/


































































Author: Белоусов Ю.М. Кузнецов В.П. Смилга В.П.
Tags: справочник высшая математика
ISBN: 978-5-91559-187-4
Year: 2014




Text
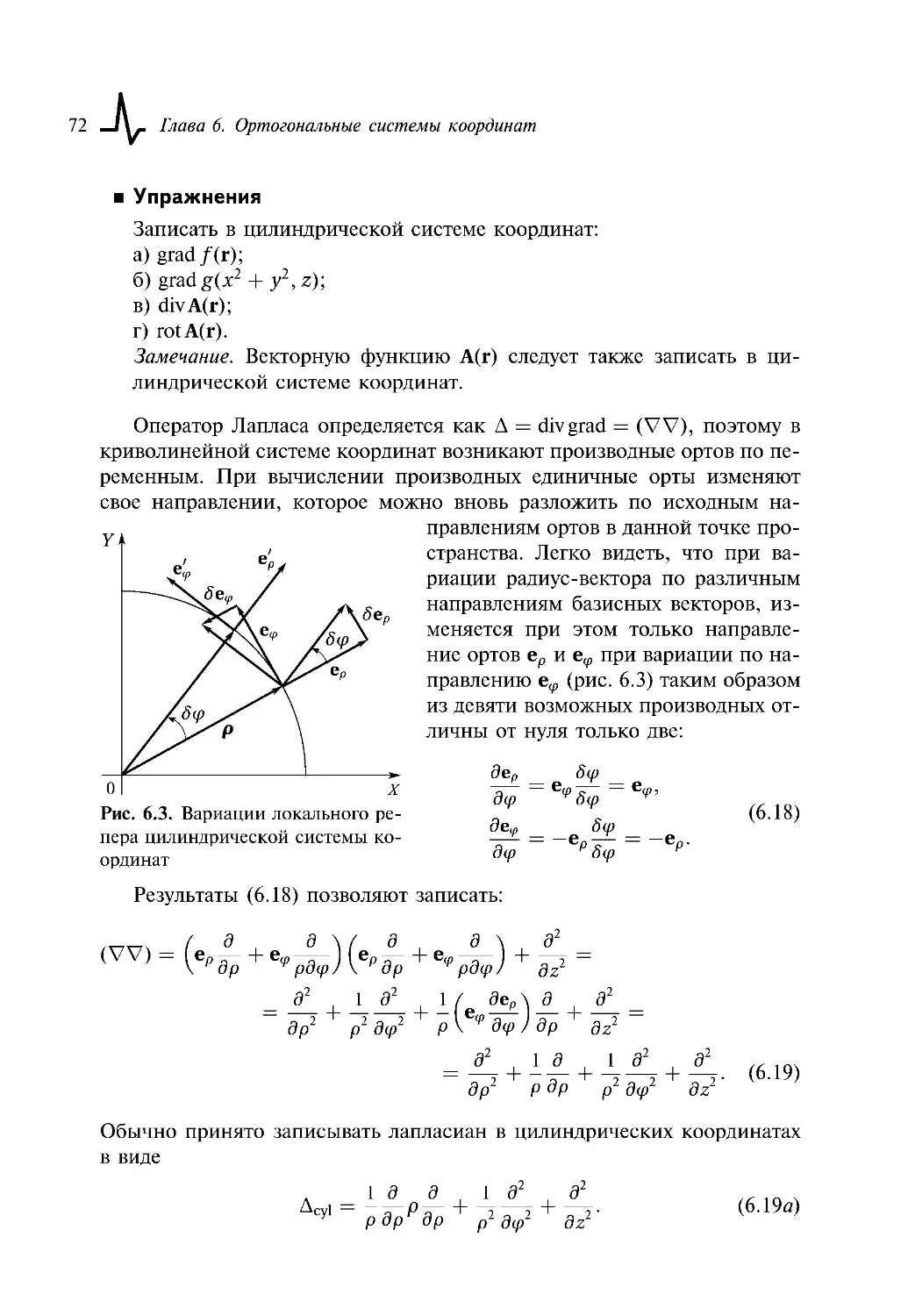
ФИЗТЕХОВСКИЙ УЧЕБНИК
Ю.М. БЕЛОУСОВ, В.П. КУЗНЕЦОВ, В.П. СМИЛГА
ПРАКТИЧЕСКАЯ
МАТЕМАТИКА
РУКОВОДСТВО ДЛЯ НАЧИНАЮЩИХ
ИЗУЧАТЬ ТЕОРЕТИЧЕСКУЮ ФИЗИКУ
Справочно-методическое руководство
Второе издание
Л
Издательский Дом
ИНТЕЛЛЕКТ
ДОЛГОПРУДНЫЙ
2014
Ю.М. Белоусов, В.П. Кузнецов, В.П. Смилга
Практическая математика. Руководство для начинаю-
щих изучать теоретическую физику: Учебное пособие /
Ю.М. Белоусов, В.П. Кузнецов, В.П. Смилга — Долго-
прудный — 2-е изд.: Издательский Дом «Интеллект», 2014.
- 176 с.
ISBN 978-5-91559-187-4
Представлен справочно-методический материал по различным раз-
делам высшей математики, имеющий большое применение при
изучении курса теоретической физики: линейная алгебра, различ-
ные системы координат и их преобразования, преобразования сим-
метрии, элементы векторного анализа и тензорной алгебры в трех-
мерном евклидовом пространстве, техника замены переменных,
применение методов теории функций комплексного переменного
и функции Грина. Специальные главы посвящены разделам, кото-
рым, как правило, не уделяется достаточно внимания в стандарт-
ных курсах высшей математики: элементам псевдоевклидовой гео-
метрии, представлениям обобщенных функций, а также математическому
аппарату квантовой механики.
В заключении представлены краткие сведения о выдающихся
ученых, внесших определяющий вклад в развитие математики.
Первое издание учебного пособия широко используется в веду-
щих российских университетах.
Для студентов, изучающих теоретическую физику.
ISBN 978-5-91559-187-4 © 2009, Ю.М. Белоусов,
В.П. Кузнецов, В.П.Смилга
© 2014, ООО «Издательский Дом
«Интеллект», оригинал-макет,
оформление
ОГЛАВЛЕНИЕ
Предисловие........................................................ 6
Глава 1
Аксиоматический метод.............................................. 8
1.1. Введение.................................................... 8
1.2. «Начала» Евклида........................................... 10
1.3. Система аксиом Г. Вейля..................................... 15
Глава 2
Элементы линейной алгебры.......................................... 18
2.1. Основные понятия............................................ 18
2.2. Преобразования системы базисных векторов.................... 25
2.3. Эрмитовы операторы и матрицы................................ 27
Глава 3
Преобразования симметрии в трехмерном пространстве................. 29
3.1. Преобразования системы координат........................... 29
3.2. Преобразования поворота.................................... 30
3.3. Отражения в плоскости...................................... 32
3.4. Группа преобразований симметрии............................ 33
Глава 4
Векторная и тензорная алгебра в трехмерном евклидовом пространстве .... 35
4.1. Введение................................................... 35
4.2. Скаляр, вектор, тензор..................................... 37
4.3. Операции с тензорами....................................... 38
4.4. Симметрии трехмерного пространства и матрица поворота..... 41
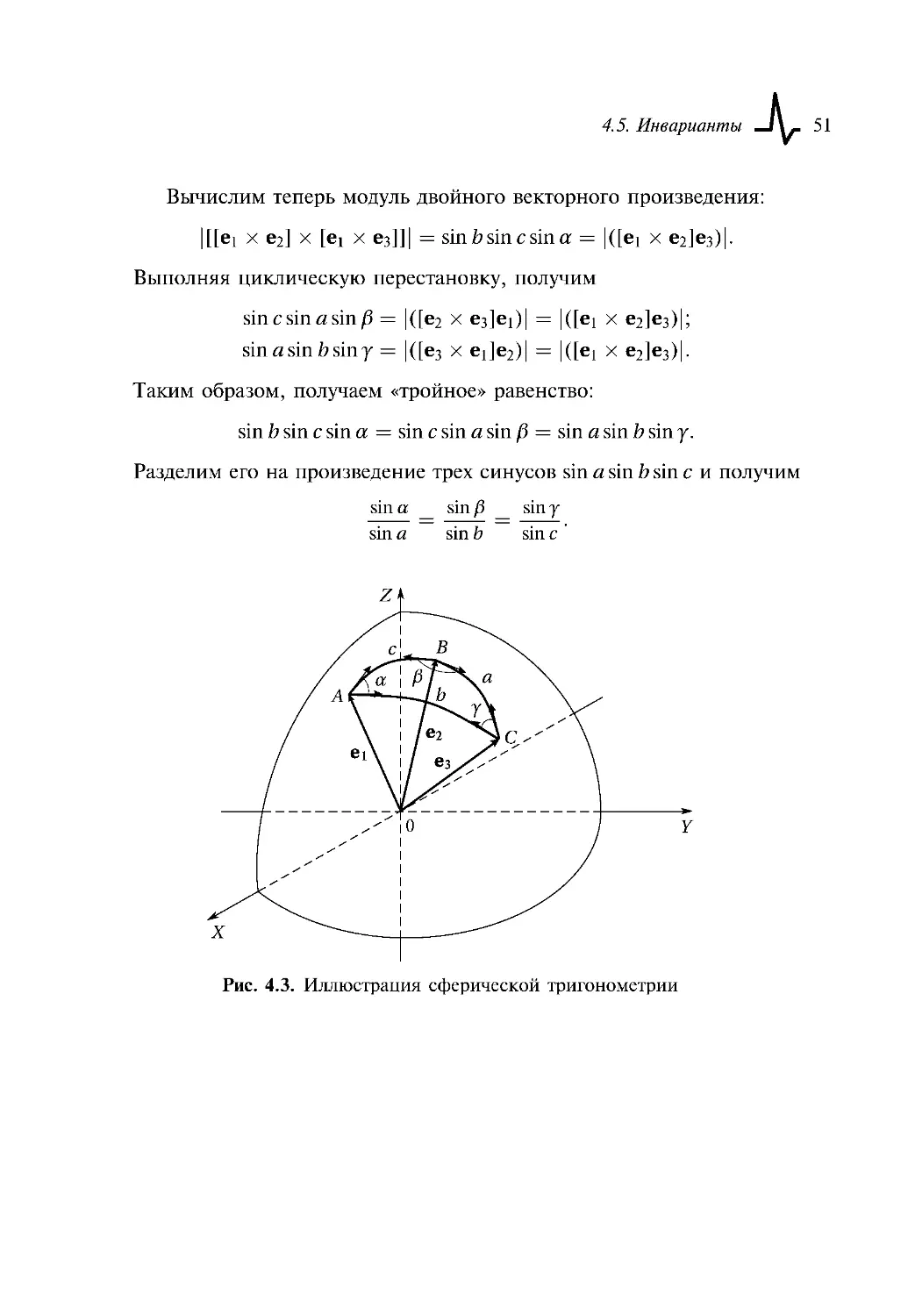
4.5. Инварианты................................................. 45
4 -J\, Оглавление
Глава 5
Элементы векторного анализа в трехмерном евклидовом пространстве .... 52
5.1. Основные понятия векторного анализа....................... 52
5.2. Действия с оператором V................................... 55
5.3. Операции векторной алгебры в тензорных обозначениях....... 60
5.4. Интегральные формулы векторного анализа................... 61
5.5. Преобразование интегральных выражений .................... 64
Глава 6
Ортогональные системы координат.................................. 67
6.1. Основные физические системы координат..................... 67
6.2. Операторы V и Д в цилиндрической системе координат........ 70
6.3. Операторы V и Д в сферической системе координат........... 73
Глава 7
Замена переменных, якобиан....................................... 76
7.1. Замена переменных в многомерных интегралах................ 76
7.2. Якобиан................................................... 80
Глава 8
Псевдоевклидово пространство СТО................................. 83
8.1. Метрический тензор........................................ 83
8.2. Метрика Минковского....................................... 87
8.3. Тензорная алгебра в четырехмерном пространстве Минковского . . 91
Глава 9
Некоторые применения теории функций комплексного переменного.... 95
9.1. Основные понятия.......................................... 95
9.2. Дифференцирование и интегрирование аналитических функций . . 100
9.3. Нули и особые точки аналитических функций................. ПО
9.4. Вычеты. Контурное интегрирование......................... 112
9.5. Гамма-функция и другие функции, определенные интегралами . . 117
9.6. Метод Бореля............................................. 121
Глава 10
Применение обобщенных функций................................... 124
10.1. Введение.................................................. 124
10.2. 5-функция................................................. 125
10.3. Представления <5-функции.................................. 126
10.4. Свойства <5-функции....................................... 130
10.5. Функция Хевисайда в(х), sign х и рД....................... 134
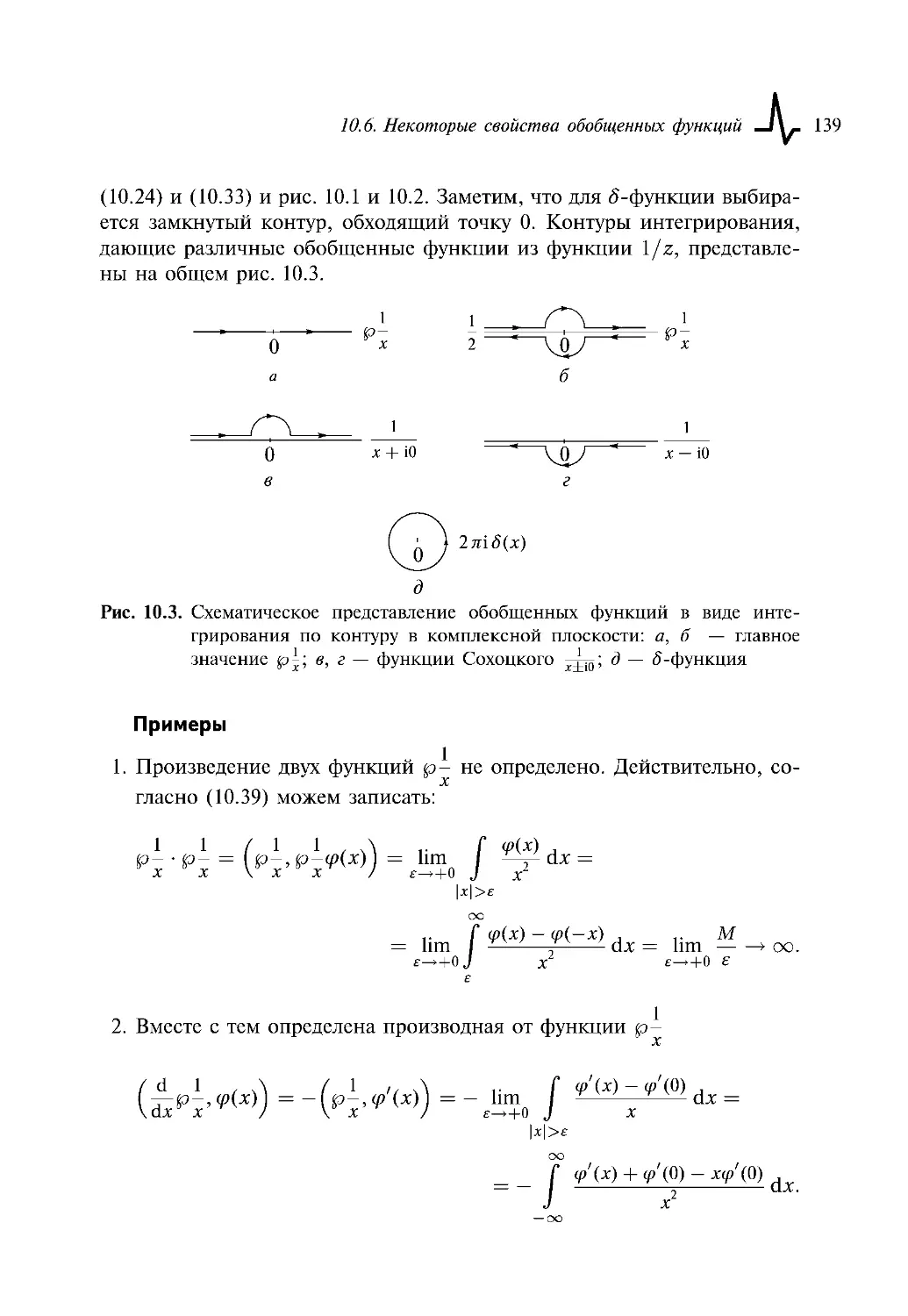
10.6. Некоторые свойства обобщенных функций..................... 138
Оглавление 5
Глава 11
Геометрия и алгебра в математическом аппарате квантовой механики .... 141
11.1. Основные понятия......................................... 141
11.2. Операторы в гильбертовом пространстве.................... 144
11.3. Собственные значения и собственные векторы операторов.. 147
11.4. Проекционный оператор.................................... 149
11.5. Представление векторов и операторов матрицами............ 150
11.6. Непрерывный спектр....................................... 152
Глава 12
Некоторые применения функций Грина............................. 154
12.1. Основные понятия и свойства функции Грина................ 154
12.2. Функция Грина волнового уравнения. Запаздывающие потенциалы 155
12.3. Функция Грина стационарного уравнения Шредингера......... 159
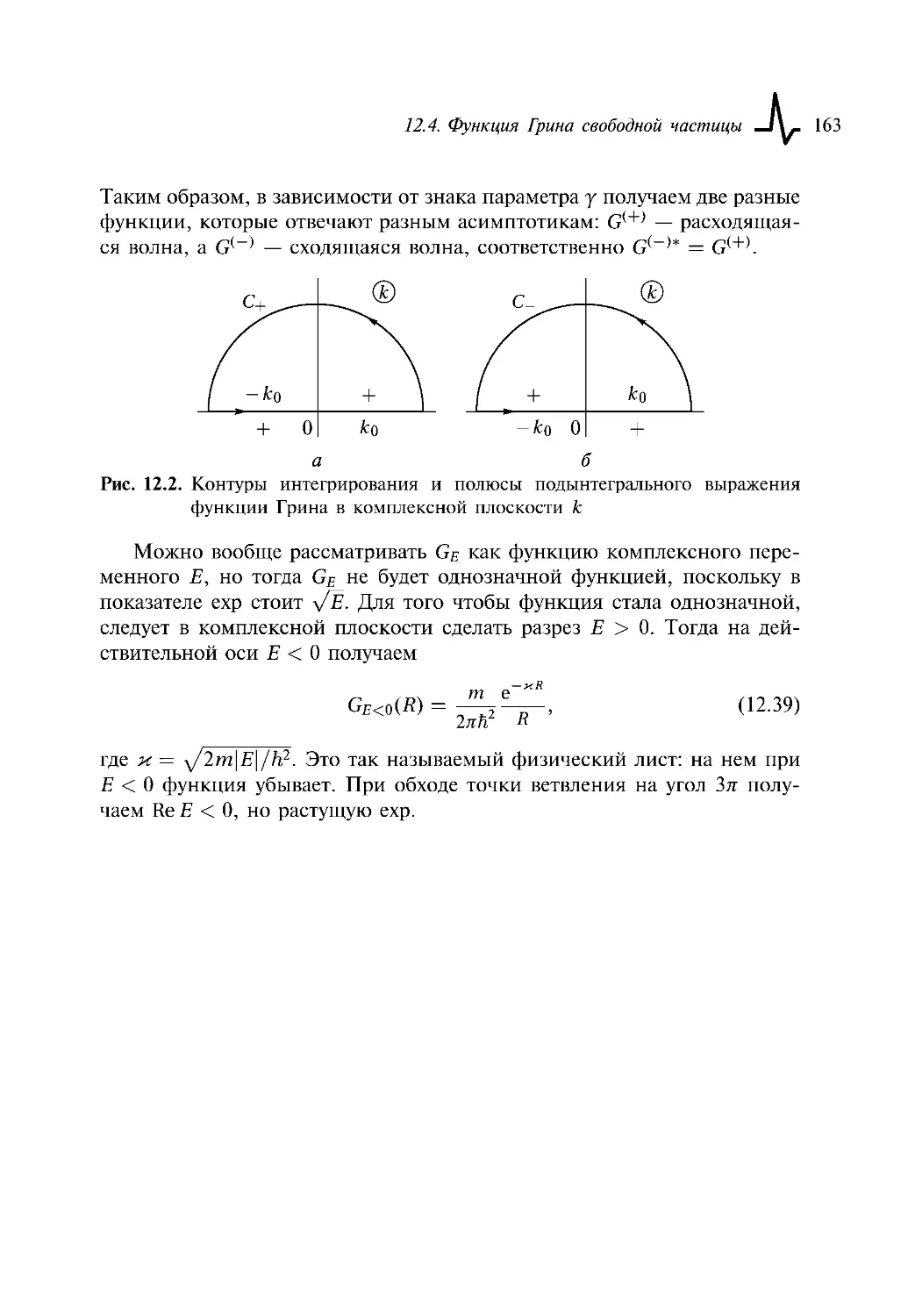
12.4. Функция Грина свободной частицы.......................... 161
Историческая справка........................................... 164
Список литературы.............................................. 175
ПРЕДИСЛОВИЕ
«Катехизис» (от греч. kathechesis — наставление, познание) — краткое
изложение вероучения в вопросах и ответах (словарь иностранных слов).
Перед вами не учебник и не задачник, но и не список формул, а прак-
тическое руководство по применению знаний, полученных в курсе мате-
матики, что и позволяет его понимать как «Катехизис». Катехизис — это
форма, издавна принятая как в религиозной, так и в русской литературе.
Кажется, один из первых отечественных катехизисов составлен генера-
лиссимусом Суворовым. «Военный катехизис», или «Наука побеждать».
Мы решили принять такую форму изложения не от хорошей жизни.
Многолетние и, увы, не всегда радостные беседы со студентами, при-
вели авторов к заключению, что некий «катехизис» по математике был
бы весьма невреден. Бесспорно, «катехизис» — это школярство. Но кто
доказал, что школярство столь уж зловредно. Нормальный средний сту-
дент вполне может несколько растеряться, прослушав обширный и пре-
красный комплекс математических курсов физтеха. А главное — он про-
сто не в состоянии оценить, какие именно разделы математики будут
необходимы при изучении той или иной прикладной дисциплины. Цель
нашего «катехизиса» — отметить и напомнить необходимый для работы
(изучения) теоретической физики математический аппарат. Безусловно,
мы не стремимся к какой-либо полноте или математической строгости.
И математики, наверное, найдут здесь массу неточностей, нестрогих, а,
может быть, и прямо неверных с точки зрения высокой науки форму-
лировок. И они будут правы. Но и мы правы. Кому-то из математиков
принадлежит эффектное замечание: Вейерштрасс и Кантор извлекли ду-
шу Ньютона и Лейбница из адского огня через полтораста лет, а Шварц
спас Дирака еще при жизни. Как, конечно, ясно просвещенным чита-
телям, имеется в виду строгое обоснование анализа и математическое
оправдание использование 5-функции — теория обобщенных функций.
Предисловие -'V 7
Авторы данной брошюры, находясь в трезвом уме и ясной памя-
ти, обрекают себя на пребывание в математическом аду ради облегче-
ния жизни юного поколения физиков. Более того, мы позволили себе
несколько вольный стиль с тем, чтобы подчеркнуть: «Не так страшен
чёрт...» и т. д. В заключение позвольте в педагогических целях проци-
тировать «катехизис» А. В. Суворова:
«За ученого трех неученых дают. Нам мало трех! Давай нам шесть!
Давай нам десять на одного! Всех побьем, повалим и в полон возь-
мем! ... — вот, братцы! воинское обучение! Господа офицеры! Какой
возторг!»
Итак, «катехизис».
ГЛАВА
АКСИОМАТИЧЕСКИМ МЕТОД
1.1. ВВЕДЕНИЕ
Аксиоматический метод в математике впервые (насколько
нам известно) был сформулирован Евклидом в его «Началах» [1]. «На-
чала» произвели такое исключительное впечатление и на современников
и на последующие поколения математиков (да и вообще всех ученых),
что более двадцати столетий полагались непревзойденным образцом ак-
сиоматического метода.
О самом Евклиде нам известно очень мало. Мы знаем только, что
жил и работал он при Птолемее I около 300 г. до н. э. в Александрии, что
он автор еще нескольких книг (самые интересные потеряны в веках), да
еще два анекдота, где Евклид выступает как благородный независимый
ученый. Будем верить, что он таков и был. А «Начала», повторимся,
вызывали восторженное восхищение арабов, средневековых европейских
философов, математиков, физиков более двух тысяч лет, в частности,
Ньютона и Эйнштейна.
Итак, аксиоматический метод. Его принципиальная схема внешне
выглядит весьма простой. Доказать какую-либо теорему в некоторой
дедуктивной системе — значит установить, что эта теорема есть необ-
ходимое логическое следствие тех или иных ранее доказанных теорем
(предложений). Последние, в свою очередь, должны быть доказаны и
т. д. Математическое обоснование таким образом сводилось бы к невы-
полнимой задаче бесконечного спуска, если не остановиться в каком-
либо месте. Но тогда должно существовать некоторое число утвержде-
ний — аксиом или постулатов, которые принимаются истинными без
какого-либо доказательства. В этом смысле аксиомы можно сравнить с
1.1. Введение -i\r 9
воинским уставом, либо с догматами какой-либо религии. Но далее все
оказывается существенно сложней.
Во-первых, аксиомы должны быть достаточно просты, и их должно
быть не слишком много. Иначе от них просто мало пользы.
Во-вторых, система должна быть непротиворечивой, т. е. никакие две
теоремы, выведенные на основе аксиом, не должны содержать взаимных
противоречий.
В-третьих, система аксиом должна быть полной, т. е. любая теорема
в данной области может быть выведена либо опровергнута на основе
аксиом.
Наконец, система должна быть независимой, т. е. ни одна из аксиом
не может быть логическим следствием остальных.
Но и это еще не все. Любая дедуктивная математическая система
оперирует с некоторыми объектами (например, в геометрии — треуголь-
ники, правильные многогранники и т. д.) Эти объекты определяются
через другие «более простые» и т. д. Как и в случае аксиом, мы неиз-
бежно приходим к тому, что некоторые понятия (объекты) должны быть
приняты за основные — неопределимые. Как говорят в математике: «Мы
не определяем эти понятия, а только называем».
Связь этих «основных» объектов с объектами реального мира для
формальной математической схемы несущественна. Они принимаются
чисто абстрактно и их математические свойства всецело вытекают из тех
соотношений между ними, которые утверждаются в аксиомах. В геомет-
рии Евклида, например, основные понятия — точка, прямая, принадле-
жать, между и т. д.
Если мы хотим, чтобы геометрия была применима к описанию физи-
ческой реальности, мы должны выбрать такие аксиомы и основные по-
нятия, чтобы они находились в согласии с доступными физической про-
верке (опытом) утверждениями относительно реальных («осязаемых»)
предметов.
В ином случае дедуктивная схема («математика») останется красивой,
но абстрактной игрой ума. Наиболее яркий пример — шахматы.
Подведем итоги. Дедуктивная (аксиоматическая) система изложения
сводится:
— к перечислению основных понятий;
— формулировке определений;
— формулировке аксиом;
— формулировке теорем;
— доказательству теорем.
Создание аксиоматического метода бесспорно можно считать одним
из величайших достижений человеческой мысли.
10 Глава 1. Аксиоматический метод
Насколько мы знаем, аксиоматический метод создавался в греческой
цивилизации в продолжение нескольких столетий многими поколения-
ми ученых: философов, астрономов, геометров.
Первым принято считать Фалеса Милетского (VII в. до н.э.), далее
Пифагора (VI в. до н. э.), Демокрита (V в. до н. э.), Платона (IV в. до н. э.),
Аристотеля (IV в. до н.э.), Евдокса и Теэтета (IV в. до н.э.) и многих,
многих других.
Однако работы этих замечательных ученых, где последовательно фор-
мулировался аксиоматический метод, либо полностью утеряны, либо до-
шли до нас в виде позднейших отрывков.
Нам еще повезло, что «Начала» сохранились полностью. Причем в
этом мы должны в большой мере благодарить арабскую цивилизацию.
Когда в эпоху раннего средневековья в Европе наука находилась, мяг-
ко говоря, в полудиком состоянии, на Востоке знали, чтили и изучали
Евклида.
Можно вспомнить, например, прекрасного астронома, математика,
философа Омара Хайама (1048—1131), который большинству известен
только как поэт.
1.2. «НАЧАЛА» ЕВКЛИДА
Итак, «Начала».
Замечательный немецкий математик Феликс Клейн в самом начале
двадцатого века провел полный и критический анализ «Начал» [2].
Но это был двадцатый век. Уже лет 70 как была создана неевкли-
дова геометрия Лобачевского—Бояи. Более того, математики привыкли
и приняли революционные идеи Римана, полностью переворачивающие
наши представления о геометрии мира.
А через тридцать лет обнаружили, что и Клейн отнюдь не выяснил
все в аксиоматике1). Но сейчас — «Начала».
И последуем Клейну.
«Начала» должны были дать лишь введение в изучение геометрии —
и вместе с тем и математики вообще — и при этом они были по-видимо-
') Курт Гёдель доказал в 1931 г. поразительную теорему: «В любой достаточ-
но богатой дедуктивной системе есть утверждения (теоремы), которые нельзя
доказать и нельзя опровергнуть» (Теорема Гёделя о неполноте). Что означа-
ют слова «достаточно богатая система», мы разбирать не будем. И отошлем
любознательных читателей к популярной книге В. А. Успенского [3]. Книга эта
хороша, но непроста. Сам предмет обсуждения, математическая логика и теория
алгоритмов, весьма тяжел для не-специалистов математиков.
1.2. «Начала» Евклида -JU 11
му приспособлены еще к одной совершенно особой цели: они должны
были дать изложение математики в том виде, в каком она считалась
необходимой с точки зрения платоновой школы, — как подготовка к
общим занятиям философией. Такое назначение «Начал» делает понят-
ным, почему главное значение придавалось выработке логических связей
и установлению замкнутой в себе системы геометрии, тогда как все
практические применения целиком отодвигались в сторону. В угоду этой
же системе Евклид, несомненно, оставил без внимания целую область
теоретического знания своего времени, которая тогда еще не настолько
развилась, чтобы могла уложиться в нее.
Перейдем теперь к тексту «Начал» и рассмотрим аксиоматический
метод на примере аксиоматики геометрии.
Как и положено для любой дедуктивной системы, «Начала» начина-
ются с аксиом, постулатов и определений.
Определения
У Евклида точка, линия, прямая, поверхность, угол, окружность и т. д.
Идеи, что определения есть основные неопределяемые понятия, у
Евклида еще не было. Мы их не определяем, а только называем —
говорим мы сейчас.
Например, у Евклида точка есть то, чего часть есть ничто, или ли-
ния есть длина без ширины, прямая — такая линия, которая одинаково
(равномерно) расположена относительно своих точек.
Клейн критикует (и справедливо) Евклида, но это уже был двадца-
тый век.
Различия между аксиомами и постулатами у Евклида постоянно об-
суждались потом. Ясно лишь то, что постулаты есть аксиомы, связанные
с геометрией. Аксиомы Евклид относил к общим фактам математики.
Будем помнить, что «Начала» в значительной мере посвящены не
только геометрии, но и основам арифметики и теории чисел.
Между прочим, в «Началах» есть поразительное по простоте и изя-
ществу доказательство, что число простых чисел бесконечно.
Постулаты
Они требуют, чтобы было возможно:
1. Провести прямую от любой точки до любой другой точки.
2. Неограниченно продолжить ограниченную прямую.
3. Описать из данного центра окружность, которая прошла бы через
данную точку.
4. Все прямые углы равны между собой.
5. Если прямая, пересекающая две прямые, образует внутренние по
одну сторону углы меньше двух прямых, то эти две прямые, продолжен-
12
—Глава 1. Аксиоматический метод
ные неограниченно, встречаются с той стороны, где сумма углов меньше
двух прямых.
Грубо говоря, постулаты у Евклида — это аксиомы, которые относят-
ся к свойствам геометрических фигур и геометрическим построениям.
Не очень ясен четвертый постулат. Именно, пользовался ли Евклид
понятием движения геометрических фигур без изменения при этом сво-
их внутренних свойств (т. е. может ли геометрическая фигура двигаться
как твердое тело).
Если так, этот постулат служит для введения идеи движения, но,
правда, в весьма несовершенной форме.
Впрочем, многие считают, что здесь просто имеет место какое-то
искажение оригинального текста «Начал», и Клейн меланхолично заме-
чает, что против этого трудно возразить.
Вообще, видимо, Евклид не очень стремился к идеальной строгости
в своей аксиоматике, а просто вводил первоначальные понятия и отно-
шения в терминах, которые должны были быть ясны каждому.
В В'
Рис. 1.1. Аксиома о жесткости треугольника «с хвостом»
В современной математике постулат 4 заменяется аксиомой «о жест-
кости треугольника «с хвостом» [4, С. 19]:
Аксиома 1. Если АВС — треугольник и точка D лежит на продолже-
нии стороны АС, а точка D' аналогично расположена по отношению к
треугольнику А1 В1 С1 (рис. 1.1), то из того, что
ВС = В1 С', С А = С'А', АВ = А'В1, BD = B'D',
следует, что
AD = a!d'.
Аксиому 1 можно использовать для распространения понятия равенства
отрезков на более сложные фигуры, как, например, углы, что позволяет
указать точный смысл отношения
ААВС = АА!в'С'.
1.2. «Начала» Евклида -JU 13
После этого нам уже не понадобится сомнительный принцип нало-
жения для того, чтобы можно было доказать предложение Евклида (1.4):
Аксиома 2. Если два треугольника имеют две соответствующие рав-
ные стороны и равные углы, содержащиеся между равными сторонами,
то они должны иметь равные третьи стороны и соответственно равные
оставшиеся углы, т. е. они должны быть равными треугольниками.
И наконец, знаменитый пятый постулат. Он мучил математиков Во-
стока и Запада более двух тысяч лет.
Во-первых обращала внимание сложная формулировка. Во-вторых
в «Началах» первые двадцать восемь теорем у Евклида доказывают-
ся без привлечения пятого постулата (так называемая «абсолютная
геометрия»).
Этот постулат выглядел скорее как теорема и не очень очевидная.
Далее, среди теорем «абсолютной геометрии» Евклид доказывает: Внеш-
ний угол треугольника всегда больше любого внутреннего угла, не смежного
с ним. Отсюда сразу видно, что если две прямые при пересечении с
третьей образуют внутренние углы, сумма которых равна 180°, прямые
не пересекаются (параллельны).
А пятый постулат Евклид дает как обратную теорему: Если две прямые
образуют с третьей (по одну ее сторону) внутренние углы, сумма которых
меньше 180°, то такие прямые пересекаются при достаточном продолже-
нии с этой стороны.
Следует помнить, что обратная теорема далеко не всегда верна, если
верна прямая.
В обратной теореме данным считается то, что доказывалось в пря-
мой, а доказывается, естественно, то, что в прямой считалось данным1).
Часто доказательство обратной теоремы может быть значительно слож-
ней, чем доказательство прямой.
Пример
Если треугольник АВС равнобедренный (АВ = ВС), то
1. ZA = ZC;
2. Высоты или медианы или биссектрисы углов А и С равны.
') С прямыми и обратными теоремами связана одна из распространенных
логических ошибок начинающих. Часто полагают, что из прямой теоремы
автоматически следует обратная. Как опровергающий эту идею пример можно
привести известное рассуждение капитана Врунгеля. Прямая теорема — всякая
селедка рыба, обратная: всякая рыба — селедка. Как доказал капитан Врунгель,
в данном случае обратная теорема неверна.
14 Глава 1. Аксиоматический метод
Обратные теоремы
Если в треугольнике АВС 1) ЛА = ZC; 2) высоты или медианы или
биссектрисы углов Л и С равны, то треугольник АВС равнобедренный
(АВ = ВС).
Предоставляем читателям убедиться, что теорема: Если две биссектри-
сы углов А и С равны, треугольник АВС равнобедренный (АВ — ВС) верна.
Доказательство довольно непросто. Доказательство обратной теоремы к
пятому постулату мучило математиков более двух тысяч лет.
Одним из первых комментаторов Евклида был Прокл (V в. н. э.)
Он пишет о пятом постулате: «Это положение должно быть совер-
шенно изъято из числа постулатов потому, что это теорема, вызываю-
щая много сомнений. И сам Евклид дает обращение этого положения
в качестве теоремы. Совершенно ясно, что должно быть найдено дока-
зательство, а такое требование природе постулатов совершенно чуждо:
Необходимо обнаружить его справедливость, но не как нечто, представ-
ляющееся очевидным без доказательства, а как предложение (теорему),
становящееся таковым благодаря доказательству.»
Далее Прокл «доказывает» пятый постулат, фактически приняв вме-
сто него новую аксиому: Расстояние между двумя не пересекающими-
ся между собой прямыми, расположенными в одной плоскости, остается
ограниченным.
Согласимся: аксиома Прокла выглядит совершенно естественно.
Смотрим далее. В XIII в. Насирэддин Туси исходит в своем доказа-
тельстве постулата Евклида из следующей аксиомы: Две прямые, лежа-
щие в одной плоскости и сближающиеся между собой в некотором направ-
лении, не могут начать расходиться в том же направлении, если они не
пересекаются.
Он же первый выяснил, что утверждение «сумма углов треугольника
равна двум прямым» равносильно пятому постулату.
Христофор Клавий (Германия, XVI в.) вводит аксиому: Три точки,
лежащие в одной плоскости с прямой по одну сторону от нее и равноуда-
ленные от нее и равноудаленные от этой прямой лежат на этой прямой.
Ваппис (Англия, XVII в.) пользуется аксиомой: Для каждой фигуры
всегда существует другая подобная ей фигура произвольной величины.
Плейфер (Англия, XVIII в.) вводит аксиому: Через точку вне прямой в ее
плоскости можно провести только одну прямую, не пересекающую данную.
Такой аксиомой и заменяется аксиома Евклида в современных учеб-
никах элементарной геометрии.
Лежандр (Франция, XVIII—XIX вв.) основывается на аксиоме: Через
всякую точку, расположенную между сторонами угла, можно провести
прямую, пересекающую обе стороны этого угла.
1.3. Система аксиом Г. Вейля -JU 15
Можно только восхищаться Евклидом, тем, что он безусловно созна-
тельно сформулировал пятый постулат в такой сложной форме.
1.3. СИСТЕМА АКСИОМ Г. ВЕЙЛЯ
1. Равные одному и тому же третьему равны также и между собой:
если а = b, b = с, то а = с.
2. Если к равным прибавляются равные, то и суммы равны:
если а = b, с = d, то а + с = b + d.
3. Если от равных отнимаются равные, то остатки равны:
если а = b, с = d, то а — с = b — d.
4. Налагающиеся друг на друга равны.
5. Целое больше части:
а > а — Ь.
Четыре из этих аксиом имеют логическую природу, и в данном слу-
чае они должны, очевидно, констатировать то, что выражаемые ими
общие отношения имеют место также и для всех рассматриваемых гео-
метрических величин (отрезков, углов, площадей и т. д.) Четвертая же
аксиома говорит о том, что в конечном счете решающим моментом
для равенства или неравенства является конгруентность или совпадение
при наложении, хотя опять-таки остается, конечно, неясным, предпо-
лагается ли здесь идея движения или нет. Что же касается различия
между аксиомами и постулатами, то первые связаны с простейшими
фактами логики, а вторые — с простейшими фактами пространственной
интуиции. Это было бы очень удачным и вразумительным решением
вопроса, если бы только мы были убеждены в том, что известный нам
текст «Начал» в точности соответствует оригиналу. Но в действительно-
сти в рукописях встречаются существенные отклонения в расположении
и содержании постулатов.
Полную непротиворечивую систему аксиом ввел Гильберт [5]. Но
при всем уважении к ней мы не будем здесь о ней говорить.
Герман Вейль предложил совершенно иную систему аксиом, особен-
но ценную для нас, физиков. Прежде всего, вводятся первичные по-
нятия: точка и вектор. Вейль популярно объясняет, что есть вектор:
В то время, как отрезок обладает только длиной, вектор обладает дли-
ной и направлением. Вектор, по существу, то же, что перенос, хотя для
16 Глава 1. Аксиоматический метод
векторов и переносов применяют различную терминологию. Вместо того,
чтобы говорить о переносе а, переводящем точку А в точку А', говорят о
-------------->
векторе а = АА1, а вместо слов «Перенос а переводит точку А в точку А1»
говорят, что точка А! — конец вектора а, отложенного от точки А. Тот
же вектор а, отложенный от точки В, имеет конец в точке В', если
перенос, переводящий А в А', переводит В в В'. [6, С. 71].
Мы настоятельно рекомендуем читателю запомнить эти слова.
Далее, вводятся следующие аксиомы1).
В основу своего понимания термина «евклидово пространство»
Г. Вейль кладет объекты двух родов: «векторы» и «точки». Связь между
векторами и точками определяется тем, что каждым двум точкам А и В
—>
отвечает единственный вектор АВ, а каждой точке А и вектору а — един-
—>
ственная точка В такая, что АВ = а; кроме того, при любых точках А,
В и С
АВ + ВС = АС.
Далее, для векторов определены операции сложения и умножения
вектора на число, удовлетворяющие всем обычным свойствам; после
этого прямая АВ определяется как совокупность всех таких точек М,
что
ОМ = ОА + ХАВ,
где точки О, А и В фиксированы, а Л — произвольное число.
') Здесь мы цитируем предисловие И. М. Яглома [7] к прекрасной книжке
Вейля «Симметрия». Исаак Моисеевич и его брат-близнец Акиба Моисеевич
были (увы, их уже нет) замечательными русскими педагогами, и самый древний
из авторов этой книжки имел радость в последние военные и первые послево-
енные годы заниматься у них в математическом кружке Мехмата на Моховой
(8—10 класс). Есть было мало чего, полуслепые лампочки еле освещали хо-
лодную аудиторию, жизнь была прекрасна, девочки (почти все) хорошенькие
и целомудренные, страной заведовал светоч и величайший гений всех времен
и народов (см. газеты той эпохи), война была далеко, мы побеждали, и в
продаже в Москве появилось мороженое — а миллионы, отдыхавшие в Воркуте,
Норильске, Магадане и на прочих курортах нашей бескрайней Родины, также
были далеко. Молодые Ягломы рассказывали нам о проективной и аффинной
геометрии, о комплексных числах, еще о чем-то, и жизнь была прекрасна. И. М.
и А. М. — авторы более десятка чудных популярных книг по элементарной
математике и истории математики. Здесь мы не будем говорить об их чисто
научных оригинальных работах. В работе кружка участвовал и ныне заслужен-
ный профессор физтеха, а тогда тоненький студент (или аспирант?) Александр
Александрович Абрамов. Авторы рады пожелать ему самого-самого лучшего.
1.3. Система аксиом Г. Вейля -JU 17
Плоскость АВС определяется как совокупность всех таких точек М,
что
ОМ - ОА + ЛАВ + рАС,
где точки О, А, В иС фиксированы, а числа Л и /г произвольны.
Наряду с этим множество векторов должно удовлетворять аксиоме
размерности', каждые четыре вектора должны быть линейно зависимы,
но три линейно независимых вектора должны существовать.
Наконец, в множестве векторов должно быть определено скалярное
умножение, сопоставляющее любым двум векторам а и b число ab, удо-
влетворяющее условиям
— коммутативности', ab = Ьа для любых векторов а, Ь;
— линейности'. (Aiai + Л2а2)Ь = A|(a|b) I Aifa^h) для любых векторов
ai, аг, b и любых чисел Л], Лг;
— положительной определенности', а2 = аа > 0 при а / 0 (где 0 — нуль-
вектор, прибавление которого не меняет никакого вектора) и а2 = 0 при
а = 0.
Аксиоматика Вейля, повторимся, особенно близка физикам. Во-пер-
вых, она годится для многомерных (в том числе и бесконечномерных)
пространств. Во-вторых, легко обобщается на пространство Минковско-
го (псевдоевклидова метрика). Наконец, скалярное произведение может
быть введено как произведение двух векторов из разных пространств,
если между векторами в этих пространствах можно установить взаимно-
однозначное соответствие. В квантовой механике мы встречаемся имен-
но с такой ситуацией. Скалярное произведение — результат произведе-
ния вектора в прямом пространстве и вектора в комплексно-сопряжен-
ном (точнее, эрмитово-сопряженном) пространстве. Этот факт впервые
ясно осознал великий Поль—Морис Дирак, что резко упростило мате-
матический аппарат квантовой механики.
Если отказаться от требования положительности скалярного произ-
ведения, в частности, положительной определенности а2, (именно, допу-
стить a2 Js 0), мы переходим к псевдоевклидовой метрике пространства
Минковского или к метрике специальной теории относительности и
релятивистской квантовой механики. Наконец, подход Вейля позволя-
ет элегантно ввести важнейшие понятия преобразований симметрии и в
частности понятие автоморфизма — преобразования пространства или
фигуры, не изменяющего их. В следующих главах мы вернемся к фор-
мальному анализу всего, о чем говорилось, но будем твердо помнить,
что в основе идей Вейля — утверждение: Вектор по существу то же,
что перенос.
ГЛАВА
ЭЛЕМЕНТЫ ЛИНЕИНОИ АЛГЕБРЫ
2.1. ОСНОВНЫЕ ПОНЯТИЯ
Начнем с напоминания некоторых важных понятий1).
Линейное {векторное) пространство — это множество элементов V,
называемых векторами, для которых определены две операции:
1) сложения, согласно которой двум элементам пространства ставит-
ся в соответствие третий, также принадлежащий V;
2) умножения вектора на число (вещественное или комплексное).
Линейное пространство образуют, например, непрерывные функции
f(t), определенные на некотором отрезке а < t < b. В этом случае функ-
ции f(t) также называют векторами.
Операции сложения векторов и умножения их на число, в принципе,
допускают наглядную интерпретацию. Будем обозначать их жирными
буквами.
Вначале введем понятие линейной независимости («непараллельности»)
векторов а и Ь. Векторы а и b линейно независимы, если
аа + /ЗЬ 0 для всех а 0, /3 0. (2.1)
Максимальное число п линейно независимых векторов {е/}, i =
= 1,2, ...,п в данном векторном пространстве называется размерно-
стью этого пространства. Набор векторов {ег} образует базис простран-
ства Vn.
') Для желающих лучше вспомнить линейную алгебру, можем порекомендо-
вать известную книгу А. Г. Куроша [8].
2.1. Основные понятия 19
Любой вектор v G 1/„ можно представить в виде линейной комбина-
ции базисных векторов:
v=E^ei- (2-2)
i— 1
Утверждение (2.2) называется свойством полноты набора {ег} и его мож-
но рассматривать также как определение.
В физике принято соглашение, называемое правилом суммирования
Эйнштейна, согласно которому по дважды повторяющемуся индексу под-
разумевается суммирование и знак У не пишется.
Числа Vt называются координатами вектора v в базисе {ег}.
Согласно определению (2.2) операция сложения векторов означает
сложение их координат (чисел). Действительно,
а + b = + lye: = (а,- + Ь^е,. (2.3)
Операция умножения вектора на число есть операция умножения на это
число всех координат:
аа—аа^е,. (2.4)
Введенные формулы (2.2)—(2.4) позволяют представить пространство V
как пространство с системой координат, задаваемой набором базисных
векторов — ортов {ег}.
Координаты, представляющие вектор, можно записать в виде упоря-
доченной в соответствии с порядком нумерации базисных векторов {ег }
строки чисел, т. е., например,
а = (щ, at, ..., ап). (2.5)
Тогда сумма двух векторов (2.3), записанных в одном и том же бази-
се {ег} (2.5), будет также записана в виде строки упорядоченных чисел:
(яьа2, ..., ап) + (Ьг, b2, ..., Ьп) = (аг + bY, а2 + Ъ2, ..., ап + Ьп), (2.6)
а операция умножения вектора на число представляется строкой
аа — (aai, аа2, ..., аап). (2.7)
Представление вектора в виде упорядоченной строки чисел позволя-
ет и сами базисные векторы также представить в виде таких же строк.
Например, можно базисные векторы {ег} представить как
ej = (1,0, ...,0), е2 = (0,1, ...,0), ..., е„ = (0, 0, ..., 1). (2.8)
До тех пор, пока мы не указали способ определения координат век-
тора в данном базисе, написанные выше формулы не имеют особого
20 -*v- Глава 2. Элементы линейной алгебры
практического применения, поскольку мы фактически не определили
сам вектор. Вектор будет определен, когда будет указана строгая регу-
лярная процедура сопоставлению ему упорядоченного набора чисел. Эта
процедура достигается путем дальнейшего сближения векторной алгебры
и геометрии, если ввести понятия длины вектора и угла между векторами
линейного пространства V, определив скалярное произведение.
В комплексном линейном пространстве определено скалярное про-
изведение двух векторов х и у. Это скаляр (число), обозначаемое (х, у),
удовлетворяющее условиям1):
1)(х,у) = (У,х)*, (2.9)
2) (у, axi + /Зх2) = a(y,xi) + 0(у,х2), (2.10)
3) (х, х) > 0, (х, х) — х2 = 0 только при х — 0. (2.11)
Векторы х и у ортогональны, если (х, у) = 0.
В физике обычно (но не всегда) работают с ортогональными базиса-
ми (понятие нормированный — опустим)
(ej,efc) = 8ik. (2.12)
В этом случае для двух вещественных векторов х = х,е,- и у = у;е;
получаем
(х,у) = (Xtei,ykek) = Х1ук(е,,ек) = Xtyk8ik = х^. (2.13)
Упражнение
Показать, что система векторов в трехмерном пространстве
ej = (1,0,0), е2 = (0,1,1), е3 = (0,1,-1)
линейно независима.
Если базисные векторы неортогональны, калярное произведение двух
векторов определяется в виде квадратичной формы:
(х, у) = gikXtyk, (2.14)
где совокупность элементов
gik = (ei,ek) (2.15)
') Требование неотрицательности квадрата вектора (2.11) обязательно только
в евклидовом пространстве. Как будет видно в гл. 8, квадрат вектора в псевдо-
евклидовом пространстве Минковского может быть и отрицательным.
2.1. Основные понятия. 21
составляет метрический тензор2). Метрический тензор играет важную
роль в построении математического аппарата для описания физических
явлений.
Элементами линейного пространства могут быть не только упорядо-
ченные совокупности-строчки из определения (2.1), но и таблицы раз-
мером т х п элементов:
ап
Й21
Я12
Я22
Множество матриц с т строками и п столбцами образует линейное
пространство размерности т х п. Убедитесь, что для матриц выполня-
ются оба условия определения!!!
Очевидно, базис в таком пространстве составляют также матрицы
т х п.
Пример
В пространстве матриц 2 х 2 в качестве базиса можно выбрать матрицы:
/1 0\ /О 0\
Очевидно, вместо матриц (2.17) можно выбрать любую их линейную
комбинацию. В физике чаще всего используют такую:
Матрицы (У\ — ах, а 2 = ау, ay = az называются матрицами Паули.
Особое место занимает единичная матрица I.
Часто, особенно в теории углового момента, выбирают в качестве
базисных не матрицы ах и (Ту, а их линейные комбинации сг± = ax±iay:
О 2\ /О О
2) Определение и свойства тензоров будут даны в гл. 4.
22
_Глава 2. Элементы линейной алгебры
Упражнение
Показать, что квадрат ненулевых матриц <т= равен нулю, т. е. = 0.
Дадим еще ряд определений.
Транспонированной матрицей А называется матрица
А= (aij) = (а}1). (2.19)
Комплексно сопряженная матрица:
А* = (я*.). (2.20)
Эрмитовски сопряженная матрица
А+ = (я0)+ = (я*Д = А*. (2.21)
Если А+ = А, матрица называется эрмитовой. Эрмитовы матрицы име-
ют очень большое значение в физике. Всем физическим величинам в
квантовой механике соответствуют обязательно эрмитовы матрицы.
Напомним основные свойства эрмитовых матриц.
1. Собственные значения эрмитовой матрицы действительны.
2. Собственные векторы представляют базис.
Произведение матриц А • В имеет смысл, если число столбцов мат-
рицы слева (А) равно числу строк матрицы справа (В).
А • В = т х п х
п
х
к
т
х
к
или
А- В =
(2.22)
(2.22а)
п
X
к
| fc х m |
п х т
х
Основные свойства произведения матриц.
1. Умножение (матриц) ассоциативно:
(АВ)С = А(ВС).
2. (АВ)+ = В+А+. Доказать!
3. Для квадратных матриц можно ввести понятие коммутатора'.
АВ — В А = [А, В] ф 0 в общем случае.
2.1. Основные понятия -JU 23
Примеры
1. (Т10-2 = 1СТз; (О'1О’2)+ = О-+сг+ = (72<Т1 = -кг3.
2. [СТ1,о-2] = i2<r3.
3. о-1СТ2сгз = i.
Матрица А имеет обратную матрицу А~1, если
AA~l = 1; Л-1Л=1. (2.23)
Для квадратной матрицы, определитель которой det Л 0, всегда суще-
ствует обратная.
Если Л и В — квадратные матрицы, то
йеЦЛВ) = (det 4)(det Д). (2.24)
Если det Л 0 и АВ = 0, то В — 0. (2.25)
Матрица U называется унитарной, если
U+U = 1, соответственно, U~l = U+. (2.26)
Матрица, состоящая из одной строки или одного столбца — вектор.
Вектор-строка получается из вектора-столбца операцией транспониро-
вания или эрмитовского сопряжения. Будем обозначать:
/хА
|х> = : ; (х| = (|х))+ = «,...,<). (2.27)
\Хп/
Вспоминая введенные выше базисные векторы (2.8), можно записать:
|х) = хг|е;), где х,- = (е/|х). (2.28)
Если А — матрица, получаем очевидное следствие:
Л|х> = |у>, (Л|х))+= (х|Л+= (у|. (2.29)
Произведение квадратной матрицы на вектор есть линейное преоб-
разование координат данного вектора в другие координаты этого вектор
в этом же пространстве.
Согласно правилу матричного умножения, скалярное произведение
(2.13) двух векторов можно записать в виде
(У,х) = = У*х1-
(2.30)
24 -*v- Глава 2. Элементы линейной алгебры
Если для некоторой матрицы U, имеющей обратную, выполняется
условие
U~l = U+ и, соответственно, U+U = 1, (2.31)
она называется унитарной.
Унитарные матрицы U осуществляют унитарные преобразования
U\x) = |х'), сохраняющие скалярное произведение:
(/Ю = (y\U+U\x) = <у|1|х> = <у|х>. (2.32)
Теперь мы готовы к определению оператора G, т. е. операции, перево-
дящей вектор |х) в вектор |у) того же пространства'.
|у) = G|x). (2.33)
Оператор G называется линейным, если
G(a|x) + j6|y)) = aG|x) + fiG\y). (2.34)
Оператор G задается в пространстве векторов!
В «-мерном пространстве оператор G может быть представлен в виде
матрицы п х п.
Пусть задан базис |ег ), тогда для произвольного вектора |х) = X/ |еД
имеем
G|x) = xtG\ei}. (2.35)
Действие оператора G на произвольный вектор |х) полностью опреде-
ляется его действием на векторы базиса.
Очевидно:
G\et) = gik\ek)- (2.36)
Умножим (2.36) скалярно на (еу |, получим
(ej\G\ei) = gik(ej\ek) = gik8jk = gtj. (2.37)
Таким образом,
|х') = G|x) = xtgik\ek}. (2.38)
Матрица g,k оператора G — есть матрица линейного преобразования,
она определяет «новые» координаты х'к = Xtgik вектора в «старом» ба-
зисе. Отметим, что это преобразование координат описывается умноже-
нием строки (xi, ..., х„) на матрицу (g/fc).
2.2. Преобразования системы базисных векторов —’ V- 25
Пример
В качестве линейного преобразования А рассмотрим поворот вектора
в трехмерном пространстве относительно оси z на угол
х' = х cos <ро — у sin </>о
у' = у cos (ро + х sin </>о
/ = Z
= cos (ро,
«22 = COS (/?(),
«И = 1,
«21 = — sin<po,
«12 = sinfpo,
Я13 — ^31 — а32 — й23 — 0;
(2.39)
(&ik) —
COS <ро
— sin <ро
sin <ро 0
cos <ро 0
0 1
det(aijt) = 1; (aikl) = (aik) = (aik)+.
Или A 1 = A = A+.
Если записать координаты вектора г в виде столбика, получаем
г' = А-1г. (2.40)
Важный вывод
Матрица G = (gik) определяет закон преобразования базисных век-
торов (2.36).
Матрица G-1 = (g^1) определяет закон преобразования компонентов
вектора, записанного в том же базисе, что и G.
Очевидно, все свойства квадратных матриц присущи операторам:
1. G* — комплексно сопряженный оператор.
2. G — транспонированный оператор.
3. G+ — эрмитовски сопряженный оператор.
4. det G = det(giJt) — не зависит от выбора базиса и т. п.
2.2. ПРЕОБРАЗОВАНИЯ СИСТЕМЫ БАЗИСНЫХ ВЕКТОРОВ
Итак, оператор полностью определяется действием на ба-
зисные векторы и, соответственно, полностью определяется заданием
координатной системы. В качестве базисных векторов в физике обычно
выбирается система ортогональных векторов, нормированных на единицу.
26
_Глава 2. Элементы линейной алгебры
Важное место занимают операторы, которые преобразуют систему
базисных векторов (систему координат). При этом новая система базис-
ных векторов тоже должна быть ортонормированной. Легко видеть, что
таким операторам должны в общем случае соответствовать унитарные
матрицы (сохраняющие скалярное произведение!), поэтому операторы,
описывающие преобразования системы координат, будут унитарными.
Пример
В некоторых задачах удобно выбирать не декартовы, а так называе-
мые циклические координаты:
(2.41)
Переход к базису (2.41) осуществляется матрицей
/е+\ /1/V2
е = 1/д/2
yez у у О
^1/У2
(tik) = 1/^2
\ 0
i/V2
—i/x/2
О
i/V2
-i/Vl
О
О
о
1
(2.42)
Матрица (Г^) унитарна. Соответственно, этому преобразованию соот-
ветствует унитарный оператор Т:
Т+Т =
( 1/^2 1/У2 о'
-i/^2 i/Уг о
0 0 1
/1/д/2 i/x/2 o'
1/У2 -1/У2 0
0 0 1
/1 о о\
О 1 О =1. (2.43)
0 V
Матрица поворота относительно оси z на угол </>о действительна, А+ = А,
А А = L
Матрица А описывает ортогональное преобразование.
Пример
В двумерном вещественном пространстве ортогональную матрицу V
всегда можно представить в виде
1) если det V = 1, 1 cosy/ sim/<
I — sin у/ cos
2) если det V = -1, I cosy/ sim/<
I sin у/ - • cos
где у/ = v + iw.
2.3. Эрмитовы операторы и матрицы -* V- 27
В частности, если det А = 1, то ip — <ро — действительно.
Пусть U — унитарное преобразование:
\е'{} = U\et}; (е<| = (е,-|П+, (2.44)
Тогда в «новом базисе» оператор G описывается матрицей
(e<|G|4> = (ei\U+GU\ek}. (2.45)
Иными словами, при унитарном преобразовании U «новый» опера-
тор, записанный в старом базисе имеет вид
х*^ х^ Х*-ч х*^
G = U+GU. (2.46)
Поясним еще раз смысл формулы (2.46). Линейный оператор G есть
правило, согласно которому каждому вектору |х) линейного простран-
ства ставится в соответствие вектор |х') того же пространства. Од-
нако это правило может быть представлено в виде матрицы, кото-
рая определяется правилом воздействия на данные базисные векторы.
Очевидно, это представление зависит от выбора базиса.
2.3. ЭРМИТОВЫ ОПЕРАТОРЫ И МАТРИЦЫ
Оператор Н эрмитов (самосопряженный), если
Н+ = Н. (2.47)
Соответственно, матрица этого оператора (в ортонормированном базисе
евклидова пространства) тоже эрмитова.
Пример
Любая вещественная симметричная матрица — эрмитова.
Матрицы Паули — эрмитовы(1!)
Унитарное преобразование U наряду со скалярным произведением
сохраняет эрмитовосты
(U+HU)+ = (П)+(Н)+(Н)+)+ = и+ни.
Вектор |х) /О, удовлетворяющий уравнению
G|x)=A|x>, (2.48)
называется собственным вектором линейного оператора G, число А —
собственное значение этого оператора.
(x|G+ = А*(х|. (2.49)
28 _Глава 2. Элементы линейной алгебры
Упражнения
1. Собственные значения эрмитова оператора действительны. Показать,
используя определения (2.21) и (2.47).
2. Найти собственные значения и собственные векторы матриц Паули.
Собственные векторы эрмитова оператора представляют базис.
ГЛАВА
ПРЕОБРАЗОВАНИЯ СИММЕТРИИ
В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
3.1. ПРЕОБРАЗОВАНИЯ СИСТЕМЫ КООРДИНАТ
В предыдущей главе мы видели, что преобразования систе-
мы базисных векторов под действием каких-либо операторов полностью
описывает действие этого же оператора на произвольный вектор. В фи-
зике большую роль играют так называемые преобразования симметрии.
Под преобразованиями симметрии обычно понимаются такие действия с
системой, которые ее не изменяют, т. е. по отношению к которым систе-
ма инвариантна. Очевидно, преобразования симметрии для различных
систем могут быть различными, однако все они сводятся к некоторым
основным операциям, которые можно проделать с системой базисных век-
торов или, что то же, с системой координат в трехмерном пространстве.
Прежде всего заметим, что преобразования системы координат —
унитарны. В физике наиболее часто используются1)
1) поворот относительно какой-либо оси;
2) отражение относительно какой-либо плоскости;
3) преобразование инверсии (отражение относительно какого-либо
центра);
4) перенос (трансляция) начала отсчета на некоторый вектор.
Преобразования 1)—3) — так называемые точечные преобразования,
поскольку при них остается неподвижной хотя бы одна точка пространства.
В трехмерном пространстве операторам преобразований симметрии
соответствуют матрицы 3x3.
') В специальных случаях (например, фазовые переходы) рассматриваются
также масштабные преобразования.
30
__Глава 3. Преобразования симметрии в трехмерном пространстве
3.2. ПРЕОБРАЗОВАНИЯ ПОВОРОТА
В предыдущей главе мы получили в качестве примера вид
матрицы поворота на угол <р относительно оси z.
Упражнения
1. Покажите, что
ЦД<Р2) Uz(<Pi) = Uz(<px + <р2)-
2. Покажите, что
= П+(<р) = ЦД-</>).
det Uz((p) = 1.
Справедливо утверждение:
Если для некоторой матрицы преобразования R
dettf = 1,
то она описывает чистый поворот.
Замечание. Вид матрицы поворота не зависит от ориентации осей
(пространство изотропно!), но определяется только взаимным располо-
жением базисных векторов (осей координат).
Преобразования поворота относительно двух различных осей неком-
мутативны.
Пример
Проведем поворот на угол тг/2 относительно оси z'. Uz(ti/1), а затем
относительно оси х: Ux(n/2)'.
<1 0 ° \ /о 1 0 \ / 0 1 0
Ип(<р) = Uх(л/2) Uz(jt/2~) = 0 0 -1 0 0 -1 = 0 0-1
V 1 0 / д) ° 1 у ^-1 0 0
Проведем теперь операции в обратном порядке:
0 -1\
0 0^ Нп(<р).
1 0 /
/ 0
иП'((р') = Uz(ti/2) Ux(n/2) = -1
V
Две системы, (имеющие общее начало координат) совмещаются
поворотом на три угла Эйлера. Обычно считают одну из систем ко-
ординат неподвижной (лабораторной), а другую — подвижной (или
3.2. Преобразования поворота —’ V- 31
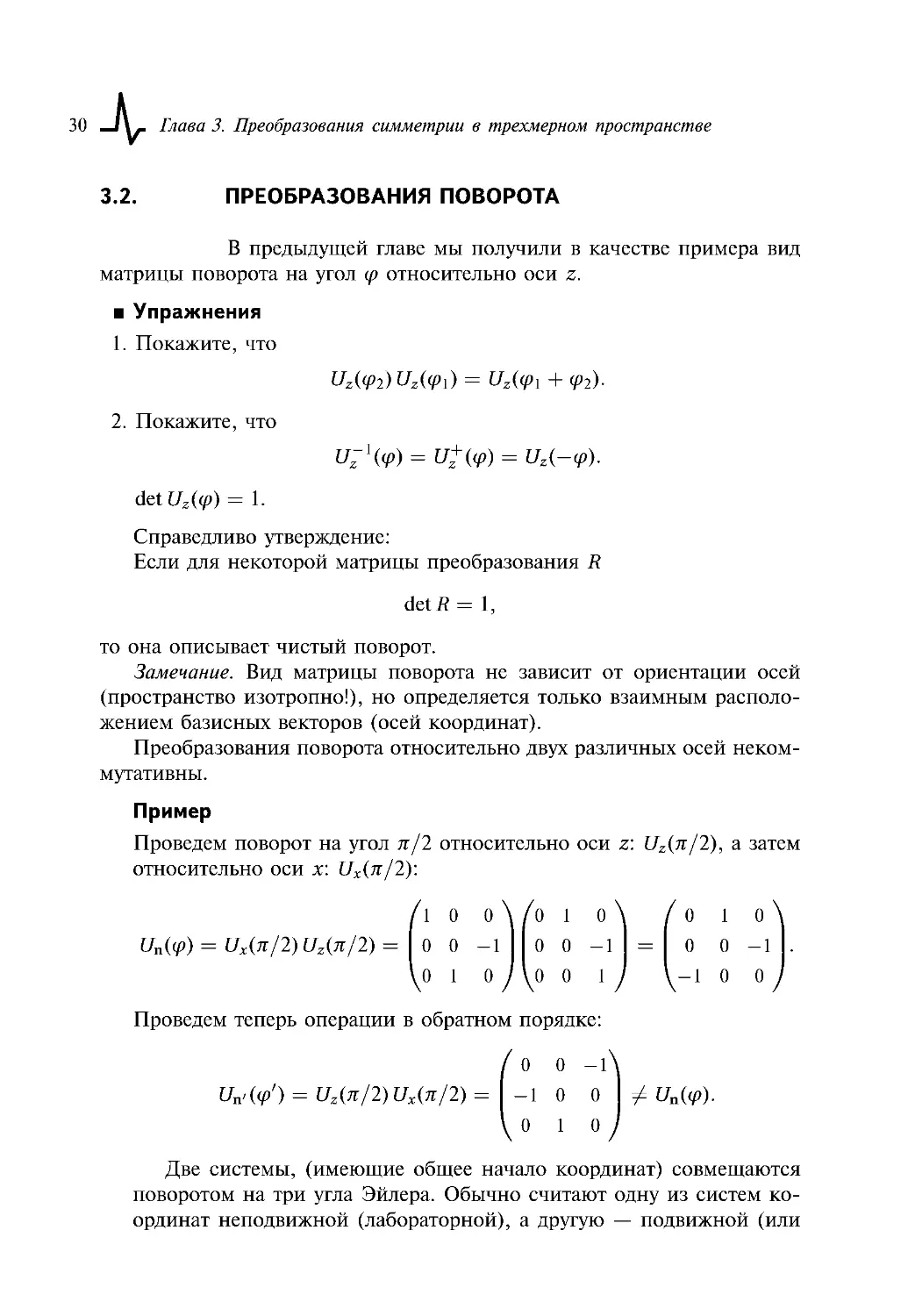
связанной с какой-либо физической системой) (рис. 3.1). Будем сов-
мещать лабораторную систему с подвижной.
Рис. 3.1. Схема поворотов на углы Эйлера
1. Сперва делают поворот на угол а относительно оси z, который
описывается оператором Rz(a).
2. Затем поворачивают на угол /3 относительно оси у':
Ry'(P) — Rz(a) Ry(f3) R~1(a)
или
Ry,(P)Rz(a) = Rz(a)Ry(fi). (3.1)
3. Последний поворот совершается на угол у относительно оси z":
Rz"(Y) = {Rz(a)Ry(l3))Rz(Y)(Rz(a)Ry(l3))~l,
т. е.
Rz„(y)Rz(a)Ry(J3) = Rz>>(y) Ry>(P) Rz(a) = Rz(a) Ry(/3) Rz(y). (3.2)
Эти три последовательных поворота эквивалентны повороту от-
носительно некоторой оси п на угол у/:
Ua(V) = Uz(y)Uy(J3)Uz(a),
(3 3)
U-\w) = U~x(a) Uy1 (р) и-1 (у) = Uz(-a)Uy(-fi)Uz(-Y).
32
_Глава 3. Преобразования симметрии в трехмерном пространстве
Упражнение
Получите явный вид матрицы (3.3):
а) для произвольных углов поворота;
б) для поворота а = л/4, /3 — л/2, у = л/2. Найдите ось, относитель-
но которой произведен полный поворот.
3.3. ОТРАЖЕНИЯ В ПЛОСКОСТИ
Отражения в плоскости изменяют систему координат: ле-
вую на правую и наоборот, поэтому для преобразования отражения а
всегда deter = — 1. При отражении остаются неизменными координаты
в плоскости отражения, а вдоль оси, перпендикулярной плоскости, ко-
ординаты изменяют знак. Обычно рассматривают операции отражения
относительно плоскостей, проходящих через какие-либо две оси коор-
динат. Отражение в произвольной плоскости получается последователь-
ным действием операций поворота и отражения.
Пример
Матрица, описывающая отражение в плоскости ху, имеет вид
& ху —
/10 о
0 1 о
^0 О -1
detcrXy — 1, (х Xy(j Ху — 1,
а ху — аху-
Два последовательных отражения соответствуют повороту отно-
сительно некоторой оси. Действительно, пусть оу и оу — опера-
торы отражения относительно каких-либо двух плоскостей. Тогда
det 0’10’2 = det О’] • detoy = 1. Таким образом, результат двух отраже-
ний должен соответствовать повороту.
Пример
Проведем сперва отражение а плоскости (ху),
а затем в плоскости (xz):
<1 О
&XZ&ху = 0—1
^0 о
/10 о
О 1 о
^0 О -1
о
о
1
/1 о о \
0-1 о = их(л).
^0 о -1J
Проведем отражение оу в плоскости (ху), а затем отражение оу
плоскости, проходящей через ось z и биссектрису £ между осями х и у.
3.4. Группа преобразований симметрии
К
33
Запишем матрицу оператора отражения а у.
/о 1 О
оу = a^z =10 0
^0 0 1
Матрица произведения операторов двух отражений есть
& ху(Т cz.
Л) 1 ° \
10 О = и^л).
^о о -iy
Упражнение
Показать, что два последовательных поворота относительно двух раз-
личных плоскостей соответствуют повороту на угол л относительно
оси, совпадающей с линией пересечения этих плоскостей.
Операции поворота и отражения некоммутативны. Последовательно
проведенные не сводятся ни к чистому повороту, ни к чистому отражению.
Пример
&XZUz(<p) =
cos <р
sing)
sin <р 0 \
— cos (р 0 Ф Uz(<p) &XZ
о 1 /
' cos <р — sin (р 0
— sin <р — cos ip 0
0 0 1
Важный пример
Поворот относительно оси z на угол л и отражение в плоскости (ху):
— GxyUz(Tt) —
/-1 О 0 \
0 -1 0 = I
0 0 -1J
(3.4)
— преобразование инверсии (изменяет направление всех осей на
противоположное).
3.4. ГРУППА ПРЕОБРАЗОВАНИЙ СИММЕТРИИ
Множество всех возможных поворотов, отражений в плос-
костях и инверсия представляют группу точечных преобразований си-
стемы координат.
34 -*v- Глава 3. Преобразования симметрии в трехмерном пространстве
Определение. Группой называется множество G, на котором
1. Определена бинарная операция, называемая умножением, которая
ставит в соответствие любым двум элементам множества элемент из это-
го же множества, т. е. для gi, g2 € G определен g3 = gi • g2 € G.
2. Операция умножения ассоциативна: (gi • gj) • g3 = gi • (g2 • gi)-
3. Существует единичный элемент e € G такой, что для любого g t G
справедливо: е g — g е = g.
4. Для каждого элемента g € G определен обратный g-1 g G такой,
что g"1 • g = g • g"1 = e.
Замечания. Пусть U — матрица, описывающая унитарное преобразо-
вание базисных векторов, тогда
1) координаты вектора при этом преобразуются с помощью матри-
цы U+ (см. формулу (2.39));
2) матрица оператора G в новом базисе определяется как
G' = UGU+. (3.5)
Особый интерес представляют такие преобразования Ug, которые не
изменяют вид матрицы оператора G: g'ik = guc, т. е.
G = UgGUg GUg = UgG. (3.6)
Иными словами, матрица Ug коммутирует с оператором G:
[G, Ug] = GUg - UgG = 0. (3.7)
Множество таких преобразований системы координат составляет группу
симметрии оператора G.
Упражнения
1. Показать, что множество всех возможных поворотов относительно
какой-либо оси (например, z) на угол 0 < (р < 2л образует группу.
Чему равны обратный и единичный элементы?
2. Убедиться в том, что совокупность отражений в плоскостях группу
не образует.
3. Показать, что совокупность операций поворота и отражений в плос-
костях будет образовывать группу только в том случае, если добав-
лено в качестве элемента преобразование инверсии.
глава ВЕКТОРНАЯ И ТЕНЗОРНАЯ
4
АЛГЕБРА В ТРЕХМЕРНОМ
ЕВКЛИДОВОМ ПРОСТРАНСТВЕ
Рис. 4.1. Радиус-вектор в де-
картовой системе координат
4.1. ВВЕДЕНИЕ
В предыдущих главах мы определили элементы линейного
пространства как векторы. В этой главе мы рассмотрим частный, но
очень важный (если не самый важный)
случай трехмерного пространства, в ко-
тором описываются основные физические
явления. В трехмерном пространстве мож-
но выбрать три взаимно ортогональных,
линейно независимых базисных вектора
ei,e2,e3, которые часто обозначают i,j,k.
Если вдоль этих векторов направить соот-
ветственно оси х, у и z, образуется де-
картова система координат, в которой лю-
бая точка пространства задается с помо-
щью радиус-вектора г — отрезка, направ-
ленного из начала координат, в котором
пересекаются все три оси, в данную точку
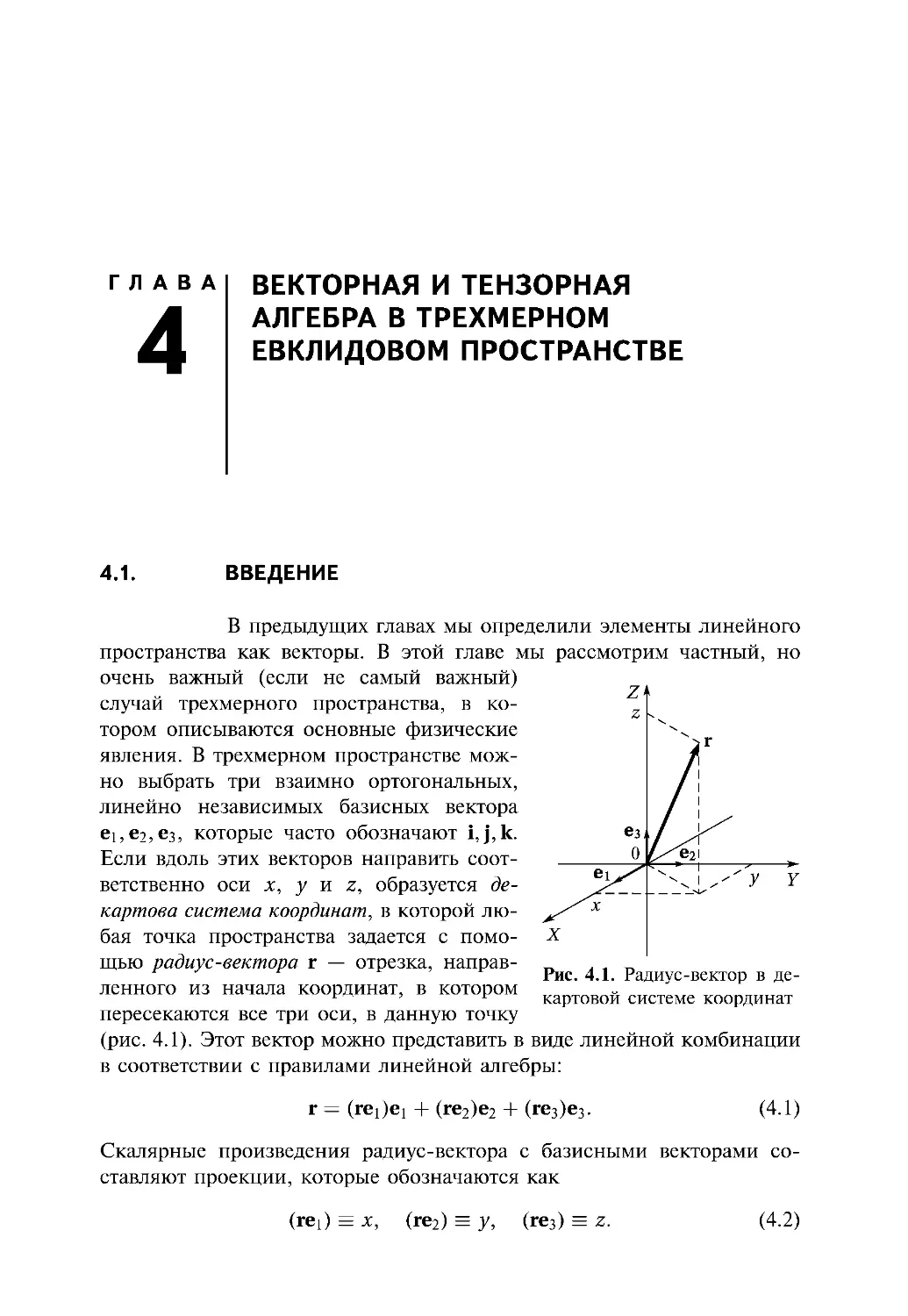
(рис. 4.1). Этот вектор можно представить в виде линейной комбинации
в соответствии с правилами линейной алгебры:
г = (ге^в! + (ге2)е2 + (ге3)е3. (4.1)
Скалярные произведения радиус-вектора с базисными векторами со-
ставляют проекции, которые обозначаются как
(rei) = х, (ге2) = у, (re3) = z. (4.2)
36 —Глава 4. Векторная и тензорная алгебра в евклидовом пространстве
Тройка чисел (4.2) дает представление радиус-вектора и, соответственно,
произвольной точки трехмерного пространства в декартовой системе
координат. Обычно при этом понимают радиус-вектор в смысле опре-
деления (2.1) гл. 2 и записывают в виде г = (х, у, z).
Свойства векторов, как способа описания пространства, определя-
ются его симметрией. Симметрия выявляется после введения понятия
длины, или расстояния между двумя точками пространства. Длина, или
расстояние между точками есть число, которое не должно изменять-
ся при всех преобразованиях симметрии, которые были рассмотрены в
предыдущей главе. Иными словами, длина — это инвариант относитель-
но преобразований симметрии.
Определение. Расстояние между двумя точками, задаваемыми радиус-
векторами Г1 и Г2, определяется вектором = Г1 — Г2 и равно
/12 = |ГГ2| = ^2 = т/(г12Г12), (4.3)
где (Г12Г12) — скалярное произведение двух векторов. В ортогональном
базисе декартовой системы координат расстояние определяется суммой
квадратов проекций вектора г^:
/12 = (Г12Г12) = U1 - *г)2 + (У1 - У2)2 + (Z1 - z2)2. (4.4)
Очевидно, сам радиус-вектор также определяет расстояние между про-
извольной точкой пространства и выделенной «нулевой» — началом ко-
ординат. Поэтому в дальнейшем, если не возникает каких-либо недора-
зумений, считаем Г2 = 0.
После определения длины в виде (4.4) абстрактное векторное про-
странство получает характеристику, превращающую его в евклидово, в
котором справедлива геометрия Евклида (Евклид, III в. до н.э.), зна-
комая всем из школьного курса. Следует подчеркнуть, что определение
длины (4.4) следует только из свойств нашего пространства, получен-
ных в результате нашего опыта и вовсе не обязательно для произвольного
векторного пространства. Отождествление длины со скалярным произ-
ведением оказалось возможным только благодаря простой, евклидовой
метрике, о чем более подробно рассмотрим в гл. 8.
Геометрия Евклида следует из требования инвариантности длины (4.4)
относительно преобразований симметрии, в частности, поворотов отно-
сительно начала координат. Инвариантность длины означает, что в ис-
ходном и преобразованном пространстве расстояние между двумя задан-
ными точками пространства, определяемыми разными векторами (г^ и г'12)
определяется одним и тем же числом:
/12 = U1 - ^2)2 + (У1 - У2)2 + (Zi - Z2)2 =
= (х'[ - х2)2 + (у! - у2)2 + (zi - z2)2 = Г22. (4.5)
36 —Глава 4. Векторная и тензорная алгебра в евклидовом пространстве
Тройка чисел (4.2) дает представление радиус-вектора и, соответственно,
произвольной точки трехмерного пространства в декартовой системе
координат. Обычно при этом понимают радиус-вектор в смысле опре-
деления (2.1) гл. 2 и записывают в виде г = (х, у, z).
Свойства векторов, как способа описания пространства, определя-
ются его симметрией. Симметрия выявляется после введения понятия
длины, или расстояния между двумя точками пространства. Длина, или
расстояние между точками есть число, которое не должно изменять-
ся при всех преобразованиях симметрии, которые были рассмотрены в
предыдущей главе. Иными словами, длина — это инвариант относитель-
но преобразований симметрии.
Определение. Расстояние между двумя точками, задаваемыми радиус-
векторами Г1 и Г2, определяется вектором = Г1 — Г2 и равно
/12 = |ГГ2| = ^2 = т/(г12Г12), (4.3)
где (Г12Г12) — скалярное произведение двух векторов. В ортогональном
базисе декартовой системы координат расстояние определяется суммой
квадратов проекций вектора г^:
/12 = (Г12Г12) = U1 - *г)2 + (У1 - У2)2 + (Z1 - z2)2. (4.4)
Очевидно, сам радиус-вектор также определяет расстояние между про-
извольной точкой пространства и выделенной «нулевой» — началом ко-
ординат. Поэтому в дальнейшем, если не возникает каких-либо недора-
зумений, считаем Г2 = 0.
После определения длины в виде (4.4) абстрактное векторное про-
странство получает характеристику, превращающую его в евклидово, в
котором справедлива геометрия Евклида (Евклид, III в. до н.э.), зна-
комая всем из школьного курса. Следует подчеркнуть, что определение
длины (4.4) следует только из свойств нашего пространства, получен-
ных в результате нашего опыта и вовсе не обязательно для произвольного
векторного пространства. Отождествление длины со скалярным произ-
ведением оказалось возможным только благодаря простой, евклидовой
метрике, о чем более подробно рассмотрим в гл. 8.
Геометрия Евклида следует из требования инвариантности длины (4.4)
относительно преобразований симметрии, в частности, поворотов отно-
сительно начала координат. Инвариантность длины означает, что в ис-
ходном и преобразованном пространстве расстояние между двумя задан-
ными точками пространства, определяемыми разными векторами (г^ и г'12)
определяется одним и тем же числом:
/12 = U1 - ^2)2 + (У1 - У2)2 + (Zi - Z2)2 =
= (х'[ - х2)2 + (у! - у2)2 + (zi - z2)2 = Г22. (4.5)
38 -*v- Глава 4. Векторная и тензорная алгебра в евклидовом пространстве
Важный пример
Продифференцируем компоненты радиус-вектора по его же компо-
нентам:
fl, если i = к,
Р- = 8,к = п . ’ (4.8)
ихк 0, если i ф к.
Очевидно, 8ik — симметричный тензор 2 ранга: = 8к;- Его назы-
вают также символом Кронекера.
Очевидно также, что
(4.9)
е дх, dx'j
Oik = у;— = -х-т = 0ik,
uXk OXk
т. e. 6ik — абсолютный симметричный тензор ранга 2, или, — это
инвариант относительно преобразований системы координат.
4.3. ОПЕРАЦИИ С ТЕНЗОРАМИ
В операциях с тензорами играют важную роль следующие
понятия.
1. Тензорные равенства. Если записано, что для двух тензоров оди-
накового ранга
= Pik...mt (4.10)
S S
это означает, что в любой системе координат разность соответствующих
компонентов этих тензоров равна нулю. Таким образом, равенство (4.10)
означает, в трехмерном пространстве систему 3s уравнений.
2. Свертка (упрощение) по одной, двум и т. д. парам индексов:
Pjkil ...т,= Tkl...m> (4.11)
S S-2
Fjikl ...т, — Skl...m- (4-12)
S S-2
Вообще говоря, Т 7^ S.
Пример
В трехмерном пространстве 8ц = 3 — скаляр.
Важный пример
Рассмотрим тензор 3 ранга (в трехмерном пространстве) е,к1 такой,
что exyz = 1, а все остальные отличные от нуля элементы равны ±1
в зависимости от перестановки индексов i, k, I, причем = — екц = екц.
4.3. Операции с тензорами —’ V- 39
Запишем преобразование компонентов этого тензора при перехо-
де в другую систему координат. По определению:
е'р^^^. (4.13) uXi оХк uxi
Если проделать все суммирования с учетом чередования знаков, мы
получим _ д(х'р,х',х') Prs~ d(Xi,xk,Xl) tkl’ { ’
где 9(x'p,x'r,x's) d(Xi, xk, xi)
— якобиан.
Исходя из свойств якобиана, получаем, что при чистых поворотах
eprs ~ eprs- (4.16)
Таким образом получаем, что так введенный полностью антисиммет-
ричный тензор etki не зависит от выбора системы координат. А в этом
смысле он так же, как и 8ik — инвариант. Однако, в отличие от 8,к
при отражениях e'tki = -dki, (4.17)
поэтому, строго говоря, вил не является инвариантом, и его обычно
называют псевдотензором1).
Если есть два тензора:
Тцс...1 И Ртп..з^
S Р
соответственно, ранга s и р, их можно
1) просто перемножить. При этом получится тензор ранга s р'.
Tik ...г, = ^ik...r-
s Р S+P
Это прямое или кронекеровское произведение;
2) перемножить, свернув при этом по одной паре индексов. В ре-
зультате получится тензор ранга s + р — 2:
Tik...lFln...r = Qik...r-
S Р S+P-2
') Мы не будем здесь математически строго обсуждать, что такое еиа. В курсе
теоретической физики, изучаемом в МФТИ, такое определение не приведет к
каким-либо недоразумениям и поэтому вполне достаточно.
40
__Глава 4. Векторная и тензорная алгебра в евклидовом пространстве
Можно сворачивать по разным парам индексов, при этом будут по-
лучаться, вообще говоря, разные тензоры:
Tik^lFrnl...^ = Q'ik...r-
s р S+P-2
Можно свернуть по двум, трем и т. д. (до тех пор, пока позволяет ранг
тензоров) парам индексов. В результате будем получать тензоры ранга
s + р — 4, s + р — бит.д.
Если тензоры Т и F одинакового ранга: s = р, то, свернув по всем s
парам индексов получим скаляр:
Tik...lFik:...l = <р-
Если пары индексов, по которым производится суммирование выбрать
по-другому, например,
Tik...iPki...i = <Р1,
при этом, вообще говоря, <р ср, .
Рассмотрим несколько важных примеров.
1.
2.
Важные примеры
8 ik8 ki8 im8 пи = 3.
'8im
^ikl^mnp — det 8km
{8/m
8 in
8kn
8 in
8кр
8ip J
(4.18)
Действительно, в нашем примере eikiemnp = tjkimnp — инвариантный
тензор 6-го ранга, антисимметричный относительно перестановки
соседних индексов в первой и второй тройках индексов, все эле-
менты которого равны ±1. Детерминант в правой части обладает
в точности такими же свойствами: перестановка соседних столбцов
или строк изменяет знак детерминанта и одновременно перестав-
ляет соседние индексы в первой или второй тройках индексов. Все
элементы матрицы — инвариантные тензоры второго ранга, поэтому
в результате детерминант получается инвариантным тензором 6-го
ранга. Раскроем детерминант и получим
^ikl^mnp — dim5kn8ip 5 im8 in6 fap + dindimdkp
dindkmdIp Ч- dipdkmdln dipdkndim-
3. Cikl^mni = dimdkn dindkm-> ^ikl^mln = dfmdkn H” djndkm- (4.19)
4.4. Симметрии трехмерного пространства и матрица поворота —’ V- 41
4. eikiemki = 26im. (4.20)
5. eik!eiki = 6, но ешецк = -6. (4.21)
Упражнения
1. Показать что свертка симметричного Sjk и антисиметричного Aik
тензоров второго ранга равна нулю:
SikAik = SkiAik = —SikAki = 0.
2. Упростить выражение:
& ik&kl& 1т&тп •
3. Показать, что детерминант матрицы третьего ранга Aik можно пред-
ставить в виде формулы:
detA!jt = ||А|| = ешАцА^Атц.
4. Используя результаты предыдущего упражнения, показать:
£тпр\ |-А|1 — ^ikl A mi А нк А р!
5. Доказать справедливость выражения:
ll^ll — ^eikiemnpAmiAnkApl-
6. Представим компоненты трехмерного вектора матрицами Паули (2.18):
а = (<jx, <jy, <jz). (4.22)
Показать, что компоненты вектора (4.22) удовлетворяют следующему
важному соотношению:
(Ti<7k = 8ik + ieiki<Ji. (4.23)
4.4. СИММЕТРИИ ТРЕХМЕРНОГО ПРОСТРАНСТВА
И МАТРИЦА ПОВОРОТА
Наиболее просто поддается проверке симметрия относи-
тельно трансляции, связанная с однородностью пространства. Действи-
тельно, инвариантность длины «доказывается» очень просто. Преобра-
зование трансляции на постоянный вектор а переводит точки простран-
ства rj и г2 в новые
r'j = Г1 + а, г2 = г2 + а.
(4.24)
42 —' V- Глава 4. Векторная и тензорная алгебра в евклидовом пространстве
Соответственно, вектор, длина которого определяет расстояние между
этими точками остается неизменным:
1'12 = rj - г2 = Г1 + а - г2 - а = и - г2 = Ь-
Так же легко проверяется инвариантность длины при отражениях в
плоскостях: в декартовых координатах квадратичная форма не зависит
от изменения изменения знака проекции.
Рис. 4.2. Схема поворота единичного вектора е относительно вектора п на
угол <р
Свойство изотропии пространства определяется инвариантностью дли-
ны относительно поворотов вокруг произвольной оси на любой угол.
Для проверки данного свойства прежде всего рассмотрим преобразова-
ние произвольного единичного вектора е при повороте его на угол <д
относительно оси, направление которой задается единичным вектором п
(рис. 4.2). Представим исходный вектор в виде продольной и попереч-
ной составляющих, направленных соответственно вдоль и перпендику-
лярно единичному вектору п:
ец = n(ne), ex = е — п(пе), е = ец+ех- (4.25)
В результате поворота, очевидно, продольная составляющая (4.25) оста-
ется неизменной: = ец. Поперечную составляющую вновь представим
в виде суммы двух составляющих: е{, в плоскости, в которой лежат
векторы е' и е, и е2, лежащий в плоскости, перпендикулярной как е,
так и п. По своей величине компонент ej равен cos<p, поскольку он
совпадает с проекцией единичного вектора на плоскость, лежащую под
углом <р. Компонент е2, по величине равен sin поскольку он совпадает
с расстоянием конца единичного вектора до плоскости, содержащей е,
4.4. Симметрии трехмерного пространства и матрица поворота —’ V- 43
так и п. Таким образом, оба компонента повернутого вектора можно
представить в виде формул:
e'j = (е — n(en)) costp, е'2 = [n х е] sintp. (4.26)
Окончательно повернутый вектор связан с исходным соотношением:
е' = п(пе) + (е — п(еп)) cos<p + [nx е] sirup. (4.27)
Запишем теперь выражение (4.27) в тензорной форме:
e'j = Oik(n, <р)ек, (4.28)
где тензор
Оц(п, <р) = п, пк + (6ik - п.1 пк) cos <р + eikj n.j sin <p (4.29)
называется матрицей поворота относительно оси п на угол <р.
Запишем транспонированную матрицу:
6ik(n, ср) = п,пк + (6ik - П[Пк) cos<р - eikjrij sin<p. (4.30)
Как видим, отличие возникает только в знаке последнего члена, что
обусловлено антисимметрией тензора etjk относительно перестановки
индексов. Вычислим произведение матриц (4.29) и (4.30):
OijOjk = п.п^Пк + (бу - ninj)(6jk - rijnk) cos2 <p -
- etjiejkmninm sin2 <p = ntnk + (3ik - ntnk) cos2 <p -
4” &im&SIH ф — Sik-
Мы здесь воспользовались свойством единичного вектора Пу Ну = n2 = 1
и сверткой двух символов Леви—Чивита по одной паре индексов (4.19).
Таким образом показали, что транспонированная матрица поворота
совпадает с обратной:
0ik = 0ki = 07k\ (4.31)
Матрицы, удовлетворяющие условию (4.31) называются ортогональными,
и, соответственно, преобразование поворота оказывается ортогональным
преобразованием. Легко видеть также, что det Оtk = 1.
Если единичный вектор п совпадает с одной из осей декартовой
системы координат, получится матрица поворота относительно соответ-
ствующей оси. Например, для n|| z получаем матрицу (2.33).
Если задать направление единичного вектора двумя углами а, /3, как
показано на рис. 4.2, а угол поворота обозначить у, получим матрицу
поворота на три угла Эйлера R[k(a, /3, у).
44 _Глава 4. Векторная и тензорная алгебра в евклидовом пространстве
Упражнения
1. Получить явный вид матрицы поворота Rik(a, fi. у).
Указание. Записать компоненты единичного вектора п в виде
Hi = пх = sin fi cos а, п^= пу = sin /3 sin а, п~< = nz = cos /3.
2. Показать, что матрица поворота на угол <р — л вокруг произвольной
оси е/ декартовой системы координат может быть записана в виде
Oik(ei, л) = 28ц8ы - 8ik, (4.32)
где индекс I фиксирован и суммирования по дважды повторяюще-
муся индексу не производится.
3. Показать, что матрица поворота на угол <р = л/2 вокруг произволь-
ной оси е/ декартовой системы координат может быть записана в виде
Oik(ei, л) = 6ц6к1 + еш. (4.33)
Здесь индекс I фиксирован и суммирования по нему не производится.
Итак, возвращаясь к определению тензора в § 4.2, можно сказать, при
преобразованиях поворота следует заменить Utk Oik. При проведе-
нии операций отражения в плоскостях, следует делать замену Uik (Т!к,
где матрицы приведены в §3.3. Наконец, преобразование инверсии
определяется матрицей I (3.4).
Пример
Важную роль в физике играют преобразования поворота на беско-
нечно малые углы (инфинитезимальные преобразования). Запишем
матрицу поворота (4.30) на бесконечно малый угол 8(р. С точностью
до линейных по малому параметру величин имеем
О(к ~ 6ik — 6<peikini.
Введем обозначение
8<р = п8(р,
тогда при таком повороте радиус-вектор преобразуется так
г' = г + 8г = г + [<5<р х г]. (4.34)
Упражнение
Доказать, что необходимое и достаточное условие линейной незави-
симости трех векторов в трехмерном пространстве есть
(а[Ь х с]) ± 0.
4.5. Инварианты —’ V- 45
4.5. ИНВАРИАНТЫ
Прежде всего заметим, что инвариант — это некая величи-
на (или функция), остающаяся неизменной (инвариантной) относитель-
но каких-ибо преобразований. В частности, скаляр — по определению
инвариант, поскольку он не изменяется при всех преобразованиях сим-
метрии. Однако, могут встречаться и такие объекты, которые не обя-
зательно инвариантны относительно всех преобразований симметрии,
но остаются инвариантными только для какого-то типа преобразований.
Например, скалярное произведение векторов — инвариант относительно
всех преобразований, поскольку это по определению скаляр. Однако сме-
шанное произведение трех векторов уже не инвариантно относительно
преобразований инверсии и отражений в плоскостях, но инвариантно
относительно вращений. Такой объект принято называть псевдоскаляром.
И вообще, если какой-либо объект ведет себя как скаляр, вектор или
тензор только относительно части преобразований симметрии (обыч-
но, относительно преобразований поворота), к его названию добавляют
приставку псведо, т. е. псевдовектор (векторное произведение двух век-
торов), псевдотензор.
Произвольный тензор второго ранга всегда можно представить в виде
суммы двух тензоров, преобразующихся независимо при поворотах:
Tik = Sik + Aik, (4.35)
где соответствено
Sik = Ski = \(Tik + Tki) (4.36)
— симметричный и
Aik = -Aki=V-(Tik-Tki) (4.37)
— антисимметричный тензоры.
Симметричный тензор Sik всегда может приведен к диагонально-
му виду путем выбора надлежащей системы координат. Действительно,
найдем собственные векторы п(а) и собственные значения тензора
второго ранга (матрицы):
(Sik ~ Sw8ik)n^ = 0. (4.38)
Здесь а - 1,2, 3.
46 -*v- Глава 4. Векторная и тензорная алгебра в евклидовом пространстве
Собственные векторы матрицы (4.36) в общем случае могут быть
комплексными. Умножая уравнение (4.38) на п*^ и выполняя свертку,
получаем выражение для собственных значений матрицы:
с, *(а) (а)
S(a) = Sikn t пк
|nW|2
Заметим, если тензор S7 действителен, его собственные значения также
действительны и они представляют искомые инварианты тензора вто-
рого ранга. В этом случае и собственные векторы также могут быть
выбраны действительными.
Покажем теперь, что собственные векторы ортогональны. Для этого
умножим уравнение (4.38) на различные собственные векторы и выпол-
ним свертку:
Sikn^n^ = Sw8ikn^}n^} = S(a)(n(a)nw),
Sikn^n^ = S^8ikn^n^ = S<»(n<“)n<«).
Вычитая из первого уравнения второе, получаем
Sik(n^n{^ - = (S{a} - S(W)(n(a)n^)) = 0. (4.40)
Равенство нулю в уравнении (4.40) обеспечивается сверткой симметрич-
ного тензора Stk и антисимметричного, образованного произведением
собственных векторов в скобках. Таким образом получаем ортогональ-
ность собственных векторов, которые всегда можно выбрать нормиро-
ванными на 1:
(п"1)п'/0) = 8 ар.
Итак, в системе координат с единичными ортами п(а) матрица симмет-
ричного тензора имеет вид
(s(1) о о \
О S<2) О . (4.41)
0 0 S<37
Вместо трех инвариантов S<a) можно использовать три их независимые
функции:
£ S(a) = = Sa = TrS, (4.42)
a—1
£ S(a)2 = S^ = SikSki = TrS2, (4.43)
a—1
£ S(a)3 = = SikSklSn = TrS3. (4.44)
a—1
Здесь знак Tr означает след — сумму всех диагональных элементов.
4.5. Инварианты -* V- 47
Для антисимметричного тензора можно ввести понятие дуального объ-
екта. В трехмерном пространстве антисимметричному тензору второ-
го ранга соответствует дуальный вектор, который определяется согласно
правилу:
А = ^iklAkl- (4.45)
Вектору можно поставить в соответствие только один инвариант — его
длину, или его квадрат А2, поэтому и для антисимметричного тензора
второго ранга существует всего один инвариант:
2 1 _ 1 1
А = -ем^тп Akl А т.п — ^^ikl^imnTklTmn — (8 km8 In & kn&lm)Tk[Tmn —
1 1 ~ э
= -^TklTkl - TklTlk) = -(Тг TT - Tr T2). (4.46)
Упражнения
1. Показать, что введенные выше инварианты симметричного тензора
второго ранга выражаются через исходный тензор 1}к следующим
образом:
TrS = Tr Т;
TrS2 = |(Тт ТТ + Тг Г2);
TrS3 = -(ТгТ3 + ЗТгТТ2).
4
2. Убедиться, что вместо приведенных выше инвариантов тензора вто-
рого ранга можно использовать следующие четыре:
Tr Т, Tr Т2, Тг ТТ, Тг[(Т + ЗТ)Т2]. (4.47)
3. Показать, что любой тензор второго ранга может быть представлен
в виде
Tik = Dik + eikiAi + P8ik, (4.48)
где Djk = Dki — симметричный тензор второго ранга с нулевым сле-
дом (девиатор): Da = 0; А/ — псевдовектор, дуальный антисиммет-
ричному тензору (4.37), а Р = Tr Т — скаляр.
4. Показать, что свойства симметрии и антисимметрии сохраняются
при преобразованиях поворота.
Рассмотрим далее инварианты относительно преобразований пово-
рота для объектов различного ранга. Начнем с вектора (тензора первого
ранга).
48 —Глава 4. Векторная и тензорная алгебра в евклидовом пространстве
Если вектор инвариантен по отношению к преобразованиям поворо-
та, должно иметь место соотношение:
X- = OikAk = Ai, т.е. (Oik - 8ik)Ak = 0, (4.49)
где Oik — матрица поворота (4.29). Поворачивая вектор на угол л отно-
сительно оси z, получаем А[ = — Ах — А1г А!г = — А^ = А^, А'} = Аз, сле-
довательно для инвариантного вектора А] = Аг = 0. Совершая поворот
на угол л относительно оси х получаем также Аз = 0. Таким образом,
отличного от нуля инвариантного вектора не существует.
Тензор второго ранга вновь представим в виде суммы симметричного
и антисимметричного тензоров. Поскольку антисимметричному тензору
второго ранга соответствует дуальный вектор, инвариантный антисим-
метричный тензор второго ранга должен быть равен нулю. Остается разо-
браться с симметричным тензором. Поскольку всегда можно выбрать
систему координат, в которой симметричный тензор диагоналей, запи-
шем его в виде Зц = S^8tk. Если хотя бы два значения параметров S<a)
различны, компоненты тензора Sik будут зависеть от выбора нумерации
осей а, значит, и не будут инвариантны относительно поворотов. Таким
образом, для инвариантного относительно поворотов тензора второго
ранга остается единственная возможность: 5(1) = S'21 = S<3> = Л. Соот-
ветственно, инвариантный тензор второго ранга изотропен и пропорци-
онален символу Кронекера, который имеет теперь смысл абсолютного
инвариантного тензора второго ранга'.
= A8ik. (4.50)
Пример
Рассмотрим решение этой же задачи способом, аналогичным для
первого случая. Условие инвариантности тензора второго ранга от-
носительно преобразований поворота имеет вид
T’ik = ОцОктТ1т = Tik. (4.51)
Возьмем свертку обеих частей соотношения (4.51) с матрицей пово-
рота и используем соотношение ортогональности
OknTtk = ОцОктОпкТ1т = Оц8тпТ[т — ОцТ[П.
Полученное соотношение запишем в виде
OknTik — ОцТ[П.
4.5. Инварианты -* V- 49
Теперь приведем его к виду, чтобы матрица поворота слева и справа
имела одинаковые индексы:
Oki6lnTik = Oki8ikTin. (4.52)
Поскольку соотношение (4.52) есть тождество, должно выполняться
равенство:
8inTik = 6ikTln. (4.53)
Полагая I — п = 1 и обозначая Тп = Л, имеем
Tik = №ik. (4.54)
Инвариантный относительно поворотов или, что то же, изотропный
тензор третьего должен удовлетворять уравнению:
T'iki = OimOknOipTmnp = Tikl. (4.55)
Для нахождения изотропного тензора воспользуемся представлением (4.32)
матрицы поворота на угол л и покажем, что все компоненты, у которых
хотя бы два индекса совпадают, равны нулю. Действительно, рассмот-
рим, например, преобразование компонента Т122 при повороте на угол л
относительно оси z:
Т122 = (—8im)(—8гп)(—8гр)Ттпр = — Тщ = Г122 = 0.
Для оставшихся компонентов рассмотрим преобразование поворота, на-
пример, относительно оси z на угол л/2 и воспользуемся представлени-
ем матрицы поворота в форме (4.33):
Т123 = е1тЗе2пЗ<5зрТтпр = — ?213 = ТцЗ-
Рассматривая повороты на угол л/2 относительно других осей, получаем
Т123 = — ?321 = — Г132 = ?231 = Гз12 = —7213 = М-
Таким образом, можем записать, что инвариантный тензор третьего ран-
га пропорционален тензору eiki, который называется абсолютный анти-
симметричным псевдотензором:
Tiki = peiki. (4.56)
В заключение этого параграфа найдем инвариантный тензор четвер-
того ранга. По определению имеем соотношение:
тшт = OiPOkqO[rOmsTpclrs = ТШт. (4.57)
50 —Глава 4. Векторная и тензорная алгебра в евклидовом пространстве
Будем искать инвариантный тензор четвертого ранга в виде линейных
комбинаций, составленных из инвариантных тензоров более низкого
ранга. Поскольку отличный от нуля инвариантный вектор не сущест-
вует, можно записать искомую линейную комбинацию в виде
Tiklm = (4.58)
Далее мы должны написать условия инвариантности трех тензоров вто-
рого ранга в выражении (4.58), которое уже получено ранее (4.50), и
подставить его в наше разложение:
Tiklm = ^-iSikSlm + + AjSimSkl- (4.59)
Упражнение
Показать, что из двух полярных векторов а и b и одного аксиально-
го с можно составить
а) все возможные независимые скаляры:
а2, Ь2, (с2), (ab), (ас)2, (be)2, (ас)(Ьс), ([а х Ь]с);
б) все возможные независимые псевдоскаляры:
(ас), (Ьс).
Пример
Выведем основные формулы сферической тригонометрии. Проведем
три неколлинеарных вектора ei, ег, е3 из центра сферы единичного
радиуса (рис. 4.3). Обозначим длины образованных на поверхности
сферы дуг АВ = с, ВС = а, АС = Ь, а углы, образованные касатель-
ными к этим дугам при вершинах сферического треугольника Л ЛВС,
соответственно, при А ~ а, В ~ fi. С ~ у. Касательные к дугам мож-
но определить соответствующими векторными произведениями еди-
ничных векторов ei, ег, ез, поэтому имеем
cosа _ ([ei х e2][ei х е3]) _ (ei[e2 х [ei х е3]]) _
|[ei х e2][ei х е3]| sinbsinc
_ (е2е3) — (eie2)(eie3) _ cos а — cos b cos с
sin b sin c sin b sin c ’
откуда получаем формулу
cos a = cos b cos c + sin b sin c cos a.
Делая циклическую перестановку, получим аналогичные соотноше-
ния для двух других углов:
cos b = cos с cos а + sin с sin a cos /3,
cos с = cos a cos b + sin a sin b cos y.
4.5. Инварианты —’ V- 51
Вычислим теперь модуль двойного векторного произведения:
|[[ei х е2] х [ei х е3]]| = sin b sin с sin а = |([ei х е2]е3)|.
Выполняя циклическую перестановку, получим
sin с sin a sin /3 = |([е2 х e3]ei)| = |([ei х е2]е3)|;
sin a sin b sin у = |([е3 х ejej)! = |([e3 х е2]е3)|.
Таким образом, получаем «тройное» равенство:
sin b sin с sin а = sin с sin a sin /3 = sin a sin b sin у.
Разделим его на произведение трех синусов sin a sin b sin с и получим
sin а _ sin/1 _ sin у
sin а sin b sin с
Рис. 4.3. Иллюстрация сферической тригонометрии
ГЛАВА
ЭЛЕМЕНТЫ ВЕКТОРНОГО АНАЛИЗА
В ТРЕХМЕРНОМ
ЕВКЛИДОВОМ ПРОСТРАНСТВЕ
5.1. ОСНОВНЫЕ ПОНЯТИЯ ВЕКТОРНОГО АНАЛИЗА
Физические величины имеют тензорный характер, при-
чем часто они оказываются функциями координат (и времени). В та-
ком случае данные физические величины представляют собой тензор-
ные поля. В этой главе мы ограничимся рассмотрением тензорных по-
лей в трехмерном евклидовом пространстве. Простейшее тензорное по-
ле — скалярное, и оно описывается скалярной функцией многих пере-
менных.
Замечание. В физике любая функция многих переменных — есть функ-
ция вектора, т. е.
f(x,y,z) = /(г).
Что понимается под тензорным полем? Согласно содержанию преды-
дущей главы, тензор определяется соответствующими законами преоб-
разования компонентов при преобразованиях системы координат. Зна-
чение поля само зависит от точки в пространстве. Поэтому под тензор-
ным полем понимается в общем случае многокомпонентная функция,
компоненты которой в каждой точке пространства преобразуются со-
гласно закону преобразования тензора соответствующего ранга. Итак,
скалярное поле — это обычная функция координат. Часто поля могут
обладать дополнительной симметрией по отношению к преобразованиям
симметрии, рассмотренным в гл. 3. В частности, поле может зависеть не
от трех, а только от двух или даже одной переменной.
5.1. Основные понятия векторного анализа —• V- 53
Примеры
1. Скалярное поле
а) плоское поле:
/(г) = Ж у);
б) цилиндрическое поле:
f(r) = f(p), Р = Vх2 + У2',
в) центрально-симметричное (центральное) поле:
/(г) = f (г), Г = у/х2 + у2 + Z2.
2. Векторное поле в декартовых координатах задается трехкомпонентной
функцией'.
v(r) = цг(г)е;,
где ez- — единичные орты системы координат.
а) Плоское поле:
V(r) = vx(x, у)ех + vy(x, у)еу;
б) цилиндрическое поле
v(r) = v(p)np, пр = ^;
в) сферическое поле
г
v(r) = ц(г)пг, пг = -.
г
Скалярное поле удобно изучать, задавая его поверхности уровня'.
/(г) = const.
Изучение векторного поля можно сделать наглядным, введя линии тока
(силовые линии) — кривые, для которых в точке пространства с радиус-
вектором г поле v(r) оказывается касательным вектором.
Пусть dr — приращение радиус-вектора вдоль линии тока, тогда оно
должно быть параллельно вектору v(r) в точке г. Таким образом, урав-
нение для определения линий тока задается векторным произведением:
[drxv(r)]=0. (5.1)
Уравнение (5.1) можно записать в виде
|dr| = |v(r)|ds = t/(r)ds,
54 -*v- Глава 5. Элементы векторного анализа в евклидовом пространстве
где ds — элемент длины линии тока. Уравнение (5.1) эквивалентно си-
стеме дифференциальных уравнений первого порядка:
dx _ dy _ dz _ ds ..
Mr) = Mr) = Mr) = М)'
Примеры
1. Для плоского поля система уравнений (5.2) имеет вид
dx _ dy
М*, у) vy(x, у) ’
решение которой можно представить как у = f(x, xq, уо) — плоская
кривая, проходящая через точку (ху, уо).
2. Линии тока поля цилиндрической симметрии определяются усло-
виями
tp = const, z = const.
3. Для сферически симметричного поля линии тока определяются урав-
нениями
в = const, <р = const.
Упражнения
1. Получить уравнение для поверхности уровня скалярного потенциала
<р(г) =
Г
2. Получить и решить уравнения для силовых линий векторного поля
Е(г)=^.
Г
Тензорные поля можно получить, например, дифференцированием
векторного поля по компонентам радиус-вектора:
Tik(r) = ^vk(r). (5.3)
OXi
Чтобы убедиться в справедливости сказанного, необходимо показать, что
производные также преобразуются по закону преобразования компонен-
тов радиус-вектора:
Доказательство утверждения (5.4) представляем читателям в качестве
упражнения.
55
5.2. Действия с оператором V -'V
Векторный оператор дифференцирования (5.4) обозначается специ-
альным символом «набла»'.
^ = е^. (5.5)
о X,
Итак, для занятий теоретической физикой совершенно необходимо
свободно обращаться с функциями векторов (как векторными, так
и скалярными). Есть, конечно, стандартный, но совершенно непри-
емлемый в теоретической физике способ: всегда «честно» работать с
функцией многих переменных строго по правилам математического
анализа. Однако на практике все дифференциальные операции следует
проводить, используя либо технику оператора V, либо технику тензор-
ных обозначений.
5.2. ДЕЙСТВИЯ С ОПЕРАТОРОМ V
Оператор V представляет собой векторный оператор диф-
ференцирования1). В декартовых координатах его можно записать так:
v=f—,—,— Y V/= —.
\<Эх ду dzj дх.
Во всех действиях с оператором V нужно четко соблюдать следующие
основные заповеди.
1. Как и всякий другой оператор, V действует только на то, что стоит
справа от него, и не действует ни на какую функцию, стоящую от него
слева.
2. Оператор V обладает всеми свойствами операции дифференциро-
вания, поэтому он должен продифференцировать все, что стоит справа от
него.
3. Будучи вектором, оператор V при всех перестановках в формулах
подчиняется только правилам векторной алгебры.
Примеры
1. \7<р — некоторая функция, но <pV — оператор.
2. V(ab) a(Vb) + b(Va).
*) Для простоты обычно «стрелку» над оператором оператором не пишут
V = V, поскольку здесь не может быть недоразумений. Это один из немногих
случаев, когда над вектором можно не писать стрелку или не выделять его
жирным шрифтом.
56
—Глава 5. Элементы векторного анализа в евклидовом пространстве
Сейчас мы не побоимся оказаться занудными и наивными, но на-
помним основные правила, которые подразумеваются во второй и тре-
тьей заповедях.
Основное свойство дифференцирования в данном случае относится
к дифференцированию произведения функций, которое мы здесь запи-
шем так
(5.6)
Здесь индекс «с» указывает, что функция f или g считается константой.
Основные правила векторной алгебры
Из двух векторов а и b можно составить
1) скаляр, «устроив» скалярное произведение:
= (ab) = (Ьа), (5.7)
2) вектор, составив векторное произведение:
с = [а,Ь] =-[Ь,а]. (5.8)
Из трех векторов а, b и с можно составить
1) скаляр, посредством смешанного произведения:
<р = (а[Ь, с]) = (Ь[с, а]) = (с[а, Ь]), (5.9)
2) вектор, «устроив» двойное векторное произведение:
d = [а, [Ь, с]] = Ь(а, с) — (а, Ь)с = (а, с)Ь — с(а, Ь). (5.10)
Кроме того следует иметь в виду еще другие полезные свойства, в част-
ности правила умножения векторных выражений на скаляр:
Л(а, Ь) = (Ла, Ь) = (а, ЛЬ),
Л[а,Ь] = [Ла,Ъ] = [а, ЛЬ].
(5.П)
(5.12)
При действиях с оператором V всегда следует стремиться свести вы-
ражение к такому виду, чтобы оно состояло из основных функций, име-
ющих инвариантный смысл, т. е.
\7р — gradtp, (5.13)
(V,a) = diva, (5.14)
[V,a] = rota, (5.15)
либо к основным операторам, также имеющим инвариантный смысл:
(а, V) = Va — оператор дифференцирования вдоль а, (5.16)
(V, V) = div grad = Л — лапласиан.
(5.17)
5.2. Действия с оператором V —' V- 57
Выполняя дифференцирование всех функций по правилам диффе-
ренцирования, следует по правилам векторной алгебры переставить все
функции, на которые оператор V не действует, так, чтобы они оказались
слева от него.
Примеры
Рассмотрим теперь наиболее характерные примеры.
1. rot rota = [V, [V, а]] = V(V, а) — (V, V)a = grad diva — Ла.
Здесь мы воспользовались формулой двойного векторного произве-
дения, помня о том, что векторная функция а должна стоять справа
от V.
2. div[a, b] = (V[a, b]) = (V[a, bj) + (V[ac, b]) = (b, [V, a]) - (a, [V, b]).
В этом примере мы воспользовались как правилом дифференцирова-
ния произведения двух функций, так и свойством смешанного про-
изведения относительно перестановки сомножителей.
3. rot[a, b] = [V, [a, b]] = [V, [ас, b]] + [V, [a, bc]] = a(V, b) - (V, ас)Ь -
— b(V, а) + (V, bc)a = adivb — (aV)b — bdiva + (bV)a.
Здесь были использованы правила дифференцирования произведе-
ния функций и свойства двойного векторного произведения относи-
тельно перестановки векторных сомножителей.
4. Чтобы получить формулу градиента скалярного произведения
grad(a, b) = [a, rotb] + [b, rot а] + (a, V)b + (b, V)a,
сперва следует заметить, что переставлять местами векторы в фор-
муле V(a, Ь) можно, исходя из формулы двойного векторного про-
изведения (5.10):
а(Ь, с) = [Ь, [а, с]] + (Ь, а)с.
Затем следует вспомнить, что скалярное произведение симметрично
относительно перестановки сомножителей.
В физике часто встречаются функции вида а/(г) или А(г)/(г). При
действиях с такими функциями следует использовать дополнительные
полезные свойства векторной алгебры (5.11) и (5.12). Кроме того, следует
знать результат воздействия оператора V на радиус-вектор, а именно:
grad г = - = п, (5.18)
Г
где п — единичный вектор:
divr = 3, (5.19)
rotr = 0. (5.20)
58 —Глава 5. Элементы векторного анализа в евклидовом пространстве
Далее полезно получить формулу для градиента функции, зависящей
только от модуля радиус-вектора (случай центрального поля):
grad/(г) = grad г = nf'(r). (5.21)
Здесь нужно воспользоваться правилами дифференцирования сложной
функции.
Далее легко проверить покомпонентным дифференцированием, что
(aV)r = а. (5.22)
Теперь вновь можно рассмотреть ряд поучительных и полезных
примеров.
1. div(pr) = (\7д)г = (д\7г) = (д grad г) = (дп).
Здесь в этом и последующих примерах вектор д считается постоянным,
т. е. независящим от координат.
2. grader) = д.
Здесь мы воспользовались, во-первых, формулой для градиента скаляр-
ного произведения, а, во-вторых, формулами действия оператора V на
радиус-вектор.
3. гофд, г] = 2д.
Комментарии к этому примеру излишни.
4. div^/(r)) = (V, д/(г)) = (д, grad f(r)) =
5. гоЦд/(г)) = [V, дДг)] = -[д, V/(r)] = -Лд,п] = f[n, д].
В рассмотренных двух примерах легко проследить применение всех ос-
новных правил и заповедей.
6. Продифференцируем экспоненту, которая регулярно встречается
в формулах теоретической физики, как только речь заходит о плоской
волне
grad eikr = Veikr = eikr(V(ikr)) = ikeikr.
В этом примере воспользовались как формулой градиента скалярного
произведения, так и правилом дифференцирования сложной функции.
7. В следующих двух примерах вектор А считается постоянным
divAeikr = (V,Aeikr) = (A, Veikr) = i(A,k)eto.
8. rotAeikr = [V, Aeikr] = [Veto, A] = i[k, A]eikr.
В качестве специального примера найдем магнитное поле магнитного
диполя д.
Как известно из электродинамики, магнитное поле полностью опре-
деляется векторным потенциалом
Н = rotA(r).
5.2. Действия с оператором V —' V- 59
Векторный потенциал магнитного диполя определяется формулой
А(г)= Ц^ = [д,г]1. (5.23)
Г г
Теперь проделаем все необходимые выкладки, используя полученные
ранее результаты:
Н= [v, [g,r]l
r J г
l[r,[g,r]] + ?g = Wr)-Mr2 = Зп(дп) — д (5 24)
г г г г
Формула (5.24), вообще говоря, не совсем корректна. Действительно, век-
торный потенциал (5.23) можно представить в виде действия оператора V на
функцию 1/г:
A(r) = -[M,V]1,
тогда магнитное поле определяется двукратным действием оператора V
Н = rotA = —[V х [д х V]]- = —дД- + (д\7)Х7~.
Второе слагаемое полученной формулы совпадает с результатом (5.24), а опе-
ратор Лапласа дает
Д- = —4л5(г).
Таким образом, к выражению для магнитного поля диполя следует добавить
4лд<5(г). Следует, однако, заметить, что данное «дополнительное» слагаемое
отлично от нуля только в случае, когда рассматривается поле в начале коорди-
нат, т. е. в точке нахождения диполя, что в классической физике исключено.
Дополнительное слагаемое имеет большой смысл в задачах квантовой механики.
Предлагаем читателю самостоятельно получить формулу для элек-
трического поля статического электрического диполя d:
E=-grad(d^=3n(d^)~d. (5.25)
г г
Упражнения
1. Получить уравнения для силовых линий поля электрического дипо-
ля (5.25).
2. Получить уравнения для силовых линий поля магнитного дипо-
ля (5.24).
Изложенные в этом параграфе правила позволяют легко выполнять
выкладки в инвариантной (не зависящей от выбора системы координат)
60 —Глава 5. Элементы векторного анализа в евклидовом пространстве
форме. Это особенно удобно, когда проводятся действия с электромаг-
нитным полем. Однако в конкретных задачах могут возникнуть вычис-
лительные осложнения. Например, даже в простой задаче (a, V)r = а
пришлось привлекать покомпонентное дифференцирование. Все выклад-
ки существенно упрощаются, если использовать технику тензорных обо-
значений. Правда, к сожалению, в результате таких выкладок бывает
весьма непросто выделить инвариантные функции. Поэтому, как пра-
вило, часто комбинируют два метода.
5. 3. ОПЕРАЦИИ ВЕКТОРНОЙ АЛГЕБРЫ
В ТЕНЗОРНЫХ ОБОЗНАЧЕНИЯХ
Перепишем основные определения и свойства, сформули-
рованные в предыдущем параграфе, в тензорных обозначениях.
1. (a, b) = ajbi.
2. [а, Ь]; = eikiakbi = eukaibk = -eikibkai = -[b, a],.
Здесь мы просто переобозначили немые индексы, по которым произво-
дится суммирование.
3. (a, [b, с]) = eikiaibkci.
Легко видеть, что симметрия смешанного произведения относительно
циклической перестановки определяется соответствующими свойствами
тензора
4. [а, [Ь, с]]г- = eiklClkeimnbmCn — ^ikl^mnl^k^m^n — (8im8kn ^in^km)^
x akbmcn = akbick akbkCt — akbiCk (a, b)c';.
Если векторы перестановочны, получаем формулу (5.10) для двойного
векторного произведения.
5. ') grad<p =
U Xf
г д- dai
6. diva = -—.
dxj
- dai
7'rOta^^^-
Рассмотрим теперь, как решаются некоторые примеры предыдущего
параграфа в технике тензорных обозначений.
1. div г = = 6ц = 3.
и Xj
2. rot г = ем^- = eiki8ki = еш = 0.
') Здесь и далее мы для ясности и краткости будем писать знак «=» вместо
указания индексом произвольной проекции вектора.
5.4. Интегральные формулы векторного анализа —' V- 61
дх'
3. (a, V)r = ak - = ak8ik = а, = a.
9xk
4. grad(g, r) = = pk8ik = Hi = fi.
5. rot[/i,r] = eikieimn-g^-pmxn = eikiemnipm8kn = eikiemkipm = 28—
= 2fii = 2/r.
6. gradr2 = ~^—xkxk = 2xk^- = 2xk8ik = 2xt = 2r.
u Xf О Xi
j 5 1 9 , Xi г
7. gradr = — Vr2 = —= —Г = — = - = n.
9xi 2v r2 °xi r r
В качестве специального примера вычислим электрическое поле ста-
тического электрического диполя (5.25).
В предыдущем параграфе мы написали векторный потенциал маг-
нитного диполя (5.23). Скалярный потенциал электрического диполя
имеет совершенно аналогичный вид, если мы теперь двум векторам d и г
поставим в соответствие скаляр:
(5.26)
Электрическое поле равно:
„9 д dkxk dk 9xk , 9 1
hi = --<P = ----=--------Г "Z---dkXk------5- =
Эх, 9xi r3 r3 9xi Эх, r3
dk e . , 3 9r
--yOik + akxk^— =
r-r OXi
di
3dkxkxi „ _ 3(dn)n — d
---5—8ik = ------J----
5.4. ИНТЕГРАЛЬНЫЕ ФОРМУЛЫ ВЕКТОРНОГО АНАЛИЗА
Поля в физике часто приходится не только дифференциро-
вать, но и интегрировать. Поскольку речь идет о функциях многих пе-
ременных, интегрирование может выполняться по одному, двум и трем
измерениям: соответственно по кривым, поверхностям и объему. Рас-
смотрим перечисленные операции в порядке возрастания размерности.
Более того, будем в основном рассматривать векторные и скалярные
поля, допускающие представление результатов в инвариантной форме.
Интегрирование тензорных полей будет понятно после представления
полученных результатов в тензорной форме так же, как и при выполне-
нии операций дифференцирования с помощью оператора V.
Кривая L в пространстве обычно задается параметрическим образом:
г = r(.s'), где .s' — параметр, отсчитываемый вдоль кривой (пути интегри-
рования), начальная точка на кривой соответствует значению So (обычно
So = 0). Если интегрировать некоторое векторное поле А(г) по данной
62 -*v- Глава 5. Элементы векторного анализа в евклидовом пространстве
кривой, нужно определить изменение поля вдоль пути интегрирования
и получить в результате интегрирования скаляр'.
$2
f (A(r) dr) = J (а(г(5)) ds. (5.27)
I Sl
Часто элемент длины дуги обозначают как dr = dl. Для интегрирования
по замкнутому контуру применяют специальный символ а сам инте-
грал при этом называют циркуляцией.
Важную роль в физике играют потенциальные поля, для которых ин-
теграл по любому замкнутому контуру равен нулю и, соответственно, не
зависит от выбора пути интегрирования. Потенциальное поле удовле-
творяет условию:
rotA(r) = 0, можно представить A(r) = grad ф(г). (5.28)
Скалярная функция /(г) называется потенциалом поля и определена с тон-
костью до произвольной постоянной. Учитывая определение (5.28), имеем
(A(r) dr) = (grad ф(г) dr) = d/
— полный дифференциал, поэтому
г2 г2
У (A(r) dr) = J dtp = <p(r2) - <p(ri).
Рассмотрим теперь поверхность S, ограниченную замкнутой кривой L.
Элемент площади поверхности в трехмерном пространстве определяется
Рис. 5.1. Определение вектора
элемента поверхности
вектором dS, направление которого
совпадает с единичным вектором нор-
мали к поверхности п, а величина рав-
на площади dS «бесконечно малого»
элемента поверхности: dS - ndS, как
это показано на рис. 5.1. Интеграл по
поверхности от некоторого поля опре-
деляет его поток. Для скалярного поля
поток определяется однозначно:
F = f dS — вектор.
s
Для векторного поля поток можно
определить и как вектор, и как скаляр:
Ф = § (AdS) = § (An) dS — скаляр,
S S
F = J [А х п] dS — вектор.
s
5.4. Интегральные формулы векторного анализа —' V- 63
Поток через замкнутую поверхность определяется интегралом, име-
ющим специальный символ:
J/dS, J(AdS), J[AxdS].
s s s
Поверхность, как и кривая, может задаваться параметрически, при
этом требуется два параметра:
г = r(u, v) или Xi = Xi(u,v), i= 1,2,3.
Элемент поверхности, заданной параметрически, определяется формулой:
dS = Г— х — 1 du di/ или dS; = ещ —— dudv. (5.29)
Ldw drj dn dp
Упражнение
Проверить справедливость формулы (5.29) для замкнутой поверхно-
сти в форме куба.
Интеграл по объему определяется одинаковым образом для тензор-
ного поля любого ранга:
Ti_idV, где dV = dxdydz = d3r.
v
Часто, если это не приводит к недоразумениям, пишут также dV = dr.
Здесь не следует путать элемент объема с элементом длины дуги. Полу-
ченное интегральное выражение, вообще говоря, уже не обладает свой-
ством тензора, стоящего под знаком интеграла.
Интегралы по объему и поверхности определенного вида можно пре-
образовать соответственно в интегралы по замкнутой поверхности, огра-
ничивающей объем интегрирования или по замкнутому контуру, на ко-
торый опирается поверхность.
Интегральная теорема Гаусса позволяет свести интеграл по объему к
поверхностному, если он вычисляется от дивергенции векторного поля:
divAdV = |||(VA)dV = J(AdS) = J(An)dS. (5.30)
V V s s
В формуле (5.30) элемент поверхности (вектор нормали) направлен на-
ружу. В дальнейшем нам нужно будет уметь записывать теорему Гаусса
в тензорной форме:
^divAdV = JJJ ^dV = j> AkdSk = f AknkdS. (5.30a)
V V s s
64 -*v- Глава 5. Элементы векторного анализа в евклидовом пространстве
Интегральная теорема Стокса гласит, что интеграл по поверхности
(скалярный поток) от ротора векторного поля сводится к его циркуля-
ции по контуру, ограничивающему поверхность:
(rotAdS) = (dS[V х А]) = ^(Adl).
S S L
Теорема Стокса в тензорной форме имеет вид
Д eikl Ifxk dSi = j* Ak dXk
S L
(5.31)
(5.31a)
S
5.5. ПРЕОБРАЗОВАНИЕ ИНТЕГРАЛЬНЫХ ВЫРАЖЕНИЙ
Все векторные интегральные выражения преобразуются в
соответствии с правилами векторного дифференцирования, рассмотрен-
ными в §§5.1—5.3, интегральными теоремами (5.30)—(5.31а) и правилом
интегрирования произведения функций по частям'.
Jf(x)^dx = f(x)g(x)- J(^)g(x)dx. (5.32)
Приведенная тривиальная формула (5.32) играет такую же важную роль,
как и совсем «смешная» формула дифференцирования произведения
функций (5.11).
Рассмотрим прежде всего преобразование интегралов по объему от
векторных выражений. Обобщим теорему Гаусса на случай скалярного
поля. Для скалярного поля определен градиент, поэтому следует рас-
смотреть преобразование в поверхностный интеграл выражения
HI grad /(r)dV,
V
которое по своим свойствам есть некоторый вектор. Умножим его на
произвольный постоянный вектор с, занесем под интеграл и получим
(с ! Vf(r)dv) = ! V(c/)dV = ! div(c/)dV= (cj/ds).
V V V s
В силу произвольности вектора с имеем1):
JJJgradf(r)dV = |f(r)dS. (5.33)
V S
') Этот же результат получается из формулы (5.30а) формальной заменой
Ak^f.
5.5. Преобразование интегральных выражений —' V- 65
Примеры
1. Применим формулу интегрирования по частям (5.32) и преобразуем
выражение:
| /(г) divA(r) dV = J /(VA) dV = j f(AdS) -
V vs
dV.
Тот же самый результат получим, применив тензорные обозначения:
Г f9^ dV = f f Ак dSk - f dVAk^-f.
J dxk J J dxk
V S V
2. Преобразовать в интеграл по поверхности объемный интеграл от
выражения
(grad/, rot А).
Теорема Гаусса просто так неприменима, однако с помощью формул
векторного анализа в нашем выражении можно выделить диверген-
цию. Действительно, перепишем выражение с помощью оператора
набла:
(V/)[V х А] = V(/[V х А]) - /(V[V х А]) = div(/[V х А]),
поскольку для любого вектора divrotA = 0.
Таким образом, имеем
J”(grad/, rotA) dV = /(rotAdS).
V s
Получим этот же результат в тензорных обозначениях, используя
правило интегрирования по частям (5.32):
f(grad/, rot A)dV = f^eik!^dV^ fe^^dS- ffeikl?^dV.
J J иXj dXk J OXk J ОXiOXk
V V S V
В силу того, что свертка под интегралом
а2 „
Siki~s—л— — 0,
dxidxk
получаем искомый результат.
66 —Глава 5. Элементы векторного анализа в евклидовом пространстве
Упражнения
Вычислить поверхностные интегралы, связав их с объемными (век-
тор с постоянный):
1. J(rdS) = ЗУ;
s
2. j> zdxdy = V;
s
3. § r(cdS) = У (cV)rdV = eV;
s V
4. (cr) dS = J V(cr) dV = сV;
S V
5. §[dS x A] = J[V x A] dV = JrotAdy;
SV V
6. J(dSc)A = J(cV)Ady.
S V
Примеры
1. Аналогично формуле (5.33) можно преобразовать интеграл по кон-
туру от скалярной функции в поверхностный:
ffdl = J[dSx V]/.
L S
2. Докажем полезную формулу:
|J[drxr]=JdS. (5.34)
L S
Для доказательства следует скалярно умножить выражение (5.34) на
произвольный постоянный вектор с. Получим выражение:
(с[г х dr]) = ([с х г] dr).
Далее вспомним результат упражнения rot[c х г| — 2с и получим
§ rot[c х r]dS = 2с J dS = с j>[dr х г].
S S L
ГЛАВА
ОРТОГОНАЛЬНЫЕ
СИСТЕМЫ КООРДИНАТ
6.1. ОСНОВНЫЕ ФИЗИЧЕСКИЕ СИСТЕМЫ КООРДИНАТ
Как отмечалось в гл. 2, произвольный вектор можно задать,
выбрав систему линейно независимых векторов, которые определяют
соответствующий базис. Задавая определенный масштаб измерения дли-
ны по каждому базисному направлению определяют систему координат.
Обычно в физике принято выбирать ортогональные системы координат,
когда все базисные векторы взаимно ортогональны.
Наиболее часто в физике используется декартова система координат,
особенность которой состоит в том, что базисные векторы имеют одно и
то же направление для любой точки пространства. Важную роль также
играет определение элемента объема пространства в выбранной системе
координат. Элемент объема в окрестности какой-либо точки простран-
ства определяется элементарными приращениями (вариациями) радиус-
вектора этой точки в направлении базисных векторов. Например, если
три единичных вектора ei, ез и ез составляют базис и, соответствен-
но, г = %!в! + %2е2 + то элементарные приращения радиус-вектора
будут:
с1Г|—e|dx|, dr2 = e2cbc2, с!гз=езс1хз. (6.1)
Из векторной алгебры известно, что объем параллелепипеда, образован-
ного тремя векторами а, b и с, равен их смешанному произведению:
V = (а[Ь х с]),
поэтому элементарный объем определим так же:
dV = (dri[dt2 х dr3]) = (ефег х ез]) dxi dxx dxx.
(6.2)
68 -*v- Глава 6. Ортогональные системы координат
В ортогональной системе координат смешанное произведение базис-
ных векторов равно 1, поэтому, например, в декартовой системе коор-
динат имеем хорошо знакомую формулу:
dVdec = dxi dx2 d.r2 = d.r dy dz. (6.3)
Часто физические задачи имеют определенную симметрию, и тог-
да удобнее выбирать систему координат, учитывающую ее. Если задача
Рис. 6.1. Цилиндрическая система координат
имеет аксиальную симметрию, удобно ввести цилиндрическую систему
координат (p,tp,z) (рис. 6.1):
О < р < сю, 0 < <р < 2л, —сю < z < сю. (6.4)
Цилиндрическая система координат также ортогональна, ее базисные
векторы направлены в соответствии с направлением возрастания пере-
менных, поэтому ориентация базисных векторов зависит от точки про-
странства. Такое задание базисных векторов, «привязанных» к точке про-
странства, называется локальным репером. Координаты точки в декар-
товой и цилиндрической системах координат связаны простыми соот-
ношениями:
x = pcos<p, y = psin<p, z = z. (6.5)
В отличие от декартовой цилиндрическая система координат криволиней-
на, т. е. элементарные приращения не совпадают с приращениями соот-
ветствующих переменных и зависят от точки пространства, а именно:
drp = ер dp, dr(/, = evp dtp, drz = ez dz. (6.6)
Элемент объема в цилиндрической системе координат равен
dVCyi = р dp dtp dz. (^-7)
6.1. Основные физические системы координат —' V- 69
Направления ортов цилиндрической системы координат связаны с на-
правлениями ортов декартовой системы координат очевидными соотно-
шениями. Принято обозначать орты декартовой системы координат как
ei = ех = i, ej = еу = j, ез = ez = к, поэтому имеем
ер = (epi)i + (epj)j = cos<pi + sin <pj,
= (evi)i + (e<pj)j = - sin<pi + cos<pj, (6.8)
ez = k.
Преобразование (6.8) можно записать в матричной форме:
cos<p sin<p о\ /i\
— sin<p cos<p 0 j I. (6.9)
0 0 1 / \к/
Упражнения
1. Написать преобразование, обратное к (6.8).
2. Записать проекции радиус-вектора точки г в цилиндрической систе-
ме координат.
3. Найти связь координат точки в цилиндрической и декартовой систе-
мах координат и наоборот.
Рис. 6.2. Сферическая система координат
Задачи о движении в центрально-симметричном поле удобно решать
в сферической системе координат (г,9,(р) (рис. 6.2):
О < г < сю, 0 < 0 < л, 0 < <р < 2л. (6.10)
70 -*v- Глава 6. Ортогональные системы координат
Координаты точки в декартовой и сферической системах координат свя-
заны соотношениями:
х = г sin 0 cos гр, у = г sin в sin <р, z=rcos9. (6.11)
Сферическая система координат ортогональна, но так же как и ци-
линдрическая криволинейна. Запишем элементарные приращения при
вариации радиус-вектора точки в направлении возрастания переменных:
drr = er dr, drg=eerd0, dr(/, = evr sinO dtp. (6.12)
Элемент объема в сферической системе координат равен:
dlsph = (drr[drg х dr,,]) = г2 sin в dr d0 dtp. (6.13)
Установим теперь связь единичных ортов сферической и декартовой
систем координат:
er = (eri)i + (erj)j + (erk)k = sin0(costpi + sin tpj) + cos 0k,
ee = (e0i)i + (eej)j + (eek)k = cos0(costpi + sin tpj) — sin 0k, (6.14)
e,, = (evi)i + (evj)j + (e(/,k)k = - sintpi + costpj.
Упражнения
1. Написать преобразование, обратное к (6.14).
2. Написать преобразование (6.14) в матричной форме.
3. Записать проекции радиус-вектора точки г в сферической системе
координат.
4. Найти связь координат точки в сферической и декартовой системах
координат и наоборот.
6.2. ОПЕРАТОРЫ V И Д
В ЦИЛИНДРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
Оператор V можно легко записать сразу по определению
для произвольной системы координат:
V = e,-^-. (6.15)
оге;
Подставляя выражения для элементарных приращений радиус-вектора
(6.6), имеем
V7 _ д д д , ,
Vcyl — я + ez . (6.16)
J op potp oz
6.2. Операторы V и Д в цилиндрической системе координат —' V- 71
Результат (6.16) поучительно получить более строго, спроектировав пред-
ставление оператора V в декартовой системе координат на базисные
орты цилиндрической системы:
Vcyi = (epV)ep + (e(pV)e¥> + (ezV)ez. (6.17)
Вычислим последовательно три скалярных произведения в формуле (6.17).
Заметим, что орт ez ортогонален как ер, так и ev, поэтому
др д др д
(epV) = + (epj)-^ —.
r r дх dp r dy dp
Из соотношений (6.8) имеем
(epi) = cos</>, (epj) = sin</>.
Далее вычисляем производные:
др = дх дл/х2 + у2 х — — = - = costp; дх р
др _ ду Таким образом, получаем ду/х2 + у2 у v —— = - = sintp. ду Р
(ePV) = ( '< -\др , / -\др\ д д (epi)^- + (epj)^- л- = л-- ч г дх к ду) др др
Для орта переменной (р имеем
(e^V) = ((еД)|^ + (еДк'П /-•
\ дх г оу/ о<р
Из соотношений (6.8) имеем
(е<Д) = - sin ip, (evj) = cos ip.
Из упражнений предыдущего параграфа следует, что <.р = arctg(y/x), поэтому
д<р = у = у = sin<p
ОХ X + у р Р
dtp X X COS <р
ду X2 + у2 р2 Р '
Таким образом, для орта <р получаем
(eVV)=
ро(р
Поскольку орт ez = к, окончательно получаем искомую формулу (6.16).
72
—Глава 6. Ортогональные системы координат
Упражнения
Записать в цилиндрической системе координат:
a) grad/(г);
б) gradg(x2 + у2, z);
в) divA(r);
г) rotA(r).
Замечание. Векторную функцию А(г) следует также записать в ци-
линдрической системе координат.
Оператор Лапласа определяется как А = div grad = (VV), поэтому в
криволинейной системе координат возникают производные ортов по пе-
ременным. При вычислении производных единичные орты изменяют
свое направлении, которое можно вновь разложить по исходным на-
Рис. 6.3. Вариации локального ре-
пера цилиндрической системы ко-
ординат
правлениям ортов в данной точке про-
странства. Легко видеть, что при ва-
риации радиус-вектора по различным
направлениям базисных векторов, из-
меняется при этом только направле-
ние ортов ер и ev при вариации по на-
правлению ev (рис. 6.3) таким образом
из девяти возможных производных от-
личны от нуля только две:
Sc, Й- „
дер v 8<р
Utty ___ иЦ) _________
д<р вр 8<р Ср'
(6.18)
Результаты (6.18) позволяют записать:
(8 д \ ( д д \ д2
(VV) = (ер -—h е,,, ——) (ер -—h е,Р ——1 + —=
\ др ' рд<р / \ др рд<р J qz
_ д2 , 1 а2 , 1 / дер\ д , д2
— —у Н----2 2 "I-( е<Р л— ) Ъ-1"
др р1 дер Р \ д<р / др Qz
Обычно принято записывать лапласиан в цилиндрических координатах
в виде
_ 1 д д I д2 д2
Су1 р др Р др + р1 dip2 + dz2'
(6.19а)
6.3. Операторы V и А в сферической системе координат —' V- 73
На скалярное поле лапласиан действует «обычным» образом. Однако при
действии на векторное поле вновь возникают кинематические эффекты,
связанные с криволинейностью системы координат: следует помнить,
что при дифференцировании орты также изменяют свое направление.
Упражнение
Показать, что результат действия оператора Лапласа на векторное
поле можно записать в виде
(е A — А М — Ар —
(.epAcyiA; — acyiAp ,
р р (,'Р
(всрА^А) = Асу1 Др у Ч j ,
р р °<р
(егДсу1А) = ACy]Az.
6.3. ОПЕРАТОРЫ V И А
В СФЕРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
Оператор V запишем согласно определению (6.15) и выра-
жению для элементарных приращений (6.12):
У7 _ д i д 1 д
VSph — er + eg + e<p . Q я (6.20)
or г он r sin» dtp
Как видели в предыдущем параграфе, применение оператора V (диф-
ференцирование) в криволинейной системе координат требует учета ки-
нематических эффектов, которые в сферической системе координат про-
являются еще сильнее. Поэтому для дальнейших целей необходимо пре-
жде всего выписать все девять производных базисных ортов по перемен-
ным сферической системы координат:
дег дег дег
~дг = о, ~дв = eg, д<р = sin0e(/,,
дед дед дев
~дг = 0, ~дв = ~ег, д<р = cos9ev, (6.21)
де,,, = 0, де,., = 0, де,., = — eg.
~дг ~дв дер
Пример
Получим выражение в декартовой системе координат для оператора
орбитального момента в квантовой механике, который определяется
74 —' V- Глава 6. Ортогональные системы координат
как 1 = —i[r х V], выраженного через переменные сферической си-
стемы координат. Для этого сперва запишем проекции оператора V:
Vx = (iVsph) = (ier)^- + (iee)4z + =
or rati r sinti dtp
. _ d 1 _ d sin tp d
= sin t) cos tp-—I— cos в cos tp —-3- —,
dr r oti r smti dtp if.
. . 9,1 Q 9 cos tp d
\7y = sinOsin/p — + - COS0Sin<p— -I-
dr r dti r sinti dtp
_ „ d 1 . „ d
\7 = cost/------sin 0 —.
dr r dd
Далее остается найти компоненты векторного произведения, подста-
вив компоненты радиус-вектора, полученные в упражнении в кон-
це §6.1. Ввиду относительной громоздкости вычислений приведем
окончательные результаты:
7 • 9 „ 9
1Х = 1 sin tp---hi cos tp ctg t) —;
dd dtp
Г 9 . . n d
I = -icos<p— + isin<pctg0 —;
1 de dtp
7 9
lz = —1-^—•
z dtp
(6.23)
Упражнения
1. Показать, что дивергенция векторного поля А(г) в сферической си-
стеме координат равна:
divA(r) = (VsphA(r)) = ^-^-r2Ar Н-X sin 4-----------
F г or rsintJoti rsnw ocp
2. Вычислить дивергенцию центрально-симметричного векторного по-
ля А(|г|).
Запишем теперь лапласиан в сферической системе координат:
Asph = (V • er)^ + (V • е9)А + (V • еу) / =
or roU rsmvotp
d2 dfl der 1 der \
= 773 + л ( e« 377 + e<p —'—77 я I +
dr or\ r de ^rsmddtpj
1 / 92 1 9ee 9 \ 1 92 _
r2 \ dO2 e<f sin в dtp de J r2 sin2 0 dtp2
d2 , 2 d , 1 / d2 , „ d \ 1 d2
— --2 “I--Л--'--2 ( -2 I “I-2---2---2' (6-24)
dr r dr Г \d0 90 J r sin 6 dtp
6.3. Операторы V и А в сферической системе координат
К
75
Упражнения
1. Показать, что результат действия оператора Лапласа на векторное
поле в сферической системе координат можно записать в виде
(erAsphA) = AsphAr ~ ^(аг + sin0Ae + ctg0^);
r r \ suit) d0 dtp /
2 (8Ar Ag cos 0 9 Ay \
(e0AsphA) = AsphA0 + — - . -
r \ 90 2sin 0 sin0 dtp )
t \ л\ _ л л । 2 (dAr । t adAe Av A
(e^AsphA) — AsphAip + j . ( о "I- ctg0 . I •
r sin 0 \ dtp dtp 2 sin 0 /
2. Показать, что квадрат оператора момента в сферической системе
координат имеет вид
12 д1 t ад 1 а2 I (. д а . д а , а2 \
аа2 90 sin2 0 dtp sin2 0 \ 90 90 dtp2)
ГЛАВА
ЗАМЕНА ПЕРЕМЕННЫХ, ЯКОБИАН
7.1. ЗАМЕНА ПЕРЕМЕННЫХ
В МНОГОМЕРНЫХ ИНТЕГРАЛАХ
При решении многих задач в физике, особенно при инте-
грировании выражений, часто возникает необходимость произвести за-
мену переменных. В частности, преобразования симметрии, рассмотрен-
ные в гл. 3, это замена переменных. Переход от описания физической
системы в декартовой системе координат к описанию в цилиндриче-
ской или сферической системах координат — замена переменных. Мы
видим, что во всех случаях существует определенная функциональная
связь между координатами радиус-вектора до и после замены перемен-
ных. Таким образом, замену переменных хг- на переменные щ можно
выразить формулой:
щ = fi(xfc), 1 < z, к < п, (7.1)
где п — число измерений. При преобразованиях симметрии индекс i
соответствует, как обычно, проекциям на оси декартовой системы коор-
динат. При переходе к цилиндрической системе координат можно опре-
делить новые переменные как
щ — р, и2 = <р, пз = z; Xi = fi(p, ср, z).
При переходе к сферической системе координат имеем
щ — г, U2 = в, щ = <р; Xi = fi(r, в, <р).
В общем случае замена переменных может носить более сложный и даже
весьма абстрактный характер. Заметим только, что обычно она носит
взаимно однозначный характер.
7.1. Замена переменных в многомерных интегралах —’ V- 77
При замене переменных область в пространстве исходных перемен-
ных отображается в область новых переменных, одновременно изменя-
ется и функциональный вид исследуемых выражений. Ясно, что объемы
областей в новых и старых переменных могут не совпадать и, что весьма
важно в физике, могут иметь даже разную размерность. При выполне-
нии преобразований, не изменяющих вид математического объекта, этот
факт не играет существенной роли, однако при выполнении, напри-
мер, интегрирования, после которого с исходным объектом связывается
совсем другая по смыслу величина, указанный факт играет очень важ-
ную роль. При выполнении операций интегрирования, подынтегральное
выражение может рассматриваться как плотность некоторой величины.
Плотность всегда связана с объемом, поэтому при изменении элементар-
ного объема должна измениться соответствующим образом и величина
плотности.
Пример
Рассмотрим простейший случай интегрирования в одномерном про-
странстве:
ь
Л = f g(x) dx.
а
При замене переменной х = х(и) и, соответственно, и = и(х) получаем
«(й) и(Ь)
/1= J g(x(u))^ du = J g(x(u))J du,
u(a) u{a)
где введено обозначение J — dx/ dw.
Как видим, подынтегральная функция (плотность) изменилась:
g(x) g(x(u))J= g(u)J.
Здесь g указывает на другой функциональный вид. В частности, если
g(x) = 1, получаем
и(Ь)
Ц = b — а = J(u)du.
и(а)
Можно сказать, что функция J(u) характеризует растяжение или
сжатие элемента длины при данном преобразовании — замене
переменных.
78
__Глава 7. Замена переменных, якобиан
Функция /(ы) играет важную роль в физике в многомерных задачах.
Рассмотрим далее какой вид она приобретает в двумерном случае. Ясно,
что смысл функции J(u, v) в двумерном случае остается тем же: изме-
нение площади, поэтому запишем определение площади, ограниченной
некоторым контуром L с помощью интеграла по замкнутому контуру.
Пусть контур ограничивает плоскую поверхность, расположенную парал-
лельно плоскости ху декартовой системы координат (5.34):
S — | ^"[r х dr] = k| <j>(xdy — у dx).
L L
Площадь, ограниченная контуром, равна:
S = (kS)= ^f(xdy-ydx). (7.2)
L
Рис. 7.1. Деформация контура интегрирования при замене переменных
Направление обхода контура L должно соответствовать установлен-
ному правилу: область интегрирования остается слева для принятой в
физике правой системы координат, как показано на рис. 7.1. Заметим,
что
$ d(xy) = 0 = ^xdy + ^y dx,
L L L
поэтому
S = | (x dy — у dx) = $ x dy = — § у dx.
L L L
Произведем замену переменных:
x = x(u, v), у = y(u, v) (7.3)
и, соответственно,
U — l/(x, y), V = v(x, y).
7.1. Замена переменных в многомерных интегралах —’ V- 79
Вычислим элемент площади dS в самом простом случае: прямоуголь-
ника со сторонами dx и dy, ориентированными соответственно парал-
лельно осям декартовой системы координат, что соответствует понятию
«физически бесконечно малой» площади поверхности. При этом в новых
переменных контур, ограничивающий поверхность, будет иметь совсем
другой вид (рис. 7.1). В декартовых координатах вычисления носят три-
виальный характер:
dS = х dy = J xdy + J xdy + J xdy-l- J xdy =
L 12 23 34 41
= 0 + (x + dx) dy + 0 — x dy = dx dy.
Обозначим значение новых переменных в вершине «1» прямоугольника
как щ = и(х, у), Vi = v(x, у). Функцию и на сторонах контура можно
разложить в ряд, удерживая только члены первого порядка:
и(х + dx, у + dy) = щ + dx + dy.
dx ду
Соответственно, дифференциал второй новой переменной равен:
, ди . ди ,
dv = — dx + — dy.
дх ду
Далее, вовсе не желая быть назойливыми, приведем цепочку простых
выкладок при вычислении площади в новых переменных:
dS'=/udn=U1/dn + J(gdx+gdy)(gdx+gdy) =
L L L
„ С Г Г Г ди , dv . (ди . ди , \ dv ,
= ° + + + + = ~х~ dx — dx + ( — dx + — dy) — dy -
J J J J dx dx \dx dy J dy
12 23 34 41
(du , du , \dv , du , dv , (dudv dudv\ , ,
— — dx + — dy — dx — — dy — dy = — ----— — dx dy =
\<9x dy } ) dx dy ~ dy \dx dy dydxj
(dufdx du/dy\ d(u,v) , , T, ,
= det ( dx dy = —---dx dy = Jdx dy.
\dv/dx dv/dyj d(x, y)
Таким образом, получаем искомое соотношение для площадей, ограни-
ченных контуром в новых и старых переменных:
Ф wdp d(u, v) , (dufdx du/dy\
J = hm 4----- = ' ’ 7 = det 7 7 . (7.4)
s^° £ xdy д(х’У> \dv/dx du/dy)
Функция (7.4) называется якобианом.
80 -*v- Глава 7. Замена переменных, якобиан
7.2. ЯКОБИАН
В общем случае для «-мерного интеграла при замене пере-
менных (7.1) мы должны писать:
/n=f f(ut)dnu = J f(Ui(xk))Jdnx, (7.5)
v„ v„
где элемент «-мерного объема
d"x = П dxk,
а якобиан — есть определитель функциональной матрицы:
д{щ, ..., и„)
5(xi, ...,мп)’
J = det
дщ
dxk
(7.6)
В частности, рассмотрим как преобразуется в трехмерном случае ин-
теграл от некоторой функции координат х, у, z — функции радиус-век-
тора /(г) = fix. у, z) в двух системах координат, полученных в резуль-
тате преобразований, рассмотренных в гл. 3 и 6. Координаты радиус-
вектора г в лабораторной системе координат и в «штрихованной» систе-
ме г', полученных в результате преобразований, рассмотренных в гл. 3
связаны линейно посредством ортогональных матриц преобразований.
Запишем формально:
J /(г) dr =
V
fjj f(x, У, z) dx dy dz =
V
v (7.7)
Здесь
d(x, y, z)
d(x ,y',z)
= det dy/dx'
ydz/dx'
dx/dy'
ду/ду'
dzldy'
dxjdz
dyfdz!
dzjdz!
(7.8)
t дх 13x7
— якобиан перехода от «старых» переменных к «новым» в трехмерном
случае.
Легко видеть, что для всех матриц перехода
d(x V z) f +1, если преобразование есть чистый поворот;
— , ’ , = det U = <
d(x ,y,z) ( — 1, если преобразование содержит отражение.
(7.9)
Поэтому должно быть
f f(r)dr = ±f f(r')dr'. (7.10)
V V
На применении формул (7.7) и (7.10) основаны правила отбора в физике.
7.2. Якобиан 81
При операциях с якобианами полезно использовать его основные
свойства'):
1. Антисимметрия относительно перестановки переменных:
_ д(и, v) _ д(у, и) _ д(и, и) /7 1
д(х, у) д(х, у) д(у,х)
2. Для обратного преобразования
.-1 = д(х, у) = / д(и, р)\-1 = 1 (7 12)
д(и, и) \д(х,у)} д(и, и)/д(х,у)
3. При «двойной» замене переменных (и, v) —> (х, у) —> (.s', t) имеем
д(и, v) _ д(и, и) д(х, у) _ д(и, и) 1
fl(s, f) д(х, у) d(s, t) д(х, у) d(s, t)/d(x, у)
4. Частная производная может быть записана в виде якобиана:
= (?) <714)
О(Х,у) \OXjy
Индекс «у» указывает, что производная от функции и(х, у) вычисляется
при постоянном значении у. Такая запись весьма удобна при преобра-
зовании различных термодинамических функций в статистической физике.
5. Перечисленные выше свойства позволяют оперировать только с
«верхней половиной» дроби:
д(и, v) = —д(и, и),
д(и, v)d(x, у) = д(и, x)d(v, у) — д(и, у)д(х, v).
6. Можно также записать:
д(и, v)= д(х, и) + (^\ д(у, v).
\9xjy \9yJx
Упражнения
1. Вычислить якобиан перехода от переменных в декартовой к пере-
менным в цилиндрической системе координат.
2. Вычислить якобиан перехода от переменных в декартовой к пере-
менным в сферической системе координат.
Важное значение имеет якобиан при преобразовании функции рас-
пределения. Однако, поскольку плотности должны быть по определению
неотрицательными, а якобиан может принимать как положительные, так
и отрицательные значения (7.9), следует писать преобразование плотно-
сти и, соответственно, функции распределения как
/(г) Яг(г,))|/|. (7.15)
*) Для простоты будем рассматривать две переменные.
82 -*v- Глава 7. Замена переменных, якобиан
Пример
В качестве примера рассмотрим преобразование изотропной функции
углового распределения фотонов при переходе из одной инерциаль-
ной системы отсчета в другую в специальной теории относительности.
Задачу, естественно, следует решать в сферической системе ко-
ординат. Пусть в «движущейся» относительно лабораторной систе-
ме отсчета источник фотонов покоится, тогда функция изотропного
углового распределения f(9', <р’) есть константа, удовлетворяющая
условию:
j” f(Q’, <р') dn' = I sin0'd0' I f(0',<p')dtp' = 1.
0 0
Следовательно, в движущейся системе отсчета
В системе отсчета, движущейся со скоростью V относительно лабо-
раторной вдоль оси z, фотон, вылетевший под углом 0 к оси z в
лабораторной системе отсчета, в движущейся системе будет лететь
под углом в', удовлетворяющему условию:
cos в — Vic ,
cost/ = ----------—, <р = <р.
1 —(V/c)cos0
Удобно рассматривать не переменную в, а сразу cos0, тогда di? =
= —dcosSdtp и соответственно
Л
4л — sin 0 d0
о
2тг +1 2тг
J d(p = J dcosS J dtp.
0-10
Таким образом, якобиан перехода к переменным лабораторной си-
стемы отсчета равен:
j_ d(cos0' _ d cos д' _ 1 — (V/c)2
<9(cos0,tp) dcos0 (1 - (V/c)cos0)2’
соответственно, искомая функция распределения не зависит от уг-
ла <р, имеет аксиальную симметрию и сильно анизотропный характер:
Г/ Д А 1 l-C^/c)2
f(cos0, <р) = ---------------у. (7.16)
4л (1 _ (V/c)cos0)2
Видно, что в ультрарелятивистском случае V/с « 1 фотоны вылетают
в узком телесном угле Зв ~ 1 - V /с в направлении движения по-
движной системы отсчета.
ГЛАВА
ПСЕВДОЕВКЛИДОВО
ПРОСТРАНСТВО СТО
8.1. МЕТРИЧЕСКИЙ ТЕНЗОР
Вначале рассмотрим трехмерное евклидово пространство и
произведем замену переменных:
г = Аг', или Xi = atkx'k, (8.1)
а затем запишем определение длины радиус-вектора (4.4):
г2 = xtXi = ацсацх'кХ1 = gkix'kx'i, (8.2)
где
gki = aikau = У. aikan (8.3)
— метрический тензор.
Если преобразование (8.1) унитарное, в частности одно из преоб-
разований симметрии, рассмотренных в гл. 3, метрический тензор равен
единичному. Унитарное преобразование сохраняет скалярное произведе-
ние, а, следовательно, и определение длины. Это, в частности означает,
что при всех линейных (аффинных) ортогональных преобразованиях вид
метрического тензора не изменяется. Метрический тензор определяет
метрику пространства, в евклидовом пространстве она определена фор-
мулой (4.4), т. е.
gTkX
Лоо'
О 1 о
^0 О 1
(8.4)
84 -*v- Глава 8. Псевдоевклидово пространство СТО
Упражнение
Проверить, что при преобразовании поворота относительно оси z
(2.39) метрический тензор равен единичному 6ki-
Преобразование (8.1) должно быть обратимым: г' = А-1г, поэтому
можно записать
г'2 = x'ix'i = a^a^XkXi = g^lxkxi, (8.5)
где обратный метрический тензор g^1 удовлетворяет очевидному условию:
gikgki1 = 8ц. (8.6)
Пример
Рассмотрим неунитарное преобразование в плоскости, описывающее
переход от декартовой ортогональной с базисными ортами i и j, к
косоугольной системе координат с базисными ортами в! и в2, со-
ставляющими между собой угол в, как показано на рис. 8.1.
Обозначим проекции радиус-вектора г
в декартовой системе координат х и у, а
в косоугольной, соответственно Xi = (rei)
и %2 = (гез). Связь координат радиус-
вектора в декартовой и косоугольной си-
стемах определяется линейным преобразо-
ванием:
г = ix + jy = ejXi + е2Х2, (8.7)
или в матричной форме:
Г х\ /1 cos а \ /Xi
\у J \0 sina/\X2
Далее по определению метрического тензора (8.3) получаем
Рис. 8.1. Связь между ко-
соугольным и ортогональ-
ным проектированием
(8.8)
Вид метрического тензора (8.9) можно получить прямым возведени-
ем второй части равенства (8.7) в квадрат.
Найдем теперь обратный метрический тензор:
1 / sin2 а — cos а/ sin2 а
cos а / sin2 а 1 / sin2 а
gik = gik = (
(8.10)
8.1. Метрический тензор —’ V- 85
В отличие от ортогональной системы координат обратный метрический
тензор отличается от «прямого», поэтому для удобства и чтобы различать
разные пространства вводят метрический тензор обратного преобразова-
ния с верхними индексами. Ниже мы вернемся к обсуждению этих двух
типов объектов.
Получим теперь вид метрического тензора (8.9) и обратного к нему
(8.10) прямым возведением в квадрат разложения некоторого вектора а
в рассмотренной выше косоугольной системе координат (см. рис. 8.1):
а = eifl1 + егя2,
где а1 и а2 — проекции вектора на базисные векторы не определяются
«привычным» скалярным произведением вектора с базисными вектора-
ми, как это мы делали для ортогональных систем координат. Квадрат
вектора а равен:
а2 = (я1)2 + (я2)2 + 2я1я2(е[е2) = gikalak,
где, как легко видеть, метрический тензор g.k определяется формулой (8.9).
Квадрат вектора можно записать и с помощью обратного метриче-
ского тензора (8.10), если ввести проекции вектора в «обратном» про-
странстве по определению:
at = gikak и, соответственно, а‘ = glkak, (8.11)
тогда проекции в обратном пространстве равны:
12 2 1
Я| — я + я cos а, яг = я + я cos а.
Квадрат вектора через его проекции в обратном пространстве определя-
ется с помощью обратного метрического тензора (8.10):
а2 = g,katak. (8.12)
В справедливости выражения (8.12) легко убедиться простыми вычисле-
ниями. Заметим, что квадрат вектора можно выразить через свертку про-
изведений проекций в прямом и обратном пространстве, опустив при
этом метрический тензор. Действительно, согласно определению (8.11)
имеем
а2 _ g‘kajak = gika‘ak = а1 ец = akak. (8.13)
Упражнение
Убедиться прямым вычислением в справедливости соотношений
(8.13).
86 -*v- Глава 8. Псевдоевклидово пространство СТО
Рассмотрим теперь другой принципиально важный пример преобра-
зования перехода к криволинейной системе координат. Поскольку при
переходе к криволинейной системе координат матрица перехода зави-
сит от точки пространства, имеет смысл говорить о преобразовании в
окрестности данной точки и рассматривать не конечный радиус-вектор,
а только его дифференциал dr. Выберем знакомую нам сферическую
систему координат, тогда переход от декартовых к сферическим пере-
менным согласно соотношениям (6.14) имеет вид
sin в cos <р г cos в cos <р
sin в sin <р г cos в sin <р
cos в — г sin 0
— г sin0 sin<p
г sin в cos <р
О
(8.14)
Построим метрический тензор:
(8.15)
Вид квадрата длины и, соответственно, радиус-вектора в декартовых
координатах обусловлен исключительно выбором системы координат,
поскольку, как мы только что видели, в одном и том же евклидовом
пространстве выражение для квадрата длины получается различным. В
декартовых координатах метрический тензор единичный (8.4) и он вы-
ражается через скалярные произведения базисных векторов (6.14), что
наглядно показано в примере (8.9). В декартовых координатах также
можно было бы записать определение квадрата длины радиус-вектора,
введя явным образом метрический тензор (8.4), а именно:
г2 = xtXi = gikXiXk, (8.16)
но в таком случае определение (8.2) следует переписать как
г2 = gtkXiXk = gikx'ixk, (8.2а)
где
, dxi дх/с
Sik = glmaliakm = glm^py я t
ОХ, ОХт
(8.17)
— метрический тензор в «новой», преобразованной системе координат.
Преобразование компонентов метрического тензора определяется функ-
циональной матрицей перехода Якоби. Если теперь вычислить детерми-
нанты обеих частей соотношения (8.17), обозначив det(giJt) = g и соот-
ветственно det(gi'jt) = g' получим
g' = J2g, или x/g' = \ J\VS, (8-18)
8.2. Метрика Минковского —’ V- 87
Соотношение (8.18) показывает, что детерминант метрического тензора
при замене переменной (переходе к другой системе координат) преоб-
разуется как скалярная плотность.
8.2. МЕТРИКА МИНКОВСКОГО
Рассмотрим теперь произвольное преобразование коорди-
нат (замену системы координат) типа (7.1), но новые переменные обо-
значим штрихом:
Xi =fdx{, ...,4) = хг(4). (8.19)
В этом случае так же, как и для случая перехода к сферической си-
стеме координат, мы можем рассматривать преобразование перехода в
окрестности какой-либо точки Го и метрический тензор в новой системе
координат (даже если исходное пространство было евклидовым и бы-
ла выбрана декартова система координат) будет зависеть от координат:
g!'|t(x/') = Будем считать, что существует обратное преобразова-
ние, тогда определитель функциональной матрицы должен быть отличен
от нуля. Если теперь определить квадрат элемента длины как
dr2 = gifc(r) dx; dxfc, (8.20)
где
gik = gki, det(g/Jfc) > 0, (8.21)
говорят, что задана риманова метрика. Метрический тензор преобразу-
ется при замене переменной согласно (8.17). Метрический тензор опре-
деляет скалярное произведение двух векторов:
(ab) = gikaibk. (8.22)
Если хотя бы в одной системе координат метрический тензор сво-
дится к единичному — метрика евклидова. Все рассмотренные выше
примеры связаны с евклидовой метрикой.
Если матрица gjk невырождена (detg,^ 0), но квадратичная форма
2
а — gik^i &k
индефинитна (не определена положительно), говорят, что метрика псев-
дориманова.
Если в какой-либо системе координат метрический тензор можно
привести к диагональному виду, причем
±1 при i = к,
0 при i к,
(8.23)
88 -*v- Глава 8. Псевдоевклидово пространство СТО
метрика называется псевдоевклидовой, а соответствующие координаты —
псевдоевклидовыми.
В специальной теории относительности все явления рассматривают-
ся в четырехмерном пространстве времени, для которого мерой длины
служит интервал между двумя событиями, произошедшими в момент
времени Г в точке пространства ri и в момент времени Гг в точке про-
странства п:
= c2(t2-t1)2-(x2-X1)2-(y2-y1)2-(Z2-Z1)2 = c2(t2-t1)2-(r2-rl)2.
(8.24)
Если теперь ввести 4-радиус-вектор
х = ха = (ct, х, у, z) = (х°, х1, х2, х3), (8.25)
его квадрат будет определяться как
XX = х2 = gapxax13, (8.26)
где
/1 0 0 0 \
д:
^0 0 0 -1у
Метрический тензор (8.27) определяет метрику и, соответственно, про-
странство Минковского. Определитель метрического тензора в простран-
стве Минковского detga^ = — 1.
Мы здесь специально ввели греческие индексы для обозначения ком-
понентов 4-мерных пространственно-временных объектов. Системы ко-
ординат в пространстве Минковского называются системами отсчета.
Четырехмерное псевдоевклидово пространство теперь обладает до-
полнительными преобразованиями симметрии по сравнению с рассмот-
ренными в гл. 3: преобразования перехода из одной системы отсчета в
другую, затрагивающие временную переменную — преобразования Ло-
ренца и преобразования обращения времени (Т: t —> —t). Поэтому полная
инверсия координат и времени определяется одновременно операциями
I и Т. Эти преобразования теперь будут играть важную роль при клас-
сификации объектов по способу их преобразования — тензорной класси-
фикации физических величин в четырехмерном пространстве-времени.
Преобразования только пространственной части по-прежнему определя-
ются в соответствии с правилами, рассмотренными в предыдущих гла-
8.2. Метрика Минковского -* V- 89
вах. Преобразования, затрагивающие время, требуют специального рас-
смотрения. В частности переход из одной инерциальной системы отсче-
та в другую — преобразования Лоренца, может быть описан как поворот,
но относительно плоскости, который наглядно представить невозмож-
но. Этот поворот будет определяться не сферической, а гиперболической
тригонометрией. В частности, переход в систему отсчета, движущуюся
относительно исходной (лабораторной) вдоль оси X со скоростью V,
определяется матрицей перехода вида:
' Y y0 0 O'
ха = Lpx'P, где Lp = yfi у 0 0 0 0 10 (8.28)
\ 0 0 0 1J
Здесь
о V 1
f> = —, у = ,
с v'-fi2
с — скорость света.
Если ввести чисто мнимый угол iy/ такой , что t h т// — fi, матрицу
перехода можно записать в виде
/chу/ shy/ 0 о''
а sh у/ ch у/ 0 0 Ел = (8.29)
р 0 0 10
\ 0 0 0 1J
Упражнения
1. Найти обратное преобразование Лоренца (обратную матрицу) (Е-1)^
и убедиться, что
(L~l)ap = (8.30)
р дх
2. Показать, что преобразование Лоренца
га _ дха
Р ~
дх
сохраняет метрику (8.27), т. е.
g'iiv = gapLpLP = g^.
90 -*v- Глава 8. Псевдоевклидово пространство СТО
3. В гл. 3 мы говорили, что совокупность всех преобразований симмет-
рии составляет группу. Это означает, в частности, что два последова-
тельно проведенных поворота также представляют поворот. Убедить-
ся, что два последовательно проведенных преобразования Лоренца
относительно одной и той же оси L(0i) и Ц/Ь) также определяются
матрицей £(/312). Получить релятивистский закон сложения скоро-
стей. Показать, что он эквивалентен закону сложения аргументов
гиперболических функций.
В псевдоевклидовом пространстве удобно рассматривать два вида век-
торов и, соответственно, тензоров. Рассмотрим некоторое скалярное
(4-скалярное) поле f(xa) = f(x) и вычислим его 4-градиент в «лабора-
торной» и преобразованной системах отсчета1):
df(x) д/(х(хУ) дх'Р
дха дх'"' дх-а '
(8.31)
С точки зрения трехмерного анализа в евклидовом пространстве grad
функции есть вектор, т. е. преобразуется так же как радиус-вектор. Здесь
же мы видим (8.31), что 4-градиент преобразуется в соответствии с об-
ратным преобразованием (8.30), следовательно, строго говоря, это не
есть такой же вектор, как 4-радиус-вектор. Поэтому вводятся два типа
объектов: контравариантные, обозначаемые индексами вверху и преоб-
разующиеся так же как 4-радиус-вектор, и ковариантные, обозначаемые
индексами внизу и преобразующиеся в соответствии с обратным преоб-
разованием. Таким образом, мы имеем
va — га-у/Р
Л, — р Л у
Ха = = lPax' р.
(8.32)
Правило Эйнштейна суммирования по дважды повторяющимся индек-
сам также должно быть модифицировано: суммирование проводится по
дважды повторяющимся индексам, если один из них верхний, а другой —
нижний. Именно этим объясняется запись квадрата 4-радиус-вектора в
форме (8.26).
') В тензорном исчислении, а также в пространствах с римановой метрикой
эти два вида объектов: векторы и ковекторы (соответственно, «объект» и «ко-
объект») вводятся сразу. Мы же «стартовали» их трехмерного евклидова про-
странства, где различать два типа объектов нет необходимости, поэтому до сих
пор исходили только из определения вектора.
8.3. Тензорная алгебра в четырехмерном пространстве Минковского —• V- 91
Четырехмерный символ Кронекера (абсолютный симметричный тен-
зор второго ранга) должен быть записан как
дха
(833)
Квадрат 4-радиус-вектора (интервал) можно записать и для ковари-
антного вектора:
х2 = gapxaxp, (8.34)
где gaP = (gap)-1 — контравариантный метрический тензор, обратный
ковариантному (8.27).
Контравариантный вектор можно преобразовать в ковариантный и
наоборот с помощью метрического тензора:
Ха = gafiXP, (8.35)
ха = gaPXp. (8.36)
Таким образом, квадрат 4-радиус-вектора можно записать в виде произ-
ведения ко- и контравариантных компонентов:
х2 = хаха = хаха. (8.37)
Упражнения
1. Показать, что обратный метрический тензор ga@ определяется мат-
рицей (8.27) (совпадает с gap).
2. Убедиться, что
garg^ = 8ap- (8.38)
8.3. ТЕНЗОРНАЯ АЛГЕБРА
В ЧЕТЫРЕХМЕРНОМ ПРОСТРАНСТВЕ МИНКОВСКОГО
В соответствии с двумя типами векторов вводятся и раз-
личные типы тензоров. Однако теперь могут быть контравариантные
(все индексы вверху), ковариантные (все индексы внизу) и смешанные
(часть индексов вверху, а часть внизу). Для смешанных тензоров важное
значение имеет какой индекс вверху, а какой внизу. Например,
т Р т Р
1а y^...v 1 ay д...у
Преобразование компонентов 4-тензоров при преобразованиях Лоренца
ничем не отличается от обычного преобразования системы координат,
92 -*v- Глава 8. Псевдоевклидово пространство СТО
однако надо все время помнить, что ко- и контравариантные компо-
ненты преобразуются взаимно обратными матрицами. Например, для
смешанного 4-тензора третьего ранга имеем
т Р — (I Р (I т' ,Р <
у — >а >у 1 а' у'-
С 4-тензорами можно производить следующие операции, в результа-
те которых снова получается 4-тензор:
1. Сложение тензоров одинакового ранга и типа.
2. Умножение на число.
3. Произведение тензоров разного ранга и типа, например
s ч s+q
гуа.-.р _ С1а' •Р' _ гуа...р'
1 p...v ' V р! ...vf Л p...v'‘
Р
4. Перестановка индексов одного типа (либо верхних, либо нижних),
в частности, для симметризации или антисимметризации по ним, а так-
же изменение порядка следования верхних и нижних индексов.
5. Так же как и в трехмерном случае применяется свертка по паре
индексов, обязательно относящихся к разным типам, например:
ТаРбар = Таа = Трр = inv.
В данном примере в результате свертки получился 4-скаляр.
6. Опускание или поднятие индексов — «жонглирование» индексами
с помощью метрического тензора gap или gaP.
При формулировке различных законов физики часто приходится ис-
пользовать следующие важные свойства тензора.
1. Исключительная роль нулевого тензора, т. е. тензора, у которого
все компоненты равны нулю. Если тензор равен нулю в какой-либо
одной системе отсчета, он равен нулю и в любой другой системе отсчета.
Вместе с требованием ковариантности, т. е. чтобы все законы физики
имели тензорный характер и тем самым не меняли своего вида при
рассмотренных выше преобразованиях (принцип относительности Эйн-
штейна), это свойство имеет фундаментальное значение.
2. Свойство, которое условно назовем «произвольностью» задания
тензора. Суть этого свойства состоит в следующем: если мы в какой-
либо системе отсчета выберем произвольный набор 4s чисел, задавая ими
строение тензора, мы получаем в любой другой системе отсчета тензор
с помощью преобразований (матриц перехода), относительно которых
определено понятие тензора. В частности при переходе из одной инер-
циальной системы отсчета в другую — это преобразования Лоренца.
8.3. Тензорная алгебра в четырехмерном пространстве Минковского —’ V- 93
Пример
Пусть в некоторой системе отсчета (СО) х'у' z!, движущейся относи-
тельно лабораторной СО вдоль оси х со скоростью V, задан единич-
ный вектор п, направленный по оси х'. Какой вид имеет этот вектор
в лабораторной СО?
Заметим, что трехмерному единичному вектору п должен соответ-
ствовать пространственно-подобный 4-вектор N, компоненты кото-
рого в движущейся СО равны Л/7 = (0,1, 0, 0): N'N1 = — 1.
Компоненты этого 4-вектора в лабораторной СО получаются в
результате преобразований Лоренца, следовательно
N = (у/3,у,0,0), NN = y2(/32- 1) = -1.
Особое место занимают, как мы видели в гл. 4 инвариантные матема-
тические объекты. В пространстве Минковского мы уже познакомились
с двумя из них: это прежде всего сам метрический тензор gap, а так-
же 4-символ Кронекера — абсолютный симметричный тензор второго
ранга. Есть еще один инвариантный тензор — абсолютный антисим-
метричный тензор ранга, совпадающего с рангом пространства ea^rfi. В
четырехмерном случае его инвариантность показывается так же, как в
трехмерном (4.13).
Компоненты полностью антисимметричного тензора ea^rfl отличны
от нуля только если все индексы различны. Выберем компонент е0123 = 1,
тогда все остальные равны ±1 в зависимости от четности перестанов-
ки индексов к правильному порядку. Запишем преобразование компо-
нентов этого тензора при переходе из одной системы отсчета в другую
(замене переменных):
,арур. дх'а дхР дх'у дх'11 Av>rl)
е = (839)
Если проделать все суммирования с учетом чередования знаков, мы получим
о д/ ,а '0 'У 'Р\
/аруц _ и(Х XXX) Хужт} /о
п/ Л v х Т)\ , '
о(х X X X1)
где вновь появился якобиан. В случае преобразований Лоренца (чистый
поворот) он равен единице, следовательно так определенный тензор ин-
вариантен относительно преобразований систем отсчета.
С помощью тензора ea^rfl можно строить дуальные объекты. В СТО
наиболее часто строятся дуальные тензоры второго ранга. Если Fa^ —
антисимметричный контравариантный тензор второго ранга, ему можно
94 -*v- Глава 8. Псевдоевклидово пространство СТО
поставить в соответствие дуальный ковариантный тензор второго ранга,
который также будет симметричным:
Fap = \еарг^. (8.41)
Упражнения
1. Показать, что произведение двух полностью антисимметричных тен-
зоров можно представить в виде определителя матрицы:
8“ 81
= det б1 8i 8$ (8.42)
81 81 81
81 81с 64)
2. Показать, что полностью антисимметричному тензору eaF'>‘ соответ-
ствует дуальный скаляр:
еа^еар^ = -24. (8.43)
3. Убедиться в том, что свертка по двум парам индексов двух полностью
антисимметричных тензоров равна:
= 2(5“^ - 8ах8^. (8.44)
4. Вычислить свертку
earilvep^v = —68 р. (8.45)
5. Показать, что 4-градиент скалярной функции есть ковариантный вектор:
= daf, (8.46)
или оператор V в четырехмерном случае
Va = aa = A. (8.47)
ГЛАВА
НЕКОТОРЫЕ ПРИМЕНЕНИЯ
ТЕОРИИ ФУНКЦИЙ
КОМПЛЕКСНОГО ПЕРЕМЕННОГО
9.1. ОСНОВНЫЕ ПОНЯТИЯ
При решении различных задач в теоретической физике труд-
но, а зачастую невозможно, обойтись без применения комплексных чи-
сел, переменных и функций. Как и в предыдущих главах мы считаем,
что читатель знаком по крайней мере с основными понятиями, иначе
бы он и не приступал к изучению теоретической физики. Тем не ме-
нее, в этом параграфе мы напомним некоторые из них. Замечательное
изложение теории функций комплексного переменного можно найти в
книгах [9, 10], а также в «классическом» учебнике Лаврентьева и Шаба-
та [11]. Подробно рассмотрено большое число самых разных примеров
в книгах [12, 13].
Принято обозначать комплексную переменную буквой z. Комплекс-
ная переменная задается двумя переменными, которые также принято
обозначать буквами х и у1). Иными словами, паре переменных х и у
ставится в соответствие другая переменная z следующим образом:
z = x + iy, где i2 = — 1. (9.1)
Число i называется мнимой единицей, а переменные х и у называются
соответственно действительной и мнимой частями и обозначаются как
x — Rez, y = Imz. (9.2)
') На самом деле никто не мешает обозначать комплексную переменную
любой другой буквой, например, ш, а соответствующую пару чисел миг, что,
впрочем часто и делают. Просто по умолчанию так принято обозначать.
96 -*v- Глава 9. Некоторые применения теории функций комплексного переменного
Если Im z = 0, число (переменная) называется чисто действительным, а
если Re z = 0 — чисто мнимым.
Комплексное число равно нулю только в том случае, если и действи-
тельная и мнимая части равны нулю, иными словами,
z = 0 = 0 + 10, или х = Re z = 0 и у = Im z = 0.
Два комплексных числа складываются таким образом, что складыва-
ются независимо действительная и мнимая части:
•Zi + z2 = (%1 + iyi) + (х2 +1?2) = (%1 + х2) + 1(У1 + у2). (9.3)
Умножение комплексных переменных определяется «обычно», как про-
изведение двух сумм, но с учетом свойства мнимой единицы:
Z1Z2 = Х]Х2 - У1У2 + 1(Х1У2 + Х2У1). (9.4)
Всякому комплексному числу или переменной можно поставить в
соответствие комплексно сопряженную величину, которую принято обо-
значать в физике z* ')
z* = х — iy. (9.5)
Произведение комплексной переменной и ее комплексно сопряжен-
ной согласно правилу (9.4) есть действительная величина:
Рис. 9.1. Изображение комплекс-
ной переменной точкой на ком-
плексной плоскости
zz* = |z|2 = (х + iy)(x - iy) = х2 + у2,
(9.6)
где неотрицательная величина |z| > 0
называется модулем переменной z.
Поскольку комплексная перемен-
ная определяется парой переменных,
ее удобно изображать точкой (или век-
тором) на комплексной плоскости, где
ось абсцисс соответствует действитель-
ной, а ось ординат — мнимой части,
как показано на рис. 9.1.
Начало координат располагается в
точке z = 0, поэтому можно опреде-
точки z от начала координат, которое
лить расстояние р какой либо
равно модулю данного комплексного числа:
р = у/(Re z)2 4- (Imz)2 = \/х2 + у2. (9.7)
') В математике часто для комплексно сопряженной величины используют
обозначение z.
9.1. Основные понятия 97
Угол (р называется аргументом комплексной переменной z и обо-
значается как (р — arg z. Легко видеть, что при этом комплексное число
можно задавать другой парой чисел |z| и argz и записывать в виде
z = |z| cos(argz) + i|z| sin(argz) = p(cos<p + isin<p) = pelip. (9.8)
В последнем равенстве легко убедиться, разложив в абсолютно сходя-
щиеся ряды функции costp и sin<p и получив сумму двух рядов, которая
есть разложение в ряд функции ехр(кр).
Особого внимания требует точка, соответствующая бесконечности сю.
Такая точка единственная, что трудно себе представить на плоскости,
однако легко понимается, если установить взаимно однозначное соот-
ветствие комплексной плоскости и сферы единичного радиуса (сферы
Римана), имеющей один полюс (южный) в начале координат, с помо-
щью стереографической проекции. В этом случае бесконечно удален-
ной точке комплексной плоскости соответствует точка северного полюса
сферы Римана. Иными словами,
z = оо = оо + ioo.
Комплексную плоскость, дополненную бесконечно удаленной точкой,
называют расширенной комплексной плоскостью, которая всегда исполь-
зуется при различных вычислениях в физике.
На комплексной плоскости можно определить ряды с комплексными
членами:
W\ + w? + ..., с общим членом wn = ип + ivn, (9.9)
где ип и vn — действительные величины.
Для комплексных рядов, как и для действительных, вводится поня-
тие сходимости, т. е. существования конечной суммы
ш = и + iv = Е wn. (9.10)
П— 1
Согласно введенным выше определениям должно обязательно выпол-
няться условие
U = Е ип, и V = Е vn- (9.11)
П—1 П—1
Для равномерно сходящихся рядов сумма не зависит от порядка следова-
ния членов ряда. Абсолютно сходящиеся ряды можно перемножать, при
этом получающийся двойной ряд также будет абсолютно сходящимся,
т. е. его сумма будет равна произведению сумм рядов.
98 _Глава 9. Некоторые применения теории функций комплексного переменного
Комплекснозначная функция комплексного переменного w(z) опре-
деляется как соответствие каждому комплексному числу z = х + iy из
некоторого множества какого-либо другого комплексного числа w= u + iv.
Число w(z) называется значением функции в точке z, а множество, вхо-
дящее в определение функции — областью определения. Значения ком-
плекснозначной функции также удобно представлять в виде точек ком-
плексной плоскости, где ось абсцисс соответствует действительной ча-
сти и, а ось ординат — мнимой части и. Основные понятия комплекс-
нозначных функций комплексных переменных, (например, непрерыв-
ность) можно получить, в результате обобщения этих же понятий функ-
ций действительных переменных, однако следует при этом учитывать,
что е окрестность точки zy. \z — Zq\ < е теперь представляет окружность
радиуса е с центром в точке zq.
Функциональный ряд
S(z) = wi(z) + w2(z) + w3(z) + ... (9.12)
в качестве членов имеет функции комплексного переменного, поэто-
му сумма ряда (9.12) s(z) также есть комплекснозначная функция ком-
плексного переменного z. Понятия сходимости и равномерной сходи-
мости для таких рядов также обобщаются. В частности, если члены ря-
да (9.12) — непрерывные функции на некотором множестве, а ряд непре-
рывно сходится, то и сумма ряда есть непрерывная функция (на этом же
множестве).
Примеры
1. Важный случай функциональных рядов представляют степенные ряды
P(z, а) = со + ci(z — а) + c2(z — а)2 + ... = £ cn(z — а)п. (9.13)
п—О
Каждый степенной ряд вида (9.13) имеет круг сходимости с центром
в точке а, внутри которого он сходится, а вне его — расходится.
2. Степенной ряд
V(z, 0) = со + ciz+ c2z2 + ... (9.14)
заменой переменной z-1 —» ( сводится к ряду
P(z,oo) = co+y+ |+...= £с„С", (9.15)
который имеет круг сходимости в бесконечно удаленной точке ос.
9.1. Основные понятия 99
Если индекс суммирования в степенном ряде (9.13) может изменять-
ся в «бесконечных» пределах — сю < п < сю, получается ряд Лорана
C(z) = £ cnzn, (9.16)
П — — ОО
который имеет смысл, если сходятся оба степенных ряда
P(z) = СО + C1Z + C2Z2 + . . . ,
Р1(1) = ^ + Ц1 + ....
Z Z2
Если ряд P(z) сходится в круге радиуса г, а ряд — вне круга
радиуса п, то общая область сходимости возможна, если п < г, и пред-
ставляет собой кольцо сходимости.
Примеры
1. Ряд Тейлора представляет собой частный случай ряда Лорана, у ко-
торого все коэффициенты сп = 0 при п < 0.
2. Если кольцо сходимости образовано кругами с центром в точке а / 0,
ряд Лорана имеет вид
£(z,a) = £ cn(z—a)n. (9.17)
П — — ОО
Важную роль в теории функций комплексного переменного игра-
ет понятие переразложение степенного ряда. Пусть степенной ряд ви-
да (9.13) имеет отличный от нуля радиус сходимости tq. Если выбрать
точку b внутри его радиуса сходимости и сделать замену переменной
z z — Ь, его можно представить в виде
P(z, b) = £ cn(z - b)n,
п—0
который также будет сходиться в круге с центром в точке Ь, причем ра-
диус сходимости «нового» ряда, как легко показать, равен г < iq— \ b — а\.
Полученный таким образом степенной ряд называется переразложением
исходного ряда. Внутри этого круга выполняется равенство двух рядов, т. е.
P(z, а) = P(z, Ь). (9.18)
Упражнение
Получить переразложение степенного ряда P(z, сю) в точке Ь.
100 _Глава 9. Некоторые применения теории функций комплексного переменного
Любой ряд, получаемый из ряда P(z, а) конечным числом переразло-
жений называется его аналитическим продолжением. Система степенных
рядов, в которой каждый ряд есть продолжение любого другого ряда, на-
зывается моногенной и представляет собой аналитическую функцию. Эти
функции в общем случае многозначны.
Зная исходный элемент аналитической функции P(z, а), можно един-
ственным образом выделить элемент Р(х, Ь) той же аналитической функ-
ции, указав путь, вдоль которого совершается продолжение. Все воз-
можные пути можно представить в виде ломаных линий, которые по
определению имеют счетное число вершин, поэтому в каждой точке
аналитическая функция имеет не более счетного число различных эле-
ментов. В этом состоит одно из важнейших отличий теории функций
комплексного переменного от теории «обычных» функций действитель-
ного переменного.
Многозначность аналитических функций приводит к еще одному важ-
ному новому понятию: ветви аналитической функции. Ветвь аналити-
ческой функции содержит все продолжения ряда P(z, а) по ломаным,
которые не выходят за пределы некоторой области. Однозначные ветви
называются регулярными и соответствуют регулярным (в данной области)
функциям.
Аналитические функции, определяемые всюду сходящимися рядами,
называются целыми.
Наконец, напомним еще одно важное понятие: особая точка. Про-
извольный степенной ряд (регулярная ветвь аналитической функции)
P(z, а) определен в некотором круге сходимости.
Точка ( на окружности круга сходимости, не принадлежащей области
определения, называется регулярной, если в ней существует продолжение
ряда P(z, (). Если продолжения в виде такого ряда нет — ( называется
особой точкой. На окружности круга сходимости всегда есть по меньшей
мере одна особая точка.
9.2. ДИФФЕРЕНЦИРОВАНИЕ И ИНТЕГРИРОВАНИЕ
АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Производной комплексной функции f(z) в точке Zi; назы-
вается предел
lira 7?(Z) ~ ^(zo) = /(zo). (9.19)
Z^ZO Z — zo
Если предел конечен, функция называется дифференцируемой в точке zq.
9.2. Дифференцирование и интегрирование аналитических функций —’ V- 101
Ветви аналитических функций, которые определяются в некотором
круге сходимости, имеют производные всех порядков. Они имеют тот же
круг сходимости.
Рассмотрим теперь, как можно определить аналитична или нет неко-
торая комплексная функция двух переменных f(z) = и(х, у) + iи(х, у).
Пусть разность z — z« вещественна, т. е. zq = хо + iyo, a z = х + iyo, тогда
f(z) - f(zp) _ и(х,уо) - м(хо,уо) . г(х, уо) - г(хр,у0)
Z — Zo X — Х(| X — Х(| ’
Иными словами
f'(zo) = . (9.20)
\иХ dxj X—XQ,y—yQ
Совершенно аналогично для чисто мнимой разности z — zq имеем
• (9.21)
Уду ду ) х=хп,у=у0
Поскольку выражения должны совпадать, получаем условия Коши—Римана
для аналитических функций:
ди dv ди ди .. ...
л- = л-> д- = -д- ПРИ x = xQ, у = уо- (9.22)
дх ду дх ду
Упражнения
1. Показать, что функция
/(z) = Re(z) = х
не аналитическая.
2. Определить, в какой точке выполняются условия Коши—Римана для
функции
/(Z) = х2 + у2.
Можно ли считать функцию f(z) = |z|2 аналитической?
3. Определить, в какой точке выполняются условия Коши—Римана для
функции
/(z) = |z| = \/х2 + у2.
Примеры
1. Экспонента определяется аналитической функцией, производная ко-
торой совпадает с нею самой. Рассмотрим ряд и его производную
ОО z ч п ОО у ч п
P(z,a) = y сЯ^-, P'(z,a)=Vc„+i^y-.
п\ п\
п—0 п—0
102 _Глава 9. Некоторые применения теории функций комплексного переменного
Равенство рядов означает, что все коэффициенты не должны зави-
сеть от п: с„+1 = сп = с. Если при а — 0 постоянный множитель
выбрать равным с = 1, на действительной оси получим «обычную»
экспоненту. Таким образом, постоянный множитель зависит от точ-
ки а и можно записать
ez = c(a)Y
п\
п—0
Делая замену переменных z — а = (, имеем
е<+а _ с(я)е^,
откуда следует, что
с(я) = ея.
Таким образом, получаем основные свойства экспоненты как анали-
тической функции:
ez = V \zn, eZ1+z2 = eZ1eZ2, e"z = 4- (9.23)
n\ e
n—Q
Из вида ряда (9.23) следует важное соотношение
elz = cos z + i sin z, (9.24)
поэтому легко получить основные свойства тригонометрических функ-
ций комплексного переменного, аналогичные правилам сложения
углов. Поскольку тригонометрические функции имеют период 2л,
экспонента имеет период 2т, таким образом получаем
е'2'т = 1, ez+2,ri = ez. (9.25)
На действительной оси экспонента ez совпадает с ех, поэтому
функция (9.23) есть аналитическое продолжение действительной экс-
поненты на всю комплексную плоскость.
Совершенно аналогично, функции cosz и sinz есть аналитиче-
ские продолжения функций соответственно cosx и sin х с действи-
тельной оси на всю комплексную плоскость.
2. Логарифм комплексного числа z определяется совокупностью значе-
ний w, удовлетворяющих уравнению
ew = z, или iv = Lnz. (9.26)
Поскольку экспонента не может обращаться в 0 и оо, эти точки из
области определения z должны быть исключены.
9.2. Дифференцирование и интегрирование аналитических функций —’ V- 103
Используя представление логарифмической функции в виде
w = и + in, имеем
е“ = р, еш = е1<р, где р = \z\, (р = arg(z). (9.27)
Действительная часть логарифмической функции имеет одно реше-
ние, как это имеет место для действительных переменных, тогда как
мнимая часть определена с точностью до целого числа 2лi. Таким
образом, общее решение уравнения (9.26) может быть представлено
в виде
w — In р + 1(р + 2лш, где п — любое целое число. (9.28)
Логарифмическая функция многозначна, значение In р + i<p = In z на-
зывается главным значением логарифма.
Главное значение Inz — регулярная функция во всей комплекс-
ной плоскости за исключением точек отрицательной части действи-
тельной оси и 0, т. е. в области, ограниченной неравенством | arg z| < л.
Согласно определению аналитической функции, всегда можно запи-
сать разложение в окрестности некоторой точки а из области опре-
деления
Inz = Ina + У сДг — a)k = Ina + P(z, а), или = -.
*=i a
Для малых |z — a | экспоненту можно разложить в ряд
l+P(z,a)+^(P(z,a))2+ ... = -
2! 4 7 а
и его продифференцировать:
V\z, a){ 1 + P(z, a) + ^(P(z, a))2 +...}= P'(z, a)- = -.
L. z*» j a a
Таким образом, получаем, что главное значение логарифмической
функции удовлетворяет «обычному», знакомому дифференциально-
му уравнению:
^-lnz=-. (9.29)
az z
Если устремить z —> — р, главное значение логарифма будет стре-
миться к In р ± iтт, в зависимости от того сверху или снизу рассмат-
ривается предел.
Совершенно очевидно, что функция In z + 2лin при любом фик-
сированном п также регулярна в рассматриваемой области, поэтому
их следует рассматривать как регулярные ветви одной и той же ана-
литической функции Lnz.
104 -*V- Глава 9. Некоторые применения теории функций комплексного переменного
3. Степенная функция комплексного числа определяется как анали-
тическое продолжение степенной функции действительного числа,
определенного на положительной полуоси:
а __
Степенная функция комплексного числа есть
za _ eaLnz _ e«(ln |z|+iargz) _ e«(ln |z|+i(v>+2TrA:)) 3())
где a — произвольное комплексное число, a k — 0, ±1, ±2,..., т. e.
In |z| + i(p = In л — главное значение логарифма.
Согласно определению (9.30) степенная функция многозначна, ес-
ли а не равно целому действительному числу.
Если а — т/п, где т — 0, ±1, ±2, ..., п = 2, 3, 4,... и т/п —
несократимая дробь, степенная функция принимает п различных зна-
чений и аналитическая функция zm!n имеет п регулярных ветвей.
В частности, функцию zxln называют корнем п-й степени из z'.
zx/n = к = 0,1, 1. (9.31)
Степенная функция комплексного переменного удовлетворяет тако-
му же дифференциальному уравнению, что и функция действитель-
ного переменного:
f(z) = azf{z). (9.32)
В точке -Zq / 0 степенная функция представляется рядом Тейлора
ОО z -.п
za = zoay C^z~„zo) . (9.33)
i—i Zq
n—0
Здесь
С” = ^a(a- l)(a — 2)(a — n+ 1), n=l,2, ..., C°a = 1.
Пример
Функция zz согласно определению есть
zz = ezLnz, при z ± 0 zz = e^lzl+iargz).
Упражнения
1. Показать, что
ei7r = — 1, ei7r/2 = i.
9.2. Дифференцирование и интегрирование аналитических функций —’ V- 105
2. Найти решения уравнения
zn = 1,
где п > 1 — целое число.
3. Показать, что
cos(iy) = ch(y), sin(iy) = ish(y).
4. Используя результаты предыдущего упражнения, показать, что
cos z = cos(x + iy) = cos x ch у — i sin x sh y;
sin z = sin(x + iy) = sin x ch у + i cos x sh y.
5. Показать, что решение для мнимой части логарифмической функции
можно представить в виде
и = (р + 1тт,
где п — целое число.
6. Какие значения может принимать Lni?
7. Записать явное выражение для функции zl.
8. Показать, что
f = е-*/2+2^, fc = 0,±l,±2, ...
9. Пусть точки а и b расположены симметрично относительно отри-
цательной части действительной оси (Rea = Reb), как показано на
рис. 9.2.
a Imz @
Т
। — р 0 Re z
।
।
।
।
b
Рис. 9.2. Расположение точек к упражнению 9
Показать, что ряды
P(z, а) = In р + т + 2nin,
P(z, b) = In p — л! + 2^i(n + 1)
представляют непосредственное аналитическое продолжение друг друга.
106 -*v- Глава 9. Некоторые применения теории функций комплексного переменного
Интеграл от комплекснозначной функции комплексной переменной
в комплексной плоскости формально может быть записан в виде инте-
грала от функции одной переменной
1 = f f(z) dz.
Мы здесь специально не указали пределы интегрирования и представили
в виде неопределенного интеграла. Фактически функция комплексно-
го переменного определяется двумя переменными, поэтому в принципе
необходимо определить, что понимается под дифференциалом dz.
Пусть в комплексной плоскости переменной z определена дуга С
с концами в точках zA = хА + iyA и zB = хв + 1ув параметрическими
уравнениями
x = (p(t), y = \p(t),
где t — непрерывно меняющийся параметр. Функции <р(Г) и y/(t) имеют
непрерывные производные соответственно (p'(t) и При изменении
значения параметра от tA до tB точка z = х + iy перемещается вдоль
кривой С, причем zA = (p(tA) + iip(tA), zB = g>(tA) + iifr(tB).
Интеграл функции f(z) = u(x, y) + iv(x, у) вдоль кривой, или конту-
ра, С определяется как
Jf(z)dz- (u + iv)(<p'(t)+ iy/(t)) dt. (9.34)
C tA
Если С' — тот же контур С, но описываемый в противоположном на-
правлении, имеет место свойство, аналогичное перемене местами пре-
делов интегрирования:
f f(z)dz=-f f(z)dz. (9.35)
с с
Контур — это непрерывная кривая, состоящая в общем случае из
конечного числа рассмотренных выше кривых, или дуг. Среди множе-
ства контуров следует выделить замкнутые, у которых конец последней
дуги совпадает с началом первой. Для замкнутых контуров определяются
понятия внутренней и внешней точки. Интуитивно эти понятия кажутся
очевидными, однако следует все-таки условиться, что по отношению к
контуру считается внешней, а что — внутренней областью. Изменение
параметра t задает направление обхода контура. Область, остающаяся при
обходе контура слева, называется внутренней. Точки, не лежащие внутри
контура и на границе, называются внешними. Для контура С', описыва-
емого параметром в обратном направлении по отношению к контуру С,
9.2. Дифференцирование и интегрирование аналитических функций 107
внутренние точки совпадают с внешними точками контура С. Простой
замкнутый контур состоит из дуг, которые между собой нигде не пе-
ресекаются. Простые замкнутые контуры Ci и С2, имеющие одну или
несколько смежных дуг, можно складывать, образуя новый замкнутый
контур С.
Замкнутые контуры (кривые) позволяют определить еще одно важ-
ное понятие: односвязности некоторой области комплексной плоскости.
Область комплексной плоскости называется односвязной, если любую
лежащую в ней замкнутую кривую можно непрерывно деформировать в
точку.
Пример
Вычислить интеграл
с
где С — окружность радиуса р с центром в начале координат.
Положим х = pcosO = <р(в), у — psinO = 1//(0), где параметр в
изменяется от 0 до 2л. Тогда на контуре
z = <р(0) + ii//(0) = р cos в + ip sin в — ре1в
и соответственно
(р'(О) + ир'(0) — ipe'fl.
Таким образом, интеграл (9.34) равен
2тг
[—= [-------!—ipeiS d0 = i f d0 = 2лй (9.36)
J z J pexp(id) J
CO 0
Упражнение
Доказать, что для контура, рассмотренного в предыдущем примере,
для любого целого п —1 имеет место
J” zn dz = 0.
с
Интегральное исчисление комплексных функций, применяемое в фи-
зике, основывается на важнейшей теореме Коши, если функция f(z~) ана-
литична внутри простого замкнутого контура С и на самом контуре, то
j7(z)dz = 0. (9.37)
С
108 -*V- Глава 9. Некоторые применения теории функций комплексного переменного
Следствия теоремы Коши.
1. Пусть точки Zi и Z2 соединены двумя различными кривыми Ci и Сг
таким образом, что заменив направление кривой на противоположное
и объединив их, получим замкнутый контур С. Если функция / (z) ана-
литична внутри полученного таким образом простого замкнутого конту-
ра и на нем самом, имеет место равенство:
f f(z)dz = f f(z)dz. (9.38)
Cl c2
2. Пусть С — простой замкнутый контур и С' — другой простой
замкнутый контур, лежащий полностью внутри С, а функция f(z) ана-
литическая во всех точках кольцевой области, заключенной между этими
контурами, тогда
f f(z)dz = f f(z)dz. (9.39)
С С'
3. Интегральная формула Коши позволяет выразить значение анали-
тической функции f(z) в произвольной точке, лежащей внутри простого
замкнутого контура С, через ее значения на С:
f(z) = dw. (9.40)
2я1 J w — z
с
Интегральная формула Коши (9.40) позволяет определять производ-
ные всех порядков аналитической функции. В частности,
f /M dw. (9.41)
2л1 J (w — z)2
С
Упражнение
Пусть z — произвольная точка внутри контура С и z + h — близкая
к ней точка, также лежащая внутри С, тогда
. ,, If f(w) ,
f(z + h) = — dw.
2л1 J w — z — h
C
Используя определение производной аналитической функции (9.19)
и рассматривая предел /г —> 0, получить формулу (9.41).
Производная /г-го порядка определяется формулой
(9 42)
9.2. Дифференцирование и интегрирование аналитических функций
К
109
Если теперь формально записать разложение произвольной регуляр-
ной ветви аналитической функции /(z) в ряд Тейлора в точке zo, коэф-
фициенты будут определяться производными (9.42), поэтому факториа-
лы сократятся.
Разложение регулярной ветви аналитической функции в ряд Лорана
определяется суммированием в бесконечных в обе стороны пределах
(—сю < п < оо):
f(z)= £ an(z — Zo)", где ап = f — ^(z) , dz. (9.43)
И—— oo 27П J (z- zo)
C
Важно подчеркнуть, что интегралы, определяющие коэффициенты
разложения аналитической функции в ряд Лорана (9.43), не зависят от
выбора контура, важно лишь, чтобы он находился в кольце сходимости.
Пример
Разложить в ряд Лорана функцию
f(z) = exp|j(z- (9.44)
в окрестности точки z = 0.
Поскольку коэффициенты в разложении в ряд Лорана не зави-
сят от выбора контура внутри кольца сходимости 0 < |z| < оо, выбе-
рем в качестве контура окружность единичного радиуса, на котором
z = е1|/’, где 0 < tp < 2л. Коэффициенты имеют вид
а (
2 V
ехр
2ти J
С
^21dz =
2тг
/ ei(aSin<p-n<p)d(/)
0
Заметим, что пределы интегрирования в интеграле могут быть из-
менены: —2л < <р < 0. Если при этом сделать замену <р —<р, для
коэффициентов разложения получим
2тг
ап = — f e-i(asin’’-n’,)d<p.
2тг J
о
Складывая полученные выражения, получаем для коэффициентов раз-
ложения функции (9.44) в ряд Лорана:
2тг
ап = — I cos(<z sin </> — ntp) dtp. (9.45)
2л J
о
но Глава 9. Некоторые применения теории функций комплексного переменного
9.3. НУЛИ И ОСОБЫЕ ТОЧКИ
АНАЛИТИЧЕСКИХ ФУНКЦИЙ
В теории функций комплексного переменного и ее различ-
ных приложениях важнейшую роль играют особые точки. Формальное
определение особой точки мы дали ранее, а теперь вернемся к более
подробному рассмотрению.
Изолированная особая точка. В окрестности ее функция f(z) ана-
литична, за исключением самой этой точки. Например, точка а будет
изолированной особой точкой f(z), если функция аналитична всюду
в некоторой окрестности, скажем, \z — а\ < R, за исключением самой
точки а.
Рассмотрим ряд Лорана регулярной ветви аналитической функ-
ции в окрестности изолированной особой точки а, при этом радиус
внутренней окружности кольца сходимости можно взять сколь угодно
малым:
п—оо п—оо
f(z)= £ an(z-a)n+ £ bn(z—a)~n, где 0 < \z - а| < R. (9.46)
п—0 п—1
Первую сумму в выражении (9.46) принято называть правильной, а
вторую — главной частью ряда Лорана.
Возможны три случая.
1. Все коэффициенты Ьп = 0. Этот случай не представляет для фи-
зики интереса, поскольку функция имеет «искусственную» (нефизиче-
скую) особенность.
2. Ряд отрицательных степеней z — а содержит конечное число чле-
нов, так что при п — т коэффициент Ьт — последний отличный от
нуля. В этом случае функция f(z) имеет полюс порядка т. При z а
имеем |/(z)| —» сю. Если т = 1 — полюс называется простым. Конеч-
ный ряд
т
b„(z — а)~п называется главной частью f(z) при z а.
П— 1
Пусть функция f(z) имеет полюс порядка т, тогда функция /-1(д)= 1/f(z)
имеет ноль порядка т.
3. Изолированная особая точка называется существенно особой, если
ряд отрицательных степеней содержит бесконечное число членов. Это
означает, что функция f(z) стремится к любому наперед заданному чи-
слу при z а.
9.3. Нули и особые точки аналитических функций —’ V- 111
Примеры
1. «Простая функция»
f, , 1 1/1 1 \
/(z) = ~г--- = ;----.
z + 1 21 \z - 1 z + 1/
имеет простые полюсы в точках z = ±1.
2. Функция sin z имеет простые нули в точках z = ±лп, где п — 0,1,2, ... —
целое неотрицательное число. Следовательно, функция
sin-1(z) = cosec z
имеет в этих же точках простые полюсы.
3. Функция (9.44) может быть разложена в ряд Лорана в окрестности
точки z = 0 с бесконечным числом членов с отрицательными степе-
нями z, поэтому z = 0 — существенно особая изолированная точка.
4. Функции
l/z .11
е ' и соответственно sin-, cos-
z z
имеют изолированные существенные особенности при z = 0.
Всегда рассматривается в качестве особой бесконечно удаленная точ-
ка. Поведение функции /(z) на бесконечности такое же, как поведение
функции /(1/z) в точке z = 0. Поэтому к бесконечно удаленной точке
применяются те же понятия: аналитичности, нулей, полюсов и суще-
ственно особых точек.
Упражнения
1. Проанализировать поведение функции f(z) = az2 + bz + с в беско-
нечно удаленной точке.
2. Какую особенность имеет бесконечно удаленная точка для функции
(9.44)?
При работе с аналитическими функциями часто появляются «спе-
циальные» особые точки — точки ветвления. Они существуют для всех
аналитических функций, имеющих несколько регулярных ветвей. Анали-
тическая функция имеет точки ветвления, если при аналитическом про-
должении какой либо функции (обычно это — функция действительного
переменного), результат зависит от пути, по которому оно делается. В
физических приложениях обычно встречаются два типа точек ветвления,
которые нами были рассмотрены в § 9.2.
1. Точки ветвления степенной функции. Если показатель степенной
функции za, а = т/п — несократимая дробь, точка z = 0 есть алгебра-
ическая точка ветвления порядка п.
112 Глава 9. Некоторые применения теории функций комплексного переменного
2. Логарифмическая точка ветвления z = 0 определяется для логариф-
мической функции Ln z. Мы видели, что при обходе точки z = 0 против
часовой стрелки, мнимая часть логарифмической функции изменяется
в соответствии с изменением аргумента <р переменной z. При обходе
в п полных оборотов к исходному значению логарифмической функции
добавляется 12лп. Если взять в качестве исходного элемента (из которого
получается аналитическое продолжение) логарифмическую функцию на
положительной части действительной оси Inx, все ветви логарифмиче-
ской функции отличаются от главного значения логарифма In z кратным
числом i2?r. С равным успехом можно было бы взять в качестве исход-
ного элемента для аналитического продолжения любую другую ветвь.
Упражнения
1. Определить регулярные ветви аналитической функции f(z) =
2. Определить регулярные ветви аналитической функции f(z) = Lnez.
9.4. ВЫЧЕТЫ. КОНТУРНОЕ ИНТЕГРИРОВАНИЕ
Возможность разложения регулярной ветви аналитической
функции в ряд Лорана в окрестности изолированной особой точки Хд
имеет важные следствия. В частности, коэффициент при степени п = — 1
есть просто интеграл этой функции по произвольному замкнутому кон-
туру С, содержащему данную особую точку, но не охватывающему дру-
гих, например, окружности, с центром в хп:
«-1 = ±ff(z)dz. (9.47)
2я1 J
С
Коэффициент а-i называется вычетом функции f(z) относительно точ-
ки zq и обозначается
resz=zo/(x) = а-ь (9.48)
Разложение регулярной функции в бесконечно удаленной изолиро-
ванной особой точке в ряд Лорана имеет вид
/(х)= £ anzn, (9.49)
п— — оо
где коэффициенты разложения определяются интегралами (9.43) по кон-
туру с радиусом R < р < оо. Вычетом функции /(х) в точке х = оо на-
зывается коэффициент ряда Лорана я_1; взятый с обратным знаком:
resz=oo f(z) = — я_ь (9.50)
9.4. Вычеты. Контурное интегрирование —’ V- из
Если изолированная особая точка zq есть полюс порядка т, вычет
определяется как
1 дП2 — 1
resz=Z|) /(z) = —щ Um [(z - z0)mf(z)]. (9.51)
В частности, если функция f(z) может быть представлена в виде
Ж>= , g(Z\m, g(zo)^O, (9.52)
вычет определяется производной функции g(z) порядка т — 1:
resz_z„ f(z) = (т[ 1)!g(m~1)(z0). (9.53)
Формула (9.53) часто бывает очень полезной в различных практических
применениях.
Для бесконечно удаленной (регулярной) точки, в которой функция
f(z) имеет простой полюс, формула (9.53) принимает вид
resz=oo f(z) = Jim, [z(f(oo) - f(z))]. (9.54)
Основная теорема теории вычетов: Пусть область D есть внутрен-
ность замкнутой кривой Г, ориентированной так, что при движении
точки по направлению ориентации область D остается слева, и пусть
функция f(z) регулярна в области D за исключением особых точек
Zi,Z2, ...,zn и непрерывна около кривой Г вплоть до самой кривой,
тогда
Г /(z) dz = 2лд £ resz=Zjt f(z) + 2Triresz=oc f(z). (9.55)
Jr k=l
Основная теорема о вычетах очень часто используется при вычисле-
нии различных (одномерных) определенных интегралов от действитель-
ных функций. Для этого делают аналитическое продолжение подынте-
гральной функции на комплексную плоскость, а интервал интегриро-
вания сводят к замкнутому контуру. Определение замкнутого контура в
комплексной плоскости зависит как от пределов интегрирования, так и
от вида самой подынтегральной функции. При этом часто имеется ряд
стандартных приемов.
1. Аналитическое продолжение есть регулярная функция.
Если пределы интегрирования конечны и симметричны, а действи-
тельная функция не имеет особенностей, интервал интегрирования в
этом случае, как привило, сводится к замкнутому контуру в виде окруж-
ности соответствующего радиуса.
114 _J\_ Глава 9. Некоторые применения теории функций комплексного переменного
Если интеграл несобственный с бесконечными пределами интегри-
рования, контур представляет собой полуокружность радиуса R сю,
замкнутую в верхней или нижней полуплоскости, таким образом, чтобы
на ней подынтегральная функция обращалась в нуль.
2. Аналитическое продолжение имеет точку ветвления (многозначная
функция).
В этом случае обязательно делается разрез таким образом, чтобы ис-
ключить точку ветвления из области, ограниченной замкнутым конту-
ром. Тогда выделяется какая-либо регулярная ветвь, а дальнейшие дей-
ствия аналогичны рассмотренным в предыдущем случае.
При вычислении несобственных интегралов оказывается очень по-
лезной лемма Жордана: Пусть функция g(z) непрерывна и ограничена
при |z| > Ro > 0 в верхней полуплоскости (Irnz > 0), тогда на полу-
окружности Cr радиуса R с центром в начале координат, расположенной
в верхней полуплоскости
*lim I g(z)eiaz dz = 0 при Im а > 0. (9.56)
Cr
Примеры
1. Вычислим интеграл действительной функции
2тг
/= Г—
J 1 — 2а cos tp + а
о
Сделаем замену переменной z = е1<р, тогда dtp = —idz/z а подынте-
гральная функция принимает вид
1 z
1 - a(z - 1/z) + a2 fl(z - a)(z - 1/«)'
Исходный интеграл сводится к интегралу по окружности единичного
радиуса в комплексной плоскости:
7=i <f _________dz z .
a J (z — a)(z — 1/я)
|z| = l
Согласно теореме о вычетах получаем, что интеграл равен вычету в
точке z = а, если |я| < 1, и в точке z = 1/д, если |я| > 1:
Г dtp = J 2л/(1 - а2) при |д| < 1,
J 1 — 2а cos tp + a1 — при |д| > 1.
9.4. Вычеты. Контурное интегрирование
К
115
2. Вычислим несобственный интеграл
I =
dx
U2 + I)2’
Видно, что в комплексной плоскости подынтегральная функция на
полуокружности 7? —> оо обращается в нуль. Регулярная функция
1 /(z2 + I)2 имеет два полюса второго порядка в точках z = ±i соот-
ветственно в верхней и нижней полуплоскости. Замыкая контур в
верхней полуплоскости, получаем
I = 2zri resz_
1
1 (z - i)2(z + i)2
2лт----------у
2 dz (z + i)
л
4'
3. Вычислим несобственный интеграл с применением леммы Жордана:
/—iaiT
—|----2 daj, т > 0.
(i)q +
(9.58)
Подынтегральная функция обращается в нуль на полуокружности
Я —> оо, замыкающей контур в нижней полуплоскости, где она имеет
простой полюс в точке z = —iwo- Учитывая «неправильное» направ-
ление обхода контура, получаем
1= — e~“vc.
4. Вычислим несобственный интеграл функции, имеющей точку ветв-
ления:
оо Im z
1= [ dx. Ся ®
J х2 + 1 / Х
о
Подынтегральная функция не обла-
дает какой-либо четностью, поэтому
интеграл нельзя распространить на
бесконечные в обе стороны пределы.
В комплексной плоскости подынте-
гральная функция f(z) имеет (корне-
вую) точку ветвления z = 0, поэтому
при обходе по бесконечно удаленной
окружности, где эта функция обраща-
ется в нуль, на угол 2я, следует учи-
тывать «набег» фазы, который в нашем случае приводит к дополни-
тельному множителю ехр(12л/2) = — 1. Выберем замкнутый контур,
Г+
Re z
Рис. 9.3. Изображение замкну-
того контура для вычисления
интеграла в примере 4
116 Глава 9. Некоторые применения теории функций комплексного переменного
как показано на рис. 9.3, и получим
j” f(z)dz+J f(z)dz+J f(z)dz+J f(z) dz = 2л1(^ + т^) = л/Ьг,
Г_|_ Си Г Cp
где
/(z) = ^ZT
z + 1
Интегралы по контурам Cr при R —> сю и Ср при р 0 обращаются
в нуль. Интеграл по контуру Г+ в этих же пределах совпадает с ис-
ходным. В интеграле по контуру Г_ на действительной оси функция
отличается от исходной функции f(x) знаком. Учитывая обратный
порядок пределов интегрирования, видим оба отличных от нуля ин-
теграла равны, поэтому получаем
/= ^=.
V2
5. Рассмотрим еще один пример вычисления интеграла, в котором подын-
тегральная функция имеет точку ветвления:
I=f-------dx, 0<а<1. (9.59)
J х+ 1
о
Выбирая контур такой же, как в предыдущем примере, можем записать
J” f(z) dz+J~ f(z) dz+f f(z) dz+f f(z) dz = 2^i(—1)“-1 =2д1е1л(“-1).
г-I- Cr Г- Cp
Совершенно аналогично показывается, что интегралы по контурам Сд
при R —> сю и Ср при р 0 обращаются в нуль, а интеграл по кон-
туру Г+ в этих же пределах совпадает с исходным. В интеграле по
контуру Г_ на действительной оси функция отличается от исходной
фазой 2ni(a — 1), поэтому имеем
(1 - e2'Ti"l~") f — dx = 2л1е1я(а-1).
v 7 J x+1
0
Окончательно получаем
f^dx=^. (9.60)
J x + 1 sin ал
0
Примеры вычисления определенных интегралов с помощью вычетов,
в которых подынтегральная функция имеет особенности на действитель-
ной оси, будут рассмотрены в гл. 10.
9.5. Гамма-функция и другие функции, определенные интегралами -* V- 117
Упражнения
1. Для действительной функции и(г,в), не имеющей особенностей на
действительной оси, доказать соотношение (интеграл Пуассона):
2тг
1 (* гр- _
и(г,0)=— / —5------------------,u(R, ф) dtp.
2л J r2 _ 2Rr cos(0 - tp) + г2
О
2. Вычислить интеграл
/= Г c?s(^<w
J (1)q -f- (1)
3. Вычислить интеграл
i= 7_____.
J д/Д(х2 + 1)
О
4. Вычислить с помощью вычетов табличные интегралы
+1
J V 1 ± х2
5. Получить с помощью вычетов «знакомое» значение интеграла
/sinах ,
-----------------------------------dx,
х
о
где действительный параметр а > 0. При решении воспользоваться
результатами примера (9.36).
9.5. ГАММА-ФУНКЦИЯ И ДРУГИЕ ФУНКЦИИ,
ОПРЕДЕЛЕННЫЕ ИНТЕГРАЛАМИ
Интеграл
F(z)= f e^z-'dt (9.61)
о
определяет аналитическую функцию, регулярную при Re z > 0, кото-
рая называется гамма-функцией. Гамма-функция часто встречается при
различных вычислениях, поэтому очень полезно быть знакомым с ее
основными свойствами.
118 _J\_ Глава 9. Некоторые применения теории функций комплексного переменного
Наиболее часто используется свойство
r(z) = (z-l)r(z-l),
(9.62)
которое легко проверяется интегрированием по частям. Для z = п, где
п — натуральное число, получается хорошо знакомая формула
Г(и) = (п—1)!, (9.63)
поскольку Г(1) = 1.
Для корректного применения свойства (9.62) важно определить рас-
положение полюсов и других особенностей гамма-функции.
Свойства гамма-функции во всей комплексной плоскости определя-
ются с помощью интеграла по замкнутому контуру, представленному на
рис. 9.3:
/(х) = j” ew(-wY~x dm. (9.64)
с
На контурах Ср и Cr интегралы стремятся к нулю. Подынтегральная
функция многозначна, поскольку
(-ш)2-1 = e^-i)Ln(-w)
Главное значение логарифма выбирают так, чтобы при отрицательном
действительном w = — р значение логарифма было положительным, то-
гда для w — ре1<р имеем 1п(—ш) = 1пр + 1(<р — л). Таким образом, инте-
гралы, взятые по контурам Г+ и Г_ вдоль действительной оси в сумме
дают
j [_e-p+(z-l)(lnp-br) e-p+(z-l)(lnp+br)j
О
dp =
о
= — 2isinzTr
dp = —2isinzTrr(z),
откуда получаем еще одно интегральное представление гамма-функции:
Г(г) = —-— f e~w(-w)z~1 dm. (9.65)
2 sin zn J
c
Поскольку гамма функция регулярна и не имеет особенностей при z =
= 1,2, 3,..., можно заключить, что гамма-функция имеет простые по-
люсы при z = 0, — 1, —2, ....
Получим полезную формулу, определяющую произведение двух гам-
ма-функций. Сперва рассмотрим действительные аргументы, тогда
Г(х)Г(у) = J” tx~le~ldt J” 5J'-Ie-Sds, (х > О, у > 0).
о о
9.5. Гамма-функция и другие функции, определенные интегралами -* V- 119
Рассмотрим данное выражение как повторный интеграл и сделаем фор-
мальную подстановку s = tu. Меняя порядок интегрирования, получим:
Г(х)Г(у) = j” rx-1e-fdr j” ryuy-1e-t(1+u) d« =
О о
эс оо оо 00 _1
= f иу~1 du [ Гх+у-1е-Г(1+и) dt = [ vx+y~1e~1'du f—- dw.
J J J J (1 + и) +y
0 0 0 0
Здесь мы сделали еще одну замену переменной v = 1(1 + и). Теперь
можем записать:
Г(х) Г (у) = Г(х + у) [ иУ ' du. (9.66)
J (1 -1- U)
о
Формула (9.66) позволяет вычислить широко используемое в физике
значение Г(1/2). Полагая х = у=1/2и учитывая Г(1) = 1, получаем
<™/2)>! = 7v5^ = ^ = ’-
о
где мы воспользовались результатами примера (9.60) для а — 1/2. Таким
образом, имеем
Г(1/2) = 7л. (9.67)
Положим формально у = 1 — х, что возможно для действительного
аргумента 0 < х < 1:
Г(х)Г(1-х)= ( —du. (9.68)
J 1 + и
о
Интеграл в правой части выражения (9.68) можно взять с помощью
вычетов, аналогично рассмотренному в предыдущем параграфе приме-
ру (9.59). Подставляя выражение (9.60), получаем
Г(х)Г(1 - х) = если 0 < х < 1. (9.69)
sm их
Продолжая аналитически выражение (9.69) на комплексную плос-
кость, получаем
T(z)T(l — z) = л cosecTrz, (9.70)
следовательно 1/T(z) — целая функция.
120 -*V- Глава 9. Некоторые применения теории функций комплексного переменного
Соотношение (9.66) позволяет получить еще одну очень полезную
формулу: формулу Стирлинга, которая определяет асимптотическое по-
ведение Г(х) при х —> сю для действительных значений аргумента. В
основном она используется для вычисления факториалов. При выводе
формулы можно использовать метод сравнения суммы и соответствую-
щего интеграла:
п— 1
1пГ(и) = 1п[(и — 1)!] = £ Inv.
V—1
Далее замечаем, что
v+l/2 v+1/2 v—1/2 1/2
§ In t dt = § Intdr— § Intdt— J (ln(v+ t) + ln(v — Г)} dt =
v—1/2 0 0 0
2 / f2
Inv2 + In 1 -
dt = In v + Cv,
где Cv = 0(1 /v2). Следовательно,
n— 1
£ Inv =
V=1
n—l/2
1/2
n— 1
In t dr — £ Cv.
V=1
(9.71)
Таким образом, получаем1):
n—1/2
c' n-i
InT(n) = I Intdt — £ С,
J V=1
1/2
In n — n + C + o(l), (9.72)
где С — некоторая постоянная.
Полученная нами формула (9.72) обобщается и на случай нецелых
(произвольных) значений х:
1пГ(х)= (х-01пх-х + С + о(1), (9.73)
откуда можно определить неизвестную константу С.
Предварительно получим «формулу удвоения» из соотношения (9.66).
Делая в интеграле правой части подстановку 1 + и — 1 /1 и полагая у = х,
получаем
х-1 ^2
—-----dw-2 f гх-'(1 — 0х-1 dr. (9.74)
(1 + и) J
о о
(Г(х))2 = Г
Г(2х) J
') Мы здесь сразу записали конечный результат.
9.6. Метод Бореля —' V- 121
Далее сделаем еще одну подстановку It = 1 — y/v или 4г(1 — Г) = 1 — v,
в результате которой интеграл в правой части преобразуется к виду:
1 1
- f f1 ~ dp _ з1-^ fd _ pV-1 dp = 2i-2x£W£(1/2)
2 J k 4 J J Г(х+ 1/2) '
0 0
Теперь получаем искомую формулу:
Г(2х) = ^2г(х) Г(х + 1/2). (9.75)
ул
Логарифмируя формулу (9.75) и применяя к логарифмам формулу Стир-
линга (9.73), получаем значение константы
С = 1п(л/2л).
Таким образом, формула Стирлинга в окончательном виде выглядит как
Г(х) = У^(|)Х(1 + о(1)). (9.76)
Обычно формулу (9.76) записывают для факториала большого натураль-
ного числа
№=71(тЛ1+о(1))- (9-77)
9.6. МЕТОД БОРЕЛЯ
В теоретической физике встречается проблема суммирова-
ния расходящихся рядов. Обычно она возникает при решении задач
методами теории возмущений. В этом случае помогает метод аналити-
ческого продолжения Бореля. Суть метода состоит в следующем.
Пусть функция f(z) есть сумма ряда, сходящегося в круге |z| < 1:
f(z) = £ anzn (|z| < 1), (9.78)
п—О
тогда интеграл
P(z) = j1 e-f<p(zr)dr, (9.79)
О
ГДС ос
<p(z) = £ %zn, (9.80)
п—0
осуществляет аналитическое продолжение функции f(z) через каждую
дугу границы круга сходимости, на которой эта функция регулярна.
122 -*V- Глава 9. Некоторые применения теории функций комплексного переменного
Метод основан на двух свойствах сходящихся рядов.
1. Степенной ряд
/(х) = £ апхп
п—О
можно умножить на е~х и почленно проинтегрировать в интервале (0, сю),
если только полученный в результате интегрирования ряд
/ е~х [ £ dx = £ ап I е~ххп dx = £ апп\
" п—0 п—0 " п—О
СХОДИТСЯ.
2. Пусть ряд (9.78) сходится при |z| < R и имеет особые точки ai, оь, • •,
а ряд
g(z) = £ bnzn
п—О
сходится при |z| < R' и имеет особые точки fii, @2, ..., тогда функция
F(z)=^ ( (9.81)
2тп J \wj w
С
где С — контур, охватывающий начало и на котором | w\ < R, |z/w\ < R',
имеет особые точки среди точек апр,„ (мультипликационная теорема
Адамара).
Данное утверждение эквивалентно тому, что функция F(z) есть сум-
ма ряда
F(z) = £ anbnzn. (9.82)
п—О
Действительно, для g(z) справедлив ряд
-) =У •
Ш/ Z—l \w J
о
Подставим его в интеграл (9.81) и почленно проинтегрируем в соответ-
ствии со свойством 1:
Г/ 2 1 Г #7 ^l,(Z\nAw V' bnZn f f(w) , “ , „
F(z) = — I f(w) X bn - — = ) I - XanbnZ
2ni J \w / w 2ni J Wn+L
с о о c
Мы здесь воспользовались основной теоремой о вычетах.
9.6. Метод Бореля —' V- 123
Примеры
1. Пусть f(z) = (a — z)-1 и g(z) = (b — z)-1, тогда
1 ОО / \ п 1 оо , \ ij
п—0 п—0
Следовательно, функция F(z) есть
1 / 7 \ п 1
=~^—-
ab ^^\аЬ/ ab — z
п—0
2. Пусть f(z) = (1 — z2)-1 и g(z) = z(l — z2)-1. Имеем
f(z) = £ z2k, g(z) = £ z2k+1,
k=0 k=0
поэтому ряд (9.81) содержит произведение коэффициентов, где для
нечетных п все ап = 0, а для четных п все Ьп равны нулю, следова-
тельно F(z) = 0, т. е. точки z = ±1 не являются ее особенностями.
3. Применим метод Бореля для функции
1 ое
/(*) = r^=
1 z п=0
Для функции <p(z) имеем ряд
сю п
^z) = Eh^eZ-
п—0
Вычислим теперь интеграл Бореля (9.79):
F(z)= f e-teztdr = ——.
J 1 — z
о
Упражнения
1. Проверить метод Бореля для функции
Ж =
1 — Z
2. Для функции f(z), рассмотренной в примере 3, найти функцию F(z),
вычислив интеграл (9.79).
ГЛАВА
10
ПРИМЕНЕНИЕ
ОБОБЩЕННЫХ ФУНКЦИЙ
10.1. ВВЕДЕНИЕ
Оперирование с идеальными объектами в физике такими как
точечный заряд, материальная точка, мгновенное включение и т. п. приво-
дит к появлению в математическом аппарате, описывающем эти объек-
ты, так называемых обобщенных функций. Наиболее известные и часто
употребляемые — 5-функция Дирака, в-функция Хевисайда. При реше-
нии конкретных задач эти обобщенные функции никогда не входят в
окончательный результат, но встречаются на промежуточных этапах вы-
числений. В конечном ответе они могут входить только в интегральных
выражениях, умноженными на «хорошую» функцию. Поэтому свойст-
ва обобщенных функций определяются свойствами интегралов — они
имеют интегральный смысл.
Таким образом, математическая теория обобщенных функций стро-
ится на сопоставлении им функционалов, т. е. интегральных выражений,
содержащих произведения с хорошими «функциями». Например, для
5(х)-функции определяется функционал с произвольной <р(х) из класса
«хороших» функцией:
(5(х), <р(х)) = J” 5(х) <р(х) dx = <р(0). (Ю.1)
В функционале происходит «сглаживание» (усреднение) сингулярности
5-функции. В физике это отвечает замене модели точечного объекта
некоторым распределением в «физически бесконечно малом» объеме,
так что среднее значение распределенного объекта совпадает с величи-
ной точечного.
10.2. 6-функция —' V- 125
В теории обобщенных функций часто используется другой подход:
обобщенная функция рассматривается как предел последовательности
«хороших» функций. Такой подход может оказаться более наглядным,
чем функциональный, поскольку в этом случае производится предельный
переход после выполнения всех «обычных» операций над последователь-
ностью «хороших» функций, аппроксимирующих обобщенную.
10.2. 5-ФУНКЦИЯ
В этом параграфе рассмотрим «основную» обобщенную функ-
цию на уровне «физической строгости». Оправданием такого подхода
может служить высказывание одного из великих математиков: «Если
Ньютон ждал три века, пока его душу спасут из ада, построив строгую
теорию математического анализа, то Шварц спас душу Дирака еще при
его жизни».
Прежде всего подчеркнем, что 5-функция — это операторная вели-
чина, которая приобретает «реальный» смысл только если она стоит под
знаком интеграла. Иными словами, 5-функция есть ядро линейного ин-
тегрального оператора. При этом само ядро не есть функция в обычном
смысле.
Представления и определения 5-функции мы рассмотрим в следую-
щем параграфе, а сейчас приведем, пожалуй, самое распространенное
определение:
к к
5(х) = — lim f elA5jfclx= 1 lim f cosA7xdx=- lim sin Kx. (10.2)
2n K^oc J Л K—юо J Л K^oc X
—K 0
Сам по себе предел К —> оо выражения (10.2), конечно, не существует,
однако, если его правую часть умножить на «хорошую» (обычную) функ-
цию, регулярную при х = 0 и проинтегрировать по интервалу, вклю-
чающему точку х = 0, а после интегрирования выполнить предельный
переход, предел будет существовать:
ь ЬК
J 5(x)/(x)dx= J dy =/(0).
— а —аК
(10.3)
Формула (10.3) определяет основное свойство 5-функции и ее можно
рассматривать как определение (10.1).
126 -*V- Глава 10. Применение обобщенных функций
Наглядно 8(х) можно представить себе как функцию, равную нулю
при всех но имеющую в точке х = 0 столь сильную сингуляр-
ность, что
I 5(x)dx=l. (10.4)
Если формально продифференцировать определение (10.2), получим
определение производной от 5-функции:
. 1 .. (Ксе&Кх sinKx\ ..
8 (х) = - lim-------------5— , (Ю.5)
Л К—>оо \ X X /
которая имеет «реальный» смысл только в интегральном выражении.
Если после выполнения интегрирования выполнить предельный переход
так же, как и в формуле (10.3), получим
J/(x)5'(x)dx=-/'(0). (10.6)
Заметим, что интегрированием по частям, выражение (10.3) сводится к
выражению (10.6), где производная 5-функции определена в соответ-
ствии с (10.5).
10.3. ПРЕДСТАВЛЕНИЯ 5-ФУНКЦИИ
Рассмотрим наиболее часто встречающиеся случаи появле-
ния 5-функции, когда некоторый параметр стремится к нулю.
1. Бесконечно медленное (адиабатическое) изменение физической ве-
личины (как правило — некоторого взаимодействия). В этом случае име-
ем интегральное выражение:
5(х) = lim--—— = lim — f e~£^e±lkxdk. (Ю.7)
л(х2 + г2) e-0 2л J
Действительно, выражение (10.7) обладает необходимыми свойствами:
lim---—у- = 0,
Л(Х + £ )
и соответственно при х = 0 получаем
lim — = сю.
£—0 ЛЕ
10.3. Представления 8-функции
К
127
Вычислим теперь интеграл от дроби, стоящей под знаком предела:
е dx _ Г dy
л(х2 + Е2) J тг(1 + у2)
1+у2 L
2тт1
— res
=1.
2. Периодически меняющееся взаимодействие (представление Дирихле)
N N
sinNx 1 Г +ii-Y ,, 1 Г 7 л?
lim ------= — hm / _ iim / cos kx ak.
N^oo 71X 2n N^oo J 71 N^oc J
— N 0
(10.8)
Здесь роль малого e играет 1 /N.
В дальнейшем придется часто пользоваться теоремой Римана—Лебега:
интеграл от произведения медленно меняющейся функции fix) и периоди-
ческой функции с малым периодом и средним за период равным нулю мал
и в пределе равен нулю.
Это имеет место, например для функций: cxp(iAfx), sinlVx, cos.Vx
при IV —> оо. Действительно, беря по частям интеграл, получаем
J f(x)eiNxdx =
а
b
а
dx =
0.
N^oo
Проверим теперь выполнение основных свойств 5-функции для вы-
ражения (10.8).
Заметим, что в конечных пределах
lim
N^oo
sin Nxcp(x) dx = 0,
но интеграл в бесконечных пределах (по всей оси) отличен от нуля и
равен
1 Г sin Nx , 1 Г sin у , ,
- I ------dx = - I ----- dy = 1.
nJ X Tt J у
Таким образом, согласно сформулированной выше теореме получаем
£ FsmlVx х= £ 7 anJVx =
71 J X 71 J X
128 -*V- Глава 10. Применение обобщенных функций
Следовательно, функция (10.8) удовлетворяет основному свойству 5-функ-
ции (10.1).
Рассмотренные два представления наиболее часто встречаются в фи-
зических задачах.
3. Представление в виде гауссовой экспоненты:
5(х) = lim -Ue-?/£. (10.10)
у/НЕ
Легко видеть, что
lim —^е~х = 0, но lim —±е-х Iе = оо.
у/НЕ Х-ЕО 0 у/НЕ х=о
Сама функция по знаком предела (10.10) выбрана нормированной на
единицу:
Для любой хорошей функции, как и в представлении Дирихле можем
записать:
lim f —!=е-х/£<р(х) dx = <р(0) lim [ —^=е~хdx = <р(0). (10.11)
е—0 J у/НЕ г—>0 J у/НЕ
Таким образом, рассмотренное представление также удовлетворяет необ-
ходимым свойствам 5-функции.
4. Это представление похоже на представление Дирихле:
5(х) = lim £Sm2(*/£). (10.12)
пх
Вновь легко проверяем:
lim £sinV£) =0, lim £sinV£) = lim ±=oo.
nx x/0 ЛХ x=0 £—0 яе
Осталось убедиться, что интеграл в бесконечных пределах от рассматри-
ваемой функции равен 1. Для этого вычислим интеграл
r. . If sin2 ay ,
1(а)=н ---
Л J у
10.3. Представления 8-функции
К
129
Интеграл вычисляется дифференцированием по параметру а:
81(a)
да
1 Г 2 sin ay cosay , _
л J у
1 Г sin 2а у , 1 Г sin t , ,
- I -----^-dy=- I -----dt=l.
л J у л J t
Решая тривиальное дифференциальное уравнение I'(a) = 1, получаем:
1(a) = а + const с «начальным» условием 1(0) — 0, поэтому 1(a) = а.
Заметим теперь, что заменой х/е — у мы сводим нужный нам ин-
теграл к вспомогательному при а — 1. Таким образом убеждаемся, что
функция под знаком предела нормирована на 1. Далее, воспользовав-
шись теоремой Римана—Лебега, убеждаемся, что рассматриваемое пред-
ставление удовлетворяет основному свойству 5-функции (10.1).
5. Представление Пикара:
8(х) = lim —е JV'XL
' ’ N^x, 2
(10.13)
Здесь так же как в представлении Дирихле е = N 1.
Легко убеждаемся:
lim — = 0, lim — = lim — =
2 x^0 N^oo 2 N—*oo 2
Интеграл в бесконечных пределах равен 1 и не зависит от параметра N.
Основное свойство 5-функции также выполняется.
6. Представление Стильтьеса:
5(х) = lim
N—><x
N
2л chNx
(10.14)
Проверяем выполнение необходимых требований:
lim -------- = 0, lim ------------- = lim — = сю.
N^oc 2nchNx x_^0 N^oo 2jrchNx x_0 N^x 2л
Убедимся, что функция нормирована на единицу:
JVd^= Г Ne~Nx dx=l
2nchNx J тг(1+е ) л J 1 + у2
— arctgyl = 1.
Л I - oo
Убедиться в том, что представление (10.14) удовлетворяет необходимому
свойству (10.1) можно так же, как в случае с быстро убывающей гауссо-
вой экспонентой (10.8).
В заключение параграфа отметим, что 5-функция размерна, ее раз-
мерность обратна размерности аргумента:
[5(х)] = [х]-1. (10.15)
130 -*v- Глава 10. Применение обобщенных функций
10.4. СВОЙСТВА Й-ФУНКЦИИ
Подчеркнем еще раз, что свойства обобщенных функций
не зависят от выбора представления, аппроксимирующего данную функ-
цию: свойства обобщенных функций выполняются в пространстве ос-
новных, «хороших» функций. Например, в классе функций С°°, которые
при |х| —» оо стремятся к нулю вместе со своими производными любого
порядка быстрее любой степени 1/|х|. Таким образом, равенства в фор-
мулах понимаются как равенства соответствующих функционалов. В этом
смысле обобщенную функцию можно рассматривать как ядро линейного
интегрального оператора.
Например, основное свойство й-функции (10.1) для какой-либо функ-
ции /(х)записанное в виде
J/(x)<5(x)dx = /(0), (10. la)
следует понимать как:
(/(х)5(х), <р(х)) = lim f f(x)8e(x)<p(x)dx = /(0)<р(0) =
Е—>0 J
=/(0) lim f йг(х)<р(х)dx. (10.16)
£'~0 J
Поскольку все свойства в классе основных функций переносятся на
исследуемые функции, в физике принято в записи формул опускать функ-
ции <р(х), и оставлять только «нужные» функции /(х), как это представ-
лено в формуле (10.1а).
Перечислим основные свойства й-функции.
1. При «сдвиге» аргумента d-функции имеем
|f(x)5(x-xo)dx = f(xo). (10.17)
2. 8-функции четная:
<5(-х) = й(х). (10.18)
3. d-функции однородная:
6(ах) = Д<5(х). (10.19)
|«|
10.4. Свойства 8-функции —' V- 131
Свойства (10.17)—(10.19) легко доказываются заменой переменной под
интегралом в определении (10.1).
4. 3-функция от функции:
= V у - (ю.20)
f (*<)
I
где f(xt) = 0, Xi — простые (некратные) корни. Это свойство легко дока-
зывается разложением функции f(x) в ряд Тейлора до первого порядка в
окрестностях нулей: f(x) = f(Xi) + f'{xi){x — х,) 4-... с учетом свойств
(10.18) и (10.19).
5. х5(х) = 0.
6. Производная 5-функции может быть записана только в интеграль-
ном соотношении:
J/(x)^(5(x))dx=-f'(0). (10.21)
Это свойство доказывается интегрированием по частям с учетом обра-
щения в нуль на пределах интегрирования «хороших» функций.
Свойство (10.21) обобщается на производную любого порядка:
f /(x)^r(5(x))dx=(-l)V('1)(0). (10.2U)
J dx
7. Интегральное представление (фурье-образ) 5-функции:
j” eikx dx = 2л8(к). (10.22)
Это свойство можно рассматривать как обратное преобразование Фурье
для 1, поскольку из перечисленных выше свойств следует:
I 5(x)eitedx = 1.
8. Функционал, определяющий действие 5-функции, можно пред-
ставить интегралом по замкнутому контуру в комплексной плоскости:
lim f 5£(х)<р(х)dx = lim — f <p(z) — = <p(0). (10.23)
г—П J e—0 2m J Z
-oo \z\=e
132 -*V- Глава 10. Применение обобщенных функций
Примеры
1. Вычислить интеграл
1= f cos kix cos kx dx.
0
Для вычисления интеграла следует воспользоваться интегральным
представлением (10.22):
/ = J” (cos(fc + ki)x + cos(fc — fci)x) dx =
= ReQ ei(fc+fcl)x + ei(fc“fcl)x) dx = 2л(8(к + fci) + 8(k - fci)).
2. Вычислить <5(sinx). Согласно свойству (10.20) вычисляем нули функ-
ции, стоящей в качестве аргумента 5-функции: хп = лп, соответст-
венно sir/x,, = cos хп = (—!)"• Поэтому можно записать:
5(sinx) = £ 8(х — 2лп).
П— — ОО
3. Разложить в ряд Фурье на отрезке — л < х < л функцию
f(x) = £ 8(х-лп).
П— — <Х>
Коэффициенты Фурье равны
сп = f f (x)e~inx dx = V f 8(х — 2лк)е~1ПХ dx =
2л J 2л J 2л
— 71 k— — OQ — 71
поэтому имеем
СЮ 1 сю
£ 8(х-лп)-' £ einx.
П=—СХ) п— — <х>
4. Показать, что в смысле обобщенных функций справедлива формула:
Если точка х = 0 [а, Ь], по теореме Римана—Лебега
ь
1 Г e±iNx
— lim / ----------<»(x)dx = 0.
2л, .v—тс J x=pi0
a
10.4. Свойства 8-функции
К
133
Обходя точку х = 0 в комплексной плоскости по контуру, показан-
ному на рис. 10.1, получаем
, 1 f е±1Л,х . . , , <р(0) .. Г е±1Л,х ,
±— lim I ----------ф(х)с1х = ± lim I -----------dx =
2тп N^oo J x=pi0 2тп N^oo J x=pi0
-оо C±
= ±<Х21 f dx = (0), (10.24)
2тп J x
C±
что соответствует основному свойству 5-функции.
Рис. 10.1. Контуры интегрирования С_|_ и С- в комплексной плоскости
Упражнения
1. Показать, что
5[(х-Х!)(х-х2)] = |—2—г(5(х“ Х1) + 5(х-х2)).
| X1 1
2. Получить полезную формулу:
8(х2 — а2) = (б(х — а) + 6(х + а)).
2|a|v 7
3. Вычислить интеграл
1= f sinfcixsinfcxdx.
о
4. Используя теорему Римана—Лебега, показать, что в смысле обобщен-
ных функций
±— lim
2тп N—юо
±iNx
е
х ± Ю
= 0.
10.4. Свойства 8-функции
К
133
Обходя точку х = 0 в комплексной плоскости по контуру, показан-
ному на рис. 10.1, получаем
, 1 f е±1Л,х . . , , <р(0) .. Г е±1Л,х ,
±— lim I ----------ф(х)с1х = ± lim I -----------dx =
2тп N^oo J x=pi0 2тп N^oo J x=pi0
-oo C±
= ±V(0) f dx = (0) (10.24)
2тп J x
C±
что соответствует основному свойству 5-функции.
Рис. 10.1. Контуры интегрирования С_|_ и С- в комплексной плоскости
Упражнения
1. Показать, что
<5[(х-Х!)(х-х2)] = |—2—г(5(х“ Х1) + 5(х-х2)).
| X1 1
2. Получить полезную формулу:
<5(х2 — а2) = —Ц- (б(х — а) + 6(х + а)).
2|a|v 7
3. Вычислить интеграл
1= f sinfcixsinfcxdx.
о
4. Используя теорему Римана—Лебега, показать, что в смысле обобщен-
ных функций
±— lim
2тп N—юо
±iNx
е
х ± Ю
= 0.
10.5. Функция Хевисайда в(х), signx и pl -*V 135
Функцию signx = |х|/х можно выразить через функцию Хевисайда:
{1
О
-1
при X > 0,
при X = 0,
при X < 0.
(10.29)
Упражнения
1. Показать, что
d I I
— X = signx.
dx
2. Определить производную функции signx.
3. Доказать, что в смысле обобщенных функций
lim (-i)N6(x)eiNx = <5(х).
N^oo
Указание. Проинтегрировать по частям и воспользоваться теоремой
Римана—Лебега.
Обобщенная функция р- определяется через функционал следую-
щим образом:
—е оо ое
fl,<p(x)Ulimf [ ^dx+f^dxV [ dx. (10.30)
\Х / E—^OyJ X J X J J X
— DC £ — ОО
С произвольной функцией f(x) такой интеграл называется интегралом
в смысле главного значения и обозначается как
V.p. J i^dx=p J ^dx=J^dx. (10.30a)
Часто в физике возникают следующие ситуации, когда необходимо
использовать обобщенную функцию р-, аппроксимируемую функциями:
pi = lim * = - lim f ye~Weeikxdk, (10.31)
5x £-+ox2 + f2 2i £—+o J \k\
N
<p-= lim -—cosNx _ f sinfcxdA:. (10.32)
X X J
0
136 -*v- Глава 10. Применение обобщенных функций
Действительно, в случае (10.31) получаем
lim f —y<p(x)dx = lim lim f f dx + f ^dx^) +
E-+0 J x+e2 x J X J
+ <p(0) lim lim / —, X , dx = (a-, (p(x)}.
t-+0 >r-+0 J x2 + E \ X )
В случае (10.32) справедливость представления доказывается аналогич-
но, но следует дополнительно воспользоваться теоремой Римана—Лебега.
Рис. 10.2. Обход особенности в точке 0 и контуры интегрирования С+ и С- в
комплексной плоскости
Функционал (10.30) можно представить в виде интеграла в комплекс-
ной плоскости z по контуру С+ или С_, обходящему точку х = 0 по по-
луокружности радиуса е 0 соответственно сверху или снизу (рис. 10.2)
и вычитания или добавления полувычета 1тг<р(0):
(р-,<р(х)) = lim J" - dz 1тг<р(0). (10.33)
с±
От интеграла по контуру в комплексной плоскости (10.33) можно
перейти к интегралу по действительной оси, записав его в виде
lim f dz = lim Г g>(x)) =
s—+0 J Z г—+0 J X =F IE \ X =F 10 /
C± —oo
= (ppip(x)j ± щ(5(х), <p(x)). (10.34)
Полученная формула (10.34) позволяет ввести еще две новые обоб-
щенные функции Сохоцкого:
—Ь = ^1Тш5(х). (10.35)
х ± 10 х
10.5. Функция Хевисайда в(х), signx и -* V 137
Формулы Сохоцкого могут быть также легко получены в предельном
переходе для ^-последовательностях:
1 _ X =F _ X1 Е
„ | — 2 . 2 — 2 . 2 "F 2 . 2? ’
х ± ie х + е х + е л(х + е )
Пример
Показать, что обобщенная функция р- есть производная от 1п|х|.
Действительно, запишем функционал:
(d = = ~ J (ln|x|)<p'(x)dx.
Выделяя теперь s-окрестность 0 и разбивая интеграл на три, получаем
lim ^ln |х|<р(х)| + In |х|<р(х)| — f - dxY
£—»+0 \ I—ос Ie J % /
Л1;. J тг‘‘1=(₽т’,(1))-
|х|>£
Упражнение
Показать, что фурье-образ функции 1/х можно получить из пред-
ставления (10.32), и он равен
f(k) = J" -е-1Ь: dx = — \л sign k.
С обобщенными функциями Сохоцкого можно связать еще две функ-
ции, имеющие большое применение в физике:
Обобщенные функции (10.36) получаются в s-последовательностях
<5±(х) = ±— lim —i—= lim — f e~ek±lkx dk.
2л e^+o x ± IE e—+n 2л J
0
Функции обладают полезными свойствами:
5+(x) + 5_(x) = 5(x), (10.37)
<5+(x)-d-(x)=-p-. (10.38)
71 X
138 -*V- Глава 10. Применение обобщенных функций
10.6. НЕКОТОРЫЕ СВОЙСТВА ОБОБЩЕННЫХ ФУНКЦИЙ
Умножение обобщенных функций может быть определено
либо как предел произведения ^-представлений, либо как функционал.
Во втором случае, если fug- две обобщенные функции, то произве-
дение их определяется как:
(g-f,<P) = (g,f<P)- (Ю.39)
Определение (10.39) справедливо не для любых обобщенных функций,
видно, что одна из функций (в данном случае /) должна быть достаточно
«хорошей», чтобы имеющаяся сингулярность функции g не превысила
гладкость основных функций <р.
Производные обобщенных функций можно определять как через функ-
ционал, так и вычисляя производную какого-либо ^-представления.
Трехмерная функция 8 (г) определяется как
5(r) = <5(x)5(y)5(z) = —Ц f etod3k, (10.40)
(2л) J
где интегрирование совершается по всему k-пространству. Соответст-
венно, основное свойство (10.1) теперь принимает вид
f d3rS(r)f(r) = f(0), (10.41)
где интегрирование выполняется по некоторой области, включающей
точку г — 0.
Если функция /(г) = /(|г|) = f(r) и при этом регулярна в нуле, свой-
ство (10.41) можно переписать как
f 8(r)f(r) d3r = f f(r)r2 dr f S(r) cLQ = /(0). (10.42)
Выражение (10.42) позволяет ввести «радиальную» функцию 8(г):
8(г) = = (10.43)
2тг г 2л г
Деление на г2 как бы учитывает «тройную» сингулярность трехмерной
5-функции в нуле. При этом данная операция вполне допустима, посколь-
ку элемент объема содержит г2. Множитель 1/2л учитывает, что интегри-
рование проводится только по половине действительной оси: 0 < г < оо.
На комплексной плоскости все обобщенные функции можно опре-
делить как 1/z, но с особым выбором пути интегрирования (контура)
для каждой функции. Действительно, это свойство вытекает из формул
10.6. Некоторые свойства обобщенных функций
К
139
(10.24) и (10.33) и рис. 10.1 и 10.2. Заметим, что для 5-функции выбира-
ется замкнутый контур, обходящий точку 0. Контуры интегрирования,
дающие различные обобщенные функции из функции 1/z, представле-
ны на общем рис. 10.3.
б
\07 ' х — Ю
в г
д
Рис. 10.3. Схематическое представление обобщенных функций в виде инте-
грирования по контуру в комплексной плоскости: а, б — главное
значение в, г — функции Сохоцкого д — 5-функция
Примеры
1. Произведение двух функций р- не определено. Действительно, со-
гласно (10.39) можем записать:
= =f|imo I
X X \ X X / £—J
|х|>£
= Um f dx= lim
X e^+0 E
£
2. Вместе с тем определена производная от функции р-
(^4^(х))=-s / "(JV(0) d*=
|x|>£
= _ f </(*) + y'(0) - xy'(O)
J x2
140 -*V- Глава 10. Применение обобщенных функций
Если воспользоваться ^-представлением, получаем
d
&Х& х) е
d х
х2 + Е2
X — £
z 2 . 2?2 ’
(х + £ )
3. Покажем, что
^6(х) = -1-6'(х). (10.44)
Действительно, воспользуемся ^-представлениями обеих функций:
<5£(х) =
Е
7Г(Х2 + Е2) ’
X
~1~. 2’
X + Е
8'АХ)=--^-
Л(Х + £ )
Переходя в произведении е-представлений к пределу е —> 0, получаем
результат (10.44).
4. Можно так же показать, что не определено произведение двух
5-функций, имеющих одинаковый аргумент.
5. Так же как и во втором примере, используя Е-представления, можно
показать, что
(р~ + тт<5(х)) (р- - л8(х)] = (10.45)
\ X / \ JC / X
6. Определено произведение двух функций Сохоцкого:
1 1 d 1 . . d 1
------ • ------ =-------- = —1ЛО (х) T-fp--
х —10 х —10 dx х —10-----------------------------dx x
Упражнения
1. Показать, что в смысле обобщенных функций
7 . , , . 1/1 1
I sm fci х cos kxax = -------
J 2\k+kik— ki
о
2. Показать, что при а Г b произведение
<5(x — я)5(х — b) = 0.
3. Доказать формулу:
3(ах + Ьу)3(сх + dy) = det
(а
\ с а /
(10.46)
ГЛАВА
11
ГЕОМЕТРИЯ И АЛГЕБРА
В МАТЕМАТИЧЕСКОМ АППАРАТЕ
КВАНТОВОЙ МЕХАНИКИ
11.1. ОСНОВНЫЕ ПОНЯТИЯ
Фундаментальный принцип суперпозиции состояний в кван-
товой механике определяет выбор ее математического аппарата. Это —
геометрия линейного (векторного) пространства, элемент которого, век-
тор, определен с точностью до произвольного фазового множителя е1|₽,
(Im<p = 0).
Основные понятия линейного пространства определены в гл. 2, од-
нако в этой главе мы будем рассматривать комплексные элементы. Эле-
менты рассматриваемого пространства определяют состояния квантовой
системы, поэтому их следует отличать от векторов, рассмотренных выше.
Выбор способа обозначений играет важную роль для успешного описа-
ния, ибо выбор неудобных обозначений затрудняет представления и вы-
числения в теории. Обозначения вектора в евклидовой геометрии а или
4-вектора в специальной теории относительности А в квантовой теории
неудобны, поскольку не позволяют в таком виде записать необходимое
в квантовой механике количество информации. Выбор удачной записи
векторов состояний предложил Дирак, заключив соответствующий сим-
вол в скобки («ящик»). Таким образом, векторы состояний в опреде-
ленный момент времени t будем обозначать как = \ t). Так обо-
значенный вектор состояния называется кет-вектором. В силу принципа
суперпозиции, в линейном пространстве из двух элементов пространства
IV/'i) и можно построить линейную комбинацию |i//) = Ci | ) + <^21 »
где коэффициенты Ci и C2 — комплексные числа, которая также будет
элементом этого же пространства. Пространство состояний полное. С
физической точки зрения это означает, что любому состоянию кванто-
вой системы может быть поставлен в соответствие определенный вектор.
142 _Глава 11. Математический аппарат квантовой механики
Условимся называть пространство кет-векторов прямым пространством.
Прямому пространству поставим взаимно однозначно сопряженное про-
странство, элементы которого составляют векторы бра (у\. Соответствие
между элементами прямого и сопряженного пространства устанавлива-
ется с помощью операции эрмитовского сопряжения, для которой опре-
делим обозначение:
(^| = |^)+. (11.1)
Для линейной комбинации (суперпозиции) также будет установлено со-
ответствие по определению:
+ с2\у/2}) + = С*(1Л1| + С2 (11-2)
где знак * означает комплексное сопряжение.
Подчеркнем, что векторы бра и кет принадлежат разным пространст-
вам, поэтому их нельзя складывать! Иными словами, запись Ci |y/i) + ci(у2\
смысла не имеет.
Для векторов состояния вводится понятие «длины» (норма), квадрат
которой определяется как
НИН2 = (W) > °, (Ц-З)
причем
= 0 только если = 0.
В квантовой механике обычно принято выбирать векторы состояния,
нормированные на единицу:
= 1. (11-4)
Таким образом, линейное пространство состояний, векторы которого
нормированы согласно (11.4) есть сфера единичного радиуса в беско-
нечномерном пространстве комплексных чисел.
Введение нормы (11.3) позволяет определить скалярное произведение
двух векторов \у/) и \(р) как билинейную комбинацию. Для этого следует
один вектор взять из прямого пространства (кет), а другой из сопряжен-
ного (бра), при этом согласно определению имеем свойство:
(<P\v) = Ш*- (11.5)
Из определения (11.5) становится понятным название векторов прямого
и сопряженного пространства: две половинки английского слова bracket.
бра- и кет1).
') Когда П. А. М. Дирак выступал с докладом на семинаре в институте Физи-
ческих проблем, Л.Д. Ландау переводил названия векторов как «ско» и «бка»,
однако прижились более благозвучные английские названия.
11.1. Основные понятия -JU 143
Свойство скалярного произведения (11.5) (комплексное сопряжение)
следует из требования действительности нормы вектора \у/) + А|<р):
«vl + (И + МфУ) = (vlv) + + WW + И2(<рН > о,
откуда следует, что
Im(A*(<p|i//) + A(vd<p)) = 0. (П-6)
Представим скалярные произведения в виде
(<р\ц/) = А + iB, (у/\<р) = С + ID,
где А, В, С и D — действительные числа. Полагая в соотношении (11.6)
произвольное число А = 1, получаем D = —В, а для А = 1, соответственно,
С = А. Таким образом, получаем свойство комплексной сопряженности
скалярных произведений (11.5).
Если скалярное произведение двух векторов равно нулю
(VM=O, (11.7)
векторы \у/) и \<р) называются ортогональными.
Линейное пространство со свойствами (11.1)—(11.3) и (11.5) называ-
ется гильбертовым.
Пример
1. Определить условия, при которых коэффициенты в суперпозиции
|i//) = + C2IV2) удовлетворяют условию |С112 + |сд|2 = 1.
Поскольку вектор нормирован на единицу, имеем
(vlv) = |й I2 + |о|2 + 2RecjtC2(v,i|V2)-
Пусть фаза скалярного произведение (V1IV2) равна <р. а фазы ко-
эффициентов соответственно 512, тогда условие задачи удовлетво-
ряется, если
RecjtC2(VilV2) = I Re cf с2(тЛ! |V^2> I cos(</> — + 52) = 0.
Если исключить тривиальные случаи сд = 0 или С2 = 0, получаем,
что для выполнения условия требуется либо
1) ортогональность состояний суперпозиции = 0, либо
2) условие на фазы <р —81+82 = 71(71 + 1/2), где п = 0, ±1, ±2, ... —
любое целое число.
2. Разложить вектор \<р) на векторы параллельный и перпендикулярный
вектору \ip).
Пусть (%| 1//) = 0, но (<р\у/) / 0 и (%|<р) / 0 и, соответственно,
(vlv) = = 1-
144 _Глава 11. Математический аппарат квантовой механики
Будем искать разложение в виде
М = A|||v<> + А±|я>,
где Ац = Поскольку вектор \<р) нормирован на единицу, ко-
эффициенты разложения удовлетворяют условию: |Ац|2 4- /1_|2 = 1,
поэтому
ы=71-Ц||2=7i-iwi2.
Выберем фазу вектора |%) так, чтобы = |Л_|_|, тогда
1^ = Д
Ш |А±|^ У1-|Ш)12
Упражнение
Доказать неравенство Шварца
(u\u)(v\v) > IH0I2.
Указание. Ввести суперпозицию \(р) = \и) + Л|п).
11.2. ОПЕРАТОРЫ В ГИЛЬБЕРТОВОМ ПРОСТРАНСТВЕ
Векторы линейного пространства можно связать между со-
бой линейными соотношениями с помощью линейных операторов
|<p) = L|V<), (П-8)
которые не нарушают линейность пространства:
+ C2IV2)) = + c2L\y/2)-
Для данного оператора L в линейном пространстве существует об-
ласть определения 1>(L) — область пространства (подпространство D),
в котором определено действие оператора на векторы L\y/), G D) и
область значений 7^(£) — подпространство R, в которое он отображает
векторы из D:
\<р) =L\v) € R. (11.9)
Линейные операторы образуют конструкцию, называемую алгеброй
операторов, т. е. множество, в котором выполняются:
11.2. Операторы в гильбертовом пространстве —’ V- 145
1) умножение на скаляр (комплексное число);
2) коммутативная операция сложения:
А + В = В + А;
3) операция умножения, которая в общем случае некоммутативна
А • В ф В • А.
Некоммутативность умножения операторов задается коммутационными
соотношениями — коммутаторами:
А-В — В А= [А,В], (11.10)
которые обладают следующими свойствами:
[Я,В] = — [В, Я]; (П.Н)
[Я,В + С] = [Я, В] + [Я, С]; (11.12)
[Я,ВС] = [Я,В]С + В[Я,с]; (11.13)
[Я, [В, С]] + [В, [С, Я]] + [С, [Я, В]] =0. (11.14)
Последнее соотношение называется тождеством Якоби и оно аналогич-
но тождеству Якоби для скобок Пуассона.
Если имеется взаимно однозначное соответствие между двумя векто-
рами \у/) и \(р), оно определяет два оператора:
7lv) = \<Р) и g\<p) = \у/). (11.15)
Операторы f и g обратны друг другу, т. е. удовлетворяют операторному
уравнению:
7g = i, Я7=1- (11.16)
Иными словами,
g = r-1, Я-1 = 1. (11.16а)
Если два оператора f ng имеют обратные, тогда существует обратный
оператор их произведения:
(7g)"1 (И-17)
При вычислении скалярного произведения двух векторов \<р) и
накладывается условие ассоциативности:
(</>1(71^» = (<</>l7lM = (<p\f\w}, (П.18)
которое позволяет не писать векторы в круглых скобках и, соответствен-
но, оператору действовать как на кет, так и на бра-векторы — «налево
и направо».
146
_Глава 11. Математический аппарат квантовой механики
Мы определили операторы в прямом пространстве. Установим те-
перь соответствие с операторами в сопряженном пространстве. Пусть
|<р) = тогда по определению вектор в сопряженном пространстве
получается эрмитовским сопряжением:
(М)+ = И = (ГШ'Г = {v\f + , (11-19)
где оператор f+ эрмитовски сопряжен оператору f.
Вычислим скалярное произведение вектора \<р) с произвольным век-
тором |х):
(<р\х) = {v\f+\x) = {х\<рГ = {x\f\vY,
т. е.
(V\f + \x> = <х\Ш*- (11-20)
Соотношение (11.20) следует рассматривать как определение эрмитов-
ски сопряженного оператора. Эрмитовское сопряжение для операторов
аналогично переходу от кет- к бра-векторам а также комплексному со-
пряжению чисел.
Если
f+=f, (И-21)
оператор называется эрмитовым или самосопряженным.
Для сопряженных операторов легко убедиться в справедливости со-
отношений:
(af)+ = «V + , (11.22)
(f + g)+ = f+ + g+; (11.23)
(7'g)+ -F-/+- (11.24)
Упражнения
1. Показать, что для эрмитовых операторов / = и g = g+ комму-
татор имеет вид
[f, g] = ih,
где h — h+.
2. Показать, что справедливо неравенство: (f+f) > 0.
Пример
Получить соотношение неопределенностей для физических величин
А и В.
11.3. Собственные значения и собственные векторы операторов —’ V- 147
Физическим величинам соответствуют эрмитовы операторы: А = А+
и В — В+, поэтому их коммутатор равен [А, В] = 1С. Введем оператор
L = ДА + ЫДВ, где Im Л = 0 и ДА = А — (А), ДВ = В — (В), соот-
ветственно, [ДА, ДВ] = 1С.
Поскольку (L+L) > 0, имеем
((ДА - 1ЛДВ)(ДА + 1ЛДВ)) = ((ДА)2) + Л2((ДВ)2) +
+ 1Л([ДА, ДВ]) = ((ДА)2) + Л2((ДВ)2) - Л(С) > 0.
Неравенство выполняется, если дискриминант квадратного уравне-
ния относительно Л
Л2((ДВ)2) - (С)2 - 4((ДА)2) = 0
не больше нуля:
(С)2 — 4((ДА)2)((ДВ)2) <0,
т. е.
((ДА)2)((ДВ)2) >
Введем обозначения
8 А = ^((ДА)2), 8В = у/ ((АВУ), (С) = (С)
и получим искомое соотношение неопределенностей:
8А6В >
“ 2
11.3. СОБСТВЕННЫЕ ЗНАЧЕНИЯ
И СОБСТВЕННЫЕ ВЕКТОРЫ ОПЕРАТОРОВ
Особую роль, характеризующую внутренние свойства опе-
ратора, играют его собственные значения и собственные векторы. Задача
ставится так же, как и в линейной алгебре для матриц:
7|ш)=Л|ш), (11-25)
где Л и Iv'a) — соответственно, собственное значение и соответствую-
щий ему собственный вектор. Для характеристики вектора состояния
\у/ц) достаточно только индекса Л, тогда как буква у/ имеет вспомога-
тельный характер и совершенно излишня, поэтому принято ее опускать,
а выражение (11.25) записывать в виде
/|Л) = Л|Л).
(11.25а)
148 -*V- Глава 11. Математический аппарат квантовой механики
В сопряженном пространстве (для векторов бра) уравнение (11.25а) сле-
дует записать для эрмитовски сопряженного оператора:
(Л|7+ = Л*(Л|. (11.26)
В квантовой теории особую роль играют операторы физических вели-
чин, средние значения которых в любом состоянии представляют собой
измеримые, а, следовательно, действительные числа:
Ш = Ш* = = Ш + \ч}- (Н-27)
Из выражения (11.27) и определения эрмитово сопряженного оператора
(11.20) видно, что физическим величинам соответствуют эрмитовы опе-
раторы. Рассмотрим свойства эрмитовых операторов подробнее.
1) Из определения эрмитова оператора следует: если |<р) = ф + \ф'), то
М = (v\f+ = (W-
2) Из определения (11.20) следует:
trl/M = (Wlx)*-
3) Из соотношения (11.26) получаем
(Л|/+ = Л*(Л| = <Л|7= Л(Л|,
т. е. А*(А|А) = А(А|А). Откуда сразу следует, что А* = А — собственные
значения эрмитова оператора действительны.
4) (А'|/|А) = А(А'|А) = А'(А'|А), т. е.
(А — А')(Л'|А> = 0.
Пусть А' А, тогда (А'| А) = 0. Таким образом, собственные векторы
эрмитова оператора, отвечающие различным собственным значениям,
ортогональны.
5) Функция от оператора F(f) определяется формулами: если f\ А) = А| А),
то F(/)|A) = F(A)|A).
Свойство 5) предполагает, что функция от оператора может быть
представлена в виде ряда Тейлора:
F(/) = £ ^<”>(0)?. (Н-28)
п—0
Свойства эрмитовых операторов позволяет использовать их собствен-
ные векторы в качестве системы ортонормированных базисных векторов
линейного пространства.
11.4. Проекционный оператор —’ V- 149
11.4. ПРОЕКЦИОННЫЙ ОПЕРАТОР
С помощью кет-вектора \1р) прямого пространства и век-
тора бра (<р| сопряженного пространства было определено число — ска-
лярное произведение этих векторов Однако, скалярное произве-
дение — не единственный способ перемножения векторов бра и кет.
Можно составить «внешнее» произведение:
Р = Ш (И.29)
которое обладает свойствами оператора. Действительно, по определению
оператор ставит в соответствие произвольному вектору |i//) некоторый
другой по определенному правилу. Подействуем конструкцией (11.29)
на произвольный вектор \(р):
р\ф> = (ЫСг1)М = СгИИ;
(<р|р = (<p|(|vO(xl) = CrlMvO-
Таким образом, конструкция (11.29) обладает свойствами оператора про-
ектирования: при действии на любой вектор кет он переводит его в век-
тор \у/) с определенным числовым множителем, а при действии на любой
вектор бра он переводит его в вектор (х I также с определенным (другим)
числовым множителем. Таким образом удобно определить проекционный
оператор (оператор, проектирующий любой вектор на заданный) в виде
pv = \v}(w\. (11.30)
Сформулируем основные свойства оператора (11.30).
1. Ру\<р) = <р)\ty) и, соответственно, = (у/\(<р\|i//).
2. Р+ = (|i//)(i^|)+ = |i//)(у/\ = Ру, т. е. оператор Ру эрмитов.
3. Из операторного соотношения
Ру = = \w)(.w\ = Ру
следует важный вывод о собственных значениях оператора проектиро-
вания. Рассмотрим задачу на собственные значения:
Ру\Л.) = Л|Л>;
Ру\Л.) = Л2 |Л>, но
^|Л)=Р„|Л)=Л|Л),
поэтому получаем Л2 — Л = 0, т. е. собственные значения оператора про-
ектирования равны Л = 0,1. Этим двум значениям соответствуют соб-
ственные векторы |0) и |1):
Ру|1) = |1), (l-7V)|0) = |0>. (И.31)
150 -*V- Глава 11. Математический аппарат квантовой механики
11.5. ПРЕДСТАВЛЕНИЕ ВЕКТОРОВ
И ОПЕРАТОРОВ МАТРИЦАМИ
Пусть \f) — набор собственных векторов некоторого эр-
митова оператора1), тогда любому кет-вектору \у/) можно поставить в
соответствие матрицу вида
\V) - <М- (U-32)
Матрица (11.32) представляет собой столбец. Говорят, что в этом случае
вектор состояния задан в f -представлении. Вектору бра соответствует
комплексно сопряженная матрица-строка:
(vH (W) = ШчГ- (11-33)
Линейному оператору L поставим в соответствие квадратную матрицу:
L^(f'\L\f), (11.34)
задание которой полностью определяет свойства оператора L. Таким
образом, появляется возможность использовать хорошо разработанный
аппарат алгебры матриц, рассмотренный в гл. 2. Обозначения, введен-
ные Дираком, придают использованию этого аппарата дополнительные
удобства.
Предположим, что собственные векторы \ f) некоторого эрмитова опе-
ратора f = f+ образуют полную ортонормированную систему =
= Полнота системы векторов означает, что по ней можно разло-
жить любой вектор линейного пространства:
И = £СГ|Г>. (11.35)
f
Умножим соотношение (11.35) слева на вектор (/| и получим
(f\v) = £ cr(f\f) = £ CfSff = Cf. (11.36)
Г f
Если подставить выражение для коэффициента разложения (11.36) в раз-
ложение (11.35), получится
l^=£l/)(/lv), (11-37)
f
которое примет вид тождества, если выделить единичный оператор
Т = £1Л(Л- (Ц-38)
f
*) Принято записывать в качестве символа собственного значения оператора
тот же символ: f\f) = f\f}, т. е. символ А —» f.
11.5. Представление векторов и операторов матрицами —’ V- 151
Единичный проекционный оператор (11.38) выполняет роль «оператора
полноты».
В базисе собственных векторов оператора f (в /-представлении) опе-
ратор g имеет вид
g = Е 1ЛЖ1ЛГ1 = Е(Ж1ЛЮ(Л (п-39)
f,f'
где (f\g\f') — матрица оператора g в /-представлении.
В своем собственном представлении матрица оператора диагональна:
f= Е= Е Г(/1Л1ЛЛ = ЕЛЛЛ (И-40)
и1 fj1 /
Формула (11.40) называется спектральным представлением оператора.
Переход от одного представления к другому осуществляется с помо-
щью единичного оператора (11.38):
(g\w) = (glb#> = EWX./W- (Ц-41)
f
Матрица (g\f) называется матрицей перехода от g- к /-представлению.
Здесь индекс / у единичного оператора указывает базис представления.
Матрица оператора при переходе к другому представлению преоб-
разуется с помощью двух матриц перехода в соответствии с правилами
линейной алгебры:
(Л1Л = (glW/|g'> = L (g|/>(/|£|/'> </'1Л- (11-42)
Задача перехода от g к /-представлению сводится к нахождению
собственных векторов оператора / в g-представлении, т. е. к решению
уравнения
Е(Ж1ЛЛЮ = ЖЛ (п-43)
g'
Примеры
1. Доказать теорему: если [/, g] = 0, то эти операторы имеют общую
систему собственных векторов.
Пусть |/п) — собственные векторы оператора /: f\fn) = fn\fn)-
Запишем коммутатор в матричной форме в базисе собственных век-
торов |/„>:
Е((Л|7|Л(А1М> - <fm\g\fk)(fk\f\fn)) = 0.
к
152 -*V- Глава 11. Математический аппарат квантовой механики
Поскольку матрица оператора в собственном представлении диаго-
нальна, имеем
Если спектр оператора f невырожден, получаем = grf>mn,
т. е. состояния \fn) также собственные для оператора g.
Если спектр оператора f вырожден, т. е. fn = fni = ... = fns, где
.s' — кратность вырождения, матричные элементы вообще
говоря, могут быть отличны от нуля. Однако, из 5 линейно незави-
симых векторов можно образовать s линейно независимых линейных
комбинаций, диагонализирующих квадратные матрицы (fni\g\fnj) и,
следовательно, представляющих собой собственные векторы опера-
тора g. Таким образом и при наличии вырождения операторы fug
имеют общую систему собственных векторов. В этом случае в век-
торе указывают собственные значения обоих операторов: \f,g).
2. Показать, что если для трех операторов f.gtih имеют место соотно-
шения [/, h] = [g, /г] = 0, но [f, g] / 0, спектр оператора h вырожден.
Пусть \f,h) — общий собственный вектор операторов f и h:
f\f, h)=f\f, h),h\f, ti) = h\f, h), тогда gh\f, h) = hg\f, h) = hg\f, h)
/ hg\f,h), поскольку иначе следовало бы, что [f, g]|/, h) = 0, т. e.
вектор g\f, h) линейно не зависит от \f,h), но при этом оба вектора
оказываются собственными для оператора h с одним и тем же соб-
ственным значением h. Следовательно, данное собственное значение
оператора h вырождено.
11.6. НЕПРЕРЫВНЫЙ СПЕКТР
Рассматривая собственные векторы операторов, мы пред-
полагали дискретный спектр собственных значений, однако операторы
могут иметь и непрерывный спектр. Собственные векторы непрерывно-
го спектра требуют специального рассмотрения.
Пусть спектр собственных значений оператора f непрерывен, а его
собственные векторы |/) образуют полную систему. Произвольный век-
тор можно разложить по этой системе:
= f (Н.44)
Умножая выражение (11.44) слева на базисный вектор (/|, получаем
<М = (11.45)
11.6. Непрерывный спектр —' V- 153
Формула (11.45) может быть тождеством только при условии1)
(Г1Л =S(f-f'). (11.46)
Условие (11.46) противоречит требованию конечности нормы векторов
состояния. С физической точки зрения это можно объяснить только,
допустив, что векторы состояния непрерывного спектра с точным значе-
нием f не могут быть созданы экспериментально, а представляют собой
идеализацию реальных объектов подобную плоской волне в электро-
динамике. Однако можно создать состояние, сколь угодно близкое к
идеалу — суперпозицию состояний (волновой пакет шириной А/ —> 0)
в интервале собственных значений fo<f<fo + Такой пакет уже
может иметь единичную норму. Запишем суперпозицию в виде
Л+А/о
\Vfo}= f (11.47)
А
Квадрат нормы вектора (11.47) равен:
/о+Д/о /о+Д/о /о+Д/о
(Wa\Wa) = f df f df'af,af(f'\f} = f |a/|2d/. (11.48)
A A A
т. e. норма вектора (11.47) равна 1 при условии, что
Л+Д/о
[ \a/\2df=l.
А
') Именно необходимость удовлетворить тождество (11.45) привела Дирака к
определению (5-функции.
ГЛАВА
12
НЕКОТОРЫЕ ПРИМЕНЕНИЯ
ФУНКЦИЙ ГРИНА
12.1. ОСНОВНЫЕ ПОНЯТИЯ И СВОЙСТВА
ФУНКЦИИ ГРИНА
Метод функции Грина (функции влияния) позволяет ре-
шать различные краевые задачи и играет важнейшую роль в теорети-
ческой физике. Главное достоинство метода состоит в том, что он пе-
реводит неоднородные дифференциальные уравнения, в которых реша-
ется задача на собственные значения, к симметрическим интегральным
уравнениям1). Основные линейные уравнения физики — волновые урав-
нения в теории поля и уравнение Шредингера в квантовой механике —
дифференциальные уравнения второго порядка, поэтому мы ограничим-
ся рассмотрением только таких уравнений.
Задача формулируется следующим образом: пусть есть неоднородное
дифференциальное уравнение
W.)] = -Ж), (12-1)
где L[w] — линейный дифференциальный оператор, в частности, для
волнового уравнения — это д’Аламбертиан, х, — переменные, для вол-
нового уравнения это координаты и время, для стационарного уравне-
ния Шредингера — только координаты. Требуется найти такое реше-
ние u(Xi) уравнения (12.1), которое бы на границах области D удов-
') Подробное и очень доступное изложение можно найти в, к сожалению,
труднодоступной книге Р. Куранта и Д. Гильберта «Методы математической
физики» [14], представляющей сейчас скорее всего библиографическую ред-
кость. Из доступных книг можем порекомендовать [15—17].
12.2. Функция Грина волнового уравнения. Запаздывающие потенциалы —' V- 155
летворяло заданным граничным условиям. Например, если границы об-
ласти находятся в бесконечности, решение там обращалось бы в ноль:
u(r, Г)||г|^оо = 0. Зависимость от временной переменной при этом обя-
зательно должна удовлетворять заданным начальным условиям.
Решение уравнения (12.1) есть сумма общего решения однородно-
го уравнения £[и(хг)] = 0 и частного решения неоднородного уравне-
ния. Нас будет интересовать частное решение неоднородного уравне-
ния (12.1), которое может быть записано в виде интеграла
u(Xi) = — f G(Xi, x/i)f(x'i) dr, (12.2)
D
где dr — элемент объема (для волнового уравнения dr = drdt, для ста-
ционарного уравнения Шредингера dr = dr).
Функция G(x,-,x-), удовлетворяющая уравнению (12.1) с единичным
точечным источником
L[G(Xi, х<)] = П <5(х/ - xi), (12.3)
i
называется функцией Грина. При этом оператор действует на «нештрихо-
ванные» переменные. Дельта-функция многих переменных определена
так, что
J Ц 6(Xi - х-) dr = Ц f 6(Xi - x-) dx; = 1.
В справедливости утверждения (12.2) можно убедиться, подставив это
выражение в исходное уравнение и воспользовавшись уравнением (12.3):
L[i/(x/)] = L[- J” G(xi, Xi)f(Xi) dr] = —J” L[G(x/, x-)] f(x-) dr' =
D D
= - У П S(xi - x'i)f(xi) dT' = ~f(xi)-
D '
12.2. ФУНКЦИЯ ГРИНА ВОЛНОВОГО УРАВНЕНИЯ.
ЗАПАЗДЫВАЮЩИЕ ПОТЕНЦИАЛЫ
Уравнения Максвелла сводятся к волновым уравнениям для
компонентов 4-потенциала электромагнитного поля: скалярного tp(r, t)
и векторного А(г, Г), которые вместе представляют собой систему линей-
ных неоднородных уравнений. Уравнения для всех четырех компонентов
156 -*V- Глава 12. Некоторые применения функций Грина
имеет одинаковую структуру, т. е. определяются одним и тем же диффе-
ренциальным оператором
= (12.4)
с at
поэтому достаточно рассмотреть только одно уравнение для какого-либо
компонента. Различие волновых уравнений для векторного и скалярного
потенциалов заключается только в правой части, где стоит соответст-
венно функция плотности тока или плотности распределения зарядов.
Рассмотрим для определенности уравнение для скалярного потенциала
. , , 1 д2(р(г, Г) . , , , ..
Л<р(г, Г) - — —— = -4яр(г, Г). (12.5)
С ot
Уравнение (12.3) для функции Грина G(r, Г; г', г') принято записывать
как:
f Д —7 ““2^ G(r, t; г', t') = — 4m5(r — r')8(t— t'). (12.6)
\ c dt )
При таком выборе правой части частное решение неоднородного урав-
нения (12.5) имеет вид
<р(г, Г) = J” р(г', г') G(r, t; г', t1) dr' dr'. (12.7)
Пространство, в котором описываются поля, считается однородным
и изотропным, а время — однородным, поэтому функция Грина может
зависеть только от разности координат и времени:
G(r, Г; г', Г') = G(r —г'; t- t'). (12.8)
Рассмотрим фурье-образ функции (12.8):
g(k,w) = mi dRdTe"ilkR""T]G(R, т). (12.9)
Соответствующее обратное преобразование равно 1)
G(r - г'; Г - г') = ^|yeilk(r"r')"ft'a"f')1g(k,w). (12.10)
*) В теории электромагнитного поля определяется четырехмерный волновой
вектор k1 = (w/c, к), поэтому выражение (12.10) можно записать в 4-инвари-
антной форме (см. гл. 8)
- ////
12.2. Функция Грина волнового уравнения. Запаздывающие потенциалы —' V- 157
Проделаем фурье-преобразование уравнения (12.6):
(—к2 + °^g(k, w) = — 4л, или g(k, сд) = 4”2—2. (12.11)
\ с ) к — ш /с
Подставим теперь выражение для фурье-образа (12.11) в формулу (12.10):
1 ГГГ V i(kR—<ут)
G(r,t)= _ dk dv-2-----------------2-2, (12.12)
4я J J J J к — co /с
где обозначено R = r — г',т = t — t'.
Как видим, при к — ±ы/с подынтегральное выражение имеет по-
люс первого порядка. Интеграл (12.12) можно легко вычислить, если на
функцию Грина наложить физические
ограничения, а именно: должен соблю-
даться принцип причинности, т. е.
JG(R,t), при т>0 (Г > г'),
Ст(К, Т) — <
]^0, при т < 0 (Г < Г).
(12.13)
Принцип причинности требует, чтобы
при t > t' поле точечного источника
представляло расходящуюся волну.
Прежде всего вычислим интеграл по
переменной а>. Принцип причинности
(запаздывающая функция Грина) будет
выполняться, если к частоте формаль-
но добавить мнимую часть такую, чтобы
Re iwr > 0, (т. е. для т > 0 должно быть
Im го
Рис. 12.1. Выбор контура ин-
тегрирования в комплексной
плоскости ш. В нижней по-
луплоскости показаны полюса
подынтегрального выражения
Imw < 0), а затем устремить ее к нулю. Пусть Imw = е, тогда интеграл
для определения функции Грина (12.12) принимает вид
+сс
I(kR—шт)
k2 — (w + ie)2/ с2
(12.14)
Интеграл по переменной ш вычисляется путем сведения его к контур-
ному интегралу в комплексной плоскости, замыкая действительную ось
бесконечно удаленной полуокружностью в нижней полуплоскости, как
это показано на рис. 12.1:
dw ,-----е 2 , = -2я1—(eicfcT - e~ickT) = 2л sin(cfcT)
k2 - (ш + ie)2/c2 2fc' к
158 -*v- Глава 12. Некоторые применения функций Грина
Подставляя полученное выражение под интеграл (12.14) и переходя
к сферической системе координат по переменной к, имеем
G(R,r)=-^ ksin(cki) dk J eifcBcosS dGk, (12.15)
О
где 0 — угол между векторами Кик. Интегрирование по телесному углу
легко выполняется:
71
J eiMcose dl?k = 2я J eiMcose sin 0 dO = 4я
О
Таким образом, выражение для функции Грина принимает вид
G(R, т) = — f sin(kR) sin(ckr) dk =
nR j
о
— cos
о
j dk(eic^T-J?/^ 4- e~ickd~R/c'> _ eick(r+R/c) _ e
о
= ^f dx(ei(r-*/c)x-ei(T+*/c)x). (12.16)
Воспользуемся теперь интегральным представлением 5-функции (10.22)
I eiaxdx = 2л5(а).
Если учесть, что для т > 0 всегда т + R/c 0 и соответствующая 5-функ-
ция, возникающая при интегрировании второго слагаемого в (12.16),
будет давать нулевой вклад, получим запаздывающую функцию Грина
G<-)(R, т)= lg(T-R/c), (12.17)
R
Если рассматривать случай т < 0, для выполнения условия Re iwr > 0
необходимо изменить знак мнимой добавки к частоте: Imw > 0 и рас-
смотреть контур в верхней части комплексной плоскости. В результате
12.3. Функция Грина стационарного уравнения Шредингера —' V- 159
увидим, что первое слагаемое под интегралом в (12.16) будет давать ну-
левой вклад. В этом случае получаем опережающую функцию Грина
G<+)(R, т) = -<5(т + R/c). (12.18)
R
Запаздывающая функция Грина удовлетворяет принципу причинно-
сти, поэтому она применяется в различных физических задачах клас-
сической теории поля. Выражение для запаздывающей функции Гри-
на (12.17) удобно переписать в виде
G(r-r';t- t')= —t'- (12.19)
|r - r I \ C /
Подставляя выражение для функции Грина (12.19) в уравнение (12.7),
получаем скалярный потенциал электромагнитного поля в точке г в мо-
мент времени t, создаваемого распределенной плотностью заряда:
. \ f J / f J ! Р(г', t') I Г H \ f p(r', 1 — |r — l\/c) , ,
<p(r, t) = dr dt'HV ’ /8 It — t' - J--1 = I dr'.
J J |r - r I \ C ) J |r-r|
(12.20)
Совершенно аналогично получается решение для векторного потенциала:
A(r, t)=- f lr~r'l/c) dr\ (12.21)
Cj |r —r|
Формулы (12.20) и (12.21) определяют так называемые запаздывающие
потенциалы.
12.3. ФУНКЦИЯ ГРИНА
СТАЦИОНАРНОГО УРАВНЕНИЯ ШРЕДИНГЕРА
Стационарное уравнение Шредингера в координатном пред-
ставлении — однородное уравнение второго порядка и поэтому на пер-
вый взгляд задача о нахождении его функции Грина кажется бессмыс-
ленной и не имеющей отношения к квантовой механике. Однако в тео-
рии возмущений уравнение Шредингера может быть формально «сдела-
но» неоднородным, если перенести возмущение в правую часть:
(H0-E)V(r) = -V(r)V(r). (12.22)
Теперь с помощью функции Грина дифференциальное уравнение Шре-
дингера становится интегральным:
1//(г) = - f G^"(r, г') V(r')i//(r') dr'. (12.23)
160 -*v- Глава 12. Некоторые применения функций Грина
При этом возникает функция Грина невозмущенного уравнения Шре-
дингера Gp\r, г').
Итак, согласно определению (12.3), функция Грина стационарного
уравнения Шредингера в координатном представлении должна удовле-
творять уравнению
(H(r)-E)G£(r,r') = 5(r-r'). (12.24)
При нахождении функции Грина воспользуемся понятиями и неко-
торыми результатами гл. 11. Прежде всего заметим, что
(гЮ =5(r-r')= (г|Т|г'>, (12.25)
поэтому можно сказать, что в уравнении (12.24) слева стоит ядро еди-
ничного оператора 1:
(r|(H-E)GB|r/) =5(r-r'),
и соответственно
(Н - E)Ge = Т (12.26)
Уравнение (12.26) есть обобщение уравнения (12.24), и поэтому можно
понимать функцию Грина как1)
Ge = (H-E)~\ (12.27)
В гл. 11 было показано, что любой линейный оператор можно пред-
ставить в виде квадратной матрицы, выбрав некоторый базис — пред-
ставление. Удобно сперва определить оператор (12.27) в базисе собствен-
ных векторов состояния гамильтониана, т. е. в энергетическом представ-
лении. Спектр гамильтониана в общем случае может быть любым, но мы
будем считать для простоты его дискретным:
Н\п) = Еп\п), (12.28)
тогда
(n'\GE\n} = (п'\(Н-Е)-1\п) =8п,п-±-- (12.29)
-Ьп Ь
Как видим, матрица (n'\GE\n) — GE8n/ n имеет полюсы при Е = Еп, сле-
довательно полюсы функции Грина определяют спектр гамильтониана.
Определим теперь функции Грина GE(r, г') в координатном представ-
лении. Для этого воспользуемся правилом перехода от одного представ-
ления к другому в соответствии с формулой (11.42).
*) Оператор (12.27) с точностью до знака совпадает с резольвентой оператора
Гамильтона G(z) = (z — Н)~1 при действительных значениях переменной z.
12.4. Функция Грина свободной частицы —' V- 161
По определению функция Грина есть ядро оператора Ge, которое в
координатном представлении равно
GB(r,r')= (r|GB|r'>. (12.30)
Проделаем переход от координатного к энергетическому представлению
с помощью единичного проекционного оператора (11.38) согласно фор-
муле (11.42):
(r|G£|r') = (r|T„G^T„z|r'> = =
п п'
E(r|n)(n|r') = у y;(r')yn(r) 31)
Еп Е Еп Е
п п
Здесь мы воспользовались формулой (12.29), показывающей, что матри-
ца оператора Ge диагональна в энергетическом представлении.
Если гамильтониан содержит как дискретный, так и непрерывный
спектр, нужно добавить интеграл
Ge( ,) = у ^о-')г-(г) + fаЛ:(г')Уу(г)
Еп — Е J Ev — Е ±17
п
где у —> ±0, смысл двух знаков перед у будет понятен немного ниже,
v — совокупность параметров, характеризующих непрерывный спектр.
12.4. ФУНКЦИЯ ГРИНА СВОБОДНОЙ ЧАСТИЦЫ
Функцию Грина можно вычислить точно только в несколь-
ких частных случаях, когда точно решается уравнение Шредингера. В
нерелятивистской квантовой механике наибольший интерес будет пред-
ставляет функция Грина свободной частицы, которая позволяет запи-
сать уравнение Шредингера в интегральной форме и получить основное
интегральное уравнение, удобное для последующего анализа задачи о рас-
сеянии в борцовском приближении.
Для свободной частицы совокупность параметров v = р — импульс
частицы. Обычно удобнее работать с волновым вектором (р —» к), тогда
волновые функции, стоящие под интегралом (12.32) есть плоские волны,
имеющие вид
Шг) = ' 2eikr. (12.33)
(2л)3/2
162 -*V- Глава 12. Некоторые применения функций Грина
В базисе состояний свободной частицы дискретного спектра нет, и фор-
мула (12.32) принимает вид
GB>0(r,r/) = f tik,eik,r-r'’ 2 ---------=
J (2л)3 h к /2т — Е ± iy
= [ fc2d/cdGe'kR-----15-----. (12.34)
Й2 (2л)3 J к2 - kl ± iy
Здесь // = 2mE/h2, R = г — г'.
Сначала проинтегрируем выражение (12.34) по углам в сферической
системе координат. Поскольку зависимости от угла <р нет, f dtp — 2л и
| d.QeikR =
2л f eifcBcose sin Odd = — (eikR - e~ikR).
J ifcR
о
Объединяя два интеграла в один и делая замену во втором интеграле
к —к, получаем
GB>o(|r-r'|) =
+сс
2т 1 Г
(2лЙ)21Я J
ikR
е
к2 — kl ± iy
к dk.
(12.35)
Как видно, подынтегральное выражение имеет полюсы в точках
fc = ±(fcoyi|). (12.36)
Выберем нижний знак перед у, тогда полюс подынтегрального выра-
жения находится в точках к = ±(fco + iy/2). Видно, что интеграл легко
вычисляется, если свести его к контурному в комплексной плоскости пе-
ременной к. Действительно, в верхней полуплоскости интеграл по бес-
конечно удаленной полуокружности обращается в ноль, поэтому можно
замкнуть контур С+ в верхней полуплоскости (рис. 12.2, а), после чего
он равен вычету в единственном полюсе:
4>о(|г-г'|) =
2т 1 2л1 к° cikf,R = т е‘|Г Г ^2тЕ/Л2
(2лЙ)2 1П 2fco 2лЙ2 |г — г'|
(12.37)
Выберем теперь верхний знак перед у, тогда полюсы будут нахо-
диться в точках к = ±(fco — iy/2). В этом случае контур С_ следует за-
мкнуть также в верхней полуплоскости (рис. 12.2, б), и вычет в точке
к = —(ко — iy/2) приводит к результату
G^>o(|r-r'|) =
т e-i|r-r/ Н/2т£/л2
2лЙ2 |г — г'|
(12.38)
12.4. Функция Грина свободной частицы —' V- 163
Таким образом, в зависимости от знака параметра у получаем две разные
функции, которые отвечают разным асимптотикам: G<+) — расходящая-
ся волна, a G(~’ — сходящаяся волна, соответственно G*-)* = G(+).
Рис. 12.2. Контуры интегрирования и полюсы подынтегрального выражения
функции Грина в комплексной плоскости к
Можно вообще рассматривать Ge как функцию комплексного пере-
менного Е, но тогда Ge не будет однозначной функцией, поскольку в
показателе ехр стоит у/Е. Для того чтобы функция стала однозначной,
следует в комплексной плоскости сделать разрез Е > 0. Тогда на дей-
ствительной оси Е < 0 получаем
-xR
Ge<o(R) = (12-39)
2тгп Л
где х = у/2т\Е\/К2. Это так называемый физический лист: на нем при
Е < 0 функция убывает. При обходе точки ветвления на угол Зя полу-
чаем ReE < 0, но растущую ехр.
ИСТОРИЧЕСКАЯ СПРАВКА
Подумав, мы решили рискнуть и добавить несколько строк об уче-
ных, чьи имена упоминались в тексте.
Дело в том, что, как показал наш многолетний опыт, подавляющее
большинство студентов имеют самое скудное представление об истории
науки. В подтверждение этих слов приведем историю, вполне достойную
опубликования в газете «За науку». Один из нас (ВПС) как-то, принимая
экзамен у симпатичной студентки, спросил: «Кто такой Роберт Гук?»
Студентка, взмахнув мохнатыми ресницами, не очень уверенно ответила:
«Это, вроде бы, замдекана, вот только не помню, какого факультета. А
к чему это Вы?»
Это не история науки, а всего лишь очень краткая историческая
справка. О каждом герое можно написать несколько книг, и они, к сча-
стью, написаны. Мы здесь упомянем не всех, кто встречался на преды-
дущих страницах. Более того, мы не сможем даже дать краткий очерк
их результатов. Если говорить, например, о Гауссе или Эйлере, то даже
простое перечисление заняло бы страниц 30—40. Мы лелеем надежду,
что, возможно, эти строки пробудят некоторое любопытство у наших
глубокоуважаемых читателей. А люди действительно были замечатель-
ные и удивительные! Правда, здесь необходимо сделать уточнение: за-
мечательные — это точно, но с точки зрения человеческих качеств все
они были весьма и весьма различными.
Лейбниц (1646—1716), например, всю жизнь старался угодить гер-
цогам Браунгшвейгской династии (где служил библиотекарем) и писал
историю их династии, которую, слава богу, так и не закончил. Отчаянно
и не очень пристойно ругался с Ньютоном: в переписке с сильными
мира (того) он практически опускался до того, что мы сейчас называ-
ем политическим доносом. Ньютон, в престарелых годах был человек
с деформированной, больной психикой: сумасшедшая работа оставила
свой след.
Историческая справка —' V- 165
Но мы хотим сказать о другом. Именно о фанатическом стремлении
к творчеству всех, о ком будет сказано дальше.
Пожелаем Вам творческих успехов. И, пожалуйста, запомните: Ро-
берт Гук (1635—1703) вовсе не был замдекана, хотя и заслуживает вся-
ческого уважения, и, быть может, даже большего, чем сам декан!
Евклид
Его имя известно каждому школьнику, даже двоечнику. Любопытно,
что ученые мужи знают о нем не намного больше.
Даже годы жизни его точно не известны. Известно лишь то, что ра-
ботал он в Александрийском Музее — научном центре, неведомо почему
созданном Птолемеем Сотером — первым из династии: ему после дележ-
ки отделили Египет по смерти Александра Македонского. Он и устроил
первую платную академию — Александрийский музей. Прилично платил
ученым, чем и знаменит вполне заслуженно. Еще Птолемей знаменит
как пра — прадедушка Клеопатры.
Евклид был одним из профессоров. Родители и место рождения его
пропали в веках: то ли Греция, то ли Сирия. До XIX в. его вообще
путали с одноименным философом из Мегеры (есть такой городок).
«Достоверны» только два благородных анекдота.
Будто бы на вопрос Птолемея: как попроще, полегче превзойти всю
геометрическую премудрость?, Евклид холодно ответствовал: «В геомет-
рии нет царского пути».
Далее, когда некто вопросил: «Какую выгоду я извлеку из всех этих
теорем?» Евклид призвал раба: «Дай бедняге три обола (гроша), он хочет
получить выгоду».
Человек растворился в веках. Осталась работа.
«Начала» Евклида были в Западном мире второй, после Библии, кни-
гой по популярности. В школах геометрию учили только по «Началам»
до XX в. (а, возможно, учат в Англии и сегодня). Все математики и
физики начинали свою жизнь с «Начал».
Видимо, подобного учебника геометрии не будет больше никогда. В
истории математики за один только 1880-й год отмечено 460 переводов
«Начал» на все европейские языки, латынь и греческий, из них на рус-
ский, увы, только 5.
Такие, вот, дела.
Рене Декарт (1596-1650)
На портрете он напоминает стареющего Д’Артаньяна.
Действительно, Рене Декарт был офицером, изящен, ходил со шпа-
гой. С математикой познакомился в иезуитском колледже.
166 -*v- Историческая справка
Обычно считают и, видимо, справедливо, что он — основатель со-
временной картезианской философии — картезианства.
Как математик, получил важные результаты в теории алгебраических
уравнений. Но его бессмертное творение — аналитическая геометрия.
Сам Декрт писал, что его алгебраический метод позволяет посредствен-
ности получать те же результаты, каких мог бы достичь талант, не при-
бегая к нему.
Широкой публике Декарт известен фразой: «Cogito — ergo sum»1).
Исаак Ньютон, 1642 (25 декабря старого стиля) —
1727 (1643-1727)
Последние слова краткой эпитафии на гробнице Ньютона в Вест-
минстерском аббатстве: «Пусть радуются смертные, что существовало
такое украшение рода человеческого».
Без малого триста лет прошло с того времени, а мы можем только
повторять эти слова и удивляться.
Сдержанный и довольно скупой на оценки Сергей Иванович Ва-
вилов (кстати, один из авторов «черенковского излучения») написал в
краткой биографии Ньютона: «Здесь излишне и не место говорить о
значении научного наследия Ньютона, до и после Ньютона никто еще
не достиг большего в естествознании».
Поразительно то, что большинство своих идей, в частности, такие
«мелочи», как создание современного анализа, теории цветов и закона
всемирного тяготения, Ньютон развил совсем юношей в 1665—1666 гг.
в своей деревне, где он скрывался от чумы, поразившей Кембридж.
Понять это мы не в состоянии и можем лишь поражаться.
Удивительно и то, что был он блестящим экспериментатором. В част-
ности, построил отражательный телескоп (1671 г.), который был благо-
склонно одобрен самим королем. О том, что король разумел в физике,
история умалчивает, но телескоп принес Ньютону членство в Королев-
ском общество и сравнительно обеспеченное положение.
Внешне жизнь Ньютона проходила без заметных потрясений. Он
никогда не выезжал за пределы Англии и, более того, по самой Англии
тоже почти не передвигался. Работал непрерывно, но публиковал очень
скупо. Так что, с одной стороны, совершенно не заботился о приоритете,
хотя очень болезненно реагировал на недооценку своих результатов кол-
легами (многолетний спор с Лейбницем и столь же длительная распря
с Гуком). В Англии он имел все мыслимые знаки признания: президент
Королевского общества, личное дворянство, директор монетного двора,
') «Мыслю, следовательно, существую».
Историческая справка —' V- 167
член парламента и т. д. Однако в Европе Англию не любили и порой
переносили эту нелюбовь на Ньютона.
По легенде в парламенте Ньютон выступил всего один раз с заявле-
нием: «Надо закрыть окно, так как дует». Но если говорить о реалиях,
именно Ньютон восстановил монетную систему Англии, изрядно пору-
шенную в XVII в. Именно при нем ввели насечку (ободок) на монетах,
ликвидировав любимый прием фальшивомонетчиков: обрезку золотых
монет.
Короче — Ньютон во всем был Ньютоном. Его современник, поэт
Александр Пот резюмировал впечатление современников в двустишии:
Nature and Nature’s lows lay hid in night
God said let Newton be and all was light1).
Лейбниц Готфрид Вильгельм (1646-1716)
Человек блестящего таланта. Считается одним из крупнейших фило-
софов, но мы в этом, однако, некомпетентны.
Судя по всему, с математикой он познакомился весьма поздно, после
бесед с Гильбертом. Однако, создал основы современного анализа позже
Ньютона лет на десять, но абсолютно независимо.
Не будем останавливаться на знаменитой склоке о приоритете, устро-
енной учениками Ньютона и Лейбница. Не будем также объяснять глу-
бокоуважаемым читателям, что означают слова «создатель анализа», по-
скольку наши читатели бесспорно знают, что интегрировали десятки
математиков, начиная с великого Архимеда. В многолетней склоке Нью-
тон-Лейбниц победил Ньютон, но Лейбниц взял реванш: современные
обозначения dy/ dx и т. д. принадлежат ему.
Как человек, он восторга не вызывает, но дело не в этом. Впрочем,
если верить Расселу, «Лейбниц был трудолюбив, бережлив, воздержан
и честен в денежных делах». Продолжая цитировать Рассела, закончим
рассказ словами; «именно Лейбниц изобрел теорию, что наш мир —
лучший из всех возможных миров».
Леонард Эйлер (1707-1783)
В 1727 г. 20-летний молодой человек (юноша) из Швейцарии прибыл
в Петербург, в Академию Наук. Пригласили его как способного матема-
тика вместе с братьями Бернулли. Надо сказать, что за 300 лет своего
существования более шикарного приобретения у нашей Академии наук
') Неизвестный остроумец в наши дни добавил:
Но Сатана не долго ждал реванша
Пришел Эйнштейн — и стало все как раньше.
168 -*V- Историческая справка
не было. Соблазняя Эйлера, некто Вольф писал ему: «Вы едете туда, где
рай для ученых».
В те времена, пожалуй, он был недалек от истины. Поначалу Эйлер
получил чин небольшой, но уже через два года стал профессором. В Ака-
демии тогда обязанности членов были самыми разнообразными. Эйлер
проверял весы (новой конструкции), занимался геодезией, навигаци-
ей, составил атлас Российской Империи (чем, кстати, весьма гордился).
Между прочим, написал капитальный труд «Теория корабля», который
цитировал наш академик Крылов.
Когда он успевал при этом заниматься чистой математикой, понять
невозможно, но ведь успевал! Теория чисел, анализ, теория вероятно-
стей, начала топологии и т. д. и т. п.
Он был дважды женат, имел тринадцать детей. Последние восемна-
дцать лет работал слепой!
Из России он уехал в 1741 г. при правлении толстой дуры Анны
Ивановны, сформулировав с математической точностью: «В этой стране,
чтобы выжить, надо молчать». Но потом его пригласила и вернула ма-
тушка Екатерина, в девичестве Софья Фридерика Августа Ангальб Церб-
ская, она же Екатерина П. Когда Эйлер прибыл, и академики стали
устраивать склоки, кто какое место займет, какое место главнее, Ека-
терина ему сказала: «Садитесь. Какое бы место Вы ни заняли, оно будет
первым».
Кстати, когда Эйлер жил у Фридриха, он продолжал тесные связи
с российскими учеными. О его вкладе в математику мы писать более
не будем, поскольку простое перечисление полученных им результатов
заняло бы более 20 страниц.
После смерти Эйлера, в 1783 г., Кондорсе написал: «Эйлер прекратил
вычислять и жить».
Пьер Симон Лаплас (1749-1827)
Астроном, физик, математик, механик.
Как будто этого мало: был еще и политиком! Министром. Довольно
беспринципным. Граф империи.
Член многих европейских Академий, кавалер ордена Почетного леги-
она. Приятель Наполеона Бонапарта и пр. и пр. Любопытно, что Напо-
леон переписывался с Лапласом даже в 1812 г. из России. Надо сказать,
у императора была слабость к ученым, и в юности он увлекался мате-
матикой.
В астрономии наиболее известна гипотеза Канта—Лапласа.
Куда менее популярна его многотомная «Небесная механика», в ко-
торой Лаплас рассчитал взаимное влияние планет Солнечной системы,
Историческая справка —' V- 169
создал теорию спутников и колец Юпитера и многое другое. В част-
ности, он создал математическую теорию приливов.Увы, элементарное
представление о приливах есть великая загадка для многих студентов.
Лапласу принадлежат фундаментальные результаты по теории веро-
ятностей. Забавно, что он пытался применить теорию вероятностей к
работе судов.
Его имя и сегодня многократно цитируют в любом учебнике мате-
матики.
Мы не пишем биографию, и не стоит разбираться, каков он был.
Лучше вспомнить слова, произнесенные на его похоронах (см. ниже).
Фурье Жан Батист Жозеф (1768-1830)
Весьма приличную жизненную карьеру сделал при Наполеоне. Участ-
вовал в египетской экспедиции, куда первый раз консул взял с собой
приличный обряд ученых. С тех времен сохранилась гениальная команда
некоего генерала: «Ослов и ученых в середину!» Боевой строй француз-
ской армии при атаке был каре: квадрат или прямоугольник. В середине
было безопасней всего. С той поры ученых и ослов многие правители
государств часто отождествляют.
Далее Фурье был префектом департамента в Гренобле, членом и сек-
ретарем Парижской Академии наук, и даже почетным членом Санкт-
Петербургской Академии Наук. Но, повторим слова Фурье на похоронах
Лапласа: «Все это несущественно. Мы должны отделить бессмертного
творца небесной механики от министра и сенатора».
Фурье много занимался развитием теории дифференциальных урав-
нений, в частности, вывел уравнение теплопроводности, обессмертил
свое имя последовательным применением идеи: «любая функция может
быть представлена в виде разложения (бесконечного ряда или интеграла)
по любой полной системе функций».
Сам Фурье чаще всего использовал разложение по системе синусов
и косинусов. Один известный наш математик говорил, что идея эта —
самая ценная во всем анализе. Физикам же стоит помнить, что ме-
тод наименьших квадратов, по сути, основан на этой идее Фурье. Но
главное — другое. Математический аппарат квантовой механики — идея
гильбертова пространства — это развитие идеи Фурье.
Карл Фридрих Гаусс (1777-1875)
Самый великий математик в истории.
Он сделал даже больше, чем Эйлер. Гаусс говаривал: «Математика —
царица наук, а теория чисел — царица математики».
170 -*V- Историческая справка
В восемнадцать лет он решил задачу о построении правильных мно-
гоугольников (разбиении круга) циркулем и линейкой. Задача со времен
древних греков. Результат поразителен: построение возможно, если чис-
ло сторон п есть простое число вида п = 22р + 1. Здесь р — целые числа,
начиная с нуля, т. е. п = 3, 5,17, 257, 65 537. Гаусс очень любил эту свою
теорему: доказав ее, он решил стать математиком, а не филологом.
Жизнь прожил внешне спокойно. Впрочем, Клейн замечает: «В семье
его совершенно не понимали». От себя добавим, особенно в первые
годы — годы малой зарплаты.
Родился в семье водопроводчика. Впрочем, в одном источнике на-
писано, что отец его был фонтанный мастер. А это совсем другое.
Между прочим, известный астроном Ольберс, открывший астероид
Паллада, был другом отца, что тоже не совсем вяжется с нашим пред-
ставлением о водопроводчиках. Проделав фантастический объем подроб-
нейших вычислений, Гаусс вычислил орбиту Паллады.
Как и Эйлер занимался физикой, астрономией, Земным магнетиз-
мом. И сегодня все экспериментаторы используют метод наименьших
квадратов Гаусса.
Работы свои публиковал, только если был уверен в них до конца. Его
девиз: «Nil actum reputans si quid superessed agentum»1) было бы весьма
полезно помнить. Правда, в итоге, сам Гаусс не опубликовал (остались
в записках) свои замечательные результаты по теории эллиптических
функций и неевклидовой геометрии. Про Коши, автора около тыся-
чи работ, Гаусс говаривал: «Коши страдает математическим поносом».
Неизвестно, говорил ли Коши, что Гаусс страдает математическим за-
пором.
Итак, теория чисел, алгебра, анализ, арифметика, чистая математика.
Прикладные науки — смотри выше.
Гаусс и экспериментировал. С годами он все больше отходил от чи-
стой математики. Геодезисты вообще были уверены, что он главный
геодезист мира.
Математики говорят: «Были Архимед, Ньютон и Гаусс».
Джордж Грин (1793-1841)
Как большинство математиков XIX в. по нашим меркам прожил он
недолго. Сегодня функция Грина — один из основных и наиболее попу-
лярных инструментов теоретической физики. Как почти у всех крупных
математиков того столетия, его работы тесно связаны с физикой (теория
потенциала, акустика, оптика). Феликс Клайн пишет, что Дж. Грин был
самоучкой, ив Кембридж попал только в сорокалетием возрасте. Клайн
') «Что не сделано до конца, вообще не сделано».
Историческая справка —’ V- 171
далее меланхолически замечает: «Грин — сын бедного ноттингенского
пекаря. И, к сожалению, то, что его талант был поздно открыт и из-
влечен на свет, не пошло ему на пользу. Приглашенный в Кембридж,
он стал добычей алкоголя». Естественно, русскому человеку представить
себе такое невозможно!
Якоби Карл Густав Якоб (1804-1851)
Нашим читателям это имя известно «по якобиану», но был Якоби
одним из самых разносторонних математиков XIX в. (теория эллипти-
ческих функций, вариационные принципы в механике и пр.) Был он
одним из самых плодовитых педагогов Германии (Кенигсбергская школа
Якоби).
Любопытно, что в юности, подобно многим математикам, увлекался
классическими языками. Какова связь между филологией и математикой
нам не очень ясно, но факт остается фактом: она существует. После
сорока лет его активная работа занимает значительно меньше времени.
Тоже очень частое явление среди математиков.
Человек он был яркий, блестящий. Интеллектуальный диктатор (воз-
можно, сказывался иудейский темперамент. Хотя, правда, независимо
от национальности, сама математика воспитывает диктаторские черты.)
Автор знаменитых «тезисов» (афоризмов). До сих пор математики с удо-
вольствием их повторяют. Например, «Математика относится к числу
тех наук, которые ясны сами по себе». Может быть, не очень понят-
но, но зато красиво! Или, «Для Гауссовой строгости у нас нет време-
ни, господа». Студентам физтеха последний тезис, без сомнения, очень
близок.
А умер он совсем молодым от оспы. И Дженнер уже скончался
тридцать лет назад, и вакцина от оспы была им давно придумана.
Как и почему Якоби не привили? Не знаем. Единственное объясне-
ние — бессмертная человеческая тупость, которую математикам понять
не дано.
Гамильтон Вильям Роуан (1805-1865)
Все, о ком мы пишем, — блестящие, удивительные таланты. Га-
мильтон, возможно, самый поразительный. В десять лет он наизусть
знал Гомера и начал изучать арабский и санскрит. Через несколько лет
(еще мальчиком) он в совершенстве владел тринадцатью(!) языками (по
крайней мере, так утверждают). Мало того, он был еще плодовитым
поэтом!
Родился и жил в Дублине. В 1827 г. (как видите, ему только двадцать
два) он назначен директором обсерватории близ Дублина и получил
172 —' V- Историческая справка
звание Королевского астронома Ирландии. Увы, в наши годы подобная
карьера немыслима. В математике ему принадлежит изобретение ква-
тернионов — комплексных чисел в трехмерном пространстве. В наше
время кватернионы привлекают все большее внимание. В механике ему
принадлежат уравнения Гамильтона — наиболее общая формулировка
принципов механики. И теория относительности, и квантовая механика
наиболее последовательно вытекают из принципа Гамильтона.
Феликс Клайн пишет, что эти работы Гамильтона возникли в резуль-
тате исследования проблемы распространения световых лучей в кристал-
лах. Поэтому еще раз обратим внимание наших читателей: в XIX в. все
ведущие математики активно занимались физикой.
И, наконец, Гамильтон придумал оператор набла и, вроде бы, пер-
вый назвал вектор вектором, ввел понятия скаляра и векторного произ-
ведения в трехмерном пространстве.
Лежен Дирихле (1805-1859)
Француз, всю жизнь работавший в Германии. Замечательный педа-
гог. В основном чистый математик (теория чисел, теория рядов, осно-
вания анализа), но как и все математики XIX столетия много занимался
теоретической физикой. Очень скромный человек и, как пишет Клайн,
видимо поэтому в семье его мало ценили.
Много лет — ближайший друг Якоби, что было совсем непросто.
Как мы писали, характер у Якоби был не сахар. Но, как вспоминает
жена Дирихле, они с Якоби, оставаясь вдвоем, могли часами молчать
о математике. Впрочем, Дирихле порой очень резко высказывался, а
Якоби, как ни странно, покорно это выслушивал.
Бернгардт Риман (1826-1866)
Один из самых великих. Прожил всего 40 лет. Умер от туберкулеза:
тогда его лечить не умели. Сделал исключительно много. В чистой мате-
матике основные результаты в теории функций комплексного перемен-
ного. Впрочем, как и для Гаусса, и для Эйлера простое их перечисление
заняло бы несколько страниц.
В «Истории математики XIX столетия» Феликса Клайна Риману от-
ведена восторженная глава. Правда, Клайн, как математик, почти ничего
не упоминает о гениальных идеях римановой геометрии и, соответствен-
но, риманова пространства. Для нас, физиков, это, быть может, самая
замечательная из идей Римана. Куда большая, чем гипотеза о нулях
^-функции (математики бьются над доказательством этой гипотезы уже
более полтораста лет!).
Историческая справка —’ V- 173
В физике (а Риман, как почти все великие математики XIX-го сто-
летия много занимался математической физикой1)) ему, по-видимому,
первому принадлежит фантастическая идея, что гравитация и свет по-
рождены единым полем.
Таков был Бернгардт Риман, очень скромный, застенчивый и боль-
ной человек.
Джордж Стокс (1819-1903)
Профессор Кембриджа, где проработал 66 лет. Его помнят не только
как математика, но и замечательного, очень доброжелательного педагога.
Глубокоуважаемым студентам полезно знать, что помимо прочих сво-
их работ он — один из авторов понятия равномерной сходимости, до-
ставляющей столько неприятностей студентам первого курса!
Давид Гильберт (1862-1943)
Возможно, самый великий математик XX столетия.
Родился в Кенигсберге2) в семье прусских интеллигентов. Впрочем,
из-за имени, кстати, и из-за взглядов, при нацистах ему пришлось объ-
ясняться, доказывать, что он — немец3).
Как у многих великих математиков, характер у Гильберта был непро-
стой. Но был он настоящий педагог и после смерти Клайна объединил и
возглавил знаменитую Геттингенскую школу математиков, где он жил и
работал последние 40 лет. Помимо фундаментальных результатов в чи-
стой математике получил много не менее фундаментальных результатов
в физике (теория относительности, квантовая механика).
Совсем еще молодым он поставил и обсудил 23 нерешенных про-
блемы. Большинство из них сегодня уже решены, но они действительно
определяли развитие математики в XX в., и ученый, решивший хотя бы
одну из проблем Гильберта, сразу же оказывался одним из «коронованных».
Нам, физикам, следуебт помнить гильбертово пространство, возмож-
но, самое главное в математическом аппарате квантовой механики. О его
работах по аксиоматике математики, как и обо всем прочем, мы здесь
писать не будем.
') Жаль, что в наше время такой интерес практически утерян. Исключения —
Пуанкаре и, быть может, Гильберт только подтверждают этот грустный тезис.
2) Ныне Калининград.
3) Это очень напоминает историю о провале Штирлица, хотя в знаменитом
сериале об этом умолчали.
Мюллер: — Герр Штирлиц, из Абвера нам сообщили, что Вы еврей!
Штирлиц: — Что Вы, герр Мюллер! Я русский.
174 —' V- Историческая справка
Герман Минковский (1864-1909)
Ближайший друг Гильберта.
С детских лет поражал всех своей математической одаренностью. В
математике основные его работы посвящены теории чисел. Но бессмерт-
ный его труд — пространство Минковского: четырехмерная геометрия
пространства и времени.
В отличие от многих математиков был скромен, застенчив, доброже-
лателен. Правда, об Эйнштейне отзывался весьма нелестно как о тупо-
ватом студенте (он читал ему теорию чисел). Он же говорил, что теория
относительности удивительно неуклюже сформулирована с точки зрения
математики.
Эпилог
Итак, вот и все отрывочные заметки. Но мы не в силах удержаться
от нравоучительного заключения.
В древней Греции самые знаменитые люди — олимпийские чемпио-
ны. В столь же древнем Риме удачливый гладиатор (между прочим, раб
или преступник) был куда популярнее философа или математика.
Сегодня талантливый футболист или средняя эстрадная певичка из-
вестны в сотни раз больше талантливых физиков, математиков, вообще,
ученых.
Правильно ли это ...
СПИСОК ЛИТЕРАТУРЫ
1. Начала Евклида. В 3 т. / Пер. с греч. и комментарии Д.Д. Мордухай—
Болтовского. — М,—Л.: ГТТИ, 1948—1950.
2. Клейн Ф. Элементарная математика с точки зрения высшей геометрии.
Т. 2. - М.: Наука, 1987.
3. Успенский В. А. Теорема Гёделя о неполноте. — М.: Наука, 1982.
4. Кокстер Г. С. М. Введение в геометрию. — М.: Наука, 1966.
5. Гильберт Д. Основания геометрии — М,—Л.: Гостехиздат, 1948.
6. Вейль Г. Симметрия. — М.: Наука, 1968.
7. Яглом И.М. Герман Вейль и идея симметрии. — М.: Наука, 1968.
8. Курош А. Г. Курс высшей алгебры. — М.: Наука, 1975.
9. Гурвиц А., Курант Р. Теория функций / Пер. с нем. В. А. Рохлина. — М.:
Наука, 1980.
10. Титчмарш Е. Теория функций / Пер. с англ. М. А. Евграфова. — М.: Наука,
1968.
11. Лаврентьев М.А., Шабат Б. В. Методы теории функций комплексного пе-
ременного. — М.: Наука, 1973.
12. Шабунин М., Сидоров Ю. Теория функций комплексного переменного. —
М.: Юнимедиастайл, 2002.
13. Половинкин Е. С. Курс лекций по теории функций комплексного перемен-
ного. — М.: Физматкнига, 2003.
14. Курант Р., Гильберт Д. Методы математической физики. Т. 1. — М.—Л.:
ТИТТЛ, 1951.
15. Тихонов А. Н., Самарский А. А. Уравнения математической физики. — М.:
Наука, 2004.
16. Владимиров В. С. Уравнения математической физики. — М.: Наука, 1988.
17. Владимиров В. С., Жаринов В. В. Уравнения математической физики. — М.:
ФИЗМАТЛИТ, 2000.