/


























































Author: Васьковський Ю.М.
Tags: механіка електроніка електротехніка електричні машини
ISBN: 978-966-622-269-8
Year: 2007




Text
Міністерство освіти і науки України
Національний технічний університет України
«Київський політехнічний інститут»
Ю. М. Васьковський
Польовий аналіз
електричних машин
Рекомендовано Міністерством освіти і науки України
як навчальний посібник для студентів
електротехнічних та електромеханічних спеціальностей
вищих навчальних закладів
Київ
ІЇГУУ «КПІ»
2007
УДК 621.313(075.8)
ББК31.261я73
В19
Гриф надано Міністерством освіти і науки України
(Лист№ 1.4/18-Г-1333 від 30.07.2007р.)
Рецензенти:
О. І. Титко, д-р техн. наук, проф.,
Інститут електродинаміки НАН України
В. І. Міиіин, д-р техн. наук, проф.,
Національний аграрний університет
Ю. А. Шумілов, д-р техн. наук, проф.,
Національний технічний університет України «КПІ»
Відповідальний редактор
В. Ф. Шинкаренко, д-р техн. наук, проф.,
Національний технічний університет України «КПІ»
Васьковський Ю. М.
В19 Польовий аналіз електричних машин: Иавч. посіб. - К.: НТУУ
«КПІ», 2007.-192 с.
І8ВЯ 978-966-622-269-8
Розглянуто новий сучасний напрям розвитку теорії електричних машин,
пов’язаний з визначенням та аналізом параметрів і характеристик електричних
машин на основі рівнянь теорії поля. Обґрунтовано методи, методики та
алгоритми, які дозволяють з високою вірогідністю отримати характеристики
машин безпосередньо на основі розрахункової інформації щодо розподілу
поля в її активній зоні. Наведено балато прикладів комп’ютерної реалізації
польових методів аналізу електричних машин різного типу та конструкції, які
наочно демонструють нові можливос ті та перевал и польових методів порі-
вняно з традиційними ланцюговими методами аналізу. Доведено доцільність
та перспективність використання польових методів у процесі розроблення
дослідження нових та нетрадиційних конструкцій електричних машин.
Для сіудептів-електромеханіків, а також аспірантів, інженерів та
наукових співробітників, які розробляють і досліджують електричні машини.
УДК 621.313(075.8)
ББК31.261я73
І8ВИ 978-966-622-269-8
© Ю. М. Васьковський, 2007
ЗМІСТ
ПЕРЕДМОВА................................................5
СПИСОК УМОВНИХ СКОРОЧЕНЬ.................................6
ВСТУП....................................................7
РОЗДІЛ 1. АНАЛІЗ ЕЛЕКТРОМАГНІТНИХ І ТЕПЛОВИХ
ПОЛІВ В ЕЛЕКТРИЧНИХ МАШИНАХ..................................13
1.1. Рівняння електромагнітного поля і постановка крайових
задач........................................................13
1.1.1. Рівняння електромагнітного поля для матеріальних середовищ
з незмінними фізичними характеристиками......................13
1.1.2. Рівняння електромагнітного поля для матеріальних середовищ
з нелінійними фізичними характеристиками.....................31
1.1.3. Рівняння електромагнітного поля для матеріальних середовищ
з анізотропними фізичними характеристиками...*..........35
1.2. Рівняння теплового поля і постановка крайових задач.....37
1.3. Методи розв’язання кранових задач теорії поля......41
1.4. Візуалізація картин електромагнітного поля.........46
РОЗДІЛ 2. ВИЗНАЧЕННЯ ІНТЕГРАЛЬНИХ ПАРАМЕТРІВ
І ХАРАКТЕРИСТИК ЕЛЕКТРИЧНИХ МАШИН МЕТОДАМИ
ТЕОРІЇ ЕЛЕКТРОМАГНІТНОГО ПОЛЯ...........................51
2.1. Магнітні потоки, потокозчеплення, електрорушійні сили і ін-
дуктивні опори обмоток електричних машинах..............51
2.1.1. Магнітний потік взаємоіндукції і характеристика холостого
ходу електричної машини.................................51
2.1.2. Магнітний потік пазового розсіяння...............56
2.1.3, Магнітні потокозчеплення обмоток.................58
2.2.4. Електрорушійні сили і індуктивні опори обмоток...62
2.2.5. Синхронні, перехідні і надперехідні індуктивні опори
синхронних машин........................................64
2.2. Електромагнітні сили і моменти в електричних машинах....73
2.2.1. Методи розрахунку електромагнітних сил і моментів в
електричних машинах..........................................73
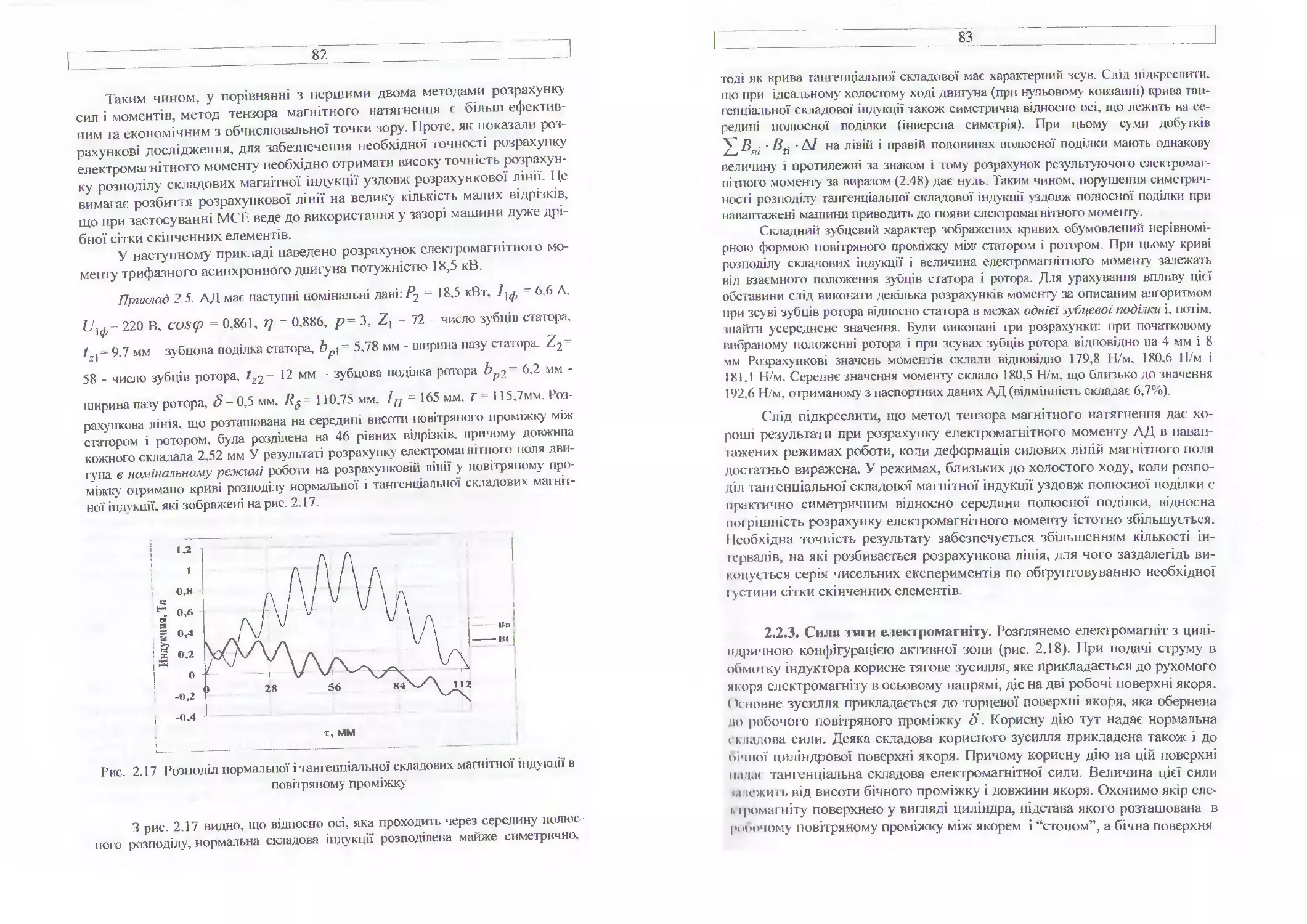
2.2.2. Електромагнітний обертаючий момент електричної машини.79
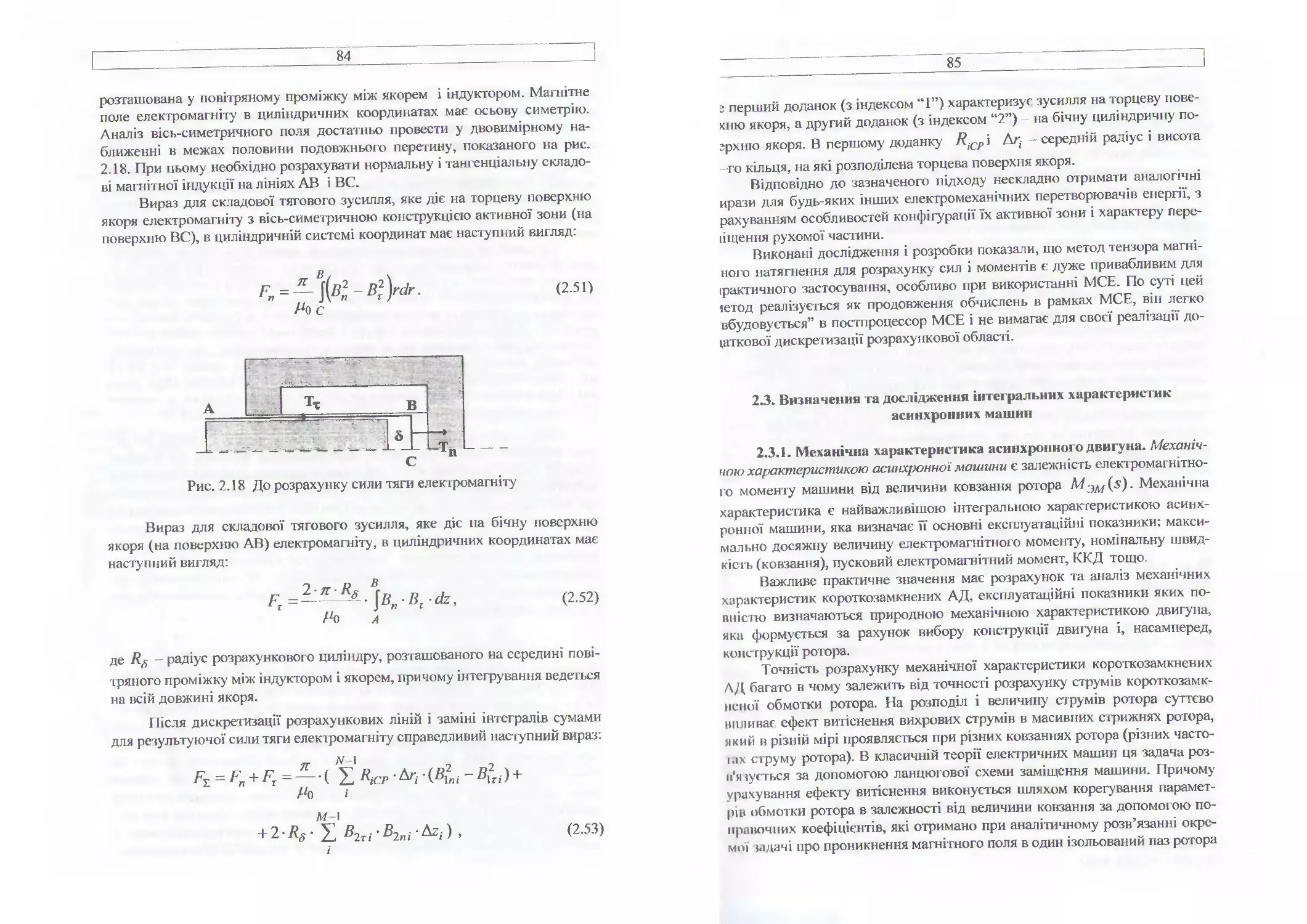
2.2.3. Сила тяги електромагніту..............................83
2.3. Визначення га дослідження інтегральних характеристик
асинхронних машин.......................................85
2.3.1. Механічна характеристика асинхронного двигуна....85
2.3.2. Розрахунок СО8(Д, ККД та робочих характеристик...96
2.3.3. Дослідження асинхронних двигунів у несиметричних режимах
роботи..................................................99
4
2.4. Визначення та дослідження інтегральних харакісрисгик
синхронних машин........................................112
2.4.1. V - образна характеристика синхронної манім о и..112
2.4.2. Зовнішня характеристика автономного синхронної о
генератора.............................................118
2.4.3. Регулювальна характеристика автономного синхронного
генератора..............................................119
2.5. Визначення а дослідження інтегральних характеристик
машин постійного струму.................................121
2.5.1. 11 цектромеханічні характерист ики двигуна постійного
гіруму ти 'іідонііоіо «буджспня.........................121
2.5.2. Піші (кісна і механічна характеристики двигуна постійного
с ірему паралельного збудження..........................126
РОЗДІЛ 3. АНАЛІЗ ВЗАЄМОПОВ’ЯЗАНИХ ЕЛЕКТРОМАГ-
III ГНИХ І ТЕПЛОВИХ ПРОЦЕСІВ електричних ма-
шин .................................................. 127
3.1. Взаємо,в’язок електромагнітних і теплових полів та процесів
в електричних машинах..................................127
3.2. Особливості чисельного моделювання взаємопов’язаних
слсктромаї ні і ного і теплового полів.................129
3.3. Визначення та дослідження характеристик електричних
машин з урахуванням взаємозв’язку електромагнітних та
теплових процесів......................................133
3.3.1. Асинхронна машина з масивним ротором.............133
3.3.2. Елекіро-тепло-механічний перетворювач енергії.. 135
3.3.3. Оптимізація форми кінцевих клинів ротора турбогенератора.. .143
3.3.4. Рейковий прискорювач електропровідних тіл.......149
РОЗДІЛ 4. КОЛО - ПОЛЬОВІ МЕТОДИ і математичні
МОДЕЛІ ДЛЯ АНАЛІЗУ динамічних режимів електри-
чних машин.............................................157
4.1. Динамічні режими і їх коло — польові моделі........157
4.2. Коло — польова математична модель узагальненого
електромеханічного перетворювача енергії................159
4.3. Методи розв’язання коло — польових маїсмаїїічпих
моделей................................................164
4.3.1. Метод поінтервальної апроксимації...............165
4.3.2. Метод динамічних характерне ти к.............. 172
4.3.3. Метод поділу змінних............................174
4.3.4. Метод покрокового ін іеі рування................180
СПИСОК ЛІТЕРАТУРИ ... 188
5
Присвячується пам 'яті видатного
вченого — електромеханіка
Постнікова Івана Матвійовича
ПЕРЕДМОВА
Електромеханічне перетворення енергії в електричних машинах від-
бувається в активному об’ємі машини завдяки електромагнітному полю.
Тому математичний аналіз цього явища необхідно провадити на основі рі-
внянь електромагнітного поля.
Хоча вочевидь польовий метод аналізу забезпечує найвищу точність
розрахункових результатів, але, з огляду на складність розв’язання польо-
вих рівнянь, історично цей метод довгий час не мав свого розвитку. Класи-
чна теорія електричних машин розвивалася на основі рівнянь теорії елект-
ричних кіл, а моделі електричних машин приймалися у вигляді електрич-
них схем заміщення зі зосередженими параметрами. Проте інтерес до без-
посереднього визначення характеристик машин на основі польових моде-
лей без усіляких “посередників” у вигляді електричних схем заміщення
завжди існував серед фахівців та дослідників.
У даний час розвиток комп’ютерної техніки та відповідного науково
- методичного забезпечення набув такого рівня, що цілком реальним стало
широке впровадження в електромеханіку польових методів аналізу. Особ-
ливо це є актуальним для розробки нових та нетрадиційних конструкцій
машин. Польовий аналіз забезпечує не тільки нову розрахункову техноло-
гію, але й започатковує нову ідеологію досліджень електричних машин.
В книзі на основі єдиного системного підходу розглянуто коло пи-
тань щодо методів, методик та алгоритмів, призначених для польового
аналізу електричних машин різного типу, у тому числі з урахуванням вза-
ємного зв’язку електромагнітних і теплових процесів в активній зоні елек-
тричної машини. Розглянуто методи визначення характеристик машин, як
в сталих, так і в динамічних режимах роботи. Наведено багато прикладів
комп’ютерної реалізації польових методів аналізу електричних машин різ-
ного типу та конструкції.
Книга грунтується на матеріалах лекцій, що викладаються автором
для студентів кафедри електромеханіки Національного технічного універ-
ситету України “Київський політехнічний інститут”, які навчаються за
спеціальністю “Електричні машини і апарати”, а також на результатах вла-
сних наукових досліджень та розробок.
Автор висловлює щиру подяку співробітникам кафедри електроме-
ханіки НТУУ “КІЛ” за допомогу при підготовці рукопису, а також рецен-
зентам за доброзичливість та цінні зауваження.
Всі зауваження і побажання щодо покращення навчального посібни-
ка автор просить надсилати на адресу: Київ - 57, пр. Перемоги 37, кори. 20.
Автор
6
СПИСОК УМОВНИХ СКОРОЧЕНЬ
АД - асинхронний двигун
ЛСГ - автономний синхронний генератор
ДЕМП - динамічні електромагнітні параметри
ДПС — двигун постійного струму
ЕМ- електрична машина
ЕМПЕ — електромеханічний перетворювач енергії
ЕРС - електрорушійна сила
ЕТМП - елекіро-тепло-механічний перетворювач
КК Д - коефіцієнт корисної дії
КПММ - коло - польова математична модель
ЛММ - ланцюгова математична модель
МДХ - метод динамічних характеристик
МІУ - метод інтегральних рівнянь
ММ — математична модель
ММХ - магніто-механічна характеристика
МПА — метод поінтервальної апроксимації
МПЗ - метод поділу змінних
МІП — метод покрокового інтегрування
МСС — метод симетричних складових
МСР - метод скінченних різниць
МСЕ — метод скінченних елементів
НС — намагнічуюча сила
1ІК - персональний комп’ютер
11 ЕОМ — персональна електронна обчислювальна машина
СДР система диференційних рівнянь
СГ - синхронний генератор
СЕ - скінченний елемент
СМ — синхронна машина
ССЕ - сітка скінченних елементів
ТГ турбогенератор
ТАД - тяговий асинхронний двигун
XXX - характеристика холостого ходу
7
ВСТУП
Математичне моделювання — це напівтеоретичний, напівекспериме-
нтальний метод дослідження та з’ясування суті процесів і явищ в реальних
об'єктах різної фізичної природи, у тому числі в технічних об’єктах антро-
погенного походження. При математичному моделюванні, об’єкт дослі-
дження, як правило, строго (на абстрактному математичному рівні) не є
визначеним, багато істотних зв'язків в об’єкті отримано емпірично і, тому
вони не мають загальнотеоретичного тлумачення. Область емпіричного
базису чітко не окреслена. Разом з тим математичне моделювання дає ви-
соку динамічність сучасним науковим дослідженням — це шлях до розроб-
ки нових наукових теорій і умова їх швидкого розповсюдження на нові об-
ласті дослідження. Моделюванню в сучасній науці належить найважливі-
ша роль в процесах формування нових знань.
Під математичною моделлю (ММ) розуміється така побудована на
принципах математичної теорії і реалізована математичними засобами си-
стема, яка, відображаючи об'єкт дослідження, здатна заміщати його так,
що її вивчення дає нову інформацію про самий об’єкт. На практиці під ма-
тематичною моделлю розуміється, як правило, система рівнянь (диферен-
ціальних, інтегральних, алгебраїчних), початкових, граничних умов і ін-
ших математичних співвідношень, які з урахуванням прийнятих апріорних
припущень про об’єкт, описують фізичні процеси, які в ньому відбувають-
ся. Вивчення поводження розв’язків цієї системи при варіюванні парамет-
рів технічного об’єкту (чисельних експериментів) веде до більш глибокого
дослідження його властивостей. Стратегія чисельного експериментування
не має загальнотеоретичного обірунтовування і базується на суб’єктивних
оцінках і досвіді дослідника - експериментатора.
Книжка присвячена питанням математичного моделювання електро-
механічних перетворювачів енергії (ЕМПЕ) або більш коротко - електрич-
них машин (ЕМ). Важлива складова назви книги — “Польовий аналіз...”
дає основну характеристику представленого матеріалу - математичне мо-
делювання ЕМ методами теорії поля. Цей напрям моделювання ЕМ у да-
ний час швидко розвивається, і стимулом до його розвитку є потреби прак-
тики в удосконаленні конструкції традиційних машин, створенні машин
нетрадиційного виконання, поглибленні знань щодо режимів їх роботи і ін.
Чому ж традиційна методологія математичного моделювання ЕМ не
завжди забезпечує необхідну достовірність результатів моделювання і ви-
магає подальшого удосконалення? В чому полягають її основні недоліки і
внутрішні суперечності?
Класична теорія електричних машин визначає і вивчає характеристи-
ки машин на основі аналізу їх спрощених ланцюгових моделей — електри-
чних схем заміщення. Будь-яка електрична схема заміщення містить суку-
пність електричних контурів з незмінними зосередженими параметрами.
Кількість контурів, як правило, дорівнює числу обмоток ЕМ, причому
8
деякі з них можуть взаємно переміщатися один до одного в просторі. Сис-
тема диференціальних або алгебраїчних рівнянь, яка складена для схеми
заміщення за законами Кирхгофа, формує ММ електричної машини. У тих
випадках, коли в процесі, що аналізується, змінюється швидкість рухомої
частини машини, наприклад, швидкість ротора при пуску електродвигуна,
до системи рівнянь електричної рівноваги контурів додається також рів-
няння рівноваги механічної системи машини - рівняння руху ротора. По-
дальше розв’язання ММ - аналітичними або чисельними методами, дає
можливість проаналізувати статичні або динамічні характеристики елект-
ричної машини, отримати вихідну інформацію для її проектування і ін.
Для аналізу процесів в магнітопроводі ЕМ використовується теорія
магнітних кіл. Залежно від задачі, що розглядається, може формуватися
спрощена — одно контурна або більш докладна - розгалужена схема замі-
щення магнітопроводу, яка з певним ступенем наближення дозволяє розра-
хувати магнітні потоки в основних елементах магнітопроводу машини.
Такі спрощені ланцюгові схеми заміщення ЕМ називаються ланцю-
говими математичними моделями (ЛММ), вони формують основу теорії і
практики елек гричних машин, і у даний час є основним інструментом для
розрахунку їх характеристик і режимів роботи.
Практична реалізація ЛММ ЕМ вимагає наявності достовірних зна-
чень параметрів схем заміщення. Тому важливе і самостійне місце в класи-
чній теорії електричних машин займає обґрунтовування методів розрахун-
кового і експериментального визначення параметрів схем заміщення. У
найпоширеніших електричних машинах індукційного типу - це є активні і
індуктивні опори. Параметри електричних схем заміщення в неявному ви-
гляді містять інформацію щодо конструкції і схеми з’єднання обмоток ма-
шини, конфігурації її магнітопроводу і ін.
Аналіз ЕМ на базі їх електричних і магнітних схем заміщення не ві-
дображає той очевидний факт, що насправді електрична машина є склад-
ною просторовою конструкцією з розподіленими параметрами, в якій еле-
ктромеханічне перетворення енергії здійснюється за допомогою електро-
магнітного поля. З цієї точки зору більш логічною була б побудова теорії
ЕМ на основі рівнянь електромагнітного поля. Ці рівняння історично були
сформульовані Максвелом раніше, ніж створені перші конструкції елект-
ричних машин, тобто к початку створення теорії електричних машин тео-
ретична основа для її побудови на базі рівнянь поля вже була відома.
Основна причина історичного розвитку теорії ЕМ па основі методів
теорії електричних кіл пов’язана з практичною складністю польового ана-
лізу і відсутністю на той час математичних методів і засобів для чисельно-
го розв’язання складних польових рівнянь. Диференційні рівняння поля
формулюються для векторних функцій - векторного магнітного потенціа-
лу, магнітної індукції і ін., кожна з яких в загальному випадку може зале-
жати як від трьох просторових координат, так і від часу. З урахуванням
9
складної геометрії активної зони ЕМ, нелінійності фізичних властивостей
матеріалів, ідо використовуються в конструкції, очевидно, що розв’язання
рівнянь поля в електричній машині можливо тільки чисельно при викорис-
танні потужної обчислювальної техніки. Аналітичні розв’язки рівнянь по-
ля можливі тільки при значних спрощуючих припущеннях, прийняття яких
в більшості випадків веде до істотного зниження достовірності результатів
аналізу. Такі окремі аналітичні розв’язки для величин поля в обраних еле-
ментах конструкції були отримані в класичній теорії ЕМ і використову-
ються, як правило, для визначення параметрів ЕМ. Наприклад, це задача
визначення магнітного поля у повітряному проміжку ЕМ без урахування
наявності зубців магнітопроводів статора і ротора, задача про магнітні по-
токи розсіяння у пазу магнітопровода з припущенням про нескінченно ве-
лику магнітну проникність феромагнітних матеріалів і інші задачі. В /ой
же час аналіз поля одночасно у всіх елементах активної зони практично
ніколи не виконувався зважаючи на його значну складність.
Таким чином, створення загальної теорії і методів математичного
моделювання ЕМ на основі ЛММ було об'єктивним і історично неминучим
процесом, незважаючи на очевидну початкову невідповідність властивос-
тей реальних об'єктів - електричних машин і їх моделей - електричних
схем заміщення. У даний час ситуація істотно змінилася - вже розроблені
ефективні математичні методи і комп’ютерні програми для чисельного
розв’язання рівнянь поля в складних розрахункових областях, створена ви-
сокопродуктивна обчислювальна техніка, за допомогою якої ці методи
можуть бути практично реалізовані. Це дає можливість створити нову об-
числювальну технологію і перейти до широкого практичного застосування
польових методів аналізу ЕМ.
Іншим важливим недоліком, але одночасно і достоїнством класичної
теорії ЕМ є її лінійність. Вихідним постулатом лінійної теорії електричних
машин є припущення про лінійність електромагнітних зв'язків обмоток.
Ухвалення цього постулату означає, що магнітні потокозчеплення обмоток
і// і їх струми і зв’язані прямо пропорційною залежністю. Прийняття по-
стулату про лінійність електромагнітних зв’язків в електричних машинах
дозволило при побудові теорії широко використовувати принцип суперпо-
зиції. Фундаментальні результати класичної теорії ЕМ засновані на засто-
суванні цього принципу. До числа важливих прикладів можна віднести
розкладання кривих намагнічуючих сил і магнітної індукції у повітряному
проміжку машини на гармонійні складові, використання симетричних
складових при аналізі несиметричних режимів роботи, теорію двох реакцій
якоря в синхронних машинах тощо.
У відповідності до принципу суперпозиції електромагнітне поле ма-
шини в лінійній теорії ЕМ умовно розділяється на дві основні складові -
поле взаємоіндукції і поле розсіяння обмоток. Цим двом складовим поля в
схемах заміщення відповідають певні параметри, для розрахунку яких
отримано аналітичні вирази.
10
Насправді ж електрична машина є об’єктом з істотно нелінійними
властивостями. Основними причинами, що ведуть до нелінійності характе-
ристик машини, є нелінійність кривих намагнічування феромагнітних ма-
теріалів магнітопроводів і нагрів струмонесучих елементів.
Урахування нелінійних властивостей ЕМ в рамках класичної лінійної
теорії зустрічає принципові ускладнення. Один зі способів наближеного
урахування нелінійних властивостей, який використовується на практиці
полягає у тому, що без зміни структури схеми заміщення ЕМ її параметри
приймаються залежними від показників навантаження машини, наприклад,
струмів в обмотках. Такі залежні від струмів “статичні індуктивні опори”
до певної міри відображають зміну потоку взаємоіндукції або розсіяння
контурів при зміні магнітної проникності магнітопроводу машини. І, тому,
в деяких випадках цей спосіб на практиці знайшов своє застосування. Про-
те в загальному випадку вказаний спосіб не має теоретичного обґрунтову-
вання. Можна показати, що для довільного електромагнітного стану ЕМ,
який характеризується заданими значеннями струмів в обмотках, немож-
ливо однозначно визначити сукупність залежних від струмів “статичних
параметрів” схеми заміщення, що ставить під сумнів результати такого
аналізу ЕМ [3].
Теоретично строге урахування нелінійних властивостей машини в
рамках теорії електричних кіл можливе лише при використанні “динаміч-
них параметрів” машини, якими є часткові похідні повних магнітних по-
токозчеплень обмоток за їх струмами або координатами переміщення ру-
хомої частини. Строгому розгляду і урахуванню нелінійних властивостей
ЕМ на основі “динамічних параметрів” присвячена нелінійна теорія ЕМ,
що розвивається в останні десятиріччя [48,3].
Польовий підхід до аналізу ЕМ дозволяє достатньо строго і ефектив-
но врахувати нелінійні ефекти в електричних машинах, відмовившись при
цьому від принципу суперпозиції, що підвищує достовірність результатів
моделювання.
Подальший розвиток електромеханіки, розробка ЕМ з високим вико-
ристанням активних матеріалів, створення електромеханічних перетворю-
вачів нетрадиційної конструкції, що функціонують в спеціальних режимах
роботи, вимагає підвищення достовірності їх математичного моделювання.
Резерви подальшого підвищення точності моделювання в класичній лан-
цюговій теорії ЕМ вже вичерпані. Істотне підвищення точності і достовір-
ності результатів моделювання вимагає докладного урахування складної
конфігурації активної зони машини і нелінійності фізичних властивостей
матеріалів. Таке урахування можна здійснити на базі нових польових ММ.
Тому розробка методів польового аналізу ЕМ, застосування цих методів
для вирішення практичних задач є актуальним напрямом розвитку теорії і
практики елскіричних машин.
Польовий підхід дозволяє аналізувати як сталі, так і динамічні режи-
ми роботи ЕМ.
11
При дослідженні сталих режимів роботи інтегральні електромагнітні
параметри і робочі характеристики ЕМ можна безпосередньо знайти за ре-
зультатами розрахунку їх електромагнітного поля. Цс обумовлено тим, що
в сталих режимах струми в обмотках у часі не змінюють своїх значень (або
змінюють їх по відомому, наїтриклад, гармонійному закону). Тому джерела
поля - густина струмів в пазах з провідниками обмоток, є відомими напе-
ред заданими величинами.
При дослідженні перехідних процесів і динамічних режимів роботи
ЕМ струми в обмотках є невідомими функціями часу, а заданими слід вва-
жати електричні напруги, що прикладені до обмоток ЕМ. Тому аналіз та-
ких режимів необхідно виконувати на основі коло — польових ММ(КПММ),
які передбачають сумісне розв’язання диференціальних рівнянь електрич-
них кіл обмоток і рівнянь нестаціонарного електромагнітного поля в акти-
вній зоні ЕМ [3]. Невідомими функціями часу в КПММ є сукупність стру-
мів обмоток і значень польової функції у вузлах розрахункової сітки, що
покриває активну зону машини. При розгляді електромеханічних процесів
до системи рівнянь поля і електричних кіл додасться сукупність рівнянь
для невідомих функцій, що характеризують стан механічної системи —
швидкостей руху і координат переміщення рухомих частин ЕМ.
При електромеханічному перетворенні енергії в електричній машині
виникає єдине силове фізичне поле, окремими складовими якого є поля
електромагнітних, теплових і механічних величин. Аналіз ряду явищ і ефе-
ктів в машині потрібно виконувати з урахуванням взаємного впливу окре-
мих складових. Наприклад, нагрівання струмонесучих елементів змінює
розподіл в них струмів і втрат, що у свою чергу впливає на розподіл тем-
ператури в ЕМ. Нагрівання елементів конструкції веде до їх деформації і
зміни конфігурації активної зони і, як результат, до зміни розподілу елект-
ромагнітного поля і ін. Безумовно, необхідність і доцільність сумісного
аналізу взаємозв'язаних полів різної фізичної природи в ЕМ необхідно об-
грунтовувати у кожному конкретному випадку окремо з урахуванням осо-
бливостей явищ і процесів, що розглядаються. Як правило, така необхід-
ність виникає при аналізі динамічних процесів, що супроводжуються шви-
дкою зміною розподілу струмів, втрат і температури в елементах констру-
кції ЕМ.
Книга містить чотири розділи.
В першому розділі дано теоретичні основи аналізу електромагнітних
і теплових полів в електричних машинах. Сформульовано диференційні
рівняння поля для лінійних, нелінійних і анізотропних середовищ, приве-
дено короткий огляд математичних методів розв’язання задач поля і мето-
дів візуалізації розрахункових картин поля на екрані монітору ПК.
Центральне місце в книзі займає другий розділ, в якому обґрунтовано
методи, методики і алгоритми розрахункового визначення інтегральних
параметрів і характеристик електричних машин різного типу методами те-
орії електромагнітного поля.
12
В третьому розділі розглянуто окремі питання аналізу взаємозв'яза-
них електромагнітних і теплових полів електричних машин, та вплив тако-
го зв’язку на характеристики машини.
В четвертому розділі розглянуто проблему аналізу динамічних ре-
жимів електричних машин па основі коло - польових математичних моде-
лей і методів.
Приведені в книзі методи і алгоритми сформульовано для загального
випадку, який є справедливим для полів будь якої вимірності. Але наведені
в книзі приклади чисельної реалізації запропонованих методів демонстру-
ються для випадку двовимірного електромагнітного поля ЕМ. З одного бо-
ку обґрунтований і вдало виконаний двовимірний польовий аналіз дає хо-
роші практичні результати, з другого боку аналіз тривимірного поля ЕМ в
більшості випадків поки що представляє складну обчислювальну проблему
і, тому, на практиці він виконується лише для окремих найважливіших і
відповідальних досліджень.
Для практичного застосування методів польового аналізу ЕМ потрі-
бне виконання ряду умов:
1) наявність високопродуктивної обчислювальної техніки;
2) наявність зручного у використанні програмного забезпечення, гцо реалі-
зовує чисельні методи розрахунку поля;
3) наявність науково - методичного забезпечення у вигляді теоретично об-
ґрунтованих методів, методик і розрахункових алгоритмів для польового
аналізу параметрів і характеристик ЕМ.
У даний час основні умови для використання польового аналізу в на-
укових дослідженнях і інженерних розробках вже створені. Разом з тим
науково - методичної літератури, в якій би була обґрунтована, впорядко-
вана і систематизована ідеологія польового аналізу ЕМ, опубліковано дуже
мало. Подальший розвиток польового аналізу вимагає не тільки системно-
і о підходу при його теоретичному обґрунтовуванні, але і підготовки ква-
ліфікованих фахівців - електромеханіків, добре знайомих з конструкцією,
методами розрахунку і проектування ЕМ, і досконало володіючих сучас-
ними комп'ютерними технологіями.
В книзі наведено багато прикладів польового аналізу електричних
машин різного типу, отриманих автором при проведенні досліджень. Ос-
новні приведені в книзі результати отримано за допомогою пакету прикла-
дних програм ГЕМЬАВ різних версій, що реалізує розрахунок фізичних
полів методом скінченних елементів (МСЕ) і надає користувачу повний
набір процесорних функцій, необхідних для польових розрахунків ЕМ.
При викладі матеріалу книжки передбачається, що читач у цілому знайо-
мий з теоретичними основами і практичним застосуванням МСЕ, оскільки
цей метод широко використовується фахівцями - електромеханіками в до-
слідженнях та розробках електричних машин.
Безумовно, автор з вдячністю прийме зауваження і побажання фахів-
ців щодо поліпшення і подальшого розвитку змісту пропонованої книжки.
13
1. АНАЛІЗ ЕЛЕКТРОМАГНІТНИХ І ТЕПЛОВИХ ПОЛІВ В
ЕЛЕКТРИЧНИХ МАШИНАХ
1.1. Рівняння електромагнітного поля, постановка крайових задач
1.1.1. Рівняння електромагнітного поля для матеріальних сере-
довиїц з незмінними фізичними характеристиками. Теоретичною базою
для математичного моделювання електромагнітних полів в природі є зна-
мениті рівняння поля, сформульовані Дж. Максвелом в 1873 р. Рівняння
Максвела встановлюють взаємозв'язок між векторними польовими функці-
ями, характеристиками джерел поля і фізичними параметрами матеріаль-
них середовищ. У сучасній формі запису ці рівняння мають наступний ви-
гляд:
гоіН -3 (1.1)
гоіЕ = -дВ/ді (1-2)
сіїуВ = ії (1.3)
сііуЕ = р (1-4)
В = рН,15 = ЕЕ (1-5)
= /Е + + /(V х В) + уЕстор + Р^р + ГОІ(Р XV). (1.6)
В наведеній системі рівнянь позначено: польові функції — вектори напру-
женості магнітного Н і електричного Е полів, вектор магнітної індукції
В і вектор електричного зміщення £>; коефіцієнти, що характеризують
фізичні властивості матеріальних середовищ — магнітна проникність р,
електропровідність /, діелектрична проникність £ , густина електричних
зарядів р. Вираз (1.6) дозволяє знайти густину струмів .1, обумовлену су-
мою доданків різної фізичної природи. Доданок уЕ визначає індуковану
густину струму в електропровідному середовищі, доданок дІУ/ді- густину
струму діелектричного зміщення, доданок /(ух В) визначає “конвектив-
ну складову” густини струму, що обумовлена рухом електропровідного
середовища зі швидкістю V відносно магнітного поля з індукцією В.
14
Доданок Зстор = уЕстор визначає густину струму, яка викликана сто-
ронніми ЕРС, доданок рм„ характеризує густину струмів перенесення ві-
льних зарядів, а доданок го/(£>хі') - “конвективну складову” густини
струму, що обумовлена рухом поляризованого діелектрика.
В загальному випадку будь-яка польова функція є векторною функ-
цією, і кожна її складова залежить від чотирьох незалежних змінних —
трьох просторових координат точки і часу. Наприклад, в декартових коор-
динатах для вектора напруженості магнітного поля є справедливим насту-
пний запис:
н — ехЕІХ(х,у,г,ї) + еуЕІу(х,у,г,і) + егЕІ2(х,у,г,і). (1.7)
При запису системи рівнянь (1.1) - (1.6) і при її подальших математичних
перетвореннях припускаємо, що коефіцієнти, які характеризують фізичні
властивості матеріальних середовищ, не залежать від значень польових
функцій.
Використовуючи сучасну термінологію, систему рівнянь Максвела
слід вважати узагальненою математичною моделлю електромагнітних
явищ, що відбуваються у природі. Узагальненість ММ Максвела полягає в
тому, що вона описує електромагнітні явища в будь-якому довільному
об’єкті природного або антропогенного походження незалежно від його
конструкції і парамеїрів. Електромагнітні явища в технічних об'єктах ан-
тропогенного походження протікають у відповідності до функціонального
призначення цих об’єктів з різними часовими і просторовими характерис-
тиками. Наприклад, польові функції в одних об’єктах можуть у часі зміню-
ватися дуже швидко, а в інших - повільно або взагалі залишатися незмін-
ними, у ряді об’єктів відсутні електропровідні середовища або їх віднос-
ний рух і т.д. Для кожного з таких випадків повна система рівнянь Макс-
вела, як правило, може бути перегворена до більш простого вигляду з ура-
хуванням особливостей конструкції об’єкту та характеристик електромаг-
нітного процесу, що аналізується.
Основні припущення. При аналізі електромагнітних полів в елект-
ромеханічних перетворювачах енергії антропогенного походження - елек-
тричних машинах приймають наступні характерні для їх конструкцій при-
пущення.
1. Відсутні струми діелектричного зміщення б£>/ді - 0. В характерному
для ЕМ діапазоні робочих частот (0 ... 2000) Гц відношення струму змі-
щення до струму електропровідності в електропровідному середовищі до-
рівнює (для величин, що гармонійно змінюються у часі Е = Ее}аі)
15
дВ/ді _ єдЕ/ді _ . соє
уЕ уЕ у
Наприклад, для заліза, що має електропровідність у = 1,11 107 (1/Ом ' м)
Е = £0 = 8.85'10'12 (Кл/В м) при частоті 2000 Гц це відношення дорів-
нює 10 ’14 (А) ! В не електропровідному середовищі величина струму змі-
щення при тій же частоті дорівнює 5,56 ' Е 10’8 (А). Таким чином, в діапа-
зоні частот електромагнітних величин, який є характерним для функціону-
вання ЕМ, струмами зміщення можна повністю нехтувати.
2. Відсутні складові струмів перенесення р\?р — 0 і струмів, обумовлених
рухом поляризованого діелектрика гоі(В X у) = 0. Струми такої фізичної
природи в ЕМ не виникають.
3. В активних елементах ЕМ індукційного типу не виникають концентра-
ції нерухомих в просторі і незмінних в часі вільних електричних зарядів.
4. Відсутні струми електропровідності в шихтованих магнітопроводах ЕМ
і в інших електропровідних елементах, конструкція яких перешкоджає ві-
льному протіканню струмів. Вважається, що вихрові струми в листах ших-
тованих магнітопроводів не впливають на характер розподілу поля в акти-
вній зоні машини, а їх дія враховується тільки при розрахунку втрат і ККД.
5. Нехтується неоднорідністю фізичних властивостей в об’ємі активних
матеріалів, за винятком випадків анізотропних властивостей.
6. Нехтується явищем гістерезису у феромагнітних магніте м’яких матері-
алах за винятком випадків, коли це явище досліджується окремо. Втрати
потужності в магнітопроводі па гістерезис враховуються по емпіричних
формулах.
При розгляді конкретних задач можуть бути зроблені і інші припу-
щення, наприклад, які стосуються геометрії досліджуваного об’єкту, ура-
хуванню або не урахуванню кривизни поверхонь, урахуванню впливу не-
лінійності фізичних властивостей матеріальних середовищ і ряд інших
припущень. Обгрунтовування і формулювання припущень є дуже важли-
вим етапом розв’язання задачі, який забезпечує рівень достовірності ре-
зультатів математичного моделювання.
Рівняння Максвела можугь бути перетворені до диференціального
рівняння в часткових похідних щодо однієї з визначальних польових фун-
кцій — Н , Е, векторного магнітного потенціалу А тощо.
Диференціальні рівняння поля в часткових похідних. З рівнянь
Максвела озримаємо диференціальні рівняння в часткових похідних відно-
сно різних польових функцій і проведемо їх порівняльний аналіз [14].
Рівняння для функції Н. Виконаємо над рівнянням (1.1) диференці-
альну операцію гої:
16
гоігоіН =гоіЗ (1.8)
Згідно до правил векторного аналізу справедливою є тотожність
гоігоіН — ^гсісі (ііуН — ЛН,
де Д- оператор Лапласа. З виразів (1.3) і (1.5) витікає сііуН — 0 і рівнян-
ня (1.8) приймає більш простий вигляд:
- ЕН = гоі.1. (1.9)
Далі з виразу (1.6) при урахуванні рівнянь (1.2), (1.5) і на підставі
прийнятих припущень отримаємо:
, __________ .
гоМ = угоіЕ + угоі{у х В) + гоі(.ІстОр ) = -ДУ+ 7Р гоі(у х II) + гоі^стор
сі
(1-Ю)
Підставляючи вираз (1-Ю) в рівняння (1.9), отримаємо остаточно ди-
ференціальне рівняння в часткових похідних для функції Н в нас тупному
вигляді:
__ зн _
Д Н - Ду----+ Д/ ГОІ(у X Н) = -ГОІІДстор ) • (1-11)
сі
Рівняння для функції Е. Виконуючи над другим рівнянням Максвс-
ла (1.2) векторну операцію гоі і враховуючи рівняння (1.1) і (1.3), отри-
маємо наступний вираз:
— 0 — 8Е 8(ухВ) дф стоп
гоігоіЕ =— д—гоіН = - ду - ду-----------д------— =
ді ді 8і сі
=~ВУ^~-ВУ^хгоіЕ^іі~^. (1.12)
оі 8і
Аналогічно у відповідності до правил векторного аналізу маємо
гоігоіЕ - %гасІ сііл>Е - ЕЕ.
Величина сііл? Е відмінна від нуля тільки за наявності в даній облас-
ті вільних електричних зарядів, що є нехарактерним для електричних ма-
шин індукційного типу (припущення №3). Тому можемо прийняти, що
17
сіі\' Е = 0, гоігоіЕ — -ЕЕ і остаточно для функції Е отримаємо наступ-
не диференціальне рівняння в часткових похідних:
ДЕ-//у^--і-//у(гхгоґЕ) = //^^^?-. (1-13)
ді ді
Рівняння для функції А. В теорії електромагнітного поля широко ви-
користовується векторний магнітний потенціал А, який вводиться за до-
помогою наступного співвідношення
гоіА = В. (1.14)
Диференціюючи рівняння (1.14) за часом і враховуючи рівняння (1.2)
отримаємо
8А — дА —
гоі---— -гоїЕ або гоі(. — + Е) = 0. (1.15)
ді ді
~ . /і .о . • „ ЗЛ . -
З рівнянь (1.15) витікає, що значення двох функцій — і Е мо-
ді
жуть відрізнятися одне від одного тільки на деяку постійну незалежну від
координат величину. Враховуючи векторну тотожність гоі ргасіф — 0,
цю величину можна представити у вигляді градієнта деякої скалярної фун-
кції ф, яка називається скалярним електричним потенціалом поля. Тому
можна записати наступний вираз:
— ЗА ,
Е = -—-^гаа<р. (1.16)
Аналогічно попереднім випадкам візьмемо операцію гоі над рів-
нянням (1.14). При цьому, враховуючи співвідношення (1.16), отримаємо
наступне рівняння:
ГОІГОІА = Ц-уЕ + Ц-у{у X В) + /иФспюр =
ЗА - (1-17)
= ~ВУу-~ В? Ягасіф + ру(у х гоі А) + цФ епюр
ОІ
Оскільки за правилами векторного аналізу гоІгоіА = укасі сііуА — ЛД, то
рівняння (1.17) переписується в наступному вигляді:
— ЗА - — - -
ЛЛ ~ ВУ — - ВУ £гскі(р + /ну (у х гоі А)- руасі сІЕ А = -в^тор (1.18)
18
Виконуючи операцію сііу над (1.16) з урахуванням рівняним (1.4), <>і ріша-
ємо ще одне визначальне рівняння:
сііувгасіф + - Р або Д^>+—(1іуА = (1.19)
ді £ ді £
Таким чином, система двох взаємозв'язаних рівнянь (1.18), (1.19)
щодо функцій векторного магнітного А і скалярного електричного <р по-
тенціалів однозначно описує електромагнітне поле.
Розглядаючи найбільш поширені ЕМ індукційного іипа можна зро
бити припущення, що постійні складові електричного поля в таких маши-
нах не мають практичного інтересу, оскільки фізичних процесів в ЕМ нони
не викликають. При цьому, використовуючи припущення про відсутність в
активній зоні ЕМ індукційного типу концентрацій нерухомих у нросіорі і
незмінних у часі вільних електричних зарядів, приймемо р = 0 і <р - 0. В
результаті з рівняння (1.19) витікає додаткова умова (умова калібрування),
яку можна накласти на векторний магнітний потенціал:
сііуА-О. (1.20)
При цій умові для опису електромагнітного поля дост атньо викорис-
товувати тільки один векторний магнітний потенціал. З урахуванням умо-
ви (1.20) остаточно рівняння для векторного магнітного потенціалу запи-
шеться в наступному вигляді:
— дА — —
А А - ру— + РУ (V X ГОІА) = ~ рЗ стор - (1.21)
ді
З трьох отриманих рівнянь (1.11), (1.13) і (1.21) найпростішим для
розв’язання є рівняння (1.21), записане відносно векторного магнітного
потенціалу. Дійсно, ліві частини всіх рівнянь практично ідентичні, проте
найпростішу праву частину має рівняння (1.21). У цьому рівнянні густина
струмів сторонніх джерел входить в праву частину безпосередньо, тоді як
в правих частинах рівнянь (1.11) і (1.13) над 7Стор необхідно виконати
диференціальні операції. Тому за інших рівних умов використання вектор-
ного магнітного потенціалу як визначальної польової функції виявляється
більш доцільним.
Однією з принципових переваг векторного числення є тс, що отри-
мані векторні рівняння визначають властивості, що є характерними для
всіх електромагнітних полів і сформульовані ці рівняння безвідносно до
будь-якої конкретної системи координат.
Електромагнітні поля, для опису яких використовуються векторні
функції типу (1.7), називають тривимірними нестаціонарними полями.
19
Якщо вектори поля не змінюються в часі, то поле називають тривимірним
стаціонарним полем. Такі поля виникають, наприклад, при протіканні по
обмотках незмінних у часі (постійних) струмів. Розрахунковою областю
для тривимірних полів є об’ємна фігура, що відображає конфігурацію і
конструкцію об’єкту.
На практиці розрахунок тривимірних полів пов’язаний із значною
трудомісткістю обчислювальних процедур, оскільки при цьому у вибраній
просторовій системі координат необхідно розраховувати розподіл усіх
трьох проекцій векторів поля, кожна з яких у загальному випадку може
бути складною функцією чотирьох незалежних змінних - трьох просторо-
вих координат точки і часу. Наприклад, в декартових координатах одне
векторне рівняння (1.19) розпадається на три взаємно пов’язані скалярні
рівняння відносно проекцій векторного магнітного потенціалу:
, л 8Ах
от
х
к дх
/^хстор
дА
ді
& > х дх ду у
ЛИ 8А2
а4 у |Х
дх дх у д ду
гстор
^-^^(1-22)
де А = ехАх(х,у,г,і} + еуАу(х,у,х,1} + егА2.(х,у,г,1). З системи рів-
нянь (1.22) виходить, що у загальному випадку всі три проекції векторного
потенціалу є взаємозалежними. Аналогічні системи рівнянь можна отри-
мати в циліндричній та сферичній системах координат.
Двовимірні поля. У ряді випадків достатню інформацію щодо розпо-
ділу електромагнітного поля в конструкції вдається отримати за допомо-
гою двовимірних моделей поля, практична реалізація яких вимагає істотно
менших витрат. В цих моделях, по-перше, всі вектори поля залежать тільки
від двох просторових координат і, по-друге, кожний з векторів має або
тільки одну або дві просторові складові. Наприклад, вектор магнітної інду-
кції в декартових координатах в таких задачах можна записати в наступ-
ному вигляді:
5 = ехВх(х, у,і) + еуВу(х,у,і). (1.23)
Такі електромагнітні поля називають двовимірними полями, а розрахунко-
вою областю для аналізу поля є плоска фігура.
20
Найбільша ефективність від використання векторного магнії ноі о по-
тенціалу/! досягається при розв’язанні двовимірних польових задач з іа-
кою орієнтацією системи координат, при якій струми обмоток направлені
уздовж однієї з її осей. До таких задач відноситься, наприклад, клас задач
щодо аналізу поля у поперечному перетині активної зони елекіричної ма-
шини
Осі X і у декартової системи координат при розв’язанні таких задач
розміщують в поперечному перетині активної зони машини, а вісь ~ на-
правляю і ь уздовж її подовжньої осі (рис. 1.1).
Рис. 1.1 Орієнтація декартової системи коордипаї
в поперечному перетині ЕМ
При вибраній орієнтації системи координат струми обмоюк проті-
кають тільки уздовж осі 2: Аст,р = :Стг>р- Векторний магніїпиіі поте-
нціал, як випливає з рівняння (1.19), також має одну просторову (осьову)
складову
А(х,у,() = егАг(х,у,1),
(1.24)
а векторне рівняння (1.21) перетворюється на аналогічне за написом скаля-
рне рівняння для однієї проекції потенціалу.
В декартових координатах для нерухомих середовищ (при умові, що
швидкість руху г = 0) з третього рівняння системи (1.22) оіриматмо на-
ступне рівняння:
82А д2Аг дА.
—т~ + —г- ~ НУ ’
2 стир *
(1.25)
Не зважаючи на те, що для опису електромашиною поия в цьому
випадку потрібна тільки одна проекція векторною маїпіпюю потенціалу,
проте, таке поле є двомірним, оскільки для опису вектор» магніїпої індук-
ції в поперечному перетині необхідно мати дві йоі о проекції. І (с леї ко ба
чити із загального виразу (1.14), що зв’язує векторний магнітний поіенціал
21
і магнітну індукцію. В дскартових координатах вираз (1.14) переписується
у наступному вигляді:
В = ехВх + е, Ву + <?. Д,
ЗА ) -(дАх дАЛ -(ЗА
дг ) \ & дх ) дх
а/И
Зу )
Оскільки Ах = Аг =0, то звідси слідують прості вирази, що дозволяють
розрахувати складові вектора магнітної індукції за відомими значеннями
векторного магнітного потенціалу:
Вх = дА21 Вг = - <54, / <5с.
(1.26)
За наявності рухомих електропровідних середовищ важливе значен-
ня має напрям вектора швидкості руху. В електромеханіці часто зустріча-
ються задачі, в яких вектор швидкості рухомої частини об'єкту має тільки
дві складові, що направлені, наприклад, уздовж осей X і у
'' = єх''х+еу'’у
(1.27)
При цьому рівняння приймає наступний вигляд:
д2А, д2А,
дх2 ду"
алг ґ
-ВГ---ВУ у
Зі і
64
дх
(1-28)
Для стаціонарних двовимірних електромагнітних полів або для не
електропровідних середовищ (у = 0) з (1.26) маємо рівняння Пуассона
з24 а24
дх2 ду"
(1.29)
Таким рівнянням описується магнітне поле не тільки в неелектроп-
ровідних середовищах, але і в шихтованих магнітопроводах електротехні-
чних пристроїв (припущення №4), для яких можна також умовно прийняти
у = 0.
Для розрахунку густини струму, індукованої в електропровідному
середовищі, на підставі першого рівняння Максвела (1.1) може бути отри-
маний наступний вираз:
дВ^
Зу >
/л( дх
(і.зо)
22
Аналогічні рівняння можна записати і в інших системах координат.
Наприклад, рівняння для двовимірного вісь - симетричного (не залежного
від кутової координати) поля в циліндричних координатах {ег,е2,ер}
відносно єдиної азимутальної проекції Ар при нерухомих середовищах
має вигляд
д2А ]дА д2Ар дАр _
я 2 + д д 2 стор
дг Г ОГ 02 ді
(1-31)
В електромеханіці часто зустрічається інший клас задач, які можуть
бути розв’язані у двовимірному наближенні при орієнтації уздовж осі г
однієї найхарактернішої складової магнітної індукції. І (е, як правило, зада-
чі про розтікання індукованих вихрових струмів в масивній електропрові-
дній деталі при падінні на неї магнітного потоку, орієнтованого уздовж
вектора нормалі до поверхні. Диференціальне нестаціонарне рівняння, що
описує електромагнітне поле в цьому випадку, формулюється щодо аксіа-
льної (направленої уздовж вектора нормалі до поверхні) складової магніт-
ної індукції і має наступний вигляд:
02В2 д2Вг 8В,
дх2 ду2 ді
0.
(1-32)
Під дією нестаціонарного магнітного потоку в електропровідному
середовищі індукуються вихрові струми, які у відповідності до рівняння
(1.1) мають дві просторові складові:
ЦЮ, .• =
// ду’ у /л дх
(1-33)
До числа польових задач, які розв’язуються за допомогою формулювання
(1.32) - (1.33), відносяться задачі розрахунку вихрових струмів у клинах і
коронках зубців електричних машин з масивними роторами, аналіз розпо-
ділу струмів в масивних полюсних наконечниках синхронних машин, в ма-
сивних витках силових індукторів тощо.
Умови сполучення. Розрахункові області,, що відображають реальні
об’єкти, складаються з сукупності окремих підобластей, які мають різні
фізичні характеристики. Іншими словами область інтегрування представ-
лених вище диференціальних рівнянь має кусковий (багатозв’язаний) ха-
рактер. На межі розділу двох підобластей 1 і 2 з різними значеннями маг-
нітної проникності і //2 повинні виконуватися наступні умови сполу-
чення векторів магнітного поля:
23
1) рівність нормальних складових магнітної індукції:
Вп\ - ^п2 і
(1-34)
2) рівність дотичних (тангенціальних) складових напруженості магнітно-
го поля (за відсутності поверхневих струмів на межі):
Яг1=Яг2 або =
Аі Аг
(1-35)
На межі розділу двох підобластей з різними значеннями електропро-
відності у повинні виконуватися наступні умови сполучення векторів еле-
ктричного поля:
3) рівність дотичних (тангенціальних) складових напруженості електрич-
ного поля:
^т\ ~ ^г2 ’
(1.36)
4) рівність нормальних складових густини струму
^гі\ ~^п2-
(1-37)
Виконання умов (1-34) - (1.37) забезпечує дотримання фізичних за-
конів і принципів безперервності па межах розділу середовищ з різними
фізичними властивостями. Методи розв’язання рівнянь поля в складній
області повинні передбачати автоматичне дотримання умов сполучення
векторів електромагнітного поля (1.34) - (1.37).
Граничні і початкові умови. Диференціальне рівняння в часткових
похідних формулюється в межах деякої розрахункової області, що відо-
бражає конструкцію ЕМ. Розрахункова область містить сукупність основ-
них конструктивних елементів - обмотки із струмами, магнітопроводи,
розділені повітряними проміжками, намагнічені середовища (постійні маг-
ніти). У ряді випадків розглядається не вся область машини, а її частина,
відповідна періоду зміни поля. Оскільки поле в решті частин конструкції
має аналогічний розподіл, то результати розрахунку поля на одному пері-
оді можна розповсюдити на всю машину. Це дає можливість без втрати
інформації заощадити обчислювальні ресурси і підвищити швидкість ком-
п’ютерного розрахунку. При аналізі двовимірних полів розрахунковою об-
ластю є плоска фігура, відповідна характерному перетину (поперечному
або подовжньому) активної зони ЕМ.
Для отримання однозначного розв’язку на межах розрахункової об-
ласті необхідно задати граничні умови.
24
В задачах електромагнетизму зустрічанії вся іраіінчні умови ірьох
типів:
1. Граничні умови першого роду - відомі значення іюльоіюї функції
Р(х,у,г,і) на межі області Ср
Р(х,у,2,і)\О] = Г}(х,у,г,і), {х,}’,2)є6’|. (І.ЗК)
Дуже часто при аналізі полів в електричних машинах з цикорнеіан-
ням векторного магнітного потенціалу задаюіься однорідні іріііііічпі умо-
ви першого роду:
Л(х,3>,2,0|О) = 0, и,^7}є0’| (1.ІЧ)
Завдання граничної умови (1.39) означає прийняття припущення про ві д-
сутність магнітних потоків, що проходять через виділену межу О) розра-
хункової області. Як правило, таким межам відповіданії ь зовнішні і ранній
ярем осердь статора і ротора. Це легко показати на прикладі двовимірних
полів у декартових координатах ОХУ. Нехай межею обласі і, на якій задана
умова (1.39), є пряма лінія, що паралельна осі ОХ. Оскільки значення по-
тенціалу на лінії задано незмінним (зокрема, рівним нулю), то відновідно
до виразів (1.24) складова магнітної індукції В\ = — г’І./гЗ 0 на межі
дорівнює нулю, тобто орієнтований уздовж вектора нормалі до межі (по
осі О¥) магнітний потік є відсутнім. Магнітний потік може розповсюджу-
ватися тільки уздовж дотичної до даної межі.
2. Граничні умови другого роду відомі значення нормальної похідної
польової функції на межі області С2 -
д Р(х,у,2,Г)/дп\Оі = Р2(х,у,х,і), {х,у,г} е(.х2 (1.40)
При аналізі полів за допомогою векторного магнітного потенціалу часі о
задають однорідні граничні умови другого роду:
аЛ(х,у,7,0/5и|О2 = 0 {х,у,г}єС2 (1.41)
Завдання граничної умови (1.41) означає прийняття припущення про іе,
що магнітний потік може перетинати межу тільки уздовж вектора нормалі
до межі. Якщо, як і у попередньому випадку, межею двовимірної області є
паралельна осі ОХ пряма лінія, то при завданні на ній умови (1.41) отрима-
ємо В* = <24,/^ = 0. Це означає, що магнітний потік не має складової,
направленої уздовж дотичної до межі, а є орієнтованим тільки уздовж но-
рмалі до неї (уздовж осі О¥).
25
3. Умови періодичності. Ці умови задаються у тих випадках, коли наперед
відомо, що розподіл поля періодично повторюється уздовж вибраного на-
пряму в розрахунковій області. Умови періодичності задаються на двох
межах розрахункової області С3 і С3. про які відоме лише те, що значен-
ня польової функції на них мають однакові значення (з точністю до знака).
Застосовуються два варіанти умов періодичності:
Р(х,у,г,і) |Оз = Р(х,у,2,1) |с- або Р(х,у,2,і) |Оч = -Р(х, у,г,і) |с..
(1.42)
Перший варіант використовується в тих випадках, коли за розрахун-
кову область вибрано повний період зміни поля. Другий варіант викорис-
товується в тих випадках, коли для розв’язання задачі можна обмежитися
напівперіодом. В цьому варіанті значення функції на межах С3 і С3 відрі-
зняються лише знаком. Використання умов (1.42) дозволяє істотно змен-
шити розміри розрахункової області без втрати корисної інформації щодо
розподілу поля. Так, наприклад, аналіз поля в ЕМ з числом полюсів, що
дорівнює двом, можна виконати в межах однієї чверті плоші повного по-
перечного перерізу машини. Це дозволяє у чотири рази зменшити об’єм
пам’яті ПЕОМ, необхідний для зберігання масивів даних, а також процесо-
рний час на їх обробку. Ще більшу економію обчислювальних ресурсів
можна отримати при аналізі багатополюсних машин.
При розв’язання нестаціонарних польових рівнянь необхідно задати
початкові умови - значення польової функції усередині області в початко-
вий розрахунковий момент часу /0:
А(х,у,2,і)\^1а= А^{х,у,2,і^. (1.43)
Диференціальне рівняння у часткових похідних щодо польової функції в
межах розрахункової області спільно з граничними і початковими умовами
формує крайову задачу теорії поля [41]. Математичне розв’язання сформу-
льованої крайової задачі є основою для змістовного аналізу характеристик
елекгромагнітного поля ЕМ.
Вплив скалярного електричного потенціалу. В електричних маши-
нах індукційного типу зустрічається клас задач, для яких прийняте вище
припущення про відсутність концентрацій вільних електричних зарядів в
активній зоні є несправедливим. Концентрації електричних зарядів можуть
виникати, наприклад, на межах розділу двох електропровідних середовищ
з різними значеннями електропровідності (уІ /2) при проз іканні елект-
ричного струму через межу розділу. Цей ефект виявляється при істотній
відмінності фізичних характеристик провідників - різною концентрацією в
28
/7 -г
е}А-е2а- д(
дВ лг,"
— ?М> МІІ м
дґ 1л г,
Тоді на підставі виразу (1.16) можна визначнім складних іііінружіш» піп ічрн
чного поля, яка обумовлена появою градієніа скалярної о спскіріїчііоні іюніїїн
алу:
(§гасІ<р)\ - ~(^гасІ(р}2 = Е}А - £’| = । - /' ) ”'<і *ч ’ІІмПч
Безумовно, такий істотний вплив ірадіїїна скалярної< шш іініп їх нон и
заний з великою відмінністю електропровідності двох нініріпіп - ярові ціним їх
електропровідності відрізняються В 12.3 ріпи В більш рГЦіЦ.ІІІІХ І III ІОНИ ІруКЦІІІ
електричних машин поєднаннях провідників іішу "мідь сніть іти ііноміїїііі
сталь" їх електропровідності відрізняються НІДІІОШ що II < 1 І і І ринв
При цьому вплив градієнта електричного поіспціаїх імі ншуі п.і я в в з ряді
випадків ЙОГО ВПЛИВ може залишишся ІСГОІНИМ ІОМІ ОІІ1ІІОЧІІІІ НІН І ІІІоІІІіІІ
задачі і вибір системи визначальних функцій поли іінивнєіі нрипо нпів я їв
тільки з урахуванням виявлених особливосіен нроіііиііііін і|и пічних ііроїв < ні 1і.
й з урахуванням чисельних значень параметрів серсдпмпн
Урахування різних осьових довжин діїяноь ніі.-іііпинір<нчн>і е іск
тричноїмашини при двовимірному польовому ана їїч. V рц ц | М ціпки
ни ділянок магнітопроводу в осьовому напрямі по коїв і рутинним мірі.у
ванням виконуються різними. Наприклад, в деяких пінах ноіужннх іии»
вих двигунів постійного струму довжини м;п НІ ІОІіроІЮІіу якоря Оіср II.
головних і додаткових полюсів, а іакож ярма сііптір і в нпно (ті
30% і більше) відрізняються ОДИН ПІД ОДНОЮ ІНШИМ НріІИ І І Цім МОКУІІ.
служити конструкції потужних турбоїенераіорів ( II ) Як нрпіні ці, іюііііп
конструктивна довжина осердь сіаіора і роїорп в II пнінірім іі.і н о ні.іко
вою. Проте на відміну від суцільної о магніїоііроиоду м.ц ннііоі п роїор.і
осердя статора виконується шихтованим і екпал.п п.і я і окремих ііііксі ні
відокремлених один від одною ріідішіьніїмп ІІСІІІІПІІНІІІІННМН К.ІІІІІ ГІМН
Тому реальне заповнення фером.н ін і ним матеріалом іниіііиі ніні.ііпн іііих
тованого осердя статора ГЕ, що пакеїуі іьєя. менше ніж у мініншою рою
ра. Цю обставину можна ротілядаїи, як відміннії н. ,ік іііііііпх лонкип і пі
тора і ротора. При цьому, основний м.п ні інші ііоіік, перехо іичи 1і1 із юри
в ротор і навпаки, зміїної спою густину, причому ни лніянкіїх мш ні іопро
воду з меншою активною довжиною індукція мш (н іьпп иьічіііпв
Строге урахування впливу різних довжин ділянок мін нііиііріпіо їх
ЕМ можна виконати при тривимірному польовому іііілпні При двиїїіімір
йому аналізі поля ЕМ (в поперечному ііереііпп) м.іипіні ні іуііцін іігіс
жить тільки від радіальних і кутових розмірів конструкції і не піп кип. ш і
її аксіальних розмірів. Тому для забезпечення необхідної нч іінирної и
розрахункових результатів при двовимірному польовому іішпіі н । п кірнч
НИХ МаШИН 3 РІЗНИМИ ДОВЖИНИ ОКреМИХ ДІЛЯНОК МДіНІТОІірпІіОДу .................
проводити спеціальне урахування відзначеної віііпе оїц і.івііііи
29
Для приблизного урахування різних довжин ділянок магнітопроводу
при двовимірному аналізі електромагнітних полів, професор В. І. Милих
запропонував наступний метод [28,29].
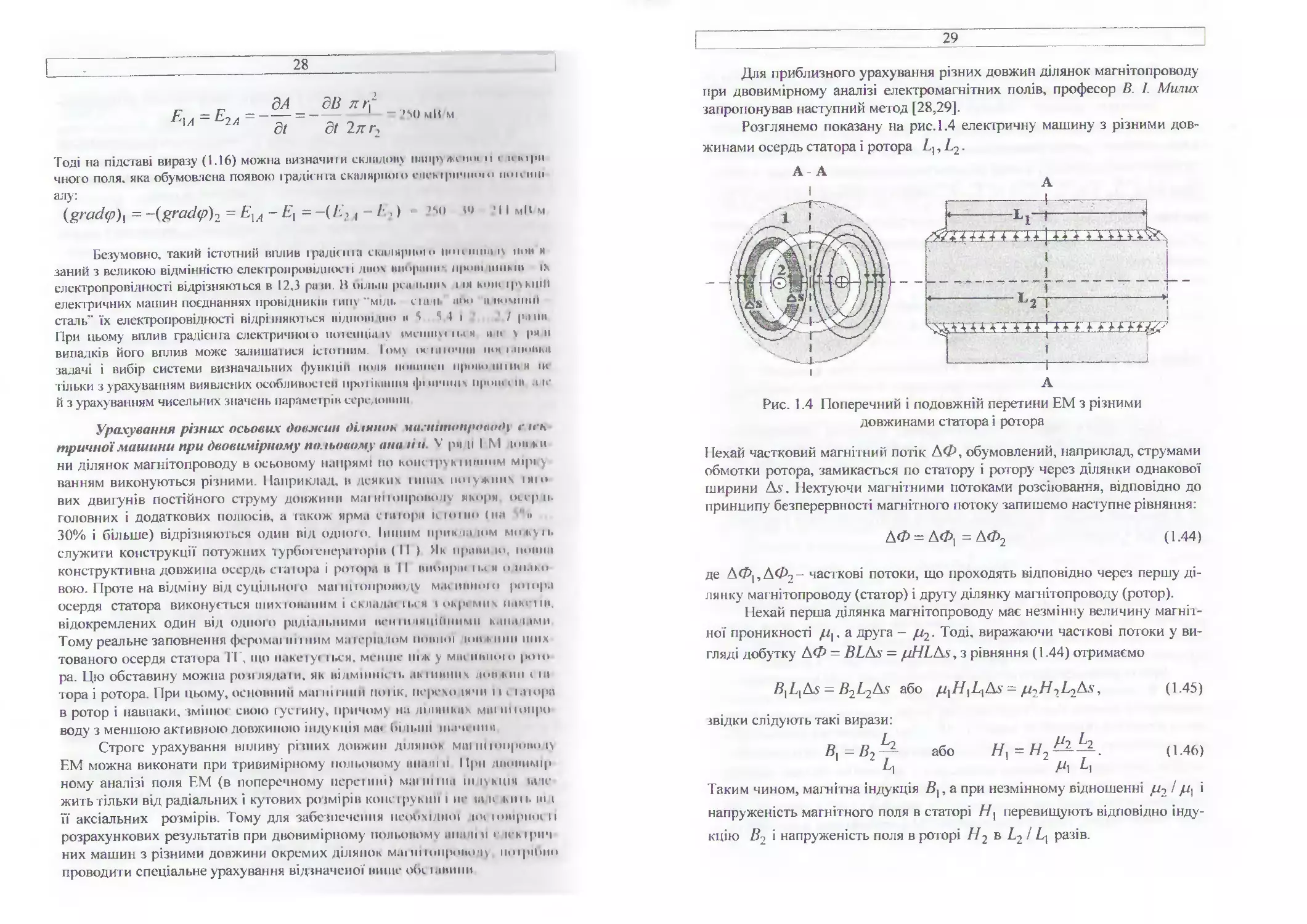
Розглянемо показану на рис. 1.4 електричну машину з різними дов-
жинами осердь статора і ротора Ц, £2 •
Рис. 1.4 Поперечний і подовжній перетини ЕМ з різними
довжинами статора і ротора
Нехай частковий магнітний потік АФ, обумовлений, наприклад, струмами
обмотки ротора, замикається по статору і ротору через ділянки однакової
ширини А\. Нехтуючи магнітними потоками розсіювання, відповідно до
принципу безперервності магнітного потоку запишемо наступне рівняння:
ДФ = АФ, = ДФ2
(1-44)
де АФ,, АФ2 - часткові потоки, що проходять відповідно через першу ді-
лянку магнітопроводу (статор) і другу ділянку магнітопроводу (ротор).
Нехай перша ділянка магнітопроводу має незмінну величину магнії-
ної проникності //|, а друга - //2. Тоді, виражаючи часткові потоки у ви-
гляді добутку АФ — = /у//£Л\, з рівняння (1.44) отримаємо
В|£|Д.У = В2£2Ау або = х/2//2£2Лу, (1.45)
звідки слідують такі вирази:
В}=Вг^ або Н}=Н2^^. (1.46)
£і /у, £]
Таким чином, магнітна індукція В,, а при незмінному відношенні /л> / //, і
напруженість магнітного поля в статорі Н\ перевищують відповідно інду-
кцію В2 і напруженість поля в роторі И2 в Ь2! £( разів.
Вираз (1.46) покладено в основу наближеного мсгоду урахування рі-
зних довжин ділянок магнітопроводу ЕМ.
Замінимо реальну конструкцію магнітопроводу на екіїїк.ілсіїїпу
конструкцію, яка має однакові довжини обох ділянок. Приймемо, напри-
клад, довжину ротора рівною довжині статора £2 = 11 І°ДІ мін чина ін-
дукція в еквівалентному роторі збільшиться відповідно до вира іу (1.46) до
величини $2 = В2 £2/^2 = ^г/ Замінимо матеріал реальною рото-
ра з проникністю //2 на еквівалентний матеріал з проникністю /6, причо-
му таким чином, щоб напруженість магнітного поля в роюрі і.сіиіііалися
незмінною Н2 = Н2 Тоді маємо:
’ В2 В2 В2 Іп І.т
н2 н2 Н2Ц
звідки слідує наступне співвідношення:
Р2~ Вг^о.1 Ь\- (1 -47)
Після заміни реального магнітопроводу з різними довжинами діля-
нок на еквівалентний магнітопровід з однаковими довжинами ділянок і
зміни магнітної проникності однієї з ділянок у відповідною і до виразу
(1.47), виконується розрахунок двовимірного поля в поперечному перет ині
ЕМ. Після визначення характеристик поля здійснюється зворотнії перехід
до їх реальних значень. Наприклад, реальна магнітна індукція в роторі роз-
раховується за допомогою наступного виразу:
В2~В2ЦІЬ2 (1.48)
Описаний метод В.І. Милих забезпечує дотримання принципу безпе-
рервності магнітного потоку при двовимірних розрахунках поля і легко
розповсюджується на магнітопроводи з довільною кількістю ділянок рі гної
довжини. За базову довжину приймається довжина однієї з ділянок.
Метод розповсюджується і на магнітопроводи з нелінійними матері-
алами. В цьому випадку після еквівалентної заміни довжини і магнітної
проникності ділянок магнітопроводу виконується розрахунок поля і визна-
чається реальна індукція по виразу (1.48). Далі знаходиться реальна магні-
тна проникність по заданій нелінійній залежності /л(В) і викопується іте-
раційна процедура порівняння попередніх і наступних значень маг пітної
проникності. Для виконання наступної ітерації знову здійсшосться перехід
до еквівалентної магнітної проникнос ті за виразом (1.47) і розраховується
поле. Таким чином, для магнітопроводів ЕМ з нелінійними властивос тями
31
взаємозв'язок між магнітною індукцією і магнітною проникністю по за-
лежності р(В) повинна здійснюватися за їх реальними значеннями.
Урахування скінченної довжини активної зони електричної ма-
шини при двовимірному польовому аналізі. При двовимірному польовому
аналізі в ряді випадків доцільно застосовувати наближений спосіб ураху-
вання скінченної довжини активної зони електричної машини [35]. Цей
спосіб полягає у тому, що при розрахунках вводиться коефіцієнт скінчен-
ної довжини к, = 1 + г/£, де т і Ь - відповідно полюсна поділка і активна
довжина машини. При розрахунках поля використовується еквівалентна
електропровідність елементів машини (стрижнів короткозамкнепої клітки
АД, сталі ротора масивно роторної машини і ін.) узке —у/кі- Зменшення
електропровідності дозволяє наближено урахувати додатковий опір інду-
кованим струмам в кінцевих зонах машини (в коротко замикаючих кільцях
білячої клітки, в торцевій зоні масивного ротора тощо).
1.1.2. Рівняння електромагнітного поля для матеріальних середовищ з
нелінійними фізичними характеристиками. Система рівнянь (1.1)-(1.6)
записана в припущенні, що коефіцієнти, які характеризують фізичні влас-
тивості матеріальних середовищ, мають постійні значення, тобто не зале-
жать від польових функцій. У ряді випадків це припущення є несправедли-
вим. Так, в ЕМ широко використовуються феромагнітні матеріали, магніт-
на проникність яких залежить від значення напруженості магнітного поля.
В електротехніці застосовуються сегнетоелектричні матеріали, діелектри-
чна проникність яких залежить від напруженості електричного поля. В цих
випадках при строгому виконанні математичних перетворень рівняння по-
ля істотно ускладнюються. Покажемо це на прикладі рівнянь для феромаг-
нітних середовищ. Система рівнянь Максвела у векторній формі запису з
урахуванням прийнятих раніше припущень та за наявності нелінійності в
коефіцієнтах рівнянь має наступний вигляд:
гоіН=3 (1-49)
гоіЕ = -дв(н)/ді (1.50)
сііуВ(Н)-0 (1-51)
б/гг £>(£) = р (1.52)
В = д(|я|)- Н,б(Е) = £(|£|) £ (1.53)
У = уЕ + у(ухВ) + ./стоР. (1.54)
32
Без втрати загальності висновків розглянемо поле в нерухомій облас-
ті (і’ = 0) і сформулюємо рівняння в часткових похідних для некіора на-
пруженості магнітного поля у феромагнітному середовищі
Утворюючи операцію гої від першого рівняння системи Макснела
(1.49), отримаємо
гоігоіН гоїЕ + гоМ
а після заміни складової угоіЕ за допомогою другого рівняння Максвел-
ла (1.50) отримаємо
— = „,,,,) (1 55)
сі ’ 1
На відміну від лінійних середовищ у даному випадку іііх'іі / 0 {іі.ічепня
дивергенції Н можна знайти із загального рівняння (І 51), використову-
ючи відому формулу векторного аналізу, що справедлива для добутку с ка
лярної / і векторної Е функцій:
с1іу(/Е) = Е §гас1(/) + / сііу(Е).
За допомогою цієї формули маємо наступне співвідношення
//1)• //]= + Н $гшІ /г(|//^) ’ 0.
або
сііуН = -Н %гас1 А^|)/ А^|)
(1.56)
В результаті векторних перетворень рівняння для напруженої'і і II при-
ймає наступний вигляд:
ДН - У К^|)’ И]+ Н І 7^|)]=
) ( І -57)
Рівнянню (1.57) можна надати і іншого вигляду, у якому операція
градієнта виконується не над коефіцієнтом рівняння (магнітною проникні-
стю), а над функцією поля — напруженістю магнітного поля [ 1 ]:
ЕН-у
д Г /і—і\ -1 с/1п//(/7)
— [М ) Я]+ £га<Ц----------і-
І І
Я] £/•«/(|//|)
ГОІ(.)і тор)
(1.58)
33
Другий доданок в лівих частинах рівнянь (1-57), (1.58) з урахуванням
правил диференціювання складних функцій можна переписати у наступ-
ному вигляді:
Легко бачити, що вираз в квадратних дужках дорівнює
^і),77‘Мя|) 4“Ж ав
А ’ ГІН ГІН СІН
Цей вираз називають диференціальною магнітною проникністю
(1.59)
Якщо задана нелінійна залежність для магнітної проникності то за
виразом (1.59) нескладно знайти і використати при розрахунках відповідну
залежність для диференціальної магнітної проникності.
З урахуванням виразу (1.59) рівняння (1.58) в остаточному вигляді
можна записати так:
Цілком очевидно, що рівняння (1.60) має значно складніший вигляд,
ніж аналогічне рівняння для середовища з лінійними властивостями. В
ньому з'являється додатковий доданок, пов’язаний з градієнтом нелінійної
функції . Якщо в рівнянні (1.60) прийняти р - сопзі, то
легко бачити, що %га<і рін\) = 0, і воно перетвориться до
більш простого (лінійного) вигляду:
. 77 дН —
— ру-—- — —ГОІ^Фстор)
СІ
(1-61)
Аналогічним чином можна отримати рівняння для інших польових
функцій. Вигляд цих рівнянь є також істотно складнішим, ніж у лінійному
випадку.
34
Значно ускладнюються польові рівняння і для напружено*, н елект-
ричного поля в сегнетоелектричних середовищах. В кікпх середовищах
діелектрична проникність є функцією напруженості елек ірпчпої о поля
При цьому рівняння для вектора Е за відсутності струмів тміщеп-
ня приймає наступний вигляд [1]:
-
Д£-гд-
оі
Д/ тор
= В
ді
(1.62)
Зважаючи на значну математичну складність строгого уріїхутиіппя
нелінійності коефіцієнтів матеріальних середовищ а інженерній практиці
широке застосування отримали наближені методи урахування нелінійності.
Відзначимо деякі з них, що добре зарекомендували себе при ропі'я тинні
конкретних задач.
Напівемпіричний метод лінеаризації. Суть цього методу полягає у
тому, що диференціальні рівняння поля складаються і ротн'я туються як для
випадку лінійного середовища, і лише в остаточні вирази вносяться іміптп
значення коефіцієнтів. При цьому за допомогою ігераційних процедур в
кожній точці розрахункової області досягається відповідність тпачень
знайдених польових функцій і залежних від них нелінійних коефіцієнтів
матеріальних середовиїц. Хоча в загальному випадку строге теоретичне
обгрунтовування такого методу дати неможливо, проте рішення численних
нелінійних задач електромагнітного поля цим методом показало доста гньо
хороший збіг розрахункових результатів і результатів вимірювань. При-
наймні, це справедливо для задач, нелінійність яких обумовлена нслпіійні-
стю коефіцієнтів р для кривих намагнічування розповсюджених електро-
технічних сталей. Тому напівемпіричний метод лінеаризації використову-
ється багатьма дослідниками при розв’язанні нелінійних крайових задач
поля і його впроваджено в численні пакети прикладних програм.
Метод диференціальної магнітної проникності. Відмінність цього
методу від напівемпіричного методу лінеаризації полягає у тому, що за-
мість статичної магнітної проникності р — ВІН використовується дифе-
ренціальна магнітна проникність за виразом (1.59). Достовірність результа-
тів розв’язку, отриманих цим методом, має бути більш високою і ви тнача-
ється тільки похибками, які пов'язані з прийняттям припущення про рів-
ність нулю сіІуН = 0 в нелінійних середовищах.
В деяких наближених розрахунках поля і втрат в електропровідному
середовищі використовуються наближені методи, засновані па введенні
еквівалентних параметрів фізичних середовищ. Серед самих відомих мето-
дів слід згадати метод комплексної магнітної проникності Неймана [ЗО],
метод еквівалентної проникності [44] тотцо. Ці методи не дозволяють
35
розрахувати точні закономірності розподілу поля усередині середовища,
але дають можливість з достатньою для практики точністю знайти в елект-
ропровідному середовищі сумарні втрати, що обумовлені вихровими стру-
мами.
Окрім розглянутої вище нелінійності І роду (в коефіцієнтах рівнян-
ня) нелінійність крайової задачі може бути обумовлена також нелінійністю
II роду (нелінійність в правій частині рівняння) і III роду (в граничних
умовах). Ці типи нелінійності також ускладнюють розв’язок та вимагають
спеціальних оцінок їх впливу на поле ЕМ і застосування адекватних мето-
дів розв’язання задачі.
1.1.3. Рівняння електромагнітного поля для матеріальних середовищ з
анізотропними фізичними характеристиками. Деякі матеріальні середо-
вища мають різні фізичні характеристики уздовж різних просторових на-
прямів. Такі властивості середовищ можуть бути обумовлені як безпо-
середньо фізичними характеристиками матеріалу, так і бути результатом
конструктивної реалізації технічного об’єкту. Наприклад, холоднокатана
електротехнічна сталь унаслідок технології прокату має різну магнітну
проникність удовж і поперек прокату. Тому набрані з листів електротехні-
чної сталі магнітопроводи ЕМ і трансформаторів мають анізотропні влас-
тивості. Магнітні проникності для магнітних потоків у ярмі і зубцях в ані-
зотропних магнітопроводах суттєво відрізняються.
Анізотропними мапіітними і електричними властивостями характе-
ризуються, також середовища, які набрані (ламіновані) з різних матеріалів
(мідь, сталь і др.).
В загальному випадку в анізотропних середовищах магнітна проник-
ність і електропровідність може бути виражена через тензори другого по-
рядку, тобто величинами, складеними з дев'яти незалежних компонент.
Наприклад, в декартовій системі координат магнітна проникність і
електропровідність виражається наступними тензорами:
В анізотропних лінійних середовищах компоненти тензора, які симе-
трично розташовані відносно головної діагоналі, мають однакові значення:
^ху ~ Ихг ~ №XX * Т‘Д"
В таких середовищах після проведення математичних перетворень та
приведення тензорів до головних осей вони можуть бути записані в діаго-
нальному вигляді з трьома незалежними компонентами:
38
З аналізу системи рівнянь (1.67) виходить, що сисіема роїп.ідасться на два
окремі рівняння, кожне з яких може бути розв’язано незалежно. Для цього необ-
хідно задати граничні умови - значення складових Ех і Ет па поверхні даної
площини. Після знаходження складових вектора напруженості електричного по-
ля визначається модуль результуючого вектора Е = -^Ех + /^ , а потім і іус-
тина теплових втрат в кожній точці даної площини і] = уЕ .
1.2. Рівняння теплового поля і постановка крайових задач
Диференціальне рівняння поля. Іншим найважливішим фііичним
полем, яке істотно впливає на ефективність електромеханічної о перегно-
рення енергії в електричних машинах, є теплове або температурне поле.
Втрати енергії, що виділяються в процесі роботи І'М і нон'я ьпіий з
ними нагрів елементів конструкції ведуть до зміни активних опорі» стру-
монесучих контурів, впливають на надійність електричної ізоляції вінків
обмоток, приводять до термомеханічних деформацій конструкції І'М і ін-
ших фізичних явищ. Тому вивчення процесів нагрівання ЇМ є важливою і
актуальною задачею теорії і практики електричних машин, причому досто-
вірні результати можна отримати при аналізі теплових полів ГМ.
Тепловий потік в ЕМ розповсюджується від джерел тепловиділення
через конструкцію машини до зовнішнього охолоджуючого середовища,
яким в переважній більшості випадків є газоподібне (повітря, водень) або
рідке (вода) середовище, що омиває виділену поверхню конструкції маши-
ни. Джерела тепловиділення мають різну фізичну природу. Основний вид
втрат енергії в ЕМ є обумовленим електромагнітними причинами. І (і піра-
ти мають розподілений характер і виникають в об’ємі активних елементів
конструкції — витках обмоток і феромагнітному матні гонроноді В класич-
ній теорії ЕМ втрати електромагнітного походження підроіділяюгься на
дві групи: основні, які безпосередньо пов’язані з процесом елекіромехані-
чного перетворення енергії, і додаткові, що обумовлені друї орядними
чинниками, такими як недосконалість конструкції машини або системи
електроживлення її обмоток. Методам розрахунку теплових нтр.ті в торії
ЕМ надається велика увага. Втрати іншого вигляду - механічні, обумовле-
ні чинниками, що мають неелекгромагнітну природу. До них відносяться,
наприклад, втрати на тертя рухомої частини об охолоджуюче середовище
(вентиляційні втрати), втрати на тертя у підшипниках тощо.
З точки зору теплофізики задача теплообміну в ЕМ відносні вся до
задач теплопровідності у суцільному середовищі від внутрішніх джерел до
зовнішніх меж конструкції, на яких відбувається копвсктіївпиіі іеплообміи
з навколишнім середовищем.
Польовою функцією, що описує теплове поле, є температура ска-
лярна функція, залежна від трьох просторових координат і від часу
39
Т =Т(х,у,х,і).
(1.68)
Теплові процеси в ЕМ, також як і електромагнітні процеси можуть
бути динамічними (нестаціонарними), якщо вони виникають при перехід-
них режимах ЕМ, і сталими тепловими процесами, якщо виникають у ста-
лих режимах роботи ЕМ.
Основним рівнянням нестаціонарного температурного поля є лінійне
рівняння нестаціонарної теплопровідності [20,47]:
ЛАТ -ср---= 0,
и ді
(1.69)
де Л, с, р — коефіцієнти теплофізичних характеристик - відповідно теп-
лопровідність, теплоємність і густина матеріалу; — питомі об'ємні теп-
лові втрати (Вт/м3). В декартових координатах рівняння (1.68) перепису-
ється в наступному вигляді:
д2т д2т д2т дт
А—+ А——у + А—?— ср——— — ().
дх2 ду2 &2 ді
(1-70)
У загальному випадку коефіцієнти А, С, р залежать від температури
середовища, а рівняння (1.69), (1.70) при цьому перетворюються на нелі-
нійні диференціальні рівняння. Проте в більшості практично важливих ви-
падків у діапазоні допустимих для ЕМ температур зазначені коефіцієнти
можна вважати незмінними. Виключення представляють задачі нагріву ма-
сивних електропровідних елементів.
При аналізі теплового поля в лінійних анізотропних середовищах ко-
ефіцієнт теплопровідності є тензором і має різні значення уздовж різних
просторових напрямів. Після приведення тензора до головних осей систе-
ми координат він може бути записаний в діагональному вигляді з трьома
незалежними компонентами Ах,Ау,Аг. При цьому рівняння теплопровід-
ності має наступний вигляд:
. д2т . д2т . д2т дт
я 2 + ^У д2 + д 2 СР а # - 2 '
дх ду дг оі
(1-71)
За формою запису рівняння теплопровідності близьке до рівняння
електромагнітного поля. Так, рівняння (1.69) ідентично за формою запису
рівнянню (1.21) для векторного магнітного потенціалу у випадку нерухо-
мих середовищ (V = 0). Істотна відмінність, проте, полягає у тому, що еле-
ктромагнітне поле є векторним, а теплове поле — скалярним.
40
Ця обставина істотно ускладнює розв’язання задач електромаї пітних
полів, оскільки для них необхідне визначення трьох просторових складо-
вих векторних функцій. Але у разі двовимірних полів, коли розмірнії* і ь ве-
кторного магнітного потенціалу вдається зменшити до однієї просторової
складової, математичний запис двох видів рівнянь виявляється практично
ідентичним. Це дозволяє створювати і використовувати одноіиііну мето-
дологію розв’язання крайових задач електромагнітного і теплової о полів.
Як вже наголошувалося, електромагнітний і тепловий процеси в ГМ
взаємозв'язані. Тому у ряді важливих випадків необхідним є сумісний ана-
ліз електромагнітного і теплового полів машини з урахуванням їх взаємно-
го впливу. Розгляду окремих питань, пов’язаних з цією проблемою, при-
свячено Розділ 3.
Граничні і початкові умови. Для однозначною магема нічного опи-
су теплового процесу необхідно задати граничні умови, що харакіерту-
ють взаємодію даного тіла з навколишнім середовищем. І рапнчні умови
можуть бути задані декількома способами.
7. Граничні умови першого роду. При цьому задає ться розподіл гем пера іу-
ри на зовнішній поверхні С\ тіла для кожного моменту часу
Т(х,у,2,і)\С] = Т{(х,у,г,1), {х,у,г} еСг (1.71)
2. Граничні умови другого роду. При цьому задаються величини (силової о
потоку Ц для кожної точки зовнішньої поверхні і будь-якої о моменту
часу. З математичної точки зору виконання цієї умови означш іавдання на
границі нормальної похідної температури
— (х,у,гьі} =—ц(х,у,2,1), {х,у,г}(Ст.
5п а2 А
(1.72)
За відсутності теплових потоків через зовнішню поверхню СД (умо-
ва теплоізоляції) на ній задається однорідна гранична умова другою роду
дТ,
— (х,у,г,і) =0.
о2
3. Граничні умови третього роду. Характеризують теплообмін між повер-
хнею бу тіла і навколишнім газоподібним або рідким середовищем. При
цьому задаються: коефіцієнт тепловіддачі «, що характери іу< пііеіісив-
ність теплообміну між поверхнею тіла і навколишнім середовищем, і тем-
пература навколишнього середовища Т^. Граничні умови іреіьою роду
базуються на законі Ньютона Ріхмана і записуються в наступному виї ля-
ді:
41
—(х,у,г,ї) = “(Т-Т0), {х,у,г}єС3. (1.73)
би с3 л
Коефіцієнт тепловіддачі а чисельно дорівнює кількості тепла, що відда-
ється (або сприймається) одиницею поверхні в одиницю часу при різниці
температур між тілом і навколишнім середовищем, яка дорівнює 1 С° Чи-
сельні значення цього коефіцієнту істотно впливають на отримані розра-
хункові розподіли температури усередині тіла. Визначаються ці коефіцієн-
ти експериментальними методами.
Як окремий випадок граничних умов третього роду можуть розгля-
датися граничні умови першого роду. Завдання температури на поверхні
тіла можна інтерпретувати як завдання температури навколишнього
середовища при нескінченно великій величині коефіцієнту тепловіддачі
а — °о. У цьому випадку різниця температур поверхні і середовища дорів-
нює нулю (Т - То) = 0.
При розв’язанні нестаціонарних задач необхідно задати початкові
умови - значення температури усередині розрахункової області в початко-
вий розрахунковий момент часу (0
Т(х,у, 2,1) |,=/о = То (х, у, 2, Іо ). (1.74)
Диференціальне рівняння теплопровідності у розрахунковій області спіль-
но з граничними і початковими умовами формує крайову задачу теплопро-
відності. Математичне розв’язання сформульованої крайової задачі є осно-
вою для змістовного аналізу особливостей розподілу температури в актив-
ній зоні ЕМ.
1.3. Методи розв’язання крайових задач теорії поля
Тривалий час крайові задачі теорії поля розв'язувалися виключно за
допомогою аналітичних методів. В рамках окремого розділу математики -
математичної фізики був сформульований і застосований при розв’язанні
конкретних фізичних задач ряд спеціальних математичних методів. Ці ме-
тоди базувалися на: спеціальних способах представлення невідомої функ-
ції, проведенні проміжних аналітичних перетворень, введенні нових змін-
них і інших математичних процедурах. Кожний аналітичний метод
розв’язання задач теорії поля є зразком високоінтелектуального математи-
чного мистецтва. Серед самих відомих аналітичних методів можна назвати
метод розподілу змінних (метод Фур’є - Ламе), метод скінченних інтегра-
льних перетворень (метод Грінберга), метод конформних перетворень. Ва-
жливе значення для становлення і розвитку теорії електричних машин
42
мали результати аналітичного розв’язання конкретних шдііч щодо роїпо-
ділу електромагнітного поля в елементах конструкції машини
Аналітичні розв’язки дозволяють представляти реіулі.гііпі польового
аналізу в узагальненому вигляді, при якому можна вичерпно оцінити
вплив окремих параметрів конструкції ЕМ на розподіл її поля. І (<• < найва-
жливішим достоїнством аналітичних методів. Разом з інм ііпанпіічіііім ме-
тодам властиві і істотні недоліки. Перш за все, застосовна її. мсюдів об-
межується можливістю отримання розв’язків для відносно простих облас-
тей, тцо вимагає істотного спрощення конфігурації розрахункової області,
яка відображає реальну мапіину. Спроби більш докладної о урахування
конструктивних особливостей ЕМ неодмінно стикалися і раннім усклад-
ненням остаточних виразів або навіть з нсможливіспо їх оіріімшнія. При
цьому формувати такі розв’язки і здійснювати їх чисельну решн шцііо мо-
жуть лише фахівці високого рівня. Слід підкреслити, що та каючи на уні-
кальність кожного з аналітичних методів уніфікованої технолої іі їх чисе-
льної реалізації при розв’язанні конкретних задач епюрній поки що не
вдалося.
Практична реалізація аналітичних методів стишиться і і обчислюва-
льними труднощами. Необхідно відзначити, що отримані в результаті
розв’язання аналітичні вирази у багатьох випадках записуюіься через ряди
або інтеграли. Тому для отримання остаточних чисельних значень іні осно-
ві таких аналітичних виразів необхідно, як правило, ви корщ іону вати
ЕОМ. В цьому сенсі такі розв’язки можна назвати “ііапівашіні пічними”.
Існують і спеціальні обчислювальні проблеми при засіосунанні аналітич-
них методів. Наприклад, часто ряди по власних функціях, що формулю-
ються як кінцевий результат в результаті застосування апалі нічних мето-
дів, погано сходяться, оербливо біля меж області або поблизу джерел поля,
що вимагає розробки спеціальних процедур поліпшення ібіжносіі рядів.
Крім того, майже завжди не вдається строго врахувати аналіз нчними мето-
дами нелінійність задачі.
Альтернатива застосуванню аналітичних методів виникла у зв’язку з
бурхливим розвитком обчислювальної техніки, у резульзаіі якою стало
можливим ефективне застосування чисельних методів розв'язання крайо-
вих задач теорії поля. При чисельному розв’язанні вихідні диференціальні
рівняння розв’язуються безпосередньо у числовому вигляді без виконання
проміжних аналітичних перетворень шляхом підстановки в рівняння конк-
ретних значень матеріальних коефіцієнтів, величин джерел поля, даних
про геометричні розміри об'єкту тощо.
Особливістю застосування чисельних методів є тс, що один отрима-
ний розв’язок є справедливим тільки для заданих вхідних даних. /Еля отри-
мання розв’язку при інших вхідних даних необхідно знову застосувати
процедуру чисельного розв’язання задачі. Результат одного чисельного
розв?язку називають чисельним експериментом, причому витрати проце-
сорного часу ЕОМ на виконання одного чисельного експерименту можуть
43
бути достатньо великими. Для формування змісту . достатньо до-
кладних висновків щодо параметрів і характер^ потрібне
проведення значної кількості чисельних експерим^ у ць полягає
один з недоліків чисельних методів у порівнянні з аМтичними методами.
Інша особливість використання чисельних методі* полягає тому> що у
кожному В конкретному випадку потрібно обгрунт* ти ТОчність розра-
хунків. Оскільки, при чисельному розв язанні вик^^ величезна кіль-
кість числових операцій, то в остаточному резулц^ 3-являються обчис.
лювальні похибки, які значною мірою залежать . від зддяяих бід-
них даних.
Розвиток чисельних методів довгий час стри^ місткістю
чисельного розв’язання. Останнім часом у звязку з і8тенсивІ^м розвитком
обчислювальної техніки чисельні методи розв язац^ практично ВИТІСНИЛи
аналітичні методи.
Головною перевагою чисельних методів є анадізу подя в
розрахункових областях складної геометри з Ураху^^ більшості конс-
труктивних особливостей ЕМ, а також урахування^ нелінійності фізичних
властивостей активних матеріалів. Чисельні методу ^цими до-
зволяють розробити однотипні обчислювальні і іфіковане,
доступне широкому колу користувачів проїр^ забезпечення дая
комп’ютерної реалізації. Це особливо важливо з на ши
тичне впровадження чисельного польового аналі3у . зниження надмірно
високих вимог до рівня кваліфікації фахівця - К0РИ^вача
Основними чисельними методами, що отри^ ши визнання і
розповсюдження в практиці польових розрахунків є. дифереНціальні ме-
тоди - метод скінченних різниць (МСР) 1 мет<^ центів
(МСЕ), а також інтегральні методи - метод інте^^ ь (шр) ;
метод граничних інтегральних рівнянь (МІ 1Р).
Історично раніше за всіх отримав розвито* скінченних різ-
ниць. В МСР реалізована проста і очевидна ідея заМіни частоових похідних
в диференціальних рівняннях їх скінченими різшц^ ц розра.
хункова область покривається прямокутною сіт*^ скінченних ізниць
(ССР), яка має уздовж осі координат, як правило, Мвн - ний в ре.
зультаті такої заміни вихідні диференціальні рівіц^ часткових похід-
них редукуються до системи алгебраїчних рівнянь щ значень ПОльової
функції у вузлах ССР. Чим дрібніше крок скінчену тим іше
ССР і тим точніше апроксимується безперервний р польової функ.
ції в розрахунковій області за допомогою п дискр^.. (сіткової) моделі.
Величина кроку скінченних різниць вздовж різни* Ьсей координат
може обиратися різною. Один з суттєвих недолі*^ мср полярає в труд.
нощах відображення реальної криволінійної дост*^ складаої геомеірїї
ЕМ, а також меж розрахункової області за допомог^ прямокутної ССР
В МСЕ розрахункова область також розділя*^ ість під0.
бластей малих розмірів, кожна з яких називається скінченним елементом
(СЕ). В своєму об'єднанні СЕ утворюють сітку скінченних елемешів
(ССЕ), яка повністю покриває розрахункову область. Для іабе іисчеінія не-
обхідної точності розв’язку розміри СЕ вибираю іь доспи і н.о маленькими.
В реальних задачах кількість елементів в ССЕ складає десяіки і сопи іисяч
елементів. При аналізі двовимірних полів СЕ мас вид плоскої фігури, яку
частіше за все вибирають у вигляді трьох - або чогирику пінка. І іа рис 1.6.
представлена ССЕ для асинхронного двигуна, яка містин. 59996 і рику і них
скінченних елементів і 30083 вузлів.
На рис. 1.7. представлено фрагмент ССЕ у зоні повіт ряної о проміж-
ку. Зображена ССЕ генерована за допомогою сіткової» іепераіора, який
автоматично згущує скінченні елементи (зменшує їх розміри) на ділянках
області з підвищеним градієнтом польової функції. І, навпаки, на ділянках
з однорідним характером розподілу поля розміри слемсніів ивіомаїично
збільшуються.
Рис. 1.6 Сітка скінченних елементів в поперечному ііереіині
асинхронного двигуна
Така оптимізація розмірів і розташування СЕ дозволю будувати оп-
тимальні сітки, які з одного боку забезпечують необхідну ..ієн. розра-
хунків поля і, з другого боку, не містять надмірної кількос і і слеменіів, що
заощаджує обчислювальні ресурси і витрати часу.
45
У методі скінченних елементів задача також зводиться до
розв’язання системи алгебраїчних рівнянь щодо невідомої польової функ-
ції у вузлах ССЕ. При цьому усередині будь-кого СЕ розподіл польової
функції апроксимується поліномом деякого порядку, що дозволяє розраху-
вати поле в будь-якій точці розрахункової області. Найбільше розповсю-
дження отримали трикутні СЕ, в яких польова функція апроксимується по-
ліномом першого порядку (симплекс - елементи). Використання трикут-
них СЕ дозволяє, також, набагато точніше відобразити криволінійні грани-
ці в розрахунковій області електричної машини.
Диференціальні методи МСР і МСЕ знайшли широке застосування в
електромеханіці, причому у даний час найбільше розповсюдження отримав
МСЕ. Цьому сприяє можливість ефективного урахування в рамках МСЕ не
тільки складної конфігурації розрахункової області, але і нелінійності фі-
зичних характеристик конструктивних матеріалів, однотипність обчислю-
вальних процедур і інші переваги. Хоча порядок системи алгебраїчних рі-
внянь МСЕ є дуже високим (система містить десятки, сотні тисяч рівнянь),
що визначається кількістю вузлів ССЕ, проте матриця системи рівнянь має
важливі переваги: вона є симетричною і стрічковою. Це дозволяє викори-
стовувати спеціальні та ефективні методи розв’язання алгебраїчних систем
рівнянь з розрідженими матрицями. Тому надалі в книзі МСЕ розглядати-
меться як основний обчислювальний метод при розв’язанні задач польово-
го аналізу електричних машин.
46
Детально теорію МСЕ і технологію його практичною застосування
можна знайти в роботах [16, 17,39] і ін.
У даний час створені усі умови для застосування М( І в практиці
розрахунків і проектування електричних машин. Зокрема, розроблено зру-
чні програмно — обчислювальні комплекси для комп'юіерної реалізації
МСЕ. Серед найбільш відомих розробок, що отримали широке міжнародне
визнання, необхідно особливо відзначити комплекси I I МІ АВ і АМБУ.Ч.
Разом з диференціальними чисельними методами тримали розвиток
інтегральні методи - метод інтегральних рівнянь і метод граничних ішег-
ральних рівнянь. Ці методи засновані на перетворенні рівнянь Максвела до
інтегральних рівнянь, які формулюються відносно допоміжних (вюрин-
них) джерел поля. Не зупиняючись детально на характерне піках цих мето-
дів, з якими читач може ознайомитися в літературі [2.15|, відзначимо, що
їх застосування найбільш ефективно за умови, що об'єм облає іей, зайнятих
джерелами поля і феромагнітними матеріалами, є незначним у порівнянні
зі всім об'ємом розрахункової області. Такі задачі пов'язані, наприклад, з
аналізом полів системи струмонесучих контурів, розташованих у повітря-
них проміжках. Для різних електричних машин, розрахункова область
яких в основному заповнена феромагнітними магнітонроводами, засіосу-
вання МІР і МГІР виявилося недостатньо ефективним і тому ці методи при
аналізі полів в ЕМ використовуються рідко.
1.3. Візуалізація картин електромагнітної о поли
Безпосереднім результатом розрахунку електромагніт ного або теп-
лового поля є сукупність значень польової функції у вузлах дискретної сіт-
ки скінченних елементів, що покриває розрахункову область, вважаючи на
велику кількість вузлів об’єм одержаної розрахункової інформації і дуже
великим і тому потрібна її подальша обробка і упорядкування. 1 ому пред-
ставлення розрахункової інформації у зручному для подальшою аналізу і
досліджень вигляді є важливою складовою технології польового аналізу
ЕМ.
Отримана чисельна інформація може бути представлена візуально на
моніторі комп'ютера у вигляді загальної картини поля, що відображає роз-
поділ знайденої польової функції в межах розрахункової області.
Наочна візуалізація тривимірних картин поля представляє достатньо
складну проблему, яка в даній книжці не розглядається.
Проблема візуалізації двовимірних картин поля у даний час практи-
чно вирішена. Стосовно МСЕ розроблено і впроваджено у практику декі-
лька зручних способів візуалізації двовимірних картин поля, серед яких
можна виділити наступні:
1. Спосіб безперервного фонового зафарбовування розрахункової обла-
сті, при якому значенню функції в кожній точці області відповідає
певний відтінок кольору або інтенсивність зафарбовування (для
Ь. .... 47
чорно - білих зображень) у відповідності до шкали, що приводиться.
Такий спосіб дає безперервне зображення картини поля. На рис. 1.8.
представлено приклад фонової візуалізації поля векторного магніт-
ного потенціалу чотирьохполюсного АД для чорно - білих зобра-
жень. При визначенні величини польової функції в довільній точці
розрахункової області, що не співпадає з будь - яким вузлом побудо-
ваної ССЕ, використовуються властивості апроксимуючих поліномів
МСЕ, що дозволяють знайти функцію у будь-якій внутрішній точці
скінченного елементу за відомими її значеннями у вузлах елементу.
Рис. 1.8 Візуалізація поля векторного магнітного потенціалу АД
за допомогою фонового зафарбовування
2. Спосіб візуалізації за допомогою сімейства ізоліній (ліній постійного
значення) польової функції. На рис. 1.9 представлено приклад візуа-
лізацїї поля векторного магнітного потенціалу того ж двигуна, що і
на рис. 1.8. При відображенні ізоліній векторного магнітного потен-
ціалу такий спосіб візуалізації співпадає з класичним способом зо-
браження магнітних полів за допомогою “силових ліній”.
48
Така візуалізація поля є дискретною, причому ступінь дискретності
картини поля залежить від використаної кількості ізоліній. При цьо-
му кожній ізолінії відповідає конкретне значення потенціалу, від-
значене на прикладеній шкалі. Такий спосіб є достатньо наочним і
дозволяє відобразити усі особливості розподілу поля
0437
0404
0 0372
0 034
0 0307
0 0275
О0243
0 021
0 0176
00146
00113
0 0081
0 0049
0 0017
-0 0016
4)0046
-0 006
-0 0113
-00145
-0 0177
'-0 021
0 0274
-0 0242
-0 0307
-0 0339
-0 0403
0 0371
0 0436
-(і Л468
Рис. 1.9 Візуалізація поля векторного магнітного потенціалу ЛД
за допомогою ізоліній
З Спосіб візуалізації за допомогою стрілок векторів, кожна і яких ю-
бражае не тільки модуль векторної функції, але і її напрямок. 11а від-
міну від згаданих вище двох способів, які дозволяюіь ні іуалі іувати
розподіл довільної скалярної функції (у тому числі модулі, пек і орної
функції або одну з її просторових складових), даний спосіб ьібеліе-
чує візуалізацію векторних функцій, для яких важливо шані орієн-
тацію вектора у кожній точці розрахунково" області. На рис. 1.10
представлено приклад візуалізації поля вектора маїніїної індукції,
причому фоновим зафарбовуванням відображається м«)і її, магнії -
ної індукції, а стрілками — вектор магнітної індукції у відповідній
49
]
точці. Візуалізація за допомогою стрілок застосовується також для
відображення розподілу векторних функцій на виділеній поверхні,
наприклад, вектора лінійної густини сили, прикладеної до поверхні
ротора ЕМ тощо.
Рис. 1.10 Візуалізація поля магнітної індукції АД
за допомогою фонового зафарбовування і стрілок векторів
Для візуалізації температурного поля використовуються тільки пер-
ші два способи, оскільки температура не є векторною функцією.
Кожний із згаданих способів візуалізації має свої переваги і недолі-
ки. Використовуючи і поєднуючи різні способи візуалізації картин поля,
можна забезпечити якнайповніше відображення і вивчення отриманої роз-
рахункової інформації.
На основі способу безперервного фонового зафарбовування розраху-
нкової області будуються анімаційні комп'ютерні зображення, що дозво-
ляють спостерігати зміни в розподілі поля у часі. Це особливо важливо при
вивченні нестаціонарних процесів, наприклад, процесу дифузії електрома-
і пітного поля в електропровідне середовище. Анімаційні зображення до-
шоляють наочно і глибше проаналізувати закономірності та фізичні особ-
ливості даних процесів.
Окрім побудови картин поля ефективним способом візуального відо-
браження результатів польових розрахунків є побудова кривих розподілу
польових функцій в межах характерних перетинів і розрізів. Для двовимір-
них полів такими перетинами є лінії, що проходять через найвідповідаль-
ніші ділянки активної зони.
50
Наприклад, важливу інформацію щодо оптимальності конструкції
машини можна отримати, аналізуючи характер зміни модуля магнітної ін-
дукції уздовж радіусу ЕМ, що проходить через повітряний проміжок, ярма
і зубці магнітопроводів статора і ротора. Приклад візуалізації розподілу
магнітної індукції уздовж радіусу показано на рис. 1.11. З наведеної кривої
видно, що у повітряному проміжку асинхронного двигуна індукція сягає
значення 0,7 Тл, а в зубцях ротора - до 1,9 Тл.
Рис. 1.11 Розподіл магнітної індукції уздовж радіусу
Інтенсивний подальший розвиток методів та засобів графічної віїуа-
лізації картин поля у найближчі роки повністю розв’яже проблему повного
та адекватного сприйняття великого обсягу інформації, яка отримується в
результаті розрахунку поля.
51
2. ВИЗНАЧЕННЯ ІНТЕГРАЛЬНИХ ПАРАМЕТРІВ І
ХАРАКТЕРИСТИК ЕЛЕКТРИЧНИХ МАШИН МЕТОДАМИ ТЕОРІЇ
ЕЛЕКТРОМАГНІТНОГО ПОЛЯ
У даному розділі обгрунтовано методи, методики та алгоритми без-
посереднього визначення інтегральних параметрів і характеристик елект-
ричних машин різного типу на основі результатів розв’язання рівнянь еле-
ктромагнітного поля в активній зоні електричної машини. Надалі інтегра-
льними параметрами і характеристиками електричної машини будемо
називати такі її параметри і характеристики, які суттєво впливають або в
значній мірі характеризують її експлуатаційні властивості і техніко — еко-
номічні показники. Це, наприклад, магнітні потокозчеплення та індуктивні
опори обмоток, механічні та робочі характеристики асинхронних двигунів,
зовнішні або V - образні характеристики синхронних генераторів тощо.
Інтеїральні характеристики машин можна отримати після чисельної
обробки диференціальної (або розподіленої) інформації, яка характеризує
розподіл електромаї пітного поля в об’ємі активної зони машини.
2.1. Магнітні потоки, потокозчеплення, електрорушійні сили і
індуктивні опори обмоток електричних машинах
2.1.1. Магнітний потік взаємоіндукції і характеристика холостого
ходу електричної машини. Розрахунок магнітних потоків, що протікають
по виділеним зонам конструкції електричної машини, має важливе значен-
ня для оцінки рівня магнітного насичення окремих ділянок феромагнітного
магнітопроводу, визначення індуктивних опорів обмоток, при розрахунках
параметрів і характеристик машини.
Магнітний потік знаходиться після розрахунку розподілу вектора ма-
гнітної індукції в активній зоні машини і інтегрування по площі поверхні 8
виділеної ділянки магнітопроводу нормальної складової магнітної індукції
Вп (направленої уздовж вектора нормалі п до поверхні), яка перетинає
цю поверхню:
Ф= . (2.1)
С кладова вектора магнітної індукції, що направлена уздовж дотичної до
поверхні (тангенціальна складова ВТ), не перетинає розрахункову поверх-
ню і магнітного потоку через неї не створює.
Важливе практичне значення має величина магнітного потоку взає-
моіндукції Фт між обмотками статора і ротора машини. Магнітним пото-
ком взаємоіндукції називається магнітний потік одного полюсу машини,
52
який, перетинає повітряний проміжок між статором і ротором і зчінліоєїь-
ся з обмотками на статорі і роторі. Розрахунок величини потоку взаємоін-
дукції необхідно проводити на поверхні з площею 5, що розташована у
повітряному проміжку на середині його висоти. Ця поверхня мат ширину,
яка дорівнює розміру однієї полюсної поділки т і довжину, яка дорівнює
активній довжині машини. Для визначення величини потоку Фт полюсну
поділку необхідно вибрати таким чином, щоб в кожній її точці нормальна
складова індукції мала однаковий напрямок (однаковий знак).
При розрахунку потоку взаємоіндукції за результатами аналізу дво-
вимірного магнітного поля машини в її поперечному перетині інтегрування
проводиться уздовж розрахункової лінії, яка розташована на середині пові-
тряного проміжку:
Фт=\Вп<Л = Іп]вп(Н (2.2)
5 0
де Іп - активна довжина машини.
Алгоритми чисельного розрахунку магнітного потоку за виразом
(2.2) безпосередньо пов'язані з обраним чисельним методом розв’язання
рівнянь електромагнітного поля. Найпростіші і зручні алгоритми можна
отримати при застосуванні МСЕ.
При дискретизації поперечного перетину машини на скінченні еле-
менти розрахункова лінія розподіляється на ряд відрізків. Довжини цих
відрізків дорівнюють довжинам сторін скінченних елементів, що межують
з розрахунковою лінією (рис. 2.1). У результаті інтеграл (2.2) замінюється
сумою добутків ВіиЛІ і по сукупності відрізків розрахункової лінії:
л
(2.3)
о
де Впі — нормальна складова індукції на і - ому відрізку, ЛІІ довжина і
— оіо відрізку. В декартових координатах нормальну складову в бу дь-якій
точці легко визначити за відомими в цій же точці проекціями векюра інду-
кції на вісі системи координат:
Впі = Вхі 8ІП у,- + Вуі СО5 у і (2.4)
де уі - кут між віссю ¥ і вектором нормалі до і - го відрізка розрахунко-
вої лінії.
Складові індукції Вх,Ву визначаються за допомогою відомого спів-
відношення В — гоіА, яке зв'язує векторний магнітний потенціал і магні-
тну індукцію. Зокрема для двовимірних полів маємо вирази
Вх - дЛ/ду, Ву—~дА/дх. (2.5)
53
Рис. 2.1 Розрахункова лінія на середині повітряного проміжку
Слід зазначити, що на практиці при використанні МСЕ дуже часто засто-
совують трикутні скінченні елементи першого порядку. В межах будь-
якого трикутного елемента першого порядку розподіл векторного магніт-
ного потенціалу апроксимується лінійним поліномом
А(х, у) = а} + а2 х + а. у
(2.6)
де а],о2,аз - постійні коефіцієнти, які визначаються через значення век-
торного потенціалу у вершинах трикутного елементу [391- Після диферен-
ціювання потенціалу за виразами (2.5) у кожному трикутному скінченному
елементі першого порядку, складові магнітної індукції набувають постійні
значення
Вх - °3 ’ у ~ а1
(2-7)
Кусково — постійна функція розподілу магнітної індукції в розрахун-
ковій області неточно відображає реальну картину поля. Більш адекватний
розподіл магнітної індукції можна отримати, якщо для її апроксимації ви-
користати по аналогії з виразом (2.6) лінійний поліном першого порядку.
Рис. 2.2 Визначення магнітної індукції у вузлі ССЕ
*>._ _______________ _ |
При такій апроксимації кожному вузлу ССЕ можна поставил и у від-
повідність значення індукції, яке розраховано як середньоарифметичне
значень індукцій у прилеглих до даного вузла скінченних елементах, з ва-
говими коефіцієнтами, які дорівнюють відстані від центру вати кожного
прилеглого елемента до даного вузла (рис. 2.2 при числі елементів / - 5):
(2.8)
де Гу = д/[(л:7| + ху2 + хуз )/ З]2 +[(у7! +у]2 +уІЗ')/УС , ко-
ординати вузлів у - го скінченного елемента.
Після лінійної апроксимації нормальна складова індукції па і ому
відрізку розрахункової лінії визначається як
Вга=(В„й+Ви,(А+1))/2, (2.9)
де Впік, Впі(к <_1)- значення нормальної складової індукції у к- ому і к + І
- ому вузлах і - ого відрізку.
Після знаходження магнітного потоку взаємоіндукції для електрома-
гнітних процесів, які гармонійно змінюються у часі з частотою , діюче
значення ЕРС взаємоіндукції у фазі обмотки електричної машини можна
розрахувати за відомою формулою [13]
<2І°)
Розраховане за формулою (2.10) значення ЕРС індукується інтегральним
магнітним потоком полюса. Тому згідно з класичною теорією електричних
машин розрахована ЕРС є сумарною ЕРС від усіх гармонік магнітного по-
ля, а не тільки від основної (першої) гармоніки поля, для якої характерним
є синусоїдальний розподіл магнітної індукції уздовж у повітряного промі-
жку.
Отримані вирази (2.3), (2.10) дозволяють розрахувати характерис-
тики холостого ходу (XXX) електричних машин різного типу - синхро-
нних генераторів, машин постійного струму тощо. Характеристикою холо-
стого ходу зазвичай називають залежність магнітного потоку вгаємоіндук-
ції Фт(іг) або відповідно до виразу (2.10) залежність ЕРС в обмотці яко-
ря Ет(і^) від струму обмотки збудження (індуктора) машини /у. Для
знаходження XXX виконується серія польових розрахунків машини при
різних заданих значеннях струму обмотки збудження і відсутності струму
у обмотці якоря. Кожний польовий розрахунок визначає одну точку
XXX.
55
Наведемо приклад розрахунку XXX серійного синхронного турбоге-
нератора (ТГ) типу ТГВ - 200 потужністю 200 МВт (виготівник - ДП завод
«Електроважмаш», м. Харків).
Приклад 2.1. Зважаючи на симетрію розподілу поля ТГ на холостому ході
для аналізу магнітного поля ТГ в режимі холостого ходу достатньо обрати роз-
рахункову область, яка дорівнює половині полюсної поділки. Для двополюсного
ТГ розрахункова область відображає одну чверть площі поперечного перетину.
І Іоказана на рис.2.3 ССЕ містить 5615 скінченних елемент ів.
В декартових координатах розподіл магнітного поля в активній зоні син-
хронного ТГ описується нелінійним стаціонарним рівнянням Пуассона
54 54_ ,т7
я 2 + 2 епюр'
дх ду
(2.11)
іс іустина сторонніх струмів задається у пазах ротора і визначається заданими
нсііичипами струму збудження Ір, числом послідовно з’єднаних елементарних
провідників у пазу Пп і площею перетину паза ротора 8п:
епюр •
(2.12)
І устина струму за виразом (2.12) має усереднене значення, яке відрізня-
і ься від реальної густини струму у провідниках обмотки на величину' коефіціє-
иїх ьшовнення паза міддю. При цьому не враховуються особливості розподілу
провідників обмотки у пазу, наявність пазової і ниткової ізоляції витків, венти-
іиційних каналів і клина ротора. Як показали численні дослідження, урахування
них особливостей при розрахунках XXX практично не впливає на точність роз-
рахункових результатів, але істотно ускладнює ССЕ.
56
умова друк» о роду
Для розв’язання даної задачі необхідно використовувані ііасіупні іранич-
ні умови: на лініях ОСА і АВ задається однорідна гранична умова першої о роду
= Л|АВ =0. а на лінії ООВ однорідна гранична
5Л/Нй=0-
1'кспер.
° Розрах.
/у, А
Рис. 2.4 Харакгеристика холостого ходу ТГВ 200
Для кожного заданого значення струму збудження Івиконується розра-
хунок магнітного поля машини з урахуванням нелінійної залежності //(/ї) для
феромагнітних сталей статора і ротора. Потім за виразом (2.3) визначає ї вся маг-
нітний потік, що перетинає лінію СГ). Цей потік дорівнює половині потоку взає-
моіндукції. За допомогою виразу (2.10) розраховується сумарна Г.РС обмотки
якоря на холостому ході.
На рис. 2.4. зображена експериментальна і розрахункова залежності ліній-
ної напруги обмотки якоря від струму збудження на холостому ході.
Розрахункові значення ЕРС відрізняються від експериментальних значень
не більше ніж на (3...6) % в широкому діапазоні значень струму збудження. Це
свідчить про високу достовірність польової методики розрахунку XXX, яка за-
снована на аналізі магнітного поля генератора у двомірному наближенні.
2.1.2. Магнітний потік пазового розсіяння. Магнітні потоки розсі-
яння обмоток і відповідні їм індуктивні опори розсіяння відіграють важли-
ву роль в теорії і практиці електричних машин. Найбільший внесок в інду-
ктивні параметри розсіяння обмоток дають так звані магнітні потоки пазо-
вого розсіяння. Магнітним потоком пазового розсіяння будемо називати
магнітний потік, який перетинає паз магнітопроводу з обмоткою уздовж
його ширини (рис.2.5). За результатами розрахунку магнітного поля ма-
шини з достатньою для практики точністю магнітний потік пазового розсі-
яння і індуктивний опір пазового розсіяння обмотки можна знай ги на під-
ставі наступних міркувань.
57
Величина поперечного магнітного потоку пазового розсіяння визна-
чається по наступному виразу;
= 6/ \^Х^У ' ^Хср ' \
0
(2.13)
де Вх - середнє значення х — ої складової магнітної індукції по висоті па-
Рис. 2.5 До розрахунку магнітного потоку пазового розсіяння
(Оскільки для двовимірних задач Вх = дА/ду, то маємо
В 4(/) ~ ЛЯ/Ау = кА: кп . З урахуванням виразу (2.13) отримаємо
Фаї=/п-ДД. (2.14)
де А4 різниця значень потенціалу між точками А і В по висоті паза (рис.
2.5). Вираз (2.14) є дуже корисним для наближених оцінок магнітних пото-
ків при проведенні електромагнітних розрахунків. Він показує, шо магніт-
ний потік через лінію, яка з’єднує дві довільні точки, чисельно дорівнює
різниці векторних магнітних потенціалів у цих точках (на одиницю аксіа-
іьпої довжини машини).
У підручниках по загальній теорії електричних машин [13] отримано
іьієіупні аналітичні вирази для магнітного потоку і відповідного йому ін-
іуктивного опору пазового розсіяння одновиткової котушки:
(2.15)
*оп=2я/4)/М (2.16)
,е ! ф струм в котушці, Я - відносна магнітна провідність пазового розсі-
НІПІЯ.
58
З урахуванням виразів (2.14) і (2.15) отримаємо наступний вираз для
індуктивного опору пазового розсіяння через відомі значення векторного
магнітного потенціалу:
х^^2тг/Іп-^/Іф. (2.17)
Якщо котушка містить в пазу И' витків, то вираз (2.17) слідує помножити
2
на гг .
В наступному прикладі виконано розрахунок магнітного потоку па-
зового розсіяння обмотки статора шестиполюсного асинхронної о двигуна
поіужністю 1200 кВт.
Приклад 2.2. Двигун має наступні дані статора; висоту плкі 52,3 мм, ши-
рину паза 10,5 мм; число пазів 72; магнітну провідпісії. шинного розсіяння
Л. 1.7; амплітудне значення струму у фазі обмотки статори Іф ~ ч/2 443 = 626
А; число котушок на полюс і фазу д 4; відносне укорочення кроку двошарової
обмотки статора /3 -=0,833.
Однойменні фазні зони верхнього і нижнього шарів обмінки сіаіора тсу-
нуті один до одного на дві зубцеві поділки. Витки оОмоікп. пю клані, у патах
усередині загальної двошарової фазної зони, матої), різні ноіокп іьііовою розсі-
яння, що обумовлене різним положенням ЦИХ І11ГІІВ підносно |К-ІУ н.ісючої осі
магнітного полюса. Після розрахунку' поля і обчислення поперечної о млі піїного
потоку за виразом (2.14) отримаємо для кожного і іі.іпв і нічними фпш обмоіки
статора наступні значення потоків: Ф„\\ “ 0,0105 Но ц . 0 0051 Вб
ФаХ^ 0,0027 Вб ФгаУ4- 0.002 Вб ФаХІ 0,00051 Ні, </>(И „ о.оооі Вб(па
1 м аксіальної довжини). Середнє значення поперечної о понжу іпионоіо розсі-
яння для всієї сукупності послідовно з'єднаних вінків скла ції 0 004 І Вб.
2.1.3. Магнітні потокозчеплення оЛмоінк. Магнітнии нотокоічеп-
ленням обмотки електричної машини пінніші їм я іншіній мш ііііпии поіік,
зчеплений з усіма витками обмотки. Джеімчьтмн мпіііііііоїн інноку можуть
бути струми в даній обмотці машини, в інших її обмоіктіх інн ніші магні-
ти, зовнішні магнітні поля тощо.
Конструкція обмотки елекіричної м.ііпипн < нн іпиіі.іі і іиіацноіо:
окремі котушки, з яких складаються фази обмоікн роніонпніїї уїдовж
розточки статора і розміщуються в різних па піч млі ііііоііроііоцу, шпки ко-
тушок можуть мати різний крок, розтанюїзуїшінся н.і рітііі інн <>н пі і.і і ін.
Тому достовірний розрахунок магнітної о ноіокоічеіі к піні мо в пііііиіі ііль-
ки після детального аналізу розподілу поли п пк і пішій ннп мшпніііі
Величини магнітних потокозчеплень обмінок штііршіиі. пі канву
роль при розрахунках ЕРС, що наводяться в обмоікнх і ішн ч.ііі. їв пішки
від величин потокозчеплень, але й від іпіпщкої 11 іч імііні у чи і Мсіоди
59
розрахунку потокозчеплень займають важливе місце в теорії електричних
машин індуктивного типу.
Визначимо спочатку магнітне потокозчеплення котушки малого (то-
чкового) поперечного перетину (рис. 2.6).
Рис. 2.6 Магнітне потокозчеплення котушки малого
поперечного перетину
Хай котушка містить XV витків, маг довжину контуру £, площу по-
верхні 5 і нескінченно малий поперечний перетин. Джерела електромаг-
нігного поля створюють магнітний потік Ф, зчеплений з витками даної
коїушки. Припустимо, що зчеплений з котушкою магнітний потік Ф є
розподіленим уздовж поверхні котушки по гармонійному (синусоїдально-
му) закону з періодом 2т. Сторони коїушки лежать в двох однакових па-
гах магнітопроводу, віддалених один від одного на відстань полюсної по-
ділки Г. З торцевих сторін магнітопроводу пазові частини котушки
з'єднані лобовими частинами. Для повного магнітного потокозчеплення
котушки можна виписати наступні вирази:
= іг -Ф = щ• <£ = щ $гоґА (І8 = XV • ^А сії. (2.18)
5і 5 С
У виразах (2.18) використано відоме співвідношення В = гоі А між
маті гною індукцією В і векторним магнітним потенціалом А, а також
ніс госовано теорему Стокса, відповідно до якої потік ротора вектора че-
рг! іадану поверхню 5 дорівнює циркуляції цього вектора уздовж замкну-
। оі о контуру С, який обмежує цю поверхню. Інтеграл по контуру С роз-
кнадається на наступні складові:
<$А (11 = р! (11 + рЛ! (11 + р2 сії + рл2 (2.19)
с Іп Іл Іл
। ~ ____________________________________________________________
де інтегрування проводиться уздовж довжин пазових /ц і лобових /у ча-
стин контуру котушки.
Оскільки сторони котушки знаходяться в однакових умовах, але під
різними полюсами на відстані полюсної поділки, з урахуванням періодич-
ного характеру розподілу поля маємо Л, = — Л2 .
При двомірному аналізі поля у поперечному перетині машини струм
в котушці направлений перпендикулярно площині поперечного перетину, а
векторний магнітний потенціал не змінює свого значення уздовж довжини
пазової частини котушки. Тому, з урахуванням різного напряму обходу
сторін котушки при інтегруванні уздовж довжини її контуру, маємо
сії = ^А2-с11. Якщо прийняти значення магнітною потенціалу уз-
гп !п
довж довжини лобових частин котушки рівним нулю А,п — А,/- 0, іцо
еквівалентно нехтуванням магнітними потоками в лобових часіиплх коту-
шки, то після інтегрування (2.19) з урахуванням (2.18) отримаємо наступ-
ний простий вираз:
^=2-//7-и-4
(2.20)
де Ак — А\ —— А2 - значення векторного магнітного поісііці.ілу в ючці
поперечного перетину ЕМ, в якій розташована одна із сторін даної котуш-
ки.
Якщо поперечний перетин котушки є достаїньо великим, іо некюр-
ний магнітний потенціал має різні значення в різних ючк.іх пер* і нну ко-
тушки. 7'ому необхідно знайти середнє значення потенціалу в коїунщі. І Іри
використанні МСЕ, коли область поперечного перегину ііокрнп.к п.ся сіт-
кою скінченних елементів, необхідно проінтегруваїн впр.іі ( !..'<)) по всіх
скінченних елементах, що лежать в перетині котушки (рис.2.7).
Потокозчеплення фази обмотки, що склала» п.ся і </ шн іп іонно
з’єднаних котушок, знаходиться інтегруванням приведеної о ннраіу іа су-
марною площею поперечного перетину сторін усіх коїупвж <|іаш X . що
мають струми одного напряму. Після заміни інгеїрала скінченними сума-
ми остаточний вираз має наступний вигляд:
, . . ТС 2/ ГТ Г XV і Г7
-о - !^ ^ = Р—•££4/„, (2.21)
ЛП її
де А^ср = (Ау + А2і + Лз;)/3 - середнє арифметичне іппченнц н> к вірно-
го магнітного потенціалу в /-ому скінченному елемешІ В / ОМпаїу.у
і_:бі
якому лежить котушка фази у = (1...д), 5 - площа і — го скінченного
елементу в і - ом пазу 8 ц - площа пазу, р - число пар полюсів.
Рис. 2 7 Перетин паза з котушкою
Формула (2.21) є луже зручною і легко програмується на ЕОМ, оскі-
льки містить тільки прості операції підсумовування відомих значень поте-
нціалу у вузлах ССЕ. ІДя формула наочно демонструє переваги викорис-
тання векторного магнітного потенціалу як розрахункової функції елект-
ромагнітного поля.
Формула (2.21) дає значення повного магнітного потокозчеплення
обмотки. Термін “повне потокозчеплення " підкреслює, що знайдене зна-
чення містить всі основні складові, які розглядаються в класичній теорії
електричних машин. Зокрема, у повне потокозчеплення входять складові
від магнітного потоку “взаємоіндукції”, магнітних потоків “пазового розсі-
яння”, потоків всіх просторових вищих гармонік магнітного поля тощо.
Повне потокозчеплення є реальною фізичною величиною, яка може бути
знайдена з експериментів.
Внесок потоків “лобового розсіяння” в повне потокозчеплення обмо-
тки можна врахувати тільки при тривимірному аналізі поля в зоні лобових
частин. При двовимірному моделюванні поля цей внесок доцільно врахо-
вувати традиційним способом, використовуючи в розрахунках індуктивно-
сті лобового розсіяння обмотки [13].
Загальна формула (2.21) заснована на аналізі розподілу реального
поля в активній зоні машини. Тому в розрахунковому значенні потокозче-
плення враховані всі основні особливості конструкції обмотки, такі, як
розподіл котушок по пазах в межах фазної зони, укорочений крок котушок
і ін. В класичній теорії машин ці конструктивні чинники враховуються за
допомогою обмотувальних коефіцієнтів. При польовому аналізі характери-
стик машини необхідність в їх використовування відпадає.
_______-________-____— 62_____________________________,
2.1.4. Електрорушійні сили і індуктивні опори обмоток. Діюче
значення електрорушійної сили (ЕРС) фази обмотки електричної машини
при електромагнітних величинах, що гармонійно змінюються у часі, моле-
на розрахувати за наступною формулою:
Е = 7г4ї/^ф, (2.22)
де магнітне потокозчеплення фази Чф знаходиться за формулою (2.21).
Відмінність формули (2.22) від (2.10) полягає у тому, що формула (2.22)
дає значення повної (результуючої) ЕРС Е, яка викликана ішегральпцм
магнітним потоком (потокозчепленням) Чф обмотки, в якому врахову-
ються і магнітні потоки розсіяння, а формула (2.10) дозволяє ліайіи ЕРС
Ет, яка обумовлена тільки магнітним потоком взаємоіндукції ФПІ.
Методи польового аналізу дозволяють також розрахуваїи повні ін-
дуктивності і індуктивні опори обмоток. Для знаходження індукіивно^ті
обмотки необхідно провести розрахунок поля в машині за цаявносіі іільки
одного джерела поля — струму в даній обмотці.
Якщо визначається індуктивність багатофазної обмоіки сгагора
змінного струму, то необхідно задати густину струмів у всіх фа$ах обмотки
з урахуванням часового зсуву струмів окремих фаз. На рис. 2.8, як при-
клад, умовно зображена схема трифазної двополюсної одношарової обмот-
ки статора з числом зубців статора 7.у- ЗО.
Рис. 2.8 Схема трифазної двополюсної одношарової
обмотки статора
На рис. 2.9 зображено поперечний перетин машини з позначенням
фазних зон, в яких знаходяться відповідні податки і кінці фаз.
Якщо, наприклад, розглянути момент часу, при якому у фазі «Д» ви-
никає амплітудне значення фазного струму, то струми у фазах «В» і «с»
1______________’_______' - _____63
у відповідності до зірки струмів фаз симетричної трифазної системи, ма-
ють половинну амплітуду і направлені у зворотному напрямку. Тоді у па-
зах статора потрібно задати систему густин струмів, яку показано на рис.
2.9, де 3 - густина струмів у пазах фазної зони «А», яка обчислюється за
виразом (2.12).
Рис. 2.9 Розподіл густини струмів у фазних зонах статора
Після визначення потокозчеплення фази обмотки за формулою (2.21)
її індуктивність розраховується за наступним виразом:
Ьп = — \А-Ж = р---------(2.23)
" і ] с і ' т с іуср ід ' ’
Іф ‘ф^ц х ]Ф^П у і
Індекс “П” відображає факт, що знайдене значення характеризує ін-
дуктивність пазової частини обмотки. Для розрахунку повної індуктивнос-
іі обмотки з урахуванням внеску лобових частин необхідно до знайденого
шачення додати індуктивність розсіяння лобових частин обмоток , яка
розраховується, наприклад, по відомих емпіричних формулах 113]
Ьф - ^11 + І'аП
(2.24)
Повний індуктивний опір фази обмотки виражається за формулою
Хф — Ьф-
(2.25)
Із знайдених повних ЕРС і індуктивного опору фази обмотки можна,
> разі необхідності, відокремити ЕРС і індуктивні опори взаємоіндукції і
64
розсіяння обмотки. Наприклад, ЕРС від потоків розсіяння у пазовій частині
обмотки легко знайти на підставі виразів (2.22) і (2.10):
ЕсП = Е - Ет = (Ч Ф - ) <2-26)
Відповідно вираз для розрахунку індуктивного опору розсіяння фази об-
мотки (окрім індуктивного опору розсіяння її лобових частин) мас наступ-
ний вигляд:
= л-72/ (Тф - м>к„Фт) / /ф. (2.27)
Вираз (2.27) дозволяє точніше визначити індуктивний опір розсіяння пазо-
вої частини обмотки, ніж наближений вираз (2.17), оскільки у виразі (2.27)
використовується більш докладна інформація щодо розподілу магнії ного
поля у всій активній зоні машині. Проте при цьому потрібен більший обсяг
обчислень.
2.2.5. Синхронні, перехідні і надперехідні індуктивні опори син-
хронних машин. Важливим і актуальним прикладом вишачсіпія ішегра-
льних параметрів електричних машин польовими методами < ро (рахунок
індуктивних опорів синхронних машин (СМ). Дія практичною виконання
таких розрахунків необхідно мати зручні і доступні для широкої о кола ко-
ристувачів обчислювальні алгоритми і методики, що до тволяю і ь адекка і но
інтерпретувати результати польового аналізу і на їх основі оі римувати до-
стовірні величини електромагнітних параметрів.
При розрахунковому аналізі сталих і перехідних режимів робоїй СМ
достатня достовірність розрахункових результагіву ряді випадків табеше-
чується методами класичної теорії, в якій СМ відображав ївся лінійною ла-
нцюговою моделлю. Для отримання достовірних розрахункових результа-
тів в моделі необхідно задати адекватні значення основних її елек < ромаї пі-
тних параметрів індуктивних опорів обмотки якоря СМ в сінних і пере-
хідних режимах. Зазвичай індуктивні опори обмотки якоря синхронні,
перехідні, надперехідні розраховуються по спрощених формулах, трима-
них при істотних допущеннях. Але ці формули далеко не іанжди врахову-
ють особливості конструкції машини, внаслідок чоіо спосісрії .ноі ься істо-
тні відмінності розрахункових і експериментальних даних У ряді випадків
індуктивні опори визначаються експериментальними методами | 1/ і ін.|,
проте розрахункове визначення параметрів виявлж іьея бпіьіп іручіптм і
доцільним.
Визначення достовірних значень індуктивних опорів < М мо «пітно па
основі розрахункової інформації щодо розподілу елекіром.ті ііііноїо поля в
активній зоні машини. Нижче представлена польова методика чшсипного
розрахунку як синхронних, так і перехідних (надтіерехідпих) інлук іикпих
опорів СМ.
[ 65- ............................................|
Визначення синхронних індуктивних опорів. Синхронні індуктивні
опори СМ по повздовжній <1 та поперечній Ц осям Xа і X характери-
зують синхронну машину у сталому синхронному режимі роботи і у відпо-
відності до класичної теорії ЕМ дорівнюють сумі індуктивних опорів реак-
ції якоря X ис1 (або Xі розсіяння обмотки якоря Х](Т. Без втрати зага-
льності аналізу розглянемо задачу на прикладі неявнополюсної СМ, яка
має однакові значення індуктивних опорів по осям сі і д (Х^ = Хд). Для
визначення ХА формулюється наступна польова задача. Оскільки статор є
шихтованим, а вихрові струми у контурах ротора в сталому симетричному
режимі роботи не виникають, електромагнітне поле в активній зоні СМ
може бути описаним стаціонарним рівнянням Пуассона для векторного
магнітного потенціалу. В декартових координатах воно записується у ви-
гляді (2.11). Розрахунковою областю являється площа поперечного перері-
зу СМ, а на зовнішній поверхні ярма статора задаються однорідні граничні
умови першого роду:
Л(х,^)|Сі = 0. (2.28)
При цьому ротор вважається умовно нерухомим, а положення у про-
сторі його повздовжньої осі співпадає з положенням осі фази А обмотки
якоря. Джерелами поля в правій частині рівняння (2.11) є задана густина
струмів у фазах обмотки якоря. Струми в обмотці збудження відсутні. Для
розрахунку вибирається момент часу ір, для якого струм у фазі А має мак-
симальне значення, а в інших фазах струми дорівнюють половині значення
струму фази А і протікають у зворотному напрямку:
і = ^В^р) ~ *С&р) ~ ~^тТакий вибір розрахункового мо-
менту часу не має принципового значення і визначається лише зручністю
тавдання початкових даних.
У відповідності до виразу (2.18) після розрахунку поля векторного
магнітного потенціалу повне магнітне потокозчеплення фази А визнача-
ється за наступним виразом:
~(2.29)
де 8А- площа інтегрування, що складається з сумарної площі поперечно-
го перетину сторін всіх послідовно з’єднаних котушок фази А, які мають
струми одного напрямку (на рис. 2.10 площу інтегрування зафарбовано
темним кольором); 8р-перетин паза статора; Іп~ активна довжина стато-
ра И’р- кількість послідовно з’єднаних витків у пазу.
66
Визначене за виразом (2.29) потокозчеплення включає складові від
потоків взаємоіндукції, пазового і диференціального розсіяння.
Зважаючи на нелінійність кривих намагнічування феромагнітних
сталей, з яких виготовляються магнітопроводи електричних машин, магні-
тні проникності Д ділянок магнітопроводу залежать від вибраного значен-
ня струму якоря. Для відповідності магнітного стану магнітопроводу умо-
вам номінального синхронного режиму, для якого визначається параметр
X с), необхідна амплітуда струму Іт знаходиться у результаті проведення
серії польових розрахунків відповідно до наступних правил.
Рис. 2.10 Площа інтегрування при розрахунку потокозчеплення фази А
Діюче значення ЕРС фази А обмотки якоря розраховується за вира-
зом (2.22). Підставляючи у вираз (2.22) замість ЕРС номінальну фазну на-
пругу, знайдемо з нього інтегральне потокозчеплення фази А статора
Ч^, яке відповідає номінальному режиму роботи. Виконуючи серію роз-
рахунків при різних заданих струмах обмотки якоря, знайдемо такий с грум
якоря 1т, який відповідає номінальному потокозчепленню фа зи обмотки
якоря Ч^д,. При цьому розрахунковий розподіл магні тної проникності у
об'ємі магнітопроводу буде близьким до розподілу проникносіі в номіна-
льному режимі ТГ.
Після чисельної реалізації описаного розрахункового алгори гму син-
хронний індуктивний опір визначається за наступним виразом:
(2.30)
Індекс “ІТ’ у виразі (2.30) означає, що отриманий індуктивний опір
відноситься тільки до пазових частин обмотки, оскільки він розрахований
на основі розв’язання двовимірної польової задачі в поперечному перетині
ТГ. Для урахування внеску магнітних потоків лобових частин обмоток до
вказаного опору необхідно додати індуктивний опір лобових частин (див.
(2.24)), який розраховується за відомими формулами [ 13].
Для визначення синхронних індуктивних опорів для поперечній осі,
іцо є необхідним для явнополюсних СМ, потрібно розв’язати аналогічну
задачу, в якій просторове положення осі фази обмотки якоря співпадатиме
з поперечною віссю <7 ротора.
Нижче в прикладі 2.3 приведені результати розрахунків синхронних
індуктивних опорів для синхронних турбогенераторів типу ТГВ потужніс-
тю 200 і 300 МВт. Польовий аналіз проводився у двомірному наближенні в
межах поперечного перетину активної зони, оскільки для ТГ, які мають
значну осьову довжину, вплив торцевих зон на інтегральні електромагнітні
параметри є незначним. Внесок лобових частин обмоток в індуктивні опо-
ри врахований за відомими формулами для індуктивних опорів лобового
розсіяння.
Приклад 2.3. Початковими даними для розрахунків є наступні значення.
Для ТГВ - 200: номінальні лінійна напруга і фазний струм ІЗ ІІЛ = 15750 В,
/нф~ 8625 А; число пар полюсів /7 = 1; діаметр розточки статора /9| = 1275
мм. діаметр ротора £)2 ~ 1075; активна довжина Іц= 5200 мм; висота і ширина
паза статора Ну = 50 мм, Ь1 = 38 мм; висота і ширина паза ротора /?2 = 171.5
мм; =30,6 мм; число зубців статора і ротора = 60: И2 = 36: число витків у
фазі обмоток статора і ротора ТГ] = 10, П-'2 = 180; струм збудження на холостому
ходу і при номінальному навантаженні /е0 = 705 А , Іен = 1880 А.
Для ТГВ - 300: ІЗ20000 В; І пф = 10200 А; /2=1: Г>і= 1300 мм;
/?2 1120 мм; /?| =280 мм; 6|=39,9 мм; /г2=160 мм; />2=33,9 мм: Х|=60;
/2 36; 1^=10; Н’2=128; /вО=183ОА; /в„=3050А.
При інтегруванні за формулою (2.29) враховано, що обмотка якоря ТГ ви-
копується стрижньовою і в одному пазу статора розміщується один виток обмо-
ки И^р=1. При розрахунку потокозчеплення фази А площа інтегрування по на-
ше, в яких лежать витки фази А обмотки якоря із струмами одного напрямку,
гображена на рис. 2.10 темним кольором. При цьому враховано, що котушки
циошарової обмотки статора мають скорочений крок (відносне скорочення {3 =
0,8). внаслідок чого провідники верхнього і нижнього шарів мають відносний
куй на 6 зубцевих поділок.
Описана обчислювальна методика реалізована в програмно - обчислюва-
льному комплексі ЕЕМЬАВ.
І’ігка скінченних елементів, що покриває розрахункову область ТГВ - 200
поперечний перегин активної зони, містить 7168 вузлів і 14278 скінченних
еіісмен і ів. Аналогічні параметри має сітка і для ЗТВ - 300.
І іриведемо результати чисельних розрахунків.
- .........~~.....~68 -
Для ТГВ - 200: при миттєвих значеннях струмів у фазах обмотки якоря
і4 — / = 6830.7 А. /в = Іс — - 3415,35 А потокозчеплення фат А склала,
40.93 Вб. фазна ЕРС Е д - 9087 В, а синхронний індуктивний опір Xдц 1,883
Ом або в системі відносних одиниць - 1,786 в.о. Індуктивний опір лобових час-
тин обмотки складає X = 0,039 в.о. [13]. Остаточно магмо
Хд — Xдд +ХаЛ = 1,825 в.о. Відзначимо, що синхронний індуктивний опір
ТГВ - 200, підтверджений експериментальними даними, дорівнює 1,84 в.о.
Для ТГВ - 300: при миттєвих значеннях струмів у фазах обмотки якоря
ІЛ ~ 1 т~ 6Ю5 А 1В ~ = " 3382.5 А потокозчеплення фази Л складає 52,5 Вб
Ед =11659 В, пазовий індуктивний опір X = 2,44 Ом або 2,153 в.о. З ураху-
ванням лобового розсіяння маємо Xд = 2,218 в.о. при експериментальному зна-
ченні 2.195 в.о.
Такий близький збіг розрахункових і експериментальних даних свідчить
про те. що двовимірні польові моделі ТГ, які використовуються спільно з на-
ближеними формулами урахування потоків розсіяння лобових частин обмоток,
адекватно відображають основні особливості конструкції П і можуть успішно
використовуватися при визначенні його індуктивних параметрів в синхронних
режимах роботи.
Визначення перехідних і надперехідних індуктивних опорів. І Іри ви-
никненні перехідних процесів СМ в її роторних контурах індукуються
струми, які впливають на величину індуктивного опору обмотки якоря.
Наприклад, якщо ротор СМ є масивним (як, наприклад, в ГЕ), то н зубцях і
клинах ротора індукуються вихрові струми, які витісняють маї ні і ний потік
у повітряний проміжок. На початку перехідного процесу, коли глибина
проникнення поля в масивний ротор складає декілька міліметрів і значна
частина магнітного потоку замикається у повітряному проміжку, індукти-
вний опір машини має якнайменше значення. Надалі при проникненні маг-
нітного потоку в ротор СМ її індуктивний опір збільшується. Зміна опору
відбувається безперервно аж до сталого синхронного значення.
Проте класична теорія описує поведінку СМ в динамічних режимах
роботи на основі незмінних індуктивних опорів. Для цього вводять в роз-
гляд налперехідний Хд і перехідний Х(І індуктивні опори. Ці параметри
широко використовуються при розрахунках СМ, на їх основі отримано
зручні аналітичні вирази для визначення перехідних струмів [22,35]. Хоча
насправді індуктивний опір СМ при перехідних режимах є безперервною
функцією часу, при адекватному виборі значень Хд і Хд можна отримати
достатньо достовірні розрахунки перехідних струмів.
Оскільки при перехідних процесах струми ротора витісняють магні-
тний потік у повітряний проміжок, надперехідний опір СМ значною мірою
визначається власним розсіюванням обмотки якоря.
Ь9
Незважаючи на те, що тривалість надперехідної стадії перехідною
процесу СМ складає всього 0,05 ... 0,15 с, що обумовлено часом загасання
надперехідних струмів в роторних контурах, ця стадія перехідного процесу
є дуже важливою для докладного аналізу, оскільки виникаючі ударні стру-
ми являють найбільшу небезпеку для конструкції машини.
При визначенні перехідних і надперехідних індуктивних опорів роз-
в'язується нестаціонарна задача, в якій аналізується процес дифузії елект-
ромагнітного поля в електропровідний ротор. Перехідний процес виникає в
результаті миттєвого включення обмотки якоря в електромережу. При
цьому вважається, що ротор обертається синхронно з незмінною швидкіс-
тю. В загальній формі запису рівняння поля відносно векторного магнітно-
го потенціалу в цій задачі має такий вигляд:
— дА - —
ЬА-р? + уу(уХГОіА) = ~цЗ стор (2.31)
сі
де V - відома лінійна швидкість руху ділянок ротора відносно джерел по-
ля. При розв’язанні рівняння (2.31) у правій його частині задається система
іустин струмів в пазах з витками обмотки статора, яка гармонійно зміню-
ються у часі і формує обертове магнітне поле статора.
Використовуючи принцип інваріантності систем координат, можна
спростити розв’язання рівняння (2.31), розглядаючи задачу в роторних ко-
ординатах. Оскільки магнітне поле статора і ротор, що обертається, у син-
хронному режимі роботи є взаємно нерухомими, припустимо, що на поча-
тку перехідного процесу струми у фазах обмотки статора стрибкоподібно
ібільшуються від нуля до номінальних значень, знайдених раніше при роз-
рахунку синхронних індуктивних опорів. Надалі при розв’язанні нестаціо-
нарної задачі ці значення струмів статора у часі не змінюються. Не зміню-
ється також взаємне положення зубців статора і ротора. Це означає нехту-
вання зміною розподілу поля при повороті ротора в межах однієї зубцевої
поділки. Обгрунтованість такого допущення була підтверджена
роів'язанням ряду аналогічних задач при різних положеннях зубців ротора
відносно зубців статора. При цьому чисельні значення параметрів у всіх
варіантах залишалися практично однаковими. Швидкість ротора в рівнянні
(2.31) приймається рівною нулю V = 0. В розрахунковій області (рис. 2.10)
задаються однорідні початкові умови /1(0) = 0, а також однорідні гранич-
ні умови (2.28) на зовнішній поверхні ярма статора.
Розглядаючи задачу на прикладі СМ з масивним ротором, кожний
паз ротора по його висоті підрозділяється на дві немагнітні електропровід-
ні підобласті. Верхня підобласть паза відображає електропровідні дюра-
иіомінієві клини ротора, а нижня - мідні провідники обмотки збудження,
що мають еквівалентну електропровідність, яка визначається за допомо-
гою коефіцієнту заповнення паза ротора міддю. Розв’язання даної задачі
дозволяє спостерігати поступове проникнення у часі магнітного поля
статора в електропровідний ротор і пов'язану з цим явищем зміну індукти-
вного опору машини.
Після розрахунку поточного розподілу поля для заданого моменту
часу за виразами (2.29), (2.30) розраховується потокозчеплення фази А об-
мотки якоря і її змінний індуктивний опір Х^І). Цей опір являє собою
функцію, яка монотонно збільшується у часі, причому її значення у момент
часу 0,005 с відповідає першій амплітуді ударного струму в обмотці якоря і
дорівнює надперехідному індуктивному опору. При повному загасанні
струмів ротора ця функція прагне до синхронного опору Х^. Слід особли-
во підкреслити, що зважаючи на нелінійність властивостей магнітопроводу
за інших рівних умов значення функції АД/), а, отже, і шукані індуктивні
опори залежать від величини заданих струмів обмотки якоря.
Спосіб визначення індуктивних опорів, що пов'язаний з чисельним
розв’язанням рівняння (2.31), є універсальним і дозволяє знайти усі необ-
хідні значення, проте застосування цього способу доцільно тільки для роз-
рахунку надперехідних і перехідних параметрів. Це обумовлено тим, що
розв’язання рівняння (2.31) на всьому відрізку часу, який відповідає пов-
ному загасанню струмів у всіх контурах ротора (7 ... 10 с), вимагає вели-
ких витрат ресурсів ПЕОМ. Тому для визначення синхронних параметрів
доцільно використовувати модель, засновану на розв’язанні стаціонарного
рівняння (2.28).
Перехідний індуктивний опір Х(І в класичній теорії СМ характери-
зує опір синхронної машини після загасання надперехідних струмів в дем-
пферних контурах ротора, але при наявності перехідних струмів в контурі
обмотки збудження. Цей параметр визначається по кривій АҐД/), якщо
приблизно відома постійна часу загасання надперехідних струмів Т(1. На-
приклад, для ТГВ - 200 розрахункова величина постійної часу дорівнює
7.7=0,1375 с.
Приклад 2.4. Нижче представлені результати розрахунків перехідних па-
раметрів турбогенераторів ТГВ - 200 і ТГВ - 300. вихідні дані яких приведені у
прикладі 2.3. Розглядався процес включення обмотки якоря на систему незмін-
них струмів фаз статора, який еквівалентний процесу раптового КЗ синхронного
генератора на холостому хода.
Розподіл магнітного поля в активній зоні машини змінюється для кожного
моменту часу. На рис. 2.11 а) зображена розрахункова картина розподілу магніт-
ного поля у поперечному перетині ТГВ - 200 у момент часу 0,2 с після ночатку
перехідного процесу. У цей момент часу магнітний потік замикається по шляхах
пазового розсіяння ротора і проникає у зубцово - пазову зону ротора на глибину'
близько 2/3 висоти паза.
71
Рис. 2.11 а) Картина магнітного поля ТГВ 200 у момент часу і = 0,2с; б)
фрагмент картини поля у момент часу І = 1 с.
Рис. 2.12 Залежність індуктивного опору АД(/)для ТГВ 200
На рис. 2.11 б) зображено фрагмент картини поля в області зубцево - па-
«>них зон статора і ротора ТГВ - 200 у момент часу 1 с після початку перехідно-
ю процесу. До цього моменту часу магнітний потік встигає досягти поверхнево-
<» шару ярма ротора, тобто глибина проникнення поля в ротор перевищує гли-
бііну паза ротора.
Па рис. 2.12 представлено розрахункову залежність від часу АД(/) для
11 В 200,з якої для вибраних моментів часу нескладно знайти надперехідні і
перехідні опори. Залежність отримана з урахуванням індуктивності лобового
розсіяння обмотки якоря. Аналогічний вигляд має залежність для ТГВ 300. Час
на осі абсцис представлено в логарифмічному масштабі.
Показана на рис. 2.12 залежність X г/(Г) може бути апроксимована трьо-
ма прямолінійними відрізками, кожний з яких відповідає тривалості (постійній
часу) певного етапу перехідного процесу. Інтервал часу 0 ... 0.1 с відповідає по-
чатковому (надперехідному) етапу перехідного процесу, в перебігу якого у рото-
рних контурах протікають надперехідні струми, а індуктивний опір обмотки
якоря змінюється дуже мало; інтервал 0,1 ... 10 с відповідає другому етапу пере-
хідного процесу, в перебігу якого перехідні струми в роторних контурах посту-
пово затухають і спостерігається збільшення індуктивного опору СМ; інтервал
часу понад 10 с відповідає практично сталому режиму роботи СМ.
Значення надперехідних і перехідних індуктивних опорів склали:
Для ТГВ - 200 — Л^(0,005) = 0,203 в.о., експериментальне значен-
ня дорівнює 0,19 в.о. (відмінність складає: 6,8 %); Х(/ = 375) =• 0.322
в.о., експеримент - 0,295 в.о. (відмінність складає 9,1%).
Для ТГВ - 300 X0,21 в.о., експеримент - 0,195 в.о. (відмінність скла-
дає 7.7%); О,331о.е., експеримент - 0.3 в.о. (відмінність складає 10,3%).
Нижче в таблиці 2.1 для двох розглянутих ТГ зведені усі індуктивні пара-
метри. Відмінність між експериментальними і розрахунковими значеннями над-
перехідних і перехідних індуктивних опорів є більшою, ніж для синхронних
опорів, розрахованих у прикладі 2.3.
Таблиця 2.1
ТГ Методика Параметр
Хб Хб' Х<1"
ТГВ-200 Експеримент 1,84 0.295 0.19
Розрахунок 1,825 0.322 0,203
ТГВ-300 Експеримент 2,195 0,3 0,195
Розрахунок 2,218 0,331 0.21
Цс може бути пояснено неоднаковими умовами насичення маїнітопроводу
ТГ в розрахунку і експерименті. Проте, отримані розрахункові значення цілком
задовольняють потребам практики.
Наведені приклади розрахунку дозволяють зробити висновок, що ме-
тодика визначення індуктивних опорів обмотки якоря, яка базується на ре-
зультатах польового аналізу СМ у стаціонарному і перехідному режимах
роботи, забезпечує високий рівень достовірності розрахункових результа-
_________________________________73__________________________________
тів. При визначенні індуктивних параметрів СМ польовими методами хо-
роший результат дають двовимірні скінченно - елементні моделі, які необ-
хідно використовувати спільно з наближеними формулами для урахування
магнітних потоків лобових частин обмоток.
2.2. Електромагнітні сили і моменти в електричних машинах
2.2.1. Методи розрахунку електромагнітних сил і моментів в еле-
ктричних машинах. Ефективність електромеханічного перетворення ене-
ргії в електричній машині визначається величиною електромагнітних сил і
моментів, які діють на рухому частину машини. Тому точний розрахунок
сил і моментів відіграє велику роль в теорії і практиці електричних машин
при визначенні їх характеристик і основних техніко-економічних показни-
ків.
Цілком зрозуміло, що достовірні методи розрахунку електромагніт-
них сил і моментів повинні базуватися на методах аналізу електромагніт-
ного поля в активній зоні машині. При цьому точність розрахункових ре-
зультатів залежить від того, наскільки у моделі машини детально врахова-
на геометрія активної зони, конфігурація джерел поля і фізичні властивості
активних матеріалів.
Обґрунтовуванню методів розрахунку сил і моментів електричних
машин присвячено багато наукових робіт. Особливо необхідно відзначити
фундаментальну працю [ 19].
В електродинаміці теоретично обґрунтовано три методи розрахунку
силових чинників, що діють у електромагнітному полі.
Перший метод [40, 50] заснований на визначенні вектора об’ємної
густини електромагнітної сили
— - - 1 ІЯІ2 -----------—-
А = -£га(1ц . (2.32)
2 р
І Іерший доданок в (2.32) відображає силу Ампера, яка діє на елементарний
с і рум з густиною 7, що знаходиться у магнітному долі, а другий доданок
силу, обумовлену неоднорідним розподілом (градієнтом) магнітної про-
никності феромагнітних матеріалів. Другий доданок дозволяє врахувати
сили, що виникають в системі намагнічених середовищ (постійних магні-
і ш). Вектор результуючої сили, що діє на даний об’єм тіла V, знаходиться
інтегруванням вектора густини електромагнітної сили:
(2.33)
V
Розрахунок сили за виразами (2.32), (2.33) являє дуже трудомістку
обчислювальну операцію інтегрування векторної функції за об’ємом
74
розрахунковій області і, тому, застосовується дуже рідко, особливо для си-
стем, що містять феромагнітні матеріали.
Другий метод заснований на використанні закону збереження енергії
при виконанні електромагнітними силами механічної роботи [19,45]. Енер-
гія зовнішніх джерел що надходить в електромеханічну систему,
витрачається на здійснення механічної роботи Аліех, зміну енергії магніт-
ного поля ДИ^, і втрати в елементах системи Рп(]т:
^Ліех ^пот
(2.34)
Якщо розглядати замкнуту консервативну систему за відсутності
надходжень енергії від зовнішніх джерел і нехтувати втратами енергії, то
механічна робота електромагнітних сил дорівнює зміні енергії електромаг-
нітного поля системи
(2-35)
Виражаючи механічну роботу через добуток модуля результуючої елект-
ромагнітної сили Рх (або для обертального руху - електромагнітного мо-
менту і узагальненого віртуального переміщення - лінійного Дх або
кутового Д/, а, також переходячи до нескінченно малих приростів вели-
чин, отримаємо
3)4'
Р = або М
дх г
ду
(2.36)
Електромагнітна сила або електромагнітний момент, що розрахову-
ються за виразами (2.36), направлені уздовж передбачуваного (віртуально-
го) напрямку переміщення (або деформації) електромеханічної системи,
яке відбуватиметься під дією електромагнітних зусиль. У більшості випад-
ків цей напрямок легко визначається виходячи з наявних уявлень щодо
принципу дії та конструкції конкретної електричної машини.
Аналітичні вирази для енергії електромагнітного поля та її часткових
похідних уздовж координати переміщення рухомої частини отримати вда-
ється тільки для дуже простих конфігурацій розрахункової області. В бі-
льшості практично важливих задач для розрахунку зусиль використову-
ються чисельні методи. При цьому похідні у виразах (2.36) замінюють скі-
нченними різницями
дІУ МУ д]У МУ
Ь' — маг ~ маг _ Іугг маг маг
ГХ~ а ~ ~ а Г •
ох Дх ду Ду
75
Розрахункові алгоритми передбачають чисельне визначення енергії
поля електромеханічної системи при двох різних положеннях її рухомої
частини, що відрізняються на величину малого віртуального переміщення
Дт або А/. Нехай в даній електромеханічній системі є /V обмоток -
струмонесучих контурів. Тоді енергію магнітного поля можна виразити
через значення струмів і магнітних потокозчеплень контурів. При цьому
можливі два способи розрахунку зміни енергії магнітного поля при пере-
міщенні рухомої частини. У першому способі переміщення відбувається
при незмінних значеннях магнітних потокозчеплень усіх струмонесучих
контурів системи, в другому способі — при незмінних значеннях струмів в
усіх контурах.
У першому способі, коли магнітні потокозчеплення контурів при пе-
реміщенні не змінюються, але змінюються струми в контурах (для підтри-
мки незмінними потокозчеплень), енергія поля, яка відповідає заданому
значенню координати у, визначається інтегруванням відомої залежності
потокозчеплень контурів \уку) за струмами контурів:
к=ії,к
^аг=Х (2-37)
*=1 о
де Ік - поточні задані значення струмів у контурах. Підсумовування ве-
деться по усіх контурах системи. При цьому зберігається незмінним поло-
ження рухомої частини, яке визначається конкретним значенням коорди-
нати у або х.
У другому способі при незмінних струмах контурів енергія магнітно-
го поля системи визначається інтегруванням відомої залежності струмів
за магнітними потокозчепленнями:
к Л'Ч'*
Е (2-38)
*=1 о
де ук- поточні задані значення магнітних потокозчеплень контурів. Під-
сумовування також ведеться по усіх контурах системи.
Величину, що розраховується за виразом (2.37), називають магніт-
ною коенергісю системи, а величину, що розраховується за виразом (2.3 8) -
магнітною енергією системи.
На рис. 2.13 для одноконтурної системи дано графічне зображення
магнітної енергії і коенергії у вигляді відповідних площин, отриманих при
інтегруванні функцій /]({/|)і (і/|Ц). Інтегрування ведеться до деяких по-
точних значень струму ІХп і потокозчеплення
76
Рис. 2.13 Магнітна енергія і коенергія електромеханічної системи
Підставляючи вираз (2.37) в загальні вирази (2.36) отримаємо насту-
пні вирази для визначення електромагнітної сили (моменту):
сх х-=|1 0 Ох )
(2.39)
м = _ = '
аг £І.І аг
Енергію магнітного поля системи можна виразити іакож безпосере-
дньо через вектори магнітного поля
(Г„ог = { В Н { (|В|2 /И ) Л (2.40)
V V
Інтегрування в (2.40) необхідно вести по усьому розрахунковому об’єму
електромеханічної системи, що являє більш складнішу обчислювальну
операцію, ніж інтегрування у виразах (2.38) (2.39).
У загальному випадку залежності ^(/,,,..,^,7)4 ік(у/|,...,у/Л,,/)є
нелінійними, а інтеграли (2.38), (2.39) мають різні значення. Проте у роботі
[19] приведений детальний аналіз цієї проблеми і показано, що при розра-
хунку сил н нелінійних магнітних системах енергетичним методом реальну
нелінійну систему на кожному кроці розрахунку необхідно замінити її лі-
нійною моделлю. При цьому енергія і коенергія магнітного поля, які ви-
значаються за допомогою виразів (2.38) і (2.39), і відповідні їм величини
розрахункових зусиль по (2.37) виявляються одігаковими:
Рх\ - ,=Гх\-- Мг\ =Мг\ <2-4’)
77
З вищевикладеного виходить, іцо визначення зусиль за виразом
(2.37) вимагає двократного розрахунку електромагнітного поля системи і
чисельного інтегрування. До того ж заміна похідної скінченною різницею
несе додаткову невизначену чисельну помилку, пов’язану з вибором ве-
личини віртуального переміщення Дх. Тому цей спосіб, хоча і застосову-
ється на практиці, але може вести до істотних обчислювальних похибок.
Третій метод розрахунку зусиль заснований на еквівалентній заміні
розподілених об’ємних сил в тілі силами поверхневого натягнення на по-
верхні тіла. В теоретичній механіці доведено, що ідентичний напружено -
деформований стан тіла може бути викликаний як системою розподілених
усередині тіла об’ємних сил, так і еквівалентною системою сил на поверхні
тіла. Ключовим в цьому методі є поняття тензора магнітного натягнення
Т [40]. Якщо 5 площа поверхні, ідо обмежує виділений об’єм V елект-
ромеханічної системи, то тензор магнітного натягнення вводиться таким
чином, щоб завжди виконувалася рівність
V 8
(2.42)
З виразу (2.42) виходить, що якщо знайти розподіл тензора магнітно-
і о натягнення на поверхні тіла, то вектор повної сили, що діє на тіло, ви-
значається інтегруванням тензора тільки по поверхні тіла (замість інтегру-
вання густини сили за об’ємом тіла). При розв’язанні двовимірних польо-
вих задач інтегрування за площею розрахункової області замінюється інте-
ірування уздовж замкнутій лінії, що охоплює цю площу. Ця властивість
тензора магнітного натягнення дозволяє значно заощадити обчислювальні
ресурси при практичній реалізації третього методу і забезпечує йому знач-
ні переваги у порівнянні з першими двома методами.
Тензор магнітного натягнення має фізичну розмірність (н/м2) і є по
суті поверхневою густиною сили.
Найкомпактніший математичний запис для вектора тензора магніт-
ного натягнення можна отримати у нормально - тангенціальній системі
координат (рис. 2.14).
Рис. 2.14 Нормально - тангенціальна система координат
78
До кожної точки поверхні А можна провести два ортогональних орта — пе-
рпендикулярний до поверхні орт нормалі п і дотичний (тангенціальний)
до поверхні орт Г. При цьому напрям орта Т у просторі вибирається не
довільно, а так, щоб він лежав в одній площині з ортом п і вектором ре-
зультуючої індукції В (рис. 2.14). Просторова орієнтація нормально - тан-
генціальної системи координат залежить від положення точки на поверхні.
У цьому випадку вектор В в будь-якій точці поверхні може бути предста-
влений у вигляді суми нормальної Вп і тангенціальної Вг складових
В-пВп +іВт.
Таким же чином можна представити і вектор тензора магнітного на-
тягнення
Т = пТп + тТт,
причому у загальному випадку напрямок у просторі векторів В і Ті різ-
ним.
Взаємозв'язок складових магнітної індукції і тензора натягнення мо-
же бути отриманий на основі загальних формул (2.42) і (2.32). Так з (2.42)
витікає загальне співвідношення
Т = сГЕуІ&і.
Підставляючи у нього вираз для сили (2.32), після проведення математич-
них перетворень можна отримати остаточні вирази для складових тензора.
Докладні математичні перетворення приведені в роботах 119,40|. Нормаль-
на складова тензора натягнення записується у наступному вигляді:
ГЙ=^--(В2-В2).
(2.43)
Нормальна складова повної сили знаходиться інтегруванням по по-
верхні, що охоплює вибрану ділянку системи:
Е^т^-^-в^ав
8 8
(2.44)
Аналогічно для розрахунку тангенціальних складових тензора магні-
тного натягнення і тангенціальної складової повної електромагнітної сили
отримано наступні вирази:
79
7;=^-^ (2.45)
В
Рт = /Т/й =- • Вт с18. (2.46)
5 в 5
Як випливає з виразів (2.44), (2.46) при однакових по абсолютній ве-
личині нормальній і тангенціальній складових індукції нормальна складова
тензора натягнення зникає, і натягнення має тільки тангенціальну складо-
ву. З іншого боку, тангенціальна складова натягнення відмінна від нуля
тільки у тому випадку, коли не рівними нулю є обидві складові індукції.
Якщо ж хоча б одна з складових індукції дорівнює нулю, то тензор натяг-
нення і сила мають тільки нормальну складову. Наприклад, у разі однорід-
ного магнітного поля, коли в кожній точці Вт—0 вираз для сили має відо-
мий класичний вигляд
При практичній реалізації виразів (2.45), (2.46) необхідно провести
чисельне інтегрування на довільній замкнутій поверхні, що охоплює дане
тіло. Іншими словами розрахунковий результат не залежатиме від вибору
поверхні інтегрування - єдиною умовою до поверхні є те, щоб вона повні-
стю охоплювала тіло і не містила в собі елементи інших електропровідних
або феромагнітних середовищ. Це забезпечує методу додаткові переваги
при практичній реалізації, оскільки вибір поверхні не обмежується тільки
власною поверхнею виділеної ділянки системи. Наприклад, при визначенні
електромагнітного моменту, що діє на ротор електричної машини, інтегру-
вання можна виконати не на поверхні ротора, а на поверхні, що охоплює
ротор на середині повітряного проміжку машини. Конфігурація гладкої
розрахункової поверхні у зазорі значно простіше, ніж конфігурація зубча-
тої поверхні ротора, що спрощує розрахунки. Зусилля, прикладені до такої
уявної поверхні, є віртуальними, проте їх розрахункові значення дорівню-
ють реальним силам, що діють на ротор.
Вказані обставини роблять дуже привабливим використання третьо-
го методу розрахунку електромагнітних сил і моментів, який знайшов до-
статньо широке застосування у практиці електромагнітних розрахунків.
2.2.2. Електромагнітний обертаючий момент електричної маши-
ни. Використовуючи результати розрахунку електромагнітного поля ма-
шини на основі виразів (2.45), (2.46) для тензора магнітного натягнення не
важко отримати формули для обертаючого електромагнітного моменту
електричної машини будь-якої конструкції.
80
Електромагнітний обертаючий момент машини визначається як до-
буток тангенціальної складової електромагнітної сили, яка прикладена до
розрахункової поверхні, що охоплює ротор, на плече сили відстань від
поверхні до центру обертання.
Якщо поверхнею є циліндр або сфера, а для двовимірних полів ко-
ло, то плечем сили є радіус цієї поверхні (кола).
Рис. 2.15 До розрахунку електромагнітного моменту
Отримаємо вираз для електромагнітною моменту у раті двовимірно-
го електромагнітного поля машини. Розрахункову лінію у пні ляді кола ра-
діусу Кб, яке охоплює ротор > /?-,), ротгаїнутмо на середині висоти
повітряного проміжку між статором і ротором (рис. 2.15). Інажаючи на
симетрію картини поля розрахунки достатньо нровесіи в межах одної по-
люсної поділки (на рис. 2.15 зображено ротор чоіирьохіюіюсної асинх-
ронної машини).
З урахуванням виразу (2.46) повний елекіромаї ннніііі момент між
статором і ротором електричної машини вишачаї іься пат іупііою форму-
лою:
МЕМ=1-р-Рт.К6=2 Ні .// ('2.47)
А) о
де р,Т — число пар полюсів і полюсна поділка. І Ірії цьому приховано, що
площа інтегрування дорівнює 5 = ІцТ, а /і //0 При ішкоріи пінні МСЕ
у результаті заміни лінійного інтеграла сумою но відрі іках, обмежених (^)
вузлами скінченних елементів, які лежать на роїрлхуііконій пінії і (2.47)
остаточно отримаємо наступну розрахункову формулу
9 . г>. Р . І Р 1
МЕМ = Е Р,„ «,/ Ч (2 48)
Ао
81
де Впі, Вг- нормальна і тангенціальна складові магнітної індукції на і -
ому відрізку А/,— довжина відрізку.
Формула (2.48) дуже зручна, легко програмується на ЕОМ і дозволяє
ефективно розрахувати електромагнітний момент між статором і ротором
для поточного знайденого розподілу поля.
У деяких випадках зручно виразити момент через проекції тензора
натягнення на осі системи координат. Наприклад, в декартових координа-
тах, коли момент направлений уздовж напряму руху годинникової стрілки,
тангенціальна складова тензора в довільній точці на розрахунковій лінії
(рис. 2.16) виражається таким чином:
Рис. 2.16 Визначення тангенціальної складової тензора
магнітного натягнення
Тт = Тхсоза-Т зта = Тх--Ту —
1 л У х п У п
(2.49)
де х, у - проекції радіус-вектора на осі системи координат, Тх,Ту - про-
екції тензора магнітного натягнення на осі декартової системи координат.
Тоді з урахуванням виразу (2.46) для тангенціальної складової тензора ма-
гнітного натягнення отримаємо дуже зручну і просту формулу для розра-
хунку електромагнітного моменту машини, яка використовується на прак-
тиці у пакетах прикладних комп’ютерних програм, що реалізують МСЕ:
МЕМ=2Р1пРгК8^'1Р1п^бг\Тт-Л = 1Р1п\{уТх-хТу}аі . (2.50)
о о
82
Таким чином, у порівнянні з першими двома методами розрахунку
сил і моментів, метод тензора магнітного натягнення с більш ефектив-
ним та економічним з обчислювальної точки зору. Проте, як показали роз-
рахункові дослідження, для забезпечення необхідної точності розрахунку
електромагнітного моменту необхідно отримати високу точність розрахун-
ку розподілу складових магнітної індукції уздовж розрахункової лінії. Це
вимаїає розбиття розрахункової лінії на велику кількість малих відрізків,
що при застосуванні МСЕ веде до використання у зазорі машини дуже дрі-
бної сітки скінченних елементів.
У наступному прикладі наведено розрахунок електромагнітного мо-
менту трифазного асинхронного двигуна потужністю 18,5 кВ.
Приклад 2.5. АЛ має наступні номінальні дані: Р2 - 18,5 кВт, 1^ = 6,6 А,
1^\ф- 220 В, СО8(р = 0,861, Г] = 0,886, р= З, = 72 - число зубців статора.
9.7 мм - зубпова поділка статора, Ьрі = 5.78 мм - ширина пазу статора. Х2=
58 - число зубців ротора, Іг2 = 12 мм - зубцева поділка ротора 6,2 мм -
ширина пазу ротора. 8= 0,5 мм. К$= 110,75 мм. Іп - 165 мм, Г 115.7мм. Роз-
рахункова лінія, що розташована на середині висоти повітряного проміжку між
статором і ротором, була розділена на 46 рівних відрізків, причому довжина
кожного складала 2,52 мм У результаті розрахунку' електромапіі гпого поля дви-
іуна в номінальному режимі роботи на розрахунковій лінії у повітряному про-
міжку отримано криві розподілу нормальної і тангенціальної складових магніт-
ної індукції, які зображені на рис. 2.17.
Рис. 2.17 Розподіл нормальної і тангенціальної складових магнітної індукції в
повітряному проміжку
З рис. 2.17 видно, що відносно осі, яка проходить через середину полюс-
ного розподілу, нормальна складова індукції розподілена майже симетрично.
83
тоді як крива тангенціальної складової мас характерний зсув. Слід підкреслити,
що при ідеальному холостому ході двигуна (при нульовому ковзанні) крива тан-
генціальної складової індукції також симетрична відносно осі, що лежить на се-
редині полюсної поділки (інверсна симетрія). При цьому суми добутків
Впі В& 81 на лівій і правій половинах полюсної поділки мають однакову
величину і протилежні за знаком і тому розрахунок результуючого електромаг-
нітного моменту за виразом (2.48) дає нуль. Таким чином, порушення симетрич-
ності розподілу- тангенціальної складової індукції уздовж полюсної поділки при
навантажені машини приводить до появи електромагнітного моменту.
Складний зубцевий характер зображених кривих обумовлений нерівномі-
рною формою повітряного проміжку між статором і ротором. При цьому криві
розподілу складових індукції і величина електромагнітного моменту залежать
віл взаємного положення зубців статора і ротора. Для урахування впливу цієї
обставини слід виконати декілька розрахунків моменту за описаним алгоритмом
при зсуві зубців ротора відносно статора в межах однієї лубцееої поділки і, потім,
«найти усереднене значення, були виконані три розрахунки: при початковому
вибраному положенні ротора і при зсувах зубців ротора відповідно па 4 мм і 8
мм Розрахункові значень моментів склали відповідно 179,8 Н/м, 180.6 Н/м і
181.1 Н/м. Середнє значення моменту склало 180,5 Н/м, що близько до значення
192,6 Н/м, отриманому з паспортних даних АД (відмінність складає 6,7%).
Слід підкреслити, що метод тензора магнітного натягнення дає хо-
роші результати при розрахунку електромагнітного моменту АД в наван-
іажених режимах роботи, коли деформація силових ліній магнітного поля
достатньо виражена. У режимах, близьких до холостого ходу, коли розпо-
діл тангенціальної складової магнітної індукції уздовж полюсної поділки є
практично симетричним відносно середини полюсної поділки, відносна
поірішність розрахунку електромагнітного моменту істотно збільшується.
І Ісобхідна точність результату забезпечується збільшенням кількості ін-
іервалів, на які розбивається розрахункова лінія, для чого заздалегідь ви-
копується серія чисельних експериментів по обгрунтовуванню необхідної
іустини сітки скінченних елементів.
2.2.3. Сила тяги електромагніту. Розглянемо електромагніт з цилі-
ндричною конфігурацією активної зони (рис. 2.18). При подачі струму в
обмін ку індуктора корисне тягове зусилля, яке прикладається до рухомого
якоря електромагніту в осьовому напрямі, діє на дві робочі поверхні якоря.
<Існовне зусилля прикладається до торцевої поверхні якоря, яка обернена
до робочого повітряного проміжку 8. Корисну дію тут надає нормальна
«киддова сили. Деяка складова корисного зусилля прикладена також і до
бічної циліндрової поверхні якоря. Причому корисну дію на цій поверхні
н.тц.іє тангенціальна складова електромагнітної сили. Величина цієї сили
«.«нежить від висоти бічного проміжку і довжини якоря. Охопимо якір еле-
юромагніту поверхнею у вигляді циліндра, підстава якого розташована в
рої нічому повітряному проміжку між якорем і “стопом”, а бічна поверхня
84
розташована у повітряному проміжку між якорем і індуктором. Магнітне
поле електромагніту в циліндричних координатах має осьову симетрію.
Аналіз вісь-симетричного поля достатньо провести у двовимірному на-
ближенні в межах половини подовжнього перетину, показаного на рис.
2.18. При цьому необхідно розрахувати нормальну і тангенціальну складо-
ві магнітної індукції на лініях АВ і ВС.
Вираз для складової тягового зусилля, яке діє на торцеву поверхню
якоря електромагніту з вісь-симетричною конструкцією активної зони (на
поверхню ВС), в циліндричній системі координат має наступний вигляд:
Рос
Вираз для складової тягового зусилля, яке діє на бічну поверхню
якоря (на поверхню АВ) електромагніту, в циліндричних координатах має
наступний вигляд:
№ і
(2-52)
де - радіус розрахункового циліндру, розташованого на середині пові-
тряного проміжку між індуктором і якорем, причому інтегрування ведеться
на всій довжині якоря.
Після дискретизації розрахункових ліній і заміні інтегралів сумами
для результуючої сили тяги електромагніту справедливий наступний вираз:
А) і
М-І
+ 2-^- £ В2г,..В2пі.-Лг,.), (2.53)
85
2 перший доданок (з індексом “1”) характеризує зусилля на торцеву пове-
хню якоря, а другий доданок (з індексом “2”) на бічну циліндричну по-
грхню якоря. В першому доданку КіСрі - середній радіус і висота
-го кільця, на які розподілена торцева поверхня якоря.
Відповідно до зазначеного підходу нескладно отримати аналогічні
ирази для будь-яких інших електромеханічних перетворювачів енергії, з
рахуванням особливостей конфігурації їх активної зони і характеру пере-
ііщення рухомої частини.
Виконані дослідження і розробки показали, що метод тензора магні-
ного натягнення для розрахунку сил і моментів є дуже привабливим для
фактичного застосування, особливо при використанні МСЕ. По суті цей
іетод реалізується як продовження обчислень в рамках МСЕ, він легко
вбудовується” в постпроцессор МСЕ і не вимагає для своєї реалізації до-
іаткової дискретизації розрахункової області.
2.3. Визначення та дослідження інтегральних харак теристик
асинхронних машин
2.3.1. Механічна характеристика асинхронного двигуна. Механіч-
ною характеристикою асинхронної машини є залежність електромагнітно-
го моменту машини від величини ковзання ротора Механічна
характеристика є найважливішою інтегральною характеристикою асинх-
ронної машини, яка визначає її основні експлуатаційні показники: макси-
мально досяжну величину електромагнітного моменту, номінальну швид-
кість (ковзання), пусковий електромагнітний момент, ККД тощо.
Важливе практичне значення має розрахунок та аналіз механічних
характеристик короткозамкнених АД, експлуатаційні показники яких по-
вністю визначаються природною механічною характеристикою двигуна,
яка формується за рахунок вибору конструкції двигуна і, насамперед,
конструкції ротора.
Точність розрахунку механічної характеристики короткозамкнених
ЛД багато в чому залежить від точності розрахунку струмів короткозамк-
неної обмотки ротора. На розподіл і величину струмів ротора суттєво
впливає ефект витіснення вихрових струмів в масивних стрижнях ротора,
який в різній мірі проявляється при різних ковзаннях ротора (різних часто-
і.іх сгруму ротора). В класичній теорії електричних машин ця задача роз-
в'я іується за допомогою ланцюгової схеми заміщення машини. Причому
урахування ефекту витіснення виконується шляхом корегування парамет-
рів обмотки ротора в залежності від величини ковзання за допомогою по-
правочних коефіцієнтів, які отримано при аналітичному розв’язанні окре-
мої іадачі про проникнення магнітного поля в один ізольований паз ротора
86
з масивним електропровідним провідником. Використання методів теорії
поля забезпечує більш високу точність розрахунку механічних характерис-
тик короткозамкнених АД.
Розглянемо два різних методи розрахунку механічних характеристик
короткозамкнених АД, які базуються на різних способах визначення стру-
мів в масивних стрижнях обмотки ротора.
Метод векторних діаграм дозволяє задати величини і фази струмів в
стрижнях ротора після попереднього розв’язання рівнянь схеми заміщення
АД і побудови векторної діаграми, яка відповідає, заданому режиму роботи
машини (величині ковзання ротора).
Нехай відомі усі електричні параметри схеми заміщення АД, задана
напруга живлення обмотки статора, ковзання ротора і за допомогою схеми
заміщення виконано розрахунок струмів статора і ротора. Для електричних
величин, що гармонійно змінюються у часі, розраховані струми і падіння
напруги можуть бути представлені векторами і зображені на комплексній
площині у вигляді векторної діаграми. Побудована векторна діаграма до-
зволяє знайти кут фазового зсуву у часі між струмами обмоток статора і
ротора. Цей фазовий кут є еквівалентним просторовому куту зсуву між на-
магнічуючими силами (НС) обмоток статора і ротора. Кут зсуву НС обмо-
ток можна визначити як кут між положеннями амплітуд густини струмів в
пазах статора і ротора. Надалі, виходячи з припущення щодо синусоїдаль-
ного розподілу НС ротора уздовж полюсної поділки, можна задати густину
струму в кожному пазу ротора за допомогою виразу
Л; ^ЛтахСОЗЦ/г+Л/г),
(2.54)
де /2 = 2т?? / 2Г2 - кутовий розмір зубцевої поділки ротора, виражений в
електричних градусах; Л/2~ додатковий кут, який враховує, що через не-
однаковість розмірів зубцевих поділок статора і ротора і дискретного роз-
ташування пазів на поверхні ротора фактичне значення екстремуму НС
ротора, може розташовуватися не в пазу, а мати по відношенню до середи-
ни паза деякий просторовий зсув; /= 0, 1, ..., /2 - поточний номер паза
ротора.
Практичну реалізацію методу векторних діаграм покажемо на на-
ступному прикладі.
Приклад 2.6. АД потужністю 11 кВт несе номінальне навантаження при
ковзанні ротора 0.0206 в.о. і діючому номінальному струмі статора 21 А. Число
пазів статора /]= ЗО і ротора /2= 24 (Рис. 2.9). Число пар полюсів р 1, схема
обмотки зображена на рис.2.8. Площа паза статора складає 178,1 мм2, а кількість
елементарних провідників у пазу - 16. При цьому еквівалентне амплітудне зна-
чення густини струму у фазній зоні «А» обмотки статора дорівнює: 3а= л/2' 2Г
16/ 178,1 = 2,668 А/мм2.
87
Приведені до статора параметри обмотки ротора мають наступні значення:
активний опір г2= 0-021 в.о.. індуктивний опір розсіяння Х2(т ' 0,0532 в.о. Кут
фазового зсуву струму ротора відносно до ЕРС ротора при заданому ковзанні
дорівнює ^2 - агс^§{х2сг8 / гг) = ОГС/£(0,0532 0,0206/ 0,021) = 3°. Розрахо-
ване за схемою заміщення приведене до статора діюче значення струму ротора
складає 18,77 А. З урахуванням коефіцієнту приведення ротора до статора А,-=
19,13 реальне значення струму ротора дорівнює 359 А. Площа паза ротора скла-
дає 151.3 мм2, а амплітудне розрахункове значення струму у пазу ротора дорів-
нює 3,35 А/мм2.
Магнітопроводи статора і ротора АД виконуються із шихтованої сталі ма-
рки 2013. При розв’язанні задачі в комплексі МАТЕАВ - ГЕМЕАВ нелінійні
властивості сталі враховуються у вигляді функції Н(В), представленої як таб-
лиця значень в окремому т - файлі. На рис.2.19 показано текст т - файлу з ім'ям
‘яетти 2О13.т”, в який заведена інформація щодо кривої намагнічування сталі
марки 2013.
Вхідним параметром функції “зетти 2013. т” є параметр ПОгтВ - абсо-
іютне значення магнітної індукції у будь - якій точці, де необхідно знайти маг-
нітну проникність. При цьому по заданих вузлових значеннях будується інтер-
полююча функція. Вихідною величиною є параметр ти - значення магнітної
проникності в даній точці.
Рис. 2.19 1'екст т-файлу з даними про криву намагнічування сталі 2013
1;. розрахунковими даними будується векторна діаграма аналізованого режиму,
яку зображено на рис. 2.20. По векторній діаграмі визначається кут /З, який ха-
рактеризує фазовий зсув між струмами, а також еквівалентний просторовий зсув
між намагнічуючими силами обмоток статора і ротора.
Для даного номінального режиму роботи АД кут [З = 163°, на який мак-
і пмум струму ротора відстає від максимуму струму статора. Отже, мінімум
88
струму ротора випереджає максимум струму статора на кут 180° - 163° = 17°.
Для даного двополюсного АД ці кути відповідають кутам просторового зсуву
еКстремумів струмів у пазах.
Рис. 2.20 Векторна діаірама АД
Схематично положення мінімуму струму ротора відносно максимуму
струму статора показано на рис. 2.21. При цьому із - за різних розмірів зубцевих
поділок статора і ротора додатковий кут зсуву дорівнює Д/2 = 3е. Кут зубцевої
поділки ротора дорівнкм /2 ~
Таким чином, в пазах ротора уздовж поверхні ротора необхідно у відпові-
дності до виразу (2.54) задати наступну послідовність густини струмів: ,/2о = "
3,35 СО83°=-3,3454А/мм2; ./21 = -3,35 СО5І8°= - 3,186 А/мм2; У22 =-
3>35 СОхЗЗ°= - 2,8095 А/мм2; 723 = - 3,35 - СО548°=- 2,2416 А/мм2 і т.д.
Рис. 2.21 Визначення кута зсуву струмів ротора і статора
89
Густина струмів ротора рівномірно заповнює перетини пазів. Після
завдання джерел поля - густин струму у пазах статора і ротора з урахуван-
ням їх фазового зсуву виконується розрахунок розподілу магнітного поля
АД при сумісній дії НС обмоток статора і ротора. Потім за допомогою ви-
разів (2.48) або (2.50) знаходиться поточна точка механічної характерис-
тики - електромагнітний момент, що відповідає заданому значенню ков-
зання.
Розглянутий метод завдання струмів обмотки ротора за допомогою
векторної діаграми АД дає хороші результати в області малих номінальних
ковзань ротора, при яких ефект витіснення струмів в стрижнях ротора про-
являється несуттєво і струми ротора практично рівномірно заповнюють
перетин пазів. Тому метод векторних діаграм рекомендується використо-
вувати при розрахунку робочих характеристик АД.
При розрахунку пускових характеристик, коли унаслідок високої ча-
стоти струмів вплив ефекту витіснення струмів в стрижнях ротора прояв-
ляється суттєво, метод векторних діаграм може вести до істотних похибок,
незважаючи на те, що пускові струми розраховуються по схемі заміщення
з використанням електричних параметрів обмотки ротора, які визначають-
ся з наближеним урахуванням ефекту витіснення.
Дія строго урахування впливу струмів обмотки ротора на механічну
характеристику асинхронної машини при великих ковзаннях потрібен по-
вний аналіз електромагнітного поля в машині з урахуванням усієї сукупно-
сті усіх визначальних чинників.
Метод індукованих струмів не передбачає примусового завдання
сторонніх густин струмів у стрижнях короткозамкненого ротора АД, а за-
снований на безпосередньому розрахунку величини і характеру розподілу
індукованих струмів в стрижнях у результаті розв’язання загального
польового рівняння типу (2.31).
При розв’язанні цього рівняння у пазах ротора задається немагнітний
електропровідний матеріал з властивостями алюмінію, міді або іншого ме-
талу, з якого виконуються стрижні клітки. Електропровідність матеріалу в
пазах статора приймається рівною нулю, але в пазах задається густина сто-
ронніх струмів, обумовлених заданими струмами фаз обмотки статора.
Електропровідність шихтованого магнітопроводу також приймається рів-
ною нулю. Таким чином, відмінна від нуля електропровідність задається
і'ільки у пазах ротора, в яких розміщені масивні електропровідні стрижні.
У результаті розв’язання рівняння (2.31) для кожної точки механічної ха-
рактеристики знаходиться реальний розподіл індукованих струмів у пере-
гині стрижнів обмотки ротора.
Необхідно відзначити, що у відомих наукових роботах, присвячених
аналізу розподілу вихрових струмів в стержнях ротора АД, розв'язується
польова задача в окремо взятому пазу без урахування складної конфігура-
ції активної зони, характеру магнітного поля та інших важливих чинників.
І Іри цьому в більшості зазначених робіт апріорно вважається, що густина
Г _____________________________ 9°______________________________-
струмів в стрижнях нерівномірно розподілена тільки уздовж висоти паза.
Але насправді обертове магнітне поле проникає в стрижні не тільки з одні-
єї зверненої до повітряного проміжку сторони, але і з бічних сторін паза,
до яких магнітний потік проходить без затримки у часі через шихтовані (не
електропро'відні) зубці. При цьому через обертовий характер поля на одну
сторону паза електромагнітне поле “набігає”, а з іншої “збігає”. Тому елек-
тромагнітні умови на різних сторонах стрижня є різними, що обумовлює
різну глибину проникнення струмів на різних сторонах стрижня. В резуль-
таті вихрові струми в стрижнях нерівномірно розподілені не тільки уздовж
висоти стрижня, але і по його ширині. Цей ефект вдається знайти тільки
при аналізі поля у всьому поперечному перетині машини.
Кожну точку механічної характеристики асинхронної машини слід
розглядати як сталий режим роботи машини при струмах і векторному ма-
гнітному потенціалі, що гармонійно змінюються у часі. Переходячи до
комплексних зображень величин, а, також виражаючи вектор лінійної
швидкості у вигляді V = (і)к К, де (і)к - кутова частота обертання ротора,
К - радіус - вектор довільної точки ротора, отримаємо запис рівняння
(2.31) в наступному вигляді:
• • • •
ЛА - дсощ'А + цу(і)к(К х гоі А) = -цАстор (2.55)
де (О - кутова частота зміни у часі векторного магнітного потенціалу. При
цьому у всіх точках перетину пазів ротора задається вектор швидкості ру-
ху провідників ротора відносно системи координат. Наприклад, в декарто-
вих координатах з початком, розташованим в геометричному центрі рото-
ра, для складових вектора швидкості в довільній точці маємо
Ух=СОкКСО8/ = 0)к у, /?8ІП / = (і)кх ,
де 7?,Х,у — радіус і декартові координати довільної точки розора, у — кут
між віссю У і радіус - вектором точки.
Кутова частота зміни у часі магнітного потенціалу і струмів /і), і ку-
това частота обертання ротора а>к залежать від вибору сис геми координат,
в якій виконується розв’язання рівняння (2.55). Розв’язання можна викона-
ти в наступних системах координат - синхронній, статорній або роторній.
При виборі системи координат формулюються відповідні умови, які на-
кладаються на частоти ЄУ і С9Л в рівнянні (2.55).
В координатах, що обертаються синхронно і магні і ним полем стато-
ра, спостерігач бачить “заморожену систему” струмів фа і обмотки статора.
При цьому можна вважати, що струми у фазах статора у часі не тмінюють-
ся. Умовно припускаючи, що разом із струмами статора обсріаіозься і пази
статора, нескладно задати в них незмінні у часі іусіини струмів.
91
Наприклад, в пазах, де розташовані провідники з початками витків фази
“А” статора, задається густина сторонніх струмів ААстор -ІтІ8п, в па-
зах, в яких знаходяться кінці витків фази “В” (фаза задається густина
струму ^стор =С0$(-2л73)/8П і т.д., де І,п- амплітуда струму в
обмотці статора, 8 п — площа перегину паза. Ротор в синхронній системі
координат обертається з кутоЬою частотою 0)к = 69]5 = ІП /з/ р,№ 69] -
кутова частота обертання поля статора, 5- ковзання ротора, р- число пар
полюсів. Оскільки при роботі двигуна в сталому режимі поле струмів ро-
тора г нерухомим відносно поля струмів статора, спостерігач в синхронних
координатах також бачить незмінну систему струмів в стрижнях ротора.
Тому частоту струмів у роторі слід прийняти рівною нулю Оі = 0, внаслі-
док чого рівняння (2.55) набуває наступний вигляд:
1\.Ал-р'уо\8{К'хгоіА)-~рЗстор (2.56)
При розв’язанні задачі в координатах статора слід прийняти умови
єн —<У] і (ок — Оі{(1-і), внаслідок чого рівняння (2.55) приймає наступ-
ний вигляд:
ДЛ - Іо^руА + - л)(К X гоіА) - -р.]ст>г. (2.57)
І ус гину струмів у фазах обмотки статора в цьому випадку необхідно зада-
іи як комплексні величини в наступному вигляді:
Астор — / Зц
З Встор = -Ім[со8(-2л- і З)-у 8Іп(—2тг 13)]/5п. (2.58)
ІСстор = -/т[со»(-4л-/3)-у8Іп(-4л-/3)]/5я
Нарешті при розв’язанні задачі в роторних координатах ротор зали-
пни гься нерухомим. Оскільки на статорі немає електропровідних середо-
нпіц, в яких могли б індукуватися вихрові струми, його теж можна вважати
умовно нерухомим. Частота струмів у роторі дорівнює частоті ковзання.
І оці в рівнянні (2.55) необхідно прийняти умови 69 = 69]5 і Оік = 0. Рів-
няння остаточно записується в наступному вигляді:
ЬА-руА = -рЛстор, (2.59)
іс нііічепня густини струмів у статорі задаються за виразами (2.58).
92
Хоча дане фізичне явище і величина електромагнітного моменту є
інваріантними у будь-якій системі координат, вибір оптимальної системи
визначається двома умовами. По - перше, складністю запису рівняння по-
ля. З приведених рівнянь (2.56), (2.57), (2.59) найпростішим для чисельного
розв’язання є рівняння (2.59), записане в роторних координатах. В цьому
рівнянні відсутня “конвективна” складова, яка пов'язана з рухом електро-
провідного ротора відносно системи координат. І навпаки, найскладнішим
для розв’язання є рівняння (2.57) в координатах статора, оскільки в ньому
•
присутні як “індукційна” , так і “конвективна” складові. По - дру-
ге, при використаній розорної системи координат аналіз поверхневого
ефекту в стрижнях ротора можна виконати найбільш наочно. Це ж явище,
розраховане, наприклад, в координатах статора, дає іншу картину розподі-
лу струмів в перетині стрижнів ротора, що ускладнює інтерпретацію ре-
зультатів. Тому переважним і практично доцільним є розв’язання даної за-
дачі в роторних координатах.
При розрахунку механічної характеристики необхідно враховувати
зміну струму обмотки статора при зміні ковзання. Найбільш строго таке
урахування можна виконати при коло - польовому аналізі, коли величина
струму обмотки статора при заданому ковзанні знаходиться у результаті
розв’язання об’єднаної системи рівнянь (див. розділ 4). Але таке урахуван-
ня можна зробити і наближеним способом. Якщо нехтувати падінням на-
пруги в активному опорі обмотки статора, то урахування зміни струму ста-
тора можна виконати послідовними наближеннями по наступному алгори-
тму.
1. Задаються поточні значення ковзання Л(- і прикладеної до обмотки
статора напруги І/1. Зокрема, при підключенні АД до трифазної мережі
незмінної напруги для будь-якого ковзання задається номінальна напруга
статора С') — (7^ — сопхі.
2. Припускаючи Е} ~ (7|, з виразу (2.22) знаходиться потрібне пото-
козчеплення фази обмотки статора
ч/ф=ї/1/л-72/;. (2.60)
При роботі АД від мережі незмінної напруги знайдене потокозчеплення
Дф = 'Рфд, залишається однаковим для будь-якого ковзання.
3. Задається прогнозоване значення струму в обмотці статора 7^,
виконується розрахунок поля і по (2.60) визначається реальне потокозчеп-
лення статора 'Рф/. Якщо для заданої похибки є задовольняється нерів-
ність Тф(—'Рфд! <£, то задане значення струму вважається таким, що
93
відповідає поточному ковзанню. Якщо задана похибка не задовольняється,
то значення струму статора корегується, і розрахунок поля повторюється.
4. Розраховується електромагнітний момент МЕМі по формулам
(2.47) або (2.50) відповідно до методики, описаної в підрозділі 2.2.2.
5. Задається нове ковзання 5(+], виконуються розрахунки поля при
нових значеннях струмів статора, і знаходиться наступна точка механічної
характеристики Мем(і+Г) •
У ряді випадків урахування зміни струму статора при зміні ковзан-
ня можна виконати за приблизною формулою. Як показали розрахунки ме-
ханічних характеристик АД серійного виконання при відомій (очікуваної)
кратності пускового струму (при 5 — 1) залежність амплітуди струму
обмотки статора від ковзання !,„(.$) при 5>5ПОИ можна апроксимувати
наступною формулою:
4 (-0 = [1 + (*/ -1 ] (2-61)
де /тЛ- - значення амплітуди струму при .V = зном.
Нижче наведено приклад розрахунку методом індукованих струмів
механічної характеристики трифазного АД потужністю 200 кВт, призначе-
ного для приводу вугледобувного комбайну.
І
Приклад 2.7. Двигун має наступні дані. Фазна напруга живлення 660 В,
номінальний струм статора 116 А, СО8^> = 0,934, 7] ~ 0,93, число пар полюсів -
2. Зовнішній діаметр статора 0,32 м, внуїрішній діаметр стат ора - 0,198 м, по-
вітряний проміжок - 1,2 мм, число пазів статора 48, число пазів ротора - 45,
активна довжина статора - 0,6 м. Обмотка статора петльова, обмотувальний
коефіцієнт - 0,925, крок по пазах 1-11, число елементарних провідників у пазу
статора - 8, число паралельних гілок обмот ки статора - 1, площа прямокутного
паза статора 117,1 мм2. Пази ротора виконані закритими, висота паза - 20 мм.
Стрижні пазів ротора виконані з міді МІ. Магнітопроводи статора і ротора ших-
товані сталлю 2013.
Деякі розрахункові результати ілюстровані на рис. 2.22 - рис. 2.25.
Па рис.2.22 у вигляді ізоліній поля представлена картина розподілу векто-
рною магнітного потенціалу при ковзанні ротора 5= 0,6. На цьому ж рисунку у
вигляді фонового зафарбування дано розподіл тустини струму у пазах статора і
розора. Аналіз картини розподілу вихрових струмів у стрижнях ротора дозволяє
спостерігати відомий ефект “закручування” силових ліній магнітного поля елек-
тропровідним розором, що обертається [5]. Дія цього ефекту виявляється у тому,
що завдяки кінцевій швидкості дифузії поля в електропровідне середовище маг-
нітний потік, що проник у ротор, захоплюється і відноситься ротором, що обер-
ті гься. За інших рівних умов глибина проникнення поля в ротор короткозамк-
пеіюго АД з шихтованим магнітопроводом є більшою, ніж в АД з масивним фе-
ромагнітним ротором.
94
00315
0 0267
«10216
0017
0.0122
0.0073
І 0 0025
....0 0024
— -0 0072
— -0 0121
— -0 0169
“—-0 0216
— -о 0266
Г—-0 0315
— -0 0363
—-0.0412
- 0 046
Рис. 2.22 Розподіл векторного магнітного шпоні™ і • • *
-ах статора і ротора при иуску СПЛМІВ в
95
Цс пов'язано з тим. що витіснення магнітного поля в ЛД з шихтованим роїором
з ііііснк» іься іільки струмами стрижнів, а шихтовані зубці розора такої дії не
вііконуіоіь Проте. у цілому картини подів у цих випадках виявляються досип,
схожими. Урахування цього ефекту мас важливе значення при розрахунку елек-
іромагніїноіо моменту /нзи.уна.
Па рис. 2.23 у вигляді направлених стрілок певної довжини дано розподіл
вектора тензора магнітного натяїнення па поверхні ротора уздовж повітряного
проміжку. Па рис. 2.24 представлено збільшений фраз мент іакого розподілу.
Рис. 2 24 Збільшений фрагмент розподілу вектора тензора
магнітного натягнення на поверхні ротора
Па рисунках видно істотну нерівномірність розподілу зусиль уздовж про-
міжку. ’іака нерівномірність обумовлена локальними пеоднорідпостями розподі-
ли магнітного поля в зубцево - пазових зонах статора і ротора Зокрема, значні
радіальні зусилля прикладені до зубців статора і перекриттів пазів ротора.
Остання обставина у разі дефекту конструкції — нещільного прилягання окремих
сірижнів до стінок пазів ротора або неякісної заливки стрижнів (для литих клі-
ток) може вести до розлому перекриттів пазів ротора і руйнуванню конструкції.
Інтегрування тангенціальної складової тензора натягнення уздовж промі-
жку визначає величину електромагнітного моменту двигуна. Розподіл іангенціа-
іьіюї складової також характеризується істотною нерівномірністю. Па окремих
ділянках тангенціальна складова має різний напрям, що обумовлене різним вза-
ємним положенням зубців статора і ротора. При зсуві ротора відносно сіагора В
межах о іної зубцевої поділки приведені картини розподілу зусиль змінюються.
Проте, як показують численні розрахунки різних варіантів ЛД, інтегральна во-
тчина моменту при цьому практично не змінюється або зміним гьея в дуже ма-
лих межах. У разі потреби можна знайти момент як усереднене значення, розра-
ховане при різних положеннях ротора.
На рис. 2.25 представлено залежність електромагнітного моменту і стру-
му обмотки сіатора від ковзання. Залежність моменту і струму дана у відносних
96
одиницях. Попередні розрахунки показали, що кратність пускового струму скла-
дає 4,6 в.о. Ця величина була використана для апроксимації залежності струму
статора від ковзання по формулі (2.61). Номінальний момент 1275 н м двигун
розвиває при ковзанні 0,025 в.о., кратність максимального моменту склала 2,04
в.о., кратність пускового моменту - 0,82 в.о.
Рис. 2.25 Залежність електромагнітного моменту і струму
обмотки статора від ковзання
Механічна характеристика характеризується високою жорсткістю при ма-
лих ковзаннях. Це сприятливо позначається на величині КПД двигуна, оскільки
зміна в широких межах навантаження не веде до значних змін ковзання. Жорст-
кість характеристики даного двигуна обумовлена тим, що стрижні клітки ротора
виконуються з міді, яка має знижений акгивний опір. Проте при цьому спостері-
гається знижене значення пускового моменту.
2.3.2. Розрахунок СО8$2, ККД та робочих характеристик. За ре-
зультатами розрахунку електромагнітного поля можна розрахувати найва-
жливіші енергетичні показники асинхронної машини та визначити її робо-
чі характеристики.
Розрахунок сО8<р проводиться для сталого режиму роботи машини
при заданому ковзанні і електромагнітних величинах, що гармонійно змі-
нюються у часі. Розрахунок СО8^? можна виконувати для будь-якої фази
обмотки статора, наприклад, фази А. Для решти фаз обчислення дають
аналогічний чисельний результат.
При використанні методу комплексних амплітуд кожний комплекс-
ний вектор характеризується модулем і фазою. Це дає можливість знайти
97
СО8^2 після розрахунку електромагнітного поля як кут зсуву фаз комплек-
сних амплітуд струму і напруги статора.
Нехай струми у фазах статора задані відповідно до виразу (2.58),
тобто на векторній діаграмі напрям вектора струму фази А статора спів-
падає з напрямом дійсної осі комплексної площини. Після розрахунку по-
ля векторного магнітного потенціалу комплексний вектор ЕРС фази А з
урахуванням формули (2.29) визначається за наступним виразом:
• • 2/ її’ •
Еа = а = -уа) П р = ЕАе^г . (2.62)
8р $А
ЕРС, що розрахована за виразом (2.62), індукується повним магнітним по-
токозчепленням фази, у тому числі і магнітним потоком розсіяння. Тому
вектор знайденої ЕРС відрізняється від зображеного на діаграмі (рис. 2.20)
•
вектора ЕРС взаємоіндукції Е\ не тільки величиною, але і фазою. Якщо
нехтувати падінням напруги на активному опорі фази обмотки статора
•
/1 /"і, то вектор знайденої ЕРС приблизно дорівнює вектору прикладеної
• •
напруги електромережі Еа Проте, якщо величина активного опору
обмотки статора є відомою, то це падіння напруги легко врахувати, оскіль-
ки напрям вектора 11 г} співпадає з напрямом вектора струму фази А ста-
тора, а в даному випадку з напрямом дійсної осі комплексної площини:
(7. = Еа + /і п = (ЕАа + ) + 7ЕЛг - , (2.63)
де Еа = ЕАа + ]ЕАг = Еа соз(рЕ + )ЕА $туЕ. Визначивши таким чином
ку і фазового зсуву вектора напруги електромережі відносно струму фа-
ш А статора, знаходимо потрібний СО8<Р|.
Приклад 2.8. Визначимо коефіцієнт потужності АД з приведеними у при-
кладі 2.7 даними для режиму сталого КЗ. Після розрахунку поля векторного маг-
нії ного потенціалу і інтегрування потенціалу по перетину пазів, в яких міститься
•
фаза, знаходимо у (1,8 - у 6,835) І О’5. Такому значенню інтеграла
5л
відповідає кут зсуву між струмом і ЕРС, який дорівнює (рЕ = 75,2 °. При цьому
СО8$>£ = 0,255. З урахуванням падіння напруги на активному опорі обмотки
статора маємо кут зсуву 74,4 0 і відповідне йому значення СО8(?| = 0,267.
_________________98
Розрахунок коефіцієнта корисної дії електричної машини виконуєть-
ся за відомою формулою:
77 = Р2/(Р2+^р), (2.64)
де Р2- корисна потужність ЕМ, £ р = рмх +рст + рМ2 + рмех + рдоа -
сумарні втрати потужності в машині, рмі, рМ2 — втрати відповідно в об-
мотках статора та ротора, рст— втрати в магнітопроводі, рмех - механіч-
ні втрати, рдод - додаткові втрати.
Згідно припущенню, яке зазвичай приймається при постановці задач
розрахунку електромагнітного поля (розділ 1), вихрові струми провідності
і відповідні втрати на вихрові струми в шихтованих магнітопроводах ЕМ
не існують. Не враховуються також втрати на перемагнічування феромаг-
нітного заліза (на гістерезис). Тому сумарні втрати в сталі шихтованого
магнітопроводу рст не можна знайти безпосередньо за результатами роз-
рахунку електромагнітного поля, якщо не розглядати цю задачу спеціаль-
но. Не можна знайти з польових розрахунків механічні втрати на тертя і
вентиляцію рмех, а також додаткові втрати в тих електропровідних конс-
труктивних елементах, які не враховано в математичній моделі машини.
Втрати в струмонесучих елементах конструкції, у тому числі в обмотці
статора рМу і в масивних електропровідних стрижнях обмотки ротора
Рм2 знаходяться за формулами
=7ИГ,/12, (2.65)
РМ2= (2.66)
Уст
де т- кількість фаз статора, а інтегрування у формулі (2.66) виконується
після польових розрахунків по об’єму стрижнів ¥ст.
Таким чином при польовому аналізі розрахунок ККД електричної
машини можливий тільки за умови завдання додаткових вхідних даних —
величин рст, Рмех, Роод та як' повинні розраховуватися окремо за
традиційними формулами [13]. Корисна потужність машини знаходиться
після розрахунку відповідної точки механічної характеристики. Для визна-
чених та узгоджених величин ковзання та електромагнітного моменту ця
потужність розраховується за наступною формулою:
Л/£Л/2^(1-5)
Г2 - ~ Рмех > (2.67)
Р
де р,/] — відповідно число пар полюсів машини та частота живлення.
99
Робочими характеристиками асинхронної машини називаються за-
лежності ІХ,Мі Г] від корисної потужності Р2 при заданих
та незмінних С/( = сопхі і = СОП8І. Беручи до уваги наведені вище
розрахункові алгоритми, неважко сформулювати послідовність розрахун-
ків, необхідних для обчислювання робочих характеристик.
1. Задається поточне ковзання ротора 5 і у відповідності до викладе-
ної у п. 2.3.1 методики послідовними наближеннями розраховується такий
струм статора Ц, при якому забезпечується виконання умови І], =1/^.
2. Для знайдених та узгоджених значень .V і /] розраховується елек-
тромагнітний момент МЕМ.
3. За допомогою рівняння (2.63) знаходиться С05$>.
4. Задаються складові втрат потужності рст, риех, рдод та актив-
ний опір обмотки статора Г].
5. По формулі (2.67) знаходиться корисна потужність машини Р2.
6. По формулам (2.65), (2.66) розраховуються складові втрат рМ\ і
рМ2, а по формулі (2.64) - ККД.
Розрахунки проводяться для ряду значень ковзання у діапазоні, в
якому корисна потужність машини змінюється в межах від 0,25 Р2^ до
1,5 Р2Е,. Цілком зрозуміло, що до відмічених вище залежностей можна та-
кож додати залежності активної потужності живлення (Р2 ), що поступає
в машину з електромережі, і швидкості ротора «2(^2)-
2.3.3. Дослідження трифазних асинхронних двигунів у несимет-
ричних режимах роботи. Порушення умов симетрії при роботі асинхрон-
них двигунів призводить до погіршення їх енергетичних показників, під-
вищення перегріву, збільшення рівня шуму та вібрацій тощо. Існують дві
основні причини, що викликають несиметричні режими роботи трифазних
АД. Це: 1) несиметричність трифазної системи напруг живлення двигуна;
2) несиметричність параметрів фаз обмоток статора або ротора.
На практиці несиметричні режими роботи трифазних АД виникають
досить часто. Тому достовірне визначення реальних показників двигунів в
цих режимах є актуальної задачею. Практичне значення розгляду зазначе-
ної проблеми полягає також у необхідності визначення можливих термінів
подальшої експлуатації двигунів, які тривалий час працюють у несиметри-
чних режимах, виявлення та ідентифікації ушкоджених елементів констру-
кції, що призводять до несиметричного режиму, наприклад, зруйнованих
стрижнів короткозамкненої клітки ротора двигуна тощо.
В теорії електричних машин несиметричні режими АД аналізуються
методом симетричних складових (МСС). У відповідності до МСС для
100
розрахунку несиметричного режиму необхідно мати наступні електричні
опори двигуна: - для струмів прямого порядку проходження фаз, 72 —
для струмів зворотного порядку проходження фаз і 20 - для струмів ну-
льового порядку проходження фаз (у разі наявності цих струмів). Обґрун-
товане визначення, електричних опорів, особливо 1 являе собою
складну проблему. Тому на практиці часто використовуються спрощені
способи визначення цих параметрів. Так, наприклад при розгляді несимет-
ричних режимів, які викликані несиметричністю системи живлення, пара-
метр /2 знаходиться по схемі заміщення АД при завданні ковзання ротора
= 2 — Л'|, де 5] - ковзання ротора відносно основного обертового поля
(поля прямої послідовності проходження фаз).
Ще більш невизначеним і малообгрунтованим в класичні теорії є
аналіз несиметричних режимів роботи АД, викликаних несиметричністю
параметрів ротора. Класична теорія ЕМ не дає способу розрахунку параме-
тра 72 в залежності, наприклад, від кількості зруйнованих стержнів рото-
ра, або місць їх розташування на роторі, хоча характер і інтенсивність не-
симетричного режиму безумовно залежить від цих факторів.
Крім того МСС базується на принципі суперпозиції, який не дозво-
ляє урахувати вплив нелінійності. Тому у багатьох випадках порівняння
експериментальних і отриманих на основі МСС розрахункових даних свід-
чить про їх велику розбіжність. Тільки польовий підхід дозволяє точно
встановити вплив усіх основних факторів на несиметричні режими роботи
трифазних АД.
При дослідженні несиметричних режимів будемо використовувати
метод індукованих струмів, оскільки він є універсальним і дозволяє розра-
хувати характеристики машини за довільних умов живлення обмотки ста-
тора або несиметричності параметрів обмоток статора або ротора. Розгля-
немо окремо два зазначених вище випадки несиметричних режимів АД.
Несиметричність трифазної системи напруг живлення двигуна. Для
визначення рівня несиметричності режиму роботи у цьому випадку будемо
використовувати наступний коефіцієнт несиметричності:
Існс =И2.Ю0% (2.68)
де (/](,[/]2— амплітуди симетричних систем напруг живлення обмотки
статора прямої та зворотної послідовностей.
Ці системи напруг знаходяться в результаті розкладення реальної не-
симетричної системи напруг трифазного живлення обмотки статора на
симетричні складові. Вважається, що система напруг (7ц призводить до
виникнення прямого обертового магнітного поля, а система напруг С712-
101
до зворотного обертового магнітного поля. Результуюче магнітне поле ста-
тора має еліптичний характер. Вектор магнітної індукції не тільки оберта-
ється з кутовою частотою <У1; але іде й з такою ж частотою змінює свою
амплітуду. В результаті в роторі індукуються струми частотою ТУ| (2 - л).
Польовий аналіз механічної характеристики АД при несиметричному
живленні статора потрібно виконувати в статорній системі координат за
допомогою рівняння (2.57). Саме в цій системі можна адекватно задати
чинники несиметричного режиму — несиметричну систему напруг статора.
Кожний несиметричний режим роботи двигуна характеризується
конкретним значенням коефіцієнту несиметричності і, отже, заданою не-
симетричною системою фазних напруг живлення обмотки статора. Проте
для розрахунку електромагнітного поля необхідно задати джерела поля -
струми в фазах обмотки статора. І (я система струмів повинна відповідати
як заданому ковзанню ротора, так і заданій несиметричній системі фазних
напруг живлення статора. Зарані несиметрична система струмів для кожної
точки механічної характеристики невідома і знаходиться вона методом по-
слідовних наближень.
Кожна точка механічної характеристики розглядається як сталий ре-
жим роботи АД. Задаючись рядом значень ковзання, для кожної точки роз-
раховується електромагнітне поле в активній зоні двигуна з урахуванням
усіх основних фізичних ефектів та конструктивних даних.
Алгоритм розрахунку механічної характеристики АД при його неси-
метричному живленні є наступним.
1. Задається несиметрична система амплітуд фазних напруг живлен-
ня тВ^тС’ яка відповідає заданій величині коефіцієнта несимет-
ричності
2. Задається поточне значення ковзання ротора 5.
3. Задається перше наближення системи несиметричних амплітуд
фазних струмів статора
4. Формується система джерел поля - розподіл густин струмів по па-
іах статора у відповідності до схеми обмотки статора і методом скінченних
елементів розраховується електромагнітне поле АД за рівнянням (2.57).
5. За результатами розрахунку поля по формулі (2.21) розраховують-
ся магнітні потокозчеплення кожної фази обмотки статора
а по формулі (2.22) - несиметрична система діючих
ііі.ічень ЕРС Еа\Ев\Е^ фаз. Помножаючи отриману систему ЕРС на
\І2, переходимо до системи амплітудних значень ЕРС фаз
г,-(1) г-(І)
' пі І -''піВ’^тС'
6. Оскільки знайдені по (2.21) потокозчеплення фаз є повними (за
ипняіком магнітних потоків лобових частин обмоток), то отримана
102
несиметрична система амплітуд ЕРС фаз відрізняється від заданої несиме-
тричної системи амплітуд фазних напруг живлення І]гтс тільки
падінням напруги на активних опорах фаз статора. При необхідності по
аналогії з формулою (2.63) неважко врахувати внесок цих падінь напруги і
таким чином знайти перше наближення системи фазних напруг- статора
яка може Дещо відрізнятися від заданої.
7. Після порівняння от риманої системи напруг з заданою у разі сут-
тєвої їх різниці формується друге наближення фазних струмів статора
’ виконується перехід до п.4 алгоритму.
8. Після N ї ітерації при співпаданні в межах заданої похибки роз-
рахункової і заданої систем напруг живлення задається нове значення
ковзання і виконується розрахунок наступної точки характеристики (пе-
рехід до п.З алгоритму). У подальших розрахунках механічної характерис-
тики несиметрична система напруг живлення повинна залишатися незмін-
ною для кожного ковзання, оскільки вона обумовлює конкретний несиме-
тричний режим роботи АД.
Спосіб послідовного підбору несиметричних фазних струмів матема-
тично не формалізується, а ґрунтується на емпіричних підходах та на інди-
відуальному досвіді дослідника. Проте при формуванні першого набли-
ження системи несиметричних амплітуд фазних струмів статора
можна вважати, що у цілому ця несиметрична система
струмів подібна (пропорційна) до заданої несиметричної системи фазних
напруг живлення АД.
Необхідно відмітити, що одне й теж значення коефіцієнту несимет-
ричності може бути отримано при різних сполученнях несиметричних фа-
зних напруг живлення. Тому при виконанні досліджень необхідно спеціа-
льно оговорювати конкретні умови, які викликають несиметричний режим
роботи АД. Поширеним випадком несиметричного режиму є такий, при
якому змінюється напруга тільки однієї фази, а напруги інших фаз лиша-
ються незмінними.
Цей випадок несиметричного режиму розглянуто у наступному при-
кладі [1 1], який досліджено разом з Ю.А. Гайденко.
Приклад 2.8. Розглянемо допоміжний тяговий асинхронний двигун (ГАД)
типу СВА-55, що призначений для приводу компресора гальмівних систем слек-
гропотягу. Практично усі ТАД працюють у важких умовах підвищеного нагріву,
вологості, сильної забрудненості, а також обмеженого простору на їх розміщен-
ня. Технічні показники та надійність роботи таких 1 АД в значній мірі визнача-
ється вимогами до їх пускового моменту та перевантажувальної здатності. Гак, в
мотор-комиресорах, що забезпечують живлення стисненим повітрям гальмівної
системи потяга і апаратів з електропневматичними пристроями, запас по кратно-
сті пускового моменту по технічним умовам повинен складати не менше, ніж
103
М =(4 .5) в.о. Виконання таких жорстких вимог до механічних харак-
теристик ТАД значно ускладнюється наявністю несиметричності прикладеної
трифазної напруги живлення обмотки статора. Несиметричний режим роботи
обумовлюється використанням у схемах електроживлення ТАД на електровозах
спеціальних розгціплювачів фаз - електромашинних перетворювачів однофазно-
го струму в трифазний.
Досліджуваний ТАД має такі дані: номінальна потужність 55 кВг: син-
хронна частота обертання електромагнітного поля 1500об/хв; номінальна фазна
напруга 220 В: клас ізоляції - Н; висота осі обертання 236 мм. На роторі для
підвищення пускового електромагнітного моменту двигуна виконані глибокі та
достатньо вузькі пази. Фрагмент поперечного перерізу зазначеного ТАД разом з
ССЕ показано на рис. 2.26.3аіалом сформована ССЕ складається з 108554 еле-
ментів і 54324 вузлів. Така кількість вузлів і скінченних елементів забезпечує
високу деталізацію розрахунку' поля у всіх частинах конструкції двигуна і висо-
ку точність розрахунку характеристик.
На рис.2.27 зображено сімейство механічних характеристик, розрахованих
для симетричного режиму живлення, а також в несиметричних режимах роботи
при гначеннях коефіцієнту несиметричності = 5, 10 і 25 %. Цим значенням
коефіцієнту відповідають такі діючі значення напруг фаз статора С/в = ІУ(- =
220 В і відповідно V А - 209 В; 198.5 В і 169 В.
Рис. 2.26 Фрагмент поперечного перерізу ТАД типу САВ 55 разом з ССЕ
Як видно з наведених даних, однією з головних проблем, яка пов’язана з
іцчімсіричним живленням ТАД, є погіршення їх пускових характеристик, адже
ні машини працюють у повторно - короткочасному режимі роботи і тому
104
потребують досить частих пусків. Так пусковий момент при коефіцієнті —
25% у порівнянні з режимом симетричного живлення зменшується у 1.33 рази. У
1.39 рази також зменшується перевантажувальна здатність двигуна
Рис. 2.27 Сімейство механічних характеристик ТАД типу СВА - 55 для
різних значень коефіцієнту несиметричності: = 0, 5. 10 і 25 %.
Отримані залежності також наочно демонструють, що для забезпечення
заданої корисної потужності двиїуна при збільшенні коефіцієнту несиметрично-
сті швидкість обертання ротора зменшується, а значить збільшується струм і
втрати в обмотках статора і ротора.
Несиметричність напруги живлення негативно впливає і на енергетичні
показники ТАД. Це відбувається значною мірою внаслідок зростання електрич-
них втрат. На рис. 2.28 відображено .зростання сумарних (в обмотках статора і
ротора) електричних втрат в двигуні при збільшенні коефіцієнту несиметрично-
сті живлення при умові незмінної потужності на валу - 55 кВт.
Рис. 2.28 Електричні втрати в двигуні при збільшенні коефіцієнту
несиметричності живлення
______________ _______105____________________________________І
В таблиці 2.2 зведено основні показники досліджуваного ТАД потужністю
55 кВі для режимів живлення з коефіцієнтами несиметричності в 0% (симетрич-
ний режим). 5%, 10% га 25%. Значення СО8ф> і Г] розраховані у відповідності
до методики п. 2.3.2. Також наведено: Цф - середнє значення діючих фазних
струмів статора: кІ, км - кратності (у в.о.) пускового струму і моменту.
Таблиця 2.2 _________ __________________
кне 0% 5% 10% 25%
7 0.90 0,88 0.85 0,75
СО8(Р 0,70 0,715 0,72 0,67
Цф, А 133 147 159 211
к/, в.о. 8,9 9,3 9,6 9,9
АЛ/,в.о. 4.0 3.6 3.4 3.0
З таблиці 2.2 видно, що при збільшенні коефіцієнту несиметричності спо-
сіеріїається збільшення пускового струму та зменшення пускового моменгу.
При збільшення коефіцієнту несиметричності від 0% до 10% відбувається незна-
чне збільшення СО8^> при зменшенні ККД. Це пов’язано зі збільшенням рівня
віраї у двигуні та відповідно активної складової струму статора. При подаль-
шому збільшенні коефіцієнту несиметричності СО8ф> починає різко зменшува-
іпся. Результати розрахунку досліджуваного ТАД дозволили іробити висновок,
що при несиметричності напруги живлення більше ніж на 5% двигун перегріва-
< і і.ся і може вийти з ладу. Тому у цих випадках доцільно рекомендувати вимк-
нути двигун не пізніше ніж через 10 хвилин після виникнення несиметричності
живлення, або зменшити навантаження у 1.5 ... 2.3 рази при несиметричності
відповідно у 10 ... 25%.
Слід зазначити, що трифазне електричне коло обмотки статора дви-
іуна при його несиметричному живленні є неврівноваженою системою.
1 (є оніачає, що миттєве значення активної потужності двигуна не є постій-
ною величиною, а залежить від часу, що неважко показати. Нехай миттєві
іначсння напруг живлення фаз статора виражаються наступним чином:
ил - ^тА 5*П а)І - иВ = 8*П С6* ~ 2л7 3),
ив = 1/тВ8Іп(й# + 2л73) (2.69)
Припускаючи, що фазовий кут між напругами і струмами є однаковим для
уі їх фл обмотки статора, запишемо відповідні вирази для струмів:
Сі =ІтА Ів=1тв 5ІП(й#-2я73-(Р),
іс = /тС$іп(а)і + 27г/3>-<р) (2.70)
106
Миттєве значення потужності машини є сумою миттєвих потужностей усіх
трьох фаз обмотки статора:
Р\ = Ра + Рв + Рс = иА1А + “в*В + иС1С (2-71)
Підставляючи в формулу (2.71) вирази (2.69) і (2.70), отримаємо
Р1 +^тв]тв тЛ121 [(7^1 тА /2СО8(2^-^)
+ ^тВ^тВ / 2 • СО8 (2(ВІ - 4тг 13 - ф) + тСІ12 СО8(2бЯ + 4 л- / 3 - р)] =
= Рсим + Р(0несим *
(2.72)
І Іерша незмінна складова рсил, в (2.72) не залежить від часу і в симе-
тричному режимі роботи дорівнює сумарній активній потужності симет-
ричної трифазної системи. Друга складова рнесим(Р) змінюється у часі з
подвійною частотою живлення 2<У і нулю дорівнює тільки у випадку си-
метричного живлення, КОЛИ Р/тА=1}тВ=УтС І 1 тА~ ^тВ~ тС- ^К
приклад, на рис. 2.29 зображено залежності у часі сумарної активної поту-
жності /?] та її несиметричної складової Днссим(0 для розглянутого вище
ТАД при коефіцієнті несиметричності живлення 10%. Величина несимет-
ричної складової потужності у даному випадку сягає до 10% від сумарної
величини активної потужності двигуна.
Рис. 2.29 Залежності миттєвих складових активної потужності АД від ча-
су при коефіцієнті несиметричності 10%
Незважаючи на те, що середнє за період значення несиметричної
складової потужності дорівнює нулю, наявність коливань у часі активної
потужності, яка споживається машиною з електромережі, приводить до
107
коливань електромагнітного моменту з подвійною частотою і відповідному
підвищенню рівня шуму та вібрацій.
Несиметричність параметрів фаз обмоток статора або ротора. А над із
режимів роботи асинхронних машин при несиметричності параметрів об-
мотки статора може бути зведений до випадку несиметричності системи
напруг живлення статора, який розглянуто вище.
Нехай активні і індуктивні опори (розсіяння) фаз А, В і С трифазної
обмотки статора мають різні значення, причому опори фаз В і С можна ви-
разити через відповідні опори фази А:
гА = г, гв = г + гь, гс = г + гс хА =х, хв=х + хь, хс = х + хс.
Годі систему рівнянь електричних кіл фаз обмотки статора можна записати
у наступному вигляді:
• • •
Е А - Іа{г + ]х) + Еа8
Ев-ів(гь + /гА) = /«(г + іх) + Евв (2.73)
Не - Іс (гс + іхс) = Іс (г + їх) + Есз
Аналіз режимів роботи асинхронної машини у цьому випадку можна
провести за допомогою вищенаведеної методики, приймаючи припущення,
що обмотка статора живиться несиметричною трифазною системою на-
пруг: Еіа,ЕІВ-ів(гь + ух6), і Не-Іс{гс + /хс).
Іншим чином проводиться аналіз несиметричних режимів асинхрон-
них машин, які викликані несиметричністю параметрів обмотки ротора. У
цьому випадку система напруг живлення статора є симетричною, а неси-
метричність обумовлюється дефектами в обмотці ротора. В асинхронних
машинах, що мають на роторі білячу клітку, така несиметричність, як пра-
вило, обумовлена ушкодженням окремих стержнів клітки.
Польовий метод аналізу дає унікальну можливість визначити харак-
теристики машини в залежності від конкретного виду ушкодження клітки
ротора. З точки зору методики розрахунку аналіз механічної та робочих
характеристик АД при ушкодженні (обриві) стрижнів короткозамкненої
клітки ротора має наступні особливості у порівнянні з розрахунком симет-
ричного двигуна. Після формування конфігурації розрахункової області у
пазах статора задається густина струму (джерело поля), а в усіх підоблас-
тях — фізичні властивості матеріалів, з яких складається розрахункова об-
ласть. В пазах ротора, в яких знаходяться неушкоджені стержні і протіка-
ють струми, задається електропровідність алюмінію у = улі або електро-
провідність іншого матеріалу, з якого виготовляються стержні. В пазах з
108
ушкодженими (обірваними) стержнями задається / =0. Далі за алгорит-
мами методу скінченних елементів проводиться розрахунок поля після чо-
го розраховуються характеристики АД за описаною вище методикою. Та-
ким чином аналіз несиметричного режиму у даному випадку виконується
досить простим способом - за рахунок відповідного завдання властивостей
матеріалів в розрахунковій області.
Польовий аналіз дає можливість дослідити особливості електромаг-
нітних процесів в роторі короткозамкненого АД при наявності ушкодже-
них стержнів, виявити механізм подальшої руйнації білячої клітки ротора,
обґрунтувати режимні обмеження та допустимі навантаження ушкоджено-
го двигуна. Такі рекомендації можуть бути зроблені в залежності від інте-
нсивності та характеру ушкодження обмотки розора - кількості зруйнова-
них стержнів га місць їх розташування на роторі.
У наступному прикладі, який розглянуто разом з Ю.А. Гайденко, до-
сліджено характеристики короткозамкненого АД при несиметричності па-
раметрів клітки ротора.
Приклад 2.9 За об’єкт дослідження обрано серійний АД з короткозамкне-
ним розором типу 4А180М4УЗ потужністю 25 кВт, фазною напругою 220 В,
синхронною частотою обертання 1500 об/хв- Двигун має 48 пазів на статорі і 38
на роторі.
На рис. 2.30 показано ізолінії векторного магнітного потенціалу та розпо-
діл щільності індукованих струмів в пазах ротора зазначеного АД при його ро-
боті з номінальною потужністю 25 кВт та наявності на роторі чотирьох ушко-
джених стержнів, позначених відповідно номерами І - 4.
3,8 еб
Рис. 2.30 Розподіл щільності індукованих струмів в пазах ротора АД при роботі
з номінальною потужністю 25 кВтта наявності на роторі чотирьох ушкоджених
стержнів
109
На рис. 2.31 з метою наглядного порівняння зображено ізолінії поля век-
торного магнітного потенціалу зазначеного ЛД при його пуску (ковзання 5=1)
для симетричного ротора (рис. а)), при наявності двох ушкоджених стержнів
(рис. б)) і наявності восьми ушкоджених стержнів (рис. в)).
Рис. 2.31 Розподіл векторного магнітного потенціалу при пуску ЛД для симет-
ричного ротора та при наявності двох і восьми ушкоджених стержнів
В таблиці 2.3 зведено основні показники зазначеного двигуна при його
роботі в наступних режимах: в симетричному режимі, в несиметричних режимах
при різних значеннях коефіцієнту несиметричності напруги живлення та в неси-
метричних режимах при різній кількості ушкоджених стержнів короткозамкне-
ної обмотки ротора. В кожному режимі незмінною залишається номінальна ак-
тивна потужність двигуна 25 кВт.
Лналіз розподілу поля при наявності зруйнованих стержнів ротора
(рис.2.31) засвідчує суттєву деформацію ліній поля, особливо в зоні руйнації, що
призводить до різкого зниження усіх показників двигуна (таблиця 2.3). Таке
по
зниження показників супроводжується появою наступних негативних ефектів у
роботі АД. По-перше, у порівнянні з неушкодженим двигуном у магнітопроводі
виникають насичені зони зі збільшеною величиною магнітної індукції. Як, на-
слідок, це призводить до зменшення СО8^>, а при незмінній активній потужності
АД - до збільшення струму та нагріву обмотки статора.
Таблиця 2.3
Показник Симет- ричний режим Коефіцієнт несиметри- чності напруги жив- лення (Ру/С’) Кількість ушкоджених стержнів ротора пзс
5% 10% 25% 2 4 8
Номінальна активна потужність Р? ’ к^т 25 25 25 25 25 25 25
Номінальний момент Л/2, Ні 163 163 163 164 163 163 164
Номінальний фазний струм !]ф’А 45,2 46,1 47,8 53.1 47,0 49,8 58,5
Номінальне ковзання 5Н,% 2,18 2,34 2,5 3,1 2,4 2,5 2,9
Пусковий момеїгт Л/„, н і 292 262,8 233,6 219 267 222 147
Пусковий струм /,, Я 352 341 331 305 333 304 237
СО5^> 0,92 0,9 0,88 0,8 0,90 0,85 0,74
ККД 0,91 0,9 0,89 0,88 0.90 0,89 0,87
По-друге, різко (у 1,5 ... 2,3 рази) збільшуються струми і втрати потужно-
сті в тих стержнях ротора, що розташовані біля ураженої ділянки ротора. Таке
несиметричне навантаження неушкоджених стержнів ротора стимулює подаль-
ше лавиноподібне руйнування стержнів ротора, та повний вихід двигуна з ладу.
До того ж наявність на роторі ушкодженої ділянки призводить до погіршення
форми ЕРС і струму в обмотці статора, тобто до появи у струмі статора вищих
гармонік.
В таблиці 2.4 наведено електричні втрати рспЛ і рст2 в стрижнях 1 і 2,
що межують зліва і справа з ушкодженою ділянкою ротора при Пзс = 2 (рис.2.31
б)), та втрати загалом у роторі Рмг відносно показників АД з симетричною об-
моткою. Дані наведено для номінального режиму при Р-, -25 кВт і для пуску.
Таблиця 2.4
Рст\ Рст2 Рм2
/ 2 =25кВт 1,65 1,25 1,10
Пуск 2,59 2,54 0,95
І 2________________________________ш__________________ _____________
З таблиці 2.4 видно, що втрати в стрижнях, які знаходяться в безпосеред-
ній близькості до ушкодженої ділянки, зростають приблизно в 1,3... 2,5 рази,
причому більше значення відповідає режиму пуску двигуна, а менше номіна-
льному режиму роботи. При цьому нагрів стрижнів збільшується у 1,5 ... 1,6 ра-
ці. І ому, для тимчасового збереження подальшої працездатності ушкодженої
машини необхідно уникати частих пусків, особливо під навантаженням.
З таблиці 2.3 видно, що при пзс= 2, що складає 5 % від усієї кількості
стержнів, пусковий момент зменшується на 10 %, а струм статора збільшується
на 5% 3 ростом кількості ушкоджених стержнів негативні прояви різко зроста-
їоіь. Так. при Пзс- 8 (20 % від усієї кількості стержнів), пусковий момент дви-
гуна зменшується більш ніж у 2 рази, що практично не уможливлює його пода-
льше функціонування. З іншого боку, при =1 ... З тимчасова робота двигу-
на можлива за умови деякого зменшення йото активної потужності. Розроблена
методика дозволяє обгрунтувати доцільні режимні обмеження. Так, при пзс = 2
за умови зменшення номінальної потужності з 25 кВт до 23 кВт у разі потреби
можлива тимчасова експлуатація зазначеного двигуна до появи технологічної
можливості виходу його в ремонт.
Як видно з таблиці 2.3, руйнація стержнів ротора більш суттєво впливає на
показники двигуна, ніж несиметричність напруги живлення. Наприклад, прибли-
шо однакове погіршення роботи АД виникає при кис = 25% і при Пзс = 4 (що
складає 10% від усієї кількості стержнів).
На рис.2.32 приведені механічні характеристики досліджуваного АД, який
працює в несиметричному режимі при пзс = 2 (пунктирна лінія) і в симетрич-
ному режимі (суцільна лінія).
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0.9 1
Рис. 2.32 Механічні характеристики АД в несиметричному режимі при пзс 2
(пунктирна лінія) і в симетричному режимі (суцільна лінія)
Механічна характеристика АД при несиметричності ротора має незначний
провал при ковзанні 5= 0,5, що цілком відповідає теоретичній уяві щодо особ-
ливостей вигляду механічних характеристик АД в несиметричних режимах ро-
боти при несиметричній конструкції ротора. Незначна величина провалу у
112
даному випадку пов'язана з тим, що два зруйнованих стрижня складають незна-
чну частку від загальної кількості стрижнів ротора - 38. При збільшенні їх кіль-
кості провал механічної характеристики також збільшується.
Розроблена методика визначення характеристик АД в несиметричних ре-
жимах роботи лежить в основі систем діагностики стану двигунів та методів
раннього попередження їх аварійного стану.
2.4. Визначення та дослідження інтегральних характеристик
синхронних машин
2.4.1. V — образна характеристика синхронної машини. Однією з
найважливіших характеристик синхронних машин (СМ), що працюють па-
ралельно з електромережею, є V — образна характеристика - залежність
струму обмотки якоря від струму збудження 7о(/у) при незмінній заданій
напрузі електромережі Ь!а =СОП8І і незмінної активної потужності ма-
шини Р\ = тіїа1 иСО$(р = СОП8І (рис. 2.33). Друга умова еквівалентна
умові незмінності активної складової струму обмотки якоря
7йа — 7а СО8 <р = СОП8І, де - (р кут фазового зсуву між напругою і стру-
мом якоря.
Рис. 2.33 V образна характеристика СМ
Польовий розрахунок V образної характеристики СМ виконується
при одночасній дії двох джерел поля — густини струмів у пазах статора з
обмоткою якоря і густини струмів у пазах ротора, в яких розташована об-
мотка збудження. Це дає можливість врахувати вплив на V образну хара-
ктеристику реального магнітного насичення магнітопроводу машини. При
завданні струмів у пазах статора необхідно правильно задати просторовий
зсув амплітуд намагнічуючих сил (НС) обмоток якоря і збудження, який
еквівалентний фазовому зсуву між векторами ЕРС і струму якоря на век-
торній діаграмі СМ.
Для визначення просторового зсуву НС скористаємося показаною на
рис. 2.34 векторною діаграмою явнополюсного синхронного генератора.
113
Рис. 2.34 Векторна діаграма явнополюсного
синхронного генератора
Магнітний потік, викликаний струмом збудження, направлений уз-
довж повздовжньої осі ротора і при обертанні ротора індукує у витках об-
моїки якоря змінну електрорушійну силу Е, причому максимум ЕРС інду-
ку< гься у витках (провідниках), які знаходяться у даний момент часу над
іюнідовжньою віссю ротора. Положення максимуму струму обмотки якоря
у ви і ках обмотки зміщено у просторі відносно положення максимуму ЕРС
(або повздовжньої осі ротора) на кут у/ г = у/ / р(в геометричних граду-
сах), який залежить від режиму роботи машини, де у/ - кут між векторами
І РС і струму обмотки якоря на векторній діаграмі (в електричних граду-
сах), р число пар полюсів.
Па рис. 2.35, як приклад, зображено розрахункову картину електро-
магнітного поля (ізолінії - векторний магнітний потенціал, фонове зафар-
бування - модуль магнітної індукції) для двохполюсного синхронного
і урбогенератора типу ТГВ - 200 - 2 у режимі номінального навантаження.
І Іоказано, також, взаємне положення повздовжньої осі ротора і осі фази А
обмотки якоря, яке характеризується просторовим кутом зсуву (/ = (//
(Р=1).
Нехай є заданими параметри і режим роботи синхронного генератора
(СГ), тобто є відомими його індуктивні опори по повздовжній та попере-
чній осям X, і , активний опір обмотки якоря Ка, напруга електроме-
режі У а, струм якоря Іи і кут між напругою і струмом якоря <р (або зада-
на величина СО8^?).
Для визначення кута у/ між векторами ЕРС і струму обмотки якоря
спроектуємо вектори діаграми на повздовжню і поперечну осі. Для проек-
цій векторів запишемо наступні рівняння:
114
Рис. 2.35 Відносне положення повздовжньої осі ротора і осі фазної зони А
обмотки якоря синхронного турбогенератора ТГВ 200
СО8(у/ - р) = Е - Х^ - ІчКа
Еа зіп(у/ - ср) = ХдІд -
(2.74)
де = /д5ІП(/, Ід = 1 а СО8\р - відповідно повздовжня і поперечна
складові струму обмотки якоря.
Застосовуючи формули розкладання тригонометричних функцій, з
другого рівняння (2.74) нескладно знайти наступний вираз для потрібного
кута у/:
у/ = агсі§
ґЦа <>т(р + ХдІа'
<Уа соз<р + Ка1а }
(2.75)
З першого рівняння системи (2.74) після знаходження кута у/ легко визна-
чити ЕРС в обмотці якоря, яка наведена потоком збудження
+ (2.76)
Знайдена за виразом (2.76) ЕРС індукується потоком збудження в обмотці
якоря на холостому ході СГ і тому при навантаженні істотно відрізняється
від напруги мережі. При навантаженні СГ реальний рівень насичення маг-
нітопроводу в кожній точці V — образної характеристики визначається ре-
зультуючим магнітним потоком з урахуванням впливу магнітного поля ре-
акції якоря. Результуючий магнітний потік індукує у фазі обмотки якоря
ЕРС Е$. Зв'язок між величинами Е8 і (7 витікає з векторної діаграми:
115
Ед= а - Р) + 'А ’ (2'77)
З іншого боку, за результатами розрахунку електромагнітного поля СГ ве-
личина Е6 може бути визначена за допомогою вище наведеної методики з
використанням виразу (2.22).
Таким чином, розрахунок кожної точки V - образної характеристики
виконується ітераційним методом: при заданому струмі якоря послідовни-
ми наближеннями підбирається такий струм збудження, при якому вели-
чини ЕРС, що знайдені польовим методом і за виразом (2.77), співпадають
в межах заданої похибки.
Сформулюємо загальний алгоритм розрахунку V - образної характе-
ристики СМ.
1. Задаються початкові дані СМ, що відповідають конкретному режиму
роботи машини і її параметрам: напруга Е а, активна потужність Г\ (або
активна складова струму якоря Іаа), синхронні індуктивні і активний опір
обмотки якоря X-,Х,Ка
2.В діапазоні значень (/йтіп.../отах)> в ЯКОМУ проводиться розраху-
нок характеристики, задається поточне значення струму якоря 1 аі, і розра-
ховуються кути фазового зсуву між струмом і напругою обмотки якоря
= ±агссо8(/оо І Іа). Значення кута із знаком «плюс» відповідає
сіруму збудження /у। на гілці V — образної характеристики “недозбудже-
ної СМ” (рис. 2.33), а значення кута із знаком «мінус» - струму іна гілці
“перезбудженої” СМ.
3. За виразом (2.75) визначається кут між ЕРС і струмом обмотки
якоря.
4. 3а виразом (2.77) визначається ЕРС, яка індукована результуючим
м.и нітним потоком у фазі обмотки якоря.
5. Формується розрахункова область СМ (при умовному припущенні,
що пази статора і ротора є взаємно нерухомими) і будується скінченно
елемен тна модель її електромагнітного поля. При завданні струмів обмот-
ки якоря вісь фазної зони фази «А» повертається в просторі відносно по-
нідовжньої осі ротора на просторовий кут у/г І р. У фазних зонах
• опора задається система трифазних струмів, причому у фазній зоні «А»
і.ідагі ься амплітудне значення струму.
6. Задається перше наближення струму в обмотці збудження .
/. Виконується розрахунок електромагнітного поля для векторного ма-
нії і ного потенціалу і потім за допомогою виразу (2.22) розраховується
величина ЕРС Е^, яка відповідає заданому струму
116
8. Виконується порівняння < Є, де Є - задана похибка. Як-
що розрахункова похибка перевищує задану, то вибирається друге набли-
ження струму збудження і виконується новий розрахунок поля по п. 7.
9. Досягнувши заданої похибки, аналогічно розраховується друга точ-
ка V — образної характеристики, яка відповідає іншому значенню фазного
кута, визначеного в п.2.
10. Аналогічно розраховуються наступні дві точки V - образної харак-
теристики, які відповідають іншому значенню струму обмотки якоря, виб-
раному з заданого діапазону (7атіп—^атах^- При СО8(4> = 1 виконується
розрахунок однієї точки, яка відповідає мінімуму V - образної характерис-
тики.
На наведеному нижче прикладі приведений розрахунок V - образної
характеристики потужного синхронного гідрогенератора.
Приклад 2 10. Повна номінальна потужність гідрогенератора - 130 МВА,
номінальний фазний струм якоря 5465 А, номінальна фазна напруга якоря скла-
дає 13800 / х(3 = 7967 В, номінальний коефіцієнт потужності 0,8, номі-
нальна активна потужність Р\^~ 104 МВт, номінальний струм збудження 1300
А, число пар полюсів 28. індуктивні опори X1,935 Ом, X= 1,232 Ом, Ка~
0,0042 Ом. На рис. 2.36 а) зображено поперечний переріз активної зони гідроге-
нератора. Враховуючи періодичність розподілу поля уздовж повітряного промі-
жку, розрахункову область для аналізу поля можна обмежити показаною на рис.
2.36 б) зоною, що складається з двох полюсних поділок.
Рис. 2.36 а) - поперечний переріз активної зони гідрогенератора;
б) - розрахункова область для аналізу магнітного поля
г
117
Розрахунок виконаємо для чотирьох значень активної потужності генера-
тора: Р\ = (0,25; 0.5; 0,75 і 1,0)Л{д-, яким відповідає активна складова струму
якоря Іии 1093 А, 2186 А, 3279 А і 4375 А.
Розглянемо спочатку режим роботи Р} ~ 0,25 Р^ (тобто режим при зада-
ному значенні 1аа= 1093 А). Розрахуємо перші дві точки характеристики. При-
ймемо. наприклад, що струм якоря дорівнює 5000 А. Такому струму якоря па V
образній характеристиці відповідають дві симетричні точки на двох її гілках.
При цьому маємо СО8#> = 0,219 і два куги <р = ± Тіуі °. Рсалізуючі наведений
вище алгоритм, отримаємо, що кут \р для лівої гілки характеристики (режим
педозбуджеїшя”) дорівнює 82,7 0 (відповідно г = 2,96 °). а для правої гілки
(режим ”псрсзбудження”) у/ = - 42.5 € (у/ г = - 1.52 °). ЕРС по формулі (2.77) до-
рівнює 7972 В. Після ітераційних розрахунків поля для першої точки отримаємо,
що при струмі збудження /у। = 728 А розрахункова ЕРС, що знайдена по фор-
мулі (2.22), складає 7940 В, тобто відмінність двох ЕРС не перевищує 0,4%. Та-
кий збіг є цілком прийнятним і розрахунок першої точки завершено. Аналогічно
находимо значення струму збудження для другої (симетричної) точки: /р =
1285 А. Надалі приймається інше значення струму якоря і розрахунок повторю-
< і вся. Таким же чином виконуються розрахунки V - образної характеристики
для інших заданих значень потужності гідрогенератора.
В таблиці 2.5 зведені окремі розрахункові результати для усіх V - образ-
них характеристик гідрогенератора при різних значеннях його активної потуж-
посіі.
Іабліщя 2.5
Р' 4 '/і 1Л
^Р\» 7972 1093 962 962
3000 851 1128
5000 728 1285
0,5/^ 7977 2186 1007 1007
3000 923 1079
5000 812 1276
<>•75 7981 3279 1072 1072
4000 975 1144
5000 871 1261
7986 4200 1100 1100
4700 995 1198
5465 1262
І Іа рис. 2.36 зображено «утримані криві V образних характеристик. Роз-
рахунковий струм збудження у номінальному режимі роботи гідрогенератора
(при номінальному струмі якоря 5465 А) дорівнює 1262 А, що відносно експери-
мсіі і дивного значення 1300 А дає розбіжність результатів усього в 3% і свідчить
при високу достовірність алгоритму.
Рис. 2.36 V - образні характеристики синхронного гідрогенератора
Отримані залежності підтверджують, що з ростом активної поіужііост)
машини існує зсув мінімуму V - образних характеристик (при СОЙ (р = 1) в ^ону
більших значень струмів збудження.
2.4.2. Зовнішня характеристика автономного синхронного г^не.
ратора. Зовнішньою характеристикою автономного синхронного генера-
тора (АСГ) називається залежність вихідної напруги генератора від струму
обмотки якоря (струму навантаження) С/О(7О) при незмінному значенні
струму обмотки збудження і^-С0П8І, незмінному СО8(Р = СОП8І І не_
змінній частоті обертання валу ротора- Вид зовнішньої характеристики
АСГ залежить від характеру параметрів навантаження генератора, яКий
визначається заданим значенням С05^ ' якому відповідає векторна діагра-
ма (рис. 2.34).
Польовий розрахунок зовнішньої характеристики АСГ виконує-ІЬСЯ
при одночасній дії двох заданих джерел поля - струмів в обмотці якоря ,
струмів в обмотці збудження. При цьому в кожній точці зовнішньої харак-
теристики враховується вплив на характеристику реального рівня н^си_
чення магнітопроводу, а також особливості геометрії активної зони генера-
тора.
Оскільки кожна точка зовнішньої характеристики визначається на-
перед заданими значеннями двох струмів, та побудова усієї характеристи-
ки виконується послідовним розрахунком і аналізом ряду картин електро-
магнітного поля АСГ. У кожній точні зовнішньої характеристики напруга
генератора розраховується за допомогою наступного виразу, який витщає 3
приведеної вище формули (2.77):
иа = ?- 7Л)7 С05^ ~ • <г-78)
[
119
Розрахунок ЕРС Е$ від результуючого магнітного потоку викону-
( гься за допомогою виразу (2.22).
Таким чином, алгоритм розрахунку зовнішньої характеристики АСГ
складається з наступних етапів.
1. Задаються початкові дані АСГ: струм збудження, що індукує в об-
могці якоря на холостому ходу номінальну ЕРС, СО8$> = СОПХі (або відпо-
відний кут <р), синхронні індуктивні і активний опір обмотки якоря
гдл-
2. В діапазоні значень (О...7отах) задається поточне значення струму
обмотки якоря.
3. За виразом (2.75) визначається кут 7/ між індукованою потоком
збудження ЕРС і струмом обмотки якоря.
4. Формується розрахункова область АСГ (при умовному припущенні,
що пази статора і ротора взаємно нерухомі) і будується скінченно — елеме-
п і па модель її електромагнітного поля. При завданні струмів обмотки яко-
ря вісь фазної зони фази «А» зміщується відносно повздовжньої осі ротора
па кут (//г = у/1 р, де р — число пар полюсів. У фазних зонах задається
система трифазних струмів, причому у фазній зоні «А» задається ампліту-
ди- значення струму.
5. Виконується розрахунок електромагнітного поля відносно вектор-
ної о магнітного потенціалу і за допомогою виразу (2.22) розраховується
результуюча ЕРС Е8.
6. За виразом (2.78) розраховується напруга обмотки якоря, яка відпо-
відає даній точці зовнішньої характеристик АСГ.
7. Задається нове значення струму якоря, і виконуються розрахунки
відповідно до п.З
Як видно з наведеного алгоритму, розрахунок зовнішньої характерис-
іики АСГ є більш простим у порівнянні з розрахунком V - образної харак-
і еристики СМ, оскільки у даному випадку немає потреби виконувати по-
слідовні наближення для знаходження в кожній точці характеристики вза-
( мно узгодженої комбінації змінних струмів і ЕРС.
2.5.2. Регулювальна характеристика автономного синхронного
існератора. Регулювальною характеристикою АСГ називається залеж-
ність струму збудження генератора від струму обмотки якоря (струму на-
вантаження) іЛІа) при незмінній величині вихідної напруги Еа = сопії,
незмінному СО8 <р = сопзі і незмінній частоті обертання валу ротора. Вид
реї улювальної характеристики, також як і зовнішньої залежить від харак-
іеру навантаження генератора, який визначається заданими параметрами
навантаження (значенням СО8#>).
Дія розрахунку регулювальної характеристики АСГ польовими ме-
і одами слід застосувати такий же підхід, як і при розрахунку V - образної
□22__________2______________;____І20________________________________]
характеристики СМ. Відмінність полягає лише в тому, що при розрахунку
регулювальної характеристики АСГ СО8#> залишається незмінним для всіх
значень струму обмотки якоря. Проте ця обставина не має принципового
значення для розрахункового алгоритму, оскільки із зміною струму якоря
змінюється падіння напруги на опорах обмотки якоря і, як випливає з ви-
разу (2.75), змінюється кут між ЕРС холостого ходу і струмом якоря.
З урахуванням цього зауваження алгоритм розрахунку регулюваль-
ної характеристики АСГ складається з наступних етапів.
1. Задаються початкові дані АСГ: вихідна напруга обмотки якоря, кое-
фіцієнт потужності СО5 <р = сопх1 (або відповідний кут <р), синхронний
індуктивний і активний опір обмотки якоря
2. Формується розрахункова область АСГ, будується скінченно - еле-
ментна модель і виконується польовий розрахунок АСГ в режимі холосто-
го ходу (за відсутності струму в обмотці якоря). Послідовними наближен-
нями підбирається такий початковий струм збудження Ло, який індукує в
обмотці якоря ЕРС холостого ходу, що дорівнює номінальній вихідній на-
прузі Еа0 — Для розрахунку ЕРС використовується вираз (2.22).
З. В діапазоні значень (0.../отах) задається поточне значення струму
обмотки якоря /и/.
4. За виразом (2.75) визначається кут у/ між ЕРС, що індукована пото-
ком збудження, і струмом обмотки якоря.
5. При завданні струмів обмотки якоря вісь фазної зони фази «А» змі-
щується відносно подовжньої осі ротора на кут і// г / р. У фазних зо-
нах задається система трифазних струмів, причому у фазній зоні «А» зада-
ється амплітудне значення струму. Задається нове значення струму збу-
дження ір з урахуванням передбачуваного виду регулювальної характери-
стики.
6. Виконується розрахунок електромагнітного поля відносно векторно-
. ...... г . .(1)
го магнітного потенціалу при сумісній дії двох джерел поля: 1аі і .
7. 3а виразом (2.22) розраховується ЕРС Е$, а за виразом (2.78) розра-
ховується напруга обмотки якоря С/„2
8. Виконується порівняння |(?оЛ- — < Е, де Є- задана похибка.
Якщо розрахункова похибка перевищує задану, то вибирається друге на-
ближення струму збудження іХ і виконується новий розрахунок поля за
п. 5 алгоритму.
9. Задається нове значення струму якоря, і виконуються розрахунки
відповідно до п. 4 алгоритму.
121
2.5. Визначення та дослідження інтегральних характеристик машин
постійного струму
2.5.1. Електромеханічні характеристики двигуна постійного
сіру му послідовного збудження. Двигуни постійного струму (ДПС) по-
слідовного збудження характеризуються великим значенням пускового
моменту і тому широко використовуються в різних галузях техніки, на-
приклад, як тягові електродвигуни на транспортних засобах. Експлуата-
ційні властивості ДПС послідовного збудження визначаються двома його
найважливішими електромеханічними характеристиками — залежностями
електромагнітного моменту і швидкості обертання ротора від струму якоря
А//.
Аналітичні вирази для електромеханічних характеристик ДПС послі-
довного збудження в класичній теорії електричних машин отримуються з
наступних міркувань. Рівняння електричної рівноваги напруг в електрич-
ному колі обмотки якоря має наступний вигляд:
Е ~Е + Іаг^ = сеЕ1Ф + = се2япФ + 1аг^ (2.79)
іе и - задана напруга електромережі, Е~ ЕРС обмотки якоря, сумар-
ний активний опір послідовно з’єднаних обмоток якоря, збудження, ком-
пенсаційної обмотки і обмотки додаткових полюсів, Ф- магнітний потік
обмотки збудження, Се = рТ\1 І^ТТСі — конструктивна стала, р число пар
полюсів, а - число паралельних гілок обмотки якоря, N = 2«пиїа2и’ -
число провідників обмотки якоря, 2— число пазів якоря, Птм— число ко-
іушок в пазу, число витків в котушці, Г2 = 2лт7 - кутова швидкість
обертання ротора (рад/с), п - швидкість обертання ротора в об/с.
Для електромагнітного моменту справедливий загальний вираз
^ЕМ -се^а^-
(2.80)
Нехтуючи зміною насичення феромагнітного магнітопроводу, можна
припустити, що магнітний потік збудження в двигуні постійного струму
послідовного збудження є пропорційним струму якоря:
Ф = СрІи,
(2-81)
де коефіцієнт С залежить тільки від обмотувальних і геометричних даних
двигуна. Підставляючи (2.81) в рівняння (2.79) і (2.80) після виконання
122 І
перетворень, отримаємо наступні аналітичні вирази для електромеханічних
характеристик ДПС послідовного збудження:
« = (2-82)
2лсес/Іа
Як видно з виразів (2.82), електромеханічні характеристики цілком
залежать від добутку двох конструктивних сталих СеСг. При виборі (за-
вданні) номінальних даних двигуна, однозначно задається і величина
Сс,Су. Причому електромеханічні характеристики не залежать від варіації
окремого конструктивного параметра двигуна, наприклад, числа провідни-
ків якоря або числа витків обмотки збудження. Змінивши один з парамет-
рів, ми повинні узгоджено змінити і інші, залишаючи незмінною величину
сеС^, якщо при цьому необхідно зберегти незмінними номінальні дані
двигуна. При таких узгоджених варіаціях параметрів електромеханічні ха-
рактеристики двигуна не змінюються.
Отримаємо аналітичний вираз, який зв’язує Сесу з основними гео-
метричними і обмотковими параметрами двигуна. Величина се визнача-
ється, як се — рії12тїа. Величину Су знайдемо таким чином. Магнітний
потік полюса визначимо як
Ф=Е/Кт, (2.83)
де Р- результуюча НС обмоток, Кт~ результуючий магнітний опір маг-
нітного кола двигуна. Припускаючи, що НС якоря повністю врівноважу-
ється (компенсується) зворотною дією НС компенсаційної обмотки, буде-
мо вважати, що величина результуючої НС обумовлена тільки ампер - вит-
ками обмотки збудження
Р = (2.84)
де и-у- число витків обмотки збудження на полюс. Магнітний опір визна-
чається як
(2.85)
де 18 — 8 к8 кн- еквівалентна довжина магні тного кола двигуна, що вира-
жається через добуток висоти повітряного проміжку 8, коефіцієнта повіт-
ряного проміжку к8 і коефіцієнта насичення магнітного кола кн,
= тії)а1иа8 /2р - площа магнітному потоку під полюсом, яка виража-
ється через добуток полюсної поділки г = 7їРа !2р, активної довжини
123
якоря Іа і коефіцієнту полюсного перекриття а8, Ра- діаметр якоря. Під-
ставляючи вирази (2.84), (2.85) в (2.83), отримаємо вираз для потоку
ф^ц^/а6Оа11,
2р8к6кн а'
Прирівнюючи вирази (2.81) і (2.86), отримаємо
4 2р6кеки
Остаточно отримаємо наступний вираз для добутку Сеср.
р^^еР^а
сес ( ----------.
4о£ к8 кн
(2.86)
(2.87)
(2.88)
Таким чином формули (2.82) разом з виразом (2.88) дозволяють роз-
рахувати електромеханічні характеристики ДПС послідовного збудження
при заданих конструктивних даних. Але, як показує досвід створення цих
двигунів, розрахункові результати, що отримуються по зазначеним форму-
лам, в ряді випадків суттєво відрізняються від експериментальних даних.
Гака відмінність частіше спостерігається для потужних ДПС. Причина по-
лягає в неврахуванні (або приблизному урахуванню) впливу магнітного
насичення магнітопроводу двигуна.
Польовий метод аналізу дозволяє строго врахувати такий вплив.
Враховуючи, що в ДПС послідовного збудження по усім його обмоткам
протікає один і той же струм Іа, розрахунок поля у даному випадку на від-
міну від інших ЕМ є більш простим, оскільки не потребує ітераційних
процедур для узгодження величин струмів різних обмоток. Таким чином
послідовність розрахунку електромеханічних характеристик ДПС полягає
у наступному.
1. Задаються вхідні дані ДПС: V,г^. Задається поточне значення
< і руму І а, яке обирається з заданого діапазону значень (0... Іатах ).
2. Виходячи з даних двигуна, формуються розрахункова зона і від-
повідна скінченно — елементна модель, задаються густини струму в пере-
і ппах витків усіх обмоток ДПС і проводиться розрахунок магнітного поля.
г
3. По формулі (2.50) МЕМ =2рІп \(уТх-хТу)сІІ виконується
о
розрахунок електромагнітного моменту двигуна, який відповідає заданому
иніченпю струму Іа.
124
(У -1иГу}1а
4. По формулі п -------, що витікає з формул (2.82), знахо-
1лМЕМ
диться швидкість обертання ротора, яка відповідає заданому значенню
струму .
5. Задається наступне значення струму якоря і перехід до п. 2.
В наступному прикладі польовим методом розраховуються електро-
механічні характеристики потужного тягового ДПС і виконується їх порі-
вняння з електромеханічними характеристиками, розрахованими за фор-
мулами (2.82), (2.88).
Приклад 2.11 Двигун типу СТК - 800 У1 має наступні номінальні дані в
часовому режимі роботи: потужність - 800 кВт, напруга мережі 1500 В, струм
якоря 565 А. швидкість обертання ротора 945 об/хв (або 15,75 об/с). ККД -
94,2%. сумарний активний опір електричного кола двигуна Гу = 0,148Ом. Ви-
ходячи з заданих номінальних даних, з першого рівняння (2.82) легко отримати
вираз для розрахунку коефіцієнту сеС^ =(У - Іаг^)І2ті ПІа = (1500 0.148
565) / (6,2832 15,75 565) = 0,02533. Надалі, залишаючи незмінним отриману
величину і варіюючи величиною струму якоря, по (2.82) розраховуємо
електромеханічні характеристики. Ці характеристики отримані при незмінному
насиченні магнітопроводу, який відповідає номінального режиму двигуна.
З іншого боку у відповідності до вказаного алгоритму виконується польо-
вий розрахунок характеристик зі строгим урахуванням насичення магнітопрово-
ду для кожного значення струму якоря.
На рис. 2.37 наведено фрагмент картини поля СТК 800У1 в номінально-
му режимі. Ізолініями зображено векторний магнітний потенціал, фоновим фар-
буванням - модуль індукції, стрілками - вектор тензора магнітного тяжіння.
Рис. 2.37 Фрагмент картини поля СТК - 800У1 в номінальному
режимі роботи
125
На рис. 2.37 і рис. 2.38 зображено отримані розрахункові залежності
МЕМ(Іи) * п(Лі) для двох методик розрахунку: при /7 саг (польовий розра-
хунок) і при /7= сопкі (розрахунок по формулам (2 82)).
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
0
♦ р = уаг
—*— р = СОП5І
Кратність струму якоря, в.о.
Рис. 2.37 Розрахункові залежності МЕМ (Іа)
2000 ।
= 1800 |
1600 .
а* 1400 ,
а.
1200
2. юоо
£ 800
Ч 600
£ 400
5 200
—♦— р =
р = СОП5І
0,5 0,75 1 1,25 1,5
Кратність струму якоря, А
Рис. 2.38 Розрахункові залежності п(Іа)
і рисунків видно, що урахування польовими методами змінного насичення маг-
іпіопроводу веде до більш лінійних залежностей, ніж ті, що дають формули
(2 82) при фіксованому /7. Особливо суттєвою є розбіжність результатів в зоні
м.іііііч струмів якоря. Більш точні розрахунки показують, що зі зменшенням
іірхму якоря збільшується магнітна проникність магнітопроводу. Це зменшує
піо ефекту послаблення потоку збудження і відповідного збільшення швидкості
роїора. І ому реальне підвищення швидкості ротора, наприклад при половинно-
му їмсіїїпеїпіі струму якоря, буде в 1,6 разів менше, ніж по формулам (2,82).
126
2.5.2. Швидкісна і механічна характеристики двигуна постійною
струму паралельного збудження. Швидкісною характеристикою назива-
ється залежність п(Іа), яка визначається наступною формулою:
П =-----" . (2.89)
сЕФ
Механічною характеристикою називається залежність и(Л/£Ау), яка ви-
значається наступною формулою:
(7 гу Л7»'
П —-------±—Щг (2.90)
сеф сесмФ2
Відомо [13], що в ДПС паралельного збудження магнітний потік
збудження змінюється відносно мало, оскільки при зміні навантаження
двигуна струм його обмотки збудження, яка безпосередньо підключається
до електромережі, і напруга електромережі залишаються незмінними. То-
му, як свідчить досвід розробки та експлуатації ДПС паралельного збу-
дження, їх швидкісна і механічна характеристики є практично прямоліній-
ними. Але кут нахилу характеристик залежить від впливу поперечної реак-
ції якоря і величини падіння напруги на активному опорі якоря. Проблема
розрахункового визначення цих характеристик полягає у правильному
урахуванні впливу поперечної реакції якоря при обов’язковому достовір-
ному урахуванні нелінійних властивостей магнітопроводу. Таку можли-
вість забезпечує польовий метод.
Застосування польового методу для розрахунку характеристик ДПС
паралельного збудження мало чим відрізняється від розрахунку електро-
механічних характеристик ДПС послідовного збудження. Основна відмін-
ність полягає у тому, що густина струму в витках обмотки збудження за-
лишається незмінною, а густина струму в обмотці якоря змінюється у від-
повідності до поточної величини струму якоря Іа.
Алгоритм розрахунку наступний.
1. Задаються вхідні дані ДПС: (7, /у, дані про геометрію.
2. Задається поточне значення струму якоря Іа.
3. Формується розрахункова область, задаються густини струмів в
обмотках і виконується розрахунок поля.
4. За результатами розрахунку тензора магнітного тяжіння по фор-
мулі (2.50) розраховується електромагнітний момент.
5. За результатами розрахунку векторного магнітного потенціалу по
формулі (2.21) розраховується величина = СеФ.
6. По формулі (2.89) розраховується швидкість ротора. Таким чином
знайдені і узгоджені усі величини, що формують характеристики ДПС.
127
3. АНАЛІЗ ВЗАЄМОПОВ’ЯЗАНИХ ЕЛЕКТРОМАГНІТНИХ 1
ТЕПЛОВИХ ПРОЦЕСІВ ЕЛЕКТРИЧНИХ МАШИН
3.1. Взаємозв’язок електромагнітних і теплових полів та процесів в
електричних машинах
Основним фізичним полем, завдяки якому відбувається процес елек-
тромеханічного перетворення енергії в електричних машинах, є електрома-
гнітне поле. Але разом з ним в процесі роботи машини виникають і впли-
вають на робочі характеристики машини фізичні поля іншої природи. Це,
насамперед, теплове або температурне поле, яке обумовлено нерівномір-
ним розподілом теплових втрат енергії в активному об’ємі машини, меха-
нічне поле деформацій в елементах конструкції, поле вібрацій тощо. Ці фі-
зичні поля різної природи існують в машині одночасно і є взаємозалежни-
ми. Взаємний зв'язок полів витікає з закону збереження енергії і проявля-
ється у впливі одних фізичних полів на матеріальні характеристики сере-
довищ та параметри джерел фізичних полів іншої природи. Вплив такого
взаємозв’язку на характеристики машини у ряді випадків є дуже суттєвим і
потребує обов’язкового урахування при створенні адекватної математичної
моделі ЕМ. Проте необхідність і доцільність сумісного аналізу взаємозв'я-
заних полів різної фізичної природи в ЕМ необхідно обгрунтовувати у ко-
жному випадку окремо з урахуванням особливостей явищ і процесів, що
розглядаються, а також конкретних задач, які ставляться при розробці ма-
тематичної моделі ЕМ.
Найбільш актуальним для ЕМ є урахування взаємозв’язку електро-
магні гного та теплового полів. Цей зв'язок проявляється в різних ефектах і
явищах. Особливо суттєвим є вплив температури на електромагнітні пара-
метри середовищ. Наприклад, питомий опір усіх електропровідних середо-
вищ збільшується при нагріванні по лінійному закону з температурним ко-
ефіцієнтом а, який знаходиться експериментально і має різні значення
для різних матеріалів. В деяких електротехнічних сталях, наприклад в ста-
лі 3413, з ростом температури спостерігається зменшення магнітної про-
никності вздовж напряму прокату з температурним коефіцієнтом 0,625% /
°С. При високих температурах (близько 700 °С- точка Кюрі) феромагнети-
ки взагалі втрачають свої феромагнітні властивості. При нагріванні високо
енергетичних постійних магнітів МбРеВ суттєво змінюється їх магнітна
характеристика: коерцитивна сила зменшується з температурним коефіціє-
нтом - 0,6%/ °С, а залишкова індукція - з коефіцієнтом - 0,12%/ °С [50].
Тому у багатьох випадках аналіз ЕМ з постійними магнітами необхідно
оґит ’ячково проводити з урахуванням нагріву активної зони машини. Та-
ким чином, з одного боку, інтенсивність теплового поля непрямо впливає
на протікання електромагнітних процесів через зміну величин елекгромаг-
нініих параметрів матеріальних середовищ - електропровідності /(Т),
магнії ної проникності /г(Г) тощо.
128
Зворотній вплив електромагнітного поля на теплофізичні параметри
проявляється лише в області надвисоких магнітних полів, коли індукція
перевищує В > 10 Тл. Оскільки в ЕМ такий рівень полів практично не іс-
нує, можна вважати, що теплофізичні параметри - теплопровідність Л,
теплоємність С і масова густина р не залежать від інтенсивності магніт-
ного поля. Ці теплофізичні параметри можуть залежати тільки від темпе-
ратури, що складає задачу нелінійної теплопровідності.
Проте зворотній вплив електромагнітного поля на теплове поле про-
являється в зміні величини і просторового розподілу температурних дже-
рел поля, оскільки ці джерела створюються індукованими струмами, маг-
нітною індукцією тощо.
Взаємозв’язок теплового та електромагнітного процесів легко спо-
стерігати на прикладі проникнення хвилі електромагнітного поля в ма-
сивне електропровідне середовище [44]. Закон розподілу індукованого
струму по глибині плоского провідника при гармонійно змінному в часі
магнітному полі можна виразити наступною приблизною формулою:
(3.1)
де к — у[сору/2, (О - кутова частота зміни поля у часі. Зворотна величина
8 = Мк називається умовною глибиною проникнення змінного електро-
магнітного поля в масивний провідник і дорівнює відстані від поверхні
провідника, на якій значення струму зменшується в е = 2,7183 раз. Якщо
електропровідність провідника лінійно залежить від температури по відо-
мому закону
= /0 /[1 + «(Г- То)], (3.2)
де /о ~ електропровідність при температурі 70, то за інших рівних умов із
збільшенням температури Т провідника збільшується і глибина проник-
нення його струмів:
£ = 72П+«(^-^о)]/^т- (3.3)
При зміні розподілу струмів в перетині провідника змінюється, також, гус-
тина тепловиділень
= Лу)І у(Т) = ^[\ + а(Т(3.4)
і, відповідно, температура, тобто проявляється зворотний вплив електро-
магнітних явищ на теплові явища. Таким чином в результаті взаємного
впливу електромагнітного і теплового процесів утворюється інша картина
розподілу фізичних полів в середовищі. Наведені аналітичні вирази (3.1) -
(3.4) є приблизними, оскільки отримані в припущенні, що провідник має
129
однакову температуру і однакову електропровідність у всьому своєму
об’ємі. Насправді ж температура, як і струми також є неоднорідно розподі-
леною вздовж координати у. Тому кожному тонкому шару по глибині
провідника відповідає своє окреме значення як температури, так і електро-
провідності, а остаточна закономірність розподілу індукованих струмів є
більш складною і може бути знайдена при розрахунках тільки з викорис-
танням чисельних методів.
Урахування взаємного впливу електромагнітного та теплового поля є
особливо важливим для електричних машин з масивними (не шихтовани-
ми) електропровідними елементами, наприклад, для асинхронних машин з
масивним ротором. Збільшення глибини проникнення струмів в масивний
ротор ЛД внаслідок його нагрівання веде до істотної зміни конфігурації
струмонесучого шару вторинного контуру, зміни його еквівалентного ак-
ційної о опору і збільшення індуктивності розсіяння і, як результат, — до
ніачіїої зміни механічних і робочих характеристик машини. Причому в ря-
ді випадків може спостерігатися на перший погляд парадоксальний ефект-
паї рінання ротора супроводжується зменшенням, а не збільшенням його
еквівалентного активного опору, що обумовлюється зростанням площі по-
ін-речіюго перетину для протікання індукованих струмів. Особливо це си-
льно виявляється в машинах нетрадиційних конструкцій, які мають вели-
кий рівень електромагнітного навантаження і значний рівень наїрівання
вк і інших електропровідних елементів.
3.2. Особливості чисельного моделювання взаємопов’язаних
елект ромагнітного і теплового полів
Системний підхід до аналізу взаємозв’язаних фізичних полів перед-
, то при математичному описі єдиного поля машини його окремі
складові повинні описуватися в рамках загальної системи рівнянь з ураху-
ішнням усіх взаємозв’язків між змінними. Розглянемо спочатку поле в не-
рухомому суцільному середовищі. Виходячи з рівнянь (1.21) і (1.69), за-
пишемо систему рівнянь відносно вект орного магнітного потенціалу і тем-
пі рліури у наступному вигляді:
51 , (3.5)
сі
де електропровідність /(7) залежить від температури за виразом (3.2), а
сумарна об’ємна густина теплових втрат знаходиться за виразом
С(Л) =ЛА)і7(Т)+ґсторі7м+ест+ @мех. (3.6)
130
До виразу (3.6) входять усі існуючі складові тепловиділень: втрати від ін-
дукованих вихрових струмів в масивних електропровідних частинах ЕМ
72 ( Л) / у(Т), втрати від сторонніх струмів в обмотках .!^тор І , втрати
в сталі шихтованих магнітопроводів , втрати неелектромагнітного по-
ходження ()мех, наприклад механічні, або вентиляційні втрати тощо. При
необхідності задаються також нелінійні залежності р(Т).
Зв'язок між густиною індукованих струмів і векторним магнітним
потенціалом встановлюється за допомогою першого рівняння Максвела
(1.1) і залежностей (1.5), (1.14), (1.20). Після знаходження розподілу векто-
рного потенціалу густина струму знаходиться через операцію диференцію-
вання за виразом:
1 1 1
/(А) =—гоі В = - гоігоіА -------ЛА (3.7)
В В в
Аналізуючи систему (3.5) легко бачити, що рівняння для температу-
ри за формою математичного запису ідентично відповідному рівнянню для
векторного магнітного потенціалу при таких замінах змінних і коефіцієн-
тів: Т = А, Л = 1/р, ср~у. Умови на границях розрахункової області
також значною мірою ідентичні: у формулюваннях кожного типу задач пе-
редбачено завдання граничних умов першого, другого роду, а також умов
періодичності. Відмінність полягає лише в можливості завдання для теп-
лових полів граничних умов третього роду, які відображають умови тепло-
обміну на границі розділу суцільного і газоподібного (рідкого) середовищ.
Ідентичність математичного запису рівнянь для векторного магнітного по-
тенціалу і температури дає можливість у повному обсязі використовувати
для їх розв’язання однакові методи і математичний апарат. Зокрема алго-
ритми і програмне забезпечення при реалізації МСЕ для розрахунку тепло-
вих полів значною мірою такі ж самі, як і для розрахунку електромагніт-
них полів.
Для розв’язання системи (3.5) на основі методології МСЕ формуєть-
ся сітка скінченних елементів, яка є однаковою, як для електромагнітної,
так і для теплової задач. Далі система диференційних рівнянь редукується
до системи нелінійних алгебраїчних рівнянь, матриця якої має розмірність
(Л^4 + №т)х(]Уа + Л^-), де 1УА,МТ - кількість невідомих складових век-
торного потенціалу і температури. Наприклад, при аналізі двохвимірного
поля у суцільному середовищі, коли векторний потенціал має одну прос-
торову складову, отримаємо ВГА = . Таким чином, кожному вузлу сфо-
рмованої ССЕ відповідають декілька невідомих функцій, значення яких є
взаємопов’язаними.
Слід вказати на важливу обставину, яка ускладнює побудову і пода-
льше використання однакової для обох полів ССЕ. При вказаній вище
131
аналогії в математичних описах нестаціонарних теплових і електромагніт-
них полів існує суттєва відмінність в чисельних значеннях електромагніт-
них і теплофізичних параметрів матеріальних середовищ, які входять як
коефіцієнти до двох зазначених рівнянь. Наприклад, значення коефіцієнту
теплопровідності Л для матеріалів, які використовуються в ЕМ, лежить в
межах від 0,25 (Вт/м °С) (для пазової ізоляції обмоток) до 385 (Вт/м °С)
(для міді провідників), тоді як еквівалентна їй величина /л в першому
рівнянні (3.5) змінюється від 700 (Гн/м) (для ненасичених сталей) до 8 10’
(І п/м) (для діелектриків). Аналогічно, добуток ср приймає значення в ді-
.іпаїоні від 1,1 106 (Дж/м3 °С) (для пазової ізоляції) до 3,42 106 (Дж/м3
"(’) (для міді), а еквівалентна цьому добутку величина електропровідності
у н першому рівнянні (3.5) лежить в межах від 10,5 106 (1/Ом м) (для
сі.ілі) до 57,2 106 (1/Ом м) (для міді). З вказаної відмінності чисельних
ш.ічеііь коефіцієнтів рівнянь (3.5) витікає дві важливі відмінності в пове-
дінці розв'язків цих рівнянь. По-перше, швидкість дифузії теплового поля
н суцільне середовище у часі є значно меншою, ніж швидкість дифузії еле-
к іромагніпюго поля в електропровідне середовище. У результаті теплова
інерція для елементів конструкції ЕМП є істотно вищою за електромагніт-
ну інерцію. Так, розрахункова величина постійної часу нагрівання елемен-
ті реальних ЕМП вимірюється від декількох секунд до декількох сотень
ігкунд, притому, що постійна часу встановлення електромагнітного про-
тчу іашичай складає частки секунди (вимірюється в мілісекундному діа-
ікі піні) І ому розрахункові відрізки часу для аналізу нестаціонарних елек-
ірпмаї ні і них і теплових процесів суттєво відрізняються. По-друге, просто-
ропііи ір.ідієнг польової функції є значно більшим для електромагнітного
киця І (є веде до відмінності глибин проникнення зазначених полів в сере-
іонніпе Іміпне електромагнітне поле при частоті 50 Гц проникає в елект-
ропровідне середовище на глибину від часток міліметра до десятка міліме-
ірів, її і гінбипа проникнення теплового поля в це ж середовище обчислю-
. 11-і II і о і ними міліметрів.
Відмінність просторових і часових характеристик зазначених полів
поірпїуі використання різних параметрів дискретизації польових рівнянь
по ч.н у і простору. Це означає, що єдина ССЕ, яка сформована для чисель-
....ропі’я іання системи рівнянь (3.5), а також однаковий крок по часу не
иіГіс пкчіуіоп. однакової чисельної похибки для двох розв’язків. Доцільні-
ші ґц ію (> для кожного поля використовувати свою більш адекватну ССЕ і
। пііі крок по часу. Але у такому разі вузли двох ССЕ не будуть співпадати,
ніо < иіоріоі проблему адекватного урахування взаємного зв’язку полів. До
іоі о к у шім'яті 11ЕОМ потрібно зберігати збільшений у два рази великий
пі» ні інформації щодо координат вузлів, порядок їх з’єднання в ССЕ тощо,
і ому при чисельній реалізації сумісного аналізу зв’язних полів слід фор-
мули ні одну ССЕ, яка відповідає вимогам електромагнітного поля. Так,
міінм.і іьнии розмір розрахункового кроку по часу і мінімальний розмір
132
скінченних елементів в ССЕ необхідно приймати виходячи з умов досяг-
нення необхідної точності розв’язання рівняння електромагнітного поля,
хоча вибрані розміри вочевидь будуть дуже заниженими для теплового по-
ля. При цьому такою згущеною ССЕ необхідно покрити чималу розрахун-
кову область, яка за своїм розміром може бути значно більшою, ніж це по-
трібно для електромагнітного аналізу. У результаті такого вимушеного
вибору параметрів ССЕ розроблена скінченно - елементна модель набуває
ознак інформаційної надлишковості, оскільки надає багато надлишкової
чисельної інформації, яка не потребується і не використовується для отри-
мання змістовних висновків щодо розподілу поля. При цьому суттєво зро-
стають недоцільні витрати комп’ютерного часу і обсяг пам’яті ПЕОМ для
чисельної обробки такої інформації.
Окрему групу складають задачі аналізу дуже швидких (імпульсних)
потужних електромагнітних процесів при адіабатних (без теплообміну з
навколишнім середовищем) режимах нагрівання електропровідних середо-
вищ. Для цих задач обрання єдиної ССЕ є обірунтованим і не веде до не-
доцільних витрат комп’ютерного часу.
Аналізуючи загальну матрицю Якобі системи рівнянь (3.5) після за-
стосування МСЕ, можна зробити висновок, що вона не є стрічковою. Це не
дозволяє використовувати ефективні чисельні методи розв’язання алгебра-
їчних систем з рідкими стрічковими матрицями. У результаті, з огляду на
збільшену розмірність загальної матриці, це додатково призводить до зна-
чного зростання витрат комп’ютерного часу.
Виходом з такої ситуації є застосування приблизного розрахункового
методу, який передбачає окремий (поблочний) розрахунок кожного з полів
з організацією внутрішніх ітераційних процедур. Ці процедури дозволяють
узгодити значення потенціалу і температури у кожному вузлі ССЕ і для
кожного моменту часу з урахуванням взаємного зв’язку параметрів матері-
альних середовищ. Хоча такий метод не має строгого теоретичного обґру-
нтування він, як показує практичний досвід, дозволяє отримати результати
з достатньою для практики достовірністю.
Зазначені особливості сумісного аналізу електромагнітних та тепло-
вих полів поширюються і на випадок рухомих середовищ, в яких електро-
магнітне поле описується більш загальним рівнянням (1.21).
У ряді важливих випадків конфігурація та розміри розрахункових
областей для аналізу електромагнітного та теплового полів не співпадають.
Це пов’язано з тим, що на відміну від рівняння електромагнітного поля,
яке однаково описує поле у всіх середовищах активної зони ЕМ, рівняння
теплопровідності типу (3.5) описує поле лише в твердих суцільних середо-
вищах, а на границях з газоподібними або рідкими середовищами зазви-
чай задаються граничні умови третього роду. Оскільки ротор і статор
ЕМ розділені робочим повітряним проміжком, а також існують проміжки
між іншими елементами конструкції (в лобових частинах обмоток, між яр-
мами магнітопроводів і корпусом, в вентиляційних каналах різного типу
' 133!
тощо), то розрахункова активна зона ЕМ для аналізу теплового поля скла-
дається з декількох окремих зон. Якщо необхідно врахувати взаємний
ніілив (підігрів) цих зон, то це виконується через завдання граничних умов
з урахуванням змінної температури охолоджуючого агенту і характеристик
існуючої системи вентиляції ЕМ.
В ряді конструкцій ЕМ (асинхронні машини) робочі повітряні про-
міжки між статором і ротором вибираються дуже малими - (0,5 ... 1) мм.
І ідравлічний (аеродинамічний) опір таких проміжків є дуже великим, у
результаті чого охолоджуюче повітря через ці проміжки практично не пе-
реміщується і тепло через нього від статора і ротора не відводиться. Мож-
на нехтувати в таких малих проміжках і теплообміном за рахунок явища
конвекції. У таких випадках повітряний проміжок можна представити тве-
рдим суцільним шаром між статором і ротором, що має низьку еквівалент-
ну теплопровідність — теплопровідність повітря, численне значення якої
можна знайти в довідниках. Використання такої моделі дозволяє об’єднати
зони статора і ротора в єдину розрахункову область, спростити подальший
аналіз взаємозв’язаних полів і певною мірою врахувати теплообмін між
статором і ротором. В інших випадках, коли повітряний проміжок є вели-
ким (наприклад, в потужних синхронних машинах) і теплообмін між нагрі-
тими елементами і охолоджуючим агентом в проміжках є суттєвим, аналіз
теплового поля необхідно проводити окремо для кожної з підобластей, що
потребує застосування для усіх підобластей окремих ССЕ.
3.3. Визначення та дослідження характеристик електричних машин
з урахуванням взаємозв’язку електромагнітних
та теплових процесів
В даному розділі розглянуто декілька математичних моделей ЕМ рі-
зного типу та призначення, які наочно демонструють необхідність ураху-
вання взаємозв’язку електромагнітних та теплових процесів для адекватно-
го розрахункового визначення характеристик машин.
3.3.і. Асинхронна машина з масивним ротором. Розглянемо асин-
хронну машину, що має електропровідний феромагнітний гладкий (без па-
зів) ротор. Розподіл вихрових стругів в роторі безпосередньо впливає на
механічну і робочу характеристики машини, а нагрівання ротора на хара-
ктер розподілу струмів.
ІІрикни) 3.1 Вхідні номінальні дані машини, а також дані щодо її статора
нрнймаїїися іакими ж, як у АД потужністю 200 кВт, який було розз лянуто вище
у крик залі 2.7. Обравши висоту повітряного проміжку рівною 1.2 мм. рогор .ма-
шини виконано гладким, електропровідним і феромагнітним, причому електро-
машині іа іеплофізичні параметри матеріалу ротора відповідають сталі марки
( і ' Аналі з електромагнітного поля у сталому режимі роботи машини проведе-
но мсіодом індукованих струмів по методиці, яку викладено в підрозділі 2.3.1.
134
При аналізі теплового поля повітряний проміжок між статором і ротором моде-
лювався суцільним твердим шаром з теплопровідністю, що дорівнює теплопро-
відності повітря 0,034 (Вт/м °С). І (є дало змогу- при сумісному аналізі застосува-
ти єдину ССЕ. На зовнішній поверхні статора задавалися однорідні іраничні
умови першого роду для векторного магнітного потенціалу і умови третього ро-
ду для температури.
Було розглянуто два варіанти розрахунку: а) при незалежній від темпера-
тури величині електропровідності сталі ротора, яка дорівнює електропровідності
‘•холодного’" ротору 1,12 107 (1/Ом м); б) при електропровідності ротора,
яка лінійно залежить в кожній точці від локальної темпераіури у відповідності
до співвідношення (3.2).
На рис. 3.1 а) і б) зображено картини поля векторного магнітного потенці-
алу (ізолінії) та струмів ротора і статора (фонове забарвлення) для двох зазначе-
них розрахункових варіантів при номінальному струмі обмотки статора 116 А і
однаковому ковзанні ротора 5 =0,03 в.о..
б)
Рис. 3.1 .Розподіл векторного магнітного потенціалу і струмів при:
а) незалежній від температури електропровідності сталі ротора; б) при електро-
провідності сталі роюра, яка залежить від локальної температури у
відповідності до рівняння (3.2).
Аналіз отриманих картин поля свідчить, що з урахуванням нерівномірного
наїріву ротора збільшується розрахункова глибина проникнення вихрових стру-
мів у масивний ротор - вихрові струми прагнуть проникнути у більш холодні
глибші шари ротора, які мають більшу електропровідність. При цьому зменшу-
ється амплітуда вихрових струмів на поверхні ротора: для ротора з “холодною”
незмінною електропровідністю іустина вихрових струмів на поверхні ротора
складає 15 А/мм" а при урахуванні нагріву вона зменшується до величини 9,73
А/мм2 (на 54%).
На картинах поля чітко проглядається ефект закручування силових ліній
магнітного поля обертовим ротором, причому характер цьоіо ефекту не зміню-
ється при нагріванні ротора.
135
На рис. 3 2 зображено фрагмент картини поля з зображенням стрілок, що
харакісризують розподіл вектора тензора магнітного тяжіння, який створює еле-
ктромагнітний момент машини.
Рис. 3.2 Фрагмент картини поля з розподілом вектора
тензора магнітного тяжіння
І Електромагнітний момент машини у даному випадку зручно розраховува-
ти на основі формули (2.50). Величина електромагнітною моменту, який розви-
ває машина при даному ковзанні, складає: у першому випадку 1882 н м, а в
другому - 1450 н м. Тобто при урахуванні змінного і нерівномірного нагріву
масивного ротора асинхронної машини її розрахунковий електромагнітний мо-
мент зменшується на 29,7 % у порівнянні з аналогічними за методикою розраху-
нками. але без урахування впливу нагріву ротора. Тому взаємопов'язаний аналіз
електромагнітних і теплових процесів дозволяє отримати більш адекватну роз-
рахункову інформацію щодо реальних показників машини.
3.3.2. Електро-тепло-механічний перетворювач енергії. У наступ-
ному прикладі докладно розглянуто математичну модель і результати мо-
делювання спеціалізованого електро-тепло-механічного перетворювача
енері її технологічного призначення, розробленого та дослідженого профе-
сором Заблодським М.М. [12].
ІІ/шк иїд 3.2. Єлектро-тепло-механічні перетворювачі енергії (ЕТМП). є осно-
вним вузлом спеціалізованих технологічних установок, які використовуються в
різних іалузях промисловості і сільському господарстві. Технологічний процес в
і.ікнх установках полягає в механічній обробці і одночасному наїріванні робо-
чою маїеріалу. Ефективні ЕТМП створюються на базі багатомодульних елект-
ромашинних систем, які перетворять електроенергію мережі в корисну механіч-
ну і і силову енергію. Сумарний ККД енергоперетворення в ЕТМП є дуже
136
великим, що забезпечує ефективну реалізацію та впровадження принципів енер-
гозбереження.
Важливим для практики прикладом ЕТМП є шнекові двохмодульні ЕТМП
для транспортування і сушки сипких матеріалів. Конструкція такого ЕТМП міс-
тить дві розташовані на одному валу асинхронні машини обертового виконання.
одна з яких працює в режимі двигуна, а інша в режимі електромагнітного галь-
ма. ЕТМП має загальний масивний зовнішній ротор і два незалежні статори.
1 Іоперечний перетин одного з модулів показаний на рис. 3.3.
Електромагнітні моменти, які створюються першим (руховим) і другим
(гальмовим) модулем, діють на ротор у зустрічних напрямках. У результаті, з
урахуванням дії моменту зовнішнього опору, частота обертання ротора є досить
малою. Тому, на відміну від традиційних асинхронних машин, особливістю фу-
нкціонування шнекового ЕТМП є його робота при малій частоті обертання ро-
тора та в умовах нестабільності моменту зовнішнього опору. Робочий діапазон
ковзань ротора для рухового модуля складає 5 = 0,85 ... 0,95 в.о., а для гальмів-
ного - відповідно 5 = 1,05 ... 1,15 в.о. Робоче ковзання знаходиться шляхом
накладення механічних характеристик рухового і гальмівного модулів, а також
опору механічного навантаження. Відомі методи розрахунку механічних харак-
теристик асинхронних машин не забезпечують необхідної точності розрахунку'
електромагнітного моменту в області великих ковзань. Такий розрахунок з точ-
ним урахуванням ефекту витіснення струмів у масивному роторі, нелінійної за-
лежності магнітної проникності і впливу температури можливий тільки метода-
ми теорії поля.
Рис. 3.3 Поперечний перетин ЕТМП: 1,1’ ділянки зовнішнього ротора, 2 -
внутрішній стагор, 3 - повітряний проміжок, 4 - пази статора. 5 - аксіальні вен-
тиляційні канали, 6- порожнистий вал статора.
Вихідні дані модулів ЕТМП є наступними:
Перший (руховий) модуль: довжина статора 500 мм; зовнішній діаметр
сіаіора 370 мм; внутрішній діаметр статора 135 мм; розміри паза статора висо-
іа паза 42 мм. ширина шліца (відкриття паза) 3,8 мм, висота шліца 1 мм, великий
і малий діаметри паза статора 17 мм і 13,5мм; число пар полюсів 4; число
ефективних провідників у пазу 24; число пазів статора 48; число паралельних
гілок 2, число витків у фазі 96.
Другий (гальмовий) модуль: геометрія поперечного перетину статора іден-
тична першому модулю; довжина статора 450 мм; число ефективних провідників
у пазу ЗО; число витків у фазі 120.
Загальний для обох модулів порожнистий виконаний зі Ст.З зовнішній ротор
маг внутрішній діаметр 374 мм, товщину 12 мм і довжину 1436 мм Повітряний
проміжок між статором і ротором для кожного модуля дорівнює 2 мм. З’єднані в
трикутник фази трифазних обмоток статора живляться напругою 380 В.
Двовимірна математична модель для ЕТМП, що розглядається, містить
наступні рівняння, граничні умови і вирази. Рівняння електромагнітного поля
для аксіальної складової векторного магнітного потенціалу А2 мас вигляд, ана-
логічний рівнянню (1.28):
а2Л д2А ( дА дЛ2}
у- +--з~ДїФ)—~~Д7(Т) V —--V,,—- = -д72сто„. (3.8)
дх2 ду2 ді Xх 8х у ду ) ^хст>р
І Іри аналізі сталих режимів роботи для величин, що гармонійно змінюються у
часі, рівняння (3 8) відносно комплексної амплітуди записується в наступному
вигляді:
І д2 А 1 д2 А.
-----2_ + __—_
Д дх2 Д ду2
'4 л дД сМ, *
= -^стоР-№
' дх ду
В рівняннях (3.8) і (3.9) позначено: Ух, V, (Оц - проекції вектора лінійної швид-
кості в довільній точці ротора з координатами (х, у) в декартовій системі коор-
динат і кутова частота обертання ротора
І ''лскіропровідність масивного ротора є функцією температури відповідно
до виразу (3.2). Двовимірне поле температури у декартових координатах опису-
ється наступним рівнянням нестаціонарної теплопровідності
,д2Т .д2т дт
А—у + 2—^—ср— = О(А)
дх2 ду2 ді
(3.10)
де густина джерел тепловиділення визначаються за допомогою виразу (3.6).
Складові магнітної індукції розраховуються через відомий магнітний потенціал
Вх = дАг/е%>,Ву = -дАг/дк,
(3.11)
а і устина струмів в масивному роторі визначається за допомогою виразу
„ 1
= ГОІ2Н = —
В
'дВ^
. дх
дВхУ
ду )
(3.12)
138 ___ ~ ]
Граничними умовами для рівнянь електромагнітного поля (3.8) або (3.9) г
однорідні граничні умови першого роду (1.39). При виборі іраничних умов для
рівняння теплопровідності (3.10) слід враховувати особливості системи вентиля-
ції Ь ]'МП. Основна теплопередача в навколишнє середовище теплової енергії,
що виділилася в активних елементах ЕТМП, здійснюється шляхом конвективно-
го теплообміну між нагрітою поверхнею і потоком охолоджуючого пові гря. Та-
кий теплообмін відбувається відповідно до закону Ньютона - І’іхмана, а на від*
повідних границях задається гранична умова третього роду (20)
О|,о2,о3
(3.13)
Гранична умова (3.13) задасться на верхній частині зовнішньої іраниці ротора
(ті - На внутрішній поверхні порожнистого валу статора Ст2 і на поверхнях Ст3
аксіальних вентиляційних каналів статора. Теплообмін на нижній частині повер-
хні ротора (7|. яка стикається з сипким матеріалом, що транспортується, мас
складну фізичну природу. З фізичної точки зору найбільш адекватним є припу-
щення про передачу всіх втрат, що виділилися в нижній половині ротора, сип-
кому матеріалу у вигляді теплового потоку через поверхню СУ,. Цьому припу-
щенню відповідає гранична умова другого роду, яка задає середню величину
теплового потоку на границі розрахункової області
Л2« $ К2н $
(3.14)
де - зовнішній радіус ротора. Таким чином, у даному випадку не тільки
вирази (3.2), (3.6), але і гранична умова (3.14) обумовлює взаємозв’язок електро-
магнітного і теплового полів ЕТМП.
ІЗ -загальному випадку при аналізі нестаціонарних процесів наведені
польові рівняння доповнюються рівняннями електричних кіл обмоток статорів
модулів
-гі І
' 1(1 Е Г 9
кк аі
(3.15)
де ик , і ,гк ,Ц/к - напруга, струм, активний опір і повне магнітне потокозчеп-
лення обмотки статора, к - індекс модуля (к = 1 для рухового модуля, к = 2 -
для гальмового модуля) і рівнянням рівноваги моментів
, = ЕМ\~~ ЕМ2~ (3-16)
аі
Магнітне потокозчеплення обмоток статорів визначає ться виразом (2.21). Елект-
ромагнітні моменти модулів МЕМ\, МЕМ2 в (3.16) підходять методом тензора
магнітного натягнення за виразами (2.50). Механічний момент навантаження
І
139
обумовлюється опором сипкого матеріалу і має характер, який наближається до
лінійної залежності моменту від швидкосіі обертання ротора з коефіцієнтом
пропорційності а.
Мс = Мсо + аа>к. (3.17)
При чисельній реалізації математичної моделі (3.8) (3.17) застосовувався
метод поблочного розв’язання рівнянь електромагнітного та теплового полів з
виконанням внутрішніх ітераційних процедур у відповідностями з виразами
(І..’). (1.6). (3.13). При побудові скінченно - елементної моделі використовува-
вся тдііна ССЕ. сформована для показаної на рис. 3.3 площі поперечного пере-
тну 1 МІН При цьому при аналізі теплового поля повітряний проміжок між
і і тором і рот ором моделювався суцільним твердим шаром з теплопровідністю,
що іоріїїііюс теплопровідності повітря 0.034 (Вт/м °С). Далі представлені окре-
мі найбільш суттєві результати моделювання ЕТМП з зазначеними параметрами
І»’І
11.1 рис. 3.4. зображено фрагмент картини розподілу векторного магнітного
ііонтщіалу (Поліції) і густини струму (фонове забарвлення) зазначеного ЕТМП
при Гни о пуску (5 =1).
Рік 3.1 Фрагмент картини розподілу векторного потенціалу і
густини струму ЕТМП при пуску
Максимальна іусгина індукованих струмів на поверхні масивного ротора
при щ< ьу ( 5 І) сяі аг значення 42 А/мм2. При цьому спостерігається ефект «за-
іівііііН" ситових ліній поля, викликаний обертальним рухом магнітного по-
їм । іакірії пі іііосно масивного ротора.
II । ріп І 5 показано миттєвий розподіл густини вихрових струмів по гли-
і'ііііі м.іі іііііііііп роїора при роботі перетворювача з номінальним ковзанням ро-
Н>р:І \ оКК
140
Рис. 3.5 Розподіл густини струму по глибині масивного ротора для
холодного ротору і при урахуванні його нагріву
вихровими струмами.
На рис. 3.5. зображено дві розрахункові криві - для холодного ротору при
незмінній температурі Т — То — 40 °С і з урахуванням змінного розподілу тем-
ператури по глибині, викликаного нерівномірним нагрівом ротора вихровими
струмами. Повна глибина проникнення вихрових струмів в ротор складає близь-
ко 8 мм. При цьому напрям протікання струмів на різній відстані від поверхні
ротора є різним. Це зв'язано з тим, що швидкість проникнення хвилі електромаг-
нітного поля углиб ротора і швидкість її обертання у повітряному проміжку уз-
довж поверхні ротора мають близькі значення. У результаті у той час, коли на
поверхні ротора збуджуються струми одного напряму, на деякій його глибині ще
затухають струми протилежного напряму, які були індуковані раніше іншим по-
люсом хвилі електромагнітного поля. Цей ефект безумовно позначається на ве-
личині електромагнітного моменту ЕМПЕ і він автоматично враховується при
чисельних розрахунках, коли визначаються значення тензору магнітного натяг-
нення.
Важливим результатом моделювання взаємопов’язаних електромагнітних
та теплових процесів по сформульованій вище моделі є встановлення суттєвої
зміни розподілу вихрових струмів по глибині ротора при його нагріванні в номі-
нальних режимах до робочих температур. Як видно з кривих на рис.3.5, розра-
хункові амплітуди вихрових струмів на поверхні ротора зменшуються на 15 ...
20%. Але при цьому на 25 ... ЗО % збільшується глибина їх проникнення у масив
ротора.
На рис.3.6 показано характерний розподіл вектора магнітної індукції уз-
довж напрямку радіуса ЕТМП у номінальному режимі роботи при номінальному
ковзанні ротора .у =0,88. Якщо в зубцях статора індукція сягає значень біля 2
Тл, то на поверхні ротора в тонкому його шарі спостерігається значне збільшен-
ня індукції, аж до 3 Тл. Проте слід зазначити, що оскільки градієнт векторного
магнітного потенціалу в поверхневому шарі ротора при робочих ковзаннях
ЕТМП є дуже великим, то виникаючі тут при розрахунках магнітної індукції
чисельні похибки є більш суттєвими, ніж на інших ділянках активної зони пере-
творювача.
141
Радіус, м
Рис. 3.6 Розподіл магнітної індукції уздовж радіусу
Зміна розподілу струмів у роторі при нагріванні викликає зміну величини
електромагнітного моменту, який знаходиться інтегруванням вздовж поверхні
ротора тензора магнітного натягнення. На рис.3.7 зображено фрагмент розподілу
гензора магнітного натягнення (лінійної густини сили) на поверхні ротора, який
свідчить про наявність не тільки корисної тангенціальної складової сили, але і
іначної нормальної складової сили. Причому тангенціальна складова характери-
гусгься міачною нерівномірністю розподілу вздовж поверхні ротора, набуваючи
більших шачень напроти правої сторони зубця статора, з якого обертове магніт-
не йоле гбігаг при своєму обертанні
1'іи 17 фраї мент розподілу вектора тензора магнітного натягнення
уздовж поверхні ротора
142
Розподіл температури уздовж радіусу ЕТМП показано на рис.3.8. З пред-
ставленої кривої видно, що температура масивного ротора досягає значення 300
°С. При цьому температура обмотки статора досягає гранично допустимих зна-
чень близько 135 ... 140"С.
Рис. 3.8 Розподіл температури уздовж радіусу ЕТМП
На рис.3.0 представлені відрізки механічних характеристик кожного мо-
дуля Лї] і Л72, результуюча механічна характеристика ЕТМП М\ + М2, а та-
кож залежність моменту навантаження Мс від ковзання. Крива моменту кож-
ного модуля має вигляд, характерний для механічних характеристик АД з маси-
вним ротором, для яких максимум моменту досягаєт ься при ковзаннях, близьких
до 5 — 1.
Рис. 3.9 Механічні характеристики ЕТМІІ
143
При нікому навантаженні номінальний режим роботи ЕТМП реалізується при
коїн.-піііі ротора 5 = 0,88. Сумарний нульовий момент ЕТМП (рівність абсолют-
них шіічепь моментів модулів) виникає при ковзанні 5=0.78 або при частоті
оосріапня ротора 165 об/хв.
У цілому розроблена модель забезпечує високу достовірність результатів
моле новітня, то підтверджується результатами порівняння експериментальних
і ро «рахункових значень електромагнітних моментів рухового і гальмового мо-
іхпіи в режимі КЗ. які наведені нижче втаблиці 3.1.
І поіиця 3.1.
Модуль Розрахунок М Ем (н/м). Експеримент, МКм (н/м).
Руховий 702 666
Гальмовий 496 452
Розбіжність отриманих розрахункових і експериментальних даних зна.хо-
іініля в доііусіимих межах (6...10)%. Перевищення розрахункових значень
««їхмовлено. перш за все, кінцевою довжиною модуля, вплив якої в розробленій
тіппімірпій польовій моделі враховувався приблизно. Про це свідчип. і.ік«»к
іиіі фіікі. що відмінність розрахункових і експериментальних значень для більш
мірні кою іальмівного модуля є більшою і складає 9.6%. а для більш довгої о
мо п «я ВСІ.ОЮ 5,4%.
ТЕЗ. (Інтимізація форми кінцевих клинів ротора турбоїеисраіо
|«и Урахування взаємного зв’язку електромагнітних та теплових процесів <
п< їх нн.іпім не тільки для достовірного розрахунку характеристик 1-М, апе
п при удосконаленні елементів конструкції машин. Розглянемо один і при
і ііілів їдкою аналізу, який пов’язаний з оптимізацією форми кінцевих
і іиііік роюра турбогенератора для підвищення надійності його роботи в
іп < нмеїричпих режимах [8].
ІІрнк ик) 3.3. Необхідність підвищення надійності експлуатації 11 вимін ін
п іін копіілсння конструкції його самого навантаженого аузла ротора, і. юкрі
ми ііоііє ірукції торцевих зон ротора. Особливо актуальним є вдосконаленії»
КОЇВ ірхкції юрцевих зон з метою підвищення стійкості ТГ в дуже псбепісчііпх
ін і нмеїричпих режимах роботи. При несиметричному навантаженні іурбоїене
іиіііір.і в його роторі індукуються струми частотою 100 Гц, що замикати,ся по
цоііі рхіп роїора на полюсній поділці, яка дорівнює полюсній поділці першої ін
рмпніки міпіпіного поля. Шляхи замикання індукованих струмів в кііщсвпі юні
|ніін|іц в і.нігенціальному напрямі уздовж поверхні ротора показано на рис І ’
І Іриси і» 11, ці шляхи по двох паралельних напрямках - через послідовно ропа
ніііпіііп кишені клини і зубці ротора, а також через бандажне кільце роїора, в іо-
м\ віпііі іку. якщо конструкція ГГ передбачає консольну посадку бандажної о
11 п ни їм бочку ротора. При цьому, як показують дослідження, близько 80" всіх
і|>\ мін роїора. наприклад, в турбогенераторах типу ТГВ, замикається через кіп
їв ш к піші і іубці ротора.
144
При частоті 100 Гц глибина проникнення струмів в ротор є малою і тому,
навіть в межах допустимої несиметричності струмів фаз статора (за Міждержав-
ним стандартом ДСУ 533-2000 вона складає 8%), в торцевій зоні виникають ді-
лянки з великою нерівномірністю розподілу струмів і інтенсивним тепловиді-
ленням. Особливу небезпеку для конструкції представляють локальні втрати на
контактних поверхнях “клин - зубець". Відомі випадки, коли виникаючі тут ло-
кальні перегріви були настільки великими, що призводили до оплавлення поса-
дочних поверхонь кінцевих клинів і їх приварювання до сталевих зубців. Таке
явище неприпустимо, оскільки істотно ускладнює технологію подальшого ремо-
нту ротора і може викликати термічне руйнування ізоляції розташованої під
клином обмотки ротора. У зв'язку з цим необхідно приймати спеціальні конс-
труктивні заходи щодо підвищення термічної стійкості кінцевих клинів ротора
ГГ в несиметричних режимах роботи. Одним з таких заходів є виконання кінце-
вих клинів з матеріалів з більш високою електропровідністю, ніж дюралюмініє-
вих клинів марок Діб і Д16Т. які застосовуються в центральних зонах ротора.
Використовування бронзових або латунних кінцевих клинів сприяє зниженню
сумарних втрат і перегріву торцевих зон, проте, не вирішує проблеми зменшення
нерівномірності розподілу струмів і втрат.
Зниження нерівномірності розподілу струмів і втрат можна досягти за ра-
хунок вибору оптимальної конфігурації поперечного перерізу кінцевих клинів
ротора в зоні контактної поверхні клина із зубцем. При оптимізації форми пере-
різу клина вдається понизити максимуми локальних втрат і нагріву в контактних
зонах за рахунок більш рівномірного розподілу вихрових струмів. Такий опти-
мальний вибір може бути заснований на результатах математичного моделюван-
ня вихрових струмів, втрат і температури в торцевій зоні.
Розрахункову область для побудови математичної моделі зображено на
рис.3.10 (вид з торця ротора).
Рис. 3.10 Розрахункова область - поперечний переріз кінцевих
клинів ротора ТГ
Припускаючи, що на суміжних зубцевих поділках поле розподілено іден-
тично, можна обмежитися аналізом поля в межах однієї зубцевої поділки, яка
145
містить один клин і дві половини зубця. Індуковані вихрові струми, переходячи
від одної зубцевої поділки до іншої, розтікаються в площині креслення і тому
мають дві просторові складові. Оскільки механічний контакт між клином і зу-
бцем існує на двох плечиках клину, а між вертикальними стінками клина і зу-
бцем існують повітряні проміжки ‘Веде’ і 'Г д к 1г , то індуковані струми ви-
мушені заглиблюватися у клин обминаючи зазначені повітряні проміжки. Пере-
хід сіру му від зубця до клину відбувається також на контактних плечиках.
За визначальну польову функцію будемо використовувати напруженість
магнітного поля, яка обумовлена струмами зворотного порядку проходження
фаз обмотки статора і має одну нормальну (направлену вздовж осі ОХ) просто-
рову складову. Джерелом поля у такій моделі є напруженість магнітного поля
Н 2 — II2. яка задається на зовнішній поверхні розрахункової області як грани-
чна умова.
Визначальне рівняння електромагнітного поля, сформульоване для
комплексної амплітуди напруженості магнітного поля, яка гармонійно зміню-
ється у часі, має наступний вигляд:
д 1 дії, 5 1 д Н.
---------* +----------і.
дх/л дх ду /л ду
- }а>2у Н-=®.
(3.18)
де у,/Л,О)2 електропровідність і магнітна проникність елементів конструкції
(клина і зубця) та кутова частота змінних. При відомому розподілі напруженості
магнітного поля, складові густини струму визначаються по наступних співвід-
ношеннях. які витікають з першого рівняння Максвелла (1.1):
дії, . дН.
ду дх
(3.19)
Для отримання достовірних результатів моделювання необхідно обгрунтува-
іи ірапичні значення напруженості магнітного поля на поверхнях розрахункової
області. Ці значення знаходяться на підставі наступних міркувань. Струми час-
иною 100 1 ц індукуються в активній зоні ротора потоком магнітної індукції,
який викликаний струмами зворотного порядку' проходження фаз в обмотці ста-
іора. Якщо к = І2І- коефіцієнт несиметричності струмів статора, де І2 -
сірум статора зворотного порядку проходження фаз, то напруженість магнітного
поля сіаюра в повітряному проміжку, що обумовлена струмом /->, визначається
через відоме значення індукції першої гармоніки в повітряному проміжку- В$
по іііїсіуііпому співвідношенню:
^2 - ВІ2= В5к/ /лй.
І з рахуванням гою. що в несиметричному режимі ТГ через клини і зубці зами-
к.кп.ся близько 80% повного вихрового струму ротора, вважаємо, що
146
кі №кі + а 0,8. Тому за граничну умову на зовнішньому контурі ’а Ь с
сі е Ге; її к Г (рис. 3.10) приймається значення
/7г — 0,85^//г0.
(3.20)
Вважаючи, що к =0,08 і — 0,715 Тл, отримаємо, наприклад, для гранично-
допустимого несиметричного режиму (Л=0,08/|) турбогенератора типу
ТГВ-200 наступне чисельне значення напруженості магнітного поля, яке вико-
ристовується далі, як гранична умова:
Нг = 0,8 0,715 • 0,081 = 0,046 / /у0 — 3,643 -104 (А/м).
Оскільки глибина проникнення струмів частотою 100 Гц в електропровід-
ні елементи конструкції ротора є малою і за її межами електромагнітне поле мо-
жна вважал и таким, що затухло, то на зовнішньому достатньо віддаленому кон-
турі "ги порт 5' задаються однорідні граничні умови першого роду
Я2=0. • (3.21)
Зважаючи на передбачувану симетрію розподілу поля в суміжних зубце-
вих поділках, на зовнішніх границях ‘а я’ і Ч т’ задаються однорідні граничні
умови другого ролу
дНу/дп-0. (3.22)
Стаціонарне теплове поле в сталому несиметричному режимі в розрахун-
ковій зоні описується наступним рівнянням:
,д2Т ^д2Т
А—у = 0(Я), (3 23)
дх" ду
де об’ємна густина теплових втрат знаходиться за виразом
2(Я) = /7* (/7?+ ./^Я) / у(Т). (3.24)
Для теплового поля задаються наступні граничні умови. Виходячи з при-
пущення, що теплообмін між сусідніми зубцевими поділками не виникає, на
границі Ч т п о р г я а’ задаються умови теплоізоляції однорідні граничні умо-
ви другого роду
дТ/дп = 0. (3.25)
147
Теплообмін ч навколишнім середовищем відбувається через зовнішню по-
верхню ‘аЬсдеГрІгкГ . на якій задаються граничні умови третього роду
'У'г'
А~~ =-ат(Т-То), (3.26)
8п
де СС-/-- коефіцієнт тепловіддачі між поверхнею ротора і охолоджуючим агентом
(воднем), То- температура охолоджуючого агенту. Для даного випадку прийма-
лося аг= 1100 (Вт/м2 °С), а 7}, = 40 °С.
Зв'язок між електромагнітним і тепловим полями враховується за допомо-
гою заданої залежності елекіропровідності від температури (3.2). а також виразу
(3.24). Сформульована математична модель (3.18) (3.26) реалізована чисельно
методом скінченних елементів.
Приведемо деякі результати аналізу на прикладі серійного Т Г типу' ТГВ
200. Стандартна конфігурація кінцевих клинів, які застосовуються на ТГВ - 200,
і картина розггоділу в них густини струму і втрат представлені на рис. 3.11. При
цьому, разом із зображенням картини поля для всієї розрахункової області, при-
ведено також збільшене зображення розггоділу густини струму і втрат в зоггі ко-
нтакту клина із зубцем. Густина зафарбовування темним фоггом відповідає рівню
втрат відповідно до представленої шкали. Показані ізолінії густини струму зо-
бражають шляхи протікання вихрових струмів.
Рнс. 3 11 Картина розподілу вихрових струмів і втрат в зоні контакту клина і
зубця ротора
Розподіл струмів і втрат уздовж довжини контакту між зубцем і клином є
чуже неоднорідним, причому найбільші значення струмів і втрат, як видно з рис.
3.11. виникають на гострому куті при повороті ліній струму від зубця до клину.
І ому для достовірного чисельного аналізу з метою усунення чисельних похибок,
які пов'язані г скінченним розміром елементів ССЕ, доцільно розглядати усере-
тпчп величини струму і втрат в межах невеличкої ділянки, розташованої в зоні
коїиакту. і ака невеличка ділянка площею 5Д = 0,15 мм 2 показана на рис.3.11
148
суцільною лінією в верхній частині контактної поверхні. В межах цієї ділянки
розраховуються усереднені значення густини струму і інтегральних втрат на
одиницю довжини:
= ( Р ’ Л'л <А/мм2) > С?л = /О2 ІуУ& (Вт/м). (3.27)
5Л «Д
Зважаючи на незначні розміри ділянки, отримані розрахункові величини дозво-
ляють обґрунтовано визначити максимальну густину струму і втрат. Зважаючи
на характер ліній струму, ділянка завжди вибирається у верхній найбільш наван-
таженій струмами частині плечика клина, причому на ділянці розміщуються як
частка клина, так і частка зубця уздовж контактної поверхні.
При заданих величинах електропровідності клина і зубця у Аі — 5,99 107
і уре - 1 107 (1/Ом м) і магнітної проникності, яка визначається по кривій на-
маї цінування турбороторної сталі, отримані наступні максимальні значення
— 32.2 А/мм3 і ()^ =4.9 Вт/м. Знайдена величина відповідає об'ємній густи-
ні теплових втрат 32,7 106 Вт/м’. На початку
несиметричного режиму температура ділянки зростає зі швидкістю 13 °С /с.
Стала температура ділянки в зоні контакту між клином і зубцем складає 534 °К
або 261 °С. На рис. 3.12 зображено розподіл сталої температури в зоні
контактної поверхні клин - зубець(гемпература дана в ПК).
Рис. 3.12 Розподіл температури в зоні контактної поверхні клин зубець
Зазначені температури є створюють небезпеку для елементів конструкції
ротора і для зменшення локальних перегрівів необхідна подальша оптимізація
149
конфігурації клина. На рис. 3.13 представлено один з оптимізованих варіантів
клина, отриманий шляхом виконання у верхній частині плечика клина круглого
отвору з діаметром 2 мм.
Рис. 3.13 Варіант оптимізованої форми кінцевого клину ротора
На відміну від стандартного клина у даному варіанті в контактній зоні лі-
нії вихрового струму мають меншу кривизну. У результаті густина струмів в мі-
сцях переходу струму з зубця в клин зменшується. При цьому магмо значення
максимальної густини струму уд = 31 А/мм2, втрат рд — 4,18 Вт/м і темпера-
тури 221 °С . У порівнянні із стандартним варіантом при такій формі клина мак-
симальні локальні втрати і температура у виділеній контактній зоні зменшують-
ся на 17%. При цьому, як показали механічні розрахунки, міцність клина при
таких незначних змінах профілю практично не зменшується і він надійно вико-
нує функції кріплення в пазах ротора обмотки збудження ТГ.
3.3.4. Рейковий прискорювач електропровідних тіл. Рейковий
прискорювач (РП) призначений для електродинамічного прискорення еле-
кіропровідних тіл до високих швидкостей в режимі імпульсного електро-
механічного перетворення енергії. Електрична енергія, яка накопичена у
високовольтній конденсаторній батареї, при комутації батареї на електри-
чне копо 1’11 в лічені долі секунди перетворюється в кінетичну енергію по-
єіуп.і іі.ного руху електропровідного тіла (якоря). У найбільш потужних
1'11 вихідна швидкість якоря може сягати декількох десятків км/с. Розряд-
іінн імпульс струму в РП характеризується великою амплітудою (сотні кА)
і юірінкочаспістю. При електродинамічному процесі в РП виділяються
ці.ічиї іеііпоні втрати, які безпосередньо впливають на процес. Враховую-
чи цю ірншпіість процесу складає декілька мілі- або навіть мікросекунд,
можи і пнажапі, іцо нагрівання РП проходить в адіабатному режимі безте-
.....иміну і навколишнім середовищем. У наступному прикладі розгляну-
ці міііі'мііііічну модель РП і деякі характерні результати його моделюван-
ня | І‘»|
150
Приклад 3.4. Розрахункова схема РП в подовжньому і поперечному (пере-
тин 0 0) перегинах зображена на рис.3.14. а) і б).
Рис. 3.14 Подовжній а) і поперечний б) перетни розрахункової схеми РП
РП складається з двох електропровідних рейок 1 і контактуючого з ними
електропровідного рухомого якоря 2. При розряді кондснса горної батареї на РП
на рухомий якір діють осьові електродинамічні сили, які виштовхують його з
активної зони РП. Потужне електромагніте поле дифундує в рейки та приско-
рюване тіло і призводить до теплових втрат, які коїщеіііруюгься у тонкому шарі
рейок і якоря. Для адекватного розрахунку процесу прискорення якоря дуже ва-
жливим є урахування зміни електропровідності провідних матеріалів, причому',
зважаючи на короткочасність процесу прискорення якоря, режим наїрівання РП
можна розглядати як адіабатний.
Математична модель РП включає наступні рівняння. Сірум / і напруга в
розрядному контурі [/(• описуються такими рівняннями.
(3.28)
(3.29)
І___________________________________151_______________________________]
^жв + гзкв! +^с
аі
сІЇ
де / )!•;в -<ГЖВ ~ еквівалентні індуктивність і активний опір РІІ, які змінюються
у часі. У двовимірному наближенні електромагнітне поле в РП зручно описувати
га допомогою вектора напруженості магнітного поля Н . В подовжньому (рис
3.14 а ) перетині вектор напруженості магнітного поля має тільки одну просто-
рову складову, направлену уздовж осі 02 // = гН,, тоді як струми, розт ікаю-
чись в площині креслення, мають дві складові, що визначаються (для густини
струмів) за допомогою наступних співвідношень:
А = дН2/ду,]у = -дН,/дх. (3.30)
В декартових координатах електромагнітне поле в рейках і якорі РП описується
наступним диференціальним рівнянням:
д \дн, д \дн2 ,^дн2 днг
-------£. +-----£. _ г - І
дхц дх ду [і ду ді--------------ду
(3.31)
Рівняння (3.31) необхідно доповнити наступними граничними умовами. Зважа-
ючи на симетрію картини поля достатньо розглянути половину РП (за умови од-
накових контактних опорів між якорем і обома рейками), задавши на лінії АЗ
однорідну граничну умову другого роду:
дН дН
дп дх
= 0
г=лз
(3.32)
У здовж внутрішньої поверхні РП (контур АБВ) необхідно задати постійне уз-
довж поверхні значення напруженості поля
(3.33)
Необхідність завдання умови (3.33) виходить з виразів (3.30). Оскільки нормаль-
на до контуру АБВ складова густини струму дорівнює нулю, то це означає не-
зміпііісп. напруженості поля уздовж даного контуру. Аналогічно на зовнішній
поверхні (контур ГДЕЖЗ) задається
И\г=гдежз Нн(і).
(3-34)
Ілсіосуїміпія незалежних від просторової координати граничних умов (3.33),
(< 34) при двовимірній постановці задачі є неминучим, оскільки інакше існувала
<і складова струму, яка направлена з рейок в оточуючий простір, що неможливо.
152
Уздовж лінії ВГ, на якій існує ідеальний електричний контакт між РП і
джерелом живлення, задається наступна гранична умова першого роду:
Н(х,1)\ пг = Нв—— ГX-— — <Х< — + Ь. (3.35)
ІГ=ЙГ в мА 2/2 2
З граничноїумови (3.35) виходить Н\ — І — Нв і
н(^ + ь] = Нн = Нв-~. (3.36)
\2 у п
що узгоджується із законом повного струму. Нормальна до контуру ВГ густина
струму відповідно до виразу (3.30) з урахуванням умови (3.35) визначається як
. । дН І
.у,. =------=—. Інтегруючи її по поперечному перетину рейки РП.
'г вг дх Ьк
отримаємо повний струм РП | 11(71 ЬИ)сІХ(1у = І. Таким чином, сис-
5 ' 00
тема рівнянь і співвідношень (3.30) - (3.36) вичерпно характеризує електромаг-
нітне поле у подовжньому перетині РП.
Температура у кожній точці рейки і якоря в умовах адіабатного режиму
нагрівання описується насзупним диференціальним рівнянням:
дТ 7 7
ср~ = (./.? + ІуУу(Т).
(3.37)
Електропровідність матеріалів, що входять у рівняння (3.31), (3.37). складним
чином залежить від температури. Для деяких матеріалів і діапазонів зміни тем-
ператур задовільні практичні результати дає використання лінійної залежності
по виразу (3.2). В інших випадках потрібна більш точна інформація, яку отри-
мають у результаті експериментальних досліджень відповідних матеріалів. Та-
ким чином, рівняння (3.37) з урахуванням наявної залежності у(Т) вичерпно
описує температурне поле РП.
Рух якоря РУ описується за допомогою наступних рівнянь:
сІУ 1 „
— = —Е
с/г т
сії
(3.38)
(3.39)
де т - маса якоря, Е - миттєве значення електродинамічної прискорюючої сили,
орієнтованої уздовж рейок РП (напрям уздовж осі ОУ). Об'ємна іустина сили
визначається добутком магнітної індукції і густини струму в кожній точці якоря
153
/\ = вг іх = /.і^-Н
"У Л А • V
(3.40)
Інтегруючи вираз (3.40) за об’ємом якоря з використанням методу скінченних
елемегггів, отримаємо наступний вираз для інтегральної сили:
нгі , (з.4і)
0 ду 7=1 ду
де к — товщина якоря, N - число скінченних елементів, що покривають розра-
хункову область якоря в подовжньому перетині РП.
Для розв’язання рівняння (3.31) необхідно мати граничні функції
яв(0, нн(і) , які задаються в граничних умовах (3.33), (3.34). Для їх визна-
чення необхідно розв’язати допоміжну задачу розрахунку електромагнітного
поля РП в поперечному достатньо видаленому від якоря перетині рейок (рис.
3.14 б). Така задача зводиться до розв’язання наступного рівняння відносно век-
торного магнітного потенціалу:
д 1 дА д 1 дА дА 1
----------~ +-----------~~У—- =— (3.42)
дх д дх дх д дх ді Ьк
На границях розрахункової області КЬМИ задаються однорідні граничні умови
першого роду
причому відрізок КЬ є рівновіддаленим від обох рейок, а решта частина контуру
КЬМН віддалена від перетину рейки на достатню відстань, на якій можна вважа-
ти поле таким, що затухнуло до нуля. Після розв’язання задачі (3.42),(3.43) неві-
дома напруженість магнітного поля знаходиться у точці з координатами
X — (1! 2, у — к/2 за наступним виразом:
нв(і)=-
±4
До дх
(3.44)
І Іапружсггість на зовнішній поверхні РП Нн (7) знаходиться за допомогою ви-
разу (3.36). Джерелом поля в правій частині рівняння (3.42) є струм розрядного
контуру, який описується рівняннями (3.28), (3.29). Взаємозв'язок цих рівнянь
здійснюється за допомогою наступних співвідношень. Магнітне потокозчеплен-
ня 1’11 можна визначити за допомогою виразу, аналогічного приведеному раніше
виразу (2.21)
Ч'РУ = ~’ Е4 сР ’ , (3-45)
Ьк і
154
де 10 — довжина рейки, що відповідає початковому положенню якоря у момент
часу І =0. Підсумовування ведеться по усіх скінченних елементах, які покрива-
ють поперечний перетин рейки. Еквівалентна індуктивність РУ визначається як
^ЗКВ ~ Ч'ру Ч • О -4^)
Як видно з (3.45), (3.46) індуктивність РП лінійно залежить від відстані, пройде-
ної якорем. При чисельних розрахунках в початковий момент часу еквівалентну
індуктивність слід визначати по відомих формулах для системи тонких шин пря-
мокутного перетину.
Поточне значення активного еквівалентного опору РУ визначається після
інтегрування об'ємної густини втрат в рейках
І(7,2+у’)/хак
----- д---------<’«>
1---------------1 і
Приведені вище рівняння доповнюються початковими умовами:
С7с(0) = С7ео,/(0) = 0, Г(0) = Го, х(0) = 70,7(0) = То,//(О) = 0. (3.48)
Таким чином, сформульовано замкнуту математичну модель РП у вигляді
сукупності зв'язаних рівнянь, граничних умов і співвідношень (3.28) (3.48).
Рівняння (3.28), (3.29), (3.46) - (3.47) описують процес в електричному колі роз-
рядного контуру джерела живлення РП. Рівняння (3.30) - (3.36) і (3.42) - (3.44)
описують нестаціонарне квазітривимірне електромагнітне поле у рейках і якорі
РП, причому окремо аналізуються поля у подовжньому і поперечному перетинах
РП, а їх зв'язність забезпечується виконанням умов (3.44). Рівняння (3.37) описує
нестаціонарний адіабатний наїрів рейок і якоря з урахуванням температурної
залежності електропровідності матеріалів, причому знайдені по цій залежності
електропровідності використовуються у рівняннях (3.31), (3.42) при розрахунках
електромагнітного поля. Рівняння (3.38) - (3.41) описують процес прискореного
руху якоря під дією електродинамічної сили.
Приведемо деякі результати моделювання одної-о з варіантів РП [49]. Рей-
ки виконані з кадмієвої бронзи і мають розміри: ширина 23 мм; товщина 23 мм;
довжина 1000 мм. Відстань між рейками дорівнює 23 мм. Якір виконаний з алю-
мінієвого сплаву марки АЛ і має наступні розміри: довжина 34,5 мм; ширина 23
мм; товщина 23 мм В початковий момент часу якір є нерухомим. На вильоті з
РП якір отримує кінцеву швидкість 1000 м/с. Маса якоря - 0,05 кг. Початкова
температура якоря і рейок дорівнює 20 °С. Амплітуда струму розрядного конту-
ру склала 1,2 МА, а час руху - 2,0 мс. На рис.3.15 для моменту часу І = 1,6 мс,
поточних значеннях швидкості V ~ 855 м/с і переміщення якоря X- 1,56 м зо-
бражено ізолінії тустини струму. Для більш наочного зображення картина поля
показана для частини розрахункової області РП, що безпосередньо знаходиться в
зоні контакту якоря і рейки. Кожному вказаному діапазону величин відповідає
конкретний тип зафарбування, показаний на рис. 3.15.
155
З рис. 3.15 видно, шо глибина проникнення поля в якір є значно більшою,
ніж в рейки. Це пояснюється двома причинами. По-перше, на розподіл струмів в
якорі впливає ЕРС руху, яка має максимальну величину на задній торцевій пове-
рхні якоря. Поява цієї ЕРС обумовлена впливом “конвективної складової”, що
входить в праву частину рівняння (3.31). Під дією ЕРС руху нитки струму в яко-
рі витісняються в більш глибокі його шари. Проте цей ефект проявляється тоді,
коли якір вже набрав достатньо велику швидкість.
По-друге, такий же ефект надає інтенсивний наїрів задніх поверхневих
торцевих шарів якоря. У результаті підвищення температури цих шарів їх елект-
ропровідність істотно зменшується, а струми прагнуть “піти” в більш холодні і
глибокі шари якоря. Тому урахування нагріву якоря є вкрай необхідним.
О .320Е+02
... ,?й4Еига
» .352Е+1В
... .422Е+10
.7ЕМЕ-ВЧ
... -141Е*10
і Л22Е*ів
... .493Е*10
ІЙЛ .141Е+10
... .2111*10
да .493Е+1В
... .ььзтліа
№ ,гііЕ*ів
... .2826*10
.5ЬЗЕ*1Й
... ьаіЕ+іо
.282Е*10
... .352Е*10
і .684Е*10
... .884Е+10
Рис. 3.15 Розподіл струмів в якорі і рейках РП
Найбільша густина струмів виникає на задній кромці якоря в зоні його ко-
нтакту з рейкою.
Важливою проблемою РУ є проблема термічної стійкості якоря, який най-
більшою мірою піддається нагріву і руйнуванню. Для створення більш рівномір-
ного розподілу густини струму в контактних зонах якоря застосовують і дослі-
джують вплив додаткового тонкого контактного шару, розташованого між яко-
рем і рейкою. Такий шар виконується з тугоплавкого електропровідного матері-
алу і наноситься на контактні поверхні якоря. На рис. 3.16 показано розподіл ре-
іульїуючої температури уздовж контактної зони якоря в кінці його руху для
двох варіантів виконання контактного шару: №1 - матеріал шару - хром; №2 -
матеріал шару - графіт. Товщина контактного шару в обох варіантах дорівнює
І мм. На осі абсцис показана відносна відстань XІ Сі від нижньої (правої) кромки
якоря, яка виражена в частках від довжини якоря а.
З наведених кривих видно, що вздовж довжини якоря існує великий іраді-
<іп і емітера тури, а максимальна розрахункова температура найбільш нагрітої
мщпьої поверхні якоря досягає значень 2000 °С. При таких температурах не
ііїн.ки суттєво змінюється електропровідність якоря, але й виникає оплавлення
йото окремих ділянок, тобто змінюється і конфітурації якоря. Урахування цих
явищ при розрахунках є принципово важливим і його можна здійснити тільки
при комплексному аналізі.
156
Рис. 3.16 Розподіл результуючої температури уздовж контактної
зони якоря в кінці його руху
Як випливає з рис.3.16 у другому варіанті виконання контактного шару
якоря максимальна температура зменшилася на 12,5%, причому розподіл темпе-
ратури уздовж довжини якоря є більш рівномірним.
Наведені приклади не вичерпують великої кількості практично важ-
ливих задач, в яких урахування взаємного впливу електромагнітних та те-
плових процесів призводить не тільки до більш точного та адекватного ви-
значення характеристик ЕМ, але й дозволяє розробити нові технічні рі-
шення, направленні на підвищення якості функціонування електричних
машин. Ці приклади тільки підкреслюють важливість такого аналізу, хоча
доцільність і ефективність його проведення повинна у кожному випадку'
оцінюватися окремо з урахуванням мети і конкретних задач, шо стоять пе-
ред дослідником.
157
4. КОЛО - ПОЛЬОВІ МЕТОДИ І МАТЕМАТИЧНІ МОДЕЛІ
ДЛЯ АНАЛІЗУ ДИНАМІЧНИХ РЕЖИМІВ
ЕЛЕКТРИЧНИХ МАШИН
4.1. Динамічні режими і їх коло- польові моделі
Динамічні або перехідні режими електричних машин виникають при
підключенні обмоток машини до джерел електроживлення, при різних ви-
дах раптових коротких замикань обмоток, при швидкій зміні навантаження
машини і інших різких змінах її роботи. Динамічні режими, які ще часто
називають перехідними процесами, характеризуються значними струмами
в обмотках, ударними електромагнітними силами і моментами. Ці струми і
моменти можуть у багато разів перевищувати їх значення в сталих номіна-
льних режимах роботи. Тому динамічні режими значною мірою визнача-
ють стійкість, надійність і довговічність ЕМ. Тривалість у часі і інтенсив-
ність перехідних процесів істо тно впливає на параметри мережі електро-
живлення, а значить і на інші паралельно працюючі електричні машини.
До числа динамічних режимів, що часто зустрічаються, слід віднести пуск
асинхронного двигуна, раптові короткі замикання обмотки якоря синхро-
нного генератора, процес синхронізації синхронної машини з електроме-
режею, різкі зміни зовнішнього моменту на валу електричної машини і ін-
ші процеси.
В теорії електричних машин вивченню динамічних режимів надаєть-
ся значна увага. Традиційно теоретичною основою для вивчення динаміч-
них режимів є теорія електричних кіл, в рамках якої машина відображаєть-
ся електричною схемою заміщення із зосередженими параметрами. Мате-
матичні моделі ЕМ, засновані на законах теорії електричних кіл назива-
ються ланцюговими (коловими) математичними моделями. Незважаючи на
те, що ЕМ є об’єктом складної просторової конфігурації, в якому електро-
механічне перетворення енергії здійснюється за допомогою електромагні-
тного поля, ланцюговий підхід отримав широкий розвиток враховуючи йо-
го простот у і наочність. При цьому вся інформація про конструкцію обмо-
ток і магнітопроводу ЕМ міститься в чисельних значеннях параметрів схе-
ми іаміїцення. Точність завдання параметрів визначає точність розрахунку
характеристик машини. Тому проблема обґрунтовування і правильного ви-
бору параметрів ЕМ давно виділилася в окремий важливий напрям теорії
електричних машин, розв’язанню якої присвячена велика кількість науко-
вих робіт.
У більшості випадків під параметром технічного об’єкту мається на
ува іі су іт< ва характеристика, яка однозначно визначає властивості об’єкту
незалежно від його динамічного стану. Параметри можуть бути постійни-
ми і імінними, зосередженими і розподіленими. Введені в класичній теорії
параметри електричних машин мають, як правило, постійні значення, хоча
в реальній- ті у багатьох випадках ці параметри слід вважати змінними.
158
Особливо суттєво зміна параметрів виявляється в динамічних режи-
мах роботи машин. Наприклад, при пуску асинхронного двигуна із-за
ефекту витіснення струмів із стрижнів ротора і змінного насичення магні-
топроводу змінюється індуктивності розсіяння і взаємоіндукції обмоток
статора і ротора. При раптовому КЗ синхронного генератора на холостому
ходу індуктивний опір обмотки якоря, як було показано в прикладі 2.4,
безперервно змінюється у часі, а ведені параметри Х^Х^Х^ відобра-
жають лише проміжні стани машини.
Досвід розробки і експлуатації ЕМ різного типу показав, що резуль-
тати розрахунків динамічних режимів, які отримані по схемах заміщення,
часто не співпадають з експериментальними даними. Для поліпшення збі-
жності у ряді випадків використовують поправочні коефіцієнти, які отри-
мані емпірично або з розв’язання допоміжних модельних задач. Проте, такі
підходи забезпечують задовільну збіжність тільки для добре вивчених
конструкцій ЕМ. При створенні машин із спеціальними характеристиками
або нетрадиційної конструкції такі методи розрахунку перехідних процесів
виявляються малопридатними.
У зв'язку з швидким розвитком обчислювальної техніки останнім ча-
сом з'явилася можливість практичної реалізації нових методів і математич-
них моделей аналізу динамічних режимів, заснованих на сумісному
розв’язанні диференціальних рівнянь електричних кіл обмоток ЕМ, рів-
нянь електромагнітного поля в активній зоні машини і рівнянь механічної
рівноваги рухомих частин машини. Такі математичні моделі називаються
коло — польовими математичними моделями (КПММ) [3]. Коло — польове
моделювання динамічних режимів робить необов'язковим використання
перехідних параметрів електричних машин, а їх динамічні характеристики
розраховуються безпосередньо у результаті розв’язання КПММ як невідо-
мі функції часу. Слід підкреслити, що необхідність у застосуванні КПММ
виникає перш за все при аналізі саме динамічних режимів, оскільки сталі
режими, або режими, що змінюються у часі досить повільно можуть успі-
шно аналізуватися з використанням концепції електромагнітних парамет-
рів ЕМ.
Математичний зв'язок між рівняннями електромагнітного поля і рів-
няннями електричних кіл обмоток здійснюється через значення магнітного
потокозчеплення відповідно до виразу (2.21). Сили і моменти, що необхід-
ні при розв’язанні рівнянь руху, також легко визначаються за результатами
польових розрахунків (розділ 2.3).
Розв’язання системи рівнянь КПММ представляє складну обчислю-
вальну проблему навіть при використанні високопродуктивних ЕОМ, оскі-
льки система має дуже високий порядок, який визначається в основному
розмірністю польової підсистеми, що може містити десятки і сотні тисяч
рівнянь. Тому для ефективного розв’язання КПММ з відносно невеликими
витратами обчислювальних ресурсів потрібна розробка спеціальних чи-
сельних методів. Властиві польовим методам переваги і достоїнства,
159
у тому числі строге урахування нелінійних і геометричних чинників, від-
мову від ряду істотних припущень (наприклад, припущення про розділен-
ня електромагнітного поля на поля взаємоіндукції і розсіяння і ін.) дозво-
ляють с тверджувати, що КПММ дає розрахункові результати із значно бі-
льшою достовірністю. КПММ є універсальними і можуть бути сформульо-
вані для електромеханічних перетворювачів енергії будь-якого типа і конс-
трукції.
У даний час рівень розвитку обчислювальної техніки дозволяє про-
водити практичну реалізацію КПММ для ЕМ, електромагнітне поле яких
аналізується у двовимірній постановці. Проте в перспективі слід чекати
створення і розвитку КПММ для тривимірних полів, а також для зв’язних
полів різної фізичної природи.
Для успішної практичної реалізації КПММ необхідно маги розвину-
те програмне забезпечення, що містить у собі повний набір потрібних ма-
тематичних методів, засобів візуалізації і інших функцій. У даний час такі
обчислювальні комплекси розроблені і на їх основі можна “конструювати”
КПММ довільної складності і призначення.
4.2. Коло - польова математична модель узагальненого
електромеханічного перетворювача енергії
Сформулюємо в загальному вигляді КПММ узагальненого електро-
механічного перетворювача енергії (ЕМПЕ) з нелінійними електромагніт-
ними зв'язками [3]. Під узагальненим ЕМПЕ будемо вважати довільний
перетворювач, про конструкцію якого відоме лише те, що він містить N
магніте зв’язаних контурів (обмоток) зі струмами і £ незалежних рухомих
частин (роторів). Одна частина контурів розташована на нерухомих елеме-
нтах конструкції ЕМПЕ, а інша їх частина переміщається разом з ротора-
ми. При цьому, в загальному випадку припускатимемо, що електромагнітні
зв'язки між контурами узагальненого ЕМПЕ є нелінійними, тобто потокоз-
чеплення контурів і струми контурів не зв’язані пропорційними залежнос-
тями.
Для компактного запису рівнянь електричної рівноваги контурів
ЕМ11Е введемо в розгляд наступні вектори - стовпці: струмів контурів
/ = (/| ,...,/Л ), прикладених до контурів зовнішніх електричних напруг
и~(и} ,...,11/^) і магнітних потокозчеплень контурів (/ = ((/],...,(/дг).
Для компактного запису рівнянь механічної рівноваги рухомих частин
І МІ ІЕ будемо використовувати вектори — стовпці просторових координат
рухомих частин У=(.У\ ,...,Уі), швидкостей їх руху /У=(бУ[ ,...,<Уд),
електромагнітних моментів (зусиль) М = {МХ,...,Мі заданих зовні-
шніх моментів (зусиль) Мв = (М\В,...,Мьв). При аналізі передбачаєть-
ся, що положення у просторі кожної рухомої частини ЕМПЕ однозначно
160
характеризується однією просторовою координатою (кутом повороту, лі-
нійним переміщенням тощо), тобто не розглядаються ЕМПЕ з декількома
ступенями свободи руху ротора.
Основними рівняннями узагальненого ЕМПЕ є векторне диференці-
альне рівняння електричної рівноваги його контурів
дір А
—- + гі-и=0
сії
(4.1)
і векторні диференціальні рівняння механічної рівноваги його рухомих ча-
стин
-У—+м-мв=о
аі в
сіу
сії
(4-2)
де Г — У = (У|,...,У£) - вектор - стовпці активних опорів ко-
нтурів і моментів інерції (мас) рухомих частин ЕМПЕ.
Нехтуючи явищем гістерезису, припустимо, що у загальному випад-
ку магнітні потокозчеплення контурів і електромагнітні моменти ЕМПЕ
можна однозначно визначити деякою функціональною залежністю, аргу-
ментами якої є невідомі вектори струмів і координат рухомих частин
ЕМПЕ:
М=М[і,у]‘
(4.3)
Вирази (4.3) називаються явною магніто - механічною характерис-
тикою (ММХ) ЕМПЕ.
Перша (магнітна) характеристика з ММХ (4.3) після перетворення
використовується в рівнянні рівноваги електричних кіл (4.1). Виконуючи
диференціювання функцій потокозчеплень ір = ]р[і,у] за часом з ураху-
ванням правил диференціювання складних функцій декількох змінних,
отримаємо наступне рівняння:
дії/ сі і дір
-------+ — -со + гі-и-О, (4.4)
ді сії ду
.. . дір дір
де матричні коефіцієнти---, --- складаються з часткових похідних по-
ді ду
токозчеплень контурів за струмами і координатами
161
дУ]
д'к
ҐІ/7; —— —
,-Г£ /Л = 1Л; ^=і,х.
ду3
Ці часткові похідні називаються динамічними електромагнітними параме-
трами (ДЕМП) ЕМПЕ і характеризують динамічні індуктивності контурів
і динамічні коефіцієнти ЕРС руху у контурах. У загальному випадку
ДЕМП є функціями, що залежать від невідомих векторів струму і та пе-
реміщення у, які знаходяться в процесі розв’язання системи дифереіщій
них рівнянь (4.1), (4.2).
Якщо розкрити вектори — стовпці, то векторне рівняння (4.4) можна
переписати у наступному вигляді:
*дуі (іік ±^Уі . г-Тг г~г
+ 7 = 1,М 5 = 1,£. (4.5)
*=1 5ік сії Ї=1 ду,
Якщо ЕМПЕ має лінійні електромагнітні зв’язки, тобто якщо потоко-
зчеплення довільного І - го контуру лінійно залежить від струмів усіх ко-
N
нтурів (//у (І, у) — Хмук(г)-ік , то динамічні електромагнітні параметри
к=і
перетворюються в статичні електромагнітні параметри. Наприклад:
дУ(
&к
дУу
діі
=мІІ=ь,
дМ-'к
З?, к^\к дУз
де взаємна індуктивність у —гоі к - го контурів, £у-власна ін-
дуктивність у — го контуру.
Друга (механічна) характеристика з ММХ безпосередньо викорис-
товується в рівняннях механічної рівноваги (4.2) для визначення швидко-
стей і просторових координат рухомих частин.
Для більшості ЕМПЕ, особливо для ЕМПЕ з нелінійними електрома-
гнітними зв'язками або при складній конструкції активної зони, явна ММХ
наперед невідома. Тому виникає необхідність розв’язання додаткової зада-
чі для визначення залежності (4.3).
Явна ММХ визначається за результатами розрахунку електромагніт-
ного поля в активній зоні перетворювача після застосування обчислю-
вальних алгоритмів для розрахунку потокозчеплень і моментів. Для цього
необхідно розв’язати наступну групу рівнянь:
- векторне рівняння високої розмірності, яке описує електромагнітне
поле у вузлах дискретної сітки, що покриває розрахункову область ЕМПЕ
(4.6)
162
де А = (Л],... ,Ад) - вектор - стовпець обраних змінних стану електро-
магнітного поля (векторний магнітний потенціал, магнітна індукція, на-
пруженість магнітного поля і ін.), д- кількість вузлів сітки;
- алгебраїчні рівняння (алгоритми), що дозволяють розрахувати маг-
нітні потокозчеплення і електромагнітні моменти через відомі струми кон-
турів, їх координати і змінні електромагнітного поля
(4.7)
м =м[і,/,а]
Рівняння (4.6) — (4.7) називають неявною магніто механічною хара-
ктеристикою ЕМПЕ, а процедуру їх розв’язання - перетворенням неявної
ММХ в явну ММХ.
Рівняння (4.6) формується після алгебраізацїї відповідної краєвої за-
дачі, сформульованої у вигляді диференціального рівняння у часткових
похідних для змінної поля. Рівняння поля доповнюється граничними умо-
вами, нелінійною залежністю /^(Л) і іншими даними. Слід підкреслити,
що процедура отримання рівняння (4.6) з рівняння електромагнітного поля
не є тривіальною. Вона залежить від способу дискретизації розрахункової
області, властивостей апроксимуючих функцій, необхідної точності
розв’язання і, нарешті, від індивідуального досвіду фахівця. Тому форму-
вання рівняння (4.6) є достатньо трудомістким етапом побудови математи-
чної моделі.
Перетворення (4.7) можна виконати за допомогою виразів (2.29),
(2.39), (2.44), (2.46), (2.47), (2.50) для розрахунку потокозчеплень, сил і
моментів, які були отримані в розділах 2.2, 2.3. Наприклад, у відповідності
до виразу (2.39) електромагнітний момент можна визначити як часткову
похідну магнітної коенергії ЕМПЕ за просторовою координатою у (уз-
довж напряму' переміщення рухомої частини):
М[і,у] =-----. (4.8)
о дг ;
З виразу (4.8) виходить, що розрахунок електромагнітного моменту пов'я-
заний з інтегруванням динамічних коефіцієнтів ЕРС руху.
Таким чином, КПММ узагальненого ЕМПЕ з нелінійними електро-
магнітними зв'язками складається з векторних рівнянь (4.1) - (4.7). Рівно-
вага електричних контурів описуються рівнянням (4.4), механічна рівнова-
га рухомих частин - рівнянням (4.2), а електромагнітне поле рівнянням
(4.6). Взаємозв'язок між польовими рівняннями і рівняннями електричних і
механічних контурів забезпечується співвідношеннями типу (2.29), (2.39),
(2.44), (2.46), (2.47). Заданими змінними є вектори и ,Мп, невідомими
163
змінними - вектори І,у, А Відзначена система рівнянь є замкнутою і до-
зволяє однозначно знайти усі основні електромагнітні і механічні характе-
ристики ЕМІ Ні з використанням тільки тих припущень, які приймаються
при формуванні задачі аналізу поля ЕМПЕ.
Проаналізуємо структуру і властивості отриманої системи рівнянь
(4.1)-(4.7).
По-перше, кількість змінних в системі рівнянь після розгортання ве-
кторів є дуже великою і, в основному, визначається числом д. Дійсно, як
правило, в більшості практичних прикладів кількість контурів ЕМПЕ (кі-
лькість невідомих струмів в обмотках перетворювача) лежить в межах
N = 2 ... 6, а кількість рухомих частин £ = 1 ... 2. В той же час для достат-
ньо докладного опису електромагнітного поля в активній зоні реального
ЕМПЕ навіть при двовимірній польовій постановці задачі потрібна сітка
скінченних елементів з кількістю вузлів д = 10000 ... 100000, що відпові-
дає кількості невідомих змінних поля.
По-друге, через нелінійність залежності р(А ) розв’язання системи
рівнянь можливо тільки чисельними ітераційними методами. Як показав
досвід розв’язання реальних задач навіть при використанні ефективних
ітераційних методів Ньютона, Ньютона - Рафсона і ін. для отримання од-
ного розв’язку потрібно виконати 8 ... 20 і більш ітерацій.
По-третє, при чисельному розв’язанні одного нестаціонарного про-
цесу ЕМПЕ з необхідною точністю знадобиться не менше 200 ... 250 кро-
ків за часом. До того ж система диференційних рітяньІСДР), яка сформу-
льована відносно польових функцій, майже завжди є “жорсткою Жорс-
ткість системи диференційних рівнянь поля проявляється в нестаціонарних
задачах, де існують масивні електропровідні середовища. Завдяки явищу
поверхневого ефекту електромагнітне поле проникає у електропровідне
середовище поступово. Тому швидкості зміни польової функції на повер-
хні середовища, звідки починається процес дифузії поля, і па глибині, куди
поле ще встигло проникнути, суттєво відрізняються. Оскільки рівняння,
що записані для різних вузлів сітки, розв’язуються в єдиній системі, то за-
тначений характер зміни польової функції призводить до обчислювальної
проблеми, яка називається проблемою жорсткості СДР. Використання для
розв’язання таких СДР традиційних явних методів (Рунге - Кутта, Кутта -
Мсрсона та ін.) призводить до значних обчислювальних похибок, а часто і
взагалі до неможливості отримання розв’язку. Тому для розв’язання жорс-
тких СДР використовуються спеціальні неявні чисельні методи — неявний
ме год Ейлера, метод Гіра, метод формули диференціювання назад та інпі.
За значені вище обставини створюють істотні труднощі для практич-
ної реалізації коло - польових моделей ЕМПЕ, навіть, з огляду на досягнуті
останніми роками успіхи в створенні поіужної обчислювальної техніки.
Тому для практичного розв’язання КПММ (4.1) - (4.7) потрібна розробка
обчислювальних методів і алгоритмів підвищеної ефективності.
164
4.3. Методи розв’язання коло — польовик математичних моделей
В значній мірі структуру КПММ і методи її чисельного розв’язання
визначає вид рівняння, яке описує електромагнітне поле в активній зоні
ЕМ. Для широкого класу машин розподіл електромагнітного поля в актив-
ній зоні можна з високою достовірністю описати стаціонарним рівнянням
Пуассона:
&А — —/Л,]стор- (4-9)
До таких машин відносяться всі ЕМ з шихтованими магнітопроводами і
багатовитковими обмотками, намотаними з тонкого дроту малого попе-
речного перетину. На відміну від рівнянь електричних кіл обмоток, рів-
няння Пуассона не залежить від часу, а його розв’язок визначаться миттє-
вими значеннями джерел поля - струмами в обмотках, і геометрією розра-
хункової області, яка змінюється внаслідок зміни координат рухомих час-
тин ЕМ. Тому при чисельному рішенні КПММ таких машин доцільно роз-
вивати методи, що використовують принцип роздільного розв’язання лан-
цюгової і польової підсистем КПММ. Такий підхід дозволяє істотно за-
ощадити обчислювальні витрати при розв’язанні задачі і забезпечити ши-
роке впровадження коло — польових методів аналізу в практику наукових і
інженерних розрахунків.
Інший клас перетворювачів представляють ЕМ, що мають електро-
провідні масивні частини з індукованими струмами, що беруть безпосере-
дню участь в електромеханічному перетворенні енергії. Масивну електро-
провідну частину конструкції можна розглядати як вторинну обмотку, яка
внаслідок явища дифузії електромагнітного поля в електропровідне сере-
довище не має чітко вираженої геометричної конфігурації. У динамічному
режимі у часі змінюється глибина проникнення струмів у середовище і у
результаті істотно змінюються інтегральні характеристики ЕМ.
Електромагнітне поле в активній зоні таких перетворювачів описується
загальним нестаціонарним рівнянням в часткових похідних:
~ дА — -
А А - ц? — + /// (V X ГОІ А) = -Н^стор (4.10)
ді
Для розв’язання нестаціонарного рівняння (4.10) потрібні початкові умови.
Чисельне розв’язання КПММ у цих випадках необхідно проводити мето-
дами покрокового інтегрування у часі системи (4.1) (4.7) взаємозв'язаних
диференціальних рівнянь електричних кіл обмоток, руху і електромагніт-
ного поля. Зважаючи на велику розмірність системи диференціальних рів-
нянь, нелінійність і жорсткість її властивостей, несиметричність і відсут-
ність стрічкової структури матриці СДР чисельне розв’язання задачі зу-
стрічає значні труднощі, пов'язані, перш за все з високою трудомісткістю
165
обчислень. У багатьох випадках навіть застосування високопродуктивних
ЕОМ не забезпечує ефективного розв’язання. Тому доцільно, якщо це до-
зволяє загальна постановка задачі, звести початкову задачу до більш прос-
тої, електромагнітне поле в якій можна описати рівнянням (4.9). Це можна
здійснити, використовуючи еквівалентні заміни вторинних розподілених
обмоток зосередженими обмотками з рівномірно заданою по перетину гус-
тиною струму.
Методи розв’язання КПММ електричних машин, для опису електро-
магнітного поля яких можна використовувати рівняння Пуассона (4.9), за
способом визначення значень ММХ і динамічних параметрів можна розді-
лити на дві групи.
Тип рівняння електромагнітного поля
Рис. 4.1 Класифікація методів розв’язання КПММ
До першої групи відносяться методи, що визначають поточні зна-
чення ММХ і динамічних параметрів у процесі інтегрування у часі СДР
електричних кіл обмоток. До другої групи — методи попереднього визна-
чення всієї ММХ і всієї сукупності динамічних параметрів та подальшого
використання знайдених характеристик. На рис. 4.1. у вигляді блок - схеми
юбражена умовна класифікація основних методів розв’язання КПММ.
С гисло розглянемо деякі методи розв’язання КПММ.
4.3.1. Метод поінтервальної апроксимації (МПА). Нестаціонарні
процеси в ЕМ з короткозамкнутими контурами супроводжуються більш
повільною зміною повних потокозчеплень контурів у порівнянні з їх стру-
мнми. І (с витікає з теореми про постійність потокозчеплень контурів [22].
В короткозамкненому контурі зміна повного потокозчеплення контуру до-
рівнює падінню напруги на його активному опорі: сії]// (11+ і-г — 0. Якщо
пех іуиаги малим активним опором контуру, то з цього рівняння виходить,
166
що при швидкому перехідному процесі V — СОП8І, не дивлячись на те,
що при цьому у контурі протікають перехідні струми великої амплітуди,
що швидко змінюються у часі. Оскільки електромагнітне поле ЕМ розра-
ховується для визначення потокозчеплень обмоток, то при аналізі нестаці-
онарного процесу немає потреби виконувати розрахунок поля з таким же
малим кроком за часом, який необхідний для досягнення заданої точності
розрахунку струмів. Принаймні, протягом деякого відносно великого від-
різка часу немає необхідності у розрахунку потокозчеплення, а значить і
електромагнітного поля. Якщо ж такий розрахунок поля виконується, то
знайдена на кожному малому кроці розрахункова інформація мало відріз-
няється одна від одної і тому насправді залишається надлишковою і не ак-
туальною.
Цей факт покладено в основу ідеї методу поінтервальної апроксима-
ції [4].
В МПА весь аналізований відрізок часу перехідного процесу
(0,...,Т) розбивається на ряд достатньо великих часових інтервалів
N
Т = АІ- . Розміри кожного інтервалу вибираються такими, щоб вони в
7-і
десятки разів перевищували розміри кроку по часу, що використовується
для розв’язання СДР відносно струмів обмоток ЕМ.
Розрахунки поля виконуються тільки на кінцях кожного інтервалу
А/д в моменти часу ік, к — \,її . На підставі розрахунків поля для кож-
ного інтервалу будуються аналітичні вирази, що апроксимують функції
у ~ V [* ’/] Усередині інтервалів окремо розв'язується СДР електричних
кіл обмоток і руху роторів, яка має малу розмірність. Алгоритми МПА пе-
редбачають обмін даними на межах інтервалів і послідовну передачу
управління від польового вирішувана до вирішувана системи диференцій-
них рівнянь електричних кіл і навпаки. Цим досягається висока обчислю-
вальна ефективність методу.
Без втрати загальності розглянемо реалізацію МПА на прикладі ЕМ з
нелінійними електромагнітними зв'язками, що має дві обмотки і одну ру-
хому частину (ротор), тобто таку машину, яка характеризується трьома
змінними ц , г2, /.
Розглянемо простір С змінних {/] ,і2,/}, на якому визначені функції
потокозчеплень обмоток ,І2 ~ в цьому
просторі виділимо поточну підобласть Ок+\ - паралелепіпед, який побу-
дований на трьох ортогональних відрізках (|),і), Д/А+1Де
А’1(*+1) =/1(*+1) Д^2(*+1) ~ *2(*+1) ~і2к^Ук+\ = Ук^~7к-Усередині
167
підобласті Ск+Х апроксимуємо функції потокозчеплень обмоток тривимі-
рними параболічними поліномами:
^10’1, 4»/) = «1 + «2 (А - Чк ) + а3 (4 - 12к ) + а4 (У - Ук ) +
+ "5(А-^)2+«б(/1-^)(/2-/2А) + «7(/1-/и)(/-П)+ > (4-П)
+ "в(4 ~4*)2 +"р(4 -4л)(/-П) + "ю(/-П)2
^2('1»4>Г) = ^1 +620)-Чк) + Ьз(.І2 ~і2к) + Ь4(Г-Ук) +
+Ь5(Ч-Чк)2 +М*1 ~*іл)(4 -4*)+Мі -/и)(/-п)+, (4-12)
+^(4 - 4л)2 + М4 - 4л X/ - Ук)+Мг - Ук)2
де Чк - Ч - 4(л+і)> 4л-4-іцк+\)’Ук-У-Ук+\> аі’Ь] , ] =1,10 -
невідомі коефіцієнти поліномів. Тепер легко записати вирази для ДЕМП.
Для ДЕМП першої обмотки з формули (4.11) маємо такі вирази:
д / діх = л2 + о5 2(і, - /и ) + а6 (і2 - 4л ) + "7 (/ - П )
а</1/а/2=а3+й6(/1-/и) + а82(г2-г2А) + п9(/-^) , (4.13)
д І ду = оґ4 + «7 (і, - іхк ) + О) (і2 - 4л ) + "іо 2(/ - Ук)
а для ДЕМП другої обмотки з виразу (4.12) виходить
ду/2/діх = Ь2 + Ь52(іх -іхк) + Ь6(і2-і2к) + Ь1(у~ук)
діу2/ді2 - й3 + 56(/, - іХк) + &82(/2 -і2к ) + 69(/ -ук). (4.14)
ду/2 /ду = Ь^+ Ь2{іх -іХк) + Ь<>(і2 -і2к) + іІ02(/ -ук)
Знайдемо вирази для коефіцієнтів а^ ,Ь^. Нехай у момент часу ік
сіан ГМ повністю визначений. Це означає, що у цей момент часу є відо-
мими струми і потокозчеплення усіх обмоток, ДЕМП і координата рухомої
частини ЕМ. Будемо використовувати наступні позначення;
^,л =^(Ал’4л>/л)’ (^У75’і1=^-0’іл.4л»/л). у=и І т.д.
К діх
Годі безпосередньо з виразів (4.11) - (4.14) можна знайти вирази для пер-
ших трьох коефіцієнтів:
168
Й1 ~Рік >а2 ~ 1б21 ) ,«3 = к [ВІ2 ,й4 = к
=^2к>Ь2 = '^2У ’^З = ,ь4 = ^2
1 б/1 > к (Ві2 > к 1 ВУ
(4.15)
Крім того, з теореми взаємності виходить, що <?<//]/ді2 — ду/2/ ді},
звідки легко знайти а2=Ь2, а6= 2Ь5, = 0,5й6, а9 — Ь7 . Для визна-
чення інших шести невідомих коефіцієнтів кожного з поліномів розрахує-
мо електромагнітне поле ЕМ, а потім по виразах (2.29) знайдемо потокоз-
чеплення обмоток в шести точках під області (7Л+І при наступних сполу-
ченнях змінних:
К1’*2(*+1)>/Д |21Ь22*>/(*+1)£
(. 1 . 1 . )• (4.16)
¥1(*4-1)»22(*+1)»/*Е П(*+1)>*2*’/*+!> СІ* ’22(*+1) »/*+!)
Підставляючи отримані значення потокозчеплень у формули (4.11),
(4.12), знайдемо вирази для решти невідомих коефіцієнтів. Наприклад,
для коефіцієнтів апроксимаційних поліномів потокозчеплень першої обмо-
тки маємо наступні вирази:
а5---------~------------------5---------------
(М(*+1))
_ У'і0і*>/2(*+і)’?*)~У'і* _(51/і/бг2)*Д22(*+і)
«8 — -----—---------у—----—---------
(А22(*+1))
п _ ^і(2і*Л*,/*+і)-^і*
“10------------------------~2-----------------’
(4.17)
^іС^+рЛсл+і)»/*) ~ У/'і0~і*^2(*+1) > Гк) + У\к
М(*+1)Д72(*+1)
V1 (г1(*+1)»22*»/*+1) ~УЛ1(21(*+1)>22*>/*)~У/|О1*Д2*>7'*+1) + УЛ1*
А21(*+1)А/*+1
У'і (1\к ’22(*+1), /*+1) ~ (^1 (21*> 22(*+1)> /* ) ~ ^1 (2|* > 12к >Ук +1) + Рік
А22(*+1)А/*+1
169
Аналогічні вирази можна виписати і для коефіцієнтів поліному, який
апроксимує потокозчеплення другої обмотки.
Для розрахунку поля при шести заданих наборах змінних (4.16) не-
обхідно мати значення струмів і координати рухомої частини ЕМПЕ у мо-
мент часу ^+|- Оскільки ці значення підлягають знаходженню і заздале-
гідь невідомі, апроксимуємо функції /](ґ),/2(0’/(0 3 точки Ік у точку
ік+\ за допомогою рядів Тейлора:
0(*+і)
А
мк
2!
(11у
ж >к
,І = М
. (4.18)
1! [(ІЇ
А
<і1(2 п
Знайдені по формулам (4.18) величини називатимемо “прогнозова-
ними значеннями” змінних. Відзначимо, що значення функцій і їх перших
похідних у точці Ік відомі безпосередньо з поточного розв’язання СДР
обмоток ЕМ, а похідні більш високого порядку можна знайти чисельним
диференціюванням.
Електромагнітний момент можна розрахувати, наприклад, за виразом
(4.8) у вигляді сукупності інтегралів:
к=М~\
м(і{,і2,у} = Е
к=$
0^,
Лі + 1
г2к '
, .... І
і ’’ і су
1\М ' г2М '
(4-19)
де М кількість розрахункових підобластей 6к у просторі Сі, які до
моменту часу Ік вже перетнули годографи функцій , /2, у),
у/2 — </2(7і А >/)• Останні два інтеграли характеризують чисельний вне-
сок у сумарний електромагнітний момент складових на поточному інтер-
валі по часу, а інші інтеграли характеризують внески на всіх попередніх
інтервалах. До моменту часу Ік ці інтеграли є вже розрахованими і їх
величини зберігаються в пам'яті ЕОМ. Оскільки аналітичні вирази для
170
ДЕМП вже також відомі, то і інтеграли в (4.19) можуть бути також розра-
хований аналітично.
Приведемо, наприклад, вираз для одного з інтегралів, який входить у
формулу (4.19):
] — =01 -»1Л/)
'їм '
а4 + у (»1 - 'Ш ) + «9(^2 - *2М ) + 2йю(/ - Гм )
Після розв’язання СДР на поточному інтервалі по часу ,Ік (1] мо-
же виявитися, що знайдені у результаті розв’язання невідомі змінні
А(Л+1)’*2(Л+1)’?'*+1 істотно не співпадають з їх “прогнозованими значен-
нями”, які отримані з рядів Тейлора (4.18). Якщо ця відмінність перевищує
задану величину погрішності, необхідно зробити ітераційне наближення з
розрахунком нових уточнених значень ДЕМП. Необхідно відзначити, що
ДЕМП, також як і потокозчеплення контурів, змінюються по величині зна-
чно менше ніж перехідні струми в контурах. Тому однієї розрахунко-
вої ітерації, як показав досвід чисельних експериментів для різних типів
ЕМ, виявляється цілком достатньо для отримання потрібної збіжності ре-
зультатів.
У сукупності на всьому відрізку по часу поліноми (4.11), (4.12) утво-
рюють апроксимуючий сплайн, оскільки у вузлах з’єднання окремих полі-
номів виконуються умови безперервності функції потокозчеплення і її пе-
рших похідних (ДЕМП). В загальному випадку порядок апроксимуючих
поліномів може бути прийнятий іншим (лінійні поліноми, кубічні поліно-
ми і т.д.), проте, самим оптимальним з погляду трудомісткості обчислень і
точності одержуваного результату є вибір параболічних поліномів.
Таким чином, алгоритм розрахунку методом поінтервальної апрок-
симації перехідного процесу ЕМ складається з наступних етапів:
1. Розділення досліджуваного відрізка часу нестаціонарного процесу на
N розрахункових часових інтервалів.
2. Визначення по рядах Тейлора (4.18) в кінці поточного часового інтерва-
лу “прогнозованих значень” струмів контурів і геометричної координа-
ти рухомої частини.
3. Виконання шести розрахунків електромагнітного поля ЕМ при заданих
сполученнях відомих і “прогнозованих” значень змінних (4.16) і розра-
хунок потокозчеплень контурів по виразах (2.29).
4. Розрахунок на поточному інтервалі коефіцієнтів апроксимуючих полі-
номів за виразами (4.15) (4.17).
5. Розв’язання системи диференціальних рівнянь (4.1), (4.2) і визначення у
момент часу реальних значень невідомих змінних. Після порівняння
знайдених значень з використаними “прогнозованими значеннями” у
171
разі потреби виконується ітераційне наближення для розрахунку уточ-
нених значень ДЕМП.
6. 1 Ісрехід до розрахунку процесу на наступному інтервалі по часу.
Важливими проблемами при реалізації МПА є: 1) завдання початко-
вих умов і “розгін” обчислювального алгоритму; 2) вибір кількості і розмі-
рів інтервалів по часу, на які роділяється аналізований відрізок часу неста-
ціонарного процесу.
Початкові умови встановлюються шляхом завдання у момент часу
І - 0 початкових значень невідомих змінних
/'і (0) = /]о, і2 (0) = г20, /(0) = у0. Для визначення у цей момент часу по-
чаткових значень ДЕМП виконуються чотири розрахунки поля для насту-
пних поєднань змінних
{*іоЛо>Го},{*іо + {»()Ло + ЛІ2>ГоІ
{/ю + Д/^о+Д^/о + Д/}
де Д/| ,Д/2,Д/- довільно вибрані малі віртуальні прирости змінних. В то-
му випадку, якщо для струмів задані нульові початкові умови, то викону-
ються три розрахунки поля. Далі за допомогою чисельного диференцію-
вання знаходяться початкові значення динамічних параметрів. Наприклад,
для коефіцієнта а2 маємо наступний вираз
'^1) ~ ^10'10 + <20,Г)-^10'ю,<20^)
< ^1 70
“Прогнозовані значення” струмів обмоток і координати рухомої частини в
кіпці першого часового інтервалу встановлюються приблизно з урахуван-
ням очікуваного характеру аналізованого процесу.
Для успішного розгону МПА величину першого (“стартового”) часо-
вого інтервалу рекомендується приймати рівному сумарній тривалості не
більше ніж 5...10 кроків за часом, які використовуються для розв’язання
СДР елек іричних кіл обмоток ЕМ.
Оптимальний вибір кількості і розмірів розрахункових часових ін-
тервалів А=0,..., N визначається особливостями аналізованого
процесу і конструкцією ЕМ. Значною мірою він залежить від характеру
спілого процесу, до якого прагне перехідний процес. Тому не існує універ-
сальних рекомендацій по вибору параметрів розділення, справедливі для
будь-кого ЕМ і для довільних нестаціонарних процесів. Оптимальні зна-
чення цих параметрів встановлюються в результаті проведення чисельних
експериментів при виконанні досліджень конкретних машин.
Можна рекомендувати ряд стандартних шаблонів для вибору пара-
мс і ріп розподілу:
172
1. Рівномірний шаблон — застосовується при моделюванні нестаці-
онарних процесів, які завершуються сталими гармонійними ко-
ливаннями. Кількість інтервалів на один період коливань не пе-
ревищує 3...4, що відповідає числу переходів струму через екст-
ремальні значення.
2. Розгінний шаблон — застосовується при моделюванні нестаціо-
нарних процесів, які закінчуються постійними значеннями змін-
них. Розгінний шаблон має малі розміри інтервалів на початку
процесу, і вони швидко збільшуються наприкінці динамічного
процесу.
3. Шаблон з центральним згущуванням - застосовується при моде-
люванні нестаціонарних процесів у вигляді окремого імпульсу
або серії імпульсів струмів. Такий шаблон має зменшені розміри
інтервалів в моменти максимуму імпульсу і збільшені — па ета-
пах пологого зростання або загасання імпульсу.
МПА за рахунок значного зменшення кількості розрахунків поля до-
зволяє істотно понизити витрати процесорного часу ЕОМ. При цьому рів-
няння поля розв'язуються незалежно від решти рівнянь і зберігаються всі
обчислювальні достоїнства чисельного розв’язання польових задач. Зокре-
ма матриця рівнянь поля при використанні, наприклад, методу скінченних
елементів є симетричною і стрічковою. За допомогою МПА розв’язано ряд
практично важливих задач. Проте МПА не є універсальним методом. Крім
того, проблема раціонального розбиття аналізованого відрізка часу па роз-
рахункові інтервали не формалізується і може вирішуватися тільки емпі-
ричним шляхом.
4.3.2. Метод динамічних характеристик. Універсальним методом,
що відноситься до групи методів розв’язання КПММ, які побудовані на
рівнянні Пуассона (4.9), є метод динамічних характеристик (МДХ).
Суть методу динамічних характеристик полягає в попередньому роз-
рахунку повної ММХ ЕМ (4.3). Польовими методами виконується сукуп-
ність розрахунків магнітного поля і потокозчеплень обмоток при варіації
значень струмів і координат рухомих частин в діапазонах їх зміни, що пе-
редбачаються. Після апроксимації знайдених функцій потокозчеплень
[/, /], у = 1, N здійснюється їх чисельне диференціювання і визначаєть-
ся сукупність динамічних параметрів ЕМ. Отримана таким чином розраху-
нкова інформація формує вихідну базу даних динамічних параметрів даної
машини, до якої надалі легко звернутися при розв’язанні СДР електричних
кіл обмоток.
Загальний алгоритм методу складається з наступних етапів:
1. На основі апріорних припущень щодо інтенсивності процесу і меж пе-
реміщення рухомої частини робляться припущення щодо діапазонів
173
зміни значень усіх невідомих функцій часу:
(/тіп < */(О < ^угпах’ Хттіп </ятах’ У- — • Де
Отіп^утах’/хтіп’/хтах характеризують граничні значення змінних.
2. Зазначені діапазони підрозділяються на відрізки, внаслідок чого у
Л' + Ь - мірному просторі змінних формується сітка вузлів
{/ІА ,...,/м,у1т,...к = 1,М^, т ~ \,М1, яка відповідає різним
комбінаціям значень струмів і координат. Числа Мг дорівнюють
кількості вузлів, що лежать на осях струмів і просторових координат,
причому, як правило, кількість вузлів на різних осях вибирається різ-
ною.
3. Для кожного набору змінних, що відповідають поточному вузлу, вико-
нується розрахунок поля і визначаються магнітні потокозчеплення об-
моток.
В результаті в даному просторі формуються функції потокозчеплень
[/, /], / = 1, N, задані у вигляді таблиці значень.
4. Знайдені функції (/Д/,/] апроксимуються сплайнами у всьому зада-
ному просторі змінних.
5. Знайдені апроксимуючі сплайни чисельно диференціюються, і в резуль-
таті знаходяться характеристики ДЕМП, що визначені в заданому прос-
6у/і ------ ------
торі змінних: ---- [г,у],-— [/, у], у, к = 1,N;
8ік дг*
6. Чисельно розв'язується СДР (4.1), (4.2) і знаходяться невідомі змінні як
функції часу.
Областю застосування МДХ є ЕМ, електромагнітне поле яких опису-
ється стаціонарним рівнянням Пуассона. В цих випадках набір значень
змінних в кожному вузлі сітки однозначно визначає поле ЕМ і потокозчеп-
лення його обмоток і не залежить від значень змінних в інших вузлах, а
значить від інших моментів часу. Таким чином, кожна точка ММХ розра-
ховується незалежно від інших.
Розрахунок ММХ у всьому просторі змінних представляє досить
трудомістку обчислювальну задачу. Наприклад, якщо ЕМ має N = 3 об-
мотки і /. = 1 рухому частину, то при завданні по кожній змінній 10 розра-
хункових точок загальна кількість розрахункових вузлів (поєднань змін-
них) для визначення характеристик поля складає ' к —104.
Аналіз ЕМ за допомогою МДХ дає найдостовірніші результати, але є
доєїаіньо трудомістким і інформаційно надмірним. Останнє означає, що
при розрахунку одного режиму роботи ЕМ використовується дуже незнач-
на частина знайденої залежності яка відповідає значенням І і /,
хпріїкіерним для даного режиму роботи. Тому застосування МДХ доцільно
174
в тих випадках, коли ставиться задача докладного дослідження режимів
роботи ЕМ з незмінною конструкцією, що дає можливість багатократного
використання заздалегідь побудованої ММХ.
4.3.3. Метод поділу змінних. В лінійній класичній теорії ЕМ вирази
для потокозчеплень записуються у вигляді лінійної комбінації добутків
струмів обмоток і коефіцієнтів, які можуть залежати тільки від координати
у і називаються статичними власними і взаємними індуктивностями об-
моток:
V] & (4.20)
*=і
У виразі (4.20) разом з використанням принципу суперпозиції реалізується
також принцип поділу змінних. Дійсно, кожний співмножник в (4.20)
представлений добутком двох величин, кожна з яких залежить тільки від
однієї змінної - від координати у або від струму. Проте припущення про
лінійну (пропорційної) залежність струмів і потокозчеплень не дозволяє
врахувати нелінійність характеристик ЕМ, іцо знижує достовірність ре-
зультатів моделювання.
Вираз (4.20) можна узагальнити, якщо для урахування нелінійності
ЕМ представити залежність — у/(і, у) у вигляді суми добутків окре-
мих нелінійних функцій, кожна з яких залежить тільки від однієї змінної:
У
= Е<г>(4) £л(г) (4.21)
а-і
де (р^ (і^— нелінійна залежність потокозчеплень у - ої обмотки від стру-
му к - ої обмотки за відсутності струмів у решті обмотках ЕМ; (у) -
безрозмірні функції, що характеризують зміну потокозчеплення у- ої об-
мотки при переміщенні рухомої частини за умови незмінності заданого
струму в к- ій обмотці і відсутності струмів у решті обмотках. Ці функції
зручно визначити у вигляді відношення ^к(у) = у/і(Ік,у)!у/ (Ік,/0),
де у0— значення координати рухомої частини, при якому потокозчеплення
(4 =/о) має максимальне значення; ік = со1оп(0,...,ік,...,0).
Вираз (4.21) узагальнює класичну формулу (4.20). Якщо припустити
<Р}к (ік ) ~ а^к > «е °у = соті, то маємо Мдк (/) = а)^к (у) і вираз (4.21)
зводиться до формули (4.20).
175
Динамічні параметри ЕМ легко знайти, диференціюючи вираз (4.21)
за змінними і та у:
ду/і дфік^к) ду/; „ д$ік(Ґ)
-^ = ^к(г)-^^ ^=Х^к(.ік)~~—- («2)
дік дік 5/, Л_, ду
Визначення потокозчеплень за виразом (4.21) дозволяє розробити
ефективні обчислювальні алгоритми і істотно в порівнянні з МДХ скоро-
тити ви грати процесорного часу ПЕОМ при розрахунку ММХ. У порі-
внянні з МДХ кількість трудомістких розрахунків поля зменшується в
(иЛ+і1)/(7У + £) разів, де п- кількість розрахункових точок по кожній
змінній. Таке скорочення кількості розрахунків обумовлено використан-
ням принципу поділу змінних, відповідно до якого довільна функція декі-
лькох змінних знаходиться у вигляді добутку декількох функцій, кожна з
яких залежить тільки від однієї змінної. Коло - польовий метод аналізу
динамічних режимів ЕМ на основі формули (4.21) називається методом
поділу змінних (МПЗ) |7].
Розглянемо алгоритм практичної реалізації МПЗ у простому випад-
ку, коли ЕМ має дві обмотки і одну рухому частину. У цьому випадку у
відповідності до формули (4.21) вирази для потокозчеплень мають наступ-
ний вигляд:
У'іЦЛ./) = Фі і (А) • і(г) + Й2О2) • йг(г) (4-23)
^2 (А , /) = 02101) • £21 (/) + Фї2 (4 ) • ^22 (/) -
Алгоритм складається з наступних етапів.
1. При заданих І2 —0, у~у$ виконується розрахунків поля ЕМ для
діапазону значень іх = [О,..., і 1тах] з кроком А/, = і 1тах/ДГ,, де і )тах-
очікуване граничне значення струму першої обмотки. За результатами
розрахунків поля знаходяться значень функцій ^](/|) і ^5] (А).
2. 1 Іри заданих ї, =0, у = у0 виконується Дт2 розрахунків поля ЕМП
для діапазону значень і2 = [0,..., і 2тах] 3 кроком Д/2 = і 2тах/Л^2,
(?тііх “ очікуване граничне значення струму другої обмотки. За ре-
іульгагами розрахунків поля знаходяться Лу значень функцій ^2(/2) і
022 О?)-
3. При гаданих іх -іхо, І2 =0 виконується N розрахунків поля ЕМП
для діапазону значень у - [О,..., /тах] з кроком Д/-/тах/^, де
у тих очікуване граничне переміщення рухомої частини.
176
За результатами розрахунку поля знаходяться N значень функцій
£и(г) і £1<Г)
4. При заданих = 0, /2 = <го виконується /\г? розрахунків поля ЕМП
для діапазону значень у - [О,..., /П1ах] з кроком Ду - у тах/N?. За ре-
зультатами розрахунку поля знаходяться N значень функцій ^]2(у) і
<22(Г)-
5. Функції, &2(*2)> <ц(г)> 5гі(/)> £і2(/) і
^ггС/) чисельно апроксимуються на усьому діапазоні значень змінних
/], г2,у.
6. Виконується чисельне диференціювати знайдених у п.5 безперервних
функцій - визначаються їх часткові похідні
дф^/ді^д^/ді^д^/ду іт- д., які далі апроксимуються на усьому
діапазоні значень змінних.
7. За виразом (4.22) розраховуються ДЕМП на усьому діапазоні значень
змінних і}, і2, У-
Таким чином, у даному випадку при використанні МПЗ для визна-
чення ДЕМП необхідно заздалегідь виконати N^+N2 + розрахунків
електромагнітного поля ЕМ.
В МПА необхідна кількість розрахунків поля складає 6N + 3, де N
- число розрахункових інтервалів. Як правило, на практиці виконується
умова Л| + N2 + 2ЛГ?, > 6N + 3. Проте МПЗ у порівнянні з МПА має важ-
ливу перевагу: він дозволяє досліджувати і оптимізувати різні динамічні
режими ЕМ, ґрунтуючись на польовій інформації щодо значень ДЕМП, яка
була отримана один раз, використовуючи при цьому тільки інтегрування
СДР обмоток малої розмірності. На відміну від цього, МПА при проведен-
ні кожного режимного розрахунку знов вимагає виконання поточних
польових розрахунків. З цієї причини МРП більш перспективний для за-
стосування в САПР, а також при оптимізацїї характеристик динамічних
режимів.
МПЗ у порівнянні з МДХ вносить похибку, яка пов’язана з застосу-
ванням у формулі (4.21) принципу суперпозиції. Проте, МПЗ при
розв’язанні баїатьох КПММ виявився достатньо достовірним і ефектив-
ним. Про це свідчать результати порівняльного аналізу розрахункових ре-
зультатів, отриманих більш точним МДХ і МПЗ, а також їх порівняння з
експериментальними даними.
МПЗ успішно використовується для аналізу КПММ, сформульованих
як для традиційних електричних машин, так і для нетрадиційних ЕМПЕ.
Далі приводиться приклад КПММ, сформульованої для трифазного син-
хронного генератора (СГ).
177
Приклад 4.1. Для аналізу динамічних режимів трифазного СГ без демпфе-
рної системи використовується наступна КПММ, яка сформульована в еквівале-
нтній двофазній системі координат статора. СГ має наступні дані: номінальна
потужність —ЗО кВт; кількість пар полюсів р=2; номінальна лінійна напру-
га =400 В коефіцієнт потужності СО8(р=$,&, повітряний проміжок 8 — 1
мм; зовнішній діаметр =406 мм; внутрішній діаметр =286 мм; дов-
жина пакету статора = 160 мм; висота осі обертання Й] =225 мм.
1 Іотокозчеплеїшя записуються як довільні функції струмів обмоток та ку-
та повороту ротора у/, =1//^Іа,ір,ір,у) , ] — а,Р,р. СДР електричних
кіл обмоток у власних координатах у формі Коші після перетворень має наступ-
ний вигляд:
дУ (д'Р, дУ'„ 'І дЧ'ґдЧ' дЧ', дЧ'(дЧ' дЧ'
ді~ 7.
ді, ( діа 1 діа ") ( йс ° діа ді,
а ~ г
к к-^-к 1ЛДк к)
а±= дів ( ді, ді, ' діа [ді/ ' ді/ °) /[ді/ " ді, ~
а г
к к
л ' а.
(4.24)
де Кп = иа -іаг-а>ду/а/ду , Кр^ир-ірГ-аду/р/ду ,
К г- =иу -і^г-сдду/р,
'д'Р, дЧ'р дРр дР/ (д>ра д'Р, д*Р{ [дРр дТа д^а дЧ'р
Р- -Я і» < а; а, аа ' ді. ^г/ ^Й \ « Р ар
Для (примання залежностей = і/І),] — а^Р,/ необхідно визначити
ДГ'МП, що входять до СДР (4.24). Вирази для потокозчеплень у цьому випадку
піп иядаїоіь іак:
’Л = <Ра (іа)• ^аа (г) +% (г) + <Ра (*/)’ (/)
7'/ • '/< ’ '7> Г) - <Р{ 0и ) • (/) + (3/ (/д ) • (?) + <РГ {їр
178
де (ра \<Р/ (і]) - потокозчеплення фаз при варіаціях струму
, відсутніх (нульових) струмах в інших фазах і незмінному заданому куті по-
вороту ротора.
Алгоритм розрахунку динамічного режиму методом поділу змінних скла-
дається з наступних етапів.
1. Розрахунок базових величин — при заданому у0, що відповідає положенню
ротора, при якому значення є максимальним, виконуються три
розрахунки поля для наступних комбінацій змінних (/а0,0,0, /0),
(0, і, О,/о),(О,О, їуо’/о) і ДЛЯ кожного розрахунку визначаються базові
потокозчеплення обмоток фаз статора і ротора Струми
^аО’^О’^/О ~ оДАлг , де । „ — номінальне значення струму обмотки ста-
тора;
2. Розрахунок функцій струму (р ( і ) - при фіксованому значенні кута /0
формується сітка значень струму = {0;0,1/,Лг! 0/1Л,} (в інших обмот-
ках струм дорівнює нулю) і для кожної комбінації змінних
(Ал,О,О,/о),(0,їд,0,7о),(0,0,/д,у0) розраховуються потокозчеплення
обмоток 'Рд,Тд;
3. Розрахунок безрозмірних кутових функцій ^к(/) — формується сітка значень
кута повороту ротора УК для кожного значення^ виконується
три розрахунки поля при наступних комбінаціях змінних (/^,0,0,/^),
(0,/д,0,П), (0,0піедя чого розраховуються потокозчеплення
4. Розрахунок динамічних електромагнітних параметрів виконується чисельне
диференціювання отриманих функцій <р ^і.) і (у ) і по формулам (4.22)
знаходяться необхідні функції ДЕМІІ;
5. Розв’язок системи диференційних рівнянь - будь яким чисельним методом
розв’язується СДР обмоток СГ на заданому інтервалі по часу, в межах якого до-
сліджується динамічний режим роботи генератора, і знаходиться сукупність шу-
каних змінних.
На рис.4.2 і рис.4.3, як приклад, зображено розрахункові залежності дина-
. 3<Ріа . . ^Рі
мічних параметрів-----(іа) і-----
ЗА З/
179
Рис. 4.2 Розрахункова залежність динамічного параметру
При необхідності урахування змінної швидкості ротора математична мо-
дель доповнюється рівняннями руху ротора. Практичну реалізацію зазначеного
алгоритму зручно виконувати в середовищі обчислювального комплексу
МАГГАВ - Г'ЕМЬАВ.
Рис. 4.3 Розрахункова залежність динамічного параметру --(/)
б/
За допомогою описаного МПЗ досліджуються динамічні режими СГ з
урахуванням змінного насичення феромагнітного магнітопроводу, наприклад
режим рангового короткого замикання СГ, що пращовав в режимі неробочого
ходу. Розрахунки режиму раптового короткого замикання СГ з зазначеними ви-
ще даними засвідчили, що при урахуванні змінного насичення магнітопроводу
генерлора розрахункова амплітуда ударного струму в обмотці статора в 1,21
ра ні перевищує розрахункову амплітуду ударного струму, яка була отримана по
ірадиціііній методиці з використанням незмінних перехідних індуктивних опо-
рів СГ. Відповідно в 1,44 рази збільшилися електродинамічні зусилля. Таким
чином урахування насичення магнітопроводу СГ має суттєве значення при ана-
:ц и слскіродинамічної стійкості електричних машин.
180
4.3.4. Метод покрокового інтегрування. У тих випадках, коли для
опису електромагнітного поля в ЕМ необхідно застосовувати нестаціонар-
не рівняння (4.10), КПММ формулюється у вигляді єдиної СДР відносно
наступних змінних: струмів в обмотках ЕМ, векторного магнітного потен-
ціалу в активній зоні, координати і швидкості руху рухомої частини ЕМ. У
векторному вигляді система складається з таких рівнянь:
(дА ,
а... ---а$ + гі-и=0
ді
ДА- /лу — + ру (V х гоїА) = а, і, (426)
ді
-А— + М-Мв=0
а в
сіу
— = а>
(її
де , аі = — р. 18П . Надалі сформована СДР розв’язується чи-
сельним методом і знаходиться сукупність невідомих функцій часу. Такий
метод розв’язання КПММ називається методом покрокового інтегрування
(МЛІ), оскільки передбачає визначення на кожному кроці по часу поточ-
них значень всієї сукупності взаємопов’язаних невідомих функцій. МПІ є
найбільш загальним і універсальним методом розв’язання КПММ, але його
реалізація потребує значних ресурсів ПЕОМ. До того ж, як відмічалось
вище, СДР (4.26) є жорсткою, шо обумовлено суттєво різною швидкістю
виникнення електромагнітних процесів в різних шарах електропровідного
середовища, через яке проникає електромагнітне поле. Для розв’язання
жорстких СДР необхідно застосовувати неявні методи інтегрування. З
огляду на велику розмірність (4.26), яка виникає після просторової дискре-
тизації розрахункової області на велику кількість скінченних елементів,
для отримання результату з прийнятними витратами комп’ютерного часу
ПЕОМ на практиці доцільно використовувати найпростіші методи і схеми
дискретизації СДР по часу, наприклад неявну схему Ейлера або схему тра-
пецій.
Приведемо приклад формування системи рівнянь КПММ для аналізу
динамічного режиму АД з масивним електропровідним ротором [3]. Апро-
ксимуємо похідні по часу однокроковими формулами, заснованими на
двох точковій апроксимації. Наприклад, для похідної магнітного потенціа-
лу по часу запишемо
дА/ді = (Ам -Ак)/Ді,
(4.27)
181
де А/ = — Ік - крок за часом; Ак+], Ак - значення потенціалів у момен-
ти часу Ік+],Ік. Величину потенціалу в інших членах рівняння, не зв'яза-
них з похідними, представимо у вигляді
А = От-Ак+'+(1-От)-Ак, (4.28)
де 0 < От < 1 - ваговий коефіцієнт, який дозволяє обрати одну з чисель-
них схем розв’язання нестаціонарної задачі. Наприклад, при От = 0,5 ре-
алізується схема трапецій, при От—И3 - схема Гальоркіна, а при
От = 1 - неявна схема Ейлера. Для кожної з зазначених схем існує своя
оптимальна область застосування. Але найкращі властивості має неявна
схема Ейлера, яка є абсолютно стійкою і не викликає лавиноподібного на-
громадження чисельних похибок при розв’язанні задачі при будь-якому
кроці по часу.
У аналогічному вигляді, подібному до (4.28), представимо інші змін-
ні - струми в обмотках, прикладені напруги живлення, швидкість і коор-
динату переміщення ротора. Усі величини в момент часу Ік вважаються
відомими, тому відповідні значення змінних в цей момент часу запишемо у
правих частинах рівнянь. Після заміни похідних скінченними різницями з
рівнянь (4.26) з урахування формули (2.21) отримаємо рівняння для неві-
домих змінних у момент часу ік+^ - потенціалів у вузлах ССЕ Ак *,
струмів у фазах обмотки статора ік+І, кутової швидкості і координати ро-
тора й/+І,у*+1:
Ак
А/ 77 7 д і А/ (4.29)
А/ 7 "
1 \ик-гік]-(1-Ом) + ик+]Ом,
„ д2Ак+] д2Ак+1 Ак+І .к
дх ду Аґ
,.л+і _
і ~
лк -у2 лк
цу((ок х-Вк-сок у Вк)-(\-Ом)-[—у- + ] + (4.30)
дх ду"
Ак к
А/
182
лм
б/+1 = (Ок + Дґ (ам £ Вкпі Вк - д/,. - Мк)/7 , (4.31)
І
ук+1 = ук + Лі-й)к, (4.32)
Суми у рівнянні (4.29) розраховуються по площині скінченних еле-
ментів, що покривають поперечний перетин усіх сторін котушок вибраної
обмотки, які з’єднані послідовно і мають струм одного напрямку.
При виводі рівняння (4.30) використано співвідношення (1.26) між
складовими магнітної індукції Вх,Ву і векторним магнітним потенціалом,
а також співвідношення між кутовою швидкістю обертання ротора та
складовими вектора лінійної швидкості довільної точки ротора з коорди-
натами х,у: \>х = СО-у, х>у ~ й)-х. Індекс у відповідає кількості обмоток
ЕМ, наприклад для трифазної обмотки на статорі і масивному роторі без
обмотки маємо у = А, В, С .
При виводі рівняння (4.31) використана формула розрахунку елект-
О Г) 7
ромагнітного моменту (2.48), де коефіцієнт ам =---—.
Во
При чисельному розв’язанні рівняння в часткових похідних (4.30) на
основі МСЕ воно приводиться до відповідної підсистемі алгебраїчних рів-
нянь щодо невідомих магнітних потенціалів у вузлах ССЕ.
Остаточно замкнута система нелінійних алгебраїчних рівнянь у мат-
ричній формі запису має наступний вигляд:
[С*+)].Ц*+1 + ік+і + й/+1] = [(7*].[Л* +ік +й/]. (4.33)
Мат риці - стовпці (вектори) змінних для моментів часу /А+1 і Ік „ що вхо-
дять до системи (4.33) для випадку у = А, В, С мають наступний вигляд:
[Л*+1+/*+1 + й?+1] =
— А А^+1 ;Л+1 ,-£+1 7+1 ,7+1 „7+1\
-соІоп(А} ,...,А^у,іл ,1В ,1С ,6) ,у )
і (4.34)
[Ак +ік + а)к] = соІоп(Ак,...,Ауу,іА,ів,ік,й)к,ук)
Матриці - стовпці мають розмірність Му + 5, де ^ту - кількість
вузлів у ССЕ. Результуючі квадратні матриці [СА+1] і [(?*] розмірністю
183
(Лу +5)х(7Уу +5), формуються на підставі вище наведених рівнянь.
Алгоритм формування матриці [Сг*'1 ] наступний:
1. Виконується матричне підсумовування [ТС ] Ом + | С] / Д / , де | К |
- матриця “жорсткості” і [С] - матриця “демпфірування”. Порядок
отриманої матриці дорівнює іїту х ^'у.
2. До отриманої матриці приєднуються три стовпці матриці [а]-Ом, що
має розмірність х 3 і відображає наявність джерел поля (струмів в
обмотці статора Ід-АбАс ) У тих скінченних елементах, що розташовані
в перетині витків обмотки. Матриця “джерел поля” [«] містить відмінні
від нуля елементи — У^к 18паза, = А,В,С ) тільки в тих її ряд-
ках, номера яких дорівнюють номерам вузлів скінченних елементів, що
лежать у перетині витків обмотки статора. Визначення номерів таких
вузлів виконується за допомогою алгоритмів, що визначають принале-
жність скінченного елемента перетину витків.
3. До отриманої матриці приєднуються три рядки матриці “потокозчеп-
лень” підсистеми рівнянь (4.29), що описує електричну рівновагу елект-
ричних кіл обмоток статора і має розмірність 3 х (ТУу + 3). Елемента-
ми цієї матриці є добутки а,,, /А/, що лежать тільки в тих її стовп-
цях, номера яких збігаються з номерами вузлів скінченних елементів,
що розташовані в перетині витків відповідної фази обмотки (фази, для
якої розраховується потокозчеплення). В останніх трьох стовпцях зада-
ються активні опори Г • Ом . В результаті отримана матриця розмірніс-
ію ((Уу +3)х^у +3).
4 Остаточно матриця системи (4.33) формується після приєднання чоти-
рьох стовпців і рядків, що відповідають рівнянням руху (4.31), (4.32). У
кожнім з цих рядків є тільки один ненульовий елемент — одиниця, роз-
ташована на головній діагоналі матриці. Остаточна розмірність матриці
дорівнює (Уу + 5) х (А у + 5), а розмірність вектора невідомих змін-
них дорівнює + 5 .
С груктуру матриці [Сг *11 ] зображено на рис. 4.4.
Маїриця С* формується аналогічним чином з тією лише різницею,
що спочатку виконується матричне підсумовування по виразу
| (' | / А/ [ЛГ ] • (1 — Од/ ) + [К *] , де [Рк] - матриця стовпець, яка
враховує вплив щільності струмів /(б) X • В* — СО -у • В* ), що виникли
у вузлах ССЕ на роторі. Потім до результату приєднуються елементи мат-
риці |«|-(1 ОЛ/)і правих частин рівнянь (4.29), (4.30) - (4.32).
184
„ • г лк , ’к . . .к 1
Оскільки вектор змінних [А +1 + СО а також складових векто-
рів магнітної індукції і швидкості в момент часу 1к відомі, то після пере-
творень у правій частині рівняння (4.33) залишається відома чисельна мат-
риця стовпець довжиною Му х 5 .
Рис. 4.4 Структура матриці [О* ' ]
Матриця жорсткості формується шляхом підсумовування складових
часткових матриць по всіх скінченних елементах [АГ ] = \ [Ае ], Де N3 -
е=І
число скінченних елементів у ССЕ. Квадратні часткові матриці [Ае] харак-
теризують внесок кожного скінченного елемента в повну матрицю жорст-
кості і мають розмірність 3x3. При використанні в ССЕ трикутних скін-
ченних елементів першого порядку (симплекс - елементів) часткові мат-
риці [кс ] для будь-якого скінченного елемента можуть бути представлені
через величини координат вузлів, що входять до складу даного елемента, у
наступному вигляді:
Ьі Ьі ь,ьк
Ь}Ьі ЬІЬк ЬіЬк
ЬкЬ, ЬкЬк
с.с. сіс] с-,ск
1
+ “------ СІСІ СІСІ С,Ск
4р8е ' ' 11 ' к
|_с*с, скс^ скск
(4.35)
де коефіцієнти дорівнюють: Ьі=у^~ук, Ь}=ук—уі, Ьк=уі-у:,
С: — хк — хс; = х: — хі, Сі. — х; — X:, 5„ - площа е го скінченного
/ Д _/У / ' А А / І С
185
елементу, х,, х/5 хк, У), у^, ук - координати вершин вузлів трикутника,
позначені індексами і,І,к. Таким чином, матриця жорсткості є числовою
маїрицею, коефіцієнти якої залежать тільки від координат вузлів і магніт-
ної проникності матеріалів.
Матриця демпфірування також є числовою і формується підсумову-
е-^:>
ванним внесків часткових матриць окремих елементів [С] — [&е ]- При
<?=1
використанні в ССЕ трикутних елементів першого порядку часткові мат-
риці мають наступний вигляд:
’2
1
2
1
1
1
2
(4.36)
1
Значення складових магнітної індукції, що входять в праву частину
системи рівнянь (4.30), розраховуються з урахуванням використовуваних
апроксимаційних формул для векторного потенціалу по наведеним раніше
виразам В ч = дА/ду і В = — дА/дх . Так, у межах е - го елементу з ву-
злами , в яких розраховані потенціали А^ А , Ак , маємо
Вх = І8~^С,Аі + С]А' + СкАк }
(4.37)
В -------(к,А + Ь.Аі +ЬкАк)
> 25” ' 1 1 к к г
Як видно з рис. 4.4, структура матриць МПІ [СА] і [б-*1] є неси-
метричною відносно головної діагоналі. Це обумовлено несиметричним
внеском елементів матриці [а] й елементів матриці рівнянь електричних
кіл фаі обмотки статора. Структура матриць [(?*] і [С*+1] також не є
стрічковою. Розмірність (ДГу+5)х(ДГу +5) матриць [ Ск ] і
практично така ж, як розмірність і^уХІЇу матриць систем рівнянь, які
формуються в результаті використанні МСЕ, оскільки »5. Але за-
піачеііі матриці МПІ втрачають важливі переваги у порівнянні з матриця-
ми МСІ симетричність і стрічковість структури. Тому у порівнянні з
бс півсереднім використанням МСЕ для розрахунку поля суттєво знижу-
< іься ефекіивність чисельного розв’язання системи (4.33) МПІ, оскільки
ііі.ічно збільшується необхідний для зберігання масивів даних обсяг
и.ім’я 11 ІII ОМ і процесорний час для чисельної оброки цих даних.
186
На кожному кроці по часу сформована нелінійна система рівнянь
МГП (4.33) розв’язується ітераційними методами. Ітерації виконуються з
урахуванням одночасного збігу двох параметрів - величин магнітної про-
никності у СЕ, що розташовані в феромагнітних середовищах розрахунко-
вої області і величин магнітної індукції в електропровідних середовищах,
що рухаються. Як показав досвід чисельних експериментів, для ітерацій-
ного розв’язання (4.33) наряду з використанням більш складних методів
хороший результат забезпечує застосування методу простих ітерацій з під-
релаксацією.
Розв'язання КПММв системі "МАТЬАВ - ЕЕМЬАВ”. Для практи-
чного розв’язання КПММ па ПЕОМ користувачу необхідно мати спеціалі-
зоване програмне забезпечення, до складу якого входить сукупність потрі-
бних для розрахунків та досліджень процесорних та пост процесорних фу-
нкцій. У даний час доступним для широкого загалу користувачів програм-
ним середовищем, яке у цілому забезпечує технологію побудови та
розв’язання КПММ, можна вважати систему “МАТЬАВ — ЕЕМЬАВ” .
Ідеологія і реалізація коло — польового моделювання в системі
“МАТЬАВ — РЕМЕАВ” її розробниками не передбачалася. Проте, наяв-
ність у комплексі необхідних інструментальних засобів дозволяє на його
основі створити ефективну технологію побудови і розв’язання КПММ ЕМ.
Принципи побудови такої технології в системі “МАТЬАВ - ГЕМЬАВ”
представляє науковий інтерес, а її практична реалізація відкриває нові пер-
спективи для широкого застосування коло - польових методів моделюван-
ня при дослідженнях і розробках ЕМ.
В основі згаданої системи лежить програмний пакет “МАТЬАВ”, що
містить мову програмування високого рівня. Моделювання динамічних
систем можна виконати: а) за програмами, які написані користувачем на
мові програмування “МАТЬАВ”; б) за допомогою пакету розширення
“8ІМІЛЛМК”, в якому реалізується принцип візуально орієнтованого мо-
делювання. В останньому випадку розрахункова модель (8 — модель) за
допомогою графічної технології дгар-апсі-сігор легко збирається з окремих
блоків в повній аналогії із структурною схемою модельованої системи. 8 —
модель є графічним відображенням модельованої системи, в якій реальні
фізичні елементи замінені їх математичними моделями, причому функціо-
нальні зв'язки між елементами також забезпечуються графічними засоба-
ми. СДР, що розв’язується, автоматично формується в процесі з'єднання
різних блоків 8 - моделі, використовуючи при цьому можливості системи
“МАТЬАВ” в прихованій формі. Користувач може вибрати відповідний
метод розв’язання СДР і встановити необхідні параметри мегоду.
Пакет розширення “РЕМЬАВ” призначений для моделювання фізич-
них полів різної природи методом скінченних елементів. Користувач за
допомогою інтерфейсу Мосіе! Кауі^аіог може вибрати будь-яку просторову
187
розмірність задачі (Ю - одновимірна, 20 - двовимірна і ЗГ) - тривимірна),
тип і орієнтацію системи координат (декартова, циліндрична), тип залеж-
ності невідомих змінних від часу (стаціонарна, квазістаціонарна, нестаціо-
нарна задача). Користувач може вказати порядок апроксимуючих поліно-
мів і задати інші необхідні опції.
І Іри розв’язанні задач в області електромагнетизму (Еіесгіоиіа^пеііск
Мосіпіе) реалізуються всі необхідні для моделювання функції: препроцесо-
рні (побудова і оптимізація сітки скінченних елементів, завдання фізичних
характ еристик матеріалів, граничних і початкових умов, джерел поля і ін.),
процесорні (вибір параметрів методу розв’язання і розрахунок поля) і
постпроцесори! (візуалізація картин поля, визначення значень польових
функцій в заданих точках області). Побудова нерегулярної сітки здійсню-
ється сітковим генератором, який дозволяє згущати сітку в місцях високо-
го градієнту магнітного поля. При цьому практично не обмежується кіль-
кість вузлів сітки.
Пакет “ЕЕМЬАВ” за допомогою функції Ехрогі 8іти1іпк тосісі до-
зволяє експортувати результати розрахунку електромагнітного поля в на-
писану користувачем програму або в створену заздалегідь розрахункову 8
- модель системи. Моделювання динамічного режиму роботи ЕМ здійсню-
є і ься в пакеті “МАТЕАВ”, а динамічний взаємозв'язок рівнянь поля і рів-
нянь електричних кіл КПММ забезпечується за допомогою вказаною фун-
кції Ехрогі 8іти1іпк тобеї, а також іншими засобами, що входять до скла-
ду пакету “ЕЕМЬАВ”.
Подальший розвиток та впровадження технології коло - польового
моделювання динамічних режимів в практику розробок та досліджень еле-
ктричних машин і пристроїв, у тому числі з використанням тривимірних
польових моделей, стимулює удосконалення існуючих та створення нових
методів та спеціалізованих обчислювальних комплексів для побудови і
розв’язання КПММ електричних машин різного типу і призначення.
188
СПИСОК ЛІТЕРАТУРИ
1. Березовский А.А. Лекции по нелинейньїм краевьім задачам
математической физики. 4.1 - Киев, изд. Института математики АН
УССР.- 1974.-452 с.
2. Брьінский Е.А., Данилевич Я.Б., Яковлев В.И. Злектромагнитньїе
поля в злектрических машинах - Ленинград, Знергия, Л.О. - 1979. -
176 с.
3. Васьковський Ю.М. Математичне моделювання електромеханічних
перетворювачів енергії - Київ, НТУУ “КПІ”.-2003. - 164 с.
4. Васьковский Ю.Н. Метод расчета дифференциальньїх параметров и
динамических процессов злектромеханических преобразователей на
основе анализа злектромагнитного поля // Изв. АН СССР. Знергетика
и транспорт. — 1991. — №2. — С.59-65.
5. Васьковский Ю.Н., Дьінник Л.Н. Применение метода конечних
злементов для моделирования двухмерньїх злектромагнитньїх полей в
движущихся злементах злектромеханических устройств // Известия
Вузов Злектромеханика. - 1990. - №9. - С.28 - 34.
6. Васьковский Ю.Н. Развитие методов численного моделирования
динамических процессов злектромеханических преобразователей
знергии // Техническая злектродинамика. - 1995. - №1. - С.47 - 50.
7. Васьковський Ю.М., Гибель Ю.А. Методи розв’язання коло -
польових математичних моделей електромеханічних перетворювачів П
Вісник НУ “Львівська політехніка”, №485. - 2003. - с. 194-201.
8. Васьковский Ю.Н., Цивинский С.С., Гайденко Ю.А. Оптимизация
концевьіх клиньев ротора турбогенератора для повьішения
належносте его работьі в несимметричньїх режимах работьі //
“Електротехніка і електромеханіка”, №3. - 2004. - с. 26 - 28.
9. Васьковский Ю.Н., Цивинский С.С., Ветушка С.А. Определение
индуктивньїх сопротивлений синхронних машин на основе численних
расчетов злектромагнитньїх полей // Техническая злектродинамика,
2006. №1,с. 52-56.
10. Васьковский Ю.Н., Гайденко Ю.А,, Цивинский С.С. Определение
интегральньїх характеристик злектрических машин методами теории
поля // “Електротехніка і електромеханіка”, 2006. - № 1, с.28 - 32.
11. Васьковський Ю.М., Гайденко Ю.А. Моделювання методами теорії
поля характеристик тягових асинхронних двигунів в несиметричних
режимах робота // Техническая злектродинамика, 2006 - №6, с.37- 41.
12. Васьковский Ю.Н., Заблодский Н.Н. Моделирование полей и
характеристик злектротепломеханических преобразователей
технологического назначения // Техническая злектродинамика. - 2006.
-Тематический випуск. Ч. 7- с. 41- 44.
ІЗ. Вольдек А.И. Злектрические машиньї. — Л., Знергия, Л.О., 1978, 832 с.
189
і І ІЬ- іі. іік А И. Индукционние магнитогидродинамические машиньї с
< и ікомсіаллическим рабочим телом - Ленинград, Знергия, Л.О. -
272 с.
І 'Іпм<>р>>нский В.В. Справочное пособие по расчету злектромагнитного
іішіи її ніекірических машинах. - Ленинград. Знергоатомиздат, Л.О. -
РЖІ 256 с.
В І, ні.> ннч О. Метод конечних злементов в технике - М.: Мир. 1975.
І
її пні ііігі (>., Морган К. Конечньїе злементьі и аппроксимация. - М.:
Мир !‘>86.-320 с.
ІІїнііікіі Смоленский А.В. Злектрические машиньї - М.: Знергия.-
РЖИ 928с.
11п >и.ш (моленский А.В. Злектромагнитньїе сильї и преобразование
ііц рі ті її ілекгрических машинах - М.; Вьісшая школа.- 1989. -312 с.
н II. .і'ірііко Н І І., Осилова В.А., Сукомел А.С. Теплопередача - М.:
•ін рі ии 1969. — 440 с.
І ні і кіш 11 І і. Численньїе методи - М.: Наука. - 1978. 512 с.
І іім'і к II, Рац И. Переходние процесси в машинах переменного
। . М Л.; Госзнергоиздат. —1963. -744 с.
1 і пі.і іон 1111 Злектромеханическое преобразование знергии —
І «ні рі ия -1973.— 400 с.
II пін...і II II. Проектирование злектрических машин. М.: Вьісшая
. ні ЛЮ2. - 758 с.
рпікр II , ШтафльМ. Вихревиетоки. М.-Л.: Знергия, 1967,208с.
* Ми іі.ін II II. Дубинина О.Н. Численний расчет магнитного поля в
•....ігниіі юне іурбогснератора в режиме иагрузки // Електротехніка і
І іріімі-х.іпіка, №1,2003, с.64 —69.
1 Ми ч II II., Полякова Н.В. Анализ фазових соотношений
і і><» ірнм.її пінних величин в турбогенераторе на основе численних
і Ц іон м;іі питних полей // Електротехніка і Електромеханіка, №4,
ПНІ . •,’) 64.
♦ • Ми в ч Н II Расчет злектромагнитного поля в поперечном сечении
.ріічіч кнх машин // Злектротехника, №12, 1982, с.46-49.
ВИ, Поляков И.В., Полякова Н.В. Расчетно
н римі п іальное тестирование программьі ЕЕММ и преодоление
і । "М іт нсііользования для расчета магнитного поля злектрических
мяііііін І пекіротехніка і Електромеханіка, №3, 2004, с.38 - 43.
" і • •• ні II Р. І Іоверхностний зффект в ферромагнитньїх телах - М.:
І "і । .. рі «>и ідаї. 1949. —320с.
II Iі ч. н ІО Н., Чувашев В.А., Васьковский Ю.Н., Гайденко Ю.А.
Чия ні і мі хпннчсских характеристик короткозамкнутьіх асинхронних
> рп нішшелей методами теории злектромагнитного поля //
І м і ірічс піка і Електромеханіка, №1,2005, с.55 - 58.
190
32.Подольцев А.Д., Кучерявая И.Н. Применение многоуровневого
моделирования для исследования злектротепловьіх процессов в
установко индукционного нагрева // Техническая злектродинамика. -
2006. -Тематический випуск. Ч. З - с.17 - 20.
ЗЗ.Поливанов К.М. Теоретические основи злектротехники. Т.З Теория
злектромагнитного поля - М.: Знергия. - 1975. - 208 с.
34-Попов П.Г., Шумилов Ю.А. Анализ злектромагнитньїх устройств с
индуктивними связями методом конечних злементов //
Злектричество. - 1978. - №11. - С.43 - 48.
Зб.Постников В.И. Волновне параметри массивно — роторних
злектрических машин-Киев: Наукова думка, 1986,183 с.
Зб.Постников И.М. Обобщенная теория и переходимо процесом
злектрических машин - Киев: Техніка. -1966. - 436 с.
37 .Рогозин Г.Г. Определение злектромагнитньїх параметров машин
переменного тока - Київ: Техніка. - 1992. - 168 с.
38 .Сильвестер П., Феррари Р. Метод конечних злементов для
радиоинженеров и инженеров - злектриков - М.: Мир. - 1986. - 230 с.
39 .Сегерлинд Л. Применение метода конечних злементов - М.: Мир. -
1979. - 392 с.
4О .Тамм И.Е. Основи теории злектричества - М.: Наука, 1976. - 616 с.
41 .Тихонов А.Н., Самарский А.А. Уравнения математической физики -
М.: Наука. - 1977. - 735с.
42 .Теория и методи расчета асинхронних турбогенераторов / под ред.
И.М. Постникова/ - Киев, Наукова думка, 1977. - 176 с.
43 .Трещев И.И. Методи исследования злектромагнитньїх процессов в
машинах переменного тока - Л.: Знергия.- 1969. - 272 с.
44 .Туровский Я. Техническая злектродинамика - М.:3нергия. -1974. -
488 с.
45 .Уайт Д., Вудсон Г. Злектромеханическое преобразование знергии -
М.: Знергия. - 1964. — 527 с.
46 .Физический знциклопедический словарь. - М.: Советская
знциклопедия. -1984. — 944с.
47 .Филиппов И.Ф. Теплообмен в злектрических машинах — Л.:
Знергоатомиздат. - 1986. - 255 с.
48 . Фильц Р.В. Математические основи теории злектромеханических
преобразователей - Киев: Наукова думка. - 1979. - 206 с.
49 . Фрищук Н.Г., Васьковский Ю.Н., Бондарь Л.Н. Математическое
моделирование злектромагнитнмх полей и джоулевьіх потерь в
рельсовом ускорителе П Техническая злектродинамика. -1992. - № 5.
-С.3-11.
50 . Численнеє моделирование и разработка конструкций злектрических
машин с учетом взаимного влияния физических полей. Казаков Ю.Б. -
автореферат докт. дис., М., 2000. -39с.
51 . Шимони К. Теоретическая злектротехника — М.: Мир. -1964. — 774 с.
Навчальне видання
Васьковський Юрій Миколайович
Польовий аналіз
електричних машин
Навчальний посібник
В авпні/хі.кіи і'чЬіьііП
Надруковано з оригінал-.махета іачопшімі
Гсмплан 2007 р., поз. 1-2-015
Піди, до друку 17.10.2007. Формат 60x84’/к- Папір офс. Гарнітура Тішев.
Спосіб друку - ризографія. Ум. друк. арк. 11,16. Обл.-ввд. арк. 18,56. Зам. 1 Іаклцд 150 іір
НТУУ «КІП» ВШ ВПК «Політехніка»
Свідоцтво ДК № 1665 від 28.01.2004 р.
03056, Київ, вул. Політехнічна, 14, корп. 15
тел./факс (044) 241-68-78