовая установка по схеме Алексея Андреевича».
В результате серийный Ту-16 имел основные летно-технические и массогаба-
ритные характеристики, представленные в табл. 2.1.
Отметим некоторые технические особенности самолета. В передней гермо-
кабине размещены штурман, левый летчик (он же командир корабля), правый
летчик, штурман-оператор, работающий с радиоприцелом РБП-4 и управляю-
щий огнем верхней пушечной установки. В задней гермокабине размещены воз-
душный стрелок-радист, управляющий огнем нижней пушечной установки, и ко-
мандир огневых установок, управляющий огнем кормовой пушечной установки и
радиоприцелом ПРС-1 «Аргон». Вход в переднюю кабину обеспечивается через
нижний люк под сиденьем штурмана-оператора, а в заднюю — через нижний люк
под сиденьем командира огневых установок. Для аварийного покидания самоле-
та имеются аварийные люки со сбрасываемыми крышками: для летчиков они ка-
тапультируются вверх, сверху фонаря кабины, для остальных членов экипажа —
снизу под катапультными сиденьями. Перед катапультированием сиденья летчи-
ков перемещаются в крайнее заднее положение.
При посадке самолета на воду или с убранным шасси экипаж из передней
кабины выходит через люки фонаря, из задней кабины — через аварийное окно
кормового фонаря. Самолет обладает плавучестью, достаточной для того, чтобы в
случае посадки на воду экипаж смог пересесть в спасательные лодки. Каждый
член экипажа обеспечен индивидуальной аптечкой, термосом, бортпайком, ава-
рийной радиостанцией и носимым аварийным запасом.
199
Таблица 2.1
Летно-технические и массогабаритные характеристики бомбардировщика Ту-16
Основные летно-технические характеристики
Двигатель:
тип РД-ЗМ-5ОО
тяга, кгс 2 х 9520
Максимальная скорость, км/ч:
на высоте 6250 м 992
на высоте 10 000 м 938
Практический потолок, м Максимальная техническая дальность 12 800
(без дозаправки), км 5760
Длина разбега, м Бомбовая нагрузка, кг: 1500... 1800
нормальная 3000
максимальная 9000
Основные массогабаритные характеристики
Размах крыла, м 32,99
Длина фюзеляжа, м 34,8
Высота на стоянке, м 9,85
Площадь крыла, м2 164,65
База шасси, м 10,91
Колея шасси, м 9,77
Масса, кг:
взлетная нормальная 55 000
взлетная максимальная 77 150
пустого 37 200
допустимая посадочная 47 000
топлива (максимальная) 34 360
Крыло состоит из центроплана, двух первых и двух вторых отъемных частей
(ОЧ К). Разъем между двумя 04 К организован по нервюре № 7, к которой кре-
пятся основные опоры шасси. По борту фюзеляжа применен симметричный про-
филь ЦАГИ ПР-С-10С-9 толщиной 15,7%, по нервюре № 7 — профиль СР-11-12
толщиной 15% и на конце — СР-11-12 толщиной 12%. Стреловидность по линии
четвертей хорд 35°, поперечное V — минус 3°.
Все плоскости хвостового оперения имеют симметричный профиль и
стреловидность по линии четвертей хорд 42°. Все рули имеют осевую компенса-
цию и снабжены триммерами с электроприводом. Триммер руля высоты, кроме
того, снабжен тросовым управлением. Концевой обтекатель киля — деревянный.
К взлетно-посадочным устройствам Ту-16 относятся шасси, включая
хвостовую предохранительную опору, и парашютно-тормозная система ПТ-16.
Тормозные парашюты предназначены для сокращения пробега и применя-
ются при посадке на влажную или ограниченную ВПП, на грунт при неправиль-
ном заходе на посадку, при неисправных тормозах. Размещаются парашюты в
легкосъемном контейнере в нижней задней части фюзеляжа. Система ПТ-16
обеспечивает длину пробега не более 1535 м при включенном автомате торможе-
ния колес и выпуске парашютов в момент касания земли при скорости не более
270 км/ч, массе не более 47 000 кг и сухой бетонной ВПП.
200
Силовая установка состоит из двух турбореактивных двигателей АМ-3 с
максимальной тягой 8750 кгс. С 1958 г. на самолете устанавливаются более мощ-
ные двигатели РД-ЗМ тягой 9520 кгс, а с 1961г.— усовершенствованные
РД-ЗМ-500 той же тяги. Управление двигателями — тросовое. Для запуска ис-
пользуется авиационный бензин Б-70.
Топливо — керосин Т-1 или ТС-1 — помещается в 27 топливных баках об-
щим объемом 43 800 л. При нормальной взлетной массе 72 000 кг максимальная
заправка составляет 34 360 кг. Баки разделены на 10 групп — по 5 групп на каж-
дый двигатель. Все они протестированные, кроме баков № 1, 2 и 5, топливо из
которых расходуется в первую очередь. Баки заполняются нейтральным газом.
Вооружение Ту-16 состоит из наступательного — бомбового и оборонитель-
ного — пушечного. Нормальная бомбовая нагрузка составляет 3 т, максималь-
ная — 9 т. Электросбрасыватель ЭСБР-49А обеспечивает одиночный и серийный
сброс бомб, мин и торпед во всем диапазоне высот и скоростей полета. Прицели-
вание при бомбометании производится с помощью векторно-синхронного опти-
ческого прицела ОПБ-11Р с автоматом боковой наводки, связанным с автопило-
том, благодаря чему штурман во время прицеливания может управлять самолетом
по курсу. При отсутствии видимости прицеливание производится с помощью ра-
диолокационного прицела РБП-4 «Рубидий ММ-П», сопряженногос ОПБ-11Р.
Пушечное вооружение состоит из 7 пушек калибра 23 мм, расположенных в
носовой неподвижной и трех подвижных установках с дистанционным электриче-
ским управлением. Для стрельбы вперед по правому борту носовой части фюзеля-
жа установлена пушечная установка ПУ-88 с боезапасом 100 снарядов. Пушкой
управляет командир корабля, используя коллиматорный прицел ПКИ, установ-
ленный на откидном кронштейне. Верхняя установка ДТ-87 с боезапасом
500 снарядов имеет зону обстрела по горизонту 360°, вверх 90°, вниз 3°. Основное
управление установкой осуществляет штурман-оператор с верхнего прицельного
поста, вспомогательное— командир огневых установок. Нижняя установка
ДТ-Н7С с боезапасом 700 снарядов имеет зону обстрела по горизонту 95° вправо и
влево от оси самолета в задней полусфере, вверх 2°, вниз 90°. Основное управле-
ние выполняет стрелок-радист с обоих блистерных постов, вспомогательное — ко-
мандир огневых установок. Кормовая установка ДК-7 с боезапасом 1000 снарядов
имеет зону обстрела по горизонту 70° вправо и влево от оси самолета в задней по-
лусфере, вверх 60°, вниз 40°. Основное управление осуществляет командир огне-
вых установок, вспомогательное — штурман-оператор и стрелок-радист.
Для стрельбы из пушечных установок в условиях визуальной видимости само-
лет оборудован 4 прицельными станциями ПС-53: по одной у штурмана-операто-
ра и командира огневых установок и две — у воздушного стрелка-радиста (с лево-
го и правого бортов). Для контроля стрельбы станции ПС-53 имеют фотопристав-
ки ПАУ-457, а контроль результатов стрельбы из носовой пушки осуществляется
фотопулеметом С-13 в кабине штурмана-навигатора. Станция ПРС-1 «Аргон» по-
зволяет вести прицельный огонь из пушечных установок в заднюю полусферу при
плохой видимости и ночью. На части самолетов на месте ДК-7 устанавливался
хвостовой отсек со станциями РЭП «Резеда-АК» или «Сирень».
К средствам обороны самолета относится также бронирование рабочих мест
всех членов экипажа и устройства (АСО-16, АСО-2Би АПП-22) постановки пас-
сивных помех работе РЛС противника путем разбрасывания в полете металлизи-
рованного стекловолокна, фольговых профилированных полосок или бумажных
лент с фольговым покрытием.
201
На самолете Ту-16 было применено много оригинальных технических решений.
Основные из них следующие:
определение оптимальных размерности самолета, параметров аэродинамической
и конструктивной компоновок благодаря проведению огромного числа парамет-
рических исследований модельных экспериментов и натурных испытаний;
создание самого мощного в мире двигателя с тягой более 9000 кгс главного
конструктора А. А. Микулина. Двигатель АМ-3 благодаря беспримерной
энергии и помощи А. Н. Туполева был своевременно создан и внедрен в се-
рийное производство;
оригинальная, обеспечивающая минимум лобового сопротивления, компо-
новка двигателей в корневой части крыла с поджатием фюзеляжа и компо-
новкой воздухозаборных каналов внутри центроплана крыла. Компоновка
была предложена Алексеем Андреевичем Туполевым, но Андрей Николаевич
лично много сделал, чтобы обеспечить минимальный мидель (площадь попе-
речного сечения) композиции крыло + фюзеляж + мотогондолаТ
отработка вместе с ЦАГИ аэродинамической компоновки крыла и оперения
для высокоэффективного околозвукового самолета (удлинение, стреловид-
ность, профилировка и относительная толщина). В результате небывалого объ-
ема модельных испытаний были выбраны стреловидность крыла 35° (у корня
40°) и удлинение крыла 6,6;
компоновка основных стоек шасси в отдельные крыльевые гондолы, распо-
ложенные за максимальной строительной высотой дужки крыла и за макси-
мальным миделем самолета. В результате при аэродинамических продувках
моделей самолета с шассийными гондолами и без них приращение лобового
сопротивления от постановки шассийных гондол практически не удавалось
заметить. Схема такой уборки основных стоек оказалась настолько удачной,
что А. Н. Туполев применил ее на целом ряде последующих самолетов;
применение в передней опоре шасси впервые в отечественной практике для
уменьшения «шимми» спаренных колес на одной общей оси. В результате
этого самолет мог эксплуатироваться на грунтовых аэродромах;
удачная компоновка грузового отсека за задним лонжероном центроплана,
когда отсек не нарушает силовую завязку крыла;
расположение сбрасываемого боевого комплекта вблизи от центра тяжести
самолета, при освобождении от нагрузки центровка самолета меняется мало;
разработка и внедрение необратимого бустерного управления;
повышение точности конструктивной «провязки» чертежей и изготовления ос-
настки в результате перехода от методов ручной графической «провязки» обводов
фюзеляжа, гондол двигателей (по батоксам и горизонталям) на математическое
задание этих поверхностей кривыми второго порядка, которые получали на ос-
нове специальных графических построений, а затем — аналитических расчетов;
обеспечение самолета таким комплексом оборонительного вооружения, ко-
торый обеспечивал оборону на более высоком уровне, чем у современных
ему самолетов-аналогов. Недаром в НАТО Ту-16 называют «Badger» — бар-
сук, т. е. зверь, способный дать свирепый отпор;
разработка и внедрение эффективных мер по защите самолета-носителя от
поражающих факторов ядерного взрыва. В СССР с Ту-16 впервые была сбро-
шена термоядерная бомба;
отработка технологии применения вместо сплава Д-16 высокопрочного
сплава В-95 в искусственно состаренном состоянии с нагартовкой;
202
• отработка технологии производства из сплава АК-8 монолитных крупногаба-
ритных рам в корневых зонах лонжеронов крыла, предназначенных для про-
хода каналов воздухозаборника, вместо сборных;
• внедрение прессованных монолитных профилей переменного сечения,
крупногабаритных монолитных заготовок, большеразмерных листов и т. д.;
• динамическое нагружение конструкции. При разработке самолета Ту-16 —
первопроходца в классе тяжелых скоростных самолетов — вскрылся ряд те-
оретических проблем в области аэроупругости и динамического нагружения
самолета, особенно на взлетно-посадочных режимах. Случаи динамического
нагружения фюзеляжа, например, вызывали более высокие изгибающие мо-
менты, чем традиционные расчетные данные, принятые по нормам прочнос-
ти того времени. На всех последующих самолетах такого типа, проектируе-
мых в ОКБ, стали специально рассматриваться случаи динамических нагру-
жений конструкции;
• демонстрация авиационному миру эффективности борьбы за облегчение кон-
струкции самолета и оборудования. В результате небывалой «борьбы за вес»,
которой руководил лично Андрей Николаевич (тогда впервые ввели плату
конструкторам, прочнистам, аэродинамикам и технологам за каждый снятый
грамм веса), удалось получить за счет выпуска нового комплекта конструктор-
ской документации (КД) исключительный результат — второй опытный са-
молет имел вес на 5500 кг меньше, чем опытный первый экземпляр. Вес пус-
того самолета был уменьшен с 41,5 до 36 т. Причем снижение веса достигалось
не только за счет конструктивных (стыков, обжатий, укрупнений), технологи-
ческих (новых технологий, новых материалов) улучшений, но и за счет назна-
чения оптимальных эксплуатационных нагружений (ограничений скорости
на малых и средних высотах для уменьшения скоростного напора).
Варианты обеспечения минимального сопротивления дозвукового реактив-
ного самолета и сравнительные данные самолетов ТУ-16 и Б-47 представлены
на рис. 2.16.
Рис. 2.16. Варианты обеспечения минимального сопротивления
203
Схема самолета с расположением
двигателей вплотную к фюзеляжу и
поджатием фюзеляжа и мотогондол
в районе крыла
Двигатели на пилонах, шасси
в фюзеляже ОБМИД = 2...3 м2
Схо М=0,8 “max М=0,8 Схо «max
ТУ-16 0,0155 15,5 1,0 1,0
Б-47 0,0175 14,6 1,13 0,94
В создании самолета участвовали многие тысячи специалистов, многие де-
сятки КБ, НИИ, заводов, различных министерств и ведомств.
Талант, целеустремленность, упорство в получении, казалось бы, недостижи-
мых результатов А. Н. Туполева увлекали и вдохновляли всю эту нацеленную на
выдающийся результат команду.
В результате родился, креп и мужал выдающийся самолет-легенда Ту-16. Са-
молет имел более 100 различных модификаций и вариантов. Из них, например,
одна — пассажирский самолет Ту-104.
Наиболее подробную информацию о модификациях Ту-16 рекомендуем по-
лучить у авторов — В. Г. Ригмант, Е. И. Гордон и др. работы [40], где приводится
описание различных модификаций с такими вводными словами: «Все варианты
Ту-16 можно разделить на несколько групп: бомбардировщики, заправщики,
ракетоносцы, разведчики, постановщики помех, самолеты специального назна-
чения и летающие лаборатории. Произвести абсолютно точный учет всех моди-
фикаций Ту-16 практически невозможно, так как некоторые из них многократно
переделывались друг в друга, а затем снова переоборудовались в исходный
вариант. Причем отдельные модификации рождались не на заводах авиапрома,
а непосредственно в эксплуатирующихся организациях». '
Всего было построено 1507 самолетов, около 120 — в КНР. Самолет экспор-
тировался в КНР, Индонезию, Египет, Ирак.
Активное участие принимали Ту-16 и в боевых действиях в Афганистане.
В числе боевых задач, к выполнению которых привлекались самолеты Ту-16, от-
носились, в частности, ночные бомбовые удары по открытым участкам местнос-
ти в тылу противника. В арабо-израильском вооруженном конфликте в 1967 г.
Ирак применял самолеты Ту-16 для проведения авианалетов на территорию Из-
раиля. Самолет показал себя как надежная и неприхотливая машина. Индонезия
использовала Ту-16 в вооруженном конфликте с Малайзией для «коротких вне-
запных налетов» на оборонительные позиции противника на его территории.
Особо отмечались скоростные качества Ту-16, позволявшие уходить от преследо-
вания истребителей ВВС Великобритании «Джевлин» фирмы «Глостер», которые
принимали участие в этом конфликте [37].
Цитатой из источника [40] заключаем рассказ о выдающемся бомбардиров-
щике XX века: «История Ту-16 не может не восхищать. Заложенные в этот само-
лет проектные решения можно считать гениальными — ведь они позволили ему
в течение 30 лет бурного развития авиации оставаться на уровне современных
требований и стать основой для такого количества вариантов различного назна-
чения, какое и «не снилось» его ровесникам Boeing В-47, Avro Vulkan и Handley
Page Victor. Задумаемся над этим и проникнемся глубоким уважением ко всем
тем, кто сумел создать такой самолет в трудные послевоенные годы, эффектив-
но эксплуатировал и развивал его в дальнейшем. Их трудом вписана одна из са-
мых ярких страниц в истории мировой авиации».
2.2. Ударные самолеты
на вооружении ВВС РФ
2.2.1. САМОЛЕТЫ «Су» - ОСНОВА
ФРОНТОВОЙ АВИАЦИИ РОССИИ
1. Фронтовой бомбардировщик Су-24 и его модификации1
Созданный четверть века назад в ответ на появление в США многоцелевого так-
тического истребителя F-111 двухместный сверхзвуковой фронтовой бомбардиров-
щик Су-24 стал целым этапом в развитии отечественной боевой авиационной техни-
ки. По уровню и новизне технических решений, основанных на последних достиже-
ниях отечественного самолетостроения, авиационного оборудования и вооружения,
эта машина не имела себе равных в Советском Союзе. Вот лишь некоторые из нови-
нок, нашедших применение на Су-24: это и крыло изменяемой геометрии, и интег-
рированный прицельно-навигационный комплекс на основе цифровой вычисли-
тельной машины, и управляемые средства поражения наземных целей, и ра-
диоэлектронный бортовой комплекс обороны, и автоматизированная система мало-
высотного полета. В середине 1970-х годов на смену устаревшим самолетам Як-28 и
Ил-28 пришел самолет 3-го поколения Су-24. Он придал отечественным Воен-
но-воздушным силам такие новые качества, как всепогодность и круглосуточность
боевого применения, полет с отслеживанием рельефа местности, значительно улуч-
шил показатели безопасности полета и боевой живучести в условиях противодейст-
вия современных средств ПВО. Самолеты этого типа и сегодня составляют основу
боевой мощи фронтовой бомбардировочной авиации России [34, 41, 42].
В феврале 1975 г. на вооружение ВВС Советского Союза был принят двух-
местный сверхзвуковой реактивный самолет Су-24. Он представлял собой каче-
ственно новый тип ударного самолета, сочетавший свойства штурмовика и фрон-
тового бомбардировщика и предназначавшийся для ведения боевых действий в
простых и сложных метеоусловиях, днем и ночью с прицельным поражением на-
земных и надводных целей при ручном и автоматическом управлении. Путь к со-
зданию Су-24, по отношению к которому впервые в нашей военной авиации стал
по праву применяться термин «авиационный боевой комплекс», оказался долгим
и нелегким. Задуманный еще в 1961 г. как модернизированный вариант истреби-
теля-бомбардировщика Су-7Б, проект самолета неоднократно дорабатывался и
переделывался, пока не воплотился в том виде, в каком он сегодня несет службу в
войсках. Опытный образец Су-24 с крылом изменяемой геометрии — Т6-2И (а до
него был экспериментальный самолет Тб-1 с треугольным крылом и подъемными
двигателями, не оправдавший возлагавшиеся на него надежды) — был поднят в
первый полет 17 января 1970 г. В 1971 г. Су-24 был запущен в серийное произ-
водство, а основные испытания были завершены в 1974 г. Серийное производст-
во самолета Су-24 и его модификаций продолжалось на Новосибирском АПО
1 В написании подраздела принимал участие В. Н. Коровин.
205
в общей сложности 22 года, с 1971 по 1993 г. Базовый вариант Су-24 выпускался
в 1971 —1983 гг., всего было построено свыше 500 самолетов (все приводимые
данные о количестве выпущенных и находящихся в строю самолетов взяты из за-
рубежной и открытой отечественной печати, поэтому их следует считать ориен-
тировочными). Заложенный в конструкцию Су-24 потенциал для дальнейшего
совершенствования позволил в сжатые сроки создать ряд модификаций. В 1977 г.
вышел на испытания, а в 1979 г. был запущен в серийное производство модерни-
зированный вариант фронтового бомбардировщика с расширенными боевыми
возможностями, получивший обозначение Су-24М. На самолет установили дора-
ботанный прицельно-навигационный комплекс, в состав которого была вклю-
чена лазерно-телевизионная прицельная система «Кайра». Номенклатура управ-
ляемого вооружения класса «воздух—поверхность» была расширена ракетами
с лазерной и телевизионно-командной системами наведения, ракетами с телеви-
зионным и пассивным радиолокационным самонаведением, корректируемыми
авиабомбами массой 500 и 1500 кг. Су-24М стал первым самолетом фронтовой
авиации, на котором нашла применение система дозаправки топливом в полете.
Дозаправка осуществлялась через выдвижную штангу-приемник от самолета-за-
правщика Ил-78 или однотипного самолета Су-24М, оборудованного унифици-
рованным подвесным агрегатом заправки (УПАЗ). На Су-24М установили радио-
электронный бортовой комплекс обороны, включавший станции радиотехниче-
ской разведки и активных помех, средства обнаружения пуска ракет, автомат
отстрела ложных тепловых целей и вычислитель. Произведенные доработки по-
зволили значительно повысить боевую эффективность фронтового бомбардиров-
щика, снизить уровень потерь в боевом вылете. В 1983 г. модернизированный
Су-24М (рис. 2.17) был принят на вооружение отечественных ВВС. С 1988 г. вы-
пускается его экспортный вариант Су-24МК, поступивший на вооружение ВВС
ряда арабских стран (Ирака, Ливии и Сирии).
Рис. 2.17. Самолет Су-24М
206
На базе фронтового бомбардировщика Су-24М в 1980 г. были созданы еще
две модификации: самолет-разведчик Су-24МР с разнообразным радиолокаци-
онным, радиотехническим, телевизионным и аэрофотосъемочным оборудовани-
ем; самолет-постановщик помех Су-24МП с комплексом аппаратуры радио-
электронного противодействия. Обе машины с 1983 г. выпускались серийно.
Модернизированный бомбардировщик Су-24М строился в 1979—1993 гг., было
выпущено около 400 самолетов. Самолет комплексной воздушной разведки
Су-24МР выпускался с 1983 по 1993 г. (построено около 200 машин). Самолет ра-
диоэлектронного противодействия Су-24МП, освоенный в производстве в
1983 г., был выпущен малой серией (около 20 машин). Экспортный вариант бом-
бардировщика Су-24МК для стран Ближнего Востока выпускался в 1988—
1989 гг., было изготовлено не менее 60 самолетов. Таким образом, общий объем
выпуска самолетов Су-24 всех модификаций достиг примерно 1200 машин.
После вывода российских войск из Восточной Европы и передислокации ряда
частей и соединений с территории бывших республик СССР в Россию, судя по сооб-
щениям в печати, ВВС РФ на конец 1993 г. располагали приблизительно 600 фрон-
товыми бомбардировщиками Су-24 и Су-24М и более 100 самолетами-разведчиками
Су-24МР. Среди зарубежных государств наиболее мощным парком самолетов этого
типа располагает ставшая не так давно «заграничной» Украина, в ВВС которой экс-
плуатируется около 270 самолетов Су-24, Су-24М, Су-24МР и Су-24МП. Эти маши-
ны продолжают нести службу в вооруженных силах Белоруссии и ряда республик За-
кавказья и Средней Азии. В дальнем зарубежье, как уже отмечалось, фронтовые
бомбардировщики в экспортном варианте Су-24МК состоят на вооружении ВВС
Сирии (20 самолетов) и Ливии (15 самолетов); 24 самолета ВВС Ирака с января
1991 г. находятся на территории Ирана.
В Военно-воздушных силах Российской Федерации самолеты Су-24 входят в
состав частей фронтовой авиации: Су-24 и Су-24М являются основным типом са-
молетов бомбардировочных авиационных полков, а также морских штурмовых
авиаполков; самолетами Су-24МР вооружены эскадрильи отельных разведыва-
тельных авиационных полков. На сегодняшний день Су-24 и его модификации —
наиболее массовый тип самолета ВВС: по сообщениям в печати, доля их во всем
парке боевых самолетов Военно-воздушных сил Российской Федерации превы-
шает 30%. Бомбардировочные авиаполки, входящие в состав бомбардировочных
авиадивизий, как и морские штурмовые полки в составе морской штурмовой
авиадивизии, имеют по 30 или 40 самолетов Су-24 (Су-24М). Отдельные разведы-
вательные авиаполки обычно состоят из одной-двух эскадрилий самолетов
Су-24МР и эскадрильи самолетов МиГ-25РБ или Су-17МЗР (Су-17М4Р), но есть
и полностью укомплектованные Су-24МР. Кроме боевых полков, самолеты Су-24
имеются и в ряде учебных и специальных авиационных частях.
Биография Су-24, к счастью, не изобилует фактами реального боевого при-
менения грозного бомбардировщика. По сообщениям в печати, самолеты этого
типа в первой половине 1980-х годов ограниченно применялись в боевых дейст-
виях в Афганистане. Экипажи Су-24, базировавшихся на советских аэродромах
Мары и Термез, совершали эпизодические боевые вылеты по нанесению бомбо-
вых ударов по позициям моджахедов в Алмазной долине.
После распада Советского Союза бомбардировщики Су-24, доставшиеся ря-
ду независимых государств Закавказья и Средней Азии, также изредка участвова-
ли в боевых операциях. Это относится к узбекским Су-24, применявшимся на
таджикско-афганской границе против отрядов вооруженной оппозиции. Не
обошлось без самолетов этого типа и в последних событиях в Чечне.
207
Конструкция, оборудование, вооружение самолета Су-24
Двухместный фронтовой бомбардировщик Су-24 представляет собой цельно-
металлический высокоплан, выполненный по нормальной аэродинамической
схеме и оснащенный двумя турбореактивными двигателями, боковыми нерегули-
руемыми воздухозаборниками, крылом изменяемой в полете геометрии, стрело-
видным оперением с дифференциально отклоняемым цельноповоротным стаби-
лизатором, трехопорным убирающимся в фюзеляж шасси. Под радиопрозрачным
обтекателем сложной аэродинамической формы размещены антенны радиолока-
ционной станции переднего обзора (РПО) «Орион» и радиолокатора предупреж-
дения о столкновении с естественными наземными препятствиями (РПС) «Рель-
еф». В носовой части обтекателя установлены антенна передней полусферы антен-
но-фидерной системы (АФС) «Пион» из комплекта радиотехнической системы
ближней навигации, приемник воздушного давления ПВД-18 и антенная система
пассивной радиолокационной станции (ПРС) «Филин». Для доступа к антеннам
РПО и РПС радиопрозрачный обтекатель откидывается на петлях в левую сторону.
Указанные антенны установлены на поворотной раме, которая в свою очередь от-
кидывается на петлях вправо, обеспечивая доступ к высокочастотным моноблокам
и радиоэлектронному оборудованию, установленному в глубине переднего отсека.
За носовым отсеком оборудования размещена двухместная герметичная кабина
экипажа с посадкой летчика и штурмана рядом. Под ней расположены три подка-
бинных отсека: два боковых, в которых установлены блоки радиоэлектронного и са-
молетного оборудования, и средний, служащий нишей уборки стойки передней опо-
ры шасси. Замыкает головную часть фюзеляжа закабинный отсек, где размещены
основной объем специального оборудования и часть агрегатов самолетных систем.
Специальное бортовое оборудование самолета Су-24 состоит из:
• прицельно-навигационной системы;
• радионавигационного оборудования;
• радиосвязного оборудования;
• аппаратуры опознавания государственной принадлежности;
• аппаратуры предупреждения об облучении и радиоэлектронного противо-
действия;
• аппаратуры контроля и регистрации параметров;
• разведывательного оборудования.
Прицельно-навигационная система ПНС-24 предназначена для реше-
ния следующих задач:
• круглосуточного всепогодного обнаружения и прицельного поражения так-
тических наземных целей всеми видами вооружения самолета;
• автономного и автоматического решения задач самолетовождения с про-
граммированием заданного маршрута;
• обеспечения безопасного маловысотного полета с предупреждением столк-
новений и облетом наземных препятствий в вертикальной плоскости;
• обеспечения прицельного поражения маломаневренных воздушных целей
(транспортные, связные самолеты и т. п.) при обнаружении их визуально или
с помощью теплопеленгатора.
В соответствии с решаемыми задачами прицельно-навигационная система
включает в себя датчики информации, устройства ее обработки и выработки команд
для управления самолетом, аппаратуру управления и индикации. В состав П НС-24
входят радиолокатор переднего обзора «Орион-А», радиолокатор предупреждения о
столкновении с наземными естественными препятствиями «Рельеф», пассивный ра-
208
дислокационный пеленгатор (ПРП) «Филин», электронно-оптический визир «Чай-
ка-1», теплопеленгатор ТП-23Е, система наведения ракеты Х-23 «Аркан» с радиоко-
мандной линией и телевизионным пеленгатором «Таран», доплеровский измеритель
скорости и угла сноса ДИСС-7, радиовысотомеры малых (РВ-ЗМП) и больших
(РВ-18А1 «Крона») высот, малогабаритная инерциальная система МИС-П, система
воздушных сигналов СВС-ПН-5-3, система автоматического управления самолетом
САУ-6, система индикации с прицельно-пилотажным визиром ППВ, бортовая циф-
ровая вычислительная система на базе БЦВМ «Орбита-10» (ЦВУ-10-058), коммуни-
кационная аппаратура и ряд других более мелких систем.
Радионавигационное оборудование самолета обеспечивает решение за-
дач ближней и дальней навигации и посадки в сложных метеоусловиях. В состав
радионавигационного оборудования входят:
• бортовая радиотехническая система ближней навигации РСБН-бС «Ромб-1 К»;
• автоматический радиокомпас АРК-10 (на самолетах поздних серий —
АРК-15М) для вождения самолета по приводным широковещательным стан-
циям и радиомаякам;
• самолетный ответчик СО-63Б, обеспечивающий управление воздушным
движением в зоне аэродрома;
• антенно-фидерная система «Пион-ГТ-6», обеспечивающая работу РСБН-бС
и СО-63Б;
• маркерное радиоприемное устройство МРП-56П.
Аппаратура предупреждения об облучении и постановки помех
предназначена для обнаружения факта облучения самолета радиолокационными
станциями зенитных комплексов и истребителей противника, создания активных
и пассивных помех средствам наведения зенитных управляемых ракет и ракет
класса «воздух—воздух». На самолете имеется станция предупреждения об облу-
чении и станция ответных помех. Они предназначены для индивидуальной защи-
ты самолета от поражения управляемыми ракетами путем постановки активных
помех радиолокационным станциям импульсного и непрерывного излучений.
Кроме того, самолеты поздних серий оборудуются автоматическими устройства-
ми выброса противорадиолокационных и инфракрасных патронов — дипольных
отражателей и ложных тепловых целей, — отстрел которых снижает вероятность
успешного наведения управляемых ракет с тепловыми и радиолокационными го-
ловками самонаведения; на некоторых из них устанавливалась также аппаратура
предупреждения об облучении с расширенными возможностями.
Аппаратура контроля на самолете представлена системой объективного
контроля и регистрации параметров полета типа «Тестер-УЗ», предназначенной
для записи в полете состояния режимов и параметров основных систем самолета
и его оборудования, текущего времени и служебных данных и сохранения запи-
санной информации в случае летного происшествия.
Разведывательное оборудование фронтового бомбардировщика Су-24
включает в себя аэрофотоаппарат, установленный в средней части фюзеляжа и
предназначенный для решения задач дневной воздушной фоторазведки.
Вооружение фронтового бомбардировщика Су-24 включает:
• стрелково-пушечное вооружение;
• неуправляемые авиационные бомбардировочные средства поражения;
• неуправляемые авиационные ракеты;
• управляемые авиационные ракеты классов «воздух—поверхность» и «воздух-
РЛС»;
• управляемые ракеты класса «воздух—воздух».
209
Все виды вооружения, кроме встроенной пушечной установки, устанавлива-
ются под самолетом на балочных держателях и авиационных пусковых устройст-
вах на 8 точках подвески: четырех подфюзеляжных, двух под центропланом и
двух под поворотными консолями крыла. Для решения задач подготовки и выбо-
ра видов оружия, управления пуском (сбросом) авиационных средств поражения
и взрывателями при различных вариантах загрузки самолета предназначена уста-
новленная на борту система управления оружием (СУО).
Стрелково-пушечное вооружение представлено встроенной установкой с
шестиствольной пушкой ГШ-6-23 или ГШ-6-23М, имеющей боекомплект
500 снарядов. Эта же пушка используется в съемных подвижных пушечных уста-
новках СП ПУ-6. На самолет может быть подвешено три такие установки. Бое-
комплект СППУ-6 составляет 400 снарядов, установка имеет две степени свободы.
Бомбардировочное вооружение самолета состоит из неуправляемых
авиационных бомб массой 1500, 500, 250 и 100 кг, разовых бомбовых кассет
(РБК-500 и РБК-250), зажигательных баков (ЗБ-500), размещаемых на внешних
подвесках на балочных держателях 3- и 4-й групп. На самолет можно подвесить
3 фугасные авиабомбы ФАБ-1500 на балочных держателях БД4-У, 8 бомб
ФАБ-500М-62 на балочных держателях БДЗ-У, 16 бомб ФАБ-250М-62 или 28
ФАБ-250М-54 (вариант с максимальной бомбовой нагрузкой) на многозамковых
держателях МБДЗ-У6, 38 осколочно-фугасных авиабомб ОФАБ-Ю0-120 на дер-
жателях МБДЗ-У6.
Неуправляемое ракетное вооружение состоит из ракет калибром 57, 80,
240 и 266/340 (420) мм с боевыми частями осколочного, осколочно-фугасного,
кумулятивного и проникающего действия, а также специального назначения.
Неуправляемые авиационные ракеты типа С-5 применяются из блоков
УБ-32А-73, имеющих 32 пусковых ствола, и представлены НАР типа С-5М,
С-5МО, С-5К, С-5КО(КП) с боевыми частями фугасного, осколочно-фугасного,
кумулятивного и кумулятивно-осколочного типа соответственно, специализиро-
ванных ракет осветительного (С-5-О) и противорадиолокационного (С-5П) на-
значения. Неуправляемые ракеты типа С-8 применяются из 20-ствольных блоков
Б-8М и могут комплектоваться кумулятивно-осколочной (НАР С-8, С-8В, С-8А,
С-8М) или фугасно-проникающей (С-8Б) боевыми частями, стреловидными по-
ражающими элементами (НАР С-8ВС, С-8АС). Тяжелые неуправляемые ракеты
типа С-24 (С-24Б) имеют осколочно-фугасную боевую часть и применяются с
авиационных пусковых устройств АПУ-68УМ2. Неуправляемые ракеты С-25
имеют надкалиберную боевую часть осколочного (С-25-О) или осколочно-фугас-
ного (С-25-ОФ) действия.
Управляемое ударное ракетное вооружение включает тактические уп-
равляемые ракеты (УР) класса «воздух—поверхность» и противорадиолокацион-
ные управляемые ракеты. Тактическая УР имеет радиокомандную систему на-
ведения с передачей команд управления по радиолинии, аппаратура которой
установлена на борту самолета-носителя и ракеты. Ракета комплектуется кумуля-
тивно-осколочно-фугасной боевой частью. Управляемая ракета класса «воздух-
РЛС» имеет пассивную радиолокационную головку самонаведения, комплекту-
ется фугасной боевой частью.
Управляемое ракетное вооружение класса «воздух—воздух» состоит
из двух ракет с тепловыми головками самонаведения, подвешиваемых на пуско-
вых устройствах под поворотными пилонами подвижных частей крыла.
210
Особенности конструкции, оборудования, вооружения Су-24М
На самолете Су-24М (рис. 2.17) применена модернизированная прицель-
но-навигационная система (ПНС), установлен бортовой комплекс обороны, бо-
лее современное радионавигационное и связное оборудование, доработана систе-
ма объективного контроля и регистрации параметров полета [41].
Прицельно-навигационная система ПНС-24М обеспечивает возмож-
ность применения управляемых средств поражения наземных целей с лазерной и
телевизионной системами наведения. В связи с этим в состав ПНС-24М включе-
на лазерно-телевизионная прицельная система «Кайра», заменившая ЭОВ «Чай-
ка». Кроме того, для обеспечения применения управляемой ракеты Х-59 и кор-
ректируемой бомбы КАБ-1500ТК с телевизионно-командной системой наведе-
ния предусмотрена возможность установки аппаратуры управления в подвесном
контейнере. Из состава ПНС исключены теплопеленгатор и телевизионный пе-
ленгатор системы наведения ракеты Х-23. Пассивный радиопеленгатор «Филин»
уступил место аппаратуре «Фантасмагория» в подвесном контейнере. Два отдель-
ных высотомера малых и больших высот заменены на единый радиовысотомер
РВ-21 «Импульс» (А-035).
Радионавигационное оборудование включает:
• радиотехническую систему ближней навигации А-321 «Клистрон» (вместо
РСБН-бС «Ромб-1 К»);
• радиотехническую систему дальней навигации (РСДН) А-720 «Скип-2»;
• автоматический радиокомпас АРК-15М «Тобол» (устанавливался и на по-
следние серии Су-24);
• самолетный ответчик СО-69 (вместо СО-63Б);
• модифицированную АФС «Пион-ГТ-бМ-9» с антенными блоками РСБН
«Клистрон» и СО-69.
Аппаратура бортового комплекса обороны (БКО) состоит из:
• станции радиотехнической разведки, регистрирующей факт облучения само-
лета радиолокационными станциями истребителей и зенитных средств про-
тивника и определяющей направление на излучающую РЛС (устанавлива-
лась и на последних сериях Су-24);
• теплопеленгатора «Мак», предупреждающего экипаж о пуске ракет классов
«воздух—воздух» и «земля—воздух», установленного на верхней поверхности
фюзеляжа за кабиной;
• модернизированной станции активных помех радиолокационного диапазона;
• автоматической системы отстрела дипольных отражателей и ложных тепло-
вых целей АПП-50 с двумя блоками по 12 патронов калибра 50 мм, разме-
щенными на верхней поверхности фюзеляжа с обеих сторон вертикального
оперения;
• вычислительно-управляющего устройства.
Особенности вооружения. Вооружение самолета Су-24М включает
стрелково-пушечное оружие, бомбардировочные средства поражения, неуправ-
ляемые авиационные ракеты, управляемые ракеты классов «воздух—поверх-
ность», «воздух—РЛС» и «воздух—воздух». Число и размещение точек подвески
вооружения на самолете не изменилось, однако грузоподъемность несколько
увеличилась. Это позволило увеличить максимальную массу боевой нагрузки.
Основные отличия системы вооружения Су-24М по сравнению с рассмотренным
ранее самолетом Су-24 состоят в расширении номенклатуры управляемого ра-
кетного вооружения класса «воздух—поверхность», применении корректируемых
211
авиационных бомб и более совершенных ракет класса «воздух—воздух». В соот-
ветствии с этим доработкам подверглась система управления оружием.
Стрелково-пушечное вооружение Су-24М полностью соответствует
применявшемуся на самолете Су-24 и включает встроенную пушку ГИ1-6-23
(ГШ-6-23М) и три подвесные установки СППУ-6.
Неуправляемое бомбардировочное вооружение по номенклатуре не от-
личается от описанного выше, однако в связи с увеличением грузоподъемности
точек подвески и общей массы подвесного вооружения число одновременно под-
вешиваемых под самолет авиационных бомбардировочных средств поражения
увеличено. На самолете Су-24М может быть подвешено 3 авиабомбы ФАБ-1500,
10 ФАБ-500М-62, 30 ФАБ-250М-54 и 38 бомб массой 100 кг. Дополнительно
обеспечена возможность применения контейнеров малых грузов типа КМГ-У (до
7 штук) с различными боевыми элементами.
Управляемое бомбардировочное вооружение состоит из корректируе-
мых авиационных бомб массой 500 и 1500 кг. Корректируемые авиабомбы мас-
сой 500 кг могут иметь полуактивную лазерную систему наведения или телеви-
зионно-корреляционное самонаведение. Корректируемые бомбы массой 1500 кг
имеют полуактивное лазерное или телевизионно-командное наведение.
Неуправляемое ракетное вооружение по номенклатуре и числу приме-
няемых НАР аналогично использовавшемуся на самолете Су-24.
Управляемое ракетное вооружение класса «воздух—поверхность» и
«воздух—РЛС» претерпело значительные изменения. Наряду с применявшимися
ранее ракетами с радиокомандным наведением появилась возможность подве-
шивать на самолет УР с лазерным, телевизионным и телевизионно-командным
наведением. Номенклатура управляемых ракет класса «воздух—поверхность» са-
молета Су-24М состоит из ракет с:
• радиокомандной системой наведения;
• полуактивной лазерной системой наведения;
• телевизионной головкой самонаведения;
• телевизионно-командной системой наведения;
• пассивной радиолокационной головкой самонаведения.
Наведение ракет с радиокомандной системой наведения на цель осуществляет-
ся с помощью радиокомандной аппаратуры, а корректируемых бомб КАБ-Т — с по-
мощью аппаратуры управления в подвесном контейнере. Применение ракет с полу-
активной лазерной системой наведения, а также корректируемых авиабомб КАБ-Л
обеспечивается лазерно-телевизионной системой «Кайра». Наведение ракет с теле-
визионной и пассивной радиолокационной головкой самонаведения — автономное.
Управляемая ракета с полуактивной лазерной системой наведения снабжает-
ся осколочно-фугасной боевой частью. На ее базе разработана модульная ракета,
имеющая различные модификации в зависимости от использующейся системы
наведения.
Управляемые ракеты с полуактивной лазерной системой наведения и с теле-
визионной головкой самонаведения имеют осколочно-фугасную или фугас-
но-проникающую боевую часть.
Управляемая ракета с телевизионно-командной системой наведения имеет
фугасно-кумулятивную боевую часть.
Управляемые ракеты класса «воздух—воздух», применявшиеся на самолете
Су-24, уступили место более совершенным УР с тепловыми головками самонаве-
дения. Ракеты имеют стержневую боевую часть.
212
Особенности конструкции, оборудования, вооружения Су-24МР
Самолет-разведчик Су-24МР создан на базе фронтового бомбардировщика
Су-24М и практически не отличается от него по общей конструктивно-компоно-
вочной схеме и конструкции основных узлов и агрегатов. Однако в связи с уста-
новкой радиолокационной станции бокового обзора, фотооборудования, аппара-
туры тепловой и телевизионной разведки определенным доработкам подверглась
носовая часть фюзеляжа, нижняя поверхность средней части фюзеляжа, подка-
нальные отсеки воздухозаборников [41,43].
В носовой части самолета установлена аппаратура радиолокационной
разведки — станция бокового обзора с двумя антеннами. Упразднение радиоло-
катора переднего обзора «Орион» позволило отказаться от большого радиопроз-
рачного обтекателя сложной формы. Для обеспечения работы радиолокационной
аппаратуры на боковых поверхностях носовой части выполнены большие прямо-
угольные радиопрозрачные панели, конструкция которых позволяет при их сня-
тии производить обслуживание блоков РЛС. Остальная обшивка носового обте-
кателя выполнена из алюминиевых сплавов, за исключением небольшой части,
оставшейся радиопрозрачной, под которой находится антенна смещенного впе-
ред радиолокатора маловысотного полета «Рельеф».
Основными отличиями радиоэлектронного оборудования самолета Су-24МР
от предшествовавшего ему фронтового бомбардировщика Су-24М являются пре-
образование прицельно-навигационной системы ПНС-24М в навигационный
комплекс и установка базового комплекса разведки. По составу и характеристи-
кам радионавигационного, радиосвязного оборудования, аппаратуры госопозна-
вания, комплекса обороны и объективного контроля Су-24МР практически пол-
ностью соответствует самолету Су-24М.
Навигационный комплекс спроектирован на базе системы ПНС-24М и
отличается от нее сокращением функций в части произведения прицеливания и
обеспечения применения оружия. В соответствии с упразднением в номенклату-
ре вооружения самолета средств поражения наземных целей из состава оборудо-
вания исключены радиолокационная станция переднего обзора «Орион», пас-
сивный радиолокационный пеленгатор «Филин», лазерно-телевизионная при-
цельная система «Кайра», аппаратура наведения управляемых ракет класса
«воздух—поверхность». В составе навигационного комплекса, таким образом, ос-
тались: радиолокатор предупреждения о столкновении с наземными препятст-
виями «Рельеф», радиовысотомер РВ-21 «Импульс», ДИСС-7, инерциальная
система, цифровое вычислительное устройство, система автоматического управ-
ления САУ-6 и некоторые другие подсистемы.
Разведывательное оборудование самолета состоит из:
• радиолокационной станции бокового обзора;
• аппаратуры телевизионной разведки;
• инфракрасного разведывательного оборудования;
• системы лазерной разведки;
• станции общей радиотехнической разведки;
• аппаратуры радиационной разведки;
• аэрофотоаппаратов панорамной и перспективной съемок.
Для оперативной передачи на наземный приемный пункт разведывательной
информации от телевизионного, теплового и лазерного средств разведки на само-
213
лете установлен широкополосный радиоканал ШРК-1. Для временной увязки
разведывательных данных в состав оборудования самолета включена система
единого времени «Севан».
Аппаратура радиолокационной разведки — РЛС бокового обзора — ус-
тановлена в носовой части фюзеляжа и предназначена для получения радиолока-
ционной карты местности, разведки объектов и выделения наземных целей, для
регистрации изображения на фотопленку на борту самолета.
Аппаратура телевизионной разведки предназначена для ведения теле-
визионной разведки с малых высот полета с передачей изображения местности на
наземные приемные пункты, установлена в обтекателе на нижней поверхности
средней части фюзеляжа.
Аппаратура тепловой разведки предназначена для обнаружения, рас-
познавания и определения деятельности боевой техники, транспортных средств,
инженерных сооружений и военно-промышленных объектов противника по их
тепловому излучению, а также для получения тепловой карты местности. Она
обеспечивает регистрацию информации на борту самолета и передачу ее на зем-
лю; установлена в отсеке под правым воздухозаборником.
Аппаратура лазерной разведки предназначена для ведения разведки
местности с малых высот в любое время года и суток и обеспечивает выдачу ин-
формации для передачи ее на наземный пункт, а также фоторегистрацию на бор-
ту. Аппаратура размещается в подвесном контейнере.
АппаратурЬ общей радиотехнической разведки предназначена для ве-
дения радиотехнической разведки с целью определения типов и местоположения
источников радиоизлучения. Устанавливается в подвесном контейнере.
Аппаратура радиационной разведки определяет радиационное зараже-
ние местности или воздуха в зависимости от высоты полета самолета-разведчика
в любых метеоусловиях и любое время суток с регистрацией информации на лен-
те и передачей ее на землю. Размещается в подвесном контейнере.
Фотооборудование состоит из кадрового и панорамного фотоаппаратов.
Первый осуществляет перспективную аэрофотосъемку с малых высот (устанав-
ливается в отсеке под левым воздухозаборником), второй — служит для выполне-
ния аэрофотосъемки широкой полосы местности (размещается на лафете под
центральной частью фюзеляжа). Проявленный на борту фотоматериал сбрасыва-
ется на землю в специальной капсуле.
Основной объем разведывательного оборудования (аппаратура радиолокаци-
онной, телевизионной, тепловой и фоторазведки) постоянно размещается на
борту самолета. На восьмой точке подвески под фюзеляжем устанавливается кон-
тейнер либо с лазерным, либо с радиотехническим разведывательным оборудова-
нием. Контейнер с аппаратурой радиационной разведки подвешивается на пово-
ротный пилон правой подвижной части крыла.
Вооружение самолета Су-24МР состоит из двух управляемых ракет класса
«воздух—воздух» с тепловыми головками самонаведения. Никакие другие типы
авиационных средств поражения с самолета-разведчика применяться не могут.
Встроенная пушечная установка, имевшаяся на самолетах Су-24 и Су-24М, де-
монтирована. Упрощенной системе управления оружием оставлены лишь функ-
ции управления ракетами «воздух—воздух».
214
2. Штурмовик Су-25
Один из наиболее эффективных боевых самолетов российской фронтовой
авиации — Су-25 — в настоящее время является единственным в мире типом
«классического» бронированного штурмовика (рис. 2.18), находящегося в серий-
ном производстве [4, 20].
Работы по созданию этого самолета были начаты в 1968 г. в инициативном
порядке, при этом рассматривался ряд компоновочных решений. В конечном
счете был выработан облик штурмовика нормальной аэродинамической схемы с
двумя ТРД АИ-25Т (2 х 1750 кгс), боковыми нерегулируемыми воздухозаборни-
ками и высокорасположенным крылом малой стреловидности, имеющим отно-
сительно большое удлинение. Проект получил рабочее обозначение Т8.
В марте 1969 г. ВВС был объявлен конкурс проектов перспективного штурмо-
вика, в котором, помимо ОКБ П. О. Сухого, приняли участие ОКБ А. С. Яковлева
(Як-25ЛШ), В. С. Ильюшина (Ил-42) и А. И. Микояна (МиГ-21ЛШ). В «финал»
вышли проекты ОКБ П. О. Сухого и А. И. Микояна, работы по которым было ре-
шено довести до постройки опытных экземпляров. В дальнейшем «микояновцы»
по ряду причин прекратили участие в «гонке», а разработка штурмовика Сухого
была продолжена.
Первоначально самолет предполагалось оснастить уже существующим при-
цельно-навигационным оборудованием, разработанным для истребителя-бом-
бардировщика Су-17 (что должно было ускорить создание штурмовика и облег-
чить освоение его в войсках). В дальнейшем штурмовик должен был получить
новое БРЭО, полностью отвечающее требованиям ВВС к боевым самолетам 4-го
поколения.
Огромное внимание конструкторы самолета уделяли вопросам боевой живу-
чести нового штурмовика. Отрабатывались различные системы бронирования (в
том числе и с использованием композиционных преград, включающих листы из
титанового и алюминиевого сплава с резиновой прослойкой), варианты резерви-
рования бортовых систем, а также (впервые в СССР применительно к фронтово-
му ударному самолету) меры по снижению радиолокационной заметности.
Рис. 2.18. Самолет Су-25
215
В конце 1972 г. началась постройка первого опытного штурмовика. 22 февра-
ля 1975 г. самолет Т8-1, пилотируемый летчиком-испытателем В. С. Ильюши-
ным, впервые поднялся в воздух.
В июле 1976 г. штурмовику Т8 было присвоено название Су-25. Первый этап
государственных испытаний самолета завершился 30 мая 1980 г., однако уже в
марте 1980 г. по личному указанию министра обороны СССР Д. Ф. Устинова два
самолета Су-25 были направлены в Афганистан, где, базируясь на высокогорном
аэродроме Шинданд, проходили испытания в «особых условиях».
Государственные испытания штурмовика были закончены в декабре 1980 г.,
а в следующем году уже началось формирование штурмовых эскадрилий, воору-
женных новыми самолетами.
В ходе серийного производства шло постоянное совершенствование самоле-
та. При этом учитывался опыт его боевого применения в Афганистане. За счет ус-
тановки на мотогондолах дополнительных кассет АСО-2В число ИК-ловушек на
борту штурмовика достигло 265, что позволило эффективно защищаться от пере-
носных зенитно-ракетных комплексов первого поколения. В состав бортового
радиооборудования Су-25 включили станцию связи с наземными войсками.
Всего было выпущено более 1000 Су-25 различных модификаций, в том чис-
ле 300 учебно-боевых Су-25УБ. В настоящее время на вооружении ВВС России
имеется более 250 штурмовиков. Кроме того, ими располагают ВВС Азербайджа-
на, Анголы, Армении, Белоруссии, Грузии, Ирака, Ирана, Болгарии, КНДР, Сло-
вакии, Туркмении, Узбекистана, Украины и Чехии.
Сокращение оборонных расходов России привело к фактическому прекраще-
нию переоснащения самолетного парка ВВС новой техникой. В этих условиях на
первый план вышли задачи модернизации уже имеющихся в строю машин. В начале
1998 г. в ОКБ П. О. Сухого началась работа по созданию проекта модернизации су-
ществующего парка самолетов Су-25. Основная задача создания модернизирован-
ного штурмовика Су-25СМ заключается в повышении боевой эффективности ма-
шины, придании ей многоцелевых возможностей, повышении эксплуатацион-
но-технических характеристик и системы технического обслуживания. На Су-25СМ
предусмотрена замена бортового электронного оборудования, введение в комплекс
вооружения высокоточных авиационных средств поражения, а также перекомпо-
новка кабины летчика в соответствии с современными требованиями. Проведение
модернизации позволяет более чем в два раза увеличить боевую эффективность
штурмовика.
Для штурмовика отработан и комплекс мер, существенно снижающих замет-
ность, в частности покрытие планера специальным радиопоглощающим соста-
вом, а также применение нового типа краски, уменьшающей визуальную замет-
ность самолета.
Оборудование. Прицельный комплекс самолета Су-25 в целом подобен
прицельному комплексу истребителя-бомбардировщика Су-17МЗ. В его состав
входит стрелково-бомбардировочный прицел АСП-17БЦ (прицеливание при
стрельбе из пушки, бомбометание, пуск ракет), а также лазерный дальномер-це -
леуказатель «Клен-ПС» (измерение наклонной дальности до цели, наведение УР
с лазерной системой наведения).
Непрерывное автоматическое счисление координат самолета, выполнение
полета по маршруту, вход в район заданной цели, возврат на аэродром, снижение
на высоту предпосадочного маневра, повторный заход на посадку, определение и
216
выдача основных навигационных параметров осуществляются пилотажно-нави-
гационным комплексом КН-23-1.
В состав средств РЭБ входит аппаратура обнаружения работающих РЛС про-
тивника, станция активных радиотехнических помех и автомат постановки пас-
сивных ИК-помех и дипольных отражателей.
На модернизированном штурмовике Су-25СМ планируется установить
комплекс бортового оборудования, имеющего в своем составе высокопроизводи-
тельную БЦВМ и включающего радиолокационную станцию РЛПК-25СМ (на
базе БРЛС «Копье»), а также комплекс средств РЭБ в съемных контейнерах
(станция радиотехнической разведки и целеуказания, станция активных помех).
Вооружение Су-25 оптимизировано для поражения целей на поле боя. Оно
состоит из двухствольной пушки ГШ-ЗО, предназначенной в основном для пора-
жения слабобронированных целей типа БТР и БМП.
Имеется 10 подкрыльевых узлов подвески вооружения: восемь из них, рас-
считанных на нагрузку по 500 кг, предназначены для ракетно-бомбового и артил-
лерийского оружия и два — для оборонительных ракет класса «воздух—воздух»
малой дальности.
Ракетное оружие класса «воздух—поверхность» включает УР с лазерным на-
ведением, блоки НАР. Возможна подвеска и четырех съемных подвижных уста-
новок СППУ-22 с пушкой ГШ-23Л.
В состав вооружения модернизированного самолета Су-25СМ должны вхо-
дить ракеты класса «воздух—воздух» средней дальности, а также ракеты малой
дальности. Ударное вооружение штурмовика предполагается дополнить ракета-
ми с телевизионным наведением и корректируемыми авиабомбами (КАБ) с теле-
визионным самонаведением КАБ-КР. Предполагалось установить два двухбалоч-
ных подкрыльевых держателя, что позволит увеличить число ПТБ.
3. Фронтовые истребители с ударными функциями
В ответ на разработку в США самолета завоевания господства в воздухе TFX
(ставшего прообразом истребителя Макдоннелл-Дуглас F-15 «Игл») в нашей
стране в 1969 г. были начаты работы по созданию фронтового истребителя 4-го
поколения. Анализируя опыт боевого применения истребителей 2-го поколения —
МиГ-21, F-4, «Мираж III» и др., — советские специалисты пришли к выводу, что
машина 4-го поколения, идущая на смену истребителям МиГ-21 и МиГ-23,
должна быть специализированной, максимально приспособленной для воздуш-
ного боя на малой и средней дальности.
В начале 1970-х годов командование ВВС обосновало целесообразность по-
строения перспективного парка истребительной авиации страны на основе двух
типов самолетов — тяжелых и легких (в отношении 1 : 3). Легкий истребитель
должен был обладать превосходством в воздушных боях над американским истре-
бителем 4-го поколения F-16 и любым истребителем предшествующего поколе-
ния и вести бой на равных с тяжелым истребителем 4-го поколения F-15A, пере-
хватывать широкий круг воздушных целей, в том числе крылатые ракеты, а также
поражать наземные цели неуправляемым оружием.
В 1971 г. с учетом опыта боевого применения истребительной авиации во
Вьетнаме и на Ближнем Востоке были сформулированы тактико-технические
требования к перспективному фронтовому истребителю, способному бороться с
новейшими истребителями потенциального противника 4-го поколения. Основ-
217
ними отличиями ПФИ от его предшественников— истребителей МиГ-21,
МиГ-23 и Су-15 — должна была стать повышенная маневренность, обеспечивае-
мая за счет новых аэродинамических и компоновочных решений, применение
принципиально нового БРЭО (в частности, цифровой СУВ) и перспективных
авиационных средств поражения.
Фронтовой истребитель Су-27
Этот самолет, являющийся сегодня звездой практически всех крупных между-
народных авиационных салонов, по праву считается «визитной карточкой» рос-
сийского военного авиастроения. В настоящее время Су-27 (рис. 2.19), бесспорно,
является наиболее мощной серийной машиной в своей «весовой категории».
Осенью 1969 г. небольшая группа специалистов ОКБ П. О. Сухого приступи-
ла к формированию облика нового истребителя, впоследствии вошедшего в исто-
рию мирового авиастроения как Су-27. Первый чертеж общего вида самолета был
разработан в начале 1971 г., а к 1974 г. с участием специалистов ЦАГИ была
окончательно сформирована аэродинамическая и конструкторско-силовая схемы
самолета, в 1975 г. начался выпуск рабочих чертежей. Общее руководство про-
граммой осуществлял П. О. Сухой, главным конструктором истребителя являл-
ся Л. И. Кнышев [44, 45].
Постройка первого опытного самолета Т10-1 началась в 1976 г., а 20 мая
1977 г. истребитель впервые поднялся в воздух.
Первый видоизмененный истребитель Т10-7 (Т10-С), ставший прототипом
серийного Су-27, поднялся в воздух 20 апреля 1981 г., а в 1982 г. в г. Комсо-
мольске-на-Амуре уже начался серийный выпуск истребителей. Согласно ре-
зультатам моделирования совокупный боевой потенциал Су-27 на 30% превзо-
шел соответствующий показатель американского аналога.
В процессе серийного производства Су-27 продолжал совершенствоваться.
На самолетах более позднего выпуска, отвечавших требованиям ВВС (Су-27С),
состав вооружения был расширен за счет свободнопадающих бомб массой 100,
250 и 500 кг, а также НАР.
Рис. 2.19. Самолет Су-27
218
Резкое сокращение оборонных расходов России в 1990-х годах, приведшее к
замедлению сроков реализации программ создания боевых самолетов поколений
«4+» и «5», выдвинуло на первый план задачи модернизации уже существующего
парка боевой авиационной техники. Были начаты работы и по модернизации
истребителей Су-27. Доработки в основном затрагивают БРЭО и комплекс во-
оружения самолета. В середине 1990-х годов часть истребителей получила систе-
му космической навигации и аппаратуру радионавигации VOR/DME/ILS, интег-
рированную с прицельно-навигационным комплексом.
Бортовое оборудование и системы. Су-27 — первый серийный оте-
чественный самолет, оснащенный электронной системой дистанционного управ-
ления (аналоговой, с четырехкратным резервированием). Она решает следующие
задачи: управление самолетом, статически неустойчивым в продольном канале;
обеспечение требуемых характеристик устойчивости и управляемости в продоль-
ном, поперечном и путевом каналах; повышение аэродинамических характерис-
тик на маневре; ограничение допустимых значений нормальной перегрузки и уг-
ла атаки; снижение аэродинамических нагрузок на планер.
Бортовое радиоэлектронное оборудование самолета Су-27 включает четыре
комплекса: систему управления вооружением, пилотажно-навигационный комп-
лекс (ПНК), комплекс связи (КС) и бортовой комплекс обороны. Все вышепере-
численные комплексы функционально связаны между собой, являясь тем не ме-
нее независимыми системами.
Система управления вооружением обеспечивает ведение дальнего ракетного
боя (ДРБ) против одиночных целей и группы взаимодействующих целей вне зави-
симости от погодных условий и времени суток, без ограничений по высотам и ско-
ростям полета, в условиях огневого и радиоэлектронного противодействия, а так-
же ведение ближнего маневренного боя с применением УР и пушек. Типовыми
целями являются самолеты различных типов, крылатые ракеты и БПЛА. Ведение
ДРБ обеспечивается как в одиночку, так и в составе однотипных истребителей.
В СУВ имеется два информационных канала — радиолокационный и тепло-
пеленгационный. Каналы связаны между собой через ЦВМ, информация о це-
лях, полученная любым из каналов, поступает в другой канал. При работе в со-
ставе группы однотипных истребителей каждый из них получает свой ранг, обус-
ловленный положением самолета в группе (ведущий, ведомый, командир звена,
эскадрильи, группы). При этом каждый истребитель работает на своей литере ра-
диолокатора, на своем радиоканале межгруппового обмена, со своим пунктом
управления, что исключает подавление и взаимные помехи самолетам группы.
Обмен информации производится автоматически. Информационный обмен
включает данные о целях, полученные по собственным информационным кана-
лам или в результате обмена, команды на распределение целей между членами
группы. Работа СУВ автоматизирована. В зависимости от боевой ситуации она на-
значает ведущий канал, производит автоматический захват наиболее опасной це-
ли, выбирает оружие, формирует команды на необходимые маневры истребителя.
В состав СУВ входит когерентный импульсно-доплеровский радиолокаци-
онный прицельный комплекс РЛПК-27 с БРЛС. Комплекс включает цифровой
приемник, перестраиваемый многолитерный передатчик и ЦВМ-80, которая об-
рабатывает сигналы. Возможны режимы с высокой и средней частотой повторе-
ния импульсов. Обеспечивается обнаружение и сопровождение воздушных целей
как в свободном пространстве, так и на фоне земли, сопровождение «на проходе»
219
до 10 целей, опознавание и определение наиболее опасной (для самолетов более
позднего выпуска — двух наиболее опасных) из сопровождаемых целей и выбор
ее (их) для атаки. Управление БРЛС сконцентрировано на рычаге управления
двигателем и ручке управления самолетом (РУС). Размещение наиболее важных
органов управления на РУС и РУД позволяет решать задачи прицеливания, со-
провождения цели и выбора оружия без отрыва от них рук летчика.
Оптико-электронная прицельная станция ОЭПС-27 включает теплопеленга-
тор с дневным и ночным каналами, а также лазерный дальномер. Станция обеспе-
чивает скрытность ведения воздушного боя за счет обнаружения цели по теплово-
му контакту, в том числе (впервые в мире) в переднюю полусферу. Максимальная
дальность обнаружения цели типа истребитель — 50 км. В состав ОЭПС входит
ЦВМ, которая осуществляет также управление вооружением от нашлемного при-
цела НСЦ-27 и стрельбой из пушки, применение оружия по наземным целям.
На Су-27 впервые в нашей стране внедрена цифровая обработка информа-
ции и связь между системами комплекса, включая цифроаналоговую систему ав-
томатического управления. Это позволило реализовать сложные алгоритмы ко-
мандного и бортового наведения и автоматизировать практически все режимы
полета, в том числе и заход на посадку с метеоминимумом 60/800 м, а также со-
пряжение комплекса с взаимодействующим оборудованием самолета и сущест-
венно уменьшить вес БРЭО.
В кабине истребителя используется система объединенной индикации, обес-
печивающая летчика необходимой информацией на всех этапах полета. В ее со-
став входит коллиматорный индикатор на лобовом стекле, телевизионный инди-
катор тактической обстановки, ЦВМ и блок формирования символов. Вывод
требуемой информации осуществляется как автоматически, так и по запросу лет-
чика. Имеется универсальное табло, информирующее о состоянии бортовых сис-
тем самолета, а также система речевой информации об аварийных ситуациях и
выдачи «подсказок» — инструкций о дальнейших действиях летчика.
Пилотажно-навигационный комплекс обеспечивает ручное, директорное или
автоматическое управление полетом при наведении на цель в дальнем ракетном
бою (при управлении от СУВ), безопасное маневрирование по краю ограничений
в ближнем маневренном бою, выход на запрограммированную наземную цель,
полет по маршруту, возвращение на заданный аэродром, межсамолетную навига-
цию. Пилотажно-навигационный комплекс включает радиотехническую систему
ближней навигации, две инерциальные курсовертикали, систему воздушных сиг-
налов, систему автоматического управления (САУ), автоматический радиокомпас,
радиовысотомер малых высот и специальный цифровой вычислитель. При полете
по маршруту в память вычислителя вводятся координаты восьми промежуточных
пунктов маршрута, пяти радиомаяков и трех аэродромов. Для повышения скрыт-
ности работы ПНК имеется режим «радиомолчание», а также режим направлен-
ного запроса, когда излучение осуществляется только в сторону радиомаяка.
Система дистанционного управления (СДУ) обеспечивает устойчивость са-
молета во всех диапазонах скоростей и высот.
Впервые в отечественной практике на самолете Су-27 установлен единый
комплекс связи, объединяющий две УКВ-радиостанции, KB-радиостанцию, ап-
паратуру коммутации и специальную управляющую ЦВМ. Управление комплек-
сом в полете осуществляется с объединенного пульта, а ввод исходных данных
перед полетом выполняется автоматизированно, с использованием переносного
запоминающего блока. КС обеспечивает ведение радиосвязи в обычном режиме
220
между самолетами или с наземными КП, автоматический телекодовый обмен
между самолетами или наземными КП, дальнюю (до 1500 км) радиосвязь на ко-
ротких волнах. При работе в группе КС обеспечивает автоматический телекодо-
вый обмен данными СУВ и ПНК по специальной циклограмме, зависящей от
ранга участников обмена. По запросу наземного или воздушного КП может авто-
матически передаваться «формуляр полетных данных», содержащий сведения о
координатах и параметрах полета, запасе топлива и наличии вооружения. В со-
ставе КС имеется два речевых информационных устройства. Одно из них воспро-
изводит аварийные сообщения, а второе — озвучивает поступившие с КП стан-
дартные сообщения (набор команд летчику).
Бортовой комплекс обороны включает станцию радиотехнической разведки
и предупреждения об облучении, станцию активных помех и пиротехническое
устройство постановки пассивных помех.
Станция радиотехнической разведки и предупреждения об облучении «Бере-
за» позволяет обнаруживать облучение самолета РЛС противника на дальностях,
превышающих дальность обнаружения самолета, осуществлять распознавание
облучающего средства при помощи банка данных, определять режим работы и
степень угрозы РЛС и выдавать летчику соответствующие рекомендации.
Станция активных помех, блоки которой размещены в контейнерах на край-
них крыльевых узлах подвески вместо авиационного пускового устройства
(АПУ), предназначена для противодействия РЛС противника, работающей в
трехсантиметровом диапазоне. Для эффективного подавления любого из сущест-
вующих радиолокаторов используется 10 типов помеховых программ (шумовые,
уводящие, перенацеливающие, мерцающие помехи). Станция работает в автома-
тическом режиме, осуществляя помеху наиболее угрожаемому средству, одновре-
менно проверяя эффективность противодействия.
Пиротехническое устройство постановки пассивных помех включает блок
управления и 96 стволов калибром 50 мм, заряженных пиропатронами с ложны-
ми тепловыми целями или дипольными отражателями. Возможен отстрел оди-
ночных патронов, очередь или залп из четырех патронов (режим стрельбы задает-
ся летчиком на пульте в кабине истребителя).
Вооружение. Истребитель Су-27 оснащен пушкой ГШ-301. На 10 под-
крыльевых и подфюзеляжных узлах подвески может размещаться до 10 УР класса
«воздух—воздух», в том числе до шести ракет средней дальности, до двух ракет
увеличенной дальности, до шести УР малой дальности с ТГС, до пяти контейне-
ров малогабаритных грузов КМГ-У с суббоеприпасами различных типов, до шес-
ти блоков НАР (с ракетами С-8, С-13) или НАР С-25, до 38 свободнопадающих
бомб различной массы. Максимальная боевая нагрузка на узлах внешней подве-
ски может достигать 6000 кг (на самолетах более позднего выпуска — 8000 кг).
Модернизация. В конце 1990-х годов начались испытания модернизиро-
ванного варианта системы управления вооружением истребителя, имеющей ряд
дополнительных возможностей:
• обеспечено применение ракет средней дальности «воздух—воздух» с активной
радиолокационной головкой самонаведения и повышенной маневренностью;
• введен режим одновременной атаки двух целей;
• БРЛС получила возможность работы по поверхности (картографирование,
выделение движущихся целей, применение оружия по наземным или мор-
ским целям);
221
• обеспечена возможность применения УР «воздух—поверхность» и КАБ с те-
левизионным и лазерным наведением, ракет большой дальности с комбини-
рованным телевизионным и радиокомандным управлением, а также проти-
ворадиолокационных и противокорабельных ракет.
Одним из основных направлений совершенствования самолета является
формирование нового информационно-управляющего поля кабины с использо-
ванием многофункциональных жидкокристаллических индикаторов. Информа-
ционно-управляющее поле кабины летчика предполагается усовершенствовать за
счет внедрения двух многофункциональных цветных крупноформатных индика-
торов с кнопочным обрамлением.
Ведутся работы по усовершенствованию пилотажно-навигационного комп-
лекса за счет замены инерциальных курсовертикалей и индикационных прибо-
ров, доработки системы дистанционного управления.
Для совершенствования бортового комплекса обороны Су-27 проводятся ис-
пытания новой станции радиотехнической разведки с повышенными характе-
ристиками, расширенным банком данных, возможностью управления противо-
радиолокационными ракетами. Кроме того, планируется модернизация пиротех-
нического устройства пассивных помех, обеспечивающего автоматическое
управление от станции предупреждения об облучении. Прорабатывается возмож-
ность установки на самолете станции активных помех в ИК-диапазоне и оснаще-
ния Су-27 сбрасываемыми аэродинамическими ложными целями.
Возможна адаптация с самолетом контейнера комплексной разведки, имею-
щего в своем составе оборудование для телевизионной, тепловой и радиотехни-
ческой разведки с возможностью транслирования информации в реальном масш-
табе времени на наземный командный пункт.
Дальнейшие шаги по наращиванию боевого потенциала Су-27 могут включать
установку более эффективной БРЛС, способной обнаруживать воздушные цели с
ЭПР порядка 5 м2 на дальности более 100 км. Станция может сопровождать на про-
ходе до 10 целей и обеспечивать одновременное наведение ракет на четыре из них.
Модернизированный вариант истребителя должен нести до восьми УР клас-
са «воздух—воздух» средней дальности, до шести ракет класса «воздух—поверх-
ность» с телевизионным самонаведением, до шести КАБ-КР, до четырех проти-
ворадиолокационных ракет, а также до двух тактических КР.
Фронтовой истребитель МиГ-29
Самолет МиГ-29 — один из наиболее распространенных в мире истребите-
лей 4-го поколения и основной легкий истребитель российских ВВС (рис. 2.20).
Работы по формированию облика перспективного истребителя, почти сразу
получившего название МиГ-29, начались в 1970 г. под непосредственным руко-
водством Генерального конструктора Р. А, Белякова и его заместителя по проек-
тированию А. А. Чумаченко. На самолете предусматривалось применение ракет
«воздух—воздух» нового поколения — УР средней дальности и УР ближнего боя,
обеспечивающих поражение воздушных целей, маневрирующих с максимальной
перегрузкой, на значительно больших дальностях по сравнению с ракетами типа
К-23, К-13М и К-60. Совершенно новой должна была стать и система управления
вооружением истребителя, в которую предлагалось включить многофункциональ-
ный радиолокатор, оптико-электронную прицельную систему, систему электрон-
ной индикации и более современные средства навигации [16, 19, 25].
222
Рис. 2.20. Самолет МиГ-29
Государственные совместные испытания МиГ-29 начались в 1979 г. и
успешно завершились в октябре 1983 г. В 1987 г. самолет был принят на вооруже-
ние ВВС.
Наличие на МиГ-29 эффективных ракет «воздух—воздух» средней и малой
дальности, уникальной системы управления вооружением на основе РЛС, КОЛС
и нашлемной системы целеуказания, его отличные маневренные характеристи-
ки, большая максимальная скорость обеспечили самолету абсолютное превос-
ходство над американским истребителем F-16A (на нем отсутствовали ракеты
средней дальности, а комплекс «прицел — ракета малой дальности» значительно
уступал по своим возможностям российскому), а также определенное превосход-
ство над F-15A, хотя и не столь яркое. Вместе с тем появление в США ракет «воз-
дух—воздух» средней дальности с активной радиолокационной головкой самона-
ведения AMRAAM и вооружение этими ракетами самолетов F-15 и F-16 значи-
тельно уменьшило перевес МиГ-29 в дальних ракетных боях. Кроме того,
летчиков и авиационных специалистов вполне справедливо не удовлетворяли
дальность полета МиГ-29 первых серий и величина бомбовой нагрузки, они кри-
тиковали его за отсутствие аппаратуры активных помех и высокоточного оружия
для действий по наземным целям. Все это и определило основные направле-
ния дальнейшего развития МиГ-29: «малую модернизацию» МиГ-29 (9-13), а за-
тем МиГ-29С (9-13С) и глубокую модернизацию МиГ-29М (9-15) для ВВС и
МиГ-29К (9-31) для ВМФ.
МиГ-29 (9-13) — одноместный фронтовой истребитель с двумя двигателями
РД-33, радиолокационным прицельным комплексом РЛПК-29 и оптико-элек-
тронным прицельно-навигационным комплексом ОЭПрНК-29, модификация
серийного МиГ-29 (9-12). Максимальная масса бомбовой нагрузки возросла до
3000 кг (обеспечена возможность подвески 6 бомб массой 500 кг (по две бом-
бы) на тандемных балочных держателях). 4 мая 1984 г. в воздух поднялся истре-
битель МиГ-29 (9-13), имеющий встроенную станцию постановки активных ра-
диолокационных помех. В 1986 г. истребитель (9-13) был запущен в серийное
производство.
223
20 января 1989 г. совершил первый полет самолет МиГ-29С (9-13С), полу-
чивший усовершенствованную СУВ, включающую модернизированную БРЛС
повышенной помехозащищенности, обеспечивающую возможность одновре-
менной атаки двух целей, и новый цифровой вычислитель. Были оптимизирова-
ны возможности стрельбы из пушки по воздушной цели («совмещенное» управ-
ление). Принят на вооружение в 1994 г.
Эффективность истребителя МиГ-29С по сравнению с МиГ-29 при ведении
воздушного боя возросла в 2,5...3,0 раза, по данному параметру он превзошел са-
молеты F-16C и «Рафаль» на 10%, а «Мираж 2000» — на 5% и JAS39 «Грипен» —
на 25%.
Бортовые системы и оборудование. Самолет МиГ-29 оснашен
комплексной системой управления вооружением СУВ-29, включающей импульс-
но-доплеровский радиолокационный прицельный комплекс РЛПК-29 с цифро-
вым вычислителем серии Ц100, а также оптико-электронный прицельно-навига-
ционный комплекс ОЭПрНК-29 (С-31). БРЛС массой 350 кг с параболической
антенной, имеющей механическое сканирование по азимуту и углу места, спо-
собна обнаруживать цели типа истребитель (ЭПР порядка 3 м2) в передней полу-
сфере (в том числе и на фоне земли) на дальности 60 км и в задней полусфере --
на дальности 35 км.
Прицельно-навигационный комплекс ОЭПрНК-29 включает оптико-элек-
тронную прицельную систему ОЭПС-29, которая, в свою очередь, состоит из ла-
зерной оптико-локационной станции КОЛС (ИК-датчик и коллимированный с
ним лазерный дальномер) и автономной нашлемной системы целеуказания
«Щель-ЗУМ»; систему навигации СН-29; систему управления оружием СУО-29М;
цифровой вычислитель серии Ц100; систему единой индикации и фотоконтроль-
ный прибор. Имеется аппаратура командной радиолинии управления, обеспечи-
вающая взаимодействие с наземными автоматизированными системами наведе-
ния, и система автоматического управления САУ-454.
Самолет МиГ-29 оснащен станцией предупреждения о радиолокационном
облучении, имеющей круговой обзор. Для создания активных радиолокационных
помех истребители МиГ-29 «9-13» и МиГ-29С оборудованы встроенной станци-
ей, обеспечивающей защиту самолета в задней полусфере.
Для защиты от ракет с ТГС имеется система выброса ложных целей ППИ-26
(в двух блоках выброса помех размещается 60 патронов).
Одноместный фронтовой истребитель МиГ-29С— модернизированный ва-
риант МиГ-29 (9-13) с радиолокационным прицельным комплексом РЛПК-29М,
доработанным оптико-электронным прицельно-навигационным комплексом
ОЭПрНК-29-1 и дополнительным ракетным вооружением. Усовершенствован-
ный РЛПК-29М с РЛС Н019М и новым вычислителем Ц101М отличается от
прежнего РЛПК-29 повышенной помехозащитой, новым программным обеспе-
чением, системой углубленного встроенного контроля и позволяет производить
одновременную атаку двух целей двумя ракетами с АРГС. В ОЭПрНК-29-1 ре-
ализован режим совмещенного управления для стрельбы из пушки по воздуш-
ным целям.
Вооружение. Имеется встроенная пушечная установка ТКБ-687 с 30-мил-
лиметровой пушкой ГШ-301. Ракетное вооружение МиГ-29 включает две УР
класса «воздух—воздух» средней дальности с радиолокационным полуактивным
наведением и УР малой дальности с ТГС (до шести единиц).
224
Боевая нагрузка самолета (9-13) 3000 кг, в состав вооружения включили кон-
тейнеры малогабаритных грузов КМГ-У, число одновременно подвешиваемых
бомб по 500 кг возросло с четырех до шести.
Комплекс вооружения истребителя МиГ-29С дополнен ракетами средней
дальности с активным самонаведением и новыми УР с ТГС, а также УР увеличен-
ной дальности (две единицы).
Неуправляемое вооружение включает блоки НАР С-8 (40 или 80 ракет) или
две—четыре НАР С-24Б, свободнопадающие бомбы массой 250 и 500 кг, КМГ-У
и другие авиационные средства поражения. Масса бомбового вооружения 4000 кг
(восемь боеприпасов массой 500 кг).
2.2.2. САМОЛЕТЫ «Ту» - ОСНОВА ДАЛЬНЕЙ
(СТРАТЕГИЧЕСКОЙ) АВИАЦИИ РОССИИ
1. От бомбардировщика Ту-95 к ракетоносцу Ту-95МС
Предпосылками начала реализации проекта стратегического бомбардиров-
щика явились:
• политическая ситуация в конце 1940-х — начале 1950-х годов;
• перемещение перспективного театра военных действий за океан;
• технические возможности отечественной авиационной промышленности.
Сейчас более чем широко известно, что третья мировая война должна была
начаться весной 1954 г. или в крайнем случае осенью того же года. Стратеги по-
тенциальных противников, которые еще так недавно были крепкими союзника-
ми, высчитали время начала последней схватки довольно точно с учетом тради-
ций начала всех предыдущих войн и последних достижений науки и техники.
Только что завершившаяся Вторая мировая война кроме всех ужасов, кото-
рые сопутствуют аналогичным глобальным событиям, дала резкий толчок разви-
тию как фундаментальных, так и прикладных наук. Это позволило странам-побе-
дительницам за счет качественно новых достижений в физике, химии, металлур-
гии, металлообработке, технологии накопить к концу войны такое количество
вооружения, что они, страны-победительницы, были вынуждены немедленно
превратиться в беспощадных врагов.
США, сумевшие во многом «благодаря» военным действиям, происходившим
не на их территории, занять лидирующие позиции в мировой экономике, политике
и технике в те послевоенные годы, были в более выгодном положении. К 1945 г.
американцы уже имели ядерное оружие и средства его доставки на нашу террито-
рию. Более того, еще во время войны были проведены успешные испытания как
первого, так и второго. Далее практичные американцы подсчитали, что для полного
накрытия ядерным ковром такой огромной страны, как СССР, потребуется /7-е
число бомб и их носителей, а это, учитывая, что ядерное производство еще не стало
массовым, — большие деньги, а деньги — это время. Возможно, расчеты проводи-
лись и по другой схеме, но результат был один — 1954 г.! Именно к этому времени
США рассчитывали накопить достаточное количество ядерных боезапасов и спосо-
бов их доставки на место. Начинать войну раньше было решительно невозможно!
Узнав о предполагаемой дате начала новой военной кампании, первые лица
СССР проанализировали наши возможности. В 1949 г. было взорвано первое
ядерное устройство. Страна включилась в небывалую по масштабам гонку воору-
8 Авиация ВВС России и научно-технический прогресс
225
жений. Советскому Союзу для нанесения удара по США были необходимы носи-
тели с радиусом действия минимум в два раза большим, чем поступивший на во-
оружение Ту-4 с дальностью полета 6200 км, который мог решать боевые задачи
лишь в пределах Европы, Северной Африки, стран Ближнего и Среднего Восто-
ка, а также с дальневосточных баз наносить удары по Японии. Однако североаме-
риканский театр военных действий для данного самолета был закрыт! Попытки
увеличить его дальность оборудованием системы дозаправки в воздухе не вышли
из стадии эксперимента. В связи с этим всерьез рассматривался сценарий полета
до Америки в один конец, согласно которому после выполнения задания экипаж
покидал самолет в заданном районе, где его подбирала подводная лодка. Но ни-
какие варианты применения и модернизации единственного на конец 1940-х го-
дов отечественного носителя ядерного оружия не могли создать реальную угрозу
Америке. Для этого требовался новый бомбардировщик!
В 1950 г. В. М. Мясищев обратился в правительство с предложением со-
здать стратегический бомбардировщик с максимальной скоростью 950 км/ч и
дальностью более 13 000 км, оснащенный четырьмя турбореактивными двигателя-
ми конструкции А. А. Микулина. Предложение приняли, и воссозданному
ОКБ-23 В. М. Мясищева поручили в кратчайший срок создать бомбардировщик
М-4, способный с ядерной бомбой массой в 5 т достичь территории США. Однако
И. В. Сталин, решив подстраховаться, дал аналогичное задание и А. Н. Туполеву.
К новому проекту А. Н. Туполев оказался хорошо подготовленным: поиско-
вые работы по тяжелым самолетам с околозвуковой скоростью начались в
ОКБ-156 еще весной 1948 г. А годом раньше А. Н. Туполев с соратниками разра-
ботали уникальную стратегию создания сверхдальнего бомбардировщика, что по-
зволило значительно сократить время эскизных проработок на первой стадии ре-
ализации проекта. Суть нового научного подхода к решению данной проблемы,
если кратко, состояла в следующем:
• на первом этапе в рамках выбора схемы и размеров самолета, способного со-
вершать боевые вылеты дальностью до 20 000 км, проводились сравнения
шести- и восьмимоторных вариантов с перспективными двигателями. Расче-
ты и исследования показали, что достижение такой дальности нереальны, но
дальность порядка 15 000... 16 000 км вполне возможна. Площадь крыла тако-
го самолета составила бы 300...340 м2, а потребная ВПП — более 2500 м.
Представляется небезынтересным на нескольких примерах проследить раз-
витие конструкторской мысли при осуществлении первого этапа проектиро-
вания стратегического бомбардировщика.На рис. 2.21—2.23 представлены
проекты 1948 г. На приведенных эскизах, а эти самолеты не строились даже
в единичном экземпляре, заметно постепенное изменение стреловидности
оперения и увеличение площади крыла;
• на втором этапе число двигателей ограничивалось четырьмя, а новый само-
лет проектировался как дальний бомбардировщик, способный после соот-
ветствующей модификации выполнять функции сверхдальнего.
Проработки различных вариантов (рис. 2.21—2.23) позволили сделать вывод,
что дальний четырехмоторный бомбардировщик целесообразнее всего создавать,
используя опыт постройки Ту-4. Освоение именно этого самолета оказалось тем
магическим шагом, который помог преодолеть отставание отечественной авиа-
ционной промышленности (интересно, какая отрасль промышленности не от-
носится к авиационной?) от западных технологий 1940-х годов и заложить осно-
вы для успехов в 1950-х и 1960-х годах.
226
Рис. 2.21. Тяжелый бомбардировщик проекта «485»
Летно-технические характеристики тяжелого бомбардировщика проекта «485»
Состояние...............проект 1948 г.
Производство............ не строился
Экипаж, чел...................10—12
Габаритные размеры, м:
длина........................37
размах крыла..............55,98
Практический потолок, м........15 000
Масса, кг:
взлетная.........................95 000
посадочная..................57 000
боевой нагрузки (макс.)....20 000
Скорость макс., км/ч...............700
Дальность полета, км..............6000
Длина разбега/пробега, м......1200/800
Первым шагом на пути реализации общей стратегической концепции стала
постройка в 1949 г. самолета Ту-80 (изготовлен 1 экз.) — глубокой переработки
Ту-4 в направлении увеличения взлетной массы и дальности полета. В ходе моди-
фикации, в целом повторявшей эволюционное развитие американских В-29 и
В-50, устранялись недостатки компоновки Ту-4 и улучшались характеристики
силовой установки, усиливалось вооружение. Дальность удалось довести до
8200 км. Из-за задержек в получении новых двигателей дальнейшее проектирова-
ние велось под двигатели АШ-73ТКФ. В ходе проектных работ крыло Ту-4 было
использовано практически без изменений, но с увеличенной до 173 м2 площадью,
передняя часть фюзеляжа переделана полностью. Предполагалась установка ра-
диолокационных прицелов, подвеска мин и торпед и исследовалась возможность
оснащения бомбардировщика системой дозаправки в воздухе.
227
Рис. 2.22. Тяжелый бомбардировщик «489» (проект 1948 года, 9 вариант)
Летно-технические характеристики тяжелого бомбардировщика «489»
Состояние................проект 1948 г.
Разработчик..................ОКБ-156
Экипаж, чел.......................11
Габаритные размеры, м:
длина........................35,2
размах крыла................47,2
Взлетная масса, кг............. 90 880
Масса боевой
нагрузки (макс.), кг......около 20 000
Тип двигателя.....................ПД
Скорость, км/ч:
максимальная......................650
крейсерская .................400
Вооружение:
пушечное ..................5 х 2 х 23 мм
бомбовое...............до ФА Б 6000
Работы по Ту-80 органично перешли в разработку проекта самолета Ту-85,
постройка первого опытного образца которого была закончена в сентябре 1950 г.
Испытания он проходил с более мощными и экономичными двигателями конст-
рукции ОКБ В. А. Добрынина. В одном из полетов максимальная дальность до-
стигла 12 018 км. Скорость на высоте 10 000 м равнялась 638 км/ч. Нормальная
бомбовая нагрузка составляла 5000 кг, максимальная — 18 000 кг.
Испытания машины шли сравнительно спокойно, и складывалось впечат-
ление, что самолет, способный наносить ядерные удары по территории США,
практически создан. Победил здоровый консерватизм А. Н. Туполева, который
в условиях дефицита времени взял курс на модернизацию проверенного и на-
дежного Ту-4, отказавшись от перспективных проектов, предложенных инже-
нерами и конструкторами его ОКБ. Начиналась подготовка к серийному произ-
водству.
228
Рис. 2.23. Тяжелый бомбардировщик Ту-200 (два варианта)
229
Летно-технические характеристики тяжелого бомбардировщика Ту-200
Состояние.....................проект
Разработчик..................ОКБ-156
Экипаж, чел....................10—12
Габаритные размеры, м:
длина........................60,9
размах крыла................71,6
Взлетная масса, кг............ 200 000
Масса боевой
нагрузки (макс.), кг........около 20 000
Тип двигателя...................ТВД
Максимальная скорость, км/ч.....748
Вооружение:
пушечное ............5 х 2 х 23 мм
бомбовое.............до ФАБ 6000
Однако, как это часто бывает, в дело вмешались достижения прикладной
науки, техники и сам ход истории.
Усиление в конце 1940-х годов средств ПВО, в первую очередь появление
перехватчиков с околозвуковыми скоростями полета и бортовыми РЛС, застави-
ло руководство ВВС пересмотреть требования к тяжелым бомбардировщикам.
Начавшаяся вскоре война в Корее и вовсе показала бесперспективность
тяжелых поршневых бомбовозов. В результате США свернули все программы
их развития и форсировали работы над реактивными В-47 и В-52. Советский
Союз отреагировал мгновенно. Едва построив вполне удачный Ту-85 (рис. 2.24),
СССР срочно сворачивает эту последнюю в мире программу тяжелого поршне-
вого бомбардировщика и переходит к проектированию стратегических само-
летов-носителей ядерного оружия с турбореактивными и турбовинтовыми дви-
гателями.
Для применения ядерного оружия с межконтинентальных самолетов-носи-
телей разработчикам необходимо было решить следующие задачи:
• увеличение скорости и дальности полета стратегического бомбардировщика;
• преодоление средств ПВО вероятного противника;
• защита экипажа при транспортировке и применении ядерного оружия.
Подготовленный Ту-95В (В — «Ваня» — кодовое обозначение ядерного уст-
ройства) перегнали на северный аэродром в Ваенге. Вскоре он со специальным
термозащитным покрытием белого цвета и реальной бомбой на борту, которая
своими размерами практически полностью выступала за габариты фюзеляжа, пи-
лотируемый экипажем во главе с летчиком Дурновцовым, взял курс на Новую
Землю. Испытание самого мощного в мире термоядерного устройства состоялось
30 октября 1961 г. Подрыв бомбы массой 24 т произошел на высоте 4500 м, при-
чем площадь парашютной системы, замедляющей скорость падения бомбы для
обеспечения возможности ухода бомбардировщика на безопасное расстояние,
составляла около 4000 м2, а масса 800 кг. Тем не менее самолет тряхнуло, а эки-
паж получил некоторую дозу радиации. Мощность взрыва, по разным оценкам,
составила от 75 до 120 Мгт, Хрущеву Н. С. доложили о взрыве бомбы в 100 Мгт, и
именно эту цифру он называл в своих выступлениях.
Даже это краткое описание применения ядерного оружия, носителем кото-
рого является стратегический бомбардировщик, показывает, что в первую оче-
редь как экипаж, так и самолет-носитель такого груза должны быть надежно за-
щищены от поражающих факторов ядерного взрыва — проникающей радиации,
ударной волны, электромагнитного излучения и радиационного заражения при
транспортировке такого оружия.
Реально проблемы защиты решались на более поздних моделях бомбарди-
ровщиках-носителях ядерного оружия следующим образом: самолет Ту-95А от-
личался термостабилизированным грузоотсеком, противолучевым термозащит-
230
Рис. 2.24. Последний поршневой тяжелый бомбардировщик Ту-85
Летно-технические характеристики тяжелого бомбардировщика Ту-85
Состояние...........опытный самолет
Разработчик.................ОКБ-156
Производство..........построено 2 экз.
Скорость, км/ч:
максимальная .........585
максимальная у земли .......460
посадочная..................185
Экипаж, чел......................11
Габаритные размеры, м:
длина......................39,31
размах крыла............ 55,939
высота................... 10,58
Площадь крыла, кв. м.......... 273,6
Масса, кг:
Практический потолок, м.........11700
Длина разбега, м.................1950
Длина пробега, м.................1500
Запас топлива, кг...............63600
Двигатели..........ПД, М-253К (ВД-4К)
Мощность двигателей, л.с.
взлетная..................4 х 4300
номинальная...............4 х 3800
Дальность полета, км............12000
Вооружение:
стрелково-пушечное. . . .5 х 2 х 23 мм
НР-23
бомбовое...........до 2 х ФАБ-900
взлетная нормальная....... 76000
взлетная максимальная ... 107225
боевой нагрузки............18000
ным покрытием белого цвета нижней части фюзеляжа, дополнительной защитой
членов экипажа, приборов, электрооборудования, элементов конструкции само-
лета от радиации и светозащитными шторками в кабинах экипажа.
Бомбардировщик, чтобы выйти на цель, должен пройти зоны ПВО против-
ника, поэтому на Ту-95 устанавливалось мощное оборонительное вооружение:
верхняя пушечная установка ДТ-В12 (боезапас 700 выстрелов), нижняя —
231
ДТ-Н12 (боезапас 800 выстрелов) и кормовая установка ДК-12 (боезапас
1000 выстрелов) с пушками АМ-23.
При создании первого самолета Ту-95 использовались последние достиже-
ния фундаментальной науки, ядерной физики, аэродинамики, новые взгляды на
решение проблем сопротивления материалов, новые технологии и материалы.
Однако первый Ту-95 потерпел катастрофу в районе г. Ногинска 11 мая
1953 г. во время своего 17-го полета. Командир корабля А. Д. Перелет и борт-
инженер Л. Ф. Чернов погибли непосредственно от взрыва при столкновении с
землей, штурман С. С. Кириченко покинул самолет по приказу командира, но
его накрыло ударной волной и пламенем, техник по виброиспытаниям из НИИ
самолетного оборудования А. М. Большаков тоже выпрыгнул, но забыл надеть
парашют, на котором сидел (говорили, что он не умел им пользоваться). Второй
летчик, бортрадист, ведущий инженер, помощник ведущего инженера, борт-
электрик, бортмеханик и инженер спаслись на парашютах.
Причиной катастрофы, как установило расследование, явилось разрушение
промежуточной шестерни третьего двигателя вследствие ее недостаточной уста-
лостной прочности. Эта деталь была изготовлена с нарушением технологии. Ны-
не она находится среди экспонатов музея Самарского НПО «Труд», на котором
был изготовлен двигатель.
Но до трагедии, которая едва не закрыла весь проект, были годы напряжен-
ной не только конструкторской работы, но и больших научных изысканий, кото-
рые легли в основу принятых разработчиками решений.
Еще весной 1948 г. на стол Андрея Николаевича Туполева лег отчет «Иссле-
дование летных характеристик тяжелых реактивных самолетов со стреловидным
крылом». В этом отчете по исследованиям ОКБ и ЦАГИ рассматривались про-
блемы выбора основных проектных параметров самолета с полетной массой
80... 160 т и со стреловидностью крыла 25...35° по линии 1/4 хорд. По решению
А. Н. Туполева данные этого отчета были использованы для радикального улуч-
шения характеристик Ту-85. Таким образом, целенаправленная последователь-
ность решения сложных научно-технических проблем и учет тенденций развития
мирового самолетостроения позволили коллективу ОКБ к 1950 г. сформировать
облик будущего скоростного дальнего бомбардировщика, получившего шифр
«95». Самолет должен был иметь взлетную массу порядка 150 т и крыло стрело-
видностью 35° с удлинением около 9. Подобное крыло к тому времени достаточ-
но хорошо изучили в ЦАГИ. Фюзеляж новой машины по компоновке и диаметру
повторял фюзеляж самолета Ту-85.
Для определения типа силовой установки были проработаны различные вари-
анты, основными из которых были: 4 турбореактивных двигателя (ТРД) или 4 тур-
бовинтовых двигателя. В ходе поиска оптимального варианта площадь крыла изме-
нялась от 274 до 400 м2, удлинение — от 6,8 до 11,75, а стреловидность — от 0 до 45°.
Расчеты показали, что наиболее приемлемым для получения максимальной
дальности полета являлся вариант с четырьмя ТВД мощностью 12 000... 15 000 э. л. с.
и удельными расходами на крейсерском режиме порядка 0,25 кг/э. л. с. При этом
взлетная масса самолета достигала 200 т, расчетная максимальная скорость на
высоте 10 000 м — порядка 800 км/ч, длина разбега — 1500 м.
Аналогичный самолет с четырьмя ТРД и тягой по 9000 кгс имел бы в лучшем
случае максимальную дальность не более 10 000 км и длину разбега свыше 2000 м.
Его единственным преимуществом была бы максимальная скорость более 900 км/ч.
232
Изучив результаты исследований и понимая, что главное — это долететь до цели,
Туполев окончательно выбрал для нового самолета силовую установку с ТВД.
В порядке научной полемики отметим, что примерно в одно и то же время
(первый полет Ту-95 совершил 12 ноября 1952 г.) аналогичную задачу решали
конструкторы и ученые США (проект В-52, первый полет 15 апреля 1952 г.) и
ОКБ В. М. Мясищева (проект М-4).
В этом заочном споре фирма «Boeing» сделала свой выбор в пользу 8-ми ТРД,
ОКБ В. М. Мясищева укомплектовало свой самолет 4-мя ТРД. Уже упоминавший-
ся, здравый консерватизм Туполева и преемственность в разработке новых конст-
рукций как продолжение предыдущих позволили в короткий срок создать конку-
рентоспособный дальний бомбардировщик. Вариант М-4 ОКБ В. М. Мясищева
показал на госиспытаниях практическую дальность всего 9050 км.
В процессе конструирования и постройки нового бомбардировщика коллек-
тив ОКБ-156 совместно с разработчиками систем и агрегатов успешно решил ряд
важнейших научно-технических задач. Для координации этой масштабной рабо-
ты Туполев назначил ответственным за тему «95» своего ближайшего помощника
//. И. Базенкова, который впоследствии стал главным конструктором Ту-95 и
его гражданского варианта Ту-114 (в 1970-е годы его преемником стал
Н. В. Кирсанов, а в конце 1980-х годов — Д. А. Антонов).
Самолет «95» оснащался самым совершенным оборудованием своего време-
ни. Его особенностями, распространившимися затем на все типы тяжелых само-
летов, стали применение в системе электроснабжения более легких алюминиевых
проводов и внедрение электрических противообледенительных систем крыла,
оперения, винтов и других поверхностей.
Важной особенностью проекта было отсутствие катапультируемых сидений.
Восемь членов экипажа в аварийной ситуации покидали машину через люки и от-
сек передней опоры шасси. Такое решение оправдывалось сравнительно неболь-
шими скоростными напорами, а также существенной экономией в весе и более
комфортными условиями размещения экипажа, что в длительном полете особенно
важно. При создании нового самолета решили максимально использовать полу-
фабрикаты и комплектующие изделия предыдущих разработок ОКБ. В последую-
щем это позволило ускорить процесс освоения машины в серийном производстве.
Но новинка того времени — необратимые бустера в системе управления са-
молета Ту-95 — так и не была применена, хотя ОКБ В. М. Мясищева смело пос-
тавило бустера на свой М-4, туполевцы еще долго сохраняли верность высказы-
ванию своего шефа: «Лучший бустер тот, который стоит на земле».
На рис. 2.25 представлен уже серийный вариант самолета Ту-95. С 1955 по
1957 г. построен 31 бомбардировщик.
Фюзеляж самолета Ту-95 представляет собой конструкцию типа полумоно-
кок обтекаемой формы, круглого сечения, с гладкой работающей обшивкой,
подкрепленной набором шпангоутов и стрингеров. Технологически он делится
на передний фонарь, носовую часть, включающую в себя переднюю гермокаби-
ну, среднюю негерметичную часть, кормовую герметическую кабину и обтекатель
кормовой пушечной установки.
Фонарь и носовая часть фюзеляжа образуют переднюю герметичную кабину,
в которой расположены места экипажа (летчиков, штурмана, второго штурмана,
старшего бортового техника, старшего воздушного стрелка-радиста и офицера по
системам радиоэлектронного противодействия).
233
Рис. 2.25. Тяжелый бомбардировщик Ту-95
Летно-технические характеристики тяжелого бомбардировщика Ту-95
Состояние ... .на вооружении с 10.1957 г.
Разработчик ОКБ-156 А. Н. Туполева
Производство............серия с 1955 г.
Экипаж, чел......................8—9
Габаритные размеры, м:
длина......................46,17
размах крыльев.............50,04
высота (на стоянке)....... 12,50
Площадь крыла, кв. м.......... 283,7
Скорость, км/ч:
максимальная............ 850—890
крейсерская............. 720—750
взлетная.....................300
посадочная...................270
Практический потолок, м ...... 11 800
Угол стреловидности
крыла, град.................. 35—33,5
Размеры
бомбоотсека, м..........11,3x1,92x2,4
Масса, кг:
взлетная максимальная..... 172 000
боевой нагрузки..........до 12 000
Запас топлива, кг.............. 74 000
Тип, марка двигателей.....ТВД, НК-12
Длина разбега/пробега, м..... 2350/1540
Вооружение:
бомбовое (варианты).....ядерные
свободнопадающие бомбы и обыч-
ные бомбы от ФАБ-1500 до
ФАБ-9000
Здесь же размещены приборы, органы управления самолетом, аэронавига-
ционное, высотное и другое оборудование. В нижней части кабины под полом
штурмана установлена закрытая радиопрозрачным обтекателем антенна радио-
234
локационной станции. В специальном отсеке расположена передняя стойка шас-
си, убираемая в фюзеляж и закрываемая створками. Передняя и верхняя части
остеклены органическим и частично силикатным стеклом. Нижнее лобовое стек-
ло передней кабины и два стекла фонаря пилотов — триплексные с электрообог-
ревом. В верхней части кабины есть блистер старшего стрелка-радиста.
Вход в кабину производится через отсек передней стойки шасси и люк в полу.
Для облегчения аварийного покидания самолета экипажем в кабине установлен
подвижной пол с гидроприводом. Покидание машины производится через перед-
ний отсек шасси при выпущенном положении передней стойки.
К средней части фюзеляжа крепится центроплан, здесь же расположен бом-
бовый отсек. Значительная часть свободного объема занята контейнерами с топ-
ливными баками, ближе к наружной поверхности вмонтированы спасательные
лодки. В кормовой гермокабине расположены рабочие места воздушного стрел-
ка-радиста и командира огневых установок, прицельные станции и оборудова-
ние. Далее крепится кормовая пушечная установка с обтекателем и радиолокаци-
онной прицельной станцией. Для обзора боковых полусфер в кабине имеются
блистеры из органического стекла.
Крыло на Ту-95 кессонной конструкции состоит из центроплана, двух пер-
вых отъемных частей и двух вторых отъемных секций.
Кессон образован передним и задним лонжеронами, верхними и нижними
панелями с толстой работающей обшивкой. Между нервюрами в кессоне разме-
щаются мягкие топливные баки.
На верхней панели есть узлы крепления гондол двигателей. Нижняя панель в
местах установки основных стоек шасси усилена балками. На крыле расположе-
ны органы управления самолетом.
Оперение цельнометаллическое, свободнонесущее, однокилевое, стреловид-
ное. Угол стреловидности вертикального и горизонтального оперения 40°. Стаби-
лизатор кессонного типа состоит из двух половин, стыкующихся между собой по
оси самолета.
Шасси убирающееся, трехстоечной схемы с хвостовой предохранительной
пятой. Основные его стойки подвешиваются к первым отъемным частям крыла и
убираются в обтекатели, являющиеся продолжением внутренних мотогондол.
Управление самолетом осуществляется с помощью двух штурвальных коло-
нок и двух пар ножных педалей, соединенных с органами управления тягами.
Силовая установка состоит из четырех двигателей, расположенных в мото-
гондолах, воздушных винтов и системы управления.
Топливная система включает в себя топливные баки и систему автоматиче-
ского измерения расходования топлива, которая обеспечивает в полете диапазон
допустимых центровок машины. Горючее располагается в 74 крыльевых и фюзе-
ляжных мягких топливных баках.
Гермокабины экипажа вентиляционного типа. По условиям экономии мас-
сы и повышения живучести самолета в кабинах поддерживается определенный
перепад давления. На больших высотах экипаж должен работать в кислородных
масках.
Самолет оборудован типовым бомбардировочным вооружением, позволяю-
щим использовать обычные бомбы массой от 1500 до 9000 кг. Возможна под-
веска ядерных свободнопадающих бомб. Максимальная бомбовая нагрузка —
12 000 кг.
235
Для обороны от истребителей противника на Ту-95 применяется комплекс
механизированных пушечных установок. Имеется три подвижных спаренных пу-
шечных установки: верхняя, нижняя и кормовая. На каждой — по две пушки ти-
па АМ-23. Для уменьшения аэродинамического сопротивления верхняя установ-
ка выполнена подъемной и в полете находится внутри фюзеляжа.
По всему комплексу оборудования, вооружению и летно-техническим дан-
ным Ту-95 для своего времени был эффективным стратегическим средством на-
несения превентивного и ответного ударов по территории вероятного противни-
ка, находящейся на сверхдальнем расстоянии.
С самого начала разработки бомбардировщика «95» большая нагрузка легла
на отдел прочности. Специалисты отдела провели анализ силовых схем самолета
в целом и его отдельных агрегатов, определили оптимальное расположение дви-
гателей по размаху крыла. После тщательных исследований и расчетов, проведен-
ных совместно с ОКБ В. М. Мясищева и под руководством ЦАГИ, разработчики
пришли к неожиданному выводу: регламентируемые существовавшими нормами
прочности коэффициенты безопасности были признаны завышенными, приво-
дящими к необоснованному утяжелению конструкции. В результате методы оп-
ределения расчетных нагрузок были пересмотрены, и крылья самолетов «95» и
М-4 получились значительно более легкими. Дополнительные сложности в рабо-
ту прочнистов и конструкторов вносил параллельный процесс подготовки серий-
ного производства, который в полном объеме развернулся на заводе в г. Самаре
(бывш. Куйбышев), ведь требуемые ими изменения в конструкции приводили к
переделке оснастки и доработке опытного самолета на сборочном конвейере.
Несмотря на постоянный рабочий конфликт между учеными, конструктора-
ми и производственниками, рабочие чертежи самолета стали готовить еще в сен-
тябре 1951 г., а к концу ноября завершили полноразмерный макет, который предъ-
явили макетной комиссии, и в декабре главнокомандующий ВВС его утвердил.
Постройка же первого опытного самолета «95» и второго экземпляра для ста-
тических испытаний началась на серийном заводе в октябре 1951 г.
12 ноября 1952 г. экипаж летчика-испытателя А. Д. Перелета поднял'ма-
шину в воздух.
Начался обычный процесс доводки. Напомним, что первый полет американ-
ского конкурента состоялся 15 апреля 1952 г.
Строительство второго опытного экземпляра «95-2» уже с двигателями ТВ-12
(«дублера») началось на заводе в феврале 1952 г. и продолжалось до ноября. Это
дало возможность учесть результаты первых полетов «95-1». В итоге «дублер» ока-
зался легче своего предшественника (вес пустого «95-1» превышал расчетный на
15%, а «дублера» — на 3%).
Кроме измененных мотогондол, он отличался новыми конструкционными мате-
риалами, в частности применением сплава В95 и более совершенным оборудованием.
16 февраля 1955 г. экипаж во главе с летчиком-испытателем М. А. Нюх-
тиковым поднял бомбардировщик в воздух. Предсерийный В-52 совершил пер-
вый полет 5 августа 1954 г.
Заводские испытания велись до 8 января 1956 г. За этот период «дублер» на-
летал 168 часов в 68 полетах. В целом испытания шли успешно, но один эпизод
едва не сорвал всю программу самолета «95».
Летом 1955 г., когда «дублер» в очередной раз возвращался на аэродром, борт-
инженер А. М. Тер-Акопян (спасся на парашюте во время катастрофы «95-1»
И мая 1953 г.) сообщил по радио, что не выпускается шасси. Посадка самолета
236
«на брюхо» с большой вероятностью означала гибель второй опытной машины.
На летной базе создалась тревожная обстановка. Бомбардировщик летал кругами,
выжигая топливо. Из Москвы срочно приехали А. Н. Туполев, Л, Л. Кербер и
другие ведущие сотрудники ОКБ. Л. Л. Кербер со специалистами по оборудова-
нию разложил на траве у выносного КП электрические схемы и стал искать при-
чину невыпуска шасси при питании от аварийной сети. Через два часа
Л. Л. Кербер взял микрофон и начал четко передавать команды на борт самолета.
Он велел полностью обесточить машину, и на какое-то время «дублер» остался без
радиосвязи с землей. При повторном включении электросети реле, блокировав-
шее систему выпуска шасси и вычисленное Л. Л. Кербером, сработало, шасси
вышло и самолет совершил штатную посадку.
Этим же летом «дублер» представили министру обороны Г. К. Жукову и ру-
ководителю страны Н. С. Хрущеву, который, сидя в кабине самолета, обсудил его
дальнейшую судьбу с А. Н. Туполевым.
Самолет произвел большое впечатление на западных авиаспециалистов во
время традиционного парада в Тушино. В НАТО он получил кодовое обозначение
«Bear» (медведь). О том, насколько эффективно сработали спецслужбы по проти-
водействию иностранным разведкам, свидетельствует тот факт, что уже после па-
рада в Тушино в западной прессе писали о новом бомбардировщике, якобы со-
зданном в ОКБ С. В. Ильюшина, и называли его Ил-38. Лишь через два года с дру-
гой стороны «железного занавеса» определили истинных создателей самолета.
Испытания «дублера» продолжались. В сентябре 1955 г. наступило время
главного экзамена — полета на максимальную дальность со сбросом бомб, фото-
графированием разрывов и возвращением на аэродром базирования.
Маршрут начинался в г. Жуковском, пролегал через всю территорию СССР
до г. Хабаровска, затем следовало бомбометание на камчатском полигоне и воз-
вращение. В том полете взлетная масса «дублера» была равна 167,7 т, топлива —
84,44т, крейсерская скорость— 750 км/ч, максимальная скорость достигла
880 км/ч, практический потолок— 12 150 м, длина разбега — 2300 м. Самолету
официально присвоили обозначение Ту-95. Уже в 1955 г. на стапелях стояли са-
молеты двух первых серий — нулевой и первой, по пять машин в каждой.
Серийные Ту-95 имели в отличие от «дублера» удлиненный почти на два
метра фюзеляж, большую на 5% массу пустого самолета и полную комплектацию
бортового оборудования.
Первые две серийные машины были выпущены 31 августа 1955 г. (к предпо-
лагаемому началу третьей мировой войны не успели, но задачу выполнили!).
В период с 1955 по 1957 г. Куйбышевский серийный завод построил
31 бомбардировщик Ту-95, а до конца 1958 г. — еще 19 Ту-95М, которые внешне
отличались от самолета Ту-95 лишь дополнительными воздухозаборниками в
верхней части мотогондол, предназначенными для обдува электрооборудования.
В 1970-е годы эти машины прошли весь цикл доработок и усовершенствова-
ний, позволивших им оставаться в строю вплоть до 1980-х годов.
За свою долгую жизнь Ту-95 неоднократно модифицировался. В общей
сложности спроектировано и построено более двух десятков вариантов Ту-95,
еще большее количество их осталось лишь на бумаге. Самолеты последних моди-
фикаций будут летать и в начале XXI в.
Следующим в этой серии самолетов оказался самолет Ту-95МС, который ра-
зительно отличался от своих предшественников.
237
Ту-95МС — ударный стратегический ракетоносец
Несмотря на то что сроки начала нового глобального конфликта были пере-
несены на неопределенное время, начавшаяся гонка вооружений набирала обо-
роты. Бомбы с ядерным зарядом уступали место баллистическим ракетам как на-
земного, так и морского базирования, что делало носитель мобильных ударных
ракет (корабль-ракетоносец, атомную подводную лодку) менее уязвимым и не
менее эффективным.
В 1959 г. вошла в строй американская головная атомная подводная лодка
с ядерными ракетами (ПЛАРБ) первого поколения на борту («Поларис А-1»).
К 1963 г. было построено пять ПЛАРБ. При модернизации в 1964 — 1967 гг. их
вооружили ракетами «Поларис А-3» с дальностью 4600 км, в боевой состав вошли
еще 36 ПЛАРБ разных типов.
Не стесненные маневром ПЛАРБ могли осуществлять пуск ракет по назем-
ным объектам из обширных районов боевого патрулирования, расположенных в
Норвежском, Средиземном морях, Индийском, Атлантическом и Тихом океанах.
Подводная угроза обрела реальные формы, и проблема борьбы с ней приоб-
рела первостепенное значение.
В штабе авиации ВМФ был сверстан грандиозный план создания противоло-
дочной авиации, в состав которой должно было входить около 500 самолетов раз-
личных типов, 160 машин должны были иметь радиус действия более 6000 км.
Ввиду отсутствия альтернативы и для сокращения сроков решено было разраба-
тывать дальний противолодочный самолет (ДПЛС) на базе Ту-95РЦ (развед-
чик - цел еу казател ь).
В ходе проектирования решили полностью переработать конструкцию само-
лета, обновить его оборудование и постараться вывести новую модель на совре-
менный уровень самолетостроения (шел 1963 год).
Было спроектировано новое крыло с жесткими металлическими кессон-ба-
ками. Сам профиль крыла самолета Ту-95 был модифицирован: носки вытянули
и отогнули вниз, что обеспечило увеличение качества на 4...5%. Последующая
эксплуатация показала, что при полете на наивыгоднейших высотах (по потол-
кам с постоянным значением числа А/, равным 0,7, при котором обеспечивает-
ся минимальный расход топлива с увеличением высоты по мере выгорания топ-
лива) самолет имеет качество 18,3 по сравнению с 17,5 у самолета с исходным
крылом.
Для устранения перетекания пограничного слоя вдоль верхней поверхности
крыла установлены три пары аэродинамических перегородок. Для сохранения
эффективности элеронов профили концевых частей крыла сделаны более несу-
щими, чем корневые. Благодаря этому, срыв потока должен происходить позже,
чем в корневой части. Кроме того, на крыле установили новые, выдвижные по
потоку двухщелевые закрылки.
Переработана система управления, в ней появились необратимые бустеры.
Создавался единый пилотажно-навигационный комплекс, который должен был
использоваться для пилотирования и обеспечивать работу противолодочной сис-
темы. В ходе разработок выяснилось, что все новое оборудование для комплекса
Ту-142, так официально стал называться ДПЛС, трудно разместить в старой ка-
бине, поэтому было предложено удлинить носовую часть фюзеляжа.
238
Рис. 2.26. Ракетоносец Ту-95МС
Летно-технические характеристики ракетоносца Ту-95МС
Состояние.....................принят
на вооружение в 1981 г.
Разработчик....ОКБ-156 А. Н. Туполева
Производство....................серия
Экипаж, чел........................7
Тип, марка двигателя . . ТВД, НК-12 (МВ)
Скорость, км/ч:
максимальная............. 830—910
крейсерская...............710—800
взлетная......................300
посадочная....................270
Габаритные размеры, м:
длина.......................49,13
размах крыла ...............50,04
высота (на стоянке)...........13,20
Площадь крыла, кв. м ...... 289,9 (295)
Угол стреловидности
крыла, град ................. 35—33,5
Масса, кг:
взлетная максимальная...... 185 000
посадочная................. 135 000
боевой нагрузки................ 12 000
Длина разбега, м..................2110
Длина пробега, м..................1540
Кроме того, сняли верхнюю и нижнюю стрелково-пушечные установки.
31 октября 1963 г. опытная машина Ту-142 с удлиненной кабиной поднялась в
воздух. Самолет этого типа и стал в дальнейшем прототипом ударного стратеги-
ческого ракетоносца — Ту-95МС (рис. 2.26).
На рис. 2.26 представлен самолет Ту-95МС в варианте с шестью ракетами в
грузовом отсеке фюзеляжа и с десятью ракетами на подкрыльевых пилонах. К со-
жалению, этот вариант запрещен Договором СНВ-2.
Появление отечественного самолета, оснащенного мощным ракетным во-
оружением, было обусловлено развитием и совершенствованием самого ракетно-
239
го вооружения. Преимущества ракетоносца перед обычным, хотя и стратегиче-
ским бомбардировщиком, очевидны: ракетоносец способен поражать цели, не
входя в зону действия наземных средств ПВО вероятного противника.
Носители крылатых ракет Ту-95МС начали поступать в дальнюю авиацию в
1982 г. Эти самолеты представляли собой наиболее реальную угрозу для против-
ника в случае проведения воздушной наступательной операции.
Создание авиационного комплекса началось в середине 1970-х годов. В ОКБ
А. Н. Туполева рассматривался проект модификации противолодочного Ту-142 в
стратегический ракетоносец Ту-142МС (преемственность опыта предыдущих
разработок при создании новых конструкций соблюдалась), который предпола-
галось оснастить двумя многопозиционными катапультными установками
МКУ-6-5 для подвески 12 ракет. Но сложности с обеспечением центровки, а так-
же большой объем необходимых доработок заставили отказаться от этого вариан-
та. Было решено разместить на самолете только одну МКУ-6-5 на шесть ракет.
Этот проект послужил базой для нового самолета Ту-95МС с одной установкой
МКУ-6-5 и дополнительными ракетами под крылом.
Самолет строили в двух вариантах: Ту-95МС-6 с шестью ракетами в грузоот-
секе на установке МКУ-6-5 и Ту-95МС-16 с шестью ракетами в грузоотсеке и
десятью — на катапультных установках под крылом. Две такие катапультные ус-
тановки, несущие по две ракеты, размещались на ближних к фюзеляжу крылье-
вых пилонах, еще две установки, на три ракеты каждая, крепились к внешним
пилонам. Согласно договору СНВ-2, ограничивающему общее число ядерных
боеголовок н& всех видах носителей, все подкрыльевые катапультные установки
на Ту-95МС-16 были демонтированы.
В ГосНИИАС был создан уникальный стенд полунатурного моделирования,
где под научным и техническим руководством Е. А. Федосова и В. И. Червива
проводились отработка системы управления вооружением и взаимодействие с ап-
паратурой крылатой ракеты и системой подготовки полетных заданий.
С середины 1980-х годов две воздушные дивизии, вооруженные Ту-95МС,
стали важнейшей частью стратегических сил страны.
На Ту-95МС было организовано боевое дежурство. Однако становившиеся
на него экипажи уже не испытывали такого психологического напряжения, как
их предшественники на бомбардировщиках. Во-первых, они не должны были за-
ходить в зону с мощной ПВО, а во-вторых, они не знали ни своих целей, ни даже
точки пуска. Их задача — привести самолет в определенное место, откуда он, уп-
равляемый автоматикой, должен лететь еще в течение часа, а затем самостоятель-
но произвести пуски ракет. Несмотря на современное электронное оборудование
и новые технологии, примененные при конструировании и строительстве,
Ту-95МС представляет собой развитие исходного бомбардировщика Ту-95, кон-
струкцию и системы которого за ЗОлет довели до высокого уровня надежности.
Поэтому и доверие к самолету со стороны летчиков с самого начала освоения бы-
ло высоким. Экипажи Ту-95МС очень высоко оценивали его оборонительные
возможности и высокую живучесть.
Но тем не менее в феврале 1992 г. был принят указ Президента России о за-
вершении производства самолетов Ту-95МС.
Летно-технические характеристики самолетов семейства Ту-95, Ту-142 при-
ведены в табл. 2.2, где Ту-95М — серийный вариант самолета с увеличенной
взлетной массой; Ту-95КМ — носитель авиационно-ракетного комплекса К-20
240
Таблица 2.2
Данные 95/1 Ту-95М Ту-95КМ Ту-142М Ту-95МС
Год выпуска 1952 1956 1962 1975 1979
Двигатели: 2ТВ2Ф НК-12М НК-12МВ НК-12МВ НК-12МП
мощность (элс): 12 000 15 000 15 000 15 000 15 000
Размах крыла, м 50,1 50,04 50,04 50,04 50,04
Площадь крыла, м2 284,9 283,7 283,7 289,9 289,9
Длина самолета, м 46,17 46,17 46,17 53,07 49,13
Высота, м Максимальная 12,5 12,5 12,5 14,47 13,2
взлетная масса, т 156 182 182 185 185
Максимальная скорость, км/ч 890 905 — — 830
Крейсерская скорость, км/ч — 720-750 700 735 —
Экипаж, чел. 10 8-9 9 11 7
(ракета Х-20М), серийный самолет; Ту-142М — серийный дальний противоло-
дочный самолет с поисково-прицельной системой.
Самолеты семейства Ту-95 служат не только гарантом безопасности рубежей
страны, но и являются пока главной стратегической ударной силой ВВС. Более
того, в первой четверти наступившего нового века самолеты этого семейства как
минимум не утратят своего значения [46—51].
2. Самолет Ту-22М —
основа дальней авиации России
Предыстория создания самолетов семейства Ту-22М
(самолеты Ту-16, Ту-128, Ту-121, Ту-22)
Еще в 1977 г. известный авиационный журнал «Flight International» [52] пи-
сал: «По объему потребных контрмер «Backfire» следует считать одним из самых
удачных изделий советской промышленности».
В создании знаменитого семейства выдающихся бомбардировщиков Ту-22М
заметную роль играл научно-технический потенциал, накопленный ОКБ
А. Н. Туполева при разработке и серийном производстве самолетов Ту-128,
Ту-121, Ту-22, Ту-106 и на начальном этапе работ по Ту-144 (рис. 2.27).
Самолет Ту-128 задумывался как перехватчик дальнего действия, оснащен-
ный РЛС обнаружения целей на максимальной дальности и способный нести ра-
кеты класса «воздух—воздух». Для ведения воздушного боя он не предназначал-
ся, и его вес был существенно больше веса истребителя. А так как главный конст-
руктор И. Ф. Незваль для Ту-128 выбрал в качестве базового самолета Ту-98 —
летающую лабораторию для сбора данных о прочности, долговечности, управля-
емости самолета на околозвуковых и сверхзвуковых скоростях — и поскольку
аэродинамическая схема Ту-128 и окончательная схема Ту-22МЗ оказались очень
близки, то опыт аэродинамиков, прочнистов, мотористов (боковые прифюзе-
ляжные воздухозаборники, спаренные сопла), конструкторов очень пригодился.
241
ПРОГРАММА СОЗДАНИЯ Ту-22МЗ И ЕЕ ПРЕДЫСТОРИЯ
1950 г 1955 г 1960 г 1965 г 1970 г 1975 г 1980 г 1985 г 1990 г 1995 г 2000 г
неск.
единиц
1600 км/ч, 13.5 км, 92 т, Марков Д.С., Казань
ПРОГРАММА Ту-16 «BADGER»
1050 км/ч, 13 км, 107 т, Марков Д.С., Казань, Самара, Воронеж
1613 с=>
^+120 Китай О
неск.
единиц
ПРОГРАММА Ту-128 «FIDDLER»
первый полет 1910 км/ч, 15.6 км, 43 т, Незваль И.Ф., Воронеж
начало
сер.
198 i==> _____________
А пост, наф конец
вооруж. сер. произ.
снят с
вооруж.
___w ПРОГРАММА Ту-98 «BACKFIN»
2 с-та | | 1238 км/ч, 13 км, 39 т, Марков Д.С., Москва
I-------1------1---7---1-------1-------1-------1-------1-------1-------1------1
1950 г 1955 г 1960 г 1965 г 1970 г 1975 г 1980 г 1985 г 1990 г 1995 г 2000 г
Рис. 2.27. Программа создания самолета Ту-22 М
Следует отметить, что максимальная скорость Ту-128 без ракет была около
2000 км/ч, а облегченный самолет мог достигать высот 20 000 м.
Изделие «121» и другие беспилотные летающие аппараты разработки сына
Андрея Николаевича Алексея Андреевича Туполева, запущенные им в конце
1950-х годов, также значительно пополнили познания туполевцев в разработке
высокосовершенных сверхзвуковых летательных аппаратов. Дальность полета из-
делия «121» составляла 3650 км, расчетная скорость 2700 км/ч, высота полета до
21 000 м.
Под руководством А. А. Туполева на беспилотной технике были решены
многие научно-технические проблемы и задачи, которые затем были использова-
ны в дальнейших разработках ОКБ:
• обеспечение устойчивости и управляемости при переходе от дозвуковых ско-
ростей к сверхзвуковым и наоборот (рис. 2.28), создание силовой конструк-
ции, наполненной топливом, для надежной работы в условиях длительного
кинетического нагрева;
• отработка газодинамической и аэродинамической компоновки регулируемо-
го, расположенного под центральной частью изделия воздухозаборника до
высоких сверхзвуковых скоростей.
Главный аэродинамик фирмы Г. А. Черемухин особо подчеркивает сле-
дующие разработки:
• расчеты по влиянию режима работы силовой установки на аэродинамические
коэффициенты на до- и сверхзвуковых скоростях — задача решалась впервые,
большой вклад в ее решение внес Михаил Яковлевич Блинчевский',
242
Создание аппаратов с
завязкой кр + ф через
гребенку типа «ласточкин
хвост» и с расположенным
в нчф дестабилизатором
изменяемой размерности
«CONCORDE», Ту-144
ПЕРЕКАЧКА
ТОПЛИВА
Рис. 2.28. Проблема обеспечения и управляемости
Получение потребных mzCy
при любой комплектации
изделия и для перехода М=1
• расчеты управляющих моментов трехлопастного оперения (с углом 120°) —
от правильного определения этих величин зависела точность выдерживания
траектории, следует отметить работу Кима Николаевича Бабурина-
Бельчикова',
• расчеты сил от тормозного парашюта, открывающегося на сверхзвуке. По
данным летных испытаний, коэффициент его сопротивления, отнесенный к
расчетной площади при переходе через звук, оставался неизменным — нон-
сенс! С помощью киноаппарата, фиксирующего поведение парашюта при
выпуске и переходе звука, установили, что фактическая площадь купола на
сверхзвуке существенно меньше, чем на дозвуке, что и объясняло постоянст-
во коэффициента сопротивления, отнесенного к одной площади. Большой
вклад в эту работу внес Евгений Яковлевич Пивкин.
Особая роль в создании семейства самолетов Ту-22М принадлежит самолету
Ту-22 (рис. 2.29).
21 июля 1958 г. этот новый самолет сделал первый полет в ЛИИ
им. М. М. Громова (г. Жуковский Московской области). Сверхзвуковой дальний
бомбардировщик Ту-22 представлял самую последнюю разработку конструктор-
ского бюро А. Н. Туполева в СССР.
Этот полет — начало длинной истории, известной как история программы
туполевских бомбардировщиков Ту-22.
Командование ВВС заказывает ОКБ Туполева новый двухдвигательный
бомбардировщик — ракетоносец дальнего действия, способный выполнять и за-
дачи воздушной разведки. Самолет должен быть способен кратковременно пре-
одолевать звуковой барьер.
Главный конструктор Д. С. Марков в этом проекте использовал низкорас-
положенное крыло со стреловидностью 55° и расположение двигателей над хвос-
товой частью фюзеляжа с обеих сторон от хвостового стабилизатора.
243
Рис. 2.29. Самолет Ту-22
Одноконтурные двигатели спроектировали в КБ моторостроения Добрыни-
на в г. Рыбинске. Первоначально использовались двигатели ТРДФ-ВД7М со ста-
тической тягой 16 000 кг, позднее их заменили на двигатели РД7М2, обладающие
большей тягой, — 16 500 кг. Обычная бомбовая нагрузка составляла 3 т, но при
уменьшении дальности полета самолет мог брать на борт до 13 т.
Герметичная кабина экипажа оснащалась катапультными креслами К-22,
опускающимися вниз, и находилась в передней части фюзеляжа, в которой раз-
мещались три члена экипажа: пилот, штурман и оператор управления вооружени-
ем. В фюзеляже размещался бомбовый отсек, в котором находились «кассетные
бомбодержатели». Под фюзеляж ракетоносца подвешивалась частично выступав-
шая ракета дальнего действия класса «воздух—поверхность». На разведыватель-
ном Ту-22Р вместо ракеты устанавливались фотокамеры, закрепленные внутри
фюзеляжа над смотровыми люками [37].
С 1959 по 1969 г. было построено 311 самолетов Ту-22. Известны его основ-
ные модификации:
• Ту-22 — дальний бомбардировщик;
• Ту-22К — ракетоносец;
• Ту-22П — самолет радиоэлектронного противодействия;
• Ту-22Р — разведчик-бомбардировщик, оснащенный оборудованием для ве-
дения разведки днем и ночью;
• Ту-22У — учебно-тренировочный самолет, у которого кабина инструктора
расположена выше и сзади кабины экипажа.
Индекс «Д» (например, Ту-22РД) стали использовать тогда, когда Ту-22 обо-
рудовали системой дозаправки топливом в воздухе. Заправка топливом обычно
производилась с самолета-заправщика Ту-16Н с помощью системы штанга-ко-
нус «ЗМС-2».
Самолет Ту-22 имел одну пушку НР-33 в хвостовой части. Пушка предназна-
чалась для оборонительных целей и дистанционно управлялась оператором сис-
тем оружия из герметичной кабины. Кроме пушки, оператор управлял пуском ра-
кет и сбросом авиабомб.
С двигателем РД7М2 с форсажной камерой Ту-22 на высоте 12 200 м разви-
вал максимальную скорость 1600 км/ч (Л/ = 1,51). С двигателями меньшей мощ-
ности ВД-7М скорость была на 190 км/ч меньше. Практический потолок самоле-
244
та составлял 13 500 м, дальность полета без дозаправки — 5650 км. Нормальный
взлетный вес — 85 т с возможностью увеличения до 92 т.
В середине 1960-х годов несколько Ту-22Р и Ту-22У были экспортированы:
девять в Ирак и семь в Ливию [37].
Дальние сверхзвуковые бомбардировщики-ракетоносцы
Ту-22МО, Ту-22М1, Ту-22М2
По первоначальным планам сверхзвуковой Ту-22 разрабатывался на замену
дозвуковому Ту-16. Но жизнь внесла свои коррективы. Программа Ту-16 хорошо
шла в производстве, самолет постоянно совершенствовался, оснащался перспек-
тивным вооружением, имел десятки модификаций. Ту-22, хотя и имел сверхзву-
ковую скорость, но только для короткого пролета над целью, к тому же опыт по-
казал, что в основном боевые действия осуществляются на дозвуковых скоростях,
близких к скоростям Ту-16. Так что Ту-22 не заменял, а дополнял Ту-16. К тому
же в ВВС быстро поняли, что за сверхзвуковую скорость Ту-22 дорого заплатил
дальностью полета и взлетно-посадочными характеристиками. Для реальной за-
мены массового высокоэффективного дозвукового Ту-16 требовался новый
сверхзвуковой тяжелый дальний бомбардировщик.
Учитывая, что в это время в СССР господствовало навязанное Н. С. Хруще-
вым направление — «Межконтинентальные баллистические ракеты решают всё,
авиация не нужна!», А. Н. Туполеву пришлось вместе с руководством ВВС пойти
на хитрость. Разработку знаменитого семейства сверхзвуковых бомбардировщи-
ков-ракетоносцев «Бэкфайер» (такое название они получили в НАТО) выдавали
за модернизацию Ту-22. Главнокомандующий ВВС /7. С. Кутахов очень под-
держивал А. Н. Туполева. Хотя в конечном счете туполевцы — ветераны, участво-
вавшие в работах по Ту-22М, сравнивая Ту-22 и Ту-22М, шутили: «От Ту-22 оста-
лась только строительная горизонталь самолета!» Из крупных агрегатов от Ту-22
на самом деле были использованы только носовая стойка шасси и створки бом-
боотсека.
Андрей Николаевич поручает руководство новым проектом Д. С. Маркову
Противоречивые, казалось бы, несовместимые требования заказчика — большая
дальность, высокая скорость (до М = 2), возможность полета на малых высотах с
высокими околозвуковыми скоростями, возможность базирования на полевых
аэродромах — указывали на необходимость применения крыла изменяемой гео-
метрии. Такое решение значительно усложняло конструкцию, существенно уве-
личивало вес пустого самолета, поднимало стоимость, требовало многочисленных
исследований и отработок по выбору положения шарнира по размаху и хорде кры-
ла, компоновке ниши для уборки консоли в центральной части самолета, отработ-
ке надежной системы, обеспечивающей синхронную перекладку консолей и т. д.
Смотрелось множество самых различных схем и компоновок самолета [53].
Здесь уместно вспомнить, что Андрей Николаевич часто поручал проработку ка-
кого-то сложного проекта, проблемы, вопроса разным группам, которыми руко-
водили сильные конструкторы. Так, проект первого сверхзвукового пассажир-
ского самолета Ту-144 длительное время параллельно вели подразделения
С. М. Егера, признанного лидера ОКБ в проектировании туполевских пасса-
жирских машин, и подразделение Алексея Андреевича Туполева, доказавшего
своими сверхзвуковыми и гиперзвуковыми разработками право на руководство
этим выдающимся для своего времени проектом.
245
Мало кто знает, что в тот момент, когда по проекту Ту-22М принимались та-
кие важные компоновочные решения, как выбор положения оси вращения пово-
ротной консоли края по размаху крыла, сочетание этой консоли с центральной
частью самолета в убранной на максимальную стреловидность консоли и т. д„
Алексей Андреевич Туполев пришел утром в совершенно секретную комнату, где
его компоновщики А, Л. Пухов и Г. А. Соколова работали над Ту-144. (В то
время общие виды, компоновки самолета Ту-144 были совершенно секретными.)
Немного смущаясь необычным видом исходного материала (на плохо обрезан-
ном крохотном (в 3 спичечных коробка) кусочке пергамина жирным карандашом
была нарисована плановая проекция самолета с двумя положениями поворотных
консолей) и поэтому мило улыбаясь, Алексей Андреевич сказал: «Вот, Андрей
Николаевич, вечером вчера по «45-й» такой представилась компоновка. Быстро
прорисуйте и принесите мне». Конечно, все работы были отложены, и к вечеру
общий вид был передан А. А. Туполеву.
То, что в работе по Ту-22М не было мелочей, все делалось по высшим мер-
кам, характеризует такой эпизод.
Одновременно с работами по Ту-22 в США разрабатывали самолет F-111.
С. М. Егер очень внимательно следил за этой разработкой, так как по внешнему
облику и характеристикам F-111 во многом напоминал Ту-22МЗ. Сергей Михай-
лович скрупулезно, методически собиравший всю интересную для него зарубеж-
ную информацию, рано утром (еще не начался рабочий день) пригласил к себе
А. Л. Пухова, который подрабатывал в БНТИ ОКБ переводами английских тех-
нических статей: t
«Саша, вот очень интересный материал по F-111. Я Вас прошу лично его пе-
ревести. И передает зарубежный журнал, почти целиком посвященный про-
грамме F-111».
Пухов А. Л. отвечает: «Сергей Михайлович! Вчера на фирму пришли 2 самых
последних номера «Технической информации» БНТИ ЦАГИ, оба номера — почти
дословный перевод этого журнала». Егер С. М. ответил: «Я знаю, я их уже видел.
Но мне нужен абсолютно дословный перевод. Вы переведите коряво, но отсле-
живая детали, а в БНТИ переводчик, не зная сути, переводит ориентировочно,
затем редактор придает литературности, ну и потом Ружицкий Е. И. (редактор
БНТИ ЦАГИ) тоже наводит лоск!»
И вот, наконец, наступил момент — первый опытный самолет Ту-22М ушел в
небо. Главный конструктор Б. Е. Леванович вспоминает [54]:
«Пролетели напряженные дни отработок, гонок двигателей, различных про-
верок сложной техники специалистами, и настал день 30 августа 1969 года.
В этот солнечный день первый экипаж будущего ракетоносца-бомбардировщи-
ка занял свои, еще не обжитые, рабочие места в кабинах: командир корабля
В. Борисов, помощник командира (правый летчик) Б. Веремей, штурман-нави-
гатор Л. Сикачев, штурман К. Щербаков».
Под руководством С. М. Егера компоновали, оценивали ЛТХ самолета та-
кие маститые сегодня ведущие специалисты ОАО «ТУПОЛЕВ», а тогда совсем
молодые В. А. Максимов, Б. А. Грибанов, Н. И. Шаврова. Ныне начальник
отдела «Проектирование» ОАО «ТУПОЛЕВ» Б. А. Грибанов вспоминает, что
массовая эксплуатация этого самолета в строевых частях ВВС выявила ряд суще-
ственных недостатков этого самолета: низкие показатели надежности и отказобе-
зопасности некоторого бортового оборудования и отдельных агрегатов самолет-
ных систем, малый ресурс двигателей силовой установки. Кроме того, система
246
катапультирования не обеспечивала спасение экипажа при аварийных ситуациях
на режимах взлета и посадки самолета.
Выявленные в эксплуатации недостатки самолета Ту-22, а также новые требо-
вания ВВС по увеличению максимальной скорости полета, увеличению боевого ра-
диуса действия и выживанию самолета в условиях огневого и радиоэлектронного
противодействия потребовали проведения глубокой модернизации этого самолета.
Вот почему в 1962 г. Решением ВПК при ЦК КПСС и СМ СССР была одоб-
рена и запущена в производство Программа глубокой модернизации самолета
Ту-22.
Руководство по модернизации самолета Ту-22 было возложено на главного
конструктора Д. С. Маркова, опорой которого был отдел технических проектов
ОКБ, возглавляемый С. М. Егером.
На начальной стадии работ по модернизации самолета Ту-22 аэродинамиче-
ская компоновка самолета не претерпела существенных изменений. Были изме-
нены воздухозаборники и мотогондолы, в которых размещались новые двигатели
НК-106, разработанные Моторостроительным конструкторским бюро под руко-
водством Генерального конструктора Н. Д. Кузнецова.
Следует сказать, что в начале 1960-х годов конфронтация США и стран
НАТО с Советским Союзом и странами—участницами Варшавского договора
продолжала усиливаться. Из бюджетов этих стран выделялись громадные средст-
ва на военные программы. Это позволило США и странам НАТО развернуть ши-
рокую программу по созданию глубоко эшелонированной системы ПВО на Севе-
ро-Американском континенте и на территории стран Западной Европы.
Для обеспечения стратегии сдерживания противника и нанесения ответного
удара возмездия в случае нападения потребовался ударный самолет, способный
реагировать на создававшуюся систему ПВО.
Поэтому в тактико-техническое задание ВВС на модернизацию Ту-22 были
внесены дополнительные требования, а именно:
• обеспечение многорежимного полета при выполнении боевого задания;
• включение в состав ударного вооружения самолета ракет «воздух—поверх-
ность», т. е. самолет бомбардировщик должен превратиться в бомбардиров-
щик-ракетоносец.
Под многорежимностью полета понималось обеспечение возможности по-
лета по комбинированному профилю полета, т. е. полет от аэродрома вылета до
зоны ПВО противника на дозвуковом крейсерском режиме, преодоление зоны
ПВО на режиме маловысотного полета, затем на форсажном режиме подъем на
максимальную высоту с выходом на сверхзвуковой крейсерский режим полета,
пуск ракетного оружия и по комбинированному профилю полета возвращение на
аэродром вылета.
Для обеспечения многорежимности полета самолета Ту-22 А. Н. Туполев по-
ручил отделу технических проектов проработать вариант с крылом изменяемой
геометрии путем установки на крыле шарниров поворота консолей крыла. Одна-
ко проработка варианта модернизации самолета Ту-22 и проведенные расчеты
аэродинамических и летно-технических характеристик самолета не удовлетворя-
ли требований ВВС. И тогда А. Н. Туполев совместно с С. М. Егером и
Д. С. Марковым приняли смелое решение о разработке нового самолета по новой
аэродинамической схеме с сохранением индекса Ту-22М.
Разработка проекта нового дальнего ударного авиационного комплекса по-
требовала нового подхода к проектированию, а именно — метода системного
247
проектирования. Одновременно с проектированием самолета проектировались и
создавались:
• двигатели для силовой установки самолета;
• функциональные самолетные системы;
• автоматическая бортовая система управления;
• функциональное бортовое радиоэлектронное оборудование;
• ракетное оружие средней дальности действия класса «воздух—поверхность»;
• новые конструкционные материалы;
• новые технологические процессы;
• новое технологическое оборудование;
• новые производственные и технологические цеха и участки.
В сжатые сроки отделом технических проектов — группой под руководством
Г. В. Махоткина — были проведены параметрические исследования по опре-
делению оптимальных геометрических и весовых характеристик проектируемого
самолета и разработан общий вид с крылом изменяемой геометрии и с боковыми
воздухозабор никами.
В качестве силовой установки самолета были использованы два вновь разра-
батываемых под этот самолет двигателя НК-20 конструкции Н. Д. Кузнецова с
максимальной взлетной форсажной тягой 20 т одного двигателя.
Во время разработки вариантов общего вида самолета А. Н. Туполев каждый
день с утра посещал отдел технических проектов, проверял работу конструкто-
ров-разработчиков и вносил свои коррективы. С учетом замечаний и внесенных
корректив А. Н. Тупрлева общий вид самолета перечерчивался.
Разработчиком общего вида самолета Ту-22М (рис. 2.30), утвержденного
А. Н. Туполевым, был ведущий конструктора. Д. Воробьев.
После утверждения общего вида самолета Ту-22М в работу по проектирова-
нию комплекса были включены все структурные подразделения ОКБ, которые по
мере необходимости начали подключать к этим работам предприятия соразработ-
чиков в соответствии с кооперацией, утвержденной МАП и комиссией ВПК.
Были разработаны и изготовлены аэродинамические модели для отработки
оптимального профиля крыла и проведены исследования в трубах ЦАГИ. В ре-
зультате этих работ было создано крыло самолета Ту-22М с аэродинамическим
качеством на дозвуковом крейсерском режиме таким же, как на лучшем в те годы
пассажирском самолете Ту-154. Были изготовлены аэродинамические модели
для отработки в трубах ЦАГИ взлетно-посадочной механизации крыла и для ис-
следования характеристик самолета в сверхзвуковом полете.
Работы в ЦАГИ проводились под руководством В. Г. Микеладзе,
Р. И. Штейнберга, Ю. А. Якимова, В. И. Васильева при непосредствен-
ном контроле со стороны начальника ЦАГИ Г. П. Свищева и его заместителя
Г. С. Бюшгенса.
Для сокращения сроков разработки конструкторской документации самоле-
та Ту-22М и постройки опытной партии самолетов максимально использовалась
конструкторская документация самолета Ту-22, которая дорабатывалась под
новые обводы самолета. В конструкции планера самолета и в самолетных систе-
мах максимально использовались полуфабрикаты, механизмы и агрегаты от са-
молета Ту-22.
Одной из существенных проблем в проекте нового самолета была проблема
создания узла поворота консоли крыла. Шарнирный узел должен был восприни-
мать и передавать на неподвижную часть крыла большие изгибающие и крутя-
248
Рис. 2.30. Общий вид самолета Ту-22МЗ
249
щие моменты от воздушных нагрузок на консоли крыла, при этом вес конструк-
ции должен быть минимальным, а ресурсные характеристики такими же, как у
конструкции планера самолета. В короткие сроки эта проблема была решена, а
разработанный узел поворота был изготовлен и в лабораторных условиях прошел
все необходимые испытания и показал высокие характеристики прочности, над-
ежности и ресурса.
Не меньше проблем было и при разработке системы управления самолетом.
Над решением этих проблем трудился коллектив под руководством Л. М. Род-
нянского совместно со специалистами ЦАГИ и специалистами МИЭА — разра-
ботчиками автоматической бортовой системы управления (АБСУ-145). Созда-
ваемая система управления, ее отдельные узлы и агрегаты отрабатывались и про-
ходили испытания на многочисленных стендах. Работами по созданию стендов
системы управления и испытаниями на этих стендах руководил В. Я. Воронов.
В 1967 г. была закончена постройка полномасштабного деревянного макета
самолета и проведена макетная комиссия заказчика, по положительному заклю-
чению которой было принято решение приступить к изготовлению опытной пар-
тии самолетов с учетом замечаний и дополнительных требований этой комиссии.
Структурными подразделениями ОКБ были разработаны все необходимые
стенды для отработки систем, механизмов и агрегатов строящегося самолета и про-
водились интенсивные испытания. Был разработан и построен пилотажный стенд
для облегчения подготовки экипажа летчиков-испытателей к первому вылету.
Постройка первого опытного образца самолета Ту-22М была закончена в
июле 1968 г., и сразу же приступили к интенсивной наземной отработке всех сис-
тем самолета и самолетного оборудования.
Первый вылет самолета Ту-22М состоялся 30 августа 1969 г. Всего опытных
самолетов Ту-22М «0» — нулевой опытной партии было выпущено 9 экземп-
ляров.
На самолетах серии «0» функциональное радиоэлектронное оборудование
для боевого применения самолета не устанавливалось.
Эта серия предназначалась для проверки правильности принятых конструк-
тивно-технологических решений, а также для отработки самолетных систем, ис-
пытаний двигателей и оценки летно-технических характеристик.
К моменту постройки самолетов этой опытной партии еще не были реализо-
ваны мероприятия по обеспечению создания этого самолета, а именно еще не бы-
ло налажено производство проката чистых и особо чистых алюминиевых сплавов,
магниевых сплавов, титановых сплавов, большеразмерных заготовок и поковок,
не было готово технологическое оборудование для механической и термической
обработки длинноразмерных деталей и клепальные автоматы для изготовления
большеразмерных панелей. Поэтому конструкция планера самолета оказалась пе-
ретяжеленной, а технология, применявшаяся при стапельной сборке самолетов,
не обеспечила того уровня качества внешней поверхности, который требуется для
получения минимального аэродинамического сопротивления.
По результатам испытаний этой партии было принято решение изменить
технологию стапельной сборки самолета и провести доработку конструкторской
документации для снижения веса конструкции планера.
Над разработкой новых технологических процессов, созданием новых про-
изводственно-технологических участков по производству конструкций из ком-
позиционных материалов и разработкой нового технологического оборудова-
ния трудился коллектив специалистов во главе с главным технологом ОКБ
250
С. А. Вигдорчиком совместно со специалистами отраслевых институтов
МАП - НИАТ, ВИАМ, ВИЛС и др.
По обновленной конструкторской документации была выпущена новая
опытная партия самолетов, которая получила индекс «единичка», т. е. Ту-22М1.
Эта опытная партия предназначалась для проведения полномасштабных летных
испытаний, и 28 июля 1971 г. был совершен первый вылет самолета этой партии.
Всего было выпущено 9 самолетов.
Для сокращения объемов и сроков проведения летных испытаний самолета
Ту-22М в НИ НАС были разработаны стенды полунатурного и натурного моде-
лирования работы бортового радиоэлектронного оборудования, на которых
под руководством Е. А. Федосова, Е. И. Чистовского, Б. П. Киселева и
В. И. Червина проводилась отработка и опережающие испытания этого обору-
дования.
Во время проведения летных испытаний самолета Ту-22М он был сфотогра-
фирован разведывательными спецслужбами США и получил кодовое название
НАТО «Backfire» — обратная вспышка (задний огонь). Это название самолет по-
лучил за использование в компоновке самолета дистанционно управляемой кор-
мовой пушечной установки с двумя пушками ГШ-23 и радиолокационным при-
целом «Криптон», расположенными над соплами двигателей в корневой части
вертикального оперения.
Основным летчиком-испытателем опытных самолетов Ту-22М был лет-
чик-испытатель Б. И. Веремей. За испытания и доводку самолета Ту-22М ему
было присвоено звание Героя Советского Союза.
Во время проведения испытаний по программе продолженного взлета при
отказе одного из двигателей один самолет этой опытной партии был потерян
из-за ошибочных действий экипажа. Командир самолета летчик-испытатель
ГНИКИ ВВС полковник Б. Л. Львов получил повреждение позвоночника.
Правый летчик — летчик-испытатель Б. И. Веремей практически не пострадал.
После лечения полковник Б. Л. Львов продолжил свою летную службу в ВВС.
Если на «0»-й опытной партии самолетов поворотные узлы на крыле самолета
были закрыты обтекаемыми козырьками, то на «1»-й опытной партии они были
сняты, так как вносили существенное увеличение аэродинамического сопротив-
ления самолета. В районе стыка подвижных и неподвижных частей крыла «1»-й
опытной партии, над узлами поворота, для увеличения жесткости панелей, закры-
вающих узлы поворота, были установлены аэродинамические ребра. В процессе
летных испытаний было выявлено вредное влияние носовых частей этих ребер на
продольную устойчивость самолета и на аэродинамическое сопротивление. По-
этому носки этих ребер были обрезаны, а также была уменьшена их высота.
По результатам испытаний этой опытной партии самолетов было принято
решение о внесении в конструкторскую документацию следующих конструктив-
ных изменений:
• увеличение размаха каждой консоли крыла на 1,2 м для повышения дальнос-
ти полета самолета на дозвуковом крейсерском полете;
• доработка носовых частей профилей крыла по всему размаху для увеличения
скоростных характеристик самолета и улучшения характеристик продольной
устойчивости;
• усиление конструкции центроплана и установка узлов подвески пилонов под
ракеты;
251
• доработка узлов поворота консолей крыла в связи с увеличением размаха
консоли, а также для уменьшения щели и ступеньки между подвижной и не-
подвижной частями крыла;
• замена двигателей НК-20 на модернизированные двигатели НК-22 с макси-
мальной форсажной тягой 22 т каждый и с уменьшенными расходами топли-
ва на крейсерских режимах полета.
Во время летных испытаний самолет Ту-22М1 получил высокую летную
оценку летных экипажей как удобный и легкий в управлении и эргономичный по
компоновке приборных досок и пультов управления, а также по обзору внека-
бинного пространства через фонарь кабины экипажа.
После проведения доработок конструкторской документации по вышепере-
численным пунктам самолет был запущен в серийное производство с индексом
Ту-22М2. На этой модификации самолета были установлены вертикальные пане-
ли регулирования входа воздуха в каналы воздухозаборников при различных ре-
жимах полета и работы двигателей.
После запуска в серийное производство ударного авиационного комплекса
Ту-22М2 работы в ОКБ по совершенствованию и наращиванию боевых возмож-
ностей комплекса, по увеличению выживаемости комплекса в условиях огневого
и радиоэлектронного противодействия не прекращались и не ослабевали по на-
пряженности.
В МКБ Н. Д. Кузнецова совместно с ЦИАМ им. П. И. Баранова продолжа-
лись работы по совершенствованию двигателей. Была разработана и запущена в
производство модификация двигателя НК-25 с максимальной взлетной форсаж-
ной тягой 25 т с повышенными КПД ступеней компрессора и с увеличенной тем-
пературой газов перед турбиной.
Для размещения двигателей НК-25 на самолете была разработана конструк-
торская документация по доработке конструкции фюзеляжа и по изменению гео-
метрии воздухозаборников. Были разработаны новые воздухозаборники с гори-
зонтальным клином, конструкторская документация по довооружению самолета
новыми ракетами с размещением их на МКУ-6-5У внутри грузоотсека и по за-
креплению бомбового вооружения на внешней подвеске под крылом и на фюзе-
ляже под каналами воздухозаборников.
Проводились работы по перекомпоновке бортового радиоэлектронного обо-
рудования в технических отсеках, вызванные необходимостью наращивания и
совершенствования ранее установленного оборудования, а также заменой на но-
вые образцы этого оборудования.
Комплекс всех проведенных работ позволил создать новую модификацию
комплекса, получившую индекс Ту-22МЗ. Эта модификация была запущена в се-
рийное производство и производилась массовой серией (рис. 2.31).
На самолете Ту-22МЗ экипаж под управлением летчика-испытателя
Б. И. Веремея совершил беспосадочный полет Москва — Дальний Восток —
Москва с несколькими дозаправками самолета топливом в полете. Этот полет
был зафиксирован американскими разведывательными спутниками. И на пере-
говорах об ограничении стратегических вооружений — ОСВ-2 между США и
СССР американская сторона настаивала о включении самолета Ту-22МЗ в класс
стратегических ударных авиационных комплексов. Для устранения разногласий
Правительством СССР было принято решение о демонтаже системы дозаправки
топливом в воздухе на самолетах Ту-22МЗ.
252
Рис. 2.31. Компоновка самолета Ту-22МЗ
На самолетах, находящихся в строю ВВС, демонтаж системы топливозаправ-
ки в воздухе был выполнен, а на вновь строящихся самолетах эта система не уста-
навливалась.
На базе самолета Ту-22МЗ были разработаны модификации: самолета-поста-
новщика помех и самолета-разведчика Ту-22МР.
При разработке проекта самолета-разведчика Ту-22МР была осуществлена
оригинальная компоновка функционального разведывательного оборудования с
контейнерным размещением внутри грузоотсека самолета. Контейнерное разме-
щение всего разведывательного оборудования внутри грузоотсека самолета было
253
разработано ведущим инженером-конструктором В. Ф. Корнеевым совместно
со специалистами предприятий—разработчиков этого оборудования под руко-
водством заместителя главного конструктора Г. В. Махоткина.
Каждая модификация из семейства Ту-22М предназначалась для определен-
ной цели.
Самолеты серии Ту-22МО использовались для подготовки процессов серий-
ного производства, для проведения летных испытаний по определению лет-
но-технических характеристик, данных по устойчивости и управляемости само-
лета, для испытаний и отработки систем силовой установки других систем, преж-
де всего системы вооружения, включая сбросы бомб и запуски ракет.
Испытания показали, что ЛТХ Ту-22МО существенно ниже требуемых, а
вследствие недостаточной прочности крыла взлетный вес вместо требуемых 121 т
достигает всего лишь 95 т.
Срочно разработанный предсерийный вариант Ту-22М1 отличался от
Ту-22МО главным образом усиленным крылом, увеличенным размахом крыла,
новыми двигателями НК-22, введением трех рядов створок подпитки вместо од-
ной створки на более скошенном воздухозаборнике. Кроме того, появились
внешние узлы подвески ракет на нижней поверхности крыла, самолет смог нести
12 т бомбовой нагрузки. Автопилот был заменен АБСУ-145.
Самолеты Ту-22М1 использовались для дальнейших испытаний по опреде-
лению ЛТХ и характеристик силовой установки, для отработки авионики, систе-
мы АБСУ, электромагнитной совместимости авиационного оборудования. Боль-
шой объем летных испытаний прошел по отработке сброса бомб и запуска ракет.
Несколько Ту-22М были поставлены в ВМФ для апробации в морских операци-
ях. Эта модификация самолета (Ту-22М1) была очень важна в подготовке боевого
серийного варианта Ту-22М2.
Внешне Ту-22М2 мало отличался от Ту-22М1: уменьшенный обтекатель ос-
новных стоек шасси больше не продлевался за заднюю кромку крыла, форкиль
был поделен на 3 секции для ослабления влияния полетных деформаций, верх
самолета был покрашен в серый цвет, нижняя поверхность — в белый (для того
чтобы обезопасить самолет от вспышки взрыва сброшенных им ядерных бомб).
Гораздо более значительное отличие было по внутреннему содержанию: само-
лет был полностью оборудован и по вооружению, и по электронному оборудова-
нию, как требовал заказчик. Тормозной парашют из основания киля был перенесен
в спецотсек хвостовой части фюзеляжа, а место контейнера тормозного парашюта
заняла универсальная кормовая установка с двумя пушками для защиты самолета
от атак сзади. Наступательное вооружение выглядело тоже достаточно мощно:
• 3 крылатые ракеты (2 — на крыле, 1 — в отсеке);
• 12...21 т бомб в разнообразной комплектации.
«Ударная сила Ту-22М2 была эффектно продемонстрирована при показе новой тех-
ники высшему военному и партийному руководству в июне 1971 г. Всего лишь один бом-
бардировщик обрушил на полигон 20 тонн бомб, превратив в крошево танки и БТР, изо-
бражавшие танковый полк на марше. От взрывов мощных «пятисоток» вылетели все
стекла в павильоне, сооруженном для высоких гостей. Пилотировавший Ту-22М2
Б. Г. Подчиненов был удостоен рукопожатия Л. И. Брежнева, которому особенно понра-
вился самолет, сбросивший у него на глазах целый вагон бомб» [55].
Для получения требуемых ЛТХ также было предпринято весовое
«обдирание» — с выплатой вознаграждения. В результате вес пустого самолета
был снижен еще на 2 т.
254
Рис. 2.32. Компоновка самолета ТУ-22М3
Основные характеристики Ту-22МЗ
Первый полет, г...............1977
Двигатели..................2 х НК-25
Максимальная тяга
на форсаже, кгс........... 2 х 25 000
Длина со штангой, м..........42,46
Размах крыла, м:
максимальный.............34,28
минимальный...............23,3
Площадь крыла, м2:
максимальная........... 183,58
минимальная............. 175,8
Стреловидность крыла
по передней кромке, град......20 до 65
Взлетный вес, т..................124
Максимальная
скорость, км/ч...................2000
Рабочий потолок, м............. 13 300
Длина разбега, м.................2100
Длина пробега, м ..........1200... 1300
Экипаж, чел.........................4
Сильно улучшили ЛТХ самолета Ту-22М2 и замена, выполненная в ходе се-
рийного производства, профилей крыла и горизонтального оперения: профили
стали походить на суперкритические, имели более скругленную переднюю кром-
ку. Также с 34-го самолета Ту-22М2 отказались от раздвижки пары колес в сред-
ней части опоры основной стойки шасси. Раздвижка предназначалась для умень-
шения нагрузки на полосу, чтобы самолет мог садиться на небетонированные
аэродромы, но испытания показали, что эффект от раздвижки оказался незначи-
тельным, и от этой идеи отказались.
Таким образом, самолет Ту-22МЗ явился продолжением многолетней работы
по целому семейству самолетов. Его компановка представлена на рис. 2.32, где
/ — радиопрозрачный обтекатель антенны РЛС; 2 — эксплуатационные люки;
3 — фара подсветки заправочной штанги; 4 — приемник воздушного давления;
5 — кабина летчиков; 6 — антенна УКВ радиостанции и АРК-15; 7 — кабина
штурмана и штурмана-оператора; 8 — обтекатель бомбардировочного прице-
ла ОПБ-15; 9 — проблесковые маяки ИМ (белый свет); 10 — створки дополни-
тельного забора воздуха; 11 — форкиль; 12 — радиопрозрачные обтекатели; 13 —
аэродинамический гребень; 14 — обтекатель узлов крепления шасси; 15 — меха-
низированная выхлопная створка ВСУ (положение — открыта); 16 — обтекание
антенн; 17— аэронавигационный огонь (белый); 18— обтекатель с воздухозабор-
255
ником для ВВР; 19— телевизионный прицел ТП-1 (закрыт металлической штор-
кой); 20— обтекатель радиолокационного прицела; 21 — универсальная кормо-
вая установка УК-9А; 22 — контейнер спасательной лодки ЛАС-5; 23 — сигнали-
затор заправки (красный огонь); 24 — надстройка стабилизатора; 25 — опорный
узел стабилизатора (балка стабилизатора условно не показана).
При разработке и производстве семейства самолетов Ту-22М конструктор-
ское бюро А. Н. Туполева вместе с ЦАГИ и другими головными институтами
авиационной промышленности России добилось выдающихся достижений в це-
лом ряде областей и направлений авиационной науки, техники, технологий.
Здесь уместно привести высказывания главных специалистов ОКБ А. Н. Ту-
полева о работе по самолетам Ту-22М.
Главный «моторист», начальник моторного подразделения ОКБ в 1972—
1996 гг. Владимир Михайлович Буль вспоминает о некоторых особенностях
отработки силовой установки самолета Ту-22МЗ:
«При создании модификации Ту-22МЗ силовая установка по сравнению с
Ту-22 была существенно изменена.
Были установлены более экономичные на режимах дальнего полета двух-
контурные (турбовентиляторные) двигатели НК-22 с тягой R = 22 т на форсаже,
а на модификации Ту-22МЗдвигатели НК-25 с R = 25 тс несколько повышенной
степенью двухконтурности, повышенной степенью сжатия и другими улучше-
ниями.
Двигатели были размещены внутри задней части фюзеляжа, что значитель-
но уменьшило общий мидель и снизило донные потери обтекания.
Воздухозаборники (ВЗ) были размещены перед корневыми частями крыла
по бокам фюзеляжа со сливом с него пограничного слоя. ВЗ сверхзвукового ти-
па внешнего сжатия, регулируемые с плоскими подвижными панелями и с рас-
четным числом полета М -2. Входные кромки — острые (г-2,5 мм), с электро-
обогревом. На Ту-22М2 расположение клина торможения воздуха перед ВЗ бы-
ло вертикальным, а на М3 — горизонтальным (более экономичным).
Три секции длинного воздушного канала в фюзеляже соединены между со-
бой телескопически с уплотнением кольцевыми резиновыми трубками. Задняя
часть ВЗ присоединялась к двигателю также телескопически с уплотнением
кольцевым «зубом» (на торце двигателя), вдавливаемым при монтаже в резино-
вое кольцо.
Для снижения потерь тяги на взлете в средней части ВЗ размещены 9 авто-
регулируемых задемпфированных створок подпитки, автоматически открываю-
щихся внутрь при работе на месте и при малых скоростях полета.
При доводке двигателей мы столкнулись с рядом новых проблем, которые
были решены в процессе стендовых летных испытаний:
а) недобор тяги в первые минуты выхода двигателя на повышенный режим
из-за неравномерного прогрева различных деталей двигателя;
б) повышенные вибрации отдельных двигателей (из-за дисбаланса рото-
ра), причем эти вибрации проявились только на самолете. Как было установле-
но последующим совместным с мотористами анализом, этот дисбаланс не вы-
являлся на стенде, так как лемнискатный стендовый воздухозаборник (толсто-
стенная тяжелая конструкция, жестко соединенная с корпусом двигателя)
жестко крепился мощными хомутами к раме стенда, заделанной в фундамент,
что препятствовало колебаниям корпуса двигателя. После введения на стенде
крепления воздухозаборника (лемнискаты) по самолетному типу — с развяз-
кой — случаи дисбаланса стали четко выявляться на стенде;
256
в) перегрев масла в задней опоре теплонапряженного двигателя из-за ее
недостаточной теплоизоляции. Усиленная теплоизоляция (так называемая
«шапка Мономаха»), повышенная подача охлаждающего масла («душевание»)
позволили снять этот недостаток;
г) выброс масла из дренажа масляной системы. Это явление нередко
встречается на двигателях, особенно на больших высотах полета, а на двигате-
лях семейства НК дефект усугублялся некоторым «заеданием» торцевых и ради-
ально-торцевых контактных уплотнений валов при тепловых деформациях вну-
три двигателя во время быстрого снижения скорости после сверхзвукового по-
лета и поступления в двигатели холодного воздуха. На Ту-22М со сравнительно
нечастыми и недолгими сверхзвуковыми полетами этот недостаток проявлялся
не так сильно, как впоследствии на Ту-144 при сильном прогреве двигателей в
длительном полете с М = 2;
д) устойчивость горения в форсажной камере двухконтурного двигателя.
Топливная система включала 9 групп кессонных и мягких топливных баков,
расположенных в крыле и фюзеляже. Была установлена и детально отработана
и доведена система заправки топливом в полете по схеме шланг с конусом —
штанга. Эта система была снята с самолета в соответствии с договором ОСВ-2.
Длительной отработки и доводки потребовали ресурс мягких баков, гибких
шлангов; работоспособность дренажной системы со специальными петлями
дренажных труб во избежание выброса топлива при перегрузках в полете и при
рулежке на земле.
Профилировка сверхзвукового ВЗ, створок подпитки и обеспечение про-
чности ВЗ (в том числе при возможных помпажных нагрузках от двигателя) по-
требовали многочисленных модельных исследований и натурных испытаний,
в том числе испытаний двигателя с натурным самолетным воздухозаборником
(с длинными каналами) на стенде моторного завода. Стендовые и летные испы-
тания ВЗ показали, в частности, что необходимо строгое соблюдение малых
зазоров в кольцевых полостях стыков секций ВЗ, где расположены уплотняю-
щие телескоп резиновые трубки, во избежание выдавливания этих трубок под
перепадом давлений. Некоторой прочностной доводки потребовали также низ-
ковольтовые электронагревательные элементы на тонких кромках передней
части ВЗ.
Летные испытания показали, что температура всасываемого в двигатели
воздуха может существенно повышаться от нагретого солнцем бетона (на
5... 8 °C) и этот нагрев следует учитывать при расчете тяги двигателя на взлете.
В результате большого комплекса исследовательских, конструкторских и
испытательно-доводочных работ была создана эффективная и надежная сило-
вая установка самолетов Ту-22М. Этой работой руководил заместитель Гене-
рального конструктора К. В. Минкнер, деятельное творческое участие прини-
мали конструктора В. М. Буль, Е. Р. Губарь, В. А. Леонов, Б. С. Иванов,
А. А. Курьянский, А. П. Балуев, Е. М. Миндлин, В. С. Тимофеев, П. Г. Климков,
Н. Н. Фураева, Ю. Г. Иванов, Б. П. Бузаев, В. Н. Андрианов, Н. А. Ремизов,
А. С. Виноградов, Е. Е. Кузьмин, М. И. Гусихин, Э. С. Березанский, Р. М. Белкин,
А. И. Андреев, А. М. Шумов, Н. И. Додурин, Б. Н. Варгин, В. М. Прошин».
Главный технолог ОКБ А. Н. Туполева Владимир Васильевич Садков
вспоминает:
«1.0. Был реализован принцип параллельного проектирования, когда одно-
временно с разработкой узла, детали и т. д. рядом с разработчиком работали
конструктора стапельной оснастки и технологи с серийного завода, а также кон-
структора с металлургических заводов, которые проектировали штампы и гото-
257
9 Авиация ВВС России и научно-технический прогресс
вили другую технологическую документацию для изготовления штамповок,
прессованных профилей, литья и др. Аналогично была организована работа и
поставщиков всех неметаллических узлов (обтекателей, остекления и г д.).
2.0. Наиболее критичный в ресурсном отношении стык центроплана со
средней частью крыла был полностью перепроектирован за счет использования
в конструкции так называемых «угловых» панелей из крупногабаритных штампо-
вок и заменой фланцевого стыка на двухсрезный.
3.0. С учетом того, что изначально первый самолет строился в г. Казани, а
не в ОКБ, то большое внимание было уделено лабораторно-стендовой отработ-
ке новых конструктивно-технологических решений и среди этих работ главное
место занимал узел поворота. На кинематическом стенде были отработаны все
элементы конструкции, материалов, смазки и регламента технического обслу-
живания в эксплуатации.
4.0. При разработке самолета использовались все новые достижения в об-
ласти технологии и материаловедения, среди которых особенно хотелось упо-
мянуть следующее:
была освоена технология изготовления деталей из теплопрочного алюми-
ниевого сплава АК4-1, который являлся основным конструкционным материа-
лом для самолета Ту-144;
была освоена уникальная технология штамповки взрывом сложных деталей
планера из листовых материалов. Для этих целей на территории завода был по-
строен специальный бассейн, где изготавливались натурные детали, такие как
монолитные окантовки крышки фонаря, шпангоутов и др.;
было освоено изготовление «точных» штамповок среднего размера из тита-
нового сплава ВТ-22 с коэффициентом использования металла (КИМ) более
0,4, при этом директивно не допускалось проектирование деталей из штампо-
вок с КИМ < 0,4.
Практически полностью отказались от полива кессон-баков герметиками за
счет внедрения топливостойкого грунта ЭПО214 и новых схем герметизации.
Коррозионная стойкость конструкции достигалась за счет специальных режи-
мов термической обработки AL-сплавов.
Была проведена кропотливая работа по улучшению местной аэродинамики
за счет целого ряда конструктивных и технологических мероприятий, таких, как:
уменьшение количества выступающих надстроек, сглаживания уступов, ликви-
дации щелей, ступенек в разъемных и неразъемных стыках. Благодаря этому
были созданы конструкция и технология, обеспечивающие все повышенные
требования ТУ на форму и качество внешней поверхности самолета.
Запомнилось мне на Коллегии выступление ведущего летчика-испытателя
Василия Петровича Борисова, который скромно, но убежденно говорил (и отве-
чал на вопросы) о характеристиках самолета и двигателей, и к его мнению при-
слушивались.
Однажды перед самым Новым годом меня пригласил к себе главный конст-
руктор Марков Дмитрий Сергеевич, рассказал о трудностях освоения в Казани
штамповочных деталей из листового материала и вежливо спросил: «Не сможе-
те ли Вы подъехать туда и разобраться?»
Разве можно было ответить отрицательно такому ведущему авиаконструк-
тору. До Нового года я сумел съездить в Казань, решить там все вопросы и ус-
петь к новогоднему праздничному семейному столу!
Также я хочу отметить, что в этой выдающейся программе сразу же была от-
ведена важная роль подготовке летных экипажей.
258
В ОКБ совместно с Харьковским авиационным заводом была проведена ра-
бота, результатом которой стало создание самолета Ту-134УБЛ, полностью от-
вечающего поставленным требованиям, на котором до сих пор проводится под-
готовка экипажей для самолета Ту-22МЗ».
При общей завязке внешнего облика среднего сверхзвукового бомбардиров-
щика с крылом изменяемой геометрии еще в 1969 г. были выбраны основопола-
гающие решения, которые затем были повторены на таких выдающихся проек-
тах, как В-1В (США) и Ту-160 (СССР).
Таким образом, в процессе работы над самолетами можно выделить следую-
щие достижения конструкторов и ученых в области новых материалов и новых
технологий:
• крыло изменяемой геометрии со значительно приближенной к фюзеляжу
осью поворота консоли крыла и развитым прифюзеляжным наплывом крыла;
• четырехместная кабина с отдельным катапультированием кресел с каждого
места;
• использование двухконтурного турбореактивного двигателя;
• аэродинамическая компоновка самолета с изменяемой геометрией крыла, от-
работанная учеными ЦАГИ и других институтов, включающая определение
геометрии и соотношений площадей неподвижного прифюзеляжного наплыва
и поворотной консоли, выбор оптимального расположения шарнира по разма-
ху крыла, определение геометрических параметров крыла (удлинения, стрело-
видности по передней кромке, профиля, кривизны, крутка), выбор оптималь-
ных с точки зрения весовых аэродинамических потерь компоновок, сочетаю-
щих носики поворотной консоли с носовой частью переднего фиксированного
DG, кг
650
650
500
400
300
250
Шасси (технология, треб, грунта)
Крыло (ликвидация разъема)
Минусовые допуски
Системы кондиционирования
Точное литье, штамповка
Го (укороченная балка)
503 - 73 2602 - 78
D, км 100 % 137 %
V, км/ч 100 % 128 %
G пуст > Т 100 % 93 %
DV, км/ч
____________. 60
АЭРОДИНАМИКА)» |q
40
НФЧ°
с до 65
Кормовая установка
В/3 с горизонтальным клином
I СУ^| РЯ= 25...20 т DCe = 0,78 (0,88)
«По объему потребных
контрмер «Backfire» следует
считать одним из самых
удачных изделий советской
промышленности»
Рис. 2.33. Доводка самолет Ту-22МЗ до заданных ЛТХ
259
наплыва крыла и внутренней части поворотной консоли с центральной частью
самолета при перекладке консоли на максимальную стреловидность;
• беспрецедентное наращивание ЛТХ изделия на модификациях самолета
(рис. 2.33). За пять лет интенсивной, хорошо организованной работы были
увеличены дальность на 37%, скорость на 28%, вес пустого самолета снижен
на 7%. Причем, например, снижение веса достигалось не только за счет но-
вых технологий (минусовые допуски, точное литье, штамповка) или конст-
руктивной доводки (ликвидация разъема по крылу, укороченная балка ГО,
усовершенствованное СКВ и т. д.), но и за счет отказа от ранее принятых,
оказавшихся несостоятельными решений (отказались от раздвижки колес по
средней оси основной стойки шасси и от одной из кормовых пушек);
• отработка высокоэффективное™ прифюзеляжных боковых воздухозаборни-
ков с горизонтальным расположением регулируемых панелей. Переход от
воздухозаборников с вертикальным клином позволил увеличить расход воз-
духа через двигатель, снизил входное сопротивление и оптимально согласо-
вал воздухозаборник с новыми, более мощными двигателями НК-25.
Самолет Ту-22МЗ
На этом бомбардировщике летали такие знаменитые асы, как главнокоман-
дующий ВВС П. С. Дейнекин. Известны многочисленные случаи, легенды от-
носительно эффективного боевого применения этих самолетов, например в ра-
боте [55], где описаны боевые действия Ту-22МЗ в Афганистане в октябре 1988 г.
Для обеспечения начавшегося вывода советских войск помимо самолетов
фронтовой и армейской авиации привлечены были и шестнадцать Ту-22МЗ. Что-
бы не допустить нападений на уходящие колонны и устранить даже возможность
подготовки таких вылазок, интенсивность вылетов и количество сбрасываемых
бомб достигли небывалого уровня. «Тройки» с полной бомбовой нагрузкой нано-
сили удары группами по 12... 16 самолетов одновременно. Бомбардировкам под-
вергались не только районы сосредоточения и базы моджахедов, но и горные пе-
ревалы и подходы к дорогам, по которым шел вывод войск. Разрывы мощных фу-
гасок вызывали обвалы в горах и делали эти районы непроходимыми. В начале
налетов применялись в основном «пятисотки», а затем в дело пошли тяжелые
ФАБ-1500 и ФАБ-3000. По впечатлениям очевидцев, «после налетов дальней
авиации горы превращались в долины».
На начало XXI в. большой флот Ту-22МЗ стоит на вооружении ВВС и ВМФ
Российской Федерации.
Программа Ту-22МЗ сегодня: состояние парка, модификации,
экспортный вариант, летающие лаборатории, перспективы
Эксплуатация самолета Ту-22МЗ в организациях ДА началась в 1981 г.,
Ту-22МР —в 1994 г.
Учитывая, что производство самолетов Ту-22МЗ началось в 1980 г. и закончи-
лось в основном в 1993 г., становится ясным, что в условиях отсутствия воспроиз-
водства серийной техники и медленных темпов создания новых разработок актуаль-
ным становится вопрос продления календарных и межремонтных сроков службы.
Ремонт самолетов становится главной задачей сохранения ДА в ближайший период.
Таким образом, эксплуатация самолетов Ту-22МЗ и Ту-22МР будет продол-
жаться еще долгие годы. В связи с этим на первый план выдвигается модерниза-
ция вооружения и оборудования.
260
«Туполевцы проводят большую работу по модернизации самолетов Ту-22М3,
основными путями совершенствования которых стали оснащение их современ-
ными прицельно-навигационными системами, средствами РЭБ и новыми комп-
лексами вооружения. К их числу относится и высокоточное оружие, что позволит
находящимся на боевом дежурстве самолетам Ту-22МЗ оставаться мощным и эф-
фективным оружием» [56].
Ту-22МЗ в настоящее время пользуется пристальным вниманием как пред-
мет возможного экспорта.
Индийская сторона давно присматривается к самолету Ту-22МЗ. Летчики
Индии летали на самолетах Ту-22МЗ и дали высокую оценку самолету.
«Помимо основного назначения, «Бэкфайры» нашли применение и в иссле-
довательских целях для отработки новых конструктивных и аэродинамических
решений, оборудования и вооружения. Один из Ту-22МЗ в 1991—1992 гг. ис-
пользовался в качестве летающей лаборатории при совместных экспериментах
ЛИИ и ЦАГИ по изучению сверхзвукового ламинирного обтекания» [55].
«Ту-22МЗ использовался и при испытаниях систем спасения возвращаемых
космических аппаратов. Массивный габаритно-весовой макет спутника, осна-
щенный измерительной аппаратурой и парашютной системой, требовалось
сбрасывать с больших высот на скоростях до М = 2, и «Бэкфайры» с этой зада-
чей справились наилучшим образом» [55].
Большой научно-технический потенциал, заложенный в программу семей-
ства самолетов Ту-22М, не использован до конца и будет впредь инициировать
туполевцев на новые разработки на базе уникального самолета Ту-22МЗ. Напри-
мер, непрекращающиеся разработки сверхзвукового пассажирского самолета
2-го поколения наверняка потребуют создания различных многоплановых ле-
тающих лабораторий, включая и демонстраторов инфраструктуры сверхзвуковых
перевозок, опробование различных «коридоров» с приемлемым уровнем «звуко-
вого удара» и т. д. ОАО «ТУПОЛЕВ» разработало технический проект такого де-
монстратора на базе самолета Ту-22МЗ.
И конечно же, рано или поздно в Российской Федерации будет создан Перс-
пективный авиационный комплекс дальней авиации (ПАК ДА) XXI в., в разра-
ботке которого заметную роль предназначено сыграть семейству самолетов
Ту-22М не только как предшественнику, заложившему основы для создания
перспективного комплекса, но и как активному соразработчику по созданию и
испытаниям нового оборудования и вооружения.
3. Ту-160 — межконтинентальный сверхзвуковой
стратегический ракетоносец1
Силы и средства ПВО западного союза, появившиеся на вооружении в конце
1940-х — начале 1950-х годов, могли значительно ограничить возможности со-
ветских дозвуковых самолетов-носителей Ту-95 и М-4 по прорыву ПВО и нанесе-
нию ответных или превентивных стратегических ядерных ударов по объектам на
территории США и их союзников. Одним из направлений повышения потенциала
межконтинентальных стратегических самолетов является повышение их макси-
мальных скоростей и потолков. На повестке дня перед разработчиками новой
авиационной техники встал вопрос о создании ударных авиационных систем, спо-
1 Авторы подраздела В. И. Близнюк, В. Г. Ригмонт.
261
собных преодолевать ПВО противника на больших сверхзвуковых скоростях. И в
СССР, и в США основные направления работ по созданию межконтинентальных
пилотируемых сверхзвуковых систем приблизительно совпадали: проектирование
ударных авиационных составных систем на основе освоенных в серии тяжелых
межконтинентальных самолетов-носителей В-36 в США и Ту-95 в СССР в комби-
нации с подвесными сверхзвуковыми ударными самолетами, вооруженными ядер-
ными тактическими бомбами; проектирование сверхзвуковых тяжелых самолетов
как в вариантах бомбардировщиков, так и в вариантах носителей подвесных само-
летов и беспилотных управляемых самолетов-снарядов. В ОКБ А. Н. Туполева ре-
ализацией этих направлений стали работы по созданию отечественных стратегиче-
ских авиационно-ракетных комплексов на базе Ту-95, а также проекты сверхзву-
ковых стратегических составных авиационных систем «108», «109» и работы по
однорежимной сверхзвуковой стратегической системе Ту-135.
Разработка в США самолета В-70 «Валкирия», успехи в создании средств
ПВО и новейшие достижения в области авиационных технологий в 1960-е годы, а
также начало работ в 1962 г. в США над проектом перспективной многорежим-
ной стратегической авиационной системы AMSA (начало работ по будущему В-1)
заставили нас ускорить работы по созданию многорежимного стратегического
самолета.
В СССР начало работ над новым многорежимным стратегическим авиацион-
ным носителем можно отнести к 1967 г. Тогда этим занялись два отечественных
авиационных ОКБ: ОКБ П. О. Сухого и только что восстановленное ОКБ
В. М. Мясищева. 28 ноября 1967 г. вышло правительственное постановление по
новому самолету. От разработчиков требовалось спроектировать и построить само-
лет-носитель, обладающий исключительно высокими летными данными. Напри-
мер, крейсерская скорость на высоте 18 000 м оговаривалась 3200...3500 км/ч, даль-
ность полета на этом режиме определялась в пределах 11 000... 13 000 км, дальность
полета в высотном полете на дозвуковой скорости и у земли соответственно равня-
лись 16 000... 18 000 км и 11 000... 13 000 км. Ударное вооружение оговаривалось
сменным и включало в себя ракеты воздушного базирования, а также свободнопа-
дающие и корректируемые бомбы различных типов и назначения, суммарная масса
боевой нагрузки достигала 45 т.
К началу 1970-х годов оба ОКБ, основываясь на требованиях полученного за-
дания и предварительных ТТТ ВВС, подготовили свои проекты. Оба ОКБ пред-
лагали четырехдвигательные самолеты с крылом изменяемой стреловидности, но
совершенно разных схем. Первоначально в ОКБ П. О. Сухого пытались макси-
мально использовать научно-технический задел по своему проекту Т-4 («100»),
опытный экземпляр которого в это время находился в производстве — был подго-
товлен вариант глубокой модернизации Т-4 с увеличенными дальностью полета и
массой. Модернизированный Т-4М отличался от Т-4 новым крылом изменяемой
стреловидности, заменившим треугольное крыло, схема «утка» сохранялась.
В 1969—1970 гг. исходный проект Т-4М полностью перерабатывается в проект
Т-4МС («200»), который с Т-4М имел только общие буквы и цифры в условном
обозначении. Новый Т-4МС выполнялся по схеме «бесхвостки» с фюзеляжем и
центральной частью крыла, выполненными как единое целое по «интегральной»
схеме, к центральной части крыла крепились поворотные консоли крыла изме-
няемой стреловидности. «Молодое» ОКБ В. М. Мясищева вышло в конце 1960-х
годов с предложением сразу по двум проектам: М-18 и М-20. Как и проекты ОКБ
О. П. Сухого, оба мясищевских самолета имели крыло изменяемой стреловид-
262
Рис. 2.34. Самолет Ту-160
ности. Отличия между проектами М-18 и М-20 заключались в выборе размеще-
ния стабилизатора: для М-20 ОКБ выбрало схему «утка», а для М-18 — нормаль-
ную схему. Проект М-18 по своим компоновочным решениям во многом соответ-
ствовал проекту американского В-1 и был принят как более перспективный для
дальнейшего развития. В предложениях обоих ОКБ предполагалось использова-
ние самолета в основном варианте многорежимного стратегического бомбарди-
ровщика-ракетоносца с возможностью модификации в высотный разведчик или
противолодочный самолет. В 1969 г. ВВС сформулировали требования к перспек-
тивному стратегическому многорежимному самолету. Разработку предполагалось
вести на конкурсной основе — помимо ОКБ П. О. Сухого и ОКБ В. М. Мясище-
ва решено было привлечь к работам ОКБ А. Н. Туполева.
До 1970 г. ОКБ А. Н. Туполева присутствовало во всех этих перипетиях с но-
вым «стратегом» лишь как наблюдатель, исправно участвуя во всех обсуждениях
и заседаниях по теме. Туполевцы вели работу с большим числом самолетов (во
второй половине 1960-х годов они выпустили на испытания Ту-154, Ту-144,
Ту-22М, Ту-142) и были загружены работой выше головы, поэтому руководству
ОКБ было не до новых заказов, хотя тема явно вписывалась в традиционное ге-
неральное направление проводимых работ. В 1970 г., оценив реальное положение
дел и дальнейшие перспективы с разработкой новой стратегической машины в
СССР, взвесив свои возможности и возможности своих конкурентов, в ОКБ
А. Н. Туполева приступили к работам по новому проекту, основываясь на требо-
ваниях, выдвинутых в 1967 г. Проектные работы велись в ОКБ под общим руко-
водством А. А. Туполева, в дальнейшем руководство было возложено на глав-
ного конструктора В. И. Близнюка, долгие годы до этого работавшего в коман-
де С. М. Егера, где он участвовал в проектировании системы «135». В отделении
«К» ему пришлось работать над проектами первых туполевских беспилотных
сверхзвуковых ЛА (самолеты «121» и «123»), а затем долгие годы — по СПС-1
Ту-144. Большой вклад в работу над проектом внес нынешний руководитель ра-
бот по Ту-144ЛЛ и СПС-2 Ту-244Л. Л. Пухов.
Новый проект ОКБ первоначально получает шифр «156», просуществовав-
ший не более одной недели, вскоре условное обозначение по ОКБ меняется на
«160» (Ту-160) — самолет «К» или изделие «70» (рис. 2.34). На начальном этапе
263
проектирования работы в ОКБ по теме шли практически в инициативном поряд-
ке без особой огласки и о них знал весьма ограниченный круг людей в самом
ОКБ и в МАП. На этом этапе у ОКБ были полностью развязаны руки в выборе
возможной аэродинамической схемы и конкретных компоновочных решений бу-
дущего самолета. В ОКБ решили сделать ставку на использование огромного
уникального опыта, полученного при проектировании СПС, и на этой базе со-
здать стратегический многорежимный носитель, по своим техническим решени-
ям отличающийся от проектов Т-4МС, М-18 и М-20. Совокупность заданных в
постановлении 1967 г. летных характеристик самолета-носителя ставила перед
ОКБ сложнейшую и во многом практически трудноосуществимую задачу. На
первом этапе решили принять за определяющие облик самолета характеристики
сверхзвуковой дальности полета и крейсерской скорости полета на этом режиме.
Следует отметить, что одновременно с началом проектирования Ту-160 в ОКБ
проводились исследования по поиску дальнейших путей развития СПС-1 Ту-144,
давшие старт работам по сверхзвуковому пассажирскому самолету второго поко-
ления СПС-2 Ту-244. Естественно, часть наработок по Ту-244 использовалась
при выборе аэродинамической компоновки Ту-160. Таким образом, на первом
этапе выбор ОКБ пришелся на модифицированную схему «бесхвостки», которая
с успехом использовалась для проектов Ту-144 и Ту-244. Наработки ОКБ по про-
екту Ту-244 позволяли надеяться на получение на крейсерском сверхзвуковом ре-
жиме аэродинамического качества в пределах 7...9, а на дозвуковом режиме до 15,
что в сочетании с перспективными экономичными двигателями давало реальную
возможность приблизиться к заданным дальностям полета (например, согласно
материалам проекта Ту-244 1973 г. с ТРД, имеющими на крейсерском сверхзву-
ковом режиме удельный расход топлива 1,23 кг/кгс • ч, обеспечивалась расчетная
дальность на сверхзвуковом режиме полета 8000 км). Схема «бесхвостки» в соче-
тании с силовой установкой соответствующей мощности гарантировало наращи-
вание скорости полета, основные проблемы при этом связывались с применени-
ем новых конструкционных материалов и технологий, способных обеспечить
длительный полет в условиях высоких температур. Стремясь снизить степень тех-
нического риска по новому проекту, в ОКБ решили все-таки в отличие от своих
конкурентов ограничить крейсерское число М нового «стратега» на уровне 2,3.
Что касается варианта самолета с крылом изменяемой стреловидности^ то этот
выбор привносил множество преимуществ, но приводил к увеличению массы и к
значительному усложнению конструкции за счет введения поворотного узла кон-
солей крыла. Основным требованием, предъявляемым к тяжелому многорежим-
ному самолету, являлось обеспечение большой дальности полета по сложному
профилю с преодолением зоны ПВО на большой высоте со сверхзвуковой скоро-
стью или у земли с дозвуковой скоростью полета. При этом основной полет к це-
ли до зоны действия ПВО должен был выполняться на оптимальных высотах с
дозвуковой скоростью. К дополнительному требованию можно отнести необхо-
димость обеспечения эксплуатации самолета с ВПП ограниченных размеров
(аэродромы 1-го класса). Совмещение указанных свойств в одном самолете пред-
ставляло сложную техническую задачу, достичь компромиссного решения между
дозвуковыми и сверхзвуковыми характеристиками самолета можно было путем
применения крыла изменяемой стреловидности, а также использованием двига-
телей комбинированной схемы: одноконтурного на сверхзвуке и двухконтурного
на дозвуке (последнее, естественно, распространяется и на самолеты с фиксиро-
ванной стреловидностью крыла). Сравнительные исследования, проведенные в
264
ходе выбора оптимальной конфигурации тяжелых многорежимных самолетов с
крылом фиксированной стреловидности и с крылом изменяемой стреловиднос-
ти, выявили следующие основные преимущества и особенности использования
такого крыла. При полете с дозвуковой скоростью аэродинамическое качество
самолета с крылом изменяемой стреловидности примерно в 1,2...1,5 раза выше,
чем у самолета с фиксированной стреловидностью. При полете со сверхзвуковой
скоростью аэродинамическое качество самолета с крылом изменяемой стрело-
видности в сложенном положении практически равно аэродинамическому каче-
ству самолета с крылом фиксированной стреловидности. Существенным недос-
татком крыла с изменяемой стреловидностью является увеличение массы самоле-
та вследствие наличия шарнира и механизма поворота консолей крыла. Согласно
проводившимся расчетам потеря массы на шарнирном узле, превышающая 4%
взлетной массы, полностью дискредитировала идею самолета с крылом изменяе-
мой стреловидности для тяжелого самолета. При использовании однотипных
двигателей дальность полета на дозвуковой скорости на средних высотах самоле-
та с крылом изменяемой стреловидности примерно на 30...35%, а на малой высо-
те на 10% получалась выше, чем у самолета с крылом фиксированной стреловид-
ности. Дальности полета на сверхзвуковой скорости самолетов обоих конфигура-
ций получалась приблизительно одинаковыми. Дальность полета на малой
высоте самолета с крылом изменяемой стреловидности получалась приблизи-
тельно на 15% больше, чем для самолета с крылом фиксированной стреловиднос-
ти. Самолет с крылом изменяемой стреловидности в сложенном положении бо-
лее был приспособлен для полетов на малых высотах за счет меньшей несущей
способности крыла по углу атаки и больших удельных нагрузках на него. Взлет-
но-посадочные характеристики самолета с изменяемой стреловидностью крыла
были лучше. Как отмечалось выше, важным вопросом при создании тяжелых
сверхзвуковых стратегических самолетов является выбор максимального значе-
ния скорости сверхзвукового полета. В ходе исследований проводилась сравни-
тельная оценка дальности полета самолета с крылом изменяемой стреловиднос-
ти, рассчитанного на полет с крейсерской сверхзвуковой скоростью, соответст-
вующей Л/ = 2,2 и М = 3. Снижение скорости до М = 2,2 позволяло значительно
поднять дальность полета за счет меньших удельных расходов топлива двигателей
и большего значения аэродинамического качества. Помимо этого, конструкция
планера самолета, рассчитанного на М = 3, предполагала выполнение ее из тита-
новых сплавов, что приводило к 15...20% удорожанию самолета и к возникнове-
нию дополнительных проблем технологического и эксплуатационного характера.
Поэтому в ходе дальнейшего развития концепции многорежимного сверхзвуко-
вого самолета удалось доказать заказчику целесообразность снижения требова-
ний к максимальному значению крейсерского числа Л/, хотя при этом пришлось
пойти на уменьшение скорости реакции стратегической системы.
Взвесив все за и против, в ОКБ начали готовить аванпроект самолета по схе-
ме «бесхвостки». С 1970 по 1972 г. подготовили несколько вариантов, проходив-
ших по ОКБ под шифрами Ту-160М (Л-1), (Л-2) и т. д. К 1972 г. аванпроект за-
кончили и предоставили его ВВС. Одновременно ВВС приняли к рассмотрению
проекты ОКБ В. М. Мясищева и ОКБ П. О. Сухого. Все три проекта представля-
лись в рамках конкурса, проводимого МАП в 1972 г., для получения наилучшего
решения по перспективному стратегическому самолету. Можно сказать, что все
три проекта, разработанные в рамках конкурса МАП (Т-4МС, Ту-160 «бесхвост-
ка» и М-18), являлись как бы дополнением друг друга и представляли три взгляда
265
на одну проблему Выстраивалась логическая последовательность перехода от са-
молета с жестким крылом к самолету, в котором реализовалось оптимальное со-
отношение между центропланом и поворотной частью крыла: Ту-160 «бесхвост-
ка» — Т-4МС — М-18.
Результаты рассмотрения предложенных проектов ОКБ П. О. Сухого, ОКБ
В. М. Мясищева и ОКБ А. Н. Туполева, а также анализ работ в США по В-1 скло-
нили чашу весов в пользу М-18, его поддержали ЦАГИ и НТС МАП. Однако это
ОКБ не располагало необходимой производственной базой и было сравнительно
малочисленным для реализации такого сложного проекта. По решению руковод-
ства МАП и других инстанций это задание передается для выполнения в более
мощное ОКБ А. Н. Туполева. Проект ОКБ П. О. Сухого Т-4МС сняли с рассмот-
рения в основном из-за высокой степени технического риска и нежелания ВВС
загружать это ОКБ сложной работой, которая наверняка оттянула бы его конст-
рукторские и производственные силы от столь важных для ВВС проектов, как
Т-6И (Су-24), Т-8 (Су-25) и Т-10 (Су-27), над которыми при поддержке ВВС в
это время работали суховцы.
После всех этих событий, решивших дальнейшую судьбу отечественного
многорежимного самолета, ОКБ А. Н. Туполева приступило к проектированию
самолета Ту-160 с крылом изменяемой стреловидности. Варианты с фиксирован-
ным крылом дальнейшего развития не получили. В том же 1972 г. ОКБ, ЦАГИ,
другие организации и предприятия отечественного ВПК, а также и научно-иссле-
довательские институты ВВС приступили к выполнению широкой программы по
оптимизации схемы, параметров будущего самолета, его силовой установки, вы-
бору конструкционных материалов и разработки необходимых технологий, выбо-
ру оптимальной структуры и взаимосвязи комплексов и систем бортового обору-
дования и вооружения. Всего работами по Ту-160 в СССР в той или иной форме
занималось около 800 предприятий и организаций различного профиля.
После выбора основной схемы самолета силы ОКБ сконцентрировались на
отработке конкретных элементов самолета и комплекса. В качестве двигателей для
силовой установки первоначально остановились на НК-25, однотипных с теми,
что предназначались для Ту-22МЗ. По тяговым характеристикам двигатель в ос-
новном удовлетворял разработчиков Ту-160, а вот удельные расходы топлива не-
обходимо было снижать, иначе межконтинентальной дальности получить не уда-
лось бы даже при самой идеальной аэродинамике. Как отмечалось выше, в это
время ОКБ Н. Д. Кузнецова приступило к проектированию нового двухконтурно-
го трехвального ДТРДФ НК-32, который при той же взлетной форсажной тяге
25 000 кгс и бесфорсажной 13 000 кгс должен был иметь удельный расход топлива
на дозвуковом режиме 0,72—0,73 кг/кгс • ч и на сверхзвуке — 1,7 кг/кгс • ч. Проект
НК-32 имел в своей основе многие основные узлы, идентичные с НК-25, что в
значительной степени гарантировало реальность нового двигателя. Мясищевцы
в своем проекте М-18 остановились на компоновке двигателей и мотогондол,
близкой к В-1. Несмотря на это, в ОКБ А. Н. Туполева решили все-таки провести
цикл работ по поиску наиболее оптимального варианта. Совместно с ЦАГИ на
14 моделях провели большое количество продувок различных вариантов компоно-
вок силовой установки на самолете. Подходы были самые неожиданные. Напри-
мер, в проработке находились: четырехдвигательный вариант со спаренными в
вертикальной плоскости двигателями в мотогондолах с горизонтальным клином,
трехдвигательный вариант с осесимметричными воздухозаборниками, несколько
вариантов со спаренными мотогондолами по типу примененных на Ту-22МЗ и т. д.
266
Окончательно выбрали вариант спаренной подкрыльевой установки двигателей с
двухмерными, многорежимными подкрыльевыми воздухозаборниками с верти-
кальным клином. Аналогичные воздухозаборники прошли всестороннюю летную
проверку на Ту-144. Однако в отличие от Ту-144 процесс проектирования двигате-
ля, мотогондол, воздухозаборников и выбор размещения их на Ту-160 рассматри-
вался и самолетчиками, и двигателистами взаимосвязанно, что позволило уйти от
многих недостатков, присущих силовой установке Ту-144.
Как и для предварительных проектов «бесхвосток», для окончательного ва-
рианта компоновки планера выбрали «интегральную» схему, объединявшую на-
плывную переднюю часть крыла и фюзеляж в единый агрегат. Все это сочеталось
с поворотными консолями крыла, с углами поворота от 20 до 65° и хвостовым
оперением нормальной схемы с дифференциально отклоняемым стабилизатором
и килем с верхней управляемой частью. Для повышения аэродинамического ка-
чества самолета при различных положениях консолей в ОКБ разработали систе-
му специальных подвижных шторок, а в серии внедрили поворотный гребень,
позволивший оптимизировать аэродинамику участка сочленения поворотной
части крыла с его неподвижной частью. Для оценки совершенства принятых
аэродинамических решений совместно с ЦАГИ был выполнен большой объем
продувок на 11 специально подготовленных моделях самолета. Продувки показа-
ли, что удалось получить максимальное аэродинамическое качество на крейсер-
ском дозвуковом режиме полета в пределах 18,5... 19, а на сверхзвуке — более 6,0.
Вопросы, связанные с общей компоновкой самолета, решались в неразрыв-
ной связи с конструктивными и технологическими проблемами. Основные на-
грузки воспринимала центральная цельносварная титановая балка, вокруг нее
группировались все остальные элементы планера. Оригинальная технология из-
готовления столь большого конструктивного элемента, как титановая балка, ос-
новывалась на процессе электронно-лучевой сварки в нейтральной среде, кото-
рая до настоящего времени относится к уникальным технологиям и по праву мо-
жет считаться национальным приоритетом страны. Поворотные части крыла,
узлы поворота и привода по своей схеме и техническим решениям в общем по-
вторяли принятые для Ту-22М, однако значительное увеличение размеров и на-
грузок на них потребовало существенных доработок конструкции и увеличения
мощности приводов. При выборе схемы хвостового оперения рассматривались
варианты с цельноповоротным стабилизатором, расположенным на вершине ки-
ля, и киль с нормальным рулем поворота, среднее расположение стабилизатора с
разделением руля поворота на две секции. В окончательном варианте приняли
оригинальную схему с двухсекционным килем, состоявшим из нижней непо-
движной части, к которой крепился цельноповоротный стабилизатор, и верхней
подвижной части киля. Подобное решение позволило в условиях ограниченных
объемов разместить мощные рулевые электрогидроусилители и шарнирные при-
воды отклоняемых плоскостей хвостового оперения.
Достаточно долго решался вопрос со схемой расположения грузоотсеков в
фюзеляже. Первоначально в качестве варианта рассматривалось расположение
двух грузоотсеков в центральной части фюзеляжа рядом, что давало минималь-
ный разброс центровок при сбросе боевых грузов, но одновременно увеличивало
мидель фюзеляжа и добавляло сложностей с проектированием оптимальных мо-
тогондол. В дальнейшем от спаренных грузоотсеков отказались и перешли к двум
расположенным один за другим по длине фюзеляжа отсекам.
267
Самолет предполагалось строить с широким использованием современных
материалов: 38% конструкции выполнялось из титановых сплавов, 58% — из
алюминиевых, 15% — из высококачественных стальных сплавов и 3% — из ком-
позиционных материалов.
При построении системы управления самолетом впервые в отечественной
практике создания тяжелых самолетов была использована электродистанционная
система (ЭДСУ) передачи информации на привода органов управления с исполь-
зованием строевой ручки летчиков.
Совместно с Государственным научно-исследовательским институтом авиа-
ционных систем и другими организациями ОКБ вело поиск наиболее эффектив-
ной системы ракетного вооружения. Помимо сверхзвуковых маловысотных ра-
кет, предлагалось создать для самолетов подобного класса дозвуковые маловы-
сотные крылатые ракеты с корреляционной системой навигации по рельефу
местности. На основании этих работ совместно с МКБ «Радуга» были подготов-
лены технические предложения по крылатой ракете в нормальном и стратегиче-
ском вариантах с обычной и ядерной боевыми частями для поражения слабо-
контрастных наземных и морских целей (Х-55 и Х-55СМ). Руководством МАП и
ВВС принимается решение стратегическим вариантом ракеты не заниматься. Это
положение сохранялось до 1976 г., когда стало ясно, что США усиленно разраба-
тывают ракету такого же назначения (ALCM-B), и работы по Х-55СМ продолжи-
лись. Исходя из предпосылки о неопределенности геополитической и военной
ситуации в будущем (что стало жесткой реальностью для России в 1990-е годы),
вопрос о системе вооружения Ту-160 предполагалось решать с учетом его много-
функциональности. Планировалось вооружать самолет сверхдальними ракетами,
дальними, средней дальности, управляемым и неуправляемым оружием ближне-
го действия, а также создать ракетную огневую оборону. Приоритет отдавался
оружию, обеспечивающему поражение целей, в том числе и слабоконтрастных,
без входа в ПВО вероятного противника и размещаемому во внутренних отсеках
самолета. Бортовой комплекс оборудования должен был обеспечивать навигацию
и применение широкой номенклатуры бортового вооружения.
Для создания многофункциональной и сложной конфигурации системы уп-
равления бортовым вооружением были широко привлечены методы и технологии
современной вычислительной техники. В системе управления вооружением за-
кладывались возможности перехода на мультиплексные каналы связи в федера-
тивно-централизованной структуре комплекса и постановки на борт самолета
современного цифрового радиоэлектронного оборудования. В структуре борто-
вого комплекса появилась отдельная система управления ракетным оружием
(СУРО) — дань новому поколению ракет, требующему подготовки и перекачки с
борта самолета большого количества информации. Одновременно решалась зада-
ча создания наземной системы подготовки полетной информации. Вся эта работа
шла в тесном сотрудничестве разработчиков системы вооружения и комплекса с
ОКБ (от ОКБ А. Н. Туполева этими проблемами занимался Л, Н. Базенков).
После проработки основных системных и компоновочно-конструктивных воп-
росов, согласования их с заказчиком и смежниками открывалась зеленая улица
для постройки Ту-160.
В 1976—1977 гг. были подготовлены эскизный проект и полноразмерный ма-
кет самолета. В том же 1977 г. макет и эскизный проект одобряется заказчиком.
В ГосНИИАС был создан уникальный стенд полунатурного моделирования, на ко-
тором под научным и техническим руководством Е. А. Федосова и В. И. Черви-
268
на были отработаны комплекс бортовой радиоэлектронной аппаратуры самолета и
его взаимодействие с крылатой ракетой и системой подготовки полетных заданий.
Производство первых трех самолетов началось в Москве в цехах ММ3
«Опыт» в 1977 г. Производство этих машин шло в тесной кооперации с заводом,
на котором готовились к серийной постройке Ту-160. Первая опытная машина
предназначалась для заводских испытаний и доводок, вторая — для статических
испытаний, третья должна была стать предсерийной машиной.
К лету 1980 г. первая машина была частично закончена и перевезена на
аэродром в г. Жуковском. С 22 октября 1980 г. на опытной машине начались про-
верки систем самолета и оборудования. Окончательно сборку опытного самолета
в ЖЛИ и ДБ закончили в январе 1981 г. До ноября шли доводки и наземные ис-
пытания. 14 ноября 1981 г. самолет под управлением экипажа во главе с летчи-
ком-испытателем Б. И. Веремеем совершает первую рулежку, а 18 декабря того
же года экипаж Б. И. Веремея поднимает самолет в первый полет, который
продолжался около получаса. Начались заводские испытания первой машины, в
феврале 1985 г. она впервые развивает сверхзвуковую скорость. 6 октября 1984 г.
взлетает третья машина, испытания продолжаются на двух машинах. 10 октября
уходит в первый полет первая серийная машина производства Казанского авиа-
ционно-производственного объединения (КАПО), 16 марта 1985 г. — вторая се-
рийная, 25 декабря 1986 г. — третья серийная, фронт испытаний и доводок ново-
го комплекса расширился. 15 августа 1986 г. взлетает четвертая серийная машина.
Самолеты готовятся к поступлению в ВВС. Первые две серийные машины посту-
пили в г. Прилуки в 184-й Гвардейский авиационный полк 17 апреля 1987 г.,
одну из них пилотировал заместитель командующего 37-й Воздушной армии ге-
нерал-лейтенант Л. В. Козлов. Впервые по приказу министра обороны столь
сложный самолет передавался в строевую часть в опытную эксплуатацию, не за-
кончив госиспытаний. Но было недопустимо затягивать время, в США полным
ходом шло производство и поступление с 1985 г. в строевые части модернизиро-
ванного самолета В-1В. Следует отметить, что после проведения испытаний пер-
вых В-1А американцы притормозили программу дальнейшего производства
и развертывания В-1, пытаясь разобраться, нужен ли им и в каком качестве этот
весьма дорогостоящий самолет. Получение информации о работах в СССР
по аналогичному носителю в какой-то степени подтолкнуло США к продолже-
нию работ по программе В-1. В-1А модернизировали, проведя большую работу
по снижению характеристик заметности, установив новые более экономичные
двигатели, обновив оборудование и состав вооружения. При этом взлетная масса
модернизированного самолета В-1В по сравнению с В-1А значительно возросла.
Вернувшись к вопросам боевого применения самолетов подобного класса, аме-
риканцы решили удовлетвориться значением максимальной скорости на боль-
шой высоте 1328 км/ч и у земли 1160 км/ч, что вполне соответствовало требова-
ниям к многофункциональной авиационной ударной системе, основным назна-
чением которой становилось не нанесение ядерных ударов в глобальной ядерной
войне, а участие в локальных или ограниченных конфликтах различной степени
интенсивности в условиях наличия у противника мощных систем ПВО. Всего
до конца 1980-х годов ВВС США получило от промышленности около 100 ма-
шин В-1В, которые до настоящего времени вместе с В-52 и небольшим коли-
чеством В-2 составляют костяк авиационных стратегических сил США. Совет-
ская программа производства Ту-160 также предусматривала выпуск порядка сот-
ни машин, однако уменьшение ассигнований на оборону во второй половине
269
1980-х годов, а затем и развал СССР и вступление СССР, затем и новой России
в полосу жесточайшего экономического и политического кризиса привели
к свертыванию программ производства и полномасштабного развертывания дан-
ной стратегической системы вооружения.
К моменту прибытия самолетов в полк его летный состав уже прошел теоре-
тическую подготовку в г. Казане и в г. Самаре, летал на Ту-22МЗ, которые неза-
долго до этого для освоения летчиками тяжелых самолетов с крылом изменяемой
стреловидности получил и освоил полк. В первую очередь Б. И. Веремей и за-
водские летчики-испытатели из г. Казани готовили летчиков-инструкторов. Эр-
гономику кабины хвалили все. Пожалуй, единственным объектом критики со
стороны летных экипажей стали «истребительные» кресла К-36ДМ, малоприспо-
собленные для многочасовых полетов. Положение исправилось с внедрением по-
душки с пульсирующим воздухом для массажа. Такой сложнейший авиационный
комплекс, как Ту-160, потребовал совершенно иного подхода к переучиванию
технического состава. Достаточно сказать, что в первое время подготовка к
полету занимала до трех суток, в дальнейшем за счет усилий личного состава, ог-
ромной работы ОКБ и его подразделений эксплуатации по улучшению эксплу-
атационной технологичности самолета и комплекса это время было приведено в
нормальные пределы. Много хлопот в эксплуатации доставляли новейшие радио-
электронные системы, в частности бортовой комплекс обороны, 80% агрегатов
которого размещались в хвостовой части фюзеляжа — в зоне повышенных вибра-
ций при работающих двигателях. Часто разрушались створки сопел НК-32. Все
эти и другие «детские болезни», присущие начальному циклу освоения любого
самолета, находились в поле зрения авиапромышленности. Напряженная работа
летного и технического составов ВВС, промышленности вскоре была вознаграж-
дена, постепенно самолеты Ту-160 становились боевыми единицами. Уже в ав-
густе 1987 г. экипаж генерала Л. В. Козлова совершил первый полет на иммита-
цию боевого применения. Вскоре начались полеты самолетов полка за пределы
СССР. Самолеты ходили за «угол», в Атлантику, покрывая огромные расстояния,
выходя в расчетные точки пуска крылатых ракет. На их перехват по маршруту
поднимались истребители-перехватчики стран НАТО, в западной печати появи-
лись фотографии нового советского самолета, а в 1988 г. с ним мог близко озна-
комиться министр обороны США Фрэнк Карлуччи на показе в Кубинке. Высокие
летные характеристики Ту-160 подтверждены рядом мировых рекордов. В октяб-
ре 1989 г. и в мае 1990 г. экипажи ВВС выполнили несколько полетов на установ-
ление мировых рекордов скорости и высоты полета. Всего экипажи ВВС на
Ту-160 сумели установить 44 мировых рекорда.
В 1980-е годы в ОКБ проводились исследования по дальнейшему развитию
комплекса Ту-160. На этапах предварительной проработки находилось несколько
проектов дальнейшего развития самолета — предполагались переход на более
экономичные двигатели НК-74, оснащение высокоточным оружием, новейшим
оборудованием и т. д. Существовал проект Ту-160В с силовой установкой, рабо-
тающей на жидком водороде. От Ту-160 самолет Ту-160В отличался, помимо си-
ловой установки, размерами фюзеляжа, рассчитанного на размещение баков с
жидким водородом.
В рамках конверсионной программы ОКБ совместно с МКБ «Радуга» и други-
ми предприятиями ВПК подготовило проект авиационно-космического комплекса
«Бурлак» — экономичного и экологически чистого средства запуска на околоземные
орбиты сравнительно небольших искусственных спутников Земли. Согласно проек-
270
ту в состав комплекса должны входить самолет-носитель Ту-160СК, ракета-носи-
тель «Бурлак» и комплекс средств наземного обслуживания и обработки информа-
ции. Ту-160СК является модификацией серийного Ту-160. Как и базовый Ту-160, он
оборудован системой дозаправки топливом в полете, что обеспечивает пуск ракеты
практически в любом районе земного шара. Двухступенчатая ракета «Бурлак» осна-
щена ЖРД, работающим на нетоксичных компонентах топлива. Система позволяет
выводить полезные нагрузки на круговые орбиты на высоты от 200 до 1000 км. При
этом масса полезной нагрузки в случае вывода на полярные орбиты составляет
600...800 кг и при выводе на экваториальные орбиты — 840... 1100 кг. Вывод одного
килограмма полезной нагрузки на орбиту находится в пределах 6000...8000 амери-
канских долларов, что приблизительно в 2...2,5 раза ниже, чем у аналогичных по гру-
зоподъемности ракет с вертикальным наземным стартом.
Основные данные самолета Ту-160 (по материалам открытой печати)
Длина самолета, м..................54,1
Размах крыла, м:
при 20°........................55,7
при 65°........................35,6
Высота самолета, м.............13,2
Максимальная взлетная
масса, кг.................... 275 000
Экипаж, чел........................4
2.2.3. СОЗДАНИЕ ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕЙ
СИСТЕМЫ АВИАЦИОННОЙ РАКЕТНОЙ СОСТАВЛЯЮЩЕЙ
ЯДЕРНОЙ ТРИАДЫ
Информационно-управляющая система (ИУС) авиационного ракетного
комплекса является сложной системой, включающей бортовое радиоэлектрон-
ное оборудование самолета-носителя, системы управления и наведения ракеты и
систему подготовки полетных и боевых заданий со всей необходимой информа-
ционной инфраструктурой. В ее создании принимают участие многочисленные
научно-исследовательские и опытно-конструкторские организации. Естествен-
но, что для координации этой работы, выработки концептуальных положений и
интеграции разнородного оборудования в единый комплекс необходима одна ор-
ганизация. Такой организацией стал ГосНИИАС, а работу в целом по созданию
ИУС возглавил начальник института Е. А. Федосов.
Одной из первых работ, проводившейся с 1968 г. и сыгравшей значительную
роль в становлении в институте нового для того времени направления — иссле-
дование по комплексам стратегической авиации — была НИР по созданию мало-
высотной крылатой ракеты. НИР была задана ВВС, головными организациями
были определены ГосНИИАС и ГосМКБ «Радуга». Работы велись с привлечени-
ем широкой внешней кооперации.
В 1970 г. научный руководитель и ответственный исполнитель этой НИР
В. И. Червин и В. И. Казаков предложили сосредоточить усилия на создании
немодной тогда дозвуковой маловысотной крылатой ракеты. Выдвинутые идеи
были просты: такие ракеты при небольших габаритах могут иметь большую даль-
ность полета и значительный боекомплект; их можно запускать вне зоны дейст-
вия ПВО или прорывать ее за счет насыщения ПВО и малой высоты полета. Из-
вестно, что прорыв даже одной ракеты с ядерной боеголовкой наносит значи-
тельный ущерб противнику.
Оставалось решить один вопрос: как при большой дальности полета обеспе-
чить необходимую точность?
271
Удачной оказалась идея установки на этой маловысотной ракете корреляци-
онной системы навигации по рельефу местности, которая воспринималась тогда
как фантастическая. Однако А. А. Красовский из ВВИА им. Н. Е. Жуковского
уже давно работал над подобной системой, и вместе с молодым аспирантом
из РПКБ Г. И. Джанджгавой они создали макет такой системы, которая про-
шла летные испытания на подмосковной трассе. Результаты этих работ были ис-
пользованы институтом при разработке системы навигации и наведения дозвуко-
вой маловысотной ракеты. В итоге был выпущен отчет по маловысотной страте-
гической ракете с навигацией и наведением по рельефу местности.
Работа по НИР «Эхо» завершилась выпуском ГосМКБ «Радуга» и
ГосНИИАС технических предложений по ракете Х-55 с ядерной боевой частью
для поражения наземных стратегических целей с известными координатами, по
ее размещению в бомбоотсеках самолетов Ту-95 и в бомбоотсеках перспективных
на то время самолетов Ту-160. Работа по компоновкам различных вариантов ра-
кеты проводилась в ГосМКБ «Радуга» Л. Н. Боголюбским под руководством
главного конструктора ГосМКБ «Радуга» Л. Я. Березняка.
В 1974 г. комиссия ВВС рассмотрела результаты НИР и предложила открыть
ОКР по стратегическому варианту дозвуковой маловысотной ракеты.
Однако Министерство авиационной промышленности после совещания у
министра П. В. Дементьева и руководство военно-промышленного комплек-
са приняли решение о несвоевременности разработки стратегических маловы-
сотных дозвуковых ракет. Такая ситуация продолжалась вплоть до 1975 г., когда
поступила информация, что США усиленно разрабатывают подобную ракету
(ALCM-B).
В результате в 1976 г. была отрыта ОКР по созданию ракеты Х-55, работу над
которой возглавил главный конструктор ГосМКБ «Радуга» И. С. Селезнев.
ГосНИИАС в период до 1983 г. принимал активное участие в работе над ба-
зовым образцом крылатой ракеты и ее последующими модификациями. В базо-
вом образце ракеты многое было новым:
• использование малогабаритной бортовой цифровой машины для хранения и
переработки информации;
• установка аппаратуры, обеспечивающей хранение цифровой карты местнос-
ти и коррекцию текущих координат ракеты по рельефу;
• применение прецизионной инерциальной системы для определения теку-
щих координат ракеты в длительном автономном полете;
• система управления ракеты, обеспечивающая маловысотный полет с огиба-
нием рельефа местности и маневрированием в горизонтальной плоскости;
• цифровой принцип связи практически между всеми подсистемами;
• одновременное использование большого числа датчиков первичной инфор-
мации;
• большой объем и темп передачи системы цифровой телеметрической ин-
формации.
На протяжении всего периода создания и отработки вплоть до принятия ра-
кеты на вооружение ГосНИИАС принял на себя роль головной организации по
интеграции оборудования. В создании ракеты и ее системы управления принима-
ло участие большое число предприятий, но практически вопросы взаимодейст-
вия и интеграции систем решались на территории ГосНИИАС. Кроме МКБ «Ра-
дуга», среди основных соразработчиков были МОКБ «Марс», РПКБ, МКБ «Вос-
ход», МИЭиА, ЛНПО «Электроавтоматика», АНТК им. А. Н. Туполева, и это
272
далеко не полный перечень предприятий и организаций, участвовавших в работе.
ГосНИИАС в этой кооперации в вопросах программно-математического обеспе-
чения и отработки взаимодействия по праву занял главенствующее положение.
Структура системы управления ракеты, принципы работы ее подсистем по-
требовали принципиально нового подхода к задаче отработки и сертификации
бортовой системы управления. В связи с этим родилась новая технология назем-
ной отработки системы управления. Основным ее принципом было рациональ-
ное сочетание математического моделирования на универсальных цифровых ма-
шинах, отработки алгоритмов и программ на комплексе отладки программ
(КОП) и полунатурного моделирования в реальном масштабе времени с динами-
ческим подыгрышем всем подсистемам БСУ и автоматизированной вторичной
обработкой информации с высокоточной оценкой действительной траектории
полета ракеты, ее динамических и точностных характеристик.
Для этой цели в ГосНИИАС был разработан ряд взаимоувязанных методик и
программ испытаний, подчиненных одной цели: максимально подготовить раке-
ту и ее систему управления к проведению летного эксперимента.
Математическая модель ракеты совместно с системой БСУ-55 была постро-
ена по модульному принципу, удобному для автономного создания и анализа мо-
делей отдельных агрегатов изделия и их взаимодействия в соответствии со схемой
связей. В ее создании участвовали В. А. Стефанов, С. В. Швов, Д. А. Горю-
шин, В. Н. Сошников, В. И. Казаков, Л, В. Витлин, А. Н. Багдасаров,
В. В. Синяков.
Основные модули представляли собой проблемно-ориентированные про-
граммы с обусловленными входами и выходами, решающие функционально обо-
собленные задачи и реализующие математические модели конкретных агрегатов
ракеты. Вспомогательные модули обеспечивали ввод-вывод информации, анализ
текущих результатов моделирования. Информационные связи между модулями
программы осуществлялись с помощью управляющего модуль-диспетчера.
Созданная модель ракеты явилась базовой для разработки частных моделей,
используемых при полунатурном моделировании, анализе натурных испытаний
и послеполетном моделировании.
При проведении работ по математическому моделированию были успешно
решены отличающиеся научно-технической и организационной сложностью за-
дачи разработки методики моделирования, анализа результатов, идентификации
математической модели и расчетных вариантов, согласованных с предприятия-
ми-разработчиками и ВВС.
За период 1976—1982 гг. было проведено около 2500 имитаций пусков на ма-
тематической модели, результаты которых отражены в отчетах и заключениях.
На следующем этапе развития технологии в ГосНИИАС небольшим коллек-
тивом под руководством В. М. Соляника был разработан комплекс отладки
программ на базе УЦВМ-5Э92 с помощью специальной аппаратуры сопряжения
с БЦВМ-20-700, управляемой сервисным программным обеспечением. КОП
обеспечивал проведение программирования, отладку, редактирование объектной
программы БЦВМ в статическом и динамическом режимах в квазиреальном
масштабе времени и получение документации на программный продукт для пере-
дачи ее на последующие этапы отработки. На ранней стадии разработки системы
использовались «прошивные» панели постоянной памяти (ППЗУ), для изготов-
ления которых требовалась специфичная документация, поскольку прошивка
осуществлялась вручную прошивальщиками высокой квалификации. В дальней-
шем, при переходе на репрограммируемые элементы ППЗУ, на КОП готовились
273
обменные носители информации. Значение этой работы трудно переоценить, по-
казателем ее необходимости являлся жесткий график распределения машинного
времени между предприятиями-соразработчиками. Арбитром в их технических
спорах неизменно и успешно выступал ГосНИИАС. Такая организация работ по-
зволила экономить время моделирующего комплекса, поскольку программы на
КПМ поступали, пройдя этап статической отладки.
Завершающим этапом наземной отработки, дающим сертификат на проведе-
ние летных испытаний, являлся этап полунатурного моделирования. Новые
принципы построения системы управления ракеты потребовали создания и мо-
делирующего комплекса на новой элементной базе, сложной структуры с боль-
шим количеством подсистем и связей между ними. Новый центр комплекса — не
динамический стенд, а цифровая разветвленная магистраль с набором вычисли-
телей, имитаторов, построенных на различных физических принципах, устройств
сопряжения, согласования и регистрации.
Отработка на КПМ изделия подобного класса выявила ряд сложностей. Ра-
нее создававшиеся ракеты класса «воздух-поверхность» в автономном режиме на-
ходились считанные минуты, а при моделировании нового изделия столкнулись с
необходимостью проведения экспериментов продолжительностью в несколько
часов. Это потребовало не только выделения значительного объема машинного
времени, но и обеспечения бесперебойной работы всей аппаратуры комплекса и
утомительной процедуры выполнения самих экспериментов. В вычислительных
программах реального времени на комплексе пришлось реализовать различного
рода защиты, блокировки и пролонгации, без которых 3-, 5-часовые прогоны бы-
ли бы невозможны.
Именно таким комплексом стал комплекс полунатурного моделирования
КПМ-5500, созданный под руководством К. А. Сарычева, В. А. Стефанова,
И. В. Логвинова. Следует отдать должное выдержке и упорству И. В. Лог-
винова, Л. П. Лихошерстовой, А. Н. Горчакова, В. И. Широченкова,
Т. Н. Морозовой, Н. В. Осипова, Н. Я. Мирошичева, которые на протя-
жении нескольких лет обеспечивали работу комплекса. Являясь оригинальной
разработкой, не имеющей прототипов, КПМ-5500 защищен авторским свиде-
тельством № 101061.
За время своей эксплуатации комплекс обеспечил прохождение всех этапов
отработки БСУ ракеты от макетного образца системы управления через экспери-
ментальный и опытный образцы до первого штатного БСУ, комплект которого
после моделирования на комплексе поступил на сборку первой пусковой ракеты.
Это сыграло немалую роль в том, что в первой натурной работе ракета полностью
выполнила полетное задание и все ее подсистемы функционировали штатным об-
разом.
В ходе сопровождающего моделирования на различных этапах летных испы-
таний решались задачи функционирования подсистем аппаратуры БСУ-55 и их
взаимодействия, проводилась оценка качества процессов стабилизации и управ-
ления на всех режимах полета, оценка качества работы экстремального корректо-
ра и точности наведения. Большой объем наземной отработки позволил провести
16 успешных пусков ракет при одном незачетном. Такой показатель зачетности в
практике государственных испытаний был получен впервые. Сопровождающее
полунатурное моделирование по объему зачетных реализаций в несколько раз
превысило объем натурных испытаний и органически включалось в программы
этапов «А» и «Б» государственных испытаний, что позволило сократить их сроки
и объем.
274
Комплекс полунатурного моделирования ГосНИИАС сыграл свою положи-
тельную роль и в проведении анализа натурных испытаний. Еще на ранней ста-
дии моделирования Д. А. Горюшиным, Н. В. Осиповым, А, И. Маркеловым,
В. В. Абашиным, И. В. Ковернинским была создана и отлажена линия обработ-
ки телеметрической информации. Кроме обеспечения отображения информации
в процессе проведения моделирования на КИМ, она хорошо зарекомендовала себя
в процессе натурных испытании. При первой же контрольной работе с носите-
ля Ту-95МС возник ряд вопросов по реализации полетного задания в совместном
полете. Для их выяснения бригада ГосНИИАС (В. А. Стефанов, Д. А. Горю-
шин, И. В. Логвинов, Н, Я. Мирошичев) со своей распечаткой процесса моде-
лирования, полученной на комплексе, была направлена в ЖЛИИДБ. Там, положив
на стол обе распечатки (с комплекса и с контрольного полета), В. А. Стефанов
и Д. А. Горюшин на основе опыта моделирования на комплексе показали экипа-
жу Ту-95МС и специалистам ЖЛИИДБ моменты расхождения режимов, значения
показателей и признаков и дали рекомендации по их учету в совместном полете.
Взаимодействие специалистов по проведению натурных испытаний и по работе
на КПМ ГосНИИАС не прекращалось и в дальнейшем.
Именно на основе работ на комплексе в коллективе ГосНИИАС
Д. А, Горюшиным, В. В. Шпирко, А. А. Сосуновым для натурных испытаний
был разработан способ оценки точностных характеристик ракеты на основе ис-
пользования метода корреляционно-экстремальной обработки сигналов датчиков
первичной информации, полученных по каналу телеметрии, и поля рельефа мест-
ности по трассе испытаний. В условиях полигона ошибки определения геодезиче-
ских координат точки падения ракеты были соизмеримы с заданной точностью из-
делия. ГосНИИАС неоднократно на основе этого метода уточнял истинные значе-
ния координат точки падения ракеты в очередном пуске. Оглядываясь назад, на
прошедшие годы работы над низколетящей крылатой ракетой, невольно удивля-
ешься тому, какой короткий срок потребовался для создания такой сложной систе-
мы и насколько успешно была применена при ее отработке новая технология, ис-
пользующая различные формы наземных испытаний и позволившая практически
безаварийно, с ограниченным числом натурных пусков обеспечить принятие сис-
темы на вооружение. Зарубежные специалисты пророчили СССР длительность ра-
боты над созданием подобной ракеты в течение 10—15 лет. Наша промышленность,
ее инженерно-технические кадры и специалисты войсковых частей прошли этот
путь за 5—6 лет. Результаты контрольно-серийных испытаний, войсковых учений и
маневров в настоящее время подтвердили эффективность созданного оружия.
Другой определяющей работой по созданию ИУС была НИР по базовому
комплексу вооружения для стратегической авиации. Ответственным исполните-
лем этой комплексной НИР был назначен В. И. Червин. Эта НИР велась сила-
ми почти всех подразделений института, ее задачи — разработка новой концеп-
ции стратегических самолетов, синтез бортового оборудования и вооружения.
Исходной предпосылкой являлась неопределенность военной ситуации в буду-
щем, что логически приводило к необходимости создания многофункционально-
го самолета. Для этого самолет должен быть вооружен ракетами сверхдальними,
дальними, средней дальности, управляемым и неуправляемым оружием ближне-
го действия, а также иметь ракетную огневую оборону. Приоритет отдавался ору-
жию, обеспечивающему поражение целей, в том числе и слабоконтрастных, без
входа в зону ПВО вероятного противника и размещаемому в отсеках самолета.
Бортовое оборудование должно обеспечить навигацию и применение широкой
275
номенклатуры оружия. Таковы основные идеи этой работы, которые в дальней-
шем удалось воплотить только частично.
Начиная с 1970 г. велась работа по созданию технической концепции страте-
гического межконтинентального самолета (СМС), разрабатываемого на конкурс-
ной основе ММ3 «Опыт» (А. Н. Туполев), ММ3 «Кулон» (П. О. Сухой) и ОКБ
В. М. Мясищева. В конечном счете конкурс был выигран туполевской организа-
цией и была начата разработка проекта самолета Ту-160. Институт с самого рожде-
ния этого самолета вел активную работу по определению его технического облика
и эффективности. В частности, он уже тогда настаивал на переходе на муль-
типлексные каналы связи в федеративно-централизованной структуре комплекса
и на постановке на борт самолета новейшего оборудования. Вследствие этого
в структуре комплекса появилась как отдельная составляющая система управле-
ния ракетным оружием (СУРО) — дань новому поколению ракет, требующему
подготовки и перекачки с борта самолета большого количества информации. Бы-
ла также поставлена задача о необходимости создания наземной системы под-
готовки полетной информации. Вся эта работа шла в тесном сотрудничестве
с Л. Н. Базенковым (ММ3 «Опыт»), О. Н. Некрасовым и В. Ф. Худовым
(МИЭиА).
В качестве носителей для ракеты Х-55 были выбраны самолеты Ту-95МС и
Ту-160.
Начальник института Е. А. Федосов предвосхитил большой объем работ по
дальней и стратегической авиации и создал своим приказом в августе 1974 г. но-
вое научное подразделение. Начальником этого подразделения был назначен
В. И. Червин.
Главной задачей института в период создания опытных образцов стратегиче-
ских ракетных комплексов являлась задача интеграции всех его составляющих в
единую систему, а также создание программно-математического обеспечения
совместно с главным конструктором БРЭО этих самолетов Е. С. Липиным.
Для успешного разрешения стоящих проблем потребовалось создание уни-
кальных комплексов полунатурного моделирования, что и осуществил коллек-
тив, возглавляемый А. Г. Гетмановым, а впоследствии С. И. Могилевчиком.
Работа на этих стендах проводилась объединенной комплексной бригадой под
руководством В. И, Червина. Большой вклад в создание комплекса внесли спе-
циалисты ГосНИИАС и ЛНПОЭ Г. А. Чуянов. С. И. Некрасов, М. В. Яки-
мов, В. И. Златомрежев, В. В. Раскин, Н. В. Куланов, И. А. Богуслав-
ский, М. М. Кофман, Б. И. Суров. Одновременно был создан коллектив под
руководством Б. Д. Климова, участвующий в летных испытаниях самолета и ра-
кеты. На его основе была создана объединенная группа анализа, куда вошли также
представители ЖЛИИДБ, ММ3 «Опыт», МКБ «Радуга», ЛИИ. В работе группы
анализа следует отметить большую роль В. М. Столярова, Е. И. Стася.
Следует отметить, что внимание к работе по созданию стратегических авиаци-
онных ракетных комплексов было чрезвычайное и со стороны Министерства авиа-
ционной промышленности, и со стороны заказчика. В процессе работы ГосНИИАС
целевым образом посещали председатель ВПК Л. В. Смирнов, министры Минави-
апрома В. А. Казаков и И. С. Силаев, главком ВВС /7. С. Кутахов, секретарь
ЦК КПСС Я.П. Рябов.
Благодаря четкой организации работы и героическому труду коллективов в
рекордно короткие сроки были сданы на вооружение и эксплуатацию самолеты
Ту-95МС, Ту-160, ракета Х-55 и система подготовки полетных и боевых заданий.
276
2.3. Ударные вертолеты —
главная сила
армейской авиации1
2.3.1. УДАРНЫЕ ВЕРТОЛЕТЫ -
ЭФФЕКТИВНОЕ СРЕДСТВО ВЕДЕНИЯ
ЛОКАЛЬНЫХ ВОЙН
История развития военных вертолетов и участия их в локальных войнах на-
чалась вскоре после окончания Второй мировой войны. Перечень наиболее круп-
ных локальных войн с участием боевых вертолетов включает следующие события:
• 1950—1953 гг. — война в Корее;
• 1954—1962 гг. — война в Алжире;
• 1964—1975 гг. — война во Вьетнаме;
• 1980—1990 гг. — военный конфликт Ирака и Ирана;
• 1991 г. — боевые операции США в Ираке.
Анализ вышеперечисленных событий позволяет сделать важный вывод о
том, что постоянно расширялся круг задач, решаемых вертолетами, — от чисто
транспортных до разведывательных и ударных задач.
Первое массовое применение отечественных вертолетов Ми-4 относится к
1971 г., когда происходили вооруженные конфликты Индии и Пакистана Основны
ми задачами вертолетов являлись транспортные и десантные операции. Вертолеты
имели малые потери и оказали существенную помощь вооруженным силам Индии.
В сирийско-израильской войне 1973—1974 гг. вертолеты Ми-8Т с успехом
выполняли транспортные и десантные задачи в условиях огневого противодейс!-
вия. Вертолеты показали высокие эксплуатационные качества и хорошую восста-
навливаемость после боевых повреждений.
В ирано-иракской войне 1980—1990 гг. впервые участвовали боевые вертоле-
ты Ми-24, вооруженные управляемыми противотанковыми ракетами, неуправ-
ляемыми авиационными ракетами, стрелково-пушечным и бомбардировочным
вооружением. Вертолеты имели средства повышения боевой живучести, транс-
портную кабину для перевозки отделения десантников.
История боевых сражений пополнилась воздушными боями вертолетов
Ми-24 и боевых вертолетов США «Хью Кобра» и «Си Кобра». Огнем стрелко-
во-пушечного и ракетного вооружения Ми-24 было сбито несколько вертолетов
«Кобра», которые имели лучшие маневренные характеристики, но уступали по
боевой живучести вертолету Ми-24.
Вертолеты Ми-24 не потеряли ни одной машины в воздушных боях.
Война в Афганистане
Роль вертолетов в афганской войне трудно переоценить. Фактически боевые
действия в условиях Афганистана были невозможны без ежедневного применения
вертолетов Ми-24 и Ми-8. Наиболее интенсивные боевые действия вертолеты
1 В написании подраздела принимал участие С. В. Щербаков.
277
Ми-24 выполняли по огневой поддержке сухопутных войск, нанесению бомбо-
во-штурмовых ударов, минированию и патрульному сопровождению колонн.
Транспортные вертолеты Ми-8 выполняли десантирование, перевозки военных
грузов и людей, поисково-спасательные операции. Объемы десантных перевозок
и высадки в горах за месяц достигали 7000 десантников при активном сопротивле-
нии ПВО противника. Экипаж сам определял возможные посадочные площадки в
полете и осуществлял приземление без предварительной разведки и подготовки.
Вертолеты Ми-24 сопровождали каждую колонну транспорта с боеприпаса-
ми, топливом, продовольствием из-за угроз нападения на маршруте. В задачу
этих вертолетов также входили перехваты и уничтожение транспортных колонн
противника, прикрываемых от налета стрелковым оружием.
Все полеты вертолетов на боевое применение выполнялись в условиях при-
крытия боевыми вертолетами и вертолетами поисково-спасательного обеспечения.
Боевые действия по уничтожению объектов противника велись по заранее
заданным или обнаруженным объектам в назначенное время или из положения
дежурства на аэродроме или в воздухе.
В условиях сильной ПВО противника, включающей стрелковое оружие,
крупнокалиберные пулеметы, зенитные пушки и переносные зенитные ракетные
комплексы «Стингер» с самонаведением на цели, суммарные потери вертолетов
составили значительную величину.
Также были потери по техническим, эксплуатационным причинам и из-за
ошибок летного состава.
Вооруженный конфликт в Чеченской Республике
Подавление бандформирований в Чечне происходит с привлечением боевых
вертолетов во взаимодействии с различными подразделениями сухопутных
войск. В боевых действиях участвуют те же отечественные вертолеты Ми-24 и
Ми-8, что воевали в Афганистане.
Масштабы боевых действий существенно меньше, хотя некоторые природ-
ные условия идентичны, т. е. горы на юге Чечни с ущельями и неподготовленны-
ми площадками, те же средства огневого противодействия — стрелковое оружие,
крупнокалиберные пулеметы у противника.
Боевые операции — оперативное подавление огневого противодействия су-
хопутным войскам, сопровождение войсковой колонны на маршруте, обеспече-
ние транспортировки и боевая поддержка десанта.
В ходе контртеррористических операций вертолеты выполняли также задачи
воздушной разведки, поиск и спасение военнослужащих.
Оценивая в целом положительно участие вертолетов в боевых действиях в
Чечне, самоотверженную работу летного и технического состава, приходится еще
раз отметить, что вертолеты Ми-24 и Ми-8 не полностью соответствуют совре-
менным условиям боевого применения, что было выявлено еще по результатам
войны в Афганистане:
• летно-технические характеристики вертолетов Ми-24 не позволяют прово-
дить боевые действия по целям, посадку и высадку десантов на высотах выше
2...2,5 км;
• недостаточная маневренность вертолетов затрудняет выход из зоны огня и поле-
ты в условиях гор, усложняет управление вертолетом в условиях гор, при ветро-
вых возмущениях требует от пилотов большого напряжения, быстрой и коорди-
нированной реакции, что доступно лишь хорошо подготовленным летчикам;
• недостаточная боевая живучесть вертолета и его систем.
278
Анализ участия вертолетов в локальных войнах позволяет сделать следующие
выводы и обобщения:
• армейская авиация хорошо справляется с огневыми, транспортно-десантны-
ми, разведывательными, специальными задачами в обеспечении действий
сухопутных войск;
• боевые действия проводятся в сложных географических, климатических, ме-
теорологических условиях, днем и ночью;
• поражаемые цели отличаются малоразмерностью, малозаметностью и спо-
собностью действовать круглосуточно с возможностями быстрого перемеще-
ния и всеракурсного огневого воздействия на вертолеты (в основном стрел-
ковым оружием различного калибра и ПЗРК сухопутных войск);
• с течением времени неуклонно возрастает летная нагрузка на экипаж.
Эти обстоятельства предъявляют к вертолетным системам ряд определенных
требований в части:
• летно-технических характеристик;
• безопасности пилотирования;
• эффективного поражения малоразмерных целей управляемым и неуправляе-
мым оружием круглосуточно;
• обеспечения целеуказания сухопутным войскам (в том числе по видеоканалу);
• боевой живучести.
Также необходимо отметить еще очень важное обстоятельство — успешное
выполнение боевых задач экипажами вертолетов во многом зависело от уровня
подготовки летного состава, его натренированности и опыта полетов в рассмат-
риваемых условиях.
2.3.2. АНАЛИЗ СОСТОЯНИЯ
И ВАРИАНТЫ ФОРМИРОВАНИЯ
ПАРКА АРМЕЙСКОЙ АВИАЦИИ РОССИИ
До настоящего времени парк вертолетов армейской авиации Вооружен-
ных сил Российской Федерации состоит из транспортно-боевого вертолета
Ми-24В(П), выпускавшегося серийно с 1971 г., а также транспортных вертолетов
типа Ми-8МТ и Ми-26.
На вооружении армейской авиации находятся различные модификации вер-
толетов Ми-24, включая разведчика Ми-24Р и корректировщика Ми-24К.
В настоящее время существует два варианта концепции реализации задачи
реформирования частей армейской авиации России [57—59].
1. Московский вертолетный завод им. М. Л. Миля
Московский вертолетный завод (МВЗ) им. М. Л. Миля является мировым
лидером в области боевого вертолетостроения.
Для подтверждения этого положения можно указать на тот факт, что за по-
следние 40 лет было построено и эксплуатируется в различных странах мира бо-
лее 11 тысяч вертолетов типа Ми-8 и более 2,5 тысячи вертолетов типа Ми-24.
279
Широкое распространение этих машин обусловлено высокими боевыми и
эксплуатационными характеристиками вертолетов Ми-8 и Ми-24.
Опытно-конструкторское бюро МВЗ им. М. Л. Миля последовательно ведет
работы по повышению боевой эффективности создаваемых им вертолетов.
Боевые вертолеты можно условно разбить на следующие поколения:
• второе — вертолеты типа Ми-8 и Ми-24;
• третье — модернизированные вертолеты Ми-8 и Ми-24;
• четвертое — ударный вертолет Ми-28.
Второе поколение боевых вертолетов
Летно-технические характеристики вертолетов Ми-8 МТВ-5 и Ми-24
Ми-8 МТВ-5 Ми-24
Экипаж/пассажиры, чел. 3/26 (2...)3/8
Максимальная взлетная масса, кг 12 000 11 500
Нормальная взлетная масса, кг 11 100 И 200
Максимальная скорость, км/ч 260 320
Крейсерская скорость, км/ч 225 228
Скороподъемность, м/с 9 12,5
Статический потолок, м 3980 2000
Динамический потолок, м 6000 4600
Практическая дальность полета, км 480 595
Ми-8 MTB-J5 — современный десантно-транспортный вертолет, созданный с
учетом опыта боевых действий (рис. 2.35), продолжает линию развития вертолета
Ми-8. Машина является базовым вертолетом для целевых модификаций в соот-
ветствии с требованиями заказчика. Он предназначен для перевозки грузов вну-
три фюзеляжа, транспортировки боевой техники, а также для перевозки крупно-
габаритных грузов на внешней подвеске. Для сокращения времени десантирова-
ния машина имеет увеличенную левую и дополнительную правую двери.
Рис. 2.35. Вертолет Ми-8 МТВ-5
280
Боевой вариант вертолета предназначен для основной поддержки сухопут-
ных войск или десанта при его высадке и эвакуации, а также прицельного бом-
бометания, оборудован штатным комплексом вооружения. Разработан вариант
кабины экипажа, адаптированный для применения различных систем ночного
видения.
Вертолет Ми-8 МТВ-5 серийно производится на Казанском вертолетном за-
воде с 1996 г. Всего построено 10, экспортировано 9 вертолетов. Регионы
эксплуатации — Россия, Индия, Руанда, Южная Корея.
Вертолет Ми-24 создавался как «воздушная боевая машина пехоты»
(рис. 2.36). По основным агрегатам и системам унифицирован с вертолетами се-
мейства Ми-8/17 и Ми-14. Опыт боевого применения этих вертолетов способст-
вовал дальнейшему совершенствованию, повышению надежности, боевой живу-
чести и эффективности.
Ми-24 — транспортно-боевой вертолет. Предназначен для уничтожения бро-
нетанковой техники и огневой поддержки подразделений сухопутных войск, для
прицельного бомбометания, обнаружения и опознавания целей, пуска и наведе-
ния противотанковых ракет. В транспортном варианте используется для перевоз-
ки и высадки тактического десанта, поисково-спасательных и разведыватель-
но-диверсионных групп, для снабжения передовых частей, перевозки грузов вну-
три фюзеляжа до 1500 кг и негабаритных грузов массой до 2000 кг на внешней
подвеске.
Вариант Ми-24В располагает модернизированным комплексом вооружения,
в том числе подвесной пулеметной установкой УСПУ-24 с высокотемпным пуле-
метом ЯкБ-12,7, прицельной станцией КПС-53АВ с автоматическим вводом по-
правок при стрельбе.
Ми-24В (экспортный вариант Ми-35) — модифицированный вариант
Ми-24Д — предназначен для борьбы с танками противника. Оборудуется проти-
вотанковым комплексом «Штурм-В» с управляемыми сверхзвуковыми ракетами
и автоматическим стрелковым прицелом летчика АСП-17В. Создан вариант
Ми-24П с пушечным вооружением (в экспортном исполнении — Ми-35П).
Рис. 2.36. Вертолет Ми-24
281
Вариант Ми-24Р предназначен для ведения радиационно-химической раз-
ведки.
Проектирование вертолета Ми-24 началось в 1967 г., макет утвержден в фев-
рале 1969 г. Государственные испытания — июль 1970 г. Начало серийного произ-
водства: Ми-24В - 1976 г., Ми-24П - 1981 г., Ми-24ВП - 1985 г.
Серийное производство организовано заводом «Роствертол» и Арсеньевской
АК «Прогресс». Всего построено более 2500 вертолетов. Ми-24 является основ-
ным боевым вертолетом авиации Сухопутных войск России, стран СНГ и эксплу-
атируется более чем в 30 зарубежных странах.
Третье поколение боевых вертолетов
Вертолет Ми-171Ш (рис. 2.37) представляет собой одну из модификаций
вертолета Ми-8. Оснащен комплексами высокоточного управляемого ракетного
вооружения «Штурм-В» и «Игла-В».
В комплексе «Штурм-В» используется сверхзвуковая ракета «Атака». На
спецфермах могут быть размещены блоки неуправляемых ракет С-8 или пушеч-
ные контейнеры с пушками ГШ-23Л (УПК-23-250).
В носовой и кормовой части установлены пулеметы ПКТ калибра 7,62 мм.
Основные варианты вооружения:
• 80 НАР С-8;
• 40 НАР С-8, 2 контейнера с ГШ-23Л с боезапасом по 250 патронов;
• 8 УР «Атака», 40 НАР С-8;
• 8 УР «Атака», 2 контейнера с ГШ-23Л;
• 4 УР «Игла», 40 НАР С-8;
• 8 УР «Атака», 4 УР «Игла».
Вертолет Ми-8МТКО (рис. 2.38) представляет собой дальнейшую модифика-
цию вертолета Ми-8МТ, проводимую для круглосуточного применения оружия;
выполнения автоматического полета по запрограммированному маршруту; ноч-
ного маловысотного полета с использованием очков ночного видения (ОНВ), ко-
Рис. 2.37. Вертолет Ми-171Ш
282
Рис. 2.38. Вертолет Ми-8МТКО
торые обеспечивают летчику осмотр закабинного пространства на режимах взле-
та, посадки, висения и пилотирования в условиях естественной ночной освещен-
ности.
Вертолет Ми-24ПН является дальнейшим развитием вертолетов Ми-24В и
Ми-24П (рис. 2.39). Оборудован высокоэффективным вооружением несъемной
пушечной установкой НПУ-30, предусмотрена подвеска до 16 ПТУР комплекта
«Атака-В», до 10 НАР С-13, до 80 НАР С-8, до 2 УР класса «воздух—воздух», бомб
массой до 500 кг.
Для боевой работы в любое время суток вертолет оснащен круглосуточным
оптико-электронным обзорно-прицельным комплексом, очками ночного виде-
ния и тепловизионным прицелом.
Рис. 2.39. Вертолет Ми-24ПН
283
Четвертое поколение боевых вертолетов
Рис. 2.40. Вертолет Ми-28Н
Летно-технические характеристики вертолета Ми-28Н
Экипаж/пассажиры, чел...........2/3
Максимальная взлетная масса, кг ..11 500
Нормальная взлетная масса, кг .... 10 700
Максимальная скорость, км/ч.....320
Крейсерская скорость, км/ч......270
Скороподъемность, м/с..........13,6
Статический потолок, м.........3600
Динамический потолок, м........5700
Практическая дальность
действия, км....................435
Ми-28Н (рис. 2.40) предназначен для поддержания сухопутных войск на по-
ле боя, уничтожения танков и другой бронетехники, сопровождения десантов,
борьбы с вертолетами противника.
Вертолет вооружен несъемной пушечной установкой НППУ-28 с пушкой
калибром 30 мм (боекомплект — 250 снарядов), подвижность которой составляет
-110...4-110° по азимуту и —40...+ 13° по углу места. На внешних балочных держа-
телях могут быть подвешены до 16 противотанковых управляемых сверхзвуковых
ракет комплекса «Атака-В» и «Штурм-В» с командными системами наведения,
поражающими наземные низколетящие малоскоростные цели. На внутренних
балочных держателях предусматривается подвеска неуправляемых ракет (80 НАР
С-8, 20 НАР С-13), унифицированных гондол в пулеметном и гранатометном ва-
риантах, двух пушечных контейнеров УПК-23-250, ЗБ-500 с зажигательной
смесью, авиационных бомб массой 250 и 500 кг.
Ми-28 оборудован принципиально новым интегрированным бортовым
комплексом пятого поколения, созданного на базе современных технологий.
284
Комплекс обеспечивает возможность круглосуточного и всепогодного приме-
нения, включая режим маловысотного (5... 15 м) полета с огибанием рельефа
местности в автоматическом режиме с использованием картографической ин-
формации и трехмерного синтезированного изображения местности; поиск, об-
наружение и распознавание целей, групповое применение вертолетов с автома-
тизированным распределением целей между ними, двухсторонний обмен инфор-
мацией между вертолетами, воздушными и наземными командными пунктами.
В его состав входят: стабилизированная обзорно-прицельная станция с оптиче-
ским, тепловым и телевизионным каналами наблюдения, телевизор и лазерный
дальномер, нашлемная система целеуказания и индикации, очки ночного виде-
ния летчика, система электронной идентификации на цветных жидкокристалли-
ческих дисплеях, инерциальная и спутниково-инерциальная системы, а также
система навигации по физическим полям Земли. Вертолет оборудуется надвту-
лочной РЛС кругового обзора. Начало проектирования — 1993 г.
Отличие этих поколений заключается в непрерывном повышении боевой
эффективности, определяемой следующими факторами:
• комплексом вооружения;
• летно-техническими характеристиками;
• совершенством комплекса бортового оборудования (КБО);
• уровнем боевой живучести;
• эксплуатационными параметрами.
Комплекс вооружения за последние 25 лет развивался по следующим на-
правлениям:
• повышение эффективности противотанкового вооружения (от ПТУР
«Штурм-В» до ПТУР «Атака-В»);
• увеличение эффективности применения неуправляемых авиационных ракет
калибром от 50 до 130 мм;
• повышение калибра стрелково-пушечного вооружения от пулеметов 7,62 мм
до пушечных установок калибром 30 мм.
Следует отметить, что улучшены характеристики по высоте боевого приме-
нения.
Модернизация КБО осуществляется в двух направлениях:
• установке систем для круглосуточного пилотирования и применения оружия;
• оснащении вертолетов комплексом высокоточной навигации.
Отличительной эксплуатационной особенностью всех боевых вертолетов
МВЗ им. М. Л. Миля является обеспечение транспортных возможностей при спа-
сении экипажей.
2. Фирма «Камов»
Эта фирма предполагает создание двух базовых проектов:
• ударного вертолета третьего поколения Ка-50 (рис. 2.41);
• легкого многоцелевого вертолета четвертого поколения Ка-60.
Ка-50 — единственный в мире одноместный боевой ударный вертолет соос-
ной схемы. Он предназначен для поражения бронетанковой и мотомеханизиро-
ванной техники, воздушных целей и живой силы на поле боя.
Бортовой комплекс оборудования и вооружения оптимизирован для одно-
местного вертолета. Прицельно-пилотажно-навигационный комплекс обеспечи-
вает ведение боевых действий днем и ночью во всем диапазоне высот и скоростей
285
Летно-технические характеристики вертолета Ка-50
Экипаж, чел.......................1
Максимальная взлетная масса, кг .. 10 800
Нормальная взлетная масса, кг. 9800
Максимальная скорость, км/ч.....315
Крейсерская скорость, км/ч......250
Скороподъемность
(Н = 2500 м), м/с................10
Статический потолок, м.........4000
Динамический потолок, м........5500
Практическая дальность, км......520
полета как автономно, так и с использованием внешнего целеуказания. Пилотаж-
но-навигационный комплекс на современном уровне решает задачи по пилоти-
рованию и вертолетовождению с использованием спутниковой навигации и циф-
ровой карты местности.
Обзорно-поисковая прицельная система (ОПС) объединяет круглосуточный
лазерно-телевизионный и тепловизионный каналы, нашлемную систему целе-
указания и БЦВМ. ОПС со стабилизированным полем зрения формирует и восп-
роизводит на экранах дисплеев телевизионное и тепловизионное изображение
цели на фоне местности. Ее подсистема осуществляет автоматическое сопровож-
дение цели, формирование в пространстве зон автоматического управления
ПТУР «Вихрь», лазерное дальнометрирование и подсвет цели для ракет с лазер-
ными головками самонаведения.
Для применения пилотом стрелково-пушечного и неуправляемого ракетного
оружия на малых высотах полета с «поднятой головой» необходимая пилотажная
и прицельная информация выводится на индикатор ИЛС-31. Наличие автомати-
ческих режимов наведения ПТУР в цель и стрельбы из пушки обеспечивает по-
падание ракет в танк с вероятностью близкой к единице, а точность пушечной
установки — 1...2 мрад.
В состав вооружения вертолета входят 12 сверхзвуковых ПТУР «Вихрь»
(дальность пуска до 8 км, вероятность попадания 0,9); 4 управляемых ракеты
286
Рис. 2.42. Вертолет Ка-52
Рис. 2.43. Вертолет Ка-60
«Игла-В» с тепловой головкой самонаведения; подвижная скорострельная пушка
2А42 калибром 30 мм (боекомплект 460 патронов, прицельная дальность стрель-
бы до 4 км); НАР калибром 80 мм типа С-8 (80 штук); 2 блока унифицированных
пушечных контейнеров УПК-23-250 с пушками калибром 23 мм (боекомплект
500 патронов); бомбы различного назначения массой до 500 кг.
287
Начало проектирования — 1977 г., начало серийного производства — 1991 г.
Серийное производство развернуто на ОАО Арсеньевской авиационной ком-
пании «Прогресс». Построено 15 машин, в эксплуатации 13.
Вертолет Ка-52 (рис. 2.42) — двухместная серийная модификация ударного
вертолета Ка-50. Он предназначен для разведки целей, проведения целеуказания,
координации действий вертолетов при ведении боевых операций над полем боя и
целераспределения между ними в группе, взаимодействия вертолетов с наземны-
ми командными пунктами. Ка-52 дополнительно оборудован аппаратурой мно-
гофункциональной РЛС. Многофункциональная РЛС обеспечивает пилотирова-
ние на предельно малых высотах с огибанием рельефа местности, выдачу сигна-
лов об облучении вертолета в бортовой комплекс обороны, поиск наземных
целей в сложных метеоусловиях. Состав вооружения вертолета Ка-52 аналогичен
составу вооружения вертолета Ка-50.
Защита проекта — 1994 г., постройка опытного образца — 1996 г.
Ка-60 (рис. 2.43) — первый вертолет фирмы «Камов», созданный по одновин-
товой схеме с многолопастным рулевым винтом в кольцевом канале вертикально-
го хвостового оперения. Вертолет предназначен для перевозки вооруженного де-
санта, доставки оружия и боеприпасов в район боевых действий, эвакуации ране-
ных, ведения поисково-спасательных работ, выполнения патрулирования, обуче-
ния и тренировки летного состава.
Для понижения заметности вертолета в оптическом, ИК- и радиолокацион-
ном диапазонах принят ряд конструктивных мер: специальное покрытие плане-
ра, уборка шасси, отвод выхлопных газов двигателей в верхнюю часть задней по-
лусферы.
Первый полет состоялся 10 декабря 1998 г., вертолет проходит государствен-
ные испытания.
Летно-технические характеристики вертолетов Ка-52 и Ка-60
Ка-52 Ка-60
Экипаж, десантники, чел................................... 22/14
Максимальная взлетная масса, кг.................. 10 800 6500
Нормальная взлетная масса, кг..................... 9800 —
Максимальная скорость, км/ч........................ 310 300
Крейсерская скорость, км/ч ........................ 250 270
Скороподъемность (// = 2500 м), м/с ................. 8 —
Статический потолок, м............................ 3600 2100
Динамический потолок, м........................... 5500 5150
Практическая дальность, км ........................ 520 700
2.4. Ударная авиация
в локальных войнах1
Истребитель-бомбардировщик Су-7Б
Истребители-бомбардировщики Су-7Б различных модификаций состояли
на вооружении советских ВВС до конца 1980-х годов. Они поставлялись в ВВС
Алжира, Афганистана, Чехословакии, Египта, Индии, Ирака, Северной Кореи,
Польши и Сирии.
Высокие требования к живучести и надежности, заложенные в конструкции
Су-7Б, впоследствии оправдали себя в ходе многочисленных больших и малых
войн, в которых участвовали эти истребители-бомбардировщики.
Опыт боевого применения F-105 во Вьетнаме выявил низкую боевую живу-
честь этой машины, по сравнению с которой Су-7Б, также участвовавший в мно-
гочисленных локальных войнах, оказался более «стойкой» машиной.
Кроме боевых действий, в составе египетских и сирийских ВВС на Ближнем
Востоке Су-7Б применялись и в других локальных войнах [60].
3 декабря 1971 г. вспыхнул индо-пакистанский конфликт, в котором на ист-
ребители-бомбардировщики Су-7Б ВВС Индии выпала основная тяжесть «рабо-
ты» по непосредственной поддержке наземных индийских войск.
Уже 4 декабря, на второй день войны, четыре эскадрильи Су-7БКЛ под при-
крытием истребителей МиГ-21 нанесли массированные бомбовые удары по узло-
вым железнодорожным станциям на территории Пакистана. Совместно с истре-
бителями-бомбардировщиками «Хантер» и бомбардировщиками «Канберра»,
действовавшими ночью, Су-7БКЛ участвовали в подавлении пакистанской ави-
ации на земле. Так, эскадрилья индийских ВВС в ходе первого же налета на авиа-
базу Шоркот уничтожила два бомбардировщика В-57, один истребитель
«Мираж» 3 и два F-86.
Су-7БКЛ, снабженные авиационным фотоаппаратом, активно привлекались
к ведению воздушной разведки, что всегда было сопряжено с большим риском.
Так, самолет, пилотируемый командиром 32-й эскадрильи X. Мангатом, был пе-
рехвачен пакистанскими истребителями J-6 (МиГ-19 китайского производства),
которые атаковали индийский самолет при помощи УР А1М-9В «Сайдуиндер».
Одна из ракет взорвалась в сопле двигателя: был почти полностью разрушен руль
направления, стабилизатор, элероны, серьезно были повреждены закрылки. Од-
нако индийский летчик сумел довести израненный самолет до своего аэродрома,
1 В написании подраздела принимал участие О. С. Титков.
10 Авиация ВВС России и научно-технический прогресс
289
выполнить посадку и доставить командованию ценную разведывательную ин-
формацию (сейчас хвостовая часть этого истребителя-бомбардировщика нахо-
дится в музее индийских ВВС в г. Палам). Были и другие случаи поражения ин-
дийских истребителей-бомбардировщиков УР «Сайдуиндер», однако ни один
Су-7БКЛ не был потерян в результате действий авиации противника.
В свою очередь Су-7БКЛ также наносили ущерб пакистанским истребителям
в воздушных боях. Так, Су-7БКЛ, пилотируемый лейтенантом С. Малхотра,
выполнявшим разведывательный полет, был атакован двумя J-6. Сбросив ПТБ и
зайдя в хвост одному из самолетов противника, индийский летчик сбил его огнем
из пушек.
Су-7БКЛ стали «грозой» для пакистанских железных дорог, по которым ак-
тивно велись военные перевозки. Мощные 30-миллиметровые снаряды пушек
НР-30 без труда пробивали толстое железо паровозного котла, лишая поезд хода,
а залп НАР буквально сметал его с железнодорожного полотна. Так, на участке
Касур — Монтгомери ими было полностью парализовано железнодорожное дви-
жение, а большинство локомотивов выведено из строя.
На Восточном фронте, в Бенгалии, во время наступления на Дакку Су-7БКЛ
тесно взаимодействовали с наземными войсками, а также наносили удары по па-
кистанским аэродромам и вели фоторазведку. В этих боях особенно полно про-
явилось одно из основных положительных качеств Су-7Б — высокая точность
применения бортового оружия. Целями являлись хорошо замаскированные огне-
вые точки в непосредственной близости от своих войск (бои в джунглях ведутся
на малых дистанциях), мо'сты, паромные переправы, канонерские лодки и паро-
ходы на реках.
В ходе 14-дневной войны на обоих фронтах Индия потеряла в общей сложнос-
ти 19 истребителей-бомбардировщиков Су-7БКЛ. Все они были сбиты огнем мало-
калиберной зенитной артиллерии, выполняя боевые полеты на малых высотах.
Следующей крупной войной, в которой Су-7Б пришлось участвовать, явился
очередной арабо-израильский конфликт 1973 г.
По образному выражению египтян, Су-7Б, «прочные как дредноут», успешно
использовались для нанесения ударов с малых высот по израильским войскам на
Синае. Условия пустынной местности позволяли Су-7Б выполнять полеты на пре-
дельно малых высотах (до 20 м) с околозвуковой скоростью, а уход от цели — на ма-
лой высоте на «сверхзвуке», что делало их трудноуязвимыми для ПВО противника.
В целом оценка Су-7Б по итогам войны 1973 г. египетскими и сирийскими
летчиками совпала с оценкой, данной индийцами: живучая, «прочно скроенная»
машина, обладающая хорошей маневренностью на малых высотах, большой ско-
ростью и высокой точностью стрельбы из бортового оружия. К недостаткам они
относили плохой обзор вперед-вниз, высокую посадочную скорость и относи-
тельно низкую точность при сложных видах бомбометания (впрочем, и у против-
ника она оказалась не выше).
Истребитель-бомбардировщик Су-17
Самолеты типа Су-17 широко и весьма успешно использовались в различных
локальных конфликтах 1970—1990-х годов: в арабо-израильских войнах 1973 и
1982 гг., в ирано-иракской войне 1980—1988 гг., в войне в Анголе, в боевых дей-
290
ствиях в Афганистане, в перуано-эквадорском конфликте 1995 г., в многочислен-
ных локальных конфликтах на территории бывшего СССР, а также во время опе-
рации по наведению конституционного порядка в Чечне в 1994—1996 гг.
Впервые истребители-бомбардировщики Су-17 (точнее, экспортные маши-
ны Су-20) были применены в боевых условиях в 1973 г. во время арабо-израиль-
ской войны. К началу военных действий ВВС Сирии располагали 15 самолетами
этого типа. Уже в первый день конфликта, 6 октября, 12 сирийских Су-20 под
прикрытием восьми МиГ-21 нанесли удар по центру управления израильской
авиацией «Хеврон». В ходе войны сирийские Су-20 выполнили 98 боевых выле-
тов, потеряв при этом восемь самолетов (50% первоначального состава). Все они
были сбиты огнем зенитной артиллерии или ЗРК. В воздушные бои Су-20 не
вступали, хотя их летчики и были подготовлены к ведению воздушного боя в со-
ставе звена.
Су-17 и Су-17М Кзыл-Арватского авиаполка 49-й Воздушной армии стали
первыми ударными самолетами советских ВВС, размещенными на афганской
земле после ввода туда 25 декабря 1979 г. «ограниченного контингента советских
войск». Самолеты разместились на аэродроме Шинданд. В марте 1980 г. они уже
участвовали в боевых действиях, нанося удары бомбами и НАР по группам мя-
тежников. В дальнейшем, сменяя один другого, на ТВД направлялись различные
истребительно-бомбардировочные подразделения советских ВВС, оснащенные
преимущественно самолетами Су-17МЗ и Су-17М4.
В Афганистане широко использовались и разведывательные Су-17МЗ-Р и
Су-17М4-Рс контейнерами ККР-1 в различной комплектации. Они вели аэрофо-
тосъемку в дневных и ночных условиях, вели И К- и радиотехническую разведку
(выявление радиостанций противника). В дальнейшем разведчики начали при-
менять новейший тепловизионный комплекс, имеющий высокую точность и по-
зволяющий обнаруживать по тепловому излучению такие цели, как след проехав-
шего автомобиля или недавно потухший костер.
Су-17 сыграли видную роль во время наступательной операции в провинции
Фориаб в декабре 1981 г. (из 44 участвовавших в ней боевых самолетов 24 были
Су-17МЗ). В мае 1982 г. при наступлении в долине реки Пандшер успех операции
в значительной мере был обеспечен действиями разведчиков Су-17, которые в те-
чение 10 дней отсняли 2000 км2 местности, контролируемой противником.
На заключительном этапе войны в 1988 г. использовались и Су-17, оснащен-
ные доработанной радиосистемой дальней навигации, обеспечивающей автома-
тический полет к цели на большой высоте и бомбометание по площадям. Зимой
1989 г. последние советские Су-17М4 покинули афганские аэродромы. На само-
летах Су-20 и Су-22М действовали афганские летчики 355-го авиаполка, базиро-
вавшегося в Баграме. Два афганских Су-22М были сбиты в 1988 г. пакистанскими
истребителями Р-16А вблизи афгано-пакистанской границы.
Ливийские Су-22М применялись в 1980-х годах в боевых действиях в Чаде,
несколько самолетов было уничтожено огнем зенитной артиллерии.
В 1982 г., к моменту начала боевых действий в Ливане, ВВС Сирии распо-
лагали истребителями-бомбардировщиками Су-20, а также одной эскадрильей
Су-22М. Эти самолеты с первых дней войны активно использовались для нанесе-
ния бомбовых ударов по позициям израильских войск. 10 июня восемь Су-22М,
каждый из которых был вооружен восемью бомбами ФАБ-500, нанесли удар по
штабу израильских войск в Южном Ливане. Цель была уничтожена (с большими
291
потерями для израильтян) ценой гибели семи самолетов, сбитых истребителями
F-16/1 ВВС Израиля.
Еще одной областью применения Су-22М в Ливане стало ведение воздушной
разведки (самолеты комплектовались контейнерами ККР-1). Всего в ходе бое-
вых действий в Ливане истребители-бомбардировщики Су-22М совместно с
МиГ-23БН совершили 42 боевых вылета, уничтожив 80 танков и два батальона
израильской мотопехоты (при этом потери составили семь Су-22М и четыр-
надцать МиГ-23БН).
Ирак достаточно успешно применял Су-20 и Су-22 в боевых действиях про-
тив Ирана. В ходе операции «Буря в пустыне» Су-20 и Су-22М в боях не использо-
вались, однако, по утверждению американцев, два самолета этого типа было пере-
хвачено истребителями F-15C при попытке перелететь на территорию Ирана.
В январе—феврале 1995 г. Су-22М ВВС Перу использовались в боевых дейст-
виях на границе с Эквадором, причем эквадорские пехотинцы, вооруженные рос-
сийскими ПЗРК «Игла», 10 февраля сбили два истребителя-бомбардировщика
Су-22М и один штурмовик Цессна А-37В.
Штурмовик Су-25
Первым боевым испытанием для Су-25 стал Афганистан, куда первые опыт-
ные самолеты Т8-Д1 и Т8-3 попали еще весной 1980 г., а в апреле 1981 г. в Афга-
нистан прибыла первая строевая эскадрилья штурмовиков. В апреле 1986 г. Су-25
впервые использовали в боевых условиях высокоточное оружие — управляемые
ракеты Х-25МЛ и Х-29Л с лазерным полуактивным самонаведением. Подсветка
цели могла осуществляться с борта другого штурмовика при помощи лазерного
дальномера-целеуказателя «Клен-ПС». Менее успешно проявили себя в Афга-
нистане УР Х-23 с радиокомандной системой наведения: летчику было трудно
одновременно следить за целью, управлять ракетой и пилотировать самолет. Все-
го за годы войны в Афганистане штурмовики Су-25 выпустили по противнику
139 управляемых ракет всех типов [60].
Об эффективности штурмовиков Су-25 в условиях Афганистана свидетельст-
вует среднегодовой налет летчиков-штурмовиков — 270...300 ч. На один самолет
в год приходилось в среднем 360 вылетов (значительно больше, чем на машины
других типов, применявшиеся в Афганистане). К концу войны число самолетов
Су-25 в Афганистане достигло примерно 50. Они выполнили около 60 тысяч вы-
летов (один самолет совершал в среднем до 6... 10 вылетов в день). За все время
боевых действий было потеряно 23 штурмовика. Су-25 широко использовались
также во время ирано-иракской войны 1980—1988 гг. В 1986—1987 годах Ираку
было поставлено два полка Су-25, воевавших с 1987 г. (если ежедневно вся ави-
ация Ирака выполняла 1400... 1500 боевых вылетов, то на Су-25 приходилось
1200 БВ, некоторые самолеты делали до 15 боевых вылетов вдень.
Фронтовой бомбардировщик Су-24
Бомбардировщики Су-24М с большим успехом применялись во время вой-
ны в Афганистане. Первая же операция с участием этих самолетов стала одной
из самых крупных и «громких» в афганской войне. Она проходила в апреле—
мае 1984 г., когда 40-я Советская армия совместно с афганскими войсками на-
несла серию мощных ударов по формированиям Ахмад Шаха Масуда в долине
292
реки Панджшир к северу от Кабула. Су-24М действовали начиная с 21 апреля
1984 г. вместе с дальними бомбардировщиками Ту-16. Из-за гористой местности
и отсутствия у моджахедов средств ПВО, способных поражать цели на средних
высотах (тогда как маловысотных ПЗРК «Стрела-2», «Редай», а также крупнока-
либерных пулеметов ДШК у них было достаточно), Су-24М не использовали ре-
жим огибания рельефа местности, а наносили бомбовые удары с высоты около
5500 м, оставаясь недосягаемыми для огня противника. Базировались самолеты
на советской территории — в г. Термезе (Узбекистан) и на других пригранич-
ных аэродромах. По советским данным, в ходе Панджширской операции из
3000 мятежников было уничтожено не менее 1700, а остальные покинули этот
район [60].
Во время войны в районе Персидского залива зимой 1991 г. Су-24МК ВВС
Ирака в боевых действиях участия не принимали, так как Ирак к началу «Бури в
пустыне» располагал лишь одним экипажем, подготовленным для боевого при-
менения этой сложной машины. Однако все 24 самолета Су-24МК, имевшиеся в
ВВС Ирака, после начала бомбовых ударов союзников благополучно перелетели
в Иран, избежав при этом атак американских истребителей (чего нельзя было
сказать о самолетах других типов — Дассо «Мираж» Р.1, F-7, МиГ-23, Су-7 и
Су-22, — значительное число которых было сбито американскими истребителя-
ми Макдоннелл-Дуглас F-15C «Игл» во время перелета в Иран). Таким образом,
даже пилотируемые неподготовленными экипажами маловысотные Су-24 оказа-
лись трудноуязвимыми для истребителей противника, действовавших почти в
«полигонных» условиях.
Истребитель-бомбардировщик МиГ-23Б
В период боев в Южном Ливане летом 1982 г. самолеты МиГ-23БН сирий-
ских ВВС нанесли несколько мощных бомбовых ударов по целям в глубине изра-
ильских боевых порядков. Всего истребители-бомбардировщики МиГ-23БН и
Су-22М выполнили 40 боевых вылетов, уничтожив, по сирийским данным,
80 танков и около двух батальонов пехоты. В то же время армейским «средствам»
ПВО и авиацией Израиля было сбито 14 МиГ-23БН. Истребители МиГ-23МФ
сирийских ВВС выполнили с 6 по 11 июня 52 боевых вылета и провели семь воз-
душных боев, сбив восемь пилотируемых самолетов израильтян (в том числе пять
истребителей Локхид F-16A) и один БПЛА BQM-34, потеряв шесть машин. Ист-
ребители МиГ-23МС уничтожили два самолета Макдоннелл-Дуглас F-4E (си-
рийские потери составили четыре самолета этого типа) [60].
Зимой 1982/83 г. сирийские МиГ-23БН, получившие из СССР новое воору-
жение (в частности, авиационные бомбы увеличенной мощности и более совер-
шенные кассетные боеприпасы), участвовали в нанесении ударов по кораблям
американского флота, развернутым у побережья Ливана. Сирийские МиГ-23МЛ
сбили три израильских истребителя F-15A и один F-4E, не понеся при этом потерь.
Другим театром военных действий, на котором широко применялись
МиГ-23, была Ангола, куда в 1985 г. было направлено 50 самолетов МиГ-23МФ и
МиГ-23БН, пилотируемых кубинцами. В 1987 г. над северными районами Нами-
бии самолетами МиГ-23 был сбит один истребитель Дассо «Мираж» F.1Z2. Во
второй половине 1987 г. еще один самолет «Мираж» F.1CZ в воздушном бою с
МиГ-23МФ получил попадание ракетой Р-60 (однако сумел вернуться на базу).
293
Кроме того, в Анголе самолетами МиГ-23 был уничтожен истребитель ВВС ЮАР
Дассо «Мираж» III и штурмовик «Импала».
Самолеты МиГ-23 различных модификаций широко использовались Ираком
в войне с Ираном в 1980—1988 гг. Самолетом этого типа, вооруженным двумя уп-
равляемыми ракетами класса «воздух—поверхность», 17 мая 1987 г. был атакован
и тяжело поврежден американский фрегат «Старк».
В Афганистане истребители МиГ-23МЛД советских ВВС использовались для
нанесения ударов по наземным целям, а также для прикрытия действий ударных
самолетов в пограничных с Ираном и Пакистаном районах. Советским истреби-
телем МиГ-23МЛД был сбит самолет F-16A ВВС Пакистана, нарушивший воз-
душную границу Афганистана.
В ходе войны в районе Персидского залива зимой 1991 г. истребители США
F-15C, по западным данным, сбили шесть самолетов МиГ-23, пытавшихся пере-
лететь в Иран. В свою очередь, иракские истребители МиГ-23 сбили как мини-
мум один самолет противника — истребитель-бомбардировщик «Торнадо» ВВС
Италии, уничтоженный над Багдадом 18 февраля 1991 г. парой МиГ-23МФ.
В 1999 г. самолеты МиГ-27 индийских ВВС применялись в боевых действиях
в Кашмире (один самолет был сбит огнем с земли).
Авиация в чеченских событиях
Участие российских ВВС в чеченском конфликте можно условно разделить
на три этапа. В конце ноября 199,4 г., когда стало ясно, что мирным путем проб-
лему Чечни решить не удастся, был реализован первый: самолеты ВВС Су-24МР
выполнили воздушную разведку, произведя аэрофотосъемку трех аэродромов
Чечни — Калиновская, Грозный-Северный и Ханкала, а также военных объектов
в Грозном, его пригородах и других населенных пунктах. Данные разведки свиде-
тельствовали о том, что Дудаев активно готовится к боевым действиям. Ускорен-
ными темпами строились укрепрайоны и блокпосты, сосредоточивались живая
сила и техника, готовилась к боевому применению и авиация. Всего у Дудаева на-
считывалось 266 самолетов. Они заправлялись керосином, снаряжались подвес-
ными блоками с неуправляемыми авиационными ракетами. Многие из них, осо-
бенно учебно-тренировочные Л-39 чехословацкого производства, могли пред-
ставлять угрозу для российских войск. Дело в том, что Л-39 на средних высотах
может применять как неуправляемые реактивные снаряды, так и обычные авиа-
ционные бомбы. Опасность была тем более реальной, что Чечня располагала не-
сколькими десятками подготовленных летчиков. Кроме них, там уже находились
наемные летчики из некоторых бывших республик СССР. Нельзя было не учиты-
вать и тот факт, что около ста летчиков Дудаев отправил на учебу в Турцию (прав-
да, никто из них к началу конфликта в Чечню не вернулся).
Надо ли говорить, сколько бед могли бы принести дудаевцы, получив воз-
можность сесть в кабины боевых машин. Речь идет не только о возможном росте
потерь со стороны Объединенной группировки российских войск. Учитывая фа-
натичность дудаевских вояк и неоднократные угрозы их лидера совершить акты
возмездия на российской территории за пределами Чечни, резонно предполо-
жить, что вполне могли найтись среди них «камикадзе», готовые направить свой
самолет на любой стратегический объект — будь то химический завод, склад ору-
жия или атомная электростанция... Потому и было принято решение нанести
бомбово-штурмовые удары первоначально по всем трем аэродромам Чечни. Так
294
начался второй этап операции с участием ВВС. Эту задачу успешно выполнили
штурмовики Су-25, хорошо показавшие себя в Афганистане, стартовавшие с не-
скольких аэродромов Северо-Кавказского военного округа.
В результате прицельных авиационных ударов на аэродромах Грозный-Се-
верный, Ханкала и Калиновская (второй этап) были уничтожены или выведены
из строя все 266 самолетов (в том числе один Ту-154, шесть Ту-134, три вертоле-
та). Причем «отработали» Су-25, надо сказать, филигранно: практически не пост-
радали взлетно-посадочные полосы, места стоянок самолетов, здания и сооруже-
ния аэровокзальных комплексов, радио- и светотехническое оборудование.
Третий этап начался с выдвижения к г. Грозному Объединенной группиров-
ки российских войск. В этот период ВВС решали задачу по ее авиационной под-
держке. На некоторых направлениях движения колонн сразу же сложилась весь-
ма непростая ситуация, приведшая к потерям в живой силе и технике. Кроме то-
го, в начале декабря резко осложнились метеоусловия, что существенно затруд-
нило применение высокоточного оружия (управляемых ракет и корректируемых
авиабомб с лазерным и телевизионным наведением). Поэтому пришлось исполь-
зовать бомбардировочную авиацию — самолеты Су-24М. Действуя днем и ночью
с прицеливанием вне видимости земли, по радиолокационным ориентирам, они
поражали боевиков и их военные объекты.
Авиация широко применяла также светящиеся авиационные бомбы (САБ) —
для освещения района боевых действий. Это делалось в интересах наземных
войск, особенно в районе г. Грозного. Эти бомбы не имеют заряда и не могут по-
ражать объекты, живую силу. Использовались они и днем, поскольку способны
«уводить» головки самонаведения «Стингеров» и «Стрел», которых у сторонников
Дудаева было немало.
Примерно в те же дни, а именно 22 декабря, четверка Су-24 нанесла удар
бомбами (ФАБ-500) по участку шоссейной дороги Старая Сунжа — Беркат-Юрт
северо-восточнее г. Грозного для того, чтобы воспрепятствовать выдвижению
групп боевиков в город. Позднее, 17 и 18 января, семь штурмовиков Су-25, по-
давляя сопротивление дудаевцев в г. Грозном, нанесли массированный удар по
президентскому дворцу, применяя неуправляемые реактивные снаряды и бетоно-
бойные бомбы БетАБ-500. Две бетонобойные бомбы прошили дворец от крыши
до подвала, остальные пять разрушили подземный переход и сам защищенный
КП, находившийся в соседнем здании на большой глубине. Реактивные снаряды
вывели из строя большое количество танков и бронетранспортеров, другой тех-
ники, сконцентрированной в районе президентского дворца.
25 января северо-западнее г. Бамута восемнадцать штурмовиков Су-25 бом-
били подземные склады боеприпасов, расположенные в четырех шахтах бывших
позиций межконтинентальных баллистических ракет Ракетных войск стратегиче-
ского назначения СССР. В итоге были уничтожены шахтные пусковые установки,
заглубленный КП дивизиона, входы и выходы вентиляционных систем и вы-
движных антенн, монтажно-испытательный корпус и прицепы с боеприпасами.
Российские ВВС нанесли также ракетно-бомбовые удары по населенным пунк-
там Аршты и Шали. В первом, по данным разведки, находился крупный склад
боеприпасов (на северной окраине), который и был уничтожен самолетами
Су-25. В г. Шали подверглись атаке с воздуха крупные скопления боевиков на се-
верной и северо-западной окраинах. Об этом свидетельствуют материалы аэро-
фотосъемок и других средств объективного контроля.
295
Отдельно надо сказать о высокоточном оружии. Российские ВВС стали при-
менять управляемые ракеты и корректируемые авиационные бомбы с лазерным
наведением КАБ-Л в конце декабря, как только улучшилась погода. В первую
очередь были разрушены шоссейные мосты через р. Аргун, чтобы воспрепятство-
вать подходу резервов Дудаева к г. Грозному. На одном из фотопланшетов хорошо
видны результаты удара по мосту через р. Аргун в 10 км восточнее города. Первый
снимок на склейке запечатлел момент отцепки бомбы от самолета. Далее она на
траектории полета. И, наконец, последний снимок — прямое попадание бомбы
КАБ-Л в заданную цель.
Удары с применением высокоточного оружия наносились также по военным
объектам в г. Грозном (были разрушены цехи танкоремонтного завода), мощным
опорным пунктам и узлам сопротивления боевиков. Многочисленные данные
объективного контроля подтверждают их высокую эффективность. Что касается
других авиационных средств поражения, то в период вооруженного конфликта в
Чечне ВВС России применяли только фугасные и осколочные заряды.
Российская авиация работала в Чечне в условиях сильного противодействия
ПВО противника. Чеченская сторона располагала зенитной артиллерией, пере-
носными зенитно-ракетными комплексами «Стрела» и «Стингер», зенитными
самоходными установками «Шилка».
В начальный период конфликта боевикам удалось сбить огнем зенитных
средств два вертолета Ми-8: один с продуктами и медикаментами, другой
санитарный — с ранеными и врачами на борту. Были еще два серьезных инцидента
с самолетами Су-25. Один из них вернулся на аэродром базирования с разбитым
стабилизатором, а второй — на одном двигателе. Всего же боевые повреждения по-
лучили 15 машин. Боевых потерь в авиации не было вплоть до 4 февраля, когда
был сбит штурмовик Су-25. Обстоятельства трагедии таковы. Эскадрилья Су-25
наносила удар по опорному пункту боевиков в 2 км южнее населенного пункта Че-
чен-Аул. Объектом атаки пары штурмовиков стали дудаевцы, прикрывавшие мост
через р. Аргун. При заходе на цель ведущий обнаружил скопление огневых точек
боевиков. Пара, выполнив маневр, устремилась в атаку. В этот момент самолет
майора Николая Баирова был сбит огнем ЗСУ «Шилка». Летчик погиб.
В ходе операции по овладению городами авиация выполняла следующие за-
дачи: нанесение бомбово-штурмовых ударов по опорным пунктам, скоплениям
живой силы и техники, базам подготовки боевиков; изоляция района боевых дей-
ствий и воспрещение выдвижения подходящих резервов вооруженных бандфор-
мирований; минирование местности; ведение воздушной разведки; воздушные
перевозки войск, боевой техники и прочих материальных средств и другие специ-
альные задачи.
Авиационная поддержка войск осуществлялась посредством нанесения уда-
ров группами 4... 10 Су-25 по опорным пунктам на правом берегу р. Аргун, 3 км
южнее г. Гудермеса, в г. Аргуне, в селе Комсомольском, кроме того, осуществля-
лась изоляция района боевых действий, уничтожение баз боевиков и минирова-
ние дорог. Для предотвращения выдвижения боевиков в ночных условиях приме-
нялись самолеты Ту-22МЗ для подсветки участков местности.
Для выполнения задач по ликвидации незаконных вооруженных формирова-
ний в горных районах Чеченской Республики была задействована ранее создан-
ная авиационная группировка в составе фронтовой, дальней и военно-транс-
портной авиации. Боевая авиация, несмотря на объективные трудности, со свои-
ми задачами справилась в полном объеме, показав высокую эффективность и
надежность русского оружия и техники.
296
Список литературы к разделу 2
1. Ильин В., Скрынников С. Воздушная мощь России. — Вестник воздушного
флота, 1996, № 1-2, 7-8.
2. Государственный научный центр Российской Федерации. Государственный науч-
но-исследовательский институт авиационных систем. 1946—1996 годы. Очерки истории /
Под ред. академика Е. А. Федосова — М.: Научно-информационный центр ГосНИИАС,
1996.
3. Виноградов Р., Пономарев А. Развитие самолетов мира. — М.: Машиностро-
ение, 1991.
4. А нт оное В., Барковский В., Гордюков Н. и др. Самолеты «Су». — М.: М3
им. П. О. Сухого, 1993.
5. Зуенко Ю., Коростелев С. Боевые самолеты России. Справочник. — М.: Эла-
кос, 1994.
6. Бурдин С. МиГ-23МЛ, П, МЛД. — Минск: Аэроплан, 1994.
7. Гордон Е., Климов В. МиГ-21. — Приложение в 2-х частях к журналу «Крылья
Родины», 1994, № 1.
8. Левин М. А., Ильин В. Е. Современные истребители. Энциклопедия техники. —
М.: Хоббикнига, 1994.
9. Левин М. А., Ильин В. Е. Ударные самолеты. Энциклопедия техники. — М.:
Хоббикнига, 1994.
10. Карасев Б. А. и др. ОКБ им. А. И. Микояна— 50лет. — М.: Внешторгиздат,
1989.
11. Кокушкин Я. Г., Полушкин Ю. Ф. и др. ОКБ им. Микояна А. И. 60 лет. — М.:
ООО «Центр авиации и космонавтики», 2000.
12. Беляков Р. А., Мармен Ж. Самолеты «МиГ» 1939—1995 гг. — М.: Ави ко пресс,
1996.
13. Полушкин Ю. Еще раз о модернизации МиГ-21. — Военный парад, 1997, № 2.
14. Манучаров А., Полушкин Ю. Новая жизнь МиГ-1. — Военный парад, 1995, № 1.
15. Российская авиационно-космическая выставка Мосаэрошоу-92. — Техническая
информация ЦАГИ, специальный выпуск, 1992, № 19—21.
16. Гордон Е., Фомин А., Михеев А. МиГ-29. — М.: ОАО «Любимая книга», 1998.
17. Ильин В. Е. Многоцелевые истребители России. — М.: Астрель, ACT, 2000.
18. Ильин В. Е. Боевые самолеты России XXI века. — М.: Астрель, ACT, 2000.
19. Боевые самолеты ВВС России. — Авиация и космонавтика вчера, сегодня, завтра,
1997, №8.
20. Боевые самолеты ВВС России. Авиация и космонавтика вчера, сегодня, завтра,
1999, № 8. Техническая информация, вып. 2—3. — М.: ОНТИ ЦАГИ, 1999.
21. Вестник авиации и космонавтики. 2000, № 3.
22. Вестник авиации и космонавтики. 2000, № 4.
23. Военная авиация. Кн. 1. Самолеты, вертолеты. — Минск: ООО «Попурри», 2000.
24. Военная авиация. Кн. 2. Самолеты, вертолеты, ракетное вооружение. — Минск:
ООО «Попурри», 2000.
25. Военная авиация России. — Военный парад, 2001.
26. Ильин В. Военная авиация России и США. Современное состояние и ближай-
шие перспективы. — Авиация и космонавтика, 1994, вып. 3.
27. Илларионов А. Балкон с видом на поле боя. (История МиГ-23БН и МиГ-27). —
Мир авиации, 2001, № 1.
28. Полушкин Ю., Ильин В. МиГ-23: Последнее слово еще не сказано. — Вестник
авиации и космонавтики, 1998, № 1.
29. Полушкин Ю. Ф. Рост боевой эффективности МиГ обеспечен. Авиапанорама,
1998, март—апрель.
30. Нешкумай И. Увеличивая дальность полета. — Авиация и космонавтика, 1991,
№8.
297
31. Полушкин Ю. МиГ-25. Через тепловой барьер. — Авиация и космонавтика,
1992, № 10.
32. Дмитриев Г., Серегин С., Полсуевич С. МиГ-25 и модификации. — Киев: Ар-
хив-пресс, 1995.
33. Военный парад, 1997, № 4.
34. Логвинов Л., Рудницкий Ю. Самолет Су-24 с крылом изменяемой стреловид-
ности. — Техника воздушного флота, 1990, № 2.
35. Кербер Л. Л. Ту-человек и самолет. — М.: Советская Россия, 1973.
36. Андрей Николаевич Туполев. Жизнь и деятельность. — М.: Изд-во ЦАГИ, 1989.
37. Paul Duffy & Andrey Kandalov. TUPOLEV «The man and his aircraft». Airlife Publishing
Ltd, 101 Longden Road, Shrewsbury, SY3 9EB Englad.
38. Шавров В. Б. История конструкций самолетов в СССР до 1938 года. — М.: Ма-
шиностроение, 1978.
39. «Из истории советской авиации» (К 60-летию опытного конструкторского бюро
имени А. Н. Туполева). — М.: Изд-во ЦАГИ, 1982.
40. Гордон Е. И., Ригмант В. Г. и др. «Легендарный Ту-16», монография. — Ави-
ация и время, 2001, № 1 и № 2.
41. Фронтовой бомбардировщик Су-24. Серия «Полигон». — Москва, 1996.
42. Логвинов Л., Яковлев В. Фронтовой бомбардировщик Су-24. — Авиация и кос-
монавтика, 1991, № 5.
43. Манушкин А. Су-24МР: воздушный разведчик. — Красная звезда, 28 декабря
1992.
44. Военные самолеты мира. Справочник/ Под ред. Н. Н. Новичкова. — М.:
Информационное агенство АРМС-ТАСС, 2003.
45. Военный парад, 1997, № 3.
46. Антонов Д. А, Ригман В. Г. Из досье русского «медведя». — Крылья родины,
1994, №6, 7, 8.
47. Карпенко А. В., Ганин С. М., Колногоров В. В., Трушенков В. В. «Невский
бастион» — Приложение к военно-техническому сборнику. 1996, вып. № 5.
48. Карпенко А. В., Ганин С. М., Колногоров В. В. «Невский бастион» — При-
ложение к военно-техническому сборнику. 1996, вып. № 6.
49. Артемьев А. А. Дальний противолодочный самолет Ту-142. — Киев: Major, 2000.
50. Гордон Е. И., Ригман В. Г Цель — Америка. — Авиация и время, 1996, № 5.
51. Самолеты ОКБ им. А. Н. Туполева 1923—1994 гг. — М.: Изд-во ЦАГИ, 1994.
52. Tupolev Tu-22 «Blinder», Tupolev Tu-22M «Backfire»-Russia’s long range supersonic
bombers...» Flight International» 17.12.1977 r.
53. «Бэкфайр» — прорыв из неизвестности. Монография. — Аэрохобби, 1993, № 1.
54. «Коммерсант», 17 октября 2001.
55. Jane’s All The World’s Aircraft, Copy right, 1997, London.
56. Военный парад, 1995, июль—август 1995.
57. Вертолетный мир России. Российский информационный технический журнал.
Издается с 2000 г.
58. Независимое военное обозрение. Еженедельное приложение к «Независимой га-
зете», 2000, № 38, издается с 1995 г.
59. Artificial Intelligence System a Problem of the Helicopter. Makhov E. A.,
Sherbakov S. V, Abstract for 27 European Rotorcraft Forum, Moscow, 11 — 14 September 2001.
60. Авиация в локальных войнах. — М.: Воениздат, 1988.
раздел
УПРАВЛЯЕМОЕ ОРУЖИЕ
«ВОЗДУХ - ПОВЕРХНОСТЬ»
САМОЛЕТОВ УДАРНОЙ
АВИАЦИИ
В данном разделе представлены материалы по
крылатым ракетам авиационного базирования, а так-
же корректируемым авиационным бомбам.
Крылатые ракеты до настоящего времени явля-
ются одним из основных видов вооружений во всем
мире. Основные достринства этого вида вооруже-
ний — высокая точность попадания в цель и эффек-
тивность действия боевого заряда.
С самого начала создания такого вооружения
перед ГосМКБ «Радуга» (главный конструктор
А. Я. Березняк, впоследствии И. С. Селезнев), а так-
же перед ОКБ «Звезда—Стрела» была поставлена
задача создания ракет различного вида базирова-
ния и особенно создания крылатых ракет класса
«воздух—поверхность» для вооружения самолетов
дальней и фронтовой авиации.
Приведены краткие характеристики и основные
особенности крылатых ракет класса «воздух—по-
верхность», а также корректируемых авиационных
бомб, разработанных для вооружения ударных са-
молетов.
3.1. Крылатые ракеты
для вооружения самолетов
дальней авиации
Конец 1940-х — начало 1950-х годов исторически отмечен как рубеж переос-
нащения дальней авиации России с классического ударного вооружения — бомб
различной мощности — на новый вид вооружения — крылатые ракеты, способ-
ные нести эффективные боевые части на большие дальности с высокой точно-
стью попадания, отдаляя экипаж самолета-носителя от контакта с целью и, есте-
ственно, от ее средств обороны. Эта работа началась с исторического Постанов-
ления Совета Министров Союза ССР:
Сонет ммкмстров Союза ССР
ПОСТАНОВЛЕНИЕ * 3I40-I028CC
от 8 сентября 1947 г.
Москва, Кремль
Совет министров Союза ССР постановляете
I/ В целях появления эффективности действия тяжелой бомбардиро-
вочной авиации по кораблям противника я повыяения безопасности атаку*
ющих самолетов приступить к разработке комплексной системы радиолока-
ционного наведения и самонаведения реактивных самолетов-снарядов»
сбрасываемых с тяжелых бомбардировщиков по крупным морским целям (шифр
системы «.Комет я»).
2} Для сущего технического руководства разработкой проекта комп-
лексной системы «Комета» и частей, входящих в нее» организовать спе-
циальное бюро, присвоив ему наименование «Спецбюро ПТ МВ».
3J Назнылть Начальником и Главным конструктором Спецбюро И МВ
Куксенко П.Н. Назначить заместителем начальника Спецбюро ЯП МВ
Берия G Л< _
Прадседат ль Совета Министров Сталин
Новая концепция построения комплексов вооружения (систем оружия) за-
тронула все компоненты самолета, включая радиолокационное оборудование,
подвесные устройства для ракет, электрические связи самолет-ракета, аэродина-
мику самолета, его прочность и новые аспекты в совместной динамике при взле-
тах-посадках и т. д.
301
И хотя пройдут десятилетия, прежде чем в этой сфере появится информаци-
онный цифровой обмен «верх—низ», реальный аналоговый обмен стал воплоще-
нием научной конструкторской мысли по передаче решения боевой задачи от
контакта с целью до ее поражения беспилотным летательным аппаратом.
Основными целями для новых систем оружия станут надводные корабли,
включая авианосцы, наземные и корабельные радиолокационные РЛС, наземные
радиолокационные контрастные цели (мосты, плотины и др.), площадные цели.
В новую концепцию развития самолетного оружия были привлечены
лучшие конструкторские бюро страны: АНТК им. А. Н. Туполева, ОКБ-155
им. А. И. Микояна, КБ-1, а также подключены передовые институты Министерства
авиационной промышленности: ЦАГИ, ЦИАМ, ВИАМ, НИАТ, ГосНИИАС и др.
Во главе этого нового направления работ стали лично наши прославленные
авиаконструкторы и начальники институтов со своими коллективами.
Практицизм генеральных конструкторов сразу сказался в двух принципиаль-
ных направлениях:
• аэродинамика крылатых ракет носила явно отработанный и хорошо исследо-
ванный к этому времени на самолетах-истребителях характер, что и прояви-
лось в целом семействе ракет КС, Х-20М, К-ЮС и др.;
• параллельно создавался целый унифицированный вид вооружений различ-
ного базирования КСС, КС-7, в том числе и первая крылатая ракета ФКР-1
(КС-7) с ядерным боеприпасом (ЯБП) наземного базирования.
Фактор времени стал главным и поэтому были найдены, естественно, самые
короткие пути в области прочности и аэродинамики с использованием нарабо-
танных исследований истребителей легкого класса. В то же время был найден
другой путь отработки «головок» самонаведения и автопилотов на самолетах-ист-
ребителях МиГ различной нумерации, где прославленные летчики-истребители
работали операторами, позволяя истребителям летать в беспилотном режиме,
включая в этот режим и полет самого истребителя под его силовой установкой.
С 1951 г. к этой работе был подключен и А. Я. Березняк как зам. главного
конструктора ОКБ им. А. И. Микояна и начальник филиала в г. Дубне Москов-
ской области. В очень короткое время филиал вырос в многотысячное самосто-
ятельное конструкторское бюро (МКБ «Радуга») во главе с главным конструкто-
ром А. Я, Березняком. В 1974 г. коллектив возглавил главный конструктор, а
затем генеральный конструктор И. С. Селезнев. ГосМКБ «Радуга» заняло пе-
редовые позиции в создании вооружения не только для ВВС, но и ВМФ страны,
за что было награждено орденами в 1976 и 1983 годах.
А тогда маленький коллектив вместе с прикомандированными специалиста-
ми ОКБ им. А. И. Микояна доводили конструкцию первых крылатых ракет, уча-
ствовали в их испытаниях, разрабатывали совместно новую научно-техническую
документацию (НТД); готовили серийное производство на опытных авиа- и ра-
диозаводах в Москве, Казани, Куйбышеве, Санкт-Петербурге, Дубне, Тбилиси,
Таганроге и других городах страны.
Пройдут годы, сменятся поколения конструкторов, ученых, изменятся техноло-
гии проектирования, появится моделирование процессов в новых системах, но ос-
новы, заложенные в начале становления крылатых ракет, позволят будущим поколе-
ниям, выросшим из маленького коллектива — филиала в г. Дубне, — создать новое
поколение крылатых ракет для дальней и стратегической авиации, которые и сегод-
ня составляют основу авиационной составляющей обороны нашей страны [1 — 10].
302
Конечно, эффективность оружия нового поколения это прежде всего даль-
ность полета на несколько тысяч километров от рубежей пуска, это увеличение
скорости полета вплоть до гиперзвука, а также использование для маршрутной
навигации особенностей земных контрастов, нахождение новых принципов на-
ведения и навигации, где точность не зависит от дальности, снижение радиоло-
кационной заметности до тысячных долей квадратного метра, огибание рельефа
местности, оснащение ракет средствами противодействия ПВО и ПРО.
Ниже приведены краткие характеристики и основные особенности крыла-
тых ракет, основы вооружения самолетов дальней авиации Ту-16, Ту-95К,
Ту-95МС, Ту-160, Ту-22М2(МЗ), а также самолетов фронтовой авиации Су-24М,
Су-17МЗ(М4), Су-25Т, МиГ-25БМ, Су-ЗОМК.
3.1.1. ПРОТИВОКОРАБЕЛЬНАЯ КРЫЛАТАЯ РАКЕТА КС
Опыт Второй мировой войны показал, что для поражения надводных целей
управляемые бомбы являются грозным оружием, однако совершенствование сис-
тем ПВО надводных кораблей приводило к большим потерям самолетов-носите-
лей. Это обстоятельство явилось основным мотивом к поиску нового противоко-
рабельного оружия, каким впоследствии явились противокорабельные крылатые
ракеты, обладающие увеличенной дальностью пуска и высокой точностью попа-
дания с применением радиолокационных систем наведения.
Впервые в практике отечественного авиастроения работы по созданию такой
ракеты, получившей название крылатая ракета КС, были начаты в 1948 г. в ОКБ
им. А. И. Микояна. Доводка ее была поручена организовавшемуся в г. Дубне фили-
алу ОКБ-155, руководителем которого стал А, Я. Березняк, впоследствии выдаю-
щийся главный конструктор ракетной техники. Интенсивные работы над создани-
ем такой ракеты завершились успешно, и в 1953 г. она была принята на вооружение
в составе дальнего ракетоносца-бомбардировщика Ту-16К (система «Комета»).
Вооружение самолета Ту- 16К такой ракетой обеспечило ему качественно но-
вую боевую возможность поражать морские цели, не входя в зону действия
средств ПВО корабля. Вооружение такого типа не имело в то время авиация ни
одного зарубежного государства.
В состав ракетного вооружения системы «Комета» входили:
• самолет-носитель Ту-16КС с аппаратурой обнаружения и подсвета цели и
аппаратурой подготовки и пуска ракет;
• две крылатые ракеты, управляемые по радиолучу с переходом на полуактив-
ное радиолокационное самонаведение на конечном участке полета;
• средства наземного обслуживания и контрольно-проверочная аппаратура.
Крылатая ракета КС была выполнена по самолетной схеме и комплектова-
лась газотурбинным воздушно-реактивным двигателем РД-500К (рис. 3.1).
Планер ракеты представлял собой цельнометаллический моноплан клепаной
конструкции. Основным материалом ракеты являлся алюминиевый сплав Д16Т, а
силовые узлы выполнялись из стали 30ХГСА. Ракета КС имела достаточно высо-
кие показатели надежности и точности поражения целей, отличалась относитель-
ной простотой конструкции и эксплуатации в войсковых частях.
Дальность пуска ракеты составляла примерно 80 км и определялась в основ-
ном дальностью обнаружения цели радиолокатором самолета-носителя.
При стартовой массе ракеты в целом 2750 кг масса фугасной боевой части
составляла 920 кг. Боевая часть представляла собой стальной бак, наполненный
взрывчатым веществом (ВВ) и снабженный двумя механическими взрывателями.
303
Рис. 3.1. Ракета КС
Подвеска ракеты к самолету-носителю осуществлялась с помощью двух буге-
лей, расположенных сверху фюзеляжа, и двух ухватов, имеющих по одному шты-
рю и по два упора.
Схема боевого применения была следующей:
• после обнаружения бортовой РЛС самолета-носителя надводной цели осу-
ществлялся пуск ракеты в направлении цели;
• полет ракеты происходил по наклонной траектории «носитель—цель»;
• до момента захвата цели полуактивной радиолокационной головкой самона-
ведения £РЛГС) ракеты ее курс корректировался с самолета-носителя по ли-
нии радиоуправления;
• после захвата цели РЛ ГС ракеты включался режим самонаведения до попада-
ния в цель и подрыва боевой части.
На базе крылатой ракеты КС впоследствии был создан комплекс управляе-
мого ракетного вооружения неподвижного наземного дивизиона «Стрела», под-
вижного наземного дивизиона «Сопка». Ракета в этих комплексах получила на-
именование «Крылатая ракета КСС». Ракета КСС по компоновке в основном не
отличалась от ракеты КС, за исключением дополнительной комплектации ее
стартовым пороховым двигателем и введения в состав автопилота статоскопа для
поддержания постоянной высоты полета около 400 м.
Крылатая ракета КСС входила также в состав корабельного управляемого
ракетного вооружения системы «Колчан», разработанной в 1956 г. и предусмат-
ривавшейся для применения с кораблей типа крейсер проекта 61. Такая система
на вооружение не поступила, но этим было положено начало применения на ко-
раблях ВМФ управляемого ракетного вооружения.
На базе крылатой ракеты КСС была создана система наземного управляемо-
го ракетного комплекса «Метеор». В этом комплексе ракета получила наимено-
304
вание «Крылатая ракета ФКР-1». Она предназначалась для поражения наземных
целей в прифронтовой полосе. Это была первая отечественная крылатая ракета
класса «земля—земля», оснащенная специальной боевой частью.
3.1.2. ПРОТИВОКОРАБЕЛЬНАЯ КРЫЛАТАЯ РАКЕТА КЛОС
Постоянное совершенствование средств ПВО надводных кораблей, особен-
но оснащение их зенитно-ракетными комплексами, снизило вероятность пора-
жения морских целей крылатыми ракетами типа КС и КСС. Это послужило
предпосылкой для создания сверхзвуковой противокорабельной ракеты К-ЮС.
Крылатая ракета К-ЮС в составе ракетного вооружения самолета-носителя
Ту-16К10 (система К-10) предназначалась для поражения надводных боевых ко-
раблей и транспортов.
В состав системы К-10 входили:
• самолет-носитель Ту-16К10, оборудованный системой подвески и подготов-
ки ракет к пуску и станцией радиоуправления;
• крылатая ракета К-ЮС с аппаратурой управления, двигательной установкой
и боевой частью;
• средства наземного обслуживания и контрольно-проверочная аппаратура.
Крылатая ракета К-ЮС выполнялась по нормальной самолетной схеме,
имеющей сверхзвуковые формы носовой части фюзеляжа и крыла, что обеспечи-
ло возможность достижения сверхзвуковой скорости полета ракеты 1800 км/ч.
Она оснащалась турбореактивным двигателем М-9МК, размещенным в хвосто-
вой части под корпусом планера (рис. 3.2).
Конструкция планера в основном выполнялась из алюминиевых сплавов
Д-16АТ и AM Г-6. Для удобства транспортирования и хранения ракеты консоли
крыла складывались вверх без расстыковки тяг управления элеронами. При старто-
вой массе 4600 кг масса боевой части составляла 940 кг, дальность пуска — примерно
Рис. 3.2. Ракета К-ЮС
305
220 км. Для ракеты была разработана фугасно-кумулятивная боевая часть, что повы-
сило эффективность поражения цели. Ракета подвешивалась под фюзеляж самоле-
та-носителя полуутопленной в бомбовом люке на специальном балочном держателе.
Полет ракеты к цели осуществлялся со снижением по ступенчатой траекто-
рии. До захвата цели аппаратурой самонаведения траектория ракеты по курсу
корректировалась с самолета-носителя в режиме радиоуправления. Подрыв бое-
вой части происходил при встрече с целью.
Крылатая ракета К-ЮС подвергалась модернизации для увеличения даль-
ности пуска за счет доработки системы управления и полного использования
имеющегося на борту ракеты запаса топлива, а также для совершенствования
траектории полета (увеличения протяженности конечного горизонтального уча-
стка и уменьшения высоты полета до 300...400 м) и расширения диапазона высот
пуска. Максимальная дальность пуска ракеты была доведена до 360 км.
На базе крылатой ракеты К-ЮС была разработана ее модификация — крыла-
тая ракета К-ЮСП, ракета-постановщик помех корабельным радиолокацион-
ным станциям противника. Такая ракета — беспилотный постановщик помех —
была создана впервые. Аппаратура помех с системами электроснабжения, управ-
ления и коммутации была установлена на местах расположения радиолокацион-
ной станции самонаведения и боевой части.
Применение ракет—постановщиков помех для прикрытия залпа боевых ра-
кет резко повышало боевую эффективность противокорабельных ракет К-ЮС.
3.1.3. КРЫЛАТАЯ РАКЕТА Х-20М
Крылатая ракета Х-20М входила в состав ракетного управляемого вооруже-
ния дальнего стратегического ракетоносца Ту-95К (система К-20). Это была пер-
вая отечественная стратегическая крылатая ракета, разработанная для поражения
площадных объектов специальной боевой частью на дальностях до 600 км. В это
время межконтинентальные баллистические ракеты находились лишь в началь-
ной стадии развития.
В состав системы К-20 входили:
• самолет-носитель Ту-95К с аппаратурой обнаружения и сопровождения цели
и управления ракетой, аппаратурой подвески и подготовки ракеты к пуску;
• крылатая ракета Х-20М с аппаратурой радиоуправления;
• средства наземного обслуживания и контрольно-проверочная аппаратура.
Крылатая ракета Х-20М была выполнена по нормальной самолетной схеме с
лобовым воздухозаборником и сверхзвуковыми формами крыла и оперения
(рис. 3.3). Она имела сверхзвуковую скорость полета 2200 км/ч и маршевую высо-
ту полета 15 км. Планер ракеты представлял собой цельнометаллический моно-
план клепаной конструкции со свободнонесущим крылом. Основным материа-
лом конструкции являлся алюминиевый сплав Д-16Т, силовые узлы были выпол-
нены из стали 30ХГСНА.
Подвеска ракеты к самолету-носителю осуществлялась с помощью бугеля,
расположенного сверху фюзеляжа в плоскости симметрии, и двумя ухватами.
Крылатая ракета Х-20М комплектовалась бортовой аппаратурой радиоуп-
равления, электрооборудованием, специальной боевой частью, общей массой
2560 кг. Стартовая масса ракеты составляла примерно 11 830 кг. Ракета оснаща-
лась газотурбинным воздушно-реактивным двигателем АЛ-7Ф с форсажной ка-
мерой. Воздух к двигателю поступал через сверхзвуковой лобовой воздухозабор-
306
ник, регулируемый выдвижным трехпозиционным конусом. На ракете было
предусмотрено дублирование питания двигателя топливом из баков самолета-но-
сителя на подвеске под самолетом перед пуском ракеты.
Схема боевого применения крылатой ракеты Х-20М была следующей:
• обнаружение цели и определение ее координат аппаратурой самолета-но-
сителя;
• после подготовки ракеты к пуску (включая запуск двигателя на подвеске)
при нахождении цели в зоне стрельбы производился пуск ракеты;
• по заданной программе полета ракета выходила на высоту маршевого полета;
• наведение ракеты на цель осуществлялось радиотехнической аппаратурой
самолета-носителя, работающей в прерывистом режиме, совместно с аппа-
ратурой, установленной на ракете;
• управление осуществлялось по курсу и дальности. Для передачи сигналов уп-
равления использовались кодово-импульсные сигналы;
• стабилизация по высоте полета осуществлялась программным датчиком дав-
ления в составе автопилота;
• на дальности до цели 50...70 км ракета переводилась в пикирование, после
чего задействовалась боевая часть.
3.1.4. КРЫЛАТАЯ РАКЕТА КСР-2
Основой для создания противокорабельной крылатой ракеты КСР-2 послу-
жила разработанная к концу 1950-х годов крылатая ракета КСР, прошедшая сов-
местные государственные испытания. Однако из-за примененной на ней систе-
мы управления, не удовлетворяющей современным на ту пору требованиям, на
вооружение ракета не была принята.
В отечественном ракетостроении это была первая ракета с жидкостным ра-
кетным двигателем (ЖРД). Применение такого двигателя вместо сложного по
конструкции, эксплуатации, тяжелого по весу и дорогого по стоимости двигателя
типа ТРД, ранее применявшегося на крылатых ракетах, позволило упростить
конструкцию планера ракеты, снизить его вес, стоимость и трудоемкость изго-
товления ракеты и упростить ее эксплуатацию.
307
Рис. 3.4. Ракета КСР-2
Вместе с тем применение нового типа двигателя потребовало решения ряда
новых задач:
• разработки принципиально новой пневмогидравлической схемы двигатель-
ной установки;
• создания несущей конструкции баков-отсеков топлива;
• проведения большой экспериментальной работы по отладке системы забора
топлива с минимальными остатками;
• решения вопросов заправки и слива двухкомпонентного топлива.
Успешное решение ряда принципиальных вопросов, связанных с примене-
нием ЖРД на ракете КСР, позволило заложить целое техническое направление на
последующие разработки крылатых ракет с применением ЖРД.
Крылатая ракета КСР-2 входила в состав системы вооружения самолета-но-
сителя Ту-16К (система К-16) и предназначалась для поражения надводных ко-
раблей и наземных радиолокационно-контрастных целей (рис. 3.4).
В состав системы К-16 входили:
• самолет-носитель Ту-16К с аппаратурой обнаружения и слежения за целью,
системой подвески и подготовки ракет к пуску;
• две ракеты КСР-2;
• средства наземного обслуживания и контрольно-проверочная аппаратура.
Впервые в практике отечественного ракетостроения крылатая ракета КСР-2
была оснащена активной радиолокационной головкой самонаведения с выбором
и захватом цели на автосопровождение непосредственно на подвеске под самоле-
том-носителем. В ракете реализовывался принцип «пустил—забыл», означаю-
щий, что самолет-носитель после пуска ракеты полностью был свободен в прове-
дении дальнейших маневров.
Для ракеты была разработана фугасно-кумулятивная боевая часть с корпусом
из алюминиевого сплава вместо стального, что позволило увеличить вес ВВ.
При стартовой массе ракеты 4070 кг масса фугасно-кумулятивной боевой
части (ФКБЧ) составила 940 кг.
Крылатая ракета КСР-2 была выполнена по нормальной самолетной схеме.
Конструкция фюзеляжа включала в себя несущие баки окислителя и горючего.
308
Крыло выполнено цельнометаллическим с работающей обшивкой. Консоли
крыла при хранении и транспортировании складывались без разъединения тяг
управления элеронами. Двигательная установка состояла из жидкостного ракет-
ного однокамерного двухрежимного двигателя с турбонасосной подачей топлива
и топливо-воздушной системы.
Ракета под самолет-носитель подвешивалась на балочный держатель за бу-
гель и фиксировалась двумя ухватами.
Пуск ракеты осуществлялся на максимальную дальность до 160 км. Обнаруже-
ние цели и определение ее координат производились радиолокационной станцией
самолета-носителя на расстоянии до 350 км. Координаты выбранной цели переда-
вались в станцию ракеты, которая переходила в режим автосопровождения цели.
При достижении разрешенной дальности стрельбы производился пуск ракеты. От-
цепка ракеты происходила на высоте 4... 10 км. Полет ракеты к цели происходил по
наклонной траектории «носитель—цель» в режиме самонаведения с помощью ак-
тивной станции ракеты. При встрече с целью происходил подрыв боевой части.
На базе ракеты КСР-2 была разработана ее модификация — крылатая ракета
КСР-11.
Постоянное совершенствование средств ПВО противника как на морском,
так и на сухопутном театре военных действий, основу которых составляли радио-
локационные станции обнаружения и наведения зенитно-ракетных комплексов,
сделало особо актуальной задачу создания авиационных средств для их подавле-
ния перед нанесением удара непосредственно по назначенным целям. Антенные
посты РЛС обнаружения целей и наведения ракет (самолетов) являются наиболее
уязвимым элементом звена управления огнем средств ПВО, поскольку они рабо-
тают в активном режиме и их практически невозможно замаскировать при бое-
вой работе. Первоначально РЛС ЗРК удавалось эффективно «задавить» активны-
ми или пассивными помехами, но вскоре появились радиоэлектронные средства
защиты от таких помех. С течением времени было установлено, что наиболее эф-
фективным способом выведения РЛС из строя на длительный срок является
только огневое их подавление.
Самым эффективным средством огневого подавления должны были стать
управляемые авиационные ракеты с пассивной противорадиолокационной го-
ловкой самонаведения.
Крылатая ракета КСР-11 являлась первой отечественной ракетой с пассив-
ной РГСН. Эта ракета входила в состав системы управляемого ракетного воору-
жения самолета Ту-16К (система К-11) и предназначалась для поражения рабо-
тающих импульсных наземных и корабельных радиолокационных станций обна-
ружения, управления огнем и наведения управляемого оружия.
В состав системы К-11 входили:
• самолет-носитель Ту-16К, оборудованный аппаратурой разведки и целеука-
зания;
• две крылатые ракеты КСР-11;
• средства наземного обслуживания и контрольно-проверочная аппаратура.
Для ракеты КСР-11 была разработана фугасная боевая часть массой 860 кг с
активной оболочкой, что позволило увеличить радиус поражения целей. Для под-
рыва боевой части над поверхностью земли устанавливался оптический взрыватель.
По аэродинамическим и конструктивным характеристикам, геометрическим
размерам, двигательной установке, основным летно-техническим данным она не
отличалась от ракеты КСР-2.
309
Последовательность боевого применения ракеты КСР-11 следующая:
• при достижении заданного района (или при свободном поиске) самолет-но-
ситель с помощью аппаратуры разведки производил обнаружение работаю-
щих РЛС, определение их координат и основных параметров работы. Даль-
ность обнаружения целей составляла 300...400 км;
• настройка аппаратуры ракеты на выбранную РЛС-цель производилась опе-
ратором самолета-носителя. При достижении разрешенной дальности
стрельбы (160жм) производился пуск ракеты. Наведение ракеты на цель осу-
ществлялось по принимаемым сигналам от цели;
• при достижении ракетой района цели по сигналу от оптического взрывателя
или при встрече с преградой происходил подрыв боевой части.
На базе крылатой ракеты КСР была разработана крылатая ракета-мишень
КРМ, которая предназначалась для отработки и испытаний ракетных комплек-
сов перехвата целей, летающих со сверхзвуковыми скоростями на больших высо-
тах, а также для боевой подготовки личного состава войск ПВО. Ракета-мишень
достигала маршевой скорости полета примерно 3200 км/ч. При этих испытаниях
был накоплен опыт применения конструкций из обычных алюминиевых сплавов
при скоростях полета, соответствующих числу М = 3, который был использован
в последующих разработках крылатых ракет.
3.1.5. КРЫЛАТАЯ РАКЕТА Х-22
Крылатая ракета Х-22 была разработана в трех модификациях, отличающих-
ся системами наведения, позволяющими реализовать широкие боевые возмож-
ности в части поражения большой номенклатуры разнородных целей.
Создание крылатой ракеты Х-22 с высокими на то время летно-техническими
характеристиками и боевыми возможностями явилось новым качественным шагом в
развитии отечественного ракетного вооружения класса «воздух—поверхность». Для
ракеты впервые была разработана аэродинамическая схема с безэлеронным крылом
малого удлинения, с цельноповоротным килем и горизонтальными стабилизатора-
ми, отличающаяся высоким аэродинамическим качеством и послужившая прототи-
пом для последующих разработок. Была создана теплопрочная конструкция планера
ракеты, для которой впервые было освоено применение титановых сплавов, обла-
дающих высокой удельной прочностью в заданном диапазоне температур. При лет-
ных испытаниях теоретические методы тепловых расчетов были проверены замера-
ми реально действующих температур в полете. Решены вопросы прочности и тепло-
стойкости и разработаны методы испытаний крупногабаритных радиопрозрачных
обтекателей в условиях интенсивного нагрева и больших внешних давлений. Были
решены вопросы тепловой защиты оборудования с помощью системы охлаждения в
полете, а также решен вопрос защиты топлива от аэродинамического нагрева приме-
нением внутренних малонагруженных емкостей. Проведены большие теоретические
и экспериментальные исследования флаттера при больших скоростных напорах.
Впервые при изготовлении планера широко применялась автоматическая
сварка тонкостенных материалов.
В процессе разработки ракеты Х-22 в области динамики полета были решены
следующие проблемные вопросы:
• определение логики выдачи траекторных команд программных и управляю-
щих сигналов в автопилоте АПК-22А для обеспечения формирования задан-
ной траектории полета ракеты в вертикальной плоскости;
310
• обеспечение стабилизации ракет относительно центра масс с помощью фор-
мирующих пассивных RC-цепочек в широком диапазоне изменения условий
полета ракеты по высоте и скорости. Качественная стабилизация ракеты в этих
условиях обеспечивалась за счет изменения параметров формирующих ячеек
по командам, выдаваемым программным механизмом автопилота АПК-22А;
• обеспечение точности стабилизации заданной высоты горизонтального по-
лета в условиях нестандартности атмосферы и искажения статического дав-
ления за счет влияния углов атаки и скольжения. Для повышения точности
выхода ракеты на заданную высоту горизонтального полета в автопилот
АПК-22А с самолета-носителя вводилась высота отцепки ракеты от самоле-
та-носителя с учетом нестандартности атмосферы и ошибок приема статиче-
ского давления;
• регулирование заданного числа М полета после разгона ракеты до числа
М = 3,4. Разгон ракеты осуществлялся на стартовом режиме работы ЖРД
Р-2О1-ЗОО. После разгона стартовая камера ЖРД выключалась, а регулирова-
ние заданного числа М полета осуществлялось непрерывным изменением
тяги маршевой камеры ЖРД;
• обеспечение стабилизации ракеты с учетом нежесткости конструкции и уп-
ругости проводки управления за счет реализации в структуре автопилота
АПК-22А пассивных корректирующих RC-цепочек;
• обеспечение безопасности отцепки ракеты от самолета-носителя при дейст-
вии больших внешних возмущений в зоне влияния самолета-носителя на
аэродинамические характеристики ракеты. Безопасность отцепки обеспечи-
валась за счет оптимального выбора параметров формирующих ячеек и пере-
даточных чисел на участке отцепки ракеты от самолета-носителя.
Крылатая ракета Х-22 входила в состав системы управляемого ракетного во-
оружения самолета-носителя Ту-22К и предназначалась для поражения радиоло-
кационно-контрастных надводных и наземных целей.
В состав системы входили:
• самолет-носитель Ту-22К, оборудованный радиолокационной станцией об-
наружения и сопровождения целей;
• крылатая ракета Х-22;
• контрольно-измерительная аппаратура и средства наземного обслуживания.
Крылатая ракета Х-22 выполнялась по самолетной схеме с крылом малого
удлинения и большой стреловидности, с цельноповоротным килем и горизон-
тальными стабилизаторами (рис. 3.5). В качестве основного конструкционного
материала при изготовлении планера применены хорошо свариваемые и обла-
дающие высокой удельной прочностью титановые сплавы. Некоторые отсеки и
узлы выполнены из высокопрочных сталей.
Ракета оснащалась активной головкой самонаведения, фугасно-кумулятивной
боевой частью массой 930 кг, двухкамерным жидкостно-ракетным двигателем с тур-
бонасосной подачей топлива и плавным регулированием тяги при маршевом полете.
Подвеска ракеты под самолет-носитель осуществлялась на специальном ба-
лочном держателе, выпускающемся вместе с ракетой при подготовке ее к пуску.
Обнаружение и выбор цели производились оператором самолета-носителя с по-
мощью станции самолета, данные о цели заводились в аппаратуру ракеты, и она за-
хватывала цель на автосопровождение. При достижении разрешенной дальности
стрельбы производился пуск ракеты. После пуска осуществлялось автономное наве-
дение ракеты на заданную цель. Ракета обладала высокими летными харакгеристика-
311
Рис. 3.5. Ракета Х-22 ПГ
ми: на маршевом участке она летела на постоянной высоте приблизительно 22,5 км и
с постоянной скоростью, соответствующей числу М = 3,4. Подрыв ФКБЧ происхо-
дил при встрече ракеты с целью от срабатывания системы контактных датчиков.
В процессе разработки ракета совершенствовалась как в части улучшения характе-
ристик системы наведения, так и в части расширения условий применения ракеты.
Эта ракета вошла в состав ракетного вооружения самолета-носителя Ту-22М2(3)
под наименованием крылатая ракета Х-22Н.
В настоящее время продолжается совершенствование бортовой системы управ-
ления ракеты, ведутся работы по повышению летно-технических характеристик.
В процессе испытаний и эксплуатации ракет Х-22Н были выявлены и реше-
ны следующие проблемные вопросы:
• обеспечение безопасности отцепки ракеты от самолета-носителя при дейст-
вии больших внешних возмущений для подкрыльевой подвески из-за влия-
ния самолета-носителя на аэродинамические характеристики ракеты. Без-
опасность отцепки обеспечивалась за счет оптимального выбора передаточ-
ного числа и параметров формирующих ячеек автопилота в канале крена;
• ухудшение точности попадания ракеты Х-22НА при пусках по «высокой»
траектории полета и при малых дозвуковых скоростях полета из-за больших
колебаний маршевой высоты полета и разброса угла и дальности пикирова-
ния, возникавших за счет большого угла разарретирования (тЗо = 6...8°) ги-
роскопа тангажа и поздней выдачи программного сигнала автопилота для
выхода на заданную высоту полета. Улучшение точности попадания было
обеспечено обнулением сигнала стабилизации высоты при переводе ракеты
в пикирование и выдачей программного сигнала на уменьшение угла набора
высоты по команде с высотного сигнализатора ВС-16 500;
• срыв захвата цели и переход на сопровождение фона станцией наведения
ПМГ для ракеты Х-22Н на участке пикирования из-за наличия токопроводя-
щего конденсата газа, выделяющегося компонентами радиопрозрачного ма-
териала обтекателя при его нагреве до температуры более 400 °C. Устранение
попадания токопроводящего конденсата в отсек аппаратуры ПМГ было
обеспечено введением герметизации аппаратурного отсека головной части
ракеты и дренажа конденсата из аппаратурного отсека.
312
Крылатая ракета Х-22П также являлась модификацией ракеты Х-22. В соста-
ве ракетного управляемого вооружения самолета-носителя Ту-22К она предназ-
началась для поражения работающих наземных и корабельных радиолокацион-
ных станций.
В состав системы входили:
• самолет-носитель Ту-22КП, оборудованный аппаратурой разведки и целе-
указания;
• крылатая ракета Х-22П, оснащенная пассивной радиолокационной головкой
самонаведения и фугасно-кумулятивной с активной оболочкой боевой частью;
• контрольно-измерительная аппаратура и средства наземного обслуживания.
После выбора цели оператором самолета-носителя информация о цели пере-
давалась в аппаратуру ракеты. После захвата цели на автосопровождение и дости-
жении разрешенной дальности пуска производился пуск ракеты. Траектория по-
лета ракеты была такая же, как у ракеты Х-22.
В составе ракетного управляемого вооружения самолета-носителя Ту-22М2(3)
ракета имеет наименование «крылатая ракета Х-22НП».
При разработке и испытаниях ракеты Х-22НП были выявлены и решены
следующие проблемные вопросы:
• искажение пеленгационной характеристики системы «аппаратура ПГП-К +
+ обтекатель», которое приводило к неустойчивому процессу самонаведения
на участке пикирования и выходу ракеты на большие углы курса (более 15°);
• при больших углах курса на участке пикирования и наличии в автопилоте
корректирующих RC-цепочек возникала дестабилизирующая связь каналов
курса и крена из-за карданной ошибки курсового гироскопа, что приводило
к потере устойчивости ракеты.
Для исключения подобных явлений была проведена доработка обтекателя
ракеты, а в аппаратуре ПГП-К введена гармоническая линеаризация пеленгаци-
онной характеристики.
Крылатая ракета Х-22Б была разработана как экспериментальная авиацион-
ная баллистическая ракета. Она предназначалась для исследования возможности
полета крылатых летательных аппаратов на больших высотах с гиперзвуковыми
скоростями по баллистико-планирующим траекториям.
В результате лабораторно-экспериментальных, а также летных испытаний
был решен ряд новых проблем, связанных с аэродинамикой и динамикой полета,
работоспособностью конструкции при больших скоростях полета и скоростных
напорах, обеспечением работы радиотехнических устройств в условиях возник-
новения плазменных образований.
Проведенные работы дали обширный материал ддя создания в будущем гипер-
звуковых летательных аппаратов. При летных испытаниях ракеты Х-22Б была до-
стигнута максимальная высота полета 80 км и скорость, соответствующая М = 6,2.
3.1.6. КРЫЛАТАЯ РАКЕТА КСР-5
Крылатая ракета КСР-5 (рис. 3.6) была разработана для применения в соста-
ве ракетного управляемого вооружения (система К-26) самолета-носителя
Ту-16К как более перспективная на то время по сравнению со стоящими на во-
оружении в составе этого самолета ракетами К-ЮС, КСР-2, КСР-11.
Ракета КСР-5 предназначалась для поражения радиолокационно-контраст-
ных морских и наземных целей.
313
В состав системы К-26 входили:
• самолет-носитель, оборудованный бортовой аппаратурой целеуказания;
• две крылатых ракеты КСР-5;
• контрольно-измерительная аппаратура и средства наземного обслуживания.
Для этой ракеты была разработана система наведения, отличающаяся повы-
шенной дальностью действия, помехоустойчивостью и возможностью наведения
ракеты на источник помех.
Обнаружение цели производилось радиолокационной станцией самоле-
та-носителя. Захват цели осуществлялся на подвеске под самолетом. После пуска
ракеты самолет-носитель имел полную свободу маневра. Была заложена возмож-
ность залпового пуска двух ракет с минимальным интервалом между пусками ра-
кет по одной или различным целям.
Ракета оснащалась фугасно-кумулятивной боевой частью массой 700 кг при
общей массе ракеты 3940 кг. В качестве двигателя использовался двухрежимный
жидкостный ракетный двигатель с турбонасосной подачей топлива.
Ракета была выполнена по аэродинамической схеме, аналогичной аэродина-
мической схеме ракеты Х-22. Полет ракеты происходил по горизонтальной вы-
сотной траектории 22,5 км со скоростью полета 3200 км/ч.
Для обеспечения минимального веса конструкции и простоты технологии
изготовления в качестве основного конструкционного материала использовался
алюминиевый сплав АМГ-6. Это был верхний предел применения этого матери-
ала для скорости, соответствующей М = 3, реализованной для этой ракеты.
В дальнейшем в ракете КСР-5 была модернизирована система наведения и
реализована наклонная траектория (ракета КСР-5Н).
В процессе летных испытаний ракеты КСР-5 возникали острые ситуации, когда
приходилось выяснять причины срыва автосопровождения цели активной головкой
самонаведения. Нередко причиной этого были автоколебания ракеты по углу крена,
вызванные работой нелинейного рулевого привода (РП) с шариковинтовым редукто-
ром. Он имел достаточно большую зону нечувствительности (более 0,6°) и нелиней-
Рис. 3.6. Ракета КСР-5
314
ную скоростную характеристику «диванного типа», т. е. в большом диапазоне малых
входных сигналов добротность привода уменьшалась. В этой ситуации потребовался
активный поиск путей по устранению автоколебаний или минимизации амплитуды
колебаний по углу крена. Московским институтом электротехники и автоматики в
сотрудничестве с Институтом проблем управления был создан адаптивный автопилот
переменной структуры (ААППС), использующий параметры автоколебательного
процесса в контуре стабилизации угла крена для настройки коэффициентов.
Адаптивная часть ААППС была выполнена на усилителях, переменная
структура была реализована только в канале крена по переключающей функции,
являющейся следом пересечения двух фазовых плоскостей.
Адаптивный автопилот переменной структуры в широком диапазоне изме-
нения динамических параметров по крену позволил перейти к минимальным уг-
лам отклонения рулей. В результате уменьшилась амплитуда автоколебаний по
углу крена до минимальной величины, вынужденное движение по крену стало
носить апериодический характер со скользящим режимом.
Такой автопилот был применен на ракетах КСР-5НМ и успешно прошел от-
работку в летных испытаниях, подтвердив высокую эффективность.
Использование ААППС на ракете КСР-5Н, имеющей широкий спектр типов
траекторий, в том числе маловысотную, формируемую за счет использования ми-
нимального значения угла визирования цели в вертикальной плоскости, требующе-
го устойчивого автосопровождения цели на всей траектории, позволило в короткий
срок успешно провести летные испытания и сдать в эксплуатацию эту ракету.
Использование ААППС на ракете КСР-5НМ позволило успешно провести
летные испытания этой ракеты на сверхмалых высотах.
Крылатая ракета КСР-5П являлась модернизацией ракеты КСР-5. В составе
ракетного вооружения самолета Ту-16К (система К-26П) она предназначалась для
поражения работающих наземных и корабельных радиолокационных станций.
В состав системы К-26П входили:
• самолет-носитель Ту- 16К с аппаратурой разведки и целеуказания;
• две ракеты КСР-5П;
• контрольно-измерительная аппаратура и средства наземного обслуживания.
Ракета комплектовалась пассивной головкой самонаведения и фугасно-ку-
мулятивной боевой частью с активной оболочкой массой 700 кг. По конструкции
планера и двигательной установки она не отличалась от ракеты КСР-5.
Обнаружение и выбор цели производились оператором самолета-носителя с
помощью пеленгационного устройства головки самонаведения ракеты и аппара-
туры разведки и целеуказания самолета. Параметры выбранной цели вводились в
головку самонаведения ракеты, которая затем переходила к автономной работе в
режиме автосопровождения цели. При достижении разрешенной дальности пу-
ска производился пуск ракеты. Полет ракеты к цели осуществлялся по такой же
траектории, как у ракеты КСР-5. Дальность пуска ракеты составляла 300 км. При
дальнейшей модернизации дальность пуска была доведена до 400 км за счет уве-
личения массы заправляемого топлива и использования маршевого участка ее
полета без работающего двигателя.
На базе крылатой ракеты КСР-5 была разработана ракета-мишень КСР-5НМ,
которая являлась полноразмерным имитатором целей типа ракет «воздух—земля»,
«воздух—корабль», летящих на малых высотах, и предназначалась для отработки
зенитных и авиационных комплексов перехвата, а также боевой подготовки зенит-
но-ракетных войск. Основной особенностью мишени является полет ее на боль-
шой сверхзвуковой скорости (М = 2) у поверхности земли (на высоте 25 м).
315
ЗАЛ. АЭРОБАЛЛИСТИЧЕСКАЯ РАКЕТА Х-15
Аэробаллистическая ракета Х-15 входит в состав ракетного вооружения самоле-
тов дальней авиации типа Ту-22М и Ту-160 и предназначается для поражения стаци-
онарных наземных объектов и объектов системы ПВО с известными координатами.
Ракета выполнена по бескрылой аэродинамической схеме с тремя симмет-
ричными поворотными рулями (рис. 3.7). Ракета комплектуется системой управ-
ления на базе инерциальной системы и БЦВМ, специальной боевой частью и
твердотопливным ракетным двигателем. При разработке ракеты была поставлена
задача создания комплектующих ее систем с минимально возможными массога-
баритными характеристиками. В результате была создана ракета с высокими лет-
но-техническими характеристиками при минимальных массогабаритных харак-
теристиках. Длина ракеты 4,8 м при диаметре 0,45 м. Такие размеры, в свою оче-
редь, позволили увеличить запас ракет на носителях: на самолете-носителе
Ту-22М размещается шесть ракет внутри фюзеляжа на ПУ барабанного типа и че-
тыре ракеты на внешних подкрыльевых узлах подвески, а на самолете-носителе
Ту-160 размещается 24 ракеты в двух отсеках вооружения.
Ракета обладает высокими летно-техническими характеристиками, многооб-
разием типов траекторий. На ракете реализованы специальные меры по обеспе-
чению малой эффективной отражающей поверхности. Все это потребовало реше-
ния ряда научно-технических проблем, прежде всего создания конструкции с вы-
сокой весовой отдачей, работающей в условиях воздействия высоких температур
и скоростных напоров.
Ракета может совершать полет по аэробаллистической траектории, по траек-
ториям с горизонтальным участком полета на заданной высоте, в том числе и на
малой высоте. При подходе к цели осуществляется наведение по методу погони,
что обеспечивает практически нулевой динамический промах наведения. Ракета
X-15 имеет большой диапазон изменения скоростного напора от 0 до 100 000 кгс/м2,
а по углу атаки и скольжения — ±15°.
Из-за отсутствия крыла аэродинамические характеристики ракеты относитель-
но углов атаки, скольжения и отклонения рулей существенно нелинейные. Поэтому
для обеспечения хорошего качества стабилизации движения ракеты передаточные
числа в контуре стабилизации системы навигации и автоматического управления
(СНАУ) корректируются в зависимости от высоты и скорости полета (с частотой
5 Гц) и от текущих углов атаки а и скольжения р (с частотой 20 Гц), что выполнено
впервые на летательных аппаратах, разрабатываемых в ГосМКБ «Радуга».
Рис. 3.7. Ракета X-15
316
Особенность аэродинамических характеристик ракеты — резкое уменьшение
эффективности рулей из-за их «затенения» при больших значениях пространст-
венного угла атаки апр = а/ос2 + р2 в случае, когда плоскость рулевой поверхности
совпадает с плоскостью апр. Для ослабления этого эффекта ракета поворачивает-
ся системой управления на программный угол крена упрог, и эффективность «зате-
ненного» руля восстанавливается.
Ракета Х-15П является модификацией ракеты Х-15. При разработке были
расширены боевые возможности ракеты путем повышения ее точностных харак-
теристик при применении по излучающим РЛС-целям. Ракета комплектуется пас-
сивным радиотехническим корректором и осколочно-фугасной боевой частью.
Кроме того, была разрешена одна из основных проблем — создан радиопрозрач-
ный обтекатель с необходимыми радиотехническими характеристиками, работаю-
щий в условиях воздействия высоких температур и больших скоростных напоров.
Основные летно-технические, а также габаритно-массовые характеристики
ракеты Х-15П такие же, как у ракеты Х-15.
3.1.8. КРЫЛАТАЯ РАКЕТАХ-55
Крылатая ракета Х-55 является стратегической маловысотной ракетой боль-
шой дальности полета, оснащенной ядерной боевой частью и предназначенной
для поражения широкого класса наземных целей с заранее известными коорди-
натами. В 1970—1974 гг. ГосМКБ «Радуга» и Гос НИИАС проводилась НИР, в
которой была разработана концепция стратегической крылатой дозвуковой раке-
ты с наведением по рельефу местности, и выпущен аванпроект такой ракеты. Та-
ким образом, работы в СССР по указанной ракете начали проводиться на не-
сколько лет раньше, чем появились сообщения о разработке такого типа ракеты в
США. Ракеты Х-55 в составе комплексов вооружения самолетов-носителей
Ту-95МС и Ту-160 являются авиационной составляющей стратегических ядер-
ных сил нашей страны. Принятие на вооружение таких ракет установило паритет
с США в области такого вида стратегических наступательных вооружений. Ана-
логом ракет Х-55 являются американские крылатые ракеты ALCM и AGM-129A.
Основными особенностями таких ракет, обеспечивающими их высокую бое-
вую эффективность, являются:
• автономный полет на большую дальность (2500...3000 км) с высокой точно-
стью наведения на заданную цель;
• полет на предельно малой высоте с огибанием рельефа местности;
• согласованный групповой полет с выполнением заданного пространствен-
но-временного графика;
• минимально возможная их радиолокационная и тепловая заметность;
• минимально возможные массогабаритные характеристики, обеспечивающие
размещение большого боезапаса на самолетах-носителях, что достигается
применением малогабаритных комплектующих.
Крылатая ракета Х-55 выполнена по нормальной аэродинамической схеме с
корпусом круглого сечения, крылом большого удлинения, расположением двига-
теля ТРДД в полетном положении под корпусом хвостовой части ракеты (рис. 3.8).
В транспортировочном состоянии, в том числе и на подвеске под самоле-
том-носителем, консоли крыла, а также маршевый двигатель убираются внутрь
корпуса ракеты, а консоли оперения складываются вокруг хвостовой части корпуса.
Благодаря применению в конструкции планера большого количества механизмов
складывания-раскладывания, габариты ракеты в транспортировочном состоянии
317
не выходят за габариты корпуса. При разработке ракеты был реализован ряд мер по
обеспечению минимально возможной заметности в радио- и тепловом диапазонах.
Для ракеты Х-55 впервые в практике отечественного ракетостроения была раз-
работана автономная система управления, использующая информацию о рельефе
местности, благодаря которой обеспечивается низковысотный полет ракеты с оги-
банием рельефа местности, а также высокая точность попадания ракеты в цель.
При проектировании этой ракеты пришлось искать решения, нейтрализую-
щие противоречие между требованием реализации максимальной дальности по-
лета и обеспечения полета на минимальной высоте с огибанием рельефа местнос-
ти (что приводит к потере дальности при большой продолжительности полета).
Были проработаны рекомендации, реализованные как в бортовой системе управ-
ления (БСУ), так и в наземном комплексе средств подготовки полетных заданий.
Суть рекомендаций состояла в оптимальном назначении режима огибания и про-
граммной высоты полета, обеспечивающих в комплексе минимизацию вероят-
ности столкновения ракеты с поверхностью земли и минимизацию потерь даль-
ности при этом за счет обоснованного «ослабления» огибания.
Особое внимание было уделено разработке циклограммы выдачи из БСУ ра-
зовых команд на раскладку агрегатов ракеты при переводе из транспортной кон-
фигурации (на подвеске под самолетом-носителем) в полетную, логики выдачи
команды на запуск двигателя, для чего требовалось выполнение ряда условий по
высоте, числу М и времени автономного полета (из-за ограничения емкости хи-
мического источника тока).
Значительный объем продувок моделей ракеты в аэродинамической трубе
ЦАГИ и изучение материалов летных испытаний позволили отказаться от рас-
пространенных методов адаптации передаточных чисел за счет пробных сигналов
и реализовать в БСУ алгоритмы адаптации передаточных чисел системы автома-
тического управления по навигационной информации о высоте и скорости поле-
та, о массе ракеты по величине расхода топлива, передаваемой от двигателя.
Новым также являлся разработанный под руководством специалистов
ГосМКБ «Радуга» алгоритм управления боевым снаряжением, в том числе при
различных аварийных ситуациях на борту ракеты, что позволило достичь макси-
мальной эффективности ракеты. Созданный на базе боевого алгоритма алгоритм
Рис. 3.8. Ракета Х-55
318
анализа аварийных ситуаций для учебно-боевой подготовки (ААСУБП) позволил
ВВС проводить пуски по программе учебно-боевой подготовки (УБП) без само-
летного командно-измерительного пункта (СКИП-Ил-76) и без увеличения ри-
ска выйти за пределы отчужденной территории.
В ГосНИИАС был создан уникальный комплекс полунатурного моделирова-
ния, на нем были отработаны бортовая система управления (БСУ) и наведения
ракеты и система управления подготовки и пуска ракет самолетов-носителей
(СУППР).
За время своей эксплуатации комплекс обеспечил прохождение всех этапов
отработки ракеты от макетного образца системы управления через эксперимен-
тальный и опытный образцы до первого штатного БСУ, комплект которого после
моделирования на комплексе поступал на сборку пусковой ракеты.
На всех стадиях отработки системы управления на КПМ проводились исследо-
вания различных версий программ алгоритма управления при работе в режимах пред-
стартовой подготовки и автономного полета. По результатам более 3000 реализаций,
проведенных на КПМ, было выпущено около 100 заключений и актов с рекоменда-
циями на доработку программ алгоритма управления. Впервые на моделирующем
комплексе проверялась и отрабатывалась логика управления и блокировки специали-
зированной боевой части и ее взаимодействие со штатной БСУ.
В ходе сопровождающего моделирования на различных этапах летных испы-
таний решались задачи функционирования подсистем аппаратуры БСУ и их взаи-
модействия, проводилась оценка качества процессов стабилизации и управления
на всех режимах полета, оценка качества работы экстремального корректора и
точности наведения. Большой объем наземной отработки позволил провести 16
успешных пусков ракет при одном незачетном. Такой показатель зачетности в
практике государственных испытаний получен впервые. Сопровождающее полу-
натурное моделирование по объему зачетных реализаций в несколько раз превы-
сило объем натурных испытаний и органически включалось в программы этапов
«А» и «Б» государственных испытаний, что позволило сократить их сроки и объем.
Отмечая огромный объем наземной отработки ракеты, стендовой отработки
программно-математического обеспечения БСУ, что в конечном итоге способст-
вовало успеху разработки и испытаний в очень сжатые сроки, нельзя не вспом-
нить отработку ракеты в «сборе» с «горячей гонкой» двигателя на стенде ГосМКБ
«Радуга» моторно-испытательной станции с подключением стенда полунатурно-
го моделирования и вводом полетного задания.
Данная уникальная работа проводилась в рамках программы испытаний ракеты
с боевым снаряжением и позволила сократить объем летных испытаний на два пуска.
Надо сказать, что проектирование ракеты велось в тесной увязке с проекти-
рованием комплекса подготовки полетных заданий для ее применения, с раци-
ональным (на тот период) распределением функций, что обеспечило высокую
эффективность авиационного ударного комплекса в целом.
Для обеспечения большой дальности полета был разработан и применен на
ракете малоразмерный высокоэкономичный турбореактивный двухконтурный
двигатель.
Крылатая ракета Х-55СМ является модернизацией ракеты Х-55 — увеличена
дальность полета как основного параметра, влияющего на боевую эффектив-
ность. Увеличение достигнуто за счет применения подвесных топливных баков,
сбрасываемых в автономном полете после израсходования топлива.
Дальнейшие разработки в области такого класса ракетного вооружения про-
водятся в направлении создания высокоточных ракет нового поколения, обладаю-
щих увеличенной дальностью действия и высокой точностью попадания в цель.
319
3.2. Крылатые ракеты
для вооружения фронтовой авиации
3.2.1. КРЫЛАТЫЕ РАКЕТЫ ГосМКБ «РАДУГА»1
1. Крылатая ракета Х-28
Для огневого подавления радиолокационных средств ПВО дальняя авиация
была оснащена противорадиолокационными ракетами КСР-11, Х-22П, КСР-5П,
которые были достаточно тяжелыми для применения с самолетов фронтовой ави-
ации. Для таких самолетов требовалось создать ракету с относительно небольши-
ми массогабаритными характеристиками. С этой целью в ГосМКБ «Радуга» с
1963 г. начались работы по созданию системы вооружения для фронтовых бом-
бардировщиков с противорадиолокационной крылатой ракетой Х-28. Под такую
систему вооружения создавался самолет-носитель Як-28Н, оснащенный аппара-
турой обнаружения РЛС. На этом самолете комплекс прошел испытания, но на
вооружение не был принят. Дальнейшие работы по такой системе было принято
продолжать для перспективного фронтового бомбардировщика Су-24. В 1973 г.
ракета Х-28 была принята на вооружение фронтовой авиации.
В качестве носителей этой ракеты использовались самолеты Су-17М и
МиГ-23Б.
Крылатая ракета Х-28 в составе фронтовой системы К-28П предназначена
для поражения работающих радиолокационных станций обнаружения воздуш-
ных целей, наведения истребителей, управления зенитным оружием и других
РЛС (рис. 3.9).
В состав системы входили:
• самолет-носитель с бортовой аппаратурой системы управления;
• крылатые противорадиолокационные ракеты Х-28;
• средства наземного обслуживания.
Ракета Х-28 — первая в отечественной практике авиационная ракета массой
700 кг с пассивной головкой самонаведения, предназначенная для поражения ра-
диолокационных станций, работающих в режиме непрерывного излучения и ра-
ботающая в широком диапазоне высот и скоростей полета самолета-носителя.
На ракете впервые был применен жидкостно-ракетный двигатель с вытесни-
тельной системой подачи компонентов топлива, что существенно упростило дви-
гательную установку ракеты. Пассивная РГС ракеты Х-28, в отличие от ранее раз-
работанных пассивных радиотехнических головок самонаведения (ПРГС) ракет
КСР-11, Х-22П, использовалась на подвеске совместно с аппаратурой самоле-
та-носителя в режиме разведки, выбора цели и целеуказания.
1 В написании подраздела принимал участие Л. А. Чернов.
320
Рис. 3.9. Ракета Х-28
По аэродинамической схеме ракета Х-28 выполнена аналогично схеме раке-
ты Х-22. Планер ракеты выполнен цельнометаллическим. Основные материалы
конструкции — алюминиевые сплавы АМГ-6 и Д-19.
Ракета комплектовалась ПРГС, осколочно-фугасной боевой частью с актив-
ной оболочкой массой 140 кг и оптическим взрывателем. На ракете применен
жидкостно-ракетный однокамерный двухрежимный двигатель с вытеснительной
системой подачи топлива.
Боевое применение ракеты начинается с момента обнаружения цели пелен-
гационным устройством ПРГС ракеты, в основу работы которой был положен
фазовый метод пеленгования РЛС в заданной зоне обзора по курсу и тангажу. На
подвеске под носителем ПРГС используется совместно с аппаратурой индикации
самолета-носителя в режиме целеуказания (поиск, обнаружение, захват и авто-
сопровождение цели). При приеме сигналов от цели с заданными параметрами, с
последующим целеуказанием с борта носителя ПРГС осуществляла захват цели.
При достижении заданной дальности до цели производится пуск ракеты.
Траектория полета ракеты состоит из двух участков: набора высоты и пики-
рования на цель. Это обеспечивало получение необходимых дальностей полета
при пуске ракеты как с больших, так и с малых высот полета самолета-носителя.
По сравнению с зарубежными ракетами на то время, например противоради-
олокационными ракетами США «Шрайк» и «Стандарт ARM», она имела преиму-
щество по дальности стрельбы (до 120 км) и по мощности боевой части. С начала
1980-х годов ракета поставлялась во многие зарубежные страны.
2. Крылатая ракета Х-58У
Крылатая ракета Х-28, несмотря на все ее достоинства, имела и недостатки:
применяемый на ракете ЖРД имел токсичное топливо, что затрудняло ее эксплу-
атацию, особенно при боевых действиях в полевых условиях фронтовой авиации.
В связи с этим еще до принятия ракеты Х-28 на вооружение начались работы по
созданию новой противорадиолокационной ракеты Х-58, на которой был приме-
нен ракетный двигатель твердого топлива (РДТТ). Ракета Х-58 создавалась под
11 Авиация ВВС России и научно-технический прогресс
321
специализированный самолет подавления ПВО Миг-25БМ. В результате неод-
нократной модернизации эта ракета стала применяться на разных типах самоле-
тов фронтовой авиации: Су-24, Су-24М, Су-17МЗ(М4), Су-25Т Ракета получила
обозначение крылатая ракета-58У (рис. 3.10).
Крылатая ракета Х-58У в составе комплексов вооружения фронтовых само-
летов предназначена для поражения работающих наземных радиолокационных
станций в тактической и ближней оперативной глубине фронта.
При разработке этой ракеты был заложен ряд новых технических решений,
обеспечивающих ее превосходство как над отечественными, так и над зарубеж-
ными аналогами в части:
• расширения диапазона высот и скоростей пуска;
• расширенного диапазона дальностей пуска от минимально возможной до
максимальной;
• всеракурсности пуска;
• расширения типов поражаемых РЛС;
• повышенной помехозащищенности;
• многократного перенацеливания во время полета самолета-носителя;
• возможности выбора приоритетной цели в автономном полете.
При создании этой ракеты был решен ряд сложных научно-технических
проблем:
• разработана аэродинамическая схема, обеспечивающая высокое аэродина-
мическое совершенство, а также перспективная компоновка ракеты, позво-
ляющая производить ее сборку из функционально законченных отсеков-мо-
дулей, что обеспечило создание ракеты в минимально возможных весах и га-
баритах;
• разработана самонастраивающаяся система автоматического управления,
обеспечивающая качественную стабилизацию и необходимые условия для
наведения ракеты на цель.
Характерной особенностью формирования нестационарных по высоте тра-
екторий в вертикальной плоскости является использование, кроме временных
Рис. 3.10. Ракета Х-58У
322
команд, только двух измеряемых параметров: угла пеленга цели, измеряемого
пассивной радиолокационной головкой самонаведения, и угла тангажа, измеряе-
мого свободным гироскопом. Дальность полета ракеты определяется аэробаллис-
тическим участком полета, который начинается после удаления ракеты на без-
опасное расстояние от самолета, и формируется путем выдерживания постоян-
ного угла пеленга, величина которого определяется высотой отцепки и лежит в
пределах от минус 40° до минус 18°. При этом в вертикальной плоскости форми-
руется траектория, близкая к логарифмической спирали, а информация об угле
тангажа используется для перевода ракеты в пикирование с последующим само-
наведением на РЛС-цель.
Ракета выполнена по нормальной аэродинамической схеме с Х-образным
расположением крыла и оперения. Консоли крыла и оперения трапециевидной
формы в плане выполнены съемными для уменьшения габаритов ракеты при хра-
нении и транспортировании.
Конструкция корпуса ракеты выполнена из основного конструкционного
материала — титана, что обеспечило жесткость и прочность ракеты в условиях
силовых и температурных воздействий.
Впервые при изготовлении ракеты разработано и освоено внешнее теплоза-
щитное покрытие, обеспечивающее необходимые температурные режимы в отсе-
ках ракеты.
Для ракеты была создана малогабаритная пассивная радиотехническая го-
ловка самонаведения с повышенной помехозащищенностью, обеспечивающая
необходимую чувствительность, избирательность и селективную способность для
наведения в сложном радиолокационном поле на выбранную РЛС-цель.
Ракета комплектуется высокоэффективной боевой частью с активной обо-
лочкой массой 150 кг, а также двухрежимным РДТТ с использованием высоко-
энергетического топлива и применением ряда новых материалов и прогрессив-
ных технологических процессов, обеспечивающих его высокое весовое совер-
шенство.
Для отцепки от самолета-носителя в условиях воздействия интерференции
впервые в практике отечественного ракетостроения было создано катапультное
устройство.
Безопасность самолета-носителя обеспечена, помимо катапультного устрой-
ства комплексом мероприятий, включающим начальное отклонение рулей высо-
ты на пикирование, выбором тяги стартового режима и момента ее подключения,
а также программой кабрирования, которая меняется в функции условий отцеп-
ки. Реализация этих мероприятий обеспечила не только безопасность самоле-
та-носителя на участке старта, но и возможность использования ракеты Х-58У
вплоть до высоты Hq = 100 м.
Применение ракеты Х-58У с различных типов самолетов-носителей в широ-
ком диапазоне начальных условий по высоте, скорости и дальности пуска обус-
ловили применение адаптивного автопилота с пробным сигналом на одной фик-
сированной частоте, который обеспечил устойчивость ракеты в условиях измене-
ния динамических коэффициентов в 100 и более раз, причем изменение
передаточных чисел в автопилоте осуществляется по информации об эффектив-
ности рулей в канале крена. Структура и параметры такого автопилота, и в част-
ности частота пробного сигнала (/= 7,5 Гц), выбраны с учетом взаимодействия и
совместимости контуров стабилизации, адаптации, наведения и упругости с уче-
том существенной нелинейности электрофрикционного рулевого привода.
323
Необходимая точность попадания ракеты обеспечивается соответствующи-
ми точностными характеристиками ПРГ-58, законом наведения с упреждением и
использованием угловой скорости линии визирования и дальностью наведения,
величина которой £>сн > 10 км для всех дальностей пуска, кроме зоны минималь-
ных дальностей. Для повышения вероятности попадания предусмотрен поиск
цели в случае ее потери на траектории, в том числе при кратковременном прекра-
щении работы РЛС-цели.
Боевое применение заключается в следующем:
• после выбора оператором цели, захвата ее ПРГС и достижения разрешенной
дальности пуска производится катапультирование ракеты и она начинает ав-
тономный полет к цели;
• ракета выполняет автономный полет по аэробаллистической траектории.
ПРГС следит за целью и вырабатывает управляющие сигналы и команды для
наведения на цель;
• при подлете ракеты к цели на заданной высоте неконтактный лазерный
взрыватель выдает команду на подрыв боевой части.
3. Крылатая ракета Х-59
Развитие отечественного приборостроения, особенно постоянное совершен-
ствование систем автономного наведения и головок самонаведения, работающих
на различных физических принципах, с одной стороны, развитие средств ПВО,
особенно увеличение дальности действия войсковых ЗРК, с другой стороны,
поставили вопрос о создании тактической авиационной управляемой ракеты со
средней дальностью стрельбы, обладающей высокой точностью попадания.
Для решения этой задачи в начале 1970-х годов приступили к разработке сис-
темы ракетного оружия «Овод» с ракетой средней дальности Х-59.
Крылатая ракета Х-59 в составе ракетного оружия «Овод» самолета-носителя
Су-24М предназначена для поражения в простых метеоусловиях малоразмерных
наземных и надводных целей, координаты которых определены до пуска ракеты.
Особенностью ракеты является оснащение ее разработанной впервые в на-
шей стране телевизионно-командной системой наведения, обеспечивающей вы-
сокую точность попадания в малоразмерные наземные и надводные цели. Даль-
ность полета ракеты и дальность линии связи системы наведения позволяют при-
менять ракету по заранее разведанным целям без захода самолета-носителя в зону
действия комплексов ПВО.
Аппаратура телевизионно-командного наведения размещается как на борту
ракеты, так и в специально разработанном, подвешиваемом под самолетом-носи-
телем, аппаратурном контейнере.
Ракета Х-59 (рис. 3.11) выполнена по аэродинамической схеме типа «бесхво-
стка» с Х-образным расположением крыла и дестабилизаторов.
Консоли крыла и дестабилизаторов трапециевидной формы в плане, деста-
билизаторы изменяемой геометрии; элероны расположены в хвостовой части
крыла. Консоли крыла выполнены съемными для уменьшения габаритов ракеты
при хранении и транспортировании.
Для ракеты разработана двигательная установка в составе стартового и мар-
шевого РДТТ, а также фугасно-кумулятивная боевая часть массой 148 кг.
Особенностью конструкции ракеты является использование корпусов отдель-
ных комплектующих в качестве силовых элементов планера (блок управления и ру-
левой привод системы навигации, боевые части, стартовый и маршевый двигатели).
324
Рис. 3.11. Ракета Х-59
В качестве основных конструкционных материалов корпуса ракеты исполь-
зованы алюминиевые сплавы АМГ-6 и Д-16АТ
В состав системы ракетного оружия «Овод» самолета Су-24М входят:
• две ракеты Х-59;
• аппаратурный подвесной контейнер.
Ракеты размещаются на внутренних подкрыльевых пилонах на авиационных
катапультных устройствах, унифицированных и для ракеты Х-58У. Аппаратурный
контейнер подвешивается под фюзеляжем в плоскости симметрии самолета и
стыкуется к фюзеляжу через пилон, являющийся принадлежностью контейнера.
Пуски ракет производятся без контакта оператора с целью, вследствие чего
они могут осуществляться только по заранее разведанным целям. В совместном
полете проводятся операции по подготовке ракеты к пуску. После отцепки, для
обеспечения вхождения в связь аппаратуры ракеты и самолета, самолет выдержи-
вает горизонтальный прямолинейный полет до получения устойчивого телевизи-
онного изображения местности на экране видеоконтрольного устройства (ВКУ)
самолета. После вхождения в связь самолет может совершать маневр по отвороту
в любом направлении.
После вхождения в связь ракета по заданной программе выходит на высоту
маршевого полета. В зависимости от положения нижней кромки облачности
штурман может изменять маршевую высоту полета ракеты.
Вывод ракеты в район цели может осуществляться как штурманским, так и
автономным методом. После обнаружения цели штурман совмещает подвижное
электронное перекрестие с изображением цели, изменением фокусного расстоя-
ния объектива, увеличивает размеры цели на экране видеоконтрольного устрой-
ства и удерживает перекрестие на выбранной точке изображения цели до попада-
ния ракеты в цель. При этом круговое вероятное отклонение ракеты от точки
прицеливания составляет 2...3 м в картинной плоскости. Подрыв фугасно-куму-
лятивной боевой части осуществляется по сигналу контактных датчиков при
встрече с целью.
325
При создании ракеты Х-59 очень большого внимания потребовала отработка
подсистемы адаптации бортовой системы управления ракеты. На этой ракете впер-
вые реализована беспоисковая система самонастройки с эталонной моделью. Имен-
но для этой темы нашими смежниками из Института проблем управления АН СССР
была разработана теория таких систем, что сопровождалось получением нескольких
авторских свидетельств, работа была оценена Государственной премией, были выпу-
щены несколько монографий и защищено несколько диссертаций, в том числе док-
торских. Творческое сотрудничество по проблемам адаптации началось еще при
А. Я. Березняке, но настоящие исследования и летные испытания пришлись на
более поздние годы (1976—1980 гг.), когда в кабинете И. С. Селезнева проходили и
солидные совещания с участием академика Б. Н. Петрова и сотрудников его ла-
боратории ИПУ, и азартные оперативные обсуждения «в своем кругу» очередного се-
анса моделирования. Именно на этой теме была показана эффективность и незаме-
нимость полунатурного моделирования как метода отработки новых систем.
Трудности испытаний и доводки адаптивной БСУ ракеты Х-59 были связаны
с двумя моментами. Во-первых, контур самонастройки, оказавшись наилучшим
идентификатором динамических характеристик ракеты, позволил провести ряд
существенных доработок параметров БСУ. Во-вторых, в начале испытаний отсут-
ствовали представления о методах контроля самонастраивающихся систем в про-
цессе производства и эксплуатации в составе ракеты. В конце концов была разра-
ботана и внедрена встроенная в БСУ система контроля подсистемы самонастрой-
ки, опирающаяся на эталонную модель этой системы.
Многие сложные вопросы были решены в ходе ПНМ и летных испытаний
(ЛИ) телевизионной системы наведения ракеты. В частности, были на практике
решены вопросы обеспечения необходимых динамических и точностных харак-
теристик контура наведения с учетом человека-оператора как звена этой систе-
мы. Был создан наземный тренажер для штурманов-операторов ракеты Х-59.
Телевизионная высокоточная система наведения впервые реализована имен-
но на ракете Х-59, и именно она обеспечила высокую эффективность ракеты, лю-
бовь к ней со стороны заказчика и все возрастающий интерес со стороны потен-
циальных покупателей за рубежом.
В целом ракета Х-59 получилась очень эффективной, особенно с учетом от-
крывшихся позже возможностей по:
• увеличению дальности действия телевизионной радиолинии (ТРЛ) и ко-
мандной радиолинии (КРЛ);
• замене твердотопливного маршевого двигателя на воздушно-реактивный
двигатель;
• модернизации БСУ на базе современной цифровой техники.
С началом разработки первого в СССР образца высокоточного оружия с те-
левизионно-командным самонаведением (ТКСН) на базе ГосМКБ «Радуга» было
впервые развернуто полунатурное моделирование человеко-машинной системы.
С этой целью была создана кабина самолета Су-24 с точным воспроизведени-
ем в ней места штурмана-оператора. С большим трудом из Киева привезли в порт-
феле реальную ручку управления перекрестием. Для проведения исследований
влияния человека-оператора (Ч-О) на точность наведения ракеты была разработа-
на специальная методика тренировки Ч-О и оценки результатов по фигурам Лис-
сажу. Комплекс ПНМ, кроме макета кабины самолета Су-24, реальной ручки уп-
равления перекрестием, включал реальное видеоконтрольное устройство, головку
самонаведения, реальный автопилот и плакат с изображением местности и раз-
личных целей на ней. Плакат устанавливается на радиолокационном иммитаторе
326
цели, которая в соответствии с относительным движением ракеты и цели переме-
щала его по двум координатам. Головка самонаведения устанавливалась на трех-
степенном стенде, который воспроизводил угловые перемещения ракеты.
По результатам проведенного полунатурного моделирования были отработа-
ны контур слежения 4-0 за целью, параметры закона наведения и логика работы
САУ. Был разработан специальный тренажер на базе ВКУ. На экране появлялась
цель в виде квадрата 3 х 3 м, которая с приближением ракеты к цели увеличива-
лась в размерах на экране пропорционально дальности до нее. Цель перемеща-
лась в соответствии с динамикой полета ракеты, ее скоростью и высотой полета.
С помощью подвижного перекрестия 4-0 следил за целью и выдавал соответст-
вующие команды управления. По окончании режима наведения на экране на не-
сколько секунд автоматически появлялся квадрат и в масштабе 3 х 3 м на экране
высвечивалась точка попадания или промаха в картинной плоскости относитель-
но центра квадрата. Было изготовлено два таких тренажера, один из которых был
установлен на техпозиции и на нем проходили тренировку и адаптацию штурма-
ны-операторы. Из-за придирок и всевозможных проволочек в течение трех лет
так и не удалось на этот тренажер оформить заявку на изобретение. В дальней-
шем оказалось, что это была первая телевизионная игра в мире.
4. Крылатая ракета Х-59М
Открывшиеся возможности дальнейшего совершенствования аппаратуры те-
левизионно-командного наведения — увеличение дальности трансляционно-ко-
мандной связи, неоднократная связь самолета и ракеты в течение ее автономного
полета, появление отечественного малогабаритного высокоэкономичного турбо-
реактивного двухконтурного двигателя (ТРДД) — обеспечили предпосылки для
проведения модернизации ракеты Х-59. Модернизация была проведена в пре-
дельно сжатые сроки, практически за один год, и заключалась в расширении бое-
вых возможностей самолетов фронтовой авиации по поражению малоразмерных
целей без захода самолетов в зону действия объектовых средств ПВО.
Рис. 3.12. Ракета 59М
327
Повышение боевой эффективности комплекса «Овод-М» с ракетой Х-59М
(рис. 3.12) достигнуто увеличением максимальной дальности пуска ракеты и ос-
нащением ее более мощной боевой частью.
Максимальная дальность пуска была доведена до 120 км за счет применения
маршевого ТРДД. Ракета Х-59М оснащалась новым типом боевого снаряжения
на основе проникающей боевой части массой 320 кг, что позволило увеличить
номенклатуру поражаемых ракетой целей и повысить боевую эффективность,
особенно при действии по прочным целям.
По аэродинамической схеме ракета не отличается от ракеты Х-59, за исклю-
чением подвешенного снизу к корпусу маршевого ТРДД.
Схема боевого применения такая же, как и для ракеты Х-59.
5. Крылатая ракета Х-59МК
Крылатая ракета Х-59МК является модификацией ракеты Х-59М и предназ-
начается в комплексе ракетного вооружения самолетов типа Су-30МК для пора-
жения широкой номенклатуры надводных целей в любое время суток как в прос-
тых, так и в сложных погодных условиях.
Ракета оснащается вместо телевизионно-командной системы активной ра-
диолокационной головкой самонаведения, а также системой навигации и авто-
матического управления на базе бесплатформенной инерциальной навигацион-
ной системы в комплексе с системой спутниковой навигации.
Замена стартового ускорителя на сбрасываемый после выработки топлива
топливный бак позволила довести дальность применения ракеты до 280 км.
По аэродинамической схеме и другим характеристикам ракета Х-59МК не
отличается от ракеты Х-59М.
Боевое применение этих ракет заключается в следующем. После предпуско-
вой подготовки ракеты и ввода полетного задания в бортовую аппаратуру произ-
водится пуск ракеты. После отделения от самолета-носителя ракета по програм-
ме выходит на высоту маршевого полета (10... 15 м) с одновременным разворотом
в направлении местоположения точки начала маршрута полета ракеты, в которой
АРГС должна включиться в режим обнаружения цели. До момента обнаружения
цели АРГС осуществляется обзор водного пространства. После обнаружения и
выбора цели происходит ее «захват», самонаведение ракеты на выбранную цель
до прямого попадания в нее и подрыв боевой части.
В табл. 3.1 приведены тактико-технические характеристики крылатых ракет,
разработанных ГосМКБ «Радуга» для вооружения фронтовой авиации.
Таблица 3.1
Параметры Крылатые ракеты
Х-28 Х-58У Х-59 Х-59М
Год принятия на вооружение Самолеты - носители 1973 Су-7БМ Су-17М МиГ-23Б 1980 Су-24М Су-17МЗ Су-17М4 Су-25Т МиГ-5БМ 1980 Су-24М Су-17МЗ Су-17М4 1988 Су-24М Су-ЗОМК
328
Окончание табл. 3.7
Параметры Крылатые ракеты
Х-28 Х-58У Х-59 Х-59М
Типы поражаемых целей РЛС РЛС Наземные ма- лоразмерные Наземные ма- лоразмерные
Масса, кг 720 640 780 930
Масса БЧ, кг 140 150 148 320
Тип БЧ Диаметр ФБЧ ФБЧ ФКБЧ ПрБЧ
корпуса, м 0,43 0,38 0,38 0,38
Длина, м Размах 5,97 4,8 5,36 5,69
крыла, м Дальность 1,39 1,17 1,3 1,3
полета, км Максимальная скорость 120 200 40 120
полета, км/ч Максимальная высота 3500 4800 1000 1000
полета, км 18 32 1,0 1,0
Тип Аэробал- Аэробал- Гори- Гори-
траектории листическая листическая зонтальная зонтальная
Система наведения Пассивная РГС Пассивная РГС Телеви- зионно- командная СН Телеви- зионно- командная СН
Тип двигателя ЖРД РДТТ РДТТ ТРДД
3.2.2. ФРОНТОВЫЕ РАКЕТЫ ОКБ «ЗВЕЗДА»
Краткая история ОКБ «Звезда»:
• 12 марта 1966 г. образовано ОКБ Калининградского машиностроительного
завода (КМЗ);
• в 1976 г. ОКБ КМЗ получило название ОКБ «Звезда» Калининградского ма-
шиностроительного завода;
• 10 февраля 1995 г. КМЗ «Стрела» со вновь присоединенным ОКБ «Звезда»
преобразован в Государственный научно-производственный центр «Звез-
да-Стрела», ныне ФГУП ГНПЦ «Звезда-Стрела», г. Королев;
• в 2003 г. на базе ГПНЦ «Звезда-Стрела» образована корпорация «Тактиче-
ское ракетное вооружение».
1. Ракета Х-66
В 1962 г. по требованию командования ВВС Вьетнама самолет МиГ-21 ПФМ,
являвшийся основным самолетом вьетнамских ВВС и участвовавший в боевых дей-
ствиях того периода, был довооружен ракетами РС-2-УС с радиолокационным ка-
налом наведения в дополнение к ракетам К-13 с тепловым каналом самонаведения.
329
В 1963 г. при проведении летных испытаний этой системы вооружения ини-
циативно, с одобрения и при личной поддержке генерального конструктора Ар-
тема Ивановича Микояна, были выполнены сверх программы государствен-
ных летных испытаний пуски 4 ракет РС-2-УС по наземным целям. Пуски вы-
полнялись в режиме «закрепленного» луча самолетного радиолокатора РП-21 с
удержанием луча на цели прицельным пилотированием с использованием штат-
ного коллиматорного оптического прицела ПКИ-1.
Ввиду особенностей внутреннего контура управления ракеты РС-2-УС,
обусловленных ее применением только по воздушным целям, полученные ре-
зультаты пусков по поражению наземных целей оказались неэффективными. Об
этом в акте № 50 по испытаниям системы вооружения самолета МиГ-21 ПФМ,
доукомплектованной ракетами РС-2-УС, записано: «Пуски ракет РС-2-УС по
наземным целям возможны, но нецелесообразны ввиду недостаточной точности
попадания ракеты при малой ее боевой части».
Через два года, в 1965 г., в период интенсификации боевых действий (после
разрушения ВВС США стратегического моста через р. Красная прямым попада-
нием управляемых ракет «Буллпап», примененных с самолетов «Супер Сейбр»),
вьетнамская сторона попросила советское правительство принять срочные меры
по довооружению того же самолета МиГ-21 ПФМ идентичными управляемыми
средствами поражения наземных целей. К этому времени Советский Союз по-
добным вооружением не располагал.
В связи с этим генеральным конструктором А. И. Микояном было дано по-
ручение комплексу вооружения ОКБ (начальник комплекса В. Г. Кореньков)
дать технические предложения по решению этой проблемы в кратчайшие сро-
ки. Поскольку задача ставилась применительно к самолету МиГ-21 ПФМ, то по-
иск решения проблемы со всей очевидностью лежал в области устранения недос-
татков системы вооружения данного самолета, выявленных при пуске ракеты
РС-2-УС по земле, изложенных в акте № 50. Анализ материалов акта и пара-
метров контура управления ракеты, проведенного сотрудниками НИИ-2
(ГосНИИАС) Р. Д. Кузьминским, Г. А. Кирюшиным и другими, показал воз-
можность обеспечения приемлемой точности наведения для эффективного пора-
жения целей боевой частью массой 100 кг.
В ОКБ Микояна (В. Г. Кореньков, Н. И. Завиданов, В. Н. Анисимов
и др.) совместно с ГосНИИАС (Р. Д. Кузьминский, Г. А. Кирюшин,
В. А. Черке и др.) были разработаны технические предложения создания пер-
вой отечественной тактической ракеты класса «воздух—поверхность» на основе
межвидовой унификации (модернизированный двигатель твердого топлива раке-
ты К-8 класса «воздух—воздух», аппаратура управления, пневмоблок, батарея ра-
кеты РС-2-УС класса «воздух—воздух», взрывательное устройство НРС-24 и др.).
После одобрения коллегией МАП технические предложения были переданы
на Калининградский машиностроительный завод.
Приказом министра авиационной промышленности П. В. Дементьева
№ 100 от 12 марта 1966 г. на КМЗ для разработки конструкторской документа-
ции ракеты Х-66 создается ОКБ. Главным конструктором ОКБ был назначен
Ю. Н, Королев. Для реализации проекта ракеты Х-66 из ОКБ Микояна был пе-
реведен В. Г. Кореньков, назначенный на должность заместителя главного кон-
структора.
Летная отработка ракеты Х-66 проведена с 1967 по 1968 г., и приказом мини-
стра обороны № 0075 от 20.06.68 г. ракета была принята на вооружение.
330
Ракета Х-66 (рис. 3.13) выполнена по аэродинамической схеме «утка» с Х-об-
разным расположением консолей крыла и рулей и включает следующие функци-
ональные системы:
• планер. Выполнен из алюминиевых (25,5%) и магниевых (24,7%) сплавов, кро-
ме корпусов двигателя и боевой части, выполненных из стали (43%), покрыт
антикоррозийным покрытием и технологически разделен на шесть отсеков, че-
тыре консоли крыла, каждая из которых имеет элерон, четыре руля и гаргрот;
• двигатель ПРД-204 (изделие З96-Пс64). Является однокамерным однорежим-
ным твердотопливным ракетным двигателем с вкладным пороховым зарядом.
Двигатель ПРД-204 имел суммарный импульс 10 850 кг - с, максимальную тягу
3500 кг, время работы 4,0...6,7 с, массу топлива 62 кг, массу снаряженную 118 кг;
• осколочно-фугасно-кумулятивную боевую часть Ф-66, состоящую из сталь-
ного корпуса, в котором размещено снаряжение (взрывчатое вещество ТГ40)
и имеется гнездо для взрывателя. Обеспечивает пробивание гомогенной бро-
ни толщиной до 250 мм и поражение по типу «С» кабины РЛС в радиусе
до 10 м;
• взрывательное устройство ЭВУ-Н-29, состоящее из взрывателя ЭВУ-Н-29,
в литом корпусе которого размещены узел дальнего взведения и эле-
менты электроцепи, и реакционного контакта. Обеспечивает подрыв бое-
вой части при встрече ракеты с преградой не ранее чем через 4...8 с после
пуска;
• аппаратуру управления и стабилизации. Она состоит из двух датчиков ли-
нейных ускорений ДА-11, двух рулевых блоков для управления по тангажу и
курсу ДА-2СА и ДА-ЗСА, каждый из которых включал управляющий магнит,
двухстепенной демпфирующий гироскоп, сопло с приемником воздушного
давления и рулевую пневмомашинку, и одного блока крена ДА-1, содержа-
щего интегрирующий гироскоп с арретиром, сопло и рулевую пневмома-
шинку с приемником воздушного давления;
• аппаратуру наведения 5И-1-Б, состоящую из штыревой антенны, высокочас-
тотной части приемного устройства, приемника и блока управления и обес-
Рис. 3.13. Ракета Х-66
331
печивающую прием радиосигналов с бортовой РЛС носителя и сигналов дат-
чиков линейных ускорений ДА-11 и преобразование их в управляющие токи,
распределенные по каналам управления;
• воздушную систему, состоящую из пневмоблока, трубопроводов для подвода
воздуха к блоку крена для раззаретирования гироскопа и обеспечения работы
рулевой машинки, а также раззаретирования датчиков ускорений, коллекто-
ра и трубопроводов для подвода воздуха в рабочие цилиндры рулевых блоков,
раскрутки демпфирующих гироскопов, раззаретирования рулей;
• электросистему, состоящую из аккумуляторной батареи 949Ф, электрообору-
дования и электросети.
Компоновка ракеты предусматривает сборку, стыковку, а также технологиче-
скую взамозаменяемость ее агрегатов и отсеков, что достигается размещением
аппаратуры в виде отдельных блоков:
• 1-й отсек представляет собой реакционный контакт электровзрывательно-
г о устройства, выполненный в виде двух изолированных один от другого ко-
нусов;
• 2-й отсек выполнен из двух частей, в которых установлены рулевые блоки
Д А-2С и ДА-ЗС (или ДА-2СА и ДА-ЗСА), предохранительный механизм с че-
кой, бортовой источник электропитания. На корпусе отсека крепятся рули;
• 3-й отсек представляет собой боевую часть, с заднего торца которой установ-
лен взрыватель;
• 4-й отсек — пороховой ракетный двигатель. На корпусе отсека размещены
контакты запуска двигателя и узлы подвески под носитель;
• 5-й отсек — место размещения блока крена ДА-1А, двух датчиков линейных
ускорений, пневмоблока, элементов электрооборудования. На корпусе отсе-
ка находятся узлы крепления консолей крыла, а вверху имеются бортовой и
контрольный электроразъемы;
• 6-й отсек — место размещения аппаратуры наведения.
Серийное производство ракеты началось на Калининградском машиностро-
ительном заводе в 1968 г., и к 1972 г. было выпущено 1175 ракет данного типа.
После 1972 г. в процессе серийного производства на Х-66 стали устанавливать:
• двигатель ПРД-228 (изделие 393-11) с ракеты Х-23, имевший по сравнению с
ПРД-204 более высокие энергетические и эксплуатационные характеристи-
ки. Он допускал 50 взлетов-посадок вместо 5, мог использоваться в тропиче-
ских условиях и при кинетическом нагреве ±150 °C;
• ампульный пневмоблок (с ракеты Х-23) вместо пневмоблока, что вызвало
изменения в воздушной системе ракеты;
• блок питания МБП-66 (включает две термохимические батареи 9Б16) вместо
батареи 949Ф, что вызвало изменения в электрооборудовании и электросхе-
ме ракеты и позволило повысить дальность прицельного пуска до 10 км и
время управляемого полета до 19 с.
Основными целями ракеты Х-66 являлись ракетные установки, кабины РЛС,
бронемашины, железнодорожные эшелоны и малотоннажные корабли. После
обнаружения цели летчик пикировал на нее, прицеливаясь по коллиматорному
прицелу ПКИ с неподвижной маркой, при этом луч РЛС РП-21М был «закреп-
лен» и совпадал с прицельной маркой. Пуск ракет возможен с пикирования под
углом 10...30° как одиночно, так и залпом. После нажатия боевой кнопки включа-
ется часовой механизм программного регулирования усиления по дальности и
мощности поступающего на борт радиосигнала, происходит запуск двигателя, ра-
332
кета сходит с направляющей и летит автономно, стабилизируясь вокруг продоль-
ной оси. Примерно через 1,5 с после схода с пускового устройства Х-66 входит в
луч бортовой РЛС носителя и аппаратура наведения начинает вырабатывать сиг-
налы для удержания ее на равносигнальной линии радиолуча. В конце активного
участка полета происходит полное взведение взрывателя и ракета полностью го-
това к подрыву, который происходит при ее встрече с преградой. До этого момен-
та летчик должен удерживать марку прицела на цели.
Единственным носителем ракеты Х-66 был самолет МиГ-21ПФМ, который
мог брать две ракеты, размещавшиеся на правой и левой подкрыльевых точках
подвески на пусковых устройствах АПУ-68У.
На точность наведения влияли как сам способ наведения, зависящий от
дальности, так и состав оборудования носителя, не имевшего САУ, позволяющей
демпфировать собственные колебания самолета и, следовательно, радиолуча.
Центральная марка прицела на предельных дальностях закрывала малоразмер-
ную цель, мешая прицеливанию.
В табл. 3.2 приведены основные тактико-технические характеристики раке-
ты Х-66.
Таблица 3.2
Тактико-технические характеристики ракеты Х-66
Параметры Х-66
выпуска 1969 г. выпуска 1974 г.
Максимальная дальность пуска, км:
с максимальной высоты пуска До 6 До 10
с минимальной высоты пуска Минимальная дальность пуска, км: До 6 До 10
с максимальной высоты пуска ДоЗ Доз
с минимальной высоты пуска ДоЗ ДоЗ
Диапазон высот пуска, км 0,5...5,0 0,5...5,0
Диапазон скоростей пуска, км/ч Скорость полета, м/с: 560... 1100 560... 1100
максимальная Менее 700 700
средняя (на дальности, км) 430....600 (6) 420....570 (8)
минимальная конечная Менее 300 300
Время управляемого полета, с До 15 До 25
Располагаемая перегрузка, g До 11 До 11
Точность (^кво), м Размеры ракеты, мм: 8,2 8,2
длина 3631 3631
диаметр 275 275
размах крыла 811 811
Стартовая масса ракеты, кг 278 278
Масса боевой части, кг 105 105
Тип боевой части ОФК ОФК
Тип двигателя РДТТ РДТТ
Тип системы наведения По радиолучу По радиолучу
Условия применения Простые метеоусловия Простые метеоусловия
Носители МиГ-21ПФМ МиГ-21ПФМ
333
2. Ракета Х-23
Одновременно с испытаниями Х-66 в соответствии с Постановлением ЦК и
СМ СССР № 1044-381 от 26.12.1968 г. ОКБ КМЗ вело работы по созданию раке-
ты Х-23.
По ТЗ ОКБ в НИИ-131 Минрадиопрома под руководством М, А. Грамаги-
на была разработана система радиокомандного управления «Дельта». Ее размести-
ли в последнем, пятом, отсеке, в котором размещалась аппаратура наведения и на
ракете Х-66. Кроме того, были повышены энергетические характеристики ДУ пе-
реходом на топливо с более высоким удельным импульсом. Унифицированный
двигатель ПРД-228 устанавливался не только на Х-23, но и на Х-66 и некоторых
других ракетах, разработанных ОКБ. Двигатель ПРД-228 имел не только более вы-
сокие энергетические, но и эксплуатационные характеристики. В частности, он
допускал 50 взлетов-посадок вместо 5, мог использоваться в тропических условиях
и при кинетическом нагреве 150 °C. Модернизации подверглась и боевая часть.
Первые десять опытных ракет были подготовлены к испытаниям в конце
1967 г., а в начале следующего года приступили к заводским летным испытаниям.
Для приобретения навыков управления ракетой с командной системой уп-
равления в ГосНИИАС был создан наземный тренажер ТИР-23, на котором лет-
чики-испытатели через 5...6 ч работы приобретали необходимый опыт. Этот тре-
нажер также использовался перед испытательными пусками для тренировки лет-
чиков перед вылетом.
Заводские летные испытания начались в начале 1968 г. и затянулись до кон-
ца 1969 г. Государственные летные испытания на этапе «А» проходили с 20 марта
1970 г. по 7 июня 1971 г. Для оценки неконтактного радиовзрывателя РОВ-19,
эффективности переноса датчиков линейных ускорений ДА-11 из пятого отсека
во второй, влияния пороховых газов двигателя ракеты на работу силовой уста-
новки носителя были проведены дополнительные испытания по этапу «А»
(9.06.1972- 30.08.72 гг.).
Государственные совместные испытания на этапе «Б» начались 25 декабря
1972 г. и были прерваны 28 апреля 1973 г. после выполнения 31 пуска по назем-
ным целям, выявившим ряд недостатков, основными из которых были затянутость
входа ракеты в поле зрения летчика, плохая работа системы стабилизации ракеты и
неудачное размещение трассера «Блесна» в кормовой части ракеты, оказывающее
тепловое и механическое воздействия на рупорную антенну аппаратуры «Дель-
та-1Р» командной радиолинии, что приводило к нарушению нормального процес-
са наведения на цель. Кроме этого, даже опытные летчики при полете на малых
высотах ошибались в определении дальности до цели, что приводило к промахам.
После проведения комплекса мероприятий, заключавшихся во внесении изме-
нений в контур стабилизации ракеты по крену, уточнении параметров контура уп-
равления, введении перекомпенсации веса ракеты для обеспечения выхода ее после
схода в поле зрения летчика, установке вместо «Блесны» трассера Т-60-5 на кронш-
тейне снизу кормовой части ракеты. В кабине летчика установили вместо кнюппеля
«по давлению» кнюппель «по перемещению с усилием» для выдачи летчиком-опера-
тором контролируемых пропорциональных команд. По замечанию летчиков-испы-
тателей, уменьшили зону нечувствительности кнюппеля у «нулевого положения» и
увеличили усилие, необходимое для его отклонения из этого положения.
334
Эффективность принятых доработок была проверена в 9 реальных зачетных
пусках в период с 19 июля по 1 августа 1973 г. По их результатам этап «Б» ГСЛИ
был возобновлен и успешно завершен 8 октября 1973 г. после выполнения
32 пусков. В ходе испытаний точность стрельбы (Екво) в картинной плоскости
при ручном наведении составила 5,9 м (в ТТТ ВВС задана 4...7 м), а вероятность
поражения типовой цели «кабина РЛС» в режиме пикирования составила
0,54...0,62 (0,48...0,56) без учета (с учетом) ошибок летчика (задана в ТТТ ВВС
0,6...0,8). Вместе с тем испытания показали неэффективность ракеты Х-23 при
пусках в горизонтальном полете ввиду низкой вероятности поражения типовой
цели из-за трудности определения дальности до цели.
В 1974 г. система ракетного управляемого вооружения Х-23 (рис. 3.14) при-
казом министра обороны СССР № 0028 была принята на вооружение.
Работами по созданию ракеты Х-23, а в дальнейшем Х-25, Х-27 и Х-25М ру-
ководил первый заместитель главного конструктора Вадим Георгиевич Ко-
реньков.
Ракета выполнена по аэродинамической схеме «утка» с Х-образным располо-
жением консолей крыла и рулей и включает следующие функциональные агрега-
ты и системы:
• планер. Выполнен из стали (32,8%), алюминиевых (42,6%) и магниевых
(21%) сплавов и состоит из корпуса, четырех консолей крыла, на каждой из
которых установлен элерон, и четырех рулей. Корпус технологически делит-
ся на шесть отсеков. Все детали конструкции имеют антикоррозийное по-
крытие;
• двигатель ПРД-228 (изделие 393-11). Является однокамерным одно-
режимным твердотопливным ракетным двигателем со стальным корпусом,
в который вложен пороховой заряд. Двигатель имеет суммарный импульс
12 100 кг - с, максимальную тягу 3500 кг, время работы 3,4...6,4 с, массу топ-
лива 63,5 кг, массу снаряженную 118 кг;
• аппаратуру приема команд и выработки сигналов управления
«Дельта-Р1М». Состоит из рупорной антенны, выключателя сверхвысоких
частот, приемника и блока дешифровки и преобразования;
Рис. 3.14. Ракета Х-23
335
• аппаратуру управления и стабилизации. Состоит из двух датчиков ли-
нейных ускорений ДА-11, двух рулевых блоков для управления по тангажу и
курсу ДА-2СА и ДА-ЗСА, каждый из которых включал управляющий магнит,
двухстепенной демпфирующий гироскоп, сопло с приемником воздушного
давления и рулевую машинку, и одного блока крена ДА-1А, состоящего из
интегрирующего гироскопа с арретиром, сопла и воздушной рулевой ма-
шинки с приемником воздушного давления;
• осколочно-фугасно-кумулятивную боевую часть Ф-23 или Ф-23Д.
Последняя отличается размещенной внутри трубкой, предназначенной для
прокладки жгута от системы контактных датчиков к предохранительно-ис-
полнительному механизму На внутренней поверхности стального корпуса
боевой части, в двух диаметрально противоположных зонах, наклеены 1488
стальных осколков кубической формы со стороной 10 мм. Радиус зоны до-
стоверного поражения зачетной цели составляет 10 м;
• контактное взрывательное устройство, включающее систему кон-
тактных датчиков СКД-24 (три датчика Б-24 инерционного типа и две мон-
тажные колодки Б-35), и предохранительно-исполнительный механизм
И-256. Обеспечивает подрыв боевой части при скорости встречи 200...900 м/с
и углах подхода 2...45° (от горизонтальной плоскости);
• электросистему, состоящую из блока питания БП-68 (две электрохимиче-
ские батареи 9Б16 с пиротехническим приводом в действие), электрообору-
дования^ электросети;
• воздушную систему, состоящую из ампульного пневмоблока, трубопрово-
дов для подвода воздуха к блоку крена для разаретирования гироскопа и
обеспечения работы рулевой машинки, трубопровода для разаретирования
датчиков ускорений, коллектора и трубопроводов для подвода воздуха в ра-
бочие цилиндры рулевых блоков, раскрутки демпфирующих гироскопов,
разаретирования рулей.
Компоновка ракеты предусматривает сборку, стыковку, а также технологиче-
скую взамозаменяемость ее агрегатов и отсеков, что достигается размещением
аппаратуры в виде отдельных блоков:
• 1-й отсек — носовой обтекатель;
• 2-й отсек — приборный. В нем размещена часть аппаратуры управления (ру-
левые блоки ДА-2СА, ДА-ЗСА и датчики линейных ускорений) и контакт-
ные датчики взрывательного устройства. Снаружи отсека размещены рули и
контрольный электроразъем;
• 3-й отсек — боевая часть с предохранительно-исполнительным механизмом
И-256;
• 4-й отсек — двигатель ПРД-228, на корпусе которого размещены дополни-
тельные узлы крепления консолей крыла и узлы подвески под носитель;
• 5-й отсек — блок крена ДА-1 А, пневмоблок с редуктором, блок электропита-
ния БП-68, элементы электроавтоматики. Снаружи корпуса находятся ос-
новные узлы крепления консолей крыла, а вверху имеется бортовой элетро-
разъем для электросвязи с носителем;
• 6-й отсек — аппаратурный, где размещена приемная часть системы «Дельта» —
«Дельта-Pl М». На кронштейне под отсеком установлен трассер Т-60-5.
336
Калининградский машиностроительный завод «Стрела» начал серийное
производство ракеты Х-23 в 1971 г.
С 1976 г. серийно выпускается модернизированный вариант Х-23М, отличав-
шийся от Х-23 новой аппаратурой «Дельта-Р2М» с полупроводниковым усилите-
лем, в результате чего длина ракеты уменьшилась на 66 мм и масса почти на 2 кг.
На нем установили более надежный трассер Т-60-9, так как его предшественник
Т-60-5 иногда гас в полете и летчик терял возможность наблюдать ракету. В про-
цессе серийного производства Х-23М, продолжавшегося до 1980 г., в блоках пита-
ния ракет вместо 9Б16 стали устанавливаться электрохимические твердосолевые
батареи Т-454, которые обладали повышенной устойчивостью к линейным пере-
грузкам. Ракеты Х-23М последних партий комплектовались осколочно-фугасной
боевой частью Ф-23М.
Ракеты Х-23 и Х-23М предназначены для поражения малоразмерных под-
вижных и неподвижных целей в условиях визуальной видимости с самолетов
фронтовой авиации. Основными целями для них являлись пусковые установки
ракет, танки и бронемашины, железнодорожные эшелоны, кабины РЛС, мало-
тоннажные корабли и суда. Ракета используется в системе ракетного вооружения
Х-23, куда также входят:
• пусковые устройства АПУ-68У, АПУ-68УМ, АПУ-68УМ2, АПУ-68УМЗ с
электроавтоматикой управления;
• радиокомандная аппаратура управления «Дельта-Н», размещаемая на авиа-
ционном носителе;
• наземное контрольно-проверочное оборудование;
• наземный тренажер.
Подготовка ракеты к боевому применению проводится на подвижной техни-
ческой позиции типа «Ингул», обеспечивающей производительность 12 ракет
Х-23 в час. Ракета выдерживает без проверок до 10 взлетов-посадок с бетониро-
ванной ВПП. Пуск ракеты по визуально обнаруженной цели возможен с пикиро-
вания (до 40°) и горизонтального полета. Однако в последнем случае при стрель-
бе с малых высот точность стрельбы снижена из-за трудности определения даль-
ности до цели. В момент пуска ракеты допускается положение цели в секторе
±5...7° от направления полета самолета. После нажатия боевой кнопки происхо-
дит запуск двигателя, ракета сходит с пускового устройства и летчик или опера-
тор стремится кнюппелем, расположенным на ручке управления, вывести ракету
на линию «самолет—цель» и удержать ее на ней. Направление команды должно
совпадать с требуемым перемещением ракеты в сторону цели, а ее уровень опре-
деляется величиной перемещения кнюппеля, которая должна быть пропорци-
ональна величине углового отклонения трассера ракеты от направления на цель.
Поскольку система вооружения Х-23 создавалась параллельно с фронтовыми
истребителями и бомбардировщиками третьего поколения, их вооружение дан-
ной системой было предусмотрено еще в процессе разработки самолетов. В ходе
проведения государственных испытаний пуски ракет проводились с самолетов
МиГ-23, МиГ-23М, МиГ-23Б, Су-17. В ходе проведения испытаний в середи-
не 1970-х годов самолетов Як-38, МиГ-27, Су-17М, Су-17М2 и Су-24 была
подтверждена их способность использовать систему вооружения Х-23. В ходе
эксплуатации последней ее носителями выступали истребители и ударные само-
леты Як-38, Су-22, Су-24, МиГ-23 и МиГ-27 всех модификаций, Су-17 (кроме
337
Су-17М4). Каждый самолет мог брать две ракеты (кроме бомбардировщиков типа
Су-24, берущих до четырех ракет).
Для самолета Су-24 разрабатывалась полуавтоматическая система наведения
«Аркан», включавшая телевизионный пеленгатор положения ракеты «Таран»,
электронно-оптический визир «Чайка-1» и аппаратуру передачи команд управле-
ния «Дельта-НТМб». В ней от летчика или штурмана требовалось лишь удержа-
ние марки прицела на цели, а вывод ракеты на линию прицеливания и ее удержа-
ние на линии прицеливания осуществлялись автоматически. Однако проведен-
ные в середине 1970-х годов летные испытания из-за трудности попадания
ракеты в поле зрения телепеленгатора закончились неудачно, и экипаж самолета
Су-24 смог осуществлять наведение ракет только в ручном режиме.
Тактико-технические данные ракеты Х-23
Максимальная дальность пуска, км:
при максимальной высоте пуска..................................До 10
при минимальной высоте пуска...............................До 10
Минимальная дальность пуска, км:
при максимальной высоте пуска..............................2,0
при минимальной высоте пуска...............................2,0
Диапазон высот пуска, км................................0,05...5,0
Диапазон скоростей пуска, км/ч.......................... 600... 1000
Скорость полета ракеты, м/с:
максимальная...............................................750
4 средняя (при дальности пуска 6 км).................... 430...600
Время управляемого полета, с..................................До 25
Располагаемая перегрузка, £ ..................................До 11
Точность (FKBO), м.............................................5,9
Размеры, мм:
длина ракеты............................................3591
диаметр ракеты ..........................................275
размах крыла.............................................785
Стартовая масса ракеты, кг...................................289
Масса боевой части, кг.......................................Ill
Тип боевой части.............................................ОФК
Тип двигателя.............................................. РДТТ
Тип системы наведения.............................Радиокомандная
Условия применения..........................Простые метеоусловия,
при визуальном наблюдении цели
Носители ...................МиГ-23М, МиГ-23МЛ, МиГ-27, МиГ-27К,
МиГ-27М, МиГ-27Д, Су-17, Су-17М, Су-17М2, Су-17МЗ, Су-17УМЗ,
Су-20, Су-22, Су-22М, Су-22МЗ, Су-22М4, Су-22УМЗ, Су-24, Су-24М.
Кроме вооружения самолетов, в 1975 г. начались экспериментальные работы
по вооружению корабельного транспортно-боевого вертолета Ка-252ТБ управ-
ляемыми ракетами Х-23. В 1977 г. было выполнено несколько успешных пусков
ракет Х-23 с пассивным стартом, когда двигатель ракеты запускался через
0,7...0,9 с после отделения. Однако вооружать вертолет ракетами Х-23 не стали,
так как к моменту начала поступления вертолетов в войска серийное производст-
во ракет планировалось прекратить.
В конце февраля 1983 г. начались летные испытания вертолета Ми-14ПЛ с
ракетой Х-23М, размещенной в отсеке вооружения. Ракета имела пассивный
338
старт, для чего ее двигатель был доработан. В конце весны того же года начались
испытания вертолета Ми-14ПЛ, вооруженного одной ракетой на внутренней
подвеске в отсеке вооружения и двумя на наружных специальных фермах, причем
последние имели активный старт с пусковых устройств АПУ-68УМЗ. На заклю-
чительном этапе исследований летом 1984 г. были проведены летные испытания
вертолета Ми-14ПЛ с четырьмя ракетами Х-23М на наружной подвеске, имевши-
ми активный старт, доказавшими возможность вооружения вертолетов данного
типа этими ракетами.
В августе 1983 г. были проведены летные испытания по определению воз-
можности применения ракет Х-23М с вертолета Ка-252ТБ (Ка-29). Вертолет был
вооружен одной ракетой Х-23М в отсеке вооружения и двумя — на наружной
подвеске. Все ракеты имели пассивный старт, запуск их двигателей производился
после сброса ракет с вертолета.
3. Ракета Х-25
В 1971 г. совместными усилиями ГосНИИАС (Е. А. Федосов), ЦКБ «Гео-
физика» (Д, М. Хорол), ОКБ КМЗ (В. Г. Кореньков) был разработан проект
принципиально новой системы наведения управляемых авиационных тактиче-
ских ракет класса «воздух—поверхность», основанной на их самонаведении на
пятно узкого лазерного луча лазерного генератора самолета и удержания пятна на
наземной цели. Проблемы создания такой системы заключались в выборе длины
волны лазерного излучения, исходя из условий прохождения через атмосферу
различных состояний, выборе рекурентной частоты и мощности излучения, ди-
намического диапазона головки самонаведения.
После успешной реализации лазерной системы в составе самолетов
Су-17М-2, СУ-17М-3, МиГ-27 и ракет Х-25 работа «Решение научной и практи-
ческой проблемы использования лазерного излучения для точного наведения
авиационных средств поражения» в 1976 г. была удостоена Ленинской премии.
Группе авторов в составе Е. А. Федосова (ГосНИИАС), В. Г. Коренькова
(ОКБ КМЗ), Д. М. Хорола,А. А. Казамарова (ЦКБ «Геофизика»), Р. А. Пан-
кова (30 ЦНИИ МО) было присвоено звание лауреатов Ленинской премии.
Для ракеты с лазерной ГСН, получившей индекс «Х-25», на 3-м МПЗ был
разработан автопилот СУР-71.
Головка самонаведения была размещена в первом отсеке, а в хвостовом, где
на ракете Х-23 помещалась система «Дельта», установили дополнительную БЧ
массой 24 кг.
Новая разработка была отнесена к приоритетным направлениям. Эта работа
выполнялась ОКБ «Звезда» в тесном содружестве с ГосНИИ авиационных сис-
тем, ОКБ П. О. Сухого и Летно-испытательным институтом.
Заводские летные испытания были проведены в феврале—июле 1973 г. В ходе
них с самолета-носителя Су-7БМ было выполнено несколько пусков программно-
го варианта ракеты с целью определить реальные аэродинамические и баллистиче-
ские характеристики ракеты, оценить правильность выбора динамических коэф-
фициентов системы управления ракетой. 16 августа 1973 г. начался этап «А» госу-
дарственных совместных летных испытаний ракеты Х-25 в составе
авиационно-ракетного комплекса Су-7КГ («квантовый генератор»), включавшего
самолет Су-7БМ и опытную систему вооружения «Прожектор». По результатам
этапа «А» ГСЛИ, завершившегося 24 мая 1974 г., было признано нецелесообраз-
339
Рис. 3.15. Ракета Х-25
ным создание авиационно-ракетного комплекса Су-7КГ, так как самолет Су-7БМ
не имел системы автоматического управления, демпфирующей его колебания при
полете на малых высотах, в то время как выявилась зависимость точности прице-
ливания и, как следствие, точности попадания ракеты от демпфирующих свойств
самолетами места размещения на нем станции подсвета. В ходе испытаний была
осуществлена модернизация автопилота, позволившая улучшить характеристики
стабилизации ракеты в момент старта. Этап «Б» ГСЛИ, в ходе которого было вы-
полнено 26 пусков, был проведен на самолете Су-17МКГ в августе—ноябре 1974 г.
По его результатам ракета Х-25 была рекомендована к серийному производству.
В акте по испытаниям отмечалось: «Первая отечественная лазерная система
вооружения «Прожектор», обеспечивающая самонаведение управляемых ракет Х-25
по малоразмерным наземным целям, подсвеченным оптическим квантовым генера-
тором (ОКГ), значительно расширяет боевые возможности самолетов фронтовой
авиации».
Серийное производство ракеты Х-25 началось в 1975 г. на Калининградском
машиностроительном заводе «Стрела».
Постановлением ЦК КПСС и СМ СССР № 90-35 от 3 февраля 1976 г. ракета
Х-25 была принята на вооружение ВВС.
Ракета выполнена по аэродинамической схеме «утка» с Х-образным располо-
жением консолей крыла и рулей и включает следующие функциональные систе-
мы (рис. 3.15):
• планер. Выполнен в основном из алюминиевых сплавов (51%), а также маг-
ниевых сплавов (24,4%) и стали (19,7%) и состоит из корпуса, четырех консо-
лей крыла, на каждой из которых установлен элерон, и четырех рулей. Кор-
пус технологически делится на шесть отсеков. Все детали конструкции име-
ют антикоррозийное покрытие;
• двигатель ПРД-228 (изделие 393). Является однокамерным однорежим-
ным твердотопливным ракетным двигателем, имеющим стальной корпус, в
который вложен пороховой заряд. Он имеет суммарный импульс 12 100 кг-с,
максимальную тягу 3500 кг, время работы 3,4...6,4 с, массу топлива 63,5 кг,
массу снаряженную 118 кг;
340
• полуактивную лазерную ГСН 24Н1 с четырехплощадным кремниевым
фотодиодом и стабилизированной в пространстве оптической линией визи-
рования. ГСН состоит из гирокоординатора, электронного блока и кожуха
и имеет: рабочую длину волны 1,06 мкм, дальность захвата 10 км, углы пе-
ленга по каналам управления 30°, угловую скорость автосопровождения
до 7,0 и более град/с, поле захвата 1°, время перехода из режима целеуказа-
ния в режим слежения до 1,5 с, время работы в совместном полете до 2 ч,
время работы в автономном полете более 40 с;
• систему управления СУР-71 и включающую блок управления БУ-41, в со-
став которого входят датчики угла крена, линейных ускорений (два), угловых
ускорений (три) и электронная схема, два пневмопривода рулей ПГ-11 для
управления по тангажу и курсу и пневмопривод элеронов ПГ-10 для стабили-
зации крена;
• боевую часть Ф-25. Состоит из двух самостоятельных частей: осколочно-фу-
гасной Ф-25-1М и осколочной Ф-25-2. В задней части алюминиевого корпуса
последней, внутри которого размещено снаряжение, имеется специальная по-
лость, где уложены в два ряда 620 осколков прямоугольной формы. У Ф-25-1М
снаряжение размещается в стальном корпусе, внутри передней части которого
предусмотрена специальная зона, где уложено до 10 кг стальных осколочных
элементов цилиндрической формы, каждый диаметром 10 мм и длиной 13 мм;
• контактное взрывательное устройство КВУ-69, обеспечивающее
подрыв боевых частей при скорости встречи с преградой 200...600 м/с и углах
подхода 2...50° от горизонта при крене ракеты 15°. Оно включает систему
контактных датчиков СКД-69, состоящее из трех ударных замыкателей инер-
ционно-волнового действия, реакционного кабельного датчика, имеющего
контактный нож для увеличения чувствительности, соединительной колод-
ки, и предохранительно-исполнительные механизмы И-256 и И-255 для под-
рыва основной и дополнительной боевых частей;
• воздушную систему, состоящую из ампульного пневмоблока и устройств
для подвода воздуха к рулевым приводам и арретирам рулей;
• электросистему, включающую блок из шести электрохимических батарей
9Б16 (источник постоянного тока), блок питания БП-69 (источник перемен-
ного тока), предохранительный механизм ПМ-68, блок задержки БЗ-69 и
коммутационную аппаратуру.
Компоновка ракеты предусматривает сборку, стыковку, а также технологиче-
скую взамозаменяемость ее агрегатов и отсеков, что достигается размещением
аппаратуры в виде отдельных блоков:
• 1-й отсек - ГСН 24Н1;
• 2-й отсек — отсек управления, где размещены блок управления БУ-41, два
пневмопривода рулей ПГ-11 и система контактных датчиков СКД-24. Сна-
ружи отсека расположены рули и чека предохранительного механизма
ПМ-68 в верхней части отсека;
• 3-й отсек — боевая часть Ф-25-1М с исполнительно-предохранительным ме-
ханизмом И-256;
• 4-й отсек — двигатель ПРД-228. На корпусе двигателя расположены узлы
подвески под носитель и дополнительные узлы крепления консолей крыла;
• 5-й отсек — отсек энергообеспечения, где размещаются пневмоблок с редук-
тором, блок батарей 9Б16, блок электропитания БП-69, элементы электроав-
томатики, пневмопривод ПГ-10. Снаружи корпуса находятся основные узлы
341
крепления консолей крыла, а вверху имеется бортовой электроразъем для
электросвязи с носителем;
• 6-й отсек боевой части Ф-25-2 с предохранительно-исполнительным меха-
низмом И-255.
В процессе серийного производства в конструкцию ракеты постоянно вно-
сились изменения для повышения ее эксплуатационных свойств. Так, источник
питания БП-69 был заменен на БПГ-69, в котором вместо параметрического ста-
билизатора напряжения используется емкостный фильтр. Начиная с 1977 г. на
ракете стала устанавливаться боевая часть Ф-25-2М вместо Ф-25-2, в СКД-69 уб-
ран реакционный датчик, блок задержки БЗ-69 заменен на МБЗ-69. С июля этого
же года блок управления БУ-41 системы управления ракетой заменен на блок
БУ-42, в котором были использованы интегральные операционные усилители ти-
па «Регата». Позднее его заменил блок БУ-42-01, отличающийся от БУ-42 коэф-
фициентами передачи по перегрузке и крену в законе управления. Батареи 9Б16
были заменены на электрохимические твердосолевые батареи Т-454, обладающие
повышенной устойчивостью к линейным перегрузкам.
Ракета Х-25 предназначена для поражения малоразмерных подвижных и не-
подвижных целей в условиях визуальной видимости с самолетов фронтовой ави-
ации. Основными целями являются пусковые установки ракет, легкобронирован-
ные машины, железнодорожные эшелоны, кабины РЛС, малотоннажные кораб-
ли и суда. Первой системой вооружения, где использовалась Х-25, была система
вооружения «Прожектор», предназначенная для применения ракет с полуактив-
ной лазерной ГСН. В ее состав входили (при использовании Х-25):
• 2 ракеты Х-25;
• авиационные пусковые устройства АПУ-68УМ2 (позднее также
АПУ-68УМЗ);
• станция СП-14С («Прожектор-1») в подвесном контейнере для подсвета це-
ли лазерным лучом (длина волны 1,06 мкм, оптический квантовый генератор
выполнен на стекле активированном неодимом) и выдачи целеуказания на
четыре ГСН, а также аппаратура связи, индикации, управления пуском;
• средства управления и индикации в кабине летчика;
• контрольно-проверочная аппаратура и средства наземного обслуживания.
Подготовку ракеты к боевому применению проводят на штатной позиции
ППП-3 «Ингул» («Ингул-А») с приставкой контрольно-проверочной аппаратуры
АКПА-69. Пуск ракеты в системе вооружения «Прожектор» был возможен с пи-
кирования (до 40°) или горизонтального полета, для чего перед вылетом марка
прицела (условный индикатор положения лазерного луча) устанавливается под
углом —2° или —6° от строительной оси станции. При обнаружении цели летчик
прицеливался по неподвижной марке прицела АСП-17, включал станцию под-
света и, получив сигнал о захвате ГСН 24Н1 отраженного от цели лазерного луча,
производил пуск. В течение приблизительно одной секунды ракета выполняла
полет, близкий к горизонтальному, отрабатывая стартовые возмущения, после че-
го переходила в наведение на цель по сигналам ГСН методом пропорционального
наведения. В течение всего этого времени летчик пилотировал самолет так, чтобы
лазерный луч не потерял цель.
Основными недостатками системы вооружения «Прожектор» были:
• невозможность выполнения самолетом-носителем маневра от начала атаки
цели до момента ее поражения;
342
• сложность прицеливания и удержания лазерного луча при подсвете цели,
вызванная жесткой установкой контейнера на самолете, подверженного воз-
действию воздушных потоков;
• большие масса и габариты;
• относительно большое потребление энергии;
• отсутствие комплексного решения вопроса измерения дальности и подсвета
цели, приводящей к необходимости одновременной установки на борту са-
молета-носителя двух источников лазерного излучения.
Поэтому система вооружения «Прожектор» не получила широкого распрост-
ранения, и единственным серийным самолетом, использовавшим ее, был истре-
битель-бомбардировщик Су-17М2, что было продемонстрировано в 6 пусках в
ходе специальных летных испытаний в сентябре 1975 г. Каждый самолет мог
брать только две ракеты Х-25.
В 1975 г. на самолете МиГ-23Б (32-24) начались испытания системы воору-
жения «Клен», предназначенной для замены системы вооружения «Прожектор».
Ее основное отличие от последней заключалось в использовании лазерной стан-
ции дальнометрирования и подсвета «Клен-П», установленной вместо лазерного
дальномера «Фон», что позволило отказаться от контейнера со станцией подсве-
та. При атаке цели ракетами с лазерной ГСН с использованием системы воору-
жения «Клен» от летчика требовалось удерживать марку прицела на цели (а сле-
довательно, ось лазерного луча) при помощи кнюппеля на ручке управления, пи-
лотируя самолет так, чтобы лазерный луч не потерял цель. При наличии на борту
самолета цифровой машины типа «Орбита» возможно программное сопровожде-
ние цели лазерным лучом по ее сигналам без вмешательства летчика. В 1975—
1978 гг. в ходе специальных и государственных летных испытаний системы во-
оружения «Клен» было выполнено 32 пуска ракет Х-25 с опытных образцов само-
летов МиГ-27М (16 пусков) и Су-17МЗ (8 пусков), опытных образцов МиГ-23Б
(5 пусков) и Су-17М2 (3 пуска). По результатам пусков данная система была при-
нята на вооружение ударных самолетов фронтовой авиации. Ее носителями яв-
ляются Су-17МЗ, Су-17М4, Су-17УМЗ, Су-22МЗ, Су-22М4, Су-22УМЗ, Су-25,
Су-25К, Су-25УБ, МиГ-27М и МиГ-27Д. Каждый самолет может брать до че-
тырех ракет Х-25, размещаемых на пусковых устройствах АПУ-68УМ2 и
АПУ-68УМЗ (рис. 3.16).
Практически одновременно с системой вооружения «Клен» на опытном об-
разце самолета МиГ-23БК начались испытания более сложной системы вооруже-
ния «Кайра». Она позволяла применять управляемые бомбы и ракеты с полуак-
тивной лазерной и пассивной телевизионной системами наведения. После визу-
ального обнаружения цели летчик выводил ее изображение в центр
видеоконтрольного устройства, производил захват на сопровождение датчиками
слежения системы «Кайра», включал лазерную станцию подсвета и после получе-
ния сообщения о захвате ГСН 24Н1 цели при условии выдачи БЦВМ прицель-
но-навигационного комплекса сообщения о нахождении в зоне разрешенных пу-
сков производил пуск. Во время полета ракеты к цели самолет мог выполнять
противозенитный маневр при условии удержания цели лазерной станцией под-
света, генератор которой имел углы прокачки —160...00 по тангажу и ±35° по го-
ризонтальному углу пеленга. Сопровождение цели осуществлялось следящей те-
левизионной системой. В ходе проведения государственных испытаний системы
343
Рис. 3.16. Опытный образец самолета Су-17М4
с ракетами Х-25 под крылом и фюзеляжем
вооружения «Кайра-23» в составе прицельно-навигационного комплекса
ПрнК-23 самолета МиГ-23БК было выполнено 46 пусков ракет Х-25, по результа-
там которых данная система была принята на вооружение истребителей-бомбар-
дировщиков МиГ-27К (обозначение МиГ-23БК с 1981 г.). Каждый самолет мог
размещать до четырех ракет Х-25 на пусковых устройствах АПУ-68УМ2 и
АПУ-68УМЗ. Модификацией «Кайры-23» является система вооружения «Кай-
ра-24», используемая фронтовыми бомбардировщиками Су-24М, размещающими
также до четырех ракет Х-25 на пусковых устройствах АПУ-68УМ2 и АПУ-68УМЗ.
Впервые советские ВВС применили ракеты Х-25 в боевых действиях в Афга-
нистане весной 1986 г. с самолетов Су-25. Первоначально подсвет цели осу-
ществлял сам носитель или его ведомый, однако вскоре для подсветки цели стали
использоваться лазерные станции наземных наводчиков. Сам источник лазерной
энергии монтировался первоначально импровизированно на БМП или БТР, за-
тем их сменили штатные боевые машины авиационного наведения на шасси
БТР-80, на которых система целеуказания была укрыта под броней и выдвигалась
наружу при работе. В ходе боев пилоты 378-го отдельного штурмового авиаполка
выполняли пуски ракет по вырубленным в скалах складам, пещерам, долговре-
менным огневым укрепленным точкам моджахедов с пологого пикирования под
углом 20...30° на дальности 4...5 км. В ходе них ракеты точно попадали во входы
пещер и амбразуры, отклонение ракет от точки прицеливания не превышало
1,5...2 м. Всего, по данным ОКБ П. О. Сухого, в Афганистане было выполнено
139 пусков управляемых ракет с лазерной ГСН.
В 1985 г. на нескольких серийных ракетах Х-25 передняя (основная) боевая
часть была заменена на кассетную, содержащую 90 боевых элементов 9А-773, а
вместо задней боевой части разместили взрыватель-рад иовысотомер. Это была
экспериментальная работа и преследовала цель определить конфигурацию и раз-
меры зоны разлета боевых элементов, оценить плотность точек их падения, про-
верить взведение их взрывательных устройств. Всего было выполнено шесть пу-
сков с самолета Су-17МЗ. Несмотря на вполне приемлемые результаты, дальней-
шие работы прекратили, так как серийное производство ракеты Х-25 уже было
завершено, а ее преемница Х-25МЛ имела меньшие размеры отсека боевой части.
344
Тактико-технические данные ракеты Х-25
Максимальная дальность пуска, км:
при максимальной высоте пуска..................................До 7
при минимальной высоте пуска...............................До 7
Минимальная дальность пуска, км:
при максимальной высоте пуска.............................. 3
при минимальной высоте пуска.............................. 3
Диапазон высот пуска, км...................................0,05...4
Диапазон скоростей пуска, км/ч......................... 400... 1100
Скорость полета, м/с:
максимальная ............................................ 700
средняя (при дальности пуска 7 км)..................... 400...500
Время управляемого полета, с.................................До 22
Располагаемая перегрузка, g.................................., До 11
Точность (£*кво), м..........................................6,4
Размеры, мм:
длина ракеты............................................ 3570
диаметр ракеты ......................................... 275
размах крыла............................................ 785
Стартовая масса ракеты, кг.................................. 320
Масса боевых частей, кг.................................. 111+26
Тип боевой части........................................... ОФ + О
Тип двигателя...............................................РДТТ
Тип системы наведения........................................Л ГСН
Условия применения............ПМУ, при визуальном наблюдении цели
Носители ...................АБК МиГ-27К, МиГ-27М, МиГ-27Д, Су-25,
Су-24М, Су-17М2, Су-17МЗ, Су-17М4, Су-17УМЗ
4. Ракета Х-27ПС
15 августа 1972 г. вышло Решение № 221 Комиссии Президиума СМ СССР
по военно-промышленным вопросам, ставившее перед ОКБ КМЗ задание — со-
здать легкую противорадиолокационную ракету для вооружения самолетов
фронтовой авиации МиГ-21бис, МиГ-23Б, Су-7Б и Су-17М, предназначенную
для поражения работающих РЛС ЗРК «Хок» и «Найк Геркулес», зенитно-артил-
лерийских комплексов, что должно было обеспечиваться сменными пассивными
радиолокационными ГСН.
В ЦНИИРТ (Москва) под руководством Н. А. Викторова и в ЦКБ «Авто-
матика» (г. Омск) под руководством А. С. Киричука были созданы ПРГС, спо-
собные пеленговать РЛС-цели различного типа. Для увеличения дальности поле-
та по сравнению с ракетами Х-23 и Х-25 был разработан двухрежимный двига-
тель ПРД-276 на смесевом топливе с суммарным импульсом в полтора раза
выше, чем у ПРД-228 при тех же массогабаритных характеристиках.
На 3-м МПЗ по ТЗ ОКБ «Звезда» был разработан автопилот СУР-73, кото-
рый позволил в дальнейшем создать целое семейство управляемых ракет.
За базовую схему для новой ракеты, получившей обозначение Х-27ПС, взя-
ли схему ракеты Х-25. На ней установили пассивную радиолокационную систему
наведения, новый автопилот, позволявший ракете выполнять маневр «горка» для
повышения ЛТХ и эффективности новой, фугасной, боевой части, силовую уста-
новку из двух твердотопливных ракетных двигателей: основного двухрежимного
ПРД-276 с суммарным импульсом 15 500 кг-с и временем работы 6... 10 с и до-
полнительного ПРД-277 с суммарным импульсом 5000 кг-с и временем работы
345
8...12 с, размещавшегося в хвостовом отсеке на месте дополнительной боевой
части ракеты Х-25. В отличие от ПРД-228 на ПРД-276 и ПРД-277 применили но-
вое смесевое топливо, имевшее более высокий удельный импульс. Предполага-
лось, что Х-27ПС при стартовой массе 350 кг будет иметь дальность пуска
до 55 км. Однако в процессе ОКР было решено отказаться от дополнительного
двигателя, что упростило конструкцию ракеты, а выросшую у нее из-за более тя-
желой ГСН продольную устойчивость удалось снизить за счет установки дестаби-
лизаторов.
Заводские летные испытания, в ходе которых было выполнено 4 пуска про-
граммного варианта ракеты, оборудованного габаритно-массовым макетом ГСН,
двигателем и доработанным до уровня Х-27ПС автопилотом ракеты Х-25, были
проведены на самолете МиГ-23Б с 29 января по 18 февраля 1975 г. Они преследо-
вали цель оценить работу контура стабилизации ракеты, определить ее аэродина-
мические, баллистические и динамические характеристики, действие на нее стар-
товых возмущений. В июле были проведены испытания двигателя ПРД-276.
С 8 августа начались государственные совместные летные испытания (этап «А»)
ракеты Х-27ПС (изделие 721) с ГСН ПРГС-1ВП в составе вооружения доработан-
ного самолета МиГ-27, оборудованного подвесным контейнером с аппаратурой
управления ГСН «Метель-23/72», которые завершились 12 октября 1976 г. В ходе
них было выполнено 28 пусков ракеты Х-27ПС в различных вариантах комплек-
тации для определения работоспособности систем ракеты и совместимости с обо-
рудованием самолета. С 26 января по 8 июля 1977 г. на самолете МиГ-27, осна-
щенном подвесным контейнером с аппаратурой управления ГСН «Вьюга», был
проведен этап «Б» государственных совместных испытаний (14 пусков), в ходе
которых круговое вероятное отклонение составило 3,2 м. Вероятность поражения
одной ракетой Х-27ПС (без учета надежности) работающей типовой зачетной
цели — кабины РЛС П-20 (П-35) — характеризуется частотностью попадания в
зону достоверного поражения 0,87.
По результатам государственных испытаний ракета Х-27ПС с ГСН ПРГС-1ВП
была рекомендована в серийное производство. 19 июня 1977 г. на самолетах
МиГ-23БК, проходившем в то время летные испытания, и МиГ-27 начался этап
«А» государственных совместных летных испытаний ракеты Х-27ПС (изделие
727) с ГСН ПРГС-2ВП, который планировалось завершить 30 декабря 1977 г. Од-
нако после выполнения 8 пусков, в которых круговое вероятное отклонение со-
ставляло 1,8, причем в трех были зафиксированы прямые попадания, по предло-
жению комплексной испытательной бригады 13 октября было принято совмест-
ное решение МАП, МРП и ВВС по завершению ГСЛИ опытной ракеты Х-27ПС
с ГСН ПРГС-2ВП без проведения этапа «Б» испытаний.
По результатам государственных совместных летных испытаний было реше-
но отказаться на серийных ракетах от неконтактного радиовзрывателя в ГСП
ПРГС-1ВП из-за его низкой точности срабатывания и надежности.
Постановлением ЦК КПСС и СМ СССР от 2 сентября 1980 г. № 758-248 ра-
кета Х-27ПС была принята на вооружение ВВС СССР (рис. 3.17).
Ракета выполнена по аэродинамической схеме «утка» с Х-образным распо-
ложением консолей крыла и рулей и включает следующие функциональные сис-
темы:
• планер. Выполнен в основном из алюминиевых сплавов и состоит из корпу-
са, четырех консолей крыла, на каждой из которых установлен элерон, и че-
тырех рулей. Перед рулями для повышения управляемости ракеты дестаби-
346
лизаторы. Корпус технологически делится на пять отсеков. Все детали конст-
рукции имеют антикоррозийное покрытие;
• двигатель ПРД-276 (изделие 502-0), являющийся твердотопливным, одно-
камерным ракетным двигателем. Заряд смесевого топлива обеспечивает
двухрежимную работу двигателя с повышенным уровнем тяги в течение пер-
вых двух секунд и не требует при своем производстве бронирования и меха-
нической обработки. Для воспламенения топлива используется воспламени-
тель В-287, унифицированный для восьми двигателей различного назначе-
ния и требующий герметичных условий. Благодаря использованию в
конструкции корпуса двигателя высокопрочных сталей КВК-26 и КВК-32,
вновь созданного материала ПДМ-2К, одновременно выполняющего функ-
ции теплозащитного покрытия и защитно-крепящего слоя, заливной конст-
рукции заряда, двигатель ПРД-276 по сравнению с двигателем ПРД-228 ра-
кет Х-66, Х-23, Х-25 имеет при практически равной массе почти в полтора
раза больший суммарный импульс. Двигатель ПРД-276 имел суммарный им-
пульс 17 200кг-с, тягу за время 0,15...2,Ос более 2000кг, время работы
5... 11,5 с, массу топлива 81 кг, массу снаряженную 122 кг;
• пассивную радиолокационную ГСН (ПРГСН). Ракета оснащается одной
из двух ГСН: ПРГС-1ВП (ЛО77) или ПРГС-2ВП (ЛОИ), идентичных между
собой по конструктивно-технологическим, электрическим и информацион-
ным связям. В обеих ГСН используются фазовый метод пеленгации и под-
вижная стабилизированная антенна. Основные тактико-технические данные
ГСН ПРГС-1ВП (ПРГС-2ВП):
дальность обнаружения излучения РЛС, км.......... 100 (100)
углы обзора в плоскости, град.:
вертикальной............................±30 (—40...+20)
горизонтальной..............................±30 (±30)
угловая скорость автосопровождения, град/с......до 6 (до 8)
Головка СН ПРГС-1ВП предназначена для наведения РЛС AN/MPQ-46 и
AN/MPQ-48 ЗРК «Хок» и других, работающих в непрерывном режиме в диапа-
зоне частот 9,5... 10,5 ГГц (литера А). Для повышения помехозащищенности она
может запоминать угловую скорость линии визирования на 3...6 с, производить
Рис. 3.17. Ракета Х-27 ПС
347
селекцию сигналов по частоте и приоритетный захват станции AN/MPQ-46 для
наведения ЗУР.
Головка СН ПРГС-2ВП обеспечивает наведение на включенные РЛС
AN//MPA-5A, -5В, -4А, -4В ЗРК «Найк Геркулес» и других РЛС, работающих в
импульсном режиме в диапазоне 8,5...9,6 ГГц (литера А'). Для помехозащищен-
ности она оснащена устройством пролонгации цели на 3...6 с, может произво-
дить селекцию по частоте, пространству и периоду повторения импульсов;
• систему управления ракетой СУР-73, включающую блок управления
БУ-42-01, в состав которого входят датчики угла крена, линейных ускорений
(два), угловых ускорений (три) и электронная схема, блок формирования ко-
манд управления БФКУ-79, состоящий из датчика угла тангажа и электрон-
ной схемы, два пневмопривода рулей ПГ-11 для управления по тангажу и
курсу и пневмопривод элеронов ПГ-10 для стабилизации крена. Используе-
мый в контуре закон управления компенсирует случайную составляющую
ошибок пеленгации, вызванную шумом цели и ошибками обтекателя ГСН, и
имеет программное ограничение заданной перегрузки;
• боевую часть Ф-27. Включает цельносварной корпус из алюминиевого
сплава и разрывной заряд с детонатором и имеет тротиловый эквивалент
1,92...1,94, что обеспечивает вывод из строя РЛС AN/MPQ-46 (-48) при под-
рыве в зоне достоверного поражения с радиусом до 16 м;
• контактное взрывательное устройство, включающее систему кон-
тактных датчиков (СКД) СКД-24 из трех датчиков Б-24 инерционного типа
и предохранительно-исполнительный механизм И-255. Обеспечивает под-
рыв боевой части до ее внедрения в преграду при скорости встречи ракеты с
целью 200...900 м/с и углах подхода 2...45° (от горизонта);
• электросистему, включающую ампульную свинцовую батарею АБ-447
(источник постоянного тока в автономном полете), блок питания БП-72 (ис-
точник постоянного тока в совместном полете и переменного тока — в авто-
номном), предохранительный механизм ПМ-68 и электрожгутовую сеть со
штепсельными разъемами;
• воздушную систему, состоящую из ампульного пневмоблока и оборудова-
ния для подвода воздуха к рулевым приводам, арретирам рулей и устройству
запуска ампульной батареи.
Компоновка ракеты предусматривает сборку, стыковку, а также технологиче-
скую взамозаменяемость ее агрегатов и отсеков, что достигается размещением
аппаратуры в виде отдельных блоков:
1 -й отсек — ГСН. На ее корпусе в плоскости рулей установлены дестабили-
заторы;
2 -й отсек — отсек управления, где размещены блоки БУ-42-01 и БФКУ-79,
два пневмопривода рулей ПГ-11 и система контактных датчиков СКД-24. Снару-
жи отсека установлены две пары рулей и чека предохранительного механизма
ПМ-68;
3 -й отсек — боевая часть. В передней части отсека расположен исполнитель-
но-предохранительный механизм И-255;
4 -й отсек — двигатель. На корпусе двигателя располагаются узлы подвески
под носитель и дополнительные узлы крепления крыла;
5 -й отсек — отсек энергообеспечения, где размещаются пневмоблок, ам-
пульная химическая батарея, блок питания БП-72, элементы электроавтоматики,
пневмопривод ПГ-10. Снаружи отсека расположены основные узлы крепления
348
консолей крыла, а в верхней части располагается разъем для электросвязи с носи-
телем. В задней части отсека находится разъем безопасности.
Внизу снаружи под отсеками ракеты имеется гаргрот, в котором проложены
воздушная трубка и электрожгут из 5-го отсека во 2-й.
Ракета Х-27ПС серийно выпускалась в 1977—1983 гг. Калининградским про-
изводственным объединением «Стрела».
Ракета Х-27ПС предназначена для поражения РЛС, работающих в диапа-
зонах литер А и А', и входит в систему управляемого ракетного вооружения, ко-
торая включает:
• одну-две ракеты Х-27ПС;
• авиационные пусковые устройства АПУ-68УМЗ;
• подвесной съемный контейнер с аппаратурой «Вьюга» (или «Вьюга-17») для
управления работой ГСП ракет;
• средства индикации и управления в кабине летчика;
• наземное контрольно-проверочное оборудование.
Аппаратура «Вьюга» разработки ПО «Автоматика» (г. Омск) предназначена
для управления работой головок самонаведения ракет на подвеске, подготовки к
пуску ракет по работающим РЛС, выдачи в автопилот ракеты команд и сигналов
для формирования траектории полета, определения дальности до цели и нахож-
дения самолета в зоне разрешенного пуска. Она обеспечивает:
• одновременную подготовку к пуску двух ракет одного типа с ГСН одного литера;
• управление антенной системой ГСН по курсу;
• установку антенной системы ГСН на расчетный угол в зависимости от высо-
ты полета и тангажа самолета;
• определение по сигналам ГСН и датчика тангажа самолета текущего значе-
ния угла визирования захваченной РЛС-цели;
• определение при высоте полета более 5 км угла визирования, соответствую-
щего минимальной и максимальной дальностям пуска;
• определение при высоте полета менее 5 км зоны возможных пусков интегри-
рованием воздушной скорости от намеченного ориентира при известных ко-
ординатах РЛС-цели;
• выдачу целеуказания ГСН одной ракеты на угловые координаты РЛС-цели,
захваченной ГСН другой ракеты;
• выдачу в автопилот ракеты тангажа самолета с учетом несоосности стро-
ительных осей ракеты и самолета;
• выдачу в СУВ информации для индикации летчику;
• совместную проверку работоспособности ГСН ракеты и аппаратуры «Вьюга».
Система управляемого ракетного вооружения Х-27 используется истребителя-
ми-бомбардировщиками МиГ-27М, МиГ-27К, МиГ-27Д, Су-17М4и Су-17МЗП.
Тактика действий самолетов-носителей Х-27ПС сводится к минимуму пре-
бывания в зоне поражения ЗУР комплексов «Хок» и «Найк Геркулес». Подготов-
ка ракеты к боевому применению осуществляется на позиции подготовки
ППП-ЗУ, укомплектованной аппаратурой контроля АКПА7-ЗУК. Применение
ракеты возможно днем и ночью в любых метеоусловиях. Пуск одной или двух ра-
кет по одной (или разным РЛС-целям), обнаруженной и захваченной ГСН раке-
ты, возможен с пикирования, кабрирования (до 20°) и горизонтального полета,
после чего летчик разворачивает машину с максимальной перегрузкой и уходит
из зоны поражения ЗУР атакуемого комплекса.
349
Возможности ракеты Х-27ПС постоянно проверялись при различных испы-
таниях, в ходе которых она демонстрировала свою высокую боевую эффектив-
ность. Так, на войсковых испытаниях, проведенных в сентябре 1981 г., было вы-
полнено 8 пусков ракет Х-27ПС — 3 ракеты поразили цели прямым попаданием,
а у 5 промах не превышал 6 м. По результатам всех испытаний в 37% пусков были
зафиксированы прямые попадания.
Существенными недостатками ракеты Х-27ПС являются недостаточно вы-
сокие дальность пуска и среднетраекторная скорость полета, низкая помехоза-
щищенность при прерывистой работе РЛС и наличии вблизи РЛС ложных источ-
ников излучения.
Тактико-технические данные ракеты Х-27ПС (изделие 721/727)
Максимальная дальность пуска, км:
при максимальной высоте пуска............................... 40
при минимальной высоте пуска.............................До 25
Минимальная дальность пуска, км:
при максимальной высоте пуска............................... 18
при минимальной высоте пуска............................... 10
Диапазон высот пуска, км.................................0,05...12
Диапазон скоростей пуска, км/ч............................. 700... 1250
Скорость полета, м/с:
максимальная .............................................. 880
средняя (на дальности 25 км) .......................... 300...450
Время управляемого полета, с................................... 90
Располагаемая перегрузка, g ................................. До 10
Точность (£*кво), м............................................7,5
Размеры, мм:
длина ракеты......................................... 4194/4294
диаметр ракеты.............................................275
размах крыла...............................................755
Стартовая масса ракеты, кг...................................310/311
Масса боевой части, кг........................................88,5
Тип боевой части.................................................Ф
Тип двигателя................................................ РДТТ
Тип системы наведения.........................................ПРГС
Условия применения.............................................СМУ
Носители ....................................АБК МиГ-27К, МиГ-27М,
МиГ-27Д, Су-17МЗП, Су-17М4
5. Ракета Х-25М
Идея и ведущая роль в создании первой в мире модульной ракеты принадле-
жит В. Г. Коренькову, который в 1973 г. предложил концепцию построения ря-
да ракет на основе комплектации сменных отсеков систем наведения и боевых
частей с единой унифицированной ракетой УР-73. Эта концепция легла в основу
модульного агрегатирования.
После выхода правительственного постановления в конце 1978 г. работы по
такой ракете, получившей обозначение Х-25М («модульная»), развернулись пол-
ным ходом.
Отметим основные принципы, заложенные в идеологию ее построения:
• замена находящихся в производстве трех ракет Х-23М, Х-25 и Х-27ПС одной
ракетой со сменными системами наведения;
350
• возможность формирования в строевых частях необходимого облика ракеты;
• возможность совершенствования данного класса оружия за счет применения
новых типов боевых частей и перспективных систем наведения.
Создание модульной ракеты Х-25М позволяет:
• уменьшить число типов ракет;
• значительно снизить затраты и сроки на создание новых систем управляемо-
го ракетного оружия;
• сократить цикл мобилизационного развертывания на особый период;
• создать семейство модульных элементов систем вооружения с достаточной
степенью адаптации к динамической ситуации на театре венных действий;
• повысить эксплуатационную надежность систем вооружения и упростить их
эксплуатацию.
На первом этапе предполагалось унифицировать ракеты Х-23М, Х-25 и
Х-27ПС, а в дальнейшем — разработать для модульного ряда Х-25М новые вари-
анты модулей ГСН и боевого снаряжения.
В качестве базового образца для ракеты Х-25М была принята ракета Х-27ПС.
К концу 1979 г. были разработаны четыре варианта:
• Х-25МП (изделие 711) — противорадиолокационная ракета с пассивной ра-
диолокационной ГСН ПРГС-1ВП, боевой частью, двигателем и пневмосис-
темой ракеты Х-27ПС;
• Х-25МП (изделие 712) — вариант Х-25МП (изделие 711) с пассивной радио-
локационной ГСН ПРГС-2ВП;
• Х-25МЛ (изделие 713) — многоцелевая ракета, в отличие от Х-25МП осна-
щенная полуактивной лазерной ГСН 24Н1;
• Х-25МР (изделие 714) — многоцелевая ракета, в отличие от Х-25МП осна-
щенная радиокомандной аппаратурой наведения В-500.
Создание этого семейства ракет было завершено принятием их на вооруже-
ние в 1981 г.
Концепция создания новых ракет на основе модульного агрегатирования
стала традиционной при разработке средств поражения различного назначения.
В дальнейшем была разработана ракета Х-25МТП (изд. 715) с тепловизион-
ной ГСН Ю-700 (работы были остановлены после изготовления первой опытной
партии из 5 ракет).
В настоящее время идут работы по дополнению модульного семейства
Х-25М ракетами Х-25МС и Х-25МА.
Этап «А» ГСЛИ начался 21 декабря 1979 г. и проходил в четыре подэтапа.
Первый подэтап проводился на самолете МиГ-23М (21.12.79— 22.04.80) и за-
ключался в испытании ракеты Х-25МР. В ходе него было выполнено 8 пусков ра-
кеты Х-25МР в телеметрическом варианте и 3 пуска Х-23М в боевом варианте.
На втором подэтапе (21.12.79 — 18.07.80) отрабатывалась ракета Х-25МП в соста-
ве вооружения самолета МиГ-23БК, выполнившего три пуска телеметрического
варианта ракеты. Третий подэтап (23.10.80 — 3.04.81), на котором отрабатывалась
Х-25МЛ, проводился с использованием второго самолета МиГ-23БК, осуществ-
лявшего подсвет цели при двух пусках ракеты с первого МиГ-23БК. На четвертом
подэтапе (27.3.81 — 3.09.81) проводилась проверка работоспособности разных
вариантов ракеты Х-25М при наведении на цель для доводки до состояния, обес-
печивающего определение летно-тактических, технических и боевых характе-
351
ристик. В ходе него было выполнено 8 пусков ракеты (1 Х-25МП, 5 Х-25МЛ и
2Х-25МР).
На самолете МиГ-27К (обозначение МиГ-23БК с 1981 г.) 4 ноября 1981 г.
начался этап «Б» ГСЛИ. Хотя его окончание планировалось 22 февраля 1982 г.,
все 14 намеченных пуска были проведены досрочно, что позволило завершить
этап «Б» 28 декабря 1981 г.
В ходе государственных совместных летных испытаний ракеты Х-25М в со-
ставе системы вооружения самолета МиГ-27К были получены следующие резуль-
таты для типовой зачетной цели типа «Кабина РЛС П-35»:
• вероятность поражения, заданная по ТТТ ВВС не менее 0,7, с доверительной
вероятностью 0,9, составила 0,36...0,92 для ракеты Х-25МР и 0,43...0,97 для
ракеты Х-25МЛ;
• частотность попадания в приведенную площадь поражения составила 0,71
для ракеты Х-25МР и 0,83 для ракеты Х-25МЛ (рис. 3.18).
Вероятность поражения и частотность попадания для ракеты Х-25МП не
рассматривались, так как были приняты равными вероятности поражения и час-
тотности попадания ракеты Х-27ПС.
Серийное производство ракеты Х-25М началось в 1982 г. Калининградским
производственным объединением «Стрела». Месячный объем производства со-
ставлял во второй половине 80-х годов почти 3000 ракет (из них несколько десят-
ков Х-25МП, остальные Х-25МЛ и Х-25МП приблизительно поровну).
Серийное производство ракет Х-25МР и Х-25МП было свернуто к 1993 г.,
дольше всех производилась ракета Х-25МЛ, последняя партия была выпущена
в 1995 г.
Ракета Х-25М, как и все предыдущие ракеты ОКБ «Звезда», выполнена по
аэродинамической схеме «утка» с Х-образным расположением консолей крыла и
рулей и включает следующие функциональные системы:
• планер. Выполнен в основном из алюминиевых сплавов и состоит из корпу-
са, четырех консолей крыла, на каждой из которых установлен элерон, и че-
тырех рулей. Перед рулями для повышения управляемости ракеты на малых
скоростях и снижения продольной устойчивости на варианте Х-25МП уста-
Рис. 3.18. Ракета Х-25МЛ
352
новлены дестабилизаторы. Корпус технологически делится на шесть отсеков.
Все детали конструкции имеют антикоррозийное покрытие;
двигатель РДТТ-324. Разработан на базе двигателя ПРД-276 ракеты
Х-27ПС, от которого отличается использованием менее дымного топлива и
является твердотопливным, двухрежимным, однокамерным ракетным двига-
телем, в стальной корпус которого заливается заряд смесевого топлива. Дви-
гатель имеет суммарный импульс 17 200 кг-с, тягу за время 0,15...2 с более
2000 кг, время работы 5... 11,5 с, массу топлива 82,5 кг, массу снаряженную
122 кг;
боевую часть Ф-27. Включает цельносварной корпус из алюминиевого
сплава и разрывной заряд с детонатором и имеет тротиловый эквивалент
160 кг, что обеспечивает вывод из строя РЛС AN/MPQ-46 (-48) при подрыве в
зоне достоверного поражения с радиусом до 16 м;
контактное взрывательное устройство, включающее систему кон-
тактных датчиков СКД-24 из трех датчиков Б-24 инерционного типа и пред-
охранительно-исполнительный механизм И-255. Обеспечивает подрыв бое-
вой части до ее внедрения в преграду при скорости встречи ракеты с целью
200...900 м/с и углах подхода 2...45° (от горизонта);
систему управления ракетой СУР-17. Разработана на базе системы уп-
равления СУР-73 ракеты Х-27ПС. Ее главное отличие — использование бло-
ка формирования команд управления БФКУ-89, состоящего из датчика угла
тангажа и электронной схемы и отличающегося от БФКУ-79 автопилота
СУР-73 введением признака системы наведения и закона переключения при
превышении углом визирования заданной величины, зависящей от времени.
Это позволило уменьшить минимальную дальность пуска для ракеты
Х-25МП по сравнению с Х-27ПС до 3...5 км, а для ракеты Х-25МЛ по срав-
нению с Х-25 увеличить углы подхода к цели. Кроме БФКУ-89, в состав
СУР-17 входят блок управления БУ-42-01, включающий три датчика угловых
скоростей, два датчика линейных ускорений, датчик крена и электронную
схему; два пневматических рулевых привода ПГ-11 для управления по курсу
и тангажу; пневматический рулевой привод ПГ-10 для стабилизации ракеты
по крену;
• электросистему, включающую ампульную свинцовую батарею АБ-447
(источник постоянного тока в автономном полете), блок питания БП-71
(источник постоянного тока в совместном полете и переменного тока —
в автономном), предохранительный механизм ПМ-71 и элекгрожгуто-
вую сеть со штепсельными разъемами. Специфические для каждого варианта
ракеты элементы электрооборудования: блок задержки БЗ-71 на Х-25МЛ,
преобразователь ПТ-0,125С и регулятор частоты БРЧ-2 на Х-25МР;
• воздушную систему, состоящую из ампульного пневмоблока и оборудова-
ния для подвода воздуха к рулевым приводам, арретирам рулей, устройству
запуска ампульной батареи;
• пассивную радиолокационную ГСН ПРГС-1ВП ракеты Х-27ПС (ракета
Х-25МП-изделие 711);
• пассивную радиолокационную ГСН ПРГС-2ВП ракеты Х-27ПС (ракета
Х-25МП — изделие 712);
• полуактивную лазерную ГСН 24Н1 (ракета Х-25МЛ — изделие 713);
12 Авиация ВВС России и научно-технический прогресс 353
• радиокомандную систему наведения В-500 (ракета Х-25МР— изделие
714). В-500 отличается от аппаратуры «Дельта-Р2М» ракеты Х-23М меньши-
ми габаритами (в 5 раз) и массой (в 3 раза).
Все варианты ракеты имеют общий базовый модуль, где размещаются систе-
мы управления, пневмо- и элетросистемы, двигатель, боевое снаряжение, и
сменные носовой (ГСН на Х-25МЛ и МП, на Х-25МР пустой обтекатель, под ко-
торым размещены преобразователь с регулятором частоты) и хвостовой отсеки
(аппаратура В-500 на Х-25МР, обтекатели на Х-25МЛ и МП).
В строевые части ВВС СССР ракета начала поступать в 1982 г. и в настоящее
время является основной тактической ракетой класса «воздух—поверхность»
ВВС России. Зарубежными аналогами ракеты Х-25М можно считать раке-
ты AGM-65 «Мейврик», «Буллпап» и «Шрайк» (США) и AS.30 (AS.30L) ВВС
Франции.
Ракета Х-25МП предназначена для поражения РЛС, работающих в диапа-
зонах литер А и А’, и используется в системе вооружения, включающей:
• до двух ракет Х-25МП;
• авиационные пусковые устройства АПУ-68УМЗ;
• подвесной съемный контейнер с аппаратурой «Вьюга» (на самолетах МиГ)
или «Вьюга-17» (на самолетах Су) для управления работой ГСН ракет;
• наземное контрольно-проверочное оборудование.
Носителями данной системы вооружения являются самолеты МиГ-27М,
МиГ-27К, МиГ-27Д, Су-17МЗ, Су-17М4, Су-22МЗ и Су-22М4.
Ракета Х-25МЛ предназначена для поражения кабин РЛС, пусковых устано-
вок ракет, самолетов на открытых стоянках, железнодорожных эшелонов и мало-
тоннажных кораблей и судов. Она используется в системах вооружения «Прожек-
тор», «Кайра», «Клен», «Шквал», включающих:
• лазерную станцию подсвета цели;
• до четырех ракет Х-25МЛ;
• авиационные пусковые устройства АПУ-68УМЗ и АПУ-68УМ2;
• контрольно-проверочную аппаратуру.
Система вооружения «Прожектор» используется самолетами Су-17М2,
«Кайра» - Су-24М, Су-24МК и МиГ-27К, «Клен» - Су-17МЗ, Су-17М4, Су-22МЗ,
Су-22М4, Су-25, Су-25К и МиГ-27М, «Шквал» — Су-25Т. Все самолеты могут
размещать до 4 ракет (кроме Су-17М2, на котором размещаются 2 ракеты). Кроме
того, в ходе летных испытаний самолета МиГ-29М была подтверждена способ-
ность использования ракет Х-25МЛ.
Ракета Х-25МР предназначена для поражения тех же целей, что и Х-25МЛ, и
используется в системе вооружения Х-23, включающих:
• две-четыре ракеты Х-25МР;
• пусковые устройства АПУ-68У, АПУ-68УМ, АПУ-68УМ2, АПУ-68УМЗ с
электроавтоматикой управления;
• радиокомандную аппаратуру управления «Дельта-Н», встроенную на носите-
ле ракет или размещаемую на нем в подвесном контейнере;
• наземное контрольно-проверочное оборудование;
• наземный тренажер.
Система вооружения Х-23 с ракетами Х-25МР используется самолетами
МиГ-23М, МиГ-23МЛ, МиГ-27М, МиГ-27К, МиГ-27Д, МиГ-23Б, Су-17М,
Су-22М4, Су-24М, Су-24МК. Все самолеты размещают 2 ракеты, а Су-24МК —
четыре.
354
Таблица 3.3
Тактико-технические данные изделий
Параметры Изделие
711 712 713 714
Максимальная дальность при высоте пуска, км: максимальной 40 40 10 10
минимальной До 25 До 25 10 10
Минимальная дальность при высоте пуска, км: максимальной 15 15 2,5 2,5
минимальной 3,0 3,0 2,5 2,5
Диапазон высот пуска, км 0,05...12,0 0,05...12,0 0,05...5,0 0,05...5,0
Диапазон скоростей пуска, км/ч 700... 1350 700... 1350 700... 1350 700... 1350
Скорость полета, м/с: максимальная 920 920 870 870
средняя (на дальности, км) 300 (20) 300 (20) До 450 (6) До 450 (6)
Время управляемого полета, с 90 90 90 90
Располагаемая перегрузка, g 10 10 10 10
Точность (£*кво), м 4,0...7,5 4,0...7,5 4...6 5...6
Размеры, мм: длина ракеты 4255 4355 3705 3686
диаметр ракеты 275 275 275 275
размах крыла 755 755 755 755
Стартовая масса ракеты, кг 316 316 299 299
Масса боевой части Ф-27М, кг 86 86 86 86
Тип боевой части Фугасная Фугасная Фугасная Фугасная
Тип двигателя РДТТ . РДТТ РДТТ РДТТ
Тип системы наведения ПРГС ПРГС Л ГСН Радио-
Условия применения СМУ СМУ ПМУ командная ПМУ
Носители Самолеты фронтовой авиации
6. Ракета Х-31
Разработка противорадиолокационной ракеты (ПРР) Х-31 началась в 1975 г.
в ОКБ «Звезда». Необходимость ее создания была вызвана тем, что ее предшест-
венница, ПРР Х-27ПС, не удовлетворяла заказчика по своей дальности пуска и
скорости полета, заставляя носитель производить пуск ракеты в зоне досягаемос-
ти ЗРК «Усовершенствованный Хок» и «Найк Геркулес» с маневром ухода от це-
ли, что, в свою очередь, позволяло расчету ЗРК выключать РЛС, тем самым сры-
вая наведение ПРР. Предполагалось, что новая ракета будет иметь дальность пу-
ска около 60 км и массу менее 400 кг, причем высокая (порядка 750 м/с при пуске
на дальность 25 км с малой высоты) скорость позволит ей обеспечить поражение
фугасной боевой частью РЛС ЗРК «Усовершенствованный Хок» раньше, чем вы-
пущенная им ЗУР достигнет носителя. По РЛС ЗРК «Найк Геркулес» удары пла-
нировалось наносить вне зоны досягаемости ЗУР. Планировалось вооружить ПРР
ударные самолеты третьего поколения типа МиГ-27, Су-17М и Су-24, на каждом
из которых должно было размещаться не менее двух ракет.
355
Для обеспечения требуемой средней скорости при заданной массе было ре-
шено использовать ПВРД. Для разгона ракеты до скорости запуска ПВРД ис-
пользовался стартовый твердотопливный ускоритель, который удалось размес-
тить в камере сгорания ПВРД.
В процессе проектирования стало ясно, что создать ракету массой менее
400 кг не удастся прежде всего из-за трудности создания малогабаритного ПВРД.
Так, вместо легкой ПРР была получена ПРР средней дальности для подавления
ПВО с дальностью пуска, в два раза превосходящей заданную первоначально.
Был расширен также перечень РЛС-целей для ракеты Х-31 за счет включения в
него РЛС ЗРК SAM-D (будущий «Патриот»), а также обзорных РЛС, работающих
в диапазонах частотных литер В и С, для чего Омскому НПО «Автоматика» бы-
ло выдано задание на проектирование трех ГСН (ПРГС-4ВП, ПРГС-5ВП и
ПРГС-6ВП), работающих в данных диапазонах.
В процессе создания ракеты Х-31 в 1978 г. вышло правительственное постанов-
ление о создании на ее базе противокорабельного варианта, получившего обозначе-
ние Х-31 А, предназначенного для поражения надводных кораблей водоизмещением
до 4500 т. Для этого на ракете Х-31 была установлена активная радиолокационная
ГСН и проникающая боевая часть вместо осколочно-фугасной. Проведенные рас-
четы показали, что вероятность попадания ракеты Х-31 А без учета огневого проти-
водействия в одиночную морскую цель типа эсминец (ЭПР = 5000 м2) составляет
0,6... 0,9, типа ракетный катер (ЭПР = 500 м2) при ее маневрировании — 0,8, кото-
рая снижается до 0,55 при наличии группы из трех катеров, при этом требуется око-
ло трех прямых попаданий ракет для потери целью типа эсминец боеспособности.
Заводские летные испытания ракеты Х-31 начались в мае 1982 г. на самолете
МиГ-27М. На них ракета была предъявлена в вариантах Пр1 и Пр2, а также ее га-
баритно-массовые макеты для проверки аварийного сброса. Оснащенная старто-
вым двигателем и макетом маршевого двигателя Х-31Пр1 предназначалась для
отработки отделения ракеты, ее старта и стабилизации на стартовом участке.
Х-31Пр2 со стартовым и маршевым двигателями силовой установки предназна-
чалась для отработки запуска маршевого двигателя, определения ее характерис-
тик, оценки работоспособности системы стабилизации, проверки аэродинамиче-
ских и баллистических характеристик.
22 ноября 1983 г. начался этап «А» государственных совместных испытаний
ракеты Х-31 с ГСН ПРГС-4ВП в составе системы вооружения самолета МиГ-27М.
К этому времени Х-31 претерпела конструктивные изменения, внешне выра-
зившиеся прежде всего в изменении формы крыла и места его установки для по-
вышения устойчивости ракеты. Параллельно с начавшимся 28 августа 1984 г. эта-
пом «Б» государственных совместных летных испытаний ракеты Х-31 в комплексе
вооружения МиГ-27М был разработан перечень мероприятий по модификации
ракеты Х-31 с целью повышения ее эффективности. Улучшения баллистических
характеристик планировалось достичь снижением аэродинамического сопротив-
ления за счет выполнения носовой части в едином калибре (360 мм) с камерой
сгорания маршевой ступени, что также приводило бы к увеличению запаса мар-
шевого топлива, уменьшению габаритов бугелей, устранению щелей и зазоров
между сопрягаемыми элементами каркаса, установке рулей в плоскости крыльев и
др. Технологический процесс планировалось усовершенствовать за счет обеспече-
ния лучшего подхода к соединяемым штепсельным разъемам, прокладки жгутов
внутри отсеков для обеспечения их надежной термоизоляции, более рациональ-
ной компоновки и упрощения монтажа агрегатов. Эксплуатационная надежность
356
повышалась путем обеспечения досборки и снаряжения ракеты без ее расстыков-
ки за счет установки блока розжига, прокладки части жгутов электросхемы и их
проверки при сборке двигателя, установки пиропатронов на заводе без снятия об-
текателей при эксплуатации, установки боевой части через люк, а не с торца, вы-
зывавшего необходимость отсоединения отсека с аппаратурой наведения и управ-
ления. Был проведен детальный анализ каждого элемента конструкции для сни-
жения стартовой массы ракеты.
В феврале 1986 г. успешно были проведены летно-конструкторские испыта-
ния модернизированной ракеты Х-ЗШ. В конце весны продолжился этап «Б» го-
сударственных совместных летных испытаний комплекса вооружений самолета
МиГ-27М с опытной ракетой Х-31П и опытной аппаратурой «Прогресс-Н».
В начале июня 1987 г. этап «Б» летных испытаний был завершен и ракета ре-
комендована к серийному производству и принятию на вооружение.
Заводские летные испытания ракеты Х-31П с ГСН ПРГС-5ВП начались в ян-
варе 1986 г. и проводились на самолете МиГ-27М с аппаратурой «Прогресс-Н». За-
тем в феврале 1987 г. подключили самолет Су-24М (Т6М-37), на двух самолетах
продолжили летно-конструкторские испытания ракеты Х-31А. В третьем квартале
1987 г. были выполнены практические пуски ракеты Х-ЗШ с ПРГС-5ВП с самолета
Су-24М, позволившие успешно завершить заводские летные испытания 8 сентября
1987 г. В конце сентября 1987 г. начались государственные совместные летные ис-
пытания этой ракеты, проводившиеся на самолетах МиГ-27М и Су-24М и успешно
завершившиеся в конце марта 1988 г., после чего Х-31П с ПРГС-5ВП была реко-
мендована к принятию на вооружение.
В начале весны 1988 г. начались заводские летные испытания ракеты Х-ЗШ
с ПРГС-6ВП. Они были завершены в конце апреля 1988 г., затем во второй поло-
вине 1988 г. были проведены государственные совместные испытания данного
варианта ракеты в составе вооружения самолета МиГ-27М, завершившиеся с по-
ложительным результатом.
Так как разведывательно-прицельная станция, работающая в литерах В + С и
В' и предназначенная для установки на Су-24М к этому времени не была разрабо-
тана, провести пуски ракет Х-ЗШ с ГСН ПРГС-6ВП с него не представлялось воз-
можным. Поэтому опытный самолет Су-24М (Т6М-37), доработанный для приме-
нения ракет Х-31П, был задействован в мае 1988 г. для проведения контрольно-се-
рийных испытаний ракет Х-ЗШ выпуска 1987 г., в ходе которых проверялись
также возможности применения с самолета ракет Х-ЗШ с ГСН ПРГС-4ВП.
В начале лета 1986 г. начались летно-конструкторские испытания ракеты
Х-31А на двух самолетах Су-24М (Т-6М30 и Т-6М37), завершившиеся 21 октября
1988 г. с положительным результатом. Государственные совместные испытания
ракета Х-31А прошла на Су-24М с 20 марта по 7 декабря 1989 г. В ходе них прак-
тически все ракеты поразили мишени.
Серийное производство ракеты Х-31П на Калининградском производствен-
ном объединении «Стрела» (ныне ГНПЦ «Звезда-Стрела») началось в 1987 г., ра-
кеты ? 1А —в 1990 г.
Р< га Х-ЗШ (рис. 3.19) выполнена по нормальной аэродинамической схе-
ме с Х-образным расположением консолей крыла и рулей и включает следующие
функциональные системы:
• планер. Построен по конструктивной схеме полумонокок, при которой кар-
касы отсеков имеют силовую обшивку, подкрепленную шпангоутами, и со-
стоит из корпуса, технологически делящегося на три отсека, четырех консо-
лей крыла и четырех рулей. Выполнен из титановых сплавов и жаропрочных
357
сталей, в небольшом количестве используются также дюралюминий и ком-
позитные материалы;
комбинированную двигательную установку 31 ДПК, включающую
маршевый прямоточный воздушно-реактивный двигатель 31ДП с блоком за-
пуска и топливной системой и вложенный в его камеру сгорания стартовый
ускоритель 31ДТ-1 с заливным зарядом твердого топлива;
пассивную радиолокационную ГСН. На ракете устанавливаются сменные
ГСН (ПРГС-4ВП, ПРГС-5ВП и ПРГС-6ВП), унифицированные по конст-
руктивно-технологическим, электрическим и информационным связям;
комплексную систему управления ракетой КСУР-72, включающую
блок управления БУ-75 сер. 2 (два датчика линейных ускорений ДЛУ-ВД-20с,
три свободных гироскопа ГС-12В1, три измерителя угловых ускорений
ИУУ-М-3, два вычислителя продольного канала, вычислитель крена, устрой-
ство формирования команд и стабилизатор) и четыре пневматических (рабо-
чее тело — азот) привода ППН-24, отклоняющихся дифференциально и ис-
пользующихся для управления по тангажу и курсу и стабилизации по крену;
осколочно-фугасную боевую часть. Состоит из корпуса и размещенного
внутри его разрывного заряда с дополнительными детонаторами. По внут-
ренней поверхности обечайки корпуса, в ее верхней передней и нижней зад-
ней частях вклеены полуцилиндрические осколочные блоки, представляю-
щие собой набор размещенных на тонколистовой подложке стальных эле-
ментов с полуготовыми осколками;
контактное взрывательное устройство КВУ-77 в составе системы
контактных датчиков СКД-77 и двух предохранительно-исполнительных ме-
ханизмов 099М5. Все датчики (четыре Б-48-1 инерционно-волнового дейст-
вия и четыре 108Д5 реакционного действия) разделены на два независимых
канала, каждый из которых подключен к своему ПИ Му;
пневмосистему, состоящую из трех пневомблоков с азотом, различных ре-
дукторов, пироклапанов, штуцера и трубопроводов;
систему электроснабжения, включающую источники электроэнергии
(ампульная батарея БА-501 и блок питания БП-77М) и электросеть (элект-
рожгуты, разъемы стыковки, безопасности и контроля, блок автоматики
БА-77М-01 и предохранительный механизм ПМ-77).
Рис. 3.19. Ракета Х-31П
358
Ракета Х-31А в максимальной степени унифицирована с ракетой Х-31П и
имеет общие с ней планер, двигательную установку, системы электроавтоматики
и электропитания, рулевые приводы.
Вместо ПР ГСН установлена АР ГСН АРСН-31, за которой размещаются ра-
диовысотомер А069 и проникающая боевая часть с модернизированной системой
контактных датчиков. В составе КСУР-72 был установлен новый блок управле-
ния БУ-77 вместо БУ-75.
В строевые части ракеты Х-31П и Х-31 А не поступали, так как доработка но-
сителей для их применения не проводилась по причине отсутствия финансовых
средств. К настоящему времени выполнены успешные пуски ракет Х-ЗШ с трех
самолетов МиГ-27М, одного МиГ-27К и одного Су-24М. Пуски ракет Х-31А вы-
полнялись с двух самолетов Су-24М (один из которых выполнял пуски и Х-31П)
и одного из опытных образцов МиГ-29М.
Аналогов ракеты Х-ЗШ за рубежом и в России нет.
Ракета Х-31 А является первой тактической противокорабельной ракетой
(ПКР), предназначенной для вооружения ударных самолетов фронтовой ави-
ации, и авиационных аналогов не имеет. ВМФ располагает ракетами с аналогич-
ным типом двигательной установки («Москит», «Оникс»), однако при стартовой
массе порядка нескольких тонн их трудно разместить на самолетах фронтовой
авиации. За рубежом аналогов ракеты Х-31 А не существует.
На базе Х-ЗШ в 1980—1989 гг. была разработана мишень М-31, предназна-
ченная для имитации противорадиолокационных ракет и отработки систем ПВО.
От противорадиолокационной ракеты она отличается конструкцией второго от-
сека, где размещены радиовысотомер А069, приемоответчик для внешнетраек-
торных измерений, телеметрическая аппаратура, система ликвидации. Измене-
ния коснулись также одного из хвостовых обтекателей, где проложены электро-
жгуты для трассера, установленного в хвостовой части.
Траектория полета мишени такая же, как и у ракеты Х-31П, однако на ко-
нечном участке предусмотрен маневр безопасности, в ходе которого мишень вы-
ходит на высоту 60 м, следует на ней и затем пикирует за позицией РЛС, на кото-
рую она наводилась. Летно-конструкторские и государственные испытания М-31
были проведены с 26 марта по 10 июня 1989 г. и закончились с положительным
Рис. 3.20. Ракета Х-31 в составе комплекса Су-24
359
результатом. В ходе них с опытового самолета Су-24М (Т6М-37) было выполнено
5 пусков (рис. 3.20).
В 1993 г. на базе ракеты Х-31 по заказу американской фирмы McDonnel Dou-
glas East началась разработка мишени МА-31. В 1996 г. на полигоне ВМС США
Пойнт-Мугу был проведен ряд успешных пусков с самолета QF-4.
Таблица 3.4
Тактико-технические данные ракеты Х-31
Параметры Модификация ракеты
Х-ЗШ Х-31А
Максимальная дальность при высоте пуска, км: максимальной но 50
минимальной 40 30
Минимальная дальность при высоте пуска, км: максимальной 15 10
минимальной 15 10
Диапазон высот пуска, км 0,1...15 0,1...12
Диапазон скоростей пуска, М 0,6... 1,3 0,6...1,3
Скорость полета ракеты, м/с: максимальная 950 950
средняя (на дальности, км) 750 (45) 750 (на 30)
Время управляемого полета, с 120 120
Располагаемая перегрузка, g 10 10
Точность (FKBO), м 5 5
Размеры, мм: длина ракеты 4700 4700
диаметр ракеты 360 360
размах крыла 914 914
Стартовая масса ракеты, кг 592...594 610
Масса боевой части, кг 85,5 94,5
Тип боевой части ОФ Пр
Тип двигателя ПВРД + РДТТ ПВРД + РДТТ
Тип системы наведения ПР АР
Условия применения СМУ СМУ
Носители Су-24М Су-24М
МиГ-27М/К Су-30 МиГ-27М/К Су-30
7. Ракета Х-35
В 1977 г. ОКБ «Звезда» разработало техпредложение по созданию противоко-
рабельной ракеты Х-35, предназначенной для использования в составе корабель-
ных, вертолетных и самолетных систем вооружения. Ракета массой 400...550 кг,
оснащенная малогабаритным двухконтурным турбореактивным двигателем (в за-
висимости от варианта размещения), должна была иметь дальность пуска до
100 км, высокую дозвуковую скорость полета и поражать надводные корабли во-
доизмещением до 5000 т боевой частью массой 150 кг.
На основании этого техпредложения в 1978 г. ВМФ выдал ОКБ «Звезда» тех-
ническое задание на проведение ОКР по созданию противокорабельной ракеты
360
Х-35. В то время в СССР был создан малогабаритный ТРДД (Р95-ЗОО), предназ-
наченный для применения на стратегических крылатых ракетах. Его и решено
было использовать в качестве двигательной установки ракеты Х-35.
В 1982 г. начались бросковые испытания с береговой ракетной позиции ма-
кета ракеты, оснащенной стартовым ускорителем и измерительными датчиками.
16 марта 1983 г. вышло правительственное постановление, предписывающее
ОКБ «Звезда» начать работы по созданию корабельного ракетного комплекса
«Уран» с противокорабельной ракетой Х-35 в соответствии с ТТЗ Министерства
обороны, утвержденным заместителем главкома ВВС по вооружению и согласо-
ванным с заместителем главкома ВМФ по кораблестроению и вооружению.
3 марта 1983 г. Х-35 была задана для применения в составе корабельных и верто-
летных комплексов и предназначена для поражения ракетных, торпедных и ар-
тиллерийских катеров, эсминцев и фрегатов водоизмещением до 5000 т, морских
транспортов. К концу 1983 г. ОКБ «Звезда» разработало и защитило эскизные
проекты вертолетного варианта ракеты Х-35 и корабельного комплекса «Уран»,
использующего корабельный вариант ракеты Х-35. Ракета была оснащена вклад-
ной осколочно-фугасной боевой частью проникающего типа массой 150 кг. Диа-
метр ракеты составил 420 мм, в нижней части корпуса разместился полуутоплен-
ный воздухозаборник. Проведенные расчеты показали, что ракета Х-35 (в составе
вертолета типа Ка-27) обеспечивает достаточно высокую эффективность пораже-
ния надводных целей типа ракетный катер и эсминец как одиночных, так в соста-
ве группы.
5 ноября 1985 г. начался первый этап предварительных испытаний автоном-
но-телеметрической ракеты Х-35АТ и корабельного ракетного комплекса
«Уран», проходивший на береговой стартовой позиции. 21 мая 1987 г. эти испы-
тания завершились рекомендацией перейти к испытаниям ракеты Х-35 в составе
комплекса «Уран» на ракетных катерах проекта 206МР и вертолетах типа Ка-27.
22 октября 1987 г. начался второй этап предварительных испытаний ракеты
Х-35АТ и ракетного комплекса «Уран» на ракетном катере проекта 206МР, модер-
низированного по проекту 02066. К этому времени был готов штатный вариант
ракеты (1-78), имевший радиовысотомер ЗА-59А и рулевые приводы ПГ-27. По
результатам первого этапа на ракете установили пневматические механизмы рас-
крытия консолей крыла и рулей вместо пирогидравлических.
9 декабря 1989 г. второй этап предварительных испытаний был завершен за-
ключением продолжить испытания ракеты Х-35, оснащенной ГСН, на ракетном
катере проекта 02066, являющегося модернизацией ракетного катера проекта
206 МР. Однако к 1995 г. был выполнен всего лишь один (в декабре 1992 г.) пуск
телеметрического варианта ракеты Х-35, оснащенной ГСН, в ходе которого раке-
та попала в мишень.
В 1991 г. было проведено три пуска ракеты с вертолета Ка-27, в ходе которых
был отработан старт ракеты Х-35 с вертолета. Государственные испытания
бортового ракетного комплекса (БРК) «Урал» завершены в 2003 г.
В настоящее время ГНПЦ «Звезда-Стрела» ведет подготовку серийного про-
изводства ракеты Х-35.
Для поставок на экспорт разработан ракетный комплекс «Уран-Э» с экспорт-
ным вариантом ракеты Х-35 — ракетой ЗМ24Э.
Ракета Х-35 выполнена по нормальной аэродинамической схеме с Х-об-
разным расположением консолей крыла, рулей, отклоняемых дифференциально,
361
и стабилизаторов (рис. 3.21). В состав ракеты входят следующие основные агре-
гаты и системы:
• планер, выполненный из алюминиевых сплавов и имеющий в качестве ос-
новных конструктивных элементов: корпус, крылья, рули и стабилизаторы;
• двигательная установка, состоящая из стартового ускорителя СРДТТ-35,
маршевого двигателя Р95ТМ-300, топливной системы и воздухозаборного
устройства. Стартовый ускоритель, сбрасываемый после отработки, является
однорежимным ракетным двигателем, имеющим стальной корпус с заливным
зарядом твердого топлива. Для ракеты, запускаемой с вертолета, разработан
стартовый ускоритель СРДТТ-35В, имеющий меньший заряд топлива.
Маршевый двигатель относится к семейству двигателей Р-95 и отличается от
двигателя Р95-300 ракеты Х-55 отсутствием входного устройства, системы авто-
матического регулирования тяги, имеет меньший ресурс и работает только на
максимальном режиме, в системе запуска используются пиросвечи, обеспечи-
вающие двукратный запуск;
• проникающая осколочно-фугасная боевая часть, имеющая вклад-
ную конструкцию и состоящая из корпуса, разрывного заряда и двух дето-
наторов;
• контактное взрывательное устройство КВУ-78 предохранительного ти-
па, состоящее из двух предохранительно-детонирующих устройств ЗВ45.О1-1 и
системы контактных датчиков;
• система энергоснабжения, состоящая из источников электроэнергии и
электросети. Источниками постоянного тока являются узел батарей УБ-78 и
турбогенератор ТГ-4Т с блоком выпрямления, регулирования и коммутации
БВРК-78, обеспечивающие аппаратуру ракеты на стартовом и маршевом уча-
стках полета, источником переменного тока (только в автономном полете) —
блок питания БП-78М. Электросеть включает в себя электрожгуты, отрывной
бортовой разъем, разъемы безопасности ракеты и маршевого двигателя, блок
автоматики БА-78М и предохранительный механизм ПМ-77 для контроля ис-
ходного безопасного состояния и фиксации момента старта ракеты;
• пневматическая система, состоящая из подсистем раскладывания плос-
костей и питания рулевых приводов;
Рис. 3.21. Ракета Х-35
362
• аппаратура управления и стабилизации, включающая инерциальную
систему управления ИСУ-35, четыре рулевых газовых привода ПГ-27 и ра-
диовысотомер. ИСУ-35 выполнена на гироплатформе, использует ЦВМ и
обеспечивает вывод ракеты в район цели с точностью, достаточной для за-
хвата цели ГСН;
• активная радиолокационная ГСН АРГС-35.
Аналогом ракеты Х-35 за рубежом является американская ракета «Гарпун».
По универсальности размещения на носителях к ее аналогам можно отнести так-
же французскую ракету «Экзосет».
Ракета Х-35 предназначена для поражения надводных кораблей и судов во-
доизмещением до 5000 т и должна входить в состав:
• ракетного комплекса «Уран» разработки ОКБ «Звезда», включающего 2...4
пусковые установки с 8... 16 ракетами в транспортно-пусковых контейнерах,
корабельную автоматизированную систему управления и комплекс наземно-
го оборудования с комплектом ЗИП. «Уран» применим в любое время суток
и года на широтах от 75° с. ш. до 75° ю. ш. при волнении моря до 6 баллов и
запланирован к размещению на надводных кораблях проектов 1241.1, 1145.2,
11 540, 11 660, 11 661, транспортах проекта 1607. Позволяет проводить
стрельбу всем боезапасом сразу по 1...6 целям;
• наземного мобильного ракетного комплекса «Бал» разработки Московского
конструкторского бюро машиностроения, включающего 1 или 2 командных
пункта управления и связи и 1—4 самоходные установки (до 8 ракет в ТПК
на каждой);
• авиационного противокорабельного комплекса Ка-27ПК, включающего
вертолет типа Ка-27ПКЦ и 1—3 ракеты Х-35, каждая на пусковом устройст-
ве ПУ-78-1.
Пуск ракеты производится из ТПК, кроме вертолетного варианта. По окон-
чании выхода ракеты из транспортно-пускового контейнера происходит раскры-
тие консолей крыла, рулей, стабилизатора, запуск пневмосистемы. До выхода на
маршевую высоту полета ракета может кабрировать, пикировать, совершать гори-
зонтальный полет над сушей на высоте до 1000 м, одновременно разворачиваясь
на цель по горизонту. По окончании работы стартового двигателя происходит его
сброс и запуск маршевого. После выхода на маршевую высоту полет происходит
на высоте 10... 15 м, а после обнаружения цели ракета переходит на высоту 3...5 м.
В 1992 г. ОКБ «Звезда» успешно защитило эскизный проект ракеты Х-35У. За
счет использования новой ИНС и более плотной компоновки ракеты появилась
возможность разместить дополнительный запас топлива, что вдвое увеличивает
дальность пуска с возможностью повторного захода на цель в случае промаха.
Модификацией ракеты Х-35 является ракета-мишень ИЦ-35-01, разработан-
ная в 1981—1992 гг. и предназначенная для имитации тактических дозвуковых
противокорабельных ракет при тренировке расчетов средств ПВО и отработки
различных систем вооружения. Она оснащена штатным оборудованием боевой
ракеты, за исключением ГСН, вместо которой установлен габаритно-массовый
макет, и боевой части, в отсеке которой размещена телеметрическая аппаратура,
радиолокационный приемоответчик системы внешнетраекторных измерений и
автономная система ликвидации. В соответствии с назначением ракеты-мишени
доработана ИСУ-35. Осенью 1992 г. и летом—осенью 1994 г. ракета-мишень
ИЦ-35-01 успешно прошла летно-конструкторские и государственные испыта-
ния и в настоящее время может быть запущена в серийное производство.
363
Основные тактико-технические данные ракеты Х-35
Дальность пуска, км:
максимальная...............................................130
минимальная................................................ 5
Протяженность конечного участка, км............................5... 12
Маршевая высота полета, м:
на траектории..............................................5... 10
на конечном участке......................................3...5
Скорость полета, м/с....................................... 280...300
Время управляемого полета, с.................................. 470
Располагаемая перегрузка, g.................................. До 3
Размеры, мм:
длина ракеты (без ускорителя)............................ 3750
диаметр корпуса (описанной окружности)..................420 (730)
размах крыла..............................................1330
Стартовая масса ракеты (вертолетный вариант), кг........... 603 (583)
Масса маршевой ступени, кг.................................... 490
Масса боевой части, кг........................................ 145
Тип боевой части...............................ОФ проникающего типа
Тип двигательной установки..............................ТРДД + РДТТ
Тип системы наведения....................................ИНС + АРГС
Условия применения............................................ СМУ
Носители ..................БРК «Бал», КРК «Уран», вертолеты типа Ка-27
Проводится адаптация к размещению на ударных самолетах
3.3. Управляемые авиационные бомбы
Современные управляемые авиабомбы и их подвид — корректируемые авиа-
ционные бомбы создавались в нашей стране в конце 1960-х — начале 1970-х го-
дов. К настоящему времени были разработаны и приняты на вооружение ВВС
УАБ с двумя типами головок самонаведения: лазерной полуактивной флюгерной
и телевизионной пассивной гиростабилизированной.
Головным разработчиком всех отечественных УАБ является ГНПП «Регион»
[11,12].
3.3.1. УПРАВЛЯЕМЫЕ АВИАЦИОННЫЕ БОМБЫ
С ЛАЗЕРНЫМИ ПОЛУАКТИВНЫМИ ФЛЮГЕРНЫМИ
ГОЛОВКАМИ САМОНАВЕДЕНИЯ
На вооружение ВВС были приняты четыре разновидности УАБ с лазерными
полуактивными флюгерными ГСН массой 500 и 1500 кг (см. рис. 4.21). Все они
оснащены одинаковыми ГСН. У бомб одной массы одинаковые автопилот и сис-
тема энергопитания, но разные типы БЧ.
КАБ-500 — первая отечественная УАБ, принятая на вооружение ВВС
в 1979 г. Она разрабатывалась для поражения визуально видимых наземных
и надводных целей, таких как стартовые позиции ракет, промышленные сооруже-
ния, склады, железнодорожные и шоссейные мосты, военные корабли и транс-
портные суда на рейдах и т. д.
В настоящее время корректируемые авиабомбы являются одним из наиболее эф-
фективных типов авиационного вооружения. Они сочетают в себе высокую точность
попадания и мощность боевой части, относительно низкую стоимость боеприпаса.
Управляемые авиационные бомбы типа КАБ-500 применяются практически,
как и обычные авиабомбы, по алгоритму, близкому к баллистическому. Этот при-
знак заложен не только в самом названии КАБ (корректируемая авиационная
бомба, т. е. авиационная бомба, корректируемая в автономном полете относитель-
но баллистической траектории), но и в алгоритме ее сброса с самолета-носителя —
сброс КАБ происходит, как и обычных АБ, по баллистическим таблицам с введе-
нием некоторого количества постоянных поправок.
Это определило следующие основные требования к оружию при формировании
технического облика современных КАБ и их подсистем:
• обеспечение с помощью аэродинамического модуля устойчивого полета КАБ
на всех траекториях, близких к баллистическим;
365
• устойчивое функционирование ГСН в период всего времени полета КАБ к
цели (для непрерывности работы контура управления КАБ);
• применение в качестве исполнительного механизма автопилота с рулевым
приводом;
• использование источников питания, мощность и время работы которых вы-
бираются из условия обеспечения получения необходимых управляющих
моментов на рулях в течение всего времени автономного полета КАБ на тра-
ектории.
Вторым «идеологическим» признаком, характеризующим КАБ как объект
управления, является выполнение следующего условия — с помощью системы
наведения и управления свести к минимуму промах АБ относительно ее теорети-
ческой расчетной баллистической траектории полета, который возникает в слу-
чае полета АБ в обычном неуправляемом режиме.
Таким образом, управляемая авиационная бомба — это авиационная бомба,
снабженная системой управления, обеспечивающая минимальный промах отно-
сительно точки прицеливания.
По оценке специалистов, основными преимуществами управляемых авиа-
бомб по сравнению с обычными авиационными бомбами АБ являются:
• повышение точности попадания в цель в 4... 10 раз;
• сокращение расхода боеприпасов в 5...25 раз в зависимости от типа цели;
• уменьшение числа самолетовылетов и числа заходов на цель в 2...20 раз;
• уменьшение вероятности сбитая самолетов-носителей системой ПВО про-
тивника;
• сокращение затрат на выполнение боевой операции в 2...30 раз;
• возможность селективного поражения целей;
• уменьшение времени, потребного для поражения цели.
Началом работ по созданию корректируемых авиационных бомб в СССР
можно считать первые месяцы 1971 г. Тогда Научно-исследовательскому институ-
ту прикладной гидромеханики (НИИПГМ), впоследствии Государственному на-
учно-производственному предприятию «Регион», а в настоящее время Федераль-
ному государственному унитарному предприятию ГНПП «Регион» как головному
предприятию в кооперации с рядом предприятий Министерства машиностроения
и других министерств было поручено начать работы по созданию КАБ.
КАБ-500 являлась базовым образцом для всех других разработанных отечест-
венных УАБ с лазерными ГСН. Для унификации этих УАБ все они создавались
по аэродинамической схеме «бесхвостка». Разработанные УАБ конструктивно
состоят из трех отсеков: головного, центрального и хвостового [12].
Головной отсек КАБ-500 состоит из обтекателя (с расположенными на нем
дестабилизаторами), содержащего электронно-вычислительный блок ГСН, а так-
же оптико-механический блок, который находится в двухосном флюгерном под-
весе бомбы и состоит из оптической системы (обтекателя, светофильтра и объек-
тива) и электронной системы (четырехплощадочного ИК-детектора, смесителя и
предусилителя). Электронно-вычислительный блок содержит логарифмический
усилитель, ослабляющий принятый сигнал при сближении с пятном подсвета, ре-
гуляторы уровня сигнала, а также логические схемы, вырабатывающие сигналы
управления в автопилот. Центральный отсек создан на базе боевой части авиабом-
бы ФАБ-500. Хвостовой отсек содержит турбогенераторный источник питания
(ТГИП), блок бортовой автоматики (ББА) и автопилот, состоящий из блока дат-
чиков, измеряющих линейные и угловые ускорения бомбы, а также электронного
366
блока, вырабатывающего сигналы управления на четыре газовые рулевые машин-
ки, отклоняющие рули, расположенные в хвостовых частях стабилизаторов.
Промах определяется величиной Екъо = 7... 10 м.
Некоторые основные характеристики этой и других рассматриваемых отече-
ственных УАБ помещены в табл. 3.5.
УАБ массой 500 кг с кассетной БЧ
и лазерной полуактивной флюгерной ГСН — КАБ-500К
КАБ-500К — единственная из созданных отечественных УАБ, оснащенных
кассетной БЧ. Она разрабатывалась для поражения визуально видимых наземных
целей, таких как стартовые позиции ракет, бронетанковая и механизированная
техника, самолеты на открытых стоянках и в обвалованиях и т. д.
Данная бомба отличается от базовой кассетной боевой частью, содержащей
280 боевых элементов кумулятивного действия типа ПТАБ-1. Для обеспечения
вскрытия кассеты на нужной высоте в состав аппаратуры бомбы включен высото-
мер. В остальном бортовая аппаратура аналогична базовой [13].
УАБ массой 1500 кг с лазерной полуактивной флюгерной ГСН
с фугасной БЧ (КАБ-1500Л-Ф) и с проникающей БЧ (КАБ-1500Л-Пр)
Управляемые авиационные бомбы КАБ-1500Л-Ф и КАБ-1500Л-Пр внешне
не отличаются одна от другой. Все их компоненты одинаковые, за исключением
боевых частей. Имеющая меньший диаметр, проникающая БЧ авиабомбы
КАБ-1500Л-Пр помещена в «футляр», чем достигается полная идентичность
внешних размеров этих бомб. Данные УАБ разрабатывались для поражения на-
земных и подземных командных пунктов, гидротехнических и промышленных
сооружений, складов ядерного оружия, объектов военно-морских баз, железно-
дорожных и шоссейных мостов и т. д. [14].
3.3.2. УПРАВЛЯЕМЫЕ АВИАЦИОННЫЕ БОМБЫ
С ТЕЛЕВИЗИОННЫМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ
Для УАБ с телевизионными ГСН базовым образцом является КАБ-500Кр, до
сих пор находящаяся на вооружении ВВС. Еще две УАБ с такими же ГСН
КАБ-500 ОД и КАБ-1500Кр сданы на вооружение, но широкого распространения
пока не получили. Данные УАБ предназначаются для поражения визуально види-
мых целей в светлое время суток [15, 16].
КАБ-500Кр разрабатывалась для поражения целей, таких, как стартовые по-
зиции ракет, промышленные сооружения и склады, железнодорожные и шоссей-
ные мосты, бетонированные ВПП, самолеты в укрытиях усиленного типа, воен-
ные корабли и транспортные суда на рейдах и т. д.
Поскольку в ГСН КАБ-500Кр используется корреляционный алгоритм обра-
ботки входного сигнала, эта бомба может атаковать только неподвижные цели
[18]. Сначала планировалось, что эта УАБ и КАБ-500 должны быть взаимозаме-
няемыми и отличаться только головными отсеками. Однако из-за весовых огра-
ничений для КАБ-500Кр была разработана более легкая, чем для КАБ-500, бето-
нобойная боевая часть «Бетаб-У». Позже был существенно доработан и автопилот
этой бомбы. Таким образом, в настоящее время КАБ-500Кр и КАБ-500 сходны
только по аэродинамической схеме, отличаясь во всем остальном.
367
Головным отсеком КАБ-500Кр является телевизионная ГСН (ТГСН). Вну-
три корпуса головки имеется трехосная гиростабилизированная платформа с пе-
редающей телевизионной трубкой, объективом и предусилителем, а также элек-
тронная аппаратура и блоки питания. Электронная аппаратура обработки видео-
сигнала вырабатывает в соответствии с корреляционным алгоритмом сигналы,
обеспечивающие сопровождение ГСН цели с помощью электронного контура
слежения и гиростабилизатора, а также сигналы управления, подаваемые в авто-
пилот для осуществления наведения бомбы на заданную цель.
Первоначально КАБ-500Кр, как и все планировавшиеся к разработке УАБ,
предполагалось применять с использованием только баллистических траекторий,
однако впоследствии бомба была доработана с целью получения более широкой
зоны возможных сбрасываний (ЗВС). Величина промаха КАБ-500Кр была задана
£кквпо < Юм относительно центра первого эталонного изображения для всех ре-
жимов применения и £кквпо = 5...8 м для зачетного режима. По результатам реаль-
ных сбрасываний во всем диапазоне применения точность оказалась равной
££впо = 4,4 м, а на зачетной траектории ££впо = 3,4 м [17—19].
УАБ массой 500 кг с объемно-детонирующей БЧ
и телевизионно-корреляционной ГСН
В 1987 г. специально для нужд 40-й армии на базе КАБ-500Кр была разрабо-
тана УАБ с объемно-детонирующей БЧ — КАБ-500 ОД. Она разрабатывалась в
основном для поражения живой силы, расположенной в укрытиях скального ти-
па и в складках местности, а также ДОТ и опорных пунктов. От КАБ-500Кр она
отличается только типом БЧ. Внешние размеры, состав аппаратуры, точностные
характеристики и размеры ЗВС этих бомб идентичны.
КАБ-1500 Кр — УАБ массой 1500 кг
с телевизионно-корреляционной ГСН
Эту бомбу (рис. 3.23) первоначально планировалось создать на базе двух уже
разработанных бомб первого поколения: КАБ-500Кр (головной отсек) и
КАБ-1500Л-Ф (центральный и хвостовой отсеки). Однако при создании бомбы ее
хвостовой отсек подвергся существенной переработке и стал отличаться от хвос-
тового отсека КАБ-1500Л-Ф. КАБ-1500Кр разрабатывалась для поражения при-
мерно той же номенклатуры целей, что и КАБ-1500Л-Ф. Промахи КАБ-1500Кр
характеризуются величиной £кквпо = 4...7 м относительно центра первого эталон-
ного изображения.
В табл. 3.5 приведены тактико-технические данные разработанных коррек-
тируемых авиационных бомб.
3.3.3. РАЗВИТИЕ СИСТЕМ НАВЕДЕНИЯ УПРАВЛЯЕМЫХ
АВИАЦИОННЫХ БОМБ
Как видно из предыдущего, все разработанные к настоящему времени УАБ
могут применяться только в светлое время суток и в простых метеоусловиях
(ПМУ). Исключение могли бы составить УАБ с лазерными системами наведения,
368
Таблица 3.5
Тактико-технические данные корректируемых авиационных бомб
№ п/п Наименование Начало разработки/при- нятие на воору- жение Общая масса, кг Тип БЧ Масса БЧ, кг Масса ВВ, кг Размеры Условия боевого применения Тип ГСН
Длина и максимальный диаметр, м Размах крыла в сложенном и раскрытом состоянии, м Высота сброса, км Дальность сброса, км Скорость сброса, м/с
1 КАБ-500 1968/1979 560 фугасная 460 190 3,04 0,4 0,75 0,75 1...5 2,1...9 по бал- листике 170...300 Лазерная полуактивная флюгерная
La) чо 2 КАБ-500К 1975/1988 525 ± 25 кассетная 280 БЭ ПТАБ-1 3,25 0,45 0,75 0,75 1...5 2,1...9 по бал- листике 170...300 То же
3 КАБ-1500Л- Ф 1973/1988 1465 фугасная 1160 450 4,615 0,58 0,85 1,3 1...1 8 2,1...39,5 по бал- листике 170...330 Тоже
4 КАБ-1500Л- Пр 1975/1988 1575 проникающая 1250 220 4,615 0,58 0,85 1,3 1...1 8 2,1...39,5 по бал- листике 170...330 Тоже
5 КАБ-500Кр 1969/1984 525 ± 25 бетонобойная 380 105 3,05 0,35 0,75 0,75 0,5.. .5 1,8...8,6 170...300 Телевизионная
6 КАБ-500 ОД 1987/— 365 объемно- детонирующая 250 140 3,05 0,35 0,75 0,75 0,5.. .5 1,8...8,6 170...300 Тоже
7 КАБ-1500Кр 1988/- 1530 ±25 фугасная 1160 450 4,63 0,58 0,85 1,3 1...8 — 170...330 Тоже
Рис. 3.23. КАБ-1500Кр
которые можно применять и ночью, если лазерный целеуказатель совмещен с
тепловизионным прицелом, имеющим высокое разрешение.
Решением задачи всепогодного и круглосуточного применения УАБ по це-
лям с заранее известными координатами является оснащение их аппаратурой
спутникового наведения (АСН). Разнообразие тактического применения таких
УАБ может быть обеспечено путем объединения АСН с другими имеющимися и
разрабатываемыми сйстемами наведения [20, 21].
3.3.4. МОДЕРНИЗАЦИЯ
УПРАВЛЯЕМЫХ АВИАЦИОННЫХ БОМБ
С ЛАЗЕРНЫМИ ПОЛУАКТИВНЫМИ
СИСТЕМАМИ НАВЕДЕНИЯ
Как было отмечено выше, изделия КАБ-1500Л-Ф и КАБ-1500Л-Пр весьма
плохо переносят ветровые возмущения. При значениях скорости бокового ветра,
больших 10 м/с, промахи могут достигать нескольких десятков метров. Для иск-
лючения неблагоприятного влияния ветра предполагается заменить на этих УАБ
лазерные флюгерные ГСН на лазерные гиростабилизированные. При этом все
другие тактико-технические характеристики данных УАБ должны остаться неиз-
менными. Данное решение за счет усложнения аппаратурного исполнения повы-
шает стоимость УАБ, но их точностные характеристики, особенно при ветровых
возмущениях, значительно улучшаются.
Типичным представителем зарубежных изделий данного класса является
американская УАБ проекта «Пэйв Уэй-2», выполненная по аэродинамической
схеме «утка», оснащенная лазерной полуактивной флюгерной ГСН, сигналы с
которой поступают непосредственно на рулевые машинки, каждая из которых ре-
лейно отклоняет свою пару рулей, расположенных впереди центра масс, на
±10,5° или оставляет их неотклоненными. Такой подход к построению УАБ с ла-
зерными полуактивными флюгерными ГСН дает возможность существенно уп-
ростить аппаратуру, что позволит не только снизить их стоимость, но также повы-
сить вероятность безотказной работы.
370
3.3.5. МОДЕРНИЗАЦИЯ УПРАВЛЯЕМЫХ АВИАЦИОННЫХ БОМБ
С ТЕЛЕВИЗИОННЫМИ СИСТЕМАМИ НАВЕДЕНИЯ
Телевизионная ГСН, которой оснащены все разработанные УАБ рассматри-
ваемого типа, имеет длиннофокусный объектив с узким полем зрения, что за-
трудняет поиск и обнаружение цели непосредственно через ГСН. При примене-
нии таких ГСН требуется оснастить самолет-носитель соответствующей борто-
вой оптико-электронной станцией обнаружения и целеуказания, отсутствие
которой существенно ограничивает возможности боевого применения данных
УАБ. ТГСН с узким полем зрения имеет корреляционный алгоритм обработки
входного сигнала, что дает возможность осуществлять слежение только за непо-
движными целями, за исключением очень больших кораблей и судов, атакуемых
с близкого расстояния.
Для раширения тактических возможностей УАБ телевизионные ГСН
оснащаются объективом, который имеет широкое и узкое поля зрения, что
позволяет обнаруживать цели через оптическую систему ГСН. Это позволит раз-
мещать модернизируемые УАБ на носителях, не оснащенных оптико-электрон-
ными системами с широким полем зрения.
Новая ГСН помимо корреляционного имеет еще и контрастный алгоритм
слежения, что позволяет атаковать не только неподвижные цели, но также и ма-
лоразмерные контрастные подвижные цели, расположенные на подстилающих
поверхностях, имеющих равномерные пространственно-оптические характерис-
тики, которые не удается «захватить» ГСН с корреляционным алгоритмом слеже-
ния. Наличие широкого поля зрения в ГСН дает возможность автоматически
«раздавать» первое эталонное изображение из ведущей информационной систе-
мы (прицела или «ведущей» УАБ) в ГСН «ведомых» УАБ, что позволит осущест-
вить залповое применение нескольких УАБ по одной цели.
Список литературы к разделу 3
1. Оружие и технологии России. Энциклопедия XXI век. Том IV. Военная авиация /
Под общей ред. министра обороны РФ Сергея Иванова. — М.: Изд. дом «Оружие и тех-
нологии», 2002.
2. Государственный научный центр Российской Федерации — Государственный науч-
но-исследовательский институт авиационных систем. 1946—1996годы. Очерки истории/
Под ред. академика Е. А. Федосова. — М.: Научно-информационный центр ГосНИИАС,
1996.
3. Бастион, 2000. № 1.
4. Карпенко А. В. Российское ракетное оружие 1943... 1993 годы. Справочник.—
СПб.: ТОО «Пика», 1993.
5. Авиация и космонавтика, 1999, вып. 2—3.
6. Савельев Г. А. От гидросамолетов до суперсовременных ракет. — М.: Издатель-
ский центр «Феникс», 1999.
7. Крылья Родины, 1994, № 1.
8. Военный парад, 2001, № 1.
9. Самолет, 2001, № 4.
10. «Jeans» AIR-LAUNCHED WEAPONS, 1994.
11. История ГНПП «Регион» в календаре памятных дат. Государственное научно-про-
изводственное предприятие «Регион». ЗОлет.: Буклет, май 1999.
12. Военная авиация России. — Военный парад, 2001.
371
13. «МОСАЭРОШОУ-92». Российская авиакосмическая выставка (обзор). Раздел 6.
Бортовое авиационное вооружение. Корректируемые авиабомбы: Бюллетень иностранной
научной и технической информации. Сер. 1. Естественные науки. Техника. 1992, №42
(2600), 20 октября, с. 17—20.
14. Руденко В. Авиабомбы ищут цель. — Красная звезда, 28 мая 1993.
15. Егоров С. Высокоточное бомбовое вооружение авиации. — Военный парад, 1994,
№2, с. 134-135.
16. Зуев Ю. А., Коростелев С. Е. Авиационные ракеты и бомбы. Боевые самоле-
ты России. — М.: Элакос, 1994.
17. Солунин В. ЦНИИАГ: высокоточные системы управления вооружением. — Во-
енный парад, 1998, № 6, с. 42—43.
18. Манушкин А. Высокоточные бомбы из ГНПП «Регион». — Красная звезда,
№ 97-98 (22 879-22 880), 30 апреля 1999 г.
19. Шахиджанов Е. ГНПП «Регион»: высокоточное управляемое оружие. — Воен-
ный парад, 1999, № 3, с. 34—35.
20. Харчев В. Н., Семенов С. С. Основные концептуальные положения методоло-
гии создания управляемого высокоточного оружия. — Боеприпасы, 2000, № 3, с. 14—22.
21. Харчев В. Н., Семенов С. С. Разработка оптимальных проектных решений
сложных технических систем. — Конверсия в машиностроении, 2002, № 4, с. 87—92.
раздел
НАУЧНО-ТЕХНИЧЕСКИЙ ПРОГРЕСС
В СИСТЕМАХ НАВЕДЕНИЯ
И УПРАВЛЕНИЯ ДЛЯ РЕШЕНИЯ
Представлены материалы по системам управле-
ния и наведения на цели при использовании множе-
ства их информационных признаков. К сожалению,
объем книги не позволил представить материалы,
определяющие работу этих систем в информаци-
онной инфраструктуре, обеспечивающей получение,
преобразование и доведение до систем наведения
разведывательной информации о целях, в том числе
в реальном масштабе времени.
4.1. Исследования
по повышению точности применения
неуправляемого вооружения
4.1.1. ИССЛЕДОВАНИЯ ПО ПОВЫШЕНИЮ
ТОЧНОСТИ БОМБОМЕТАНИЯ
Основным видом вооружения авиации в 1940-х — начале 1950-х годов явля-
лось стрелково-пушечное и бомбардировочное вооружение. Для точного, при-
цельного применения оружия нужно было корректно рассчитывать траектории
боеприпасов при различных начальных условиях движения. Элементы траекто-
рии снарядов стрелкового оружия и пушек содержались в так называемых табли-
цах стрельбы.
Необходимым условием при пользовании таблицами было требование устой-
чивого движения боеприпаса по траектории в соответствии с принятым при со-
ставлении таблиц. Однако скорость полета V\ реактивных самолетов с учетом
ожидаемого и планируемого ее роста стала приближаться к начальной собствен-
ной скорости Ио пуль и снарядов авиационного оружия, а значения абсолютной
скорости снаряда относительно воздуха начали выходить за пределы, предусмот-
ренные таблицами (при стрельбе вперед по полету И01 = V\ + Ио > 1300... 1500 м/с).
Еще сложнее обстояло дело при стрельбе под углом к вектору скорости самолета
(так называемой «бортовой стрельбе»), когда начальный угол атаки снаряда а
(угол между осью ствола и вектором И01) превышал 20...30°, в то время как в табли-
цах стрельбы а(Г) принимается равным нулю на всей траектории полета снаряда.
В авиационном ствольном оружии снаряд стабилизируется вращением и при
наличии боковой составляющей аэродинамической силы, нормальной к вектору
И01, совершает в атмосфере сложное прецессионное движение. Возникла необхо-
димость исследования этого движения, включая вопросы гироскопической ус-
тойчивости снаряда.
Исследования движения вращающихся снарядов при больших углах атаки
аналитическими методами проводились в ВВИА им. Н. Е. Жуковского проф.
В. С. Пугачевым. В 1946 г. он был приглашен в НИИ-2 для прикладного реше-
ния проблемы «бортовой стрельбы». Непосредственно под его руководством по
этой теме в НИИ-2 работали два молодых математика, выпускника МГУ —
С. И. Гордон иД. С. Иргер. Работа предусматривала также проведение на спе-
циально построенной баллистической трассе уникального эксперимента для
проверки теории с регистрацией движения снаряда и определением аэродинами-
ческих сил и моментов, действующих на летящий снаряд, совершающий прецес-
сионное движение.
Точность регистрации параметров движения на трассе была уникальная:
ошибки не превышали для линейных координат 2 мм, для угловых координат,
определяющих направление оси снаряда в пространстве, 0,5', для измерения вре-
мени полета снаряда 0,00002 с.
375
Для измерения времени полета снаряда существующие баллистические хро-
нографы оказались непригодными по точности. Для этого был разработан но-
вый, так называемый катодный хронограф. Для сообщения снаряду больших уг-
лов атаки применялся несимметричный косой надульник. Было выполнено кон-
структивное оформление баллистической трассы, обеспечившее, в частности,
точную юстировку рам-мишеней по трем координатным осям. Трасса и ее обору-
дование позволяли получать исходные данные для определения в широком диа-
пазоне скоростей следующих сил и моментов, действующих на снаряд в полете:
лобовое сопротивление, нормальную силу и момент Магнуса, опрокидывающий
момент, тушащий момент, момент трения. Был проведен также натурный летный
эксперимент с регистрацией угловых отклонений траектории снаряда от оси ка-
нала ствола при бортовой стрельбе.
Результаты теоретических и экспериментальных исследований позволили
НИИ-2 разработать и предложить поправки к баллистическим таблицам при
стрельбе под углом к борту. Поправки эти для больших скоростей полета самолета
оказались значительными. Таблицы поправок были изданы ВВС для учета в вы-
числителях воздушной стрельбы подвижных пушечных установок.
Метод регистрации в полете трасс пуль и снарядов с помощью бортовой фо-
тоаппаратуры был разработан и внедрен в 1946—1947 гг. в НИИ-2 К. А. Сары-
чевым. След трассы фиксировался фотоаппаратом, ось которого была параллель-
на оси канала ствола. Время экспозиции при съемках соответствовало разным
дальностям полета снаряда — на расстояние 1500 м и более. Была проведена боль-
шая работа по подбору пленки, светофильтров, диафрагмирования и трассеров.
Оценка точности методики проводилась с учетом влияния на баллистику снаряда
изменений его массы и центра масс при выгорании трассера и реактивной силы
при его горении. Методика широко применялась при суммарном контроле рас-
четно-аналитических методов исследования баллистики воздушной стрельбы,
в частности бортовой, влияния изгиба стволов в потоке на отклонение траекто-
рии снарядов, при исследовании так называемого прямого выстрела и в ряде дру-
гих работ.
В области баллистики авиационного оружия методом стрельб на трассе были
уточнены аэродинамические коэффициенты сил и моментов для штатного сна-
ряда калибра 23 мм, проведен анализ приближенных баллистических формул,
выполнен ряд других работ, связанных с проблемой увеличения дальности воз-
душной стрельбы.
Капитальные и скрупулезные исследования закона сопротивления воздуха
(лобового сопротивления) при нулевых углах атаки для типовых снарядов авиа-
ционных пушек калибров 23, 30 и 37 мм при скорости полета от 100 до 1500 м/с
были проведены в НИИ-2 Н. Л. Гертманом. Дело в том, что закон сопротив-
ления Сиаччи, укоренившийся в баллистических расчетах воздушной стрельбы,
приводил к недопустимо большим ошибкам в оценке скорости и времени полета
снаряда при стрельбе на большие дальности. Существовавший более новый
«Закон 1943», сформированный в 1943 г. в Артиллерийской академии, соответст-
вовал формам снарядов преимущественно наземной артиллерии. Обширный ста-
тистический материал, полученный в НИИ-2 на специально оборудованной
трассе с применением катодного хронографа, позволил предложить закон сопро-
тивления, пригодный для расчета полета снарядов авиационных пушек в расши-
ренном диапазоне дальностей и высот воздушной стрельбы (для малых значений
скорости снаряда он оказался близок к «Закону 1943»).
376
Интересную творческую работу в области конструкции артиллерийских сис-
тем, существенно расширившую возможности решения задач стрельбы, провел в
рамках тематического плана В. В. Яворский (впоследствии доктор технических
наук и главный конструктор, награжденный орденами и медалями). Проведенный
им эксперимент на предложенных моделях нового патрона был настолько убеди-
телен, что КБ Миноборонпрома взялось за разработку опытного образца артилле-
рийской системы, который успешно прошел государственные испытания.
Проблемы внешней баллистики бомб, сбрасываемых при большой скорости
полета самолета, были в общем аналогичны проблемам баллистики при воздуш-
ной стрельбе в новых условиях. Здесь также требовалось уточнение законов со-
противления для бомб и расширение по диапазонам высот и скоростей таблиц
бомбометания. Как и в случае с артиллерийскими снарядами, использовался ме-
тод стрельбы моделями бомб из пушки (на этот раз гладкоствольной) на аэробал-
листических трассах. В нескольких сечениях трасса была оборудована системой
искрового фотографирования летящей модели.
Работы проводились НИИ-2 совместно с ВВИА им. Н. Е. Жуковского под
общим руководством академика Академии артиллерийских наук Д. А. Вент-
целя и закончились составлением в 1950 г. новых баллистических таблиц бомбо-
метания. Работа была удостоена Государственной премии. Развивались также и
методы натурного эксперимента с регистрацией полета бомб.
В 1946 г. лаборатории № 4 (предшественник НИИ-2) и № 5 ЛИИ решили
применить наземный артиллерийский радиолокатор ЗСР-584 для регистрации
траекторий полета самолетов с земли. От лаборатории № 4 работу вел
Ю. Л. Карпов, а от лаборатории № 5 — специалист в области систем управле-
ния Н. Т. Каробан, Разработанная им система регистрации углов места и ази-
мута оси антенны и фиксация дальности на трубке позволяла определять движе-
ние самолетов по времени в сферической системе координат.
В 1948 г. эта установка была применена для записи траекторий авиабомб-раз-
новесов при сбрасывании их на полигоне в Фаустово с высоты 5000 м. При этом
дальность бралась с радиолокатора (с ошибкой 10 м), а углы азимута и места — с
синхронно работающего кинотеодолита «Аскания» с точностью измерения углов
45". Таким способом было определено лобовое сопротивление авиабомб в натуре
при числах М, близких к единице.
Из работ, проведенных в НИИ-2 по баллистике бомб, следует также отметить
теоретические и экспериментальные исследования по определению границ ус-
тойчивости бомб при дозвуковых и сверхзвуковых скоростях полета.
Крупнейшей проблемой бомбометания при больших скоростях полета было
отделение бомбы от носителя и изучение последующего ее движения. Существо
проблемы состояло в том, что вследствие интерференции авиабомбы с носителем
или в случае ее негоризонтальной подвески авиабомба отделялась от самолета с
начальным углом атаки, что изменяло ее траекторию и приводило к большим
систематическим ошибкам бомбометания, а при полете на скоростных напорах
более 4000 кг/м2 грозило столкновением с носителем.
Эта проблема возникла в 1934 г. при разработке самолета СБ (АНТ-40).
В бомбоотсеке должно было размещаться шесть 100-килограммовых бомб, одна-
ко из-за малого расстояния между лонжеронами крыла разместить их горизон-
тально было нельзя. А. Д. Страдаев разработал держатель для вертикальной
подвески авиабомб головной частью вверх. Это обеспечило полную боевую за-
грузку самолета, который был принят на вооружение в 1936 г.
377
При учебных бомбометаниях в частях ВВС были обнаружены большие систе-
матические недолеты авиабомб, достигавшие иногда 200...300 м. Отделу № 7 ЦАГИ
было поручено установить причины недолетов и обеспечить повышение точности
бомбометания. Работа была выполнена М. А. Шойхетом, который вел ее в двух
направлениях: экспериментальном и теоретическом. При эксперименте две авиа-
бомбы массой 50 кг одновременно сбрасывались из отсека самолета СБ, при этом
одна — с горизонтальной подвески, другая — с вертикальной. Эксперимент прово-
дился при разных скоростях и высотах полета. Траектории авиабомб регистрирова-
лись кинофототеодолитами, и разность в относах измерялась на земле.
В результате обобщения экспериментальных данных М. А. Шойхетом бы-
ла предложена поправочная формула для учета уменьшения относа авиабомбы,
сброшенной с вертикальной подвески. Теоретическая работа состояла в расчете
траекторий авиабомб с начальным углом атаки 90°. М. А. Шойхет составил
дифференциальные уравнения движения авиабомбы с возмущением по углу ата-
ки. С помощью метода численного интегрирования по способу Адамса—Штер-
мера было рассчитано (вручную) огромное число траекторий для разных высот,
скоростей полета и различных авиабомб. Сравнение результатов расчетов и экс-
перимента дало удовлетворительную сходимость. Были составлены и изданы
ЦАГИ баллистические таблицы бомбометания с горизонтальной и вертикальной
подвесок. Вычисления проводил Е. А. Сакин. Приказом Главкома ВВС № 294
от 29.10.39 г. эти баллистические таблицы были приняты ВВС как официальное
руководство для бомбометания с самолетов СБ, которых до начала Второй миро-
вой войны было построено более 6000.
В 1950 г. в частях ВВС появился один из первых фронтовых бомбардировщи-
ков Ил-28, способный летать при скоростных напорах 2500...3000 кг/м2. Решено
было провести экспериментальное исследование процесса выхода авиабомбы из
бомбоотсека при полете на максимальных скоростных напорах. Эта работа была
поручена М. П. Лисичко, высококвалифицированному экспериментатору. При
фотографировании выхода авиабомб массой 250 кг было обнаружено, что бомбы
с верхнего эшелона заднего кассетного держателя бомбоотсека выходят с боль-
шим углом атаки. Это подтверждалось большим числом экспериментов, прове-
денных в НИИ-2, ГЛИЦ и ВВИА им. Н. Е. Жуковского.
Чтобы исследовать выход авиабомб из бомбоотсека, М. П. Лисичко скон-
струировал подвесные контейнеры для самолета МиГ-19, из которых могли сбра-
сываться геометрически подобные авиабомбы при больших скоростных напорах.
Результаты эксперимента полностью подтвердили первые опыты.
С конца 1950 г. началась активная работа по исследованию процесса отделе-
ния авиабомб с наружной и внутренней подвесок. Впервые был применен статис-
тический подход и были вычислены возможные варианты столкновений авиаци-
онной бомбы с носителем.
Нерешенным оставался вопрос, связанный с начальными условиями при от-
делении авиабомб с внутренней подвески. Пришедший на работу в НИИ-2 круп-
ный ученый-газодинамик (впоследствии профессор и сотрудник ЦИАМ)
А. Я. Черкез обосновал картину потоков в бомбоотсеке самолета при сверхзву-
ковой скорости полета. В конце 1960-х годов он предложил создать испытатель-
ный аэродинамический стенд для моделирования отделения боевых грузов от но-
сителя на базе аэродинамической трубы непрерывного действия с использовани-
ем компрессорной части авиадвигателя АИ-20, приводимого в движение двумя
электродвигателями общей мощностью 1600 кВт. Труба (аэродинамический
378
стенд МАС), рабочее сечение которой составляло 410 х 400 мм, позволяла разви-
вать скорости до числа М = 3,5, имела набор аэродинамических весов и устрой-
ство для исследования отделения боевых грузов от упрощенной модели носителя.
Запуск трубы состоялся в 1975 г.
Был сконструирован и построен тензометрический макет авиабомбы наруж-
ной подвески, в котором ушки подвески соединялись с корпусом авиабомбы через
тензометрические весы. Было проведено огромное число экспериментов почти на
всех фронтовых самолетах и был собран обширный материал по величинам нагру-
зок, действующих на бомбу, расположенную на наружной подвеске. В 1976 г.
Минавиапром, ВВС и Минмаш подписали соглашение об обязательной выдаче
заключения НИИ-2 (совместно с генеральным конструктором ОКБ) о допусти-
мости (при обеспечении безопасности носителя) сбрасывания авиабомб новых
конструкций с самолетов. Для учета изменения относа авиабомбы при отделении
от носителя были проведены исследования траекторий авиабомб с возмущением
по углу атаки на начальном участке траектории при разных режимах полета. В ре-
зультате исследования А. Я. Черкез предложил приближенную формулу измене-
ния относа как функцию начального угла атаки, высоты и скорости полета. Про-
ектирование и постройка стенда, а впоследствии и работы по выдаче заключений
по безопасности отделения проводились под руководством В. А. Шилова.
По согласованию с Минавиапромом и Минмашем ВВС включили в текст
ОТТ-76 запись, обязывающую институт выдавать официальное заключение (вмес-
те с генеральным конструктором) о безопасных режимах отделения неуправляе-
мых боевых грузов от носителя. Кроме того, на всех бомбодержателях наружной
подвески были установлены пиротехнические толкатели, обеспечивающие более
правильное отделение бомб от носителя при сбрасывании с наружной подвески, а
также быстрый выход отделяемого груза из поля интерференции с носителем [1].
Основные исследования по отделению бомб от носителей были начаты и
проводились в НИИ-2 в лаборатории № 3, руководимой Ю. Л. Карповым.
Начало 1950-х годов характерно широким внедрением в систему вооружения
самолетов (не только штурмовиков, но и истребителей) неуправляемых реактив-
ных снарядов. Большой цикл исследований баллистики НРС был проведен в
НИИ-2. При этом исследовался и случай стрельбы НРС под углом к вектору ско-
рости самолета (вопрос о создании кормовой подвижной установки НРС рассмат-
ривался в промышленности, что повлекло за собой возникновение ряда научных
проблем). Методы исследования баллистики артиллерийских снарядов при боль-
ших углах нутации, развитые В. С. Пугачевым, были успешно приложены
В. И. Козловым в его докторской диссертации к изучению движения оперенного
снаряда с косопоставленным оперением, моделирующего НРС. Для проведения
стрельб моделями (из гладкоствольной пушки) к этому времени (1953 г.) в НИИ-2
была возведена уже «монументальная» трасса, а начальная скорость подкалибер-
ной модели была существенно увеличена за счет применения поддонов.
Следующей работой на трассе, проведенной также В. И. Козловым, было
установление закона сопротивления СХ(М) для типовых НРС (М8, АРС-212) в
диапазоне 0,5 < М < 3. Варьировался ряд параметров геометрии снаряда, число и
толщина перьев стабилизатора. При обработке результатов эксперимента в об-
ласти малых значений числа М использовались продувки натурных НРС в трубе
ЦАГИ Т-106. На трассе проводились также исследования гироскопически неус-
тойчивых режимов полета турбореактивных НРС (моделирование осуществля-
лось на участках пассивного полета НРС).
379
Помимо чисто баллистических исследований полета моделей НРС, на трас-
сах без моделирования тяги двигателя проводились обширные исследования ди-
намики полета и рассеивания ракет при полете с двигателем. Работа эта пред-
ставляла теоретический интерес в связи со сложностью описания движения (осо-
бенно для вращающихся снарядов) и сложностью решения уравнений движения
(вспомним, что ЭВМ тогда не было). Велика была и практическая потребность в
проведении этих исследований, так как НРС были перспективным оружием ави-
ации, а их уязвимым местом являлось большое рассеивание.
Существенный вклад в исследование динамики полета НРС внес Н. Н. Мо-
исеев (впоследствии академик АН СССР, автор многочисленных монографий
и учебников по теории оптимальных систем, системному анализу и пр.). Он ис-
следовал рассеивание снарядов вследствие эксцентриситета реактивной си-
лы (1947 г.), разработал методы оценки устойчивости движения вращающего-
ся реактивного снаряда (1948 г.), оценил влияние размещения оружия на самоле-
те на рассеивание НРС. В 1949 г. им был выпущен обобщающий труд «Исследо-
вание динамики полета и рассеивания НРС», широко известный в промышлен-
ности.
Общий спектр работ по НРС в НИИ-2 был весьма широкий и комплексный.
Изучалась проблема создания оборонительного вооружения бомбардировщика на
основе НРС (к сожалению, с общим отрицательным результатом). В ходе исследо-
ваний проводился летный эксперимент по регистрации рассеивания снарядов
ТРС-85 при4стрельбе с кормовой установки Ту-14. Исследовалась схема раци-
онального размещения ракетного вооружения на истребителях и штурмовиках с
учетом ограничений, наложенных заглоханием двигателя самолета при стрельбе.
Определялись наивыгоднейшие баллистические характеристики НРС для скоро-
стного истребителя (И. Л. Фельдштерн), и исследовалась эффективность ра-
кетного неуправляемого вооружения в воздушном бою. Оценивались возможнос-
ти обороны современного бомбардировщика при атаке его истребителями, воору-
женными батареями НРС. Продолжались и чисто баллистические исследования, в
частности экспериментальное определение внешнебаллистических характеристик
снаряда АРС-212 в натурных стрельбах в наземных условиях.
Можно подвести общий итог работ института в области внешней баллистики,
проведенных в 1946—1956 гг.: НИИ-2 обеспечил реактивную авиацию, прицело-
строение, конструкторов оружия и установок точными методами расчета движе-
ния снарядов, бомб и частично НРС в новых условиях — при больших скоростях,
высотах полета и дальностях стрельбы. Две из этих работ были отмечены Государ-
ственными премиями. Получили высокую оценку работы, проведенные на бал-
листических трассах на полигоне НИИ-2. Баллистические характеристики всех
серийных и опытных образцов боеприпасов — бомб и снарядов — определялись
впоследствии на этих трассах, в том числе и в случаях полета с начальными возму-
щениями, характерными для воздушной стрельбы и бомбометания [2, 3].
4.1.2. ПРОБЛЕМЫ ПОВЫШЕНИЯ ТОЧНОСТИ
И ДАЛЬНОСТИ ВОЗДУШНОЙ СТРЕЛЬБЫ
До развития основ теории эффективности воздушной стрельбы у практиков
бытовало мнение, что для увеличения дальности и эффективности воздушной
стрельбы необходимо, как и в наземной артиллерии, увеличивать калибр оружия
380
и начальную скорость снаряда. В качестве ограничений при этом рассматрива-
лись сила отдачи и масса пушки. Такой подход оказывал влияние и на тематику
исследований по авиационному вооружению, где ведущее место занимала про-
блема силы отдачи автоматического оружия на самолете.
Однако из опыта воздушных боев в Великую Отечественную войну, как и
предшествующих локальных войн, следовало, что дальность результативной воз-
душной стрельбы как пулеметов, так и пушек, а впоследствии и НРС не превы-
шала 120...200 м.
Проведенный анализ показал, что решающее влияние на дальность и эффек-
тивность воздушной стрельбы оказывает точность прицела (при подходящем тех-
ническом рассеивании снарядов и точном знании их баллистики). Особенно
сложной была проблема расчета и построения угла упреждения при стрельбе по
подвижной маневрирующей цели. Было ясно, что поправку на упреждение нужно
вводить на основе измерения параметров движения цели и стреляющего самолета.
Подходы к решению проблемы намечались и в отечественных исследовани-
ях, но блестящим примером технического решения проблемы явился английский
прицел-автомат MK-2D для стрельбы из неподвижно закрепленного на самолете
оружия. Прицел был строго засекречен, появился на вооружении английских са-
молетов в 1943—1944 гг. и сразу же изменил соотношение побед в воздушных бо-
ях английских и немецких истребителей до 3 : 1 в пользу англичан (по немецким
данным). На основе образца MK-2D и был создан такой прицел.
Разработка теории прицела, основанного на использовании свободного ги-
роскопа с электромагнитной коррекцией угловой скорости прецессии, была по-
ручена выпускнику МГУ И. А. Богуславскому, поступившему в НИИ-2 после
демобилизации из армии. С это задачей он успешно справился.
Одновременно в НИИ-2 Я. Я. Трандофиловым был разработан компактный,
уменьшенный по габаритам приблизительно в два раза, вариант корпуса прицела.
На лабораторной установке были проведены исследования динамики навод-
ки перекрестия прицела на подвижную цель, определена роль коэффициента
демпфирования линии визирования, сделано несколько изобретений (новая оп-
тическая схема, не имевшая систематических ошибок, метод увеличения диапа-
зона углов упреждения) и выполнен ряд других работ.
Весь комплекс теоретических и экспериментальных работ НИИ-2 был пере-
дан ЦКБ «Геофизика», что способствовало быстрому созданию отечественного
аналога — прицела АСП-1 и последующей гаммы прицелов-автоматов воздуш-
ной стрельбы.
Для повышения эффективности воздушной стрельбы требовалась также раз-
работка математических аппроксимационных зависимостей, описывающих ре-
шение задачи стрельбы применительно к возможностям существующих датчиков
информации и структурных схем прицелов. Работа в этом направлении была раз-
вернута в 1946—1947 гг. вначале в виде составления простейших «рабочих фор-
мул» прицелов.
Первые работы заключались в приближенном описании аналитическими за-
висимостями элементов траектории снаряда (заданных таблицами), времени его
полета на упрежденную дальность и углов упреждения. Требовались простота за-
висимостей и удобство их реализации в построителях поправок.
В 1951 г. И. Л. Фельдштерном были разработаны и внедрены в тесном со-
трудничестве с КБ заводов «Геофизика» и «Арсенал» рабочие формулы для
стрельбы НРС.
381
В промышленности продолжались работы по усовершенствованию прицела
АСП-1Н для учета все большего числа параметров, от которых зависит точность
решения задачи стрельбы (на большую дальность) как при неподвижном, так и
при подвижном закреплении оружия на самолете. В эти годы НИИ-2 становится
ведущей организацией по составлению рабочих формул для всех прицелов, уста-
навливаемых на самолеты с любым составом вооружения, и новых систем датчи-
ков информации, в том числе радиолокационных систем углового сопровожде-
ния цели. Большая роль в исследовании и разработке рабочих формул принадле-
жит И. Л. Фельдштерну.
Можно констатировать, что в НИИ-2 в 1946—1950 гг. возникло и начало
развиваться новое прикладное научное направление — разработка рабочих фор-
мул воздушной стрельбы и их реализация в прицельных системах самолетов.
В дальнейшем эти исследования вылились в одно из основных направлений ра-
бот института — составление бортовых алгоритмов стрельбы и пуска как неуп-
равляемых снарядов, так и управляемых ракет.
Участвовал институт и в работах КБ по созданию прицелов новых схем, а за-
тем и прицельных комплексов. В частности, на прицел ДСП-17 (завод «Арсе-
нал»), рабочие формулы которого реализованы на основе рекомендаций НИИ-2,
было выдано авторское свидетельство на изобретение, в число авторов которого
вошли и наши сотрудники Е. И, Чистовский и И. Л. Фелъдштерн.
С появлением БРЛС истребителя, обладающей следящей за целью осью ан-
тенны, И. А. Богуславским была предложена прицельная несинхронная схема,
освобождающая истребитель от полета по «кривой атаки», на что было получено
авторское свидетельство. Впоследствии вышло решение ВПК, обязывающее
НИИ-17 реализовать эту схему, что и было сделано в прицельной системе «Со-
кол». НИИ-2 активно участвовал в создании этой прицельной системы (фильтры
для выходов гироскопов БРЛС, в которых использовалось управление кинемати-
ческим звеном, разработка рабочих формул, полунатурное моделирование). При-
цельная система успешно прошла государственные испытания.
Общую теорию перехвата и прицеливания на встречно-пересекающихся
курсах, и в частности метод наведения в фактическую точку встречи, разработал
И. А, Богуславский. В этой же работе получила завершение теория фильтра-
ции для прицельных систем воздушной стрельбы. На основе упомянутых работ
И. А. Богуславский написал и защитил докторскую диссертацию.
Бурное развитие исследования методов перехвата и разработки бортовых ал-
горитмов пуска снарядов (ранее рабочих формул) произошло, как и во всех облас-
тях техники, с появлением и внедрением электронных вычислительных машин.
В первые годы существования НИИ-2 был проведен также большой цикл ра-
бот по исследованию точности наведения и сопровождения цели лучом визиро-
вания. В это время еще не было бортовых самолетных систем сопровождения це-
лей и информационным и исполнительным звеном системы управления, навод-
кой оружия при воздушной стрельбе являлся человек. Ошибки визирования были
первичными в длинной цепочке ошибок системы прицеливания, и естественно
было их изучать и находить решения, уменьшающие ошибки при расширенном
диапазоне углов и угловых скоростей относительного движения цели.
Эргономические исследования проводились на лабораторной установке,
включающей задатчик движения цели, пульт стрелка-оператора и узел управления
визирным лучом. Между входом — «валом» пульта управления и выходом — дви-
жением луча можно было включать простейшие преобразователи (ап = у4[Зпуг1ьт;
382
«пульт= где А — варьируемый коэффициент). Стрелок мог непосредственно
наблюдать за ошибкой рассогласования между движением цели и движением пе-
рекрестия прицела. Методика эксперимента и лабораторное оборудование были
разработаны 3. С. Орловым.
Вначале обследовалось влияние конструктивной схемы пульта наведения,
управляемого руками стрелка. Затем был разработан «пульт» в виде коллиматор-
ного прицела, закрепленного на голове стрелка (прототип современного нашлем-
ного визира). Вращение головы вокруг двух координатных осей регистрирова-
лось сельсинами.
Из интересных результатов, полученных с помощью нашлемного визира,
следует отметить увеличение приблизительно в два раза предельной угловой ско-
рости сопровождения цели по сравнению с «ручным» визиром (при близких по
точности результатах сопровождения). Были также найдены качественные оцен-
ки сопровождения цели движением глазного яблока. Результаты оказались очень
высокими, но никаких реальных методов использования этого движения в каче-
стве управляющего найти в то время не удалось. Исследования визирования пе-
рископом проводились Б. А. Маврицким.
Наконец, аналитическими методами исследовалась система управления, в ко-
торой преобразователь А был представлен дифференциальным уравнением. При-
мером такой системы является самолет-истребитель с неподвижным оружием и
«пультом» наведения в виде рычагов рулей управления самолетом. Было показано,
что при не слишком грубых допущениях движение истребителя, сопровождающего
прямолинейно летящую цель лучом визирования, жестко связанным с осью истре-
бителя, описывается дифференциальным уравнением движения маятника с укора-
чивающейся длиной подвеса (в случае полета со сближением). В зависимости от
дальности визирования, нагрузки на квадратный метр площади крыла и плотности
воздуха (высоты полета) движение может быть как колебательным, так и апериоди-
ческим. Это движение центра масс вносит возмущение в задачу прицеливания. При
визировании догоняющей цели через зеркало заднего обзора происходит потеря ус-
тойчивости движения самолета (исследование проведено В. Е. Рудневым).
Сложнейшая эргономическая проблема по управлению летчиком одновре-
менно двумя связанными объектами — самолетом и установленным на нем пуль-
том наведения визирного луча — была решена в это время.
Прицелы воздушной стрельбы, рабочие формулы и системы визирования
целей определяли в существенной степени систематическую составляющую
ошибок воздушной стрельбы. Второй составляющей ошибок являлось рассеива-
ние, вносимое оружием и установкой, в частности изгибом стволов в потоке. Для
измерения изгиба стволов пушки НС-23 в потоке был поставлен летный экспе-
римент на самолете Ту-2. Две пушки при параллельном расположении стволов
закреплялись на специальной установке в плоскости симметрии самолета под уг-
лом 90° к его оси. Первый эксперимент проводился без стрельбы, и поворот осей
каналов стволов у дульного среза фиксировался оптической системой.
Во втором эксперименте, уже со стрельбой, осуществлялось фотографирова-
ние трасс снарядов, выстреливаемых одновременно из двух закрепленных рядом
пушек. Ствол одной из них был экранирован от потока специальным обтекате-
лем. Эксперимент, проведенный К. А. Сарычевым в 1949 г., показал, что уже
при скорости полета самолета 500 км/ч ошибки за счет изгиба ствола пушки
НС-23 достигли 9... 10 тыс. дальности; пересчет на скорость полета 900 км/ч дал
отклонение до 30 тыс. дальности.
383
Результаты эксперимента направили внимание конструкторов на серьезные
изменения в компоновке подвижных пушечных установок. Позднее было прове-
дено обширное исследование с детальной регистрацией линейных и угловых ко-
лебаний дульного среза ствола пушки при автоматической стрельбе, так как
именно это движение являлось основной причиной технического рассеивания
пушечных снарядов. Эксперимент проводился на самолете МиГ-15 при скорости
полета до 900 км/ч. Пушка закреплялась под углом 90° к оси самолета в носовой
его части. Для разрешения на полеты при таком расположении оружия потребо-
валось заключение ЦАГИ о том, что при стрельбе из установки самолет не будет
терять устойчивости. Для регистрации колебаний была разработана оригиналь-
ная оптическая аппаратура. Обработка результатов эксперимента показала, что
за счет колебаний ствола вероятность поражения цели может уменьшаться на
10...30% (для разных образцов пушек). Такой же эффект был достигнут на мате-
риале исследований ряда задач баллистики воздушной стрельбы.
В это время были проведены детальные исследования технического рассе-
ивания всех пяти подвижных дистанционно управляемых пушечных установок
бомбардировщика Ту-4 в наземных условиях. Были получены смещения центров
группирования снарядов (это важно при пристрелке установок) и величины их
вероятного отклонения (необходимые для оценки эффективности стрельбы). Бы-
ли изучены все составные части технического рассеивания установок и выявлены
наиболее важные факторы, определяющие рассеивание. Также были проведены
исследования по определению параметров рассеивания и выявлению его причин
при стрельбе с истребителя по наземным щитам при большой скорости полета.
К большим ошибкам прицеливания приводили оптические искажения, вно-
симые остеклением кабины пилота и блистером стрелка. В 1948 г. НИИ-2 полу-
чил задание от ВВС отработать методику холодной пристрелки оружия с учетом
оптических искажений остекления. Б. А. Маврьщкий разработал аппаратуру,
измеряющую отклонение луча, исходящего из точки визирования как бы через
прицел. Методика и конструкция аппаратуры были приняты заказчиком и вне-
дрены на авиационных заводах, включая серийные [4].
4.1.3. СОВЕРШЕНСТВОВАНИЕ
СИСТЕМЫ ПРИЦЕЛИВАНИЯ
И ТРАЕКТОРНОГО УПРАВЛЕНИЯ
В ОПЕРАЦИИ БОМБОМЕТАНИЯ
С ростом скорости и высоты полета самолета возникли затруднения в обес-
печении высокой точности бомбометания из-за сокращения времени, остающе-
гося на прицеливание после обнаружения цели, и увеличения относа бомбы.
Дальность видимости цели становится одним из основных факторов, определяю-
щих возможность «визирного бомбометания» (т. е. бомбометания, при котором
прицеливание ведется с помощью прицела с оптической визирной системой, ос-
тающегося до сих пор наиболее точным из всех известных способов).
С ростом скорости и высоты полета отрезок пути самолета, равный разности
предельной горизонтальной дальности видимости (обнаружения) цели и относа
бомбы, уменьшается, так как дальность видимости не зависит от скорости и при
равных условиях практически постоянна, а относ бомбы интенсивно возрастает.
Таким образом, отрезок пути самолета, на котором осуществляется прицеливание,
384
укорачивается, и еще более интенсивно сокращается располагаемое для прицели-
вания время. Очевидно, что должны существовать предельные скорости, до кото-
рых еще возможно визирное бомбометание. Само по себе интенсивное увеличение
относа бомбы приводит к почти пропорциональному увеличению погрешностей
бомбометания, если не принимать дополнительных мер по их уменьшению.
При решении проблемы повышения точности бомбометания в условиях роста
скорости и высоты полета внимание было сосредоточено на следующих работах:
• исследовании дальности видимости целей и определении предельных воз-
можностей визирного бомбометания;
• исследовании возможностей преодоления затруднений из-за дефицита вре-
мени на прицеливание путем автоматизации процессов;
• разработке методики исследований и исследовании системы бомбометания
как динамической системы самолет — автопилот — прицел;
• теоретических и экспериментальных исследованиях путей повышения точ-
ности основных элементов прицельной системы бомбометания.
Работы по исследованию дальности видимости целей были проведены в
1946-1947 гг.
Потребное для прицеливания (состоящего из прицеливания по направле-
нию, или «боковой наводки», и прицеливания по дальности) время зависит от
способов прицеливания, уровня технической оснащенности и квалификации
экипажа. Исследованию путей сокращения потребного времени для прицелива-
ния при бомбометании с горизонтального полета был посвящен цикл работ инс-
титута в конце 1940-х — начале 1950-х годов. Исследования, проведенные специ-
алистами института в процессе отработки системы управления бомбардировоч-
ным вооружением самолета Ту-4, показали, что использование «синхронных»
способов прицеливания, реализованных ЦКБ «Геофизика» в бомбардировочном
прицеле ОПБ-4С (прототипом которого служил американский прицел «Нор-
ден»), а затем и в ОПБ-5С, ОПБ-6СР, требует много времени на прицеливание и
доступно только весьма квалифицированному и хорошо тренированному экипа-
жу (штурману-бомбардиру). Разработка к началу 1950-х годов доплеровских из-
мерителей составляющих путевой скорости сделала возможным использование
векторного способа прицеливания по неподвижным целям, не требующего
«синхронизации» (а следовательно, и больших затрат времени) для измерения со-
ставляющих скорости движения самолета относительно цели.
Следует отметить, что векторный способ прицеливания по дальности был ре-
ализован в автоматическом прицеле ОПБ-1 Д, разработанном под руководством
А. С. Деренковского еще в конце Великой Отечественной войны. Прицел обес-
печивал непрерывное высокоточное автоматическое вычисление угла прицелива-
ния и практически не требовал затрат времени специально на прицеливание по
дальности. Другое дело — прицеливание по направлению, или боковая наводка:
здесь обязателен специальный маневр самолета по курсу, обеспечивающий нало-
жение «линии разрывов бомб» на цель. Ранее этот маневр осуществлялся летчиком
путем последовательных доворотов по командам штурмана-бомбардира и занимал
много времени. На самолете Ту-4, оборудованном автопилотом АП-5, впервые
операция управления маневром самолета при боковой наводке была передана от
летчика штурману-бомбардиру. Это позволило сосредоточить управление процес-
сом прицеливания в руках одного человека, повысить точность наведения. Однако
реализованный в прицельном оборудовании «синхронный» или близкий к нему
метод прицеливания существенно уменьшить время прицеливания не позволил.
13 Авиация ВВС России и научно-технический прогресс 385
Использование векторного метода прицеливания, основанного на практиче-
ски мгновенном вычислении необходимого угла доворота самолета, сулило су-
щественное сокращение времени боковой наводки при условии максимального
использования маневренных возможностей самолета по курсу При этом требо-
валось рационально построить сложную динамическую систему самолет —
прицел — система управления. Первым взялся за исследование путей рациональ-
ного построения такой динамической системы Г. Г. Абдрашитов, разработав-
ший основы теории боковой наводки, главным содержанием которой было ре-
шение задачи оптимизации по быстродействию управления динамической систе-
мой, состоящей из самолета, его кинематических связей с целью и системы
управления самолетом. Математическая модель системы включала линеаризо-
ванные дифференциальные уравнения самолета, его системы управления и урав-
нения кинематики, содержащие существенные нелинейности. Полученное чис-
ленными методами параметрическое решение задачи позволило определить
конкретные пути реализации оптимальных законов управления самолетом при
боковой наводке и дать оценку быстродействия системы управления.
Основные работы по выяснению природы составляющих погрешностей бом-
бометания и рациональному построению элементов бомбардировочного прицела
проводились А. С. Деренковским (автором прицела ОПБ-1Д, лауреатом Госу-
дарственной премии СССР) с сотрудниками. Определив, что в суммарном рассе-
ивании авиабомб составляющая прицельного рассеивания преобладает над со-
ставляющей технического рассеивания, а в прицельном рассеивании основная до-
ля приходится на погрешность построения базы (как правило, с помощью
гировертикали) отсчета угла прицеливания, исследователи наряду с учеными та-
ких организаций, как ВВИА им. Н. Е. Жуковского, ЦКБ «Геофизика», основное
внимание обратили на погрешности гировертикали с маятниковой коррекцией,
применяющейся в прицелах. Было выяснено, что самолету с автопилотом АП-5
присущи длиннопериодические (фугоидные) колебания по скорости и высоте, ко-
торые уводят гировертикаль прицела (ОПБ-10, ОПБ-11) с маятниковой коррек-
цией. Для уменьшения этих ошибок было рекомендовано существенно увеличить
точность автоматической стабилизации скорости и высоты полета на боевом кур-
се. Однако реализовать эту рекомендацию в полной мере оказалось технически
невозможно. Выходом из этого тупика явилось изобретение невозмущаемой гиро-
вертикали.
Отдельной страницей в истории работ по совершенствованию оптического
бомбардировочного прицела для больших скоростей полета явились исследова-
ния под руководством А. С. Деренковского по созданию нового способа и уст-
ройств для измерения скорости ветра (а для подвижной цели — и скорости цели)
в полете по смещению наземного ориентира (цели) относительно перекрестия
оптического векторно-синхронного прицела. Подтверждение результатов в про-
цессе государственных испытаний в 3-м Управлении ГК НИИ ВВС в 1947 г. по-
зволило внедрить новый способ измерения ветра в ряд опытных образцов прице-
лов разработки ЦКБ «Геофизика».
Работы института по проблеме повышения точности бомбометания в этот
период были посвящены преимущественно бомбометанию с горизонтального
полета. Лишь в некоторых работах проводилось частное оценочное исследование
прицельных схем бомбометания с самолета-штурмовика на выходе из пикирова-
ния при сопряжении оптического прицела с радиолокационным визиром. По-
зднее (в 1956 г.) исследования по разработке алгоритмов, оценке точности и без-
386
опасности методов бомбометания с истребителя в режимах с пикирования, с гор-
ки и полупетли Нестерова. В 1951 г. была разработана оригинальная аппаратура
для исследования процесса прицеливания при бомбометании с горизонтального
полета. Аппаратура представляла собой приспособление для синхронного фото-
графирования поля зрения прицела и основных прицельных данных. Это позво-
ляло в летных экспериментах получать объективные сведения о работе аппарату-
ры и штурмана-бомбардира.
В 1946—1948 гг. Н, И. Зенкевич (доцент, а затем профессор ВВИА
им. Н. Е. Жуковского, плодотворно сотрудничавший с НИИ-2) и В. П. Со-
нюшкин разработали методику оценки погрешностей гировертикали бомбар-
дировочного прицела путем суммирования колебаний самолета, полученных
покадровым фотографированием солнца, с колебаниями стабилизирующих уст-
ройств (гировертикали) относительно самолета. Последующий летный экспери-
мент подтвердил наибольшее по сравнению с другими факторами влияние по-
грешностей гировертикалей (в прицелах «Норден», «Лотфе», ТСА) на точность
бомбометания.
В период 1949—1952 гг. Н. Л. Гертман разработал методику организации
и обработки кинотеодолитных съемок в целях экспериментального определения
точности прицеливания и оценки вероятности попадания при бомбометании и
высотном торпедометании по подвижным морским целям. Методика успешно
использовалась в летных экспериментах при испытаниях реактивной авиацион-
ной торпеды РАТ-52.
Повышение точности бомбометания может быть обеспечено управлением
траекторией авиабомбы после ее сброса с самолета по информации об относи-
тельном местонахождении авиабомбы на траектории и цели, получаемой на бор-
ту самолета теми или иными информационными средствами.
4.1.4. РАЗВИТИЕ И СОВЕРШЕНСТВОВАНИЕ
ПРИЦЕЛЬНЫХ КОМПЛЕКСОВ САМОЛЕТОВ
ФРОНТОВОЙ УДАРНОЙ АВИАЦИИ
ДЛЯ РЕШЕНИЯ ЗАДАЧ БОМБОМЕТАНИЯ1
В 1960-е годы для решения боевых задач самолетов развивающейся штурмо-
вой авиации потребовалась более совершенная прицельная техника, обеспечи-
вающая реализацию возрастающих тактико-технических возможностей самоле-
тов и применение широкой номенклатуры средств поражения, в том числе управ-
ляемого точного оружия. С повышением точностных характеристик аппаратуры
измерения параметров движения самолета и внедрением вычислительной техни-
ки возрастали требования к точности решения боевых задач. Сокращение резерва
времени на выполнение боевой задачи за счет возросших скоростей сближения с
целью в режимах маловысотного полета, являющихся рабочими для самоле-
тов-штурмовиков, требовало автоматизации процессов прицеливания.
Оборудование и функциональные связи прицельных систем штурмовой ави-
ации в 1960-е годы формировались на основе аналоговых вычислительных
элементов — электрических, электронных, электромеханических (например, сле-
дящих систем постоянного и переменного тока на базе потенциометров, синус -
1 В написании подраздела принимали участие В. Н. Свешников, К. Ю. Швецов
387
но-косинусных трансформаторов и сельсинов, различных типов электромехани-
ческих релейных устройств, электронных усилителей, механических счетно-ре-
шающих устройств).
Ядром этих прицельных систем являлся центральный бортовой вычислитель,
функционально связанный с визирным устройством, датчиками информации,
системой управления оружием и системой автоматического управления самоле-
том (если она использовалась). В состав систем включалась также различная
комплексирующая аппаратура, обеспечивающая ввод исходных данных, управле-
ние режимами работы и процессом прицеливания.
Прогресс в формировании бортовых комплексов управления авиационным
вооружением, расширение функциональных возможностей и повышение точ-
ности применения оружия связаны с разработкой и внедрением бортовых цифро-
вых вычислительных машин с последующим переходом на цифровые вычисли-
тельные системы. Институт внес большой вклад в развитие и освоение цифровой
вычислительной техники. Первые работы специалистов по этой технике были
связаны с переходом от боевых алгоритмов самолетов, реализованных на анало-
говых вычислителях, к созданию программного обеспечения для БЦВМ.
В начале 1970-х годов группа специалистов института под руководством
Ю. А. Белоусова разработала методику анализа алгоритмов в интересах опреде-
ления требований к БЦВМ по необходимому быстродействию, разрядности (точ-
ности), объемам долговременной и оперативной памяти. Вторым шагом было со-
здание программ-трансляторов на универсальных ЭВМ для перехода от универ-
сальных языков программирования к машинному языку программирования,
которые различались в зависимости от типа машин [4].
Завершающим технологическим этапом разработки программного обеспече-
ния для БЦВМ являлась отработка машинных программ на специально создан-
ных комплексах отработки программ, в состав которых включались элементы
универсальных наземных ЭВМ большого быстродействия увеличенных объемов
оперативной и долговременной памяти, что обеспечивало редактирование и пе-
репрограммирование окончательного продукта — программ БЦВМ.
Эти программы в промышленности вводились в БЦВМ выбранного типа, и
заключительный этап отработки проходил уже в составе бортового комплекса са-
молета на базе полунатурного моделирования. Основным типом БЦВМ, широко
внедренным в авиационные бортовые комплексы, явились БЦВМ «Орбита» раз-
ных поколений.
Разработка программ для БЦВМ проводится с учетом особенностей динами-
ческих процессов, требований к точности и эргономичности прицельных сис-
тем. Большая заслуга в разработке и внедрении методов программирования для
инженеров-специалистов принадлежит Р. А. Колчанову, О. В. Бялковскому,
А. В. Егоровой.
Следующий этап развития бортовой вычислительной техники характеризо-
вался переходом БЦВМ на универсальные языки программирования и снижени-
ем массогабаритных параметров при одновременном повышении производитель-
ности. Первое обстоятельство упростило создание и отработку программ, сокра-
тило временной цикл и материальные затраты.
Особенностью большинства самолетов штурмовой авиации является нали-
чие одного члена экипажа. Поэтому требовались многофункциональные систе-
мы, обеспечивающие решение различных боевых задач и применение различных
видов оружия одним летчиком.
388
1. Прицел ОПБ-16
Для решения боевых задач развивающейся реактивной бомбардировочной
авиации в военные и послевоенные 1940—1960-е гг. были разработаны и исполь-
зовались оптические бомбардировочные прицелы (ОПБ-5С, ОПБ-Ю, ОПБ-11),
обеспечивающие автоматизацию наведения самолета по направлению и сброс
бомб с использованием векторно-синхронного метода прицеливания. Прицели-
вание по направлению и стабилизация линии боевого пути до момента сброса
осуществлялись с использованием автопилота. С прицелом работал второй член
экипажа — штурман.
Развитие прицелов этого типа завершил прицел ОПБ-16, который проходил
испытания в начале 1960-х годов и устанавливался на легком бомбардировщике
Як-28И. Прицел функционировал в комплексе с РЛС «Инициатива-2», работаю-
щей по наземным целям. Конструктивно прицел был оформлен в виде монобло-
ка вычислителя и оптического визирного устройства. Гиростабилизированное
визирное устройство содержало телескопическую визирную систему и две приз-
мы отклонения луча в продольном и боковом направлениях. В прицеле реализо-
ван автосинхронный метод прицеливания, позволяющий совместить выполне-
ние прицеливания в продольном и боковом направлениях, что сокращало время
на выполнение процесса прицеливания.
Для выполнения прицеливания в поле зрения визира индицировалось под-
вижное перекрестие, отрабатывающее продольный и боковой углы визирования.
Управление движением перекрестия осуществлялось с помощью продольных и
боковых рукояток визирования и синхронизации. Начальное положение верти-
кальной черты перекрестия ориентировалось по направлению продольной оси
самолета (по курсу). После предварительного доворота самолета на цель летчи-
ком штурман, обнаружив цель в поле зрения, вводил в вычислитель начальные
координаты цели, совмещая перекрестие с целью рукоятками визирования. Вы-
полнив «привязку» к цели, штурман включал режим синхронизации и, работая
рукоятками синхронизации, обеспечивал синхронное движение перекрестия и
цели. В процессе синхронизации определялись величины составляющих путевой
скорости самолета и скорости ветра. На основании этих параметров и информа-
ции от датчиков в режиме счисления осуществлялся процесс слежения за целью.
В процессе синхронизации вычислялся текущий угол разворота по курсу, не-
обходимый для реализации траектории движения самолета по линии боевого пу-
ти. Разворот осуществлялся с помощью автопилота АП28К-1, куда от прицела
поступал соответствующий сигнал. На основании введенных баллистических
данных авиабомб вычислялись траекторные баллистические характеристики
авиабомб, по которым в функции соответствующих параметров движения само-
лета и составляющих скорости ветра определялись продольный и боковой углы
прицеливания. Моменты совпадения текущих углов визирования цели с углами
прицеливания индицировались, и при совпадении текущего продольного угла
визирования и вычисленного угла прицеливания выдавался сигнал сброса.
Отработка прицела ОПБ-16 с РЛС «Инициатива-2» проводилась методами
полунатурного моделирования на экспериментальной базе НИИ-2 (ныне ФГУП
ГосНИИАС). Комплекс ПНМ включал аналоговую вычислительную машину,
трехстепенной динамический стенд и узел цели на базе индикатора с двухлучевой
ЭЛТ. На экран индикатора выводилась метка цели, воспроизводящая угловое пе-
ремещение самолета относительно цели по углу места и азимуту. Вторая метка
389
индицировала углы визирования, формируемые на основании данных реального
прицела. Угловые координаты цели формировались на аналоговой модели, где
были реализованы уравнения движения самолета и цели в функции параметров
моделируемого режима полета. Совмещая эти метки рукоятками реального при-
цела, оператор выполнял моделирование режимов прицеливания.
Значительный вклад в отработку прицела ОПБ-16 самолета Як-28И и выработ-
ку рекомендаций по его применению внесли высококвалифицированные специалис-
ты НИИ-2 Е. А. Федосов (ныне генеральный директор ФГУП ГосНИИАС),
Е. И. Чистовский. А. С. Деренковский. Б. П. Киселев. Г. В. Кузнецов.
Г. В. Свиридов. В. Н. Свешников. Е. С. Вавилов и др.
В процессе испытаний были разработаны рекомендации, позволяющие
учесть и парировать влияние выявленных особенностей реализации использо-
ванного в ОПБ-16 метода прицеливания. Были отработаны методические реко-
мендации по выполнению режимов бомбометания с самолета Як-28И, обеспечи-
вающие применение прицела на самолете и позволяющие парировать влияние
ускорений самолета на функционирование системы маятниковой коррекции ги-
ростабилизатора прицела. В результате испытаний была отработана связь прице-
ла с автопилотом по параметру управления разворотом, позволяющая сократить
время доворота при прицеливании по направлению.
2. Прицельные системы «Сокол» и АСП-17БМЦ
В конце 1960-х — начале 1970-х годов формируются и испытываются прицель-
ные системы для одноместных самолетов МиГ-23Б, Су-17МЗ и Су-25 — прицель-
ные системы «Сокол» и АСП-17БМЦ. Рабочий диапазон прицельных систем соот-
ветствовал рабочему диапазону режимов решения боевых задач самолетов штурмо-
вой авиации: применение оружия в режимах маловысотного полета (Н < 1000 м) и
с вертикальных маневров — пикирования и кабрирования — в диапазоне высот,
потребном для выполнения маневров и применения оружия (// = 5000...7000 м).
Отработку этих прицельных систем на стендах моделирования в институте вы-
полняли Р. А. Колчанов. С. Е. Макогон. В. Н. Корниенко. К. Ю. Швецов.
И. Л. Фельдштерн. Е. А. Махов. В. И. Медведев. Е. С. Вавилов и др. [1,2, 4].
Система «Сокол» формировалась на основе аналогового вычислителя ПБК-3
(прицел для бомбометания с кабрирования), функционально связанного с опти-
ко-механическим визирным устройством С-17ВГ посредством аналогового блока
согласования. Решение реализованных в вычислителе задач информационно
обеспечивалось функциональными связями с датчиками воздушной скорости и
барометрической высоты самолета (система воздушных сигналов), геометриче-
ской высоты над поверхностью (радиовысотомер), угловых координат (курсовер-
тикаль), углов атаки и скольжения. Использовалась и информация о наклонной
дальности по направлению визирного луча, поступавшая от одноканального ла-
зерного дальномера типа «Фон». В состав системы входила и другая аппаратура
комплексирования — пульты и кнопки управления, сигнальные устройства.
Визирная головка содержала оптическую систему, формирующую подвижное
перекрестие в поле зрения плоскопараллельной пластины отражателя, с электро-
механической отработкой угловых координат перекрестия по сигналам от вычис-
лителя. Визирная головка размещалась в кабине над приборной доской таким об-
разом, чтобы отражатель находился в поле зрения летчика, выполняющего наве-
дение на цель и наблюдающего цель и перекрестие в поле зрения отражателя.
390
Однако нижняя половина поля зрения визира закрывалась передней частью фю-
зеляжа, что ограничивало угол прицеливания по дальности в нижней полусфере.
Вычислитель обеспечивал решение задач бомбометания с горизонтального
полета и пикирования, а также с кабрирования с прицеливанием по вынесенному
ориентиру. В режимах горизонтального полета и пикирования вычислитель фор-
мировал текущие углы прицеливания в функции параметров движения самолета,
баллистических характеристик и составляющих скорости ветра, определяемых
вычислителем на основании введенных метеоданных. Отрабатывая эти углы, пе-
рекрестие визира указывало угловые координаты точки попадания авиабомбы
при сбросе ее в данный момент времени. Летчик выполнял прицеливание, манев-
ром самолета совмещая перекрестие (точку попадания) с целью, и в момент сов-
мещения выдавал команду на сброс авиабомбы. Стабилизация прицельного пере-
крестия при угловых маневрах самолета осуществлялась за счет построения его
угловых координат с учетом углов крена и тангажа.
В условиях, когда значение текущего угла выходило за пределы указанного
выше ограничения, прицел отрабатывал угол, соответствующий этому ограниче-
нию. При прицеливании летчик совмещал перекрестие с целью и выдавал в вы-
числитель сигнал «привязка», по которому угломестным способом вычислялась
начальная дальность до цели в функции установленного угла и высоты полета
(или наклонной дальности от лазерного дальномера, измерявшего дальность до
поверхности Земли по направлению луча визирования). Сигнал сброса формиро-
вался на основании измеренной дальности до цели в режиме счисления. Летчик,
выполнив «привязку», до момента сброса выдерживал постоянный курс полета.
Способ прицеливания по подвижному перекрестию в видимой зоне получил
название бомбометание в режиме «угол сброса», а в невидимой зоне — бомбоме-
тание в режиме «угол визирования».
Бомбометание с кабрирования выполнялось с прицеливанием по ориентиру,
положение которого относительно цели задавалось дальностью (базой) и ее кур-
совым углом. Летчик выходил на ориентир с курсом базы и в момент пролета его
производил «привязку», после чего до момента сброса выдерживал постоянный
курс. Учет бокового ветра производился визуально боковым пролетом. Моменты
ввода в маневр и сброса авиабомб определялись в режиме счисления сравнением
вычисляемых прицелов текущей дальности до цели, дальности ввода в маневр и
баллистического пролета. Дальность ввода в кабрирование вычислялась в соот-
ветствии с расчетной зоной дальностей, обеспечивающих попадание в цель для
принятого диапазона режимов бомбометания, на основании алгоритма, аппрок-
симирующего ее в зависимости от параметров режима применения.
Аналогичным образом осуществлялось прицеливание при бомбометании с
горизонтального полета с использованием вынесенного ориентира.
Для выполнения конкретной задачи в прицел вводились данные о виде режима
бомбометания, баллистические данные оружия, метеоданные о силе и направлении
ветра, база и курсовой угол. Выдача сигналов «привязки» и сброса (ручного) обес-
печивалась кнопками, смонтированными на ручке управления самолетом.
Совмещение решения задач бомбометания и стрельбы с использованием
прицельной системы было реализовано в прицеле АСП-17БМЦ.
По аналогии с прицельной системой «Сокол» он был сформирован на основе
аналого-цифрового вычислителя АЦВУ, фундаментально связанного с оптиче-
ской визирной головкой типа АСП-17. Информационное поле прицела включало
датчики воздушной скорости и барометрической высоты (систему воздушных
391
сигналов), геометрической высоты (радиовысотомер), наклонной дальности (од-
ноканальный наземный дальномер), угловых координат самолета (инерционная
гировертикаль), путевой скорости и угла сноса (доплеровский измеритель), углов
атаки, скольжения и угловых скоростей самолета. В состав его входили блоки пи-
тания и обеспечения функциональных связей, пульты и органы управления
(кнопки, тумблеры), элементы индикации (сигнальные лампочки).
Устройства управления прицела размещались в кабине и на ручке управле-
ния самолетом. Визирная головка обеспечивала индикацию на отражателе в поле
зрения летчика подвижного прицельного перекрестия, управляемого сигналами
вычислителя. Стабилизация перекрестия при маневрах самолета по крену и тан-
гажу осуществлялась вычислительной системой на основании соответствующих
сигналов гировертикали.
В прицеле имелись аналоговые информационные связи. В состав аналогово-
го вычислителя были включены вычислительные модули цифрового типа для по-
вышения точности вычислений при выполнении арифметических и логических
операций, а также операций интегрирования.
Вычислитель имел блочную структуру. Он содержал функционально связан-
ные блоки решения задач бомбометания (Б), стрельбы (М, Ц) и вычислительные
устройства общего назначения, смонтированные на общей раме.
Диапазон решаемых задач включал виды режимов бомбометания, аналогич-
ных системе «Сокол», и задачи стрельбы из пушки и неуправляемыми реактив-
ными снарядами по наземной цели в режимах горизонтального полета и пикиро-
вания.
В режимах бомбометания с горизонтального полета и пикирования прицели-
вание осуществлялось методами, примененными в системе «Сокол»: в видимой
зоне визира — совмещением подвижного перекрестия с целью маневром самоле-
та (в режиме «угол сброса»), в невидимой зоне — с «привязкой» к цели в режиме
«угол визирования».
В режимах бомбометания с использованием вынесенного ориентира (с гори-
зонтального полета и при кабрировании) «привязка» к ориентиру производилась
по оптическому визиру, с помощью которого отрабатывались угловые координа-
ты по аналогии с режимом «угол визирования». Через отклонение перекрестия по
азимуту учитывалось наличие бокового ветра.
Выполнив «привязку», летчик выдерживал курс полета до получения сигнала
«сброс». Координаты взаимного положения цели и ориентира определялись с
учетом координат самолета относительно ориентира в момент «привязки».
В режимах стрельбы по наземной цели подвижным перекрестием визира от-
рабатывались угловые координаты точки попадания снаряда, сформированные
вычислителем на основании баллистических характеристик и параметров движе-
ния самолета. Отклонением перекрестия в продольном направлении вниз (угол
места) учитывались понижение снаряда на траектории движения за счет действия
силы тяжести и сопротивления воздуха и угол атаки.
При работе прицела производилось вычисление разрешенной и запрещен-
ной дальностей стрельбы для поражения цели и обеспечения безопасности несу-
щего самолета. Вычисления выполнялись в соответствии с расчетными зонами
этих параметров на основании баллистических данных и параметров движения
самолета. Момент совпадения текущей дальности до цели и указанных дальнос-
тей индицировался летчику сигнальными лампочками на визирной головке.
392
Получив сигнал разрешенной дальности стрельбы, летчик уточнял совмеще-
ние перекрестия с целью и выдавал в прицел сигнал стрельбы (нажатием гашетки
стрельбы на ручке управления самолетом), поступавший в систему управления
оружием.
В прицеле был также предусмотрен режим стрельбы из пушки по воздушным
целям (ВЦ), алгоритм которого был реализован в блоке решения задач стрельбы.
Включение режима и способа прицеливания производилось с пульта управления.
Перемещение перекрестия обеспечивалось в соответствии с заданным режимом.
В качестве воздушных целей предполагались малоскоростные объекты —
транспортные самолеты, вертолеты.
Работа вычислительной системы прицела обеспечивала:
• прием и отработку входных и формирование выходных сигналов;
• формирование баллистических характеристик оружия — авиабомб, ударных
снарядов, НРС;
• формирование угловых координат перекрестия визира в соответствии с ре-
шаемой боевой задачей;
• формирование и индикацию сигналов организации процесса прицеливания
и применения оружия (например, начала ввода в вертикальный маневр, раз-
решения и запрета стрельбы, предупреждения сброса и проведения сброса
авиабомб, начала стрельбы).
3. Прицельно-навигационные комплексы ПРНК-23М и ПРНК-23К
К середине 1970-х годов разрабатываются и вводятся в состав авиационной
техники бортовые цифровые вычислительные машины, имеющие достаточное
быстродействие для решения боевых и навигационных задач и обладающие весо-
выми и габаритными характеристиками, позволяющими размещать их на самоле-
тах штурмовой авиации.
Использование БЦВМ создало условия для расширения диапазона решае-
мых боевых задач, организации информационного поля в кабине, автоматизации
процессов прицеливания и повышения точности.
К середине 1970-х годов на основе БЦВМ формируются и выходят на испы-
тания прицельные системы ударных самолетов штурмовиков, в круг задач кото-
рых входят не только поддержка войск в районе боевых действий, но и нанесение
ударов по тыловым объектам.
Наличие БЦВМ позволило совместить решение навигационных и боевых за-
дач, решение задач стрельбы и бомбометания, а также применения управляемого
оружия в рамках единой системы, имеющей визирные устройства и индикаторы,
вычислительные устройства, датчики информации, устройства управления и сис-
тему управления оружием.
В 1970-е годы БЦВМ конструктивно представляли собой набор функци-
онально связанных вычислительных блоков. В их состав входили преобразовате-
ли входной и выходной информации; долговременное запоминающее устройство
(ДЗУ), содержащее реализованные алгоритмы; оперативная память; арифмети-
ческое вычислительное устройство, обеспечивающее вычислительный процесс.
Блоки ЦВМ размещались на общей раме, на которой устанавливались также бло-
ки питания и аналоговый блок связи с остальными подсистемами комплекса (в
зависимости от модификации машины).
393
Обмен с подсистемами комплекса производился с частотой обновления ин-
формации (приема и выдачи) порядка 10 Гц, быстродействие составляло порядка
106 простых операций (типа сложения) в секунду. ДЗУ была фиксированной и
формировалась на основании магнитных запоминающих элементов. Для внесе-
ния изменений в элементы требовались электромонтажные работы.
В 1970-е годы испытываются и вводятся в эксплуатацию прицельно-навига-
ционные комплексы второго поколения прицельной техники самолетов-штурмо-
виков ПРНК-23М и ПРНК-23К для применения на самолетах типа МиГ-27М и
МиГ-27К [1, 2, 4].
Ядром комплекса ПРНК-23К была БЦВМ (в соответствующей модифика-
ции), взаимодействующая с оптико-телевизионной прицельной станцией типа
«Кайра» и оптическим визирным индикатором типа «Зрачок». Для самолета
МиГ-27К, оснащенного БЦВМ, впервые были разработаны, запрограммирова-
ны, отлажены на комплексе полунатурного моделирования и переданы в про-
мышленность для реализации на БЦВМ все боевые алгоритмы. Руководство ра-
ботами по Ми Г-27 К осуществлял начальник лаборатории И. А. Богуславский,
разработку алгоритмов провели В. Н. Коровин, В. М. Чугунов, Г. Н. Мая-
ков, М. А. Озеров, Н. В. Куланов, программную реализацию выполнили
А. В. Егорова, С. А. Петрова, К. И. Магеровская, Р. Г. Макрак, отработ-
ку телевизионного канала осуществили К В. Обросов, А. Е. Кабанов,
Г. И. Чадов [4].
Комплекс ПРНК-23М был сформирован на основании БЦВМ (типа моди-
фикации машины «Орбита-20»), функционально связанной с оптической визир-
ной головкой типа С-17ВГ и лазерной станцией подсвета и дальнометрирования
типа «Клен-П». Работы по МиГ-27М выполняли сотрудники института
Р. А. Колчанов, С. Е. Макогон, В. Н. Корниенко, К Ю. Щвецов, А. Э. Кор-
женевский, В. Н. Свешников и др. [4].
При решении боевых задач использовалась информация о параметрах дви-
жения самолета, поступившая с соответствующих датчиков (системы воздушных
сигналов, радиовысотомера, доплеровского измерителя, инерциальной курсо-
вертикали, датчиков углов атаки, скольжения и угловых скоростей самолета).
Следует отметить, что развитие прицельного оборудования шло на фоне со-
вершенствования всей авиационной техники, в том числе и информационных
датчиков. С развитием авиационной лазерной техники к этому времени было
разработано оборудование, позволяющее получить не только информацию о ве-
личине наклонной дальности до поверхности (цели), а также обеспечить подсвет
цели лазерным лучом для применения управляемого оружия, наводящегося на
цель по лазерному пятну.
На комплексе ПРНК-23М датчиком наклонной дальности была станция ти-
па «Клен-П», которая обеспечивала измерение дальности и подсвет цели, отсле-
живая положение визирного луча головки по обоим каналам: угломестному и
азимутальному.
В ПРНК-23К данные о наклонной дальности поступали со станции «Кайра».
С разработанных к этому времени модификаций инерциальной гироверти-
кали и доплеровского измерителя путевой скорости и угла сноса в БЦВМ комп-
лексов поступали составляющие путевой скорости самолета в неподвижной
инерциальной системе координат, привязанной к земле, принятой для решения
задач навигации, и составляющие путевой скорости самолета в подвижной, свя-
занной с самолетом системе координат. В процессе решения боевых задач эта ин-
394
формация использовалась для счисления координат, определяющих взаимное
положение самолета и цели.
При решении навигационных задач данные ДИСС использовались для кор-
рекции инерциальных скоростей. Контур функционально связанных систем
ИКВ, ДИСС, БЦВМ являлся основанием системы счисления навигационных
координат.
Оперативный ввод информации о виде решаемой боевой задачи, способах
прицеливания, типе оружия, ввод оперативной навигационной информации
производился с пультов управления, размещенных в кабине. Для управления
процессами прицеливания и режимами работы аппаратуры комплекса использо-
вались устройства управления (различные кнопки), смонтированные в кабине и
на ручке управления самолетом.
Связь БЦВМ с элементами комплекса обеспечивалась устройствами комп-
лексирования (блоки согласования входной и выходной информации). Инфор-
мация о разрешенных и запрещенных режимах работы (например, вход в зоны
запрещения и разрешения применения оружия, разрешения и запрещения вер-
тикальных маневров), о выданных исполнительных сигналах (например, команд
на применение оружия) индицировалась с помощью сигнальных лампочек на ви-
зирной головке.
Ввод исходной информации в БЦВМ, используемой при решении боевых и
навигационных задач, производился с помощью перфокарт. В состав информа-
ции входили баллистические данные оружия, координаты вынесенного ориенти-
ра относительно цели, координаты промежуточных пунктов маршрута и другие
различные константы, используемые в вычислениях.
Для ввода перфокарт использовался специальный пульт (пульт оперативной
подготовки), размещаемый в одном из отсеков фюзеляжа.
В индикаторе типа «Зрачок» прицельная информация формировалась на эк-
ране электронно-лучевой трубки, размещенной в головке, и индицировалась в
поле зрения отражателя оптической системой. Управление индицируемой ин-
формацией производилось БЦВМ.
Комплексы обеспечивали решение задач навигации самолетов при полете с
аэродрома вылета до цели и возвращения на заданный аэродром с коррекцией
пути использованием заданных промежуточных пунктов маршрута. Коррекция
выполнялась с помощью радиотехнических средств ближней и дальней навига-
ции, функционально связанных с БЦВМ, на которой производилась обработка
входной информации, формирование выходной информации и вычисление ко-
ординат самолета.
Боевые задачи решались в основных рабочих диапазонах самолета-штурмо-
вика, включавших режимы маловысотного полета (Н < 1000 м) и режимы атаки
цели с вертикальных маневров при пикировании и кабрировании.
Прицельная система «Кайра» была сформирована на основании оптико-те-
левизионного визирного устройства, обеспечивающего индикацию телевизион-
ного изображения визируемого участка местности и цели на экране телеиндика-
тора типа ИТ-23 (с размером экрана 23 см по диагонали). Индикатор устанавли-
вался в кабине справа от визирной головки.
Углы визирования вычислялись БЦВМ и отрабатывались оптическим уст-
ройством, стабилизированным по крену и тангажу. Визирование цели производи-
лось в связанной с самолетом системе координат.
395
Измерение наклонной дальности и подсвет цели осуществлялись с помощью
лазерного канала, направление излучения которого было оптически совмещено с
направлением визирного луча.
Телевизионный канал станции имел телеавтомат, обеспечивавший захват
изображения цели и автоматическое слежение. При работе со станцией предва-
рительное визирование выполнялось с помощью визирной головки.
Летчик маневром самолета вводил цель в поле зрения головки, визировал ее
и переходил на прицеливание по экрану ИТ-23. Визирные лучи головки и прице-
ла синхронно управлялись БЦВМ. Выполнив визирование на экране, летчик вы-
давал в вычислительную систему комплекса сигнал фиксации начальных коорди-
нат цели (сигнал «привязки» к цели) и переходил на режим синхронного слеже-
ния за целью, обеспечиваемый станцией совместно с БЦВМ. Функционировало
два режима слежения: программно корректируемое слежение (ПКС) и автомати-
чески корректируемое (АКС). Процесс ПКС осуществлялся в режиме счисления
функций начальных координат цели и параметров движения самолета. Режим
АКС обеспечивался захватом цели телеавтоматом, осуществлявшим запоминание
изображения в момент включения и слежение за ним в процессе корреляционной
обработки.
Для коррекции совмещения визирного луча с целью при «привязке» и его
уточнения в процессе ПКС использовалось устройство управления: кнюппель,
размещенный на ручке управления самолетом. Он представлял собой специаль-
ную кнопку, при нажатии на которую вперед-назад, влево-вправо в БЦВМ посту-
пали электрические сигналы, на основании которых вычислялись корректирую-
щие поправки. Уточнив визирование, летчик переходил на режим ПКС и при ус-
тойчивом слежении — на режим АКС для дальнейшего выполнения боевой
задачи.
Станция «Клен-П» обеспечивала формирование лазерного луча для дально-
метрирования и подсвета цели. Лазерным лучом с помощью электромеханиче-
ских следящих систем по сигналам от БЦВМ отслеживались угловые координаты
визирного луча головки.
Прицельными комплексами обеспечивалось решение следующих боевых задач:
• бомбометания и стрельбы (из пушек и НРС) по наземным целям с горизон-
тального полета и пикирования;
• бомбометания в режимах кабрирования;
• применения управляемого оружия с лазерными (ЛГСН) и телевизионными
головками наведения.
Задачи бомбометания и стрельбы в режимах горизонтального полета с пики-
рования решались с помощью визирной головки, визирный луч которой по сиг-
налу БЦВМ отрабатывал соответствующие режиму углы прицеливания в функ-
ции баллистических данных и параметров движения самолета. Положение конца
визирного луча указывало точку попадания, с которой летчик маневром самолета
совмещал цель и производил сброс авиабомб или стрельбу. В режимах бомбоме-
тания, когда вычисленный угол прицеливания попадал в зону, закрытую перед-
ней частью фюзеляжа, на головке устанавливалась фиксированная величина мак-
симального видимого угла места. Боковым углом визирования отрабатывалась
поправка для прицеливания по направлению в функции бокового ветра. Летчик
совмещал луч визирования с целью и выдавал сигнал «привязки» (нажатием
кнопки на ручке управления самолетом), по которому фиксировались начальные
координаты цели, начинался режим счисления. Выдав сигнал «привязки», летчик
396
продолжал полет, выдерживая курс, соответствующий моменту «привязки». Сиг-
нал сброса формировался при достижении дальности сброса на основании бал-
листических данных.
Бомбометание с кабрирования осуществлялось с прицеливанием по задан-
ному ориентиру, относительно которого определялось положение цели. Прице-
ливание выполнялось по визирной головке, в поле зрения которой отрабатывался
постоянный угол места, максимальный для видимой зоны. Летчик маневром са-
молета обеспечивал «привязку» к ориентиру. В момент «привязки» фиксирова-
лось положение самолета относительно ориентира. На основании данных «при-
вязки», заданного положения цели и информации о параметрах движения само-
лета осуществлялся режим счисления координат самолета относительно цели, в
процессе которого вычислялись моменты ввода в вертикальный маневр и приме-
нения оружия. Момент ввода определялся сравнением текущего расстояния до
цели с величиной дальности ввода, определяемой в соответствии с расчетной зо-
ной разрешенных дальностей ввода. Момент применения оружия формировался
при совпадении с дальностью баллистического относа. Разрешенная дальность
вычислялась в функции параметров движения самолета и баллистических данных
оружия на основании алгоритма, характеризующего зону суммарных пролетов
самолета и оружия в принятом рабочем диапазоне маневров самолета.
Прицеливание по направлению обеспечивалось с помощью системы автома-
тического управления самолетом. В момент «привязки» на основании данных о
курсе самолета, взаимном положении ориентира и цели, баллистических данных
оружия, информации о параметрах движения самолета и измеренном ветре фор-
мировался сигнал, характеризующий текущий угол поворота самолета по курсу,
обеспечивающий траекторию движения самолета к цели по линии боевого пути.
В функции этого сигнала в боковой канал САУ выдавался управляющий сигнал
заданного крена для реализации автоматического доворота.
Работа с САУ производилась с помощью органов управления (кнопок), раз-
мещенных на ручке управления самолетом и в кабине, а также размещенного в
кабине пульта. Управление вертикальным движением самолета после «привязки»
осуществлялось при включении САУ в режим стабилизации высоты полета до
поступления сигнала ввода в вертикальный маневр. По этому сигналу в продоль-
ном канале САУ включался режим управления вертикальным маневром. От
БЦВМ в САУ выдавался сигнал управления маневром — сигнал заданной допус-
тимой максимальной вертикальной перегрузки.
При ручном управлении продольным движением перегрузка при выполне-
нии маневра выдерживалась по данным пилотажных приборов. Для ручного уп-
равления прицеливанием по направлению в поле зрения визира летчику индици-
ровался после «привязки» формируемый БЦВМ директорный сигнал в функции
необходимого по условиям выполнения задачи угла доворота. Обнуляя этот сиг-
нал, летчик выводил самолет на линию боевого пути. Аналогичным образом про-
изводилось прицеливание в режиме бомбометания с горизонтального полета с
использованием заданного ориентира. Выполнив «привязку», летчик с помощью
САУ или в директорном режиме выполнял боковую наводку на основании фор-
мируемого БЦВМ сигнала управления. Момент применения оружия определялся
в процессе счисления при совпадении текущего расстояния до цели с дальностью
баллистического пролета.
Применение УР с ЛГСН обеспечивалось лазерной станцией подсвета и даль-
нометрирования «Клен-П» (ПРНК-23М) и системой «Кайра» (ПРНК-23К).
397
В ПРНК-23М наведение выполнялось с помощью оптического визира. Летчик
обнаруживал цель, маневром самолета вводил ее в поле зрения визира, совмещал
с целью перекрестие визира и выдавал в БЦВМ сигнал «привязки», на основании
которого БЦВМ в режиме счисления вырабатывала текущие углы визирования,
обеспечивающие сопровождение цели. Уточнение сопровождения производи-
лось с помощью кнюппеля, на основании сигналов которого формировались
корректирующие поправки. Летчик, получив сигнал предупреждения о прибли-
жении к дальности пуска, выполнял операции подготовки ЛГСН к работе и
включал лазерное излучение станции. Визирный луч ЛГСН синхронно отслежи-
вал направление визирного луча головки. Получив сигнал захвата головкой ла-
зерного пятна, летчик совмещал перекрестие с целью, дожидался сигнала разре-
шения пуска УР и производил пуск. После пуска летчик сопровождал цель пере-
крестием до индицируемого расчетного момента попадания.
В ПРНК-23К, выполнив аналогичным образом предварительное прицелива-
ние с помощью визирной головки, летчик выполнял слежение по экрану телеви-
зионного индикатора. Уточнив слежение в режиме ПКС, летчик переходил на
слежение в режиме АКС, включал излучение в режиме подготовки пуска, получив
сигнал захвата лазерного пятна головкой и разрешения пуска, производил пуск.
БЦВМ обеспечивала синхронность перемещения лучей визирования головки и
станции, а также выдачу информации для управления визирным лучом ЛГСН.
Прицеливание при пуске УР с ТВГСН производилось аналогичным образом
в ПРНК-23К с предварительным использованием головки и последующим пере-
ходом на работу с системой «Кайра». Получив сигнал захвата, летчик по сигналу
разрешения пуска производил пуск. Процесс слежения головкой с момента за-
хвата до пуска контролировался по экрану индикатора ИГ-23.
Сигналы применения оружия, индицирующие начало подготовки оружия и
разрешения и запрета пуска, формировались БЦВМ в соответствии с расчетны-
ми зонами применения оружия на основании параметров режимов применения и
баллистических данных. БЦВМ обеспечивала также режимы стрельбы из пушки
по воздушным малоскоростным целям (типа вертолета), формируя при переходе
на этот режим угловые координаты перекрестия в функции условий полета. Из-
мерение дальности до цели осуществлялось с помощью оптического внешнеба-
зового дальномерного кольца, индицируемого в поле зрения головки.
4. Прицельно-навигационные комплексы ПРНК-54 и ПРНК-24
Ко второму поколению относятся также комплексы ПРНК-54 и ПРНК-24,
разработанные для самолетов Су-17М4 и Су-24 и его модификаций. Комплексы
формировались и испытывались с середины 1970-х и до середины 1980-х годов.
Комплекс ПРНК-54 по структуре и составу оборудования аналогичен
ПРНК-23М. Ядро комплекса составляло БЦВМ типа «Орбита-54» (модификация
машины типа «Орбита-20» применительно к аппаратуре комплекса) функци-
онально связана с оптической визирной головкой типа С-17ВГ и станцией лазер-
ного подсвета и дальнометрирования «Клен-П». Аппаратура комплекса обеспечи-
вала решение боевых задач самолета Су-17М4 по аналогии с ПРНК-23 в режимах
бомбометания и стрельбы по наземным целям с горизонтального полета и с верти-
кальных маневров (пикирования и кабрирования). Работы Су-17М4 выполняли
сотрудники института Р. А. Колчанов, С. Е. Макогон, В. Н. Корниенко,
К. Ю. Швецов, А. Э. Корженевский, В. Н. Свешников и др. [4].
398
В процессе отработки Су-17М4 ВВС поручило рассмотреть и дать предложе-
ния по проблеме безопасности боевых самолетов при нанесении удара по назем-
ным целям. Опыт боевого применения, проводимые учения показали, что ата-
кующие самолеты часто входят в зону разлета осколков собственных боеприпа-
сов. Имели место и столкновения с землей из-за несвоевременного выхода из
пикирования, особенно ведомых. Проблема исчезла, когда была разработана сис-
тема автоматического увода самолета из опасной зоны в случае, если пилот не
реагирует на соответствующую индикацию. Система «Увод» построена по прин-
ципу прогнозирования опасной зоны и выбора оптимального времени отворота с
учетом маневренных возможностей самолета и зоны эффективного применения
оружия. Предложенные алгоритмы прошли всесторонние исследования на комп-
лексе полунатурного моделирования, где использовались имитаторы пилотажных
датчиков и БЦВМ. После получения положительного заключения института сис-
тема «Увод» прошла государственные летные испытания и была установлена на
самолетах Су-17М4. Тактико-технические требования к системе безопасности в
редакции института вошли в состав общих технических требований (ОТТ) ВВС.
Метод и устройство системы безопасности защищены авторским свиде-
тельством № 242603, приоритет от 13.11.85 г. Авторы А. Г. Зайцев, Г. В. Куз-
нецов, Р. А. Колчанов, С. Е. Макогон, В. Н. Корниенко, К. Ю. Швецов,
В. Н. Свешников, А. Э. Корженевский, О. Д. Щербацевич, Е. Л. Рябова,
А. В. Чеботарев и инженеры ОКБ им. П. О. Сухого И. В. Пащинский,
С. Б. Назарычев, А. М. Новоторцев [4].
Решение задач навигации и автоматического управления самолетом обеспе-
чивалось связью БЦВМ с аппаратурой навигационного комплекса и системой
автоматического управления самолетом. Комплекс обеспечивал автоматизацию
прицеливания по направлению в режимах бомбометания с горизонтального по-
лета при использовании вынесенного ориентира и при кабрировании.
При бомбометании с горизонтального полета и на горизонтальном участке
полета при бомбометании с кабрирования БЦВМ вырабатывала сигнал управле-
ния боковым движением самолета в функции заданного крена, обеспечивающий
вывод самолета на линию бокового пути. Для автоматизации вертикального ма-
невра при кабрировании БЦВМ формировала сигнал управления в функции за-
данной максимальной по условиям полета вертикальной перегрузки, который
поступал в продольный канал САУ.
Комплекс ПРИ К-24 был сформирован для обеспечения боевых задач двух-
местного всепогодного самолета-штурмовика Су-24, относящегося к типу удар-
ных самолетов, предназначенных для нанесения ударов по противнику не только
в зоне боевых действий, но и в тылу. Особенностью этого комплекса было нали-
чие в составе аппаратуры радиолокационной станции переднего обзора типа
«Орион». Локатор имел два диапазона радиолокационного излучения и обеспе-
чивал дальнее обнаружение и прицеливание по радиоконтрастным наземным це-
лям (объекты типа кораблей, мостов и т. п.) и прицеливание по малоразмерным
целям во втором более коротковолновом диапазоне на дальностях порядка 10 км
(и менее).
С помощью локатора производилось измерение координат целей по даль-
ности и азимуту. Функциональная связь локатор — БЦВМ — САУ позволяла
комплексу решать задачи бомбометания в диапазоне режимов самолетов бомбар-
дировочной авиации с автоматизацией процесса прицеливания по направлению.
399
Наличие локатора обеспечивало самолету всепогодность, а также возможность
применения УР с РГСН.
Для решения задач стрельбы по наземным целям (пушка, НРС) и бомбоме-
тания в рабочих диапазонах самолетов-штурмовиков использовался оптический
визир типа ППИ (прицельно-пилотажный индикатор), в поле зрения которого
формировалось подвижное прицельное перекрестие, управляемое БЦВМ, и пи-
лотажная информация. Прицеливание с его помощью выполнялось по аналогии
с рассмотренными ранее комплексами этого поколения.
В процессе модификации комплекса (к концу 1970-х — началу 1980-х годов) в
его состав было введено оптико-телевизионное визирное устройство типа станции
«Кайра». Наличие этой станции позволяло решать задачи применения управляе-
мого оружия с ЛГСН и иметь информацию о наклонной дальности от лазерного
канала. Решение боевых задач обеспечивалось на основе БЦВМ типа «Орбита-20»
(в модификации применительно к комплексу «Орбита-58»), функционально свя-
занной с радиолокационной станцией (типа «Орион»), оптико-телевизионным
визирным устройством (типа «Кайра») и прицельно-пилотажным визиром (типа
ППИ). Решение навигационных задач обеспечивалось связью БЦВМ с навигаци-
онным оборудованием самолета. Для обнаружения и выхода на ориентиры при
полете по маршруту помимо радионавигационного оборудования также использо-
вался локатор.
Разработку алгоритмов провели В. Н. Коровин, В. М. Чугунов, Г. Н. Ма-
яков, М. А. Озеров, Н. В. Куланов, О. И. Иващенко, отработку телевизионно-
го канала осуществили К В. Обросов,А. Е. Кабанов, Г. И. Чадов. Большую ра-
боту по созданию КПМ и отработке на нем бортового оборудования Су-24М выпол-
нил В. М. Цветков. Отработкой системы Су-24М при моделировании руководил
В. Н. Коровин [4].
Автоматическое управление процессом прицеливания при бомбометании
выполнялось по аналогии с ранее рассмотренными комплексами с помощью
САУ. Ввод начальных координат целей в зависимости от условий решения и вида
боевой задачи (стрельба, бомбометание, применение УО) производился от со-
ответствующих визирных устройств: ППИ, оптико-телевизионной станции, ло-
катора.
Связи БЦВМ прицельных комплексов с остальной аппаратурой (за исклю-
чением локатора) реализовывались в аналоговом виде. Обработка входной и вы-
ходной информации производилась с помощью соответствующих преобразовате-
лей. Работа с локатором в ПРИ К-24 обеспечивалась вторым членом экипажа.
Особенностью комплекса было наличие в составе оборудования специаль-
ной радиолокационной станции, обеспечивавшей индикацию и автоматический
облет препятствий по направлению полета при выполнении маловысотных поле-
тов (типа «Рельеф»). Станция производила измерение наклонной дальности, в
направлении полета под фиксированным углом места. Эта информация сравни-
валась вычислительной системой с величиной заданной опасной дальности и при
совпадении выдавался сигнал на выполнение вертикального маневра с набором
высоты, который индицировался для ручного управления и при автоматическом
управлении поступал в продольный канал САУ. Когда дальность до препятствия
становилась больше заданной, сигнал обнулялся и полет выполнялся на достиг-
нутой высоте, пока луч станции не встречал следующего препятствия, требующе-
го повторения маневра.
400
5. Прицельно-навигационный комплекс ПРНК-56
В начале 1980-х годов начинает разрабатываться и испытываться ПРНК для
модификации самолета-штурмовика Су-25, обеспечивающего помимо решения
основных боевых задач легкого штурмовика, рассмотренных ранее, применение
точного управляемого оружия с лазерным управлением для поражения малораз-
мерных подвижных наземных целей, например танка [1,2].
Данный ПРНК был сформирован на основании использования оптико-те-
левизионной станции, в которой оптико-телевизионный канал оптически совме-
щен с лазерным каналом, работающим в режимах наведения противотанковых
ракет с лазерным управлением и управляемого оружия с Л ГСН, а также в режиме
лазерного дальномера.
В режиме наведения противотанковых ракет станция формировала лазерный
луч (лазерное поле) диаметром порядка 4 м, направляемый на цель, в котором
следовала ракета (после пуска), управляемая информацией, содержащейся в ла-
зерном излучении. Приемник излучения размещался в хвостовой части ракеты.
Управление лучом и слежение за целью обеспечивались вычислительным комп-
лексом. Оптический канал имел телескопическую систему с 23-кратным увели-
чением и был рассчитан на обнаружение малоразмерных целей на дальностях
до 10 км.
Оптическое изображение воспринималось телеканалом и воспроизводилось
в виде телевизионного изображения на экране индикатора типа ИТ-23, разме-
щенного в кабине под приборной доской справа от оптического визира. Опти-
ко-телевизионный канал имел два поля зрения: широкое (порядка 4°) и более уз-
кое для точного слежения (порядка 1°). Стабилизация оптической системы обес-
печивалась силовым гироскопическим устройством.
Визирное устройство станции конструктивно оформлено в виде моноблока,
на шасси которого размещаются гиростабилизированная оптическая система,
приемное устройство телевизионного канала и блок формирования лазерного из-
лучения.
Оптическая система включает телескопический канал и зеркало, обеспечи-
вающее отклонение визирного луча в продольном и азимутальном направлениях.
Управление зеркалом осуществляется электромеханическим приводом по сигна-
лам управления от вычислительной системы.
Визирное устройство функционально связано с вычислительной системой
станции, включающей свою бортовую цифровую вычислительную машину (типа
модификации БЦВМ «Орбита-20»), цифроаналоговые и вычислительные блоки,
выполняющие обработку сигналов телеканала станции и формирование изобра-
жения на экране телеиндикатора, захват образа цели и автоматическое его сопро-
вождение (организацию работы телеавтомата), управление формированием ла-
зерного излучения в режимах пуска ракет и дальнометрирования, формирование
сигналов управления противотанковыми ракетами по лазерному каналу.
Алгоритмы, реализованные в БЦВМ станции, обеспечивали управление на-
ведением противотанковых ракет, управление наведением ракете ЛГСН и ТГСН,
а также решение задач бомбометания и стрельбы по наземной цели (пушка,
НРС). БЦВМ станции могла быть использована также и для решения задач нави-
гации.
Станция работала в контуре прицельно-навигационного комплекса самоле-
та, который включал центральную бортовую цифровую вычислительную машину
401
(типа модификации «Орбита-20»), функционально связанную со следующей ап-
паратурой:
• датчиками параметров движения самолета;
• системой индикации лобового стекла;
• системой управления оружием;
• системой контроля и индикации функционирования аппаратуры ПРНК;
• системой автоматического управления самолетом;
• устройством управления режимами работы ПРНК и процессами прицели-
вания.
В качестве датчиков информации использовалась соответствующая аппара-
тура, разработанная и используемая на начало 1980-х годов, обладающая лучши-
ми точностными характеристиками и обеспечивающая обмен информацией с по-
требителями в цифровом виде.
В состав датчиков входили:
• система воздушных сигналов (воздушная скорость и барометрическая высо-
та), доплеровский измеритель (составляющие путевой скорости самолета),
не выбиваемая при эволюциях самолета инерциальная курсовертикаль (со-
ставляющие путевой скорости самолета в неподвижной ортодромической
системе координат и угловые координаты самолета);
• радиовысотомер (геометрическая высота до поверхности);
• датчики углов атаки, скольжения и угловых скоростей самолета.
Система индикации лобового стекла была сформирована на основании оп-
тического индикатора лобового стекла (типа ИЛС-31), работающего совместно
со специализированной цифровой вычислительной машиной.
Оптический индикатор представлял собой визирную головку, в поле зрения
отражателя которого воспроизводилась подвижная прицельная метка, различная
прицельная информация в зависимости от вида боевого режима, информация о
параметрах движения самолета (в виде оцифрованных шкал), а также различные
параметры управления (в виде соответствующих меток и символов).
Формирование воспроизводимой на ИЛС информации производилось на
экране электронно-лучевой трубки в визирной головке на основании управляю-
щих сигналов вычислительной машины. Стабилизация подвижного перекрестия
при эволюциях самолета обеспечивалась вычислительной системой комплекса,
формированием его координат с учетом параметров угловых перемещений са-
молета. Перемещение прицельной метки производилось по углу места и азиму-
ту в системе координат, связанной с самолетом, по сигналам вычислительной
системы.
Система контроля обеспечивала индикацию летчику параметров функци-
онирования аппаратуры комплекса и самолетного оборудования для контроля
режимов работы и исправности оборудования в процессе выполнения задачи.
В состав этой системы входили устройства, осуществляющие сбор и обработ-
ку контролируемой информации и устройства индикации (световое табло, сиг-
нальные лампочки), размещаемые в кабине.
Устройства управления (пульты, различные кнопки и переключатели, уста-
новленные в кабине) использовались для задания режимов работы комплекса,
ввода вида боевой задачи, типа применяемого оружия (пушка, НРС, УР), выдачи
различных управляющих признаков и разовых команд.
Центральная вычислительная машина во взаимодействии с периферийной
вычислительной машиной ПВМ и ее оборудованием обеспечивала решение всего
402
объема навигационных и боевых задач самолета-штурмовика, бомбометания и
стрельбы по наземной цели (пушка, НРС) в режимах горизонтального полета и с
пикирования, бомбометания с кабрирования, применения управляемого оружия
(УО) с горизонтального полета и при пикировании.
В состав применяемого с комплексом УО входило УО с ЛГСН, ТВГСН и
ТГСН, а также противотанковое УО.
При отказах в ЦВМ решение боевых и навигационных задач дублировалось
ПВМ, в которой были реализованы соответствующие алгоритмы, а также обеспе-
чивалось дублирование связей с подсистемами.
В ПРНК использовались цифроаналоговые функциональные связи между
подсистемами. Числовая информация и признаки состояния передавались дву-
полярным, последовательным цифровым кодом. Разовые команды, управляю-
щие признаки и сигналы связи с устройствами управления и исполнительными
устройствами формировались в аналоговом виде.
Решение навигационных задач обеспечивалось на основании функциональ-
ных связей вычислительной системы сдатчиками параметров движения самолета
и подсистемами радиотехнической навигации.
Прицеливание при бомбометании и стрельбе осуществлялось с помощью оп-
тического визира. В видимой зоне визира вычислительная система формировала
положение прицельной метки (небольшой круг с центральной точкой), указы-
вающее точку попадания оружия, которую летчик маневром самолета совмещал с
целью и подавал сигнал сброса или производил стрельбу.
В режимах, когда вычисленное положение точки попадания попадало в зону
затенения носовой частью фюзеляжа, в поле зрения визира индицировалась при-
цельная информация, воспроизводящая метку в положении, соответствующем
максимальному значению угла места в видимой зоне визира и исходящую от нее
линию, указывающую направление линии и боевого пути (изображение в виде
«шпаги»).
Летчик маневром самолета совмещал цель с концом «шпаги» и обеспечивал
перемещение цели вдоль этой линии в процессе сближения до момента совмеще-
ния с меткой. При совмещении выдавал сигнал «привязки», по которому вычис-
лительная система фиксировала начальные координаты цели и осуществляла вы-
дачу команды на применение оружия в процессе счисления.
До появления сигнала этой команды летчик после «привязки» выдерживал
курс постоянным.
При выполнении бомбометания с кабрирования прицеливание по направле-
нию осуществлялось с помощью САУ. Летчик производил «привязку» к вынесен-
ному ориентиру (ВТ) или цели по метке в поле зрения визира, индицируемой в
положении максимального угла места для видимой зоны визира. Далее управле-
ние боковым движением самолета передавалось САУ.
Вычислительная система ЦВМ ПВМ на основании начальных координат са-
молета относительно ориентира по данным «привязки» заданного относительно
ориентира положения цели (при использовании ориентира), баллистических
данных, расчетного положения точки ввода в маневр, параметров движения са-
молета и информации о ветре формировала параметр управления боковым дви-
жением, в функции которого в боковой канал САУ выдавался сигнал заданного
крена. При обнулении параметра управления самолет выходил на линию боевого
пути.
403
Момент ввода в вертикальный маневр определялся в режиме счисления по
достижению расчетной дальности, вычисляемой в соответствии с расчетной зо-
ной разрешенных дальностей ввода в функции баллистических данных оружия и
рабочего диапазона режимов бомбометания.
Управление продольным движением до момента ввода осуществлялось в ре-
жиме стабилизации высоты полета летчиком или с помощью САУ.
Вертикальный маневр выполнялся летчиком при управлении от САУ, в про-
дольный канал которой с вычислительной системы поступал сигнал в функции
заданной вертикальной перегрузки.
Сигнал на применение оружия (сброса) формировался в режиме счисления
при совпадении текущей дальности до цели с величиной баллистического пролета.
Аналогичным образом осуществлялось прицеливание в режимах бомбомета-
ния с горизонтального полета с использованием ВТ. Управление продольным
движением выполнялось до сброса в режиме стабилизации высоты.
Применение УО обеспечивалось системой. При наличии у системы узкого
поля зрения предварительное наведение выполнялось по ИЛС. Произведя пред-
варительную привязку к цели в поле зрения ИЛС, летчик уточнял ее по широко-
му полю зрения системы, индицируемому на экране ИТ-23.
Вычислительная система обеспечивала синхронное перемещение лучей ви-
зирования оптического индикатора и системы.
Уточнив «привязку» по широкому полю зрения, летчик включал систему в ре-
жим программно-корректируемого слежения цели визирным лучом системы. Та-
кое положение осуществлялось путем управления движением визирного луча в ре-
жиме счисления на основании данных «привязки» и информации об условиях по-
лета. Далее производилось уточнение слежения по узкому полю зрения. Система
формировала в центре экрана прицельную рамку, в которой в процессе слежения
удерживалась цель. Размеры рамки могли изменяться летчиком по мере увеличе-
ния изображения цели в процессе сближения. Изменение размеров осуществля-
лось с помощью устройства, смонтированного на ручке сектора газа в кабине.
Уточнение слежения за целью обеспечивалось сигналами от специальной
кнопки (кнюппеля), установленной на ручке управления самолетом.
На основании сигналов кнюппеля вычислительная система корректировала
положение и скорость перемещения визирного луча. Убедившись в устойчивом
слежении, летчик включал телеавтомат станции, обеспечивающий «захват» теле-
изображения цели и ее автоматическое сопровождение визирным лучом станции
по сигналам управления от телеавтомата в режиме автоматически корректируе-
мого слежения. Получив сигнал «захвата» телеавтоматом, летчик выполняет опе-
рации по подготовке УО к применению.
В режимах применения УО с Л ГСН летчик на основании сигнала «захвата»
цели телеавтоматом включал лазерное излучение и при наличии сигнала захвата
от головки по сигналу на разрешение пуска производил пуск УО, контролируя
слежение за целью по экрану телеиндикатора и корректируя его кнюппелем.
Станция обеспечивала слежение за целью лазерным пятном для наведения УО.
При пуске УО с ТГСН летчик после захвата цели телеавтоматом при получе-
нии сигнала «захвата» цели ТГСН переходил на контроль слежения за целью ви-
зирным лучом головки, который на основании сигналов, формируемых вычисли-
тельной системой, синхронно отслеживал движение визирного луча системы. На
экран теле индикатора по получении сигнала «захвата» от головки транслирова-
404
лось формируемое ею телеизображение. По поступлению сигнала на разрешение
пуска летчик выполнял пуск и уходил от цели.
При пуске противотанковых ракет после захвата цели телеавтоматом при вы-
ходе на разрешенную дальность пуска летчик включал лазерный канал управле-
ния, формировавший управляющий луч, и производил пуск. Управляющий луч,
в котором следовала ракета, отслеживал цель синхронно с визирным лучом сис-
темы, работающей в режиме автоматического слежения.
В режимах пуска УО с Л ГСН и ПТУР летчик пилотировал самолет в процес-
се слежения за целью до момента попадания.
Работы по наземной отработке обзорно-прицельного комплекса Су-25Т
и сопровождению летных испытаний выполняли ведущие специалисты институ-
та Р. А. Колчанов, В. Н. Корниенко, К. Ю. Швецов, И. Л. Фельдштерн,
И. С. Кикин, Д. В, Агуреев, В. И. Добровольский, А. Э. Корженевский,
В. Н. Свешников, С. А. Мартынов, Г. Н. Митрофанова и др. [4]
4.1.5. СИНТЕЗ ЕДИНОГО
БАЛЛИСТИЧЕСКОГО АЛГОРИТМА
ДЛЯ ВСЕХ ВИДОВ НЕУПРАВЛЯЕМЫХ
АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ1
В связи с особенностями применения неуправляемых авиационных средств
поражения (НАСП) — широкими диапазонами высоты и скорости ЛА, углов и
дальности цели, наличием в общем случае угла между вектором скорости ЛА и
вектором начальной скорости АСП, широким ассортиментом объектов с прин-
ципиально разными баллистическими схемами и необходимостью их примене-
ния с помощью единой прицельной системы ЛА — требуются специфические ме-
тоды решения баллистических задач и форм представления результатов решения.
Во внешней баллистике НАСП рассматривается движение объекта под дей-
ствием трех сил — аэродинамической, гравитационной и реактивной и ставится
цель — дать на основе анализа движения ответы на ряд прикладных вопросов,
важнейшие из которых связаны с подготовкой данных для решения задач прице-
ливания при воздушной стрельбе и бомбометании [5].
В качестве примеров можно назвать разработанные в авиационной внешней
баллистике методы вычисления траекторий снарядов при воздушной стрельбе,
методику составления таблиц для бомбометания, алгоритмы баллистических за-
дач, реализуемые в бортовых вычислителях прицельных систем ЛА, методы опре-
деления баллистических характеристик различных объектов из условий согла-
сования решения уравнений реальных математических моделей движения с ре-
шением уравнений схематической модели, реализованной в прицельной сис-
теме, и т. д.
В историческом плане задачи обеспечения применения каждого вида НАСП
(пушки, бомбы, НАР) решались обособленно — с помощью разнотипных при-
борных средств (стрелковых прицелов и бомбардировочных прицелов) и алгорит-
мов решения задачи прицеливания.
Заманчивым выглядит поиск универсального решения — синтез единого
баллистического алгоритма для всех видов НАСП, когда типы применяемых
1 Раздел написан С. Г. Хохловым.
405
ДСП оперативно вводятся на борт в процессе подготовки полетного задания, а
конкретный применяемый тип выбирается экипажем простым переключением
органов управления оружием. Такая возможность появилась с ростом характе-
ристик бортовых вычислительных систем в процессе их развития.
Для синтеза алгоритма была предложена модель пространственного движе-
ния авиационного средства поражения, в общем случае представленная следую-
щей системой уравнений:
для активного участка траектории
x = W; W=/pV-g;
для пассивного участка при наличии подъемной силы
V>X = -fSXfky- ^У^х/^
Ч = -Л( Уу - к у игоР) + я3 - я;
wz = -/c^; (4.1)
для пассивного участка без подъемной силы
WX = -fSX~ ^у^х/^
= -f^y + ^2/Л3 -S\
где V = W — U — вектор воздушной скорости; W — вектор путевой скорости; U —
вектор скорости ветра; fc = ccx(M)pV — функция сопротивления; V =
= + Уу + ~ модуль воздушной скорости; М = У(\/а3)уа — число Маха;
с = (с0 + kctY(p — нормированный баллистический коэффициент; р, \/а3 — па-
раметры состояния атмосферы\fky = 1 + — параметр подъемной силы;
Игор = л/И? + ~ г°Ризонтальная составляющая воздушной скорости; R3 —
средний радиус Земли; f = (-fc + PmIV)$m — функция суммарного ускорения;
Ф/w = 1/( 1 — ~ отношение начальной массы ДСП к текущей; Рт = Рс^/т^ —
параметр тяговооруженности; тт^ = т/т^ — относительный секундный расход
топлива; Рср — средняя тяга двигательной установки, определяемая как отноше-
ние суммарного импульса и времени работы ДУ; ку — коэффициент подъемной
силы; ур = р(//)/рст(//), уа = ^Т{Н)/ — коэффициенты, учитывающие
возмущенный характер атмосферы по плотности воздуха ур и температуре уа;
Т(Н), р(Н) — температура и плотность воздуха на высоте бросания ДСП;
Тст(Н), рст(//) — соответствующие параметры стандартной атмосферы.
Система (4.1) решается в горизонтальной системе координат, ось ОХ которой
совпадает с проекцией вектора путевой скорости на горизонтальную плоскость.
Как следует из системы уравнений, в баллистическом отношении модель об-
ладает свойством универсальности, так как она описывает траекторию движения
любого вида из состава неуправляемых средств вооружения:
406
• авиабомб;
• неуправляемых авиационных ракет;
• артиллерийских снарядов;
• разовых бомбовых кассет.
Наличие в системе (4.1) тяги двигательной установки и переменной массы
позволяет использовать ее не только для описания пассивных участков траекто-
рии, но и законов движения неуправляемых авиационных ракет и активно-реак-
тивных снарядов на активном участке, а также движения авиабомб при наличии
разгонных или тормозных ступеней бетонноубойной авиационной бомбы.
Для прекращения интегрирования используются следующие четыре пара-
метра: время работы ступени, высота срабатывания исполнительных механизмов,
скоростной напор (или индикаторная скорость) и дальность стрельбы.
Помимо этого, допускается расчет траекторий баллистических ступеней с
переменным по времени баллистическим коэффициентом = const и при нали-
чии подъемной силы с постоянным аэродинамическим качеством. Эти факторы
являются нетрадиционными для бортовых баллистических алгоритмов.
Диапазоны изменения скорости, высоты и траекторного угла движения ох-
ватывают широкую зону аэродинамического коридора. По высоте это соответст-
вует диапазону 1000...30 000 м, по скорости — числу М < 5, а по углу наклона
траектории — (—90 < X < +90°). При реализации переключения ступеней по вы-
соте это гарантирует возможность построения траектории при атаке целей на лю-
бой высоте и при любой высоте подрыва боевой части над целью.
Число баллистических ступеней ничем не ограничивается, что позволяет
рассматривать в качестве самостоятельной ступени и случай включения в работу
какого-либо датчика, например датчика скоростного напора.
Не ограничивается и диапазон изменения баллистического коэффициента,
что допускает расчет траекторий медленно падающих средств. На установивших-
ся участках падения средств с тормозным парашютом система (4.1) допускает по-
лучение аналитического решения, что соответствует повышению быстродействия
при расчете баллистики.
Задающим параметром в рассматриваемой модели является путевая ско-
рость, что позволяет учитывать переменный по высоте падения бомбы ветер, за-
даваемый градиентом, также переменным по высоте.
В модели используется закон сопротивления общего вида СХ(М), что делает
возможным учет не только групповых, но и индивидуальных законов сопротив-
ления боеприпасов.
Кроме того, в модели отсутствуют ограничения на дальность применения
оружия. Это делает возможным использование ее в прицельно-навигационных
комплексах новых режимов (пушечная стрельба, пуски НАР с кабрирования).
На базе предложенной В. М. Чугуновым модели внешней баллистики
НАСП в конце 1990-х годов коллективом под его руководством был синтезирован
алгоритм информационного обеспечения применения НАСП, реализованный в
бортовых комплексах перспективных самолетов фронтовой авиации.
Анализ содержательной стороны информационного обеспечения показыва-
ет, что рассматриваемый алгоритм обладает целым рядом новых свойств, выгодно
отличающих его от алгоритмов аналогичного назначения, реализованных в су-
ществующих комплексах. К такого рода достоинствам относится представление
баллистического портрета НАСП во всей полноте, которая только возможна в
407
рамках основной задачи внешней баллистики, т. е. такой задачи, в которой дви-
жение АСП представляется как движение материальной точки, но обладающей
всеми инерционными и силовыми свойствами реального средства. Нет сомнения
в том, что данное представление баллистики НАСП в классе бортовых баллисти-
ческих алгоритмов является одновременно предельно возможным вообще, по-
скольку более высокий уровень представления (например, с помощью полных
математических моделей, рассматривающих не только движение центра масс
АСП, но и его движение относительно центра масс) ни теоретически, ни тем бо-
лее практически, скорее всего, на борту ЛА в сколь-нибудь обозримом будущем
достигнут быть не может. Иначе говоря, используемое в БЦВМ информационное
описание баллистического портрета НАСП является идеологически предельно
полным.
Развивая это положение, к вышесказанному можно добавить следующие ча-
стные особенности математического обеспечения БЦВМ. В данной версии мате-
матического обеспечения баллистического спецвычислителя реализован новый
подход, выражающийся в том, что уравнения движения НАСП решаются в соот-
ветствии с его индивидуальной баллистической моделью, принципиально спо-
собной учесть все без исключения особенности баллистической схемы конкрет-
ного АСП, а именно:
• в расчетном алгоритме предусмотрено деление траектории НАСП на естест-
венные участки без принципиальных ограничений на число участков (в
предшествующих алгоритмах траектория делилась не более чем на два участ-
ка, из-за этого НАСП с большим числом участков не вписывалось в расчет-
ную схему и это приводило к недопустимым методическим ошибкам);
• алгоритм допускает разнообразие условий переключения участков траекто-
рии НАСП (ранее допускалось переключение только по временному усло-
вию, однако существует целый ряд средств, переключающихся по участкам
высоты полета, и др.);
• в алгоритме предусмотрен широкий диапазон изменения числовых значений
для условий переключения участков траектории (ранее приемлемые методи-
ческие ошибки достигались только при сравнительно малой продолжитель-
ности первого участка — не более нескольких секунд, что характерно только
для АБСП с ТУ, однако кроме них имеется большое число НАСП, например
все РБК, у которых длительность первого участка траектории достигает не-
скольких десятков секунд);
• в отличие от прежних алгоритмов, рассчитанных в лучшем случае только на
ступенчатое изменение силы лобового сопротивления, в анализируемом ал-
горитме представлена широкая система сил, действующих на АСП на том
или ином участке траектории, включающая тягу разгонного и тормозного
двигателей, подъемную силу, изменяющуюся по программе силу лобового
сопротивления и др.;
• в алгоритме нет допущений, ограничивающих порядок чередования баллис-
тических свойств НАСП на смежных участках траектории. В предыдущих ал-
горитмах вычислительные процедуры строились на допущении, что на вто-
ром участке траектории сила лобового сопротивления резко увеличивается
(в несколько десятков раз). На самом деле многие средства не соответствуют
этому допущению, и сила лобового сопротивления при переходе на новый
участок может даже упасть;
408
• изложенные выше свойства алгоритма позволяют использовать введенные
баллистические характеристики постоянными значениями без их корректи-
ровки в широком диапазоне условий применения НАСП, что в значитель-
ной мере снимает существовавшую ранее проблему связывания летчика в
свободе маневра ЛА на этапе работы по цели. В прежних алгоритмах в силу
их несовершенства эта проблема была обусловлена необходимостью ввода
так называемых эквивалентных баллистических характеристик, численные
значения которых существенно зависели от реально складывающихся в по-
лете условий. Но поскольку вводились они на Земле еще до вылета самолета,
то всякое отклонение условий полета от предполагаемых приводило к значи-
тельным методическим ошибкам. Предпринятые в некоторых комплексах
попытки учесть это обстоятельство оперативной корректировкой введенной
на земле баллистической характеристики большого эффекта не дали, так как
раз и навсегда «прошитый» в БЦВМ алгоритм корректировки не был в со-
стоянии адекватно отразить все многообразие баллистических свойств раз-
личных НАСП.
Таким образом, в представленном алгоритме отсутствуют принципиальные
ограничения на тип баллистической схемы НАСП, численные значения его бал-
листических характеристик и условия применения, что существенно расширяет
возможности ЛА.
В математическом и программном обеспечении БЦВМ реализованы три ре-
жима ввода баллистических характеристик НАСП, обеспечивающие принципи-
альную возможность точного применения не только всех без исключения имею-
щихся НАСП (режим кодового ввода), но и тех, которые могут появиться в доста-
точно далекой перспективе, а также трофейных АСП (режимы оперативного и
индивидуального ввода). Таким образом, можно впервые говорить о реальном
выполнении «Решения межведомственного совещания о перспективной системе
баллистического обеспечения». В данном алгоритме впервые нашел практиче-
ское воплощение принцип В. М. Межуева по оперативному формированию
заданного закона сопротивления путем композиции его из ограниченного набора
так называемых опорных законов. При этом разработчиком программного обес-
печения БЦВМ этот принцип конкретизирован и распространен на широкую но-
менклатуру имеющихся НАСП с учетом необходимых ограничений по быстро-
действию алгоритма и требований к точности расчетов. Тем самым открыта воз-
можность решения баллистической задачи с использованием не только всех без
исключения действующих в настоящее время законов сопротивления (в предыду-
щих алгоритмах было реализовано не более четырех законов сопротивления), но
и оперативного ввода любого нового закона сопротивления, если появится ка-
кое-либо новое перспективное средство.
В анализируемом алгоритме предусмотрена принципиальная возможность
учета реального разреза атмосферы (включая диаграмму ветров) с различной сте-
пенью детализации и полноты, ориентированной на способность комплекса бор-
тового оборудования ЛА по обеспечению БЦВМ необходимой информацией.
Перечисленные достоинства характеризуют содержательную сторону инфор-
мационного обеспечения.
Что же касается его программной реализации в представленной для анализа
версии, то в качестве безусловного достоинства следует отметить высокое быст-
родействие алгоритма.
409
Вместе с тем проявились и недостатки, над ликвидацией которых надо рабо-
тать при проектировании следующих версий программного обеспечения. Заме-
тим, что основополагающим принципом организации информационного обеспе-
чения современных программных систем является разделение программ и данных.
Такой подход хорошо известен и позволяет разрабатывать алгоритмическую и
программную части системы независимо от фактического содержания информа-
ционной части. В этом случае при глубоко проработанной на начальной стадии
проектирования системы структуре данных их добавление и обновление (модифи-
кация) никак не связаны с изменением кода программы, т. е. не требует его пере-
компиляции. Это особенно важно для бортового баллистического алгоритма
(ББА), поскольку всякое обновление программной части бортового вычислителя
неизбежно влечет за собой затяжной этап новых согласований, испытаний и т. п.
Оцениваемое программное обеспечение унифицированного ББА на данном этапе
его разработки с этой точки зрения имеет трудную технологию, так как содержа-
ние бортового баллистического архива встроено непосредственно в программный
код, что делает неизбежной компиляцию программы при изменении данных архи-
ва. Перспективным в плане организации хранения информации в баллистическом
архиве представляется использование реляционной модели данных, являющейся
основой большинства современных систем управления базами данных. Предпола-
гаемая, существенно более совершенная и перспективная элементная база БЦВМ
(386 процессор) допускает применение практически любой СУБД из широкого
спектра программного обеспечения ПЭВМ. Следует отметить, что реляционные
СУБД удовлетворительным образом обеспечивают требуемую полноту и мини-
мальную избыточность хранимых данных, автоматическую поддержку их непро-
тиворечивости и целостности при относительной простоте использования.
Если с этих позиций оценивать бортовой баллистический архив, то необхо-
димо отметить значительную избыточность информации. В качестве отдельных
примеров последней могут служить следующие факты: для НАСП с управляемы-
ми ступенями дважды вводится условие конца участка траектории — в баллисти-
ческих характеристиках для ступени и в месте анализа признака управления сту-
пенью; для каждого участка траектории в обязательном порядке в архиве хранит-
ся (или должна быть введена оперативно) информация о Гк, Нк, даже если она и
не используется (в этом случае эти параметры все равно должны задаваться нуле-
выми значениями). Вообще задание условия конца участка траектории организо-
вано не лучшим образом. Так, ограничение по трем параметрам tK, Нк, QK делает
невозможным закончить расчет траектории, например по заданной дальности
£>к, что является обязательным условием при применении АПС и НАР.
Затруднено или невозможно задание сложных логических условий по схемам
«и», «или». Поэтому представляется целесообразным хранить условия в символь-
ном виде (/к > 1,2; Нк < 100 и т. п.) и распаковывать их при считывании из архива.
Что касается непротиворечивости и целостности хранимых в анализируемом ар-
хиве данных, то фактический материал может быть проконтролирован только
вручную при его занесении в архив. Ясно, что это непроизводительно и чревато
пропуском ошибок оператором. В то же время СУБД имеют встроенные средства
контроля, позволяющие резко повысить оперативность ввода исходных данных и
избежать при этом значительного числа ошибок субъективного характера.
Отмеченные недостатки являются «болезнями роста» нового подхода к со-
зданию единого баллистического алгоритма.
410
4.2. Применение
авиационных средств поражения
с телесистемами наведения1
4.2.1. ОСОБЕННОСТИ ПРИМЕНЕНИЯ
УПРАВЛЯЕМЫХ РАКЕТ КЛАССА «ВОЗДУХ-ПОВЕРХНОСТЬ»
С ТЕЛЕКОМАНДНЫМ НАВЕДЕНИЕМ
Применение управляемых ракет с телекомандным наведением для пораже-
ния наземных целей особого значения и важности является одной из основных
задач самолетов фронтовой ударной авиации (ФУА).
Для поражения стационарных наземных целей, расположенных в глубине
фронтовой полосы и защищенных комплексом ЗУР, применяется оружие с теле-
визионно-командной системой наведения. Эта система дает возможность повы-
сить дальность пуска и существенно снизить вероятность поражения самоле-
та-носителя средствами ПВО.
Увеличение эффективной дальности управляемого оружия с телевизион-
но-командной системой наведения стало возможным с появлением устойчивой
широкополосной системы передачи телевизионных изображений с ракеты на са-
молет.
Для наведения УР и управляемых авиабомб используется двухканальная ап-
паратура связи и наведения, имеющая видеоканал, по которому с борта ракеты
или бомбы передается телевизионное изображение, и командный канал, обеспе-
чивающий передачу команд наведения на конечном участке траектории. Пуск
можно осуществлять на предельно малых высотах [6, 7].
Применение оружия посредством телевизионно-командной системы осу-
ществляется в несколько этапов. На первом этапе идет подготовка оружия к при-
менению, ракета находится под крылом самолета. По достижении заданной точ-
ки маршрута бортовые системы самолета включают электропитание комплекса,
производятся прогрев оборудования и контроль исправности всех систем. В слу-
чае положительного результата тестирования начинается следующий этап — вы-
бор экипажем момента пуска ракеты и формирование пусковых команд. После
успешного схода ракеты на третьем этапе устанавливается связь контейнер—ра-
кета. Затем начинается следующий этап — полет ракеты по маршевому участку.
Полет проходит по заданной программе с помощью инерциальной навигацион-
ной системы ракеты, а телевизионная камера ракеты используется для обзора
местности по маршруту полета и передачи телевизионного изображения на само-
лет-носитель. При необходимости летчик-штурман может скорректировать курс
и высоту полета ракеты. При полете по маршруту оператор должен обнаружить
ориентир (или группу ориентиров) и, управляя ракетой, довести ракету до района
цели. Последний этап наведения начинается после попадания цели в поле зрения
1 В написании подраздела принимали участие Л. В. Кравцова, О. С. Титков,
А. В. Чиркушин.
411
телевизионной камеры и опознавания ее оператором. Распознав появившуюся на
экране цель, летчик-штурман с помощью пульта управления осуществляет при-
целивание, совмещая электронное перекрестие на экране индикатора с изобра-
жением цели. Для этого оператор непрерывно передает сигналы управления го-
ловкой самонаведения на борт ракеты, а также в требуемый момент времени фор-
мирует команды управления ракетой в продольном и боковом каналах. Данный
этап заканчивается в момент попадания ракеты в цель.
После пуска ракеты и установления устойчивой связи контейнер—ракета са-
молет осуществляет маневр отворота влево, вправо или в противоположном на-
правлении. Направление отворота задается экипажем. Маневр заканчивается
после перехода в связь на антенны задней полусферы авиационного подвесного
контейнера (АПК). Управление в боковом канале строится таким образом, чтобы
направление на ракету в горизонтальной плоскости было близко к значению, со-
ответствующему области минимального затенения корпусом носителя. На
рис. 4.1 в качестве примера приведен характерный вид зоны затенения самолета
двухкилевой схемы.
Начало координат размещено по строительной оси контейнера, сам АПК
подвешен под левой мотогондолой двигателя. На рис. 4.1 отчетливо видны огра-
ничения зоны правым и левым килями (литеры С и D) и зоны минимального за-
тенения (литеры А и В). Зона затенения заштрихована.
Для построения управления выбирается три варианта маневра:
• влево и удержание антенны в зоне правого крыла (В) — отворот влево;
• вправо и удержание антенны в зоне левого крыла (С) — отворот вправо;
• влево и удержание антенны в зоне левого крыла (А) — отворот назад.
В зависимости от выбранного варианта управления получается три вида воз-
можных траекторий носителя (А—С), которые показаны на рис. 4.2 (£> — дви-
жение ракеты).
Траектория А соответствует варианту отворота назад. Во время выполнения
этого маневра самолет выполняет поворот влево с заданным углом крена. Азиму-
тальный угол антенны АПК постепенно увеличивается до прямого угла, после чего
связь обеспечивается задней антенной контейнера. Угол АПК—ракета уменьшает-
ся (по абсолютной величине) во время дальнейшего выполнения отворота, после-
довательно проходит зону минимального затенения правого крыла, переходит че-
рез нуль и удерживается вблизи зоны минимального затенения левого крыла по-
средством специального алгоритма управления самолетом в боковом канале.
Траектория В соответствует варианту отворота влево. Во время выполнения
этого маневра самолет выполняет поворот влево с заданным углом крена. Изме-
нение азимутального угла антенны АПК до его значения вблизи зоны минималь-
ного затенения правого крыла происходит аналогично описанному ранее, после
чего удерживается вблизи зоны минимального затенения правого крыла. Отворо-
ту вправо соответствует траектория С, которая практически симметрична преды-
Рис. 4.1. Диаграмма затенения для антенны
Рис. 4.2. Варианты траекторий
412
дущему варианту. Траектория D ракеты показана прямой линией в соответствии
с принятым для данного варианта моделирования предположением о том, что ра-
кета летит строго в направлении ориентира.
Специфика применения УР с ТКН заключается в участии экипажа в процес-
се управления комплексом.
Летчик обеспечивает прицеливание по курсу на пункт перемены маршрута,
предназначенный для работы с оружием с ТКН (ППМ—ТК), добиваясь мини-
мальной величины курсовой ошибки в момент пуска ракеты. После пуска ракеты
и установления связи контейнер—ракета летчик совершает маневр отворота,
обеспечивая такую траекторию движения, чтобы выполнялись условия связи.
Штурман-оператор управляет ракетой при ее полете по маршруту. В процес-
се управления движением ракеты по маршруту он использует заранее выбранные
во время предполетной подготовки визуальные ориентиры. На конечном участке
наведения штурман-оператор может выбрать режим автосопровождения цели
или применить метод ручного наведения вплоть до момента попадания ракеты в
цель. Если цель имеет высокий оптический контраст, то можно использовать ре-
жим самонаведения. Точность попадания управляемых ракет с телекомандным
наведением зависит как от ошибок самой системы наведения, так и в немалой
степени от мастерства летчика-штурмана. При работе по слабоконтрастным це-
лям телевизионно-командная система наведения имеет существенное преимуще-
ство по сравнению с телевизионным оружием. В этом случае режим ручного на-
ведения используется в течение всего времени автономного полета ракеты.
Применение УР с ТКН является достаточно сложной задачей, требующей
глубокой проработки маршрута полета самолета до и после пуска ракеты. От-
дельной задачей является выбор участка автономного полета ракеты. Разработка
маршрутов требует учета различных факторов:
• степени защищенности объекта средствами ПВО;
• условиями освещенности по курсу полета ракеты;
• наличием на маршруте визуально различимых ориентиров;
• дальности полета ракеты до цели.
Для решения данной задачи на борту самолета необходимо иметь современ-
ный навигационный комплекс и автоматизированный наземный комплекс под-
готовки полетного задания.
Обычно оружие с ТКН применяется по заранее разведанным, т. е. програм-
мным, целям. Во время предполетной подготовки для цели с известными коор-
динатами выбирается маршрут подлета ракеты к цели. Максимальная дальность
пуска обусловлена аэродинамическими характеристиками ракеты и энергетиче-
скими возможностями ее двигателя. Большая дальность полета ракеты наряду с
достаточно грубой навигационной системой вызывает необходимость корректи-
ровать курс полета по истечении некоторого времени. Практически это приводит
к наличию двух частей маршрута (после вхождения в связь): участок автономного
полета и участок полета под управлением оператора.
На стадии автономного полета движение ракеты происходит под управлени-
ем навигационной системы ракеты. Продолжительность автономного участка
полета определяется точностью навигационной системы. Данный режим закан-
чивается поиском оператором цели или ориентира. Во втором случае после рас-
познавания ориентира дальнейшее движение осуществляется под управлением
штурмана, который прокладывает маршрут полета, последовательно распознавая
намеченные во время предполетной подготовки ориентиры.
413
Во время предполетной подготовки по известным координатам цели и предпо-
лагаемому моменту атаки выбирается курс выхода на цель, определяются географи-
ческие координаты ориентира и характерные ориентиры штурманской стадии по-
лета ракеты, выбирается курс захода на ориентир. Полученные данные оформля-
ются в виде полетного задания и, в идеальном случае, заносятся в память бортового
вычислителя. Эта информация используется во время атаки для формирования
подсказок экипажу и максимальной автоматизации процедуры подготовки ракеты
к пуску. Таким образом, для эффективного применения оружия с ТКН бортовой
прицельно-навигационный комплекс ударного самолета должен обеспечивать:
• возможность ввода полетного задания, подготовленного на наземном комп-
лексе подготовки данных;
• требуемую точность выхода самолета в точку пуска;
• требуемую точность курсового угла в момент пуска;
• требуемую точность определения углов ориентации самолета в момент пуска;
• требуемую точность определения параметров ветра.
Лишь при выполнении всех вышеперечисленных требований возможно эф-
фективное применение оружия с ТКН.
Как было отмечено выше, одним из основных факторов, определяющих успех
применения рассматриваемого типа оружия, является построение такого управле-
ния самолетом, который обеспечивает устойчивую связь контейнер—ракета.
Перед пуском ракеты штурман при помощи оперативных органов управле-
ния на многофункциональном индикаторе выбирает вариант отворота. Во время
выполнения маневра отворота, после вхождения в связь бортовой вычислитель
рассчитывает директорное (полуавтоматическое) управление и сигналы для обес-
печения управления в автоматическом режиме с использованием САУ. При на-
значении директорного режима управления вся необходимая для обеспечения
режима информация выводится на ИЛС. Экипаж может выбрать автоматический
режим выполнения маневра отворота.
Расчет параметров управления самолетом производится программным моду-
лем бортового вычислителя. Модуль обеспечивает формирование параметров для
управления ЛА: синтезирует управление носителем на этапе предпусковой подго-
товки, пуска ракеты, установления связи и полета ракеты по маршруту.
Управление самолетом осуществляется по трем каналам:
• скоростному (изменение скорости полета);
• боковому (изменение курса носителя);
• продольному (изменение высоты полета или угла наклона траектории).
До схода ракеты задачей управления является обеспечение текущей высоты
и скорости движения ЛА в диапазоне, допускающем применение ракеты. В боко-
вом канале управление строится таким образом, чтобы обеспечить движение са-
молета по выбранной во время предполетной подготовки ортодромии при мини-
мальном отклонении от расчетной траектории.
После схода ракеты программа должна обеспечивать стабилизацию парамет-
ров движения самолета — высоты и курса полета. Эта стадия управления необхо-
дима для установления связи контейнер—ракета и заканчивается после установ-
ления устойчивой связи.
Далее в соответствии с выбранным экипажем направлением бокового отво-
рота, текущей высотой полета самолета и предполагаемой дальностью полета ра-
кеты в боковом канале строится управление, обеспечивающее требуемую траек-
торию движения (см. рис. 4.2): отворот влево, отворот вправо, отворот назад.
414
Характер управления в продольном канале зависит от высоты пуска и пред-
полагаемой дальности до цели. Дальность полета ракеты — до 100 км. В момент
отворота в сторону или назад самолета увеличивается дальность самолет—ракета
к моменту подрыва в 1,2...1,7 раза по отношению к дальности полета ракеты.
Дальность разлета и требуемая высота завершения режима связаны следующей
формулой:
+ >2);
где R — дальность разлета, км; hx — высота носителя в момент завершения режи-
ма, м; h2 = 0 — высота цели относительно уровня земли, м.
На рис. 4.3. иллюстрируется схема учета высоты радиогоризонта.
По условию задачи высота ракеты в момент подрыва должна быть равна нулю
(Л2 = 0). Дальность разлета самолета и ракеты рассчитывается с учетом выбранно-
го экипажем варианта отворота самолета после установления связи с ракетой.
Из анализа зоны затенения (см. рис. 4.1.) следует, что после перехода в связь
антенны АПК задней полусферы наиболее благоприятным для связи вариантом
полета самолета является горизонтальный полет или пологое снижение носителя.
Следовательно, набрать высоту радиогоризонта следует во время отворота, когда
затенения нет. Бортовая программа оценивает время выполнения отворота и не-
достающую высоту. По этим параметрам рассчитывается заданный угол наклона
траектории, позволяющий построить управление в продольном канале.
До схода ракеты в скоростном канале управление носителем (признак управ-
ления в скоростном канале и значение заданной скорости) формируется так, что-
бы обеспечивалась возможность применения ракеты. После пуска ракеты ско-
рость полета носителя определяется экипажем.
Управление в боковом канале формируется следующим образом. До пуска
ракеты управление строится для полета по маршруту. После пуска ракеты, до ус-
тановки связи задней антенны контейнера с антенной ракеты осуществляется от-
ворот с заданным креном. После перехода на связь задней антенны контейнера с
антенной ракеты ошибка боковой наводки ЛА вычисляется как отклонение теку-
щего угла антенны контейнера от заданного значения в азимутальной плоскости.
До пуска ракеты в продольном канале управление осуществляется так, чтобы
в момент перехода на связь антенной задней полусферы носитель перешел в го-
ризонтальный полет на высоте большей, чем высота радиогоризонта. Если теку-
щая высота пуска оказывается меньше высоты радиогоризонта, то рассчитывает-
ся и выполняется горка. При достаточной высоте пуска отворот происходит в ре-
жиме горизонтального полета.
После завершения отворота управление в продольном канале должно строиться
таким образом, чтобы завершение режима происходило на высоте радиогоризонта.
Концепция применения УР с ТКН впер-
вые реализована как комплекс ракетного во-
оружения, состоящий из ракеты Х-59 и авиа-
ционного подвесного контейнера, на самолете
Су-24, модернизированная система устанав-
ливается на носителе Су-24М.
Применение этого комплекса подразу-
мевает активное участие обоих членов эки-
пажа самолета в управлении самолетом и
ракетой на определенных этапах наведения,
415
поэтому необходимо организовать обучение летчиков и штурманов навыкам ра-
боты с оружием. Данная задача может быть решена как созданием наземных тре-
нажеров, так и организацией учебных и учебно-тренажных режимов работы
комплекса, позволяющих в условиях полета имитировать пуски ракет и обеспе-
чивать управление как самолетом, так и ракетой, максимально приближенное к
реальному.
Для оптимального управления самолетом во время выполнения маневра от-
ворота после вхождения в связь ракеты и самолета-носителя контейнера в борто-
вом вычислителе выбирается траектория движения и рассчитываются директор-
ное (полуавтоматическое) управление и сигналы для обеспечения управления в
автоматическом режиме с использованием САУ. При назначении директорного
режима управления вся необходимая для обеспечения режима информация вы-
водится на ИЛС.
Рассмотрим характерные особенности применения УР с ТКН, определяемые
участием человека как основного элемента контура управления ракетой.
Необходимая для управления ракетой информация обеспечивается много-
функциональными индикаторами летчика МФИ-Л и штурмана МФИ-Ш, вос-
производящими информацию с ГСН ракеты с дополнением необходимой для ра-
боты оператора информации, обеспечивающей функционирование индикатора в
режиме пульта, обеспечивая тем самым формирование и передачу в ракету тре-
буемых разовых команд. Кроме того, возможно переключение МФИ в режим,
когда на фоне карты местности или условной схемы применения ракеты отобра-
жаются текущее полржение самолета и ракеты и запланированные траектории их
движения.
Кадр МФИ с учетом возможностей человека должен содержать:
• значение действительной высоты полета ракеты;
• дальность до ориентира (до точки прицеливания);
• дальность до цели (после пролета ориентира);
• неподвижное прицельное перекрестие — центр поля зрения ГСН ракеты;
• подвижное прицельное перекрестие;
• метку, показывающую угловое положение строительной оси ракеты относи-
тельно оптической оси ГСН;
• предусмотренные заранее управляющие действия для выбора варианта отво-
рота носителя после пуска ракеты;
• выбор режима наведения ракеты;
• переключение режимов «узкое поле»/«широкое поле»;
• назначение заданной высоты полета ракеты.
Для уменьшения времени запаздывания разовых команд, таких как запись
эталона в ГСН или для перевода на конечный этап наведения, оперативные орга-
ны управления типа «кнопка» реализованы на ручке управления стрельбой (РУС)
штурмана.
На этапе выхода в район ориентира бортовые системы носителя и индикато-
ры экипажа работают в режиме обнаружения и распознавания ориентира. После
распознавания ориентира внимание оператора переключается на обнаружение и
распознавание ряда ориентиров (или протяженного ориентира) для обеспечения
полета ракеты по маршруту обнаружения и распознавания цели.
Критическими моментами процесса наведения ракеты являются:
• управление положением линии визирования ГСН ракеты в режиме поиска
цели (ориентира);
416
• работа в режиме слежения при дефиците времени;
• управление полем зрения ГСН в момент изменения (скачкообразного) его
размеров;
• выбор логики режима работы ГСН при выходе ракеты на цель;
• ограничения моторной деятельности руки, способные привести к срыву сле-
жения из-за запаздывания управляющих движений по отношению к отраба-
тываемому сигналу;
• затруднения при реализации прогнозирования из-за трудностей контроля те-
кущей информации о состоянии систем носителя ракеты вблизи цели.
Кроме того, возможны затруднения при коррекции курса ракеты по ориен-
тиру при дефиците времени на компенсацию пролета из-за накоплений ошибки
навигации, особенно в случае позднего обнаружения ориентира и при необходи-
мости сканирования полем зрения ГСН ракеты.
Структура деятельности экипажа
На уровне функциональных звеньев алгоритм деятельности (профессио-
грамма) экипажа содержит следующие основные элементы:
• обнаружение, распознавание объектов на МФИ;
• принятие решения;
• работа как элемент следящей системы при управлении ракетой в процессе ее
наведения на цель (ориентир);
• совершение необходимых моторных (ручных) операций при работе с кабин-
ным оборудованием.
Обнаружение, распознавание объектов на экранах МФИ относится к катего-
рии творческих процессов, носящих эвристический характер. Продуктивным яв-
ляется получение характеристик этих процессов прямыми методами моделирова-
ния (полунатурного, натурного) работы с экранами ИУП кабины самолета, на
которые от ОПС самолета и с информационных датчиков различного спектраль-
ного диапазона выводится информация о мишени, совмещаемая с необходимой
прицельно-пилотажной символикой на общем индикационном поле. Статисти-
ческая обработка результатов эксперимента позволяет для заданного класса ре-
шаемых задач и различных условий применения получать временные и вероятно-
стные характеристики процесса обнаружения и распознавания объектов на фоне
различных подстилающих поверхностей.
В рассматриваемом случае необходимо выделить режимы работы с запом-
ненным РЛ-избражением и формируемым в реальном времени изображением в
районе непосредственного контакта с целью (ориентиром). Первый режим отно-
сится к начальным стадиям операции и характеризуется наличием резерва време-
ни у экипажа в отличие от второго, когда экипажу приходится работать в услови-
ях дефицита времени и ограниченного резерва дальности в основном из-за экра-
нирующего фактора рельефа.
Принятие решения оператором производится в рамках концептуальной мо-
дели, сформированной на основании накопленного жизненного и професси-
онального опыта. Особенностью процесса принятия решения штурманом-опера-
тором является его безусловность, что характеризует оперативные решения. Как
правило, подобные решения вырабатываются исходя из «образа полета», создан-
ного в процессе прохождения подготовки и тренажа.
14 Авиация ВВС России и научно-технический npoipecc
417
Время актуализации долговременной памяти при вызове из нее «образа по-
лета» составляет в среднем t = 1,2 с при среднеквадратическом отклонении о =
= 0,2 с. Время реакции на совершение элементарных актов принятия решений
t = 0,1...0,35 с и зависит от способа и средств предъявления информации. В про-
цессе принятия решения не исключена ситуация, когда осмыслению может пред-
шествовать информационный поиск нужной информации. В этом случае время
Т принятия решения определяется временем на поиск и восприятие необходи-
мой информации и временем на выполнение последовательности элементарных
актов выработки решения в актуализированной концептуальной модели:
w
Г = ,?1
где т7 — коэффициент учета влияния характера рабочей среды, причем т, = 1 для
нормальных и т, = 1,2... 1,5 для экстремальных, приводящих к стрессу условий.
При оценке информационной загрузки учитываются возможности оператив-
ной памяти человека, сохраняющей текущую информацию в течение времени,
необходимого для решения задачи. Средний объем оперативной информации со-
держит одновременно примерно 8 символов, средняя скорость приема информа-
ции равна приблизительно 10бит/с. Количество информации, которая может
быть принята в оперативную память БЦВМ при нормальной информационной
загрузке, составляет
= Z i = □,
где Hi — число бит информации в одном символе, воспринятом оператором; i —
число таких символов.
Для справки: двоичному символу соответствует 1 бит, буква русского алфа-
вита содержит 5 бит, десятичная цифра — 3,3 бит информации.
При работе в контуре наведения ракеты оператор выполняет задачи основно-
го элемента следящей системы, в которой на основании воспринятой зрительной
информации на МФИ от ГСН УР формируется сигнал управления в виде рассо-
гласования фц(Г) = а(/) — 0(Г) — угла между лучами зрения, направленными на
прицельное перекрестие ос(/) и прицельную марку 0(Г).
Оператор работает с сигналом 0(Г) по управлению прицельной маркой и вы-
рабатывает выходной сигнал S(t), как правило, в виде линейного перемещения
органа управления при незначительных силах сопротивления его перемещению
(управление с кинематическим входом). Оператор осуществляет сопровождаю-
щее слежение по сигналам о положении перекрестия ос(/) и прицельной марки
0(0, индицируемых на МФИ, и сводит рассогласование <рц(/) = a(Z) — 0(/) к нулю,
что означает направление движения ракеты точно на цель.
В процессе слежения для оператора как элемента следящей системы крити-
ческими являются:
• предел моторных возможностей руки (4...5 Гц);
• срыв слежения, если запаздывание управляющих движений по отношению к
отрабатываемому сигналу превысит по своему значению 1/6 периода сигнала;
• срыв слежения при сдвиге моторных возможностей руки в область частот
2...2,5 Гц (запаздывание < 0,1 с) в случае, если оператор имеет возможность
прогнозирования с использованием локальных параметров сигнала а(/) и
контроля состояния системы носитель—ракета.
418
Необходимо отметить ситуацию, связанную со ступенчатым (скачкообраз-
ным) изменением параметра фц(/) при изменении поля зрения ГСН ракеты, осу-
ществляемом при поиске ориентиров (цели) и особенно при переходе на конеч-
ный этап командного наведения, когда возможно появление больших ошибок,
что может отвлечь оператора от самого процесса слежения. Очевидно, что в этой
ситуации оператор должен изменить характер управленческой деятельности в за-
висимости от величины ошибки фц(/). Таким образом, если (рц(г) < <р0 (<р0 — неко-
торое пороговое значение), слежение осуществляется за сигналом в течение ин-
тервала времени, необходимого для отработки ошибки, контроля процесса сле-
жения, и для того, чтобы удостовериться, что процесс происходит в заданном
режиме. Параметры этого процесса определяются реакцией органов чувственно-
го восприятия (чистое запаздывание) и нейромускульной системы человека.
В момент поступления ступенчатого сигнала при переключении поля зрения
ГСН ошибка слежения, воспринимаемая оператором, может измениться скачко-
образно до значения фц(г) > <р0, и оператор должен переключиться на отработку
ступенчатой составляющей сигнала. При этом оператор вынужден затрачивать
некоторое дополнительное время (чистое запаздывание) на выбор не только уп-
равляющей программы С(Г), но и установление максимального значения управ-
ляющего сигнала. Временная протяженность сигнала С(/) опытным оператором
выбирается такой, чтобы минимизировать время Т переходного процесса. Гра-
ничное смещение М органа управления (максимальный управляющий сигнал) и,
следовательно, прицельной марки выбирается оператором с учетом уровня вход-
ного ступенчатого сигнала, реакции управляемого объекта (ракеты), настройки
параметров контура телекомандного управления ракетой и др.
Таким образом, суммарное время от момента обнаружения на МФИ и фикса-
ции глазами оператора ошибки рассогласования до момента компенсации опера-
тором ошибки рассогласования, т. е. время цикла слежения Ти = Тп + + 7"отм.
Здесь 7"п — время принятия решения; — время чистого запаздывания орга-
нов чувственного восприятия человека; Готвл < Д/фцтах ~ (<р0 - у)/фцтах — время
«отвлечения», где А — зона нечувствительности; фЦП1ах — максимальная скорость
нарастания ошибки; ф0 — пороговое значение ошибки слежения; у — острота зре-
ния оператора (в условиях дискомфорта кабины у ~ 3').
Алгоритм деятельности штурмана-оператора
В описательной форме в соответствии с основными этапами операции алго-
ритм деятельности штурмана-оператора по управлению УР с ТКН может быть
представлен следующим образом.
Этап 7. Подготовка ракеты к пуску (обеспечивается МФПУ,
МФИ-Ш) заключается в:
• выборе комплекса БРЭО, обеспечивающего применение УР;
• выборе систем комплекса БРЭО, обеспечивающих применение УР;
• приведении систем обеспечения пуска УР в рабочее состояние;
• проверке линий ТКН;
• подтверждении работоспособного состояния линий ТКН и АП и ГСН УР;
• контроле и подтверждении условий пуска УР;
• контроле времени пуска.
419
Этап 2. Предпусковые мероприятия и контроль параметров по-
лета УР после пуска (обеспечивается МФИ-Ш, МУП) состоят из:
• переключения МФИ-Ш в режим работы с ГСН ракеты;
• установки широкого поля зрения ГСН;
• настройки параметров формата МФИ-Ш для работы с ГСН ракеты;
• контроля пуска УР;
• контроля нахождения параметров полета УР в заданных пределах, который
заключается в подтверждении нахождения параметров полета УР в заданных
пределах, реализации мероприятий по корректировке параметров автоном-
ного полета УР, оценке успешности принятых мер;
• контроля параметров полета УР в автономном режиме;
• контроля выхода ракеты в зону нахождения первого ориентира и подтверж-
дения выхода;
• переключения на режим телекомандного наведения.
Этап 3. Телекомандное наведение по ориентирам (обеспечивается
МФИ-Ш, МУП) обеспечивается:
• обнаружением и распознаванием ориентира (последовательности ориентиров);
• управлением движением ракеты по обнаруженному
ориентиру (по N ориентирам);
• слежением за выходом в контрольную точку принятия решения об атаке цели;
• выполнением набора высоты ракетой по контрольной точке.
Этап 4. Наведение ракеты в районе цели (обеспечивается МФИ-Ш,
МУП) осуществляется:
• отклонением поля зрения ГСН УР вниз по углу места;
• поиском района цели по информации от ГСН;
• обнаружением района цели;
• переключением ГСН на узкое поле зрения;
• захватом цели узким полем зрения.
Этап 5. Наведение ракеты на конечном участке (обеспечивается
МФИ-Ш, МУП) заканчивается:
• коррекцией траектории ракеты;
• сопровождением выбранной точки прицеливания до попадания в цель или
переключением на режим самонаведения со слежением за точкой прицели-
вания до попадания в цель.
Действия штурмана-оператора по управлению
полем зрения ГСН с целью захвата ориентира
При наведении ракеты штурман-оператор производит операции по управле-
нию полем зрения ГСН, направленные на обнаружение и захват цели (ориенти-
ра). Он изменяет размер поля зрения ГСН и, используя подвижность ГСН по ази-
муту и углу места, осуществляет при необходимости режим сканирования полем
зрения. Последнее может оказаться необходимым для поиска цели (ориентира),
если она вследствие навигационной ошибки, накапливаемой на этапе полета ра-
кеты между ориентирами, не попадает в зону обзора ГСН с зафиксированным на-
правлением ее поля зрения.
Связь навигационной ошибки с потребным размером поля зрения ГСН до-
статочно точно устанавливается соотношением ср ~ 2 ДЛ7£>обн, где АХ — макси-
мальная курсовая навигационная ошибка, £>обн — дальность обнаружения ГСН,
<р — величина поля зрения ГСН.
420
Условие ф > ф*, где ф* — мгновенное поле зрения ГСН, указывает на необхо-
димость перевода ГСН в режим сканирования для осуществления поиска ориен-
тира и его последующего захвата.
Темп совершения коррекций, обеспечивающих нахождение ориентира в по-
ле зрения ГСН, может быть определен как /кор ~ ДЛ/о*, где — среднеквадрати-
ческая ошибка навигационной системы ракеты.
Эргономическая оценка алгоритма телекомандного наведения УР
Эргономическая оценка приведенного выше алгоритма телекомандного на-
ведения проводится на основании критериев стереотипности £ст, логической
сложности клс и эмоциональной напряженности £э, которые для задач подобного
класса следует принимать в качестве наиболее информативных.
к
Критерий стереотипности кст = где x\f> — число последователь-
ных элементарных действий в группе без логических условий по 1, 2,..., к членов,
p\f> — частота таких групп. Очевидно, что если в алгоритме нет логических усло-
вий, то £ст = к = max.
Критерий логической сложности клс = Z^ р^где х^ — число прове-
ряемых логических условий в группе из 1, 2, ..., т таких условий, — частота
таких групп.
Допустимый диапазон разброса критериев 0 < £ст < 8, 0 < клс < 4, в таблице
приведены значения критериев по этапам наведения ракеты.
Анализ таблицы показывает:
• кСУ и кЛУ находятся в границах допустимых значений;
• выбранный алгоритм ТКН ракеты может быть определен как алгоритм со
средним уровнем стереотипности (к™* < 2) и логической сложности;
• показатель клс на втором этапе по своему значению приближается к середине
допустимого интервала, что характеризует ситуацию, когда может возник-
нуть необходимость перестройки схемы действий штурмана-оператора в за-
висимости от состояния параметров движения ракеты.
Таблица 4.1
Критерии стереотипности и логической сложности
на различных этапах наведения ракеты
Этап Критерий Примечание
1 1,6 1
2 1,8 1,5
3 1...2 1 Значения ксу зависят от числа совершаемых коррекций
по ориентирам кст = 2 + ; ксу = 1 соответствует полету
без коррекции (7V = 0), ксу = 2 — 7V -> оо (например, N > 6)
4 1 1
5 1 0
421
В отличие от критериев кст и клс критерий эмоциональной напряженности кэ
может быть определен только на основании прямых измерений вегетативных па-
раметров систем организма человека, фиксируемых датчиками медико-биологи-
ческого контроля, например в процессе моделирования на КПМ или при работе
на тренажере. Среди них наиболее просто определяется динамика частоты сер-
дечных сокращений и изменения артериального давления. В этом случае в каче-
стве эквивалента-аналога критерию кэ, как правило, используется коэффициент
резерва R = (Pmax - P)/(PmaK - Ро), где Ртах, Ро, Р — максимальное, в покое (фо-
новое значение) и текущее значения частоты сердечных сокращений.
Эмоциональная напряженность оценивается как:
• малая, если R > 0,9;
• умеренная, если 0,9 < R < 0,7;
• высокой степени, если 0,7 < R < 0,4;
• стрессовая, если R < 0,3.
Проведенные исследования условий работы оператора при решении задач
класса телекомандного наведения с использованием стандартного состава ин-
формационно-управляющего поля кабины позволяют давать оценки эмоци-
ональной напряженности оператора на различных этапах наведения ракеты, в со-
ответствии с которыми можно ожидать, что на этапах 2...5 оператор будет испы-
тывать достаточно высокую напряженность (R ~ 0,5...0,6), этап 1 характеризуется
умеренной напряженностью (R ~ 0,8...0,85).
Таким образом,рассмотренный возможный алгоритм деятельности штурма-
на-оператора может быть оценен как приемлемый для практических целей ре-
ализации телекомандного наведения УР.
Организация учебно-тренировочных режимов
Для приобретения навыков летчиком и штурманом по управлению самоле-
том и ракетой во время проведения пусков были разработаны режимы, позволяю-
щие имитировать применение ракет с ТКН — так называемые тренировочные ре-
жимы. Они позволяют без реального пуска ракет отрабатывать навыки работы
экипажей по управлению комплексом.
Первым учебным режимом является «холостой проход». При этом ракета и
контейнер находятся на одном носителе, пуска ракеты не происходит, управле-
ние ракетой идентично штатному, а управление самолетом летчик осуществляет,
разворачивая ЛА по направлению визирования при заданном управлении по кур-
су. В противном случае летчик обеспечивает режим стабилизации курса и высоты
полета. Данный режим наиболее удобен при проведении испытательных работ
для ознакомления с трассой предстоящего пуска.
Вариантом данного режима является режим УТР — учебно-тренировочной
работы. При этом на самолете подвешивается учебная ракета, лишенная высо-
кочастотных трактов, а контейнер заменяется специальным устройством, обес-
печивающим коммутацию сигналов. Данное устройство выполняется в виде
специального жгута-заглушки, устанавливаемого на штатные разъемы АПК.
Преимуществом этого варианта является дешевизна и увеличенный ресурс обо-
рудования, а недостатком — невозможность пуска ракеты в отличие от первой
конфигурации, когда после ознакомления с трассой после повторного захода до-
пускается пуск ракеты.
422
Легко видеть, что оба описанных выше варианта не обеспечивают трениров-
ку обоих членов экипажа. В рассмотренных случаях действия, более или менее
соответствующие штатным, выполняет штурман. Действия летчика нестандарт-
ны. Пилот управляет самолетом по информации на МФИ и ИЛС, имитируя дей-
ствия автопилота ракеты.
Следующим вариантом учебных режимов является парная работа. Для обес-
печения данного режима используются два самолета. Возможно использование
как однотипных, так и разнотипных самолетов. На одном из них стандартным
образом подвешивается контейнер и специальное устройство — заглушка ракеты,
обеспечивающее наличие признака ракеты и прохождение необходимых сигна-
лов. На другом самолете подвешивается ракета и заглушка-контейнер. Преиму-
ществом данного метода обучения является то, что операции, выполняемые эки-
пажем на самолете-носителе АПК, практически идентичны операциям в режиме
штатного пуска. Естественным недостатком этого варианта является использова-
ние двух самолетов.
При проведении парных работ подготовка к условному пуску производится
одновременно на обоих самолетах при полете к ППМ-ориентиру, как и в штат-
ном режиме. После подготовки аппаратуры самолеты выстраиваются — само-
лет-носитель ракеты выходит вперед и вниз относительно самолета-носителя
контейнера. Такая конфигурация обусловлена тем, что необходимо обеспечить
связь контейнер-ракета на начальном участке полета. Далее экипаж самоле-
та-контейнера нажимает кнопку «Пуск». Информация об этом событии по кана-
лу связи передается на борт второго самолета. После условного пуска самолет-но-
ситель контейнера выполняет маневр отворота, а самолет-носитель ракеты про-
должает полет к ориентиру, имитируя полет ракеты.
При проведении тренировочного режима «парная работа» может возникнуть
ситуация, когда связь между контейнером и ракетой может быть утеряна из-за за-
тенения линии между антеннами АПК и ракеты элементами конструкций плане-
ров самолетов. Для самолета-носителя контейнера затенение антенны полностью
аналогично штатному режиму (см. рис. 4.1).
На рис. 4.4 изображена диаграмма затенения для антенны ракеты, подвешен-
ной под левым крылом самолета, показан вид сзади — левое крыло ЛА располага-
ется на рисунке справа. На рисунке видны области затенения конструкциями
планера: А — гондола левого двигателя, В — левый киль, С — левый стабилиза-
тор, D — левый флапперон, Е — левое крыло, F — рабочее окно, G — линия пре-
дельного отклонения антенны по азимуту.
Координатные оси на рис. 4.4 проведены через строительную ось ракеты.
Как видно из рисунка, для повышения устойчивости связи желательно, чтобы на-
правление визирования самолета-носителя контейнера со стороны самолета-но-
сителя ракеты располагалось в окне F между крылом (флаппероном), мотогондо-
лой, килем, стабилизатором и границей предельного угла антенны ракеты.
Для выявления ограничений на проведение тренировочных режимов «пар-
ная работа» было проведено моделирование различных вариантов разлета само-
летов.
При моделировании была поставлена задача, таким образом подобрать по-
строение самолетов перед началом работы и обеспечить такое управление их дви-
жением, чтобы избежать затенения обеих антенн элементами конструкции пла-
неров.
423
Рис. 4.4. Диаграмма
затенения для антенны
Рис. 4.5. Моделирование
парной работы (отворот вправо)
Рис. 4.6. Моделирование
парной работы (отворот назад)
Рис. 4.7. Моделирование
парной работы (отворот влево)
Выше было отмечено, что возможны три варианта траектории самолета-но-
сителя контейнера после вхождения в связь (см. рис. 4.2). Результаты моделиро-
вания для самолета-носителя ракеты при различных вариантах отворота самоле-
та-носителя контейнера представлены на рис. 4.5—4.7: отворот вправо, отворот
назад, отворот влево.
На этих рисунках изображен годограф антенны ракеты при выполнении ре-
жима, наложенный на диаграмму затенения самолета-носителя ракеты.
При отвороте вправо луч антенны ракеты будет затенен элементами конст-
рукции планера самолета-носителя ракеты (рис. 4.5). В связи с этим при проведе-
нии учебных полетов типа «парная работа» вариант маневра отворот вправо необ-
ходимо запретить. Это можно ввести в инструкцию экипажу по выбору варианта
маневра или изменить программу назначения варианта отворота таким образом,
чтобы отворот вправо не назначался.
В том случае, если экипаж попытается совершить вариант отворот назад, про-
изойдет затенение стабилизатором самолета носителя ракеты (литера С на
рис. 4.4). Данное обстоятельство обусловлено тем, что при отвороте назад траекто-
рия самолета-носителя контейнера отворачивает на угол больше 180° и в некото-
рых случаях может пересечь траекторию полета ракеты. Следовательно, отворот
назад также непригоден для проведения тренировочных полетов типа «парная ра-
бота», и данный вариант маневра также должен быть запрещен инструктивно или
программно.
При отвороте влево при правильно построенном управлении самолетом-но-
сителем контейнера затенение линии между антеннами минимально. Для того
чтобы избежать затенения, необходимо построить пару самолетов в момент ими-
тации пуска с превышением самолета-носителя контейнера на несколько десят-
ков метров и смещением его влево относительно самолета-ракеты (см. рис. 4.1 и
рис. 4.3).
424
4.2.2. ОСОБЕННОСТИ ПРИМЕНЕНИЯ
УПРАВЛЯЕМЫХ РАКЕТ КЛАССА
«ВОЗДУХ-ПОВЕРХНОСТЬ» МАЛОЙ ДАЛЬНОСТИ
И КОРРЕКТИРУЕМЫХ АВИАБОМБ
Управляемые ракеты класса «воздух—поверхность» малой дальности и кор-
ректируемые авиабомбы с телевизионной ГСН предназначены для поражения
визуально видимых наземных целей, а ракеты — и надводных целей.
Достоинством телевизионных систем самонаведения является возможность
автосопровождения цели после ее обнаружения и привязки, что полностью осво-
бождает экипаж после применения оружия для выполнения других задач. Данное
преимущество обусловлено формированием изображения местности в виде ви-
деосигнала, что позволяет организовать автосопровождение цели, используя кор-
реляционный или контрастный способы слежения либо их комбинацию. Недос-
татком таких систем является то, что в сложных метеоусловиях применение ору-
жия с ТГСН во многих случаях затруднено или вообще невозможно [3].
Для применения УР малой дальности и КАБ с ТГСН необходимо вывести но-
ситель в зону оптической видимости цели в случае известного расположения ее или
визуально обнаружить цель на маршруте и после определения цели и принятия ре-
шения об ее атаке включить режим захвата и автосопровождения ГСН УР или КАБ
цели. Контроль захвата цели и ее сопровождения осуществляется визуально по те-
левизионному изображению, поступающему с ГСН на многофункциональный ин-
дикатор. Далее производится пилотирование ЛА для входа его в зону возможных
пусков (ЗВП) УР и при нахождении носителя в ЗВП после нажатия боевой кнопки
(БК) происходит необходимая предпусковая подготовка и затем штатный пуск ра-
кеты и ее автономный полет к цели после схода. При этом экипажу выводится ин-
формация, необходимая для пилотирования ЛА для выхода в ЗВП, и о требуемых
параметрах полета при необходимости их коррекции в интересах применения ору-
жия. Аналогично происходит штатный сброс КАБ при нахождении носителя в зоне
возможных сбросов КАБ. ЗВП УР и ЗВС КАБ являются областью пространства,
при нахождении самолета-носителя в которой соответствующее средство пораже-
ния попадет в цель с заданной вероятностью и заданным круговым вероятным от-
клонением. ЗВП УР и ЗВС КАБ определяются как параметрами соответствующего
оружия, так и некоторыми параметрами носителя и цели.
Одной из задач бортового вычислительного комплекса при обеспечении
применения УР или КАБ является расчет минимальной и максимальной допус-
тимых дальностей, ограничивающих применение. Минимальная и максимальная
допустимые наклонные дальности формируются бортовым вычислительным
комплексом после задания режима применения УР или КАБ по вычисленной на
борту зоне возможных пусков УР или зоне возможных сбросов КАБ. Отметки
минимальной, максимальной допустимых наклонных дальностей наряду с отмет-
кой текущей дальности выводятся на шкале дальности, представляемой на инди-
каторах при применении УР или КАБ. После привязки к цели бортовым вычис-
лительным комплексом также формируется время, оставшееся до достижения до-
пустимой минимальной дальности, которое также выводится на индикаторы. По
относительному положению отметок минимальной, максимальной допустимых
наклонных дальностей, текущей дальности и времени, оставшемуся до достиже-
ния допустимой минимальной дальности, оператор судит о вхождении носителя
в зону возможных пусков УР или зону возможных сбросов КАБ по дальности в
зависимости от выбора режима применения УР или КАБ с ТГСН соответственно.
425
Основными ограничивающими факторами изделий с ТГСН, имеющих ак-
тивный участок полета УР, являются:
• энергетические возможности изделия;
• маневренные возможности изделия;
• углы прокачки ТГСН изделия;
• время взведения радиовзрывателя.
Существенное влияние на расчет минимальной (ближней) и максимальной
(дальней) границ зоны возможных пусков оказывают текущие условия полета но-
сителя (скорость, превышение над целью, крен и тангаж ЛА, угол пеленга цели),
а также значение барометрической высоты цели и заданный способ наведения
изделия.
Основными ограничивающими факторами изделий с ТГСН без активного
участка полета КАБ являются:
• маневренные возможности изделия;
• углы прокачки ТГСН изделия;
• время взведения взрывателя.
Существенное влияние на расчет минимальной и максимальной границ зо-
ны возможных сбросов также оказывают текущие условия полета носителя (ско-
рость, превышение над целью, крен и тангаж ЛА, угол пеленга цели), значение
барометрической высоты цели и установленное время взведения взрывателя.
Необходимость учета такого большого количества факторов делает задачи
расчета ЗВП и ЛВС, а следовательно, расчета минимальной и максимальной до-
пустимых индикационных наклонных дальностей чрезвычайно сложной инже-
нерной задачей. Дополнительные сложности создаются ограниченными возмож-
ностями вычислительных систем.
Заметим, что со времени испытания предшествующих комплексов, обеспе-
чивающих применение оружия, вычислительные возможности современных
БЦВМ существенно возросли. Так, скорость выполнения операций с целыми
числами возросла в 100...300 раз, объем памяти программ возрос в 10...20 раз,
объем памяти данных — в 10... 100 раз. Кроме того, появилась возможность вы-
полнять операции с числами с плавающей точкой, в том числе и расчет тригоно-
метрических и некоторых других элементарных математических функций за не-
сколько периодов тактовой частоты процессора, возросшей в 100 раз. Коренным
образом изменились условия программирования. Появилась современная опера-
ционная система реального времени и возможность программирования на язы-
ках высокого уровня.
Перечисленные факторы позволили поставить и решить при разработке про-
грамм современных бортовых вычислительных комплексов задачу синхронного
расчета всех параметров, предъявляемых экипажу при решении задачи примене-
ния оружия с ТГСН: текущей дальности цели, минимальной и максимальной
дальностей пуска, времени, оставшегося до достижения ближней и дальней гра-
ниц ЗВП или ЗВС. Также выполняется анализ возможности применения оружия
с формированием всех необходимых признаков, сигналов для управления ЛА и
информации о безопасности ЛА от поражения осколочным полем собственного
оружия. Дополнительно была решена задача повышения точности аппроксима-
ции ЗВП и ЗВС и в результате увеличения (в пределах исходных зон фирм разра-
ботчиков оружия) времени прицеливания в пределах ЗВП до 10% по сравнению с
ранее разработанными программами.
426
При решении данной проблемы изменен способ аппроксимации зон. Ранее
вычисления минимальной и максимальной границ ЗВП управляемых ракет и
ЗВС корректируемых авиабомб производились при помощи полиномов. В разра-
ботанных программах информация о зонах организована в виде базы данных, со-
храняющей полную исходную информацию о зонах фирм разработчиков.
Рассмотрим особенности расчета ЗВП УР. Исходные материалы по ЗВП для
УР имеются в виде вертикальных сечений для ряда значений скоростей носителя,
углов наклона траектории, барометрической высоты цели для каждого из спосо-
бов наведения при нулевом пеленге цели (рис. 4.8).
Ближняя граница — участки 7, 2 (определяются временем взведения взрыва-
теля и маневренными характеристиками изделия). Дальняя граница — участок 4
(определяется энергетическими возможностями). Сверху и снизу ЗВП ограниче-
на максимально и минимально допустимыми относительными высотами приме-
нения (участки 3 и 5).
Традиционно минимальная 7)min и максимальная Отах индикационные на-
клонные дальности при применении УР представлялись апроксиммационными
полиномиальными функциями от текущих параметров полета: скорости, крена и
высоты носителя, угла наклона траектории и барометрической высоты цели. Та-
кой подход приводил к существенному искажению ЗВП уже на этапе формирова-
ния коэффициентов полинома.
Для вычисления Z>m5n и Z>max в современных вычислительных комплексах ис-
ходные сечения ЗВП для определенных фиксированных сочетаний значений ско-
рости носителя и барометрической высоты цели для каждого из способов наведе-
ния в виде массивов точек содержатся в памяти БЦВМ.
Для текущих параметров производится синтез ЗВП в зависимости от вы-
бранного способа наведения по имеющимся данным для фиксированных сочета-
ний значений указанных параметров. При этом если текущие параметры полета
совпадают с фиксированным сочетанием соответствующих параметров, то ЗВП с
точностью до графического представления совпадаете предоставленными разра-
ботчиками данными.
На основе синтезированной ЗВП вычисляются минимальная dn и макси-
мальная dx разрешенные наклонные дальности применения изделия, учитываю-
щие энергетические, маневренные характеристики изделия и время, потребное
на взведение взрывателя. Их вычисление ведется в предположении, что ЛА про-
должает полет прямолинейно с текущим углом наклона траектории и постоянной
скоростью. На рис. 4.9 показана прогнозируемая траектория движения ЛА с ука-
Рис. 4.8. Сечение ЗВП
Рис. 4.9. Прогнозируемая
траектория движения ЛА
427
занием текущей дальности до цели d и графическая иллюстрация вычисления dn,
dx в прямоугольной системе координат, центр которой совпадает с целью, ось
OY — направлена вертикально вверх, а ЛА находится в плоскости YOX.
Минимальная и максимальная разрешенные наклонные дальности примене-
ния изделия, учитывающие энергетические, маневренные характеристики изде-
лия и время, потребное на взведение взрывателя, представлены на рис. 4.9 точка-
ми пересечения прогнозируемой траектории носителя с ближней и дальней гра-
ницами ЗВП. В случае если прогнозируемая траектория носителя проходит выше
(ниже) ближней (дальней) границы ЗВП, в качестве dn (dx) берется дальность до
верхней (нижней) точки ближней (дальней) границы ЗВП. В БЦВМ также рас-
считываются минимальная гп и максимальная гх разрешенные горизонтальные
дальности, которые являются исходными в дальнейших вычислениях.
В случае наличия ненулевого угла курса цели согласно заданным разработ-
чиками функциям производится коррекция минимально и максимально разре-
шенных горизонтальных дальностей. Кроме того, по данным разработчиков, в
момент отделения цель должна находиться внутри конуса обзора ГСН. В БЦВМ
рассчитываются минимальная A"nind и максимальная A"xind горизонтальные даль-
ности, учитывающие эти факторы. Пояснение нахождения Xnind, A"xind приведено
на рис. 4.10 и 4.11 для случаев горизонтального полета носителя и пикирования
на цель. XOZ — прямоугольная горизонтальная система координат, центр кото-
рой расположен в проекции центра масс ЛА на горизонтальную плоскость, про-
веденную через точку цели, оси ОХ и OZ лежат в этой плоскости и направлены
по проекции вектора путевой скорости и в сторону правого крыла. В такой систе-
ме координат в случае прямолинейного полета ЛА цель будет перемещаться по
прямой, параллельной оси ОХ (траектория цели показана пунктирной линией на
рис. 4.10 и 4.11).
Горизонтальная дальность A"nind является максимумом из величин Х^ Х2, где
Xj, Х2 — абсциссы точек пересечения прогнозируемой траектории движения це-
ли при сближении цели с ЛА в горизонтированной системе координат при пря-
молинейном движении ЛА с кривой F\ (закон изменения гп в зависимости от бо-
кового положения цели) — Х1 и сечением конуса допустимых углов прокачки
ГСН — Х2 (рис. 4.10). Горизонтальная дальность A"xind является минимумом из ве-
Рис. 4.10. Расчет максимальной
и минимальной дальностей
для случая горизонтального полета
Рис. 4.11. Расчет максимальной
и минимальной дальностей
при пикировании
428
личин Х3, Х4, где Х3, Х4 — абсциссы точек пересечения прогнозируемой траекто-
рии движения цели при сближении цели с ЛА в горизонтированной системе ко-
ординат при прямолинейном движении ЛА с кривой F2 (закон изменения гх в за-
висимости от бокового положения цели) — Х3 и сечением конуса допустимых
углов прокачки ГСН — Х4 (рис. 4.11).
В случае горизонтального полета носителя (рис. 4.10) конечного значения не
существует, так как сечением конуса в этом случае является гипербола.
Формирование индикационных минимальной Dm-n и максимальной
д д НИИ HldA
разрешенных наклонных дальностей при применении УР с ТГСН производится
на основе горизонтальных дальностей Xnind, %xind, которые вычислены с учетом
бокового положения цели и конуса ГСН, в пределах которого должна находиться
цель в момент отделения изделия.
На рис. 4.12 иллюстрируется формирование индикационных дальностей:
OXYZ — прямоугольная горизонтальная система координат, центр которой сов-
падает с точкой цели, плоскость ZOX расположена горизонтально, ось ОХ па-
раллельна проекции вектора путевой скорости на горизонтальную плоскость и
направлена в сторону ЛА, ось OY направлена вертикально вверх, OZ — до пра-
вой системы координат.
На рис. 4.12 сплошной линией представлена траектория ЛА в предположе-
нии его дальнейшего прямолинейного движения с отмеченной текущей дально-
стью D и точками 7 и 2. Координаты точек 7 и 2 по оси ОХ равны A"nind и A"xind.
Максимальная индикационная разрешенная дальность 7)тах является даль-
ностью до точки, отнесенной от точки 2 по траектории на отрезок а = tpw, где
t — время от момента нажатия БК до прогнозируемого момента отделения изде-
лия, w — путевая скорость ЛА. Аналогично формируется и минимальная индика-
ционная разрешенная дальность 7)mjn.
Рассмотрим особенности расчета ЗВС КАБ. Исходные материалы для расчета
ЗВС КАБ имеются в виде геометрических двухмерных фигур сложной формы в
плоскости цели, являющихся зонами поражения цели (ЗП), для ряда значений
скоростей носителя, углов наклона траектории, барометрической высоты цели
для каждого из возможных установок времени задержки взрывателя. Вид ЗП пред-
ставлен на рис. 4.13 кривой 7, где изображена одна ее половина, поскольку фигура
симметрична относительно оси ОХ. Зона поражения представляет собой геомет-
Рис. 4.12. Формирование
индикационных дальностей
Рис. 4.13. Представление
ЗП для КАБ
429
рическое место точек положения цели, обладающее тем свойством, что если цель
находится в этой области, то при сбросе КАБ произойдет попадание в цель с за-
данной вероятностью и заданным круговым вероятным отклонением.
В результате проведенного анализа для представления ЗП был выбран сим-
метричный вписанный шестиугольник (кривая 2 на рис. 4.13 является его поло-
виной), данная фигура позволяет достаточно легко рассчитать все необходимые
параметры и хорошо представляет форму ЗП.
Традиционно минимальная и максимальная индикационные наклонные
дальности при применении КАБ представлялись апроксиммационными полино-
миальными функциями от текущих параметров полета: скорости, крена и высоты
носителя, угла наклона траектории и барометрической высоты цели, а ранее даже
применялись в режиме сброса по методу баллистического бомбометания.
При вычислении £>min, £>max в современных вычислительных комплексах па-
раметры вписанных в ЗП шестиугольников для определенных фиксированных
сочетаний значений скорости носителя, высоты носителя, угла наклона траекто-
рии и барометрической высоты цели, для которых имеются данные от разработ-
чиков КАБ, в виде массивов точек содержатся в памяти БЦВМ. Для текущих па-
раметров производится синтез ЗП с использованием метода многомерной линей-
ной интерполяции по имеющимся данным для фиксированных сочетаний
значений указанных параметров.
На основе синтезированной ЗП вычисляются минимальная A"nind и макси-
мальная A"x5nd горизонтальные разрешенные дальности при применении КАБ.
Формирование индикационных минимальной Z)m5n и максимальной Z>max разре-
шенных наклонных дальностей осуществляется также, как описано выше для УР
на основе горизонтальных дальностей %nind и JVx5nd с учетом времени от момента
нажатия БК до схода изделия.
Таким образом, применение управляемых ракет класса «воздух—поверх-
ность» малой дальности и корректируемых авиабомб с ТГСН с самолетов, обору-
дованных современным бортовым вычислительным комплексом, допускается во
всей зоне возможных пусков ракеты и практически во всей зоне возможных сбро-
сов КАБ, что максимально увеличивает время нахождения ЛА в зоне, допускаю-
щей применение оружия, а следовательно, и время на применение оружия ука-
занных типов. Наряду с расчетом допустимой зоны применения оружия синхрон-
но выполняется анализ возможности применения оружия с формированием всех
необходимых признаков и сигналов для управления ЛА и информации о безопас-
ности ЛА от поражения осколочным полем собственного оружия.
4.3. Телевизионные системы наведения
К концу 1950-х годов советская авиация имела на вооружении управляемое
оружие класса «воздух—поверхность», наведение которого осуществлялось либо
по методу совмещения трех точек самолет—ракета—цель (Х-23, Х-23М), либо по
методу удержания ракеты в радиолокационном луче, который тем или иным спо-
собом направлялся с самолета на цель (лучевой метод, ракета Х-66).
Это оружие имело существенные недостатки, главные из которых:
• недостаточная для эффективного поражения точность попадания ракеты
в цель;
• необходимость нахождения самолета, с которого наводится ракета, в зоне
контакта с целью, т. е. в зоне ее ПВО.
Эти причины потребовали разработки нового поколения управляемого ору-
жия класса «воздух—поверхность», не имеющего отмеченных недостатков. К это-
му времени в СССР в результате научно-технической революции бурно развива-
лась электроника, в том числе и телевизионная техника. Появились малогабарит-
ные отечественные телевизионные передающие трубки (типа видикон),
обладающие повышенной чувствительностью и виброустойчивостью. Они могли
работать в условиях ракетных вибраций и виброударов и обеспечивали нормаль-
ный сигнал в условиях работы в сумерках. В дальнейшем появились видиконы
для работы в условиях освещенности Луны и звездного неба.
Быстрыми темпами совершенствовалась элементная база в части надежности
и миниатюризации. Стремительное развитие космического и гражданского теле-
видения привело к существенному улучшению характеристик линий передачи те-
левизионного изображения на большие расстояния и их помехозащищенность.
Это обстоятельство, анализ развития зарубежного управляемого оружия
(Франция, Англия — ракета «Мартель» Aj-168, США — ракета «Кондор»), а также
результаты научно-исследовательских работ в СССР показали, что в стране мож-
но перейти к созданию высокоточных систем наведения ракет класса воздух—по-
верхность с телевизионно-командным наведением. В этих системах приемник
информации (телевизионная передающая трубка) должен находиться на борту
ракеты, непрерывно сближающейся с целью. Информация в виде телевизионно-
го изображения передается по радиолинии на борт самолета-носителя, где по
этому изображению на телевизионном экране оператор формирует команды уп-
равления. Эти команды по командной радиолинии передаются обратно на борт
ракеты, где используются для наведения. Такая система, по существу, является
системой самонаведения, которая по предварительным прикидкам могла обеспе-
чить точность наведения порядка КВО = 1...3 м.
431
Эти исследования были проведены в 1960-х годах с использованием экспери-
ментальных телевизионных головок, передающие камеры для которых изготав-
ливались инициативной группой инженеров ОКБ Московского телевизионного
завода «Рубин».
На основе этих исследований и достижений советской промышленности,
предприятий и организаций оборонной отрасли комиссией при СМ СССР по во-
енно-промышленным вопросам в 1970 г. был задан для разработки комплекс во-
оружения самолета СУ-24М ракетой Х-59.
В процессе проектирования было определено, что часть комплекса телевизи-
онно-командного наведения ракеты Х-59 должна располагаться по ее борту, а
часть — на борту самолета-носителя (рис. 4.14).
Ракетная часть комплекса состояла из:
• гиростабилизированной телевизионной головки, располагаемой в головной
части ракеты за светопрозрачным сферическим обтекателем. Объектив ТГН
с переменным фокусным расстоянием 40...200 мм). В ТГН электронной
схемой формировалось безынерционное подвижное перекрестие (ПП), уп-
равляемое по двум взаимно перпендикулярным осям (вверх-вниз, впра-
во-влево) по сигналам командной радиолинии с борта самолета-носителя.
В ТГН реализована также автономная система слежения за заданной целью.
Факт задания фиксировался наложением ПП на цель и нажатием кнопки
«привязка» штурманом-оператором (система «Тубус» от ракеты Х-29Т);
• передатчика телевизионного изображения (Нить-A) с антенной, располо-
женной в хвобтовой части ракеты, закрытой отделяющимся в полете старто-
вым двигателем (СД). Раскрыв диаграммы направленности (ДНА) около 6°;
• приемника команд управления, имеющего общую с передатчиком изображе-
ния антенну;
• системы наведения и автономного управления (СНАУ-59), предназначенной
для приема, хранения данных полетного задания (ПЗ) и выработки сигналов
стабилизации и управления ракеты.
Рис. 4.14. Блок-схема системы телевизионно-командного наведения ракеты Х-59
432
Самолетная часть комплекса состояла из:
• подвесного контейнера, в котором располагались приемник телевизионного изо-
бражения (Нить-Б) и передатчик команд управления. Там же располагались две
приемно-передающие антенны со следящими приводами. Передняя с ДНА око-
ло 20°, задняя около 6°. Обе антенны закрыты радиопрозрачными обтекателями;
• телевизионного видеоконтрольного устройства, на которое из ПК-9 переда-
валось телевизионное изображение (вместе с ПП), полученное по радиоли-
нии из ТГН борта ракеты. Размер экрана ВКУ 23 см по диагонали. Устройст-
во находилось в кабине самолета перед штурманом-оператором (Су-24М —
двухместный самолет);
• механизма управления перекрестием (МУП), которое располагалось под
правой рукой штурмана-оператора. Сигналы с МУП передавались в передат-
чик команд управления и далее по командной радиолинии на ракету в блок
управления ПП и на гиростабилизатор (ГС) ТГН. На МУП под большим
пальцем штурмана-оператора располагались кнопки изменения фокусного
расстояния объектива ТГН (фокус больше, фокус меньше). Этот сигнал по
командной радиолинии также передавался на борт ракеты (на привод изме-
нения фокусного расстояния ТГН);
• галетного переключателя дистанционного изменения высоты ракеты, распо-
ложенного на лицевой панели приборной доски. Сигналы изменения высо-
ты по командной радиолинии передавались на ракету (в контур стабилиза-
ции высоты). Высота полета дискретно изменялась от 50 до 1000 м.
Одной из наиболее важных особенностей комплекса телевизионно-команд-
ного наведения ракеты Х-59 является наличие в контуре наведения ракеты штур-
мана-оператора с многообразием его передаточных характеристик. Для реализа-
ции в ракете любого закона наведения штурман-оператор должен непрерывно
совмещать оптическую ось передающей телевизионной камеры с изображением
цели на экране ВКУ.
В большинстве работ [8, 9] показано, что поведение человека-оператора (его
передаточная функция) существенно зависит от типа управляемой им системы и
наличия средств, облегчающих ему решение задач управления.
Поэтому в процессе проектирования ракеты Х-59 в ГосНИИАС был создан
комплекс полунатурного моделирования. На нем реализован аппаратный облик,
подобный приведенному на рис. 4.14, с включением в контур наведения ракеты
штурмана-оператора самолета и созданием системы визуализации, близкой к
имеющейся при реальном наведении ракеты Х-59 на цель.
На комплексе был проведен большой объем исследований по отработке сис-
темы телевизионно-командного наведения ракеты Х-59 как на этапе проектиро-
вания, так и при отработке ее на этапах Л КИ и ГИ.
Важным результатом исследований на комплексе явились работы по иденти-
фикации передаточной функции человека-оператора, работающего в контуре теле-
визионно-командного наведения ракеты Х-59. На комплексе получены входные
U(t), t = 1,2, ..., N и выходные Y(t), t = 1, 2, ..., N последовательности челове-
ка-оператора, работающего в контуре сопровождения цели, приведенного на
рис. 4.14. Входная последовательность — рассогласование изображения цели и оп-
тической оси головки наведения, выходная последовательность — сигналы с МУП.
На комплексе была предварительно определена базовая структурная схема челове-
ка-оператора при его работе по синусоидальным и линейно изменяющимся пере-
мещениям изображения цели по экрану ВКУ. Эта схема приведена на рис. 4.15.
433
«белого» шума
Рис. 4.15. Структурная схема человека-оператора в контуре
телевизионно-командного наведения ракеты Х-59
Идентификация параметров человека-оператора в структуре рис. 4.15 прово-
дилась с использованием последовательностей U(t) и К(/), полученных при ис-
следованиях на МК-61Т.
При идентификации параметров человека-оператора использовался цифро-
вой метод представления дискретной базовой динамической системы (рис. 4.15)
в разностных уравнениях:
A(Z~l)Y(t) = B(Z~])U(t) + XC(Z~')X(t), (4.2)
где X(t) — последовательность независимых случайных переменных с математиче-
ским ожиданием, равным нулю, и дисперсией 1 (0, 1); A(Z~}), B(Z~'), C(Z~]) —
полиномы от Z~k
A(Z~') = 1 + a{Z~] + a2Z~2 + ... + anZ~n\
B(Z~') = bQ + b}Z-' + b2Z~2 + ... + bnZ-“; (4.3)
C(Z~!) = 1 + qZ-1 + c2Z~2 + ... + cnZ~n.
При идентификации использовался метод максимального правдоподобия.
Для этого вводился многомерный вектор идентифицируемых параметров
ет = (й|, а2,ап, b0, bt,bn, с„ с2, ..., с„) (4.4)
и находилась п-мерная нормальная плотность вероятности последовательности
независимых переменных X(t):
Р(х( 1), Х(2),...»х(Л)) = exp ,Е х2(/)) = Р(у( 1), у{2),у(N)/Q) =
= Р(х(1),х(2),..., (TV) •
Lay(/)J ,
x(t) =/(Э)
(4.5)
где — абсолютная величина Якобиана преобразования.
Lay(r)J
434
Якобиан определялся из схемы измерений на МК-61Т в общем виде:
kx(t) = у(\) - Ьои(\);
Ах(2) + XqxG) =у(2) + яjy(l) - Z>0w(2) “ 6iw0);
................................................................... (4.6)
kx(N) + XcjX(7V — 1) + ... + kcnx(N — n) =y(N) + axy(N — 1) + any(N — n) —
- bQu(N) - bxu(N - 1) - ... - bnu(N - n).
Якобиан преобразования:
]_
X
a\
Xcj
... о
... о
\n'
(4.7)
о
1
ап - 1
an - 1
Xc„ xcn_} - X
Таким образом,
W0) = rr^==
N
Логарифм плотности вероятности
1 N
L = log P(y/0) = - .?je2(z) - TV log X + const.
Вводилась функция потерь
PF(0) = i 1 e2(Z).
(4.8)
(4.9)
(4.10)
Максимизация Р(у/0) эквивалентна минимизации ^(0). Если найдено та-
кое 0, что И^(0) минимально, то оценка максимального правдоподобия £:
V= Е (4.11)
/ = 1
Необходимые условия минимизации следующие:
— = О’ — = 0
Э0, ’ ЭХ и’
Второе условие получается из (4.9) дифференцированием L по X:
£ e2G)
я = (4|2>
Так как зависимость от Сi не квадратичная, то для минимизации функции
потерь И^(0) используется итерационный алгоритм Ньютона—Рафсона:
0* + i =0*-G-iR, (4.13)
где 0к, 0к+ 1 — векторы идентифицируемых параметров на к = и(к + 1)-м шаге
итераций; G — матрица вторых частных производных функции потерь; R — век-
тор первых частных производных функции потерь.
435
Составляющие вектора R получались прямым дифференцированием функ-
ции потерь И/(6):
о и / i = I О v j
Элементы матрицы G получались следующим образом:
Э2И^(0) = у rde(z) Эе(/) Э2е(Г) q . ...
ае, Э0У ,=11_ эеу эе, () эе-эод ( )
Производные от е(/) определялись из выражений:
С(г-1)^Йг = z~‘y^ = Z-'u(r); C(z-')^ = Z-'E(r); (4.16)
_|\ Э2С(/) _ '7—i — j — )\ ^2£(/) _ yr—i—j
C{z Or77)’ C(z hb^bj-~Z сОтЛ’
C(z-1) /2g(Z} = 2Z-' -j. (4.17)
v 'dCj'dCj c(z~4
Матрица вторых частных производных функции потерь тесно связана с ин-
формационной матрицей Фишера и использовалась для оценок состоятельности,
эффективности и нормальности оценок максимального правдоподобия. Кроме
того, она может быть использована как указатель избыточности параметров в мо-
дели. Однако в работах по идентификации параметров структуры человека-опе-
ратора использовался другой подход. Если порядок модели не менее чем порядок
системы, то остатки е(/) образуют последовательность независимых переменных.
Простым контролем независимости этой последовательности является подсчет
корреляционной функции:
Е(Г)Е(/ + т), т = 1, 2,..., /?. (4.18)
Изменения в пределах одной структуры, приводящие к приближению иденти-
фицируемой системы к реальной, могут контролироваться поведением величины
1 N
N _ j Z е2(/). Если при каких-то изменениях величин параметров в пределах одной
структуры эта величина уменьшается, это свидетельствует об уточнении модели.
Использование приведенной выше методологии определения параметров
передаточной функции человека-оператора в контуре телевизионно-командного
наведения позволило определить типы и параметры нелинейных коэффициентов
усиления 1 и II на рис. 4.15, параметры мультипликативной составляющей шума
и параметры формирующего оператора, ограничивающего полосу воспроизводи-
мых частот шумовой составляющей человека-оператора. Было установлено, что
нелинейное звено I хорошо идентифицируется зоной нечувствительности, коэф-
фициентом усиления и зоной насыщения при больших входных сигналах,
звено 11 нелинейностью вида К1Параметры мультипликативного шума оп-
ределяются нелинейным звеном 11 и формирующим оператором типа апериоди-
ческого звена с постоянной времени Т= 0,2...0,3 с.
Структура передаточной функции человека-оператора, приведенная на рис. 4.15,
а также методология определения величин параметров, входящих в эту функцию,
широко использовались в ГосНИИАС и других организациях при проведении
436
математического моделирования, в том-числе и статистического, процессов на-
ведения ракеты Х-59 и других ракет и бомб с телевизионно-командными систе-
мами управления.
В исследованиях на комплексе установлено, что параметры передаточной
функции человека-оператора существенно зависят от наличия в контуре слеже-
ния за целью через телевизионную головку наведения подвижного безынерцион-
ного электронного перекрестия, а также от величины его коэффициента переда-
чи от МУП до положения перекрестия на экране ВКУ (А^).
В результате работ на комплексе полунатурного моделирования и по результа-
там анализа зарубежных источников было установлено, что введение подвижного
электронного безынерционного перекрестия на экране ВКУ, управляемого от
МУП, в сильной степени стабилизирует коэффициент передачи штурмана-опера-
тора и уменьшает величину запаздывания его реакции. Этот факт можно объяснить
следующим. На рис. 4.16 приведена упрощенная блок-схема контура сопровожде-
ния цели ракеты Х-59, где ец — кинематический угол направления на цель относи-
тельно какой-то неподвижной базы отсчета; ег — угол отклонения гиростабилизи-
рованной ТГН относительно той же базы отсчета; Krz/p — упрощенная передаточ-
ная функция гиростабилизатора; Кпи — коэффициент передачи подвижного
перекрестия (от сигнала МУП до величины перемещения ПП на экране ВКУ); А —
величина отклонения изображения цели на экране ВКУ от оптической оси ТГН.
Из рис. 4.16 видно, что коэффициент передачи контура ПП стабилизируется
величиной l/A^, если единственной задачей штурмана-оператора является не-
прерывное наложение (сопровождение) на изображение цели на экране ВКУ
подвижного перекрестия.
Если принять коэффициент передачи контура, равным 1/А^, то передаточ-
ную функцию контура слежения можно представить в виде:
^вых(р)
£ц(Р)
ПП
-р +
ГС
(4.19)
Видно, что выходной сигнал f/BbIX является производной от ец с коэффици-
ентом 1/АГпп, пропущенный через апериодическое звено с постоянной времени
т= Кпп/Кк.
Таким образом, в системе наведения ракеты Х-59 обеспечивается закон про-
порциональной навигации. Подбором величин Кпп и Кгс можно обеспечить ра-
циональное для ракет и бомб с телевизионно-командным наведением значение
постоянной времени контура.
Рис. 4.16. Блок-схема контура сопровождения цели ракеты Х-59
437
При формировании подвижного перекрестия на борту ракеты (см. рис. 4.14)
оно охватывает обе радиолинии, что уменьшает влияние низкочастотных помех,
действующих в них.
В исследованиях на МК-61Т показана существенная роль предварительных
тренировок человека-оператора для приобретения устойчивых навыков сопро-
вождения цели меткой, расположенной на подвижном основании.
Во время проведения испытаний ракеты Х-59 на этапах Л КИ и ГИ комплекс
интенсивно использовался как тренажер для штурманов-операторов ОКБ
им. П. О. Сухого, что способствовало успешному проведению этих испытаний.
В процессе проектирования и отработки сформировался следующий облик
комплекса.
Атаки ракетами Х-59 осуществляются по малоразмерным особо важным целям с
заранее известными координатами. Эти координаты вводятся в прицельно-навига-
ционную систему (ПНС-24) самолета СУ-24 до момента атаки. В ПНС-24 вводятся и
координаты точки пуска. Эта точка должна выбираться заранее с учетом максималь-
ной дальности полета ракеты и расположением средств ПВО противника. Пуск мож-
но осуществлять и без ввода точки пуска в ПНМ-24, но при этом команда отделения
ракеты от самолета будет проходить только в пределах разрешенной зоны пусков
(РЗП), жестко зашитых в ПНС-24 (рассчитывается по известным координатам цели).
В процессе полета летчик или ПНС-24 должны выводить самолет СУ-24М в
заранее заданную точку пуска. При этом ПНС-24 рассчитывает необходимые
данные, которые вводятся в СНАУ-59 и используются при автоматическом выво-
де ракеты в район поиска цели.
Пущенная ракета под действием тяги стартового двигателя (СД) оказывается
впереди самолета примерно на одной с ним высоте. После выгорания топлива СД
отстреливается и открывает расположенную за ним приемопередающую антенну.
Дальность между самолетом и ракетой к этому времени составляет около 1 км.
После отстрела СД осуществляется взаимный поиск и вхождение в связь перед-
ней антенны ПК-9 и антенны ракеты. Далее самолет начинает маневр отворота от
цели. Ракета по сигналу СНАУ-59, используя данные, полученные до пуска из
ПНМ-24, летит в направлении атакуемой цели.
В процессе разворота самолета угол поворота передней антенны контейнера
в горизонтальной плоскости увеличивается, а поскольку задняя антенна автома-
тически отслеживает положение передней, в некоторый момент времени равно-
сигнальные зоны ДНА антенн оказываются направленными на ракету. При этом
автоматически осуществляется переключение с передней широконаправленной
антенны на заднюю узконаправленную, что существенно увеличивает дальность
линий связи самолет—ракета и их помехозащищенность.
При подлете ракеты к цели на дальности около 10 км (эта дальность индици-
руется штурману на экране ВКУ) начинается этап обнаружения и опознавания
цели по телевизионному изображению, транслируемому с ракеты и воспроизво-
димому на экране ВКУ.
При этом штурман-оператор имеет следующие возможности:
• разворачивать с помощью команд МУП камеру ТГН в горизонтальной и в
вертикальной плоскостях;
• увеличивать или уменьшать масштаб изображения (примерно в 5 раз);
• изменять высоту полета ракеты в пределах 50... 1000 м.
Вывод ракеты в район поиска цели можно осуществлять и так называемым
штурманским методом. При этом штурман по наиболее заметным ориентирам на
трассе полета ракеты к цели, которые он наблюдает на экране ВКУ, может выво-
дить ракету в район поиска цели.
438
После обнаружения и опознавания цели единственной задачей штурмана са-
молета является удержание с помощью команд МУП подвижного перекрестия на
изображении цели. Он может по желанию, наложив перекрестие на изображение
цели, нажать кнопку «Привязка» (расположена на МУП). После этого ракета без
вмешательства штурмана будет автоматически наводиться на отмеченную штур-
маном цель (автономное самонаведение). Характеристики комплекса после отра-
ботки на этапе ГИ приведены ниже.
Характеристики комплекса с ракетой Х-59
Тип ракеты....................Тактическая средней дальности для пора-
жения особо важных наземных малораз-
мерных целей
Система управления............Телевизионно-командная + автономное
телевизионное самонаведение
Дальность стрельбы, км.......До 40
Точность, КВО................2...3 телевизионно-командное наведение
3...5 автономное самонаведение
Скорость полета, м/с.......... 250...350
Модель ракеты, мм.............380
Размах крыльев, мм............ 1260
Стартовый вес, кг............. 760...790
Боевая часть, кг..............Фугасно-кумулятивная 147...148
Стартовый двигатель...........РДТТ
Маршевый двигатель............РДТТ
Пусковая установка............АКУ-58
Самолеты-носители Су-24М (базовый), Су-27ИБ, Су-17М4,
Су-30МК
Состояние разработки............серийное производство с 1981 г.
На рис. 4.17 приведен общий вид ракеты Х-59, а на рис. 4.18 — общий вид
подвесного контейнера.
Рис. 4.17. Ракета Х-59
439
Рис. 4.18. Подвесной контейнер
Рис. 4.19. Ракета Х-59М
В 1980-х годах была осуществлена модернизация ракеты Х-59. Вместо твер-
дотопливного маршевого двигателя РДТТ (он размещался в корпусе ракеты Х-59)
был установлен турбореактивный двигатель ТРДД Р-95ТП-300БТ Он подвеши-
вается на консоле под ракетой.
За счет этого увеличена дальность полета ракеты и увеличен вес БЧ (до
315...320 кг в варианте проникающей БЧ и до 280 кг в варианте кассетной БЧ).
При этом стартовый вес ракеты возрос до 920 кг. Общий вид ракеты Х-59М при-
веден на рис. 4.19.
440
В телевизионной головке наведения использована передающая телевизион-
ная трубка с высокой чувствительностью, что обеспечивает всесуточность приме-
нения ракеты.
Так как система автономного управления ракеты не модернизировалась, то
зона возможных пусков в автономном варианте осталась прежней. На большие
дальности пуск ракеты должен осуществляться штурманским методом. Посколь-
ку предполагался рост дальности радиолиний самолет—ракета, то были увеличе-
ны мощности передатчиков телевизионного изображения и команд управления.
Ракета Х-59М серийно выпускается с 1991 г. В процессе испытаний ракеты
Х-59 возник вопрос о возможности ее применения с одноместных самолетов, лет-
чики которых во время наведения ракеты должны осуществлять пилотирование
самолета. Ответ на этот вопрос могли дать натурные пуски ракет с одноместных
самолетов или полунатурные испытания на специально разработанном модели-
рующем комплексе. В качестве такого комплекса был использован комплекс по-
лунатурного моделирования после его существенной модернизации. В результате
ее был введен модернизированный тренажер «Полоса-2» для обучения летчиков
пилотированию при посадке самолетов, снабженный объемным макетом мест-
ности размером 2,5 х 10 м, который имитировал реальную местность 2,5 х 10 км с
расположенными на ней макетами наземной обстановки.
В состав тренажера «Полоса-2» входила подвижная каретка, на которой рас-
полагалась передающая телевизионная камера с широкоугольным объективом.
Световой поток от макета через систему поворачивающихся зеркал и призм по-
падал в передающую камеру. Поворотами приводов соответствующих зеркал
и призм через следящие системы осуществлялось изменение положения поля зре-
ния камеры по курсу, тангажу и крену. Подвижная каретка с помощью следящих
приводов могла перемещаться вдоль, поперек макета и по высоте.
Следящие системы каретки управлялись сигналами вычислительного уст-
ройства, на котором решались уравнения движения одноместного самолета. Вхо-
дами вычислительного устройства являлись сигналы, снимаемые с органов уп-
равления, расположенных в макете кабины одноместного самолета, входящего в
состав модернизированного комплекса.
Видеосигнал из передающей камеры передавался на большой телевизион-
ный экран, располагавшийся перед летчиком в макете кабины немного выше
ВКУ, входящего в состав телевизионно-командной системы наведения ракеты.
В процессе исследований на модернизированном комплексе летчик должен
был осуществлять имитацию пилотирования самолета по большому телевизионно-
му экрану и наводить ракету по экрану ВКУ. В результате большого объема иссле-
дований на комплексе с участием летчиков-испытателей ОКБ им. А. И. Микояна
было установлено, что одновременное пилотирование одноместного самолета
и наведение ракеты с телевизионно-командной системой наведения вполне воз-
можно, причем с хорошей точностью попадания в цель. Этот факт был подтверж-
ден государственными испытаниями комплекса вооружения одноместного само-
лета СУ-17М с ракетой Х-59М (комплекс СУ-17М4).
4.4. Лазерные системы наведения
4.4.1. ОСНОВНЫЕ ЭТАПЫ СОЗДАНИЯ
УПРАВЛЯЕМЫХ СРЕДСТВ ПОРАЖЕНИЯ,
ОСНАЩАЕМЫХ ПОЛУАКТИВНЫМИ
ГОЛОВКАМИ САМОНАВЕДЕНИЯ
В конце 1960-х годов была проведена комплексная НИР с участием
ГосНИИАС, ЦКБ «Геофизика», ОКБ КМЗ (ОАО «КТРВ»), МКБ «Кулон» (ОАО
«ОКБ Сухого»), в которой определялась идеология и была показана возможность
разработки тактического ударного оружия, включающего станции подсвета цели
лучом оптического квантового генератора, расположенного на штурмовике, и ра-
кет с полуактивными головками самонаведения, способными следить за сигна-
лом лазера, отраженным от цели (подстилающей поверхности в районе цели).
В НИР были определены пути создания в приемлемых весах и габаритах
станции подсвета цели с использованием лазеров на базе стекла, активированно-
го неодимом, с длиной волны 1,06 мкм, чувствительных элементов ГСН, способ-
ных воспринимать сигнал ОКГ, отраженный от различных подстилающих по-
верхностей, на дальностях до 8 км. Проработаны компоновка ракеты с осколоч-
но-фугасной боевой частью, возможность ее размещения на самолете Су-17М,
принципы демпфирования луча станции подсвета цели, обеспечивающие удов-
летворительную точность удержания его на цели в режиме пикирования. В НИР
было показано, что новый вид оружия дает существенный прирост эффективнос-
ти действия фронтовой авиации по сравнению с неуправляемыми ракетами и
бомбами при поражении разнообразных точечных целей: позиций оператив-
но-тактических ракет, РЛС, самолетов на стоянке и др. Эффективность действия
лазерных ракет выше и по сравнению с ракетами Х-66 и Х-23 за счет возможности
залпового применения в одной атаке цели и более высокой точности наведения.
По результатам НИР в 1970 г. вышло решение правительства СССР о созда-
нии системы вооружения с лазерной станцией подсвета цели, размещаемой в
контейнере, и ракетами Х-25 (ОКБ «Звезда») с полуактивными лазерными ГСН
24Н1 (рис. 4.20) для оснащения одноместных фронтовых штурмовиков. В 1972 г.
Рис. 4.20. Ракета Х-25
442
правительством была задана ОКР по созданию ракеты Х-29Л (КБ «Молния») для
поражения широкого круга фронтовых прочных целей (типа мостов, самолетов в
ЖБУ и др.) с проникающей боевой частью и головкой самонаведения 24Н1 [10].
При разработке первой лазерной станции подсвета целей, ракет Х-25 и
Х-29Л были решены основные технические задачи. Это позволило создать эф-
фективное оружие нового типа с полуактивными лазерными головками самона-
ведения.
После успешной реализации лазерной системы в составе самолетов
Су-17М2(3) и ракет Х-25 работа «Решение научной и практической проблемы
использования лазерного излучения для точного наведения авиационных средств
поражения» в 1976 г. была удостоена Ленинской премии. Группе авторов в соста-
ве Е. А. Федосова (ГосНИИАС), В, Г. Коренькова (ОАО «ТРВ»), Д. М. Хо-
рола, А. А. Казамарова (ЦКБ «Геофизика») и Р. А. Панкова (30 ЦНИИ МО)
было присвоено звание лауреатов Ленинской премии.
В 1971 г. в НИИПГМ начата ОКР по созданию корректируемой авиабомбы
КАБ-500 с лазерной головкой самонаведения 27Н, обеспечивающей захват отра-
женного от цели сигнала ОКГ на траектории автономного полета авиабомбы.
Авиабомбы должны были применяться в комплексе со специально разработан-
ной станцией подсвета цели, обеспечивающей гиростабилизацию лазерного луча
и большие углы прокачки (особенно в вертикальной плоскости).
На этапе аванпроекта перед разработчиками КАБ встал вопрос о выборе
аэродинамической и конструктивно-компоновочной схем бомбы. Было извест-
но, что аэродинамическая схема УАБ США типа «Болт-84» выполнена по схеме
«утка», о габаритно-массовых параметрах которой имелась весьма ограниченная
информация. В основу ее конструктивно-компоновочной схемы положен прин-
цип использования боевых частей штатных неуправляемых авиабомб из имею-
щихся запасов с минимальными доработками: к передней оживальной части
авиабомбы крепился приборный отсек с флюгерной ГСН и аппаратурой управле-
ния с аэродинамическими рулями, а к задней — отсек с развитым хвостовым опе-
рением (стабилизаторами) либо жесткой конструкции, либо с раскрывающимся в
полете.
При выборе конструктивно-компоновочной схемы учитывались следующие
обстоятельства:
• жесткие габаритные ограничения, не позволяющие на существовавших са-
молетах-носителях бомб иметь размах стабилизаторов более 750 мм, что в
схеме «утка» не позволяло получить нужные аэродинамические характерис-
тики. Складывающиеся стабилизаторы значительно усложняли конструк-
цию бомбы, что было нерационально для бомбы массой 500 кг;
• ограничения массы бомб, поскольку бомбовые держатели III группы допус-
кали подвеску бомб массой не более 525 кг. По этой причине нельзя было
использовать фугасные боевые части от штатных управляемых авиабомб ти-
па ФАБ-500 из-за их значительной доработки по снижению общей массы
(525 кг с учетом систем управления и наведения). Впоследствии для
КАБ-500, как исключение, была согласована допустимая масса не более
560 кг;
• в системе управления бомбы «Болт-84» не предусматривалась стабилизация
по крену, что, по мнению отечественных специалистов, несмотря на просто-
ту, было малоперспективным при дальнейшем оснащении бомбы гиростаби-
лизированными ГСН другого типа (например, телевизионного).
443
В результате для первой отечественной КАБ была выбрана аэродинамиче-
ская схема «бесхвостка» с креплением к заднему торцу боевой части хвостового
отсека со стабилизаторами и аэродинамическими рулями, установленными по
схеме «X» (рис. 4.21).
Еще до окончания работ по КАБ-500 в 1975—1977 гг. соответствующими ре-
шениями правительства был задан к разработке ряд УАБ массой 500 и 1500 кг:
• КАБ-500 с полуактивной лазерной ГСН и кассетной боевой частью для борь-
бы с бронированной техникой;
• КАБ с телевизионной ГСН и бетонобойной боевой частью;
• КАБ-1500 Л-Ф, КАБ-1500 Л-Пр и КАБ-1500 Л-К с полуактивной лазерной
ГСН и боевыми частями фугасного, проникающего и кассетного типа.
Этими решениями была в основном определена номенклатура КАБ первого
поколения. В обеспечение этих работ в НИИПГМ на базе уже имевшегося кол-
лектива специалистов было сформировано специальное тематическое направле-
ние по разработке корректируемых и управляемых авиабомб [11].
При начатом в нашей стране на рубеже 1960—1970-х годов проектировании
самолетных комплексов вооружения с лазерными системами целеуказания и на-
ведения определился ряд проблем, в оперативном решении которых ГосНИИАС
принимал активное участие как в области научно-исследовательской работы, так
и в создании кооперации научно-технических организаций — исполнителей по
отдельным направлениям. Одной из важнейших задач, решение которой опреде-
ляет тактико-технические характеристики комплексов (дальность действия, точ-
ность наведения, надежность помехозащищенность и др.), является получение
исходных данных и разработка методов инженерных расчетов уровня полезных
сигналов, естественных и организованных помех в условиях боевого применения.
К началу проектирования уже был накоплен достаточно серьезный науч-
но-технический задел по различным аспектам проблемы переноса оптического
излучения в рассеивающих средах и характеристикам отражения природных объ-
ектов (главным образом применительно к дальномерным системам и системам
связи) [10—12]. Однако для более глубокой проработки вопросов, связанных с
оптической импульсной локацией в бортовых системах целеуказания и наведе-
ния, требовалось:
• получение характеристик отражения лазерного излучения от наземных целей
и элементов окружающего ландшафта, а также рассеяния лазерного излуче-
ния на атмосферных аэрозолях;
Рис. 4.21. Корректируемая авиационная бомба КАБ-500 Л-Ф
444
• создание инженерных методов расчета характеристик сигналов и помех че-
тырехплощадочного фотоприемника в неоднородной аэрозольной атмосфе-
ре и при организованном противодействии, когда станция подсвета (СП) и
оружие с головкой самонаведения находятся в разных точках подвеса или
движутся по разным траекториям, а лоцируемые поверхности неоднородны.
По первому направлению институтом на договорных началах привлекались
следующие наиболее известные в стране (в области исследования распростране-
ния лазерного излучения в естественных средах) научные коллективы: Централь-
ная аэрологическая обсерватория Госкомгидромета, Институт физики АН БССР,
Институт физики атмосферы АН СССР, Институт оптики атмосферы АН СССР,
Главная геофизическая обсерватория Госкомгидромета.
Были проведены работы по следующим направлениям:
• исследование отражательных характеристик элементов ландшафтов и полу-
чение высотных зависимостей рассеивающих свойств атмосферных аэрозо-
лей, эффективных поверхностей отражения (ЭПО) лазерного излучения об-
разцов военной техники;
• получение статистических зависимостей параметров светорассеяния атмос-
ферных дымок;
• модельные исследования в водном бассейне пространственно-временной
структуры помехи обратного рассеяния в оптически плотных средах, соот-
ветствующих сложным метеоусловиям;
• исследование прозрачности атмосферы на наклонных трассах и лидарного
отношения (отношение коэффициентов общего и направленного светорас-
сеяния);
• исследование коэффициентов отражения естественных поверхностей и фо-
нового излучения.
Модельные исследования отражающих свойств наземной техники и самоле-
тов на макетных образцах с реальной окраской методом немасштабного модели-
рования (отношение размеров деталей макетов к длине волны излучения не соот-
ветствует натурным условиям) на специальной лазерной установке проводились
сотрудниками ГосНИИАС.
Параллельно с перечисленными исследованиями НПО «Геофизика» — раз-
работчик лазерных СП и ГСН — заказало Государственному институту приклад-
ной оптики Миноборонпрома работу по изучению зависимости коэффициента
ослабления атмосферного аэрозоля е от длины волны лазерного излучения и его
высотных профилей.
В результате исследований, проведенных перечисленными организациями,
были получены:
• ЭПО ряда образцов наземной военной техники и самолетов для X =1,06 мкм
и 0,694 мкм под разными ракурсами наблюдения. Показано, что ЭПО во
многих случаях инженерных расчетов может быть представлена в виде про-
изведения коэффициента отражения используемого типа окраски на пло-
щадь проекции образца на картинную плоскость ГСН;
• угловые зависимости в пределах углов 0...800 для моностатической схемы ло-
кации коэффициентов отражения р (средние значения и дисперсии) основ-
ных типов подстилающих поверхностей — степь, лес, песок (барханы), снег,
вода (море), лед — с разных высот. Показано, что коэффициент лазерного
отражения удовлетворительно согласуется с коэффициентами отражения не-
когерентного монохроматического излучения той же длины волны X;
445
• спектральные зависимости коэффициента ослабления атмосферного аэрозо-
ля е для различных условий применения. Показано на основе обработки зна-
чительного объема экспериментальных данных, что спектральная зави-
симость е в трех основных сезонных периодах определяется следующим со-
отношением [14, 15]:
£(Х)= Ц^-(ПО +
где 5М — метеорологическая дальность видимости, а постоянные приведены
в табл. 4.2.
Представленные расчетные соотношения проверялись по имеющимся экс-
периментальным данным, полученным при импульсном лазерном зондировании
в натурных условиях. Они показали удовлетворительную сходимость результатов
и в дальнейшем использовались при анализе результатов испытаний и доработке
ФПУ лазерных ГСН и ПРНК видимого диапазона.
В ГосНИИАС был разработан, изготовлен и в 1973 г. введен в эксплуатацию
оригинальный комплекс полунатурного моделирования для исследования про-
цессов наведения оружия с полуактивными лазерными ГСН.
Комплекс позволял задействовать реальные станцию подсвета, головки са-
монаведения системы управления оружием и имитировать:
• процесс наведения оружия на цель с нарастанием плотности потока мощнос-
ти диффузного сигнала, отраженного от цели, на входе ГСН;
• увеличение размера пятна от подсвечивающего цель ОКГ на фотоприемнике
ГСН и колебания этого пятна из-за ошибок удержания луча на цели пилотом
самолета.
Исследования на КПМ сыграли большую роль в процессе разработки и до-
водки систем управления ракеты Х-25 и корректируемой авиабомбы КАБ-500.
Одновременно с проведением ОКР по разработке оружия в 1974 г. ЦКБ
«Геофизика» и ГосНИИАС выполнили НИР по исследованию принципов повы-
шения помехозащищенности станций подсвета цели и ГСН. В НИР была иссле-
дована помехозащищенность ГСН 24Н1 и 27Н и системы управления оружия при
действии различных типов помех: синхронных, асинхронных, уводящих, ослеп-
ляющих. Для повышения помехозащищенности оружия были предложены прин-
ципы кодирования сигнала станции подсвета цели по частоте повторения и соот-
ветствующие схемы, обеспечивающие прием кодированного сигнала, отражен-
ного от цели в ГСН.
Комплекс вооружения самолета Су-17КГ с лазерной станцией подсвета цели
и с ракетами Х-25 был принят на вооружение в 1976 г., а с ракетами Х-29Л — в
1977 г. Это был первый в мире комплекс вооружения штурмовика с лазерной
станцией подсвета целей и ракетами с лазерными полуактивными ГСН.
Таблица 4.2
Период Тип погоды по п\ ni
Летний Устойчивая дымка 0,06 0,36 1,88
Весенне-осенний Дымка 0,1 0,45 1,3
Туманная дымка 0,01 0,8 0,5
Зимний Устойчивая дымка 0 0,58 1,24
446
4.4.2. ОПТИМИЗАЦИЯ СТРУКТУРЫ
И ПАРАМЕТРОВ УНИФИЦИРОВАННОГО
ЗАКОНА НАВЕДЕНИЯ
Стремление к сокращению затрат на производство однотипных ракет приве-
ло к необходимости создания базовой фронтовой ракеты малой дальности со
сменными системами наведения (ракеты семейства Х-25М).
Актуальной задачей при этом является разработка единой или максимально
унифицированной системы наведения базовой ракеты для ряда сменных ГСН.
Решение этой задачи осложняется наличием существенной специфики рабо-
ты каждой системы наведения, проявляющейся в различии состава и спектра воз-
мущений, действующих на контур наведения ракеты с конкретным типом ГСН.
Так, в полуактивных лазерных системах (в отличие от телевизионных и теплови-
зионных систем) угловой шум на входе ЛГС, вызванный ошибками удержания
луча ОКГ на цели, нарастает по мере приближения ракеты к цели и может ухуд-
шить точность попадания ракеты, особенно при пуске с дальней границы ЗВП с
малых и сверхмалых высот (50...300 м).
В начале 1980-х годов была поставлена задача получения оптимального зако-
на наведения, учитывающего специфику требований к ракетам данного класса.
Для решения ее был выполнен ряд следующих теоретических работ:
• анализ существующих и вновь разрабатываемых систем наведения для на-
хождения унифицированного закона наведения ракеты малой дальности со
сменными модулями ГСН;
• обоснование выбора критерия качества системы, учитывающего специфику
ракет данного класса;
• синтез оптимального закона наведения, обеспечивающего максимальную
эффективность в рамках основных ограничений;
• формирование рациональных структур систем наведения, использующих
всю информацию, поступающую с ГСН;
• анализ различных законов наведения и выработка рекомендаций по постро-
ению унифицированного закона наведения с учетом возможностей элемент-
ной базы ракет данного поколения.
Анализ работы систем наведения с оптико-электронными ГСН показал сле-
дующее:
• наиболее «жесткие» требования к унифицированному закону наведения ра-
кет малой дальности типа Х-25, Х-29Л, С-25КОР предъявляет полуактивная
лазерная система наведения из-за высокого уровня углового шума на входе
ЛГС, вызванного ошибками удержания луча ОКГ на цели;
• в пассивных телевизионных и тепловизионных системах наведения начальная
ошибка в выдаче целеуказания ГСН не устраняется в процессе наведения (при
отсутствии явного контраста цели) и входит как составляющая в промах ракеты;
• в пассивных ГСН уровень входного шума, связанного с микроструктурой
сюжета, невелик, однако из-за несовершенства обработки информации в
ГСН возникает смещение точки слежения, что ведет к увеличению рассеива-
ния ракет относительно цели;
• при отсутствии помех, приводящих к нарушению нормальной работы ГСН,
можно в первом приближении считать, что ГСН осуществляет измерение уг-
ловой скорости со(/) линии визирования
уй)(г) = ©(/) + е(й(О (4.20)
447
при измерении угла Д#(Г) между оптической осью и линией визирования
yq(t)=Aq(t)+eq(t), (4.21)
где ew(Z), eq(t) — случайные процессы с заданными статистическими характерис-
тиками, которые описывают ошибки измерения угловой скорости и угла.
Учитывая, что Д#(/) = q(t) — qr(t), измерение yq(t) можно преобразовать к
виду
y4(f) = + qr<t) = q + (4.22)
где q, qr — углы наклона линии визирования и оптической оси ГСН.
Уравнения движения объекта
Уравнения движения центра масс ракеты в полускоростной системе коорди-
нат имеют следующий вид:
Й = ^(«x — sin 0), е= ^(пу - cos 0), V = - Kc^s е nv И = Ksin 0, (4.23)
где проекции перегрузки на полускоростные оси координат равны
пх = (Pcos a cos р — X), пу = [(Psin а + У) cosy — (—Pcos а sin р + Z) sin у],
п. = ± [(Р sin а +*У) sin у + (—Pcos а sin р + Z) cos у]. (4.24)
о
Кинематические уравнения, описывающие относительное движение ракеты
и цели в сферической системе координат, имеют вид
D = [ Иц cos 0Ц cos (\|/ц - qr) - У cos 0 cos (\|/ — #г)] cos qB +
+ (И. sin 0 — Ksin 0) sin q-
<7B = 5 {[- Hlcos eu cos (Vu - <7r) + ^cos 0 cos (v - <7r)] cos qB +
+ (Гц sin 0Ц - Г sin 0) sin 0B}; (4.25)
<7r = Deos qT [ Cos 0u Sin (Vu - ~ Kcos 0 sin
В уравнениях (4.23)—(4.25) И, Иц — скорости ракеты и цели; а, р — углы
атаки и скольжения; 0, 0Ц, \|/, \|/ц — углы наклона и поворота траектории ракеты и
цели; у — угол крена; G — вес ракеты; Р — сила тяги двигателя; X, Y, Z — аэроди-
намические силы; qB, qr — углы поворота линии визирования в сферической сис-
теме координат; D — дальность ракета—цель; Н — высота полета ракеты.
Если ракета симметрична относительно продольной плоскости ОХх жестко
стабилизирована по крену, то общее движение можно разделить на два независимых
движения в двух взаимно перпендикулярных плоскостях — боковое и продольное.
В этом случае можно принять
cos р ~ cos у ~ 1,
cos (\|/ - qr) ~ cos (\|/ц - q) = 1.
448
Поскольку для увеличения эффективности боевой части ракета совершает
маневр набора высоты в вертикальной плоскости, то и движение ракеты будем
рассматривать в вертикальной плоскости:
V = g(nx — sin 0); 0 = у(пу — cos 0); Н = Hsin 0;
1Л') COS а - Al; пу = [Р(0 sin а + У];
Ь = Va cos (0Ц - q) - Ceos (0 - qB)\
DqR = sin (0Ц - q) — Vsin (0 - q^.
Дифференцируя уравнение для qn по t и используя выражения для V и 0, по-
лучаем
Аов + D^B = jB;
}в = [Уи sin (0Ц - qB) + Гц0и cos (0Ц - <?в)] - gnx sin (0 - qB) - gny cos (0 - qB) +
+ q cos qB,
где JB — проекции полного ускорения ракеты относительно цели на плоскость,
перпендикулярную к линии визирования.
Полагая, что в процессе наведения q(t) ~ 0(/), получаем дифференциальное
уравнение, описывающее эволюции угловой скорости линии визирования (ЛВ):
+ •/в 8Пу + Дг), Юв(/о) = Юо;
D
jB = Va sin (0U - qB) + Гц 0 cos (0Ц - qB\, (4.26)
Л(/)= Ж) cos^’
где F(t) — угловое ускорение Л В, вызванное действием составляющей силы тя-
жести.
4.4.3. ВЫБОР КРИТЕРИЯ КАЧЕСТВА.
ПОСТАНОВКА ЗАДАЧИ СИНТЕЗА УПРАВЛЕНИЯ
Основными факторами, определяющими эффективность авиационного
комплекса (на заключительном этапе атаки цели), оснащенного ракетами с опти-
ко-электронными ГСН, являются точность попадания ракеты, угол подхода ра-
кеты к поверхности цели 0А, средняя и конечная скорости полета ракеты.
Точность попадания ракеты обычно измеряется промахом в картинной плос-
кости ракеты, который однозначно связан с угловой скоростью Л В соотношением
сов(Гк)02(/к)
А =-----V------
отн
где D(t^ — дальность ракета—цель; Иотн — относительная скорость сближения
ракеты и цели; tK — заданный момент окончания процесса наведения.
(4.27)
15 Авиация ВВС России и научно-технический прогресс
449
Требования к углу подхода ракеты к поверхности цели 0К, т. е. углу наклона
вектора скорости ракеты, формируются либо из условия получения максималь-
ной эффективности данного типа БЧ (если такой угол подхода ракеты может тех-
нически обеспечить система наведения), либо из условия исключения прежде-
временного контакта ракеты с землей. Ограничение на значение угла подхода ра-
кеты к цели можно записать в следующем виде:
М{-0(/к)} > —0К при 0К < 0, (4.28)
где Л/ — операция осреднения по совокупности значений 0(/к).
Средняя скорость полета ракеты эквивалентна времени полета. Сокращение
времени полета ракеты уменьшает вероятность оказания противником огневого
и информационного противодействия авиационному комплексу. Кроме того,
пуск ракеты должен осуществляться на дальности, не меньше заданной. Система
наведения должна обеспечить выполнение условия
м\ j И(т) dr! > Пзал. (4.29)
I r0 J
Для успешного осуществления процесса наведения необходимо, чтобы ра-
кета обладала определенными потребными перегрузками в конце процесса наве-
дения, т. е. конечная скорость ракеты должна быть не меньше заданной:
Л/{И(ГК)}> Ик. (4.30)
Условие (4.30) является необходимым при применении ракет с проникаю-
щей БЧ для поражения прочных и укрепленных целей.
Таким образом, задачу синтеза оптимального управления ракеты с оптико-элек-
тронными ГСН можно сформулировать следующим образом: при измерениях типа
(4.20) или (4.22) требуется определить управляющую переменную U(t) = п кото-
рая в фиксированный момент времени tK доставляет минимум функционалу
'к
7(гк) = Л/{(ов2(гк) + Хе0(гк)-ХкГ(гк)-Хо J K(T)dT}, (4.31)
,о
где Х0, — положительные неопределенные множители Лагранжа, которые
выбираются так, чтобы выполнялись условия (4.28)—(4.30); математическое ожи-
дание М означает среднее по начальным условиям, возмущениям и ошибкам из-
мерений фазовых координат системы (4.31).
Движение центра масс ракеты и кинематические связи в вертикальной плос-
кости описываются следующей системой уравнений:
V = auV+a^ + ax,H + b,lF +Fx(t) + x\x(t), Г(Г0) = Ио;
О = b2U + F2(t) + п2(Г), 0(го) = 0О; (4.32)
Н ~ ^32® 4" # ('о) —
«в = а55®в + «5бЛ + b5U+ F5(f) + n5<z>;
®в('о)= %;
Л = n6W; Л('о) =/о>
где в качестве управляющей переменной будем рассматривать перегрузку ракеты
U(t) = ny(t).
450
Sacxq{H) Sa2c2p2f^c} \
Кроме того, a}} = ——~; an = —g\ ——— 7— — 1 ; av = И(Г);
K ’ 11 2/n(r) ’ 12 13 2m(t) / 32
= _ 20 = 1 . h = C|W^(o = g . , =___________________g . P =
°55 D(ty a56 D(t)’ 1 [P(t) + C«Sq]2’ 2 И(/)’°5 D(r)’ |W
= ^77\ + 5—7T\ (Pi _ —~ Pz^l’ = ~v cos = ~nh\ cos Qb’ ci’ c2 > 0 —
m(t) 2m(r)v c2a2 2 J 2 P D(t) B 1 2
oc, a2c2
константы, входящие в выражение CxQ = -р- — , которое аппроксимирует
зависимость Сх0(М) при 0,8 < М < 2,2; С® — коэффициент подъемной силы;
а — скорость звука; р1? р2 > 0 — константы, входящие в уравнение р(//) = Pi — Р2^
q — скоростной напор (рИ2/2); 5 — характерная площадь.
В системе уравнений (4.32) введены случайные процессы рД/) с заданными
статистическими свойствами.
Представим систему дифференциальных уравнений (4.32), описывающих
поведение объекта, в векторном виде
X = А(/)Х + B(u, t) + F(Z) + п(Г), t g k0, /J; X(/o) = (4.33)
где А(Г) — известная матрица; B(u, t) — матрица, зависящая от управления и вре-
мени; X — вектор фазовых координат; и — вектор управления; F — вектор детер-
минированных возмущений; т| — вектор случайных возмущений.
4.4.4. АЛГОРИТМ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
С использованием стохастического принципа максимума получена структура
оптимального закона, определяющая предельно достижимую точность наведения
ракет данного класса.
Алгоритм оптимального управления перегрузкой может быть записан в виде
Л2ОПТ(/) = (Ч + юр + К?А + «9- <4-34)
Анализируя структуру оптимального управления, можно сделать следующие
выводы:
• оптимальный закон наведения — линейная комбинация оценок фазовых ко-
ординат объекта юв и ув, где а)в и ув — калмановские оценки угловой скорос-
ти линии визирования и возмущения, действующего на контур наведения.
Важно отметить, что коэффициенты в (4.34) не зависят от текущего состоя-
ния объекта и могут быть заранее получены из решения дифференциальных
уравнений Риккати и введены в систему наведения;
• оптимальный закон наведения инвариантен к виду измерений уравнения
(4.20) или (4.22). Таким образом, этот закон может быть реализован как в уже
разработанных системах наведения, где в качестве измерений используются
выходные сигналы ГСН, пропорциональные угловой скорости линии визи-
рования, так и в перспективных системах наведения, где фильтр (типа
фильтра Кал мана) может быть введен в контур углового слежения ГСН;
451
оптимальная система наведения, обеспечивающая минимум среднеквадра-
тической ошибки промаха в момент окончания наведения при ограничениях
гкзад,
WO>eK3aj,
М J K(T)dr >Z>O3W
реализует метод пропорционального наведения.
Наличие сигнала в законе наведения позволяет повысить помехозащи-
щенность системы наведения, так как при прерывании информации о цели раке-
та будет под действием этого сигнала осуществлять полет по траектории, близкой
к баллистической, что способствует исключению больших промахов ракеты от-
носительно цели.
Формирование заданного угла подхода ракеты к цели осуществляется введе-
нием в закон наведения составляющей nQ(t).
Таким образом, применение стохастического принципа максимума позволя-
ет получить оптимальную структуру закона наведения для фронтовых ракет
ближнего действия с оптико-электронными ГСН. При этом оптимальный закон
реализуется на базе закона пропорционального наведения и состоит из блока
фильтрации фазовых координат объекта и блока выработки заданной перегрузки.
На траектории движения ракеты можно выделить три участка, на каждом из
которых системой наведения решается самостоятельная задача:
• участок дальнего наведения (ДН);
• участок перехода с дальнего наведения к ближнему наведению;
• участок ближнего наведения (БН).
В некоторых случаях на участке ДН непосредственно происходит переход к
участку БН.
Был проведен анализ законов наведения ракеты «воздух—поверхность» типа
Х-25 при наличии ограничений на структуру управления, т. е. в предположении,
что наведение ракеты состоит из перечисленных выше последовательных этапов;
решена задача синтеза субоптимального закона наведения на участке БН с исполь-
зованием всей информации, поступающей с выхода ГСН; на основании частных
критериев эффективности получены структуры субоптимальных систем наведе-
ния на участках ДН и БН. Показано, что для уменьшения влияния углового шума
ГСН на точность наведения ракет (особенно в полуактивных лазерных системах)
целесообразно использовать законы, построенные на информации об угловой
скорости ЛВ и угле пеленга цели. В этом случае наиболее просто реализуется су-
боптимальный закон управления, приближающийся к оптимальному. Упрощен-
ный вариант субоптимального закона управления был реализован в ракете Х-25.
4.5. Системы наведения
на морские радиоконтрастные цели
4.5.1. СИСТЕМЫ НАВЕДЕНИЯ РАКЕТ
БОЛЬШОЙ ДАЛЬНОСТИ1
Основными радиоконтрастными объектами, представляющими цели для ра-
кет дальней авиации, являются отдельные корабли и корабли в составе группиро-
вок кораблей.
Поэтому ракеты данного класса часто называют противокорабельными раке-
тами (ПКР) [16, 17].
Развитие средств наведения ПКР напрямую связано с изменением условий
наведения на корабли и требований, предъявляемых к ПКР.
Условия применения включают в себя следующие понятия:
• размеры зон противодействия ПВО группировок кораблей, включая дейст-
вия истребительной авиации противника;
• эффективность ПВО с учетом наличия самолетов дальнего радиолокацион-
ного обнаружения типа Авакс и Хокай;
• характеристики средств радиоэлектронного противодействия кораблей;
• характеристики радиоэлектронной заметности кораблей.
К требованиям, предъявляемым к ПКР, можно отнести:
• всепогодность и всесуточность применения;
• высокую точность наведения (прямое попадание);
• возможность применения с дальностей, обеспечивающих безопасность са-
молета-носителя от системы ПВО кораблей;
• работоспособность ПКР в условиях РЭП;
• выполнение боевых задач при отсутствии достаточно точного предваритель-
ного целеуказания;
• избирательное наведение на главные цели из состава группировки;
• увеличение эффективности действия по крупнотоннажным кораблям, обла-
дающим высокой живучестью;
• эффективное преодоление ракетами ПВО противника.
В процессе общетехнического прогресса усложнялись условия наведения ПКР
и повышались требования к тактико-техническим характеристикам ПКР [16].
В соответствии с этим адекватно развивались и средства наведения ПКР
дальней авиации.
Одной из первых отечественных ПКР является ракета Х-20М [18]. Система уп-
равления ракеты состоит из автопилота и бортовой аппаратуры радиоуправления.
Назначение автопилота — стабилизация ракеты относительно центра тяжес-
ти и отработка сигналов управления.
1 В написании подраздела принимал участие Г. Т. Миряшкин.
453
В состав автопилота входит блок свободных и демпфирующих гироскопов,
программный механизм. На начальном участке полета автопилот осуществляет
программное управление ракетой по высоте с выходом на участок горизонталь-
ного маршевого полета. Стабилизация высоты полета производится от баромет-
рического датчика. Наведение на цель осуществляется радиотехнической аппа-
ратурой, установленной на самолете-носителе и ракете.
С помощью радиоаппаратуры осуществляется прерывистое радиоуправление
ракеты по курсу. На определенной дальности производится переход ракеты в пи-
кирование на цель.
Требования к повышению точности наведения ПКР на корабли привели к
реализации в ПКР КС и К-ЮС [18] режима полуактивного самонаведения на ко-
нечном участке траектории. Для этого на самолете-носителе устанавливается ап-
паратура радиолокационного обнаружения и подсвета цели.
На начальном участке полета ПКР после пуска с помощью программного
механизма автопилота осуществляется управление ракетой в вертикальной плос-
кости для вхождения в луч радиолокатора самолета-носителя. После входа в луч
происходит управление ракетой по радиолучу (по курсу).
Формирование траектории в вертикальной плоскости осуществляет автопи-
лот по сигналам статоскопа и радиовысотомера.
После захвата цели аппаратурой самонаведения ракета переходит в режим
полуактивного самонаведения по сигналам от этой аппаратуры по курсу и танга-
жу. Управление системы самонаведения строится по интегральному закону по уг-
лу с упреждением. В качестве угловой величины используются значения пеленгов
в боковой и продольной плоскостях, измеряемые угловыми датчиками, установ-
ленными на кардановом подвесе аппаратуры самонаведения. Недостатком полу-
активных систем самонаведения является ограничение свободы перемещений са-
молета-носителя, что повышает вероятность его поражения средствами истреби-
тельной авиации.
Поэтому в ракете КСР-2 [18] впервые применена станция активного самона-
ведения с выбором и захватом цели на подвеске самолета-носителя. После пуска
ракеты самолет-носитель полностью свободен в своем маневре (по принципу
пустил — забыл).
Целеуказание станции активного самонаведения ПКР производится от ра-
диолокатора самолета-носителя по углам линии визирования цели и дальности
до нее. В результате антенна станции активного самонаведения ракеты устанав-
ливается в направлении на выбранную цель, а строб дальности на дальность, рав-
ную дальности до цели.
Система управления ракеты Х-22ПГ [18] аналогична системе управления ра-
кеты КСР-2.
Дальнейшее развитие радиолокационные системы самонаведения получили
на ракете КСР-5 [18], где был реализован режим захвата цели под носителем при
отсутствии целеуказания от самолета-носителя, а также реализованы режимы на-
ведения «по памяти» в случае отсутствия сигнала от системы самонаведения и ре-
жим наведения на помеху в случае невозможности отстройки от помехи.
Впервые на ПКР КСР-5 применена гиростабилизированная антенна систе-
мы самонаведения, что улучшило условия работы системы самонаведения при
наличии колебаний ракеты относительно центра тяжести. Введение режимов
по «памяти» и по «помехе» существенно увеличивает эффективность ПКР при са-
454
монаведении на корабль в условиях постановки противником заградительных
помех.
В настоящее время условия наведения на современные корабли существенно
изменились. В основном используются боевые действия боевыми группами с раз-
личным составом кораблей [16].
Походные и боевые группировки кораблей имеют глубоко эшелонированное
охранение от атак воздушного противника. Предприняты организационные ме-
ры по созданию единой для НАТО системы разведки и наблюдения за морской и
воздушной обстановкой, в частности на Атлантике. Она включает объединенные
системы ПВО, самолеты дальнего радиолокационного обнаружения и управле-
ния истребительной авиацией, корабли радиолокационного дозора, воздушные
патрули, средства космической разведки. Кроме того, современные группы ко-
раблей имеют мощные средства ведения радиоэлектронной борьбы.
Ввиду такой мощной обороны корабельных групп стала актуальной задача
применения ПКР с дальностей, обеспечивающих безопасность самолетов-носи-
телей от ПВО противника, т. е. обеспечение загоризонтных пусков ПКР. В этих
условиях очень важно обеспечить ПКР целеуказанием. Для этого привлекаются
не только авиационные, но и космические средства.
Увеличение дальности полета ПКР приводит к разработке активных радио-
локационных головок самонаведения с автоматическим поиском и захватом цели
на траектории. Для уменьшения зон поиска цели необходимо устанавливать на
современные ПКР инерциальные системы.
Дальнейшее совершенствование систем наведения требует включения в со-
став аппаратуры ПКР бортовых цифровых вычислительных машин.
Наличие БЦВМ позволяет реализовать алгоритмы точной выставки ИНС,
законов управления и комплексной обработки информации от различных ин-
формационных систем ПКР.
Для увеличения помехозащищенности АРГС ПКР стала необходимой комп-
лексная обработка информации от ИНС и АРГС. В основе такой обработки ле-
жит решение в БЦВМ дифференциальных уравнений кинематики сближения
ПКР и цели по измерениям ИНС ускорений и скорости движения ПКР и кор-
рекция расчетного относительного положения ПКР и цели по измерениям АРГС.
При такой схеме использования информации ИНС и АРГС относительное
положение ПКР и цели, вычисленное в каком-то временном такте работы алго-
ритма БЦВМ по измерениям АРГС, можно рассматривать как начальное условие
для прогнозирования этого положения в следующие временные такты при усло-
вии отсутствия поступления новой информации АРГС вследствие потери цели
или срыва АС.
Для построения алгоритма прогнозирования используется модель ИНС, ус-
тановленная на ПКР.
Простейшим вариантом такой модели является измерение на осях заданной
системы координат значений скорости ПКР. В качестве системы координат
обычно используется земная стартовая прямоугольная система координат.
Для комплексной обработки информации от ИНС и АРГС могут применять-
ся алгоритмы адаптивной нелинейной фильтрации.
При этом уравнения прогнозирования в БЦВМ рассматриваются как урав-
нения модели процесса в дискретной форме с точностью до неизвестного векто-
ра параметров, в качестве которых выступают ошибки ИНС и скорость движения
цели. Информация АРГС рассматривается как вектор измерений.
455
В общем виде математически задача представима следующим образом.
Задана система управления модели объекта
Zk+1=A(Zk, ик,ок) + Ск
и вектор измерений
YK = H(ZK,0K) + nK,
где ZK, YK, UK — векторы состояния модели, измерений и управления; А и Н — не-
линейные вектор-функции; ит]к- векторы случайных гауссовских последова-
тельностей статистически независимых шумов объекта и измерений с нулевыми
математическими ожиданиями и независимыми приращениями; 0К — векторы
случайных неизвестных параметров модели с априорной плотностью вероятнос-
ти /?(0О) и функцией изменения 0К + j =/(0к).
Вектор начального состояния Zo статистически независим от £к, т]к и имеет
условную по 0 плотность вероятностей p(Zo/0).
Задача адаптивного оценивания состоит в том, чтобы в момент времени tK по
совокупности измерений YK = {Yj, Y2, ..., YK} построить оценку ZK/K, оптимальную
по заданному критерию, и оценку 0К неизвестных параметров модели. Сформу-
лированная задача адаптивного оценивания может рассматриваться как задача
совместного оценивания вектора состояния и идентификации модели [19, 20].
Один из способов ее решения состоит во включении вектора неизвестных пара-
метров 0 в вектор состояния модели.
Добавляя к уравнениям модели объекта функции изменения параметров, по-
лучаем систему уравнений для построения алгоритма адаптивной нелинейной
фильтрации
XK+1=A(XK,UK) + CK; Y^lKXJ + iu-
Вектор Xq статистически не зависит от £к, т]к и имеет плотность вероятнос-
тей/?^).
В момент времени /к требуется по совокупности измерений YK = {Yb Y2,..., YJ
построить оценку вектора состояния Хк/к, оптимальную в смысле заданного
функционала.
Данная задача решается методами теории байесовых оценок, в соответствии
с которой для построения в момент /к оценок фазового вектора Хк заданной сис-
темы уравнений модели объекта необходимо знание его апостериорной плотнос-
ти вероятностей /?(XK/YK) [21—25].
Эволюция апостериорной плотности определяется рекуррентными форму-
лами, которые условно можно разбить на формулы пролонгации (прогнози-
рования) плотности вероятностей и ее коррекции при поступлении измере-
ний.
При практической реализации фильтра, как правило, достаточно исполь-
зовать аппроксимацию априорных апостериорных плотностей вероятностей
/?(Хк + j/YK) иp(XK/YK) гауссовыми плотностями:
p(XK/V) = 7V{XK-XK/K;CK/K};
p(XK+1/YK) = MXK+1-XK + 1/K;;K+1/K}.
456
При этом получается рекуррентный алгоритм обобщенного фильтра Калмана:
\+1/к= асх^, Ч);
+ 1/к — АКСК/К Ак + QK,
\+1/к+1 \+ 1/к + Ск+ 1/кН£ + । [Нк+ jCk+ 1/кН£ + । + Rk + J 1 [ук+] Н(Хк+ |/к)];
^К + 1/к + 1 ^К + 1/к ^К + 1/кНК + 1 Шк + |СК + )дНк + | “Ь RK _|_ |] Нк _|_ ]СК + )/К5
_ ЭА(ХК, Uk)
гдеАк эх:
ЭН(ХК)
эхк
х,=х,
н
Наличие ИНС в составе системы управления ПКР позволяет построить до-
статочно простой алгоритм фильтра Калмана, в котором в качестве оцениваемых
координат удобно принять проекции вектора дальности «ПКР—цель» на оси
стартовой системы координат OXYZ, в которой цель находится в плоскости
CZYZnpn Гц = 0.
Обозначив AY, AY, /XZ — проекции векторов дальности на оси X, Y, Z, диф-
ференциальные уравнения модели движения ПКР можно записать в виде
АХ = —ХИ + Их;ДГ = -Ги + AZ = -ZH+
где Хи, Уи, ZM — измеренные ИНС ПКР значения проекций скорости полета
ПКР по соответствующим осям; V Vz — суммарные ошибки измерений
ИНС скорости относительного движения ПКР и цели, включающие неизвестные
значения проекций скорости движения цели и собственные ошибки ИНС.
Ввиду сравнительно небольшого времени процесса самонаведения ПКР на
цель ошибки Vx, V Vz можно считать постоянными величинами, что позволяет
для них ввести уравнения Vx = 0, V = 0, Vz = 0.
Вектор измерения по информации АРГС определяется следующими выра-
жениями:
AY м cos е® cos ег ;
ИЗМ ИЗМ ИЗМ ИЗМ 7
XY = D sin е в
ИЗМ ^ИЗМ^ИЗМ’
AZM4M = -D^ cos ев sin еАзм,
ИЗМ ИЗМ ИЗМ ИЗМ 1
где величины £>изм, евзм, £иЗМ — измеренные АРГС ПКР значения дальности и
углов визирования с шумами, присущими каналам измерений АРГС.
Окончательно после линеаризации тригонометрических функций и некото-
рых допущений относительно шумов измерений уравнения модели изменения
фазовых координат уравнения измерений сводятся к следующему виду:
ДХк+, = Д%к-^иД/+ИхДГ; ИХк+|= ИХк; Д%ИЗМк = ДХК + Ц;
ДУК + , = ДГК - Уи Д/ + Vy \t- VK+= УУк; Д ГИЗМк = ДГК + ;
+ 1 = П:к+ J = ’ А^измк = ’
где ДГ — шаг счета БЦВМ; — случайные гауссовские последователь-
ности с независимыми приращениями (дискретная модель «белого шума»).
457
Уравнения для каналов Л¥, ДУ, &Z независимы один от другого, и для каж-
дого из них строятся независимые фильтры Калмана по приведенной выше мето-
дике. В результате обработки получаются оценки ДУк/к, AZK/K, на основа-
нии которых вычисляются апостериорные оценки значений дальности и углов
визирования для выдачи их в АРГС при перерывах информации:
4 = 7А^К/К + А ГК/К + AZK/K ;
л. у л. / Л. |\ { !Ч Л. { л.
екв = —arcsin АГк/кА;
eKr = -arcsin AZK/K/ 7AZk/k + AZk/k •
Значения оценок е®, е£ используются в алгоритмах самонаведения, а также
для ориентации в пространстве антенны АРЛГС, значение Ьк — в канале измере-
ния дальности.
Поскольку в процессе оптимальной обработки информации восстанавлива-
ются значения ненаблюдаемых ошибок ИС по скорости и значений скорости це-
ли, то в случае пропадания информации от АРГС фильтр Калмана осуществляет
пролонгацию относительного движения «ракета—цель» с учетом ошибки ИНС
по скорости и движения цели, т. е. улучшаются характеристики пролонгации
движения в режиме «память».
Одной из самых важных задач, стоящих перед системами управления ПКР,
является эффективное преодоление глубоко эшелонированного ПВО противника.
Для этого ПКР и ее система управления должны реализовать [16]:
• максимальное снижение ЭПР ракеты для уменьшения дальности обнаруже-
ния ПКР средствами обнаружения противника (малая заметность);
• набор различных траекторий для ведения атаки с разных направлений;
• противозенитный маневр на конечном участке траектории;
• меры радиопротиводействия для уменьшения вероятности обнаружения ПКР;
• насыщение ЗУР-комплексов кораблей одновременным входом в зону пере-
хвата ПВО кораблей большого числа ПКР;
• возможность атаки кораблей несколькими эшелонами ПКР;
• переход с дозвукового режима полета на сверхзвуковой на конечном участке
траекторий [26, 27].
Для осуществления одновременного входа в зону ПВО группы ракет и воз-
можности эшелонирования атаки ПКР ракетам необходимо выдерживать про-
странственно-временной график полета (ПВГП). Для этого целесообразно ус-
танавливать на ПКР интегрированные инерциально-спутниковые системы нави-
гации [28]. Кроме того, весьма актуальной является задача повышения помехоза-
щищенности спутниковых систем [28, 29], а для разрабатываемых и перспектив-
ных ПКР — задача обнаружения морских целей в условиях радиопротиводейст-
вия противника. Для выполнения последней задачи необходимо повысить
помехозащищенность систем наведения ПКР. Для этого в АРГС должны быть ре-
ализованы современные методы помехозащиты: моноимпульсный метод пелен-
гации, когерентность, использование широкополосных зондирующих сигналов,
перестройка несущей частоты от импульса к импульсу, вобуляция периода повто-
рения, наведение на помеху в случае невозможности отстройки от нее на несущей
частоте и т. д.
458
С этим же вопросом связаны задачи селекции главных целей из группы ко-
раблей в условиях постановки пассивных помех в виде облаков дипольных отра-
жателей (ОДО) и уголковых отражателей (УО), имитирующих ложные цели.
Для борьбы с ложными целями (ОДО и УО) в перспективных АРГС должны
быть реализованы спектральные методы выделения ОДО и УО, основанные на
различии геометрического положения ОДО и кораблей по высоте и т. д.
После отсеивания ложных целей современные АРГС должны решать задачу
выделения главных целей среди обнаруженной группы кораблей.
Одним из путей решения данной задачи является установка на ПКР актив-
но-пассивных головок самонаведения, использующих различную радиолокаци-
онную информацию о кораблях противника [30].
Дальнейшим путем увеличения вероятности правильного обнаружения за-
данных типов кораблей является установка на ПКР радиосистемы обмена инфор-
мацией между ракетами залпа и самолетами-носителями. Это позволяет создать
единое информационное поле. Оптимальная обработка информации единого ин-
формационного поля с высокой вероятностью сможет определить типы целей и
произвести необходимое распределение ракет залпа по кораблям противника.
Поскольку крупные корабли противника обладают высокой живучестью, не-
обходимо решить задачу попадания и поражения ПКР наиболее уязвимых частей
корабля. Именно поэтому перспективные информационные средства ПКР долж-
ны иметь информационные каналы высокого разрешения. В качестве таких ка-
налов могут рассматриваться радиолокационные каналы миллиметрового диапа-
зона, тепловизионные, телевизионные и др. Тогда могут быть реализованы алго-
ритмы распознавания кораблей по их портрету на основании эталонного
описания, полученного от носителя из полетного задания.
Так, в [31] рассматриваются вопросы распознавания объектов по дальномер-
ному портрету с помощью радиолокационной станции с высоким разрешением
по дальности (0,1 м).
В работе [32] предлагается определение радиолокационного портрета кораб-
ля, основанное на доплеровской фильтрации (с высоким разрешением по частоте
около 8 Гц), и после опознавания создания алгоритма управления полетом ПКР с
попаданием ракеты в центр корабля.
Для эффективного поражения корабельных групп информационная система
систем наведения ПКР должна быть многоканальной [33].
4.5.2. СИСТЕМЫ НАВЕДЕНИЯ
ДЛЯ ТАКТИЧЕСКИХ ПРОТИВОКОРАБЕЛЬНЫХ РАКЕТ
С АКТИВНЫМИ РАДИОЛОКАЦИОННЫМИ
ГОЛОВКАМИ САМОНАВЕДЕНИЯ1
1. Проектирование систем наведения
с использованием математического и полунатурного моделирования
При проведении ОКР по оснащению комплекса вооружения носителя но-
вым типом ракет (корректируемыми бомбами) в ФГУП ГосНИИАС сложилась
определенная методика, в которой решающую роль играют математическое
1 В написании подраздела принимал участие Е. В. Слухоцкий.
459
(ММ) и полунатурное моделирование. Большой вклад в это направление работ в
ГосНИИАС внес начальник института Е. А. Федосов, который за последние со-
рок лет, работая в должности заместителя начальника института, а с 1970 г. — на-
чальником института, создал уникальную базу полунатурного моделирования по
отработке в наземных лабораторных условиях комплексов вооружения боевых са-
молетов ракетами различных классов. Одновременно Е. А. Федосов обеспечил
последовательное оснащение и обновление института перспективными цифро-
выми вычислительными машинами, которые позволили разрабатывать матема-
тические модели комплексов вооружения высоких уровней сложности. Развитие
указанных направлений обеспечило тесную связь института с ОКБ, разрабаты-
вающими перспективные комплексы вооружения. Процесс проведения совмест-
но с промышленностью ОКР можно рассмотреть на примере оснащения комп-
лекса авиационного вооружения (КАВ) новыми тактическими ракетами «воз-
дух—море» с АРГС.
На рис. 4.22 приведена укрупненная структурная схема, отражающая роль
ММ и ПНМ в процессе проектирования ракеты и ее БСУ в составе комплекса во-
оружения конкретного авиационного носителя. В связи со сложностью техниче-
ского облика разрабатываемых БСУ ракет, многорежимностью их работы, а также
наличием взаимосвязи с работой других сложных систем, в том числе системы
РЭП и ОП, различных ордеров целей противника, групповых действий авиаци-
онных носителей при пуске новых ракет, требуется системный подход к модели-
рованию элементов БСУ (АРГС, ИНС, ССН, системы стабилизации и т. д.) и
БСУ в целом. Основным принципом при этом является иерархичность создавае-
мых ММ, позволяющая осуществлять исследование с необходимой глубиной
проработки. При этом каждый более низкий уровень иерархии необходим для
описания и формирования динамических и статистических эквивалентов эле-
ментов БСУ более высокого уровня иерархии. Математическое моделирование на
этапе технического проектирования и изготовления опытных образцов произво-
дится с помощью ММ элементов БСУ ракеты высокого уровня сложности (низ-
кий уровень иерархии).
Этот полный пакет моделей создается в течение всего процесса проектирова-
ния по мере углубления проработок. Первоначальные модели на этапе разработки
технического облика и аванпроектов ракеты и ее БСУ представляют собой упро-
щенные аналоги, полученные теоретическим путем с привлечением опыта преды-
дущих разработок и новых наметившихся достижений в области информационных
систем БСУ ракет, двигательных установок, боевых частей и др. На последующих
этапах разработки (эскизный проект, технический проект, создание опытных об-
разцов ракеты и ее БСУ) происходит углубление математического описания про-
цессов, происходящих в элементах БСУ с неминуемым усложнением ММ. Под-
робные модели применяются для разработки и исследования частных показателей
качества, например при разработке в АРГС принципов селекции ложных, пассив-
ных источников отражения (ОДО, буксируемые угловые отражатели), оценки по-
мехозащищенности от широкого класса активных помех. Однако, например,
поимпульсную модель АРГС нецелесообразно использовать для оценки обобщен-
ного показателя качества БСУ в целом, такого как вероятность попадания ракеты
в цель в условиях РЭП. Для этого используются упрощенные динамические и ста-
тистические эквивалентные модели АРГС, включаемые в статистическую матема-
тическую модель более высокого уровня иерархии, описывающую групповые дей-
ствия носителей при атаке цели.
460
Рис. 4.22. Методика проведения ММ и ПНМ в процессе создания КАВ
новыми тактическими ракетами «воздух—море» с АРГС
На этапе эскизного и технического проектирований при создании опытных
образцов элементов БСУ производится коррекция их математических моделей по
результатам ПНМ (ограниченное ПНМ может проводиться и на этапе аванпро-
екта). Дальнейшая коррекция математических моделей и комплекса ПНМ осно-
вывается на натурных испытаниях элементов БСУ (АРГС, высотомера, ИНС,
ССН и др.) на специальном самолете-лаборатории, подвижном или стационар-
ном береговых стендах. Это позволяет добиться хорошего совпадения результатов
ПНМ и ММ с реальными образцами БСУ и уменьшить число пусков ракет на
этапе ЛКИ и ГИ. Наличие пакета математических моделей ракеты и ее БСУ раз-
ного уровня сложности, идентифицированных с реальным поведением аппарату-
ры и ракеты с помощью ПНМ и реальным пуском ракет на этапе ЛКИ и ГИ, еще
не дает возможности дать ответ на все требования технического задания на ракету
«воздух—море», предназначенную для поражения ордеров кораблей противника
в составе комплекса вооружения заданного авиационного носителя. Для этого
необходима операционная статистическая математическая модель (ОСММ)
групповых действий носителей ракет, в которой имитируются во времени боевой
порядок движения кораблей ордера противника, функционирование их средств
РЭП и ОП, тактические схемы пуска ракет с носителей, кинематика движения
всех стартовавших ракет с учетом стохастического характера ошибок средств це-
леуказания СУВ носителей и БСУ ракет, логика функционирования БСУ ракет в
условиях РЭП, ОП и др.
Операционная статистическая математическая модель строится на базе ло-
гики функционировайия укрупненных статистических эквивалентов агрегатов
БСУ ракет (АРГС, высотомера, ИНС, ССН) и динамических эквивалентов кон-
туров управления ракет. С помощью ОСММ производится оценка эффектив-
ности КАВ носителя с разрабатываемыми ракетами, определяются рациональ-
ные тактики групповой атаки носителей различных ордеров кораблей противни-
ка, обеспечивающие наивысшие показатели эффективности по различным
критериям.
Рассмотрим изложенную методику ММ и ПНМ на примере создания КАВ с
ракетой Х-31 А. Ракета Х-31 была задана к разработке правительством СССР в
1978 г. как ракета, предназначенная в первую очередь для опережающего пора-
жения работающих РЛС зенитных ракетных комплексов при прорыве носителя-
ми объектовой ПВО противника. Она получила индекс Х-31П и оснащалась пас-
сивными РГС различных модулей несущих частот. Одновременно этим же реше-
нием правительства была задана к разработке ракета Х-31 А с активной
радиолокационной головкой самонаведения, предназначенная для поражения
катеров различных типов и надводных кораблей типа эсминец, СКР водоизме-
щением до 4500 тыс. т, транспортов и максимально унифицированная с ракетой
Х-31П [34, 35]. ОКР ракеты последовательно возглавляли главные конструкторы:
В. Н. Бугайский, В. Г. Галушко, Г. И. Хохлов. Под руководством конструк-
торов АРГС-35 В. Ф. Алексеева и А. В. Лебедева на НПО «Ленинец», опира-
ясь на опыт разработки АРГС оперативно-тактической ракеты, провели серьез-
ную модернизацию АРГС-31А, существенно повысив помехозащищенность при
действии пассивных и активных помех со стороны противника. Комбинирован-
ная прямоточная двигательная установка с размещением внутри камеры сгора-
ния стартового РДТТ создавалась под руководством главного конструктора
Д. Д. Гилевича на ТМКБ «Союз», система стабилизации и управления на ав-
тономном участке полета — под руководством главного конструктора О. В. Ус-
462
ленского на 3-м Московском приборном заводе (3-й МПЗ). Радиовысотомер
разрабатывался под руководством главного конструктора УПКБ «Деталь»
В. С. Фомина. От ФГУП ГосНИИАС научно-техническим сопровождением
ОКР ракеты Х-31 А руководил заместитель начальника института В. А. Сте-
фанов. В 1983 г. было принято решение разместить ракету на штурмовике
Су-24М (разработка главного конструктора Е. С. Фельснера) и проводить на
нем испытания ракеты Х-31 А этапов ЛКИ и ГИ. С помощью ПНС-24М можно
обеспечить одновременную подготовку до трех ракет Х-31 А. В соответствии с
технологией проведения ММ и ПНМ, представленной на рис. 4.22, в ФГУП
ГосНИИАС в процессе ОКР ракеты Х-31 А в КАВ штурмовика Су-24М проведе-
ны следующие работы:
• спроектирован, изготовлен и введен в эксплуатацию комплекс ПНМ
КПМ-31А, включающий в себя безэховую камеру, трехстепенный стенд,
имитирующий колебания ракеты относительно центра масс; двухстепенный
стенд, имитирующий положение линии ракета—цель в процессе сближения;
имитатор реального отраженного от цели сигнала АРГС-31А для обеспече-
ния ПНМ процесса поиска, обнаружения, взятия на АС и режим АС цели;
имитаторы ряда активных помех; пульт управления КПМ; математическое
обеспечение работы КПМ, включающее в себя и систему контроля правиль-
ности работы элементов комплекса;
• разработаны алгоритмы закона управления ракетой на участке самонаведе-
ния, обеспечивающие полет ракеты вблизи баллистической траектории с ми-
нимальным лобовым сопротивлением при высокой вероятности прямого по-
падания в цель в пределах ЗВП.
При непосредственном участии сотрудников ФГУП ГосНИИАС и предста-
вителей промышленности с помощью ММ и ПНМ на КПМ-31А было сделано
следующее:
• проведена комплексная стыковка аппаратуры управления ракеты на
КПМ-31А при работе в режимах «СР» и «АР»;
• для обеспечения пуска ракеты с носителя в режиме «АР» разработаны алго-
ритмы вычисления дальности перевода ракеты в пикирование и дальности
включения АРГС в поиск с использованием информации с датчиков пере-
грузки, установленных в АРГС, и параметров целеуказания из ПНС-24М в
пределах ЗВП;
• разработаны алгоритмы ЗВП ракеты в режимах применения «АР» и «СР»,
проведено ПНМ процессов наведения ракеты в различных точках ЗВП;
• скорректированы параметры контура вывода ракеты на высоту включения
АРГС в режимы поиска, обнаружения и взятия на АС цели;
• скорректированы параметры системы стабилизации ракеты, обеспечиваю-
щие повышение эффективного коэффициента передачи системы стабилиза-
ции по перегрузке при малых скоростях движения ракеты после окончания
работы прямоточного двигателя;
• разработана подробная математическая модель АРГС-31А, проведены иссле-
дования по оценке ее помехозащищенности от пассивных помех типа «ЛОЦ»
и «ЛУЦ», выданы рекомендации по улучшению параметров селектора помех;
• разработана математическая модель АРГС-31А по оценке помехозащищен-
ности от ряда активных помех. Методом ПНМ на КПМ-31А проведена
идентификация результатов ММ и ПНМ;
463
• совместно с представителями НПО «Ленинец» выданы рекомендации по
улучшению помехозащищенности АРГС-31А и уточнению логики ее работы
в условиях РЭП;
• методом статистического ММ проведена оценка точности наведения ракеты
на цель в различных точках ЗВП при отсутствии организованных помех и ОП
противника;
• на малом аэродинамическом стенде в ФГУП ГосНИИАС проведены экспе-
рименты по изучению процесса отделения вставной части камеры сгорания
стартового двигателя от ракеты, с использованием ММ выдано заключение о
безопасности носителя при старте ракеты в пределах ЗВП;
• на общеинститутской экспериментальной базе проведены климатические и
виброиспытания элементов БСУ и ракеты Х-31 А в целом.
В ФГУП ГосНИИАС разработана блочная статистическая ММ группового
применения ракет Х-31 А с нескольких носителей при атаке различных ордеров
кораблей противника. Совместно с представителями НИИ заказчика на этой
ММ была проведена оценка эффективности действия комплекса вооружения но-
сителя Су-24М с ракетами Х-31 А, рекомендована рациональная тактика приме-
нения ракет, позволяющая максимизировать математическое ожидание числа
пораженных целей при заданном наряде ракет в условиях огневого и радиопро-
тиводействия (модель дает возможность использовать различные принципы оп-
тимизации). Результаты моделирования на ОСММ вошли в акт по завершению
этапа Б государственных испытаний ракеты Х-31 А в комплексе Су-24М.
ФГУП ГосНИИАС принимал активное участие в планировании и разработке
методик проведения натурных работ с АРГС-31А с использованием самолета-ла-
боратории НПО «Ленинец», стационарного берегового комплекса в г. Севасто-
поле и при проведении облетов целей для проверки работоспособности
АРГС-31А на носителе Су-24М. Полученные результаты сопоставлялись с ре-
зультатами, полученными на подробных ММ и при ПНМ.
Каждая натурная работа по пуску ракеты Х-31А на этапе ЛКИ и ГИ проходи-
ла в ФГУП ГосНИИАС предполетное и послеполетное моделирование с обсуж-
дением результатов с разработчиками комплекса вооружения.
Высокое качество работ, выполненных разработчиками комплекса вооруже-
ния самолета Су-24М в процессе ОКР с помощью ММ, ПНМ и специальных
экспериментальных работ, позволило успешно провести натурные пуски ракет
Х-31А на этапах ЛКИ и ГИ. Все ракеты, пущенные в режимах «СР» и «АР», при
отсутствии отказов аппаратуры поразили цель прямым попаданием.
Государственные испытания комплекса вооружения завершились в 1989 г.
Незначительные второстепенные замечания заказчика вошли только в Перечень
№ 2. Комплекс вооружения самолета Су-24М, оснащенный первыми в мире вы-
сокоскоростными тактическими ракетами Х-31 А с активной радиолокационной
головкой самонаведения, был рекомендован для принятия на вооружение, а ра-
кета Х-31 А передана в серийное производство.
2. Система наведения ракеты Х-31 А
Тактическая противокорабельная сверхзвуковая авиационная ракета Х-31 А
(рис. 4.23, 4.24) с комбинированным прямоточным воздушно-реактивным двига-
телем и активной радиолокационной головкой самонаведения (рис. 4.25) разра-
464
Рис. 4.23. Ракета Ч-31А (Рекламный проспект ГНПЦ «Звезда-Стрела»)
Рис. 4.24. Авиационная тактическая ракета Х-31 А на МАКС-98
ботана в ОКБ «Звезда-Стрела». Ракета предназначена для поражения боевых над-
водных кораблей различных классов, включая эсминцы водоизмещением до
4500 т, транспортов. Она выполнена по нормальной аэродинамической схеме с
Х-образным расположением крыла и рулей. На корпусе в плоскости несущих по-
верхностей расположены четыре боковых круглых воздухозаборника [34, 35].
В 1989 г. ракета Х-31 А прошла государственные испытания в составе комплекса
вооружения носителя Су-24М с ПНС-24М, СУО-1-6М и системой индикации
экипажу (СИ). В комплексе были про-
изведены доработки, после которых
стали возможными пуски ракеты по
морским целям в режиме поиска и за-
хвата цели на АС как под носителем
(режим «СР»), так и на автономной тра-
ектории полета (режим «АР»). Основ-
ным режимом применения ракеты,
обеспечивающим в пределах ЗВП пуск
ракеты во всех оговоренных в ТЗ по-
годных условиях и условиях волнения
Рис. 4.25. АРГС ракеты Х-31 А
465
Рис. 4.26. Зона применения
ракеты Х-31 А
моря в первом заходе носителя на цель, явля-
ется режим «АР» (рис. 4.26 и 4.27). Ракета раз-
мещается на авиационном катапультном уст-
ройстве АКУ-58.
Бортовая система управления ракеты по-
строена на базе АРГС, радиолокационного вы-
сотомера и комплексной системы управления
ракеты КСУР-31А [34, 35]. Последняя создана
на базе свободных гироскопов, датчиков пере-
грузок, датчиков угловых ускорений каналов
тангажа, рыскания и крена и на аналоговых микросхемах на УПТ Приводы пнев-
матические. В пределах ЗВП ракета летит в широком диапазоне скоростных на-
поров от 5000 до 50 000 кГ/м2. Для обеспечения стабилизации и управления раке-
той в этих условиях были применены нелинейные микросхемы с образованием
скользящих режимов. В режиме «АР» к моменту включения АРГС-31А в режим
поиска цели ракета спускается на высоту 350 м для обеспечения поиска и захвата
на сопровождение цели на фоне взволнованного до 5...6 баллов моря под доста-
точно малыми углами визирования цели. Квазиоптимальный по быстродействию
спуск ракеты на эту высоту обеспечивает КСУР-31А. После поиска и захвата на
автосопровождение цели в боковой плоскости используется закон управления на
базе метода пропорциональной навигации [36]. На контур стабилизации ракеты,
замкнутый по перегрузке, подается сигнал заданной перегрузки
(4.35)
г = _li_L2Lq
зад jy р ।
где Qr — горизонтальная составляющая угловой скорости линии визирования,
снимаемая с АРГС-31А.
Параметры апериодического фильтра выбираются в функции спектра блуж-
дания центра переотражения сигнала АРГС-31А от цели и скорости сближения
ракеты с целью. При уменьшении |Z>(/)| постоянная времени возрастает. Ко-
эффициент A"r|Z)(/)| при статическом коэффициенте контура стабилизации
пвых /пзад ~ 1 выдерживает статическое соотношение
где Т — проекция угловой скорости вектора скорости ракеты в горизонтальной
плоскости.
Рис. 4.27. Боевое применение ракеты Х-31 А
466
Зоны возможных пусков ракеты строились таким образом, чтобы включение
АРГС-31А в поиск цели и захват ее на автосопровождение происходили при ско-
ростях полета ракеты 750...900 м/с. В этих условиях для увеличения быстродейст-
вия системы управления ракеты в боковой плоскости с момента выдачи команды
«ЗГ» из АРГС-31А в КСУР-31А осуществляется программный разворот с макси-
мальной заданной перегрузкой
«згад =аЛг|В(/)|Г[/+ t sign фг(гзг), (4.36)
где <рг(/зг) — угол пеленга цели в момент выдачи команды «ЗГ».
Окончание программного разворота в горизонтальной плоскости определя-
ется условием
|фг(^3г)1 ~ *3г) +
t
J Qrd/
6 г
(4.37)
< 0.
По формулам (4.36) и (4.37) обеспечивается доворот проекции вектора ско-
рости ракеты в боковой плоскости на захваченную на сопровождение цель. При
довороте развивается максимально допустимый угол скольжения, зависящий от
возможностей маршевого двигателя, и учитывается некоторый поворот проекции
линии визирования в горизонтальной плоскости в процессе действия . После
выполнения условия (4.37) процесс самонаведения в боковой плоскости осу-
ществляется по алгоритму (4.35).
После захвата цели на автосопровождение в вертикальной плоскости в си-
лу входит закон управления, согласно которому ракета выводится на траекто-
рию, близкую к пологой баллистической траектории, проходящей через цель.
Приближенно при скорости ракеты, значительно превышающей скорость цели,
угловая скорость линии визирования ракета—цель вблизи баллистической траек-
тории
£в(0 35 TWn « ГТ~ • (4.38)
2Г(/) 2Р(0
Алгоритм закона управления в вертикальной плоскости формируется сле-
дующим образом:
/ а X /СВ|П(П1
п в = I Q + .. ]• —-——.
зад I ° 26(f)) Цр+1 .
(4.39)
Из (4.39) видно, что
Кл |Z>(/)|
«зВад = Ц, + ! + «зад! > <4-40)
Кв g 57,3
где <ад1 = -----2---, так как постоянную величину можно не пропускать через
фильтр.
Приближенный полет ракеты в вертикальной плоскости относительно теку-
щей баллистической траектории организуется с помощью метода пропорциональ-
467
ной навигации, аналогичного алгоритму метода пропорциональной навигации в
g 57,3
боковой плоскости (4.35) с добавлением постоянной перегрузки । =-------,
поднимающей ракету вверх. Окончательно законы управления ракеты Х-31 А на
участке самонаведения уточнялись в ГосНИИАС на математической пространст-
венной статистической модели БСУ ракеты и при ПНМ на КПМ-31А. При этом в
вертикальном канале было реализовано в следующем виде:
«Звад1 =a + bD(t).
В ракете Х-31 А вопрос о допустимых ошибках обтекателя и синхронных
ошибках стоит не так остро, как в ракетах «воздух—воздух», так как даже самые
быстроходные ракетные катера, предназначенные для поражения этой ракетой,
могут маневрировать с перегрузкой, не превышающей 0,3g, и поражение целей
происходит при максимальной плотности воздуха.
Цифровая линия связи носителя с ракетой в соответствии с ГОСТ 18977—79
обеспечивает передачу полетного задания через АРГС-31А. Цифровая информа-
ция в АРГС-31А преобразуется в аналоговую и далее транслируется по абонентам
в аналоговом виде.
Помехозащищенность от широкого спектра пассивных и активных помех,
создаваемых предполагаемым противником, укрупненно обеспечивается следую-
щими мерами:
• литерностью несущей частоты изделий АРГС-31А;
• селекцией ОДО;
• обнаружением и захватом на АС шумовой помехи;
• селекцией импульсных помех;
• достаточно разветвленной логикой работы АРГС-31А и БСУ ракеты в целом
при поиске, обнаружении и взятии на АС цели в условиях групповой атаки
несколькими носителями с ракетами Х-31 А различных ордеров противника
при действиях РЭП и ОП [34, 35].
Ракета Х-31 А в 1989 г. передана в серийное производство.
3. Система наведения ракеты Х-35
Дозвуковая тактическая противокорабельная ракета Х-35 [34, 35] с активной
радиолокационной головкой самонаведения предназначена для поражения ко-
раблей типа эсминец, фрегат, ракетный катер, а также транспортов из состава
конвоев и десантных отрядов и других надводных кораблей без входа в зону огне-
вого воздействия их средств ПВО. Ракета разрабатывается в ГНПЦ «Звезда-Стре-
ла» в модульном варианте, обеспечивающем ее применение с корабля, вертолета,
наземного комплекса и самолета (рис. 4.28—4.30). Ракета выполнена по нормаль-
ной аэродинамической схеме и имеет складное крыло и оперение. Воздухозабор-
ник маршевого турбореактивного двигателя расположен в нижней части корпуса.
В корабельном, вертолетном и наземном вариантах ракета снабжена стартовым
твердотопливным ускорителем, расположенным тандемно с маршевым двига-
телем. На вертолетном варианте стартовый РДТТ имеет меньший суммарный
импульс.
468
Рис. 4.28. Ракета Х-35 (Рекламный проспект ГНПЦ «Звезда—Стрела»)
Рис. 4.29. Противокорабельная ракета Х-35 на выставке МАКС-99
(вертолетный и корабельный варианты)
Рис. 4.30. Боевое применение ракеты Х-35
469
Рис. 4.31. Головка самонаведения
АРГС-35 ракеты Х-35
Система управления ракеты — инер-
циальная с АРГС и радиовысотоме-
ром [34, 35]. Инерциальная система
управления разрабатывается в ОАО
АНПП «Темп-Авиа». Разработчик АРГС
(рис. 4.31) — ОАО НПП «Радар ММС».
Дальность действия АРГС-35 до 20 км
при волнении моря 5...6 баллов [34].
Ракета Х-35 в варианте «корабль-
корабль» и «корабельный вертолет типа
Ка-27К— корабль» начала разрабаты-
ваться в середине 1980-х годов. К этому
времени развитие получили специализи-
рованные цифровые вычислители и уни-
версальные цифровые машины, которые
по своим габаритам и энергопотребле-
нию уже можно было размещать в такти-
ческих ракетах.
В БСУ ракеты Х-35 используется
БЦВМ, размещенная в инерциальной
системе управления ракетой Х-35
(ИСУ-35). В АРГС-35 для первичной об-
работки радиолокационного сигнала, от-
раженного от цели, используются специ-
ализированные процессоры; вторичная обработка, управление всеми элемента-
ми АРГС-35 и обмен с внешними абонентами осуществляются с помощью
БЦВМ, расположенной в АРГС-35. Для обеспечения значительного уровня по-
мехозащищенности БСУ ракеты Х-35 в АРГС-35 используются:
• литерность несущей частоты;
• сложный радиолокационный сигнал с цифровой обработкой, повышающий
эффективность выделения истинной цели при действии помех и при волне-
нии моря в 5...6 баллов;
• дискретный метод работы;
• моноимпульсный метод измерения углового рассогласования;
• селекторы ОДО и импульсных помех на базе цифровой обработки сигнала;
• обнаружение шумовой помехи в главном лепестке диаграммы направленнос-
ти и взятие ее на АС.
Комплексирование информации из ИСУ-35, АРГС-35 и высотомера дало
возможность создать в БСУ ракеты в целом совершенную, разветвленную логику
работы при групповых действиях носителей ракеты Х-35 в условиях РЭП и ОП
противника, обеспечивающую высокую вероятность поражения целей.
Рассмотрим укрупненно принципы построения системы управления ракеты
на участке самонаведения, алгоритмы которой разрабатывались в ГосНИИАС.
При автосопровождении АРГС-35 цели-отражателя (ЦО) алгоритм комплекси-
рования АРГС-35 и ИСУ-35 оценивает горизонтальные и вертикальную коорди-
наты цели и их производные в навигационной системе координат с помощью оп-
тимального линейного фильтра Калмана. Полученные оценки используются для
расчета горизонтальной и вертикальной проекций угловой скорости линии визи-
рования цели при формировании закона управления ракетой в ИСУ-35.
470
Основной режим применения ракеты Х-35 после старта — спуск на высоту
10... 12 м и полет на этой высоте в точку, в которой АРГС-35 включается в поиск
цели в режиме работы, заданном в ее полетном задании. После обнаружения цели
и взятия ее на автосопровождение (АС) ракета спускается на высоту полета 3...5 м
и летит до поражения цели. Наведение ракеты на цель в этом режиме произво-
дится только в горизонтальной плоскости при стабилизации заданной высоты
полета.
Рассмотрим структуру оптимального линейного фильтра Калмана второго
порядка, с помощью которого производится независимое оценивание координат
и проекций вектора скорости цели в горизонтальной плоскости навигационной
системы координат. Эти оценки используются при формировании закона само-
наведения ракеты на большие корабли типа фрегатов, крейсеров, десантных ко-
раблей. Такие корабли практически не маневрируют на участке самонаведения
ракеты.
Для горизонтальной плоскости навигационной системы координат модель
изменения каждой из координат целей и модель измерителя приняты:
X = V • Z = v •
Ц Г ХЦ’ U У £Ц’
^ц=И/]; Иги=И/2;
^изм = ^ц+И; zH3M = zu+K2,
где Хц, Zu — координаты цели в навигационной системе координат; Ихц, И,ц —
проекции вектора скорости цели; W\, W2 — гауссовский «белый шум» возмуще-
ния; И], V2 — гауссовский «белый шум» измерения.
Алгоритм дискретного оптимального фильтра Калмана в матричном виде за-
писывается:
Р = ФРФТ + ГОГТ;
К = РНТ(НРНТ+ /?)’;
Р = Р - КНР;
X = ФХ + К(ХИЗМ - НФХ);
z = ф£ + K(ZU - нФг),
(4.41)
где Х(ХЦ, Vxu), Z(ZU, Vzu) — оценки векторов состояния; Р =
ляционная матрица ошибок оценивания;
- ^21
^12
Р22-
— корре-
— переходная матрица системы;
— переходная матрица шумов возмущений; h — шаг итерации;
Н = [1, 0] — матрица наблюдений; К = А\Г — матричный коэффициент уси-
ления; Q, R— дисперсии шумов возмущения и измерения; т — символ транспо-
нирования матрицы.
471
В качестве измерений Хц, используются координаты цели в навигацион-
ной системе координат:
(4.42)
где Аа1(е3, ра) — матрица перехода от связанной в антенную систему координат;
А1Н(у, V) “ матрица перехода от навигационной в связанную систему коорди-
нат; Dc — дальность до сопровождаемой цели; rx, rY, rz— координаты центра
масс ракеты в навигационной системе координат.
Таким образом производится оценивание горизонтальных координат цели Хц,
Zu и компонентов вектора скорости Ихц, К,ц. Параметры алгоритма фильтрации Q,
R выбирались в процессе моделирования участка самонаведения в пределах ЗВП.
При оптимальной фильтрации на участке самонаведения ошибки ИСУ-35,
накопленные в процессе автономного полета, прибавляются к оцениваемым ко-
ординатам цели, но фактическая оценка реального угла линии визирования е3(/)
оказывается практически независимой от этих ошибок через несколько тактов
итераций:
t Zu + AZ+ ( VZu + AKz)r — [Zp + AZ+ ( VZp
Ea(/) агс1ё^ + д%+(1/^ + д^)/_Ир + д%+(К^ +д^);], (4.43)
где AZ, AZ и АИ%, AKZ— накопившиеся ошибки ИНС-35 по положению и ско-
рости в процессе автономного полета ракеты.
Оценки координат движения цели Хц, Zu, полученные с помощью опти-
мального фильтра Калмана, используются далее для формирования закона наве-
дения ракеты по методу пропорциональной навигации, аналогичного закону,
реализованному в ракете Х-31 А:
«зад = ^а|А|Ёа,
где
? _ ^а(< + I) — .
а h
z — z
£а/ = -arctg ;
Xut - xpi
Ea(/+ о = -arctg £-----
Лц(/ + I) Лр(/ + I)
(4.44)
(4.45)
При потере цели в момент i (забитая АРГС-35 помехами) ракета в режиме
«пролонгации» продолжает наводиться в мгновенную точку встречи. В этом слу-
чае параметр £а(/ + |( вычисляется по формуле:
Еа</+ 1) = -arctg
(А/ + ^uzih) - Zp(i + I)
(Xui + vuxh) - Xp(i+
(4.46)
472
Режимы работы АРГС-35 и БСУ ракеты в целом весьма разнообразны. Воз-
можен вариант задания полетного задания в БСУ, при котором ракета после взя-
тия на АС цели совершает маневр типа горка. На эту же траекторию ракета выхо-
дит, если в режиме слежения за целью забивается помехами высотомер (или про-
изошел его отказ) и др. В этом случае необходима дополнительно оптимальная
оценка координаты Y. Реально в ИСУ-35 с помощью фильтра Калмана сразу
производится оценка всех трех координат цели и их производных в навигацион-
ной системе координат независимо от полетного задания. При работе с боль-
шими целями (фрегат, эсминец и т. д.) по всем трем координатам использует-
ся фильтр второго порядка. При пуске ракет по целям типа быстроходные
маневренные катера в горизонтальной плоскости используется фильтр Калма-
на третьего порядка (добавляется еще оценка ускорения движения цели), а в
вертикальной плоскости для оценки координаты Y остается фильтр второго
порядка.
В вертикальной плоскости на участке слежения за целью АРГС-35 закон уп-
равления ракеты Х-35 практически совпадает с законом управления ракеты
Х-31А:
«зад = «3Вад1 • (4-47)
Только формула (4.47) в записи через уравнения движения в пространстве
имеет более сложный вид.
В режиме пролонгации после потери слежения за целью наведение в верти-
кальной плоскости происходит, по сути, по (4.47) и формулам, эквивалентным
(4.46), отнесенным только к вычислению EB(t) по запомненным оценкам X..,, К.,
Zui, Vuzi в момент потери слежения за целью и текущим параметрам
Xp(t),Zp(t), Yp(t).
Для повышения эффективности действия ракеты А"-35 после взятия цели
на автосопровождение в алгоритме БСУ предусмотрен противозенитный маневр
в горизонтальной плоскости. Закон управления ракеты в боковой плоскости име-
ет вид
па = К \Ь\г + max sin (со (/ - t )), (4.48)
зад d । d М < у Мх М7 7 7 х 7
где и ™х — предельная допустимая перегрузка в боковой плоскости, после дости-
жения которой происходит заглохание двигателя; Км, сом — рациональный пери-
од и амплитуда колебаний ракеты на траектории для уменьшения вероятности
поражения ее МЗА и ЗУР ближнего радиуса действия.
На ОАО АНПП «Темп-Авиа» на базе фильтра Калмана разработаны алгорит-
мы и рабочие программы комплексирования информации высотного кана-
ла ИСУ-35 с информацией, снимаемой с радиовысотомера. Это обеспечивает
квазиоптимальный спуск ракеты на высоту полета 3...5 м над гребнями волн
при волнении моря до 5...6 баллов и пролонгацию движения ракеты на малой вы-
соте при возможном забитии помехами (отказе) высотомера при подходе ракеты
к цели.
Для научно-технического сопровождения ОКР ракеты Х-35 в ФГУП
ГосНИИАС совместно с представителями промышленности на базе КПМ-31А
был создан комплекс полунатурного моделирования КПМ-35, с помощью кото-
473
рого проводилась отработка БСУ ракеты. Были разработаны, изготовлены и вве-
дены в эксплуатацию цифровые элементы комплекса, которые позволили прово-
дить ПНМ, используя реальные цифровые ИСУ-35 и АРГС-35. В последних
штатных образцах АРГС-35 и ИСУ-35 сделаны специальные технологические
выводы, позволяющие размещать их на КПМ-35 ГосНИИАС в полностью со-
бранном и проверенном заказчиком виде (АРГС-35 с обтекателем). Совместно
с представителями ОАО «Радар ММС» проведена установка, стыковка и налад-
ка имитаторов сложных сигналов АРГС-35, отраженных от цели; разработаны
алгоритмы записи телеметрической информации, поступающей из АРГС-35
на станцию «Орбита IV» в память ЦВМ IBM-486 в реальном масштабе времени
при ПНМ, и представления этой информации после окончания ПНМ в виде таб-
лиц и графиков, удобных для анализа. Разработаны новые имитаторы ряда ак-
тивных помех для оценки помехозащищенности АРГС-35 и БСУ в целом. ММ
и ПНМ в ФГУП ГосНИИАС в обеспечение ОКР ракеты Х-35 продолжается
несколько лет.
В процессе ММ в ФГУП ГосНИИАС разработаны алгоритмы определения
параметров движения цели на базе принципов калмановской фильтрации, алго-
ритмы работы системы пролонгации движения цели при срыве слежения за ней
АРГС-35, законы управления на участке самонаведения при различных комбина-
циях забития помехами АРГС-35 и высотомера. Разработаны подробные матема-
тические модели АРГС-35 при работе в различных режимах. При ММ и ПНМ
совместно с представителями промышленности создавалась и корректировалась
логика работы БСУ ракеты в условиях РЭП и ОП противника; были выявлены и
ликвидированы ряд погрешностей в работе аппаратной части ИСУ-35 и АРГС-35
и многочисленные погрешности в системе программного обеспечения (СПО).
Рис. 4.32. Пуск ракеты Х-35 с индийского корабля
474
Все АРГС-35 и ИСУ-35, которые размещались в ракетах, предназначенных
для натурных пусков на этапах ЛКИ и ГИ, проходили комплексное ПНМ в
ФГУП ГосНИИАС на режимах, имитирующих эти пуски. На КПМ-35 для обес-
печения имитации штатного режима предстартового функционирования БСУ ра-
кеты использовалась корабельная автоматизированная система управления
(КАСУ). Высокую степень достоверности результатов ПНМ на КПМ-35 и натур-
ных пусков продемонстрировали пуски экспортных ракет Х-35Э с инертной бое-
вой частью в варианте «море—море» в Индии (рис. 4.32). Большинство комплек-
тов изделий АРГС-35Э и ИСУ-35Э, поставленных в Индию в составе ракет
Х-35Э, прошли ПНМ в ФГУП ГосНИИАС. Из девяти проведенных в Индии ре-
альных пусков этих ракет по различным целям (в том числе и групповым) в широ-
ком диапазоне дальностей и послестартовых разворотов ракет восемь ракет пора-
зили цель прямым попаданием. На одной ракете предположительно не сработали
все пиропатроны при отстреле стартового двигателя, он полностью не отделился
от ракеты, в результате ракета приводнилась. При пусках телеметрическая ин-
формация на ракетах отсутствовала.
4.6. Системы наведения
на радиоизлучающие цели
4.6.1. СИСТЕМЫ САМОНАВЕДЕНИЯ
ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ
В современных условиях успешное выполнение всего объема боевых задач
ударной авиации в значительной степени определяется ее возможностями веде-
ния борьбы с различными силами и средствами радиоэлектронного обеспечения
боевых операций вооруженных сил вероятного противника. В частности, реше-
ние задачи поражения ударной авиацией различных наземных и надводных це-
лей немыслимо без решения задачи прорыва (преодоления) системы ПВО путем
огневого и (или) информационного подавления входящих в состав этой системы
радиоэлектронных информационных средств.
В настоящее время системы ПВО вооруженных сил многих стран характери-
зуются высоким уровнем автоматизации управления, обработки и обмена между
отдельными звеньями поступающей информации о воздушной обстановке, мощ-
ной огневой обороной на дальних и ближних рубежах защищаемых объектов,
способностью оперативно применять разнообразные средства и режимы радио-
противодействия. В перспективе очевидно дальнейшее совершенствование и раз-
витие системы ПВО, главным образом в направлениях:
• роста суммарного огневого потенциала вследствие модернизации сущест-
вующих и принятия на вооружение новых более эффективных огневых
комплексов и насыщенности ими театра военных действий;
• повышения живучести системы и отдельных элементов за счет развертыва-
ния мобильных огневых комплексов и систем управления силами и средства-
ми ПВО, применения работающих в различных частотных диапазонах поме-
хозащищенных РЛС, совокупности инженерных и организационных мер по
снижению уязвимости и т. п.;
• широкого использования различных более совершенных средств и режимов
группового и индивидуального радиопротиводействий (РПД).
Естественно, что эффективное противостояние такой сложной, высокоорга-
низованной и информативно насыщенной системе может быть осуществлено
только более организованной ударной системой, обладающей необходимым ар-
сеналом разнообразных и взаимодействующих средств с рациональной тактикой
их боевого применения.
Анализ различных региональных военных конфликтов последних десятиле-
тий, результаты моделирования боевых операций показали, что одним из наиболее
эффективных средств подавления элементов системы ПВО являются противора-
диолокационные ракеты (ПРР) с пассивными радиолокационными головками са-
монаведения. Основные преимущества этих ракет заключаются в автономности
действий носителя и оружия после пуска, возможности всепогодного и всесуточ-
ного применения, высокой точности наведения на излучающие устройства радио-
476
электронных средств, возможности поражения не только самих этих средств, но и
объектов и позиций, на которых они размещаются. Отсутствие такого оружия в ар-
сенале средств ударной авиации может привести к недопустимым уровням потерь
самолетов даже при комплексном применении ударного вооружения и бортовых
систем радиоэлектронного противодействия с наиболее рациональных маловы-
сотных или высотных режимов полета.
В ближайшей перспективе предполагается оснащение ПРР комбинированны-
ми системами наведения, включающими кроме ПРГС спутниковые навигационные
системы, еще более расширяющими тактические возможности этого вида оружия.
Указанные обстоятельства способствовали широкому развертыванию у нас в
стране и за рубежом исследований по формированию рационального облика и ти-
пажа ПРР, определению структур, характеристик и логики взаимодействия систем
целеуказания и самонаведения, отдельных подсистем, возможных условий боево-
го применения и оценки эффективности оружия и комплекса в этих условиях.
В процессе исследований в НИИ и КБ (в том числе в ГосНИИАС) в 1960—1990-е гг.
были разработаны и широко использованы на различных этапах проектирования
и отработки инженерные методы анализа и синтеза отдельных подсистем и систем
самонаведения ПРР, методы и средства проведения лабораторной отработки, ма-
тематического, полунатурного и натурного моделирований и летных испытаний.
Основное внимание при этом уделялось эффективности предложенных подходов,
позволяющих при возросшем объеме и сложности решаемых задач:
• сократить сроки проведения исследований на различных этапах проектиро-
вания и наземной отработки конкретных образцов ракетного оружия рас-
сматриваемого класса;
• уменьшить объем и стоимость этапов летных испытаний реальной аппарату-
ры и ракеты в целом, поскольку отработка системы самонаведения в реаль-
ных условиях сложной информационной обстановки связана с созданием и
использованием сложных и дорогостоящих имитационных средств и воз-
можна лишь в весьма ограниченном объеме.
Совокупность полученных результатов исследований и реализованных на их
основе технических решений позволила успешно завершить разработку ряда оте-
чественных ПРР и принять их на вооружение в 1960—1980-е годы.
Однако при непрерывном совершенствовании ЛТХ оружия и самолетов-носи-
телей, увеличении номенклатуры целей и повышении их боевой живучести, услож-
нении условий боевого применения в современном и перспективном радиолокаци-
онном поле ПВО, использующем различные средства и режимы РПД, к системам
самонаведения ПРР предъявляются новые требования, а перед разработчиками это-
го вида оружия ставится ряд принципиально новых проблем. В связи с этим актуаль-
ным стало проведение широкого круга теоретических и экспериментальных работ по
исследованию принципов построения, режимов и характеристик радиоэлектронных
средств, возможностей применения радиопротиводействия этими средствами, по
формированию облика, выбору интегрированных структур и оценке точностных ха-
рактеристик комплексированных систем самонаведения в условиях такого противо-
действия. Полученные результаты использовались как для оценки области возмож-
ных значений точностных характеристик, условий применения и, как следствие, эф-
фективности уже разработанных, находящихся на вооружении и модернизируемых
ПРР, формирования соответствующей тактики боевого применения, так и для опре-
деления и обоснования тактико-технических требований и возможных технических
решений для вновь разрабатываемых ПРР нового поколения.
477
1. Основные характеристики наземных радиоизлучающих средств
Большое разнообразие находящихся на вооружении армий различных стран
современных радиоэлектронных средств (РЭС) различного назначения, обра-
зующих систему радиоэлектронного обеспечения боевых операций вооруженных
сил, предопределяет широкую номенклатуру возможных средств (и их характе-
ристик) поражения или нарушения нормального функционирования этих
средств.
Весьма важным поэтому является:
• выделение из всего многообразия тех радиоэлектронных средств, поражение
которых может осуществляться с наибольшей эффективностью противора-
диолокационными ракетами с ПРГС;
• определение очередности уничтожения выделенных радиоэлектронных
средств противорадиолокационными ракетами.
Выбор конкретных типов РЭС и очередность их уничтожения определяются
степенью снижения эффективности функционирования органов управления, к
которой может привести вывод из строя обеспечивающих его РЭС.
Значение органов управления характеризуется:
• важностью стратегического или оперативного направления, на котором на-
ходится орган управления;
• ролью и значением сил и средств, управление которыми осуществляется дан-
ным органом;
• удалением от линии соприкосновения войск;
• числом и качеством РЭС, входящих в состав органов управления;
• стоимостью подавления помехами и возможностями разработки помеховых
средств;
• стоимостью огневого подавления РЭС противорадиолокационными раке-
тами.
Кроме того, при окончательном решении о включении данного типа РЭС в
перечень целей для ПРР с ПРГС и установлении очередности их уничтожения
должны учитываться фактор уязвимости РЭС на позиции и технические возмож-
ности по созданию аппаратуры пассивного самонаведения существующих и
перспективных ракет, способной работать в необходимом диапазоне частот с раз-
личными видами сигналов.
Проведенные в ряде организаций министерств обороны СССР и США в
1970—1980-е гг. в соответствии с указанными положениями и разработанной ме-
тодологией исследования по выбору и обоснованию перечня РЭС, предназначен-
ных для поражения ракетами с ПРГС, показали, что первоочередными целями
при этом являются РЛС:
• обнаружения в центрах и постах управления и оповещения, совмещенных с
центрами управления группировками ЗРК постах дальнего обнаружения, на-
блюдения и оповещения;
• сопровождения и подсвета самолетов в зенитных ракетных комплексах ма-
лой, средней и большой дальности действия;
• обнаружения и целеуказания зенитных и артиллерийских комплексов.
В качестве типовой модели радиолокационного поля наиболее целесооб-
разно рассматривать модель для Центральной и Западной Европы как наибо-
лее насыщенной радиолокационными средствами различного назначения. Такая
478
модель включает совокупность РЛС системы ПВО и зенитных ракетных комп-
лексов, выбранных в качестве первоочередных целей для ПРР, включая РЛС
маловысотных мобильных зенитных ракетных и артиллерийских комплек-
сов, развертывание которых осуществляется непосредственно в боевой обста-
новке.
Основными элементами боевого управления в системе ПВО являются цент-
ры и посты управления и оповещения, посты дальнего обнаружения, наблюде-
ния, оповещения и наведения. Основные задачи этих РЛС состоят в:
• обнаружении, опознавании и сопровождении воздушных целей своими и
приданными радиолокационными средствами;
• сборе данных о воздушной обстановке от РЛС маловысотных постов, воз-
душных дозоров, дивизионов и батарей ЗРК;
• оценке степени опасности целей и подготовке для оперативных центров сек-
торов рекомендаций по распределению целей между истребительной авиа-
цией, ЗРК и ЗАК;
• наведении самолетов истребительной авиации;
• целеуказании группам и дивизионам ЗРК.
Зенитные ракетные комплексы средней и большой дальности действия, на-
ходившиеся на вооружении стран НАТО в 1970—1990-х гг. («Хок», «Патриот»,
«Найк-Геркулес», их модификации), размещались по всей глубине ТВД.
Типовой состав радиолокационных средств зенитных ракетных комплексов
следующий:
• для комплексов «Найк-Геркулес» — две РЛС обнаружения и целеуказа-
ния, одна РЛС сопровождения цели и одна РЛС сопровождения зенитной
ракеты;
• для комплексов «Хок» и «УХок» — две-четыре РЛС обнаружения и целе-
указания на больших и средних высотах, обнаружения и целеуказания на ма-
лых высотах, две РЛС подсвета цели и зенитной ракеты;
• для комплексов «Патриот» — одна многоцелевая многофункциональ-
ная РЛС с фазированной антенной решеткой и электронным сканированием
диаграммы направленности в двух плоскостях (типа AN/MPQ-3).
Приведенные характеристики радиолокационного поля ПВО и типовых РЛС
вероятного противника свидетельствуют о высокой плотности размещения на
местности однотипных и разнотипных радиолокационных средств, что сущест-
венно осложняет решение задачи анализа этого поля аппаратурой целеуказания
самолета-носителя. Конечной задачей анализа поля является идентификация
принимаемых сигналов от всей совокупности РЛС данного частотного диапазона
и определение числа приоритетных РЛС, подлежащих первоочередному подавле-
нию, с формулируемой последовательностью подавления в зависимости от пос-
тавленных задач и количества ПРР на носителе. В условиях рассматриваемого по-
ля ПВО с учетом возможных значений высот полета носителей и ПРР в секторе
приема аппаратуры целеуказания и ПРГС может оказаться 100...200 РЛС-целей,
что приводит не только к существенному снижению значений вероятности выбо-
ра приоритетной РЛС-цели при целеуказании, но и вероятности последующего
устойчивого автосопровождения целеуказанной РЛС при самонаведении ПРР. В
последнем случае при определении основных характеристик приемно-пеленга-
ционного устройства, устройств обработки информации и логики ПРГС сигналы
всех остальных РЛС данного частотного диапазона, находящихся в секторе при
479
ма ПРГС, следует рассматривать в качестве случайного мешающего фона. Исходя
из этого важнейшей задачей являлась разработка математических моделей сум-
марного сигнала на входе пассивной головки самонаведения различной степени
сложности, описывающих:
• информационные характеристики выбранной при целеуказании РЛС-цели,
включая совокупность радиотехнических параметров и возможное их изме-
нение в процессе наведения ПРР, пространственные координаты, диаграмму
направленности, переотражения от местности и т. п.;
• случайный импульсный поток сигналов от других РЛС выбранного частотно-
го диапазона, находящихся в секторе приема ПРГС;
• возможные меры и режимы радиопротиводействия.
Разработка методологии и формирование таких моделей были осуществлены
в 1980—1990-е гг. в ряде организаций, в том числе в ГосНИИАС. Наибольшую
сложность при этом представлял учет возможных мер и режимов радиопротиво-
действия как отдельных РЛС, так и всего поля РЭС.
Как следует из многочисленных публикуемых материалов [37], назначение
радиотехнических мер защиты РЛС от поражения противолокационными раке-
тами с ПРГС заключается в воздействии на радиотехническую аппаратуру ракеты
и самолета-носителя для нарушения нормального функционирования их прием-
но-пеленгационных устройств (ПРГС и аппаратуры целеуказания), в конечном
счете — для существенного снижения точностей целеуказания источника излуче-
ния и наведения на него.
При разработке радиотехнических мер защиты учитывается специфика рабо-
ты ПРГС и всего контура самонаведения ПРР, решающих в процессе наведения
задачи приема радиотехнической информации и ее обработки; определения на-
правления на источник излучения на основе обработанной информации и фор-
мирования сигнала рассогласования; изменения направления полета ПРР.
Затруднение приема и выделение полезной информации в ПРГС может до-
стигаться:
• изменением спектра сигнала излучающего источника, не согласованного с
полосой пропускания ППУ ПРГС;
• сменой радиотехнических параметров сигнала излучающего источника;
• подавлением сигнала излучающего источника более мощными сигналами
других источников;
• наличием нескольких сигналов во временном стробе селекции ПРГС;
• применением дискретного режима работы излучающего источника, а также
комбинацией перечисленных мер.
Определение направления на заданный источник излучения может осу-
ществляться с существенными ошибками при:
• одновременном воздействии сигналов нескольких источников излучения с
достаточно близкими значениями радиотехнических параметров;
• применении дискретного режима работы излучающего источника, а также
комбинацией перечисленных мер.
Характер изменения направления полета ПРР может зависеть от периода
дискретности режима работы источника излучения. Возможная совокупность ра-
диотехнических мер защиты РЛС и их классификация приведены на рис. 4.33
(ОУ — отвлекающие устройства).
Использование каждого режима и его количественные характеристики зави-
сят от назначения, тактико-технических характеристик РЛС и конкретной бое-
480
Авиация ВВС России и научно-технический прогресс
Рис. 4.33. Радиотехнические меры защиты РЛС
вой ситуации. Режимы секторного выключения излучения и «мерцания» исполь-
зуются, например, в РЛС обнаружения и целеуказания; биссектриса сектора вы-
ключения может быть ориентирована в любом азимутальном направлении с
заданной дискретностью и установлена в направлении, противоположном на-
правлению налета авиации противника. В случае продолжительного применения
секторного режима предусматривается программное включение кругового обзора
через несколько оборотов антенны РЛС.
Изменение радиотехнических параметров излучения может быть связано с
использованием как штатного режима функционирования РЛС, так и режима ра-
диопротиводействия. В первом случае имеет место жесткая функциональная за-
висимость между перестраиваемыми параметрами, во втором такая зависимость,
как правило, отсутствует. На сегодня наиболее распространено изменение несу-
щей частоты/н и частоты повторения Fn, режимы перестройки которых зависят
от типа применяемых в РЛС генераторов СВЧ.
В табл. 4.3 приведены характерные законы изменения радиотехнических па-
раметров используемых в РЛС различных диапазонов.
Отвлекающие устройства (ОУ) являются весьма эффективной мерой защиты
РЛС от ПРР и представляют собой дополнительные источники излучения
(ДНИ), расположенные на расстоянии нескольких сотен метров от РЛС и со-
здающие активные прицельные по несущей частоте синхронные помехи. Рас-
стояние между источниками и РЛС выбирается из соображения невозможности
одновременного поражения РЛС и ОУ одной боевой частью. Являясь ложной
целью, ОУ должно обеспечить отвлечение противолокационных ракет с ПРГС от
РЛС. Характеристики диаграмм направленности антенны ОУ зависят от схемы
построения системы радиозащиты, тактических и технических характеристик за-
щищаемых средств нападения и могут быть круговыми или секторными по углу
азимута, секторными по углу места.
Таблица 4.3
Законы изменения радиотехнических параметров
Параметр Закон изменения Диапазон излучаемых частот
А А' В' В С
РЛС ПВО РЛС ЗРК РЛС ПВО РЛС ЗРК РЛС ПВО РЛС ЗРК
/н-% Постоянный Плавный, 70 — 42 71 38 14 42 —
скачкообразный От импульса 30 100 29 — 51 86 22 100
к импульсу — — 29 29 14,5 — 36 —
Постоянный Скачкообраз- ный — 100 65 35 41 59 23 77 88 12 24 76 3 97
Т,% Постоянный 100 88 12 61 78 41 —
Скачкообраз- ный — — 12 88 39 22 59 100
то6з, % 42 27 100 100 80 65 80 50
482
В зависимости от типа создаваемой помехи ОУ можно разделить на ИМИТИ-
РУЮЩИЕ, МАСКИРУЮЩИЕ И КВАЗИМАСКИРУЮЩИЕ.
В случае ОУ, работающих в имитирующем режиме, сигналы от РЛС и ОУ, не
разрешаемые, как правило, по радиотехническим параметрам, на входе ПРГС не
перекрываются; постоянно, попеременно и случайно опережающие запуски сиг-
налов РЛС и ОУ достигаются вобуляцией частоты повторения излучаемых сигна-
лов по детерминированным и случайным, с различной вероятностью, законам.
Это может привести к попеременной пеленгации РЛС и ОУ при достаточно ши-
рокой номенклатуре возможных логик обработки сигналов в ПРГС — выработке
пеленга по первому принимаемому импульсу, по второму и т. д. Увеличение веро-
ятности перенацеливания ПРГС на ОУ может быть достигнуто увеличением ве-
роятности поступления импульсов от ОУ, а также применением комбинирован-
ных мер защиты ОУ совместно с дискретными режимами излучения РЛС, режи-
мами изменения радиотехнических параметров (/н и Fn) с запаздывающим (ДГ с)
изменением соответствующих радиотехнических параметров ОУ; режимом рабо-
ты РЛС с пропусками небольшой части зондирующих сигналов и т. п.
В случае ОУ, работающих в маскирующем режиме, сигналы от РЭС и ОУ на
входе ПРГС, действуя одновременно, перекрываются; ошибка контура углового
сопровождения ПРГС зависит от соотношения мощностей принимаемых от РЛС
и ОУ сигналов на входе ПРГС. Несмотря на принципиальную возможность мас-
кировки только главного луча или всей ДНА РЛС (со всех направлений), ввиду
технической сложности и большой стоимости реализации такого типа ОУ, наибо-
лее вероятно применение ОУ, маскирующих только боковое излучение РЛС. Уг-
лы прикрытия бокового излучения определяются возможными направлениями
атаки ПРР.
Маскирующие ОУ могут быть когерентного и НЕКОГЕРЕНТНОГО типа. В ко-
герентных сигналы формируются или ретрансляцией сигналов РЛС, или жесткой
синхронизацией сигналов излучения РЛС и ОУ. Учитывая сложность техниче-
ской реализации когерентных ОУ, более вероятно применение ОУ некогерентно-
го типа.
При использовании маскирующих ОУ для защиты импульсных РЛС необхо-
димо обеспечить одновременность прихода в точку приема (на входе ПРГС) сиг-
налов РЛС и ОУ. Для этого излучаемый импульс ОУ должен опережать (или от-
ставать) по времени излучаемый импульс РЛС. Поскольку максимальное значе-
ние опережения (или отставания) зависит от расстояния между источниками
излучения (базы) и угла между направлением на ракету и нормалью к базе, прак-
тически обеспечить требуемое значение задержки (отставания) в широком диа-
пазоне возможных изменений этого угла очень сложно.
Поэтому применение маскирующих ОУ наиболее вероятно при защите РЛС
непрерывного излучения.
Использование двух ОУ позволяет перекрыть передний и задний фронты им-
пульсов РЛС в широком диапазоне углов.
Приведенные выше возможные меры радиопротиводействия наземных РЛС
позволяют судить о проблемах, стоящих перед разработчиками ПРР с ПРГС, и
наметить пути построения интегрированных систем наведения с несколькими
источниками информации (ПРГС + спутниковая навигационная система, ПРГС
+ радиолокационная головка ММ-диапазона и т. д.).
483
2. Особенности построения систем самонаведения
противорадиолокационных ракет и математические модели
пассивной радиолокационной головки самонаведения
СИСТЕМА самонаведения ПРР представляет собой совокупность устройств,
обеспечивающих процесс наведения, состоящую в основном из:
• информационного устройства (пассивной радиолокационной головки само-
наведения), измеряющего путем обработки входного сигнала текущие значе-
ния параметров движения ПРР относительно мгновенного положения экви-
валентной цели;
• блока формирования команд управления (БФКУ), объединяющего вычисли-
тельные и корректирующие устройства, прогнозирующего текущую оценку
измеряемых величин и формирующего в соответствии с законом наведения
заданные управления;
• контура стабилизации, обеспечивающего реализацию заданных управлений
и включающего ракету и систему стабилизации, выполняющих в данном
случае функции исполнительного устройства и регулятора.
Совместно с блоком, условно называемым «противник», формирующим сиг-
нал на входе информационного устройства в соответствии с характеристиками
относительного движения ПРР, информационными свойствами РЛС-цели и ха-
рактеристиками режимов РПД противника, система самонаведения образует
контур самонаведения. Структурную схему этого контура можно представить в
виде, изображенном на рис. 4.34, где Ф (/ = 1, 2, 3) — векторы внешних и внут-
ренних возмущающих воздействий и начальных условий [38].
Задачей наведения на наземную радиоизлучающую цель является выведение
ПРР в процессе ее управляемого полета в некоторую окрестность этой цели при вы-
полнении требований к вектору скорости в момент подрыва боевой части. Располо-
жение этой окрестности (на земной поверхности, в некоторой плоскости, парал-
лельной земной, в картинной плоскости и т. п. — рис. 4.35), ее размеры и требования
к вектору скорости в момент подрыва БЧ задаются в зависимости от типа и характе-
ристик БЧ, способа ее подрыва, требуемой вероятности поражения РЛС-цели.
Рис. 4.34. Контур самонаведения
484
Исходя из этого мерой точности наведения можно считать расстояние между
точкой, характеризующей положение центра масс ПРР в указанной окрестности
в момент t = TQ, и точкой прицеливания (центром антенной системы источника
излучения).
Типовые траектории полета противолокационных ракет малой, средней и
большой дальности действия в вертикальной плоскости отличаются разнообра-
зием. Для ракет малой и средней дальности, как правило, захват цели осуществ-
ляется под самолетом-носителем, для ракет большой дальности захват цели мо-
жет быть осуществлен как под самолетом-носителем, так и на траектории полета.
Можно выделить три участка полета ПРР, на каждом из которых системой
самонаведения решаются самостоятельные задачи:
• участок дальнего наведения, характеризуемый автономным управлением ра-
кетой при наличии или отсутствии информационного контакта ПРГС с
целью;
• участок перехода от дальнего наведения к ближнему самонаведению, харак-
теризуемый разворотом ПРР в пикирование и формированием заданных тре-
бований к условиям встречи с помощью программного управления или само-
наведения;
• участок ближнего самонаведения, характеризуемый формированием движе-
ния ПРР относительно РЛС-цели по информации от ПРГС в соответствии с
принятым законом самонаведения, обеспечивающим заданное значение
промаха.
Для исследования динамики процессов наведения и точности попадания в
цель в общем случае необходимо рассмотреть движение ракеты в пространстве.
Однако при решении многих частных задач используют разделение общего про-
странственного движения на два — в продольной и боковой плоскостях.
Основное внимание в настоящем разделе уделяется вопросам построения
взаимосвязанных математических моделей входного сигнала и ПРГС, описываю-
щих процессы поступления и обработки информации в системе самонаведения.
Математические модели ракеты, контура стабилизации достаточно полно описа-
ны в литературе, например [38, 39].
В информационном аспекте для ПРР с ПРГС радиолокационная станция
может рассматриваться как точечный излучатель, информационные характерис-
тики которого
иной степенью
теристики, как
ния, являются
определяющими динамику процес-
сов наведения и точность попадания
ПРР. Именно поэтому разработчики в
процессе проектирования и отработ-
ки ПРГС и системы управления всег-
да стремились к наиболее точному
определению (расчетному и экспери-
ментальному) и полному представле-
нию ]
НИИ
щих ।
РЛС.
известны
точности.
показали
наиболее
с той или
Эти харак-
исследова-
важными и
при математическом моделирова-
этих характеристик, учитываю-
основное и вторичное излучения
485
Принципы построения математических моделей ПРГС, их структура, сте-
пень сложности и достоверности существенным образом зависят от назначения
модели и целей исследований.
Основная предпосылка построения математических моделей ПРГС — воз-
можность использования этих моделей для исследования точности или в общей
постановке динамики процесса самонаведения в условиях РПД. В этом случае
математическая модель ПРГС — часть более общей модели контура самонаведе-
ния ПРР. Естественно, что для исследования «внутренних» процессов ПРГС ма-
тематические модели могут быть другими.
В общем случае для оценки точности системы самонаведения в условиях
РПД необходима достоверная математическая модель ПРГС достаточно сложно-
го вида. Однако трудности проведения исследований с использованием такой
модели и стремление охвата всего многообразия тактических ситуаций и возмож-
ных мер РПД приводят к необходимости существенных упрощений, связанных с
предположениями идеальности функционирования отдельных блоков и уст-
ройств ПРГС. Эти упрощения зависят от режимов работы ПРГС и средств РПД,
целей и сроков проведения исследований на различных этапах проектирования
ПРГС и системы самонаведения в целом.
Исходя из этого была разработана совокупность математических моделей
ПРГС различной степени сложности и достоверности, образующая систему раз-
личных иерархических уровней. Указанная совокупность взаимосвязанных моде-
лей позволяет определить как рациональные области применения каждой отдель-
ной модели, так и условия перехода от одной модели к другой, что существенно
облегчает на практике проведение исследований. Она позволяет также использо-
вать различные методы исследования — от аналитических расчетов до статисти-
ческих испытаний — для получения требуемых результатов и для повышения сте-
пени достоверности отдельных моделей каждого иерархического уровня.
Указанные математические модели представляют собой обобщение опыта,
накопленного в НИ НАС и других организациях промышленности в процессе
проектирования и исследований целого ряда отечественных ПРГС. На рис. 4.36
схематично представлены факторы, лежащие в основе построения совокупности
математических моделей ПРГС.
Структурная схема ПРГС может быть представлена следующими функци-
ональными устройствами:
• приемно-пеленгационным (ППУ), состоящим из пеленгационного
датчика — антенной системы ПРГС, преобразователя информации о мгно-
венном положении цели;
• углового сопровождения (УУС) антенной системы ПРГС, включающего уси-
лительные и преобразовательные устройства, устройства пролонгации и про-
странственной селекции;
• управления и логики (УУЛ), состоящего из блоков селекции по радиотехни-
ческим параметрам, управления пролонгатором, пространственной и пара-
метрической селекциями, сменой режимов работы ПРГС.
Из всего многообразия возможных структур моноимпульсных ППУ, осно-
ванных на возможном использовании амплитудного, фазового и амплитудно-фа-
зового методов приема и амплитудного, фазового и суммарно-разностного мето-
дов извлечения угловой информации, в ПРГС нашли применение фазово-фазо-
вые, амплитудно-амплитудные, амплитудные и фазовые суммарно-разностные
методы.
486
Рис. 4.36. Совокупность математических моделей ПРГС
При этом используются детекторные, супергетеродинные и комбини-
рованные приемные устройства. Выбор приемного устройства определяется ха-
рактеристиками излучения РЛС-целей (мощностью, длительностью импульсов,
режимом перестройки/н и т. п.), тактико-техническими требованиями (дально-
стью захвата, ракурсами и т. п.) и требованиями помехозащищенности.
Антенная система — многобазовая, раздельная для фазометрических каналов
и пространственно-частотной селекции.
Приемно-пеленгационное устройство формирует и выдает в УУЛ селекти-
рующие признаки — радиотехнические параметры/н, т, и Ризл, угловое поло-
жение и признак цели.
Устройство углового сопровождения предназначено для формирования сиг-
налов управления положением антенной системы в пространстве по расчетным
сигналам, приходящим из системы целеуказания (расположенной на самоле-
те-носителе при захвате цели на подвеске или на самой ракете при захвате цели
на траектории от системы навигации и автономного управления СНАУ) в режиме
поиска и захвата; по сигналам ошибок, приходящим из приемно-пеленгационно-
го устройства в режиме сопровождения цели; по сигналам пролонгатора или дру-
487
гого информационного устройства в случае отсутствия информации (радиолока-
ционной). Оно осуществляет стабилизацию и управление линией визирования
антенной системы в пространстве, развязку ее движения от движения ракеты от-
носительно центра масс и непосредственно участвует в формировании сигналов
управления ракетой.
Обычно работа контура углового сопровождения рассматривается в двух тес-
но связанных режимах: режиме управления и режиме стабилизации.
Характеристики контура углового сопровождения в режиме стабилизации
определяются конструкцией и характеристиками карданного подвеса антенной
системы и его элементов, типом контура стабилизации, его динамическими и
статическими характеристиками, внешними воздействиями. Они характеризуют,
с одной стороны, устойчивость сопровождения цели, в том числе и при пропада-
нии информации о ней (что особенно важно при узких диаграммах направлен-
ности антенн ПРГС или малых значениях величины пространственного строба);
с другой — ошибки в формировании и выдаче сигналов управления движением
ракеты (углов пеленга, угловых скоростей линии визирования и т. п.). По числу
осей стабилизации устройства углового сопровождения ПРГС бывают двух- и
трехосными; по методу стабилизации — гироскопические системы с использова-
нием принципов силовой гиростабилизации, индикаторной стабилизации и ком-
бинированные.
Многообразие возможных принципов построения, структур и схемных ре-
ализаций ППУ, УУС, зависящее от назначения ПРГС и решаемых ею задач, оп-
ределяет и многообразие возможных математических моделей ПРГС. К тому же
многообразие возможных математических моделей ПРГС определяется и сово-
купностью указанных на рис. 4.36 факторов: наличием, объемом и характером
исходных данных на различных этапах проектирования. К ним относятся прин-
ципиальные и структурные схемы, описания, расчеты, результаты лабораторных
исследований ПРГС, отдельных устройств и блоков, результаты испытаний об-
разцов ПРГС и макетов в полигонных условиях, на наземных позициях, летаю-
щих лабораториях и в пусках.
На различных этапах проектирования и функционирования, определяющих
специализацию математических моделей, можно выделить три подхода к форми-
рованию математических моделей ПРГС и ее устройств (рис. 4.36):
• детальное (поэлементное) математическое описание всех или ряда функци-
ональных устройств и блоков ПРГС и связей между ними;
• функциональный принцип построения модели, считающейся идентичной
оригиналу (описанию), если она с заданной точностью обеспечивает функ-
циональное преобразование входных сигналов в выходные;
• эквивалентный принцип построения модели, состоящий в замене структуры
или функциональных зависимостей отдельных блоков эквивалентными воз-
действиями, воспроизводящими внешние характеристики этого блока по за-
данному показателю качества.
В зависимости от требуемой полноты модели (ее сложности и достовернос-
ти), описания одной части устройств или блоков могут быть воспроизведены де-
тально, другой — функционально или эквивалентно с приближенным отражени-
ем отдельных сторон работы данных устройств или блоков ПРГС.
В рассматриваемой постановке подход к формированию математических мо-
делей того или иного конкретного устройства или блока ПРГС, степень сложнос-
ти и достоверности этих моделей определяются как важностью информации на
488
его выходе для выработки сигнала управления в условиях РПД, так и возможно-
стью реализации, экономичностью этих моделей при использовании ЦВМ.
Математические модели антенных систем, преобразователей информации и
приемно-измерительных устройств, входящих в ППУ, а также части блоков УУЛ,
основанные на детальном описании процессов обработки сигналов на промежу-
точной и несущей частотах, обычно труднореализуемы. В математических моде-
лях ПРГС используется только функциональное или эквивалентное описание та-
ких блоков (усилители и фильтры основной и промежуточной частот, смесители,
детекторы, частично АПЧ, анализаторы импульсов и т. п.). При таком описании
ошибки устройств обработки сигналов на промежуточной и несущей частотах
определяются расчетным или экспериментальным путем и в математических мо-
делях ПРГС учитываются в виде аддитивных составляющих выходных сигналов
функциональных или эквивалентных моделей указанных устройств. В математи-
ческих моделях УУС и УУЛ могут использоваться как поэлементный, так и функ-
циональный или эквивалентный принципы построения различной степени
сложности с различными упрощениями. Таким образом, основные затруднения
вызывает разработка подробных математических моделей ППУ и УУЛ.
Трудности математического моделирования процессов преобразования сиг-
налов на несущей и промежуточной частотах в ППУ осложняют исследование ра-
боты ПРГС при некоторых мерах РПД. Например, при использовании
РЛС-целью сложных зондирующих сигналов (с ЛЧМ, ФКМ и т. п.) при защите
РЛС непрерывного или импульсного излучения ОУ с неразрешаемыми по/н сиг-
налами (совпадающими во временном интервале отработки по переднему фронту
ПРГС — в случае импульсных РЛС) и т. д. Исключением являются случаи, когда
сигналы РЛС и ОУ когерентны — для фазовых моноимпульсных ППУ или для
других типов ППУ, если несущие частоты сигналов строго равны. В этих случаях
значение угла пеленга определяется только мощностными соотношениями сиг-
налов на входе ППУ и, следовательно, математическая модель ППУ может быть
представлена достаточно упрощенно.
Упрощения математических моделей ПРГС основываются на следующих
факторах:
• компромиссе между ожидаемой точностью результатов моделирования и
сложностью модели;
• балансе точностей, характеризуемом:
♦ исходной неопределенностью, т. е. соразмерностью систематических
погрешностей моделирования (отклонения математической модели от
описания) с погрешностью в задании параметров описания;
♦ соответствием систематической погрешности моделирования и случай-
ной погрешности при интерполяции и усреднении результатов модели-
рования;
• наглядности модели и получаемых результатов как для исследователя, так и
для заказчика.
В соответствии с вышеизложенным на рис. 4.37 приведены математические
модели ПРГС трех уровней.
Таким образом, разработанная подробная математическая модель позволяет
определить амплитудно-фазовые характеристики суммарного вектора напряжен-
ности электрического поля в точке приема (на входе приемно-пеленгационного
устройства ПРГС), учитывающие основное и вторичное излучения каждого из N
излучателей. Такая модель используется также для построения косых сечений
489
Рис. 4.37. Иерархия математических моделей ПРГС
амплитудной диаграммы направленности антенны РЛС с последующим сравне-
нием полученных результатов с результатами летных испытаний. Она позволяет
помимо уточнения и оценки адекватности подробной математической модели
перейти к упрощенным математическим моделям.
В упрощенных математических моделях информационные свойства источ-
ников излучения описываются двумя взаимонезависимыми характеристиками:
мощностными, определяющими вид и параметры диаграммы направленности
антенны источника, и угловыми, определяющими изменение положения мгно-
венного (эквивалентного) центра излучения в пространстве относительно ПРГС.
Диаграмма направленности представляется некоторым случайным процессом и
реализуется логическим элементом типа ключ с известными статистическими ха-
рактеристиками режима переключения. Изменение положения центра излуче-
ния описывается совокупностью:
490
• детерминированного процесса, характеризующего изменение положения
ПРР относительно центра антенны РЛС в соответствии с уравнениями кине-
матических связей;
• случайного процесса, полученного преобразованием процесса типа «белого
шума» стационарным формирующим фильтром с дробно-рациональной пе-
редаточной функцией, структура и параметры которого определены для не-
которых типов РЛС по результатам летных испытаний и математического
моделирования с подробной моделью.
На основе обобщения опыта проектирования отечественных и анализа пуб-
ликаций о разработках зарубежных ПРГС рассмотрены принципы и особенности
построения приемно-пеленгационных устройств, устройств управления и логи-
ки, устройств углового сопровождения, функционирующих в условиях радиопро-
тиводействия.
Исходя из многообразия возможных принципов построения ПРГС, режимов
функционирования, различия задач на различных этапах проектирования, объ-
ема и характера исходной информации, типа и режимов работы РЛС-целей и
средств РПД, возможностей реализации на ЦВМ в ГосНИИАС разработаны ос-
новы построения процесса формирования математических моделей, использую-
щих поэлементный, функциональный и эквивалентный принципы.
Совокупность разработанных математических моделей ПРГС, используемая
на различных этапах проектирования и функционирования системы самонаведе-
ния при различных типах РПД, представлена трехуровневой иерархической сис-
темой. Модели каждого уровня (подробные поимпульсные, упрощенные поим-
пульсные, непрерывные и дискретно-непрерывные) отличаются степенью под-
робности представления устройств обработки и входной информации ПРГС, а
также способами имитации этой информации.
Поимпульсные математические модели позволяют исследовать процессы це-
леуказания и самонаведения ПРР на выбранную РЛС-цель в условиях радиолока-
ционного поля, сигналы которого имитируются импульсными последовательнос-
тями с амплитудами, пропорциональными значениям углов, и радиотехнически-
ми параметрами каждой РЛС. Основой таких моделей является подробное
описание логических устройств обработки информации и принятия решений.
Упрощенные непрерывные и дискретно-непрерывные (с логическими эле-
ментами типа ключ) модели основаны на использовании априорно известных
или определенных с помощью моделей более высокого уровня характеристик
сигналов на выходе ППУ и УУЛ, что позволяет имитировать работу этих уст-
ройств вероятностными соотношениями. Разработанная методика определения
условий перехода к упрощенным моделям позволяет оценить области возможно-
го применения каждой из указанных моделей в зависимости от режимов полета
ПРР, типов и режимов РПД.
Рассмотренные математические модели входного сигнала и ПРГС позволяют
представить математические модели системы самонаведения ПРР в условиях
РПД как модели нелинейной нестационарной логико-динамической системы ав-
томатического управления с конечным числом возможных состояний структуры
и случайным скачкообразным процессом изменения этих состояний. Статисти-
ческие характеристики указанного процесса изменения структуры определяются
конкретными режимами РПД, структурой и параметрами ПРГС и системы само-
наведения.
491
3. Методы анализа точностных и динамических характеристик
Рассмотренная выше совокупность математических моделей нашла широкое
применение на всех этапах проектирования систем самонаведения противолока-
ционных ракет класса «воздух—поверхность». Особый интерес представляет ис-
пользование математических моделей при исследовании точностных и динами-
ческих характеристик процессов наведения ПРР в условиях применения источ-
никами радиоизлучения различных мер радиопротиводействия (см. рис. 4.33).
В этих случаях система самонаведения представляет собой мультиструктурную
систему, т. е. систему со случайным скачкообразным изменением структуры. Та-
кая система в каждом из состояний структуры, когда характер функциональных
связей между элементами и подсистемами остается неизменным, может нахо-
диться в течение ограниченного случайного интервала времени. Переходы из од-
ного состояния в любое возможное другое осуществляются скачкообразно в слу-
чайные моменты времени.
Обобщенная математическая модель такой мультиструктурной системы ха-
рактеризуется совокупностью нелинейных, нестационарных обыкновенных диф-
ференциальных или разностных уравнений, определяющих поведение вектора
фазовых координат при каждом фиксированном состоянии структуры, и случай-
ным процессом изменения состояний структуры, зависящим от применяемого
режима РПД.
Элементы теории мультиструктурных систем и ее практические приложения
применительно к системам самонаведения ПРР разрабатывались в ГосНИИАС в
1970—1990-е гг. и широко использовались в целом ряде предприятий промыш-
ленности и организаций Министерства обороны. Центральными моментами этой
теории являлось [40]:
• представление многомерных условных плотностей вероятности вектора фа-
зовых координат существенно нелинейных, нестационарных моделей систем
самонаведения конечной суммой гауссовых компонент (пол и гауссовой ап-
проксимацией);
• описание процессов изменения структуры системы самонаведения в зависи-
мости от используемых режимов радиопротиводействия простыми или ус-
ловными марковскими цепями.
Наиболее характерной иллюстрацией разработанной методики является
пример случайного дискретного процесса поступления информации о положе-
нии линии визирования в ПРГС, когда структура системы самонаведения опи-
сывается моделью устройства углового сопровождения с несколькими ключами
(рис. 4.37). Режимы работы этих ключей зависят от применяемых режимов ра-
диопротиводействия (рис. 4.38).
В качестве обобщенных моделей многомерных мультиструктурных систем
наведения с N возможными состояниями структуры и дискретными марковски-
ми переходами от одной структуры к другой рассматривались канонические век-
торные (векторно-матричные) уравнения, имеющие для каждой детерминиро-
ванной 7-й структуры дискретной системы следующий вид:
*к + 1 = F*(/)(xJ + ВА(хА)^, к = 1, 2,(4.46)
где Рл(/)(хл)— нелинейная лг(/)-мерная векторная функция; ВА(/)(х^) — нелиней-
ная матричная функция размерности д?(/) х т\ — т-мерная чисто случайная га-
уссовая последовательность.
492
Для таких дискретных мультиструктурных динамических систем (4.46) веро-
ятностное описание (п + 1)-компонентного марковского процесса случайной
структуры при фиксированном Z-м состоянии и произвольном (к + 1)-м моменте
времени характеризуется совместной плотностью вероятности/(х* + р Z).
Эта функция определяется при фиксированной z-й структуре уравнением
вида
/(хА + „ /) = J /.(ХА + }/xk)f(xk, i) dxk. (4.47)
е„
В свою очередь переходная плотность вероятности f. определяется в силу
уравнения (4.46) и свойств случайной гауссовой последовательности и являет-
ся гауссовой
fi^k + i/xJ = [(2л)'>/2| ДО)| 1/2] х
х ехр хк + , - Fp(x*)JTDp - 1 [хА _ , — F^')(xJ]
где = B^\xk)QВ^т(хл); Q — интенсивность случайной гауссовой последо-
вательности с нулевым математическим ожиданием.
Совокупность совместных плотностей вероятности для всех N возможных
состояний структуры системы представляет собой безусловную плотность веро-
ятности, удовлетворяющую условию нормировки во всей области Еп существова-
ния вектора фазовых координат
/(хл + |)= Е/(хл + |,/); Z f /(xA + l,z) dxA + , = 1.
' 1 '
Локальные характеристики случайного процесса изменения состояний диск-
ретной мультиструктурной динамической системы (4.46) задаются значениями
493
вероятности переходов, образующими для условной и простой марковских цепей
соответствующие переходные матрицы
Р(А: + 1/хЛ, к) = |Р/у(Лг + 1/хА, Л)|, i,j = 1,N- (4.48)
Р(£ + !/£) = |Р,у(Лг + 1/£)|, (4.49)
где, например,
Р(£ + \/к) =
Pl}(k+l/k)...PXN(k+l/k)
pN](k + \/k).,.pNN(k + \/к)
Исходя из этого рассмотрим возможности нахождения системы (4.46) в z-m
состоянии структуры в произвольный момент времени (к + 1).
Таких возможностей две:
• в момент времени к система имеет z-ю структуру и в момент времени к + 1
сохраняет это состояние с вероятностью Р„(к + 1/х^, к) для условной или
Ри(к + \/к) для простой марковских цепей;
• в момент времени к система имеет j-ю структуру (J = 1, N\j z) и в мо-
мент времени к + 1 переходит в z-e состояние с вероятностью перехода Р^(к +
+ 1/хЛ, к) для условной или Pj\k + 1/х*, к) для простой марковских цепей.
Тогда эволюция совместной плотности вероятности многомерного марков-
ского процесса случайной структуры с переходами из состояния в состояние, ха-
рактеризуемыми условной или простой марковскими цепями, удовлетворяет
уравнениям вида t
f(xk + i> о = Л ifj(xk + \/^f(^kJ>PjSk + Vx*, к) dxA; (4.50)
7=1
f(xk + ], z) = Е J fj{xk + x/xk)f(xk,j)Pjj(k + \/k) dx*. (4.51)
J~'
Приведенные уравнения по своей сути аналогичны соответствующим урав-
нениям для совместных плотностей вероятности непрерывных мультиструктур-
ных динамических систем и могут рассматриваться в качестве аналога обобщен-
ных уравнений Фоккера—Планка—Колмогорова относительно совместных плот-
ностей вероятности для процессов с распределенными переходами.
В дальнейшем будем называть их обобщенными уравнениями сохране-
ния вероятности для дискретных мультиструктурных динамических систем,
математическое описание которых соответствует (4.46).
Поскольку каждая совместная плотность вероятности f(xk+x, z) при фикси-
рованном z-м состоянии структуры не нормирована к единице, интеграл от нее
во всей области Еп, аналогично случаю непрерывных мультиструктурных сис-
тем, будем трактовать как вероятность нахождения дискретной мультиструктур-
ной системы в z-м состоянии
Р^к + 1) = Е \f(xk,J)PjSk + \/хк, к) dxk
J=i Е„
для процессов смены состояний в виде условной марковской цепи и
Pt(k + 1) = Е Р (к + \/к) J f(xkJ) dxk
7=1 Е„
для процесса в виде простой марковской цепи.
(4.52)
(4.53)
494
При этом всегда имеет место соотношение
£Pi(k + 1)= 1.
Используя значения вероятности Р^к + 1) в качестве нормирующего мно-
жителя, введем в рассмотрение функцию условной плотности вероятности
/(,)(ХЛ + ।) = р.(Д X)f^k + 1, о, (4.54)
удовлетворяющую в отличие от совместной плотности вероятности условию нор-
мировки для каждого i
J /(,’(xA + l)dxA + l = 1.
Эволюция условной плотности вероятности характеризуется также обоб-
щенным уравнением сохранения вероятности, принимающим, учитывая (4.54),
для условной и простой марковских цепей следующий вид:
N Р(к)
+ ।) = p-(l +-f) J/;(х* + |Аа)/'(7)(ха)Р/7(А: + 1/ха, к) dxA; (4.55)
1
N Р (кЛР
Л>(ХЛ + ,) = .Z \fj^k + ./х^/^Схр dx,. (4.56)
1 Еп
Уравнения, определяющие вероятность нахождения системы в z-м состоя-
нии структуры (4.52) (4.53), в этом случае записываются
Pt{k + 1) = Z Р(Л) J (Л + 1/хА) dxA; (4.57)
7 = 1 £„
Pj(k + 1) = Z РЛк) Рн(к + 1/Лг). (4.58)
Нетрудно заметить, что в последнем случае (4.58), когда процесс смены со-
стояний характеризуется простой марковской цепью, вероятность нахождения
дискретной системы в каждом из состояний структуры в момент времени (к + 1)
определяется рекуррентно достаточно просто при заданных начальных услови-
ях Р,(0).
Таким образом, вероятностное описание процессов в дискретных, нелиней-
ных, нестационарных мультиструктурных системах вида (4.46) с распределенны-
ми переходами из состояния в состояние в виде условной или простой марков-
ских цепей полностью характеризуется системами уравнений (4.50) (4.52) или
(4.55) (4.57); (4.51) (4.53) или (4.56) (4.58). При этом совместные или условные
плотности вероятности вектора фазовых координат в начальный момент
времени — /(Xg, Z) или так же, как и Pz(0), должны быть известны.
Как уже отмечалось, в случае дискретных мультиструктурных динамических
систем вероятностное описание процессов смены состояний структуры характе-
ризуется совокупностью значений вероятностей переходов Р^, образующей для
условной и простой марковских цепей соответствующие переходные матрицы
(4.48), (4.49). При этом вероятности переходов считаются известными дискрет-
ными функциями времени и фазовых координат, а вероятности нахождения сис-
темы в каждом из состояний структуры Р^к + 1) определяются через совместные
плотности вероятности f(*k, z) выражениями (4.57), (4.58).
495
Р(Л + 1/Л) =
Для простой марковской цепи с дискретным временем и двумя дискретными
состояниями элементы Ру переходной матрицы (4.49)
/>и(Х + 1/Л)Р12(Л+ \/к)
P2i(k + l/k)P22(k + 1 /к)
можно определить, например, соотношениями
Ру(к + \/к) = к,(к At) АГ,
Рц(к + \/к) = 1 - \(Л At) At,
где At — шаг дискретизации системы; к = 0, 1, ..., Tk/At.
Для однородной эргодической марковской цепи с дискретным временем
Ру(к + \/к) = Ру = к,- АГ, Ри(к + \/к) = Рц = 1 - At (4.59)
распределение 7"z нахождения в каждом из состояний характеризуется законом вида
к
FT (к At) = Р( Т, < к At) = Р7 Z (1 - РАГ ~ 1 (4.60)
Z J г = I J
с математическим ожиданием 4/(7^] = .
Для простой марковской цепи с дискретным временем и N дискретными со-
стояниями элементы переходной матрицы
Р(к + \/к) =
Pxx(k+\/k)...PXN(k+\/k)
Р NX(k + \/к)...Р NN(k + \/к)
(4.61)
можно определить аналогично через интенсивности смены состояний X, =
1
М[ тд •
Ру(к + \/к) = ку{к At) At-
Ри(к + \/к) = 1 - £ к,Лк At) At = 1 - ку(к At) At. (4.62)
В этом случае вероятности состояний дискретной мультиструктурной систе-
мы определяются рекуррентно уравнением вида
+ V)...PN(k + 1)| = Р(£ + l/£)|PI(£)...Pyv(£)| (4.63)
при заданных начальных условиях Pz (к = 0) = Р/о > 0.
Если элементы переходной матрицы Р(£ + \/к) не зависят от времени, т. е.
Ру(к + \/к) = Рд и матрица Р = |7< | является регулярной переходной, то устано-
вившиеся значения вероятностей состояний для такой конечной марковской це-
пи с дискретным временем удовлетворяют уравнению
ipi.../’/vi=i/’,o...^oi
Pip.-Piyv
?N\ —
и представляют собой компоненты единственного неподвижного вектора пере-
ходной матрицы Р Среднее время сохранения состояний в этом случае
— ‘ii А'П
496
При периодическом процессе изменения состояний статистические характе-
ристики задаются переходной матрицей (4.61), элементы которой определяются
через интенсивности смены состояний X согласно (4.62).
В тех случаях, когда характеристики процесса изменения структуры зависят
не только от времени, но и от фазовых координат, воспользуемся переходной
матрицей вида
Р(к + 1/хЛ, к) = \Ри(к + 1/хЛ, Л)|. (4.64)
Например, при случайных пропаданиях информации о положении линии
визирования и соответствующих переходах в режим пролонгации система угло-
вого сопровождения (рис. 4.38) в произвольный момент времени t может нахо-
диться в одном из трех возможных состояний структуры. Используя представле-
ние математической модели процесса изменения состояний структуры в виде ус-
ловной марковской цепи, переходную матрицу (4.64) запишем в виде
Р(к + 1/А, £) = | Рд(к + 1 /А, Л)|, (4.65)
где А — величина ошибки сопровождения (рис. 4.38).
Зависимости элементов матрицы (4.65) от значений А, соответствующие раз-
личным дискретным режимам поступления информации, определяются, напри-
мер, в виде
Ри(к + 1 /к) = ки(к АХ) А/,
Pr\k + \/к) = 1 - _= Ри(к + \/к\ (4.66)
Приведенные примеры иллюстрируют возможные подходы к формированию
математических моделей процессов изменения состояний структуры дискретных
систем, характеризуемых элементами Р.. переходных матриц для всех возможных
состояний ij = 1,..., TV. В зависимости от особенностей рассматриваемой задачи пе-
реходные вероятности могут представлять собой как функции времени Рц(к + \/к),
так и функцию времени и фазовых координат Р^(к + 1/х^, к).
Следующим этапом является определение значений вероятностей состояний
системы в соответствии с (4.52), (4.53) или (4.57), (4.58) и нахождение прибли-
женных решений уравнений относительно плотностей вероятности (4.50), (4.51)
или (4.55), (4.56).
Оставляя в стороне вопросы возможной аппроксимации условных плотнос-
тей вероятности (4.55), (4.56) конечным числом компонент (в том числе и гауссо-
вых компонент при полигауссовой аппроксимации), подробно рассмотренных в
монографии [4], опишем лишь процедуру перехода от уравнений (4.55), (4.56) к
уравнениям относительно числовых характеристик этих плотностей.
Воспользуемся представлением условных плотностей вероятности вектора
фазовых координат дискретной мультиструктурной системы (4.46) в виде
/(/)(х*) = С/р), (4.67)
где МА(р, С^р — вектор математических ожиданий и корреляционная матрица /-Й
гауссовой компоненты условной плотности вероятности в Z-м состоянии структуры;
а//}(А:) — скалярная величина (весовой коэффициент), удовлетворяющая условиям:
а}'\к) > 0; Е aj'\k) = 1,
где Lk — число гауссовых компонент.
497
При использовании представления вида (4.67) обобщенные уравнения сохра-
нения вероятности (4.55), (4.56) для процессов изменения состояний структуры, ха-
рактеризуемых условной или простой марковскими цепями, могут быть записаны
+1) = J //(х* + ^хк^рл{к + */х*’ к>х
1 Еп
х £ qp) dxA; (4.68)
" P(k)PJKk+ \/к) f
/(’(хл +1) = .?. р.(к+\)-----Шх* + 1/х*> х
7 1 Еп
Ек
X/Z ap)(^)/^(Mj(p, qp) dx*. (4.69)
Уравнения, определяющие вероятность нахождения системы в Z-м состоянии
структуры для условной и простой марковских цепей, в этом случае записываются
Р,(к + 1) = Е Pj(k) J Рл(к + 1/хЛ, к) Е a^(k)f^](xk) dx*; (4.70)
1 ' Е„
Р^к + 1) = Е PjWPAk + 1Д). (4.71)
Используя полученные уравнения (4.68) и (4.69), условные плотности веро-
ятности будем искать в виде линейной комбинации гауссовых компонент:
/<')(хЛ + ,)= Е1 а^+1)>О|).
что позволяет записать (4.68), (4.69) в виде
а.^(к + 1)/V)(x* +,) = Д + ,/х*, к)Р..{к + 1/Хл, к} X
1 Еп
х Е, а/»(Л)/0)(хр dx,; (4.72)
£‘ + | z-A z-A £ Р:{к)Р,,(к + \/k)
/?i a/7 + + i) “ y?! p.(k + p x
x \fj^k + lAJ Л, dx*. (4.73)
Такое представление позволяет перейти к уравнениям относительно каждой га-
уссовой компоненты, исходя, например, из предположения о возможности прибли-
женного представления интегральных слагаемых в правых частях (4.72), (4.73) в виде
J fj^k + 1/хл)Л/^ + ‘/хЛ, k)f$(xk) dxk = f^(xk +,); (4.74)
Еп
J fj<*k + '/*к)/$(*к) dx, « ffl(xk + ,). (4.75)
Такое допущение, как показывают результаты решения целого ряда конкрет-
ных задач, можно в большинстве случаев считать оправданным, учитывая инер-
ционные свойства операторов динамической системы (4.46) для каждого фик-
сированного состояния структуры. Тогда из сравнения правых и левых частей
уравнений (4.72), (4.73) следует, что число гауссовых компонент в условных плот-
498
ностях вероятности в каждый последующий (к + 1)-й момент времени по сравне-
нию с предыдущим к-м моментом увеличивается в N раз, где N — число воз-
можных состояний структуры системы (4.46), т. е.
При этом также появляется возможность перехода от уравнений (4.72), (4.73)
к уравнениям относительно каждой гауссовой компоненты, имеющим для про-
цессов изменения состояний структуры типа условной и простой марковских це-
пей вид
<*Р<к + + ,) = Р J fj(xk + ,/xk)Pj7(k + 1/хк, k)f^r(xk) dx*; (4.76)
арЧк + l)ftf(xk +,) = РРм(к + l/k) J fj(xk + x/xk)f^r{xk) йхк, (4.77)
где i,J = 1, ..., N; I + (j - \)Lk < I <JLk, r = I - (J - l)Lk ;
P;(k)
p= pi{k+\^JKk). (4.78)
На основании (4.75) формирование первой гауссовой компоненты условной
плотности вероятности в первом состоянии структуры — /^(xj) определяется
эволюцией начальной гауссовой плотности в этом же состоянии — /^/(Xq), а
формирование TV-й компоненты в первом состоянии /^p(xi) — эволюцией на-
чальной гауссовой плотности в TV-м состоянии структуры Соответ-
ственно, в общем случае для любого i = 1,..., N формирование первых Lk гауссо-
вых компонент условной плотности вероятности в этом Z-м состоянии в произ-
вольный момент времени к + 1 определяется эволюцией всех Lk гауссовых
компонент условной плотности первого состояния в предшествующий момент
времени к\ вторых Lk — всеми компонентами второго состояния и т. д.
Переход от уравнений (4.76), (4.77) относительно отдельных гауссовых ком-
понент условной плотности вероятности /^/(х*) к уравнениям на числовые ха-
рактеристики этих компонент и соответствующие весовые коэффициенты —
МЛ(р, а[1\к) может быть осуществлен умножением правой и левой частей
уравнения (4.76) соответственно на хк + j и (хк + t — МЛ(/) ^(х^ + j — j)T и ин-
тегрированием полученных выражений и самого уравнения (4.76) по всей облас-
ти Еп. В результате получим соотношения, определяющие указанные параметры
представления каждой Z-й гауссовой компоненты. Например, при В^(хк) =
соотношения для вектора математического ожидания, корреляционной матрицы
и весового коэффициента могут быть записаны как
эд(') = Ф/гУ)(^) = (/у)/^\.
A+l <PoW) Ф,оД h
•=+=+(4-79)
ар(к + 1)= Р<р0</)(А:),
499
где функции ср в силу исходной системы (4.76) имеют вид
<№(*) = f Fp)(xfc)/C')(Xfe)Py.(fc + 1/Xjfc> к) dXjt;
Еп
= J [Fp)(xA) - <₽,<'>>(A:)][Fy)(xA) - Ф|^(Л)Г x
x /V)(xppy.(^ + 1/Xfc, k} dXfc; (4.80)
VoW = J Pjt(k + 1/x*, k)f$(xk) dxk,
En
а значения индексов Z,j, Z, г удовлетворяют условиям (4.78).
Приведенные выражения существенно упрощаются в том случае, когда про-
цесс смены состояний структуры системы (4.76) характеризуется не условной, а
простой марковской цепью (вероятности переходов Ру7 не зависят от фазовых коор-
динат); соответственно уравнение, определяющее эволюцию каждой условной га-
уссовой компоненты, имеет вид (4.77). Тогда соотношения (4.79) принимают вид
С((')+1)^ = Лр)+ф<>)(А:); (4.81)
а.\‘\к + 1) = PPjtik + \/к),
а функции ф не зависят от вероятностей переходов Р7:
ФИ’(Л)= J Fp)(x,)7V)(xA)dx,;
Еп
Ф^’ (*) = f [Fp’Cx^) - ф </) (*)][Fp>(x*) - Ф1Р «$>*) dxA. (4.82)
*л
После определения в результате решения уравнений (4.79), (4.81) параметров
представления всех Lk + X гауссовых компонент на некотором {к + 1)-м шаге реше-
ния и соответствующих весовых коэффициентов — j С^+ j), а^\к + 1) х
х (Z = 1, ..., Lk + 0 параметры представления условных плотностей вероятности
М£'}_ j , Ср| j характеризуются выражениями
MVb = x'apV+l)M<'>+1)/;
Ш 1 = + 1), + <М((А- 1), - 1)(М<(Л 1), - MV* 1 >4-
(4.83)
Разумеется, решение уравнений (4.79), (4.81) может быть осуществлено лишь
при задании начального распределения вектора фазовых координат в каждом из
возможных состояний структуры системы и представлении этого распре-
деления суммой гауссовых компонент вида
/(«(Хо) = а/0(0)/<;)(мо<0, Со<0). (4.84)
При этом подразумевается, что Lo = £0(/) и одинаково для всех z = 1,..., N.
500
Рис. 4.39. Структурная схема алгоритма полигауссовой фильтрации
Значения вектора математического ожидания и корреляционной матрицы
безусловной плотности вероятности вектора фазовых координат дискретной муль-
тиструктурной системы могут быть определены через соответствующие значения
параметров условных плотностей и вероятностей состояний (4.70), (4.71) как
Ск +. = J, W + жад1 + (Mfi , гад, - мА + ,)(тад, - м, +
(4.85)
Приведенная выше методика оценки точностных характеристик системы са-
монаведения ПРР, рассматриваемой в классе нелинейных, нестационарных дина-
мических систем со случайным скачкообразным изменением структуры, является
эффективным инструментом исследований. Она позволяет оценить зависимость
точностных характеристик как от применяемой противником широкой номенкла-
туры средств и режимов радиопротиводействия, так и от разнообразных мер адап-
тации самой системы к таким режимам, например к комплексированию несколь-
ких источников информации и оптимальной обработке этой информации.
Достаточно подробное изложение основных положений этой методики, в
том числе и при решении задач оптимальной фильтрации при случайных переры-
вах входной информации, имеется в работе [40]. Здесь приведем лишь в качестве
примера алгоритм построения нелинейного фильтра в виде структурной схемы
(рис. 4.39). Использование метода полигауссовой аппроксимации априорной и
501
апостериорной плотностей вероятности вектора фазовых координат позволяет
получить уравнения прогнозирования и коррекции, аналогичные алгоритмам
калмановской фильтрации. Перерывы информации в этом алгоритме характери-
зуются значениями коэффициента ае (ае = 0,1) в уравнениях коррекции.
4.6.2. РАЗВИТИЕ СРЕДСТВ НАВЕДЕНИЯ РАКЕТ
НА РАДИОИЗЛУЧАЮЩИЕ ОБЪЕКТЫ1
Назначение противорадиолокационных ракет ДА — дезорганизация и подавле-
ние систем радиолокационного обеспечения боевых действий, радиолокационных
средств ПВО, в частности центров и постов управления и оповещения, центров и
постов управления ЗРК, ЗРК средней и большой дальности на СТВД типа «Хок»,
«У—Хок», «Найк-Геркулес», «Патриот» и т. д., а также корабельных РЛС [18].
В связи с мобильностью наземных средств ПВО ПРР должны обеспечивать
поражение целей как с заранее известными координатами, так и оперативно об-
наруженных с самолетов-носителей.
При этом система целеуказания самолетов-носителей и система управления
ПРР должны обеспечивать захват, выбор и сопровождение целей в сложном и на-
сыщенном радиолокационном поле (РЛП) в условиях применения вероятным про-
тивником мер огневого и информационного противодействий, а также при сверх-
звуковых скоростях полета самолетов-носителей и ПРР и их маневрировании.
В условиях оперативно обнаруживаемых целей самолет-носитель оказывает-
ся в дуэльной ситуации с ЗРК. Для выигрыша «дуэли» требуется максимальное
снижение времени обработки информации о цели, максимальное сокращение
времени на пусковые операции и повышенные скоростные возможности ПРР
для того, чтобы опередить зенитную управляемую ракету [18, 41].
Бортовая система ЦУ самолета-носителя и система наведения ПРР должны
позволять производить запуск ПРР без захода самолета-носителя в зоны ответ-
ственности ближайшей системы ПВО. Выполнение этого условия возможно при
определенных требованиях на дальность полета ПРР и дальность обнаружения
РЛС противника информационными средствами ПРР.
Основным информационным средством ПРР, обнаруживающим источники
радиоизлучения, является пассивная радиолокационная головка самонаведения,
которая измеряет пеленги радиоизлучающих объектов.
Излучаемые РЛС противника сигналы характеризуются следующими радио-
техническими параметрами:
• несущей частотой;
• частотой повторения импульсов;
• длительностью импульсов;
• модуляцией несущих частот;
• поляризацией;
• мощностью излучаемого сигнала;
• типом излучения (импульсное, непрерывное).
В табл. 4.4, 4.5 для примера приведены некоторые тактико-технические харак-
теристики ЗРК «Найк-Геркулес» и «Хок» [42] и радиотехнические характеристики
их РЛС.
1 В написании подраздела принимал участие Г. Ф. Муравьев.
502
Таблица 4.4
Тактико-технические характеристики ЗРК
Тактико-технические характеристики Наименование ЗРК
«Найк-Геркулес» «Хок»
Назначение Мобильность Высота боевого применения, км: максимальная минимальная Дальность стрельбы, км: максимальная минимальная ПСО и ПРО объектов и войск Стационарный и подвижный 30 0,5 160 13 ПСО и ПВО объектов и войск Стационарный и подвижный 18 0,15 35 1,7
Таблица 4.5
Радиотехнические характеристики ЗРК
Характеристики РЛС ЗРК «Найк-Геркулес» ЗРК «Хок»
AN/MS W-1 AN/MP А-4А AN/MP А-4В AN/MP Q-35 AN/MP Q-34 AN/MP Q-33
Назначение Обнару- Слеже- Слеже- Обнару- Обнару- Облуче-
станций жение ние ние жение жение ние
целей за целью за раке- той высотных целей низколе- тящих целей целей
Излучение Импуль- Импуль- Импуль- Импуль- Непре- Непре-
Длина сное сное сное сное рывное рывное
волны, см Частота 8,5...10 3,1...3,5 3,1...3,5 22...24 3 3
повторения, Гц Мощность, 500 500 500 800 — —
МВт Дальность, км: 1 0,25 0,12 0,65 0,2 0,2
обнаружения 350 — — 105 105 —
сопровождения — 220 185 — — 65
Из табл. 4.4, 4.5 следует, что ПРГС ПРР должны обеспечивать пеленгацию
сигналов в очень широком диапазоне длин волн (от 3 до 20 см). Для перекрытия
этого диапазона были разработаны литерные ПРГС.
Радиотехнические параметры предназначенных для поражения РЛС-целей
предварительно задаются с самолета-носителя весьма приближенно. Известен,
например, характер сигнала (непрерывный или импульсный), диапазон несущих
частот (см, дм) и т. д. Оценка таких параметров сигналов, как несущая частота,
частота повторения, длительность импульсов, производится только в процессе
пеленгации. Точность измерения этих параметров не позволяет в полной мере
использовать методы оптимальной обработки высокочастотных сигналов, как
503
это делается в активной радиолокации (согласованная фильтрация, корреляци-
онная обработка, супергетеродинный прием) [43].
Использование когеррентной обработки, широко внедряемой в активной ра-
диолокации, в ПРГС принципиально невозможно, так как априори неизвестны
фазы высокочастотного заполнения пачки импульсов принимаемого сигнала.
Поскольку оценки параметров сигналов проводятся лишь в процессе пелен-
гации, то весьма эффективными мерами информационного противодействия яв-
ляются изменение радиотехнических параметров излучаемого сигнала и приме-
нение дополнительных источников излучения с близкими радиотехническими
параметрами [44].
Стабилизация ПРР относительно центра тяжести и формирование траекто-
рии полета производится автопилотом ракеты, в состав которого, как правило,
входят гироблок и корректор высоты.
Траектория ПРР разделяется на два участка: маршевого полета и самона-
ведения. Управление в горизонтальной плоскости на участке маршевого полета
производится по сигналам ПРГС, а профиль траектории в вертикальной плос-
кости может формироваться программно или по информации высотомера. На
участке самонаведения управление ПРР по курсу и тангажу производится по ин-
формации ПРГС.
Ввиду того что для ПРР класса «воздух—поверхность» цели являются непо-
движными или малоподвижными (РЛС кораблей), при самонаведении может ис-
пользоваться интегральный закон управления по углу с упреждением.
Первой отечественной ПРР класса «воздух—поверхность» была ракета КСР-11
[18]. Она была предназначена для поражения работающих импульсных наземных
и корабельных РЛС обнаружения, управления огнем зенитной артиллерии и на-
ведения управляемого оружия. ПРГС ракеты КСР-11 имеет гиростабилизирован-
ную антенну. Настройка (целеуказание) ПРГС на выбранную РЛС-цель произво-
дится оператором в совместном полете самолета-носителя и ракеты («под кры-
лом»). Пуск КСР-11 осуществляется при достижении разрешенной дальности
после захвата РЛС-цели с помощью ПРГС.
Траектория полета ракеты КСР-11 состоит из трех участков:
• отцепка и программный выход на участок горизонтального полета;
• участок горизонтального полета со стабилизацией высоты полета от коррек-
тора высоты и самонаведением ракеты по курсу;
• участок пикирования с самонаведением по курсу и тангажу.
Следующей отечественной ПРР была ракета Х-22П [18]. По идеологии при-
менения она аналогична ракете КСР-11, отличие состоит в установке на нее не-
подвижных антенн. Захват цели на автосопровождение производится также под
крылом самолета-носителя.
Следующая по времени разработки ракета КСР-5П [18] отличается от преды-
дущих тем, что обнаружение и выбор цели производится оператором с помощью
пеленгационного устройства ПРГС и аппаратуры разведки самолета-носителя.
Параметры выбранной цели вводятся в ПРГС, после этого ракета переходит к ав-
тономной работе в режиме автосопровождения РЛС-цели. Управление ракетой
на траектории аналогично ПРР КСР-1 Ш и Х-22П.
Следующим этапом в развитии отечественных ПРР явилась новая противо-
радиолокационная ракета (разд. 3.1).
504
На ней впервые были установлены инерциальная система (ИС) и бортовая
цифровая вычислительная машина. Это позволило реализовать набор различных
траекторий полета, а также захват РЛС-цели с заданными координатами на тра-
ектории в автономном полете ПРР. Были разработаны алгоритмы грубой и точ-
ной выставки ИС ПРР на подвеске при совместном полете самолета-носителя
и ПРР.
Для управления движением ракеты на траектории после пуска в БЦВМ сис-
темы навигации и автоматического управления ПРР вводятся следующие исход-
ные данные:
• координаты и радиотехнические параметры РЛС-цели;
• программные углы отцепки;
• параметры программных маневров.
На заданной расчетной дальности включается ПРГС и начинается поиск
РЛС-цели с заданными радиотехническими параметрами. Антенна ПРГС гирос-
табилизирована. Первоначальная установка антенны ПРГС по углам произво-
дится на основании информации, полученной от СНАУ. После захвата и взятия
РЛС-цели на автосопровождение начинается участок самонаведения.
Для управления на участке полета до захвата цели ПРГС применялся метод
«погони за мнимой точкой», который обеспечивал формирование разнообразных
траекторий. На участке самонаведения использовался интегральный закон само-
наведения с упреждением.
Дальнейшие пути развития средств наведения ПРР ДА могут быть определе-
ны из опыта применения ПРР вооруженными силами США в военных конфлик-
тах во Вьетнаме и Югославии [44].
Данные анализа конфликтов показали, что наиболее эффективными средст-
вами защиты РЛС от ПРР являются выключение излучения РЛС при подлете к
ней ПРР и установка отвлекающих устройств [44].
Так, во время войны во Вьетнаме был использован простой способ защиты
от ПРР «Шрайк» — образование отвлекающего устройства засветкой поверхно-
сти земли главным лучом РЛС, в результате чего ПРР «Шрайк» наводилась на пе-
реотраженное излучение.
Во время военного конфликта в Югославии также были применены отвле-
кающие устройства в виде «зеркал» (простейших отражателей радиолокационно-
го сигнала в виде деревянных щитов, обтянутых фольгой). «Зеркала» размеща-
лись в нескольких сотнях метров от защищаемой РЛС, были ориентированы
вверх и подсвечивались главным лучом РЛС. В итоге ПРР США «Харм» или
«Аларм» захватывали переотраженный сигнал и наводились на «зеркала».
В Югославском военном конфликте в качестве меры защиты весьма эффек-
тивным показал себя метод выключения излучения РЛС при подлете ПРР. При
своевременном выключении РЛС ПРР вынуждена наводиться «по памяти». При
этом ошибки навигационной системы ПРР достигали такой величины, что при
подрыве БЧ ПРР РЛС оставалась непораженной. При выключении радиолокаци-
онного канала РЛС, конечно, снижалась эффективность ЗРК, так как приходи-
лось переходить от радиолокационного канала к оптическому [44].
Дальнейшее развитие систем наведения ПРР ДА должно идти по пути увели-
чения боевой эффективности системы самолет-носитель — ПРР.
Одной из задач в такой постановке является обеспечение безопасности само-
лета-носителя. При поражении РЛС-целей с известными координатами система
505
ЦУ носителя должна выдать в ПРР значения радиотехнических параметров сиг-
налов РЛС, которые необходимо обнаружить и захватить ПРГС ракеты.
Для того чтобы самолет-носитель не входил в зону поражения ЗРК, разре-
шенная дальность пуска ПРР должна превосходить дальность поражения носите-
ля ЗРК. Поэтому системы наведения перспективных ПРР должны иметь в своем
составе инерциальную систему (ИС). Назначение ИС — выведение ПРР в зону
поиска и захвата сигналов заданной РЛС пассивной головкой самонаведения
ракеты.
Кроме вариантов пуска ПРР по целям с известными координатами, возни-
кают также задачи поражения оперативно обнаруженных целей. В этом случае на
систему ЦУ кроме задачи оценки радиотехнических параметров сигнала возлага-
ется задача определения дальности до цели. При этом время определения даль-
ности обычно бывает ограниченным. Перспективными и, пожалуй, безальтерна-
тивными применительно к ПРР ДА являются пространственно-временные мето-
ды обработки информации, заложенной в волновых полях и радиосигналах,
принимаемых одновременно в пространственно-разнесенных точках, т. е. груп-
пой самолетов. Реализация данного принципа возможна лишь в многопозицион-
ных радиосистемах [45]. В [46] описывается перспективная противорадиолока-
ционная система ЦУ АТТТ, предназначенная для обеспечения точной атаки ЗРК.
Для реализации этого метода предполагается применение трех летательных аппа-
ратов, оснащенных приемниками радиолокационного излучения и оснащенных
линией передачи данных между ЛА.
Дальность действия системы ЦУ до 280 км, точность определения дальности
до 50 м, выполнение ЦУ в течение 10 с.
Перспективные системы наведения ПРР должны успешно продолжать рабо-
ту в условиях информационного противодействия, а именно при дискретной ра-
боте или выключении РЛС.
Одним из методов борьбы с дискретной работой РЛС является комбиниро-
ванная обработка информации от ИС и ПРГС на основе фильтра Калмана.
Структура алгоритма аналогична структуре фильтра, применяемого для
активной радиолокационной головки самонаведения. Отличие заключается
только в векторе измерения, когда дальность до цели формируется на основа-
нии данных радиовысотомера и значений вертикального угла визирования це-
ли, т. е.
Дичм = -/fH4M/sin £В .
г'ИЗМ ИЗМ' изм
В этом случае
AX..M = -#и™ COS £w™/tg еи™;
= 7/и_м sin e^M/tg £®
Как показал опыт войны' в Югославии [44], одним из самых эффектив-
ных методов борьбы с ПРР явилось выключение РЛС на конечном участке поле-
та ПРР.
Для борьбы с таким противодействием перспективные ПРР должны иметь
комбинированные головки самонаведения. Так, в [28, 47] предлагается комбини-
рованная головка, включающая в себя ПРГС и активную ГСН (АРГС) миллимет-
506
Зона поражения ДП
Зона поражения РЛС
Траектория до пространственного
разрешения
Точка пространственного
______разрешения______
Точка попадания
ПРР
Траектория после
пространственного разрешени
РЛС
ДП
Рис. 4.40. Схема защиты РЛС
рового диапазона. ПРГС во время ра-
боты РЛС дает ЦУ АРГС для разворо-
та ее антенны по углам. При подлете
ПРР к РЛС по информации ПРГС
АРГС производит поиск и захват этой
РЛС на автосопровождение. Дальней-
шее наведение ПРР на РЛС осуществ-
ляется по информации АРГС.
Использование отвлекающих уст-
ройств во время конфликтов во Вьетна-
ме и Югославии защищало РЛС от по-
ражения ПРР, но при этом РЛС не осу-
ществляла свою основную функцию —
обзор пространства. В перспективе
отвлекающие устройства могут быть
применены без нарушения работы за-
щищаемой РЛС. Это может дости-
гаться установкой отвлекающих источников излучения (дополнительных пере-
датчиков) с радиотехническими параметрами, близкими к радиотехническим па-
раметрам защищаемой РЛС. В случае РЛС с фазированными антенными
решетками могут быть использованы и отражатели, подсвечиваемые одним из лу-
чей ФАР. Установка отвлекающих устройств позволяет защитить РЛС при одно-
временной атаке позиции несколькими ПРР и при интервальных пусках, так как
уязвимость отражателей и передатчиков на порядок ниже уязвимости самой РЛС.
Кроме того, они дешевы в изготовлении и легко монтируются.
Режим работы дополнительных передатчиков (ДП) выбирается таким обра-
зом, что разрешение РЛС и ДП по углу (по отличию сигналов пеленга РЛС и ДП)
происходит на дальности, недостаточной для отработки системой управления
ПРР (ввиду ограниченной перегрузки ПРР) угла между направлением вектора
скорости ПРР и линией визирования на разрешенный источник излучения (РЛС
или ДП), что приводит к промаху ПРР как относительно РЛС, так и ДП. Расстоя-
ния между РЛС и ДП подбираются так, чтобы точка падения ПРР на земную по-
верхность находилась на таком удалении от РЛС и ДП, что вероятности пораже-
ния РЛС и ДП были близкими к нулю.
Процесс наведения в данном случае проиллюстрирован на рис. 4.40. Описан-
ная ситуация возможна из-за неполной параметрической селекции ПРГС сигна-
лов РЛС относительно сигналов ДП: существует вероятность приема сигналов
как от РЛС(Р1), так и от ДП(Р2), в результате чего измеренное направление ли-
нии визирования не совпадает с направлением на РЛС-цель. Это количественно
подтверждают и результаты оценки статистических характеристик измеренного
ПРГС пеленга [48].
Рассмотрим для простоты случай защиты РЛС одним ДП. Как показано в
[48], математическое ожидание измеренного пеленга на выходе ПРГС т(Е) есть
сумма математических ожиданий сигналов пеленга РЛС т(ъх) и ДП ли(е2), взятых
с некоторыми весами:
1 2
т{Е) = + Ъ'Р'Гп^.
507
Кроме того, на выход ПРГС поступает случайный сигнал типа «белого шума»
со спектром постоянной интенсивности S в полосе пропускания контура авто-
сопровождения ПРГС
(2 — р — Р }
3 = Г-—+—£-РхР2{<^ + а2 + [/П(е1) -/п(е2)]2},
1
где е19 е2 — пеленги РЛС и ДП; Рх, Р2 — вероятности приема сигналов РЛС и ДП;
Oj о2> ,w(ei)» w(e2) среднеквадратические отклонения сигналов пеленга РЛС
и ДП.
Ввиду наличия «белого шума» условие Рх > Р2 не всегда обеспечивает разре-
шение РЛС относительно ДП. Расчеты показывают, что для надежного разреше-
ния РЛС должно выполняться условие
2Т(2- Р,- Р2)Р{Р2
л(Л + Р2)
оо
Г I Wco) |2dm,
До 11 + И^С/со)!
где PK(jco) — амплитудно-фазовая характеристика разомкнутого контура углово-
го автосопровождения ПРГС.
Возможен вариант организации работы ДП при условии Р2 > /\, тогда раз-
решение РЛС происходить не будет. Для надежного выделения РЛС в этом случае
необходима дополнительная обработка сигнала, например с накоплением видео-
сигнала на некотором отрезке времени для выделения сигналов РЛС путем ис-
пользования некоторых отличий сигналов РЛС от сигналов ДП.
Такое накопление видеосигналов возможно ввиду того, что для управления
ПРР достаточна частота выдачи сигнала от ПРГС 0,5... 1 Гц, а частота периода по-
вторения видеосигнала несколько сотен герц. Естественно, это реализуется при
наличии достаточно быстродействующей БЦВМ.
При данной обработке могут быть использованы отличия статистических ха-
рактеристик измеренных сигналов РЛС и ДП, таких как пеленги и мощности.
Естественно, чем больше время накопления, тем точнее оцениваются статис-
тические характеристики сигналов (математические ожидания, дисперсии, кор-
реляционные функции), однако при чрезмерном увеличении времени обработки
ухудшаются характеристики точности наведения из-за увеличения дискретности
поступления управляющего сигнала.
Таким образом, должен быть выбран разумный компромисс между противо-
положными требованиями, обеспечивающий максимальную эффективность
ПРР. Для селекции сигналов РЛС в рассматриваемой ситуации полезными могут
оказаться такие отличия принятых сигналов, как время поступления импульсов
РЛС и ДП, поляризация, модуляция.
В процессе развития ПРР, как говорилось выше, ПРГС первоначально вы-
полнялись литерными. Это ограничивало тактические возможности самоле-
тов-носителей в борьбе с радиоизлучающими средствами противника.
В связи с этим возникла задача разработки широкодиапазонной ПРГС
(ШПРГС), охватывающей весь частотный диапазон, перекрываемый нескольки-
ми литерами. Такая головка разрабатывается для ракеты «Харм» [18].
508
Наличие ШПРГС увеличивает возможности поражения самолетом-носите-
лем любой РЛС, частотный диапазон которой совпадает с диапазоном ШПРГС.
Кроме того, предусмотрено перенацеливание на РЛС другого литера в случае вы-
ключения первоначально автосопровождаемой РЛС (например, для комплекса
ЗРК «Хок», у которого станция подсвета и станция обнаружения находятся на од-
ной позиции).
На основании изложенного материала можно сделать следующие выводы от-
носительно облика перспективной системы наведения ПРР.
Система наведения должна включать:
• систему навигации и автоматического управления на основе инерциальной
системы, а в перспективе интегрированной инерциально-спутниковой сис-
темы;
• комбинированную головку самонаведения на основе ШПРГС и активной
АРГС миллиметрового диапазона;
• БЦВМ;
• измеритель высоты.
Для повышения помехозащищенности системы наведения в БЦВМ ПРР
должны быть введены оптимальные алгоритмы обработки информации от
ШПРГС, ИНС и высотомера.
Кроме того, для эффективного преодоления ПВО противника в системе на-
ведения должна быть реализована возможность полетов ПРР по различным тра-
екториям, включая противозенитный маневр.
4.7. Системы навигации и наведения
по геофизическим полям
4.7.1. КЛАССИФИКАЦИЯ
КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНЫХ
СИСТЕМ НАВИГАЦИИ И НАВЕДЕНИЯ
Последние десятилетия интенсивно развивается теория и практика автома-
тических систем навигации по геофизическим полям, в полной мере удовлетво-
ряющих всей совокупности требований, предъявляемых к современным средст-
вам навигации летательных аппаратов [49—54].
Способ навигации по некоторым геофизическим полям использовался из-
давна: по измерению магнитного курса, наблюдению за ориентирами на земной
поверхности. Однако лишь научно-технические достижения последних десятиле-
тий позволили реально поставить задачу создания высокоэффективных автома-
тических автономных средств навигации по геофизическим полям Земли — маг-
нитному, гравитационному, рельефу поверхности, оптическому, тепловому и ра-
диолокационному контрасту поверхности и др. Автоматическая навигация по
геофизическим полям с определением местоположения основана на сопоставле-
нии информации, получаемой бортовой системой наблюдения поля (датчиком
поля), с информацией о поле, хранящейся в бортовой памяти (карта поля). Со-
поставление осуществляется обычно посредством вычисления некоторого функ-
ционала типа корреляционной функции и поисковым или беспоисковым нахож-
дением экстремума этой характеристики. В системах, служащих для определения
скорости, бортовая карта поля может отсутствовать. Ее заменяет информация до-
полнительного датчика поля. Однако здесь также необходимы вычисление харак-
теристики типа корреляционной функции и поиск (определение) экстремума.
Поэтому системы автоматической навигации по физическим полям получили на-
звание корреляционно-экстремальных систем навигации и наведения (КЭСНН).
В последнее время КЭСНН находят широкое признание и применение. Они
имеют разнообразную структуру и различное предназначение. Одним из удобных
способов классификации КЭСНН является классификация по объему и характе-
ру полезной информации, снимаемой с навигационного поля бортовым датчи-
ком в каждый момент времени или за короткий цикл сканирования. В соответст-
вии с этим КЭСНН делятся на три основных класса (рис. 4.41):
• КЭСНН-1 — в системах этого класса рабочая информация в текущий момент
времени снимается в «точке», т. е. выходной сигнал датчика поля представля-
ет собой скалярную величину;
• КЭСНН-П — для систем данного класса характерным является то, что бор-
товой датчик за короткий цикл сканирования или мгновенно снимает ин-
формацию о поле вдоль произвольных, но заранее выбранных линий. Тако-
выми, в частности, могут служить линии, перпендикулярные к продольной
(в случае поперечного сканирования антенной системой датчика) или попе-
речной (при продольном сканировании) оси летательного аппарата, спирали
(для объектов, совершающих движение в вертикальной плоскости) и т. д.;
510
Рис. 4.41. Классификация КЭСНН
• КЭСНН-Ш — к этому классу относятся системы, в которых рабочая инфор-
мация снимается с участка площади земной поверхности («кадра»), просмат-
риваемого бортовой системой в каждый момент времени или за короткий
цикл сканирования (КЭСНН с сопоставлением изображений).
Следует отметить, что возможны промежуточные типы КЭСНН, информа-
ция в которых одновременно или практически одновременно снимается в не-
скольких точках, вдоль нескольких линий или нескольких кадров и т. д. Однако
существование промежуточных типов не нарушает ценности и достаточной общ-
ности приведенной классификации.
Особенностью КЭСНН-1 — систем с точечным зондированием навигацион-
ного поля — является возможность использования как поверхностных (поле
рельефа, радиотепловое, оптическое, инфракрасное поля, поле радиолокацион-
ного контраста и др.), так и пространственных (аномальные магнитное и гравита-
ционное) полей Земли.
Системы этого класса с памятью работоспособны при комплексировании с
системой, контролирующей (с относительно невысокой точностью) компоненты
скорости подвижных объектов и другие навигационные параметры. Эта вспомо-
гательная (или базовая) навигационная система получила название ГРУБАЯ
(ГНС). Комплексирование корреляционно-экстремальной системы с ГНС мо-
жет осуществляться или по разомкнутой схеме, когда от ГНС получают прибли-
женные значения навигационных параметров и обратное воздействие отсутству-
ет, либо по замкнутой схеме коррекции, когда корреляционно-экстремальная
система и ГНС представляют взаимосвязанный комплекс. Если в качестве ГНС в
таком комплексе используется инерциальная система, то в результате коррекции
511
можно получить высокоточные определения (оценки) не только координат мес-
тоположения, но и скорости, вертикали, курса.
Системы, мгновенно снимающие информацию с линии или кадра, могут ис-
пользовать только поверхностные поля Земли, так как геометрические размеры
подвижных объектов существенно меньше так называемого радиуса корреля-
ции пространственного поля. Даже в варианте систем с памятью они могут
работать без ГНС.
По объему исходной (априорной) информации об интенсивности физиче-
ского поля каждый из рассматриваемых классов КЭСНН делится на два подклас-
са: А — СИСТЕМЫ БЕЗ ПАМЯТИ, Б — СИСТЕМЫ С ПАМЯТЬЮ.
Примерами КЭСНН без памяти могут служить корреляционные измерители
путевой скорости и угла сноса самолетов и ракет [55] и т. д. Для функционирова-
ния КЭСНН этого подкласса в основном могут быть использованы поверхност-
ные поля. К числу важных достоинств КЭСНН без памяти следует отнести воз-
можность использования нестабильных (особенно в высокочастотной части
спектра) поверхностных полей: поля радиолокационного контраста, радиотепло-
вого поля Земли, поля облачного покрова с его неровностями.
Для функционирования КЭСНН с памятью требуется априорная информа-
ция о физическом поле. Эти системы объединяются в большую группу систем на-
вигации и наведения по картам местности. Основным достоинством таких сис-
тем является возможность получения высокой точности в определении коорди-
нат местоположения объекта, не зависящей (после окончания переходного
процесса) от продолжительности движения в пределах закартографированной
области, и скорости его движения. Основная трудность, возникающая при реали-
зации КЭСНН с памятью, заключается в необходимости их обеспечения исход-
ной (априорной) информацией, т. е. в создании рабочих карт поля.
В зависимости от степени закартографированности района полетов КЭСНН
с памятью можно разделить на три группы: системы с полной, неполной и мини-
мальной априорной информацией [52].
В системах с полной априорной информацией геофизическое поле записывает-
ся с высокой точностью в блоке памяти навигационного комплекса для всего района
полетов. Например, при дискретной форме представления поля шаг дискретизации
по горизонтальным координатам и шаг квантования по интенсивности должны вы-
бираться такими, чтобы дополнительно вносимые ошибки при воспроизведении по-
ля в блоке памяти не превышали ошибок его измерения датчиком [53]. В КЭСНН с
минимальной априорной информацией в бортовом запоминающем устройстве хра-
нится информация о координатах отдельных ориентиров (точечных, протяженных),
расположенных вдоль линии заданного пути (ЛЗП). Этим достигается значительное
сокращение потребной памяти БЦВМ при реализации алгоритмов коррекции (с не-
которым усложнением вычислительных процедур).
Системы с полной априорной информацией предполагают коррекцию нави-
гационных комплексов как по точечным и протяженным ориентирам, так и не-
прерывную на отдельных участках маршрутов, имеющих необходимые для корре-
ляционно-экстремальной навигации показатели одного или нескольких геофи-
зических полей.
По методу определения отклонения от экстремума КЭСНН подразделяются
на эвристические, поисковые, беспоисковые и комбинированные. Такая класси-
фикация в некоторой мере соответствует алгоритмам КЭСНН, которые могут
быть реализованы в КЭСНН-I, КЭСНН-П и КЭСНН-П1 на базе аналоговой,
аналого-цифровой и цифровой техники.
512
В развитии алгоритмического обеспечения (теории) КЭСНН-I (и КЭСНН
других классов) можно выделить четыре основные этапа (направления).
Первый этап составила теория квазистационарных режимов непрерывных
беспоисковых КЭСНН эвристического происхождения. Как и для других экстре-
мальных систем [56, 57], приближенная теория квазистационарных режимов сво-
дится к обычной теории следящих систем, в общем случае нелинейных [57].
Главным недостатком дифференциального беспоискового алгоритма являет-
ся потеря работоспособности системой при начальных рассогласованиях, превы-
шающих радиус корреляции поля [58], а также при нестационарности поля по
дисперсии, математическому ожиданию и спектру. Предложенные способы учета
нестационарности поля и применение алгоритмов «сходящихся головок», моду-
ляционной головки и эффекта усреднения [58, 59] позволили расширить область
допустимых начальных рассогласований, но возникающее при этом уменьшение
соотношения сигнал/шум в системе затрудняло их применение.
Второе направление в развитии теории КЭСНН составили поисковые алго-
ритмы, исследованные главным образом в работах [51—53].
Концепция таких систем строится на основе широко известной теории ста-
тистических решений [60]. Особенностью поисковых алгоритмов является отсут-
ствие ограничений на величину начальных ошибок навигационной системы. Од-
нако реализация данных алгоритмов, особенно в случае решения задачи многопа-
раметрического оценивания, требует значительной производительности БЦВМ.
Дальнейшее развитие теории КЭСНН привело к созданию оптимальных (суб-
оптимальных) беспоисковых алгоритмов КЭСНН, образующих третье направле-
ние теории. Эти алгоритмы ведут свое происхождение от фильтра Калмана, приме-
ненного к специфической задаче наблюдения нерегулярного и не поддающегося
аналитическому описанию навигационного поля. Впервые в задачах этого класса
применены теория усреднения и метод декомпозиции, позволившие получить ана-
литические оценки точности в зависимости от статистических характеристик нави-
гационного поля и уровня шумов, действующих по каналам измерения [53, 61, 62].
Комбинированные алгоритмы, составляющие четвертый этап развития те-
ории КЭСНН, представляют собой сочетание поисковых и беспоисковых алго-
ритмов, полученных как на основе строгого решения задачи оптимизации [63],
так и на основе инженерной интуиции, опыта. Они не имеют ограничений по на-
чальным ошибкам рассогласования и в ряде случаев не предъявляют особых тре-
бований к БЦВМ при своей реализации. Поэтому возможности применения по-
добных алгоритмов достаточно широки.
4.7.2. ГЕОФИЗИЧЕСКИЕ ПОЛЯ,
ИСПОЛЬЗУЕМЫЕ В СИСТЕМАХ
НАВИГАЦИИ И НАВЕДЕНИЯ
1. Сравнительная характеристика геофизических полей
Геофизические поля, особенно пространственные, принято делить на нор-
мальные и аномальные, точнее, на нормальные и аномальные компоненты поля.
НОРМАЛЬНЫМ ПОЛЕМ называется составляющая, имеющая практически регу-
лярный (гладкий) в пространственном отношении характер для всей Земли или
крупных ее регионов. Модель нормального поля описывается относительно прос-
то, и для хранения этой модели требуется небольшой объем памяти БЦВМ. Нор-
17 Авиация ВВС России и научно-технический прогресс
513
мальные геофизические поля (магнитное, гравитационное) используются в навига-
ции давно. Однако они способны дать лишь ограниченную информацию, напри-
мер магнитный курс (и то с учетом склонения, что уже относится, вообще говоря, к
аномальному полю), вертикаль (без учета аномального уклонения отвеса).
В корреляционно-экстремальной навигации используются АНОМАЛЬНЫЕ
ГЕОФИЗИЧЕСКИЕ ПОЛЯ, представляющие собой высокочастотные или мелко-
структурные в пространственном отношении составляющие геофизических по-
лей. Их величины по отношению к нормальным могут составить малую долю, но
содержат большой объем информации, если рассматривать их в масштабах регио-
нов или всей Земли. Модели аномальных полей весьма сложны, а для их удовлет-
ворительного описания требуются большие объемы памяти БЦВМ. Возможность
использования аномальных полей Земли различной физической природы в целях
корреляционно-экстремальной навигации основана на свойстве практически од-
нозначного соответствия распределения параметров какого-либо поля, «образа»
этого поля, конкретному месту на земной поверхности. Другими словами, земная
поверхность однозначно характеризуется распределением на поверхности или в
пространстве геофизических полей: перепадом высот, растительностью, почвами
с различными свойствами, породами с различной намагниченностью и проводи-
мостью, кажущейся температурой и т. д. Это позволяет каждой точке земной по-
верхности в какой-либо системе координат поставить в соответствие определен-
ные в количественном смысле физические величины, допускающие возможность
их измерения. Такими полями являются:
• ПОЛЕ РЕЛЬЕФА ЗЕМНОЙ ПОВЕРХНОСТИ, характеризующееся взаимным распо-
ложением высот, т. е. перепадами местности относительно какого-либо
уровня, например уровня моря. Перепады местности носят геометрический
смысл, не зависящий от объектов, образующих эти неровности земной по-
верхности [64]. Измерение параметров этого поля на борту летательного ап-
парата осуществляется с помощью радиовысотомеров или дальномеров с ис-
пользованием сигналов барометрических или инерциальных измерителей
высоты для задания уровня отсчета профиля рельефа местности [64, 65];
• оптическое поле земной поверхности, которое образуется отдельными
объектами и их взаимным расположением в видимом диапазоне излучений и
характеризуется геометрическими, яркостными и спектральными признака-
ми изображения. Бортовые измерения параметров этого поля осуществляют-
ся оптическими или телевизионными средствами получения изображений;
• тепловое ПОЛЕ ЗЕМНОЙ поверхности, образуемое электромагнитным из-
лучением отдельных ее элементов (почвой, водой, растительностью, метал-
лическими и железобетонными сооружениями) в инфракрасном, сантимет-
ровом или миллиметровом диапазонах длин волн и характеризующееся ка-
жущейся температурой этих объектов. Эта температура измеряется на
достаточно больших расстояниях, зависящих от поглощения радиации, спе-
циальными бортовыми приборами (тепловыми станциями, радиометрами),
работающими в соответствующих диапазонах длин волн [66, 67];
• ПОЛЕ КОЭФФИЦИЕНТА отражения (поглощения) радиоволн (поле радио-
локационного контраста), образуемое элементами поверхности и характери-
зующее отражательные свойства местности в радиодиапазоне длин волн. Ко-
личественные показатели коэффициента отражения радиоволн измеряются
бортовыми радиолокаторами со сканирующим лучом или с синтезированной
апертурой [68, 69];
514
• МАГНИТНОЕ ПОЛЕ ЗЕМЛИ (нормальное и аномальное в совокупности), обус-
ловленное магнитными породами ядра Земли и ее поверхностного слоя и ха-
рактеризующееся напряженностью и направлением магнитных силовых ли-
ний. Бортовые измерения этих полей как модульные (по абсолютной вели-
чине напряженности), так и векторные выполняются индукционными,
феррозондовыми, квантовыми магнитометрами [70, 71];
• ГРАВИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ, образованное всей массой Земли и массами
естественных и искусственных образований на ее поверхности и характери-
зующееся силой притяжения [72]. Бортовые датчики этого поля (гравиметры)
строятся на основе измерения силы притяжения эталонных масс, расположен-
ных на летательном аппарате, к земной поверхности в данном месте [73, 74].
Существует целый ряд других полей (поле естественного у-излучения, элек-
тростатическое и др.), менее стабильных во времени или слабо изученных.
Как уже отмечалось, физические поля Земли, используемые в навигации ле-
тательных аппаратов, можно разделить на два класса:
• пространственные поля земли, параметры которых определены в каждой
точке околоземного пространства, — магнитное и гравитационное поля;
• ПОВЕРХНОСТНЫЕ ПОЛЯ ЗЕМЛИ, параметры которых определены лишь на зем-
ной поверхности, — поле рельефа местности, тепловое, оптическое, поле ко-
эффициента отражения радиоволн.
Очевидно, что для получения информации о поверхностных полях Земли не-
обходимо активное зондирование посредством радиотехнических, лазерных вы-
сотомеров и локаторов или пассивное зондирование земной поверхности посред-
ством радиометров и оптических визиров.
Пространственные поля, определенные в трехмерном пространстве, присут-
ствуют на борту летательного аппарата в месте установки чувствительных датчи-
ков и непосредственно измеряются магнитометрической и гравиметрической ап-
паратурой.
Немаловажным фактором является наличие пространственных полей над
всей земной поверхностью, тогда как поверхностные поля, доступные для конт-
роля с летательных аппаратов, имеют место лишь над сушей Земли.
Естественно, что поля Земли имеют различную физическую природу и ха-
рактеризуются информативностью, стабильностью во времени, зависимостью от
метеоусловий, времени суток и времени года, помехозащищенностью. Вслед-
ствие этого они имеют различную ценность для применения их в средствах нави-
гации вообще и для конкретных летательных аппаратов в частности.
Кроме того, при практическом использовании полей в навигации важны и
такие аспекты, как наличие и простота реализации бортовых измерителей полей,
наличие картографического материала достаточной полноты и подробности,
простота аппаратурного построения системы в целом и т. п.
Качественное сопоставление геофизических навигационных полей приво-
дится на рис. 4.42.
Наиболее информативными полями являются поверхностные поля, в част-
ности поля оптического контраста, ввиду информационной содержательности
любого малоразмерного (до единиц метров и менее) объекта земной поверхности
в сочетании с высокой разрешающей способностью оптических приборов. Про-
странственные поля, обладая свойствами потенциальных полей, характеризуют-
ся информативностью, убывающей с увеличением высоты полета летательного
аппарата. Этот факт связан с необходимостью пересчета карт этих полей на высо-
515
Рис. 4.42. Качественное сопоставление геофизических навигационных полей
ты с помощью интегральных операторов математической физики, описывающих
так называемый эффект сглаживания на высоте [75]. Для глобальной навигации
наиболее пригодно в настоящее время геомагнитное поле.
Сопоставление поверхностных полей позволяет выделить в качестве основ-
ного поля для навигации над участками суши земной поверхности поле рельефа
местности, характеризующееся достаточно высокими значениями всех показате-
лей, определяющих его практическую применимость.
Однако достаточно высокая информативность полей оптического, теплового
и радиоконтрастов делает возможным и актуальным их применение в отдельных
ответственных случаях, например для наведения на конечном участке, уточнения
местоположения в районе аэродрома и т. п. [76, 77], несмотря на имеющие место
ограничения:
• для оптического поля — влияние на работоспособность облачного покро-
ва и тумана, уменьшение чувствительности в вечернее и ночное время;
• для теплового поля — зависимость от метеоусловий и времени года;
• для поля коэффициента отражения радиоволн — зависимость от се-
зонных изменений, чувствительность бортовых систем (датчиков) к помехам.
2. Статистический подход в теории КЭСНН
В теории КЭСНН, как и при исследовании геофизических полей, весьма
удобным является использование статистического подхода. Это позволяет изу-
чать некоторые средние, общие характеристики геофизических полей и оцени-
вать точность КЭСНН при их использовании в определенных геофизических
районах.
516
Отказ от статистического подхода оста-
вил бы нам лишь возможность анализиро-
вать точность КЭСНН при движении по
конкретным траекториям. Однако нет ни-
какого основания точностные характерис-
тики, полученные для одной траектории
движения, распространять на случаи дви-
жения по другим траекториям. В этом со-
стоит практическое неудобство использова-
ния детерминированного подхода.
Обоснование статистического подхо-
да представляет некоторую трудность, ес-
ли учесть, что реальные геофизические по-
ля являются детерминированными функциями
Рис. 4.43. Область
возможных траекторий
пространственных координат:
f (х*,у*, //). Поэтому для упрощения рассматривается более простой вариант, ког-
да поле f зависит только от горизонтальных координат х*, у* и не зависит от высо-
ты //. Такая ситуация имеет место при использовании поверхностных полей, а так-
же пространственных в случае, когда изменения высоты полета несущественны.
По-видимому, обоснование статистического подхода должно определяться
дальнейшим использованием рассчитываемых на его основе исходных статисти-
ческих характеристик геофизических полей. С этой точки зрения ситуация в тео-
рии КЭСНН относительно простая. Если одной из задач такой теории считать
выяснение средней точности КЭСНН при движении по некоторому множеству
траекторий, то случайность целесообразно вводить заданием возможных траекто-
рий движения и вероятностей движения по этим траекториям.
Итак, исходное поле /(х*, у*) является детерминированным, а траектории
движения Т*(/) — случайными. Под векторной величиной Т*(/) понимается сово-
купность х*(/), y*(t).
Рассмотрим случай равномерного прямолинейного движения со скоростью И
Пусть все траектории движения параллельны оси х, а начальные точки траекторий
заполняют квадрат (рис. 4.43).
Вводя двойную нумерацию траекторий индексами ц, v = 1, Q, так что началь-
ные координаты траекторий равны xOpv = (ц — 1) А/, ^Opv = (v — 1) А/, получим
*0gVW = *0gv + -VOnvW = ^Оцу
Обычно задаются конечное множество траекторий движения {T*v(/)} ц, v =
= 1,2, ..., Q и вероятности pgv событий //pv, состоящих в том, что движение со-
вершается по траектории T*v(r). Любые два события //gv и НХу при ц # к и v # у
Q
предполагаются независимыми. По условию нормировки Z j ppv = 1.
Как в этом случае перейти от детерминированного исходного поля f (х*, у*}
к случайному полю?
Наряду с исходной системой координат О*х*у* введем системы координат
Ogvxgvygv, связанные с траекториями движения T*V(Z), следующим образом:
центры этих систем Ogv поместим в начальные точки траекторий T*V(Z), оси xpv
совместим с положением вектора скорости движения, ocn.ygv направим перпен-
дикулярно к осям xgv.
517
В качестве реализации /^(х, у) случайного поля f(x, у) рассмотрим линей-
ные преобразования исходного детерминированного поля /(х*, у*), получаю-
щиеся следующей заменой переменных:
X* = х0 + X, у* = Jo ’
т. е. будем считать flv(x, у) = f (хп 4- х ) и припишем этой реализации веро-
ятностьp^v рассматриваемой траектории движения T*V(Z). Введем новую систему
координат Оху, в которой все траектории совпадают, начинаются в начале коор-
динат и уравнения этих траекторий имеют вид xgv(Z) = И/, y^v(t) = 0, причем ц,
v-я траектория Т (/) = (xpv(Z), j/pv(Z)) обладает вероятностью pgv. Обозначим че-
рез %gv индикатор события //pv, т. е. такую функцию, которая равна единице, если
событие произошло, и равна нулю в противном случае. Тогда случайное поле
f(x, у} будет связано с индикаторами %gv и со своими реализациями f^(x, у} сле-
дующим образом:
Q
а траектория движения Т(/) определяется в виде
Q
Поскольку все исходные траектории T*V(Z) могут быть получены из какой-
то одной траектории То(/) переносом начала координат, то все преобразован-
ные траектории Т (/) в новой системе координат Оху совпадают с траекторией
Т0(Г), т. е.
Q
T(/) = T0(r)J=)X(lv.
Q
Так как сумма индикаторов 2L j полной системы несовместных событий
равна единице, то T(Z) = То(/) и, следовательно, траектория движения Т(/) явля-
ется детерминированной.
От исходной постановки задачи, когда случайной была траектория движе-
ния, а детерминированным — поле f (х*, у*У приходим к эквивалентной задаче,
в которой траектория движения детерминирована, а поле f(x, у) — случайно.
Можно найти математическое ожидание mf(x, у} и корреляционную функцию
z2) случайного поля f(x, уУ
Q Q
mf{x, у) = М{f(x, у)} = ц Z tpgv/gv(x, у) = ц Z (Pgv/(x0^ + х, у0^); (4.84)
Q
Z2) = M{f(Zi),f(Z2)> = g =
Q ~
= gvS=|/W(*0gv +*1, -Vo +^1)/(*0 +*2, ^0(4-85)
где M — символ операции математического ожидания, z = (х, у).
518
Помимо корреляционной функции, можно рассматривать также ковариаци-
онную функцию Kz/U|, z2) поля/(•*, У), связанную с корреляционной функцией
, z2) зависимостью K^(z15 Z2) = R^Uj, Z2) - m^(Zi)^(z2). В случае центриро-
ванного поля понятия корреляционной и ковариационной функций поля /’(х, у)
совпадают. Подобное задание случайного поля f(x, у) на основании априорных
вероятностей pgv траекторий движения T*V(Z) позволяет получить исчерпываю-
щие статистические характеристики этого поля.
Иногда достаточно знать математическое ожидание у) и взаимную
корреляционную функцию Ryy(z15 Z2), определяемые формулами (4.84) и (4.85).
Предположив стационарность поля и равновероятность траекторий движе-
ния (pgv = ^ , Vp, v), находим
ц / [(И - 1) А/, (v - 1) А/]; (4.86)
i 2 ~
R/z(Ах, \у) = ц Z 1 f [(р - 1) А/, (v - 1) А/]/ [(ц — 1) А/ + Ах, (v — 1) А/ + Ау].
(4.87)
Если множество траекторий движения меняется или на тех же траекториях зада-
ется новое распределение вероятностей, то математическое ожидание, корреляцион-
ная функция и закон распределения случайного поля также меняются. В качестве
частного случая избранная постановка вопроса охватывает движение по одной-един-
ственной траектории. При этом ковариационная функция поля тождественно равна
нулю, а вся информация о поле содержится в математическом ожидании т^(х, у).
Полученные расчетные формулы (4.84)—(4.87) могут быть использованы для
предварительной обработки информации о навигационных полях.
Рассчитанные таким образом статистические характеристики описывают не
один какой-то маршрут, а целый район.
Если существует необходимость более тщательного учета особенностей поля в
районе навигации, то не следует делать предположения о стационарности поля. Спе-
циальным выбором параметров (2 и А/ необходимо добиться, чтобы математическое
ожидание поля т^(х, у) было постоянным или изменилось плавно, тогда основная
информация о свойствах поля будет содержаться в корреляционной функции.
3. Картографирование геофизических полей
Определяющими факторами при практическом использовании тех или иных
физических полей в целях навигации являются наличие карт поля и возможность
пополнения этой информации.
Карты поля рельефа, имеющиеся в настоящее время, уже позволяют осу-
ществлять навигацию над большей частью континентов. Ввиду достаточно высо-
кой стабильности этого поля во времени, для навигации может быть использован
даже картографический материал, полученный в девятнадцатом веке. Например,
фирма E-Systems проводила испытания системы TERCOM по картам рельефа
местности 1895 года и получила положительный результат [64]. Несмотря на это,
ведутся интенсивные работы по съемке данного поля с помощью искусственных
спутников Земли [78].
Существующий материал по съемкам гравитационного и магнитного полей
может быть с достаточной степенью успеха использован для осуществления кор-
519
рекции навигационных средств над отдельными участками и по отдельным
маршрутам полета как над экваториями, так и над участками суши. Эти данные
интенсивно пополняются результатами морских съемок, выполняемых ВМС
США, и аэрокосмических измерений [79], проводимых отдельными фирмами, с
обработкой результатов на ЭВМ [80, 81]. Например, во второй половине 1970-х
годов на самолете RP-30 Orion фирмы Lockheed была выполнена съемка магнит-
ного поля Северной Атлантики и прилегающих континентальных областей по
программе Magnet. Для этих целей фирмой Honeywell разработана самолетная
инерциальная система с гироскопом на электростатическом подвесе, позволяю-
щая осуществлять не только точную привязку измерений к местности, но и пре-
цизионную съемку компонент вектора напряженности геомагнитного поля [82].
Следует указать, что поля теплового и радиолокационного контрастов допус-
кают составление приближенных карт с помощью синтеза по аэрокосмическим
фотоснимкам и заранее подготовленным каталогам кажущихся температур (излу-
чательной способности) и коэффициентов отражения земных покровов. Тем не
менее ведутся интенсивные работы по непосредственному изучению полей и на-
коплению материала съемок. Фирмой Goodyear Aerospace по программе Saphire
разработана система SLAR, предназначенная для обработки изображений, полу-
чаемых радиолокационной станцией бокового обзора с синтезированной аперту-
рой, и регистрации изменений, происходящих в них с течением времени [83].
Может выполняться также операция нанесения топографических линий на эти
изображения. Кроме того, этой же фирмой разработан ряд радиолокационных
станций бокового обзора, предназначенных для картографирования земной по-
верхности с высокой угловой разрешающей способностью [84].
Разработана оптимальная процедура обработки данных, получаемых на ис-
кусственных спутниках Земли, для оптических сканирующих измерительных
систем, обеспечивающих уточнение мест положения до 80 м [85].
В США разработана многоспектральная система MSS, основанная на прин-
ципе спектральной дифференциации отражаемой (излучаемой) лучистой энер-
гии и предназначенная для изучения земной поверхности с больших высот [86].
В системе в качестве первичных приемников применяются фото- и термоэлект-
рические датчики, чувствительные к излучениям в различных диапазонах волн.
Отметим общие моменты, вызывающие определенную сложность осуществ-
ления измерений параметров различных геофизических полей на борту летатель-
ного аппарата. Необходима определенная «развязка» бортовых измерений от уп-
равляемых и неуправляемых эволюций аппарата. Компенсацией или фильтраци-
ей возмущений при бортовых измерениях параметров полей достигаются
сходные условия измерений при картографировании этих полей:
• при измерении превышений рельефа необходимы компенсации влияния ко-
лебаний центра масс аппарата по высоте и пересчет измерений для соответ-
ствующих углов тангажа и крена;
• для двумерных измерителей поверхностных полей возникает задача пересче-
та изображений по пространственным углам и исключения влияния их изме-
нений на измерения, а также масштабирования изображений в зависимости
от высоты полета;
• при бортовом измерении ускорений силы тяжести следует точно учитывать
или компенсировать инерционные воздействия всех видов;
• осуществление точных бортовых магнитных измерений предполагает ком-
пенсацию влияния магнитных масс, электрооборудования и других факторов
в условиях нестационарного возмущенного полета.
520
4.7.3. АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ КЭСНН-1
1. Алгоритмы эвристического происхождения
Хотя эвристические алгоритмы почти утратили прикладное значение, их рас-
смотрение целесообразно в силу физичности этих алгоритмов, а также потому,
что свойства, присущие КЭСНН-I эвристического происхождения, проявляются
и в некоторых типах КЭСНН-I, синтезированных на основе строго оптимальных
принципов.
Рассмотрим так называемую дифференциальную схему двумерной
КЭСНН-I (рис. 4.44, а). Канал х будем называть продольным каналом управле-
ния, а каналу — боковым. Сигнал f(x,y), поступающий отдатчика 1 навигаци-
онного поля, умножается множительными устройствами 4 и 5 корреляторов 2 и
3 продольного и бокового каналов на разности сигналов, извлекаемых из блока
памяти, в котором записана карта используемого поля.
В дифференциальной схеме сигналы в блоке карт снимаются в четырех фикси-
рованных точках 6, 7, 8 и 9, отстоящих от координат х и у, выдаваемых скорректи-
рованной ГНС, на некотором фиксированном расстоянии ±/, а затем образуются
разности этих сигналов, чем и объясняется термин «дифференциальная схема».
Сигналы произведений их и иу могут подаваться на специальные фильтры 10,
входящие в состав корреляторов. Передаточные функции фильтров обозначим че-
рез Выходные сигналы корреляторов vx и vy используются для коррекции
ГНС, суммируясь с сигналами скорости движения И* и И*, измеряемыми ГНС.
Передаточная функция цепей коррекции 11 обозначена через и>(р).
Переменные
их =f(x, y)[f(x -I, у)- /(£ + /, у)]; (4.88)
иу =f(x, y)[f(x, у-I) -Ж у + /)], (4.89)
гдех и у — действительные координаты движущегося объекта.
Выделим в сигналах их и иу их математические ожидания тх и ту.
тх = M<ux> = Rfj{&x — 7, Ду) — R^&x 4- /, Ду); (4.90)
ту = М<иу> = Т^Дх, Ду — /) — Rfj(kx, \у 4- /), (4.91)
где Rff— корреляционная функция используемого навигационного поля f(x, у),
принимаемого стационарным; Дх = х — х и Ду = у — у — продольная и боковая
ошибки ГНС.
Величины тх и ту представляют собой полезные составляющие сигналов.
Кроме них, на выходах множительных блоков корреляторов присутствуют цент-
рированные помехи Ъих = их — тх и Ъиу = иу — ту Для сглаживания этих помех
и предназначены фильтры корреляторов. Вообще говоря, фильтры в коррелято-
рах могут и отсутствовать. Тогда роль сглаживающих устройств выполняют инер-
ционные части контура коррекции ГНС. Заметим, что даже в случае абсолютно
точного определения координат движения ГНС, когда х = х и у =у, помехи 5мх и
8ыу не обращаются в нуль.
Для ликвидации этого недостатка может устанавливаться еще один цент-
ральный считывающий элемент, сигнал которого вычитается из сигнала датчика
521
a)
б)
Рис. 4.44. Дифференциальная схема двумерной КЭСНН-I:
а — без центрального элемента; б — с центральным элементом
поля, прежде чем последний подается на множительные блоки корреляторов
(рис. 4.44, б).
Рассмотрим статические характеристики эвристических КЭСНН-1 диффе-
ренциального типа. Для упрощения ограничимся рассмотрением одномерной за-
дачи, полагая \у = 0, /(х, у) = /(х) и вводя обозначения Ах = А, тх = т,
0) = /?^(А). Тогда из (4.90) находим
т = Rff(\ -I) - Rff(\ + /). (4.92)
522
Рис. 4.46. Статические
характеристики КЭСНН-1
Рис. 4.45. Корреляционные
функции
Для оценки пространственного спектра случайной функции воспользуемся
понятием радиуса корреляции р. В соответствии с [87] будем считать, что
р= j°/?/z(A)dA, (4.93)
О
где 7^(0) — дисперсия f(x).
Простейшие выражения корреляционных функций имеют вид
Л//|(Д) = /?у/(О)е-“2д2; (4.94)
/?//2(Д) = /?7Г(0)е-“2д2 cos [ЗА; (Д) = ^(0)6-“^, (4.95)
причем радиусы корреляции для них
„ _ 7л. _ Jit
р 1 л , О-) "т? е
2а Г2 2а
1
Р3 а*
Перечисленные корреляционные функции показаны на рис. 4.45.
Радиус корреляции р является удобной обобщенной характеристикой случай-
ной функции /(х): чем выше значение р, тем медленнее в пространстве изменяет-
ся f(x), и наоборот. Значение радиуса корреляции является очень существенным
для работы КЭСНН-I. Величина р является тем естественным масштабом, в кото-
ром измеряются основные показатели КЭСНН-I: установившаяся точность, до-
пустимые начальные отклонения, длительность переходных процессов и т. п.
Статическая характеристика КЭСНН-I дифференциального типа как при
наличии центрального считывающего элемента, так и без него определяется од-
ним и тем же соотношением (4.92) и равна первой разности корреляционной
функции используемого поля, вычисленной на базе 2/ (21— расстояние между
считывающими элементами блока памяти).
На рис. 4.46 приведены статические характеристики 7, 2 и 3 для корреляцион-
ных функций, определяемых уравнениями (4.94), (4.95), в случае, когда расстояние
между считывающими элементами равно а/ = 1/72 и параметр корреляционной
функции (4.95) X = р/а = 2. При небольших отклонениях А, не превосходящих ра-
диуса корреляции р, статические характеристики линейны и в этом диапазоне из-
523
менения А процессы коррекции ГНС подчиняются линейным дифференциальным
уравнениям. Установившимся режимом дифференциальной КЭСНН-I является
положение, в котором первая разность корреляционной функции обращается в
нуль, т. е. дифференциальная КЭСНН-I отыскивает положение экстремума корре-
ляционной функции поля. Этому свойству эвристических КЭСНН-I и обязан сво-
им происхождением термин «корреляционно-экстремальная система».
При больших отклонениях А наблюдаются нелинейные эффекты [57]. Если
аА > 2, то для корреляционных функций (4.94) и (4.95) (кривые 7—3 на рис. 4.46)
сигнал коррекции сильно ослабляется, и без принятия специальных мер работо-
способность дифференциальной КЭСНН-I обеспечена быть не может.
Если параметр к мал (например, X = 0), то знаки статической характеристики и
отклонения совпадают. В этом случае существует единственное положение рав-
новесия. При отсутствии возмущения корреляционно-экстремальная система всег-
да приходит в положение ЛГХ) = 0. Если параметр к достигает больших значений (на-
пример, X = 2), могут возникать более разнообразные движения. В этом случае ста-
тическая характеристика коррелятора (кривая 2 на рис. 4.46) при положительном
отклонении А имеет области положительных и отрицательных значений, чему со-
ответствуют два возможных положения равновесия. В зависимости от величины
начального рассогласования Ао КЭСНН-I может либо прийти в нужное положение
равновесия АГ)О = 0 [захватить главный экстремум — максимум корреляционной
функции (4.95)], либо захватить ложные экстремумы корреляционной функции.
Итак, если корреляционная функция 7?^(А) кроме главного экстремума —
максимума имеет ложные экстремумы (максимумы или минимумы), желаемое
положение равновесия Агх;, = 0 может наступить лишь при условии, если началь-
ные отклонения Ао не превосходят некоторого предельного значения. Предель-
ным значением Ао является как раз то значение, при котором статическая харак-
теристика меняет знак.
Важную роль играет правильный выбор расстояние 2/ между считывающими
элементами блока памяти. При недопустимо больших значениях / знак статиче-
ской характеристики может оказаться противоположным знаку отклонения А и
контур коррекции ГНС будет неработоспособным. Этот нежелательный вариант
иллюстрирует кривая 4 на рис. 4.46, соответствующая корреляционной функции
(4.95) с параметрами X = 2 и а/ = 2.
Проведенный анализ показал, что дифференциальная схема КЭСНН-I рабо-
тоспособна лишь в области относительно малых (по сравнению с аномалиями на-
вигационного поля) начальных позиционных ошибках ГНС и, кроме того, кри-
тична к величине ошибки измерения скорости движения [57].
2. Субоптимальные беспоисковые алгоритмы КЭСНН-1
Известны два строгих теоретических подхода к синтезу субоптимальных бес-
поисковых КЭСНН-I: нелинейная калмановская фильтрация [88, 89] и нелиней-
ная фильтрация Р. Л. Стратоновича [90, 91], причем первый подход появился рань-
ше и имеет большую глубину проработки. Рассмотрим использование нелинейной
калмановской фильтрации для синтеза субоптимальных беспоисковых КЭСНН-1.
Конечная запись алгоритма, предназначенного для реализации на БЦВМ,
естественно, должна быть дискретной, но поскольку математические модели
ошибок навигационных систем, например инерциальной, описываются диффе-
ренциальными уравнениями, то возможно использование как непрерывного, так
524
и дискретного фильтра Калмана. Если используется дискретный вариант фильт-
ра, то сначала дифференциальные уравнения ошибок навигационной системы с
каким-то приближением заменяются на рекуррентные, что сводит задачу к кано-
нической постановке дискретной нелинейной калмановской фильтрации. Если
же используется непрерывный вариант фильтра Калмана, то уравнения фильтра
получаются в дифференциальном виде и лишь затем рассматривается вопрос о
численном интегрировании этих дифференциальных уравнений, что и приводит
в конце концов к рекуррентным соотношениям, пригодным для реализации в
БЦВМ. Поэтому при синтезе беспоисковых алгоритмов КЭСНН-I допустим оп-
ределенный произвол в выборе непрерывного или дискретного варианта фильтра
Калмана. В настоящем параграфе будет рассмотрен непрерывный вариант в свя-
зи с большей компактностью описания соответствующих алгоритмов.
Распространенная постановка задачи в непрерывной нелинейной фильтра-
ции такова [92].
Заданы уравнения контролируемого процесса
X + А(Х, Г) = <р(Х, /)и + £ (4.96)
и условия наблюдения
Z = h(X,/) 4-т|, (4.97)
где X — и-мерный вектор состояния; Z — т -мерный вектор наблюдения; и — из-
вестный вектор, иногда называемый вектором управляющих воздействий; t —
непрерывное время; А(Х, Г), ф(Х, /), h(X, t) — известные нелинейные векторные
функции вектора состояния и времени; т| — случайные возмущения, имеющие
характер «белого шума».
Начальное значение вектора состояния является случайным и подчиняется нор-
мальному закону с математическим ожиданием mQ и ковариационной матрицей G:
р(Хо) g N(/n0, G).
(4.98)
Возмущения Т| — центрированные, взаимно некоррелированные, они не кор-
релированы также с вектором Х^
Интенсивности «белых шумов» т| задаются матрицами спектральных плот-
ностей S^, Stj.
Субоптимальная в смысле минимума дисперсии ошибок всех координат
оценка вектора состояния определяется двумя уравнениями:
уравнением оценок
Х4-А(Х, Г) = Ф(Х, Г)и4-
'[Z - h(X, /)], Х(0) = т0
ЭХ I л
и уравнением ковариации
R + Rf Ц У + -.R + r(^4 У S,7 ’(^4]r = S£; R(0) = G,
ЭХ IdjrJ Л IdjrJ
где ^4, ^4 — матрицы Якоби, вычисленные в точке X = X;
дХ ЭХ
(4.99)
(4.100)
R(0 = М<[Х(Г) - Х(/)][Х(/) - X(r)F/Z(T), т е [0, /]>
— условная ковариационная матрица ошибок оценивания в момент времени t
при условии наблюдения сигнала Z(x) на интервале т е [0, Г].
Алгоритм (4.99), (4.100) обычно называется расширенным фильтром Калма-
на первого (линейного) приближения.
525
Оценка X(Z) является приближенно оптимальной (субоптимальной). Теоре-
тически показано, что она тем ближе к оптимальной, чем выше точность началь-
ного оценивания. При больших начальных ошибках уравнение (4.99) может не
давать удовлетворительного оценивания и система, описываемая уравнениями
(4.99) и (4.100), вообще может стать неработоспособной.
При использовании идей нелинейной калмановской фильтрации для синтеза
беспоисковых алгоритмов КЭСНН-I уравнения (4.99) и (4.100) конкретизуются.
Уравнения контролируемого процесса, в качестве которых обычно используются
уравнения ошибок грубой навигационной системы (инерциальной, инерциаль-
но-доплеровской, курсо-доплеровской, курсоаэрометрической или какой-либо
другой), являются линейными
X + А(/)Х = b(/)u + £. (4.101)
Слагаемое b(/)u может присутствовать или отсутствовать. Все зависит от пос-
тановки задачи синтеза. Если уравнения корректируемой навигационной систе-
мы записываются в ошибках, то составляющая b(/)u пропадает. Если же уравне-
ния навигационной системы записываются в полных координатах, то в качестве
составляющей b(/)u выступают измерения ГНС [53]. Конечные структуры
КЭСНН-I при любой записи уравнений навигационной системы оказываются
тождественными.
Уравнение наблюдения часто представляет собой зависимость навигацион-
ного поля fix, у, г) от координат местоположения
Z=/(x,y,^) + 8/, (4.102)
где х, у — горизонтальные координаты движущегося объекта; z — вертикальная
координата; 8/— разность между измеренным значением поля в точке (х, у, г) и
значением поля в этой же точке, записанным в бортовой карте, т. е. помеха 8/оп-
ределяется ошибками измерения геофизического поля 8/’] и ошибками составле-
ния бортовой карты 8/2:
5/=5/, + 5/2.
Зависимость геофизического поля от координат местоположения является
существенно нелинейной, носит характер реализации случайной функции, и в
этом состоит своеобразие задачи оценивания в КЭСНН-1.
В первом приближении значения поверхностных полей, если пренебречь ус-
реднением полей внутри пятна диаграммы направленности датчика поверхност-
ного поля, определяются только координатами х и у. Значения же пространст-
венных полей зависят от высоты полета; поэтому навигация по пространствен-
ным полям требует дополнительного пересчета наземных карт ./(х, у, 0) на
высоту Z-
Алгоритм субоптимальной нелинейной калмановской фильтрации в задачах
навигации по геофизическим полям принимает вид
Х + АХ = bu + R[^]TS-1[Z-h(X)], Х(0) = /и0; (4.103)
R + AR + RAT + R[^41TS-|f^4lR = S«, R(0) = G. (4.104)
526
Запись (4.103) предполагает, что в наблюдение h(X) кроме физического поля
f(x, у, z) могут входить некоторые другие величины, т. е. уравнения фильтра (4.103)
и (4.104) составлены для модели наблюдения (4.97) более общей, чем (4.102).
Рассмотрим беспоисковую КЭСНН-1 для оценивания пространственного
положения летательного аппарата по полю рельефа местности.
Траектории полета ЛА имеют переменный профиль и состоят из ряда последова-
тельных участков, таких как взлет, набор высоты, огибание препятствий на малой вы-
соте и т. п., которые характеризуются большими вертикальными маневрами. В этом
случае в показания датчика поля рельефа помимо информации о собственном релье-
фе входит информация о движении центра масс ЛА. Для выделения информации о
рельефе из показаний датчика поля необходимо знание абсолютной высоты полета с
точностью до шумов датчика поля (радиовысотомера). Существующие барометриче-
ские измерители определяют абсолютную высоту полета с большими ошибками. Из-
вестные методы определения высоты на основе комплексирования вертикального ка-
нала ИНС и барометрических измерителей в условиях интенсивных вертикальных
маневров ЛА также не позволяют оценить высоту с требуемой точностью.
Ниже рассматривается возможность использования беспоисковых КЭСНН-1
для оценивания пространственного положения объектов по рельефу местности.
В качестве ГНС используется инерциальная система. Поскольку пространствен-
ная длительность оценивания, как показали исследования, оказалась небольшой
(первые десятки километров пройденного пути), то в качестве модели ошибок
ИНС можно использовать соотношения
Ах = АГ АГГ - 0, \у = АГ = 0, А7/и = АГ,,, АГ„ = 8у„,
где АГХ, АГу, — ошибки измерения составляющих скорости и высо-
ты инерциальной системы; bjH — случайное возмущение типа «белого шума» со
спектральной плотностью SH.
Необходимость введения 5jH объясняется тем, что в КЭСНН-I точность из-
мерения вертикальных параметров полета (при использовании для навигации по-
ля рельефа) должна быть существенно выше точности измерения местоположе-
ния в горизонтальной плоскости.
Так как вертикальный канал ИНС без принятия специальных мер является
неустойчивым, обычно для его коррекции используются измерения абсолютной
высоты или вертикальной скорости с помощью других датчиков. Рассмотрим ис-
пользование барометрического высотомера в качестве корректора вертикально-
го канала. Математическое моделирование беспоискового алгоритма проводи-
лось по реальному участку поля рельефа Земли, имеющему радиус корреляции
р ~ 1,2 км. Уровень шумов датчика поля (радиовысотомера) задавался таким,
что соотношение сигнал/шум было равным = 3. Шаг дискретизации запи-
си поля в блоке памяти равен А/х = А/у = 250 м. Предполагалось, что движение
в горизонтальной плоскости х, у прямолинейно и равномерно со скоростью
Vx = 250 м/с.
Результаты моделирования представлены на рис. 4.47, а—г, где изображены
кривые изменения во времени ошибок оценивания параметров движения
8х(/) = Ах(Г) - Ах(/), 8ГХ(/) = АГХ(Г) - АГХ(/),
5у(0 = Ду(/) - by(t), Wy(t) = \Vy(.t) - \Vy(t)
527
8х, м
8у, м
Рис. 4.47. Ошибки оценивания:
а, б — продольной и боковой координат; в, г — продольной и боковой скоростей
при различных начальных отклонениях по координатам Дх(0) и Ду(0). Кри-
вым 1—4 соответствуют начальные отклонения Ах, = Ду] = 1500 м, Ах2 = Ду2 ~
= 750 м, Ах3 = Лу3 = —750 м, Ах4 = Ду4 = —1500 м. Для удобства сравнения про-
цессов оценивания остальные параметры движения выбирались одинаковыми
для всех рассматриваемых вариантов.
Штриховыми линиями обозначены области, в которых заключены удвоен-
ные «расчетные» среднеквадратические значения ошибок оценивания, опреде-
ляемые через соответствующие диагональные элементы матрицы R.
Внутренние штриховые линии соответствуют минимальным среднеквадра-
тическим значениям ошибок, а наружные — максимальным из четырех вариан-
тов оценивания. Эти области получаются вследствие того, что работа фильтра на-
чинается с разных участков рабочей карты блока памяти. Поэтому производные
а/ а/ ,
— и — поля рельефа, входящие в подынтегральные выражения элементов мат-
ах ду
рицы R(Z), в оцениваемых точках x(t) и y(t) для одних и тех же моментов времени
различны по знакам и величинам.
Как следует из приведенных графиков, при начальных отклонениях |Дхг(0)| =
= |Ду(0)| = 750 м, меньших радиуса корреляции поля рельефа выбранного участка
коррекции, сходимость процессов оценивания достаточно хорошая (кривые 2 и
5), и со временем ошибки оценивания входят в область, ограниченную удвоен-
ным значением соответствующих среднеквадратических отклонений.
528
Кривые 7 и 4, соответствующие начальным
отклонениям по координатам |Ах(0)| = |Ау(0)| =
= 1500 м, показывают, что при невыполнении
условия |Дхг(0)|, |Ау(0)| < р процессы оценивания
горизонтальных координат х, у и скоростей
Vy становятся расходящимися.
На рис. 4.48 представлена область началь-
ных отклонений, при которых обеспечивается
выполнение неравенства |Ах(/к)| < А//2 и |Ау(/К)| <
< А//2, где А/ — шаг дискретности по координате
при цифровой записи карты рельефа, /к — время
окончания процесса оценивания (было принято
А/ = 0,25 км, /к = 200 с). Эту область можно счи-
тать областью сходимости субоптимального бес-
Рис. 4.48. Область допустимых
начальных отклонений
поискового алгоритма оценивания по начальным ошибкам местоположения. Ве-
личины остальных ошибок могут быть достаточно большими, и для их списания
до определенных пределов необходимо лишь увеличить время оценивания Гк.
3. Оптимальные поисковые алгоритмы КЭСНН-1
Практические алгоритмы КЭСНН-I относятся к поисковым алгоритмам.
В поисковых КЭСНН-I проверяются гипотезы о возможных значениях ошибок
местоположения и скорости движущегося объекта. Для каждой проверяемой ги-
потезы на основе измерений геофизического поля и имеющейся бортовой карты
этого поля с использованием данных навигационной системы рассчитываются
значения функционала, являющегося мерой близости полученной в полете ре-
ализации поля и реализации поля, извлекаемой из блока памяти и соответствую-
щей проверяемой гипотезе. Поиском экстремума функционала по всем прове-
ряемым гипотезам определяются координаты местоположения и скорость движе-
ния. Методы достижения экстремума функционала могут быть различными.
Может применяться «слепой поиск», когда вводится дискретизация коорди-
нат и значения функционала рассчитываются абсолютно для всех возможных
дискретных значений ошибок ГНС. Такой метод поиска, являющийся в опреде-
ленных условиях единственно возможным, надежно решает проблему ликвида-
ции больших начальных отклонений в КЭСНН-I, хотя в некоторых случаях тре-
бует чрезмерно высокой производительности БЦВМ.
Другая группа методов поиска связана с вычислением градиентов (или их
аналогов) функционала, определяющих направление движения к экстремуму.
Здесь требования к быстродействию БЦВМ обычно оказываются ограниченны-
ми, так как нет необходимости рассчитывать значения функционалов для всевоз-
можных значений ошибок ГНС, но возникают ограничения сходимости.
Рассмотрим одномерную поисковую КЭСНН-I и равномерный горизонталь-
ный полет. Пусть к текущему моменту времени Г, когда принимается решение,
проведено 7V измерений геофизического поля Z\ = f*, . = (рис. 4.49, а) и
пусть в памяти БЦВМ записана карта поля _/п(х) (рис. 4.49, б).
В поисковых КЭСНН-I производится запись в оперативное запоминающее
устройство измеренных значений поля zk = f* и выдаваемых ГНС координат
529
Рис. 4.49. Измеренная реализация поля (а) и гипотетическая карта поля (б)
местоположения х* в Момент проведения измерений. Пусть xfi — координата
местоположения в момент последнего замера.
Алгоритм поисковой КЭСНН-I сводится к следующему. Назначается дове-
рительный интервал 2 Дтах с центром в точке х£, где Дтах — возможная макси-
мальная ошибка ГНС. Задается шаг дискретизации по координате Д/, и в довери-
тельном интервале с этим шагом выбирается ряд дискретных точек. В дальней-
шем предполагается, что реальное положение летательного аппарата совпадает с
одной из дискретных точек. В действительности это условие может и не выполня-
ться. Однако если величина Д/ невелика, то введение дискретизации при провер-
ке гипотез не приводит к существенным ошибкам. В рассматриваемом случае ги-
потезами D{ являются возможные дискретные значения z Д/ продольной ошибки
ГНС Дх (z = —и, ..., п; п = Дтах/Д7). Поскольку предположено отсутствие ошибки
измерения скорости и постоянство Дх в процессе проведения измерений геофи-
зического поля, то с точностью до шумов датчика поля и ошибок картографиро-
вания измеренная реализация совпадает с некоторым участком реализации нави-
гационного поля, хранящейся в блоке памяти.
В процессе перебора различных возможных значений ошибок ГНС (т. е. про-
верки различных возможных гипотез Z>z, состоящих в предположении, что ошиб-
ка Дх = z Д/) из блока памяти извлекается для каждой проверяемой гипотезы со-
ответствующая ей реализация поля
{/п[х„* — z Д/ — (7V — 1)£], /п[х„* - z М - (N - 2)£], .... /п[х„* -IM- L],
Сопоставляется гипотетическая реализация поля с измеренной
Zi =f[xN -(N — 1)£],zN~ , =f[xN - L],ZN =f{xN),
530
Рис. 4.50. Оптимизируемые
функционалы
где xN — действительное местоположе-
ние ЛА в момент проведения последнего
замера, L — расстояние, пролетаемое
ЛА между последовательными измере-
ниями. В результате такого сопостав-
ления получается некоторое число /z,
которое характеризует степень несов-
падения измеренной и проверяемой
гипотетической реализации. Величина
= /(Z>z) зависит от измеренной и про-
веряемой гипотетической реализаций
навигационного поля. Кроме этого, /z является функцией проверяемого значе-
ния &х = IЫ ошибки навигационной системы.
Могут использоваться различные виды функционалов, но они должны обла-
дать общим обязательным свойством: в идеальных условиях при отсутствии оши-
бок измерения поля и картографирования и других возмущений функционал
должен достигать абсолютного (глобального) экстремума на истинной гипотезе,
т. е. при Ах = Хуу — xN. Тогда и в условиях неизбежных возмущений, рассчитав
значения функционала для всех возможных значений ошибки ГНС и выбрав то
значение ошибки Ах, при котором функционал достиг экстремума, можно полу-
чить оценку местоположения, близкую к истинной. Точность этой оценки будет
тем выше, чем меньше ошибки измерения геофизического поля и больше длина
обрабатываемой реализации (число измерений поля 7V).
В качестве функционалов в эвристических (неоптимальных) поисковых ал-
горитмах используются:
среднее произведение
Л(/п^* ~ *ГА7 — kL)zN_k,
средняя абсолютная разность
Л/ — \t-N-k ~ fx\(XN ~ 1 ~
средний квадрат разности
Л/= i *?о ^N~k
Типичный вид зависимости функционалов /IZ, /2/, /3/ от рассогласования по-
казан на рис. 4.50; при больших ошибках &х могут появиться локальные миниму-
мы и максимумы.
Теоретической основой синтеза алгоритмов оптимальных поисковых
КЭСНН-I служит теория статистических решений [93].
Рассмотрим одномерную КЭСНН-I для оценки местоположения и лишь
один такт формирования сигнала коррекции.
Пространство сигналов Q = {5J состоит из отрезков функции /(х) длиной
NL и содержит 2п 4- 1 сигналов. Сигнал оканчивается в точке х$. Любой сиг-
531
нал содержит N точек, т. е. может быть представлен TV-мерным векто-
ром-столбцом
Л1 ’ ~ fix % + iM]
S,= 8/2 = fixfi - iM - L]
_S/W_ _fix% - iM-(У- 1)£]
где Sg — у-я проекция вектора Sz.
Вход системы Z представляет аддитивную смесь сигнала и шума и также яв-
ляется TV-мерным вектором-столбцом
Л-Гдт] + 8/1*лг]
7= fixN-L] + 8f[xN-L]
_fixN-(N- 1)£] + ЗДхд,- (/V — 1)£]
где bf(xN), bf(xN — L), ..., 8/’[xv — (TV — 1)£] — ошибки измерения, вносимые
датчиком информации и имевшие место соответственно в точках xN, xN — £, ...
...,х N — (N — \)L.
Пространство решений G = {£>у} совпадает (в случае одномерного варианта)
с пространством Сигналов {5J.
Задача многоальтернативного выбора сводится к тому, чтобы, используя
сравнение входа Z со всеми сигналами S, (z = —и,...., п) и имеющиеся сведения о
статистике шума 6/и об априорных вероятностях сигналов Si9 выбрать опти-
мальную гипотезу Dv. Так как пространства сигналов {кУД и решений {Dj} совпа-
дают, то в результате принятия решения указывается тот сигнал Уу, на который
более всего похож вход Z.
При простой функции потерь и в случае, когда шумы датчика информации
8/*являются высокочастотным случайным процессом и время корреляции этого
процесса меньше интервала £/И, за который движущийся объект проходит рас-
стояние £, по оптимальному решающему правилу [51] выбирается та гипотеза
£>v, для которой оказывается наименьшим функционал Ij,
Ij = -2о£ 1пЛ. + ||SyIF - 2(ZSy) + ||Z IP,
здесь oZ — дисперсия шума 8/
Обсудим этот подход для различных предположений о распределении апри-
орных вероятностей pj и о характеристиках поля f(x).
Если все гипотезы равновероятны (ру = const;y = —и, ..., и), поле f(x) — ста-
ционарное и эргодическое, длина реализации NL достаточна для вычисления по
ней дисперсии и коэффициентов взаимной корреляции, то ||S-||2 = const и мини-
мум Ij совпадает с максимумом (ZSy). Скалярное произведение (ZSy) пропорци-
онально вычисленному с помощью усреднения по времени коэффициенту корре-
ляции векторов Z и Sy. Следовательно, для равновероятных гипотез Sy и простой
функции потерь при нормально распределенной помехе 8/, носящей характер
«белого шума», и в случае стационарного поля f(x) оптимальным является кор-
532
реляционный метод, что оправдывает сохранение термина «корреляционно-экс-
тремальные» и применительно к оптимальным поисковым системам.
Если все гипотезы равновероятны (pj = const;y = —и,и), но поле нестаци-
онарное (||Sy|| const), то минимум Ij совпадает с минимумом ||Z — SJ2. Алгоритм,
обеспечивающий min ||Z — S ||2, представляет собой не что иное, как метод наи-
j J
меньших квадратов.
Будем оценивать точность совмещения реализаций величиной среднего
квадрата о2 ошибки xN — xN.
Можно показать [51], что выигрыш в точности совмещения реализаций
БЦВМ, получаемый за счет перебора вариантов, оценивается формулой
= 2(2« + 1)-^= Ге’^Ф^-’^фГг- —)dz, (4.105)
% 72л Joo V °- /
где о 2о — дисперсия ГНС до коррекции; о2 — дисперсия поля f(x); Ф(г) — функ-
ция интеграла вероятности
ф<г)= jk b4d'-
Результаты вычисления на ЭВМ зависимости <зх/<зх^ от п и приве-
дены на рис. 4.51. Хотя при выводе (4.105), как отмечалось выше, не учитывались
некоторые существенные возмущения, например ошибки измерения скорости
ДИ грубой навигационной системой, тем не менее вытекающие из (4.105) выводы
правильно отражают существо дела и дают оценку точности, близкую к реальной.
Обсудим полученные результаты. Если поисковая КЭСНН-I использует
мелкоструктурные поля, а интервал наблюдения достаточен для вычисления кор-
реляционной функции, то достижимая точность определяется уравнением
(4.105). Эта зависимость, рассчитанная для п = 20, показана на рис. 4.52.
При достаточной длительности наблюдения (большие значения N) для ре-
альных соотношений сигнал/шум (о/о^ = 0,5...2) точность по сравнению с точ-
ностью ГНС увеличивается на порядок и более.
^х0
0 1 2 3 4 5 JAo/o.
Рис. 4.51. Зависимость точности
совмещения реализаций от начальной
ошибки навигационной системы
для различных соотношений сигнал/шум
Рис. 4.52. Зависимость точности
совмещения реализаций от длины
реализаций для различных
соотношений сигнал/шум
533
4. Оптимальное рекуррентно-поисковое оценивание
Хотя глобальные поисковые алгоритмы, связанные со сплошным перебором
всех вариантов, надежно решают принципиальную для КЭСНН-1 проблему лик-
видации больших начальных отклонений, их непосредственное использование в
случае многопараметрического оценивания наталкивается на вычислительные
трудности.
В общей задаче многопараметрического оценивания навигационных пара-
метров по наблюдениям геофизических полей, являющейся с математической
точки зрения существенно нелинейной, надо отделить часть, связанную с нели-
нейной зависимостью геофизических полей от позиционных координат, и сохра-
нить в этой части сплошной перебор вариантов, чтобы алгоритмы надежно реша-
ли проблему ликвидации больших начальных отклонений, а по отношению к
другим параметрам отказаться от сплошного перебора и использовать методы
фильтрации.
Теоретической основой такого подхода как раз и являются метод рекуррент-
но-поискового оценивания [63] и его непрерывный аналог [54], объединяющие
идеи калмановской фильтрации и теории проверки гипотез.
Рассмотрим метод рекуррентно-поискового оценивания. Пусть имеется ко-
нечное множество гипотез G = {£>j,..., Djy..., Z>z} и заданы априорные вероятнос-
ти гипотезpj = P(Dp. В дискретные моменты времени z = 0, 1,..., N наблюдается
сигнал
Z/ = Н</Х/ + Fy + Л/,
зависящий от вектора состояния Xz линейной дискретной динамической систе-
мы, описываемой уравнением
Х/+|=А..Х,. + ^.
Матрица объекта А/у- = Az(Z).), матрицы канала наблюдения Н/у = Hz(Z>-) и
Fzy = Fz(Z)y), статистические характеристики возмущений T|z, £z и начального рас-
пределения вектора состояния Х() зависят от гипотезы (варианта), реализующейся
на интервале наблюдения z = О, 1,..., N. Наблюдателю априори неизвестно, какая
из гипотез выполняется. Случайные возмущения T|z и £z — центрированные нор-
мально распределенные взаимно некоррелированные дискретные «белые шумы».
Тогда оптимальный в смысле максимумаp(xN, Dj/zN) алгоритм оценивания
вектора состояния XN и выбора гипотезы Dj включает три группы уравнений:
уравнения оценок, уравнения ковариационной матрицы и уравнения функци-
оналов, которые рассчитываются для всех проверяемых гипотез (у = 1,...,/) и для
моментов времени z = О, 1, ..., N.
По этим уравнениям рассчитываются конечные значения функционалов IjN.
В качестве наиболее вероятной выбирается гипотеза Z>v, минимизирующая
функционал IjN\
ly/v = min //W’
J
а оценка xvZV, выдаваемая соответствующим этой гипотезе дискретным фильтром
Калмана, является оптимальной оценкой вектора состояния XN.
534
Схема оптимального алгоритма оценивания изображена на рис. 4.53, где т оз-
начает блок единичного запаздывания. Видно, что алгоритм оценивания структур-
но распадается на две части: рекуррентную, где реализуются дискретные фильтры
Калмана и рассчитываются значения функционалов I.., и поисковую, в которой
отыскивается mjn IjN. Этим обстоятельством и объясняется название алгоритма.
j
Хотя общего решения задачи оптимальной нелинейной фильтрации не сущест-
вует, использование рекуррентно-поискового оценивания для целей синтеза алго-
ритмов КЭСНН-I (или его непрерывного аналога) дает строгое решение задачи оп-
тимальной нелинейной фильтрации в частном случае, характерном для КЭСНН-1.
Применение для оценки пространственного положения ЛА рекуррентно-по-
искового оценивания рассмотрено в [54, 94, 95]. Для определения вертикальных
координат движущихся объектов обычно используется вертикальный канал
ИНС. Однако в силу его неустойчивости необходимо принимать специальные
меры, например по коррекции показаний датчиков абсолютной высоты или вер-
тикальной скорости движения. Применение коррекции по рельефу Открывает
новый подход к решению задачи. В частности, оказывается возможным исклю-
чить из минимально необходимого состава подсистем некоторые традиционные
подсистемы. Так, при использовании поля рельефа возможна выставка верти-
кального канала ИНС только по показаниям радиовысотомера без использова-
ния барометрического высотомера.
Рис. 4.53. Структурная схема алгоритма оценивания
535
Известно, что при полете над морем выставка вертикального канала ИНС
осуществляется по данным радиовысотомера, ибо в этом случае он становится
измерителем абсолютной высоты полета. Однако при полете над сушей с ярко
выраженным рельефом такая возможность в традиционном варианте исключает-
ся, так как радиовысотомер как измеритель абсолютной высоты в этих условиях
оказывается весьма неточным, поскольку рельеф здесь играет роль помехи. Если
же на борту ЛА иметь карту рельефа и точно знать горизонтальные проекции тра-
ектории движения, то, извлекая из блока памяти рельеф вдоль траектории движе-
ния и суммируя его с измерениями относительной высоты, выдаваемыми радио-
высотомером, можно получить точные измерения абсолютной высоты. Таким
путем задача фильтрации вертикальных параметров движения сводится к ситу-
ации полета над морем.
На первый взгляд может показаться, что образовался порочный круг в рас-
суждениях: с одной стороны, чтобы с помощью КЭСНН-I хорошо оценить гори-
зонтальные координаты х и у, надо измерять рельеф местности, для чего необхо-
димо точное знание параметров вертикального движения центра масс ЛА; с дру-
гой стороны, чтобы точно оценить абсолютную высоту полета, надо знать
проекции траектории движения на горизонтальную плоскость. Более подробное
исследование вопроса показывает, что никакого порочного круга в рассуждениях
нет и совершенно строгое решение этой задачи достигается использованием ре-
куррентно-поискового оценивания.
Рассмотрим навигационной комплекс, в состав которого входят все три ка-
нала ИНС, измеряющие координаты пространственного (х, у, Н) и углового (\|/,
д, у) положения ЛА, радиовысотомер и БЦВМ с записанной в ее памяти картой
рельефа f(x, у). Совместная обработка перечисленной входной информации
производится с целью определения ошибок ИНС в измерении координат (Ах, Ау,
А//) и скоростей (АИХ, АИу АИЯ) движения. Барометрические измерители в со-
став рассматриваемого навигационного комплекса не входят.
Оптимальное правило обработки информации, вытекающее из рекуррент-
но-поискового оценивания, имеет ясное логическое объяснение. Назначаются
гипотезы о возможных значениях ошибок горизонтальных каналов навигацион-
ной системы. Для каждой гипотезы по измеренным значениям горизонтальных
координат движущегося объекта x*(t) и y*(t), измеренным значениям углов тан-
гажа 0*(/), крена у*(/) и рыскания \|/*(/),
а также по предполагаемым проверяе-
мой гипотезой значениям ошибок
Ьх(Т) = ку(Т) = kl, АИХ(7Э = w и
А 1^(7") = Ср рассчитывается гипотети-
ческая траектория
xMvXi;(z) = x*(f) - [Н/ + <t - 7)vuJ,
^« = да-[Х/ + (г- ПСИ
горизонтального следа оси диаграммы
направленности радиовысотомера (ко-
торая предполагается игольчатой или
близкой к ней). Из блока памяти извле-
кается соответствующий этому следу
профиль рельефа (рис. 4.54).
536
Этот профиль суммируется с измерениями радиовысотомера D*(t) cos 0*(Z) х
х cos y*(Z) (на рис. 4.54 представлен случай, когда углы О* и у* малы), в результате
чего только на основании измерений, проведенных радиовысотомером, и борто-
вой карты рельефа получается гипотетическая абсолютная высота полета
Кроме того, профильиспользуется в фильтре Калмана, где на основании
показаний вертикального канала инерциальной системы Я*(/) и использования
данных радиовысотомера и бортовой карты путем фильтрации рассчитывается
отфильтрованная высота Несовпадение этих двух высот, фиксируемое
невязкой Д — Н содержит информацию и о точности фильтра-
ции абсолютной высоты полета (в предположении истинности гипотезы £>pv^), и
о самой истинности гипотезы Поэтому разность высот Д используется
как в фильтре Калмана для коррекции вертикальных параметров движения (опять
же в предположении истинности гипотезы так и для расчета функционала
/gvX^, который является мерой истинности гипотезы D Функционал обра-
зуется очень просто: он равен интегралу
от квадрата невязки, а начальное условие
при интегрировании учитывает априор-
ные вероятности гипотез.
Для истинной гипотезы функцио-
нал мал, а для неверных гипотез — ве-
лик, причем значение 1^(Т) тем боль-
ше, чем сильнее предположение о гори-
зонтальных параметрах движения
отличается от их действительных значе-
ний. Это обстоятельство и позволяет пу-
тем минимизации функционала
по всем гипотезам определить
правильную гипотезу. Поскольку при
формировании гипотез «захватывают-
ся» все возможные значения ошибок на-
вигационной системы, как бы велики
они ни были, то надежно решается про-
блема ликвидации больших начальных
отклонений. При этом сплошному пере-
бору подвергаются только горизонталь-
ные координаты и скорости движения,' а
вертикальные параметры определяются
путем фильтрации и исключаются из пе-
ребора.
На рис. 4.55 представлены результа-
ты моделирования описанного алгоритма.
Задавались следующие значения ошибок
навигационного комплекса: Д Н1Л = 2 км,
ио
= 7,5 м • с-1, Лх0 = —5 км, Ду0 = 5 км,
ДИ. = — 3 м *с-1, ДИ. = 1,5 м* с-1. Нави-
ло То ’
Рис. 4.55. Ошибки оценивания:
а — высоты; б — вертикальной скорости;
в — горизонтальных координат
537
50
г, м
100
X, км
Рис. 4.56. Сечение
навигационного поля
0 10 20 30 40
гационное поле моделировалось стационар-
ным случайным полем со статистическими ха-
рактеристиками: о = 15 м, р = 2 км (о — сред-
неквадратическое отклонение поля, р — ради-
ус корреляции поля). Одно из сечений поля
представлено на рис. 4.56. Размеры довери-
тельных квадратов предполагались равными:
п = 24, т = 0; общее число проверяемых ги-
потез составило q = (2т 4- 1)2(2и 4- I)2 = 2401.
Шаг дискретности по координате при задании
множества гипотез выбирался равным 0,25 км. Все гипотезы считались равноверо-
ятными = const), углы тангажа, крена и рыскания предполагались нулевыми.
На рис. 4.55 кривые 1 соответствуют гипотезе ^_20д год определяемой ошиб-
ками Дх = —5 км, ДVx = 0, Ду = 5 км, Д Vy = 0; кривые 2 — гипотезе D_x д 20 0, опре-
деляемой ошибками Лх = —5,25 км, А Ух = 0, Ду = 5 км, A Vy = 0; кривые 3 — гипо-
тезе Z>20 о _20 о, определяемой ошибками Лх = 5 км, Д = 0, Ду = —5 км, A Vy = 0.
Первый поиск экстремума функционала 7 и первое оценивание координат
производились на 60-й секунде, когда уже была измерена реализация рельефа дли-
ной 15 км. Функционалы рассчитывались через каждые 4 с. В диапазоне 60 < t <
< 134 с функционал минимизировался гипотезой £>_20Д год а в Диапазоне 124 <
С t С 200 с минимум функционалу доставлялся гипотезой ^_21д год Ошиб-
ки оценивания горизонтальных координат не превышали 320 м. Кривые 3 соот-
ветствуют гипотезе Z>20 0 _20 0, предполагающей существенно неверные значения
координат горизонтального местоположения. Из рис. 4.55 видно, что и оценки
вертикальных параметров в этом случае оказались явно неудовлетворительными.
Теоретически рекуррентно-поисковое оценивание является оптимальным мето-
дом оценивания пространственного положения ЛА при навигации по рельефу мест-
ности. Взаимодействие между горизонтальными и вертикальным каналами, предус-
мотренное в структуре рекуррентно-поискового оценивания, позволяет наилучшим
образом оценить абсолютную высоту полета с использованием вертикального акселе-
рометра инерциальной системы, радиовысотомера и бортовой карты рельефа. Это
обеспечивает возможность наиболее точного измерения рельефа пролетаемой мест-
ности в условиях интенсивного вертикального маневрирования, что, в свою очередь,
приводит к повышенной точности определения горизонтальных координат.
Помимо сплошного перебора гипотез при поиске экстремума функционала
/gvx;(T), могут использоваться и различные варианты нелинейного программи-
рования [96]. Все определяется характером зависимости функционала от позици-
онных ошибок в области возможных значений этих ошибок. При рекуррент-
но-поисковом оценивании область ложных экстремумов функционала смещает-
ся по сравнению с обычными поисковыми алгоритмами. Это представляет
дополнительные благоприятные возможности при реализации.
4.7.4. АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
КЭСНН-П И КЭСНН-Ш
В корреляционно-экстремальных навигационных системах классов КЭСНН-П
и КЭСНН-Ill используются поверхностные поля Земли оптического, теплового, ра-
диотеплового диапазонов электромагнитного спектра (далее сокращенно — оптиче-
538
ского диапазона), измеряемые иконическими (ИК-, видеокамеры, теле-, фото-, ра-
диометры) системами, что позволяет решать автономно, в пассивном режиме мно-
гие задачи, стоящие перед летательными аппаратами.
Проблема актуальна и обоснована в связи с большим объемом информации,
содержащейся в поверхностных полях Земли оптического диапазона, так как
пространственные радиусы корреляции этих полей составляют первые десятки
метров, а сама информация поставляется в виде изображений местности. Коли-
чество информации, содержащейся в изображениях местности оптического диа-
пазона, на несколько порядков превосходит количество информации в исполь-
зуемых профилях рельефа существующих рельефометрических систем.
Оперативное решение задач, стоящих перед КЭСНН-П и КЭСНН-Ш, свя-
зано с необходимостью иметь цифровые модели физических полей Земли опти-
ческого диапазона в виде карт этих полей и эталонов участков местности. Однако
это затрудняется временной (суточной, сезонной) нестабильностью (изменчиво-
стью) этих полей.
В настоящее время разрабатываются эффективные алгоритмы обработки
иконической информации, преодолевающие временную нестабильность оптиче-
ских полей.
Исследован ряд подходов. Если интервал времени между моментами картог-
рафирования (создания эталона) оптического поля и применения оптико-элек-
тронной системы (ОЭС) невелик и сезонные изменения (появление или исчезно-
вение растительности; замерзание или таяние рек, озер; образование снежного
покрова и др.) проявляются незначительно, то возможно использование полных
изображений местности [54, 89]. Если же этот интервал велик, то необходимо со-
хранить в карте (эталоне) только стабильные элементы нестабильного оптиче-
ского поля местности. К таким стабильным элементам, в частности, относятся
линейные и точечные ориентиры, а также рельеф местности, на котором распо-
лагается оптическое поле. Последняя возможность реализуется в идее стереоско-
пических навигационных систем [97, 98].
1. Использование полных изображений местности в КЭСНН-Ш
В КЭСНН-Ш, где зачастую весьма сильно проявляются нелинейные эффек-
ты [57], воспользоваться теорией оптимальной фильтрации для создания опти-
мальных алгоритмов оценивания весьма затруднительно. В этих условиях целе-
сообразнее применить теорию нелинейного оценивания [53, 54]. Однако для вы-
вода формул достижимой точности КЭСНН-Ш теория оптимальной линейной
фильтрации с успехом может быть применена. Работающие по оптимальным не-
линейным алгоритмам КЭСНН-Ш после окончания переходного процесса при-
ходят в область малых отклонений, где точность оптимального нелинейного оце-
нивания будет не хуже, чем точность, даваемая калмановской фильтрацией. По-
этому оценки точности, получаемые на основе применения калмановской
фильтрации, можно рассматривать как верхние границы для точности оптималь-
ных нелинейных алгоритмов.
Перейдем к математической формулировке задачи для КЭСНН-Ш, использую-
щих полные изображения местности. Наблюдаемое поле обозначим f(x, у}, хОу —
горизонтальная прямоугольная система координат. Вектор наблюдения представим
набором дискретных измеренных значений поля zt- (/ = 1,#), получаемым после-
довательной разверткой строк изображения в один столбец (рис. 4.57).
539
Рис. 4.57. Преобразование изображения в вектор наблюдения
Предположим, что продольная осьх0 движущегося объекта повернута отно-
сительно оси х на величину курсовой ошибки у. Тогда
Z = h(X) + т|, = ЛДХ) + Т|„ (4.106)
где X — (%и ..., xn)J — вектор состояния; Z = (г1? zqY — вектор наблюдения;
ц = (г|], ..., г|^)т — вектор шумов наблюдения; h(X) = [Zjj(X), ..., /z^(X)]T — нели-
нейная векторная функция вектора состояния X; Sn — матрица спектральных
плотностей шумов;
Zzz(JV) =жд + (-N' - 1 + z - AqzW-1!)^ cos V 4- (-М 4- sin у, уд 4-
4- (-/V' - 1 4- z - N]iN~' [)£x sin \|z 4- (M - JzW"1 [)£y cos y} +
= 8f J%д + (~N' ~ 1 + Z “ cos V + (~Af + sin \|/,1 .
n' > _УЛ + (~W' - 1 + i - TVJzW-'DZ^ Sin у + (Л/ - ]zW-’[)£y cos y) f ’
знак ]a [ обозначает наибольшее целое число, меньшее а\ хд, уд — координаты той
точки земной поверхности, куда направлена ось датчика поля (поскольку возмож-
ны отклонения рх, оси датчика поля от вертикали, то координаты хд, уд могут
отличаться от координат объекта); £х, Ly — действительные расстояния между эле-
ментами изображения; NLX х (2М 4- 1)£^ — размеры изображения («кадра»), в об-
щем случае предполагаем кадр несимметричным (N = N' 4- 7V" 4-1, ЛГ # TV"), q =
= N(2M 4-1); 8/*— ошибка измерения поля f(x, у) датчиком поля. Элементы изо-
бражения пронумерованы так, что первым считается верхний левый элемент.
Представление непрерывных изображений в виде совокупности их дискрет-
ных значений не является существенным ограничением, так как £х, Ly принци-
пиально можно брать сколь угодно малыми. Кроме того, в реальных системах об-
работки изображений при помощи ЦВМ приходится переходить от непрерывно-
го изображения к его дискретизации с некоторыми шагами £х, Ly. Масштабы
изображения £х, Ly, как и курсовая ошибка \|/, в дальнейшем предполагаются по-
540
стоянными во времени, но неизвестными на движущемся объекте. Например, в
случае использования на летательном аппарате оптических изображений неиз-
вестность £х, Ly определяется неточным знанием высоты полета и углами (Jx,
отклонения оси датчика поля от вертикали; в случае использования радиолока-
ционных изображений местности и при осуществлении развертки по горизон-
тальной дальности (что обычно необходимо) неизвестность масштабов также
объясняется неточным знанием высоты полета.
Не снижая общности рассуждений, рассмотрим равномерное перемещение
движущегося объекта (и установленного на нем датчика поля) вдоль оси х: хд = И/,
уд = 0. На основании сказанного выше уравнения движения в скалярной форме за-
пишутся следующим образом: хд= V, И = 0, Lx = 0, Ly = 0, у = 0. Если ввести век-
тор состояния X = (Xj, х2, х3, х4, х5)т, Xj = хд, х2 = V, х3 = £х, х4 = Ly, х5 = \|/,
то уравнения движения примут вид (4.96), где следует положить А(Х, /) = АХ, и = 0,
^ = 0:
Х + АХ = 0,
(4.107)
о
-1 0 0 0 \
0 0 0 0
0 0 0 0
0 0 0 0
о о о 0;
Таким образом, задача свелась к исходным уравнениям (4.96), (4.97). Пред-
положим, что матрица спектральных плотностей шумов 8/диагональная:
Г5' 01
s2
Sn = -. >
' 0 sq.
здесь Sj,..., 5Z,..., sq — значения спектральных плотностей ошибок измерения по-
ля в различных точках кадра на нулевой частоте.
Считаем измерения равноточными Sj = ...sq = 50, тогда:
где Е — единичная матрица размера q х q. Начальное значение /?0 = G ковари-
ационной матрицы ошибок оценивания примем таким:
avo
I 2гг2
I 2^2
где о^0, о^0, — дисперсии начальных ошибок оценивания местоположения,
скорости и курса движущегося объекта; о^0, о— дисперсии начальных отно-
сительных ошибок оценивания £х, Ly.
541
Теперь определены все условия для решения системы уравнений (4.106),
(4.107) и построения нелинейного фильтра Калмана.
Решение ковариационного уравнения (4.104) приводит к следующим зави-
симостям:
+ г2 + г3 22L Y 1 + _L £22 + *2 1 + 12 T1- °xo 3 so Л°хоаио ° ио 5o 3 a20 s0 12 s^ J (4.109)
+ ^Y—(4.110) 50 Aax0aK0 aro 5o 3 so 12 502 J
+ мп»
°“w ° (sk + (4J,2) $0 J y )
1 2 М(М + 1) 2
sn L 12 * 3 у
(4.113)
Входящие в формулы (4.109)—(4.113) параметры q, <у, 50 могут быть выраже-
ны через дисперсию о 2 и временной радиус корреляции т шума т|, площадь изо-
бражения S, радиус корреляции оптического поля р^:
здесь оД — дисперсии оптического поля и его градиента.
При этом о 2 = ajL + где О]2^ — дисперсия ошибки измерения оптиче-
ского поля оптико-электронной иконической системой во время полета, —
дисперсия разности между значением оптического поля, зафиксированным на
эталоне, и действительным значением оптического поля в момент применения.
Последняя составляющая связана как с ошибкой измерения поля при составле-
нии эталона, так и с временной нестабильностью (суточной, сезонной) самого
оптического поля.
Следует отметить, что, хотя зависимости (4.109)—(4.113) получены на основе
использования нелинейного варианта фильтра Калмана, при выводе которого де-
лается предположение о возможности линеаризации функции h(X), это не дол-
жно вызывать сомнения в обоснованности итоговых формул, так как из теории
КЭСНН известно, что употребление приближенных линеаризованных зависи-
мостей вместо строгих нелинейных вполне допустимо в случае, когда рассогласо-
вания не превосходят радиуса корреляции используемого поля р. Поскольку речь
идет о достижимой точности, а установившиеся ошибки обычно намного меньше
р, то переход к линеаризации вполне обоснован.
По формулам (4.109)—(4.113) на рис. 4.58 построены в логарифмическом
масштабе графики зависимости точности КЭСНН-Ш от времени /, рассчи-
танные для исходных данных = 1000 м, = 10 м/с, =3°, V = 250 м/с,
*0 r0 Vo
5 = 10 км х 10 км, = 2, L = Ух = = 103 м.
542
Частным случаем полученных
результатов может явиться теория
КЭСНН-II, в которых информация о
поле снимается вдоль некоторых конту-
ров или линий. Теорию таких КЭСНН
можно вывести из общих результатов,
если, например, положить N = 1. Тогда
в каждый текущий момент времени ин-
формация о поле f(x, у) будет сниматься
вдоль линии, перпендикулярной оси х0.
В таких КЭСНН, как это следует из
уравнения (4.113), возможно оценива-
ние курса движущихся объектов.
Структура оптимального алгорит-
Рис. 4.58. Зависимости точности
КЭСНН-Ш от времени
ма оценивания параметров движения
вытекает из уравнения (4.99). Но использование подобных структур ограничено
лишь такими случаями, когда начальные рассогласования по всем параметрам
невелики и в КЭСНН не проявляются нелинейные эффекты.
2. Использование линейных и точечных ориентиров
Для преодоления временной нестабильности оптических полей необходимо
в оптическом поле выделить неподверженные суточной и сезонной изменчивос-
ти стабильные элементы. Одно из возможных решений состоит в использовании
в качестве эталонной информации координат и высот точечных закартографиро-
ванных ориентиров и автоматическом сравнении этих координат с земными ко-
ординатами тех же ориентиров, рассчитанными по изображениям местности,
поставляемым оптико-электронной системой.
Точечными ориентирами могут служить резко выраженные контуры, надеж-
но отождествленные на аэроснимке и карте. В качестве точечных ориентиров не-
обходимо выбирать такие, которые наносятся на карту инструментально с высо-
кой точностью [99]:
• геодезические пункты — надежно закрепленные на местности специальны-
ми сооружениями точки земной поверхности, координаты и высоты которых
определены из геодезических измерений. На картах различными условными
знаками изображают такие геодезические пункты, как пункты государствен-
ной геодезической сети, точки съемочной сети, закрепленные на местности
центрами, астрономические пункты, реперы и марки государственной ниве-
лирной сети, тригонометрические пункты, заводские трубы, определенные
как тригонометрический пункт, церкви, мечети, межевые знаки. Геодезиче-
ские пункты служат основой при съемке и составлении карт. Однако не всег-
да и не все геодезические пункты могут использоваться для целей навигации
и определения наземных координат незакартографированных наблюдаемых
объектов, так как ряд геодезических пунктов может быть замаскирован и,
следовательно, ненаблюдаем с летательного аппарата;
• местные предметы и характерные точки контуров, наносимые на карту с
особой тщательностью с точностью до 0,2 мм. К числу ориентиров относятся
фабрики, заводы и мельницы с трубой, наблюдательные и нефтяные вышки,
геометрические точки на пересечении шоссейных и грунтовых дорог, соору-
543
жения и постройки башенного типа, колодцы, маяки морские, ветряные
мельницы и двигатели, километровые столбы, указатели дорог, отдельно
стоящие памятники, углы поворотов телефонных, телеграфных и электриче-
ских воздушных линий, пограничные столбы;
местные предметы, определенные инструментально и нанесенные на карту с
точностью до 0,5 мм. Сюда относятся углы жилых домов отдельного двора,
дома лесников, башни элеваторов, автоколонки складов горючего, углы
ограды пасек, углы ограды большого кладбища, углы поворота наземного га-
зопровода и нефтепровода, железнодорожный туннель (вход и выход путей),
путепроводы, переезды, отмеченные на карте семафоры и светофоры, пере-
сечения железных дорог, виадуки. В населенных пунктах инструментально
наносятся внешний контур населенного пункта; крайние со стороны поля
постройки, не входящие в кварталы; главные улицы, переулки и проезды;
крайние со стороны поля постройки на улицах и в переулках; первые от пе-
рекрестков главных улиц и переулков постройки.
В табл. 4.6 по результатам статистического исследования топокарт приводят-
ся данные, характеризующие плотности р ориентиров.
Алгоритм КЭСНН-П1, использующей точечные ориентиры, основан на фо-
тограмметрических уравнениях оптико-электронных иконических систем. Рас-
смотрим иконическую систему, создающую изображение по закону центральной
проекции 1100].
Закономерности центральной проекции иллюстрируются рис. 4.59. Имеется
центр проекции S, задаваемый своими земными координатами Xs, Ys, Zs\ изо-
бражение <«г» наблюдаемой точки М получается в месте пересечения линии ви-
зирования с плоскостью изображения П. Ориентация иконической системы
определяется репером е = (ехеуе^)т, связанным как с центром проекции S, так и
с плоскостью изображения Охиуи, причем орт е направлен по оптической оси
иконической системы. Ориентация земной системы координат О3%3У32Г3 зада-
ется репером е = (ехеуе^)т. Переход от е к е в предположении, что установочные
углы ОЭС равны нулю, осуществляется тремя последовательными поворотами:
сначала на угол курса у вокруг оси Z, затем на угол тангажа О вокруг оси Y и да-
лее на угол крена у вокруг оси X. Примем употребляемые в авиации положитель-
ные направления вращения: по курсу — по часовой стрелке, по тангажу и
крену — против часовой стрелки.
Тогда элементы матрицы преобразования реперов
е = Ле, А =
я2|
Л31
Л12 Л13
а22 а23
аУ2 аУЬ_
Плотность ориентиров на местности
Таблица 4.6
Характер местности /», [ор/км2]
Сильная изрезанность контуров 1,25
Средняя изрезанность контуров 0,79
Слабая изрезанность контуров 0,33
Полупустынная местность 0,12
544
Рис. 4.59. Закономерности центральной проекции
имеют вид ап = cosy cos О, я12 = — sin \|/cos О, я13 = sin О, я21 = sin \|/cos у —
— cos \|/ sin О sin у, а22 = cos у cos у 4- sin \|/ sin О sin у, я23 = cos О sin у, я31 = —sin \|/ sin у —
— cos \|/ sin О cos у, я32 = —cos \|/ sin у 4- sin \|/ sin О cos у, а33 = cos О cos у. Фото-
грамметрические уравнения для центральной проекции записываются следую-
щим образом [100]:
о r anx + а?]у — F
х=х* + wx, у) - " 2|; 31 •
я13х + я23у - я33г
о 4- а^у — a-nF
Y = У5 + [h(X, Y) - Hs] '2 22v F', (4.114)
fl13X + fl23^ - ^33*
«,,(%-+ a,2( у _ Ys) — at3[Hs — h(X, У)]
X —a3l(X—Xs) - а32(У — Y°) + а33[Н* - h(X, У)]’
= a2l(X — Xs) + a22(Y — Ys) — a23[Hs — h(X, У)]
У — a3i(X—Xs) — a32(Y—Ys) + a33[Hs — h(X,Y)]’ ( J
где X, Y — земные координаты наблюдаемой точки; F — фокусное расстояние
оптико-электронной системы; х, у — координаты наблюдаемой точки в плоскос-
ти изображения Ox^; h(X, Y) — высота наблюдаемой точки.
В отличие от (4.115) уравнение (4.114) нелинейное. Эти соотношения являют-
ся основополагающими в фотограмметрии. При этом равенства (4.114) называют-
ся прямыми уравнениями фотограмметрии, а равенства (4.115) — обратными.
Оптимальный алгоритм обработки информации определяется дискретным
фильтром Калмана. Под измерением, связанным с одним наблюдаемым ориен-
тиром, понимаются разности
ъх=хъ-х$к, gy=yj-y0Y
18 Авиация ВВС России и научно-технический прогресс 545
Здесь Х^к, Y*k — земные координаты ориентира, снятые с топографической
карты; Xfi, Yfi — земные координаты ориентира, рассчитанные по фотограммет-
рическим формулам (4.114) на основании определенных пилотажно-навигацион-
ным комплексом координат центра проекции Xs*, Vs*, Hs*, углового положения
ЛА \|/*, $*, а также измеренных на изображении координат ориентира , jg.
Величины 8Х, 8 К зависят от текущих ошибок ПНК в измерении положения
центра масс ЛА и его углового положения. Эта зависимость устанавливается ли-
неаризацией фотограмметрических уравнений (4.114). Мешающими факторами
при оценивании являются ошибки снятия («скола») координат ориентира с изо-
бражения и топокарты, а также ошибка знания высоты ориентира [101].
Вектор оцениваемых параметров включает позиционные AY, XY, \Н и угло-
вые Дф, ДО, Ду ошибки ПНК в момент получения изображения местности; раз-
мерность этого вектора равна шести. Поэтому необходимо наблюдение не менее
трех ориентиров, чтобы уравнения (4.114) позволили уточнить позиционные и уг-
ловые координаты ЛА. Если на принятом изображении (или нескольких последо-
вательных изображениях) содержится п ориентиров, то вектор наблюдения мо-
жет быть представлен в виде
Z = (8%1?..., 8^.,..., 5Х„, 8Г1?..., 8Г„..., 8У„)Т,
где 5Х^ 5Y; — разности координат, соответствующие z-му ориентиру.
Уравнения оценок фильтра Калмана определяют оптимальный алгоритм об-
работки информации, а ковариационное уравнение позволяет оценить точность
коррекции ПНК. Дисперсии ошибок коррекции ПНК ЛА в режиме стабилизиро-
ванного горизонтального полета на высоте Н по наблюдению п ориентиров оп-
ределяются следующими соотношениями [101]:
2 14
5 ' + 3tg2 * + 45tg4 <₽
- (J 2 * _____________________'
П ~ tg4 ф
2 = 2 = 5 2 = 2_ __2__ 2 = А °"
^0 л//2tg4 ф’^У 2п Z/2tg2 ф’ 2д? tg2 ф’
и = ^рН2 tg2 ф,
где р — плотность точечных ориентиров; 2ф — угол зрения оптико-электронной
системы;
о о2 + о02 Н1 1 э т
°2------м2— + т? °ои + з tg2 Фай~;
М — масштаб карты; — дисперсии ошибок «скола» координат ориен-
тира с топокарты и изображения; о2 — дисперсия ошибки нанесения ориентира
на карту; о А — дисперсия ошибки знания высоты ориентира (для плоских
ориентиров — дисперсия ошибки карты рельефа).
На рис. 4.60, 4.61 приведены графики зависимости точности коррекции
ПНК ЛА от плотности ориентиров р при использовании одного изображения,
рассчитанные для следующих данных: Н = 5 км, F = 0,2 м, tg ф = 0,45, М =
= 1 : 25 000, 1 : 50 000, о0к = о0и = 0,2 мм, ок = 0,2 мм, oh~ = 5 м.
546
ох, м
Оу, м
ан,м
о , угл. сек.
oj, угл. сек.
о , угл. сек.
Рис. 4.60. Зависимость точности
коррекции ПН К ЛА от плотности
ориентиров при М = 1 : 25 000
ох, м о угл. сек.
Оу, м о^, угл. сек.
он, м о , угл. сек.
Рис. 4.61. Зависимость точности
коррекции ПН К ЛА от плотности
ориентиров при М = 1 : 50 000
Одновременное использование нескольких изображений существенно повы-
шает точность коррекции. Алгоритмы систем, использующих линейные ориен-
тиры, сводятся к выбору точечных ориентиров.
3. Стереоскопические навигационные системы
Возможность получения объемной картины наблюдаемой сцены по ее фотогра-
фическим изображениям досконально изучена в фотограмметрии (стереофотограм-
метрии) [100, 102]. Фотограмметрия является средством бесконтактного определе-
ния координат точек объекта, что обеспечивает ей практически неограниченные
возможности при картографировании территорий, строительстве и эксплуатации
инженерных сооружений [103], в космических исследованиях и пр. Помимо фото-
графических средств, снимок может быть получен и другими иконическими систе-
мами: телевизионными, инфракрасными, радиометрическими, радиолокационны-
ми, что существенно расширило область фотограмметрии; появились телевизион-
ная, радиолокационная и другие виды фотограмметрии [104]. С созданием мощных
вычислительных систем появилась возможность цифровой обработки информации
от различных иконических систем на движущемся объекте в реальном времени.
Идеи стереоскопических систем находят применение в навигации летатель-
ных аппаратов [97, 98, 105].
Законы построения изображения различными иконическими средствами
(кадровыми и панорамными аэрофотоаппаратами, телевизионными, инфракрас-
ными средствами, радиометрами, радиолокационными станциями) отличаются
один от другого. Но во всех случаях математические модели иконических средств
оказываются весьма точными, что позволяет решать разнообразные задачи, свя-
занные с обработкой изображений. Хотя дальнейшее изложение ориентировано
на иконические системы, создающие изображения по закону центральной про-
екции [100], который проявляется в том или ином качестве в любой оптико-элек-
тронной системе, содержащей оптический блок, большинство конечных резуль-
татов относится ко всем иконическим системам.
Из теории КЭСНН [52—54] известно, что беспоисковыми алгоритмами мо-
гут быть ликвидированы начальные отклонения, не превышающие первого
экстремума — максимума корреляционной функции. Аналогичным свойством
обладают и беспоисковые стереоскопические навигационные системы (СтНС).
547
В тех случаях, когда начальные ошибки навигационной системы могут
быть достаточно велики и возможна потеря работоспособности беспоиско-
вой СтНС, основанной на линеаризации уравнений наблюдения и исполь-
зующей калмановскую фильтрацию, необходимо применять новые алгоритмы
обработки, не имеющие ограничений на величину начальной ошибки навигаци-
онной системы. Эти алгоритмы связаны с идеей поиска правильного местополо-
жения ЛА.
Теоретической основой синтеза оптимальных алгоритмов поисковых СтНС
служит теория статических решений [93].
Блок-схема поисковой СтНС для рассматриваемого упрощенного варианта
показана на рис. 4.62, а. Рис. 4.62, б поясняет формирование гипотетического II
изображения стереопары. Опишем кратко математические преобразования, вы-
полняемые отдельными блоками.
Пусть на борту летательного аппарата измеряются значения координат, ско-
рости и угловой ориентации датчика.
Блоки памяти I, II хранят информацию о всех стереопарах изображений.
В последовательные дискретные моменты времени к — 1, к оптико-электронны-
ми (или радиолокационными) средствами фиксируются два изображения мест-
ности, имеющие значительную степень перекрытия. Множество значений {fljk}
записывается в блок памяти I с шагом 8. Второе изображение дискретизируется
по координатам х, у с шагом гораздо более мелким, чем 8, так, чтобы в дальней-
шем можно было е необходимой точностью управлять считыванием со второго
изображения в произвольной точке х, у. В блоке памяти II, хранящем информа-
цию о втором изображении, записывается массив {Д1^}.
Автоматический оптимизатор выполняет две функции: генерирование про-
веряемых гипотез Dpq о возможном местоположении ЛА и осуществление поиска
минимума функционалов по возможным гипотезам.
В блоке карты рельефа местности содержится цифровая карта рельефа h(X,
Y) в районе проведения стереонаблюдений. После того как сформирована гипо-
теза Dpq, для нее из блока карт извлекается массив значений рельефа {hijpq} в уз-
ловых точках местности Xijpq, , соответствующих узловым точкам I изобра-
жения. Этот массив подается в блок управления считыванием.
При управлении считыванием используются зависимости (4.114), (4.115) и
находится положение f)jpqk, y)jpqk узловых точек на II изображении, соответст-
вующее гипотезе Dpq. Именно в этих точках в блоке памяти II изображения счи-
тываются гипотетические величины облученностей f)jpqk (рис. 4.62, б).
В блок вычисления функционалов поступает множество {f)jk }, а также (для
проверяемой гипотезы Dpq) множество значений {f)jpqk} и по ним рассчитыва-
ется значение функционала Ipq, представляющее собой меру несовпадения для
проверяемой гипотезы облученностей I и II изображений стереопары. Значе-
ние I поступает в автоматический оптимизатор и хранится там. После расче-
та Ipq задается новая гипотеза и рассчитывается соответствующее ей значе-
ние функционала. При слепом поиске расчет функционалов осуществляется
для всех проверяемых гипотез, после чего определяется £>gv, для которой функ-
548
Стереопара
II изображение
Рис. 4.62. Блок-схема поисковой стереоскопической системы (а) и принцип действия
поисковой стереоскопической навигационной системы (б)
549
ционал / принимает наименьшее значение. Соответствующие этой гипотезе
координаты
%sn = rsn_^ ysii = r^sn_v£
принимаются за истинное положение летательного аппарата, здесь Д'*511, T*sn —
координаты ЛА, измеренные навигационной системой в момент записи II
изображения.
В теории стереоскопических навигационных систем [98, 105] получены сле-
дующие соотношения, определяющие среднеквадратические ошибки координат
оу, скорости , высоты <зн, курса 0^, тангажа о0 и крена оу:
_ _ 2 _ Гб V
°х °у HiS2 ф’ а/5 агаА, №tg3 <р’
_ /6 _ Гб Дс-
N 5 //tg^ ’ N 5 <5f<5h- //2tg^ ’
= = /з Др~
2 Oy,//2tg3 ф’ а/ 2 cy/Ptg3 ф’
0'- - - - - 'i - - -- “ - г 0 Г ~ - .
0,02 0,04 0,06 0,08 <з„. 0,02 0,04 0,06 0,08 а„
Рис. 4.63. Точность определения навигационных параметров
в продольном канале по одной стереопаре изображений
550
где A — шаг дискрета на местности разбиения координат Х3, У3, производимого в
рассматриваемых условиях сеткой равномерного разбиения первого изображе-
ния с шагом 8; ф — половина угла зрения оптической системы; ofr — диспер-
Гд2
сии градиентов оптического поля и поля рельефа, о = /772 + 2о^; —
дисперсия шума оптико-электронной системы; В — стереобаза наблюдения;
— дисперсия ошибки карты рельефа.
На величину дискретности А наложено лишь одно ограничение: дискрет-
ность должна быть не меньше радиуса корреляции ру оптического поля. Средне-
квадратические отклонения поля /(%, Y) и его градиента У) связаны при-
ближенным соотношением Оу = р/зр где ру — радиус корреляции поля f(X, У).
На рис. 4.63 приведены графики, иллюстрирующие относительную точность
оценивания координат в продольном (и боковом) каналах стереоскопической на-
вигационной системы при наблюдении одной стереопары и tg ф = 0,5, В/Н = tg ф,
Ру= 20 м, Су/ои = 3, = 5 м, А = 20 м в зависимости от высоты наблюдения Н и
градиента рельефа ; параметр а =
р/ А H\tg2 +
2Р/2
(ор)2'
Основные достоинства стереоскопической навигационной системы состоят
в ее высокой точности, независимости от временной нестабильности оптических
полей и использовании в качестве априорной информации карт рельефа мест-
ности, т. е. в отсутствие необходимости картографирования оптических полей.
Исследуется также возможность [105] использовать идеи стереофотограммет-
рии при распознавании наблюдаемых сцен по их яркостным и геометрическим
образам на основе информации, содержащейся в стереопаре изображений, зафик-
сированных оптико-электронной иконической системой. Необходимость распоз-
навания объемных картин наблюдаемых сцен встречается в самых разнообразных
технических применениях: картографировании местности по данным аэрокосми-
ческих наблюдений, навигации летательных аппаратов и роботов, разведке мест-
ности, расследовании катастроф и природных катаклизмов, экологии и пр.
4.8. Системы наведения на эталон цели1
В настоящее время мы являемся свидетелями рождения систем оружия с «ис-
кусственным интеллектом», обеспечивающих возможность без участия человека
(автономно) обнаруживать и распознавать цели с последующим их поражением
[106]. Применение таких систем оружия позволяет уберечь личный состав само-
летов от опасности непосредственного участия в боевых действиях и расширить
возможности боевых действий самолетов.
Первыми системами наведения, получающими информацию непосредствен-
но от цели, были системы самонаведения по контрастным целям. Датчик инфор-
мации обнаруживал цель по ее отражающим или излучающим сигналам на фоне
подстилающей поверхности и выдавал информацию о целях в систему управле-
ния ракеты. В качестве датчиков использовались телевизионные, тепловизион-
ные и радиолокационные системы.
В процессе развития систем вооружения появилась необходимость наведе-
ния с высокой точностью на неконтрастные цели. Точности навигационных
систем ракет, даже использующих системы высокоточной коррекции, не отвеча-
ли требованиям эффективности поражения заданных объектов. Поэтому потре-
бовалась разработка высокоточных систем наведения на неконтрастные цели
с использованием информации о «портрете» цели и прилегающей местности.
Такие системы принято называть СИСТЕМАМИ КОНЕЧНОГО НАВЕДЕНИЯ (СКН).
Наиболее перспективными системами конечного наведения являются системы
с использованием методов распознавания по эталону цели. Структурная схема
построения такой СКН представлена на рис. 4.64.
Инерциальная навигационная сис-
тема (ИНС) используется для вывода ра-
кеты в район цели и ориентации датчика
изображения ДИ в направлении на цель.
Координатор цели КЦ включает
датчик изображения с оптической осью,
ориентируемой и стабилизируемой в
пространстве по сигналам гиростабили-
затора ГС, и специализированный вы-
числитель СОРИ, реализующий алго-
ритмы обнаружения, распознавания, це-
леуказания и автосопровождения цели.
Блок фильтрации БФ производит
Рис. 4.64. Структурная схема СКН оптимальную обработку информации
В написании подраздела принимал участие Г. Т. Митряшкин.
552
для выдачи ее в блок формирования сигналов управления БФСУ для наведения
ракеты на конечном этапе наведения с помощью системы автоматического уп-
равления и стабилизации и ракеты САУ и С.
Функционирование рассматриваемой СКН может быть описано следующей
циклограммой:
• после выхода в район цели ракета выполняет маневр в вертикальной плос-
кости и переходит с маршевой высоты полета на заданную высоту, опреде-
ляемую условиями функционирования системы обработки и распознавания
изображения СОРИ;
• по информации от ИНС рассчитываются дальность до цели и углы ориента-
ции линии визирования ракета—цель, в соответствии с которыми осуществ-
ляется выставка оптической оси датчика изображения;
• в расчетной точке траектории по дальности формируется текущее изображе-
ние объекта поражения и района его расположения;
• осуществляется обработка текущего изображения, в результате которого
происходит обнаружение, распознавание объекта и выдача целеуказания для
заданной точки попадания на объекте. Целеуказание предполагает определе-
ние на ТИ координат точки прицеливания и запись эталонного изображения
(цифрового массива яркостных характеристик области ТИ, центрированного
относительно точки прицеливания), необходимого для последующего функ-
ционирования системы автоматического слежения за целью (автосопровож-
дение цели);
• переход в режим автосопровождения цели, заключающийся в организации
по сигналу от КЦ и ИНС автоматического слежения за точкой прицеливания
и формирования сигналов управления, пропорциональных компонентам уг-
ловой скорости линии визирования ракета—цель. В процессе режима авто-
сопровождения в КЦ происходит сравнение текущего изображения с эталон-
ным, полученным в результате обнаружения распознавания цели и выдан-
ным в процессе ЦУ. По мере сближения с целью эталонное изображение
периодически обновляется в связи с изменением масштаба изображения;
• в зависимости от типа и параметров датчика изображения, точностных ха-
рактеристик режима автосопровождения цели и ряда других факторов пред-
усмотрена возможность уточнения ЦУ за счет повторной реализации на тра-
ектории полета ракеты процедуры формирования, обработки и распознава-
ния текущего изображения объекта поражения и уточнение координат точки
прицеливания;
• по сигналам БФСУ осуществляется управление ракеты в горизонтальной
плоскости, по достижении заданной дальности до цели производится маневр
ракеты в вертикальной плоскости. После выполнения маневра наведение ра-
кеты на цель ведется в обеих плоскостях;
• в случае срыва АС управляющие сигналы формируются по информации от
БФ, в который поступает информация только от ИНС.
Ключевыми вопросами построения СКН являются:
• разработка бортовых информационных устройств;
• разработка методов и средств подготовки информационного обеспечения;
• решение алгоритмических проблем обработки изображений и распознава-
ния образов;
• разработка бортовых микроэлектронных вычислительных средств.
553
В качестве датчиков информации могут быть использованы пассивные инфор-
мационные устройства в видимом, инфракрасном и радиотепловом диапазонах, а
также активные информационные устройства на основе лазерных и радиолокаци-
онных локаторов миллиметрового диапазона. В настоящее время наиболее прора-
ботаны вопросы построения СКН с телевизионными датчиками информации.
Алгоритмы системы обработки изображения и распознавания образов должны:
• обеспечивать работоспособность при использовании лишь доступных (для
современных систем информационного обеспечения) данных и в условиях
априорной неопределенности об объектах и сцене в целом;
• быть достаточно помехоустойчивыми, т. е. обеспечивать требуемые характе-
ристики СОРИ в широком диапазоне условий изменчивости изображений
сцены, в условиях значительного зашумления изображений и потери части
полезной информации о сцене вследствие применения противником мер ин-
формационного противодействия;
• обладать достаточной простотой и допускать распараллеливание обработки
информации для их реализации с требуемым быстродействием на бортовом
специализированном вычислителе, выполненном на существующей эле-
ментной базе (или на элементной базе ближайшей перспективы) с допусти-
мыми весами, габаритами и энергопотреблением;
• обеспечивать решение поставленной задачи для широкой номенклатуры це-
лей и сцен рассматриваемого класса (наземные стационарные цели с извест-
ными координатами).
Таким требованиям удовлетворяют комбинированные структурно-статисти-
ческие алгоритмы обработки и распознавания изображений [107, 108], которые
реализуют:
• учет специфики объектов распознавания;
• учет специфики исходной априорной информации (высокая точность ин-
формации о размерах объекта, их взаимном расположении в плане, инфор-
мация о высоте объекта);
• учет специфики функционирования ракеты (ошибки выхода ракеты в район
цели существенно меньше дальности визирования цели, что позволяет ис-
пользовать для описания изображения объектов и сцен изображения в кар-
тинной плоскости, изображения на дальности распознавания лишены неиз-
вестных априори деталей изображений, что позволяет использовать для рас-
познавания объектов характеристики их формы);
• построение формального описания входных изображений как объектов рас-
познавания, содержащего структурную информацию, при получении кото-
рой учитывается иерархичность структуры сцен и объектов распознавания;
• выбор описания объектов распознавания и сцен с учетом надежности и про-
стоты выделения элементов этого описания из входных изображений;
• многоуровневый характер процесса распознавания.
Блок-схема алгоритма иерархической обработки и распознавания изображе-
ний содержит следующие операции:
1. Фильтрацию текущего изображения.
2. Построение контурного изображения (выделение непроизводных элемен-
тов [109].
3. Нахождение откликов от эталонных объектов.
4. Сборку суммарного отклика сцены.
5. Принятие решения.
554
Контурные изображения строятся по шести направлениям с помощью масок
следующего вида:
Величина отклика с помощью указанных масок получается по следующей
формуле:
5 10
ЛФИМ = | L Mj\,
где Mj — J-и элемент маски (интенсивность сигнала в данном пикселе отфильт-
рованного изображения).
После получения контурных изображений они бинаризуются. Величина по-
рога выбирается по гистограмме матрицы градиентов В^. Бинаризация осу-
ществляется по выбранному порогу с дальнейшей логической фильтрацией для
удаления отдельно стоящих точек. Отклики от эталонных объектов находятся пу-
тем сравнения их с бинаризованным контурным изображением и вычисления
матрицы сходства в определенной зоне поиска.
Величина зоны поиска определяется возможной неопределенностью положе-
ния точки прицеливания. Суммарный отклик сцены собирается из отдельных от-
кликов от эталонных объектов, которые переносятся в точку привязки прицельного
объекта в соответствии с матрицей взаимных расстояний между объектами. На ос-
нове суммарного отклика сцены формируется список кластеров. Если число клас-
теров более одного, вырабатывается сигнал отказа от распознавания. Если кластер
один, то координаты центра кластера выбираются в качестве точки прицеливания.
Перспектива создания высокоточных систем конечного наведения сущест-
венным образом зависит от возможности получения требуемой исходной инфор-
мации, важнейшими компонентами которой являются геометрические признаки
целей и прилегающих районов местности.
555
Современные аэро- и космические средства дистанционного получения ин-
формации на основе фотографической, оптико-электронной и радиолокацион-
ной аппаратуры позволяют с высокой оперативностью (в хороших погодных ус-
ловиях с задержкой от нескольких часов до нескольких суток) и детальностью (от
единиц и даже долей до первых десятков метров) получать данные о геометриче-
ских и частично отражательных свойствах земной поверхности и наземных объ-
ектов. Эта первичная информация для формирования эталонных признаков
должна быть с высокой точностью привязана к земной поверхности по совокуп-
ности выбранных опорных точек с известными координатами, откорректирована
с целью устранения геометрических и фотометрических искажений, вызванных
аппаратурными и методическими факторами при регистрации изображений, и
преобразована к виду, удобному для построения модели изображения, наблюдае-
мой системой наведения сцены (цифровой фотоплан, трехмерная модель и др.).
Создание моделей изображения, необходимых для формирования цифровых
эталонов, является частью общей проблемы синтезирования двумерных полей и
может осуществляться несколькими путями в зависимости от используемой ис-
ходной информации.
Основными из них являются:
• преобразование цифрового изображения на основе изменения фотометриче-
ских (контрастных) характеристик элементов местности и объектов при за-
данной геометрической структуре, условиях освещения и источников собст-
венного излучения (используется в случаях, когда исходный космо- или
аэрофотоснимок получен с направления, близкого к реализуемому в услови-
ях применения СКН);
• построение геометрической модели сцены наблюдения по трехмерной моде-
ли местности, включающей рельеф и объектовый состав, окрашивание эле-
ментов местности в соответствии с предполагаемыми отражательными (из-
лучательными) характеристиками, вычисление контрастов и проективное
преобразование в картинную плоскость датчика СКН для заданных условий
наблюдения и освещения.
Для создания трехмерных моделей местности по аэро- и космическим сним-
кам может использоваться достаточно грубое описание сцены: объекты, вклю-
ченные в сцену, имеют простую геометрическую форму (цилиндры, конусы, мно-
гогранники), мелкие детали и отражательные характеристики не учитываются.
Исходя из подобных данных в качестве эталонного объекта может приниматься
набор прямых линий, представляющих собой элементы проекции каркаса моде-
ли здания на картинную плоскость, контраст которых предполагается достаточ-
ным для работы датчика СКН.
По трехмерной модели местности строится изображение сцены района цели,
получаемое как бы из той расчетной точки, в которой будет находиться ракета в
момент распознавания. После этого изображение сцены тщательно анализирует-
ся для выявления наиболее характерных элементов. И наконец, линии контуров
подобных элементов включаются в эталонное описание.
Эталон состоит из нескольких отдельных эталонных объектов. Число таких
эталонных объектов может быть различным в зависимости от числа реальных
объектов, входящих в сцену.
В геометрической модели должна быть обеспечена возможность отбраковки
эталонов с направлений, экранируемых объектами, не относящимися к цели.
556
Перспективным направлением развития систем конечного наведения явля-
ется создание многоспектральных, многорежимных СКН, использующих инфор-
мацию от нескольких датчиков, принимающих информацию в различных спект-
ральных диапазонах.
Комплексная обработка информации от этих датчиков позволяет повысить точ-
ность и помехозащищенность и уменьшить ограничения по условиям применения.
О разработке таких систем в [110] имеются следующие сведения:
• разработан экспериментальный образец комбинированной тепловизион-
но-радиолокационной (ММ-диапазона длин волн) головки самонаведения
для управляемых средств поражения общего назначения, которая обеспечи-
вает наведение в неблагоприятных ночных условиях при наличии помех;
• для перспективных ПТУР разработана комбинированная ГСН с радиолока-
ционными и ИК-датчиками;
• для экспериментальной ПРР разработана комбинированная ГСН, имеющая
пассивный радиолокационный и тепловизионный каналы;
• для ПРР возможна разработка комбинированной ГСН с пассивным радио-
локационным и ИК-каналами.
Вопросы построения многоспектральных СКН также рассматриваются в [111]:
• приводятся сведения о макете комбинированной радиолокационно-тепло-
визионной головки самонаведения для легкой ПРР;
• приводятся сведения о разработке автономных систем наведения, в состав кото-
рых входят несколько средств обнаружения целей и устройство их комплекси-
рования. Главной задачей системы управления является автоматическое распоз-
навание целей и их уничтожение в заданном районе на территории противника;
• сообщается о проекте создания крылатой ракеты с установленной на ней
комбинированной тепловизионно-телевизионной ГСН. Ракета средней
дальности, система управления имеет ИНС, скомплексированную с прием-
ником глобальной спутниковой системы и системой коррекции по рельефу
местности. На конечном участке траектории управление ракетой произво-
дится от системы конечного наведения;
• есть данные о применении комбинированной ГСН в УР для поражения на-
земных особо важных целей. УР имеет навигационную систему с коррекци-
ей, а также ГСН для автоматического распознавания целей и ее захвата с
дальнейшим точным наведением на конечном участке траектории. ГСН име-
ет в своем составе РЛС ММ-диапазона и ИК-канал;
• приведены сведения о проекте ракеты, представляющей высокоточное ору-
жие большой дальности, которая на малой высоте с очень высокой точно-
стью автономно должна осуществлять обнаружение и сопровождение цели,
используя два источника информации (радиолокационный и инфракрас-
ный), на конечном участке траектории.
Аналогичные сведения имеются также в [112].
Наиболее перспективной на данном этапе развития элементной базы, а так-
же по своим массогабаритным характеристикам представляется комбинирован-
ная многоспектральная СКН, основанная на телевизионном, тепловизионном,
радиолокационном (трехмиллиметровом диапазоне длин волн) датчиках инфор-
мации. Информационное обеспечение таких СКН может быть аналогичным ин-
формационному обеспечению телевизионных (односпектральных) СКН (космо-
фотоснимки, топографические карты, каталоги соответствующих характеристик
целей и подстилающих поверхностей).
557
Список литературы к разделу 4
1. Боевые самолеты ВВС России. — Авиация и космонавтика вчера, сегодня, завтра,
№ 8, 1999.
2. Зуенко Ю., Коростелев С. Боевые самолеты России. Справочник. — М.: Эла-
кос, 1994.
3. Боевая авиационная техника. Авиационное вооружение. Учебное пособие для слу-
шателей высших военных заведений / Под ред. Д. И. Гладкова. — М.: Военное изда-
тельство, 1987.
4. Государственный научный центр Российской Федерации. Государственный науч-
но-исследовательский институт авиационных систем. 1946—1996 годы. Очерки истории/
Под ред. академика Е. А. Федосова. — М.: Научно-информационный центр ГосНИИАС,
1996.
5. Постников А. Г., Чуйко В. С. Внешняя баллистика неуправляемых авиацион-
ных ракет и снарядов. — М.: Машиностроение, 1985.
6. Дымова А. И., Альбац М. Е., Бонч-Бруевич А. М. Радиотехнические систе-
мы. — М.: Сов. радио, 1975.
7. Научно-технический сборник НИИАС, 1988, № 2(277).
8. Наслен П., Рауль Ж. Непрерывные и импульсные модели человека-оператора,
как звена цепи управления. — Доклад. II Международный конгресс ИФАК, 1963.
9. Беки Дж. Человек-оператор в системах управления. Современная теория систем
управления / Под ред. К. Т. Леондеса. — М.: Ин. литература, 1956.
10. Горчаков Г И., Исаков А. А., Свириденков А. А. Анализ корреляционных
связей между коэффициентом направленного светорассеяния и коэффициентом рассея-
ния. В кн. I: Всесоюзное Повешение по атмосферной оптике, с. 206—210. — Томск: ИОА
СО АН СССР, 1976.
11. Семенов С. С., Харчев В. Н. Ударная авиация России. Ч. 2. Управляемое авиа-
ционное оружие класса «воздух—поверхность». — М.: ГНПП «Регион», 2003.
12. Зуев В. Е. Распространение видимых и инфракрасных волн в атмосфере. — М.:
Сов. радио, 1971.
13. Иванов А. П. Оптика рассеивающих сред. — Минск: Наука и техника, 1969.
14. Иванов А. П., Кожевников А. И., Корнеев В. С. и др. Исследование про-
странственного распределения коэффициента обратного рассеяния на высотах до
10 км. — В кн. IV: Всесоюзный симпозиум по лазерному зондированию атмосферы. —
Томск: ИОА СО АН СССР, 1976.
15. Орлов В. М., Самохвалов И. В., Матвиенко Г. Г, Белов М. Л., Кожев-
ников А. И. Элементы теории светорассеяния и оптическая локация. — Новосибирск:
Наука, 1982.
16. Родионов Б. И., Новичков Н. Н. Крылатые ракеты в морском бою. — М.: Во-
енное издательство, 1987.
17. Федосов Е. А. Полвека в авиации. Записки академика. — М.: Дрофа, 2004.
18. Энциклопедия современного оружия и боевой техники. Т. 1.— СПб.: Полигон
ACT, 1997.
19. Lainiotis D. G., Park S. U. On point Detection Estimation and System Identifica-
tion Discrete Data Case, International Journal Control, vol. 17, no 3, 1973.
20. Гроп Д. Методы идентификации систем. — М.: Мир, 1979.
21. Богуславский И. А. Прикладные задачи фильтрации и управления. — М.: Нау-
ка, 1983.
22. Тихонов В. И., Миронов В. А. Марковские процессы. — М.: Сов. радио, 1977.
23. Тихонов В. И., Кульман Н. К. Нелинейная фильтрация и квазикогерентный
прием сигналов. — М.: Сов. радио, 1975.
24. Логинов В. П., Устинов Н. Д. Приближенные алгоритмы нелинейной фильт-
рации. — Зарубежная радиоэлектроника, 1975, № 2; 1976, № 3.
558
25. Богуславский И. А. Методы навигации и управления по неполной статистиче-
ской информации. — М.: Машиностроение, 1970.
26. Авиационные системы научно-технической информации 2001/3. — М.: Науч-
но-информационный центр ГосНИИАС.
27. Авиационная техника на международных авиасалонах, ГосНИИАС, 1996.
28. Авиационная техника на международных авиасалонах, ГосНИИАС, 1998.
29. Авиационные системы научно-технической информации 2001/2. — М.: Науч-
но-информационный центр ГосНИИАС.
30. Авиационная и ракетная техника на международных авиационно-космических
салонах, 1999.
31. Авиационные системы научно-технической информации 2001/4—5. М.: Науч-
но-информационный центр ГосНИИАС.
32. Разработка алгоритмов помехозащиты радиолокационных пеленгаторов, обеспе-
чивающих эффективное наведение беспилотных летательных аппаратов (БПЛА), рабо-
тающих в условиях внешних воздействий, маскирующих направление прихода сигналов.
Отчет о научно-исследовательской работе. — М.: Научно-информационный центр.
ГосНИИАС, 2001.
33. Труды четвертой Всероссийской научно-практической конференции. Воен-
но-морской флот России. — СПб., 2001.
34. Карпенко А. В., Ганин С. М. Бастион. Военно-технический сборник. — СПб.,
2000.
35. Тактико-технические характеристики ракет Х-31 А, Х-35, представленные ГНПЦ
«Звезда-Стрела» на Московском авиационно-космическом салоне (МАКС).
36. Авиация ПВО России и научно-технический прогресс / Под ред. академика
Е. А. Федосова. - М.: ГосНИИАС, 2001.
37. Экспресс-информация, 2001, № 45—46.
38. Проектирование систем наведения / Под ред. Б. А. Федосова. — М.: Машино-
строение, 1975.
39. Кринецкий К. И. Системы самонаведения. — М.: Машиностроение, 1970.
40. Федосов Е. А., Инсаров В. В., Селивохин Ю. С. Системы управления конеч-
ным положением в условиях противодействия среды. — М.: Наука, 1989.
41. Aviation Week, 1975—1990.
42. Мальчин А. С. Управление огнем зенитных ракетных комплексов. — М.: Воен-
ное издательство, 1971.
43. Караваев В. В., Сазонов В. В. Статистическая теория пассивной локации. —
М.: Радио и связь, 1987.
44. Военная операция НАТО «Союзническая сила» против Югославии. Аналитиче-
ский обзор по материалам зарубежной информации. — М.: Научно-информационный
центр, ГосНИИАС, 2000.
45. Кондратьев В. С., Котов А. Ф., Марков Л. Н. Многопозиционные радио-
технические системы. — М.: Радио и связь, 1986.
46. Экспресс-информация, 2001, № 43—44.
47. Экспресс-информация, 2001, № 42.
48. Муравьев Г. Ф. Статистический эквивалент пеленгатора при неполном пара-
метрическом разрешении сигналов. Труды ГосНИИАС. — Вопросы авионики, 2000,
вып. 3(7).
49. Белоглазов И. Н., Вершинский А. В. Корреляционно-экстремальные и бесплат-
форменные системы навигации КЛА // Исследование космического пространства. Т. 3. —
М.: ВИНИТИ, 1972.
50. Тарасенко В. П. Проблемы синтеза и анализа корреляционно-экстремальных
систем, I. — В кн.: Адаптивные автоматические системы / Под ред. Г. А. Медведева. —
М.: Сов. радио, 1972.
559
51. Белоглазов И. Н. Проблемы синтеза и анализа корреляционно-экстремальных
систем. Т. II. — В кн.: Адаптивные автоматические системы /Под ред. Г. А. Медведе-
ва. — М.: Сов. радио, 1972.
52. Белоглазов И. Н., Тарасенко В. П. Корреляционно-экстремальные системы. —
М.: Сов. радио, 1974.
53. Красовский А. А., Белоглазов И. Н., Чигин Г. П. Теория корреляционно-
экстремальных навигационных систем. — М.: Наука, 1979.
54. Белоглазов И. Н., Джанджгава Г. И., Чигин Г. П. Основы навигации по
геофизическим полям / Под ред. А. А. Красовского. — М.: Наука, 1985.
55. Dickey F. R., Craig S. Е. Bi-static correlation radar for velocity sensing in space-
craft. — AIAA Guidance and Control Conference 1963, Massachusetts Institute of Technology.
56. Красовский А. А. Динамика непрерывных самонастраивающихся систем. — М.:
Физматгиз, 1963.
57. Белоглазов И. Н. Нелинейные эффекты в экстремальных корреляционных сис-
темах. — В кн.: Поиск экстремума. — Томск: Изд. ТГУ, 1969.
58. Белоглазов И. Н. Ликвидация больших начальных отклонений в экстремальных
корреляционных системах. — В кн.: Поиск экстремума. — Томск: Изд. ТГУ, 1969.
59. Джанджгава Г. И., Кичигин Г. Г. Управление статической характеристикой
корреляционной СЭР. — В кн.: Поиск экстремума. — Томск: Изд. ТГУ, 1969.
60. Миддлтон Д. Введение в статистическую теорию связи. Т. 1. — М.: Сов. радио,
1961.
61. Чигин Г. П. Моделирование оптимальной корреляционно-экстремальной систе-
мы. — Изв. АН СССР. Сер. Техническая кибернетика, 1978, № 2.
62. Красовский А. А., Чигин Г. П. Сопоставление рекуррентных алгоритмов бес-
поисковых КЭНС. — Изв. АН СССР. Сер. Техническая кибернетика, 1981, № 4.
63. Белоглазов И. Н. Рекуррентно-поисковые алгоритмы оценивания. — ДАН СССР,
1977, т. 236, №2.
64. Klass Ph. J. New guidance technique being tested. — Aviation Week and Space Tech-
nology, 1974, vol. 100, no. 8.
65. Красовский А. А., Джанджгава Г. И., Чигин Г. П. Синтез комплексных
систем оценивания высоты. — В кн.: Научно-методические материалы по исследованию
алгоритмов корреляционно-экстремальных систем / Под ред. И. Н. Белоглазова. — М.:
ВВИА им. Н. Е. Жуковского, 1975.
66. Rainwater J. Н. Radiometers: electronic eyes that «See» noise. — Microwaves, 1978,
vol. 17, no. 9.
67. Flexible 10C dates key in new pentagon weapon management philosophy. — Aerospace
Daily, 1974, vol. 65, no. 13.
68. Develet J. A. Pervomance of a synthetic-aperture mapping radar system. — IEEE
Transactions on Aerospace and navigational electronics, 1964, vol. ANE-11, no. 3.
69. James L. Map-maching estimation using range-scan radar images. — NAECON 74,
vol. 1.
70. Семенов H. M., Яковлев H. И. Цифровые феррозондовые магнитометры.—
Л.: Энергия, 1978.
71. Михлин Б. 3., Селезнев В. П., Селезнев А. В. Геомагнитная навигация. — М.:
Машиностроение, 1976.
72. Бровар В. В., Магницкий В. А., Шимбирев Б. П. Теория фигуры Земли. —
М.: Геодезиздат, 1961.
73. Frey Е. J., Harlan R. В. Design configuration and error, analysis stady of an airborne
gravimetric systems. — AESWC-TR-77-6, Massachusetts Institute of Technology, April 1971.
74. Paik H. J. Spacebome superconducting gravity gradiometr for mapping the Earths
gravity field. — IGARSS 81, New York.
75. Винц Б. Д., Почтарев В. И., Рахматулин Р. П. Методика расчета магнит-
ного поля Земли вверх в приземном пространстве. — Геомагнетизм и аэрономия, 1970,
т.Х, № 1.
560
76. Elson В. M. Radiometric-map guidance aid tested. — Aviation Week and Space Tech-
nology, 1976, vol. 104, no. 14.
77. Moskowitz S. Terminal guidance by pattern recognition — a new approach. — IEEE.
Transaction on Aerospace and Navigational Electronics, 1964, vol. ANE-11, no. 4.
78. The technological guts of the 1500-mile navy strategis cruise missile. — Ocean Science
News, 1974, vol. 16, no. 25.
79. Иванов M. M. Магнитные съемки океанов. — M.: Наука, 1966.
80. Лозинская Л. М., Ямаев И. Л. Опытные аэрогравиметрические измерения над
Каспийским морем. — ДАН СССР, 1970, т. 103, № 1.
81. Morony G. Some computing technigues for storage, retrieval and interpretation of
gravimetric data. — APEA Journal, 1975, vol. 15, no. 1.
82. 7.34 Internal navigational system for research of the Earth’s mangetic field. — Interavia
Air Letter, 1973, no. 7707.
83. Klass Ph. J. Analysis pinpoints changes. — Aviation Week and Space Technology,
1975, vol. 102, no. 21.
84. Самолетная импульсно-доплеровская радиолокационная станция картографиро-
вания с мгновенным построением изображения. — Патент США, кл. 343-9, № 3.228.028,
опубл. 04.01.1966.
85. Caron R. Н., Simon К. W. Attitude time-series estimator for rectification of space-
borne imagery. — Journal of Spacecraft and Rockets, 1975, vol. 12, no. 1.
86. Сафронов Л. Многоспектральная съемка местности. — Зарубежное военное
обозрение, 1977, № 2.
87. Харкевич А. А. Борьба с помехами. — М.: Наука, 1965.
88. Красовский А. А. Оптимальная фильтрация в теории корреляционно-экстре-
мальных систем. — Изв. АН СССР. Сер. Техническая кибернетика, 1976. № 3.
89. Белоглазов И. Н. Оптимальная фильтрация в корреляционно-экстремальных
системах, использующих изображения местности. — Изв. АН СССР. Сер. Техническая ки-
бернетика, 1977, № 2.
90. Баклицкий В. К, Юрьев А. Н. Корреляционно-экстремальные методы нави-
гации. — М.: Радио и связь, 1982.
91. Баклицкий В. К., Бочкарев А. М., Мусьяков М. П. Методы фильтрации
пространственно-временных сигналов. — М.: Радио и связь, 1986.
92. Справочник по теории автоматического управления / Под ред. А. А. Красовско-
го. — М.г Наука, 1987.
93. Амиантов И. Н. Избранные вопросы статистической теории связи.— М.:
Сов. радио, 1971.
94. Белоглазов И. Н., Ермилов А. С., Карпенко Г. И. Рекуррентно-поисковое
оценивание и синтез алгоритмов корреляционно-экстремальных навигационных систем. —
Автоматика и телемеханика, 1979, № 7.
95. Белоглазов И. Н., Ермилов А. С. О возможности использования рекуррент-
но-поискового оценивания для коррекции инерциальных систем по полю рельефа. —
Приборостроение, 1981, № 1.
96. Химмельблау Д. М. Прикладное нелинейное программирование. — М.: Мир,
1975.
97. Белоглазов И. Н. Автоматизация процесса стереофотограмметрической обра-
ботки//Автоматизация процессов сбора и обработки информации.— М.: ВВИА
им. Н. Е. Жуковского, 1982.
98. Белоглазов И. Н., Казарин С. Н. Стереоскопическая навигационная система. —
Изв. АН РФ. Сер. Теория и системы управления, 1997, № 6.
99. Указание по фотограмметрической обработке материалов воздушного фотографи-
рования для составления фотопланов. — М.: Наука, 1979.
100. Лобанов А. Н. Фотограмметрия. — М.: Недра, 1984.
561
101. Белоглазов И, Н., Нассар М. Ф. Топографический ориентирный метод кор-
рекции навигационных систем и определения координат наблюдаемых объектов с по-
мощью иконических систем наблюдения. — Тр. ГосНИИАС, 2002.
102. Скиридов А. С. Стереофотограмметрия. — М.: Геодезиздат, 1959.
103. Рапасов П. Н. Стереофотограмметрия для целей картографирования и реше-
ния инженерных задач. — М.: Недра, 1979.
104. Аковецкий В. Г. Цифровая стереофотограмметрия. — Новый инструмент топо-
геодезического обеспечения боевых действий войск. — В кн.: Исторические очерки. — М.:
изд. 29 НИИ МО РФ, 2001.
105. Beloglasov I. N., Kazarin S. N. Stereoscopic Navigation and Observation Sys-
tem. — 6-th St. Petersburg International Conf, on Integrated Navigation Systems. St. Petersburg,
Russia, 24—26 may 1999.
106. Высокоточное оружие класса «воздух—поверхность» на рубеже веков. — Науч-
но-техническая информация «Авиационные системы», 2000, № 5.
107. Ковалевский В. А. Локальные и глобальные решения в распознавании
изображений. — ТИИЭР, 1979, т. 67, № 5.
108. Павлидис Т. Иерархические методы в структурном распознавании образов. —
ТИИЭР, 1979, т. 67, № 5.
109. Розенфельд А. Распознавание и обработка изображений. — М.: Мир, 1972.
110. Перспективы развития авиационного высокоточного оружия зарубежных стран. —
Научно-техническая информация «Авиационные системы», 1992, № 11.
111. Перспективные системы наведения авиационного управляемого оружия стран
НАТО. — Научно-техническая информация «Авиационные системы», 1993, № 6.
112. Экспресс-информация «Зарубежные авиационные системы», 1992, № 11, 15, 43;
1994, №38; 1995, № 13, 14.
раздел
НАУЧНО-ТЕХНИЧЕСКИЙ ПРОГРЕСС
В ОСНОВНЫХ ИНФОРМАЦИОННО-
УПРАВЛЯЮЩИХ СИСТЕМАХ
АВИАЦИОННЫХ УДАРНЫХ
КОМПЛЕКСОВ
В данном разделе представлены материалы по
основным информационным подсистемам, обеспе-
чивающим получение информации о целях в различ-
ных диапазонах спектра или о координатах цели, а
также о средствах обработки и реализации этой ин-
формации. Тема научно-технического прогресса в
авиационном приборостроении настолько интерес-
на и обширна, что может послужить материалом для
целой книги.
5.1. Архитектура авионики1
Средства обработки информации и организация информационного обмена
практически определяют архитектуру бортового радиоэлектронного оборудова-
ния (авионику) самолета. По мере совершенствования средств вычислительной
техники (СВТ) изменяется и архитектура авионики. При этом основная тенден-
ция развития состоит в постепенном переходе от аналоговой авионики, характер-
ной для военных самолетов 1940—1950-х годов, к цифроаналоговой и полностью
цифровой авионики для самолетов 4-го поколения и к цифровой интегрирован-
ной авионики самолетов нового поколения, которые планируется принять на во-
оружение в текущем десятилетии.
5.1.1. АВИОНИКА ПЕРВОГО ПОКОЛЕНИЯ
Первое поколение авионики (40—50-е гг. прошлого столетия) — это анало-
говая авионика с отдельными и в основном независимыми функциональными
подсистемами на базе аналоговых вычислителей (рис. 5.1). Каждая из подсистем
имела свои датчики, исполнительные устройства и индикаторы. Межсоединения
(если таковые использовались) были реализованы по типу соединений «точка с
точкой». Вычислительная система как таковая отсутствовала, комплексная обра-
ботка информации не обеспечивалась.
5.1.2. АВИОНИКА ВТОРОГО ПОКОЛЕНИЯ
Второе поколение авионики (начало 60-х — середина 70-х годов прошлого
столетия) — это цифроаналоговая авионика. Она характеризуется появлением в
составе бортового оборудования самолетов цифровых вычислительных машин,
которые по мере совершенствования характеристик (повышения вычислительно-
го потенциала и надежности, снижения веса и энергопотребления) практически
вытеснили аналоговые вычислители. Представление об авионике второго поко-
ления дает структура гипотетической бортовой вычислительной системы (БВС),
приведенная на рис. 5.2.
При построении бортовых вычислительных систем наряду с каналами пере-
дачи аналоговых данных началось использование радиальных каналов для пере-
дачи последовательных цифровых кодов. Эти каналы были организованы в соот-
1 В написании подраздела принимал участие И. И. Копошилко
565
Рис. 5.1. Аналоговая авионика:
Д|—Дш — датчики, ABj...AB„ —
аналоговые вычислители, Ир..ИЛ —
индикаторы, пульты, ИУр..Не-
исполнительные устройства
Рис. 5.2. Цифроаналоговая авионика:
Др..Д„ — датчики, АВр.ЛВ" —
аналоговые вычислители, ИР..Ие —
индикаторы, пульты, ИУр..Не-
исполнительные устройства
ветствии с требованиями Arinc429 в зарубежных разработках и ГОСТ 18977—
79 — в отечественных. В рамках второго поколения авионики создавались как
централизованные, так и федеративные цифроаналоговые ВВС.
В ВВС с централизованной организацией структуры БЦВМ использовалась
в качестве центрального вычислительного устройства, которое решало задачи,
обобщая информацию, поступающую от периферийных вычислителей (которые
первоначально были в основном аналоговые) и датчиков. Для взаимодействия
БЦВМ со своими абонентами использовались аналоговые каналы. По мере заме-
ны аналоговых вычислителей цифровыми и разработки датчиков с цифровым
выходом одновременно с аналоговыми каналами использовались радиальные
цифровые каналы. Примером централизованных систем может служить ВВС
штурмовика A-7D, разработанная в США в середине 1960-х годов с использова-
нием БЦВМ 4pi/TC-2 фирмы IBM.
В федеративной ВВС для выполнения основных функций образовывались
подсистемы, структуру каждой из которых составляла центральная БЦВМ и пери-
ферийные аналоговые вычислители. Для взаимодействия БЦВМ между собой ис-
пользовались цифровые радиальные каналы передачи последовательных кодов,
связь с датчиками и периферийными вычислителями внутри подсистемы произво-
дилась в основном по аналоговым каналам. Примером федеративных Б ВС может
служить вычислительная система стратегического бомбардировщика США FB-111,
разработанная тогда же. В составе БВС использованы две БЦВМ 4pi/CP-2 фирмы
IBM с общим устройством ввода-вывода (одна машина для решения задач навига-
ции, вторая для управления вооружением), а также БЦВМ D26j-41 в системе инер-
циальной навигации и БЦВМ в системе управления оптическим прицелом.
5.1.3. АВИОНИКА ТРЕТЬЕГО ПОКОЛЕНИЯ
Третье поколение авионики (начиная с середины 1970-х гг.) — это цифровая
авионика, которая характеризуется построением иерархических федератив-
но-централизованных БВС. Верхний уровень этих БВС образуют одна или не-
сколько БЦВМ общего назначения (БЦВМ-OH), которые решают задачи обще-
комплексного характера (наведение и пуск ракет, бомбометание, управление пото-
ками информации, комплексом, самолетом) на основе обобщения информации от
566
Рис. 5.3. Структура гипотетической федеративно-централизованной БВС
нескольких подсистем нижнего уровня. Нижний уровень БВС образуют подсисте-
мы, в которых для решения задач требуется информация от одного источника (об-
работка сигналов РЛС и т. п.) или от нескольких функционально близких источ-
ников (навигационная подсистема и т. п.). Основой архитектуры иерархических
федеративно-централизованных БВС являлись мультиплексные каналы с про-
пускной способностью 1 Мгбит/с, по которым БЦВМ верхнего уровня взаимодей-
ствовали с подсистемами нижнего уровня, по ним под управлением БЦВМ-ОН
производился обмен информацией между подсистемами нижнего уровня. Подсис-
темы нижнего уровня могут быть построены как на основе локального мульти-
плексного канала, так и с использованием радиальных каналов передачи последо-
вательных кодов. В первых БВС на нижнем уровне допускалось использование
аналоговых подсистем, которые подключались к мультиплексному каналу через
специальное оконечное устройство. Структура гипотетической федератив-
но-централизованной БВС приведена на рис. 5.3.
В качестве примера подобных БВС можно указать вычислительные системы
таких самолетов, как Bl-А и В1-В. Верхний уровень БВС самолета Bl-А образу-
ется тремя БЦВМ-ОН SKC-2070 фирмы Singer и запоминающим устройством
большой емкости. Первая машина является центральной в навигационном,
вторая — в ударном, третья — в оборонительном комплексах. Для получения ин-
формации, необходимой для решения этих задач, используется резервированный
мультиплексный канал AMUX. На верхнем уровне решаются также задачи конт-
роля и управления электроснабжением, при этом для получения необходимой
информации используются мультиплексные каналы CMUX и EMUX.
Верхний уровень БВС самолета В1-В имеет восемь унифицированных
БЦВМ общего назначения АР-101 F (фирма IBM) и запоминающее устройство
большой емкости. Первая машина является центральной для навигационного
комплекса, вторая и третья машины предназначены для обработки данных РЛС в
режиме следования рельефу, четвертая — решает задачи управления вооружени-
ем, пятая — задачи индикации в ударном и оборонительных комплексах, шес-
тая — является резервной для ударного комплекса, седьмая — решает задачи в
интегрированной системе контроля, восьмая — задачи РЭП. В подсистемах ниж-
него уровня используется примерно 30 БЦВМ и встраиваемых процессоров,
обеспечивающих обработку сигналов и данных. БЦВМ-ОН верхнего уровня БВС
взаимодействуют с подсистемами нижнего уровня (и между собой) по мульти-
плексным каналам, которые регламентированы стандартом MIL-STD-1553B.
567
Разрабатываемые в США с начала 1970-х гг. вычислительные системы прак-
тически всех военных самолетов построены с использованием мультиплексных
каналов по MIL-STD-1553В, а ранее разработанные БВС тех самолетов, которые
планировалось использовать до 2010 г. (например FB-111), были соответствую-
щим образом модернизированы.
В научно-техническом плане разработка авионики военных самолетов США и
стран НАТО и прежде всего бортовых вычислительных систем поддержана резуль-
татами исследований, полученными в процессе выполнения таких программ, как
«DAIS (Digital Avionics Information System)», «Pave Pillar», «Pave Расе» и ряда других.
Программа DAIS завершилась разработкой стандартной мультиплексной
шины передачи данных (стандарт MIL-STD-1553B), стандартной архитектурой
процессора обработки данных (стандарт MIL-STD-1750A) и языка «Джовиал».
Полученные результаты трудно переоценить, так как они определили построение
вычислительной системы самолетов на основе мультиплексной шины передачи
данных, которая была реализована практически на всех самолетах МО США, в
том числе и на В-1В. Программа DAIS ознаменовала собой коренной переход от
аналоговых систем к федеративно-централизованным цифровым БВС с мульти-
плексированной системой передачи данных.
В рамках программы Pave Pillar было разработано относительно небольшое
семейство общих модулей бортового электронного оборудования на основе сверх-
быстродействующих интегральных схем (VHSIC), разработана технология сетевой
высокоскоростной передачи данных на основе волоконно-оптических линий свя-
зи (ВОЛС) со скоростью 50 мгбит/с. Кроме того, полученные результаты можно
рассматривать как предпосылку для перехода к сетевым архитектурам БВС.
Программы, аналогичные DAIS и Pave Pillar, в СССР и позднее в РФ не вы-
полнялись. Проводились исследования отдельных частных проблем, возникав-
ших, как правило, в процессе разработки структуры БВС для конкретного из-
делия. Работы проводились практически без должной координации и в боль-
шинстве случаев не имели поддержки со стороны элементной базы. В силу
сложившихся традиций при комплексировании БВС использовался морально ус-
таревший подход, принятый еще в эпоху аналоговой техники. Все это определи-
ло отставание разработок как минимум на одно поколение от мирового уровня.
Разработка научно-технических основ комплексирования БВС проводилась
практически одним ГосНИИАС, который, в частности, теоретически детально
проработал магистрально-модульную архитектуру БВС на базе низкоскоростного
мультиплексного канала с пропускной способностью в 1 Мбит/с. Эта архитекту-
ра в настоящее время может быть широко использована при проведении модер-
низации КБО летательных аппаратов, так как она по сравнению с архитектурами,
которые находятся в эксплуатации, бесспорно, имеет ряд существенных преиму-
ществ. Однако проведенный ГосНИИАС анализ показал, что подобные БВС сис-
темно ориентированны, а их вычислительный ресурс раз и навсегда распределен
между информационными каналами комплекса в аппаратно реализованных под-
системах. В силу этого они являются детерминированными и принципиально не
могут обеспечить требуемые качества КБО ЛА нового поколения.
В ГосНИИАС обоснована необходимость создания БВС с функционально
ориентированной архитектурой, организованной по типу интегрированной вы-
числительной среды (ИВС), в которой изначально отсутствует жесткое распреде-
ление средств вычислительной техники по информационным каналам КБО и нет
никаких аппаратно реализованных подсистем.
568
5.1.4. АВИОНИКА ЧЕТВЕРТОГО ПОКОЛЕНИЯ
Разработка интегрированной цифровой авионики (авионики четвертого по-
коления), использование которой ориентировано на период после 2005 г., нача-
лась в США на рубеже 1990-х гг. Для этого поколения характерно, что наряду с
интеграцией цифровой части авионики проводится интеграция сенсорной части
(интеграция датчиков), которая является доминирующей в конечной стоимости,
массогабаритных характеристиках, потребляемой мощности и надежности ави-
оники. Кроме того, при разработке систем этого поколения большие усилия на-
правляются на улучшение сетевого взаимодействия вычислительных средств,
внедрение оптических высокоскоростных переключательных сетей и построение
на их основе суперкомпьютеров.
Ключевым моментом в этой архитектуре является использование централи-
зованной высокоинтегрированной открытой масштабируемой вычислительной
среды — высокопроизводительной вычислительной системы (сетевой архитекту-
ры), построенной на специально спроектированных бортовых супер- и мульти-
процессорах и единой унифицированной сети передачи данных.
При построении вычислительной среды ориентация делается на применение
отработанных коммерческих интерфейсов и компонент. В качестве физической
среды передачи информации предполагается использовать волоконно-оптиче-
ские каналы, что не только обеспечивает высокие скорости передачи данных, но
и повышенную надежность передачи информации. Ориентация на использова-
ние в вычислительной среде перспективных самолетов высокопроизводительных
мультипроцессоров, построенных на основе последних достижений в области
коммутирующей аппаратуры и обеспечивающих любую функциональную обра-
ботку (обработку сигналов, изображений, реализацию алгоритмов искусственно-
го интеллекта и т. д.), сделана в силу того, что практически нет другого пути обес-
печения требуемых ресурсов для решения задач на борту таких самолетов. Объ-
единение матричных коммутаторов с высокоскоростными последовательными
шинами позволяет получить высокопроизводительные системные соединения,
обеспечивающие создание высокопроизводительных вычислительных сред с тре-
буемыми ресурсами за счет большой масштабируемости. В отличие от систем на
основе параллельной шины в этой архитектуре проще добавлять и удалять вы-
числительные модули. Кроме того, данная архитектура позволяет добиться высо-
ких показателей надежности за счет поддержки горячего резерва переключающей
структуры, динамической конфигурируемости при отказах в модулях, резервиро-
вания линий связи, использования различных механизмов защиты и т. д.
Одной из ключевых проблем построения перспективных бортовых средств
вычислительной техники является решение проблемы перехода к унифицирован-
ному протоколу взаимодействия и построению на его основе унифицированной
бортовой сети. Унифицированная сеть (Unified Network-UK) будущей авионики
в общем случае должна обеспечивать высокую скорость передачи информации,
малую задержку, проводить как передачу сообщений, так и парадигму вычисле-
ний с использованием разделяемой памяти, должна быть масштабируемой, под-
держивать распределенные и централизованные переключатели, электрические и
оптическую среды передачи информации, обеспечивать передачу информации на
большие расстояния, проводить вычисления в реальном времени и должна отли-
чаться невысокой стоимостью. Наиболее очевидными кандидатами для постро-
ения унифицированной сети стали такие интерфейсы, как Fibre Channel (FC),
569
Myrinet, Scalable Coherent Interface (SCI/RT), Serial Express, Gigabit Ethernet (GE),
ATM, Firewire (1394). Рассматривается также возможность использования сетево-
го интерфейса AS-4074. Четыре из них уже имеют коммерчески доступные эле-
менты технических реализаций: SCI/RT (IEEE Р. 1596.6 SCI for Real-Time Applica-
tions), Fiber Channel, ATM, Myrinet. Наиболее подходящими системами для по-
строения унифицированной сети являются интерфейсы SCI/RT, FC.
ИНТЕРФЕЙС SCI/RT отличает высокая производительность (до 8 Гбит в секун-
ду), гибкость при проектировании различных топологий (структур) вычислитель-
ных средств, масштабируемость. Он поддерживает как проводную, так и опти-
ческую среды передачи информации, параллельный и последовательный спосо-
бы передачи данных, пригоден для реализации вычислений в реальном масштабе
времени как в режиме передачи сообщений, так и вычислений в режиме разде-
ления памяти, является удобным средством для построения толерантных архи-
тектур.
ИНТЕРФЕЙС FC по своим возможностям ни в чем не уступает SCI/RT, но су-
щественно превосходит последний в плане аппаратной (элементной) поддержки
различными производителями, наличия авиационного стандарта, практического
использования, включая положительный опыт его применения при выполнении
программы MAST (Maritime Avionics Subsystems and Technologies), продемонстри-
ровавшей, как от федеративной архитектуры авионики существующих самолетов
можно перейти к передовой, открытой, масштабированной авионике на основе
максимального использования коммерческих компонент, имеющихся на рынке.
Использование единого унифицированного интерфейса позволит существенно
сократить число используемых контактов (что существенно влияет на надеж-
ность), число модулей-мостов, необходимых при применении различных сетей
передачи информации.
5.1.5. ЭВОЛЮЦИЯ СТРУКТУРЫ БВС
Безопасность полета, эффективность выполнения поставленного задания,
эксплуатационная пригодность и ряд других, не менее важных качеств ЛА в зна-
чительной мере определяются способностью комплекса бортового оборудования
выполнять свои функции. А основные качества КБО, в свою очередь, практиче-
ски полностью определяются бортовой вычислительной системой, которая, по
существу, и является основой этого комплекса. Работая в режиме разделения вре-
мени, БВС должна иметь высокий информационно-вычислительный потенциал,
высокую надежность и развитые средства взаимодействия элементов системы
между собой, с аппаратурой КБО и наземными комплексами подготовки и ана-
лиза полета.
Бортовая вычислительная система представляет собой совокупность средств
цифровой вычислительной техники, которые информационно связаны и работа-
ют под общим управлением. Под архитектурой БВС понимают принципы орга-
низации, определяющие состав аппаратных и программных средств, их функции
и порядок взаимодействия, т. е. совокупность свойств и характеристик системы,
обеспечивающих заданное функционирование бортового комплекса. Структура
БВС рассматривается как аппаратная реализация архитектуры, выполненная с
ориентацией на конкретное применение. Как правило, в процессе синтеза БВС
возникает некоторое множество структур, в той или иной мере удовлетворяющих
570
заданным требованиям. Номенклатура бортовых СВТ, образующих структуру, оп-
ределяется составом решаемых задач, структура БВС — принципами ее организа-
ции и принятым подходом к декомпозиции и агрегатированию решаемых задач.
При проектировании БВС необходимо изначально выбирать такой подход к агре-
гатированию задач, который приводит к максимально полной независимости их
решения от аппаратуры КБО.
Декомпозиция задач может быть проведена по различным признакам, при
этом каждому способу декомпозиции будет соответствовать определенная струк-
турная организация БВС. Если декомпозиция и агрегатирование задач проводят-
ся с ориентацией на конкретную аппаратуру, то полученные результаты приведут
к построению федеративной БВС с системной ориентацией структуры и аппа-
ратной реализацией подсистем. Простейшая детерминированная федеративная
структура, во многом повторяющая структуру аналоговых КБО, получается при
декомпозиции задач по функциональному назначению. В федеративных БВС для
выполнения каждой крупной функции на аппаратном уровне образуется авто-
номная подсистема, в структуре которой используется как минимум одна борто-
вая ЭВМ. Взаимодействие подсистем в основном осуществляется летчиком.
В федеративных БВС практически исключена возможность реконфигурации
структуры и комплексной обработки.
Декомпозиция, выполненная с учетом функционального назначения задач и
степени обобщения информации, необходимой для их решения, позволяет по-
строить иерархическую федеративно-централизованную БВС с аппаратной орга-
низацией подсистем лишь на нижнем уровне. Однако структура подобных БВС
остается по существу детерминированной и системно-ориентированной.
Агрегатирование задач для выполнения функций КБО, проводимое без
жесткой ориентации на конкретную аппаратуру, позволяет построить БВС с
функциональной ориентацией структуры. Подобная организация структуры БВС
обеспечивает комплексную обработку информации, поступающей от разных дат-
чиков по единому алгоритму, и позволяет выбирать для решения задачи тот тракт,
в котором эта обработка будет наиболее эффективна. При этом отказ одного из
датчиков не будет приводить к отказу БВС, а лишь незначительно снизит качест-
во реализуемого алгоритма, что в итоге повысит устойчивость комплекса.
Современные авиационные БВС построены по федеративно-централизо-
ванной схеме и имеют системно-ориентированную детерминированную структу-
ру. Ресурс этих БВС распределен между информационными каналами КБО по-
средством аппаратно реализованных подсистем. Состав задач, решаемых в каж-
дой из этих подсистем, определяется в процессе разработки, перераспределение
задач между подсистемами в процессе эксплуатации КБО не предусматривается.
Допускается лишь дублирование найболее важных задач, решаемых машинами
верхнего уровня. Стратегия функционирования системы определяется заранее и
может быть изменена или в пределах управляющей программы, или заменой са-
мой программы. В каждой подсистеме может использоваться несколько БЦВМ.
Для таких БВС характерно нерациональное использование СВТ, что приводит к
неоправданно высоким габаритно-весовым и энергетическим характеристикам.
На рубеже 1990-х гг. подобные БВС исчерпали практически свои возможности.
Их основные качества, принципиально изменившие в свое время подходы к
комплексированию бортового оборудования и стимулировавшие развитие циф-
ровой авионики, перестали отвечать постоянно возрастающим требованиям к
КБО летательных аппаратов.
571
Развитие КБО характеризуется постоянным увеличением числа решаемых
задач и повышением их сложности, расширением интеллектуальных и адаптив-
ных возможностей комплекса. Основные отличительные качества КБО самоле-
тов нового поколения это прежде всего развитая архитектура и интеллект, обеспе-
чивающие высокую информационную поддержку выполнения полетного з л-
ния и высокий уровень автоматизации управления ЛА на всех этапах noj 1.
Архитектура КБО должна обеспечивать адаптацию комплекса к текущим услови-
ям функционирования, которая заключается в способности концентрировать ре-
сурсы для выполнения наиболее важных задач и перестраивать свою структуру
при обнаружении отказов, а также обеспечивать и возможность введения новых
информационных каналов, позволяя тем самым адаптировать КБО к ЛА различ-
ного класса и проводить глубокую модернизацию комплекса. Постоянный рост
сложности и числа решаемых на борту ЛА задач неизбежно приводит к усложне-
нию БВС, к которой предъявляются повышенные требования в части вычисли-
тельных ресурсов для решения новых задач. По прогнозу, вычислительный ресурс
БВС самолетов, разработанных в первом десятилетии нового века, может быть
оценен в 2...3 млрд оп/с для целочисленных операций и 40...60 млрд оп/с в режи-
ме плавающей запятой.
Вычислительные системы КБО нового поколения наряду с высоким вычис-
лительным потенциалом должны быть способны проводить осмысленный ана-
лиз, принимать решения на основе накопленных знаний и адаптироваться в за-
ранее непредсказуемых ситуациях. Детерминированные системно-ориентиро-
ванные БВС «для подобных задач принципиально непригодны. Проведенные
исследования показали, что для построения КБО нового поколения наиболее ра-
циональна ФУНКЦИОНАЛЬНО ориентированная БВС, организованная как интег-
рированная вычислительная среда, вычислительный ресурс которой может дина-
мически перераспределяться между информационными каналами комплекса.
В ИВС изначально отсутствует жесткое распределение СВТ по информаци-
онным каналам КБО, а значит, нет аппаратно реализованных подсистем. На вре-
мя выполнения каждой функции в ИВС формируется вычислительная структура
(виртуальная вычислительная система), которая обеспечивает оптимальную ре-
ализацию совокупности алгоритмов, соответствующей данной функции. Сово-
купность виртуальных ВС, обеспечивающих выполнение всех функций КБО, оп-
ределяет общую структуру ИВС.
Задачи, решаемые современными БВС, весьма многообразны, однако могут
быть разделены на следующие группы:
• традиционные, претерпевающие эволюционное развитие, алгоритмы обра-
ботки информации для решения задач навигации, управления КБО и ряда
других, в алгоритмах которых преобладают скалярные операции. Для этого
используются БЦВМ общего назначения (БЦВМ-ОН), которые можно опи-
сать пентаплетом Pon = (1, 1, w, И, (2), где w — длина разрядной сетки маши-
ны, V — производительность процессора, Q — емкость памяти;
• задачи обработки в реальном времени больших массивов (обработка сигна-
лов и обработка изображений), в алгоритмах которых преобладают вектор-
ные операции и для решения которых требуются специализированные
БЦВМ обработки сигналов, как правило, имеющие параллельную организа-
цию структуры — БЦВМ обработки сигналов (БЦВМ-ОС), пентаплет кото-
рых представляется, например, соотношением вида Рс = (1, R, N, V, Q), где
R — число процессорных элементов (ПЭ), a N — разрядность ПЭ;
572
• задачи управления самолетом, двигательной установкой, системой энерго-
снабжения и ряд других, для которых требуются СВТ повышенной надеж-
ности, в их алгоритмах также преобладают скалярные операции. Для их ре-
ализации необходимы высоконадежные машины со структурой, аналогич-
ной структуре БЦВМ-OH, необходимы БЦВМ, обеспечивающие хранение
программ в постоянной памяти и содержащие достаточное для многократно-
го резервирования число каналов ввода-вывода. Для обеспечения живучести
ЛА этот ресурс целесообразно физически изолировать от остальных.
Таким образом, интегрированная вычислительная среда образуется для
комплексной обработки информации, решения задач экспертных систем и сиг-
нальной обработки. Структуру И ВС образует конечное множество машин, часть
из которых работает в режиме горячего резерва. Система информационного об-
мена организована таким образом, что каждая БЦВМ-OH может работать с лю-
бой БЦВМ-ОС, а каждая БЦВМ-ОС может получать данные от любого информа-
ционного канала КБО.
Число машин, образующих среду, зависит от конкретного применения и мо-
жет меняться в достаточно широких пределах, что, однако, не влияет на общую
организацию И ВС и законы ее функционирования. Это позволяет рассматривать
ИВС в качестве ядра БВС, инвариантного к решаемым задачам, составу оборудо-
вания и режимам функционирования комплекса.
Для формирования стратегии функционирования и управления конфигура-
цией ИВС выделяется обособленный, защищенный ресурс — одна или несколь-
ко БЦВМ, т. е. система—диспетчер (С—Д), которая проводит постоянный анализ
использования общих ресурсов среды и периодический контроль состояния бор-
тового оборудования, включая БВС. Если системы бортового оборудования пол-
ностью исправны, С—Д в соответствии с режимом функционирования КБО фор-
мирует алгоритм выполнения очередной функции и виртуальную ВС (с подклю-
чением необходимой аппаратуры КБО) для реализации этого алгоритма. Если
С—Д выявляет отказ, возникший внутри ИВС, она локализует его и исключает
отказавший элемент из структуры среды, заменяя его соответствующим из соста-
ва горячего резерва, и только после этого формирует виртуальную ВС.
Реконфигурация структуры ИВС при нормальном функционировании комп-
лекса (формирование виртуальной ВС при переходе на новый режим) должна
осуществляться в реальном времени. Реконфигурация в аварийной ситуации (от-
каз элемента ИВС, отказ в ИК комплекса) должна проводиться с минимально
возможными потерями качества функционирования комплекса. Функциониро-
вание ИВС обеспечивает операционная система (ОС), имеющая двухуровневую
организацию. Верхний уровень ОС, реализуемый С—Д ИВС, осуществляет
функции планирования, организации связи и распределения ресурсов. Нижний
уровень ОС осуществляет управление вычислительным процессом каждого от-
дельного СВТ. Динамическое распределение задач на доступные ресурсы должно
производиться с гарантией целостности данных и обеспечением равномерной ба-
лансировки нагрузки в динамических условиях.
Таким образом, ВВС нового поколения может быть представлена ядром и вы-
числительными средствами, не вошедшими в состав этого ядра. Ядро вычислитель-
ной системы, организованное как ИВС, представляет собой часть вычислительной
системы, в которой обеспечивается решение задач, максимально не зависимое от
конкретного состава бортового оборудования. Подобное качество позволяет ис-
пользовать ядро БВС в КБО различного функционального назначения с минималь-
573
ними доработками в части замены объектных программ. Возможный вариант орга-
низации структуры распределенной БВС нового поколения приведен на рис. 5.4.
Полученный в РФ к настоящему времени технологический задел в области
разработки элементной базы и качественно новые концепции построения СВТ
позволят создать для российских самолетов начала XXI в. интегрированную вы-
числительную среду, практически ни в чем не уступающую БВС, планируемую
к применению на самолетах JSF, к КБО которых на сегодня предъявляются наи-
более высокие требования к вычислительным ресурсам.
Для справки: централизованная высокоинтегрированная вычислительная
среда КБО самолета JSF, построенная на бортовых супермультипроцессорах, име-
ет суммарные ресурсы порядка 2500 миллионов целочисленных операций в секун-
ду и примерно 50 миллиардов операций в секунду в режиме плавающей запятой.
К концептуальным особенностям технологии проектирования БВС нового
поколения относятся:
• открытость и адаптируемость архитектуры;
• масштабируемость структуры вычислительных средств;
• ориентация на широкое использование коммерческих технологий и компонент;
• реализуемость на момент разработки;
• приемлемая стоимость системы;
• информационная безопасность и технологическая независимость;
• независимость программ от аппаратных средств;
• общность используемых аппаратных и программных средств;
• высокий уровень надежности, обнаружение и изоляция ошибок;
• стандартизация конструктивного исполнения;
• минимизация стоимости программного обеспечения;
• технология искусственного интеллекта.
Рис. 5.4. Распределенная интегрированная вычислительная среда
574
В настоящее время сформулированы новые концепции построения борто-
вых вычислительных машин и систем, объединяющие открытость архитектуры и
масштабируемость структуры, глубокую унификацию, аппаратную интеграцию и
высокую технологичность.
Концепция открытости архитектуры, если базироваться на использовании
ограниченного набора унифицированных стандартных компонентов (аппарат-
ных модулей) и открытых унифицированных интерфейсов, позволяет создавать
масштабируемые СВТ с широким спектром характеристик, которые дают воз-
можность обеспечить:
• увеличение вычислительного потенциала как отдельной БЦВМ, так и систе-
мы в целом, что делает реальным решения более сложных задач практически
без изменения структуры машины и системы;
• адаптацию БВС на конкретное применение;
• увеличение продолжительности жизненного цикла КБО вследствие модерниза-
ции БВС за счет замены морально устаревших модулей более совершенными,
построенными с использованием новейших достижений микроэлектроники.
Глубокая унификация подразумевает не только унификацию, но и стандарти-
зацию, которые распространяются на все компоненты БВС, включая аппаратные
модули, конструктивное исполнение машины, состав и тип интерфейсов, про-
граммное обеспечение (ПО) и средства его отработки. Кроме того, такая концеп-
ция позволяет использовать при создании элементов БВС дешевые и доступные
коммерческие модули. Ориентация на отработанные коммерческие технологии и
использование на начальных этапах (вплоть до отработки на стендово-имитаци-
онной среде) коммерческих компонент способствуют как снижению стоимости
разработки БВС, так и сокращению сроков проведения работ, т. е. обеспечивают
реализуемость и приемлемую стоимость авионики.
Курс на аппаратную интеграцию позволяет построить единую ИВС, которая
обеспечит не только глубокую функциональную интеграцию, но и независимость
программ от используемых аппаратных средств, обеспечит расширение функци-
ональных возможностей КБО на основе комплексной обработки информации,
возможность концентрации ресурсов вычислительной среды для выполнения
наиболее важных функций и повышения надежности и живучести комплекса за
счет реконфигурации структуры ИВС. Такая организация ядра БВС с архитекту-
рой интегрированной и вычислительной среды создаст общность используемых
на борту различных ЛА аппаратных и программных средств.
Высокая технологичность, внедрение последних достижений позволят авто-
матизировать процессы проектирования и разработки БВС и ПО, снизить техни-
ческий риск при создании БВС и КБО, а также сократить затраты на техобслужи-
вание и эксплуатацию.
Для реализации всего вышеперечисленного прежде всего необходима разра-
ботка минимального по числу унифицированных модулей набора, обеспечиваю-
щего построение всего спектра СВТ. Состав стандартных интерфейсов должен
взаимодействовать на всех уровнях от межмодульного в составе БЦВМ и межма-
шинного обмена в составе БВС до взаимодействия с информационными канала-
ми КБО и наземными комплексами анализа-подготовки. Концепция открытой
архитектуры позволяет создавать необходимые конфигурации БЦВМ из имею-
щегося набора модулей. При построении машины практически объединяются
необходимые наборы модулей на основе открытого стандартного интерфейса и
разрабатываются коммутационные платы и корпуса.
575
В БАЗОВЫЙ НАБОР МОДУЛЕЙ, обеспечивающий построение современных
БЦВМ-ОН (например, ЭВМ семейства «Багет», при создании которых наиболее
полно была использована концепция открытой архитектуры), входят модули
процессоров общего назначения, модули ЗУ большой емкости, модули внешних
интерфейсов (в соответствии с принятыми стандартами), модули блоков пита-
ния. К модулям расширения относятся модули процессоров обработки сигна-
лов, изображений и ряда других характеристик, вводимых в соответствии с требо-
ваниями конкретного применения. В составе набора допускается использование
модулей, созданных различными разработчиками. Важным качеством открытос-
ти архитектуры является возможность замены морально устаревших модулей бо-
лее совершенными, созданными с использованием новых технологий, например
на базе более высокопроизводительных микропроцессоров. Это существенным
образом увеличивает жизненный цикл семейства БЦВМ авиационного примене-
ния. Ориентация на стандартные модули, в том числе и в коммерческом испол-
нении (на начальных этапах), и использование отработанных коммерческих тех-
нологий способствуют как снижению стоимости разработки БВС, так и сокраще-
нию сроков проведения работ, т. е. обеспечивают реализуемость и приемлемую
стоимость авионики. В сочетании с принципами модульного ПО и сборочного
программирования концепция открытой архитектуры существенно снижает сто-
имость и сроки разработки бортовых вычислительных машин и систем.
Структура БЦВМ нового поколения, как было установлено выше, сущест-
венным образом отличается от структуры современных машин и прежде всего
использованием принципиально новых интерфейсов, обеспечивающих паралле-
лизм обработки, и составом модулей, осуществляющих эту обработку. Для по-
строения БЦВМ (в том числе и высокопроизводительных гетерогенных мульти-
процессоров) в базовом наборе необходимы модули высокопроизводительных
процессоров обработки данных (ПД), обработки сигналов с плавающей и с фик-
сированной запятой (МСО2 и МСО1), графических процессоров (ГП2О и 3D),
модуль высокоскоростного сетевого обмена типа FCAL, модуль управления пол-
носвязанной сетью коммутации (МК), модуль ввода-вывода (МВВ) информации
с датчиков, модуль ввода-вывода индикации, модуль низкоскоростного интер-
фейса по ГОСТ 26765.52—87/Р50832—95 (ММК) и ряд других, обеспечивающих
построение машин требуемой конфигурации.
Современные (тем более перспективные) БВС представляют собой сложные
технические системы, содержащие в своей структуре достаточно большое число
СВТ (автономных БЦВМ или вычислительных модулей, различающихся архи-
тектурой, составом структуры и взаимодействием со своими абонентами). Созда-
ние БВС представляет собой длительный, трудоемкий и дорогой процесс. Сто-
имость и реализуемость предлагаемых технических решений при этом становятся
определяющими факторами разработки. Чтобы уложиться в заданные ограниче-
ния по стоимости и сжатые сроки создания БВС, разработчики должны исполь-
зовать новейшие информационные технологии. Эти технологии позволяют полу-
чить высокую гибкость проектирования при минимизации стоимости анализа
различных вариантов структуры и внесения неизбежных изменений, оставаться в
заданных ограничениях по стоимости, обеспечивая высокое качество разработки.
Как правило, проектирование БВС начинается в условиях неопределеннос-
ти, т. е. при отсутствии полного объема информации, необходимой для правиль-
ного выбора технических решений. Любые ошибки, допущенные в процессе про-
576
ектирования, начальные этапы которого формализованы далеко не полностью,
приводят к дополнительным затратам материальных и трудовых ресурсов.
Совершенствование средств вычислительной техники и тенденции развития
БВС требуют новых системотехнических принципов проектирования, обеспечи-
вающих создание высокоэффективных бортовых вычислительных систем реаль-
ного времени и повышающих одновременно эффективность самого процесса
проектирования. К числу основных из них следует отнести:
• комплексный подход к проектированию;
• иерархическую структуру процесса проектирования;
• методы декомпозиции;
• итерационный характер процесса проектирования;
• свойство открытости системы;
• виртуальное прототипирование.
КОМПЛЕКСНЫЙ ПОДХОД предполагает максимально полный анализ и учет всех
факторов, влияющих на качество системы. Однако следует помнить, что повыше-
ние эффективности по каждому показателю в отдельности чаще всего приводит к
ухудшению эффективности по другим показателям. Поэтому необходима оценка и
оптимизация либо по комплексному критерию, объединяющему все основные кри-
терии, либо оптимизация по одному с учетом остальных в качестве ограничений.
иерархический характер процесса определяет порядок анализа и проведе-
ние проектирования по схеме «сверху-вниз» от БВС к ее подсистемам и элемен-
там подсистем.
ДЕКОМПОЗИЦИЯ предполагает разделение целого на составные части для пос-
тановки и решения частных задач (несомненно, менее сложных, чем исходная) и
объединения их решений в решение полной задачи. Это позволяет провести рас-
параллеливание работ, исключив тем самым основное противоречие в требовани-
ях к организации процесса принятия решений — противоречие между большим
объемом работ и временем, отводимым на эти работы. Итерационное проектиро-
вание предполагает циклический характер проведения работ с многократным
анализом проектируемой системы, детализация которого возрастает с каждым
шагом. Итерационность является объективным следствием новизны разработки:
чем больше новых идей закладывается в разработку БВС, тем глубже и длитель-
нее итерационный процесс. Вполне естественно, что на каждой новой итерации
необходим комплексный подход.
ПРИНЦИП ОТКРЫТОСТИ должен наделять проектируемую систему способнос-
тями к развитию, совершенствованию и модернизации. Он должен обеспечить
построение БВС, характеристики которых могут изменяться в широких пределах
в зависимости от требований конкретного применения.
виртуальное прототипирование существенным образом снижает затраты
на разработку, так как позволяет выявить основную массу ошибок на ранних эта-
пах проектирования.
Проектирование БВС представляет собой циклический итерационный про-
цесс с постепенным уточнением характеристик на каждом шаге итераций и начи-
нается этапом системно-структурного проектирования, основной целью которо-
го является синтез структуры вычислительной системы. Для достижения этой це-
ли необходимо ответить на следующие вопросы: какие средства обработки (и в
каком количестве) необходимо использовать, как объединить эти средства для
решения заданных задач и как распределить процесс реализации алгоритмов во
времени и пространстве между этими средствами?
19 Авиация ВВС России и научно-технический прогресс
577
Таким образом, на этапе системно-структурного проектирования необходи-
мо определить:
• состав СВТ, порядок их взаимодействия между собой и с аппаратурой КБО.
В состав СВТ входят средства обработки информации (БЦВМ-OH, БЦВМ-ОС
или процессорные модули общего назначения и обработки сигналов), запо-
минающие устройства большой емкости, используемые в качестве банков
программ, данных и банков знаний, каналы информационного обмена и
другие, необходимые для построения БВС средства;
• основные характеристики СВТ и БВС такие, как производительность, ем-
кость памяти и ряд других;
• требования к системе информационного обмена (СПО), ее архитектуру и ос-
новные характеристики;
• структуру (конфигурацию) БВС;
• состав функционального программного обеспечения и требования к рабоче-
му месту программиста.
Исходной информацией для проведения работ на этапе системно-структур-
ного проектирования являются принципы организации структуры БВС, характе-
ристики КБО и характеристики алгоритмов. Принципы организации структуры
должны обеспечивать построение БВС, отвечающей всем требованиям КБО но-
вого поколения и практически реализуемой на момент проектирования системы.
Состав бортового оборудования (источники и потребители информации), состав
задач, решаемых в каждом режиме функционирования комплекса, могут быть
получены при анализе ОТТ на КБО. Для получения характеристик алгоритмов
необходимо провести анализ этих алгоритмов.
Проведение анализа алгоритмов является одной из ключевых проблем син-
теза БВС. Информационный, операционный и точностной анализы алгоритмов
определяют характеристики, которые позволяют оценить вычислительные ресур-
сы, необходимые для их реализации. Результаты структурно-ориентированного
анализа позволяют судить о наличии параллелизма алгоритма и архитектуре про-
цессора, которая ему соответствует. Функциональный анализ позволяет выявить
степень взаимосвязи между задачами, связь задач с аппаратурой комплекса (ха-
рактеристики информационных сигналов) и степень обобщения информации,
необходимой для решения задачи. По этим характеристикам производятся де-
композиция и агрегатирование задач. На основе совокупности всех этих характе-
ристик определяются состав СВТ и требования к ресурсам средств обработки, к
средствам хранения информации, а также требования к системе информацион-
ного обмена.
Определение состава СВТ и оценку их характеристик также следует отнести
к ключевым проблемам синтеза БВС. Для ее решения по результатам анализа ал-
горитмов формируются алгоритмические подсистемы, обеспечивающие выпол-
нение каждой функции КБО в соответствии с режимами его функционирования,
определяются вычислительные ресурсы, необходимые для реализации этих
функций. Далее определяются количество БЦВМ-OH и БЦВМ-ОС (или число
процессорных модулей общего назначения и обработки сигналов) и их основные
характеристики. Выбор машин для проектируемой системы начинается с оценки
возможностей использования БЦВМ (или соответствующих процессорных моду-
лей), имеющихся на рынке. Для этого требуемый вычислительный ресурс каждой
из алгоритмических подсистем сопоставляется с вычислительным потенциалом
БЦВМ или соответствующего процессорного модуля. В случае соответствия вы-
578
числительных возможностей машины выдвигаемым требованиям ее физические
характеристики проверяются на соответствие ОТТ Если ни одна из имеющихся
на рынке БЦВМ не удовлетворяет выдвигаемым требованиям, формируется тех-
ническое задание на разработку необходимой машины.
Выбор и разработку структуры вычислительной системы можно отнести к
наиболее сложным и трудоемким проблемам синтеза. Снижение трудоемкости
может быть достигнуто за счет использования методов виртуального прототи-
пирования различных вариантов архитектурного построения БВС на ранних ста-
диях ее проектирования. С учетом принципов организации структуры БВС оп-
ределяются функции, которые целесообразно выполнять в составе ядра БВС,
организованного как интегрированная вычислительная среда. После этого фор-
мируются вычислительные структуры (виртуальные вычислительные системы)
для выполнения каждой функции КБО, устанавливаются режимы функциониро-
вания ИВС, исследуются вопросы реконфигурации структуры среды (при фор-
мировании виртуальных вычислительных систем для штатных режимов функци-
онирования и в аварийных ситуациях) и организуется механизм, обеспечиваю-
щий вычислительный процесс, проводится оптимизация структуры БВС, для
того чтобы система максимально эффективно функционировала при заданных
ограничениях.
Важное место в системно-структурном проектировании отводится критери-
ям, на основе которых производятся оценивание и выбор СВТ, декомпозиция и
агрегатирование алгоритмов, формирование подсистем, оценивание СИО,
структурной организации ИВС и принятие технических решений в процессе син-
теза БВС. Следовательно, разработку критериев, обеспечивающих правильный
выбор нужного технического решения при проектировании и отработке БВС,
также следует считать ключевой проблемой синтеза.
Основные требования к архитектуре и структурной организации БВС можно
сформулировать следующим образом. БВС должна:
• предоставлять требуемые ресурсы и обеспечивать решение всех задач КБО
в полном объеме;
• обеспечивать заданную надежность выполнения всех функций КБО;
• допускать возможность поэтапной разработки бортового комплекса;
• обладать способностью развития и адаптации;
• обеспечивать для различных КБО общность аппаратных средств и характе-
ризоваться независимостью программ от используемой аппаратуры;
• быть реализуема на момент разработки и отвечать требованиям информаци-
онной безопасности и технологической независимости;
• иметь минимальную (или не превышающую заданной величины) стоимость
разработки.
Вычислительная среда для нового поколения самолетов РФ может быть по-
строена на основе БЦВМ с открытой архитектурой (и масштабируемой структу-
рой), объединяемых в сеть с помощью высокоскоростного канала передачи дан-
ных на основе ВОЛ С. Подобная архитектура за счет масштабируемости может
обеспечить нужную для решения задач производительность. Масштабируемость
вычислительной среды обеспечивается применением модульных машин и прос-
тым наращиванием (увеличением числа узлов) сети при использовании высоко-
скоростных каналов передачи данных. БЦВМ, которые предполагается исполь-
зовать для построения среды, могут быть реализованы на отечественных микро-
процессорах 1В579, 1В577, Р-20.
579
МИКРОПРОЦЕССОР 1В579 (аналог МП Sparc ф. SUN), выполненный с тополо-
гическими нормами 0,5 мкм, может работать на частоте 200...300 МГц, а тополо-
гическими нормами 0,35 мкм — на частоте до 400 МГц. БЦВМ-OH на основе это-
го МП будет иметь в однопроцессорной конфигурации быстродействие порядка
200...300 млн оп/с, а в многопроцессорной конфигурации — до 1500 млн оп/с и
выше.
МИКРОПРОЦЕССОР 1В577 (аналог DSP-процессора 96002 ф. Motorola) исполь-
зуется для построения модулей обработки сигналов (МОС). Быстродействие
МОС, содержащего четыре МП 1В577, работающих на частоте 33 МГц, составля-
ет 200 млн оп/с в режиме плавающей или 133 млн оп/с в режиме фиксированной
запятой. В настоящее время разработана версия МП с топологическими нормами
0,8 мкм и находится в разработке версия МП с нормами 0,5 мкм. Быстродействие
МОС на четырех МП (0,8 мкм), работающих на частоте 60 МГц, составляет
400 млн оп/с или 266 млн оп/с в режимах плавающей или фиксированной запя-
той. Частота работы 0,5 мкм МП предположительно будет порядка 100... 120 МГц.
МИКРОПРОЦЕССОР Р-20 (аналог микропроцессора i860 ф. Intel), выполненный
с топологическими нормами 0,5 мкм, работает на частоте 100 МГц и имеет быст-
родействие 100 и 200 млн оп/с в режиме плавающей и фиксированной запятой.
Разработан вариант МП Р-22 с топологическими нормами 0,35 мкм (200 МГц) с
пиковым быстродействием соответственно 200 и 800 млн оп/с над операндами с
плавающей запятой. Подготовлена конструкторская документация на их изготов-
ление.
Разработка конкурентоспособных БЦВМ-OH и БЦВМ-ОС с указанными
выше характеристиками с использованием этих микропроцессоров не представит
технических трудностей для организаций, традиционно занимавшихся разработ-
кой бортовых машин.
Ключевым моментом построения КБО нового поколения следует считать пе-
реход от использования магистрально-модульных федеративно-централизованных
БВС с детерминированной структурой к применению централизованной высо-
коинтегрированной открытой масштабируемой вычислительной среды с сетевой
архитектурой, реализуемой на специально разработанных высокопроизводитель-
ных бортовых мультипроцессорах и единой унифицированной сети передачи дан-
ных. Важнейшей является проблема обоснованного выбора интерфейса и постро-
ения на его основе унифицированной бортовой сети.
Непосредственный переход от современной детерминированной БВС с ма-
гистральной организацией структуры к интегрированной вычислительной среде
связан с определенным техническим риском. Для того чтобы уменьшить степень
технического риска и обеспечить преемственность разработок, целесообразно
провести поэтапный переход к БВС на основе интегрированной вычислительной
среды.
На первом этапе И ВС образуется только для решения задач верхнего уровня.
По существу сохраняется иерархическая федеративно-централизованная структу-
ра, содержащая вычислительные средства в информационных каналах комплекса.
Задачи управления двигательной установкой, системой энергоснабжения и ряд
других, которые требуют повышенной надежности средств реализации, физически
изолируются от остальных задач КБО. Для взаимодействия ИВС с подсистемами
нижнего уровня рекомендуется использовать низкоскоростной мультиплексный
канал по ГОСТу 26765.52—87 или канал по ГОСТу Р50832—95. Компоненты, обес-
печивающие построение первого канала, уже разработаны, а второго — находятся
580
в разработке. В настоящее время можно вплотную приступить к моделированию и
разработке подобной организации БВС.
На следующем этапе вычислительные средства информационных каналов
передаются в ИВС. В состав БВС вводится переключательная сеть, обеспечиваю-
щая связь датчиков со средствами обработки сигналов. Для управления датчика-
ми и для связи с общесамолетными системами рекомендуется использовать, как
и на первом этапе, мультиплексный канал по ГОСТу 25765.52—87 или ГОСТу
Р50832—95. К моделированию подобной структуры БВС можно будет приступить
в самое ближайшее время. И только после этого можно будет с минимальным
техническим риском построить ИВС в полном объеме на основе единого высоко-
скоростного интерфейса.
Интегрированная вычислительная среда может быть как распределенная, по-
строенная с использованием автономных БЦВМ-OH и БЦВМ-ОС, так и централи-
зованная на основе высокопроизводительного гетерогенного мультипроцессора. На
начальных этапах проектирования БВС (а тем более до проведения проектирова-
ния) не представляется возможным провести сопоставление распределенного и
централизованного вариантов построения структуры по количественным показате-
лям. Оценка по качественным критериям проводится в предположении, что все ва-
рианты структуры БВС решают задачи КБО в полном объеме. Следует отметить,
что на организацию структуры БВС достаточно сильное влияние оказывает приня-
тый подход к декомпозиции и агрегатированию решаемых задач. Для оптимальной
реализации алгоритмов необходимо, чтобы пентаплет, описывающий и определяю-
щий структуру БВС, максимально полно соответствовал обобщенному алгоритми-
ческому пентаплету. Агрегатирование задач и формирование обобщенного алгорит-
мического пентаплета производятся по результатам информационного, операцион-
ного и системного анализов алгоритмов. Поэтому обоснование рекомендаций по
типу структуры ИВС и наиболее рациональному уровню аппаратурной и функци-
ональной интеграций может быть выполнено при получении необходимых исход-
ных данных.
При создании распределенной БВС в какой-то мере сохраняется преемст-
венность в разработках и можно использовать имеющийся опыт, накопленный
при разработке магистрально-модульных систем. В этом аспекте распределенная
БВС имеет некоторые преимущества перед централизованной. Однако распреде-
ленная ИВС, включающая в состав необходимое для решения задач число авто-
номных БЦВМ, может проигрывать по габаритно-весовым показателям центра-
лизованной системе, построенной с использованием мультипроцессора. Кроме
того, если возникает необходимость в увеличении вычислительного потенциала,
то нужно заменить БЦВМ в соответствующем узле на более мощную (возможно с
мультипроцессорной структурой) или увеличить число узлов в вычислительной
сети, а это усложнит решение проблем обеспечения требуемой надежности,
проблем размещения на самолете нового оборудования и т. д.
В централизованной БВС, построенной на базе мультипроцессора, внутрен-
ний интерфейс которого обеспечивает максимальный параллелизм, увеличение
ресурса достигается использованием дополнительного процессорного модуля.
Централизованная ИВС характеризуется более высоким уровнем аппаратной ин-
теграции по сравнению с распределенной и простым межпроцессорным взаимо-
действием, осуществляемым по более коротким линиям связи. Централизованная
ИВС на базе мультипроцессора превосходит распределенную и по надежности.
581
Обсудим оба варианта организации структуры ИВС, полагая, что для постро-
ения автономных БЦВМ-ОН и БЦВМ-ОС используются унифицированные мо-
дули из одного набора, а в качестве системного интерфейса используется канал
типа Fiber Chanel.
В распределенной структуре в составе ядра БВС, организованного как интег-
рированная вычислительная среда, решаются практически все задачи КБО, за
исключением задач, связанных с двигательной установкой, системой энергоснаб-
жения и ряда других, которые требуют повышенной надежности, для решения ко-
торых используются СВТ повышенной надежности, не вошедшие в состав ядра.
Структура ИВС образована объединением конечного множества БЦВМ-ОН
и БЦВС-ОС в вычислительную среду. Для образования ИВС используется высо-
коскоростная коммутирующая сеть на базе переключателя FC. Информация от
датчиков передается по каналу FC в варианте «точка—точка» в БЦВМ-ОС через
входную переключательную сеть, изображение, полученное в ИВС, — в ИУП по
каналу FC через переключательную сеть. Взаимодействие с вычислительными
средствами и агрегатами общесамолетного оборудования производится по каналу
FC—AL. Второй канал FC—AL используется для управления информационными
каналами КБО.
Общее число БЦВМ-ОН и БЦВМ-ОС в составе вычислительной среды мо-
жет изменяться в зависимости от требований конкретного применения. В состав
ИВС в общем случае входит запоминающее устройство большой емкости, выпол-
няющее функции базы данных, а в перспективе и базы знаний.
В соответствии с принятой концепцией построения БВС нового поколения
интегрированная вычислительная среда внедряется в состав КБО поэтапно.
На первом этапе ИВС образуется только для решения задач верхнего уровня,
к числу которых относятся:
• задачи навигации, управления вооружением, управления режимами и рекон-
фигурацией КБО и ряд других;
• задачи управления системой индикации (загрузка, хранение и оперативный
доступ к базе данных 2D/3D карт местности, комплексирование РЛ-карты,
2D/3D карты местности, вторичная обработка информации в режиме картог-
рафирования подстилающей поверхности), формирование индикационных
форматов в зависимости от текущего режима КБО;
• задачи, образующие экспертные системы «В помощь летчику», «В помощь
штурману» и ряд других по мере их появления.
Подсистемы нижнего уровня БВС (в информационных каналах КБО), вклю-
чающие БЦВМ сигнальной обработки и БЦВМ общего назначения, сохраняют-
ся. Для взаимодействия ИВС с подсистемами нижнего уровня рекомендуется ис-
пользовать низкоскоростной мультиплексный канал по ГОСТу 26765.52—87 или
ГОСТу 50832—95. Компоненты, обеспечивающие построение первого канала, уже
разработаны. В настоящее время можно вплотную приступить к моделированию
и разработке подобной организации БВС.
На следующем этапе вычислительные средства передаются из информацион-
ных каналов КБО в ИВС. В БВС практически могут быть организованы две ин-
тегрированных вычислительных среды: ИВС для решения задач верхнего уровня
и ИВС обработки сигналов, которая фактически решает те задачи, которые в пер-
воначальном варианте БВС реализовались в составе подсистем информационных
каналов КБО. БЦВМ-CO, входящие в состав ИВС сигнальной обработки, имеют
двухпроцессорную конфигурацию, в которой один процессор осуществляет сиг-
582
нальную обработку, а второй — обработку данных. И ВС сигнальной обработки
образуется на основе переключательной сети информации с датчиков, которая
взаимодействует с датчиками по каналам FC «точка—точка». Возможен также и
вариант единой И ВС.
Интегрированная вычислительная среда верхнего уровня образована на ос-
нове высокоскоростной коммутирующей сети FC с переключателем. Со всеми
абонентами, включая и И ВС сигнальной обработки, она взаимодействует по ка-
налу ГОСТ 26765.52-87 (или ГОСТ Р50832-95). Связь ИВС с ИУП производит-
ся по каналам FC «точка—точка» через переключательную сеть. В окончательном
варианте распределенная ИВС может быть организована на базе единого высо-
коскоростного интерфейса.
Следует обратить особое внимание на то, что в приводимых примерах были
рассмотрены ИВС, содержащие в структуре всего три БЦВМ-OH. Для того чтобы
ИВС могла предоставить ресурс, обеспечивающий решение всех задач КБО нового
поколения, число машин в ее составе должно быть увеличено до необходимого пре-
дела или БЦВМ-OH должны иметь мультипроцессорную организацию структуры.
Централизованная ИВС может быть построена на базе двух высокопроизво-
дительных мультипроцессоров, объединенных в сеть интерфейсом FC—AL.
Структура этих мультипроцессоров организована на основе интерфейсов, обес-
печивающих максимальный параллелизм в обработке. Использование двух муль-
типроцессоров вызвано необходимостью обеспечения требуемых ресурсов и за-
данного уровня надежности. Целесообразно предусмотреть возможность под-
ключения в структуру ИВС в случае необходимости и третьего мультипроцессора.
В этом случае как первоначальный вариант может обсуждаться структура
БВС, в которой (как и в распределенной структуре) ИВС организована на базе
высокопроизводительных мультипроцессоров, объединенных в сеть интерфей-
сом FC—AL только для решения задач верхнего уровня. С информационными
каналами КБО и системами общесамолетного оборудования, с СУО и ИУП ИВС
взаимодействует по двум мультиплексным каналам, реализованным в соответст-
вии с ГОСТом 26765.52—87 и/или ГОСТом Р50832—95. Для передачи изображе-
ния из мультипроцессора в ИУП через переключательную видеосеть использует-
ся канал FC в варианте «точка—точка».
Для построения мультипроцессора используются модули процессора дан-
ных, модули графического процессора и, возможно, модули поддержки реализа-
ции искусственного интеллекта, а также модуль памяти и модули интерфейса,
обеспечивающие обмен по каналам в соответствии с ГОСТом 26765.52—87 и/или
ГОСТом Р50832—95, ГОСТом 18977—79 и по каналам FC. В силу того что обра-
ботка сигналов производится в информационных каналах, в структуре мульти-
процессора модули сигнальной обработки используются только в составе моду-
лей, обеспечивающих решение задач индикации.
На следующем этапе обработка сигналов из информационных каналов КБО
передается в ИВС. Мультипроцессоры имеют другую конфигурацию — в их
структуре используются в большем числе модули для обработки сигналов и мо-
дуль ввода информации отдатчиков. В составе БЦВС появляется переключатель-
ная сеть, обеспечивающая подключение датчика на время решения задачи к мо-
дулю ввода мультипроцессора. Сигналы от датчиков поступают на переключа-
тельную сеть по каналам FC «точка—точка». Сигналы управления на датчики от
ИВС передаются по двум низкоскоростным мультиплексным каналам (ГОСТ
25765.51—87 или ГОСТ Р50832—95). По этим же каналам ИВС переключательной
583
сетью взаимодействует с СУО и системами общесамолетного оборудования. Ин-
формация из мультипроцессора в ИУП передается по каналам FC «точка—точка»
через переключательную видеосеть. В структуре мультипроцессора для этих це-
лей предусмотрены соответствующие модули. И только после этого базовая
структура централизованной ИВС может быть организована на базе единого вы-
сокоскоростного интерфейса.
Анализ показывает, что уже в настоящее время можно начать разработку как
распределенной на базе автономных БЦВМ, так и централизованной ИВС на базе
высокопроизводительных мультипроцессоров и единого открытого интерфейса.
В относительно короткие сроки при условии необходимого финансирования ра-
бот могут быть выполнены ОКР по созданию всех компонентов, необходимых для
построения высокоинтегрированных БВС — высокопроизводительных процессо-
ров обработки данных, работающих на тактовой частоте 300...400 Мгц (и даже
выше, например на платформе 1В579), высокоскоростных процессоров сигналь-
ной обработки, графических процессоров, канального оборудования, коммутато-
ров, переключательных сетей и других необходимых компонентов. Одновременно
с проведением ОКР представляется целесообразным, закупив коммерческие ком-
поненты, начать моделирование и отработку прототипа БВС. Вследствие проведе-
ния этих работ при появлении соответствующей элементной базы отечественного
производства можно будет в короткий срок построить и отработать БВС для КБО
нового поколения, отвечающую требованиям информационной безопасности и
технологической независимости.
Реализация подобных архитектур на борту самолетов РФ нового поколения
требует осваивания в РФ новых технологий таких, как технология конструирова-
ния бортовых мультипроцессоров (бортовых кластеров), бортовых интегрирован-
ных вычислительных сред (переход на новые конструктивные решения, новые
технические решения проблем охлаждения, вибропрочности и т. п.), как техноло-
гия программирования интегрированных вычислительных сред.
Концепция открытой архитектуры обеспечивает проведение работ на всех
этапах перехода по общим принципам с использованием ограниченного набора
унифицированных модулей и стандартных интерфейсов, который в случае необ-
ходимости может быть расширен. Ориентация на стандартные модули, поддер-
жанная принципами модульного ПО и сборочного программирования, и воз-
можность использования на начальных этапах работ коммерческих модулей по-
зволяют существенно сократить стоимость и сроки создания БВС.
5.2. Бортовые цифровые
вычислительные системы1
5.2.1. БОРТОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
Цифровые вычислительные средства в составе бортового оборудования са-
молетов появились на рубеже 1960-х годов и за относительно короткий срок
практически полностью заменили используемые ранее аналоговые вычислители.
По сравнению с аналоговыми вычислителями бортовые цифровые вычислитель-
ные машины обеспечивают более высокую точность решения задач, характеризу-
ются универсальностью применения и обладают широкими логическими воз-
можностями.
Эти качества позволяют использовать БЦВМ для решения задач практиче-
ски во всех подсистемах бортового оборудования самолета, обеспечивают ее ус-
тойчивость к усложнению алгоритмов, что делает возможным применять более
сложные, а следовательно, и более совершенные законы управления самолетом.
Кроме того, они осуществляют информационное взаимодействие между отдель-
ными (и ранее непосредственно не взаимодействующими) подсистемами борто-
вого оборудования и образуют на борту самолета единый комплекс бортового
оборудования, что в конечном счете повышает эффективность выполнения по-
летного задания и безопасность полета.
Использование БЦВМ стимулировало определенную унификацию бортово-
го радиоэлектронного оборудования самолета, проведение которой позволило
сократить сроки и снизить затраты на разработку и последующие модернизации
КБО, снизить его затраты на эксплуатацию.
Для эффективного использования средств цифровой вычислительной техни-
ки в составе бортового оборудования самолетов было необходимо разработать:
• БЦВМ, максимально удовлетворяющие по всем параметрам требованиям
конкретного применения;
• систему обмена информацией, обеспечивающую первоначально сопряжение
БЦВМ с бортовой аппаратурой (датчиками и исполнительными органами), а
в дальнейшем и взаимодействие машин между собой в составе бортовой вы-
числительной системы;
• программное обеспечение, включающее средства создания и отработки про-
грамм и средства обеспечения вычислительного процесса и функционирова-
ния машины.
Необходимость решения первых двух проблем была очевидна изначально, а
вот создание ПО казалось делом второстепенным. Поэтому на ранних стадиях
В написании подраздела принимали участие Е. П. Федосеев, Р. А. Шек-Иовсепянц.
585
развития цифровой авионики основное внимание уделялось разработке БЦВМ и
созданию средств ее сопряжения с бортовой аппаратурой. Между тем проблема
разработки ПО постоянно возникала по мере усложнения структуры машины,
расширения круга решаемых задач, появления и развития бортовых вычисли-
тельных систем. В настоящее время затраты на разработку ПО превышают затра-
ты на создание аппаратных средств.
Разработка средств цифровой вычислительной техники для применения в
составе бортового оборудования самолетов началась в РФ во второй половине
1950-х годов, когда в приборостроительных НИИ и КБ Минавиапрома, Минра-
диопрома и ряда других отраслей началась разработка макетов различного рода
цифровых вычислительных устройств для использования в составе бортового
оборудования самолетов, а затем и ракет. Несмотря на то что большинство из
этих разработок не было востребовано, был сделан серьезный задел в области со-
здания БЦВМ.
В середине 1960-х годов ОКБ «Электроавтоматика» (г. Санкт-Петербург),
которое к этому времени уже накопило определенный опыт разработки бортовых
аналоговых вычислителей, и НИИ «Аргон» (г. Москва) определились как основ-
ные разработчики БЦВМ общего назначения (БЦВМ-OH) авиационного при-
менения. В 1990-х годах в число разработчиков авиационных БЦВМ-OH вошли
Раменское приборостроительное КБ (РКПБ) и ОАО «Русская авионика»
(г. Жуковский). Основным разработчиком БЦВМ для ракет, используемых в ка-
честве авиационного вооружения, становится НИИ приборостроения (НИИП)
г. Москва.
На протяжении четырех десятилетий произошло качественное изменение
БЦВМ, которое было обусловлено совершенствованием элементной базы, разви-
тием архитектуры и совершенствованием структурной организации. Вычисли-
тельный потенциал БЦВМ увеличился более чем натри порядка. Быстродействие
современных БЦВМ-OH в однопроцессорной конфигурации оценивается десят-
ками миллионов операций в секунду (и в ближайшей перспективе может быть
повышено до 200...300 млн оп/с), а емкость запоминающих устройств — десятка-
ми мегабайт. Одновременно более чем на порядок уменьшились вес и энергопот-
ребление.
Обсудим подробно эти изменения. Для построения первых БЦВМ использо-
вались дискретные компоненты (диоды, транзисторы, конденсаторы и др.). За-
тем по мере развития элементной базы дискретные компоненты заменялись ин-
тегральными схемами, схемами со средним уровнем интеграции (СИС), быстро-
действующими ИС (БИС) и, наконец, микропроцессорными комплектами БИС
(МПК БИС). Переход от дискретных компонентов при построении структуры к
БИС позволил повысить быстродействие машины более чем на два порядка при
одновременном снижении на порядок и более энергопотребления и веса. Совер-
шенствование МПК БИС в 1980 — 1990 гг. позволило поднять более чем на по-
рядок быстродействие БЦВМ.
Одновременно совершенствовались архитектура БЦВМ и ее структурная ор-
ганизация. При построении структуры используются более совершенные процес-
соры, иерархическая многоуровневая память, конвейеризация, обеспечивающая
одновременное выполнение нескольких операций, и другие технические реше-
ния, направленные на повышение производительности машины, совершенству-
ются внутренние и внешние интерфейсы БЦВМ. В бортовых машинах первых
разработок в качестве внутреннего интерфейса, обеспечивающего взаимодейст-
586
вие между функциональными блоками, использовались уникальные, неунифи-
цированные шины, а внешний интерфейс для связи с абонентами представлялся
устройством сопряжения, которое содержало преобразователи «код—аналог» и
«аналог—код». По мере развития структуры для взаимодействия функциональ-
ных блоков БЦВМ начинает использоваться интерфейс общая шина (например,
Q-bus), существенно упростивший проведение модернизации машины, затем —
системные шины (ISA, VME, CPCI), которые уже являются открытым интерфей-
сом. Аналоговый внешний интерфейс дополняется радиальными каналами для
передачи последовательных кодов (ARINC-429, ГОСТ 18977—79), в состав внеш-
него интерфейса вводятся мультиплексные каналы с пропускной способностью
1 Мбит/сек. В дальнейшем по мере совершенствования структуры в составе
внешнего интерфейса стало возможным использование каналов с пропускной
способностью 20 Мбит/с, сетевых интерфейсов типа AS4074 (HSDB), Fibre Chan-
nel (FC) и Scalable Coherent Interface в варианте реального времени (SCI/RT) с
пропускной способностью 1 Гбит/с и 1 Гбайт/с.
На основе анализа развития элементной базы, элементов структуры, архи-
тектуры и структурной организации БЦВМ, анализа развития ее программного
обеспечения можно сформулировать основные признаки, характеризующие по-
коления бортовых цифровых вычислительных машин. Однако реальная БЦВМ
может быть лишь условно отнесена к какому-либо конкретному поколению, так
как некоторые ее параметры могут, например, соответствовать или предыдущему,
или последующему поколениям. Действительно, если принять во внимание толь-
ко элементную базу, использованную для построения машины, то БЦВМ се-
мейств 80-30ХХХ, ЦВМ 80-40ХХХ могут быть отнесены (как это и сделано разра-
ботчиком) к четвертому поколению. Однако по составу и организации структуры
эти машины следует отнести к третьему поколению.
БЦВМ первого поколения
Для БЦВМ первого поколения были характерны относительно низкий ин-
формационно-вычислительный потенциал и довольно примитивная (с совре-
менной точки зрения) структура, реализуемая с применением дискретных ком-
понент. Структуру этих БЦВМ составляли арифметическое устройство (АУ), опе-
ративное и постоянное запоминающие устройства (ОЗУ и ПЗУ), устройство
управления (УУ) и вторичный источник питания (ВИП), память машин была од-
ноуровневой. Архитектура этих машин была закрытой, она строилась на основе
функциональных блоков, которые разрабатывались специально для каждого
конкретного случая. Любая модернизация машины была связана с необходимо-
стью дополнительной разработки соответствующих функциональных блоков с
требуемыми характеристиками. Программирование производилось в машинных
кодах, а для отработки программ использовались интерпретирующие системы и
пульты контроля и индикации.
БЦВМ первого поколения взаимодействовала со своими абонентами через
устройство сопряжения (УС), которое содержало необходимый набор преобразо-
вателей типа аналог—цифра и цифра—аналог, так как бортовая аппаратура имела
в основном аналоговый интерфейс. Устройство сопряжения интегрировалось
с БЦВМ, образуя устройство ввода-вывода. Уже для БЦВМ первого поколения
была сделана попытка унификации параметров внешних сигналов и каналов,
обеспечивающих взаимодействие машины со своими абонентами.
587
Машины первого поколения использовались в начале 60-х годов прошлого
столетия для построения централизованных и, как правило, одномашинных ана-
лого-цифровых вычислительных систем. Физические характеристики (вес, габа-
риты и энергопотребление) БЦВМ в большинстве случаев не позволяли исполь-
зовать на борту другую машину. Низкий вычислительный потенциал БЦВМ не
мог обеспечить решение всех задач, БЦВМ выполняла функции центрального
вычислителя, решая относительно небольшой объем задач, требующих высокой
точности. Для решения большей части задач и первичной обработки информа-
ции использовались периферийные аналоговые вычислители, с которыми БЦВМ
взаимодействовала по аналоговым каналам.
К БЦВМ первого поколения относится первая отечественная авиационная
БЦВМ, разработанная коллективом ОКБ «Электроавтоматика» (г. Санкт-Петер-
бург) под руководством главного конструктора В. И. Ланердина. БЦВМ разра-
ботана в двух модификациях — ЦВМ263 и ЦВМ264. Начало разработки — 1959 г.,
начало серийного выпуска на Уфимском приборостроительной заводе — 1964 г.
Всего было выпущено более 200 машин.
ЦВМ-263 (ЦВМ-264)
ЦВМ-263 (ЦВМ-264) — цифровая вычислительная машина универсального
типа, последовательно-параллельного действия, синхронная, одноадресная, вы-
полняющая операции над 16-разрядными операндами в режиме фиксированной
запятой. Система* команд машины одноформатная, в ней используются прямая
(в пределах нулевой страницы), относительная, непосредственная и индексная
адресации и обеспечивается выполнение до 64 различных операций. Структуру
ЦВМ -263 (ЦВМ-264) образуют: устройство арифметики и управления (УАУ),
оперативное запоминающее устройство, постоянное запоминающее устройство,
устройство ввода-вывода (УВВ), вторичный источник питания. Память машины
имеет страничную организацию (разделена на «квадраты» емкостью по 512 слов)
и выполнена на магнитных сердечниках. Замена информации в ПЗУ осуществля-
ется путем перепрошивки.
В качестве элементной базы использованы дискретные полупроводниковые
приборы (интегральные схемы на внутреннем рынке в это время отсутствовали) —
диоды, транзисторы, резисторы, конденсаторы и т. п., что и является одним из
признаков первого поколения бортовых ЦВМ. Для увеличения внутри- и меж-
проектной унификации дискретные элементы сгруппированы на нескольких ти-
повых печатных платах, с использованием которых проектировались ЦВМ263 и
ЦВМ264. Так, например, для создания логических устройств использовались пе-
чатные платы типа ТГД1 и ТГД2 — конструктивные наборы динамических триг-
геров различных типов. Устройства ввода-вывода построены на своих типовых
платах.
Эта ЦВМ264 была использована в составе КБО самолета Ту-95. Главными
недостатками первых ЦВМ был их непомерный вес и габариты, низкая надеж-
ность. Все это являлось следствием примененной дискретной элементной базы.
Расположение дискретных элементов на печатных платах, хотя и было неизбеж-
ным, но порождало громоздкие и тяжелые конструкции, обилие внутримашин-
ных связей, громадное количество ручных паек, рабочий объем изделий исполь-
зовался неэффективно.
588
Основные характеристики ЦВМ263 и ЦВМ264
Особенности архитектуры.....Универсальная, одноадресная, синхронная,
последовательно-параллельного действия,
16-разрядная с фиксированной запятой
Система команд............. SEAC/DISEAC, одноформатная, одноадресная
Система адресации............... Прямая, непосредственная, индексная
Система прерываний..................Двухуровневая, один уровень КПА
Быстродействие, тыс. оп/с
регистр-регистр.............................................62
регистр-память............................................. 31
Емкость, К слов
ОЗУ...........................................................0,256
ПЗУ.............................................................8,0
Каналы ввода-вывода.................Аналоговые по 847АТ, дискретные,
107/66 входных/выходных величин
Надежность, ч/отказ.............................................200
Потребляемая мощность, Вт......................................2000
Вес, кг
ЦВМ263 ........................................................ 330
ЦВМ264 ........................................................ 350
БЦВМ «Орбита»
К первому поколению можно отнести и ЦВМ Орбита (вторая генерация),
которая была разработана в 1963—1965 гг. как базовая унифицированная машина
для использования ее в бортовых комплексах самолетов военной и гражданской
авиации.
ЦВМ Орбита разработана в виде набора блоков — ячеек, размещаемых на пол-
ке несущей рамы и соединяемых электрически при помощи врубных разъемов. Не-
сколько ячеек объединяются в функциональное устройство. Одновременно с ЦВМ
разработана система ее контроля, состоящая из программной (система тест-про-
грамм) и аппаратной (контрольно-поверочная аппаратура — КПА) частей.
Базовые характеристики БЦВМ «Орбита»
Тип ЦВМ........................ Универсальная, одноадресная, синхрон-
ная, последовательно-параллельного дей-
ствия с фиксированной запятой
Разрядность........................... 16(15 — значащих и 1 знаковый)
Быстродействие.............................62 500 операций типа «+» в с
.......................... 31 250 операций типа «х» в с
............................... 3676 операций типа «:» в с,
при этом одновременно с операцией деления
может выполняться любая другая операция
Емкость ОЗУ...................................1 К 16-разрядных слов
Емкость ПЗУ........................1 К 16-разрядных слова, в том числе
емкость наборного запоминающего устройства — 0,2 К слова
Состав УВВ......................Универсальный набор преобразователей
сигналов бортовых датчиков
Вес, объем,
потребляемая мощность,
надежность.........................................В соответствии
с конкретным применением (составом) ЦВМ
589
БЦВМ второго поколения
В структуре БЦВМ второго поколения начинают использоваться элементы
конвейеризации, обеспечивающие совмещение в выполнении операций, исполь-
зуются процессоры, содержащие более совершенные сумматоры и специальные
устройства для выполнения операций умножения, деления и вычисления эле-
ментарных функций. Структура машин реализуется на интегральных схемах, но
остается детерминированной и трудно модернизируемой, по существу, закрытой.
Для написания программ начинают использоваться языки уровня ассемблера, а
для их отработки — специальные отладочные комплексы, объединяющие БЦВМ
с инструментальной вычислительной машиной.
Взаимодействие с абонентами БЦВМ второго поколения также производи-
лось через устройство сопряжения, которое содержало необходимый набор пре-
образователей «аналог—цифра» и «цифра—аналог», так как бортовая аппаратура
имела в основном аналоговый интерфейс. В машинах второго поколения в соста-
ве УС появляются радиальные каналы для передачи последовательных кодов с
пропускной способностью 48 Кбит/с (ARINC-429, ГОСТ 18977—79). Устройство
сопряжения конструктивно выполнялось или в виде автономного блока, взаимо-
действующего с центральным вычислительным устройством (ЦВУ) машины по
цифровому каналу, или интегрировалось с БЦВМ, образуя устройство ввода-вы-
вода. В первом варианте пользователю поставлялось ЦВУ. Пользователь в боль-
шинстве случаев был вынужден разрабатывать устройство сопряжения самостоя-
тельно. В связи с отсутствием у пользователя необходимого опыта в области со-
здания средств вычислительной техники физические характеристики УС (вес,
габариты, энергопотребление и надежность) значительно уступали соответствую-
щим характеристикам ЦВУ, что в итоге снижало общие параметры машины. Во
втором варианте пользователю поставлялась БЦВМ, в составе УВВ которой
имелся определенный набор преобразователей. Естественно, что фиксирован-
ный набор преобразователей не мог обеспечить все случаи конкретного примене-
ния и возникала необходимость в разработке семейства машин, различающихся
составом УВВ.
На основе БЦВМ второго поколения, объем, вес и энергопотребление кото-
рых были примерно на порядок лучше, строились в основном федеративные вы-
числительные системы, содержащие несколько машин, объединяемых радиаль-
ными связями по типу «каждый с каждым». Бортовой комплекс состоял из ряда
автономных подсистем и во многом повторял структуру аналоговых КБО. Прак-
тически в каждой из подсистем в качестве центрального вычислителя использо-
валась БЦВМ, а первичная обработка производилась в аналоговой форме. В ряде
случаев БЦВМ второго поколения использовались и для построения централизо-
ванных БВС, в которых очень часто одна или несколько машин взаимодействова-
ли с периферией через общее устройство сопряжения.
В силу того что БЦВМ второго поколения имели закрытую архитектуру, фе-
деративные вычислительные системы, построенные на их основе, были детерми-
нированными закрытыми, а следовательно, и трудно модернизируемыми систе-
мами.
К второму поколению БЦВМ условно можно отнести машины семейств
«Орбита-10» и «Орбита-20», разработанные в ОКБ «Электроавтоматика», БЦВМ
«Аргон-15» разработки НИИ «Аргон».
590
БЦВМ «Орбита-10»
Разработка БЦВМ «Орбита-10» начата в 1966 г., серийное производство — в
1970 г., выпущено более 3000 машин. В качестве одного из применений БЦВМ
«Орбита-10» можно указать использование ее в составе НК-45 самолета Ту-22МЗ.
В состав арифметического устройства БЦВМ «Орбита-10» введено специаль-
ное множительно-делительное устройство, позволившее существенно повысить
быстродействие машины. Для реализации структуры БЦВМ использовались гиб-
ридные микросхемы «Трапеция 3» (серия 221).
Основные характеристики БЦВМ «Орбита-10»
Тип ЦВМ.....................Универсальная, одноадресная, синхронная,
последовательно-параллельного действия
с фиксированной запятой
Система команд.........................................SEAC/DSEAC
Разрядность.................16, предусмотрен режим работы с числами,
имеющими удвоенную разрядность
Быстродействие, тыс. оп/с:
регистр-регистр............................................125
регистр-память.............................................125
умножение.................................................62,5
деление......................................................5
Емкость, К слов
ОЗУ........................................................1,0
ПЗУ......................................................16-32
ЭЗУ........................................................256
Каналы ввода-вывода...........Аналоговые по нормали 847АТ, дискретные
Надежность, ч/отказ........................................ 250—500
Мощность, Вт.............................................. 500—1500
Масса, кг................................. 60...90, для базовой ЦВМ 60
(ЦВУ - 20, УВВ - 30, блок питания - 10)
БЦВМ «Орбита 20»
Разработка базовой модели семейства БЦВМ «Орбита 20» начата в 1970 г., се-
рийное производство освоено в 1974 г., всего было выпущено более 11 000 машин.
Бортовые ЦВМ «Орбита 20» это одноадресные, синхронные машины после-
довательно-параллельного действия универсального типа, основной единицей
информации в машине является 16-разрядное двоичное поле. Машины выполня-
ют операции с 16-разрядными операндами в режиме фиксированной запятой.
В систему команд введены также и операции с удвоенной точностью.
Система команд одноформатная и работает с прямой (в пределах нулевой
страницы), относительной, непосредственной и индексной адресацией. В ко-
мандном слове машины 9 разрядов (0—8) указывают адрес операнда, 6 разрядов
(9—14)— код операции, семантика 15-го разряда определяется выполняемой
операцией. Машина выполняет следующие операции: арифметические (в том
числе и с удвоенной точностью), логические, сдвига, над битами, пересылки, за-
поминания, передач управления, обмена и ввода-вывода. Система прерываний
двухуровневая, один уровень отведен для работы с КПА.
Структуру БЦВМ образуют ЦВУ и УВВ. В состав ЦВУ входят арифметиче-
ское устройство, включающее множительное и делительное устройства, ОЗУ и
ПЗУ со страничной организацией (по аналогии с ЦВМ «Орбита 10»), а в ряде мо-
дификаций и энергонезависимая память (ЭЗУ). Относительно высокое быстро-
591
действие обеспечивается совмещением в выполнении команд по трем уровням
(по аналогии с ЦВМ «Орбита 10») и применением множительно-делительного
устройства. В состав УВВ базовой модели входят:
• многоканальные преобразователи «аналог—код», «частота—код» и «последо-
вательный код—машинный код»;
• преобразователь разовых команд;
• многоканальный преобразователь «код—аналог»;
• преобразователь «машинный код—параллельный код и разовые команды»;
• преобразователь «код—сигнал».
В структуре машины предусмотрена возможность подключения дополни-
тельных блоков ЗУ и модулей УВВ. Структура машин семейства построена с при-
менением микросхем 17 различных типов («Тюльпан-3», «Титан», «Турбина»,
«Дон» и др.). Для построения ОЗУ и ПЗУ использованы магнитные сердечники.
Изменение информации в ПЗУ осуществляется перепрошивкой. Вопросы охлаж-
дения решались в зависимости от модификации машины.
Включение в структуру машины преобразователей информации было техни-
чески оправдано, в составе бортового оборудования отсутствовали датчики с
цифровым выходом и исполнительные органы с цифровым входом. Однако ин-
теграция БЦВМ с преобразователями информации приводит к необходимости
разработки модификаций, различающихся прежде всего составом преобразовате-
лей. Действительно, к концу 1980-х гг. в семействе было разработано около шес-
тидесяти модификаций БЦВМ, в том числе и с использованием новой элемент-
ной базы и новых технологических решений («Орбита-20М-22», «Орби-
та-20М-22-56» и*др.). Одновременно был разработан и ряд автономных блоков
УВВ - УВВ20, УВВ20-12, УВВ20-12-01.
Основные характеристики БЦВМ семейства «Орбита 20»
Тип ЦВМ...................Универсальная, одноадресная, синхронная,
последовательно-параллельного действия
с фиксированной запятой
Система команд.....................................SEAC/DSEAC
Разрядность...............16, предусмотрен режим работы с числами,
имеющими удвоенную разрядность
Быстродействие операций, тыс. оп/с:
в формате регистр-память..................................200
умножение.................................................100
деление....................................................10
Емкость, К слов
ОЗУ.....................................................0,5-4
ПЗУ.....................................................16-48
ЭЗУ.........................................................1
Каналы ввода-вывода:
входные аналоговые.......................................6—64
выходные аналоговые......................................1—36
разовых входных команд, бит.............................16—96
разовых выходных команд, бит............................16—96
входные по ГОСТу 18977—79................................0—14
выходные по ГОСТу 18977—79................................0—2
Надежность, ч/отказ:
для максимальной комплектации.............................300
для минимальной комплектации.............................4000
Мощность, Вт............................................. 85—400
Вес, кг.......................8,5—60 (в зависимости от комплектации)
592
БЦВМ семейства работают с единой системой команд и имеют одинаковое
быстродействие. Они оснащены системой тестового встроенного контроля и мо-
гут работать с системой автономного контроля при отключении и без отключения
штатных жгутов. В состав программного обеспечения БЦВМ включены ассемб-
лер, макрогенератор, символьный отладчик и комплекс отработки программ на
базе инструментальной ЭВМ.
Бортовые цифровые вычислительные машины этого семейства и до настоя-
щего времени остаются самыми массовыми вычислительными машинами авиа-
ционного применения. Они используются, например, в составе ПрНК самолетов
Ту-22МР, Ту-22М4 и Ту-160, в составе КБО самолета Ту-95.
Бортовая ЦВМ «Аргон-15»
Бортовая цифровая вычислительная машина «Аргон-15» разработана в НИИ
«Аргон» в начале 1970-х гг. «Аргон-15» это одноадресная, синхронная машина
параллельного действия универсального типа [1]. В состав операций БЦВМ вве-
дены аппаратно выполняемые операции вычисления синуса, косинуса и извлече-
ния квадратного корня. В основном формате операция сложения выполняется
за 4,8 мкс (около 200 тыс. опер/с), операция умножения — 20 мкс, операция
деления — 32,8 мкс, операции вычисления синуса и квадратного корня — 29,6
и 16,8 мкс.
Бортовая ЦВМ «Аргон-15» поставлялась пользователям как вычислительное
устройство в составе центрального процессора (ЦП), ОЗУ, ПЗУ и энергонезави-
симого ЗУ Создание средств сопряжения машины с бортовой аппаратурой осу-
ществлял разработчик соответствующей подсистемы. Подобный подход хотя и
повышал универсальность машины, однако ставил в затруднительное положение
ее пользователей, зачастую не имевших должного опыта в разработке средств
цифровой вычислительной техники.
К середине 1980-х гг. было разработано четыре программно совместимых мо-
дификации машины. Первые две модификации реализованы на схемах с малой
интеграцией и имеют быстродействие около 200 тыс. оп/с. Применение схем
среднего уровня интеграции и больших интегральных схем при построении двух
других модификаций повысило быстродействие до 500...800 тыс. оп/с. Примене-
ние современной элементной базы позволило повысить надежность машины, уве-
личить емкость запоминающих устройств и одновременно снизить вес машины.
БЦВМ третьего поколения
В БЦВМ третьего поколения находит применение иерархическая память,
включающая сверхоперативную память (РОН — регистры общего назначения),
многоуровневая система прерывания, каналы прямого доступа к памяти, контрол-
леры каналов внешнего интерфейса, а также механизмы защиты информации
от несанкционированного доступа. В структуре бортовых машин третьего поко-
ления начинают использоваться средства поддержки мультипроцессирования.
Структура этих БЦВМ имеет в основном магистрально-модульную организацию
и допускает изменение характеристик машины в достаточно широких пределах
путем использования необходимого числа соответствующих (унифицированных)
модулей, т. е. приобретает некоторые качества открытости. Для построения уни-
фицированных модулей применяются схемы со средним и высоким уровнями
интеграции, в том числе и микропроцессорные комплекты больших интеграль-
ных схем. В составе внешнего интерфейса для обмена информацией используют-
593
ся мультиплексные каналы, которые дополняются радиальными каналами для
обмена последовательными кодами. Наряду с цифровым интерфейсом в составе
УВВ машины в случае необходимости используется и нужный набор преобразо-
вателей «аналог—цифра» и «цифра—аналог». Для создания объектового програм-
много обеспечения начинают применяться рабочие места программиста (РМП),
разрабатываемые одновременно с машиной.
Эти БЦВМ третьего поколения обеспечили построение федеративно-цент-
рализованных БВС с магистрально-модульной организацией структуры. Отличи-
тельными особенностями подобных БВС являются иерархическая (в основном
двухуровневая) структура, программно управляемые потоки информации, функ-
циональная и конструктивная завершенность подсистем нижнего уровня, воз-
можность изменения состава этих подсистем и относительная простота модерни-
заций. Однако БВС данного типа имеют системную ориентацию и являются де-
терминированными.
Третье поколение составляют семейства ЦВМ 80-30ХХХ, ЦВМ 80-40ХХХ,
БЦВМ Ц100, Ц101, Ц102, Ц104, ЦВМ А-30, А-40 иА-50, а также серия встраивае-
мых БЦВМ «Заря-ЗХ» и автономные «Заря-40» и «Заря-41».
Семейство ЦВМ 80-30ХХХ
Машины семейства ЦВМ 80-30ХХХ разработаны в ОКБ «Электроавтомати-
ка» под руководством главного конструктора Р. А. Шек-Иовсепянца. Разра-
ботка семейства, включающего 4 модификации, начата в 1982 г., серийное про-
изводство в 1986 г.
Машины семейства это одноадресные, асинхронные машины универсального
типа, параллельного действия с микропрограммным управлением. Эти БЦВМ
16-разрядные, выполняют операции с фиксированной запятой и допускают удвое-
ние разрядности при вычислениях. Система команд машин универсальная, много-
форматная (типа Sirius), в ней реализовано шесть форматов — команды обращения
к памяти, ветвления, операций с регистрами, сдвигов, операций ввода-вывода и
спецкоманд. Она допускает расширение перечня команд введением в ЗУ микро-
программ соответствующих макрокоманд. В системе команд используются непо-
средственная, прямая регистровая, относительная индексная, относительная с пла-
вающей страницей и косвенная адресации. Система прерываний двухуровневая.
Функционально структура машины включает процессор (один или несколько),
запоминающие устройства, устройство ввода-вывода и блок питания. Для реализа-
ции структуры машин было разработано семейство модулей, имеющих единую
конструктивно-технологическую основу, и выбран унифицированный интерфейс.
Таким образом, в структуру БЦВМ изначально заложена возможность подключе-
ния дополнительных модулей. В частности, второй процессор может быть подклю-
чен для управления преобразователями и подготовки входной информации. Для
взаимодействия процессоров используется ОЗУ с двойным доступом.
Процессор выполнен на основе МПК БИС серии 1804. Он содержит
16 регистров общего назначения и имеет быстродействие при выполнении опера-
ций сложения в формате R-R 600 тыс. оп/с, в формате R-S 300 тыс. оп/с при вы-
полнении умножений 100 тыс. оп/с. Операции сложения с удвоенной точностью
выполняются со скоростью около 200 тыс. оп/с. В составе процессорного модуля
имеется ЗУ микрокоманд емкостью 2К*40 бит, выполненное на БИС М556РТ7.
Для построения ОЗУ были использованы БИС 537РУ2А, ПЗУ построено на осно-
594
ве БИС М556РТ7, репрограммируемое ЗУ (РПЗУ) — на основе схемы 573РФ2, а
ОЗУ с двойным доступом — на схемах 537РУ9.
В составе семейства разработаны четыре модификации: 80-302ХХ, 80-303ХХ,
80-307ХХ и 80-308ХХ, имеющие одинаковое быстродействие, но различающиеся
емкостью памяти, составом УВВ и физическими характеристиками. Минимальную
емкость памяти (ОЗУ — 4 К, ПЗУ — 12 К и ЭЗУ — 1 К слов) имеет 80-303ХХ, мак-
симальную (ОЗУ - 24 К, ПЗУ - 72 К и ЭЗУ - 1 К слов) - 80-307ХХ. Особенно-
стью 80-307ХХ является трехпроцессорная структура, особенностью 80-308ХХ —
наличие мультиплексного (ГОСТ 26765.52—87) канала обмена. В машинах семейст-
ва предусмотрена развитая система контроля. Полнота контроля системы встроен-
ного тестового контроля не менее 0,8. Предусматривается и применение автоном-
ной системы контроля с использованием КПА с коэффициентом автоматизации
контроля не менее 0,9.
Для отладки ПО предлагается рабочее место программиста РМП-80, вклю-
чающее технологическую ЭВМ, внешнюю память, блоки индикации и блоки со-
пряжения.
Конструкция ЦВМ представляет собой легкий каркас с внешними разъема-
ми, в который сверху по направляющим вдвигаются панели модулей, несущие на
себе стандартный разъем. Охлаждение конвекционного типа для большинства
модификаций кроме одного, для которого применен кондуктивный метод, в свя-
зи с особыми условиями применения.
Основные характеристики машин семейства ЦВМ 80-30ХХХ
Тип ЦВМ.............Универсальная с микропрограммным управлени-
ем, одноадресная, асинхронная, параллельного дей-
ствия с фиксированной запятой; двухуровневая
система прерываний
Система команд......Открытая, типа SIRIUS (близкая к универсаль-
ной), возможно расширение системы команд по-
средством введения в запоминающее микропрог-
раммное устройство дополнительных команд, четы-
ре вида адресации
Разрядность................16, предусмотрен режим работы с числами,
имеющими удвоенную разрядность
Быстродействие, тыс. оп/с:
в формате регистр-регистр........:......................... 600
в формате регистр-память................................... 300
умножение...................................................100
деление......................................................54
Емкость, К слов:
ОЗУ..................................................17-97
ПЗУ..................................................12-72
ЭЗУ......................................................1
Каналы ввода-вывода...........................По ГОСТу 18977—79,
ГОСТу 26765.52-87
Надежность, час/отказ............................... 1500—2500
Мощность, Вт............................................23—145
Масса, кг...............................................0,8—12
Выпущено 20 модификаций ЦВМ80-302ХХ, по шести модификаций
ЦВМ80-303ХХ и ЦВМ80-307ХХ и 24 модификации ЦВМ80-308ХХ. Число про-
граммных модификаций — 56.
595
Семейство ЦВМ 80-40ХХХ
Бортовые ЦВМ 80-40ХХХ разработаны в ОКБ «Электроавтоматика» под ру-
ководством главного конструктора Р. А. Шек-Иовсепянца. Работа над семей-
ством БЦВМ начата в 1984 г., к серийному производству приступили в 1987 г.
Бортовые ЦВМ этого семейства относятся к типу универсальных, асинхрон-
ных машин параллельного действия. Машины 16-разрядные выполняют опера-
ции с фиксированной и плавающей запятой, возможно удвоение разрядности при
вычислениях. Система команд многоформатная (типа «Электроника 60»), в ней
предусмотрены регистровая, косвенно-регистровая, автоинкрементная, автодек-
рементная, косвенно-автоинкрементная, косвенно-автодекрементная, индексная
и косвенно-индексная адресации. Система прерываний восьмиуровневая.
Структура БЦВМ строится с использованием модулей процессоров, модулей
памяти и интерфейсных модулей. Процессорный модуль кроме процессора и ЗУ
микропрограмм включает также ОЗУ и ПЗУ емкостью 4 и 16 К слов. Быстродейст-
вие процессора в формате R-R — 800 тыс. оп/с, а в формате R-S — 500 тыс. оп/с.
Модуль памяти комбинированный, он включает ОЗУ емкостью 4 К, ПЗУ ем-
костью 32 К и ЭЗУ емкостью 16 К слов. Емкость памяти машин семейства изме-
няется в пределах: ОЗУ от 10 до 24 К слов, ПЗУ от 48 до 224 К слов, ЭЗУ от 16
до 224 К слов. Интерфейсные модули обеспечивают обмен по ГОСТу 18977—79 и
ГОСТу 26765.52—87. Разработано две однопроцессорные и четыре двухпроцес-
сорные конфигурации БЦВМ, различающиеся емкостью памяти и составом ин-
терфейса.
Система встроенного тестового контроля обеспечивает полноту контроля не
менее 0,9. Предусмотрена автономная система контроля с использованием КПА с
коэффициентом автоматизации контроля не менее 0,9.
Для отладки ПО предлагается рабочее место программиста РМП-85, вклю-
чающее технологическую ЭВМ, внешнюю память, блоки индикации и блоки со-
пряжения.
Характеристики БЦВМ 80-40ХХХ
Тип ЦВМ...............Универсальная с микропрограммным управлени-
ем, одноадресная, асинхронная, параллельного дейст-
вия, с плавающей запятой; система прерываний —
8 управляемых уровней
Система команд.................................... Электроника 60М
Разрядность.................16, предусмотрен режим работы с числами,
имеющими удвоенную разрядность
Быстродействие, тыс. оп/с:
в формате регистр-регистр................................. 800
в формате регистр-память.................................. 500
умножение..................................................100
деление.................................................... 60
Емкость, К слов:
ОЗУ......................................................10-24
ПЗУ.................................................... 48-224
ЭЗУ......................................................16-224
Каналы ввода-вывода............................По ГОСТу 18977—79,
ГОСТу 26765.52—87, дискретные
Надежность, ч/отказ..................................... 2500—5000
Мощность, Вт ............................................. 100—250
Масса, кг.....................................................7—16
596
К структурным новшествам, внедренным в эти ЦВМ, следует отнести воз-
можность создания одноконтурных и двухконтурных вычислительных систем для
повышения производительности либо надежности. Обмен информацией между
контурами выполняется при этом при помощи двухпортового ОЗУ.
Бортовые ЦВМ с архитектурой «Поиск»
Бортовые ЦВМ с архитектурой «Поиск» серии Ц100 разработаны в НИИ
«Аргон». Разработка начата в конце 1970-х гг. Первая модель Ц100 была разрабо-
тана и передана в серийное производство в 1983 г., затем Ц101 и Ц102, а в
1986 г. — Ц104 [1].
Отличительная особенность БЦВМ серии заключается в возможности адап-
тации набора команд к решаемым задачам, которая достигается введением в ос-
новной набор операторов, свойственных данным задачам. Наряду с традицион-
ными операциями в систему команд включены и сложные операторы, посред-
ством которых производится адаптация на конкретное применение. Сложные
операторы реализуют обратную польскую запись и выполняются на стеке, повы-
шая долю операций, не требующих обращения к памяти, что повышает реальную
производительность машины. Например, выражение^ = a*b + c(d + е), реали-
зуемое как последовательность операций «+» и «х», требует 38 тактов работы
машины, а реализуемое как сложный оператор — только 23 такта. Реальное эф-
фективное быстродействие машины (в зависимости от класса решаемых задач)
в 1,3...1,5 раза превышает потенциальное, определяемое на типовой операцион-
ной смеси.
Потенциальное эффективное быстродействие БЦВМ Ц100 составляет
180 тыс. оп/с, а БЦВМ Ц101, Ц102 и Ц104 — 400 тыс. оп/с. В составе структуры
БЦВМ Ц104 предусмотрен интерфейс для подключения к каналу по ГОСТу
26765.52-87.
Конструктивно машины серии выполнены в виде моноблока. Модули рас-
положены вертикально в одном из двух изолированных отсеков корпуса. Другой
отсек отведен для блока питания. Машины работают с воздушным охлаждением.
Вместе с машиной пользователю предлагается система автоматизации про-
граммирования, отладки и документирования (САПОД), которая включает: кон-
фигуратор для настройки транслятора на состав операторов изделия, транслятор
с языка символического кодирования операторов, загрузчик. Подсистема авто-
матизации отладки позволяет проводить автономную и статическую комплекс-
ную отладку в среде ОС ЕС в интерактивном режиме и включает диспетчер от-
ладки, транслятор с языка отладки и интерпретатор машинных команд изделия.
БЦВМ с архитектурой ЕС ЭВМ
Разработка БЦВМ с архитектурой ЕС-ЭВМ была начата в НИИ «Аргон» в
середине 1970-х годов. Эта архитектура была реализована в БЦВМ А-30, А-40 и
А-50 [1].
БЦВМ А-30 является младшей моделью семейства. В системе команд маши-
ны нет операций плавающей и десятичной арифметики, она выполняет операции
с 16- и 32-разрядными операндами. БЦВМ А-50 полностью совместима с ЕС
ЭВМ, она выполняет операции с фиксированной и плавающей запятой, ее быст-
родействие в формате R-R составляет 2 млн оп/с. В структуре машины использу-
597
ются накопители на магнитной ленте и на цилиндрических магнитных доменах в
исполнении для жестких условий эксплуатации. Для отработки ПО используются
рабочие места, выполненные на базе ЕС ЭВМ.
Семейство БЦВМ «Заря-40»
Разработка БЦВМ семейства «Заря-40» была начата в 1980-х годах в НИИП,
были разработаны «Заря-40» и «Заря-41» [2]. Эти БЦВМ имеют эффективное
быстродействие, равное 700 тыс. оп/с (сложение R-R — 1500 тыс. оп/с). В струк-
туре БЦВМ «Заря-40» имеется специализированный процессор, быстродействие
которого составляет 12 млн оп/с. БЦВМ «Заря-40» имеет ПЗУ емкостью 64 К
слова и два блока ОЗУ емкостью по 64 К слова каждый, «Заря-41» имеет ОЗУ ем-
костью 16 К слов, ПЗУ емкостью 64 К слова.
Для обмена с внешней средой используются каналы по ГОСТу 18977—79 (об-
мен последовательными кодами), а в БЦВМ «Заря-40» используется и один муль-
типлексный канал. Энергопотребление машин составляет 200 Вт, наработка на от-
каз превышает 4000 ч.
БЦВМ четвертого поколения
Четвертое поколение БЦВМ характеризуется открытой архитектурой. Маши-
ны этого поколения могут иметь интегрированную структуру, в состав которой на-
ряду с процессорами общего назначения могут входить и специализированные про-
цессоры. В составе внешнего интерфейса БЦВМ в настоящее время используются
открытые унифицированные мультиплексные каналы (1 Мбит/с) для основного
обмена информацией и радиальные каналы для обмена разовыми командами. По
мере разработки в состав внешнего интерфейса могут быть включены модули муль-
типлексных каналов со скоростью передачи данных 20 Мбит/с, модули сетевого
интерфейса типа AS4074 (HSDB), модули интерфейса типа FC и/или SCI/RT.
БЦВМ четвертого поколения обеспечивают построение магистрально-мо-
дульных федеративно-централизованных БВС, а при наличии в структуре этих
машин соответствующих интерфейсных модулей они обеспечат построение БВС с
архитектурой интегрированной вычислительной среды, структура которой будет
динамически перестраиваться в соответствии с требованиями решаемых задач.
В состав четвертого поколения входят семейства БЦВМ-386/486 (РПКБ
г. Раменское), БЦВМ МВК, разработанная с применением МП i486 (ОАО «Рус-
ская авионика», г. Жуковский), и БЦВМ90-50ХХХ и БЦВМ90-60ХХХ (ОКБ
«Электроавтоматика», г. Санкт-Петербург).
Первыми БЦВМ четвертого поколения можно считать БЦВМ СБ 3541 и
СБ 3542, разработанные ОКБ «Электроавтоматика» в рамках программы созда-
ния унифицированных СБ-ЭВМ, заданной постановлением правительства
СССР от 1984 г.
Следует отметить, что наступивший в середине 1980-х годов резкий спад фи-
нансирования практически всех работ по вычислительной технике для МО СССР
вначале затормозил и далее остановил все работы по СБ 3541 и СБ 3542. Была раз-
работана документация для опытных образцов и было изготовлено 8 комплектов
СБ 3541 и один макет СБ 3542, которые подтвердили заложенные в них идеи и
требуемые характеристики. Шесть комплектов были переданы в опытные образцы
комплексов для стыковки и отладки программного обеспечения. На этом все ра-
боты прекратились.
598
Таблица 5.1
Основные технические характеристики ЦВМ СБ 3541 и СБ 3542
Характеристики СБ 3541 СБ 3542
Тип ЦВМ Асинхронная, параллельного действия,
с фиксированной и плавающей запятой, 16-разрядная
Система команд СМ 1420
Быстродействие, тыс. оп/с:
в формате регистр-регистр 4000 1000
в формате регистр-память 2000 400
умножение 800 100
деление 400 50
Емкость, Кбайт:
ОЗУ 224 16
ПЗУ 128 96
ЭЗУ 32 16
Каналы ввода-вывода ГОСТ 26765.52 -87, 18977-79
Надежность, ч/отказ 5000 15 000
Мощность, Вт 100 20
Масса, кг 12 2
Ряд БЦВМ-386/486
В начале 1990-х годов в Раменском прибороконструкторском бюро (РПКБ)
на основе микропроцессорных комплектов i386 и i486 был разработан ряд борто-
вых вычислительных машин БЦВМ-386/486.
Машины ряда БЦВМ-386/486 имеют модульную организацию структуры и
построены на основе ограниченного набора унифицированных модулей. Для ор-
ганизации взаимодействия между модулями выбрана системная шина типа ISA с
пропускной способностью 40 Мбайт/с. БЦВМ выполняются в виде моноблоков с
габаритами от 2,5 до 4 К в соответствии с ГОСТом 26.765.16—87.
В обеспечение создания семейства в РПКБ разработан набор унифицирован-
ных модулей, содержащий:
• модули центрального процессора МЦП-1 (i386DX, i387DX) и МЦП-4
(i486DX2, 50 МГц);
• модуль графического процессора МГП-1 (i80860, 25 МГц);
• модуль предварительной обработки МПО-1 (80C186XL,12 МГц);
• модуль памяти и разовых команд МП-52;
• модуль статического ОЗУ на 2 Мбайта;
• модуль памяти энергонезависимой МПЭ-4 (Flash-память 256 Мбайт);
• модуль памяти энергонезависимой МПЭ-5 (Flash-память 64 Мбайта);
• модули внешнего интерфейса (20 типов).
Базовая модель БЦВМ-386 (БЦВМ-386-1) содержит в структуре модуль
центрального процессора (i80386DX, 20 МГц), модуль памяти и разовых команд,
три модуля обмена по ГОСТу 26765.52—87 и модуль обмена последовательными
кодами по ГОСТу 18977—79. В такой конфигурации машина обеспечивает нара-
ботку на отказ 10 000 ч, имеет вес 9 кг и энергопотребление 100 Вт. БЦВМ выпол-
нена в корпусе 2,5 К (L = 318, М = 194, В = 157 мм) и для нормального функци-
599
онирования требует принудительного охлаждения. Для отработки программного
обеспечения предлагается рабочее место программиста РМП БЦВМ-386.
Базовая модель БЦВМ-486 (БЦВМ-486-1) содержит в структуре модуль
центрального процессора (МЦП-4-2), модуль разовых команд (МРК-5-2), два
модуля мультиплексного обмена (МОМ-1-2) и три модуля последовательного об-
мена (ПоПС-5-2). Модуль центрального процессора построен на основе
180486DX2 (тактовая частота 50 МГц). Машина в данной конфигурации имеет на-
работку на отказ 10 000 ч, вес 13 кг, энергопотребление 120 Вт и выполнена в кор-
пусе 3 К (L = 318, М = 194, В = 194 мм). Для нормального функционирования
требует принудительного охлаждения. Для отработки программного обеспечения
предлагается рабочее место программиста РМП БЦВМ-486.
ЦВМ90-50ХХХ и ЦВМ90-60ХХХ
В 1995—1998 гг. ОКБ «Электроавтоматика» разработало базовую БЦВМ об-
щего назначения, которая спроектирована как открытая вычислительная систе-
ма, содержащая требуемые наборы конструктивно-функциональных модулей
(КФМ), размещаемые в стандартных для авиационного применения корпусах по
ГОСТу 26765.16-87.
БЦВМ-OH разработана в двух вариантах — ЦВМ90-50ХХ и ЦВМ90-60ХХ,
каждый из которых может быть одноконтурным или двухконтурным (для увели-
чения производительности вычислительной системы). Она предназначена для
обеспечения комплексирования широкого класса систем и комплексов и в том
числе систем реального времени в широком диапазоне внешних воздействий [3].
Предлагается базовый набор КФМ, включающий в свой состав вычислитель-
ные модули МВ56 для ЦВМ90-50ХХ и МВ60 для ЦВМ90-60ХХ. В первом случае
использован микропроцессорный комплект (МПК) серии 1839, являющийся
отечественным полностью патентно-чистым комплектом среднего быстродей-
ствия (10 000 тыс. коротких операций в секунду). Модуль МВ60 построен на ос-
нове БИС процессора R3081 более высокого относительно МП К 1839 быстродей-
ствия с тактовой частотой 25 и 50 МГц и соответствующей скоростью вычисле-
ний (25 000 и 50 000 тыс. коротких операций в секунду в зависимости от тактовой
частоты).
Кроме вычислительных модулей, в базовый комплект входят:
• КФМ мультиплексных каналов обмена по ГОСТу 26765.52—87 (аналог MIL
1553В), содержащий 3 дублированных мультиплексных канала;
• КФМ радиальных каналов информационного обмена по ГОСТу 18977—79
(типа ARINC429), содержащий 18/6 информационно-независимых каналов
приема/передачи последовательных кодов, 16/8 каналов приема/передачи
разовых сигналов;
• КФМ внешнего запоминающего устройства с емкостью накопителя до
16 Мбайт (существует техническая возможность существенного увеличения
этого параметра);
• КФМ вторичных напряжений.
Базовый комплект может расширяться по желанию заказчика.
Для ЦВМ-OH разработана документация, изготовлены образцы, успешно
прошедшие лабораторные испытания. С 1998 г. ОКБ осуществляет изготовление
и поставку опытных образцов ЦВМ.
600
Таблица 5.2
Обобщенные характеристики БЦВМ ОН
Тип БЦВМ Серия БЦВМ90-50ХХХ Серия БЦВМ90-60ХХХ
Тип процессора МПК 1839 МПК R3081
Тактовая частота, МГц (типа VAX11/750) 10 50
Быстродействие (ФЗ), млн оп/с 5 50
Быстродействие (ПЗ), млн оп/с 0,6 25
Емкость ПЗУ, Кбайт 1024...4096 4096...8192
Емкость ОЗУ, Кбайт в модуле процессора 128...1024 в модуле процессора 1024...4096
Емкость ЭЗУ, Кбайт в модуле процессора До 16 Мбайт при установке в модуле процессора До 16 Мбайт при установке
РК на входе дополнительного модуля 16...48 дополнительного модуля 16...48
РК на выходе 8...24 8...24
ГОСТ 18977-79 18 каналов приема 18 каналов приема
ГОСТ 26765.52-87 6 каналов выдачи (в отдельном модуле) 3 канала 6 каналов выдачи (в отдельном модуле) 3 канала
(MIL 1553В) (в отдельном модуле) (в отдельном модуле)
RS 232 2 (в модуле процессора) 2 (в модуле процессора)
Наработка на отказ, ч 10 000 10 000
Масса, кг 7...12 7...12
Энергопотребление, Вт 50...90 50...90
Унифицированные БЦВМ
Идея межвидовой унификации получила логическое завершение в разработ-
ках ЭВМ семейства «Багет» (головной разработчик КБ «Корунд-М»). При созда-
нии семейства ЭВМ «Багет» были поставлены следующие цели:
• унификация аппаратных средств и программного обеспечения;
• возможность построения вычислительных машин и систем различной кон-
фигурации на основе унифицированных магистралей межмодульного обме-
на и стандартных конструктивов модулей;
• построение вычислительных систем различной производительности (одно- и
многопроцессорных конфигураций) с использованием процессоров различ-
ной архитектуры.
В обеспечение поставленных целей был разработан базовый набор унифи-
цированных модулей и ряд мезонинных плат. Этот набор обеспечивает постро-
ение управляющих ЭВМ (в том числе и бортовых) с широким спектром харак-
теристик.
Основные черты пятого поколения БЦВМ еще окончательно не определены.
Однако обязательным качеством этих машин следует считать наличие в структу-
ре унифицированных внутренних и внешних интерфейсов, модулей интеллек-
туальных процессоров, способных к адаптации и обучению, «дружелюбного»,
интеллектуального интерфейса и развитых операционных систем, а также ин-
601
струментальных средств поддержки разработки программ на всех этапах их жиз-
ненного цикла. Работы по созданию БЦВМ пятого поколения все еще находятся
на стадии НИР, сроки создания опытных образцов целиком зависят от финанси-
рования.
5.2.2. АВИАЦИОННЫЕ СИСТЕМЫ
ИНФОРМАЦИОННОГО ОБМЕНА
Устойчивой тенденцией в развитии авиационных систем информационного
обмена является их постоянно возрастающая сложность и, как следствие, необ-
ходимость постоянного совершенствования и развития их организации. Наряду с
этим характерной особенностью современного развития военной техники следу-
ет считать быстрое развитие, обновление и появление различных новых техноло-
гий, поддерживающих создание этой техники. Так, быстро развиваются микро-
электроника, информационные сетевые технологии передачи данных, волокон-
но-оптические технологии связи, технологии создания высокопроизводительных
бортовых мультипроцессорных кластеров и высокоинтеллектуальных интер-
фейсных аппаратно-программных средств [4—11].
В современной экономической ситуации все развитые государства, как пра-
вило, в итоге получают доступ к технологической базе с одними и теми же техни-
ческими характеристиками. Превосходством в военной технике будет обладать та
сторона, которой потребуется минимальное время внедрения новейших техноло-
гий в серийные образцы вооружения и военной техники. В качестве основного
инструмента для достижения поставленной цели могут быть предложены следую-
щие механизмы:
• применение концепции открытых систем, направленной на стимулирование
порядка использования отработанных коммерческих продуктов, технологий
и стандартов при разработке образцов вооружения;
• решение проблем межвидовой унификации и стандартизации, «двойное» ис-
пользование аппаратных и программных модулей, тиражирование эффек-
тивных методов и средств разработки для обеспечения требуемых техниче-
ских характеристик образцов вооружения.
Несомненно, что оба предлагаемых механизма ведут к существенному сни-
жению стоимости разработки, обслуживания и эксплуатации образцов вооруже-
ния. Именно фактор стоимости в настоящее время становится определяющим
при разработке новой техники. Так, при проектировании авионики самолета JSF
рассматриваются только такие технологии, которые позволяют дать экономию
общей стоимости жизненного цикла порядка 10...20% по сравнению с аналогич-
ной характеристикой по технологии самолета F-22.
В настоящий период достаточно четко обрисовался перечень взаимосвязан-
ных протоколов информационного обмена, рекомендованных к применению в
комплексах бортового оборудования реального времени на межсистемном уровне:
• ГОСТ 26765.52—87 (аналог MIL-STD-1553B в редакции 1986 г.);
• ГОСТ Р50832—95 (идеология информационного обмена STANAG 3910).
В военной авиации основополагающим стандартом комплексирования бор-
тового оборудования на межсистемном уровне определен ГОСТ 26765.52—87. Он
в настоящее время в основном уже внедрен или же его внедрение для изделий оп-
ределенного типа в полном объеме заканчивается. Этот ГОСТ на межсистемном
602
уровне определил переход к интеграции комплексов бортового оборудования на
основе использования принципов построения магистрально-модульных, иерар-
хических систем информационного обмена, обеспечивающих программное уп-
равление потоками информации. Магистральная организация СИО позволяет
развивать и модернизировать комплексы бортового оборудования без глобаль-
ных изменений в топологии связей на уровне функциональных систем и делает
возможным программное управление потоками информации. Разработка иде-
ологии обмена информации в соответствии с ГОСТом 26765.52—87 со скоростью
передачи данных 1 Мбит/с явилась техническим компромиссом между требова-
ниями к характеристикам обмена информацией со стороны комплексов авиаци-
онного бортового применения и возможностями цифровой элементной базы на
данный момент времени. К настоящему времени проведены работы по корректи-
ровке ГОСТа 26765.52—87 для учета в его спецификациях требований документа
NOTICE II и обеспечения соответствия уровню современных зарубежных регла-
ментирующих документов в данной области.
Необходимо также отметить, что ГОСТ 26765.52—87 регламентирует приме-
нение электропроводной электрической среды (на основе симметричного кабе-
ля), которая должна обеспечивать надежную передачу информации в сложной
помеховой обстановке при наличии большого количества взаимовлияющих раз-
личных источников помех:
• электромагнитных, мощных импульсных помех, которые порождаются
функционированием отдельных систем или их составных узлов;
• атмосферных электрических помех, а также электростатических помех и на-
водок, образующихся вне или внутри летательного аппарата;
• электростатических помех, возникающих в результате применения компо-
зитных материалов при отсутствии экранирования.
Внедрение в авионику протокола ГОСТа 26765.52—87 породило проблему обес-
печения необходимой помехоустойчивости передачи информации, а также снятия
в дальнейшем ограничений на величину скорости передачи информации и расши-
рения его функциональных возможностей. Вышеуказанные проблемы были раз-
решены посредством применения в качестве физической среды волоконно-опти-
ческих средств передачи информации (ВОСПИ). За рубежом, в частности в США,
для реализации данной задачи в течение последних десяти лет проводились интен-
сивные разработки компонентной базы ВОСПИ, которые сопровождались выпу-
ском различных регламентирующих спецификаций на них. Для испытаний были
созданы летающие лаборатории, в которых проводились исследования действитель-
ной возможности применения ВОСПИ в комплексах бортового оборудования.
В итоге проведенных исследований в 1989 г. был выпущен стандарт MIL-STD-1773,
который регламентирует протокол обмена MIL-STD-1553В и возможность приме-
нения ВОСПИ, на данный момент времени он является текущим действующим
стандартом государственного уровня для США.
Внедрение отечественной промышленностью организации обмена информа-
цией в соответствии с ГОСТом 26765.52—87 происходило с большими трудностя-
ми и достаточно длительное время. К моменту окончательного освоения данного
интерфейса величина его пропускной способности в ряде случаев уже являлась
ограничением при построении современных вычислительных систем и комплек-
сировании бортового оборудования, что обусловливало необходимость использо-
вания большого числа каналов, обеспечивающих распределение совокупного ин-
603
формационного трафика. Таким образом, по окончании внедрения в вычисли-
тельные средства интерфейса по ГОСТу 26765.52—87 в ряде случаев при
построении отечественных комплексов уже имелась логическая целесообраз-
ность перехода на интеллектуально более сложные интерфейсы, обеспечиваю-
щие объединение большего числа абонентов и большую пропускную способ-
ность (по крайней мере на порядок выше, чем 1 Мбит/с).
Проведенные исследования показали, что внедрение высокоскоростных по-
следовательных интерфейсов в СИО реального времени, определяемое перехо-
дом к полномасштабному использованию ВОСПИ и передачей информации на
высоких скоростях, должно осуществляться поэтапно с учетом современного со-
стояния отечественной цифровой элементной базы и компонентной базы
ВОСПИ. Для накопления положительного технического опыта использования
достижений современных сетевых технологий можно выделить три последова-
тельных этапа внедрения:
• развитие функциональных возможностей реализованного и применяемого
протокола по ГОСТу 26765.52—87 введением в него дополнительных функ-
циональных возможностей, например высокоскоростных магистралей, и пе-
редачи по ним информационного трафика в соответствии с сетевыми прин-
ципами;
• адаптация стандартных протоколов передачи информации локальных вы-
числительных сетей (ЛВС) общего применения в соответствии с особеннос-
тями функционирования комплексов бортового оборудования реального
масштаба времени;
• всесторонний анализ, выбор и внедрение перспективной сетевой технологии
в качестве единой унифицированной сети авионики (Unified Network-UN)
для перспективных ЛА, отвечающей многочисленным и одновременно про-
тиворечивым требованиям комплексирования бортового оборудования в ре-
альном масштабе времени.
Предлагаемые этапы не являются альтернативными. Однако при проведе-
нии их постепенно наращивается и развивается функционально-логическая ор-
ганизация последовательных высокоскоростных интерфейсов на основе будущих
полномасштабных применений ВОСПИ на межсистемном уровне.
Так, стандарт ГОСТ Р50832—95, предполагающий реализацию первого эта-
па, является функциональным развитием ГОСТа 26765.52—87 вследствие исполь-
зования дополнительной высокоскоростной шины (ВШ), реализованной на ос-
нове ВОСПИ, которая управляет низкоскоростной шиной (НШ) в соответствии с
ГОСТом 26765.52—87. Скорость передачи данных по ВШ составляет 20 Мбит/с, а
размер массивов передаваемых данных — до 4 К 16-разрядных слов. При этом
обеспечивается:
• сохранение идеологии обмена (централизованного доступа) и преемствен-
ности с уже созданными наработками в области аппаратно-программных
средств по ГОСТу 26765.52—87;
• первичная апробация применения ВОСПИ в бортовых системах реального
времени;
• минимально необходимые экономические затраты и минимальный техниче-
ский риск при реализации идеологии обмена.
Современная отечественная технологическая база ВОСПИ способна реали-
зовать традиционную для комплексов бортового оборудования, полностью пас-
604
сивную волоконно-оптическую среду, которая охватывает до 16 абонентов. При
объединении большего числа абонентов (32...64) в физическую среду должны
вводиться активные компоненты. При этом наиболее перспективной топологией
физической среды является распределенная звездообразная топология. Необхо-
димо также отметить, что современная отечественная цифровая элементная база
в настоящее время способна реализовать протоколы обмена на скоростях
примерно 20 Мбит/с.
Проведенные исследования показали, что дальнейшее развитие СИО на ос-
нове использования традиционных методов улучшения их отдельных характерис-
тик является невозможным. Необходим принципиально новый системный под-
ход к организации обмена между вычислительными средствами и бортовым
функциональным оборудованием. Переход к использованию технологий инфор-
мационно-вычислительных сетей для передачи данных был предопределен тре-
бованиями к организации, характеристикам и составу оборудования комплексов
перспективных ЛА, а также влиянием независимого интенсивного развития сете-
вых технологий общего применения. Для повышения эффективности, экономич-
ности и быстроты внедрения данный подход может рассматриваться как един-
ственно верный, если принять во внимание затраты на проведение необходимых
исследований и разработок.
Внедрение сетевых технологий в авионику предполагается посредством
адаптации уже апробированных протоколов передачи данных общего примене-
ния для возможности их использования в системах реального масштаба времени.
Данный подход предусматривает, с одной стороны, более высокую степень ин-
теграции функционального оборудования, с другой стороны — в конечном счете
реализацию принципиально новой парадигмы организации СИО бортового при-
менения, когда предлагается единая сетевая технология авионики на основе со-
здания однородного связного оборудования, отвечающего всем требованиям ин-
формационного обмена реального времени.
Требования, предъявляемые к средствам обмена ИВС реального времени,
могут быть различными и в основном зависят от:
• состава функциональных задач, решаемых комплексами бортового оборудо-
вания;
• условий эксплуатации и конструктивных особенностей используемого обо-
рудования;
• идеологии обмена и накопленного опыта построения СИО для комплексов
оборудования объектов конкретного применения;
• состояния и перспектив развития элементной базы.
Результаты проведенного анализа состояния и перспектив развития борто-
вых СИО позволили выявить общую тенденцию перехода к межсистемным ин-
терфейсам с сетевыми организациями обмена. Тенденции развития СИО на меж-
системном уровне могут быть представлены во взаимосвязанной последователь-
ности переходов от одной организации обмена к другой (рис. 5.5).
Первый этап полномасштабного внедрения сетевых технологий в авионику
естественным образом связан с развитием и широким применением протоколов
передачи данных ЛВС общего применения, концепции которых полностью соот-
ветствуют подходу к комплексированию бортового оборудования на основе
иерархического построения СИО. Организация СИО на данном этапе развития с
605
Рис. 5.5. Тенденции развития системы информационного обмена
использованием принципов сетевого взаимодействия, которые определены для
ЛВС, должна обеспечивать следующие системные характеристики:
• предоставление равного и приоритетного доступа для различных абонентов к
единому физическому моноканалу с обеспечением при этом кратных и ограни-
ченных по величине сверху временных задержек при передаче информации;
• адаптацию и логическую гибкость организации информационного взаимо-
действия при переменном составе объединяемых абонентов, суммарное чис-
ло которых должно составлять не менее 64 (с возможностью расширения их
состава до 128);
• реализацию трансакций различного типа: направленного обмена информаци-
ей между двумя абонентами, а также организацию «логической» адресации;
• техническую скорость передачи информации не менее 50 Мбит/с;
• эффективную пропускную способность, определяемую логикой протокола и
форматами передаваемой информации;
• возможность передачи сообщений с информационными массивами до 4 К
слов;
• качество (или достоверность) передачи информации, определяемое значени-
ем вероятности разрядной ошибки на уровне Рош = 1 х 1О-10 ош/бит;
• структурную надежность и возможность реконфигурации первичной струк-
туры СИО.
Зарубежными специалистами по комплексированию бортового оборудова-
ния интенсивно внедряется концепция преемственности идеологии обмена, рег-
ламентированного стандартами локальных сетей ISO. В последнее время ISO оп-
ределило ряд известных протоколов передачи данных локальных сетей в качестве
международных, на которые должно быть обращено пристальное внимание при
проведении разработок по логической и структурно-схемотехнической организа-
606
ции аппаратно-программных средств канального оборудования СИО бортового
применения. Данная группа протоколов реального времени базируется на иде-
ологиях обмена, применяемых в системах передачи данных стандартных локаль-
ных сетей International Standardization Organization — ISO (8802.4, 8802.5, 8802.7,
8802.8). При этом следует отметить, что при внедрении высокоскоростных ин-
терфейсов с сетевой идеологией предполагается также при необходимости ис-
пользование на нижних уровнях иерархических СИО менее логически мощных и
уже апробированных организаций обмена, таких как ГОСТ 26765.52—87 и ГОСТ
Р50832-95.
Работы по созданию внутриобъектных высокоскоростных информацион-
но-вычислительных сетей с использованием базовых протоколов локальных вы-
числительных сетей были начаты за рубежом во второй половине 1980-х годов, а
несколько позднее были инициированы работы по их стандартизации и унифи-
кации. С учетом особенностей функционирования комплексов оборудования в
реальном масштабе времени были сформулированы общие требования к высоко-
скоростной шине передачи данных — HSDB (High Speed Data Bus), в настоящее
время осуществляется полномасштабная разработка необходимой элементной
базы фирмами США и Западной Европы.
В рамках программы AVS «Высокоскоростная шина данных» в США был
разработан ряд протоколов перспективных интерфейсов с сетевой организацией.
К настоящему моменту времени для комплексирования бортового оборудования
разработан ряд версий протоколов информационного обмена с идеологиями де-
терминированного (конкретно маркерного) доступа к среде, на основе которых
предполагается осуществлять комплексирование бортового оборудования перс-
пективных ЛА 2005...2010 гг. Версии перспективных протоколов были предложе-
ны различными техническими группами разработчиков протоколов, в том числе
и специалистами общества SAE (США), а именно техническими подкомитетами
SAE-AS-2B и SAE-AS-9B. В настоящее время данным подкомитетом созданы два
основных проекта различных стандартов высокоскоростных шин (HSDB):
• AS4074 — высокоскоростная линейная (магистральная) шина с маркерным
методом доступа (базовый прототип ИВС — ISO 8802.4);
• AS4075 — высокоскоростная кольцевая шина с маркерным методом доступа
(базовые прототипы ИВС — ISO 8802.5 и ISO 8802.8).
Организация указанных стандартов соответствует положениям эталонной
модели ВОС (ГОСТ 28906—91) и регламентирует основные технические требова-
ния, указанные выше (скорость передачи не менее 50 Мбит/с и обмен массивами
данных до 4 К 16-разрядных слов).
Для выработки единых требований, определяющих идеологию обмена в
перспективных комплексах бортового оборудования, при комитете SAE была со-
здана техническая группа Joint Integrated Avionics Working Group (JIAWG). В част-
ности, специалистами группы JIAWG были проведены работы по анализу раз-
личных версий протоколов высокоскоростной последовательной линейной ши-
ны и выработки единых требований к данному типу интерфейса. По мнению
специалистов этой группы, в настоящее время наиболее перспективной органи-
зацией обмена при реализации системной высокоскоростной последовательной
шины является линейная шина с маркерным методом доступа. JIAWG разработа-
на версия нормативного документа на протокол линейной шины с маркерным
доступом — J88-M2 (на основе AS4074), который, как предполагается, и явится
базой для проекта STANAG 3939.
607
Кроме того, тем же комитетом SAE-AS-9B разработан стандарт на маркер-
ную шину с резервированной (дублированной) кольцевой топологией и противо-
положными по направлению передачами информации в отдельных кольцах —
AS4075. Данный протокол бортового применения является адаптацией к реаль-
ному времени базовых прототипов ISO 8802.5 и FDDI. При этом регламентиру-
ется аналогичная (как и для FDDI) техническая скорость передачи данных —
125 Мбит/с. Однако при создании перспективных зарубежных комплексов авиа-
ционного бортового оборудования данный стандарт (AS4075) до настоящего вре-
мени не нашел применения.
Для реализации изменяемой части станции на уровне доступа к среде ISO
разработаны достаточно известные стандартные протоколы на основе шинной
и кольцевой топологий физической среды ISO 8802.4, ISO 8802.5, ISO 8802.7,
ISO 8802.8, которые реализуют различные способы доступа к среде на определен-
ной скорости передачи данных. В отличие от предыдущих идеологий обмена в ре-
альном времени (MIL-STD-1553B и STANAG3910) необходимо в дальнейшем
регламентировать логическую организацию функционирования станции и орга-
низацию взаимодействия станции с абонентом. Таким образом, должны быть раз-
работаны регламентирующие документы для применения в реальном времени,
совместимые с ISO 8802.2 и протоколом транспортного уровня локальных сетей
общего применения. На основе указанных выше верифицированных прототипов
в настоящее время разрабатываются проекты стандартов на системы передачи
данных ИВС реального времени: AS4074 и AS4075. Протоколы высокоскоростных
маркерных шин с линейной и кольцевой топологиями в рамках эталонной модели
ВОС определяют идеологию организации канального оборудования на уровне из-
меняемой части логики станции данных.
Транспортный уровень должен обеспечивать выполнение следующих ос-
новных функций:
• организацию функционирования с установлением соединения;
• обнаружение и исправление ошибок в сообщениях пользователей (абонентов);
• обеспечение взаимодействия с пользователями по абонентскому интерфейсу;
• установление и разъединение транспортных соединений (передачу инфор-
мации от отправителя к получателю о размере передаваемого массива
данных — количестве сегментов, кадров в сегменте);
• управление транспортным потоком данных (определение очередности пере-
дачи данных в соответствии с их нумерацией в массиве и приоритетом);
• сегментацию (разбиение массива данных пользователя на блоки, предназна-
ченные для однократной передачи) и сборку массивов данных из принятых
блоков;
• восстановление передачи после устранения неисправностей;
• контроль и восстановление целостности данных (исключение потерь, дву-
кратной обработки и нарушений порядка следования сообщений).
Подуровень управления логическим звеном должен обеспечивать:
• упаковку (разупаковку) данных в (из кадров) данных;
• передачу и прием кадров данных;
• управление процедурами инициализации и деинициализации логического
канала;
• установление и разъединение канального соединения;
• контроль последовательности передачи и приема кадров;
608
• передачу и прием подтверждений о приеме кадров;
• организацию передачи данных в двух направлениях;
• инициализацию повторных передач, принятых получателем с ошибкой;
• информирование пользователя о результатах передачи и приема кадров.
Подуровень управления доступом к среде в общем случае должен обес-
печивать:
• начальный запуск (инициализация) сети;
• контроль состояния физической среды;
• логическое подключение станции;
• логическое отключение станции;
• формирование управляющих кадров;
• передача и прием управляющих кадров;
• передача и прием кадров данных;
• обнаружение и исправление ошибок (повторная передача искаженных кад-
ров, неподтвержденных команд, уничтожение поврежденных кадров, в том
числе с нарушенным порядком нумерации), информирование отправителя
об обнаруженных ошибках;
• оповещение о неустранимых на данном уровне ошибках;
• контроль за соблюдением временных параметров протокола;
• организацию очереди передачи данных в соответствии с их приоритетами;
• формирование управляющих кадров и кадров данных в соответствии с ре-
ализуемым протоколом;
• компоновку передаваемых данных в кадрах;
• разупаковку данных из принимаемых кадров;
• определение границ кадров;
• контроль размеров кадров.
Физический уровень должен обеспечивать:
• установление (прекращение) физических соединений;
• организацию последовательности передачи кадров;
• обнаружение сбоев и отключение питания;
• обнаружение неисправностей соединительного и коммутационного оборудо-
вания аппаратуры подключения к физической среде (обрывов проводов, по-
терь механического и электрического контакта и т. д.);
• кодирование (декодирование) электрических сигналов в коды сигналов, пе-
редаваемых по физическим линиям того или иного типа;
• формирование синхроимпульсов и их установку в поле синхронизации пере-
даваемого кадра;
• синхронизацию декодирующего устройства с частотой принимаемых сигна-
лов из физической линии;
• дешифрацию содержимого поля адреса в принимаемом кадре и идентифика-
цию адресов пользователей, обслуживаемых станцией;
• ретрансляцию принятых кадров в случае несовпадения их адресов с адресами
обслуживаемых станцией пользователей.
Как уже отмечалось выше, в настоящее время интенсивно развиваются сете-
вые технологии вычислительных средств общего применения. Обмен данными
между элементами ядра ЭВМ и периферийными устройствами постоянно требо-
вал все большей и большей пропускной способности соответствующих каналов
данных. В ответ на эти требования в параллельных интерфейсах увеличивалась
20 Авиация ВВС России и научно-технический прогресс
609
разрядность составляющих шин «адреса» и «данных», а также усложнялась шина
управления. Кроме того, по мере роста используемой полосы пропускания воз-
растали неудобства, связанные с многожильными кабелями и громоздкими
разъемами. Учитывая это, разработчики цифровых систем общего применения в
своем большинстве начинают переходить от параллельных интерфейсов к после-
довательным с использованием современных достижений сетевых технологий
обмена. Разрабатываемые технологии коммерческого плана могут явиться осно-
вой СИО комплексов бортового оборудования перспективных ЛА.
Анализ информационных потоков в современной авионике показывает, что
по мере усложнения реализуемого состава алгоритмов основным средством по-
вышения производительности вычислительных средств и систем становится раз-
работка высокоскоростных, высокоинтеллектуальных интерфейсов. Возрастание
передаваемого информационного трафика и быстроты его обработки в системах
современной военной техники в основном продиктовано желанием сохранить
превосходство в скорости анализа внешней информационной обстановки. Уве-
личение трафика передаваемой информации предполагается в следующих при-
кладных областях:
• цифровой обработки сигналов;
• построения и обработки изображений;
• целеуказания (трассировки цели);
• распознавания целей.
Все эти изменения в характеристиках внешней информационной обстановки
влияют на выбор сетевых средств передачи информации для КБО перспективных
ЛА. При выборе организации перспективной сетевой магистрали, рассчитанной
на эксплуатацию в жестких условиях, необходимо принимать во внимание сле-
дующие требования к ее функциональным характеристикам, которые должны
обеспечивать:
• соответствие современным стандартам общего применения;
• рыночную жизнеспособность и использование коммерческих компонент;
• нечувствительность в широком диапазоне к длинам соединений при переда-
че информации, а также отказоустойчивость и ремонтопригодность приме-
няемых топологий физической среды;
• поддержку последовательных и параллельных физических систем связей, ре-
ализуемых с малым числом физических контактных соединений;
• поддержку различных топологий среды на основе распределенных и центра-
лизованных переключательных модулей, электрических и оптических реали-
заций физической среды;
• поддержку специализированных («жестких») условий эксплуатации системы;
• поддержку высокой технической скорости передачи данных и малого време-
ни задержки;
• поддержку парадигмы передачи сообщений сетевого характера и передачи
данных в общей распределенной системе памяти между процессорными мо-
дулями;
• масштабируемость и наращиваемость вычислительных характеристик в
средствах обработки;
• поддержку функционирования в режиме реального времени;
• формирование изохронных видеоизображений;
• низкую стоимость/эффективность масштабируемых вычислительных средств
в широком смысле слова.
610
Соответствие международным стандартам гарантирует совместную взаимо-
заменяемость изделий, поступающих от различных производителей. Кроме того,
обеспечивается переносимость систем и снижается риск необходимости исполь-
зования уникальных реализаций. При этом соответствие международным стан-
дартам может потерять всякий смысл, если стандарт не поддерживается техниче-
скими реализациями достаточного числа разработчиков. Тенденции последнего
времени показывают, что разработчики специализированных систем предпочита-
ют применять новые технологии, которые хорошо зарекомендовали себя в нево-
енных областях общего применения. Принятие и развитие гражданским рынком
общего применения технологий перспективных локальных сетей — хороший по-
казатель живучести данных технологий.
Последовательные или параллельные связи, использующие небольшое число
контактов объединительной панели, необходимы для уменьшения ее насыщен-
ности (степени интеграции) и тем самым уменьшения уязвимости системы по от-
ношению к отказам контактов в соединениях.
Реализация электрических и оптических физических связей необходима для
поддержки всего диапазона требований, которым должны отвечать связи унифи-
цированных систем передачи данных. Электрические реализации являются са-
мыми дешевыми (в настоящий момент времени) и подходят для межмодульных
связей внутри стойки (крейта). Оптические связи устойчивы к электромагнитно-
му излучению, с их применением могут быть реализованы «длинные» связи (еди-
ницы километров). Длинные соединения типа стойка—стойка и датчик—стойка
желательно реализовывать в виде оптических соединений. Нечувствительность
связей к величинам их длин позволяет разместить вычислительные средства в
фюзеляже ЛА везде, где это наиболее удобно для доступа при эксплуатации, рав-
номерного распределения массы или по другим причинам. Это также допускает
использование одной связи для соединений на уровнях «датчик—стойка» и
«стойка—стойка», а также связей «модуль—модуль». Общее требование к отказо-
устойчивости для этих связей: отказы должны иметь высокую вероятность обна-
ружения и локализации, при этом любой единичный отказ не должен отключать
целое соединение (в некоторых случаях может быть допустимо потерять целую
секцию соединений). В общем случае для реализации этого требования требуют-
ся избыточные связи или некоторая организация коррекции ошибок.
Необходимо отметить, что авиационные КБО являются критическими сис-
темами жизнеобеспечения объектов. Таким образом, сетевые магистрали, обес-
печивающие их взаимодействие, должны обладать отказоустойчивостью при воз-
никновении большинства возможных отказов в соединениях между взаимодейст-
вующими узлами. В идеале выбранная перспективная сетевая технология должна
обеспечивать не меньшую отказоустойчивость, чем та, которую обеспечивает ор-
ганизация ГОСТа 26765.52—87 Изменение! (аналог MIL-STD-1553B + Noticell) с
двойным резервированием. Сетевая магистраль с перспективной организацией
передачи данных должна поддерживать простые процедуры изменения состава
объединяемых функциональных узлов посредством их подключения или отклю-
чения. Учитывая условия эксплуатации авиационных и подвижных систем, сете-
вая магистраль должна надежно работать в требуемых диапазонах рабочих темпе-
ратур и механических нагрузок.
Масштабируемость связей (возможность гибкого изменения топологии) не-
обходима для реализации многочисленных дополнительных функций, которые
611
могут появиться по прошествии значительного периода времени (тридцать лет
или более) эксплуатации КБО ЛА. Это также необходимо для возможности при-
менения новых компонент, созданных на основе новых, более высокопроизводи-
тельных технологий, которые будут, несомненно, разработаны в течение периода
эксплуатации. Масштабируемый протокол связей должен обеспечивать возмож-
ность подключения и обслуживания систем с невысокими информационными
характеристиками. В случае возрастания требований к пропускной способности
с их стороны необходимо также одновременно поддерживать обслуживание ин-
формационно-емких систем.
Одни типы связей, используемые для соединений в системах с распределен-
ной памятью, должны обеспечивать скорости передачи данных для перспектив-
ных технологий процессоров на уровне нескольких единиц Гбит/с. Другие же ти-
пы связи, используемые для соединений в сетях обработки видеосигналов, долж-
ны обеспечивать величину скорости передачи меньше единицы Гбит/с. Таким
образом, унифицированная сеть должна эффективно поддерживать изменения
требований к скорости передачи данных и являться масштабируемой.
Для поддержания обмена между интеллектуальными узлами видео-, аудио- и
цифровой информации сетевая магистраль должна иметь полосу пропускания не
менее 100 Мбит/с (желательно 1 Гбит/с). Высокая производительность это толь-
ко часть требований. Сетевая магистраль также должна передавать данные с не-
большими задержками для обеспечения предсказуемости откликов, что необхо-
димо в режиме реального времени систем военного применения.
Для формирования изображений в реальном масштабе времени перспектив-
ная сетевая магистраль должна обеспечивать малые задержки и при «жестких» ог-
раничениях на максимальные времена передачи данных. Малое время временной
задержки необходимо как в системах с распределенной памятью, так и в системах
передачи сообщений, в которых используется одна и та же сеть для потоков ин-
формации контроля и управления, а также потока данных, как требуется для уни-
фицированного протокола связей. В случае использования концепции распреде-
ленной памяти с когерентными (связными) кэш-памятями высокоскоростные
процессоры (с тактовой частотой 300 МГц и более) могут быть приостановлены
на сотни машинных циклов, если сеть связи обеспечивает значительное время за-
держки. В системах передачи сообщений большое время задержки в связях часто
приводит к очень низкой эффективности функционирования параллельных про-
цессоров. Эксперименты, проводимые при использовании передачи сообщений в
коммерческих параллельных системах процессоров, доказали, что даже умерен-
ная величина времени задержки в связях может иметь разрушительные последст-
вия для эффективного функционирования процессоров.
Обеспечение режима реального времени (предсказуемость функционирова-
ния во времени) необходимо для обеспечения своевременной доставки высоко-
приоритетных команд и данных управления в случае их смешения в едином пото-
ке с большими трафиками низкоприоритетных сообщений. Это может быть вы-
полнено посредством применения:
• уникальных топологий связей (например, использования централизованных
или распределенных переключателей);
• малой информационной загруженности СИО;
• различных способов планирования передач (дисциплины обслуживания)
данных.
612
Понятие эффективности/стоимости может иметь более широкий смысл и
включает в себя намного больше, чем просто стоимость соединений. Данное по-
нятие включает возможность:
• предотвращения значительного увеличения стоимости при изменении ха-
рактеристик будущих модификаций вычислительных средств;
• предотвращения увеличения стоимости вследствие поддержки парадигмы
простого программирования, которая предполагает возможность сдержива-
ния роста стоимости на множестве архитектур комплексов бортового обору-
дования путем устранения избыточных средств сопряжения;
• переходных интерфейсных модулей в виде мостов и шлюзов.
Тенденции развития организации СИО в КБО перспективных ЛА будуще-
го позволяют определить требования к характеристикам перспективных ин-
терфейсов/сетей, обеспечивающих различные требования по передаче данных.
В случае если большинство бортовых источников информации авионики бу-
дут объединены в единую сеть, то она должна обладать следующими характерис-
тиками:
• эффективной рыночной стоимостью и коммерческой жизнеспособностью;
• возможностью применения различных топологий физической среды.
В единой сети должны обеспечиваться следующие функциональные пара-
метры и физические характеристики:
• техническая скорость передачи не менее 1 Гбит/с на узел;
• малая величина задержки доступа к среде (менее 1 мкс);
• небольшой формат заголовка для наиболее часто используемых типов тран-
сакций;
• одинаковая эффективность передачи коротких и длинных по размеру сооб-
щений;
• малая величина разрядной ошибки (Рош < Ю-12 ош/бит);
• небольшой формат синхропреамбулы;
• мультипортовый (2...4 порта на устройство) физический интерфейс;
• низкий уровень потребляемой мощности (2...3 Вт);
• незначительные геометрические размеры (менее 18 см2);
• низкая стоимость аппаратных средств (менее 100 $);
• технологическая прозрачность к будущим поколениям процессорных техно-
логий и технологий физической среды передачи информации, будущим до-
стижениям в технологии создания интегральных схем;
• поддержка передачи информации всех типов (командной, управляющей,
тестовой, технического обслуживания, информации от датчиков, видеоин-
формации).
Проведенные исследования показали, что принципы организации совре-
менных авиационных специализированных систем информационного обмена
имеют тенденцию к логическому усложнению организации обмена информаци-
ей, повышению скорости передачи данных и все более широкому использованию
волоконно-оптических средств связи. Этим объясняется постоянно возрастаю-
щий интерес к применению различных сетевых принципов передачи информа-
ции, используемых в общих системах, в комплексах бортового оборудования и их
адаптации к использованию в режиме реального времени. Традиционные прин-
ципы передачи информации на основе магистральных шин в настоящее время
испытывают идеологическую конкуренцию со стороны новейших нетрадицион-
613
ных технологий, которые являются потенциальными кандидатами на примене-
ние при реализации внутрисистемных связей при построении перспективных
многопроцессорных средств обработки информации, а также межсистемных свя-
зей при построении распределенных вычислительных систем.
Именно с учетом этих критериев целесообразно проводить выбор и сравни-
тельный анализ различных перспективных сетевых технологий: Fibre Channel
(FC), ATM, Scaleable Coherent Interface (SCI), Myrinet, Serial Express (SE) Fire Wire
(IEEE 1394) и Gigabit Ethernet (GE).
К таким технологиям следует отнести организацию информационного обме-
на в соответствии с SCI (ANSI/IEEE Std 1596-92) сетевую технологию «переноса
информации» ATM и уникальную организацию обмена FC, которые подходят
для применения как в области передачи, так и в области хранения данных.
Из рассматриваемых перспективных разрабатываемых сетевых технологий
на уровне первичной обработки информации хорошую перспективу применения
имеет технология SCI. Основной причиной появления подобного протокола яв-
ляется подготовка к полномасштабному применению сверхпроизводительных
специализированных средств обработки в авиационных комплексах следующего
поколения. В настоящее время протокол SCI может рассматриваться как один из
реальных кандидатов на применение в качестве унифицированного протокола в
авиационных комплексах будущего на межпроцессорном уровне и для унифика-
ции цифрового взаимодействия с информационно мощными функциональными
датчиками бортоворо оборудования на периферийном уровне. Его отличают вы-
сокая производительность (1 Гбит/с при последовательных связях и до 8 Гбит/с
при параллельных), гибкость при проектировании различных топологий (струк-
тур) вычислительных средств, масштабируемость. Он поддерживает как провод-
ную, так и оптическую среды передачи данных, является удобным средством для
построения толерантных структур.
Однако метод доступа в основной завершенной версии основного протокола
SCI носит недетерминированный характер (технологии типа Ethernet), и приме-
нение данного протокола нецелесообразно на межсистемном уровне в АК реаль-
ного времени. Режим реального времени может обеспечиваться низкой ин-
формационной загрузкой СИО при использовании основного протокола SCI.
В АК реального времени целесообразно применение только расширения SCI —
SCI/RT, в первую очередь — для межпроцессорного обмена в мультипроцессор-
ных системах и обмена в периферийных переключательных сетях на уровне обме-
на с датчиками.
Наиболее перспективной и универсальной из приведенных выше техноло-
гий является FC (1 Гбит/с при последовательных связях), которая имеет несколь-
ко функционально-логических составляющих и предполагает охват всех уровней
организации СИО (уровни первичных датчиков-приемников, региональный, об-
щесистемный). Это реально позволит в дальнейшем провести унификацию тех-
нологии информационного обмена авионики будущего. Сказанное подтвержда-
ется интенсивной разработкой специализированных технических предложений
(авиационных профилей) на базе основных документов информационной техно-
логии Fibre Channel. Разработка специализированных документов в настоящее
время интенсивно осуществляется рабочей группой Fibre Channel Avionics Envi-
ronment (FC-AE). Целью разработок специализированных технологий информа-
ционного обмена бортового применения является ее адаптация к функциониро-
614
ванию в режиме реального времени, а также обеспечение возможности сопряже-
ния с уже завершенными технологиями (типа MIL-STD-1553B), применяемыми
на общесистемном уровне в современных АК.
Не случайно выделенные технологии, в первую очередь FC, а также SCI рас-
сматриваются в программе JSF в качестве основных кандидатов на применение
при формировании вычислительной системы ЛА в качестве средства для пост-
роения унифицированной авиационной сети. При этом обеспечиваются со-
пряжения типа модуль—модуль, крейт—крейт, сопряжения с датчиками и дисп-
леями, соединения общесистемного уровня. В конечном счете предполагается
использование единого унифицированного интерфейса, что позволит сущест-
венно сократить число используемых контактов задней панели, число моду-
лей-мостов и шлюзов, необходимых при использовании различных организаций
обмена.
В современных экономических условиях, приведших к формированию но-
вой доктрины в области вооружения, роли унификации и стандартизации суще-
ственно возрастают. Использование стандартов обеспечивает интеграцию кол-
лективов разработчиков, повышает уровень технологической дисциплины при
синтезе функциональных элементов БРЭО различными коллективами разработ-
чиков. Более того, в случае успешного сопряжения отечественных стандартов с
зарубежными аналогами достигается широкая интеграция предприятий-разра-
ботчиков с общегосударственным объединением всей технической политики в
области создания авиации, включая вопросы экспорта.
В этом контексте разработку стандартов на интерфейсы следует рассматри-
вать как составную часть единого технологического цикла синтеза авионики.
При этом разрабатываемые и предлагаемые проекты стандартов целесообразно
отрабатывать и апробировать в процессе проведения отдельных НИР. При разра-
ботке БРЭО для создания перспективных образцов авионики требуются пере-
смотр определенного числа существующих нормативных документов и разработ-
ка новых государственных стандартов. Это относится в первую очередь к пробле-
мам создания аппаратных и программных интерфейсов различных классов,
протоколов обмена с внешними системами, средств информационного и элект-
рического сопряжений.
Основными целями в проблеме стандартизации интерфейсов следует
считать:
• создание единых государственных стандартов на протоколы обмена и сопут-
ствующей НТД на аппаратные и программные средства интерфейсов как
элементов единой технологии проектирования авионики;
• отработку и апробацию этих стандартов для обеспечения минимального ко-
личества возможных ошибок и практически исключения риска при синтезе
элементов БРЭО;
• создание на базе разработанных стандартов необходимого научно-техниче-
ского задела при разработках перспективных образцов авионики.
Концепция стандартизации интерфейсов состоит в создании наилучших ус-
ловий для реализации концепций синтеза перспективных систем БРЭО на осно-
ве нормативно-технической базы государственных стандартов. Решение этой
проблемы предполагает развитие существующей нормативно-технической базы и
разработку ряда новых государственных стандартов.
615
Таблица 5.3
Классификация стандартов на различные классы интерфейсов
и соответствие их существующим в РФ стандартам
Интерфейсы Действующие стандарты
Межсистемные ГОСТ 18977-79(73), РТМ 1495-79 ГОСТ 26765.52-87 ГОСТ Р50832-95 ГОСТ 7845-81
Внутрисистемные ГОСТ 26765.51-86 МУ 1.1.194-89
Периферийные —
Приборные ГОСТ 26.003-80
Кабинной среды —
Для России основные и существенные изменения в проведении стандартиза-
ции состоят в опережающей разработке стандартов и другой НТД, предшествую-
щих ОКР по созданию образцов авионики. Это естественным образом вытекает
из новых экономических условий в формировании политики и доктрины созда-
ния авионики в РФ. При разработке и создании систем БРЭО, которые концеп-
туально являются модульно-сборочными и унифицированными, это требование
становится основополагающим, так как только при наличии согласованной нор-
мативной базы и безусловном ее использовании при проектировании БРЭО мож-
но провести в большой кооперации организаций-соисполнителей совместную
разработку отдельных модулей и элементов БРЭО, которые затем собираются и
соединяются по конструктивному исполнению.
Если проанализировать технологический цикл проектирования, производст-
ва и эксплуатации интерфейсов, то можно также выделить ряд направлений стан-
дартизации:
• порядок проектирования и создания протоколов интерфейсов;
• разработка аппаратно-программных средств интерфейсов;
• порядок отработки, испытаний и тестирования оборудования интерфейсов;
• сертификация и оценка качества оборудования интерфейсов;
• сопровождение новых разработок интерфейсов.
Поставим в соответствие этим направлениям действующие в настоящее вре-
мя отечественные стандарты (табл. 5.4).
Таблица 5.4
Направления стандартизации и действующие отечественные стандарты
Направление стандартизации Действующие стандарты
Порядок проектирования и создания протоколов интерфейсов Разработка аппаратно-программных средств интерфейсов Порядок отработки, испытаний и тестирования оборудования интерфейсов Сертификация и оценка качества интерфейсного оборудования Сопровождение новых разработок технологий интерфейсов Семь стандартов для тестирования интерфейсного оборудования по ГОСТу 26765.52-87
616
Анализ действующих стандартов, приведенных в табл. 5.3 и 5.4, позволяет
сформулировать комплекс дальнейших исследований в областях перспективных
информационных технологий:
• межсистемные интерфейсы Fibre Channel (ANSI ХЗТ11); Scaleable Coherent
Interface — SCI (ANSI/IEEE Std 1596—1992), Myrinet, Serial Express, Gigabit
Ethernet, Asynchronous Transfer Mode;
• внутрисистемные интерфейсы Scaleable Coherent Interface SCI (ANSI/IEEE
Std 1596-1992), Fibre Channel (ANSI X3T11); PCI Compact, SKY Channel
Packet BUS.
Все приведенные интерфейсы представляют собой высокоэффективные ар-
хитектуры передачи данных для многопроцессорных вычислительных средств ре-
ального времени.
Кроме этого, целесообразна разработка семейства опережающих стандартов
для перспективных информационных технологий авионики:
• ГОСТ Р «Расширяемый связной интерфейс многопроцессорных систем» (ба-
зовая технология SCI — ANSI/IEEE Std 1596—1992);
• ГОСТ Р «Высокопроизводительная сетевая волоконно-оптическая техноло-
гия передачи информации бортового применения» (базовая технология —
семейство протоколов информационной технологии Fibre Channel — ANSI
ХЗТ11).
Разработка стандартов предполагает их обязательную дальнейшую апроба-
цию и отработку. Основными целями этого этапа работы можно считать:
• проведение экспериментальной отработки предлагаемых технических реше-
ний;
• определение организационного механизма реализации и внедрения стандартов.
Базой проведения этих работ следует считать создание специальных комп-
лексов математического и полунатурного моделирования, которые являются не-
отъемлемой частью БРЭО. Эти стенды используются на этапах проектирования,
отработки, испытаний, сертификации функциональных»элементов БРЭО, а за-
тем на этапах сопровождения и эксплуатации БРЭО с проведением многократ-
ной модернизации различной глубины на протяжении всего жизненного цикла
существования БРЭО.
5.3. Развитие
оптико-электронных систем
5.3Л. СОВРЕМЕННЫЕ
ОПТИКО-ЭЛЕКТРОННЫЕ СИСТЕМЫ
В 1960-е годы для решения боевых задач самолетами и вертолетами военной
авиации потребовалась более совершенная прицельная техника, обеспечиваю-
щая реализацию возрастающих тактико-технических возможностей носителей и
применение широкой номенклатуры средств поражения, в том числе новых ви-
дов управляемого точного оружия с лазерным и телевизионным наведением.
Применяемые к тому времени прицельные устройства имели простую опти-
ко-механическую схему и были по сути автономными, не связанными с борто-
вым комплексом. Так, широко распространенный в военные годы и некоторое
послевоенное время бомбардировочный прицел ОПБ-1 и его усовершенствован-
ная А. С. Деренковским версия ОПБ-1 Д представлял собой телескопическую
оптическую визирную трубку с увеличением 1,2 крат, полем зрения 32°. Прицел
позволял определять углы визирования в вертикальной плоскости и угол сноса.
Бомбометание выполнялось только с горизонтального полета. Данные для боко-
вой наводки самолета и для определения момента сбрасывания бомбы вычисля-
лись оператором на основе заранее составленных таблиц и графиков. Для воз-
душной стрельбы применение нашли полуавтоматические коллиматорные при-
целы серии АСП, использующие гироскопический принцип определения
скорости линии визирования и пассивный оптический дальномер.
Оборудование и функциональные связи прицельных авиационных систем
первых поколений формировались на основе аналоговых вычислительных эле-
ментов.
Лазерный подсвет и дальнометрирование наземных целей реализованы в
разработанной в начале 1970-х годов станции «Прожектор» для самолетов типа
МиГ-23. Измерение наклонной дальности и подсвет наземных целей происходил
в фиксированном направлении относительно строительной оси самолета-носи-
теля. Дальнейшим развитием этого направления было создание станций дально-
метрирования и подсвета «Фон» и «Клен», обеспечивающих совместно с визир-
ными головками С-17ВГ и АСП-17БП отслеживание целей в вертикальной плос-
кости («Фон») или в вертикальной и горизонтальной плоскостях («Клен»).
Станции могли измерять дальность до наземных целей на расстоянии 7...8 км, а
также имели режим подсвета целей лазерным излучением для наведения управ-
ляемых ракет и корректируемых авиабомб. Использовался лазер на стекле с не-
одимом (длина волны 1,06 мкм).
Первой универсальной прицельной станцией, интегрированной в бортовой
вычислительный комплекс и обеспечившей все виды стрельбы, бомбометания,
пуски ракет с лазерной и телевизионной головками самонаведения, стала при-
цельная станция «Кайра», которой оснащались ударные самолеты МиГ-23К,
618
Су-24 с середины 1970-х годов. Оптическая система станции и встроенный теле-
канал обеспечивали обнаружение и распознавание целей на большой дальности,
а интегрированный вычислитель — автоматическое сопровождение выбранной
цели и выдачу целеуказания для применения ракет типа Х-25, Х-29Л, Х-29Т, а
также корректируемых авиабомб.
В станции «Кайра» нашла применение оптическая схема с «развязанной» ли-
нией визирования, в которой для управления положением прицельного пере-
крестия не требовалось высокоточного пилотирования носителя.
Основные характеристики прицельной станции «Кайра» следующие:
• максимальная дальность применения управляемого оружия 7...8 км;
• точность углового сопровождения целей 3,5...4 угл. мин;
• углы визирования в вертикальной плоскости до —160°, в наклонной плоскос-
ти ±35°;
• поля зрения — широкое 13 х 18°, узкое 4 х 5°;
• интервал измеряемых дальностей лазерного дальномера 200...7000 м;
• ошибка определения направления на цель 10 угл. мин;
• максимальная скорость движения линии визирования 60 град/с;
• вес 125 кг.
Упрощенная блок-схема станции «Кайра» приведена на рис. 5.6, а общий вид
ее на рис. 5.7.
Команды управления Питание
Рис. 5.6. Блок-схема станции «Кайра»
Рис. 5.7. Оптико-электронная система «Кайра». Общий вид
619
При проектировании станции «Кайра» разработчиками были предложены и
отработаны новые технические решения и алгоритмы, которые в дальнейшем ус-
пешно применялись в других станциях более поздней разработки. Особо следует
отметить работы по внедрению в аппаратуру станции телевизионного канала с
адаптивными средствами полутоновой коррекции, способного работать в слож-
ных условиях освещенностей, внедрение телевизионного автомата сопровожде-
ния целей. К недостаткам станции «Кайра» можно отнести весьма ограниченные
условия применения — только днем и при хорошей метеовидимости.
В начале 1960-х годов был разработан и испытан прицельно-навигационный
комплекс ПРИ К третьего поколения для самолета-штурмовика Су-25, обеспечи-
вающего помимо решения основных боевых задач легкого штурмовика примене-
ние точного оружия с лазерным управлением для поражения малоразмерных под-
вижных наземных целей типа танк. Он был сформирован на основе использования
оптико-телевизионной станции типа «Шквал», имеющей оптико-телевизионный
канал, оптически совмещенный с лазерным каналом, работающим в режимах наве-
дения противотанковых ракет с лазерным управлением и управляемого оружия с
ЛГСН, а также в режиме лазерного дальномера.
В режиме наведения противотанковых ракет станция формировала лазерный
луч (лазерное поле) диаметром около 4 м, направляемый на цель, к которой сле-
довала ракета, управляемая информацией, содержащейся в пространственном
коде лазерного излучения. Для повышения точности попадания ракеты в цель
применялось панкратирование размера лазерного поля в зависимости от текуще-
го расстояния додели. Приемник излучения размещался в хвостовой части раке-
ты. Управление лучом и слежение за целью обеспечивались вычислительным
комплексом. Оптический канал имел телескопическую систему с 18-кратным
увеличением и был рассчитан на обнаружение малоразмерных целей на дальнос-
тях до 10 км.
Оптическое изображение воспринималось телеканалом и воспроизводилось в
виде телевизионного изображения на экране индикатора типа ИТ-23, размещен-
ного в кабине под приборной доской. Оптико-телевизионный канал имел два по-
ля зрения: широкое (порядка 4°) и более узкое для точного слежения (порядка Г).
Стабилизация оптической системы обеспечивалась силовым гироскопическим
устройством, механически связанным с визирным зеркалом.
Визирное устройство станции конструктивно оформлено в виде моноблока,
на шасси которого размещаются гиростабилизированная оптическая система,
приемное устройство телевизионного канала и блок формирования лазерного из-
лучения.
Оптическая система включает телескопический канал и зеркало, обеспечи-
вающее отклонение визирного луча в продольном и азимутальном направлениях.
Управление зеркалом осуществляется электромеханическим приводом по сигна-
лам управления от вычислительной системы.
Визирное устройство функционально связано с вычислительной системой
станции, включающей свою бортовую цифровую вычислительную машину (типа
модификации БЦВМ «Орбита-20»), цифроаналоговые и вычислительные блоки,
выполняющие обработку сигналов телеканала станции и формирование изобра-
жения на экране телеиндикатора, захват образа цели и автоматическое его сопро-
вождение (организацию работы телеавтомата), управление формированием ла-
зерного излучения в режимах пуска ракет и дальнометрирования, формирование
сигналов управления противотанковыми ракетами по лазерному каналу.
620
Рис. 5.8. Общий вид оптико-электронной системы «Шквал»
Алгоритмы, реализованные в БЦВМ станции, обеспечивали управление на-
ведением противотанковых ракет, управление наведением ракет с ЛГСН и ТГСН,
а также решение задач бомбометания и стрельбы по наземной цели (пушка, НРС).
БЦВМ станции могла быть использована также и при решении задач навигации.
Станция «Шквал» работала в контуре прицельно-навигационного комплекса
самолета, который включал центральную бортовую цифровую вычислительную
машину, функционально связанную (помимо станции «Шквал») со следующей
аппаратурой:
• датчиками параметров движения самолета;
• системой индикации на лобовом стекле;
• системой управления оружием;
• системой контроля и индикации функционирования аппаратуры ПРНК;
• системой автоматического управления самолетом;
• устройством управления режимами работы ПРНК и процессами прицеливания.
В качестве датчиков информации использовалась соответствующая аппара-
тура, разработанная к началу 1980-х годов, обладающая улучшенными точност-
ными характеристиками и обеспечивающая обмен информацией с потребителя-
ми в цифровом виде.
В это же время была разработана модификация прицельной станции
«Шквал» для оснащения прицельно-навигационных комплексов боевых вертоле-
тов (рис. 5.8).
5.3.2. СОВРЕМЕННОЕ СОСТОЯНИЕ
ТЕХНИКИ НОЧНОГО ВИДЕНИЯ
Оптико-электронные системы в составе интегрированного бортового при-
цельно-навигационного комплекса современных ударных летательных аппаратов
предназначены в первую очередь для решения следующих основных задач:
• предъявление летчику в любое время суток изображения местности;
• обеспечение обнаружения препятствий;
• обнаружение наземных целей в любое время суток и при неблагоприятных
погодных условиях;
• выдача и отработка внутреннего и внешнего целеуказания;
• обеспечение индикации одновременно с изображением визируемой мест-
ности, прицельно-пилотажной информации, необходимой для пилотирова-
ния и применения штатного вооружения [13—20].
621
В связи с этим на этапе разработки оптических средств навигации и прице-
ливания большое внимание уделяется вопросам обнаружения, распознавания и
прицеливания, автосопровождения выбранных целей, комплексирования опти-
ческих средств с другими информационными каналами.
В своей работе ОЭС используют практически все известные методы дистан-
ционного активно-пассивного зондирования объектов в видимой и ИК-областях
электромагнитного спектра. На самолетах и вертолетах ударной авиации ОЭС
реализуются обычно в виде двух независимых прицельных и пилотажных блоков,
объединенных общей системой индикации. В ОЭС в качестве пассивных инфор-
мационных каналов используются очки ночного видения (ОНВ), дневные и ноч-
ные телевизионные системы, а также тепловизиры (ТпВ), чувствительные в
спектральном диапазоне 3...5 и 8...14 мкм. В качестве активного информацион-
ного канала наиболее часто рассматривается лазерный локатор (ЛЛ) и система
активно-импульсного телевидения.
В простых и ограниченно сложных метеоусловиях ОНВ предпочтительны
для наблюдения объектов на малых дальностях, на периферии, ТпВ — для конт-
роля наличия сравнительно крупноразмерных препятствий по курсу полета са-
молета. При наблюдении, в частности движущихся по дороге транспортных
средств, дорога лучше просматривается в ОНВ, а сами средства (как правило,
более нагретые) — в ТпВ. Кроме того, в ОНВ лучше просматривается линия го-
ризонта, что при выполнении полета на малой высоте является немаловажным
фактором.
С этой точки зрения желательным было бы совмещение изображений в раз-
личных спектральных диапазонах с определенными весовыми коэффициентами,
учитывающими преимущества каждого из них в той или иной целе-, фоно- и ме-
теообстановке. Однако осуществление такого совмещения на практике является
далеко не простым делом, хотя такие попытки уже неоднократно и предприни-
мались (нашлемные системы целеуказания и индикации (НСЦИ) «Crusader» анг-
лийской фирмы GEC Marconi, «Advanced HMD» французской фирмы Sextant
Avionique и др.). Но самое главное препятствие состоит в том, что ОНВ-изобра-
жения, формируемые обычно на выходном люминофорном экране используемо-
го в ОНВ ЭОП, какой-либо предварительной обработке практически не подда-
ются. Поэтому даже при использовании комбинированных НСЦИ летчикам
приходится иметь дело с исходными (необработанными) ОНВ-изображениями.
Как уже неоднократно отмечалось ранее, выполнение ЛА маловысотного
полета (МВП) в условиях сложного рельефа местности или вблизи населенных
пунктов сопряжено с опасностью столкновения их со сравнительно малоразмер-
ными проводами линий связи, ЛЭП. К сожалению, пассивные ОНВ, низкоуров-
невое телевидение (НУТВ), ТпВ своевременно обнаружить подобные препятст-
вия, как правило, не могут.
В связи с этим во многих странах мира в течение довольно длительного вре-
мени проводились многочисленные исследования по использованию для этой
цели не пассивных, а активных (обычно лазерно-локационных) оптико-элек-
тронных средств, работоспособность которых ни от температурных контрастов
То, ни от освещенности местности Ем не зависит.
Долгое время ЛЛ-средства оставались слишком дорогостоящими и исполь-
зовались лишь в исключительных случаях. И лишь недавно, в конце 1990-х годов
622
появились первые сообщения о некотором прогрессе в снижении их стоимости.
К таким средствам потенциально можно отнести следующие:
• OASYS (Obstacle avoidance system). Fibertek, Northrop Grumman, США. Длина
волны X = 0,9 мкм;
• LBOAS (Laserbeam obstacle avoidance system). Marconi Spa, Италия. Длина
волны неизвестна;
• Hellas (Helicopter laser). Dornier GmbH, Германия, X = 1,54 мкм (в литературе
часто упоминается также под названием OWS — Obstacle warning system).
По словам разработчиков этих ЛЛ, все они экспериментально подтвердили
свою способность обнаруживать провода линий связи и тем более кабелей ЛЭП
на приемлемых для МВП ЛА ночью и в сложных метеоусловиях (по крайней мере
для вертолетов) дальностях.
Таким образом, из вышеизложенного следует, что для обеспечения боевых
действий ЛА в темное время суток и в сложных метеоусловиях потенциально
пригодными являются ОНВ, НУТВ, ТпВ и ЛЛ.
Технический прогресс ОЭС в значительной степени определяется достиже-
ниями в создании информационных каналов ночного видения.
5.4. Развитие бортовой
радиолокационной техники
ударной авиации
5.4.1. ПЕРВОЕ ПОКОЛЕНИЕ
БОРТОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Начало развития первых отечественных бортовых самолетных РЛС в интере-
сах ВВС нужно отнести к 1940 г., когда было принято решение о создании на базе
разработанных ранее отечественных РЛС ПВО «Редут», «РУС-2» бортовой РЛС
самолета-истребителя «Гнейс-1» и получивших реальное воплощение «Гнейс-2»
и «Гнейс-5» (разработчик — НИИ радиопромышленности СССР).
Послевоенные годы для Военно-воздушных сил были периодом развития ра-
диолокационной бортовой, наземной и аэродромной техники, охватившей три
основных направления:
• оснащение бомбардировочной авиации дальнего действия (АДД) бортовыми
радиолокационными средствами, обеспечивающими:
♦ радиолокационное обнаружение наземных и надводных объектов при
самолетовождении в любых погодных условиях, днем и ночью;
♦ определение навигационных элементов полета по радиолокационным
ориентирам;
♦ прицельное бомбометание по обнаруженным и опознанным целям;
♦ защиту бомбардировщиков от атак истребителей противника;
♦ привод самолетов и их посадку на свои аэродромы;
• оснащение фронтовой бомбардировочной авиации радиолокационными
средствами для нанесения бомбовых ударов по вражеским инженерным со-
оружениям и объектам, обеспечения защиты бомбардировщиков от атаки
истребителей противника, а также для обеспечения привода и посадки бом-
бардировщиков на свой аэродром;
• оснащение самолетов истребительной авиации бортовыми радиолокацион-
ными станциями обнаружения самолетов противника и обеспечение приме-
нения против них оружия независимо от условий оптической видимости.
Необходимость развития радиолокационного оборудования самолетов яви-
лась следствием расширения боевых действий авиации при любой погоде и в лю-
бое время суток уже в ходе Второй мировой войны.
Первым послевоенным бомбардировщиком АДД был самолет Ту-4. Комп-
лекс радиолокационной аппаратуры самолета Ту-4 включал радиолокационные
бомбовые прицелы «Кобальт» или «Рубидий», радиовысотомеры, приборы при-
вода и слепой посадки, приборы опознавания, радиолокационную станцию обес-
печения защиты самолета от атак истребителей противника.
1. Бомбовые прицелы «Кобальт» и «Рубидий»
Радиолокационные бомбовые прицелы «Кобальт» и «Рубидий» создавались в
1946—1948 гг. в соответствии с постановлением Совета Министров СССР. Разра-
ботками РЛС руководили А. И. КорчмаревмЯ. Б. Шапировский\У1\.
624
Бомбоприцел «Рубидий» включал в свой состав РЛС «Кобальт» и отличался
от последней наличием приставки «Цезий», обеспечивавшей сопряжение РЛС с
оптическим прицелом ОПБ-5ср.
Станции сантиметрового диапазона с мощностью излучения около 65 кВт
имели узкую диаграмму направленности антенн в горизонтальной плоскости (3°)
и широкую в вертикальной и позволяли обнаруживать и опознавать крупные
промышленные объекты на дальностях до 100 км и производить прицельное бом-
бометание с высоты 3000... 10 000 м. Дальность действия РЛС с наземным радио-
локационным маяком составляла 400 км. Точность определения координат цели
на крупном масштабе индикации составляла ±100 м по дальности и ±2° по азиму-
ту. В данном разделе используются выдержки из книги [21].
Решение задачи прицеливания по дальности с помощью РЛС «Кобальт» осу-
ществлялось оператором по данным о высоте полета, путевой скорости бомбар-
дировщика и баллистических характеристик авиабомб. По ним счетно-решаю-
щим устройством РЛС вырабатывалась метка упреждения сбрасывания бомб.
Баллистические характеристики бомб вводились оператором вручную. Определе-
ние путевой скорости и угла сноса самолетов производилось по данным переме-
щения изображения объектов на экране индикатора РЛС.
2. Бомбардировочный прицел РБП-4
С переходом авиации на реактивные двигатели резко поднялись ее боевые
качества, увеличилась скорость, высота и дальность полета. В связи с этим ко-
мандование ВВС дало задание промышленности на разработку новых бортовых
радиолокационных средств, в том числе радиолокационного бомбардировочного
прицела РБП-4.
Прицел РБП-4 является дальнейшей разработкой РЛС «Рубидий». Он ус-
танавливается на бомбардировщиках дальнего действия и обеспечивает бомбо-
метание с повышенной точностью в более широком диапазоне высот и скоростей
полета.
Для защиты радиопротиводействия противника в бомбоприцеле была пред-
усмотрена работа на двух переключаемых в полете фиксированных частотах.
РБП-4 мог обнаруживать промышленные центры на дальности 150...180 км,
обеспечивая максимальную дальность прицеливания порядка 70 км; позволял
вести прицельное бомбометание с высот 2000... 15 000 м в диапазоне скоростей
300... 1250 км/ч. Радиолокационный прицел обеспечивал разрешающую способ-
ность по дальности от 75 до 150 м в зависимости от дальности излучаемого им-
пульса, а по азимуту — около 2,5°. РБП мог работать в круговом или секторном
(45°) обзоре с возможностью ступенчатого изменения направления секторного
обзора в пределах ±55° от продольной оси самолета.
Аппаратура прицела РБП-4 принципиально отличалась от аппаратуры при-
цела «Кобальт» наличием синхронной связи с векторно-синхронным оптическим
бомбоприцелом ОПБ-11р, разработанным под руководством А. С. Хрусталева.
Применение органов управления и датчиков прицела ОБП-llp позволяло осу-
ществлять по экрану индикатора прицела РБП-4 точную боковую наводку само-
лета на цель и синхронное прицеливание по дальности. Сопряжение прицелов
РБП-4 и ОПБ-11р производилось по типу сопряжения прицелов «Рубидий» и
ОПБ-5ср. При этом обеспечивались векторные, векторно-синхронный и синх-
ронный способы прицеливания как по площадным, так и по точечным целям.
Сброс авиабомб производился автоматически через контактную систему оптиче-
ского прицела и электросбрасывателей.
625
Бомбоприцел РБП-4 был разработан согласно постановлению Совета Мини-
стров СССР в 1949—1952 гг. под руководством В. С. Дехтярева и при активном
участии и содействии В. И. Смирнова.
3. Бомбардировочные прицелы
фронтовых бомбардировщиков ПСБН-М и РБП-3
Требования к бомбардировочному прицелу фронтового бомбардировщика
отличались от требований к РБП самолетов АДД более жесткими ограничениями
на массогабаритные характеристики и требованием упрощения управления (од-
ним членом экипажа). Радиолокационные прицелы фронтовых бомбардировщи-
ков имели синхронную связь с оптическими бомбоприцелами, которая совмеща-
ла радиолокационное изображение с оптическим визированием и повышала точ-
ность прицеливания.
Первым отечественным фронтовым бомбардировщиком, оборудованным
радиолокационным бомбоприцелом, был Ил-28, а ПСБН-М был первым радио-
локационным бомбоприцелом сантиметрового диапазона. Он разработан соглас-
но постановлению Совета Министров СССР в 1946—1948 гг.
Для решения задач бомбометания прицел ПСБН-М был сопряжен с оптиче-
ским прицелом ОПБ-бср. Максимальная дальность обнаружения (при мощности
излучения 60...70 кВт) крупных промышленных центров и городов составляла
70... 100 км, а больших кораблей — 40...50 км. Бомбометание обеспечивалось на
высотах 90... 13 000 м при диапазоне скоростей при бомбометании 300...900 км/ч.
Бомбоприцел ПСБН-М с узкой диаграммой направленности (2°) в горизонталь-
ной плоскости и широкой — вертикальной плоскости мог вести круговой обзор
по азимуту или секторный в пределах 60...300° через 60° в любом направлении.
В прицеле ПСБН-М была предусмотрена его совместная работа с наземным ра-
диолокационным маяком.
Следующим типом радиолокационного бомбоприцела для фронтовой бом-
бардировочной авиации был прицел РБП-3, созданный в 1952—1954 гг. под руко-
водством В. П. Островского. При создании прицела широко использовался
опыт разработки бомбоприцела ПСБН-М. В прицеле РБП-3 при появлении по-
мех осуществлялся переход на другую рабочую волну. Радиолокационный прицел
был сопряжен с оптическим бомбоприцелом ОПБ-Юр. Он имел максимальную
дальность обнаружения (при мощности 60 кВт) крупных промышленных центров
и городов до 100 км, крупных кораблей и железнодорожных мостов — до 50 км.
РБП-3 мог вести круговой или секторный обзор в пределах 60, 90 или 120° в лю-
бом направлении и определять наклонную дальность на расстоянии до 30 км с
точностью ±100 м.
5.4.2. ВТОРОЕ ПОКОЛЕНИЕ БОРТОВЫХ
РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Первое поколение бортовых РЛС характеризуется технологическим уровнем:
применением электровакуумных ламп, некогерентным передающим вакуумом
(магнетроны) и аналоговыми счетно-решающими устройствами.
626
В бортовых РЛС второго поколения (конец 1950-х — начало 1960-х годов)
осуществляется переход на полупроводниковые усилительные устройства с на-
весным монтажом, внедрение цифровых электронно-вычислительных машин.
Для РЛС самолетов-истребителей появляются когерентные режимы излуче-
ния-приема (квазинепрерывные режимы). Для РЛС бомбардировщиков пере-
дающий вакуум остается в основном некогерентным (магнетроны). Начинаются
НИЭР-разработки режимов синтезированной апертуры на основе псевдокоге-
рентных режимов («когерентность на приеме»), реализуемых за счет «запомина-
ния» фазы СВЧ-колебаний излучаемого радиоимпульса. Ко второму поколению
РЛС можно отнести БРЛС «ПНА», «Прогресс», «Обзор» самолетов дальней и
стратегической авиации Ту-22М, Ту-95, Ту-160 и БРЛС «Орион-А» прицель-
но-навигационной системы фронтового бомбардировщика Су-24.
1. Бортовые радиолокационные станции
самолетов дальней и стратегической авиации1
Послевоенные годы для отечественной авиации характеризовались пери-
одом бурного развития радиолокационной бортовой, наземной и аэродромной
техники, в том числе для бомбардировочной авиации дальнего действия. Необхо-
димость развития радиолокационного оборудования самолетов явилась след-
ствием расширения боевых действий авиации при любой погоде и в любое время
суток.
Оснащение авиации дальнего действия бортовыми радиолокационными
средствами было направлено на обеспечение решения следующих задач:
• радиолокационного обнаружения наземных и надводных объектов при само-
летовождении в заданном диапазоне высот полета, в любых погодных усло-
виях, днем и ночью;
• определение навигационных элементов полета по радиолокационным ори-
ентирам;
• прицельного бомбометания по обнаруженным и опознанным целям;
• защиты бомбардировщиков от атак истребителей противника;
• привода самолетов и их посадки на свои аэродромы независимо от условий
погоды.
Радиолокационная техника существенно повысила эффективность бом-
бардировочной авиации дальнего действия и дала экипажам самолетов мак-
симальную свободу вождения, независимую от наземных радионавигационных
систем.
Создание радиолокационного оборудования для самолета Ту-4
Наиболее быстрое и широкое развитие получили радиолокационные бом-
боприцелы, которые предназначались для получения радиолокационного изо-
бражения пролетаемой местности, обеспечения самолетовождения, поиска и об-
наружения наземных и надводных объектов и прицельного бомбометания при
любых условиях погоды и оптической видимости.
1 В написании подраздела принимали участие Е. Ф. Бочаров, Ф. Ф. Золотухин,
Б. А. Смирнов.
627
Самолетовождение с помощью бомбоприцелов обеспечивалось осуществле-
нием навигационной ориентировки по полетной (аэронавигационной) карте при
ее сличении с радиолокационным изображением на экране индикатора РЛС и по
сигналам специальных наземных радиолокационных маяков, а также определе-
нием путевой скорости, угла сноса и высоты полета по радиолокационному изо-
бражению местности. Во всех РЛС предусматривалась возможность совместной
работы с аппаратурой госопознавания. Дальность действия РЛС находилась в за-
висимости от высоты полета, характера обнаруживаемого объекта и его эффек-
тивной отражающей поверхности.
Первым послевоенным бомбардировщиком ДА был самолет Ту-4. Одновре-
менно с созданием самолета проводились разработки его бортового вооружения,
в том числе и радиолокационного.
Для самолета Ту-4 в 1946—1948 гг. был разработан комплекс радиолокацион-
ной аппаратуры в составе.самолетного радиолокационного бомбоприцела «Ко-
бальт» (позднее «Рубидий») и РЛС обеспечения защиты задней полусферы.
В этот же период были разработаны и внедрены в серию тренажер «Строн-
ций» и контрольно-испытательная аппаратура (КИА) «Вольфрам» для «Кобаль-
та» и «Рубидия».
Создание современной для того периода отечественной радиолокационной
аппаратуры для самолетов потребовало разработки целого ряда новейших прибо-
ров СВЧ, электровакуумной, антенной, радиоизмерительной техники, а также
комплектующих электрорадиоэлементов повышенной точности и стойкости. Это
также потребовало создания новых технологий обработки металлов и электротех-
нических материалов. Параллельно создавались комплексы аппаратуры для кли-
матико-механических испытаний создаваемой радиолокационной аппаратуры.
В целом вышеперечисленные мероприятия представляли собой качественный
скачок в развитии радиолокационной науки и техники для ДА, а аппаратура «Ко-
бальт» по своим тактико-техническим характеристикам не уступала лучшему за-
рубежному (американскому) аналогу — аппаратуре AN/APQ-13 с самолета В-29.
На основании результатов государственных испытаний на самолете Ту-4
станции «Кобальт» и «Рубидий» были приняты на вооружение ВВС для авиации
дальнего действия.
Создание радиолокационного оборудования для самолета Ту-16
С переходом авиации на реактивные двигатели резко поднялись ее боевые
качества, увеличились скорость, высота и дальность полета. Для новых бомбар-
дировщиков потребовались на борту иное вооружение, иная радиолокационная
техника. В связи с этим началась разработка новых бортовых радиолокационных
средств, в том числе радиолокационного бомбардировочного прицела РБП-4.
В 1949—1952 гг. был разработан более совершенный радиолокационный бом-
боприцел РБП-4, который прошел испытания на бомбардировщике Ту-16.
На основании положительных результатов государственных испытаний ра-
диолокационный бомбоприцел РБП-4 был принят на вооружение и поставлен на
серийное производство.
Дальнейшее развитие комплексов радиолокационной аппаратуры шло при-
менительно к вновь создаваемым самолетам дальней авиации.
В 1953 г. началась разработка нового более совершенного самолетного ра-
диолокатора «Рубин», который должен был заменить на новых самолетах дальней
628
авиации уже серийно выпускавшиеся РЛС. Таким самолетом был определен но-
вый дальний бомбардировщик Ту-16.
Основными отличиями РЛС «Рубин» от предыдущих разработок были:
• переход на новый двухсантиметровый диапазон волн, что повысило разре-
шающую способность РЛС и позволило получить более детальное изображе-
ние земной поверхности;
• более усовершенствованная по сравнению с РБП-4 помехозащита;
• применение (впервые для такого класса РЛС) электромеханического вычис-
лительного устройства (своего рода аналоговой вычислительной машины)
для решения задач навигации и бомбометания (навигационный бомбардиро-
вочный автомат НБА);
• модульная конструкция блоков и конструкция единого шкафа для всей низ-
кочастотной части аппаратуры;
• параллельная с созданием локатора разработка контрольно-измерительной
аппаратуры к нему;
• меньший вес и габариты всего комплекса РЛС «Рубин» при возросших функ-
циональных возможностях;
• повышенная по сравнению с предыдущими разработками дальность обнару-
жения морских и наземных целей.
Удачная конструкция РЛС «Рубин» позволила впоследствии использовать ее
на различных типах самолетов (Ту-16, Ту-22, Ту-95, М-3, М-4) и в вертолетном
варианте.
Несмотря на ряд трудностей, связанных с несовершенством элементной базы
и стремлением сократить вес и габариты аппаратуры, к началу 1957 г. РЛС «Ру-
бин» была подготовлена к серийному производству. К 1959 г. были закончены го-
сударственные испытания и РЛС «Рубин» была принята на вооружение.
В дальнейшем в 1960-е годы родилось целое семейство РЛС «Рубин» (моди-
фикации Р-1, Р-1А, PH В, Р-1Д, Р-1Е, Р-1И, Р-1Л, Р-1М и др.), для отработки и
внедрения в серию которых разработчики создали специальное подразделение.
В середине 1950-х годов отечественная электронная промышленность при-
ступила к выпуску первых образцов полупроводниковой техники. В конце 1957 г.
начались работы по созданию на базе РЛС «Рубин» макета РЛС на полупроводни-
ковых приборах «МБР» (малогабаритный «Рубин»). В его основе были высоко-
частотные и электромеханические блоки, заимствованные из РЛС «Рубин», и це-
лый ряд блоков на полупроводниковых приборах (управления антенной, синхро-
низатор, схемы АПЧ и развертки), являвшихся аналогами ламповых блоков.
Полученный в результате разработки макета «МБР» опыт позволил в 1958—
1959 гг. разработать летный образец вертолетного варианта РЛС РНВМ на полу-
проводниковых приборах и провести летные испытания по обнаружению мор-
ских целей разного класса.
Завершением этого цикла работ было создание первой в стране РЛС на полу-
проводниковых приборах, получившей название «Лоция» и предназначенной для
замены РБП-4 на некоторых типах самолетов.
В 1956 г. работы с РЛС «Рубин» получили дальнейшее развитие. В этот пери-
од самолеты ДА стали вооружаться ракетным оружием. Учитывая высокие такти-
ко-технические характеристики РЛС «Рубин», возникла идея использования ее
для целеуказания в составе радиолокационной системы управления авиационны-
ми крылатыми ракетами самолета Ту-16.
629
Первой разработкой, начатой в том же 1956 г., была система «Рубикон». Сис-
тема была предназначена для авиационно-ракетного комплекса К-16, состоящего
из двух дозвуковых крылатых ракет КСР-2 и носителя — дооборудованного само-
лета-бомбардировщика Ту-16КСР-2.
Система «Рубикон» была основана на принципе дальнего активного самона-
ведения с захватом цели на автосопровождение радиолокационной головкой са-
монаведения ракеты перед ее пуском и обеспечила комплексу К1-6 следующие
основные преимущества:
• полную свободу маневра самолета-носителя с момента пуска ракеты;
• возможность пуска ракет КСР-2 не только по кораблям, но и по наземным
крупным радиолокационным целям;
• сохранение за самолетом-носителем функций бомбардировщика;
• сосредоточение операций предпусковой подготовки ракет у штатного штур-
мана-навигатора (бомбардира) без привлечения специального члена экипажа.
В состав системы «Рубикон» входили РЛГС КС-П на борту ракеты, наземное
КПА КА-П для нее, радиолокатор переднего обзора «Рубин-1 К» на самолете-
носителе — модификация штатного самолетного радиобомбоприцела «Рубин-1» и
автопилот ракеты.
Система «Рубикон» в составе комплекса К-16 успешно прошла государствен-
ные испытания и была сдана в эксплуатацию в 1962 г.
Вторая разработка системы управления на основе РЛС «Рубин-1 К» — систе-
ма управления «Взлет» была начата в 1967 г. и предназначалась для разработан-
ной к томуъремени авиационной сверхзвуковой ракеты КСР5. Носитель — моди-
фицированный самолет Ту-16КСР-2-5 (Ту-16К-26). Система «Взлет» так же, как
и система «Рубикон», построена на принципе дальнего активного самонаведения
с захватом цели РЛГС до пуска ракеты и, сохраняя все достоинства комплекса
К-16, обеспечила новому комплексу К-26 следующие преимущества:
• увеличение дальности пуска ракет почти вдвое;
• реализацию всех траекторий ракет КСР-5Н с выбором типа траектории пе-
ред пуском;
• возможность предпускового прицеливания с выбором цели при обзоре мест-
ности непосредственно от РЛГС ракеты;
• возможность пуска ракеты КСР-5 (КСР-5Н) по источнику радиолокацион-
ной помехи;
• увеличение помехозащищенности и надежности аппаратуры ракеты за счет
резкого повышения технического уровня разработки и технологичности из-
готовления;
• сопряжение с комплексной автоматизированной системой контроля (АСК)
бортовой аппаратуры ракеты КСР-5 на техпозиции.
Работы по системам управления ракет КСР-51 (КСР-5Н) интенсивно про-
должались до середины 1970-х годов. Были разработаны модификации системы
«Взлет»: «Кратер» и «Накат». Также была проведена разработка системы «Венец»
с целью довооружения подкрыльевой подвеской двух ракет КСР-5 (КСР-5Н) са-
молета-ракетоносца Ту-16К-10, несущего под фюзеляжем одну ракету К-ЮС.
Таким образом, бортовые радиолокационные станции и радиолокационные
головки самонаведения нашли с середины 1950-х годов широкое применение как
составные части систем радиоуправления авиационно-ракетных комплексов са-
молетов дальней авиации.
630
Создание оборудования для самолета Т-4
В 1961 г. с целью создания технического задела по созданию как самолет-
ных РЛС, так и РЛГС ракет для радиолокационных систем управления дальней
авиации была начата НИР. В процессе выполнения этой работы было создано не-
сколько вариантов макетов самолетной РЛС «Прогресс», работающих на раз-
ных принципах построения, а также макет перспективной РЛГС «Гарпун». Аппа-
ратура прошла всесторонние исследования на самолетах — летающих лабораториях
Ил-18.
В 1963 г. к моменту завершения этой НИР в Московском ОКБ Генерального
конструктора П. О. Сухого началось проектирование нового дальнего стратегиче-
ского сверхзвукового самолета — ракетоносца Т-4. Самолет вооружался новыми
сверхзвуковыми ракетами разработки КБ «Радуга», оснащаемыми системой авто-
номной навигации СНАУ и РЛГС. Размещение ракет в барабане револьверного
типа, устанавливаемом в фюзеляже.
В новой машине все было нетрадиционно и необычно. Пожалуй, не было в
стране самолета, который бы содержал так много новинок. Объяснялось все не-
обходимостью обеспечения полета с крейсерской скоростью 3200 км/ч и преодо-
ления так называемого «теплового барьера» с нагревом конструкции планера до
300 °C. Предполагаемое использование широкого диапазона скоростей требовало
тщательной отработки аэродинамической схемы.
Основной отличительной особенностью самолета Т-4 был выход на новые
современные, а по некоторым проблемам даже опережающие технологические
уровни. В самолетостроении это — оригинальная схема построения, сварной
планер из титановых сплавов и высокопрочной нержавеющей стали, электродис-
танционная система управления самолетом и двигателями, в радиоэлектронном
и навигационном оборудовании — применение микроэлектроники, бортовых
ЦВМ, гироинерциальных систем.
В этом самолете основой были приборы, центральная часть фюзеляжа пред-
ставляла собою приборный отсек. Вся аппаратура была выполнена в блоках стан-
дартной конструкции независимо от того, кто ее разрабатывал. Радиоэлектрон-
ное оборудование представляло собой уже не отдельные приборы, а системы,
увязанные идейно, схемно и конструктивно. Центром такой системы была циф-
ровая вычислительная машина. В системах широко применялись полупроводни-
ковая техника, микросхемы, вычислительные устройства. Соответственно, по-
требовался новый подход к организации как самих радиоэлектронных средств,
так и их разработке.
Впервые в стране самолет Т-4 предполагалось оснастить несколькими комп-
лексами оборудования: навигационным — на базе астроинерциальной системы с
индикацией на планшете и многофункциональными пультами управления;
радиоэлектронным — на базе систем управления ракетами, средств радиоразвед-
ки, связи и радиоэлектронного противодействия.
Вопросы создания такого радиоэлектронного комплекса (РЭК), состоящего
из большого числа систем, увязанных между собой идеологически и конструк-
тивно, ставились впервые. Комплексирование и автоматизация управления ра-
диоэлектронным оборудованием должны были быть столь высокими, чтобы сде-
лать минимальным экипаж самолета — ограничить его летчиком и штурма-
ном-оператором.
631
Система управления ракетами включала в себя:
• РЛС переднего обзора на самолете-носителе;
• РЛ ГС на ракете;
• систему СНАУ разработки МИЭА (главный конструктор Е. П. Попов) на
ракете.
Следующие характеристики РЛС позволили использовать ее в составе систе-
мы управления ракетами:
• большая дальность обнаружения (радиогоризонт) морских и наземных це-
лей;
• повышенная помехозащищенность (реализация 9 методов ПМЗ);
• повышенная точность, обеспечиваемая оптимальной обработкой сигнала;
• высокая разрешающая способность по дальности;
• высокая степень автоматизации решения задач (автосопровождение цели с
одновременным сохранением обзора).
Самолет Т-4 оснащался радиоэлектронным оборудованием в двух вариантах:
разведывательном и ударном.
Радиоэлектронные средства ударного варианта самолета и ракет были объ-
единены в один радиоэлектронный комплекс. В состав РЭК вошли системы ра-
диоэлектронного противодействия, радиоразведки, радиосвязи и управления ра-
кетами.
Система радиоразведки включала в свой состав оптические, инфракрасные,
радиотехнические датчики и впервые применявшуюся РЛС бокового обзора.
В системе управления ракетами комплексирование СНАУ и РЛГС осуществ-
лялось бортовой ЦВМ СНАУ и обеспечивало два режима наведения ракеты:
• площадное наведение с автономной навигацией на точку прицеливания до
конца полета;
• автономную навигацию на точку прицеливания на первом этапе полета, за-
тем автоматический поиск радиолокационно-контрастной цели в окрестнос-
тях точки прицеливания, захват цели на автосопровождение РЛГС и самона-
ведение ракеты на сопровождаемую цель.
В процессе предпусковой подготовки производились выставка гироинерци-
альной платформы СНАУ и ввод необходимых начальных данных для пуска, осу-
ществляемые в диалоге БЦВМ самолета-носителя и СНАУ ракеты.
На стадии эскизно-технического проектирования были определены основ-
ные структурно-функциональные и конструктивно-технологические решения,
которые легли в основу построения РЭК и входящих в него систем.
Впервые при проектировании сложного комплекса оборудования для само-
лета, составные части которого разрабатывались разными научно-исследователь-
скими институтами, был применен системотехнический подход для обеспечения
оптимального взаимодействия между ними в процессе выполнения боевых задач.
Для предварительной оценки широко использовалось математическое и полуна-
турное моделирование на базе НИИАС МАП, для чего специально были изготов-
лены комплекты опытных образцов аппаратуры. Последние отрабатывались в на-
турных условиях на летающих лабораториях — самолетах Ил-18.
К началу 1970-х годов были выполнены поставки опытных образцов РЛС
«Прогресс» и РЛГС «Гарпунен» на первые опытные самолеты Т-4 и ракету, отра-
ботана в основном техническая документация. Такие же поставки аппаратуры на
самолетную фирму были сделаны другими институтами — участниками разработ-
ки РЭК «Океан».
632
Работы по входящим системам продолжались до 1973 г. и были остановлены
в связи с неоправданным прекращением разработки самолета Т-4, что задержало
развитие перспективного направления отечественной техники на 5... 10 лет.
В 1975 г. испытания самолета Т-4 прекратили. Самолет совершил всего
10 полетов и был установлен в Музее ВВС в Монино.
Создание обзорно-прицельных радиолокационных систем «Обзор»
Назначение РЛС. Унифицированные обзорно-прицельные радиолока-
ционные системы «Обзор» создавались для самолетов Ту-22МЗ, Ту-22М4,
Ту-160 и Ту-95МС.
Работы производились в НИИ системотехники НПО (в настоящее время ХК
«Ленинец», г. Санкт-Петербург) по постановлениям правительства в следующей
последовательности: «Обзор-К» (1975—1985 гг.), «Обзор-МС» (1976—1983 гг.),
«Обзор-МР» (1983—1986 гг.). Эти РЛС разрабатывались в соответствии с ТЗ
на многофункциональную РЛС «Обзор-К» для самолета Ту-160 и дополнениям
к нему для РЛС самолетов Ту-95МС, Ту-22МЗ и Ту-22МР. В соответствии с эти-
ми дополнениями РЛС и их блоки максимально унифицированы по техническим
решениям, отличия вызваны в основном условиями размещения РЛС на объек-
тах, требуемыми углами стабилизации антенны, связями РЛС с сопрягаемыми
системами. Поэтому историю создания РЛС можно проследить по разработке
РЛС для самолета Ту-95МС.
Созданию аппаратуры «Обзор» предшествует ОКР по разработке РЛС «Про-
гресс» для самолета Т-4 и НИР по исследованию технических путей построения
многофункциональных РЛС со специальной обработкой принятых сигналов.
Задачи, решаемые РЛС «Обзор», следующие:
• обзор земной и водной поверхностей, обнаружение радиолокационно-конт-
растных целей;
• определение координат (наклонной дальности и бортового пеленга) целей
(ориентиров) относительно самолета с сохранением обзора;
• выделение «главной» цели;
• сопровождение четырех целей с сохранением обзора;
• выдача необходимой информации для применения оружия;
• выдача координат обнаруженных целей (ориентиров) в навигационный
комплекс;
• сопряжение с запросчиком системы госопознавания;
• обзор воздушного пространства в передней полусфере для обнаружения и
индикации метеообразований.
Основные отличия РЛС «Обзор» от более ранних отечественных разработок
и зарубежных РЛС подобного класса:
• большая дальность действия;
• повышенная точность измерения координат;
• высокая степень автоматизации решения задач;
• визуальное наблюдение радиолокационного изображения и информации
системы госопознавания на экране индикатора телевизионного типа при ре-
альной освещенности и одновременном фотографировании экрана без ухуд-
шения условий наблюдения за ним (впервые осуществлено в отечественной
бортовой РЛ);
• выполнение жестких требований к РЛС в части обеспечения возложенных на
нее задач в условиях воздействия перспективного РПД;
633
• обеспечение эксплуатации РЛС в условиях пониженных (до —60 °C) рабочих
температур. Это требование, возникшее еще в период разработки ламповых
РЛС и не пересмотренное ко времени разработки РЛС «Обзор», оказалось
наиболее трудным в реализации.
Выбор структурной схемы РЛС. Основными особенностями РЛС
«Обзор» явились использование фазоманипулированного сигнала и реализация
внутренней когерентности с запоминанием начальной фазы излучаемых импуль-
сов. Это позволило наряду с другими мерами увеличить дальность обнаружения
целей, разрешающую способность РЛС по дальности и выполнять возложенные
функции в условиях активного РЛПД.
В РЛС широко применена цифровая техника — автоматический обнаружи-
тель цели с использованием многоуровневых аналого-цифровых преобразовате-
лей (АЦП), синхронизатор, дальномер, угломер, устройство запоминания фазы
излучаемого сигнала и доворота фазы принимаемых сигналов, СЦВМ. Это по-
зволило добиться немыслимой для того времени точности определения коорди-
нат обнаруженных целей, увеличить число сопровождаемых при обзоре целей до
четырех.
Примененная в РЛС встроенная система контроля позволила вести непре-
рывный автоматический контроль работоспособности РЛС на всех этапах ее ис-
пользования, информировать обслуживающий персонал РЛС об уходе ее па-
раметров до критической отметки. В случае отказа РЛС с помощью системы
встроенного контроля определялось место отказа с точностью до конструктив-
но-сменного блока и даже узла с выводом информации в цифро-буквенном виде
оператору.
Широкое применение в станции метода резервирования направлено на вы-
полнение высоких требований к ее надежности.
Применение мультиплексной системы передачи данных (МСПД), реализую-
щей метод уплотнения обмена информацией как между отдельными блоками
станции, так и с сопряженными изделиями (НПК, контрольно-проверочной ап-
паратурой), привело к уменьшению массы кабелей и облегчению поиска неисп-
равностей в РЛС при использовании для этого специально разработанного пульта
МСПД, входящего в состав ЗИП1 : 1 и имеющегося в полете на каждом самолете.
Разработка РЛС велась с учетом требований ТЗ по обеспечению ее работы в
условиях перспективного противодействия. В ней заложен ряд методов, не поте-
рявших своей эффективности до настоящего времени.
Основные устройства РЛС
Антенное устройство РЛС зеркального типа обеспечивает формирова-
ние диаграмм направленности «острого» луча и косекансного луча. Отража-
тель изготовлен из двух «зеркал», причем внешнее является поляризационным
фильтром и выполнено из специальной поляризационной ткани с чередующи-
мися узкими проводящими полосками. Облучатель РЛС является двухполяри-
зационным, переключение диаграмм (поляризаций) производится волноводным
переключателем и поляризационным тройником. Стабилизация антенны пря-
мая по тангажу, крену, азимуту с возможностью управления зеркалом по азимуту
и наклону. В антенное устройство встроены также облучатели системы госопоз-
навания.
634
Передающее устройство обеспечивает генерацию простых и сложных
фазоманипулированных импульсных сигналов. В состав его входят два задающих
генератора на магнетронах, блоки управления автоматической подстройкой час-
тоты магнетронов и выходной усилитель мощности на амплитроне.
Задающие генераторы перестраиваются либо вручную для обеспечения
настройки на требуемую частоту или подстраиваются автоматически при работе с
фазоманипулированным сигналом (ФМС) для поддержания номинальной часто-
ты принимаемых сигналов. Длительность простых сигналов автоматически пере-
ключается в зависимости от масштаба или режима работы РЛС.
В режиме ФМС каждый магнетрон формирует последовательность из 10 эле-
ментарных импульсов («гребенку») со случайной начальной фазой, смещенных
один относительно другого на длительность элементарного импульса.
Тепловой режим усилителя мощности поддерживается специально разрабо-
танной для бортовых РЛС термосифонной системой охлаждения (ТСО).
Приемное устройство РЛС состоит из широкополосного усилителя вы-
сокой частоты (УВЧ), общего для двух частотных каналов и приемника.
Приемник имеет два одинаковых канала.
Перестраиваемый гетеродин выполнен на лампе обратной волны, гетеродин
с фиксированной настройкой — на клистроне. При разработке клистронного ге-
теродина приняты меры по обеспечению его высокой стабильности, что в даль-
нейшем позволило при очередной модернизации РЛС «Обзор» обеспечить допле-
ровское обужение луча (ДОЛ).
Блоки фильтров сжатия служат для когерентной обработки принимае-
мых сигналов в режиме ФМС после фазовых детекторов. Блоки представляют со-
бой самонастраивающиеся фильтры сжатия сигналов по длительности.
При излучении «гребенки» из 10 элементарных импульсов в каждом канале
блоки обеспечивают запоминание в цифровом виде начальных фаз элементарных
импульсов зондирующего сигнала.
Информация о начальных фазах излучаемого сигнала используется для коге-
рентной обработки принимаемых сигналов в течение всего данного периода по-
вторения. Для запоминания четырехразрядных позиционных кодов используют-
ся устройства цифровой памяти, каждое из которых состоит из десяти четырех-
разрядных регистров.
В блоках обеспечивается доворот фаз принимаемых сигналов (умножение на
весовые коэффициенты), суммирование полученных векторов в соответствии с
зафиксированными ранее фазами излученных элементарных импульсов.
Система индикации РЛС «Обзор» предназначалась для преобразования
радиолокационной информации, сохранения и отображения ее совместно с циф-
ровой и знаковой информацией в телевизионном стандарте.
На момент разработки РЛС «Обзор» не существовало бортовых цифровых уст-
ройств, обеспечивающих хранение такого объема памяти. Поэтому была проведе-
на НИР по разработке двухлучевой запоминающей электронно-лучевой трубки
(ЗЭЛТ), а в 1979 г. начато опытное производство трубок ЛН24. Время сохранения
РЛ-информации в данной ЗЭЛТ достигало 10 мин. Система индикации включала:
• блоки разверток и преобразования сигналов на ЗЭЛТ «Линия» (ЛН24);
• блок телевизионной индикации на трубке 23ЛМ29Э;
• блок знаковой индикации;
• фотоконтрольную приставку типа ПАУ-486 для регистрации на фотопленку
изображения, получаемого на экране ЭЛТ.
635
В 1978—1979 гг. были выпущены 3 комплекта РЛС «Обзор» и начаты исследо-
вательские испытания на самолете-лаборатории НПО «Ленинец» Ил-18 и на са-
молете Ту-95МС с телевизионной системой индикации на ЗЭЛТ
К сожалению, особенностью ЗЭЛТ «Линия» явилось перенакопление заря-
дов на ее мишени, которое приводило к выходу из строя части люминофора,
обеспечивающего хранение радиолокационной информации. Поэтому в 1980—
1981 гг. ГК НПО «Ленинец» приняло решение отказаться от ЗЭЛТ и провести за-
мену на телевизионную систему индикации с послесвечением.
В системе индикации РЛС «Обзор», проходившей государственные испыта-
ния на самолете Ту-95МС в 1981 — 1983 гг. и принятой на снабжение на указан-
ном самолете, применена ЭЛТ типа 23ЛМ17В-В с длительным послесвечением,
обеспечивающим немерцающее изображение при максимальном периоде обзора
(до 8 с). Блок знаковой индикации обеспечивает на экране ЭЛТ отображение
цифробуквенной индикации, непрерывно видимой метки (визира), масштабных
меток и другой информации.
Задачи автоматического обнаружения и автосопровождения целей решались
рядом цифровых блоков обработки.
Автоматический обнаружитель целей (АОЦ) обеспечивает в режиме автома-
тического сопровождения на проходе выделение главной цели в зоне центра мик-
роплана после накопления и обнаружения сигналов целей в данной зоне и выда-
чу сигналов выделенной цели в угломер и дальномер. АОЦ является цифровым
устройством, включающим бинарное аналого-цифровое преобразование вход-
ных видеосигналов с автоматической регулировкой уровня квантования и стаби-
лизацией величины ложной тревоги.
Накопление и АО целей реализуется на второй ступени двухпорогового об-
наружителя, наименее критичного к динамическому диапазону принимаемых
сигналов. АОЦ обеспечивает также выделение «главной» цели в заданной зоне по
критерию, выбранному оператором.
Блок синхронизатора осуществляет управление во времени работой бло-
ков РЛС и слежение по дальности за выбранной целью в автоматическом и полу-
автоматическом режимах, обеспечивает управление перекрестием.
С помощью дальномера обеспечивается:
• формирование кодов дальности обнаруженных сигналов;
• вычисление рассогласования по дальности;
• вычисление поправок скорости сближения;
• экстраполяция вычисленного значения дальности в промежутках между дву-
мя последовательными обнаружениями сигналов и выдача информации о
дальности до сопровождаемых целей в виде кода.
Блок угломерного устройства (УУ) обеспечивает измерение азимута
(пеленга) выбранной цели или запрограммированного в НПК ориентира при ав-
томатическом и полуавтоматическом режимах и формирует:
• кодовый сигнал управления антенной по азимуту и углу места;
• кодовые сигналы ошибок стабилизации антенны по крену и тангажу;
• метку пеленга и управление ею в автоматическом, полуавтоматическом и
ручном режимах;
• сигнал, определяющий достоверность команды «Захват».
Вычислительный тракт осуществляет:
• вычисление скоростей изменения наклонной дальности и бортового пеленга
АС целей, наклонной дальности и бортового пеленга ПАС целей;
636
• вычисление угла наклона антенны;
• вычисление доплеровского сдвига несущей частоты для внесения поправки
на нее в гетеродины приемника;
• реализацию алгоритмов вычисления пройденного пути в режиме бокового
обзора.
Мультиплексная система передачи данных предназначена для обмена по
единой магистрали кодовой и командной информацией между блоками РЛС и конт-
рольно-проверочной аппаратурой (КПА). Объем передаваемой информации —
64 слова по 16 разрядов в параллельном коде, время передачи информации 1 мс, час-
тота синхроимпульсов приема и передачи 62 кГц.
С помощью встроенной системы контроля РЛС обеспечивается:
• определение работоспособности РЛС на всех этапах подготовки изделия и
его боевого применения;
• поиск места неисправности с точностью до конструктивного блока и боль-
шинства узлов;
• ремонт изделия при восстановлении работоспособности;
• проведение регламентных работ;
• контроль параметров и сигнализация о подходе параметра к критическому
значению.
Система контроля имеет два режима работы: режим обнаружения отказа,
включаемый автоматически при включении изделия, и режим, позволяющий по
совокупности всех отказов обнаружить место отказа в станции и включаемый
оператором при наличии замечаний к работоспособности РЛС.
История внедрения научно-технических достижений
отечественной промышленности в РЛС «Обзор»
Государственные испытания РЛС «Обзор МС» успешно закончились в
1983 г. Самолет Ту-95МС с РЛС «Обзор МС» принят на снабжение, начато серий-
ное производство РЛС на заводах холдинговой компании «Ленинец». В процессе
разработки, эксплуатации эти РЛС постоянно совершенствовались.
Еще в процессе ГСИ внедрен блок защиты, обеспечивающий отключение
РЛС при выходе системы электроснабжения за нормы, предусмотренные
ГОСТом 19705-79.
В процессе эксплуатации произведены:
• замена системы госопознавания на более совершенную, в связи с чем изме-
нению подверглась антенна РЛС;
• введение дополнительно (сверх ТТЗ) режима «метео» с возможностью
«оконтуривания» наиболее опасных метеообразований;
• внедрение прожигаемой памяти в ПЗУ СЦВМ;
• замена микросхем на более надежные микросхемы большей степени интег-
рации, причем в значительной части замена микросхем осуществлялась для
обеспечения работы РЛС при сдаче ее при воздействии пониженной темпе-
ратуры —60 °C, хотя при включении РЛС ее работоспособность восстанавли-
валась через 3...5 мин за счет прогрева микросхем или при повышении тем-
пературы в камере до —58 °C.
По мере освоения микросхем высокой степени интеграции и, в частности,
памяти (132 РУ 10, 537 РУ9) НИИ системотехники получил возможность провес-
ти модернизацию РЛС «Обзор» в части введения блоков преобразования РЛ-ин-
637
формации и цифровой памяти более производительной БЦВМ, выполняющей
функции блоков дальномера и угломера и телевизионной системы индикации
(ТСИ), обеспечивающей работу оператора без тубуса при солнечном освещении
до 1500...2000 люкс и работу в режиме бокового обзора.
В 1984—1985 гг. НИИ системотехники выполнил НИЭР по внедрению в РЛС
«Обзор» ТСИ, в процессе которой разработаны новые блоки.
Блок обработки РЛ-информации, осуществляющий 16-уровневое АЦП
РЛ-информации, цифровое межпериодное накопление информации в пределах
выбранного оператором масштаба и частоте дискретизации 7 МГц.
Цифровой преобразователь разверток обеспечивает прием, преобразование в
формат кадра отображения, запоминание радиолокационной информации и пе-
редачу ее на телевизионный индикатор. Память в нем реализована на микросхе-
мах 537 РУ9.
Запоминание РЛ-информации возможно производить с замещением (с разм-
ножением лучей или без) либо с накоплением размноженных или неразмножен-
ных РЛ-разверток.
В процессе выполнения НИЭР внедрена новая бортовая цифровая вычисли-
тельная машина — быстродействующая, с большим объемом памяти, это позво-
лило возложить на нее решение задач определения координат, сопровождения
целей, измерения координат в режимах бокового обзора и «замороженного» изо-
бражения (стоп-кадр), отображения на стоп-кадре текущего положения самоле-
та, обеспечения расчетов для управления углами сканирования и наклона антен-
ны для получения равномасштабного изображения, а также задач контроля исп-
равности РЛС.
Таким образом, перечисленные мероприятия при модернизации РЛС позво-
лили обеспечить:
• введение режима стоп-кадр;
• выведение на экран индикатора крупномасштабного микроплана, обеспечи-
вающего возможность более точного совмещения перекрестия;
• введение межобзорного накопления;
• реализацию бокового обзора.
Первые образцы РЛС «Обзор» выпускались с индикаторами с послесвечени-
ем, последующие с ТСИ.
В 1988—1990 гг. НИИ системотехники выполнил НИЭР по исследованию и
экспериментальной оценке технических решений для повышения основных ха-
рактеристик изделий «Обзор».
В процессе работы проведены исследования стабильности частот генерато-
ров приемного тракта и магнетронных задающих генераторов.
В результате разработаны новые узлы автоподстройки частоты магнетрона,
обеспечивающие повышение устойчивости этой системы.
Проведены исследование стабильности и измерения фазовых и амплитудных
шумов клистронного гетеродина с объемным резонатором высокой добротности,
используемого в РЛС, при воздействии вибраций в диапазоне частот 10... 1000 Гц.
Замеры спектра фазовых и частотных флуктуаций, произведенные промыш-
ленным измерителем типа ИФ-1503СА, показали, что уровень фазовых шумов
клистронного гетеродина не превышает уровня шумов кварцевого генератора с
умножителем, что позволяет реализовать режим доплеровского обужения луча.
В ходе работ было принято решение о разработке безлитерной КД и выпуске
опытных образцов изделий «Обзор» с ТСИ и ДОЛ.
638
Для реализации режима ДОЛ в состав РЛС введен «блок обработки сигналов
в режиме ДОЛ», выполняющий следующие функции:
• компенсацию начальной фазы измеренного излученного сигнала;
• квадратурное накопление сигналов;
• формирование модуля (амплитуды) обработанного сигнала;
• выдачу выходного сигнала в аналоговой форме на вход блока некогерентной
обработки сигнала, ранее разработанного в РЛС с ТСИ.
Все операции выполнены в цифровом виде с использованием современных
на момент разработки быстродействующих интегральных схем.
Сигнал на вход блока поступает с фазовых детекторов, используемых в том
числе для блока сжатия по дальности фазомодулированного сигнала.
В результате модернизации РЛС разрешающая способность РЛС по пеленгу
повысилась в 6...8 раз, по дальности за счет создания режима укороченного
импульса — в 5... 10 раз в зависимости от выбранного масштаба.
Оснащение самолетов дальней и стратегической авиации РЛС «Обзор» с ТСИ
и ДОЛ позволило расширить тактические возможности самолетов данного класса.
По техническим параметрам и решаемым задачам РЛС соответствовала серий-
но выпускаемым зарубежным аналогам РЛС AN/APQ-144, EAR, AN/APQ-164,
по дальности действия и точности измерения координат целей превосходила их,
хотя по массе и энергопотреблению уступала им.
Летные испытания самолетов Ту-160 и Ту-22МС, оснащенных РЛС «Обзор»
с ТСИ и ДОЛ, подтвердили эффективность решения задач указанными самолета-
ми. Кроме того, резко повысилась точность коррекции навигационно-пилотаж-
ного комплекса при полете в безориентирной местности (тундре, степи и т. д.) с
использованием РЛС «Обзор».
Перспектива дальнейшего развития БРЛС ударных самолетов
в свете новой технологической базы и использования достижений
фундаментальной и прикладной науки
НИИ системотехники ХК «Ленинец» разработал семейство бортовых РЛС
SEA DRAGON (Морской Змей), обеспечивающих решение задач самолетов ДА и
самолетов противолодочной обороны (ПЛО).
При построении РЛС «SD» использован опыт разработки БРЛС «Обзор» для
самолетов ДА, поисково-прицельных систем для самолетов ПЛО, а также новей-
шие достижения в области разработки адаптивных методов излучения, приема и
обработки РЛ-сигналов, учитывающих все особенности современной радио-
электронной борьбы, новейшие достижения в области формирования зондирую-
щих сигналов, когерентной обработки для различных режимов обнаружения воз-
душных целей, синтезирования антенного раскрыва (САР) и инверсного синте-
зирования (ИНСАР).
Перед разработчиками РЛС была поставлена задача создания многофункци-
ональной РЛС, обеспечивающей выполнение задач в различных режимах с часто
противоречивыми требованиями. Так, обнаружение надводных кораблей на пре-
дельных дальностях требует большой импульсной мощности. РЛС обнаружения
воздушных целей строились ранее с использованием передатчиков, имеющих ма-
лую импульсную мощность при большой средней. Для обнаружения малоразмер-
ных целей на фоне отражений от взволнованной поверхности требуются очень ко-
роткие импульсы при достаточной импульсной и средней мощности излучения и
639
при значительных скоростях вращения антенны. Взаимодействие радиогидроакус-
тическими буями (РГБ) также выдвигает требования к передающему устройству, не
совместимые с перечисленными выше по параметрам модуляции сигнала.
Впервые разработаны рабочие алгоритмы и специальное программное обес-
печение обнаружения воздушной цели при низкой и средней частотах повторе-
ния, режимы обнаружения скоростных и короткоживущих малоразмерных целей
применительно к бортовой вычислительной технике, созданной с учетом выше-
изложенных режимов работы и необходимости одновременного автоматического
сопровождения до 50 целей.
Большое внимание при разработке РЛС уделено внедрению мер помехоза-
щиты, обеспечивающих выполнение функции в условиях организованного РПД.
Эти меры следующие:
• повышенный потенциал РЛС;
• расширенный динамический диапазон принимаемых сигналов;
• использование широкополосных ЛЧМ-сигналов;
• селекция целей по длительности и амплитуде;
• поимпульсная перестройка частоты;
• вобуляция зондирующих импульсов;
• межпериодное когерентное и межобзорное накопление сигналов;
• паузный режим работы (режим стоп-кадр);
• работа в режимах «однократный обзор» и «подсвет».
РЛС выполняет следующие режимы:
• обзор надводной обстановки, обнаружение НК;
• наблюдение береговых объектов (картографирование, реализуется посред-
ством синтезирования антенного раскрыва;
• работа с радиогидроакустическими буями;
• обзор воздушного пространства, обнаружение ВЦ;
• инверсивное синтезирование антенного раскрыва;
• работа по метеообразованиям.
Структура РЛС. Антенное устройство включает волноводно-щелевую
антенную решетку (ВЩАР), антенну госопознавания и блок управления. ВЩАР
разбита на четыре симметричных квадранта. Волноводно-распределительная
система и система излучающих щелей обеспечивают формирование суммарной
ДН и разностных ДН в вертикальной или горизонтальной плоскостях, низкий
уровень первых боковых лепестков. Уровень дальних боковых лепестков минус
45...50 дБ. Сканирование антенны в секторе до 360° по азимуту и ±25° по углу
места — механическое. В антенном устройстве обеспечивается косвенная стаби-
лизация основной антенны и антенны госопознавания.
Приемозадающий модуль (ПЗМ) обеспечивает:
• формирование когерентных зондирующих простых и сложных ЛЧМ-сигна-
лов, частотно-манипулированных сигналов;
• формирование гетеродинных и опорных колебаний для преобразования и
детектирования отраженных сигналов;
• двухканальный прием, преобразование по частоте, усиление преобразован-
ных отраженных сигналов, сжатие ЛЧМ-сигналов, регулировки усиления
(ЦАРУ, ВАРУ и др.) сигналов для сопряжения с диапазоном АЦП;
• поимпульсную перестройку частоты по случайному закону во всем диапа-
зоне рабочих частот.
640
Приемо-задающий модуль имеет следующие формируемые зондирующие
сигналы:
• простой сигнал длительностью от 0,2 до 5,0 мкс;
• ЛЧМ-сигналы длительностью от 2 до 28 мкс с девиацией, обеспечивающей
заданную разрешающую способность по дальности;
• частотно-манипулированные сигналы — последовательности чередующихся
элементарных импульсов длительностью более 0,1 мкс.
Усилитель мощности (УМ) включает предварительный усилитель мощ-
ности на лампе бегущей волны и оконечный на многолучевом клистроне. Он
имеет в своем составе регулируемый цифровой аттенюатор, позволяющий умень-
шить выходную импульсную мощность в диапазоне 0...20 дБ. Охлаждение УМ —
жидкостное.
Цифровой преобразователь разверток (ЦПР) обеспечивает преобразо-
вание РЛ-информации из полярной системы координат в формат телевизионно-
го кадра и межскановую обработку изображения под действием управляемой вы-
числительной среды. Формат кадра РЛ-изображения до 1024 х 1024 х 6.
Модуль обработки решает следующие задачи:
• обнаружение, измерение мгновенных координат до 50 целей за один цикл
обзора, формирование сигнатур целей для их классификации;
• измерение пеленга постановщиков помех;
• формирование РЛ-изображения для кругового и секторного обзоров;
• синтезирование апертуры антенны;
• формирование РЛ-портрета цели в режимах САР и ИНСАР;
• картографирование.
Модуль обработки представляет собой многопроцессорную репрограмми-
руемую вычислительную систему для скалярной и векторной обработки данных.
Система команд — универсальная типа VAX 11/750.
Управляющая вычислительная система (УВС) предназначена для уп-
равления блоками и устройствами РЛС, выполнения вычислений, контроля, рас-
пределения информации внутри РЛС и связи РЛС с внешними системами.
Она обеспечивает:
• организацию отображения служебной информации на экране индикатора РЛС;
• организацию каналов автосопровождения целей, обнаруживаемых модулем
обработки;
• вычисление параметров движения целей;
• организацию системы встроенного контроля.
Управляющая вычислительная система выполнена на основе универсально-
го вычислительного модуля скалярной обработки с системой команд типа
VAX 11/750.
Унифицированное рабочее место (УРМ) предназначено для отображе-
ния информации, управления РЛС с пульта оператора, регистрации информации
системой документирования. Оно обеспечивает формирование РЛ-изображения
и служебной информации на экране индикатора, обмен информацией с пультом
управления и НПК по мультиплексному каналу информационного обмена.
Индикаторное устройство телевизионного типа на основе цветной ЖК-па-
нели с активной матрицей работает в стандарте XGA.
Пульт управления включает в себя клавиатуру с кнопками постоянного
назначения, механизм управления визиром (джойстик), плоский электродюми-
нисцентный индикатор, совмещенный с прозрачной сенсорной панелью.
21 Авиация ВВС России и научно-технический прогресс
641
Аппаратура системы документирования обеспечивает запись цифровой ин-
формации на оптический диск.
Бортовая РЛС разрабатывалась и строилась с учетом наращивания режимов
работы и решаемых задач и достижений современной науки. При этом дальней-
шее наращивание функций БРЛС должно производиться без изменения структу-
ры и связей лишь за счет доработки специального программного обеспечения
вычислительных средств РЛС.
2. Бортовые РЛС фронтовой авиации
Создание прицельно-навигационных систем многоцелевого всепогодного
фронтового сверхзвукового бомбардировщика-ракетоносца Су-24 СКБ П. О. Сухо-
го явилось яркой страницей научно-технической деятельности холдинговой компа-
нии «Ленинец».
Работы по разработке ПНС для самолета Су-24, получившей наименование
ПНС-24, начались в НИИРЭ в ее СКБ-3 и продолжались в том же СКБ во
НИИРЭС с 1963 г. Перед коллективом разработчиков СКБ-3 НИИРЭ были по-
ставлены весьма сложные задачи, в соответствии с которыми ПНС-24 должна
обеспечить:
• всепогодное обнаружение в ночных и дневных условиях наземных, надвод-
ных и воздушных целей;
• определение их государственной принадлежности;
• выработку целеуказания для поражения различных целей управляемыми и
неуправляемыми видами вооружения;
• осуществление полета самолета на весь радиус его действия по строго задан-
ному маршруту, в том числе обеспечение полета на предельно малых высо-
тах;
• высокие эксплуатационные характеристики (по надежности, малому време-
ни подготовки к полету и т. д.).
В результате анализа возможности выполнения поставленных перед ПНС за-
дач было принято единственно правильное решение о создании бортового комп-
лекса систем и устройств, обеспечивающих выполнение как прицельных, так и
навигационных задач.
В соответствии с этим в состав ПНС входили: радиолокационная станция
переднего обзора, радиокомандная радиолиния разработки НИИРЭ, электрооп-
тический визир, пассивная радиолокационная станция и др. устройства, выпол-
няющие функции обнаружения наземных, надводных и воздушных целей и пере-
дачу необходимых данных ракетному оружию самолета, а также радиолокатор
предупреждения столкновения с естественными препятствиями, доплеровский
измеритель скорости и угла сноса разработки НИИРЭ; малогабаритная инерци-
альная система, системы автоматического управления и др., решающие пилотаж-
но-навигационные задачи. В целом ПНС объединяла 15 различных устройств и
датчиков, для обеспечения их взаимодействия и управления в ПНС была введена
ЦВМ разработки Ленинградского ЦКБ электроавтоматики с устройствами вво-
да-вывода и управления, которые разрабатывали специалисты СКБ-3 так же, как
ПО и СПО для них.
К основным проблемным вопросам, которые были решены разработчиками
ПНС-24, что, безусловно, является и научно-техническим достижением, должны
быть отнесены:
642
• создание всепогодной радиолокационной системы, которая обеспечива-
ет обнаружение различных целей, в том числе малоразмерных наземных объ-
ектов;
• решение навигационной задачи маловысотного полета;
• обеспечение управления ПНС и ее связей с оборудованием самолета на ос-
нове использования БЦВМ с устройствами вывода-ввода и управления и
разработкой ПО и СПО для этих целей.
Впервые предлагалось создать двухдиапазонный радиолокатор (РЛС «Ори-
он»). Для дальнего обзора земной поверхности служил 3-сантиметровый канал
РЛС. Кроме того, в радиолокаторе была применена система селекции подвижных
объектов на фоне помех от земной поверхности.
Дополнительно к 1-му каналу для обнаружения малоразмерных наземных
целей был применен обзорно-прицельный радиолокатор 8-миллиметрового диа-
пазона. Введение этого канала расширило класс наблюдаемых наземных объек-
тов. Достигаемое в этом случае высокое разрешение при ограниченной апертуре
антенного устройства дало возможность наблюдать шоссейные дороги, мосты и
паромы через небольшие речки, линии электропередач, железнодорожное полот-
но, железнодорожные составы, взлетно-посадочные полосы и самолеты на сто-
янках. Создание двухдиапазонной РЛС заставило разработчиков решить целый
ряд сложных технических вопросов, таких как:
• разработка антенного устройства, обеспечивающего функционирование
3-сантиметрового и 8-миллиметрового каналов с общим зеркальным отража-
телем;
• разработка высокоточных технологий, необходимых для создания элементов
антенных устройств и волноводной техники, а также специальных вакуум-
ных приборов;
• создание многодиапазонного радиопрозрачного обтекателя для сверхзвуко-
вого самолета;
• создание радиолокационного индикаторного устройства с высокой разре-
шающей способностью и др.
Разработка двухдиапазонной РЛС, да еще с миллиметровым диапазоном
волн, показала всю перспективность построения таких РЛС, значительно повы-
шающих эффективность их применения для разведки различных целей и выра-
ботки данных целеуказания для ракетного оружия. Кроме того, создание ПНС с
таким радиолокатором и с использованием еще пассивного радиолокационного
канала для обнаружения излучающих РЛС противника было первым опытом раз-
работки многоканальных авиационных систем, за которыми, как показал опыт
их эксплуатации, было будущее.
Еще одним научно-техническим достижением разработки ПНС-24 явилось
решение задачи обеспечения маловысотного полета, что для фронтового самоле-
та бомбардировщика-ракетоносца имело решающее значение и значительно по-
вышало его боевые возможности.
В этом случае впервые радиолокатор предупреждения столкновений с назем-
ными естественными препятствиями (РПС «Рельеф») включался в контур управ-
ления маловысотного полета через автопилот.
Радиолокатор должен был обеспечивать измерение дальности до земной по-
верхности с относительно высокой точностью и работать только в автоматиче-
ском режиме обеспечения маловысотного полета.
643
Радиолокатор являлся не только датчиком, измеряющим угол визирования и
дальность до препятствия, но и включал в себя автоматизированный контур уп-
равления антенной и специализированный вычислитель, обеспечивающий авто-
матическое слежение за заданной дальностью, а также определение координат
угол — дальность вершины препятствия.
Весьма важным моментом отработки МВП явилось проведение его деталь-
ного моделирования, что очень много дало для совершенствования как РПС
«Рельеф», так и всего контура МВП. Окончательная его отработка была заверше-
на на самолете Ил-14, что дало возможность успешно ввести его в боевые режи-
мы полета самолета и обеспечить максимальную степень безопасности полета в
любых условиях.
Таким образом, впервые в нашей стране был принят на вооружение ВВС са-
молет, бортовое оборудование которого обеспечивало ему маловысотный полет
со скоростью до 1100 км/ч на малых высотах не только над равниной, но и в го-
рах. Еще к одной принципиально новой стороне создания ПНС-24 необходимо
отнести применение в ПНС БЦВМ с устройствами ввода-вывода и управления, а
также разработку ПО и СПО для них.
Для разработчиков СКБ-3 института, да и не только для них, это направле-
ние работ на период создания ПНС-24 надо было начинать с «чистого листа».
Необходимо было также учитывать не только обилие ранее не существовавших
режимов и задач, которые необходимо было решать в ПНС, но и обеспечить при
этом взаимодействие ПНС со всеми устройствами и оборудованием самолета, в
том числе управление и обработку информации, поступающей от РЛС «Орион».
Требовалось peu/ить сложную техническую задачу выбора вычислительной ма-
шины с учетом обеспечения необходимой ее производительности, быстродейст-
вия, объема ДЗУ и других параметров. Было принято решение о выборе БЦВМ
«Орбита», разрабатываемой Ленинградским ЦКБ «Электроавтоматика», и введе-
ние ее в состав ПНС-24, а разработку устройства вывода-ввода и управления, ко-
торое получило наименование «Бином-А», вести самостоятельно.
В УВВ «Бином-А» впервые решались вопросы управления и синхронизации
РЛС «Орион» и его индикатора от ЦВМ, а также обработка информации и авто-
матическое измерение координат и ввод их в ЦВМ. Кроме того, «Бином-А» обес-
печивал вывод на бортовой магнитный регистратор информации о состоянии ап-
паратуры ПНС и действии экипажа в полете, что позволило впоследствии обес-
печить систему наземной обработки этой информации.
Разработки ПО и СПО для БЦВМ и УВВ целиком легли на разработчиков
ПНС-24, причем они были осуществлены, по сути дела, в отсутствие какого-ли-
бо задела работ в этом направлении.
В число научно-технических достижений разработки ПНС-24 входят также
разработки тренажеров для тренировки экипажа самолета. Без обыгрывания раз-
личных ситуаций, которые могли бы возникнуть в полете, летчику, находящемуся
в кабине самолета и имеющему перед глазами большое количество индикаторов и
датчиков, было бы трудно принимать правильное решение. Основной частью
тренажера с имитатором являлся движущийся планшет с двумя фотошаблонами,
кроме него в состав тренажера входили имитаторы всех основных устройств
ПНС, блоки сопряжения БЦВМ, УВВ и т. п.
После завершения работ по ПНС-24 и принятия на вооружение в состав
ВВС самолета Су-24 естественным ее продолжением была разработка ПНС-24М
для самолета Су-24М. Государственные испытания этого самолета были завер-
шены в 1981 году. Кроме того, позднее были созданы две модификации ПНС:
644
ПНС-24МР (для самолета-разведчика) и ПНС-24МП (для самолета постановщи-
ка помех). Таким образом, была завершена разработка этого поколения прицель-
но-навигационных систем для фронтовых самолетов Су-24.
Начальником СКБ-3 со дня его образования в 1959 г. и главным конструкто-
ром ПНС-24 и ПНС-24М был Евгений Александрович Зазорин, один из та-
лантливых конструкторов-разработчиков авиационной радиоэлектроники. Имен-
но под его руководством и личном участии на всех этапах разработки, испытаний,
производства и принятия на вооружение было успешно завершено создание при-
цельно-навигационных систем ПНС-24 и ПНС-24М самолетов Су-24 и Су-24М.
Он же был заместителем главного конструктора этих самолетов П. О. Сухого.
Для повышения боевых возможностей самолета-штурмовика Су-25 в 1980 г.
было принято решение оснастить его многофункциональной РЛС переднего обзо-
ра для борьбы с малоразмерными наземными и воздушными подвижными и непо-
движными целями типа танк и вертолет. Для быстрого и надежного преодоления
ПВО противника и эффективного боевого применения оружия в зоне нахождения
цели эта РЛС должна была обеспечивать безопасный полет самолета на малой вы-
соте с огибанием рельефа местности в вертикальной и горизонтальной плоскостях.
Для создания такой РЛС в НИИРЭК холдинговой компании «Ленинец»
(г. Санкт-Петербург) была выполнена ОКР. Бортовая радиолокационная стан-
ция — это станция 8-миллиметрового диапазона радиоволн с когерентной циф-
ровой обработкой РЛ-сигнала, блочно-модульной конструкции на базе исполь-
зования микроэлектронной цифровой техники.
Бортовая РЛС предназначена для работы в простых и сложных метеоуслови-
ях днем и ночью:
• для поиска, обнаружения, сопровождения неподвижных и подвижных на-
земных и воздушных радиолокационно-контрастных объектов и выдачи в
радиолокационно-навигационный комплекс самолета-носителя координат
выбранного летчиком объекта;
• для получения РЛ-информации о впереди лежащем рельефе местности, фор-
мирования и выдачи сигналов управления при выполнении ЛА маловысот-
ного полета в режиме следования рельефу местности.
Станция размещается в съемном контейнере, который подвешивается на
центральную точку подвески самолета. Она состоит из радиолокационного уст-
ройства, устройства цифровой обработки информации органов управления.
Основные тактико-технические характеристики БРЛС следующие:
• режим «воздух—поверхность», при котором осуществляется панорамный об-
зор земной поверхности и обнаружение наземных подвижных целей;
• режим «воздух—воздух»;
• маловысотный полет в двух вариантах — облет в вертикальной плоскости и
обход в горизонтальной плоскости;
• дальность обнаружения неподвижных объектов с ЭОП 10 м2 5...7 км, с ЭОП
100 м2 25...30 км и подвижных объектов 15...20 км;
• обнаружение в направлении полета естественных наземных препятствий с
уклоном до 20° и высотой до 2000 м в режиме маловысотного полета на высо-
тах полета 100...500 м при скоростях 600... 1000 км/ч;
• автоматизированный контроль работоспособности;
• отображение информации на лобовом стекле носителя и на телевизионном
индикаторе;
• общий вес БРЛС 150 кг, общая потребляемая мощность от бортовых источ-
ников питания 3,5 кВА.
645
На предприятиях холдинговой компании «Ленинец» в 1980-х годах было из-
готовлено 8 опытных образцов БРЛС, предназначенных для проведения государ-
ственных летных и лабораторных испытаний. Проведены ЛКИ нескольких режи-
мов его работы в ЛИИ им. Громова и в ГЛИКИ. Подготовлен к проведению ис-
пытаний в режиме маловысотного полета «Облет».
Работы по созданию и внедрению БРЛС были остановлены в 1993 г. из-за от-
сутствия финансирования.
На базе этой БРЛС в ОАО «НИИРЭК» был разработан маловысотный нави-
гационный комплекс контейнерного и внутрифюзеляжного расположения, кото-
рый включает в себя радиолокатор следования рельефу местности и пассивную
теплонавигационную систему.
5.4.3. МЕТОДИКА СИНТЕЗА ПЕРСПЕКТИВНЫХ
БОРТОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Третье и четвертое поколения БРЛС характеризуются переходом к когерентно-
му передающему вакууму, применением интегральных цифровых схем, микроми-
ниатюризацией монтажа, интегрированной системой отображения информации.
Антенные системы — щелевые антенные решетки с механическим сканированием
(третье поколение) и пассивные ФАР (четвертое поколение). Многофункциональ-
ное совмещение режимов.
Созданию фронтового бомбардировщика Су-27ИБ предшествовал ряд науч-
но-исследовательских работ ВВС и ГосНИИАС. В частности, был определен оп-
тимальный облик БРЛС для данного уровня технологий. В НИИАС была принята
концепция многофункциональности БРЛС, поскольку кроме задач обнаружения
наземных целей необходимо решение задач маловысотного полета и обороны от
средств ПВО противника. Усложнение функций БРЛС, естественно, вызывает
увеличение ее стоимости и массогабаритных характеристик. В этом случае выбор
альтернатив БРЛС возможен только на основе оценки эффективности по край-
ней мере на уровне эффективности авиационного боевого комплекса, т. е. боево-
го самолета с его бортовым радиоэлектронным оборудованием и вооружением.
Ниже рассмотрим пример методики, используемой в НИИАС для выбора опти-
ческого состава обзорно-прицельной системы, включая БРЛС.
Результат разработки АБК оценивается критерием эффективности е, кото-
рый является векторным по крайней мере по двум причинам. Во-первых, крите-
рий должен отражать как полезный эффект W (число пораженных целей, пред-
отвращенный ущерб, вероятность поражения целей и т. д.), так и «плату» П —
стоимость АБК, потери. Плата может рассматриваться как ограничение По, за-
данное верхним уровнем иерархии, а также может входить в сам показатель эф-
фективности. В обоих случаях необходимо оперировать по крайней мере двумя
показателями, т. е.
8 =/(W, П).
Для целей синтеза ОПС может использоваться ряд критериев эффективнос-
ти АБК как при одиночных, так и при групповых действиях. Например, могут
быть использованы критерии Еп — вероятность поражения цели; ц — среднее
число пораженных целей N за среднее число вылетов АБК Я, ц ~ N/п \ С — сто-
имость наряда АБК, необходимого для выполнения поставленной задачи.
646
Для несъемного оборудования ОПС необходима оценка эффективности, ос-
редненной по всем условиям Zz боевого применения и для разных боевых задач
5, т. е. свертка
е = <e(W, П)>г 5,
где < • >z s указывает на операцию свертки по Z и S.
Задачу синтеза ОПС (БРЭО) на рассматриваемый период t сформулируем в
общем виде следующим образом: найти вектор а*(/) технических решений, кото-
рый доставляет максимум показателю эффективности е(а(/)):
£(а*(/)) = Sup е(а(/)), a cz А,
где
8(а*(?)) = <Sup inf£(a(r), Z>(r), б/(г),^(г), Z, S)>z 5,
d cz D, b cz B, reg h cz H при ограничениях £ > yz 5,
где A {a} — множество технических решений; B{b} — множество технических ре-
шений противника; D{d} — множество технических приемов АБК; 7/{/г} — мно-
жество технических приемов противника; reg — множество режимов ОПС
(БРЭО); у — ограничения (нижняя граница) по допустимым значениям эффек-
тивности £ для каждого из условий Z и боевых задач 5.
Вид операции свертывания < • > есть стратегия оперирующей стороны при
синтезе ОПС (БРЭО). Операция < • > может включать нахождение модуля обра-
ботки при наличии распределения вероятностей Z и 5, а также осреднение по ча-
стной группе Z и 5.
Свертка критерия £ по Z и 5 не является тривиальной задачей ввиду труд-
ности распределения частот и весов для большого числа условий и боевых задач.
Ниже описывается процедура, существенно облегчающая задачу.
Веса или вероятность условий и задач запишем в виде матрицы подмат-
риц-столбцов (Vj, V2,..., VJ, каждая из которых имеет в качестве элементов веро-
ятности частоты или веса событий, составляющие в каждой матрице полную
группу событий, T.e.ZV2 )= 1.
Например, подматрицы матрицы V могут содержать следующие элементы:
— вероятность работы в условиях радиопротиводействия; И12 — вероятность
работы в условиях отсутствия противодействия; И21 — вероятность работы на фо-
не Земли; И22 — вероятность работы в свободном пространстве; И31 — вероят-
ность работы в простых метеоусловиях; И32 — вероятность работы в сложных ме-
теоусловиях; И41 — вероятность применения ракет по радиолокационному целе-
указанию; С42 — вероятность применения ракет по целеуказанию от
оптикоэлектронной системы; С43 — вероятность применения бомбометания по
целеуказанию от РЛС; Ин — вероятность применения бомбометания по целеука-
занию от ОЭС и т. д.
Полное вероятностное распределение Vz получается при перемножении вве-
денных матриц по-кроненкровски:
Vz = (...(((Vj 0 V2) 0 V3) 0 V4)... 0 VJ.
Очевидно, что размерность матрицы Vz равна I • N, где N равно произведе-
нию размерности всех подматриц. Например, для указанного примера N = 2 • 2 х
х 2 • 3 = 24.
647
Эффективность конкретной альтернативы с номером К вычисляется по фор-
муле:
N
Е^^ Z Е/ЛУ,.
В качестве примера приведем сравнительную оценку эффективности АБК
для различных вариантов БРЛС. Критерием оценки эффективности примем
стоимость наряда АБК, необходимого для решения поставленной задачи (пора-
жение цели).
Cz = CN,
где С — стоимость АБК; N — боевой наряд АБК или число вылетов.
Поскольку N ~ где FK — вероятность поражения цели, то
Q-c/^nop,
И/ПОр= ^ор^^навО " ^пот)(1 - И'™),
где FKop — условная вероятность поражения цели применяемым оружием;
И^отн — условная вероятность выполнения этапов полета, обнаружения, распоз-
навания и целеуказания; РИнав — условная вероятность выполнения навигацион-
ной задачи; ИЛПОТ — условная вероятность потери своего самолета от средств ПВО
противника или грубого отказа оборудования; И^отк — условная вероятность от-
каза оборудования, приводящего к невыполнению боевого задания.
Очевидно, что величина показателя FFnop определяется практически всеми
системами БРЭО и вооружения.
Сравнительная оценка альтернатив БРЛС фронтового бомбардировщика
производится при фиксированных характеристиках остальной части БРЭО и во-
оружения. Приняты следующие альтернативы БРЛС:
1. Некогерентная БРЛС с антенной зеркального типа без использования ре-
жима синтезированного антенного раскрыва.
2. Вариант 1 и режим САР.
3. Когерентная БРЛС с щелевой антенной, режим САР, режим «воздух—воз-
дух».
4. В отличие от варианта 3 используется антенна типа пассивной ФАР, режи-
мы МВП и измерение путевой скорости.
5. В отличие от варианта 4 используется антенна типа активной фазирован-
ной решетки АФАР.
Очевидно, что, несмотря на повышение стоимости БРЛС, суммарная сто-
имость наряда АБК (принятый критерий эффективности) падает с увеличением
функций, решаемых БРЛС.
Принятый показатель эффективности дает малое приращение при переходе
от ФАР к АФАР, поскольку он не учитывает некоторые важные отличия показа-
телей качества ФАР и АФАР, которые рассмотрим ниже.
На основе уравнения дальности, охватывающего основные показатели каче-
ства РЛС, можно ввести ряд обобщенных показателей, которые могут быть ис-
пользованы в различных ситуациях, когда фиксируются какие-либо показатели,
например масса РЛС, размер антенны, потребляемая мощность и т. д.
Исходим из уравнения дальности, записанного в следующей форме:
U ~ 4т^рАш ’
648
где D — дальность до цели; Рср — средняя мощность, генерируемая передатчи-
ком; Т — время просмотра зоны с телесным углом у; ЛГр — коэффициент различ-
ности; N1И — спектральная плотность шума приемника; А — площадь раскрыва
антенны; оц — ЭПР цели; Т|ф — коэффициент потерь в антенно-волноводном
тракте.
Вводим показатель V' — скорость просмотра объема пространства, заданно-
го его телесным углом \|/ и максимальной дальностью £>тах:
а4я/Гр^Отах’
где а — коэффициент порядка 1.
Другой показатель — скорость просмотра угловой зоны \|/ на заданной
дальности:
/ _ д Лф^цПф
где b — коэффициент порядка 1.
Для АФАР величина Л связана с мощностью передатчика соотношением
р = р
ср ’
где Рм — генерируемая мощность на один модуль; А4М — площадь торцевой час-
ти СВЧ-модуля АФАР.
Поэтому для АФАР можно записать
2 <5цТ|ф
АФАР - а4тг/ГрУУш/)ДЛм ’
или
рл/ _ АЛмОцЛф
^АФАР-^ Рм4тс/ГрАшР-
Соответственно для
-а РмЛ2°нПф
Уафар £?(4тс)3/ГрАшП4
или
/ _ д ^*ср ОцЛф
^афар - ° (4n)3/’M/rp^D4 •
Для сравнения показателей качества для РЛС с ФАР и АФАР при ограниче-
нии потребляемой мощности Ро существенным является сравнение КПД АФАР и
ФАР.
КПД активной решетки
= ПфПмПвС^рм + О
П Лм + ^рмП^Пв ’
где Т|ф, Т|ф — КПД распределительной системы АФАР и ФАР; т|в, Т|м — КПД воз-
будителя и модуля АФАР; АГрм — коэффициент усиления модуля активной решет-
ки по мощности.
649
Выигрыш КПД активной решетки по сравнению с пассивной
Таблица 5.5
М
^рм/Лф 2 4 6 8 10 12 14 16
0,25 2 2,5 2,8 3 3,14 3,25 3,33 3,4
0,5 1,55 1,66 1,75 1,8 1,83 1,86 1,88 1,89
0,75 1,2 1,25 1,27 1,29 1,29 1,3 1,3 1,3
КПД пассивной решетки
Лап ~ ЛпЛф>
где Т|п — полный КПД передатчика, работающего на ФАР.
Величина выигрыша КПД активной решетки по сравнению с пассивной
Па ПмЛф *рм + 1
Пап ПгПф П„/Пв + *рмПф
Выигрыш М > 1 при ЛГрм > 1 удовлетворяет условию
Пм = ПгПф.
Например, если в пассивной решетке Т|г = 0,5; т|ф = 0,3, то переход к активной
решетке энергетически целесообразен при КПД модуля такой решетки не ниже 0,15.
В таблице 5.5 представлен выигрыш М для различных ЛГрм и
При отсутствии ограничения по потребляемой мощности в антенно-фидер-
ной системе Т|ф для ФАР и т|ф для АФАР практически всегда Пф > И ф •
При прочих равных условиях (Р А, оц, N[U)
ПхФАР _ Лф > j
РфАР Лф
Для АФАР при т|ф = 1, а Т|ср = 5... 10 дБ энергетический выигрыш составит
0...10дБ.
В качестве примера приведем сравнение обобщенных характеристик РПО
самолетов типа Су-27ИБ в вариантах ФАР и АФАР (таблица 5.6).
Таблица 5.6
Сравнение обобщенных характеристик РПО самолета с ФАР и АФАР
Обобщенный параметр РПО с ФАР РПО с АФАР
Дальность действия максимальная на единицу массы 2,56 5
Скорость просмотра зоны на максимальной дальности при заданной структуре (относительно ФАР) 1 5...10
Надежность системы 0,9945 0,9975
Вероятность безотказной работы за 2 ч полета, ч 500 1000
Надежность РЛС 0,964 0,97
Вероятность безотказной работы за 2 ч полета, ч 44 60
Стоимость серийного образца в ценах 1991 г., тыс. р. 2146 4500
„ „ ^отн без помех Помехозащищенность с = Z)OTH в помехах ~ 10 2
Число одновременных режимов 2 4...5
650
5.4.4. БОРТОВЫЕ РАДИОЛОКАЦИОННЫЕ СТАНЦИИ
С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ
1. Принципы построения радиолокационных станций
с синтезированной апертурой. Основные характеристики
Для ударной авиации важнейшим достижением в области радиолокации во
второй половине XX в. является создание когерентных БРЛС с синтезированием
апертуры, работающих в режиме реального (псевдореального) времени за счет
цифровой обработки сигналов. Имеется большое число достаточно ранних пуб-
ликаций зарубежных и отечественных авторов о результатах теоретических, экс-
периментальных и серийных разработок РСА [22—31].
Радиолокатор с синтезированной апертурой (РСА) сантиметрового и метро-
вого диапазонов частот позволил осуществить всесуточное и всепогодное
радиовидение — картографирование земной поверхности с разрешающей спо-
собностью, сравнимой с разрешающей способностью оптических средств. На
рис. 5. 9 приведен пример изображения, полученного РСА.
Для пояснения физических принципов РСА основные соотношения можно
получить в спектральной области. Угловое положение объекта (элемента разре-
шения) в РСП определяется соответствием (вычислением) азимутального угла а
по измеренному доплеровскому сдвигу (рис. 5.10).
2 W
= -у- cos а cos у, (5.1)
где у — угол места наземного объекта; W — путевая скорость самолета.
Рис. 5.9. Изображение земной поверхности, полученное РСА
Рис. 5.10. Геометрия положения объекта относительно носителя
651
Рис. 5.11. Разрешающая способность
по азимутальному углу
5а, угл. мин
Рис. 5.12. Ошибка измерения азимуталь-
ного угла в зависимости от азимута цели
(5.2)
Из (5.1) следует, что
ч
а = arccos *— .
2 PTcos у
Из (5.2) вытекает выражение для разрешающей способности Да по азиму-
тальному углу а. Поскольку ширина доплеровского спектра
2 W
= -т- sinacos'yAa,
о к
при условии согласованного приема, когда время накопления Т=
(5.3)
(5.4)
(5.5)
2 J-TTsin acos у 2£sinacosy’
где 2L sin a cos у — эквивалентная (синтезированная) апертура в направлении
лоцируемого объекта.
Из-за погрешности измерения путевой скорости АРИ возникает ошибка из-
мерения азимута цели
8a = ctg а.
На рис. 5.11 и 5.12 показаны графики Да, 8а в зависимости от азимутного
угла а, погрешности ЗРИ и длины пути L.
Из графиков рис. 5.11 видно, что рез-
кое ухудшение разрешения по а происхо-
дит в зоне величин а, близких к нулю.
Характерно, что Да связана обратной
пропорциональностью с производной до-
плеровской частоты по азимуту:
Ч _ 2 PKT^sin acos у
дБ ~ X ’
которая по курсу имеет «провал»
ти, близкой к a = 0 (рис. 5.13).
Достижимая разрешающая
ность по азимуту для цифровой РСА огра-
Рис. 5.13. Зоны производной
разрешающей способности от угла а
(5.6)
в облас-
способ-
652
ничивается точностью измерения параметров движения ЛА, по дальности — ши-
рокополосное™ приемника, быстродействием и оперативной памятью процес-
сора обработки сигналов.
Для медленных по сравнению с интервалом 7 колебаний фазового центра
антенны (ФЦА) наиболее существенным является так называемый «квадратич-
ный набег» координаты по направлению линии визирования, т. е. ошибка изме-
рения ускорения daR, при допустимом набеге фазы Аф = л/2, которая выражает-
ся формулой
4 И''2 А 7?2 sin2 acos2 у
да^---------’ (5-7)
где А7?аз = АаТ? — линейная разрешающая способность по азимуту на дальности R.
Для заданного линейного разрешения по азимуту ААаз = 10 м, дальности до
цели R = 80 км; у~ 0, W= 250 м/с и X = 3 • 10-2 м, при а = 30° необходимая точ-
ность измерения daR составит 3 • 10-2 м/с2, а при а = 10° составит 3,4 • 10-3м/с2.
При быстрых колебаниях ФЦА, когда время корреляции колебаний тк Т/2
для конкретного значения тк/Т= 0,1, допустимая ошибка компенсации составит
Х/3 [24].
Столь высокие требования к точности измерения положения ФЦА приводят к
необходимости установки специального датчика положения вблизи ФЦА, посколь-
ку основная гироинерциальная система устанавливается, как правило, вблизи цент-
ра тяжести (ЦТС) самолета и не может учитывать дополнительные изгибные коле-
бания фюзеляжа на отрезке «ЦТС—ФЦА», возникающие при полете в турбулентной
атмосфере, и изгибы фюзеляжа при изменении нормальных нагрузок самолета.
При равной разрешающей способности по азимуту и дальности емкость опе-
ративной памяти и необходимое число умножений цифрового процессора обрат-
но пропорционально квадрату разрешающей способности, а скорость выполне-
ния операций обратно пропорциональна третьей степени разрешающей способ-
ности [29].
2. РЛС с трансверсальным синтезированием апертуры
В РЛС с трансверсальным синтезированием апертуры (РТСА) предлагается
использование полного размаха крыльев самолета L (рис. 5.14). В данном случае
угловое разрешение двухантенной системы с изменяю-
щимися во времени параметрами рассматривается с
точки зрения доплеровского эффекта.
Эквивалентность такого подхода следует, напри-
мер, из работы А. Р. Вольперта «Об угловом разреше-
нии посредством антенны с изменяющимися парамет-
рами в журнале «Вопросы электроники», 1981, вып. 14.
Приемная часть РЛС с антенной А{) размещается в
миделе передней части фюзеляжа. Дополнительно на
концах крыльев размещаются малоапертурные пере-
дающие антенны А,, А2. Мощность импульсов с пери-
одом повторения Т изменяется за время когерентного
накопления (синтезирования) Тс по пилообразному за-
кону в противофазе для антенн Aj и А2 (рис. 5.15).
Рис. 5.14. Геометрия
возможного размещения
антенн
653
Рис. 5.15. Межпериодная
модуляция импульсов
вРТСА
Дф, угл. мин
Рис. 5.16. Зависимость разрешающей
способности Дф по азимуту в РТСА
от азимутального угла ф
В соответствии с межпериодной модуляцией импульсов энергетический и фа-
зовый центр излучения системы антенн Aj— А2 движутся со скоростью L/Tz,
а величина перемещения фазового центра равна размаху крыльев £, который и
ограничивает длину трансверсальной (поперечной) синтезированной апертуры.
Для малоскоростных самолетов службы поиска и спасения для вывода прин-
ципиальных соотношений можно принять РИ и малые углы скольжения у, р.
Учитывая малость углаФЦ—Ц—А^, доплеровский сдвиг в точке А{)
г _ 2 Kcos ф
X ’
(5.8)
(5.9)
в приращениях по ф
г = -2 Ksin фДф
х
Учитывая, что для согласованного приема Д/ = 1/7^, получим разрешаю-
щую способность в функции угла ф
А. - Х X
2 И/sin ф 2 Asin ф ’
Соответствующий график Дф(ф) показан на рис. 5.16.
Ошибка измерения азимута цели 8ф в зависимости от 8И соответственно
имеет выражение
5(Р = Т7- Ctg ф,
(5.10)
(5.11)
а график ошибки Дф показан на рис. 5.17.
Производная доплеровской частоты выражается соотношением
2 VТсsin фcos у
Лф “ X ’
а геометрия производной показана на рис. 5.18.
Из формул (5.9), (5.10) и рис. 5.18 очевидно, что «зона неопределенности»
ориентирована в боковую зону относительно направления пути, т. е. зона низкого
654
8ф, угл. мин
Рис. 5.17. Зависимость
погрешности измерения
азимутального угла цели
в РТСА от азимутального угла
Рис. 5.18. Диаграмма производной
доплеровской частоты /g(p
в зависимости от азимутального
угла (р при неподвижном носителе
разрешения, неоднозначности и больших азимутальных ошибок и сдвига изобра-
жения 8ф за счет погрешности измерения модуля скорости А И ориентирована в
боковую зону относительно направления полета самолета.
Таким образом, рассматриваемый принцип РТСА соответствует обычной
РСА, в которой длина синтезированного раскрыва ограничивается двумя разма-
хами крыльев самолета 2L.
Обработка сигнала, как и в РСА, производится в реальном масштабе време-
ни в дискретном цифровом процессоре. При этом может использоваться как ме-
тод весовых функций, так и метод обработки в частотной области с применением
БПФ и все другие методы, используемые в РСА. На рис. 5.19 представлена из-
вестная блок-схема цифрового процессора обработки данных с применением
БПФ [29].
Для скоростных самолетов, когда величина путевой скорости сравнима с Ии
с учетом угла сноса и скольжения р, геометрия ситуации изображена на рис. 5.20.
Доплеровский сдвиг
2 Kzcos ф
Л_ х ’
Рис. 5.19. Блок-схема процессора цифровой обработки данных, используемого в РТСА
655
Рис. 5.20. Диаграмма производной
доплеровской частоты f
при подвижном носителе
решающая способность по азимуту для
согласно (5.9)
где — суммарный вектор скоростей,
откуда
4*
ф = arccos .
v 2 Kzcos (p
В зависимости от соотношения W и
V ось «зоны неопределенности» меняет
свое положение, но исходя из необходи-
мой рабочей зоны можно менять вели-
чину и направление скорости движения
фазового центра.
Одним из применений РТСА может
быть «закрытие зоны неопределенности»
радиолокатора переднего обзора путем
установки малоапертурных дополни-
тельных приемных антенн с управляе-
мым коэффициентом усиления на кон-
цах крыльев для корректировки зоны об-
зора вблизи линии пути (рис. 5.20).
Количественно максимальная раз-
X = 3 см и размахе крыльев L = 20 м будет
7 7 • 10-2 *
Аф = ' 2 20 = 0’8 ’ 10~3 = Угл- мин-
3. Оценка условий однозначности
для радиолокационных станций
с трансверсальным синтезированием апертуры
Необходимое условие для интервала однозначной дальности должно быть
следующее:
д/г < C/(2Fn), (5.12)
где Fn — период повторения импульсов.
Однако в то же время период повторения должен быть более чем две шири-
ны доплеровского спектра:
^„>2Д/Г Таким образом, (5.13)
2XR >^n>^sin<pA<p. Считая (5.13) равенством, получим л. Р <- СХ 8 Ksin фАф ‘ Учитывая, что Дф = Х/Др (5.14) (5.15)
656
где Дг — горизонтальный раскрыв антенны, получим
САГ Д/? = . £ KSin ф В наиболее неблагоприятном случае при ф = 90° СИГ (5.16) (5.17)
полагаем, что для легких самолетов апертура Дг антенны А() равна 0,5 м, а требуе-
мая зона однозначности AR = 60 км.
Тогда из (5.16) следует
IZ- СИ' _ з 10® 0,5 _ ,пп ,
V 8&R 8 • 60 • Ю3 300 М/
При этом период повторения сканирования при размахе крыльев L = 20 м
’•.-ГЖ=В* Z,-J,-I5ru.
Частота повторения импульсов
„ _ с _ з • ю8 с г
2ДЛ 2-60 2,5кГц‘
Период повторения импульсов
Т= \/Fn = 1/2,5 = 0,4 мс.
Очевидно, что полученные значения для параметров вполне реализуемы. Так,
при скорости полета самолета W= 100 м/с угол поворота зоны неопределенности
у ~ arcsin (W/V) ~ 17°,
что позволяет сохранять зону максимального разрешения по линии пути.
5.5. Инерциальные системы
5.5.1. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ
ДЛЯ УДАРНЫХ САМОЛЕТОВ И ВЕРТОЛЕТОВ1
Инерциальные системы являются идеальным средством навигации для воен-
ных самолетов. Они абсолютно автономны и помехозащищены, определяют все
основные навигационные параметры, необходимые для управления полетом и вы-
полнения боевых задач (кроме воздушной скорости), посредством измерения и ин-
тегрирования ускорений, возникающих при движении летательного аппарата.
Эти уникальные особенности инерциальных систем определили их важные
роль и место в составе бортового оборудования военных самолетов различного
назначения.
Первые практические опытно-конструкторские работы по созданию опыт-
ных образцов авиационных инерциальных систем и курсовертикалей (систем оп-
ределения курса и вертикали места) были развернуты в Раменском приборостро-
ительном КБ (ныне Федеральный научно-производственный центр «РПКБ») в
конце 50-х — начале 60-х годов прошлого века.
Исходной основой для этих работ послужили материалы теоретических и
экспериментальных исследований многих отечественных ученых и инженеров по
теории инерциальных систем ориентации и навигации, а также изобретения
1940-х годов и созданная на их базе гировертикаль с интегральной коррекцией.
В этих исследованиях было показано, что на основе использования инфор-
мации от определенным образом взаимно расположенных инерциальных датчи-
ков — гироскопов и акселерометров, объединенных в трехосный пространствен-
ный гиростабилизатор, принципиально возможно после ввода начальных усло-
вий осуществить определение пространственной ориентации, путевой скорости
и координат местоположения самолета независимо от характера его движения
путем измерения и интегрирования ускорений с последующим формированием
сигналов управления положением гиростабилизатора. Такая «невозмущаемая»
система была названа автономной навигационной инерциальной системой
(АНИС) или инерциальной навигационной системой.
После проведения ряда поисковых научно-исследовательских работ, выпол-
ненных специалистами РПКБ совместно с учеными МВТУ им. Н. Э. Баумана,
МАИ, ВВИА им. Н. Е. Жуковского, НИСО, филиала ЛИИ, МИЭА и др., всесто-
роннего исследования всех основных инструментальных и методических по-
грешностей ИНС были выбраны наиболее подходящие для тогдашнего уровня
развития инерциальных измерительных и вычислительных устройств принципи-
альная схема и структурная блок-схема такой системы, принятые к реализации.
1 Подраздел составлен под редакцией Г. И. Джанджгава.
658
Первые две инерциальные системы РПКБ — АНИС-2 и АНИС-7 были раз-
работаны для беспилотных летательных аппаратов, прошли лабораторные и лет-
ные испытания на летающей лаборатории, но на военных самолетах не использо-
вались и в серийное производство не пошли.
Эти системы определяли и выдавали бортовым потребителям в аналоговом
виде углы маневра (крен, тангаж и курс ЛА с А\|/ = \|/тек — Узад)> путевую скорость и
координаты местоположения ЛА в простейшей — ортодромической системе ко-
ординат на земной сфере с помощью собственного аналогового вычислительного
устройства на электромеханических интеграторах (ИЭ-1) и точных и многообо-
ротных линейных и функциональных потенциометрах. Время работы АНИС-2 и
АНИС-7 с заданной точностью составляло 20...40 мин. Гироплатформы ГЦ-2 и
ГЦ-7 были созданы на основе стабилизирующих гироблоков оригинальной кон-
струкции («силовая стабилизация с отработкой»), позволяющей использовать
асинхронные гиромоторы и обеспечивать требуемую точность управления ГЦ за
счет относительно высоких точностных характеристик ИЭ-1.
Внешний вид гироплатформы ГЦ-7 и ее структурная блок-схема представле-
ны на рис. 5.21 и 5.22.
Первой автономной навигационной инерциальной системой (по сути —
инерциальной курсовертикалью), разработанной для отечественной авиации,
была АНИС-8. Эта система прошла все виды испытаний, была внедрена в серий-
ное производство и эксплуатацию, устанавливалась на сверхзвуковой многоцеле-
вой ударный самолет МиГ-25Р (РБ) и обеспечивала совместно с первой отечест-
венной авиационной БЦВМ решение задач точной навигации, автоматизирован-
ной разведки и навигационного бомбометания.
Погрешности и некоторые параметры АНИС-8 составляли:
• о < 8 угл. мин за все время работы по углам крена и тангажа;
• о < 30 угл. мин за 1 ч работы по курсу;
• о < 12 м/с по составляющим скорости за 20 мин полета;
• о < 4,5 км по координатам за 20 мин полета;
• допустимые углы маневра у < ±60°, v < 90°, Т С 360°;
• допустимые перегрузки пх < 2, nz < 1, пу < 5;
• время предполетной подготовки 7/от С 35 мин;
• масса системы 82 кг.
АНИС-8 автоматически и автономно выполняет режим начальной выставки
(настройки) в плоскость горизонта, выставку по курсу (или определение началь-
ного положения гироплатформы в азимуте) с помощью дополнительных средств
(специального выставочного устройства или теодолита), а в рабочий режим пере-
водится летчиком вручную.
Система выполнена в блочной конструкции, все блоки полностью взаимоза-
меняемы без подрегулировок. Указанная точность достигнута за счет использова-
ния самого эффективного в то время метода организации встречного реверсного
вращения подшипников подвеса гироскопов с определенными, эмпирически по-
добранными параметрами, а также применения наиболее точных базовых эле-
ментов того времени. Существенное снижение массогабаритных характеристик
системы обеспечило применение безредукторной силовой стабилизации гиро-
платформы ГЦ-9, осуществленной впервые в отечественном гироприборострое-
нии, а также прямой прецессионной интегральной коррекции гироблоков ГБ-9
659
Рис. 5.21. Внешний вид гироплатформы ГЦ-7
Рис. 5.22. Структурная блок-схема гироплатформы ГЦ-7
гироплатформы по вертикали с помощью специально разработанного прецизи-
онного датчика момента и синхронного гироскопа ГМС-4.
АНИС-8 определяет и выдает всем потребителям на самолете (прицельным
системам, системам управления, разведки и др.) сигналы составляющих абсолют-
ной скорости движения в инерциальном пространстве — крена, тангажа и курса в
аналоговом виде (с СКТ, потенциометров, БСКТ). Это и отличает инерциальную
курсовертикаль (ИКВ) от ИНС (АНИС), в которых с учетом вычисляемой в ВУ
660
ИНС (БЦВМ) переносной скорости от вращения Земли из сигналов составляю-
щих абсолютной скорости, используемых для осуществления интегральной кор-
рекции гироплатформы с акселерометрами, формируются составляющие путевой
скорости полета, а после интегрирования — данные о местоположении ЛА в вы-
бранной системе координат на Земле.
Теоретический анализ и практика применения АНИС-8 показали, что основ-
ные инструментальные погрешности определения ИНС углов маневра, скорости и
координат самолета являются длиннопериодическими функциями времени с со-
ставляющими, имеющими период Шулера (84,4 мин) и кратными суткам (24 ч).
Проведенные специальные исследования позволили установить, что это
свойство ИНС делает их идеальным «партнером» различных радионавигацион-
ных и радиолокационных систем, таких как ДИСС, РСБН, РСДН. Было опреде-
лено теоретически и подтверждено экспериментально, что, формируя сигналы
разностей показаний ИНС и этих систем и пропуская эти сигналы через специ-
ально подобранные фильтры низких частот, можно осуществлять высокоэффек-
тивную комплексную коррекцию как ИНС, так и радиосистем и существенно по-
высить точность и надежность навигации и управления полетом самолета. Этот
принцип впервые был реализован в комплексной инерциальной навигационной
системе «Пеленг» (и ее последующих модификациях «Пеленг-С», «Пеленг-Д»,
«Пеленг-ДР», «Пеленг-ДМ» и др.), включавшей в свой состав АНИС-8, БЦВМ
«Орбита 155», ДИСС-ЗС, РСБН и РСДН (в различных сочетаниях), а затем ши-
роко использовался при разработке последующих поколений навигационных
комплексов боевых самолетов. Поскольку БЦВМ в то время имели крайне низ-
кую надежность, то в АНИС-8 сигналы управления от БЦВМ не использовались
и система функционировала полностью автономно в режиме инерциальной кур-
совертикали, ориентированной по геоцентрической вертикали места (для сниже-
ния методических ошибок от нецентральное™ поля силы тяжести Земли).
Внешний вид комплекта серии АНИС-8 и ее принципиальная блок-схема
представлены на рис. 5.23 и 5.24.
Непрерывное совершенствование отечественной авиационной техники по-
стоянно повышало требования к инерциальным навигационным системам и кур-
совертикалям. Требовались существенное улучшение весогабаритных характерис-
тик, снижение энергопотребления, повышение точности и надежности в услож-
ненных условиях применения. В связи с ростом маневренности самолетов
необходимо было обеспечить «невыбиваемость» гиростабилизированной плат-
формы ИНС (ИКВ) при сложных пространственных эволюциях самолета с сохра-
нением ее «невозмущаемости», реализовать режим магнитной коррекции курса
для выдачи гиромагнитного курса и еще целый ряд дополнительных требований.
Для решения всех этих задач в 1965—1970 гг. была разработана невыбивае-
мая малогабаритная инерциальная курсовертикаль ИКВ (МКВ). В этой системе
был реализован целый ряд передовых для того времени технических решений и
использовано новое поколение базовых элементов отечественной электроники и
электромеханики. За счет применения гироскопов с меньшим кинетическим мо-
ментом, специального датчика моментов силовой стабилизации — двигателя с
катящимся ротором, удалось существенно улучшить весогабаритные характерис-
тики системы. Для обеспечения «невыбиваемости» была создана специальная
оригинальная электронная система управления дополнительной следящей рамой
курсовертикали. Более глубокий и достоверный встроенный контроль позволил
повысить надежность работы системы. Исходная схема и конструкция ИКВ
661
Рис. 5.23. Внешний вид АНИС-8
Рис. 5.24. Принципиальная блок-схема АНИС-8
(ИКВ-1) разрабатывались для самолета Як-ЗбМ с вертикальным взлетом как ос-
новной системы — датчика навигационных параметров и для самолета Ту-22М —
в качестве резервной системы — датчика курса и вертикали. Затем система
ИКВ-1 и ее последующие модификации — И КВ-2, И КВ-8 были применены на
самолетах Як-38, МиГ-23Б (МиГ-27), Су-17 и всех его модификациях, а также
662
на тяжелых самолетах Ту-22М, Ту-142 в составе трехканального комплекса курса
и вертикали «Румб-1». На гиростабилизированной платформе ИКВ-1 был допол-
нительно установлен третий вертикальный акселерометр для измерения и выда-
чи сигнала ускорения ау, используемого для управления полетом и решения бое-
вых задач. Модификация ИКВ-2 со специальным блоком фильтров БФ-6 обеспе-
чивала автоматическую автономную начальную выставку гироплатформы на ка-
чающемся основании (палуба авианосца) на самолетах морского базирования
(Як-36, Як-38).
В модификации И КВ-8 использовались высокоточные датчики крена, танга-
жа и курса для повышения точности решения боевых задач прицельными систе-
мами самолетов.
Основные погрешности системы ИКВ составляли:
• о < 25 м/с за 20 мин работы в определении скорости;
• о < 0,25°/ч в хранении курса;
• о < 14 угл. мин за первые два часа работы по крену и тангажу, о < 0,5° по ги-
ромагнитному курсу (в зависимости от широты места и скорости полета) при
нормальной подготовке с временем готовности 15 мин.
При ускоренной подготовке с временем готовности 5 мин погрешности не-
сколько возрастают.
Система работоспособна при угловых скоростях эволюций самолета по курсу
±50°/с, по крену ±270°/с, по тангажу ±20°/с и перегрузках пх, nyfl nz< 10.
Время готовности при нормальной подготовке < 15 мин, при ускоренной
подготовке < 5 мин. Масса системы 38 кг.
Кроме режима интегральной коррекции, в системе реализован режим ради-
альной (маятниковой) коррекции, в котором ИКВ определяет и выдает все ука-
занные параметры (кроме данных о скорости) с пониженной точностью.
Как и система АНИС-8, ИКВ успешно применяется в качестве основного
датчика в навигационном комплексе КН-23 и всех его модификациях на самоле-
тах МиГ-23Б (МиГ-27), Су-17, первых самолетах Су-25 и др. совместно с БЦВМ
«Орбита 20», доплеровским измерителем скорости и угла сноса ДИСС-7 и радио-
системами РСБН-бСи РСДН (на самолетах Су-17МЗ, М4).
Применение ИКВ в КН-23 позволило резко повысить качество и надеж-
ность, а также степень автоматизации навигации и управления полетом боевых
маневренных самолетов, облегчить экипажу процесс пилотирования и улучшить
качество прицельной стрельбы и бомбометания за счет обеспечения выдачи ди-
намически точной информации о параметрах движения на всех режимах полета.
Внешний вид комплекта ИКВ и ее принципиальная блок-схема представле-
ны на рис. 5.25 и 5.26.
Так же, как и в АНИС-8, в ИКВ сигналы управления от БЦВМ не использо-
вались, и формирование данных о скорости, координатах, точных углах тангажа,
крена и курса, а также коррекция этих данных системы осуществлялась аналити-
чески во внешнем контуре в БЦВМ бортовых комплексов навигационного обо-
рудования по специально разработанным алгоритмам, учитывающим модели ос-
новных инструментальных и методических погрешностей ИКВ.
Вся информация от ИКВ по скорости, крену, тангажу и курсу выдавалась по-
требителям в аналоговой форме, при этом для повышения точности выдачи при-
менялись двухканальные СКТ или СКТ-(8-вольтовая серия) и бесконтактный
синусно-косинусный трансформатор (БСКТ).
663
Рис. 5.25. Внешний вид инерциальной курсовертикали
Принципиальная блок-схема системы ИКВ
Сиситема ИКВ состоит из:
— курсовертикали КВ-1;
— блока усилителей;
гидродатчиков БУГ-14;
— пульта управления ПУ-38;
— блока коррекции БК-20;
— коррекционного механизма КМ-2;
— индукционного датчика НД-6
Рис. 5.26. Принципиальная блок-схема ИКВ
В конце 1960-х годов при создании самолетов МиГ-25РБ и МиГ-31 возникла
необходимость для выполнения их основных боевых задач в обеспечении высо-
кого уровня скрытности при подходе к цели. Это потребовало существенного по-
вышения точности режима автономного счисления координат инерциальных
систем, предназначенных для этих ЛА, с соответствующим снижением величины
случайного дрейфа гироскопов ИНС на порядок — до 0,02°/ч.
Решение было найдено путем разработки нового для авиационных ИНС типа
гироскопа — поплавкового интегрирующего гироскопа ГПИ-5 на основе конст-
рукционного бериллия. Кроме того, был создан поплавковый прецизионный ак-
селерометр ДА-2. Применение в этих приборах поплавкового подвеса и бериллия
позволило при улучшении массогабаритных характеристик значительно повысить
664
их точности. На основе ГПИ-5 и ДА-2 была разработана гироцентраль КВ-1П,
явившаяся основой инерциальной навигационной системы ИС-1-72А, имевшей
следующие основные технические данные в автономном режиме работы:
• погрешность о < 4 км за 1 ч полета в определении координат местоположе-
ния;
• погрешность о < 3 м/с в определении скорости;
• погрешность о < 2 угл. мин в определении вертикали;
• погрешность о < 0,05°/ч в хранении курса;
• время готовности 15 мин при нормальной подготовке и 5 мин при ускорен-
ной подготовке;
• масса системы 34,5 кг.
Система сохраняла работоспособность в условиях, аналогичных условиям
эксплуатации ИКВ с гироцентралью КВ-1.
Кроме применения на самолетах МиГ-25РБ, РБМ и МиГ-31, система ИС-1-
72 А использовалась в качестве основного автономного датчика на первом отече-
ственном сверхзвуковом пассажирском самолете Ту-144 в виде строенного комп-
лекта под шифром «Румб-П».
Высокие точностные характеристики системы ИС-1-72А позволили впервые
в отечественной практике реализовать режим автоматической автономной на-
чальной выставки по курсу в оригинальной форме — гирокомпасированием с ре-
версивным прецессионным вращением гироплатформы в плоскости горизонта,
после выставки ее по вертикали места стоянки.
Выбранные в результате теоретических и экспериментальных исследований
параметры вращения обеспечили выполнение начальной выставки системы за
заданное время готовности с погрешностью о < 15 угл. мин. Это позволило резко
снизить трудоемкость предполетной подготовки системы и самолета в целом, по-
высить качество и удобство эксплуатации. Реализованный впоследствии режим
автоматической довыставки курса при разбеге по ВПП на взлете еще более улуч-
шил эксплуатационные показатели системы, особенно в высоких широтах.
Внешний вид и структурная блок-схема системы ИС-1-72А представлены на
рис. 5.27, 5.28.
ИС-1-72А стала основой навигационных комплексов самолетов МиГ-25РБ
(Пеленг-2), МиГ-25РБМ (Пеленг-2М), МиГ-31 (КН-25), а также применялась в
виде строенного комплекта, объединенного блоком контроля, в виде комплекса
«Румб-П» на тяжелых самолетах.
Все вышеописанные инерциальные системы и курсовертикали, их вычисли-
тельные устройства были выполнены на аналоговых электромеханических эле-
ментах и аналоговой полупроводниковой электронике. Для связи с цифровым
бортовым оборудованием и БЦВМ использовались датчики СКТ, БСКТ, потен-
циометры, сигналы которых преобразовывались в цифровую форму в блоках УВВ
потребителей.
Следующее поколение более совершенных инерциальных курсовертикалей
и инерциальных навигационных систем было разработано в 70-х годах прошлого
века на основе применения нового, нетрадиционного типа гироскопов — с внут-
ренним карданом, так называемых динамически настраиваемых гироскопов
(ДНГ). Использование ДНГ и интенсивные работы по их миниатюризации наря-
ду с широким применением достижений в области микроэлектроники открыли
перспективы дальнейшего повышения точностных характеристик ИНС и ИКВ и
улучшения их массогабаритных данных.
665
Рис. 5.27. Внешний вид системы ИС-1-72А
В комплект системы ИС-1-72А входят:
— курсовертикаль КВ-1П;
— блок усилителей гидродатчика БУГ-15;
— блок коррекции БК-28;
— блок управления БУ-20
БУГ-15
КВ-1П
БУ-20
Рис. 5.28. Принципиальная блок-схема системы ИС-1-72А
666
Кроме того, если все предыдущие системы выполнялись конструктивно в
виде многоблочных систем (гироцентрали, блока усилителей, блока управления
(коррекции) и др.), то первая курсовертикаль на ДНГ (ИКВ-72 с ДНГ ГВК-3) бы-
ла создана в моноблочной конструкции.
Основные технические данные ИКВ-72:
• погрешности о < 5° по крену и тангажу за 1 ч работы;
• погрешность о < 0,5°/ч по курсу;
• время готовности 10 мин при нормальной подготовке и 3 мин при ускорен-
ной подготовке;
• масса системы 25 кг.
Из военных самолетов ИКВ-72 применяется на Ан-70, Ан-72 и Ан-74 ВТА.
Внешний вид курсовертикали ИКВ-72 представлен на рис. 5.29.
В 1990-х годах совместно со специалистами серийного завода были проведе-
ны работы по существенной модернизации этой курсовертикали, в результате ко-
торых за счет применения новой модификации ДНГ — гироскопа ГВК-6, новой
конструкции акселерометра ДА-11 и применения цифровой микроэлектроники
была создана курсовертикаль И КВ-802, полностью взаимозаменяемая с ИКВ-72
по габаритно-присоединительным размерам, но с более высокими тактико-тех-
ническими данными и с реализацией дополнительных функций — выдачей дан-
ных в цифровом виде и с автономной автоматической начальной выставкой в
азимуте в режиме гирокомпасирования.
Основные технические данные И КВ-802:
• погрешность
• погрешность
• погрешность
• погрешность
• время готовности 10 мин при нормальной подготовке без режима ГК и
25 мин при подготовке с ГК;
• масса 22 кг.
Данная система, кроме указанных выше самолетов ВТА, применялась на
учебно-тренировочном самолете Л-39МС.
В 1970-х годах в ходе работ по созданию самолетов МиГ-29 и Су-27 была на-
чата разработка унифицированных информационных комплексов курса и верти-
о < 4 м/с по скорости за 1 ч работы;
о < 10 угл. мин по вертикали за 1 ч работы;
о < 0,05°/ч по курсу за 1 ч работы;
о < 15 угл. мин при начальной выставке курса в режиме ГК;
Рис. 5.29. Внешний вид курсовертикали ИКВ-72
667
кали ИКВК-80, для которых на основе имевшихся к тому времени ДНГ ГВК-4 и
акселерометров ДА-11М были разработаны инерциальная курсовертикаль
И КВ-80-4 и электронный блок управления и связи БУС-3 с использованием по-
следних достижений микроэлектроники того времени. В состав ИКВК-80-4
(Ц-050) входили два моноблока И КВ-80-4 (для обеспечения требуемой надеж-
ности), БУС-3, пульт управления и магнитный канал коррекции курса. Данный
комплекс обеспечивал определение и выдачу всей необходимой для автономной
навигации (совместно с БЦВМ) информации, а также автоматическую автоном-
ную начальную выставку по вертикали и курсу. Электронный блок был выполнен
отдельно от гироплатформы для удобства размещения их на относительно мало-
размерных самолетах. Вся информация из ИКВК-80-4 выдавалась как в цифро-
вой форме в виде сигналов в коде по ГОСТу 18977—73 (в БЦВМ), так и в аналого-
вом виде (в систему управления и другим потребителям).
Основные технические данные ИКВК-80-4:
• погрешность о < 4 м/с по скорости за 1 ч полета;
• погрешности о < 15 угл. мин по крену и тангажу;
• погрешность о < 0,5° по курсу;
• время готовности 10 мин при нормальной подготовке и 3 мин при ускорен-
ной подготовке;
• масса 48 кг.
При этом обеспечивался режим «невозмущаемой» и «невыбиваемой» гиро-
вертикали без ограничений на углы маневра самолета. Внешний вид комплекта
системы представлен на рис. 5.30.
ИКВК-80-4 выдержал все виды испытаний и был принят на вооружение в
составе навигационных комплексов СН-29 и КН-10, являвшихся частью БРЭО
самолетов МиГ-29 и Су-27.
В последующие годы после разработки новой, более точной модификации
ДНГ — гироскопа ГВК-6 были разработаны модификация курсовертикали ИКВ-80-6
и усовершенствованный блок БУС-3 серия 1, из которых была сформирована но-
вая модификация ИКВК— ИКВК-80-6 (Ц-060) с несколько более высокими
точностными характеристиками:
Рис. 5.30. Внешний вид комплекта системы ИКВК-80-4
668
погрешность о < 2 м/с по скорости за 1 ч работы;
погрешность о < 15 угл. мин по вертикали за 1 ч работы;
погрешность о < 0,5° по курсу за 1 ч работы;
погрешность о < 15 угл. мин при некачественной выставке по курсу;
• время готовности 10... 15 мин при нормальной подготовке, 3 мин при уско-
ренной подготовке, 1 мин при экстренной подготовке;
• масса 48 кг (с двумя ИКВ-80).
Системы ИКВК-80-6 (Ц-060) выпускаются до настоящего времени и эксплу-
атируются на самолетах МиГ-29, Су-27 первых модификаций, самолете Су-25,
Су-25К, в комплектации с одним моноблоком ИКВ-80-6 (Ц-061) применяются
на первых образцах вертолетов Ка-50, Ка-52, Ми-28. Вес комплекта Ц-061 со-
ставляет 31 кг.
В ходе испытаний и внедрения в эксплуатацию на основе наработок, полу-
ченных при создании И КВ-2, была решена задача обеспечения надежной авто-
номной автоматической начальной выставки ИКВ-80 при действии случайных
возмущений от колебаний самолетов под действием ветра путем использования
специальных оптимальных фильтров в цепях коррекции вертикали и курса.
Остальные характеристики Ц-061 соответствуют данным Ц-060, за исключе-
нием надежности (из-за отсутствия дублирующего канала курсовертикали).
Эта же методика используется для обеспечения автоматической начальной
выставки систем в модификациях Ц-060К и Ц-061 К для самолетов корабельного
базирования, испытанных на опытных самолетах Су-27К, МиГ-29К и Су-25К.
Все описанные выше системы оснащены встроенными системами контроля,
осуществляющими формирование и выдачу сигналов их исправности как при
предполетной подготовке и проверке, так и в полете, при этом глубина и досто-
верность такого контроля обеспечивается на уровне 0,87...0,90.
Повышение точности систем было достигнуто заменой аналоговых вычис-
лительных устройств на цифровые и предполетной калибровкой с компенсацией
основных погрешностей.
Наиболее полное решение задачи автоматической автономной инерциальной
навигации для боевых маневренных самолетов удалось осуществить только в 80-х
годах прошлого века, когда на базе гироскопа ГВК-6 и нового миниатюрного аксе-
лерометра ДА-9 была создана инерциальная навигационная система ИНС-80. За
счет применения самой передовой для того времени цифровой и аналоговой микро-
электроники и использования первого встроенного микропроцессора в качестве
собственного вычислительного устройства ИНС была разработана моноблочная
конструкция системы, полностью соответствующая всем предъявленным к ней тре-
бованиям и действующим нормам и стандартам для типовой унифицированной
ИНС военных самолетов. Эта система автономно и автоматически определяла все
компоненты навигационного вектора состояния ЛА (кроме воздушной скорости),
необходимые для навигации, управления полетом и решения задач боевого приме-
нения, обеспечивая автономную и автоматическую начальные выставки по вертика-
ли и курсу, в том числе и на качающемся основании: на самолете, под действием вет-
ровых возмущений на суше и на самолетах и вертолетах корабельного базирования.
ИНС-80 взаимозаменяема по габаритно-присоединительным размерам и
функционально с большинством ранее разработанных систем, поэтому эффек-
тивно использовалась при модернизации БРЭО боевых самолетов МиГ и Су и их
модификаций. Она стала основой для бортовых комплексов навигационно- и
прицельно-пилотажного оборудования боевых самолетов и вертолетов.
669
о < 2 км по координатам места за 1 ч полета;
о С 1 м/с по скорости за 1 ч полета;
о < 0,05° по вертикали (по крену и тангажу) за 1 ч полета;
о < 0,15° по курсу истинному за 1 ч полета;
Основные технические данные ИНС-80:
• погрешности
• погрешность
• погрешности
• погрешность
• время готовности 10 мин при нормальной подготовке и 2 мин при ускорен-
ной подготовке;
• масса системы 18 кг.
Система нормально функционирует в условиях динамического маневренно-
го полета на современных боевых самолетах. Она успешно прошла все виды лабо-
раторных и летных испытаний в составе БРЭО самолетов МиГ-29 и Су-27, реко-
мендованных в серийное производство и эксплуатацию.
Рис. 5.31. Внешний вид ИНС-80
Рис. 5.32. Внешний вид МНС-80, модификация Ц-094
670
Внешние виды ИНС-80 и ее более точной модификации Ц-094 представлены
на рис. 5.31 и 5.32.
Эта система в различных модификациях (Ц-094, Ц-097 и др.) применяется в
составе БРЭО современных отечественных боевых самолетов.
В середине 1980-х годов, следуя мировой тенденции развития ИНС и И КВ,
были начаты работы по созданию бесплатформенных систем такого типа (БИНС
и БКВ) на основе применения ДНГ в режиме ДУС. При этом следует отметить,
что первые теоретические и экспериментальные исследования по проработке
возможности создания такого типа систем с экспериментами на «заклиненных»
гироплатформах ГЦ-2 и ГЦ-7 проводились совместно специалистами РПКБ и
КВИАВУ еще в 1958—1965 гг. Для применения в БКВ и БИНС были специально
разработаны несколько поколений и модификаций ДУС-ДНГ. Первые образцы
таких гироскопов ГВК-10 имели небольшой диапазон измерения 40...60°/с и до-
пускали применение только на маломаневренных летательных аппаратах. На их
основе была создана первая отечественная бесплатформенная авиационная кур-
совертикаль СБКВ-85, нашедшая применение на самолете Ил-114. Последую-
щие образцы ДУС-ДНГ (МГ-4, ГВК-16 и др.) и акселерометров (кремниевых
А-15, А-16) имели меньшие габариты и вес, а также существенно больший диапа-
зон измерения (200°/с и более) и высокую точность, достаточную для решения
задачи автономного инерциального определения не только углов маневра, но и
скорости полета самолета.
Так, наиболее широко в настоящее время в составе ПНК планируется исполь-
зовать малогабаритную бесплатформенную систему курса и вертикали СБКВ-2В.
Основные технические данные системы:
• погрешности
• погрешность
• погрешность
• погрешность
• время готовности 1 мин;
• масса системы 9 кг.
Для повышения точности и надежности работы система взаимодействует с
ИНС и СВС, используя их информацию об углах маневра и скорости полета са-
молета. В составе комплексов БРЭО современных отечественных боевых самоле-
тов и вертолетов СБКВ-2В применяется совместно с ИНС-80 и ее модификация-
ми в качестве резервного дублирующего средства.
Внешний вид комплекта СБКВ-2В представлен на рис. 5.33.
Все описанные системы этого поколения ИНС и ИКВ выдают информацию
в цифровом виде, в том числе и в мультиплексные бортовые каналы информаци-
онного обмена БРЭО по согласованным унифицированным (базовым) протоко-
лам обмена и взаимодействия, что существенно упрощает пользователям приме-
нение этих систем при создании различных модификаций комплексов и их мо-
дернизации.
В последнее десятилетие активно проводились работы по созданию БИНС
(БКВ), интегрированных со спутниковыми навигационными системами GPS и
ГЛОНАСС. Организация тесного взаимодействия этих систем позволяла полу-
чать высокие точности БИНС при коррекции от спутниковой навигационной
системы (СНС) и существенное повышение точности (сохранение точности)
после ее отключения из-за отказа или пропадания сигналов СНС, а также значи-
тельно улучшить помехозащищенность работы приемных устройств СНС за счет
использования высокой динамической точности навигационной информации от
о < 0,13° по углам крена и тангажа;
о < 0,5° по магнитному курсу;
о < 0,25°/ч по гироскопическому курсу;
о < 0,05°/с по угловой скорости;
671
Рис. 5.33. Внешний вид комплекта СБКВ-2В
БИНС, в том числе и при маневрировании летательного аппарата. Образцы
БИНС (БКВ) с СНС разрабатывались не только для применения на самолетах, но
и на беспилотных ЛА.
Опытный образец системы БКВ/СНС (НСБКВ-95) в настоящее время про-
ходит лабораторные и летные испытания и предназначен для применения на во-
енных и гражданских самолетах и вертолетах.
Расчетные технические данные НСБКВ-95:
• погрешности о С 0,25° при определении и выдаче углов крена и тангажа;
• погрешность а < Г при определении и выдаче истинного курса;
• погрешность о С 0,7° при определении и выдаче магнитного курса;
• погрешность а < 50 м при определении и выдаче координат местоположе-
ния (совместно с СНС);
• погрешность о С 1 км/ч при определении и выдаче скорости полета (сов-
местно с СНС);
• время готовности 1...3 мин;
• масса 10 кг.
Внешний вид системы представлен на рис. 5.34.
С конца 70-х — начала 80-х годов прошлого века велись работы по разработ-
ке БИНС и БКВ на принципиально новых датчиках параметров движения в
инерциальном пространстве — лазерных и твердотельных волновых гироскопах.
Были созданы образцы таких систем с использованием трехкомпонентного ла-
зерного измерителя (ЛИНС-85), но они пока не получили дальнейшего развития.
В настоящее время ведется формирование новой программы дальнейшего
развития автономных инерциальных навигационных систем и курсовертикалей
на период до 2010 г., предусматривающей как создание новых поколений чувст-
вительных элементов для них, так и теоретическую и экспериментальную прора-
ботки принципиально новых схем БИНС (БКВ) — так называемых «безгирос-
копных» систем — на мультисенсорных акселерометрических датчиках или на
пространственных акселерометрических структурах (гравиградиентная БИНС),
672
Рис. 5.34. Внешний вид системы НСБКВ-95
открывающих новые перспективы в дальнейшей микроминиатюризации ИНС
(ИКВ) и расширении их функциональных возможностей.
При этом предполагается расширить и углубить исследования и разработки
специальных микроминиатюрных (микромеханических) инерциальных измери-
тельных элементов и блоков, не уступающих по своим основным характеристи-
кам лучшим зарубежным аналогам. Они будут использоваться для решения задач
ориентации, навигации и стабилизации различных объектов, обеспечения высо-
кого качества режимов работы бортовых РЛС в режиме картографирования (за
счет осуществления микронавигации фазового центра антенны РЛС) и других за-
дач на борту военных самолетов последующих поколений.
Представленные в данном разделе образцы ИНС и ИКВ для отечественной
боевой авиации были созданы в Раменском приборостроительном конструктор-
ском бюро и внедрены в серийное производство и в эксплуатацию под руко-
водством и при непосредственном участии С. В. Зеленкова, В. С. Магнусо-
ва, Г. И. Джанджгавы, С. В. Прозорова, В. Н, Чистякова, В, Л. Буд-
кина, К. А. Бахонина, В. М. Бражника и многих других специалистов
предприятия.
Большой вклад в доводку и дальнейшее совершенствование всех этих систем
внесли руководители и коллективы Пермского, Раменского, Чебоксарского и Бо-
рисовского приборостроительных заводов.
5.5.2. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ
И ПОВЫШЕНИЕ ТОЧНОСТИ
НАВЕДЕНИЯ КРЫЛАТЫХ РАКЕТ1
Современные способы ведения военных операций требуют создания для удар-
ной авиации (УА) высокоточного оружия с обычной боевой частью (ОБЧ), запус-
каемого вне зоны действия противовоздушной обороны противника [32—39]. В на-
стоящее время США совершенствуют как высокоточные маловысотные крылатые
1 В написании подраздела принимал участие Л. И. Брозгуль.
22 Авиация ВВС России и научно-технический прогресс
673
ракеты (МКР) (AGM-86, AGM-86C, AGM-129B, AGM-137, малозаметная МКР
JASSM) воздушного базирования (самолеты B-52G/H, В1-В, В-2, F-16, F-117, F-
15Е и др.), так и морского базирования. Полигонами для испытаний этого оружия
явились Ирак и Югославия. Так, например, первая военная операция против Ира-
ка («Буря в пустыне») осуществлялась с применением высокоточных МКР воздуш-
ного базирования AGM-86, а вторая операция «Лиса в пустыне» — с применением
более совершенных МКР — AGM-86C [36, 37]. Военная кампания НАТО против
Югославии имела цель всесторонне испытать ВТО различного базирования. В ча-
стности, запуск ракет воздушного базирования производился с высоты 8...9 тыс. м,
вне зоны ПВО. МКР морского базирования запускались с кораблей и подводных
лодок ВМС США. МКР воздушного и морского базирования поражали цели на
дальностях 300...800 км от рубежей пусков. Были испытаны новейшие МКР воз-
душного базирования, хотя в целях дезинформации они проходили под старым
шифром AGM-86 с добавлением определенных индексов. В этот же период были
испытаны практически новые МКР морского базирования BGM-109, носителями
которых были корабли и подводные лодки ВМС США.
Приоритетами научно-технического обеспечения военной безопасности РФ
являются:
• опережающее развитие фундаментальных и прикладных исследований и
ОКР, позволяющих эффективно реагировать на возникающие военные угро-
зы и военно-технические прорывы;
• разработка и производство высокоэффективных систем управления, высо-
коточных, мобильных средств поражения с обычной боевой частью, а также
систем их информационного обеспечения;
• обеспечение уровня фундаментальных, поисковых и прикладных исследова-
ний, перспективных научно-технических и технологических разработок,
развития научно-экспериментальной, испытательной и производственной
баз предприятий, гарантирующего выполнение государственного заказа.
Важной задачей при разработке новых поколений вооружения, в том числе
высокоточных крылатых ракет средней и большой дальности ударной авиации
(МКР СБД УА), является обеспечение высоких точностных характеристик сис-
тем навигации. Системы навигации современных крылатых ракет строятся с ис-
пользованием инерциальной навигационной системы. Актуальной является раз-
работка ИНС повышенной точности на основе паспортизации и алгоритмиче-
ской компенсации ее систематических погрешностей, а также разработка
алгоритмов определения и компенсации систематических погрешностей в полете
с использованием методов комплексной обработки информации и рационально-
го использования средств коррекции ИНС [32—35].
Переход к созданию высокоточных МКР СБД с ОБЧ базируется на науч-
но-техническом заделе, полученном при создании МКР первого поколения. Для
большинства отечественных и зарубежных ракет первого поколения характерно
применение на них бортовых систем управления средней точности, так как эти
МКР оснащались специальной боевой частью. Маршрут полета МКР разбивался
на два участка: оперативный участок (от точки старта до зоны первой коррек-
ции (ЗПК) по рельефу местности) и маршевый участок (от ЗПК до цели). Для
повышения точности при формировании полетного задания цель включалась в
участок последней зоны коррекции (ЗК) по рельефу местности (РМ) или распо-
лагалась в непосредственной близости от этой зоны.
Основным элементом БСУ МКР со специальной БЧ, определяющим эффек-
тивность их боевого применения, является система навигации и наведения, обес-
674
печивающая полет ракеты по сложному маршруту на малой высоте и выход на
цель с точностью, обеспечивающей ее поражение.
Современный этап создания МКР СБД УАс ОБЧ характеризуется применени-
ем на них БСУ с навигационной системой (НС) повышенной точности. Маршрут
полета этих МКР разбивается на три участка: оперативный, маршевый и участок
конечного наведения. Научно-технический задел по структуре, составу бортовой
аппаратуры и алгоритмов, методам и средствам информационного обеспечения вы-
сокоточных МКР был разработан в нашей стране в ряде НИЭР, выполненных в ос-
новном в 1985—1995 гг. под научным руководством академика Е. А. Федосова ко-
операцией предприятий промышленности во главе с ГосНИИАС. МКР запускается
с носителя вне зоны действия ПВО противника и летит в инерциально-доплеров-
ском режиме счисления на оперативном участке полета до ЗПК, где осуществляется
коррекция по рельефу местности инерциальной навигационной системы для ликви-
дации отклонений ракеты от расчетной траектории полета. Далее на маршевом уча-
стке маршрут полета ракеты пролегает через ряд промежуточных зон коррекции по
РМ, в которых осуществляется коррекция ИНС и ликвидируются отклонения МКР
от расчетного маршрута. После пролета последней ЗК включается система коррек-
ции и конечного наведения, осуществляющая высокоточную коррекцию и наведе-
ние ракеты в расчетную точку прицеливания.
В качестве системы коррекции в БСУ этих ракет может быть использована
навигационная аппаратура потребителя спутниковой радионавигационной сис-
темы (СРНС), работающая на всех этапах полета.
В БСУ зарубежных высокоточных МКР применяются инерциальные навига-
ционные системы, корреляционно-экстремальные НС по рельефу местности ти-
па TERKOM, спутниковые приемники системы GPS («Навстар») и системы кор-
рекции и конечного наведения типа DSMAC [35].
Повышение точности НС БСУ позволяет осуществить маршрут полета МКР
с единственной ЗК по РМ, расположенной непосредственно у цели, а при приме-
нении помехозащищенной навигационной аппаратуры потребителя спутниковой
радионавигационной системы отказаться от системы коррекции по РМ. БСУ
предназначена для осуществления навигации и управления движением МКР по
заданному маршруту с выполнением заданного пространственно-временного
графика полета с обеспечением наведения МКР в заданную точку прицеливания
(ТП) на наземные стационарные объекты военно-промышленного назначения с
известными до пуска координатами и информационными характеристиками,
расположенные как в глубине континентов, так и на их побережье [33].
Важным элементом БСУ, влияющим на ее тактико-технические характерис-
тики, является навигационная система. От нее зависят точностные характеристи-
ки БСУ и, следовательно, точность доставки МКР с ОБЧ в район ТП.
Ядром высокоточной навигационной системы является гироинерциальная
система (ГИС). Основным режимом счисления координат МКР первого поколе-
ния являлся инерциально-доплеровский режим. Наличие в БСУ доплеровского
измерителя скорости и угла сноса влияет на помехозащищенность ракеты и эф-
фективность ее боевого применения.
Идеальным с точки зрения скрытности и помехозащищенности является чис-
то инерциальный режим работы НС. Однако погрешности чисто инерциальной
системы навигации при входе МКР СБД в ЗПК по РМ соизмеримы или превосхо-
дят размеры самой зоны вследствие недостаточной точности ГИС и ошибок ее вы-
ставки от пилотажно-навигационного комплекса самолета-носителя в полете.
675
Имеются два пути повышения точности навигационной системы, работаю-
щей в чисто инерциальном режиме: первый — технологический, заключающий-
ся в совершенствовании базовых чувствительных элементов (ЧЭ), уменьшении
их инструментальных ошибок, второй — паспортизация и компенсация ошибок
ГИС, заключающийся в выявлении ошибок взаимного положения осей чувстви-
тельности ЧЭ, систематических тепловых, независимых, корпусных и динамиче-
ских составляющих дрейфов гиростабилизированной платформы (ГСП) и фор-
мировании матрицы поправок как для компенсации, так и последующего учета
указанных ошибок в алгоритмах навигации. При этом требуется, чтобы указан-
ные систематические ошибки были стабильны во времени и существенно не из-
менялись от запуска к запуску ИНС.
Компенсация систематических ошибок ИНС в соответствии с математиче-
скими моделями ошибок ЧЭ ГСП превращает ИНС средней точности в высоко-
точную ИНС. А это в свою очередь существенно повышает как точность выстав-
ки ИНС на самолете-носителе, так и точность ее «довыставки» на траектории по-
лета МКР при использовании информации от СРНС.
Технологический путь в значительной мере исчерпал себя, так как возмож-
ности уменьшения инструментальных ошибок изготовления ЧЭ ограничены точ-
ностью применяемого станочного и измерительного оборудования.
Учитывая актуальность повышения точности навигации МКР в чисто инер-
циальном режиме и в связи с появившейся информацией о разработках в США
перспективных МКР (типа АСМ) повышенной точности, скрытности и помехо-
защищенности, осуществляющих навигацию в чисто инерциальном режиме,
ГосНИИАС выступил в 1986 г. инициатором проведения НИЭР с целью опреде-
ления технических путей исключения из состава БСУ ДИСС.
Методы компенсации инструментальных погрешностей
инерциальных навигационных систем
Все возможные методы компенсации инструментальных погрешностей (ИП)
ИНС базируются на предварительном определении этих погрешностей на заво-
де-изготовителе и занесении их в память вычислителя (паспортизация). Методи-
ка определения ИП требует знания математических моделей ошибок [40].
В процессе паспортизации определяются коэффициенты указанных математи-
ческих моделей. На их основе могут быть сформированы три метода компенсации.
1. Метод приборной компенсации. Основан на формировании (вы-
работке) по данным измеряемых ускорений ракеты и соответствующих коэффи-
циентов математической модели ИП корректирующих сигналов, подаваемых на
датчики моментов (ДМ) гироскопов и акселерометров. Кроме сигналов, пропор-
циональных ускорениям, на ДМ гироскопов могут подаваться сигналы, зависящие
как от времени, так и от температуры. Число формируемых корректирующих сиг-
налов, подаваемых на ДМ, зависит от полноты знания математических моделей
ИП. Например, при наличии так называемой корпусной составляющей дрейфа
ГСП формируются сигналы, пропорциональные sin К и cos К, где К— гироскопи-
ческий курс платформы. Необходимо учитывать также рассогласование осей чув-
ствительности гироскопов и акселерометров, а также другие погрешности. Часто
(зависит от конструкции гироскопа и акселерометра) подача корректирующих
сигналов на ДМ сопровождается таким тепловыделением, что при этом ухудшают-
ся точности гироскопов и акселерометров. Поэтому при создании прецизионной
ИНС более предпочтительным является метод алгоритмической компенсации.
676
2. Метод алгоритмической компенсации. Этот метод заключает-
ся в формировании матрицы поправок на основе знания коэффициентов матема-
тических моделей погрешностей ГИС и вычисления поправок к координатам и
скоростям на выходе ИНС.
3. Комбинированный приборно-алгоритмический метод. Ос-
нован на частичном использовании первого метода (при кратковременном при-
ложении корректирующих сигналов к ДМ, например, для компенсации динами-
ческих составляющих погрешностей во время разгона и маневра ракеты) и час-
тичном применении второго метода для учета длительно воздействующих во
время полета ракеты факторов.
Известные зарубежные и отечественные НС БСУ для МКР созданы на базе
электромеханических гироинерциальных систем, построенных на динамически
настраиваемых гироскопах и маятниковых акселерометрах [40]. Применение та-
ких НС как на военных, так и на гражданских ЛА прогнозируется до 2010 г.
Несмотря на ряд работ по созданию гироскопов на других физических прин-
ципах (лазерные, волоконно-оптические, твердотельные вибрационные, микро-
механические гироскопы), ДНГ остается вне конкуренции и удовлетворяет боль-
шинство потребителей по точностным, конструктивным, эксплуатационным и
стоимостным показателям. Возможности его совершенствования не исчерпаны, а
точностные характеристики близки к предельным. Так, например, платформен-
ная ГИС на ДНГ фирмы «Зингер-Кирфотт» типа SKN-2443 имеет точность счис-
ления координат (2о), равную 0,37 км за 1 ч полета, массу 15 кг, габариты 19 х
х 38,6 х 19 см, время выставки по запомненному курсу 90 с [34].
Динамически настраиваемый гироскоп хорошо изучен [40], он характеризу-
ется стабильными во времени выходными характеристиками, что позволяет ис-
пользовать методы паспортизации и компенсации его инструментальных ошибок
для дальнейшего повышения точности ИНС. Теоретически его точностные ха-
рактеристики не зависят от габаритов. Некоторые ДНГ, разработанные НИИШП
«Дельфин» (ГБ-23), ФНПЦ РПКБ (ГВК-6, ГВК-10) и НИИ ПМ (КИНД 05-081,
КИНД 05-089), представлены в табл. 5.7 [41].
Таблица 5.7
Характеристики чувствительных элементов типа ДНГ,
предназначенных для авиации, морского флота и космоса
ГБ-23 ГВК-6 для Ц-060 ГВК-6 для Ц-094 ГВК-10 КИНД 05-081 КИНД 05-089
Случайная составляющая в запуске, °/ч Дрейф от пуска ±0,02 ±0,056 ±0,02 ±0,2 ±0,15 ±0,15
к пуску, °/ч ±0,03 ±0,05 ±0,05 ±0,15 ±0,3 ±5,0
Основной режим Индика- Индика- Индика- ДУС ДУС ДУС
работы Диапазон торный торный торный
измеряемых угловых скоростей, ° /с — — — 110 150 300
Ресурс,ч 30 000 2000 2000 7500 11 000 11 000
Габариты, мм 0 54 х 47 0 54 х 45 0 54 х 45 0 56 х 63 0 26 х 34 0 26 х 34
Масса, г 350 290 290 500 80 80
677
Методы компенсации инструментальных погрешностей ИНС, используе-
мые на баллистических ракетах, нашли широкое применение как за рубежом, так
и в нашей стране. Например, головная часть баллистической ракеты США «Пер-
шинг-2» оснащена ИНС на ДНГ и маятниковых акселерометрах (фирма «Зин-
гер-Кирфотт»). Для обеспечения высоких точностных характеристик в течение
всего срока эксплуатации заводская матрица поправок ИНС периодически
обновляется. Процесс калибровки длится 4,5 ч и включает измерение сигна-
лов гироузлов и акселерометров в 13 различных угловых положениях гироплат-
формы. По этим измерениям рассчитываются 34 коэффициента математических
моделей погрешностей чувствительных элементов и обновляется матрица попра-
вок [42].
Опыт эксплуатации ГИС с формированием матрицы поправок накоплен
также на ряде предприятий России [36]. Например, применительно к ракетам
класса «воздух—поверхность» тактического назначения паспортизуются ИП ГИС,
построенной на ДНГ. Разработана автоматизированная система для формирова-
ния матрицы поправок на заводе-изготовителе. Математическая модель ДНГ со-
держит три слагаемых: независимую составляющую ухода, составляющую ухода
из-за осевой разбалансировки и квадратурную составляющую. Время паспорти-
зации ГИС составляет около 24 ч. Измерения производятся в 6 положениях ГСП,
поправки вводятся алгоритмически. Неравножесткость подвеса ДНГ вводится в
память БЦВМ как константа, одинаковая для всех ДНГ. Компенсация уходов в
соответствии с требрваниями по точности и принятой математической моделью
выполняется до уровня 0,3 град/ч (0,3 град/ч -g), а на весь срок эксплуатации и
хранения (10 лет) допускается увеличение компенсируемых составляющих до
1 град/ч (1 град/ч •g). Так как от ГИС не требуется повышенная точность, то пе-
риодические калибровки в процессе эксплуатации не предусматриваются,
а обеспечиваемая ГИС точность гарантируется в течение 10 лет.
Накоплен значительный опыт эксплуатации комплекса командных гироско-
пических приборов (ККГП), установленных на баллистических ракетах наземно-
го и морского базирования. В связи с высокими требуемыми точностями гиро-
систем периодические калибровки производятся с интервалами от нескольких
месяцев до нескольких лет, а число калибруемых параметров доходит до 40. Раз-
работаны гиросистемы для баллистических ракет дальнего действия (БРДД) с
большим числом паспортизуемых параметров [42].
Обновление матрицы поправок с периодичностью несколько лет выполня-
ется в ККГП (построены на классических гироскопах), установленных на БРДД
наземного базирования. Такая же периодичность принята для ККГП на ДНГ,
предназначенного для разделяющихся головных частей баллистических ракет и
некоторых ракет наземного базирования.
Исследования по повышению точности стрельбы МКР СБД были выполне-
ны ГосНИИАС в 1980-е годы применительно к комплексам авиационного воору-
жения на базе самолетов ударной авиации [43]. Были сформулированы направле-
ния исследовательских и проектно-конструкторских работ по паспортизации и
компенсации систематических погрешностей ИНС, используемых в БСУ МКР
СБД, а также даны предложения по содержанию, организации и материаль-
но-техническому обеспечению работ.
Исследование влияния компенсации систематических погрешностей ИНС
БСУ ракеты на точность навигации дали следующие результаты.
678
Предельные погрешности начальной выставки и калибровки дрейфов гирос-
копов улучшаются по вертикали и курсу в 3 раза, по калибровке дрейфов гирос-
копов в 5—6 раз.
В инерциальном режиме работы НС БСУ компенсация систематических по-
грешностей ИНС примерно в 3 раза снижает «ракетную» составляющую погреш-
ности счисления бокового отклонения и боковой скорости при полете до первой
зоны коррекции по рельефу земной поверхности. Суммарная (с учетом «самолет-
ной» составляющей) погрешность счисления бокового отклонения и боковой
скорости уменьшается примерно в 2 раза. При этом «ракетная» и «самолетная»
составляющие становятся примерно равными и дальнейшее повышение точнос-
ти авиационного ракетного комплекса возможно за счет одновременного повы-
шения точности НС БСУ ракеты и точности ПНК самолета-носителя.
Интересно сравнить результаты расчетов точности инерциально-доплеров-
ского режима работы НС БСУ без компенсации и с компенсацией систематиче-
ских погрешностей ИНС. Оказывается, что при компенсации систематических
погрешностей ИНС навигация в чисто инерциальном режиме работы НС БСУ
примерно в 1,2 раза точнее, чем в инерциально-доплеровском режиме при полете
до зоны первой коррекции по РМ. Погрешности в определении скорости движе-
ния ракеты при работе НС БСУ в инерциальном режиме с компенсацией систе-
матических погрешностей ИНС примерно в 2,2 раза меньше аналогичных по-
грешностей, возникающих при работе НС БСУ в инерциально-доплеровском ре-
жиме без компенсации систематических погрешностей ИНС, и примерно в
1,1 раза меньше аналогичных погрешностей, возникающих при работе НС БСУ в
инерциально-доплеровском режиме с компенсацией систематических погреш-
ностей ИНС. При этом учитывались собственная ошибка ДИСС, ошибки при-
вязки осей ГИС и ДИСС, а также влияние подстилающей поверхности (напри-
мер, движение водной поверхности при полете над морем). Считалось, что систе-
матические погрешности ДНГ ГИС компенсируются до уровня 5% от их
первоначального значения, измеренного на заводе-изготовителе.
Таким образом, было показано, что на основе метода паспортизации и ком-
пенсации систематических погрешностей ИНС можно отказаться от использова-
ния ДИСС и осуществить чисто инерциальный режим работы НС БСУ МКР СБД.
Математические модели погрешностей гироскопов
и акселерометров для построения высокоточной
инерциальной навигационной системы
Создание высокоточной ИНС базируется на использовании прецизионных
чувствительных элементов и на знании достаточно подробных математических
моделей их погрешностей [40].
Высокоточные малогабаритные ИНС, отвечающие требованиям современ-
ных и перспективных МКР СБД УА, построены на основе ДНГ и маятниковых
акселерометров с упругим подвесом [40]. Упомянутые акселерометры в настоя-
щее время хорошо исследованы и выпускаются промышленностью. В то же вре-
мя ДНГ высокой точности и ИНС на их основе до сих пор являются объектами
пристального внимания исследователей. При этом возникает ряд проблем, тре-
бующих проведения значительного объема исследовательских работ. Одна из них
связана с обоснованием возможности использования математических моделей
679
погрешностей ДНГ, разработанных в период создания ИНС средней точности,
для ИНС высокой точности.
При разработке упомянутых моделей в уравнениях движения ДНГ были от-
брошены периодические члены и некоторые члены, зависящие от линейной пе-
регрузки ракеты, на которой установлена ИНС. При таком подходе для значи-
тельного числа погрешностей удается получить аналитические выражения,
которые могут быть использованы при создании алгоритма компенсации ошибок
навигации.
В общем случае необходимо исследовать систему линейных дифференциаль-
ных уравнений с периодическими коэффициентами, зависящими от перегрузки.
В принципе здесь также можно найти аналитическое решение, однако оно будет
громоздким и неудобным для анализа и практического использования [44]. По-
этому целесообразно проводить исследование конкретной гиростабилизирован-
ной платформы.
Инерциально-навигационная система, в состав которой входит ГСП типа
ПГИ-3, выполнена на двух ДНГ типа ГВК-6 и трех маятниковых акселерометрах ти-
па ДА-9 [41, 45]. Для этой ГСП (разработчик ФНПЦ РПКБ) в ФГУП ГосНИИАС
методом математического моделирования была обоснована возможность использо-
вания принятых ранее математических моделей погрешностей (для ИНС средней
точности) при построении высокоточной ИНС.
Погрешности ГСП, если пренебречь ошибками системы стабилизации (а это
допустимо), определяются целиком сигналами, снимаемыми с ДНГ. Если при ка-
ких-либо эксплуатационных воздействиях ДНГ порождает дополнительную по-
грешность в выдаче углового положения относительно инерциального простран-
ства, то этот сигнал будет отработан системой стабилизации ГСП и стабилизи-
руемая платформа займет новое положение. Таким образом, погрешность ГСП
практически совпадает с погрешностью, порождаемой ДНГ из-за влияния экс-
плуатационных воздействий.
В настоящее время многие погрешности ДНГ, возникающие при ударах, виб-
роударах, умеренных линейных переносных ускорениях и при изменении темпе-
ратуры, исследованы как теоретически, так и экспериментально. Однако возмож-
ные ошибки ИНС при больших переносных ускорениях ракеты долгое время ос-
тавались неисследованными. Как было указано выше, ошибки ИНС в пределах
тех требований, которые предъявляются к БСУ МКР СБД, целиком определяют-
ся сигналами, снимаемыми с ДНГ.
Достаточно полные уравнения движения ДНГ имеют вид
Ja 4- //р 4- кка 4- AcjOt 4- Jjp (5.18)
Jp - На 4- £кр 4- Дс2р — d2a
где
4
Ack = Ас0 4- Acl0 4- Acly - (-l)*Ac2y + sin (/Qr) 4- qdp cos (zQr));
dk = d - (-l)*[Jly 4- Z (p5/ sin (z’Qr) 4- pci cos (/Qr))], к = 1,2;
H = Q(y43 4- 2Z?j) — кинетический момент гироскопа;
J = B\ 4- Z?3; d = kK — k^
a, p — малые углы поворота ротора гироскопа относительно его корпуса;
680
Ас0 = ск 4- (А, — Вх — Cj)Q2 — остаточная жесткость подвеса после динами-
ческой настройки идеального ДНГ;
Ас10 — добавочная жесткость подвеса, обусловленная инструментальными
погрешностями ДНГ;
4
Дс1у ± Дс2у, d^ X (...) — приращение жесткости подвеса при ускоренном
поступательном движении корпуса ДНГ;
— гироскопические, внешние возмущающие и управляющие мо-
менты, приложенные к маховику ДНГ.
Входящие в уравнения (5.18) коэффициенты выражаются через параметры
ДНГ по формулам, приведенным в работе [40]. Так как исследовались погреш-
ности и устойчивость ДНГ только из-за влияния перегрузки, которая отражена в
коэффициентах ДсА и dk системы уравнений (5.18), то решение так поставленной
задачи предполагает выполнение следующих допущений:
• маховик считается абсолютно жестким;
• изменением геометрии упругого подвеса при перегрузках можно пренебречь;
• деформациями и изменением взаимного расположения преобразователей уг-
ла и момента можно пренебречь;
• деформациями наружного кожуха и изменением зазоров между кожухом и
маховиком можно пренебречь;
• синхронный гиродвигатель не «выбивается» из синхронизма из-за роста мо-
мента сопротивления в опорах маховика при больших перегрузках;
• влияние больших перегрузок на работу каналов следящей системы ничтожно
(двигатели стабилизации имеют достаточный запас по моменту, а усилители
по мощности);
• деформациями рам карданова подвеса ГСП можно пренебречь.
Перечисленные выше допущения обычно можно обеспечить при констру-
ировании ДНГ и ГСП.
Движение маховика серийного ДНГ типа ГВК-6, разработанного ФНПЦ
РПКБ, моделировалось на ЭВМ. На таких ДНГ, доработанных с целью повы-
шения их стабильности и точностных характеристик, построены высокоточ-
ные ИНС.
При статистическом моделировании на ЭВМ в уравнениях (5.18) задавались
траекторные значения проекций перегрузки ракеты из набора возможных траек-
торий ее полета. Перегрузки п варьировались от 1 до 100. Во всех случаях система
была устойчива. В худшем случае (п = 100) амплитуда колебаний ротора не пре-
вышала одной угловой секунды. Результаты зависели от задаваемого шага интег-
рирования (1,736 • 10-3 с < Аг < 1,75 • 10-4 с).
Последнее обстоятельство приводит к выводу, что возникающие колебания,
которыми можно пренебречь, явились результатом использования определенно-
го метода интегрирования системы дифференциальных уравнений движения
ДНГ (метод Рунге—Кутта с автоматической выборкой шага).
Таким образом, на основе математического моделирования полных уравне-
ний движения ДНГ был обоснован выбор математической модели погрешностей
высокоточной ИНС. Методами статистического моделирования подтверждена
эффективность решения задачи паспортизации и алгоритмической компенсации
систематических ошибок ИНС с гарантированной точностью [46].
681
Периодичность обновления матрицы поправок
Типовая блок-схема автоматизированного комплекса средств паспортиза-
ции и формирования матрицы поправок готовых ИНС на заводе-изготовителе
приведена на рис. 5.35. ИНС, состоящая в основном из ГСП и встроенного вы-
числителя, изображена в центральной части схемы. Предварительно ось крена
ГСП должна быть выставлена в плоскость меридиана. Блок программного управ-
ляющего воздействия задает платформе различные фиксированные ориентации
по отношению к вектору ускорения тела при свободном падении, плоскости ме-
ридиана и вектору угловой скорости вращения Земли. В задаваемых фиксирован-
ных ориентациях производится измерение уходов ГСП вокруг трех ее осей.
Число ориентаций зависит от числа коэффициентов математической модели
ИНС, подлежащих определению. По числу этих коэффициентов набирается чис-
ло уравнений (ориентаций). Система этих уравнений решается в блоке измере-
ний и автоматической обработки результатов. Результаты поступают, с одной
стороны, в блок документирования паспортных данных, с другой — в блок фор-
мирования матрицы поправок, которая передается во встроенный вычислитель и
записывается там в память. Одна группа коэффициентов матрицы поправок ис-
пользуется в блоке компенсации ошибок и поступает в ГСП для приборной ком-
пенсации части ее ошибок. Другая группа коэффициентов используется в блоке
компенсации ошибок для формирования сигналов, которые поступают на вход
БЦВМ для алгоритмической компенсации ошибок ИНС.
Число паспортизуемых на заводе-изготовителе параметров ГИС в зави-
симости от ее точности может превышать 100. Однако не все они должны пере-
проверяться с определенной периодичностью в процессе эксплуатации. Выбор
перечня параметров ИНС и периода их обновления представляет самостоя-
тельную научно-техническую задачу. Сохраняемость (стабильность) точностных
характеристик ИНС определяется в основном стабильностью точностных харак-
теристик гироскопов и акселерометров, их креплением на ГСП, наличием или
отсутствием системы термостатирования, условиями хранения и другими при-
чинами.
Чтобы понять суть проблемы обновления матрицы поправок в период хране-
ния ракет в арсеналах, проанализируем упрощенные математические выражения
Рис. 5.35. Типовая блок-схема автоматизированного комплекса паспортизации
и формирования матрицы поправок
682
уходов ГСП, построенной на ДНГ типа ГВК-6. В установившемся тепловом ре-
жиме уходы относительно инерциального пространства ГСП, с которой связана
система координат Oxyz, описываются следующими выражениями [40]:
уходы гироскопа горизонтальных каналов (уходы ГСП вокруг осей Ох и Oz)
со^ = 5L0 4- ах — Sау + Sif az + Sz2axay + со * + £(сог — со^);
=5у0+ S^az- S^ay + ах + Sy2ayaz + + к((лу - <ох); (5.19)
уход азимутального гироскопа (уход ГСП вокруг оси Оу)
Му = Syo - ^1 а у - ах + 5Д az + Sy2axay + to* + к(ых - ох,). (5.20)
Здесь нижние индексы у «со» обозначают оси, вокруг которых уходит ГСП, а
нижние индексы у «S» обозначают оси, связанные с корпусом соответствующего
гироскопа; (ах, az) — проекции медленно меняющегося ускорения на оси
Oxyz, связанные с ГСП. Коэффициенты Slk (i = х, у, z; £ = 0, 1,2) имеют сле-
дующий смысл:
^0, — независящая составляющая ухода, определяемая несовершенст-
вом датчика угла, датчика момента и упругого подвеса, несовершенством шари-
коподшипников, порождающих осевые, радиальные и угловые вибрации, про-
скальзыванием шариков в шарикоподшипниках во время форсированного раз-
гона гироскопа и другими причинами; она изменяется при вибровоздействиях
на корпус ДНГ, но не зависит от медленных поступательных ускорений. В неза-
висимую составляющую включается также уход из-за остаточной жесткости уп-
ругого подвеса вследствие ограниченной точности динамической настройки,
град/ч;
— коэффициент составляющей ухода, зависящей от поступатель-
ного ускорения перпендикулярно валу и определяемой осевой разбалансировкой
кардановых колец и маховика, непересечением осей торсионов вдоль оси враще-
ния вала и другими причинами, град/(ч -g);
5р^д , — коэффициент составляющей ухода типа радиальной разбалан-
сировки, зависящей от поступательного ускорения вдоль вала и определяемой
несовершенством упругого подвеса и вибрациями, перпендикулярными оси ва-
ла, град/(ч -g);
? SKf — коэффициент квадратурной составляющей ухода, зависящей от
поступательного ускорения, перпендикулярного валу, и определяемой неперпен-
дикулярностью осей кручения торсионов к оси вала, их радиальным смещением
и другими причинами, град^(ч -g);
Sy2, Sz2 — коэффициент составляющей ухода из-за неравножесткости по-
двеса, зависящей от произведения поступательных ускорений вдоль двух взаим-
но перпендикулярных осей, град/(ч -g2);
к — коэффициент перекрестных связей между каналами, характеризующий
неперпендикулярность осей чувствительности гироскопов, как в связи с их креп-
лением на ГСП, так и из-за неперпендикулярности осей датчика угла и датчика
момента внутри гироскопа;
683
co*, co*, co* — составляющие «корпусного ухода» ГСП, связанные с измене-
нием углового положения стабилизируемой платформы относительно неодно-
родных теплового и вибрационного полей внутри корпуса ГСП, с ошибками пре-
образователя координат, а также с неравножесткостью карданового подвеса плат-
формы, град/ч.
Так как ДНГ типа ГВК-6, на которых построена ИНС, имеет упругий вращаю-
щийся подвес, выполненный из одной заготовки специально подобранной стали,
то стабильность упругих свойств подвеса является высокой. Это значит, что коэф-
фициенты Syl, Sz2 неравножесткости подвеса будут сохраняться в течение 11 лет и
не потребуют перепаспортизации. Во всяком случае, для ИНС средней точности.
Что касается коэффициентов и SPf*, S.P;UI, характеризующих осе-
вую и радиальную разбалансировки, а также , характеризующих квадра-
турную составляющую уходов, то на уровне указанных точностей и с учетом «мо-
нолитности» конструкции ДНГ их стабильность также можно считать высокой.
В самом деле, , £*{* в значительной мере определяются упругими характерис-
тиками и геометрией подвеса, a и SPf21, — стабильностью положе-
ния центров масс маховика и кардановых рамок (двух) вращающегося подвеса.
Стабильность положения центров масс может нарушиться в основном из-за
старения сварного шва, которым свариваются наружная (корпусная) деталь уп-
ругого подвеса и внутренняя часть маховика. Сварка выполняется электронным
лучом в вакууме со снятием напряжений от сварки по специальной инструкции
по термостабилизации. Между подвесом и маховиком имеется единственное со-
членение, выполненное с помощью указанной электронно-лучевой сварки. Это
должно гарантировать высокую временную стабильность взаимного положения
центров масс вращающихся деталей ДНГ. На основе изложенного можно утверж-
дать, что перепаспортизации коэффициентов , 5^, 5^ для
ИНС средней точности в течение 11 лет не потребуется.
За время хранения ИНС в составе БСУ рассмотренные выше коэффициенты
изменятся. Но их изменение применительно к ИНС средней точности останется
в допустимых пределах. Другое дело, когда речь идет о высокоточной ИНС. Тогда
необходимо определить указанные (а также другие) коэффициенты на заводе-из-
готовителе (см. рис. 5.35), осуществить алгоритмическую компенсацию ошибок,
сформировав матрицу поправок, и превратить тем самым ИНС средней точности
в ИНС высокой точности. Для высокоточных ИНС изменения элементов матри-
цы поправок, характеризующих уходы ГСП, за время хранения становятся недо-
пустимыми. Исследования, проведенные рядом организаций, показали, что для
высокоточных ИНС на ДНГ, входящих в состав БСУ МКР СБД, необходимо об-
новлять матрицу поправок через несколько лет в местах хранения ракет.
Пути дальнейшего повышения точности БСУ.
Построение ИНС, интегрированной с НАЛ СРНС
В США, Франции, Германии и других странах разработке интегрированных
навигационных систем уделяется существенное внимание. Разработка ведется на
фирмах «Ханиуэлл», «Литтон», «Боинг», «Делко», в лаборатории им. Дрейпера
684
Массачусетского технологического института и др. Навигационная аппаратура
потребителя спутниковой радионавигационной системы разрабатывается такими
зарубежными фирмами, как «Аштек», «Секстант», «Коллинз», «Тексас инсту-
ментс», «Рокуэл Интернейшнл» и др. В качестве ИНС рассматриваются системы,
построенные на базе бесплатформенных ИНС, в которых в качестве чувствитель-
ных элементов используются лазерные, волоконно-оптические и твердотельные
вибрационные гироскопы и акселерометры.
При раздельно-блочном построении системы навигации комплексной обра-
ботке подвергается выходная навигационная информация ИНС и НАП. При
этом в каждом из блоков системы имеется фильтр Калмана, вырабатывающий
координаты и скорость ЛА. Эти данные из каждого блока направляются в борто-
вую ЭВМ общего назначения, где производится их обработка в 3-м фильтре Кал-
мана, вырабатывающем поправки к показаниям ИНС. При такой структуре сис-
темы точность полученного решения в значительной степени зависит от точнос-
ти временной синхронизации процессов обработки данных в каждом из трех
фильтров.
В интегрированной системе псевдодальности и скорости их изменения, пос-
тупающие из НАП СРНС, обрабатываются в едином фильтре Калмана синхрон-
но с информацией, поступающей от гироскопов и акселерометров ИНС. Комби-
нация измерений (показаний датчиков первичной информации), а не навигаци-
онных данных дает возможность моделировать ошибки более адекватно,
следовательно, повысить и точность определения координат местоположения, и
скорость движения ракеты.
Необходимость применения НАП СРНС, анализ основных характеристик
СРНС ГЛОНАСС и GPS (NAVSTAR), требования к СРНС в различных режимах
боевого применения, формирование бортовой инерциально-спутниковой систе-
мы навигации и характеристики НАП (спутниковых приемников) США и Рос-
сии приведены в монументальном труде [47] ФГУП ГосНИИАС и организаций-
смежников.
Использование ИНС, интегрированной с НАП СРНС, в БСУ МКР СБД по-
зволяет:
• уменьшить число ЗК по РМ по маршруту полета ракеты вплоть до реали-
зации единственной ЗК, расположенной в непосредственной близости от
цели;
• обеспечить выдерживание строя при полете группы ракет с минимальными
интервалами между ракетами;
• обеспечить достижение средних высот полета ракеты по маршруту, близких к
предельно минимальным, за счет уменьшения неопределенности ее положе-
ния;
• обеспечить уменьшение погрешности наведения ракеты в заданную точку
прицеливания по информации от интегрированной навигационной системы
(в случае отказа системы коррекции и конечного наведения).
Преимуществами интеграции ГИС с аппаратурой СРНС являются:
• повышение точностных характеристик изделия, возможность обеспечения
«довыставки» и калибровки ГИС при периодических сеансах с космически-
ми аппаратами длительностью до 5...20 мин;
• возможность информационной поддержки приемника СРНС при работе по
неполному созвездию и в случае временной потери радиосигнала;
685
• сокращение времени поиска созвездия КА и возможность работы по непол-
ному созвездию. Это достигается синхронизацией измерений в интегриро-
ванной системе и вводом в НАП СРНС навигационной информации от
обобщенного фильтра комплексной обработки информации;
• повышение помехоустойчивости НАП СРНС за счет уменьшения динамиче-
ских погрешностей слежения и др.
Экспериментально-теоретические исследования по дальнейшему повыше-
нию точности ИНС показали, что интегрированный вариант ИНС + НАП (в
едином корпусе с собственным вычислителем) позволит примерно в 1,5 раза по-
высить точность счисления координат, в 7 раз сократить время готовности, в
1,4 раза сократить массогабаритные характеристики, повысить помехоустойчи-
вость и надежность.
Одним из путей дальнейшего повышения помехоустойчивости интегриро-
ванной НС БСУ является применение специальной антенны, в которой с по-
мощью процессора осуществляется управление положением нулей диаграммы
направленности антенны [48].
Научные и технические проблемы, требующие решения,
при построении высокоточных ИНС для МКР СБД УА
на современном этапе
Дальнейшее совершенствование платформенных и бесплатформенных ИНС
основывается на использовании последних достижений в области прецизионно-
го приборостроения, вычислительной техники, наиболее совершенных структур-
но-функциональных принципов построения, перспективной элементной базы, а
также различных средств коррекции.
К числу основных проблем при построении ИНС для МКР СБД УА на сов-
ременном этапе развития науки и техники в России следует отнести:
• отказ от механического способа построения опорной системы координат
(карданова подвеса), переход к твердотельной технологии создания чувст-
вительных элементов, интегрированных непосредственно в электронные
схемы;
• создание чувствительных элементов, отвечающих предъявляемым к ним тре-
бованиям по точности, конструктивным, эксплуатационным и стоимостным
показателям;
• создание высокопроизводительной, малогабаритной, надежной БЦВМ;
• разработка алгоритмического и программного обеспечения для решения за-
дач точной выставки (в том числе в полете) при малом времени готовности,
диагностики ошибок и их коррекции в полете;
• совершенствование технологий создания компонентов ИНС и всей системы
в целом для повышения точности, увеличения ресурса, снижения массогаба-
ритных характеристик и стоимости производства и эксплуатации;
• создание методов и средств автоматизации проектирования, испытаний и
контроля;
• совершенствование метрологической базы и испытательного оборудования;
• комплексирование (в дальнейшем интегрирование) ИНС (БИНС) с нави-
гационной аппаратурой потребителя спутниковой радионавигационной сис-
темы;
• разработка и совершенствование способов повышения помехозащищеннос-
ти НАП СРНС для МКР СБД УА.
686
5.5.3. ПРИМЕНЕНИЕ
ИНЕРЦИАЛЬНО-СПУТНИКОВЫХ СИСТЕМ НАВИГАЦИИ
1. Необходимость применения спутниковых систем навигации
При решении широкого круга задач, которые стоят перед военной авиацией,
особо важными являются вопросы определения местоположения самолета, его
связи с наземными пунктами управления и между собой. Существующие в настоя-
щее время наземные и бортовые системы определения координат самолета, осно-
ванные на использовании инерциальных систем, систем первичной и вторичной
радиолокации, во многих случаях не обеспечивают требуемую для автоматизиро-
ванного управления и безопасности полетов точность и полноту информацион-
но-управляющего поля. Ошибки измерения координат самолета с применением
указанных систем составляют сотни метров, а в ряде случаев и километры, что не
позволяет в должной мере автоматизировать процессы управления авиацией и
обеспечивать безопасность ее полетов. Информационные поля, существующие в
настоящее время в РФ, имеют существенные (во многие километры) разрывы.
Применение спутниковых навигационных систем для решения задач навига-
ции, связи и наблюдения позволяет обеспечить определение местоположения са-
молета с ошибками, не превышающими несколько десятков метров, практически
в любой зоне воздушного пространства. При использовании инерциально-спут-
никовых систем наблюдения (ИССН) и обработки информации, основанной или
на калмановской фильтрации или на алгоритмах физической интеграции, обес-
печивается определение местоположения самолета с точностью до нескольких
метров. Это позволяет, в свою очередь, полностью автоматизировать процессы
управления самолетом во всех основных режимах полета. К ним относятся:
• полет по заданному маршруту;
• повышение точности выхода самолета на наземную (надводную) цель с за-
данными географическими координатами;
• заход на посадку и посадка самолета;
• сбор самолетов в группы;
• выдерживание заданных строев и эшелонов полета;
• расширение боевых возможностей при групповых действиях.
При установке спутникового навигационного приемника (СНП) на борт са-
молета можно рассматривать два режима его работы:
• абсолютный, когда приемник автономно определяет местоположение;
• дифференциальный, когда на приемник с наземной контрольно-корректи-
рующей станции по телекодовой радиолинии связи поступают дифференци-
альные поправки, которые снимают значительную часть погрешностей опре-
деления местоположения самолета, связанных с искривлением радиосигнала
со спутника при прохождении через тропосферу и ионосферу.
Существующие в настоящее время спутниковые навигационные системы
(СНС) — американская GPS и российская ГЛОНАСС — обеспечивают различ-
ную точность абсолютных режимов работы спутникового приемника.
Среднеквадратические погрешности единичных абсолютных определений
составляют:
• по созвездиям спутников ГЛОНАСС 8... 10 м по широте и долготе, 12... 15 м
по высоте, 0,1...0,2 м/с по составляющим вектора скорости;
• по созвездиям спутников GPS (с учетом селективного доступа, S/А код)
40...50 м по широте и долготе, 60...70 м по высоте, 0,5... 1 м/с по составляю-
щим вектора скорости.
687
Таблица 5.8
Требования к спутниковой навигационной системе
№ п/п Наименование параметра Значение параметра
1 Точность определения координат ЛА, СКО
1.1. Решение задач движения по заданному маршруту и в зоне барражирования:
в горизонте, м 100
в вертикальной плоскости, м 50
по скорости, м/с 5
1.2. Решение задач организации групповых действий:
в горизонте, м 10
в вертикальной плоскости, м 5
по скорости, м/с 1
1.3. Автоматический заход на посадку и посадка самолета (I и II категории сложности):
в горизонте, м 4,5
в вертикальной плоскости, м 1,2
по скорости, м/с 0,1
1.4. Автоматический заход на посадку и посадка самолета (III категория сложности):
в горизонте, м 2,4
в вертикальной плоскости, м 0,5
по скорости, м/с 0,05
1.5. Решение задач ЦУ ракетам:
в горизонте*, м 25
в вертикальной плоскости, м 15
по скорости, м/с 2
2. Передача данных на землю
2.1. Решение задач движения по заданному маршруту и в зоне:
дальность передачи, км > 1500
быстродействие, кБод >9,3
2.2. Решение задач организации групповых действий:
дальность передачи, км >400
быстродействие, кБод > 19,6
2.3. Автоматический заход на посадку и посадка самолета:
дальность передачи, км > 50
быстродействие, к Бод > 38,2
3. Целостность
3.1. Движение по заданному маршруту и в зоне барражирования:
вероятность необнаружения неисправности или ложная тревога Рн = 2« 10-4
коэффициент безопасности Для высотных трасс - 105, для маловысотных трасс = 2,5 • 10-7
3.2. Решение задач групповых действий Рн = 2« 10-4 ЛГб = 2,5 • 10-7
3.3. Автоматический заход на посадку и посадка II II О О 1 1 оо о\
688
Среднеквадратические погрешности дифференциальных определений нави-
гационных параметров по созвездиям ГЛОНАСС и GPS (S/А код) составляют 2 м
по широте и долготе, 3 м по высоте и 0,02 м/с по составляющим скорости.
При решении боевых задач перехватчик может совершать маневры с кренами
до 70° и перегрузками до 4 ед. пер. При таких маневрах можно ограничиться уста-
новкой одной системы в верхней части фюзеляжа. При выборе навигационного
приемника необходимо учитывать диапазон скоростей и высот самолета, так как
у большого количества приемников, предназначенных для использования в граж-
данской авиации, введены ограничения по их применению Ис < 900 км/ч и Нс <
< 11 км. Требования, предъявляемые к СНС авиационным боевым комплексом в
различных режимах боевого применения по точности определения координат,
скорости и дальности передачи данных и целостности, приведены в табл. 5.8, где
под целостностью понимается мера доверия к правильности выдаваемой инфор-
мации и гарантия того, что неисправность будет своевременно обнаружена. Це-
лостность может характеризоваться двумя количественными показателями: веро-
ятностью необнаружения неисправности Рн или вероятностью ложной тревоги и
коэффициентом безопасности АГ6. Под коэффициентом безопасности понимает-
ся вероятность выхода летательного аппарата за границы заданного коридора.
Как следует из табл. 5.8 и характеристик СНС, достаточно установить на са-
молете одноантенный комбинированный GPS/ГЛОНАСС 20—24-канальный
приемник и обеспечить совместную обработку его данных и датчиков пилотаж-
но-навигационного комплекса, чтобы получить требуемую точность и устойчи-
вость работы навигационной системы при решении боевых задач, в том числе:
• движения по заданному маршруту;
• групповых действий;
• выдачи целеуказания оружию;
• передачи информации на наземный командный пункт.
2. Анализ основных характеристик спутниковых
навигационных систем ГЛОНАСС и GPS (NAVSTAR)
Спутниковые навигационные системы относятся к классу многопозицион-
ных радионавигационных систем и предназначены для определения пространст-
венного местоположения и вектора скорости потребителей спутниковой навига-
ционной информации. Основа спутниковых навигационных систем — сеть (со-
звездие) навигационных искусственных спутников Земли, выполняющих
функцию опорных радионавигационных точек, относительно которых измеря-
ются навигационные параметры. Конфигурация созвездия и число спутников
выбираются из условий получения требуемой зоны действия СНС и избыточного
числа видимых спутников в точке приема.
Местоположение самолета, как правило, определяется его собственной ап-
паратурой, процессор которой позволяет вычислять не только его местоположе-
ние в пространстве, но и скорость, а также определить точное время.
Для решения различных боевых задач потребителям необходима достоверная
информация о местоположении с определенной точностью и дискретностью об-
новления в любой точке земного или околоземного пространства.
Основные требования предъявляются к:
• точности местоопределения объектов;
• доступности навигационной системы;
• целостности навигационной системы.
689
На суммарную точность спутниковой навигационной системы влияют сле-
дующие составляющие:
• геометрический фактор, учитывающий характеристики точности в горизон-
тальной и вертикальной плоскостях и в определении поправки к шкале вре-
мени потребителя;
• качество навигационного сигнала, зависящее от точности содержащейся в
нем информации прогноза об эфемеридах, вызывающих сдвиг частоты эта-
лона времени и частоты спутника относительно эталона наземного центра
системы;
• условия, влияющие на распространение радиоволн, которые приводят к воз-
никновению погрешности ионосферной и тропосферной рефракций, а так-
же погрешностей из-за многолучевого распространения сигнала;
• несовершенство аппаратуры потребителя, которое приводит к появлению
погрешностей, обусловленных в основном шумом приемника, дискретиза-
цией сигнала и недостаточной точностью вычислительных средств. Для по-
вышения точности и целостности СНС применяются дифференциальные
спутниковые системы и комбинированные системы ГЛОНАСС и GPS.
Дифференциальный режим позволяет произвести коррекцию систематиче-
ских погрешностей в зоне их пространственно-временной корреляции и увеличе-
ния точности местоположения самолета.
Любая дифференциальная система должна включать следующие элементы:
• контрольно-корректирующие станции, осуществляющие определение диф-
ференциальных поправок и их формирование для передачи;
• линии радиосвязи для передачи дифференциальных поправок потребите-
лям;
• приемную аппаратуру потребителей, обеспечивающую прием и учет диффе-
ренциальных поправок. Поправки, вычисляемые на контрольно-корректи-
рующих станциях и передаваемые на борт потребителя, действительны толь-
ко на определенном расстоянии от станций, которое и определяет зону дей-
ствия дифференциальной системы.
При интегрировании космических навигационных систем ГЛОНАСС и GPS
появляется возможность удовлетворения требований большинства потребителей
по точности навигационного обеспечения, доступности и целостности СНС.
Комплексирование систем ГЛОНАСС и GPS предполагает интеграцию ра-
дионавигационных полей, объединение приемно-индикаторной аппаратуры по-
требителей, способной работать в системе ГЛОНАСС и GPS.
Для совместного использования навигационных параметров необходимо
устранение имеющихся расхождений в используемых системах координат и шка-
лах времени систем ГЛОНАСС и GPS.
Эфемеридная информация, поступающая от спутников каждой из систем,
рассчитывается в своей системе координат:
• ПЗ-90 (геоцентрической) для ГЛОНАСС;
• WGS-84 для GPS.
Интегрирование ГЛОНАСС с наземными навигационными системами по-
зволит создать единое радионавигационное поле, имеющее единую согласован-
ную координатно-временную основу и согласованную структуру навигационных
сигналов.
690
Спутниковая навигационная система ГЛОНАСС
Спутниковая, глобальная, среднеорбитальная, квазидальномерная навига-
ционная система ГЛОНАСС разработана для неограниченного числа потребите-
лей Министерства обороны России и народного хозяйства.
Она состоит из следующих компонентов:
• космического базирования — орбитальная группировка спутников;
• наземного базирования — контрольно-измерительные и управляющие комп-
лексы;
• аппаратуры потребителя.
Спутники системы ГЛОНАСС излучают два вида навигационных радиосиг-
налов: сигнал стандартной точности и сигнал высокой точности.
При этом используются частоты дециметрового диапазона:
£, = 1602...1620 МГц; £2 = 1246...1262 МГц.
Сигнал стационарной точности предоставляется отечественным и зарубеж-
ным потребителям и передается в диапазоне £Р
Для решения потребителем навигационной задачи сигналы каждого спутни-
ка содержат высокоточную информацию и с высокой точностью (не хуже 20 нс)
синхронизированы между собой.
Возможность одновременного наблюдения потребителем «созвездия» навига-
ционных спутников обеспечивается структурой орбитальной группировки систе-
мы ГЛОНАСС, включающей 24 спутника на круговых орбитах высотой 19 100 км,
наклонением 64,8°, расположенных по 8 спутников в трех плоскостях равномерно
через 120°, разнесенных один относительно другого вдоль экватора Земли, сред-
ний драконический период обращения спутника 11 ч 15 мин 44 с, эксцентриситет
орбит равен нулю. Такая структура обеспечивает одновременную радиовидимость
не менее четырех спутников в экваториальных районах. В средних широтах и в по-
лярных районах возможна одновременная радиовидимость от 6 до 10 спутников,
что значительно повышает надежность и точность навигационных определений
всем классам потребителей. По оценкам западных специалистов, занимающихся
радионавигационными системами и полями, система ГЛОНАСС обеспечивает
высокую точность местоопределения особенно при заходе на посадку и при поле-
тах в северных районах. Навигационное определение в системе осуществляется в
стандартном режиме по четырем спутникам. При первом вхождении в связь со
спутниками длительность навигационных определений составляет 1...300 с.
Потребителю обеспечиваются следующие точностные характеристики:
а) для военных потребителей:
• точность местоопределения по плановым координатам 20 м;
• по высоте 17 м;
• по составляющим вектора скорости 0,2...0,3 м/с;
• точность привязки шкалы времени потребителя к госэталону и эталону Ми-
нистерства обороны 3 мкс;
б) для гражданских потребителей:
• точность местоопределения по трем координатам 30 м;
• по составляющим вектора скорости 0,5 м/с;
• точность привязки шкалы времени 0,3 мкс.
Оценочные погрешности навигационных параметров на конец 30-суточного
интервала автономного функционирования, т. е. без связи с наземными пункта-
ми управления СНС, составляют по плановым координатам 2850...3342 м, по вы-
соте 572 м.
691
При автономной работе спутников на интервале времени до трех суток точ-
ностные характеристики ухудшаются до 100 м, что гарантирует гражданским по-
требителям высокую надежность эксплуатации.
В представленных материалах в международные организации (ИКАО и
ИМО) были даны гарантии об эксплуатации СНС ГЛОНАСС в интересах широ-
кого сообщества не менее 15 лет, начало эксплуатации системы — 1995 г.
Для обеспечения непрерывного функционирования орбитальной группи-
ровки и создаваемого ею радионавигационного поля разработана инфраструк-
тура системы ГЛОНАСС, включающая комплексы наземных и бортовых техни-
ческих средств автоматизированной системы управления орбитальной группи-
ровки и системы синхронизации, входящие в контрольно-измерительные стан-
ции. Станции расположены в Москве, С.-Петербурге, Енисейске, Комсо-
мольске-на-Амуре и пос. Балхаш.
Основная задача автоматизированных систем управления и систем синхро-
низации заключается в высокоточном определении и прогнозировании эфеме-
рид навигационных спутников, высокоточной синхронизации спутниковых
шкал времени относительно единых шкал времени системы технического состоя-
ния и управления спутниками, контроля параметров навигационного поля, а так-
же подготовке и закладке на спутники необходимой специальной (эфемерид и
параметров синхронизации) и командной информации.
Отечественная аппаратура потребителя СНС ГЛОНАСС для нужд высокоди-
намичных самолетов находится на стадии освоения серийного производства и
требует исследований и сертификации на летающих лабораториях. Импортная
приемоиндикаторная аппаратура, продаваемая в России, имеет искусственно
введенные ограничения по скорости и высоте.
Перспектива развития аппаратуры потребителей СНС должна быть направ-
лена на:
• создание семейства интегрированной аппаратуры потребителей СНС
ГЛОНАСС и GPS модульного типа, пригодной для установки на самолеты и
вертолеты военной и гражданской авиации РФ всех типов;
• повышение точностных характеристик за счет использования дифференци-
альных режимов приема поправок и снижения инструментальных погреш-
ностей измерительного канала, обусловленных в основном шумом приемни-
ка, дискретизацией сигнала и недостаточной точностью вычислительных
средств;
• расширение функциональных возможностей и сервисных услуг, в том числе с
применением электронных карт с отображением, например трасс, зон, фор-
муляров, заданий и т. д.;
• повышение надежности, помехоустойчивости и электромагнитной совмес-
тимости;
• обеспечение автономных методов контроля целостности системы;
• уменьшение массогабаритных характеристик;
• уменьшение стоимости аппаратуры и доступности для массового потреби-
теля;
• обеспечение возможности комплексного использования с другими автоном-
ными и навигационными средствами;
• унифицирование блоков и узлов, используемых в навигационной аппара-
туре.
692
Приемники аппаратуры потребителя уязвимы при постановке помех мощно-
стью 1 Вт и частотной модуляции на несущей частоте 1,6 МГц в радиусе 22 км, а
при увеличении мощности на 6 дБ радиус удваивается. По этой причине боль-
шинство военных самолетов необходимо оборудовать сложными антеннами,
способными автоматически менять диаграмму направленности при появлении
сигналов помехи. При мощности помехи 130 дБ • Вт наступает полная потеря ин-
формационного сигнала на выходе приемника.
Аппаратура потребителя выпускается одноканальной и многоканальной. Од-
ноканальный приемник обеспечивает последовательный прием псевдошумовой
навигационной информации от каждого спутника «созвездия» в режиме уплотне-
ния с последующей обработкой, многоканальный — одновременно от выбороч-
ных спутников «созвездия».
Спутниковая навигационная система NAVSTAR
Система NAVSTAR разработана в интересах министерства обороны США,
но может использоваться и гражданскими потребителями. В системе использо-
ван тип созвездия 6 х 3 х 12, т. е. спутники располагаются на шести равномерно
рассредоточенных круговых орбитах на высоте 20 000 км. На каждой орбите на-
ходится по три рабочих спутника. Плоскости орбит разнесены по долготе на 60° и
имеют наклонение 55° относительно экватора. Период обращения спутников
12 ч. Орбиты выбраны так, что в любой точке земного шара в разное время на-
блюдается не менее четырех спутников, благодаря чему можно одновременно
производить четыре измерения. Шкала времени аппаратуры потребителя привя-
зана к шкале времени спутников системы NAVSTAR.
Для исключения погрешности из-за неточного знания условий распределе-
ния радиоволн через тропосферу и ионосферу, а также из-за многолучевого рас-
пространения сигнала используется двухчастотный метод, при котором каждый
навигационный спутник непрерывно излучает радионавигационные сигналы в
диапазонах:
£, = 1565,2...1585,7 МГц, £2 = 1217,4...1237,8 МГц.
Один диапазон частот содержит кодированные сигналы точной и грубой на-
стройки. Первый из них имеет криптозащиту, а второй без защиты (открытый).
Сигнал с криптозащитой предназначен только для военных потребителей и слу-
жит для точного определения местоположения, основанный на передаче Р-кодов.
Сигнал без защиты используется для стандартного определения местоположе-
ния, который является менее точным, и основан на передаче С/А-кодов.
В другом диапазоне частот передаются сигналы одного из двух указанных ти-
пов. Работа всех навигационных спутников Земли с высокой степенью синхрони-
зирована с системой единого времени.
Система GPS состоит из трех частей: орбитальной, наземной управляющей
(командно-измерительный комплекс), пользовательской (приемники).
Командно-измерительный комплекс системы GPS предназначен для опре-
деления орбит искусственных спутников, измерения расхождения шкал времени
спутников с системным временем, предсказания эфемерид каждого из них и ухо-
да бортового времени, формирования массива служебной информации и загруз-
ки его в память соответствующего спутника.
693
Эфемеридная информация, поступающая от спутников GPS, рассчитывается
в системе координат WGS-84.
В режиме использования открытого С/А-кода КВО местоопределения со-
ставляет по трем координатам около 40 м. Если учесть, что знание скорости при
определении места по системе NAVSTAR не требуется, то практически все типы
аппаратуры потребителей позволяют определить также вектор скорости потреби-
теля с КВО 0,07...0,3 м/с.
Высокая точность определения места по С/А-коду системы NAVSTAR, как
считают специалисты министерства обороны США, может позволить противни-
ку использовать систему при применении высокоточного оружия. Чтобы исклю-
чить это, в С/А-код вводится искусственная погрешность (режим «избиратель-
ной доступности»), которая приводит к возрастанию погрешности местоопреде-
ления до 100 м.
Для своих военных потребителей в системе NAVSTAR предусмотрен защи-
щенный P-код, передаваемый на двух частотах. Он состоит из 37 секторов, каж-
дый из которых действует примерно 7 суток. Периодическая смена секторов на
всех навигационных спутниках позволяет надежно использовать один этот код в
течение 267 суток. Закон формирования кода не раскрывается, в связи с чем не-
возможно его несанкционированное применение. Еще одним преимуществом
P-кода является его высокая помехозащищенность. КВО местоопределения при
его использовании составляет примерно 10 м.
В связи с тем что величина погрешности (100 м) в режиме избирательной по-
грешности часто не удовлетворяет гражданских потребителей, особенно в райо-
нах полета со сложными условиями захода и посадки самолетов по II и
III категориям сложности, система NAVSTAR интегрирована с радиомаяками,
координаты которых точно известны, образуя тем самым дифференциальный ре-
жим. На радиомаяках установлена специальная аппаратура, которая определяет и
формирует величину расхождения между точными координатами данного маяка
и координатами, выдаваемыми системой NAVSTAR, образуя дифференциальные
поправки. Они передаются в кадрах сигнала радиомаяка. В аппаратуре потреби-
теля поправки вводятся в результаты сеанса обсервации. Такая операция позво-
ляет повысить точность определения места по С/А-коду с режимом избиратель-
ной доступности на расстоянии 1000...1500 км от радиомаяка до величины, лишь
немногим уступающей значению точности, полученному по защищенному Р-ко-
ду, и повысить точность измерений с использованием Р-кода.
3. Формирование бортовой
инерциально-спутниковой системы навигации
Создание интегрированной навигационной аппаратуры с применени-
ем спутникового навигационного приемника систем ГЛОНАСС и GPS обеспе-
чивает:
• повышение точностных характеристик определения местоположения само-
лета, особенно при использовании дифференциального режима;
• расширение функциональных возможностей и сервисных услуг навигацион-
ной аппаратуры, в том числе с применением электронных карт с отображе-
нием трассы, зон, формуляров заданий;
• повышение надежности, помехоустойчивости и целостности навигационной
системы;
694
• уменьшение массогабаритных и стоимостных характеристик;
• обеспечение возможностей комплексного использования информации от
различных датчиков.
Совместная обработка данных СНП и ПНК осуществляется с частотой 18 Гц
и с этой же частотой формируется файл выходной информации для внешнего по-
требителя, содержащий плоские координаты местоположения самолета. После
начала построения трассы она передается внешнему потребителю. Информация,
поступающая в БЦВМ, различна по составу и по стабильности поступления. При
этом при быстрых эволюциях самолета по крену возможна потеря наиболее точ-
ной спутниковой информации. Информация же ПНК, поступая стабильно, обла-
дает невысокой точностью. Основная задача совместной обработки информации
состоит в снижении ошибок определения местоположения и составляющих ско-
рости полета самолета, а также в обеспечении непрерывного слежения за трассой
самолета при любых его эволюциях и удержания достигнутой точности в интер-
валах между поступлениями информации спутникового приемника за счет обра-
ботки информации датчиков ускорений. Снижение ошибок достигается за счет
оптимальной фильтрации, а удержание достигнутой точности за счет качествен-
ной экстраполяции. Программы оценки координат требуют следующих вычисли-
тельных ресурсов: тактовая частота процессора не менее 33 МГц, разрядность вы-
числительной машины — 32 разряда, наличие режима плавающей точки, опера-
тивная память 256 кбайт, частота выдачи оценок 18 Гц.
Совместная обработка информации СНС, ПНК и датчиков ускорений по-
зволяет снизить ошибки определения декартовых координат и составляющих
скоростей полета самолета в 3...4 раза после 8... 10 замеров СНС.
Важным при построении ИССН является выбор СНП и спецвычисли-
теля. В результате проведенных исследований было установлено, что наиболее
полно удовлетворяют требованиям системы 24-канальный приемник фирмы
ASHTECH, 20-канальный приемник фирмы SEXTANT и TOPSTAR-100-1, а так-
же приемник А-737 КБ «Компас», характеристики которых приведены в таб-
лице 5.9.
Для передачи координатной информации с борта на Землю и передачи ин-
формации с Земли на борт, содержащей дифференциальные поправки и псевдо-
дальности, целесообразно использование телекодовой системы. Для преобразова-
ния RTM-кода в код RS 232 должно быть использовано согласующее устройство.
При построении ИССН используется штатный ПНК самолета, содержащий:
• систему воздушных сигналов;
• радиовысотомер;
• систему ограничений сигналов;
• инерциальную систему;
• навигационный вычислитель;
• датчик угловых скоростей.
На борту самолета вся информация от элементов ПНК поступает в шины с
РТМ-кодом, оттуда — всем потребителям.
В ИССН принята схема передачи всей выходной информации ПНК через
согласующее устройство в спецвычислитель. В то же время передача коррекции
координат от спецвычислителя поступает в ПНК по каналу РСДН. Такой прин-
цип связи ПНК со спецвычислителем позволяет использовать ПНК без ка-
ких-либо доработок. Для этого только требуется введение в запоминающее уст-
ройство спецвычислителя географических координат условной точки, относи-
тельно которой определяются декартовые координаты.
695
Таблица 5.9
Характеристики приемников для ИССН
№ п/п Характеристики Тип приемника
ASTECHGG24 A-737 TOPSTAR
1 2 Число каналов Точность определения плановых координат (СКО) в реальном времени: автономные 12 ГЛОНАСС + + 12GPS 12 20
определения, м дифференциаль- 10...20 15...50 20
3 ный режим, м Точность определения скорости в реальном масштабе 0,5...1 1...3 1...3
4 времени (СКО), м/с Обновление 0,1 0,1...0,3 0,1
координат, Гц 5 1 2
5 Подключение 2 RS-232 мкио гост 2 порта
6 внешних устройств Время получения первых координат: «холодный» старт «горячий» старт 2 RS-422 порт TSMC31 NMEA0183 1 мин Юс 18977-79 PTM ARINC RS-422 3 мин 1,5 мин
7 8 Напряжение питания, В Потребляемая Плата OEM board 5 + 10...5% sensor 6... 15 27 28
9 мощность, Вт Рабочая температура 1,8 15...20 21 -40...+70
10 приемника, °C Температура хранения,°C -30.. .+70 -40.. .4-85 -40.. .4-50 антенна -40.. .4-70
11 Габариты, мм Плата evrocard 1,67-100-25 SENSOR 160-57- 190 241•131-81
12 Масса, кг 0,2 2 1,3
5.6. Радиоэлектронное противодействие
5.6.1. ИСТОРИЯ РАЗВИТИЯ
РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
Современные взгляды на формы и методы ведения вооруженной борьбы
свидетельствуют о том, что значительная роль в современной войне будет отво-
диться высокоточному оружию и авиации как средству его доставки и наведения.
Это подтверждается ходом всех локальных конфликтов последних лет, включая
«Бурю в пустыне», югославские события и военные действия в Афганистане.
Высокая выживаемость самолетов и эффективность применения высокоточ-
ного оружия будет обеспечиваться комплексом мер, среди которых лидирующее
положение будут занимать способы радиоэлектронной борьбы.
В настоящее время РЭБ, как было сформулировано в [49], определяется как
комплекс мероприятий и действий конфликтующих сторон, направленных на
выявление и радиоэлектронное подавление радиоэлектронных средств управле-
ния войсками (силами) и боевыми средствами, в том числе и высокоточным ору-
жием противника, а также на радиоэлектронную защиту (РЭЗ) своих РЭС и дру-
гих радиоэлектронных объектов от технической разведки, преднамеренных и не-
преднамеренных помех.
Первоначально РЭБ рассматривалась как вид оперативного и боевого обес-
печения, однако в последующем она все более и более стала перерастать в эле-
мент содержания операций и боевых действий.
Ввиду того что радиоэлектронные средства составляют и будут составлять ос-
нову систем управления войсками и оружием во всех видах вооруженных сил, со-
ответственно и понятие РЭБ распространяется также на все виды вооруженных
конфликтов. Однако на сегодняшний день этот вид борьбы в наиболее полной
форме проявляется при применении авиации.
Первые упоминания об умышленном создании радиопомех относятся к рус-
ско-японской войне. Командир русского крейсера «Урал» предложил командую-
щему эскадрой вице-адмиралу 3. П. Рожественскому подавить излучением бор-
товой радиостанции линию радиосвязи японских разведывательных крейсеров,
следовавших на небольшом удалении от русской эскадры и передававших сведе-
ния о ее передвижении. Однако, к сожалению, встречающаяся во все времена не-
дальновидность руководства выразилась в запрете помехового излучения, что по-
зволило противнику беспрепятственно передавать своему высшему командова-
нию сведения о боевых порядках и координатах кораблей русской эскадры. Хотя
ряд наших кораблей по собственной инициативе и применил помехи радиосвязи,
но общей картины это уже не изменило.
Применительно к авиации первые элементы РЭП проявились в борьбе бом-
бардировочной авиации Англии и ПВО гитлеровской Германии в период Второй
мировой войны. 24 июня 1943 года во время ночного налета на Гамбург бомбар-
697
дировочная авиация Англии массированно применила дипольные средства пас-
сивных помех РЛС управления оружием. Объектом подавления являлись радио-
локационные станции орудийной наводки «Вюрцбург», длина волны излучаемо-
го сигнала которых составляла примерно 50 см. Пассивные помехи в данном
случае представляли собой станиолевые ленты (диполи) длиной около 25 см, ко-
торые сбрасывались вручную. В результате применения пассивных помех потери
бомбардировочной авиации Англии за несколько месяцев снизились примерно
наполовину;
Высокой эффективности помех во многом способствовало отсутствие в РЛС
«Вюрцбург» схем защиты от пассивных помех, которые появились лишь в конце
войны. В октябре 1943 г. бомбардировщики США начали создавать активные по-
мехи РЛС «Вюрцбург» с помощью передатчиков помех типа «Карпет», эффектив-
ность которых оказалась также высокой ввиду отсутствия возможности пере-
стройки несущей частоты у подавляемых РЛС.
Период, соответствующий Второй мировой войне, и первые послевоенные
годы можно считать начальным этапом в развитии средств и способов радио-
электронной борьбы.
Официально первым днем существования службы РЭБ в Советском Союзе
признан 16 декабря 1942 г.
14 декабря 1942 г. наркомом внутренних дел СССР была подана в Государст-
венный Комитет Обороны (ГКО) докладная № 2072/6, в которой на основе ана-
лиза рабочих частот советских и немецких радиостанций (как оказалось, практи-
чески не совпадающих) делается вывод о возможности создания помех противни-
ку. В докладной сообщается, что «НКВД считает целесообразным организовать в
Красной Армии специальную службу по забивке немецких радиостанций».
Вопрос был рассмотрен, и через 1 день (!) 16 декабря Верховным Главноко-
мандующим Вооруженными Силами СССР было подписано Постановление ГКО
№ ГОКО 2633 «Об организации в Красной Армии специальной службы по забив-
ке немецких радиостанций, действующих на поле боя».
В соответствии с постановлением в 10-дневный срок были сформированы 3
отдельных радиодивизиона специального назначения, в состав каждого из кото-
рых входили до 10 автомобильных станций активных помех (САП) средствам свя-
зи и 1 железнодорожная САП «Пчела». Постановлением ГКО была также постав-
лена задача: в двухмесячный срок разработать новые типы САП.
Эти средства хорошо зарекомендовали себя во время Сталинградской и всех
последующих операций. В частности, командующий группировкой войск, защи-
щавшей г. Кенигсберг, сообщил, что одной из причин капитуляции немецких
войск было полное подавление немецкой радиосвязи.
В 1942 г. была издана, по-видимому, первая в мировой литературе моногра-
фия «Радиопомехи и борьба с ними». Ее автор академик Н. Д. Папалекси зани-
мался вопросами разведки, а впоследствии и радиоэлектронного подавления еще
со времен Первой мировой войны, когда им совместно с Л. И, Мандельшта-
мом был создан коротковолновый пеленгатор, с помощью которого определя-
лось местоположение немецких штабов. В частности, в данной монографии опи-
саны впоследствии реализованные в отечественных САП способы создания при-
цельных, заградительных, а также скользящих по частоте помеховых сигналов.
В 1944 г. вышло второе издание (!) этой работы.
В СССР начало становления промышленности, создающей аппаратуру РЭП,
связано с именем яркого советского ученого Акселя Ивановича Берга, который в
698
начале войны находился в местах лишения свободы на основании поступившей
«информации», что он-де хотел осуществить возможность разом лишить воору-
женные силы страны управления путем предлагаемой им унификации систем
связи ВВС, Сухопутных войск и ВМФ.
В июле 1943 г. постановлением ГКО был создан Совет по радиолокации, ко-
торый занимался и вопросами радиопротиводействия. Заместителем председателя
этого Совета и стал А. И. Берг, который в том же году основал и возглавил Цент-
ральный научно-исследовательский радиотехнический институт (ЦНИРТИ, вна-
чале ЦНИИ-108 МО) — центр разработки средств РИД. В нем в 1944 г. были раз-
работаны и испытаны для подавления наземных радиолокационных станций об-
наружения станции активных помех, а также дипольные отражатели в виде
станиолевых лент. Для создания пассивных помех в полках дальней авиации по
3 самолета загружались станиолевыми лентами, которые вручную выбрасывались
в полете.
Вскоре ЦНИРТИ для организации подсобного хозяйства были переданы
земли совхоза «Протва», находящегося недалеко от одноименной реки. А. И. Берг
очень заинтересовался удобным и красивым местом поймы реки Протвы, и в
1950-е годы по его инициативе, разрабатывается проект строительства там нового
научно-исследовательского учреждения. В 1950 г. в будущем поселке Протва уже
функционировала строительная площадка № 2, которая приступила к возведе-
нию первых объектов в Протве и Тряси (испытательный полигон ЦНИИ-108).
В 1957 г. на основании директивы Генерального штаба Вооруженных сил СССР
от 20 августа 1957 года и Постановления Совета Министров от 26 сентября 1957 г.
в Протве был создан филиал ЦНИИ-108 (ныне ФГУП «КНИРТИ»), который в
дальнейшем станет ведущим предприятием по разработке средств РЭП для ВВС.
Одновременно в г. Новосибирске начал создаваться Научно-исследователь-
ский институт авиационного приборостроения (НИИАП), который станет ос-
новным разработчиком аппаратуры РЭП для самолетов дальней авиации.
Дальнейшее развитие средств РЭП в СССР и в мире осуществлялось, как бы-
ло отмечено в [49], в соответствии с законами диалектики. Объектами борьбы, с
одной стороны, являлись радиолокационные средства, их технический уровень, а
с другой — средства РЭБ. Здесь можно выделить примерно четыре основных эта-
па, в течение которых существенно изменялись как структура и алгоритмы РЛС,
так и средства РЭБ. Периоду 1950-х годов соответствуют некогерентные РЛС с
быстрой перестройкой несущей частоты и устройствами защиты от помех, по-
строенными по схеме череспериодной компенсации ЧП К.
В это время в станциях помех вводится электронная перестройка частоты.
Разрабатываются специальные устройства сбрасывания дипольных отражателей.
В ЦНИРТИ создаются первые станции активных помех СПС-1 и СПС-2, разме-
щаемые на самолете-помехопостановщике Ту-16.
Военно-Воздушные Силы явились одним из первых видов Вооруженных Сил
СССР, где были созданы структуры, обеспечивающие как оснащение войск соот-
ветствующей техникой, так и организацию и ведение радиоэлектронной борьбы.
В 1947 г. в Главном штабе ВВС было создано подразделение заказов средств
РЭБ, а в штабе дальней авиации сформировано отделение РЭБ (тогда такого со-
кращения еще не существовало). В 1954 г. в дальней авиации была сформирована
первая часть РЭБ. Учитывая необходимость и важность проведения учебной и
научной работы в области РЭП, по представлению начальника ВВИА им. проф.
Н. Е. Жуковского генерал-лейтенанта В. И. Волкова приказом ГК ВВС главно-
699
го маршала авиации К. А, Вершинина от 11.10.58 г. была создана кафедра ра-
диопротиводействия и радиотехнической разведки. Первым ее начальником стал
инженер-подполковник С. А. Вакин.
В шестидесятые годы и в первой половине семидесятых годов прошлого сто-
летия появляются импульсно-когерентные РЛС, осуществляющие фильтрацию
пассивных помех и позволяющие обнаруживать низколетящие летательные аппа-
раты на фоне отражений от земной поверхности. Защита от активных помех в них
обеспечивается увеличением удельного энергетического потенциала. Появляют-
ся первые РЛС с быстрой перестройкой несущей частоты. В ЦНИРТИ в это вре-
мя создается станция активных помех индивидуальной защиты, которая устанав-
ливается на большинство существовавших в то время самолетов, включая
МиГ-21, МиГ-25, МиГ-27, Су-17, Су-24; модификации этой САП далее устанав-
ливаются на Як-28ПП, Ан-12ППС, Ту-22М, Ту-95, Ил-76. Разрабатывается САП,
которая будет установлена на Су-24М. Во многих перечисленных работах участ-
вует созданное в г. Куйбышеве конструкторское бюро при заводе «Экран» (далее
НИИ «Экран). В НИИАП (Новосибирск) создаются новые комплексы РЭП, в
КНИРТИ разрабатываются бортовые вертолетные САП, базовый приемопере-
датчик для самолетной аппаратуры РЭП и комплекс аппаратуры радиотехниче-
ской разведки.
В аппаратуре РЭП в это время применяются гетеродинные устройства на
электровакуумных приборах СВЧ, в том числе с электромеханической перестрой-
кой частоты, печатные антенны, разрабатываются малоэлементные фазированные
антенные решетки (ФАР), используются элементы цифровой обработки.
В издательстве «Советское радио» в 1968 г. выходит первая в мире фунда-
ментальная работа по теории РЭП начальника кафедры РЭП и РТР ВВИА
им. проф. Н. Е. Жуковского С. А. Вакина и ведущего преподавателя кафедры
Л. Н. Шустова: «Основы радиопротиводействия и радиотехнической развед-
ки» [50], которая вызвала бурный резонанс в военно-технических кругах мира и тут
же была переведена на несколько языков. В отличие от вышедшей в США в 1961 г.
и переизданной в СССР Воениздатом в 1963 г. монографии Р. Дж. Шлезингера
«Радиоэлектронная война», носившей в основном философский и описательный
характер, в книге С. А. Вакина и Л. Н. Шустова впервые были подробно изложе-
ны научные основы теории радиоэлектронного подавления РЭС различного на-
значения.
Во второй половине семидесятых и начале восьмидесятых годов появляются
РЛС, работающие в двух режимах: импульсно-когерентном с узкополосными
сигналами и с широкополосными сигналами, имеющими большую базу. Увели-
чение базы позволяет соответственно увеличить энергетический потенциал РЛС.
Применение двух режимов затрудняет возможность постановки эффективных
как активных, так и пассивных помех. В узкополосном режиме ослабляется воз-
действие широкополосных шумовых помех и значительно подавляется эффект
пассивных помех, а широкополосный режим в сочетании с быстрой перестрой-
кой частоты от импульса к импульсу позволяет значительно снижать эффектив-
ность немобильных узкополосных помех. Соответственно появляется необходи-
мость очередной модификации средств и способов РЭБ.
В КНИРТИ в это время разрабатываются вертолетные САП, САП для само-
лета Су-27, в ЦНИРТИ — САП для самолета МиГ-29, в НИИАП — комплексы
РЭП. В аппаратуре РЭП широко используются твердотельные активные
СВЧ-устройства в гибридном исполнении. Различные типы печатных линий пе-
редачи СВЧ-колебаний, в том числе микрополосковые СВЧ-линии. В КНИРТИ
700
разрабатываются также многоканальные ФАР с электронным сканированием.
Конструкции выполнены преимущественно на основе функциональных блоков
базовых конструкций. Для всей аппаратуры характерна развитая цифровая об-
работка, преимущественно на основе аппаратной логики с использованием ИС
низкого и среднего уровня интеграции.
В 1982 г. в США вышел «Справочник по методам радиоэлектронного подав-
ления и помехозащиты систем с радиоэлектронным управлением» Л. В. Ван
Бранта [51], который не претендовал на глубокую теоретическую проработку
РЭП в целом, но зато в нем оказались отраженными практически все возможные
способы радиопротиводействия, как устаревающим, так и современным РЛС,
использующим сложные виды сигналов, быструю перестройку частоты и моно-
импульсные пеленгационные устройства, реализуемые как при индивидуальной,
так и при коллективной защите.
Четвертый этап РЭБ, вплотную примыкающий к настоящему моменту вре-
мени, наряду с появлением систем высокоточного оружия, отмечен применени-
ем РЛС с фазированными антенными решетками, адаптирующимися к помехо-
вой обстановке, частичным переходом к многопозиционным схемам обработки
сигналов. В различных странах проводится ряд НИР по повышению скрытности
излучений РЛС путем перехода к сверхширокополосным шумоподобным сигна-
лам, радиоэлектронная борьба с которыми станет одной из составляющих пятого
этапа РЭБ.
Одновременно разрабатываются средства РЭП четвертого поколения. Ха-
рактерной чертой аппаратуры РЭП четвертого поколения, к типичным предста-
вителям которой можно отнести американскую САП AN/ALQ-165 и отечествен-
ный комплекс средств РЭП самолетов Су-32 и Су-34, явилось использование
цифрового синтеза помеховых сигналов из запомненных цифровых копий зонди-
рующих сигналов подавляемых РЛС (впервые реализованного несколько ранее в
серийной САП истребителей Су-27).
Наличие цифрового управления синтезом помеховых сигналов в аппаратуре
активных помех позволило значительно увеличить количество реализуемых спо-
собов РЭБ и поднять результирующую эффективность РЭП при противодейст-
вии РЛС всех типов.
Характерным для этого времени стало массированное применение средств
РЭП. После «Войны в заливе» РЭБ стала рассматриваться не только как вид опе-
ративного и боевого обеспечения, но и как элемент содержания операций и бое-
вых действий.
5.6.2. ОСНОВНЫЕ СПОСОБЫ СОЗДАНИЯ
РАДИОЭЛЕКТРОННЫХ ПОМЕХ
Как было указано выше, произошедшее в последние пятнадцать лет разви-
тие бортовых средств РЭП, связанное в первую очередь с внедрением цифровых
методов формирования помеховых сигналов, позволило, с одной стороны, резко
увеличить возможности аппаратуры по реализации описанных [49—51] способов
РЭБ, с другой стороны, значительно сократить их требуемую номенклатуру.
Последнее связано с увеличением числа РЛС, использующих различные
помехозащищенные способы обработки принимаемых радиосигналов, снижаю-
щих эффективность ряда помеховых воздействий, рассчитанных на конкрет-
701
ные недостатки построения типовых РЛС, а также непосредственно связано с
универсальным характером помех, создаваемых станциями активных помех с
цифровыми формирователями помеховых сигналов.
Основным принципом противодействия, реализуемым цифровыми форми-
рователями помеховых сигналов, является маскировка защищаемых самолетов
на фоне множества имитируемых целеподобных отметок, формируемых из за-
помненных цифровых копий зондирующих сигналов подавляемых РЛС. Различ-
ные виды уводящих, прерывистых и других типов модуляционных помех, реали-
зуемых путем временной, частотной и амплитудной модуляции записанных циф-
ровых копий сигналов РЛС, задаваемых программно, стали являться составной
частью обобщенной имитационно-маскирующей помехи.
По-прежнему основным движущим фактором, определяющим развитие ап-
паратуры и способов РЭБ, является дальнейшее совершенствование РЭС систе-
мы ПВО (во многом вызванное в соответствии с законами диалектики предшест-
вующим развитием средств РЭП). То, что среди современных РЛС управления
оружием, включая головки самонаведения атакующих ракет, доминируют моно-
импульсные пеленгаторы, выдвинуло на первый план способы РЭБ, реализуемые
пространственно-распределенными системами защиты (включая САП, разме-
щенные на защищаемых самолетах, самолетах прикрытия, одноразовые САП,
размещенные на БПЛА, буксируемых ловушках, отстреливаемые передатчики
помех, подсвеченные полосы ДО и т. п. [51]). Использование в РЛС узкополосной
и согласованной фильтрации принимаемых сигналов снизило значение загради-
тельных помех, а появление РЛС с изменяемыми параметрами зондирующих сиг-
налов от импульса к импульсу (таких, как, например, несущая частота, длитель-
ность импульса и характеристики внутриимпульсной модуляции) с учетом имею-
щихся ограничений на массу и энергопотребление бортовой аппаратуры РЭП
усилило роль прицельных помех «за собой».
Скорее всего именно сложность самозащиты помехопостановщика, форми-
рующего прицельные помехи РЛС с быстро меняющимися параметрами сигна-
лов, во многом обусловила проведение в США в последнее время большого объ-
ема работ по созданию буксируемых за самолетом радиолокационных ловушек,
обеспечивающих защиту самолета со стороны задней полусферы и беспилотных
летательных аппаратов, для повышения эффективности защиты группы самоле-
тов со стороны передней полусферы [52].
Следует, однако, отметить, что с точки зрения теории РЭБ практически все
характерные для современной аппаратуры способы РЭП были описаны ранее
[49—51], изменились только уровни предпочтения, отдаваемого тем или иным
конкретным методикам защиты самолетов. По всей видимости, основными вида-
ми помех на ближайшую перспективу, не позволяющими противнику получить
достоверную информацию о координатах и типе защищаемых самолетов, останут-
ся распределенные (многоточечные по пространству) имитационно-маскирую-
щие помехи, создаваемые как с защищаемых самолетов, так и с одноразовых пере-
датчиков помеховых сигналов, включенных по управлению в единую систему.
Другими словами, для обеспечения эффективной защиты самолетов от пора-
жения управляемым оружием противника системе комплексов перехвата (напри-
мер, системе ПВО) необходимо противопоставить распределенную систему за-
щиты строя самолетов. Эффективность этой системы, несомненно, в большой
степени будет зависеть от характеристик отдельных ее составляющих, в частности
от величины маскируемых ими угловых секторов радиолокации у подавляемых
702
РЛС, но эффективность пространственно распределенной системы защиты в це-
лом будет значительно превосходить суммарную эффективность ее компонентов.
В то же время, несмотря на высокую эффективность пространственно распреде-
ленной системы защиты группы самолетов (ее виды будут уточнены ниже), всегда
будет сохраняться задача индивидуальной защиты отдельных самолетов (по край-
ней мере до того времени, пока будут оставаться военные самолеты, пилотируе-
мые человеком). Поэтому рассмотрение основных способов РЭП начнем именно
с задач индивидуальной защиты.
Необходимость реализации угловых помех моноимпульсным РЛС УО в усло-
виях отсутствия помеховых сигналов, излучаемых с других самолетов, и ограниче-
ния на массогабаритные характеристики средств индивидуальной защиты предъ-
являет к последним чрезвычайно жесткие и подчас противоречивые требования.
Именно требования обеспечения индивидуальной защиты подталкивают разра-
ботчиков максимально использовать известные недостатки распространенных ти-
пов РЛС, т. е. расширять перечень реализуемых видов помех, обеспечивающих не-
обходимую эффективность индивидуальной защиты самолетов на разных этапах
полета, и предъявляют наибольшие требования к формирователям помеховых сиг-
налов и приемопередающим трактам станций и комплексов РЭП в целом.
Ниже представлено краткое описание наиболее эффективных помех индиви-
дуальной защиты, разбитых по группам, различающимся способами излучения
помех в направлении подавляемой РЛС. В первую группу отнесены помехи, излу-
чаемые в направлении подавляемой РЛС с борта защищаемого самолета, в свою
очередь, эта группа помех различается на одноточечные имитационно-маски-
рующие помехи и помехи, нарушающие сопровождение защищаемого самолета
по углам (ортогональные типы помех или малобазовые мерцающие). Во вторую
группу входят многоточечные помехи: либо переизлученные внешними пассив-
ными объектами (перенацеливание на подстилающую поверхность или на облака
дипольных отражателей), либо излученные с вынесенных передатчиков помех
(как правило, одноразовых).
К первой группе помех индивидуальной защиты можно отнести одноточеч-
ные (излучаемые одним излучателем) имитационно-маскирующие помехи с уп-
равлением текущей мощностью излучения по «негативному» закону относитель-
но мощности зондирующих сигналов подавляемой РЛС, которые используются
против всех типов РЛС, работающих в режимах обнаружения, целеуказания и за-
хвата на сопровождение. «Негативный» закон изменения мощности излучаемых
помеховых сигналов предполагает управление мощностью излучения в зависи-
мости от текущей мощности зондирующего сигнала подавляемой РЛС. При этом
в моменты времени, когда подавляемая РЛС излучает в направлении защищаемо-
го самолета зондирующие сигналы максимальной мощности (т. е. ее антенная
система направлена на самолет максимумом своей диаграммы направленности),
величина помехового сигнала превышает предполагаемую величину мощности
отраженного самолетом в направлении РЛС зондирующего сигнала в заданное
типом помехи число раз. Когда же ДНА РЛС отклоняется в сторону и величина
мощности принимаемого зондирующего сигнала падает, мощность излучаемого
помехового сигнала возрастает по обратной зависимости. Этот тип управления
мощностью помехового сигнала также известен под термином «инверсная» поме-
ха. В результате воздействия помех этого типа на индикаторах подавляемой РЛС
происходит заполнение узкого пространственного сектора пеленг-дальность или
пеленг-частота (который за счет воздействия «негативного» изменения мощнос-
703
ти помех несколько расширяется) множеством целеподобных отметок, не позво-
ляющих операторам РЛС выделить отметки истинных целей.
Для формирования целеподобных отметок модуль формирования помеховых
сигналов должен имитировать амплитудно-фазовые флуктуации радиосигналов,
отраженных самолетами различных типов, и воспроизводить близкую к реальной
огибающую имитируемых сигналов. Наиболее сложным моментом в формирова-
нии имитационно-маскирующих помех является их формирование РЛС с быстро
изменяющимися параметрами сигналов (в частности, их несущей частоты). Фун-
даментальным способом создания опережающих целеподобных отметок «перед
собой» РЛС с быстрой перестройкой частоты является одновременное воспроиз-
ведение всех ранее запомненных копий зондирующих сигналов, например на
всех различных значениях несущей частоты. Однако требования по энергетике
при этом возрастают более чем в и раз, где и — число различных значений несу-
щей частоты. В результате такой способ реализуем либо в случае индивидуальной
защиты специализированных помехопостановщиков, обладающих большой
энергетикой, либо против устаревающих РЛС с малым числом возможных значе-
ний несущей частоты.
Для защиты самолетов от поражения атакующими ракетами с РГСН извест-
ным вариантом применения одноточечных помех является сочетание защитного
маневрирования с прерывистыми уводящими помехами, создающими периоди-
ческие срывы приема отраженных защищаемым самолетом зондирующих сигна-
лов, и, соответственно, паузы в процессе углового сопровождения самолета в
РГСН. Наличие пауз увеличивает эффективность защитного маневрирования с
переменным вектором углового ускорения [51]. Однако в современных ЗРК,
имеющих многоканальные системы сопровождения целей, уводящая помеха мо-
жет восприниматься как дополнительная отметка цели, не влияющая на продол-
жение сопровождения ранее выбранной цели. Соответственно, эффективность
рассматриваемого способа защиты против последних систем уменьшается до ве-
личины, близкой к эффективности «чистого» маневра.
Для индивидуальной защиты самолетов от атак ракетами с активными
РГСН, при отсутствии возможности создания вынесенных источников излуче-
ния, наиболее эффективным видом помех теоретически являются ортогональные
типы помех — когерентные и поляризационные (в англоязычных странах обычно
называемые Cross-Eye и Cross-Polarization). Положительной характеристикой по-
мех этого типа (помимо возможности противодействия моноимпульсным коор-
динаторам) является то, что эти типы помех воздействуют непосредственно на
высокочастотные части пеленгатора РГСН, и поэтому обеспечение контрмер по
защите от помех такого типа требует коренной переработки высокочастотных
трактов РГСН.
Как было описано еще в [49, 51], когерентная помеха реализуется путем из-
лучения с разнесенных в пространстве антенн (расположенных на самолете или
другом объекте, подлежащем защите) двух противофазных сигналов равной мощ-
ности, в общем случае когерентных зондирующему сигналу, причем сигналы из-
лучаются так, что их противофазность обеспечивается именно в приемнике по-
давляемой РЛС. Разнесение излучающих антенн в пространстве приводит к тому,
что принимаемый подавляемой РЛС разностный сигнал отличен от нуля, а его
вектор Пойтинга (если не учитывать наличие отраженного от защищаемого само-
лета зондирующего сигнала) развернут почти под 90°. Указанное искажение фа-
зового фронта приводит к возникновению угловых ошибок в следящих пеленга-
704
торах (как в моноимпульсных, так и в устаревших, с коническим сканировани-
ем). Максимальная угловая ошибка, реально достигаемая помехами этого типа,
ограничена шириной ДН антенны подавляемой РЛС [51].
Для специалистов в области СВЧ понятно, что обеспечение прямого синтеза
строго противофазного сигнала с длиной волны примерно 3 см в направлении
приемной антенны РГСН является невыполнимой задачей. Поэтому большинст-
во попыток реализовать рассматриваемый вид помех был связан с построением
различных схем стробируемых ретрансляторов [50, 51], в которых две разнесен-
ные антенны работали бы как на прием, так и на излучение сигналов с реализа-
цией стробируемого перекрестного ретрансляционного канала, большая часть
которого, включая нелинейные усилители мощности, использовалась бы за счет
прецизионных фазостабильных коммутаторов и линий задержки, для передачи
СВЧ-мошности как в одну, так и в другую сторону. В простейшем случае отличие
цепей прохождения СВЧ-сигнала должно было бы заключаться во введении ин-
вертора фазы в одном из двух вариантов прохождения сигнала. Большинство раз-
работчиков предлагали использовать высокие скорости коммутации, в несколько
раз превышающие величину полосы пропускания приемника подавляемого ра-
диолокатора. Предполагалось, что вследствие столь высокой скорости стробиро-
вания приемник подавляемого радиолокатора будет усреднять принимаемые
импульсные последовательности и эффект воздействия когерентной помехи та-
кого типа будет мало отличаться от исходного теоретического варианта постро-
ения аппаратуры, за исключением незначительного снижения эквивалентной
СВЧ-мощности помехи.
К сожалению, именно высокая требуемая мощность излучаемых СВЧ-сиг-
налов, разностная компонента которых (в приемнике подавляемой РЛС) должна
превышать мощность зондирующего сигнала, отраженного самолетом, так и не
позволила реализовать аппаратуру, создающую эту помеху всем типам РЛС УО
(по крайней мере в САП самолетов фронтовой авиации). Предложенный в [51]
предварительный увод стробов сопровождения приемника подавляемой РЛС в
область отсутствия отраженного зондирующего сигнала значительно снижает
требования к энергетике формируемых помех, однако он же резко сокращает об-
ласть применения рассматриваемых помех устаревающими РЛС УО, не имеющи-
ми защиты от увода, и, что существенно, не позволяет применять помеху, когда
тип угрожающей РЛС достоверно неизвестен.
Если в качестве основного объекта противодействия определить моноим-
пульсные активные РГСН ракет «воздух—воздух», то требования к энергопотен-
циалу создаваемых когерентных помех существенно (более чем на три порядка)
снижаются и становятся реализуемыми в рамках САП самолетов ФА. Следует,
однако, отметить, что даже и в этом случае корректно построенная система со-
здания когерентных помех требует размещения на законцовках крыльев самолета
двух приемопередающих модулей, в которых передающие устройства непосред-
ственно приближены к антенным системам (для исключения потерь мощности
выходных СВЧ-усилителей).
По этому пути пошла известная итальянская компания, разрабатывающая
различную аппаратуру РЭБ — Elettronica [53].
Ключевым фактором, позволившим реализовать Cross-Eye на двух передат-
чиках, по мнению Филиппа Нери, помощника президента компании Elettronica
по технологиям и типам помех, стали именно новые, недавно появившиеся раз-
работки элементов аппаратуры. Основными из них являются приемопередающие
23 Авиация ВВС России и научно-технический npoipcn.
705
Рис. 5.36. Принцип созда-
ния
Рис. 5.37. Контейнер с приемопередающей
аппаратурой когерентных помех
фирмы Elettronica
активные ФАР и технологии сверх-
быстрой когерентной обработки сиг-
налов. На рис. 5.36 приведен об-
щий принцип создания когерент-
ной помехи, а на рис. 5.37 — вид
приемопередающего модуля компа-
нии Elettronica.
Cross-Eye в версии Elettronica
строится по твердотельной элемент-
ной базе, а не на Л БВ, которые сегод-
ня применяются в СВЧ-усилителях
большинства передатчиков РЛС и пе-
редатчиков РЭП, для достижения
требуемой эффективной мощности
излучения. Компания работает над
твердотельными приборами с 1988 г.,
результатом чего стала разработка не-
большого размера активных ФАР. Не-
ри сообщил, что такая антенна имеет
луч уже, чем у других антенн РЭП, по
меньшей мере, на 10 дБ большее уси-
ление антенны и может электронным
способом переключать луч за 100 нс.
Каждый передающий контейнер име-
ет переднюю и заднюю антенны, каж-
дая из которых имеет чуть меньше 20
приемопередающих модулей. По-ви-
димому, именно структура приемопе-
редающих ФАР и их связь между со-
бой являются одним из основных
know-how компании.
Elettronica уже поставила 2 прототипа Cross-Eye в ВМС и в ВВС Италии. ВВС
Италии выражают желание иметь Cross-Eye уже на самолетах Eurofighter «транша 3».
Необходимо, однако, отметить, что на перспективу средства создания коге-
рентных помех, зависимые от приема и использования зондирующего сигнала по-
давляемых систем управления оружием, будут неэффективными в применении
против бистатической радиолокационной ракетной системы, например против
системы полуактивного наведения, так как автоматическое наведение когерент-
ной помехи обеспечивается только по той антенной системе, откуда был принят
зондирующий сигнал. В последнем случае основной эффект применения САП,
реализующей когерентные помехи, будет проявляться при противодействии пе-
ленгационной системе БРЛС самолета, с которого предполагается ракетная атака.
В то же время (завершая рассмотрение когерентных помех) следует упомянуть и
такую их особенность (отсутствующую у всех других способов радиопротиводейст-
вия), как увеличение эффективности помехи по мере приближения РЛС УО к защи-
щаемому самолету. Последнее связано с увеличением модуля разностной векторной
компоненты помехового сигнала, воздействующей на пеленгационную систему, и
уменьшением влияния разброса амплитуд сигналов излучаемых разнесенными при-
емопередающими модулями, определяемого увеличением углового расстояния меж-
ду ними по мере подлета (с точки зрения пеленгационного устройства).
706
Следующим типом ортогональных помех (по вышеуказанной классифика-
ции) являются поляризационные помехи. Этот тип помех реализует способ со-
здания угловых ошибок в следящих РЛС, основанный на излучении сигнала с
поляризацией, ортогональной рабочей поляризации приемопередающих антенн
подавляемого радиолокатора. При этом используется принципиальное различие
пеленгационных характеристик большинства моноимпульсных пеленгаторов на
основной и ортогональной (кросс) поляризации.
По сути этот метод почти тождествен рассмотренному выше способу иска-
жения фазового фронта и реализуется сходной ретрансляционной системой, ко-
торая использует две ортогонально поляризованные приемные антенны, выход-
ные сигналы которых усиливаются коммутируемым усилительным каналом [51].
При этом горизонтально поляризованная составляющая принятого сигнала из-
лучается как вертикально поляризованная, а вертикально поляризованная со-
ставляющая принятого сигнала сдвигается по фазе на 180° и излучается как гори-
зонтально поляризованная составляющая. При переизлучении сигнала в направ-
лении подавляемой РЛС формируется суммарный сигнал с поляризацией, орто-
гональной поляризации излучающей антенны подавляемой РЛС.
Если уровень принятого приемной антенной подавляемой РЛС сигнала на
кроссполяризации превышает уровень сигнала, принятого по основной поляри-
зации (включая уровень отраженного от защищаемого самолета зондирующего
сигнала), то в приемнике РЛС возникает угловая ошибка ввиду указанного прин-
ципиального различия пеленгационных характеристик при приеме сигналов на
основной и кроссполяризации.
Существенной особенностью поляризационных помех является то, что [51]
их эффект не ограничивается действием только на следящий радиолокатор, но
также охватывает и другие типы РЛС, включая воздействие на такие подсистемы
РЛС обнаружения, как когерентные компенсаторы боковых лепестков, блоки-
рующие устройства по боковым лепесткам и поляризационные компенсаторы, а
также РЛС, работающие на проходе, которые могут использовать различные по-
ляризации азимутального и угломестного каналов.
К сожалению, поляризационная помеха по принципу ее создания, так же,
как и когерентная, малоэффективна в применении против бистатической радио-
локационной ракетной системы и так же требует большой энергетики, предъяв-
ляя при этом чрезвычайно жесткие требования к фазовым характеристикам
СВЧ-трактов. Несмотря на это, «универсальный» характер поляризационной по-
мехи делает ее весьма заманчивой для использования.
Как указывается в [54], этот тип помех компания Lockheed Martin применила
на экспортных вариантах своих Block 60 F-16. Аппаратуру РЭП на этот самолет
для компании Lockheed Martin создает Northrop Grumman, но ничего детально не
сообщает об особенностях формируемой поляризационной помехи. Считается,
что она является усовершенствованной кроссполяризационной помехой (cross-
polarization jamming) — так называемой адаптивной кроссполяризационной по-
мехой (adaptive cross-polarization). Покупатель этих самолетов — Объединенные
Арабские Эмираты — станут первыми, кто получит, как отмечается в прессе, «со-
колиное преимущество» («Falcon Edge»), определяемое в том числе возможно-
стью создания поляризационных помех. Достаточно неожиданным является тот
факт, что это даст ОАЭ возможности, которых сами ВВС США пока еще не име-
ют. По всей видимости, следует ожидать появления аналогичных возможностей у
F-35 и F/A-22 (после модернизации его БРЛС).
707
Другим способом создания угловых помех РГСН атакующих ракет непосредст-
венно с борта защищаемого самолета, не требующим больших технологических
проработок, является давно описанный в различной литературе способ поперемен-
ного излучения помеховых сигналов с нескольких разнесенных точек (законцовок
крыльев), называемый малобазовым мерцанием. Недостатком этого способа защи-
ты является небольшая величина создаваемого им промаха ракеты, носящего к тому
же вероятностный характер (ввиду отсутствия достоверной информации о резо-
нансных частотах контура углового наведения ракеты и текущей фазы его раскач-
ки). Однако этот способ создания помех РГСН абсолютно универсален, так как мо-
жет быть реализован против всех систем наведения оружия, в том числе примени-
тельно к аппаратуре как радио-, так и оптического диапазонов длин волн.
Известным типом многоточечных помех, создаваемых с борта одиночного
самолета, является подсвет подстилающей поверхности. Помехи этого типа со-
здают мнимый зеркальный образ защищаемого самолета, расположенный на вы-
соте полета ниже уровня подстилающей поверхности (рис. 5.38). Если величина
отраженного от подстилающей поверхности в направлении атакующей ракеты
сигнала превышает величину сигнала, отраженного от защищаемого самолета, и
сигнала подсвета, излучаемого в направлении перенацеливаемой РГСН по боко-
вым лепесткам антенны подсвета подстилающей поверхности, то атакующая ра-
кета наводится на зеркальный образ и попадает в подстилающую поверхность.
Так как уровень боковых лепестков антенн подсвета подстилающей поверхности
в большинстве случаев не удается реализовать меньше —30 дБ, то над лесистой
местностью помехи такого типа оказываются неэффективными даже против
РГСН, не имеющих элементов защиты от перенацеливающих помех этого типа.
Рис. 5.38. Перенацеливание на поставленную полосу ДО
708
Более эффективным способом создания помех из вынесенной точки при ин-
дивидуальной защите ударных самолетов от поражения ракетным оружием явля-
ется подсвет полос дипольных отражателей, которые либо заранее ставятся поме-
хопостановщиками с подветренной стороны, либо ставятся непосредственно с
защищаемых ударных самолетов, либо со специализированных ракет или БПЛА,
запускаемых также с ударных самолетов [51]. Последний вариант более предпоч-
тителен, так как в этом случае сохраняется мобильность применения эффектив-
ных способов РЭП и обеспечивается защита от атак комплексов перехвата с пе-
редней полусферы с РЛС УО любого типа.
Весьма эффективными способами индивидуальной защиты самолетов явля-
ются защиты с использованием вынесенных одноразовых передатчиков помех,
включая буксируемые ловушки, одноразовых передатчиков помех, отстреливае-
мых из штатных устройств выброса, ИК-ловушек, одноразовых САП, размещен-
ных на ЛА (ракетах или БПЛА), летящих впереди защищаемых самолетов. На-
ибольшим достоинством использования вынесенных средств РЭП является воз-
можность маскировки защищаемых самолетов от РЛС с быстро изменяющимися
параметрами сигналов, постановка прицельных помех которым возможна только
«за собой». Решение этой задачи может быть обеспечено созданием одноразовых
приемопередающих модулей, способных создавать за собой имитационно-мас-
кируюшую помеху, закрывающую необходимый интервал дальности. В этом слу-
чае защита от атак с ЗПС обеспечивается применением одноразовых отстрели-
ваемых передатчиков помех или буксируемых ловушек, а защита с ППС — одно-
разовыми АЛЦ (мини-САП), размещаемыми на БПЛА, летящими впереди
защищаемого самолета (или группы самолетов).
В США для защиты самолетов с ППС в последнее время активно разрабаты-
ваются одноразовые передатчики помех, размещаемые на малогабаритных БПЛА
(Miniature Air-Launched Decoy — MALD), запускаемые с защищаемых самолетов
и способные имитировать радиолокационную сигнатуру самолетов различных
типов (рис. 5.39). Основной задачей MALD является перенацеливание на себя ре-
Рис. 5.39. Одноразовая САП (типа MALD)
709
сурсов ПВО противника и маскировка в РЛС противника отметок истинных це-
лей на фоне ложных. MALD будут летать на высоких дозвуковых скоростях на
дальность более 250 миль с использованием GPS-навигации [52, 55].
Для защиты с ППС от ракет с РГСН устаревающих типов, не имеющих се-
лекции целей по дальности, возможно использование буксируемых ловушек с пе-
редатчиками помех, излучающими в ППС помеховый сигнал, сформированный в
бортовой аппаратуре РЭП и переданный на ловушку по оптоволокну.
По сути последние указанные способы индивидуальной защиты практически
ничем не отличаются от способов создания пространственно распределенных по-
мех в коллективных системах защиты, где также целесообразно использовать од-
норазовые САП, размещенные на впереди летящих БПЛА. На сегодняшний день
принято различать такие типы организации пространственно распределенных
схем защиты боевых порядков самолетов, как взаимная, групповая, взаим-
но-групповая и коллективная.
Под понятием взаимная защита в общем случае понимается защита не-
скольких самолетов (в минимальном составе — пары самолетов), оснащенных
станциями активных помех от ракетной атаки. При этом каждый самолет группы
защищает другие (соседние) самолеты группы с помощью своей САП, причем
участвующие во взаимной защите самолеты обмениваются информацией о пара-
метрах сигнала подавляемой РЛС для определения оптимальных параметров амп-
литудной модуляции сигналов, излучаемых в направлении атакующей ракеты,
обеспечивающих дестабилизирующее воздействие на ГСП ракеты. В простейшем
случае помеховый сигнал с борта облучаемого главным лучом ДНА РЭС самолета
на ГСН не излучается, а информация об облучающем сигнале передается на дру-
гие самолеты группы.
Групповая защита — это защита с помощью помехопостановщика, нахо-
дящегося в ударной группе самолетов, или с помощью высокопотенциального
модуля РЭП, размещенного на одном из ударных самолетов группы.
Взаимно-групповая защита — это защита одной или нескольких групп
самолетов несколькими самолетами-постановщиками помех, осуществляющими
информационное взаимодействие между собой с целью организации взаимной
защиты групп самолетов и друг друга.
Коллективная защита представляет собой организованную защиту груп-
пы самолетов единого боевого порядка, оснащенных средствами РЭП, включая
(при наличии) одноразовые САП на БПЛА, с помощью и посредством управления
ресурсами, параметрами и видами помех, создаваемых средствами РЭП самолетов
этой группы, включая защиту самолетов на всех этапах функционирования систе-
мы ПВО — обнаружения, целераспределения и целеуказания, захвата обнаружен-
ных воздушных целей на сопровождение и наведение оружия, т. е. по сути вклю-
чая в себя все виды организованной защиты самолетов боевого порядка.
Все вышеперечисленные типы организации защиты самолетов при противо-
действии системе РЛС ПВО на этапах обнаружения самолета, целераспределения,
целеуказания и захвата его на сопровождение предполагают, что с отдельных средств
РЭП излучаются имитационно-маскирующие помехи, имеющие технические харак-
теристики, оптимизированные (применительно к РЛС конкретного типа) для мас-
кирования защищаемых самолетов в заданном пространственном секторе.
Для реализации помех взаимной защиты формируемый помеховый сигнал
должен быть оптимизирован под противодействие всему типажу РГСН, к которо-
му может быть отнесена РГСН атакующей ракеты на основании тех данных, ко-
710
торыми могут располагать средства РЭП самолетов, входящих в систему взаим-
ной защиты.
Организация различных видов коллективной защиты требует наличия кана-
лов информационного взаимодействия между комплексами средств РЭП, разме-
щенными на различных самолетах, обеспечивающими возможность обмена ин-
формацией о радиотехнических параметрах угрожающих РЛС, их координатах,
расположении самолетов группы, целераспределении подавляемых РЛС по САП
самолетов группы, типе и параметрах создаваемых помех.
5.6.3. СОВРЕМЕННОЕ СОСТОЯНИЕ ТЕХНИКИ
РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ
И ПЕРСПЕКТИВЫ РАЗВИТИЯ
Как было отмечено выше, в процессе развития методологии РЭБ значитель-
но менялся и подход к разработке самой техники РЭБ. В 1980-х годах большинст-
во разработчиков и заказчиков в своих концептуальных подходах основывались
на опыте создания техники РЭП в предыдущие периоды (1950—1970-е годы). Ос-
новным показателем эффективности РЭП для таких САП служила величина
дальности подавления. Эффективность САП была тем выше, чем на более малых
дальностях обеспечивалось подавление различных РЛС. Тенденция достижения
минимальных значений дальности подавления на долгие годы определила доми-
нирующий интенсивный путь развития техники РЭП.
Внедрение в САП цифровых методов обработки принимаемых сигналов, и
особенно формирования помех из запомненных цифровых копий зондирующих
сигналов подавляемых РЛС, в 1980-е годы дало дополнительные возможности по
увеличению степени коррелированное™ помехи с сигналом, концентрации мощ-
ности помех в полосе частот, согласованной с полосой пропускания РЛС. Основ-
ным способом РЭП при этом считалось создание ответных помех (имитацион-
ных, имитационно-шумовых, маскирующих или уводящих — в зависимости от
режима работы РЛС) по главному лепестку ДНА облучающей РЛС. Вместе с тем
появление на вооружении зарубежных стран радиолокационных систем (РЛС
ЗРК, БРЛС, РГС управляемых ракет) с моноимпульсными методами пеленгации,
с возможностью пеленгации цели по излучению бортового источника активных
помех требовало дальнейшего развития способов РЭП из вынесенной точки про-
странства. К таким способам РЭП относится создание:
• мерцающих помех с бортов нескольких самолетов;
• помех подсвета подстилающей поверхности (низковысотный антипод);
• помех подсвета облаков дипольных отражателей.
Одной из наиболее оригинальных и перспективных разработок 1980-х годов
явилась САП самолета Су-27 (главный конструктор А. Н. Денисов). Как уже от-
мечалось, в САП (рис. 5.40) впервые была использована цифровая память для фор-
мирования высокоприцельных помеховых сигналов. Кроме того, чрезвычайно вы-
годным по конструктивно-техническим параметрам аппаратуры оказался выбран-
ный тип размещения САП — в контейнерах, на законцовках крыльев самолета, что
позволило реализовать режим независимого приема-излучения радиосигналов.
На сегодняшний день частично модифицированная САП является по-преж-
нему одним из эффективных средств РЭП отечественных ВВС. В частности, САП
позволяет обеспечивать высокую боевую живучесть всего семейства самолетов
типа Су-27 (включая Су-30, Су-33, Су-35, Су-37).
711
Рис. 5.40. Самолет Су-27 с контейнерами САП на законцовках крыла
Удачная совокупность общей структуры станции и технических характерис-
тик отдельных ее компонент позволила САП:
• подавлять бортовые РЛС самолетов, РЛС управления оружием ракетных и ар-
тиллерийских зенитных комплексов, радиолокационные головки самонаве-
дения управляемых ракет класса «воздух—воздух» и «поверхность—воздух»;
• работать в автономном автоматическом режиме с возможностью подавления
нескольких опасных радиоэлектронных средств противника в переднюю и
заднюю полусферы одновременно;
• одновременно принимать с высокой чувствительностью радиосигналы и из-
лучать мощные радиопомехи.
Во многом реализация таких уникальных возможностей обеспечивается при-
менением многолучевых приемных и передающих антенн, а также размещением
аппаратуры станции в двух приемопередающих контейнерах на законцовках крыла.
Высокая чувствительность приемной аппаратуры и высокая мощность излу-
чения активных помех станции позволяют:
• обнаруживать излучение угрожающих РЛС и подавлять их помехами еще до взя-
тия ими самолета на сопровождение, своевременно препятствуя последнему;
• обеспечивать эскортную защиту группы самолетов, не оснащенных станция-
ми активных помех.
В последующих разработках ФГУП «КНИРТИ», осуществлявшихся в тесном
сотрудничестве с научными институтами ВВС, ФГУП «ГосНИИАС», АООТ «ОКБ
Сухого» и другими отечественными предприятиями, создавались комплексы
средств РЭП самолетов Су-30, Су-32, Су-34, включающие в свой состав в том чис-
ле средства разведки и противодействия оптического диапазона длин волн. При
этом максимальное внимание было сосредоточено на повышении «интеллектуаль-
ных» возможностей аппаратуры РТР и РЭП и расширении их диапазона рабочих
частот. В процессе выполнения этих работ осуществлялось также проведение на-
учно-исследовательских работ по наиболее перспективным направлениям созда-
712
ния средств радио- и оптоэлектронного противодействия. Так, был создан новый
вид сверхширокополосных антенных решеток (с 2...4-кратным перекрытием по
частоте), обеспечивающих относительную стабильность диаграмм направленнос-
ти за счет сильных электромагнитных связей между отдельными элементами ре-
шетки. Созданы принципиально новые элементы модулей РЭП, связанные с при-
менением волоконно-оптических линий связи для формирования помеховых сиг-
налов (а также удаленной СВЧ-связи между модулями РЭП, включая передачу
сформированных в бортовой аппаратуре помеховых СВЧ-сигналов на буксируе-
мые активные ловушки). Большой объем работ был проведен в части функци-
ональной интеграции аппаратуры РЭП с другими подсистемами БРЭО, в частнос-
ти с БРЛС. К основным направлениям функциональной интеграции пока можно
отнести взаимообмен текущими данными по сопровождаемым целям, но прораба-
тываются и другие вопросы, включая использование возможностей БРЛС для со-
здания высокопотенциальных помех, угрожающих РЛС УО.
Тесное взаимодействие ФГУП «КНИРТИ» с предприятиями электронной про-
мышленности в части разработки сверхширокополосной интегрированной элемент-
ной базы позволило в результате создать действительно малогабаритные СВЧ-моду-
ли, снизив их массогабариты за последние 15 лет ориентировочно в 4...6 раз. К ос-
новным техническим решениям в этом направлении можно отнести разработки:
• широкополосных бескорпусных усилителей с увеличенным перекрытием по
диапазону частот;
• монолитных однокристальных на Ga As многофункциональных СВЧ-прибо-
ров, например выполняющих одновременно функции усиления, выключения
и регулировки мощности, а при необходимости и преобразования частоты;
• миниатюрных квазимонолитных высокостабильных на диэлектрических ре-
зонаторах генераторов СВЧ;
• высоконадежных керамических СВЧ-конденсаторов, заменяющих МОП и
МПД-конденсаторы, применяемые ранее;
• диэлектрических подложек с высокой диэлектрической проницаемостью и
высокой температурной стабильностью, позволяющих проектировать на них
пассивные СВЧ-приборы, в том числе фильтры, которые не реализуются по
монолитной технологии, но имеют габариты и массу, сравнимые с монолит-
ными приборами;
• технических процессов и методов проектирования фильтров, линий задер-
жек и других устройств на поверхностных акустических волнах, позволяю-
щих получать рекордные характеристики по габаритам, потерям, избира-
тельности;
• новых конструкций и технологических процессов, которые максимально ис-
пользуют возможности перечисленных элементов и позволяют проектиро-
вать многофункциональные герметичные, функционально законченные мо-
дули. При монтаже таких сложных модулей используются техпроцессы, при-
меняющиеся в электронной промышленности для изготовления микросхем,
что резко повышает надежность аппаратуры в целом;
• новых конструкций многофункциональных матричных быстродействующих
коммутирующих устройств СВЧ, которые существенно увеличивают про-
пускную способность радиотехнических систем.
Больших успехов в это же время добился ФГУП «ЦНИРТИ» при плотном
взаимодействии с предприятием-изготовителем микроэлектроники в разработке
широкополосных твердотельных выходных усилителей.
713
Таким образом, ныне разрабатываемое поколение аппаратуры РЭП характе-
ризуется:
• повышенной интеллектуальностью;
• существенно меньшими массой и габаритами (в 4...6 раз);
• меньшей трудоемкостью изготовления и стоимостью;
• повышенной надежностью;
• модульностью построения;
• функциональной интеграцией с другими подсистемами БРЭО.
Другим основным направлением усилий специалистов в области РЭП во
всех странах на сегодняшний день является модернизация бортового оборудова-
ния самолетов строя, в первую очередь модернизация аппаратуры обработки ра-
диотехнической информации за счет перевода многих процессов обработки из
аналоговой области в цифровую.
Так, в США большое внимание уделяется модернизации именно средств
РЭБ. Прошедшая модернизацию бортовая аппаратура РЭБ, как правило, имеет
прежнее обозначение, но с цифровым индексом в скобках. Модернизация вклю-
чает в себя усовершенствование отдельных элементов и узлов аппаратуры, обнов-
ление средств обработки данных. В состав аппаратуры вводятся блоки автомати-
ческого управления ресурсами подавления, цифровая память радиочастот и ряд
других достижений в области РЭБ.
ФГУП «КНИРТИ» разработаны контейнерные станции активных помех
(рис. 5.41), предназначенные для повышения боевой живучести самолетов типа
Су-20, Су-22, Су-25, Су-24, МиГ-21, МиГ-23, МиГ-25, МиГ-27, МиГ-29, которые
не имеют средств РЭП или оснащены устаревшими средствами РЭП, не имеющи-
ми возможности эффективного противодействия современным комплексам ПВО.
Оснащение указанными контейнерными станциями помех индивидуальной
защиты позволит снизить потери самолетов в 2,5...3 раза. Для защиты группы са-
молетов, не имеющих самозащиты, используются контейнерные станции помех
групповой защиты (эскорта), размещаемые на одном или нескольких самолетах
группы. Так как разработанные контейнеры подвешиваются на стандартную точ-
ку внешней подвески, то оборудование самолетов контейнерными станциями
помех проводится непосредственно на месте базирования.
Рис. 5.41. Контейнеры станций помех для оснащения самолетов ФА различных типов
714
Указанные контейнерные станции помех работают в автономном автомати-
ческом режиме и обеспечивают одновременное подавление нескольких, наибо-
лее опасных РЭС. Высокая эффективность контейнерных станций помех дости-
гается за счет следующих факторов:
• широкого частотного диапазона, перекрывающего большинство радиолока-
ционных средств управления оружием;
• большой мощности активных радиопомех;
• высокой прицельности создания помех и возможности создания интеллекту-
альных имитационных помех, неотличимых от «своих» сигналов в подавляе-
мых РЛС;
• цифровой обработки сигналов и современного математического обеспече-
ния, позволяющих осуществлять анализ текущей тактической обстановки и
производить выбор оптимального вида помех.
Помимо указанных работ по экспресс-модернизации, продолжается плано-
вое совершенствование средств РЭП, размещаемых на самолетах, исторически
закрепленных за определенными предприятиями. Так, большой объем работ вы-
полняет ФГУП «ЦНИРТИ» по совершенствованию аппаратуры РЭП самолета
МиГ-29, а ФГУП «НИИАП» — средств РЭП самолетов дальней авиации.
В ФГУП «КНИРТИ», кроме того, продолжают создаваться и совершенст-
воваться вертолетные постановщики активных помех, эффективность которых
в первую очередь достигается существенно большей энергетикой излучаемых
помеховых сигналов. В качестве примера на рис. 5.42 изображен вертолет —
постановщик помех Ми-17ПГЭ, предназначенный для групповой защиты ле-
тательных аппаратов и наземных объектов от средств воздушного нападения
и ПВО противника путем подавления мощными радиопомехами радиоэлект-
ронных средств противника из зон барражирования вертолета (вне досягаемости
ракет).
Вертолет Ми-17ПГЭ обеспечивает ведение радиотехнической разведки и од-
новременное радиоподавление нескольких РЭС различного назначения, в том
числе:
• самолетных бортовых РЛС;
• РЛС управления зенитно-ракетных комплексов;
• радиолокационных головок самонаведения ракет (класса «поверхность—
воздух», «воздух—воздух»).
Рис. 5.42. Вертолет Ми-17ПГЭ — постановщик помех
715
На рис. 5.43 приведена фотография вертолета, оснащенного станцией актив-
ных помех, с мощной твердотельной АФАР.
Как уже указывалось выше, РЭБ в настоящее время стала рассматриваться не
только как вид оперативного и боевого обеспечения, но и как элемент содержания
операций и боевых действий. Функционирование аппаратуры РЭП самолетов осу-
ществляется в плотном взаимодействии практически со всем их бортовым радио-
электронным оборудованием, а объем обрабатываемой аппаратурой РЭП информа-
ции вышел на первое место как по затрачиваемым ресурсам, так и по значимости.
Для иллюстрации необходимых затрат вычислительных мощностей достаточ-
но обратить внимание на задачи обработки входного потока данных в аппаратуре
РТР, получаемого на выходе первичных измерителей радиотехнических парамет-
ров сигналов. Как следует из проработок американских специалистов (в рамках
программы JSF), величина этого потока в средненасыщенных районах боевых
действий (при участии авиации) может достигать 1 Гбита/с. Однако для современ-
ной (и тем более перспективной) аппаратуры РТР такая величина информацион-
ных потоков не является предельно высокой. Одним из направлений дальнейшего
развития аппаратуры РТР является переход на непосредственно цифровую обра-
ботку радиосигналов, позволяющий более чем на порядок повысить точность из-
мерений как радиотехнических характеристик принимаемых сигналов, так и коор-
динат источников излучений с соответствующим дальнейшим повышением тре-
бований к аппаратуре обработки радиотехнической информации [56].
Таким образом, современная аппаратура РЭП и решаемые с ее помощью за-
дачи защиты выходят на одно из первых мест в комплексах бортового оборудова-
ния самолетов по требованиям к вычислительным ресурсам. Последнее утверж-
дение становится достаточно очевидным, если принять во внимание, что каждый
бортовой комплекс средств РЭП осуществляет радиотехническую разведку с оп-
ределением режимов работы, координат и степени опасности всех наблюдаемых
источников излучений, каждый из которых является сложной системой со своей
«манерой поведения».
Опыт показывает, что создание современной сложной радиотехнической
системы просто невозможно без детального математического моделирования
Рис. 5.43. Вертолет, оснащенный станцией активных помех,
с мощной твердотельной АФАР
716
функционирования этой системы в условиях, максимально приближенных к
ожидаемым. Аналогичные мысли выражают специалисты многих фирм, в част-
ности, как утверждают представители фирмы Lockheed, создание современного
сложного комплекса бортового оборудования самолета F-22 (с интегрированной
аппаратурой РЭП) было бы невозможно выполнить без детального математиче-
ского моделирования функционирования БРЭО на всех этапах его разработки.
В настоящее время объем работ по математическому моделированию средств
РЭП составляет еще незначительную (менее 20%) долю общей трудоемкости раз-
работки аппаратуры РЭП, но по темпам его роста в ближайшее время объем этих
работ явно превысит 50% общего объема работ.
Математическое моделирование представляет собой необходимый и эффек-
тивный инструмент оптимизации аппаратной структуры и алгоритмов функци-
онирования комплексов бортового радиоэлектронного оборудования самолетов.
Математическое (компьютерное) моделирование позволяет синтезировать струк-
туру и параметры аппаратуры «от поставленной задачи», закладывать алгоритмы
ее функционирования, получать численные оценки оптимальности параметров
разрабатываемого комплекса, сравнивать эффективность предлагаемых инже-
нерных решений на всех стадиях разработки.
Создание единой модифицируемой математической модели, полностью от-
ражающей информационный обмен в информационно-управляющей системе
бортового оборудования, размещенной на стендах математического моделирова-
ния основных разработчиков этого оборудования, позволит:
• создать единую понятийную базу предметной области, единое информаци-
онное пространство, обеспечивающее преемственность разработок;
• «увидеть» и скорректировать будущую систему до того, как она будет реали-
зована физически;
• добиться согласованности точек зрения и конструктивного взаимодействия
между всеми участниками работы;
• в конечном счете уменьшить затраты на разработку системы и улучшить ее
качество.
Дальнейшее развитие аппаратуры РЭП в «физическом» плане будет, по всей
видимости, сопряжено с очередным резким скачком, определяемым пятым эта-
пом РЭБ, когда появятся серийные многопозиционные РЭС УО и БРЛС со
сверхширокополосными шумоподобными сигналами прямого синтеза (без несу-
щей частоты), что также потребует от радиотехнической аппаратуры РЭБ перехо-
да на сверхширокополосную цифровую обработку радиосигналов, в пределе —
непосредственно по СВЧ-входным сигналам. При этом усилится роль оптиче-
ского диапазона длин волн в теории и практике РЭП.
Другим побудительным мотивом изменений в аппаратуре РЭП, без сомне-
ний, будет являться задача интеграции бортовой аппаратуры перспективных
авиационных комплексов. Указанный интеграционный процесс затрагивает как
функциональную, так и физическую интеграцию аппаратуры. Несомненно, что
(с точки зрения РЭБ) физическая интеграция в первую очередь должна коснуться
антенных систем, чей вклад в величину эффективной поверхности рассеяния са-
молетов является определяющим, а также и приемопередающих устройств в це-
лом для снижения заметности их излучений.
Авторы выражают благодарность кафедре РЭП ВАТУ имени профессора
Н. Е. Жуковского за предоставленную достоверную информацию по истории раз-
вития РЭП в Российской Федерации.
717
Список литературы к разделу 5
1. Пройдаков Э. СКБ-245 во всех его реинкарнациях, PC WEEK/RE, 1998, № 50.
2. Гаврилин Б. НИИ приборостроения — лидер в разработке малогабаритных инер-
циальных систем управления ракетами. — Военный парад, 1998, № 3(27).
3. Парамонов П., Суслов В. и др. Вычислительные средства комплексирования
Гул ОКБ «Электроавтоматика» на рубеже XXI века. — Мир авионики, 1998, № 4.
4. Федосеев Е. П. Авиационные системы информационного обмена. Сборник тру-
дов РАН, МГУ, ИЯИ, Центр РАН — МГУ «Еликс» / Международная школа-семинар по
автоматизации и компьютеризации в науке, технике и промышленности ASC’, 1998.
5. Сборник трудов РАН, МГУ, ИЯИ, Центр РАН — МГУ «Еликс» / Международная
школа-семинар по автоматизации и компьютеризации в науке, технике и промышленнос-
ти ASC’, 1998.
6. Сборник трудов РАН, МГУ, ИЯИ, Центр РАН — МГУ «Еликс» / Международная
школа-семинар по автоматизации и компьютеризации в науке, технике и промышленнос-
ти ASC’, 1999.
7. Федосеев Е. П. Ст. Перспективы развития внутри машинных и межсистемных
интерфейсов. Ст. Высокоинтеллектуальные интерфейсы — основа бортовых вычислитель-
ных систем перспективных ЛА. — Сборник трудов РАН, МГУ, ИЯИ, Центр РАН — МГУ
«Еликс» / Международная школа-семинар по автоматизации и компьютеризации в науке,
технике и промышленности ASC’, 2000.
8. Копоишлко И. И., Федосеев Е. П., Павлов А. М. Организация высокоинтел-
лектуальных средств информационного обмена. — Мир авионики, 2001.
9. Федосеев Е. П. формирование критериальных показателей уровня безотказности
ЛВС. Тр. ФГУП ГосНИИАС. Информационные технологии в разработках сложных сис-
тем, 2001, вып. 1 (7).
10. ГОСТ 26765.52—87. Интерфейс магистральный последовательный системы элек-
тронных модулей. — Изд-во стандартов, 1988.
11. ГОСТ Р 50832—95. Интерфейс магистральный последовательный волоконно-оп-
тический системы электронных модулей. — Изд-во стандартов, 1994.
12. Авиационные системы информации оптического диапазона. Справочник под ред.
Л. 3. Криксунова. — М.: Машиностроение, 1987.
13. Бегучее В. П, Чапкевич А. Л., Филачев А. М. Электронно-оптические пре-
образователи: состояние и перспективы развития. — Прикладная физика, 1999, № 2.
14. Мусатов А. Л. Фотоэмиттеры с отрицательным электронным сродством. —
Итоги науки и техники. Сер. Электроника и ее применение, 1979, т. 11.
15. D. Estera, Т. Sainer и др. / SPIE, 1994, vol. 2551, рр. 135—143.
16. Техническое сообщение фирмы Philips Photonics (Нидерланды), 1995.
17. Рекламное сообщение фирмы Delft Sensor Systems (Бельгия, Нидерланды),
IDEX’97.
18. Рекламное сообщение фирмы Litton (США), IDEX’97.
19. Рекламное сообщение фирмы ITT (США), IDEX’97.
20. Сборник тезисов докладов 16-й Международной конференции по фотоэлектрони-
ке и приборам ночного видения. НПО «Орион». М., 2000.
1\. Лобанов М. М. Развитие советской радиолокационной техники. — М.: Военное
издательство, 1982.
22. Катрона, Вивиен, Лейс, Холл. Радиолокационная станция с высокой разре-
шающей способностью для наблюдения за полем боя. — Зарубежная радиоэлектроника,
1961, № 12.
23. Реутов А. П, Михайлов Б. А., Кондратенков Г. С., Бойко Б. В. Радио-
локационные станции бокового обзора / Под ред. А. П. Реутова. — М.: Сов. радио,
1970.
718
24. Буренин Н. И. Радиолокационные станции с синтезированной антенной. — М.:
Сов. радио, 1972.
25. Ицхоки Я. С., Сазонов Н. А., Толстов Е. Ф. Основные характеристики РСА
при произвольном движении летательного аппарата. — Радиотехника и электроника, 1984,
т. XXIX, № 11, с. 2164-2172.
26. Муш Б. С. Принцип «равного наблюдения» и экономичные алгоритмы обработ-
ки сигналов квазиголографических импульсно-доплеровских систем. Оптические методы
обработки изображений и сигналов / Под ред. В. А. Потехина. — Л.: АН СССР, 1981,
с. 24-28.
27. Муш Б. С., Альтман Л. С. Обработка сигналов в квазиголографических систе-
мах как обратная задача. — Радиотехника и электроника, 1984, т. XXIX, № 7, с. 1242—1251.
28. Штейншлегер В. Б., Лифанов П. С. Способы обработки сигналов радиолока-
ционных станций с синтезированной апертурой при решении народно-хозяйственных за-
дач. — Радиотехника и электроника, 1984, т. XXVII, № 2, с. 193—213.
29. Радиолокационные станции с цифровым синтезированием апертуры антенны /
Под ред. В. Т. Горяйнова. — М.: Радио и связь, 1988.
30. Войтенко В. И. Самолетная РЛС с трансверсальным синтезированием аперту-
ры. Разработка принципов действия и исследование информационных средств. / Отчет
о научно-исследовательской работе № 127/14862/2001, с. 26—38. ФГУП ГосНИИАС. М.,
2001.
31. Кочешков Н. А., Турчак А. А. Очерки истории создания холдинговой компа-
нии «Ленинец». — СПб., 2000.
32. Крылатые ракеты ВМС и ВВС США (Обзор по материалам иностранной печати).
Составители: В. Г. Теплое, Н. И. Повар, П. В. Сафронов. — М.: НИЦ ГосНИИАС,
1976.
33. Зарубежные крылатые ракеты. (Обзор по материалам иностранной печати) /
Под общей ред. К. А. Сарычева. Составители: А. П. Добролюбов, Я. П. Швецов,
А. П. Поликахин, В. Я. Дерий. - М.: НИЦ ГосНИИАС, 1980.
34. 37-я международная авиационно-космическая выставка. Авиационные комплек-
сы и вооружение. Отчет группы специалистов. Париж, 1987.
35. Системы скрытой навигации маловысотных летательных аппаратов (Обзор по ма-
териалам иностранной печати) / Под ред. акад. Е. А. Федосова. Составители: А. И. Си-
лаев, М. Г. Колобов, К. А. Смирнов, Т. Г. Терещенкова. — М.: НИЦ ГосНИИАС,
1988.
36. Перспективы создания новых крылатых ракет и МБР для ВВС и ВМС США. —
НИЦ ГосНИИАС. НТИ, Авиационные системы, 2001, № 19—20.
37. «Лиса в пустыне» 1998 года. «Морская газета», 12.05.01. Изд. Военно-морской ин-
женерный институт. Россия, СПб.
38. Слипченко В. Анализ военной кампании НАТО против Югославии весной
1999 года. — Экспорт вооружений, 2000, июль—август.
39. Управляемая ракета JASSM класса «воздух—поверхность». — НИЦ ГосНИИАС.
НТИ. Авиационное, зенитное и противоракетное вооружение, 1997, № 5.
40. Брозгуль Л. И. Динамически настраиваемые гироскопы. Модели погрешностей
для систем навигации. — М.: Машиностроение, 1989.
41. Динамически настраиваемый гироскоп. Пермская приборостроительная компа-
ния. Рекламный проспект, 1997.
42. Система управления головной части ракеты «Першинг-2». МО СССР, Централь-
ный институт военно-технической информации, 1986, вып. № 1320.
43. Волковский Н. Л. Энциклопедия современного оружия и боевой техники,
т. 1. — СПб.: Полигон-АСТ, 1997.
44. Якубович В. А., Старжинский В. М. Параметрический резонанс в линейных
системах. — М.: Наука, 1987.
45. Датчики акселерометра. Пермская приборостроительная компания. Рекламный
проспект, 1997.
719
46. Зайцев А. В.. Кислицын Ю. Д., Разумихина Г. Б. Метод паспортизации ста-
бильных инструментальных погрешностей инерциальных навигационных систем с гарантиро-
ванной точностью. — Ракетно-космическая техника, НЦТИ «Поиск», 1990, сер. X, вып. 3.
47. Авиация ПВО России и научно-технический прогресс. Боевые комплексы и сис-
темы вчера, сегодня, завтра / Под ред. акад. Е. А. Федосова. С. 516—527. — М.:
ГосНИИАС, Дрофа, 2001.
48. Разработка противопомехового модуля для систем оружия с использованием GPS. —
НИЦ ГосНИИАС, ЭИ, 1998, № 35-36.
49. Вакин С. А., Шустов Л. Н. Основы радиоэлектронной борьбы. Учебное посо-
бие. Ч. 1. — М.: Типография ВВИА имени Н. Е. Жуковского, 1998.
50. Вакин С. А., Шустов Л. Н. Основы радиопротиводействия и радиотехниче-
ской разведки. — М.: Сов. радио, 1968.
51. Van Brunt. Applied ECM EW Engineering, Inc., USA, 1982.
52. Основные программы РЭБ, JED (Journal of Electronic Defense), август, 1999.
53. Брюс Д. Нордвалл. Новый передатчик помех вытеснит буксируемые ловушки.
Рим AW&ST, 25 июня 2001.
54. Дэвид А. Фулгхем, Джон Д. Морокко и Эдвард X. Филипс F-16 Объединен-
ных Арабских Эмиратов станут предметом зависти пилотов ВВС США, Даллас AW&ST,
13 марта 2000.
55. MALD, продолжение испытаний, ЕС Monitor, JED, декабрь, 2000.
56. Radar Warning Receiver: The Digital Revolution. JED, июнь, 2000.
Список принятых сокращений
АА — армейская авиация
ААППС — адаптивный автопилот переменной структуры
ААСУБП — алгоритм аварийных ситуаций учебно-боевой подготовки
АБК — авиационный боевой комплекс
АБР — аэробаллистические ракеты
АДД — авиация дальнего действия
АК — авиационный комплекс
АКС — автоматическое корректируемое слежение
AM Г — авиационная многоцелевая группа
АНИС — автономная навигационная инерциальная система
АОЦ — автоматический обнаружитель цели
АПК — авиационный подвесной контейнер
АПУ — авиационное пусковое устройство
АРГС — активная радиолокационная головка самонаведения
АРК — автоматический радиокомпас
АС — автосопровождение
АСВ — авиация сухопутных войск
АСК — автоматизированная система контроля
АСН — аппаратура спутникового наведения
АСП — авиационный стрелковый прицел
АУ — арифметическое устройство
АФС — антенно-фидерная система
АЦП — аналого-цифровой преобразователь
БА — бомбардировочная авиация
ББА — бортовой баллистический алгоритм
БВС — бортовая вычислительная система
БИНС — бесплатформенная инерциальная навигационная система
БИС — быстродействующая ИС
БК — боевые корабли
БКО — бортовой комплекс обороны
БЛА — баллистический летательный аппарат
БН — ближнее наведение
БПЛА — беспилотный летательный аппарат
БРДД — баллистическая ракета дальнего действия
БРК — бортовой ракетный комплекс
БРПЛ — баллистическая ракета подводной лодки
БРЭО — бортовое радиоэлектронное оборудование
721
БСУ — бортовая система управления
БУС — блок управления и связи
БФКУ — блок формирования команд управления
БЦВМ — бортовая цифровая вычислительная машина
БЦВМ-ОН — БЦВМ общего назначения
БЦВМ-ОС — БЦВМ обработки сигналов
БЧ — боевая часть
ВА — воздушная армия
ВВ — взрывчатое вещество
ВВТ — вооружение и военная техника
ВЗ — воздухозаборники
ВИП — вторичный источник питания
ВКП — воздушный командный пункт
ВКУ — видеоконтрольное устройство
ВНТГР — воздушно-наземная тактическая группа
ВОЛС — волоконно-оптическая линия связи
ВОСПИ — волоконно-оптические средства передачи информации
ВПП — взлетно-посадочная полоса
ВСК — встроенная система контроля
ВТ — вынесенный ориентир
ВТО — высокоточное оружие
ВЦ — воздушная цель
ВШ — высокоскоростная шина
ВЩАР — волноводно-щелевая антенная решетка
ГИС — гироинерциальная система
ГНС — грубая навигационная система
ГС — гиростабилизатор
ГСИ — государственные совместные испытания
ГСЛИ — государственные совместные летные испытания
ГСН — головка самонаведения
ГСП — гиростабилизированная платформа
ГУП — группа управления полетами
ДА — дальняя авиация
ДВП — дальность включения в поиск
ДЗУ — долговременное запоминающее устройство
ДИ И — дополнительные источники излучения
ДИСС — доплеровский измеритель путевой скорости и угла сноса
ДМ — датчик момента
ДН — дальнее наведение
ДНА — диаграмма направленности антенны
ДНГ — динамически настраиваемый гироскоп
ДОЛ — доплеровское обужение луча
ДОТ — долговременная огневая точка
ДП — дополнительный передатчик
ДПЛС — дальний противолодочный самолет
ДПП — дальность перевода в пикирование
ДРБ — дальний ракетный бой
ДРВ — Демократическая Республика Вьетнам
ДРЛО — дальнее радиолокационное обнаружение
722
ЖРД — жидкостный ракетный двигатель
ЗА — зенитная артиллерия
ЗВП — зона возможных пусков
ЗВС — зона возможных сбрасываний
ЗК — зона коррекции
ЗП — зона поражения
ЗПК — зона первой коррекции
ЗРК — зенитно-ракетный комплекс
ЗУ — запоминающее устройство
ЗУР — зенитная управляемая ракета
ЗУС — запасной узел связи
ЗЭЛТ — запоминающая электронно-лучевая трубка
ИА — истребительная авиация
И БА — истребительно-бомбардировочная авиация
ИВС — интегрированная вычислительная среда
ИК — инфракрасный
ИКВ — инерциальная курсовертикаль
ИКВК — информационный комплекс вертикали и курса
ИЛС — индикатор на лобовом стекле
ИНС — инерциально-навигационная система
ИНСАР — инверсивное синтезирование антенного раскрыва
ИП — инструментальная погрешность
ИПВ — индикатор прямого видения
ИУС — информационно-управляющая система
ИС — интегральная схема
ИСЗ — искусственный спутник Земли
ИССН — интегрально-спутниковая система навигации
ИЭ — интегратор электромеханический
КАБ — корректируемые авиабомбы
КАВ — комплекс авиационного вооружения
КАСУ — корабельная автоматическая система управления
КБО — комплекс бортового оборудования
КВО — круговое вероятное отклонение
КД — конструкторская документация
КЗА — контрольно-записывающая аппаратура
КИА — контрольно-измерительная аппаратура
КИМ — коэффициент использования металла
ККГП — комплекс командных гироскопических приборов
КОЛС — квантовая оптико-локационная станция
КОМ — комплекс операционного моделирования
КОП — комплекс отработки программ
КП — командный пункт
КПА — контрольно-проверочная аппаратура
КПМ — комплекс полунатурного моделирования
КР — крылатая ракета
КРВБ — крылатые ракеты воздушного базирования
КРК — корабельный ракетный комплекс
КРЛ — командная радиолиния
КРУ — командная радиолиния управления
723
КС — комплекс связи
КФМ — конструктивно-функциональный модуль
КЭСНН — корреляционно-экстремальная система навигации и наведения
ЛВ — линия визирования
ЛВС — локальная вычислительная сеть
Л ГСН — лазерная головка самонаведения
ЛЗП — линия заданного пути
ЛИ — летные испытания
ЛЛ — лазерный локатор
ЛТПС — лазерно-телевизионная прицельная система
ЛТХ — летно-технические характеристики
МАС — малый аэродинамический стенд
МБР — малая баллистическая ракета
МВВ — модуль ввода-вывода
МВП — маловысотный полет
МЗА — малая зенитная артиллерия
МК — модуль коммутации
МКР — маловысотная крылатая ракета
МКР СБД — маловысотная крылатая ракета средней и большой дальности
МКУ — многопозиционная катапультная установка
ММ — математическое моделирование
МО — модуль обработки
МОС — модуль обработки сигналов
МП — микропроцессор
МП К — микропроцессорный комплект
МП К БИС — микропроцессорный комплект БИС
МСПД — мультиплексная система передачи данных
МУП — механизм управления перекрестием
МФИ — многофункциональный индикатор
МФПУ — многофункциональный пульт управления
НАП — непосредственная авиационная поддержка
НАР — неуправляемая авиационная ракета
НАСП — неуправляемое авиационное средство поражения
НК — надводный корабль
ННП — навигационная аппаратура потребителя
НПК — навигационно-пилотажный комплекс
НРС — неуправляемый ракетный снаряд
НС — навигационная система
НСЦИ — нашлемные системы целеуказания и индикации
НТД — научно-техническая документация
НУТВ — низкоуровневое телевидение
НШ — низкоскоростная шина
ОБЧ — обычная боевая часть
ОВТ — отклонение вектора тяги
ОДО — облако дипольных отражателей
ОЗУ — оперативное запоминающее устройство
ОКГ — оптический квантовый генератор
ОН В — очки ночного видения
ОПБ — оптический прицел бомбомета
724
ОПС — обзорно-поисковая прицельная система
ОС — операционная система
ОСММ — операционная статистическая математическая модель
ОТТ — общие технические требования
ОУ — отвлекающие устройства
ОЧК — отъемная часть крыла
ОЭПС — оптико-электронная прицельная станция
ОЭС — оптико-электронная система
ПАН — передовой авианаводчик
ПАС — полуавтоматическое сопровождение
ПВГП — пространственно-временной график полета
ПВД — приемник воздушного давления
ПВМ — периферийная вычислительная машина
ПВО — противовоздушная оборона
ПВС — пункт выхода на связь
ПД — процессор данных
ПЗ — полетное задание
ПЗРК — переносной зенитно-ракетный комплекс
ПЗУ — постоянное запоминающее устройство
ПКР — противокорабельная ракета
ПКС — программно-корректируемое слежение
ПЛ — подводная лодка
ПЛО — противолодочная оборона
ПМУ — простые метеоусловия
ПНК — пилотажно-навигационный комплекс
ПНМ — полунатурное моделирование
ПНС — прицельно-навигационная система
ПО — программное обеспечение
ПП — подвижное перекрестие
ППВ — прицельно-пилотажный визир
ППЗУ — постоянная память запоминающего устройства
ППИ — прицельно-пилотажный индикатор
ППУ — приемно-пеленгационные устройства
ПР — пункт расхождения
ПРГС — пассивная радиолокационная головка самонаведения
ПРГСН — пассивная радиолокационная головка системы наведения
ПРД — пункт регулирования движения
ПРЛ — противорадиолокационные ловушки
ПрНК — прицельно-навигационный комплекс
ПРО — противоракетная оборона
ПРП — пассивный радиолокационный пеленгатор
ПРР — противорадиолокационная ракета
ПРС — пассивная радиолокационная станция
ПРУР — противорадиолокационная управляемая ракета
ПТБ — подвесной топливный бак
ПТУР — противотанковая управляемая ракета
ПУ — пусковая установка
ПФИ — перспективный фронтовой истребитель
725
ПЭ — процессорный элемент
РГБ — радиогидроакустический буй
РГС — радиотехническая головка самонаведения
РГЧ ИН — разделяющиеся головные части индивидуального наведения
РДТТ — ракетный двигатель твердого топлива
РЗП — разрешенная зона пуска
РЛГС — радиолокационная головка самонаведения
РЛП — радиолокационное поле
РЛС — радиолокационная станция
РМ — рельеф местности
РМД — ракета малой дальности
РМП — рабочее место программиста
РНС — радионавигационная станция
РОН — регистр общего назначения
РП — рулевой привод
РПД — радиопротиводействие
РПО — радиолокатор переднего обзора
РПС — радиолокатор предупреждения столкновения
РСА — радиолокатор с синтезированной апертурой
РСБН — радиотехническая система ближней навигации
РСДН — радиотехническая система дальней навигации
РТСА — РЛС с трансверсальным синтезированием апертуры
РТТД — ракетный твердотопливный двигатель
РУД — рычаги управления двигателем
РУС — ручка управления стрельбой
РЭБ — радиоэлектронная борьба
РЭЗ — радиоэлектронная защита
РЭК — радиоэлектронный комплекс
РЭП — радиоэлектронное противодействие
РЭС — радиоэлектронные средства
САБ — светящиеся авиационные бомбы
САП — станция активных помех
САР — синтезирование антенного раскрыва
САУ — система автоматического управления
СВ — сухопутные войска
СВТ — средства вычислительной техники
СД — стартовый двигатель
СДУ — система дистанционного управления
СИО — система информационного обмена
СИС — средняя интегральная схема
СКВО — среднеквадратическое вероятное отклонение
СКД — система контактных датчиков
СКИП — самолетный командно-измерительный пункт
СКН — система конечного наведения
СМУ — сложные метеоусловия
СН — система наведения
СНАУ — система навигации и автоматического управления
СНП — спутниковый навигационный приемник
СМС — стратегический межконтинентальный самолет
726
СНС — спутниковая навигационная система
СОИ — система отображения информации
СП — станция подсвета
СПО — система программного обеспечения
СРНС — спутниковая радионавигационная система
С РТР — станция радиотехнической разведки
СтНС — стереоскопическая навигационная система
СУБД — система управления базой данных
СУВ — система управления вооружением
СУО — система управления оружием
СУП ПР — система управления подготовкой и пуском ракет
СУРО — система управления ракетным оружием
СЯС — система ядерного сдерживания
ТА — тактическая авиация
ТВД — театр военных действий
ТВД — турбовинтовой двигатель
ТГИП — турбогенераторный источник питания
ТГС — типовая головка самонаведения
ТГСН — телевизионная головка самонаведения
ТЗ — техническое задание
ТКН — телекомандное наведение
ТКСН — телевизионно-командное самонаведение
ТП — точка прицеливания
ТпВ — тепловизор
ТПК — транспортно-пусковой контейнер
ТРД — турбореактивный двигатель
ТРДД — турбореактивный двухконтурный двигатель
ТРЛ — телевизионная радиолиния
ТСИ — телевизионная система индикации
ТСО — термосифонная система охлаждения
ТТЗ — тактико-техническое задание
ТТХ — тактико-технические характеристики
УАБ — управляемая авиационная бомба
УБП — учебно-боевая подготовка
УВВ — устройство ввода-вывода
УВС — управляющая вычислительная система
УВЧ — усилитель высокой частоты
УА — ударная авиация
УО — управляемое оружие
УПАЗ — унифицированный подвесной агрегат заправки
УР — управляемая ракета
УРМ — унифицированное рабочее место
УС — устройство сопряжения
УУ — устройство управления
УУЛ — устройство управления и логики
УУС — устройство углового сопровождения
ФА — фронтовая авиация
ФАР — фазированная антенная решетка
ФКБЧ — фугасно-кумулятивная боевая часть
727
ФЛКЦ — флюгерный лазерный координатор цели
ФМС — фазоманипулированный сигнал
ФУА — фронтовая ударная авиация
ФЦА — фазовый центр антенны
ЦВУ — центральное вычислительное устройство
Ц-0 — цель-отражатель
ЦП — центральный процессор
ЦПР — цифровой преобразователь разверток
ЦТС — центр тяжести самолета
ЦУ — целеуказание
Ч-О — человек-оператор
ЧЭ — чувствительный элемент
ША — штурмовая авиация
ШПРГС — широкодиапазонная ПРГС
ЭДСУ — электродистанционная система управления
ЭЗУ — энергозависимая память
ЭЛТ — электронно-лучевая трубка
ЭОП — эффективная облучающая поверхность
ЭПО — эффективная поверхность отражения
ЯБП — ядерные боеприпасы
Оглавление
Предисловие.................................................................. 3
Введение .................................................................... 5
Раздел 1. Ударная авиация: боевые задачи и инфраструктура
1.1. Армейская авиация и ее боевое применение................................ 9
1.1.1. Боевые задачи................................................... 10
1.1.2. Армейская авиация в операциях................................... 11
1.1.3. Способы боевых действий. Вертолеты на поле боя.................. 16
1.1.4. Управление и взаимодействие..................................... 17
1.1.5. Оружие поддержки................................................ 20
1.2. Фронтовая авиация и ее боевое применение .............................. 25
1.2.1. Формы оперативного применения и способы решения боевых задач... 25
1.2.2. Принципы боевого применения. Опыт локальных войн................ 26
1. Завоевание превосходства в воздухе (26). 2. Изоляция района боевых
действий (борьба с оперативными резервами) (31). 3. Глубокое пораже-
ние в современной операции (34). 4. Непосредственная авиационная
поддержка (38).
1.2.3. Тактика ударной авиации......................................... 40
1. Боевые порядки (41). 2. Развитие способов преодоления ПВО (50).
3. Защита бомбардировщиков (58). 4. Тактика радиоэлектронной борь-
бы («нейтрализация») (60). 5. Способы атак с применением обычных
средств поражения (62). 6. Влияние высокоточного оружия на тактику
ударной авиации (67)
1.3. Дальняя (стратегическая) авиация. Ядерное сдерживание.................. 84
1.3.1. Авиационные комплексы дальней авиации........................... 85
1. Стратегические комплексы (85). 2. Дальние бомбардировщики (90).
3. Основные боевые задачи и способы применения самолетов дальней
авиации (91)
1.3.2. Роль стратегической авиации в составе стратегических сил........ 94
1. Стратегическая стабильность и стратегическое сдерживание (94).
2. Договорный процесс в области стратегических наступательных во-
оружений и его влияние на развитие стратегической авиации в РФ (96)
1.3.3. Роль стратегических авиационных комплексов в будущем........... 101
1.3.4. Научно-технический прогресс и развитие стратегической авиации.. 102
1.4. Концепция неядерного сдерживания...................................... 105
1.5. Методические основы системного анализа и обоснования облика
авиационного комплекса .................................................... 114
729
Раздел 2. Создание, развитие и применение
ударной авиации в послевоенный период
2.1. Ударные самолеты в историческом ракурсе............................ 129
2.1.1. Фронтовая авиация............................................ 129
1. Обзор развития фронтовой ударной авиации России (129). 2. Само-
леты первого послевоенного десятилетия (132). 3. Быстрее звука (134).
4. Самолеты третьего поколения (137). 5. Работы ОКБ имени А. И. Ми-
кояна в области ударной авиации (140). 6. Фронтовые ударные самоле-
ты «Су» (179)
2.1.2. Реализация принципиальных научно-технических достижений
своего времени при создании бомбардировщиков семейства «Ту»
в послевоенный период............................................... 190
1. Самолет Ту-4— перестройка всей авиапромышленности СССР и
смежных отраслей через создание абсолютной копии В-29. Идея Иоси-
фа Сталина по факту сброса атомной бомбы (190). 2. Самолет Ту-85 —
вершина стратегической авиации с поршневыми двигателями (193).
3. Начальный этап создания реактивных бомбардировщиков — опыт-
ный Ту-12, Ту-14, Ту-82 (195). 4. Научно-технические проблемы, воз-
никавшие при создании самолета Ту-16, и их решение на основе дости-
жений науки и техники того времени (197)
2.2. Ударные самолеты на вооружении ВВС РФ ............................. 205
2.2.1. Самолеты «Су» — основа фронтовой авиации России.............. 205
1. Фронтовой бомбардировщик Су-24 и его модификации (205).
2. Штурмовик Су-25 (215). 3. Фронтовые истребители с ударными
функциями (217)
2.2.2. Самолеты «Ту» — основа дальней (стратегической) авиации России. 225
1. От бомбардировщика Ту-95 к ракетоносцу Ту-95МС (225). 2. Само-
лет Ту-22М — основа дальней авиации России (241). 3. Ту-160 — меж-
континентальный сверхзвуковой стратегический ракетоносец (261)
2.2.3. Создание информационно-управляющей системы авиационной
ракетной составляющей ядерной триады................................ 271
2.3. Ударные вертолеты — главная сила армейской авиации ................ 277
2.3.1. Ударные вертолеты — эффективное средство ведения локальных войн . . . 277
2.3.2. Анализ состояния и варианты формирования парка армейской авиации
России.............................................................. 280
1. Московский вертолетный завод им. М. Л. Миля (279). 2. Фирма «Ка-
мов» (285)
2.4. Ударная авиация в локальных войнах................................. 289
Раздел 3. Управляемое оружие «воздух—поверхность»
самолетов ударной авиации
3.1. Крылатые ракеты для вооружения самолетов дальней авиации........... 301
3.1.1. Противокорабельная крылатая ракета КС........................ 303
3.1.2. Противокорабельная крылатая ракета К-ЮС...................... 305
3.1.3. Крылатая ракета Х-20М........................................ 306
3.1.4. Крылатая ракета КСР-2........................................ 307
3.1.5. Крылатая ракета Х-22......................................... 310
3.1.6. Крылатая ракета КСР-5........................................ 313
3.1.7. Аэробаллистическая ракета X-15............................... 316
3.1.8. Крылатая ракета Х-55......................................... 317
730
3.2. Крылатые ракеты для вооружения фронтовой авиации ................... 320
3.2.1. Крылатые ракеты ГосМКБ «Радуга»............................... 320
1. Крылатая ракета Х-28 (320). 2. Крылатая ракета Х-58У (321).
3. Крылатая ракета Х-59 (324). 4. Крылатая ракета Х-59М (327)
5. Крылатая ракета Х-59МК (328)
3.2.2. Фронтовые ракеты ОКБ «Звезда»................................. 329
1. Ракета Х-66 (329). 2. Ракета Х-23 (334). 3. Ракета Х-25 (339). 4. Ракета
Х-27ПС (345). 5. Ракета Х-25М (350). 6. Ракета Х-31 (355). 7. Ракета
Х-35(360)
3.3. Управляемые авиационные бомбы....................................... 365
3.3.1. Управляемые авиационные бомбы с лазерными полуактивными
флюгерными головками самонаведения................................... 365
3.3.2. Управляемые авиационные бомбы с телевизионными
головками самонаведения.............................................. 367
3.3.3. Развитие систем наведения управляемых авиационных бомб........ 368
3.3.4. Модернизация управляемых авиационных бомб с лазерными
полуактивными системами наведения.................................... 370
3.3.5. Модернизация управляемых авиационных бомб с телевизионными
системами наведения.................................................. 371
Раздел 4. Научно-технический прогресс в системах наведения
и управления для решения задачи поражения
наземных и морских целей
4.1. Исследования по повышению точности применения неуправляемого вооружения .. 375
4.1.1. Исследования по повышению точности бомбометания............... 375
4.1.2. Проблемы повышения точности и дальности воздушной стрельбы.... 380
4.1.3. Совершенствование системы прицеливания и траекторного управления
в операции бомбометания.............................................. 384
4.1.4. Развитие и совершенствование прицельных комплексов самолетов
фронтовой ударной авиации для решения задач бомбометания............. 387
1. Прицел ОПБ-16 (389). 2. Прицельные системы «Сокол» и
АСП-17БМЦ (390). 3. Прицельно-навигационные комплексы
ПРНК-23М и ПРНК-23К (393). 4. Прицельно-навигационные комп-
лексы ПРНК-54 и ПРНК-24 (398). 5. Прицельно-навигационный
комплекс ПРИ К-56 (401)
4.1.5. Синтез единого баллистического алгоритма для всех видов
неуправляемых авиационных средств поражения.......................... 405
4.2. Применение авиационных средств поражения с телесистемами наведения . 411
4.2.1. Особенности применения управляемых ракет класса «воздух—
поверхность» с телекомандным наведением.............................. 411
4.2.2. Особенности применения управляемых ракет класса «воздух—
поверхность» малой дальности и корректируемых авиабомб............... 425
4.3. Телевизионные системы наведения..................................... 431
4.4. Лазерные системы наведения.......................................... 442
4.4.1. Основные этапы создания управляемых средств поражения, оснащаемых
полуактивными головками самонаведения................................ 442
4.4.2. Оптимизация структуры и параметров унифицированного закона
наведения............................................................ 447
4.4.3. Выбор критерия качества. Постановка задачи синтеза управления. 449
4.4.4. Алгоритм оптимального управления.............................. 451
731
4.5. Системы наведения на морские радиоконтрастные цели ................. 453
4.5.1. Системы наведения ракет большой дальности..................... 453
4.5.2. Системы наведения для тактических противокорабельных ракет
с активными радиолокационными головками самонаведения................ 459
1. Проектирование систем наведения с использованием математиче-
ского и полунатурного моделирования (459). 2. Система наведения ра-
кеты Х-31 А (464). 3. Система наведения ракеты Х-35 (468)
4.6. Системы наведения на радиоизлучающие цели .......................... 476
4.6.1. Системы самонаведения противорадиолокационных ракет........... 476
1. Основные характеристики наземных радиоизлучающих средств
(478) . 2. Особенности построения систем самонаведения противоради-
олокационных ракет и математические модели пассивной радиолока-
ционной головки самонаведения (484). 3. Методы анализа точностных
и динамических характеристик (492)
4.6.2. Развитие средств наведения ракет на радиоизлучающие объекты... 502
4.7. Системы навигации и наведения по геофизическим полям................ 510
4.7.1. Классификация корреляционно-экстремальных систем навигации
и наведения.......................................................... 510
4.7.2. Геофизические поля, используемые в системах навигации и наведения. . . 513
1. Сравнительная характеристика геофизических полей (513). 2. Ста-
тистический подход в теории КЭСНН (516). 3. Картографирование гео-
физических полей (519)
4.7.3. Алгоритмическое обеспечение КЭСНН-1........................... 521
1. Алгоритмы эвристического происхождения (521). 2. Субоптималь-
ные беспоисковые алгоритмы КЭСНН-1 (524). 3. Оптимальные поис-
ковые алгоритмы КЭСНН-1 (529). 4. Оптимальное рекуррентно-поис-
ковое оценивание (534)
4.7.4. Алгоритмическое обеспечение КЭСНН-П и КЭСНН-Ш................. 538
1. Использование полных изображений местности в КЭСНН-Ш (539).
2. Использование линейных и точечных ориентиров (543). 3. Стерео-
скопические навигационные системы (547)
4.8. Системы наведения на эталон цели.................................... 552
Раздел 5. Научно-технический прогресс
в основных информационно-управляющих
системах авиационных ударных комплексов
5.1. Архитектура авионики ............................................... 565
5.1.1. Авионика первого поколения.................................... 565
5.1.2. Авионика второго поколения.................................... 565
5.1.3. Авионика третьего поколения................................... 566
5.1.4. Авионика четвертого поколения................................. 569
5.1.5. Эволюция структуры БВС........................................ 570
5.2. Бортовые цифровые вычислительные системы ........................... 585
5.2.1. Бортовые вычислительные машины................................ 585
5.2.2. Авиационные системы информационного обмена.................... 602
5.3. Развитие оптико-электронных систем ................................. 618
5.3.1. Современные оптико-электронные системы........................ 618
5.3.2. Современное состояние техники ночного видения................. 621
732
5.4. Развитие бортовой радиолокационной техники ударной авиации ........ 624
5.4.1. Первое поколение бортовых радиолокационных станций........... 624
1. Бомбовые прицелы «Кобальт» и «Рубидий» (624). 2. Бомбардировоч-
ный прицел РБП-4 (625). 3. Бомбардировочные прицелы фронтовых
бомбардировщиков ПСБН-М и РБП-3 (626)
5.4.2. Второе поколение бортовых радиолокационных станций........... 626
1. Бортовые радиолокационные станции самолетов дальней и стратеги-
ческой авиации (627). 2. Бортовые РЛС фронтовой авиации (642)
5.4.3. Методика синтеза перспективных бортовых радиолокационных станций 646
5.4.4. Бортовые радиолокационные станции с синтезированной апертурой. 651
1. Принципы построения радиолокационных станций с синтезирован-
ной апертурой. Основные характеристики (651). 2. РЛС с трансверсаль-
ным синтезированием апертуры (653). 3. Оценка условий однозначнос-
ти для радиолокационных станций с трансверсальным синтезировани-
ем апертуры (656)
5.5. Инерциальные системы .............................................. 658
5.5.1. Инерциальные системы для ударных самолетов и вертолетов...... 658
5.5.2. Инерциальные системы и повышение точности наведения крылатых ракет 673
5.5.3. Применение инерциально-спутниковых систем навигации.......... 687
1. Необходимость применения спутниковых систем навигации (687).
2. Анализ основных характеристик спутниковых навигационных сис-
тем ГЛОНАСС и GPS (NAVSTAR) (689). 3. Формирование бортовой
инерциально-спутниковой системы навигации (694)
5.6. Радиоэлектронное противодействие .................................. 697
5.6.1. История развития радиоэлектронной борьбы..................... 697
5.6.2. Основные способы создания радиоэлектронных помех............. 701
5.6.3. Современное состояние техники радиоэлектронного противодействия
и перспективы развития.............................................. 711
Список принятых сокращений.............................................. 721
Авторы:
Антонов Дмитрий Александрович, | Бабич Римма Михайловна], Балыко Юрий
Павлович, Белоглазов Иннокентий Николаевич, Бершадский Евгений Яковлевич
Борисов Лев Васильевич, Виноградов Сергей Михайлович, Войтенко Владимир
Иванович, Герасимов Александр Анатольевич, Гузеев Борис Николаевич,
Доценко Александр Васильевич, Жеребин Александр Михайлович, Зайцев
Александр Васильевич, |3инич Вячеслав Стефанович], Инсаров Вильям
Викторович, Кислицын Владимир Андреевич, Кичигин Геннадий Германович,
Колпаков Константин Михайлович, Корниенко Владимир Николаевич,
Кравченко Виталий Степанович, Кульчак Михаил Гаврилович, Махов Евгений
Александрович, Немыченков Игорь Васильевич, Попов Валентин
Александрович, Пухов Александр Леонидович, Селезнев Игорь Сергеевич,
Сорокин Юрий Николаевич, Топорков Никита Валентинович,
Федосов Евгений Александрович, Червин Владимир Иванович
АВИАЦИЯ ВВС РОССИИ
И НАУЧНО-ТЕХНИЧЕСКИЙ ПРОГРЕСС
Боевые комплексы и системы вчера, сегодня, завтра
Монография
Под редакцией Е. А. Федосова
Зав. редакцией Б. В. Панкратов
Ответственный редактор Г. С. Лонъ
Художественное оформление А. В. Пряхин
Технические редакторы И. В. Грибкова, В. Ф. Козлова
Компьютерная верстка Т. М. Дородных,
А. В. Маркин, Г. А. Фетисова
Корректор Г. И. Мосякина
Санитарно-эпидемиологическое заключение
№ 77.99.02.953.Д.006315.08.03 от 28.08.2003.
Подписано к печати 29.09.05. Формат 70х1001/16-
Бумага офсетная. Гарнитура «Таймс». Печать офсетная.
Усл. печ. л. 59,34. Тираж 2000 экз. Заказ № 3824.
ООО «Дрофа». 127018, Москва, Сущевский вал, 49.
По вопросам приобретения продукции
издательства «Дрофа» обращаться по адресу:
127018, Москва, Сущевский вал, 49.
Тел.: (095) 795-05-50, 795-05-51. Факс: (095) 795-05-52.
Торговый дом «Школьник».
109172, Москва, ул. Малые Каменщики, д. 6, стр. 1А.
Тел.: (095) 911-70-24, 912-15-16, 912-45-76.
Магазины «Переплетные птицы»:
127018, Москва, ул. Октябрьская, д. 89, стр. 1.
Тел.: (095) 912-45-76;
140408, Московская обл., г. Коломна, Голутвин,
ул. Октябрьской революции, 366/2.
Тел.: (095) 741-59-76.
Отпечатано в ОАО «Тверской ордена Трудового Красного Знамени
полиграфкомбинат детской литературы им. 50-летия СССР».
170040, г. Тверь, проспект 50 лет Октября, 46.
Книги серии
«АВИАЦИЯ И КОСМОНАВТИКА»
Книги содержат не публиковавшиеся ранее сведения о развитии и
современном состоянии отечественной авиационной и космической
техники. Они имеют большую научную и познавательную ценность,
написаны ведущими учеными, непосредственными участниками и
руководителями разработок авиакосмических систем.
Е. А. Федосов и др.
АВИАЦИЯ ПВО РОССИИ
И НАУЧНО-ТЕХНИЧЕСКИЙ ПРОГРЕСС.
Боевые комплексы и системы вчера, сегодня, завтра
Данная монография содержит уникальный объем информации
по вопросам развития отечественной и зарубежной авиации ПВО,
отражает самые последние, впервые допущенные к публикации
достижения, реализованные в авиационных комплексах перехвата
(боевые возможности, боевое применение, бортовое оснащение).
Приводятся описания современных боевых алгоритмов, анализи-
руюся реальные боевые действия российских истребителей в ло-
кальных войнах и военных конфликтах. Включен обширный иллюстративный, графический
и справочный материал.
Авторский коллектив состоит из ведущих специалистов знаменитого ГосНИИАС —
Государственного научно-исследовательского института авиационных систем.
Книга адресована разработчикам авиационной техники, специалистам в области
применения авиационных систем, инженерам, а также преподавателям, аспирантам и
студентам авиационных вузов.
0. М. Алифанов и др.
БАЛЛИСТИЧЕСКИЕ РАКЕТЫ
И РАКЕТЫ-НОСИТЕЛИ
Пособие написано в соответствии с программой для студентов
вузов, обучающихся по специальностям «Ракетостроение» и «Кос-
мические летательные аппараты и разгонные блоки» направления
подготовки специалистов «Ракетостроение и космонавтика».
В пособии изложены инженерные методы решения проектно-
конструкторских задач ракетно-космических технологий. Рассмат-
ривается ряд вопросов проектирования и разработки конструкций
сединой методической позиции с учетом системотехнических пред-
ставлений. Учебное пособие содержит примеры решения соответствующих задач, в которых
используются в основном новые и перспективные методы.
Пособие предназначено студентам вузов, обучающихся аэрокосмическим специаль-
ностям.
Книги серии
«АВИАЦИЯ И КОСМОНАВТИКА»
Книги содержат не публиковавшиеся ранее сведения о развитии и
современном состоянии отечественной авиационной и космической
техники. Они имеют большую научную и познавательную ценность,
написаны ведущими учеными, непосредственными участниками и
руководителями разработок авиакосмических систем.
Н. М. Иванов, Л. Н. Лысенко
БАЛЛИСТИКА И НАВИГАЦИЯ КОСМИЧЕСКИХ АППАРАТОВ
Учебник (1-е издание —1986 г.) соответствует программам
курсов «Космическая баллистика», «Основы навигации космических
аппаратов», «Динамика полета и управление движением космичес-
ких аппаратов» направления подготовки дипломированного
специалиста «Гидроаэродинамика и динамика полета», включа-
ющего определяемым государственным образовательным стандар-
том высшего профессионального образования специальности «Бал-
листика» и «Динамика полета и управление движением летательных
аппаратов».
В книге изложены фундаментальные положения космической баллистики как науки,
рассматриваются внешние условия полета и на этой основе детально обсуждаются пути
решения практических задач космонавтики в части баллистико-навигационного обеспе-
чения полета околопланетных и межпланеных космических аппаратов.
Книга предназначена студентам вузов, обучающимся аэрокосмическим специальностям.
Е. А. Федосов
50 ЛЕТ В АВИАЦИИ. ЗАПИСКИ АКАДЕМИКА
Автор книги — лауреат Ленинской премии, Герой Социали-
стического Труда, действительный член Российской академии наук
Е. А. Федосов вот уже 34 года возглавляет ГосНИИАС — головной
институт по разработке отечественных авиационных систем. В его
воспоминаниях последовательно, десятилетие за десятилетием,
отражены основные этапы строительства нашей боевой авиации и
систем ее вооружения. Перед читателем развертывается целая
галерея ярких личностей — генеральные конструкторы и летчики-
испытатели, руководители авиапрома и командование ВВС.
Эта книга — убедительное свидетельство того, что пресловутая «эпоха застоя» (конец
1960-х — начало 1970-х годов) в самом деле была наиболее бурным, драматичным и
результативным периодом развития нашей авиации, плодами которого до сих пор живет
эта отрасль.
Книга адресована широкому кругу читателей.