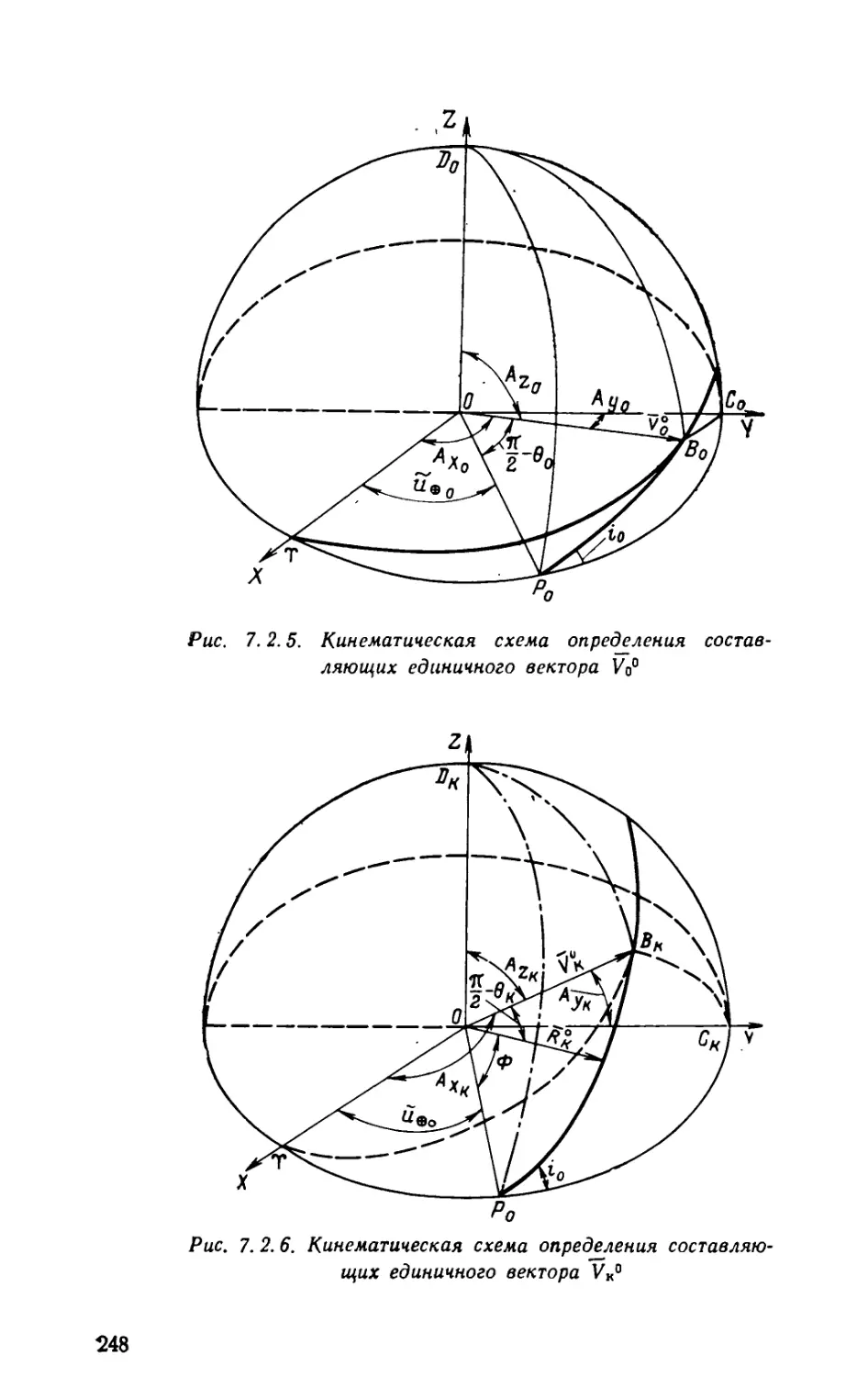
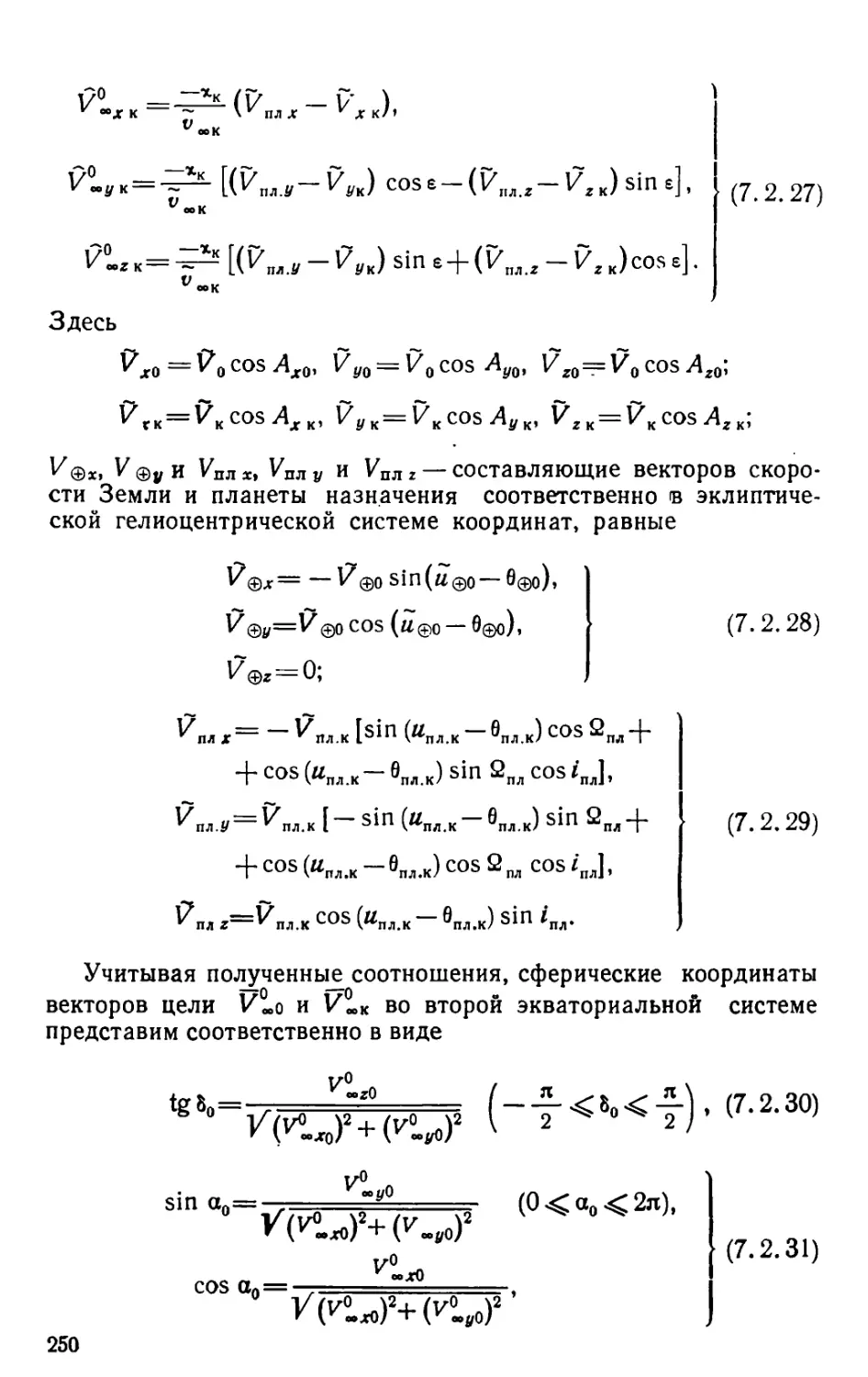
/




































































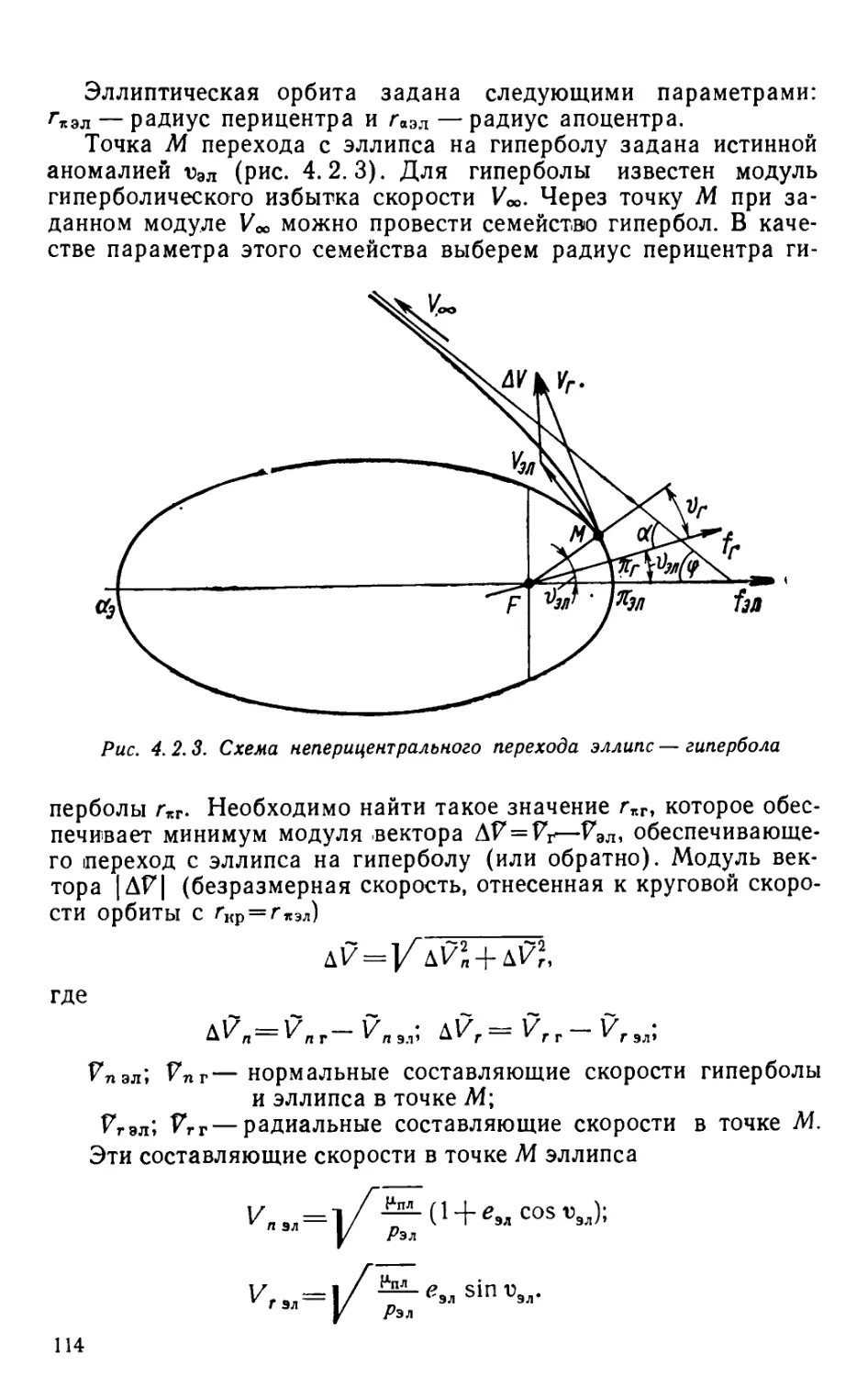
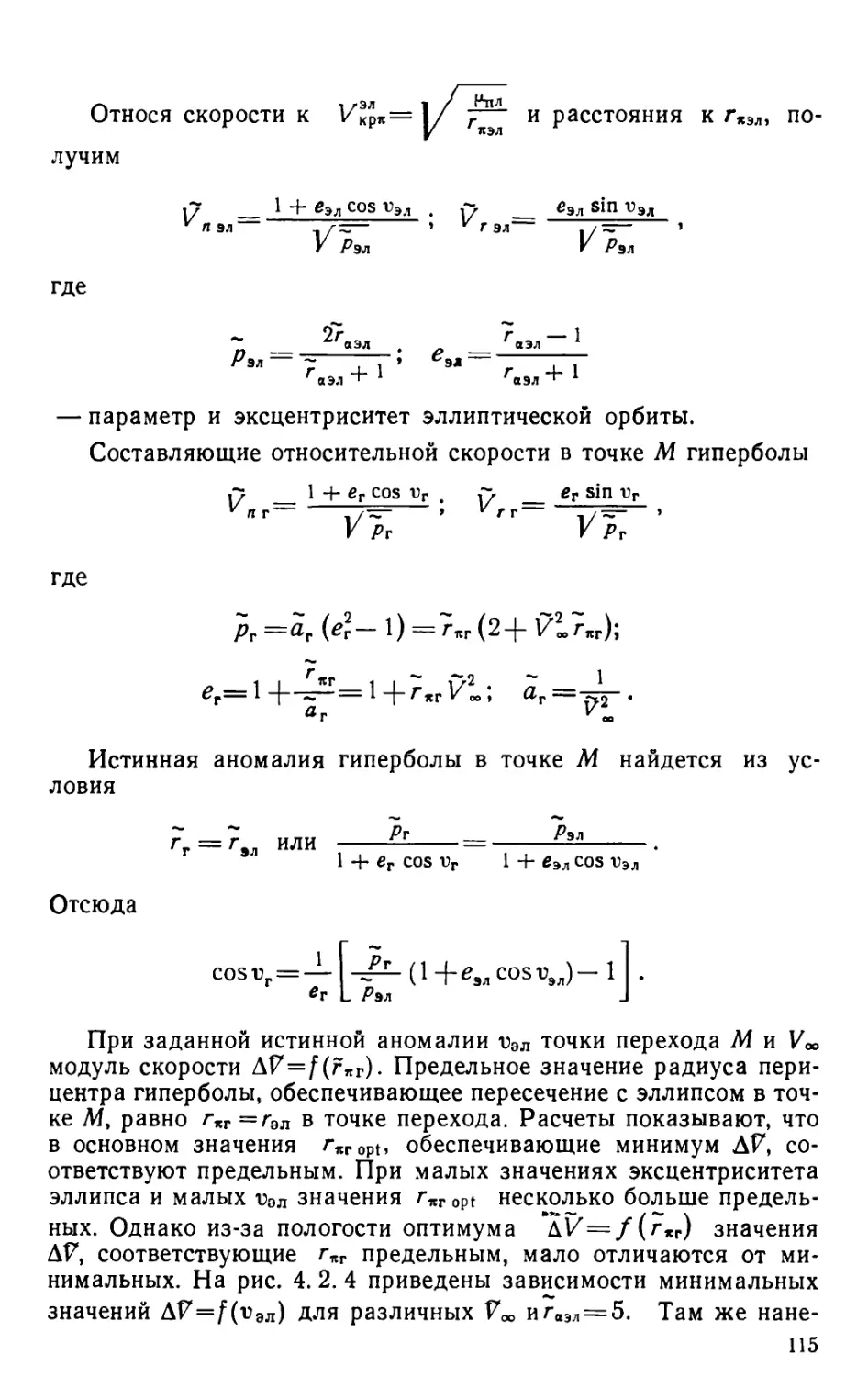
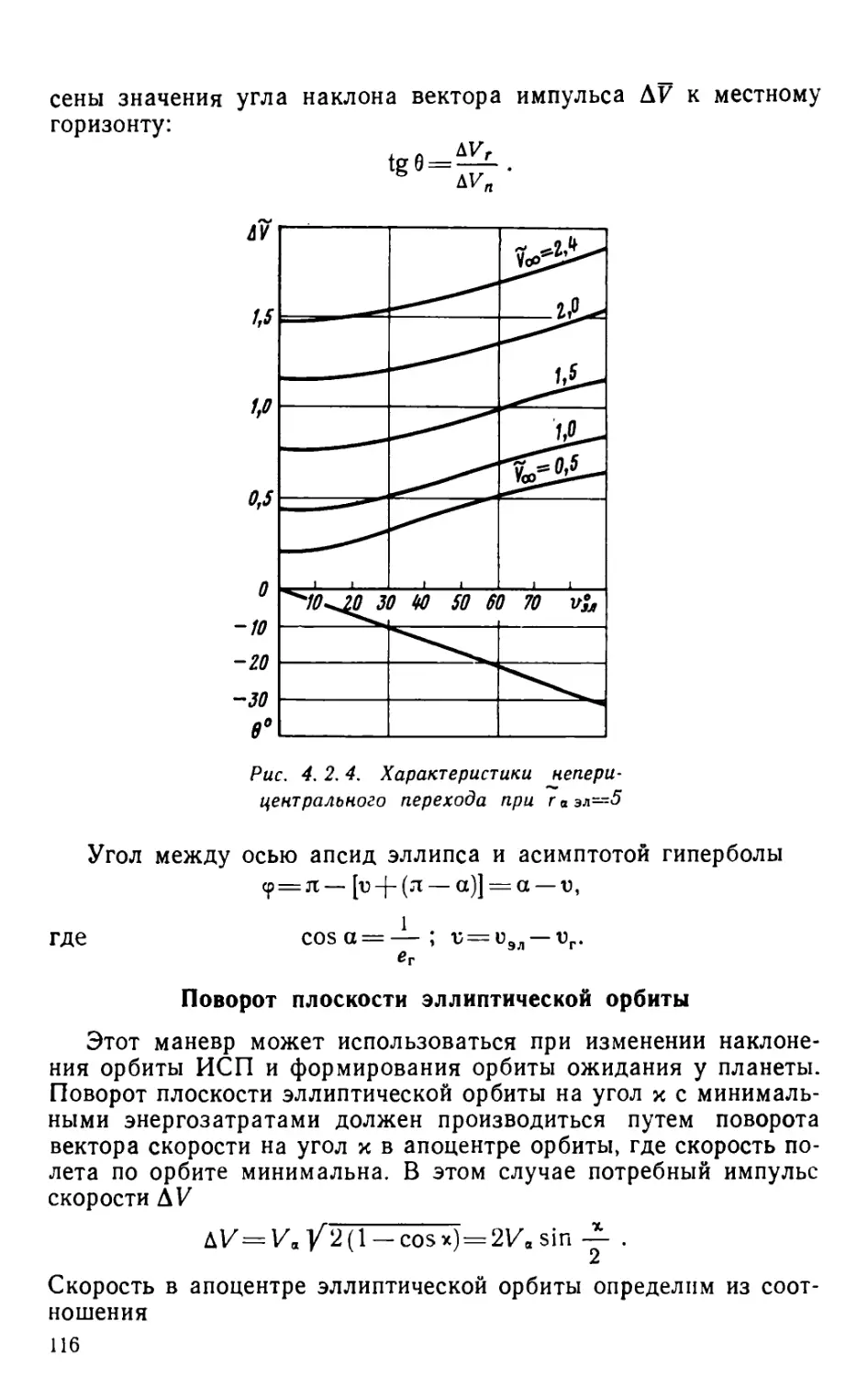





























































































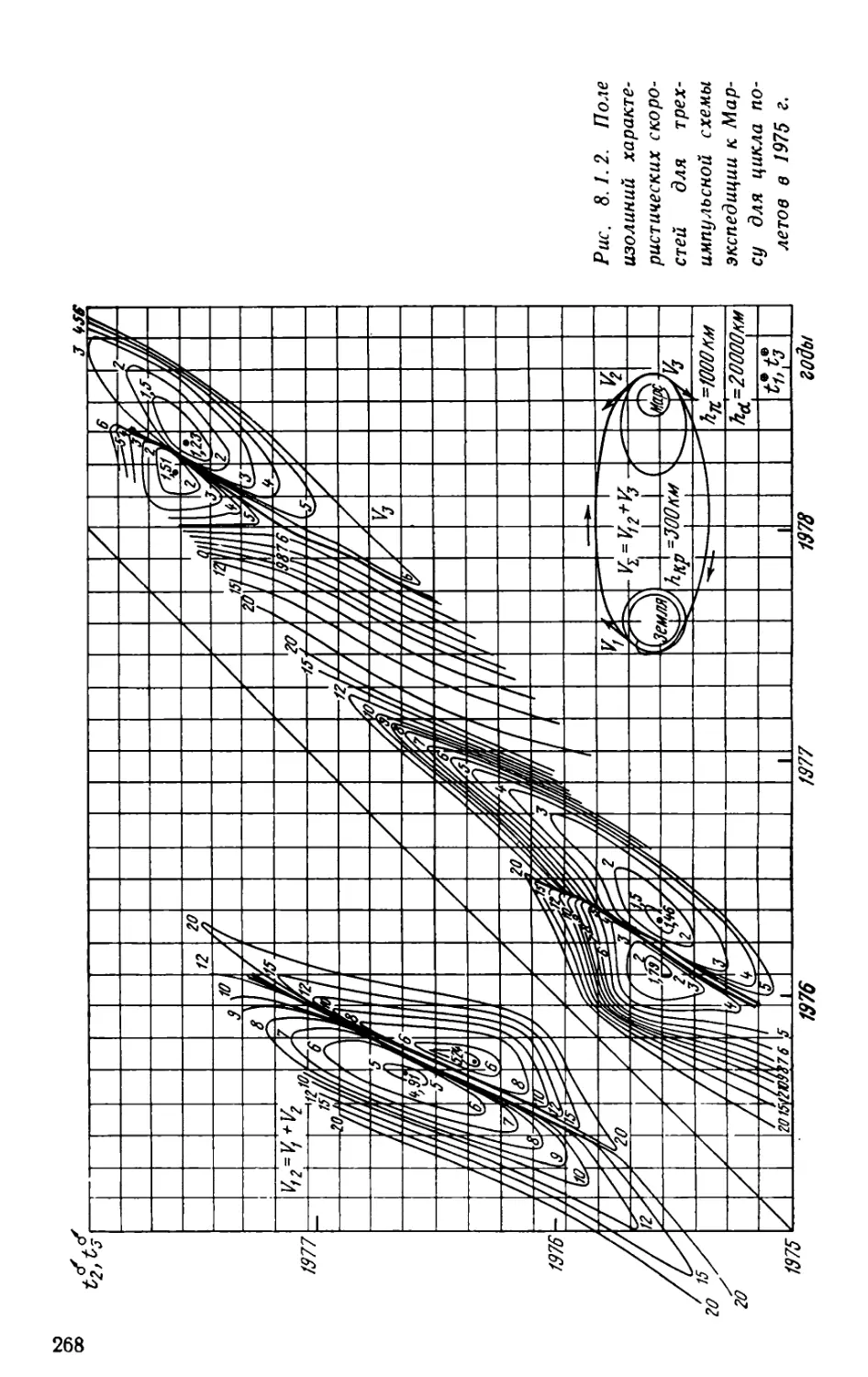
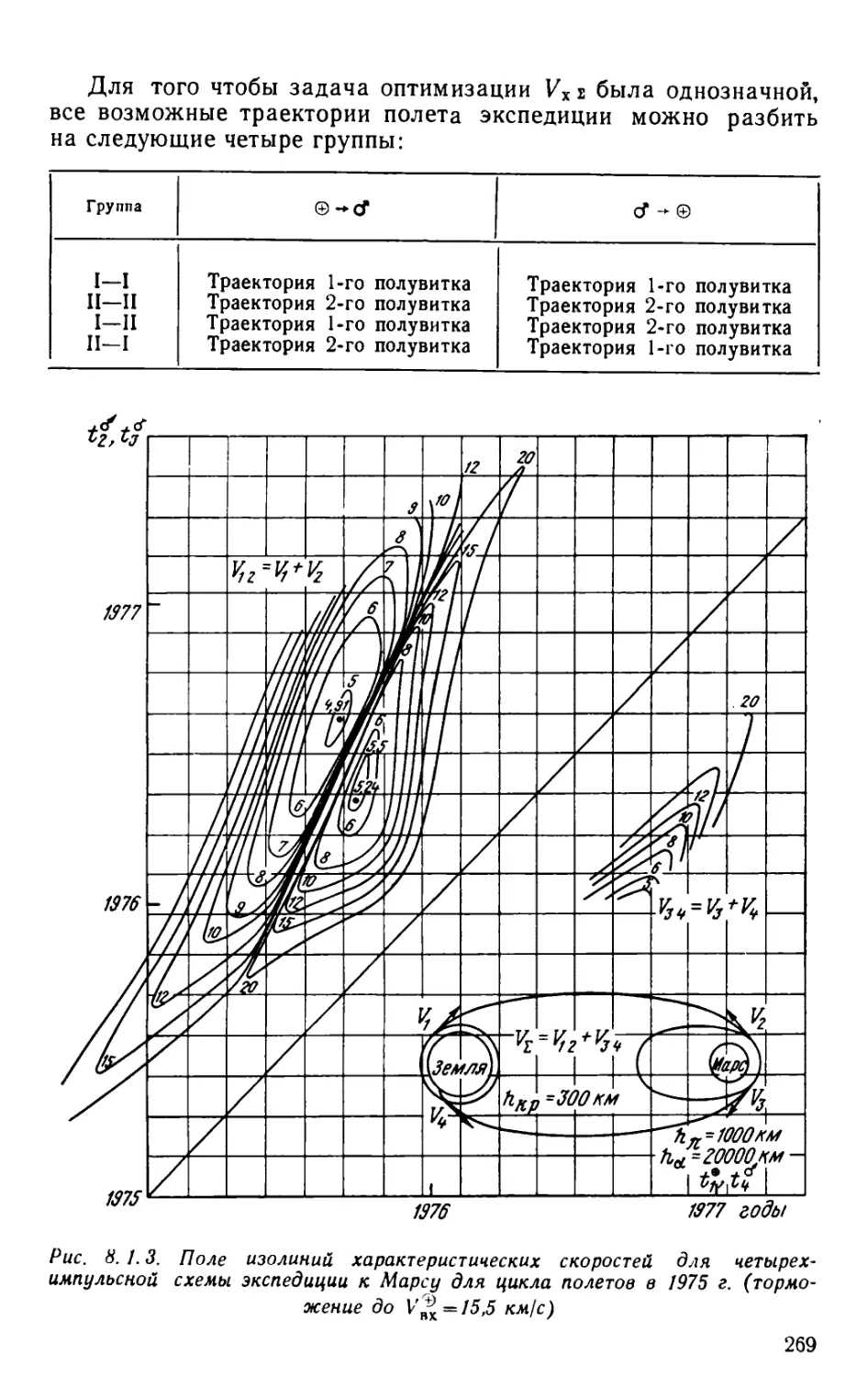














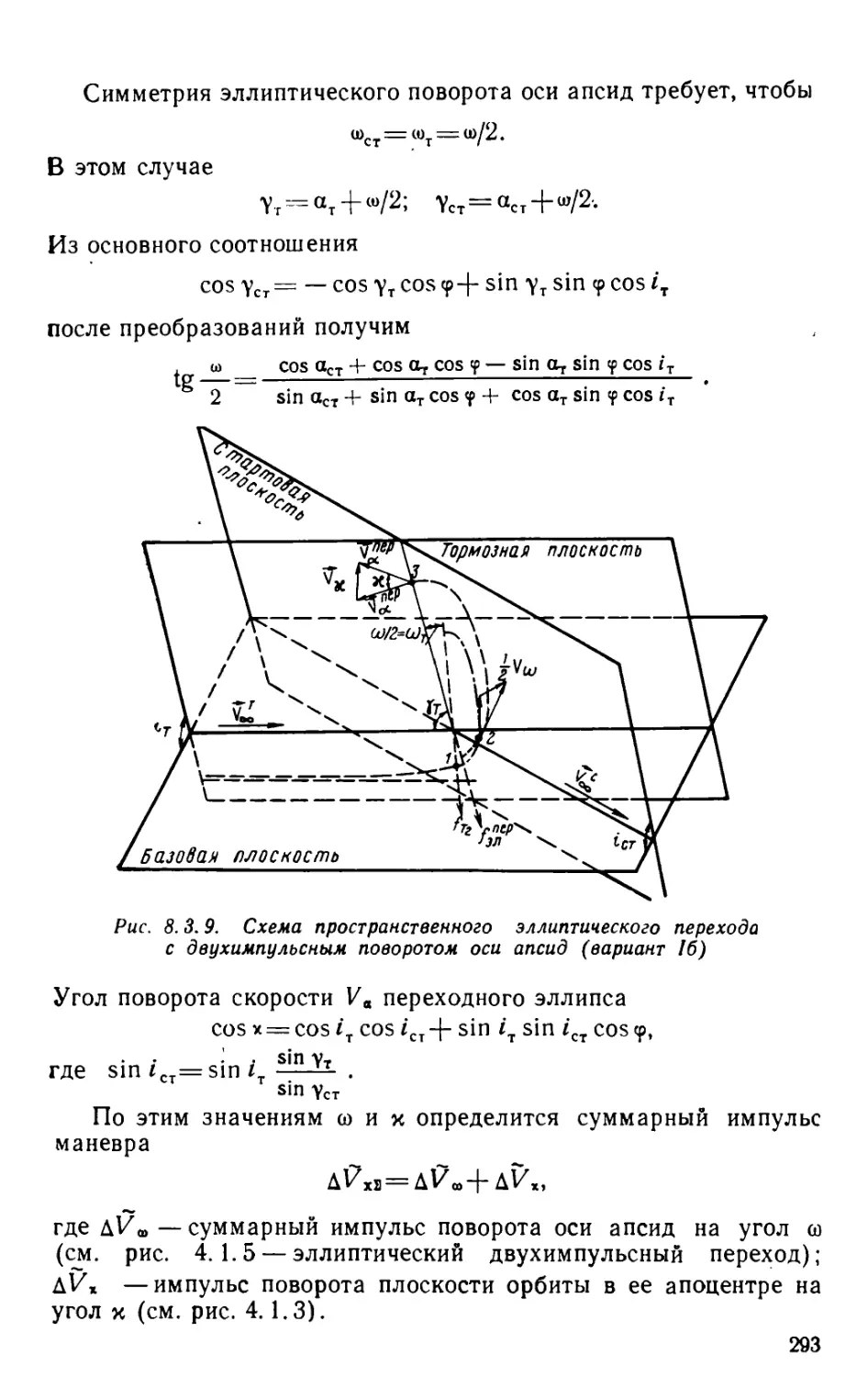







































































Text
*7 * ' ***' <'/ ** I
c f/ ,.■ v‘vl lr^lo‘' * 'v # Л ' ’ Г.' ■/’
• v*; *. .Y*»*а ■•* 4 ■• • i.J V •*•*• ■ */> ’• »**
Л* V ,; I.
«?* ,;X•>: ?' r 's^s . * I' *•
;-У?;-'ЛЛ*'"" , y-< :, Ц.в.соловьев
‘ V k<jf. •'•' < E - В .ТДРДСО в
» :■ V' : Ц.В. СОЛОВЬЕВ
,r.-£vvU\hQf '■■■•'.'■'-V E.B.TAPACOB
<*••> Asa-/•>. • A \
•«;>: .Й ПРОГНОЗИРОВАНИЕ
* \\ ». »•*. • у I
« * » • Ж
• # * * * / •* • . # •
• •• -w *A •
a*..* . * . >,
T ' * * * /.• •- .
• i » ”. . t»* * *. /• *1
i* # ,* ;
' *.* - '.f - -
••' ir »*l V **
МЕЖПЛАНЕТНЫХ
.% * ПОЛЕТОВ
ИЗДАТЕЛЬСТВО
«МАШИНОСТРОЕНИЕ»
t
Ц.В.СОЛОВЬЕВ
С.В.ТАРАСОВ
ПРОГНОЗИРОВАНИЕ
МЕЖПЛАНЕТНЫХ
ПОЛЕТОВ
Ц. В. СОЛОВЬЕВ, Е. В. ТАРАСОВ
ПРОГНОЗИРОВАНИЕ
МЕЖПЛАНЕТНЫХ ПОЛЕТОВ
МОСКВА
МАШИНОСТРОЕНИЕ
1973
С60
УДК 629.788:681.3.06.001.2
Соловьев Ц. В., Тарасов Е. В. Прогнозирование
межпланетных полетов. М., «Машиностроение», 1973,
400 с.
Книга посвящена методам расчета проектно-баллисти¬
ческих характеристик межпланетных аппаратов и опре¬
делению наиболее благоприятных дат старта для поле¬
тов на планеты. Рассмотрены возможные схемы полета
КЛА на другие планеты как с возвращением аппаратов
на Землю, так и без возвращения. Исследованы также
особые схемы полета КЛА на планеты и к Солнцу, ког¬
да для улучшения баллистических характеристик исполь¬
зуются гравитационные поля других планет, в частности
Венеры и Юпитера.
Методы поиска оптимальных решений, базирующиеся
на кусочно-конической аппроксимации межпланетных
траекторий, построены с учетом как импульсного изме¬
нения скорости, так и конечной протяженности активных
участков. Даны приближенные решения дифференциаль¬
ных уравнений движения КЛА, позволяющие с хорошей
точностью и со значительным сокращением времени
расчетов на ЭЦВМ провести поиск оптимальных про¬
ектных решений КЛА.
В книге широко представлены результаты расчетов
различных характеристик межпланетных аппаратов, ко¬
торые в обозримом будущем могут совершать полеты
на планеты Солнечной системы.
Книга рассчитана на научных работников, инженеров
и специалистов ряда отраслей промышленности. Она
будет полезна также студентам вузов.
Табл. 27. Ил. 247. Список лит. 82 назв.
Рецензент д-р техн. наук, проф. М. К. Тихонравов
„ 265-194
С 194—73
038(01)-73
© Издательство „Машиностроение",1973г.
ПРЕДИСЛОВИЕ
Современная космонавтика развивается по трем
основным направлениям.
Первое—применение космических летательных аппаратов
для народного хозяйства, например для связи, для предсказания
погоды, для нужд навигации как морской, так и воздушной, для
изучения Земли и других целей.
Второе — освоение с помощью пилотируемых аппаратов кос¬
мического пространства. Под освоением космического простран¬
ства понимаются действия, направленные на то, чтобы научиться
жить и работать в космосе, быть в межпланетном пространстве
не путешественником, а постоянным жителем. В околоземном
пространстве в недалеком будущем будут собираться и функцио¬
нировать долговременные орбитальные пилотируемые станции,
прообразом которых является советская орбитальная станция
«Салют».
Орбитальные станции могут выполнять также задачи,
свойственные первому и, как будет видно ниже, третьему направ¬
лениям. Эти станции дадут начало долговременным поселениям
в космосе, о которых мечтали К. Э. Циолковский и его последо¬
ватели. На них будут функционировать различные научные лабо¬
ратории, например космической биологии и медицины, геофизики
и астрофизики, будут устроены астрономические обсерватории.
Эти станции станут отправными пунктами для полетов к другим
планетам.
Третье направление — систематические научные исследования
и эксперименты в космосе с помощью автоматических аппаратов
и пилотируемых кораблей.
За сравнительно короткий период были созданы специализи¬
рованные системы межпланетных аппаратов научного назначе¬
ния. Выдающиеся достижения в космонавтике стимулировали
развитие ряда новых областей естествознания: космической
биологии и медицины, физики планет и межпланетного простран¬
ства. Многие отрасли техники приобрели эпитет «космическая»:
космическое двигателестроение, космическая радиоэлектроника,
космическое материаловедение. Ракетно-космическая индустрия
и космонавтика тесно связаны с научно-технической революцией,
3
переживаемой человечеством, выступая и как ее порождение
и как ее стимулятор.
Необходимо ввести разделение стоящих перед наукой и кос¬
монавтикой задач на две группы: исследования в ближнем кос¬
мосе, в околоземном пространстве и исследования более далеких
объектов Солнечной системы, например планет.
В первой группе своеобразным научно-техническим «полиго¬
ном» стали Луна и окололунное пространство. Здесь ведутся
разнообразные научные исследования, проходят всестороннюю
проверку технические средства. На Луне успешно могут дейст¬
вовать стационарные и передвижные автоматические средства
как помощь экспедициям, организованным с участием ученых.
На Луне могут быть изучены технические средства, предназна¬
ченные для будущего изучения Венеры, Марса, Меркурия и дру¬
гих планет.
Вторая группа — это исследования в первую очередь ближ¬
них планет — Венеры и Марса, а также астероидов, планет Мер¬
курия, Юпитера и более удаленных. В перспективе открываются
широкие возможности в изучении других небесных тел Солнеч¬
ной системы — комет и спутников планет.
Данная книга посвящена решению задач второй группы.
Вряд ли сейчас найдутся скептики, которые отрицали бы
огромную важность и жизненную необходимость изучения
Солнца, планет и других небесных тел и самого межпланетного
пространства. Непосредственное изучение Солнечной системы —
предпосылка ее освоения человеком. К наиболее значительным
и заманчивым научным задачам, решение которых — цель меж¬
планетных полетов, можно отнести: изучение геологического
развития планет, поиски на других планетах неизвестных форм
живой материи, выяснение возможности возникновения жизни
в условиях окружающей среды, которые радикально отличаются
от земных, изучение происхождения и эволюции Солнечной
системы, изучение природы тяготения, исследования проблемы
обеспечения автономного существования человека, земных ра¬
стений и животных вне Земли. Многие тайны Земли, возможно,
легче могут быть раскрыты на Луне, Венере, Марсе и других
небесных телах Солнечной системы. Кто решится и может
предсказать даже начало конца этих исследований?
Результаты космических исследований могут коренным обра¬
зом изменить наши взгляды и сложившиеся понятия. В связи
с этим заранее трудно предугадать, какие именно направления
принесут максимальный научный и практический эффект. Оче¬
редность исследования тел Солнечной системы определяется
техническими возможностями и научными интересами.
В решении научных проблем межпланетные аппараты яв¬
ляются только средством. Однако научные цели изучения Сол¬
нечной системы выдвигают требования совершенствования техни¬
ческих средств исследования космоса. Определение перспектив
4
изучения невозможно без выяснения возможностей космических
средств исследования и освоения космического пространства.
В настоящее время получили широкое распространение авто¬
матические средства изучения космоса.
Размеры и масса автоматических аппаратов зависят в основ¬
ном от задач эксперимента и возможностей ракет-носителей,
автоматические аппараты могут работать и давать информацию
в самых различных условиях.
Научная эффективность выполненных на таких аппаратах
исследований и быстрота получения информации зависят не
только от выбора научных целей, но и от методов и последова¬
тельности проведения исследований.
Анализ развития космических средств и предварительных ре¬
зультатов изучения Луны и окололунного пространства, Венеры
и Марса показал, что программу изучения планеты можно при¬
близительно представить состоящей из следующих этапов.
Сначала выполняются предварительные исследования с по¬
мощью межпланетных аппаратов, совершающих полет по про¬
летным траекториям. Они позволяют получить предварительную
информацию об общих характеристиках планеты, таких, напри¬
мер, как строение ее поверхности, наличие магнитного поля
и радиационных поясов, некоторых данных об атмосфере.
Затем производятся орбитальные полеты аппаратов, позво¬
ляющие проводить более детальные и всесторонние исследова¬
ния, включая картографирование, сравнение различных районов
планеты, более глубокое исследование атмосферы и др.
Далее осуществляются спуск и посадка аппаратов в задан¬
ные точки поверхности планеты в соответствии с их научной зна¬
чимостью, определенной на основании орбитальных наблюдений.
После успешного решения задачи посадки могут последовать
спуски автоматизированных средств с аппаратами для переме¬
щения по поверхности планеты, движение которых может кор¬
ректироваться дистанционно с Земли.
И, наконец, решаются задачи возврата автоматизированных
средств на Землю. Вряд ли стоит говорить, что это качественно
новый этап, его решение — триумф космической автоматики.
Ведь требуется обеспечить автоматизированный старт с пла¬
неты; выход на орбиту около планеты и, если необходимо, сты¬
ковку с основным кораблем; старт с орбиты и выход на возврат¬
ную траекторию для встречи с Землей; в нужные моменты вре¬
мени провести коррекцию траектории возвращения; за счет
атмосферы Земли погасить гиперболическую скорость входа
и посадить аппарат в заданном районе Земли.
Эта последовательность может быть и нарушена. Отдельные
этапы могут быть опущены в зависимости от конструкции авто¬
матических средств управления и самих космических аппаратов.
Однако автоматы не могут обеспечить все научные исследо¬
вания в космическом пространстве. Автоматы работают по за¬
ранее заданной человеком программе и регистрируют величину
и характер заранее назначенных параметров. Автоматы могут
доставить все данные, но только заранее заданные тематически.
Конечно, можно изменить программу по радио, но надо знать,
как изменить, что новое поручить регистрировать автомату
и каким образом это сделать. А для того, чтобы знать, надо там
находиться, что невозможно, если в космосе с целью исследова¬
ния летает только автомат.
Следовательно, необходимы пилотируемые полеты, во время
которых человек может активно участвовать в проведении иссле¬
дований, увидеть и почувствовать совершенно новые явления,
о которых не подозревалось ранее, когда человек сам может
направлять работу, автоматических приборов на регистрацию
наиболее важных параметров и встретившихся, может быть, еще
неизвестных проявлений природы космоса.
Собственно говоря, необходимость в пилотируемых полетах
не требует доказательств. Автоматические космические аппараты
будут помогать проводить научные исследования в той степени,
в которой они могут это делать, и тем большей, чем больше
и глубже человек будет познавать природу. Кроме того, за авто¬
матами всегда останется приоритет в посещении мест, недоступ¬
ных человеку. Пилотируемые корабли с научными работниками
на борту способны тщательнее и быстрее исследовать космос,
главное — они призваны осваивать межпланетное пространство,
что является актуальнейшей задачей для будущего человече¬
ства.
Взаимное положение планет меняется со временем вследст¬
вие их движения. В зависимости от положения планет в момент
старта и прибытия по-разному выглядит траектория межпланет¬
ного перелета космического корабля от’одной планеты к другой
и меняются энергетические затраты, необходимые для перелета.
Поэтому результаты баллистического проектирования межпла¬
нетного летательного аппарата во многом зависят от времени
старта и прибытия. В настоящее время одним из главных лими¬
тирующих факторов в выборе момента старта межпланетного
корабля является ограниченный диапазон удельной тяги двига¬
тельных установок. Приобретают значение поиски методов наи¬
более экономичных полетов при достижении намеченной цели.
Такими полетами являются, например, полеты с использованием
гравитационных полей Юпитера, Венеры и других планет.
Сравнительная редкость благоприятных окон старта — диа¬
пазон оптимальных дат старта для полета к планетам — нала¬
гает ограничения на программу прямого исследования пла¬
нет с помощью КЛА. Прогнозирование проектно-баллистиче¬
ских характеристик основывается на методах поиска оптималь¬
ных траекторий полета и оптимальных проектных параметров
межпланетных летательных аппаратов. Излагаемое в настоящей
работе приближенное решение дифференциальных уравнений
6
управляемого движения КЛА является оригинальным и плодо¬
творным. Оно позволяет с хорошей точностью и со значитель¬
ным сокращением времени расчетов на ЭЦВМ проводить поиск
оптимальных проектных решений КЛА.
В книге рассматриваются разнообразные схемы полета
межпланетного аппарата на различные планеты как с уче¬
том возвращения аппаратов к Земле, так и без возвращения
и дается их оценка. Исследуются особые схемы полетов КЛА
на планеты и к Солнцу, когда для улучшения баллистических
характеристик используются гравитационные поля других пла¬
нет. Широко представлены результаты расчетов различных ха¬
рактеристик межпланетных аппаратов, которые в будущем мо¬
гут совершать полеты на планеты Солнечной системы.
Книга написана по оригинальным материалам, полученным
авторами в области баллистического проектирования КЛА,
и с использованием публикаций в отечественной и зарубежной
печати. Она отличается от других работ в этой области тем, что
в ней с одних научных позиций рассматривается целый комплекс
задач проектирования межпланетных летательных аппаратов
с учетом энергетических затрат, окон старта и чувствительности
траекторий к отклонениям от расчетных данных.
М. К. ТИХОН РА ВОВ
ОТ АВТОРОВ
Бурное развитие космонавтики поставило перед наукой
ряд сложнейших проблем по осуществлению межпланетных полетов косми¬
ческих летательных аппаратов (КЛА). Планирование новых полетов КЛА
к планетам Солнечной системы вызывает необходимость дальнейшего иссле¬
дования возможных схем полетов, энергетических затрат и других характе¬
ристик межпланетного аппарата.
В последнее время в периодической печати нашей страны и за рубежом
появились работы, в которых рассматриваются баллистические задачи вы¬
хода КЛА на околопланетную орбиту и посадки десантируемых аппаратов
на планету, задачи возврата КЛА с планеты назначения на Землю и т. д.
В ряде публикаций широко обсуждаются проблемы использования гравита¬
ционных полей планет для улучшения баллистических характеристик меж¬
планетного аппарата. Как, например, для полетов на Меркурий и Марс
использовать гравитационное поле Венеры, а для полетов к Солнцу и
дальним планетам — гравитационное поле Юпитера. Обращается внимание
на важность решения задачи уменьшения скорости входа в атмосферу Зем¬
ли возвращаемых аппаратов, что может быть достигнуто, например, специ¬
альными маневрами на гелиоцентрическом участке обратного полета КЛА.
Серьезные проблемы возникают при решении задач оптимизации межпла¬
нетных полетов.
Цель настоящей книги состоит в том, чтобы дать систематизацию проб¬
лем баллистического лроектирования межпланетного аппарата и привести
некоторые методы их решения, причем особое внимание уделено кусочно-
конической аппроксимации межпланетной траектории и приближенному ре¬
шению дифференциальных уравнений управляемого движения в виде ко¬
нечных аналитических выражений. Проведенная в книге классификация схем
межпланетных полетов позволила систематизировать решение ранее извест¬
ных и новых задач баллистического проектирования КЛА при традиционном
допущении, когда планеты рассматриваются в качестве негравитирующих
центров при расчете гелиоцентрических участков перелета. Излагаемые мето¬
ды поиска оптимальных проектных решений построены с учетом как импульс¬
ного изменения скорости полета, так и конечной протяженности активных
участков.
В мниге по-новому рассматривается задача «стыковки» гелиоцентриче¬
ского участка с планетоцентрическими участками траектории, причем опти¬
мизация баллистических характеристик и основных проектных параметров
КЛА производится совместно.
Учет размеров грависфер некоторых планет в ряде задач космонавтики
становится практически необходимым. Поэтому здесь рассмотрены методы
оптимального баллистического проектирования КЛА, учитывающие влияние
размеров грависфер планет на гелиоцентрический участок.
Главы I, II (§ 1, 3), III, IV (§ 1) и VII, IX (§ 3, 4) написаны Е. В. Та¬
расовым, а главы II (§ 2, 4), IV (§ 2, 3), V, VI, VIII, IX (§ 1, 2) и X —
Ц. В. Соловьевым.
Авторы приносят глубокую благодарность всем товарищам, дружеская
помощь которых помогла написать и издать книгу.
Авторы весьма признательны рецензенту книги доктору технических наук
М. К- Тихонравову за ряд ценных замечаний, позволивших улучшить со¬
держание книги.
Особую признательность авторы выражают А. В. Лещенко, А. М. По¬
тапову и Н. Ф. Шмаковой за помощь в разработке некоторых методов и
проведение расчетов.
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
а— большая полуось орбиты.
b— малая полуось орбиты.
Сиу, С о — постоянные интегрирования.
С— хорда орбиты.
сх—коэффициент аэродинамического лобового сопротивления.
с„— коэффициент аэродинамической подъемной силы.
Е—эксцентрическая аномалия.
е— эксцентриситет орбиты.
F—сила; вспомогательная переменная.
f— постоянная тяготения.
G— вес (сила тяжести).
g — гравитационное ускорение.
h, Н—высота полета.
Н— аргумент гиперболы.
i— угол наклонения плоскости орбиты к основной плоскости.
К — аэродинамическое качество.
L, I—дальность полета (угловая или линейная).
М.— угол перелета; текущая масса КЛА; средняя аномалия.
т— масса материальной точки; масса планеты.
п— перегрузка.
пх— осевая перегрузка.
п0— начальная тяговооруженность КЛА.
Р — сила тяги двигательной установки КЛА.
Рул— удельная тяга двигателя.
Р— фокальный параметр орбиты; вспомогательный угол.
Q— интегральный тепловой поток.
q— удельный тепловой поток.
R— расстояние от Солнца до материальной точки.
г—расстояние от центра планеты до КЛА.
Тс — синодический период.
Т — период обращения ИСП; температура.
t— время полета.
А/, At\,-i—время перелета КЛА от начальной до конечной точки орбиты
(кривой конического сечения).
U — силовая функция.
и—угловое расстояние от узла орбиты (аргумент широты).
V — скорость; скорость тела относительно Солнца.
V* — гиперболический избыток скорости.
Vt, Vx s—суммарная характеристическая скорость.
Ц7 — скорость истечения продуктов рабочего тела из сопла двигателя.
X— сила аэродинамического сопротивления.
У— аэродинамическая подъемная сила.
х, у, г— декартовы координаты материальной точки.
а—угол между вектором скорости и вектором тяги; угол атаки; вспо¬
могательный угол в уравнении Ламберта при гиперболическом
движении; прямое восхождение.
9
Р— центральный угол участка выведения; вспомогательный угол в
уравнении Ламберта при гиперболическом движении; логарифми¬
ческий градиент плотности.
Ь — склонение.
е — угол наклонения плоскости экватора Земли к плоскости эклипти¬
ки; константа сжатия планеты.
0— траекторный угол.
0— угол тангажа.
X—долгота проекции точки на базовую плоскость; переменный ко¬
эффициент Лагранжа.
ц—относительная текущая масса КЛА; гравитационная постоянная.
т— постоянная интегрирования, характеризующая момент прохожде¬
ния КЛА перицентра орбиты.
Ф— угловая дальность полета КЛА по кривой конического сечения.
Ф— угол асимптоты гиперболической орбиты.
и—истинная аномалия.
Q—долгота восходящего узла.
со— угловое расстояние перицентра орбиты от линии восходящего
узла.
Глава I • ОСНОВЫ ТЕОРИИ ДВИЖЕНИЯ
КОСМИЧЕСКИХ ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
§ 1. ЭЛЕМЕНТЫ ТЕОРИИ ПРИТЯЖЕНИЯ
Космос (межпланетное пространство) — это
среда, в которой из всех сил природы, действующих на лета¬
тельный аппарат, главной является сила притяжения небесных
тел. Теория притяжения, краеугольным камнем которой явля¬
ется закон всемирного тяготения Ньютона, позволяет количест¬
венно оценивать силы притяжения различных материальных
тел. Знание принципальных позиций этой теории и ее основных
результатов необходимо для понимания основ теории движения
космических летательных аппаратов.
Материальная точка.
Закон всемирного тяготения Ньютона
Следует остановиться на понятии о материальной точке, ибо
в теории притяжения и в механике всякое материальное тело
рассматривается в виде или материальной точки, или совокуп¬
ности материальных точек. Материальная точка есть часть ма¬
терии бесконечно малых размеров, которая, однако, может об¬
ладать конечной массой. Поэтому в качестве материальной
точки можно принимать геометрическую точку конечной массы.
С действительных позиций это представление чисто фиктивное,
но в механическом смысле существуют точки, имеющие тожде¬
ственное значение с материальной точкой конечной массы. В са¬
мом деле, если тело движется под действием силы, приложен¬
ной к центру масс, то движение совсем не зависит ни от густоты
расположения материи, ни от формы тела, а только от количе¬
ства материи в теле, т. е. центр масс движется так, если бы в
нем одном была сосредоточена масса всего тела. В этом видна
реализация представления о материальной точке.
Материальные точки имеют свойство притягивать другдру-
га. Согласно закону всемирного тяготения И. Ньютона, всякие
две материальные точки притягивают друг друга с силой, пря¬
мо пропорциональной произведению масс этих точек и обратно
пропорциональной квадрату их взаимного расстояния. Величи¬
на силы притяжения определяется по формуле
F=fjnm.y (1ЛЛ)
А1
где mi — масса одной материальной точки;
т2 — масса другой материальной точки;
Д — расстояние между материальными точками;
/ — коэффициент пропорциональности, называемый по¬
стоянной притяжения, или постоянной тяготения.
Численное значение постоянной притяжения /, размерность
которой определяется равенством
[f\ = m-44-\
зависит от выбора основных единиц массы, длины и времени.
Если взять астрономическую систему единиц измерения, в ко¬
торой за единицу массы принимается масса Солнца, за едини¬
цу длины — среднее расстояние между Солнцем и центром масс
системы Земля + Луна и за единицу времени — средние солнеч¬
ные сутки, то постоянная f=k2 [30, стр. 34], где
& = 0,01720209895.
Коэффициент k в этом случае называется гауссовой посто¬
янной тяготения.
В системе единиц СГС (см, г, с) постоянная притяжения /,
определяемая из расчетов,
/=6,669*10-8.
Коэффициент / обычно определяется опытным путем, что
дает
/=6,673-10-8 см3/(г-с) [30, стр. 34].
При решении задач космонавтики, в которых в качестве
центрального небесного тела принимается Солнце или какая-
либо планета, удобно применять так называемые гелиоцентри¬
ческую гравитационную постоянную GS=/m© либо плането¬
центрическую гравитационную постоянную GMnn=/mnn. В но¬
вую систему астрономических постоянных включены только
гелиоцентрическая и геоцентрическая гравитационные постоян¬
ные, численное значение которых принимается равным [30,
стр. 34]
GS= 132718-1015 м3/с2,
12
G£ = 398603-109 м3/с2.
Для остальных планет значение планетоцентрической гравита¬
ционной постоянной можно определить, умножив / на массу
соответствующей планеты тпл.
Формула (1.1.1) симметрична относительно точек М\ и М2
и не зависит от выбора системы координат. Однако в задачах
механики полета космического аппара¬
та и небесной механики рассматрива¬
ются составляющие силы притяжения
по каким-либо координатам.
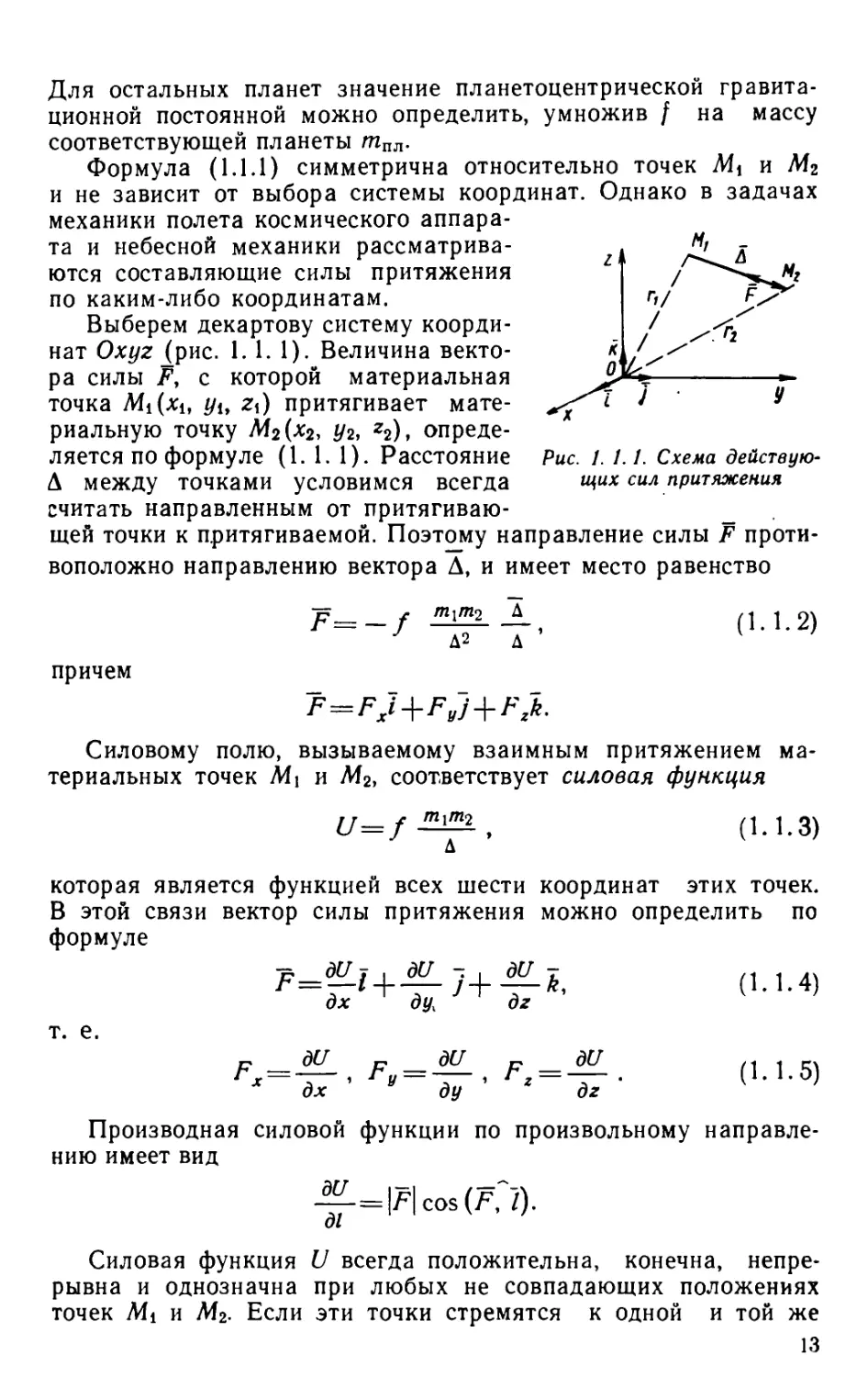
Выберем декартову систему коорди¬
нат Oxyz {рис. 1. 1. 1). Величина векто¬
ра силы F, с которой материальная
точка Mi{xu Уи Z\) притягивает мате¬
риальную точку М2{х2, у2, г2), опреде¬
ляется по формуле (1. 1. 1). Расстояние
Л между точками условимся всегда
считать направленным от притягиваю- _
щей точки к притягиваемой. Поэтому направление силы F проти¬
воположно направлению вектора Л, и имеет место равенство
J
Рис. 1. 1.1. Схема действую¬
щих сил притяжения
причем
~р х тп\тп2 А
~ Д2 А ’
F=Fj+Fj+Fj.
(1.1.2)
Силовому полю, вызываемому взаимным притяжением ма¬
териальных точек М\ и М2, соответствует силовая функция
U=f
mxm2
(1.1.3)
которая является функцией всех шести координат этих точек.
В этой связи вектор силы притяжения можно определить по
формуле
т. е.
-в dU7 . dU - , dU т
F=—i-\ j-\ k,
dx 'd&'dz
dU c dU - dU
’ У *-■ ’ 2 ~A
dz
dx
dy
(1.1.4)
(1.1.5)
Производная силовой функции по произвольному направле¬
нию имеет вид
dU
д1
И cos (F, /).
Силовая функция V всегда положительна, конечна, непре¬
рывна и однозначна при любых не совпадающих положениях
точек и М2. Если эти точки стремятся к одной и той же
13
точке пространства М, так что Мi—+М и М2—>М, то функция U
неограниченно растет и ее предел стремится к бесконечности.
Если же точки и М2 неограниченно удаляются друг от друга,
то и ее производные по координатам стремятся к нулю. Силовая
функция U аналитична, т. е. имеет непрерывные производные
всех порядков и регулярна на бесконечности.
Силовая функция U имеет определенный физический смысл.
Если судить по ее размерности, то, какшидно из (1.1.3), размер¬
ность силовой функции совпадает с размерностью энергии и ра¬
боты. Значение силовой функции U совпадает со значением ра¬
боты, которую следует затратить, чтобы преодолеть притяжение
притягивающей массы тх и удалить притягиваемую массу т2 на
бесконечно большое расстояние от массы т\. Величину U(x,y,z)
называют потенциальной энергией поля в точке (х, у, z).
При изучении движения космического летательного аппарата
его обыкновенно принимают как материальную точку. Планеты
же следует в большинстве случаев рассматривать в качестве
материальных тел, имеющих достаточно протяженные геомет¬
рические размеры и определенные формы со специфическим
распределением масс. В этом случае для расчета притяжения
космического летательного аппарата небесным телом нельзя не¬
посредственно применять закон всемирного тяготения, так как
оно (тело) является уже притягивающей системой, состоящей
из бесчисленного множества материальных точек.
Для определения величины силы притяжения, с которой не¬
бесное тело (материальное тело) Р действует на космический
летательный аппарат (материальную точку) А, и для определе¬
ния силового поля, вызываемого наличием тела Р, разобьем его
на большое число весьма малых элементов массы drrij, сосредо¬
точенных в точках Ру Эти материальные точки притягивают ма¬
териальную точку А с силой, определяемой из закона всемир¬
ного тяготения.
Переходя к пределу суммы сил притяжения при неограни¬
ченном возрастании числа элементарных масс и неограничен¬
ном уменьшении их объемов получим определенный интеграл,
взятый сто всей притягивающей массе т, в виде
Притяжение материальной точки телом
(1.1.6)
и тем самым найдем силовую функцию тела
(1.1.7)
14
где интегрирование распространено на всю притягивающую мас¬
су, a Aj есть расстояние притягиваемой материальной точки (кос¬
мического летательного аппарата) А от притягивающего эле¬
мента массы dm, который равен произведению плотности на
элемент объема, выраженного в соответствующих координатах.
Выражение силовой функции небесного тела Р в точке A(x,y,z),
определяющей положение космического летательного аппарата,
зависит от формы тела, его внутреннего строения и положения
небесного тела относительно принятой системы координат.
Однако полная масса притягивающего тела определяется во
всех случаях формулой
т= С dm. (1. 1.8)
(т)
Кроме того, частные производные от силовой функции по коор¬
динатам совпадают с проекциями силы притяжения на соответ¬
ствующие оси. Так, для декартовой системы координат х, у, z
имеем
F, = —, F, = —, F, = —. (1.1.9)
х дх v ду г дг
Вид и аналитическая структура силовой функции U, выра¬
женной определенным интегралом (1.1.7), в котором координаты
космического летательного аппарата и небесного тела играют
роль параметров, могут быть весьма сложными и разнообраз¬
ными, так как он может быть вычислен в элементарных функ¬
циях только в н-екоторых исключительных случаях, а вообще
оказывается совершенно невычисляемым [12]. Предметом теории
притяжения является изучение свойств и характера силовых
функций, определяемых интегралами вида (1.1.7), и разработка
методов их приближенного представления и вычисления [12, 18].
Воспользовавшись результатами теории притяжения, перейдем
непосредственно к изложению свойств силовой функции U, оп¬
ределяемой интегральной формой (1.1.7), во внешнем простран¬
стве.
Силовая функция однозначна, ограничена и непрерывна во
всем пространстве и вне притягивающих масс аналитична. Со¬
ставляющие силы притяжения, действующей на космический
аппарат [точка А (х, у, z)], рассматриваемые как функция коор¬
динат точки А, конечны, непрерывны и однозначны.
Пусть А — расстояние между материальной точкой А и точ¬
кой, неизменно связанной с телом Р. Тогда при неограниченном
росте расстояния А произведение AU стремится к определенно¬
му, конечному пределу, равному fMm. Из этого свойства выте¬
кает, что когда расстояние Д достаточно велико по сравнению с
15
линейными размерами небесного тела Р, то имеют место приб¬
лиженные равенства:
U=f — , ^L=-f . (1.1.10)
Д 01 Д2
Данный результат понятен: при расстоянии между мате¬
риальной точкой А и небесным телом Р, значительно большем
линейных размеров тела Р, в подынтегральном выражении
(1.1.7) А можно осреднить и в связи с (1.1.9) получить зависи¬
мости (1.1.10).
Вывод 1. Небесное тело Р любой формы и любой структуры
притягивает весьма удаленный от него космический летатель¬
ный аппарат (материальную точку А) так, как будто вся масса
тела сконцентрирована в одной точке *.
Космический летательный аппарат может совершать манев¬
ры и .вблизи планеты. В этом случае силовая функция и сила
притяжения планеты будут зависеть не только от расстояния
космического летательного аппарата до центра планеты, но и
от ее формы, размеров и распределения масс. В первом приб¬
лижении планеты можно принять шарами со сферическим **
или однородным распределением плотностей. Это позволяет
в формуле (1.1.7) взять интеграл в явном виде и получить
U = / мт
И
,, 0U с dU г- ди
х— -> ’ * У— Л ’ * г—
дх * ду * дг
где А — расстояние от центра шара до материальной точки.
Вывод 2. Планета (материальное тело), имеющая форму
шара со сферическим или однородным распределением плотно¬
стей, притягивает космический летательный аппарат (внешнюю
материальную точку) так, как будто бы вся масса планеты
сконцентрирована в ее центре.
Полученные результаты широко используются в механике
полета космического аппарата и позволяют в удобной и простой
форме вычислять силы притяжения небесных тел. Принятые
здесь допущения вполне удовлетворяют тем точностям, которые
необходимы для исследования проектно-баллистических харак¬
теристик космического летательного аппарата на этапе его эс¬
кизных разработок.
* Для небесных тел можно аналогично показать, что два достаточно
удаленных друг от друга, совершенно произвольных по форме и структуре,
небесных тела притягиваются взаимно почти так же, как две материальные
точки с соответствующими массами [12].
** Сферическое распределение плотности — это изменение плотности в за¬
висимости от расстояния до центра шара.
16
При изучении и прогнозировании движения искусственных
спутников планет, особенно движущихся по низким орбитам,
необходима более точная информация о гравитационном поле
планеты и ранее принятые допущения о распределении масс
и форме планеты могут быть слишком грубыми. Так, например,
даже непосредственные оптические наблюдения показывают, что
сжатие планет Юпитера и Сатурна на порядок больше сжатия
Земли. Полных сведений о форме и размерах Земли как геоида
и других планет в настоящее время нет. Однако можно пред¬
ложить физические модели планет, аппроксимирующие в зави¬
симости от порядка малости отбрасываемых и удерживаемых
членов практически с любой степенью точности форму и потен¬
циал планеты. Кроме потенциала сферы, в качестве моделей
потенциалов планет могут рассматриваться потенциалы сферо¬
ида, трехосного эллипсоида, несимметричного сфероида, трех¬
осного несимметричного эллипсоида и т. д. Выбранная модель
обыкновенно называется нормальным гравитационным потен¬
циалом, а его отклонения от действительного — гравитацион¬
ными аномалиями. Выбор нормального потенциала определяет¬
ся поставленной задачей и требуемым уровнем точности ре¬
шений.
Для задач баллистического проектирования и недолгосроч¬
ного прогнозирования околопланетных орбит допущение об
осевой симметрии тел, т. е. о симметричном распределении масс
относительно оси вращения планеты, справедливо и дает хоро¬
шие результаты. В этом случае в результате разложения потен¬
циала планеты по сферическим функциям гравитационный по¬
тенциал U можно представить, ограничиваясь вторым членом
разложения, в форме [1]
где /?пл — средний экваториальный радиус планеты;
г, 6 — планетоцентрический радиус-вектор и склонение
КЛА;
п 3 sin2 6 — 1
Рг= полином Лежандра 2-го порядка;
J — безразмерная постоянная, характеризующая
форму планеты *.
2
* Для Земли /2 = —/=0,0010827 [30]; для Марса /=0,002920; для Юпи-
3
тера /=0,02206; для Сатурна / = 0,02501 [10].
17
Притяжение материальной точки системой
конечного числа материальных тел
При полете космического аппарата в Солнечной системе на
него действует сила притяжения не одного, а многих небесных
тел. Важно уметь рассчитывать равнодействующую этих сил
и ее составляющие на оси координат. Если речь идет об оценке
равнодействующей сил притяжения многих небесных тел, то
можно говорить о большом удалении космического аппарата от
них. В противном случае с хорошим приближением можно
учитывать только силу притяжения планеты, вблизи которой
космический аппарат находился. Тогда, обозначив через
Qa = XJ Н" ifaj Н" zak, Q) = x)j У )j ~V zfi
радиус-вектор космического летательного аппарата и радиус-
вектор /-го небесного тела в инерциальной декартовой системе
координат, в соответствии с выводом 1 равнодействующую сил
притяжения представим в виде
F =
— dUa j . dUa | dUa -
dxa
dz.
где Ua = M
П
S'
m
J
(1. 1. 12)
у-i a1
— силовая функция системы материальных тел*;
baj = \Qa - Qyl = \(Яа~ Qj) (Qa ~ Ру)] Щ\
п — число материальных тел системы.
Поэтому F и ее составляющие можно записать в виде
П
— W
F—fM y-ffo-ёД
ai
(1.1.13)
У-1
f =dUa = _ yM
Fl
dxa
dUn
= — fM
>Уа
dU,
dz.
j-1 ai
n _
w -'a m.
(za~zj)-
jTf aj
(1.1.14)
* Силовая функция системы свободных материальных точек, за которые
принимаются небесные тела, принципиально отличается от Ua и равна
ft П П1
1 ПХ .tTt.
и = — /’Ч —;—, причем / ф j [12]. (1.1.12а)
1-1 у-1
18
§ 2. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ КЛА В ПОЛЕ
ТЯГОТЕНИЯ СОЛНЦА И ПЛАНЕТНЫХ СИСТЕМ.
ГРАВИСФЕРЫ ПЛАНЕТ
Движение КЛА происходит под действием различного рода
сил, причем одни силы, природа и характер действия которых
известны, можно оценить количественно, другие же очень приб¬
лиженно или вообще не поддаются количественной оценке.
В общем случае силы, действующие на КЛА, можно предста¬
вить состоящими из реактивной силы Р, сил притяжения небес¬
ных тел F и силы сопротивления внешней среды* Q, состав¬
ляющие которой не всегда поддаются количественной оценке,
поскольку законы и характер их проявления плохо изучены или
вообще не известны. Дифференциальное уравнение движения
КЛА в векторной форме запишется так:
Mta = P+T + Q, (1.2.1)
где М — масса КЛА;
да — радиус-вектор КЛА.
При изучении межпланетных полетов КЛА силой сопротив¬
ления внешней среды часто пренебрегают, так как движение
КЛА происходит в основном за пределами атмосферы, а осталь¬
ные составляющие силы Q оказывают малое влияние на полет **
(хотя все их количественно оценить практически невозможно).
Поэтому дифференциальное уравнение движения КЛА в век¬
торной форме будем представлять в виде
MQa = P+T. (1.2.2)
Движение КЛА, описываемое уравнением (1.2.2), называет¬
ся управляемым движением, поскольку оно может изменяться
посредством управления вектором реактивной силы ракетного
двигателя. При выключенной двигательной установке движение
КЛА описывается следующим дифференциальным уравнением:
Mq = F. (1.2.3)
* К силам сопротивления внешней среды относятся, например, сила со¬
противления атмосферы планеты, сила давления солнечных лучей, электромаг¬
нитные силы, возникающие благодаря наличию различных электромагнитных
полей в межпланетном пространстве, и т. д.
** Например, для обычных спутников, движущихся по достаточно высо¬
ким круговым орбитам, со значениями коэффициента А, выражающего отно¬
шение характерной площади к массе спутника, в пределах 0,0034-0,3 м3/(кг с2)
возмущения от светового давления равны по периоду обращения ДЯ=б-<10_74-
5 10-5 с, по радиусу за один оборот Дгшах=0,024-0,2 м [50].
19
Это движение называется баллистическим (неуправляемым)
движением КЛА.
Если Солнце и планетные системы принять за материальные
точки, то
[см. формулы (1.1.12) и (1.1.13)],
где Qj — радиус-вектор /-го небесного тела (/ = 0, 1, ..., 9);
Управляемое движение или активные участки разгона и тор¬
можения, на которых достигается потребный энергетический
уровень для совершения аппаратом заданного маневра, опреде¬
ляющим образом влияет на выбор проектно-баллистических ха¬
рактеристик межпланетных полетов. Однако в зависимости от
типа двигательной установки КЛА протяженность активных уча¬
стков межпланетной траектории полета может быть самой раз¬
личной. КЛА с двигательными установками типа ЖРД облада¬
ют большими реактивными ускорениями, и поэтому потребный
энергетический уровень достигается за несколько минут вблизи
планеты отправления или назначения. Баллистический же полет
может длиться в зависимости от планеты назначения несколько
месяцев и даже лет. КЛА с электроракетными двигательными
установками (ЭРД) обладают весьма малыми реактивными ус¬
корениями, и поэтому активный участок разгона (торможения)
является соизмеримым с баллистическим. Методы решения диф¬
ференциального уравнения управляемого движения (1.2.2) во
многом определяются протяженностью активных участков.
В книге рассматриваются КЛА с жидкостными ракетными дви¬
гателями. Это позволяет выявить и оценить специфические ме¬
тоды определения активных участков в зависимости от требуе¬
мой точности расчетов.
Для нахождения решения дифференциального уравнения уп¬
равляемого (1.2.2) или баллистического (1.2.3) движения нужно
иметь информацию об изменении радиуса-вектора планеты qj
в зависимости от времени полета t. Эта информация может быть
получена различными способами. Наиболее простой способ ее
получения заключается в предположении о кеплеровом дви¬
жении планет вокруг Солнца (т. е. о движении планет под дей¬
ствием силы притяжения Солнца) и об изолированности солнеч¬
ной системы (т. е. о прямолинейном и равномерном движении
центра масс Солнечной системы). Для более точных расчетов
уравнения (1.2.2) и (1.2.3) следует рассматривать совместно
с дифференциальными уравнениями движения планет и Солнца.
Однако изучать движение КЛА с учетом влияния сил при¬
тяжения многих небесных тел в абсолютной системе координат
20
Даj= IQa—Qj\—расстояние между /-м небесным телом и КЛА.
неудобно и трудно, поскольку астрономические наблюдения да¬
ют только относительные положения и скорости небесных тел.
В пособиях по небесной механике [13, 48] предлагается изучать-
движение небесных тел (планет) в относительной (например
гелиоцентрической) системе координат, когда начало координат
помещается в центр масс одного из небесных тел (например
Солнца). Поэтому следует перейти к дифференциальным урав¬
нениям относительного движения КЛА, когда за начало коорди¬
нат принимается центр масс центрального тела *.
Для получения дифференциального уравнения управляемого
относительного движения следует из левой и правой частей
уравнения (1.2.2) вычесть соответственно левую и правую части
дифференциального уравнения движения центрального тела
Отсюда дифференциальное уравнение управляемого относи¬
тельного движения КЛА примет вид
где V — оператор градиента по компонентам вектора Ra, по¬
лучим
* Центральное тело — это небесное тело, относительно которого рассматри¬
вается движение.
^0 00 = ^0-
что дает
где
Xa = Qa — Qo> Hj=Qj — Qo U= !.•••» я)>
A aj —
В связи со справедливостью соотношения
(1.2.4)
Скалярная функция
21
характеризует действия притяжения небесных тел, за исклю¬
чением центрального тела, и поэтому ее можно назвать возмуща¬
ющей функцией, так как сила притяжения центрального тела
является определяющей из всех сил притяжения. Это название
Rp дано по аналогии с возмущающими функциями в небесной
механике, возникающими при изучении относительного движе¬
ния планет [13, стр. 110]. Дифференциальное уравнение (1.2.4)
определяет управляемое относительное движение. Баллистиче¬
ское относительное движение описывается дифференциальным
уравнением
= (1-2.5)
Ад
полученным из (1.2.4). Если центральное тело выбрано правиль¬
но, то в правых частях уравнений (1.2.4) и (1.2.5) l-^”0 A?J^>|v/?J
_ I Ra3
и член | V RpI можно трактовать как возмущающее ускорение,
возникающее от возмущающих сил — сил притяжения небесных
тел, за исключением центрального. Исходя из такой трактовки
действия сил притяжения небесных тел (кроме центрального)
относительное движение, описываемое уравнениями (1.2.4) и
(1.2.5), часто рассматривают как относительное возмущенное
движение КЛА. Это позволяет применять специфические анали¬
тические и численные методы для решения уравнений (1.2.4) и
(1.2.5), рассматриваемые в теории возмущенного движения (см.,
например [13, ч. III, гл. VII—IX]).
Дифференциальные уравнения относительного движения
КЛА (1.2.4) и (1.2.5) в конечном виде не интегрируются. Для
получения решения и характеристик движения КЛА используют¬
ся различные приемы численного интегрирования, аналитиче¬
ские и качественные методы небесной механики. Аналитические
методы в ряде случаев дают возможность найти общее или ча¬
стное решение в основном дифференциального уравнения дви¬
жения (1.2.5) в виде бесконечно сходящихся рядов, позволяю¬
щих находить числовые значения нужных характеристик движе¬
ния с любой степенью точности. Качественные методы
позволяют установить некоторые общие свойства характеристик
движения КЛА без знания общего решения дифференциального
уравнения движения. Отличительной особенностью методов
численного интегрирования является их универсальность.
В то время как применение аналитических методов имеет опре¬
деленные ограничения, вызываемые малостью возмущений, пре¬
делами в значениях параметров орбит КЛА и т. д., при числен¬
ном интегрировании дифференциальных уравнений движения
вообще не возникает вопроса о характере орбит КЛА и о вели¬
чине возмущений. Однако систематическое накопление ошибки
в процессе интегрирования в некоторых случаях может ограни¬
чивать возможности численных методов по сравнению с анали¬
22
тическими, свободными от этого недостатка. При решении кон¬
кретных задач межпланетного полета КЛА для получения боль¬
шей информации о характеристиках движения следует сочетать
все методы: аналитические, качественные и численные. Получая
решения дифференциальных уравнений относительного движе¬
ния КЛА (1.2.4) и (1.2.5), не следует забывать, что они явля¬
ются приближенными. Приближения вызываются двумя различ¬
ными причинами, связанными с физической и математической
природой решения задачи. Физические причины приближения
обусловлены уровнем знаний о действующих силах, пренебреже¬
нием (или невозможностью учета) некоторыми из них. Матема¬
тические причины приближений вызываются методами решения
уравнений движения. Если все эти приближения четко предста¬
вить и правильно осмыслить, то можно избежать излишней точ¬
ности и ненужных трудностей в процессе поиска инженерных
решений и анализа проектно-баллистических характеристик
межпланетных КЛА.
Путь к улучшению и упрощению численного интегрирования
дифференциальных уравнений относительного движения КЛА—
в определении области преобладающего воздействия на КЛА
силы притяжения небесного тела, которое и следует рассмат¬
ривать в качестве центрального тела. Этим телом могут быть
Солнце и любая планета. В небесной механике уже возникала
такая задача при изучении движения комет. Ее решение свелось
к определению сферы действия планеты *.
Сфера действия планеты
Область пространства, в которой при вычислении возмуще¬
ний целесообразно принимать планету за центральное тело, а
Солнце — за возмущающее, называется сферой действия пла¬
неты. Количественная оценка этой области зависит от оценки
отношения возмущающего ускорения к ускорению от силы при¬
тяжения центрального тела при сведении общей задачи к за¬
даче трех тел: КЛА (или небесное тело очень малой массы) —
планета — Солнце. Пусть 65 — возмущающее ускорение, созда¬
ваемое силой притяжения Солнца, и F — ускорение от силы
притяжения планеты, когда она рассматривается в качестве
центрального тела; 6F — возмущающее ускорение, создаваемое
силой притяжения планеты, и 5 — ускорение от силы притяже¬
ния Солнца, когда оно принимается за центральное тело. По¬
верхность границы сферы действия выражается равенством
as IF
F ~ S
* Понятие «сфера действия планеты» введено в небесную механику Лап¬
ласом в связи с изучением движения комет при их сближении с Юпитером.
23
Поверхность, определяемая этим уравнением, весьма близ¬
ка к сфере с центром в центре планеты и радиусом
где R — средний радиус орбиты планеты. Значения Дл для
планет даны в табл. 1.1.
Таблица 1.1
Радиусы грависфер планет
Планета
4
Радиус грависферы в млн. км
ДЛ
ДХ
дк
С*
О
i;
с*
•с
ш
Меркурий
0,113
0,221
0,367
0,320
Венера
0,616
1,01
1,68
1,46
Земля
0,925
1,49
2,48
2,16
Марс
0,578
1,08
1,80
1,56
Юпитер
48,2
51,9
88,1
76,6
Сатурн
54,6
64,3
108,3
94,1
Уран
51,9
69*, 6
116,4
101,2
Нептун
87,0
115,4
193,1
167,9
Плутон
37,6
57,4
95,4
83,0
Следует отметить, что в небесной механике введение понятия
сферы действия было направлено на достижение более точных
результатов численного интегрирования, поскольку это позволя¬
ет избежать чрезмерно больших значений слагаемых в правой
части дифференциальных уравнений движения комет.
В космонавтике совершенствование методов численного ин¬
тегрирования дифференциальных уравнений движения отвечает
требованию повышения точности расчетов траекторий полета на
завершающем этапе проектирования КЛА. Совершенствование
же методов баллистического проектирования КЛА связано с
поиском наиболее простых способов достижения нужного реше¬
ния при требованиях к точности, отвечающих начальному этапу
проектирования. Решения дифференциальных уравнений бал¬
листического движения КЛА можно получить в законченном ви¬
де, т. е. найти все шесть первых интегралов, если пренебречь
возмущениями и рассматривать движение КЛА под действием
только силы притяжения центрального тела. Возникает вопрос,
насколько точно такое решение и при каких условиях тогда сле¬
дует переходить при изучении межпланетной траектории от пла¬
неты как центрального тела к Солнцу как центральному телу,
и наоборот. Ответ на него представляет интерес, поскольку весь¬
24
ма заманчиво и удобно в инженерной практике проектирования
использование законченного решения задачи двух тел: КЛА —
небесное тело. Очевидно, оно будет приемлемо и по точности при
малом влиянии возмущений на точное решение. Таким образом»
возникает задача, как, оставаясь в рамках решений задачи двух
тел, свести к минимуму отклонения от точного решения. Речь
идет о представлении гравитационного поля Солнечной системы
в виде гравитационного поля Солнца, ограниченного гелиогра¬
виповерхностью, и отдельных гравитационных полей планет,
каждая из которых ограничена гравитационной поверхностью
планеты (планетогравиповерхностью). Правильно описать по¬
верхности границ грависфер — значит найти минимум откло¬
нений от точного решения при принятой модели гравитационно¬
го поля Солнечной системы. Здесь принципиальным моментом
является вопрос о критерии, оценивающем такое отклонение.
До недавнего времени в практике баллистического проекти¬
рования КЛА в качестве границы поверхности грависферы пла¬
неты широко использовалась сфера действия планеты, опреде¬
ленная Лапласом. При этом утверждалось, что отклонения от
точного решения находятся в пределах допустимого для балли¬
стического проектирования. Однако, как уже отмечалось выше,
введение понятия сферы действия планеты или грависферы Лап-
л*аса * совсем не предназначалось для решения такого рода за¬
дач — оценки решения задач двух тел. Поэтому некритическое
использование грависферы Лапласа в практике баллистическо¬
го проектирования КЛА может в дальнейшем привести к неже¬
лательным методическим ошибкам, особенно в связи с ростом
требований к точности предварительных разработок. Правда,
до сих пор остается открытой задача геометрического описания
оптимальных (правильных) гравитационных поверхностей пла¬
нет. В 1964 г. на это обратил внимание М. Д. Кислик [26].
Грависфера Кислика**
М. Д. Кислик воспользовался возможностями, вытекающи¬
ми из существования обобщенного интеграла энергии (интегра¬
ла Якоби) в ограниченной круговой задаче трех тел. В качестве
критерия оптимальности, минимум которого определялся, была
принята ошибка приближенного расчета постоянной обобщенно¬
го интеграла энергии (постоянной Якоби). Тем самым была сде¬
лана попытка наиболее близко подойти к решению ранее сфор¬
мулированной общей задачи. Действительно, сравнение точных
* Такое название сферы действия планеты позволяет терминологически бо¬
лее четко отделить ее от других определений грависфер планет.
** М. Д. Кислик назвал определенную им грависферу «сфера влияния».
Однако в литературе иногда так называют и сферу действия (грависферу
Лапласа). Введенные здесь названия позволят более четко разграничить
грависферы, определяемые различным образом.
25
расчетов траектории с приближенными показало, что ошибки
расчета других параметров траектории (Да, Ае и т. д.) на гра¬
нице грависферы Кислика стали в среднем минимальны при
перелете от одной планеты к другой.
Не вдаваясь в подробности вывода [26], отметим, что грани¬
цу поверхности грависферы Кислика можно представить как
сферу, центр которой совпадает с планетой, а радиус Дк опре¬
деляется выражением
Значения Ак даны в табл. 1.1. Соотношение между Дл и
Ак выражается равенством
Сравнение значений Дк и Ал показывает, что размеры грави¬
сферы Кислика в 2—3 раза превышают размеры грависферы
Лапласа.
В связи с отсутствием решения общей задачи о точности при¬
ближенного решения представляет интерес область пространст¬
ва вокруг планеты, которая трактуется как теоретическая гра¬
ница существования спутников планеты.
В результате исследования решения ограниченной круговой
задачи трех тел (КЛА — планета — Солнце) выявляются пять
особых точек, так называемых точек либрации, в которых в слу¬
чае равенства нулю скорости полета КЛА равно нулю и его
ускорение. Такая особая точка (точка Li) существует и на пря¬
мой, соединяющей Солнце с планетой, между Солнцем и пла¬
нетой.
Расстояние либрационной точки Li от планеты определяется
следующей формулой [48, стр. 312]:
Численные значения Ах даны в табл. 1.1. Область простран¬
ства с центром в планете и с радиусом Ах будем называть гра¬
висферой Хилла.
Поверхность сферы является поверхностью нулевой скорости.
Она обладает еще рядом интересных свойств. Пусть постоянная
(1.2.7)
Дк — -гг = Дл.
Грависфера Хилла
Дх=я(
1 о 1
V V3
3 9
где
26
Якоби — постоянная обобщенного интеграла энергии в задаче
трех тел — на поверхности грависферы Хилла равняется Сi.
Если постоянная Якоби баллистического движения КЛА боль¬
ше постоянной Ci, то можно утверждать, что он всегда останет¬
ся внутри грависферы Хилла. Такая устойчивость носит назва¬
ние устойчивости по Хиллу. Поверхность грависферы Хилла
может рассматриваться как теоретическая граница существо¬
вания спутников планеты *.
Для точек, расположенных на поверхности грависферы Лап¬
ласа, Хилла и Кислика, максимальные значения соотношения
бS/F соответственно равны
В связи с приведенными значениями отношения бS/F пред¬
ставляет интерес область пространства около планеты, ограни¬
ченная поверхностью, на которой возмущающее ускорение 6S,
вызываемое силой притяжения Солнца, равно ускорению F от
силы притяжения планеты, когда она принимается за централь¬
ное тело. Из равенства бS=F найдем [48], что эта область мало
отличается от сферы с центром в центре планеты и радиусом,
равным
Сферу с радиусом Др.в условно будем именовать грависферой
равных гравитационных воздействий или грависферой равных
воздействий.
Обращает на себя внимание такой факт, что, несмотря на
несколько разные исходные предпосылки, грависферы Кислика,
Хилла и равных воздействий в первом приближении описывают¬
ся по форме одинаковым выражением вида [см. (1.2.7), (1.2.8)
где ki соответственно равны /гк = 1,15, &х=0,7, &р.в=1,0. Поэто¬
му допустимо предположение, что и гравитационную поверх¬
ность планеты, отвечающую решению ранее сформулированной
общей задачи о минимальном отклонении, в первом приближе¬
нии также можно представить сферой, радиус которой выра¬
* Примечательно, что все естественные спутники планет в Солнечной си¬
стеме, за исключением четырех спутников Юпитера с обратным движением
{VIII, IX, XI и XII), являются устойчивыми по Хиллу.
(1.2.9)
(1.2.10)
Грависфера минимальных отклонений
и (1.2.10)]
(1.2.11)
27
жается соотношением вида (1.2.11). Эту грависферу условно
назовем грависферой минимальных отклонений.
Выскажем ряд соображений по поводу возможной количе¬
ственной оценки коэффициента ki=k0 для определения радиуса
грависферы минимальных отклонений. Прежде всего отметим,
что коэффициенты, ki изменяются довольно медленно в следую¬
щей последовательности: 0,7, 1,0 и 1,15 и лежат в узком диапа-
« /85 \
зоне, максимальные же значения отношении [ —) на поверх-
1 F /max
ности грависфер Хилла, равных воздействий и Кислика резко
растут в такой последовательности: 2/з, 1,0 и 3,3. Таким образом,
значения коэффициентов изменяются всего в 1,5 раза, а зна¬
чения (—] в 5 раз. Такая скученность значений коэффици-
\ F /max
снтов ki при большом разбросе значений ( —) позволяет пред-
\ F max
положить, что значение k0 также лежит в пределах 0,7^&0^1,2.
Если же принять во внимание отсутствие решения ранее сфор¬
мулированной общей задачи о минимуме отклонений и сделан¬
ные допущения при определении радиуса грависферы Кислика
[26] и учесть принципиальную роль влияния величины отноше¬
ния 6S/F на возникновение отклонения приближенного решения
от точного, то имеет смысл выбрать значение коэффициента k0
как среднее квадратичное значений &х, £р.в и Тогда по¬
лучим
и __ ( 4 + *р.в + 4 \1/2 _ ,
*0==\ з /
Следовательно, в первом прйближении грависфера минималь¬
ных отклонений довольно близка к грависфере равных воздей¬
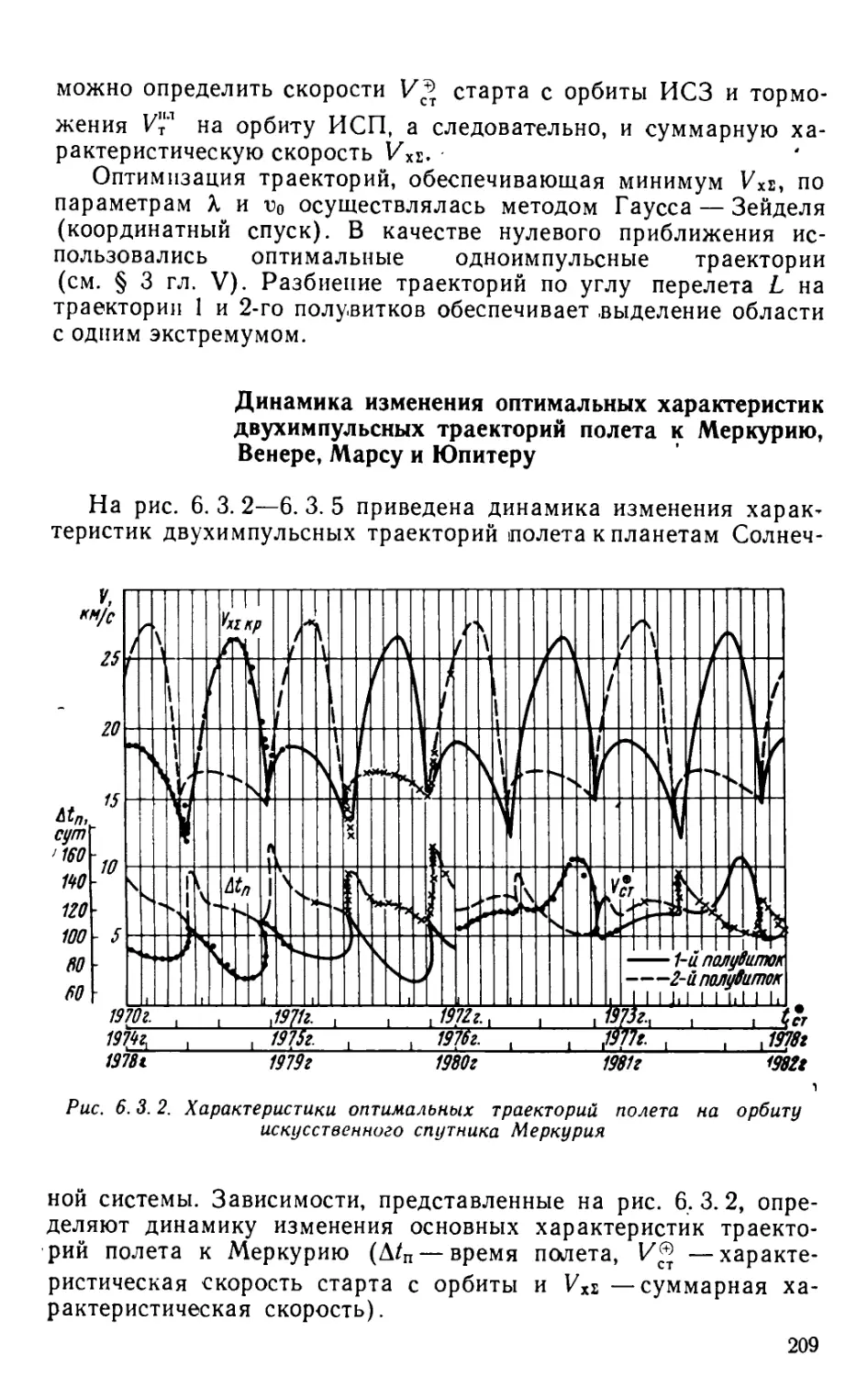
ствий, и ее радиус определяется выражением
*»=*(^Г С-2-12)
§ 3. УПРАВЛЯЕМОЕ И БАЛЛИСТИЧЕСКОЕ
ДВИЖЕНИЕ КЛА В ПОЛЕ ТЯГОТЕНИЯ ОДНОГО
НЕБЕСНОГО ТЕЛА
Итак, решение дифференциальных уравнений управляемого
и баллистического возмущенного движения (1.2.4) и (1.2.5) поз¬
воляет получить практически точную информацию о характери¬
стиках траекторий межпланетных перелетов. Если отвлечься
от ошибок аппаратурной реализации законов управления на
активных участках полета, то действительная траектория полета
будет мало отличаться от расчетной. Это свидетельство не только
объективности наших знаний, но и правильной оценки внешних
сил, действующих на КЛА, и, в частности, преобладающей роли
28
сил притяжения. Однако обращаться к точным решениям следу¬
ет только тогда, когда, по крайней мере, заканчивается разра¬
ботка проекта.
При предварительных проектных разработках КЛА вряд ли
необходимо иметь более точную информацию о характеристи¬
ках движения, чем точность проектно-весовых характеристик
КЛА и данных о материалах конструкции, топливе и т. д. Возни¬
кает задача о получении приближенных решений дифференци¬
альных уравнений движения КЛА, позволяющих достаточно
просто, но с необходимой для проектных разработок точностью
оценивать характеристики межпланетных перелетов и опреде¬
лять требования к КЛД. Достигнуть этого можно упрощением
правых частей дифференциальных уравнений движения (1.2.4)
и (1.2.5), если не учитывать силы притяжения тех небесных тел
(планет, Солнца), которые по тем или иным причинам (боль¬
шие расстояния, меньшие массы и т. д.) оказывают слабое воз¬
действие на движение КЛА. Из всех допустимых решений наи¬
более простое достигается в том случае, когда пренебрегают
возмущающим ускорением, полагая RP = 0. В этом случае имеет
место как бы фиктивное движение КЛА, возникающее под дей¬
ствием силы тяги и силы притяжения центрального тела, кото¬
рое назовем невозмущенным движением. Оно аппроксимирует
в первом приближении действительное движение. Существуют
определенные границы (см. § 2), в пределах которых можно ут¬
верждать о хорошем приближении характеристик невозмущен¬
ного движения к действительным.
Согласно (1.2.4) управляемое невозмущенное движение КЛА
описывается следующим дифференциальным уравнением:
£=2L_^mo.£, (1.3.1)
М /?з
где Я — радиус-вектор КЛА;
М — текущая масса КЛА.
Решения дифференциального уравнения управляемого невоз¬
мущенного движения (1.3.1) могут быть найдены только при за¬
дании начальных условий полета и закона изменения вектора
тяги по времени. К сожалению, нет точных аналитических ре¬
шений данного уравнения. Если же рассматривать дифференци¬
альное уравнение баллистического невозмущенного движения
£=--^£, (1-3.2)
то можно получить все необходимые первые интегралы, полно¬
стью описывающие движение. Для нахождения первых интегра¬
лов баллистического невозмущенного движения обыкновенно
используют хорошо разработанные в небесной механике мето¬
ды решения задачи двух тел (см., например (13, гл. IV, V]).
29
Здесь отличие заключается в том, что одно из тел (КЛА) при¬
нимается за тело бесконечно малой массы. Баллистическое не¬
возмущенное движение КЛА иногда называют еще кеплеровым
движением.
При решении задач межпланетных полетов методически бо¬
лее удобно баллистическое движение рассматривать как част¬
ный случай управляемого движения, которым начинается меж¬
планетный полет. Поэтому было бы желательно найти такой
подход к решению дифференциального уравнения управляемого
невозмущенного движения, при котором управляемое и балли¬
стическое движения выступают в единстве, а первые интегралы
баллистического движения определяются как частный случай
общего решения.
Перейдем к рассмотрению уравнения (1.3.1). Приняв R = V,
представим его в виде
V = £- — lH2-R, (1.3.3)
М R3
где V — вектор скорости КЛА.
Интеграл энергии
Умножив скалярно левую и правую части уравнения (1.3.3)
на 2F, найдем
2V .V =-2-^(R-R)_i_.
яз v ' vr м
После интегрирования найдем
Vi_Vj?o_=h0+2 r(ZLZl dt, . (1.3.4)
R 0 1 J M
t О
где h0 — постоянная интегрирования.
Переходя к относительной массе |х=— и учитывая равен-
Af0
ство Р=—pWM, где р — единичный вектор тяги, получим
\k _ _ (J.
у2_ 2^o=Ao_2H7fi£ji)d(1 = A(i_2r Up-V)d Inn, (1.3.5)
. (А ,
так как M(t0) =М0, и поэтому ц(70) = 1. Приняв
hu = h0-2W^(p-V)d\nv., (1.3.6а)
i
будем иметь
уг_М^.=Ни. (1.3.7а)
30
Уравнение (1.3.7а) будем называть интегралом энергии уп¬
равляемого движения, показывающим, что полная энергия —
сумма кинетической и потенциальной энергии, приходящаяся на
единицу массы КЛА, меняется на активном участке от h0 до
' Л„К=Л0-2Г CCpV)dlnr (1.3.66)
1
(jlik — относительная конечная масса КЛА), а на участке бал¬
листического полета она остается постоянной и равной Лик-
Изменение при управляемом движении полной энергии едини¬
цы массы КЛА происходит благодаря работе, совершаемой
силой тяги ракетного двигателя. Если _сила тяги всегда нор¬
мальна вектору скорости, то, так как (/>-F)=0, работа силы
тяги двигателя будет равна нулю, и полная энергия на единицу
массы КЛА не изменится на протяжении всего полета. Для
получения на конце активного участка полета КЛА максималь¬
ного значения полной энергии надо так управлять вектором
тяги, чтобы в каждый момент времени управляемого полета
(P-V) *
-=шах. *
м
В случае баллистического движения интеграл энергии пред¬
ставим в виде
уг_2Zp. = AiiK. (1.3.76)
Векторный интеграл
момента количества движения
После умножения левой и правой частей уравнения (1.3.3)
векторно на Л будем иметь
RxV=^--^-(RxR),
и в результате интегрирования получим
£ху=с„+|р*р at=с0-j Rxw Mdt, (1.3.8)
to to
где Со — постоянная интегрирования.
* Ошибочно предполагать, что ma\(P V) = PV(t) при cos('PK)=l. Е этом
случае скорость полета V(t) будет меньше скорости^ полета Vopt(t) при оп¬
тимальном управлении вектором тяги и V0pt(Ocos(^)y) oPt>V(t).
31
По аналогии с ранее выполненными преобразованиями это
уравнение приведем к виду
RXV = C0-w\(Rxli)d\nv.. (1.3.9)
i
Обозначив
Ca=Ca-W\(RX~p)d\nv, (1.3.10)
1
представим (1.3.9) так:
~RXV = CU. (1.3.11а)
Полученное уравнение будем называть векторным интегралом
момента количества движения управляемого полета *, приходя¬
щегося на единицу массы КЛА. Он показывает, что вектор мо¬
мента количества движения единицы массы КЛА при управляе-
_ _ _ £к _
мом движении меняется от Со до значенияСц К = С0 — W | (Rxp)x
о
ХйПпц, а после выключения двигателя — на участке_балли¬
стического движения — является постоянным и равным Сик- На
участке управляемого движения вектор момента количества
движения изменяется вследствие изменения вектора момента
количества движения истекающих частиц рабочего тела ракет¬
ного двигателя. Если закон управления тягой таков, что вектор
силы тяги всегда параллелен радиусу-вектору КЛА, то вектор
момента количества движения на единицу массы КЛА не изме¬
нится и на протяжении всего полета будет равен Со.
Для баллистического движения векторный интеграл момен¬
та количества движения выражается в форме
7? X V = CUK. (1.3.116)
Уравнение плоскости
Если умножить правую и левую части уравнения (1.3.1а)
скалярно на Л и на V, то получим
7?-Сц=0, (1.3.12)
F.Cu = 0. (1.3.13)
Следовательно, вектор момента количества движения едини¬
цы массы КЛА Си всегда нормален мгновенной плоскости, про¬
ходящей через центр масс центрального тела так, что в ней, кро¬
ме радиуса-вектора КЛА Л, находится и вектор скорости V
* По аналогии с интегралами задачи двух тел небесной механики урав¬
нение (1. 3.8) можно назвать векторным интегралом площадей.
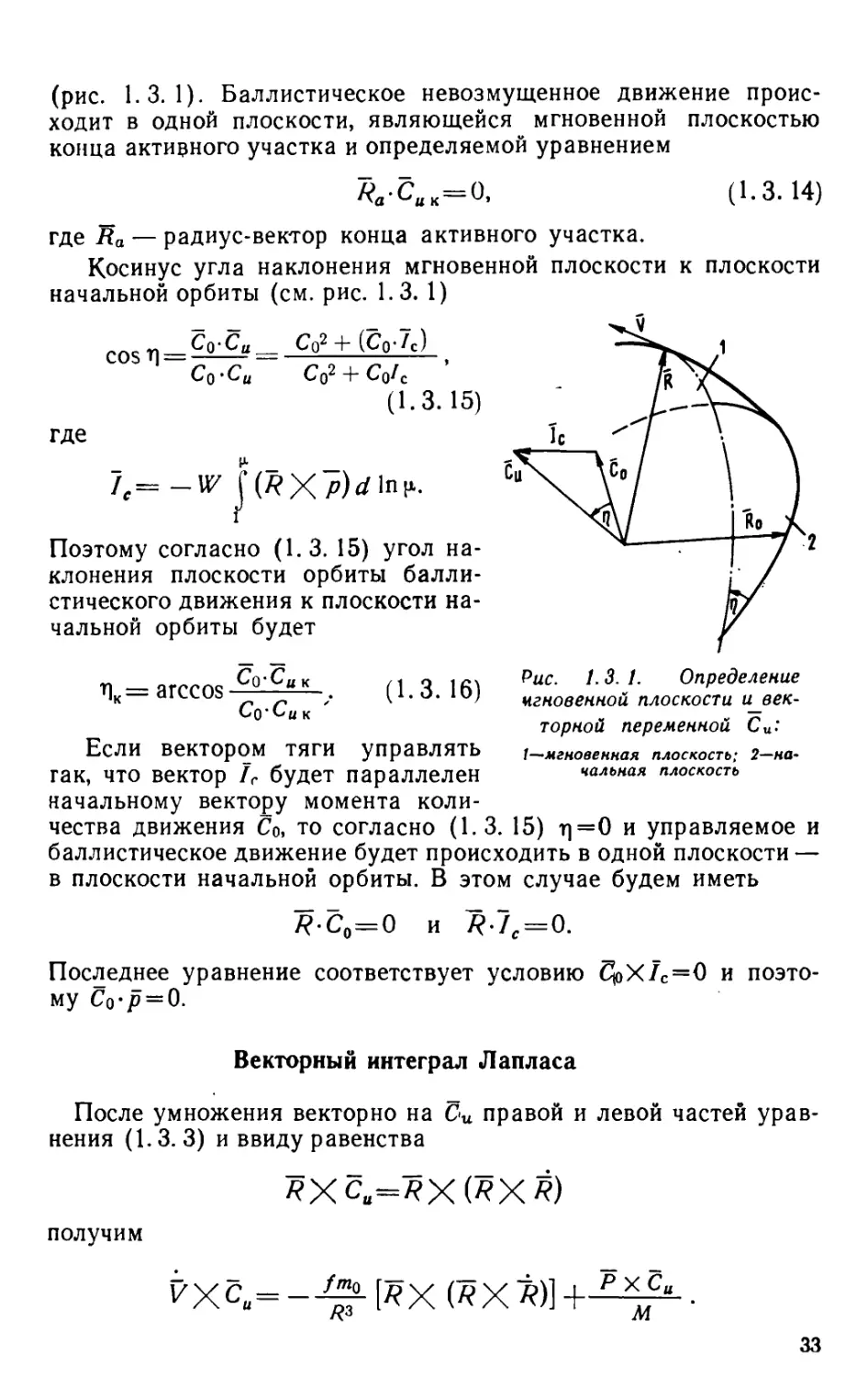
32
(рис. 1.3.1). Баллистическое невозмущенное движение проис¬
ходит в одной плоскости, являющейся мгновенной плоскостью
конца активного участка и определяемой уравнением
йаСик = о, (1.3.14)
где Ra — радиус-вектор конца активного участка.
Косинус угла наклонения мгновенной плоскости к плоскости
начальной орбиты (см. рис. 1.3. 1)
cos Л = ^°‘^ц с°2 + (gQJc)
Cq'Cu Со2 + CqIc
(1.3. 15)
где
1'= - w \(RX~P)d\nv-
Поэтому согласно (1.3. 15) угол на¬
клонения плоскости орбиты балли¬
стического движения к плоскости на¬
чальной орбиты будет
Т)к= arccos gQ,g“K .. (1.3.16)
Cq" Си к
Если вектором тяги управлять
гак, что вектор /г будет параллелен
начальному вектору момента коли¬
чества движения Со, то согласно (1.3. 15) т]=0 и управляемое и
баллистическое движение будет происходить в одной плоскости —
в плоскости начальной орбиты. В этом случае будем иметь
7?.С0=0 и R~/c = 0.
Последнее уравнение соответствует условию ЦоХ/с=0 и поэто¬
му С0'р = 0.
Векторный интеграл Лапласа
После умножения векторно на Си правой и левой частей урав¬
нения (1.3. 3) и ввиду равенства
RXC^RXCRX'R)
получим
^ХС„=-^Р?Х (RX 5)] + Р *с“ •
К3 М
33
Рис. 1.3. 1. Определение
мгновенной плоскости и век¬
торной переменной Си-
1—мгновенная плоскость; 2—на¬
чальная плоскость
Так как
£ X № X *)]=£ Р? (*• *) - £ (&•*)] =
at К
то после интегрирования, учитывая равенство
j (F X Са) dt= - jc„ X dV = V X Си- j V XdC„,
будем иметь
F X 5а= /т„ -|- + ^ (F X +-^£iL) dt+fm^,
to
где во — векторная постоянная интегрирования.
Обозначив
• t _ _
/т^и=/m„ie+j (F X iu + -4РЧ Л-
*0
последнее уравнение приведем к виду
F ХС„=/т0-|- + /тл (1.3.17)
и по аналогии с решением задачи двух тел небесной механики
назовем его векторным интегралом Лапласа, а переменный век¬
тор Ju=ftnoeu — переменным вектором Лапласа управляемого
невозмущенного движения. Учитывая согласно (1.3.8) и
(1.3. 11) выражения для переменных векторов Си и Си> вектор
ёи представим
«-=«• +7^1 [^Х(^ХР)+?Х (^ХУ)}~-
\
Раскрывая выражение двойного векторного произведения,
получим
t
eu^+^-^{2(P-V)R-(P-R)V-(V.R)~P]^ (1.3. 18)
• lo
или, учитывая значение вектора Р, будем иметь
ё«=*о [2 (p V)R- (~p-R) F-(Ftf) р] d In ц. (1.3.19a)
fm0
34
Для баллистического невозмущенного полета вектор еи ста¬
новится постоянным и равным
Положение вектора ёи в пространстве можно определить,
умножив левую и правую части уравнения (1.3.17) скалярно
на Си, что приводит к условию
Таким образом, вектор Лапласа ёи * ортогонален ^ектбрной
переменной интеграла момента количества движения Си* Поэто¬
му вектор Лапласа ёи всегда лежит в мгновенной плоскости
(рис. 1.3.2), определяемой уравнением (1.3.12).
Умножив правую и левую части уравнения (1.3. 17) скаляр¬
но на R и имея в виду равенство
Это уравнение мгновенной поверхности, в одной из точек ко¬
торой находится в текущий момент времени КЛА. Совместно с
уравнением мгновенной плоскости (1.3.12) уравнение мгновен¬
ной поверхности (1.3.22) определяет мгновенную орбиту управ¬
* В дальнейшем для упрощения терминологии вектор еи также будем на¬
зывать вектором Лапласа.
а интеграл Лапласа имеет вид
V X си к=fm0 fm^u к.
(1.3. 20)
Рис. 1. 3. 2. Схема векторных соотно¬
шений:
(1.3.21)
Уравнение орбиты
(VXCu)-R=(RXV)Cu=Cu-Ca = Ca\
найдем
(1.3.22)
35
ляемого движения. Поэтому два уравнения—(1.3.12) и
(1.3.22)—представляют общее уравнение мгновенной орбиты,
в одной из точек которой в данный момент находится КЛА.
Уравнение (1.3.22) изображает в каждый момент времени по¬
верхность второго порядка. Выясним вид поверхности. Семейство
плоскостей, перпендикулярных текущему направлению перемен¬
ного вектора Лапласа ёи, определяется уравнением
~R~ea = d, (1.3.23)
где d — параметр семейства. Тогда согласно уравнению
(1.3.22) получим
d, (1.3.24)
fm о
т. е. сечения мгновенной (поверхности второго порядка (1.3.22)
семейством плоскостей, перпендикулярных прямой, направлен¬
ной вдоль текущего вектора Лапласа ёи, есть окружности. Сле¬
довательно, мгновенная поверхность (1.3.22) является поверх¬
ностью вращения второго порядка вокруг оси, направленной
вдоль ёи, и есть либо эллипсоид, либо параболоид, либо гипер¬
болоид вращения. Один из фокусов этой поверхности совпадает
с центром масс центрального тела. Поскольку мгновенная пло¬
скость (1.3.12) проходит через ось вращения поверхности, то
мгновенная орбита управляемого движения КЛА является пло¬
ской кривой второго порядка, один из фокусов которой совпадает
с центром масс центрального тела и линия апсид (главная или
фокальная ось) которой совпадает с направлением текущего век¬
тора Лапласа.
Текущий вектор Лапласа ёи всегда направлен в перицентр
мгновенной орбиты — в точку, наиболее близко расположенную
на мгновенной орбите к центру масс центрального тела, прини¬
маемого за правый фокус орбиты. Приняв угол между текущим
радиусом-вектором КЛА и текущим вектором Лапласа равным
v, уравнение мгновенной орбиты в мгновенной плоскости со¬
гласно (1.3. 22) представим в виде
R= Сц2//т° . (1.3.25)
1 + еи cos v
Полученное уравнение является полярным уравнением кониче¬
ского сецения, если принять pu = Cu2lfmo—фокальным парамет¬
ром мгновенной орбиты; еи — эксцентриситетом мгновенной ор¬
биты; v — истинной аномалией мгновенной орбиты.
Таким образом, семейство пространственных траекторий по¬
лета управляемого движения находится на поверхности, явля¬
ющейся огибающей мгновенных эллипсоидов, параболоида и ги¬
перболоидов, определяемых уравнением (1.3.22); в случае пло¬
ского управляемого движения траекторией полета является
36
огибающая мгновенных эллипсов, параболы и гипербол, вы¬
ражаемых уравнением (1.3.25).
Поэтому мгновенное коническое сечение конца активного
участка является орбитой баллистического невозмущенного дви¬
жения, выражаемой уравнением
/?=■ С« *//'”.°„ = Ен.к . (1.3.26)
1 + бц к cos и 1 еи к cos v
Орбита находится в плоскости, задаваемой уравнением (1.3. 14).
Угол между начальным и текущим векторами Лапласа %
можно определить из уравнения
cosx=ig^g-= V + (<yU) t (1.3.27)
е$еи йо2 + ео I е
где
?,= [2(^-^)^-(^.^)F-(F.^)^rfln|.. (1.3.28)
/^0 J
1
Тогда угол наклона вектора Лапласа орбиты баллистического
невозмущенного движения к начальному вектору ёо равен
yk. = arccose°^“^arccos*02"1"^0. (1.3.29)
еовц к ^о2 + бо/гк
Текущий вектор Лапласа ёи всегда будет параллелен началь¬
ному, если закон управления вектором тяги таков, что соблюда¬
ется равенство
^>Х««=«оХ /«=о.
которое удовлетворяется при выполнении условия
2 (р'■ v) (i„ х R) - Гр ■ R) (ё« X v)—(v -7?) <ё0 х р)=о. (i. з. 30)
Полученное соотношение может быть удовлетворено при двух
различных законах управления вектором тяги. Если вектор тяги,
как и вектор скорости, будет всегда параллелен радиусу-векто¬
ру, направленному вдоль линии апсид начальной орбиты, то
ввиду ёоХЯ = ёоХУ=ёоХр = 0 соотношение (1.3.30) удовлетво¬
ряется и ёи = ёо. В случае параллельности вектора туги Р вектору
скорости V, который ортогонален радиусу-вектору Л, направлен¬
ному в перицентр начальной орбиты, соотношение (1.3.30) вы¬
полняется ввиду ёоХЯ = 0 и (р-Л) = (7 ■ Л) =0. Это возможно
при расположении вектора тяги в плоскости орбиты и при им¬
пульсном изменении тяги (т. е. импульсном изменении скорости
полета) в перицентре мгновенной орбиты.
Для баллистического невозмущенного движения может пред¬
ставлять интерес зависимость вектора скорости КЛА V от ра-
37
диуса-вектора^ которую можно получить после векторного ум¬
ножения на Си к левой и правой частей уравнения (1.3.20) и
ряда' преобразований в виде
Т7 fmо ^ v^° I fmQ c° V p°
V — cUK^u к Л Си КТ о Д ■
к к
Примечательно, что вектор скорости V выражается как сум¬
ма двух составляющих, постоянных по величине, одна из кото¬
рых перпендикулярна радиусу-вектору и равна /т0/Си к, а дру¬
гая— перпендикулярна линии апсид и равна ^т° еи к. Далее,
Си к
учитывая согласно определению истинной аномалии выражение
Я°=е°и к cosv-J-(C2k X *2к) sin v, (1.3.31а)
предыдущее уравнение можно записать в следующей форме:
V = JJ12_ [(*bk + cosv)C£kX *2к —e2icsinv], (1.3.316)
би К
раскрывающей зависимость вектора скорости КЛА V при бал¬
листическом невозмущенном движении от истинной аномалии и
векторных постоянных интегрирования Си к и ёи к.
Взаимосвязь векторных переменных Си, ёи и hu
Существует взаимная связь векторных переменных (?и, ёи и
переменной hu. Найдем ее. После умножения правой и левой'
частей уравнения (1.3. 17) скалярно на ёи будем иметь
fm, Се„ .eJ = (7XCj-ea-^S-CR-ёа).
Подставляя в это уравнение значение ёи и (Л*ёи) согласно
(1.3. 17) и (1.3.22) и учитывая равенства
(vxc,)-(vxc,)=(ca-ca)v\
(vxcu)R=(cu-cu),
получим
(i,.eJ_l + JSL£|L ha
(/щ)2
ИЛИ
eu*=l + (-jjrJ ha. (1.3.32а)
Отсюда имеет место равенство
А„=(/т0)а%Ц=!. (1.3.326)
\L,U'L,U)
38
Баллистическое движение
Имеет смысл более подробно познакомиться с характеристи¬
ками баллистического движения, так как оно охватывает наи¬
больший промежуток времени межпланетного полета. Баллисти¬
ческое невозмущенное движение описывается первыми интегра¬
лами (1.3.76), jl. 3.116) и (1.3.20). Постоянные интегрирова¬
ния Лик, Си к и /и к полностью определяют положение орбиталь¬
ной плоскости, ориентацию орбиты в плоскости движения, ее
форму и размеры. Понятно, что из семи скалярных величин
Л„К1 С и /ик(*=1, 2, 3) только пять являются независимыми,
поскольку они согласно (1.3.21) и (1.3.32) связаны следующи¬
ми соотношениями:
g..7..=o, />..=(/““^,)~((Wo)2. (1.3.33)
кОв к/
Поэтому для образования общего интеграла векторного уравне¬
ния движения (1.3.2) нужно найти шестой интеграл, содержа¬
щий время явно. Условие (1.3. 14), характеризующее баллисти¬
ческое движение как плоское, позволяет интеграл момента
количества движения (1.3. 116) в плоскости орбиты представить
в форме R2—=CUK, что даст возможность с учетом поляр-
dt
ного уравнения орбиты (1.3.26) записать недостающий (ше¬
стой) независимый первый интеграл в виде
С'л 0
t-ta = —^~ \ - dv (1.3.34а)
(//no)2 J (1 + ecosv)2
°я
ИЛИ
>3
/-т = —[ dv, (1.3.346)
(/щ)2 J (1 + е cos v)2
о
где е= |ёцк| = —эксцентриситет орбиты баллистического
//по
движения.
т—момент времени прохождения КЛА перицент¬
ра орбиты;
ta— момент времени окончания работы двигатель¬
ной установки или начальный момент балли¬
стического движения, называемый начальной
эпохой;
va—истинная аномалия КЛА мгновенной орбиты в
момент выключения двигательной установки.
Интеграл (1.3.34) является табличным. Однако в зависимо¬
сти от типа баллистического движения он берется по-разному.
39
В случае эллиптического движения [13, »§» 2 гл. V] (когда
V* < — и e<l) получим
Яа /
или
л (t—ta)=E — Ea — e(sm Е— sin Еа) (1.3.35а)
n{t — x) = E — е sin £, (1.3.356)
где £ — эксцентрическая аномалия, геометрическая интерпре¬
тация которой дана на рис. 1. 3. 3;
//«о
а — большая полуось орбиты.
Рас. /. 5. 3. Геометрическая ин¬
терпретация истинной аномалии
V и эксцентрической аномалии
Е эллиптической орбиты
Рис. 1.3.4. Геометрическая интер¬
претация истинной аномалии и а
вспомогательной переменной F ги¬
перболической орбиты
Для гиперболического движения [13, § 2 гл. V] (когда
Vа 2^”° и e>l) имеем1
n(t-ta)=e(\gF-tgF,)~\nUg (-l+45j/tg (у + 45’)]
(1.3.36а)
или
n{t — x) = eigF — lntg + • (1.3.366)
где F — вспомогательная переменная, геометрическая интерпре-
- тация которой дана на рис. 1.3.4.
40
Если ввести новую вспомогательную переменную Н, связан¬
ную с F соотношением
Кроме эллиптического и гиперболического движения КЛА
принципиально можно рассматривать в качестве невозмущенно-
е=1, Va= и прямолинейное движение. Если по¬
следний тип движения — прямолинейное — следует трактовать
как вырожденное, то к круговому и параболическому нужно под¬
ходить как к предельным случаям кеплеровского движения.
Если эксцентриситет эллиптической орбиты мал (например,
£<0,02 при ЯСр<Ю000 км), то удобно пользоваться зависимо¬
стями теории кругового движения, рассматривая его как первое
приближение к эллиптическому движению, что позволяет коор¬
динаты (и составляющие скорости) КЛА представить в виде яв¬
ной зависимости от времени [50]:
ных погрешностей в определении положения КЛА по направле¬
нию радиуса AR и по нормали AN к нему (лежащей в плоско¬
сти орбиты) можно рассчитывать по следующим зависимо¬
стям [50]:
Переход от точных формул эллиптического движения к тео¬
рии почти кругового движения можно считать вполне оправдан¬
ным при значениях AR и AN, не превосходящих величин 5—
10 км, поскольку ошибки, возникающие от допущения о невоз-
мущенности движения (неучет влияния нецентральности поля
сил тяжести, аэродинамического сопротивления, силы притяже¬
ния Солнца и т. д.), могут достигать величин порядка десятков
и даже сотен километров. Понятно, что теория кругового и поч¬
ти кругового движения может быть использована для изучения
характеристик баллистического движения только искусственных
спутников планет.
shtf = tgf,
то будем иметь
или
n{t — ta) = е (sh Н — sh На) — (Н — На)
n'(t — т) = е sh Н — Н.
(1.3. 37а)
(1.3. 376)
го движения круговое
параболическое
v = M+2e sin М,
R = a( 1 — в cos М),
(1.3. 38)
(1.3. 39)
I aR I < e2R<
cp>
дЛП< — Л?ср.
4
(1.3.40)
41
Параболическое движение КЛА — это предельный случай
эллиптического или гиперболического движения. В действитель¬
ности параболическое движение как тип движения может суще¬
ствовать только одно мгновение, переходя под действием даже
очень малых возмущений в другой тип: эллиптический или ги¬
перболический. Однако в теоретическом плане параболическое
движение и параболическая скорость, определяемая по формуле
Va—\f 2^m°, представляет определенный интерес, позволяя
у Яа
выявить предельные характеристики движения искусственных
спутников планет и минимальные энергетические возможности
межпланетных полетов. В случае параболического движения, по¬
скольку Vа = р/*-^-т° и e=U согласно (1.3.34) получим
2n(<-0=(tg Y-tgir)+T(tgS T“tg8^) С'-3-413)
или
2/»(<-T)=tg-2-+-l-tg»-5-, (1.3.416)
что позволяет задачу определения истинной аномалии v для за¬
данного момента времени t свести к решению кубического урав¬
нения
Оз_|_3з_м = о, (1.3.42)
имеющего единственное действительное решение. Здесь o = tgy,
M = 6n(t — ta) или M = 6n(i— т).
Таким образом, соотношения (1.3.76), (1.3.116), (1.3.20) и
(1.3.34) [или вместо (1.3.34) уравнения (1.3.35), (1.3.36) и
(1.3.41)] позволяют с учетом (1.3.33) определить шесть неза¬
висимых первых интегралов и тем самым образовать общий ин¬
теграл векторного уравнения движения (1.3.2). Знание из семи
пяти независимых постоянных hUK, к, /«к (/=1, 2, 3) и ta
или т дает возможность однозначно определить положение КЛА
в пространстве и в заданный момент времени. Шесть постоян¬
ных интегрирования, позволяющих однозначно определить поло¬
жение КЛА в любой момент времени при баллистическом невоз¬
мущенном движении, называются элементами орбиты КЛА. Рас¬
смотренная система элементов орбиты КЛА является полной.
Кроме нее, можно ввести много других полных систем элементов
орбиты КЛА [50, '§♦ 5.4, 5. 6], [7, § 1. 8], [52, § 3. 7, 3.8], определяя
их различными способами. Для решения ряда задач, излагаемых
в последующих главах, важно представление баллистической ор¬
биты и характеристик движения в зависимости от кинематиче¬
ских параметров в конце активного участка и ta.
42
Система элементов Ra, Va и ta
Пусть в качестве элементов орбиты используются радиус-век¬
тор Ra и вектор скорости Va в момент окончания работы двига¬
тельной установки ta. По интегральным соотношениям (1.3.11)
и (1.3.20) и связи (1.3.32) определим значения постоянных ин¬
тегрирования в виде
Си к — Ra X Уд*
Ra
fuK=VaXCuK-fm0 ,
Ад
К
/цк-(/^0)2
С2
ьик
(1.3.43)
Далее можно найти и некоторые кеплеровские элементы ор¬
биты (см., например [13, § 3 гл. IV]): фокальный параметр р, экс¬
центриситет е и большую полуось орбиты а по следующим зави¬
симостям:
е — еик
~r^af~ -1Г+[1 Х/Га 1 to • о
fmoRa J L fm0Ra
= (Я. X Уд?
У Уик ,
fm0
fm0Ra
/щ
/Щ
2|1/2
} '
(1.3.44)
(1.3.45)
причем
I Ra X Va\ =Ra'Va* COS ва = / {RaV af - (Ra • V af (1. 3. 46)
Д Jt
и —"^“o- (Рис< 1- 3. 5). Элементы p, e и а характеризуют
форму и размеры орбиты. Учитывая определение истинной ано¬
малии, найдем
cos Пд =
1
fmQe .
(Ra X О*
sin га=
_ \RgX Уд\
fm0eRa
(Ka-Va).
(1.3.47)
* Значение а<0 соответствует гиперболической орбите, условно пред¬
ставляемой в виде мнимой эллиптической (эллипс с отрицательной большой
полуосью и мнимой малой полуосью), что позволяет формально перенести на
гиперболическую орбиту все соотношения, полученные для движения по эл¬
липтической орбите.
43
Решая уравнения (1. 3. 31а) и (1.3.316) относительно единич¬
ных векторов е°ик и 1° = С°и к X е°и к три заданных Ла, Va и Da,
получим
S„ = e + cos^ sin vaVa, (1.3.48)
P V /«оP
1° = Ha + COS vaVa. (1.3.49)
p У fmoP
Здесь следует иметь в виду, что вектор ёЦк направлен из центра
небесного тела в перицентр орбиты, а вектор Г перпендикуля¬
ру. 1.3. 5. Орбитальная
полярная система коор¬
динат:
V—истинная аномалия; R—
расстояние от центра небес¬
ного тела до КЛА (точка А)
рен к нему в плоскости орбиты при правой системе координат
(рис. 1.3.6). Интересно отметить, что радиус-вектор перицентра
орбиты Л« выражается формулой
Rn = e + cosva 7ёд — 1 /~ Ra Sin I3g у (1.3.50)
1 + е у fm0 (1 + е)
легко получаемой из уравнения (1.3.48) после умножения ле¬
вой и правой ее частей на RK с учетом равенства p = Rn{ 1+е).
Рис. 1.3. 6. Орбитальная
система координат и ее
орты
Обращаясь опять к уравнениям (1.3.31а) и (1.3.316), можно
с учетом полученных соотношений (1.3.48) и (1. 3. 49)^ предста¬
вить зависимость уекущих значений радиуса-вектора R и векто¬
ра скорости V от Ra> Va и разности (v — иа) в виде
R = {1 — -J [ 1 — cos (и—va)]J ~Ra -f у-^-р sin (D- va) Va%
(1.3.51)
44
Выражая cosv = cos[(t> — na) + v>a] и учитывая зависимость
(1/-Д°) = Д= e sin v, (1.3.53)
запишем для удобства вычислений радиуса Д полярное уравне¬
ние орбиты в следующей форме:
/?=- f .
1 + — lj cos (и — Va) — — л / (Ra-Va) Sin (v — va)
(1.3.54)
Для определения зависимости текущих значений Л, R и V от
времени полета t при заданных Яа, Va и ta необходимо обратить¬
ся в зависимости от типа движения к уравнениям (1.3.35а),
(1.3.37а) — (1.3.39) и (1.3.41). Однако можно получить и
другие более удобные для вычислений зависимости Д и V от /
при заданных Ra, Va и ta, которые, правда, будут непосредствен¬
но связаны с конкретным типом движений.
Эллиптическое движение
Имея в виду определение эксцентрической аномалии Е (см.
рис. I. 3. 3), получим
Д=а (1 — е cos Е), (1.3.55)
cos Е — е . V1—в2 sin Е 0 г-^ч
cos т> = , sin v=— (1.3.56)
1 — ecos£ |1 — ecosE ’
r? e + cosr . c. V1—e2 sin и ,л 0
cos E——— , smf=- (1.3.57)
1 + e cos v 1 + 6 cos v ’
поэтому можно написать:
cos E=— (I——) , sin£=—^ V . (1.3.58)
e \ a J eY fm0a
Последние соотношения позволяют уравнение (1.3.35а) после
ряда преобразований представить в следующей форме [7, § 2.6]:
n(t-ta)=(E-Ea)+^^[l-c0s{E-Ea)]-
(1 Ra \
Подставляя в уравнения (1.3.31) и (1.3.48), (1.3.49) значе¬
ния cosd и Sinn согласно (1.3.56), после некоторых преобра¬
зований уравнения (1. 3. 31) выразим в виде
7?={l-^-[l-cos (£-£„)]}/?* +
+ {(<- Q--jj- \(Е-Еа)- sin (Е-£„)]} Va, (1.3.60)
V= sin (£-£„) Ra +(l--j [1 — cos (£ — £•„)]}F0.
(1.3.61)
Гиперболическое движение
Аналогичным образом, учитывая уравнения
R=a{echH-\), (1.3.62)
е — ch И . У е2—1 sh И м о со\
cos т = , sin яз = — , (1.3.63)
echH— 1 ech Н — 1
, г, е + cos v . и Уе2 — 1 sin г ,. Q с .
СпН=— , sh Я = — , (1.3.64)
1 + е cos v 1 4- е cos гз
преобразуем уравнения (1.3.31) и (1.3.37а) к виду
п (/_/,) = [ch (Н-На)~ 1] +
+ {\ + ^-\МН-На)-(Н-На\ (1.3.65)
^={l-^-lch(*,-^)-l]J^ +
+ {[l*а)Тlsh (Н~ Нй)~1(Н~н°)]} V°' (1'■3-66)
F= “ 8,1 {Н ~ Нл) + {' “ -R lCh (И ~ Н°]~ ‘]}V“-
(1.3.67)
Таким образом, по значениям кинематических параметров в
конце активного участка можно определить положение КЛА,
скорость и ее составляющие в каждый момент времени. Сущест¬
вует взаимно однозначное соответствие между совокупностями
кинематических параметров в конце активного участка и постоян¬
ными интегрирования и кеплеровскими элементами.
46
Движение КЛА по околопланетным орбитам
в нормальном гравитационном поле
В ряде задач межпланетного полета КЛА должен выйти (или
сойти) на эллиптическую или круговую околопланетную орбиту.
Выбор ее характеристик неразрывно связан с расчетом межпла¬
нетной траектории полета. Кроме того, в случае требования
определенного времени пребывания КЛА на орбите возникает
задача о прогнозировании его движения, поскольку элементы ор¬
биты со временем изменяются под влиянием действительного
гравитационного поля планеты. Поэтому прогнозирование дви¬
жения КЛА по околопланетной орбите является неотъемлемой
частью задачи расчета межпланетных траекторий полета.
Для уровня точности прогнозирования движения, требующе¬
гося для задач проектирования орбит, вполне можно восполь¬
зоваться представлением нормального потенциала планеты в ви¬
де соотношения (1. 1. 11). Тогда в векторной форме дифферен¬
циальное уравнение относительного баллистического движения
КЛА в нормальном гравитационном поле планеты согласно
(1.2. 3) представим следующим образом:
%= - (1.3.68)
где
^=^у(^)2(т-^6)-
причем
sinS=£»X‘V v(S0-'i'z) = 4-p2--(^0 ?J^0]; Vtf = #°;(1.3.69)
iz — единичный вектор вдоль оси симметрии*
В работах М. Д. Кислика [24, 25] было получено точное ре¬
шение данного уравнения движения *, которое является следую¬
щим приближением по сравнению с теорией кеплеровского дви¬
жения в описании действительного околопланетного движения
КЛА в пространстве без атмосферы.
Используя первые интегралы, полученные М. Д. Кисликом,
можно довольно точно, исключая влияние аномалий силы тяже¬
сти и возмущения от Солнца, прогнозировать движение КЛА.
Для задач проектирования околопланетных орбит главное в про¬
гнозировании — изменение характеристик движения за период
обращения. Поэтому, представляя каждый раз через период (пе¬
* Система дифференциальных уравнений возмущенного движения искус¬
ственного спутника планеты в общем случае не может быть проинтегрирована
в замкнутом виде. Однако имеются различные пути получения приближенных
решений, описывающих движение спутника в нецентральном гравитационном
поле. В настоящее время известно довольно много таких приближенных спо¬
собов. См., например [10, 17].
47
риоды) обращения орбиту эллиптической, пойдем по пути срав¬
нения ее элементов с исходной эллиптической орбитой, постро¬
енной по начальным данным условий перехода КЛА на орбиту
около планеты. Изменения элементов орбиты за период обра¬
щения называются вековыми изменениями (возмущениями).
Анализ указанных интегралов уравнений движения строго пока¬
зал отсутствие вековых возмущений элементов начальной орбиты
КЛА р, е и i и существованйе .вековых изменений элементов Q,
(о и т, подчиняющихся следующим условиям*:
где —, — и — —изменение элементов Q, « и т за один
dN dN dN
оборот КЛА.
Погрешность формулы (1.3.71) растет с уменьшением е и
достигает максимального значения (величины порядка е2 =
(1.3.71) нельзя, так как ошибка достигает того же порядка,
что и сама определяемая величина — . При е«1 эта ошибка
dN
имеет порядок е4.
Уравнение (1.3. 70) показывает, что под влиянием сил притя¬
жения нормального гравитационного поля планеты начальный
угол восходящего узла изменяется в направлении, противополож¬
ном вращению КЛА. Изменение происходит тем быстрее, чем
меньше наклон плоскости орбиты к плоскости экватора. Под
влиянием тех же сил перицентр и его угловое расстояние на¬
чальной эллиптической орбиты изменяются за период (1.3.71).
Угловое расстояние перицентра увеличивается, если
(5 cos2/—1)>0, т. е. /<63,4°, и уменьшается, если
(5cos2/—1)<0. При значении /=63,4° перицентр практически
не изменяет своего положения. Таким образом, под влиянием
сил притяжения планеты-сфероида изменяется положение на¬
чальной эллиптической орбиты как за счет вращения плоскости
орбиты, так и за счет вращения линии апсид, т. е. вращения са¬
мой орбиты в плоскости, причем форма и размеры орбиты веко¬
вых изменений не испытывают. Вместе с этим за период обра¬
щения изменяется момент прохождения КЛА восходящего узла.
dQ
dN
(1.3.70)
(1.3.71)
(1.3. 72)
dQ d w dx
2
= JRnn Ip2) при e(e2). К таким орбитам применять формулу
* См. [25], формулы (111), (120) и (130).
48
Период обращения КЛА по орбите в нормальном гравитаци¬
онном поле планеты с погрешностью порядка ггег л / ——
у /^пл
Т = 2я I Г■ д-3— (1 — е2 [(1 -|-5 cos2 /)--}-6е cos ш-|-
X fm пл I 2
-f 2е cos (С — w) (1 — 5 cos2 /)]}, (1. 3. 73)
где
у?2
г ^ПЛ
е = У
sin
Р2
sin В
sin /
Драконинеский период обращения КЛА Гд в нормальном гра¬
витационном поле планеты (интервал времени между двумя по¬
следовательными прохождениями КЛА через восходящий узел)
можно представить в виде зависимости
Тл=2л ^_^_|l_i_e2[(i-|-5cos2A)-2ecosa) (1—5sin2 /)]|-
(1.3.74)
Приведенные соотношения позволяют проводить прогноз эво¬
люции начальной орбиты КЛА около планеты, нормальный потен¬
циал которой описывается соотношением (1.1.11).
Глава II. ф МЕТОДЫ РАСЧЕТА УЧАСТКОВ
МЕЖПЛАНЕТНЫХ ТРАЕКТОРИЙ
/
§ 1. Определение орбит
по двум положениям КЛА
Существуют различные методы расчета орбит межпланетных
перелетов КЛА в гелиосфере. Разлйчие в методах вызывается
главным образом различными ис¬
ходными данными, определяющими
требования и задачу межпланетно¬
го перелета. В ряде случаев в каче¬
стве исходных данных могут рас¬
сматриваться положения КЛА в на¬
чале и конце полета, задаваемые
радиусами-векторами R\ и Л2 (рис.
2. 1. 1), время старта 11 и перелета
Д^1)2. Задание Ru Л2, 11 и Д^,2 по¬
зволяет полностью определить фор¬
му и размеры орбиты перелета, по¬
ложение ее плоскости в пространст¬
ве и ее кеплеровские элементы.
Однако это связано с решением си¬
стемы из шести трансцендентных
уравнений относительно шести параметров орбиты. Перейдем к
описанию уравнений указанной системы и к методам ее решения.
Рис. 2. 1. 1. Орбита межпланет¬
ного перелета КЛА:
1—орбита планеты назначения;
2—орбита планеты отправления;
3—орбита межпланетного перелета
КЛА
Метод Ламберта
_ Уравнение Ламберта. Так как модуль векторной постоянной
| Си к| векторного интеграла момента количества движения ра¬
вен удвоенной секториальной скорости, то удвоенная площадь
сектора
*^1,2 = Сц к (^2 ^1 } — кД^1.2*
50
Учитывая зависимость Сик = Y/ЩР> найдем
(2.1.1)
Оказывается, что правую часть уравнения (2. 1. 1) можно
представить в виде зависимости от a, Ri, У?2 и с или Ф (см.
рис. 2. 1. 1), структура которой связана с типом движения и воз-
Рис. 2.1.2. Эллиптические траектории:
а—Ф<п, хорда Л,Л2 не пересекает линию апсид
между фокусами FF*; б — Ф>Я( Ф=2Я — Ф0,
хорда Л|/42 не пересекает линию апсид между
фокусами FFв — Ф<я, хорда А\А2 пересекает
линию апсид между фокусами FF*; г — Ф>Я,
Ф=2я —Фй, хорда А\А2 пересекает линию апсид
между фокусами FF*; д — свободный фокус F*
никающей неоднозначностью в определении кривой конического
сечения, поскольку положение свободного фокуса не фиксирова¬
но [41, гл. V]. Дело в том, что при неизвестном положении сво¬
бодного фокуса (в главном фокусе находится небесное тело)
через две заданные точки в пространстве могут проходить две
конкретного типа орбиты при одинаковом значении полной энер¬
гии fiu к, приходящейся на единицу массы КЛА, т. е. при одном
и том же значении большой полуоси а. Поэтому площадь сек¬
тора зависит не только от значения угла Ф, но и от положения
свободного фокуса относительно хорды А Иг (для эллиптиче¬
ской орбиты см. рис. 2. 1.2).
лежит на хорде A^A2
51
Уравнение Ламберта получим для эллиптических орбит, так
как межорбитальные перелеты характеризуются в основном
такими орбитами. В общем случае имеем
51;_ =(е — sin е) —(8 — sin 8),
а у ар
(2. 1.2)
где значения углов е и 6 определяются неоднозначно из соот¬
ношений
sini=±/
Rl + R*+ с , sin —
4 а 2
/? + /?2 — 6
4 а
. (2.1.3)
Однако вычислить секториальную площадь можно по более
определенной формуле, если значения е/2 и 6/2 выбирать в пре¬
делах от нуля до я/2, учитывая при этом особенности возможных
случаев перелета (см. рис. 2. 1.2). На основании этого рисунка
найдем
(*^1,г)г = ^ (*^1 2^в’
где 5 — удвоенная площадь эллипса.
Для рис. 2. 1.2, а и в соответственно имеем [41]
(■Si 2)а — (£ — sin е) — (8 — sin 8),
а у ар
(5i,2)b
а У~ар
2я —(б — sin s) —(8 — sin 8),
(2.1.4)
причем О^е^я, 0<6<я и выражаются уравнениями (2.1.3).
Тогда для рис. 2. 1. 2, б и г получим
(■$1,2)б
а У ар
= 2я — (е — sin е) —j— (8— sin 8),
,(Si.2)r — (£__ gin е)-j- (5 — sin 8).
aYap
(2.1.5)
Обобщая эти случаи расчета секториальных площадей и учи¬
тывая уравнение (2. 1. 1), уравнение Ламберта представим
в виде
Д/ц— Яа (1 _[_ sign (sin Ф) г ^£_sjn £_я)_^_5{п
V fmQ I я I
(2. 1.6)
52
где верхний знак соответствует случаям а и б, когда хорда А^Ач
не пересекает линию апсид между фокусами *. Здесь sign (sin Ф)
определяется как +1, 0, —1 согласно знаку аргумента sinfl), т. е_
-J- 1 sin Ф О
О sin Ф = О
— 1 sin Ф < О
sign (sin Ф) =
Если КЛА до встречи с планетой назначения совершает не¬
сколько оборотов по переходной орбите, то время перелета!
будет
M=NT -(-
^ 2яа3/2 ^
где Т=— —период обращения по переходной эллиптиче-
/ fm о
ской орбите;
N—число оборотов .по переходной орбите (jV=
= 0, 1,...).
В этом случае обобщенное уравнение Ламберта (2. 1.6) при¬
водится к следующей форме:
М1л=у= (2ЛГ+ 1 + Sig" ^in Ф) [± (« - sin в - я) - (8 - sin 6)]}.
(2. 1.7)
.Следовательно, решая трансцендентное уравнение (2.1.7) при
известном числе оборотов КЛА N до встречи с планетой назна¬
чения и при заданных Л/, Ri и Яг, можно вычислить большую
полуось орбиты перелета а.
Уравнения (2. 1.2) и (2. 1.7) дают возможность соотношение
между разностью углов (е— 6) и (е — 6) представить в следу¬
ющей форме:
k=t-b = (2N-\-1) я-(-sign (sin Ф) [±(е — я) — 8]. (2.1. 8>
Кроме того, определение углов е и 6 связано с равенством
Я2 —£i=e —8 = Д. (2.1.9)
Примечание. Для гиперболической орбиты аналогом обобщенного
уравнения Ламберта является уравнение
А/, ■>= ^ ~ а- [(sha — a) — (shp — р) sign (sin Ф)], (2. 1. 10)
Vfm0
* Встречается и другая классификация орбит. Эллиптические траектории^
у которых свободный фокус орбиты лежит вне сегмента (площадь между тра¬
екторией и прямой А\А2), называют эллиптическими траекториями (орбитами)
первого рода (случаи «а» и «г»). Эллиптические траектории, у которых сво¬
бодный фокус орбиты лежит внутри сегмента (случаи «б» и «в»), называют
эллиптическими траекториями (орбитами) второго рода. Эллиптические траек¬
тории, у которых свободный фокус лежит на хорде AiA2, называют гранич¬
ными эллиптическими траекториями (см. рис. 2. 1.2,д).
53
«ытекающее из (2.1.1) с учетом возможных перелетов (рис. 2.1.3). Здесь
sh-^ = l/^Lsh-^- = l//?l + /?2~‘; . а>?>0.
2 У — 4а 2 У —4а
(2.1.11)
Время полета из точки R\ в точку R2 по параболической траектории (воз¬
можные случаи см. рис. 2.1.4) согласно (2.1.1) выражается уравнением Эйлера
Д'„ар= ? [№+#„+с?Р-(/?,+А>2-ensign (sin Ф)].
6 VfmQ
(2. 1. 12)
Рис. 2.1. 3. Гиперболические траектории
Определение типа траектории. Решение трансцендентных урав¬
нений (2. 1.7) и (2. 1.10), (2. 1. 12) относительно большой полу¬
оси а можно проводить известными численными методами, если
заранее известны тип движения, расположение свободного фокуса
относительно хорды и число оборотов N в случае эллиптической
Орбиты. Предварительное определение этих условий позволит
Рис. 2.1. 4. Параболические траектории:
NN'—директриса; FP—линия апсид
упростить и облегчить проведение итерационного процесса.
Вполне естественно при одних и тех же граничных условиях R\
и Яг выполнение неравенства А/Г<А^Пар<А^Эл. Поэтому для
54
определения типа орбиты достаточно по формуле (2. 1. 12) вы-,
числить А/'пар- Если заданное Л^>2 удовлетворяет неравенству
А^1,2 А^пар’ (2- 1* 13)
то переход из точки Ri в точку Л2 возможно осуществить только
по гиперболической орбите; если же
Д*1.«>Д*нар. (2.1.14)
то перелет может быть реализован только по эллиптической ор¬
бите.
Граничная эллиптическая орбита (см. рис. 2.1.2д) характер¬
на нахождением свободного фокуса F* на хорде, соединяющей
точки Ri и Я2. Фокальное свойство эллипса позволяет написать
+ F*A1+R2 + F*A2 = 4a
и тем самым ввиду F*Ai + F*A2 = c найти значение большой по¬
луоси граничной эллиптической орбиты:
ат = 4-(/?1+Я, + С). (2.1.15)
4
Следует отметить, что ат — наименьшее значение большой
полуоси, при которой еще возможна при заданных Ri и Л2 эл¬
липтическая траектория. Для граничной траектории время пере¬
лета согласно (2. 1.7) и (2. 1.3) выражается формулой
А^= w- \{2N-Г 1)я — sign(sin Ф)(8-sin 8)], (2. 1. 16)
V fmо
Ь 1 / -f- /?2 — С Ь / я
причем sin—=1/ — , —<—.
у 2 V Ri + R2 + С 2 2
Значение Atm при выполнении неравенства (2. 1. 14) позво¬
ляет выяснить вид эллиптической траектории. Исследования при
N=0 показывают [50, § 8. 6, 8. 7], что при удовлетворении задан¬
ного А^1)2 неравенству
tm (2.1.17)
перелет КЛА возможно осуществить только по эллиптической
траектории первого рода; если же
A*i,.>A*«. (2.1.18)
то реализация перелета возможна только по эллиптической тра¬
ектории второго рода.
Таким образом, уравнение Ламберта (2.1.6) можно пред¬
ставить в виде
3/2
A*i « = — [rt + slgn(A^m— Д/1а)(е—sin е — л) —
V /Щ
— sign (sin Ф) (8— sin 8)]. (2.1.19)
55
При N^\ решение обобщенного уравнения Ламберта
{2. 1.7) неоднозначно. Однако при Atii2<Atm и заданном N эл¬
липтические траектории второго рода реализоваться не могут.
Кроме того, можно показать, что если для заданных значений
Ль Лг и Atii2 решение возможно при каком-то N=Nk, то оно
возможно и при любом N<Nh. Пусть k — наибольшее значение
N, при котором еще возможно решение задачи. Оно определяет¬
ся из условия
AД^!.2> AVbl A^i,2j
где Ath — минимально возможное At при N = k. Тогда число воз¬
можных решений уравнения (2. 1.7) равно 2k [50, § 8.7].
Определение векторов скорости Vi и V2. В результате решения
уравнения Ламберта вычисляется большая полуось орбиты а.
Остальные элементы орбиты и ее положение в пространстве оп¬
ределяются уже значительно проще. Для решения этой задачи
вполне достаточно найти вектор скорости в начальной точке Fi,
'г е. свести задачу к определению орбиты по начальным данным
Ri и Fi, которая уже решена в § 3 гл. I. Полезно иметь также
зависимость вектора скорости в конечной точке V2 от JRi и R2.
Обратимся к формулам (1.3.60) и (1. 3. 61). Имея в виду ра¬
венство (2.1.9) и новые обозначения, представим их в следу¬
ющей форме:
1 -
(1— cos Д)
Г л/ ^
L V fm0
(A —sin Д)
]v*
п = __Г/щ±.5\п.ъ
причем согласно ранее изложенному при N=0 имеем -
A = jt-|-sign(A/>n— A/lia)(e — я) — sign(sin Ф)8. (2. 1.20)
После преобразования получим
V1 = AR2 — B^Ri,
V2 = B2R2— CRV
(2.1.21)
(2.1.22)
(A — sin Д)
—l
г1=л[1-^(1_созл)]’ йа=л[1_^(1
c=1S-sini+4,-£(l-cosi)]-
— cos A)j ,
(2. 1. 23a)
56
Если учесть равенство (2.1. 8) и зависимость
YRM* cos— = 2а sin — sin — ,
r 1 2 2 2 2
то значения коэффициентов А, В и С можно представить еще
в виде
А=-
V fmdaR\R2
2-, В^а(\sin4 —) , 1
Ф 1 V Ri 2 /
2 sin cos —
2 2
Ва=л(!-§-5‘п2т)’
c“J^-sin4+/,‘(1-|-sin,T
Примечание. Для гиперболической орбиты значения коэффициентов
А, В и С выражаются следующими зависимостями:
(2.1.236)
.3/2
К/Щ
(sh д
-л)]'1;
(2.1.24)
В1 = л П — ^-(ch д— 1)] . B,= ^[l-^(chA-l)j;
где Д = а—р sign (sin Ф).
Основываясь на факте, что касательные к орбите в точках
А\ и А2 и биссектриса центрального угла Ф имеют общую точку
пересечения, можно получить зависимость
cosec
tgO^ctg^--j/g cosA
**=]/§-<»Tc<"KT“c‘eT* I
(2. 1.25)
выражающую значение траекторного угла в точках Ai и Л2.
Определение фокального параметра р. В ряде случаев может
быть более удобен другой алгоритм определения орбиты, когда
после решения уравнения Ламберта (вычисления а) непосредст¬
венно обращаются к зависимостям, определяющим фокальный
параметр р. Согласно соотношениям между истинной и эксцент¬
рической аномалиями имеем
Vя 1#2 sin Y = Vар sin -у- (Е2 - Ех).
(2.1.26)
57
Далее, используя равенство
C2 = (R2 — R1)2= 2а sin -E2~El W 1-^cos2 £2 + £L
2 It 2
и определение e и б в пределах от нуля до я с учетом неравенств
(2. 1. 17) и (2. 1. 18), найдем
Ф
RiR2 sin2 ——
р= — (2.1.27а)
е — V
a sin2 —-—
2
или
ф
sin2 —
/>= ?_sin*i±X, (2.1.276)
где
Y=ь [sign(Д^- Д^) sign (sill Ф)].
Воспользовавшись уравнением (1.3.51), с учетом новых обо¬
значений получим формулу, определяющую вектор скорости в
начальной точке:
F‘= --^O-cos*)]*.}. (2.1.28,
Таким образом, задача сведена к задаче определения орбиты по
начальным условиям Л1 и Fi, решенной в § 3 гл. I.
Примечание. Для гиперболической орбиты фокальный параметр
р определяется по формуле
Ф
4а/?1Л2 sin2 — o + y
Р=- - sh ~' (2Л'29>
где у = Р sign (sin Ф).
При определении положения плоскости орбиты в пространст¬
ве можно встретиться с рядом особенностей решения, когда Ф = я
и заданные точки положения КЛА лежат по разные стороны пря¬
мой, проходящей через притягивающий центр. Геометрически это
означает, что положение орбиты не определено — она может
располагаться в любой плоскости, проходящей через прямую
AiA2. Для определения орбиты необходимо предварительно за¬
даться положением ее плоскости и направлением движения.
Кроме того, в этом случае можно встретиться с трудностями
вычисления некоторых других элементов орбиты, поскольку
в ряде соотношений, приведенных выше, знаменатель обращает¬
ся в нуль.
58
Метод п-итераций
Для избежания указанных особенностей в вычислении эле¬
ментов, характеризующих форму и размеры орбиты, следует
использовать метод итераций по истинной аномалии (метод
п-итераций). Исследования показали, что этот метод является
очень удобным и позволяет достаточно быстро определить орби¬
ту по двум положениям и интервалу времени перелета [52, § 6. 5
Метод п-итераций заключается в предварительном задании
начального значения истинной аномалии в начальной точке нь
Далее вычисляется эксцентриситет орбиты по формуле
получаемой из полярного уравнения орбиты с учетом заданных
двух положений КЛА. Если Ati, 2<А?Пар, то исходное значение
ню должно удовлетворять условию e^sl, что может быть достиг¬
нуто при ее определении из (2. 1.30) при е=\, т. е. из урав¬
нения
В случае Ы\, 2>А^тар значение ню нужно выбирать в диапа¬
зоне от нуля до п, определяемого из (2. 1.31).
Фокальный параметр р и большая полуось орбиты вычисля¬
ются по следующим соотношениям:
Теперь можно проверить правильность выбора vij (/=0, 1,...,
п — номер итерации), обращаясь в зависимости от значения е
и соотношений (2. 1. 17) и (2. 1. 18) к уравнению (2. 1.7) или
(2. 1. 10). После удовлетворения заданной точности решения за¬
дачи, проверяемой по значению разности [Ati<2— (АО«у], следует
по формуле (2. 1. 8) вычислить угол А. Обращешш к соотноше¬
ниям (2. 1.21) — (2. 1.23) позволяет найти V\ и К2 и тем самым
определить положение орбиты по начальным условиям.
Кроме изложенных существуют и другие методы определе¬
ния орбиты по двум положениям КЛА Ль Л2 и времени перелета
А^>2, имеющие свои преимущества и недостатки. Для анализа
проектно-баллистических характеристик КЛА, совершающих
межпланетные перелеты, рассмотренные методы наиболее удоб¬
ны и характеризуются хорошей сходимостью итерационного про¬
цесса. /
гл. VI].
е=
/?2 —
(2.1.30)
(/?! — /?2 cos Ф) COS V! + /?2 Sin Ф Sin V! ’
= 0. (2.1.31)
(2. 1.32)
59
§ 2. МЕТОД «ПОПАДАЮЩИХ ТРАЕКТОРИИ»
Использование метода Ламберта для построения поля изо¬
линий характеристик траекторий межпланетного полета требует
интерполяционной программы, которая увеличивает вр^мя рабо¬
ты на ЭЦВМ. Поэтому для расчета поля изолиний был разрабо¬
тан прямой метод, названный методом «попадающих траекто¬
рий». Идея этого метода сводится к краевой задаче, в которой
при заданной дате старта to подби¬
раются такие параметры вектора
скорости выхода из сферы действия
Земли Fooo, которые обеспечивают
попадание КЛА в планету назна¬
чения.
Рассмотрим случай расчета изо¬
линии при заданной величине моду¬
ля вектора |V<xo|. Введем транспор¬
тирующую систему координат, нача¬
ло которой расположено в центре
Земли или планеты (рис. 2.2.1). Ось
Х\ направим по радиусу-вектору к
Солнцу, ось у 1 — перпендикулярна
оси и направлена в сторону дви¬
жения Земли. Оси xi и yi лежат в
плоскости эклиптики. Ось_Zi дополняет систему до правой.
Направление вектора V«>o будем задавать двумя углами: уг¬
лом р, образованным проекцией вектора Vooo на плоскость хи у{
с вектором Foooi углом у между проекцией^вектора Vooo на пло¬
скость хи у{ и осью t/i. Проекции вектора Vooo на оси этой систе¬
мы координат {хи г/ь z{) будут:
Рис. 2. 2.1. Кинематическая
схема составляющих векто¬
ров скорости КЛА и Земли
Veoxt = cos р sin у;
V'.yt = 1/eoo cos 8 cos y;
= l/«n sin 8.
(2.2.1)
Проекции вектора V<xo на оси эклиптической гелиоцентрической
системы координат (*0, Уо, z0) равны:
l/ee^0 = l/eeXlcostt@— sin м©; 1
V~yo = sin и©+ V„y1 cos и©; 1 (2.2.2)'
V °oZ0z=V °o2, • I ,
Складывая составляющие векторов скорости Земли и скоро¬
сти КЛА на сфере действия V«>o [уравнения (2.2.2)], получим со¬
ставляющие вектора скорости аппарата Vo в гелиоцентрической
60
системе координат в начальный момент времени (момент
старта):
Зная начальные условия х0, Уо. z0, VXo, VVo, Уг0, по известным
формулам определим элементы перелетной орбиты космическо¬
го аппарата: а, е, Q, I, ш, что позволяет ш зависимости от времени
перелета At найти координаты КЛА в конечный момент хк, ук,
гк и определить расстояние между КЛА и планетой назначения
по формуле
При увеличении времени полета (от Д/0=0) величина про¬
маха AR при фиксированных значениях р и у будет иметь мини¬
мум при некотором значении At=Atm. Изменяя определенным
образом значения р и у, можно уменьшить промах AR до задан¬
ной точности попадания А#ДОп (рис. 2. 2.2).
Таким образом, задача сводится к определению искомых ве¬
личин Atm, pm, Ym- Существует несколько методов для решения
такого рода задач. Исследования показали, что сходимость по¬
иска улучшается, если использовать комбинацию градиентного
метода наискорейшего спуска по параметрам р и у с перебором
At. Суть алгоритма состоит в следующем.
Если AR=AR{$, у) — оптимизируемая функция и
то для нахождения минимума следует двигаться по направле¬
нию, противоположному градиенту.
Шаг по параметрам р и у находят по формулам
Этот шаг автоматически регулируется по мере приближения
к решению. После 5—6 шагов процесс обычно сходится к задан¬
ной точности по AR (Д/?д0п= 1000 км). Таким образом, для- за¬
данной даты старта U и Косо определяются tm, pm и Ym, формиру¬
ющие попадающую траекторию. При аппроксимации оптимизи¬
(2.2.3)
AR=V {хил-хк)г + (у11л-ук)г-\-{г11Л~гк)г • (2.2.4)
dbR/dfi
AY =
dSR/dy
61
руемой функции параболой по трем точкам время вычисления
сокращается.
Изменяя дату старта /0, можно определять величины At, р и у,
соответствующие изолинии заданного модуля вектора скорости
(рис. 2. 2. 3).
При построении замкнутой изолинии с какого-то момента'5
для to при заданном Vooo попадание не будет обеспечено (процесс
поиска сходится к АД>АЯЛОп)• В этом случае осуществляется
поиск точки 6 (см. рис. 2.2.3), лежащей на вертикальной каса¬
тельной (возврат с дроблением шага б^о). После этого знак из-
Рис. 2.2. 2. Схема вычислительно- Рис. 2. 2. 3. Схема вычислительного
менения шага 6/о меняется на обратный и рассчитываются точки
7,8 ит. д. Процесс поиска в последующих точках существенно
сокращается, если в качестве нулевых приближений использо¬
вать параметры Л/т, pm, ут предыдущей точки. Такой алгоритм
построения изолиний обеспечивает унимодальность области гра¬
диентного метода поиска. Таким образом может быть рассчита¬
но поле изолиний траекторий полета по 1-му полувитку (угол
перелета Ф^я).
Для расчета поля изолиний 2-го полувитка (Ф^я) значение
Д/0 в процессе поиска точки изолинии должно выбираться та¬
ким, чтобы первая траектория заведомо оказалась в области тра¬
ектории второго полувитка.
Аналогичным образом, не меняя логики метода, могут быть
построены и изолинии других параметров (Р и у).
Использование метода попадающих траекторий позволяет оп¬
ределять начальные кинематические параметры гелиоцентриче¬
ского участка перелета и в точной постановке с учетом конечных
размеров сфер действия планет и влияния различных возму¬
щений.
го процесса метода попадающих
траекторий
процесса построения изолиний ха¬
рактеристики траектории полета
62
§ 3. ПРИБЛИЖЕННЫЙ МЕТОД РЕШЕНИЯ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
УПРАВЛЯЕМОГО ДВИЖЕНИЯ КЛА
Если взять интегралы в правых частях уравнений (1.3.6),
(1.3. 10) и (1.3. 19), т. е. определить hu, ^ и е'и в функции от
кинематических параметров, относительного текущего веса р, и
начальной тяговооруженности п0 КЛА, то соотношения (1.3.7а),
(1.3.11а) и (1.3.17) явятся базой для анализа проектно-бал¬
листических характеристик КЛА. При заданном законе управле¬
ния вектором тяги получить такие решения точно можно только
одним из численных методов, причем результаты будут зависеть
от начальной тяговооруженности п0 и конечного относительного
веса р„. Все это затрудняет проведение анализа проектно-бал¬
листических характеристик КЛА.
Для выявления же оптимальных проектно-баллистических
характеристик КЛА необходимо обратиться к теории оптималь¬
ного проектирования летательного аппарата [43, гл. III], бази¬
рующейся на вариационном исчислении и численных методах
решения краевой задачи.
На начальной стадии проектирования особенно заметна ос¬
новная слабость численных методов, заключающаяся в том, что,
давая довольно точные ответы, они мало вскрывают сущность
задачи. В стадии предварительного проектирования КЛА и на¬
чальных разработок траекторий межпланетного перелета наибо¬
лее важно, чтобы конструкторы и расчетчики изучили существен¬
ные аспекты приближенных решений, что поможет им выявить
определяющие элементы и параметры и найти рациональные пути
осуществления общей идеи проекта. Здесь важную роль могут
сыграть приближенные методы решения дифференциальных
уравнений управляемого движения, степень точности которых
должна удовлетворять требованиям предварительного проекти¬
рования.
Предварительный анализ межпланетных траекторий полета
КЛА основывается иногда на импульсной аппроксимации, не
учитывающей конечную длительность активных участков в сфе¬
ре действия планеты и заменяющей конечную тягу, приклады¬
ваемую в течение определенного времени, импульсом тяги нуле¬
вой длительности, приводящим к скачкообразному изменению
скорости полета.
Однако импульсная аппроксимация не всегда отвечает тре¬
бованиям точности и не позволяет выявить влияние такого
важного основного параметра КЛА, как начальная тяго-
вооруженность д0, на проектно-баллистические характеристики.
Более плодотворными и охватывающими более широкий круг
требований являются методы, основывающиеся на приближен¬
ных приемах вычисления определенных интегралов.
63
Активный участок разгона КЛА
В конечной точке активного участка полета значение hUK со¬
гласно (1.3.66)
■V
hUK = hQ — 2W j (p-v)d 1п|л.
i
После интегрирования по частям найдем
(p-v)a
huK=ho — 2U7 [(p'v)a 1п{хк— j injxd(p-v)].
ifT-v) о
В случае непрерывного увеличения (уменьшения) скалярной
величины (p-v) по времени, используя теорему о среднем*, по¬
лучим
huK=h0—2W lp.v)a\n?K-aeln?K [(p-v)a-(p-v)^), (2.3.1)
где
ОМ* .
6 1Л ’
In (ХК
(Inр)е — промежуточное значение In р на интервале [(р-г>)<ь
(P'V)al
Тогда интеграл энергии управляемого движения (1.3. 7а) для
момента окончания активного участка представим в виде
'vl-—m±=h0-2 [(1—+^lntV (2.3.2)
га
Аналогичным способом преобразуем и векторный интеграл
момента количества движения (1.3.11а). В результате интегри¬
рования правой части уравнения (1.3. 10) найдем
CUK = C0—W {(г X ~р)а In рк — ат In рк [(г X ~Р )а- (г X ~Р) о*
(2.3.3)
где
п _ (Mm
ит , *
In [хк
(lnp)m— промежуточное значение In р на интервале интегриро¬
вания [(гХр)о, (гХр)а].
Учитывая (2.3.3), векторный интеграл момента количества
движения (1.3.11а) для момента ta представим формулой
(г Х^)а = Со-[(1- ат) (г X Р)а + ат (г X р)о] w 1п IV (2- 3.4)
* См., например, Г. М. Фихтенгольц. Основы математического ана¬
лиза, т. I, ГИТТЛ, 1966 (§ 2 гл. XI).
64
Поскольку промежуточные значения (1пр)е и (lnp)m опре¬
делены в области
0<(-1пц)е<(-1пИк)'. О < (— In jj.)m < (— In ixK),
то1 функции ae и am могут изменяться в пределах
О < в, < 1, 0<am< 1. (2.3.5)
При точном представлении ае и ат от In рк (или In р) соот¬
ношения (2.3.2) и (2.3.4) являются точными*. К сожалению,
получение такой информации связано только с вычислением ин¬
тегралов (1.3.7а) и (1. 3. 11а), что равносильно численному инте¬
грированию системы. Однако возможен другой путь: построение
приближенных зависимостей ае и ат от рк и п$ при различных
законах изменения вектора тяги. В этом случае соотношения
(2.3.2) и (2.3.4) будут уже приближенными, причем на их
точность влияет определенным образом точность построения за¬
висимостей ае и ат. Исследования показали, что при широко
используемых законах изменения вектора тяги точность построе¬
ния зависимостей <% и ат от р,< и п0 в диапазоне их реальных
значений для КЛА с ЖРД слабо влияет на точность решения
интеграла энергии и векторного интеграла момента количества
движения, представляемого в виде соотношений (2.3.2) и
(2.3.4). Поэтому данный метод приближенного решения диффе¬
ренциальных уравнений управляемого движения КЛА является
удобным и наглядным и позволяет достаточно просто достигнуть
требуемой для проектных разработок точности определения про¬
ектно-баллистических характеристик КЛА. Перейдем к рассмот¬
рению приближенных решений соотношений (2. 3. 2) и (2. 3. 4)
при известных законах управления вектором тяги.
Полет в плоскости начальной орбиты
Пусть имеет место управляемый разгон (торможение) КЛА
в плоскости околопланетной орбиты. Начальная орбита задается
постоянными h0, Go и ё0. Поскольку движение плоское, то угол
между векторами тяги р и скорости v выражается углом атаки а,
а угол между вектором тяги р и радиусом-вектором г — углом
Y=-j- — (6+ а) (рис. 2. 3.1).
Определение иа. Интеграл энергии (2.3.2) представим в виде
v2a — -¥^-f-2va(l—ae)W cos aflln(x- —
га
— {h0— 2,ц0аг№г cos а01п[хк) = 0. (2.3.6)
* Точность решений ограничивается условиями выполнения теоремы о
среднем.
65
Приняв
VHда = 1 — w cos aa In {1K; x»ee =1 — a*® cos aa In {1K;
. va . ~2 _ fmo/rp .
V
w =
Vo
w
, Т^кр.о
t/02
(2.3.7)
Vo '0
интеграл энергии для плоского управляемого движения (2. 3. 6)
преобразуем к следующей форме:
^» = Кдa-^a) + ^a|l ^“[^p.o (l ~ 4“)“
l vea ' ra>
— [(cos aa — cos a0) ae (0,5 — ae) w cos2 aa In jjJ w In jiJ ) V2. (2. 3.8)
Puc. 2. 3. i. Кинематика активного
участка
Раскладывая радикал в ряд и ограничиваясь первым членом
разложения, получим
®а ^иД а
vKp.o — [(cos ae — cos a0) ae +
Vea
4- (0,5 — ae) w cos2 aa In fiK] w In fiK
v
(2. 3. 9)
ea
Исследования показали, что независимо от известных законов
изменения а(/)* при я0^О,1 и рк^0,05 значения ае близки-к 0,5.
Поэтому уравнение (2. 3. 9) можно представить в виде прибли¬
жения
^а=^ида-у-^кр.о (l — у-) — (cos aa-cos a0)aew In |1K j .
(2.3.10)
* Проводились расчеты при тангенциальном, трансверсальном и оптималь¬
ном (обеспечивалось max/iu к) законах изменения а(/)-
66
В ряде случаев cos аа ~ cos ао, что позволяет получить новое
приближение в виде
Учитывая, что в первом приближении при л0>0,1 значения ги
близки к единице, вычислить va для определения нулевого при¬
ближения можно по формуле
Таким образом, соотношения (2.3.8) —(2.3. 12) при извест¬
ном законе изменения а(/) раскрывают с различной степенью
приближения зависимость va от га, рк и п0> причем зависимость
от п0 проявляется через ае и га.
Определение 0а. Векторный интеграл момента количества
(2. 3.4) для плоского управляемого движения представим в виде
Переходя к относительным величинам, после несложных преоб¬
разований получим
Формула (2.3. 15) при заданном законе изменения а(/) выра¬
жает зависимость 0а от га, рк и «0, проявляемую от п0 через га,
ае и а,„. Следовательно, для определения зависимости va и 0а
от рк и По необходимо найти зависимость га от этих параметров.
Выявить ее можно различными методами соответственно опре¬
деленному закону управления a(t).
Прежде всего отметим, что метод вывода уравнений (2.3. 8)
и (2. 3. 15) может быть использован для вычисления текущих зна¬
чений у и 0 по траектории полета КЛА, если ае и ат будут соот¬
ветствовать таким (1пр)е и (lnp)m, которые удовлетворяют не¬
равенствам
ид а
(2.3. 11)
Va = VUAa= 1 W COS 1п рк,
(2.3. 12)
причем истинная скорость находится в пределах
(2.3. 13)
rava cos 0а=Со - [(1 — ат) га cos (0в + ав) +
+ л/яго cos (0o-f a0)]U71npK.
(2.3.14)
cos ба=
cos е0 — [ат cos (90 + ар) —7Д (1 — ат) sin flQ sin ад] w In }хк
г a 1va + (1 — am) w cos aa In p.K]
(2. 3. 15)
0 <(!"!*),< In jx, 0<(lnp)m<ln|x,
где p — текущее значение относительного веса.
67
Имея это в виду, найдем
ve \ п )
— [(cos а — cos а0) ае -(- (0,5 — л^) w cos2 а In [i] In ji]} ^2; (2.3. 16)
где tjh/( = 1 — tocos a In[i, ve= 1 — aew cos a In jjl;
v, 0, а — текущие значения скорости, траекторного угла и угла
атаки.
Формулы (2. 3. 16) и (2. 3. 17) выражают при известном зако¬
не управления вектором тяги а(/) зависимость текущих значе¬
ний скорости полета v и траекторного угла 0 от текущих значе¬
ний радиуса г и относительного веса ц. Таким образом, активный
участок будет определен, если будет найдена зависимость теку¬
щего значения радиуса г от текущего значения относительного
веса р. Решение этой задачи с той или иной степенью прибли¬
жения связано с конкретным законом управления вектором тя¬
ги а(/).
Тангенциальный закон управления вектором тяги [а(7)=0]
интересен тем, что он по результатам достаточно близок к оп¬
тимальному, при котором суммарная энергия в конце активного
участка полета (величина hUK), приходящаяся на единицу массы
КЛА, достигает максимального значения при заданном рк- Обык¬
новенно орбита старта (промежуточная орбита) является кру-
Определение да и v. Уравнение (2.3.8) упростится и примет
вид
Ограничиваясь первым членом разложения радикала в ряд и учи¬
тывая ася^0,5, получим
cos 0О — [ат cos (Bq -1- а0) — г (1 — ат) sin В sin а] w In ;л
г [t; + (1 — ат) w cos а In |х]
(2.3. 17)
Тангенциальный закон управления
говой
va = {\— ®1П[1К)
(2.3. 19)
1 — aew In fiK
Воспользовавшись аналогичными упрощениями, уравнение
(2. 3. 16) приведем к виду
V = ( 1 — w lnjx) —
1 — aew In (jl
(2.3. 20)
Определение 0О и 0. Уравнения (2. 3. 15) и (2. 3. 17) преобра¬
зуем к форме
1 — amw In (iK
cos 9„ =
cos 9 =
ra 4- (1 — am) W In {JLK1
1 — amw In [x
r[v + (\ —am) w In J
(2.3.21)
(2. 3. 22)
Подставляя в (2.3.21) и (2.3.22) значения va и v согласно
уравнениям (2.3.19) и (2.3.20) соответственно, получим
cos 9a =
V.nV
еаУта
(2.3.23)
cos 9 —
vevm
vevm—^ —4r
(2.3.24)
где vm=\—amw lnjx, vma= \-amw In ^к;
ve = 1 —aew ln[x, vea= 1 — aew In [iK.
Определение ra и f. Активные участки КЛА с двигателями
больших тяг (ЖРД, РДТТ) имеют небольшую протяженность.
Расчеты показывают, что при п0^0,1 и рк^0,05 имеют место
неравенства
fta =
г а —Гр
Го
<1 и 9в<-5-.
4
В связи с этим, раскладывая в ряд по h правую часть урав¬
нения (2. 3. 24) и пренебрегая членами выше второго порядка
малости, получим
v*v
evm
VeVm — 11— —
VpV
evm
С учетом разложения cos0 в ряд по 0 и ограничиваясь первым
членом, уравнение (2. 3.24) преобразуем к виду
9 =
2 —L_ (л _ h*)]1'2'
vevm J
(2.3.25)
69
Поскольку имеет место кинематическое соотношение
г = v sin 0,
а секундное изменение относительной массы
ло
|Х=г —
то можно записать
•^ул
dh w
V sin б
dV- n0r02
или с учетом принятых допущений об угле 0 получим
dh w
т;б,
dv- Л0Г02
где
г
- 0 R* '
Подставляя в это уравнение значение 0 согласно уравнению
(2. 3.25), будем иметь
dh ^fTTd-v Г/, I \/, ,*sV/2
щ vevm } J
dP
где
w
d =
Учитывая, что при интегрировании введенные погрешности
уменьшаются, в правую часть данного уравнения вместо v под¬
ставим его первое приближение. Тогда получим
i vfw=^= - ) о - • ta rt х
х/
1 dp.
(1 — aew In fi) (1 — am w In p)
Принимая во внимание равенство *
h
Г dh
J VA(l-A)
— arc sin (1 — 2h)
= arc cos(l —2A),
* И. С. Градштейн и И. М. Рыжик. Таблицы интегралов, сумм,
рядов и произведении. Физматгиз, 1963, № 2261.
70
найдем
h =
ИЛИ
1 — cos
"о
— COS
Ir
Г= 1+ -=l + sin*^-/rj, (2.3.26)
1 ,
где o = d,
/2
d\i.
(1 — aew In fx) (1 — amw In p.)
(2.3.27)
Для конечной точки активного участка получим
?.-!+sin* (-£-/„), (2.3.28)
где
/*
1та=~ Г {\-Т£)\Пр)л/ 1 — - —у — dp.
J V (1— aew In р)(\— amw In p)
(2.3. 29)
Таким образом, определение текущего значения радиуса г
и его конечного значения га в зависимости от р, сведено к вычис¬
лению квадратур (2. 3. 27) и (2. 3. 29), численные методы расчета
которых просты и хорошо известны. Правда, эти квадратуры мо¬
гут быть также выражены аналитически с любой степенью при¬
ближения. Весьма важное свойство формул (2. 3.26) и (2. 3. 28)
заключается в слабом влиянии отклонений ае и ат от их «сред¬
них» значений, выбираемых для диапазона постоян¬
ными, на точность вычисления г и га. В табл. 2.1 даны значения
/а точ — га .Ю0%\ вычисления Га ПО Прибли-
га точ /
женной формуле (2.3.28), соответствующие |хк=0,1 и гг0=0,2,
при различных и характерных значениях ае и йт, принимаемых
постоянными в диапазоне 0,1^|хк^1 *. Благодаря указанной
особенности можно выбрать такие значения ае и ату постоянные
для любого |ак в диапазоне 0,1^|хк^1 и ввиду слабой зависи¬
мости ае и ат от По для любого значения п0 © диапазоне л0>0,2,
ошибок (дг =
* Вычисления проводились при следующих исходных данных: радиус кру¬
говой орбиты старта /?о=6571 км, удельная тяга Яуд=350с.
71
Таблица 2.1
ат
ае
0,6
0,62
0,64
0,68
0,48
0,92
0,57
0,23
0,43
0,5
0,50
0,22
0,12
0,77
при которых ошибки вычисления va, 0а и га (или v, 0 и г) явля¬
ются минимальными и вполне допустимыми для проектно-балли¬
стических расчетов. Проведенные исследования позволяют ре¬
комендовать следующие значения:
ае=0,5, ат=0,64.
(2. 3. 30)
Кстати, раскрывая неопределенность по правилу Лопиталя, мож¬
но показать, что при ц=1 согласно (2.3. 19) ае=0,5, причем с
уменьшением р, ае изменяется мало.
В табл. 2.2 и 2.3 показаны значения ошибок*
(
A va =
va точ va
• Ю0%;
A cos 0a =
COS Ид точ COS Ид
COS Ид точ
va точ
•100%;
А г =
Г а точ Га
а точ
100
*)
вычисления va, cos0a и fa по приближенным формулам (2.3. 18),
(2.3.19), (2.3.21), (2.3.23), (2.3.28) при выбранных постоян¬
ных значениях ае и ат по сравнению с точными расчетами va точ»
cos 0a точ и га точ при различных значениях По и цк. Видна хоро¬
шая точность рассматриваемого метода приближенных расчетов,
вполне удовлетврряющая требованиям, предъявляемым к точно¬
сти проектно-баллистических расчетов на этапе предварительно¬
го проектирования КЛА. Полученные результаты позволяют при
выбранных значениях ае=0,5 и am=0,64 затабулировать квадра¬
туру /г в зависимости от щ что значительно облегчает и упро¬
щает расчеты.
* Расчеты проводились для табл. 2.2 при РУД=3|Э0 с, для табл. 2.3 при
ЯУд = 450 с. Верхние значения в клетках относятся к расчетам по формулам
(2.3. 18) и (2.3.21).
72
Таблица 2.2
Ло
►к
А»а,%
Д cos ва,%
А',, %
0,2
0,5
0,43
0,67
1,07
0,60 0,49
0,4
1 0,21
0,99
1,18
0,65 0,5
0,3
0,23
0,96
| 0,87
0,66
0,06
0,2
0,47
0,05
0,2
0,89 1,7
0,1
0,3
2,99
0,12
1,73 4,5
0,4
0,5
0,19
0,22
0,41
0,21
0,21
0,4
0,23
0,41
0,64
0,28
0,41
0,3
0,21
0,6
0,85
0,28 0,52
0,2
0,13
0,64
0,96
0,27 0,16
0,1
0,12
0,01
0,80
0,32
0,24
0,8
0,5
0,06
0,06
0,11
0,06
0,06
0,4
0,07
0,12
0,19
0,19
0,11
0,3
0,08
0,19
0,29
0,46
0,18
0,2
0,08
0,26
0,39
0,96
0,24
0,1
0,08
0,2
0,46
1,9 0,16
73
Таблица 2.3
По
%
А сое ьа, %
%
0,2
0,5
0,14
1,21
0,27
0,74
0,54
0,4
0,53
1,34
0,80
0,81 0,21
0,3
0,87
0,54
0,19
1,25 2,02
0,2
0,15
1,23
1,14
2,55
4,12
0,1
3,06
1,84
7,15
4,75 3,31
0,4
0,5
0,27
0,51
0,76
0,31
0,46
0,4
0,22
0,84
1,06
'0,34 0,70
0,3
0,06
1,03
1,19
0,31 0,75
0,2
0,092
0,66
1,02
0,31 0,17
0,1
0,13
1,11
1,57
0,60
1,70
0,8
0,5
0,09
0,15
0,23
0,09
0,14
0,4
0,1
0,27
0,38
0,11
0,26
0,3
0,1
0,42
0,54
0,12
0,40
0,2
0,07
0,5
0,68
0,11
0,47
0,1
0,071
0,24
0,70
0,13 0,19
74
Определение полярного угла %а- Кинематическое уравнение
<*1 V
dt
представим в виде
cos б
v cos 0
dii
по
Подставляя в это уравнение значения v, cos0 и г согласно
(2. 3.20), (2. 3. 22) и (2. 3. 26), получим
d^
d
по
Г /
1 \ о a 1
1 +
1 — ) sin2 Ir
«ИД
L \
vevHJt j n0
1+1
(l — —-—\ sin2 — I г (
\ vevm / n0 m\
a \2
1 + sin2 — Ir
П0
Таким образом, вычисление /а сводится к вычислению квад¬
ратуры
Ха=
По
Г1 + f 1 — —— ) sin2 — /Г1 vUJl
L \ vevKX ) щ J
dp.
) [l + (l——-—) sin2— /г (l + sin2 — /Л
1 L \ vevm ) п0 \ щ J
(2.3.31)
С хорошей степенью точности ее можно представить в виде
Хл=
Щ
dp.
(2.3.32)
М" ~ид
) (‘+sin2 i,r)
После разложения в ряд подынтегрального выражения найдем
i f Ч1 ~2 (i 'Т+3 (t /г)~4 (t- ■ ■ -h
В результате будем иметь
Хд = — Г(1 + w) (1 — Рк) + In рк — 2(—\ /х2 +
по L \п0 J
+3(i)4/*446/i6+5(48/4 (2-3-33)
где
/j2=_j Vn[*dr, 1г*=-\ ^нд
1
/ц=-\ /,а= - f 8-
1 $
(2.3.34)
75
Формулы (2. 3. 31) — (2. 3. 33) позволяют с различной степенью
точности вычислять значения полярного угла х в конце управ¬
ляемого полета КЛА в зависимости от рк и п0. Выражение
(2.3.31) дает относительно лучшую точность. Для оператив¬
ных расчетов и анализа проектно-баллистических характеристик
более удобна формула (2.3.33), поскольку значения интегралов
(2. 3. 34) зависят (при равных значениях w) только от рк, что
позволяет их затабулировать. Ошибки вычисления Дха для Руд=
= 350, возникающие при расчете %а по этой формуле, даны в
табл. 2. 4.
Таблица 2.4
По
0,5
0,4
0,3
0,2
0,1
0,2
0,55
0,56
0,44
0,28
0,30
0,4
0,20
0,32
0,41
0,43
0,26
Таким образом, используемый в данном параграфе метод ре¬
шения интегралов управляемого движения позволил для танген¬
циального управления вектором тяги найти с допустимым при¬
ближением аналитические зависимости va, 0а, га и Ха от основ¬
ных проектных параметров КЛА рк и я0.
Определение hUK, Си к и еик• Полученные результаты позво¬
ляют выявить зависимость постоянных интегрирования hUK, Си к
и еик непосредственно от рк и п0. Поскольку для случая управ¬
ляемого движения в неподвижной плоскости
2 2/ОТ0
Са к 'a COS 0Д,
то, подставляя в эти уравнения значения va, га и cos 0а согласно
выражениям (2.3.19), (2.3.23) и (2.3.28), после несложных
преобразований получим
41 к
[l + f 1 — ) sin2 — Ira\ i>J
L \ ve a a I "0 I
/ a N2
I 1 -H sin2 —fr
no
1 + sin2 Ira
По
(2.3.35)
76
l+(l— )sin2— Ira , x
u K ' vfavnn.a / n0 (. . . „ 0 r |
—Г“= ; : vm a 1 + sin2 — ira\.
V 1 "° (2.3.36)
Следует отметить, что в первом приближении определять Си и
можно по формуле
7?^ = ®,,. (2-3.37)
с ошибкой вычисления, не превосходящей 5—8%.
Постоянная еик согласно уравнению (1.3.32а) определяется
зависимостью
р =
к
(2.3.38)
Активный участок торможения КЛА
До сих пор при выводе приближенных формул имелся в виду
разгон КЛА со стартовой орбиты планеты отправления до_ка-
кой-то орбиты отрыва, характеризуемой постоянными Лик, Си к
и ёи к- В ряде случаев межпланетный полет КЛА заканчивается
выходом на планируемую орбиту (назовем ее конечной орбитой)
около планеты назначения. Для выхода КЛА на эту орбиту не¬
обходим активный участок торможения, когда задачей управ¬
ляемого движения является такое снижение скорости, после ко¬
торого полет КЛА будет совершаться по заданной конечной
орбите около планеты. Если торможение КЛА происходит в од¬
ной плоскости при тангенциальном управлении вектором тяги
[а(0=я], то можно воспользоваться предыдущими результата¬
ми, используя принцип обращения движения. При этом следует
учитывать известный факт [51], что торможение по энергоза¬
тратам будет наиболее экономичным, если активный участок за¬
канчивается в перицентре конечной орбиты, т. е. при гк=гк« и
вк=6к*. Используя уравнения (2.3.19), (2.3.23), (2.3.28),
(2.3.29) и (2.3.31) или (2.3.33) и (2.3.34), выражения для
скорости г?т, траекторного угла 0Т, радиуса гт и полярного угла
Хт в начале активного участка торможения (рис. 2.3.2) предста¬
вим в виде
^т = ^ид.т ; (2. 3. 39)
ve т
cos 0Т = *41*41 ; (2. з. 40)
ri
77
1 + sin2 J_/r
\ vevm I n0*
1 + sin2—- Ir
no*
(2.3. 42)
или
Xt = ~;[0 + ®,)(1 ~Н'к)4-Н'к —^ (^) ^x2 +
+3^)4/^-4(л7)6/'6+5(л-7)8/'8]- (2-3'43)
Здесь n0* = -£°®_ я0,
go
ПЛ
Ml
vT =
v.
w =
w
v
кx
V
^кр.к —
kx
. Гт =
kx
vs
КП
KX
d=-
w
1 ^K* - 1
~ 9 ’ ГК ~~ > ° r- df,
гкЧр.к *« /2
^ид.т= 1 — ® In Jiit ^ T= 1 — In tv
®«т=1--в* 1нрк;
l‘K / v2 \1/2
/гт=~ ^ 1 rfp;
J \ vevm J
(2.3.44)
/г=- di-
v:
кр.к
Л/2
(2.3.45)
/x 2 =
= - f /n=-f«
7 *6 = - £ Vj*d)X, /X8=~^ ^ид/
/Д/Ц,
rV{X.
(2.3.46)
Выражения (2.3.39) — (2.3.43) раскрывают зависимость
кинематических параметров начальной точки активного участка
торможения от основных проектных параметров КЛА рк и п0,
выполнение которой связано с выходом КЛА на конечную ор-
78
биту около планеты назначения при тангенциальном управле¬
нии вектором тяги на участке торможения.
К известным законам управления вектором тяги на участ¬
ках разгона и торможения КЛА в заданной неподвижной плоско¬
сти относится трансверсальный закон, когда а(^)=—6(/). Одна¬
ко этот закон энергетически неэкономичен, так как при одних и
тех же значениях основных проектных параметров рк и Hq энер¬
гетический уровень разгона (торможения-), характеризуемый
Рис. 2.3. 2. Кинематика активного
участка торможения:
I—конечная орбита; 2—активный уча¬
сток торможения
Рис. 2.3.3. Энергетические по¬
тери при трансвереальном уп¬
равлении
значением hUK, при трансверсальном управлении ниже, чем при
тангенциальном. На рис. 2.3.3 показано изменение величины
. (ЛИ к)а-0~(А«к)а—в
ДhUK = — , характеризующей уменьшение
(^ил)а —О
энергетического уровня разгона при трансверсальном управле¬
нии по сравнению с тангенциальным, в зависимости от р,< при
различных по. Кроме того, рассматривался «смешанный» закон
управления вектором тяги, включающий в себя два закона: до
параболической скорости разгон совершается при трансверсаль¬
ном законе а(/)=—0(0. после — при тангенциальном законе
а(О=0- На рис. 2.3.4 дано изменение величины ДЛик =
(^и к)а~0 (^и *)см „
= в зависимости от р„ при различных по. Видно,
(Лщс)а_о
что «смешанный» закон при малых значениях р„ приводит к зна¬
чительно меньшим потерям, чем трансверсальный. Сравнение
тангенциального управления с оптимальным, при котором при
одинаковых р,< и «о достигается максимум hUK, показывает, что
различие в величинах hu к в широком диапазоне значений рк и
По не превосходит одного процента. Поэтому в рамках принима¬
79
емых допущении и приближений, отвечающих требованиям
проектно-баллистических расчетов, тангенциальный закон уп¬
равления вектором тяги впол¬
не можно рассматривать в ка¬
честве оптимального. Это по¬
вышает важность и ценность
полученных приближенных ре¬
шений дифференциальных
уравнений управляемого дви¬
жения КЛА.
Рис. 2.3.4. Энергетические потери
при смешанном управлении
§ 4. РАСЧЕТ ТРАЕКТОРИЙ С ПРОМЕЖУТОЧНЫМ
ИМПУЛЬСОМ >
Импульсные траектории перелета между двумя планетами
являются плоскими траекториями, принадлежащими к классу
конических сечений. В этом случае плоскость траекторий пере¬
лета определяется по трем точкам (рис. 2. 4. 1): / — точка стар¬
та с первой планеты; // — точка прилета ко второй планете;
© — центр тяготения (Солнце).
Угол i между плоскостями орбит планет невелик, поэтому
обычно плоскость орбиты перелета имеет малое наклонение к
Рис. 2.4. 1. Х^хема пространственного перелета
с промежуточным импульсом
плоскостям орбит планет (или к плоскости эклиптики). Однако
в особых случаях, когда угол перелета L приближается к я (или
&я, где k=\, 2,...), происходит резкое увеличение наклонения
орбиты перелета до величин =Ь~ • Это приводит к увеличению
относитатьной скорости старта (скорость У» выхода из грави¬
сферы планеты) с первой планеты и относительной скорости
80
подхода ко второй планете и, следовательно, к увеличению энер¬
гозатрат на перелет. На полях изолиний характеристической
скорости (или скорости К») появляется (см. рис. 5.2.1) «энер¬
гетический хребет». Полоса значений дат старта и дат прилета,
прилегающая к этому хребту, не может быть реализована. Оче¬
видно, что энергозатраты для траекторий перелета в области
«энергетического хребта» могут быть снижены при переходе к
траектории, состоящей из двух (или более) плоских участков
[52, 60]. В этом случае в точке 1 подается дополнительный им¬
пульс, ломающий траекторию перелета. В ряде случаев целесо¬
образно использовать траекторию перелета с промежуточным
Рис. 2.4. 2. Схема
плоского перелета
с промежуточным
импульсом
Рис. 2. 4.3. Схема перелета с промежуточ,-
ными импульсами
импульсом (или несколькими импульсами) для перелетов и в
одной плоскости [82]. Так, при больших углах перелета L>n меж¬
ду планетами / и // (рис. 2.4.2) энергетически выгодным будет
маневр с заходом внутрь орбиты планеты / и с подачей дополни¬
тельного импульса в точке 1 (импульс практически не изменяет
плоскости перелета) и перелетом по двум траекториям кониче¬
ских сечений. Момент и положение точки 1 должны выбираться
из условия минимума суммарных энергозатрат на участке переле¬
та между планетами I и //. Оптимизируемыми параметрами
будут три координаты, определяющие положение точки подачи
промежуточного импульса, и время подачи импульса.
Таким образом, при заданных моментах времени t\ старта с
планеты / и времени /ц прилета на планету II задача оптими¬
зации траектории перелета с одним промежуточным импульсом
является четырехпараметрической. В общем случае, когда число
промежуточных импульсов равно я, число оптимизируемых пара¬
метров N = 4 п.
Рассмотрим такой случай перелета между планетами I w II
с подачей промежуточных импульсов (рис. 2.4.3). Задание вре¬
мени старта t\ с планеты I и времени прилета 1ц на планету II
определяет положение радиусов-векторов планет ri и гц и векто¬
81
ров скорости планет V\ и V\\. Координаты промежуточных точек
(радиус-вектор г*) и моменты времени прохождения точек (мо¬
мент подачи промежуточного импульса tk) выбираются из усло¬
вия минимума суммарной характеристической скорости. Для
общности рассмотрим траекторию перелета между планетами с
подачей стартового импульса у планеты I и тормозного импульса
у планеты II. В этом случае суммарная характеристическая ско¬
рость
1/4=д1Л + д1/„ + 2
к 1
где AVi и АКц — характеристическая скорость старта с планеты
/ и торможения у планеты II соответственно;
1/a+i —вектор скорости КЛА в начале (&+1) участка
перелета;
VZ — вектор скорости КЛА в конце k-ro участка пе¬
релета.
Характеристическая скорость старта с планеты I (Земля)
приближенно равна приращению скорости
д1Л^1/ст — I/®,
^1 15Г Кр*
__ ^
где V®9= у ^ ^ круговая скорость на стартовой орби¬
те ИСЗ (/* = 200 км);
)2 + (^2)2—скорость в перицентре стартовой ги¬
перболы;
Vnap—параболическая скорость на высоте Л;
V®— скорость выхода из сферы действия
Земли.
Аналогично характеристическая скорость торможения на ор¬
биту искусственного спутника планеты (ИСП)
где ;
^2эл — скорость в перицентре орбиты ИСП.
Для пролетных и десантных траекторий полета (без активно¬
го торможения на орбиту ИСП) составляющая ДКц = 0. При за¬
данных параметрах точек подачи промежуточных импульсов
определение траектории на каждом участке сводится к опреде¬
лению орбиты по двум положениям. Эта задача может быть ре¬
шена методом Ламберта или другими. Оптимизация па¬
раметров точек подачи промежуточных импульсов проводится
градиентным методом. Задача решается последовательным пере-
82
бором количества импульсов. Вначале определяется траектория
перелета без промежуточного импульса, затем с одним промежу¬
точным импульсом, двумя и т. д. Для каждого случая определя¬
ется суммарная скорость VЕ. Оптимальное количество проме¬
жуточных импульсов определяется из условия минимума 1Л<е.
Если ограничить общий угол перелета L<.2n (траектории 1-го
150 200 250 300 350 400 Atn,cym
Рис. 2.4.4. Перелет орбита ИСЗ — орбита ИСМ (h^=300 км,
/if = 1000 км, /if =20000 км)
обычные траектории; с промежуточным импульсом
или 2-го полувитка в случае перелета без промежуточного им¬
пульса), то угол перелета на каждом участке LK<Cя (траектория
1-го полувитка). В этом случае область поиска экстремума Кя
даже при одном промежуточном импульсе будет унимодальной
у км!с
'700
TZ.
Рис. 2. 4. 5. Перелет орбита ИСМ — Земля
(область с одним экстремумом), что обеспечивает сходимость
градиентных методов. При последовательной оптимизации коли¬
чества импульсов целесообразно принять следующую стратегию
выбора нулевых приближений для параметров промежуточных
импульсов. Для оптимизации траекторий с одним промежуточ¬
ным импульсом момент подачи его для нулевого приближения
определяется так:
t0
*1 + *ц
83
Вектор п° выбирается равным радиусу-вектору плоской тра¬
ектории перелета в момент /Л Для траектории с двумя промежу¬
точными импульсами
Векторы п0 и гг0 соответствуют положениям в моменты ti° и
/2° на плоской траектории перелета. Для ускорения времени сче¬
та при массовых расчетах для построения полей изолиний в ка¬
честве нулевых приближений целесообразно выбирать парамет¬
ры предыдущей точки. Как показывают расчеты, при приложении
дополнительных импульсов срезается «энергетический хребет» на
полях изолиний характеристической скорости (рис. 2.4.4 и
2.4.5). Кроме того, при наличии промежуточных импульсов сни¬
жаются энергозатраты при полетах по траекториям 2-го полувит-
ка при большом времени полета. Для траекторий полета с орби
ты ИСЗ на орбиту искусственного спутника Марса (ИСМ)
характерно достаточно полное «срезание энергетического хреб¬
та», разделяющего траектории 1 и 2-го полувитков. Для тра¬
екторий полета с орбиты ИСМ к Земле остаются некоторые «сле¬
ды энергетического хребта».
Глава III • СХЕМЫ И ТРАЕКТОРИИ ПОЛЕТА
МЕЖПЛАНЕТНЫХ АППАРАТОВ
§ 1. ХАРАКТЕРИСТИКИ ТРАЕКТОРИИ
МЕЖПЛАНЕТНОГО ПЕРЕЛЕТА
Выполнение задачи доставки полезной нагрузки к планете
назначения включает несколько этапов, из которых главное
влияние на энергозатраты полета оказывают:
— выведение КЛА ракетой-носителем на промежуточную ор¬
биту;
— сход с промежуточной орбиты и разгон до нужного энерге¬
тического уровня, позволяющего преодолеть гравитационное
поле Земли;
— баллистический полет к планете назначения, для которого,
однако, планируются энергозатраты, связанные с решением нави¬
гационных задач, поддерживающих близость истинной траекто¬
рии к номинальной;
— торможение КЛА при подходе к планете назначения, по¬
зволяющее выйти на околопланетную орбиту;
— сход КЛА с околопланетной орбиты и посадка его на по¬
верхность планеты назначения *;
— возвращение, включающее энергозатраты на выполнение
задачи возвращения КЛА к Земле и состоящее из этапов, анало¬
гичных ранее рассмотренным (при полете к планете назначения)..
Трудно оценить степень влияния отдельного этапа на проект¬
но-баллистические характеристики и величину полезной нагруз¬
ки КЛА — все этапы взаимосвязаны. Однако каждый этап име¬
ет специфику, связанную с реализацией маневра, управлением
вектором тяги и выполнением конечных условий этапа полета.
Поэтому для предварительных проектных разработок КЛА мож¬
но найти приближенные методы решения задач, учитывающие
* Если планируется прямая посадка КЛА, то вместо последних двух
этапов следует рассматривать один этап торможения (активного или пас¬
сивного) и посадки КЛА на планету.
85
специфику каждого этапа. Взаимосвязи всех отдельно получен¬
ных решений можно добиться методом последовательных при¬
ближений. Такой путь удобен и плодотворен еще и потому, что он
позволяет в полной мере использовать известный метод аппрок¬
симации истинной межпланетной траектории полета КЛА участ¬
ками конического сечения (см. § 2 гл. I). Кусочно-коническая
аппроксимация позволяет определить кусочную межпланетную
траекторию, представляющую для проектных разработок хоро¬
шее приближение к точной траектории. Кроме того, эту кусоч¬
ную кривую удобно рассматривать в качестве первого приближе¬
ния для соответствующего итерационного процесса, применяемо¬
го при определении окончательной межпланетной траектории с
учетом различного рода возмущений.
Представление в действительности непрерывной межпланет¬
ной траектории в виде кусков конического сечения основывается
на допущении о действии силы притяжения только центрального
тела при движении КЛА в грависфере планеты или вне ее
(в гелиосфере). В этом случае активный участок разгона КЛА
в грависфере Земли заканчивается гиперболической орбитой
отрыва, а активному участку торможения КЛА в грависфере
планеты назначения предшествует гиперболическая орбита при¬
бытия. Вне грависфер планет (в гелиосфере) рассматривается
преимущественно баллистический полет КЛА, происходящий, по
предположению, под действием силы притяжения только цент¬
рального тела — Солнца. Здесь в качестве орбит учитываются
в основном эллиптические орбиты перелета.
Для повышения энергетической эффективности перелета
в ряде случаев целесообразно введение дополнительных актив¬
ных участков в гелиосфере (см. § 4 гл. II).
Активный участок выведения КЛА на промежуточную орби¬
ту, которая обыкновенно принимается круговой с высотой 150—
200 км, определяется проектно-баллистическими характеристи¬
ками ракеты-носителя. При планировании межпланетных полетов
обычно вновь проектируются и создаются только КЛА, пара¬
метры, компоновка и конструкция которых выбираются с уче¬
том специфики выполняемой задачи по исследованию планет и
межпланетного пространства. Выведение же КЛА осуществляет¬
ся обычно ракетой-носителем, наиболее экономичной для несе¬
ния заданной полезной нагрузки (вес КЛА), из серии типов
штатных ракет-носителей, представляющих собой многоцелевую
ракетно-космическую систему. Правда, в ряде случаев из сооб¬
ражения более рационального использования возможностей
ракеты-носителя и КЛА производится модификация последней
ступени ракеты.
Сход с круговой промежуточной орбиты и разгон до требуе¬
мого энергетического уровня, баллистический полет к планете
назначения, торможение вблизи планеты для выхода на около¬
86
планетную орбиту и возвращение к Земле определяют задачу
выбора проектно-баллистических характеристик КЛА и величи¬
ны полезной нагрузки, доставляемой к планете назначения и к.
Земле. В зависимости от требуемой точности и количества выби¬
раемых параметров эту задачу можно решать различными мето¬
дами, в основе Которых лежит кусочно-коническая аппроксима¬
ция баллистической траектории полета. Принципиально эти
методы можно разделить на два типа: метод импульсной аппрок-
Рис. 3.1. 1. Кусочно-коническая аппроксимация межпланетной траектории
полета при импульсном изменении скорости:
I—промежуточная орбита; 2—гиперболическая орбита отрыва; 3—гелиоцентрический
участок межорбитального перелета; 4—гиперболическая орбита прибытия; 5—конеч¬
ная орбита
симации и методы, учитывающие протяженность и непрерывность
активных участков разгона и торможения КЛА, которые услов¬
но назовем методами конечных тяг.
В методе импульсной аппроксимации активный участок пред¬
ставляется в виде мгновенного изменения скорости при неизмен¬
ном положении КЛА. Таким образом, предполагается, что вслед¬
ствие импульсного изменения КЛА мгновенно переходит в точке
схода на круговой промежуточной орбите на гиперболическую
орбиту отрыва, а в одной из точек (в точке схода) гиперболиче¬
ской орбиты прибытия КЛА — на планируемую околопланетную
конечную орбиту *. Благодаря такой импульсной аппроксимации
активных участков вся межпланетная траектория представляет¬
ся из трех кусков конического сечения (рис. 3. 1. 1): гиперболи-
* В случае отсутствия промежуточных пассивных участков при разгоне
или торможении. Такая аппроксимация допустима при непрерывном активном
участке.
2
87
■ческой орбиты отрыва (грависфера Земли), гелиоцентрического
(эллиптического или гиперболического) участка межорбиталь-
ного перелета (орбита Земли — орбита назначения) и гиперболи¬
ческой орбиты прибытия (грависфера планеты назначения).
Гелиоцентрический участок межорбитального перелета, в свою
очередь, может состоять из нескольких кеплеровых орбит, если
для разгона или торможения КЛА используются гравитационные
поля других планет или существуют промежуточные активные
участки. Стыковка указанных кусков конического сечения счита¬
ется выполненной, если асимптота гиперболической орбиты отры¬
ва параллельна вектору гиперболического избытка скорости Гаоо,
определяемого из равенства
(3.1.1)
а асимптота гиперболической орбиты прибытия параллельна
вектору гиперболйческого избытка скорости прибытия Гоок, опре¬
деляемого из равенства
У„к=7к-7пл. (3.1.2)
Здесь Fo, VK — векторы начальной и конечной скорости полета
на гелиоцентрическом участке; V® — вектор скорости _движения
Земли в начальный момент полета КЛА в гелиосфере;*ГПЛ — век¬
тор скорости движения планеты назначения в конечный момент
полета КЛА в гелиосфере. Тем самым предполагается, что мо¬
мент выхода КЛА из грависферы Земли и момент входа его
в грависферу планеты назначения совпадают соответственно
с точками пересечения эллиптической орбиты перелета с орбита¬
ми Земли и планеты назначения. С физической точки зрения это
означает, что планеты рассматриваются в качестве негравитиру-
ющих центров, а с геометрической — является следствием прене¬
брежения размерами грависфер планет.
Однако такой подход к оценке стыковки гелиоцентрического
участка с планетоцентрическими не всегда оправдан. Для неко¬
торых схем полета, особенно когда речь идет о полетах к плане¬
там, имеющим большие размеры грависфер, гелиоцентрический
участок следует определять для требуемой точности расчетов
с учетом размеров грависфер планет. В этом случае стыковка
достигается в результате совместного расчета гелиоцентрическо¬
го и планетоцентрических участков.
Метод импульсной аппроксимации основывается на рассмот¬
ренных допущениях, которые хотя и приводят к определенной
идеализации истинной картины межпланетного перелета, но по¬
зволяют в первом приближении достаточно простым способом
определить энергетические затраты, требующиеся для реализации
межпланетного полета.
Использование метода импульсной аппроксимации позволяет
построить следующую структурную схему решения задачи по
•88
определению проектно-баллистических характеристик КЛА. Вна¬
чале решается задача по определению гелиоцентрического участ¬
ка межорбитального перелета, одним из результатов которой
является нахождение V«<, и VooX. Далее обращаются к алгорит¬
мам поиска гиперболических орбит отрыва и прибытия, соответ¬
ствующие асимптоты которых должны быть параллельны
У „о и V оок, а константы интегралов энергии равны V'Ko и VIok
соответственно.
Важной частью этих алгоритмов являются блоки расчета ми¬
нимальных значений характеристических скоростей участков
разгона Кхз и торможения Kxs, выражающих относитель¬
ные конечные веса разгонного pKi и тормозного рК2 модулей КЛА
следующим образом:
где Руд1, РуД2—удельные тяги двигательных установок разгон-
Дело в том, что при допущении о возможности промежуточ¬
ных пассивных участков при разгоне и торможении КЛА на ос¬
нове импульсной аппроксимации траектории разгона и торможе¬
ния могут быть представлены в виде нескольких кусков кониче¬
ского сечения. В этом случае минимизация суммарных харак¬
теристических скоростей участков разгона и торможения приоб¬
ретает важное значение. Использование большого числа им¬
пульсов позволяет не просто подбирать траекторию, удовлетво¬
ряющую граничным условиям, но и оптимизировать требуемое
значение суммарной характеристической скорости.
Метод импульсной аппроксимации, привлекающий относитель¬
ной простотой и наглядностью алгоритма вычисления межпла¬
нетной траектории полета . и энергозатрат на ее реализацию*
приводит к приближенной оценке энергозатрат перелета и не по¬
зволяет в полной мере выявить проектно-баллистические харак¬
теристики КЛА.
Погрешности, вызываемые импульсной аппроксимацией, яв¬
ляются результатом неучета гравитационных потерь и изменения
ориентации вектора тяги на активном участке, пренебрежения
эффектом параллакса (протяженности грависферы планет) при
расчете гелиоцентрического участка межорбитального перелета
и протяженностью активного участка.
(3. 1.3):
(3.1.4)
ного и тормозного модулей соответственно;
go — гравитационное ускорение Земли.
На рис. 3.1.2 показано изменение относительной величины
гравитационных потерь ^А[*= ^к'ИМп~j , не учитываемых при
импульсной аппроксимации, на участке разгона с промежуточной
круговой орбиты при л0 = 0,2 в зависимости от значения рк-
Этот метод не позволяет определить необходимые для манев¬
ра начальные тяговооруженности ступеней КЛА.
Однако метод импульсной аппроксимации широко использует¬
ся при проектных разработках КЛА, поскольку решения, полу¬
чаемые с помощью этого метода,
вполне можно использовать в ка¬
честве первого приближения *.
Методу конечных тяг не свой¬
ственны многие недостатки- ме¬
тода импульсной аппроксимации.
В нем достаточно полно учиты¬
ваются гравитационные потери
и изменение вектора тяги по вре¬
мени; он дает возможность
определить оптимальные значе¬
ния начальных тяговооруженно-
стей ступеней КЛА. Метод конеч¬
ных тяг базируется на прибли¬
женных решениях системы диф¬
ференциальных уравнений управ¬
ляемого движения КЛА. Поэтому
определение кинематических па¬
раметров конца активных участков разгона или торможения
неточно и приводит к ошибкам, которые существенно меньше
ошибок при импульсной аппроксимации, что вполне удовлетво¬
ряет требованиям предэскизных разработок КЛА.
§ 2. КЛАССИФИКАЦИЯ СХЕМ ПОЛЕТА
МЕЖПЛАНЕТНЫХ АППАРАТОВ
Выбор проектно-баллистических характеристик межпланетно¬
го аппарата связан с несколькими критериальными оценками:
энергетическими затратами, общим временем полета, диапазоном
окна старта, чувствительностью номинальной траектории к воз¬
можным отклонениям и т. д. Оптимальные проектно-баллистиче¬
ские характеристики отвечают экстремальному значению одного
из критериев при ограничениях на другие. Однако используемые
аналитические зависимости, характер поиска оптимальных про¬
ектно-баллистических характеристик и результаты решений
Рис. 3.1.2. Гравитационные по¬
тери относительного конечного
веса КЛА на участке разгона
(,п$=0,21 Руд=350 с, го=
=657/ км)
* Обстоятельный обзор работ, посвященных методу импульсной аппрок¬
симации, дан в работе [64].
90
существенно зависят от схемы полета межпланетного аппарата.
Выбор схемы полета, выражающий (без излишних подробностей)
профиль межпланетной траектории, позволяет найти принципи¬
альные пути решения конкретной задачи межпланетного полета.
Классификация схем полета может явиться составным элемен¬
том алгоритма оптимизации проектно-баллистических характе¬
ристик межпланетного аппарата, если в ее основу будут поло¬
жены алгоритмическая близость схем полета и баллистические
требования к конечному маневру и к маневру при облете проме¬
жуточной планеты, базирующиеся на конечной цели полета.
Большое разнообразие гелиоцентрических участков полета к
планетам может привести в будущем к значительному увеличе¬
нию числа возможных профилей полета, которые обычно обра¬
зуются из различного рода сочетаний известных типов гелиоцен¬
трических орбит полета. Все это делает полезным проведение
классификации схем полета межпланетных аппаратов.
Возможные схемы полета к планетам можно разделить на
два типа: первый — схемы полета к планете назначения без воз¬
вращения КЛА к Земле; второй — схемы полета к планете назна¬
чения с возвращением КЛА к Земле. В свою очередь каждый
тип делится на два класса: класс схемы прямых полетов к пла¬
нете назначения и класс схем полетов с учетом маневра при об¬
лете промежуточной планеты. Для большей определенности кон¬
кретной схемы полета классы разбиваются на группы.
1-й тип — схемы полета к планете назначения
без возвращения к Земле
Для сбора информации о планетах солнечной системы важ¬
ное место занимают и будут занимать полеты к планетам назна¬
чения без возвращения к Земле. Такие схемы полета могут быть
присущи только автоматическим межпланетным аппаратам, глав¬
ная задача которых — доставить полезный груз в район планеты
назначения для получения нужной информации. Хотя существу¬
ет много конкретных схем таких полетов, их можно разделить
на два принципиально разных класса.
1-й класс — схемы прямых полетов к планете назначения (без
возврата к Земле). Схема прямого полета к планете назначения
предназначена для непосредственного перелета КЛА от Земли к
планете назначения без использования пертурбационных эффек¬
тов. Формальная систематизация множества гелиоцентрических
участков межпланетных траекторий прямого полета КЛА к пла¬
нете назначения позволяет их представить тринадцатью типами
орбит [51, т. II, ч. 2, '§»9. 2]: девятью типами эллиптических, одной
параболической и тремя гиперболическими (рис. 3. 2. 1 и 3.2. 2).
Классификация же схем прямых полетов к планете назначения с
учетом ранее указанных требований, не нарушая формальную
91
Рис. 3.2.1. Девять основных типов
эллиптических гелиоцентрических
участков перелета. Крайние точки:
1-41 ni + iv у mzv, VI-^VIII,
viT~- viiiTix -* xiTix-* Xfi^x- xi
x-xv/
систематизацию гелиоцент¬
рических участков, сводит
возможные схемы полета к
четырем группам.
1-я группа — схемы по¬
лета по пролетно-попадаю-
щим траекториям (см. рис.
3.2.3). Полет начинается с
промежуточной орбиты око¬
ло Земли, заканчивается —
Рис. 3. 2.2. Три основных типа ги¬
перболических гелиоцентрических
участков перелета. Крайние точки:
XIII - XIV, XV - XVI, XV ~ XVII
Рис. 3. 2. 3. Схема полета автоматиче¬
ского межпланетного аппарата по
пролетно-попадающей траектории
либо пролетом вблизи планеты по гиперболической плането¬
центрической траектории, либо «прямым» попаданием аппара¬
та (аппаратов) в заданный район (районы) планеты, причем
уменьшение скорости может быть достигнуто за счет торможе-
92
ния в атмосфере планеты. Для обеспечения попадания аппара¬
тов в заданные районы необходима система автоматической
навигации и коррекции траекторий на припланетном участке.
2-я группа — схемы полета с выходом на конечную орбиту
около планеты назначения (рис. 3.2.4). Полет, как и в преды¬
дущем случае, начинается с промежуточной орбиты около
Земли, заканчивается — выходом на конечную орбиту около
планеты назначения. Выхода на заданную конечную орбиту
Рис. 3. 2. 4. Схема полета автоматиче¬
ского межпланетного аппарата с вы¬
ходом на орбиту около планеты на¬
значения:
и—схема с активным торможением; б—схе¬
ма с аэродинамическим торможением
(1—старт с промежуточной орбиты: 2—ак
тивное торможение для выхода на конеч¬
ную орбиту; 2'—торможение в атмосфере
планеты; 3—коррекция для выхода на ко¬
нечную орбиту)
около планеты можно достигнуть различными способами.
Существуют два принципиально разных способа торможения:
активное торможение, когда скорость уменьшается за счет
реактивной силы, и пассивное, при котором скорость умень¬
шается за счет торможения аппарата в атмосфере планеты.
Возможна комбинация этих способов. Выбор того или иного
способа торможения зависит от .постановки задачи и задания
конечной орбиты.
3-я группа — схемы полета с выходом к планете и с высадкой
десанта (рис. 3. 2. 5). Особенность данной схемы полета заключа¬
ется в том, что после старта с промежуточной орбиты около Зем¬
ли и подхода к планете в ней предусматривается посадка десант¬
ного аппарата (десантных аппаратов) на поверхность планеты.
Мягкая посадка десантных аппаратов может быть обеспечена
различными способами: путем торможения за счет реактивной
силы и комбинации указанного способа с торможением в атмо¬
сфере планеты (баллистический спуск, спуск с аэродинамиче¬
93
ским качеством). В рассматриваемой схеме полета предусматри¬
вается возможность посадки на планету как всего аппарата, так
и последовательная посадка отдельных его модулей (десантных
аппаратов).
4-я группа — комбинированные схемы полета (рис. 3.2.6),
К комбинированным относятся такие схемы межпланетных по¬
летов, когда на участке подлета к планете межпланетный ап-
Рис. 3.2.5. Схема полета автоматического межпланетного ап¬
парата с выходом на околопланетную орбиту и с высадкой
десанта на поверхность планеты:
I—старт с промежуточной орбиты; 2—выход на околопланетную орби¬
ту; 3—4—участок спуска на поверхность планеты (3’—4'; 3"—4"; 3"'—4”’)
парат делится на модули, из которых задача одних — пролететь
мимо планеты (пролетно-десантная схема, рис. 3.2.6, а) или
выйти на околопланетную орбиту (орбитально-десантная схема,
рис. 3. 2. 6, б и в), а других — спуститься на поверхность плане¬
ты (рис. 3.2.6). Возможна также схема, когда один модуль
выходит на околопланетную орбиту, другой — пролетает мимо
планеты.
2-й класс— схемы полета к планете назначения с использова¬
нием пертурбационного эффекта промежуточной планеты. Исполь¬
зование гравитационных полей других планет при полете к пла¬
нете назначения — задача весьма перспективная. В ряде случаев
это позволяет добиться большего эффекта от межпланетного по¬
лета. Дело в том, что в результате пролета КЛА вблизи проме¬
жуточной планеты вследствие воздействия ее. гравитационного
поля гелиоцентрический участок межпланетной траектории
изменяется. Планирование соответствующего изменения и его пра¬
вильное использование могут привести к положительным резуль¬
татам: уменьшению суммарных энергетических затрат, увеличе¬
нию окон старта и т. д. Весьма заманчиво и то, что одним меж¬
i
94
планетным аппаратом можно провести исследования нескольких
планет. Правда, здесь повышаются требования к навигации
КЛА, но современные технические возможности позволяют их
удовлетворить.
На классификацию такого рода схем полета оказывают влия¬
ние маневры как около промежуточной планеты, так и на конеч¬
ном этапе полета около планеты назначения. В связи с этим mho-
ч.
\
\
ч
V»
Рис. 3. 2. 6.- Комбинированная схема
полета межпланетного аппарата:
а—пролетно-десантная схема; б—орби¬
тально-десантная схема с активным
торможением для выхода на конечную J
орбиту; в—орбитально-десантная схема
с аэродинамическим торможением для
выхода на конечную орбиту (I—старт
с промежуточной орбиты; 2—торможе¬
ние для выхода на конечную ор¬
биту; 2'—торможение в атмосфере; 3—
коррекция выхода на конечную орбиту)
жество схем полетов данного 2-го класса можно свести к не¬
скольким группам.
1-я группа — схемы полета по облетно-пролетным траекто¬
риям с использованием пертурбационного эффекта (рис. 3. 2. 7).
После старта межпланетный аппарат проходит вблизи промежу¬
точной планеты по гиперболической (относительно планеты)
траектории и в результате соответствующего изменения гелиоцен¬
трического участка достигает планеты назначения. Изменение
гелиоцентрического участка межпланетной траектории происхо¬
дит в основном от пертурбационного эффекта. Однако в ряде
случаев для повышения эффекта маневра вблизи промежуточной
планеты используют и импульсы. В конце полета планируется
либо пролет КЛА около планеты назначения, либо «прямое» по¬
падание в заданный район планеты.
В ряде случаев могут рассматриваться схемы полета, при
которых до достижения планеты назначения КЛА пролетает не¬
сколько планет, гравитационные поля которых каждый раз соот¬
ветствующим образом изменяют гелиоцентрический участок
межпланетной траектории.
95
2-я группа — схемы полета с использованием пертурбацион¬
ного эффекта промежуточной, планеты и выходом на конечную
орбиту около планеты назначения. Отличие данной группы схем
полетов от предыдущей заключается в конечном маневре, пред¬
назначенном для выхода межпланетного аппарата на околопла¬
нетную орбиту.
3-я группа — схемы полетов с использованием пертурбацион¬
ного эффекта промежуточной планеты, выходом к планете и вы¬
садкой десанта.
Рис. 3. 2. 7. Схема полета по облетно-пролетным межпланетным
траекториям
В планировании пролета около промежуточной планеты
и использовании ее гравитационного поля заключается отличие
данной группы схем полетав от аналогичной группы предыду¬
щего класса.
4-я группа — комбинированные схемы полетов с использова¬
нием пертурбационного эффекта промежуточной планеты. В дан¬
ную группу схем полетов входят такие, при которых, пролет про¬
межуточной планеты может быть совмещен с высадкой десанта
на ее поверхность, а на конечном этапе полета вблизи планеты
назначения межпланетный аппарат разделяется на модули, из
которых задача одних — пролететь около планеты или выйти на
околопланетную орбиту, а других — совершить мягкую посадку
на поверхность планеты и т. д.
Возвращение к Земле — главное требование к межпланетным
пилотируемым аппаратам. Такое же требование может быть вы¬
двинуто и при планировании полетов автоматических межпла¬
нетных аппаратов. Дальнейшее накопление знаний о солнечной
системе вряд ли мыслимо без реализации таких схем полета.
2-й тип — схемы полета к планете назначения
с возвращением к Земле
96
Все эти схемы полета могут быть разделены на два класса.
Общим для них является вход аппарата в атмосферу Земли со
скоростью, превышающей вторую космическую. Допускается воз¬
можность использования импульсов в точках гелиоцентриче¬
ского участка траектории возврата. Импульсы позволяют
в ряде случаев заметно снизить скорость входа КЛА в ат¬
мосферу Земли.
1-й класс — схемы прямых полетов к планете назначения с воз¬
вращением к Земле. Данный класс включает схемы прямых пере-
Рис. 3. 2. 8. Схемы полета по пролетно-возвратным траекториям:
а—схема полета с возвратом к Земле через целое число сидерических лет
и без учета пертурбационного эффекта планеты назначения; б—схема полета
с возвратом к Земле через дробное число сидерических лет и без учета
пертурбационного эффекта планеты назначения; в—схема полета с возвратом
к Земле с учетом пертурбационного эффекта планеты назначения
летов Земля — планета назначения и планета назначения—Зем¬
ля. Здесь не предусматривается использование пертурбационных
эффектов от других планет ни на этапе полетов к планете на¬
значения, ни на этапе возвращения к Земле. Множество схем
прямых полетов рассматриваемого класса может быть разбито
на группы.
1-я группа—схемы полета по пролетно-возвратным траекто¬
риям (рис. 3. 2.8). К этой группе относятся схемы полетов, вклю¬
чающие пролет межпланетного аппарата вблизи планеты назна¬
чения и его возвращение к Земле. Возвращение обеспечивается
различными способами: подбором соответствующего гелиоцент¬
рического участка и даты старта; использованием пертурбацион¬
ного эффекта от планеты назначения; введением дополнительных
импульсов для изменения гелиоцентрического участка межпла¬
нетной траектории возврата.
2-я группа — схема полета с выходом на орбиту ожидания
около планеты назначения и возвращением к Земле. Данная
группа схем полетов отличается от предыдущей выходом на ор¬
биту ожидания около планеты назначения, определенным вре¬
^7
менем пребывания на ней и для возвращения к Земле сходом
с орбиты. Все это требует значительных дополнительных энерго¬
затрат.
3-я группа — схемы полета с высадкой десанта на поверхность
планеты назначения и возвращением к Земле (рис. 3.2.9,
Рис. 3. 2. 9. Схема полета межпланетного аппарата с высадкой
десанта на планету назначения и возвратом к Земле:
1—старт с промежуточной орбиты; 2—посадка на планету назначения;
3—старт с поверхности планеты; 4—посадка на Землю
3.2.10). К этой группе относятся схемы полетов, по которым
предусматривается высадка десанта на поверхность планеты
назначения. Высадка десанта может быть обеспечена «прямой»
посадкой КЛА, при которой гиперболическая орбита прибытия
непосредственно стыкуется с траекторией спуска, либо спуском
с околопланетной орбиты, на которую предварительно выходит
Рис. 3.2.10. Схема полета возвращающегося на Землю меж¬
планетного аппарата с выходом на орбиту и посадкой на пла¬
нету назначения:
1—старт с промежуточной орбиты; 2— торможение для выхода на ор¬
биту ожидания; 3, 4—спуск с орбиты на планету; 5—старт с поверхно¬
сти планеты и выход на орбиту; 6—старт с орбиты; 7—посадка на Землю
КЛА. Для возвращения к Земле планируются старт с планеты,
активный участок выведения на околопланетную орбиту и далее
сход с нее. Реализация таких схем межпланетных полетов предъ¬
являет особые требования к двигательным установкам и систе¬
мам управления и к космической технике вообще.
98
4-я группа — комбинированные схемы полета с возвращени¬
ем к Земле (рис. 3.2.11, 3.2.12). В комбинированных схемах
полета задача пролета межпланетного аппарата около планеты
Рис. 3. 2.11. Комбинированная схема полета возвращающегося
на Землю межпланетного аппарата с облетом и посадкой на
планету назначения:
I—старт с промежуточной орбиты; 2—коррекция межпланетной траек¬
тории; 3—посадка десантного модуля-, 4—старт с поверхности Марса и
сближение с облетным кораблем; 5—посадка на Землю
назначения или выхода на околопланетную орбиту совмещается
с высадкой десанта посадочного модуля (модулей) КЛА на ее
поверхность, которая может происходить по схеме предыдущей
группы. Возвращение к Земле обеспечивается различными спо¬
собами. Например, оно может происходить в результате стыков¬
ки стартующего с поверхности планеты модуля с пролетным ап-
Рис. 3. 2. 12. Комбинированная схема полета возвращающегося
на Землю межпланетного аппарата с выходом на орбиту и по¬
садкой на планету назначения:
I — старт с промежуточной орбиты; 2, 5 — вариант с прямой посадкой
планетного комплекса; 3—торможение для выхода на конечную орби¬
ту; 4—спуск с орбиты на планету десантного аппарата; б—старт с по¬
верхности и выход на орбиту; 7—старт с орбиты; 8—посадка на Землю
паратом (см. рис. 3.2. 11). Другое решение задачи возвращения
достигается путем стыковки стартующего с планеты модуля с
орбитальным аппаратом, после которой образовавшийся комп¬
лекс сходит с околопланетной орбиты и выходит на траекторию
возврата (см. рис. 3. 2. 12).
99
2-й класс — схемы полета к планете назначения с возвраще¬
нием к Земле и использованием пертурбационного эффекта про¬
межуточной планеты. При таких схемах полета влияние пертурба¬
ционного эффекта от промежуточной планеты может проявиться
как на этапе полета к планете назначения, так и на этапе воз¬
вращения. Использование пертурбационного эффекта позволит
снизить суммарные энергозатраты, расширить окна старта с Зем¬
ли и планеты назначения и уменьшить скорость входа в атмо¬
сферу Земли.
Данный класс представим следующими группами.
1-я группа — схемы полета по пролетно-возвратным траекто¬
риям с учетом пертурбационного эффекта промежуточной пла¬
неты. Данная группа схем полета отличается от такой же груп¬
пы предыдущего класса тем, что вследствие использования гра¬
витационного поля планеты, мимо которой планируется пролет
КЛА, изменяется либо гелиоцентрический участок полета к пла¬
нете назначения, либо гелиоцентрический участок траектории
возврата.
2-я группа — схемы полета с учетом пертурбационного эффек¬
та промежуточной планеты, выходом на орбиту ожидания около
планеты назначения и возвращением к Земле. Отличие этой
группы от предыдущей — в маневрах выхода на промежуточную
орбиту и схода с нее.
3-я группа— схемы полета с учетом пертурбационного эффек¬
та промежуточной планеты, высадкой десанта на поверхность
планеты назначения и возвращением к Земле. Данная группа
отличается от 3-й группы предыдущего класса только планируе¬
мым изменением гелиоцентрического участка полета после кон¬
такта КЛА с промежуточной планетой либо на этапе полета к
планете назначения, либо при возврате.
4-я группа — комбинированные схемы полета с возвращени¬
ем к Земле и использованием пертурбационного эффекта про¬
межуточной планеты. Комбинированные схемы полета включа¬
ют схемы, когда пролет планеты назначения совмещается с
высадкой десанта посадочного модуля (модулей). Кроме того,
предусматривается и высадка десанта при контакте КЛА с про¬
межуточной планетой на участке полета к планете назначения.
Глава IV • ПЛАНЕТОЦЕНТРИЧЕСКИЕ УЧАСТКИ
ПОЛЕТА
§ 1. КИНЕМАТИЧЕСКИЕ ПАРАМЕТРЫ УЧАСТКА
ВЫВЕДЕНИЯ С ПРОМЕЖУТОЧНОЙ ОРБИТОЙ
НА ГИПЕРБОЛУ ОТРЫВА ОТ ЗЕМЛИ
Траектория полета от точки старта до момента,
когда вектор скорости КЛА приобретает нужное направление,
называется участком выведения. Назначение участка выведе¬
ния— обеспечить движение КЛА при выходе из грависферы с
вектором скорости, равным вектору гиперболического избытка
скорости VооО) определенному в результате решения внешней
задачи.
Участок выведения состоит из траектории управляемого по¬
лета (активный участок выведения) и траектории пассивного
полета (пассивный участок выведения). Пассивный участок, ко¬
торым заканчивается выведение, является гиперболической ор-
битой отрыва с hUK—Va„о.
Активный участок выведения может быть двух типов: пер¬
вый — активный участок непрерывного подъема, на котором дви¬
гатели практически непрерывно работают и их промежуточное
выключение не связано с выполнением задач выведения; вто¬
рой — активный участок с промежуточной орбитой, на котором
планируется промежуточное выключение двигателей для обеспе¬
чения пассивного движения аппарата по заранее выбранной про¬
межуточной орбите, способствующей лучшему решению задач
выведения. Если исходить из оценки активных участков по реше¬
нию задачи правильного времени старта и задачи навигации
с наименьшими энергозатратами, то предпочтение следует отдать
активному участку с промежуточной орбитой (рис. 4.1. 1), кото¬
рый широко используется для решения задач выведения.
Перейдем к оценке геометрических характеристик участка
выведения и их взаимосвязей, учитывая, что большая полуось и
направление асимптоты орбиты отрыва предопределены задани¬
ем Уооо и vtо. Для решения задачи параллельности асимптоты
110
гиперболической орбиты отрыва единичному вектору необ¬
ходимо, чтобы он находился в ее плоскости. Если N — нормаль
к плоскости орбиты отрыва, то этому условию отвечает векторное
уравнение плоскости
N-Vl0=0.
Соотношение между углом наклонения
плоскости орбиты I и склонением вектора цели бо
Пусть вектор цели W, проведенный из начала координат па¬
раллельно F® 0 и равный ему, во второй экваториальной геоцен¬
трической системе координат
определяется прямым восхожде¬
нием ао и склонением бо (рис.
4.1.2). Тогда, учитывая кинема¬
тическое уравнение N-N= 1, ре¬
шение векторного уравнения пло¬
скости относительно Nx и Ny
можно представить в виде
Рис. 4.1.1. Схема активного участка
выведения с промежуточной орбитой:
С—точка старта; а—конец активного участка
выведения
Ne =
— cos i sin Bq sin °o ± cos Qp (1 — sin2 Bp — cos2 Q1^2 .
ЛГ =-
cos Bo
Ny sin dp cos Bq + cos I sin B0
COS dp COS Bq
(4.1.1)
поскольку Nz=cos i, IT^cos aocos бо, №y = sin aocos бо, U?2=sin6o.
Следовательно, положение плоскости орбиты отрыва должно
удовлетворять неравенству
cos2 i cos2 80 или + cos / cos 80,
которое сводится к условию при запуске:
в северо-восточном направлении (O^t^
в юго-восточном направлении 1 ^
(*-/)> |80|.
102
(4.1.2)
(4.1.3а)
(4.1.36)
Таким образом, положение плоскости гиперболической орби¬
ты отрыва должно быть таким, что ее угол наклонения к эква-
• iZ
Плоскость
участка
выведения
Г
Рис. 4.1. 2. Кинематика участка выве¬
дения
тору i (или я — i) может быть только больше склонения вектора
цели | до | или равен ему, т. е.
Энергозатраты выведения будут меньше, если в плоскости
орбиты отрыва будет находиться активный участок — отсутству¬
ют затраты на пространственный маневр. Поэтому если г°т —
единичный радиус-вектор точки старта С, то данному требова¬
нию отвечает векторное уравнение плоскости
решение которого с учетом iV*iV=l возможно при удовлетворе¬
нии неравенства
(4.1.3в)
Соотношение между углом i
и склонением точки старта бСт
N~r°„=О,
+ cos i cos 8,
(4.1.4)
которое сводится к условию:
при запуске в северо-восточном направлении
(4. 1.5а}
в юго-восточном
(я —/)>[8СТ|.
(4. 1.56)
103
Таким образом, положение плоскости гиперболической орби¬
ты отрыва должно быть таким, что ее угол наклонения к эквато¬
ру i (или я—i) может быть только больше географической ши¬
роты |фст | точки старта или равен ей (или в момент старта —
склонению | бет |), т. е.
— |срст[. (4.1. 5в)
При решении задачи выбора угла наклонения i плоскости
промежуточной орбиты (плоскости орбиты отрыва) склонение век¬
тора цели б0 и географическая широта точки старта фст являют¬
ся величинами, заранее заданными. В соответствии со значени¬
ем величин 6о и фст и следует определять границы возможных
значений i согласно условиям (4.1.3) и (4.1.5). Если широта
точки старта фст больше склонения вектора цели бо (фст^бо)
или равна ему, то выбор угла наклонения / определяется нера¬
венствами (4. 1.5) и не зависит от бо. Если же склонение век¬
тора цели бо больше широты точки старта или равно ей
(фСт<бо), то выбор угла наклонения определяется неравен¬
ствами (4. 1.3) и не зависит от широты точки старта.
Оптимизация угла наклона i из условия
наименьших энергозатрат
Соотношения (4. 1. 3) и (4. 1. 5) дают некоторую свободу в вы¬
боре угла наклонения плоскости траектории выведения к эква¬
тору. Однако этот угол опре¬
деленным образом влияет на
энергозатраты активного уча¬
стка. Поэтому желательно пу¬
тем соответствующего выбора
угла наклонения i уменьшить
энергозатраты выведения. Ос-
новой для этого является пра-
^ вильное использование энергии
вращения Земли. Будем пред¬
полагать импульсное измене¬
ние скорости. Тогда энергоза¬
траты выведения на промежу¬
точную орбиту будут выра*
Рис. 4.1. 3. К оптимизации угла жаться характеристической
наклонения i скоростью, равной (рис. 4. 1.3)
^хвыв=^кр.о-^вр C0S (^Kp.o^Bp) = Z,KPo-«>3/?3COS 5CTCOS^— ^ ,
где икр. о — круговая скорость ракеты на промежуточной орбите;
(о3 — угловая скорость вращения Земли;
R3 — радиус Земли;
104
г>Вр— вектор скорости вращения Земли в точке С;
А — азимут запуска — угол между меридиональной пло¬
скостью точки старта и плоскостью траектории выве¬
дения, положительной к востоку от точного направле¬
ния на север (см. рис. 4. 1. 3).
Из сферического прямоугольного треугольника £1 CD найдем
sin А = ±со$' *, (4.1.6)
COS ^ст
где знак минус соответствует я.
л*
Отсюда получим
'/Х.,ы,= ®«р.« - V?» ( ± C0S ')•
Таким образом, энергозатраты при выведении ракеты на про¬
межуточную орбиту будут наименьшими при максимально воз*
можных значениях (±cos /). Теперь в зависимости от соотноше¬
ния углов 6о и фст можно определить оптимальные значения уг¬
ла наклонения /. Если фст^бо, то при запуске:
в северо-восточном направлении
<=?«; (4.1.7а)
В ЮГО-ВОСТОЧНОМ
/ = я —|срст|. (4.1.76)
Если фст^бо, то при запуске:
в северо-восточном направлении
/ = 50; (4.1.8а)
в юго-восточном
i = n —150|. (4.1.86)
Ограничения на выбор азимута запуска А
Влияние азимута запуска А на геометрию участка выведения
сказывается через угол наклонения /. При изменении азимута за¬
пуска А плоскость траектории выведения поворачивается отно¬
сительно радиуса-вектора точки старта. Однако такое вращение
может происходить только при определенных ограничениях, по¬
скольку в плоскости траектории выведения должен находиться
и вектор цели W. Воспользовавшись условием (4.1.2) и урав¬
нением (4.1.6), запишем
sin Л < cos Ъ° . (4.1.9)
COS <рст
Следовательно, если склонение вектора цели 60 больше широ¬
ты точки старта фст (фст<Сбо), то существует диапазон азимутов
* Предполагается запуск только в восточном направлении.
105
запуска (симметричный относительно направления на восток)
COS Bn я ^ я ^ я 1 COS Во
arc sin у- = Л1<^ i4 i4a=^ —arcsin — , в котором не-
cos 8CT cos 8СХ
возможно осуществить запуск из заданного места старта. Если
же склонение вектора цели 60 меньше широты точки старта
Фет (фст>6о) или равно ей, то запуск можно осуществить при
всех допустимых (внутри пределов безопасности) азимутах.
Долгота восходящего узла Q
Долгота восходящего узла промежуточной орбиты (гипербо¬
лической орбиты отрыва) определяется из сферического прямо¬
угольного треугольника tlPB (см. рис. 4. 1.2). Имеем
tg 80= sin (а0 — 2)tg i (4.1.10a)
или
2 = а0— arc sin tg . (4.1.106)
>tgi ,
Соотношения между центральным углом
выведения р и склонениями 6о, бст
и азимутом запуска А
Центральный угол участка выведения р — это угол между
радиусом-вектором точки старта и вектором цели (направлени¬
ем асимптоты) (см. рис. 4. 1.2). Он представляет собой полное
угловое расстояние, которое должна пролететь ракета от момен¬
та запуска до момента, когда вектор скорости КЛА будет парал¬
лелен вектору Fooo- При известном положении точки старта (фст)
и заданном значении склонения цели 60 угол р зависит от ази¬
мута запуска А.
Из сферического прямоугольного треугольника СРР' (см.
рис. 4. 1.2) получим
cos p = ctg P-tg А,
а из сферического прямоугольного треугольника SI РВ найдем
Pcos i
=
cos &о
или с учетом (4. 1.6)
sjn p = _coL8£1sinJ4_
cos Bq
Тогда будем иметь
cosP=±l/7 У-1 tgA (4.1.11)
у \ cos tCT sin А }
106
Двузначность в определении угла р соответствует двум воз¬
можным моментам времени запуска в сутки для определенного
азимута запуска.
Угол наклона асимптоты <р к линии апсид гиперболической
орбиты отрыва определяется из уравнения
COScp= — -L ^<cp<Jlj .
При импульсном разгоне с промежуточной орбиты ее радиус
равен радиусу перигея орбиты отрыва. Поэтому имеет место ра¬
венство
е=——(-1
а
или, поскольку а = получим
»0
Следовательно,
е=1 + ^*-. (4.1.12)
V
кр о
coscp= . (4.1.13)
1 + Vto/vlp.o
Знание угла наклона асимптоты <р к линии апсид гиперболиче¬
ской орбиты отрыва позволяет при известном направлении асим¬
птоты, определяемом вектором цели W, найти точку схода с про¬
межуточной орбиты при импульсном разгоне.
Зависимости (4.1.7) — (4. 1. 13) характеризуют геометрию
участка выведения, определяя положение плоскости траектории
выведения и ориентацию, размеры и форму гиперболической
орбиты отрыва.
Задача запуска в правильный момент времени
В основу решения задачи запуска в правильный момент вре¬
мени можно положить существующую строгую зависимость меж¬
ду азимутом запуска и временем старта. Так, если время запуска
в течение суток задано заранее, то азимут запуска должен вы¬
бираться так, чтобы плоскость траектории выведения содержала
вектор цели W. С другой стороны, если азимут запуска фикси¬
рован заранее, то запуск должен быть осуществлен в момент
времени, когда точка старта пересекает плоскость траектории
выведения.
107
В момент совмещения точки старта с фиксированной в про¬
странстве плоскостью траектории выведения должны удовлетво¬
ряться следующие уравнения (рис. 4. 1.4):
N-r?,=0;
(N X ^ст) ~k=sini.
Решая данные уравнения относительно прямого восхождения
точки старта аст, получим
cos аст= —
sin аст= —
Nx cos i sin йст -1- Ny sin i
sin2 i cos &ct
Ny cos i sin Йст— Nx sin I
(4. 1. 14)
sin2 i cos 8CT
Здесь имелось ввиду, что r°T =cosaCTcos6CTi + sinaCTcos6cT7+
+ sin бст^.
Выражения (4. 1. 14) с учетом (4. 1. 1) позволяют определить
значение прямого восхождения точки старта аст в зависимости
Рис. 4.1.4. Схема векторов
в момент запуска
от азимута запуска. Кроме того, прямое восхождение точки стар¬
та аст связано со временем старта /ст, отсчитываемым от полу¬
ночи суток запуска, следующим соотношением:
или
aCT — — GH А -}- Хст -{- С1>3^ст
tCT = — (a CT — GH А — Хст),
Ш3
(4. 1.15а)
(4.1.156)
где GHA — гринвичский часовой угол в полночь суток запуска;
Лет — географическая долгота точки старта.
Зависимость (4. 1. 15) позволяет при выбранном азимуте за¬
пуска А и заданных значениях склонения цели 6о и склонения
точки старта 6СТ» используя соотношения (4. 1. 1) и (4. 1. 14), оп¬
ределить время запуска в течение суток известной даты старта.
108
Таким образом, получено аналитическое решение задачи вы¬
ведения, позволяющее при заданном и неизменном векторе 7«>о
рассчитать геометрические характеристики участка выведения и
определить время старта tCT в течение суток.
Выбор угла наклона i из условия увеличения окна
старта при учете возмущений
До сих пор рассматривалась задача выбора кинематических
параметров участка выведения без учета нецентральности гра¬
витационного поля Земли и изменения вектора гиперболическо¬
го избытка скорости У<х>о от времени. Если же принять во внима¬
ние возможность отклонения времени старта от номинальной да¬
ты, то такие упрощения могут привести к чувствительным
ошибкам.
Рисч 4.1. 5. Отклонение вектора
гиперболического избытка скоро¬
сти (вектора цели) от плоскости
промежуточной орбиты при дейст¬
вительной дате старта
Рис. 4.1. 6. Кинематика век¬
торов при действительной
дате старта и геометриче¬
ская интерпретация угла у:
3 я
ап = — п+ у' = у± —
В действительности нецентральность поля Земли приводит к
изменению положения плоскости промежуточной орбиты от вре¬
мени. В первом приближении (см. § 3 гл. I) изменение ее долготы
восходящего узла можно оценить следующим образом:
д2=-солд ts, (4. 1. 16)
где д2 = 2,-20;
Йо, — долгота восходящего узла плоскости промежуточ¬
ной орбиты при номинальной и действитель¬
ной дате старта /s=/0~Ь А/«;
cos — скорость регрессии узлов плоскости промежуточной
орбиты.
Кроме того, вектор гиперболического избытка скорости 7«>о
также изменяется от времени по величине и направлению, обра-
109
зуя с плоскостью промежуточной орбиты угол у (рис. 4.1.5), ко¬
торый определяется из следующего уравнения (рис. 4.1.6):
sin y = cos i sin 8,+ sin * cos ^ cos (as— an)«
где _an, _as — прямое восхождение векторов Ns, Ws;
Ns, Ws — вектор нормали к плоскости промежуточной ор¬
биты и вектор цели при действительной дате
старта.
Рис. 4.1. 7. Изменение угла у
при отклонении от номиналь¬
ной даты старта
At
Рис. 4.1. 8. Потери ха¬
рактеристической скоро¬
сти на пространственный
маневр
Так как согласно определению углов имеем
a„ = -l„ + Qs=,i-n + Q0 + i2,
то с учетом формул (4. 1. 10) и (4. 1. 16) получим
a„ =y я + a0 — arc sin (ctg i tg 80) — <*>sbts.
Подставляя полученное значение an в предыдущее уравне¬
ние, после некоторых преобразований найдем
sin у = cos /[sin 8^ — cos(a0 — as — J cos 8^ tg 80] ±
± |/sin2/ — sin2 80sec 80 sin (a0— as—usAts) cos 8S, (4. 1. 17)
где в случае прямого движения берется знак « + » при
0< (a0-2o)< знак <<—* при (ao~2o)>Y •
Следовательно, при отклонении времени старта от номиналь¬
ной даты старта вследствие прецессии промежуточной орбиты и
изменения вектора гиперболического избытка скорости орбиты
отрыва могут возникнуть условия, при которых вектор гипербо¬
лического избытка скорости уже не будет находиться в плоско¬
сти промежуточной орбиты. Такая ситуация приводит к необхо¬
димости пространственного маневра разгонного модуля КЛА,
что связано с дополнительными расходами (по сравнению с ком¬
планарным полетом) на разгон. На рис. 4. 1.7 показаны типич¬
ные изменения угла у от Ata, а на рис. 4. 1.8 — соответствующее
110
этим изменениям приращение характеристической скорости раз¬
гона. Заметно резкое увеличение характеристической скорости
разгона вследствие появления угла у при отклонении от номи¬
нальной даты старта.
Рассмотренный процесс заметно уменьшает диапазон окна
старта, оказывая тем самым принципиальное влияние на выбор
угла наклонения промежуточной орбиты. Оказывается, что выби-
Рис. 4. 1. 9. Потребные значения характеристической скоро¬
сти разгона при отклонении от номинальной даты старта
в зависимости от угла наклонения промежуточной орбиты
рая i в диапазоне, определяемом условиями (4. 1.3), можно при
некоторых значениях Ats несколько снизить рост характеристиче¬
ской скорости разгона по сравнению с компланарным разгоном
(рис. 4. 1.9), что позволяет значительно увеличить окно старта.
В этом смысле выбранный таким образом угол наклонения про¬
межуточной орбиты i будет оптимальным. При построении алго¬
ритма такого процесса следует использовать соотношение
(4. 1. 17), которое дает возможность определить зависимость у от
i при заданном Дt8.
§ 2. ИМПУЛЬСНЫЕ МАНЕВРЫ КЛА
В ГРАВИТАЦИОННОЙ СФЕРЕ ПЛАНЕТЫ
При баллистическом анализе схем полета КЛА к планетам
существенным является вопрос о маневрах КЛА в грависферах
планет. Приближенная задача обычно рассматривается в им¬
пульсной постановке, что вполне достаточно на этом этапе ис¬
следований.
Ниже рассмотрены основные виды маневров, применяемых в
различных схемах полета межпланетных КЛА.
ill
Перицентральный переход
между компланарными эллиптическими
и гиперболическими орбитами
Переход такого типа используется при торможении КЛА на
орбиту ИСП или старте с нее. Потребное приращение скорости
Рис. 4. 2.1. Характеристики перехода эллипс —ги¬
пербола при гп = 1
для перехода с эллиптической орбиты на гиперболическую (или
обратно) будет
д1/ = 1/кг-1/„э,
где Vnr = ]/'2VlpK-\-Vla — скорость в перицентре гиперболы с
гиперболическим избытком скорости У»;
Vmrc=\/ — — круговая скорость, соответствующая
V г
* радиусу г* перицентра точки перехода;
эллиптической
VM9 = i/ р. ( — — ]— скорость в перицентре
у \Г* a J орбиты;
а =
1 — е
большая полуось эллипса с эксцентри¬
ка — г*
ситетом е=
Тогда
г* + г*
/2а , 1/2 / fx (1 + е)
Если в качестве опорной принята круговая орбита с гкр=гж, то
дК = У'2+Vi - l/T+i,
где V=
V
V
кр,7= —
2*
Для переходов с круговой орбиты на гиперболу (или обратно)
д\7 = |/2 + С1—1.
if
г J * 5 678910 го 30*0г,
Рис. 4.2.2. Характеристики перицентрального
перехода эллипс — гипербола
Характеристики компланарных перицентральных переходов эл¬
липс— гипербола при rn = 1 приведены на рис. 4.2. 1, а перехо¬
дов эллипс — гипербола для различных гк —на рис. 4.2.2.
Неперицентральный переход
между компланарными эллиптической
и гиперболической орбитами
Этот переход может быть использован при формировании ор¬
биты ожидания у планеты.
113
Эллиптическая орбита задана следующими параметрами:
г*эл — радиус перицентра и гаэл — радиус апоцентра.
Точка М перехода с эллипса на гиперболу задана истинной
аномалией гэЭл (рис. 4.2.3). Для гиперболы известен модуль
гиперболического избытка скорости У». Через точку М при за¬
данном модуле Voo можно провести семейство гипербол. В каче¬
стве параметра этого семейства выберем радиус перицентра ги¬
перболы г*г. Необходимо найти такое значение г*г, которое обес¬
печивает минимум модуля вектора АУ=Уг—^эл, обеспечивающе¬
го переход с эллипса на гиперболу (или обратно). Модуль век¬
тора |ДГ| (безразмерная скорость, отнесенная к круговой скоро¬
сти орбиты с г,ф = Г*эл)
д|7=1^д|7л + д(7:,
где
ьУп=Упг-Уп*л\ АКг = г — Кгэл;
Vn эл; Vn г— нормальные составляющие скорости гиперболы
и эллипса в точке М\
Угг—радиальные составляющие скорости в точке М.
Эти составляющие скорости в точке М. эллипса
Относя скорости К Ккр*= и расстояния к г*эл, по¬
лучим
где
i7 1 ~f~ ^эл COS Уэл . 77 ^эл Sin ^эл
Я ЭЛ г —— > Г ЭЛ , / —— »
К Рэл V Ръл
- 2 г„~. гп..— \
п оэл_ . аэл
г ЭЛ ~ . . > СЭЛ
''аэл + 1 '"аэл + 1
— параметр и эксцентриситет эллиптической орбиты.
Составляющие относительной скорости в точке М гиперболы
,7 1 + ег cos tir ту ег sin t>r
V пт— 77= j Vrv— J— 1
V Рт V pг
где
Pr =ar (el— 1) = r*r(2+ PL/v);
er=\+4?=\+7„Vl; flr=4-.
«г v:
Истинная аномалия гиперболы в точке М найдется из ус¬
ловия
*** ^ Рр Ръл
гт = гэл ИЛИ — = —
1 4- ег cos tir 1 + бэл cos иэл
Отсюда
1
COS V =
ег
(1 +^эл cosrj-l
При заданной истинной аномалии иЭл точки перехода М и У»
модуль скорости AV=f(rKr)• Предельное значение радиуса пери¬
центра гиперболы, обеспечивающее пересечение с эллипсом в точ¬
ке М, равно г*г = гэл в точке перехода. Расчеты показывают, что
в основном значения r*ropt, обеспечивающие минимум ДГ, со¬
ответствуют предельным. При малых значениях эксцентриситета
эллипса и малых иЭл значения rwropt несколько больше предель¬
ных. Однако из-за пологости оптимума ДV = f (г%г) значения
ДГ, соответствующие гпг предельным, мало отличаются от ми¬
нимальных. На рис. 4. 2. 4 приведены зависимости минимальных
значений &V=f(vd„) Для различных Voo игвЭл = 5. Там же нане¬
115
сены значения угла наклона вектора импульса AF к местному
горизонту:
Угол между осью апсид эллипса и асимптотой гиперболы
ср = л— [и-(-(л — а)] = а —и,
Этот маневр может использоваться при изменении наклоне¬
ния орбиты ИСП и формирования орбиты ожидания у планеты.
Поворот плоскости эллиптической орбиты на угол х с минималь¬
ными энергозатратами должен производиться путем поворота
вектора скорости на угол х в апоцентре орбиты, где скорость по¬
лета по орбите минимальна. В этом случае потребный импульс
скорости АУ
Скорость в апоцентре эллиптической орбиты определим из соот¬
ношения
116
в0
-U
-2
Рис. 4. 2. 4. Характеристики непери-
центрального перехода при гаэл—5
где
cos а = —; г=иэл —цг.
еГ
Поворот плоскости эллиптической орбиты
AK=Ka/2(l-cos*) = 2Kasin — •
2
Заменив prtJI = Vкр*г* и а= а —, получим
/2 г*
г. (%+/-.) ’
где VK* — круговая скорость при г = г*.
г*=7
Л7 Л7 Л7 120 150 х<
Рис. 4. 2. 5. Характеристики маневра поворо¬
та плоскости эллиптической орбиты
Перейдем к безразмерным величинам, относя г к г„ а 1/, к
крх< Тогда
Таким образом, минимальный относительный импульс скоро¬
сти, потребный для поворота плоскости эллиптической орбиты на
угол X,
Зависимость Дf=f(x; г«) приведена на рис. 4.2.5. Видно, что
энергозатраты, потребные на повороты плоскости эклиптической
орбиты, существенно снижаются при увеличении радиуса апо¬
центра га.
117
Одноймпульсный поворот апсид
эллиптической орбиты
Такой маневр может использоваться при формировании ор¬
биты ИСП.
Пусть оси компланарных эллиптических орбит 1 и 2 развер¬
нуты на угол со (рис. 4.2.6). Одноимпульсный переход между
этими орбитами возможен в двух точках пересечения I и //.
Рис. 4. 2.6. Характеристики маневра
одноимпульсного поворота оси апсид
Истинная аномалия точек пересечения эллипсов равна:
— для перехода в точке I
1 fV tl) A (l)
п,1 = 2я или п,=— ;
1 2 1 2
— для перехода в точке II
I W 9 1^
или t)f. = ЛМ .
II 2 11 1 2
Рассмотрим переход в точке I. Нормальные составляющие
скорости в этой точке:
J^[1+^cos(-f)]=/J^(1+ec°sf);
^=|/v(1+ecosf)’
т. e. равны.
118
Радиальные составляющие скорости равны, но противоположны
по направлению:
v”=\/ *ТеАпт'
Импульс для перехода между орбитами
д1/=2|1/,| = 2 у ^esin-j
и направлен радиально от притягивающего центра. В точке II
нормальные составляющие скоростей также равны. Радиальные
составляющие также равны и противоположны по знаку. Им¬
пульс перехода AV=2|Vr\ и направлен радиально, но по направ¬
лению к притягивающему центру. Отнесем скорости к круговой
скорости орбиты с г* ^Укр* = |/ “^г1^ » а расстояния — кг*. Тог¬
да, приняв во внимание, что
2г. га-\
е=-^г
г а + 1 га + 1
получим
у V2 (7 — i) . м г .
ДV — — —sin— = kV* sin
V Га (га + 1)
2 2
где гв — относительный радиус апоцентра эллипса. Значения
ДV*=f(ra) приведены на рис. 4.2.6. При га—►<»
д1/ — 1/ 2-sin ^ .
Двухимпульсный поворот оси апсид
эллиптической орбиты
Схема такого перехода между двумя эллиптическими орби¬
тами показана на рис. 4.2. 7. В точке 1 аппарат переводится на
эллипс перехода, затем в точке 2 — на эллиптическую орбиту,
повернутую относительно исходной на угол о. Переходы такого
типа рассмотрены в сборнике [36] (статья Дерека Ф. Лоудена
«Импульсный переход между эллиптическими орбитами»). По
материалам этой статьи на рис. 4. 2. 7 приведены основные ха¬
рактеристики такого перехода: и — радиусы перицентра
и апоцентра орбиты перехода, отнесенные к гп исходного эл¬
липса. дКц—суммарный импульс скорости, потребной для
перехода (отнесен к VKf% с г —г*).
119
Наибольшие энергозатраты приходятся на переходы с отно¬
сительным радиусом апоцентра исходного эллипса 5-5-7*
Угол о)=180° соответствует переходу с наибольшими значениями
AV. Орбита перехода в этом случае будет круговой, с $=га.
Поворот оси апсид в этом случае происходит следующим обра-
20 80 W 50 100 г,I
га;е
0,2
е-^/' Рис. 4.2.7. Характери-
стики маневра двухим-
пульсного поворота оси
апсид:
а~зависимость суммарной скорости Д V от радиуса
апоцентра г„ и от угла поворота оси апсид со; б зави¬
симость радиуса апоцентра R а и радиуса перицентра R^
переходного эллипса от угла со,- в схема перехода
зом. В апоцентре исходной орбиты аппарату сообщается первый
импульс AV, переводящий его на круговую орбиту с г = га эллип¬
са. После поворота на необходимый угол аппарат вторым импуль¬
сом AV переводится на исходный эллипс. Импульс скорости
д1/ = кра V а>
где
V кра —
К.= Ккр./1-е.
120
Переходя к безразмерным величинам,
,7 V г
V=v— и г=—’
кря я
получим
Подставив значение
г—г г п—1
_ СЕ * в
С— —' ^ ■ »
'а +г* г« +1
получим
Fa =
‘= 7 и А<7 = -75=-( >-l/^-rV
|/ '.К+0 /7. \ К г.+ 1/
В этом случае энергетика перехода не зависит от угла пово¬
рота оси апсид. При га—►«> величина AVs—>-0.
Гравитационный маневр при облете планеты
Для ряда схем межпланетных полетов целесообразно ис¬
пользование маневра в гравитационном поле планеты для изме¬
нения направления и величины вектора гелиоцентрической ско¬
рости.
Рассмотрим схему гравитационного маневра в сфере действия
планеты (рис. 4.2.8). Вектор скорости входа в сферу действия
планеты F«,i определится как разность между вектором гелио¬
центрической _скорости подлета к планете Fi и вектором скоро¬
сти планеты Гпл- В процессе гравитационного маневра в сфере
действия планеты вектор F«>i, не изменяясь по модулю, повора¬
чивается на угол ф и преобразуется в вектор скорости выхода из
сферы действия планеты F«,2. Вектор гелиоцентрической скорости
отлета F2 будет суммой векторов F«,2 и Vnn. Видно, что гелио¬
центрические векторы V{ и V2 различны как по модулю, так и по
направлению.
Угол поворота вектора F«,i определится как угол между асим¬
птотами гиперболы облета (рис. 4. 2. 9):
. <р ОР АО а 1
Sin—= = = ; = .
2 OF OF a+rK r
1 + —
a
Так как a = -^r, то sin—= —.
Vi 2 r,Vi
1 +
121
Рис. 4.2.8. Схема гравитационного
маневра при облете планеты
Рис. 4.2. 9. Схема полета по облетной
гиперболе
V< VKp
V> Vxp
Рис. 4.2.10. Схема определения наибольшего угла по¬
ворота у вектора гелиоцентрической скорости
v}px9,6t 13,05
15 Voa.KM/9
Рис. 4.2. 11. Зависимость угла
Y от Voc для различных планет
122
Поворот вектора Foo на угол <р приводит к повороту вектора
гелиоцентрической скорости КЛА на угол у (см. рис. 4.2.8). Экс¬
тремальные значения модуля угла поворота у при заданном
значении угла <р будут соответствовать случаю, когда Fi = F2=F
(рис. 4.2.10). Для круговых орбит планет, когда Fnn = FKp, угол
у определяется из соотношения
Y
Sin 2 v
Z> оо
<р V
sin
2
где
1/2 = 1/к2р+ Fi + 21/«1/кр cos -2- ,
откуда
ч>
V sin —-
. у 2
sin —
2
^p+KI±2K„Kkpcos
Здесь знак плюс соответствует F>FKP, минус— F<FKp.
Величина угла у не может превышать предельных значений
Упр (см. рис. 4.2. 10), когда
. Y,.p
sin = •
2 Ккр
Величины угла у в зависимости от Fro при предельных маневрах,
когда г*=/?Д(Ш (У?доп не менее радиуса планеты и высоты ее
плотных слоев атмосферы), для различных планет приведены
на рис. 4.2. 11.
Видно, что для планет земной группы существуют такие зна¬
чения Foo, которые обеспечивают максимальные углы у. При по¬
летах к внутренним планетам F>FKp, и максимальные у будут
Ymax~10° при пролете Венеры и Ymax~3° три пролете Мерку¬
рия. При полетах к внешним планетам F,<FKP и при пролете
Марса Ymax~9,5°. Таким образом, максимальные возможные зна¬
чения угла у для маневров в гравитационном поле Марса и Ве¬
неры примерно одинаковы.
Возможности гравитационного маневра в полях тяготения
больших планет (Юпитер и Сатурн) практически всегда соответ¬
ствуют упред и при значениях Foo = FKp обеспечивают поворот век¬
тора гелиоцентрической скорости на 180°. Поворот вектора гелио¬
центрической скорости на угол у=90° в поле тяготения Юпитера
или Сатурна обеспечивает полет на Солнце по вырожденной пря¬
молинейной гиперболе. Однако это обеспечивается лишь при
Foo^9,5 км/с для Юпитера и Foo^7,3 км/с для Сатурна, что го-
123
ворит о том, что такие полеты на близкое расстояние к Солнцу
возможны при значениях Voo у планеты больших, чем для тра¬
екторий минимальной энергии полета к Юпитеру или Сатурну
(см. табл. 5.4 и 5.8).
Активно-гравитационный маневр
при облете планеты
Возможности пассивного гравитационного маневра в поле
тяготения планет земной группы ограничены пределом
снижения высоты перицентра
облетной гиперболы до значе¬
ний г *<Ядоп. Поэтому в ряде
случаев становится целесооб¬
разным активно-гравитацион¬
ный маневр с дополнительным
импульсным изменением ско¬
рости на участке пролета ги¬
пербола подлета — гипербола
отлета планеты. Достаточно
полное изложение этой задачи
приведено в работе [63].
Общая схема такого пло¬
ского одноимпульсного пере¬
хода представлена на рис.
4.2.12. Аппарат в точке Т пе¬
реходит с входящей ветви S
подлетной гиперболы на вхо¬
дящую ветвь Р гиперболы от¬
лета. Возможные четыре ва¬
рианта переходов гипербола —
гипербола приведены на рис. 4.2.13. Угол поворота асимптот
гипербол (см. рис. 4.2. 12)
ср = ^-|-2ф2, (4.2.1)
где р — угол между входящими асимптотами гиперболы;
ф= ——а—угол, дополняющий до я/2 угол наклона асимпто-
2
ты гиперболы а.
Для переходов каждого типа справедливо соотношение
р=«-.(4-2-2)
где Пг — истинная аномалия точки подачи импульса (положитель¬
ная при повороте от оси апсид по часовой стрелке).
124
Рис. 4.2.12. Общая схема одно¬
импульсного перехода гипербола-
гипербола (F—фокус гиперболы)
Объединяя (4.2.1) и (4.2.2), получим независимо от типа
перехода
СР=('КН-'Ь)Н- (иа — vi)* (4.2.3)
'ОО f
Рис. 4. 2.13. Возможные варианты перехода между гиперболами
Из треугольника скорости в точке подачи импульса можно
определить величину импульса
AV = (V?+V,l-2Vr1Vr,cos у)'п, (4.2.4)
где
Х = 02 015
О —угол с местным горизонтом.
125
Как показано в [63], если в качестве независимых переменных
взять i|)i и т|Э2 и учитывать, что > можно углы 6 и v пред¬
ставить в виде
6=4- cos-1
1
rVi ( rVi
2 +
v= + cos
—1
sin ф
rV2
-1
1/2
(4.2.5)
tg2^
(4.2.6)
Скорость на траектории конического сечения
(тН)Г
(4.2.7)
Исключая из (4.2. 3) и (4. 2. 4) — (4. 2. 7) все переменные, кроме
и 1|з2, получим
д V=
-itr
1 +
2 (a2/ai)1/2
X
ач rjax (r/a^tg^! tg
x (•+Iff (2+ f)«•*'->l[i(2+ й'л-'ЮГ
где
A =
Air/atf+Bir/aJ + C-
= 0,
(4.2.8)
(4.2. 9)
[cos (cp—lb — ф2) — sin фх sin ф2]:
B=2['cos(y-t1+fe)0054,1008 4,1
I Y T1TW tg+itg+a
— T1 Taj cos2^ cos*t|>2;
cos ф1 cos ф2 /02^ 2 +t у
tg+ltg+2 Ul )
— cos2 ф2 — cos2 j j ;
Q COS Yl c°5 У
tg^l tg ф2
126
i la им
\ o.\ I J
Ф1 cos ф2 Г sin ф! / д2 cos ф2 \2 _|_ sin ф2
: Ф1 tg Ф2 I Sin ф2 V ^1 COS Ф1 / sin ф!
° *2 cos(cp-<K-<k)j
sin ф2 /cos Ф1 у
COS ф2 /
[
(4.2.10)
Если разрешить (4. 2.9) относительно r/at, то задача отыска¬
ния минимума AV сводится к нахождению минимума по двум
параметрам: и ф2. Если AV отнести к Vooi,
ДК _ /ахДК2\1/2
? )
и учесть, что
rVh г
то решение можно выразить только через два параметра: ajai
и ср. Таким образом, задача оптимизации им-
или
^_\2
^~2
пульса становится независимой от гравитационной постоянной
планеты и скорости V«,i.
Рассмотрим частный случай перехода, когда импульс подает¬
ся в перицентрах гипербол. Для такого перицентрального пере¬
хода in = i)2 = 0. Для этого случая получено [63]
fl2 Sin ф2 tg2<h _
д, sin ф. tgife (4.2.11)
. /sin <\>2 \
tg2<w —т1-!
Vein Ф1 /
? = 4,i + 4,a5 (4.2.12)
sin с^/ l\ = l. (4.2.13)
Исключая г/ах из (4.2.11) и (4.2.13), можно получить выра¬
жение, связывающее i|)i и ф2:
sin = ^ . (4.2.14)
— + (l ——) simfo
a\ \ «1 /
Так как импульс для перицентрального перехода направлен
по трансверсали, то cos 0i=cos02 и формулу для AVIV<x>\ можно
привести к виду
W
V
H,+*+£l,-K,+iM,+SiJfV
Из (4. 2. 12) и (4. 2. 14) получим уравнение связи
• / . \ sin Ф2 (А 9 1fi\
Сводные графики характеристик для перицентральных и оп¬
тимальных неперицентральных переходов приведены на
рис- 4.2.14 и 4.2.15. Для обратных отношений скоростей
Рис. 4. 2. 14. Сводный график характеристик перицентраль-
ного перехода между гиперболами
имеют место «зеркальные» решения с равными значениями по¬
требной характеристической скорости AV. Поэтому значения ха¬
рактеристик приведены только для V^IVooi^^
Кривые характеристики перицентральных переходов на
рис. 4.2. 14 ограничены прямыми линиями слева, а также сверху
Рис. 4. 2. 15. Характеристики оптимальных неперицентраль¬
ных переходов между гиперболами
и снизу. Ограничение слева Voo2/Vooi=\ соответствует случаю
пассивного гравитационного маневра, рассмотренного выше.
Ср
В этом случае •
128
Нижняя граница <р = 0 представляет вырожденный случай не¬
возмущенной прямолинейной траектории, когда импульс прикла¬
дывается за пределами сферы действия планеты и вектор скоро¬
сти изменяется импульсно только по величине, а не по направ¬
лению.
Верхняя граница ср=я (/’1cV'ii/|A = 0 и kV/Voa\ = 0) соответ¬
ствует также вырожденной прямолинейной гиперболе, проходя¬
щей через фокус и не требующей приложения импульса. Практи¬
чески этот случай не реализуется из-за ограничения Яло,г
График для характеристик оптимальных неперицентральных
переходов на рис. 4. 2. 15 в общем аналогичен графику рис. 4. 2. 14.
Рис. 4.2.16. Характеристики неперицент¬
ральных переходов между гиперболами
для ф = 90°:
1—оптимальные переходы; 2—перицентральные
переходы
Однако оптимальные переходы реализуются при меньшем зна¬
чении AV, что видно из сравнения кривых постоянных значений
AV/Vcoi. Заметны различия характеристик при <р = 0, где перицен-
тральные переходы происходят на бесконечности, в то время как
для оптимальных неперицентральных переходов параметр
не стремится к бесконечности, а изменяется в зависимости от зна¬
чения VoozlVooi. Следует отметить, что на границе Уоо2/Уоо1=1 кри-
вые r.V.i/ji на рис. 4.2. 14 и 4. 2. 15 начинаются при одних и тех
же значениях <р.
Для практических случаев параметр г*К»1/{л ограничен
из-за условия, что переход должен реализоваться при минималь¬
ном значении /?доп- В этом случае удобно представить ха¬
рактеристики перехода в .виде, показанном на рис- 4.2.16.
Кривая 1^002/^001 = const имеет горизонтальную асимптоту при
r% 1/il/jX—юо, для которой
дк г/ ^002 V V'.a I1/2
При подходе к планете AV/V«,1 уменьшается, достигая мини¬
мума с меньшими AV/Vooi, чем для перицентральных переходов.
Затем значения AV/Vooi снова увеличиваются, приближаясь ко
2
второй горизонтальной асимптоте при rKVв0i/|x—*0 (вырожден¬
ная прямолинейная гипербола, проходящая через фокус), для
которой
AV
1/2
Переходы в области справа от перицентральных соответству¬
ют (переходу типа О—О (на рис. 4.2. 13), т. е. КЛА приближает¬
ся к планете по входящей ветви гиперболы и совершает переход
на вторую гиперболу только после прохождения перицентра пер¬
вой гиперболы.
Переходы в области слева от перицентральных, включающие
и оптимальные переходы, соответствуют переходам типа 1—1 на
рис. 4.2. 13, т. е. КА переходит на вторую гиперболу на входя¬
щей ветви первой гиперболы до ее перицентра. Минимальное рас¬
стояние соответствует радиусу перицентра второй гиперболы.
Таким образом, оптимальные переходы соответствуют типу 1—/,
если V002/Fooi> 1 • Для Foo2/Fooi<l области меняются местами и
оптимальные переходы соответствуют типу О—О.
Кривая для Foo2/Fooi=l имеет минимальную точку с AF/Fooi =
=0 и совпадает с точкой перицентральных переходов. В этом
случае обеспечивается пассивный гравитационный маневр при
облете планеты.
На зависимостях типа представленных на рис. 4.2 16 легко
учитывается ограничение на параметр г*1/„i/jx из условия
Так как оптимальные неперицентральные переходы лежат в
окрестности перицентральных переходов, то можно использовать
следующий алгоритм поиска экстремума AV. Вначале при задан¬
ных Foot, F002 и <р определяются AV и параметры и для
перицентральных переходов. Затем от этих значений и ^осу¬
ществляется поиск минимального AV для неперицентральных
переходов по параметрам ф! и фг- Такой алгоритм обеспечивает
унимодальность области поиска и позволяет использовать прямые
методы поиска экстремума (например, градиентные).
§ 3. ВЫБОР СХЕМЫ ВЫВЕДЕНИЯ И ПАРАМЕТРОВ
РАКЕТНОЙ СТУПЕНИ ВЗЛЕТА С ПОВЕРХНОСТИ
МАРСА
Анализ схем полета к Марсу (см. гл. VIII) показывает, что
при старте с поверхности Марса возможно выведение полезного
груза на следующие орбиты:
— круговую с Якр = 500^2000 км;
130
— эллиптическую с Нк = 500-1-2000 км и //„=20-1-30 тыс. км;
— гиперболические орбиты с Нк = 500-1-2000 км.
Для выведения на такие высокие орбиты рациональна двух-
импульсная схема выведения, или схема с дожогом.
В этом случае космический аппарат первоначально выводит¬
ся на переходную эллиптическую орбиту. Апоцентр этого пере¬
ходного эллипса соответствует высоте перицентра заданной ор¬
биты. В апоцентре этого эллипса происходят повторное включе¬
ние двигателя и разгон до выхода на заданную орбиту
(рис. 4.3. 1).
Рис. 4.3. 1. Схема взлета с поверхности
Марса:
I—первое включение; П—второе;
I—старт; 1—2—вертикальный подъем; 2—3—про¬
граммный разворот; 3—4—пассивный полет; 4—раз¬
гон до = VK
Величина полезного груза зависит от программы тангажа на
первом и втором участках выведения и от параметров переход¬
ного эллипса. Так как разреженная атмосфера Марса достаточ¬
но протяженна, то при полете по переходному эллипсу возможно
заметное влияние сопротивления на траекторию полета.
Рассматривая первый активный участок полета в разрежен¬
ной атмосфере Марса (р0 = 5-1-20 мбар), можно предположить,
что аэродинамические нагрузки и потери на сопротивление будут
невелики. Поэтому можно допустить, что аэродинамические
подъемные силы отсутствуют, а коэффициент лобового сопротив¬
ления не зависит от скорости полета. Не затрагивая вопросов
управления около центра масс, рассмотрим движение ракеты как
точки переменной массы. Такая постановка задачи для оценки
энергозатрат и веса полезного груза при проектных исследова¬
ниях вполне правомочна и используется в проектных расчетах
траекторий выведения носителей при старте с Земли.
131
Уравнения движения носителя в скоростной системе коорди¬
нат с учетом принятых допущений имеют вид
£оз
V =
Ро — ЬРо
. Ро
Рук
cos а —
^Оз^х
— М^пл
Ро
УК
Г2
sin 0;
0 =
й, (Ро-^-ДЯо) _
™ —sina-}-l —
где
1
Рук
r = V sin 0;
i v о
Я = COS 0,
г
£оэ=9,81 м/с2;
q — скоростной напор I д =
М-11Л \
гЧ
COS 0
0^2
Q = Q{h) и p=p(h) — плотность и давление (заданы моделями
атмосферы планеты);
h=r — гпл — высота полета;
Тцл — радиус планеты;
_ гх5Мцд
х —баллистический коэффициент;
G0
5Мид — площадь миделя;
— Р I —
Р0 = — тягавооруженность носителя ДР0
Gq \
. SgPo\ .
G0 ] ’
Ро —давление на поверхности планеты;
— площадь сопла;
Go — стартовый вес;
V — скорость полета;
0 — угол наклона вектора к местному гори¬
зонту;
г— расстояние от центра масс планеты;
Я— угловая дальность полета;
цпл — гравитационная постоянная планеты;
Руд — удельная тяга;
a — угол атаки.
Угол тангажа <р=6 + а — Я. Известно, что при отсутствии
аэродинамических потерь оптимальная программа тангажа близ¬
ка к линейной. Как показывают расчетные оценки, в разрежен¬
ной атмосфере Марса аэродинамические потери действительно
невелики. Поэтому примем, что программа тангажа линейно за¬
висит от времени, т. е. ф = фо—Ф (t—^о)- Такая программа выне-
132
дения по характеристической скорости разгона отличается, как
показывают расчеты, от более сложных оптимальных программ
выведения не более чем на 2—3%.
Предположим, что носитель стартует с поверхности верти¬
кально. Тогда за начальные условия можно принять параметры
конца вертикального активного участка *:
0 (»„)=-£-. '-№>)='о. Ч'о)=0.
Конечные условия определяются параметрами в заданной точке
переходного эллипса. Если задана высота апоцентра ha пере¬
ходного эллипса и истинная аномалия точки выведения vK, то
конечные условия представляются в виде
гк =
а (1 — g2)
1 + е cos гзк
^ {т:~тУ
Л , е sin гзк
6K = arctg
где а
1 -Ь е cos uK
е=
r*~r*
r* + r*
Наличие свободных параметров (параметры переходного эллип¬
са) позволяет удовлетворить этим начальным и конечным усло¬
виям.
Для линейной программы тангажа на первом активном участ¬
ке исследовалось влияние параметров переходного эллипса на
потребную для выведения на заданную орбиту суммарную ха¬
рактеристическую скорость:
КОМП’
где Vxi и Vxz — характеристическая скорость, потребная для
выведения на переходный эллипс и с переходно¬
го эллипса на заданную орбиту;
ЛКкомп — характеристическая скорость, потребная для
компенсации аэродинамических потерь при дви¬
жении по переходному эллипсу.
* Продолжительность вертикального участка выбиралась из условия до¬
стижения Vo=60 м/с.
133
При изменении высоты перицентра переходного эллипса, на¬
пример при увеличении ее, возрастают гравитационные потери на
первом активном участке, но уменьшаются потребная характери¬
стическая скорость VX2 и компенсирующий импульс. Поэтому
имеется такая высота переход¬
ного импульса, при которой
суммарные потребные энерго¬
затраты минимальны.
Исследование влияния про¬
тяженности второго активного
участка траектории при выве¬
дении с переходного эллипса
на заданную орбиту (при ори¬
ентации вектора тяги, выбирае¬
мой из условия минимизации
потребного значения характе¬
ристической скорости Кхг) по¬
казало, что вследствие малости
гравитационных потерь Vx2
можно приближенно опреде¬
лить как геометрическую раз¬
ность скоростей на переходном
эллипсе и на заданной орбите
в точке перехода.
При движении по переход¬
ному эллипсу при малых вы¬
сотах перицентра вследствие
влияния сопротивления атмо¬
сферы переходная орбита иска¬
жается (уменьшается высота
апоцентра и требуются допол¬
нительные энергозатраты для
компенсации действия атмо¬
сферы). Для этого в некоторой
точке переходного эллипса
требуется сообщение дополни¬
тельного импульса скорости
ДУкомп- Так, например, при Л* = 60 и 70 км вследствие воздейст¬
вия атмосферы высота апоцентра переходного эллипса умень¬
шается с 1000 до 609 и 858 км соответственно (при максималь¬
ной модели атмосферы).
Расчеты показали, что дополнительный импульс скорости це¬
лесообразнее всего сообщать (для минимальных потребных за¬
трат) в районе перицентра переходного эллипса, т. е. необходимо
несколько увеличить скорость в конце первого участка выве¬
дения.
Потребные энергозатраты для компенсации влияния атмосфе¬
ры могут достигать А Ккомп=200 м/с.
134
v*»/c
5W
4300
4200
4100
5000
Рис. 4.3.2. Зависимость Vx от
угла в к при На=1000 км и На=
=20000 км:
р0, м бар
20
10
5
Ра
1,2
1.2
1,2
К, км
65
45
40
Ук, м/с VxtM/C \ VxtM/£
45001 г Л 1 \5ШХ 1 \ 1 1 53001—
135
Рис. 4.3.3. Влияние высоты Л* перицентра переходного эллипса на Vx для разных конечных орбит
На рис. 4.3.2 представлена зависимость потребных значений
характеристической скорости Vx от угла наклона вектора скоро¬
сти к местному горизонту 0К в конце первого активного участка.
Видно, что эта зависимость имеет очень пологий оптимум при
0К=0,5ч-1,5°.
Рассмотрено также влияние положения точки перехода
с переходного эллипса на за¬
данную орбиту. Результаты
расчетов показали, что вели¬
чина импульса дожога имеет
минимум при истинной анома¬
лии точки перехода на задан¬
ную орбиту, несколько отлич¬
ной от точки апоцентра. Одна¬
ко суммарные энергозатраты
при этом практически не отли¬
чаются от энергозатрат для
схем выведения в апоцентр.
Поэтому в дальнейшем при¬
нята следующая схема выве¬
дения:
V, .м/с
4500
4300
4100
3900
—о—Ро=20мбар
—•—р,~/0мбар
р0=5 мбар
500
1000
1500 Нкр,км
Рис. 4.3. 4. Влияние высоты_круговой
орбиты НиР на Vi при Р0=1,2:
р%, м бар
20
10
5
Л*, км
60
45
35
Vx,m/c
8000
7000
■ -*-‘ро=20м6ар
—°—р0 =10 м бар
ро = 5 мбар
6000
5000
1500 Нж,км
Рис. 4.3. 5. Влияние высоты перицент¬
ра конечных эллиптических и_гипер-
болических орбит на Vi при Р0=1,2:
р0, м бар
20
10
5
Л*, км
65
50
40
136
— старт с поверхности Марса и выведение в перицентр пере¬
ходного эллипса со скоростью, обеспечивающей компенсацию
аэродинамических потерь на переходном эллипсе;
— пассивный полет до апоцентра и разгон в апоцентре до
выведения на заданную орбиту (при этом высота апоцентра
переходного эллипса равна высоте перицентра конечной задан¬
ной орбиты).
Для этой схемы выведения было исследовано влияние высоты
перицентра переходного эллипса hK на потребные энергозатраты
при выведении на различные конечные орбиты. Результаты рас¬
четов представлены на рис. 4. 3. 3. Как видно из расчетов, сущест¬
вует оптимальное значение высоты перицентра hK переходного
эллипса, позволяющее получить минимальные потребные энерго¬
затраты. При этом оптимальное значение высоты перицентра
определяется в основном моделью атмосферы и составляет
Л* =35-1-40 км для минимальной модели ро=5 мбар, 40—50 км
для средней модели ро=Ю мбар, 60—70 км для максимальной
модели ро=20 мбар, незначительно изменяясь при изменении
высоты апоцентра переходной орбиты.
Оптимальное значение тяговооруженности /?0»1,2.
На рис. 4. 3.4 показано влияние высоты конечной круговой
орбиты Я,ф на суммарную характеристическую скорость. Увели¬
чение высоты круговой орбиты с ЯКр = 500 км до Якр=2000 км
приводит к росту Vx примерно на 500 м/с.
На рис. 4. 3. 5 показано влияние высоты перицентра Нк ко¬
нечных эллиптических и гиперболических орбит на Vx. Увеличе¬
ние высоты перицентра //* на 500 км приводит к росту Vx при¬
мерно на 250—500 м/с в зависимости от типа конечной орбиты.
Глава V • ПРОЛЕТНЫЕ И ПОПАДАЮЩИЕ
МЕЖПЛАНЕТНЫЕ ТРАЕКТОРИИ
§ 1. КАЛЕНДАРЬ ПОЛЕТОВ К ПЛАНЕТАМ
Точное определение характеристик траекторий межпланетных
полетов связано с решением пространственной задачи, требую¬
щей достаточно трудоемких вычислений. Предварительные оцен¬
ки основных характеристик траекторий и опорных дат старта для
Рис. 5.1.1. Схемы перелета
а — эллипс Хомана; б — определение разности долгот Земли и планеты
циклов оптимальных полетов к планетам можно провести при
следующих предположениях:
— орбиты Земли и планет круговые и все лежат в одной пло¬
скости;
— перелет осуществляется по траекториям минимальной
энергии.
Траектории минимальной энергии для этого случая рассмот¬
рены Хоманом [51] и представляют собой эллипсы (рис. 5. 1. 1 ,а)г
касающиеся в точках апсид круговых орбит планет.
138
Указанная постановка задачи не строга, но позволяет полу¬
чить простые приближенные зависимости, которые можно исполь¬
зовать как характеристики нулевого приближения.
Время полета
Период обращения по такому эллипсу
т 2и }
Т=Т7= а ,
V Iх©
где а — большая полуось орбиты полета аппарата;
р©— гравитационная постоянная Солнца.
Для круговых орбит Земли и планеты
а=Гз +
I
где г3, /пл — средние значения радиуса орбиты Земли и планеты
соответственно.
Будем выражать расстояния в астрономических единицах
{r3= 1), а время—в земных сидерических периодах (Т3= 1);
тогда
T=Vaa.
т
Время полета от Земли к планете Д7П=— . Подставив вели-
2
чину а = ~~~2~ПЛ ’ П0ЛУЧИМ
Л/"=^ /(-1^^)3=0Л771/(Т+^/.
Таблица 5.1
Планета
Солнце
Меркурий
Венера
Марс
Астероиды
А*п
годы
сутки
0,177
65
0,288
105
0,401
146
0,710
259
1,01—1,74
369—636
Планета
Юпитер
Сатурн
Уран
Нептун
Плутон
Д*п
годы
сутки
2,745
1000
5,980
2180
16,0
5840
30,65
11200
45,80
16800
139
Время полета к планетам с Земли приведено в табл. 5.1 и на
рис. 5.1.2. Время полета к поясу астероидов (97% астероидов
имеют орбиты в пределах гср = 2,2н-3,6) равно Д^-А — 1,01-f-
1,74 года. Для случая полета с планеты на планету
г|Л-
г\ + гг
2 У \ 2
где fi и гг — средние значения радиуса орбиты планет.
. T;Atn; Tq, годы
Т,годы
j-J5
-30
-25
-2(3
-15
~Ю
-5
г, а.е
Рис. 5.1.2. Период обращения планет Т, время полета Л1П
и синодический период Тс в зависимости от расстояния г
от Солнца
Так, время полета с Венеры на Меркурий Д/п=0,207 года»
«76 сут, а для полета Марс—астероиды Д^п= 1,27-^2,05,
Марс — Юпитер Д/п=3,08, Марс — Сатурн Д/п=6,53, Юпитер —
Сатурн Д/п= Ю лет, Юпитер — Уран Д/п=21,4 года.
Приведенные выше значения Д/п подсчитаны для круговых
орбит. Для оценки влияния эксцентриситета орбит на время по¬
лета определим
Д*„
шах
ДА1 min
-т/(2
т/(г
з шах
+ Г
ил щах
з mln + Гпл m|n
Такое сочетание 'орбит маловероятно, но значения Д/п, близкие
к Д^пmax и Д/nmim возможны через периоды великих противо¬
стояний. Значения Д/Птах и Д/п min приведены в табл. 5.2.
140
Таблица 5.2
Планета
Меркурий
Венера
и
О.
СВ
Е
Юпитер
Сатурн
X
СВ
о.
р*
Нептун
Плутон
Мп ш1п
ГОДЫ
0,260
0,390
0,644
2,550
5,36
15,0
30,2
38,5
сутки
95
138
234
935
1955
5475
11040
11060
A i
годы
0,320
0,412
0,780
2,910
6,600
17,1
30,8
57,3
atn max
сутки
115
150
283
1070
2408
6240
11250
20950
Даты старта
Полет с Земли на планету. Дата старта может быть определена
из условия, что разность гелиоцентрических долгот Земли в мо¬
мент старта и планеты в момент прилета (угол перелета) рав¬
на /=я.
Долгота Земли в момент старта
Фэ Фз.О ""Ь ШЗ^СТ.З’
где “фз.о — долгота Земли в момент начала отсчета времени
в рад;
2Я
<о3=—= 2я— угловдя скорость вращения Земли вокруг Солн¬
ца
ца в рад/год;
/ст. з — время старта с Земли на планету от начала от¬
счета времени в годах.
Долгота планеты в момент прилета
Ф«л = Ф..л.О + <в..л (/ст.з+Д/п),
где г|)Пл. о—долгота планеты в момент начала отсчета вре¬
мени;
<опл = - угловая скорость обращения планеты вокруг
Тпл
Солнца.
Разность долгот Земли и планеты может отличаться на 2л
(рис. 5. 1. 1,6):
Фз — Фпл= ± я + £2л; (£=0; +1; +2; +3),
где k — количество циклов от начала отсчета времени.
С другой стороны, разность долгот
Фз - = (Фз.о - Фил.о) + К - 0)„л) /ст.з - Шнл Д/П>
141
откуда время старта с Земли на планету
/ ±п + k2n — Афр + ,о \ьт
^СТ.Э ^СТ.З“Г с>
“з-- “пЛ
где
АФо = Фз.о-Фпл.о;
— время старта для нулевого цикла;
Тс — период времени между циклами.
Период времени между циклами равен
•г 1 ТиЖ
1 С —
1__L 7-пл— 1
тт
т. е. синодическому периоду обращения планеты.
Синодические периоды для планет приведены в таблице при¬
ложения и на рис. 5. 1.2. Синодический период обращения и пе¬
риод времени между циклами для полетов к какому-либо асте¬
роиду
Гс= 1,44-s- 1,15
(период обращения TaCT=Vrlcr= |/(2,2-^3,6)3=3,26 -г-6,85).
Для полета с планеты на планету синодический период
Т =
1 с
1
ТуТ2
1 1
\Т2 -Т,\
Ti ~ т2
Время старта с Земли для нулевого цикла от начала отсчета
времени
/ ± Я — Дфо + u,Mu>n
♦Тт а
и ( ± 9 — Д(:Ро) + Т’плД^п
о)„„Д t„ \ 2 /
ст.з' т .
“з “ил * пл L
где дф=-^ .
2я
Для определения даты старта необходимо знать гелиоцент¬
рические долготы планет в начальный момент времени.
Календарь полетов к планетам приведен на рис. 5. 1.3.
Полет с планеты на Землю. Долгота планеты в момент старта
Фпл=Фпл.о + %л^ст.пл- Долгота Земли в момент прилета ф3 = ф3.0 +
+ (0з(4т.з+ ДО- Разность долгот ф3 — ф11Л = ± я-f А2я
или
Фз — Фил = (Фз.о — Фпло) + К — Шил) 4т.„л + шэ А^п-
142
Время старта с планеты на Землю
t db я + k2п Афр /О I ут
ст.пл —* ст.пл “г с*
“>э — “>пл
Период времени между циклами
такой же, как и при полетах с Земли на планету.
Время старта нулевого цикла от начала отсчета времени
, w All а/ Л^°) + Л^П
^0 d: Я — Дфо 4* п V 2 /
* СТ.ПЛ „ .
ы3 ЫПЛ * ПЛ I
Зная гелиоцентрические долготы планет в момент начала от¬
счета времени, можно определить ^т>пл и даты старта нулевого
цикла.
Зная даты старта и время полета, можно определить время
ожидания Atom на планете и время, потребное на полный цикл,
Л/я —полет к планете, ожидание и полет к Земле (табл. 5. 3 и
рис. 5. 1.3), где
^ст.пл (А:т.з + At^y
At% = 2а/п —Д/ож.
Таблица 5.3
Планета
д/
ож
д/
я
голы
дни
голы
дни
Меркурий
0,18
66
0,76
277
Венера
1,284
469
2,085
762
Марс
1,234
453
2,666
972 . _
Юпитер
0,56
214
6,48
2209
Сатурн
0,93
40
13,026
4758
Уран
0,936
—
33,01
12060
Нептун
0,935
—
62,17
22710
143
х> Ф
♦ t
е х>
144
ом» oos" ooos*» оог- ооошг oos" оооеш oos- ооогш оог ооою»
HpoiiJiMtHut
145
Рис. 5.1.3. Календарь полетов к планетам:
время между циклами полетов в годах; AtП—время полета в годах; Atот—время ожидания на планете в годах;
Л#2“Л/П+Д/0Ж+Д^П—время полного цикла экспедиции в годах
Потребные скорости старта
и скорости подхода к планете
Скорость движения тела по орбите
Круговая скорость на расстоянии г от центрального тела
I/2 —
V кр —
Г
Подставляя Ккр в выражение для V, получим
Рассмотрим момент старта с Земли, т. е. момент выхода из
сферы действия Земли. В этом случае скорость, потребная для
перехода на эллиптическую орбиту, касающуюся орбит Земли и
планеты,
2а=?,-1-г„=1 + гил; г,= 1.
Относительная скорость старта (приближенно скорость на
сфере действия планеты V"2)
К2=ДКс".,= Кс„-1/кр,-
Значения этих скоростей приведены в табл. 5.4 и на
рис. 5.1.4. Для полета к астероидам (г=2,24-3,6) относитель¬
ная скорость старта
1/®=5,14ч-7,52 км/с.
Для случая старта с планеты на Землю
^ст.пл=^кр.пл 2{X~-^)=VW"»\/ 1 + 7ил •
Относительная скорость старта
К"=дКс"т,м=Кст.„-Ккр.„л.
Легко заметить, что относительная скорость старта с планеты
Д^Гт.™ равна скорости подхода к ней д1Л“пл при полете с
Земли и относительная скорость старта с Земли дКГтз равна
скорости подхода к ней д1Л7.з при полете с планеты.
146
Таблица 5.4
С
о
£
с н
<
11
4 н
5 и
<
а
t^*
со
СМ*
со
оо
со —>
СМ
ю а£
t^* о*
СО
1Л
о
с
Н
X
а
ю
ю
СО
СП
СМ
ю
ю*
О
о*
ю
СО_
ю*
ч
ю*
о '-5
8 с? о!
ю
Ю со
СО
CM CS
0
5
^ *?
о Н с
e U а •
Ч ОС
1 43
Ч » II
с 8
СО
Ю
о>~
о
00
см
S
ю
о>
ю
СО
ю
СП
со
00
00
со
и
£
© н
<1
и
©5
<1
00
со
СМ
00
Ю
СО
со
ю ю
00 ю
со
со
СО*
СО
ю~
ч
СО • со
СО t"»
о
оо
со
00
оо
00
00*
«
X
09
II
п
ю
ч
1*4
1Л
со
СО
СО
со*
7
а
СМ
СМ
см
СП
см
СО
00
СО
ю
ю
СО
СО
fH
СО
fH
II
п
н п
. ° 8 В
£ *
8
I
© 8
о
D
4J*
00
о_
со
СО*
стГ
00
1
СО
«к
1
ю
О)
см
см
О
ю
о
00
4)
X
я
ч
с;
О
sf
X
ч
о
U
эХ
X
о.
>1
X
о.
си
«J
о.
CU
Е
CU
CQ
о
О.
«5
=5
3
К
х
о
о.
си
н
о
<
Си
о
н
X
с
2
X
о.
>1
н
«J
и
X
«J
о.
>>
X
>1
н
с
CU
I
X
о
н
>1
147
Используя интеграл энергии, получим
(Кг.™)2 0/-)2 =(v™y
^пл ^сф.л.пл
При ^?сф.л.пл *
1/2 2р.1[Л
V нар—— ,
'мгл
Г*
где 1/ст>пл=1/вХ ,,л—скорость старта с поверхности планеты,
равная скорости подхода к поверхности
планеты без учета потерь на гравитацию
и сопротивление атмосферы;
^пар— параболическая скорость на поверхности
планеты;
/?„л—радиус планеты;
^сфд.„л—радиус сферы действия планеты.
Рис. 5.1.4. Скорость на выходе из сферы действия Земли для полета
к планетам
Используя эти два выражения, получим
^вх.нл^ ^ ст.пл=]/ V иар~\~ (Упл) •
Результаты расчетов приведены в табл. 5. 4. Для полета с пла¬
неты на планету
Vm \/ и VCTl=V№l ]/-J-^ .
У г2 + гх V гх + г2
Так, для полета Венера — Меркурий д!/£ =—5,6, Меркурий —
Венера д!/с“ =7,15, Марс — астероиды Д1/С°°т = 2,16-М,58,
Марс — Юпитер д1/с” =5,98, Марс—Сатурн дК'т =8,20,
Юпитер — Сатурн дИс” = 1,79, Юпитер — Уран дКГт = 3,28 км/с.
148
Для оценки влияния эксцентриситета орбит планет получим
V,
V,
ст.з шах
ст.з mln
Значения Д^Гт.зтах и Д1/Гт.зт1п для планет с большим экс¬
центриситетом приведены в табл. 5.4 (цифры в скобках).
Скорость старта с круговой орбиты ИСП (искусственного
спутника планеты) радиусом (/?кр=#пл
Скорость старта с орбиты ИСП ДК™ равна скорости тормо¬
жения на орбиту ИСП Д1/?Л. Значения Д^™ и д1/?л для
ИСЗ и ИСП приведены в табл. 5. 4.
Приведенные выше характеристики хомановских межпланет¬
ных траекторий дают ориентировочные представления о реальных
значениях этих характеристик. Так, время полета по эллипсу
Хомана лежит примерно между реальными временами полета по
оптимальным траекториям 1 и 2-го полувитков. Энергозатраты
хомановских траекторий соответствуют примерно энергозатратам
реальных полетов в наилучших циклах. Даты старта по этим
траекториям лежат примерно между реальными датами старта
полета по оптимальным траекториям 1 и 2-го полувитков. Эти
даты старта можно использовать как опорные для расчета реаль¬
ных траекторий.
Полеты к дальним планетам по траекториям минимальной
энергии требуют длительного времени. Интересно оценить, како¬
го увеличения энергозатрат потребует сокращение времени
полета.
Для предварительного анализа возможности обеспечения
ускоренных полетов к планетам проведем оценки характеристик
таких траекторий полета в следующих предположениях.
1. Орбиты планет Солнечной системы будем считать круговы¬
ми и лежащими в плоскости эклиптики.
2. Траектория полета КА лежит также в плоскости эклипти¬
ки. Старт КА производится в направлении скорости движения
Земли по орбите, т. е. точка старта есть апсидальная точка ор¬
где
Ускоренные траектории
149
биты перелета КА (касательный старт). Касательный старт
обеспечивает полет по траекториям, близким к траекториям ми¬
нимальной энергии при фиксированном времени полета At
(«ускоренные траектории»),
В этом случае величина стартовой гелиоцентрической скоро¬
сти Ко определяет траекторию полета.
Параметр траектории полета
эксцентриситет
е=
радиус
1 + е cos о
Время полета для эллиптических траекторий
где
для параболической траектории
и для гиперболической
А^г=77==г“ sh Я — Я),
У м-©
где
Перейдем к безразмерным величинам, относя линейные раз»
меры к радиусу точки старта г0, а скорости — к круговой скоро»
сти в точке старта Укр= . В этом случае
~p=V?\ е=У 1+170а(К02-2);
Г —
1 + е cos v
а=—- для эллипса;
1 — е2
а = —- для гиперболы.
е2 — 1 г
Время полета отнесем к периоду обращения на стартовой
орбите:
3/2
Т,„=2я кр
кр -у-
пл
Тогда относительное время полета для эллипса
для параболы
для гиперболы
дЗ/2
д<„=—— (Е- esin£);
дЗ/2
Д^г = {е sh Н — Н).
2я
На рис. 5.1.5 приведены зависимости скорости выхода из
сферы действия Земли 1/®]и скорости входа в сферу действия
планеты У"Л для ускоренных траекторий полета. Хотя такие
траектории представляют наибольший интерес при полетах к
дальним внешним планетам, интересно выяснить возможности
сокращения времени полета и к ближним планетам.
Уменьшение времени полета Д/л при увеличении скорости
выхода из сферы действия Земли на дК2=0,5 км/с по сравне¬
нию с минимальной показано в табл. 5. 5.
Видно, что не очень большое увеличение энергозатрат траек¬
тории существенно снижает время полета к ближним планетам.
При полетах к дальним планетам увеличение энергозатрат
на ДУоо=0,5 км/с позволяет сократить время полета Д/л в 1,5—
2 раза, что объясняется довольно пологим оптимумом кривых
V® =/(Д/л). Однако при таком резком сокращении времени по-
151
о/т
152
Рис. 5.1.5. Характеристики ускоренных траекторий
Таблица 5.5
Вит
траектории
Характерис¬
тика
Планета
1
Меркурий
Венера
Марс
Юпитер
Сатурн
Уран
Нептун
•
X
О
н
>»
Опти¬
V®, км/с
7,5
2,5
3,0
8,7
10,3
11,3
11,7
11,8
мальная
Atu, сут
106
146
259
2,73 г
6,05 г
16,04 г
30,6 г
33 г
Уско¬
У®, км/с
8,0
3,0
3,5
9,3
10,8
11,9
12,1
12,3
ренная
Д/п, сут
65
81
180
1,75 г
3,7 г
8,0 г
16,0 г
14 г
* Для полетов в
период 1970—
1980 гг.
лета существенно увеличивается скорость встречи КЛА с плане¬
той У"Л , что может вызвать затруднения для КЛА, входящих в
атмосферу планет. Так, при полетах по ускоренным траекториям
к Венере скорость V% возрастает с 2,7 до 5,6 км/с, что приводит
к увеличению скорости входа в атмосферу планеты К?х с 10,4
до 11,5 км/с. При ускоренных полетах к Марсу значения V% воз¬
растают с 2,6 до 5,5 км/с, что вызывает увеличение скорости
входа с 5,55 до 7,4 км/с. Для /посадки КЛА в разреженной атмо¬
сфере Марса это может иметь существенное значение.
При ускоренных полетах к Юпитеру скорость возрастает
с 5,7 до 9,3 км/с, что из-за большой параболической скорости
Юпитера вызывает увеличение скорости входа в атмосферу Юпи¬
тера с 60 до 61 км/с.
Из изложенного видно, что уже по оценочным данным уско¬
ренные траектории полета представляются достаточно интерес¬
ными для реализации полета автоматических межпланетных ап¬
паратов.
§2. ОПТИМИЗАЦИЯ ГЕЛИОЦЕНТРИЧЕСКИХ
УЧАСТКОВ МЕЖПЛАНЕТНЫХ ТРАЕКТОРИЙ
ПЕРЕЛЕТА НА ПОЛЯХ ИЗОЛИНИИ
Траектории полета пролетных, десантных и некоторых видов
комбинированных схем полетов относятся к одноимпульсным.
Характеристики одноимпульсных траекторий полета удобно
представлять в виде изолиний характеристической скорости стар-
153
та &V ® с орбиты ИСЗ (или V® ) в координатах дат старта t®
и времени перелета Д/п. Такое типичное поле изолиний для цик¬
ла полетов к Марсу приведено на рис. 5. 2. 1. Поле скоростей V®
делится «хребтом» с большими значениями V® (при углах
перелета 180°) на две области:
— перелеты по 1-му полувитку (нижняя область с Ld80°);
— перелеты по 2-му полувитку (верхняя область с L>180°).
&Lrt/ Uy/
Для каждой области существуют точки с минимальным зна¬
чением V®. Реализация траектории вблизи этих точек, естест¬
венно, обеспечивает наибольший вес полезного груза, выводимо¬
го на траекторию полета к планете. Кроме того, на таком поле
изолиний можно провести оптимизацию траекторий в двух вари¬
антах:
— траектории, обеспечивающие минимум V® при наиболь¬
шем диапазоне дат старта t® (максимум «окна» дат старта);
— траектории, обеспечивающие минимум V® при заданном
времени перелета Д?п («ускоренные» траектории).
154
Первый класс траекторий может быть реализован при поле¬
тах к ближним планетам (Марс, Венера) и дальним внутренним
(Меркурий), когда отсутствуют ограничения по времени переле¬
та. На поле изолиний 1/2 эти траектории лежат на кривой, сое¬
диняющей точки касания прямых с = const с изолиниями V®.
При полетах к дальним внешним планетам (Юпитер, Сатурн
и пр.), когда существенным является ограничение времени пере¬
лета, могут быть реализованы траектории второго класса. На по¬
ле изолиний V® они лежат на кривой, соединяющей точки каса¬
ния прямых с A^n = const с изолиниями 1/2. Естественно, из это¬
го класса наибольший интерес представляют траектории 1-го по-
лувитка, лежащие ниже точки минимума на поле изолиний 1/2.
Скорость полета около планеты или скорость встречи с пла¬
нетой можно характеризовать скоростью входа (встречи) 1/1л в
сферу действия планеты. При наличии ограничений на 1/» (на¬
пример, ограничение скорости входа 1/вх^1/* в атмосферу пла¬
неты из-за условий ввода парашютных тормозных систем или
ограничение скорости пролета мимо планеты из условий четко¬
сти изображения и пр.) на поле изолиний можно нанести гранич¬
ную изолинию 1/« и провести оптимизацию по указанным выше
классам траекторий с учетом ограничения по 1/«.
На рис. 5. 2. 2 на поле изолиний 1/2 у Земли для траекторий
1-го полувитка нанесены изолинии 1/». Траектории, оптимизи¬
рующие 1/2 и 1/2*, соответствуют точкам касания * этих изоли¬
ний. Такая трасса нанесена на рис. 5.2.2. Она, естественно, дол¬
жна проходить через точки минимума V® и 1/2. Видно, что
в этом случае точка минимума 1/2 ограничивает даты старта
слева. На участке правее этой точки (до точки min 1/2) точки
дат старта близки к трассе траекторий, оптимизируемых по мак¬
симуму «окна» дат старта. Правее точки min 1/2 точки ^2 резко
отходят вниз от трассы траекторий, оптимальных по «окну» дат
старта.
Рассмотрим другие примеры оптимизации траекторий. На
рис. 5. 2. 3 нанесены поля изолиний для траекторий полета к Ве¬
нере. На поле изолиний скорости старта V® с орбиты ИСЗ на¬
несено поле изолиний угла склонения §2 вектора скорости вы¬
хода из сферы действия Земли 1/2. Этот угол характеризует
условия видимости КА на начальном участке траектории полета.
Для пунктов, расположенных в Северном полушарии, наилучшие
* Следует различать трассы с min V2 и шах при заданном значе¬
нии V® (см. рис. 5.2.2).
155
©
условия видимости соответствуют максимальному значению 8СТ.
_ _ /Ту
На рис. 5.2.3 нанесена такая трасса на поле изолиний Vст-
Наибольшие 8® при заданных энергозатратах (К®) лежат ле¬
вее точки минимума Там же нанесена трасса, соответству¬
ющая оптимизации траектории по датам старта /ст*
На
рис. 5.2.3 нанесена также трасса, обеспечивающая minV"» (сле¬
довательно, минимум скорости входа в атмосферу планеты).
Трасса этих оптимальных траекторий близка к трассе траекто¬
рий, оптимизируемых по датам старта.
Рис. 5.2. 2. Оптимизация по минимуму скорости встречи
с Марсом V®[
Мы рассмотрели некоторые случаи оптимизации траекторий на
полях изолиний. Возможно построение изолиний других критери¬
ев, например, непосредственно веса полезного груза или других
каких-то комбинированных критериев. Оптимизация на полях
изолиний позволяет определить не только оптимальные траекто¬
рии, но и поведение критерия в окрестности оптимальных значе¬
ний. Это позволяет в процессе баллистического проектирования
отходить от оптимальных трасс, учитывая дополнительные сооб¬
ражения.
Характеристики траекторий при различных условиях оптими¬
зации можно снимать с поля изолиний. Однако более удобно
эти характеристики получать отдельно. Так, например, оптими¬
156
зацию траекторий по «окну» дат старта можно проводить при
помощи ЦВМ, определяя при заданной дате старта t® опти¬
мальное время полета, обеспечивающее min V S. При этом для
обеспечения унимодальности области поиска (область с одним
экстремумом) необходимо разделение траекторий на группы:
— траектории 1-го полувитка с 0<L< 180°;
— траектории 2-го полувитка с 180°<L<360°.
10.12.68 2012.68 301268
9.1.69
19.1.69
2.1.69
8.2.69 к. 9
Рис. 5. 2. 3. Оптимизация по минимуму угла склонения 6
©
ст
Для исключения узловых точек * и характеристик в области
энергетического хребта необходимо угол перелета L ограничить:
0</^я—(*4-е)—для траектории 1-го полувитка;
я+(/+е) <;/,^2я— (/+е) —для траектории 2-го полувитка.
Здесь i — угол между плоскостями планет. Значение е«
«0,5-=-1° обеспечивает исключение узловых точек.
В табл. 5.6—5.8 приведены характеристики траекторий ми¬
нимальных энергозатрат для полета к Марсу, Венере и Юпите¬
ру в 1970—1990 гг.
* Полет из узла орбиты Земли в узел орбиты планеты.
157
Таблица 5.6
Характеристики одноимпульсных траекторий полета к Венере
Год
Полувиток
‘ст
Л'п
*ст
V9
г оо
сут
км/с
1970
1
18.08.70
117
3,60
5,40
2
16.09.70
167
3,70
6,35
1972
1
28.03.72
112
3,77 6,06
2
07.04.72
117
3,59 5,42
1973
1
10.11.73
107
3,82
4,80
2
09.11.73
156
3,55
4,29
1975
1
10.06.75
143
3,51
3,61
2
31.05.75
154
3,49
3,69
1977
1
10.01.77
128
3,56
4,39
2
09.12.76
157
3,73
4,45
1978
1
16.08.78
118
3,60
5,33
2
15.09.78
167
3,70
6,38
1980
1
26.03.80
112
3,76
6,05
2
05.04.80
171
3,60
5,47
1981
1
08.11.81
107 3,82
4,92
2
07.11.81
157
3,56
4,36
1983
1
10.06.83
143
3,52
3,53
2
28.05.83
155
3,49
3,66
1985
1
07.01.85
129
3,56
4,29
2
08.12.84
157
3,71
3,73
1986
1
13.08.86
119
3,59
5,26
2
13.09.86
167
3,71 6,44
1988
1
24.03.88
112
3,76
6,05
2
03.04.88
171
3,60
5,51
1989
1
05.11.89
107
3,82
5,04
2
07.11.89
156
3,56
4,42
1991
1
10.06.91
142
3,54
3,54
2
26.05.91
156
3,49
3,60
158
Таблица 5.7
Характеристики одноимпульсных траекторий полета к Марсу
Гол
Полувиток
t®
*ст
гг®
у СТ
~ о©
сут
км/с
1971
1
24.05.71
210
3,43
2,84
2
03.05.71
249
3,56
3,14
1973
1
30.07.73
193
3,72
3,00
2
28.08.73
408
3,91
3,68
1975
1
15.09.75
207
3,91
3,75
2
17.09.75
373
3,66
2,89
1977
1
19.10.77
224
3,83
4,04
2
09.10.77
333
3,55
2,45
1979
1
03.11.79
286
3,48
2,87
2
03.11.79
287
3,48
2,84
1981
1
18.12.81
214
3,48
5,19
2
16,12.81
327
3,47
3,85
1984
1
08.02.84
185
3,47
5,49
2
07.03.84
313
3,42
5,28
1986
1
22.04.86
187
3,43
3,35
2
06.05.86
259
3,41
3,89
1988
1
05.07.88
192
3,59
2,77
2
19.08.88
414
3,83
3,96
1990
1
30.08.90
201
3,77
3,46
2
10.09.90
388
3,711
3,17
159
Таблица 5.8
Характеристики одноимпульсных траекторий полета к Юпитеру
(1-й полувиток)
Год
гст
СТ
г во
сут
км/с
1970
03.01.70
1005
6,24
5,69
1971
30.01.71
826
6,30
6,47
1972
04.03.72
749
6,42
7,05
1973
09.04.73
721
6,53
7,12
1974
18.05.74
742
6,56
6,66
1975
30.06.75
909
6,45
5,71
1976
29.07.76
820
6,47
5,97
1977
03.09.77
774
6,65
6,48
1978
06.10.78
716
6,78
6,86
1979
07.11.79
787
6,77
6,79
1980
07.12.90
848
6,60
6,21
1982
04.01.82
1002
6,23
5,69
1983
03.02.83
819
6,32
6,59
1984
03.04.84
743
6,44
7,08
1985
15.04.85
721
6,54
7,09
1986
23.05.86
749
6,56
6,58
1987
05.07.87
1029
6,37
5,73
1988
30.08.88
810
6,49
6,03
1989
07.09.89
770
6,68
6,55
1990
11.10.90
767
6,78
6,84
160
За период с 1970 по 1980 гг. (табл. 5.6) минимум энергоза¬
трат при полетах к Венере по траекториям 1-го полувитка при¬
ходится на 1975 г- (V® =2,5 км/с).
«Окно» запусков по датам старта Д/§ при запасе AVX«
«±0,5 км/с составляет Д^Ст~2±3 мес.
При полете к Марсу (табл. 5. 7) оптимальными для траек¬
торий 1-го полувитка будут циклы полетов с 1979 по 1986 гг.
у ® =з км/с). «Окно» запусков д/S ~1±1,5 мес для траекто¬
рий 1-го полувитка и д/^ст =3±4 мес для 2-го.
Рис. 5.2.4. Траектория полета Земля — Марс (цикл 1969 г.)
Для полетов к Юпитеру (табл. 5.8) оптимальным был 1970 г.
с потребной скоростью AV§=6,24 км/с. Полеты автоматических
КЛА с продолжительностью 2—3 года представляют серьезные
трудности в части обеспечения ресурса работы бортовых систем
и аппарата в целом. Поэтому лри полетах к дальним планетам
представляют интерес энергетически оптимальные «ускоренные»
траектории полета.
На рис. 5.2.4 в проекции на плоскость эклиптики нанесена
близкая к оптимальной траектория КЛА к Марсу для одного из
161
циклов полетов. Траектория полета относится к группе траекто¬
рий 1-го полувитка. В момент старта расстояние между Землей
и Марсом составляет 13.Пл~165 млн. км. При Atn^90 сут про¬
исходит противостояние Марса с расстоянием £3. пл~73 млн. км.
На 160-е сутки полета КЛА проходит около Марса. При этом его
расстояние от Земли L3. пл~ 100 млн. км. После пролета Марса *
Старт 10/1б9г
Рис. 5.2.5. Траектория полета Земля — Венера (цикл 1969 г.)
расстояние КЛА от Солнца увеличивается, достигая максимума
Гс.о»228 млн. км на 270-е сутки полета. Наибольшего расстоя¬
ния от Земли КЛА достигает при Д^п~380 сут, где оно равно
L3,0~318 млн. км. Расстояние КЛА от Солнца Lc. 0 определяет
мощность солнечных батарей, расстояние от Земли до КЛА
L3,0 — дальность линии радиосвязи.
На рис. 5. 2. 5 приведены геометрические характеристики тра¬
ектории полета к Венере. Аппарат стартует с Земли по траекто¬
рии, близкой по энергозатратам к оптимальной траектории
1-го полувитка. На Венеру КЛА прибывает ровно через 4 мес.
* Пролет вне сферы действия планеты.
162
Минимальное расстояние между Землей и Венерой L3. Пл~
«42 млн. км приходится на 90-е сутки полета. В момент при¬
лета КЛА на Венеру расстояние до нее L3.Пл~67 млн. км.
На рис. 5. 2. 6 приведены геометрические характеристики оп¬
тимальной ускоренней траектории полета к Юпитеру со временем
Рис. 5.2.6. Траектория полета Земля — Юпитер (цикл 1971 г.)
полета Д/п = 700 сут. Максимальное расстояние от Земли до КЛА
примерно соответствует моменту прилета его на Юпитер и со¬
ставляет L3. о л; 925 млн. км. Интересно, что это расстояние в от¬
личие от полета к ближним планетам меняется не монотонно.
Так, локальный максимум L3.0 приходится на 350-е сутки полета,
а локальный минимум — на 500-е.
§ 3. ИЗМЕНЕНИЕ ХАРАКТЕРИСТИК ОПТИМАЛЬНЫХ
ТРАЕКТОРИИ ПО ЦИКЛАМ ПОЛЕТОВ
Выше было отмечено, что циклы полетов к планете по траек¬
ториям минимальных энергий чередуются через периоды, близ¬
кие к синодическим периодам планет Тс. Известно также, что в
различные циклы полетов характеристики траекторий минималь¬
ной энергии различны. Анализируя результаты массовых расче¬
тов по характеристикам оптимальных траекторий для различных
163
циклов полетов, можно заметить некоторые закономерности из¬
менения их по циклам. Однако такой путь достаточно трудоемок
и не всегда вскрывает сложные зависимости изменения характе¬
ристик по циклам, особенно при полетах к внутренним планетам.
Определению динамики изменения этих характеристик для
различных циклов полетов посвящен данный параграф, написан¬
ный по материалам работы [6]. В нем использованы идеи метода
«достижимых областей». Суть этого метода заключается в том^,
что при заданной характеристической скорости старта ^круговой
орбиты определяется граница максимально достижимой области
пространства. Траектория минимальной энергии полета реали¬
зуется, если планета-цель находится на границе максимальной
достижимой области.
Достижимая область
представляет собой тело
вращения относительно
оси N—N, проходящей
через притягивающий
центр 5 перпендикулярно
плоскости исходной кру¬
говой орбиты (рис. 5.3.1).
Поэтому достаточно опре¬
делить сечение достижи¬
мой области секущей пло¬
скостью Р, проходящей
через ось вращения N—N.
Основной особенно¬
стью предлагаемого ме¬
тода является то, что он
позволяет отделить за¬
дачу определения оптимальных дат старта от задачи определе¬
ния геометрических и кинематических характеристик оптималь¬
ных траекторий. Кроме того, этим методом дискретный процесс
изменения характеристик по циклам полетов можно свести к пе¬
риодическому непрерывному. Вместо обычно применяемых гра¬
фических или численных методов поиска экстремума он сводит
задачу к получению решения уравнения огибающей семейства
траекторий в плоскости Р. Для некоторых случаев возможно
получение аналитического решения этого уравнения. Это су¬
щественно снижает трудоемкость расчета характеристик опти¬
мальных траекторий и позволяет выявить достаточно сложную
картину изменения этих характеристик то циклам полетов.
В дальнейшем приняты следующие допущения.
1. Орбита Земли вследствие малости ее эксцентриситета при¬
нята круговой.
2. Элементы орбит планет в ближайшие 20—30 лет вследст¬
вие вековых возмущений не претерпевают существенных изме¬
нений и в расчетах приняты постоянными.
164
Рис. 5.3.1. Достижимая область и ее
сечение:
I—плоскость исходной круговой орбиты; 2—ли¬
ния максимального отклонения от плоскости
исходной круговой орбиты; 3—исходная кру¬
говая орбита; 4—линия минимального удале¬
ния от притягивающего центра; 5—линия
максимального удаления от притягивающего
центра; 6—секущая плоскость Р
3. Сферы действия планет, как это принято в задачах прибли¬
женных расчетов межпланетных траекторий, считаются точеч¬
ными.
4. Скорость при старте с орбиты изменяется импульсно.
Определение контура сечения достижимой области
Космическому аппарату, находящемуся на орбите ИСЗ, со¬
общается импульс скорости дК®, обеспечивающий необходимую
скорость на выходе из сферы действия Земли Гелиоцентри¬
ческая скорость КА
Р=Р?р+Р2,
где К® —скорость движения Земли по круговой орбите.
Рис. 5. 3. 2. Схема траектории перелета:
а—взаимное расположение основных плоскостей: б—треугольник старто¬
вых скоростей;
I—плоскость орбиты Земли; 2—плоскость орбиты перелета; 3—секущая
плоскость Р; 4—касательная плоскость (1R0); 5—линия апсид
Оптимальное положение вектора в пространстве опреде¬
ляется двумя углами (рис. 5. 3.2) а и р. Рассмотрим частный
случай, когда треугольник скоростей лежит в плоскости, каса¬
тельной к орбите Земли ({3 = 0, 6=0 и т>о=0). В этом случае по¬
ложение вектора в пространстве определяется одним углом а.
Этот случай («касательный старт») дает решения, близкие к оп¬
тимальным, для основных характеристик траекторий полета.
165
Определение контура сечения достижимой области для каса¬
тельного старта. Рассмотрим гелиоцентрическую траекторию (см.
рис. 5.3.2), по которой движется КЛА.
Плоскость Р сечения достижимой области проходит через
притягивающий центр перпендикулярно плоскости эклиптики и
вращается относительно оси N — N. При фиксированном значе¬
нии модуля вектора |l/2| и направлении а вектора 1/2 в пло¬
скости Р при ее вращении относительно оси N — N остается
1,2/^ 1,3 Ц г,а.е,:
Изолинии (контуры достижимой
области) при At„ = const
Рис. 5.3. За. Контур сечения достижимой области для касательного старта
при V® = 2,5 км/с
след траектории полета КЛА. Построим огибающую следов тра¬
екторий при различных а, изменяющихся в интервале 0—180°
(рис. 5. 3.3а). Эта огибающая и будет максимальным контуром
сечения достижимой области или изолинией скорости 1/2 =const.
Гелиоцентрическая скорость КА в момент старта
V* = (V%Y+2V%V2 cos_a+(K2)2. (5.3.1)
Расстояние Р от притягивающего центра 5 до точки М на тра¬
ектории
/?-- Р
где р — параметр, е =
А<р
1 + е cos v
1 — эксцентриситет траектории;
(5.3.2)
v — истинная аномалия.
Расстояние точки М от плоскости эклиптики z (см. рис. 5. 3. 2)
z=P sin V) sin i, (5.3.3)
где i — наклонение траектории к плоскости эклиптики, и
V® sin a
sin i = — . (5.3.4)
Очевидно, z при a>0 будет иметь как положительные (при
v<180°), так и отрицательные (при и>180°) значения. Это бу-
166
дет соответствовать полету по первому и второму полувиткам
траектории перелета. Если z и а имеют одноименные знаки, то
полет происходит по 1-му полувитку, если разноименные —
по 2-му.
Исключив из (5.3.2) и (5.3.3) величину v, после преобразо¬
ваний получим уравнение семейства следов траекторий в пло¬
скости Р:
Р_ \2
R ~ / , *2V2
£-'У
*2 (V®)
2 sin2 а
1. (5.3.5)
Перейдем к относительным величинам:
~ V ~ V'® ~ D — *
к=—; е=—; с=——. (5.3.6)
v® V® Лкр «кр
Уравнение (5. 3.5) после некоторых преобразований можно
представить в виде
(1 _ V») (1 - е) [(1 +ё) (1 + Г. + 2К„у) - 2ё] +С2(К» + 2y)2=0,
(5.3.7)
где v = cos
Это уравнение при фиксированном Г» определяет однопара¬
метрическое (параметр а) семейство кривых, каждая из которых
является следом на плоскости Р некоторой траектории полета
космического аппарата.
Продифференцировав (5. 3. 7) по параметру у, получим
Р'- (1 — y®) (1 — g) (1 +д)—y (1 —i) [(i+q)(i+2K«y+i72-)-
— 2^] +2C2(P'«4-2y)=0. (5.3.8)
Решая систему уравнений (5.3. 7) и (5. 3. 8), получим следу¬
ющие формулы для определения огибающей:
- 2 + ?„у + У„(У„+2у)(1+?„у + у2) _
2 + P.Y - V, (?, + 2V) (1 + V„y + V2)
Г
±2У„ ( - у2) V 1 + P„V + Y2
2 + V„X- + 2Y) (1 + P.y + Y2)
(5. 3. 10)
Определение контура достижимой области для двупараметри¬
ческой задачи (пространственный старт). Пусть вектор скорости
на выходе из сферы действия Земли произвольно ориентирован
в пространстве, и его положение определяется двумя углами а
и (рис. 5. 3.2, б). Величина стартовой гелиоцентрической ско-
167
рости при таком выборе параметров является функцией а и не
зависит от р:
V*=(V®f + 2V® К© cos а + (К®)’.
Компоненты стартовой скорости — составляющая скорости по
нормали к радиусу-вектору в точке старта, лежащая в плоскости
траектории полета
= -f C0S °)2 + (^®)2 S^n2 а COs2
— радиальная составляющая
Vr=V® sin a sin р;
— проекция стартовой скорости на плоскость, перпендикуляр¬
ную вектору круговой скорости
у —V® sin a cos В.
Z оо *
Расстояние от притягивающего центра определится из выра¬
жения:
#= £ , (5.3.11)
1 + е cos (и — ы)
где о — аргумент перицентра.
Отклонение от плоскости эклиптики
z = R sin i sin и, (5.3.12)
где sin/--=—. (5.3.13)
V п
Перейдем к относительным величинам по (5.3.6). Подставив
(5. 3. 13) в (5. 3. 12), получим
*«■«» <■*«»
sina= JVn . (5.3.14)
Исключив из (5.3.14) и (5.3.11) величину О, после преоб¬
разования получим
+ W-Q) [K2(l+ftgp + Q)-2Q] +?(1/2_1) = 0,
где (5.3.15)
tgp=-^.
Полученное соотношение при фиксированном Voo определяет
двупараметрическое семейство кривых, каждая из которых яв¬
ляется следом некоторой траектории полета КА на плоскости Р.
168
Огибающая двупараметрического семейства определится из
системы типа
F (q, С, а, ^) = 0;
^■(5, С, а, р) = 0;
да
—■(е. £ а- Р)=°-
<?Р
(5.3.16)
Для первых двух уравнений этой системы (5.3. 16) можно
получить аналитическое решение в виде
г АК .
2 В —А
(5.3.17)
с= (5.3.18)
L tg р + М
где A = (9\-\)(V\V'n-\-VV?'.)-WlvVS;,
B = (V\-\)V'„-2VlV'„;
L = Vlvl(\ + K); M = (Kj-l); /T=l + Ctg?.
Однако для полной системы (5. 3. 16) не удалось получить
достаточно простого аналитического решения, и поэтому для по¬
строения огибающей двупараметрического семейства кривых
был разработан алгоритм для ЭЦВМ с использованием аналити¬
ческого решения системы первых двух уравнений (5.3.17)
(5. 3. 18).
Двупараметрическая огибающая дает несколько большую до¬
стижимую область, чем для касательного старта (см.
рис. 5.3.3 б). Угол р обращается в нуль в трех точках: при
cti=0, а2=1800 (соответствует внешнему и внутреннему хома-
новскому переходам) и a3=2arcsin (соответствует макси-
2^к°р
мальному повороту плоскости стартовой круговой орбиты). Зна-
чение а3 разделяет области внешних и внутренних перелетов.
По изложенной выше методике, изменяя значение модуля
вектора скорости на выходе из сферы действия Земли У®, мож¬
но построить поле сечений достижимых областей. Такое поле
для диапазона координат гиг, соответствующих полетам к Мер¬
курию, Венере и Марсу, приведено на рис. 5. 3. 4, а к Юпитеру,
Сатурну, Урану и Нептуну — на рис. 5.3.5. На эти поля нане¬
сены изолинии времени полета Atn и линии положения планет —
следы орбит планет на плоскости Р.
169
Ф i
3
со.
с
2
Q.
3
О
О
м
О
3
3
!Ъ
<0
К
О
3
а
со.
t-.
о
о
со.
с
3
К
О
а
VO
о
>3
о
3-
3
X
3
к
о
о
о;
3
3
!Ъ
а*
!Ъ
О
со.
2>
3
о
5<
VO
=о
=о
>о
о
•«#
<5!
О
О
ю
о
сч
сч
сч
о
сч
сч
сч
О
со
сч
9
г»
оГ
*“•
8
ю
N
г
1Л
о
г»
о
г-
00
Ю
8
ю
г-
о
•»
ю
0
о
сч
О)
8
со
н
1
О
г-
1
СО
О
сч
о
н
1
г-
О
со
со
1
СО
о
1Г>
1
Ю
о
1Л
г-
1
со
о
СО
00
7
О
Ю
00
1
О
00
о
0
о.
0
о о
1
СП.
170
г.а.е.
ч
а
о
с
4)
а»
0Q
и
Си
S
а
a
<5.
3
з>
ч
и
Cl
о.
й)
и
а
{.' ^
^ , и
^ 'S&s
171
о
а
С
г1 к
а: а
о
vo
о
‘о
«*5
*С
Vi
a
a.
Л
а >»
О а»
к
ai §
§*;
к
а з
с
а
* ^
н
а -с
к а>
V) з
*? «а.
о а>
с ь
172
т 7т
Следы проекций орбит планет на плоскости Р представляют
замкнутые кривые, соответствующие всевозможным положениям
планет за их звездный период обращения. При заданном поло¬
жении планеты в момент прилета с таких полей изолиний можно
определить характеристики оптимальных траекторий. Рассмат¬
ривая все положения планеты на ее орбите, получим все возмож¬
ные значения характеристик траекторий.
ч£>,км/с
•—о*'
V
г
15
z°a.f.
1.4
• 004
0
-0,04
Шснии
F%.e.
1%. ?
^оо» КМ/С
ом
0,01
О
№
а#-»
Пространстбенный
—
V*
-А—
. \
?
Средне
ш
Соедш
и!
ХН/
\
/
Г
'т^~0,24года
- |\ | /
1 v-|/
200 J00400 500 Щ^сут
w ^ ш
VZ>. НИ/С • —*
F^a.e.
zVf.
0,11
сУ
пространственный
wbL-.
Ллос
кий
Среднийf
^е
1ний
/
/
\
/_
ГЧ=1
N
IfltOi
ч/
пал
Средний
ГГГ-д
Средни
Z
й__
У
-Т?=0Р15еод
а —
7
Я
V~,
1 100 150 t*
НИ /С •—■’I
*сут
F*
z*
в)
МОСКШЫ
.
Средний*
*(рсдний
/
' \
. /
>
ч
Л
&
г)
д)
Рис. 5.3.6. Скорость на выходе из сферы действия Земли, потребная для
полета к различным планетам, — плоские и пространственные перелеты
На рис. 5. 3. 6 показано изменение скорости на выходе из сфе¬
ры действия Земли в зависимости от положения планеты
на орбите. Это положение характеризует зависимость условной
даты прилета tup1 от следующих величин:
— радиуса г проекции орбиты планеты на плоскость эклип¬
тики;
— расстояния г планеты от этой плоскости.
173
Видно, что отклонение от средних значений (плоские
круговые орбиты планет) коррелирует с отклонением радиуса
гпл от среднего значения и изменением модуля г. Увеличение ра¬
диуса г,,л планеты требует увеличения энергозатрат (V'®). «Вы¬
ход» планеты из плоскости эклиптики также требует увеличения
энергозатрат. Наиболее сильно влияние эллиптичности и неком-
планарности проявляется для Меркурия. Для Марса влияние
обоих факторов примерно одинаково. Для других планет наибо¬
лее сильно проявляется влияние некомпланарности их орбит.
Это показывает, что учет некомпланарности орбит планет яв¬
ляется существенным фактором при выявлении динамики изме¬
нения характеристик по циклам полетов.
Определение характеристик траекторий полета
от условных дат старта
Полученные выше выражения для определения контура се¬
чения достижимой области (огибающей следов траекторий) по¬
зволяют определить основные характеристики траекторий поле¬
та. Пространственная задача сводится к задаче на плоскости Р\
через заданную точку пространства, определяемую коорди¬
натами г и z, провести сечение максимальной достижимой обла¬
сти. Для этого необходимо подобрать значения параметров
ctopt и p0pt, определяющих траекторию минимальной энергии,
которая в заданной точке будет касаться контура сечения макси¬
мальной достижимой области.
Для определения V® и а для случая касательного старта
используем решение относительно Г» и у уравнений огибающей
(5.3.9) и (5.3.10) в безразмерном виде. Решение этих уравне¬
ний относительно Г» может быть получено аналитически:
AV2 у \V7 (q— 1 f — (q2 — 1)1
l/M = ~ 1 °° ^ . (5.3.19)
C2 (q2 — 1) (3 — Y2) - (e2 - l)2 (1 - Y2)2 - 2C4
Подставив значение Г» в уравнение (5.3.8), получим уравне¬
ние шестой степени относительно у. Был составлен алгоритм
определения Г» и у на ЭЦВМ из уравнений (5.3.9) — (5.3. 10),
используя который можно определить значения а для лю¬
бого положения планеты при полете по траектории минимальной
энергии. Эти значения V® и а использовались как нулевое при¬
ближение для расчета траектории пространственного старта при
решении системы (5.3. 16).
Задавая положение планеты на орбите в течение звездного
периода обращения планеты, можно определить характеристики
траекторий минимальной энергии при полете по 1 и 2-му полу-
виткам. Эти характеристики могут быть представлены в виде не¬
прерывных кривых от условных дат старта следующим обра-
174
зом. Задается «нулевая» дата прилета на планету (0.01. 1965 г.),
от которой отсчитываются условные даты прилета in™ . Услов¬
ная дата старта
/уел __/уел д/
ст —*пр
где время полета по 1-му полувитку
i4'=£^[£-(1-T)sin£]'
где а = — большая полуось траектории полета;
2 — V2
V — безразмерная скорость старта.
Время полета по 2-му полувитку
л * _аУ~а к4
— - Д *н, -
2л
Для отрицательных значений /стЛ прибавляется звездный
период Тпл планеты. Изменяя условную дату прилета от нуля до
величины звездного периода Г"л с нужным интервалом, перебе¬
рем все возможные положения планеты на орбите и получим
все возможные характеристики траекторий минимальной
энергии.
По этой методике были получены характеристики траекторий
минимальной энергии при касательном (р = 0) и пространствен¬
ном старте (popt), приведенные на рис. 5.3.7—5.3. 10.
Величины 1/^ и Atn для оптимальных траекторий пространст¬
венного старта (скорость на выходе из сферы действия Земли
К® и время полета Atn) мало отличаются от таковых для траек¬
торий касательного старта.
Вектор относительной скорости (скорости входа в сферу дей¬
ствия планеты)
V«hx = K„-Vka.
Модули скорости входа в сферу действия планеты назначе¬
ния V™ представлены на рис. 5.3.7—5.3. 10. Различие между
кривыми К™ для касательного и пространственного старта су¬
щественно. Поэтому значения Vй* необходимо определять по
более точной расчетной схеме пространственного старта с ор¬
биты Земли.
На рис. 5. 3. 7—5. 3. 10 точками нанесены значения характери¬
стик траекторий, определенных оптимизацией их на полях изо¬
линий V® . Хорошо ложатся на кривые точки значений V®
* Расчет на ЭЦВМ траекторий по методу Ламберта—Эйлера (см. § 1
гл. II) с оптимизацией по параметрам и Д/п.
175
Рис.
• X-
старт
176
О JO 60 90 1Z0 ISO 180 t'cfJ
6 tp f cym
N к
II
n
ii
SS5
gjgj
is£
II
II
II
££
t:5s
>«ч ^
^ t-4
55Й
Ч> 4S
*" M
II
^ t*4
4ie^
55 55
S=i&
£
5. 3. 7.
оптимальных траекторий
Динамика изменения характеристик
полета к Венере:
7’в.п=<* Лет- i=3°23'40“; а = 0,7233; е = 0,00685; Т(. = 1,599 года.
■точки, рассчитанные по методу Ламберта—Эйлера с оптимизацией по f®. и A tn;
1-й полувиток, Р = 0, касательный старт, 2-й полувиток, Р = 0, касательный
■' 1'и полувиток, P = Popt, пространственный старт; 2-й полувиток.
P = Popt. пространственный старт
Рис.
vZ,*»/c
4,i
v;
3,0
2,
Ф
//
’►1
1
?к,
1
1 1 s
0 100 ZOO 300 400 500 600 ftff
Atn,cym
400
350
300
250
200
150
♦
*
Г
* 1
Ч.
,4s
j*
— -V
/V
р
0 100 ZOO 300 400 500 600
V%, км/с
N
у
\Л'
Wi 1
V"
N ,—
У
(Й<
♦
S \J 7
W*
ж *
/У
0 100 200 300 400 500 600 t^j
Т °^= 1,80 года (687сут)
^
Ss>
*«.
V»
N
I
I
I
К
%
Ss
ГЧ
s>
1-4
4»
*s
Si
■>
oo
N
Si
1-4
Cl
rs>
£
&
§
4>
! 1 1
i i i
i i i
N !<>
3
§
ft
3
is:
Si
ft
§
ft
<S3
ft
.3
e<
S5
14
Px
i*»
<43
ts
Ps
■»
sa
ft
ft
§
5. 3. 8. Динамика изменения характеристик оптимальных траекторий
полета к Марсу:
Тв п = 15,83 года; а =1,5327 а. е.; е=0,0934; i=l°5l'03"; Тс=2,135 года
177
Vi
км/с
9,5
9,3
9,1
8,9
8,7
О 500 1000 1500 2000 2500 3000 3500 tf*
Ltn,cym
1800
1600
то
.1200
1000
800
600 и».
О 500 1000 1500 2000 2500 3000 3500 tfT
Kooftr
КМ/с
8
7
6
Рис. 5. 3. 9. Динамика изменения характеристик оптимальных траекторий
полета к Юпитеру-
Тс = 1,092 года: i=l°18'22"; а^-5,2025 а. е.; е~0,0482
178
1
\ /
i
i
I.
•
V
\
A
' *N
N*
• л
ч 1
x
1
■4
X
t/>
0 500 1000 1500 2000 2500 3000 3500 tifi*
T *= Tgr, = 11,862 года (933<i cym)
^
п ИЦ HUIL I 1
Хг CV ev
<5i
«г ^а са ^ Са
I I
Саса
Сась
I I
t I
I I
^«8
R
O'
«V»
II I I I II I I
II I I I I I I I
^ Л* ^ ’
I
I
I
£
«V»
R
R
£
Й
R
4a
4a
Ca
Ca
Ch
*41
Ca
§
§
i
I
I
R
§
Й
e-«—2,
.4P-
sT
9
iv
i
i
/
/
At
/
r
*V
-1
{/'
'A'
\//
t
i TO
}
—
1
v.V
*
V$>,™/c ©—
11.5
11,0
10.5
1000 2000 3000 mo 5000 6000 7000 8000 9000 terл
ttn t cym
7
6
5000
*
J
2
1000 лУС.
t 1000 2000 3000 mo SOOO 6000 7000 8000 9000 ter
11
10
9
8
7
6
5
• л
L 1
Г'
v m
-ft-
ff-i
■**
гЯк
\\
t
i
0 щ <
1 # V
* i
W ш
{\)
г i
«4. i
i
SL ,
VN
У4
* 1
•'ЧГ
,
1000 2000 3000 mo SOOO 6000 7000 8000 9000 tg*
tKt^ZP, Ш года (10760cym)
I I II II I I I II II I I I I I I I I I I I I I
N Q «VI Q »ч Qv, ^ v« C\j ^ Ь N ^»ч M ^ ъ. Cs|^
i i i i i i j i i i i i i i I T i i i j i i i i i i
I I I I I I I I I I I I I I I I I I I I I I I I I I
I I I I I I I I I I I I I I I I I I I I I I I I I I
Я5 o> ^^»4i^'!j-l^a4soo«5sCiO-«4i!T>^‘ <*s<o t'Oo »-» «sjJDi?'
^ IsNMsN Kvsts t->. ej 4 O) «*«>)<*
^ ^ vc к;csj рл csj C\j S vi vC vi ^ Csj •iV 1$Vij ivU) bi Jd N
Й ir-; <*i iPiri "»i vc»~i ?m v-; cs°o t~< k^nS*^
^ V< ^ >*• V. C44 tSj ^ ^ V. t\j ^ V. V. tsj ^>4 WtSj ^ VC fSg ^
Рис. 5.3.10. Динамика изменения характеристик оптимальных траекторий
полета к Сатурну:
i=2°29'19''; а=9,545 а. е.: е=0,0552; Тс=1,065 года
179
(критерий оптимизации). Точки значений А/п и Ужвх имеют за¬
метный разброс, так как их точное определение на полях изо
линий из-за пологости минимума V® затруднительно.
По этим характеристикам также можно проследить измене¬
ние энергозатрат при учете эллиптичности и некомпланарности
орбит планет.
Определение дат старта (задача фазирования)
По методике, изложенной выше, определялись геометрические
параметры траектории Рка и ^ка и наклонение траектории к
плоскости эклиптики /ка- Долгота восходящего узла траектории
КА совпадет с точкой старта
2ка = Х„р— ДХн,
где A,|Jp — гелиоцентрическая долгота планеты в момент приле¬
та КА;
ДЯп — проекция угла перелета на плоскость эклиптики.
Гелиоцентрическая долгота планеты назначения
хИ?=2..л+Arc tg [tg (»,„+»“) cos /„J =x;;j
где ЙПл—долгота узла планеты; сопл— аргумент широты пери¬
гелия планеты.
Земля в момент старта занимает положение, характеризую¬
щееся гелиоцентрической долготой
где Я®—гелиоцентрическая долгота Земли в начальный момент
времени;
п®— суточное движение Земли.
Разность гелиоцентрических долгот планеты в момент прилета
и Земли в момент старта КА равна X™ — X® = дХ.
В момент прилета к планете назначения проекция угла пере¬
лета КА на плоскость эклиптики укл и разность гелиоцентриче¬
ских долгот планеты в момент прилета и Земли в момент старта
должны быть
ДХп = дХ. (5.3.20)
Зная в этот момент дату прилета и время полета, определяем
дату старта КА с Земли:
Поэтому процесс отыскания дат старта при полете по оптималь¬
ным траекториям сводится к перебору времени прилета в задан¬
ные. 5. 3.11. Схема определения корней уравнения синхронизации
ном диапазоне и отысканию корней уравнения синхронизации
(5.3.20) (рис. 5.3. 11).
На рис. 5.3.7—5.3. 10 рисками нанесены даты старта с Зем¬
ли t®, определенные из решения уравнений синхронизации.
Изменение характеристик оптимальных
траекторий для различных циклов полета
Известно, что циклы полетов КА к планетам по траекториям
минимальных энергий лежат в области дат старта с Земли,
близких к таковым при полете по траекториям Хомана для слу¬
чая плоских круговых орбит планет. Для этих траекторий циклы
полетов наступают через время Тс — синодический период обра-
0 ill
щения планеты относительно Земли, —= ■ .
Тс т® 7'пл
Для реальных (эллиптических и некомпланарных) орбит пла¬
нет в эти циклы планета—цель занимает различные положения на
своей орбите. Однако эти положения будут приближенно повто¬
ряться через период Гв. п — период великих противостояний пла¬
неты *. Следовательно, и характеристики оптимальных траекто¬
рий полета будут также приближенно повторяться через Гв. п при
старте из произвольного положения на орбите Земли.
Изложенная выше методика позволяет определить динамику
изменения характеристик траекторий минимальных энергий для
различных циклов полетов. На рис. 5.3.7—5.3. 10 содержится
информация о характеристиках оптимальных траекторий к пла¬
нетам для любых циклов полетов. Каждой точке этих кривых
будет соответствовать (или соответствовал) определенный цикл
* Гв,п ^ к {Г* css £27'11л ~ I ^2 — b\ I Т'с —приближенное общее наимень¬
шее кратное 7®, Г|,л и 7С (см. § Л гл. IX).
181
реальных полетов, поэтому эти кривые можно рассматривать как
непрерывные зависимости. Эти зависимости носят достаточно
сложный характер, который вряд ли можно было бы выявить,
рассчитывая по существующим методам оптимизации траекторий
отдельные дискретные значения характеристик даже для доста¬
точно большого числа циклов полетов. Видно, что для некоторых
циклов значения характеристик неоднозначны, что находит отра¬
жение на полях изолиний V® в координатах и д^п (области
с несколькими локальными минимумами Точки характери¬
стик на стыке кривых траекторий 1-го и 2-го полувитков соот¬
ветствуют полету по траекториям в плоскости эклиптики в точку,
когда планета — цель находится в узле своей орбиты.
btn,Lym(M*T ы££кн/1
400 г м п ——г-—I—I—1—!—————*1——
Г 1Тс -2,13Sгода f — - + —
МО — = ——1. 1—
^
гоо 8-f==^«—=t==*==*
WO V* — ^ 4 x L
Puc. 5. 3.12. Характеристики оптимальных траекторий полета к Марсу
Однако для практических целей удобно представлять зависи¬
мость характеристик оптимальных траекторий не от условных,
а от реальных дат старта /®*. На рис. 5. 3. 12—5. 3. 15 приведе¬
ны такие зависимости для полетов к Марсу, Юпитеру, Венере
и Меркурию, условно представленные в виде непрерывных кри¬
вых с рисками, отмечающими реальные даты старта с Земли.
На рис. 5. 3. 12 представлены характеристики оптимальных
траекторий полета к Марсу:
д1/® —скорость, потребная для старта с круговой орбиты
ИСЗ (ЛКр—200 км);
Д/п—время полета;
V£ — скорость входа КЛА в атмосферу планеты.
Зависимости этих характеристик имеют период, равный перио¬
ду великих противостояний Гп. п~ 15,8 года. Циклы полетов к
/
I
-н
Гс~
г4
2,1
55*
ода
t
Г
1
—*
- +
V
—Л"
-f
—♦
V-
At
п
»—
V
V
—&
и
>'
4
/
У
У
/
И
V
1/
*
*
—•■
У
ли
-4
А\
г®
СТ
1 Л
-ш
■
-*
F=
1 “
=3
*=■
2-й "
1 Д . 1 1 1
Тв.п ~ 15,8 года
1
i i i i i
3 1970 1 2 14 5 S 7 8 91980 1 2 3 4 f F 7 8 91990 1
tfT, еодьI
* Выборка соответствующих характеристик с периодом, примерно равным
Тс, из периодических зависимостей этих характеристик с периодом 7Пл-
182
Марсу чередуются примерно через синодический период Гс =
= 2,135 года. Точками нанесены значении соответствующих ха¬
рактеристик, рассчитанные по оптимизации на полях изолиний.
Л Vc®, ни/с
&tn,cym iq
то
woo
800
600
Ч£, км/с
8
1
'
\
t
\
у
>
%
>
к
ft-
*
/
J
-4
—i
к
/
>
>
-ft
-ft
н
—1
*-
%
Я"
Jb
Ш
|
Г
1
ад/
уЯ
/00
Г-
tr
•
<
•
4
г
k
Тыг
I I—1—1—
ш 1
ь%т,годы
Рис. 5.3. 13. Характеристики оптимальных траекторий полета к Юпитеру
(1-й пол у виток)
В районе минимальных энергозатрат полета (скорость старта
ДК© ) лежат циклы полетов 1971, 1979 и 1986 гг. по траекториям
-го полувитка. Циклы полетов к Марсу в 70-х годах соответст-
гт
iso-
Лш
! ,КМ/С
kV?1
ст
4
J
Л
Й
Л
ёг:
>
£
%
d
—А
t
>
>
£
у
5
Iе2
ж
>
fc
iLs
/
г_
5
■г
■
Т
1^.
1
г
L
F"
ж!
с
w~
• —
-ж
—-
*-
-ж
■— <
£
’1
—
*-
с
•—
F
и...
-1
=0
а**-
7
ч-—
*2
-
/
>
-
4~
а
.
7
к
fc
—
7
К
-1
г
“к
-- ►
>
• *
■ч ^
5
i
с-
1ис
1
й
h
'f
><
Г
Я-
3
S
S
fj
с
>5
*-
F
>9
S
—■
К
1=
с|
1<И
А
fj^-/Т
Эз
—
^ ■
jd
ч
=9
№
i
I
п
Д\
S
>
--
ц
7
U—
™ I
__ |
-Те.
7с_
n=2,665t
= 1.599го
-4—LWJ—
^порш
* . ... ,
10км/с на
h=100нм
н
—
»—
J
шЩ
—
ЧР
—*
—
*
—
я
1
чр
■5
—
9н
—
я*
1960 г 4 6 8 1970 г 4 6 8 1980 2 4 6 8 1990 Z 4 Ь*т.годы
Рис. 5.3. 14. Характеристики оптимальных траекторий полета к Венере
вуют наибольшему изменению оптимальных характеристик. Наи¬
большие значения д!7© приходятся на циклы полетов 1975 и
1977 гг. по траекториям 1-го полувитка. Увеличение V<*r по
сравнению с «лучшим» циклом 1971 г. составляет около 500—
1000 м/с. В эти «плохие» циклы полетов по траекториям 1-го по¬
лувитка возможен переход па более экономичные для этих цик-
183
лов полетов траектории 2-го полувитка. Но, как видно из рис.
5.3.16, это приведет к увеличению времени полета с А/П~210ч-
220 сут до Д/п=300-=-400 сут.
Циклы полетов к Марсу в 80-х годах, так же как и прошед¬
шие циклы полетов в 60-х годах, более стабильны в отношении
изменения энергозатрат полетов. Для аппаратов, десантируемых
на поверхность Марса, важной характеристикой является ско¬
рость входа V& в атмосферу планеты *. Наименьшие значения
Рис. 5.3.15. Характеристики оптимальных траекторий полета
к Меркурию
приходятся на циклы полетов 1971 и 1973 гг. для траекторий
1-го полувитка. Эти циклы полетов, по-видимому, наиболее бла¬
гоприятны для создания аппаратов, десантируемых на поверх¬
ность Марса.
На рис. 5. 3. 13 приведены характеристики оптимальных тра¬
екторий для полетов к Юпитеру. Период великих противостояний
Тъ.п этой планеты примерно равен ее звездному периоду (Гв.п =
= 11,9 года). Циклы полетов к Юпитеру чередуются через Тсж
«1,09 года. На первую половину 70-х годов приходятся циклы
с меньшим изменением энергозатрат (перепад Д^® ^300 м/с
между «лучшими» и «худшими» циклами полетов). Лучшими бу¬
дут циклы полетов в 1970 и 1975 гг. Однако они соответствуют
большому времени полета /п=800-^-850 сут (полет почти в узлы
орбиты Юпитера). Полет по другим траекториям в эти циклы
приводит к повышению Д^® на 200 м/с, но позволяет сократить
* Определяется через скорость входа в сферу действия планеты .
184
время полета до A/n = 720-f-730 сут. Динамику полетов к Сатур¬
ну из-за большого периода противостояний этой планеты (Гв.п^
«Гпл «29,5 года) можно проследить по зависимостям характе¬
ристик траектории от условных дат старта (см. рис. 5.3. 10).
Наименьшим энергозатратам соответствуют циклы полетов в
1970 и 1985 гг. Наихудшие в этом смысле — циклы, близкие к
1980 г. Однако этим циклам соответствует наименьшее значение
времени полета А/п=1300 сут по сравнению с «лучшими» цикла¬
ми, где А/п= 1600ч-1800 сут. Энергозатраты для полетов к Са¬
турну существенно больше (диапазон AV® = 7,2-^-8 км/с), чем
для полетов к Юпитеру.
Динамика изменения характеристик траекторий полетов к
Венере показана на рис. 5.3.14. Великие противостояния этой
планеты происходят через 7Y п~8 лет (см. § 1 гл. IX). Синоди¬
ческий период 7'с = 1,598 года. Диапазон изменения AV ® для
различных циклов полетов составляет примерно 400 м/с. Наи¬
лучшими по энергозатратам были циклы полетовв 1967—1969гг,
(траектория 1-го полувитка) и будут ib 1975—1977 гг. Скоростг
входа ,в атмосферу Венеры изменяется в пределах Ув<£ = 10,94-
12,2 км/с.
Оптимальные циклы полетов к Меркурию приходятся 3 раза
в год (7'с = 0,317 года). Период великих соединений этой
планеты мал—Гв.П~1 год. Динамика изменения характеристик
носит быстропеременный и сложный характер (см. рис. 5.3.15).
Энергозатраты при полетах к Меркурию существенно больше
(диапазон изменения д1^© = 4,9ч-7,5 км/с), чем к Венере. Прак¬
тически каждый год среди оптимальных траекторий 1-го или
2-го полувитков можно найти траекторию с энергозатратами,
близкими к минимальным (д!/© «5 км/с).
Схема решения задачи определения
оптимальных характеристик
ускоренных траекторий методом
достижимых областей
При полетах по траекториям минимальной энергии время по¬
лета по траекториям Ьго полувитка (угол перелета L<;180°)
к внешним планетам изменяется в широких пределах и может
достигать больших значений. Диапазон оптимального времени
полета к этим планетам составляет: к Марсу Atn= 1904-250 сут,
к Юпитеру А/п=7004- 1000 сут, к Сатурну А/п= 12004-2500 сут.
В настоящее время созданы КА с ресурсом работы около
1 года (КА для полетов к Венере и Марсу и спутники связи).
Увеличение ресурса работы автоматических КА представляет
серьезную конструкторскую проблему. Поэтому отыскание опти¬
мальных по энергозатратам ускоренных траекторий является ак¬
туальной задачей.
185
Оптимизация траекторий методом достижимых областей по¬
зволяет получить характеристики оптимальных ускоренных тра¬
екторий для всех возможных циклов полетов (в пределах допу¬
щения стабильности параметров орбит планет для интервала
времени около 20—30 лет).
Задача формулируется следующим образом: при старте с ор¬
биты Земли определить траектории минимальной энергии при
полете в любую точку Солнечной системы за время полета,
меньшее или равное заданному А/П^А^П. зад-
Рассмотрен общий случай, когда вектор стартовой скорости
не лежит в плоскости, перпендикулярной плоскости эклиптики и
касательной к круговой орбите Земли («пространственный
старт»). Оптимизация траекторий на полях изолиний характери¬
стической скорости дает близкие значения характеристик опти¬
мальных траекторий.
Каждой точке следа траектории полета на огибающей конту¬
ра достижимых областей (рис. 5.3.16) соответствует определен¬
ное время полета, определяемое из уравнения Кеплера
А^п— ‘Г‘ [(£ —£0) —g(sin Е — sin Е0)\,
zn
где а=— -большая полуось траектории полета;
2 — V2
~ V
V = —безразмерная гелиоцентрическая ско-
рость старта;
! 1
е=1 —эксцентриситет траектории полета;
а
£‘=2arctg^|//r—эксцентрическая аномалия;
и —истинная аномалия.
Ограничим достижимую область линиями фиксированного
времени полета А^п при |\/®| =const.
Задавая параметры а и г0, определим траекторию полета
(параметры р,епа) следующим образом.
Из формулы для Atn, зная величину а и время полета Atn,
определим эксцентрическую аномалию Е, а следовательно,
и истинную аномалию v. После этого по формулам
е=(-~ l), ^=— — z=R sin / sin (и —ц0),
\ и/Якр / 1 + е cos (г — v0)
V® sin a cos В*
sin/=—= —, r=y/<2-za
V п
определим значения координат г и z в плоскости Р.
* р определится через 0 (см. рис. 5.3.2,6), зависящую от «о.
186
Перебирая параметры а и и0, получим огибающую контура
достижимой области при фиксированном времени полета Д/п.
Изолинии фиксированного времени Д/п (при Ц/^| =const)
касаются изолиний максимальной достижимой области
при свободном времени полета. Таким образом, контур
достижимой области при Atn^At3ajl будет состоять из участка
изолинии со свободным временем полета до точки, где Д/п = Д/3ад,
и изолинии фиксированного времени Д/зад полета.
Рис. 5.3.16. Контуры достижимых областей для траекторий с фикси¬
рованным временем полета (ускоренные траектории)
Задавая различные значения модуля |1/®| =const, можно по¬
строить поле достижимых областей при свободном и фиксиро¬
ванном времени полета. На рис. 5.3. 16 нанесено поле таких
изолиний для координат г и z, соответствующих полетам к Мар¬
су. Зная элементы орбиты планеты — цели, по тем же формулам
для R и z, задавая тПл в диапазоне от 0 до 2л, можно рассчитать
след орбиты планеты в плоскости Р. На рис. 5. 3. 16 таким обра¬
зом нанесен след орбиты Марса. Каждой точке на следе орбиты
планеты соответствует определенное время прилета на планету
?Пр. Введем, как и раньше, условное время прилета изме¬
няющееся от нуля до Тил (звездный период обращения планеты).
Задавая фиксированное время полета Atn и перебирая значения
\V®\, можно построить зависимость ^©^/(/у™). Условное
время старта с Земли
/усл = ^усл_ д/
ст нр “ »
Таким образом, получим зависимость |1/^| = /(/у™) для
фиксированных значений времени полета Д/п. На рис. 5.3.17—
5. 3. 19 для фиксированных Д/п приведены зависимости скорости
187
V ^
У со,
КМ/С
15
13
11
9
7
5
3
У
• \ ■ Нч
\
4
/
у
И-К
iTn
\
{/
)г
А
N
+„
/
и
■К—и
Г >>
W ~
4^+.
+—f
—-F—
**
к
Atп= 100 сут
120 сут
140 сут
At„=160cym
at
Vttt0 75 150 225 300 375 450 525 600 ter*
км/с
9
8
7
6
5
4
J
Z
x
\
4
1/
ч
4v
У
ПЧ
\
N
ч^
J
/s
x;
ТГ
Гч
:х
Ц
+ rt-
St
“Г ^
x!
-f-t-
Ц-w
ft»-
f=S=
1
Ф
4
k.
ttn- WOcym
120 cym
140 cym
■ 160cym
if
At„,
cym
260
220
180
140
100
0 75 150 225 300 375 450 525 600
4
• A
К
IX
+N
Ц-^
у
'X-
■+—1
0 75 150 225 300 375 450 525 600t{£*
tcr= 1,881 года (687cym) ^
Atf
At„=160 cym
140cym
120cym
At „=100 cym
Puc. 5. 3. 17. Характеристики ускоренных траекторий полета к Марсу
тв п“/5,5 года (5771 сут); i=la51'03"; е-0,0934; а-1,5237 а. е.
188
Рис. 5
Atп-400cym
450сут
500суm
550су m
At n=600cym
3500 tVS
1Z,Z
11,8
11.4
11,0
10,6
10,z
9,8
9.4
9,0
8,6
И
Л
V,
&
N
1*^
У
✓И
V
х+
ИР'
>
ч
г
+,ч
‘+Ч
LL. Jj
W
*м~~
S+-+
St
^++-
N
*г
‘4+-fc
и—а
-И
Л,
J*
7
/
к
•
+
'++
+
\
At n-400cym
950 cym
500cym
550cym.
Atn-600cym
..opt
Atn,
cym
900
800
700
600
500
400
300
0 500
1500
Z500 3500 tVS
Ь
L
}
L
н
/1
\ч
)
Ч
vhJ
—н—
И—+
У
0 500 1500 Z500 3500 tfS
Г *= 11,86Z года (4334сут)
i opt
At n-800cym
550cym
500cym
450 cym
At n~ 400cym
/МЖ Сч Ik (I IV л IV IV IV
2:>5
3.18. Характеристики ускоренных траекторий полета к Юпитер
Тв п-11,8622 года (4334 сут); 1-1°18'22е=0,0482; а-5,2025 а. е.
189
V*
WOO ;
KM/c
17
15
13
11
9
7
5
V oot
км/с
13.8
13.4
13.0
1Z,6
1Z,Z
11.8
11.4
11.0
10,6
10,z
'Atn,
cym
ZOOO
ч
Г
"*4:
-к+н
ft*
+
и*-*
-*чн
ft
ч
ч
iM-4
Ч
-Mv.
■N->
ч
-♦-If»
Ч
А
**
л
у
Atn-800cym
Atn
УСЛ
1000 3000 SOOO 7000 9000 t Cr
..1*1
1
<**+*+Чч
■s
ч
у
гК1
ч
у
г
к
ц
-Т1+
/
***
)тчлг
W*
Ч
N
У
гг
У
■
ч
+•*
/
f
1
ч.
V
Г
Ч
У
Г+”
л
L
/
л
г
“П
Atn=800cym
Icym
Atn=1000cym
1000
3000 5000
9000 tyff
800
400
К
ч
J
\
-fci
■К
ч
—t-»1
У
У
Nh
1000 3000 5000 7000 9000t9^
T*=Z9,458 года (10760cym)
^ ^
Atf
Atn=1000cym
900
At n=800cym
Puc. 5.3.19, Характеристики ускоренных траекторий
полета к Сатурну
тв.п=29'458 года О0750 сут); i=2°29'!9"; е=0,0552; а=9,5!5 а. е.
190
выхода из сферы действия Земли V® и скорости входа в сферу
действия планеты V™ от условных дат старта №л для полетов
к Марсу, Юпитеру и Сатурну.
Динамика изменений оптимальных характеристик
ускоренных траекторий полета
Ускорение траекторий представляет интерес для полета
к дальним внешним планетам (Юпитер, Сатурн). Время полета
к этим планетам по траекториям минимальных энергий достаточ¬
но велико (к Юпитеру — 2—3 года, а к Сатурну — 3,5—в лет).
Рассмотрение ускоренных траекторий полета к более дале¬
ким планетам (за Сатурн) в импульсной постановке нецелесо¬
образно. Из-за сравнительно высоких энергозатрат полеты к
этим планетам, по-видимому, будут использоваться с ДУ малой
тяги.
Хотя время полета по оптимальным, энергетическим траекто¬
риям к Марсу не превышает 1 года, однако оно достаточно ве¬
лико (от 6 до 9 мес). Поэтому целесообразно рассмотреть воз¬
можность сокращения времени полета и к этой планете.
На рис. 5.3. 17 приведены характеристики ускоренных траек¬
торий полета к Марсу:
V®—скорость выхода из сферы действия Земли, потреб¬
ная для полета к Марсу;
Atn — время полета с Земли на Марс;
V— скорость входа в сферу действия Марса в зависи¬
мости от условных дат старта — Р™.
Там же рисками нанесены значения оптимальных дат старта для
циклов полета с 1967 по 2000 год.
Как показали расчеты, даты старта для «ускоренных» траек¬
торий полета мало отличаются от таковых для свободных траек¬
торий полета (Д/?© = 10-М5сут).
Как видно из приведенных графиков, с уменьшением времени
полета возрастают энергозатраты для полета к Марсу (У©),
а также скорость входа в сферу действия планеты (У£). Эти
зависимости характеристик траекторий полетов можно развер¬
нуть для календарных дат старта (как это было сделано выше
для траекторий минимальных энергий).
Цикличность изменения всех характеристик будет соответст¬
вовать периоду великих противостояний Марса 7V п~ 15,8 года.
Циклы полетов по ускоренным траекториям с энергозатратами,
близкими к минимальным, будут в 1971, 1973, 1981, 1986 и 1988 гг.
Циклам полетов с наименьшими энергозатратами примерно со¬
ответствуют и наименьшие значения скорости входа в сферу дей¬
ствия Марса.
191
На рис. 5.3.17 крестиками нанесены значения соответствую¬
щих характеристик траекторий .полета, определенных из опти¬
мизаций на полях изолиний У®.
На рис. 5.3. 18 приведены характеристики ускоренных траек¬
торий полетов к Юпитеру. Зависимости характеристик траекто¬
рий от дат старта носят также циклический характер с периодом,
равным «11,9 года. Циклы полетов « Юпитеру по ус¬
коренным траекториям с энергозатратами, близкими к опти¬
мальным, были в 1970 и 1971 и будут в 1982 и 1983 гг.
На рис. 5.3. 19 приведены характеристики ускоренных траек¬
торий полетов к Сатурну. Зависимости характеристик траекто¬
рий от дат старта носят также циклический характер с периодом
Т'в.п» ТЧ «29,5 года.
Характеристики траекторий, полученные оптимизацией на
полях изолиний У®, несколько отличаются от полученных
методом достижимых областей. Однако это отличие не пре¬
вышает ошибок, связанных с приближенностью метода до¬
стижимых областей (круговая орбита Земли, касательный
старт), вносящих погрешности в определение У® не бо¬
лее 200—300 м/с.
Глава VI. • ТРАЕКТОРИИ ПОЛЕТА
МЕЖПЛАНЕТНЫХ АППАРАТОВ
С ВЫХОДОМ НА ОРБИТУ
ОКОЛО ПЛАНЕТЫ
§ 1. ОСОБЕНОСТИ ЗАДАЧИ ОПТИМИЗАЦИИ
МЕЖПЛАНЕТНЫХ ТРАЕКТОРИИ
С ВЫХОДОМ НА ОРБИТУ
ОКОЛО ПЛАНЕТЫ НАЗНАЧЕНИЯ
Оптимизация траекторий КА искусственных спутников пла¬
нет (ИСП) производится по максимуму веса полезного груза.
Для ИСП с аэродинамическим торможением полезный груз
Gncn = 0\UH — Ga т,
где — вес полезной нагрузки ступени старта с орбиты ИСЗ;
Gа. т — вес средств аэродинамического торможения Па орби¬
ту ИСП.
Как известно, GJ н =/(I/®) и его максимум соответствуют
минимуму характеристической скорости старта с ИСЗ I/® или
скорости на выходе из сферы действия Земли V®.’ Вес Ga. т
зависит от аэродинамических параметров средств торможения
КА и условий входа в атмосферу (скорости входа V™ и угла
входа). Из этих параметров на выбор траектории влияет только
Квх. Поэтому в общем случае критерий оптимизации такой
схемы
J=f(vb V":).
так как
Однако в большинстве случаев Ga. т и практически
оптимизация траектории такой схемы полета сводится к отыска¬
нию оптимума для одноимпульсной схемы. При заданном значе¬
нии I/® на полях изолиний выбирается область с меньшим зна¬
чением 1/"л.
оо
193
Для схемы с активным торможением траектория оптимизи¬
руется по максимуму Gn. h = Gi‘ihGi1iih. Для однотипных ракетных
ступеней максимум GmH соответствует минимуму суммарной ха¬
рактеристической скорости Vxt. Приближенно это справедливо
и для ступеней с характеристиками, не очень сильно отличающи-'
мися.
Обычно Их2 делится на первую и вторую ступени так, как
этого требует реальное разделение Их.2 по траектории. Однако
могут быть случаи, когда целесообразно оптимальное разделение
Vxt на составляющие, не соответствующие реальному разделе¬
нию импульсов. В этом случае какая-либо из ступеней работает
с разрывом — два активных участка, разделенных временем
перелета с Земли на планету.
При полетах к некоторым планетам возможно, что первый
этап (старт с ИСЗ) или второй (торможение на ИСП) потре¬
бует разделения на две ступени. Так, например, при полете
к Юпитеру больший полезный груз обеспечивают две ступени
старта с Земли при ДУ на ЖРД.
В большинстве же практических случаев траектория опти¬
мизируется по минимуму суммарной характеристической ско¬
рости:
где Д^®— характеристическая скорость старта с орбиты ИСЗ;
д\/пл —характеристическая скорость торможения на орби¬
ту ИСП.
Оптимизация также может производиться в двух вариантах:
— по максимуму «окна» дат старта, т. е. когда ищется minl/xS
при заданном времени старта /® с орбиты ИСЗ (вертикальные
касательные на поле изолиний l/xS в координатах /®; Д/„);
— для ускоренных траекторий, когда ищется min при
заданном времени полета Ata (горизонтальные касательные на
поле Vxt).
Характеристики двухимпульсных траекторий рассмотрены
для двух вариантов орбит ИСП:
— предельно низкая круговая орбита ИСП;
— энергетически более выгодная предельно вытянутая эллип¬
тическая орбита ИСП с минимальной высотой перицентра hK.
Для спутников Марса за такие орбиты можно принять, на¬
пример, орбиты со следующими параметрами:
— круговая орбита с hKV = 1000 км;
— эллиптическая орбита с Л* = 1 тыс. км и ha= 20 тыс. км.
Для спутников Венеры:
— круговая орбита с Лкр = 500 км;
— 'эллиптическая орбита Л* = 500 км иЛ«=50 тыс. км.
194
Таблица 6.1
Характеристики двухимпульсных траекторий полета к Марсу
(круговая орбита ИСМ)
Гол
Полувиток
fCT
д'п
^хЕ
Vе*
у т
сут
км/с
1971
1
23.05.71
205
5,61
2,19
2
13.05.71
245
5,81
2,29
1973
1
08.08.73
211
5,85
2,07
2
29.07.73
344
6,18
2,27
1975
1
28.09.75
242
6,14
2,06
2
05.09.75
345
5,76
2,05
1977
1
01.11.77
270
6,00
2,05
2
07.10.77
327
5,5о
2,00
1979
1
15.11.79
260
5,96
2,45
2
04.11.79
310
5,57
2,09
1982
1
07.01.82
228
6,52
2,79
2
28.11.81
299
5,80
2,31
1984
1
28.02.84
208
6,42
2,75
2
02.01.84
280
6,18
2,61
1986
1
28.04.86
201
5,97
2,36
2
09.05.86
250
6,05
2,74
1988
1
12.07.88
202
5,99
2,08 .
2
28.05.88
264
6,25
2,15
1990
1
11.09.90
230
6,07
2,06
2
24.08.90
348
5,90
2,12
1992
1
20.10.92
259
6,12
2,04
2
25.09.92
335
5,61
2,00
195
Таблица 6.2
Характеристики двухимпульсных траекторий полета к Венере
(круговая орбита ИСВ)
Г од
Полувиток
*ст
Д'п
сут
км/с
1970
1
04.09.70
110
7,69
3,97
2
15.06.70
191
7,41
3,38
1972
1
17.04.72
110
7,77
3,75
2
28.02.72
185
7,73
3,94
1973
1
25.11.73
113
7,30 '
3,37
2
14.11.73
154
7,34
3,78
1975
1
09.06.75
142
6,88
3,31
2
06.06.75
150
6,91
3,38
1977
1
11.01.77
127
7,40
3,84
2
09.12.76
170
7,11
3,28
1978
1 | 01.09.78
111
- 7,68
3,98
2
15.06.78
190
7,39
3,38
1980
1
14.04.80
110
7,78
3,77
2
21.02.80
188
7,73
3,87
1981
1
23.11.81
112
7,34
3,38
2
12.11.81
154
7,37
3,81
1983
1
09.06.83
143
6,9? 3,35
2
07.06.83
148
6,90
3,40
1985
1
10.01.85
128
7,38
3,82
2
08.12.84
168
7,08
3,28
1986
1
29.08.86
111
7,67
3,98
2
15.06.86
188
7,36
3,37
1988
1
12.04.88
110
7,80
3,79
2
18.02.88
192
7,73
3,75
1989
1
21.11.89
111-
7,37
3,40
2
10.11.89
155
. 7,41
3,85
1991
1 10.06.91
139
6,94
3,33
2
09.06.91 141
6,94
3,35
196
Такая высота круговых орбит обеспечивает длительное (по¬
рядка года) время существования ИСП из-за торможения в верх-,
них слоях атмосферы, а параметры эллиптических орбит с пре¬
дельно малой высотой hK по энергетическим характеристикам
близки к минимально возможным (выход на параболу).
В табл. 6. 1 приведены характеристики оптимальных траекто¬
рий 1 и 2-го полувитков полета на орбиту ИСМ в 1970 и
1980-е гг.
Сопоставляя оптимальные даты старта двухимпульсных и од-
ноимпульсных траекторий (см. табл. 5.7), можно заметить, что,
они различаются не более чем на 10—15 сут. Минимальным
энергозатратам соответствуют циклы полетов в 1971 и 1979 гг.
В табл. 6.2 приведены характеристики оптимальных траек¬
торий к Венере. Минимальные энергозатраты приходятся на цик¬
лы полетов в 1975 и 1983 гг.
§ 2. ВЫБОР ПАРАМЕТРОВ ОРБИТЫ
СПУТНИКА ПЛАНЕТЫ
Выбор параметров орбиты искусственного спутника планеты
(ИСП) производится из условий обеспечения минимальных энер¬
гозатрат для выведения КЛА на орбиту и удовлетворения тре¬
бований, связанных с назначением КЛА.
Задачу можно рассматривать в следующей постановке. Счи¬
таем, что вектор входа в сферу действия планеты р™ задан,
т. е. заданы модуль скорости |р^л| и углы его ориентации в эква¬
ториальной планетоцентрической системе координат: 6Пл — угол
склонения и апл — угол прямого восхождения.
Рассмотрим вначале параметры орбиты ИСП в плоскости
подлетной гиперболы. Выход из плоскости подлетной гиперболы
обычно связан с большими энергозатратами.
Для задач приближенного определения энергозатрат старта
с эллиптической орбиты на гиперболу и торможения с нее на
эллипс можно считать, что переходы между этими орбитами про¬
исходят импульсно. В этом случае оптимальными будут плоские
переходы с сопряжением траекторий в их перицентрах, рассмот¬
ренные в § 2 гл. IV. Характеристики этих переходов приведены
на рис. 4.2.1 и 4.2.2. Угол аг между асимптотой гиперболы и
осью апсид эллипса
cos аг=—— . (6. 2. 1)
ет
Через этот угол определяется положение _точки перехода с ги¬
перболы на эллипс относительно вектора V"J.
197
Из изложенного в § 2 гл. IV видно, что энергетически опти¬
мальная орбита ИСП должна иметь минимально допустимый
радиус перицентра гк и максимально допустимый радиус апо¬
центра га.
Период обращения на такой орбите
Т=2л
а
3/2
У Нил
где а
Га+
— большая полуось орбиты.
Л. ‘ 2 3 4 а,«и
013 5 10 20 3040 75 100 h,ТЫС.ни-
(Г I 01 Z S '5 10 20 30 *0 '50 W КтысТм
О 1 Z 3 4 5 10 20 30 4050 75100 hjb/C. нм
нм
Рис. 6. 2. 1. Период обращения спутников планет
На рис. 6. 2. 1 приведены значения Т для спутников различ¬
ных планет.
Выбор периода Т может влиять на га орбиты ИСП. При вы¬
боре 7\ кратного периоду обращения планеты, ИСП будет пере¬
мещаться по одним и тем же трассам на поверхности планеты,
что может противоречить требованиям картографирования пла-
198
неты. Выбор периода Т% кратного земным суткам, обеспечивает
сеансы связи с КЛА в одно и то же время.
Рассмотрим характеристику, определяющие положение пло¬
скости орбиты ИСП.
Если задан угол наклонения i орбиты ИСП к экватору
(рис. 6. 2. 2), то долгота линии узлов П от направления У (нача-
Рис. 6. 2. 2. Определение дол¬
готы узла Q орбиты спутника
планеты
»оо
Рис. 6. 2. 3. Определение ар¬
гумента широты о) спутника
планеты
ло отсчета — направление на точку весеннего равноденствия Зем¬
ли) определится из соотношения
sin (апл — . (6.2.2)
Угол между вектором у™ и линией узлов определится из ра¬
венства
* Sill & /л л о\
sin и = , (6.2.3)
sin i
а угловое расстояние со перицентра я от линии узлов Q
(рис. 6. 2.3)
(о = и — аг. (6.2.4)
Из рис. 6.2. 2 и формулы (6.2.2) следует, что наклонение i
орбиты ИСП не может быть меньше, чем угол бил, т. е.
I > 8пл (6.2.5)
при плоском переходе с подлетной гиперболы на эллиптическую
орбиту ИСП.
Орбита ИСП подвержена различного рода возмущениям. Наи¬
более сильное влияние на параметры орбиты оказывает нецент-
ральность поля тяготения планеты. Учет эффекта сжатия плане¬
ты приводит к тому, что изменяются долгота узла £2 орбиты спут¬
ника и угловое положение со перицентра орбиты. В § 3 гл. I
199
приведены следующие формулы для определения изменения Й и
о) за один оборот спутника:
dQ
2яе
aN
do)
IhuiP^
Яе
cos 1\
dN
Н’ПЛ Р
(5 cos2 / — 1).
(6. 2.6)
На рис. 6.2.4 приведены графики для определения характе¬
ристик эволюции параметров орбиты ИСП от сжатия планеты:
-^-= —2^ cos/;
dN
do>
1
dN 2
P
2^ (5 cos2/ — 1);
P =
(6.2.7)
где «эк— радиус экватора планеты.
Величины сжатия а'* и угловой скорости планет о)пл и Оэв
приведены в приложении.
Рис. 6.2.4. Характеристики эволюции
орбиты спутника от нецентральности
поля тяготения планеты
Рис. 6.2.5. Определение
границ зоны видимости
Изменение величин Й и w будет наибольшим для орбит с на¬
клонением /, близким к нулю. Орбита ИСП с /«63,4° не имеет
возмущений аргумента широты перицентра орбиты. Полярная
орбита /=90° не имеет ухода линии узлов орбиты. Существенное
влияние на параметры орбит ИСП с относительно малым радиу¬
200
сом перицентра может оказывать сопротивление верхних слоев
атмосферы планеты. Методика учета этого влияния на движение
спутников изложена в работе [50]. Однако в настоящее время не
имеется достаточно достоверных данных о характеристиках
верхних слоев атмосферы планет. Для спутника Марса можно
ориентировочно считать, что приемлемое время его существова¬
ния (порядка 1 год) может быть получено при 1 тыс. км, а
для спутника Венеры гк ^500 км.
Отношение масс спутников планет к массе планеты сущест¬
венно меньше соотношения масс Луна—Земля. Поэтому (влияние
спутников планет на параметры орбиты ИСП будет слабее, чем
влияние Луны на орбиты ИСЗ.
Влияние Солнца и других планет на параметры ИСП будет
еще меньше. О порядке величины такого влияния можно судить
по влиянию Солнца и планет на параметры ИСЗ (см., напри¬
мер, [50]).
Влияние Солнца и других планет на параметры орбиты ИСП
будет заметным при длительном времени существования ИСП
(порядка нескольких месяцев или лет). Методы расчета эволю¬
ции орбит ИСП от этих факторов изложены в работах [10, 50].
Рассмотрим вопросы расчета трассы ИСП и зон видимости
с его орбиты. •
Для задач фотографирования поверхности планеты при обле¬
те и картографирования ее с орбиты ИСП необходимо знать
трассу КА на поверхности планеты и границы зоны видимости.
Угловое расстояние х границы зоны видимости (рис. 6. 2. 5)
определяется по формуле
x = arccosf—^—cos у'] — у, (6.2.8)
\^пл 4- h )
где Rnn — радиус планеты;
h — высота ИСП над ее поверхностью;
у — угол возвышения ИСП над горизонтом.
Трасса ИСП или проекция орбиты спутника на поверхности
планеты определится из следующих соотношений:
ф=агс sin (sin и sin /);
л = 2 -(- arctg (tgи cos i) — <о1И (/ — т) -f Д2,
где ф — широта точки трассы;
X— долгота точки трассы;
и = (о + v + Aw — аргумент широты точки на орбите ИСП;
Q — долгота восходящего узла орбиты;
to— аргумент широты перицентра орбиты;
i — наклонение орбиты ИСП к плоскости экватора;
т — время прохождения перицентра;
201
J (6. 2.9)
v — истинная аномалия;
da t — т
Дш = изменение со от сжатия планеты;
dt т
0 dQ. t — т
Дм =— - изменение й от сжатия планеты;
Т — период обращения ИСП;
t—время, соответствующее аномалии О ИСП.
Граница зоны видимости определяется из соотношений:
<]>7=агс sin (sin ^cosx-(-cos^sin xcoscp);
. / cos x — cos Ф sin <p \ (6.2.10)
AT = A + arc cos 1 — ) ,
\ COS Ф COS Ф }
e <|>7 и AT— широта и долгота точек на границе зоны види¬
мости;
Ф — угол от точки трассы до точки на границе
зоны видимости (изменяется от 0 до 2я при
определении границы зоны видимости).
-170-150-130-110-90-70-50 -30 -10 0 10 30 50 70 90 110 130 150 170 X „
90 ... ~
80
70
60
. 50
W
30
20
10
0
-10
-20
-30
-if 0
-50
-60
-70
-80
-90
-170-150-130-110-90 -70 -50 -30-10010 30 50 70 90 110 130 150 170 Л°
Рис. 6.2.6. Трасса и зоны видимости с кругового полярного спутника с пе
риодом обращения Т, равным периоду вращения планеты Тпл
На рис. 6. 2. 6—6. 2. 7 показаны трассы границы зоны види¬
мости круговых полярных спутников с периодом обращения Т,
равным одному периоду и половине периода вращения планеты
Тпл• Трассы этих спутников замкнуты, т. е. проходят по одним
202
Рис. 6. 2. 7. Трасса и зоны видимости с кругового полярного спутника с пе-
1
риодом Т = -jj- 71|Л
ц)в 160 100 120 100 80 60 00 20 0 20 00 ЬО 80 100 120 100 160
180 160 ЮО 120 100 80 60 00 20 0 20 00 60 80 100 120 100 160 180
Juc. 6.2.8. Трасса и зоны видимости с эллиптического спутника с Т=7
наклонение орбиты i=63,4°
П Л»
203
Рис. 6.2.9. Трасса и зоны видимости с эллиптического спутника
с Т = ~ ТаЛ, i — 63,4°
с T = y Ты, 1=63,40
204
и тем же местам поверхности. Зоны обзора с таких орбит доста¬
точно обширны и позволяют увидеть всю поверхность планеты.
Интересно отметить, что круговая орбита спутника Марса
с Г«ГПЛ обеспечивает минимальные энергозатраты для выведе¬
ния на нее КА (в.классе круговых орбит).
Как указано выше, ИСП с наклонением / = 63,4° не имеет воз¬
мущений аргумента широты перицентра со от сжатия планеты.
Трассы и зоны видимости таких ИСП на эллиптических орбитах
с А* «0,05/?пл и с периодами обращения Т=-—Т^л\ -)-Тпли Гпл
и /,
показаны на рис. 6.2.8—6.2. 10. Так как период обращения ИСП
кратен периоду обращения планеты Гпл, то трассы спутников
замкнуты. В апогейной части орбиты ИСП зоны видимости весь¬
ма обширны (для ИСП с Т=Тпл зона видимости охватывает поч¬
ти половину поверхности планеты).
§ 3. ХАРАКТЕРИСТИКИ ОПТИМАЛЬНЫХ
ТРАЕКТОРИЙ ДЛЯ РАЗЛИЧНЫХ ЦИКЛОВ ПОЛЕТОВ
Выявить динамику изменения характеристик оптимальных
двухимпульсных траекторий по циклам полета можно путем на¬
копления данных расчетов таких траекторий для различных цик¬
лов полетов. Однако, как и в случае решения такой задачи для
одноимпульсных траекторий, целесообразнее эту задачу решить
методом достижимых областей. Задача решалась при тех же
предположениях, что и в § 3 гл. V.
Оптимизация траекторий
Оптимальная траектория должна обеспечивать минимум кри¬
терия оптимизации — суммарной характеристической скорости
К£, равной
Vx1 = lV%+lV™
где д1/ст=|Л(1/пар)2-[-(К^)2 ——скорость старта с орбиты
ИСЗ;
Vfap=- v/ —— параболическая скорость на стар-
* товой орбите;
Wp = l/ — круговая скорость стартовой ор-
V Гк? биты ИСЗ;
V2 --скорость на выходе из сферы дей¬
ствия Земли;
205
rKp=/?@-f-/zKp — радиус стартовой круговой орби¬
ты (Лкр=200 км);
R® — радиус Земли;
|а@ —гравитационная постоянная Земли;
ьу?=У (v™Y+(v™y-v™\
К„ар—1/ ^ПЛ —параболическая скорость у планеты;
У гг
«эл
1 f 2iinJ[ra
V*= I/ —;—;—г —скорость в перицентре эллиптической
у гЛи+га) орб;;ты ИСП;
V™ — скорость на входе в сферу действия
планеты;
Г*=ЯПЛ + Л«; ra=Rnjl-\rha\
Run — радиус планеты;
/г« и ha. — высота перицентра и апоцентра
орбиты ИСП соответственно.
Основной особенностью метода «достижимых областей» яв¬
ляется отделение задачи определения оптимальных характери¬
стик траектории от задачи определения дат старта. Следуя иде¬
ям метода «достижимых областей» (см. § 3 гл. V), задаемся по¬
ложением планеты назначения в момент прилета (см. рис. 5. 3. 2).
При этом нам будут известны радиус R планеты, отклонение ее
от плоскости эклиптики z и вектор скорости планеты Кпл- Задача
отыскания оптимальной траектории является двухпараметриче¬
ской. В качестве параметров оптимизации примем: Я— проекция
угла перелета на плоскость эклиптики ии0 — истинная аномалия
орбиты перелета в точке старта. Величины z и R определяют
гелиоцентрическую широту точки прилета <р:
sin ф=— ;
Y R
при этом знак z определяет знак <р. Из прямоугольного сфери¬
ческого треугольника А\ВС (рис. 6.3.1, а) определим угол пе¬
релета
cos L = cosX cos ср.
Так как величины Я и L близки, то значение L можно опреде¬
лить по cos L.
Наклонение i траектории перелета определяется как
Sin А
206
при этом-знак i соответствует знаку z для траекторий 1-го полу-
витка (0<L<n) и меняется на противоположный для траек¬
торий 2-го (л<Ь<2л).
Рис. 6.3.1. Определение скорости встречи с планетой
Параметр траектории перелета при заданной величине го
будет
/?=^o(l-i-£COSU0).
Эксцентриситет траектории перелета определяется из соотно¬
шений
Р . Р
1 + е cos го
; R=
1 + е cos (L + г0)
207
и будет
g- .
R0 cos vq — R cos (L + v0)
Полученные выше па-раметры трае^ории определяют гелиоцент¬
рические скорости старта с Земли VCT и прилета к планете V\.
Ул= — (1-f ecosv) — трансверсальная составляющая;
Vr = '^/~-^esinv — радиальная составляющая;
V = у V2n-j- V\ —модуль вектора скорости,
где t> = t>o в момент старта и v = L + v0 в момент прилета.
Компоненты вектора К® выхода из сферы действия Земли и
его модуль определяются из стартового треугольника скоростей
(см. рис. 5. 3. 2) *
= V V\n — 2VCTVKP cos
ооП f СТЛ 1 KD ст KP ’
v*t=v^ vl=V (Vtn?+V%?-
Положение планеты в момент прилета КЛА определяют век¬
тор скорости Уцл и его составляющие и V?n. Компоненты
вектора входа в сферу действия планеты и его модуль (см.
рис. 6. 3. 16):
v™„=V l'i,+(1/;)!-v:cos д*:
vz=vir-var‘- (1/"Л)2+(Чл,)2-
Здесь неизвестен лишь угол Ai между плоскостями траектории
полета и орбиты планеты назначения. Из сферического треуголь¬
ника A\BAz (см. рис. 6.4.1, а) определим
ctg д/ _ Sin L ctg (X — Хпл) — cos L cos i
sin i
где Япл —долгота планеты от узла ее орбиты.
Для реальных траекторий полета угол Ai мал ^|д*| < -^-j ,
поэтому cos А/ всегда положителен. Зная величины V® и V"* ,
* На рис. 5. 3. 2 индекс® у аектора V® опущен.
208
можно определить скорости VfT старта с орбиты ИСЗ и тормо¬
жения VT на орбиту ИСП, а следовательно, и суммарную ха¬
рактеристическую скорость Vxi.
Оптимизация траекторий, обеспечивающая минимум Vxi, по
параметрам X и и0 осуществлялась методом Гаусса — Зейделя
(координатный спуск). В качестве нулевого приближения ис¬
пользовались оптимальные одноимпульсные траектории
(см. § 3 гл. V). Разбиение траекторий по углу перелета L на
траектории 1 и 2-го полувитков обеспечивает .выделение области
с одним экстремумом.
Динамика изменения оптимальных характеристик
двухимпульсных траекторий полета к Меркурию,
Венере, Марсу и Юпитеру
На рис. 6.3.2—6.3.5 приведена динамика изменения харак¬
теристик двухимпульсных траекторий полета к планетам Солнеч-
Рис. 6.3.2. Характеристики оптимальных траекторий полета на орбиту
искусственного спутника Меркурия
ной системы. Зависимости, представленные на рис. 6.3.2, опре¬
деляют динамику изменения основных характеристик траекто¬
рий полета к Меркурию (А/п — время полета, l/g —характе¬
ристическая скорость старта с орбиты и Vxi —суммарная ха¬
рактеристическая скорость).
209
При расчете двухимпульсных траекторий полета к Меркурию
с выходом на орбиту искусственного спутника планеты была
выбрана круглая орбита ИСП с /гКр= 1000 км. При полете на
ррбиту искусственного спутника Меркурия основные характери¬
стики траекторий полета меняются в следующих пределах:
— время полета M,i = 70-Ь 110 сут. для траекторий 1-го полу¬
витка;
Д^п2 = 110ч-160 сут. для траекторий 2-го полувитка;
— стартовая характеристическая скорость Д^ст = 4,9-г-
10.5 км/с;
— скорость торможения по орбите спутника = 5,54-
17.5 км/с;
— суммарная характеристическая скорость
VxS = 12,34-28 км/с.
Характеристики д/п, д V® и l/xS даны в зависимости от дат
старта. Рисками отмечены календарные даты старта для раз¬
личных циклов полетов (траектории 1-го полувитка). Циклы
оптимальных полетов на орбиту спутника Меркурия чередуются
примерно через 1/3 года (синодический период Меркурия 7'? =
=0,317 года) для траекторий каждого полувитка. Как правило,
из шести возможных циклов полетов в год по траекториям пер¬
вого и второго полувитков имеется один, приходящийся на об¬
ласть дат старта при наименьших энергозатратах. Большой диа¬
пазон изменения характеристик полета к Меркурию объясняется
большим эксцентриситетом и наклонением плоскости орбиты
планеты. Периодичность изменения характеристик соответствует
приближенно периоду великих противостояний Меркурия
г1,~: Г°Д-
При полете к Венере для расчетов была выбрана круговая
орбита с /iKp = 500 км и вытянутая эллиптическая орбита ИСП
с параметрами: hn =500 км, /га = 50 тыс. км.
На рис. 6. 3. 3 показана динамика изменения минимальных
значений Vx$ для циклов полетов на орбиту ИСВ.
Так же как и для одноимпульсных траекторий, период изме¬
нения энергозатрат двухимпульсных траекторий Т%п лет.
Оптимальным для выведения автоматического аппарата на ор¬
биту ИСВ является цикл полетов в 1975 г.
Для спутника Марса принята круговая орбита с параметрами
/гкр = 1000 км и эллиптическая с h* = 1000 км,/гв =20 тыс. км.
На рис. 6. 3. 4 показана динамика изменения минимальных
значений суммарной характеристической скорости Кхг для цик¬
лов полетов на орбиту ИСМ. Видно, что, как и для одноимпульс¬
ных траекторий, период изменения энергетических двухимпульс¬
ных траекторий полета соответствует периоду великих противо¬
стояний 15,8 года планеты. Так, наилучщим с точки
210
зрения энергозатрат полета на орбиту ИСМ был цикл полетов в
1971 г. по 1-му полувитку и будут циклы полетов в 1977 и 1979 гг.
по 2-му. Вообще циклы полетов 1970-х годов благоприятны для
Vkp,km/c
1 —Z
I''
У*2А
£&
U*1
и
» —-
4--
<
и *
. V
KI3JI
М
г-
\ j
Тв.п =
■8ЛСП
ч
— -
—~-L
Wt
zS*
-*1
-j.
VI
_
*-1-
у
*"—!>-
-л'
-Л"
6 7
8 9 1
9 70
? .7
4 К
7-и полидиток
С 7 6 О чпоп г~г> -У /• /-
-
Уэл,км/о
7
6
5
4
3
1
1
0
91990 Гст,годы
Рис. 6.3.3. Динамика изменения характеристик траекторий полета
на орбиту спутника Венеры
полетов на орбиту ИСМ. Максимум энергозатрат соответствовал
циклам полетов в 1967, 1969 гг. и будет в 1982, 1984 гг.
На рис. 6. 3. 5 приведены основные характеристики оптималь¬
ных траекторий полета к Юпитеру (1-й полувиток). Для Юпи-
V, нм/с
-1960 г 3 9 5 Я 7 Я 1970 Z 3 4 3 9 7 Я 9 1980 Z 3 9 5 б 7 8 9 199*0
t*T, годы
' . ы*
Рис. 6.3.4. Динамика изменения характеристик ■ траекторий полета
на орбиту спутника Марса
тера была выбрана орбита спутников с параметрами: круговая
с ЛКР = 1 ООО км и эллиптическая с /гте = 1000 км, ha = 1 млн. км.
Диапазон времени полета Д/п=760-М025 сут.
211
Величина стартового импульса изменяется в пределах д1/®=
= 6,3-т-6,8 км/с, тормозного (для эллиптической орбиты) —
дУ'2}’ = 2,3-^2,5 км/с. Суммарная характеристическая скорость
Ухъ = 8,6-т-9,3 км/с.
Z5,0\
гц,5
пц,о
к
Чт, ^
КМ/с
7,0
6,5
И”
Н-
X— •
Т'
¥■
/
+■
::йл
' i 1
-к
/ IV
41 кр
-V—Г
>+
ч«*Н
,ii.
и®
А
Yximi
^1000
Atlflf
cym
\900
<
Vxisji,
KM/c
9,5
[9,0
8,5
1970г1 Z J * 5 6 7 8 9 1980z.1 Z 3 U 5 6 7 8 9 19901.1 Z 3 t t
CT
Puc. 6.3.5. Характеристики оптимальных траекторий полета на орбиту
искусственного спутника Юпитера (траектории 1-го полувитка)
Циклы полетов к Юпитеру происходят примерно через
«1,092 года. Период великих противостояний этой планеты
Т^п «11,9 года.
При изменении параметров орбиты спутника планеты
характеристики оптимальной траектории перелета практи¬
чески не меняются. Тормозной импульс может быть пересчитан
для любой орбиты спутника при известном значении скорости
на входе в сферу действия планеты
Глава VII # ОПТИМИЗАЦИЯ
ПРОЕКТНО-БАЛЛИСТИЧЕСКИХ
ХАРАКТЕРИСТИК МЕЖПЛАНЕТНЫХ
АППАРАТОВ С УЧЕТОМ ПРОТЯЖЕННОСТИ
АКТИВНЫХ УЧАСТКОВ ПОЛЕТА
§ 1. ОПТИМИЗАЦИЯ основных
ПРОЕКТНЫХ ПАРАМЕТРОВ
И ПЛАНЕТОЦЕНТРИЧЕСКИХ УЧАСТКОВ ПОЛЕТА
МЕЖПЛАНЕТНЫХ АППАРАТОВ
Введение кусочно-конической аппроксимации баллистической
траектории полета позволяет создать, рассматривая движение
аппарата в планетоцентрических координатах, методы выбора
основных проектных параметров и расчета активного участка'
разгона или торможения, требуемой гиперболической орбиты
отрыва или прибытия межпланетного аппарата при известных
характеристиках гелиоцентрического участка межорбитального
перелета. При этом главным требованием является стыковка
гелиоцентрического участка с гиперболическими орбитами отры¬
ва и прибытия. Решение задачи стыковки во многом зависит от
метода и точности определения гелиоцентрического участка.
Если он рассчитан без учета возмущающего влияния Земли и
планеты назначения и протяженности грависфер планет, когда
точка выхода КЛА из грависферы Земли и точка входа КЛА
в грависферу планеты условно совмещаются соответственно
с точками пересечения орбиты межорбитального перелета КЛА
с орбитами Земли и планеты назначения, то решение задачи,
стыковки участков обеспечивается при равенстве
Vm0 = V0-V@, VmK = VK-Vna. (7.1.1)
Здесь Vооо> Vооц — гиперболические избытки скоростей орбит от¬
рыва и прибытия соответственно, достигаемые КЛА при движе¬
нии в планетоцентрических координатах. Такой путь решения
наиболее прост и в основном удовлетворяет уровню точности
проектных разработок КЛА.
При другом методе расчета гелиоцентрического участка меж¬
планетного перелета, когда учитывается протяженность грави¬
сфер планет, величины векторов (V0— V©) и (FK — Упл) будут
213
зависеть от места выхода и входа КЛА на грависферах планет.
В этом случае удовлетворительное решение внутренних и внеш¬
ней задач можно найти только при их совместном рассмотрении.
Вначале решение задачи выбора основных проектных пара¬
метров КЛА и их оптимизации, расчет активного участка полета
и гиперболических орбит в грависфере планеты будем рассмат¬
ривать при допущении, что стыковка гелиоцентрического участка
Рис. 7.1.1. Схема участка разгона: Рис. 7.1. 2. Схема участка. торможе-
А—точка конца активного участка; О—на- ния.
-чальная. точка активного участка разгона у—точка начала активного участка тор-
(I плоскость промежуточной орбиты; 2 можения; К—точка конца активного участ-
промежуточная орбита; 3—гипербола от- ка торможения
рыва- 4 асимптота5 активный участок р—плоскость конечной орбиты; 2—конеч-
разгона; 6—линия восходящего угла плос- ная орбита; 3—гипербола прибытия;
кости орбиты отрыва) 4—асимптота)
о гиперболическими орбитами отрыва и прибытия обеспечивается
выполнением равенств (7.1.1). Соблюдению равенств (7.1.1)
отвечают условия
К.о=|Р0-Р©|,- V-o=(V0-V@)/V.0. (7.1.2)
V.* = \V,-VJ, FiK=(RK-T(7.1.3)
где И„0, \V„-V„\, К.к> \VK-VJ - скалярные значения векто-
_ __ ров;
И!о0, V*LK — единичные векторы.
Предположим, что из определения гелиоцентрического участ¬
ка известны скалярные значения К<х>о, К<»к и единичные векторы
V^o, Поэтому выбирать основные проектные параметры
КЛА рк и п0, определять активные участки разгона или тормо¬
жения и гиперболическую орбиту отрыва или прибытия необхо¬
димо таким образом, чтобы были удовлетворены заданные вели¬
чины Косо и Vlo или Коо„ и к. При решении поставленной
задачи будем предполагать, что активные участки разгона и тор¬
214
можения, гиперболические орбиты отрыва и прибытия лежат в
плоскостях промежуточной и конечной орбит соответственно
(рис. 7.1.1 и 7.1.2), которые должны быть определены. Это
отвечает требованию получения наименьших энергозатрат, по¬
скольку отсутствуют затраты на пространственный маневр.
Пусть выполнение требований (7.1.2) будет возлагаться на
разгонный модуль межпланетного аппарата, а требований
(7. 1.3) —на тормозной модуль. Перейдем к задачам баллисти¬
ческого проектирования разгонного и тормозного модулей, т. е.
к выбору проектно-баллистических характеристик разгонного и
тормозного модулей.
Разгонный модуль межпланетного
аппарата
Задача проектирования разгонного модуля заключается в вы¬
боре таких проектно-баллистических характеристик, при которых
удовлетворялись бы заданные значения Уооо и HLo- Важно най¬
ти решение, при котором относительная полезная нагрузка рп. н
достигает максимального значения (max рп. н). Проектно-балли¬
стические характеристики, соответствующие max рп. н» будем
называть оптимальными проектно-баллистическими характери¬
стиками разгонного модуля. Поиск оптимальных проектно-балли¬
стических характеристик составляет главную задачу баллистиче¬
ского проектирования разгонного модуля. Его особенностью
является постоянство и независимость от проектно-баллистиче¬
ских характеристик значений Косо и к!о, заданных из решения
внешней задачи. Указанная особенность позволяет всю задачу
баллистического проектирования разбить на две: проектно-бал¬
листическую и навигационно-баллистическую.
Содержанием проектно-баллистической задачи является вы¬
бор основных проектных параметров модуля рк и п0, а также
определение активного участка полета и кеплеровских элементов
гиперболической орбиты отрыва, характеризующих ее форму и
размеры, при которых удовлетворяется заданное значение У «о*
Оптимизация проектно-баллистических характеристик связана
с решением только этой задачи.
Решение навигационно-баллистической задачи заключается
в определении положения плоскости промежуточной орбиты
(в которой, по предположению, находится и активный участок
разгона и гиперболическая орбита отрыва) в геоцентрической
системе координат и точки старта КЛА с промежуточной орби¬
ты, которые допускают выполнение условия для t/io* Разу¬
меется, что решать данную задачу следует с учетом требований
к выбору плоскости промежуточной орбиты для выведения на
орбиту ракетой-носителем максимальной полезной нагрузки.
215
Проектно-баллистическая задача
Основная трудность решения проектно-баллистической зада¬
чи состоит в правильном представлении и оценке активного уча¬
стка полета разгонного модуля. В общем случае относительно
точные характеристики управляемого полета можно получить
только в результате численного интегрирования системы диффе¬
ренциальных уравнений движения (см. § 2 и 3 гл. I). В этом слу¬
чае для решения главной задачи — выбора оптимального режи¬
ма движения и оптимальных основных проектных параметров —
необходимо обратиться к математической теории оптимального
проектирования летательного аппарата (см. например [43]). При
таком подходе решения хотя и получаются точными, но дости¬
гаются они нелегко и немалой ценой. Каждый раз приходится
сталкиваться с «проклятием» сходимости итерационного процесса
и оценкой точности удовлетворения краевым и другим критери¬
альным условиям. Поэтому не всегда и не каждый конструктор
может позволить себе «роскошь» обращения к таким весьма
трудоемким алгоритмам оптимизации. (Разумеется, что в ряде
случаев и на определенном этапе проектных разработок КЛА
бывает трудно обойтись без них.)
В связи с этим становится понятной полезность приближен¬
ных методов расчета проектно-баллистических характеристик
КЛА. Приближенным методом расчета активного участка и вы¬
бора основных проектных параметров КЛА можно достаточно
оперативно и без привлечения больших ЭЦВМ проводить оцен¬
ку кинематических параметров активного участка и выбирать
основные проектные параметры разгонного модуля, удовлетворя¬
ющие заданному значению Косо- Таким является метод, подробно
изложенный в § 3 гл. II. Его ценность еще и в том, что он позво¬
ляет приближенно определить оптимальные значения основных
проектных параметров.
Имея в виду, что тангенциальное управление вектором тяги,
как показано в § 3 гл. II, наиболее близко к оптимальному, вос¬
пользуемся приближенным интегрированием системы дифферен¬
циальных уравнений управляемого движения при таком управ¬
лении. Тогда согласно (2.3.19), (2.3.23) и (2.3.28), (2.3.32)
имеем
(7.1.4)
(7.1.5)
= Ъ ид.а-
1 - 1/Гд .
vea
COS Ьа =
\
ra[VeaVma — ( 1 — 1//"«)]
216
Гв= 1 + sin2 — Ira\
(7.1.6)
dr vu
ИЛИ
где
Ъ=-— ^(7.1.7а)
J (■ + •>*** ^ ’г)
Xrt = -^^(l+w)(l-tAK) + ^lnfJ'K-2(-^-)2 /Х2 +
+3Ш4/'4“4(^)6/^+5Ш8Ч’ (7Л-7б>
^ил.а=1— ЯУ1П|ХК, vea=\— 0,5w ln|xK, (7.1.8)
Vma= 1 - 0,64-Ш In IV
Поскольку гиперболический избыток скорости орбиты отрыва
1/-0 =
fm@
а
\
то постоянная интеграла энергии в конце активного участка дол¬
жна быть
*«к='/1о (7.1.9а)
или в относительных величинах
где
h = vt, (7.1.96)
h ~ V n
t к «и
h = —is-5-; -и. *
V2 ^кр.о
кр.о *
/fmG)
—-— круговая скорость круговой промежуточной
го орбиты с радиусом г0.
В конце активного участка разгона согласно интегралу энер¬
гии должно выполняться следующее равенство:
~2 2 ~2
Va —=VOB.
Га
Подставляя в это уравнение значения va и га согласно
(7. 1. 4) и (7. 1. 6), найдем
»2
а "V
. Sin2 Ira
fl + sin2 — /ла] — —
Lv no I veav„„a J
— ; a ' ц 7i
x2 ил a
1 + Sin2 Ira
По
2 - . (7. 1.10)
1 + Sin2 Ira
no
217
Таким образом, требование об удовлетворении заданного ги¬
перболического избытка скорости У«,о может быть связано с вы¬
полнением равенства (7. 1. 10).
При заданной высоте круговой промежуточной орбиты и из¬
вестных характеристиках топлива двигательной установки пра¬
вая часть уравнения (7. 1. 10) зависит только от основных про¬
ектных параметров рк и п0. Поэтому выбор основных проектных
параметров связан с решением уравнения (7. 1. 10) относительно
jLiK или По. Кроме того, уравнение (7. 1. 10) позволяет определить
зависимость п0 от рк или рк от п0, соблюдение которой при выбо¬
ре р-к или По позволяет говорить об удовлетворении первого ра¬
венства (7.1.2). Решая уравнение (7.1.10) относительно п0,
получим
Wlr
п0= —
'га
г02У2 arc sin q
(7.1.11)
где
q=
v
i
v
— Pi2) + О — Pi)2 — О — Pi)
еа
Pl =
”1 — Pi2
veavи я a 1
1/2
V
A
P\
ea
V
ea
В другой форме уравнение (7. 1. 11) представим так:
N
Пп
г о"
где
N=
\wl
та
}i2 аI с sin q
(7.1. 12)
(7.1.13)
(7.1.Г4)
(7. 1. 15)
Уравнение (7. 1. И) или (7.1. 14) при заданном значении v»
и известных данных го и w позволяет рассчитать По в зависимо¬
сти от рк. Правда, следует иметь в виду, что выбор рк при за¬
данном Voo ограничен верхним рк. в и нижним рк. н пределом.
Верхний предел рк. в соответствует импульсному изменению ско-
'2 — /г= О
Sin ‘
По
рости, что отвечает равенству
п0—>-оо и согласно (7. 1. 10) приводит к условию
VHA.a=yr
и, следовательно, согласно (7. 1. 8) к равенству
]^2+Ъ1 -1
вследствие
IV»=exp
w
(7.1.16)
218
Нижний предел ри. „ определяется значениями /г0~0,1 или зна¬
чениями подрадикальных выражений (7. 1. 12), близких к нулю.
Расчет п0 по формуле (7. 1. 14) можно значительно упростить,
если функцию N затабулировать по £«,, w и рк в пределах рк. н<С
<Сцк<Сцк. в, меняющихся в зависимости от £«, и w.
Оптимизация основных проектных параметров
рк и п0 разгонного модуля
Произвольный выбор рк в ранее указанных пределах может
привести к таким значениям По, при которых разгон КЛА до за¬
данного значения hu k=V^0 приведет к значительно заниженным
величинам относительной полезной нагрузки рп. н. Следовательно,
нужно уметь выбирать такие рк и По, при которых заданное
значение £«> достигается при максимальной относительной по¬
лезной нагрузке рп. и-
Относительную полезную нагрузку можно выразить в виде
следующей зависимости или проектного уравнения (см., напри¬
мер [42, приложение])
lVH = /np(lV "о» Y/)> (7. 1.17)
где Yi — проектно-весовые коэффициенты, значения которых оп¬
ределяются из статистики.
Задача формулируется так: найти оптимальные значения рк
и по, при которых заданное значение доо достигается при макси¬
мальной рп. п. выражаемой зависимостью (7. 1. 17). Поскольку
требуется удовлетворить заданному £«,, то значения По связаны
с Цк уравнением (7.. 1.11) или (7.1.14). Тогда необходимым
условием максимума рп. п является уравнение
Фп.н ldfb\> \ | / d/np \ dno_ = Q
Фк ' Фк ' по ' дп0 фк
Если /пр линейно зависит от рк и По, то А^ = -^- и Ап=—•
Фк дщ
не зависят от них, а условие максимума выражается в виде
(7.1.18)
Ап фк
Имея в виду уравнения (7. 1. 14) и (7. 1. 15), условие максималь¬
ного значения рп.„ (7.1.18) представим следующим образом:
\ 1 dN
Принимая во внимание выражения для q (7. 1. 12) и для /га
(2. 3. 29), последнее уравнение приведем к виду
Ап
N_
го2
V
ил а
'га
Л/2
дт
Фк
v.„v
еаУта
2 V(т — 1) (2 — т) arc sin т — 1
= 0, (7.1.19b)
где
т =
Pi + Р2 — 1
t'l ~ Р\
дт
Фк
д»=
1 / Т. 2
га
1/2
(7. 1.20а)
и»
Мк ( ^1— />12)
га
veaPi .
(7. 1.206)
Уравнения (7. 1. 19) позволяют при заданном Vco определить
оптимальное значение Отметим, что конечное значение
производной
дщ_
Фк
существует при 1<Сш<2 [см. (7. 1.19в)]. Это
в какой-то мере позволяет определить диапазон цк, в котором
•существует p”pt. Анализ показал, что при т=1 цк = Цк. в, а при
т=2 ци, равное своему нижнему значению ри. и, удовлетворяет
уравнению
, _ К + l)l/2 + V [(f2„ + 1)1/2 + I]2 + 4- 3
И'кн_ 2w
Таким образом, алгоритм решения главной задачи баллисти¬
ческого проектирования состоит в следующем: путем решения
при заданном Voo трансцендентного уравнения (7. 1.19) опреде¬
ляется оптимальное значение далее по формуле (7. 1. 14)
при вычисленном p°pt определяется оптимальное значение тяго-
вооруженности /г°р1. Решение задачи значительно облегчается,
dN *
если величина затабулирована в зависимости от г?оо, w и цк-
Фк
Полученный алгоритм оптимизации основных проектных па¬
раметров довольно прост и позволяет быстро и оперативно рас¬
считывать M<°pt и tf£pt. Примечательно, что он обходится без чис¬
ленного интегрирования системы дифференциальных уравнений
управляемого движения КЛА и без решения вариационной зада¬
чи, что позволило избежать краевой задачи. Кроме того, простота
алгоритма удачно сочетается с требуемой точностью расчетов
H-°pt и /г°рг. Так, ошибки в вычислении[x°pt и /г°р1при заданном £<*>
220
не превышают 0,3 и 4% соответственно, причем при верхних зна¬
чениях ошибок p£pt и ошибки в вычислении цп. „ не превы¬
шают 0,4%.
Примечание. При расчете цп. п проектное уравнение (7. 1. '17) обыч¬
но выражается в виде [42]
1 4- ат.О У -У ат.О 4" Н’КОН , ^,,4
Пп.н = Рк — "о — — . (7.1.21)
1 Н’кон Н’кон 1 Н’кон
где ат. о — коэффициент топливного отсека;
Цкон — относительный вес различных конструктивных элементов;
Уд- у — относительный вес двигательной установки.
В предполагаемом диапазоне изменения тяги двигателя вес двигательной
установки Gд. у с хорошей степенью точности можно представить в виде
линейной зависимости от тяги Р.
dG 7 у / „ дйя у \
РО),
UU 7 v 1
дР
где — значения Сд. у и Я в начале рассматриваемого диапазона из¬
менения тяги.
Отсюда
где
О -.у С» у - ytP0
-Z- = Y ,у = Ур + -
У р =
«oGo
дСя.у
дР
Учитывая принятые зависимости, получим
А" 1 + ат-0
Ап Ур
Г'Д-У
Иногда в первом приближении принимают Gj? и Р° равными нулю, что
дп0
&G д. у
приводит к равенству уд.у=ур=—“г—•
дР
На рис. 7.1.3—7.1.6 даны зависимости производной
Фк
определенной численным образом в результате интегрирования
дифференциальных уравнений движения на ЭЦВМ, от ги> и цк
при различных значениях V<x>o- Примечательно, что кривые
дп0/д\1к в зависимости от по при Руд=450 с образуют довольно
узкий пучок, который несколько расширяется при Рул= 1000 с.
Поэтому оптимальные значения п0 при характерных величинах
Уд. у и ат. о находятся при Руд=450 с в небольшом диапазоне,
хотя диапазон изменения V^o довольно большой — от 2 до
16 км/с. Так, например, при уд. У=ур=0,05-^0,02 оптимальные
значения п£р4 лежат в пределах /г£р4 =0,3ч-0,5 при изменении
У<х>о = 2ч-16 км/с. Если в будущем увеличение Руд до 800—1000 с
не будет сопровождаться изменением диапазона возможных зна-
221
Рис. 7.1.3. Изменение производной дпо/дцк в зависимости
от тяговооруженности при различных значениях гиперболи¬
ческого избытка скорости и при Руя=450 с
222
0,4 0,6 0,8 1,0 1,2 1,4 1.6 1,8 По
Рис. 7.1.4. Изменение производной дп01дцк в зависимости 07
тяговооруженности при различных значениях гиперболического
избытка скорости и при Рул = 1000 с
223
dn0/djiK
Puc.'7.1.5. Изменение производной dn0fdpK в зависимости от отно¬
сительного конечного веса при различных значениях гиперболиче¬
ского избытка скорости и при РУЛ=450 с
Рис. 7.1. 6. Изменение производной dn0fdpк в зависимости от отно¬
сительного конечного веса при различных значениях гиперболиче¬
ского избытка скорости и при Руя = ЮОО с
224
чений уР=уд.у, то верхняя граница оптимальных значений я°р*
будет продвигаться к п0 = 1,0.
После вычисления рк и п0 или jA°pt и р* следует, обращаясь
к зависимостям (7.1.4—7.1.7), определить кинематические пара¬
метры конца активного участка va, 0а, га и В результате мож¬
но найти кеплеровские элементы гиперболической орбиты отры¬
ва аг. о, Рг. о и ет. о по формулам
Таким образом, проектно-баллистическая задача полностью ре¬
шена.
После решения проектно-баллистической задачи нужно опре¬
делить плоскость орбиты отрыва, совпадающей по условию с пло¬
скостью промежуточной орбиты, и точку схода на промежуточ¬
ной орбите, при которых возможно удовлетворение условия
Это и составляет содержание навигационно-баллистической за¬
дачи.
В дальнейшем единичный вектор F°0 будем называть век то¬
ром цели. Он является входной величиной для навигационно¬
баллистической задачи. Используя уравнение (1.3.52), запишем
условие реализации вектора цели
Я.о =— . Яг.о --=(Va}a COS 0О)2,
(7. 1.22)
ет.о= t1 + cos 0а)2]1/2>
где аг0=-^~,
(7.1.23)
Тогда угол асимптоты найдется из уравнения
C0S9= — [l + (^«x>aracos0a)2] 1/2. (7.1.24)
Навигационно-баллистическая задача
V°aoQ=(V q — V ®)jV „о.
sin (ср va)
(7.1.25)
225
Переходя к относительным величинам, условие реализации
вектора цели (7.1.25) представим в следующей форме:
Vio= 1-^(1-cosp)
Рг.о
V
-[sin ^ tgба(1 cosр)] —
(7.1.26)
У >г.о
где
Р = ср— Vfl, COS 1
Га
(7.1.27)
Следовательно, решение навигационно-баллистической зада¬
чи заключается в выборе единичных векторов у°а и Гд, удовле¬
творяющих векторному уравнению (7. 1.26).
Направление радиуса-вектора точки окончания активного
участка разгонного модуля в экваториальной геоцентрической
системе координат будет определяться кеплеровскими угловыми
элементами орбиты отрыва: Q —долготой восходящего узла; i —
углом наклонения плоскости орбиты, со—угловым расстоянием
перицентра и иа — аргументом широты (см. *§» 3 гл. I). Следова¬
тельно, будет иметь место
ra°=(costfacos2 — sin tfasin 2 cos (cosua sin 2-f-
где Г*, iy, iz — орты геоцентрической экваториальной системы.
После дифференцирования уравнения (7. 1.28) по времени и не¬
которых преобразований найдем
Единичный вектор гиперболического избытка скорости пред¬
ставим в виде
-j-sin cos 2 cos/)/v-(- (sin sin /)^z,
(7. 1.28)
Va= — [sin (ua — 0fl) cos 2-|- cos {ua — 0fl)sin 2 cos/]/x —
— [sin (ua— бд) sin 2 — cos (ua — Sa) cos 2 cos /] /„-f
-f [cos (ua — 0e)sin i]lz.
(7.1.29)
l/i0=(cos a0 cos &0)/х+(sin a0cos80) ^+sin &</*» (7.1.30)
где ao — прямое восхождение вектора цели;
бо — склонение вектора цели (см. § 1 гл. IV).
226
Принимая во внимание уравнения (7. 1.28) — (7. 1.30), век¬
торное уравнение (7. 1.26) выразим в виде следующих трех ска¬
лярных:
или
где
cos а0 cos 80= — Av {[sin (иа — 0fl)-f- Br coswfl] cos 2-f-
4-[cos(wa — 0J — Br sin ua\ sin 2 cos/}; (7. 1.31)
sin a0 cos 80= — Av {[sin {ua — ba)-\- Br coswfl] sin 2 —
*
— [cos (ua — бд) — Br sin иа] cos 2 cos /}; (7.1.32)
sin 80=j4p[cos(na — 0a) — Br sin яв] sin / (7. 1.33a)
sin i =
sin &o
Av [cos (ua — 0fl) — Br sin ua]
L P Г.0
( 1 — COS p)
Va
— »
"со
,4r=[sin p-tg6a(l-cos B)] ^ L_ ,
V-Vpr.o
Br=Ar/Av.
(7. 1.336)
(7. 1.33b)
Уравнения (7. 1.31) — (7. 1.33) являются условием реализа¬
ции вектора цели в скалярном виде. Решение навигационно-бал¬
листической задачи теперь конкретизируется: оно заключается
в удовлетворении скалярного условия реализации вектора цели.
Умножив уравнения (7. 1.31) и (7. 1.32) на cos Q и на sinfl
соответственно и сложив, после преобразований получим
cos (2 — а0)=— Av
COS &о
[sin {иа — Ba)-\-Br coswj. (7.1.34)
После умножения уравнений (7. 1. 31) и (7. 1.32) на —sinQ и на
cosQ соответственно и сложения, в результате преобразований
найдем
sin (2 — а0)= — -А*С°11 [cos (иа — 0а) — Вт sin иа] (7.1.35а)
COS йо
или с учетом (7. 1. 33)
sin (2 — а0)= — tg80ctg/.
(7.1.356)
227
Решая уравнение (7. 1.33) относительно sinua и cosua, при¬
дем к следующим формулам:
sin иа =
Ь-с ±-У\ + № — с2
1 + Ы
COS иа = г
с Т Ь у 1 + Ь2 — с2
1 + &
где
(7. 1.36а)
£___sin_0a Вг_^ с = sin^ ^ (7.1.366)
cos да Av sin i cos 0a
Согласно определению ua (см. рис. 7. 1. 1) угловое расстояние
точки схода модуля с промежуточной орбиты от линии восхо¬
дящего узла
и0=иа — Ха- (7.1.37)
Таким образом, при известных кинематических параметрах
конца активного участка разгона соотношения (7.1.35) —
(7.1.37) позволяют в зависимости от угла наклонения плоско¬
сти промежуточной орбиты (или орбиты отрыва) i и задания ?«>,
а0, бо определить долготу восходящего узла Q и точку схода мо¬
дуля с промежуточной орбиты. Казалось бы, навигационно-бал¬
листическая задача решена. Однако остается открытым вопрос
о выборе угла наклонения плоскости промежуточной орбиты i.
Вообще говоря, выбор угла наклонения плоскости промежу¬
точной орбиты i ограничен различными требованиями к участку
выведения КЛА ракетой-носителем. Активный участок выведения
КЛА ракетой-носителем для уменьшения энергетических потерь
на пространственный маневр обычно должен выполняться так,
чтобы он находился в плоскости промежуточной орбиты. В этом
случае выбор угла i может быть ограничен допустимыми значе¬
ниями азимута безопасности и кинематическими связями, возни¬
кающими из требования нахождения в плоскости орбиты отрыва
активного участка выведения КЛА ракетой-носителем, активного
участка разгонного модуля и орбиты отрыва. Кинематические
ограничения выражаются следующими неравенствами (см. § 1
гл. IV):
cos»•< + cos 50; | (7Л
COS / <; + COS <рст, )
где фст — географическая широта точки запуска (космодрома).
Для полного использования скорости вращения Земли при
выведении КЛА на промежуточную орбиту ракетой-носителем
угол i должен быть как можно меньшим. В зависимости от зна¬
чений фст и б0 угол I принимает различную наименьшую величи¬
ну. Если склонение цели б0 больше географической широты точки
запуска фст, т. е. бо^фст, то с учетом условий (7.1.38) получим
cos /mIn = + cos 50. (7.1.39а)
228
Если же склонение цели 60 меньше географической широты
точки запуска фс, т. е. 6о<Фст, то с учетом условий (7.1.38) будем
иметь
cos ± cos срСт. (7.1.396)
Азимут А — угол между меридианной плоскостью точки за¬
пуска и плоскостью промежуточной орбиты в момент старта ра¬
кеты-носителя, отсчитываемый в направлении на восток, может
быть определен из соотношения (см. § 1 гл. IV)
А ± COS I
sin А=— .
cos <рст
Поэтому в случае существования ограничения на выбор азиму¬
та А, выражаемого предельным азимутом Аир, при наличии не¬
равенства
sin А, <,
cos <рст
угол I следует определять из уравнения
cos /пр= + coscpCT sin Дф. (7.1.40)
Таким образом, формулы (7.1.39) и (7.1.39а) позволяют од¬
нозначно выбрать угол наклонения плоскости промежуточной
орбиты i и, используя соотношения (7. 1. 35) — (7. 1. 37), до кон¬
ца решить навигационно-баллистическую задачу.
Интересен случай бо^Фст, когда согласно (7.1.40) можно
Принять COS /min= ±cos бо* т. е.
*'п,!п = К1 ИЛИ /|П1П = Я—180|.
Полученные равенства благодаря соотношениям (7. 1.33) —
(7. 1. 35) приводят к следующим уравнениям:
sin (2 — а0)=— sign(tg80ctg/), (7.1.41)
sin {иа — 0e) + Вт cos ud= 0,
Av [cos (иа — Qa) — Вт sin иа] = sign (sin 80).
Совместно решая два последних уравнения, получим *
cos яв = sign (sin 80) sin p. (7.1.42)
Следовательно, в случае бо^Фст положение плоскости проме¬
жуточной орбиты и точка схода разгонного модуля определяют¬
ся из равенств (7. 1.39), (7. 1.41) и (7. 1.42) весьма просто.
* Можно сказать, что решение (7. 1.42) совместимо с указанными двумя
уравнениями.
229
Тормозной модуль межпланетного аппарата
Тормозной модуль должен обеспечить выход межпланетного
аппарата на конечную орбиту около планеты назначения, когда
гиперболическая орбита прибытия предопределяется условиями
(7.1.3). Поэтому задача баллистического проектирования тор¬
мозного модуля разбивается на две: проектно-баллистическую
и навигационно-баллистическую.
Проектно-баллистическая задача
Содержанием проектно-баллистической задачи является вы¬
бор основных проектных параметров тормозного модуля рк и /г0,
определение кеплеровских элементов орбиты прибытия, характе¬
ризующих ее форму и размеры, и точки включения на ней тор¬
мозной двигательной установки, обеспечивающей выход модуля
на конечную орбиту. Предполагается, что модуль выводит меж¬
планетный аппарат в перицентр конечной орбиты.
Для решения поставленной задачи воспользуемся приближен¬
ным методом интегрирования дифференциальных уравнений дви¬
жения при тангенциальном управлении (см. § 3 гл. II), имея
в виду ранее здесь сказанное об этом методе. Тогда согласно
уравнениям (2.3.39) — (2.3.41) и (2.3.43) будем иметь
—— ; (7-1.43)
cos0T= ; (7.1.44)
т | Vm Т*>е т—^р.к ^1 — j
г т= 14* sin2 —■ I r т; (7.1.45)
щ*
Хт=-^г1 ^ -d*
1 + sin2 Ir
2
ИЛИ
где
Хт = -^7 [(1 + «у) (1 - |^к)+1п 1^к “ 2 J /хт2 +
+3(^)4/*T4-4(^)6/irt+5('(7Л-46)
W ^кр.к — ~ г
Ч!) =. .—— — qo) ,<7i • г — т •
т/ V КР икр.к» т— г »
v кр.к к* гк%
Гк { V2 \1/а
7гт=— f vull ^ rffx.
J \ VeVm J
230
В начальной точке активного участка торможения интеграл
энергии
t/2 2/т„л t/2
V Т V оо к •
Гг
Учитывая соотношения (7. 1. 43) и (7. 1. 45), запишем его в отно¬
сительных величинах следующим образом:
VooK =
^ид.т^ т — V
кр.к
V
кр.к
е т
ver 1+ sin2 - Irr
п0*
v
кр.к
где
Приняв
Pi т
1 + sin2 —In
По*
(7.1.47)
пл
к*
^ил.т^т ^кр.к
V,
Рг Т
Ри
е т
V,
е т
~2
^кр.к
|1/2 .
2 ~2 2
^оок^кр.к Р 1т
-1
(7.1,48а)
после решения последнего уравнения относительно «о получим
п(г = —
V^wfrr
гкг У2 arcsin qT
ИЛИ
где
2
Л0 о VK ’
Гу2
NT=
w/rr
У2arcsin qT
(7. 1.486)
(7. 1.49а)
(7.1.496)
Значения Ут в зависимости от р,к при различных значениях VooK,
г>кр. к или vK= - 1 и w можно затабулировать.
V
кр.к
Здесь, так же как и в предыдущей задаче, выбор рк ограни¬
чен верхним рк,в и нижним рк.н значениями. Верхняя граница
значений определяется из следующего уравнения:
(Ак.в=еХР V -
V2+1lK-vK
w Vv
)-
231
Уравнения (7. 1.48) или (7. 1.49) дают возможность в зави¬
симости от (хк определить значения начальной тяговооруженно-
сти По, позволяющие тормозному модулю при заданном значении
Vcok выйти в перицентр конечной орбиты при тангенциальном уп¬
равлении тягой. Имея в виду соотношения (7.1.43) — (7. 1.46),
можно говорить в определенном смысле о решении проектно-бал¬
листической задачи. Однако оптимизация проектно-баллистиче¬
ских решений и здесь остается главной задачей.
Оптимизация основных проектных параметров
Рк И По тормозного модуля
Проектно-весовое уравнение для тормозного модуля можно
представить также в виде (7. 1. 17). Тогда условием максималь¬
ного значения рп>н будет уравнение
Фп.н д _ AfvfdNr
Фк
* ^Фк
о
ИЛИ
А * г 2
лп гк
Здесь согласно (7. 1.49) имеем
Ук2 dNr
Фк
Д * £0пл д
^0®
dNr
Фк
\Т I ^ИД.Т /1 ^Кр.К
TL/,T\ vervmr,
1/2
dmт
Фк
2 V(Щ — 1) (2 — mT) arc sin ^пц
(7.1.506)
/Лт =
®кр.к(Рзт + Лт—1)
V
кр,
~2 2
лЧ-к — Рлт
(7.1.50в)
Pi т=
ve т^ид.т
■I2
кр.к
V
Pi т:
Рп
е т
ve ■
Р*т =
V
е т
1/2
д«т
Фк
w 1 ! °»51/кр.Л / 2mTplT
f*K — /»1т) l\ Л ^p.k
, 0,5
I 2
V
e т
2 ~2
ooK
\РЗ т / о.тЛ
тЛт .
(7.1.50г)
1/13T- 1 \ ,
/
(7.1.50д)
Совместно решая уравнения (7.1.49) и (7. 1.50), можно од¬
нозначно определить оптимальные значения основных проектных
232
параметров тормозного модуля jx°pt и пZpt, при которых маневр
торможения будет совершаться при максимальном значении
Пп. нтах- Далее, обращаясь к формулам (7.1.43) — (7.1.46),
найдем кинематические параметры начальной точки активного
участка торможения, позволяющие модулю выйти в перицентр
конечной орбиты с заданными значениями радиуса перицентра
гкк и апоцентра гкв (или ак и ек).
Значения dNT/d[LK в зависимости от рк при фиксированных
значениях дсоК, vKV>. к и w можно затабулировать.
Навигационно-баллистическая задача
Решение Навигационно-баллистической задачи зависит от ус¬
ловия задания конечной орбиты. Если положение конечной орби¬
ты не фиксировано, то требуемого положения ее плоскости
можно добиваться путем соответствующего выбора места вклю¬
чения тормозной установки. Имея в виду метод решения навига¬
ционно-баллистической задачи разгона, зависимость угла накло¬
нения iK и долготы восходящего узла QK плоскости конечной
орбиты от аргумента широты точки включения тормозной уста¬
новки wT представим следующим образом:
sin г = 5!2-?в ; (7.1.51)
Ar [cos (uT — вт) — Br sin ит]
sin (QK— ак)= — tg8Kctg iK\ (7.1.52a)
cos(2K — aK)= —— [sin (ur — 0T) + BT cos ur], (7.1.526)
COS 8K
где aK, 6K — прямое восхождение и склонение вектора цели ViK
в планетоцентрической системе координат;
Лт= 1 —=Р^(1 — cos рт)
Рг.п
''сок
Br = [sin Вт- tg 0Т (1 - cos Зт)]/ 1 - -А- (1 - cos )] vr VЯ.п,
I L Рт .П J
рТ'П = ^~ —относительный фокальный параметр гиперболиче-
гкх
ской орбиты прибытия.
Так как имеет место равенство (см. рис. 7. 1. 2)
Ит=Хт+(0к> (7.1.53)
то путем соответствующего подбора углового расстояния пери¬
центра конечной орбиты сок по соотношениям (7.1.51) и
(7.1.52) можно найти желаемое значение 1К или QK- Таким об¬
разом, навигационно-баллистическая задача будет решена.
233
§ 2. МЕТОД РАСЧЕТА И ОПТИМИЗАЦИЯ
ПРОЕКТНО-БАЛЛИСТИЧЕСКИХ ХАРАКТЕРИСТИК
МЕЖПЛАНЕТНОГО АППАРАТА
С УЧЕТОМ СТЫКОВКИ ГЕЛИОЦЕНТРИЧЕСКОГО
УЧАСТКА С ПЛАНЕТОЦЕНТРИЧЕСКИМИ
УЧАСТКАМИ ТРАЕКТОРИИ
В предыдущем параграфе дано решение задачи оптимизации
основных проектных параметров и активного участка полета
межпланетного аппарата в сфере действия планеты при задан¬
ном векторе гиперболического избытка скорости Voo. Предпола¬
галось, что гелиоцентрический участок перелета рассчитывается
без учета возмущающего влияния Земли, планеты назначения и
протяженности сфер действия планет, когда точка выхода КЛА
из сферы действия Земли и точки входа КЛА в сферу действия
планеты условно совмещаются соответственно с точками пересе¬
чения орбиты межорбитального перелета КЛА с орбитами Земли
и планеты назначения. Такое допущение, удовлетворяющее
уровню точности проектных разработок КЛА, позволяет доволь¬
но просто решить задачу стыковки гелиоцентрического участка
с гиперболическими орбитами отрыва и прибытия путем выпол¬
нения условий (7. 1. 1).
Существенно, что полученные в § 1 решения основывались на
предположении о невлиянии основных проектных параметров
КЛА и активных участков разгона и торможения на определе¬
ние гелиоцентрического участка межорбитального перелета.
Однако такое допущение не всегда правомерно. С другой сторо¬
ны, представляет интерес и для практики весьма полезен и удо¬
бен метод расчета и оптимизации проектно-баллистических
характеристик многоступенчатого межпланетного аппарата, в ко¬
тором задачи отрыва и захвата (внутренние задачи) и задача
определения гелиоцентрического участка межорбитального пере¬
лета рассматриваются в комплексе и с учетом их взаимного влия¬
ния. Разработке и изложению именно такого метода и посвящен
данный параграф. В результате дается алгоритм определения
как оптимальной «единой» траектории межпланетно'го перелета
от промежуточной до конечной орбиты около планеты, так и оп¬
тимальных основных проектных параметров многоступенчатого
межпланетного аппарата р* г и «о, (i= 1,..., п).
Условно общую задачу определения «единой» траектории
межпланетного перелета и основных проектных параметров мно¬
гоступенчатого межпланетного аппарата разобьем на три зада¬
чи: задачу баллистического расчета гелиоцентрического участка
межпланетного перелета, проектную задачу и навигационную
задачу *.
* Здесь, как и в § 1, термин «навигационная задача» надо понимать
условно. Он относится только к этапу проектно-баллистических разработок
КЛА.
234
Задача баллистического расчета
гелиоцентрического участка
Задачей баллистического расчета гелиоцентрического участка
межпланетного перелета является определение кинематических
параметров в начальной (точка Р0 на рис. 7. 2. 1) ив конечной
(точка Рк) точках переходной орбиты, времени перелета At и
значений гиперболических избытков скорости К«>о и К«>к, кото¬
рые являются исходными данными для решения проектной
задачи.
В прямоугольной системе координат с началом, совпадаю¬
щим с положением Земли в начальный момент (точка Pq), вектор
гелиоцентрической скорости КЛА V0 можно выразить в виде
Здесь Vor, VQz—проекции гелиоцентрической скорости КЛА
Vq соответственно на радиус Я®о и на нормаль к нему в плоско¬
сти переходной орбиты; /„ iz—орты (рис. 7.2.2); ir — парал¬
лелен радиусу-вектору Лфо точки Р0 и направлен от Солнца;
iz — параллелен оси Z гелиоцентрической эклиптической систе¬
мы и совпадает с ее положительным направлением; Гт —обра¬
зует правую систему; /0 — угол наклона плоскости переходной
орбиты к плоскости эклиптики.
Рис. 7.2.1. Кинематическая
схема гелиоцентрического уча¬
стка межпланетного перелета:
/ — орбита планеты отправления
(Земли); 2—орбита планеты назна¬
чения; 3—гелиоцентрический участок
Рис. 7.2.2. Треугольник скоростей
в точке Р0
^о= vor ■ h + Vo. cos i0 • U + V0x sin i0iz.
235
Определение гиперболических избытков
скоростей Vooo и Уоок
Принимая во внимание треугольник скоростей в точке Р0 (см.
рис. 7.2.2), вектор гиперболического избытка скорости Fooo пред¬
ставим так:
F.o=(F0, - V®r) \ + (Fox cos i0- 1/©,) /, + l/ox • sin ijz. (7.2. 1)
Отсюда получим
v.o= H [( K0,-K®,)4 (К», cos l?e,)4( Ко, sin i0)2]1/2.
(7.2.2)
V n
где Vcoo= • ■(см. § 1 стр. 219);
'"o
/
/ mQrQ a
V m®a® ’
i7 K0r , i> '^ot
Or r-z- ■ VQx= r- ,
x f fm0 I / /m®
Г V a®
V V
1 / ©г I/ — ©*
/’ V /m©A
■©
a© — большая полуось орбиты Земли;
г0 — радиус круговой промежуточной орбиты.
Учитывая выражения
KOr=Kosin0o, Ко, = К0 cos 0О,
(7.2.3)
где Ro=R®o/a®', во — траекторный угол переходной орбиты в точ¬
ке Р0 и а — большая полуось переходной орбиты, формулу
(7.2. 2) преобразуем к виду
11/2
5-0=^|[4~ir(1+4bi Vp*p (cos +tg'00 tg Ч’
(7.2.4а)
где р — фокальный параметр переходной орбиты.
* Расчет кинематических параметров движения планет см. приложение.
236
В первом приближении ввиду того, что е© =0,01657<С 1, мож¬
но принять орбиту Земли круговой, т. е. е@о=0, что позволяет
(7. 2. 4) представить так:
г;м0=х0^3 2 Yp cos /оу/2. (7.2.46)
Аналогичным образом гиперболический избыток скорости
Уоок в точке Рк выразим в виде следующей зависимости:
^-«=*к[(Гкг-17пл cosiK |7„л,)2+(1/к, sin 02]1/2- (7.2.5)
Здесь
voaK=—Z-co---— (см. § 1, стр. 233);
У /тпл1г*
Kit
V = YjlL 17 ^ V = V
КГ /—J— , V КТ Г /• » пл.г
пл.г
1 / /”© ’ кт , / /”® ’ плг /”®
|/ *© V а® V а®
V
пл*
плт
©
vr
1/ /т®
V а®
У к г, Ук, —проекции гелиоцентрической скорости КЛА
соответственно на радиус /?Пл. к и на нормаль
к нему в плоскости переходной орбиты;
к У тпЛа^ ’
гкк — радиус перицентра конечной орбиты около пла¬
неты;
iK — угол наклона плоскости переходной орбиты к
плоскости орбиты планеты назначения (см.
рис. 7. 2. 1).
Принимая во внимание равенства
^Kr=^KSin9Ki VKX=VKcosQK,
(7.2.6)
где RK = -^ii 0к — траекторный угол переходной орбиты в точ-
К©0
ке Рк, уравнение (7. 2. 5) приведем к виду
1/2
(7.2.7а)
' 237
Поскольку для планет епл <0,095 (кроме Меркурия и Плутона,
см. приложение), то, допуская в первом приближении орбиты
планет назначения круговыми, получим
^ооК =
— ——2l/ — cosiKV. (7.2.
а у «к к!
76)
Определение угловых переменных Ф, /0» *к
Важным параметром, во многом определяющим кинематиче¬
ские характеристики гелиоцентрического участка межпланетного
перелета, является угол перелета Ф — угловое расстояние от
точки Р0 до точки Рк в плоскости переходной орбиты (см.
рис. 7.2.1). Согласно теореме косинусов сферической тригоно¬
метрии из сферического треугольника фЯк'Л/ (см. рис. 7.2.1)
найдем
cos Ф = cos и®о cos иплк — sin и®о sin иилк cos /пл, * (7. 2.8а)
где и® 0=2п - (й®о - 2„лк);
А/, Рк'—проекции точек Р0 и Рк на единичную сферу.
Так как Ф< (ипл.к + м©о), то квадрант угла Ф в основном
определяется квадрантом угла («пл. к+м©о), т. е.
sin Ф = sign [sin +a®o)] V1 — cos2 Ф. (7.2.86)
Нетрудно показать, что при ипл. к+м©о=я имеет место неравен¬
ство (я — /пл)<Ф<я. Из сферического треугольника $1Рк'Ро
согласно теоремам синуса и косинуса получим
sm Iq = sin 1ПЛ
sin ипл,к
COS Iq
sin Ф
COS ипл.к — COS U@о cos Ф
sin a@0 sin Ф
(7. 2.9)
sin и
sin iK= sin lnJl
©0
sin Ф
cos iK =
COS U®0— COS Ипл.к
sin Цпл.к sin Ф
cos Ф
(7.2. 10)
Определение времени межпланетного перелета
на гелиоцентрическом участке Af
и фокального параметра р переходной орбиты
В данном случае время перелета от точки Р0 до точки Ри
и фокальный параметр переходной орбиты р проще и удобнее
определять, базируясь на метод Ламберта (см. § 1 гл. II). В за-
* Алгоритм расчета ы@0 и ипл. к см. приложение.
238
висимости от типа переходной орбиты время перелета Д/ и фо¬
кальный параметр выражаются следующими зависимостями:
эллиптическая переходная орбита
<2N -f 1 -|—— [sign (Дtm— At) (е— sin е—л) —
2 1 я
— sign (sin Ф) (8 — sin 8)]},
s у/2 . ъ ( s —с У/2
- , sin—=
) 2 \ 2 а
1
sin—=( —) , sin
2 i 2а ;
съ—R0* -(- RK2— 2R0RK cos Ф, s—'7“(^o-b^K-l-r)>
[2N + 1 - _ sin ».)],
2 ^ s I
/?р/?к(1 — COS Ф)
1
2a • sin2 — (e — y)
Y = 8 [sign (Atm— At) sign (sin Ф)]; ,
параболическая переходная орбита *
V2
At
nap'
6я
гиперболическая переходная орбита *
Д t=
[(sh а — а) — (sh р—р) sign (sin Ф)],
sh —=(—-Y/2, sh-H-=f-s-^V/2,
2 I 2a) 2 \ 2a J
p_ RqRk (1 — cos Ф)
2a sh2 (a — y)
Y = f3sign(sin Ф).
(7.2. 11э)
(7.2.12Э)
[s3/2 — (s — c)3/2 sign (sin Ф)], (7.2.1 In)
p= 2(s-fo)(s-/-K) [si/2_)_sign(sin Ф)(5_С)1Л]«; (7.2.12n)
c2
(7.2. llr)
(7.2.12r)
* Реальные решения связаны с эллиптическими переходными орбитами.
Обращение к параболическим и гиперболическим переходным орбитам дикту¬
ется поиском нужных решений.
239
Определение траекторных углов 0О и 0К
переходной орбиты
Воспользовавшись соотношениями (2.1.25), получим
tg90 = ctg-^-O — j^/" cosec ф cos у , (7.2. 13)
tg 0К = \ f — cosec — Ф cos ——ctg — Ф. (7. 2. 14)
1^ R0 2 2 2
Здесь для эллиптических переходных орбит
д = (2./У’-|- 1)л + (£ — Jl)sign(A/m— At) — S sign (sin Ф), (7.2. 15э)
для гиперболических переходных орбит
д = а —psign(sin Ф). (7.2. 15г)
Проектная задача
Содержанием проектной задачи является оптимизация основ¬
ных проектных параметров /1<н и цКг разгонного и тормозного
модулей межпланетного аппарата. Ее решение связано с зада¬
нием исходных данных. Если речь идет о межпланетных поле¬
тах КЛА с промежуточной орбиты около Земли до конечной
орбиты около планеты назначения, то в качестве исходных дан¬
ных обычно рассматриваются номинальная дата старта /0 —
начальный момент времени (точка Р0) гелиоцентрического уча¬
стка перелета или номинальная дата прибытия tK — конечный
момент времени (точка Рк) гелиоцентрического участка. В об¬
щем же случае к исходным данным они не относятся, и время
перелета At и даты to и tK являются искомыми параметрами.
В случае задания даты t0 или /к и времени перелета At про¬
ектная задача сводится к задаче оптимизации основных проект¬
ных параметров разгонного и тормозного модулей при известных
значениях гиперболических избытков скоростей Vooo и 1Л»К, реше¬
ние которой изложено в § 1 данной главы. Такой вывод является
следствием однозначного определения значений Vooo и VooK в ре¬
зультате решения задачи баллистического расчета гелиоцентри¬
ческого участка межпланетного перелета при задании даты /0 или
tK и времени перелета At.
В случае же задания только даты to (или /к) решение
проектной задачи будет связано с взаимным влиянием основных
проектных параметров многоступенчатого межпланетного аппа¬
рата и кинематических параметров гелиоцентрического участка.
240
Оптимизация pKt и п0 г (/=1,2) при задании /0
или /к и времени перелета At
Если исходными данными проектной задачи являются /0 или
tK и А/, то вследствие равенства
/к = /0 -(- Д/ (7.2.16)
это равносильно заданию номинальных дат старта и прибытия.
Поэтому, имея в виду приложение, в котором дается алгоритм
расчета положения планет в зависимости от Т, можно считать
ИЗВеСТНЫМИ До, ^к> //©О» Мпл. к» /пл> 0 ©0 > бцл. к и р®, Рпл-
Теперь, обращаясь к зависимости (7.2. 8) — (7.2. 10), найдем
Ф, /о и /к. Далее в результате решения уравнений (7.2. 11) опре¬
делим значения большой полуоси переходной орбиты а, что по¬
зволяет рассчитать на основе зависимостей (7.2. 12) фокальный
параметр переходной орбиты рис помощью соотношений
(7. 2. 13) — (7. 2. 14) траекторные углы 00 и 0К. Кроме того, урав¬
нения (7. 2. 3) и (7. 2. 6) дают возможность найти значения гелио¬
центрических скоростей КЛА в начальной (Vo) и конечной (Ук)
точках переходной орбиты.
Полученных данных вполне достаточно для однозначного оп¬
ределения из уравнений (7. 2. 4) и (7. 2. 7) гиперболических из¬
бытков скоростей Vooo и £<*>«•
Таким образом, проектная задача при задании даты /0 или
/к и времени перелета А/ после определения кеплеровских эле¬
ментов переходной орбиты i0, р и а, ее кинематических парамет¬
ров в точках Р0 и Рк— V0, 0о и VK, 0к и гиперболических избыт¬
ков скоростей дооо и Vook сводится к задаче оптимизации основ¬
ных проектных параметров разгонного и тормозного модулей,
которая подробно решена в § 1 данной главы. Структурная схе¬
ма решения рассмотренной проектной задачи дана на рис. 7. 2. 3.
Вполне понятно, что если речь идет о межпланетном полете
КЛА с промежуточной орбиты около Земли до планеты назна¬
чения с пролетом вблизи нее при заданных /0 или tK и At, то
проектная задача после определения по изложенной методике
(рис. 7. 2.3) кеплеровских элементов переходной орбиты /0, р и
а, ее кинематических параметров vo, 0о в точке Р0 и гиперболи¬
ческого избытка скорости дооо также сводится к задаче оптимиза¬
ции основных проектных параметров разгонного модуля при из¬
вестном дооо, рассмотренной в § 1.
Оптимизация основных проектных параметров
Рк / и not (/=1,2), времени перелета At
при задании /0 или tK
В предыдущей постановке проектной задачи на результаты
баллистического расчета гелиоцентрического участка межпланет¬
ного перелета не оказывали влияния основные проектные пара¬
241
метры. Особенность данной проектной задачи заключается
в отсутствии задания на время перелета At, что не позволяет
однозначно определить гелиоцентрический участок и решить
проектную задачу. Свобода в выборе времени перелета At и по-
t0'Lti к
—Г~
tgi / At
Приложение
БЭПл
1
*
Ro> Rk > u&0’ иплк;1пл
P®>Pnn 'i вфо> 9ллк
(7.2.11 п)
&
4*J
А
‘А
А
A ipдрР, С; S
§•
БУгП
я *(7.2847.210)
* 1
БИтВУ
ф, i0;
**
*
At>Atnap
(7.2.12 э)
Р
(7.2.12 г)
Г
(12.113,) (7.2.11 г)
I
a, d Sit, б, A a;C;SiCC;p;A
9
(7.2.13)
(7.2.1b)
(7.Z3), (7.2.4)
БСк
(7.1. 19)
Mki
(726)-,(7.2.7)
. г_.
I
Voo о * V 0
<
*
Voo x i vK
БИтВм'к*
1 (7.1. И)
7.1.50
opt
n0i
(7.1. 48)
'opt
P 02
Puc. 7.2.3. Структурная схема решения проектной за¬
дачи при заданном At (BI7p3At):
БЭПл — блок расчета элементов планет; БУгП — блок расчета
угловых переменных; БИтВ«а»—блок итерационного выбора
большой полуоси орбиты перехода а; БСк—блок расчета гелио¬
центрических скоростей V0 и VK и гиперболических избытков
скорости и Удаи,- БИтВ —блок итерационного выбора
К X
оптимальных значений и
этому гелиоцентрического участка и основных проектных пара¬
метров not и pKt- позволяет выдвинуть требование о таком их
определении, при котором относительная полезная нагрузка рп. н
достигала бы максимального значения. Такой гелиоцентрический
участок межпланетного перелета и такие значения времени пере¬
242
лета Дt и основных проектных параметров pK* и noi будем назы¬
вать оптимальными. Нахождение их связано с решением задачи
на максимум р^. и при наличии связей в виде проектно-весовых
и кинематических уравнений. Раскрывая эти связи, отметим ряд
их особенностей.
Проектно-весовое уравнение двухступенчатого межпланетно¬
го аппарата выражается в виде
IVh^^oi ■H'oip
где относительный полезный вес разгонного poi=|Goii/G0 и тор¬
мозного модулей ро и = Gn, JG0 ц зависит от относительных зна¬
чений весовых коэффициентов уу* и основных проектных пара¬
метров по i и рк i, т. е.
^01== P*oi (Р*к1» Л01> Yyi) и tAoii;={J,oii (^2» п№’ Туг)-
Базируясь на интеграл энергии и зависимости va и га от pKi
и noi и г!т и гт qf рК2 и п02, согласно (7. 1. 10) и (7. 1.47) имеем
t>ooZ = t>ooZ(«0/> ftc/) (/ = 0, k\ i = 1, 2).
Учитывая уравнения (7.2.8) и (7. 2. 11) при наличии соотно¬
шений (7.2.9), (7.2.10) и (7.2.12) — (7.2.15), можно говорить
о существовании зависимости Ф и а от времени перелета At. По¬
этому согласно (7. 2. 4) и (7. 2. 7) имеем право записать
^ooZ = cpz (Д/) {1 = 0, k).
Теперь задача о максимуме рп. н формулируется таким обра¬
зом: найти такие значения At, рНг и п0и при которых достигает¬
ся условие
H'ii.h max==maX H'OlH'OlI
л0/.|Ак i
при наличии связей в виде
F 1=г,оо0(/г01, рк1)-ср0(д/) = 0,
F2=veoK («ог» ^кг) Тк (Д^) = 0-
Для решения поставленной задачи сформируем с помощью
коэффициентов Лагранжа Яу (/=1, 2) новую функцию / следую¬
щим образом:
2
^==lAoilJ'oil+2 }’
J- 1
243
Необходимым условием максимума J (или цп. н) являются
уравнения
д! .. | . ой
“ни I х О
т —!хоп — г Л1 — и>
Фк1 Фк1 Фк1
_ .. Ф01 | *\.о_п
—гои 7 г Л1“Г —и’
дп01 d/i0i дп01
д‘
Фк2 Фк2 Фк2
М ФоН | •> ^«к п
^oi "7 г 2 "7 — и>
d/JQ2 ^л02 ^02
" - X, ^+Х4^-=о.
дД* dAt дМ
Исключая из полученной системы уравнений коэффициенты
Лагранжа А* и Яг, найдем
= 0,
| ^еор/Ф-к!
^01/^л01 С^„о/^01
Фоп/Фк2 | ^«»к/^хк2 _q
^R)Il/^02 с^ввк/^ог
Фчн ду\/дМ | it дцоц дуъ/дМ ~ /7 9 i7\
roil 7 ,-2 /А Г Г01 т ,-2 /А — ' '
O^Kl dt/.o Фк1 Фк2 ^оок/^кг
Фо]/Фк1_ j_/^oi_\ _ о (7 2 18)
К-о
или в другой форме
Фо1/^л01 Г I Фк1
Фоп/Фк2 _|_ / &п02 \ _ Q (7 2 19)
Фоп/длог V Фтс2 )v*>К
^оп_Ёй=о. (7.2.20)
гоп дцк1 дМ ' Г01 фкг дМ
Уравнения (7.2. 18) и (7.2. 19) с учетом равенств (7. 1. 11) и
(7.1.49) являются условиями оптимизации соответственно п0},
Uni и Лог, Цк2 при постоянных значениях г?ооо и доек- Интересно
отметить, что они идентичны условиям оптимизации основных
проектных параметров разгонного и тормозного модулей при
заданных значениях дооо и доок (7. 1. 18) и (7. 1.50), найденных
в § 1.
Уравнение (7. 2.20) является условием оптимизации времени
полета А/, и его выполнение во многом зависит от основных про*
244
ектных параметров цКг и п<н многоступенчатого межпланетного
аппарата. Этим оно принципиально отличается от известного
условия оптимизации At, когда в качестве критерия оптималь¬
ности рассматривается сумма характеристических скоростей
(или сумма абсолютных значений гиперболических избытков ско¬
ростей дооо и £оок), необходимых для межпланетного перелета с
промежуточной до конечной ор¬
биты около планеты назначения.
Проектная задача при зада¬
нии только даты to или tv ре¬
шается следующим образом. Вна¬
чале следует задаться (произ¬
вольно) временем перелета At на
гелиоцентрическом участке меж¬
планетного полета. Далее расчет
ведется по алгоритму, изложен¬
ному выше и изображенному на
рис. 7.2.3. После определения
элементов переходной орбиты,
VooO И Vook, основных проектных
параметров tioi и цКг надо прове¬
рить выполнение условия
(7.2.20). Если оно не. выполняет¬
ся, то, определенным образом
задавшись новым значением At,
повторим схему решения задачи.
Цикл заканчивается, когда усло¬
вие оптимизации времени пере¬
лета At (7.2.20) удовлетворяется.
Структурная схема решения этой
проектной задачи изображена на
рис. 7.2.4.
Только проектная задача, свя¬
занная с поиском оптимальных
проектных решений, определяю¬
щих оптимальные значения основных проектных параметров По\
и рКг многоступенчатого межпланетного аппарата и времени
перелета At, отвечает основному требованию проектирования
КЛА—достижению максимального значения цп.н- В этом случае
существует взаимосвязь между оптимальным гелиоцентрическим
участком межпланетного перелета и оптимальными основными
проектными параметрами рКг и пы, проявляемая через уравне¬
ние (7.2.20) и оказывающая влияние на распределение масс
топлива и значений тяги двигательных установок между разгон¬
ным и тормозным модулями межпланетного аппарата, что непо¬
средственно сказывается на энергетическом уровне активных
участков разгона и торможения. Поэтому к результатам решения
задач оптимизации времени перелета At и межпланетных траек¬
- 245
Рис. 7.2.4. Структурная схема
решения проектной задачи при
оптимизации At, цк* и n0i
(БПрЗ At0
торий полета с выходом на орбиту около планеты назначения
и на этой основе к результатам выбора проектно-баллистических
характеристик многоступенчатого межпланетного аппарата,
когда за критерий оптимальности принимается сумма характе¬
ристических скоростей Ул = VX\ + Vx2, следует относиться осто¬
рожно.
Решение проектной задачи для пролетных межпланетных
траекторий, когда КЛА должен только пролететь вблизи плане¬
ты назначения, связано, помимо (7.2. 18), согласно (7.2. 17) со
следующим условием оптимизации:
Данное условие позволяет полностью решить задачу балли¬
стического расчета гелиоцентрического участка межпланетного
перелета при задании только t0 или tK и найти кеплеровские эле¬
менты переходной орбиты i0, аир, время перелета At и значение
гиперболического избытка скорости zw Таким образом, эта
проектная задача при задании только t0 или tK сводится к задаче
оптимизации основных проектных параметров разгонного модуля
при известном значении Vooo, решенной в § 1 данной главы.
Возникает задача в заданном диапазоне календаря опреде¬
лить дату гелиоцентрического старта U или tK и проектно-бал¬
листические характеристики КЛА, позволяющие с учетом манев¬
ра у планеты назначения достигнуть max рп. н. Отличие данной
задачи от предыдущей — в оптимизации (кроме времени пере¬
лета At и основных проектных параметров «о г и цКг) даты гелио¬
центрического старта t0 или tK в заданном диапазоне календаря,
который может охватывать часть, один или несколько синодиче¬
ских периодов.
В основе решения сформулированной задачи может лежать
алгоритм решения предыдущей задачи, который позволяет опти¬
мизацию (или tK) построить на одном из методов поиска экс¬
тремума функции по одной переменной [46]. В этом случае схема
решения задачи выражается так:
или в случае задания диапазона календарных гелиоцентриче¬
ских дат прибытия tK
Оптимизация основных проектных параметров
Цкг и пои даты гелиоцентрического старта t0
и времени перелета At
Ъ..нтах = таХ
^nniin < te < t.
Omln < *0< Отах
(max Г max (fVH)A,_constl I (7.2.21а)
I L л0/» / J —const J
Iхп.н max max
(к mln^ /к< *\
(max Гтах (tv^-constl )• (?• 2.216)
I const)
246
Навигационная задача (внешняя)
Решением навигационной задачи является определение век¬
торов гелиоцентрических скоростей КЛА в начальной и конечной
точках гелиоцентрического участка и векторов гиперболических
избытков скоростей V"i0 и V"iK’ что позволяет получить ис¬
ходные данные для решения задачи отрыва и захвата: сфериче¬
ские координаты векторов цели в экваториальной планетоцент¬
рической системе.
Векторы гелиоцентрических скоростей КЛА в начальной и
конечной точках гелиоцентрического участка можно определить
по соотношениям (2.1.21) и (2.1.22), выражаемым в данном
случае следующим образом:
Здесь
V0=ARK-BlR0t
Vk=B2Rk—CRq.
(7.2.22)
Д = [д/ —а3/2(д—sin д)]-1,
В± = А [ 1 — (1 — cos д) , Z?2 = А Г1 —— (1 — cos д)],
L Яо L Як J
sin А , D Г . а ж
'-ВЛ 1- — (1 cos ДЛ .
С =
PqPk
(7.2.23)
Однако в связи с определением углов Ф, 0о, 0К и положения
Земли и планеты назначения составляющие векторов Vo и_Ук
в эклиптической гелиоцентрической системе и векторов Fooo, К»к
во второй экваториальной геоцентрической системе и в эквато¬
риальной планетоцентрической системе для нахождения сфери¬
ческих координат вектора цели нагляднее и проще выразить
с помощью некоторых преобразований, используя кинематиче¬
ские схемы рис. 7. 2. 5—7. 2. 7.
Определим составляющие единичного вектора F0° в эклипти¬
ческой гелиоцентрической системе координат XYZ (см.
рис. 7.2. 5). Используя теорему косинусов сферической тригоно¬
метрии, из сферических треугольников на единичной небосфере
PqBqУ, PqBqCq и PqBqDq соответственно найдем
Vxo= cos AxQ= cos й@о sin 0O— sin и®о cos 0О cos i0,
V°yo=cos Ayo= sin и®о sin 0o-f cos u®0 cos0o cos /0;
V%= cos Аг0 = cos 0O sin i0,
(7.2.24)
где и®о— аргумент широты Земли в эклиптической гелиоцент¬
рической системе координат в момент t0.
247
Рис. 7.2.5. Кинематическая схема определения состав¬
ляющих единичного вектора V0°
Рис. 7. 2. 6. Кинематическая схема определения составляю¬
щих единичного вектора Ук°
248
Теперь определим составляющие единичного вектора FK°
в эклиптической гелиоцентрической системе координат XYZ
(см. рис. 7.2.6). Используя также теорему косинусов, из сфери-
Рис. 7.2. 7. Геометрическая интерпретация преобразования
координат:
1—плоскость экватора планеты назначения; 2—плоскость экватора
Земли; 3—плоскость орбиты планеты назначения
ческих треугольников на единичной небосфере РоВку, Р0ВКСК
и P0BqDk получим
V°x K=cos Ахк= — [cos и©о sin (Ф — бк) +
-f sin и©о cos (Ф — 0К) cos /0],
V^i,K=cos АУк= — sin «@0sin(® —0K)-f-
+ COS И©о cos (Ф — 0К) cos /0,
(7.2.25)
Vг к = cos Az к = cos (Ф—0К) sin i0.
Составляющие единичных векторов Vio и ViK во второй эк¬
ваториальной геоцентрической системе координат представим
следующим образом:
V°«o=^- (Р,о-?®*),
V'l„o=^2- [(Р„0 —17©„)cose—К20sin е],
Voo0
У°Ж20=-^- [(Км—sin e + l?z0 cose],
(7.2.26)
249
V
00 X к
— {v —V)
~ \ ПЛ X X К/ *
V ooK
Vi, K = VJ cos e- - 1/, K) sin s],
V
v ooK
(7.2.27)
К°-г к= =^-K - 1?J sin » + (Vm.,- Vz K)cos e].
^ ooK
Здесь
^жо =P0cos Аж0, K{/O = 1^ocos Ayo, \7z0=l?0cos Аг0;
V^fK У к COS Aj. K, ^гк=^к
К©*, V@y и Уплх, ^ПЛу и УПЛ2 — составляющие векторов скоро¬
сти Земли и планеты назначения соответственно в эклиптиче¬
ской гелиоцентрической системе координат, равные
^©ж= — V©0 sin(w@o— 0©о)»
У®у=У©о cos (и ©о — б©о)»
1/©*=0;
Упл X ^ПЛ.К [sin (#пл к 0пЛ.к) COS ^пл +
+ cos (ипл.к- 0ПЛ.К) sin 2ПЛ cos /пл],
Уил.у=Упл.к [-sin (ипл>к-епл.к) Sin 2ПЛ +
+ C0S («пл.к - 0пл.к) COS 2 пл COS /J,
^пл г==Упл.к COS (ИПЛ'К 0пл.к) Sin 1Т
(7.2.28)
ПЛ.
ПЛ *
(7.2.29)
Учитывая полученные соотношения, сферические координаты
векторов цели К1о и У°жк во второй экваториальной системе
представим соответственно в виде
tgS0= ■ ■ У~г0 (- — <80< —'l ,(7.2.30)
VQU+Krf \ 2 2'
sin ап=
0 У^хоТ+Р-уО?
V?
(0<а0<2я),
cos oft=
» jcO
>>°.,о)2+К,»)2 ’
(7.2.31)
250
tg8K =
oo г к
(7.2.32)
sin aK =
cos aK =
v°
v»!/k
v
0
ооД Г К
(0< ак<2л),
V(v^K)4(vlyKf
(7.2.33)
Для определения сферических координат вектора цели VтК
в экваториальной планетоцентрической системе следует выпол¬
нить ряд преобразований. Пусть Й'— угловое расстояние от точ¬
ки весеннего равноденствия Земли до восходящего узла эква¬
тора планеты назначения на экваторе Земли £1 (см. рис. 7. 2.7);
и= —угол между радиусом-вектором точки весеннего
равноденствия планеты назначения Rr и радиусом-вектором
точки восходящего узла /?£* линии узлов экваториальных пло¬
скостей Земли и планеты назначения; /' — угол наклонения пло¬
скости экватора планеты назначения к плоскости экватора Зем¬
ли. Если an и 6n — средние сферические координаты северного
полюса планеты назначения в экваториальной геоцентрической
системе *, то (см. рис. 7. 2. 7)
2' =
я ,
У + «ЛГ.
;/
Л
8дг.
(7. 2.34)
Выполняя с учетом введенных углов известное_преобразова-
ние поворота, составляющие единичного вектора F°K в эквато¬
риальной планетоцентрической системе можно найти из соотно¬
шения
г у0 ~\
ооХ К
" Р.РуРг
V0
У ооу к
QAQz
V0
_ V eoZK _
_ wxw„wz
ri?0 „ П
сох К
уО
осу К
V0
_ OOZK _
(7.2.35)
• Значения ан и для планет даны в приложении.
251
где с учетом (7. 2. 34)
Рх = —(cos ш' sin адг-f- sin ш' cos aN sin 8дг),
Py= cosco' cos aN— sin ш' sin aN sin bN,
**ч
Pz= sin со' cos hN\
Qx=sin ш; sin aN — cos со' cos aN sin bN,
Qy=—(sin (o' cos адг-f- cos ш' sin aN sin 8дг), (7.2.36)
0*4
Qz=COS со' cos 8дг,
0*4
Wy = cos aN cos Вдг,
Wy= sin aN cos 8дг,
Wz= sin 8дг.
В результате определения Vi.™, У°жук и сферические
координаты вектора цели к в экваториальной планетоцент¬
рической системе можно представить так:
tgsK=
V
о
оо Z К
Y(vl,K)4(viyKf
: (7-2'37)
V
sinaK=
О»у к
V ку
(0<ак<2я);
V
cos ак=
свХ К
(7.2.38)
Для использования соотношения (7.2. 35) нужно найти зависи¬
мость о' от известных средних угловых элементов планеты 0Пл,
oln и 6N. Из сферического треугольника Р0 Упл согласно
теоремам косинусов и синусов получим (см. рис. 7. 2. 7)
cos со' = cos ^ cos сру- -J- sin 3 sin cpr cos (q — /11Д), (7.2.39)
. sin (a — /„.) sin В л
sin со = ^^ i-, (7.2.40a)
sin /э
__«*«> мм
где — угловое расстояние от гелиоцентрической точ¬
ки Ро до восходящего узла
q — угол наклонения плоскости Р0О Q' к плоско¬
сти эклиптики;
<Р'Г=/?ФЛ */?Ynii —угловое расстояние от точки Р0 до точки ве¬
сеннего равноденствия планеты назначения;
1Ъ—угол наклонения плоскости экватора планеты
назначения к плоскости ее орбиты.
252
Из того же сферического треугольника
sin р cos (р + &дг)
Sin сру = •
Sin (э
(7.2.41а)
cos сру = cos о/ cos p-j- sin о)' sin Р sin (/?4~&дг).
Совместно решая последнее уравнение с уравнением
(7. 2. 39), получим
cos ш' = [cos р sin (q — /пл) sin {р-\- bN) +
+ cos {q - /пл) cos ip+hN)] — ,
Sill
cos cpy = [sin {q- /J sin (/?+ bN) -f
1
cos {q-inn) cos {p + 3лг)]
Sin (э
(7.2.406)
(7.2.416)
Следовательно, для определения o' и фу в зависимости от
угловых элементов планеты назначения Опл, *шь aN и 6jV нужно
выявить зависимость р, q, р и 1Ъ от них. Для этого обратимся к
сферическому треугольнику P^Sl' У» из которого найдем
cos р= — sin адг cos 2njI-f-cos aN sin 2ПЛ cos г,
sin p:
sm e cos a
TV
или, так как
sin q
sin e
(7.2.42a)
sin q
>0,
sin p=sign (cos адг) Y1 — cos2 p.
(7.2.426)
Рассматривая тот же сферический треугольник P0^'Y.полу¬
чим
— sin oat=cos 2пл cos р —sin 2ПЛ sin р cosq
или с учетом (7.2. 42)
sin aN sin 2ПЛ -f- cos a^cos 2ПЛ cos e
cos q
sin p
sin q-.
sin e cos a
'TV
sin p
(7.2.43a)
(7.2.436)
Кроме того, из него же будем иметь
sin е sin ^пл
Sin р:
COS Р'
sin р
cos aN cos 2ПЛ -b sin aN sin 2„л cos e
sin p
(7.2.44)
253
Выразим угол /э. По теореме косинусов (вторая форма) из
сферического треугольника Ро Y Л ' найдем
cos/9= cos {q — /11Л) sin (p-f 5^) —sin (? — /rtJcos (p + M cos p.
(7.2.45)
Соотношения (7. 2. 42) — (7. 2. 45) определяют зависимость о/
от известных угловых элементов планеты назначения ЙПл» /Пл»
an и 6N- Таким образом, навигационная задача (внешняя) ре¬
шена.
§ 3. ОПТИМИЗАЦИЯ ПРОЕКТНЫХ РЕШЕНИЙ
МЕЖПЛАНЕТНОГО АППАРАТА
С УЧЕТОМ РАЗМЕРОВ
ГРАВИСФЕР ПЛАНЕТ
В предыдущих параграфах гелиоцентрический участок меж¬
планетной траектории определялся без учета размеров грависфер
планет, т. е. Земля и планета назначения рассматривались как
бы в качестве негравитирующих центров. Это традиционный
путь оценки гелиоцентрических участков. Однако с повышением
требований к точности проектных разработок может возникнуть
необходимость в учете гравитационных полей планет, проявляе¬
мых по крайней мере в пределах их грависфер. Для планет
юпитеровой группы в связи с большими размерами их грависфер
такой учет может стать даже обязательным.
Оценка влияния размеров грависфер планет
Действительно, рассматривая в качестве исходной информа¬
ции дату гелиоцентрического старта t{ и время полета Atlt2 (или
Рис. 7.3. 1. Схема кусочно¬
конической межпланетной
траектории полета при учете
размеров грависфер планет-
0—А—активный участок раз¬
гона: А—I—пассивный участок
полета в грависфере Земли;
1—2—гелиоцентрический участок
полета; 2—Т—пассивный участок
полета в грависфере планеты
назначения; Т—К—активный уча¬
сток торможения
дату гелиоцентрического прибытия t2), которые определяют по¬
ложение Земли и планеты назначения, вследствие отличия R\от
254
R@o и i?2 от Лпл к (рис. 7.3.1) существует разность (рис. 7.3.2,
7. 3. 3)
SF0= V 0 — V1 = bV «о =V «о — ,
bVK = VK—V2 = bVeoK = V„K — v2,
где г71, V2—векторы геоцентрической и планетоцент-
_ _ рической скорости КЛА на грависферах;
Vu У г — векторы гелиоцентрической скорости в
начале и конце гелиоцентрического уча¬
стка, представляемого с учетом размеров
_ _ _ _ грависфер планет;
Vooo» У сок» ^о, FIC—векторы гиперболических избытков ско¬
рости и векторы гелиоцентрических ско¬
ростей в начале и конце гелиоцентриче¬
ского участка, представляемого без уче-
_ _ _ та размеров грависфер;
Я®о, Дпл.к, Ru R2 — радиусы-векторы начальной и конечной
точек гелиоцентрического участка, рас¬
считанного без учета и с учетом размеров
грависфер планет соответственно.
Рис. 7.3. 2. Треугольники скоростей в
момент гелиоцентрического старта
без учета (V©o, J'o, Voo0) и с уче¬
том (V©o, Vi, vt) размеров грави¬
сферы Земли
Рис. 7.3.3. Треугольники скоростей
в момент гелиоцентрического прибы¬
тия без учета (УПл.к,_ V„, V.k)
и с учетом (Vnn.K, V2, v2) размеров
грависферы планеты назначения
Так как согласно (7.2.22) векторы гелиоцентрических скоро¬
стей в начальной и конечной точках гелиоцентрического участка
равны
^о= ^о^нл.к ЯоЛо, ^к== ^оа^пл.к— С0Я©о;
Уг = А^-_ВА, У^ВЛ-СА,
то, представляя i?i=i?@o+ri и /?2=ЛПл. к+гг, векторы 6Fo и 6FK,
■6Fooo и 6FooK найдем из соотношений
bV0=bVх0=(А0— /?пл>к — (£01 — Вг) /?@0 — (Агг% — ^7,),
__ _ _ _ (7.3.1)
^^K==8Vr«K=(i?o2 В2) RnjlM (С0— Сх) /?©о— (B2r2 — Cxrj).
(7.3.2)
255
Здесь коэффициенты А0, В0ь В02, С0 и Аи Ви В2, выражаются
формулами (7.2.23) для гелиоцентрических участков, рассчи¬
танных соответственно без учета и с учетом размеров грависфер
планет, и ri = A®, г2=АПл-
Приведенные выражения подтверждают, что учет размеров
грависфер планет_приводит_к различию векторов V\ и vu V2 и v2
от векторов F0 и F«>o, VK и F«>k соответственно, причем различие
становится заметнее для планет с большим радиусом грависфе-
ры Апл-
Представляет также интерес и значение разностей
Д F оо0= F «о —■ Д F оо к== F а, к — *^2,
которые непосредственно влияют на различия в величинах ос¬
новных проектных параметров КЛА рщ и пщ. С хорошим при¬
ближением можно принять £;i-ri = yiA0 и v2'f2 = v2Aun. Тогда по¬
лучим
. (7.3.3)
ЛК.« = V . (7.3.4)
Дпл
Полученные соотношения показывают неизбежность сущест¬
вования разностей AFooo и AFooK, значения которых существенно
растут для планет с большими радиусами грависферы.
Таблица 7.1
Планета
«'л
"'ао
8К
хк
iVVK
Марс
Г1==ЛЛ сГ
0,0661
0,001
—0,1129
0,0246
(0,0261)
0,0526
0,1263
0,0615
0,0931
(0,943)
км/с
Юпитер
Г1==ДЛУ
—0,1393
—0,3059
0,8349
0., 1667
(0,171)*
0,5601
—1,3214
—0,1664
1,3463
(1,363)*
км/с
* Приближенные значения по формулам (7.3.3), (7.3.4).
В табл. 7. 1 * приведены для полетов на Марс_и на Юпитер
точные значения AFooo и AFooK и составляющих 6Fo и 6FK и их
приближенные значения, рассчитанные по приведенным прибли¬
женным формулам.
* Для полетов на Марс /1=24(41900,15, /2=1244210601,5; для полетов на
Юпитер /1=12441(375,5, /2 =12442005,5.
256
Особенность постановки задачи при заданных
к и Mi, 2
Переходя к задаче определения баллистических характери¬
стик межпланетной траектории, гелиоцентрический участок кото¬
рой рассчитывается с учетом размеров грависфер планет, рас¬
кроем ее особенности. Главная из них заключается в том, что
задание гелиоцентрической даты старта и времени перелета или
гелиоцентрической даты прибытия не дает возможности прямо>
решить задачу баллистического расчета гелиоцентрического уча¬
стка, так как оно позволяет определять только Лфо и Лпл. к и не
позволяет найти гелиоцентрические векторы его начальной и ко¬
нечной точек. Определение R\ и R2 связано с поиском значений
Г1 и гг, при которых возможно при заданном времени полета рас¬
считать гелиоцентрический участок от поверхности грависферьи
Земли до поверхности грависферы планеты назначения. Такой
процесс требует решения краевой задачи. Для рационализации
расчетов имеет смысл объединить процесс решения краевой за¬
дачи с проектной задачей — поиском оптимальных значений
основных проектных параметров рКг и п0{. Это становится воз¬
можным, если в качестве независимых переменных взять состав¬
ляющие вектора v\\V[ и его прямое восхождение ai и склонение
61. В результате решения должны быть найдены такие значения
г>1, «1 и 6i, при которых перелет КЛА от промежуточной орбиты
около Земли на конечную орбиту около планеты назначения был
бы совершен при максимальной относительной полезной нагруз¬
ке рп. и и при заданной гелиоцентрической дате старта и времени
перелета A/i>2 на гелиоцентрическом участке, рассчитываемом
с учетом размеров грависфер планет. При этом положение в
пространстве промежуточной круговой и конечной эллиптической
орбит должно быть определено.
Алгоритм решения проектной и краевой задачи
Построение алгоритма решения сформулированной задачи
может быть основано на зависимостях, полученных в § 1 гл. IV
и в § 1 и 2 гл. VII.
Геоцентрический участок разгона
Пусть известно нулевое решение: vu ai и 6j. Тогда, опреде¬
лив значение vLi по формуле
— 2 —2 JL
Vooi — Vi д ^ ’ (7.3.5)
с помощью соотношений (7. 1. 19), (7. 1.20) и (7. 1. 11) найдем
оптимальные значения pKi и Лоь Теперь по формулам (7. 1.4) —
(7.1.6) можно рассчитать значения va, 0a и ra, что позволяет
257
найти траекторный угол 01 в точке выхода из грависферы в мо¬
мент t\\
91=arccos Va4alos е* (7.3.6)
у1д©
и согласно (7. 1.22) элементы ат. о, рг. о и ег. 0 гиперболической
орбиты отрыва. Обращение к условиям (7. 1.39) и (7. 1.40) да-
Рис. 7.3. 4. Кинематика векторов в точ¬
ке выхода КЛА на поверхности грави¬
сферы Земли
ет возможность определить угол наклонения /г. о плоскости ор¬
биты отрыва и тем самым промежуточной орбиты:
при
при
51 > 'Рс г
81<<Рст
*r.0 = N ИЛИ *г.о = Я — 14 ,
^*г.о ITct] ИЛИ /гл) Я I^PctI »
при sin Лпр < +
COS ^г.о
COS fCT
COS (гг 0)„р= + COS<fct sin Дпр*.
(7.3.7)
Из сферического прямоугольного треугольника CDB
(рис. 7.3.4) найдем прямое восхождение аг и склонение бг ра-
* Следует отметить, что на практике угол наклонения промежуточной
орбиты, которому и равен ir. 0, определяется существующей трассой.
258
диуса-вектора точки выхода КЛА на поверхности грависферы
Земли п:
sin (8Х — 8Г) = cos fij sin /г>0,
tg(ai-ar) = ctg flj cos*r>0.
или
8Г = 81—arcsin (COS0J sin/г-0), )
«г= aj— arctg (ctg 0j cos /г 0). J
Гелиоцентрический участок перелета
(7.3.8)
Исходные данные и полученные соотношения позволяют оп¬
ределить кинематические параметры начальной точки гелиоцен¬
трического участка — составляющие вектора гелиоцентрической
скорости Vxu Vvu Vzi и гелиоцентрического радиуса-вектора Хи
Yi и Zi в эклиптической системе координат из следующих урав¬
нений:
Vxi= V ®х + vx cos ах cos 8^
щ*
Vyi=V®yJrv1(sin dj cos 8j cos в-f sin 8X sin s),
V2l = v1 (— sin ax cos 8j sin в -[-sin 8X cos s);
^ = ^©0+A©cos ar cos 8r,
K1=K@i-[-A©(sin ar cos 8, cos в-f sin 8, sin e),
Zx — Д©( — sin ar cos 8, sin в-f sin 8, cos в),
(7.3.9)
(7.3. 10)
где
V®x= — V®o sin (u®o— 6©o). V®y = ^©0 cos (w©o— 0©o)i
•^©0=^© cos и©о« К©=/^©o sin U®0.
Значения V\ hRi выражаются формулами
V',=(l',ii + V'JI + V']i)1/s (7.3.11)
= (*,» +К,»-j-Z,*)1/2. (7.3.12)
В результате нахождения элементов орбиты гелиоцентриче¬
ского участка из выражений
fm©
а — —
2 fm
О
(W-(b-Vit'
Jm® \ a I
1/2
(7.3.13)
259
истинная аномалия начальной точки гелиоцентрического участ¬
ка будет равна
1
(7.3.14)
Sin 13, = I/ —1—
У /»®
eRx
Определив при е<С. 1 значение эксцентрической аномалии Е2
из уравнения Кеплера [см. (1. 3. 35)]
д/
1.2
Ех — е sin Ех=Ег — е sin Ег
^,'V fm©
или при е> 1 значение Н2 из уравнения [см. (1.3. 37)]
Д^1,2
(7.3.15э)
4- е sh Н1 — Л/j = е sh Л/2 — Н2> (7.3. 15г)
где
*3/1У7^
Zf1=2arctg
н*=2Агпч/^№У
или v2 = 2Arth ^-j-th-5^
(при Е2 >2л к определенному значению v2 надо прибавить 2я),
(7.3. 16э)
(7.3. 16г)
найдем
v2=2arctg
<P=v2 — v1, я
Уо =
1 + е cos v2
1/2
© •""© j
2/m0 fmG 1/2
/?2 «
В результате кинематические параметры конца гелиоцентри¬
ческого участка можно определить из следующих векторных
уравнений [см. (1.3.51) и (1.3.52)]:
#, = [l-*2-(l_cos Ф)1л+—M^sin Ф-V.,
IP J У fm®P
+ [1_^(1_созф)]К1.
(7.3. 17)
260
Планетоцентрический участок торможения
Решение поставленной задачи должно быть связано с удовле¬
творением равенства
— Дпл 1^2 ^пл.к! — О,
(7.3.18)
свидетельствующего о попадании КЛА на поверхность грависфе¬
ры планеты назначения. После этого найдем значения кинемати¬
ческих параметров в точке входа на поверхности грависферы пла¬
неты назначения
v, = V,-V
пл.к’
(7.3. 19)
2 ,ч2 ^пл.к' J
Элементы гиперболической орбиты прибытия выражаются
следующими зависимостями:
^г.п
/т,
ПЛ
t/2
2_
2 /т„л
^пл
(Апл^)2 — (г2^)2
/тал
Соблюдение равенств
(7.3.20)
г>т- —-
а
Г.It
Fp= Рг.» — (v7?T COS0T)2=:O
(7.3.21)
(7.3.22)
отвечает требованию выполнения условий выхода тормозного
модуля на конечную орбиту заданной формы. Если она прини¬
мается свободно ориентированной, то условия конечного манев¬
ра соблюдены.
Первое условие (7.3.21) выполняется автоматически при оп¬
тимизации ц„2 и лог, когда реализуются уравнения (7.1.50)
с учетом (7. 1.48), в которых вместо значения т>1к должно быть
поставлено
~2 1
U &>2==~ •
а
Г.II
Выполнением второго условия (7. 3. 22) заканчивается реше¬
ние поставленной задачи, т. е. подбор таких значений at и 6i,
при которых выполняются условия оптимизации основных про¬
ектных параметров noi и pKt- (/=1, 2) и условия перелета меж¬
планетного аппарата с промежуточной орбиты Земли на конеч¬
ную орбиту около планеты назначения при заданных дате гелио¬
центрического старта и времени полета на гелиоцентрическом
участке.
261
Однако принципиально возможно удовлетворение краевых
условий (7.3.18) и (7.3.22) при различных, хотя и близких,
значениях v\. Поэтому выполнение краевых условий (7. 3. 18) и
(7.3.22), достигаемое согласно изложенному алгоритму при од¬
новременной оптимизации Яо{ и цКг, может не привести к одно¬
значному определению цп. н- Следовательно, процесс удовлетво¬
рения условий (7.3. 18) и (7.3.22) одновременно с оптимизацией
Яог и цкг должен быть организован так, чтобы в результате
HM/L
70.5
10
9.5
9
'
//
ч
\
/
1 1
1
W
/
V
J-
'Voo 0
L
550 050 Oitf^CQfr
Рис. 7.3. 5. Изменение
гиперболического избыт¬
ка скорости VcO и ско¬
рости V\ на поверхности
сферы действия Земли
11=2441348,5
КМ/С
Рис. 7.3.6. Изменение
гиперболического избыт¬
ка скорости У „с к и ско¬
рости и2 ка поверхности
сферы действия Юпи¬
тера t\= 2441348,5
достигнутого решения путем соответствующего подбора v\ был
получен действительный максимум цп. н- Организация алгоритма
решения краевой и проектной задачи с учетом указанного требо¬
вания позволяет представить его в виде следующего выра¬
жения:
!Ап.ншах = _ (1 — + a^s Fд +
!>*-(»*.*1» 8»)
+ k/ibsFp> max iv,l* (7.3.23)
П01^к1 )A/!2-const
Здесь kp, kb. и kp — постоянные весовые коэффициенты функ¬
ционала, нижняя граница которого определяется.
Важным условием сходимости описанного процесса незави¬
симо от математического метода поиска inf является определение
нулевого решения. Баллистические характеристики гелиоцентри¬
* Символ : раскрывает свойство, которым должен обладать рп. н, сим¬
вол V означает «для всех».
262
ческих участков, определенные с учетом и без учета размеров
грависфер планет, не являются существенно разными. Поэтому
в качестве нулевого решения поставленной задачи следует брать
баллистические характеристики, значения Vooo, ао и 60> определен¬
ные в результате решения баллистической и навигационной
(внешней) задачи, изложенной в предыдущем параграфе (см.
§ 2, гл. VII), когда планеты принимались негравитирующими
центрами. Алгоритм определения баллистических характеристик
гелиоцентрического участка и значений г>«>о, ао и 60 при заданных
t0 и без учета размеров грависфер планет весьма прост и бы¬
стро реализуется. Поэтому имеет смысл для поиска нулевого
решения включить его в алгоритм расчета рп. нтах согласно вы¬
ражению (7. 3.23).
На рис. 7. 3. 5 и 7. 3. 6 представлены результаты расчета ге¬
лиоцентрических участков полета на Юпитер [^=2441348,5
(1 марта 1972 г.)], проведенного с учетом и без учета размеров
грависфер планет, причем принимались сферы действия планет —
грависферы Лапласа. Значения гиперболического избытка ско¬
рости Vooo и скорости Vi в зависимости от времени полета даны
на рис. 7. 3. 5, a VooK и v2 — на рис. 7. 3. 6. Сдвиг изолиний Vooo
и vu Vook и v2 существенный.
До сих пор рассматривалась задача об определении проект¬
но-баллистических характеристик межпланетного аппарата, ког¬
да гелиоцентрический участок перелета рассчитывается с учетом
размеров грависфер планет при заданных гелиоцентрической
дате старта и времени гелиоцентрического перелета. Однако вре¬
мя гелиоцентрического перелета Atit2 заметно влияет на величи¬
ну цп. н» и поэтому его часто рассматривают в качестве оптими¬
зируемого параметра. Вообще говоря, формально можно ранее
сформулированную трехпараметрическую задачу vlt ai и 6i про¬
сто свести к четырехпараметрической: vit ai, 61 и А^.г, сохраняя
используемый математический метод решения. Если же исходить
из требования улучшения сходимости итерационного процесса,
то более эффективным может оказаться алгоритм оптимизации
Рп. н, составной частью которого является предыдущий алгоритм,
выраженный формулой (7.3.23). Схема такого алгоритма может
быть представлена следующим образом:
Оптимизация времени перелета Atit 2
н.н шах
max {рн<н: V!V„(4nf (1j-f-
а/Ь26АГ
A'l,2“const const
(7.3. 24)
263
Таким образом, ПОИСК Цп.нтах производится на кривой
Ип.н=<р(Д*1,2), в каждой из точек которой выполняется решение
(7.3.23). Для сходимости данного итерационного процесса
здесь, как и в предыдущем алгоритме, важно правильно опреде¬
лить нулевое решение. Оно может быть найдено на основе алго¬
ритма оптимизации проектно-баллистических характеристик
и времени перелета, рассмотренного в предыдущем параграфе,
когда при расчете гелиоцентрического участка не учитывались
размеры грависфер планет. Для ускорения серии расчетов этот
алгоритм должен быть полностью включен в алгоритм, реализую¬
щий формулу (7.3.24). Он позволит в какой-то степени опреде¬
лить и область АТ.
Оптимизация гелиоцентрической даты старта h
Возникает вопрос, изменятся ли оптимальные гелиоцентриче¬
ские даты старта в синодические периоды планет, если гелио¬
центрический участок определяется с учетом размеров грави¬
сфер планет. Ответ на него носит принципиальный характер.
С ним также связаны возможные «окна» старта в оптимальные
даты. Поэтому представляет интерес наряду с оптимизацией
основных проектных параметров run и рКг, времени гелиоцентри¬
ческого перелета Ah,2 провести оптимизацию и гелиоцентриче¬
ской даты старта h- Таким образом, задача сводится к нахож¬
дению Цп.нтах при ограничениях (7.3.18) и (7.3.22) по девяти
переменным: п0и рКг (i=l, 2), vu см и 6i, Ah,2 и t\. Основываясь
на решении проектной задачи об оптимизации Лог- и pKi при за¬
данных значениях V\ и v2 (см. § 1 гл. VII), решение сформулиро¬
ванной задачи можно свести к поиску max рп.н при указанных
ограничениях по пяти переменным Vu см, 61, Ah,2 и h- При по¬
строении алгоритма решения данной задачи, исходя из требова¬
ний быстрой сходимости итерационного процесса, следует вос¬
пользоваться ранее изложенным алгоритмом оптимизации Ah,2,
выраженным формулой (7.3.24). В связи с этим алгоритм опти¬
мизации h можно представить формулой
ншах=тах {ixrt н: v i*rt.H€ max {(*„.„ : V|*n.H€ »nf (Ml — !VH)-f
мбг, дм.ед т j,
+ kbabsFL + ktfLbsFpi V!VH6max!VHb _const I I, (7.3.25)
п0рк[ ’ Д*1Ч " const >t I — const I
где T1 — ограниченное множество значений h-
Нулевое решение, вблизи которого определяется действитель¬
ное решение поставленной задачи, следует определять на основе
алгоритма оптимизации рп.н, выраженного формулой (7.2.21а).
Он позволит также определить и 7Y
Глава VIII. • ТРАЕКТОРИИ ПОЛЕТА К ОДНОЙ ПЛАНЕТЕ
С ВОЗВРАЩЕНИЕМ К ЗЕМЛЕ
§ 1. ОПТИМИЗАЦИЯ
ГЕЛИОЦЕНТРИЧЕСКИХ УЧАСТКОВ
Циклы оптимальных полетов к одной планете
с возвращением к Земле чередуются так же, как и к планете без
возвращения, т. е. через синодический период Тс. Приближенная
повторяемость циклов полетов также происходит через период
великих противостояний планеты Методы оптимизации
траекторий к одной планете с возвращением к Земле рассмотрим
на примере траекторий полета к Марсу с возвращением к Земле.
Оптимизация траекторий полета экспедиции
Оптимизацию траекторий межпланетных участков полета
экспедиции удобнее проводить на поле изолиний составляющих
импульсов скорости Vu ^2 и т.д. в координатах дат старта и при¬
лета на планеты. Поле изолиний для циклов полета к Марсу в
1975 г. для двухимпульсной схемы полета приведено на рис. 8.1.1
(аэродинамическое торможение на орбиту ИСМ).
По оси абсцисс отложены даты старта с Земли и даты
прилета на нее п0 оси ординат—даты прилета на Марс
*г=% и старта с него tz=t&T.
Над биссектрисой системы координат (область полетов
Земля—Марс) нанесены изолинии скорости старта У1=У§
с орбиты ИСЗ, под биссектрисой (область полетов Марс —
Земля) изолинии скорости старта Vt=V&t с эллиптической ор¬
биты спутника Марса.
Расстояние от какой-либо точки на поле изолиний скоростей
V\ до биссектрисы (в направлении осей координат) определяет
время перелета с Земли на Марс:
265
o' o'
1
Ч
««*
1
5(
1
а
**•
с
'<
н
'Ъ
cn
««*
»■*
у
3>
с
VJ
3
к
ъ
Id
ъ
r«*
О
С;
3
Ci.
о;
г»
•■*
л
К
Q
С5.
О
>з
к
*3
о
Qc
ч
О
Ci.
3
о
<0
С
«•*
3
5
35
о.
а:
Со
•к»
u;
a
a- ^
ITS
в; in.
~ o%
I ^
^ *
^ "t
ч> О
3
3
a-
266
а аналогичное расстояние от точки на поле изолиний V2—
с Марса на Землю:
д*сГ-©=/4—/8.
Время ожидания на Марсе (или на орбите его спутника)
Д^ож = ^3 ^2*
Суммарное время полета корабля экспедиции
ДЬ = + Д*о* + *-*® = *4 “ *1 •
На рис. 8.1.2 приведено поле изолиний для трехимпульсной
схемы полетов к Марсу в 1975 г.
При фиксированных датах старта с Земли t\ и прилета на
Марс t2 имеет место однозначное соответствие между скоростью
V\ (старт с орбиты ИСЗ) и скоростью V2 (торможение на орбиту
ИСМ). Поэтому в области полетов Земли — Марс (выше биссек¬
трисы) построено поле изолиний суммарных скоростей:
У]2=У1+У2.
В области полетов Марс — Земля (ниже биссектрисы) по¬
строено поле изолиний скорости старта Vq с орбиты ИСМ.
Время полета Д/@_с£ и Д^-©, время ожидания Д£0ж и сум¬
марное время полета экспедиции Д^ определяется так же, как
это описано выше.
На рис. 8. 1.3 приведено поле изолиний для четырехимпульс-
ной схемы (ускоренные траектории) для случая подтормажи-
вания скорости входа V© в атмосферу Земли до У© =15,5 км/с.
В этом случае
Vu=V, + V«
где К4=1/®-15,5.
Таким образом, для любой схемы полета на поле изолиний
необходимо найти траектории, обеспечивающие минимум сум¬
марной скорости, складывающейся из двух компонентов:
Vx2 = V1 -f- У2 — для двухимпульсной схемы;
l/xS = У12 -f- Уз — для трехимпульсной схемы;
Ухе 1=1 У12“j- У34 — для четырехимпульсной схемы.
На всех полях нанесены изолинии составляющих скоростей
при полетах по траекториям как 1-го полувитка (области изо¬
линий, близкие к биссектрисе), так и 2-го (области изолиний,
более удаленные от биссектрисы). Эти области разделены между
собой «энергетическим хребтом» — узкой зоной больших значе¬
ний скоростей.
267
о
«5
<N
ОО
<о
а
а.
©
к
*
а
а.
а
ч
‘3
3
3
3
'Ч
о
о Ч
3. ©
О «3
3 *■>
<о
4 ft.
a 5
©
3
3
К >3
у 3
3. <J
£ а
? а
4J «*-.
4 <
<о
‘§ §
5 §■
£ ^
3> £
5 s
з а
о .
С ©
а jo
<! Г''
V <Л
3 ^
3
*ч
3>
©
о
ь.
©
'Ч
268
Для того чтобы задача оптимизации Ухъ была однозначной,
все возможные траектории полета экспедиции можно разбить
на следующие четыре группы:
Группа
© -*Сt
cf - ©
I-I
II—II
I—II
II—I
Траектория 1-го полувитка
Траектория 2-го полувитка
Траектория 1-го полувитка
Траектория 2-го полувитка
Траектория 1-го полувитка
Траектория 2-го полувитка
Траектория 2-го полувитка
Траектория 1-го полувитка
1375
1376
1377 годы
Рис. 8.1.3. Поле изолиний характеристических скоростей для четырех-
импульсной схемы экспедиции к Марсу для цикла полетов в 1975 г. (тормо¬
жение до У^=/5,5 км/с)
269
Рассмотрим случай оптимизации траекторий полета, когда
нет ограничений ни на суммарное время полета Ah, ни на время
ожидания Atom, В этом случае для каждой группы траекторий
наименьшее значение Ухъ будет при полетах по траекториям
с минимальными составляющими скоростей (1Л и V2; V12 и У3
и т. д.). Дата старта с Земли t\ и дата прилета на Марс ti опре¬
деляется как координата, соответствующая минимуму скорости
Vi или V\2 (дата старта с Марса h и прилета на Землю по V3
или У34). Полученные значения скорости Ухъ будут наимень¬
шими изо всех возможных для выбранной группы траекторий.
Это первый энергетический минимум, соответствующий дли¬
тельным полетам с Ah ~3 года и At0Ж~1 год.
Различные группы траекторий будут давать четыре различ¬
ных значения Ухъ и Ah, из которых может быть выбрана
наилучшая комбинация сочетания траекторий по полувиткам
для заданного цикла полетов.
Рассмотрим случай, когда задано суммарное время Ah по¬
лета экспедиции. Найдем траекторию, обеспечивающую мини¬
мум Ухв. Зафиксируем какую-либо дату старта с Земли t\, что
в свою очередь определит дату возвращения на Землю:
При фиксированных значениях t\ и U можно построить зави¬
симости
— для четырехимпульсной.
По этим зависимостям определяются даты прилета на Марс h
и старта с Марса U, обеспечивающие минимум Ухъ и время
ожидания
С уменьшением времени Ah оптимальное время Д/0ж умень¬
шается и даже может стать отрицательным. В этом случае необ¬
ходимо наложить дополнительное ограничение на
При Д^ОЖ — Д^ож.доп схема оптимизации при фиксированных
t\ и остается той же, однако теперь
h — h~\~ Ati.
Д^ож h h'
Д^ож ^ Д^
о ж Логг
так как /3 =
270
Далее для обоих рассмотренных вариантов, изменяя дату
старта с Земли t\, находим такую дату, которая обеспечивает
минимум Кхв-
Для определения оптимальных характеристик траектории
межпланетного полета корабля экспедиции была составлена
программа для ЭЦВМ. Задача в описанных двух вариантах
формулируется таким образом (для двухимпульсной схемы
полета).
Ухг.кн/с
7-7/7 1
К у
з-м-з
з-м-в-з
3-M-J с промежуточны»
импульсом
\
\j
\Л-Пп
У
\n-ic
ч
не
п-m V
П-ffn
ж
1-lfrr
rv
\ о
/'
к
■Л-Пе
I-Je
Д-le /
J>j-ne
»
200 300 W 300 600 700 800 900 1000 1100 6Ьг.сугг
Рис. 8.1.4. Суммарная характеристическая скорость для трехимпульсных
экспедиций к Марсу цикла 1975 г.
(е — естественный цикл, п — предыдущий)
Вариант 1. Отыскать значения t\, t2 и /3, обеспечивающие
minУ'хб=Vi~{-V2 при заданном Д—
Вариант 2. Отыскать значения t\ и t2y обеспечивающие
min Vxz=V1-\- V2 при заданных значениях:
Д/я = /4 —V*
Д^ож = ^3 ^2 •
Поиск оптимальных значений t\, t2 и /3 производился методом
координатного спуска. При уменьшении времени Д/е, когда
время Д/ож становилось А/ож^А/ож.дот обеспечивается переход
от варианта 1 к варианту 2.
Вариант сочетания полувитков траекторий полета (группа
траекторий) задается. Из четырех возможных вариантов групп
траекторий полета выбирается наилучшая.
На рис. 8.1.4 и 8.1.5 приведены зависимости минимальных
значений 1Лсз = /(Д/з) для траекторий полета экспедиции
271
цикла 1975 г. для различных групп траекторий. Видно, что для
каждой группы траекторий имеют место два минимума:
— при д/е =900-1-1000 сут (длительные полеты);
— при Д/е =350-7-550 сут (ускоренные полеты).
Минимум ускоренных полетов соответствует случаю с огра¬
ниченным временем ожидания (Д/Ож = 30 сут).
Vxz,km/c
20
75
70
Рис. 8.1. 5. Суммарная характеристическая скорость для
двухимпульсных экспедиций к Марсу цикла 1975 г.
(е — естественный цикл, п — предыдущий)
Минимумы 1Лсе для различных групп траекторий длитель¬
ных полетов мало отличаются. Наименьшее время Д/е соответ¬
ствует группе траекторий I—I (сочетание траекторий первых
полувитков). Время ожидания не ограничено и составляет
Д/ож~1 ГОД.
Траектории такого типа назовем траекториями «естествен¬
ного цикла». При уменьшении времени Д/е для таких траекто¬
рий Ухг увеличивается. Для некоторых групп траекторий
в районе Д/е =700-^800 сут имеется «полочка» почти постоян¬
ных значений 1Лсе, после чего наступает интенсивный рост
Как правило, этот рост l/xS происходит за счет составляющих
скорости траектории полета с Марса на Землю. При этом при
переходе от длительных траекторий к ускоренным происходит
переход через «энергетический хребет», отделяющий область
возвратных траекторий цикла 1975 г. («естественный цикл»)
в область возвратных траекторий цикла 1973 г. (назовем их тра¬
екториями «предыдущего цикла»).
Это объясняется тем, что области минимума составляющих
скоростей полета Земля — Марс имеют более «крутые склоны»,
чем области минимума составляющих скоростей возвратных
траекторий. При ускоренных полетах наименьшие Кх1 имеют
место для группы траекторий I—Пп (Земля — Марс — траекто¬
рии 1-го полувитка, обратный полет — траектории 2-го полу¬
витка) при суммарном времени полета экспедиции Д/е ^430-^
272
460 сут (при времени ожидания А^Ож = 30 сут). При этом полу¬
чаются большие скорости входа в атмосферу Земли:
1/© = 20 ч- 23 км/с.
На рис. 8.1.6 показано влияние времени ожидания Atom на
характеристики ускоренных траекторий полета. Видно, что с ро¬
стом Д^ож увеличиваются суммарные энергозатраты полета
(1/хг —суммарная характеристическая скорость, скорость входа
в атмосферу Земли и суммарное время полета Mz.
Рис. 8.1. 6. Влияние времени ожидания на характеристики
ускоренных траекторий. Трехимпульсная схема 3—М—3
(цикла 1975 г.), группа I—II (эллиптический ИСМ)
Рассмотрим, как изменятся характеристики траекторий
полета экспедиций с использованием участков гелиоцентриче¬
ских траекторий с подачей промежуточного импульса.
На рис. 8.1.7 приведено поле изолиний составляющих им¬
пульсов
Vn=Vi + V* + bV»f и К. + А^р
(ДКПр — промежуточный импульс на соответствующем гелио¬
центрическом участке траектории) для трехимпульсной схемы
полета к Марсу в 1975 г. Сопоставим это поле изолиний с полем
изолиний для аналогичной схемы полета без промежуточного
импульса на рис. 8. 1.2. Видно, что существенно снизились энер¬
гозатраты в районе «энергетических хребтов», разделяющих
траектории 1-го и 2-го полувитков, как для полетов Земля —
Марс, так и Марс — Земля. Для двухимпульсного участка пере¬
лета Земля — Марс (при определении участков считаем только
импульсы в планетосферах) поле изолиний стало одноэкстре¬
мальным. На одноимпульсном участке полета Марс — Земля
273
поле изолиний осталось двухэкстремальным, но с существенно
выровненным энергетическим хребтом.
Заметно также снизились энергозатраты на обоих участках
полета в области траекторий 2-го полувитка при больших вре¬
менах полета, что существенно снизило энергозатраты в районе
стыка траекторий Марс — Земля для «естественного» и «преды-
Рис. 8.1. 7. Поле изолиний характеристических скоростей для трехимпульс-
ных траекторий с промежуточным импульсом (цикл 1975 г.)
дущего» циклов. Все это привело к тому (см. рис. 8.1.4), что
уменьшились энергозатраты для «ускоренных» траекторий’ ле¬
вее минимумов для комбинации полувитков I—Ип и II—Нп. Для
«длительных» траекторий полета снизились энергозатраты для
комбинации полувитков II—Не при больших значениях
Д^я >1000 сут.
Таким образом, использование траекторий полета с проме¬
жуточным импульсом на гелиоцентрических участках позволяет
снизить энергозатраты при значениях дмежду «ускорен¬
ными» и «длительными» перелетами.
На рис. 8.1.4 приведены также зависимости для траек¬
торий полета к Марсу с маневром в гравитационном поле Ве¬
неры, рассматриваемые в § 2 гл. IX. Видно, что использование
схемы полета по маршруту Земля— Марс —Венера — Земля
274
позволяет еще более снизить энергозатраты при значениях Д/е
между «длительными» и «ускоренными» перелетами, в резуль¬
тате чего получить достаточно мало изменяющиеся энергетиче¬
ские характеристики с д'в =450-1-800 сут.
Оптимизация траекторий облета Марса
с возвращением к Земле
В работе [5] рассмотрены траектории облета Марса одно-
импульсной схемы (импульс старта с орбиты ИСЗ) с пассивным
облетом планеты как вне сферы действия («дальний облет»),
так и в сфере действия («близкий облет»).
Для такого класса траекторий оптимальные по стартовому
импульсу траектории лежат в окрестности так называемых двух¬
годичных траекторий полета (суммарное время полета 730 сут).
Траектории такого типа назовем траекториями «длительного
облета» Марса. Однако, если перейти к двухимпульсной схеме
облета Марса (второй импульс в сфере действия планеты),
можно в большинстве случаев существенно улучшить характе¬
ристики траекторий «длительного облета» (Д/е «2 года) и полу¬
чить новый класс траекторий «ускоренного облета» Марса с су¬
щественно меньшим временем полета Дh ~4504-500 сут. Кри¬
терием оптимизации траектории в этом случае будет суммарная
характеристическая скорость
где V® — характеристическая скорость старта с орбиты ИСЗ
(Я„р«300 км);
AVJ — импульс маневра в сфере действия Марса для пере¬
хода с планетоцентрической гиперболы подлета на
гиперболу ухода к Земле.
Параметрами оптимизации такой траектории облета будут:
1) дата старта с Земли — /© ;
2) дата прилета на Марс — /^ ;
3) суммарное время полета —д/е.
Для выделения унимодальной области поиска траектории
разделяются на четыре группы сочетаний полувитков на отдель¬
ных этапах полета: /—//, /—/, II—II и II—I. Дополнительно
траектории полета делятся на длительные с Д/е =600-1-800 сут
и ускоренные с Д/е =400-^500 сут. Это позволяет использовать
для определения оптимальных траекторий градиентные методы
поиска. Для получения оптимальных ускоренных траекторий
облета Марса использовался метод конфигураций из работы [46].
275
§ 2. ХАРАКТЕРИСТИКИ МЕЖПЛАНЕТНЫХ
ТРАЕКТОРИИ КЛА
С ВОЗВРАЩЕНИЕМ К ЗЕМЛЕ
Характеристики траекторий облета Марса
с возвращением к Земле
Возможны два типа траекторий облета Марса — длительные
(время полета ~2 года) и «ускоренные» (время полета ~450—
500 сут).
«Длительные» траектории облета происходят практически
с нулевым импульсом маневра в сфере действия Марса. Энерго¬
затраты этих траекторий для лучших комбинаций полувитков
незначительно превышают затраты, потребные для полетов
к Марсу без возвращения (см. на рис. 8.2. 1 точки ® ).
ч£,км/с
Чх,км/с
19701 1 3 41975 S 7 8 1980 7 1 3 4 1985 6 7 8 9 1990
tgT> годы
Рис. 8.2.1. Энергозатраты для ускоренных траекторий облета
Марса
«Ускоренные» траектории облета Марса требуют приложе¬
ния существенного импульса при облете Марса в сфере его дей¬
ствия (Д^£ ~ 1-:-4 км/с).
В цикле полетов 1975 г. сочетание полувитков I—I на траек¬
тории полета дает очень высокое значение оптимума Ухъ для
ускоренных траекторий. Оптимальное значение Ухг для «дли¬
тельных» траекторий этого сочетания полувитков составляет
Ухъ ~6 км/с при суммарном времени полета Д/а =620 сут. Ха¬
рактеристики траекторий для сочетания I—II существенно
лучше. Для ускоренных траекторий минимум Ухъ «8 км/с при
д/а =450 сут. Импульсы старта с Земли и маневра у Марса
составляют ~4 км/с.
Для длительных траекторий облета минимум Ухц =4,4 км/с
при Дh =700^750 сут. Импульс маневра в сфере действия
276
Марса <100 м/с, т. е. сводится к величине корректирую¬
щего импульса. Скорость входа в атмосферу Земли для ускорен¬
ных траекторий К® =22,5 км/с, для длительных траекторий
V® =12 км/с.
Хорошими характеристиками для цикла 1975 г. обладают
также ускоренные траектории группы II—II. Величина Ухъ =
= 8 км/с при V*в =520 сут и скорости входа в атмосферу Земли
V® = 2\ км/с. Оптимум длительных траекторий для этой группы
полувитков соответствует суммарному времени Д/е =800 сут.
Рис. 8.2.2. Время полета для ускоренных траекторий облета
Марса
Траектории полета для сочетания полувитков II—/ имеют худ¬
шие характеристики как для ускоренных, так и для длительных
траекторий полета.
Цикл полета к Марсу в 1975 г. является худшим. Для луч¬
шего цикла полетов в 1986 г., как показали проверочные рас¬
четы, качественная картина характеристик оптимальных уско¬
ренных траекторий примерно та же. Наилучшими являются
группы траекторий I—II и II—II. Для этих «лучших» комбина¬
ций траекторий на рис. 8.2.1 и 8.2.2 приведены зависимости
изменения характеристик для различных циклов полетов. Услов¬
ные кривые, соединяющие точки характеристик различных цик¬
лов, имеют периодичность, примерно равную периоду великих
противостояний Марса Гв.п~15,8 года. Это позволяет экстрапо¬
лировать характеристики на циклы, выходящие за пределы рас¬
считанных характеристик, с 1970 во 1990 гг. «Лучшим» был цикл
полетов к Марсу в 1969 г. и будет в 1986 г. Циклы полетов 1975
и 1977 гг. являются наихудшими.
277
Для лучших циклов У*г =5,14-5,2 км/с, д/Е =425 сут для
группы I—II, дh =490 сут для группы II—II, V® =14,5 и
15,1 км/с.
Для худших циклов: 1/хЕ =8,2н-8,3 км/с, д/Е =450 сут для
группы I—II, Д/Е =520 сут для группы II—II, V® =21,5 и
23 км/с.
Значительные энергозатраты и большие скорости входа
в атмосферу Земли для худших циклов полетов могут явиться
препятствием для использования ускоренных траекторий пря¬
мого облета Марса в эти циклы полетов.
Характеристики оптимальных траекторий
для различных схем полета экспедиций на Марс
По изложенной выше методике были проведены расчеты
оптимальных траекторий для различных схем экспедиций на
Марс в 1970—1980 гг.
Ух, км/с
- 1-й поли Виток
2-й и
“ши-тт сочетания
1360 1 2 3 4 5 6 7 8 91370 234 5 6 7 8 9 1980 1 2 3 4 5 6 7 8 9 1990 2
г%г,годы
Рис. 8.2.3. Характеристики длительных двухимпульсных экспеди¬
ций к Марсу (круговой и эллиптический ИСМ)
На рис. 8.2.3 и 8.2.4 приведены зависимости изменения сум¬
марной скорости Vxz и ее составляющих для длительных двух-
и трехимпульсных схем экспедиций на Марс. Точки, отмеченные
рисками, соответствуют оптимальным датам старта, повторяю¬
щимся примерно через Гс = 2,135 года. Условно эти точки соеди¬
нены кривыми. Изменение КхЕ и ее составляющих для всех схем
полета носит периодический характер с периодом, равным при¬
мерно периоду великих противостояний Марса ТВА,= 15,8 года.
Диапазон КхЕ примерно 500—800 м/с для лучших сочетаний
полувитков траекторий. Для двухимпульсной схемы полетов
приведены значения Vxs и ее составляющих при выведении на
круговую орбиту ИСМ с /гКр= 1 тыс. км и эллиптическую орбиту
с hK =1 тыс. км и ha =20 тыс. км. Значения VxZ при выведении
278
на эллиптическую орбиту меньше примерно на 1 км/с по сравне¬
нию с выведением на круговую орбиту. Выбранная эллиптиче¬
ская орбита обеспечивает энергозатраты, близкие к предельно
минимальным (выход на параболу снижает Ухт, всего на
250 м/с). Для трехимпульсной схемы полета Ухъ при выведении
на эллипс примерно на 2 км/с меньше, чем на круговую орбиту.
Суммарное время полета длительных экспедиций лежит в пре¬
делах д/е =900-f-l 100 сут. Скорость входа в атмосферу Земли
У® = 11,5ч-12,3 км/с. Время ожидания на Марсе А^ож — 330-i-
450 сут.
Ух,км/с
8
7
6
5
4
I
3
г
1
Рис. 8. 2. 4. Характеристики длительных трехимпульсных экспедиций
к Марсу (эллиптический ИСМ)
Характеристики оптимальных траекторий двух- и трех¬
импульсных схем ускоренных экспедиций носят также периоди¬
ческий характер. Период этот примерно равен периоду великих
противостояний Марса (рис. 8.2.5 и 8.2.6).
Суммарная характеристическая скорость Ухъ для ускорен¬
ных полетов существенно больше, чем для длительных. Диапазон
изменения Ухъ по циклам полетов также существенно больше
и равен 1,5—2 км/с. Особенно сильно изменяется скорость входа
в атмосферу Земли К® (от 14 до 23 км/с). Минимальное значе¬
ние К® примерно соответствует минимуму Ухг- Суммарное
время полета, однако, достаточно стабильно и составляет Lh=
= 430-Г-530 сут с диапазоном изменения для траекторий одной
комбинации полувитков не более 50 сут. Скорость входа в атмо¬
сферу Марса для двухимпульсной схемы полета примерно
К*»6,5—8,5 км/с. Скорость старта с орбиты ИСЗ для траекто-
279
*> 6 7 8 1970 Z3 4 5 6 7 8 1980 Z 3 4 5 6 7 8 1930 tXecd;'
рий с комбинацией полувитков I—II достаточно стабильна и со¬
ставляет V® = 3,5-ь4 км/с для трехимпульсной схемы и V fT~
«3,8-М,3 км/с для двухимпульсной.
Мп,ки/с
\,ки/с
№
14
12
Ю
8
6
4
2
1970 2 3 4 5 6 7 8 1980 2 3 4 5 6 7 8 1990 2 Ь&годы
Рис. 8.2.5. Характеристики ускоренных двухимпульсных экспедиций
к Марсу (эллиптический ИСМ, Ит=1000 км., ha=20 ООО км, Atom=30 сут)
Существенное изменение характеристик траекторий полета
к Марсу по циклам полетов приводит к тому, что имеют место
«хорошие» циклы полетов (1984 и 1986 гг.) и плохие (1975,
1977 гг.). В «хорошие» циклы полетов энергозатраты (суммарная
тг
Ух,км/с
24
22
\22
18
16
14
\12
■10
18
14
12
10
8
6
4
2
км/с
AU,cum
700\
600
400
-100
200
100
—
гр. 1-Е
го.Д-П
Ч
nI
Ч»
h-
-ь
V-
-1
-н
—
ч-
or
-+
v#5
к
+-
г+
-¥
—к
-N
Ч
\
—
—
+-
г-
-t
tl
Г
Г
*
ГГ
к
/
я
'^ч
-
И
S-
■ _
-V
^ *
+ -
I
-f
*п
1
•I-
«■
У*
—г
ч
П ~
-1L
',8 год
гг
1970 2 3 4 5 6 7 8 91980 234567 89 1990 1 2 ЩродЫ
Рис. 8.2.6. Характеристики ускоренных трехимпульсных экспедиций
к Марсу (условия те же, что в подписи рис. 8.2.5)
280
скорость Кхь ) и скорость входа в атмосферу Земли V® мини¬
мальны, что делает их благоприятными для реализации прямых
полетов к Марсу.
Характеристики траекторий облета Венеры
с возвращением к Земле
Такие траектории могут представлять интерес как для авто¬
матического аппарата, возвращающегося на Землю, так и для
пилотируемого при первых полетах к планете. Траектории дли-
At,cym
1970 2 3 4 1975 9 7 8 9 1980
2 3 4 1985 7 8 1990
tc*T,cym
Рис. 8. 2. 7. Характеристики траектории ускоренного облета Венеры
(АУЯМ <100 Mfc)
тельного облета Венеры с суммарным временем полета
Ah ^2 года имеют энергетические характеристики, близкие
к траекториям полета к Венере без возвращения. Импульс ма*
невра в сфере действия Венеры равен нулю.
Возможны ускоренные траектории облета Венеры с возвра¬
щением к Земле с суммарным временем полета Ah =«350ч-
500 сут. Наилучшими характеристиками обладают траектории
с сочетаниями полувитков I—II и II—II. Сочетания полувитков
I—I и II—I дают значения суммарной характеристической ско¬
рости на 1—2 км/с больше.
Характеристики траекторий облета Венеры имеют небольшой
диапазон изменения (рис. 8.2.7). Так, для Vхъ диапазон измене¬
ния по циклам полетов ДУхъ =300 м/с. Оптимальные траектории
соответствуют малым значениям импульса скорости в сфере
действия Венеры (AV'J ^100 м/с). Суммарное время полета
по траекториям облета Венеры также достаточно стабильно
и составляет Ah —380-М00 сут для траекторий с сочетанием
281
полувитков I—II и д*а = 450^-500 сут для II—II. Следует отме¬
тить, что Кхг облета Венеры [VxS =3,6ч-4 км/с для сочетания
полувитков I—II) незначительно превышает скорость 3,4—
3,8 км/с, потребную для полетов к Венере без возвращения. Ско¬
рость входа корабля в атмосферу Земли V* = 14-1-14,8 км/с для
сочетания полувитков II—II и V® = 134-14,2 км/с для I—II.
Циклы оптимальных облетов Венеры чередуются примерно через
синодический период Венеры Гс~1,6 года. Циклы оптимальных
траекторий повторяются примерно через период великих соеди¬
нений Венеры лет. Учитывая это, можно прибли¬
женно экстраполировать характеристики оптимальных траекто¬
рий на другие циклы полетов.
§ 3. ВЫБОР СХЕМЫ ФОРМИРОВАНИЯ
ОРБИТЫ ОЖИДАНИЯ У ПЛАНЕТЫ
В большинстве опубликованных как отечественных, так и за¬
рубежных работ при оптимизации траекторий полета корабля
экспедиции к планете считается, что маневр торможения с под¬
летной гиперболы на орбиту ожидания у планеты и старт с нее
на гиперболу отлета происходит в точках перицентра этих тра¬
екторий. В реальной ситуации такой случай практически неосу¬
ществим. Естественно возникает потребность найти реально осу¬
ществимый маневр формирования орбиты ожидания у планеты
с минимальными энергозатратами. В данном параграфе сопо¬
ставлены три варианта маневров формирования орбиты, комби¬
нируемых из маневра в плоскости эллиптической орбиты ожида¬
ния (поворот оси апсид эллиптической орбиты, неперицентраль-
ные переходы эллипс — гипербола) и маневра поворота плоскости
эллиптической орбиты в ее апоцентре (см. § 2 гл. IV). Это сопо¬
ставление не претендует на строгую оптимизацию схемы маневра
формирования орбиты ожидания. Однако полученный вариант
схемы маневра с наименьшими затратами, базирующийся на не¬
перицентральных переходах эллипс — гипербола, по-видимому,
близок по энергозатратам к минимальному.
Рассмотрены случаи формирования орбиты ожидания как
в плоскости вектора подлета к планете и упрежденного вектора
старта с нее (базовая плоскость), так и в плоскости произволь¬
ного наклонения к базовой плоскости.
Орбита в плоскости векторов подлета
к планете и старта с нее
Пусть заданы направления векторов скорости на асимптотах
подлетной и отлетной гипербол (Vi и Уч на рис. 8.3.1). Направ¬
ление этих векторов характеризуется в экваториальной плането¬
282
центрической системе координат углами at и а2— прямого вос¬
хождения, 6i и 62 — углами склонения.
В этом случае естественно формировать орбиту ожидания
в плоскости векторов V\ и V2. Наклонение этой орбиты к эква¬
тору /, а долгота восходящего узла Q. Угол ф между векторами
Vi и У2 определится из сферического треугольника 62a6i
cos cp=cos (ax— a2) cos (8X — 82).
Puc. 8. 3.1. Схема определения наклонения i
орбиты ожидания
За время ожидания у планеты А/0ж долгота узла орбиты ожи¬
дания изменится на величину *
2jt£ _ _ _ _* Л^ож
д2 = cos/
Ипл Р2 г
а ось апсид повернется на угол
Дш = — (5 COS / — 1) -A^22!L. .
Здесь е — коэффициент, характеризующий сжатие пла¬
неты;
Цпл — гравитационная постоянная планеты;
р — параметр орбиты ожидания;
аЗ/2
Т= 2л—— —период обращения на орбите ожидания;
Vv- М
а — большая полуось орбиты ожидания.
В этом случае плоскость орбиты ожидания должна проходить
через векторы V\ и упрежденный вектор V2 (базовая плос¬
кость). Направление вектора VV характеризуется углами
* См. § 1 гл. II.
283
а2=а2+&0.', 62' = 62. Наклонение орбиты ожидания в этом слу¬
чае будет //, а долгота узла Q'. Угол между векторами V\ и V2
равен ф' (см. рис. 8.3.1). За время ожидания А£0ж наклонение
орбиты i\ не изменится, а долгота узла станет
2" = 2' + д2',
2Яе ,, А/0ж
где д2' = cos i
fW2 7
В этом случае в конце времени ожидания плоскость орбиты ожи¬
дания пройдет через вектор стартовой скорости V2. Из сфериче¬
ского треугольника 6г'аб1 получим
tg(8i—8a)=sin (ах — а2—A2')tg/'.
После преобразования этого выражения будем иметь
tg (^1 ^2) _ s}n (а, —cu) cos д2' —cos(a1—а2) sin д2'.
tgi'
Это трансцендентное уравнение определяет угол Угол ф'
между векторами V\ и V2 (из сферического треугольника 62061).
cos cp' = cos(a1— a2 —д2')соз (8Х— 82).
Угловое расстояние и2 вектора V2 от линии узлов Q' определится
из сферического треугольника Q'a2b2\
Sin Йо
sin и«= — .
2 sin /'
Из сферического треугольника Q'a2b2 получим
sin р= tg&2 .
tg Г
Долгота узла Q' будет
2' = а2-{-д2' — р=а,-|- д2' — arc sin tg*2
При определении i на ЭЦВМ целесообразно, не решая транс¬
цендентного уравнения, определить i' методом последовательных
приближений из следующих рекуррентных соотношений:
tg i <*> = tg ~ ^
sinfa^aW)’-
до (ft) = ?*!_ cos i<*> f
fW2 7
a(*+i)_ q2_|_ д2(*) .
284
Учитывая поворот оси апсид от сжатия планеты, определим угол
между асимптотами гипербол ф//=ф'—А(о, необходимый для рас¬
чета маневра перехода в плоскости векторов V\, Vi.
Рассмотрим несколько вариантов маневра перехода между
гиперболической орбитой прилета, эллиптической орбитой ожи¬
дания и гиперболой отлета. Радиусы перицентра гк и апоцентра
га орбиты ожидания заданы. Все эти варианты переходов бази¬
руются на ряде элементарных маневров, методика расчета кото¬
рых описана в § 2 гл. IV.
Сопоставление различных вариантов маневров
формирования орбит ожидания
в базовой плоскости
Возможны следующие варианты маневра компланарного пе¬
рехода на орбиту ожидания с подлетной гиперболы и старта
с орбиты ожидания на гиперболу отлета от планеты.
1. Перицентральные переходы между гиперболами и эллипти¬
ческой орбитой с поворотом оси апсид эллипса:
а) с одноимпульсным поворотом оси апсид эллиптической
орбиты;
б) с двухимпульсным поворотом оси апсид эллиптической
орбиты.
2. Неперицентральный переход между гиперболическими
и эллиптической орбитами.
Пусть угол между векторами скорости VL и на асимп¬
тотах гипербол равен ф (рис. 8.3.2). Возможны два вида пере¬
хода и два положения орбит ожидания. Первый вид перехода
(сплошные линии на рис. 8.3.2) дает больший разворот осей
апсид гипербол Диа*, чем второй (пунктирные линии). Угол
между осями апсид гипербол (точки перехода)
= я + ср—(aT-faCT).
Знак « + » — для первого вида перехода, «—»—для второго.
Для перицентральных переходов угол равен потребному
углу поворота оси апсид эллипса. Для неперицентрального пере¬
хода углы Av равны аномалии точки торможения на эллипс или
старта с него. В общем случае, когда модули скорости F«> под¬
летной и отлетной гипербол не равны, справедливо соотношение
Дгт + Ди„ = я + cp-(aT + aCT) (Avr^AvCT).
* Отметим, что в варианте неперицентрального перехода точки перехода
с гиперболы на эллипс совпадают с перицентром гиперболы.
285
Оптимальное перераспределение v>T и ост находится из условия
минимума
д1?х2=д\7т + д17ст,
где АГТ и AVCT — импульсы скорости на торможение (или старт)
с гиперболы на эллипс. На рис- 8.3.3 для га=5 приведены зави¬
симости дополнительных энергозатрат на маневр перехода с не-
Рис. 8.3.2. Схема плоского перехода эллипс—гипер¬
бола—эллипс
совпадающими осями апсид тормозной и стартовой гипербол
по сравнению с перицентральными переходами при совпадаю¬
щих осях апсид гипербол. Величина
д1/=*/хе-(дк;;+д1/с*т),
где VKt — суммарные затраты на маневр перехода при не¬
совпадающих осях апсид гипербол;
ДК*; ДУТ — затраты на перицентральное торможение (старт)
с гиперболы на эллипс.
Видно, что маневр перехода с одноимпульсным поворотом
оси апсид эллипса соответствует наибольшим энергозатратам.
Маневр перехода с двухимпульсным поворотом оси апсид стано¬
вится выгодным по сравнению с вариантом неперицентраль-
ного перехода лишь при больших углах Ащ разворота оси
286
апсид. Причем преимущества его проявляются при меньших зна¬
чениях дни с увеличением относительного радиуса га эллипти¬
ческой орбиты ожидания. Однако для реальных значений
AV*
км/с
3
. 1,0
2,5
-0,8
W
Г 0,6
1.5
0,4
1,0
0,5
0,2
0
.
0
КругоВой ni
*рехсд/
—У ■ /
X 7^
-X X
— X——X—
—X—х—
ватичш
ий перехо
д
150
180 40
Рис. 8.3. 3. Характеристики различных вариантов плоского пере¬
хода эллипс—гипербола—эллипс для га = 5:
l—одноимпульсный поворот оси апсид; 2—неперицентральный переход;
3—двухимпульсный поворот оси апсид; 4—двухимпульсный параболиче¬
ский переход
l-f-2 и Лии <60° наиболее экономичным является вариант
неперицентрального перехода между гиперболами и эллипсом.
На рис. 8.3.4 приведена зависимость дКхе = / (г*) для различ¬
ных вариантов перехода. Видно, что в большинстве случаев
энергозатраты перехода уменьшаются с увеличением га.
Рис. 8.3.4. Сопоставление различных вариантов плоского перехода
эллипс—гипербола—эллипс при V0а=2 (обозначения те же, что на
рис. 8.3. 3)
287
Орбита произвольного наклонения
к базовой плоскости
За базовую примем плоскость, в которой лежат векторы
скорости прилета FT°° и старта FCToo (скорости на асимптотах
пучка гипербол на входе в сферу действия планеты и на выходе
из нее).
Считаем наклонение /т плоскости подлетной гиперболической
орбиты к опорной плоскости заданным. Значения г* и га эллип¬
тической орбиты ожидания также заданы. Рассмотрим следую¬
щие варианты маневра формирования орбиты ожидания
и старта с нее:
— вариант I — маневр с двумя перицентральными перехо¬
дами эллипс—гипербола и различных вариантов двухимпульс¬
ных поворотов оси апсид эллипса;
— вариант II — маневр с двумя перицентральными перехо¬
дами эллипс — гипербола и двумя одноимпульсными поворо¬
тами оси апсид эллипса;
— вариант III — маневр с двумя неперицентральными пере¬
ходами эллипс — гипербола.
Во всех вариантах необходим этап поворота плоскости эллип¬
тической орбиты.
Рассмотрим отдельные этапы и варианты маневров формиро¬
вания орбиты ожидания произвольного наклонения к базовой
плоскости.
Маневры с перицентральными переходами
между эллипсом и гиперболой
В этом случае маневр формирования орбиты ожидания
и старта с нее состоит из следующих этапов:
— два перицентральных перехода между эллипсом и гипер¬
болами подлета и старта;
— поворот оси апсид эллипса;
— поворот плоскости эллиптической орбиты.
Как и ранее, возможны два варианта поворота оси апсид
эллипса — одноимпульсный и двухимпульсный.
Маневр с двухимпульсным круговым поворотом оси апсид
и поворотом плоскости эллиптической орбиты (вариант (1а).
Наклонение плоскости подлетной гиперболы /т к опорной плос¬
кости задано (рис. 8.3.5). Вначале в точке / производится пло¬
ский перицентральный маневр перехода с подлетной гиперболы
на эллипс с заданными значениями г* и га, затем в точке 2 —
плоский маневр выхода на круговую промежуточную орбиту
с радиусом га. Далее в точке 3 следует поворот плоскости этой
круговой орбиты на угол х, затем переход с круговой орбиты на
стартовый эллипс. Последним этапом является перицентральный
288
маневр старта с эллипса на отлетную гиперболу *. Наклонение
плоскости орбиты стартового эллипса /ст выбирается оптималь¬
ным из условия минимума энергозатрат на общий маневр. Пусть
угол между векторами входа в сферу действия планеты VI,
и выхода из нее К» равен ф. Угол поворота вектора скорости на
Рис. 8. 3. 5. Схема пространственного перехода эллипс—гипербола—
эллипс с двухимпульсным поворотом оси апсид (вариант 1а)
круговой промежуточной орбите равен х. Из сферического тре¬
угольника следует, что
cos (я — х) = — cos /т cos /ст sin /т sin /ст cos (я — ср),
откуда
cos х = cos /т cos /ст -|- sin /т sin /ст cos ср.
При заданных гк и гв эллиптической орбиты ожидания мини¬
мум суммарного импульса будет при минимуме импульса АУ«
поворота плоскости промежуточной орбиты. При заданных tT
и ф это будет соответствовать максимуму cos х. Следовательно,
д (cos х.) . Л
—- -= — cos/,sin/CT-f- sin ir COS ICT COS cp= 0
dic
lCT
или
sin2 iT cos2 cp (1 — sin2 /„) = cos2 iT sin2 /CT.
Оптимальное значение /CTopt определится из выражения
sin2/CT=
sin2 /Tcos2 cp
cos2/T + sin2 /Tcos2 cp
* Два последних этапа на рис. 8. 3. 5 не показаны.
289
Суммарный относительный импульс на двухимпульсный пово¬
рот оси апсид (импульс дК«,) и поворот плоскости на угол х
(импульс д1/х)
ДКхЕ == Д -J- ДКх.
Относительный суммарный импульс Afxs в зависимости от
угла ф для различных наклонений прилетной орбиты /т и значе¬
ний гв =5 приведен на рис. 8.3.6. Наибольшие значения дУхе
соответствуют наклонению тормозной плоскости /т=±90°. Имеет
AV
0,8
0,6
0,4
0° 30 60
место симметрия маневров перехода относительно базовой плос¬
кости. Энергозатраты этого варианта перехода (1а) сущест¬
венно зависят от радиуса апоцентра га эллиптической орбиты
ожидания.
Маневр с одноимпульсным поворотом оси апсид и поворотом
плоскости эллиптической орбиты (вариант II). Маневр перехода
на орбиту ожидания и ухода с нее происходит следующим обра¬
зом (рис. 8.3.7). В точке 1 (перицентр подлетной гиперболы
и эллипса) аппарат переходит на первую эллиптическую орбиту.
В точке 2 радиальным импульсом д1Л»т аппарат переводится
на вторую эллиптическую орбиту, повернутую относительно пер¬
вой на угол (от. Затем в точке 3 импульсом Д1Л производится
поворот плоскости эллипса относительно оси апсид на угол к.
Этим маневром формируется стартовая плоскость. В этой плос¬
кости ось апсид эллипса поворачивается на угол (ост и из пери¬
центра этого повернутого эллипса происходит перицентральный
переход на стартовую гиперболу (последние этапы маневра на
рис. 8.3.7 не показаны). Необходимые характеристики этого ма¬
невра перехода определятся из соотношений:
cos х=cos /т cos /Ст -j- sin /, sin /ст cos <p;
cos Yct= ~ cos YT cos <p-j- sin yt sin <p cos
. . . . sin Yt
sin iCT= sin i_ — ;
sin Yet
60(120>
30° J
/
" ,30(150)
1т=0°(180)
—
Puc. 8,3.6. Зависимость суммар¬
ного импульса от углов ц.
и i для варианта 1а (га=5)
290
ШСт Yet ®ст И Ют Yr ®т*
При заданных га— относительной высоте апоцентра эллипти¬
ческой орбиты ожидания, ф — угле между векторами FL, и FCT<x
и /т — наклонении плоскости тормозной гиперболы расчет
ведется следующим образом. Перебирая величины ут. находим
Hue. 8.3.7. ^Схема пространственного перехода гипербола — эл¬
липс — гипербола с одноимпульсным поворотом оси апсид
(вариант II)
его оптимальное значение, обеспечивающее минимум энерго¬
затрат:
А V ХЕ —— LV о)Т + AF о)СТ + д1Л,
где
д\7ш=дК sin^-;
д1?,= 2Va sin -у- .
Значения ЬУш = / (га) и д1/х = /(х, га) приведены на рис.
4.2.1 и 4.2.2. Оптимальному ут соответствует оптимальное на¬
клонение /Ст стартовой гиперболы. Оптимальное значение
(1)°р‘ = 0. Интересным является вырожденный случай перехода,
когда (от = (Ост = 0. В этом случае
. * _ cos аст + cos gT + cos <P .
VvOI
sin ar sin f
sin i* = sin / sin a* •
CT T )
sin aCT
» * / 1 • а ; / sin ат \2 i • „• 9 sin a,
COS X = COS lS\ / 1 —Sin2fT — -fsipjJ2 .
x \ sin aCT / sin aCT
291
И если дополнительно l/L = 1/J (ат = аСт = а),
то
tg —
cos а (1 — cos ф) 2
cos iT = 1 — = ;
sin a sin <p tg а
cos x = cos2/Tsin2 ij cos <p.
Ha рис. 8.3.8 приведена зависимость суммарного импульса
ДКхе и его составляющих в зависимости от угла наклона старто¬
вой орбиты /т для различных <р. Зависимость дКхе =f(h) носит
V
V
1,0
0J&
0.6
О*
О,г
г SO 60 90 120 150 г7
Рис. 8.3.8. Зависимость суммарного импульса AKvOT ir
и ф (вариант II) при га =5, Vla=l, и о>т oPt = tf
довольно сложный характер. Видны точки (для ф = 60 и 90°),
в которых (ост = 0. Зависимость характеристик этого маневра
перехода симметрична относительно базовой плоскости. Наи¬
большие значения дКхе соответствуют наклонению /т, близ¬
кому к 180°.
Маневр с двухимпульсным эллиптическим поворотом оси
апсид и поворотом плоскости переходного эллипса (вариант 16).
Маневр осуществляется следующим образом (рис. 8.3.9). С тор¬
мозной гиперболы в точке 1 осуществляется перицентральный
переход на эллиптическую орбиту ожидания, в точке 2 — выход
на переходной эллипс, обеспечивающий поворот оси апсид на
угол со. В точке 3 апоцентра переходного эллипса осущест¬
вляется поворот плоскости на угол х. В этой (стартовой) плос¬
кости совершается выход с переходного эллипса на орбиту ожи¬
дания и с этой орбиты — перицентральный старт на гиперболу
отлета (второй этап маневра на рис. 8.3.9 не показан).
292
Симметрия эллиптического поворота оси апсид требует, чтобы
о)
ст
= С0т = (1)/2.
В этом случае
у г = ат -f со/2; Уст = аст + °V2-
Из основного соотношения
cos уст = — cos yTcoscp-f sin yTsin cpcos/T
после преобразований получим
со cos аст + cos Of cos у — sin СЦ. sin у cos ir
tg
2 sin aCT + sin aT cos <p + cos aT sin <f cos iT
Puc. 8. 3.9. Схема пространственного эллиптического перехода
с двухимпульсным поворотом оси апсид (вариант 16)
Угол поворота скорости V* переходного эллипса
cos х= cos ir cos /CT-f sin sin iCT cos cp,
• j sin y,
где sinfCT=sinfT — .
sin yCT
По этим значениям со и x определится суммарный импульс
маневра
СУ хЕ = ЬУ ш —X»
где ДV»—суммарный импульс поворота оси апсид на угол со
(см. рис. 4.1.5 — эллиптический двухимпульсный переход);
ьУх —импульс поворота плоскости орбиты в ее апоцентре на
угол х (см. рис. 4.1.3).
293
_ На рис. 8.3.10 приведены значения суммарного импульса
дУ’ха от угла наклона тормозной орбиты /ст и для различных
v
nr W 60 90 1Z0 150 ir
Рис. 8.3.10. Зависимость суммарного импульса
ДУа от 1т и ф для эллиптического перехода (вариант
16) npu~?a=5,Vl=l, V" =2
значении угла ф при г« =5 и FooT=l, FooCT = 2. Наибольшие зна¬
чения Vxz приходятся на /ст = 120-=-130°. Здесь также имеются
8
31 ~ TSL
6
4
Z
о
0° .10 60 .90 1Z0 150 ij
/Я** «W
Рис. 8.3. 11. Значения Ru и /?х переходного эллипса
(вариант 16)
точки, где А^сп = 0. На рис. 8.3.11 приведены значения /?, и /?ж
переходного эллипса. Для точек, где д!/т =0, Яя = 1 и/?в =5.
В общем случае значения /?* и /?« больше г% и га для орбиты
ожидания.
Маневр с неперицентральным переходом
между эллипсом и гиперболой (вариант III)
Маневр формирования орбиты ожидания и старта с нее
в этом случае состоит из двух неперицентральных переходов
между гиперболой и эллипсом (точки 1 и 3 на рис. 8.3.12) и по¬
ворота плоскости эллипса на угол х в точке 2. Схема расчета
294
Зг
*«. 90
30 ^
f = 0°
60
.30
'Zojo
— —
характеристик здесь та же, как и в случае варианта II. При
заданных га, /т и ф ищется оптимальное значение ут, обеспечи¬
вающее минимум
ЬУ xs = bV T-j- Д1^ CT-j- A Vx,
где AV\ и д\7ст — разности импульсов скорости между непе-
рицентральными и перицентральными маневрами перехода
между эллипсом и гиперболой,
A\7x=2\7asin -у .
Зависимость составляющих импульсов от наклонения старто¬
вой орбиты /т и угла ф между векторами и Vе! приведена
Рис. 8. 3.12. Схема пространственного неперицентрального перехода
гипербола—эллипс—гипербола (вариант III)
на рис. 8.3.13. Зависимости носят такой же характер, как и для
•случаев маневра с одноимпульсным поворотом оси апсид, однако
AVz существенно меньше. Зависимость AVv=f(h) также сим¬
метрична относительно базовой плоскости. Однако в этом слу¬
чае, как правило, аТфО. На рис. 8.3. 13 отмечены точки, соот¬
ветствующие (От = ШСТ = 0.
295
V
Oft
0,6
44
42
Д7Г=7*,,+'+Чиг
—• со у = сoCj=0
f- 90°
60\
V
/
1
г
0е
JO
60
90
120
150
Рис. 8.3.13. Зависимость AVj, от iT и ер для непери-
центрального перехода (вариант III) при га=5, V<x,r = l,
VCJ=2
Рис. 8.3.14. Сопоставление различных вариантов про¬
странственного перехода гипербола—эллипс—гипербола
при 7в =5, V^ = l, VCJ=2
296
Обеспечение выхода на орбиту
произвольного наклонения
для малых значений угла ф
Если угол ф между векторами скорости подлета Vr„ и скоро-
сти отлета Vе! равен нулю, то наклонение орбиты ожидания
можно Bbi6npajb произвольным. Такое взаимное положение век¬
торов Vlo и V" в принципе можно обеспечить за счет измене¬
ния параметров гелиоцентрических участков траекторий, примы¬
кающих к планете. Однако, как показали расчеты, при этом
существенно возрастают энергозатраты по траектории полета.
Объясняется это тем, что для совмещения векторов VL V"
необходимо, кроме изменения конфигурации траектории в их
плоскостях, совместить и плоскости орбит на участках, примы¬
кающих к планете.
Векторы могут совмещаться также за счет поворота одного
из векторов Vic или VеI на угол ф. Естественно, что поворачи¬
вать нужно вектор с меньшим модулем. Оптимизация траекто¬
рии в этом случае производится по суммарной скорости Vx я
с добавлением импульса поворота
д1/ =2КТ<СТ> sin .
<р оо 2
Потребные энергозатраты для случая 1?L = 1 и 1?» = 2
в зависимости от ф приведены на рис. 8.3.14. Видно, что при
Ф>0 энергозатраты такого варианта маневра будут больше, чем
для вариантов II и III. Однако при малых значениях ф его при¬
менение не вызывает существенного увеличения энергозатрат
и позволяет выбирать орбиту произвольного наклонения iT при
неизменных энергозатратах.
Сопоставление различных вариантов
маневров формирования орбиты ожидания
произвольного наклонения
На рис. 8.3. 14 приведены значения дополнительных по срав¬
нению с перицентральным маневром затрат характеристической
скорости дКе для различных вариантов маневра формирова¬
ния орбиты ожидания в зависимости от угла ф между векторами
подлета VTm и отлета Vc2. Значения ДКе приведены для на¬
клонения тормозной орбиты iT = 0 и iT при максимуме энерго¬
затрат. Для варианта / маневра это соответствует iT=90°, для
варианта III /т = 180°. Расчеты проведены для типичного случая
перехода при v„ =1 и 1/«=2, для относительной высоты апо¬
центра эллиптической орбиты гв =5. Для всех вариантов ма¬
невра формирования орбиты ожидания наименьшие энергоза-
297
траты соответствуют наклонению тормозной орбиты /т = 0. В этом
случае наилучший вариант формирования — III.
Для выхода на орбиту произвольного наклонения (максимум
энергозатрат) для ср<40° наилучшим будет вариант III, а для
Ф>40° — вариант 16. На рис. 8.3.14 приведены также энерго¬
затраты, обеспечивающие выведение на орбиту произвольного
наклонения путем предварительного поворота вектора 7<х>т на
угол ф. Как показано ранее, этот случай перехода дает большие
энергозатраты для вариантов II и III по сравнению с рассмот¬
ренными случаями формирования орбиты ожидания. Вариант I б
при произвольном наклонении (максимум энергозатрат) обес¬
печивает значения ДVi, близкие к варианту III.
Глава IX % ТРАЕКТОРИИ ПОЛЕТА
МЕЖПЛАНЕТНЫХ АП ПАРАТОВ
К НЕСКОЛЬКИМ ПЛАНЕТАМ
§ 1. ОЦЕНКА ЦИКЛИЧНОСТИ
ПОЛЕТОВ К НЕСКОЛЬКИМ ПЛАНЕТАМ
Рассмотрим случай (рис. 9.1.1), когда орбиты
планет круговые и лежат в одной плоскости. Планета 1 — пла¬
нета старта, планета п—последняя планета в цепочке облета.
там
В случае когда происходит облет нескольких планет с возвраще¬
нием к Земле, планета п соответствует планете 1. Для общности
рассмотрим случай полета с задержкой у каждой планеты на
некоторое время AU (время ожидания у планеты).
299
Гелиоцентрическая долгота планеты I в момент старта с нее
?" = ?? +“А*
где ф1° — долгота планеты 1 в момент начала отсчета времени;
coi — угловая скорость планеты /;
t\ — время старта с планеты 1.
Гелиоцентрическая долгота планеты 2 в момент прилета
на нее
СР2Р = СР2°+Ш2А+Д*12),
где ф2° и (02 — начальная долгота и угловая скорость планеты 2;
Л/12— время перелета между планетами / и 2.
То же для планеты 3.
?3Р Ъ0 + Ш3 А + Д^12 + А^2+ А^2з)>
где Ah — время ожидания у планеты 2, и т. д.
Рассмотрим участок перелета с планеты 1 к 2.
Разность гелиоцентрических долгот
для k-то цикла полетов может отличаться от нулевого (угол
перелета /21) на целое число 2я. Подставив значения фгпр и ф!ст,
получим
Д?21 “Ь А + ^12) ~' ША — ^21 “Ь Л21 • 2л,
где Л<р“,=—ср“.
Отсюда дата старта с планеты 1
<!= ~Дт°1~“гД<ц + /г1 + Аг1 ——
о>2 — t*)j ь>2 —
где Тс21 — синодический период планеты 2 относительно пла¬
неты /;
/10—дата старта нулевого цикла полетов.
Аналогично для планет 1 и 3
j — Ду30— (о3 (А^12 + Д^2 ^32) ~Ь (/21 ~Ь Д?2 ^32) |
(03 —
+ *31 2л =V + ^31.
(Од (OJ
300
где Дф2 = (02Л/2, и т- Д- Для всех возможных комбинаций участков
перелета между всеми планетами.
Для выбранного маршрута облета п планет моменты времени
t\ и ^1°, определяемые на каждом участке перелета, равны. Сле¬
довательно,
Таким образом, суммарный синодический период Гс2 равен
общему наименьшему кратному всех взаимных синодических
периодов Тс этих планет. Так как на взаимные конфигурации
траекторий и порядок облета планет (включая время ожидания
у планеты) не наложено никаких ограничений, то период Гс2
будет периодом повторения любой конфигурации и порядка
облета планет.
Но реальные синодические периоды планет Гс2 не кратны
точно между собой. Однако при достаточно высокой точности
кратности Тс можно гарантировать повторение через период Гс2
достаточно мало отличающихся конфигураций. Для реальной
Солнечной системы с эллиптическими и некомпланарными орби¬
тами характеристики траекторий через период Гс2 будут не¬
сколько отличаться.
Через период Гс2 повторяется конфигурация относительного
положения планет (при круговых орбитах планет). Возможно
повторение конфигурации положения планет в пространстве. Как
известно, для двух планет такая «абсолютная конфигурация»
повторяется через период великих противостояний Гв.п- В этом
случае каждая планета занимает исходные положения:
Л(Л-1) = Т'.
(9. 1. 1)
где ф£л — долгота k-й планеты через п оборотов после нуле¬
вого цикла полетов;
Ф° — долгота k-й планеты в момент нулевого цикла поле¬
тов. Отсюда
, 2л , 2л , 2л
* ни! — — «2 — • * • п
0>1 0)2 о)д
или
Т\.п = к\Т\ = /»27'2= ••• =knTn,
301
где Th — звездный период k-й планеты. Сопоставляя в системе
(9.1.1) каждое последующее и предыдущее соотношения (на¬
пример первое и второе), можно получить
(<$* - %°) — (<Р?‘ — Vi) = (Ф - ^1) “' “ ^1°)=
= ^21 “Ь ^21^Я Ul
ИЛИ в,|1 в. л — k2-y2Tl.
Отсюда
т1 — и —т ъ
t в.11 К21—7 с«2Г
0)2 — t»)i
Повторив эту операцию для всех комбинаций других соотноше¬
ний системы (9.1. 1), получим
'ГЪ и 741 h 741 Л 742— А Тп\— —А . Тп(п-\)
I В п — «21у С — K31J с — с • — Кп\1 с — • • • — Кп (п~1> с
Таким образом, «абсолютное повторение» конфигурации по¬
ложения планет будет происходить через суммарный период ве¬
ликих противостояний Т1„, равный общему наименьшему 'крат¬
ному звездных и всех взаимных синодических Тс периодов пла-
нет. Периодичность повторения циклов через Гв.п справедлива и
для некомпланарных и эллиптических орбит планет.
Следует отметить, что кратность синодических и звездных
периодов в общем случае может быть лишь приближенной. По¬
этому в зависимости от степени приближения будут иметь место
различные значения Тс2 и Гв.н — грубые и более точные. Для
схем полетов с возвращением к планете старта (Земле) участок
возврата никак не влияет на периодичность циклов полета.
Кроме того, на цикличность не влияет порядок облета планет
(достаточно знать лишь перечень планет по маршруту).
Для определения цикличности полета к различным комбина¬
циям планет необходимо знать синодические периоды обраще¬
ния планет Гс. Из изложенного выше ясно, что Гс для двух пла¬
нет есть период повторения относительной конфигурации их
взаимного расположения, или период обращения планет относи¬
тельно друг друга.
Синодический период планеты 1 относительно планеты 2 (или
наоборот)
тхт2
Т =
1 С
Т2-Т1
где Т1 и Т2— звездные (сидерические) периоды обращения пла¬
нет. Значения Тс для различных взаимных комбинаций двух
планет приведены в таблице к приложению.
Период великих противостояний двух планет есть период
повторения абсолютной конфигурации их взаимного расположе¬
ния. В гл. V и VI назывались значения Тв.п для Земли и раз¬
302
личных планет, когда указывались приближенные периоды по¬
вторения характеристик оптимальных траекторий по циклам
полетов.
Для случая полета с планеты 1 к планете 2 (полет с Земли
к планете) период великих противостояний
Т п. п — ^1Т1 — ^2^2 — ^21^с •
Для приближенного
определения Тъм необхо¬
димо найти k\, k2 и &2ь
обеспечивающие мини¬
мальную ошибку:
к-т, годы
72
10
ИЛИ
Д— |^21^с I
Д = \kJT2 — k-J'il.
Г
т~
/
г
/
/
у
12
[
/
/”
г
*70
—та
Ш
/б
* 5
/ -О'
/з
к.
1
п
*пТ-
10 20 30 40 50
Уис. 9.1.2. Схема графического опреде¬
ления Тв.п (полет к Меркурию)
При этом значения Тв.п
будут целыми периодами
Т\ (период Земли Т«
— 1,00004—1 год). Систе¬
му уравнений для опреде¬
ления Гв.п удобно решать
графически (рис. 9.1.2).
Ошибка А изменяется
в зависимости от k пуль¬
сирующим образом. Значения целых k, соответствующих мини¬
мальным ошибкам, легко определяются из графика. После этого
величина А уточняется расчетным путем. Так, для полетов
к Меркурию значения Гв.п с минимальными ошибками будут
(см. рис. 9.1.2):
для 7VП=1 А = 0,048, k® = \, &9@=3 и k? = 4;
для Тв.п=7 Д = 0,02, k® = 7, k^® = 22 и £$' = 29 и т. д.
В табл. 9.1 приведены значения ТВ.П различного порядка точ¬
ности кратности при полетах с Земли к планетам. Ошибку А
лучше перевести в ошибку угла перелета Д/=2яД при полете
к внутренним планетам и Д/=2я — при полете к внешним
Т'пл
планетам (т. е. при полетах к внутренним планетам А/ соответ¬
ствует смещению Земли, а к внешним планетам — смещению
планеты). В таком варианте разграничения А/ будет наимень¬
шее изменение характеристик траекторий полета. Обычно наи¬
более характерен первый период Гв.п- Так, при полетах к Мерку¬
рию он равен 1 году. Казалось бы, что кратность, соответствую¬
щая А/=17,3°, не очень точна. Однако, как показано в § 3 гл. V,
повторяемость характеристик полета к Меркурию через один год
303
достаточно точна. Это объясняется тем, что оптимум характе¬
ристической скорости К® по времени полета Atn (или по углу
перелета /) достаточно пологий. Поэтому нарастание ошибки А/
в течение первых 3—4 лет от исходного положения (см.
рис. 9.1.2) не очень сильно сказывается на оптимальных харак¬
теристиках. Затем ошибка А падает, достигая второго минимума
при 7Yn=7 лет. Далее она опять нарастает в течение 3—4 лет
и достигает третьего минимума 7^.11=13 лет и т. д.
Таблица 9.1
Маршрут полета
Гс, голы
гвп, юлы/Д/»
Земля—Меркурий
0,317
1 '
17,3’
КЗ 1
13
28’
19 25
13’ 23’
Земля—Венера
1,599
3
4,5’
5
4,7’
8
1,35’
11 13 16
4,4’ 5,4’ 2,7’
Земля—Марс
2,135
17
5,5’
32
14,6’
КЗ 1
64 79
12,8’ 1,8’
Земля—Юпитер
1,092
12
4,2’
71
5.1’
Земля—Сатурн
1,035
29
5,6’
Земля—Уран
1,012
84
0,07’
Земля—Нептун
1,006
165
0,43’
• • •
Земля—Плутон
1,004
248
0,29’
• • •
При полетах к Марсу (табл. 9.1) первый период Тв,п^\7 лет
с достаточно малой ошибкой А/, второй Тв.п=32 года с еще мень¬
шей величиной А/ и т. д. Третий период кратности 7,в.п=8 лет
при полетах к Венере очень точен и хорошо заметен на характе¬
ристиках полетов к Венере в § 3 гл. V.
При полетах к дальним внешним планетам пеоиод первой
кратности равен округленному до одного года значению звезд¬
ного периода Т планеты. Периоды Тв.п более высокой кратности
чрезвычайно велики, чтобы иметь практическую ценность. Сле¬
дует напомнить, что добавление ко всем маршрутам полета к
планетам участка (возврата на Землю не нарушает цикличности.
304
Можно определить период великих противостояний между
двумя планетами и таким образом. Через один синодический
период Тс разность в гелиоцентрических долготах планет будет
Для повторения абсолютного положения планет величина Лф
должна уложиться п (п — в общем случае не целое) раз за обо-
2Я
рот, т. е. п = — . Период великих противостояний /в этом случае
Величина k равна округленному целому числу полных обо¬
ротов планеты за период Тс. При полетах к внешним дальним
планетам, у которых Гпл>Гс, величина 6 = 0. В этом случае
Т”яп=Тпл. Такие значения периода соответствуют периоду повто¬
рения характеристик траекторий полета на условных кривых
изменения характеристик от даты старта с Земли (см. § 3 гл. V,
§.3 гл. VI и § 2 гл. VIII) для маршрутов полета Земля — пла¬
нета и Земля — планета — Земля. Для полетов к Венере повто¬
ряемость характеристик соответствует как Т£п =2,667, так и для
более сглаженных зависимостей с 7'B>n=37'JlI «8 лет. Округлен¬
ные до целого значения периодов 7^™ равны первым значениям
7’в.п из табл. 9.1.
При полетах к нескольким планетам суммарный синодиче¬
ский период Т\ и суммарный период великих противостояний
7*. определяются графическим путем. В табл. 9.2 приведены
значения Т\ и rjn первой кратности для ряда маршрутов поле¬
тов к нескольким планетам.
Наиболее интересными в настоящее время представляются
следующие маршруты:
— полет к Меркурию через Венеру с маневром в ее гравита¬
ционном поле (7^= 1,6);
— полет к Марсу через Венеру (маневр в ее гравитационном
поле) с возвращением к Земле (7^=6,4 года);
— полеты к дальним планетам с маневром в гравитацион¬
ном поле Юпитера.
Аср=1а)пл7,с — кЩ.
Т"* = пТс = 2лТс
При полетах к Меркурию
7^п= 1,005 года при А=1;
к Венере
7'Jn = 2,667 года при k=2\
к Марсу
Т<*п= 15,83 года при k=\.
305
Таблица 9.2
Маршрут полета
, голы
Л
j. л
в.п
, годы
Л
3 5 8 11
1,6
0,015
0,176’ 0,136’ 0,052’ 0,079’
13 16 19 21
Земля—Венера—Меркурий
0,086 ’ 0,104’ 0,072’ 0,072’
24 27 32 35
0,085’ 0,041’ 0,033’ 0,077’
38 40
0,145’ 0,019’
17 32 49 64
Земля—Венера—Марс
6,4
0,01
0,225’ 0,075 ’ 0,217’ 0,060’
77
0,116’
Земля—Марс—Венера—Меркурий
6,37
0,053
13 19 32
0,18’ 0,19’ 0,033’
Земля—Венера—Юпитер
3,24
0,076
12
0,3”"
Земля—Венера—Марс—Юпитер
6,55
0,3
12
0,42”"
Земля—Юпитер—Меркурий
1,02
0,14
12
0,14’"'
Земля—Меркурий — Венера —Юпи¬
тер
3,25
0,1
12
« • ••
0,3
Земля—М еркурий—Венера—М арс—
Юпитер
6,45
0,3
12
• • ••
0,42
Земля—Марс—Юпитер
2,2
0,14
12
0,42’*"
Земля—Марс—Юпитер—Сатурн
19,7
0,3
59
0,6’*"
Земля—Юпитер—Сатурн
19,75
0,11
59
0,2’
Земля—Юпитер—Уран
14
0,2
84
1,0’
Земля—Юпитер—Сатурн—Уран
138
1,9
Земля—Юпитер—Нептун
12,9
0,15
1Ь5
U)’
306
Продолжение табл. 9. 2
Маршрут полета
Тс
, голы
л
Г"-п , ГОЛЫ
л
*
Земля—Юпитер—Плутон
12,8
0,35
249
0,6’
Земля—Юпитер—Сатурн—Уран—
Нептун
177
0,5
Земля—Юпитер—Сатурн—Плутон
170
0,6
Варианты .Большого тура*
Земля—Юпитер—У ран—Нептун
168
3,4
Земля—Юпитер—Сатурн—Нептун
103
4,8
Земля—Юпитер—Сатурн—Уран—
Нептун—Плутон
500
13
К последней группе относятся и схемы полетов по трем ва¬
риантам программ «Большой тур». Однако полеты по такому
маршруту являются уникальным явлением (Тс~ 170-М80 лет).
Более реальнь! полеты по маршрутам типа Земля — Юпитер —
планета назначения. Так, полет к Сатурну через Юпитер имеет
Гс«20 лет, к Урану через Юпитер с 7,с«14 лет и к более даль¬
ним (Нептун, Плутон)—через Гс^З лет.
§ 2. ТРАЕКТОРИИ ПОЛЕТА К МАРСУ
С ВОЗВРАЩЕНИЕМ К ЗЕМЛЕ
И С ИСПОЛЬЗОВАНИЕМ ГРАВИТАЦИОННОГО
ПОЛЯ ВЕНЕРЫ
Полеты космических аппаратов к Марсу с возвращением
к Земле и пролетом около Венеры возможны по двум марш¬
рутам:
— Земля — Марс — Венера — Земля (3—М—В—3);
— Земля — Венера — Марс — Земля (3—В—М—3).
Одной из основных трудностей в решении задачи оптимиза¬
ции траекторий полета к нескольким планетам является выде¬
ление унимодальной области поиска экстремума (унимодаль¬
ность, в термонологии (46] — однозначность экстремума). Пер¬
вым мероприятием по выделению такой области по датам старта
с Земли /© является определение цикличности оптимальных
полетов к планетам.
Для прямых схем экспедиций к Марсу синодический период
Гс = 2,135 года, а период великих противостояний 7^.11=17 лет
(то же, что и для полетов к Марсу без возвращения к Земле).
307
Для любых из вариантов маршрута полета к Марсу через Ве¬
неру (3—М—В—3 или 3—В—М—3) синодический период
Тс = 6,4 года, а период .великих противостояний Тв.п~32 года.
Таким образом, отыскав какую-либо совокупность оптималь¬
ных маршрутов и схем для интервала времени rj, можно найти
всю последовательность дат старта для этих схем через
период Л.
Оптимизация траекторий полета «через Венеру»
Критерием оптимизации рассматриваемой задачи будет сум¬
марная скорость Vxv
v^vz+va+va+vi
(ст—старт, т — торможение, м — маневр) для случая трех¬
импульсной схемы или
V,..= V,g + V^g + 4VJ
для двухимпульсной.
Функция является функцией пяти параметров. Этими
параметрами для маршрута 3—М—В—3 будут: t% —дата
старта с Земли; время полета с Земли на Марс; Atow~
время ожидания на орбите ИСМ; А/?-9—время полета с Мар¬
са на Венеру; At г— суммарное время экспедиции.
Для маршрута 3—В—М—3 изменится лишь порядок для со¬
ставляющих участков времени полета.
Для локализации области поиска экстремума разобьем тра¬
екторию полета на группы по сочетанию полувитков. Число групп
в нашем случае облета трех планет N = 2" = 8. Дополнительно
разделим также траектории полета по суммарному времени
полета на длительные и ускоренные. Это существенно сужает
область поиска экстремума, однако для рассматриваемой задачи
все же не обеспечивает выделения унимодальной области.
Невозможность априорного выделения унимодальной обла¬
сти поиска в задаче облета трех планет не позволяет сразу вос¬
пользоваться градиентными методами поиска экстремума. По¬
этому поиск минимума функции Кхе проводится последова¬
тельно, в два этапа:
— первый этап — поиск начального приближения минималь¬
ного значения функции Vхе для упрощенной задачи методом
перебора с большим шагом;
— второй этап — окончательная оптимизация функции Vx\
градиентными методами (в нашем случае методом конфигура¬
ции, см. [46]).
Расчленим многопараметрическую задачу на две раздель¬
ные задачи (участки траектории) с меньшим числом параметров.
Представим траекторию полета состоящей из двух участков:
308
первый участок — участок траектории, примыкающий к Венере
(М—В—3 или 3—В—М), второй — участок 3—М для маршрута
3—М—В—3 или М—3 для маршрута 3—В—М—3.
Как показали расчеты, оптимум V%z мало отличается от
оптимумов составляющих Vxi на каждом участке. Поэтому для
этапа первого приближения можно оптимизировать каждый
участок по его независимому критерию ( V'xZ— для первого
участка и VxZ—для второго).
Если облет Венеры происходит до встречи с Марсом (марш¬
рут 3—В—М—3) на участке траектории 3—В—М, то V'xZ имеет
вид
= ++ —Для трехимпульсной схемы,
= + —для двухимпульсной.
Если облет Венеры происходит на траектории возвращения
к Земле (маршрут 3—М—В—3), то Vz имеет один и тот же
вид как для двух, так и для трехимпульсной схем, а именно:
Величина энергозатрат на этом участке весьма чувствительна
ко времени пролета Венеры. В большинстве случаев отклонение
времени пролета Венеры на 5—10 суток приводит к значи¬
тельным потерям в суммарных энергозатратах. Как правило,,
минимум энергозатрат лежит в области малых импульсов ма¬
невра у Венеры «04-300 м/с). Так как в рассматривае¬
мых интервалах изменения параметров функция V'xZ имеет не¬
сколько экстремальных точек, то минимум функции V'xZ найдем
перебором ее трех параметров — одна дата старта и два вре¬
мени полета. Снижение числа параметров с 5 до 3 позволит при¬
менить метод перебора. Кроме того, приближенность первого
этапа поиска позволяет проредить сетку перебора параметров.
Возможно не менее четырех оптимумов Vxz (четыре группы со¬
четания полувитков). Из этих оптимумов выбирается тот, кото¬
рый дает наименьшее значение VxZ. В случае близких значений
оптимумов V'xZ выбирается тот, который дает существенный
выигрыш во времени полета Д/^~9 + Д^„-®( или Д/®_?-]-Д^-^).
Если же и времена полета близки, то все варианты идут в цикл
оптимизации второго приближения.
Оптимизация второго участка по критерию V"xZ сводится
к однопараметрической задаче определения даты старта
с Земли t® (для маршрута 3—М—В—3) или даты прилета на
Землю (маршрут 3—В—М—3). Минимум VxZ для такой огра¬
ниченной задачи (фиксировано время пролета Марса) не соот¬
ветствует точке минимума двухпараметрической задачи незави¬
Ж
симой оптимизации этого участка (перелеты 3—М или В—3),
но близок к нему.
Предварительная оптимизация по описанной выше методике
проводилась для класса траекторий «ускоренных полетов» в диа¬
пазоне суммарного времени полета 400< 700 сут при фик¬
сированном минимальном времени ожидания у Марса At0ж =
= 15 сут.
В результате этих расчетов получена приближенная, но гло¬
бальная картина изменения характеристик оптимальных траек¬
торий для одного цикла полета в диапазоне дат старта с Земли
Д^® ~6,4 года. Подобная конфигурация трех планет — Земли,
Марса и Венеры — примерно повторится через суммарный сино-
£
дический период Гс=6,4 пода.
На основе этого выявлены циклы оптимальных траекторий
и соответствующие им группы полетов для интервалов времени
с 1970 по 1992 гг. Для точек, соответствующих приближенным
оптимумам, проведен уточненный поиск оптимальных траекто¬
рий методом конфигураций. Использование точек предваритель¬
ной оптимизации обеспечивает унимодальность области поиска.
Характеристики траекторий экспедиций
для циклов полетов в 1970—1990 гг.
Для того чтобы выявить циклы полетов корабля экспедиции
на Марс, в которых можно использовать гравитационное поле
Венеры, были проведены расчеты траекторий для полета с 1970
по 1992 гг. по маршрутам 3—М—В—3 и 3—В—М—3. В про¬
цессе расчетов выяснилось, что для маршрутов 3—М—В—3
даты старта с Земли близки к таковым для полетов по маршруту
3—М, а для маршрута 3—В—М—3 — к датам старта по марш¬
руту 3—В.. Из всех локальных оптимумов по Vха отбирались
лишь те, которые дают Vx$ <30 км/с. В итоге за 23 года, с 1970
по 1992 гг. из 14 возможных оптимумов по маршруту 3—В—
М—3 (синодический период полетов 3—В Гс=1,6 года)
и 11 оптимумов по маршруту 3—М—В—3 (синодический период
полетав 3—М Гс=2,135 года) выявлены оптимальные циклы по
обоим маршрутам.
Результаты расчетов для циклов с малыми энергозатратами
приведены в табл. 9.3 и 9.4.
Как показали расчеты, имеются две группы сочетания полу-
витков для минимальных траекторий. Одна обеспечивает мини¬
мум Vхп для траекторий маршрута 3—М—В—3 и соответствует
полету с Земли на Марс по траекториям 1-го полувитка, вто¬
рая— минимум 1Лсе при полете с Земли на Марс по траекто¬
риям 2-го полувитка. Траектории на участках, примыкающих
к Венере, в разных циклах полетов имеют различные комбина¬
ции полувитков.
310
«о
с.*.
<3
гг
г}
Ча
£
£
S
01
X
О
X
и
ч £ I
*1(5 «
Ж д
х ~
>>Х С
2s
«>.
о *
а
о
* о
а»
16 К
&*
и а»
* «
^ Ю
х
н
и
X
а.
о»
и
X
X
а
х
X
а
и
со
л
I
£
I
со
н
>-»
а
В
>>
а.
(—
йг
О
ЪЙ
©Й
V
© к
Ь.
о*
ь.
■4
ч1
©Й
и
Ь.
о
(_
l_M
1
*"p
1
1
—
—
1
7
—
—
T
«
—
1
—
—
1
о
О
о
о
о
о
to
о
to
42
CM
ю
ю
Tf
ЧГ
Ю
Tf
CO
oo
CO
о
ГМ
03
k-H
to
CM
03
1Л
CO
Tf
CO
t"~
о
03
to
■«J*
—4
03
г-
О
k—<
4—4
CO
to
CM
о
oo
Ю
о
о
о
ю
Tf
Ю
oo
Tf
03
О
t^
о
t-~
Tf
СМ
СО
CO
to
t"~
oo
5
#
.
•
,
•
СМ
•
•
•
•
•
О
oo
Ю
о
Ю
to
Tf
00
CO
t^
03
OO
45
03
Ю
CM
04
CO
Ю
t"~
oo
Tf
«
>
•
•
•
■X"
•
•
•
•
•
СМ
•
•
•
•
•
О
CO
Ю
о
45
о
t"~
CM
■X"
CO
CO
оо
to
■X"
t^
CO
4—4
4—4
CM
CO
Ю
t-~
oo
Tf
•
•
•
•
Tf
•
•
•
■
•
CM
•
•
•
•
•
Tf
to
Ю
Ю
to
CM
_
t"~
^4
oo
Ю
03
о
о
t^
to
CO
о
о
Ю
CO
CO
CM
СО
СО
oo
oo
oo
CO
CM
о
03
4—^
ю
о
о
о
СО
о
о
о
о
о
о
CO
oo
03
CM
CM
t"~
oo
to
oo
о
Tf
CM
Ю
CM
СО
Tf
03
Tf
oo
t-~
ТГ
о
CM
CM
to
t"~
t^
Tf
Ю
CO
СО
Tf
О
Ю
о
t^
о
03
Ю
to
oo
CM
CM
to
о
to
to
03
CO
Ю
t^
■X"
oo
о
f-
t"~
t^
oo
oo
SZ?
03
03
03
03
03
оз
1—1
'
>-
х
С
с
>>
а
и
со
I
со
I
£
I
со
н
>-»
а
S'
а
«
£
.
1
"
1
^7
1
1
1
1
I
1
^_
7
"
7
1
1
■ ■
l—<
1
"
о
о
о
о
о
о
(M
oo
Tt<
CM
T+<
о
to
Ю
Ю
Ю
to
ю
-*
t
CM
Ю
о
о
CM
Tf
CM
о
t^
03
Ю
03
oo
UD
CM
о
03
to
CO
о
ю
t"~
сз
4—4
k—«
to
to
CM
о
oo
»o
о
о
о
ю
■tt*
Ю
oo
Tf
03
о
t^
о
t^
Tt«
CM
CO
CO
to
t^
oo
Tf
.
•
■
4
Tf
■
■
«
•
•
CM
•
'
•
•
•
о
oo
о
о
Ю
о
to
■X"
oo
CM
CM
oo
03
oo
42
03
Ю
CM
4—4
CM
CO
Ю
t^
oo
■X"
•
•
•
•
■X"
•
•
.
•
CM
•
•
•
•
•
о
CO
42
о
о
о
Ю
03
t"~
oo
Ю
LO
CO
to
CM
о
CM
CO
Ю
t"~
oo
■
•
•
«
■X"
•
•
•
•
•
CM
•
•
•
•
•
о
oo-
о
ОЭ_
—
Tf
Tf
t*-"
to
t"~
Ю
to"
о
t^
tO_
CO
о
CO
CO
CM
CM
СО
oo
CM
'tf
Tf
CO
CM
t^
Ю
Tf
о
о
4-^
о
о
СО
■k
•k
m
■k
«4.
о
о
о
о
о
о -
CO
oo
oo
о
Ю
to
oo
to
t"~
о
о
■X"
Tf
CM
СО
СО
■X"
CM
to
03
t^
to
03
CO
Ю
t^
CM
со
оо
to
Ю
to
Tf
ю
03
t"~
Ю
ТГ
42
to
CM
CM
CM
to
—4*
oo
—Г
t^"
t^
о*
CO
Ю
t^
■X"
oo
о
t"~
t^
t"~
oo
oo
2?
03
03
03
03
03
оз
'
'
—
311
Маршрут 3—б—М—3. Группа X—Y—I Продолжение табл. 9. 3
>-
I
X
<3
с
с
о.
и
со
I
А
со
н
о.
В
о.
СО
ММ ММ
— «
-м ММ мм
1 1
“Т 1 1
1 1 1
мм ММ
7 1
J. ~ 5
1 J.
1 JL 1
и! ^
$ $
Ю со
620
620
570
600
570
595
359630
94957
38656
43738
193708
24227
13623
12566
2441113
...1835
...3480
...4099
...5815
...6451
...8107
...8817
2440913
... 1640
...3300
...3984
...5574
...6306
...7912
...8667
2440828
...1470
...3175
...3824
...5510
...6131
...7842
...8505
CS ю
ОО <М Ю
о о
СО о о
ст> ь-
Ю СО N
СО 00 00
Ю СО
СО N 1C
а ^ п
CS <—>
СО Tf
~ Oi ~
ст> 00
3 8
<М —1 t- Oi -н
Ю О ю 45 СЧ ОО
О О О О О О
о о
ООО
ООО
о со
оо оо
оо со g
СО оо ю
О N п
CS —1 ^
о 3
оо со (М
О —1 о
(О N ^
оо со —
СО -cf
Tf Tf ю
СО ^ ^
оо
ю ю
ь- о>
<М
in о a 'f ю
ю ю
СО Ю
со ю
1970
1972
1977
1978
1983
1985
1989
1991
312
х»
oi
в
гг
а
х
«о
К
л
Ж
<и
X
и
в
о
X
и
Е-Ь
т Ift
X —
S.-
-ё.
X в
5 s
3>*
= R
X
* X
*• X
а е(
о ■*
а> О
X
а. к
(- 2
5 а
X ®
f-
и
X
а
х
н
х
X
о.
X
X
«0
a.
U
I—II—I
I—I—II
I—1—II
I—I—I
I—I—II
I—II—I
»
сут
570
520
490
440
545
460
С
H
oc
s
2446921
566355
457785
13659
11378
503099
J. D.
2442150
...3050
...3755
...6090
...7740
...8490
CT
2441975
...2878
...3590
...5935
...7530
...8280
/©
CT
2441795
...2668
...3395
...5740
...7330
...8092
©K
км/с
15.3
12.7
13,5
13.3
12,9
12.8
OS
<1
0,051
0,012
0,082
0,029
0,018
0,099
6,18
3,12
5,64
3,31
3,02
4,46
V
4,65
2,12
5,58
3,09
1,40
3,54
©s
6,30
6,04
5.60
3.60
3,80
4,96
я
17,20
9,30
16,91
10,05
8,24
13,07
Гол
1973
1975
1977
1984
1988
1990
>*
I
те
с
с
>%
о.
С—
СП
I
со
I
I
СП
н
>%
о.
В
'а
’те‘
£
т
I I I
о о о о о о
О) Ь О IM О) -1
to ю ю to to ю ю
CS
й
оо
о
ю
ю ю
Ю оо
со t~-
to h-
to to
to -X*
CO CD
О to
О to
—' CO.
ОО ©
to ь»
CO cs
CS
о
Ю
CS
■X1
X*
CS
СО Ю
tO Ю
© r-~
со со
00 о
oo O)
со о
Ю to
© о
X* О)
t>. X
C-~ oo
8
CD
3
CS
oo о
O'. O)
oo to
CS CO
oo to
CO CO
CS 05
Ю Ю
о о
CO oo
Ю CS
C-- oo
a
X*
X1
CS
OO to OO Q to О
05 i—i со to 00 x*
to CO 05 to CS о
CS 00 X* lO t" 00
CS to Ю CO X to о
ю* cs" со* cs" со со со*
to CS CS to 05 OO
X ' OO OO CS 1—I о
©_ О О О О О CS
о о* о о о о* о
X CS X
CS >—1 to
S ■—1 cs to
ю со о х
Ю со Ю со со со X
со — х о со
СО | СО CS CS 00
CS | CS >—1 CS >—1
X lO to CO ■—1 Q X
-H -H 05 to О) Й N
to Ю to CO X X to
OO CS О CO to oo
О to OO to t~- Ю CO
X 05 X OO 05 OO CS
СО Ю b- CS X OO о
t" Is- Is- OO OO OO Q>
05 05 05 05 05 05 05
313
Маршрут 3—В—М—3. Группа X—Y—I Продолжение табл. 9. 4
га
с
с
U
и
сут
Е
Н
S
*
ст
ой
о
/©
ст
@ к
о*
ч
2
ав
©
ст
Я
ч
о
I—
ООО
О) г-~ —■
ч" ю ю
ю о о о ю
— О О to Ч*
ю ю со ч< ю
QO
О)
ю о со
(N N Ю
со ю со
Ю О) ОО
СЧ СО
N О! (О СО
Ч« СО СЧ сч о
О) СО -г со Ч'
СО О! СО СО СЧ
to — — — —
ОО о о
СО Ч« ОО
-I ОО Ч1
— —I СО
Tf
Tf
СЧ
Sto СО N N
- - О N
— ОО Ю — ОО
Ч Ю СО ОО ОО
ОО о
— Ч>
о
о
О) СО СО
о — со
5 : :
сч
§Ч1 Г- сч С-
С- —' — СО
Ю со О) СО
СО Ю to N ОО
ОО о ю
—■ t- t-
м ч -
о — со
Ч
Ч<
сч
Ч* О СО СЧ О)
СО — -т Ч О
оо ю " оо ю
СО Ю to N ОО
сч ю о-
сч — со*
СЧ СЧ ОО N СЧ
со ч —Г —Г сч
О)
CN S Ю
ООО
о о* о*
00 СЧ — 05
СО ю Ю N ОО
О О О О —
о о о о* о*
0 — 0)
О СО ОО
сч — со
ОО ОО СО S сч
О О - СО N
сч ч* —* сч —
ОО сч
«о со, г-
со со* сч*
ч о оо г- —
О) М ОО О) ю
СЧ 00* СЧ СО СО
Ю Ю оо
о- о —
со ч* ч
СЧ СЧ Ю С- С-
со о о> со —
ч ю оо ч ч
СО СЧ io
сч — оо
о о* со
о о- о ч о
Ч Ч О О СО
О)* СЧ* 00* — о>"
О СЧ 0-
0- t» t"
О) О) О)
оо со ю о -
ь. со оо Ф о
о> о о О) О)
X
СЧ
с
с
►>
о.
и
со*
I
CQ
со
н
►>
о.
3
о.
сч
«ООО— «о о о о о
COCOOl-mNCSNCl
ю
СОЮСОСОЮСОЮЮ
Ю г-~
LO
СЧ О)
со ч
1*N О)
О оо оо оо со со
ч- - о О со сч -
Ю СО Ч1 О СЧ СО Ч1
to ОО СЧ СО Ч со ч
— СО СЧ О со — сч
сч ю
Ю со
— оо
ч
ч
сч
IM ОО СО ю со N
оо — со — — о
сч
ч ю — оо ю — сч
СО СО Ч1 ю со ОО 00
ю о
сч ч
О) СО
о —
ч
ч
сч
N ОО О Ч N СЧ f'
О Q О) t-- — — СО
Ф Ю СО О (О
СО Ю Ю N ОО
8
8 g
ОО Ч
о —
ч
ч
сч
сч со — о со сч сч
О) О) Ч — Ч Ч —
— — оо ю — оо ю
СО СО СО Ю to N 00
00СОЮО0000 — 04
N - Ю N N ч’ СЧ* СЧ* —*
оо
O'- ОО СО СЧ О) —
(ОСООСЧЧ'ЮЮСЧСО
000-00000
о* о* о* о* о* о* о" о* о*
со со
— оо
ю — о
со ч ч
О) оо сч
CN N со
сч — сч сч — — —
Ю О) СЧ О СО — СО N —
raCONCOMCOOOOCO
со со сч* сч* сч* со сч* со* со*
спюсчсрюсчюс- —
сооююеооососч
0О4444ЮСОЧ4
чюаоюо'сою-
ОООСОЧ'СОСО-ЧСЧ
о>0)0)0>ооооооо)
(N Ь N ОО СО Ю
N N N ОО об
О) О) О) О) О) О)
i S
314
Если полет осуществляется по траектории маршрута
3—В—М—3, то первая комбинация, обеспечивающая минимум
У%ъ, соответствует полету с Марса на Землю по траектории 1-го
полувитка, а вторая — по траектории 2-го полувитка.
В таблицах приведены значения радиуса точки подачи им¬
пульса при облете Венеры — /?т.п.
На рис. 9.2.1 и 9.2.2 представлены зависимости оптималь¬
ных значений Vxi для двух- и трехимпульсных схем от даты
старта с Земли для маршрутов 3—М—В—3 и 3—В—М—3.
Зависимости носят периодический характер. Энергетические ми¬
нимумы оптимальных траекторий полетов «через Венеру» насту¬
пают для каждого маршрута примерно через суммарный сино¬
дический период Т\ =6,4 года. Так как эти минимумы перекры¬
вают друг друга, то примерно через каждые 3,2 года возможен
полет по энергетически минимальной траектории одного из
маршрутов. Скорость входа в атмосферу Земли V® для всех
оптимальных траекторий полета не превышает 16 км/с
(рис. 9.2.3 и 9.2.4), а в атмосферу Марса—Vb «9 км/с.
Сравним энергетически оптимальные ускоренные траектории
полетов «через Венеру» (для двух- и трехимпульсной схем)
с оптимальными траекториями полета по маршруту 3—М—3.
Потребные энергозатраты для реализации траекторий пря¬
мых полетов на Марс больше, чем для минимальных значений
при полетах «через Венеру». Нестабильны и составляющие харак¬
теристической скорости для этих вариантов на отдельных этапах
полета. Наиболее стабильны энергозатраты для старта с орбиты
ИСЗ V® «4±0,5 км/с.
При анализе траекторий полета корабля экспедиции к Марсу
обычно рассматривают траектории с ограничением скорости
входа в атмосферу Земли до V® <15,5 км/с. В этом случае
энергозатраты для реализации траекторий маршрута 3—М—3
существенно больше, чем для траекторий полета «через Венеру».
Траектории прямого полета на Марс для большинства циклов
имеют скорости входа в атмосферу Земли V® ^ 15,5 км/с. Для
того чтобы погасить избыток скорости перед входом в атмо¬
сферу, прикладывается тормозной импульс (четырехимпульсная
схема полета). Так, для четырехимпульсной схемы цикла поле¬
тов 1975 г. по траектории маршрута 3—М—3 (см. рис. 9.2.2)
общие энергозатраты Vxz =17 км/с, в то время как для опти¬
мальной траектории маршрута 3—М—В—3, Vxb =9,3 км/с. При
этом разница в суммарном времени экспедиции этих маршрутов
Д/б=60 сут. Цикл 1975 г. для прямых полетов к Марсу соот¬
ветствует наибольшим энергозатратам и наибольшей скорости
подхода к Земле.
В наилучших циклах прямых полетов к Марсу (циклы около
1985 г.) пюдтормаживания не требуются и энергозатраты
315
' ч Т - т —^
© Прямые экспедиции
+ Экспедиции через ?
->
#п
!ЧД*
4
4
■
-:
зЬ •
.
>]
J
4
у
ГУ
&
А
4
4
г
/
/ П1 «ч
(W з
< 4
4
*
V
л
4
(1
1
\
4
4
4
V
1
V
X
4
4
\|
■ 1/1
' /
Г
4
4
•Чг»
TV $
4
4
*
**
*
л
и£
4
•<ч
'1
£/?]
К 1 1
А А
4
^ i
~г'
Ж
^ 1 J
У Ч
\ X)
4
С
[ ^
\ «з
*т
/
Д S
4^sk
4
(
4
Л
а-
/
1
Jj
4
1%
<
&
к*
у
4
4
4
•
?ч
)>
4
_ ^
л
%—--
/
4
4
4
ч
S- '*»'
-=
<
1
1 <50
1
i.
4
4
4
\
V
. 4а
зс
«ч
\lV
»
* 4
А
■ и*
Г
■S ^
1
1
1/1
; 4
■s
I
4s
M
£
316
Puc. 9. 2. 1. Энергетические характеристики различных вариантов двухимпульсной схемы экспедиции к Марсу
317
Рис. 9. 2. 2. Энергетические характеристики различных вариантов трехимпульсной схемы экспедиции к Марсу
f-AZ-fI
•f-АЧ' t
£-И-9-£ С
Г-9-AZ-f С
S3
S3
S3
1ЧЧЧЧ1 ЧЧЧЦ
f-ff-AZ-fr
£-N-9-£ С
f-ff-Az-e l
Г-//-ГС
IE
<4
ft
cx
ss:
23
SIS
чччч^чччц
ISS
c-u-g-cz
£-h-s t
£-H-9-£ r
£-9-H-£Z
£-H-£ I
£-н-д-£ с
Г-//-ГС
Г-ч' \'i\ ч s*
TV'S
sszsss
22
'-4-^
' 73
• I-
t-w-g-ftz^Esk
I
<7^44
?^ччччкччч^
ES
3S3
rf
d
E3
стгтт:
°c
<41
xz
ГЧЧЧЧ
j:
ss
ч44л-
xr. ::r Гл
r ■ ч.1 ■ ■ ■ ■
S.wv.4
IS
4_
\чччч<|ччччч-
чЕТлФ
S3
^ гЕКЧЧчЧ ЧЧЧЗ?
40
>o
«X
ES
.1. — j .Y ,4\
ЗГГЗ]
ъ>4з 'j- <4 <5s
<4
<4
ft
ISSS^
4^Cx\Nk\\\\S^
ЧЧЧУЧЬЧЧЧЧЧ'*
^ччччч^чччз?
®fc
^ЧЧЧЧ<[ЧЧЧЧ\^
1
- *o
Ho
*N
1
ft ^ «5»
4>
<4
1
<>5
4>
ft
<4
ft
ft
*
: <4
tea
И1—1
ЕЯ -
5 «о
4
Г™
ы
II— -
«ъ
Г^“
ITS
а к»-"
Qq rv,
■ >=■ ■
—. г
■—i ^
^ 03
1
!
0=5
С
т ч
Ь-
!
■■ 3
С <N-5
; i ^
н~
|С=1 Щ
Ь4~
: !
оо" ^
|2| -V
Г1 *
1 <4 1 <*э
1 t=a
Н«=а
1 -
К
<>04
t=al~
П
ЕЯ -
400
4
г
Ьэ и— -
rv“3
1* ^
Г i=V И>—it Ifcj -
<4
^ (со 4
t=i 4i •—. ^
<4
4,
<4
<4 4
Г™ II- -
<4
Оэ
*: <4
1
с
ЕЯ
!l~i
<4
4
1 •—1
И —■[ \=,4
<4
С
С=Э
II-,-
*4
- S -
4
xj
4
1 Ь II с=П -
<4
«О <4
1
<4
<<5
<4
-'!,§ 1 *
to -a- <4
ft
318
Рис. 9.2.3. Характеристики различных вариантов двухимпульс ной схемы, экспедиции к Марсу
1
r-Mf-c с
£-h/-9-£ С
М-Г1
£-H-9-£Z.\
£-H-£ I
£-H-9-£
£-H-£ I
£-И-9-£
£-9-*-£ С
£-И-£ С
Z-H-9-£\
Г-#-9-£С
£-9-N-£t
£-И-£
1 i
£-H-£t
н "г
32
rzzz
YZZZ
css
TZZZ
ESS
22Z
122
7ZZZ
1ZZ
722L
T7T.
£-Mh9-£ t
I L
YZZZ
ssa
зз
322 ESS
ZE
'Ni
1ZZ
3V
S3
lZZZZTSS
EZ2SS
T7
Y///
?>>>\ TTTTT
S3
ssa
33
•t.
-^es:
<Nj
ES
I
°o
SSS
ESS
sss
ss
£
isjb 4i <C ■» CS
: ^ >»
V:
nss
I с
E
S3S
SES2
С
zis:
EE ESS EES
С
33
-E
isssi
ES
SSS!
С
■W^v
К
Ж
Ш555
4VVW
33
33
ЛЧЧЧЧ
33
35
33
зза
33
33 33
3333
1
tS
'Ni
1
°o
S3
fNJ
I
зга
ГЗЗ
33
3!
33
ic-
^ !c>
V
*>
M
&
s>
1
N -
"■S
: **ч
1 1=1
Н—1 М-
■'■S
—*5Ч-
1—
1
Т. -
i- to
Tfca1-,
-1-
— Н
45^
>=ч
►-ч
'Ч % J; ^
1
ta
1 *-1 J
""s
—а
: "-s ■
Lt-
1=^-
•VN
*
~5
1 Ья
н
М-
Ifca
И =э И
•'■s
-U-,1-
оо~~>‘
л-iQa
tsj
|
<'"S
’-Щ-
-ц=:
leal-
Ы
Н1—1
1 i
f4
-«5ч-
*■
-•~ч -
Со —)
-►~ч-
N -а
°Q Л
Е ^
<^1
—
г=т
1Тч
ТБ-
ч!
1 ta
N ►-• -
~->
*
1
V 1 *
•->
1
•i
Нчл
<4l
§
55
Oft
£
«SI
I
4»
»
•c*
&
** 1,% % ^
319
Puc. 9. 2.4. Характеристики различных вариантов трехимпульс ной схемы экспедиции к Марсу
четырехимпульсных полетов близки к таковым для трехимпульс-
ной схемы.
Функция Ухв достигает минимального значения, как пра¬
вило, при Л/ож = 0, за исключением цикла полета 1982 г., где
оптимальное время ожидания А/0ж = 35 сут. В связи с этим рас¬
четы оптимальных траекторий, за исключением 1982 г., были
проведены при фиксированном минимальном времени ожидания
Atom= 15 сут.
Характеристики оптимальных траекторий
облета Марса и Венеры для циклов
полетов в 1970—1980 гг.
По геометрическим и кинематическим характеристикам тра¬
ектории совместного облета Марса и Венеры весьма сходны
с траекториями экспедиций к Марсу через Венеру.
В табл. 9. 5 и на рис. 9.2. 5 и 9.2.6 приведены характеристики
оптимальных траекторий облета Марса и Венеры в циклах по¬
летов с 1979 по 1992 гг.
Условные кривые, соединяющие точки Ухе для оптимальных
траекторий, носят характер, аналогичный таковым для экспеди¬
ции к Марсу через Венеру. Малые значения VxZ по каждому
из двух маршрутов полетов (3—В—М—3 или 3—М—В—3) че¬
редуются через суммарный синодический период =6,4 года.
В циклы с большими Ухъ для одного из маршрутов имеются
меньшие Ухъ по другому маршруту. Таким образом, циклы
с малыми значениями Ухъ чередуются примерно через 3,2 года.
Оптимальные характеристики траекторий различных марш¬
рутов также комбинируются по сочетанию полувитков траекто¬
рий, как и для траекторий экспедиций.
На рис. 9.2.5 приведены также характеристики траекторий
облета Марса без шролета мимо Венеры (прямой облет). Видно,
что траектории прямого облета, как правило, дают большие зна¬
чения Ухе, чем траектории двойного облета. Кроме того, для
таких траекторий скорости .входа в атмосферу Земли существен¬
но больше, как и в случае аналогичных траекторий для экспе¬
диций к Марсу.
Использование траекторий двойного и прямого облетов по¬
зволяет осуществлять облеты Марса по тому или иному марш¬
руту практически каждый год.
Из изложенного видно, что траектории полета к Марсу
с использованием гравитационного поля Венеры представляют
несомненный интерес и могут служить основными рабочими
траекториями для будущих пилотируемых полетов к Марсу.
В большинстве циклов они обеспечивают меньшие энергоза¬
траты и скорости входа в атмосферу Земли менее 16 км/с.
320
*о
«
гг
г»
«={
45
к
>-
1
1
X
я
н
ф
ч
СО
СО
о
с
с
в
X
>>
а
а
е
ь
и
X
1»
X
со'
а
1
н
0Q
X
I
X
X
1
н
1
U
1
X
СО
о.
гг
н
X
>>
я
а
О.
я
3
X
а
СО
Г руппа
и—I—I
I—п—I
л—I—I
и—I—I
п
н
>,
и
© © да ©
—■ со да да
да Ю чг Ю
»-5
Q
Ч
да — да ©
Я £; 05
О со -Н e'¬
en да СО С'-
O' • * .
• • .
CN
*<*
ст
со да © ©
со да о да
да —> 05 да
CN Ю Ю t"
'Я* • • •
CN
©5
05 СО © да
3 g s i
СЧ Ю h-
• • •
• • •
CS
©К
г..
и
S
чс
о
CN СО О 05
CN да CN
с
°*v
<*
а
*
да см со h-
О ^ 05 СО
—> CN СО
t'- ОО t'- '—1
CN —
CN
о» а
г»
<
и
I
чс
cn да
cn о да —
О О CN О
о* о о* о*
Ън*
0?
а
чс
cn да со со
© да да ©
05 о ю ^
(О s n Tf
Ю -2
да
V
<
и
а
*
да cn да о
об со да да
СО -* CN i->
®В
о да cn
со да
■ч»" да со со
R
С'- 05
05 С4 © Ю
Ю О Ю
п
О
U
да cn ч** да
t" да да да
05 05 05 05
*“Н *“Н *“Н
>-
I
X
се
С
С
>>
а
СП
со
I
I
со
>>
а
В
а
СО
I f
I I
I I
ООО
Г» —' 00
СО СО да
3
да
о
СО
да 3
да да
Sec да
© о да
CN СО Ю
5 : :
CN
CN
о
о
о
да
да
СО
СО
•
•
•
•
•
•
да
8
5
CN
со
3
CN
да
о
да
о
да
05
да
да
CN
да
да
да
CN
ю
да
СО
да
•
•
•
•
•
•
•
•
•
•
2441660
...2593
...4963
...5635
...6310
...7300
о
CN
О
да
•
•
о>
(N
СО
о
о
CN
(N
CN
да
CN
CN
да
7486
6176
10770
6628
8524
10244
265270
CN
CN
О
3
да
CN
о
05
3
о
о
да
О
о
о
О
о
о
4814
5847
4935
§
со
СО
65327
4515
5176
СО
05
9
о
CN
CN
О
00
да
CN
о
О
•■и
О
да
СО
да
о
да
да
05
да
да
05
СО
да
да
о
да
8
о
О
да
о>
8
3
да
СО
СО
да
да
да
05
1973
1975
1982
1984
1985
1988
1990
321
Продолжение табл. 9. 5
>-
I.
X-
га
с
с
о.
СО
I
сА
I
го
н
е.
а
о.
га
£
се
£
Zl
U
I — II — II
I —II—II
I —II—II
I—II—II
II —I—II
I—I—II
I—I—II
II — I — П
II —I—II
I —II—II
I —II—II
II—I—II
II—I—II
I —II—II
I—I—II
I —I—II
II—I —II
Я
н
>1
и
юоооооюоооооооюоо
— t'-0)t''OOOOOt'-COCOO) — t'-OCOO)00
СОЮЮСОСОЮСОЮОЮЮСОСО^ЮЮСО
Ъ5
С
—i
XXiOONOOQXiflONOXOiON
— О — OOCOCOCO^t't^COt^ — О)
— — ООООООЮЮСМ—ООООКОЮЮ — смг^.
— — — — CMCOCO^f Ю lO lO СО СО (■» 00 00 00
см
^0
IdXOirtCOOO^XOJCOSOCOOOM
СМО^С<5сО —— — COt^OO—СМГ^фОсО
0)0)СОСОСОСОСООО)ЮЮСОСОСМО>ОСО
ОО — — CMCOCO^f^fiOlOCOCOC^t'-OOOO
• « • • • 1 • • • • • ■ ■ 1 • » • •
СМ
/©
ст
юхююхосмохоюьюсоюоь
СМ О 00 СО — ОО)^^СМСМСОСО00О)00О
OOOO-^f-^fTfCM — OOt'-LOLO — — О0000Ю
ОО — — CMCOCOCO-^fiOiOCOCOt'-t'-t'-OO
СМ
©к
и
£
а
ХЬСОСООЮЮ-ЮЮС^ЮЮМ^ЮЮ
СО СМ — СМ О Ю СО Ю О) Ю ci СО N о’ гс' 05*
Б
V
£*
£
*
lOt^t^OOO) — OOlOO^t^XCOl'tXh-
ою^юа - ооетсососм^о^ог^г-
-h.TflOOXO)XlOOO)WcOO)t>OS
10'^!0’Г100)^Х^0)10Ю^ЮО0)СМ
м* ю — CM ю
ю — см м*
ъ*
<1
.О
I
а
h- ОО СО
— СО — — 00 — СМ СО СО О СО — О СО СМ —
ОЮ^^СМХО —О) ——юсо^оою
о" О — О — — 0*0000000000
о
о;
£
а
ООСООО'^'Т'СО'^'ООСМООО) — —CM-^f —
COlOCOCOCOOOOOOCOCOiO^fOOOO)^
^0)СО0)С0—lOWNiOCOOCOf —ю
COr-^COLOCOOOt'. — —•*t — t'-OOcOCOt'-OO
■ О —0000 — — ——
CO — CO CO CO
о*
и
£
•х.
M* CM O) см о CO CO
COCOt^O)CO^f"t^COCOOOCOOO-f — OOOCM
O-OCIO'tOOONCOOO-OXO
oooo'oooo — — ooooooo
©5
ЙЮОСОЧ'ХООХХСОЮФМОЮХ
COCOCMOOOcOCOt^OO — о — ^г^ю —
СОСО^СОЮ^^^ЮЮсО^^^Ю^^'
и
О —CSCOCO —CO —NO)O^XNlO —
OlCOtOCO —®SXO0)i/50)i00)0),T<0
СО^Ю^^СО^^ООСОЮ^^^СОЮЮ
е<
О
С—
оосмсмюг^г^оосмсосоююоооо —
t^f^t^t^NNNNXXXXOOXOXJJC
0)0)0)0)0)0)0)0)00)0)0)0)0)0)0)0)
оюооюоюо
— оооог^соог^ю
OOlOO)-*t,t'-Ot'-t''
Ю—O)iO't't00©
— оо — — ююоооо
^ —1 ^ *1* СО СО 00 00
ем ! 1 I I I I I
COO^COONS
—■ "*f" О О) СМ СМ СО С©
■ttooO)««iZ5to
CM
Tt со со со оо оо
X!
га
с
с
>.
а
и
со
CQ
I
СО
н
>.
а.
a
а.
га
ИЮ050)ООС»СЧ
СМООСОСОЮЮСМ —
OO-'t'OOOO — —ЮЮ
о — coco со со оо об
см-------
СОЮ — союооооо
СО ^ (N С' — Ю (N
COCO — OCNt'-t'-rf
r^OOCNO-f — TfCN
^tOO-^CMCOCN — со
0)0) 1Л ^ Ю — СО 00
— lO О) N 00 О)
uo СО — СО Ю
СО СМ 00 СО О >0 S СМ
X О 'toi — О) О СО
СМ О* ОМ О — О* О —
CMOCt^OOt^OO-ft^
— С0СОСО*ГС)1ОЮ
— о Ф см со со о
CM СО I
СО
oot^t-O)
со
Tf Ю Tf СО
— (^СОч^С^^ООч^
— ооооооо
ОООООООО
— 0-f000)0000 —
0)00000)0)СОСМ
CO^f^f^fCOCO^^
QOO)iOcOcOt'-cOt'-
00 СМ ОО CM — О) м* ю
(О^СОЮЮ^'СЮ
ОСМООООЮЮ — —
nnnsxxo®
0)0)0)0)0)0)0)05
322
323
Рис. 9. 2.5. Энергозатраты для различных вариантов траектории облета Марса
-О*,.-
S-
1 1
I 1 ‘I "I
$
Va
<Si
Icv^
I
л->
ХЗ
CQ^
г~а »а ^ гч~>
сг
Чэ°-У
2а
'Ъ‘*а
г
«'■а
•=!>
Е
CJ
■2а.
"а >
U 2эГ
‘'•ч
_^а.
.22.
■1а»
(*а,'ч
1^22
Qq <^а
I
$
<Ni
1
к.
£
<\.
л 5 ^ На 5s
^ а>,^а <5а
тд С?>> <s,
i
324
Рис. 9. 2.6. Характеристики различных вариантов облета Марса
Использование для полета кораблей экспедиции к Марсу
траекторий «прямых полетов» и траекторий полета «через Ве¬
неру» существенно увеличивает количество возможных вариан¬
тов полетов и сокращает время между оптимальными циклами
полетов.
§ 3. ПОЛЕТ К МЕРКУРИЮ
С ИСПОЛЬЗОВАНИЕМ ГРАВИТАЦИОННОГО
ПОЛЯ ВЕНЕРЫ
Прямые межпланетные траектории полета к Меркурию —
пролетные межпланетные траектории Земля — Меркурий и меж¬
планетные траектории Земля — Меркурий с выходом на орбиту
около планеты назначения — принципиально рассмотрены в гл.
V и VI. Проведенный анализ показал, что прямые межпланетные
полеты Земля—Меркурий требуют для своей реализации боль¬
ших энергозатрат. Потребная стартовая характеристическая
скорость для облета Меркурия в лучшем случае примерно на
25% выше аналогичной скорости для облета Марса. Вывод же
КЛА на конечную орбиту около Меркурия требует гораздо боль¬
ших энергозатрат по сравнению с такой же операцией около
Марса. Кроме того, прямые пролетные траектории Земля—Мер¬
курий характеризуются большими гиперболическими скоростя¬
ми облета планеты, что не всегда приемлемо для нормального
проведения экспериментальных исследований.
Повышение энергетической эффективности межпланетных
полетов к Меркурию является важным фактором в планировании
их на ближайшее будущее. Здесь решающую роль может сыграть
особенность строения Солнечной системы, позволяющая исполь¬
зовать гравитационные поля Венеры или Юпитера.
Действительно, используя гравитационное поле Юпитера для
изменения энергии и направления полета КЛА, можно получить
много вариантов гелиоцентрических участков, проходящих вблизи
Солнца и пересекающих орбиту Меркурия (рис. 9.3. 1). Правда,
таким полетам свойственна большая продолжительность
(до 3 лет), но при наличии обычных двигательных установок
(ЖРД) использование гравитационного поля Юпитера является
практически единственной возможностью осуществить пролет
КЛА вблизи Солнца на расстоянии не более 0,1 а. е. и пересечь
орбиту Меркурия (рис. 9.3.2). Однако планирование полетов
непосредственно к Меркурию с использованием планеты Юпитер
вряд ли целесообразно из-за большой продолжительности
и очень малого выигрыша в энергетике полета.
Довольно перспективным способом решения указанной про¬
блемы является использование гравитационного поля Венеры.
Принципиально существуют несколько схем перелета к Мерку-
325
Рис. 9. 3.1. Проекция траекто¬
рии межпланетного аппарата
Земля—Юпитер—Солнце на
эклиптику (запуск принципи¬
ально возможен ежегодно):
Vxl = /6.5 kmIc; rri-=5,3 R2^", RkQ “
= 0,02 a. e.; V1:q=298 км/с
to (tn)
Уд I ,KHfc
27
24
21
18
15
120,005 0,01 0,02 0,040,06 0,1 0,2 0,4 ЙЯор.е.
Puc 9.3.2. Значения характеристической
скорости старта при полетах к Солнцу
в зависимости от перигелия переходной
орбиты:
прямой полет Земля—Солнце; полет с ис¬
пользованием гравитационного поля Юпитера
рию с облетом Венеры. Если баллистический облет Венеры при
постоянном значении Voo\ позволяет изменить направление и ве¬
личину гелиоцентрической скорости КЛА за счет только ее гра¬
витационного поля, то при активном облете изменяются как на¬
правление, так и гиперболические избытки скорости на выходе
за счет коррекции.
Характеристики траектории облета Венеры в определенной
326
а е.
степени зависят от задач маневра КЛА вблизи Меркурия. По¬
этому выбор схемы облета может в ряде случаев предопреде¬
ляться типом межпланетной траектории полета.
Траектории пролета Меркурия
Энергозатраты межпланетных траекторий пролета Меркурия
определяются стартовой характеристической скоростью. Значит,
облет Венеры только тогда эффективен, когда он способствует
уменьшению этой скорости. В этой связи следовало бы ожидать,
что баллистический облет Венеры принципиально может при¬
вести к большим выигрышам по сравнению с другими схемами
облета. Ограничением здесь является потребная высота пери¬
центра планетоцентрической орбиты облета Венеры, поскольку
она не может быть ниже высоты верхней атмосферы, приблизи¬
тельно 200-^-150 км. Избежать этого затруднения можно с по¬
мощью маневра коррекции высоты перицентра планетоцентриче¬
ской траектории облета. Коррекция, требующая обычно неболь¬
шого приращения скорости, позволяет получить высоту
перицентра последующей траектории облета заданной мини¬
мальной величины. Хотя энергетические характеристики схем
облета с коррекцией высоты перицентра не всегда лучше, чем
при баллистическом облете, н«о окна запуска становятся шире.
Кинематика межпланетных полетов Земля — Меркурий с об¬
летом Венеры такова, что они соответствуют каждому соедине¬
нию Земля — Венера, наступающему приблизительно через
17 мес. Тем самым определяется календарный год возможного
старта для полета КЛА к Меркурию с облетом Венеры. Теперь
остается найти переходную орбиту к Меркурию с учетом актив¬
ного и баллистического облета Венеры при минимальной харак¬
теристической скорости старта. Метод поиска таких переходных
орбит аналогичен изложенному в § 2.
Потребные минимальные значения стартовой Kxi и суммар¬
ной Кг (в случае активного облета) характеристических скоро¬
стей, значения гиперболической скорости прибытия к Меркурию
Коок и времени перелета At в зависимости от календарного года
соединения Земля — Венера приведены на рис. 9.3.3. Сравнение
минимальных стартовых характеристических скоростей при пря¬
мом полете КЛА к Меркурию и при полете с учетом баллисти¬
ческого облета Венеры показано на рис. 9.3.4*. Анализ резуль¬
татов расчета позволяет сделать ряд выводов. Полет межпла¬
нетного аппарата к Меркурию с баллистическим облетом Вене¬
ры и стартом 'в годы соединения Земля—Венера 1982. 83 и 85
энергетически эффективнее (см. рис. 9.3.4) ;по сравнению с
* На рис. 9. .3. 4 значение Vx равно отношению характеристических скоро¬
стей старта при баллистическом облете Венеры и при прямом полете.
327
Рис. 9. 3.3. Характери¬
стики межпланетной тра¬
ектории полета к Мер¬
курию с активным и бал¬
листическим облетом Ве¬
неры:
баллистический:
— активный
1
1980 <5
\2 83
5 86 88 90 91 199
1,6
1,4
1,1
1.0
0,8
0,6
Год соединения ©-£
Рис. 9.3.4. Сравнение характеристических скоростей разгона при прямом,
полете к Меркурию и с учетом баллистического облета Венеры
328
прямым перелетом. В 1982 г. характеристическая скорость стар¬
та в десятилетии 1980—90 будет наименьшей и равной
~4 км/с и на 16% меньше, чем для сравнимого прямого пере¬
лета. Полет к Меркурию с активным облетом Венеры позволяет
значительно снизить в 1988—1990 гг. энергозатраты по сравне¬
нию с баллистическим облетом. Такие полеты возможны и
в 1975, 1977 и 1978 гг. с потребными значениями Vs =4,08 км/с,
Д£=172 сут wVz =4,47 км/с, = 119 сут, Vs =4,44 км/с соот¬
ветственно. Время полета по сравнению с прямыми перелетами
увеличивается во всех случаях более чем вдвое.
Г о д ы
Рис. 9.3.5. Оптимальные значения тяговооруженности разгонного модуля
межпланетного аппарата, пролетающего Меркурий:
О-прямой полет; А—полет с облетом Венеры; уд у—0,1; Ya у=0,02
Гиперболическая скорость прибытия к Меркурию в среднем
равна 10 км/с и значительно меньше в случае прямого пере¬
лета. Для межпланетной траектории пролета Меркурия с бал¬
листическим облетом Венеры проектная задача сводится к оп¬
тимизации основных проектных параметров разгонного модуля
при заданном гиперболическом избытке скорости. На рис. 9.3.5
и 9.3.6 показаны оптимальные значения п§ и рк модуля межпла¬
нетного аппарата, предназначенного для пролета Меркурия с
баллистическим облетом Венеры и без него при старте в 1975—
1998 гг. Здесь гиперболические избытки скорости отрыва (соот¬
ветствующие Vxl) взяты по рис. 9.3.4.
Траектории полета с выходом КЛА
на орбиту около Меркурия
При таком маневре вблизи Меркурия облет Венеры должен
способствовать уменьшению суммарной характеристической ско¬
рости Vs, которая зависит от характеристической скорости как
329
старта, так и торможения. Таким образом, облет Венеры энерге¬
тически эффективен тогда, когда он приводит к такому измене¬
нию характеристической скорости старта и торможения, при
котором Vi уменьшается. Уменьшение не всегда связано с
уменьшением характеристической скорости торможения. Скорее
всего оно может быть вызвано уменьшением гиперболического
избытка скорости отрыва (характеристической скорости старта).
Дело в том, что выбор переходной орбиты Земля — Венера
является более гибким. Однако выбор гиперболического избытка
Руд=800с
1935 76 77 78 19 80 81 82 83 89 85 86 87 88 89 90 91 92 93 99 95 96 971998
Годы
Рис. 9.3. 6. Оптимальные значения относительного конечного веса разгонного
модуля межпланетного аппарата, пролетающего Меркурий:
Q—прямой полет; А—полет с облетом Венеры;
'д.у
-0,1; уд. у=0,02
скорости отрыва ограничен минимальным его значением, ниже
которого скорость прибытия КЛА к Венере будет весьма мала,
что не позволяет использовать гравитационное поле планеты для
полета к Меркурию. В связи с этим ограничением не удается
воспользоваться для перелета Земля — Венера эллипсом мини¬
мальной характеристической скорости и в результате баллисти¬
ческого облета Венеры достигнуть Меркурия.
Расчеты показали, что переходные орбиты с баллистическим
■облетом Венеры и выходом на орбиту около Меркурия характе¬
ризуются такими же кинематическими параметрами, как и ра¬
нее рассмотренные переходные орбиты с пролетом. На рис. 9.3.7
показано изменение минимальных значений суммарной харак¬
теристической скорости по годам соединения Земля — Венера
при баллистическом облете Венеры. Наименьшее значение Ve =
= 11,8 м/с [/о = 2449650 J; D. (24/Х 1994 г.) ; Д* = 290 сут], что на
D% меньше минимальной суммарной характеристической скоро¬
сти прямого полета [*<> = 2446562 J. D. (11/V 1986 г.); Д*=95 сут].
Сравнение минимальных значений суммарной характеристиче¬
ской скорости для прямых и непрямых (баллистический облет
Венеры) межпланетных полетов с выходом на орбиту около
330
Меркурия дано на рис. 9.3.8*. Баллистический облет Венеры
для выхода на орбиту около Меркурия энергетически эффектив¬
нее прямых полетов только в 1980, 1982, 1983 и 1994, 1998 гг.
Наименьших Vs можно достигнуть только в пределах
20 сут от даты соединения Земля — Венера. Отклонение от этих
пределов приводит к резкому увеличению VЕ.
Интересно отметить, что траектории с баллистическим обле¬
том Венеры приводят к стрече с Меркурием вблизи области
Год соединения ©-£
Рис. 9. 3. 7. Минимальные значения суммарной характеристи¬
ческой скорости межпланетного полета с выходом на орбиту
около Меркурия в зависимости от года старта (годы соедине¬
ния © — $). Конечная орбита — круговая, Нк = 1000 км;
схема с коррекцией высоты перицентра орбиты облета
нисходящий узел — афелий орбиты Меркурия. Поэтому харак¬
теристическая скорость торможения для переходных орбит
с баллистическим облетом Венеры в основном выше ее значений
при прямых полетах. В связи с этим эффективность баллистиче¬
ских облетов Венеры достигается только вследствие уменьшения
характеристической скорости старта по сравнению с прямыми
полетами. Данный результат позволяет искать резервы пониже¬
ния Vл путем регулирования долготы точки встречи с Мерку¬
рием за счет активного облета Венеры. Если он будет приводить
к встрече с Меркурием в области восходящий узел—перигелий
орбиты Меркурия, то возможно предположить уменьшение W
Однако расчеты показывают, что это не достигается ввиду боль¬
ших энергозатрат в окрестности Венеры, характеристическая
скорость которых достигает 3 км/с. В этом смысле более пер¬
* На рис. 9.3. в значение Vs равно отношению Vs при баллистическом
облете к Vs при прямом полете.
331
спективной является схема облета Венеры с коррекцией высоты
перицентра орбиты облета.
На рис. 9.3.7 пунктирной линией соединены точки с мини¬
мальным значением Vs при такой схеме облета Венеры. Видно,
что V и уменьшается до 11,2 км/с при дате старта ^=2447330
J. D. (17/VI 1988 г.) и Л^=300 сут.
Если в качестве критерия оптимальности рассматривать сум¬
марную характеристическую скорость, то решение проектной
задачи, в которой учитывается баллистический облет Венеры,
1,2
10
0,8
0,6
1980 82 83 85 86 88 90 91 93 99 961998
Год соединения ф-£
Рис. 9. 3. 8. Сравнение мини¬
мальных значений суммар¬
ной характеристической ско¬
рости для прямых и непря¬
мых (баллистический облет
Венеры) полетов с выходом
на орбиту около Меркурия.
Конечная орбита — круго¬
вая, Як = 1000 км
будет сводиться к оптимизации основных проектных параметров
разгонного и тормозного модулей при известных гиперболиче¬
ских избытках скорости. Из двух типов межпланетных полетов —
прямой и непрямой (баллистический облет Венеры)—были
выбраны переходные орбиты с наименьшими на основе ко¬
торых путем решения проектной задачи были определены опти¬
мальные значения основных проектных параметров разгонного
и тормозного модулей межпланетного аппарата, предназначен¬
ного для полета к Меркурию с выходом на конечную орбиту.
Результаты решения изображены на рис. 9.3.9 и 9.3.10.
Влияние облета Венеры на энергетические характеристики
межпланетных траекторий полета к Меркурию с возвратом
к Земле может проявляться по-другому для траекторий возвра¬
щения. Результаты расчетов показывают, что для траекторий
возвращения возможно лишь небольшое снижение Vi (менее
10%) за счет облета Венеры, но это связано с серьезным увели¬
чением продолжительности операции (на 50—100%) [72]. По этой
причине здесь не рассматриваются возвратные траектории Мер¬
курий— Земля с облетом Венеры, хотя они в ряде случаев мо¬
гут приводить к меньшим скоростям входа в атмосферу Земли.
Критерий использования схем облета Венеры для решения
задач полета к Меркурию не должен быть связан только с уров¬
нем энергозатрат. Важными характеристиками также являются
332
диапазон «окна» старта и чувствительность номинальной меж¬
планетной траектории к величинам отклонений.
При баллистическом облете Венеры для переходных орбит
с минимальной характеристической скоростью диапазон «окна»
я,
0.52
т
т
w
Рис. 9.3.9. Оптимальные значения тяговооруженности разгонного модуля
(выход на орбиту около Меркурия):
Q—прямой полет; А—полет с облетом Венеры; \д у=0,1; уд у*=0,02;
/
>
К
1
v
\
1
S
|
1
1
\
\
/
Г
/
1
N
к
\
ч
>
1
/
/
\
\
\
1
1
1
1
1
\
\
>
/
/
<
Ч
\
\
/
/
/
\
\
\
>
\
1
Г
\
Л
1
\
\
J
L
j
/
—<
'
197.
ч
f 7
Г
6 7
7 71
7
S
9
/
0
N
1 4
г в
у
з»
в
5 8
6 4
7
9 8
9 9
0 *
1 *
’ 1
2
N
3 9
0
Y
s S
6 9)
\
19i
18
Го ды
старта зависит от ограничений на минимальную высоту пери¬
центра. Так, например, для соединения 1980 г. «окно» старта
уменьшается по сравнению с прямым полетом почти в 3 раза
А
0,58
ДЛ
0,30
0,26
0,22
А.
Л\
к
!
л
\ч
А
1
А
j
А
/
//
и
\\
V
\\
\i
—1
j
\
А
/7
/У
/У
\ц
\\
/в—
//
у
I
ft
<7
1975 77 79 8
1 8
3 8
1 87 89 91 9
3 95 97 m
Годы
Рис 9. 3.10. Оптимальные значения относительного конечного веса раз¬
гонного модуля (выход на орбиту около Меркурия):
О-прямой полет; А—полет с облетом Венеры;
3
У-Д
гд.у
0.1; Уд.у =0,02;
и составляет всего около 7 сут [72]. В случае низких высот пери¬
центра при баллистическом облете Венеры переход к схеме
облета с их коррекцией даст большие преимущества. Для того
333
же года соединения (1980 г.) переход к коррекции высоты пери¬
центра орбиты облета при 5%-ном запасе Vz расширяет «окно»
старта до 42 дней [72]. Если же высота перицентра орбиты
облета достаточно большая, то баллистический облет также дает
возможность значительно расширить «окно» старта. Например,
для соединения 1982 г. баллистический облет Венеры (высота
перицентра 1980 км) позволяет при 5%-ном запасе Vz расширить
«окно» запуска до 50 дней [72]. Таким образом, в зависимости от
высоты перицентра орбиты облета выбор правильной схемы
облета Венеры позволяет значительно расширить «окно» за¬
пуска межпланетного аппарата к Меркурию. Поэтому, если даже
рациональная схема облета Венеры и не дает ощутимого вы¬
игрыша в энергетике, то уже большим ее достоинством является
расширение интервалов запуска.
Реализация межпланетной траектории полета к Меркурию
с облетом Венеры во многом зависит от чувствительности номи¬
нальной траектории к отклонениям кинематических параметров
от расчетных данных. Управление траекторией непрямого пере¬
лета Земля — Венера — Меркурий представляет собой более
трудную задачу, чем при прямом полете. Действительно, даже
очень небольшие ошибки в реализации расчетной высоты пери¬
центра могут вызвать заметные погрешности в направлении
асимптоты измененной гиперболической орбиты облета. Судя по
результатам приближенных расчетов и численного интегрирова¬
ния, располагаемый запас топлива на коррекцию должен допол¬
нять средний полный потребный запас топлива на (2,Зч-3,5)о
(а — среднеквадратичное отклонение ошибки реализации кор¬
рекции), что для непрямых полетов с пролетом Меркурия в 1970
и 1973 гг. соединения Земля — Венера соответствует характери¬
стической скорости около 250 м/с.
Таким образом, указанные результаты предварительного ана¬
лиза траекторий непрямых полетов к Меркурию позволяют
оптимистически смотреть на техническую реализацию межпла¬
нетных полетов к Меркурию с облетом Венеры.
§ 4. МАНЕВРЫ КЛА
С ИСПОЛЬЗОВАНИЕМ ГРАВИТАЦИОННОГО
ПОЛЯ ЮПИТЕРА
Гравитационное поле Юпитера—самой большой планеты —
является хорошим «помощником» в прокладывании космических
трасс в труднодоступные и удаленные районы Солнечной си¬
стемы. К ним относятся районы вблизи Солнца, районы над пло¬
скостью эклиптики и ниже ее, внешние планеты от Сатурна
до Плутона и районы глубокого космоса. Расположение орбиты
Юпитера и его масса таковы, что эти задачи можно успешно
решить с меньшими энергозатратами благодаря использованию
334
гравитационного поля Юпитера, изменяя геометрию встречи
КЛА и планеты.
Ранее было показано, что величины прицельной дальности Ъ
(или высоты перицентра) и угла г|) при неизменном К»» пол¬
ностью определяют геометрию встречи КЛА и планеты и харак¬
теризуют планетоцентрическую орбиту облета (рис. 9.4.1).
Изменяя b и угол г|), можно получить много вариантов полетов
ввиду изменения после облета величины и направления гелио¬
центрической скорости полета КЛА. Некоторые перспективные
схемы полетов КЛА с облетом Юпитера показаны на рис. 9.4.2.
Рассмотрим проектно-баллистические характеристики КЛА при
таких схемах полета.
Орбиты облета при значениях г|), близких к нулю, могут быть
использованы для полетов КЛА к Солнцу (солнечные зонды),
поскольку гелиоцентрическая скорость КЛА после облета резко
уменьшается, что приводит к почти прямолинейным гелиоцент¬
рическим траекториям и в некоторых случаях даже к траекто¬
риям «попадания» в Солнце. Прямой полет Земля — окрестность
около Солнца требует значительных энергозатрат (рис. 9.3.2).
Из возможных схем полета к Солнцу (/?*©<; 0,2) схема полета
с использованием гравитационного поля Юпитера требует наи¬
меньших энергозатрат и поэтому наиболее перспективна.
На рис. 9.4.3 приведены потребные времена полета At КЛА,
совершающего полет к Солнцу с облетом Юпитера в зависимо¬
сти от гиперболического избытка скорости Косо, радиуса периге¬
Рис. 9.4.1. Кинематика
векторов орбиты облета:
Рис. 9. 4. 2. Перспективные схе¬
мы космических маневров КЛА
с облетом Юпитера
п° положителен
Траектории полета к Солнцу
335
лия переходной орбиты после облета Юпитера /?*® и радиуса
перицентра планетоцентрической орбиты облета гкь представлен-
М,годы 0,За. с.
V
&
3,1
ю
V
0,30 0,31 т 0,30 V^/Vg, Перигелий \об' о,1 0,5 \о ~5~ю Афелий
Рис. 9.4.3. Зависимость по- Рис. 9.4.4. Изменение гиперболиче-
требного времени полета к ского избытка скорости орбиты от-
Солнцу от гиперболического из- рыва от перигелия переходной орбиты
бытка скорости орбиты отрыва при прямых перелетах Земля —
районы над плоскостью эклиптики
ного в единицах радиуса планеты Юпитер. Другие проектно¬
баллистические характеристики совпадают с данными прямого
полета Земля — Юпитер.
Траектории полета за пределы эклиптики
Зондирование районов над и под плоскостью эклиптики пред¬
ставляет большой научный интерес, вызываемый возможностью
исследования «сверху» (снизу) Солнца, характеристик меж¬
звездной среды и возможной асимметрии условий в космосе
(распределение метеорных тел, солнечных явлений и т. д.). Ге¬
лиоцентрические траектории полета КЛА в плоскостях с боль¬
шими углами наклона (близкими к 90°) позволяют решить эту
задачу.
Прямые полеты Земля — районы над эклиптикой — требуют
больших энергозатрат. На рис. 9.4.4 показаны значения гипер¬
болического избытка скорости орбиты отрыва в зависимости от
угла наклона гелиоцентрической орбиты к плоскости эклиптики
и радиуса перигелия [73]. Ввиду больших значений К<х>о вряд ли
можно предполагать реализацию таких схем полета к удален¬
ным районам над плоскостью эклиптики.
Использование гравитационного поля Юпитера позволяет
при близких к 90° (см. рис. 9.4.1), отклонять гелиоцентри¬
ческую орбиту КЛА для достижения больших эклиптических
широт. В зависимости от постановки задачи возможны две схемы
полета. Первая схема полета — поворот плоскости переходной
орбиты после облета Юпитера до 90° к плоскости эклиптики —
336
wW_
' u
м\
i7m0
У
02
0,07
0\Y
е*
№
10,005
г.
?*ГГ
\4о0,^/£ i=90jM
позволяет КЛА пролететь над (под) Солнцем. Такая схема по¬
лета изображена на рис. 9.4.5.
Вторая схема полета отвечает требованию максимизации
составляющей гелиоцентрической скорости КЛА после облета
368 168 68
t,=450cym
Рис. 9.4.5. Облет Юпитера с поворотом плоскости переходной
орбиты до 90° к плоскости эклиптики (первая схема):
U-2442590,5 I.D.; V^O.37 V®; [=90°; RnQ=0,045 а. е.;7к=7
Юпитера, нормальной к плоскости эклиптики. Эта схема позво¬
ляет достигнуть наибольшего удаления КЛА от плоскости
эклиптики в точке его максимальной гелиоцентрической широты.
Рис. 9.4.6. Удаление
КЛА от плоскости эклип¬
тики в момент его про¬
хождения над Солнцем
для двух схем полета:
I—схема с максимизацией
нормальной составляющей
скорости; 2—схема с пово¬
ротом на 90° к плоскости
эклиптики
Нэ,а*.
12
8.
4
,
2
13,5 \1 14,7 15,3 15,3 16,5 17,1 VxhKHfc
На рис. 9.4.6 показано изменение максимального отклонения
Нэ от плоскости эклиптики в зависимости от характеристической
скорости старта при двух схемах полета [40].
Межпланетные траектории полета
к внешним планетам
После реализации полетов межпланетных аппаратов к Юпи¬
теру неминуемо возникнет потребность в исследовании более
дальных планет — Сатурна, Урана, Нептуна и Плутона. Однако
прямые полеты к этим планетам потребуют еще больших энер¬
гозатрат при чрезмерно большом потребном времени полета
337
(см. § 3 гл. V). Уменьшить время полета до приемлемых величин
можно только за счет дальнейшего роста энергозатрат
(рис. 9.4.7).
Решение проблемы полета к внешним планетам при прием¬
лемых для КЛА с двигателями больших тяг (ЖРД, ЯРД) энер¬
гетических характеристиках и временах полета становится прак¬
тически возможным при использовании гравитационного поля
Юпитера. Если облет происходит при углах ф, близких к 180°
(см. рис. 9.4.1), то межпланетный
аппарат может получить от Юпите¬
ра достаточное количество энергии,
чтобы после облета двигаться даже
по гиперболической орбите и тем
самым преодолеть силу притяжения
Солнечной системы. Такая схема
полета при соответствующем рас¬
положении планет позволяет доста¬
точно быстро долететь к следую¬
щей планете. Последовательно
используя гравитационные поля
внешних планет, можно обеспечить
полет межпланетного аппарата ко
многим планетам после Юпитера.
В последние годы исследованию
межпланетных полетов к внешним
планетам с использованием грави¬
тационного поля Юпитера или гравитационных полей несколь¬
ких планет был посвящен ряд работ *.
Интересно, что в настоящем десятилетии открываются воз¬
можности исследования внешних вланет Солнечной системы
(Сатурна, Урана, Нептуна и Плутона) благодаря облету Юпи¬
тера. Возможны также межпланетные траектории с облетом
двух, трех и даже четырех внешних планет при умеренных зна¬
чениях стартовой характеристической скорости (от 14,5 до
16,5 км/с) и времен полета. Рассматриваются обычно следующие
три принципиальные схемы пролетов планет:
1) двухпланетная схема пролета по маршрутам: Юпитер —
Сатурн (Ю — С); Юпитер — Уран (Ю — У); Юпитер — Нептун
(Ю — Н) и Юпитер — Плутон (Ю — П);
2) трехпланетная схема пролета по маршрутам: Юпитер —
Сатурн — Плутон (Ю — С — П); Юпитер — Уран — Нептун
(Ю-У-Н);
3) четырехпланетная схема пролета по маршруту Юпитер —
Сатурн — Уран — Нептун.
Важная особенность рассмотренных схем пролета заклю¬
чается в том, что на каждом маршруте первой планетой является
Рис. 9. 4. 7. Зависимость мини¬
мального времени прямых по¬
летов к внешним планетам от
энергии запуска
* Анализ некоторых таких работ в США дан в работе [40].
338
Юпитер. Поэтому минимальные энергозатраты будут опреде¬
ляться скорее всего условиями полета Земля — Юпитер.
Перейдем к рассмотрению каждой схемы пролета.
Двухпланетная схема пролета
(Земля) — Юпитер — Сатурн. Зависимость времени полета
к Сатурну от гиперболического избытка скорости орбиты отрыва
Vооо при различных датах старта и различных радиусах пери¬
центра планетоцентрической орбиты облета (в радиусах Юпи¬
тера) r*i приведена на рис. 9.4.8 [73]. Видно, что наилучшие
возможности полета к Сатурну с облетом Юпитера возникают
при старте в 1977—1978 гг., когда можно достигнуть наимень¬
ших Уооо при практически минимальных At и приемлемых гп1.
Если выбрать дату старта в 1977 г., то Vooo = O,32l/0 при r*i=10,
© то время как при прямом полете
жение Vooo- В этом смысле характеристики полета к Сатурну
с облетом Юпитера становятся еще лучше, время полета умень¬
шается с 4 лет до 2,75 года. Наименьшее же время полета при
старте в 1977, 1978 и 1979 гг. равно 2 годам.
На рис. 9.4.9 [73] изображена проекция на плоскость эклип¬
тики межпланетной траектории полета к Сатурну с облетом
Юпитера при старте 6 сентября 1977 г. Близкая к ней межпла¬
нетная траектория возможна при старте в октябре 1978 г. Сле¬
дующие оптимальные даты старта возможны только через сум¬
марный синодический период (20 лет) в 1997—1998 гг. В табл. 9.6
для даты старта сентябрь 1977 г. даны оптимальные значения
основных проектных параметров разгонного модуля п0 и Цн-
Рис. 9. 4. 8. Зависимость времени по¬
лета от гиперболического избытка
скорости орбиты отрыва при марш¬
руте Земля—Юпитер—Сатурн
Рис. 9.4.9. Межпланетная
траектория полета к Са¬
турну с облетом Юпитера:
to—сентябрь 1977 г.; У^о=0,35 У@
339
(Земля) — Юпитер — Уран. Баллистические характеристики
межпланетной траектории полета к Урану с использованием
гравитационного поля Юпитера показаны на рис. 9.4.10 [73].
Наиболее приемлемые характеристики полета имеют место при
датах старта в 1978—1979 гг. Так, при Vooo = 0,34V© время по¬
лета равно 6,5 года и г*i =2 (1978 г.) или гк\ =12 (1979 г.),
тогда как минимальная продолжительность полета — около
5 лет, но уже при Кооо = 0,38ч-0,4 V®.
Прямой полет при старте в 1979 г. будет продолжаться 12 лет
при минимальном гиперболическом избытке скорости У«>о, рав-
А t, годы
16\
^ ТТ981
1979 1980 \
120
/Прямой nepei
(1979г)
^Ф <180°
'em
1978 Ь#\| /„
Ч
V
/
2^:
Ж1
0,30 0,34 0,38 , 0,41 Vooo/V.
Рис. 9.4. 10. Зависимость времени
полета от гиперболического избытка
скорости орбиты отрыва при марш¬
руте Земля—Юпитер—Уран
Рис. 9. 4. 11. Межпланетная
траектория полета к Урану
с облетом Юпитера:
to—октябрь 1978 г.; V^^O.35 Vq
ном 0,38 V©. Если же при прямом полете продолжительность
будет равна 6,5 года, то для этого надо достигнуть Vooo = 0,42 V©.
В первом случае облет Юпитера позволяет уменьшить время
полета в 1,8 раза при некотором уменьшении Vooo, во втором —
при одинаковом времени полета — Vooo меньше на 2,4 км/с или
почти на 30%.
На рис. 9.4. 11 изображена проекция межпланетной траекто¬
рии полета Земля — Юпитер — Уран на плоскость эклиптики
при дате старта октябрь 1978 г. и Vooo = 0,35 V© [73]. В табл. 9.6
для даты старта в октябре 1979 г. даны оптимальные значения
основных проектных параметров разгонного модуля По и рк-
Следующие оптимальные даты старта возможны только
в 1992-1993 гг.
(Земля) — Юпитер—Нептун. Из баллистических характери¬
стик траекторий полета к Нептуну с использованием гравитаци¬
онного поля Юпитера, изображенных на рис. 9.4.12, наиболее
приемлемые—при датах старта ib 1979—1980 гг. [73]. Так, при
дате старта в ноябре 1979 г. межпланетный полет КЛА к Неп¬
туну с облетом Юпитера может реализоваться при гиперболиче¬
ском избытке скорости Vooo = 0,37 И© и Д/ = 8 лет, близком к ми¬
нимальному, (причем г* 1 =3. Близкие к ним характеристики
340
Таблица 9.6
Оптимальные проектно-баллистические характеристики КЛА
при полетах к внешним планетам с облетом Юпитера
Схема полета
Дата
старта
V
«о
км/с
А'п
сут
„opt
tt°pt
к
тд.у
руд
с
Земля—Юпитер—Сатурн
Сентябрь
1977 г.
10,41
1072
0,38
0,72
0,5
0,93
0,174
0,183
0,456
0,468
0,05
0,01
0,05
0,01
450
1000
Земля—Юпитер—У ран
Октябрь
1978 г.
10,41
2080
0,38
0,72
0,5
0,93
0,174
0,183
0,456
0,468
0,05
0,01
0,05
0,01
450
1000
Земля—Юпитер—Нептун
Ноябрь
1979 г.
11,01
2920
0,38
0,72
0,51
0,95
0,162
0,169
0,437
0,449
0,05
0,01
0,05
0,01
450
1000
Земля—Юпитер—Плутон
1977 г.
10,12
3650
0,38
0,72
0,49
0,92
0,185
0,194
0,467
0,476
0,05
0,01
0,05
0,01
450
1000
At, годы
20
16
12
8
4
1
- 1379
1978jl98
i
\
„ 1 -I ■ Г ■
Прямой перелет
(1979г.) -
Ф < 180°
0 1981
\
У
3Ш
to
ъЗО
\
Уф
20
Г*'
я
Т~'
0,30 0,ЗЬ 0,38 0,42 Vooo/V.
Рис. 9.4.12. Зависимость времени
полета от гиперболического избытка
скорости орбиты отрыва при марш¬
руте Земля—Юпитер—Нептун
Рис. 9, 4.13. Межпланетная траек¬
тория полета к Нептуну с облетом
Юпитера:
to—ноябрь 1979 г.; V^—0,37 V@
имеет межпланетная траектория полета при старте в 1980 г.,
когда r*i =9.
Межпланетные траектории полета к Нептуну с облетом
Юпитера имеют качественно лучшие баллистические характе-
341
ристики по сравнению с прямым полетом (см. рис. 9.4.12). Так,
при старте в 1979 г. и времени полета 8 лет V<x>o=0,48 V©, что
на 3,3 км/с больше Vooo при полете с использованием гравита¬
ционного поля Юпитера. Если же прямой полет реализовать при
минимальном Уооо=0,39 V© (близком к Vooo при полете с обле¬
том Юпитера), то время полета увеличится почти на 17 лет.
На рис. 9.4. 13 изображена проекция на плоскость эклиптики
межпланетной траектории полета к Нептуну с облетом Юпитера
при старте 10 ноября 1979 г. Vooo = 0,37 V'© и At=8 лет. В табл. 9.6
даны соответствующие этой траектории оптимальные значения
ль, годы
- -
'Прямой переле/
У
' * ^
f/J/О
CJ
<Р >780°
1
' 1377
у
1979
<
1378 оМ
?/?
15
3^
Отг~5
0.30 0,34 0,38 0,42 V^/V,
Пролет
Плутона
Fuc. 9.4.14. Зависимость времени по¬
лета от гиперболического избытка ско¬
рости орбиты отрыва при маршруте
Земля—Юпитер—Плутон
Рис. 9. 4.15. Межпланетная траек¬
тория полета к Плутону с облетом
Юпитера:
ta —январь 1977 г.; =0.34 V©
основных проектных параметров разгонного модуля п0 и рк*
Следующие оптимальные даты старта возможны только а 1992—
1993 гг.
(Земля) — Юпитер — Плутон. Баллистические характери¬
стики межпланетной траектории полета к Плутону с использо¬
ванием гравитационного поля Юпитера изображены на
рис. 9.4.14 [73]. Видно, что 1977—1978 гг.— наиболее приемле¬
мые для старта, когда можно добиться относительно малого
времени полета при относительно низких значениях Vooo и удоб¬
ных гж1. Так, в 1977 г. при Уосо = 0,34 V© можно реализовать
полет к Плутону с облетом Юпитера при г%\ =5 и Д^=10 лет.
При прямом полете — оптимальная дата старта в 1976 г.—
баллистические характеристики намного ухудшаются: в случае
полета с минимальным значением Vooo=0,38 имеем At=
= 44 года, а полет с минимальным временем Д£=38 лет возмо¬
жен при Vooo = 0,48 V©.
На рис. 9.4.15 показана проекция на плоскость эклиптики
межпланетной траектории полета к Плутону с облетом Юпи¬
342
тера при старте в 1977 г. и Vooo = 0,34 V©. В момент пролета
межпланетного аппарата Плутон будет находиться в перигелии
своей орбиты, имеющей =30 а. е. В этом можно найти при¬
чину относительно низких энергозатрат для полета на Плутон.
В табл. 9.6 даны соответствующие этой траектории полета
оптимальные значения основных проектных параметров разгон¬
ного модуля по и рк- Следующие оптимальные даты старта воз¬
можны только в 1989—1990 гг.
Трехпланетная схема пролета
Для выявления возможностей снижения энергозатрат и вре¬
мени полета к самым дальним планетам Солнечной системы —
Нептуну и Плутону — интересно рассмотреть трехпланетные
схемы пролета по маршрутам (Земля)—Юпитер — Сатурн —
Плутон * и (Земля) — Юпитер — Уран — Нептун. На рис. 9.4. 16
At^odoi
14
Ю
О
14,5
е-у-и
•
1978
щ*£[977
15,5 16,5 VXi,KM/c
Рис. 9. 4. 16. Зависимость времени
полета к Плутону от характери¬
стической скорости старта при
различных схемах пролета
At,г оды
14
W
0-*-
1 Q-4-d-ty
\
\
^1978
7
1919
14,5 15,5 16,5 VXvKM/c
Рис. 9. 4.17. Зависимость времени
полета к Нептуну от характери¬
стической скорости старта при
различных схемах пролета
и 9.4.17 приведены соотношения между минимальной характе¬
ристической скоростью старта и продолжительностью перелетов
по указанным маршрутам [75]. Видно, что баллистические харак¬
теристики двух- и трехпланетных схем пролета довольно близки.
Близость энергозатрат объясняется тем, что первой планетой
облета на каждом маршруте является Юпитер, а требования
к энергетике определяются главным образом перелетом Земля —
Юпитер. Близость значений времен полета означает, что глав¬
ным фактором, определяющим время перелета, является гелио¬
центрическое расстояние конечной планеты назначения, число же
промежуточных планет облета не имеет существенного значения.
Следует также заметить, что времена полета к Нептуну и Плу¬
тону довольно близки вследствие одинаковости их гелиоцентри-
* Вариант схемы полета по программе, которая получила название
«Большой тур».
343
ческих расстояний в 1980 и 1990 гг., когда ожидается пролет
КЛА *.
Благоприятный период запуска для маршрута Земля — Юпи¬
тер— Сатурн — Плутон приходится на 1977—1978 гг., а для
маршрута Земля — Юпитер — Уран — Нептун — на 1978—
1980 гг. Следующий благоприятный период будет приходиться
только на 2076—2077 и на 2155—2156 гг. соответственно. В этом
одна из опасностей в планировании трехпланетных схем пролета,
а другая — в большей по сравнению с двухпланетной схемой про¬
лета чувствительности номинальной траектории к отклонениям.
Кроме того, при маршруте полета Земля — Юпитер — Сатурн —
Плутон хотя КЛА и не пересекает кольцо Сатурна, создаются
неблагоприятные условия для наблюдения Сатурна. Поэтому
целесообразность планирования трехпланетных схем пролета
пока сомнительна.
Четырехпланетная схема пролета
Межпланетная траектория полета с маршрутом Земля —
Юпитер—Сатурн—Уран—Нептун ** привлекает особое внима¬
ние возможностью с помощью небольшого числа межпланетных
аппаратов решить некоторые фундаментальные научные проб¬
лемы по исследованию внешних планет и удаленных районов Сол¬
нечной системы. Ее уникальность (поскольку следующий благо¬
приятный период наступит только через 180 лет) предъявляет*
особые требования к анализу проектно-баллистических характе¬
ристик межпланетного аппарата, предназначенного для такого
ответственного полета. Все аспекты проекта из-за отсутствия
достоверной информации о внешних планетах пока еще трудно
представить. Ограничения на выбор межпланетной траектории,
которые будут диктоваться условиями околопланетного прост¬
ранства, могут заметно повлиять на энергетику и время пере¬
лета. Однако, основываясь на существующей информации
о внешних планетах, уже можно выявить* рациональные межпла¬
нетные траектории полета операции «Большой тур». Рассмотрим
некоторые ее особенности.
Так как операция «Большой тур» может быть реализована
только при строго определенном положении внешних планет от¬
носительно друг друга, то благоприятные периоды для запуска
КЛА весьма редки. Периодичность благоприятных возможно¬
стей для запусков определяется главным образом синодическим
периодом Урана и Нептуна (171,4 года) и следует с интервалом
примерно 13 мес с 1976 по 1979 гг. При запусках после 1979 г.
требования к энергетике становятся чрезмерно высокими, так
как облет Юпитера вследствие его положения уже не дает долж-
* Это связано с тем, что во время пролета межпланетного аппарата Плу
тон будет находиться вблизи перигелия своей орбиты.
** Вариант схемы полета по программе «Большой тур».
344
ного эффекта. Для схем облета нескольких планет существует
некоторая граница энергозатрат, превышение которой не приво¬
дит к дальнейшему сокращению времени. Это ограничение вызы¬
вается кинематикой схем облета
планет. Для облета нескольких
.планет траектория должна «отра¬
жаться» под некоторым углом от
каждой промежуточной планеты
(рис. 9.4.18). Однако реализовать
схему облета планет при больших
углах отражения практически не¬
возможно, поскольку для этого тре¬
буются слишком малые высоты
перицентра планетоцентрической
орбиты облета, достигнуть которые
не позволяет атмосфера планет.
Следовательно, потребные времена
полета ограничены снизу мини¬
мально допустимыми высотами перицентра орбиты облета. Ска¬
занное подтверждается результатами расчетов. На рис. 9.4.19
и 9. 4.20 изображены зависимость времени полета от номиналь¬
ной даты старта при различных значениях энергии запуска huк
и условной высоты перицентра Я*, орбиты облета соответственно.
Для реализации операции «Большой тур» наиболее критиче¬
ской планетой является Сатурн. Во-первых, наименьшая продол-
At, годы
11
10
9
S
Рис. 9.4. 19. Зависимость продолжительности операции «Большой
тур» от даты старта (для 1976—1979 гг.) и энергии запуска
жительность операции прямо связана с наиболыни-м сближе¬
нием КЛА с Сатурном. Во-вторых, возникают дополнительные
ограничения на выбор радиуса перицентра орбиты облета из-за
существования колец Сатурна, встречи с которым следует избе¬
гать. Ориентация Сатурна и его колец в предполагаемый период
315
1520 2530 4 9 202530 4 9 14 25 30 5 10 15 20 30 4 9 14 1924
Июль авг аВг сент сент. окт окт ноя5
1976 1977 1978 1979
Рис. 9.4.18. Четырехпланет-
ная схема облета
облета (1979—1983 гг.) допускает его облет КЛА как с внешней
стороны колец, так и между внутренней стороной колец и по¬
верхностью планеты. Правда, продолжительность всей операции
при облете с внешней стороны колец увеличивается на 2 года по
сравнению с облетом по внутренней стороне колец Сатурна.
Баллистические характеристики межпланетной траектории
полета операции «Большой тур» приведены на рис. 9.4.21 в за-
12
11
Ю
сатцрн 40 ООО
У ран 50000
•Jljf
Сатурн 80 ООО
"7'
Юпитер 7 ООО ООО
Сатцрн 100 ООО
Сатурн 100 ООО
Уран 200 000
Сатурн 20000
юпитер 500 ООО
Сатурн чоооо
Юпитер 2000 ООО
Уран 100 000
Сатурн 60 ООО
Сатурн 0
Уран 40 000
Юпитер 250 ООО
Уран 20000
CamjlfiH и
LufnUun ОU UUU
Юпитер юоо ооо
Рюпитеа800 000
Юпитер 600 ООО
Сатурн чбооо—-
Уран юоооо
-шпитер 4 ооо ШГ
Уран 50000
—. юпитер5005 Ш "
Т'СатурнТГ
m?i}tvfArnrrr7-A
15 20 25 30 4 9
июль ч8г.
• 1976
го 25 50 9 9 14
авг сент.
1977
сент. окт.
1978
окт. ноябрь
1979
Рис. 9.4.20. Влияние условной высоты перицентра Нк 1 планетоцентри¬
ческой орбиты облета на продолжительность операции <гБольшой тур»
(нереализуемые траектории в заштрихованной области)
висимости от радиуса перицентра планетоцентрпчсской орбиты
облета Сатурна /ylj. Анализ приведенных зависимостей позво¬
ляет выработать определенные рекомендации по выбору номи¬
нальной межпланетной траекторий полета операции «Большой
тур». Во-первых, научная ценность операции будет во многом
зависеть от близости прохождения КЛА около каждой планеты
облета. Во-вторых, траектории, соответствующие расстояниям
в перицентре орбит облета Сатурна, равным = 1,2н-2,4 ра¬
диусов планеты, следует сразу исключить, поскольку это про¬
странство занимает кольцо Сатурна. Учитывая эти замечания,
к наиболее приемлемым межпланетным траекториям полета опе¬
рации «Большой тур» можно отнести траектории со следующими
датами запуска: 1§76 (гл1^=2,4); 1977 ( = 1,2); 1977 (rTClj=
= 2,4) и 1978 гг. (r*1j =1,2). Однако, принимая во внимание за¬
траты топлива, время и определенный риск, связанный с обле¬
том Сатурна по внутренней стороне колец, в качестве номиналь¬
ной предпочтительнее межпланетная траектория, характеризуе- _
мая запуском в 1977 г. и облетом Сатурна по внешней стороне
346
кольца. Проектно-баллистические характеристики соответствую¬
щего межпланетного аппарата представлены в табл. 9.7*.
Выполнение операции «Большой тур» предъявляет высокие
требования к точности реализации межпланетной траекторий.
Ошибка по положению в несколько километров при облете одной
дик, *м2/сг
т
130
по
но
т
90
во
по
80
60
90
20
О
1980
1979
197tf
/
1977
1976
1
3
9
1979-
'у
1980
W8
1977
J976
1 г
г_*
A t, сут
5200
9800
то
9000
3600
3200
2800
ГП&
20
16
12
8
9
1976
Н980
1979
У/
1978
Г//
у
fF
1977
-13
-1?
- и
-10
9
8
1980
/
1979
А
978 >
У*
t
1976
2
1
Рис. 9. 4. 21. Баллистические характеристики межпланет¬
ной траектории полета операции <гБольшой тур» в за¬
висимости от относительного радиуса перицентра
орбиты облета Сатурна
планеты может привести к ошибкам в тысячи километров при
достижении другой планеты. Успех операции «Большой тур»
во многом будет определяться правильным определением точек
приложения и величин корректирующих импульсов, которые за¬
висят от чувствительности номинальной траектории к ошибкам
в начальных условиях гелиоцентрических участков и плането¬
центрических орбит облета планет. Главными источниками оши-
* См. «Проект беспилотного автоматического аппарата для операции
Grand Tour», А. Р., 1970, №«14, реф. il<87—188.
347
Таблица 9.7
Проектно-баллистические характеристики операции „Большой тур*
Участок
перелета
Характеристика
Земля—Юпи¬
Юпитер—Са¬
Сатурн—У рай
Уран—Нептун
тер
турн
Дата старта
1 сентября
1977 г.
—
—
—
Тяговоруженность n°pt
0,38
—
—
—
(Уд-у=0,О5, Руд = 450 с)
Относительный конеч¬
0,206
—
—
—
ный вес МкР'
Гиперболический из¬
V =9,5
оо О *
V'?2=8,l
^2=П,3
быток скорости при вы¬
V
ходе из сферы действия
планеты в км/с
t
Склонение цели при
80=30
ift=5,9
вЭ=—28,4
8®=—51,8
выходе из сферы дейст¬
Л»
вия планеты в град
t
Прямое восхождение
00=64,9
aft=55,7
а£=288,9
t®=4,S
при выходе из сферы
I 9
действия планеты в град
Гиперболический избы¬
[—8.1
^=11,3
^.= 15,4
^ = 17.4
ток скорости орбиты
прибытия в км/с
А
8,tP1=29,7
Склонение цели при
=—4,8
8^ =—9,6
Т
8®=—72,7
входе в сферу действия
планеты в град
t
5®=31
aJP = 109
Прямое восхождение
aft=318,0
o^=200
при входе в сферу дей¬
ствия планеты в град
t
г® =98600
t
/®= 101,8
Радиус- перицентра ор¬
г?-=63500
К |
r\=144000
биты облета в км
Угол наклонения ор¬
/^•=17,2
^=29,3
биты облета к плоскости
экватора планеты в град
Параметр промаха Ь
1,7-106
3,3-105
1,2-105
в км
Угловой параметр про¬
5,2
—27,7
— 133,5
маха ф в град
Угол поворота вектора
98
84
24
гиперболического избыт¬
ка скорости при облете
в град
Дата выхода из сферы
2. IX 1977
28. VIII 1979
9.IX 1981
6. XII 1985
действия планеты
1
i
348
Продолжение табл. 9.7
Участок
перелета
Характеристика
Земля—Юпитер
Юпитер—Са¬
турн
Сатурн—Уран
Уран—Нептун
Дата входа в сферу
действия планеты
4. V 1979
16.VI 1981
21. IX 1985
20.11 1989
Дата прохождения пе¬
рицентра орбиты облета
I. VII 1979
29. VII 1981
30. X 1985
Угол наклонения плос¬
кости орбиты перелета
относительно плоскости
эклиптики i*o в град
2,1
2,6
2,7
2,5
Угловая дальность уча¬
стка перелета Ф в град
158,1
54,4
66,8
22,8
Радиус перигелия ор¬
биты перелета Rkq в а. е.
Радиус афелия орби¬
ты перелета RaQ в а. е.
1,01
6,5
5,0
9,6
Г ипербола
14,6
Эксцентриситет орби¬
ты участка перелета е
0,73
1.4
3,71
6,35
Время полета на уча¬
стке Ata в сут
668
759
1554
1210
Суммарное время по¬
лета до планеты At%
в сут
668
1427
2981
4191
бок являются неточность выведения КЛА на номинальную траек¬
торию, неточность реализации корректирующих маневров и опре¬
деления фактической траектории.
Для планетоцентрических участков облета планет ошибки
в определении траектории могут привести к нарушению плана
полета или к резкому возрастанию требований к коррекциям.
Ошибки при определении траектории на участках сближения
с планетами складываются из ошибок слежения и неточного зна¬
ния эфемерид облетаемых планет. По оценке перспектив уточне¬
ния эфемерид планет к концу 1970-х гг. небесные долготы и ши¬
роты внешних планет будут определяться с точностью до 0,2 с.
На расстоянии Урана (около 19 а. е.) эта угловая неопределен¬
ность эквивалентна ошибке в расстоянии около 3000 км. Если
не выявить и не скорректировать эту ошибку на участке сближе¬
ния с Ураном, то такая ошибка приведет к промаху при облете
Нептуна около миллиона километров. Выбирать оптимальную
схему управления траекторией КЛА необходимо при тщательном
исследовании возможностей доплеровской аппаратуры слеже¬
ния, методов определения дальности, навигации по звездам
и т. п. в их связи с проектно-баллистическими характеристиками
КЛА. При рассмотрении вопросов проектирования КЛА следует
349
использовать улучшенные оценки параметров траектории, что
позволяет принять потребную характеристическую скорость на
реализацию маневров коррекции 250 м/с.
Влияние галилеевых спутников
на гелиоцентрические участки
после пролета Юпитера
Галилеевы спутники Юпитера: Ио =0,012 и —— =0,255),
' тэ *©
Европа (-£-=0,0079 и -£-=0,226), Ганимед (—=0,026 и
\ та.
' т3> ^0 \т@
0,394) и Каллисто (-^- = 0,016 и —=0,35')
*© / Я? }
являются
весьма значительными объектами Солнечной системы. Поэтому
их влияние может проявиться на оценке результатов исследова-
;
Рис. 9.4.22. Типичная схема
сближения КЛА с Юпитером
и расположение галилеевых
спутников:
I—орбита Каллисто; 2—орбита Га-
нимеда; 3—орбита Европы; 4—ор¬
бита Ио; 5—траектория подхода
к планете; б—невозмущенная траек¬
тория; 7—возмущенная траектория
Радиусы спутников
ния баллистических характеристик межпланетных полетов КЛА
с использованием гравитационного поля Юпитера. На рис. 9.4.22
изображена типичная схема сближения КЛА с Юпитером и рас¬
положение орбит галилеевых спутников.
Анализ межпланетных траекторий полета, проведенный
в работе [67], показал заметное влияние возмущающего дейст¬
вия галилеевых спутников на пролет КЛА около Юпитера, если
требуется с помощью КЛА достигнуть определенной точки про¬
странства. Поэтому гелиоцентрический участок полета к внеш¬
ним планетам после пролета Юпитера может значительно отли¬
чаться от расчетного, если не учитывается возмущающее дейст¬
вие галилеевых спутников. Для любых других полетов, цель
которых заключается лишь в преодолении определенных рас¬
стояний или достижении больших наклонений к плоскости
эклиптики и т. д., возмущающим действием галилеевых спутни¬
ков можно пренебречь.
Такой вывод хорошо иллюстрируется табл. 9.8 [67]. Резуль¬
таты влияния возмущающего действия галилеевых спутников на
350
Влияние возмущающего действия галилеевых спутников Юпитера на элементы
гелиоцентрической орбиты
со
©5
гг
а
»©
К
ХЛН1ГОЭ Я BVOXIOU
олэту вжнгдивн эинволээв^
ИННШИГНС И1ЭОН
-Э01Ш ЭНЯ В1ЭГ011 BHUHBlDHtT
•э 'В 01 в BHHBOlDDBd кин
-ЭЖИ1Э01; HHswsda чл зоне Ed
3(1зфэиявс1л а вин
• Э1;жохен инэмэён чюонев^
П(}эфэ
•HaBdj си эгохян вн wiood
-ОМЭ ЭИНЭН01ГМ10 30HdBWWXQ
^^dэфэ
-HaBdj еи эгохпа вн винэж
-oirou эинэно1гн10 30HdBwwX3
<
<
3
<
О)
<1
еь
<1
О
<1
41
<1
« с
я
гс «а
X
*§
к я
т4 Л
3 Ч
га
х
а.
С
•don он W
■ о»
СО X
С X
О СО
С «
о
о
о
СО
по
СО
о оо
05 О
по о
о о*
о» о
см —
оо о
о о
оо
см
оо
по
см
СО
о
ем
о
о
о
о"
0,002
СО
о
о
о*
0,002
о
о
о*
о
см
о
о
о •
о
о"
0,005
0,0317
0,0358
0,0375
0,0356
05
о
о
оо
СО
05
о
о*
0,0546
0,0276
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
Tt<
оо
00
о
с-
о
см
о
СО
СО
СО
см
о
■—*
см
t--
с-
05
’—'
’—'
’—'
’—'
-'Г
t"-
о
05
СО
СО
СО
см
см
см
см
оо
05
см
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
ю
-'Г
-'Г
00
t-
05
СО
—<
СО
см
о
СО
см
см
СО
о
СО
ю
см
см
СО
см
о
■о
о
о
о
о
о
о
м
05
см
о
1—4
о
о
по
Т}<
со
СО
00
о
ч}<
СО
по
о
о
ю
о
о
о
о
о
о
о
о
о
о
о
о
о
ПО
00
, 1
см
сб
-'Г
-'Г
см
00
см
о
о
о
о
о
о
о
о
о
СО
_
05
ю
СО
_1
_■
00
о
00
ч}<
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
О -
о
о
о
о
о
СО
о
о
о
о
о
о
1—4
о
СО
со
СО
с-
по
ь-
ю
t"-
о
Л}
см
1—4
см
о
■
о
о
о
СО
СО
о
о
СО
по
о
о
со
со
о
о
о
со
о
о
оо
о
о
о
о
о
о
о
о
о
о
о
о
о
90
180
270
о
о
180
180
450
450
.450
450
500
550
450
450
со
о
со
о
со
о
со
о
' о
со
о
со
о
«О
о
■ '
■
•"*
'■/
■
по
см
по
см
по
см
по
см
по
см
по
см
о
ю
—
—
—
—
—
— см
СО
пз
СО
00
351
элементы и параметры гелиоцентрического участка после про¬
лета Юпитера в таблице представлены в виде разности между
элементами и параметрами, рассчитанными с учетом возмущаю¬
щего действия только Солнца и с учетом совместного возмуще¬
ния от Солнца и галилеевых спутников. Интересно определить
относительную величину приведенных изменений.
Во многих случаях А а достигают больших величин. Однако
размер а сам по себе является значительным. Поэтому относи¬
тельная величина возмущений А а не достигает более 4%. Возму¬
щения остальных элементов гелиоцентрического участка не вы¬
ходят из рамок обычных представлений.
Важным фактором является изменение величины радиуса:
вектора. Поскольку КЛА в этой точке находится примерно на
расстоянии 5 а. е. от Солнца, эти изменения в общем малы. Если
же цель полета .состоит в достижении какой-то определенной точ¬
ки пространства, как, например, последующий полет к одной или
нескольким полетам, то любые, даже малые отклонения должны
быть тщательно учтены. В этой связи целесообразно рассмот¬
реть общие отклонения скорости и положения КЛА в момент его
выхода из грависферы Юпитера (планетоцентрическая система
координат). Такие отклонения определены в табл. 9.8 (колонки
13 и 14) как корни квадратные из суммы квадратов изменения
величин отдельных составляющих. Приведенные данные пока¬
зывают, что в зависимости от типа рассматриваемого пролета
могут быть наложены дополнительные требования на систему
наведения на гелиоцентрическом участке траектории после кон¬
такта с Юпитером.
В табл. 9.8 также приведены данные о влиянии галилеевых
спутников на параметры траекторий для схем полета, в которых
точность наведения не играет существенной роли. В колонках 15
и 16 показана разность времени нахождения КЛА в грависфере
Юпитера и разность времени достижения КЛА расстояния
10 а. е. от Солнца.
Для случаев 2 и 4 табл. 9.8 разность в расстояниях, которые
КЛА может покрыть, двигаясь вне плоскости эклиптики, дости¬
гает заметных величин. Однако реально достижимые расстояния
составляют по крайней мере 25 а. е. для обоих случаев, что го¬
ворит об относительно малом влиянии возмущений.
Влияние возмущающего действия галилеевых спутников на
полет к Солнцу иллюстрируется случаями 5 и 6. В случае 5 тра¬
ектория приводит к попаданию в Солнце независимо от того,
учитывается влияние спутников или нет. В случае 6 влияние
возмущений приводит к отклонению всего на "0,6* 106 км. Поэтому
в этой схеме полета, как и в предыдущих, влиянием возмущаю¬
щего действия галилеевых спутников можно пренебречь, не внося
существенной ошибки в параметры траектории полета к Солнцу.
Глава X • ТРАЕКТОРИИ СПУСКА
В АТМОСФЕРАХ ПЛАНЕТ
§ 1. СПУСК с ОРБИТЫ исз
Схема полета по траектории спуска с орбиты
показана на рис. 10. 1.1. Траектории спуска с орбиты можно
разбить на следующие участки:
1. Участок торможения — работа тормозной двигательной
установки (ТДУ). На этом участке траектории скорость сни-
Рис. 10.1.1. Схема спуска с орбиты спут¬
ника:
I—торможение; 2—орбита спутника; 3—переход¬
ной эллипс; 4—вход в атмосферу; 5—траектория
спуска в атмосфере; 6—участок траектории при¬
земления; 7—граница атмосферы
жается со скорости полета по орбите спутника Vo до Vu необхо¬
димой для перехода на эллипс, пересекающий плотные слои
атмосферы.
2. Переходной эллипс — участок пассивного полета практи¬
чески в безвоздушном пространстве от момента конца работы
ТДУ до входа в плотные слои атмосферы (за границу плотных
слоев атмосферы в данной работе принята высота Ло=ЮО км).
353
3. Траектория спуска аппарата в атмосфере — основная часть
траектории спуска, во время которой аппарат снижает свою
скорость от близкой к первой космической до скорости устано¬
вившегося падения или планирования. На этом участке аппарат
подвергается действию высоких температур и перегрузок.
4. Участок приземления — включает в себя установившееся
вертикальное снижение или планирование и непосредственно
посадку аппарата.
Обычно высота орбиты спутника ограничивается снизу необ¬
ходимым временем его существования. Для стационарных объек¬
тов на орбите (спутник-станция, сборка космических кораблей
и пр.) за нижнюю границу высоты орбиты можно принять
/г„р»200-ь300 км. Верхняя граница высоты орбиты обитаемых
спутников выбирается из условия нахождения ее под радиаци¬
онными поясами Земли и равна /?крл; 500-ь 600 км.
Торможение аппарата и полет
по переходному эллипсу
Для определения параметров переходного эллипса необхо¬
димо знать характеристики движения аппарата в конце участка
торможения.
Время торможения
/=—, (10.1.1)
go"
где А У—потеря скорости при торможении;
go = 9,81 м/с2;
Р
п= перегрузка при торможении.
G
В общем случае, когда тормозной импульс дается под углом
а к вектору скорости на орбите, скорость в конце участка тор¬
можения
V1=VV02 -f дI/2 - 2V0bV cos а ^ l/0 - д I/ cos а, (10.1.2)
а угол наклона траектории к горизонту
л л 1 х sin Ct л 1 • / л г\ 1 о\
6i=0o+arctg— — ^00 + _—sina, (Ю. 1.3)
V0— AV cos a V0
где Vq — скорость полета по орбите;
Во — угол наклона траектории (орбиты) в момент дачи тор¬
мозного импульса.
Зная начальные параметры переходного эллипса (V^ и 0i),
можно по известным соотношениям теории эллиптического дви¬
жения определить характеристики траектории аппарата при
входе в атмосферу (Увх, 0ВХ, £вх, tBX).
354
Для практически интересного случая — спуск с круговой ор¬
биты (0о = О) при даче тормозного импульса под углом а = 0 —
можно получить простые приближенные формулы.
Скорость входа в атмосферу VBX определится из интеграла
энергий
V7_i!!-=l/!x _J*L,
г\ гвх
где ri — радиус орбиты в точке дачи тормозного импульса;
гвх — радиус границы атмосферы;
ц— гравитационная постоянная.
Введем относительные величины скорости и высоты:
V=— и А=— , (10.1.4)
^0 '"вх
где
После преобразования получим
V«.=V (1-д1/)2+2Л^К1-2(дГ-Л0), (Ю.1.5)
где
AV г г л — гвх
Д1/ = И tla =
^0 '"вх
Угол входа в атмосферу определится из закона сохранения
кинетического момента:
cos 0^!= cos 0^1/ вх
или для нашего случая 01=0
cos 0nv=
Г\ VX
'вх
Г RV К
ВХ v НХ
Так как угол входа обычно мал, то удобнее рассчитывать
не cos 0вх, a sin 0ВХ:
sin2 0„v= 1 — I — V'
V '"вх
'вх
вх ^»х
После преобразований и введения относительных величин
получим
• 2 А _ Ьа (4ДV" - ha) - AVkn [ha\V + 2 (AV — Ла)]
Дальность полета по переходному эллипсу можно получить
из уравнения эллиптической траектории
1 + £ COS V
I rV 2 \
где p = rk cos0 — параметр эллипса [k = );
е=\—k — эксцентриситет эллипса;
v—истинная аномалия (отсчитывается от перигея).
В нашем случае 01 = 0 и (тормозной импульс в апогее).
Дальность полета по переходному эллипсу
£ = ЯР=Я(2я-1>в), (10.1.7)
где р — угловая дальность; R — радиус планеты.
Истинная аномалия точки входа в атмосферу
*а 1. (10.1.8)
ДК(2 — \V)
Полученные формулы в относительных величинах скорости V
и высоты орбиты над границей атмосферы Тга годны для любых
планет.
Траектории полета в атмосфере
С высоты Л^ЮО км начинаются заметный нагрев и тормо¬
жение аппарата в атмосфере. На аппарат, летящий в атмосфере
cosvBX=
Рис. 10.1. 2. Схема сил, действующих на спускае¬
мый аппарат
на высоте со скоростью V, действуют следующие внешние силы
(рис. 10.1.2): сила лобового сопротивления X, направленная по
касательной к траектории в сторону, обратную направлению по¬
лета, подъемная сила Y по направлению, перпендикулярному
356
к траектории, и сила тяжести G по направлению местной вер¬
тикали. Эти силы уравновешиваются силами инерции. Спроек¬
тируем эти силы на скоростные оси х и у. Сумма проекций всех
сил на ось х
dV Х-0 sin 6 = 0,
— т
dt
где т = — масса аппарата (G0 и go—вес и ускорение силы
Ко
тяжести при /i = 0);
t — время полета;
0 — угол наклона траектории к горизонту;
G — вес аппарата.
Сумма проекций на ось у
V2
— т G cos 0-f-K=O,
кр
где Гщ, — радиус кривизны траектории.
Заменим
V2
wr кр^
V,
'кр 'кр
dd d В
где ш= -—угловая скорость вращения вектора скорости
dt dt
dp К cos fi 0
• — — , a p—центральный угол, про-
относительно Земли:
dt R + h
ходимый аппаратом от момента «хода ,в атмосферу (угловая:
дальность полета).
После преобразований получим следующую систему уравне¬
ний, описывающую плоское движение аппарата при спуске-
в атмосфере:
dV qV2 . .
•= -go ft- £sin 0;
dt
2 px
V2
i/db e^2 о
V—=g0 g cos 0 ,
dt 2py 6 ‘ R + h
cos 0;
dh_
dt
dj_
dt
= V sin 0;
V cos 0
_ R + A-
(10. 1.9)
где px =
m
cxS
— удельная нагрузка на „лоб“ в кг/м2; а ру
т
S -
, * \2
g—go\R + hJ
CyS
характерная площадь, к которой относятся
аэродинамические коэффициенты сх и су\
местное ускорение силы тяжести.
357
Система уравнений в общем виде нелинейна и решается чис¬
ленным интегрированием методом Рунге — Кутта на ЭЦВМ.
Рассмотрим довольно близкий к реальному случаю класс
траекторий спуска при постоянных значениях нагрузки на лоб
рх и аэродинамического качества К = -^~, т. е. траектории
Ру
с рх = const и py = const.
Основная часть траекторий спуска (т. е. та часть, где имеет
место аэродинамический нагрев и действуют перегрузки) лежит
в области гиперэвукового полета (М>3-^5), где аэродинамиче¬
ские характеристики почти не зависят от числа М. Поэтому
р.кка/!/мгс Jt *
3-W*
7-1о6
' i-Ю6
в9; Ь,нм'Хим/с, пх, I, тыс.км
Юб ю
80 8
3000 -60 6
■2000 -40 4
1000 -20 2
5?
А
/J
/'
/
t
1^
Чку
'JP
Пр
\\\
*
*
\\ 1
О НО WO 150 200 250 300 t.c
Рис. 10.1.3. Траектория баллистического спуска с ор¬
биты ИСЗ при К=0\ рх=650 кг /см2; VBx = 7,8 км/с;
0вх = —2°
условиям рх = const и py = const соответствует спуск аппарата
с постоянным углом атаки, т. е. наиболее реальный с точки зре¬
ния управления аппаратом. В частности, эти режимы охваты¬
вают и баллистический спуск (/(=0).
На рис. 10.1.3 приведены характеристики траектории балли¬
стического спуска для аппарата, входящего в атмосферу Земли
со скоростью VB\ = 7,8 км/с под углом к горизонту 0вх=—2°.
С высоты 70 км начинается интенсивное торможение аппа¬
рата. Максимальные осевые перегрузки достигают пх = 9 при
/г»35 км. Следует Отметить, что зона наиболее интенсивного
торможения аппарата лежит в относительно узком диапазоне
высот 20</i<50 км. Пик перегрузок (пт^9) длится примерно
10 с, однако общее время действия больших перегрузок (ях>4)
составляет относительно длительный период Af^lOO с.
Уже при входе в атмосферу (/г = 100 км) температура (на
рис. 10. 1.3 и далее приведены расчетные значения температуры
в критической точке сферы /?=1 м для абсолютно теплоизолиро¬
ванной стенки) составляет 7= 1500 К. «Пик» температур
7тах~3000К достигается на 45 км. Характерно, что пик тем¬
■358
ператур всегда опережает пик перегрузок. Область высоких
температур Г>1000К простирается до Л = 30 км.
Нагрев аппарата при спуске в атмосферу происходит за счет
как конвективных qK, так и радиационных (лучистых) тепловых
потоков qv от раскаленного газа за ударной волной. В зоне мак¬
симума температур конвективные и радиационные потоки при¬
мерно одинаковы (напомним, что речь идет о критической точке
сферы с R= 1 м).
. ккал
У) нгс
4 10 6
В,'
h,KM
- 80
Т,к
■чооо
3 106
- 60
■3000
210е
- 40
■2000
ЫО6
■ 20
■1000
0
■ 0
• .0
v.km/h
ffjfi
1,тыс.км
6
Ц
г
О
\h
V
Т
Як/~\
/ /
пх
L
//
2,КМ
при <р=
200
100
100 200 300 400 500 t,C
Рис. 10.1.4. Траектория планирующего спуска с орбиты ИСЗ
при 0вх=—2°, К=0,2, рх=650 кг}м2, VBX = 7,8 км1с
Угол наклона траектории длительное время почти постоянен,,
и лишь при h<40 км начинается его резкое нарастание. Общая
дальность полета в атмосфере L=1750 км. Время полета
до /i=10 км равно /«5,5 мин.
Траектория планирующего спуска при аэродинамическом ка¬
честве аппарата /С=0,2 приведена на рис. 10.1.4. В отличие от
траектории баллистического спуска существенно уменьшаются
максимальные перегрузки, а также несколько снижается макси¬
мальная температура. Заметно снижаются «пиковые» значения
радиационных потоков qp. Характерным является рикошетирую¬
щий характер траектории с двумя максимумами перегрузок
и увеличение дальности и времени полета.
Рассмотрим влияние различных параметров на характери¬
стики траектории спуска. На рис. 10.1.5 показано влияние аэро¬
динамического качества аппарата и угла входа в атмосферу на
максимальные перегрузки и дальность полета.
Наличие подъемной силы, т. е. переход от аппарата баллисти¬
ческого спуска к аппаратам планирующего спуска, является
одним из радикальных способов снижения перегрузок. Сущест¬
венное снижение максимальных перегрузок до птах = 3-М, т. е.
до таких, которые человек может выдерживать достаточно дли¬
тельное время без каких-либо последствий, можно получить при
сравнительно невысоком аэродинамическом качестве, /(«0,2.
35&
Следует отметить, что перегрузки наиболее интенсивно падают
при JC^O,2-^-0,3.
Снижение перегрузок при наличии подъемных сил объяс¬
няется тем, что у планирующего аппарата траектория идет выше,
чем у баллистического аппарата, и торможение его происходит
слабее (растягивается на большее время). Это особенно заметно
при сопоставлении траекторий рис. 10.1.3 и 10.1.4. С увеличе¬
нием угла входа 0Вх максимальные перегрузки увеличиваются
LtfbKKM. Птах
20
8
6
Ч
2
0й
15
10
\К=0,5
VV
Птах
L
К=-0,1
л
\
0.
ч\Х
\
>
4
*К~0,5
-1 -z -j а
&
0,тл/н* Ттах.К
■ 20-10 - 1,ппп —
15W
Рис. 10.1. 5. Влияние угла вхо¬
да 0вх на перегрузки лтах
и дальность полета в атмо¬
сфере L при рх = 650 кг/м2,
У в i = 7t8 км/с
1010
5-10
0
Рис. 10.1. 6. Влияние угла входа 0Dx на
температуру Tmax и интегральные тепло¬
вые потоки Q при рх=650 кг/м2, УВх =
= 7,8 км/с
(см. рис. 10.1.5). Это объясняется тем, что при крутом входе
аппарат по инерции «зарывается» в плотные слои атмосферы,
где он интенсивно тормозится. Минимальным значениям пере¬
грузок соответствует угол входа 0ВХ =—0ч—2°. Дальность по¬
лета, как этого и следовало ожидать, возрастает при увеличении
аэродинамического качества аппарата. При увеличении угла
входа в атмосферу существенно уменьшается дальность полета.
Влияние аэродинамического качества К и угла входа 0ВХ на
максимальную температуру Ттах (в критической точке теплоизо¬
лированной сферы R= \ м) и на интегральные по времени тепло¬
вые потоки Q (в той же точке)* показано на рис. 10.1.6. При
увеличении аэродинамического качества несколько снижается
максимальная температура Ттах, но увеличивается интегральный
но времени тепловой поток Q. Снижение температуры объяс¬
няется торможением планирующего аппарата в более разрежен¬
ных по сравнению с баллистическим аппаратом слоях атмо¬
сферы. Увеличение .интегральных тепловых потоков объясняется
&
* Q= j" qdt, где q— местные тепловые потоки в ккал/м2.
360
Тщах.
увеличением времени полета (за счет конвективных потоков).
С увеличением аэродинамического качества заметно, умень¬
шаются интегральные радиационные потоки Qp. При увеличении
угла входа 0ВХ возрастает максимальная температура, но суще¬
ственно снижаются интегральные теплопотоки.
Знание максимальной температуры Ттах позволяет оценить
термостойкость материала теплозащиты (в случае теплозащиты
без сублимации). Величина интегральных тепловых потоков Q
определяет вес сублимирующей части теплозащиты. Поэтому
эти величины могут слу- .
жить в какой-то степени ‘пах’ Птах
критериями оценки траекто¬
рий.
Анализируя приведенное
выше, можно выбрать более
или менее удовлетворитель¬
ные значения угла входа
0ВХ для аппарата баллисти¬
ческого спуска. Обеспечение
минимальных перегрузок
ограничивает величину
0вХ^—2°4-2,5°. Максималь¬
ная температура, по-види¬
мому, не влияет на выбор
траектории при сублими¬
рующей теплозащите (тем¬
пература при баллистиче¬
ском спуске достаточно высока при реальных значениях рх —
= 3004-500 кг/м2, чтобы говорить об теплозащите без уноса).
Однако для уменьшения веса теплозащиты желательно иметь
меньшие интегральные тепловые потоки Q, т. е. переходить на
большие углы входа, которые следует брать по верхнему пре¬
делу из условия перегрузок. Большие углы входа желательны
также для уменьшения рассеивания точки приземления из-за воз¬
можных ошибок угла входа, так как с ростом угла входа умень-
dL
5000
10
4000
-в
J ООО
•6
2000
■4
1000
-2
0
0
Q 200 400 600 800 Рх, кг/м
Рис. 10.1. 7. Влияние нагрузки на лоб рх
на температуру Ттах и перегрузки лшах
при 0вх=—2°; УВХ = 7,Я км/с
шаются дальность полета и производная
д0
(см. рис. 10.1.5).
их
Считая уровень перегрузок п=3-i-4 приемлемым по условиям
комфортабельности спуска, вряд ли имеет смысл увеличивать
при планирующем спуске аэродинамическое качество более
/( = 0,154-0,25, так как с ростом К увеличиваются интегральные
потоки, а следовательно, и вес теплозащиты.
Рассмотрим влияние удельной нагрузки на лоб на основные
характеристики траектории спуска (рис. 10.1.7 и 10.1.8).
Нагрузка на лоб рх незначительно снижает максимальные
перегрузки и дальность полета, но снижение рх существенно
уменьшает как максимальную температуру Т, так и интеграль-
361
ные тепловые потоки Q. Учитывая это, можно выявить требова¬
ния к форме аппарата с минимальным весом теплозащиты.
Действительно, параметр Рх= • Обычно вес и размеры
cxS
(а значит и мидель) аппарата заданы. Следовательно, аппарат
с минимальным весом
теплозащиты должен
иметь такую форму, ко¬
торая дает наибольший
коэффициент лобового
сопротивления сх. В усло¬
виях гиперзвукового по¬
лета наибольшим сх бу¬
дет обладать тело с наи¬
более близкой к плоской
лобовой частью (форма
типа «фары» на рис.
10.1.2). Это справедливо
для аппаратов как балли¬
стического, так и плани¬
рующего спуска.
§ 2. СПУСК В АТМОСФЕРЕ ЗЕМЛИ
С ГИПЕРБОЛИЧЕСКОЙ СКОРОСТЬЮ
Траектории с большими углами
входа в атмосферу
Рассмотрим вначале траектории при входе в атмосферу
со второй космической скоростью при углах 0ВХ =— 15н—90°.
Характер изменения характеристик траектории такой же, как
и при спуске с орбиты ИСЗ, однако процесс торможения проте¬
кает значительно быстрее. Характерным является почти постоян¬
ный угол наклона траектории к горизонту 0 на основном участке
траектории. Существенно больше, чем при спуске с орбиты,
перегрузка пх и минимальная температура Гтах-
На рис. 10.2.1 показано влияние угла входа 0ВХ и нагрузки на
лоб рх на максимальную перегрузку лтах и дальность полета L.
Максимальные перегрузки существенно снижаются при уменьше¬
нии угла входа в атмосферу, что объясняется увеличением длины
пути торможения (рост дальности полета L). Нагрузка на лоб рх
практически не влияет на дальность полета L и перегрузки птах.
Разброс величин ятах при угле 0ВХ = —90° объясняется тем, что
при разных рх зона максимальных перегрузок падает на различ¬
ные участки атмосферы с разными значениями градиента плот¬
ности (в расчетах использовалась стандартная атмосфера Зем¬
ли). Так же как и при спуске с орбиты, увеличение угла входа
приводит к увеличению максимальной температуры и снижению
362
4,ккал/мг L, тыс. нм
20-10
15-10*
1010
S-10
Q
К=0,5
У
/у/
*
1
,00
U.Cp
К-Q ^
fey
0,1
\Рр
о 200 т 600 рх,кг/мг
Рис. 10.1. 8. Влияние нагрузки на лоб рх
на дальность полета L и интегральные
тепловые потоки Q при - в „х=—2;
VB х = 7,8 км/с
интегральных тепловых потоков (рис. 10.2.2). Уменьшение на¬
грузки на лоб рх снижает как температуру Ттах, так и интеграль¬
ные тепловые потоки Q. При спуске со второй космической ско¬
ростью существенно возрастают радиационные тепловые потоки*
доля которых составляет примерно 50% от общих интегральных
тепловых потоков.
L,km
300
200
100
0'
рх=В50
/ рх -т
{/Рх-200
Рх=650/
Рх=Ш/
Ру=200
' п.X
L
-30
-60 9gx
Рис. 10. 2.1. Влияние угла входа
Он* на перегрузки птвх и даль¬
ность полета L при К=0; VBX =
= 11 км/с
Q, ккал/мг
TimaxfK
6000
mo
2000
Рх 650
JgL—
2d
} //
рх -700
§
0рЩ50
30 61
? Bh
ттак
Рис. 10. 2. 2. Влияние угла входа 0Вх
на температуру Т твх и интегральные
тепловые потоки Q при К=0 и VBX=
= 11 км/с
Пропорционально квадрату скорости возрастает перегрузка
г?шах- Однако дальность полета L возрастает весьма незначи¬
тельно (рис. 10.2.3). С увеличением скорости входа в атмосферу
Птах
L,km
т
Рис. 10.2.3. Влияние скорости
входа VBX на перегрузки птвх и
дальность полета L при К=0;
рх=400 кг/м2
300
гоо
100
800
ООО
■400
■гоо
L
Птах
<
/
—7“
/
-15
/—
/
/
У
-зо^
у
**
|
2-
—-
1 —
1
10 12 14
16 4&(,км/с
Т
max
VBX существенно возрастают максимальная температура
и интегральные тепловые потоки Q (рис. 10.2.4). Из-за больших
перегрузок птах траектории с большими углами входа пригодны
лишь для спуска автоматических аппаратов, возвращающихся
с траекторий полета к планетам. Для случая баллистического
спуска в атмосфере (/С=0) при больших углах входа, когда на
основной части траектории угол наклона 0^0BX = const, может
быть получено аналитическое решение для основных характери¬
стик траектории.
363
Для этого случая в первом уравнении системы (10.1.9)
можно пренебречь членом gsinO, так как он существенно
меньше члена, определяемого сопротивлением. Таким образом,
первое уравнение системы (10.1.9) можно записать в виде
dV QV2 /•(/-. Q •€ Ч
ИГ go~2^' (Ю.2.1)
Второе уравнение этой системы для этого случая (0 = const,
/(=0) вообще теряет смысл.
Представим закон изменения плотности приближенной зави¬
симостью (изотермическая атмосфера)
6 = Qoе_|ЗЛ.
20-10*
15-10* -
10-104
5-10*>
12000
10000
8000
6000
W00
1 1
н
90°
-15.
-за
/*5
^1
10
&
'-90
—т-
:30_
8gx -
900
0
dp
Рис. 10.2.4. Влияние скорости
входа VBx на температуру Ггаах и
интегральные тепловые потоки Q
при К=0, рх=400 кг/м2
9 70 11 12 13 Mix'*"#
Тогда уравнение (10.2.1) можно записать в виде
' dV
= -kV*д, • (10.2.2)
dt v '
где
и £oQo
д = -^-=е-РА;
Ърх Qo
—средний логарифмический градиент плотности атмо-
RT
сферы;
р— молекулярный вес газа атмосферы;
g — ускорение силы тяжести;
Т — средняя температура атмосферы;
R — универсальная газовая постоянная.
Воспользуемся еще одним уравнением системы (10.1.9),
а именно уравнением для определения вертикальной составляю¬
щей скорости спуска:
—= К sin в. (10.2.3)
dt
Дифференцируя выражение д = е~РЛ и используя (10.2.3),
получим
364
as as ah.= _v smb-$z-V'. (10.2.4)
dt dh dt
t
Исключив время из (10.2.2) и (10.2.4) и разделив перемен¬
ные, получим
— = ——db. (10.2.5)
V Р sin в ' ’
Интегрируя (10.2.5) от h0 до h, получим зависимость скорости
от высоты полета
При Л0->сю (вход в атмосферу из бесконечности)
* д
V = V0e Min
Подставляя в (10.2.2) выражение для скорости, получим
dt 0
Осевая перегрузка, действующая на СА,
Пх= — .
го
Высоту, соответствующую пхтах, получим из уравнения
dnx / Г1 г 2k
dh
Высота, соответствующая яхтах,
= лЛ-Р+-^гД) = 0.
\ sin 9 у
и 1 , Р Sin 0
hnr тях= In —
р 2k
Максимальная перегрузка
max 1
^-Sine. (10.2.6)
2^0 е
Дополнительно к этим решениям из (10.2.3) можно определить
время полета от момента входа в атмосферу до высоты h:
h h
^ С* dh f* dh
h0 h0 V°e
Подставив dh= —— , получим
рд
(3 sin 6
365
t =
J
V0$ sin 0
p sin 6
d A =
K+
+(■
kA
P sin 0 J 3-3!
2 1
■J-
1
V0$ sin 0
Kgp sin 0
p(A0—A)
kA
fi sin 0
kA
{3 sin 0
-f . . . j
Сопоставление данных расчета по приведенным выше форму¬
лам с численным интегрированием уравнений движения показы¬
вает, что для углов входа в атмосферу 0ВХ от —90 до —15° при¬
ближенные формулы дают удовлетворительную точность на
основной части траектории (доЛ«20ч-25 км).
Траектории с малыми углами входа
на границе захвата аппарата атмосферой
На рис. 10.2.5 приведены характеристики траекторий балли¬
стического спуска со второй космической скоростью при угле
входа в атмосферу (0ВХ =—5°), близком к границе захвата аппа¬
рата атмосферой. Время спуска по такой траектории сущест¬
венно больше, чем при больших углах входа, и примерно соот¬
ветствует времени спуска с орбиты ИСЗ, а максимальная
Ь,кмВ \1,ки/с,пх
•
1.ТЫС.
’км
Т,к
-100
4
-4000
-80 8
3
-3000
-60 Б
'2
-2000
-40 4
1
-1000
-20 2
0
L о
Ч
д,кшл/
1Q\
ч
J .
,t
0
A
QhL
/yi
ti/
N
mm
п/^ч)
10-706
5'10в
100 200 300 400 500 t,c
Рис. 10.2.5. Траектория планирующего спуска при
0вх = —5°; К=0,1; рх = 650 кг/м2; VUx-ll км/с
перегрузка (ятах = 6,5) даже несколько меньше, чем при балли¬
стическом спуске с орбиты, где nmax «8. Характерным для тра¬
екторий на границе захвата является наличие элемента рикоше-
тирования, выраженное в виде двух «пиков» максимальной пере¬
грузки.
Максимальная температура Ттах при спуске со второй кос¬
мической скоростью в случае как баллистического, так и плани¬
рующего спуска существенно выше, чем при спуске с орбиты
ИСЗ. Основные характеристики режима спуска при углах входа
366
в атмосферу, близких к границе захвата *, для аппаратов с на¬
грузкой на лоб рх = 400 кг/м2 и при различных значениях аэро¬
динамического качества К показаны на рис. 10.2.6 и 10.2. 7. Уве-
25
20
15
10
01
5 -500
0L
~7
/
XI
А
//
///,
* 1 й\
//
7
iX'
\
Ы
V/
Ч1
ч
тО
L 7
птах
О
8х
ккал/м2
зо-ю*
26-104
10-10*
о
Tmaxl
-2000
-1000
Ттах
Q
к=-а,1
0.
IJ.42
У-
0
/(=0,3
1-0,1
1 о 01
0?
к=о„
J
к*-оУ
W'
-3 -V -5 -6 -7 0°
Рис. 10.2.6. Влияние 0В* и каче¬
ства К на перегрузки nmBi и даль¬
ность полета L при VB * = 11 км/с;
рх=400 кг/м2
Рис. 10. 2. 7. Влияние угла входа 0„х
и качества К на тепловые потоки Q
и температуру Ттах при VBX =
= 11 км/с-, рх=400 кг/м2
личение аэродинамического качества К приводит к уменьшению
максимальных перегрузок «тах при фиксированном угле входа
в атмосферу 0ВХ и к некоторому уменьшению производной
d^max
<Э0
вх
Характерным для режимов с /С^0,2 является минимум пере¬
грузки пт&х на углах входа бвх> близких к границе захвата 0вх.Гр,
и резкий спад «шах при 0вх<0вх.Гр. При /С>0,2 переход через
границу захвата не вызывает каких-либо изменений в кривой
«шах= f (0вх) • Интересен также тот факт, что имеется минимум
«шах в зависимости от качества К (при /(^0,1). Как видно из
рис. 10.2.6, граница захвата аппарата атмосферой характери¬
зуется резким возрастанием дальности полета L в атмосфере
(L определяется от момента входа в атмосферу на «вх=100 км
до момента либо посадки аппарата, либо выхода из атмосферы).
С увеличением угла входа 0ВХ заметно возрастает максимальная
температура Ттах на траектории спуска (см. рис. 10.2.7). Сле¬
дует отметить, что Ттах на границе захвата возрастает при уве¬
личении К• Характерным является наличие «пиков» интеграль¬
ных тепловых потоков Q на границе захвата, а также то, что
с увеличением К «пиковые» значения Q на границе захвата
уменьшаются. Интегральные радиационные тепловые потоки Qp
на границе захвата практически не изменяются при изменении
качества К.
* В данной работе «захваченными» считаются такие траектории спуска,
при которых аппарат, войдя в атмосферу на /iBx=ill0O км, больше не выходит
на эту высоту.
367
На рис. 10.2.8 и 10.2.9 показано влияние нагрузки на лоб рх
на основные характеристики траекторий спуска при малых углах
входа в атмосферу. Максимальные перегрузки ,в точке мини¬
мума rtmax=/(0Bx) или на границе захвата при /(<0,1 мало за¬
висят от рх, а при /(>0,2 несколько повышаются при малых
40-10*'
зно*-
го-ю*-
10-10* ■'
— —Птах
Q
к=о
чч
к=цз
&
и OfZ
й*
-
^2
•=аз>
Рис. 10.2.8. Влияние нагрузки на
лоб рх на перегрузки птат и тепло¬
вые потоки Q на границе захвата
при Vв% = 11 км/с
4 ООО
J000
2000
1000
Овх
'так
K=0fi
К=0,3
К-0
0,2—
|-
(1.1 У
--
к=о
г-
_
200 400 600 рХ) “Г/”
Рис. 10.2.9. Влияние нагрузки на
лоб рх на угол входа 0В1 и темпера¬
туру Тши на границе захвата при
Vb% = 11 км/с
значениях рх. Угол входа, соответствующий границе захвата
атмосферой 0Вх.гр, несколько повышается с ростом рх при К<ОД
С увеличением рх возрастают максимальная температура на гра¬
фах L, нм \j. _/j •
20
15
10
5
0 -1-2 -3 -4 -5 9°вл
нице захвата 7\пах.гр и интегральные тепловые потоки Qrp. Увели¬
чение Tmax и Qrp с ростом рх объясняется тем, что при больших рх
торможение аппарата происходит в более плотных слоях атмо¬
сферы.
Влияние скорости входа в атмосферу на основные характе¬
ристики траектории баллистического спуска показано на
рис. 10.2.10 и 10.2.11. С увеличением скорости входа естест-
368
Рис. 10.2.10. Влияние уг¬
ла 0 вх и скорости входа
УВх на перегрузки лтах
и дальность полета L при
К=0, рх = 400 кг/м2
венно возрастают граничный угол входа 6вх.гр, а также произ-
дп.
водная
‘max
д0
. Следует отметить, что при Уъх>\2 км/с исчезает
вХ
минимум птах около границы захвата.
С увеличением скорости входа в атмосферу существенно
возрастают максимальная температура Ттах.гр и интегральные
0,ккал/м2 Тп
Чех = 14
-г -з -4-5 -6 в§л
Увх=9}
Рис. 10.2.11. Влияние угла 0„х и скорости входа VBX на
тепловые потоки Q и температуру Tma% при К=0,
рх=400 кг/м2
тепловые потоки Qrp на границе захвата. Существенно возра¬
стают и интегральные радиационные потоки Qp.
Как видно из рис. 10. 2.12, для каждой скорости входа в атмо¬
сферу существуют значения аэродинамического качества К,
соответствующие минимуму перегрузок пт&х. Если при спуске
с орбиты (VBx = 7,8 км/с) это /C0pt-»-°o, то уже при параболиче-
Птах
Рис. 10. 2. 12. Влияние скорости
входа VBX на максимальные
перегрузки лгаах при рх =
=400 кг/м2
ской скорости входа (Увр=11 км/с) величина /Copt~0,l-j-0,15,
а при Увх=14 км/с /COpt=0. На рис. 10.2.13 показано влияние
скорости входа в атмосферу VBX на интегральные тепловые по¬
токи Q и максимальную температуру Гтах на границе захвата.
Интересными являются следующие факты. Во-первых, радиаци¬
онные потоки Qp на границе захвата почти не зависят от аэро¬
369
динамического 'качества К и, .во-вторых, при скорости входа,
большей VBX = 8,5 км/с, увеличение качества приводит к умень¬
шению интегральных тепловых потоков Q и увеличению темпе¬
ратуры Гтах на границе захвата.
Тк, К Ц,ккал/м*
Рис. 10.2.13. Влияние скорости входа 1/п х на тепловые
потоки Q и температуру 7тазс на границе захвата при
рх = 400 кг/м2
Рассмотрим влияние различных параметров спускаемого
аппарата и скорости входа его в атмосферу на границу захвата.
Границу захвата аппарата атмосферой удобнее характеризовать
hfr,KM
60
40
>$>
"х-
Ч5\ \ \
^фаницазахбата
70 \
.•^777
пх .'.-15
— <
200
'men
60
40
20
400 600 рх, нг/mZ
к
пт1п—_
. Z5^
'Гра*
чица
11
ата
S'
njs
/п*
~ 15
Рис. 10. 2.14. Зависимость высоты
условного перигея hот нагрузки
рх на лоб и перегрузки лтах при
Pi=400 кг/м2, О
* И Ю 11 12 Чбх,км/С.
Рис. 10.2.15. Зависимость высоты hK
условного перигея от скорости входа
VDX при Vbx = 11 км/с; К=О
не углом входа, а высотой перигея hK траектории аппарата, рас¬
считанной по условиям входа в атмосферу (Лвх = 100 км; 0ВХ и
Vex), считая, что полет происходит в безвоздушном простран¬
стве. Такая условная высота перигея h- более удобна для оценки
точности систем наведения СА при входе в атмосферу. Радиус
условного перигея г* можно определить, зная высоту входа
370
в атмосферу ho, скорость входа VBX и угол входа 0ВХ. Действи¬
тельно, из уравнения конического сечения имеем
г=-— ,
1 е cos о
V\ cos20вхгвх
где р= параметр траектории;
v — истинная аномалия;
г = /? + Л;
R — радиус Земли;
е=1 -j- — ^V\x — — j —эксцентриситет орбиты.
В условном перигее и = 0, тогда
1 + е
На рис. 10.2.14 показано влияние удельной нагрузки рх на
лоб на граничную высоту условного перигея Л*гр для различных
значений К. Видно, что при больших рх спускаемый аппарат
должен глубже проникать в атмосферу, чтобы быть захвачен¬
ным. С увеличением скорости входа в атмосферу VBX высота
перигея Л*гр на границе захвата также уменьшается (рис.
10.2.13).
Для оценки точности системы выведения СА для входа
в атмосферу пользуются понятием «коридора входа». Коридор
входа ограничен с одной стороны границей захвата СА атмо¬
сферой, а с другой — уровнем допустимых перегрузок. Высоту
коридора входа можно характеризовать разностью высот услов¬
ного перигея. Высоту ДhK коридора входа можно определить
из рис. 10.2.14. Нагрузка рх на лоб практически не влияет на
высоту коридора входа, но смещает его границы. С увеличением
скорости входа в атмосферу высота коридора входа Дh% умень¬
шается. Так, для баллистических траекторий при Квх = 14 км/с
и «шах=Ю коридор входа сходит на нет (рис. 10.2. 15).
Рикошетирующие траектории спуска.
Выход КА на орбиту спутника
при маневре в атмосфере
Если СА входит в атмосферу с углом входа 0ВХ, меньшим, чем
угол, соответствующий границе захвата, то он, частично затор¬
мозившись в атмосфере, выйдет из нее. Пролетев некоторое
время по эллиптической траектории, он снова войдет в атмо¬
сферу, но уже с меньшей скоростью. Совершив несколько таких
рикошетов, СА, наконец, спустится на Землю (рис. 10.2.16).
На рис. 10.2.17—10.2.18 приведены некоторые характеристики
371
рикошетирующих траекторий спуска на Землю со второй косми¬
ческой скоростью. Характерно, что наибольшие перегрузки
имеют место при последнем погружении в атмосферу, и практи¬
чески они постоянны в широком диапазоне углов входа. При
баллистическом спуске эти перегрузки примерно соответствуют
минимальным перегрузкам при спуске с орбиты ИСЗ. Рикоше-
Рис. 10. 2.16. Схема рикошетирую¬
щей траектории спуска
тирующие траектории характерны еще тем, что по мере увеличе¬
ния числа входов в атмосферу N существенно возрастают инте¬
гральные тепловые потоки Q.
Р та
0,ккал/м*
*
4 (Г
К =0,3
—0,2
4 v
—0,1
К^-0,1
4
rJ/Z
i
4 /
zdL1
А
А’
'При п
I
ерВом
входе
~ >
Рис. 10.2.17. Зависимость птах
от угла входа 0Вх для рикошетирую¬
щих траекторий при Уьх = 11 км/с;
рх=400 кг/м2
Рис. 10. 2.18. Тепловые потоки Q на
рикошетирующих траекториях при
VBх = // км/с, рх=400 кг/м2
В табл. 10.1 приведены основные характеристики рикошети¬
рующей траектории баллистического опуска при Увх =11 км/с,
0вх = —3,8° и нагрузке на лоб рх = 400 кг/м2. Характерно, что
температура Tmax наблюдается при первом входе в атмосферу,
а наибольший интегральный тепловой поток Q — при последнем.
Полет по каждому переходному эллипсу составляет почти пол-
372
Таблица 10.1
Характеристики рикошетирующей траектории спуска при
Увх=11 Ъм/с, 6ВХ=—3,8° и рх—400 кг/м2
е°
.. вх
^тах
К
Q
ккал/м2
Ушх
км/с
L
км
Гв
КМ
лтах
п
оборо¬
тов
Первый полет в
атмосфере
-3,8
2980
8,7-104
11,0
1830
1,16
0,896
Переходной эл¬
липс
38060
32740
Второй полет
в атмосфере
-2,9
2750
8,5-104
10,0
4050
1,07
1,03
Переходной эл¬
липс
37340
13730
Третий полет
в атмосфере
—2,55
1
2580
14,3-104
9,1
7150
8,12
0,18
1
31,5-104
88430
2,21
ный оборот около Земли. Аппарат спускается на Землю, совер¬
шив 2,2 оборота вокруг Земли.
Рикошетирующие траектории представляют интерес в том
отношении, что при фиксированной широте точки входа в атмо¬
сферу (или широте точки прохождения условного перигея) они
позволяют, регулируя дальность полета, обеспечить посадку
в заданный район широт. Траектории такого типа были исполь¬
зованы для посадки на территорию Советского Союза СА, воз¬
вращаемых с траектории облета Луны, для которых точка услов¬
ного перигея лежала в южных широтах. Однако следует отме¬
тить, что спуск по рикошетирующим траекториям даст
существенно большие интегральные тепловые потоки, что свя¬
зано с увеличением веса теплозащиты. Рикошетирующие траек¬
тории позволяют расширить коридор входа в атмосферу. Дейст¬
вительно, как видно из рис. 10.2.19, переход к траекториям
с двумя входами в атмосферу существенно увеличивает коридор
входа ДЛ*. Так, если ограничить перегрузку величиной Лтах=10,
то ДЛ*тах для границы 3/2* увеличивается почти вдвое по срав-
* 3/2 = n _ 2 — гРаница «захвата» при двух входах в атмосферу,
N = 2 ~
2/1 = — — при одном.
N = 1
373
нению с границей 2/1. Переход на траектории с границы 4/3
и выше такого существенного приращения ДЛ* уже не даст. Пре¬
дельное увеличение ширины коридора входа будет при выходе
из атмосферы с параболической скоростью (число входов-
N-*oo).
Ьц, нм
60
40
Z0
-А1
А/
=5. I
г! 1
%
гГз'
'ki
\\
V
Ц2\
Птах#*
Рис. 10. 2.19. Граница захвата
на рикошетирующих траекто¬
риях при VB т = 11 км/с; рх =
=400 кг/м2:
t—bhnmax Оля границы 211; 2—для
312; 3—для 413
12,5
На рис. 10.2.20 для этого случая показана верхняя граница
высоты коридора входа в зависимости от скорости входа СА
в атмосферу VBX и аэродинамического качества К. Нижняя гра¬
ница коридора входа ограничена траекториями входа с /гтах=Ю.
hrj(M
80
60
k0
го
К—1
-0,7
-0,5
К~0,3
К-1
°'7
0,5
К-0,3
Рис. 10. 2. 20. Зависимость границ коридора входа от ско¬
рости входа Vbx и качества К при рх=500 кг/м2; птлх = Ю
Полет по верхней границе коридора происходит при отрицатель¬
ном значении аэродинамического качества СА (аппарат пере¬
вернут), а по нижней границе — при положительном. В этом
случае СА входит в атмосферу при максимальном положитель¬
ном значении качества К, а затем выходит на изоперегрузочную
траекторию с заданным nmax. Для полета по этой траектории
необходимо изменение либо лобового сопротивления в случае
баллистического спуска (регулируемые тормозные устройства),
либо подъемной силы (изменение угла крена), или изменение
того и другого (изменение угла атаки СА).
374
Рикошетирующие траектории спуска можно использовать для
маневра выхода КА на орбиту спутника планеты при торможе¬
нии в атмосфере. «Коридор входа» для таких траекторий будет
лежать между границей захвата 2/1 и границей выхода с пара¬
болической скоростью (jV-»~qо). При входе по верхней границе
коридора (скорость выхода из атмосферы близка к КПар) КА при
выходе из атмосферы даются корректирующие импульсы (один
или два) для выхода на вытянутую эллиптическую орбиту.
При входе по нижней границе КА корректирующими им¬
пульсами переводится на низкую околокруговую орбиту. По¬
садка СА на поверхность планеты производится с этих проме¬
жуточных орбит. Как показано в § 2 гл. VIII, использование
такого маневра позволяет существенно снизить энергозатраты
в схемах полетов с выходом на орбиту ИСП. Кроме того, выход
на орбиту ИСП существенно облегчает задачу посадки КА в за¬
данный район поверхности планеты. Однако реализация этой
схемы полета сужает коридор входа КА в атмосферу планеты,
что может существенно повысить требования к точности систем
навигации и управления КА на участке как межпланетного по¬
лета, так и в атмосфере.
§ 3. СПУСК КОСМИЧЕСКИХ АППАРАТОВ
В АТМОСФЕРАХ ПЛАНЕТ
Непосредственное исследование физических условий на по¬
верхности планет требует посадки космических аппаратов. Пер¬
выми аппаратами, осуществившими торможение в атмосфере
планеты, были СА советских межпланетных станций «Венера».
Осуществлена первая посадка советского КА на поверхность
Марса с торможением в его атмосфере. Разрабатываются про¬
екты КА для зондирования атмосферы Юпитера.
Все планеты с точки зрения посадки КА можно разбить на
два типа:
— планеты с плотной атмосферой, в которой космическая
скорость может быть погашена полностью (КА тормозится до
скорости равновесного падения или планирования);
— планеты с разреженной атмосферой, в которой можно
лишь частично погасить космическую скорость.
К первому типу относятся Земля, Венера и планеты юпитеро-
вой группы (Юпитер, Сатурн, Уран и Нептун), ко второму —
Меркурий и некоторые крупные спутники планет юпитеровой
группы. Марс можно отнести к промежуточному типу планет.
Его атмосфера достаточно разрежена, чтобы полностью погасить
космическую скорость КА с умеренными значениями нагрузки
на лоб рх=400ч-600 кг/м2 при больших углах входа в атмосферу,
но позволяет полностью затормозить С А с рх = 50-т-100 кг/м2
(тормозные устройства, большой экран и пр.).
375
Спуск космических аппаратов
в атмосфере Марса
Рассмотрим спуск КА, входящих в атмосферу Марса непо¬
средственно с траектории межпланетного полета. В этом случае
аппарат может входить .в атмосферу с гиперболической ско¬
ростью и углами .входа от 0Вх=—90° до малых на границе за¬
хвата аппарата атмосферой.
L,km
1000
500
30
20
10
* ■?
1 1
V ь*»
Л
(г**
Рхш650кг/ц
г/ 200 '
/ /Р°
г
0,ккал/и* Г,К
3 10*
2* 10*
1-10*
§
II
400
200
^400
100
fa-650
К
-зо
-во о,\
Рис. 10.3. 1. Зависимость мак¬
симальных пх и L от 0 вх при
VB т=6 км\с, К=0
Рис. 10.3.2. Зависимость Q и Гшах
от угла входа 0Вх> К=*0
На рис. 10.3.1 и 10.3.2 приведены основные характеристики
траекторий баллистического спуска в зависимости от угла входа
в атмосферу 0ВХ и удельной нагрузки на лоб рх. Общий харак¬
тер зависимостей такой же, как и при спуске в атмосфере Земли,
L,
км
1000
500
пх-тах
го
L 0
£вх=~90'
.
1
-ПХ
I
-J50
-L
'Ъвх
=-45°
'
-45*
'"I
Влг'
6
7
0,ккал/мг Т,к
h-10*>
■4000
3-10*
■3000
2-104
■2000
104
■1000
0
■ 0
_!
Т
B8xX
———
Q
У
У
S’
’-45°
*
*
—л
- —1
II
90°
5
i
'4
KMj
Рис. 10.3.3. Влияние VBX на пх max И
L при рх=650 кг/м2, К=0
Рис. 10.3.4. Влияние VBT на Q и Т
при рх=650 кг/м2, К—0
однако максимальные перегрузки пх существенно меньше. При¬
мерно на порядок меньше интегральные тепловые потоки Q.
Влияние скорости входа в атмосферу Марса на характеристики
376
траекторий спуска показано на рис. 10.3.3 и 10.3.4. Общий харак¬
тер зависимостей такой же, как при спуске в атмосфере Земли.
На рис. 10.3.5 показано влияние изменения логарифмиче¬
ского градиента плотности Р=="^г (экспоненциальная атмосфера
Q=Q0e~P*) на характеристики траекторий спуска. Диапазон
изменения р взят с учетом возможного разброса из-за неполного
"х
0,ккал/н*т Т, * 40
'■30
Рис. 10.3.5. Влияние ло¬
гарифмического градиен¬
та плотности р на ха¬
рактеристики спуска при
рх*=650 кг/м2, К=0,
0Вх=—45°
L,km
ZOO ‘
100
ZW4
-1-104
0
3000
■2000
-1000
о
20
[10
0
р^
/
Ъпах
1/
а>
0,004- 0,000 0,008 Д 1/км
знания физических характеристик атмосферы Марсэ. Наиболее
существенно изменение р влияет на максимальные перегрузки
лтах- С увеличением р несколько уменьшаются интегральные
тепловые потоки Q, дальность полета L и температура Ттйх изме¬
няются незначительно. Неточное знание плотности на поверхно-
20
о
Рвя=-90° Омкап/н1 TmaxJK
0 0,1 0,2 0,3 ОМ К
а)
-2500
-2000
-1500
-1000
500
\
А
-—
в8Х
— тв
-60
-30
-15
-30-
-45
-60
0,1 0,2 &0,3 ом
Рис. 10.3.6. Влияние аэродинамического качества К на характеристики
спуска при рх=Ш) кг/м2, Vbx=5 км/с
сти планеты q0 не сказывается на таких характеристиках, как
Лтах, Ттах и Q, а приводит лишь к изменению высоты зоны дей¬
ствия Лтах и Гтах*.
Из анализа характеристик траекторий спуска в атмосфере
Марса при скорости входа КВх, близкой ко второй космической
(Упар^б км/с), видно, что условия спуска КА на Марс сущест-
* При полном торможении КА.
377
венно мягче, чем при спуске на Землю в аналогичных ситуациях.
Однако по допустимому уровню перегрузок (/гтах=10) спуск
аппаратов с экипажем возможен лишь при малых углах входа
(0вх= 15^-17°). На рис. 10.3.6 показано влияние аэродинамиче¬
ского качества К на характеристики траектории спуска. Видно,
что, как и для Земли, аэродинамическое качество К снижает
максимальную перегрузку птах при малых углах входа, но мало
влияет на нее при больших углах входа. Изменение температуры
Гшах в зависимости от К незначительно. Таковы основные харак¬
теристики при спуске в атмосфер^ Марса с траекторией межпла¬
нетного полета.
Рассмотрим характеристики траекторий спуска с орбиты
спутника Марса. Зависимость основных характеристик траекто¬
риях,*
L, 0
тыс. км 8
1000
■500
Рх~40
0;200,
■100
1
ST
800
пх\
1500
'00р
800
200
0,
1500
ккал/мг
10-103
■ 1000
5-Ю3
■ 500
р&500
800
■400
'Рх-100
0 0-5 -10 -15 -20
а)
>Ттая
рх=150О
800
■400
200
%=100
Рис. 10. 3. 7. Зависимость характеристик траекторий спуска от 0Вх и рх при
V* *=3 j м/с, К=0
рий спуска от угла входа в атмосферу Марса 0ВХ и удельной
нагрузки на лоб рх приведена на рис. 10.3.7. Качественный ха¬
рактер зависимости такой же, как и при спуске с орбиты ИСЗ.
Минимальное значение перегрузки Лщах^Д в то время как для
Земли Лтах^в. Интегральные тепловые потоки Q при спуске
с орбиты спутника Марса примерно в 20 раз меньше, чем с ор¬
биты ИСЗ.
Спуск космических аппаратов
в атмосфере Венеры
Скорость входа в атмосферу Венеры непосредственно с тра¬
ектории межпланетного полета Квх= 10,5-^11,5 км/с при полете
с Земли по траектории минимальной энергии. Такие характери¬
стики, как время спуска t и дальность полета L, мало отли¬
чаются от этих же характеристик для Земли. Не очень сильно
отличаются также Гтах и Q. На рис. 10.3.8 показано изменение
баллистических и тепловых характеристик в зависимости от 0ВХ
и нагрузки на лоб рх• На рис. 10.3.9 и 10.3.10 приведены основ-
378
ные характеристики траекторий баллистического и планирую¬
щего спуска при углах входа, близких к границе захвата. Видно,
что при увеличении К граничный угол 0Вх возрастает, как и для
птах
L,km
500
400
Ж
200
100
L I
Рх =100.
200\
т\\
Pi =650
^400
1>гоо
п -1ПП
"max
-30 -60 в;,
а)
Ттх
Q
uaTjii
10000
то
6000
-шо'
4000
%
&
1
2000
-101(?
0
0
f
/рмш650
р
*50
~ шГ
■ Трп
ш
1 V
Рх- ЮОп/11
-30
6)
-60 91
''met
Рис. 10.3.8. Влияние угла входа 0Вх на характеристики баллистиче¬
ских траекторий при V*±=10,7 км/с; К=0; $=0,167 1/км
случая спуска в атмосфере Земли. Точно так же возрастает при
0вх.гр значение Q при увеличении К. Влияние удельной нагрузки
«а лоб рх на максимальные перегрузки птах, температуру Ттйх
Рис. 10.3.9. Влияние
угла входа 0„х и каче¬
ства К на перегрузки
Ятах и дальность по¬
лета L при Vbx =
= 10,7 км/с; рх=400 кг/м2;
$=0,167 1/км
и интегральные по времени тепловые потоки Q показано на рис.
10.3.11. Видно, что увеличение рх мало влияет на «max, но су¬
щественно увеличивает Тт&х и Q. На рис. 10.3.12 показано вли-
379
С/к,ккал/ме Тк,К
ZQ-104 ■ 5000
то
1Q-104 ..
\
к=о-
/
0,10,2
■fj—
э&=
1
^ к
—у
’ 1
1
1
К 0,3
0,2 0,1
к=о
Рис. 10.3.10. Влияние угла входа 0ВХ и качества
К на Q и Гтах при VBZ. = 10,7 км/с; рх=400 кг/м?;
$=0,167 1/км
' ШвХ’К птах
"7500 ~
О 100 200 300 400 SOOpjtfit**
Рис. 10.3.11. Влияние удельной нагрузки на лоб
Рх па Лщах и Тщах при Vши=Ю,7 км/с; К—Ор
$=0,167 1/км
Я.рии/м* Птах
Рис. 10.3.12. Зависимость перегрузки лтах и теп-
лопотоков Q от качества К и нагрузки на лоб р*
для траекторий на границе захвата при УВх=
=10,7 км/с; $=0,167 1/км
L.KM Птах
2000
1600
1200
800
400
-100
-80
-60
40
20
L О
к=о
К=0,1
/ /
птах
У
s'
-10
б
"
—"
Т./С 0 лкап/м2
8000 "
7000
6000
4000
2000
О
OJJ 0,15^7^0,13 0,15^17 f,±,
—-—
Ох "
'
-
Ок=1.5
II II
7/пах
-15
\
" " —
Ш!*
—
-7,5
щз 0,15 о„I7f>„& vTljsJoim
Рис. 10.3.13. Влияние Р на характеристики траек¬
торий спуска при Vbi = 10,7 км!с; Рх=400 кг/м?
Рис. 10.3.14. Зависи¬
мость перегрузки лтах и
дальности L от угла вхо¬
да 0 вх при VrBx =
= 7,13 км/с; рх=400 кг/м2,
$=0,167 1/км
381
яние К на птах и Q на границе захвата. На рис. 10.3.13 показано
влияние изменения параметра атмосферы {3 на характеристики
траекторий спуска. У/величение р мало влияет на Q, но заметно
изменяет лтах.
Рис. 10.3.15. Зависи¬
мость величины тепловых
потоков Q и Тmax от на-
грузки на лоб рх при
$ = 0,167 1/км; VBX =
= 7,13 км/с; К=0
Рассмотрим характеристики траекторий при спуске с орбиты
спутника Венеры. Характер кривых и параметры траектории
близки к таковым при спуске с орбиты ИСЗ. На рис. 10.3. 14—
10.3.15 приведены кривые изменения основных характеристик
траекторий спуска в зависимости от угла входа в атмосферу 0ВХ
и удельной- нагрузки на лоб рх. Минимальные перегрузки /imax
получаются почти такие же, как и для Земли. Несколько увели¬
чены интегральные тепловые потоки.
§4. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ СИСТЕМ
МЯГКОЙ ПОСАДКИ СА
Рассмотрим последний участок полета СА — участок контакта
с поверхностью планеты. При спуске в атмосфере Земли, начи¬
ная с h= 15-i-20 км, СА переходит на режим установившегося
вертикального падения (баллистический спуск) или на режим
планирования (планирующий или «скользящий» спуск). Система
посадки (приземления) должна обеспечить безопасное призем¬
ление СА с допустимыми перегрузками. Желательна также воз¬
можность маневра для выбора посадочной площадки. Рассмот¬
рим некоторые возможные варианты систем мягкой посадки СА.
Парашютная система с амортизацией
Наиболее простой, по-видимому, является парашютная си¬
стема. Для достижения допустимых перегрузок при контакте
с поверхностью необходимо применение амортизирующих уст¬
ройств (надувные мешки, колесное или лыжное шасси с аморти-
382
зацией и пр.). При спуске контейнеров с грузом или автоматиче¬
ских СА допустимые перегрузки могут быть достаточно высо¬
кими (я^50), и можно использовать амортизацию контейнера
с грузом или аппаратурой внутри СА. При спуске СА с экипа¬
жем (допустимая ударная перегрузка не более п= 15-1-20) необ¬
ходимо применение внешних амортизирующих устройств с боль¬
шим ходом (шасси). Работа, приходящаяся на шасси,
GV2
л— "Р -{-GS^nGSi),
2g
где G — вес СА в момент приземления;
VПр — скорость приземления (скорость парашютирования);
S — ход амортизации;
г\ — коэффициент полноты диаграммы обжатия амортиза¬
ции (г| =0,5 для пружинной и т]=0,6ч-0,8 для пневмо-
гидравлической амортизации).
Перегрузка при работе амортизации
п=
к,+
2r\gS
Относительную массу шасси можно подсчитать по формуле
atiS.
Gui
ш
Коэффициент а можно приближенно принять а = 0,05-^0,Об при
S в метрах. Относительный вес парашютной системы можно
определить как
Gnc Y пар
tVc
G
Aiap
где рлар= удельная нагрузка на купол парашюта;
^пар
Y„ap=—^ — масса парашютной системы на 1 м2 поверхности
Snap
купола (Y,iap=0,18 -г- 0,22 кг/м2).
При выборе размеров отдельных куполов парашютной си¬
стемы следует учитывать, что динамическая перегрузка при ра¬
скрытии куполов
(Рпярсх *ар)л— 1
", " Г *,
\Рпя\>сх пар)п
где сх пар — коэффициент лобового сопротивления купола пара¬
шюта (сх пар = 0,54-0,8), a k — динамический коэффициент
(6=0,74-1,0), не должна превышать допустимой.
На рис. 10.4.1 приведены зависимости относительной массы
парашютной системы рп.с и шасси рш от нагрузки на парашют
383
0пар. С увеличением рПар возрастает вес шасси (растет КПр), но
уменьшается вес парашютной системы. Общая масса парашют¬
ной системы приземления с амортизацией цп.с.а = Цп.с + Цш имеет
минимум три нагрузке на пара¬
шют рпар~6 кг/м2, чему соот¬
ветствует скорость приземле¬
ния УПр8ч- 10 м/с. При ходе
амортизации шасси 5=0,75 пе¬
регрузка не превышает я = 15.
- Масса оптимальной парашют¬
ной системы с амортизацией
составляет 8—9% от массы ап¬
парата. Система приземления
получается достаточно простой
и легкой, однако при приемле¬
мых значениях хода амортиза¬
ции ударные перегрузки все-
таки велики. Кроме того, сле¬
дует отметить, что посадка на
шасси (амортизаторы) при бо¬
ковом сносе от ветра (простая
амортизация в виде баллонов)
может привести к опрокидыванию СА. Применение же систем
с амортизаторами самолетного типа (стойки и пята-лыжа) при¬
водит к усложнению системы.
Реактивная система
Посадка на парашютной системе с амортизацией сопровож¬
дается большими ударными перегрузками в момент контакта
с поверхностью.
Обеспечить комфортабельные условия спуска, снизив пере¬
грузки практически до нуля («мягкая» посадка), можно при
использовании реактивной системы приземления. Для этой цели
возможно использование жидкостных, пороховых и турбореак¬
тивных двигателей.
Уравнения движения СА с реактивной системой приземле¬
ния могут быть записаны в следующем виде (вертикальная по¬
садка) :
Mac ^пр, н/с
о, го го
0.15 15
0J0
0,05
о
•
Мш
чл«>0
П = 15
Ч/7-/0
£
Мяс
10
15Рпар>кФ*
Рис. 10. 4.1. Характеристики пара¬
шютной системы с амортизацией
в зависимости от нагрузки на па¬
рашют Рпар
dV g PV2
Достаточно простое аналитическое решение этих уравнений мо¬
жет быть получено при условиях:
— плотность атмосферы постоянна (Q = const);
— тяга реактивного двигателя постоянна (Р = const);
— масса аппарата не меняется (G=const).
Все эти условия практически выполняются на участке при¬
земления при работе реактивных двигателей. Действительно,
участок торможения не превышает нескольких сотен метров, т. е.
£=const. Расход топлива также невелик, т. е. G = const.
В этом случае
dh =
У’Рх
Интегрируя в пределах от V— Упад до У=0 и h от hT до нуля,
получим
АР + V2 \
Рх ln I 2Рх "а*
Qg \ Д Р /
Так как торможение происходит на участке установившегося
вертикального спуска (падения, где » то выраже¬
ние для Лт упрощается:
2ir
Время движения получим из уравнения
л-
Qg V2 + gAP
2 Рх
Интегрируя от ^=0 до t и от Упад до Д/=0, получим
^пар 1
* Уд?
Проверка этого решения по данным численных расчетов (без
принятых выше допущений), проведенных на ЭЦВМ, показала
удовлетворительную точность как для случая использования для
посадочных ДУ ТРД (мало меняется G, несколько больше q),
так и ЖРД (мало меняется q, больше меняется G). На
рис. 10.4.2 показана зависимость времени работы двигателей t
385
в зависимости от тяговооруженности Р и нагрузки на лоб рх.
Относительная масса топлива и баков, необходимая для тор¬
можения СА,
Н'т о (1 +Дб)-
*уд
Относительная масса РД определяется как
^Дв= У
где уэв — удельная масса РД (кг/кг тяги).
Масса баков пропорциональна весу топлива (a<s составляет
5—10% веса топлива). Общая масса системы Цр.с = Цт + Цдв- Оце¬
ним характеристики реактивной
системы приземления с ЖРД.
Для ЖРД с тягой Р = 3-J-5 тыс. кг
можно принять уДв = 0,04. Харак¬
теристики реактивной системы
с ЖРД приведены на рис.
10.4.2. С увеличением тяговоору¬
женности реактивного двигателя
R возрастает относительная мас¬
са рдв, но уменьшается вес топлива
цт из-за сокращения времени спу¬
ска (гравитационных потерь на
торможение СА). Оптимальная
тягооворуженность ЖРД 2.
При удельной нагрузке на лоб
2*=500 кг/м2 и удельной тяге
РУд«250 с относительной массой
реактивной системы р,р.с с ЖРД
равен 15—16%. Для реактивной системы приземления воз¬
можно применение пороховых ракетных двигателей (ПРД).
Массовые характеристики такой системы приземления близки к
таковым для системы с ЖРД. Недостатком реактивных систем
приземления с ЖРД и ПРД является трудность обеспечения ма¬
невра в районе посадки, так как большой расход топлива огра¬
ничивает время работы двигателей (дополнительное время
Д/«20-^30с работы ЖРД с тяпой, равной весу СА, требует при¬
мерно 10% запаса топлива от веса СА). Кроме того, струя газов
вызывает эрозию грунта при длительном висении СА у поверх¬
ности. Избежать этого можно при вынесении посадочной ДУ на
выдвижной штанге над СА или в стропах парашюта.
Рассмотрим характеристики систем реактивной посадки
с применениел^ турбореактивных двигателей (ТРД). Лучшими
массовыми характеристиками обладают ТРД кратковременного
действия, разрабатываемые для вертикально взлетающих само¬
386
ошо
Рис. 10.4. 2. Характеристики
системы приземления с ЖРД:
УдВ-0,04; Ру„ —250 с
летов. Характеристики системы приземления с ТРД с удельной
л ^ л кг топлива
массой удв = 0,15 и удельным расходом топлива Сд=1
кг тяги ч
приведены на рис. 10.4.3. Из-за большой массы двигателя
и меньшей массы топлива оптимальная тягавооруженность
меньше, чем для ЖРД, и равна Р=1,1-И,2. Система приземле¬
ния получится несколько тяже¬
лее, чем с ТРД. Однако из-за
относительно малого расхода
топлива возможно осуществле¬
ние маневра в районе приземле¬
ния при небольшом увеличении
массы системы за счет дополни¬
тельного топлива. Так, при до¬
полнительном запасе топлива по¬
рядка 5% от массы аппарата воз¬
можно его висение в течение
3 мин, что позволит осуществить
маневр по дальности с. /=2ч-
3 км. Увеличить дальность ма¬
невра еще до 1—2 км можно за
счет бокового скольжения на
участке торможения (/«50-f-
60 с). Возможность микрома¬
невра в районе приземления позволяет выбрать удобную для
посадки площадку. Струя ТРД вызывает существенно меньшую
эрозию грунта, и посадка таких аппаратов возможна на грунт
с травяным покровом. В этом отношении еще более интересным
представляется использование турбовентиляторного РД, у кото¬
рого удельный расход топлива и скорость истечения реактивной
струи меньше, чем у ТРД.
Парашютно-реактивная система
Рассмотрим комбинированную парашютно-реактивную си¬
стему приземления. Схема работы системы следующая. При вве¬
дении парашютной системы существенно уменьшается скорость
снижения СА, а затем в непосредственной близости от поверх¬
ности запускается РД, и аппарат в момент контакта с землей
гасит скорость практически до нуля.
Основной составляющей массы реактивной системы с ЖРД
и ПРД является масса топлива. Предварительное торможение
СА парашютом позволяет существенно снизить вес системы при¬
земления. Уравнения движения аппарата с такой системой ана¬
логичны уравнениям движения аппарата с реактивной системой
387
/50
W0
50
о
Рис. 10. 4. 3. Характеристики си¬
стемы приземления с ТРД
Удв“0,/5. CR-1 кг/кг- ч
Умр.н/с fipn
при замене удельной нагрузки на лоб рх СА приведенной
нагрузкой
G
Рх пр с с »
сха°а "Г фх пар^пар
где сха; сх пар — коэффициент лобового сопротивления СА и пара¬
шюта соответственно;
•5а; «Snap — площадь миделя СА и парашюта.
Относительная масса такой системы приземления
ftip.c = Рлв + Рт 4" ft,.с
где^ ^=уляР —масса РД;
\iT=zPIPyj (1 +аб) — масса топлива и баков;
tVc = Yn/Aiap —масса парашютной системы.
Масса парашютно-реактивной системы с ЖРД в зависимости
от нагрузки на парашют рпар и тяговооруженности РД Р приве¬
ден на рис. 10.4.4. Видно, что
в этом случае имеют место
оптимальное значение как рпар,
так и Р. Масса системы полу¬
чается почти в 2 раза меньше
чем масса реактивной системы
с ЖРД. Оптимальная тягово-
ируженность существенно мень¬
ше, чем для реактивной систе¬
мы, и близка к Р= 1,24-1,3.
Скорость снижения при опти¬
мальной нагрузке на парашют
РпаР = 204-40 кг/м2 равна Упар =
= 18ч-25 м/с. По массе такая
система почти не уступает п?
рашютной системе с амортиза¬
цией, обеспечивая при этом
существенное преимущество — мягкую посадку.
Парашютно-реактивная система дает выигрыш в массе лишь
для ЖРД и ПРД. В комбинации с ТРД выигрыш в массе полу¬
чается небольшим. Парашютно-реактивная система с ПРД
успешно применялась на СА кораблей «Восход» и «Союз», обес¬
печивая надежное и комфортабельное приземление экипажа.
40
30
го
ю
0,15
0,10
0,05
о
J-J
2
-X
А-
U1
F-!’5-
^пар
г
20 30 рпар,М/мг
Рис. 10.4.4. Характеристики па¬
рашютно-реактивной системы при¬
земления с ЖРД
ПРИЛОЖЕНИЕ
КРАТКАЯ ХАРАКТЕРИСТИКА ПЛАНЕТ
СОЛНЕЧНОЙ СИСТЕМЫ
Астрономические знаки и обозначения
© Солнце (Гелиос)
■9 Меркурий (Гермес)
9 Венера (Афродита)
© или(6) Земля (Земля)
в Марс (Арес)
2/.Юпитер (Зевс)
Сатурн (Кронос)
| Уран (Уран)
ф Нептун (Посейдон)
PLПлутон (Гадес)
С Луна (Селена)
Vсозвездие Овен, а также точка весеннего равноденствия планеты
Q. точка восходящего узла
В скобках даны греческие названия планет.
Средние элементы орбит планет
Средние элементы орбит планет меняются со временем. Сущест¬
вуют формулы для определения средних элементов орбит планет в функции
времени, отсчитываемого в юлианских столетиях от некоторой выбранной
эпохи. Для планет земной группы эти формулы имеются в Астрономическом
ежегоднике *, для планеты Юпитер—в книге Мишо **. Наиболее полно эти
формулы даны в [53]. На основании указанной литературы ниже приводятся
формулы для расчета средних элементов больших планет, в которых аргу¬
ментом является время:
(J.D.)-(J.D.%
36525,0
где (J. D.)о = 2415020,0 (январь 0.5, 1900)—начальная эпоха;
J. D. — текущая юлианская дата;
36525,0 — число юлианских дней в юлианском столетии.
Средние элементы орбит больших планет выражаются зависимостями:
ЭЛЕМЕНТЫ ОРБИТ ПЛАНЕТ
Меркурий
Я= 178° 10'44",68 + 538106654",80 7+ Г',084 Г2;
л = 75°53'58",91 +5599",76 7+1",061 72;
Й = 47?8'45",40 + 4266",75 7+0",626 Г2;
1=7404 0",37+6",699 7—0",066 Т2;
е=0,20561421 +0,00002046 7—0,000000030 72;
а=О,3870984.
* Астрономический ежегодник СССР на 1974 год. М., «Наука», 1972.
** Мишо Ш. Планета Юпитер. М., «Мир», 1970.
389
Венера
X=342°46' 1",39+210669162",88 7 +1", 1148 72;
я= 1Э0°9'49",8+ 5068",93 7—3",515 Г2;
Й = 75°46'46",73+3239",46 Т+1 ",476 Т2;
i=3°23'37",07+3",621 7—0",0035 Г2;
е=0,00682069—0,00004774 7+0,000000091 Г2;
а = 0,72333015.
Земля
Ь=99°4Г48" 04+ 129602768", 13 7+1",089 Г2;
л=101°13'15",0+6189",03 7+il",63 Р+0",012 Р;
Й = 0°;
t=0°;
е=0,01675104—0,00004180 Г—0,000000126 Г2;
л= 1,00000023.
Марс
X=293с>44/51 ",46 + 68910117",33 7+1",1184 Г2;
я=334°13'5",53 + 6626",73 7+0",4675 Р—0",0043 73;
Q=48°47' 11", 19+2775",57 Г—О",005 Р—0",0192 Р;
i = 1°51 ■' 1 ",20—2",430 7+0",0454 Г2;
е =0,09331290 +0,000092064 Г—0,000000077 Р;
а =1,52368839.
Юпитер
X=238°2'57",32 +10930687", 148 7+1 ",20486 Г2—0",005936 Р;
я= 12°43'15",34 + 5795",862 7+3",80258 Г2—О",01236 Р;
£2 = 99°26'36", 19 + 3637",908 7+1",2680 Р—0",03064 Р;
* = 1в18/31",45—20",506 Г+О//0,14 Р;
е=0,04833475 + 0,000164180 Г—0,0000004676 Р—0,0000000017 Р;
а=5,202561.
Сатурн
X=266°33'51 ",76 + 4404635",5810 7+ 1", 16835 Г2—0",021 Р;
я=91°5'53",38+ 7050",297 7+2",9749 Р+0",0166 Р;
£2 = 112°47'25",40 +3143",5025 7—0",54785 Р—0",0191 Р;
* = 2°29'33",07—14", 108 Г—0",05576 Р+0",00016 Р;
•€=0,05589232—0,00034550 Г—0,000000728 Р + 0,00000000074 Р;
а=9,554747.
Уран
А,=244°11'50",89+1547508",765 7+1", 13774 Р—0",002176 Р;
п= 171032'55",14 + 5343",958 7+0",8539 72—0",00218 73;
С2 = 73°28'37",55+1795",204 7 + 4",722 72;
t=O°46'20",87+2",251 7+0",1422 72;
€=0,0463444—0,00002658 7 + 0,000000077 72;
а= 19,21814.
Нептун
X=84°27'28",78+791589",291 7+1",15374 72—О",002176 73;
я=46°43'38",37+5128",468 7+1",40694 72—0",002176 73;
£2= 130°40/52",89 + 3956", 166 7+0",89952 72—0",016984 73;
t= 1°46/45",27—34",357 7—0",0328 72;
6=0,00899704 + 0,000006330 7—0,000000002 72;
а=30,10957.
590
Синодические периоды обращения планет
Плутон
00
о
ч*
см
о
0,61674
00
о
4j<
О
со
1,89524
12,45704
33,42057
126,94673
—489,4482
;
8
S
ь
с
о
о
см
см
см
ю
I-'-
со
ю
S
о
о
СО
см
о
OS
СО
я
00
ь-
8
OS
СО
00
СО
о
4j<
8
489,4482
Е
о~
о
’ 1
■ 1
см
8
X
(Q
СХ
т?
ю
см
ю
ь-
OS
со
OS
о
см
о
СО
OS
СО
см
OS
см
4j<
см
оо
о
со
СО
со
8
со
о
4j<
СО
СО
4j<
OS
о
о
■ 1
’ 1
СО
8
СО
см
S
сх
X
н
оо
см
СМ
СО
СО
00
см
со
00
§
о
00
5
о
о
со
OS
8
8
о
со
СО
СО
Ю
00
OS
СО
оо
00
ю
о
см
4j<
и
о
о
■ 1
см
OS
3
8
8
сх
0>
ь
S
с
Tt*
ОО
3
см
со
00
оо
Tt*
со
см
OS
о
3
8
см
8
со
OS
8
см
4j<
см
00
СО
со
см
оо
-1*
о
3
2
о
о
см
OS
СО
см
см
Марс
см
см
со
£м
4j<
см
OS
Tt*
§
8
8
8
см
оо
OS
о
о
СО
ф
СО
см
OS
S
см
о
OS
ч*
см
ю
OS
00
о
о
см
см
см
’ 1
я
■5
2 *
3
СО
0,31726
1059871
8
2,1354
1,09211
1,03518
1,01209
1,00615
00
о
4j<
о
о
в
сх
Я
о
00
ю
8
8
ь-
оо
OS
ю
4j<
см
4j<
OS
СО
00
00
4j<
со
со
со
00
см
СО
ю
ь-
OS
СО
см
ю
ь-
ю
4j<
ь-
СО
СО
0
о
о
о
о
о
о
о
«в
X
сх
X
ж
сх
8
о
00
ю
со
СО
см
ь-
со
см
см
СО
см
Tt*
00
8
см
00
см
4j<
см
4j<
ю
4j<
см
о
см
4j<
см
00
о
см
о
о
о .
о
о
о
о
о
Плане¬
та
Мерку¬
рий
Венера
Земля
Марс
Юпитер
Сатурн
Уран
Нептун
Плутон
39L
Плутон
7=1989, октябрь 0,0344;
я=113°ЗГ17",72;
Й=108°57,16',,18;
t= 17°8'48",40;
е=0,2486438;
а=39,517738.
Здесь A,=£2 + w+Af— средняя долгота, М — средняя аномалия.
После определения средних элементов орбиты планеты среднюю Мвп
и истинную Опл аномалии, а также аргумент широты ипл планеты можно
вычислить по соотношениям:
•Мпл = ^-па япЛ,
^ПЛ = ^пл+ ^2бпл + -|г Sin + (т- е1л
мпл = Япл 4“ Ппл 2ПЛ;
для Земли
“© = я© + и©*
Синодические периоды обращения планет
Синодический период определяется как интервал времени между двумя
■последовательными совпадениями гелиоцентрических долгот одной планеты
относительно другой. Значения синодических периодов обращения планет
в тропических годах даны в таблице.
Средние экваториальные геоцентрические
координаты северного полюса планеты
Экваториальными геоцентрическими' координатами северного полюса
планеты являются и bN, средние значения которых с учетом пре¬
цессии определяются следующими формулами [1, стр. 53, 57, 58].
Марс
а„ = 316,844° + 0,6533° Те, Ъ„= + 53,009° + 0,3542° 7,.
Юпитер
aN= 17h52m10,72s+ 24,7 s7e, »лг= + 64°33'10",6 — 60"7„
Сатурн
dyy = 2h33m398,93 + 1015s, 207, + 56*187,2 + 2*,557Д
Йлг = +83°18'37,3" + 1570",47, —46",37^ —3", 17,3,
где
(J.D.) —2433282,4234
й ~ 36524,22
J. D. — текущая юлианская дата;
(J. D.)0=2433282,4234 (январь 0,5, i960) —начальная эпоха;
36524,22 — эфемеридные сутки тропического столетия.
—2М
■пл*
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Азимут запуска 105
Аномалия
— истинная 36
— эксцентрическая 40
Вектор
— Лапласа
баллистического движения 35
—— управляемого невозмущенного
движения 34
— момента количества движения 32
— цели 102, 225
Дальность
—.угловая 356, 357
— полета в атмосфере 359
Движение
— баллистическое 20, 39
—— относительное 22
— гиперболическое 40, 46
—кеплерово 30
— относительное возмущенное 22
— невозмущенное 29
управляемое 29
—— баллистическое 29
— параболическое 42
— управляемое *19
относительное 21
— эллиптическое 40, 45
Дата
— старта 141, 154, 174, 180, 265
— прилета 265, 275
Долгота
— восходящего узла 199
— ожидания 283
Задача
— баллистического расчета гелио¬
центрического участка 235
— запуска в правильный момент
времени 107
— навигационная 234
— навигационно-баллистическая
215, 225, 233
— проектная 234, 240
—проектно-баллистическая 215,
2И6, 230
Закон
— всемирного тяготения Ньютона
12
— тангенциального управления 68
Зона
— видимости с орбиты 201
Изменение
— вековое элемента 48
Импульс
— промежуточный 81
Изолинии
— поле 154, 156, 267, 274
— гиперболического избытка ско¬
рости 154
— склонения 155
— характеристической скорости
153, 267, 274
Интеграл
— векторный Лапласа 34
— момент количества движения 32
управляемого 32
баллистического 32
— энергии движения 30
управляемого. 30
баллистического 31
Календарь
— полетов 144, 145
Маневр
— активно-гравитационный 124
— гравитационный (пертурбацион¬
ный) 95,. 121
— поворота плоскости орбиты 116
в грависфере планеты 111
— импульсного поворота оси ап¬
сид 118, 119
Метод
— достижимых областей 164
— ипсилон-итерации 59
— импульсной аппроксимации 87
— конечных тяг 87
— Ламберта 50
— попадающих траекторий 60
Модуль
— разгонный 89, 215
— тормозной 89, 215, 230
Нагрузка на «лоб» 357
Орбита
— гиперболическая 239
отрыва 86
прибытия 86
— конечная 77
— мгновенная 35
— наклонение 199
393
— ожидания 282
— параболическая 239
— промежуточная 86
— управление 36
— элементы 42, 43
— эллиптическая 239
Параметр
— фокальный 36, 57
Перегрузка
— осевая 358
Переход
— гипербола—гипербола 124
— эллипс—гипербола 412
перицентральный 142
неперицентральный 113
Период
— великих противостояний 302, 305
—драконический 49
— обращения по орбите 198
— синодический 142, 300
суммарный 301
Плоскость
— базовая 288
— мгновенная 32
— уравнение 33
Потенциал
гравитационный 17
Притяжение
— небесного тела 16
— постоянная 12
гауссово 12
системы конечных точек 18
Скорость
— входа в атмосферу 357
— встречи с планетой 207
— старта 146, 205
— торможения 206
Сфера
— гравитационная планеты 25
— действия 23
Схема
— взлета с поверхности 131
— межпланетного полета 90
— спуска с орбиты 353
Точка
—материальная 11
Тело
— центральное 21
Траектория
— межпланетного полета 161, 162,
163
— облета планеты 94
— полувитка
1-го 154
2-го 154
—ускоренная 149, 191
— Хомана 438
— эллиптическая 53
граничная 53
первого рода 53
второго рода 53
Уравнение
— движения
в атмосфере 357
векторное дифференциальное 21
— Ламберта 52
обобщенное 53
Угол
— наклона траектории 354
асимптоты 107
Участок
— гелиоцентрический 259
— разгона 20, 64
непрерывный 101
— торможения 20, 77
Функция
— силовая
материальной точки 13
системы материальных точек 18
свойства 13, 15
тела 14
Эксцентриситет
— орбиты 39
СПИСОК ЛИТЕРАТУРЫ
1. Абалакин В. К., Аксенов Е. П. и др. Справочное руководство
по небесной механике и астродинамике. М., «Наука», 1971.
2. Алексеев К- Б., Бебенин Г. Г., Ярошевский В. А. Маневри¬
рование космических аппаратов. М., «Машиностроение», 1970.
3. Андреевский В. В. Динамика спуска космических аппаратов на
Землю. М., «Машиностроение», 1970.
4. Б а л к М. Б. Элементы динамики космического полета. М., «Наука, 1965.
5. Баузе В. Р. Э., Дашков А. А., Кубасов В. Н. Траектории об¬
лета планеты с возвращением к Земле. — «Космические исследования», 1968,
т. VI, вып. 6.
6. Бачманов А. А., Соловьев Ц. В., Филимонов В. Н. Дина¬
мика изменения оптимальных характеристик одноимпульсных траекторий
межпланетных полетов. — «Космические исследования», 1971, т. IX, вып. 4.
7. Бэттин Р. Наведение в космосе. М., «Машиностроение», 1966.
8. Гродзовский Г. Л., Иванов Ю. Н., Токарев В. В. Механика
космического полета с малой тягой. М., «Наука», 1966.
9. Д а ш к о в А. А., Ивашкин В. В. Об одном замечательном свойстве
пучка гиперболических траекторий. — «Космические исследования», 1965,
т. III, вып. 5.
10. Д е м и и В. Г. Движение искусственного спутника в нецентральном
поле тяготения. М., «Наука», 1968.
11. Дубовский С. В. Межорбитальные и межпланетные перелеты.—
«Космические исследования», 1967, т. V, вып. 4.
12. Дубошин Г. Н. Теория притяжения. М., Физматгиз, 1961.
13. Дубошин Г. Н. Небесная механика (Основные задачи и методы).
М., Физматгиз, 1963.
14. Дубошин Г. Н., Охоцимский Д. Е. Некоторые проблемы астро¬
динамики и небесной механики. — «Космические исследования», 1963, т. 1,
вып. 2.
15. Егоров В. А. Некоторые вопросы оптимизации траекторий зондиро¬
вания межпланетного пространства. — «Автоматика и телемеханика»,
1970, № 5.
16. Егоров В. А. К вопросу о захвате в ограниченной круговой проб¬
леме трех точек. — В сб.: Искусственные спутники Земли, вып. 3, 1959.
17. Евтушенко Ю. Г. и др. Движение искусственных спутников
в гравитационном поле Земли. ВЦ АН СССР, 1967.
18. Жуковский Н. Е. Теория притяжения. Сборник сочинений, т. 5,
Гостехиздат, 1949.
19. И в а н о в Н. М., Мартынов А. И. О максимальной допустимой
нагрузке на лобовую поверхность аппарата, осуществляющего аэродинамиче¬
ский спуск в атмосфере Марса. — «Ученые записки ЦАГИ», 1971, т. II, вып. 3.
20. И в а ш к и н В. В., С к о р о х о д о в А. П. Оптимальный пространст¬
венный одноимпульсный переход с гиперболической орбиты на круговую. —
«Космические исследования», 1971, т. IX, вып. 4.
21. Ильин В. А. Переход на орбиту ИСЗ за счет торможения в атмо¬
сфере.— «Инженерный журнал», 1963, т. III, вып. 2.
395
22. Ильин В. А. К расчету траекторий перелета КЛА между компла¬
нарными круговыми орбитами в ньютонианском гравитационном поле. — «Кос¬
мические исследования», 1964, т. II, вып. 5.
23. Казаков P. К-, Киселев В. Г., 41 л а т о н о в А. К- Исследование
свойств энергетики оптимальных орбит полета к Юпитеру. — «Космические
исследования», 1968, т. VI, вып. 1.
24. К и с л и к М. Д. Движение искусственного спутника в нормальном
гравитационном поле Земли. — В сб.: Искусственные спутники Земли,
вып. 4, 1960.
25. К и с л и к М. Д. Анализ интегралов движения искусственного спут¬
ника в нормальном гравитационном поле Земли.— В сб.: Искусственные спут¬
ники Земли, вып. 13, 1962.
26. К и с л и к М. Д. Сферы влияния больших планет и Луны. — «Косми¬
ческие исследования», 1964, т. II, вып. 5.
27. Космические траектории. М., ИЛ, 1963.
28. Космическая эра. Прогнозы на 2001 годы. М., «Мир», 1970.
29. Космонавтика (Маленькая энциклопедия). М., «Советская энциклопе¬
дия», 1970.
30. Куликов К- А. Новая система астрономических единиц. М.,
«Наука», 1969.
31. Левантовский В. И. Механика космического полета (в элемен¬
тарном изложении). М., «Наука», 1970.
32. Ливанов Л. Б. Об одном классе оптимальных импульсных переле¬
тов Земля—планета—Земля.— «Космические исследования», 1971, т. IX, вып. 2.
33. Л о у д е н Д. Ф. Оптимальные траектории для космической навига¬
ции. М., «Мир», 1966.
34. Лох В. Динамика и термодинамика спуска в атмосфере планеты.
М., «Мир», 1966.
35. Мартин Д. Вход в атмосферу. Введение в теорию и практику. М.,
«Мир», 1969.
36. Методы оптимизации с приложениями к механике космического по¬
лета. Под ред. Лейтмана. М., «Наука», 1965.
37. Механика в СССР за 50 лет (Механика космического полета. Небес¬
ная механика), т. I. М., «Наука», 1968.
38. Основы теории полета космических аппаратов. М., «Машинострое¬
ние», 1972.
39. Пономарев В. М. Теория управления движением космических
аппаратов. М., «Наука», 1965.
40. Современное состояние механики космического полета. Под ред.
П. Б. Ричардса. М., «Наука», 1969.
41. Субботин М. Ф. Введение в теоретическую астрономию. М.,
«Наука», 1968.
42. Тарасов Е. В. Оптимальные режимы полета летательных аппара¬
тов. М., Оборонгиз, 1963.
43. Тарасов Е. В. Алгоритм оптимального проектирования летатель¬
ного аппарата. М., «Машиностроение», 1970.
44. Тарасов Е. В., Л а б у н с к и й А. В. Оптимизация проектно-балли¬
стических характеристик межпланетного аппарата для перелета на орбиту
ИС планеты назначения. — «Труды VI чтений, посвященные разработке науч¬
ного наследия и развитию идей К- Э. Циолковского», 1972.
45. Т и х о н р а в о в М. К- О точном учете ускорений, вызываемых влия¬
нием небесных тел, в формулах для возмущений элементов орбиты космиче¬
ского аппарата.—«Космические исследования», 1968, т. VI, вып. I.
46. У а й л д Н. Д. Методы поиска экстремума. М., «Наука», 1967.
47. Циолковский К- Э. Избранные труды. М., АН СССР, 1962.
48. Чеботарев Г. А. Аналитические и численные методы небесной ме¬
ханики. М., «Наука», 1965.
49. Штернфельд А. Я. Введение в космонавтику. М., ОНТИ, 1937.
50. Эльясберг 1П. Е. Введение d теорию полета искусственного спут¬
ника Земли. М., «Наука», 1965
396
51. Эрике К- Космический полет, т. I. М., Физматгиз, 1963; т. II, ч. 1,
«Наука», 1969; ч. 2, «Наука», 1970.
52. Эскобал П. Методы определения орбит. М., «Мир», 1970.
53. Э.с к о б а л П. Методы астродинамики. М., «Мир», 1971.
54. В a 11 i n R. H. A new solution for Lambert’s problem (Новое решение
задачи Ламберта). IAF Paper, No. AD 101, 1968.
55. D e В г a D. В. Vectors and dysdics: the natural tools of space vehicle
mechanics, Preprint. Amer. Astronaut. Soc., 1961, No. 76 (Применение вектор¬
но-тензорных методов при исследовании проблем механики космического по¬
лета, А. Р., >106(2, № 4, реф. 17).
56. Bou г ke R. D., Beerer F. G. Mariner mission to Venus and
Mercury in 1973, Astronaut, and Aeronaut., 1971, vol. 9, No. 1 (Проект запу¬
ска в 1973 г. космического аппарата для исследования Венеры и Меркурия,
А. Р., 1971, № 30, реф. 4125).
57. В г е a k w е 11 J. V., Gillespie, R. W., Ross S. Research in
interplanetary transfer, Amer. Rocket. Soc. Preprints, No. 954—59 (Быстрый
метод расчета траекторий межпланетных перелетов, А. P., il960, № 30,
реф. 108).
58. Brea k we 11 J. V., Trajectories launches normal to the ecliptic,
XIV Congr. intemat. astronaut., 1963 (Траектории космических аппаратов, за¬
пускаемых перпендикулярно к плоскости эклиптики, А. Р., 1964, № 27,
реф. 130).
59. D ее г w е s t е г J. М., D’Haem S. М. Систематизированное сравне¬
ние перелетов к Марсу с пролетом около Венеры с возвращением обычного
типа. AIAA, J., 1967, vol. 5, No. 8.
60. F i m р 1 е W. R. Изменение плоскости межпланетных траекторий на
среднем участке полета. А. Р, 1963, № 20, реф. 1.22.
61. F a u s t N. L., М u г t a g h Т. В. Manned Mars lander launch-to-rendez-
vous analysis for a 1981 Venus-Swinghy mission, AIAA Paper, 1970, No. 1075
(Анализ маневра старта с поверхности Марса пилотируемого космического ко¬
рабля и встречи его с орбитальным кораблем для перелета Земля—Марс —
Земля с облетом Венеры в 1980 г., А. Р., 1071, JSfe ;17, реф. 047)^.
62. Gillespie R. W., Ross S. Перелет к Марсу с пролетом мимо Ве¬
неры и его роль в исследовании с помощью пилотируемых аппаратов. AIAA J.,
1967, vol. 5, No. 5.
63. Gobetz F. W. Оптимальные переходы между асимптотами гипербо¬
лических орбит. AIAA J., 1963, vol. 1, No. 9.
64. Gobetz F. W. Doll J. R. Импульсные траектории (обзор). AIAA
J., 1969, vol. 7, No. 5.
65. Greenwood S. W. Orbits for solar exploration: a review (Орбиты
для исследования Солнца. Обзор). Canad. Aeronaut and Space J., 1967, vol. 13,
No. 10.
66. H a z e г 1 i n g G. А. Оптимальные межпланетные траектории для КЛА
с ЖРД. А. Р, 1971, № 6, реф. 94.
67. К a u f m а п В. Влияние галилеевых спутников на траектории пролета
у Юпитера. AIAA J., 1970, vol. 8, No. 7.
68. К е 11 е г m е i е г Н. Е., К о е 11 е D. Е., М u 11 е г W. Bahnmechanische
und technische Probleme einer Merkur Ely-by Mission. (Механико-баллистнче-
ские проблемы, связанные с пролетом Меркурия). Baumfahrtforschung, 1970,
69. К1 о р р D. A., Niehoff J. С. Jupiter gravity-assisted trajectories
(Траектории полета с использованием силы притяжения Юпитера). J. Space¬
craft and Rockets, 1969, 6, No. 4.
70. L a s с о d у D. N., T h о r s о n E. D. and oth. Анализ перелета Земля —
Марс — Земля в период il076—'1035 гг. AIAA J., 1965, vol. 3, No. 10.
71. Lee V. A., Wilson S. W., Jr. Обзор работ по баллистическим пере¬
летам к Марсу. AIAA J., 1967, vol. 5, No. 5.
72. М a n n i n g L. A. Trajectory modes for manned and unmanned missions
to Mercury. J. Spacecraft and Rockets, 1967, vol. 4, No. 9 '(Схемы перелетов пи-
397
дотируемых и беспилотных космических аппаратов к Меркурию в период
1980—2000 гг., А. Р., >1968, № .3, реф. ,18).
73. Miiller W. Bedeutung der Swingby-Technik am Planeten Jupiter Шг
interplanetare Missionen (Значение для межпланетных траекторий эффекта
изменения энергии движения при близком прохождении Юпитера). Raum-
fahrtforschung, 1968, Bd. 12, Nr. 4.
74. Niehof f J. C. Gravity-assisted trajectories to solar-system targets. J,
Spacecraft and Rockets, 1966, vol. 3, No. 9 (Траектории к планетам солнечно»
системы с пролетом промежуточных планет, А. Р., 1967, № 5, реф. 64).
75. Norman S. М. A comparison of passage conditions at the outor pla¬
nets for several flyby trajectory modes, AIAA Paper, 1970, No. 1071 (Сравнение
условий прохождения вблизи внешних планет для нескольких типов траекто»-
рий облета, А. Р., 1971, № 1, реф. 1).
76. R a g s а с R. V., Titus R. R. Оптимизация траекторий межпланет¬
ных перелетов с «задержкой» около планет (полет на Марс), AIAA, J., 1963„
vol. 1, No. 8.
77. Silver R. W. Grand Tours of the Jovian planets («Большой тур» к
планетам группы Юпитера). J. Spacecraft and Rockets, 1968, vol. 5, No. 6.
78. S о h n R. L. Mars — Venus flyby missions with manned Mars landers. J.
Spacecraft and Rockets, 1907, vol. 4, No. 1 (Облет Марса и Венеры с посадкой
на Марс пилотируемого отсека, А. Р., 1967, № 00, реф. 1167).
79. Т i t u s R. R. Powered flybys of Mars. Astronaut. Acta, 1965„
vol. 11, No. 5.
80. Top s: Outer-planet Spacecraft, Astronaut, and Aeronaut., 1970b
vol. 8, No. 9 (Космический аппарат: Tops для полета по программе Grand
Tour (обзор), А. Р., 1197Л, № 25, реф. 374—<384).
81. Vickery J. D., Horse wood J. L. Mission window definition for
Jupiter swingbys to the outer planetes (Окна запуска при полетах к внешним
планетам с гравитационным маневром у Юпитера). J. Spacecraft and Rockets,
1969, vol. 6, No. 5.
82. W i 11 e s E. A. Jr. New class of optimal interplanetary trajectories,
with specified trip time. AIAA Paper, 65—36, 1965.
ОГЛАВЛЕНИЕ
Стр.
Предисловие . . . 3
От авторов ... 8
Условные обозначения 9
Глава I. Основы теории движения космических летательных аппа¬
ратов 11
§ 1. Элементы теории притяжения И
§ 2. Относительное движение КЛА в поле тяготения Солнца и пла¬
нетных систем. Грависферы планет 19
§ 3. Управляемое и баллистическое движение КЛА в поле тяготе¬
ния одного небесного тела 28
Глава II. Методы расчета участков межпланетных траекторий ... 50
§ 1. Определение орбит по двум положениям КЛА 50
§ 2. Метод «попадающих траекторий» 60
§ 3. Приближенный метод решения дифференциальных уравнений
управляемого движения КЛА 63
§ 4. Расчет траекторий с промежуточным импульсом 80
Глава III. Схемы и траектории полета межпланетных аппаратов 85
§ 1. Характеристики траекторий межпланетного перелета .... 85
§ 2. Классификация схем полета межпланетных аппаратов . . 90
Глава IV. Планетоцентрические участки полета 101
§ 1. Кинематические параметры участка выведения с промежуточ¬
ной орбитой на гиперболу отрыва от Земли 101
§ 2. Импульсные маневры КЛА в гравитационной сфере планеты 111
§ 3. Выбор схемы выведения и параметров ракетной ступени взлета
с поверхности Марса 130
Глава V. Пролетные и попадающие межпланетные траектории . . 138
§ 1. Календарь полетов к планетам 138
§ 2. Оптимизация гелиоцентрических участков межпланетных траек¬
торий перелета на полях изолиний 153
§ 3. Изменение характеристик оптимальных траекторий по циклам
полетов 163
Глава VI. Траектории полета межпланетных аппаратов с выходом
на орбиту около планеты 193
§ 1. Особенности задачи оптимизации межпланетных траекторий
с выходом на орбиту около планеты назначения 193
§ 2. Выбор параметров орбиты спутника планеты 197
§ 3. Характеристики оптимальных траекторий для различных
циклов полетов 203
399
Стр.
Глава VII. Оптимизация проектно-баллистических характеристик
межпланетных аппаратов с учетом протяженности активных участ¬
ков полета 213-
1. Оптимизация основных проектных параметров и планетоцент¬
рических участков полета межпланетных аппаратов .... 213
§ 2. Метод расчета и оптимизация проектно-баллистических харак¬
теристик межпланетного аппарата с учетом стыковки гелио¬
центрического участка с планетоцентрическими участками тра¬
ектории 234
§ 3. Оптимизация проектных решений межпланетного аппарата
с учетам размеров грависфер планет 254
Глава VIII. Траектории полета к одной планете с возвращением
к Земле 265
§ 1. Оптимизация гелиоцентрических участков 265
§ 2. Характеристики межпланетных траекторий КЛА с возвраще¬
нием к Земле 276
§ 3. Выбор схемы формирования орбиты ожидания у планеты . . 282
Глава IX. Траектории полета межпланетных аппаратов к нескольким
планетам 299
§ 1. Оценка цикличности полетов к нескольким планетам 299
§ 2. Траектории полета к Марсу с возвращением к Земле и с ис¬
пользованием гравитационного поля Венеры 307
§ 3. Полет к Меркурию с использованием гравитационного поля
Венеры . . * 325
§ 4. Маневры КЛА с использованием гравитационного поля
Юпитера 334
Глава X. Траектории спуска в атмосферах планет 353
§ 1. Спуск с орбиты ИСЗ 353
§ 2. Спуск в атмосфере Земли с гиперболической скоростью . . . 362
§ 3. Спуск космических аппаратов в атмосферах планет 375
§ 4. Оптимизация параметров систем мягкой посадки СА 382
Приложение. Краткая характеристика Солнечной системы 389
Предметный указатель .... 393
Список литературы .... . . 395
Цезарь Васильевич Соловьев, Евгений Васильевич Тарасов
ПРОГНОЗИРОВАНИЕ МЕЖПЛАНЕТНЫХ ПОЛЕТОВ
Редактор издательства М. Ф. Богомолова. Технический редактор А. Ф. Уварова
Переплет художника В. Б. Торгашова. Корректор Е. В. Сабынич
Сдано в набор 16/1II 1973 г. Подписано в печать 19/VII 1973 г. Т—08272
Формат бОХЭОУи Бумага № 2 Печ. л. 25,0 Уч.-изд. л. 23,30
Цена 2 р. 61 к. Тираж 2000 экз. Заказ Ni 3774
Издательство «Машиностроение». Москва, Б-78, I-й Басманный пер., 3.
Московская типография № 8 «Союзполиграфпрома»
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли.
Хохловский пер., 7. Тип. зак. 2779